sisteme cyber-mixmecatronice Și sisteme · pdf filecomunicare și hardware/ software) pentru...
TRANSCRIPT
SISTEME CYBER-MIXMECATRONICE ȘI SISTEME FIZICO-CYBERNETICE
Buletinul AGIR nr. 1/2017 ● ianuarie-martie 233
SISTEME CYBER-MIXMECATRONICE ȘI SISTEME FIZICO-CYBERNETICE
Prof. univ. EurIng. dr. ing. Gh. Ion GHEORGHE;
INCD Mecatronică şi Tehnica Măsurării – Bucureşti, România, Profesor universitar la UVT, UPB şi UTM,
Membru Corespondent al Academiei de Stiinţe Tehnice din România
REZUMAT. Lucrarea ştiinţifică prezintă în conceptul original al autorului, fundamentarea sistemelor cyber-mixmecatronice multiaplicative ca părţi ale sistemelor fizico-cibernetice (cyber-fizice). Lucrarea ştiinţifică focusează bazele sistemelor cyber-mixmecatronice, cu exemple şi concepte specifice și cu aplicaţii potenţiale societale.
Cuvinte cheie: sisteme cyber-fizice; sisteme cyber-mixmecatronice, aplicaţii potenţiale societale.
ABSTRACT. This scientific paper presents the author's original concept, fundamenting multi-application cyber-mixmechatronic systems as part of cyber-physical systems (cyber - physical systems), The scientific paper focuses the bases of cyber- mixmechatronic systems with specific examples and concepts and with potential societal applications.
Keywords: cyber-physical systems; cyber-mixmechatronic systems, potential societal aplications.
1. INTRODUCERE
Universul Sistemelor Cyber-Fizice (sau Fizico-Cybernetice) cuprinde în programul dezvoltării și aplicării lui, etape principale, pas cu pas, spre materializare și implementare a acestora în societate, pentru asigurarea strategiilor inovatoare naționale, europene și internaționale și pentru o societate postinformatizată și neurală.
Sistemele Cyber-Fizice (CPS), au devenit astăzi unul dintre cele mai informatizate aplicații, cu o integrare impactă de cybernetică și obiecte fizice.
Obiectele cybernetice fac referire la orice calcul de resurse hardware/ software cu care se poate realiza acesta, alături de comunicare și funcții de control într-un mediu discret, logic și conectat.
Obiectele fizice fac referire la orice sisteme naturale sau umane care sunt generate de legile fizicii și care operează în timp continuu.
De aceea, CPS vor transforma modul în care interacționează cu lumea fizică, la fel cum Internetul a transformat modul în care noi interacționăm unii cu alții.
Scopul final al CPS este de a utiliza infrastructuri cybernetice (inclusiv de detectare, de calcul, de comunicare și hardware/ software) pentru a moni-toriza inteligent (de la fizic la cybernetic) și a controla (de la cybernetic la fizic) lumea fizică.
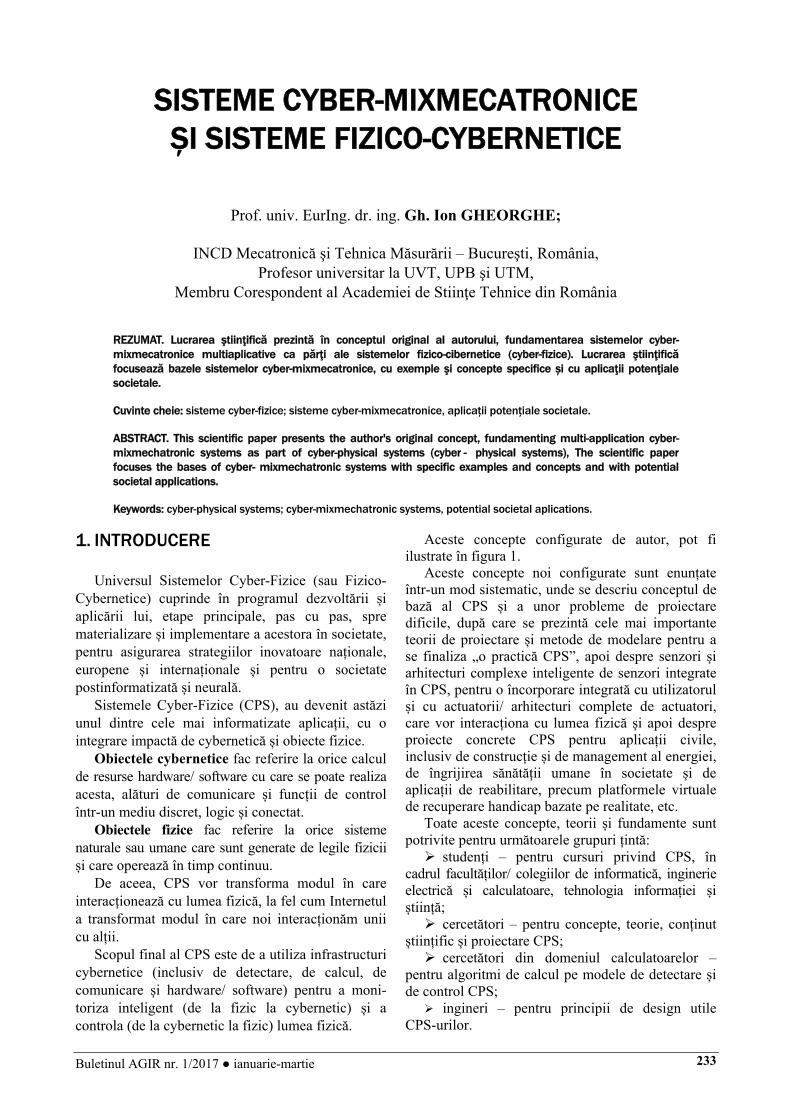
Aceste concepte configurate de autor, pot fi ilustrate în figura 1.
Aceste concepte noi configurate sunt enunțate într-un mod sistematic, unde se descriu conceptul de bază al CPS și a unor probleme de proiectare dificile, după care se prezintă cele mai importante teorii de proiectare și metode de modelare pentru a se finaliza „o practică CPS”, apoi despre senzori și arhitecturi complexe inteligente de senzori integrate în CPS, pentru o încorporare integrată cu utilizatorul și cu actuatorii/ arhitecturi complete de actuatori, care vor interacționa cu lumea fizică și apoi despre proiecte concrete CPS pentru aplicații civile, inclusiv de construcție și de management al energiei, de îngrijirea sănătății umane în societate și de aplicații de reabilitare, precum platformele virtuale de recuperare handicap bazate pe realitate, etc.
