proiectii_cartografice_2012
DESCRIPTION
proiectii cartograficeTRANSCRIPT
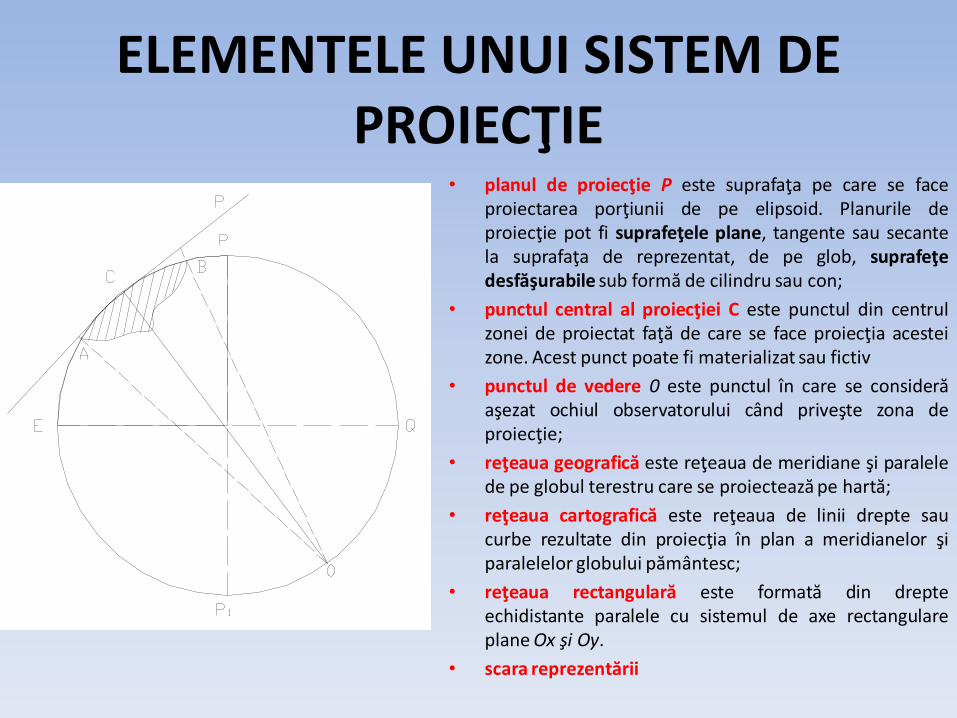
ELEMENTELE UNUI SISTEM DE PROIECŢIE
• planul de proiecţie P este suprafaţa pe care se faceproiectarea porţiunii de pe elipsoid. Planurile deproiecţie pot fi suprafeţele plane, tangente sau secantela suprafaţa de reprezentat, de pe glob, suprafeţedesfăşurabile sub formă de cilindru sau con;
• punctul central al proiecţiei C este punctul din centrulzonei de proiectat faţă de care se face proiecţia acesteizone. Acest punct poate fi materializat sau fictiv
• punctul de vedere 0 este punctul în care se considerăaşezat ochiul observatorului când priveşte zona deproiecţie;
• reţeaua geografică este reţeaua de meridiane şi paralelede pe globul terestru care se proiectează pe hartă;
• reţeaua cartografică este reţeaua de linii drepte saucurbe rezultate din proiecţia în plan a meridianelor şiparalelelor globului pământesc;
• reţeaua rectangulară este formată din drepteechidistante paralele cu sistemul de axe rectangulareplane Ox şi Oy.
• scara reprezentării

