01 cinematica
DESCRIPTION
CUrsuri fizicaTRANSCRIPT

1
conf. dr. fiz. Emilian DĂNILĂ

2
-Prezența la activitățile de laborator și seminar este
obligatorie!
-Contribuția acestor activități este de 25% din nota
finală !
-Prezența la curs NU este obligatorie și NU
contează la nota finală!
-Activitatea la curs se încheie cu examen scris!!!
CUM PROMOVĂM EXAMENUL?

3
4
PUȚINĂ ISTORIE A.GRECIA ANTICĂ - începuturile
Aristotel- primele studii sistematice
260 IC – Arhimede demonstrează matematic principiul pârghiilor
B. EVUL MEDIU
Școlile arabă și persană din secolele XI – XIII prezintă formulări primare
ale unor concepte fundamentale de mecanică: inerție, impuls,
proporționalitate între forță și accelerație.
C. SURSELE DE INSPIRAȚIE PENTRU NEWTON
1581 - Galileo Galilei descoperă izocronismul micilor oscilații ale
pendulului.
1589 - Galileo Galilei încearcă să demonstreze că în cădere liberă
corpuri cu mase diferite cad cu aceeași accelerație.
1638 - Galileo Galilei publică Dialoguri Privind Două Noi Științe.
1668 - John Wallis sugerează legea conservării impulsului.
1676-1689 - Gottfried Leibniz dezvoltă o teorie limitată a conservării
energiei.

5
PUȚINĂ ISTORIE
D. MECANICA NEWTONIANĂ …
1687 - Isaac Newton publică Philosophiae Naturalis Principia
Mathematica, în care sunt formulate legile mișcării ale lui Newton și
legea gravitației universale a lui Newton.
1739 - Leonhard Euler rezolvă ecuația diferențială a mișcării
oscilatorului forțat și observă fenomenul de rezonanță.
1788 – Joseph Louis Lagrange prezintă ecuațiile de mișcare Lagrange
în “Mechanique Analitique”
1821 – William Hamilton începe analiza funcției analitice Hamilton.
1835 – William Hamilton prezintă ecuațiile canonice Hamilton.
1835 – Gaspard Coriolis formulează efectul Coriolis.
1842 – Christian Doppler prezintă efectul Doppler.
1851 – Leon Foucault demonstrează rotația Pământului cu ajutorul unui
pendul lung (pendulul Foucault).
6
NOŢIUNI GENERALE
FIZICA - parte a ştiinţei care studiază legile ce guvernează
comportamentul extern şi intern a corpurilor din Univers şi
interacţiunea acestora.
Mărime fizică – orice proprietate măsurabilă a unui corp, care
poate fi modelată matematic printr-un scalar, vector, tensor,
spinor, etc.
Mărimea fizică este descrisă prin :
Definiţia – arată proprietatea pe care o măsoară,
Simbolul – litera cu care este notată, recunoscută,
Formula – relaţia matematică,
Unitatea de măsură – permite descrierea cantitativă,
Măsurarea – instrumentul de determinare a valorii.

7
CLASIFICAREA
MĂRIMILOR FIZICE
Mărimi fizice scalare – mărimile caracterizate integral printr-o valoare algebrică.
Mărimi vectoriale – mărimi caracterizate prin valoare şi orientare (origine, direcţie şi sens).
- Vectorul – simbolul matematic al unei mărimi vectoriale.
Caracteristicile unui vector: Direcţie – dreapta suport
Origine – punct de aplicaţie
Modul – valoare algebrică (lungimea), notat
Sens
a a a

8
VECTORI Vector opus: fiind dat un vector , prin vectorul opus,
notat , se înțelege un vector de aceeași direcție, același
modul, dar având sens diferit.
Vom numi vector nul, notat , un vector al cărui modul
este nul (în acest caz direcția și sensul sunt
nedeterminate).
Vom numi versor, un vector de modul unitar. Pentru
orice vector nenul există un versor definit prin
b
b
b
b
v
0

9
COMPONENTELE UNUI VECTOR Fiind dat un vector și o direcție orientată u, se definește
componenta vectorului după direcția u, notată vu,
produsul dintre modulul vectorului și cosinusul unghiului
q dintre vector și direcția orientată u.
vv
v
a
j
xa
ya
Ax
Ay A
y
xi
În raport cu un sistem de coordonate se
obține
A Aa x i y j xa
Ax i
ya Ay j
x ya a a