Toate aceste concepte, teorii și fundamente sunt potrivite pentru următoarele grupuri țintă: studenți – pentru cursuri privind CPS, în
cadrul facultăților/ colegiilor de informatică, inginerie electrică și calculatoare, tehnologia informației și știință; cercetători – pentru concepte, teorie, conținut
științific și proiectare CPS; cercetători din domeniul calculatoarelor –
pentru algoritmi de calcul pe modele de detectare și de control CPS; ingineri – pentru principii de design utile
CPS-urilor.
SOLUŢII PENTRU UN ORAŞ INTELIGENT
Buletinul AGIR nr. 1/2017 ● ianuarie-martie 234
Fig. 1 Sisteme cyber-fizice (CPS). Exemple și concepte.
2. DESPRE CONCEPTELE SISTEMELOR CYBER - FIZICE
În general, Sistemele Cyber-Fizice (CPS) conțin interacțiunile dintre resursele de calcul (cum ar fi hardware și software) și obiectele fizice (cum ar fi o mașină, corpul uman, etc.).
Unele CPS există deja în prezent. Pentru exem-plificări, enunțăm următoarele:
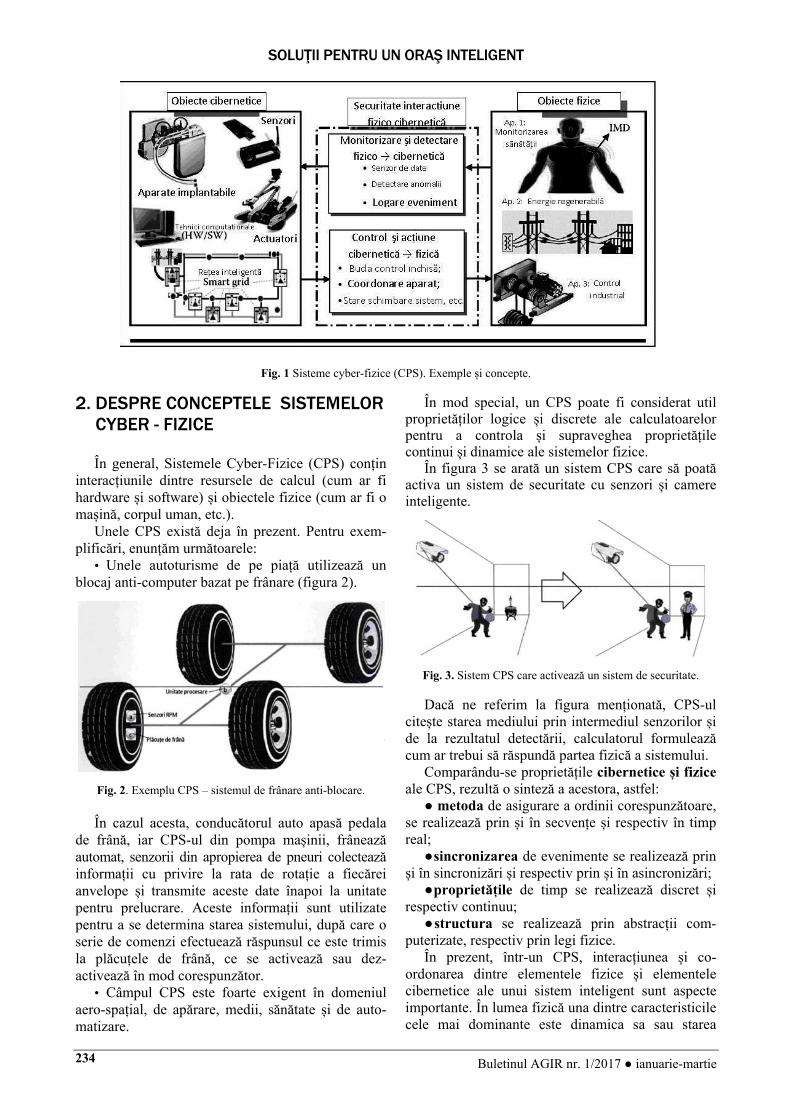
• Unele autoturisme de pe piață utilizează un blocaj anti-computer bazat pe frânare (figura 2).
Fig. 2. Exemplu CPS – sistemul de frânare anti-blocare. În cazul acesta, conducătorul auto apasă pedala
de frână, iar CPS-ul din pompa mașinii, frânează automat, senzorii din apropierea de pneuri colectează informații cu privire la rata de rotație a fiecărei anvelope și transmite aceste date înapoi la unitate pentru prelucrare. Aceste informații sunt utilizate pentru a se determina starea sistemului, după care o serie de comenzi efectuează răspunsul ce este trimis la plăcuțele de frână, ce se activează sau dez-activează în mod corespunzător.
• Câmpul CPS este foarte exigent în domeniul aero-spațial, de apărare, medii, sănătate și de auto-matizare.
În mod special, un CPS poate fi considerat util proprietăților logice și discrete ale calculatoarelor pentru a controla și supraveghea proprietățile continui și dinamice ale sistemelor fizice.
