pa_ri
TRANSCRIPT

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA: GRAFICA MECANISME SI TOLERANTE Adresa:str. Domneasca nr.111. Tel- 0236- 414871 int.399 E-mail:
PROGRAMA ANALITICĂ
Disciplina: DESEN TEHNIC SI GEOMETRIE DESCRIPTIVA A. Locul disciplinei în planul de învăţământ:
Anul II Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
14 28 14 42 28 70 V V 4 4 M-F0007
B. Obiectivele disciplinei: • Cunoaşterea instrumentelor grafice necesare realizarii unei lucrari grafice de desen
tehnic; • Cunoasterea regulilor de reprezentare a corpurilor geometrice care compun forma
spatiala a obiectelor; • Cunoaşterea normelor de intocmire a desenului de piesa si a desenului de ansamblu; • Formarea competentelor in a citi si intocmi lucrari grafice de desen tehnic in
specialitatea urmata; • Formarea si dezvoltarea rationamentului spatial, a rigurozitatii, creativitatii si initiativei
in abordarea problemelor privind intocmirea unui document tehnic de proiectare sau de oferta.
C. Metode de predare – învăţare: prelegerea, explicaţia, dezbaterea, elaborarea unor lucrari de grafica reprezentarii obiectelor precedate de o analiza concreta a modului de lucru pentru fiecare caz studiat.
D. Forme şi metode de evaluare: evaluare continuă ( pondere 30% ) prin metode orale, lucrari practice de laborator ; evaluare sumativă (pondere 70%) prin probe scrise si orale.
E. Conţinutul cursului: SEMESTRUL I
1.Sisteme de proiectie; epura Monge / 2ore Reprezentarea punctului. Reprezentarea dreptelor simplu particulare in spatiu si epura. 2.Drepte dublu particulare in spatiu si epura / 2 ore Pozitii relative a doua drepte. Proiectia unghiurilor plane. Reprezentarea planului; dreapta continuta in plan; drepte simplu particulare continute in plan. 3. Plane particulare in spatiu si in epura / 2 ore Plane simplu si dublu particulare in spatiu si in epura. Pozitii relative a doua plane. Pozitiile unei drepte fata de un plan.Vizibilitatea in epura. 4.Reprezentarea corpurilor geometrice / 2 ore Reprezentarea prismei si a piramidei; intersectia cu planul si cu dreapta. Desfasurarea poliedrelor; cazuri particulare. 5.Reprezentarea corpurilor de rotatie / 2 ore Intersectia cilindrului si a conului cu planul; teorema Dandelin. Intersectia cu dreapta. Desfasurarea cilindrului si a conului; cazuri particulare. 6.Reprezentarea vederilor si a sectiunilor in desenul industrial / 2 ore Clasificarea sectiunilor; reprezentarea rupturilor. 7.Cotarea in desenul industrial / 2 ore Elementele cotarii; reguli generale de cotare; cotari speciale.
SEMESTRUL 2 1.Inscrierea pe desen a elementelor de precizie a executiei / 2 ore Inscrierea rugozitatii suprafetei pe desenul de executie. Incrierea pe desen a tolerantelor la dimensiuni.
2.Sisteme de ajustaje / 2 ore Inscrierea ajustajelor pe desen. Inscrierea tolerantelor geometrice. 3.Desenul de ansamblu / 2 ore Reguli specifice. Pozitionarea si cotarea desenului de ansamblu. Tabelul de componenta. Exemple. 4.Reprezentarea asamblarilor demontabile / 2ore Asamblari filetate. Reprezentarea arborilor. Reprezentarea asamblarilor cu pene si cu caneluri 5.Reprezentarea rotilor dintate si a angrenajelor / 2 ore 6.Reprezentarea lagarelor cu alunecare si cu rostogolire /2 ore Reprezentarea elementelor si a dispozitivelor de etansare. 7.Reprezentarea asamblarilor nedemontabile / 2 ore Reprezentarea asamblarilor sudate. Reprezentarea asamblarilor nituite.
F. Conţinutul lucrarilor practice de laborator SEMESTRUL I
1. Enuntarea obiectivelor disciplinei si a dezvoltarii acesteia pe parcursul semestrului Standarde generale pentru reprezentari grafice; linii,scriere, formate,indicator. - 2 ore
2. Grafica constructiilor geometrice; racordari, constructia tangentelor. Aplicatie dupa model.- 2 ore
3. Aplicatii la reprezentarea dreptelor simplu si dublu particulare; teorema unghiului drept. - 2 ore
4. Aplicatii la reprezentarea planului; drepte particulare continute in plan. Constructia figurilor geometrice in plane particulare -2 ore.
5. Aplicatii privind intersectii de plane; intersectia dreptei cu o placa opaca; vizibilitate -3 ore.
6. Dispunerea proiectiilor in desenul industrial; aplicatii dupa modele spatiale-3 ore. 7. Aplicatii la reprezentarea poliedrelor: intersectia cu planul si aflarea marimii reale a
sectiunii -3 ore. 8. Aplicatii la reprezentarea suprafetelor de rotatie: intersectia cu planul-teorema Dandelin;
aflarea marimii reale a sectiunii. - 2 ore. 9. Reprezentarea axonometrica izometrica: exemple - 2 ore. 10. Aplicatie la reprezentarea axonometrica dupa un model ortogonal - 4 ore. 11. Schita unei piese prin relevare -3 ore.
SEMESTRUL 2 1.Reprezentarea flanselor si a filetelor dupa model - 4 ore. 2.Schita prin relevare a unei piese de dificultate medie: corp de lagar - 4 ore. 3.Aplicatii la reprezentarea vederilor si a sectiunilor: determinarea celei de-a treia proiectii a unei piese dupa un model ortogonal in doua proiectii; cotarea piesei reprezentate; inscrierea rugozitatii si a tolerantelor - 4 ore. 4.Schitele pieselor componente dintr-un ansamblu tip pompa cu roti dintate: corp pompa, capace, arbori pinion, lagare - 6 ore. 5.Desenul de ansamblu al pompei cu roti dintate; inscrierea ajustajelor - 6 ore. 6.Desenul de ansamblu al unei transmisii cu roti conice - 6 ore. 7.Desenul de ansamblu al unui reductor melcat – 6 ore. 8.Desenul unui recipient sudat prevazut cu stuturi si flanse de legatura - 6 ore.
G. Bibliografie de elaborare a cursului 1.Bejenaru, S., Rus, M. Desen Tehnic, Editura Fundaţiei Universitare „Dunărea de Jos”, Galaţi, ISBN (10) 973-627-301-6; ISBN (13)978- 973-627-301-8, 2006 2.Mereuţă, E., Rus, M. Geometrie descriptivă – Editura Fundaţiei Universitare “Dunărea de Jos” Galaţi, 2005, ISBN 973-627-251-6

3.Alexandru, V., Baroiu, N., Aplicaţii de geometrie descriptivă şi desen, Editura Abrudan, O., Bejenaru, S., s.a Academica, ISBN 973-8316-78-2, 2005 4.Morarescu. A., s.a. Geometrie descriptiva si Desen tehnic -Indrumar pentru lucrari practice- Editura Mongabit- Galati 2002 5.Morarescu, A., Bejenaru, S. Geometrie descriptiva si Desen tehnic- Editura Academica Galati-2001 6.Vasilescu, E. s.a. Desen tehnic industrial-Elemente de proiectare, Editura tehnica, Bucuresti,1994 7.Tosetti, A Il disegno tecnico e la sua normativa per allievi ingegneri industriali, Edizioni Libreria Cortina, Padova 1991 8.Dale.C. s.a. Desen tehnic industrial pentru constructii de masini- Editura tehnica, Bucuresti, 1990 9.Precupetu, P. s.a Probleme de geometrie descriptiva cu aplicatii in tehnica, Editura tehnica, Bucuresti, 1987 10.Alexandru.V. Geometrie descriptiva si Desen- vol.1- Universitatea din Morarescu A. s.a Galati 1982 11.xx xx xx Standarde de desen tehnic, Seria U H. Bibliografie minimala de studiu pentru studenti 1.Bejenaru, S., Rus, M. Desen Tehnic, Editura Fundaţiei Universitare „Dunărea de Jos”, Galaţi, ISBN (10) 973-627-301-6; ISBN (13)978- 973-627-301-8, 2006 2.Alexandru, V., Baroiu, N., Aplicaţii de geometrie descriptivă şi desen, Editura Abrudan, O., Bejenaru, S., s.a Academica, ISBN 973-8316-78-2, 2005 3.Mereuţă, E., Rus, M. Geometrie descriptivă – Editura Fundaţiei Universitare “Dunărea de Jos” Galaţi, 2005, ISBN 973-627-251-6 4.Morarescu. A., s.a. Geometrie descriptiva si Desen tehnic -Indrumar pentru lucrari practice- Editura Mongabit- Galati 2002 5.Vasilescu, E. s.a. Desen tehnic industrial-Elemente de proiectare, Editura tehnica, Bucuresti,1994 Data aprobarii programei analitice in catedra / departament: 15.02.2007 (Semnatura) Director departament / Sef catedra Conf.univ. dr.ing. Ioan BAICU

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: ECHIPAMENTE PERIFERICE ŞI DE BIROTICĂ
A. Locul disciplinei în planul de învăţământ:
Anul III Sem. I Sem. II Total ore Forme de
verificare Nr. credite Anul de
studiu C L C L C L Sem. I Sem. II Sem. I Sem.
II
Cod disciplină
Nr. ore 28 28 - - 28 28 V - 4 - M-S3101-2
B. Obiectivele disciplinei: • Acumularea de cunoştinţe în domeniul tehnologiei informaţiei; • Înţelegerea şi învăţarea noţiunilor necesare pentru a putea lucra cu interfaţa sistemului de
operare şi pentru a putea folosi diferite produse software pentru prelucrarea textelor, pentru prelucrarea tabelelor, pentru realizarea de prezentări, pentru folosirea serviciilor din reţeaua Internet sau pentru administrarea unei baze de date;
• Cunoaşterea modului de evoluare şi de dezvoltare a produselor şi procedeelor din domeniul tehnologiei informaţiei în ţara noastră şi pe plan mondial;
• Formarea unei concepţii sistemice asupra procedeelor din domeniul tehnologiei informaţiei; • Dezvoltarea capacităţii inginereşti de utilizare echipamentelor specifice şi de selectare a lor la
realizarea unor produse industriale de înaltă competitivitate; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei inginereşti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea tehnica a
studentului, componentă esenţială a reformei industriale în România;
C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea, studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstraţii practice, aplicaţii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de
laborator şi evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. SISTEMUL BIROTIC – 2 ore Definiţii şi principii. Funcţiile şi structura sistemului birotic.
2. CALCULATORUL DE BIROU – 6 ore Placa de bază. Procesorul. Memoria internă. Plăci grafice.
3. PERIFERICE DE INTRARE – IEŞIRE – 5 ore Discul fix. Discul flexibil. Unitatea CD-Rom. DVD-Rom. Monitorul. Proiectorul.
4. PERIFERICE DE IEŞIRE – 6 ore Imprimanta cu jet de cerneală. Imprimanta laser. Modem-fax.

5. PERIFERICE DE INTRARE – 3 ore Scanerul. Camera digitală. Tastatura. Mouse.
6. ECHIPAMENTE DE MULTIPLICARE ŞI LEGARE A DOCUMENTELOR – 4 ore Copiatorul. Aparate de îndosariere. Aparate de laminare. Cutere şi trimmere. Aparate de primit
corespondenţa. Aparat pentru bătut colile. Aparate de perforat. 7. SISTEMUL INTEGRAT DE BIROU – 2 ore
Ergonomia locului de muncă în birou. Sistemul integrat de birou. Biroul viitorului.
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: 1. Prezentarea laboratorului. Instructaj de protecţie a muncii – 2 ore 2. Calculatorul de birou, elemente componente – 2 ore 3. Unitatea CD-Rom şi RW, părţile componente, modalităţi de inscripţionare – 2 ore 4. Utilizarea calculatorului pentru procesarea de texte – 2 ore 5. Utilizarea calculatorului pentru elaborarea foilor de calcul – 2 ore 6. Utilizarea calculatorului pentru elaborarea prezentărilor – 2 ore 7. Modalităţi de prelucrare a imaginilor – 2 ore 8. Imprimanta cu jet de cerneală părţile componente, tipuri de imprimări – 2 ore 9. Imprimanta laser, părţile componente, tipuri de imprimări – 2 ore 10. Scanerul, elemente componente, tehnici de scanare – 2 ore 11. Programe de recunoaştere optică a caracterelor – 2 ore 12. Camera digitală, producerea, înmagazinarea şi comprimarea imaginilor – 2 ore 13. Aparate de îndosariere, etapele procesului de îndosariere – 2 ore 14. Aparate de laminare, etapele procesului de laminare – 2 ore
G. Bibliografie de elaborare a cursului
1. Vişan D., Bărsan D., Aparatură de birotică, Editura Fundaţiei Universitare „Dunărea de Jos” Galaţi, 2005, ISBN 973-627-254-8.
2. Hascal A., Preotesiu L., Corespondenţă şi tehnica secretariatului, Editura Didactică şi Pedagogică, Bucureşti, 1997.
3. Năftănăilă I., Birotica şi performanţa managerială, Bucureşti, 2000. 4. Burloiu P., Managementul resurselor umane, Lumina Lex, Bucureşti, 1997. 5. Godnig E., Hacunda J., Computerul şi stresul, Editura Antet, Bucureşti, 1995. 6. Grandjean E., Principiile ergonomiei, Editura Ştiinţifică, Bucureşti, 1972. 7. Harrison J., Curs de secretariat, Editura All, Bucureşti, 1996. 8. Moldovan M., Ergonomie, Editura Didactică şi Pedagogică, Bucureşti, 1993 9. Pană A., Ionescu B., Mareş V., Birotică, Editura All, Bucureşti, 1996. 10. Socobeanu I., Secretele secretariatelor, Editura Eficient, Bucureşti, 1998. 11. Somnea D., Calciu M., Dumitrescu E., Birotică, Editura Tehnică, Bucureşti, 1998.
H. Bibliografie minimală de studiu pentru studenţi
1. Vişan D., Birsan D., Aparatură de birotică, Editura Fundaţiei Universitare „Dunărea de Jos” Galaţi, 2005, ISBN 973-627-254-8., Obligatoriu integral.
Data aprobării programei analitice în catedră 19.01.2007
Şef catedră Titular disciplină
Prof. dr. ing. Georgescu V. Ş. L. dr. ing. Vişan D
.

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE EDUCAŢIE FIZICĂ ŞI SPORT Str. Gării nr. 63-65 Tel. 0236-413230 Tel/Fax. 0236-413230
PROGRAMA ANALITICĂ
Disciplina – Educaţie fizică şi sport Lect. univ.drd. Nini Florin
A. Locul disciplinei în planul de învăţământ: Anul I
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C S /
LP C S /
LP C S /
LP Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
- 14 - 14 - 28 Probe de
control
Admis / Respins
Obligatorie
Obligatorie
M-C0002
B. OBIECTIVELE DISCIPLINEI: întărirea sănătăţii; dezvoltarea fizică armonioasă şi corectarea unor deficienţe fizce; dezvoltarea calităţilor motrice de bază; formarea şi consolidarea priceperilor şi deprinderilor motrice din jocurile sportive:
baschet, volei. Iniţierea,învăţarea,fixarea,consolidarea şi perfecţionarea elementelor,procedeelor
tehnice şi a acţiunilor tactice, în vederea practicării globale a jocului de baschet(volei)şi aplicarea acestor componente în cadrul activităţilor independente dar şi în cadrul competiţiilor universitare .
Însuşirea principalelor reguli de joc, formarea şi consolidarea priceperii de a arbitra în teren şi de a organiza o competiţie sportivă.
C. METODE DE PREDARE – ÎNVĂŢARE: explicaţia, conversaţia euristică, instruirea prin tehnicile video, metoda exerciţiului,
metoda lucrărilor practice, demonstraţiei, modelării, metoda de simulare a situaţiilor de joc,metode de lucru individual, în grup, pe perechi, ateliere de lucru..
D. FORME ŞI METODE DE EVALUARE: evaluare predictivă prin probe practice la începutul semestrului I, evaluare formativă
prin metode tradiţionale de evaluare (probe practice), evaluare sumativă, prin metode tradiţionale (probe practice)şi metode complementare (observarea sistematică a activităţii şi comportamentului studenţilor,).
F. CONŢINUTUL SEMINARIILOR/NUMĂR DE ORE PENTRU FIECARE TEMĂ: Semestrul 1 1.Prezentarea activităţii de educaţie fizică în semestrul I (cerinţe, probe, norme de control). Disciplina opţională.*/2 ore 2. Disciplina opţională*. Calităţi motrice; verificarea forţei musculaturii membrelor superioare şi inferioare-testare iniţială/2ore 3.Disciplina opţională.* Calităţi motrice; verificarea forţei musculaturii abdominale şi a spatelui./2 ore 4.Disciplina opţională.* Optimizarea indicelui forţei dinamice la nivelul musculaturii membrelor superioare şi inferioare cu mingi medicinale, banca de gimnastică, etc./ 4ore 5. Disciplina opţională.* Optimizarea indicelui forţei dinamice la nivelul musculaturii abdominale şi a spatelui prin exerciţii în lucru pe ateliere./4 ore 6.Disciplina opţională.* Educarea indicelui forţei generale prin lucru în circuit./ 8 ore 7.Disciplina opţională.* Verificarea indicelui forţei segmentare:membre superioare,inferioare,abdomen şi spate/ 2ore 8. Verificarea disciplinei opţionale*./ 4 ore 9.Probe restante. Încheierea situaţiei şcolare din semestrul I/2 ore Semestrul 2 1. Prezentarea activităţii de educaţie fizică în semestrul II (cerinţe, probe, norme de control) Disciplina opţională*./ 2 ore 2. Atletism-săritura în lungime de pe loc-testare iniţială Disciplina opţională.*/2 ore 3 Atletism-alergare de viteză cu start din picioare pe distanţa de 50m-testare iniţială Disciplina opţională*./ 2ore. 4. Disciplina opţională.* Atletism-alergarea de rezistenţă 6’(F)- 10’(B)-testare iniţială./ 2ore 5. Atletism-consolidarea startului înalt şi a pasului alergător de accelerare. Disciplina opţională*./ 4 ore 6. Atletism-consolidarea săriturii în lungime de pe loc. Disciplina opţională./ 4 ore 7. Disciplina opţională.* Atletism-Consolidarea alergării de rezistenţă cu start din picioare, pe distanţe progresiv crescute(coordonarea paşilor alergători cu respiraţia corectă)/ 4 ore 8. Pregătirea probelor de control. Disciplina opţională*./ 4 ore 9. Verificarea alergării de viteză cu start din picioare pe distanţa de 50m. Verificare disciplina opţională*./ 2 ore 10 .Verificare disciplina opţională*. Verificarea săriturii în lungime de pe loc şi alergării de rezistenţă 6’(F)- 10’(B)./2 ore 11.Probe de control restante. Încheierea situaţiei şcolare pe semestrul II./ 2 ore

G. BIBLIOGRAFIE: Dragnea,A., Teodorescu-Mate S., - Teoria sportului, Editura FEST, Bucureşti, 2002.. Dragu,M., - Jocuri de mişcare, Editura Academica Galaţi, 2006. Grapă,F.,Mârza,D-"Volei în învăţământ" Editura Plumb, Bacău, 1998; Hânsa,C.,Călin,L-“Baschet-tehnică şi tactică”,Editura Fundaţiei Universitare
„Dunărea de Jos”Galaţi, 2004; Moanţă,A-“Baschet-metodică”,Editura Alpha,2005; Păcuraru,A.,Călin,L,Prisecaru, G. Metodica Baschetului şi voleiului şcolar,
Editura Fundaţiei Universitare “Dunărea de Jos”,Galaţi ,2004 PopescuM.,-Educaţia Fizică şi Sportul în pegătirea studenţilor, Editura Didactică
şi Pedagogică,R.A.-Bucureşti, 1995 *** Regulamentul jocului de baschet * ** Regulamentul jocului de volei
* DISCIPLINA OPŢIONALĂ BASCHET ANUL I SEMESTRUL I Nr. crt.
Tematica lucrărilor practice Nr. ore
1. Prezentarea cerinţelor lecţiilor de baschet. Acomodarea studenţilor cu mingea de baschet. Verificarea nivelului de însuşire a principalelor elemente (pasa, dribling, arucnare la coş, mişcarea în teren) în condiţii de joc.
2
2. Învăţarea poziţiei fundamentale, a opririlor, ţinerea, prinderea, protecţia şi pasarea mingii cu două mâini de la piept şi urmată de depalsare. Joc şcoală: „Cine totalizează mai multe pase”, sau „câştigă mingea...”.
2
3. Învăţarea aruncării la coş cu o mână de pe loc (procedeu din dreptul umărului şi de deasupra capului) şi a urmăririi la panou; Joc şcoală: coşul înscris ca urmare a aruncării la coş de pe loc – 4 p. Regulament: paşi, dublu dribling.
2
4. Învăţarea aruncărilor la coş din alergare. Consolidarea aruncării la coş de pe loc şi a driblingului. Joc bilateral 3:3 pe ½ teren. Regulament: angajarea între doi şi aşezarea la aruncarea liberă.
2
5. Consolidarea aruncării la coş din alergare şi a elementleor tehnice (dribling, oprire, pivot, pasa) în structuri de exerciţii complexe. Joc bilateral 5:5. Regulament: repunerea din lateral, linia de fund, linia de centru.
2
6. Învăţarea schimbării de direcţie cu frânare pe un picior, a marcajului şi demarcajului în relaţia 1:1. Joc bilateral 5:5. Regulament: 3”,5”,8”,24”.
2
7. Învăţarea aruncării la coş precedată de prinderea mingii din dribling. Consolidarea marcajului, demarcajului şi a elementelor şi procedeele tehnice învăţate prin structuri de exerciţii, desfăşurate pe tot terenul. Joc bilateral 2:2; 3:3; 4:4. Regulament: greşeala personală.
2
8. Învăţarea depăşirii. Consolidarea aruncării la coş din deplasare. Joc bilateral 5:5. Regulament: greşeala antisportivă, descalificatoare, tehnica.
2
9. Învăţarea pătrunderii. Consolidarea elementelor şi a procedeelor tehnice învăţate prin structuri de exerciţii complexe desfăşurate pe 1/2 teren. Joc 3:3, 4:4 pe 1/2 teren. Regulament: dubla greşeală.
2
10. Învăţarea atacului în semicerc (aşezarea în dispozitiv, circulaţia de minge şi a jucătorilor, finalizare prin pătrundere). Consolidarea pătrunderii, depăşirii şi a elementelor învăţate prin joc. Regulament: cinci greşeli de jucător, greşeli de echipă.
2
11. Consolidarea apărării om la om, a atacului în semicerc şi a elementelor învăţate prin structuri complexe de exerciţii. Joc şcoală: eliminarea jucătorului a cărui adversar aruncă la coş şi înscrie.
2
12. Verificarea structuruii complexe: ieşire la minge – prindere – oprire – pivotare – pasă. 2
13. Verificarea aruncării la coş precedentă de prinderea mingii din dribling şi pasă. Joc de verificare 3:3 pe tot terenul .
2
14. Probe şi norme de control restante. Joc bilateral. Aprecieri şi recomandări privind însuşirea conţinutului tehnico-tacic a fiecărui student la sfârşitul semestrului I.
2
DISCIPLINA OPŢIONALĂ BASCHET ANUL I SEMESTRUL II Nr. crt.
Tematica lucrărilor practice Nr. ore
1. Prezentarea cerinţelor lecţiilor de baschet. Acomodarea studenţilor la efortul specific jocului de baschet-structuri de exerciţii complexe. Joc bilateral 5:5.
2
2. Învăţarea aruncării la coş din săritură Consolidarea paselor din deplasare – „joc fără driblig”. Joc şcoală: coşul înscris ca urmare a execuţiei aruncării la coş din săritura, valorează 4 puncte.
2
3. Învăţarea combinaţiei tactice „dă şi du-te”. Consolidarea aruncării la coş învăţate – concurs de aruncări. Joc bilateral 5:5.
2
4. Învăţarea contraatacului cu intermediar, cu pasa direct la vârf a apărării împotriva contraatacului. Joc şcoală cu aplicarea contraatacului – echipa care înscrie din contraatac, rămâne în atac.
2
5. Consolidarea contraatacului şi a apărării împotriva contraatacului. Joc bilateral 5:5.
2
6. Învăţarea atacului în superiorităţile numerică (2:1; 3:2) şi a apărării în inferioritate numerică (1:2; 2:3). Joc bilateral 5:5.
2
7. Consolidarea elementelor şi procedeelor tehnice prin structuri de exerciţii complexe. Joc bilateral.
2
8. Consolidarea marcajului şi demarcajului în relaţia 1:1. Joc bilateral.
2
9. Consolidarea circulaţiei de minge, jucători şi a finalizărilor la coş prin joc bilateral. Consolidarea aruncării la coş de pe loc – concurs de aruncări.
2
10. Învăţarea realizării unei încălziri pentru un meci de baschet. Consolidarea elementelor şi procedeelor tehnice prin joc (organizarea unui turneu în cadrul grupei).
2
11. Consolidarea elementelor şi procedeelor tehnice învăţate prin joc bilateral. Consolidarea aruncării la coş de pe loc – concurs de aruncări de la 6,25 (3p).
2
12. Verificarea structurii complexe: ieşire la minge – prindere – oprire- pivot = pasa – schimbare de direcţie – aruncare la cos din săritură. Joc de verificare 3:3 pe tot terenul.
2
13. Verificarea aruncării la coş de pe loc. Joc de verificare 3:3 pe tot terenul.
2
14. Probe şi norme de control restante semestrul II. Joc bilateral. Aprecieri şi recomandări privind activitatea desfăşurată a fiecărui student – încheierea situaţiei şcolare.
2
*DISCIPLINA OPŢIONALĂ VOLEI ANUL I SEMESTRUL I Nr. ctr.
Tematica lucrărilor practice
Nr. ore
1.
Prezentarea jocului de volei şi a principalelor reguli. Acomodarea studenţilor cu jocul de volei. Învăţarea poziţiei fundamentale şi a mişcărilor în teren. Regulament: dimensiunile terenului, limite, zona de serviciu.
2
2.
Consolidarea poziţiei fundamentale şi a mişcărilor în teren. Învăţarea pasei cu două mâini de sus şi de jos înainte. Învăţarea aşezării în teren la efectuarea şi primirea serviciului – joc cu efectiv redus. Regulament: poziţia jucătorilor în teren, greşelile de poziţie, rotaţia şi greşelile la rotaţie.
2
3.
Învăţarea serviciului de jos din faţă. Consolidarea pasei cu două mâini de sus şi de jos înainte. Joc şcoală – se pune accent pe procedeele învăţate. Regulament: punct câştigat, set, meci, minge în joc, afară din joc, lovirea mingii.
2

4.
Consolidarea serviciului de jos din faţă. Consolidarea pasei cu două mâini de sus şi de jos precedate de deplasare în teren. Joc bilateral 6:6. Regulament : serviciul executat corect şi greşeli în timpul execuţiei.
4
5.
Învăţarea ridicării mingii pentru lovitura de atac. Consolidarea elementelor şi procedeelor însuşite. Joc şcoală cu accent pe realizarea atacului. Regulament: jocul la fileu.
2
6.
Învăţarea blocajului individual. Consolidare pasei pentru lovitura de atac. Joc şcoală cu accent pe elementele şi procedeele învăţate.
2
7. Consolidarea blocajului individual. Învăţarea sistemului de apărarea cu centrul doi avansat. Joc şcoală.
2
8. Consolidarea elemetelor şi procedeelor însuşite. Consolidarea sistemului de apărare cu centrul doi avansat. Joc bilateral 6:6.
2
9. Consolidarea elemetelor şi procedeelor tehnice prin joc. Pregătirea probelor de control.
4
10. Verificarea pasei cu două mâini de sus şi de jos înainte. Joc de verificare 6:6.
2
11.
Verificarea serviciului de jos din faţă. Joc de verificare 6:6.
2
12.
Probe şi norme de control restante. Joc bilateral. Aprecieri şi recomandări privind activitatea studenţilor la finalul semestrului I.
2
* DISCIPLINA OPŢIONALĂ VOLEI ANUL I SEMESTRUL II Nr. ctr. Tematica lucrărilor practice Nr. ore
1.
Prezentarea cerinţelor lecţiei de volei. Acomodarea studenţilor la efortul specific jocului de volei. Joc bilateral 6:6.
2
2. Consolidarea elementelor şi procedeelor învăţate. Joc şcoală cu accent pe realizarea apărării cu centrul doi avansat.
2
3.
Învăţarea loviturii de atac procedeul drept (elan, bătaie, săritură, aterizare) Consolidarea elemetelor şi procedeelor tehnice însuşite. Joc şcoală.
2
4. Învăţarea serviciului de sus din faţă şi a preluării din serviciu. Joc bilateral.
2
5. Consolidarea serviciului de sus din faţă. Consolidarea elementelor tehnice însuşite în cadrul jocului bilateral.
4
6. Consolidarea aşezării în teren la primirea serviciului. Joc bilateral 6:6.
2
7. Consolidarea preluărilor din serviciu cu două mâini de jos. Joc şcoală cu accent pe prima şi a doua lovitură.
4
8. Învăţarea pasei cu două mâini peste cap. Joc bilateral 6:6
2
9. Consolidarea pasei cu două mâini peste cap. Joc bilateral.
2
10. Consolidarea blocajului individual. Consolidarea elementelor şi procedeelor tehnice însuşite prin joc bilateral 6:6.
2
11. Verificarea pasei cu două mâini de sus înainte şi peste cap. Joc de verificare 6:6.
2
12. Verificarea loviturii de atac procedeul drept şi a serviciului de sus din faţă; Joc de verificare 6:6. Aprecieri şi recomandări privind activitatea studenţilor la finalul semestrului II.
2
Lect. univ.drd. Nini Florin Şef catedră,
Prof. univ. dr. HOŞTIUC NICOLAE
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE EDUCAŢIE FIZICĂ ŞI SPORT Str. Gării nr. 63-65 Tel. 0236-413230 Tel/Fax. 0236-413230
PROGRAMA ANALITICĂ
Disciplina – Educaţie fizică şi sport Lect.univ.drd.Nini Florin
B. Locul disciplinei în planul de învăţământ: Anul II
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C S /
LP C S /
LP C S /
LP Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
- 14 - 14 - 28 Probe de
control
Admis / Respins
Obligatorie Obligatorie M-C0002
B. OBIECTIVELE DISCIPLINEI: întărirea sănătăţii; dezvoltarea fizică armonioasă şi corectarea unor deficienţe fizce; dezvoltarea calităţilor motrice de bază; formarea şi consolidarea priceperilor şi deprinderilor motrice din jocurile sportive:
baschet, volei. Iniţierea,învăţarea,fixarea,consolidarea şi perfecţionarea elementelor,procedeelor
tehnice şi a acţiunilor tactice, în vederea practicării globale a jocului de baschet(volei)şi aplicarea acestor componente în cadrul activităţilor independente dar şi în cadrul competiţiilor universitare .
Însuşirea principalelor reguli de joc, formarea şi consolidarea priceperii de a arbitra în teren şi de a organiza o competiţie sportivă.
C. METODE DE PREDARE – ÎNVĂŢARE: explicaţia, conversaţia euristică, instruirea prin tehnicile video, metoda exerciţiului,
metoda lucrărilor practice, demonstraţiei, modelării, metoda de simulare a situaţiilor de joc,metode de lucru individual, în grup, pe perechi, ateliere de lucru..
D. FORME ŞI METODE DE EVALUARE: evaluare predictivă prin probe practice la începutul semestrului I, evaluare formativă
prin metode tradiţionale de evaluare (probe practice), evaluare sumativă, prin metode tradiţionale (probe practice, orale )şi metode complementare (observarea sistematică a activităţii şi comportamentului studenţilor,).

F. CONŢINUTUL SEMINARIILOR/NUMĂR DE ORE PENTRU FIECARE TEMĂ: Semestrul 1 1.Prezentarea activităţii de educaţie fizică în semestrul I (cerinţe, probe, norme de control). Disciplina opţională.*/2 ore 2. Disciplina opţională*. Calităţi motrice; verificarea forţei musculaturii membrelor superioare şi inferioare-testare iniţială/2ore 3.Disciplina opţională.* Calităţi motrice; verificarea forţei musculaturii abdominale şi a spatelui./2 ore 4.Disciplina opţională.* Optimizarea indicelui forţei dinamice la nivelul musculaturii membrelor superioare şi inferioare cu mingi medicinale, banca de gimnastică, etc./ 4ore 5. Disciplina opţională.* Optimizarea indicelui forţei dinamice la nivelul musculaturii abdominale şi a spatelui prin exerciţii în lucru pe ateliere./4 ore 6.Disciplina opţională.* Educarea indicelui forţei generale prin lucru în circuit./ 8 ore 7.Disciplina opţională.* Verificarea indicelui forţei segmentare:membre superioare,inferioare,abdomen şi spate/ 2ore 8. Verificarea disciplinei opţionale*./ 4 ore 9.Probe restante. Încheierea situaţiei din semestrul I/2 ore Semestrul 2 1. Prezentarea activităţii de educaţie fizică în semestrul II (cerinţe, probe, norme de control) Disciplina opţională*./ 2 ore 2. Atletism-săritura în lungime de pe loc-testare iniţială Disciplina opţională.*/2 ore 3 Atletism-alergare de viteză cu start din picioare pe distanţa de 50m-testare iniţială Disciplina opţională*./ 2ore. 4. Disciplina opţională.* Atletism-alergarea de rezistenţă 7’(F)- 12’(B)-testare iniţială./ 2ore 5. Atletism-consolidarea startului înalt şi a pasului alergător de accelerare. Disciplina opţională*./ 4 ore 6. Atletism-consolidarea săriturii în lungime de pe loc. Disciplina opţională./ 4 ore 7. Disciplina opţională.* Atletism-Consolidarea alergării de rezistenţă cu start din picioare, pe distanţe progresiv crescute(coordonarea paşilor alergători cu respiraţia corectă)/ 4 ore 8. Pregătirea probelor de control. Disciplina opţională*./ 4 ore 9. Verificarea alergării de viteză cu start din picioare pe distanţa de 50m. Verificare disciplina opţională*./ 2 ore 10 .Verificare disciplina opţională*. Verificarea săriturii în lungime de pe loc şi alergării de rezistenţă 7’(F)- 12’(B)./2 ore 11.Probe de control restante. Încheierea situaţiei pe semestrul II./ 2 ore
G. BIBLIOGRAFIE: Dragnea,A., Teodorescu-Mate S., - Teoria sportului, Editura FEST, Bucureşti, 2002.. Dragu,M., - Jocuri de mişcare, Editura Academica Galaţi, 2006. Grapă,F.,Mârza,D-"Volei în învăţământ" Editura Plumb, Bacău, 1998; Hânsa,C.,Călin,L-“Baschet-tehnică şi tactică”,Editura Fundaţiei Universitare
„Dunărea de Jos”Galaţi, 2004; Moanţă,A-“Baschet-metodică”,Editura Alpha,2005; Păcuraru,A.,Călin,L,Prisecaru, G. Metodica Baschetului şi voleiului şcolar,
Editura Fundaţiei Universitare “Dunărea de Jos”,Galaţi ,2004 PopescuM.,-Educaţia Fizică şi Sportul în pegătirea studenţilor, Editura Didactică
şi Pedagogică,R.A.-Bucureşti, 1995 *** Regulamentul jocului de baschet * ** Regulamentul jocului de volei
* DISCIPLINA OPŢIONALĂ BASCHET ANUL II SEMESTRUL I Nr. crt.
Tematica lucrărilor practice Nr. ore
1. Prezentarea cerinţelor lecţiilor de baschet pentru semestrul I. Acomodarea studenţilor cu mingea de baschet.
2
2. Verificarea nivelului de însuşire a principalelor elemente (pasa, dribling, aruncare la coş, mişcarea în teren) în condiţii de joc.
2
3. Reactualizarea conţinutului tehnico-tactic predat anterior..Joc bilateral 5:5. Regulament :coş reuşit şi valoarea sa ,dublu-dribling ►2 ore
4
4. Consolidarea acţiunilor tactice individuale de atac şi apărare-demarcajul şi marcajul în relaţia 1:1. Regulament:3”,5”,8”,24”.
4
5. Consolidarea acţiunii tactice individuale de atac depăşirea şi pătrunderea .Regulament:greşeală antisportivă, descalificatoare,tehnică.Joc bilateral 5:5
4
6. Consolidarea contraatacului şi a jocului 1:1.Joc bilateral 5:5. Regulament:greşeli de jucător,echipă,semnalizările arbitrilor
2
7. Consolidarea acţiunilor tactice individuale de atac şi apărare-demarcajul şi marcajul în structuri complexe.Joc bilateral 5:5 Regulament:minut de întrerupere,înlocuire de jucători,responsabilităţi oficialii jocului.
4
8. Consolidarea apărării om la om, a atacului în semicerc şi a elementelor învăţate prin structuri complexe de exerciţii. Joc bilateral 5:5
2
10. Verificarea elementelelor şi procedeelor tehnico-tactice însuşite . Joc de verificare 3:3 pe tot terenul .
2
11. Probe şi norme de control restante. Joc bilateral. Aprecieri şi recomandări privind însuşirea conţinutului tehnico-tacic a fiecărui student la sfârşitul semestrului I.
2
* DISCIPLINA OPŢIONALĂ BASCHET ANUL II SEMESTRUL II
Nr. crt.
Tematica lucrărilor practice Nr. ore
1 Prezentarea cerinţelor lecţiilor de baschet pentru semestrul II Acomodarea studenţilor la efortul specific jocului de baschet-structuri de exerciţii complexe. Joc bilateral 5:5.
2
2 Consolidarea elementelor şi procedeelor tehnice învăţate prin joc bilateral. Consolidarea aruncării la coş de pe loc – concurs de aruncări de la linia de aruncări libere.Joc bilateral 5:5
4
3 Consolidarea structurilor de bază ale jocului în atac şi apărare prin structuri de exerciţii şi jocuri.Joc bilateral cu susţinerea arbitrajului de către studenţi.
6
4 Consolidarea contraatacului şi a apărării împotriva contraatacului-structuri de exerciţii. Joc bilateral 5:5.
2
5 Consolidarea marcajului şi demarcajului în relaţia 1:1. Joc bilateral 5:5.
2
6 Consolidarea circulaţiei de minge, jucători şi a finalizărilor la coş prin joc bilateral. Consolidarea aruncării la coş de pe loc – concurs de aruncări.
2
7 Consolidarea mijloacelor necesare realizării unei încălziri pentru un meci de baschet. Consolidarea elementelor şi procedeelor tehnice prin joc (organizarea unui turneu în cadrul grupei).
4

8 Consolidarea elementelor şi procedeelor tehnice învăţate prin joc bilateral. Consolidarea aruncării la coş de pe loc – concurs de aruncări de la 6,25 (3p).
2
9 Verificarea structurii complexe: ieşire la minge – prindere – oprire- pivot - pasa – schimbare de direcţie – dribling- aruncare la cos din săritură. Verificarea noţiunilor de regulament şi arbitraj elementare. Joc de verificare 3:3 pe tot terenul.
2
10 Probe şi norme de control restante semestrul II. Joc bilateral. Aprecieri şi recomandări privind activitatea desfăşurată a fiecărui student –încheirea siuaţiei
2
*DISCIPLINA OPŢIONALĂ VOLEI ANUL II SEMESTRUL I
Nr. ctr.
Tematica lucrărilor practice
Total ore
1.
Prezentarea cerinţelor lecţiilor de volei. Acomodarea studenţilor la efortul specific jocului mde volei. Joc bilateral 6:6.
2
2. Consolidarea pasei cu două mâini de sus şi de jos înainte şi peste cap. Joc bilateral 6:6.Regulament : poziţiile jucătorilor în teren, greşelile de poziţie, rotaţia şi greşelile de rotaţie
2
3. Consolidarea elementelor şi procedeelor însuşite. Joc bilateral 6:6
2
4.
Învăţarea pasei cu două mâini de jos din lateral. Consolidarea serviciului de sus din faţă şi a preluării din serviciu. Joc bilateral 6:6.
2
5.
Consolidarea pasei cu două mâini de jos din lateral. Consolidarea elementelor şi procedeelor tehnico-tactice în structuri complexe. Joc şcoală.
4
6. Învăţarea tacticii în atac (formula de atac 4T+2R, 3T+3R) şi a combinaţiilor. Joc şcoală. Regulament :jucătorul „Libero”
2
7. Consolidarea combinaţiilor tactice în atac. Joc bilateral 6:6.
4
8.
Învăţarea pasei cu două mâini din săritură. Consolidarea blocajului individual. Joc şcoală. Regulament:acţiunile permise şi acşiunile greşite ăn jocul la fileu
2
9. Consolidarea pasei cu două mâini din săritură şi a atacului procedeul drept. Pregătirea probelor de control.
2
10.
Verificarea pasei cu două mâini de jos din lateral şi a loviturii de atac procedeul drept. Joc bilateral 6:6.
2
11. Verificarea serviciului de sus din faţă. Joc de verificare.
2
12.
Probe şi norme de control restante. Joc bilateral 6:6. Aprecieri şi recomandări privind activitatea studenţilor la finalul semestrului I.
2
*DISCIPLINA OPŢIONALĂ VOLEI ANUL II SEMESTRUL II
Nr. ctr.
Tematica lucrărilor practice
Total ore
1.
Prezentarea cerinţelor lecţiilor. Acomodarea studenţilor la efortul specific jocului de volei. Joc bilateral 6:6.
2
2.
Consolidarea paselor învăţate prin combinaţii complexe. Consolidarea serviciului de sus din faţă şi a preluării din serviciu. Joc bilateral 6:6.Regulament:conduita participanţilor
6
3. Consolidarea loviturii de atac procedeul drept. Joc bilateral 6:6.
2
4.
Consolidarea sistemului de apărare cu centrul doi avansat şi a blocajului individual. Joc bilateral 6:6 Regulament:corpul de arbitraj şi proceduri
2
5. Consolidarea combinaţiilor tactice în atac (ridicătorul în linia I). Joc bilateral 6:6.
4
6. Consolidarea tacticii la primirea serviciului. Joc bilateral 6:6.
2
7. Consolidarea elementelor şi procedeelor tehnico-tactice învăţate în joc bilateral (organizarea unui turneu în cadrul grupei).
4
8.
Verificarea unui complex de pase cu două mâini de sus din faţă, de jos din faţă, pase peste cap, pase lungi şi scurte . Serviciul de sus din faţă şi lovitura de atac procedeul drept. Verificarea noţiunilor de regulament şi arbitraj elementare. Joc de verificare 6:6. cu aplicarea combinaţiilor tehnico-tactice însuşite.
4
9.
Probe şi norme de control restante. Joc bilateral 6:6. Aprecieri şi recomandări privind activitatea desfăşurată a fiecărui student –încheirea siuaţiei
2
Lect. univ.drd. Nini Florin Şef catedră,
Prof. univ. dr. HOŞTIUC NICOLAE
PROGRAMA ANALITICĂ
Titlul disciplinei: ELECTRONICĂ (Mecatronica an II (seria III) Anul II, Semestrul: 4 Număr de ore: curs: 28 de ore; lucrări practice: 14 ore
Obiectivele disciplinei:
Scopul disciplinei este formarea cunoştinţelor de bază în domeniul electronicii, astfel încât absolvenţii Facultăţii de Mecanică să poată colabora competent cu inginerii electronişti şi / sau automatişti în vederea exploatării şi întreţinerii echipamentelor electronice în domeniul echipamentelor industriale, utilajelor de sudare, maşini unelte etc.
I. Conţinutul cursului:
Capitolul 1 DISPOZITIVE ELECTRONICE DE CIRCUIT. 1.1 Noţiuni privind conducţia electrică în semiconductoare. 1.2. Componente electronice: Diode, tranzistoare bipolare, tranzistoare unipolare, dispozitive semiconductoare speciale. Capitolul 2 AMPLIFICATOARE ŞI OSCILATOARE. 2.1. Proprietăţi generale şi caracteristici ale amplificatoarelor. 2.2. Amplificatoare de curent alternativ (amplificatoare de tensiune, amplificatoare de putere). 2.3. Amplificatoare de curent continuu. 2.4. Reacţia negativă la amplificatoare şi consecinţele ei. 2.5. Amplificatoare operaţionale. 2.6 Oscilatoare. Capitolul 3 REDRESOARE NECOMANDATE DE MICĂ PUTERE 3.1. Redresoare monofazate necomandate. 3.2. Redresoare monofazate monoalternanţă cu sarcină rezistivă. 3.3. Redresoare monofazate dublă alternanţă cu sarcină rezistivă şi inductivă. 3.4. Filtrarea tensiunii redresate. 3.5 Redresoare trifazate (conexiunea în stea şi în punte). Capitolul 4. STABILIZATOARE ELECTRONICE 4.1. Parametrii stabilizatoarelor. 4.2. Stabilizatoare parametrice. 4.3 Stabilizatoare cu reacţie. 4.4. Stabilizatoare integrate de tensiune. Capitolul 5. REDRESOARE COMANDATE DE MICĂ PUTERE 5.1 Principiul comenzii pe verticală şi orizontală 5.2 Cicuite integrate specializate pentru comanda pe grilă a tiristoarelor şi triacurilor. Capitolul 6. CIRCUITE LOGICE COMBINAŢIONALE ŞI SECVENŢIALE. 6.1. Funcţii logice elementare. 6.2. Relaţii fundamentale în algebra logicii. 6.3. Circuite logice care realizează funcţiile logice elementare şi derivate. 6.4. Circuite logice integrate. 6.6. Circuite logice combinaţionale. 6.7. Circuite logice secvenţiale elementare. Capitolul 7. APLICAŢII ALE CIRCUITELOR LOGICE COMBINAŢIONALE ŞI SECVENŢIALE. 7.1. Codificatoare şi decodificatoare. 7.2. Numărătoare electronice. 7.3. Convertoare Numeric-Analogice. 7.4. Convertoare Analog-Numerice 7.5 Circuite de memorie 7.6 Structura unui microprocesor şi microcalculator.
II. Lucrări de laborator:
1. Aparate de măsură şi control specifice laboratorului de electronică (osciloscopul catodic, voltmetrul electronic, generatorul de semnal etc). 2. Elemente fotoelectrice. 3. Tranzistorul bipolar şi unipolar. 4. Amplificatoare de curent alternativ pentru semnale mici. Amplificatoare operaţionale. 5. Redresoare monofazate de mică putere şi filtre. Stabilizatoare de tensiune continuă. 6. Redresoare comandate de mică putere cu sarcină rezitiv-inductivă. 7. Circuite logice combinaţionale (exemple teoretice şi aplicaţii).
Bibliografie minimală:
1. Miholcă, C., Mărăşescu, N., Electronică pentru profiluri neelectrice, Ed. Matrix-Rom, Bucureşti, 2003. 2. C. Miholcă – Electronică – DISTANCE EDUCATION, Universitatea „Dunărea de Jos” - Galaţi, 150 pagini,
pentru specializarea T.P.A. anul III (I.D.D), 2004 3. Emil Ceangă, Ion Tusac, Constantin Miholcă, Electronică Industrială şi Automatizări, Galaţi, 1980 4. Ceangă, E., s.a., Electronică industrială, E.D.P., Bucureşti, 1981. 5. Danilă, Th., s.a., Dispozitive şi circuite electronice, E.D.P., Bucureşti, 1982.
Titular disciplină:
Conf. dr. ing. Constantin MIHOLCĂ


UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: octavian.mircea @ugal.ro
PROGRAMA ANALITICĂ
Disciplina: ELEMENTE MECANICE ALE ROBOTILOR INDUSTRIALI
A. Locul disciplinei în planul de învăţământ: Anul III
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
2 2 - - 28 28 E - 5 - M-D3102-2
B. Obiectivele disciplinei:
• Cunoaşterea evoluţiei sistemelor mecanice mecatronice în ţara noastră şi pe plan mondial;
• Formarea unei concepţii sistemice asupra structurii sistemelor mecanice mecatronice; • Dezvoltarea capacităţii ingineresti de utilizare sistemelor mecanice mecatronice si de
alegere a lor pentru realizarea unor produse industriale de inalta competitivitate; • Cunoaşterea structurii mecanice si a mecanismelor componente ale robotilor şi aplicarea
în diferitele ramuri industriale; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de modalităţi de transmitere a mişcării, aplicatii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 25%) prin metode orale la orele de laborator si evaluare sumativă (pondere 75%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. NOTIUNI INTRODUCTIVE – 2ore Definirea conceptului de robot industrial. Caracteristici tehnice generale. Clasificarea
roboţilor 2. STRUCTURA MECANISMELR ROBOŢILOR INDUSTRIALI – 6 ore
Structura generală a roboţilor. Structura sistemului mecanic al roboţilor. Cuple cinematice. Gradul de mobilitate si manevrabilitate al unui robot. Mecanisme generatoare de traiectorie şi spaţii de lucru.
3. DISPOZITIVUL DE GHIDARE – 10 ore Construcţia batiului. Pivotare cu acţionare electrică. Pivotare cu acţionare hidraulică. Lagărul
modulului de rotire. 4. GHIDAJE DE TRANSLŢIE – 8 ore
Ghidaje cu alunecare. Variante constructive. Calculul ghidajelor. Modalitati de deplasare a glisierei. Oprirea glisierei la punct fix.Ghidaje prin rostogolire. Ghidaje cu bile. Ghidaje cu role. Calculul ghidajului prin rostogolire. Antrenarea glisierei cu sistem surub - piulita. Sistem de translatie cu surub rotativ. Sistem de translatie cu surub fix si piulita rotativa. Antrenarea glisierei cu transmisie armonica surub-piulita. Realizarea miscarii de translatie pas cu pas.
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: 1. Prezentarea laboratorului. Instructaj de protecţie a muncii – 2 ore 2. Cuple cinematice. Scheme cinematice structurale ale roboţilor– 2 ore 3. Spaţii de lucru ale mecanismelor generatoare de traiectorie – 2 ore 4. Analiza directă a poziţiilor pentru diferite structuri mecanice de roboţi– 2 ore 5. Analiza inversă a poziţiilor pentru diferite structuri mecanice de roboţi – 2 ore 6. Analiza combinată a poziţiilor pentru diferite structuri mecanice de roboţi – 2 ore 7. Calculul vitezelor şi acceleraţiilor pentru diferite scheme cinematice de roboţi – 2 ore 8. Ghidaje prin alunecare utilizate în construcţia roboţilor – 2 ore 9. Utilizarea ghidajelor prin rostogolire in construcţia roboţilor – 2 ore 10. Transmiterea mişcării prin curele dinţate şi cu lanţ – 2 ore 11. Sisteme de orientare de ordinul I – 2 ore 12. Sisteme de orientare de ordinul II – 2 ore 13. Construcţia şi calculul mâinilor mecanice – 2 ore 14. Echilibrarea roboţilor – 2 ore G. Bibliografie de elaborare a cursului
1. Antonescu P.. Mecanisme. Calculul structural şi cinematic, Institutul Politehnic Bucureşti, 1979 2. Demian T. Elemente constructive de mecanica fină. E.D.P. Bucureşti, 1980; 3. Drimer D., ş.a. Roboţi industriali şi manipulatoare.Editura Tehnică, Bucureşti, 1985; 4. Dudiţă Fl., Diaconescu D. Optimizarea structurală a mecanismelor. Editura Tehnică, Bucureşti,
1987; 5. Kovacs F., Rădulescu C. Roboţi industriali. Universitatea Tehnică, Timişoara, 1992; 6. Mircea O., Banea D.M., Elementele mecanice ale roboţilor industriali. Editura BREN, Bucureşti,
2003; 7. Miloiu Gh., Dudiţă Fl., Diaconescu D. Transmisii mecanice moderne. Editura Tehnică, Bucureşti,
1980; 8. Popescu P., ş.a. Mecanica manipulatoarelor şi roboţilor – Probleme, vol. I...vol. IV. E.D.P.- SA,
Bucureşti, 1994; 9. Rădulescu Gh., ş.a. Îndrumar de proiectare în construcţia de maşini, Vol. III. Editura Tehnică,
Bucureşti, 1986 H. Bibliografie minimală de studiu pentru studenţi
1. Mircea O. Sisteme mecanice Mecatronice - Curs şi Test pentru verificarea cunosţiintelor. Format A5, Universitatea din Galaţi, 2007, Obligatoriu integral. Titular curs si lucrari practice: SL dr ing Mircea Octavian. Semnătura:
Data aprobării programei analitice în catedră 11.07.2007
Şef catedră
Prof dr ing Georgescu V.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: octavian.mircea @ugal.ro
PROGRAMA ANALITICĂ
Disciplina: ELEMENTE MECANICE ALE ROBOTILOR INDUSTRIALI
A. Locul disciplinei în planul de învăţământ: Anul III
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
- - 3 2 42 28 - E - 6 M-D3102-2
B. Obiectivele disciplinei:
• Cunoaşterea evoluţiei sistemelor mecanice mecatronice în ţara noastră şi pe plan mondial;
• Formarea unei concepţii sistemice asupra structurii sistemelor mecanice mecatronice; • Dezvoltarea capacităţii ingineresti de utilizare sistemelor mecanice mecatronice si de
alegere a lor pentru realizarea unor produse industriale de inalta competitivitate; • Cunoaşterea structurii mecanice si a mecanismelor componente ale robotilor şi aplicarea
în diferitele ramuri industriale; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de modalităţi de transmitere a mişcării, aplicatii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 25%) prin metode orale la orele de laborator si evaluare sumativă (pondere 75%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. TRANSMISIILE ROBOTILOR – 12 ore Transmisii prin curele dintate. Transmisii prin lanturi. Aspecte functionale si constructive.
Elemente de cinematica transmisiilor prin lant. Transmisii pinion – cremaliera. Transmisii cu mecanisme planetare. Structura mecanismelor planetare. Cinematica mecanismelor planetare. Conditii suplimentare la reductoare planetare. Metoda contururilor de calcul a vitezelor unghiulare ale mecanismelor dintate
2. SISTEME DE ORIENTARE – 12 ore Sisteme de orientare cu mecanisme diferentiale de ordinul I. Sisteme de orientare cu
mecanisme diferentiale de ordinul II. Sisteme de orientare cu mecanisme diferentiale combinate. Sisteme de orientare la manipulatoarele stapan-sclav.
3. SISTEME DE PREHENSIUNE – 12 ore Notiuni introductive. Prehensiunea. Sistemul de prehensiune. Exemple semnificative de
sisteme de prehensiune. Clasificarea sistemelor de prehensiune. Sisteme naturale de prehensiune. Sisteme artificiale de prehensiune. Constructia mainilor mecanice. Calculul mainilor mecanice. Conditiile minime de prehensiune statica. Determinarea fortei de strangere necesare. Sinteza

cinematica a mecanismelor de prehensiune cu bacuri. Sinteza cinematica a elementelor tip bara. Aspecte de analiza cinetostatica.
4. ECHILIBRAREA STATICA A ROBOTILOR – 6 ore Generalitati. Echilibrarea statica a componentelor robotilor. Echilibrarea robotilor industriali
cu axele articulatiilor reciproc paralele si orizontale. Echilibrarea manipulatoarelor pantografe. Exemplu de echilibrare cu contragreutati a unui robot. Exemplu de echilibrare statica cu resoarte pentru RI.
F. Conţinutul Proiectului/ număr de ore pentru fiecare temă: Proiectarea unui sistem mecatronic de rotire cu reductor armonic - schema cinematica -2 ore - alegerea sistemului de actionare -2 ore - proiectarea sistemului de actionare -2 ore - calculul transmisiei prin curele dintate -2 ore - calculul angrenajului armonic -4 ore - calculul si verificarile organologice -2 ore - dimensionarea arborelui reductorului si stabilirea dimensiunilor constructive ale carcasei -2 ore - determinarea dimensiunilor asamblarii canelate-2 ore - alegerea si verificarea rulmentilor -2 ore - - verificarea la incalzire -2 ore - realizarea desenului de ansamblu al sistemului de rotire -4 ore - realizarea desenelor de executie -2 ore
G. Bibliografie de elaborare a cursului si proiectului 1. Antonescu P.. Mecanisme. Calculul structural şi cinematic, Institutul Politehnic Bucureşti, 1979 2. Demian T. Elemente constructive de mecanica fină. E.D.P. Bucureşti, 1980; 3. Drimer D., ş.a. Roboţi industriali şi manipulatoare.Editura Tehnică, Bucureşti, 1985; 4. Dudiţă Fl., Diaconescu D. Optimizarea structurală a mecanismelor. Editura Tehnică, Bucureşti,
1987; 5. Kovacs F., Rădulescu C. Roboţi industriali. Universitatea Tehnică, Timişoara, 1992; 6. Mircea O., Banea D.M., Elementele mecanice ale roboţilor industriali. Editura BREN, Bucureşti,
2003; 7. Miloiu Gh., Dudiţă Fl., Diaconescu D. Transmisii mecanice moderne. Editura Tehnică, Bucureşti,
1980; 8. Popescu P., ş.a. Mecanica manipulatoarelor şi roboţilor – Probleme, vol. I...vol. IV. E.D.P.- SA,
Bucureşti, 1994; 9. Rădulescu Gh., ş.a. Îndrumar de proiectare în construcţia de maşini, Vol. III. Editura Tehnică,
Bucureşti, 1986 10. Chisiu A., s.a. Organe de masini. Editura Didactica si Pedagogica, Bucuresti, 1981; 11. Bejan C., s.a. Idrumar de proiectare in constructia de masini. Editura Tehnica, Bucuresti, 1982. 12. Iordachita I. Mecanisme spaciale si transmisii mecanice pentru roboti industriali. Pentru uzul studentilor. Reprografia Universitatii din Craiova, 1997.
H. Bibliografie minimală de studiu pentru studenţi 1. Mircea O. Sisteme mecanice Mecatronice - Curs şi Test pentru verificarea cunosţiintelor.
Format A5, Universitatea din Galaţi, 2007, Obligatoriu integral.
Titular curs si lucrari practice: SL dr ing Mircea Octavian. Semnătura: Data aprobării programei analitice în catedră 11.07.2007
Şef catedră
Prof dr ing Georgescu V.

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE LITERE SI TEOLOGIE DEPARTAMENTUL DE LIMBI MODERNE APLICATE Adresa: Nr. telefon / fax: E-mail:
PROGRAMA ANALITICĂ
Disciplina: limba engleză Anul I
Facultatea de Mecanica
A. Locul disciplinei în planul de învăţământ: Anul
Sem. I Sem. II Total ore Forme de
verificare Nr. credite Anul
de studiu
C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
1 1 1 - V
A. Obiectivele disciplinei: . Cunoaştere, înţelegere, explicare şi interpretare - cunoasterea si utilizarea adecvata a terminologiei de specialitate, precum si a structurilor gramaticale aplicate si aplicabile limbajului de specialitate; - dobandirea competentelor lingvistice implicate in procesul de interpretare si traducere a textului din domeniul ingineriei mecanice; -deprinderea abilitatii de documentare in limba engleza, in domeniul de specialitate. Instrumental-aplicative - comunicarea orala pe teme de specialitate; - folosirea diverselor acte de limbaj adecvate în potenţiale situaţii de comunicare profesională din domeniul de specialitate. Atitudinale - manifestarea unor atitudini pozitive faţă de pregătirea în limba engleză ca şi componentă în formarea generală; - constientizarea rezultatelor studiului individual asistat si neasistat in formarea de limba straina - valorificarea optima si creativa a propriului potential in pregătirea la limba străină.
B. Metode de predare – învăţare:
- conversatia, explicatia, simularea de situatie
C. Forme şi metode de evaluare: - test lexico-gramatical pe text de specialitate - test de realizare a actelor de comunicare la nivel de a fi înţeles pe teme uzuale si de specialitate - tema de casa
D. Conţinutul cursului / număr de ore pentru fiecare temă: -
E. Conţinutul seminariilor / număr de ore pentru fiecare temă:
Introducere în studiul limbilor străine în scopuri profesionale / cu obiective specifice

1. Cultură şi civilizaţie anglofonă. Terminologie de bază din domeniul culturii şi civilizaţiei. Polisemie şi omonimie. 2 ore 2. Categorii verbale (timp, mod, aspect). 4 ore 3. Categorii nominale (predeterminanţi, substantiv, adjectiv, substitute). 4 ore 4. Elemente de lexicologie şi vocabular. Formarea cuvintelor. Abrevierea 2 ore (trunchiere şi siglare). 5. Sintaxa frazei (completiva directă, circumstanţa). Constrângeri modale în 4 ore subordonate. 6. Introducere în corespondenţa generală. Formule tip. Elemente de bază ale scrisorii oficiale. Formularistică. 6 ore 7. Comunicare şi prezentare orală. Funcţii de limbaj / formule tip. Sinonimie, 6 ore antonimie.
F. Bibliografie pentru elaborare programei: 1. Cook, G., Academic Writing, OUP, 1999. 2. Farrington, Olivia, Dificultăţi şi capcane ale limbii engleze, Teora, Buc., 1998. 3. Pawlowska, B., Kempiski, Z., Teste de limba engleză, Teora, Buc., 1997. 4. Galea, I., Stanciu, V., English with Tears, Dacia, Cluj, 1999. 5. Timar, E., Limba engleză în teste şi exerciţii, Teora, Buc., 1998. 6. Naylor, H., Hagger, S., Paths to Proficiency, Longman Group UK Ltd., 1992. 7. Misztal, M., Test Your Vocabulary, Teora, Buc., 1995.
G. Bibliografie minimală de studiu pentru studenţi1 1. Timar, E., Limba engleză în teste şi exerciţii, Teora, Buc., 1998. 2. Naylor, H., Hagger, S., Paths to Proficiency, Longman Group UK Ltd., 1992. 3. Misztal, M., Test Your Vocabulary, Teora, Buc., 1995
Data aprobării programei analitice în catedră / departament
(Semnătura)
Director departament / Şef catedră
Conf. dr Adela DRAGAN
1 Este de preferat ca bibliografia minimală de studiu pentru surdenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atnigerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.

UNIVERSITATEA “DUNAREA DE JOS” GALAŢI Facultatea de Ştiinţe Catedra de Fizică Adresa: Galaţi, str. Domnească Nr.111 Tel.0236 /460780 E-mail: [email protected]
PROGRAMA ANALITICĂ Disciplina: FIZICA
A.Locul disciplinei în planul de învăţământ:
Anul I Sem I Sem II
Total ore Forme de verificare
Nr. credite Anul de
studiu C LP C LP C LP Sem I Sem II Sem I Sem II
Cod disciplină
Nr. ore
2 1 2 1 56 28 E E 4 3 MF-0003
B. Obiectivele disciplinei:
-Prezentarea unor noţiuni fundamentale şi a unor fenomene fizice necesare studenţilor pentru a putea transfera aceste cunoştinţe la studiul disciplinelor de specialitate corespunzătoare profilului facultăţii; -Însuşirea de către studenţi a noţiunilor fundamentale de fizică în vederea înţelegerii principalelor fenomene fizice şi proprietăţi mecanice, termice, electrice, magnetice, optice ale materiei şi aplicaţiile acestora în inginerie.
-Dezvoltarea gândirii logice a studenţilor prin explicarea şi interpretarea unor procese fizice care fac posibile: cunoaşterea şi utilizarea corectă a noţiunilor specifice; stabilirea proprietăţilor generale ale sistemelor fizice în care se produc aceste fenomene;
-Formarea de deprinderi de a măsura diferite mărimi fizice, de a utiliza diverse dispozitive experimentale şi de a interpreta rezultatele obţinute ;
C. Metode de predare-învăţare : prelegerea, explicaţia, demonstraţia, conversaţia,
abstractizarea, generalizarea, construirea modelelor, formarea de deprinderi şi aptitudini practice, studiul bibliografiei.
D.Forme şi metode de evaluare:
-evaluare continuă (pondere 40%) prin discuţii asupra teoriei lucrărilor practice, interesul şi modul de realizare a experimentelor, prelucrarea datelor experimentale şi la sfârşitul semestrului prin colocviul de laborator; prezentarea unui referat pe o temă la alegere din tematica disciplinei;
- evaluare sumativă (pondere 60%) prin proba scrisă finală de examinare.
E.Conţinutul cursului:
Semestrul I CAP. 1. ELEMENTE DE MECANICĂ FIZICĂ (1,5 cursuri=3 ore)
1.1. MECANICĂ CLASICĂ Cinematica şi dinamica clasică a punctului material
1.2. DINAMICĂ RELATIVISTĂ

CAPITOLUL 2. OSCILAŢII ŞI UNDE ELASTICE (4 cursuri=8 ore) 2.1. OSCILAŢII ELASTICE Mişcarea oscilatorie armonică; mişcarea oscilatorie amortizată; mişcarea oscilatorie întreţinută (forţată), Rezonanţa; Compunerea oscilaţiilor armonice: oscilaţii paralele cu pulsaţii egale, oscilaţii paralele cu pulsaţii puţin diferite- fenomenul de bătăi, oscilaţii perpendiculare cu pulsaţii egale, oscilaţii perpendiculare de pulsaţii oarecare. 2.2. UNDE ELASTICE Generalităţi; Ecuaţia undei plane monocromatice; Propagarea undelor longitudinale în solide, fluide; propagarea undelor transversale în solide; Ecuaţia undelor într-un mediu ideal – ecuaţia diferenţială a undelor, unda plană şi unda sferică; Interferenţa undelor elastice; Unde staţionare; Mărimi energetice; Ultraacustică – generarea ultrasunetelor şi aplicaţii CAP. 3. ELEMENTE DE ELECTRICITATE ŞI MAGNETISM (7 cursuri=14 ore) 3.1. ELECTROSTATICĂ Sarcina electrică; Câmpul electric. Intensitatea câmpului electric în vid; Fluxul electric. Legea lui Gauss în vid; Câmpul electric al unor distribuţii de sarcină; Potenţialul electric; Dipolul electric; Conductori în câmp electric; Dielectrici în câmp electric. Polarizarea dielectricilor; Capacitatea electrică. Condensatori; Definirea vectorului inducţie electrică şi legătura cu vectorii câmp electric şi polarizare;. Legea lui Gauss generalizată; Energia câmpului electrostatic. 3.2. ELECTROCINETICĂ Curentul electric. Intensitatea curentului electric. Ecuaţia de continuitate; Legea lui Ohm; Tensiunea electromotoare; Legea lui Joule. 3.3. MAGNETOSTATICĂ Câmpul magnetic constant. Inducţia magnetică; Legea Biot-Savart-Laplace; Momentul dipolar magnetic; Interacţiuni electromagnetice; Legea circuitului magnetic (legea lui Ampère); Fluxul inducţiei magnetice; Câmpul magnetic în interiorul substanţelor magnetizate. 3.4. CÂMPURI ELECTRICE ŞI MAGNETICE VARIABILE Inducţia electromagnetică; Curentul de deplasare; Câmp electrodinamic; Câmpul electromagnetic. Ecuaţiile lui Maxwell; Conservarea energiei câmpului electromagnetic; Unde electromagnetice. Aplicaţii. CAP. 4. ELEMENTE DE OPTICĂ ELECTROMAGNETICĂ (1,5 cursuri=3 ore)
4.1. INTERFERENŢA LUMINII 4.2. DIFRACŢIA LUMINII 4.3. POLARIZAREA LUMINII 4.4. APLICAŢII Semestrul II CAP. 5. BAZELE EXPERIMENTALE ALE MECANICII CUANTICE (4 cursuri=8 ore) 5.1. RADIAŢIA TERMICĂ Legile radiaţiei termice. Ipoteza cuantelor. Legea lui Planck. Consecinţele legii de distribuţie a lui Planck pentru radiaţia termică. 5.2. EFECTUL FOTOELECTRIC 5.3. CARACTERISTICILE CORPUSCULARE ALE FOTONILOR 5.4. EFECTUL COMPTON 5.5. SPECTRE ATOMICE Modelul atomic al lui Thomson. Modelul atomic al lui Rutherford. Modelul atomic al lui Bohr. Spectrele radiaţiilor X. Aplicaţii. 5.6. NATURA ONDULATORIE A MICROPARTICULELOR.UNDELE DE BROGLIE Ipoteza lui de Broglie. Verificarea experimentală a ipotezei undei asociate. Interpretarea undei asociate. 5.7. RELAŢIILE DE NEDETERMINARE ALE LUI HEISENBERG CAP. 6. ELEMENTE DE MECANICĂ CUANTICĂ ŞI FIZICA ATOMULUI (5 cursuri=10 ore) 6.1. OPERATORI ÎN MECANICA CUANTICĂ 6.2. ECUAŢIA LUI SCHRÖDINGER 6.3. ECUAŢIA DE CONTINUITATE ÎN MECANICA CUANTICĂ 6.4. APLICAŢII ALE ECUAŢIEI LUI SCHRÖDINGER
Microparticula în groapa de potenţial unidimensională. Microparticula în groapa de potenţial tridimensională. Bariera de potenţial. Efectul tunel. Oscilatorul armonic cuantic. 6.5. MOMENTUL CINETIC ORBITAL ÎN TRATARE CUANTICĂ Operatori asociaţi. Cuantificarea momentului cinetic orbital şi a proiecţiei acestuia pe axa Oz. 6.6. ATOMII HIDROGENOIZI ÎN TRATARE CUANTICĂ 6.7. MOMENTUL MAGNETIC ORBITAL AL ELECTRONULUI 6.8. SPINUL ELECTRONULUI 6.9. COMPUNEREA VECTORIALĂ A MOMENTELOR CINETICE ŞI MAGNETICE. ATOMUL ÎN CÂMP MAGNETIC. EFECTUL ZEEMAN CAP. 7. ELEMENTE DE FIZICA STĂRII SOLIDE (5 cursuri=10 ore) 7.1. NOŢIUNI DESPRE STRUCTURA CORPULUI SOLID 7.2. OSCILAŢIILE REŢELEI CRISTALINE
7.3. MODELE ŞI METODE DE CALCUL FOLOSITE ÎN FIZICA SOLIDULUI Modelul electronilor liberi.. Modelul electronilor cuasiliberi. Teoria benzilor de energie. Zone Brillouin.Clasificarea solidelor în metale, semiconductori şi izolatori. 7.4. PROPRIETĂŢI TERMICE ALE SOLIDELOR Teoria căldurii masice. Conductivitatea termică. Dilatarea termică. 7.5. PROPRIETĂŢI ELECTRICE ALE SOLIDELOR Conducţia electrică. Supraconductivitatea. Diferenţa de potenţial de contact. Efectul termoelectric. Semiconductori Efectul Hall. 7.6. PROPRIETĂŢI MAGNETICE ALE SOLIDELOR Proprietăţi diamagnetice şi paramagnetice. Proprietăţi feromagnetice
F. Lucrări practice de laborator (2 ore pentru fiecare lucrare):
1. Determinarea vitezei sunetului în aer prin metoda compunerii oscilaţiilor perpendiculare
2. Măsurarea temperaturii cu ajutorul termocuplului 3. Studiul galvanometrului cu cadru mobil 4. Determinarea constantei Stefan-Boltzmann din legea radiaţiei corpului negru 5. Determinarea constantei lui Planck cu ajutorul efectului fotoelectric 6. Determinarea razei de curbură a unei lentile cu ajutorul inelelor lui Newton 7. Măsurarea rezistenţelor electrice liniare şi neliniare prin metoda ampermetrului şi
voltmetrului 8. Verificarea legii transportului de energie prin radiaţie 9. Determinarea caracteristicilor reţelei de difracţie 10. Studiul diodei semiconductoare 11. Studiul dependenţei de temperatură a conductivităţii semiconductorilor şi
determinarea energiei de activare 12. Studiul substanţelor feromagnetice G. Bibliografie de elaborare a cursului
1. ANGHELESCU D, MOISIL DIANA, MULLER L., PREDA A., Fizică, Editura Didactică şi Pedagogică, Bucureşti, 1981.
2. BIBOROSCH L., ş.a., Curs de fizică pentru ingineri, partea I-a, Institutul Politehnic Iaşi, 1981. 3. CREŢU T., Fizica generală, Volumul I şi II, Editura Tehnică, Bucureşti, 1984; 1986. 4. CREŢU T., TUDORACHE ŞT., Fizica atomului, Editura Ştiinţifică şi Enciclopedică, Bucureşti, 1985. 5. DOROHOI DANA ORTANSA, Optică. Teorie, experienţe, probleme rezolvate, Editura Ştefan
Procopiu, Iaşi, 1995. 6. ENE ANTOANETA, Fizică (vol. I şi II), Editura Fundaţiei Universitare “Dunărea de Jos” din Galaţi,
2000, 2002. 7. ENE ANTOANETA, Elemente de fizică pentru ingineri, Editura Fundaţiei Universitare Dunărea de Jos,
Galaţi, 2003. 8. FLORESCU VIORICA, Mecanica cuantică, Litografia Universităţii Bucureşti, vol. I şi II, 1979, 1981. 9. HRISTEV A., Mecanică şi acustică, Editura Didactică şi Pedagogică, Bucureşti, 1982.

10. IOVIŢ POPESCU I. (coord.), Optică, fizica plasmei, fizică atomică şi nucleară pentru perfecţionarea profesorilor, Editura Didactică şi Pedagogică, Bucureşti, 1983.
11. LANDAU L., LIFCHITZ E., Mécanique quantique, Troisième Édition, Éditions Mir, Moscou, 1974. 12. LICEA I., Fizica metalelor, Editura Ştiinţifică şi Enciclopedică, Bucureşti, 1986. 13. LUCA E., CIUBOTARIU C., ZET GH., PĂDURARU ANASTASIA, Fizică generală, Editura Didactică
şi Pedagogică, Bucureşti, 1981. 14. MOŢOC CORNELIA, Fizică, vol. II, Editura All. Bucureşti, 1996. 15. NAT ALEXANDRINA, Fizică (vol. I şi II), Universitatea “Dunărea de Jos” din Galaţi, 1995. 16. NAT ALEXANDRINA, Fizică atomică şi nucleară, Universitatea “Dunărea de Jos” din Galaţi, 1997. 17. POPESCU I.M., Fizică (vol. I şi II), Editura Didactică şi Pedagogică, Bucureşti, 1983, 1984. 18. PURCELL E.M., Cursul de fizică Berkeley, vol. II, Electricitate şi magnetism, Editura Didactică şi
Pedagogică, Bucureşti, 1982. 19. SAHLEAN V., Optica, Universitatea “Dunărea de Jos” din Galaţi, 1996. 20. SAHLEAN V., VOICULESCU MIRELA, Fizica (I), Editura Fundaţiei Universitare “Dunărea de Jos”
din Galaţi, 2000. 21. SAHLEAN V., Fizica (II), Editura Ars Docendi, Bucureşti, 2001. 22. TUDOSE C., CUCUREZEANU I., VELICAN N., CHIŞLEAG R., CĂLUGĂRU GH., SUCIU P.,
PĂSTÂRNAC ANTOANETA, FERNENGEL E., Fizica, Editura Didactică şi Pedagogică, Bucureşti, 1981.
23. VELICAN N., Curs de fizică, partea I-a, Universitatea “Dunărea de Jos” din Galaţi, 1992. 24. VELICAN N., SAHLEAN V., Fizica partea I-a, Universitatea “Dunărea de Jos” din Galaţi, 1977. 25. VREJOIU C., IONESCU G., MERCHEŞ I., HRISTEV A., IORDACHE D., ACZEL O., BURLACU L.,
MULLER L., RUSU G., BARBUR I., Fizică – mecanică pentru perfecţionarea profesorilor, Editura Didactică şi Pedagogică, Bucureşti, 1983.
26. WICHMANN E.H., Fizica cuantică, Cursul de fizică Berkeley, vol. IV, Editura Didactică şi Pedagogică, Bucureşti, 1983.
H. Bibliografie minimală
1. Ene, A., 2000, Fizica – volumul I, Editura Fundatiei Universitare Dunarea de Jos, Galati, 256 pagini, ISBN 973-99424-9-0.
2. Ene, A., 2002, Fizica – volumul II, Editura Fundatiei Universitare Dunarea de Jos, Galati, 252 pagini, ISBN 973-8352-73-8.
3. Ene, A., 2003, Fizica pentru ingineri. Lucrări practice si probleme rezolvate, Editura Fundatiei Universitare Dunarea de Jos, Galati, 304 pagini, ISBN 973-627-060-2.
4. Ene, A., 2003, Elemente de fizica pentru ingineri, Editura Fundatiei Universitare Dunarea de Jos, Galati, 435 pagini, ISBN 973-627-074-2.
Data întocmirii: 19-02-2007 Titular curs: Conf. dr. Antoaneta Ene Titular lucrări practice: Asist. Steluţa Gosav
Şef catedră, Conf. dr. Antoaneta Ene
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE LITERE SI TEOLOGIE DEPARTAMENTUL DE LIMBI MODERNE APLICATE Adresa: Nr. telefon / fax: E-mail:
PROGRAMA ANALITICĂ Disciplina: limba franceză
Anul I Facultatea de Mecanica
A. Locul disciplinei în planul de învăţământ:
Anul Sem. I Sem. II
Total ore Forme de verificare
Nr. credite Anul de studiu
C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
1 1 1 - V
A. Obiectivele disciplinei: . Cunoaştere, înţelegere, explicare şi interpretare - cunoasterea si utilizarea adecvata a terminologiei de specialitate, precum si a structurilor gramaticale aplicate si aplicabile limbajului de specialitate; - dobandirea competentelor lingvistice implicate in procesul de interpretare si traducere a textului din domeniul ingineriei mecanice; -deprinderea abilitatii de documentare in limba franceză, in domeniul de specialitate. Instrumental-aplicative - comunicarea orala pe teme de specialitate; - folosirea diverselor acte de limbaj adecvate în potenţiale situaţii de comunicare profesională din domeniul de specialitate. Atitudinale - manifestarea unor atitudini pozitive faţă de pregătirea în limba franceză ca şi componentă în formarea generală; - constientizarea rezultatelor studiului individual asistat si neasistat in formarea de limba straina - valorificarea optima si creativa a propriului potential in pregătirea la limba străină.
B. Metode de predare – învăţare:
- conversatia, explicatia, simularea de situatie,
C. Forme şi metode de evaluare: - test lexico-gramatical pe text de specialitate - test de realizare a actelor de comunicare la nivel de a fi înţeles pe teme uzuale si de specialitate - tema de casa
D. Conţinutul cursului / număr de ore pentru fiecare temă: -
E. Conţinutul seminariilor / număr de ore pentru fiecare temă:
Introducere în studiul limbilor străine în scopuri profesionale / cu obiective specifice

1. Cultură şi civilizaţie francofonă. Terminologie de bază din domeniul culturii şi civilizaţiei. Polisemie şi omonimie. 2 ore 2. Categorii verbale (timp, mod, aspect). 4 ore 3. Categorii nominale (predeterminanţi, substantiv, adjectiv, substitute). 4 ore 4. Elemente de lexicologie şi vocabular. Formarea cuvintelor. Abrevierea 2 ore (trunchiere şi siglare). 5. Sintaxa frazei (completiva directă, circumstanţa). Constrângeri modale în 4 ore subordonate. 6. Introducere în corespondenţa generală. Formule tip. Elemente de bază ale scrisorii oficiale. Formularistică. 6 ore 7. Comunicare şi prezentare orală. Funcţii de limbaj / formule tip. 6 ore Sinonimie, antonimie.
F. Bibliografie pentru elaborare programei: Chamberlain, Alain, Steele Ross, 1991, Guide pratique de la communication, Didier, Français langue étrangère Ghidu, George, 1983, Conjugarea verbelor franceze, Bucuresti: Editura Stiintifica si Enciclopedica Adam, Jean-Michel, 1990, Eléments de linguistique textuelle. Théorie et pratique de l’analyse textuelle, Bruxelles: Mardaga Adam, Jean-Michel, 1992, Les textes: types et prototypes. Récit, description, argumentation, explication, dialogue, Nathan Université Rata, Georgeta, 1994, De la vie à l’expression personnelle, guide pratique de conversation, Iasi: Editura Fundatiei „Chemarea” Gancz, Andrei, Franchon, Marie-Claude, Gancz, Margareta, 1999, Dictionar francez-roman al comunicarii, Bucuresti, Editura Corint *** Ghid roman- francez al actelor de vorbire. Bucuresti: Editura Corint Tutescu, Mariana, 1996, Du mot au texte, Bucuresti, Editura Cavallioti Grévisse, Maurice, 1990, Précis de grammaire française, Duculot Saras, Marcel, Stefanescu, Mihai, Gramatica limbii franceze prin exercitii, 2000, Editura Gramar 100+1 Ribière, Mireille, Thalia, Marriott, 1999, Gramatica limbii franceze pentru avansati, Bucuresti: Teora Christensen, Marie-Hélène, Fuchs, Maryse, Korach, Catherine Schapira, 2004, Gramatica limbii franceze de la A la Z, Bucuresti: Teora
G. Bibliografie minimală de studiu pentru studenţi Ghidu, George, 1983, Conjugarea verbelor franceze, Bucuresti: Editura Stiintifica si Enciclopedica Christensen, Marie-Hélène, Fuchs, Maryse, Korach, Catherine Schapira, 2004, Gramatica limbii franceze de la A la Z, Bucuresti: Teora Saras, Marcel, Stefanescu, Mihai, Gramatica limbii franceze prin exercitii, 2000, Bucuresti: Editura Gramar 100+1
Data aprobării programei analitice în catedră / departament
(Semnătura) Director departament / Şef catedră
Conf. dr Adela DRAGAN

UNIVERSITATEA "DUN�REA DE JOS" GALA�I FACULTATEA DE MECANIC� CATEDRA GRAFIC�, MECANISME SI TOLERAN�E Adresa:Str.Domneasca nr.111, 800201 Nr. telefon +40 236 414871 int.460. Tel./Fax: +40 236 314463 E-mail: [email protected]
PROGRAMA ANALITIC� Disciplina: GRAFIC� ASISTAT� DE CALCULATOR
A. Locul disciplinei în planul de înv���mânt:
Anul II Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplin�
Nr. ore
28 28 - - 28 28 V - 4 - MF0008
B. Obiectivele disciplinei: • Cunoa�terea tehnicilor de proiectare bi/tridimensional�(2D/3D) ale unui soft grafic; • Utilizarea tehnicilor de proiectare bi/tridimensional�(2D/3D) pentru modelarea pieselor pe
calculator cu ajutorul unui soft grafic; • Utilizarea vocabularului specific disciplinei; • Promovarea calit��ilor atitudinale (atitudine pozitiv� fa�� de utilizarea calculatorului pentru
realizarea unei documenta�ii tehnice, atitudine antirutinier�, aten�ie vizual�) �i aptitudinale (eficacitate personal�, relationale, actionale) specifice domeniului ingineresc.
C. Metode de predare – înv��are: Prelegerea, conversa�ia, explica�ia, demonstra�ia documentar�, demonstra�ia programat�, exerci�iul, problematizarea, modelarea, metode de luceu în grup, individual �i frontal, studiul bibliografiei
D. Forme �i metode de evaluare: • Evaluare de diagnosticare (pentru stabilirea “st�rii ini�iale a instruirii”). Se utilizeaz� o
prob� ini�ial� de 5 itemi, selecta�i din Mental Cutting Test (MCT), pentru evaluarea abilit��ilor spa�iale ale studen�ilor.
• Evaluarea formativ� ( permite stabilirea unor m�suri ameliorative). Aceasta se realizeaz� prin metode orale , teme efectuate la laborator în timpul semestrului �i un proiect (NP-30%).
• Evaluarea formativa prin prob� scris� - asigur� elaborarea unor decizii de ameliorare ajustare-restructurarea activit��ii didactice. Se realizeaz� prin 6 probe teoretice, în timpul semestrului . Este eliminatorie (se cere ob�inerea a 50% din punctaj la fiecare prob� pentru a participa la proba practic� final�).
• Evaluarea sumativa prin prob� practic� - permite verificarea capacit��ii studen�ilor de a aplica adecvat cuno�tin�ele dobândite. Se realizeaz� prin analiza lucr�rii de verificare ( LV) a studentului dat� la sfâr�itul semestrului (NLV – 70%) . Nota final�(NF) =Nota lucrare de verificare (NLV) + Nota profesional� (NP) Se acord� un bonus de 1 punct la nota final� pentru studen�ii care au o prezen�� la curs mai mare de 90%.
E. Con�inutul cursului: 1. Standarde utilizate în reprezent�rile grafice pe calculator/ 1h 2. Mijloace de reprezentare a construc�iilor geometrice, figurilor �i corpurilor geometrice pe calculator / 13h
Introducere în AutoCAD. Tehnici de baz� în aplica�ia AutoCAD(tehnici de setare a spa�iului de lucru,tehnici de desenare, tehnici de modificare, tehnici de vizualizare) Modalit��i de reprezentare a desenelor pe calculator
3. Modelarea tridimensional� a obiectelor / 8h Modelarea WIREFRAME. Modelarea suprafe�elor. Modelarea solidelor .
4. Strategii de desenare / 2 h
Elemente de reprezentare în desenul industrial (dispunerea proiec�iilor, reprezentarea �i notarea vederilor, sec�iunilor �i rupturilor, modalitati de cotare a pieselor pe calculator, modalit��i de ha�urarea a desenelor tehnice pe calculator). Optimizarea reprezent�rilor grafice pe calculator- Metoda re�elelor. Modelarea 3D a piesei pe calculator.
5. Tip�rirea desenului de piesa / 4h Spa�iul model �i spa�iul hârtie(vederi multiple, desenul de pies�). Uilizarea culorilor (caracteristicile culorii,sistemul RGB, sistemul CMYK). Tip�rirea desenelor. Utilizarea internetului pentru aplica�ii grafice. F. Con�inutul lucr�rilor practice:
1. Prob� ini�ial�- test evaluare abilit��i spa�iale – MCT (5’). Construc�ii geometrice- CIRCLE, ZOOM , ERASE, LINE, LIMITS, GRID, UNITS, OSNAP, LIST. - 2h
2. Simetrizarea, multiplicarea �i �tergerea entit��ilor reprezentate în plan - MIRROR,ORTHO, COPY, TRIM. - 2h
3. Generarea / descompunerea unui grup de entit��i reprezentate cu grosime �i asocierea unui text DONUT, PLINE, ARRAY, EXPLODE, DTEXT AREA, PEDIT. - 2h
4. Trasarea arcelor �i dreptunghiurilor, te�irea �i racordarea acestora �i utilizarea referin�elor în proiectare - CHAMFER, FILLET, RECTANGLE, ARC, ID, DIST. - 2h
5. Transformarea entit��ilor în plan ( transla�ia, rota�ia, modificarea propriet��ilor), modelare 3D - WIREFRAME a corpurilor �i vizualizarea acestora- BREAK, OFFSET, EXTEND, ROTATE, POLYGON, CHANGE /LINETYPE, LTSCALE, VPOINT, PLAN. - 2h
6. Utilizarea straturilor de desenare pentru realizarea epurei punctului - DDEDIT, UCS, UCSICON, BLOCK, LAYER - 2h
7. Epura corpurilor geometrice. Prob� teoretic� I-comenzi de organizare a spa�iului de lucru (10’) - 2h
8. Optimizarea reprezent�rilor ortogonale ale pieselor pe calculator conform standardelor de dispunere a proiec�iilor STAS 614-76, FILTRE (Z,Y,Z). Prob� teoretic� II- comenzi de desenare (10’) - 2h
9. Modelarea �i sec�ionarea solidelor– Primitive 3D, EXTRUDE, 3DPOLY, SOLVIEW, SOLDRAW, SECTION, SLICE HATCH, RENDER, REGEN. Prob� teoretic� III– comenzi de editare (10’). Primirea temei de proiect (grup 2-4 studen�i) - 2h
10. Reprezentarea �i cotarea vederilor �i sec�iunilor , STAS 103-84 , SR ISO 5457:2002 , SR ISO 7200:1994 , STAS 105-87 , SR EN ISO 5455:1997, STAS 104-80, SR ISO 3098-1:1993, SR ISO 129:1994, DIM, REGION. Prob� teoretic� IV- comenzi de modelare (10’). Proiect- etapa 1 (identificarea corpurilor geometrice simple/primitive 3D ) - 2h
11. Tip�rirea desenului de pies� - TILEMODE, VPORTS / MVIEW, MSPACE, PSPACE, VPLAYER. Prob� teoretic� V – comenzi de asociere a textului �i dimensiunilor (10’). Proiect- etapa 2 (pozi�ionarea primitivelor 3D ) - 2h
12. Modelarea unei piese (3D) realizat� dup� modelul 2D al acesteia (Pretest - 30’). Rolul comenzii SOLPROF în tip�rirea desenului de pies�. Proiect- etapa 3 (opera�ii booleene) - 2h
13. Prezentare proiect. Desenul de ansamblu - STAS-6134 -84 �i SR ISO 73:1994. Prob� teoretic� VI – comenzi de vizualizare (10’). - 2h
14. Verificare- Modelarea unei piese (3D) realizat� dup� modelul 2D al acesteia, în Model Space, �i reprezentarea ortogonal� a piese , în Paper Space. (Lucrare de verificare-30’). Încheierea situa�iei semestrului I. - 2h
G. Bibliografie: 1. Baicu, I. Grafic� pe calculator – AutoCAD, Editura Scorpion, Gala�i,
2002; 2. Buchard, B., Pitzer,D., �.a. AutoCAD 2000, Editura Teora , Bucure�ti, 1999; 3. Cohn, S.D.,�.a. AutoCAD 12. Editura Teora, Bucure�ti, 1995; 4. Iliu��, V. Elemente de desen tehnic, Editura Aronda, Gala�i, 2003;
5. Nechita, M., Berbinschi, S. Desen �i Grafic� pe calculator. Aplica�ii (e-book). Editura Academica,Gala�i,2004,www.gmt.ugal.ro/nikita/indrumar.html
6. Nechita, M. Grafic� asistat� de calculator ( e-book ). Editura Academica, Gala�i, 2006 ,www.gmt.ugal.ro / nikita / hp / gac_sia / grafica_asistata_de _calculator.pdf;
7. Nechita, M. Informatic� aplicat� �i Grafic� asistat� de calculator. Editura Funda�iei Universitare “Dun�rea de Jos” , Gala�i, 2006;
8. St�ncescu, C AutoCAD. Manual de ini�iere. Editura Fast Impex, Bucure�ti, 1993;
9. Talu, S.D.H. AutoCAD 2005. Editura Risoprint, Cluj-Napoca, 2005; 7. *** Hello Cad Fans. Editura Fast Impex, Bucure�ti, colec�ia 1991-
1995; 8. *** Standarde de stat . Bucure�ti, 2003.
Data aprob�rii programei analitice în catedra de specialitate……22.01.2007……
Sef catedra GMT,
Conf.dr.ing. Baicu Ioan
UNIVERSITATEA "DUNĂREA DE JOS" GALATI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: INSTALATII DE TELEOPERARE
A. Locul disciplinei în planul de învăţământ:
Anul III Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
- - 42 28 42 28 - E - 5 M-S3204
B. Obiectivele disciplinei: • Identificarea tipurilor de instalaţii de teleoperare şi a operaţiilor specifice acestora; • Definirea datelor de intrare şi de ieşire dintr-un sistem, reprezentarea acestora şi operaţii
specifice; • Utilizarea aplicaţiilor software specifice pentru simularea instalaţiilor de teleoperare; • Cunoaşterea structurii şi a funcţiunilor principale ale unui sistem computerizat de
monitorizare şi control al evenimentelor. • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei inginereşti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstraţii practice de realizare a unor tipuri de sisteme, aplicaţii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator si evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă: 1. TELEOPERAREA ÎN DOMENIUL ROBOTICII – 2 ORE
Scurt istoric. Generalităţi privind sistemele mecanice. Clasificarea sistemelor. 2. DOMENIILE DE APLICARE ALE TELEOPERĂRII; EXEMPLE – 2 ORE
Teleoperarea în medii ostile omului. Teleoperarea în zone inaccesibile omului. 3. DESCRIEREA GENERALĂ A UNUI SISTEM DE TELEOPERARE – 2 ORE 4. COMPONENŢA SISTEMULUI. MODUL GENERAL DE OPERARE. SPECIFICAŢIILE TEHNICE– 4 ORE
Conducerea dirijata a telerobotilor la nivel de executie. Lant cinematic “master-slave“ Sistemul mecanic. Elemente de actionare pentru comanda diverselor organe
5. SISTEME DE COMUNICATIE WIRELESS – 2 ORE Aspectele teoretice. Variante
6. CAMERE VIDEO UTILIZATE IN TELEOPERARE– 2 ORE Tipuri de camere video folosite. Particularitati constructive. Modul de instalare.
7. DISPOZITIVUL DE MIŞCARE A CAMERELOR CU DOUĂ GRADE DE LIBERTATE – 2 ORE
Tipuri de dispozitive de miscare in coordonate. Reglarea miscarii dispozitivelor. 8. SISTEME DE COMANDĂ – 2 ORE
Arhitectura. Interfaţe. Comanda unui robot cu ajutorul joystickului. 9. TIPURI DE SISTEME OPTOELECTRONICE DE URMĂRIRE – 2 ORE

SOE de urmărire automate. SOE de urmărire asistate de operator. SOE de urmărire active. Soe de urmărire multisenzoriale 10. MODELAREA UNUI SISTEM CU TRACKING VIZUAL ACTIV - 2 ORE
Modelul unui SOE. Etajul de recunoaştere. 11. MODEL DE SISTEM DE URMĂRIRE VIZUALĂ CU PREDICTOR CU REŢELE NEURONALE - 2 ORE
Definirea sistemului. Tipuri de retele neuronale. Generarea retelelor neuronale. Implementarea retelelor in cadrul sistemului de urmarire. 12. CONSIDERAŢII PRIVIND SINTEZA UNUI SISTEM OPTOELECTRONIC DE URMĂRIRE UTILIZÂND O INTERFAŢĂ DE TIP BIOFIZIC CU OPERATORUL - 2 ORE Structura anatomică a ochiului uman. Formarea imaginii. câmpul vizual. Tehnici de eye-tracking Tehnici de estimare fără contact. Urmărirea pupilei. Urmărirea reflexiilor corneale şi retiniene 13. APLICATII IN DOMENIUL MEDICAL – TELECHIRURGIE - 2 ORE
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: 1. Prezentarea laboratorului. Instructaj de protecţie a muncii - 2 ore 2. Aplicaţii utilizând modele experimentale de eye-tracker - 2 ore 3. Modelul ETD - 2 ore 4. Estimarea poziţiei elementelor caracteristice - 2 ore 5. Schema sistemului de comandă a punţii - 2 ore 6. Extragerea centroizilor din proiecţii - 2 ore 7. Estimarea poziţiei pupilei şi a reflexiilor - 2 ore 8. Estimarea poziţiei pupilei prin metoda contururilor active- 2 ore 9. Codul sursă al aplicaţiei server, care rulează pe sistemul de comandă al robotului - 2 ore 10. Modelarea unui sistem cu tracking vizual activ - 2 ore 11. Preprocesarea imaginii - 2 ore 12. Segmentarea imaginii - 2 ore 13. Tehnici de eye-tracking - 2 ore 14. Colocviu laborator - 2 ore
A. Bibliografie de elaborare a cursului 1. Akay, M. and A. Marsh, Information technologies in medicine. New York, Wiley, 2001 2. Barker, L. K., W. S. McKinney, et al., Optimized resolved rate control of seven-degree-of-freedom
Laboratory Telerobotic Manipulator (LTM) with application to three-dimensional graphics simulation. Washington, D.C., 1989
3. Ballantyne, G. H., J. Marescaux, et al., Primer of robotic & telerobotic surgery. Philadelphia, Lippincott Williams & Wilkins, 2004
4. Boyer, K. L., L. Stark, et al., Applications of AI, machine vision and robotics. Singapore ; New Jersey, World Scientific, 1993
5. Buzug, T. M. and T. Lueth, Perspective in image-guided surgery : proceedings of the Scientific Workshop on Medical Robotics, Navigation and Visualization, Rhein Ahr Campus, Remagen, Germany, 11-12 March. River Edge, N.J., World Scientific, 2004
6. Canudas de Wit, C. A., B. Siciliano, et al., Theory of robot control. Berlin ; New York, Springer, 1996 7. Goldberg, K., The robot in the garden : telerobotics and telepistemology in the age of the Internet.
Cambridge, Mass., MIT Press, 2000 8. Goldberg, K. and NetLibrary Inc., The robot in the garden telerobotics and telepistemology in the age
of the Internet. Cambridge, Mass., MIT Press, 2000 9. Harris, E., J. Ogle, et al., Design of a versatile, teleoperable, towable lifting machine with robotic
capabilities for use in NASA's lunar base operations. Washington, D.C., 1989 10. R. A. Abrams, D. E. Meyer, S. Kornblum, 1989. „Speed and accuracy of saccadic eye movements:
Characteristic of impulse variability in the oculomotor system" Journal of Experimental Psychology: Human Perception and Performance, 15, 3, 529-543;
11. C. S. Andersen, „A Framework for Control of a Camera Head", Ph. D. Dissertation, Laboratory of Image Analysis, Aalborg University, January 1996;
12. Arsenio, J. Santos-Victor, "Active monocular tracking with temporal integration of visual cues", Computer Vision and Image Understanding, 1996;
13. S. Baker, T. Sim, T. Kanade, „When is the Shape of a Scene Unique Given its Light-Field: A fundamental Theorem of 3D Vision", The Robotics Institute, Carnegie Mellon University;
14. Al Bovik, „Handbook of Image and Video Processing", Academic Press, San Diego, 2000, p. 243.-259;

Link-uri web Telerobot: The
University of Western Australia
Australia http://telerobot.mech.uwa.edu.au/(now integrated into Telelabs system - see link immediately below)
Remote electronics lab, Carinthia Tech Institute (University of Applied
Sciences) School of Electronics,
Villach
Austria http://www.cti.ac.at/Prof. Dr.-Ing., Dr.sc. Michael E. Auer
Remote experiment lab, University of Santa
Catarina
Brazil http://www.inf.ufsc.br/~jbosco/labvir.htm
http://www.inf.ufsc.br/~jbosco/
Quanser Inc Canada http://www.quanser.com/ Tele-Universite du
Quebec Canada [email protected]@videotron.cahttp://www.licef.teluq.uquebec.ca/fr/index.htm(shows
that project is awaiting funding April 2003)
EPFL: Swiss Federal Institute of Technology
(links to U. Florida Gainesville.
Switzerland (USA links
[5,8])
See http://iawww.epfl.ch/Staff/Denis.Gillet/papers.html
http://khepontheweb.epfl.ch/,
http://telerobolab.epfl.ch/
B. Bibliografie minimală de studiu pentru studenţi
1. Mistodie L., Visan D., Instalatii de teleoperare - Note de curs şi laborator , Format A4, 2007 Data aprobării programei analitice în catedră 19.01.2007
Titular curs: S.L.ing Mistodie Luigi Titular lucrări practice: S.L.ing Mistodie Luigi Semnătura:
Şef catedră Prof dr ing Georgescu V.