10
OPERAŢII CU VECTORI
Compunerea vectorilor – include însumarea şi
diferenţa a doi vectori .
Metode de compunere – grafică, analitică.
ba
ba
Concluzie – vectorul sumă este diagonala mare, iar
vectorul diferenţă este diagonala mică, a paralelogramului
format de cei doi vectori.
a
b b
11
OPERAŢII CU VECTORI
Regula paralelogramului – constă în compunerea
vectorilor prin poziţionarea acestora cu originea comună.
Diferenţa = suma vectorului cu opusul celui de-al
doilea.
Vector opus – vector cu aceeaşi direcţie, acelaşi
modul, dar sens opus. Se simbolizează cu semnul
minus înaintea simbolului vectorului dat.
Modulul vectorului rezultant:
Unde
2 2 2 2 cosR a b a b
,a b
12
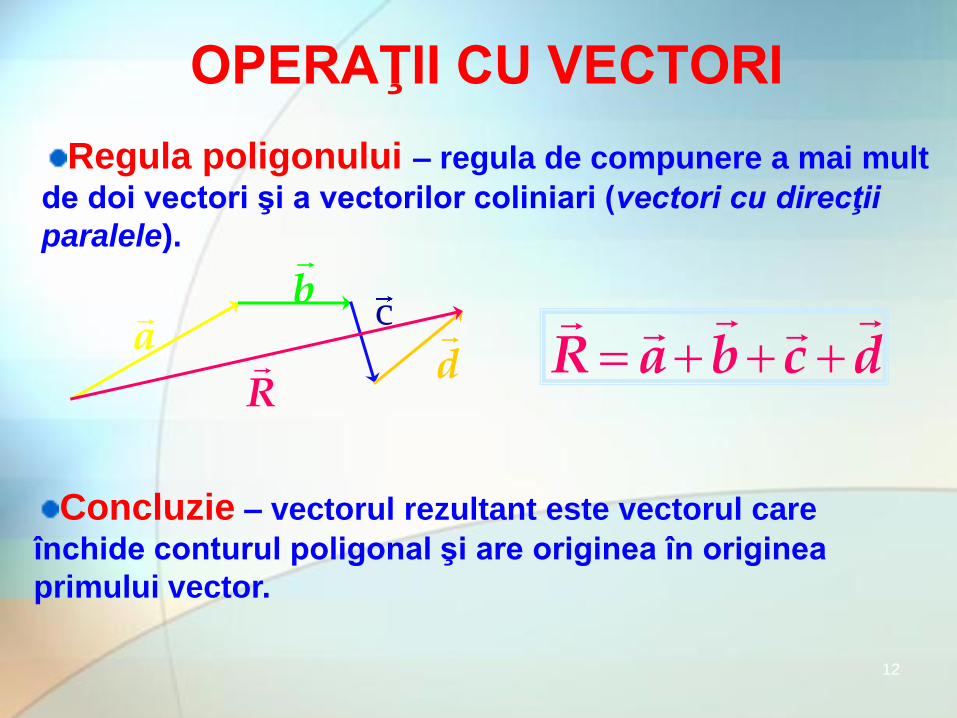
OPERAŢII CU VECTORI
Regula poligonului – regula de compunere a mai mult
de doi vectori şi a vectorilor coliniari (vectori cu direcţii
paralele).
b
c
d
dcbaR
R
Concluzie – vectorul rezultant este vectorul care
închide conturul poligonal şi are originea în originea
primului vector.
a