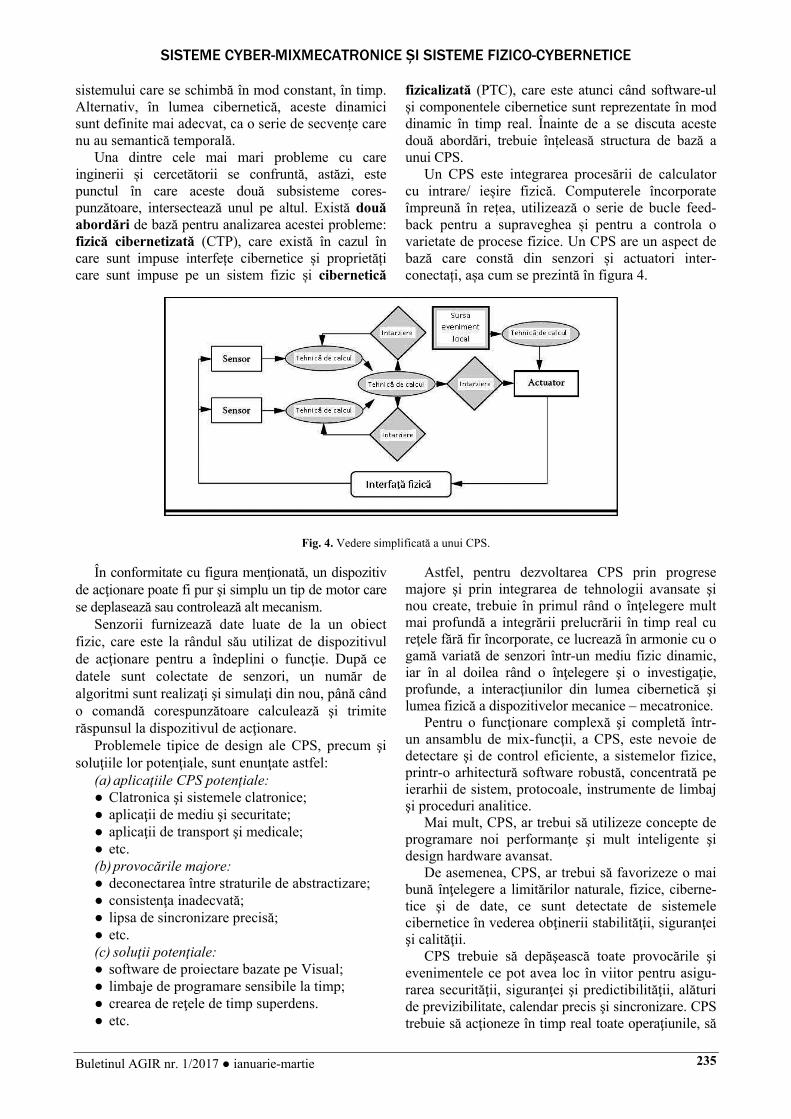
În figura 3 se arată un sistem CPS care să poată activa un sistem de securitate cu senzori și camere inteligente.
Fig. 3. Sistem CPS care activează un sistem de securitate. Dacă ne referim la figura menționată, CPS-ul
citește starea mediului prin intermediul senzorilor și de la rezultatul detectării, calculatorul formulează cum ar trebui să răspundă partea fizică a sistemului.
Comparându-se proprietățile cibernetice și fizice ale CPS, rezultă o sinteză a acestora, astfel:
● metoda de asigurare a ordinii corespunzătoare, se realizează prin și în secvențe și respectiv în timp real;
● sincronizarea de evenimente se realizează prin și în sincronizări și respectiv prin și în asincronizări;
● proprietățile de timp se realizează discret și respectiv continuu;
● structura se realizează prin abstracții com-puterizate, respectiv prin legi fizice.
În prezent, într-un CPS, interacțiunea și co-ordonarea dintre elementele fizice și elementele cibernetice ale unui sistem inteligent sunt aspecte importante. În lumea fizică una dintre caracteristicile cele mai dominante este dinamica sa sau starea
SISTEME CYBER-MIXMECATRONICE ȘI SISTEME FIZICO-CYBERNETICE
Buletinul AGIR nr. 1/2017 ● ianuarie-martie 235
sistemului care se schimbă în mod constant, în timp. Alternativ, în lumea cibernetică, aceste dinamici sunt definite mai adecvat, ca o serie de secvențe care nu au semantică temporală.
Una dintre cele mai mari probleme cu care inginerii și cercetătorii se confruntă, astăzi, este punctul în care aceste două subsisteme cores-punzătoare, intersectează unul pe altul. Există două abordări de bază pentru analizarea acestei probleme: fizică cibernetizată (CTP), care există în cazul în care sunt impuse interfețe cibernetice și proprietăți care sunt impuse pe un sistem fizic și cibernetică
fizicalizată (PTC), care este atunci când software-ul și componentele cibernetice sunt reprezentate în mod dinamic în timp real. Înainte de a se discuta aceste două abordări, trebuie înțeleasă structura de bază a unui CPS.
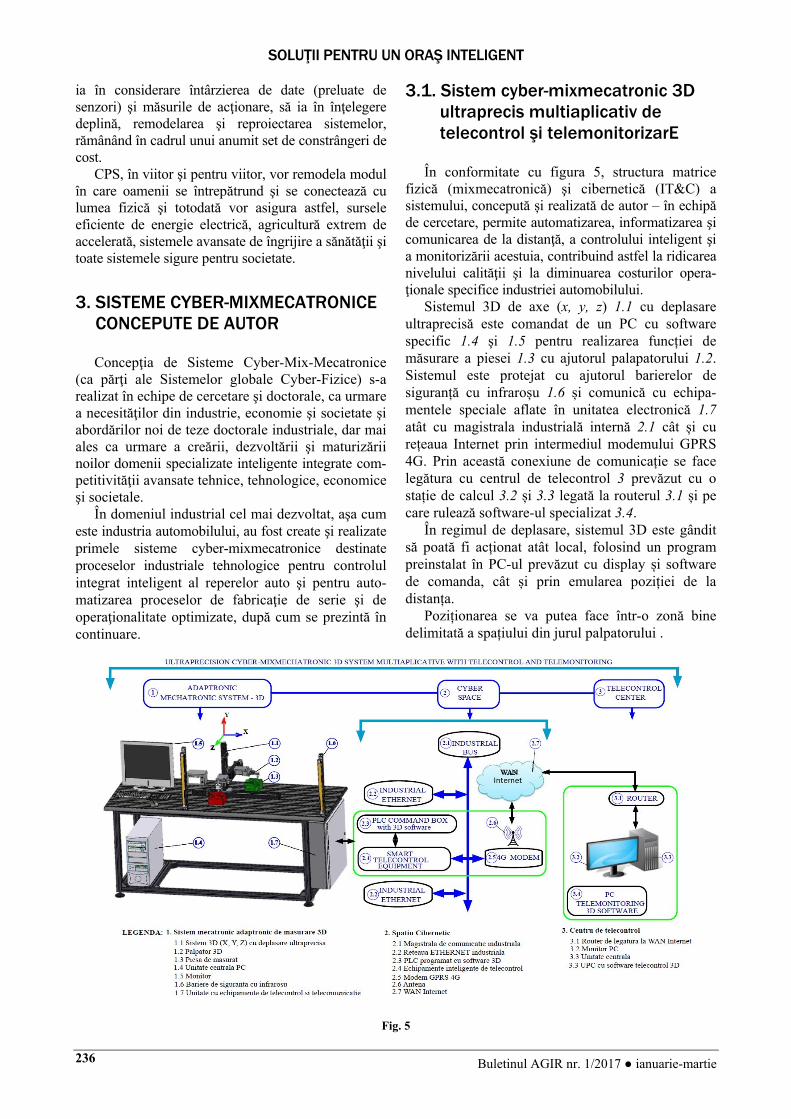
Un CPS este integrarea procesării de calculator cu intrare/ ieșire fizică. Computerele încorporate împreună în rețea, utilizează o serie de bucle feed-back pentru a supraveghea și pentru a controla o varietate de procese fizice. Un CPS are un aspect de bază care constă din senzori și actuatori inter-conectați, așa cum se prezintă în figura 4.