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: INTELIGENTA ARTIFICIALA
A. Locul disciplinei în planul de învăţământ:
Anul III RI Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
28 28 - - 28 28 V - 4 - M-D3004
B. Obiectivele disciplinei:
• Cunoaşterea principalelor tehnici ale Inteligenţei Artificiale -IA si implementarea acestora in sistemelor mecatronice;
• Cunoaşterea şi utilizarea adecvată a noţiunilor fundamentale specifice IA; • Prezentarea principalelor aplicaţii practice ale IA, în domenii ca: baze de cunoştinţe şi
sisteme expert, robotică, prelucrări de imagini, vedere artificială, reţele neuronale. • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei inginereşti; • Formării deprinderilor de implementare a tehnicilor IA, utilizând toolbox-urile mediul
MATLAB; • Dezvoltarea capacităţii inginereşti de utilizare echipamentelor de simulare a aplicaţiilor
in domeniul IA; • Dezvoltarea abilitaţilor de cercetare.
C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea, studiul de caz, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator si evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă: 1. Introducere. Inteligenţa artificială – 2 ore Conceptul de inteligenţă artificială. Programe de inteligenţă artificială. Inteligenţa naturală şi artificială. Clase de produse cu inteligenţă artificială. 2. Atributele sistemelor inteligente– 2 ore Adaptare şi instruire. Autonomie şi inteligenţă. Structurare şi ierarhizare 3. Percepţia artificială– 4 ore Percepţia imaginii parţiale. Percepţia imaginii complete ( până la operaţia de digitizare). Percepţia completă. Digitizarea. Memorarea. Extragerea conturului. Segmentarea. Extragerea caracteristicilor. Caracteristici structurale de formă. Caracteristicile metrice ale formei. Caracteristicile de formă şi situare. Interpretarea rezultatelor. 4. Proiectarea sistelelor cu vedere artificiala– 4 ore 5. Decizia artificială– 2 ore Baze de date. Organizarea extrasă a bazei de date şi modul de accesare a inteligenţei artificiale. 6. Sisteme Fuzzy– 3 ore Introducere. Notiuni de baza ale modelarii fuzzy. Multimi fuzzy. Operatii pe multimi fuzzy. Rationamente fuzzy. Metode de constructie a modelelor fuzzy 7. Aplicatii ale sistemelor fuzzy in mecatronica. Regulatoare fuzzy– 2 ore

8. Reţele neuronale– 2 ore Generalitati. Modelul neuronului artificial. Structura R.N. Proprietăţi şi funcţii ale R.N. 9. Arhitecturi de R.N– 1 ore Reţele neuronale perceptron cu un singur strat. Reţele neuronale perceptron multistrat 10. Aplicaţii ale reţelelor neuronale in mecatronica– 1 ore 11. Sisteme hibride Neuro – Fuzzy– 1 ore 12. Sisteme expert– 4 ore
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: 1. Sisteme cu vedere artificiala cu aplicaţie industriala– 2 ore 2. Recunoaşterea optică de caractere– 2 ore 3. Sistem pentru citirea codurilor reperelor liniilor automate. Coduri industriale– 2 ore 4. Recunoaşterea vorbirii. Sinteza vorbirii– 2 ore 5. Prelucrarea imaginilor utilizând software-ul MATLAB, toolbox-ul Image Processing– 2 ore 6. Transformări de imagini utilizând software-ul MATLAB, toolbox-ul Image Processing– 2 ore 7. Sisteme multiprocesor pentru comanda roboţilor adaptivi cu vedere artificiala– 2 ore 8. Aplicaţiilor cu reţele neuronale utilizând MATLAB, toolbox-ul Neural Networks– 2 9. Iniţiere in logica fuzzy utilizând software-ul MATLAB, toolbox-ul ului Fuzzy Logic– 2 ore 10. Iniţiere in simularea sistemelor fuzzy utilizând software-ul FuzzyTech– 2 ore 11. Comanda fuzzy a unui servomotor de curent continuu– 2 ore 12. Aplicarea sistemelor expert pentru un robot mobil– 2 ore 13. Comanda hibrida neuro-fuzzy unui braţ manipulator– 2 ore 14. Reţele neuronale pentru comanda robotului pe baza vederii artificiale– 2 ore
G. Bibliografie de elaborare a cursului 1. Florea, A., Elemente de inteligenta artificiala, Lit. UPB, 1993; 2. Florea, A., Dorohonceanu, B., Francu C., Programare in Prolog, Lit. UPB, 1997 3. Tiponuţ, V., Căleanu, C.D., Reţele neuronale. Arhitecturi şi algoritmi, Ed. Politehnica, Timişoara, 2001,
http://www.ee.utt.ro/ea/Discipline/Retele%20Neuronale/Retele%20neuronale%20-%20Arhitecturi%20si%20algoritmi.pdf
4. Căleanu, C.D., Tiponuţ, V., Reţele neuronale. Aplicaţii, Ed. Politehnica, Timişoara, 2002, http://www.ee.utt.ro/ea/Discipline/Retele%20Neuronale/Retele%20neuronale%20-%20Aplicatii.pdf
5. Dumitrescu, D., Costin, H. Retele neuronale; teorie si aplicaţii. Teora, Bucureşti, 1996. 6. Preit, Ş., Precup, R.E., Introducere în conducerea fuzzy a proceselor, Editura Tehnică, Bucureşti, 1997 7. Toderean G., Coşteiu M., Giurgiu M., Reţele neuronale, Editura Microinformatica,, Cluj - Napoca, 1994 8. Voloşencu C., Reglare fuzzy şi neuronală cu simulări în MATLAB, Editura EUROBIT, Timişoara, 1997 9. Russell, S., Norvig P., Artificial Intelligence, A Modern Approach, Prentice Hall, 1995 10. Luger, G.F., Stubblefield, W.A., Artificial Intelligence. Structures and Strategies for Complex Problem Solving,
Benjamin-Cummings, 1993 11. Ruan, D., ed., Intelligent Hybrid Systems: Fuzzy Logic, Neural Networks, and Genetic Algorithms ,Kluwer
Academic, Boston, Massachusetts, USA, 1997 12. The MathWorks Inc., Simulink 4.1 (Release 12.1), 2001,
http://amath.colorado.edu/courses/4720/2000Spr/Labs/Worksheets/Matlab_tutorial/matlabtutorial.html 13. The MathWorks Inc.: Neural Networks Toolbox 4.0.1 (Release 12.1), 2001 14. *** Introduction to image processing in Matlab, http://robotics.eecs.berkeley.edu/~mayi/imgproc/index.html,
http://amath.colorado.edu/courses/4720/2000Spr/Labs/Worksheets/Matlab_tutorial/matlabimpr.html, 1. Bibliografie minimală de studiu pentru studenţi
1. Mistodie L., Inteligenta artificiala si sisteme expert, note de curs, 2006; 2. Kovacs F., Tusz F., Varga S. - Fabrica viitorului. Ed. Multimedia Int., Arad, 1999 3. Ghinea M., Fireteanu M. – Matlab - Calcul numeric, grafica, aplicaţii. Ed. Teora, 1998 4. *** http://www.mathworks.com/academia/student_center/ 5. *** http://www.mathworks.com/products/image/
Data aprobării programei analitice în catedră: 13. 02. 2007 Titular curs: S.L. ing. Mistodie Luigi Titular lucrări practice: S.L.ing Mistodie Luigi Semnătura:
Şef catedră Prof dr ing Georgescu V.



UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA CATEDRA / DEPARTAMENTUL Adresa: Nr. telefon / fax: E-mail:
PROGRAMA ANALITICĂ
Disciplina: MECANICA FLUIDELOR
A. Locul disciplinei în planul de învăţământ: Anul II
Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu
C S C L C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
- - 28 14 28 14 - V 3 - M-D0011
B. Obiectivele disciplinei:
- Se urmareste atat prezentarea principiilor, ecuatiilor si a metodelor de baza ale mecanicii fluidelor cat si utilizarea acestora la rezolvarea unor probleme concrete, cu aplicabilitate specifica
-Dezvoltarea capacitatii de proiectare, realizare si evaluare a activitatilor instructiv-educative;
B. Metode de predare – învăţare: prelegerea, conversatia euristica, dezbaterea, studiul de caz, problematizarea, simularea de situatii, metode de lucru in grup, individual si frontal, predarea fiind sustinuta cu materiale specifica ( planse, retroproiector).
C. Forme şi metode de evaluare: evaluare continua prin probe scrise, practice si referate de
laborator; evaluare sumativa prin probe scrise. D. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Notiuni introductive/2ore: obiectul disciplinei, metode generale de studiu, scurt istoric.
2. Proprietatile generale ale fluidelor/2ore: compresibilitatea, vascozitatea, mobilitatea, definirea fluidului ideal.
3. Statica fluidelor /8ore: ecuatia fundamentala a staticii fluidelor, forte hidro si aerostatice pe suprafete plane si curbe, teorema lui Arhimede.
4. Cinematica fluidelor/4ore: metoda Euler si metoda Lagrange in reprezentarea cinematica a fluidelor, linie de curent si tub de curent, curent de lichid si debit, ecuatia de continuitate.
5. Dinamica fluidelor ideale/8ore: ecuatiile generale de miscare ( ecuatiile lui Euler ), forma Lamb a ecuatiilor lui Euler, ecuatia lui Bernoulli in regim permanent si fara frecari, aplicatii ale ecuatiei lui Bernoulli ( formula lui Torricelli, tubul Venturi, tubul Pitot-Prandtl, teorema impulsului.
6. Notiuni de dinamica fluidului real /6ore: ecuatia lui Bernoulli pentru fluidul real, regimurile de miscare ale fluidelor, curgerea laminara pritr-o conducta circulara, curgerea turbulenta
E. Continutul lucrarilor practice/ număr de ore pentru fiecare temă: 1. Determinarea viscozitatii cu ajutorul viscozimetrului Hoppler/2ore. 2. Masurarea vitezei cu ajutorul tubului Pitot-Prandtl/2ore. 3. Manometre.
4. Forte de impuls/2ore. 5. Regimurile de miscare ale fluidelor/2ore. 6. Curgerea prin conducte circulare/4ore.
F. Bibliografie de elaborare a cursului 1. Carafoli, E. si Constantinescu, V. – Dinamica fluidelor incompresibile – Ed. Academiei, Bucuresti, 1981.
2. Constantinescu, V. si Galetuse, St – Mecanica fluidelor si elemente de aerodinamica – E.D.P., Bucuresti, 1983.
3. Florea, J si Panaitescu, V. – Mecanica fluidelor – E.D.P., Bucuresti,1979. 4. Ionescu, D. si altii – Mecanica fluidelor si masini hidraulice – E.D.P., Bucuresti,
1983 5. Petrea, F. si Dinu, D. – Mecanica fluidelor – I.M.C., Constanta, 1994. 6. Vasilescu, Al. si Andrei, V. – Mecanica fluidelor si masini hidraulice –
Universitatea din Galati, 1984.
G. Bibliografie minimală de studiu pentru studenţi. 1. Petrea, F si Dinu, - Mecanica fluidelor – I.M.C., Constanta, 1994. 2. Vasilescu, Al. si Andrei,V. – Mecanica fluidelor si masini hidraulice- Univesitatea
din Galati, 1984.
Data aprobării programei analitice în catedră / departament
(Semnătura)
Director departament / Şef catedră



UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICĂ CATEDRA ORGANE DE MAŞINI Adresa: str. Domnească Nr. 111 Nr. telefon / fax: 0236-417421 E-mail: [email protected]
PROGRAMA ANALITICĂ Disciplina: Mecanisme şi Organe de Maşini
A. Locul disciplinei în planul de învăţământ:
Anul II Anul III Sem. II Sem. I
Total ore Forme de verificare
Nr. credite Cod disciplină
Anul de studiu C L C L P C L P Sem.
II Sem.
I Sem. II Sem. I
Nr. ore
28 14 42 14 28 70 28 28 E E, P 4 7 M-D0012
B. Obiectivele disciplinei: - Formarea orizontului tehnic al viitorului specialist. - Studierea elementelor componente ale maşinilor şi mecanismelor, cu luarea în consideraţie a legăturilor şi interdependenţei între ele, al satisfacerii rolului funcţional şi siguranţei în exploatare. - Deprinderea cu metodele inginereşti ştiinţifice de abordare şi soluţionare a problemelor din construcţia de maşini. - Dezvoltarea capacităţii de proiectare a diverselor subansamble. - Înţelegerea parametrilor funcţionali ai diverselor instalaţii. C. Metode de predare – învăţare: prelegerea, explicaţia fenomenelor şi proceselor,
dezbaterea, studiul de caz cu înţelegerea funcţionării, a încărcării, a relaţiilor de dimensionare necesare în proiectare, dezvoltarea gândirii critice şi creative.
D. Forme şi metode de evaluare: evaluare continuă (pondere 40%) prin metode orale la orele
de curs probe practice la laborator şi proiect; evaluare sumativă (pondere 60%) prin prezentarea scrisă şi susţinerea orală a problematicii abordate.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
I. Elemente generale ce stau la baza proiectării organelor de maşini- 4 cursuri
1. Materiale utilizate în construcţia de maşini /3 ore Clasificarea materialelor, criterii de alegere a lor, comportarea materialelor la solicitări statice şi variabile, la diverse temperaturi. 2. Noţiuni de tribologie /3 ore Clasificarea cuplelor cinematice şi a contactelor, frecarea, ungerea, uzura, calculul presiunii de contact maxime la contactele concentrate şi în cazul celor de suprafaţă, pierderea de energie în cuplele cinematice. 3. Calculul de rezistenţă al organelor de maşini /2 ore Siguranţa la tensiuni limită, calculul de rezistenţă la solicitări statice şi variabile.
II. Asamblări- 6 cursuri 1. Tipuri de asmblări /1 oră Clasificare, prezentare, avantaje, dezavantaje, utilizări. 2. Asamblări demontabile /4 ore Asamblări cu filet, cu pene, cu caneluri, cu ştifturi, cu clemă, cu strângere directă, cu strângere pe con (prezentare, calcul organologic). 3. Asamblări elastice /4 ore Rolul asamblărilor elastice, clasificare, caracteristicile arcurilor; arcul cu foi, arcul spirală plană, membrane (prezentare, calcul organologic). 4. Asamblări nedemontabile prin sudură /3ore Clasificare, principii de calcul, exemple de calcul pentru diverse tipuri de suduri.
III. Transmisii prin curele şi lanţuri- 2 cursuri 1. Transmisii prin curele /2 ore Clasificare elemente geometrice şi cinematice, forţe şi tensiuni în ramurile curelei, calculul curelelor late, a curelelor trapezoidale şi a curelelor dinţate. 2. Transmisii prin lanţuri /2 ore Clasificare elemente geometrice şi cinematice, elemente de calcul.
IV. Transmisii prin roţi de fricţiune. Variatoare de turaţie- 2 cursuri
1. Transmisii prin roţi de fricţiune /2 ore Cilindrice netede şi canelate, conice; calculul roţilor de fricţiune. 2. Variatoare de turaţie /2 ore Rolul şi caracteristica lor, prezentarea diverselor tipuri de variatoare.
V. Transmisii prin roţi dinţate (angrenaje)- 6 cursuri
1. Transmisii prin roţi dinţate /3 ore Clasificare, materiale, elemente geometrice şi cnematice, posibilităţi de distrugere. 2. Calculul roţilor dinţate cilindrice cu dinţi drepţi /3 ore 3. Angrenaje cilindrice cu dinţi înclinaţi /2 ore 4. Angrenaje melcate /2 ore 5. Mecanisme cu roţi dinţate /2 ore Planetare, diferenţiale, armonice. Angrenaje speciale.
VI. Osii şi arbori- 2 cursuri 1. Osii /1 oră Clasificare, materiale, calculul şi verificarea osiilor. 2. Arbori /2 ore Clasificare, materiale, calcul şi dimensionare, verificarea la oboseală şi deformaţii flexionale şi torsionale. 3. Fusuri /1 oră Tipuri şi dimensionarea fusurilor.
VII. Lagăre de alunecare şi de rostogolire- 2 cursuri
1. Lagăre de alunecare /1 oră Descriere, sisteme de ungere, distribuţie de presiuni. 2. Rulmenţi /3 ore Clasificare, simbolizare, materiale, alegerea rulmenţilor.

VIII. Cuplaje şi ambreiaje- 5 cursuri 1. Cuplaje permanente /2 ore Clasificare, cuplajul manşon, cuplajul cu flanşe. 2. Cuplaje compensatoare /3 ore Clasificare, cuplajul cu ghiare, cuplajul cu disc intermediar, cuplajul cardanic, cuplajul dinţat.
3. Cuplaje elastice /1 oră Clasificare, rolul şi caracteristicile lor, cuplajul elastic cu bolţuri şi bucşă de cauciuc.
4. Ambreiaje /4 ore Clasificare, ambreiajul plan monodisc, ambreiajul cu fricţiune cu lamele multiple, ambreiajul cu suprafaţă conică, ambreiajul cu saboţi, ambreiajul cu bile.
IX. Mecanismul bielă-manivelă- 2 cursuri
1. Descrierea mecanismului bielă-manivelă, utilizări, sarcini în mecanism /1 oră 2. Pistonul /1 oră Variante constructive, calculul pistonului pahar.
3. Segmenţi /1 oră Rol, tehnologie de calcul.
4. Biela /1 oră Variante constructive, calculul capului de bielă şi al tijei la motoarele lente şi rapide.
X. Etanşări- 1 curs
1. Etanşări /1 oră Clasificare, materiale, etanşări între piese fixe. 2. Etanşări între piese aflate în mişcare de rotaţie şi translaţie. /1 oră
XI. Organe pentru circulaţia fluidelor- 2 cursuri
1. Conducte /1 oră Clasificare, materiale, calcul. 2. Organe de îmbinare a conductelor /1 oră Clasificare, calculul flanşelor. 3. Organe de închidere, reglare şi dirijare a fluidelor /2 ore
XII. Fiabilitatea în construcţia de maşini- 1 curs
1. Parametrii de care depinde fiabilitatea /1 oră 2. Calculul fiabilităţii unui element şi al unui sistem /1 oră
F. Lucrări practice / număr de ore pentru fiecare temă: 1. Cunoaşterea practică a diverselor tipuri de asamblări demontabile /2 ore. 2. Studiul asamblărilor cu şuruburi /2 ore. 3. Cunoaşterea practică a diverselor asamblări nedemontabile /2 ore. 4. Încercarea asamblărilor nedemontabile prin sudură /2 ore. 5. Studiul transmisiilor prin roţi de fricţiune /2 ore. 6. Studiul transmisiilor prin curele şi lanţuri /2 ore. 7. Cunoaşterea diverselor tipuri de variatoare şi parametrii lor de funcţionare /2 ore. 8. Cunoaşterea diverselor tipuri de transmisii cu roţi dinţate /2 ore. 9. Elementele geometrice, corijarea danturii la roţi dinţate cilindrice, interferenţa /2 ore. 10. Distribuţia de presiuni în lagărele de alunecare /2 ore. 11. Tipuri de rulmenţi şi alegerea lor /2 ore. 12. Cunoaşterea diverselor tipuri de cuplaje /2 ore.

13. Aplicaţii ale mecanismului bielă- manivelă (motoare, compresoare): cinematică, dinamică /2 ore.
14. Cunoaşterea şi analizarea elementelor de conducere a fluidelor.
G. Proiect / număr de ore pentru fiecare temă: Proiectarea unui mecanism de prehensiune compus din degete de apucare acţionate de un
mecanism cu şurub antrenat de un reductor de turaţie şi motor electric. 1. Tema de proiectare. Etapele proiectului. Bibliografie / 2 ore. 2. Proiectarea transmisiei cu şurub / 2 ore. 3. Alegerea motorului electric. Repartizarea rapoartelor de transmisie, momente de
torsiune şi turaţii la arbori / 2 ore. 4. Dimensionarea primei trepte de angrenare a reductorului / 2 ore. 5. Gradul de acoperire, randamentul, forţe în angrenare, verificarea angrenajului primei
trepte / 2 ore. 6. Dimensionarea celei de a 2-a trepte de angrenare a reductorului / 2 ore. 7. Grad de acoperire, randament, forţe în angrenare, verificarea treptei a 2-a / 2 ore. 8. Dimensionarea carcasei reductorului./ 2 ore. 9. Calculul suprafeţei reductorului şi verificarea lui la încălzire / 2 ore. 10. Calculul arborelui I: predimensionare, formă constructivă, alegerea penelor / 2 ore. 11. Calculul arborelui II: predimensionare, formă constructivă, alegerea penelor / 2 ore. 12. Alegerea rulmenţilor / 2 ore. 13. Cuplajul elastic / 2 ore. 14. Desenul de ansamblu / 2 ore.
H. Bibliografie de elaborare a cursului
1. Bologa O. - Elemente de Inginerie Mecanică. Transmisii mecanice , Ed. Ceprohart, Brăila,2000. 2. Bologa O. - Elemente de Inginerie Mecanică. Angrenaje, Ed.Evrika, Brăila, 2001.
3. Bunescu V., Ionescu V. - Raţionalizarea calculelor în proiectare, Ed. Tehnică, Bucureşti, 1970.
4. Constantin V., Palade V. - Organe de maşini şi mecanisme. Vol.1. Asamblări, Ed. Fundaţiei Universitare “Dunărea de Jos”, Galaţi, 2004. 5. Constantin V., Palade V. - Organe de maşini şi mecanisme. Vol.2. Asamblări. Ed. Fundaţiei Universitare “Dunărea de Jos”, Galaţi, 2005. 6. Crudu I., Ştefănescu I., Panţuru D., Palaghian L., Atlas Reductoare cu roţi dinţate, Ed. Didactică şi Pedagogică, Bucureşti, 1981. 7. Demian T.,ş.a. - Elemente constructive de mecanică fină, Ed. Didatcică şi Pedagogică, Bucureşti,1980. 8. Drăghici I. - Organe de maşini – Probleme. Editura Didactică şi Pedagogică, Bucureşti, 1982. 9. Drăghici I. - Îndrumar de proiectare în construcţia de maşini. vol.2. Ed. Tehnică, Bucureşti, 1982. 10. Fălticeanu C. - Elemente de inginerie mecanică, Universitatea din Galaţi, 1988. 11. Fălticeanu C. - Elemente de mecanica solidului deformabil, Editura Evrika, Galaţi, 1997. 12. Gafiţanu M. - Organe de maşini. Vol.1,2. Ed. Tehnică, Bucureşti, 1981. 13. Guţu A. - Organe de maşini - Curs. Volumele 1, 2, 3. Universitatea din Galaţi, 1973. 14. Manea Gh. – Organe de maşini Vol. 1, Ed. Tehnică, Bucureşti, 1970. 15. Mladinescu T., Rizescu E., Weinberg H., - Organe de maşini şi mecanisme. Editura Didactică şi Pedagogică, Bucureşti, 1972.
16. Műller A. - Elemente de inginerie mecanică, Universitatea din Galaţi, 1974. 17. Palade V., Constantin V., Hapenciuc M. – Reductoare cu roţi dinţate, Ed. Alma, Galati, 2003. 18. Palaghian L. - Reductoare armonice, Ed. Tehnică, Bucureşti, 1996. 19. Răzmeriţă Ghe. - Organe de maşini. Aplicaţii, Universitatea din Galaţi, 1987. 20. Ripianu A., Crăciun I. - Osii, arbori drepţi şi arbori cotiţi, Ed. Tehnică, Bucureşti, 1977. 21. Reşetov D.N. - Organe de maşini. Ed. Tehnică, Bucureşti, 1973.
I. Bibliografie minimală de studiu pentru studenţi
1. Constantin V., Palade V. - Organe de maşini şi mecanisme. Vol.1. Asamblări, Ed. Fundaţiei Universitare “Dunărea de Jos”, Galaţi, 2004. 2. Constantin V., Palade V. - Organe de maşini şi mecanisme. Vol.2. Asamblări, Ed. Fundaţiei Universitare “Dunărea de Jos”, Galaţi, 2005. 3. Palade V., Constantin V., Hapenciuc M. - Reductoare cu roţi dinţate, Ed Alma, Galati, 2003.
Data aprobării programei analitice în catedră / departament 26. 01. 2007
Întocmit Prof. dr. ing. Iuliana Viorica Constantin
Şef catedră Prof. dr. ing. Liviu Palaghian
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICĂ CATEDRA / DEPARTAMENTUL: T.C.M. Adresa: str. Domnească 111, 800201 – Galaţi Nr. telefon / fax: 0236/414872, int. 397 E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: METODE NUMERICE
A. Locul disciplinei în planul de învăţământ:
Anul II Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
2 2 - - 2 2 E - 5 - M-F0009
B. Obiectivele disciplinei:
• Cunoaşterea domeniilor de aplicabilitate a metodelor numerice pentru rezolvarea problemelor întâlnite în practica industrială;
• Dezvoltarea gândirii algoritmice, abstracte; • Cunoaşterea algoritmilor clasici utilizaţi în rezolvarea problemelor; • Dezvoltarea capacităţii de elaborare a unor programe de calcul pentru rezolvarea unor
aplicaţii concrete.
C. Metode de predare – învăţare: prelegerea, explicaţia, exemplificarea, simularea de situaţii, metode de lucru în grup, individual şi frontal, metode de dezvoltare a gândirii critice, portofoliul, studiul documentelor curriculare şi al bibliografiei.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale, probe
scrise, practice şi teme de casă (rezolvarea numerică a unei probleme la alegere, din tematica disciplinei); evaluare sumativă (pondere 70%) prin probe scrise/orale.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
I. Noţiuni generale – 1 curs
1. Reprezentarea numerelor în calculator. Algoritmi. Erori de calcul. / 2 ore Consideraţii generale: reprezentarea numerelor în calculator, precizia calculatorului. Calcul numeric în virgulă mobilă. Algoritmi de calcul, stabilitatea şi condiţionarea algoritmilor. Erori de calcul, propagarea erorilor.
II. Rezolvarea numerică a ecuaţiilor algebrice şi transcendente – 4 cursuri 1. Consideraţii generale. Metoda generală. Metoda bisecţiei. / 2 ore
Ecuaţii algebrice şi transcendente. Criterii de oprire a căutării soluţiei. Ordin de convergenţă. Metoda generală: condiţii de aplicare, interpretare geometrică, algoritm. Metoda bisecţiei: condiţii de aplicare, interpretare geometrică, algoritm.
2. Metode clasice de rezolvare a ecuaţiilor. / 4 ore Metoda Newton-Raphson: condiţii de aplicare, interpretare geometrică, algoritm. Metoda tangentelor fixe: condiţii de aplicare, interpretare geometrică, algoritm. Metoda secantelor variabile: condiţii de aplicare, interpretare geometrică, algoritm. Metoda secantelor fixe: condiţii de aplicare, interpretare geometrică, algoritm.
3. Metoda punctului fix. / 2 ore Noţiunea de punct fix al unei funcţii. Metoda punctului fix: principiul metodei; condiţii de aplicare, interpretare geometrică, convergenţă uniformă sau oscilantă, divergenţă uniformă sau oscilantă, algoritm.
III. Rezolvarea numerică a sistemelor de ecuaţii – 2 cursuri 1. Metode numerice de rezolvare a sistemelor de ecuaţii liniare. / 4 ore
Metode directe: metoda Gauss – condiţii de aplicare, algoritm. Metode iterative: metoda Jacobi – valori proprii ale unei matrice, condiţii de aplicare, algoritm; metoda Gauss-Seidel – comparaţie cu metoda Jacobi, algoritm; metoda relaxării.
IV. Aproximarea funcţiilor reale de o variabilă reală – 5 cursuri 1. Consideraţii generale. Criterii de aproximare. / 2 ore
Condiţii în care se recurge la aproximarea funcţiilor. Polinom generalizat de aproximare. Criteriul de aproximare prin interpolare. Criteriul de aproximare cu abatere medie pătratică minimă. Criteriul de minimax. Interpretări geometrice. Analiză comparativă a criteriilor.
2. Aproximarea funcţiilor prin interpolare. / 6 ore Polinomul de interpolare Lagrange: construcţie, eroare de aproximare, algoritm. Diferenţe finite şi diferenţe divizate. Polinomul de interpolare Newton: construcţie, eroare de aproximare, algoritm. Interpolare cu funcţii spline.
3. Aproximarea funcţiilor cu abatere medie pătratică minimă. / 2 ore Aproximarea funcţiilor cu abatere medie pătratică minimă: cazul continuu, cazul discret; algoritmul de construcţie a polinomului de aproximare.
V. Metode numerice pentru derivare şi integrare – 2 cursuri 1. Metode numerice de derivare. / 2 ore
Consideraţii generale. Derivare numerică prin aproximarea formulei de derivare. Derivare numerică prin aproximarea funcţiei de derivat printr-un polinom Lagrange – formule de derivare în trei puncte; algoritm. Derivare numerică prin aproximarea funcţiei de derivat printr-un polinom Newton; algoritm.
2. Metode numerice de integrare. / 2 ore Generalităţi privind cuadratura numerică. Formule de cuadratură: metoda trapezelor – principiul metodei, interpretare geometrică, mărimea erorii, algoritm; metoda Cavalieri-Simpson.
F. Conţinutul lucrărilor practice / număr de ore pentru fiecare temă:
1. Lucrare introductivă; prezentarea generală a scopului şi conţinutului lucrărilor practice – 2 ore. 2. Aplicarea algoritmului metodei generale – 2 ore. 3. Aplicarea algoritmului metodei bisecţiei – 2 ore. 4. Aplicarea algoritmului metodei Newton-Raphson – 2 ore. 5. Aplicarea algoritmului metodei tangentelor fixe – 2 ore. 6. Aplicarea algoritmului metodei punctului fix – 2 ore. 7. Aplicarea algoritmului metodei Gauss – 2 ore. 8. Aplicarea algoritmului metodei Jacobi – 2 ore. 9. Aplicarea algoritmului metodei Gauss-Seidel – 2 ore. 10. Construcţia polinomului de interpolare Lagrange – 2 ore. 11. Construcţia polinomului de interpolare Newton – 2 ore. 12. Construcţia polinomului de aproximare cu abatere medie pătratică minimă – 2 ore. 13. Aplicarea algoritmului de derivare cu ajutorul polinomului Lagrange. 14. Aplicarea algoritmului de integrare prin metoda trapezelor.
G. Bibliografie de elaborare a cursului
1. Frumuşanu, G. – Metode numerice în ingineria tehnologică, Ed. Cartea universitară, Bucureşti, 2004.
2. Larionescu, D. – Metode numerice, Ed. Tehnică, Bucureşti, 1989. 3. Ioan, D. şi colectivul – Metode numerice în ingineria electrică, Ed. Matrix Rom, Bucureşti,
1998. 4. Iacob, C. şi colectivul – Matematici clasice şi moderne, vol. I – III – Editura Tehnică,
Bucureşti, 1981. 5. Zilli, G. – Lezioni ed esercizi di calcolo numerico – Edizioni Libreria Progetto, Padova, 2004.
Data aprobării programei analitice în catedră / departament: 11.01.2007
(Semnătura)
Şef catedră
Prof. dr. ing. Dumitru Nicoară
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE INGINERIE ELECTRICĂ ŞI ELECTRONICĂ CATEDRA: ELECTRONICĂ ŞI TELECOMUNICAŢII Adresa: Galati, 800146, Str. Ştiinţei, nr. 2 Nr. telefon / fax: 0236-470905 E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: Microcontrolere şi microprocesoare
A. Locul disciplinei în planul de învăţământ:
Anul IV Sem I Sem. II
Total ore
Forme de verificare
Nr. credite Anul de
studiu C S L P C S L P C S L P Sem. I Sem. II Sem I Sem II
Cod disciplină
Nr. ore
28 28 28 28 E 6 M-D3105
B. Obiectivele disciplinei:
• furnizarea cunoştinţelor fundamentale privind sistemele cu microcontroler şi microprocesor
• studierea modulelor componente ale unui microcontroler, a transferurilor de informaţii dintre ele, precum şi a conectărilor cu exteriorul
• studierea şi analiza comparativă a diferitelor tipuri de sisteme cu microprocesor • asigurarea cunoştinţelor şi abilităţilor practice privind funcţionarea microcontrolerelor şi a
subsistemelor componente, precum şi interconectarea şi testarea acestora C. Metode de predare – învăţare:
Predarea cursului se face sub formă de prelegere şi dezbatere, prin antrenarea studenţilor la discuţii. Cunoştinţele teoretice sunt completate cu exemple şi studii de caz, dezbătute împreună cu studenţii. Aprofundarea cunoştinţelor se realizează atât prin teme de curs, cât şi la laborator, unde studenţii dobândesc şi abilităţi practice, prin realizarea lucrărilor aplicative şi a temelor săptămânale.
D. Forme şi metode de evaluare: Evaluarea finală va conţine: a) evaluarea activităţilor din timpul semestrului, ce includ participarea la discuţiile de la curs, realizarea temelor de casă, participarea la activităţile de laborator (20%); b) colocviul la laborator, prin verificarea lucrărilor aplicative şi a temelor de laborator (20%); c) evaluarea cunoştinţelor prin examen scris (60%).
E. Conţinutul cursului / număr de ore pentru fiecare temă: Cap.1. Introducere în arhitectura sistemelor de calcul: Definirea sistemului de calcul, a funcţiilor acestuia şi a conceptului de arhitectură. Componentele hardware şi software, precum şi interdependenţele dintre ele. Particularităţi ale sistemelor de achiziţie a datelor. (2 ore) Cap.2. Subsistemul de memorie al unui microcontroler: Caracteristici ale unităţilor de memorie. Elementele subsistemului memorie. Memoria primară. Memoria cache. (4 ore) Cap.3. Subsistemul unităţii centrale: Clasificarea microprocesoarelor. Funcţia de comandă şi control: legăturile şi dialogurile unui procesor cu exteriorul său. Funcţia de prelucrare: reprezentarea informaţiilor, operaţii cu numere în virgulă fixă şi în virgulă mobilă. (6 ore) Cap.4. Subsistemul de intrare/ieşire (I/O): Unităţi I/O : clasificare şi caracteristici. Structura şi funcţiile controlerelor I/O. Transferul datelor cu subsistemul I/O: microprogramat, prin întreruperi şi prin acces direct la memorie (dma). (6 ore) Cap.5. Subsistemul de interfaţă cu operatorul uman: definire, funcţii, elemente componente. Dispozitive de intrare: tastatură, mouse. Dispozitive de ieşire: monitoare. Cuplorul video; procesoare grafice. (2 ore)

Cap.6. Linii şi dispozitive de comunicaţii: Subsistemul comunicaţiei seriale: comunicaţia serială asincronă şi unităţi I/O conectate prin aceasta, comunicaţia serială sincronă şi unităţi I/O conectate prin aceasta. Subsistemul comunicaţiei paralele: protocolul de comunicaţie şi unităţi I/O conectate prin aceasta. (4 ore) Cap. 7. Componente software ale sistemelor de achiziţie şi prelucrare a datelor: Tipuri de date şi moduri de adresare utilizate în microcontrolere şi DSP-uri. Aspecte ale programării în limbaj de asamblare. Programe utilitare pentru dezvoltarea de aplicaţii. Etapele dezvoltării aplicaţiilor cu microcontrolere şi DSP-uri. (4 ore)
F. Conţinutul seminariilor / număr de ore pentru fiecare temă: G. Conţinutul lucrărilor practice / număr de ore pentru fiecare lucrare:
1. Aparate pentru vizualizarea semnalelor digitale; vizualizarea semnalelor digitale de frecvenţă mare; erori de vizualizare. 2. Reprezentarea informaţiilor; coduri de reprezentare a numerelor negative 3. Memorii ROM, DRAM 4. Legaturile unui microprocesor cu exteriorul 5. Sisteme de dezvoltare cu microcontroler 6. Tastatura unui sistem de calcul; comunicaţia serială sincronă.. 7. Cuplorul video: moduri de lucru, caracteristici, funcţii de accelerare grafică 8. Comunicaţia serială asincronă; conectarea serială a unui mouse. 9. Comunicaţia paralelă; protocoale de comunicaţie. 10. Programarea şi lucrul cu porturile I/O ale unui microcontroler 11. Programarea şi lucrul cu temporizatoarele unui microcontroler 12. Achiziţia semnalelor analogice şi numerice cu sisteme cu microcontroler.
H. Tematica proiectului / număr de ore pentru fiecare etapă: I. Bibliografie de elaborare a cursului
1. Puşcaşu Ghe., Nicolau V. and Codreş B., TMS320C3X Digital Signal Processors. Applications (in romanian), Academica, Galaţi, 2004, ISBN 973-8316-48-0. 2. Nicolau, V. – Arhitectura calculatoarelor I, Editura Cartea Universitară, Bucureşti, ISBN 973-731-103-5, 2005 3. Mueller, S. - PC depanare şi modernizare, Editura Teora, Bucureşti, ediţia IV-a, vol. 1 şi 2, ISBN 973-601-799-0, 2003 4. Rosch, W. L. – Totul despre hardware, Editura Teora, Bucureşti, ISBN 973-601-856-3, 1998 5. Mateescu A., Dumitriu N., Stanciu L. Semnale şi sisteme. Aplicaţii în filtrarea semnalelor. Editura Teora, Bucureşti, 2001, ISBN 973-20-0666-8. 6. *****, TMS320C3X User’s Guide, Texas Instruments, 1997.
J. Bibliografie minimală de studiu pentru studenţi1 1. Puşcaşu Ghe., Nicolau V. and Codreş B., TMS320C3X Digital Signal Processors. Applications (in romanian), Academica, Galaţi, 2004, ISBN 973-8316-48-0.
Titular curs: Prof. dr. ing. Miholcă Constantin Semnătura:
Director departament / Şef catedră
Prof. dr. ing. Laurenţiu FRANGU
1 Este de preferat ca bibliografia minimală de studiu pentru studenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atingerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor, seminariilor şi lucrărilor practice.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: MODELAREA SI SIMULAREA ROBOTILOR INDUSTRIALI
A. Locul disciplinei în planul de învăţământ:
Anul IV Sem. I Sem. II Total ore Forme de
verificare Nr. credite Anul de
studiu C L C L C L Sem. I Sem. II Sem. I Sem.
II
Cod disciplină
Nr. ore 28 28 - - 28 28 E - 5 - M-S3207
B. Obiectivele disciplinei: • Simularea şi modelarea diferitelor variante arhitecturale de roboti industriali; • Simularea şi controlul proceselor robotizate; • Utilizarea aplicaţiilor software specifice pentru modelarea si simularii RI; • Formarea unei concepţii sistemice asupra modelării sistemelor robotizate; • Dezvoltarea capacităţii inginereşti de utilizare echipamentelor specifice şi de selectare a
lor la realizarea unor produse mecatronice de înaltă competitivitate; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei inginereşti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstraţii practice, aplicaţii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator şi evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Modelarea geometrica a RI – 8 ore Model geometric utilizat la conducerea RI Transformari omogene. Transformarea Denavit-Hartenberg. Determinarea modelului geometric direct si invers Transformari diferentiale omogene. Calculul matricei Jacobi. 2. Modelului dinamic – 3 ore Problema dinamica directa si inversa. Determinarea modelului dinamic folosind ecuatiile lui Lagrange. Exemple 3. Planificarea miscarii RI – 3 ore Problemele planificatorului de miscare. Specificarea miscarii. Planificarea traiectoriei in coordonate generalizzate Planificarea miscarii coordonate si in timp minim, in coordonate operationale. 4. Metode de comanda a RI utilizand diferite modele – 4 ore Conducerea cu model geometric. Functia de transfer pentru o articulatie. Conducerea prin liniarizarea modelului dinamic.

Utilizarea decuplarii in conducerea RI. Conducerea RI cu calculul on-line al modelului dinamic. Structuri de comanda adaptive. Comparatie privind diferitele structuri de comanda ale RI. 5. Sistem de simulare pentru roboţii – 2 ore Simularea dinamică a Ri cu trei grade de mobilitate. 6. Simularea dinamică a structurilor cu şase grade de mobilitate – 2 ore 7. Simularea R.I. utilizând pachetul de programe Robotics toolbox sub MATLAB
(RTM) – 1 ore 8. Limbaje de programare pentru simularea conducerii RI ABB – 2 ore 9. Simularea RI utilizand softul educaţional COSIMIR – 2 ore 10. Simularea Ri utilizand softul Delmia – 1 ora
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: 1. Conducerea si programarea robotului de sudare RIP 6,3-4 ore 2. Simularea conducerii robotului (manipulatorului industrial ROBS1) prin intermediul programului in TURBO PASCAL - ROBS1 - 4 ore 3. Conducerea inteligenta a RI ABB utilizând programul ABB-Pick Master -4 ore 4. Măsurarea poziţiei si parametrilor dinamici pentru un braţ robotizat -2 ore 5. Simularea conducerii R.I. de tip antropomorf, in programul MAX3D -2 ore 6. Conducerea robotului MRIP 0,2. Program de simulare in MAX3D -2 ore 7. Simularea R.I. utilizând pachetul de programe Robotics toolbox sub MATLAB (RTM).
Comenzi principale in mediul de programare MATLAB. Aspecte teoretice pregătitoare aferente simularii in RTM. Comenzi - prezentare succintă. Ex.demo:de conducerea R.I. Puma560. - 4 ore
8. Simularea cinematica si dinamica a R.I. utilizând programul SPACELIB sub MATLAB (conducerea in timp real a unui R.I. cu 6 grade de libertate) 2 ore
9. Programarea RI utilizând software-ul educaţional COSIMIR (varianta demo) 4 ore G. Bibliografie de elaborare a cursului 1. Stefanoiu, D., Borangiu, Th., Ionescu, Fl.,-Robot Modelling and Simulation, Editura AGIR, 2004. 2. Davidoviciu A., Draganoiu Gh., Moanga A., Modelarea, simularea si comanda manipulatoarelor si robotilor
industriali, Edit. Tehnica, 1986. 3. Voicu M., Lazar C., Sisteme de conducere a robotilor industriali, vol. III, Rotaprint I. P. Iasi, 1987. 4. Koren, Y. (1985). Robotics for engineers. New York, McGraw-Hill. 5. Kozowski, K. (1998). Modelling and identification in robotics. Berlin ; New York, Springer. 6. Borangiu Th., Hossu A., Sisteme educationale in robotica, Edit. Tehnica, Bucuresti, 1991. 7. Limbajul SIMULINK – MATLAB. 8. Radeş, M. - "Metode dinamice pentru identificarea sistemelor mecanice". Editura Academiei R.S.R., Bucureşti,
1979.
H. Bibliografie minimală de studiu pentru studenţi
1. Stefanoiu, D., Borangiu, Th., Ionescu, Fl.,-Robot Modelling and Simulation, Editura AGIR, 2004. 2. Davidoviciu A., Draganoiu Gh., Moanga A., Modelarea, simularea si comanda manipulatoarelor si robotilor industriali,
Edit. Tehnica, 1986.
Data aprobării programei analitice în catedră 19.01.2007 Şef catedră Titular disciplină
Prof. dr. ing. Georgescu V. Ş. L. drd. ing. Mistodie Luigi
.