CLASIFICAREA PROIECŢIILOR CARTOGRAFICE
• După caracterul deformaţiilor
• După suprafaţa pe care se face proiectarea
• După poziţia pe glob a centrului reţelei cartografice
• După utilizarea proiecţiilor în construcţia hărţilor
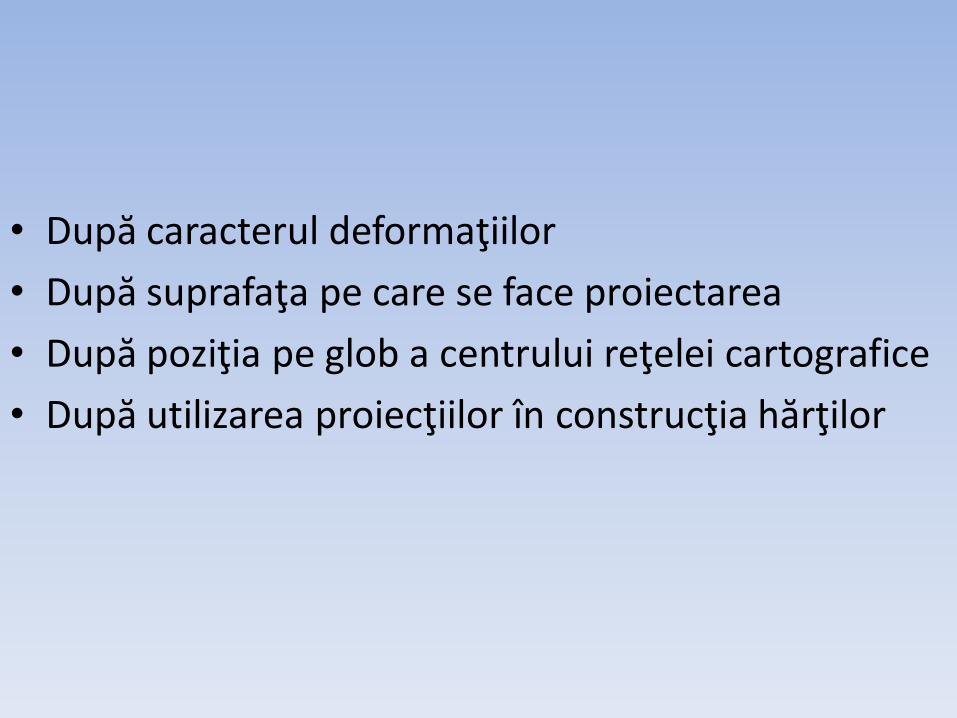
CLASIFICAREA PROIECŢIILOR CARTOGRAFICE DUPĂ CARACTERUL DEFORMAŢIILOR
1. Proiecţii conforme – sunt proiecţiile care păstrează nedeformate unghiurile.
^^
'
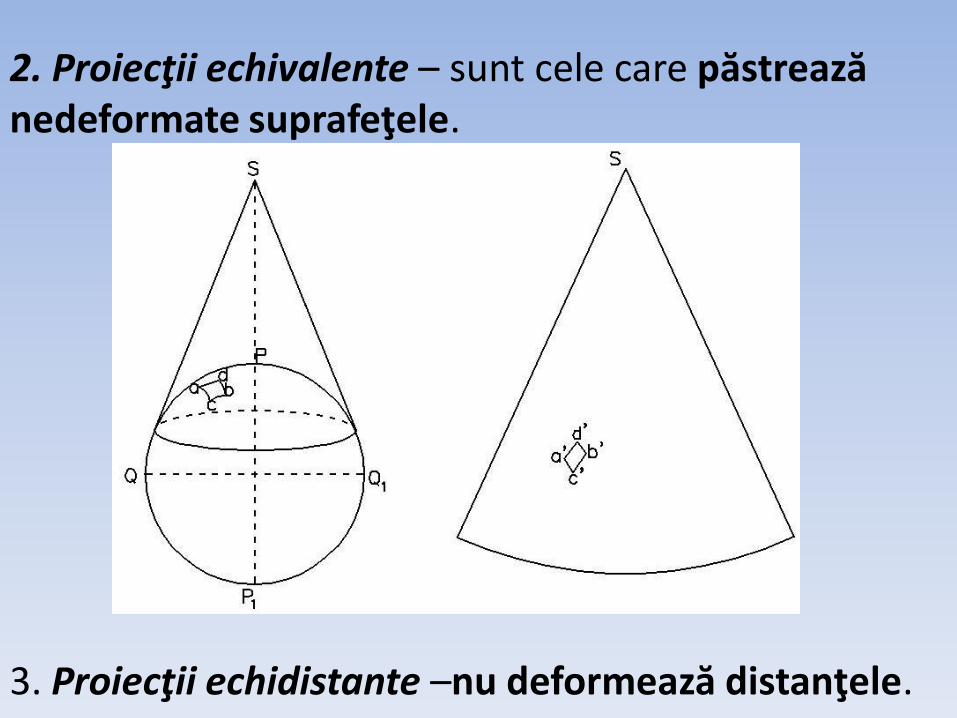
2. Proiecţii echivalente – sunt cele care păstrează nedeformate suprafeţele.
3. Proiecţii echidistante –nu deformează distanţele.
CLASIFICAREA PROIECŢIILOR CARTOGRAFICE DUPĂ SUPRAFAŢA PE CARE SE FACE PROIECTAREA ŞI ASPECTUL REŢELEI CARTOGRAFICE
• proiecţii azimutale;
• proiecţii cilindrice;
• proiecţii conice;
• proiecţii pseudocilindrice;
• proiecţii pseudoconice;
• proiecţii policonice;
• proiecţii circulare.
Proiecţii azimutale
• proiectarea se face pe un plan, iar reţeauacartografică poate avea paralelele sub formăde cercuri, iar meridianele sub formă de liniidrepte
• Se folosesc mai ales pentru reprezentareasuprafeţei terestre pe emisfere (E, V, N, S) şipentru reprezentarea unor teritorii cu aspectmai mult sau mai puţin circular.
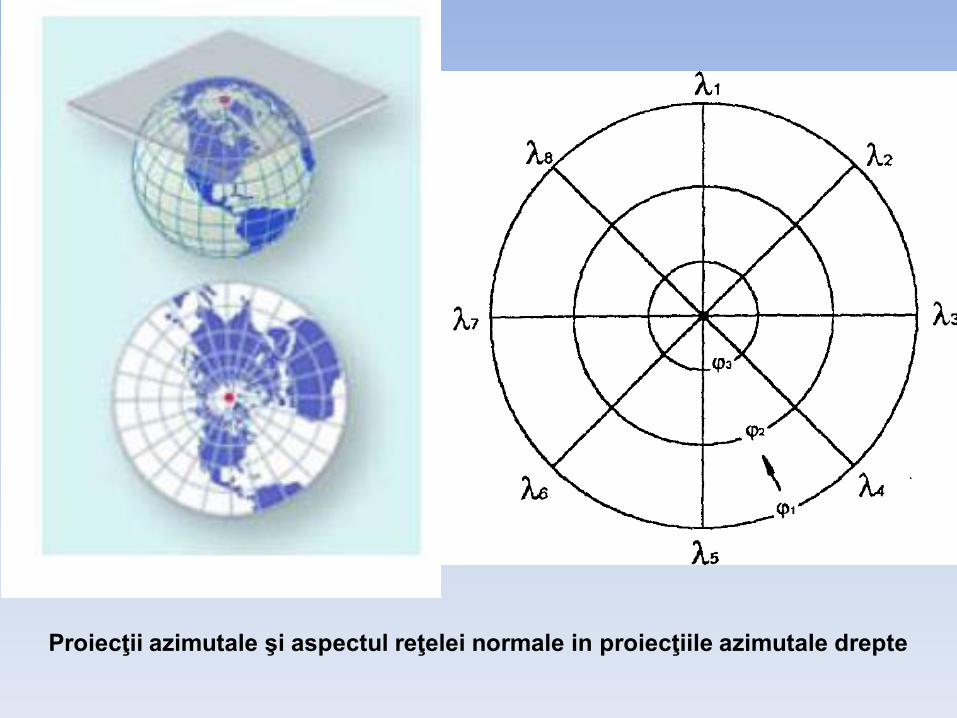
Proiecţii azimutale şi aspectul reţelei normale in proiecţiile azimutale drepte
Proiecţii cilindrice
• proiectarea se face pe suprafaţa laterală a unui cilindru, care apoi se desfăşoară prin tăierea în lungul unei generatoare.
• Meridianele şi paralelele sunt linii drepte, paralele între ele şi perpendiculare unele pe celelalte.
