controller pentru bicicletă electrică (e bike...
TRANSCRIPT
Electronică aplicată
Controller pentru bicicletă electrică (eBike controller)
Florin DUMITRACHE
Coordonator știinţific: Conf. Dr. Ing. Gheorghe PANĂ
Abstract Industria vehiculelor electrice este în continuă dezvoltare. În această categorie a vehiculelor electrice intră și bicicletele electrice (eng. ”Electric Bicycle”, ”eBike”). Bicicletele electrice, ca și alte vehicule electrice, utilizează pentru propulsie motoare BLDCM (Brushless Direct Current Motor). Lucrarea de faţă prezintă o abordare asupra proiectării hardwaresoftware a unui modul electronic de control care va avea sarcina de a controla un motor BLDC de putere și va îndeplini și alte funcţii utile pentru utilizatorul unei biciclete electrice.
Cuvinte cheie: BLDC, ebike, controller.
1. Introducere
Proiectul constă în proiectarea și construirea unui modul electronic de control pentru biciclete electrice. Modulul electronic va trebui să poată acționa corect un motor de tip BLDC cu o putere de maxim 350W alimentat la o tensiune nominală de 36V, montat în una din roțile bicicletei. În plus, modulul va prezenta următoarele funcționalități:
• Control variabil al puterii livrate de către motor, cu ajutorul unei manete de accelerație de pe ghidonul bicicletei;
• Utilizarea motorului în modul de frână / generator; • Control al blocurilor de lumini (far, stop și semnalizări); • Monitorizarea parametrilor de interes (tensiunea bateriei, viteza instantanee, temperatura internă a modulului, curentul consumat/debitat de motor etc.);
• Comunicarea prin protocol Bluetooth cu un smartphone, pe care vor fi afișate informații de interes utilizatorului bicicletei electrice;
• Posibilitate de control prin protocol Bluetooth a diferitelor funcții ale modulului (de exemplu controlul luminilor de pe bicicletă);
• Diverse măsuri de protecție: suprasarcină motor, supraîncălzire modul, subtensiune baterie etc.
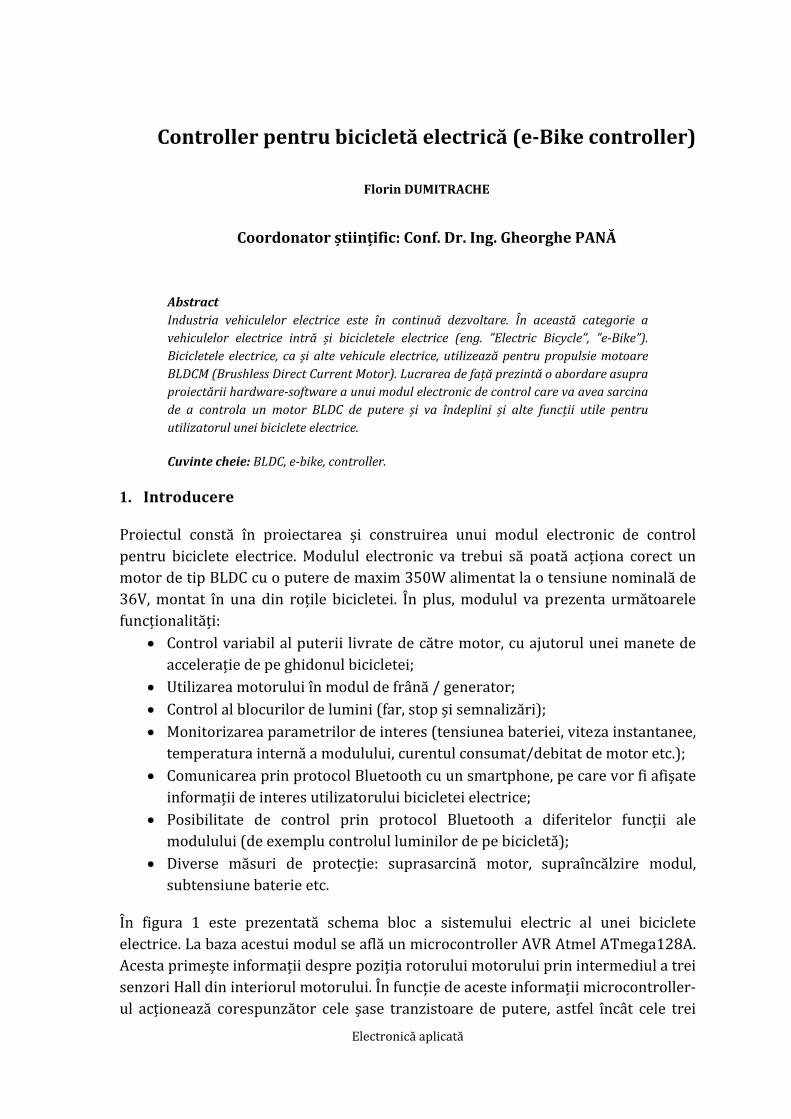