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICĂ CATEDRA Robotica si Sudare Adresa: str. Domnească Nr. 111 Nr. telefon / fax: 0236-417421 E-mail: [email protected]
PROGRAMA ANALITICĂ Disciplina: Modelarea structurilor metalice
A. Locul disciplinei în planul de învăţământ:
Anul IV Sem. II
Total ore Forme de verificare
Nr. credite Anul de studiu C L C L Sem. 8 Sem. 8
Cod disciplină
Nr. ore
28 14 28 14 V 3 M-S3210-2
B. Obiectivele disciplinei:
- Însuşirea de către studenţi a metodelor de calcul a structurilor metalice din bare şi din plăci; - Aplicarea metodei deplasărilor în calculul structurilor din bare; - Cunoaşterea expresiilor matricelor de rigiditate; - Corecţii la matricele de rigiditate prin efectul de semiîncastrare a barelor în nod; - Estimarea teoretică şi experimentală a eforturilor din barele structurii; - Optimizarea structurilor din bare – minimizarea greutatii structurii.
C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea, studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstraţii practice de analiză a problematicii specifice ingineriei, aplicaţii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator si evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă: 1. Metode de calcul a structurilor metalice din bare şi din plăci /2 ore; 2. Ipoteze de calcul /0.5 ore; 3. Calculul matricelor de rigiditate a barelor /4.5 ore; 4. Matrici de rotaţie /2 ore; 5. Matrici de rigiditate ale barelor în sistemul de axe al structurilor /1.5 ore; 6. Asamblarea matricei de rigiditate a structurii /3 ore; 7. Calculul deplasărilor de nod /2 ore; 8. Coeficienţi de eroare datorită efectului de semiîncastrare /2.5 ore; 9. Calculul de rezistenţă a barelor structurii /2 ore; 10. Calculul de stabilitate a barelor /4 ore; 11. Analiza deformatelor structurii din bare /4 ore.
F. Lucrări practice / număr de ore pentru fiecare temă: 1. Determinarea experimentală a eforturilor din bare /2 ore; 2. Coeficienţi de eroare la calculul deplasărilor de nod /2 ore; 3. Calculul matricelor de rigiditate ale barelor în cazuri concrete /2 ore; 4. Flambajul stâlpilor /2 ore; 5. Arhitectura nodurilor, influenţa asupra matricei de rigiditate a barei /2 ore. 6. Determinarea tensiunilor şi deformaţiilor din cadrele sudate /4 ore;

G. Bibliografie de elaborare a cursului 1. Constantin E., - ,,Proiectarea maşinilor utilajelor şi construcţiilor sudate”, Ed. Univ.
Galaţi, 1983; 2. Mateescu D., - ,,Construcţii metalice”, ET Bucureşti, 1972; 3. Popescu V., - ,, Construcţii metalice”, ET Bucureşti, 1985; 4. Buzdugan Gh., - ,,Rezistenţa materialelor”, ET Bucureşti, 1980; 5. Zienkiewicz C., - ,,The Finite Element Method in Engineering Sciences”, Mc.
GrawHill, 1971. H. Bibliografie minimală de studiu pentru studenţi
1. Constantin E., - ,,Proiectarea maşinilor, utilajelor şi construcţiilor sudate”, Ed. Univ. ,,Dunărea de Jos” din Galaţi vol. 2, 1983;
Data aprobării programei analitice în catedră / departament 21. 08. 2007
Titular curs si lucrari practice Prof. Dr. Ing. Elena Scutelnicu
Director departament / Şef catedră
Prof. Dr. Ing. Valeriu Georgescu

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galaţi, Str Domneasca Nr. 111 Nr. telefon: E-mail: : [email protected]
PROGRAMA ANALITICĂ Disciplina: PRACTICA
MECATRONICĂ ŞI ROBOTICĂ
A. Locul disciplinei în planul de învăţământ:
Anul II Sem. I Sem. II Total ore Forme de
verificare Nr. credite Anul de
studiu C L C L C L Sem. I Sem. II Sem. I Sem.
II
Cod disciplină
Nr. ore - - - 90 - 90 - V - 2 M-D0013
B. Obiectivele disciplinei: • Dezvoltarea capacităţii inginereşti de utilizare a echipamentelor specifice şi de selectare a
lor la realizarea unor produse industriale de înaltă competitivitate; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei inginereşti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România;
C. Metode de predare – învăţare: dezbaterea, studiul de caz, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstraţii practice, aplicaţii practice individuale.
D. Forme şi metode de evaluare: verificare.
E. Conţinutul programei de practica:
1. Acţionări hidraulice şi pneumatice 1.1. Pompe cu roţi dinţate, elemente componente, calculul debitului 1.2. Pompe şi motoare cu palete, elemente componente, calculul debitului 1.3.. Pompe şi motoare cu pistonaşe axiale, elemente componente, calculul debitului 1.4. Pompe şi motoare cu pistonaşe radiale, elemente componente, calculul debitului 1.5. Motoare hidraulice rectilinii, elemente componente, calcul 1.6. Distribuitoare cu sertar, calculul pierderilor de debit la sertăraşele distribuitoare, calculul forţei de frecare plunjer-corp 1.7. Supape de presiune nepilotate şi pilotate 1.8. Drosele cu regulatoare de viteză, rezistenţa hidraulică, calcul pierderi 1.9. Distribuitoare şi drosele cu hidrologistoare 1.10. Conducte. Filtre. Acumulatoare. Rezervorul. Schimbătorul de căldură, calcul de dimensionare 1.11. Variante de scheme hidraulice 1.12. Motoare pneumatice rectilinii, elemente componente, calcul 1.13. Scheme pneumatice

2. Tehnologia de elaborare a pieselor turnate 2.1. Tehnologia de execuţie a modelelor, cutiilor de miez şi a şabloanelor. Principii de execuţie a
modelelor; elaborarea desenelor tehnologice; stabilirea planelor de separare; mărci pentru miezuri materiale pentru confecţionarea modelelor; finisare, vopsire, păstrare şi depozitare modele etc.
2.2. Prepararea amestecurilor de formare. Materiale folosite; amestecuri de formare: caracteristici, proprietăţi; operaţii şi utilaje pentru prepararea, transportul şi uscarea amestecurilor
2.3. Proprietăţile şi încercările amestecurilor de formare. Analiza granulometrică: determinarea umidităţii, permeabilităţii şi rezistenţei mecanice a amestecurilor de formare.
2.4. Execuţia şi uscarea formelor şi miezurilor. Tehnologii de execuţie manuale, mecanice; scule şi dispozitive pentru formare; maşini de format; tehnologii de 4execuţie a miezurilor; reţele de turnare; uscarea formelor.
2.5. Turnarea metalelor feroase şi neferoase. Elaborarea şi turnarea pieselor din fontă: cubilou, cuptor rotativ, tipuri de fonte turnate, materiale şi echipamente folosite. Elaborarea şi turnarea pieselor din oţel: cuptoare electrice cu arc şi inducţie, tipuri de oţeluri turnate, particularităţi de turnare. Elaborarea şi turnarea pieselor din materiale neferoase: bronzuri, alame, aliaje de magneziu, cuptoare cu creuzet, rotative şi electrice.
2.6. Scoaterea din forme şi curăţirea pieselor turnate. Dezbaterea pieselor turnate, debavurare, eliminarea reţelelor şi maselotelor; utilaje folosite; instalaţii de sablat.
2.7. Metode speciale de turnare. Turnarea în forme metalice, sub presiune, centrifugală, de precizie, în coji etc.
2.8. Tratamentul termic al pieselor turnate. Tratamente de recoacere, detensionare, globulizare etc., cuptoare folosite.
2.9. Defectele pieselor turnate şi remedierea lor. Goluri, incluziuni, picături reci, crăpături, deplasări, bavuri, asperităţi, aderenţe, carii, neomogenităţi etc.
3. Tehnologia de elaborare a pieselor forjate 3.1. Tehnologia de execuţie a pieselor forjate. Întindere, refulare, lăţire, răsucire, gâtuire, găurire, îndoire etc. Forjare liberă: forjare în matriţă. 3.2. Utilaje folosite la forjarea pieselor. Ciocane mecanice, prese cu discuri, şurub; maşini de debitare, cuptoare de încălzire a semifabricatelor etc. 3.3. Scule, dispozitive şi verificatoare 3.4. Materiale folosite pentru piesele forjate 3.5. Tratamente termice aplicate pieselor forjate 4. Tratamente termice aplicate pieselor metalice 4.1. Principalele tipuri de TT Recoacere, normalizare, călire, revenire, cementare, cianurare, cromizare, sulfizare, CIF etc. 4.2. Regimuri de TT 4.3. Instalaţii şi dispozitive pentru TT; cuptoare, băi, lichide de răcire. 4.4. Tehnologii de TT (normalizare, îmbunătăţire etc). 5. Sudarea şi tăierea metalelor 5.1. Sudarea prin topire şi arc electric. Clasificare electrozi, simbolizare, surse de curent (generatoare, transformatoare, tehnologii de sudare manuală, tipuri de îmbinări. 5.2. Sudare cu arc electric sub strat de flux. Sudare automată sub strat de flux, fluxuri şi sârme electrod, tehnologii de sudare automată şi semiautomată.

5.3. Sudarea în mediu de CO2. tehnologie, utilaje, domenii de utilizare.
5.4. Sudarea în mediu de argon: tehnologia, utilaje, domenii de utilizare 5.5. Sudarea oxiacetilenică. Construcţia generatorului de acetilenă, funcţionare, arzătorul, reducţii, metode şi tehnici de sudare. 5.6. Sudarea prin topire: principiul, reacţia termică, tehnologia sudării. 5.7. Sudarea prin presiune: sudarea cap la cap, prin puncte, în linie; utilaje folosite. Tehnologia de execuţie a fiecărui procedeu. 5.8. Tăierea termică prin ardere. Tăierea oxigaz (tehnologie, construcţia arzătorului; tăierea oxiarc. Data întocmirii: 19.01.2007
Şef catedra Prof. Dr. Ing. Valeriu GEORGESCU
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galaţi, Str Domneasca Nr. 111 Nr. telefon: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: PRACTICĂ
A. Locul disciplinei în planul de învăţământ:
Anul III Sem. I Sem. II Total ore Forme de
verificare Nr. credite Anul de
studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore - - - 90 - 90 V - 2 - M-S0005
B. Obiectivele disciplinei: • Acumularea de cunoştinţe în domeniul tehnologiei ingineresti; • Dezvoltarea capacităţii inginereşti de utilizare a echipamentelor specifice şi de selectare a lor la
realizarea unor produse industriale de înaltă competitivitate; • Învăţarea noţiunilor necesare de reprezentare a structurilor robotilor industriali, structura si
funcţionarea unui calculator elementar, principalele clase de instrucţiuni si moduri de adresare utilizate.
• Prezentarea caracteristicilor arhitecturale ale unor calculatoare reprezentative. • Dezvoltarea capacităţii inginereşti de utilizare echipamentelor specifice şi de selectare a lor la
realizarea unor produse industriale de înaltă competitivitate; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei inginereşti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea tehnica a
studentului, componentă esenţială a reformei industriale în România;
C. Metode de predare – învăţare: dezbaterea, studiul de caz, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstraţii practice, aplicaţii practice individuale.
D. Forme şi metode de evaluare: elaborarea si sustinerea referatului de practica.
E. Conţinutul programei de practica:
1. Cunoasterea notiunilor ingineresti despre senzori si traductoare si domeniile de aplicatie – 8 ore 2. Cunoasterea structurilor mecanice a robotilor industriali – 8 ore 3. Cunoasterea actionarilor electrice, hidraulice si pneumatice a robotilor industriali – 8 ore 4. Materializarea schemelor de actionare hidraulice si pneumatice prin realizarea practica a montajelor –
10 ore 5. Motoare electrice de curent continuu si motoare pas cu pas si scheme de actionare pentru roboti
industriali – 8 ore 6. Interfete pentru comanda motoarelor de actionare – 8 ore 7. Elaborarea de programe de conducere ale robotilor industriali – 8 ore 8. Limbaje de programare si utilizarea acestora prin aplicatii practice – 8 ore 9. Proiectarea sistemelor de prehensiune – 8 ore 10. Tehnici de fabricatie a robotilor industriali, proiectarea elementelor componente pentru o structura
robotizata impusa – 8 ore

11. Analiza sistemelor de control a structurilor robotilor industriali – 8 ore
Cerinte generale: -se va preda un referat; - referatul va fi redactat in limba romana; -materialul utilizat (text si figuri) trebuie sa provina de pe Internet, utilizarea directa a textelor din carti in limba romana sau engleza -se va utiliza ca editor MS Word -se va utiliza un font Times New Roman 12pt., spatierea fiind la 1.5 randuri -in pagina de titlu trebuie sa apara termenul de predare si data de predare efectiva (se completeaza la predare) -raportul trebuie sa includa, dupa cuprins, un rezumat de cca. 150 de cuvinte, urmat de 5 cuvinte cheie relevante pentru tema respectiva -paginile vor fi numerotate si vor avea un header pe care sa apara titlul raportului, autorul si grupa -toate reprezentarile grafice vor fi identificate corespunzator (Fig.1 ..Fig12), vor avea un titlu si vor fi referite ca atare in text -nici o reprezentare grafica nu trebuie sa ocupe mai mult de jumatate din pagina -numarul minim de repere bibliografice: 4;
Data aprobării programei analitice în catedră 19.01.2007
Şef catedră Prof. dr. ing. Georgescu V.
.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: PROCESE SI ECHIPAMENTE PENTRU SUDARE ROBOTIZATA
A. Locul disciplinei în planul de învăţământ:
Anul III Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
- - 42 28 42 28 - E - 5 M-S3203-2
B. Obiectivele disciplinei:
• Cunoaşterea modului de evoluare si de dezvoltare a proceselor si echipamentelor de sudare robotizata in ţara noastră si pe plan mondial;
• Formarea unei concepţii sistemice asupra proceselor si echipamentelor de sudare robotizata;
• Dezvoltarea capacităţii ingineresti de utilizare echipamentelor de sudare si de selectare a lor la realizarea unor produse industriale de inalta competitivitate;
• Cunoaşterea tehnologiilor si echipamentelor de sudare robotizata şi utilizarea acestora în diferitele aplicatii practice industriale;
• Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de realizare a unor tipuri de imbinari, aplicatii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator si evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. NOTIUNI INTRODUCTIVE – 2 ore Procesul de producţie. Procesul tehnologic. Activităţi specifice secţiilor de sudare. Indicatorii
nivelului tehnologic al proceselor de sudare. Scurt istoric. Clasificarea procedeelor de sudare prin topire. Particularitati ale sudarii prin presiune. Clasificarea procedeelor de sudare prin presiune.
2. SUDAREA SUB STRAT DE FLUX – 10 ore Clasificarea procedeelor de sudare sub strat de flux. Performanţele sudării sub strat de flux.
Materiale de adaos. Tehnica operatorie la sudarea sub flux. Echipamente pentru sub strat de flux. Sudarea mecanizată. Tractoare pentru sudare. Principii
de realizare a modificării vitezei de avans a sârmei electrod funcţie de tensiunea arcului. Modalităţi de lucru ale sistemului cu viteză dependentă (SVD). Moduri de poziţionare a caracteristicilor surselor. Reglarea automată a parametrilor arcului la sudarea SF.
3. SUDAREA ÎN MEDIU DE GAZE – 10 ore Clasificarea procedeelor de sudare în mediu de gaze. Gaze folosite la sudare. Electrozi
nefuzibili. Sârme de sudură. Transferul materialului de sudare prin arc. Sudarea WIG (performanţele procedeului WIG, parametrii tehnologici de sudare, tehnica sudării WIG). Instalaţia pentru sudare WIG mecanizată. Elemente constructive ale echipamentelor de sudare WIG.
Sudarea MIG-MAG (performanţele procedeelor MIG şi MAG, materiale de sudare, algoritmul de calcul al tehnologiei de sudare MIG şi MAG).
Echipamente pentru sudare MIG, MAG-CO2. Consideraţii teoretice. Sisteme cu viteza constanta (SVC). Condiţii de funcţionare ale SVC. Schema bloc a unei instalaţii MIG-MAG pentru sudare semi-mecanizată.
Instalaţii moderne pentru sudarea robotizata. Conducerea prin microprocesor a unei instalaţii pentru sudare. Circuite auxiliare pentru aprindere sigură a arcului electric alimentat de surse tranzistorizate.
4. SUDAREA PRIN PRESIUNE IN PUNCTE – 20 ore Principiul de lucru. Caldura degajata la sudarea în puncte. Formarea punctului sudat. Cicluri
de sudare prin puncte. Factori tehnologici de sudare. Alegerea regimului de sudare. Alegerea electrozilor. Alegerea portelectrozilor. Recomandari constructive. Recomandari tehnologice. Aplicatii. Variante de sudare în puncte. Sudarea in puncte, cu condensatoare. Sudarea cu energie inmagazinata a bolturilor.
Echipamente stationare pentru sudarea in puncte. Clesti si echipamente specifice pentru sudarea robotizata a caroseriilor auto. Transformatore specifice operaţiei de sudare prin presiune. Comanda utilajului pentru sudare electrică prin presiune prin conducţie. Echipamente pentru reglarea procesului de sudare. Elemente constructive pentru transformatoarele maşinilor de sudat electric prin presiune. Reglarea curentului de sudare la maşinile de sudat electric prin presiune.
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă:
1. Prezentarea laboratorului. Instructaj de protecţie a muncii – 2 ore 2. Sudarea mecanizată sub strat de flux – 2 ore 3. Tractoare si pistolete pentru sudare sub strat de flux – 2 ore 4. Sudarea MAG-CO2. Instalaţie pentru sudare ISM-200– 2 ore 5. Dispozitive de avans sarma SAF-2, SAF-3 SACO-3 – 2 ore 6. Sudarea cu procedeul WIG. Instalaţie de sudare WIG IUW-400N – 2 ore 7. Instalaţii pentru sudare multiproces – 2 ore 8. Studiul încălzirii la sudarea electrica prin presiune – 2 ore 9. Comanda si reglarea maşinilor manuale pentru sudarea in puncte – 2 ore 10. Comanda si reglarea maşinilor electronice pentru sudarea in puncte – 2 ore 11. Cazuri particulare de sudare în puncte – 2 ore 12. Variante de sudare în puncte. Echipamente specifice – 2 ore 13. Echipamente pentru sudarea robotizata a caroseriilor auto – 2 ore 14. Sudarea cu energie înmagazinată. Echipamente specifice – 2 ore
G. Bibliografie de elaborare a cursului
1. Antonescu I., s.a. Sudarea prin presiune, Editura Tehnica, Bucuresti, 1969. 2. Constantin E. Tehnologia sudării prin topire, Partea II - Tehnologia procedeelor de sudare,
Universitatea din Galaţi, 1994. 3. Georgescu V. Tehnologii de sudare prin presiune. Universitatea din Galati, 1984. 4. Georgescu V., Iordachescu D., Mircea O. Tehnica sudarii prin presiune. Lucrari practice.
Universitatea din Galati, 1992. 5. Georgescu V., Georgescu B., Mircea O. – Asamblarea termomecanica. ISBN 973-9428-77-0
Editura Lux Libris, Brasov 2001. 6. Georgescu V., Mircea O., Andreescu F., Georgescu B. – Sudarea prin presiune. Metode clasice.
Format A5, 240 pagini. ISBN 973-9428-34-7 Editura Lux Libris, Brasov 2002.

7. Georgescu V., Georgescu B. Metode neconventionale de sudare prin presiune. Format A5, 152 pagini. ISBN 973-8352-44-4 Editura Fundatiei Universitare “Dunarea de Jos” Galati 2002.
8. Iordachescu M., Georgescu B., Georgescu V. Procese neconventionale de sudare. Format X5, 264 pagini. Editura Fundatiei Universitare “Dunarea de Jos” – Galati, ISBN 973-627-212-5, 2005.
9. Răileanu D-tru., Niţu V., Achimfa Şt. Tennologia sudării prin topire - Îndrumar de laborator, Universitatea din Galaţi, 1988.
H. Bibliografie minimală de studiu pentru studenţi
1. Constantin E. Tehnologia sudării prin topire, Partea II - Tehnologia procedeelor de sudare, Universitatea din Galaţi, 1994.
2. Georgescu V. Tehnologii de sudare prin presiune. Universitatea din Galati, 1984. 3. Georgescu V., Mircea O., Andreescu F., Georgescu B. – Sudarea prin presiune. Metode
clasice. Format A5, 240 pagini. ISBN 973-9428-34-7 Editura Lux Libris, Brasov 2002. Data aprobării programei analitice în catedră 11.07.2007
Şef catedră Titular disciplina Prof dr ing Georgescu V. Prof dr ing Georgescu V.

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA / DEPARTAMENTUL TCM Adresa: str. Domnească 111, 800201 – Galaţi Nr. telefon / fax: 0236/414872, int. 396 E-mail: [email protected]
PROGRAMA ANALITICĂ Disciplina: PROGRAMAREA CALCULATOARELOR SI LIMBAJE DE PROGRAMARE
A. Locul disciplinei în planul de învăţământ:
Anul I Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
1 2 14 28 V 4 M-F0005
B. Obiectivele disciplinei: Cunoaşterea rolului jucat de tehnologia moderna de prelucrare a
informaţie în cresterea calitatii produselor. Cunoaşterea sistemelor informatice. Identificarea domeniilor de utilizare a sistemelor de calcul si a importantei acestora in ingineria industriala. Cunoasterea structurilor fundamentale ale algoritmilor si utilizarea lor in construirea algoritmilor. Verificare algoritmilor si corectarea acestora. Constructia modulara a algoritmilor pentru rezolvarea problemelor de lucru cu date structurate (vectori si matrici). Dezvoltarea capacităţii de decizie, intelegerea si aplicarea corelatiilor dintre aceasta disciplina si celelalte discipline abordate in formarea inginereasca.
C. Metode de predare – învăţare: curs aplicativ; stimularea interactivitatii si a dialogului in
timpul cursului si laboratorului, metoda grupurilor de lucru in cadrul aplicatiilor de laborator.
D. Forme şi metode de evaluare: evaluare continuă prin: teste periodice (pondere 20%);
activitate de laborator (pondere 30 %); examen final-scris si proba practica (pondere 30%). E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Componentele unui produs program. Principiile programarii structurate (2 ore) 2. Structuri fundamentale ale algoritmilor (2 ore) 3. Metode de elaborare a algoritmilor (6 ore) Utilizarea structurilor alternative (cu 2 ramuri, cu o ramura vida, generalizata) intr-un algoritm. Utilizarea structurilor repetitive (cu test initial/final, cu contor) intr-un algoritm 4. Metodw de verificare a algoritmilor (2 ore) 5. Structuri tipice de date (2 ore) Identificarea datelor de intrare/iesire intr-un algoritm si a tipului acestora. Efectul tipului de date in expresiile de calcul.
F. Conţinutul seminariilor / număr de ore pentru fiecare temă:
1. Algoritm pentru calculul sumei/produsului numerelor pare/impare cuprinse intre 0 si 2N, respectiv 1 si (2N+1) (4 ore) Scrierea algoritmului. Marcarea structurilor fundamentale folosite in cadrul algoritmului. Identificarea datelor de intrare si de iesire. Verificarea algoritmului.

2. Algoritm pentru determinarea minimului/maximului valorilor dintr-un sir de numere (2 ore). Scrierea algoritmului. Marcarea structurilor fundamentale folosite in cadrul algoritmului. Identificarea datelor de intrare si de iesire. Verificarea algoritmului. 3. Algoritm pentru ordonarea crescatoare/descrescatoare a elementelor unui sir de numere (2 ore). Scrierea algoritmului. Marcarea structurilor fundamentale folosite in cadrul algoritmului. Identificarea datelor de intrare si de iesire. Verificarea algoritmului. 4. Algoritm pentru determinarea minimului/maximului elementelor de pe diagonala principala/secundara a unei matrice date. Algoritm pentru determinarea sumei/produsului elementelor minime/mazime de pe coloanele/liniile unei matrici patrate date. (10 ore). Scrierea algoritmului. Marcarea structurilor fundamentale folosite in cadrul algoritmului. Identificarea datelor de intrare/iesire si a tipului acestora. Verificarea algoritmului. 5. Algoritm pentru calculul valorii unei expresii numerice alternative in functie de valoarea unor variabile de intrare (6 ore) Scrierea algoritmului. Marcarea structurilor fundamentale folosite in cadrul algoritmului. Identificarea datelor de intrare/iesire si a tipului acestora. Verificarea algoritmului. 6. Lucrul cu diferite tipuri de date si identificarea erorilor din expresiile de calcul (4 ore).
G. Bibliografie de elaborare a cursului
[1] E. Popescu – Algoritmi si limbajul PASCAL, Ed. ELSE, 2003. [2] E. Popescu – Limbajul PASCAL. Teorie si aplicatii, Ed. ELSE, 2004. [3] C. Maier, M. Dima – Programarea calculatoarelor si limbaje de programare. Teorie si aplicatii, Ed. « Cartea Universitara » Bucuresti, 2007. [4] Luca-Dan Serbanati, s.a. – Programarea sistematica in limbajele PASCAL si FORTRAN, Editura Tehnica, Bucuresti, 1984. [5] Matthias Felleisen and col. – How to Design Programs : An Introduction to Programming and Computing, ISBN 0-262-06218-6, 2004, MLT Press Massachusetts Institute of Technology, Cambridge, Massachusetts.
H. Bibliografie minimală de studiu pentru studenţi1
[1] E. Popescu – Algoritmi si limbajul PASCAL, Ed. ELSE, 2003 [2] E. Popescu – Limbajul PASCAL. Teorie si aplicatii, Ed. ELSE, 2004 [3] C. Maier, M. Dima – Programarea calculatoarelor si limbaje de programare. Teorie si aplicatii, Ed. « Cartea Universitara » Bucuresti, 2007
Data aprobării programei analitice în catedră / departament
(Semnătura)
Director departament / Şef catedră
1 Este de preferat ca bibliografia minimală de studiu pentru surdenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atnigerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA / DEPARTAMENTUL TCM Adresa: str. Domnească 111, 800201 – Galaţi Nr. telefon / fax: 0236/414872, int. 396 E-mail: [email protected]
PROGRAMA ANALITICĂ Disciplina: PROGRAMAREA CALCULATOARELOR SI LIMBAJE DE PROGRAMARE
A. Locul disciplinei în planul de învăţământ:
Anul I Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
1 2 14 28 V 4 M-F0005
B. Obiectivele disciplinei: Cunoaşterea rolului jucat de tehnologia moderna de prelucrare a
informaţie în cresterea calitatii produselor. Cunoaşterea elementelor de limbaj PASCAL. Formarea deprinderilor de construire a algoritmilor si de transpunere a acestora in programe. Deprinderea unor metode si tehnici eficiente de programare. Interpretarea mesajelor de eroare in fazele de compilare si executie a unui program si corectarea erorilor semnalate. Dezvoltarea capacităţii de adaptare la orice limbaj de programare prin intelegerea si aplicarea logicii structurilor fundamentale
C. Metode de predare – învăţare: curs aplicativ; stimularea interactivitatii si a dialogului in
timpul cursului si laboratorului, metoda grupurilor de lucru in cadrul aplicatiilor de laborator.
D. Forme şi metode de evaluare: evaluare continuă prin: teste periodice (pondere 20%);
activitate de laborator (pondere 30 %); examen final-scris si practic (pondere 30%). E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Alfabet, constante, variabile, operatori, expresii (1 ora) 2. Structura unui program (1 ora) 3. Instructiuni de intrare/iesire (2 ore) 4. Instructiunile de atribuire, salt conditionat, alternative si repetitive. Exemple de programme (4 ore) 5. Identificarea declaratiilor necesare intr-un program. Declaratii de variabile. Declararea tablourilor. Citirea si afisarea tablourilor. Cicluri si tablouri. Exemple de programme cu vectori si matrici (2 ore) 6. Definirea procedurilor si functiilor-utilizator. Parametrii formali si efectivi. Domenii de valabilitate a declaratiilor.Exemple de programe (4 ore)
F. Conţinutul seminariilor / număr de ore pentru fiecare temă:
1. Scrierea unor secvente de program pentru aplicarea instructiunilor elementare de limbaj de programare (2 ore) 2. Program pentru calculul sumei/produsului nemerelor pare/impare cuprinse intre 0 si 2N, respectiv 1 si (2N+1) (4 ore)

Identificarea datelor de intrare si de iesire si a declaratiilor necesare. Scrierea programului. Corectarea erorilor de compilare si executie a programului. 3. Program pentru determinarea minimului/maximului valorilor dintr-un sir de numere (2 ore). Identificarea datelor de intrare si de iesire si a declaratiilor necesare. Scrierea programului. Corectarea erorilor de compilare si executie a programului. 4. Program pentru ordonarea crescatoare/descrescatoare a elementelor unui sir de numere (2 ore). Identificarea datelor de intrare si de iesire si a declaratiilor necesare. Scrierea programului. Corectarea erorilor de compilare si executie a programului. 5. Program pentru determinarea minimului/maximului elementelor de pe diagonala principala/secundara a unei matrice date. Aplicarea notiunilor de functii-utilizator si proceduri (10 ore). Identificarea datelor de intrare si de iesire si a declaratiilor necesare. Scrierea programului in varianta monobloc si in varianta ce foloseste functii-utilizator sau proceduri.. Corectarea erorilor de compilare si executie a programului. 6. Program pentru calculul valorii unei expresii numerice alternative in functie de valoarea unor variabile de intrare. Aplicarea notiunilor de functii-utilizator si proceduri (4 ore). Identificarea datelor de intrare si de iesire si a declaratiilor necesare. Scrierea programului in varianta monobloc si in varianta ce foloseste functii-utilizator sau proceduri.. Corectarea erorilor de compilare si executie a programului. 7. Programarea modulara. Transmiterea de date intre diferitele module de program. Parametri si variabile locale si globale. (4 ore).
G. Bibliografie de elaborare a cursului
[1] E. Popescu – Algoritmi si limbajul PASCAL, Ed. ELSE, 2003. [2] E. Popescu – Limbajul PASCAL. Teorie si aplicatii, Ed. ELSE, 2004. [3] C. Maier, M. Dima – Programarea calculatoarelor si limbaje de programare. Teorie si aplicatii, Ed. « Cartea Universitara » Bucuresti, 2007. [4] Luca-Dan Serbanati, s.a. – Programarea sistematica in limbajele PASCAL si FORTRAN, Editura Tehnica, Bucuresti, 1984. [5] Matthias Felleisen and col. – How to Design Programs : An Introduction to Programming and Computing, ISBN 0-262-06218-6, 2004, MLT Press Massachusetts Institute of Technology, Cambridge, Massachusetts. [6] Ion Fatu – Teste grila de programare in limbajele PASCAL si C, Ed. Didactica si Pedagogica Bucuresti, 1995, ISBN 973-30-4095-9.
H. Bibliografie minimală de studiu pentru studenţi1
[1] E. Popescu – Algoritmi si limbajul PASCAL, Ed. ELSE, 2003 [2] E. Popescu – Limbajul PASCAL. Teorie si aplicatii, Ed. ELSE, 2004 [3] C. Maier, M. Dima – Programarea calculatoarelor si limbaje de programare. Teorie si aplicatii, Ed. « Cartea Universitara » Bucuresti, 2007
Data aprobării programei analitice în catedră / departament
(Semnătura)
Director departament / Şef catedră
1 Este de preferat ca bibliografia minimală de studiu pentru surdenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atnigerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.





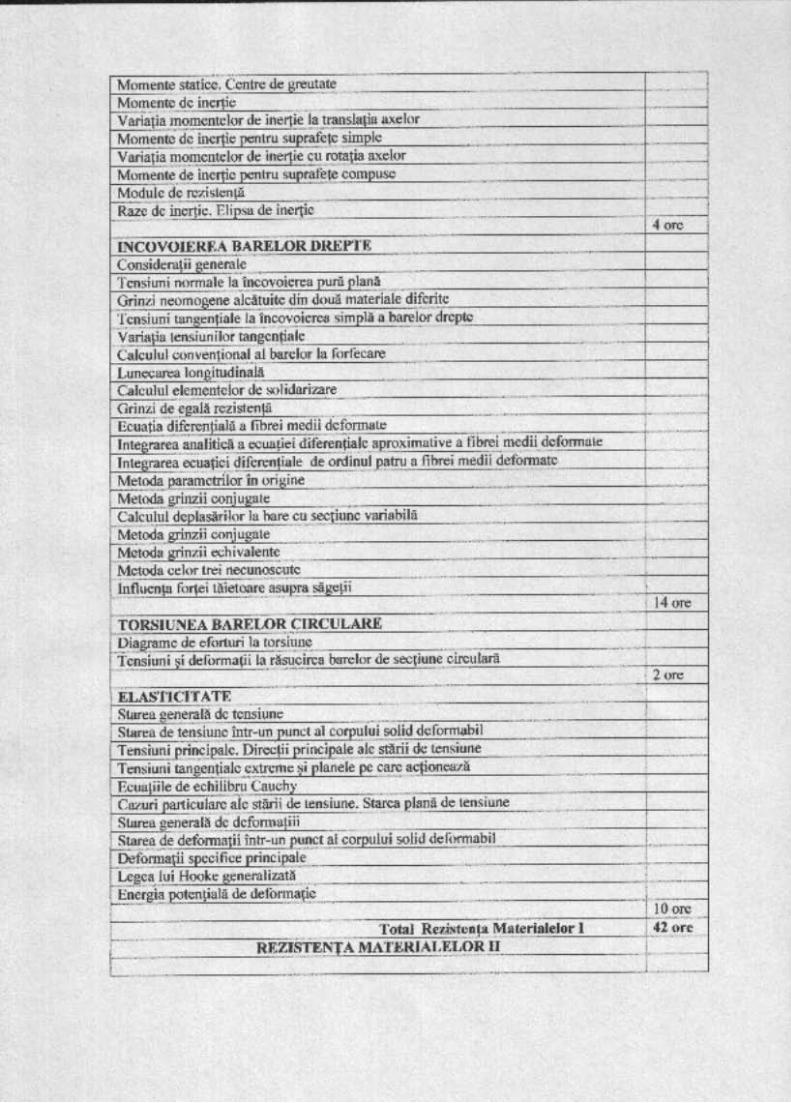
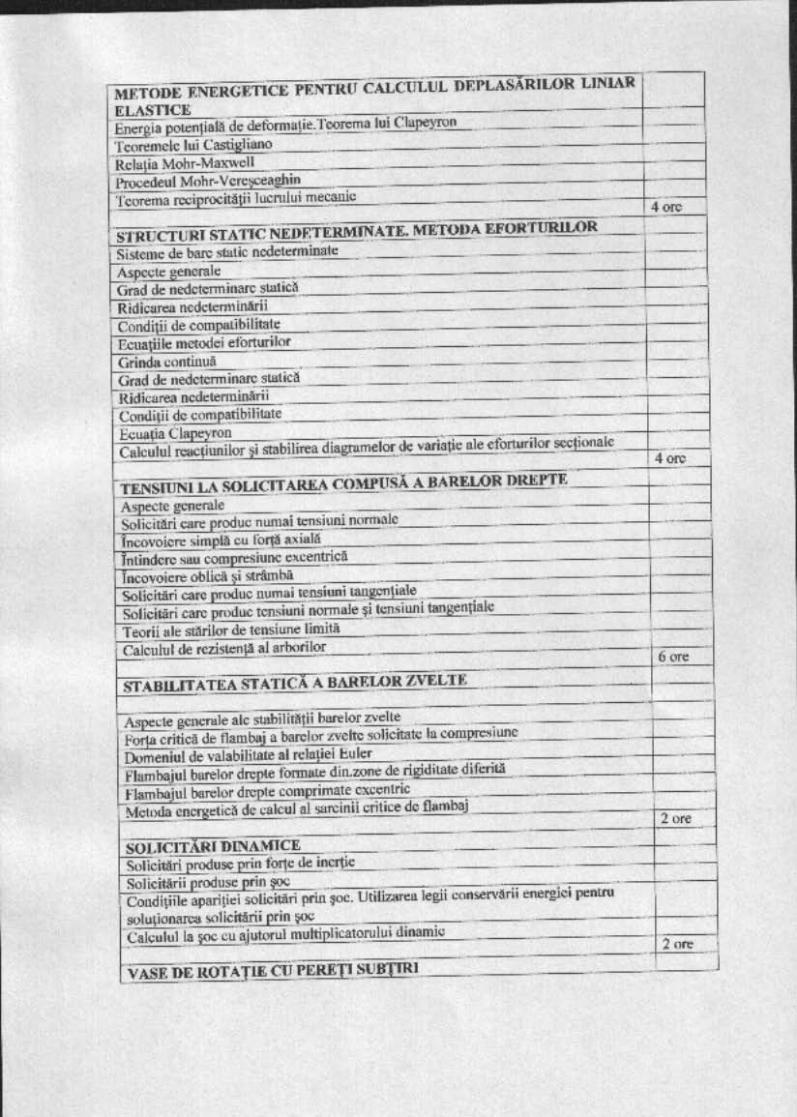

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA CATEDRA / DEPARTAMENTUL Adresa: Nr. telefon / fax: E-mail:
PROGRAMA ANALITICĂ
Disciplina:
A. Locul disciplinei în planul de învăţământ: Anul III
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
- - 42 28 42 28 - E - 5 M-S3203-1
B. Obiectivele disciplinei: Familiarizarea cu problematica de baza privind structura roboţilor industriali, analiza cinematică, analiza dinamică, calibrarea roboţilor, influenta rigidităţii(elasticităţii) elementului end-efector asupra preciziei şi vibraţiilor roboţilor.
C. Metode de predare – învăţare:
Prelegerea;invatare: prin exersarea metodelor de modelare in cadrul oerlor de lucrări; prin utilizarea in cadrul orelor de lucrari a unor programe (soft) pentru modelare si simulare in dinamica cinematica şi dinamica roboţilor.
D. Forme şi metode de evaluare: evaluare continua(50%) in cadrul orelor de seminar, lucrari, evaluare sumativa:(50%) prin probe scrise.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1.Noţiuni generale privind roboţii industriali, structura roboţilor industriali...................2h 2.Cinematica roboţilor......................................................................................................6h 3.Cinematica diferenţială şi statica...................................................................................6h 4.Dinamica roboţilor.........................................................................................................6h 5.Planificarea traiectoriei..................................................................................................4h 6.Calibrarea roboţilor.......................................................................................................2h 7.Controlul mişcării..........................................................................................................4h 8. Actuatori şi senzori...................................................................................................... 4h 9.Modelarea elasticităţii end-efectorului folosind metoda elementelor finite........... ......4h 10.Suprapunerea mişcării elastice a elementului end-efector cu mişcarea rigidă. Vibraţii rezultate din elasticitatea elementului end-efector...........................................4h
F. Conţinutul seminariilor / număr de ore pentru fiecare temă: 1.Modelarea structurilor tipice de roboţi........................................................................4h 2.Studiul cinematic al structurilor tipice de roboţi.........................................................6h 3.Calibrarea roboţilor.....................................................................................................2h 4.Analiza dinamică a structurilor tipice de roboţi..........................................................8h 5.Modelarea elasticităţii elementului end-efector folosind elemente finite...................2h 6.Dinamica roboţilor ţinând cont de elasticitatea elementului end-efector....................4h 7.Teste de evaluare a studenţilor la lucrârile aplicative.................................................2h
G. Bibliografie de elaborare a cursului 1.SCIAVICO, L., Robotica industriale-modellistica e controllo di manipulatori,McGraw-Hill Libri Italia srl, 1995. 2.KOREN, Y., Robotics for Engineering, McGraw-Hill Book Company, 1985.

3.FU, K-S, GONZALEZ, L.C., GEORGE LEE, C.S., Robotica, McGraw-Hill Libri Italia srl, 1987,
H. Bibliografie minimală de studiu pentru studenţi: Note de curs.
Data aprobării programei analitice în catedră / departament Data întocmirii:24.08.2007 Titular curs:Prof.dr. ing. MUŞAT D-tru Sorin
Semnătura: Titular seminar / lucrări practice: Prof.dr. ing. MUŞAT D-tru Sorin
Semnătura:
Director departament / Şef catedră,
Prof.dr. ing. Prof.dr. ing. MUŞAT D-tru Sorin

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICĂ CATEDRA ROBOTICĂ ŞI SUDARE Adresa: Str. Domnească nr. 111. Nr. telefon / fax: 0236/413478 E-mail: [email protected]
PROGRAMA ANALITICĂ Disciplina: ROBOTIZAREA ASAMBLĂRII ÎN CONSTRUCŢII NAVALE
A. Locul disciplinei în planul de învăţământ:
Anul IV Sem. I Sem. II
Total ore Forme de verificare Nr. credite Cod disciplină
Anul de
studiu C L C L P C L P Sem. I Sem. II Sem. I
Sem. II
Nr. ore
- - 28 14 - 28 14 - - V - 3 M-S3210-1
B. Obiectivele disciplinei: • Cunoaşterea comportărilor la sudare a materialelor metalice din domeniul naval; • Cunoaşterea bazelor tehnologice ale sudării prin topire; • Cunoaşterea procesului de producţie şi a procesului tehnologic de realizare a
construcţiilor metalice specifice domeniului naval; • Cunoaşterea algoritmului de calcul al tehnologiilor de sudare cu arc electric; • Cunoaşterea genezei, factorilor şi măsurilor pentru diminuarea tensiunilor şi
deformaţiilor remanente; • Cunoaşterea scopului şi a calculului sclerometric al temperaturii de preîncălzire; • Dezvoltarea capacităţilor de cercetare tehnologică; • Dezvoltarea capacităţilor de gândire proiectivă în domeniu; • Formarea deprinderilor practice în domeniul tehnologic.
C. Metode de predare - învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea, studiul de caz, simularea de situaţii, metode de lucru în grup, ateliere de lucru, metode de dezvoltare a gândirii critice, portofoliul, studiul documentelor curriculare, prospecte şi al bibliografiei.
D. Forme şi metode de evaluare: evaluare continuă (pondere 25%) prin metode orale în cadrul cursului şi a lucrărilor de laborator şi practice în cadrul lucrărilor de laborator; evaluare sumativă (pondere 75%) prin probă scrisă la examen (verificare).
E. Conţinutul cursului / număr de ore pentru fiecare temă: 1. Materiale de bază utilizate în construcţii navale / 1 oră Oţeluri pentru construcţii navale. Oţeluri inoxidabile. Oţeluri duplex. Cuprul şi aliaje de
cupru. Aluminiul şi aliaje de aluminiu. 2. Pregatirea componentelor în vederea sudări / 1 oră Procedee de debitare şi prelucrare. Pregătirea componentelor în vederea sudării. 3. Clasificarea şi simbolizarea îmbinărilor sudate pe desenele de execuţie / 1 oră Clasificarea îmbinărilor sudate. Simbolizarea îmbinărilor sudate. 4. Dispozitive folosite la sudarea mecanizată şi robotizată / 2 ore Dispozitive de strângere. Prese. Dispozitive pentru aducerea în plan comun a marginilor
pieselor. Dispozitive pentru poziţionarea pieselor circulare. Dispozitive de manipulare prin rotire. Dispozitive de întoarcere. Standuri şi bancuri cu role. Dispozitive pentru fixarea şi deplasarea automatelor de sudare. Dispozitive auxiliare. Dispozitive pentru etanşarea îmbinărilor sudate. Dispozitive pentru alimentarea şi aspirarea fluxului.

5. Sudarea semiautomată / 3 ore Sudarea semiautomată sub strat de flux. Sudarea semiautomată MIG-MAG. 6. Sudarea automată / 4 ore Sudarea automată sub strat de flux. Sudarea automată MIG-MAG. Sudarea
antigravitaţională. Sudarea orbitală a conductelor. 7. Scule şi utilaje tehnologice utilizate la asamblarea navei / 2 ore Scule speciale folosite în construcţia de nave. Dispozitive folosite pentru asamblare. 8. Tehnologia de asamblare şi sudare a elementelor prefabricate / 4 ore Tehnologia de asamblare şi sudare a secţiilor plane. Linii tehnologice pentru asamblarea şi
sudarea secţiilor plane. Tehnologia de asamblare şi sudare a secţiilor curne deschise pe dispozitiv. Tehnologia de asamblare şi sudare a secţiilor de volum. Metode de îndreptare a elementelor prefabricate.
9. Tehnologia de asamblare şi sudare a blocsecţiilor şi a corpului navei / 2 ore Tehnologia de asamblare şi sudare a blocsecţiilor. Tehnologia de asamblare şi sudare a
corpului navei. 10. Sudarea robotizată cu arc electric / 7 ore Procedee de sudare robotizată cu arc electric. Caracteristicile roboţilor de sudare cu arc
electric. Tipuri de roboţi industriali destinaţi sudării. Modalităţi de aplicare. Structura sistemelor se sudare robotizată. Particularităţi şi cerinţe ale sistemelor de sudare comflex robotizate. Evaluarea performanţelor sistemelor robotizate. Celule flexibile pentru sudare. Consideraţii de proiectare a îmbinărilor la sudarea robotizată. Consideraţii practice la sudarea robotizată MIG-MAG în curent pulsat. Elemente de proiectare în tehnologia comflex robotizată. Configuraţia optimă a unui sistem robotizat.
11. Principii de robotizare a structurilor sudate în construcţia de nave / 1 oră F. Conţinutul lucrărilor de laborator / număr de ore pentru fiecare temă:
1. Pregătirea componentelor în vederea sudării. Parametrii de tăiere oxigaz - 2 ore; 2. Sudarea automată sub strat de flux a îmbinărilor cap la cap şi de colţ - 2 ore; 3. Sudarea automată MIG-MAG în poziţie verticală - 2 ore; 4. Sudarea automată MIG-MAG în poziţie orizontal pe perete vertical - 2 ore; 5. Sudarea automată MIG-MAG în poziţie peste cap - 2 ore; 6. Sudarea robotizată sub strat de flux - 2 ore; 7. Sudarea robotizată MIG-MAG - 2 ore.
G. Bibliografie de elaborare a cursului
1. Anghelea N., Matragoci C., Grigoraş A., Popovici V.
Sudarea în mediu de gaze protectoare, Editura Tehnică, Bucureşti, 1982;
2. Burcă M., Negoiţescu S. Sudarea MIG - MAG, Editura Sudura, Timişoara, 2002; 3. Dehelean D. Sudarea prin topire, Editura Sudura, Timişoara, 1997; 4. Dragomir P. Roboţi industriali, RI, PCE, Vol. I şi II, Bucureşti, 1990; 5. Drimer D., colectiv Roboţi industriali şi manipulatoare, editura Tehnică,
Bucureşti, 1985; 6. Ispas V., colectiv Roboţi industriali, Editura Dacia, Cluj - Napoca, 1985; 7. Ivănescu M. Roboţi industriali - algoritm şi sisteme de conducere,
Editura Universitaria, Craiova, 1994; 8. Joni N., Trif N. Sudarea robotizată cu arc electric, Editura Lux Libris,
Braşov, 2005; 9. Joni, N., Şerban A., Matei D. Roboţi pentru sudare, SID 99, Bucureşti, 1989; 10. Joni, N., colectiv Consideraţii privind proiectarea îmbinărilor în cazul sudării
robotizate, Revista Sudura, Nr. 2/2002, pag. 42 - 50; 11. Joni, N. Soluţii moderne privind implementarea roboţilor industriali
pentru sudarea MIG/MAG şi pentru procesele de tăiere,

Teză de doctorat, Universitatea Transilvania Braşov, 2003; 12. Micloşi V., Andreescu F., Lupu V.
Echipamente pentru sudare, Editura Didactică şi Pedagogică, Bucureşti, 1984;
13. Popovici, V., Sălăjean T. Automatizarea proceselor de sudare, Editura Tehnică, Bucureşti, 1974;
14. Sălăgean T. Tehnologia procedeelor de sudare cu arc, Editura Tehnică, Bucureşti, 1985;
15. Sălăgean T., Mălai D., Vodă M.
Optimizarea sudării cu arcul electric, Editura Tehnică, Bucureşti, 1988;
16. Şerban D., Găvan E. Tehnologii de asamblare şi sudare a corpului navei, Editura Evrika, Galaţi, 2001;
17. Trif, N., Joni N. Robotizarea proceselor de sudare, Editura Lux Libris, Braşov, 1994;
18. Trif, N., Joni N. Automatizarea proceselor de sudare, Editura Lux Libris, Braşov, 1996.
H. Bibliografie minimală de studiu pentru studenţi1
1. Joni N., Trif N. Sudarea robotizată cu arc electric, Editura Lux Libris,
Braşov, 2005; 2.Şerban D., Găvan E. Tehnologii de asamblare şi sudare a corpului navei, Editura
Evrika, Galaţi, 2001.
Data aprobării programei analitice în catedră 19. 01. 2007.
Şef catedră Titular disciplină Prof. dr. ing. Georgescu V. Prof. dr. ing. Mihailescu D.
.
1 Este de preferat ca bibliografia minimală de studiu pentru surdenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atnigerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.