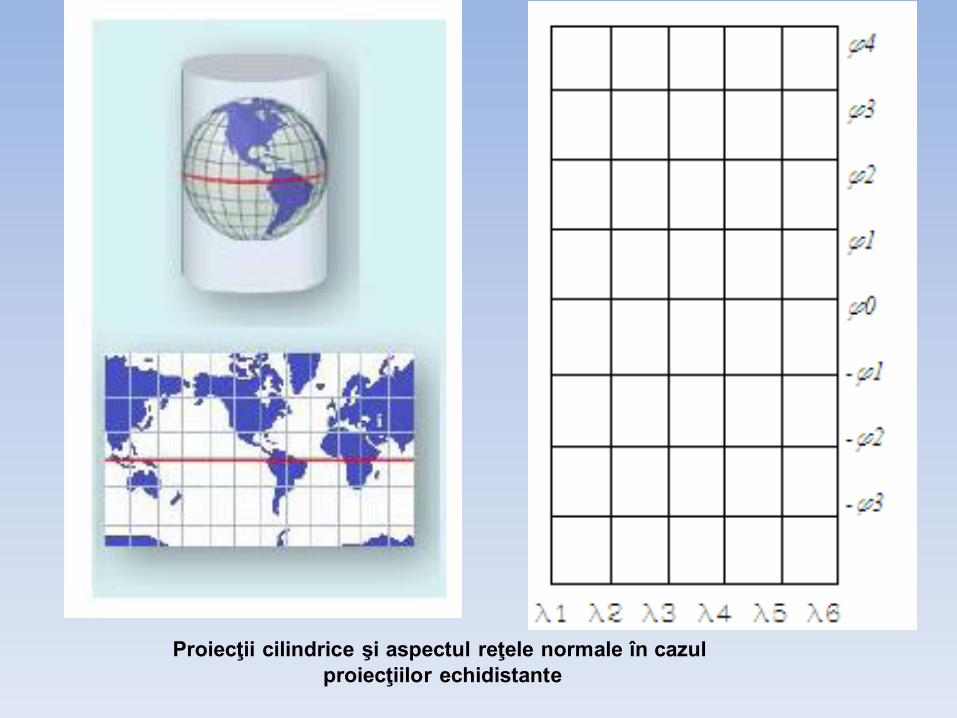
Proiecţii cilindrice şi aspectul reţele normale în cazul
proiecţiilor echidistante
Proiecţii conice
• proiectarea se face pe suprafaţa laterală aunui con. Paralelele sunt arce de cerc, iarmeridianele linii drepte ce se întâlnesc într-unpunct corespunzător cu vârful conului.
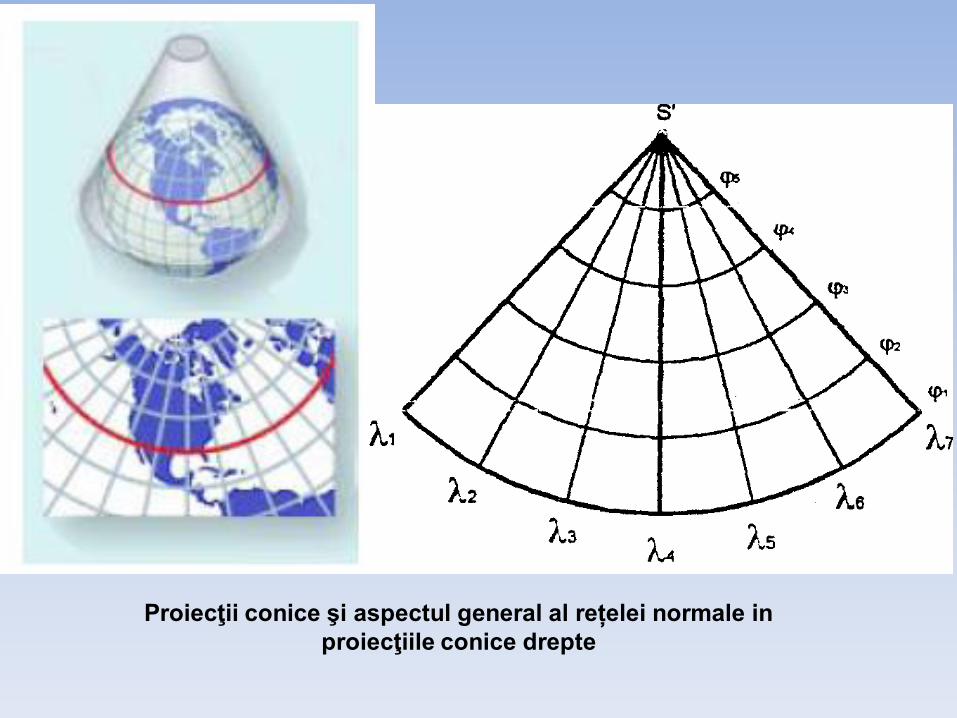
Proiecţii conice şi aspectul general al rețelei normale in
proiecţiile conice drepte
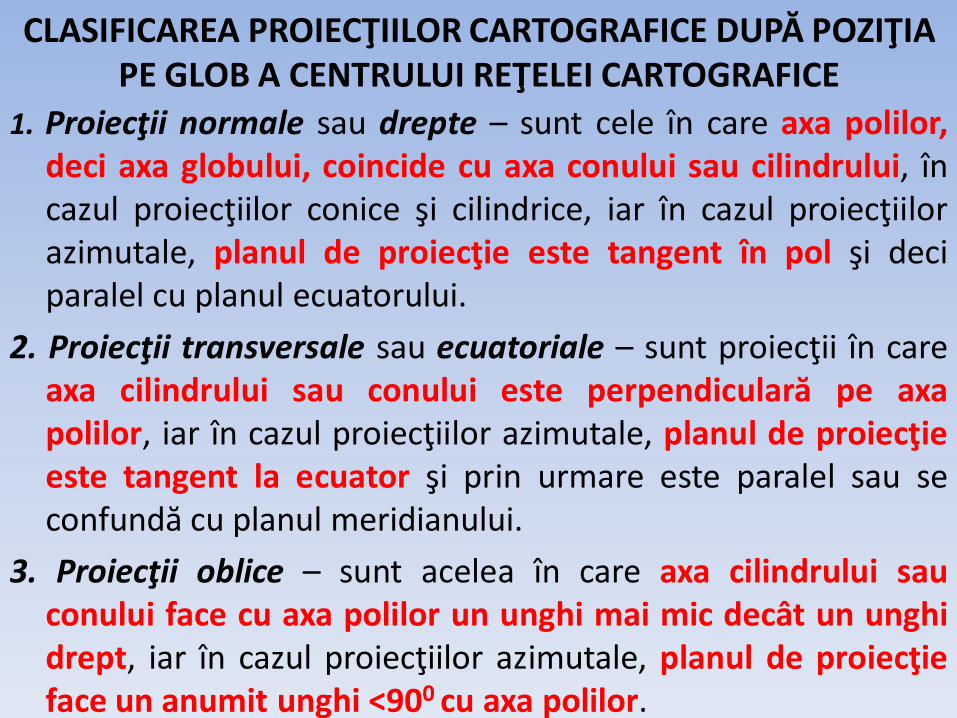
CLASIFICAREA PROIECŢIILOR CARTOGRAFICE DUPĂ POZIŢIA PE GLOB A CENTRULUI REŢELEI CARTOGRAFICE
1. Proiecţii normale sau drepte – sunt cele în care axa polilor,deci axa globului, coincide cu axa conului sau cilindrului, încazul proiecţiilor conice şi cilindrice, iar în cazul proiecţiilorazimutale, planul de proiecţie este tangent în pol şi deciparalel cu planul ecuatorului.