Fig. 4. Vedere simplificată a unui CPS.
În conformitate cu figura menţionată, un dispozitiv de acţionare poate fi pur şi simplu un tip de motor care se deplasează sau controlează alt mecanism.
Senzorii furnizează date luate de la un obiect fizic, care este la rândul său utilizat de dispozitivul de acţionare pentru a îndeplini o funcţie. După ce datele sunt colectate de senzori, un număr de algoritmi sunt realizaţi şi simulaţi din nou, până când o comandă corespunzătoare calculează şi trimite răspunsul la dispozitivul de acţionare.
Problemele tipice de design ale CPS, precum şi soluţiile lor potenţiale, sunt enunţate astfel:
(a) aplicaţiile CPS potenţiale: ● Clatronica şi sistemele clatronice; ● aplicaţii de mediu şi securitate; ● aplicaţii de transport şi medicale; ● etc. (b) provocările majore: ● deconectarea între straturile de abstractizare; ● consistenţa inadecvată; ● lipsa de sincronizare precisă; ● etc. (c) soluţii potenţiale: ● software de proiectare bazate pe Visual; ● limbaje de programare sensibile la timp; ● crearea de reţele de timp superdens. ● etc.
Astfel, pentru dezvoltarea CPS prin progrese majore şi prin integrarea de tehnologii avansate şi nou create, trebuie în primul rând o înţelegere mult mai profundă a integrării prelucrării în timp real cu reţele fără fir încorporate, ce lucrează în armonie cu o gamă variată de senzori într-un mediu fizic dinamic, iar în al doilea rând o înţelegere şi o investigaţie, profunde, a interacţiunilor din lumea cibernetică şi lumea fizică a dispozitivelor mecanice – mecatronice.
Pentru o funcţionare complexă şi completă într-un ansamblu de mix-funcţii, a CPS, este nevoie de detectare şi de control eficiente, a sistemelor fizice, printr-o arhitectură software robustă, concentrată pe ierarhii de sistem, protocoale, instrumente de limbaj şi proceduri analitice.
Mai mult, CPS, ar trebui să utilizeze concepte de programare noi performanţe şi mult inteligente şi design hardware avansat.
De asemenea, CPS, ar trebui să favorizeze o mai bună înţelegere a limitărilor naturale, fizice, ciberne-tice şi de date, ce sunt detectate de sistemele cibernetice în vederea obţinerii stabilităţii, siguranţei şi calităţii.
CPS trebuie să depăşească toate provocările şi evenimentele ce pot avea loc în viitor pentru asigu-rarea securităţii, siguranţei şi predictibilităţii, alături de previzibilitate, calendar precis şi sincronizare. CPS trebuie să acţioneze în timp real toate operaţiunile, să
SOLUŢII PENTRU UN ORAŞ INTELIGENT
Buletinul AGIR nr. 1/2017 ● ianuarie-martie 236
ia în considerare întârzierea de date (preluate de senzori) şi măsurile de acţionare, să ia în înţelegere deplină, remodelarea şi reproiectarea sistemelor, rămânând în cadrul unui anumit set de constrângeri de cost.
CPS, în viitor şi pentru viitor, vor remodela modul în care oamenii se întrepătrund şi se conectează cu lumea fizică şi totodată vor asigura astfel, sursele eficiente de energie electrică, agricultură extrem de accelerată, sistemele avansate de îngrijire a sănătăţii şi toate sistemele sigure pentru societate.
3. SISTEME CYBER-MIXMECATRONICE CONCEPUTE DE AUTOR
Concepţia de Sisteme Cyber-Mix-Mecatronice (ca părţi ale Sistemelor globale Cyber-Fizice) s-a realizat în echipe de cercetare şi doctorale, ca urmare a necesităţilor din industrie, economie şi societate şi abordărilor noi de teze doctorale industriale, dar mai ales ca urmare a creării, dezvoltării şi maturizării noilor domenii specializate inteligente integrate com-petitivităţii avansate tehnice, tehnologice, economice şi societale.
În domeniul industrial cel mai dezvoltat, aşa cum este industria automobilului, au fost create şi realizate primele sisteme cyber-mixmecatronice destinate proceselor industriale tehnologice pentru controlul integrat inteligent al reperelor auto şi pentru auto-matizarea proceselor de fabricaţie de serie şi de operaţionalitate optimizate, după cum se prezintă în continuare.
3.1. Sistem cyber-mixmecatronic 3D ultraprecis multiaplicativ de telecontrol şi telemonitorizarE
În conformitate cu figura 5, structura matrice fizică (mixmecatronică) şi cibernetică (IT&C) a sistemului, concepută și realizată de autor – în echipă de cercetare, permite automatizarea, informatizarea şi comunicarea de la distanţă, a controlului inteligent şi a monitorizării acestuia, contribuind astfel la ridicarea nivelului calităţii şi la diminuarea costurilor opera-ţionale specifice industriei automobilului.
Sistemul 3D de axe (x, y, z) 1.1 cu deplasare ultraprecisă este comandat de un PC cu software specific 1.4 şi 1.5 pentru realizarea funcției de măsurare a piesei 1.3 cu ajutorul palapatorului 1.2. Sistemul este protejat cu ajutorul barierelor de siguranță cu infraroșu 1.6 și comunică cu echipa-mentele speciale aflate în unitatea electronică 1.7 atât cu magistrala industrială internă 2.1 cât și cu rețeaua Internet prin intermediul modemului GPRS 4G. Prin această conexiune de comunicație se face legătura cu centrul de telecontrol 3 prevăzut cu o stație de calcul 3.2 și 3.3 legată la routerul 3.1 și pe care rulează software-ul specializat 3.4.