13
OPERAŢII CU VECTORI
2 a a a
2 a a a
a
a
a
a
2
a
2
Înmulţirea unui vector
cu un scalar – constituie de
fapt o adunare repetată.
Rezultatul este tot un
vector având aceeaşi
direcţie şi acelaşi sens
cu vectorul dat, pentru
scalar pozitiv şi sens
opus pentru scalar
negativ, iar modulul egal
cu produsul scalarului cu
modulul vectorului dat.
a
14
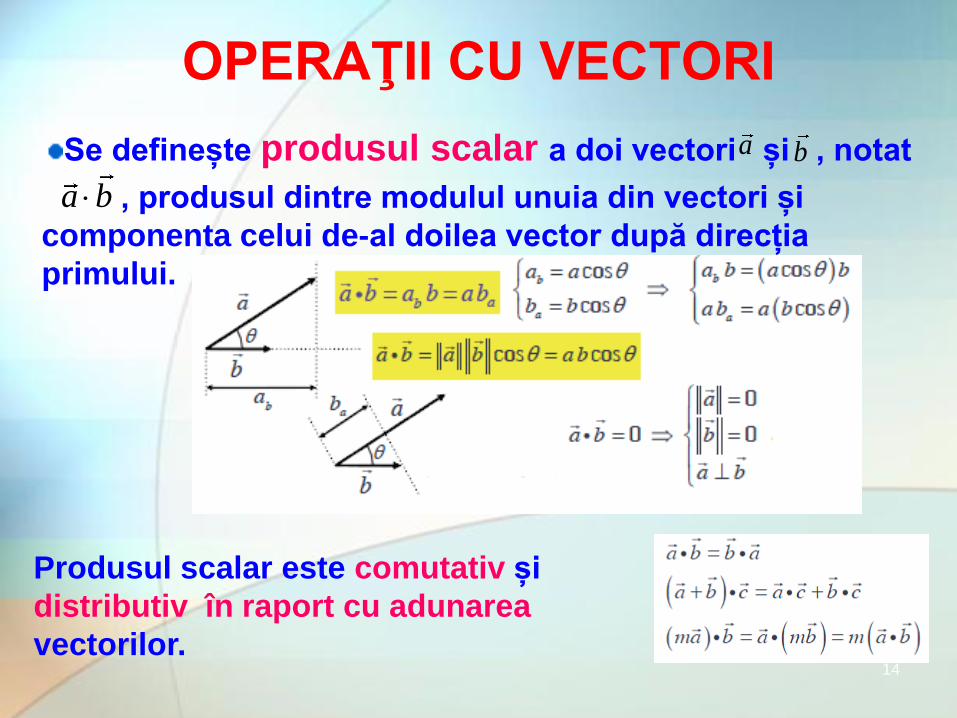
OPERAŢII CU VECTORI
Se definește produsul scalar a doi vectori și , notat
, produsul dintre modulul unuia din vectori și
componenta celui de-al doilea vector după direcția
primului.
a b
a b
Produsul scalar este comutativ și
distributiv în raport cu adunarea
vectorilor.
15
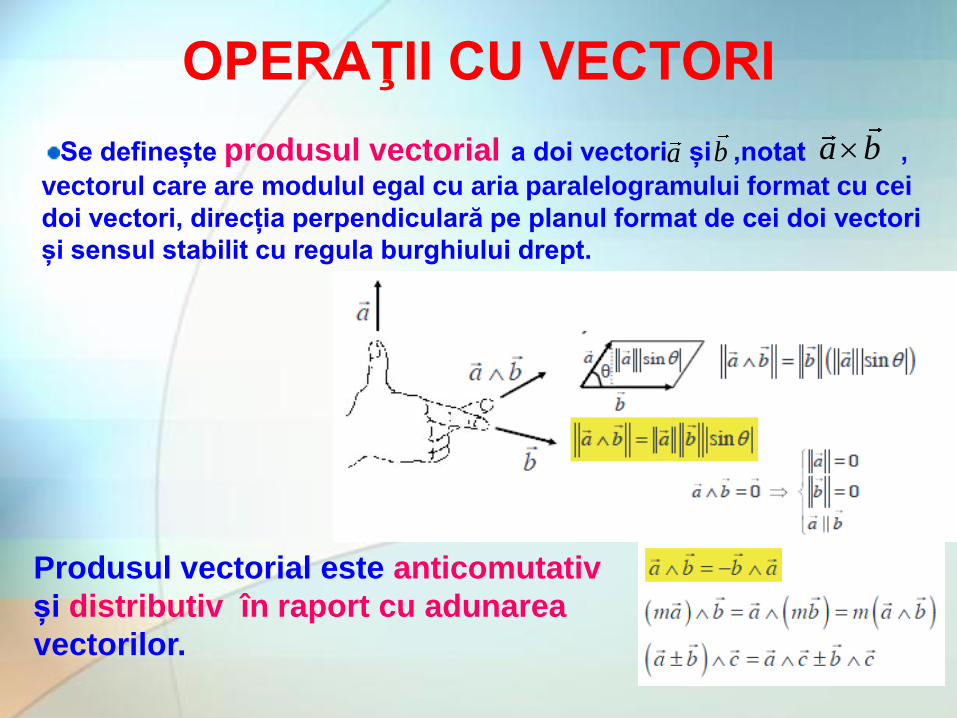
OPERAŢII CU VECTORI
Se definește produsul vectorial a doi vectori și ,notat ,
vectorul care are modulul egal cu aria paralelogramului format cu cei
doi vectori, direcția perpendiculară pe planul format de cei doi vectori
și sensul stabilit cu regula burghiului drept.
a b a b
Produsul vectorial este anticomutativ
și distributiv în raport cu adunarea
vectorilor.

16
OPERAŢII CU VECTORI
În cazul versorilor
Calcul analitic

17
OPERAŢII CU VECTORI
Calcul analitic

18
NOŢIUNI GENERALE
FIZICA - parte a ştiinţei care studiază legile ce guvernează
comportamentul extern şi intern a corpurilor din Univers
şi interacţiunea acestora.
Mecanica – parte a fizicii care studiază fenomene legate
de mişcarea mecanică a obiectelor (corpuri
macroscopice).
Mișcare mecanică Mecanica corpurilor
macroscopice

19
STUDIUL MIŞCĂRII MECANICE
CINEMATICA – studiază mişcarea mecanică fără a
analiza cauzele mişcării.
Mărimile fizice cu care operează cinematica sunt: poziția,
viteza și accelerația.
În cinematică sunt două mărimi fundamentale care se
determină prin măsurare:
- Intervalul dintre două puncte din spațiu (lungimea);
- Intervalele de timp.
DINAMICA – studiază mişcarea mecanică pornind de la
cauzele mişcării.
STATICA – studiază un caz particular al mişcării
mecanice, repausul, mai exact starea de echilibru a
corpurilor.