2. Proiecţii transversale sau ecuatoriale – sunt proiecţii în careaxa cilindrului sau conului este perpendiculară pe axapolilor, iar în cazul proiecţiilor azimutale, planul de proiecţieeste tangent la ecuator şi prin urmare este paralel sau seconfundă cu planul meridianului.
3. Proiecţii oblice – sunt acelea în care axa cilindrului sauconului face cu axa polilor un unghi mai mic decât un unghidrept, iar în cazul proiecţiilor azimutale, planul de proiecţieface un anumit unghi <900 cu axa polilor.
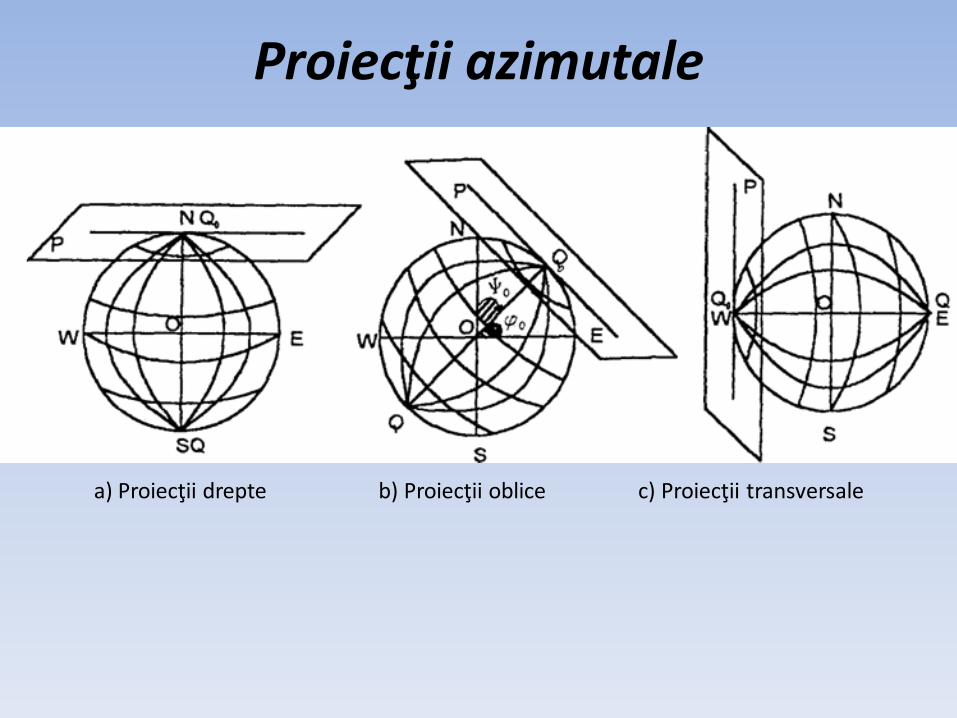
a) Proiecţii drepte b) Proiecţii oblice c) Proiecţii transversale
Proiecţii azimutale

a) Proiecţii drepte b) Proiecţii oblice c) Proiecţii transversale
Proiecţii cilindrice
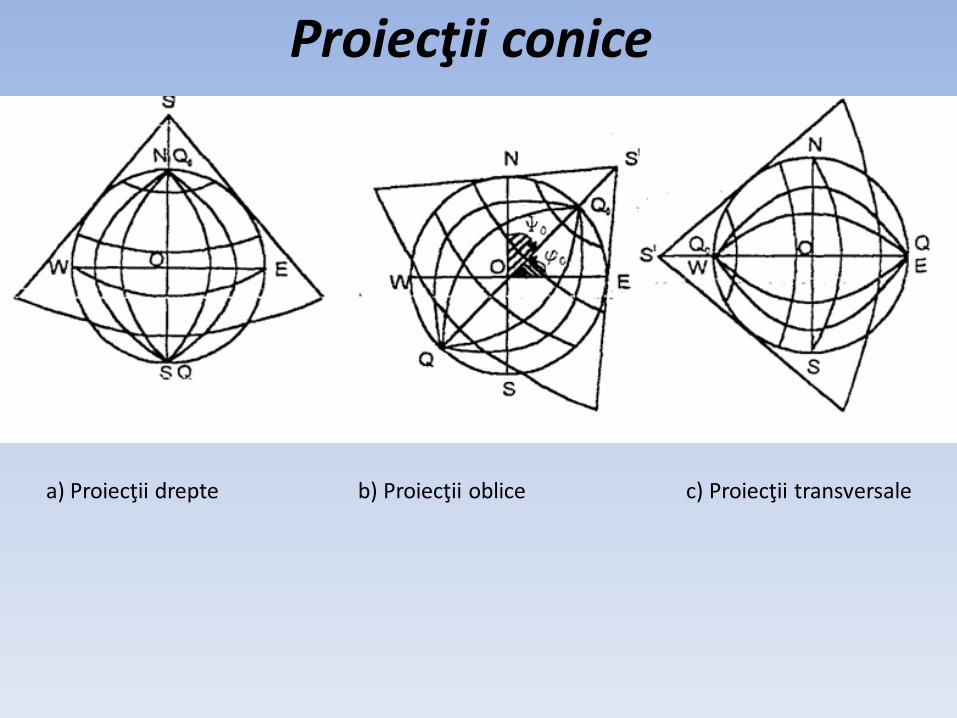
a) Proiecţii drepte b) Proiecţii oblice c) Proiecţii transversale
Proiecţii conice
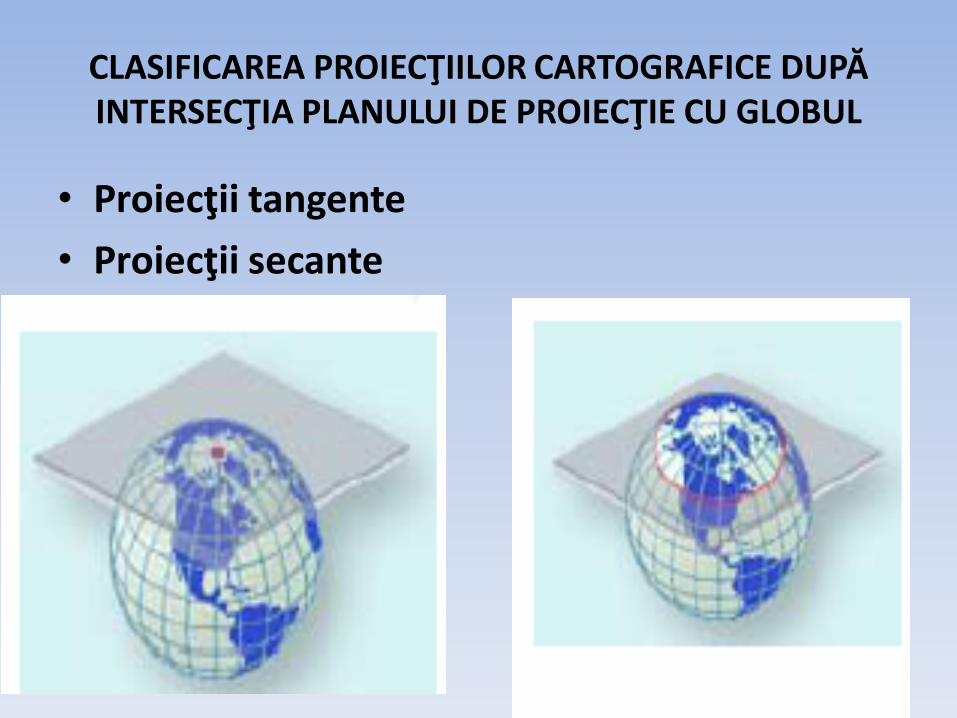
CLASIFICAREA PROIECŢIILOR CARTOGRAFICE DUPĂ INTERSECŢIA PLANULUI DE PROIECŢIE CU GLOBUL
• Proiecţii tangente
• Proiecţii secante
CLASIFICAREA PROIECŢIILOR CARTOGRAFICE DUPĂ MODUL DE UTILIZARE LA ÎNTOCMIREA HĂRŢILOR
proiecţii cartografice utilizate pentru întocmirea hărţilor universale:
• proiecţia AITOV-HAMMER;
• proiecţia GRINTEN;
• proiecţia MERCATOR;
• proiecţia MOLLWEIDE;
• proiecţia SANSON – FLAMSTEED.
proiecţii cartografice utilizate pentru întocmirea hărţilor emisferelor:
• proiecţia azimutală ecuatorială LAMBERT;
• proiecţia azimutală ecuatorială POSTEL
• proiecţia azimutală ecuatorială STEREOGRAFICA;
• proiecţia azimutală ecuatorială ORTOGRAFICA;
• proiecţia sferică sau globulară;
• proiecţia MOLLWEIDE.
proiecţii cartografice utilizate pentru întocmirea hărţilor continentale:
• proiecţia azimutală orizontală LAMBERT;
• proiecţia azimutală ecuatorială LAMBERT;
• proiecţia azimutală orizontală POSTEL;
• proiecţia azimutală polară POSTEL;
• proiecţia SANSON – FLAMSTEED;
• proiecţia pseudoconică echivalentă BONNE;
• proiecţia cilindrică transversală conformă GAUSS – KRUGER.

PROIECŢIA CILINDRICĂ TRANSVERSALĂ GAUSS-KRÜGER
• Acest sistem de proiecţie a fost conceput în anii 1825-1830 de cătrecelebrul matematician german Karl Friedrich Gauss (1777-1855), iarmai târziu Johannes Krüger (1857-1923), a elaborat, în anul 1912,formulele necesare pentru trecerea coordonatelor punctelor de peelipsoidul de rotaţie în planul de proiecţie. Astfel ca fost adoptatadenumirea de "proiecţia Gauss - Krüger", precum şi "reprezentareaconformă Gauss", iar în practica curentă "proiecţia Gauss".
• În România, proiecţia Gauss a fost introdusa în anul 1951, când s-aadoptat şi elipsoidul de referinţă Krasovski - 1940. Sistemul deproiecţie Gauss s-a folosit la întocmirea planului topografic de baza lascara 1:10.000, a hărţii topografice de baza la scara 1:25.000, precumşi a hărţilor unitare la diferite scări, pana în anul 1973.
1. ISTORIC
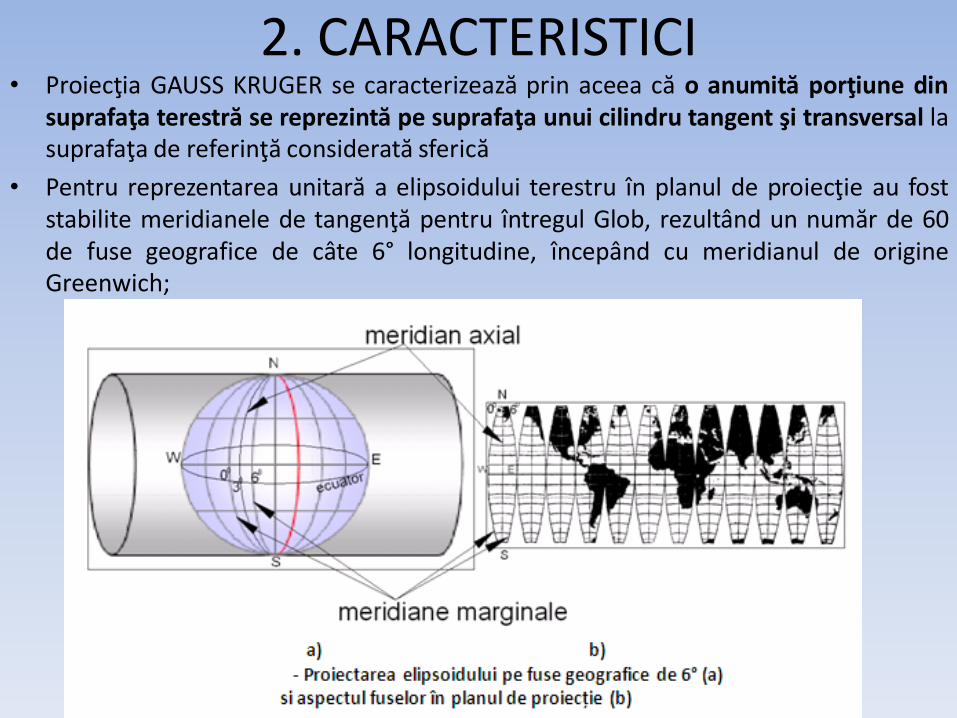
• Proiecţia GAUSS KRUGER se caracterizează prin aceea că o anumită porţiune dinsuprafaţa terestră se reprezintă pe suprafaţa unui cilindru tangent şi transversal lasuprafaţa de referinţă considerată sferică
• Pentru reprezentarea unitară a elipsoidului terestru în planul de proiecţie au foststabilite meridianele de tangenţă pentru întregul Glob, rezultând un număr de 60de fuse geografice de câte 6° longitudine, începând cu meridianul de origineGreenwich;