1
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: SENZORI SI TRADUCTOARE
A. Locul disciplinei în planul de învăţământ:
Anul II Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
2 1L 1P
- - 28 14L 14P
V, P - 5+1 - M-D3101
B. Obiectivele disciplinei: • Cunoaşterea modului de evolutie si de dezvoltare, in ţara noastră si pe plan mondial, a
construcţiei şi funcţionării senzorilor şi traductoarelor electrice şi neelectrice. • Formarea unei concepţii sistemice asupra construcţiei şi funcţionării senzorilor şi
traductoarelor electrice şi neelectrice. • Dezvoltarea capacităţii ingineresti de utilizare a senzorilor şi traductoarelor electrice şi
neelectrice si de selectare a lor la realizarea unor tehnologii moderne de monitorizare/control a unor procese industriale sau a calitatii unor produse industriale;
• Cunoaşterea caracteristicilor funcţionale şi a prescripţiilor metrologice a diverselor tipuri de senzori şi traductoare; Crearea de deprinderi teoretice şi practice în proiectarea şi alegerea adecvată a senzorilor şi traductoarelor necesare în măsurări şi automatizări.
• Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de de utilizare a senzorilor şi traductoarelor electrice şi neelectrice si de selectare a lor, aplicatii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator si evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. INTRODUCERE – 2 ore Noţiuni introductive; Clasificarea traductoarelor
2. POZIŢIA ŞI STRUCTURA TRADUCTOARELOR – 2 ore Poziţia traductoarelor în SRA; Structura generală a traductoarelor; Particularităţi ale adaptoarelor
3. CARACTERISTICILE ŞI PERFORMANŢELE TRADUCTOARELOR – 4 ore Funcţionarea în regim static; Principalele tipuri de caracteristici intrare-ieşire ale traductoarelor; Erorile de neliniaritate şi de histerezis; Caracteristici energetice; Caracteristici constructive
4. COMPONENTELE PRINCIPALE ALE TRADUCTOARELOR – 2 ore Elemente sensibile; Adaptoare
2
5. TRADUCTOARE PENTRU DEPLASĂRI – 4 ore Traductoare pentru deplasări liniare şi unghiulare de tip rezistiv; Traductoare inductive pentru deplasări liniare; Transformator diferenţial liniar variabil; Elemente sensibile cu circuit magnetic închis destinate traductoarelor pentru deplasări linare
6. TRADUCTOARE MICROMETRICE INDUCTIVE – 4 ore Sistem micrometric de măsurare utilizând metoda prin rezonanţă; Traductoare capacitive pentru deplasări liniare mici; Traductor micrometric capacitiv
7. TRADUCTOARE PENTRU DEPLASĂRI UNGHIULARE – 10 ore Traductor capacitiv pentru deplasări unghiulare; Traductoare inductive pentru deplasări unghiulare; Element sensibil de tip autotransformator; Elemente sensibile pentru deplasări unghiulare în tensiune alternativă modulată în amplitudine; Traductoare pentru deplasări liniare; Elemente sensibile pentru traductoare numerice de rotaţie; Elemente sensibile digitale rotative absolute; Traductoare numerice pentru deplasări unghiulare; Discuri magnetice absolute; Discuri optice absolute; Traductoare incrementale pentru deplasări unghiulare
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă:
1. Măsurarea parametrilor pasivi proprii ai traductoarelor parametrici; Traductoare rezistive bobinate; Termorezistoare; Termistoare – 2 ore
2. Traductoare rezistive tensometrice.Captoare tensometrice; Traductoare inductive; Traductoare cu termocuplu – 2 ore
3. Traductoare digitale pentru măsurarea vitezei de rotaţie şi a poziţiei – 2 ore 4. Traductoare electrice de timp; Traductoare de proximitate; Traductoare de vibraţie;
Traductoare acustice – 2 ore 5. Traductoare şi captoare de forţă şi moment de torsiune; Traductoare pneumatice de
deplasare; Traductoare mecanice de timp – 2 ore 6. Traductoare de debit şi temperatură; Traductoare de presiune şi nivel – 2 ore 7. Repararea şi întreţinerea traductoarelor – 2 ore
G. Tematici alternative pentru proiect:
1.Proiectarea traductoarelor de temperatură cu termorezistoare – 14 ore 2. Proiectarea traductoarelor de temperatură cu termocupluri– 14 ore 3. Proiectarea traductoarelor de temperatură cu termistoare – 14 ore 4. Proiectarea traductoarelor de deplasare rezistive – 14 ore 5. Proiectarea traductoarelor de deplasare inductive cu miez mobil – 14 ore 6. Proiectarea traductoarelor de nivel cu sondă capacitivă – 14 ore 7. Proiectarea traductoarelor pentru măsurarea forţei de greutate – 14 ore
H. Bibliografie de elaborare a cursului 1. Alexiu, I., s.a., Circuite cu semiconductoare în industrie, Ed. Tehnică, Bucureşti, 1970. 2. Alexandru, St., Florescu, I., Tehnica măsurarii şi aparate de măsurat în industria
lemnului, Ed. Tehnică, Bucureşti, 1976 3. Baritz, M., s.a., Îndrumar de proiectare pentru aparate optice, Universitatea din Braşov,
1988; 4. Constantinescu, I.N. ş.a. Măsurarea mărimilor mecanice cu ajutorul tensometriei, Ed.
Tehnică, Bucureşti, 1989. 5. Crave, H., Măsurarea electrică a mărimilor neelectrice, Ed.Tehnică, Bucureşti, 1966 6. Dumitriu, A., Tehnica prelucrării informaţiilor, Univ. Braşov, 1982. 7. Dumitriu, A. ş.a. Sisteme senzoriale pentru roboţi, Ed. Medro, Bucureşti, 1996 8. Dodoc, P., Metrologie generală, Ed. Didactică şi Pedagogică, Bucureşti. 1980. 9. Ionescu, G. ş.a., Traductoare pentru automatizări industriale, Ed. Tehnică, Bucureşti,
1985.

3
10. Iordache, P., ş.a., Aparate de măsurat electrice şi electronice, vol.I şi II, Ed. Militară, Bucureşti, 1971
11. Iordache, P., Rosca, I., Măsurarea şi metrologia mărimilor mecanice, Universitatea TransiIvania Braşov, 1994
12. Iordache, P., Baritz, M., Măsurarea şi metrologia mărimilor termice, Universitatea TransiIvania Braşov, 1994;
13. Iordachescu, D., Iordăchescu, M., Scutelnicu, E., Traductoare si senzori (Sensors and Transducers), Editura Fundatiei Universitare Dunarea de Jos, Galati, Romania, 2006, 152 pag., ISBN 13 978-973-627-350-6
14. Nicolau, E., ş.a, Manualul inginerului electronist, Aparate de măsura, Ed. Tehnică, Bucureşti, 1979
15. Pop, E., Stoica, V., Tehnici moderne de măsurare, Ed. Facla, Timişoara, 1983. 16. Savici, L., Aparate de analiză fizico-chimică, Ed. Tehnică, Bucureşti, 1980; 17. Tolle, H., Măsurări în instalaţiile termice, Ed. Tehnică, Bucureşti, 1972 I. Bibliografie minimală de studiu pentru studenţi 1. Iordachescu, D., Iordăchescu, M., Scutelnicu, E., Traductoare si senzori (Sensors and Transducers), Editura Fundatiei Universitare Dunarea de Jos, Galati, Romania, 2006, 152 pag., ISBN 13 978-973-627-350-6 Obligatoriu integral.
Data aprobării programei analitice în catedră: 19.01.2007
Titular curs: SL. Dr. Ing. Mihaela Iordachescu Semnătura: Titular lucrări practice: SL. Dr. Ing. Mihaela Iordachescu Semnătura:
Şef catedră
Prof dr ing Georgescu Valeriu
III. UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE METALURGIE ŞI ŞTIINŢA MATERIALELOR CATEDRA DEFORMĂRI PLASTICE ŞI TRATAMENTE TERMICE Adresa: Strada Domnească nr 111, cod 800201 Nr. telefon / fax: 40236460754 E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: SISTEME DE ASIGURARE A CALITATII
A. Locul disciplinei în planul de învăţământ: Anul I
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
1 1 14 14 V 1
B. Obiectivele disciplinei:
Disciplina Sisteme de asigurare a calitatii urmăreşte transmiterea către studenţi a cunoştinţelor esenţiale cu privire la conceptele actuale privind calitatea, dezvoltarea la studenţi a unor atitudini pozitive faţă de calitate, recunoaşterea şi acceptarea valorilor de bază ale calităţii totale precum clienţii, personalul întreprinderii şi furnizorii. Disciplina se înscrie în efortul învăţământului de a asigura pregătire echilibrată a studenţilor, pregătire în care problemele legate de mentalitate, de atitudinea faţă de lucrul propriu şi mai ales faţă de calitatea prestaţiei, ca factor esenţial de prevenire, au un loc special. De asemenea disciplina urmareste dezvoltarea profesională prin însuşirea şi aplicarea culturii calităţii, dezvoltarea de abilităţi privind crearea şi implementarea unui sistem de management al calităţii care să aibă ca obiectiv central clientul iar ca mecanism îmbunătăţirea continuă, implicarea în dezvoltarea instituţională prin cunoaşterea şi promovarea unor modele de excelenţă în domeniul calităţii (modelul european EFQM)
C. Metode de predare – învăţare: prelegerea, explicaţia, dezbaterea, studiul de caz, simularea de procese, metode de lucru în grup şi individual,
D. Forme şi metode de evaluare: evaluare continuă ( pondere 50% ) probe practice şi teme de casă;
evaluare sumativă (pondere 50%) prin probe scrise.
E. Conţinutul cursului / număr de ore pentru fiecare temă: 1. Conceptul de calitate. Evoluţia conceptului de calitate 1 ora 2. Structura organizaţiilor de produse şi servicii 0,5 ore 3. Calitatea în modelul tradiţional de management 0,5 ore 4. Managementul Calităţii Totale 1 ora 5. Valori de bază în managementul Calităţii Totale 4 ore 6. Procese fundamentale în Managementul Calităţii Totale 4 ore 7. Modelul ISO 9000 pentru managementul calităţii 1 ora 8. Auditul şi certificarea calităţii 0,5 ore 9. Costurile calităţii 0,5 ore 10. Instrumentele calităţii, cele 7 instrumente statistice , cele 7 instrumente de management 1 ora
F. Conţinutul seminariilor / număr de ore pentru fiecare temă: Laborator 1 - Conceptul de calitate. Definitia si caracteristicile calităţii. Cercurile celor trei calitati..

Studiu de caz. Studentii vor analiza un lot de 100 produse relizate la un copiator xerox, in productie de serie sortand produsele in ordine crescatoare in functie de perceptia pe care o au asupra calitatii .Vor distribui apoi produsele in cinci clase de calitate: excelente, bune, mijlocii, slabe, foarte slabe. De asemenea pe baza caracteristicilor componentelor si a stucturii produsului, studentii vor determina fiabilitatea unui produs evidentiind importanta fiabilitatii fiecarui component in fiabilitatea ansamblului. 2 ore Laborator 2
- Relaţia furnizor client orientarea către client. Lantul extern si intern al calitatii. Se definesc notiunile de client si furnizor, de asemenea lantul extern si intern al calitatii. Pe baza informatiilor primite studentii vor identifica elementele latului extern pentru produsul scaun de laborator si de asemeni elementele pentru lantul intern alreperului structura metalica din teava. Studentii vorfi antrenati incdrul unui test de identificare a cerintelor de calitate pentru produsul scaun prin doua metode : exprimare libera a cerintelor si testare pe baza de chestionare. Pe baza rezultatelor testului se va stabili care este profilul de calitate al produsului scaun in perceptia studentilor 2 ore Laborator 3 - Îmbunătăţirea continuă. Ciclul PDCA. Se vor analiza principiile imbunatatirii continue, de asemenea etapele componente ale ciclului PDCA sau roata lui Deming. Studentii vor fi antrenati intr-un exercitiu de identificare a masurilor de imbunatatire a activitatii didactice la disciplina Sisteme de asigurare a calitatii. In discutiile cu studentii se identifica factorii care determina nivelul de calitate a procesului de invatamant, cei 5 M. Se identifica de catre studenti problemele cu care se confrunta atat in cazul activitatii de curs cat si a activitatii de laborator. Informatiile se centralizeaza intr-un tabel pe factori si tip de activitate stabilindu-se frecventa cu care este mentionata o anumita problema. Se construieste un grafic de bare in ordinea descrescatoare a frecventei identificindu-se importanta problemelor. Se identifica masurile pentru solutionarea problemelor si responsabilii pentru ducerea lor la indeplinire. Pe baza unor indici de importanta se stabilesc si termenele de solutionare si in consecinta unprogram global de imbunatatire. 2 ore Laborator 4 - Instrumentele statistice ale calităţii (I). Fişa de culegere a datelor, grafice, histograma, analiza prin stratificare. Pentru fiecare tip de instrument studentii vor primi o tema si datele de referinta in baza carora vor construi respectivul instrument. Exercitiul este util pentru cunoasterea instrumentelor, a modului de constructie si domeniilor de utilizare a acestora 2 ore Laborator 5 - Instrumentele statistice ale calităţii (II). Diagrama Pareto, diagrama de corelaţie, diagrama Ishicawa.. Pentru fiecare tip de instrument studentii vor primi o tema si datele de referinta in baza carora vor construi respectivul instrument. Exercitiul este util pentru cunoasterea instrumentelor, a modului de constructie si domeniilor de utilizare. 2 ore Laborator 6 Normele ISO 9000, Auditul Calităţii. Se transmit studentilor informatii privind sistemele de asigurare a calitatii, a structurii Normei ISO9000-2000 si a procesului de evaluare prin audit a sistemului calitatii. Pe baza acestor informatii studentii vor reliza etapa de documentare a neconformitatilor identificate intr-un proces de audit pe baza notelor de audit puse la dispozitie. Cu aceasta ocazie studentii au posibilitatea sa cunoasca mai bine cerintele Normei ISO 9000-2000. 2 ore Laborator 7
Verificarea si evaluarea lucrarilor de laborator 2 ore G. Bibliografie de elaborare a cursului
Cananau, N., Gurău, G., Dima, O., Gurau, C., Calitate Totală, EDP, Bucureşti, 2005 Cananau,N., Dima,O.,Gurau,G.,Gonzales,A.,Sisteme de asigurare a calitatii,Junimea,1998
G.Gurau; O.Dima; N.Cananau; N.Cazacu; A.Gonzales Barajas – Evaluarea si certificarea sistemelor calităţii. Editura Fundaţiei Universităţii “Dunărea de Jos” Galaţi 2000. ISBN 973-8139-07-4 G.Gurau; O.Dima; N.Cananau; N.Cazacu; A.Gonzales Barajas – Sistemul calităţii ISO 9000 in întreprinderile mici si mijlocii din România. Editura Fundaţiei Universităţii “Dunărea de Jos” Galaţi. ISBN 973-8139-20-1 Cananau,N., Dima,O.,Gurau,G., Gurau, C.,.,Sisteme de asigurare a calitatii, Indrumar de laborator Ed. Fundatiei Universitare « Dunarea de jos Galati 2002 **Normele ISO 9000-2000
H. Bibliografie minimală de studiu pentru studenţi1 Cananau, N., Dima, O., Gurău, G., Gurau, C., Calitate Totală, EDP, Bucureşti, 2005 Cananau,N., Dima,O.,Gurau,G., Gurau, C.,.,Sisteme de asigurare a calitatii, Indrumar de laborator Ed. Fundatiei Universitare « Dunarea de jos Galati 2002 **Normele ISO 9000-2000
Data aprobării programei analitice în catedră / departament 27.09.2006
Titular curs: Sef Lucr. dr ing. Ovidiu Dima Semnătura: Titular seminar / lucrări practice Sef Lucr. dr ing. Ovidiu Dima As.Ing. Carmela Gurau Semnătura:
Director departament / Şef catedră Conf.dr.ing. Nelu Cazacu
1 Este de preferat ca bibliografia minimală de studiu pentru surdenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atnigerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.


UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: octavian.mircea @ugal.ro
PROGRAMA ANALITICĂ
Disciplina: SISTEME DE PREHENSIUNE
A. Locul disciplinei în planul de învăţământ: Anul IV
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
2 2 - - 28 14 E - 5 - M-S3205-1
B. Obiectivele disciplinei:
• Cunoaşterea evoluţiei sistemelor de prehensiune în ţara noastră şi pe plan mondial; • Formarea unei concepţii sistemice asupra structurii sistemelor de prehensiune; • Dezvoltarea capacităţii ingineresti de utilizare sistemelor de prehensiune si de alegere a
lor pentru realizarea unor produse industriale de inalta competitivitate; • Cunoaşterea structurii mecanice si a mecanismelor componente ale sistemelor de
prehensiune şi aplicarea în diferitele ramuri industriale; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de modalităţi de transmitere a mişcării, aplicatii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 25%) prin metode orale la orele de laborator si evaluare sumativă (pondere 75%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. NOTIUNI INTRODUCTIVE – 2ore Prehensiunea. Sistemul de prehensiune.
2. SISTEME NATURALE DE PREHENSIUNE – 6 ore Structura si sistematizare. Mana umana, cel mai evoluat sistem de prehensiune. Principalele
caracteristici structurale si functionale ale mainii umane. 3. SISTEME ARTIFICIALE DE PREHENSIUNE – 0,5 ore
Structura si clasificare 4. SISTEME DE PREHENSIUNE MECANICE – 10 ore
Modelarea sistemului mecanic de prehensiune. Conditiile minime de prehensiune statica. Sisteme mecanice de prehensiune cu bacuri. Sinteza structurala. Sinteza cinematica. Sisteme mecanide de prehensiune antropomorfe. Sisteme mecanice de prehensiune tentaculare. Compleanta si micromanipulare.
5. SISTEME DE PREHENSIUNE CU VACUUM – 2 ore Principii de functionare si elemente de calcul. Recomandari de utilizare, avantaje si dezavantaje. Variante constructive.
6. SISTEME DE PREHENSIUNE MAGNETICE – 2 ore Principii de functionare, elemente de calcul, avantaje si dezavantaje. Variante constructive

7. SISTEME DE PREHENSIUNE SPECIALE – 2 ore Prehensoare cu elemente metalice elastice. Prehensoare cu prindere prin adaptarea la forma piesei prehensate. Prehensoare bazate pe efecte electrice. Microprehensoare.
8. ACTIONAREA SISTEMELOR DE PREHENSIUNE – 2 ore Actionarea pneumatica. Actionarea hidrostatica. Actionarea pneumo-hidrostatica. Actionarea electrica. Actionarea electrohidrostatica
9. COMANDA SISTEMELOR DE PREHENSIUNE – 1,5 ore
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: 1.Prezentarea laboratorului. Instructaj de protecţie a muncii – 2 ore 2.Clasificarea sistemelor de prehensiune si semnificatia prehensiunii. 3.Caracteristici structurale si functionale ale mainii umane. 4.Sistemul mecanic de prehensiune artificial. 5.Sinteza structurala a sistemelor de prehensiune. 6.Sinteza cinematica a sistemelor de prehensiune. 7.Aspecte de analiza cineto-statica a sistemelor de prehensiune. 8.Sisteme de prehensiune cu bacuri. 9.Sisteme de prehensiune cu vacum. 10.Sisteme de prehensiune magnetice. 11.Sisteme de prehensiune speciale. 12.Actionarea pneumatica si hidaulica a sistemelor de prehensiune
G. Bibliografie de elaborare a cursului 1.Staretu I. Sisteme de prehensiune – Editura Lux LIBRIS, Brasov 1996, ISBN 973-96308-6-3 2.Staretu I. Neagoe M. Albu N. Maini mecanice – Mecanisme antropomorfe de prehensiune pentru protezare sin roboti – Editura Lux LIBRIS, Brasov 2001, ISBN 973-9428-27-4 3.Antonescu P.. Mecanisme. Calculul structural şi cinematic, Institutul Politehnic Bucureşti, 1979 4.Demian T. Elemente constructive de mecanica fină. E.D.P. Bucureşti, 1980; 5.Drimer D., ş.a. Roboţi industriali şi manipulatoare.Editura Tehnică, Bucureşti, 1985; 6.Dudiţă Fl., Diaconescu D. Optimizarea structurală a mecanismelor. Editura Tehnică, Bucureşti, 1987; 7.Kovacs F., Rădulescu C. Roboţi industriali. Universitatea Tehnică, Timişoara, 1992; 8.Mircea O., Banea D.M., Elementele mecanice ale roboţilor industriali. Editura BREN, Bucureşti, 2003; 9.Miloiu Gh., Dudiţă Fl., Diaconescu D. Transmisii mecanice moderne. Editura Tehnică, Bucureşti, 1980; 10.Popescu P., ş.a. Mecanica manipulatoarelor şi roboţilor – Probleme, vol. I...vol. IV. E.D.P.- SA, Bucureşti, 1994; 11.Rădulescu Gh., ş.a. Îndrumar de proiectare în construcţia de maşini, Vol. III. Editura Tehnică, Bucureşti, 1986
H. Bibliografie minimală de studiu pentru studenţi 1.Staretu I. Sisteme de prehensiune – Editura Lux LIBRIS, Brasov 1996, ISBN 973-96308-6-3; 2.Staretu I. Neagoe M. Albu N. Maini mecanice – Mecanisme antropomorfe de prehensiune pentru protezare sin roboti – Editura Lux LIBRIS, Brasov 2001, ISBN 973-9428-27-4.
Titular curs si lucrari practice: SL dr ing Mircea Octavian. Semnătura:
Data aprobării programei analitice în catedră 11.07.2007
Şef catedră
Prof dr ing Georgescu V.

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA DE TEHNOLOGIA CONSTRUCTIILOR DE MASINI Adresa: Str. Domneasca 111 Galati Nr. telefon / fax: 0236 41 48 71 E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: SISTEME FLEXIBILE DE FABRICATIE
A. Locul disciplinei în planul de învăţământ: Anul
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
3 1L 1P
- - 42 14L 14P
E P
- 6
- M-S3209
B. Obiectivele disciplinei:
Disciplina are in structura capitole in care sunt prezentate notiuni generale privind structura sistemelor-robot si a sistemelor de conducere a robotilor industriali si sistemelor robotizate (celule si linii flexibile). In partea a doua sunt prezentate sisteme de programare si simulare a robotilor in structuri CAD – CAM. Este analizat in mod detaliat sistemul MTS Robin, din punct de vedere al structurii, limbajului SRCL sia programarii si simularii aplicatiilor robotizate (manupulare, transfer, paletizare). Sisteme flexibile de fabricaţie este o disciplină complementară, necesară formării profesionale ca inginer în domeniul mecatronicii şi roboticii, care prin structură şi cunoştinţe urmăreşte realizarea următoarelor obiective principale : - identificarea arhitecturii mecanice şi de comandă a roboţilor şi sistemelor robotizate - cunoaşterea şi înţelegerea principiilor de structurare şi organizare a sistemelor flexibile de fabricaţie - interpretarea relaţiilor de comandă şi programare - proiectarea de aplicaţii de manipulare, paletizare - utilizarea unor metode specifice de programare a roboţilor - tehnici de simulare a aplicaţiilor flexibile - utilizarea sistemelor software CAD – CAM pentru robotică
C. Metode de predare – învăţare: Predarea disciplinei de studiu se realizează folosind următoarele proceduri : - curs - 7 capitole, prezentate sub formă de prelegere prin : tabele, scheme, proiecţii de diapozitive, prospecte, aplicaţii pe calculator - lucrari practice - 5 module cu 3 lucrari de laborator, prezentate sub formă de referate şi aplicaţii pe calculator - proiect – Proiectarea unui sistem automat de manipulare cu roboti tip AFAG - 4 capitole
D. Forme şi metode de evaluare: Verificarea cunoştinţelor la disciplina de studiu se realizează folosind următoarele metode: - fişe - test de laborator, pentru cunostinte aplicative; - fişe – test de curs, pentru aplicatii pe calculator ; - referat bilbliografic (opţional) ; - proiect semestrial - examinare scrisă pentru cunoştinţe teoretice.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
Tema Conţinut general Nr. ore alocat T1 Scurt istoric. Definitii. Caracteristici tehnice specifice robotilor industriali. Clasificare.
Principalele domenii de utilizare a robotilor in sisteme flexibile. 2
T2 Sistemul robot. Functiile sistemului de conducere. Limbaje de programare 4 T3 Sisteme de programare si simulare a robotilor industriali. Functiile sistemului de
programare. Structuri de sisteme CAD – CAM pentru robotica. 4
T4 Sistemul MTS Robin. Structura. Module de comenzi. Aplicatii. 6

T5 Limbajul de programare Siemens Robot. 6 T6 Programarea si simularea robotilor industriali : Puma Elbow 6, Kuka IR 364,
Movemaster RVE 2, Bosch SR 60, Gantry 3D. Aplicatii. FISE – TEST
10
T7 Programarea si simularea sistemelor robotizate de paletizare: PUMA, KUKA, BOSCH, GANTRY. Aplicatii. FISE - TEST
10
Total ore curs 42
F. Conţinutul lucrărilor practice / număr de ore pentru fiecare temă:
Modul Conţinut general lucrări practice Nr. Ore alocat M1 Robot de manipulare RMH 2 – structura, sistem de axe, sistem de actionare si
comanda. Aplicatii de manipulare – ciclul de miscari, ciclograma de manipulare, ciclograma de actionare si comanda. TEST DE LABORATOR 1
6
M2 Robot secvential programabil RS 54 - structura, sistem de axe, sistem de actionare si comanda, limbaj de programare. Aplicatii de manipulare – ciclul de miscari, ciclograma de manipulare, program. TEST DE LABORATOR 2
8
Total ore lucrări practice 14
Capitol Conţinut general proiect Nr. Ore alocat P1 Generalitati. Date de proiectare. Stabilirea ciclului de miscari 2 P2 Determinarea structurii modulare a robotului
Analiza schemei cinematice si calculul preciziei globale de pozitionare 4
P3 Proiectarea structurii de actionare pneumatica 4 P4 Ciclograma de manipulare
Ciclograma de actionare si comanda 4
Total ore proiect 14
G. Bibliografie de elaborare a cursului 1. ALLEGRI, T. H. – Materials handling: principles and practice, Van Nostrand Reinhold Co., New York, 1984 2. BOUAZDI, S. – Les calculateurs aux commandes de votre usine. L’usine en forme de pyramide, CETIM
Informations, nr. 110, Pris, 1985 3. BUZATU, C., IOAN-POPA, E., NOVAC, G. – Sisteme flexibile de prelucrare prin aşchiere, Editura Tehnică,
Bucureşti, 1993 4. COSTIN, M., TĂBĂCARU, V. – Optimizarea proceselor de prelucrare folosind celule robotizate, TEHNOMUS X,
vol. IV, Suceava, 1999 5. GANE, C., SARSON, T. – Structured systems analysis: tools and techniques, Prentice Hall Inc., Englewood Cliffs,
New York, 1979 6. IONIŢĂ, N. – Elemente de mecanica automatelor şi dinamica automatizării proceselor industriale, Editura Tehnică,
Bucureşti, 1985 7. ISPAS, V. – Aplicaţiile cinematicii în construcţia manipulatoarelor şi a roboţilor industriali, Editura Academiei
Române, Bucureşti, 1990 8. KUSIAK, A. – Modelling and design of flexible manufacturing sistems, Elsevier Science Publishers B.V.,
Amsterdam, 1986 9. NICULESCU-MIZIL, G. – Sieteme flexibile de prelucrare, Editura Tehnică, Bucureşti, 1989 10. PARSAEI, H. R., MITAL, A. – Economics of advanced manufacturing systems, Chapman & Hall, London, 1992 11. RATTNER, L. – Information requirements for integrated manufacturing, DSES Department, Rensselaer
Polytechnic Institute, Troy, 1990 12. TĂBĂCARU, V. – Case study of the flexible machining cells, BEYOND 2000-Engineering Research Strategies,
vol. XXXVI, Technical series C, Sibiu, 1999 13. TĂBĂCARU, V. – The structural design of modular robots, Robotica & Management, vol. 2, nr. 2, A.R.R.,
Timişoara, 1997 14. TĂBĂCARU, V., MARINESCU, V. – Sisteme flexibile de fabricaţie: roboţi industriali şi manipulatoare, Editura
Universităţii din Galaţi, 1995

15. TZAFESTAS, G. S. – Computer-assisted management and control of manufacturing systems, Springer-Verlag Ltd., London, 1997
16. WITTRY, E. J. – Managing information systems: an integrated approach, Society of manufacturing Engineers, Dearborn, 1987
17. * * * - Computer integrated manufacturing-CIM, DENFORD Computerised Machines & Syetems Ltd., West Yorkshire, 1995
18. * * * - Robot industriale, STAUBLI UNIMATION, 1992 19. * * * - Comau robots series SMART, COMAU Industriale, 1991 20. * * * - The single source for diecasting automation, REIS Machine Tools & Electronics, 1992 21. * * * - For every need of your machining factory, FANUC Robot, 1991 22. * * * - Automatic handling technology, AFAG Menziken, 1993 23. * * * - MTS Robin, Mathematisch Technische Software-Entwicklung GmbH Berlin, 1997
H. Bibliografie minimală de studiu pentru studenţi
Nr. crt.
Sursa bibliografică (carte, curs, fasciculă lucrări practice, îndrumar proiectare) Capitol Tema
1 TABACARU V. – Sisteme de fabricatie robotizate – programare si simulare, Editura Evrika, 2002
1 2 3 4 5 6 7
T1 T2 T3 T4 T5 T6 T7
3 TABACARU V. – Sisteme flexibile de fabricatie (vol. 1), Universitatea din Galaţi, 1996
1
T1, T2, T3
4 MARINESCU V., TABACARU V. – Manipulatoare şi roboţi – structuri şi sisteme de comandă, Editura Cartea Universitară, 2004
1 3 5 6
T2, T3 M1 M3 M2
5 TABACARU V., COSTIN M. – Roboti cu structura modulara AFAG, Universitatea din Galaţi, 1997
1,2,3 P1, P2, P3, P4
Data aprobării programei analitice în catedră / departament: 01 06 2007 Titular curs: Prof. univ. dr. ing. TABACARU VALENTIN Semnătura:
Titular seminar / lucrări practice: As. ing. CONSTANTIN IONUT CLEMENT Semnătura:
Director departament / Şef catedră
Prof. univ. dr. ing. NICOARA DUMITRU

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: octavian.mircea @ugal.ro
PROGRAMA ANALITICĂ
Disciplina: SISTEME MECANICE MECATRONICE
A. Locul disciplinei în planul de învăţământ: Anul III
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
2 2 - - 28 28 E - 5 - M-D3102
B. Obiectivele disciplinei:
• Cunoaşterea evoluţiei sistemelor mecanice mecatronice în ţara noastră şi pe plan mondial;
• Formarea unei concepţii sistemice asupra structurii sistemelor mecanice mecatronice; • Dezvoltarea capacităţii ingineresti de utilizare sistemelor mecanice mecatronice si de
alegere a lor pentru realizarea unor produse industriale de inalta competitivitate; • Cunoaşterea structurii mecanice si a mecanismelor componente ale robotilor şi aplicarea
în diferitele ramuri industriale; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de modalităţi de transmitere a mişcării, aplicatii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 25%) prin metode orale la orele de laborator si evaluare sumativă (pondere 75%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. NOTIUNI INTRODUCTIVE – 2ore Definirea conceptului de robot industrial. Caracteristici tehnice generale. Clasificarea
roboţilor 2. STRUCTURA MECANISMELR ROBOŢILOR INDUSTRIALI – 6 ore
Structura generală a roboţilor. Structura sistemului mecanic al roboţilor. Cuple cinematice. Gradul de mobilitate si manevrabilitate al unui robot. Mecanisme generatoare de traiectorie şi spaţii de lucru.
3. DISPOZITIVUL DE GHIDARE – 10 ore Construcţia batiului. Pivotare cu acţionare electrică. Pivotare cu acţionare hidraulică. Lagărul
modulului de rotire. 4. GHIDAJE DE TRANSLŢIE – 8 ore
Ghidaje cu alunecare. Variante constructive. Calculul ghidajelor. Modalitati de deplasare a glisierei. Oprirea glisierei la punct fix.Ghidaje prin rostogolire. Ghidaje cu bile. Ghidaje cu role. Calculul ghidajului prin rostogolire. Antrenarea glisierei cu sistem surub - piulita. Sistem de translatie cu surub rotativ. Sistem de translatie cu surub fix si piulita rotativa. Antrenarea glisierei cu transmisie armonica surub-piulita. Realizarea miscarii de translatie pas cu pas.

F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: 1. Prezentarea laboratorului. Instructaj de protecţie a muncii – 2 ore 2. Cuple cinematice. Scheme cinematice structurale ale roboţilor– 2 ore 3. Spaţii de lucru ale mecanismelor generatoare de traiectorie – 2 ore 4. Analiza directă a poziţiilor pentru diferite structuri mecanice de roboţi– 2 ore 5. Analiza inversă a poziţiilor pentru diferite structuri mecanice de roboţi – 2 ore 6. Analiza combinată a poziţiilor pentru diferite structuri mecanice de roboţi – 2 ore 7. Calculul vitezelor şi acceleraţiilor pentru diferite scheme cinematice de roboţi – 2 ore 8. Ghidaje prin alunecare utilizate în construcţia roboţilor – 2 ore 9. Utilizarea ghidajelor prin rostogolire in construcţia roboţilor – 2 ore 10. Transmiterea mişcării prin curele dinţate şi cu lanţ – 2 ore 11. Sisteme de orientare de ordinul I – 2 ore 12. Sisteme de orientare de ordinul II – 2 ore 13. Construcţia şi calculul mâinilor mecanice – 2 ore 14. Echilibrarea roboţilor – 2 ore G. Bibliografie de elaborare a cursului
1. Antonescu P.. Mecanisme. Calculul structural şi cinematic, Institutul Politehnic Bucureşti, 1979 2. Demian T. Elemente constructive de mecanica fină. E.D.P. Bucureşti, 1980; 3. Drimer D., ş.a. Roboţi industriali şi manipulatoare.Editura Tehnică, Bucureşti, 1985; 4. Dudiţă Fl., Diaconescu D. Optimizarea structurală a mecanismelor. Editura Tehnică, Bucureşti,
1987; 5. Kovacs F., Rădulescu C. Roboţi industriali. Universitatea Tehnică, Timişoara, 1992; 6. Mircea O., Banea D.M., Elementele mecanice ale roboţilor industriali. Editura BREN, Bucureşti,
2003; 7. Miloiu Gh., Dudiţă Fl., Diaconescu D. Transmisii mecanice moderne. Editura Tehnică, Bucureşti,
1980; 8. Popescu P., ş.a. Mecanica manipulatoarelor şi roboţilor – Probleme, vol. I...vol. IV. E.D.P.- SA,
Bucureşti, 1994; 9. Rădulescu Gh., ş.a. Îndrumar de proiectare în construcţia de maşini, Vol. III. Editura Tehnică,
Bucureşti, 1986 H. Bibliografie minimală de studiu pentru studenţi
1. Mircea O. Sisteme mecanice Mecatronice - Curs şi Test pentru verificarea cunosţiintelor. Format A5, Universitatea din Galaţi, 2007, Obligatoriu integral.
Data aprobării programei analitice în catedră 19.01.2007
Şef catedră
Prof dr ing Georgescu V.

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: octavian.mircea @ugal.ro
PROGRAMA ANALITICĂ
Disciplina: SISTEME MECANICE MECATRONICE
A. Locul disciplinei în planul de învăţământ: Anul III
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C L C P C P Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
- - 3 2 42 28 - E,P - 4+2 M-D3102
B. Obiectivele disciplinei:
• Cunoaşterea evoluţiei sistemelor mecanice mecatronice în ţara noastră şi pe plan mondial;
• Formarea unei concepţii sistemice asupra structurii sistemelor mecanice mecatronice; • Dezvoltarea capacităţii ingineresti de utilizare sistemelor mecanice mecatronice si de
alegere a lor pentru realizarea unor produse industriale de inalta competitivitate; • Cunoaşterea structurii mecanice si a mecanismelor componente ale robotilor şi aplicarea
în diferitele ramuri industriale; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de modalităţi de transmitere a mişcării, aplicatii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 25%) prin metode orale la orele de laborator si evaluare sumativă (pondere 75%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. TRANSMISIILE ROBOTILOR – 12 ore Transmisii prin curele dintate. Transmisii prin lanturi. Aspecte functionale si constructive.
Elemente de cinematica transmisiilor prin lant. Transmisii pinion – cremaliera. Transmisii cu mecanisme planetare. Structura mecanismelor planetare. Cinematica mecanismelor planetare. Conditii suplimentare la reductoare planetare. Metoda contururilor de calcul a vitezelor unghiulare ale mecanismelor dintate
2. SISTEME DE ORIENTARE – 12 ore Sisteme de orientare cu mecanisme diferentiale de ordinul I. Sisteme de orientare cu
mecanisme diferentiale de ordinul II. Sisteme de orientare cu mecanisme diferentiale combinate. Sisteme de orientare la manipulatoarele stapan-sclav.
3. SISTEME DE PREHENSIUNE – 12 ore Notiuni introductive. Prehensiunea. Sistemul de prehensiune. Exemple semnificative de
sisteme de prehensiune. Clasificarea sistemelor de prehensiune. Sisteme naturale de prehensiune. Sisteme artificiale de prehensiune. Constructia mainilor mecanice. Calculul mainilor mecanice. Conditiile minime de prehensiune statica. Determinarea fortei de strangere necesare. Sinteza

cinematica a mecanismelor de prehensiune cu bacuri. Sinteza cinematica a elementelor tip bara. Aspecte de analiza cinetostatica.
4. ECHILIBRAREA STATICA A ROBOTILOR – 6 ore Generalitati. Echilibrarea statica a componentelor robotilor. Echilibrarea robotilor industriali
cu axele articulatiilor reciproc paralele si orizontale. Echilibrarea manipulatoarelor pantografe. Exemplu de echilibrare cu contragreutati a unui robot. Exemplu de echilibrare statica cu resoarte pentru RI.
F. Conţinutul Proiectului/ număr de ore pentru fiecare temă: Proiectarea unui sistem mecatronic de rotire cu reductor armonic - schema cinematica -2 ore - alegerea sistemului de actionare -2 ore - proiectarea sistemului de actionare -2 ore - calculul transmisiei prin curele dintate -2 ore - calculul angrenajului armonic -4 ore - calculul si verificarile organologice -2 ore - dimensionarea arborelui reductorului si stabilirea dimensiunilor constructive ale carcasei -2 ore - determinarea dimensiunilor asamblarii canelate-2 ore - alegerea si verificarea rulmentilor -2 ore - - verificarea la incalzire -2 ore - realizarea desenului de ansamblu al sistemului de rotire -4 ore - realizarea desenelor de executie -2 ore
G. Bibliografie de elaborare a cursului si proiectului 1. Antonescu P.. Mecanisme. Calculul structural şi cinematic, Institutul Politehnic Bucureşti, 1979 2. Demian T. Elemente constructive de mecanica fină. E.D.P. Bucureşti, 1980; 3. Drimer D., ş.a. Roboţi industriali şi manipulatoare.Editura Tehnică, Bucureşti, 1985; 4. Dudiţă Fl., Diaconescu D. Optimizarea structurală a mecanismelor. Editura Tehnică, Bucureşti,
1987; 5. Kovacs F., Rădulescu C. Roboţi industriali. Universitatea Tehnică, Timişoara, 1992; 6. Mircea O., Banea D.M., Elementele mecanice ale roboţilor industriali. Editura BREN, Bucureşti,
2003; 7. Miloiu Gh., Dudiţă Fl., Diaconescu D. Transmisii mecanice moderne. Editura Tehnică, Bucureşti,
1980; 8. Popescu P., ş.a. Mecanica manipulatoarelor şi roboţilor – Probleme, vol. I...vol. IV. E.D.P.- SA,
Bucureşti, 1994; 9. Rădulescu Gh., ş.a. Îndrumar de proiectare în construcţia de maşini, Vol. III. Editura Tehnică,
Bucureşti, 1986 10. Chisiu A., s.a. Organe de masini. Editura Didactica si Pedagogica, Bucuresti, 1981; 11. Bejan C., s.a. Idrumar de proiectare in constructia de masini. Editura Tehnica, Bucuresti, 1982. 12. Iordachita I. Mecanisme spaciale si transmisii mecanice pentru roboti industriali. Pentru uzul studentilor. Reprografia Universitatii din Craiova, 1997.
H. Bibliografie minimală de studiu pentru studenţi 1. Mircea O. Sisteme mecanice Mecatronice - Curs şi Test pentru verificarea cunosţiintelor.
Format A5, Universitatea din Galaţi, 2007, Obligatoriu integral. Data aprobării programei analitice în catedră 19.01.2007
Şef catedră
Prof dr ing Georgescu V.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: octavian.mircea @ugal.ro
PROGRAMA ANALITICĂ
Disciplina: SISTEME MECANICE MECATRONICE
A. Locul disciplinei în planul de învăţământ: Anul III
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
2 2 - - 28 28 E - 5 - M-D3102-1
B. Obiectivele disciplinei:
• Cunoaşterea evoluţiei sistemelor mecanice mecatronice în ţara noastră şi pe plan mondial;
• Formarea unei concepţii sistemice asupra structurii sistemelor mecanice mecatronice; • Dezvoltarea capacităţii ingineresti de utilizare sistemelor mecanice mecatronice si de
alegere a lor pentru realizarea unor produse industriale de inalta competitivitate; • Cunoaşterea structurii mecanice si a mecanismelor componente ale robotilor şi aplicarea
în diferitele ramuri industriale; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de modalităţi de transmitere a mişcării, aplicatii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 25%) prin metode orale la orele de laborator si evaluare sumativă (pondere 75%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. NOTIUNI INTRODUCTIVE – 2ore Structura şi funcţiile sistemelor mecatronice. Construcţia şi proiectarea sistemelor mecanice. Sisteme mecanice specifice construcţiilor mecatronice. Domenii de utilizare
2. STRUCTURA MECANISMELR ROBOŢILOR INDUSTRIALI – 6 ore Structura generală a roboţilor. Structura sistemului mecanic al roboţilor. Cuple cinematice.
Gradul de mobilitate si manevrabilitate al unui robot. Mecanisme generatoare de traiectorie şi spaţii de lucru.
3. DISPOZITIVUL DE GHIDARE – 10 ore Construcţia batiului. Pivotare cu acţionare electrică. Pivotare cu acţionare hidraulică. Lagărul
modulului de rotire. 4. GHIDAJE DE TRANSLŢIE – 8 ore
Ghidaje cu alunecare. Variante constructive. Calculul ghidajelor. Modalitati de deplasare a glisierei. Oprirea glisierei la punct fix.Ghidaje prin rostogolire. Ghidaje cu bile. Ghidaje cu role. Calculul ghidajului prin rostogolire. Antrenarea glisierei cu sistem surub - piulita. Sistem de translatie cu surub rotativ. Sistem de translatie cu surub fix si piulita rotativa. Antrenarea glisierei cu transmisie armonica surub-piulita. Realizarea miscarii de translatie pas cu pas.

F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: 1. Prezentarea laboratorului. Instructaj de protecţie a muncii – 2 ore 2. Cuple cinematice. Scheme cinematice structurale ale roboţilor– 2 ore 3. Spaţii de lucru ale mecanismelor generatoare de traiectorie – 2 ore 4. Analiza directă a poziţiilor pentru diferite structuri mecanice de roboţi– 2 ore 5. Analiza inversă a poziţiilor pentru diferite structuri mecanice de roboţi – 2 ore 6. Analiza combinată a poziţiilor pentru diferite structuri mecanice de roboţi – 2 ore 7. Calculul vitezelor şi acceleraţiilor pentru diferite scheme cinematice de roboţi – 2 ore 8. Ghidaje prin alunecare utilizate în construcţia roboţilor – 2 ore 9. Utilizarea ghidajelor prin rostogolire in construcţia roboţilor – 2 ore 10. Transmiterea mişcării prin curele dinţate şi cu lanţ – 2 ore 11. Sisteme de orientare de ordinul I – 2 ore 12. Sisteme de orientare de ordinul II – 2 ore 13. Construcţia şi calculul mâinilor mecanice – 2 ore 14. Echilibrarea roboţilor – 2 ore G. Bibliografie de elaborare a cursului
1. Antonescu P.. Mecanisme. Calculul structural şi cinematic, Institutul Politehnic Bucureşti, 1979 2. Demian T. Elemente constructive de mecanica fină. E.D.P. Bucureşti, 1980; 3. Drimer D., ş.a. Roboţi industriali şi manipulatoare.Editura Tehnică, Bucureşti, 1985; 4. Dudiţă Fl., Diaconescu D. Optimizarea structurală a mecanismelor. Editura Tehnică, Bucureşti,
1987; 5. Kovacs F., Rădulescu C. Roboţi industriali. Universitatea Tehnică, Timişoara, 1992; 6. Mircea O., Banea D.M., Elementele mecanice ale roboţilor industriali. Editura BREN, Bucureşti,
2003; 7. Miloiu Gh., Dudiţă Fl., Diaconescu D. Transmisii mecanice moderne. Editura Tehnică, Bucureşti,
1980; 8. Popescu P., ş.a. Mecanica manipulatoarelor şi roboţilor – Probleme, vol. I...vol. IV. E.D.P.- SA,
Bucureşti, 1994; 9. Rădulescu Gh., ş.a. Îndrumar de proiectare în construcţia de maşini, Vol. III. Editura Tehnică,
Bucureşti, 1986 H. Bibliografie minimală de studiu pentru studenţi
1. Mircea O. Sisteme mecanice Mecatronice - Curs şi Test pentru verificarea cunosţiintelor. Format A5, Universitatea din Galaţi, 2007, Obligatoriu integral.
Ttular disciplina, Sef. Lucr. Dr. Ing. Mircea Octavian. Semnatura: Data aprobării programei analitice în catedră 11.07.2007
Şef catedră
Prof dr ing Georgescu V.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: octavian.mircea @ugal.ro
PROGRAMA ANALITICĂ
Disciplina: SISTEME MECANICE MECATRONICE
A. Locul disciplinei în planul de învăţământ: Anul III
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
- - 3 2 42 28 - E - 6 M-D3102-1
B. Obiectivele disciplinei:
• Cunoaşterea evoluţiei sistemelor mecanice mecatronice în ţara noastră şi pe plan mondial;
• Formarea unei concepţii sistemice asupra structurii sistemelor mecanice mecatronice; • Dezvoltarea capacităţii ingineresti de utilizare sistemelor mecanice mecatronice si de
alegere a lor pentru realizarea unor produse industriale de inalta competitivitate; • Cunoaşterea structurii mecanice si a mecanismelor componente ale robotilor şi aplicarea
în diferitele ramuri industriale; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de modalităţi de transmitere a mişcării, aplicatii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 25%) prin metode orale la orele de laborator si evaluare sumativă (pondere 75%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Elemente constructive ale sistemelor mecanice de transmitere prin curele dinţate...... 2 ore Forme constructive de transmisii prin curea dinţată. Structura curelei. Parametrii geometrici. Dimensiuni nominale. Metodica de proiectare (dimensionare, verificare). Domenii de utilizare. Aplicaţii
2. Elemente constructive ale sistemelor mecanice de transmitere planetare..................... 3 ore Structura transmisiilor planetare. Cinematica transmisiilor planetare simple (monomobile, diferenţiale). Dinamica. Particularităţi de calcul . Domenii de utilizare. Aplicaţii
3. Elemente constructive ale sistemelor mecanice de transmitere armonice..................... 5 ore Principiul de funcţionare.Clasificare. Geometria elementelor constructive ale transmisiei armonice danturate. Raportul de transmitere. Corelarea numerelor de dinţi. Mişcări relative între elementele constructive. Solicitări. Moduri de deteriorare. Calculul de rezistenţă. Randamentul unei transmisii armonice. Domenii de utilizare. Aplicaţii
4. Elemente constructive ale sistemelor mecanice pentru transformarea mişcării........ 1 oră Transmisii cu cremalieră. Tipuri constructive. Clasificare. Calcul de rezistenţă. Domenii de utilizare. Aplicaţii 4.1. Transmisii cu şurub.................................................................................................... 9 ore

Tipuri constructiv – funcţionale de şuruburi de mişcare. Transmisii şurub-piuliţă cu alunecare. Aplicaţii. Transmisii şurub-piuliţă cu rostogolire. Principiul constructiv şi funcţional. Clasificare. Materiale. Geometria elementelor constructive. Analiza cinematică. Forţe şi momente. Randamentul. Reglarea jocurilor, pretensionarea şi rigiditatea. Sisteme de rezemare. Caracteristici constructive şi funcţionale . Domenii de utilizare. Aplicaţii.
5. Sisteme de orientare – 8 ore Sisteme de orientare cu mecanisme diferentiale de ordinul I. Sisteme de orientare cu
mecanisme diferentiale de ordinul II. Sisteme de orientare cu mecanisme diferentiale combinate. Sisteme de orientare la manipulatoarele stapan-sclav.
6. Sisteme de prehensiune – 8 ore Notiuni introductive. Prehensiunea. Sistemul de prehensiune. Exemple semnificative de
sisteme de prehensiune. Clasificarea sistemelor de prehensiune. Sisteme naturale de prehensiune. Sisteme artificiale de prehensiune. Constructia mainilor mecanice. Calculul mainilor mecanice. Conditiile minime de prehensiune statica. Determinarea fortei de strangere necesare. Sinteza cinematica a mecanismelor de prehensiune cu bacuri. Sinteza cinematica a elementelor tip bara. Aspecte de analiza cinetostatica.
4. Echilibrarea statica a robotilor – 6 ore Generalitati. Echilibrarea statica a componentelor robotilor. Echilibrarea robotilor industriali
cu axele articulatiilor reciproc paralele si orizontale. Echilibrarea manipulatoarelor pantografe. Exemplu de echilibrare cu contragreutati a unui robot. Exemplu de echilibrare statica cu resoarte pentru RI.
F. Conţinutul Proiectului/ număr de ore pentru fiecare temă: Proiectarea unui sistem mecatronic de rotire cu reductor armonic - schema cinematica -2 ore - alegerea sistemului de actionare -2 ore - proiectarea sistemului de actionare -2 ore - calculul transmisiei prin curele dintate -2 ore - calculul angrenajului armonic -4 ore - calculul si verificarile organologice -2 ore - dimensionarea arborelui reductorului si stabilirea dimensiunilor constructive ale carcasei -2 ore - determinarea dimensiunilor asamblarii canelate-2 ore - alegerea si verificarea rulmentilor -2 ore - - verificarea la incalzire -2 ore - realizarea desenului de ansamblu al sistemului de rotire -4 ore - realizarea desenelor de executie -2 ore
G. Bibliografie de elaborare a cursului si proiectului 1. Antonescu P.. Mecanisme. Calculul structural şi cinematic, Institutul Politehnic Bucureşti, 1979 2. Demian T. Elemente constructive de mecanica fină. E.D.P. Bucureşti, 1980; 3. Drimer D., ş.a. Roboţi industriali şi manipulatoare.Editura Tehnică, Bucureşti, 1985; 4. Dudiţă Fl., Diaconescu D. Optimizarea structurală a mecanismelor. Editura Tehnică, Bucureşti,
1987; 5. Kovacs F., Rădulescu C. Roboţi industriali. Universitatea Tehnică, Timişoara, 1992; 6. Mircea O., Banea D.M., Elementele mecanice ale roboţilor industriali. Editura BREN, Bucureşti,
2003; 7. Miloiu Gh., Dudiţă Fl., Diaconescu D. Transmisii mecanice moderne. Editura Tehnică, Bucureşti,
1980; 8. Popescu P., ş.a. Mecanica manipulatoarelor şi roboţilor – Probleme, vol. I...vol. IV. E.D.P.- SA,
Bucureşti, 1994; 9. Rădulescu Gh., ş.a. Îndrumar de proiectare în construcţia de maşini, Vol. III. Editura Tehnică,
Bucureşti, 1986 10. Chisiu A., s.a. Organe de masini. Editura Didactica si Pedagogica, Bucuresti, 1981; 11. Bejan C., s.a. Idrumar de proiectare in constructia de masini. Editura Tehnica, Bucuresti, 1982. 12. Iordachita I. Mecanisme spaciale si transmisii mecanice pentru roboti industriali. Pentru uzul studentilor. Reprografia Universitatii din Craiova, 1997.