20
21
CINEMATICA
Obiectiv
Determinarea Legilor de Mișcare
Poziție(t), Viteză(t), Accelerație(t)
Descrierea
mișcării
mecanice
22
CINEMATICA
Mișcarea mecanică: schimbarea poziției unui corp în raport cu altele, considerate drept referință.
Caracter relativ
Definirea
sistemului de
studiat
Definirea
Sistemului
de Referință
(SR)
23
CINEMATICA
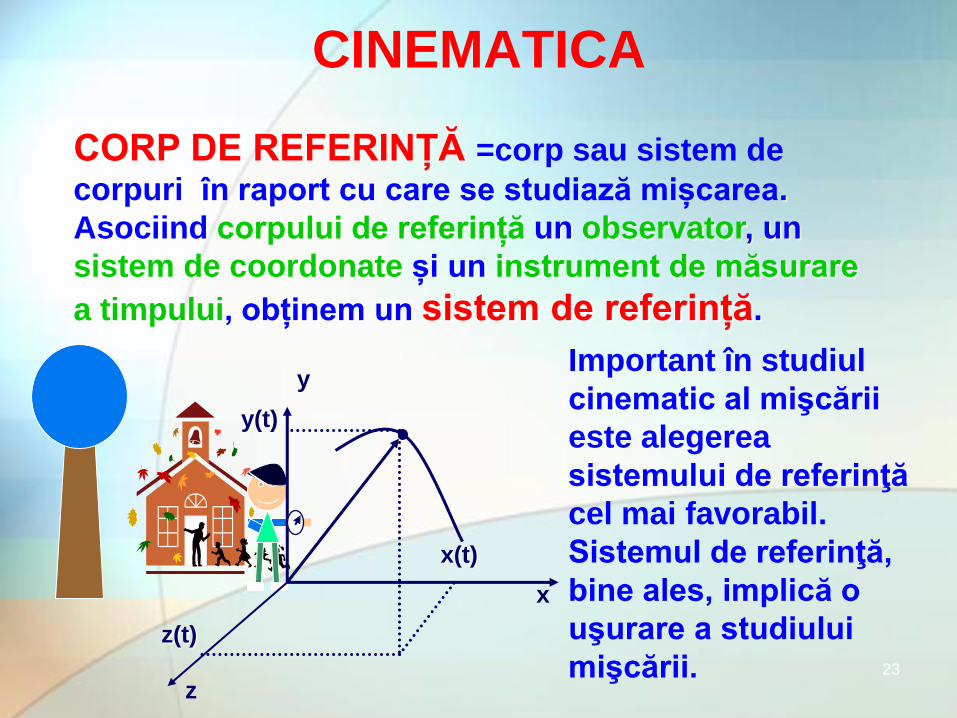
CORP DE REFERINȚĂ =corp sau sistem de
corpuri în raport cu care se studiază mișcarea.
Asociind corpului de referință un observator, un
sistem de coordonate și un instrument de măsurare
a timpului, obținem un sistem de referință.
x(t)
y(t)
z(t)
y
x
z
Important în studiul
cinematic al mişcării
este alegerea
sistemului de referinţă
cel mai favorabil.
Sistemul de referinţă,
bine ales, implică o
uşurare a studiului
mişcării.

24
Cinematica foloseşte noţiunile de :
Punct material - punct geometric cu masă.
Coordonate – mărimile fizice care definesc poziţia
mobilului în timp (coordonate temporale) şi spaţiu
(coordonate spaţiale)
Traiectorie – mulţimea punctelor atinse de mobil în
mişcare (urma lăsată de mobil în mişcare).
Traiectoriile pot fi :
Rectilinii
Curbilinii
CINEMATICA
25
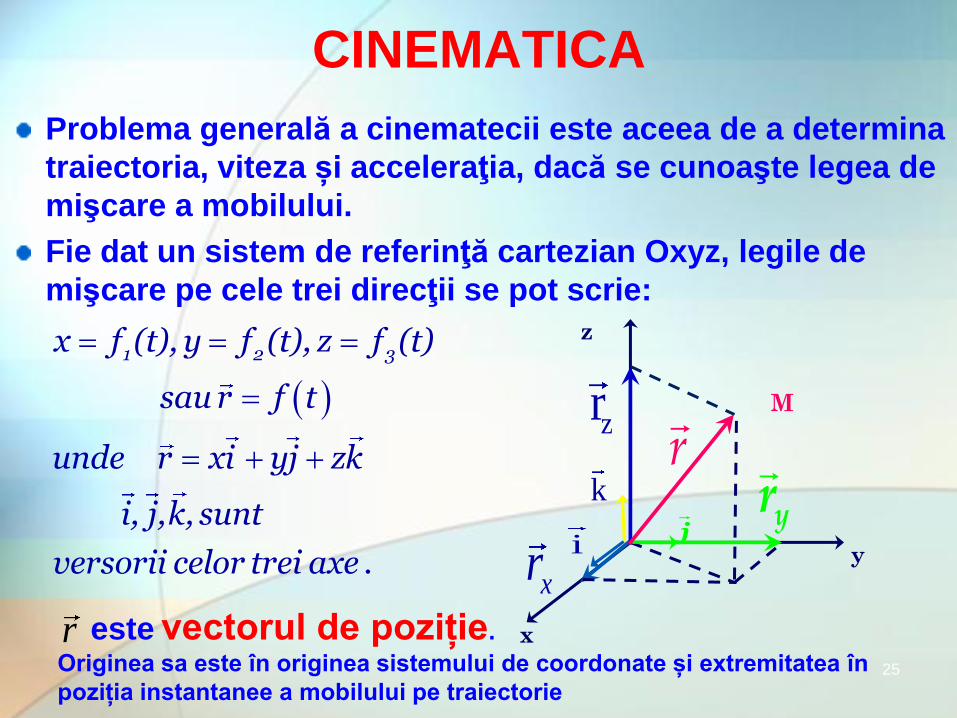
Problema generală a cinematecii este aceea de a determina
traiectoria, viteza și acceleraţia, dacă se cunoaşte legea de
mişcare a mobilului.
Fie dat un sistem de referinţă cartezian Oxyz, legile de
mişcare pe cele trei direcţii se pot scrie:
z
M
y
x
kr
ij
xryr
zr
1 2 3x f (t), y f (t), z f (t)
sau r f t
unde r xi yj zk
i, j,k, sunt
versorii celor trei axe .
CINEMATICA
este vectorul de poziție.
Originea sa este în originea sistemului de coordonate și extremitatea în
poziția instantanee a mobilului pe traiectorie
r