2. CARACTERISTICI
3. REŢEAUA CARTOGRAFICĂ
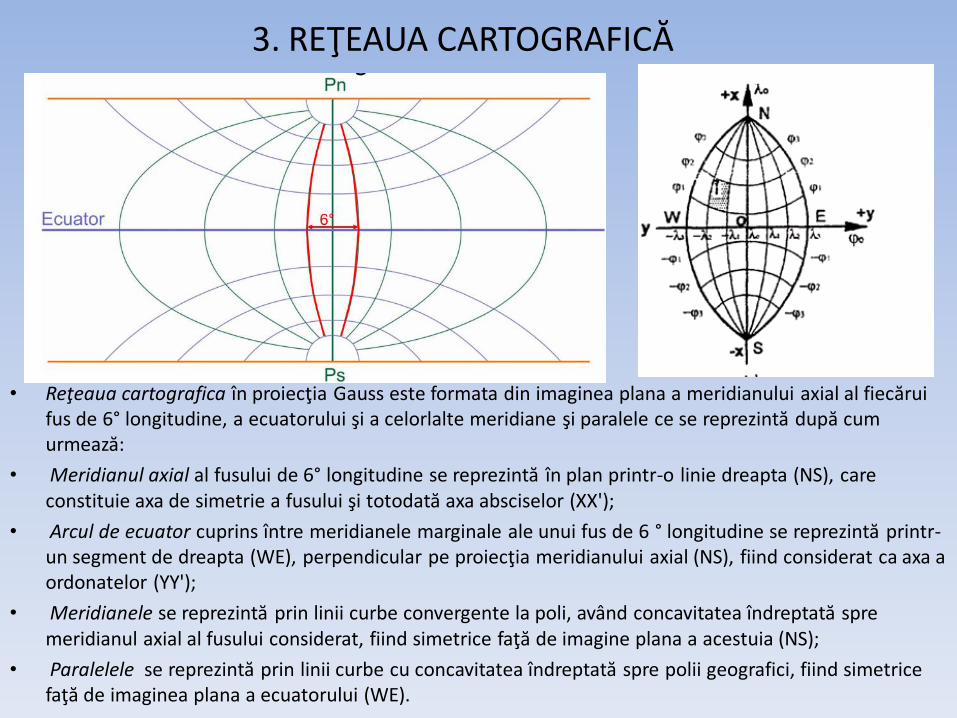
• Reţeaua cartografica în proiecţia Gauss este formata din imaginea plana a meridianului axial al fiecărui fus de 6° longitudine, a ecuatorului şi a celorlalte meridiane şi paralele ce se reprezintă după cum urmează:
• Meridianul axial al fusului de 6° longitudine se reprezintă în plan printr-o linie dreapta (NS), care constituie axa de simetrie a fusului şi totodată axa absciselor (XX');
• Arcul de ecuator cuprins între meridianele marginale ale unui fus de 6 ° longitudine se reprezintă printr-un segment de dreapta (WE), perpendicular pe proiecţia meridianului axial (NS), fiind considerat ca axa a ordonatelor (YY');
• Meridianele se reprezintă prin linii curbe convergente la poli, având concavitatea îndreptată spre meridianul axial al fusului considerat, fiind simetrice faţă de imagine plana a acestuia (NS);
• Paralelele se reprezintă prin linii curbe cu concavitatea îndreptată spre polii geografici, fiind simetrice faţă de imaginea plana a ecuatorului (WE).
4. NUMEROTAREA FUSELOR • Numerotarea fuselor de 6° se face cu cifre arabe, de la 1, 2,..., la 60,
începând cu fusul 1 limitat de meridianele de 180° şi de -174°longitudine vestica. Numerotarea fuselor se continuă spre est până lafusul nr. 30 (cuprins intre -6° longitudine vestica şi 0° - meridianulGreenwich).
• Se continua numerotarea fuselor de 6° longitudine cu fusul 31(cuprins intre meridianul Greenwich de 0° longitudine şi meridianulde 6° longitudine estica) şi până la fusul 60, limitat de meridianul de174° longitudine estică şi de meridianul de 180° .