H. Bibliografie minimală de studiu pentru studenţi
1. Mircea O. Sisteme mecanice Mecatronice - Curs şi Test pentru verificarea cunosţiintelor. Format A5, Universitatea din Galaţi, 2007, Obligatoriu integral.
Titular curs: SL dr ing Mircea Octavian. Semnătura:
Titular lucrări practice: As. Ing. Drd. Banea Doina Mariana. Semnătura:
Data aprobării programei analitice în catedră 19.01.2007
Şef catedră
Prof dr ing Georgescu V.

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICĂ CATEDRA / DEPARTAMENTUL TCM Adresa: Strada Domneasca Nr.111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: Sisteme si echipamente de conducere
Locul disciplinei în planul de învăţământ: Anul IV
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C S C P C L+
P Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
28 14 28 14 56 14+14
E E+P 4 5 M-S3206-2
A. Obiectivele disciplinei:
• Insusirea cunoştinţelor privind structura sistemelor şi echipamentelor de conducere • Utilizarea limbajelor de conducere a CNC • Utilizarea programelor de control şi monitorizare a sistemelor automate
B. Metode de predare – învăţare: explicaţia, studiu de caz, conversaţia euristică
C. Forme şi metode de evaluare: evaluare continuă ( pondere 30% ) prin metode orale, probe scrise, practice şi teme de casă; evaluare sumativă (pondere 70%) prin probe scrise/orale
D. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Introducere în problematica sistemelor şi echipamentelor de conducere (4 ore) Funcţiile sistemelor de conducere numerică. Structuri tipice de arhitecturi ale sistemelor de conducere. 2. Achiziţia datelor (6 ore) Sisteme de achiziţie a informaţiei digitale. Sisteme de achiziţie date analogice. Sisteme de distribuţie date analogice şi digitale. 3. Conducerea cu automate programabile (10 ore) Conducerea cu automate programabile scalare si vectoriale. Conducerea cu controlere logice programabile. Module IO distribuite. Module IO analogice Module de numărare. Module de control ale axelor. Module de comunicaţie. 4. Monitorizarea şi comanda sistemelor de conducere (18 ore) Pachete SCADA. Servere OPC. Specificaţii OPC. Dezvoltarea interfeţelor de monitorizare şi comanda utilizând pachete SCADA. 5. Sisteme de conducere bazate pe CNC (18 ore) Sisteme de conducere cu CNC. Structura tipică CNC. Parametrii CNC pentru axele de deplasare. Funcţii auxiliare executate de CLP. Parametri de comandă şi control. Programarea CNC.

E. Conţinutul seminariilor / număr de ore pentru fiecare temă:
1. Programarea operaţiilor de găurire si frezare pentru o maşina de găurit în coordonate cu comandă numerică (4 ore)
2. Programarea unui strung frontal cu CNC. (4 ore) 3. Dezvoltarea interfeţei om – maşină pentru robotul RS54 folosind pachetul Vijeo
LOOK (3 ore) 4. Dezvoltarea interfeţei om – maşină pentru robotul MP02 folosind pachetul Monitor
PRO. (3ore)
F. Proiect: Proiectarea interfeţei om-maşină pentru un set de manipulatoare şi roboţi folosind programe SCADA
G. Bibliografie de elaborare a cursului
1. Borangiu Th. Sisteme educaţionale în industrie Ed. Tehnică. 1991 2. Marinescu V Conducerea sistemelor flexibile de prelucrare Ed. Fundaţiei
Universitare Dunărea de Jos, Galati , 2000 ; 3. Marinescu V Sisteme şi echipamente de comandă numerică. Vol 1,2,3.
Controlere logice programabile. Ed. Cartea Universitară, Bucureşti, 2004 ;
4.*** Schneider Automation Inc. Technical Documentation PL7PRO 5.*** NumCNC. Programming manual turning milling 6.*** Schneider Automation Inc. Vijeo LOOK Technical
documentation. 7.*** Schneider Automation Inc. Monitor Pro Technical
documentation H. Bibliografie minimală de studiu pentru studenţi1
1. Marinescu V Sisteme şi echipamente de comandă numerică. Vol 1,2,3.
Controlere logice programabile. Ed. Cartea Universitară, Bucureşti, 2004 ;
Titular curs: Prof. Dr. Ing Vasile Marinescu Semnătura:
Data aprobării programei analitice în catedră / departament 05-02-2007
(Semnătura)
Director departament / Şef catedră
Prof.Dr.Ing.Dumitru Nicoară
1 Este de preferat ca bibliografia minimală de studiu pentru surdenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atnigerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.


UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: STRUCTURA SISTEMELOR INFORMATICE
A. Locul disciplinei în planul de învăţământ:
Anul IV Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
42 28 - - 42 28 V - 5 - M-S 3102-1
B. Obiectivele disciplinei:
• Cunoaşterea modului de evoluare si de dezvoltare, in ţara noastră si pe plan mondial, a sistemelor informatice;
• Formarea unei concepţii sistemice asupra structurii sistemelor informatice • Dezvoltarea capacităţii ingineresti de utilizare calculatorului electronic; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de realizare a controlului unor imbinari sudate, aplicatii practice individuale cu diferite echipamente de control.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator si evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Concepte de bază privind tehnologia informaţională şi comunicaţională......9 c
2. Calculatorul electronic – elemente fundamentale de structură şi principii de funcţionare..........................................................................................................9c
3. Sisteme de operare..........................................................................................6 c
4. Reţele de calculatoare ....................................................................................6 c
5. Produse program ............................................................................................3 c
6. Logica programării.........................................................................................6 c
7. Tendinţe în tehnologiile informaţionale.........................................................3 c
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: Tematica laborator……………………………………………………………28 L
1. Prezentarea sistemelor de calcul. Componente hardware şi software………2L 2. Sisteme de operare. Definire şi funcţii generale. Sistemul de operare Windows. Interfaţa
sistemului de operare Windows. Metode generice de interacţiune (ferestre, meniuri, pictograme, linii de instrumente), programe utilitare furnizate împreună cu sistemul de operare (My

Computer şi Windows Explorer) , conceptele de fişier şi director (folder), Control Panel, aplicaţii utile din structura sistemului de operare Windows. Notepad, Paint, WordPad………2L
3. Întreţinerea discurilor (ScanDisk, DiskDefragmenter), programe antivirus, programe de arhivare, modul de utilizare a disketelor şi CD-urilor………..2L
4. Reţele de calculatoare……………………………………………………….2L 5. Editoare şi procesoare de texte. Definire şi prezentare Microsoft Word. Elemente specifice
ferestrei principale a aplicaţiei Word. Crearea unui document nou. Deplasarea prin document. Introducerea unui text, utilizarea tastaturii româneşti, scurtături pentru caractere, salvarea unui document, regăsirea documentelor, formatarea la nivel de pagină, formatarea caracterelor, coduri ascunse, alinierea textului. Reguli elemetare pentru introducerea textului. Mutarea şi copierea textului, căutarea şi înlocuirea unui text, folosirea şabloanelor, numerotarea paginilor, antete şi subsoluri de pagină, corectarea documentului, crearea listelor numerotate şi a celor marcate, previzualizarea şi tipărirea documentelor. Aranjarea textului în coloane, folosirea stilurilor, folosirea formatării automate, schimbarea literelor mari în litere mici şi invers, despărţirea automată în silabe, lucrul cu documente multiple, protejarea documentelor cu parolă. Tabele – formatare automată, calcule matematice în tabele, sortări în tabele. Editarea ecuaţiilor matematice. Inserarea de figuri. Diagrame create după datele dintr-un tabel. Crearea automată a unui index şi crearea automată a unui cuprins. Crearea macro-urilor în Word……………12 L Realizarea de prezentări multimedia utilizând Microsoft PowerPoint. Crearea prezentărilor. Formatare text şi imagini. Grafice, diagrame şi desenarea obiectelor. Efecte aplicate diapozitivelor. Pregătirea prezentării……………8L G. Bibliografie de elaborare a cursului 1. Băduţ, M., Calculatorul în trei timpi (ediţia a II-a), Editura Polirom, Iaşi, 2002 2. Bolun, I., Covalenco, I., Bazele informaticii aplicate, Ediţia a treia, Editura Bonitas, Iaşi, 2004 3. Bot, Ed, Leonhard, Woody, Microsoft Office XP, traducere de Simona şi Titi Preda, Editura
Teora, Bucureşti, 2003 4. Crumlish, C., Internet pentru oameni ocupaţi, Editura Bic All, 2002 5. Dodescu, Gh., Sisteme de calcul şi operare, Editura Economică, Bucureşti, 2003 6. Dodescu, Gh., Vasilescu, A., Oancea, B., Sistemul de operare Unix şi Windows, Editura
Economică, Bucureşti, 2003 7. Melnic, A., Bucşă, R., Bazele tehnologiei informaţiei, Editura TehnicaInfo, Chişinău, 2005 8. Melnic, A., Bazele informaticii economice, Teorie şi aplicaţii, Editura Sedcom Libris, Iaşi,
2004 9. Norton, P., Reţele de calculatoare, Editura Teora, Bucureşti, 2000 10. Roşca, I.G., Ţăpuş, N., Internet & Intranet, Concepte şi aplicaţii, Editura Economica,
Bucureşti, 2000 11. Surcel, Tr., Sofronie, Gh., Baron, C., Toma, L., Informatică generală, Editura Calipso 2000,
Bucureşti, 1998 12. Tudose, A., Sisteme multimedia, Editura Moldavia, Bacău, 1999 13. Vaughan, T., Multimedia.Ghid practic, Editura Teora, Bucureşti, 2002 14. Bibliografie minimală de studiu pentru studenţi
1. Iordachescu, M., Scutelnicu, E., Structura sistemelor informatice, note de curs, Ed. Fundatiei Universitare Dunarea de Jos, Galati, 2007.
Data aprobării programei analitice în catedră: 19.01.2007
Titular curs: Sef lucr dr ing Mihaela Iordachescu Titular lucrări practice: Sef lucr dr ing Mihaela Iordachescu Semnătura:
Şef catedră
Prof dr ing Georgescu Valeriu

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: TEHNICI DE FABRICAŢIE A ROBOŢILOR INDUSTRIALI
A. Locul disciplinei în planul de învăţământ: Anul IV UTS
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr.ore - - 28 14 28 14 - E - 5 M-S3208
B. Obiectivele disciplinei:
• Cunoaşterea procesului de producţie prin elementele acestuia; • Formarea unei concepţii sistemice asupra metodelor de fabricaţie; • Cunoaşterea principalelor tehnologii de fabricaţie; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, aplicatii practice ale unor tehnologii. D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele
de laborator si evaluare sumativă (pondere 70%) prin test-grila scris. E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Procesul de producţie. - 1 oră Elemente componente, tipuri de producţie.
2. Precizie şi calitate. – 2 ore Metode de obţinere, factori de influenţă.
3. Dimensiuni şi baze de prelucrare. – 3 ore Lanţuri de dimensiuni, baze tehnologice şi de măsurare, precizia aşezării, scheme tipice de
bazare. 4. Alegerea semifabricatelor. - 1 oră
Metode de semifabricare, adaosuri de prelucrare, dimensiuni intermediare. 5. Procesul tehnologic. – 6 ore
Date iniţiale, principii de proiectare, succesiunea operaţiilor, alegerea maşinii unelte, tipizare, tehnologia de grup, alegerea variantei optime, norma de timp şi norma de producţie.
6. Tehnologii de prelucrare prin aşchiere. – 8 ore Prelucrarea alezajelor prin: burghiere, alezare, zencuire, strunjire, rectificare, rodare,
superfinisare; prelucrarea arborilor prin: strunjire, frezare, broşare exterioară, rectificare; prelucrarea suprafeţelor plane prin: rabotare, mortezare, frezare, broşare, rectificare; prelucrarea roţilor dinţate; prelucrarea filetelor.
7. Tehnologii de prelucrare prin presare la rece. – 7 ore Prelucrarea prin: tăiere, îndoire, ambutisare, fasonare, presare volumică; asamblarea prin
presare la rece; procedee speciale de prelucrare prin presare la rece

F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: 1. Adaosuri de prelucrare şi dimensiuni intermediare. -2 ore 2. Orientarea şi fixarea pieselor pe maşini unelte în vederea prelucrării mecanice. – 2 ore 3. Prelucrarea prin strunjire a pieselor tip arbore. - 2 ore 4. Prelucrarea alezajelor din piese de tip bucşă. – 2 ore 5. Prelucrarea filetelor. – 2 6. Rectificarea suprafeţelor de revoluţie exterioare. – 2 ore 7. Rectificarea alezajelor diverse pe maşini de rectificat universale. – 2 ore G. Bibliografie de elaborare a cursului
1. Bejan, V., Tehnologia fabricării şi a reparării utilajelor tehnologice, vol. I şi II, Bucureşti, 1991.
2. Gavrilaş, I., Voicu, N., Tehnologia pieselor tip arbore, bucşă şi disc pe maşini-unelte clasice şi cu comandă program, E.T., Bucureşti, 1975.
3. Picoş, C., Tehnologia Construcţiei de maşini, E.D.P., Bucureşti, 1974. 4. Raşeev, D. D., Oprean, I. D., Tehnologia fabricării şi reparării utilajului tehnologic,
E.D.P., Bucureşti, 1983. 5. Teodorescu, M., Zgură, Gh., Tehnologia presării la rece, Editura Didactică şi Pedagogică,
Bucureşti, 1980. 6. Zgură, Gh., Ciocârdia, C., Bude, G., Prelucrarea metalelor prin deformare la rece,
Editura Tehnică, Bucureşti, 1977. 7. Tuzu, C., Tehnologie şi calitate în fabricarea maşinilor şi utilajelor, Editura Tehnică,
Bucureşti
1. Bibliografie minimală de studiu pentru studenţi 1. Picoş, C., Tehnologia Construcţiei de maşini, E.D.P., Bucureşti, 1974.
2. Teodorescu, M., Zgură, Gh., Tehnologia presării la rece, Editura Didactică şi Pedagogică, Bucureşti, 1980. 3. Notiţe de curs.
Întocmit, Ş.l. ing. Neniţă Gabriel Data aprobării programei analitice în catedră
02.02.2007
Şef catedră Prof dr ing Georgescu Valeriu
III. UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI
FACULTATEA DE METALURGIE ŞI ŞTIINŢA MATERIALELOR CATEDRA DEFORMĂRI PLASTICE ŞI TRATAMENTE TERMICE Adresa: Strada Domnească nr 111, cod 800201 Nr. telefon / fax: 40236460754 E-mail: [email protected]
PROGRAMA ANALITICĂ Disciplina: TEHNOLOGIA MATERIALELOR
A.Locul disciplinei în planul de învăţământ: Anul I
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
2 1 28 14 V 3
B.Obiectivele disciplinei:
Tehnologia materialelor este un curs de cultura generala tehnica care trateaza probleme referitoare la metode moderne de obtinere a materialelor si semifabricatelor si de prelucrare a acestora, noi materiale metalice si nemetalice utilizate in constructia de masini in general si cu referire la industria navala, proprietatile materialelor si utilizarea rationala a acestora. Ca disciplina de pregatire tehnica generala, Tehnologia materialelor, constituie baza pregatirii tehnologice a viitorului inginer, permite dezvoltarea ulterioara a disciplinelor tehnice de baza si tehnologice de specialitate. Disciplina contribuie la dezvoltarea gandirii tehnico-economice, la intelegerea notiunilor de calitate si eficienta, trateaza elemente privind protectia muncii si a mediului ambiant si prefigureaza relatiile interumane in procesele tehnologice.
C.Metode de predare – învăţare: prelegerea, explicaţia, dezbaterea, studiul de caz, simularea de procese, metode de lucru în grup şi individual,
D. Forme şi metode de evaluare: Verificare pe parcursul semestrului prin lucrari scrise, examen scris la sfarsitul semestrului I .Evaluarile vor lua in considerare activitatea studentilor la curs si laborator si rezultatele testelor pe parcursul semestrului cu o pndere de 50%.
E.Conţinutul cursului / număr de ore pentru fiecare temă: 1Tehnologia ca stiinta. Procese de productie si tehnologice. Analiza eficientei. Materiale folosite in
constructia de masini si nave. Clasificare si simbolizare. 2 ore 2 Proprietatile si incercarile materialelor Elemente de metalurgie generala: metalurgia fontei,
metalurgia otelului, metalurgia principalelor metale neferoase Cu, Al. 4 ore 3 Prelucrarea materialelor metalice prin turnare. Tehnologii specifice. 4 ore 4 Prelucrarea materialelor metalice prin deformare plastica: laminarea, extruziunea, trefilarea si
tragerea, forjarea libera si in matrita, utilaje pentru forjare si matritare. Prelucrarea semifabricatelor din table si benzi. 8 ore
5 Prelucrarea prin sudare a materialelor metalice, tehnologii specifice. 5 ore 6 Prelucrarea materialelor metalice placate. 1 ora 7 Prelucrarea materialelor metalice prin agregare de pulberi. 1 ora 8 Procedee neconventionale de prelucrare prin eroziune. 1 ora 9 Materiale nemetalice. 1 ora 10 Coroziunea materialelor, tehnologii de protectie anti coroziva. 1 ora
F. Conţinutul laboratoarelor / număr de ore pentru fiecare temă:
Laborator 1 Determinarea principalelor proprietati ale materialelor prin incercari mecanice. Incercari de duritate. Incercarea la tractiune. Incercarea la incovoiere prin soc. Se prezinta studentilor epruvetele, utilajele si aparatele aferente incercarilor, conditiile incercarilor. Studentii efectueaza incercarile, masoara probele, inregistreaza datele si calculeaza marimile caracteristice. 2 ore Laborator 2 Tehnologii de formare manuala in doua rame si de turnare. Se prezinta studentilor pricipalele dispozitive utilizate: modele si cutii pentru miezuri, placa de model, ramele de formare. Se prezinta sculele si materialele utilizate la formare. Concomitent cu conducatorul lucrarii studentii efectueaza operatiile corespunzatoare tehnologiei de formare manuala. In formele relizate de studenti se toarna aliaj de plumb, se lasa sa se solidifice, se extrag pisele si se analizeaza calitatea acestora evidentiindu-se eventualele defecte.. 2 ore Laborator 3 Laminarea. Se prezinta studentilor utilajul pentru laminare. Pentru evidentierea conditiei de prindere se efectueaza laminare la limita in trei stari ale suprafetei cilindrilor: unsa, curata, cretata pe probe din plumb cu sectiune dreptunghiulara Se determina gradele de deformare, coeficientii de deformare, coeficientii de frecare pentru cele trei stari ale suprafetelor. Se verifica legea volumului constant, se traseaza curbele de variatie ale coeficientilor de deformare cu reducerea relativa. Se analizeaza rezultatele. Extruziunea. Se prezinta studentilor utilajul pentru extruziune Se supune operatiei o proba din plumb, pe o presa manuala care permite masurarea fortei in fiecare moment al cursei. Se traseaza curba de variatie a fortei cu deplasarea poansonului, se pun in evidenta etapele procesului de extruziune.. 2 ore Laborator 4 Forjarea libera. Se prezinta studentilor principalele operatii ale forjarii refularea, intinderea si gaurirea, utilajul sculele si dispozitivele aferente. Se efectueaza impreuna cu studentii operatiile pe probe din plumb. In cazul refularii se determina gradul de deformare si se verifica conditia de flambaj. Forjarea in matrita deschisa cu bavura. Se prezinta studentilor utilajul si dispozitivul de matritare. Se efectueaza impreuna cu studentii operatia de matritare pe o proba din plumb, pe o presa manuala care sa permita masurarea fortei in orice moment al cursei. Se inregistreaza valorile si se traseaza curba de variatie a fortei cu deplasarea. Se evidentiaza etapele matritarii: refularea, curgerea in locasul de matritare, curgerea in locasul de bavura. Se evidentiaza rolul locasului de bavura in procesul de matritare deschisa. 2 ore Laborator 5
Determinarea sudabilitatii otelurilor. Se defineste sudabilitatea si factorii care o influenteaza. Se clasifica materialele din punct de vedere a sudabilitatii. Se prezinta metodele de apreciere a sudabilitatii otelurilor. Metoda duritatii maxime in ZIT. Studentii calculeaza valoarea duritatii maxime in ZIT pentru doua oteluri OL37.1k si 51VCr11. Pe probe sudate si pregatite corespunzator studentii fac masuratori pentru evidentierea duritatii maxime. Pe baza valorilor calculate si masurate se incadreaza otelurile in clasa de sudabilitate corespunzatoare. Metoda tensiunii critice de rupere. Se executa prin sudare electrica manuala probe sudate de colt in forma literei T din cele doua oteluri amintite. Se supun apoi ruperii prin lovire si pe baza zonei de propagare a ruperii se apreciaza calitativ incadrarea intr-o clasa de sudabilitate.
Sudarea automata sub strat de flux. Se prezinta studentilor utilajul si particularitatile tehnologiei. Se executa un cordon de sudura si se analizeaza rezultatul comparativ cu aceeasi imbinare realizata prin sudare electrica manuala.. 2 ore Laborator 6
Sudarea prin presare la cald cu incalzire prin rezistenta electrica proprie. Se prezinta principiile sudarii prin presare, rolul fortelor de presare. Metode de sudare prin presare: cap la cap si in puncte, utilaje pentru sudare prin presare la cald, parametriii procesului, etapele procesului, trasarea diagramei de evolutie a fortei de presare si intensitatii curentului de incalzire in timp. Relizarea unor probe sudate cap la cap si in puncte cu diferite regimuri. Determinarea influentei intensitatii si duratei de incalzire asupra rezistentei imbinarii. Se inregistreaza datele, se traseaza graficele.
Sudarea si taierea cu flacara oxiacetilenica. Se prezinta principiile teoretice ale proceselor, utilajul si aparatura necesare, schemele tehnologiilor, parametrii proceselor. Cu participarea studentilor se realizeaza o proba de sudare si una de taiere si se analizeaza. 2ore Laborator 7
Verificarea si evaluarea lucrarilor de laborator 2 ore
G.Bibliografie de elaborare a cursului A.Nanu – Tehnologia materialelor, EDP, 1982, Buc. A. Palfalvi, N. Mehedinteanu, s.a. - Tehnologia materialelor, EDP, 1985, Buc. M. Voicu, s.a. - Tehnologia materialelor, EDP, 1978, Buc. G.Calea, D.Drimer, s.a. – Tehnologie mecanica, EDP, 1978, Buc. L. Stoian, s.a. - Tehnologia materialelor, EDP, 1980, Buc. D.Raileanu, N.Cananau, Tehnologia materialelor, vol. I-IV, Universitatea din Galati 1980 N.Cananau, O.Dima, s.a. – Indrumar de laborator - Tehnologia materialelor, vol. I-II Univ. din Galati 1993.
H.Bibliografie minimală de studiu pentru studenţi1 A.Nanu – Tehnologia materialelor, EDP, 1982, Buc. A. Palfalvi, N. Mehedinteanu, s.a. - Tehnologia materialelor, EDP, 1985, Buc. M. Voicu, s.a. - Tehnologia materialelor, EDP, 1978, Buc. G.Calea, D.Drimer, s.a. – Tehnologie mecanica, EDP, 1978, Buc. L. Stoian, s.a. - Tehnologia materialelor, EDP, 1980, Buc. D.Raileanu, N.Cananau, Tehnologia materialelor, vol. I-IV, Universitatea din Galati 1980 N.Cananau, O.Dima, s.a. – Indrumar de laborator - Tehnologia materialelor, vol. I-II Univ. din Galati 1993.
Data aprobării programei analitice în catedră / departament 27.09.2006
Titular curs: Sef Lucr. dr ing. Ovidiu Dima Semnătura: Titular seminar / lucrări practice Sef Lucr. dr ing. Ovidiu Dima Prep. Dr.ing.ec.Carmen Papadatu Semnătura:
Director departament / Şef catedră Conf.dr.ing. Nelu Cazacu
1 Este de preferat ca bibliografia minimală de studiu pentru surdenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atnigerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: TEORIA SISTEMELOR
A. Locul disciplinei în planul de învăţământ:
Anul II MTR Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
- - 28 28 28 28 - E - 4 M-D0005
B. Obiectivele disciplinei: • Familiarizarea studenţilor cu noţiunile generale despre sisteme tehnice in general, structuri
tipice de sisteme, aspecte generale privind modelarea sistemelor, observabilitatea, controlabilitatea şi stabilitatea sistemelor;
• Dezvoltarea capacităţii inginereşti de a aborda analiza produselor mecatronice intr-un mod sistemic;
• Promovarea calităţilor atitudinale şi aptitudinale specifice carierei inginereşti. • Dezvoltarea abilitaţilor de investigare si de modelare; • Înzestrarea cu capacităţi de gândire sistemica;
. C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstraţii practice de reglare si funcţionare a unor sisteme de conducere, studiul bibliografic, aplicaţii practice individuale utilizand utilitarul Matlab.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator si evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Introducere in mecatronică– 2 ore Noţiunea de mecatronică. Particularităţile sistemelor mecatronice. 2. Noţiuni generale de teoria sistemelor – 1 ore Clasificare, reprezentare, matrice de cuplare şi de structură. 3. Complemente de matematica in TS– 4 ore Transformata Laplace. Aaliza schemelor bloc folosind algebra boolena. Funcţii de transfer. 4. Tipuri fundamentale de conexiune – 2 ore Structuri tipice ale elementelor automate de reglare cu reacţie. Sisteme de reglare cu reacţie după stare. 5. Structura generală a sistemelor de conducere – 3 ore Mărimi caracteristice ale sistemelor de conducere. Clasificarea generală a sistemelor. 6. Sistem abstract, model matematic, identificare– 2 ore MMII al elementelor liniare. 7. Exemple de MMII al sistemelor mecanice si electrice– 2 ore MMII al unui circuit RL. MMII al unui circuit hidraulic.

8. Determinarea răspunsului sistemelor - 2 ore Determinarea răspunsului sistemelor continue liniare invariante utilizând ecuaţiile diferenţiale. Semnalele de intrare deterministe importante pentru studiul sistemelor. 9. Sisteme dinamice. Ecuaţiile de stare ale sistemelor liniare- 4 ore 10. Controlabilitatea sistemelor- 2 ore 11. Observabilitatea sistemelor- 2 ore 11. Stabilitatea sistemelor- 2 ore
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă:
1. Introducere în Matlab. Prezentarea toolbox-urilor utilitarului MATLAB - 4 ore 2. Operaţii matematice fundamentale- 2 ore 3. Algebră liniară şi funcţii matriciale- 2 ore 4. Analiza datelor şi transformatele Fourier - 2 ore 5. Analiză numerică neliniară- 2 ore 6. Reprezentarea graficelor 2D- 2 ore 7. Reprezentarea graficelor 3D- 2 ore 8. Vizualizarea graficelor- 2 ore 9. Exemple de modelare în Matlab a sistemelor fizice- 4 ore 10. Analiza unui sistem mecatronic de control pentru modelul motorului de cc - 2 ore 11. Analiza unui sistem de comanda aferent modelul motorului pas cu pas- 4 ore
G. Bibliografie de elaborare a cursului
1. Ionescu, V., Belea, C, Teoria sistemelor, Editura Didactică şi Pedagogică, Bucureşti, 1985 2. Ilaş, C, Teoria sistemelor de reglare automată, MatrixRom, 2001 3. Mânzu, V., s.a., Teoria sistemelor elemente fundamentale, Fundaţia Academica, Galaţi, 2003, ISBN 973-85256-1-6 4. Budişan, N, Teoria sistemelor, vol.1 şi 2, UPT Timişoara, 1986 5. Teodorescu, A., Teoria sistemelor automate, Editura Politehnica, Timişoara, 2003 6. The MathWorks Inc., Simulink 4.1 (Release 12.1), 2001,
http://amath.colorado.edu/courses/4720/2000Spr/Labs/Worksheets/Matlab_tutorial/matlabtutorial.html 7. The MathWorks Inc.: Neural Networks Toolbox 4.0.1 (Release 12.1), 2001 8. *** Introduction to image processing in Matlab, http://robotics.eecs.berkeley.edu/~mayi/imgproc/index.html,
http://amath.colorado.edu/courses/4720/2000Spr/Labs/Worksheets/Matlab tutorial/matlabimpr.html,
1. Bibliografie minimală de studiu pentru studenţi
1. Mistodie L., Teoria sistemelor, note de curs, 2006 2. Kovacs F., Tusz F., Varga S. - Fabrica viitorului. Ed. Multimedia Int., Arad, 1999 3. Ghinea M., Fireteanu M. - Matlab - Calcul numeric, grafica, aplicaţii. Ed. Teora, 1998 4. *** http://www.mathworks.com/academia/student center/ 5. *** http://www.mathworks.com/products/
Data aprobării programei analitice în catedră: 13. 02. 2007. Titular curs: S.L. ing. Mistodie Luigi Titular lucrări practice: As. ing. Barsan Dan Semnătura:
Şef catedră Prof dr ing Georgescu V.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA DE TERMOTEHNICA SI MASINI TERMICE Adresa: str. Domneasca nr. 111 Nr. telefon : 0236-414871 E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: TERMOTEHNICA
A. Locul disciplinei în planul de învăţământ: Anul II-Robotica
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C L C L+
S C L+
S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
42 14+14
42 28 E 5
B. Obiectivele disciplinei. Prezentarea unor aspecte generale prin care sa se fixeze
cunostinte minime legate de fenomenele termice intilnite in tehnica: -notiuni fundamentale privind sistemele termodinamice. -principiile de functionare ale masinilor termice si procesele termice aferente acestora: compresoare, ajutaje, turbine, motoare cu ardere interna, instalatii de forta cu gaze si vapori, instalatii frigorifice. -arederea combustibililor. -transmiterea caldurii si schimbatoare de caldura.
C. Metode de predare – învăţare: prelegerea, dezbaterea, aplicatii practice la fiecare curs,
studiul de caz, simularea de situaţii, studiul documentelor curriculare şi al bibliografiei. D. Forme şi metode de evaluare: evaluare continuă ( pondere 30% ) probe practice(laborator)
şi teme de casă ; evaluare sumativă (pondere 70%) prin probe scrise/orale. E. Conţinutul cursului:
1. Termodinamica generala(10 ore); lucrul mecanic, caldura, entropie, entalpie, transformarile simple ale gazelor perfecte, ciclul Carnot, principiile I si II ale termodinamicii, procese reversibile si ireversibile pentru sisteme termodinamice: inchis, deschis periodic si in curgere stabilizata. Ajutaje, turbine, compresoare. Exergie si analiza exergetica.
2. Amestecuri de gaze perfecte. Aerul umed si procese de tratare. Ciclurile ideale ale motoarelor cu ardere interna(6 ore): Otto, Diesel lent, Diesel rapid.
3. Instalatia de forta cu gaze(ciclul Joule). Instlatia de forta cu turbine separate(4 ore).
4. Termodinamica vaporilor. Tabele si diagrame. Transformari termodinamice. Instalatii de forta cu abur(ciclul Rankine). Instalatia cu termoficare. Instalatii frigorifice si pompe de caldura(6 ore).
5. Arderea combustibililor. Ecuatii de ardere. Analiza gazelor arse(6 ore). 6. Transmiterea caldurii in regim stationar si nestationar(10 ore): conductie,
convectie, radiatie. Schimbul complex de caldura. Schimbatoare de caldura: tipuri constructive, calculul suprafetei de schimb de caldura.
F. Conţinutul lucrarilor de laborator:
1. Metode de măsurare a temperaturii. 2 ore 2. Măsurarea presiunii, vitezelor si debitelor la gaze. 2 ore 3. Determinarea parametrilor aerului umed. 2 ore 4. Determinarea puterii calorice a combustibililor solizi si lichizi. 2 ore
5. Influenta coeficientului de aer asupra temperaturii de ardere. 2 ore 6. Determinarea conductivităţii termice a materialelor cu instalaţia Dr. Bock. 2 ore
7.Studiul convectiei libere. 2 ore G. Continutul seminariilor:
1. Marimi fizice intilnite in Termotehnica si unitati de masura-2 ore. 2. Ecuatia de stare si transformari simple ale gazului perfect-2 ore. 3. Lucrul mecanic tehnic. Compresorul cu piston .Turbine. Ajutaje. -2 ore. 4. Amestecuri de gaze perfecte. Motoare cu ardere interna -2 ore. 5. Arderea combustibililor- 2 ore. 6. Transmiterea caldurii prin conductie, convectie si radiatie-2 ore. 7. Schimbatoare de caldura- 2 ore.
H. Bibliografie : 1. V. Damian, Cr. Iosifescu, G. Coman-Termotehnica, Ed. Academica-Galati-2005, ISBN- 973-8316-76-6.
2. C. Bogdan- Curs de Termotehnica si maşini termice, Universitatea din Galaţi 1986.
3. Termotehnica si maşini termice - Popa B. , Vintila C., Ed. didactica si pedagogica - Bucureşti 1977.
4. C. Bogdan –Probleme de termotehnica , Universitatea din Galaţi, 1987. 5. A. Bejan- Termodinamica tehnica avansata, Ed. Tehnica, Bucuresti, 1996.
Data aprobării programei analitice în catedră : 18.07.2007

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: TESTAREA SI FIABILITATEA SISTEMELOR MECATRONICE
A. Locul disciplinei în planul de învăţământ:
Anul IV Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
28 28 - - 28 28 V - 3 - M-S 3205
B. Obiectivele disciplinei:
• Cunoaşterea modului de evoluare si de dezvoltare, in ţara noastră si pe plan mondial, a conceptelor privind asigurarea calitatii si testarea produselor mecatronice;
• Formarea unei concepţii sistemice asupra metodelor de asigurarea calitatii si testarii produselor mecatronice;
• Dezvoltarea capacităţii ingineresti de utilizare echipamentelor de control nedistructiv si de selectare a lor la realizarea unor tehnologii moderne de control si de asigurarea calitatii produselor mecatronice;
• Cunoaşterea metodelor de asigurare a calitatii totale şi aplicarea acestora in testarea produselor mecatronice;
• Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de realizare a controlului unor imbinari sudate, aplicatii practice individuale cu diferite echipamente de control.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator si evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Asigurarea calitatii a fiabilitatii si testarea produselor mecatronice / concepte de baza – 4 ore
2. Metode de asigurare a calitatii si normele EU privind calitatea totala - 2 ore
3. Metode de testare a calitatii si fiabilitatii produselor / defecte - 2 ore
4. Controlul nedistructiv al produselor mecatronice (Controlul cu lichide penetrante. Domenii de aplicare. Controlul magnetic – metode de control magnetic) – 4 ore
5. Controlul US (Metode de control. Defectologie ultrasonica. Aplicatii ale controlului ultrasonic.) – 6 ore
6. Controlul RX (Metode de control. Controlul radiografic) – 6 ore

F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: Clasificarea defectelor – 3 ore Analiza macroscopica si microscopica a materialelor – 3 ore Controlul cu lichide penetrante – 2 ore Metode de magnetizare – 2 ore Controlul cu pulberi magnetice – 2 ore Aparate pentru defectoscopie ultrasonica – 2 ore Controlul ultrasonic – 2 ore Executarea radiografiilor – 2 ore Instalatii Roentgen pentru control nedistructiv – 2 ore Constructia gamadefectoscopului portabil GDP-6 – 2 ore Interpretarea radiografiilor îmbinarilor sudate – 2 ore
G. Bibliografie de elaborare a cursului
1. Arghiriade I. Aspecte practice ale controlului magnetic nedistructiv cu pulberi magnetice. Oficiul de informare documentara pentru industria constructiilor de masini, Bucuresti, 1992.
2. Bohatel T., Nastase E. Defectoscopie ultrasonica fizica si tehnica. Editura Tehnica, Bucuresti, 1980.
3. Georgescu V., Georgescu B. Iordachescu M. Control nedistructiv. Editura Lux Libris Brasov 2001.
4. Krautkrämer J., Krautkrämer H. Ultrasonic Testing of Materials. 4.th Fully Revised Edition Springer-Verlag Berlin Heidelberg,1990.
5. Mocanu D. R., Safta V. s.a. Incercarea materialelor vol. 3 - Controlul nedistructiv al metalelor. Editura Tehnica, Bucuresti, 1986.
6. Safta V.I., Safta V.I. Defectoscopie nedistructivaindustriala. Editura Sudura, Timisoara, 2001.
7. *** KRAUTKRÄMER Gmb &Co., Hürth – Germany (West). Testing Materials Ultrasonically – LEVEL 1 – 1st. edition 1983 and LEVEL 2 – 3rd edition 1986, printed in Germany.
8. PROSPECTE ale firmelor MAGNAFLUX CORPORATION, NAMICON, ANDREX, HELLING, KRAUTKRÄMER, SREM, TRAKIS, SEIFERT, SCANRAY, PHILIPS, ISIM .
H. Bibliografie minimală de studiu pentru studenţi
1. Iordachescu, D, Iordachescu, M., Scutelnicu, E., Managementul calitatii totale, Ed. Fundatiei Universitare Dunarea de Jos, Galati, 2004.
2. Georgescu B. Iordachescu M. Control nedistructiv – Curs si Test pentru verificarea cunostiintelor. Format A5, Universitatea din Galati, 2006.
Data aprobării programei analitice în catedră: 19.01.2007
Titular curs: SL. Dr. Ing. Mihaela Iordachescu Semnătura: Titular lucrări practice: Sef lucr dr ing Georgescu Bogdan Semnătura:
Şef catedră Prof dr ing Georgescu Valeriu
1
UNIVERSITATEA "DUN�REA DE JOS" GALA�I FACULTATEA MECANICA CATEDRA / DEPARTAMENTUL GRAFICA , MECANISME SI TOLERANTE Adresa: str. Domneasca nr. 147 Nr. telefon / fax: 40-236-414871 (int. 460) / +40-236-314463 E-mail:
PROGRAMA ANALITIC�
Disciplina: TOLERANTE SI CONTROL DIMENSIONAL
A. Locul disciplinei în planul de înv���mânt: Anul II
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplin�
Nr. ore 2 2 56 28 V 4 M-D0008
B. Obiectivele disciplinei:
- Cunoasterea preciziei, a erorilor de prelucrare micro si macrogeometrice in constructia de masini; - Cunoasterea sistemelor de tolerante, control �i ajustaje ISO, precum si insusirea metodelor si tehnicilor de masurare utilizand aparatura din laborator; - Cunoasterea �i analizarea metodelor moderne de urmarire a proceselor de fabricatie si de estimare a calitatii produselor.
C. Metode de predare – înv��are: Prelegerea, explicatia si aplicarea practica a metodelor de masurare si control predate, pentru determinarea carateristicilor de calitate, utilizand aparatura de laborator si cunostintele statistico-matematice in analiza si interpretarea rezultatelor obtinute prin masurare.
D. Forme �i metode de evaluare: Evaluarea continua (pondere - 30%) prin metode
orale si practice de insusire a tehnicilor de masurare si de prelucrare a rezultatelor in cadrul lucrarilor de laborator; evaluarea sumativa (pondere - 70%) prin probe scrise.
E. Con�inutul cursului / num�r de ore pentru fiecare tem�:
Cap. 1 No�iuni introductive 1.1 Interschimbabilitate ……………………………………………….……….. 0,5 ore 1.2 Precizia prelucr�rii mecanice
1.2.1 Precizia dimensional�. Dimensiuni, abateri, toleran�e �i ajustaje …... Sistemul de toleran�e �i ajustaje ISO ……………………………... 1.2.2 Precizia formei geometrice. Abateri macrogeometrice ……………... Ondula�ia suprafe�elor …………………………………………….. Abateri microgeometrice (rugozitatea suprafe�elor) ………………
0,5 ore 0, 5 ore 0, 5 ore 0,5 ore 0,5 ore
1.2.3 Precizia pozi�iei reciproce Abateri de orientare ……………………………………………….. Abateri de pozi�ie ………………………………………….……… Abateri de b�taie …………………………………………………...
0,5 ore 0,5 ore 0,5 ore
1.2.4 Metode �i aparate de control a preciziei formei �i pozi�iei reciproce .. 2,5 ore Cap. 2 No�iuni de teoria probabilit��ilor �i statistic� matematic�
2
2.1 No�iuni de teoria probabilit��ilor �i statistic� matematic� aplicate în controlul dimensional …………………………………………………………..
1 or�
2.2 Func�ii de probabilitate �i reparti�ie pentru variabila aleatoare discret� �i continu�. Valori tipice, toleran�a practic� a ajustajului �i probabilitatea ob�inerii jocurilor sau strângerilor, frac�iunea defect� ….……………………...
1,5 ore Cap. 3 No�iuni privind m�sur�torile tehnice
3.1 Mijloace de m�surare speciale �i universale pentru lungimi �i unghiuri. Cale plan-paralele. Verificare. Calibre pentru controlul suprafe�elor cilindrice netede, solu�ii constructive. Aparate mecanice, optico-mecanice. Aparate electrice �i pneumatice …………………………………………………………
3 ore 3.2 Toleran�e, ajustaje �i controlul suprafe�elor conice netede ………………... 2 ore 3.3 Instrumente �i aparate pentru m�surarea unghiurilor �i conicit��ilor ……… 2 ore
Cap. 4 Toleran�e, ajustaje �i controlul unor organe de ma�ini 4.1 Toleran�e, ajustaje �i controlul suprafe�elor filetate ……………………….. 2 ore 4.2 Toleran�e, ajustaje �i controlul ro�ilor din�ate �i a angrenajelor …………… 4 ore
Cap. 5 Lan�uri de dimensiuni 5.1 Lan�uri de dimensiuni. Definire. Clasificare ……………………….………
0,5 ore
5.2 Metode de rezolvare a lan�urilor de dimensiuni liniare: 5.2.1 Metoda algebric� …………………………………………….………
0,5 ore
5.2.2 Metoda asambl�rii selective ………………………………………… 0,5 ore 5.2.3 Metoda ajust�rii �i regl�rii …………………………………………... 0,5 ore 5.2.4 Metoda probabilistic� ……………………………………………….. 0,5 ore
Cap. 6 No�iuni de control statistic al calit��ii 6.1 No�iuni de control statistic al calit��ii ……………………………………...
1 or�
6.2 Controlul statistic în timpul procesului de fabrica�ie ……………………… 1 or� 6.3 Controlul statistic de recep�ie ……………………………………………… 1 or�
F. Con�inutul seminariilor / num�r de ore pentru fiecare tem�: Cap. 1 Cunoa�terea �i utilizarea principalelor mijloace de m�surare folosite în
construc�ia de ma�ini
1.1 �ublere mecanice �i digitalizate …………………………………………… 1.2 Micrometre mecanice �i digitalizate ……………………………………… 1.3 Comparatoare mecanice �i digitalizate …………………………………….. 1.4 Ortoteste �i pasametre ……………………………………………………... 1.5 Optimetrul vertical …………………………………………………………
1 ora 1 ora 2 ore 2 ore 2 ore
Cap. 2 M�surarea rugozit��ii suprafe�elor …………………………………………….. 2 ore Cap. 3 M�surarea parametrilor geometrici ai suprafe�elor cu forme complexe
3.1 M�surarea conicit��ilor …………………………………………………….. 3.2 M�surarea elementelor geometrice ale filetelor …………………………… 3.3 Evaluarea parametrilor de control ai ro�ilor din�ate ………………………..
2 ore 4 ore 6 ore
Cap. 4 Aplicatii 4.1 Aplicatii cu abateri, tolerante si ajustaje …………………………………... 4.2 Aplicatii cu calibre ………………………………………………………… 4.3 Colocviu si incheierea situatiei la lucrarile practice………………………..
2 ore 2 ore 2 ore
3
G. Bibliografie de elaborare a cursului
H. Bibliografie minimal� de studiu pentru studen�i1 1. Gheorghe, D. – “Control dimensional”, vol. I, Universitatea din Gala�i, 1998; 2. Gheorghe, D., Georgescu, C., Baroiu, N. – “Control dimensional”, vol. II, Universitatea din Gala�i, 2002; 3. Gheorghe, D., Georgescu, C., Baroiu, N. – “Tolerante si control dimensional”, Ed. Scorpion, Gala�i, 2002.
Data aprob�rii programei analitice în catedr� / departament 01. 10 . 06 Grafica , Mecanisme si Tolerante
Intocmit, Prof. dr. ing. Dumitru GHEORGHE
(Semn�tura)
Director departament / �ef catedr�
Conf. Dr. Ing. IOAN BAICU
1 Este de preferat ca bibliografia minimal� de studiu pentru surden�i s� identifice cu claritate �i precizie capitolele pe care studen�ii le au de parcurs pentru atnigerea obiectivelor de predare �i înv��are, eventual fiind particularizat� în func�ie de tematica cursurilor �i seminariilor.
1. Gheorghe, D. – “Control dimensional”, vol. I, Universitatea din Gala�i, 1998; 2. Gheorghe, D., Georgescu, C., Baroiu, N. – “Control dimensional”, vol. II,
Universitatea din Gala�i, 2002; 3. Gheorghe, D., Georgescu, C., Baroiu, N. – “Tolerante si control dimensional”, Ed.
Scorpion, Gala�i, 2002; 4. �ura, L., “Toleran�e �i control dimensional”, Rotaprint, Universitatea Tehnic�
“Gh. Asachi” Ia�i, 1995; 5. Dragu, D., B�descu, Gh., Sturzu, A., Militaru, C. �i Popescu, I., “Toleran�e �i
m�sur�tori tehnice”, Ed. Didactic� �i Pedagogic�, Bucure�ti, 1988; 6. Ste�iu, C. E. �i Oprean, C., “M�sur�ri geometrice în construc�ia de ma�ini”, Ed. �tiin�ific� �i Enciclopedic�, Bucure�ti, 1988;
7. Lungu, Gh., �ura, L. �.a., “Calitate. Control. Toleran�e”, Ed. Tehnic�, Chi�in�u, 1994.