26
Dacă la momentul inițial (t1) corpul se găsește în punctul A(t1),
caracterizat de vectorul de poziție , iar la momentul t2 corpul a ajuns
în punctul B(t2), caracterizat de vectorul de poziție , atunci vectorul
diferență se numește vector deplasare.
2 1
2 1
2 1
Δx x - xr r r sau
y y y
O
A(t1)
B(t2)
x
y
2y
1r
2r
r
x
1x 2x
1y Distanţa parcursă d
Modulul deplasării
≤ distanţa parcursă
y
CINEMATICA
1r
2r
2 1r r r
27
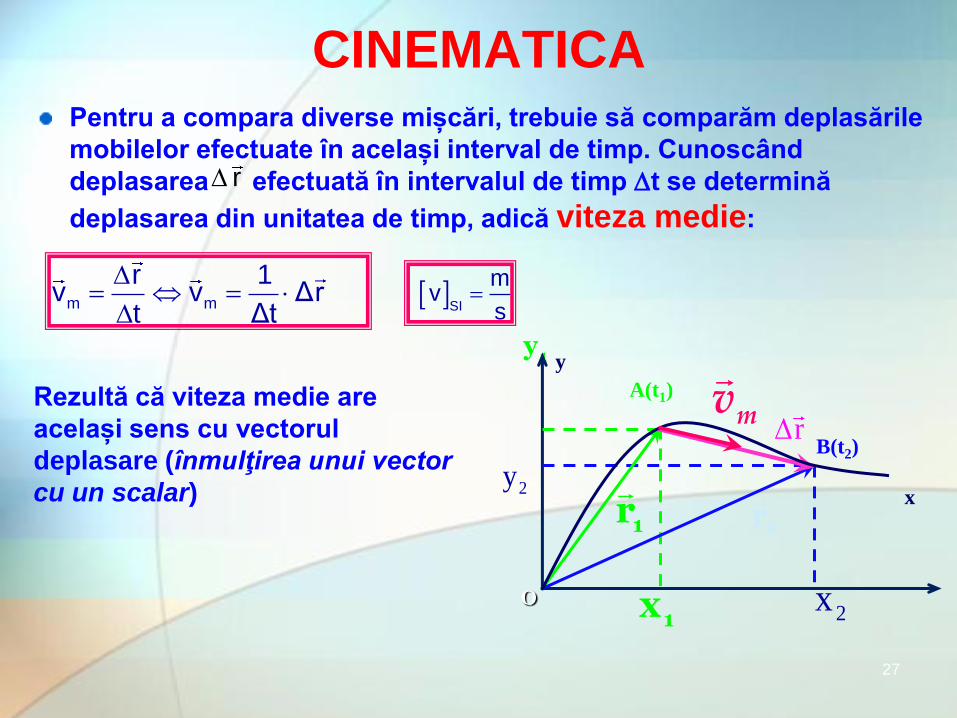
m m
r 1v v Δr
t Δt
Pentru a compara diverse mișcări, trebuie să comparăm deplasările
mobilelor efectuate în același interval de timp. Cunoscând
deplasarea efectuată în intervalul de timp t se determină
deplasarea din unitatea de timp, adică viteza medie:
SI
m v
s
Rezultă că viteza medie are
același sens cu vectorul
deplasare (înmulţirea unui vector
cu un scalar) x
1y
O
A(t1)
B(t2)
y
2y
1r
2r
r
1x 2x
mv
CINEMATICA
r
28
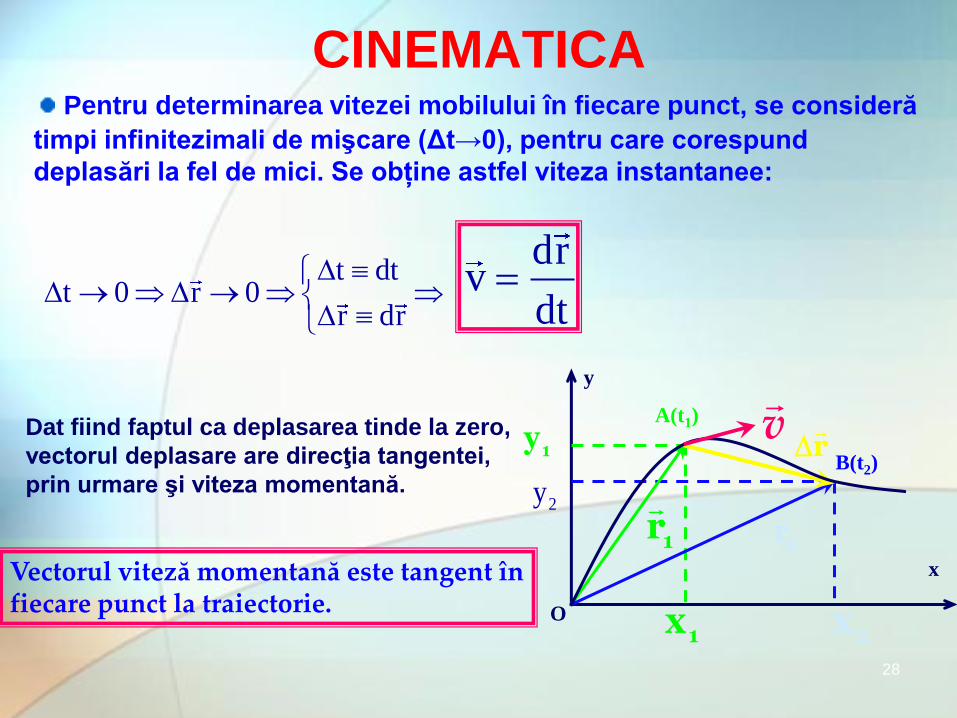
t dtt 0 r 0
r dr
Pentru determinarea vitezei mobilului în fiecare punct, se consideră
timpi infinitezimali de mişcare (Δt→0), pentru care corespund
deplasări la fel de mici. Se obține astfel viteza instantanee:
drv
dt
Dat fiind faptul ca deplasarea tinde la zero,
vectorul deplasare are direcţia tangentei,
prin urmare şi viteza momentană.
x
O
A(t1)
B(t2)
y
2y
1r
2r
r
1x 2x
1yv
Vectorul viteză momentană este tangent în fiecare punct la traiectorie.
CINEMATICA
29
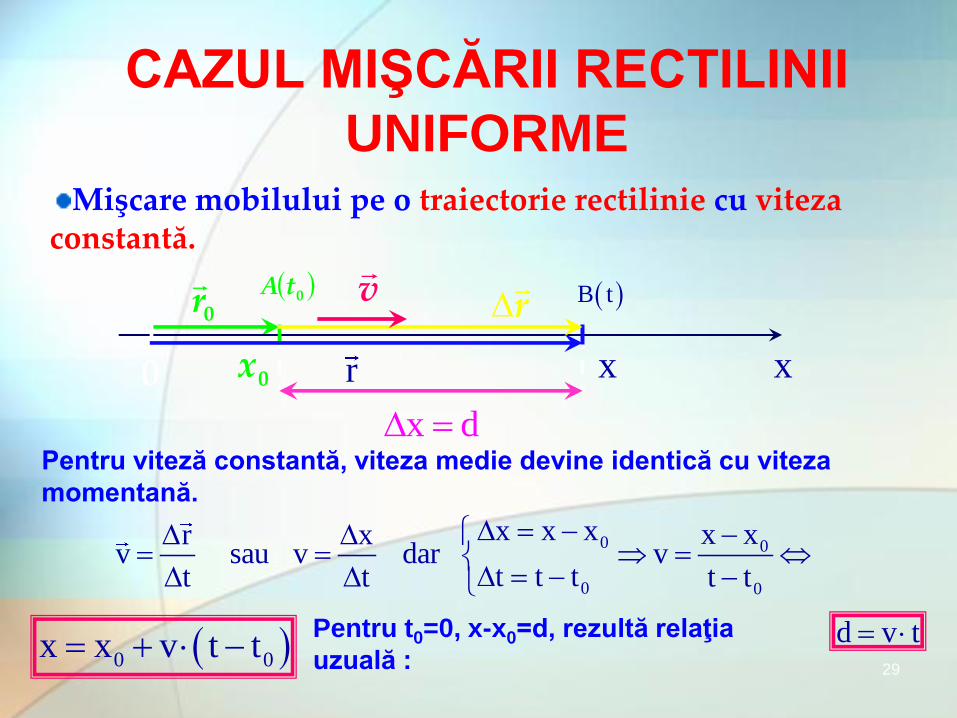
CAZUL MIŞCĂRII RECTILINII
UNIFORME Mişcare mobilului pe o traiectorie rectilinie cu viteza
constantă.
x0 0x x
0tA
x d
B t0r
r
r
v