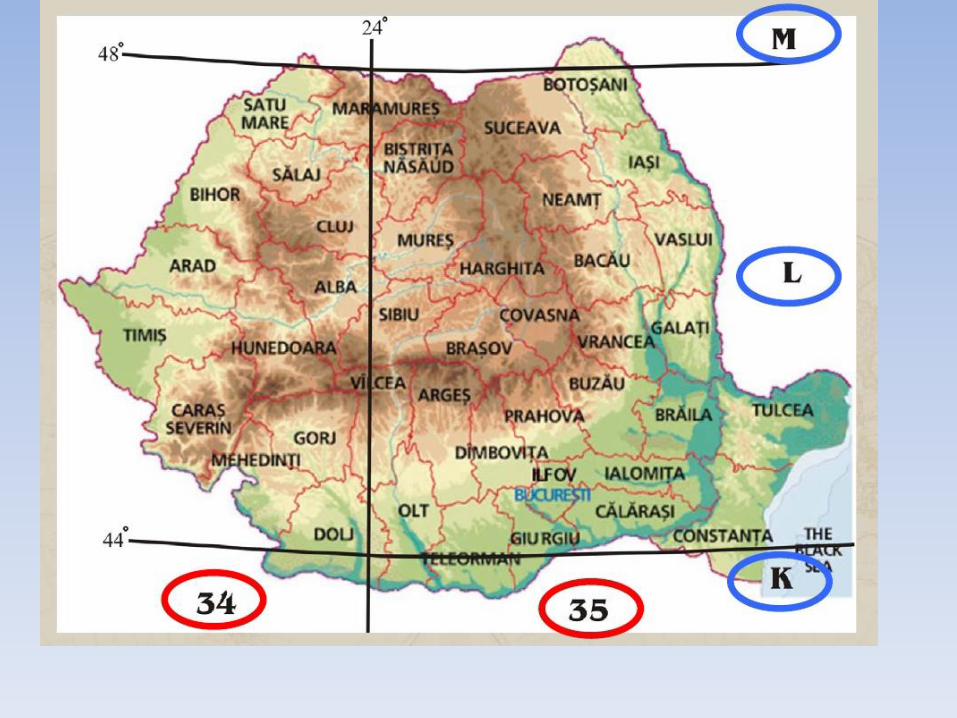
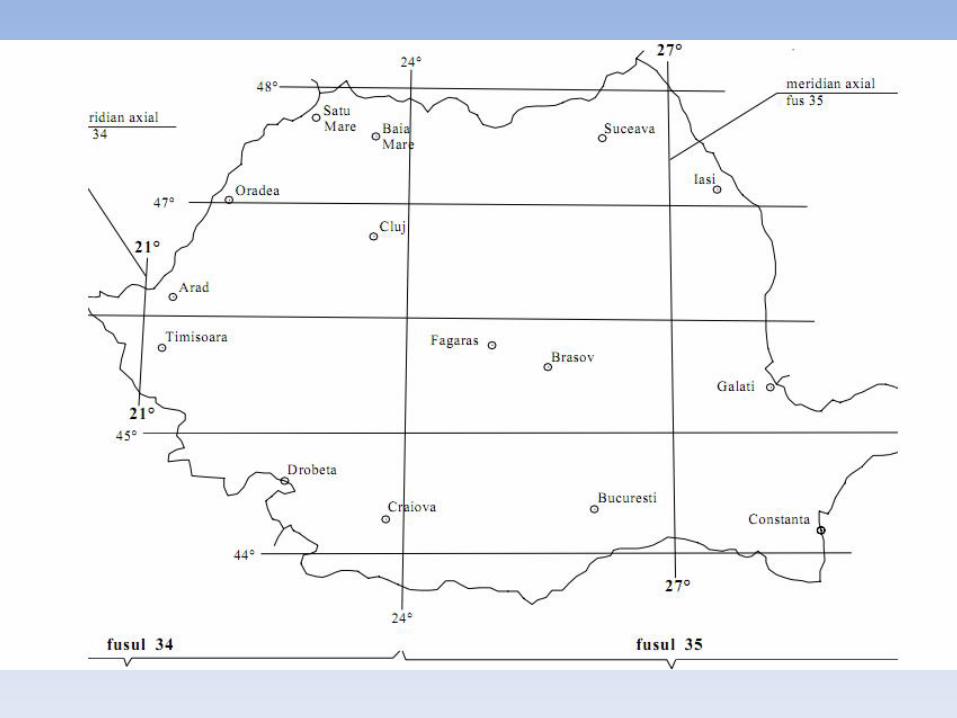
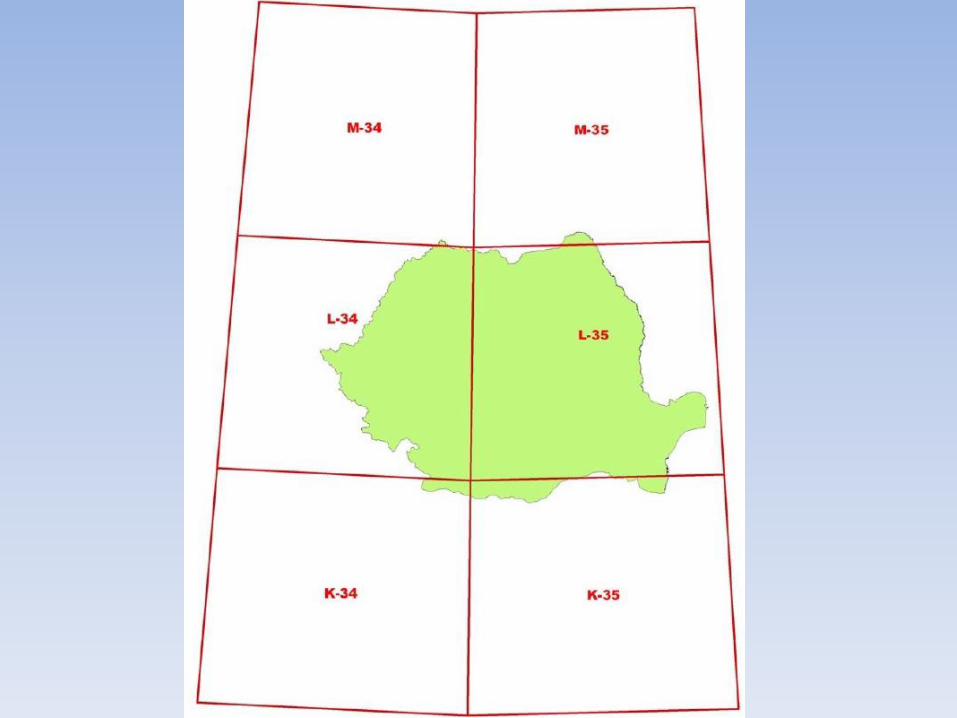
• Teritoriul României se reprezintă cartografic în doua fuse de cate 6°longitudine cu numerele 34 şi 35 cu meridianele axiale de 21° şi 27°longitudine est Greenwich
• Prin trasarea de paralele la ecuator din 4 în 4 grade pe latitudine s-arealizat împartirea globului în zone geografice care s-au numerotat culiterele A,B,C,……,V ,începind de la ecuator pîna la paralelul de +80o
la nord şi respective -88o la sud .