În regimul de deplasare, sistemul 3D este gândit să poată fi acționat atât local, folosind un program preinstalat în PC-ul prevăzut cu display și software de comanda, cât și prin emularea poziției de la distanța.
Poziționarea se va putea face într-o zonă bine delimitată a spațiului din jurul palpatorului .
Fig. 5
SISTEME CYBER-MIXMECATRONICE ȘI SISTEME FIZICO-CYBERNETICE
Buletinul AGIR nr. 1/2017 ● ianuarie-martie 237
În regimul de măsurare perechile de informații poziție – palpare se vor constitui în pachete de vectori pentru prelucrarea matematică complexă ce se poate face atât local cât și de la distanță.
Comutarea între cele două regimuri de lucru poate fi făcută oricând și punctele de măsurare pot fi stocate pentru funcționarea în regim automat, în memoria PLC-ului.
Toate aceste funcții complexe pot fi realizate prin testarea funcțională și interconectarea mai multor unități și subansamble.
Totodată, acest sistem cyber-mixmecatronic nu necesită prezenţa continuă a operatorului uman calificat şi costisitor şi are ca scop asigurarea para-metrilor de exploatare la valorile nominale, alături de avantajele tehnologiei cibernetice, precum:
● minimizarea timpilor pentru operare-depanare; ● strategii preventive în procesul de exploatare şi
întreţinere; ● modularitate, flexibilitate şi siguranţă. Sistemul cyber-mixmecatronic ultraprecis 3D
multiaplicativ, pentru telecontrol şi monitorizare asigură conectarea staţiilor de proces situate la dis-tanţă, la unul sau mai multe sisteme de control centrale, cu folosirea diverselor reţele publice sau private, pentru preluări de tip event-driven, deter-minate de un eveniment sau prelucrări ciclice ale datelor, realizate cu ajutorul protocoalelor speciale şi gestionate în mod eficient în ansamblu şi în detaliu.
Sistemul cyber-mixmecatronic foloseşte unul sau mai multe programe software pentru conectarea lui, la „centrul de control şi monitorizare de la distanţă”, pe baza tehnologiilor moderne GPRS şi a mai multor PLC-uri. Sistemul cyber-mixmecatronic poate realiza şi teleservice-ul care propune schimbul de date prin
linia telefonică sau prin intermediul Internet-ului şi Intranet-ului, utlizându-se echipamente şi sisteme aflate la distanţă, cum ar fi calculatoare, maşini, instalaţii şi linii de producţie, pentru detectarea erorilor, diagnosticare, optimizare activităţi, întreţinere, reparaţii, etc.
Astfel, sistemul cyber-mixmecatronic, realizează contribuţii semnificative la minimizarea costului şi creşterea eficienţei şi a productivităţii activităţilor industriale.
Serviciile principale de sistem, se compun din: telecontrol - controlul şi monitorizarea de la
distanţă a sistemului; teleservice, compus din: ● telemonitorizare – determinarea stării sistemului; ● telediagnoză – identificarea cauzelor de dis-
funcţionalitate; ● telementenanţă – eliminarea cauze. achiziţie a parametrilor geometrici şi mecanici. Sistemele automate de urmărire de la distanţă au
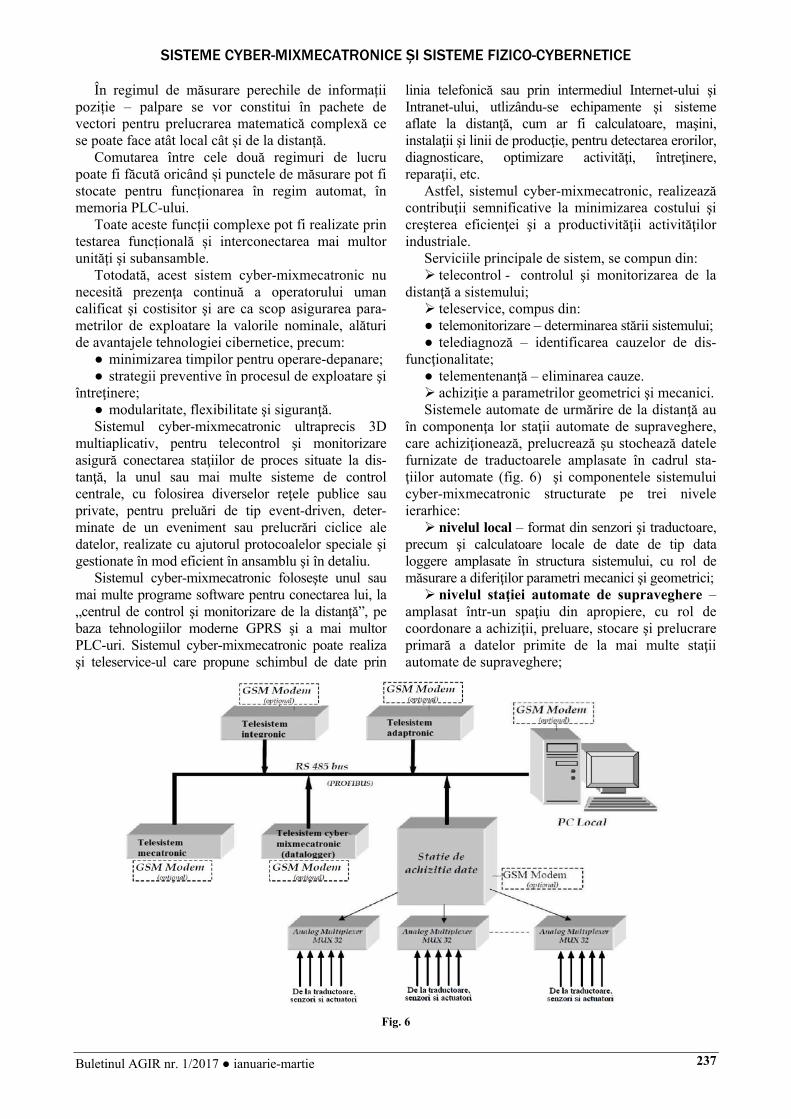
în componenţa lor staţii automate de supraveghere, care achiziţionează, prelucrează şu stochează datele furnizate de traductoarele amplasate în cadrul sta-ţiilor automate (fig. 6) şi componentele sistemului cyber-mixmecatronic structurate pe trei nivele ierarhice: nivelul local – format din senzori şi traductoare,
precum şi calculatoare locale de date de tip data loggere amplasate în structura sistemului, cu rol de măsurare a diferiţilor parametri mecanici şi geometrici; nivelul staţiei automate de supraveghere –
amplasat într-un spaţiu din apropiere, cu rol de coordonare a achiziţii, preluare, stocare şi prelucrare primară a datelor primite de la mai multe staţii automate de supraveghere;
Fig. 6
SOLUŢII PENTRU UN ORAŞ INTELIGENT
Buletinul AGIR nr. 1/2017 ● ianuarie-martie 238
nivelul central de prelucrare – calculator performant amplasat la distanţă, cu rol de prelucrare şi analiză a datelor prelucrate de la concentratorul de date precum și de avertizare privind depășirea unor limite de mărimi prestabilite.