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA DE TEHNOLOGIA CONSTRUCTIILOR DE MASINI Adresa: Str. Domneasca 111 Galati Nr. telefon / fax: 0236 41 48 71 E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: UTILIZAREA CALCULATOARELOR IN PRELUCRAREA DATELOR
A. Locul disciplinei în planul de învăţământ: Anul
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
- -
3 2L 42 28L
- V
- 5
M-S3102
B. Obiectivele disciplinei:
Disciplina are in structura capitole in care sunt prezentate notiuni generale privind structura sistemelor automate de prelucarea datelor, utilizand calculatorul, tipuri de date, functii specifice, etc. In partea a doua sunt prezentate sisteme de programare de tip expert si sisteme de diagnoza, cu elemente specifice industriei mecatronice. Utilizarea calculatoarelor in prelucrarea datelor este o disciplină necesară formării profesionale ca inginer în domeniul mecatronicii şi roboticii, care prin structură şi cunoştinţe urmăreşte realizarea următoarelor obiective principale : - identificarea arhitecturii programelor de prelucrare a datelor: EXCEL, ACCESS, SQL - cunoaşterea şi înţelegerea principiilor de functionare - interpretarea relaţiilor de prelucrare a datelor - proiectarea de aplicaţii specifice - utilizarea unor tehnici de speciale de identificare si prelucrare a datelor - utilizarea sistemelor expert si de diagnoza in mecatronica si robotica.
C. Metode de predare – învăţare: Predarea disciplinei de studiu se realizează folosind următoarele proceduri : - curs - 8 capitole, prezentate sub formă de prelegere prin : tabele, scheme, aplicaţii pe calculator - lucrari practice - 3 module cu lucrari de laborator, prezentate sub formă de referate şi aplicaţii pe calculator
D. Forme şi metode de evaluare: Verificarea cunoştinţelor la disciplina de studiu se realizează folosind următoarele metode: - fişe - test de laborator, pentru aplicatii pe calculator ; - fişe – test de curs, pentru cunostinte teoretice ; - referat bilbliografic (opţional) ;
E. Conţinutul cursului / număr de ore pentru fiecare temă:
Tema Conţinut general Nr. ore alocat T1 Analiza informaţiei. Noţiuni de bază 2 T2 Surse furnizoare de informaţie. Caracterizare. Criterii de utilizare. Eficienţă 4 T3 Prezentarea şi utilizarea informaţiilor: 4 T4 Organizarea datelor.Tipuri de informaţii / date. - Structuri de date necesare organizării
informaţiei 6
T5 Prelucrarea datelor 6 T6 Instrumente de lucru pentru sistemele informatice. Caracteristici, definire. Utilizarea
instrumentelor de lucru 8
T7 Tehnici software de prelucrare a datelor. - Macrocomenzi. Definire, utilizare 6 T8 Limbajul SQL pentru interogarea bazelor de date 6
Total ore curs 42
F. Conţinutul lucrărilor practice / număr de ore pentru fiecare temă:
Modul Conţinut general lucrări practice Nr. Ore alocat
M1 Aplicatii cu programme de baza pentru prelucrarea datelor : EXCEL, ACCESS, SQL. TEST DE LABORATOR 1
8
M2 Sisteme expert. Limbaje de inteligenta artificiala TEST DE LABORATOR 2
8
M3 Aplicatii de diagnoza cu interfata grafica: CBUILDER, CLIPS TEST DE LABORATOR 3
12
Total ore lucrări practice 28
G. Bibliografie de elaborare a cursului 1. LELUTIU A. – Proiectarea sistemelor de productie bazate pe prelucrarea automata a datelor, Editura Dacia, 2004 2. HENDERSON K. – Transact SQL, Editura Teora, 2006 3. TEODORESCU A. – Lectii de ACCESS, Editura Albastra, 2006 4. KOVACS S. – ACCESS 2000 – implementarea bazelor de date, Editura Albastra, 2006
H. Bibliografie minimală de studiu pentru studenţi 1. LELUTIU A. – Proiectarea sistemelor de productie bazate pe prelucrarea automata a datelor, Editura Dacia, 2004 2. HENDERSON K. – Transact SQL, Editura Teora, 2006 3. TEODORESCU A. – Lectii de ACCESS, Editura Albastra, 2006 4. KOVACS S. – ACCESS 2000 – implementarea bazelor de date, Editura Albastra, 2006
Data aprobării programei analitice în catedră / departament: 01 06 2007
Titular curs: Prof. univ. dr. ing. TABACARU VALENTIN Semnătura:
Titular seminar / lucrări practice: As. ing. CONSTANTIN IONUT CLEMENT Semnătura:
Director departament / Şef catedră
Prof. univ. dr. ing. NICOARA DUMITRU

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA CATEDRA / DEPARTAMENTUL Adresa: : Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail:[email protected]
PROGRAMA ANALITICĂ
Disciplina: ACŢIONĂRI ELECTRICE ŞI ELECTRONICE DE PUTERE
A. Locul disciplinei în planul de învăţământ: Anul IV
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
28 28 - - 28 28 V - 4 - M-D3106
B. Obiectivele disciplinei: · Cunoaşterea modului de evoluare şi de dezvoltare, în ţara noastră şi pe plan mondial, a
domeniului acţionărilor electrice şi electronice de putere; · Formarea unei concepţii sistemice asupra metodelor şi principiilor de lucru din domeniul
acţionărilor electrice şi electronice de putere; · Dezvoltarea capacităţii ingineresti de utilizare şi reglaj, din domeniul acţionărilor
electrice şi electronice de putere, ca şi de selectare a acestora, pentru realizarea unor tehnologii moderne, dar şi a calităţii unor produse industriale de inaltă competitivitate;
· Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti · Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de verificare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de realizare, exploatare si reglaj din cadrul acţionărilor electrice şi electronice de putere, cu aplicaţii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator si evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă: 1. DINAMICA ACŢIONĂRILOR ELECTROMECANICE - 3 ore
Elemente de mecanica acţionărilor electrice. Ecuaţia fundamentală a maşinilor rotative şi raportarea mărimilor mecanice la arborele motor.
2. TIPURI DE MOTOARE DE ACŢIONARE - 4 ore Motoare rotative de acţionaare. Caracteristici mecanice. Motorul de tip asincron, de curent
continuu, de tip sincron, motorul pas cu pas. Construcţie. Pornire, reglaj, frânare. Scheme simple de acţionare şi comandă.
3. CIRCUITE ELECTRONICE DE PUTERE - REDRESOARE- 5 ore Circuite redresoare.Redresor cu punct mediu, schema mono si dublă alternanţă. Redresoare
polifazate. Redresoare comandate. 4. CIRCUITE DE STINGERE - 8 ore
Definire şi principiu de lucru. Stingerea prin circuit de sarcină rezonant(circuit L-C în serie cu sarcina), stingerea prin circuit rezonant auxiliar, stingerea cu condensator, sau cu circuit LC şi tiristor auxiliar. Stingerea cu circuit L-C, comutat cu tiristor auxiliar. Stingerea cu sursă de impulsuri exterioară.
5. INVERTOARE - 4 ore Convertoare statice de curent continuu. Variatoare de curent şi tensiune.

6. CONVERTOARE DE FRECVENŢĂ – 2 ore Convertoare de frecvenţă cu circuit intermediar de curent continuu. Convertoare cu
transformarea directă a frecvenţei. 7. CONTACTOARE STATICE - 2 ore
Contactoare statice de curent alternativ. Contactoare statice de curent continuu. F. Conţinutul laboratoarelor / număr de ore pentru fiecare temă:
1. Determinarea experimentala a factorului GD2 la un motor electric – 2 ore 2. Alegerea motorului electric de actionare – 2 ore 3. Schema de pornire – oprire motor asincron trifazat – 2 ore 4. Schema de pornire – oprire motor de curent continuu – 2 ore 5. Schema comandă motor pas cu pas – 2 ore 6. Redresor dublă alternanţă cu priză mediana – 2 ore 7. Redresor dublă alternanţă în punte – 2 ore 8. Redresor trifazat cu punct mediu – 2 ore 9. Redresor comandat monofazat – 2 ore 10. Redresor trifazat în punte semicomandată – 2 ore 11. Circuit de stingere prin circuit de sarcină rezonant – 2 ore 12. Circuit de stingere cu condensator –2 ore 13. Variator de tensiune – 2 ore 14. Scheme diverse de acţionare şi comandă – 2 ore
G. Bibliografie de elaborare a cursului 1. S. Florea, s.a.- Electronica industrială şi automatizări, Editura Didactică şi Pedagogică,
Bucureşti, 1983. 2. C. Saal s. a. – Acţionări electrice şi automatizări, Editura Didactică şi Pedagogică, Bucureşti,
1980. 3. B. C. Kuo s. a.- Sisteme de comandă şi reglare incrementală a poziţiei, Editura Tehnică,
Bucuresti, 1981. 4. T. Dordea. – Maşini electrice, Editura Didactică şi Pedagogică, Bucureşti, 1977. 5. D. Stelian – Electronica industrială şi automatizări, Editura Didactică şi Pedagogică,
Bucureşti, 1983. 6. C. Nitu s. a. – Echipamente electrice şi electronice de automatizare, Editura Didactică şi
Pedagogică, Bucureşti, 1980. 7. S. Bârcă-Galaţeanu – Electronica industriala, Editura Didactică şi Pedagogică, Bucureşti,
1983. 8. M. Tertişco s. a. – Automatizări industriale continue, Editura Didactică şi Pedagogică,
Bucureşti, 1991. 9. Al. S. Fransua s. a. – Maşini şi acţionări electrice. Culegere de probleme, Editura Didactică
şi Pedagogică, Bucureşti, 1980. 10. N. V. Boţan- Alegerea motoarelor electrice pentru acţionarea mecanismelor şi maşinilor
industriale, Editura Tehnică, Bucureşti, 1972. 11. K. I . Şuvalov – Cele mai simple scheme de comenzi automate ale acţionărilor electrice,
Editura Tehnică, Bucureşti, 1963. 12. Al. S. Fransua, s. a. – Maşini şi acţionări electrice-Culegere de probleme, Editura Didactică
şi Pedagogică, Bucureşti, 1980. H. Bibliografie minimală de studiu pentru studenţi
1. S. Florea, s.a.- Electronica industrială şi automatizări, Editura Didactică şi Pedagogică, Bucureşti, 1983.(Circuite electronice de putere).
Data aprobării programei analitice în catedră: 20 01.2007
Şef catedră Prof dr ing Georgescu V.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon: E-mail: [email protected], [email protected]
PROGRAMA ANALITICĂ
Disciplina: Acţionări hidraulice şi pneumatice
A. Locul disciplinei în planul de învăţământ:
Anul III Sem. I Sem. II Total ore Forme de
verificare Nr. credite Anul de
studiu C L C L, P C L, P Sem. I Sem. II Sem. I Sem.
II
Cod disciplină
Nr. ore - - 42 56 42 56 - E, P - 7 M-D3103
B. Obiectivele disciplinei: • Analizarea constructiv-funcţională a elementelor care intră în componenţa schemelor
de acţionare hidrostatică; • Prezentarea de sinteze ale structurilor hidraulice funcţionale, cât şi ale schemelor
pentru realizarea diferitelor cicluri de lucru cu acţionare şi comandă hidrostatică; • Posibilitatea unei proiectări creative a schemelor de acţionare şi comandă, care permite
optimizarea acestora sub aspect tehnic, economic şi energetic; • Dezvoltarea capacităţii inginereşti de utilizare echipamentelor specifice şi de selectare
a lor la realizarea unor produse industriale de înaltă competitivitate; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei inginereşti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România;
C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea, studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstraţii practice, aplicaţii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la
orele de laborator şi evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. INTRODUCERE. UNITĂŢI DE MĂSURĂ – 1 ore Avantajele acţionării hidraulice. Dezavantajele acţionării hidraulice. Unităţi de măsură
2. MEDIUL HIDRAULIC – 2 ore Condiţii impuse mediului hidraulic. Alegerea agentului motor. Caracteristicile mediului
hidraulic 3. GENERATOARE Şl MOTOARE HIDRAULICE – 8 ore
Clasificarea pompelor şi motoarelor hidrostatice. Pompe cu roţi dinţate. Pompe cu lobi. Pompe cu şuruburi. Pompe şi motoare cu palete. Pompe cu palete cu regulator de putere. Pompe şi motoare cu pistonaşe axiale. Pompe şi motoare cu pistonaşe radiale. Pompe cu plunjere. Motoare cu rulouri. Hidromotoare oscilante. Motoare hidraulice rectilinii.
4. ECHIPAMENTUL DE DISTRIBUŢIE – 6 ore Robinete distribuitoare. Distribuitoare cu bilă. Distribuitoare cu sertar.
5. ECHIPAMENTUL DE REGLARE A PRESIUNII – 3 ore Supape de blocare. Supape de presiune.
6. ECHIPAMENTUL DE REGLARE A DEBITULUI – 6 ore Reglarea debitului. Construcţia droselelor. Utilizarea droselelor. Drosele cu regulatoare de
viteză 7. HIDROLOGISTOARE – 2 ore
Robinete cu hidrologistoare. Distribuitoare cu hidrologistoare. Supape cu hidrologistoare. Drosele cu hidrologistoare
8. ECHIPAMENTUL AUXILIAR AL SCHEMELOR HIDRAULICE – 2 ore Conducte. Filtre. Acumulatoare. Rezervorul. Schimbătorul de căldură
9. STRUCTURI HIDRAULICE FUNCŢIONALE – 2 ore Descărcarea pompelor. Scurtcircuitarea pompelor. Cuplarea pompelor. Schimbarea
discontinuă a presiunii. Sincronizarea deplasării hidromotoarelor. Amplificarea presiunii. Dozarea debitului.
10. SCHEME HIDRAULICE PENTRU REALIZAREA DIFERITELOR CICLURI – 6 ore
Alegerea schemei hidraulice. Ciclul avans de lucru-retragere de lucru AL-RL cu motor hidraulic rotativ. Ciclul avans de lucru-retragere rapidă AL-RR. Ciclul avans rapid-retragere de lucru AR-RL. Ciclul avans rapid-avans de lucru-retragere rapidă AR-AL-RR.
11. ACŢIONĂRI PNEUMATICE – 4 ore Elemente pentru producerea şi prepararea aerului comprimat. Elemente de dirijare, reglare şi
control. Elemente de execuţie. Scheme pneumatice.
F. Conţinutul laboratoarelor / număr de ore pentru fiecare temă: 1. Prezentarea laboratorului. Instructaj de protecţie a muncii – 2 ore 2. Pompe cu roţi dinţate, elemente componente, calculul debitului – 2 ore 3. Pompe şi motoare cu palete, elemente componente, calculul debitului – 2 ore 4. Pompe şi motoare cu pistonaşe axiale, elemente componente, calculul debitului – 2 ore 5. Pompe şi motoare cu pistonaşe radiale, elemente componente, calculul debitului – 2 ore 6. Motoare hidraulice rectilinii, elemente componente, calculul – 2 ore 7. Distribuitoare cu sertar, calculul pierderilor de debit la sertăraşele distribuitoare, calculul
forţei de frecare plunjer-corp – 2 ore 8. Supape de presiune nepilotate şi pilotate – 2 ore 9. Drosele cu regulatoare de viteză, rezistenţa hidraulică, calcul pierderi – 2 ore 10. Distribuitoare şi drosele cu hidrologistoare – 2 ore 11. Conducte. Filtre. Acumulatoare. Rezervorul. Schimbătorul de căldură, calcul de
dimensionare – 2 ore 12. Variante de scheme hidraulice – 2 ore 13. Motoare pneumatice rectilinii, elemente componente, calculul – 2 ore 14. Scheme pneumatice – 2 ore
G. Conţinutul proiectului / număr de ore
Proiectarea unui motor hidraulic liniar pentru acţionarea braţelor unui robot industrial.
H. Bibliografie de elaborare a cursului 1. Constantin E., Acţionări hidrostatice, Editura Tehnică Bucureşti, 1999, ISBN 973-31-1353-0. 2. Anton, V., Popovici, M. Hidraulică şi maşini hidraulice. Bucureşti, Editura Didactică şi
Pedagogică, 1979. 3. Arghirescu, L.C. Acţionări hidraulice. Universitatea din Galaţi, 1984. 4. Constantin, E., Ciocan, O. Proiectarea şi construcţia acţionărilor hidropneumatice.
Universitatea din Galaţi, 1988. 5. Constantin, E. Construcţia dispozitivelor şi mecanizarea sudării. Universitatea din Galaţi, 1979. 6. Constantin, E. Proiectarea maşinilor, utilajelor şi construcţiilor sudate. Universitatea din Galaţi,
vol. 1, 1981, vol. II, 1983. 7. Cosoroabă, V., Demetrescu, T., Georgescu-Azuga, G. Acţionări pneumatice. Bucureşti, Editura
Tehnică, 1971. 8. Marin, V., Moscovici, R., Teneslav, D. Sisteme hidraulice de acţionare şi reglare automată.
Bucureşti, Editura Tehnică, 1981. 9. Marin, V., ş.a. Sisteme hidraulice automate. Construcţie, reglare, exploatare. Bucureşti, Editura
Tehnică, 1987. 10. Oprean, A., Marin, V., Dorin, A. Acţionări hidraulice. Bucureşti, Editura Tehnică, 1976. 11. Oprean, A., Dorin, A., Măsălai, L, Medat, S. Acţionări şi automatizări hidraulice. Bucureşti,
Editura Tehnică, 1983. 12. Oprean, A., lonescu, F., Dorin, A. Acţionări hidraulice; Elemente şi sisteme. Bucureşti,
Editura Tehnică, 1982. 13. Pop, I. Noi elemente şi sisteme hidraulice; Hidrologistori. Bucureşti, Editura Academiei,
1990. 14. Radcenco, V., Alexandrescu, N., lonescu, E., lonescu, M. Calculul şi proiectarea elementelor şi schemelor pneumatice de automatizare. Bucureşti, Editura Tehnică, 1985.
15. Spânu, C. Motoare hidraulice. Universitatea din Galaţi, 1993. 16. Tureanu, C. Pompe volumice pentru lichide. Bucureşti, Editura Tehnică, 1987. 17. Vasiliu, N. Transmisii hidraulice şi electrohidraulice. Bucureşti, Editura Tehnică, 1988. 18. *** Revistele Olhydraulik und Pneumatik. 19. *** Prospecte întreprinderea Mecanică fină Sinaia. 20. *** Prospecte întreprinderea Balanţa Sibiu. 21. *** Prospecte întreprinderea Mecanică Plopeni. 22. *** Cataloagele întreprinderii de Utilaj Greu Progresul Brăila. 23. STAS 871/2-90 Lubribianţi, uleiuri industriale. Uleiuri minerale şi lichide hidraulice;
Clasificare şi notare. 24. STAS 9506-84 Uleiuri hidraulice pentru solicitări uşoare. 25. STAS 11405-80 Uleiuri hidraulice aditivate. 26. STAS 12023-82 Uleiuri hidraulice aditivate pentru extremă presiune. 27. *** Cataloagele firmei Rexroth. 28. *** Cataloagele firmei Bosch. 29. *** Cataloagele firmei Vickers. 30. *** Cataloagele firmei Denison. 31. *** Cataloagele firmei Brueninghaus. 32. *** Cataloagele firmei Herion. 33. *** Cataloagele firmei Hydac. 34. *** Cataloagele firmei Hydromatik. 35. *** Cataloagele firmei Svendborg. 36. *** Cataloagele firmei Proclain Hydraulics.
I. Bibliografie minimală de studiu pentru studenţi
1. Constantin E., Acţionări hidrostatice, Editura Tehnică Bucureşti, 1999, ISBN 973-31-1353-0., Obligatoriu integral.
2. Constantin, E., Ciocan, O. Proiectarea şi construcţia acţionărilor hidropneumatice. Universitatea din Galaţi, 1988.
3. Spânu, C. Motoare hidraulice. Universitatea din Galaţi, 1993. Data aprobării programei analitice în catedră 19.01.2007
Şef catedră Titulari disciplină
Prof. dr. ing. Georgescu V. Prof. dr. ing. Constantin E
Ş. L. dr. ing. Vişan D.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI
FACULTATEA DE ŞTIINŢE
Catedra de Matematică
Str. Domnească, nr. 111. Tel- 0236 460780 int: 357.
PROGRAMA ANALITICĂ
Disciplina: Algebră, geometrie analitică şi diferenţială
A. Locul disciplinei în planul de învăţământ:
Anul I Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
- - 42 28 - E - -
B. Obiectivele disciplinei:
• Cunoaşterea fundamentelor algebrei, geometriei analitice şi diferenţiale în perspectiva aplicărilor în practica disciplinei;
• Formarea unor deprinderi de a folosi raţionamente riguroase precum şi a deprinderilor de studiu
individual;
• Formarea unei concepţii sistemice asupra disciplinei şi aparatului matematic;
• Cunoaşterea metodelor de cercetare în domeniu, precum şi aplicarea acestora în disciplinele de
profil.
C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, problematizarea.
D. Forme şi metode de evaluare: evaluare continuă ( pondere 30% ) prin metode orale, probe scrise,
practice evaluare sumativă (pondere 70%) prin probe scrise/orale.
E. Conţinutul cursului:
Cap1. Algebra liniara. - 16 ore 1.1 Spatii vectoriale. Subspatii vectoriale. Sisteme de generatori. Liniar dependenta si liniar independenta. Baza, coordonatele unui vector intr-o baza, dimensiune. Schimbari de baze. Schimbarea coordonatelor unui vector la o schimbare de baza. 1.2 Aplicatii liniare. Nucleul si imaginea unei aplicatii liniare. Proprietati generale. Matricea unei aplicatii liniare. Modificarea matricei unei aplicatii liniare la o schimbare de baza. Vectori si valori proprii. Forma diagonala. 1.3 Forme liniare; proprietati. Forme biliniare. Matricea unei forme biliniare. Forme patratice. Reducerea formelor patratice la forma canonica. 1.4 Spatii vectoriale euclidiene . Ortogonalitate. Procedeul de ortogonalizare Gramm-Schmidt.
Cap 2. Geometrie analitica. - 18 ore 2.1 Algebra vectoriala; notiunea de vector in spatiul geometric intuitiv. Produs scalar, produs vectorial, produs mixt, dublu produs vectorial. Repere. 2.2 Dreapta si planul in spatiu. Planul: reprezentari analitice; tipuri de ecuatii ale unui plan. Pozitii relative a doua plane plane. Distanta de la un punct la un plan. Distanta intre doua plane paralele. Fascicul de plane. Dreapta: reprezentari analitice ; tipuri de ecuatii ale unei drepte. Pozitii relative a doua drepte. Distanta intre doua drepte in spatiu. Pozitia unei drepte fata de un plan. 2.3 Sfera : reprezentari analitice. Pozitia unei drepte fata de o sfera. Pozitia unui plan fata de o sfera. Puterea unui punct fata de o sfera. Cercul. 2.4 Suprafete cilindrice de rotatie si conoide. Elipsoidul, hiperboloidul, paraboloidul.
Cap 3. Geometrie diferentiala. - 8 ore
3.1 Curbe in R³. Tangenta la o curba in spatiu. Triedrul Frenet. Ecuatiile Frenet. Curbura si torsiunea unei curbe in spatiu. Cercul osculator. Curbe in R². Formule de calcul a curburii unei curbe plane. Caracterizarea cercului si a dreptei. Evoluta si evolventa unei curbe plane. 3.2 Suprafete in R³. Planul tangent la o suprafata. Prima si a doua forma fundamentala a unei suprafete. Linii asimptotice pe o suprafata. Curburi principale, curbura medie, curbura Gauss. F. Conţinutul seminariilor:
Aplicaţii la temele de la curs. - 28 ore
G. Bibliografie: 1. S. Antohe, N. Codau, Algebra liniara si geometrie analitica, Univ. Galati 1979
2. S. Antohe, N. Codau, T Buhaescu, Algebra liniara, geometrie analitica si diferentiala, culegere de probleme, Galati 1986.
3. S. Ianus, Curs de geometrie diferentiala, Bucuresti 1981. 4. L. Nicolescu, Curs de geometrie, Bucuresti 1990. 5. T. Buhaescu, Geometrie, vol.1,2,3, Ed. Mongabit 2001.
Data aprobării programei analitice în catedră,
Lect.dr. Chifan Nicolae
Şef catedră,
Conf.dr. Jenică Crînganu

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICĂ CATEDRA / DEPARTAMENTUL TCM Adresa: Strada Domneasca Nr.111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ Disciplina: Algoritmi şi sisteme de conducere a RI
A. Locul disciplinei în planul de învăţământ:
Anul IV Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C S C S+P C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
42 14 28 14+14 70 28+14
V E+P 4 6 M-D3203
B. Obiectivele disciplinei: • Cunoaşterea algoritmilor de interpolare. • Cunoaşterea principalelor tipuri de traductoare şi a metodelor de interfaţare • Cunoaşterea tipurilor de sisteme acţionare pentru axele de deplasare • Cunoaşterea sistemelor de reglare a mişcărilor. • Înţelegerea principiilor de proiectare a sistemelor de comandă realizate în logică cablată şi flexibilă • Dezvoltarea capacităţilor de sinteză a sistemelor de comandă a roboţilor C. Metode de predare – învăţare: explicaţia, studiu de caz, conversaţia euristică
D. Forme şi metode de evaluare: evaluare continuă ( pondere 30% ) prin metode orale, probe
scrise, practice şi teme de casă; evaluare sumativă (pondere 70%) prin probe scrise/orale E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Introducere în problematica sistemelor de conducere/ 4 ore Introducere. Clasificare. Componente ale sistemului robot. Structura mecanică - componente, Sistemul de conducere, Arhitecturi de conducere 2. Algoritmi de generare a traiectoriilor / 12 ore Tehnici de interpolare. Principii generale ale conturării cu intepolator intern. Algoritmi de interpolare de tip ADN. Algoritmi de interpolare liniară ADN. Algoritmi de interpolare circulară ADN. Algoritmi de interpolare circulară cu generare de sin şi cos. Algoritmi de interpolare cu calculul direct al funcţiei. Algoritmi bazaţi pe calculul unui discriminant. Algoritmul diferenţei coordonatelor. Algoritmi cu calculul direct al funcţiei prin metoda octanţilor. 3. Principii de interfaţă cu sisteme de achiziţie deplasării / 8 ore Structurarea pe nivele a interfeţelor. Principii ale măsurării deplasărilor. Prelucrarea informaţiilor de la traductoare analogice. Resolver. Inductosyn. Achiziţia şi adaptarea semnalelor de la sistemele de măsură numerică. Sisteme incrementale. Sisteme absolute. 4. Sisteme de reglare a mişcării/8 ore Sisteme de conducere cu legi de reglare complexe. Compensarea efectului perturbator al elementelor inferioare. Sisteme de conducere adaptivă. Sisteme de conducere optimală 5. Principii de comandă numerică a elementelor de execuţie / 12 ore Caracterizarea dinamică a sistemelor de transmisie a mişcării. Analiza comportării dinamice a ansamblului servomecanism transmisie mecanică. Controlul numeric al

buclelor de poziţie. Principii de şi metode de reglare a poziţiei. Tehnici de comandă a motoarelor de acţionare. Motoare pas cu pas. Motoare de curent continuu. Motoare asincrone. Servomotoare fără perii. 6. Sisteme de comandă implementate în logică cablată /14ore Automate combinaţionale Automate secvenţiale. Automatul de comandă secvenţial tehnologic. Automatul Girard. Automate implementate prin registre distribuite. 7. Sisteme de comandă flexibile /12 ore Automate implementate cu memorii PROM. Structura de bază. Configuraţie decodificator de stare şi intrare. Configuraţie decodificator de stare. Configuraţie decodificator de stare cod unic. Configuraţie format variabil. Automate microprogramate. Automate cu stivă
F. Conţinutul seminariilor / număr de ore pentru fiecare temă:
1. Introducere în problematica sistemelor de conducere / 2 ore
Prezentarea sistemelor de conducere pentru maşinile unelte şi roboţii din cadrul laboratorului
2. Algoritmi de generare a traiectoriilor / 4 ore Implementarea algoritmilor de interpolare folosind Matlab.
3. Principii de interfaţă cu sisteme de achiziţie deplasării / 4 ore Analiza intertfaţării traductoarelor pentru echipamentele din cadrul laboratorului. Inductosyn, Incremental.
4. Sisteme de reglare a mişcării/4 ore Reglarea parametrilor regulatoarelor pentru o axele unui strungului cu comandă numerică. Parametrii modulului de control a axelor TSX CAY.
5. Principii de comandă numerică a elementelor de execuţie / 4 ore Variatoare de viteză pentru motoare asincrone ATV71 şi ATV54. Configurarea şi reglarea buclei de viteză pentru variatoare de viteză. Variatoare de viteză pentru servomotoare fără perii Lexium. . Configurarea şi reglarea buclei de viteză şi a buclei de viteză
6. Sisteme de comandă implementate în logică cablată / 4 ore Sinteza automatului combinaţional. Etapele sintezei. Aplicaţii. Sinteza automatului secvenţial. Etapele sintezei. Aplicaţii. Sinteza unui automat secvenţial tehnologic pentru comanda unui robot în structură RTT.
7. Sisteme de comandă flexibile /6 ore Sinteza sistemelor de comandă flexibilă în diferite configuraţii pentru un robot de tip
portal cu 3 grade de libertate.
G. Proiect / Proiectarea unor sisteme de comandă pentru diferite tipuri de roboţi şi manipulatoare.
H. Bibliografie de elaborare a cursului 1. Ivănescu M. Roboţi industriali. Algoritmi şi sisteme de conducere Ed. Universitaria,
Craiova, 1994 ; 2. Borangiu Th, Dobrescu R. Structuri moderne de conducere automată Ed. Tehnică,
Bucureşti, 1982 ; 3. Marinescu V Conducerea sistemelor flexibile de prelucrare Ed. Fundaţiei
Universitare Dunărea de Jos, Galati , 2000 ;
4. Marinescu V Sisteme şi echipamente de comandă numerică. Vol 1. Controlere logice programabile. Ed. Cartea Universitară, Bucureşti, 2004 ;
5.*** Schneider Automation Inc. Technical Documentation ATV71, ATV61
6.Măgureanu R, Vasile N Servomotoare fără perii de tip sincron. Editura Tehnică 1990
I. Bibliografie minimală de studiu pentru studenţi1 1. Marinescu V Sisteme şi echipamente de comandă numerică. Vol 1.
Controlere logice programabile. Ed. Cartea Universitară, Bucureşti, 2004 . Capitolele 1, 2, 3.
Titular curs: Prof. Dr. Ing Vasile Marinescu Semnătura:
Data aprobării programei analitice în catedră / departament 05-02-2007
(Semnătura)
Director departament / Şef catedră
Prof.Dr.Ing.Dumitru Nicoară
1 Este de preferat ca bibliografia minimală de studiu pentru surdenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atnigerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.



UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE ŞTIINŢE ECONOMICE CATEDRA DE MANAGEMENT ŞI MARKETING Str. N. Bălcescu, nr. 59-61 Tel. 0236 415642 int: 35. Tel/Fax- 0236.460467
PROGRAMA ANALITICĂ
Disciplina: ANALIZĂ ECONOMICĂ
A. Locul disciplinei în planul de învăţământ: Anul IV Sem. II
Total ore Forme de verificare Nr. credite Anul de
studiu C S C S Sem. II Sem. II
Cod disciplină
Nr. ore
14 14 14 14 V 2 M-C0020
B. Obiectivele disciplinei: • Evidenţierea rolului şi a importanţei marketingului în cadrul organizaţiei. • Evidenţierea problemelor specifice marketingului a locului acestuia în cadrul
managementului organizaţional. • Cunoaşterea direcţiilor, a dentinţelor şi a particularităţilor marketingului în contextul
actual al dezvoltării economice. • Formarea unei concepţii sistemice asupra organizaţiei prin prizma marketingului. • Cunoaşterea, analiza, interpretarea şi adaptarea politicilor şi strategiilor de marketing. • Conştientizarea importanţei metodelor, tehnicilor şi tacticilor mixului de marketing în
cadrul organizaţiei.
C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea, studiul de caz, problematizarea, simularea de situaţii, metode de lucru în grup, individual şi frontal, portofoliul, cercetarea de piaţă, analiza şi interpretarea rezultatelor, studiul documentaţiei şi al bibliografiei. Forme şi metode de evaluare: evaluare continuă ( pondere 40% ) prin metode orale, probe
scrise, practice şi teme de casă (proiect/un studiu de caz asupra unei organizaţii din domeniul serviciilor care să cuprindă toate cunoştinţele parcurse teoretic în cadrul cursului; evaluare sumativă (pondere 60%) prin probe scrise/orale.
D. Conţinutul cursului: I. MARKETING – CONCEPTE ACTUALE – 1 curs:
1.1. CONCEPTE, ABORDĂRI ŞI DEFINIŢII 1.2. GLOBALIZAREA ŞI IMPACTUL ASUPRA MIXULUI DE MARKETING 1.3. MEDIUL EXTERN AL ORGANIZAŢIEI
Rolul, importanţa şi evoluţia marketingului. Definirea marketingului. Motivaţia studierii acestui domeniu. Particularităţile marketingului. Marketingul la nivel global. Tendinţe. Mediul extern al organizaţiei.
II. PIAŢA ORGANIZAŢIEI – 1 curs:
2.1. CONŢINUTUL PIEŢEI ORGANIZAŢIEI 2.2. DIMENSIUNILE PIEŢEI ORGANIZAŢIEI 2.3. RELAŢIILE ORGANIZAŢIEI CU PIAŢA
2.4. COMPORTAMENTUL CONSUMATORULUI 2.5. METODE DE CERCETARE A PIEŢEI
Conceptul de piaţă. Conţinutul pieţei. Delimitări conceptuale ale cererii şi ofertei. Evaluarea dimensiunii pieţei organizaţiei. Evidenţierea relaţiilor organizaţiei. Analiza comportamentului consumatorului. Metode de cercetare a pieţei: diferenţiala semantică, metoda ordonării rangurilor, scala cu sumă constantă, metoda comparaţiilor perechi, scala lui Lickert, modelul Fishbein – Rosenberg, testul χ2
III. POLITICA DE PRODUS – 1 curs
3.1. POLITICA DE PRODUS, CONCEPTE, DEFINIŢII, CONŢINUT 3.2. ELEMENTELE DEFINITORII ALE POLITICII DE PRODUS
3.2.1.DIFERENŢIEREA PRODUSULUI 3.2.2. POZIŢIONAREA PRODUSULUI Aprecierea rolului politicii de produs în cadrul politicii globale a organizaţiei. Definirea conceptuală. PRODUSUL, DEFINIŢII, INTERPRETĂRI, CLASIFICĂRI Definirea şi evoluţia elementelor specifice politicii de produs. Specificul politicii de produs în cadrul organizaţiei. Precizări conceptuale. Noi tendinţe şi orientări. Strategiile organizaţiei privind politica de produs. Strategia de poziţionare. Strategia de diferenţiere. Strategia calităţii. 3.2.3. CICLU DE VIAŢĂ AL PRODUSULUI - 1 curs
3.2.4. LANSAREA PRODUSELOR NOI 3.2.5. PORTOFOLIUL DE PRODUSE 3.2.5. MARCA ŞI STRATEGIA DE MARCĂ 3.2.6. AMBALARE, ETICHETARE
Ciclu de viaţă al produsului. Etape. Strategii corespunzătoare fiecărei etape din ciclu de viaţă. Lansarea produselor noi. Fazele lansării, particularităţi. Portofoliul de produse. Metode de analiză a portofoliului de produse. Marcarea, etichetarea, ambalarea.condiţii, particularităţi, legislaţie.
IV. POLITICA DE PREŢ – 1 curs
4.1. PREŢUL, DEFINIŢII, OBIECTIVE 4.2. METODE DE STABILIRE A PREŢULUI
Aprecierea rolului politicii de preţ în cadrul politicii globale a organizaţiei. Definirea conceptuală. Metode de stabilire a preţului. Metode formale şi neformale
4.3. ANALIZA PRAGULUI DE RENTABILITATE 4.4. STRATEGIA DE PREŢ
Definirea noţiunii de prag de rentabilitate. Tipurile de preţuri. Precizări conceptuale. Noi tendinţe şi orientări. Metode de stabilire a preţului. Strategia preţului psihologic. Strategia combinată de determinare a preţului.
V. POLITICA DE DISTRIBUŢIE – 1curs
5.1. ROLUL ŞI LOCUL POLITICII DE DISTRIBUŢIE ÎN POLITICA
GLOBALĂ A ORGANIZAŢIEI 5.2. DISTRIBUŢIA, DEFINIŢII, OBIECTIVE
Aprecierea rolului politicii de distribuţie în cadrul politicii globale a organizaţiei. Definirea conceptuală. Definirea şi evoluţia elementelor specifice politicii de distribuţie.
5.3. TIPURILE CANALULUI DE DISTRIBUŢIE Obiectivele politicii de distribuţie. Canalul de distribuţie. Tipuri decanal. Tendinţe şi evoluţii. Specificul politicii de distribuţie în cadrul organizaţiei din anumite sectoare de activitate. Precizări conceptuale. Noi tendinţe şi orientări. Metode de stabilire a strategiei.
VI. POLITICA DE COMUNICARE– 1 curs
6.1. POLITICA DE COMUNICARE, CONCEPTE, ABORDĂRI, OBIECTIVE 6.2. ELEMENTELE PROCESULUI DE COMUNICARE
Aprecierea rolului politicii de comunicare în cadrul politicii globale a organizaţiei. Definirea conceptuală. Obiectivele d ecomunicare ale organizaţiei. Elementele procesului de comunicare.
6.3. MIXUL DE COMUNICARE
Elementele mixului de comunicare. Definiţii, abordări, concepte. Tendinţe în comunicare la momentul actual. Importanţa şi impactul comunicării asupra managementului organizaţiei. Publicitatea. Reclama. Marketingul direct. Internetul. Relaţiile publice. Târgurile şi expoziţiile. Ambalajul. Marca. Eticheta…
6.4. STRATEGIA DE COMUNICARE Strategiile organizaţiei privind politica de comunicare. efectele politicii de comunicare. Tendinţe şi evoluţii. Cuantificări.Definirea şi evoluţia elementelor specifice politicii de comunicare. Precizări conceptuale. Noi tendinţe şi orientări. Mixul comunicaţional.
E. Conţinutul seminariilor: 1. Metode şi tehnici de culegere a informaţiilor în marketing: Proiectarea experimentelor de
marketing. Experimentul în cercetările de marketing. Măsurarea şi scalarea fenomenelor de Mk. Măsurarea atitudinior. Diferenţială semantică. Metoda ordonării rangurilor – 2 ore
2. Metode şi tehnici de culegere a informaţiilor în marketing: Scala cu sumă constantă. Metoda comparaţiilor perechi. Scala lui Likert. Scalarea preferinţelor cu ajutorul modelului FR. Testul hi2 – 2 ore
3. Analiza pieţei: Calculul migraţiei cererii. Studiul cererii de servicii cu ajutorul datelor din bugetele de familie. Cercetarea cererii de servicii. Cercetarea ofertei. Sergmentarea pieţei cu algoritmul Belson – 2 ore
4. Mixul de marketing: Optimizarea mixului de marketing. Politica de produs. Politica de distribuţie. Alegerea variantei de distribuţie optime – 2 ore
5. Politica de preţ. Relaţia preţ - rentabilitate. Preţul de acceptabilitate. Analiza pragului de rentabilitate în cadrul organizaţiei – 2 ore
6. Preţul psihologic. Metode de stabilire a preţurilor – 2 ore
7. Politica de comunicare: Determinarea nivelului optim al cheltuielilor de promovare. Previziunea cheltuielilor promoţionale – 2 ore
6. Bibliografie
1. SUSANU, I.O., Marketing, Editura Didactică şi Pedagogică, Bucureşti, 2006 2. SUSANU, I.O., CRISTACHE, N. Marketing - aplicaţii, Editura Didactică şi
Pedagogică, Bucureşti, 2006 3. SUSANU, I.O. Managementul politicii de produs componentă a mixului de marketing,
Editura Bren, Bucureşti, 2004 4. CRISTACHE, N., SUSANU, I.O. Comunicarea de marketing în activitatea organizaţiei,
Editura Didactică şi Pedagogică, Bucureşti, 2005 5. HUGUESS, M. „Managerul de produs”, Editura Rentrop&Straton, Bucureşti, 2004 6. KOTLER, PH. Managementul Marketingului, Editura Teora, Bucureşti, 1997
Data întocmirii: 23.01.2007 Titular curs: Lector dr.ec. SUSANU IRINA Semnătura: Titular seminar / lucrări practice: Lect. univ. dr. ec. SUSANU IRINA Semnătura:
Director departament / Şef catedră Prof. univ. dr. ec. Adriana OLARU
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI
FACULTATEA DE ŞTIINŢE
Catedra de Matematică
Str. Domnească, nr. 111. Tel- 0236 460780 int: 357.
PROGRAMA ANALITICĂ
Disciplina: Analiză matematică
A. Locul disciplinei în planul de învăţământ:
Anul I Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
42 28 - - 42 28 E - - -
B. Obiectivele disciplinei:
• Cunoaşterea fundamentelor analizei matematice în perspectiva aplicărilor în practica disciplinei; • Formarea unor deprinderi de a folosi raţionamente riguroase precum şi a deprinderilor de studiu
individual;
• Formarea unei concepţii sistemice asupra disciplinei şi aparatului matematic;
• Cunoaşterea metodelor de cercetare în domeniu, precum şi aplicarea acestora în disciplinele de
profil.
C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, problematizarea.
D. Forme şi metode de evaluare: evaluare continuă ( pondere 30% ) prin metode orale, probe scrise,
practice evaluare sumativă (pondere 70%) prin probe scrise/orale.
E. Conţinutul cursului:
Cap. I. Şiruri şi serii de numere reale - 4 ore
Şiruri de numere reale. Definiţii. Propietăţi. Serii de numere reale. Definiţii. Criteriul general de convergenţă
(Cauchy). Criteriul necesar de convergenţă. Criterii de convergenţă pentru serii cu termeni pozitivi. Serii cu
terrmeni oarecare. Convergenţă simplă. Convergenţă absolută. Criterii de convergenţă (ABEL, DIRICHLET,
LEIBNIZ).
Cap. II. Şiruri şi serii de funcţii - 3 ore
Convergenţă simplă. Convergenţă uniformă pentru ţiruri şi serii de funcţii. Criterii de convergenţă. Teoreme
de transfer. Serii de puteri. Serii Taylor. Serii Fourier.
Cap. III. Continuitate. Derivabilitate. - 7 ore
Limite de funcţii în Rk. Continuitate. Continuitate uniformă. Proprietăţi ale funcţiilor continue.
Derivabilitatea funcţiilor de mai multe variabile. Derivata după o direcţie (versor). Relaţia lui EULER pentru
funcţii omogene. Diferenţiabilitate. Extreme de funcţii de mai multe variabile.
Cap. IV. Integrabilitate - 14 ore
Integrale improprii (generalizate). Definiţii. Proprietăţi. Integrale improprii din funcţii pozitive. Integrale
improprii din funcţii cu semn variabil. Integrale improprii cu parametru. Integralele Γ şi β ale lui EULER.
Integrale curbilinii. Curbe parametrizate. Lungimea unei curbe. Integrala curbilinie de tipul I. Aplicaţii

practice. Integrale curbilinie de tipul II. Interpretare fizică. Independenţa faţă de drum a integralei curbilinii
de tipul II. Integrala dublă. Definiţii. Proprietăţi. Calculul integralei duble. Formula RIEMANN - GREEN.
Schimbarea de variabilă în integrala dublă. Coordonate polare. Aplicaţii practice. Integrale de suprafaţă de
tipul II. Interpretare fizică. Formula STOKES. Integrala triplă. Definiţii. Proprietăţi. Calculul integralei
triple. Formula GAUSS-OSTROGRADSKI. Schimbarea de variabile în integrala triplă. Coordonate polare.
Aplicaţii practice. Integrale din funcţii vectoriale. Formula gradientului. Formula rotorului. Formula
divergenţei.
Cap. V. Ecuaţii diferenţiale - 10 ore
Ecuaţii diferenţiale de ordinul I explicite în y’ (diferenţiale totale exacte, cu variabile separabile, factor
integrant, omogene sau reductibile la omogene, liniare, BERNOULLI, RICCATI). Ecuaţii diferenţiale de
ordinul I implicit în y’. Traiectorii izogonale. Traiectorii ortogonale. Ecuaţii diferenţiale de ordin superior
(integrabile prin cuadraturi sau cărora li se poate micşora ordinul). Ecuaţii diferenţiale de ordinul “n” liniare.
Ecuaţii diferenţiale de ordinul “n” liniare cu coeficienţi constanţi. Ecuaţii diferenţiale de ordinul “n” de tip
EULER.
Cap. VI. Sisteme de ecuaţii diferenţiale - 4 ore
Definiţii. Proprietăţi. Sisteme de ecuaţii diferenţiale liniare. Sisteme de ecuaţii diferenţiale liniare cu
coeficienţi constanţi. Sisteme simetrice.
F. Conţinutul seminariilor:
Aplicaţii la temele de la curs. - 28 ore
G. Bibliografie:
1. Aramă L., Morozan T. – Culegere de probleme de analiză matematică, Editura Universal, Bucureşti, 1996 ;
2. Buhăescu T., Duţu G. – Matematici aplicate în economie, Editura Fundaţiei Universitare « Dunărea de Jos«, Galaţi, 1999 ;
3. Chiriţă S. – Probleme de matematici superioare, E.D.P., Bucureşti, 1989 ; 4. Craiu M., Roşculeţ M. - Culegere de probleme de analiză matematică, E.D.P., Bucureşti, 1976 ; 5. Lixandru I. – Sinteze şi probleme de analiză matematică, Editura Fundaţiei Universitare « Dunărea de
Jos«, Galaţi, 2005; 6. Precupanu A. – Bazele analizei matematice, Editura Canova, Iaşi, 1995 ; 7. Roşculeţ M., Toma G., Margras V., Stanciu V. – Probleme de analiză matematică, Ed. Tehnică,
Bucureşti, 1993.
Data aprobării programei analitice în catedră,
Lect.drd. Lixandru Ion
Şef catedră,
Conf.dr. Jenică Crînganu

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galaţi, Str Domneasca Nr. 111 Nr. telefon: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: ARHITECTURA CALCULATOARELOR NUMERICE
A. Locul disciplinei în planul de învăţământ:
Anul III Sem. I Sem. II Total ore Forme de
verificare Nr. credite Anul de
studiu C L C L C L Sem. I Sem. II Sem. I Sem.
II
Cod disciplină
Nr. ore 28 28 - - 28 28 V - 4 - M-S3101-1
B. Obiectivele disciplinei: • Acumularea de cunoştinţe în domeniul tehnologiei informaţiei; • Învăţarea noţiunilor necesare de reprezentare a informaţiei numerice si alfanumerice in
calculatoarele numerice, structura si funcţionarea unui calculator elementar, principalele clase de instrucţiuni si moduri de adresare utilizate.
• Prezentarea caracteristicilor arhitecturale ale unor calculatoare reprezentative. • Cunoaşterea modului de evoluare şi de dezvoltare a produselor şi procedeelor din domeniul
tehnologiei informaţiei în ţara noastră şi pe plan mondial; • Formarea unei concepţii sistemice asupra procedeelor din domeniul tehnologiei informaţiei; • Dezvoltarea capacităţii inginereşti de utilizare echipamentelor specifice şi de selectare a lor la
realizarea unor produse industriale de înaltă competitivitate; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei inginereşti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea tehnica a
studentului, componentă esenţială a reformei industriale în România;
C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea, studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstraţii practice, aplicaţii practice individuale.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de
laborator şi evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. SISTEMUL BIROTIC – 2 ore Definiţii şi principii. Funcţiile şi structura sistemului birotic.
2. CALCULATORUL DE BIROU – 10 ore Placa de bază. Procesorul. Memoria internă. Plăci grafice. Discul fix. Discul flexibil. Unitatea
CD-Rom. DVD-Rom. Monitorul. Tastatura. Mouse. 3. UNITATEA CENTRALĂ DE PRELUCRARE – 6 ore
Structura şi funcţiile unităţii centrale de prelucrare. Elemente generale de arhitectură a microprocesoarelor. Elemente de arhitectură a microprocesoarelor RISC
4. UNITATEA DE MEMORIE – 6 ore

Ierarhizarea memoriei. Memoria stivă. Memoria cache. Adresarea memoriei: adresare imediata, adresare directa, adresare indirecta
5. SETURI DE INSTRUCŢIUNI – 4 ore Tipuri de instrucţiuni. Moduri de adresare. Formatul instrucţiunilor.
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă:
1. Prezentarea laboratorului. Instructaj de protecţie a muncii – 2 ore 2. Calculatorul de birou, elemente componente – 2 ore 3. Unitatea CD-Rom şi RW, părţile componente, modalităţi de inscripţionare – 2 ore 4. Sistemul de operare DOS. Utilitarul Norton Commander – 2 ore 5. Sisteme de numeraţie. Conversia bazei de numeraţie. Operaţii aritmetice – 2 ore 6. Reprezentarea numerelor reale. Reprezentare în virgulă fixă şi mobilă – 2 ore 7. Elemente de logică numerică. Instrucţiuni logice. – 2 ore 8. Instrucţiuni de salt şi apel – 2 ore 9. Moduri de adresare – 6 ore 10. Aplicaţii ale setului de instrucţiuni – 4 ore
G. Bibliografie de elaborare a cursului
1. Vişan D., Bărsan D., Aparatură de birotică, Editura Fundaţiei Universitare „Dunărea de Jos” Galaţi, 2005, ISBN 973-627-254-8.
2. Cezar Botezat „Arhitectura calculatoarelor si sisteme de operare”, Editura Sylvi, Bucuresti 2002, 3. Oleg Cernian - Arhitectura calculatoarelor, Universitatea din Craiova, 1999 4. Muscă Gh. Programare în limbaj de asamblare, Ed. TEORA, Bucureşti 1996;
H. Bibliografie minimală de studiu pentru studenţi
1. Vişan D., Birsan D., Aparatură de birotică, Editura Fundaţiei Universitare „Dunărea de Jos” Galaţi, 2005, ISBN 973-627-254-8.,
2. Muscă Gh. Programare în limbaj de asamblare, Ed. TEORA, Bucureşti 1996; Data aprobării programei analitice în catedră 19.01.2007
Şef catedră Titular disciplină
Prof. dr. ing. Georgescu V. Ş. L. dr. ing. Vişan D
.