Pentru viteză constantă, viteza medie devine identică cu viteza
momentană.
0 0
0 0
x x x x xr xv sau v dar v
t t tt t t t
0 0x x v t t Pentru t0=0, x-x0=d, rezultă relaţia
uzuală : d v t
30
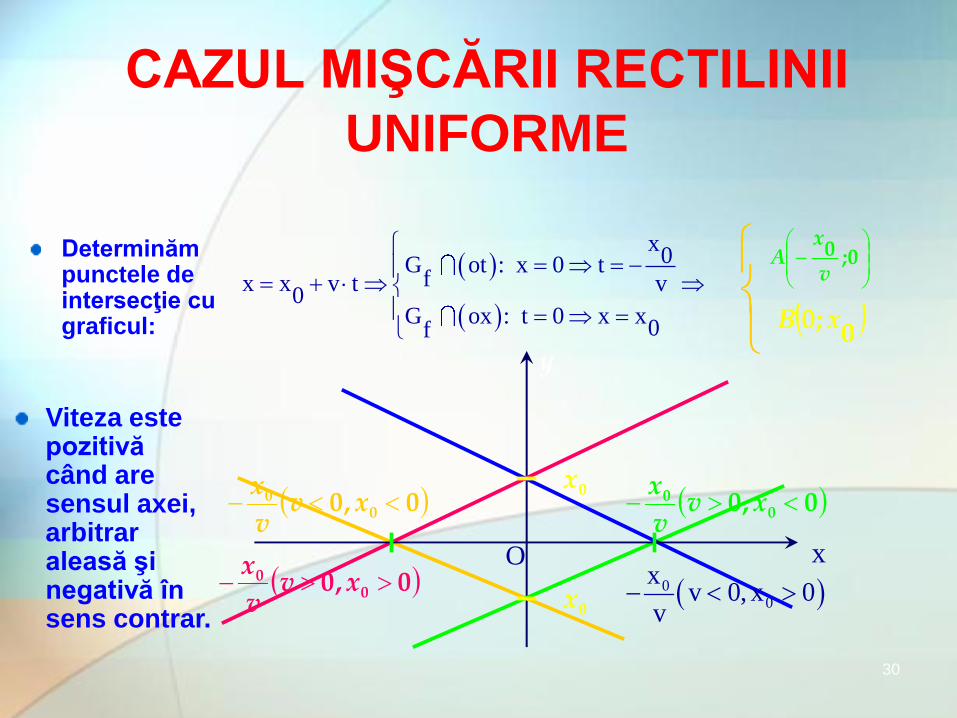
x0G ot : x 0 t
fx x v t v0
G ox : t 0 x x0f
0;0v
xA
0
;0 xB
Determinăm punctele de intersecţie cu graficul:
Viteza este pozitivă când are sensul axei, arbitrar aleasă şi negativă în sens contrar.
y
x
0x
00
xv 0, x 0
v 0,0 0
0 xvv
x
0,0 00 xvv
x 0,0 0
0 xvv
x
0x
O
CAZUL MIŞCĂRII RECTILINII
UNIFORME
31
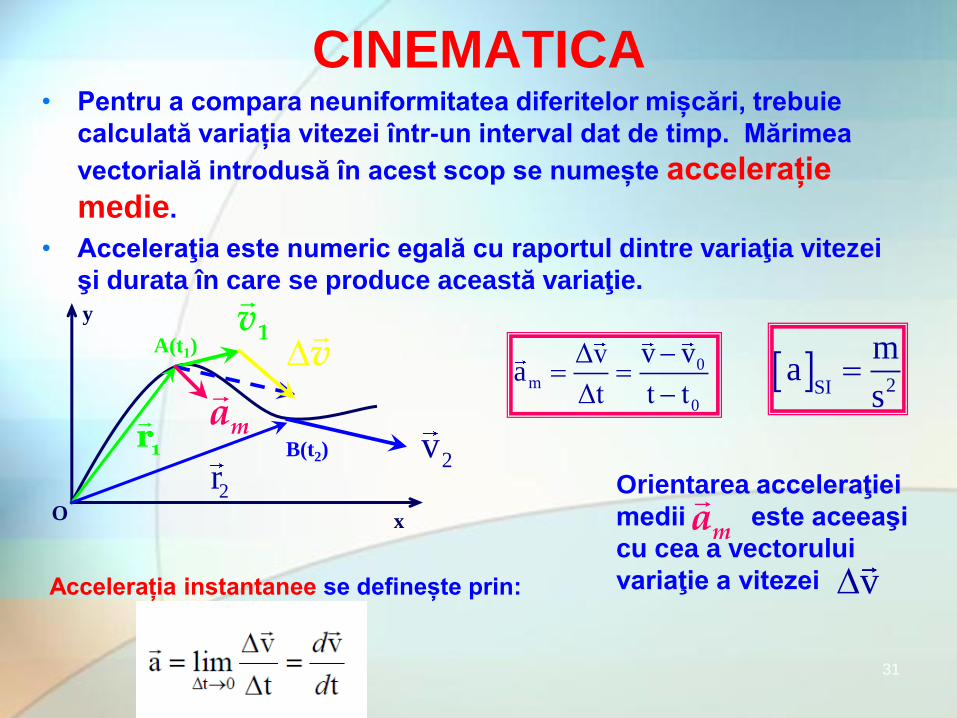
• Pentru a compara neuniformitatea diferitelor mișcări, trebuie
calculată variația vitezei într-un interval dat de timp. Mărimea
vectorială introdusă în acest scop se numește accelerație
medie.
• Acceleraţia este numeric egală cu raportul dintre variaţia vitezei
şi durata în care se produce această variaţie.
0m
0
v vΔva
Δt t t
2SI
ma
s
Orientarea acceleraţiei
medii este aceeaşi
cu cea a vectorului
variaţie a vitezei v
ma
O
A(t1)
B(t2)
y
1r
2r
1v
2v
v
ma
x
CINEMATICA
Accelerația instantanee se definește prin:
32
MIŞCAREA RECTILINIE UNIFORM
VARIATĂ
Mişcare mobilului pe o traiectorie rectilinie cu
acceleraţia constantă.
Legea mişcării rezultă din legea mişcării rectilinii uniforme
la care se înlocuieşte viteza cu valoarea medie a acesteia.
Pentru calculul valorii medii a vitezei trebuie determinată
funcţia de variaţie în timp a vitezei, deoarece :
Pentru o funcţie de gradul I – valoarea medie= media
aritmetică
Pentro o funcţie de gradul II – valoarea medie=media
geometrică
0 m 0x x v t t