Datele sunt colectate prin: • sisteme GSM (transmisie de date, SMS); • sistem radio; • sistem satelit (EUMETSAT); • sisteme combinate (GSM - radio); • VPN/Internet de la centrale dispecer locale la
alți utilizatori.
3.2. Sistem tehnologic cyber-mecatronic industrial cu telecontrol și telemonitorizare
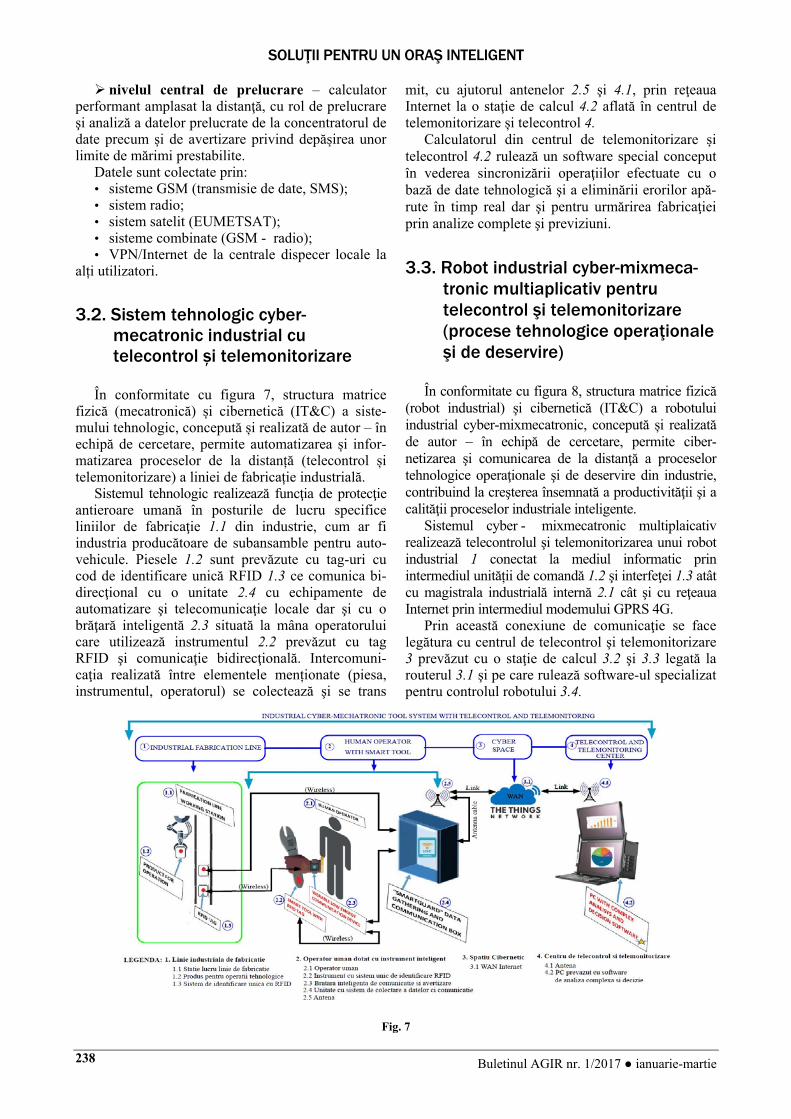
În conformitate cu figura 7, structura matrice fizică (mecatronică) și cibernetică (IT&C) a siste-mului tehnologic, concepută și realizată de autor – în echipă de cercetare, permite automatizarea și infor-matizarea proceselor de la distanță (telecontrol și telemonitorizare) a liniei de fabricație industrială.
Sistemul tehnologic realizează funcţia de protecţie antieroare umană în posturile de lucru specifice liniilor de fabricaţie 1.1 din industrie, cum ar fi industria producătoare de subansamble pentru auto-vehicule. Piesele 1.2 sunt prevăzute cu tag-uri cu cod de identificare unică RFID 1.3 ce comunica bi-direcţional cu o unitate 2.4 cu echipamente de automatizare şi telecomunicaţie locale dar şi cu o brăţară inteligentă 2.3 situată la mâna operatorului care utilizează instrumentul 2.2 prevăzut cu tag RFID şi comunicaţie bidirecţională. Intercomuni-caţia realizată între elementele menționate (piesa, instrumentul, operatorul) se colectează şi se trans
mit, cu ajutorul antenelor 2.5 şi 4.1, prin reţeaua Internet la o staţie de calcul 4.2 aflată în centrul de telemonitorizare și telecontrol 4.
Calculatorul din centrul de telemonitorizare și telecontrol 4.2 rulează un software special conceput în vederea sincronizării operaţiilor efectuate cu o bază de date tehnologică şi a eliminării erorilor apă-rute în timp real dar şi pentru urmărirea fabricaţiei prin analize complete şi previziuni.
3.3. Robot industrial cyber-mixmeca-tronic multiaplicativ pentru telecontrol şi telemonitorizare (procese tehnologice operaţionale şi de deservire)
În conformitate cu figura 8, structura matrice fizică (robot industrial) şi cibernetică (IT&C) a robotului industrial cyber-mixmecatronic, concepută și realizată de autor – în echipă de cercetare, permite ciber-netizarea şi comunicarea de la distanţă a proceselor tehnologice operaţionale şi de deservire din industrie, contribuind la creşterea însemnată a productivităţii şi a calităţii proceselor industriale inteligente.