În figura 1 este prezentată schema bloc a sistemului electric al unei biciclete electrice. La baza acestui modul se află un microcontroller AVR Atmel ATmega128A. Acesta primește informații despre poziția rotorului motorului prin intermediul a trei senzori Hall din interiorul motorului. În funcție de aceste informații microcontroller‐ul acționează corespunzător cele șase tranzistoare de putere, astfel încât cele trei
Electronică aplicată
faze ale motorului sunt energizate corect.
Figura 1 – Schema bloc a sistemului electric al unei biciclete electrice
2. Aspecte experimentale
Proiectarea modulului a plecat de la determinarea blocurilor necesare acționării motorului BLDC [1]. Alimentarea internă a modulului este realizată cu ajutorul unui convertor DC‐DC scăzător de tensiune în topologie Buck. Acest convertor asigură o tensiune de +12V necesară pentru alimentarea driverelor MOSFET și a unei surse de referință de 5V. Această abordare asigură o eficiență sporită a sursei de alimentare interne. Alte tensiuni necesare în interiorul modulului (ex. +5V și +3.3V) se obțin din tensiunea de +12V cu regulatoare de tensiune liniare. O tensiune de ‐5V necesară pentru măsurarea curentului este generată cu un convertor DC‐DC în topologie Buck‐Boost, construit cu un circuit de temporizare 555.
Pentru a comanda motorul sunt necesare 6 elemente de comutație, aici fiind folosite tranzistoare MOSFET (Metal‐Oxide‐Semiconductor Field‐Effect Transistor), aranjate în 3 semi‐punți H. Pentru microcontroller a fost ales ATmega128A dat fiind faptul că oferă 6 canale PWM de mare viteză și cu rezoluție de 16 biți. Legătura dintre microcontroller și tranzistoare este făcută de către 3 drivere MOSFET dedicate, care asigură parametrii electrici corecți pentru acționarea tranzistoarelor de putere.
Modulul monitorizează curentul consumat de către motor prin măsurarea tensiunii pe un rezistor șunt de valoare mică (de ordinul mΩ). Pentru a putea măsura corect tensiunea în acest caz, se folosește un amplificator diferențial [2]. Tensiunea este filtrată, redresată cu un redresor de precizie și apoi citită pe un canal ADC al microcontroller‐ului.