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA CATEDRA / DEPARTAMENTUL RS Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: Automate programabile
A. Locul disciplinei în planul de învăţământ: Anul IV
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
42 28 42 28 E 5 M-D3106-2
B. Obiectivele disciplinei: - Implementarea sistemelor de conducere a roboţilor cu automate programabile programabile, - Cunoaşterea algoritmilor de conducere necesari implementărilor sistemelor de comandă, - Dezvoltarea capacităţilor de sinteză a sistemelor de comandă a roboţilor. Metode de predare – învăţare: explicaţia, studiu de caz, conversaţia euristică C. Forme şi metode de evaluare: evaluare continuă ( pondere 30% ) prin metode orale, probe
scrise, practice şi teme de casă; evaluare sumativă (pondere 70%) prin probe scrise/orale D. Conţinutul cursului / număr de ore pentru fiecare temă: Automate programabile
1. Generalităţi / 2 ore. Caracteristici generale ale automatelor programabile. Arhitectură generală. Clasificare generală. 2. Automate programabile cu prelucrare scalară / 6 ore. Automate programabile cu operare scalară. Modul de intrări programabile. Caracteristici generale. Structură. Instrucţiuni. Etapele elaborării aplicaţiilor bazate pe automat programabil. 3. Automate programabile cu prelucrare vectorială / 6 ore. Automate programabile cu operare vectorială. Caracteristici generale. Structură. Instrucţiuni. Etapele elaborării aplicaţiilor bazate pe automat programabil. Programarea automatelor prin instruire
Controlere logice programabile 4. Structura/ 6 ore. Caracteristici generale. Structura modulară. Terminale de programare. Module de intrare ieşire. Module specifice aplicaţiilor. Module de comunicaţie. 5. Variabile / 2 ore. Tipul variabilelor scalare şi vectoriale folosite în programarea CLP. Structura memoriei CLP. 6. Moduri de execuţie ale programelor / 2 ore. Structuri monotask şi multitask. Modul de execuţei ciclic. Modul de execuţie periodic. 7. Limbaje de programare / 12 ore. Limbaje de programare standard. Limbajul Ladder. Limbajul Instruction List. Limbajul Structured Text.

Instrucţiuni pentru gestionarea variabilelor scalare. Blocuri de funcţii standard (contorizare, temporizare). Procesarea variabilelor vectoriale. Instrucţiuni pentru gestionarea programului. 8. Procesarea sevenţială / 6 ore. Procesarea secvenţială –limbajul Grafcet. Acţiuni asociate cu paşii Grafcet. Condiţii asociate cu tranziţiile Grafcet. Organizarea sectiunii Grafcet. Instrucţiuni Grafcet pentru CLP-uri care nu suporta programarea grafică.
E. Conţinutul seminariilor / număr de ore pentru fiecare temă: 1. Prezentare software-ului de simulare de automate programabile CLP-uri. /4ore 2. Comanda manipulatorului pneumatic MP02 cu simulatorul de automate programabile. /2ore 3. Prezentare multimedia a unei game de CLP-uri. /6 ore 4. Comanda manipulatorului hidraulic Mh01 cu automate programabile Nano Telemecanique. /4 ore 5. Comanda manipulatorului Mp02 cu automate programabile Premium şi Twido Telemecanique. /4 ore 6. Comanda robotului RS54. cu automate programabile Premium şi Twido Telemecanique. /4 ore
F. Bibliografie de elaborare a cursului 1. Borangiu Th, Dobrescu R. Structuri moderne de conducere automată Ed. Tehnică,
Bucureşti, 1982 ; 2. Marinescu V Conducerea sistemelor flexibile de prelucrare Ed. Fundaţiei
Universitare Dunărea de Jos, Galati , 2000 ; 3. Marinescu V Sisteme şi echipamente de comandă numerică. Vol 1.
Controlere logice programabile. Ed. Cartea Universitară, Bucureşti, 2004 ;
4.*** Schneider Automation Inc. Technical Documentation PL7PRO Ed. Tehnică, Bucureşti, 2000 ;
G. Bibliografie minimală de studiu pentru studenţi1 1. Marinescu V Sisteme şi echipamente de comandă numerică. Vol 1.
Controlere logice programabile. Ed. Cartea Universitară, Bucureşti, 2004 . Capitolele 1, 2, 3.
Titular curs: Prof. Dr. Ing Vasile Marinescu Semnătura:
Data aprobării programei analitice în catedră / departament 05-02-2007
(Semnătura)
Director departament / Şef catedră
Prof.Dr.Ing.Dumitru Nicoară 1 Este de preferat ca bibliografia minimală de studiu pentru surdenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atnigerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: Bazele roboticii
A. Locul disciplinei în planul de învăţământ:
Anul III RI Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C L C P C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
42 28 42 28 E 5 M-D3105-2
B. Obiectivele disciplinei:
• Cunoaşterea modului de evoluare si de dezvoltare, in ţara noastră si pe plan mondial, a robotior industriali; • Dezvoltarea capacităţii inginereşti de integrare si de selectare a robotior industriali in
sisteme de producţie flexibile, care sa conducă la creşterea calităţii produselor; • Cunoaşterea principiului, avantajelor, dezavantajelor şi a performanţelor specifice unor
categorii cat mai largi de RI; • Contribuie la crearea unei baze aplicative pentru tehnicile de programare şi comandă; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei inginereşti. • Dezvoltarea abilitaţilor de cercetare; • Înzestrarea cu capacităţi de gândire proiectivă ; • Formarea deprinderilor practice în domeniul RI. .
C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea, studiul de caz, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstraţii practice de reglare si funcţionare a unor roboti si sisteme robotizate, studiul de prospecte, caiete service, scheme cinematice şi al bibliografiei, aplicaţii practice individuale cu diferiţi roboti.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator si evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă: 1. Noţiuni de robotică – 4 ore
Definiţii. Terminologie. Roboţi şi robotică. Clasificare RI. Funcţiile RI 2. Structura de bază a conducerii – 2 ore 3. Introducere in tehnologia robotizata – 4 ore
Tipuri de aplicatii ale roboţilor industriali Necesitatea introducerii unui sistem de fabricatie robotizat Structura generala a unui robot industrial Efectele tehnice, economice si sociale ale utilizarii robotilor industriali
4. Elemente componente ale roboţilor industriali– 10 ore Traductoare specifice RI Senzori utilizati in constructia RI Probleme privind perfectionarea sistemului senzorial pentru roboti industriali
Sisteme de actionare. Actuatori mecatronici- electrici, hidraulici si pneumatici 5. Structuri de interfaţă pentru comanda RI– 4 ore
Comanda actionarilor cu motoare de c.c., de c.a., pas cu pas 6. Aspecte generale privind generarea traiectoriilor de miscare ale RI – 4 ore 7. Aspecte generale legate de conducerea RI – 4 ore 8. Vederea artificiala a robotilor. Senzori vizuali inteligenti – 2 ore 9. Programarea robotilor- generalitati – 4 ore 10. Aplicatii ale RI in sisteme automatizate flexibile – 4 ore Flexibilitatea sistemelor de fabricatie. Utilizari in operatii de sudare, vopsire, turnare, deservire.
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: 1. Robotul de sudare RIP 6,3-2 ore 2. Manipulatorului ROBS-1-2 ore 3. Analiza comparativa asupra roboţilor Movemaster RV-M1/RV-M2, RV-E5NJ/E5NJM, RVN10/ RVN12, RHE3H si MRIP 0,2-2 ore 4. Sistem de monitorizare a sudarii robotizate utilizând vederea artificiala-2 ore 5. Studierea funcţionării robotului de tip SCARA-2 ore 6. Variante de RI ABB. Programul ABB-Pick Master-2 ore 7. Studiul sistemului de reglare viteza-pozitie pentru articulatiile robotilor industriali -2 ore 8. Senzori folositi pentru roboti industriali: senzori inductivi si senzori capacitivi-2 ore 9. Senzori folositi pentru roboti industriali: senzori optici si senzori cu ultrasunete -2 ore 10. Comanda actionarilor cu motoare de c.c. -2 ore 11. Comanda actionarilor cu motoare pas cu pas-2 ore 12. Măsurarea poziţiei si parametrilor dinamici pentru un braţ robotizat.-2 ore 13. Sisteme robotizate speciale -2 ore 14. Recuperari
G. Bibliografie de elaborare a cursului
1. Kovacs F., Tusz F., Varga S., Fabrica viitorului. Ed. Multimedia Internaţional, Arad, 2000 2. Moise, A., Sisteme de conducere a roboţilor, Ed. Cartfil, Ploieşti, 1999. 3. Preumont, A., Doroftei, I., Introduction a la robotique, Editura Junimea, Iaşi, 2002. 4. Doroftei, I., Arhitectura şi cinematica roboţilor, Editura CERMI, Iaşi, 2002. 5. Mark W. Spong, Seth Hutchinson, M. Vidyasagar. Robot Modeling and Control. John
Wiley & Sons, Inc. 6. W. Spong, M. Vidyasagar. Robot Dynamics and Control. Wiley, New York. 7. Richard M. Murray, Zexiang Li, and S. Shankar Sastry. A Mathematical Introduction to
Robotic Manipulation. CRC Press. 8. John J. Craig. Introduction to Robotics Mechanics and Control. Addison Wesley, Reading,
MA. 9. Brady, M., Robotics science. Cambridge, Mass., MIT Press, 1989 10. Branwyn, G., Absolute beginner's guide to building robots. Indianapolis, Ind., Que, 2004 11. Canudas de Wit, C. A., B. Siciliano, et al., Theory of robot control. Berlin ; New York,
Springer. 1996 12. Cook, D., Robot building for beginners. Berkeley, CA, Apres, 2002 13. Choset, H. M., Principles of robot motion : theory, algorithms, and implementation.
Cambridge, Mass., MIT Press, 2005 14. Dorf, R. C. and S. Y. Nof, International encyclopedia of robotics : applications and
automation. New York, Wiley, 1988 15. Hunt, V. D., Industrial robotics handbook. New York, Industrial Press, 1983 16. Kafrissen, E. and M. Stephans, Industrial robots and robotics. Reston, Va., Reston Pub. Co,
1994

17. Edwin Wise, Robotics demystified, McGraw-Hill, New York, 2005 18. Stan Gibilisco, Concise encyclopedia of robotics, McGraw-Hill, New York, 2003 19. The Robotics review. Cambridge, Mass., MIT Press, 1989 20. John J. Craig, Introduction to Robotics, Addison-Wesley Publishing, Inc., 1989. 21. John J. Craig. Introduction to Robotics Mechanics and Control. Addison Wesley, Reading,
MA. 22. D.H. Ballard and C.M. Brown, Machine Vision, Prentice-Hall, 1982. 23. J.C. Latombe, Robot Motion Planning, Kluwer Academic Publishers, 1991. 24. P. J. McKerrow, Introduction to Robotics, ISBN: 0201182408 25. Mark W. Spong, Seth Hutchinson, M. Vidyasagar. Robot Modeling and Control. John
Wiley & Sons, Inc. 26. M. W. Spong and M. Vidyasagar. Robot Dynamics and Control. Wiley, New York. 27. Richard M. Murray, Zexiang Li, and S. Shankar Sastry. A Mathematical Introduction to
Robotic Manipulation. CRC Press.
H. Bibliografie minimală de studiu pentru studenţi
1. Mistodie L., Conducerea si programarea robotilor, note de curs, 2005; 2. Kovacs F., Tusz F., Varga S., Fabrica viitorului. Ed. Multimedia Internaţional, Arad, 2000 3. Munteanu, O., Bazele roboticii : arhitectura robotilor manufacturieri, Brasov ,2003 4. Munteanu, O., Bazele roboticii : robotica nemanufacturiera, Brasov, 2003 Data aprobării programei analitice în catedră: 13. 02. 2007
Titular curs: S.L.ing Mistodie Luigi Titular lucrări practice: S.L.ing Mistodie Luigi Semnătura:
Şef catedră Prof dr ing Georgescu V.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICǍ CATEDRA DE ROBOTICǍ ŞI SUDARE Adresa: Str. Domnească nr. 47, 800008-Galaţi Nr. telefon / fax: 0236 46 01 82 E-mail:
PROGRAMA ANALITICĂ
Disciplina: BAZELE SISTEMELOR AUTOMATE
A. Locul disciplinei în planul de învăţământ:
Anul II Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
28 28 28 28 E 3
B. Obiectivele disciplinei: Rolul acestei discipline este de a familiariza studenţii cu fundamentele teoriei sistemelor dinamice, cu principalele noţiuni şi cele mai uzuale metode şi tehnici de analiză şi sinteză a sistemelor automate. În particular, accentul va fi pus pe sisteme mecanice ca studii de caz. C. Metode de predare – învăţare:
- descoperirea dirijată, problematizarea, studiul de caz, conversaţia euristică, demonstraţia, generalizarea
D. Forme şi metode de evaluare:
1 12 2
NF NE NS= ⋅ + ⋅ , unde:
NF – nota finală NE – nota la examinarea finală NS – nota activităţilor aplicative
Examinarea finală: test grilă, notat cu NG + o aplicaţie având toată documentaţia la dispoziţie, notată cu NA
1 12 2
NE NG NA= ⋅ + ⋅
Activităţi aplicative:
4
14
ii
NSNS ==
∑, în care:
NS1 corespunde notării activităţii de la laborator NSi, i=2,3,4 – notarea rezolvării temelor de casă

E. Conţinutul cursului / număr de ore pentru fiecare temă:
1 Semnale. Clasificare, modele matematice 2 ore 2 Sisteme dinamice: definiţie formală, clasificări, exemple 2 ore 3 Modelarea matematică a sistemelor dinamice continue prin ecuaţii
diferenţiale ordinare. Calculul răspunsului unui sistem liniar continuu invariant (SLCI) la semnale canonice
2 ore
4 Funcţia de transfer a unui SLCI. Grupări de elemente dinamice fundamentale – funcţia de transfer echivalentă
2 ore
5 Stabilitatea unui SLCI. Criteriul fundamental de stabilitate. Criterii algebrice de verificare a stabilităţii
2 ore
6 Sisteme dinamice elementare: sistemul de ordinul I (elementul aperiodic), sistemul de ordinul al II-lea (elementul oscilant)
2 ore
7 Analiza frecvenţială a SLCI. Trasarea caracteristicilor logaritmice de frecvenţă (Bode) amplificare-pulsaţie şi fază-pulsaţie. Exemple de calcul
2 ore
8 Analiza sistemelor cu reacţie. Criteriul de stabilitate al lui Nyquist. Indicatorii rezervei de stabilitate. Exemple de analiză
2 ore
9 Modelarea pe stare a sistemelor automate 2 ore 10 Sinteza sistemelor automate liniare şi continue. Tipuri de regulatoare
automate. Sinteza regulatorului prin metoda alocării polilor. Exemplu de proiectare
2 ore
11 Sinteza regulatorului pentru procese rapide. Reglarea PID. Varianta Kessler a criteriului modulului. Exemple de proiectare
2 ore
12 Sinteza regulatorului pentru procese rapide. Varianta Kessler a criteriului simetriei. Exemple de proiectare
2 ore
13 Acordarea optimă a regulatoarelor pentru procese lente. Reglarea în cascadă 2 ore 14 Sisteme în timp discret. Discretizarea sistemelor continue 2 ore
F. Conţinutul lucrărilor practice / număr de ore pentru fiecare temă:
1 Indicatorii de performanţă ai sistemelor automate 2 ore 2 Elementul aperiodic. Elementul integrator 2 ore 3 Elementul oscilant 2 ore 4 Elementul derivator la limită cauzal. Elemente dinamice fundamentale cu
avans şi cu întârziere de fază 2 ore
5 Trasarea caracteristicilor de frecvenţă. 2 ore 6 Conversia parametric –> parametric: caracteristică de frecvenţă –> funcţie de
transfer 2 ore
7 Studiul unui sistem în planul fazelor 2 ore 8 Răspunsul sistemelor dinamice pentru diferite semnale de test: simulare
folosind Matlab/SimulinkTM2 ore
9 Studiul unui sistem de stabilizare automată 2 ore 10 Regulatorul proporţional-integrator (PI) 2 ore 11 Acordarea unui sistem de reglare automată cu dinamică rapidă utilizând
reglarea PID (criteriul empiric Ziegler-Nichols) – aplicaţie la reglarea nivelului lichidului dintr-un rezervor
2 ore
12 Acordarea unui sistem de reglare automată prin metoda alocării polilor – simulare în Matlab/SimulinkTM
2 ore
13 Sisteme în timp discret. Discretizarea sistemelor continue – simulare în Matlab/SimulinkTM
2 ore
14 Colocviu de laborator 2 ore
G. Bibliografie de elaborare a cursului
1. Mînzu, V., Adriana Şerbencu, L. Beldiman, Adrian Şerbencu – Teoria sistemelor – elemente fundamentale, Editura Academica, Galaţi, 2003. 2. Mînzu, V., E. Ceangă – Bazele sistemelor automate – sisteme monovariabile, Editura Didactică şi Pedagogică, Bucureşti, 2002. 3. Mînzu, V., B. Lang – Commande automatique des systèmes dynamiques continus linéaires – cours à des applications utilisant MATLAB, Édition ELLIPSES, Collection TECHNOSUP Paris, France, 2001. 4. Mihoc, D., S.S. Iliescu – Teoria şi elementele sistemelor de reglare automată, Editura Didactică şi Pedagogică, Bucureşti, 1984. 5. Călin, S., I. Dumitrache, P. Dimo – Automatizări electronice, Editura Didactică şi Pedagogică, Bucureşti. 6. Ceangă E., ş.a. – Electronică industrială şi automatizări – culegere de probleme, vol. I, Litografia Universităţii din Galaţi, 1983.
H. Bibliografie minimală de studiu pentru studenţi1 1. Mînzu, V., E. Ceangă – Bazele sistemelor automate – sisteme monovariabile, Editura Didactică şi Pedagogică, Bucureşti, 2002. 2. Ceangă E., ş.a. – Electronică industrială şi automatizări – culegere de probleme, vol. I, Litografia Universităţii din Galaţi, 1983.
Data aprobării programei analitice în catedră 20.09.2006
(Semnătura)
Şef catedră
Prof. dr. ing. Sergiu CARAMAN
1 Este de preferat ca bibliografia minimală de studiu pentru studenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atingerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA CATEDRA / DEPARTAMENTUL Adresa: Nr. telefon / fax: E-mail:
PROGRAMA ANALITICĂ
Disciplina: BAZELE SISTEMELOR MECATRONICE
A. Locul disciplinei în planul de învăţământ: Anul
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C S C S C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
42 28 42 28 - E 4
B. Obiectivele disciplinei: Prezentarea structurilor mecatronice prin care se fixează
cunoştinţe minime legate de: - definirea sistemelor mecatronice; - acţionarea sistemelor mecatronice; - cuplarea calculatorului la sistemele mecatronice; - folosirea senzorilor şi traductoarelor; - aplicaţii ale sistemelor mecatronice.
C. Metode de predare – învăţare: prelegerea, dezbaterea, aplicaţii practice, modelarea şi
simularea structurilor mecatronice, studiu documentar.
D. Forme şi metode de evaluare: evaluare continuă 30%, evaluare sumativă 70% prin probe orale.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Structura sistemelor mecatronice; - 2 ore 2. Mecanismele sistemelor mecatronice; - 4 ore 3. Senzori şi traductoare; - 4 ore 4. Acţionarea sistemelor mecatronice; - 8 ore 5. Structura sistemelor informatice; - 2 ore 6. Utilizarea calculatoarelor în prelucrarea datelor; - 3 ore 7. Sisteme de achiziţii şi interfeţe; - 3 ore 8. Achiziţia şi procesarea semnalelor; - 4 ore 9. Exemple de sisteme mecatronice : - 12 ore
- Echipamente periferice şi de birotică; - Mecatronica automobilului; - Echipamente de supraveghere şi alarme; - Mecatronica aparatelor electrocasnice; - Aparate foto-video-audio; - Echipamente pentru automatizarea serviciilor; - Echipamente mecatronice pentru sudare.
F. Conţinutul seminariilor / număr de ore pentru fiecare temă:
- Măsurători de parametrii mecanici, electrici si hidro-pneumatici; - 2 ore

- Cunoaşterea tipurilor de traductoare şi senzori; - 6 ore - Folosirea calculatorului în prelucrarea datelor; - 4 ore - Prezentarea echipamentelor periferice şi de birotică; - 4 ore - Prezentarea aparaturii foto-audio-video; - 2 ore - Prezentarea echipamentelor pentru automatizarea serviciilor. – 4 ore - Prezentarea echipamentelor mecatronice de sudare. – 6 ore
G. Bibliografie de elaborare a cursului
H. Bibliografie minimală de studiu pentru studenţi1
I. Munteanu O, Eftimie L, Diaconescu D – Bazele roboticii. Roboţi industriali – Ed Lux –
Libris – Braşov 1995
2.Constantin E – Mecanizarea şi automatizarea proceselor de sudare – Univ. Galaţi 1979 3. Davidovici A, S.a – Modelarea, simularea şi comanda manipulatoarelor şi roboţilor industriali, Ed Tehnică, Bucureşti 1986 4. Ispas V, S.a – Aplicaţiile cinematice în construcţia manipulatoarelor şi roboţilor industriali – Ed. Academică – Bucureşti 1990.
Data aprobării programei analitice în catedră / departament 20.08.2007
Şef catedră Titulari disciplină Prof. dr. ing. Georgescu V. Prof. dr. ing. Constantin E
1 Este de preferat ca bibliografia minimală de studiu pentru surdenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atnigerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE STIINTE DEPARTAMENTUL DE CHIMIE Adresa: Galati 800008, Str. Domneasca nr. 47 Nr. telefon / fax: +40 236-495400 E-mail: [email protected]
PROGRAMA ANALITICĂ Disciplina: Chimie
A. Locul disciplinei în planul de învăţământ:
Anul Sem. I Sem. II
Total ore
Forme de verificare
Nr. credite Anul de studiu C P C L C S Sem.I Sem.II Sem.I Sem.II
Cod disciplină
I 1 1 1 1 V 3
B. Obiectivele disciplinei: Disciplina are un puternic caracter teoretic si aplicativ , chimia fiind o stiinta care se bazeaza pe experiment. Legatura intre teorie se practica este in acest fel mult mai usor de realizat iar fenomenele sunt prezentate teoretic la curs si exemplificate prin experiment la laborator.Nu se pot disocia disciplinar toate specializarile cu caracter ingineresc mai ales ,de fenomenele chimice deoarece sunt naturale si nimic nu se poate realiza fara a se lua in considerare interactia cu mediul tehnologic si nu numai.Formarea interdisciplinara a viitorilor specialisti necesita un minim de cunostinte chimice cu legatura directa in domeniul aprofundat. In acest sens cursul de chimie raspunde cerintelor minimale de familiarizare cu fenomenele chimice legate de specializarea sectiei . Sunt evidentiate in curs teoriile si fenomenele chimice principale iar in cadrul lucrarilor practice parametrii si indiciii caracteristici definitorii in industria navala. Se prezinta in final si unele aspecte in ceea ce priveste chimia si tehnologia materialelor avansate cu directa aplicare in domeniul mecanic.
C. Metode de predare – învăţare:
Prelegerea, conversaţia euristică, explicaţia, dezbaterea, studiul de caz, problematizarea, simularea de situaţii, metode de lucru în grup, individual şi frontal, ateliere de lucru, metode de dezvoltare a gândirii critice, portofoliul, studiul documentelor curriculare şi al bibliografiei.
D. Forme şi metode de evaluare:
Evaluarea finală constă în examinarea pe bază examen scris, la care studentul are de răspuns la patru chestiuni teoretice şi doua aplicaţii. Prezentarea la examen este condiţionată de prezenta la laborator, de promovarea colocviului de laborator. Nota finală va fi procentual, nota de la evaluarea parţială 30% , nota de la colocviul de laborator 20% ,nota de la examinarea finală cu o pondere de 50%.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
I. Conţinutul cursului: Cap.1 Noţiuni introductive despre chimie si structura chimica a materiei: (2 ore) Cap.2 Teorii moderne, mecano-cuntice ale atomilor si moleculelor: (2 ore)
- Modele precuantice - Ecuatia lui Scrodinger - Orbitali atomici - Orbitali moleculari
Cap.3 Ecchilibre chimice si aplicatii in solutii de electroliti: (2 ore) - Legea echilibrului chimic - Principiul lui Le Chathelier - Teoria aciditatii a lui Bronsted - Notiunea de pH si calculul acestuia la solutiile principale de electroliti
Cap.4 Notiuni de electrochimie: (2 ore) - Reactii redox ; - Potentialul normal de hidrogen; - Potentiale de electrod; - Pile electrochimice si aplicatii moderne ale acestora
Cap.5 Coroziunea, fenomen natural: (2 ore) - Fenomenologie si implicatii socio-economice ale coroziunii - Tipuri generale de coroziune(chimica , electrochimica, biochimica ) - Termodinamica si cinetica coroziunii. - Indici de evaluare a fenomenului de coroziune. .
Cap.6 Metode de prevenire a fenomenului natural de coroziune : (2 ore) - Metode anodice de protectie - Metode catodice de protectie
- Metode mixte de protectie Cap.7 Materiale compozite si materiale avansate cu aplicatii industriale: (2 ore)
- Materiale compozite, definitie si clasificare - Nanocompozite , definitie si clasificare - Metode de obtinere si utilizari
F. Bibliografie de elaborare a cursului 1. Atkins P. Julio de Paula, Atkins' Inorganical Chemistry Seventh edition,
OxfordUniversity Press, 2002. 2. Berdan L., Calu N., Chime anorganică, Ed. Universitatea Iaşi, 1992. 3. Hârtopeanu A., Chime anorganică - Metalele, Universitatea Galaţi, 1999. 4. Constantinescu G.C., Roşca I., Negoiu M., Chimie anorganică, Vol. 1 şi 2,
E.T., Bucureşti, 1986. 5. Barnard A.K., Teoretical Basis of Inorganic Chemistry, Mac Graw-Hill,
Publ. comp. New York 1970. 6. Heslop R.B., Jones K., Inorganic Chemistry, Elsevier, Amsterdam, 1976. 7. Marcu Gh., Chimia metalelor, E.D.P., Bucureşti, 1979. 8. Negoiu D., Negoiu M., Structura compuşilor anorganici, I.P.B., Bucureşti,
1984. 9. Spacu P., Brezeanu M, Stan M., Gheorghiu C., Tratat de chimie anorganică,
vol.3, Ed. Tehnică, Bucureşti, 1978. 10. Wells A.F., Structural Inorganic Chemistry, Clarendon Press, Oxford, 1975 11. Marcu Gh., Brezeanu M., Bejan C., Bâtcă A., Cătuneanu R., Chimie
anorganică, E.D.P., Bucureşti, 1981. 12. Vermeşan E., Ionescu I., Urseanu A., Chimie Metalurgică, E.D.P., Bucureşti,
1981. 13. Oniciu L., Mureşan L., Electrochimie aplicată, Ed. Presa Universitară
Clujeană, Cluj-Napoca 1998. 14. Oniciu L., Constantinescu E., Electrochimie şi coroziune, E. D. P. Bucureşti
1982 15. Mitoşeriu O, Mitoşeriu L., Cristalografia, Ed. „Porto Franco”, Galati, 1998. 16. Cioroi M., Chimie generală, Ed. „Logos”, Galaţi 2000.

17. Benea L., Dima D., Chimie generală, - Laborator – Ed. Universităţii "Dunărea de Jos" din Galaţi, 1997.
18. Benea L., Dima D., Chimie generală, - Teorie şi aplicaţii practice – Ed. "Ars docendi" Bucureşti 1999.
19. Sahlean D., Stoian C., Dima D., Chimie generală, - Laborator – Ed. Universităţii "Dunărea de Jos" din Galaţi, 2000.
H. Bibliografie minimală de studiu pentru studenţi1
1. Atkins P. Julio de Paula, Atkins' Inorganical Chemistry Seventh edition, OxfordUniversity Press, 2002.
2. Oniciu L., Mureşan L., Electrochimie aplicată, Ed. Presa Universitară Clujeană, Cluj-Napoca 1998.
3. Oniciu L., Constantinescu E., Electrochimie şi coroziune, E. D. P. Bucureşti 1982
4. Benea L., Dima D., Chimie generală, - Laborator – Ed. Universităţii "Dunărea de Jos" din Galaţi, 1997.
5. Benea L., Dima D., Chimie generală, - Teorie şi aplicaţii practice – Ed. "Ars docendi" Bucureşti 1999.
6. Sahlean D., Stoian C., Dima D., Chimie generală, - Laborator – Ed. Universităţii "Dunărea de Jos" din Galaţi, 2000.
1 Este de preferat ca bibliografia minimală de studiu pentru surdenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atnigerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.

UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICĂ CATEDRA / DEPARTAMENTUL TCM Adresa: Strada Domneasca Nr.111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: Conducerea si programarea roboţilor
Locul disciplinei în planul de învăţământ: Anul IV
Sem. I Sem. II Total ore Forme de verificare Nr. credite Anul
de studiu C S C P C S Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
28 14 28 14 28 14 E E+P 4 5 M-S3206-1
A. Obiectivele disciplinei:
• Însuşirea cunoştinţelor privind conducerea roboţilor industriali • Cunoaşterea modalităţii de programare a roboţilor industriali
B. Metode de predare – învăţare: explicaţia, studiu de caz, conversaţia euristică
C. Forme şi metode de evaluare: evaluare continuă ( pondere 30% ) prin metode orale, probe scrise, practice şi teme de casă; evaluare sumativă (pondere 70%) prin probe scrise/orale
D. Conţinutul cursului / număr de ore pentru fiecare temă:
1. Modele geometrice a RI (18 ore) Problemele conducerii RI cu model geometric. Reprezentarea omogena a obiectelor. Transformari omogene. Reprezentarea şi transformarea Denavit-Hartenberg. Modelului geometric direct şi invers. Transformari diferentiale omogene. Calculul matricei Jacobi. 2. Metode de conducere a RI (20 ore) Problema dinamica directa si inversa. Determinarea modelului dinamic cu ajutorul ecuaţiilor lui Lagrange. Problemele planificatorului de mişcare. Specificarea mişcării. Planificarea traiectoriei in coordonate generalizate: planificarea unei traiectorii intre doua puncte precizate si planificarea unei traiectorii cu mai multe puncte precizate. Planificarea mişcării coordonate si in timp minim. Planificarea traiectoriei in coordonate operaţionale. Conducerea cu model geometric. Funcţia de transfer pentru o articulaţie. Reglarea poziţiei pentru o articulaţie. Conducerea unui RI cu mai multe articulatii. Conducerea prin liniarizarea modelului dinamic. Metode de tabelare a coeficienţilor dinamici. Utilizarea decuplării in conducerea RI. Conducerea RI cu calculul on-line al modelului dinamic. Structuri de comanda adaptive. Comparaţie privind diferitele structuri de comanda ale RI. 3. Programarea RI (18 ore) Metode de programare a roboţilor. Caracteristici ale limbajelor de programare folosite in robotica. Modelarea mediului. Specificarea poziţiei si a mişcării. Integrarea senzoriala. Alegerea metodei de programare adecvate aplicaţiei. Studiu de caz privind folosirea RI intr-un sistem de fabricaţie flexibil
E. Conţinutul seminariilor / număr de ore pentru fiecare temă: 1. Determinarea modelului geometric direct si invers al manipulatorului RS54.(3 ore) 2. Determinarea modelului geometric direct si invers al manipulatorului MP02.(3 ore) 3. Conducerea unui RI cu 3 grade de mobilitate in coordonate cilindrice RI (3ore)

4. Conducerea unui RI de tip portal portal. (3ore) 5. Programarea prin învăţare a robotului RS52. (2ore)
F. Proiect Conducerea unui robot în cadrul unui spaţiu impus
G. Bibliografie de elaborare a cursului
1. Voicu M., Lazar C. Sisteme de conducere a roboţilor industriali Rotaprint I. P. Iasi, 1987.
2. Panescu D. Sisteme de conducere a robotilor industriali. Modelare si planificarea traiectoriei. Rotaprint Universitatea Tehnica “Gh. Asachi” Iasi, 1996.
3. Ivănescu M. Roboţi industriali. Algoritmi şi sisteme de conducere Ed. Universitaria, Craiova, 1994 ;
4. Borangiu Th., Hossu A., Sisteme educaţionale in robotica Ed. Tehnică, Bucureşti, 1991;
H. Bibliografie minimală de studiu pentru studenţi1 1. Voicu, M., Lazar, C., Sisteme de conducere a RI., I.P. Iaşi, 1987 Titular curs: Prof. Dr. Ing Vasile Marinescu Semnătura:
Data aprobării programei analitice în catedră / departament 05-02-2007
(Semnătura)
Director departament / Şef catedră
Prof.Dr.Ing.Dumitru Nicoară
1 Este de preferat ca bibliografia minimală de studiu pentru surdenţi să identifice cu claritate şi precizie capitolele pe care studenţii le au de parcurs pentru atnigerea obiectivelor de predare şi învăţare, eventual fiind particularizată în funcţie de tematica cursurilor şi seminariilor.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: Conducerea si programarea ROBOŢILOR
A. Locul disciplinei în planul de învăţământ:
Anul IV RI Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C L C P C L+P Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
28 14 28 28 56 42 E E+P 4 3+2 M-S3206
B. Obiectivele disciplinei:
• Cunoaşterea modului de evoluare si de dezvoltare, in ţara noastră si pe plan mondial, a robotior industriali; • Dezvoltarea capacităţii inginereşti de integrare si de selectare a robotior industriali in
sisteme de producţie flexibile, care sa conducă la creşterea calităţii produselor; • Cunoaşterea principiului, avantajelor, dezavantajelor şi a performanţelor specifice unor
categorii cat mai largi de RI; • Contribuie la crearea unei baze aplicative pentru tehnicile de programare şi comandă; • Promovarea calităţilor atitudinale şi aptitudinale specifice carierei inginereşti. • Dezvoltarea abilitaţilor de cercetare; • Înzestrarea cu capacităţi de gândire proiectivă ; • Formarea deprinderilor practice în domeniul RI. .
C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea, studiul de caz, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstraţii practice de reglare si funcţionare a unor roboti si sisteme robotizate, studiul de prospecte, caiete service, scheme cinematice şi al bibliografiei, aplicaţii practice individuale cu diferiţi roboti.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator si evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă: Sem. I
1. Noţiuni de robotică.– 2 ore Definiţii. Terminologie. Roboţi şi robotică. Clasificare RI. Funcţiile RI
2. Structura de bază a conducerii – 2 ore 3. Metoda tehnica de abordare a structurii de conducere a RI.– 2 ore 4. Aspecte asupra conducerii miscarilor – 2 ore 5. Proiectarea conducerii roboţilor industriali– 2 ore 6. Problemele proiectării conducerii RI– 2 ore 7. Mijloace de descriere a conducerii RI– 2 ore 8. Conducere pe traiectorie a RI– 2 ore 9. Variante de conducere. Transformări de coordonate– 2 ore 10. Descrierea poziţiei şi orientării obiectelor– 2 ore 11. Elaborarea traiectoriei. Planificarea miscarii– 2 ore
12. Conducerea forţelor si momentelor– 2 ore 13. Modelarea şi simularea numerică a RI. – 2 ore 14. Modelele cinematice si modele dinamice ale RI. – 2 ore
Sem. II 1. Alegerea optima a algoritmilor si structurilor de conducere a RI– 2 ore 2. Proiectarea conducerii sistemelor multi-robotice– 4 ore 3. Introducere în tematica limbajelor de programare a roboţilor industriali – 4 ore Elemente caracteristice limbajelor de programare destinate structurilor de calcul. Variabile. Subrutine. Proceduri şi funcţii. Macroinstrucţiuni. Recursivitatea. Procese şi subrutine. 4. Date utilizate de limbajele de programare a roboţilor-4 ore Structuri de date. Moduri de manipulare a datelor. Operaţii aritmetice. Operaţii geometrice. Operaţii logice. Operaţii de comparare. 5.– Instrucţiuni de descriere a mediului de operare-4 ore Instrucţiuni de mişcare. Instrucţiuni de mişcare implicite. Instrucţiuni de mişcare explicite. Instrucţiuni de mişcare cu specificaţii tehnologice. 6. Instrucţiuni de control al parcurgerii programului– 4 ore Instrucţiuni de salt necondiţionat. Instrucţiuni de execuţie condiţionată. Instrucţiuni cu execuţii condiţionate. Instrucţiuni cu salt condiţionat. 7. Limbaje de programare pentru conducerea RI ABB– 3 ore 8. Conducerea RI utilizand softul educaţional COSIMIR – 3 ore
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă: 1. Conducerea si programarea robotului de sudare RIP 6,3-2 ore 2. Conducerea manipulatorului ROBS-1-2 ore 3. Analiza comparativa asupra roboţilor Movemaster RV-M1/RV-M2, RV-E5NJ/E5NJM, RVN10/ RVN12, RHE3H si MRIP 0,2-2 ore 4. Sistem de monitorizare a sudarii robotizate utilizând vederea artificiala-2 ore 5. Studierea funcţionării robotului de tip SCARA-2 ore 6. Conducerea inteligenta a RI ABB utilizând programul ABB-Pick Master-2 ore 7. Măsurarea poziţiei si parametrilor dinamici pentru un braţ robotizat.-2 ore G. Conţinutul proiectului: 1. Programarea ROBS1
Programarea unui sistem automat de manipulare de tip robot ROBS1. Date de proiectare: piesa (formă, dimensiuni, material, masă). Stabilirea ciclului de mişcări. Determinarea structurii modulare a robotului. Analiza schemei cinematice şi calculul preciziei de poziţionare. Ciclograma de manipulare. Realizarea programului.
2. Programarea RI utilizând software-ul educaţional COSIMIR (varianta demo) 3. Programarea RI folosind Robotics Toolbox, Spacedyn Toolbox, pentru Matlab H. Bibliografie de elaborare a cursului
1. Voicu M., Lazar, C., Sisteme de conducere a RI., I.P. Iaşi, 1987 2. Davidoviciu A., Draganoiu Gh., Mooanga A., Modelarea, simularea si comanda
manipulatoarelor si RI, Ed. Tehnica, Bucureşti, 1986 3. Ghinea M., Fireteanu M., Matlab - Calcul numeric, grafica, aplicaţii, Ed. Teora, 1998 4. Kovacs F., Tusz F., Varga S., Fabrica viitorului. Ed. Multimedia Internaţional, Arad, 2000 5. Bîzdoacă N., Diaconu I., Limbaje de programare a RI, Ed. Sitech Craiova 1998 6. Popescu I., Proiectarea mecanismelor plane, Ed. Scrisul românesc Craiova 1977. 7. Călin S., ş.a., Conducerea adaptivă şi flexibilă a proceselor industriale, Ed. Tehnică,
Bucureşti, 1988. 8. Borangiu T., ş.a., Conducerea multiprocesor în timp real a structurilor flexibile de fabricaţie.
Ed. Tehnica, Bucureşti, 1988. 9. Moise, A., Sisteme de conducere a roboţilor, Ed. Cartfil, Ploieşti, 1999.
10. COSIMIR Educational, User's Guide, Festo Didactic, http://www.festo-didactic.com/ov3/media/customers/1100/00515236001075223537.pdf
11. 682526 EN 06/04 COSIMIR PLC Manual, http://www.festo-didactic.com/ov3/media/customers/1100/00644419001094734149.pdf
12. http://www.festo-didactic.com/int-en/services/software-online-activation/cosimir-educational/
13. http://www.roboticsonline.com/public/articles/details.cfm?id=2424 14. COSIMIR (2005). COSIMIR® Industrial – Integrated Simulation and Programming
Software. Accessed online (January, 2005). http://www.axicont.com/Cosimir.htm 15. COSIMIR Web Presentation (2005). COSIMIR Industrial. Accessed online (January, 2005). 16. http://www.cosimir.com/English/COSIMIRManufacturing/COSIMIRIndustrial.htm
I. Bibliografie minimală de studiu pentru studenţi
1. Mistodie L., Conducerea si programarea robotilor, note de curs, 2005; 2.Voicu M., Lazar C., Sisteme de conducere a RI., I.P. Iaşi, 1987
Data aprobării programei analitice în catedră: 13. 02. 2007.
Şef catedră
Prof dr ing Georgescu V.
UNIVERSITATEA "DUNĂREA DE JOS" GALAŢI FACULTATEA DE MECANICA CATEDRA ROBOTICA SI SUDARE Adresa: Galati, Str Domneasca Nr. 111 Nr. telefon / fax: E-mail: [email protected]
PROGRAMA ANALITICĂ
Disciplina: CONTROLUL PRODUSELOR MECATRONICE
A. Locul disciplinei în planul de învăţământ:
Anul IV Sem. I Sem. II
Total ore Forme de verificare Nr. credite Anul de studiu C L C L C L Sem. I Sem. II Sem. I Sem. II
Cod disciplină
Nr. ore
28 28 - - 28 28 V - 3 - M-S 3205
B. Obiectivele disciplinei:
• Cunoaşterea modului de evoluare si de dezvoltare, in ţara noastră si pe plan mondial, a metodelor de control nedistructiv al produselor mecatronice;
• Formarea unei concepţii sistemice asupra metodelor de control nedistructiv al produselor mecatronice;;
• Dezvoltarea capacităţii ingineresti de utilizare echipamentelor de control nedistructiv si de selectare a lor la realizarea unor tehnologii moderne de control a calitatii unor produse industriale de inalta competitivitate;
• Cunoaşterea tehnologiilor de control a calitatii şi aplicarea acestora la controlul produselor mecatronice;
• Promovarea calităţilor atitudinale şi aptitudinale specifice carierei ingineresti. • Dezvoltarea interesului pentru profesiunea inginereasca şi îndeosebi pentru pregătirea
tehnica a studentului, componentă esenţială a reformei industriale în România; C. Metode de predare – învăţare: prelegerea, conversaţia euristică, explicaţia, dezbaterea,
studiul de caz, discutarea testelor de examinare aferente prelegerii, problematizarea, simularea de situaţii, metode de dezvoltare a gândirii critice, demonstratii practice de realizare a controlului unor imbinari sudate, aplicatii practice individuale cu diferite echipamente de control.
D. Forme şi metode de evaluare: evaluare continuă (pondere 30%) prin metode orale la orele de laborator si evaluare sumativă (pondere 70%) prin test-grila scris.
E. Conţinutul cursului / număr de ore pentru fiecare temă:
1. DEFECTE SI METODE DE CONTROL – 4 ore Definirea defectului. Clasificarea defectelor. Clasificarea metodelor de control.
2. CONTROLUL CU LICHIDE PENETRANTE – 2 ore Evolutia controlului cu lichide penetrante. Tehnologia controlului cu lichide penetrante.
Echipamente de control. Domenii de aplicare.
3. CONTROLUL MAGNETIC – 4 ore Principiul controlului magnetic. Clasificarea metodelor de magnetizare. Dispozitive folosite
la magnetizare. Indicatori de flux. Corpuri de proba. Echipamente pentru magnetizare. Metode de control magnetic.
4. CONTROLUL ULTRASONIC – 6 ore Producerea ultrasunetelor. Aparatura pentru control ultrasonic. Metode de control.
Defectologie ultrasonica. Aplicatii ale controlului ultrasonic.

5. CONTROLUL CU RADIATII PENETRANTE – 6 ore Producerea radiatiilor penetrante. Metode de control. Controlul radiografic al îmbinarilor sudate.
F. Conţinutul laboratoarelor/ număr de ore pentru fiecare temă:
Clasificarea defectelor – 3 ore Analiza macroscopica si microscopica a materialelor – 3 ore Controlul cu lichide penetrante – 2 ore Metode de magnetizare – 2 ore Controlul cu pulberi magnetice – 2 ore Aparate pentru defectoscopie ultrasonica – 2 ore Controlul ultrasonic – 2 ore Executarea radiografiilor – 2 ore Instalatii Roentgen pentru control nedistructiv – 2 ore Constructia gamadefectoscopului portabil GDP-6 – 2 ore Interpretarea radiografiilor îmbinarilor sudate – 2 ore
G. Bibliografie de elaborare a cursului
1. Arghiriade I. Aspecte practice ale controlului magnetic nedistructiv cu pulberi magnetice. Oficiul de informare documentara pentru industria constructiilor de masini, Bucuresti, 1992.
2. Bohatel T., Nastase E. Defectoscopie ultrasonica fizica si tehnica. Editura Tehnica, Bucuresti, 1980.
3. Georgescu V., Georgescu B. Iordachescu M. Control nedistructiv. Editura Lux Libris Brasov 2001.
4. Krautkrämer J., Krautkrämer H. Ultrasonic Testing of Materials. 4.th Fully Revised Edition Springer-Verlag Berlin Heidelberg,1990.
5. Mocanu D. R., Safta V. s.a. Incercarea materialelor vol. 3 - Controlul nedistructiv al metalelor. Editura Tehnica, Bucuresti, 1986.
6. Safta V.I., Safta V.I. Defectoscopie nedistructivaindustriala. Editura Sudura, Timisoara, 2001.
7. *** KRAUTKRÄMER Gmb &Co., Hürth – Germany (West). Testing Materials Ultrasonically – LEVEL 1 – 1st. edition 1983 and LEVEL 2 – 3rd edition 1986, printed in Germany.
8. PROSPECTE ale firmelor MAGNAFLUX CORPORATION, NAMICON, ANDREX, HELLING, KRAUTKRÄMER, SREM, TRAKIS, SEIFERT, SCANRAY, PHILIPS, ISIM .
H. Bibliografie minimală de studiu pentru studenţi
1. Georgescu B. Iordachescu M. Control nedistructiv – Curs si Test pentru verificarea cunostiintelor. Format A5, Universitatea din Galati, 2006.
Data aprobării programei analitice în catedră: 19.01.2007
Titular curs: Conf. Dr. Ing. Mihaela Iordachescu Semnătura: Titular lucrări practice: Sef lucr dr ing Georgescu Bogdan Semnătura:
Şef catedră
Prof dr ing Georgescu Valeriu