Sistemul cyber - mixmecatronic multiplaicativ realizează telecontrolul şi telemonitorizarea unui robot industrial 1 conectat la mediul informatic prin intermediul unității de comandă 1.2 şi interfeţei 1.3 atât cu magistrala industrială internă 2.1 cât şi cu reţeaua Internet prin intermediul modemului GPRS 4G.
Prin această conexiune de comunicaţie se face legătura cu centrul de telecontrol şi telemonitorizare 3 prevăzut cu o staţie de calcul 3.2 şi 3.3 legată la routerul 3.1 şi pe care rulează software-ul specializat pentru controlul robotului 3.4.
Fig. 7

SISTEME CYBER-MIXMECATRONICE ȘI SISTEME FIZICO-CYBERNETICE
Buletinul AGIR nr. 1/2017 ● ianuarie-martie 239
Fig. 8
3.4. Sistem amortizor cyber-mixmecatronic de automobil cu telecontrol şi telemonitorizare
În conformitate cu figura 9, structura matrice fizică (amortizor) şi cibernetică (IT&C), a sistemului amortizor cyber-mixmecatronic de automobil, con-cepută și realizată de autor – în echipă de cercetare, permite informatizarea şi cibernetizarea inteligentă a automobilului şi respectiv a industriei automobilului, prin ridicarea nivelului calităţii şi creşterea pro-ductivităţii industriei auto.
Sistemul amortizor cyber-mixmecatronic de auto-mobil, realizează funcţia de telemonitorizare și telecontrol a unui amortizor inteligent 1 prevăzut cu un electromagnet 1.1 alimentat de la o sursă de
înaltă tensiune 1.6 în vederea modelarii gradului de vâscozitate a fluidului reologic 1.3.
Pentru a obţine informaţia privind acceleraţia globală a ansamblului cyber - mecatronic ataşat la roata unui autovehicul se foloseşte senzorul 1.4 cu interfaţa 1.5 conectată la un echipament inteligent de comandă şi telecontrol 1.7.
Conexiunea cu reţeaua Internet WAN se realizează cu ajutorul modemului specializat GPRS-4G 1.8 prevăzut cu antenă 1.9.
Prin această conexiune de comunicaţie se face legătura cu centrul de telecontrol şi telemonitorizare 3 prevăzut cu o staţie de calcul 3.2 şi 3.3 legată la routerul 3.1 şi pe care rulează software-ul specializat pentru telemonitorizare şi control a amortizoarelor inteligente 3.4.
Fig. 9

SOLUŢII PENTRU UN ORAŞ INTELIGENT
Buletinul AGIR nr. 1/2017 ● ianuarie-martie 240
6. CONCLUZII
Dezvoltarea sistemelor fizico - cibernetice (cyber - fizice) și a sistemelor cyber-mixmecatronice, ca soluții inteligente pentru viitor, cuprinde focusarea de părți inteligente pe domenii structurale concepute în etape și corespunzător nivelelor științifice, deja descoperite și în curs de descoperire, aferente necesităților și performanțelor potențiale societale.
Astfel, au fost create de către autor – în echipă de cercetare, conceptele, principiile de proiectare, arhi-tecturile inteligente și construcțiile sistemelor cyber - mixmecatronice, ca părți constitutive ale ansamblului global de sisteme cyber- fizice, cu aplicații concrete în domeniul industriei automobilului sau al industriei în general.
Pentru evoluția high - tech, vor fi abordate de către autor – în echipă de cercetare, pentru viitor în viitor, sistemele inteligente clatronice la scară micro și nano, sistemele de realitate virtuală precum și unele abordări provocatoare pentru sisteme inteligente cyber- mixmecatronice din domenii specializate inteligente cu eficiență potențială economică și com-petitivă cu mult peste nivelul actual, pentru asigurarea securității, siguranței, predictibilității la nivel național și internațional.
BIBILOGRAFIE
[1] Lee, E. A. Cyber-physical systems design challenges. International Symposium on oriented items/ components/ services distributed using real-time computational technique (ISORC), Orlando, FL, pp. 363-369.
[2] Lee, E. A.. Are cyber-physical systems fundamentals of adequate calculus? FSN Workshop on cyber-physical systems: Motivation of research, Techniques and Roadmap, Austin, TX.
[3] Lee, E.A.. CPS fundamentals in the Proceedings of Automation Design Conference. (DAC 2010), Association for Computing Machinery, Anaheim, CA, pp. 737-742.
[4] Campbell, R.H., Garnett, G. and McGrath, R. E. Cyber-physical systems: CPS position document - environments. Cyber-physical systems, National Science Foundation, Austin, TX. Available at: http://varma.ece.cmu.edu/cps/ Position-Papers/Roy-Campbell.pdf.
[5] Campbell, J., Goldstein, S. & Mowry T.. Cyber-physical systems, National Science Foundation, Austin, TX. Available at: http://varma.ece.cmu.edu/cps/Position-Papers/ Goldstein-Mowry-Campbell.pdf.
[6] West, R. & Parmer, G.. A software architecture for next-generation cyber-physical systems. Cyber physical systems, National Science Foundation, Austin, TX. Available at: http://varma.ece.cmu.edu/cps/Position-Papers/richard-west.pdf.
[7] Kornerup, J.. 2006. A vision for overcoming the challenges of building cyber-physical systems. Cyber-Physical Systems, National Science Foundation, Austin, TX. Available at: http://varma.ece.cmu.edu/cps/Position-Papers/Jacob-Kornerup.pdf.