În proiectarea PCB‐ului (Printed Circuit Board) pentru acest modul s‐a ținut cont de aspecte de compatibilitate electromagnetică (EMC – Electromagnetic Compatibility) și aspecte de natură termică [3]. Puntea de tranzistoare fiind cea mai mare sursă de perturbații electromagnetice și termice, este plasată spre marginea PCB‐ului, într‐o
Electronică aplicată
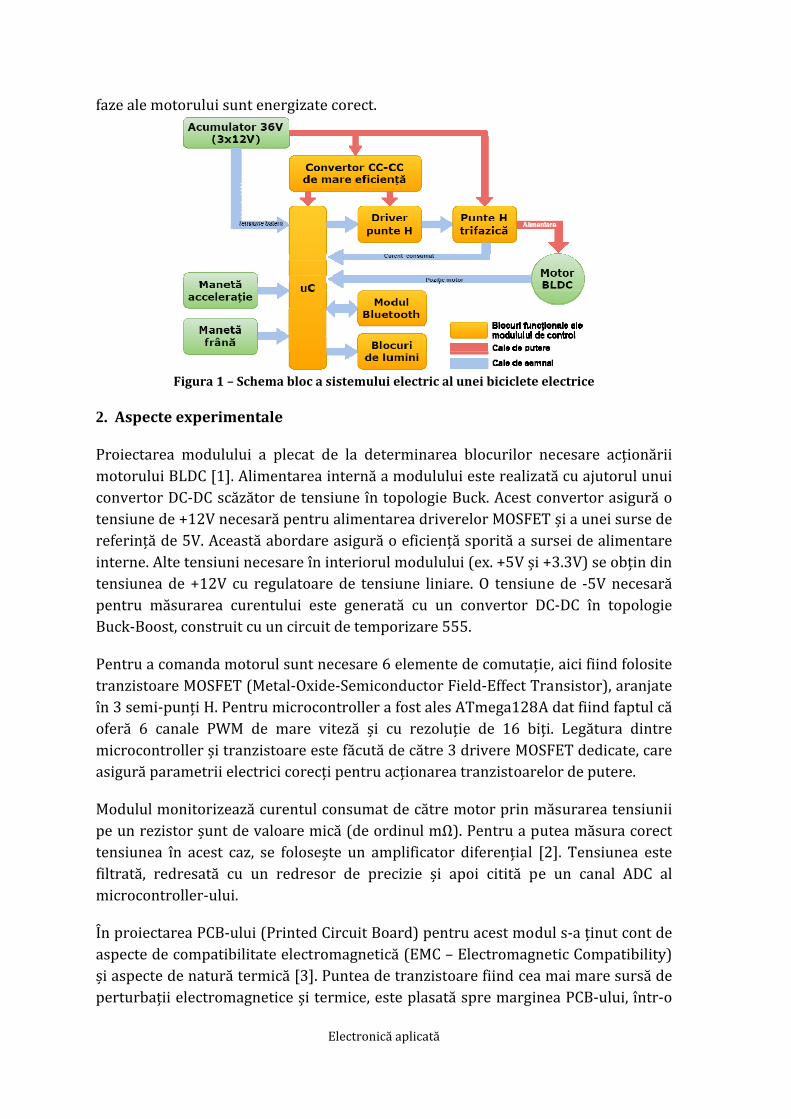
zonă care permite montarea de radiatoare, pentru o mai bună disipare termică. PCB‐ul este proiectat pe două straturi: un strat este folosit pentru semnale, iar celălalt strat este folosit pentru alimentare și circuite de putere. Ambele straturi sunt prevăzute cu plane de masă interconectate electric. Diafonia dintre trasee este minimizată prin folosirea planelor de masă și rutarea ortogonală (traseele de pe straturi diferite se ”întâlnesc” la unghi de 90°). În figura 4 este prezentat PCB‐ul modulului și repartiția blocurilor componente. Dimensiunea finală este 129 x 86mm.
Figura 2 – Imagine de ansamblu asupra PCBului
1 – microcontroller și modul Bluetooth; 2 – drivere MOSFET; 3 – măsurarea curentului; 4 – puntea de tranzistoare; 5 – sursa de alimentare internă; 6 – bloc comandă far;
7 – porturi microcontroller libere
3. Dificultăţi întâlnite
Pe durata proiectării și construirii modulului au fost întâlnite mai multe dificultăți. Cea mai mare problemă întâlnită a fost instabilitatea sursei de alimentare cu circuit Buck. Deși toate componentele au fost calculate folosind ecuațiile din foaia de catalog a circuitului integrat, după montarea tuturor componentelor, circuitul Buck a prezentat instabilitate în timp. Prin reducerea cu un ordin de mărime a două rezistoare din bucla de reacție a circuitului instabilitatea sistemului a fost înlăturată.
Instabilitatea circuitului Buck a dus la supratensiuni în circuitul de alimentare de +12V. Aceste supratensiuni au dus la defectarea driverele MOSFET. După rezolvarea instabilității din sursa de alimentare au fost înlocuite driverele defecte.