33
Acceleraţia fiind constantă, valoarea medie devine
identică cu valoarea momentană:
Adică , relaţie care indică o dependenţă
liniară de timp a vitezei .
Prin urmare, valoarea medie a vitezei va fi :
În aceste condiţii viteza medie este :
0
0
v vva a
t t t
0 0v v a t t
0m
v vv
2
tfv
0 0 0
m
v a t t vv
2
m 0 0
av v t t
2
MIŞCAREA RECTILINIE UNIFORM
VARIATĂ
34
Înlocuind valoare medie a vitezei în relaţia legii mişcării
pentru o deplasare rectilinie, rezultă legea mişcării
rectilinii uniform variate:
Din legea mişcării rezultă o dependenţă pătratică a
coordonatei de timp , ceea ce se transcrie grafic
printr-o parabolă.
MIŞCAREA RECTILINIE UNIFORM
VARIATĂ
0 0 0 0
ax x v t t t t
2
2
0 0 0 0
ax x v t t t t
2
2x f t
35
x, v
O t
x, v
t
a>0 a<0
0xmx
mt0v
mx
0x
0v
mt
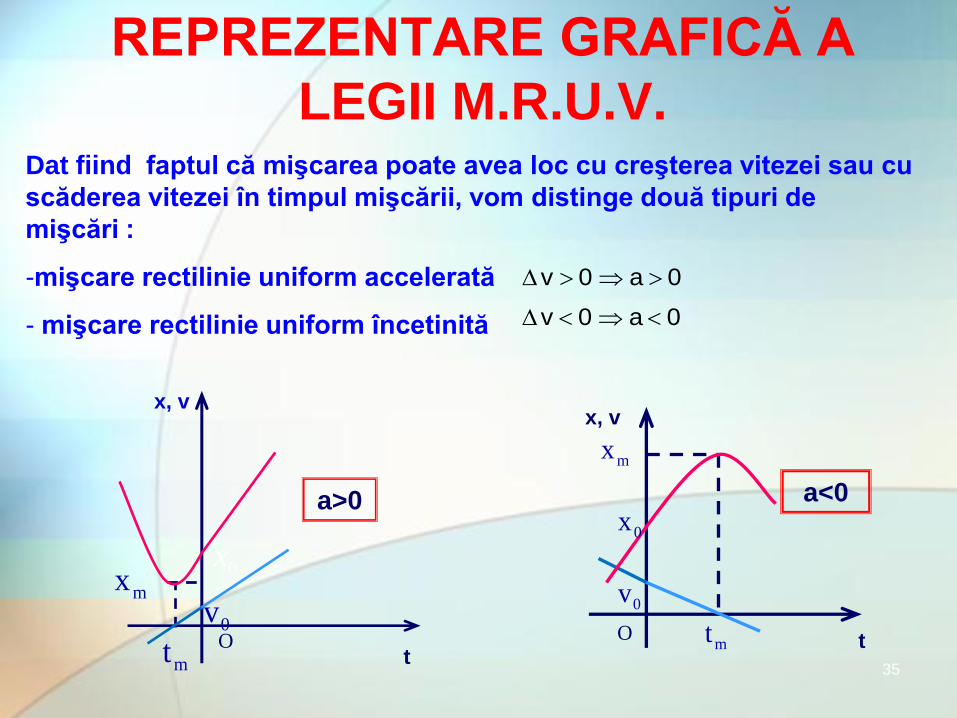
REPREZENTARE GRAFICĂ A
LEGII M.R.U.V. Dat fiind faptul că mişcarea poate avea loc cu creşterea vitezei sau cu
scăderea vitezei în timpul mişcării, vom distinge două tipuri de
mişcări :
-mişcare rectilinie uniform accelerată
- mişcare rectilinie uniform încetinită
O
v 0 a 0
v 0 a 0