[8] Rajkumar, R., Lee, I., Sha, ,L. Stankkovic, & J.. Cyber-physical systems: The next revolution calculation of the Design Automation Conference (DAC 2010), Association for Computing Machinery, Anaheim, CA
[9] Gheorghe, I. Gh, Mechatronics and Cyber-Mechatronic Systems, ISBN 978-606-8261-22-5, CEFIN Publishing House, 2015;
[10] Gheorghe I. Gh, Adaptronica Micro-Engineering, ISBN 978-606-8261-21-8, CEFIN Publishing House, 2014;
[11] Gheorghe, I Gh., Mechatronics & Cyber-Mechatronics & Micro-Nano-Mechatronics & Cyber-Micro-Nano-Mechatronics in smart industrial and societal applications, International Conference OPTIROB 2016, June 29– July 2, 2016, Jupiter, Romania, ISI quoted; impact factor: 0,15;
[12] Gheorghe, I. Gh., ILIE I., Anghel C-tin, „Scientific Evolution from Mix-Integrative Mechatronics to Smart Cyber-Mechatronics and towards Claytronics, International Conference OPTIROB 2016, June 29 – July 2, 2016, Jupiter, Romania, ISI quoted; impact factor: 0,15;
[13] Gheorghe, I. Gh, „From Mechatronics to Cyber-Mechatronics and from µnMechatronics to Claytronics” International Conference - ACME 2016 „Advanced Concepts in Mechanical Engineering”, 09–10 iunie 2016, Iași, Romania;
[14] Gheorghe, I. Gh, „From Mechatronics to Cyber-Mix-Mechatronics and in the future to Claytonics”, Annual Scientific Session of professors and researchers of University Valahia, June 2, 2016, Târgoviște, România;
[15] Spânu, A.R., Donțu, O., Besnea, D., Avram, M., Improvements on Design of Propeller for Chemical Compound Mixer, REVISTA DE CHIMIE, Volume 66, Issue 3, pp. 422-425, ISSN 0034-7752, 2015 (ISI Web of Science, IF = 0,810);
[16] Spânu, A.R., Besnea, D., Avram, M., Constantin, V., „Laser mechatronic system used for accurate measurement of spatial shapes”, Optoelectronics and Advanced Materials - Rapid Communications, Volume 8, Issue 1-2, pp.1-6, ISSN 1842-6573, 2014 (ISI Web of Science, SCOPUS, IF = 0,394);
[17] Nitu, C., Nitu, S., Gramescu, B., „Application of Electromagnetic Actuators to a Variable Distribution System for Automobile Engines”, Journal of Materials Processing Technology, vol. 161/1-2, 200, 5pag. 253- 257, Elsevier, ISSN 0924-0136 (ISI Web of Science -WOS:000229375200046) - impact factor 2.236 – 8 citations;
[18] Nitu, C., Nitu, S., „An Improved Analytical Model for Electromagnetic Actuators Design”, in „Elektronika” nr.8-9/2004, pag.47-49, ISSN 0033-2089, Varsovia (INSPEC)
[19] Nitu, C., Comeaga, C.D., Gramescu, B., „Micropositioning devices for optical applications”, Proceedings of SPIE, nr. 5227, pag. 355-360, 2002 (Web of Science WOS:000186473500050)
[20] Lemos, D.; Nunes, A.; Machado, J., „Mechanical simulation model of the systemic circulation”; et al., Source: Measurement Volume: 66 Pages: 212-221 Published: APR 2015 Times Cited: 0, DOI: 10.1016/j.measurement. 2015.01.026
[21] Barros, Carla; Leao, Celina Pinto; Soares, Filomena, „QR Codes and Java Applied to Physiological Data Acquisition in Biomedical Engineering Education”, Source: Proceedings of the International Conference of Numerical Analysis and Applied Mathematics 2014 (Icnaam-2014) Volume: 1648 Published: 2015 Times Cited: 0, DOI: 10.1063/1.4912855
[22] Rizescu C. I., Ciocan M. and Rizescu D., „Robot Control for Home Application”, Applied Mechanics and Materials Vol. 332 (2013) pp 145-153, ISSN 16609336, ISBN (978-3-03785-733-5), DOI: 10.4028/www.scientific.net/ AMM.332.145
[23] Rizescu, C.I., Udrea, C. Rizescu, D., „Experimental Setup for Harmonic Drive Efficiency Determination”, Advanced Materials Research Vols. 463-464 (2012) pp. 1518-1521, ISSN 10226680, ISBN 978-303785363-4, Accession Number: WOS: 000308114100299, Inspec Accession No.: 13066151, DOI: 10.4028/www.scientific.net/ AMR.463-464.1518.

SISTEME CYBER-MIXMECATRONICE ȘI SISTEME FIZICO-CYBERNETICE
Buletinul AGIR nr. 1/2017 ● ianuarie-martie 241
Despre autor
Prof. univ. EurIng. dr. ing. Gheorghe I. GHEORGHE INCDMTM București, România
Specialist în robotică, & cyber-mixmecatronică, mecatronică și cyber-mecatronică, adaptronică și cyber-adaptronică și integronică și cyber-integronică; creator de domenii inteligente avansate la nivel național și internațional; este absolvent al Facultăţii T.C.M. din UPB, specialitatea Mecanică fină, a obținut doctoratul în ştiinte inginerești la Universitatea Politehnica din Timișoara. Are o pregătire academică și o experiență vastă în cercetare de excelență, cu rezultate excepționale. În prezent este directorul general al INCDMTM – Bucureşti și membru corespondent al ASTR (Academia de Ştiinţe Tehnice din România). Conducător de doctorate – la Școala Doctorală – IOSUD, Inginerie Mecanică din U.V. Târgovişte și din Universitatea „Politehnica“ din București; profesor universitar titular la U.P. Bucureşti, U.V. Târgovişte și U.T.M. Bucureşti, Director al Centrului MIX de Evaluare si Formare în Mecatronică «MECATRON». Preşedinte APROMECA (Asociaţia Patronatul Român din Industria Mecanică Fină, Optică şi Mecatronică), presedinte executiv AMFOR (Asociatia de Mecanică Fină şi Optică din România), vicepreşedinte CCIB (Camera de Comerţ şi Industrie Bucureşti), preşedinte Secţiunea Cercetare - Dezvoltare - Inovare din Camera de Comerţ şi Industrie Bucureşti – CCIB, primvicepreşedinte CONPIROM (Confederaţia Patronală din Industrie, Agricultură, Construcţii şi Servicii din România - CONPIROM), membru al CNATDCU (2012 – 2016), membru IEEE și IEEE Romania Section și autor (unic sau în colaborare) a peste 55 carti stiintifice şi universitare, a peste 515 lucrări ştiinţifice, pe plan naţional şi internaţional (inclusiv ISI) precum și a peste 24 de brevete.