Montarea modulului într‐o carcasă de aluminiu a prezentat o problemă: modulul Bluetooth din interiorul cutiei nu poate transmite prin carcasa metalică. Pentru a rezolva această problemă, pe PCB a fost prevăzut un conector UF.L pentru posibilitatea conectării unei antene externe. Pe exteriorul carcasei este montată o antenă planară acordată la frecvența de 2.45GHz necesară modulului Bluetooth.
Electronică aplicată
4. Rezultate
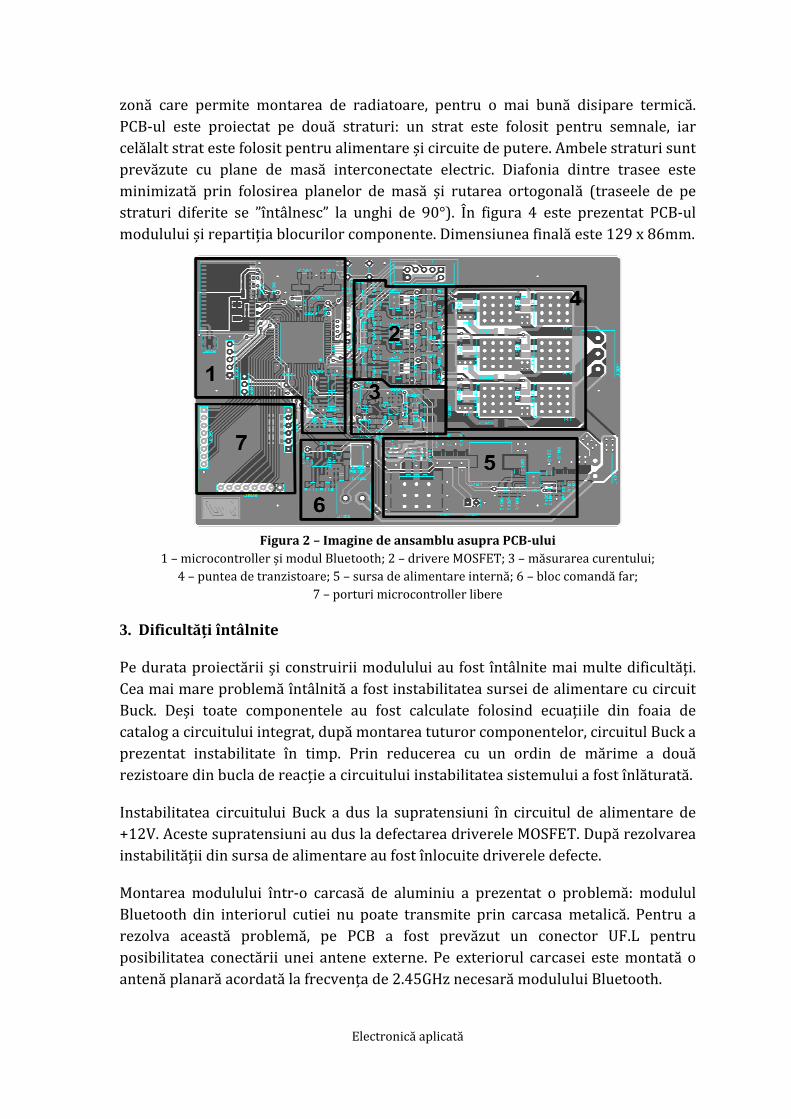
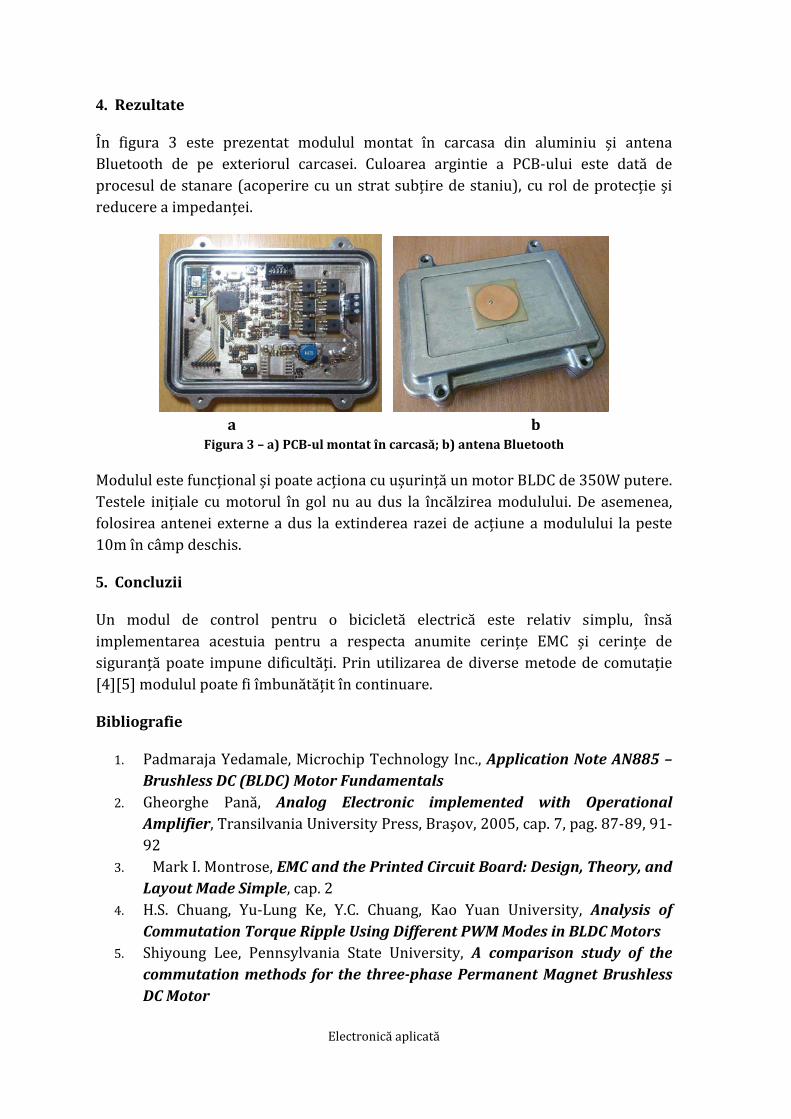
În figura 3 este prezentat modulul montat în carcasa din aluminiu și antena Bluetooth de pe exteriorul carcasei. Culoarea argintie a PCB‐ului este dată de procesul de stanare (acoperire cu un strat subțire de staniu), cu rol de protecție și reducere a impedanței.
a b
Figura 3 – a) PCBul montat în carcasă; b) antena Bluetooth
Modulul este funcțional și poate acționa cu ușurință un motor BLDC de 350W putere. Testele inițiale cu motorul în gol nu au dus la încălzirea modulului. De asemenea, folosirea antenei externe a dus la extinderea razei de acțiune a modulului la peste 10m în câmp deschis.
5. Concluzii
Un modul de control pentru o bicicletă electrică este relativ simplu, însă implementarea acestuia pentru a respecta anumite cerințe EMC și cerințe de siguranță poate impune dificultăți. Prin utilizarea de diverse metode de comutație [4][5] modulul poate fi îmbunătățit în continuare.
Bibliografie
1. Padmaraja Yedamale, Microchip Technology Inc., Application Note AN885 – Brushless DC (BLDC) Motor Fundamentals
2. Gheorghe Pană, Analog Electronic implemented with Operational Amplifier, Transilvania University Press, Braşov, 2005, cap. 7, pag. 87‐89, 91‐92
3. Mark I. Montrose, EMC and the Printed Circuit Board: Design, Theory, and Layout Made Simple, cap. 2
4. H.S. Chuang, Yu‐Lung Ke, Y.C. Chuang, Kao Yuan University, Analysis of Commutation Torque Ripple Using Different PWM Modes in BLDC Motors
5. Shiyoung Lee, Pennsylvania State University, A comparison study of the commutation methods for the threephase Permanent Magnet Brushless DC Motor