36
CINEMATICA
Metode
•Vectorială (concisă, elegantă)
•Pe coordonate (număr mare de ecuații)
•Natural (coordonate curbilinii)
Problemele cinematicii
Poziție (t)
Viteză (t)
Accelerație (t)
Pro
ble
ma
Dire
ctă
Pro
blr
ma
Inv
ers
ă

37
CINEMATICA
r t t
r t
pozitie :r(t)
ttV
tV
t 0
r drviteză : V(t)
t dtlim
dVacceleratie : a(t)
dt
mV r
m
rviteza medie : V
t
r
deplasare : r r(t t) r(t)
m
V t t V tacceleratie : a
t
medie
Vectorială
dr

38
CINEMATICA
)(tx
)(ty
)(tzpozitii :x(t),y(t),z(t)
xx
dVacceleratii :a (t)
dty
y
dVa (t)
dt
zz
dVa (t)
dt
Pe coordonate
y
x
zdeplasări : x, y, z
x
dxviteze :V (t) ,
dt
dt
dytVy )(
dt
dztVz )(

39
CINEMATICA
dsviteză :V(t) V ,
dt
dt
dVtaT )(
Ta
a
N T
2 2a a a
n
0s0s
2
N
d Vacceleratie :a (t) V n
dt
Na
Natural
dV d
acceleratie :a(t) (V )dt dt
n
pozitie :s(t)
0s

40
CINEMATICA
METODOLOGIE
• Se identifică sistemul fizic de studiat
• Alegerea adecvată a SR
• Alegerea metodei sau metodelor de rezolvare (vectorială, pe coordonate sau natural) • Rezolvarea problemei directe (prin derivare) sau indirectă (prin integrare)