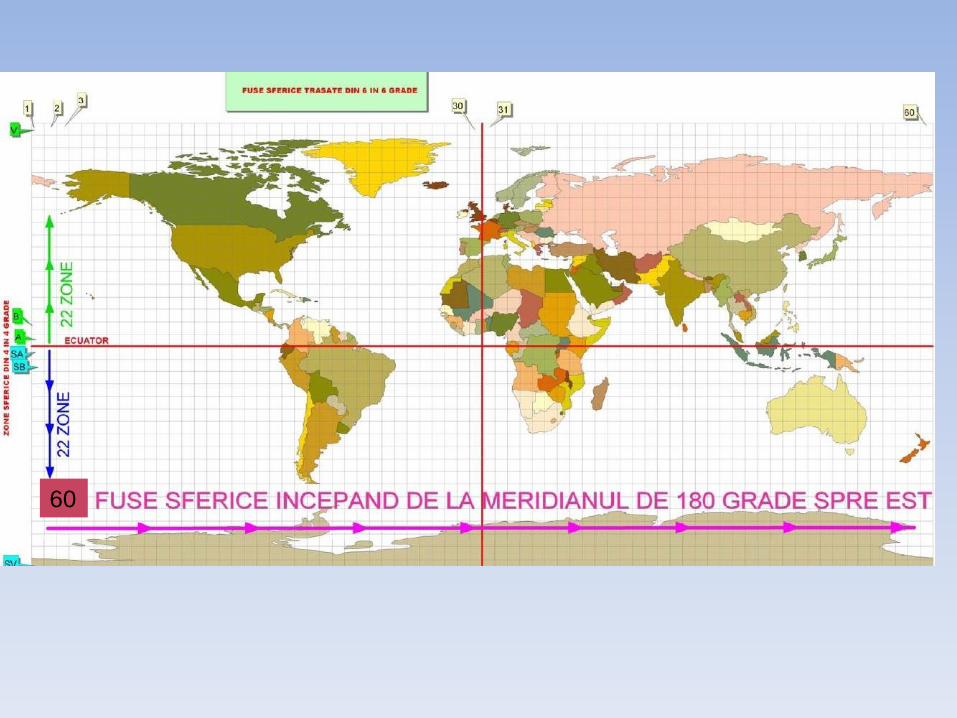
60
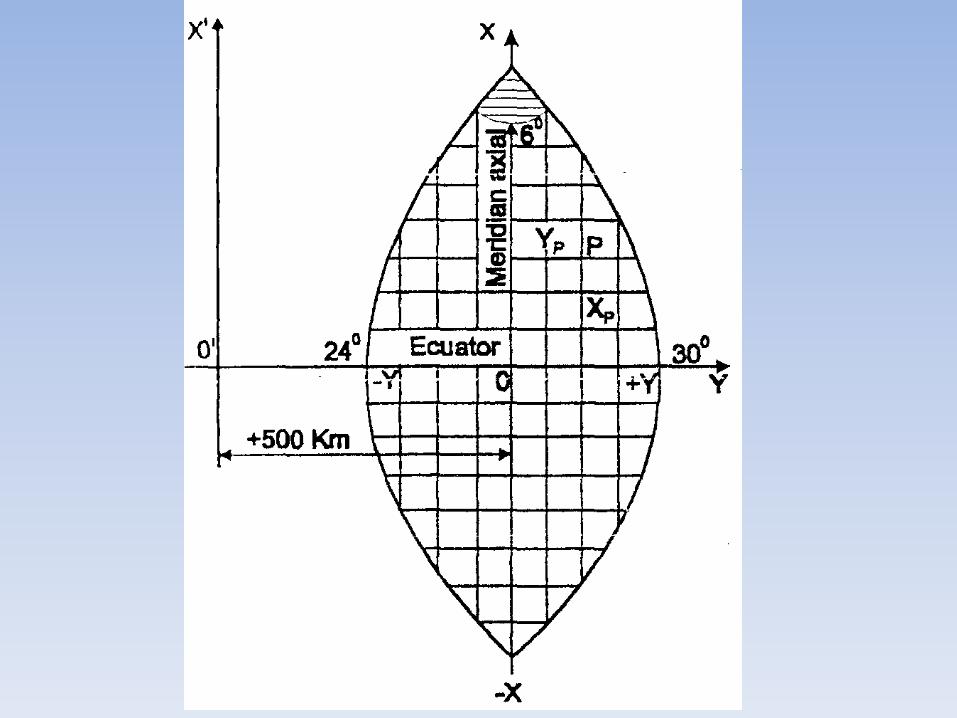
5. SISTEMUL ŞI ORIGINEA AXELOR• În proiecţia Gauss, se consideră pentru fiecare fus de 6° longitudine un sistem propriu axe de
coordonate rectangulare plane, a cărui origine O se găseşte la intersecţia meridianului axial, carereprezintă axa OX, cu Ecuatorul, ce reprezintă axa OY . Deci, pentru reprezentarea întregii suprafeţe aGlobului terestru, se vor utiliza un număr de 60 sisteme de coordonate rectangulare plane.
• Coordonatele rectangulare plane ale unui punct oarecare P(xp,yp) din emisfera nordica a Globuluiterestru, se vor exprima, în cazul absciselor X numai prin valori pozitive, care la latitudinea României suntmai mari de 5000km.
• Valorile ordonatelor y, sunt pozitive sau negative, în funcţie de poziţia punctelor faţă de meridianul axial,care sunt situate în dreapta (ordonate pozitive) sau în stânga (ordonate negative).
• Pentru pozitivarea valorilor negative ale ordonatelor Y din stânga meridianului axial al unui fus de 6°longitudine, s-a efectuat translarea originii sistemului de axe cu +500 km spre vest. Deci, ordonateletuturor punctelor se vor modifica prin adăugarea valorii de + 500 km, funcţie de coordonatele originiitranslate :
• O' ( X0 = 0, 000 m şi Y0 = 500 000, 000 m ).
• Deoarece este posibil ca din punct de vedere practic sa se obţină aceeaşi valoare a ordonatei Y pentrumai multe puncte, ce sunt situate în fuse diferite, s-a convenit sa se scrie în faţă valorii ordonatei Y şinumărul de ordine al fusului de 6°. Cifrele (4) şi (5) înscrise în faţa ordonatei Y, semnifică numărul deordine al fusului 34 şi 35.
• Spre exemplu, coordonatele plane Gauss ale unui punct din dreapta meridianului axial al fusului 35, auvalorile :Xp=5 244 670,219 m şi Yp = (5) 556 687, 082 m.
6. NOMENCLATURA HĂRŢILOR ÎNPROIECŢIA GAUSS - KRÜGER
Definiţie:Prin sistem de nomenclatură se întelege sistemul de notaţie alcătuit din cifre şi litere, cu ajutorul căruia se defineşte pozitia unei foi de hartă în cuprinsul unui teritoriu sau a întregii suprafeţe terestre.
La Congresul Internaţional de Geodezie şi Geofizică din anul 1924 a fost propus şi adoptat un sistem internaţional de nomenclatură pentru harta lumii la scara 1:1.000.000, sistem adoptat şi de România pentru hărţile în sistemul de proiecţie Gauss-Krüger. Acest sistem se utilizeaza şi în prezent la hărţile în proiecţie stereografică.Sistemul international de nomenclatură se bazează pe împărţirea globului terestru în zone sferice trasate din 4º în 4º de latitudine şi fuse sferice trasate din 6º în 6º de longitudine.
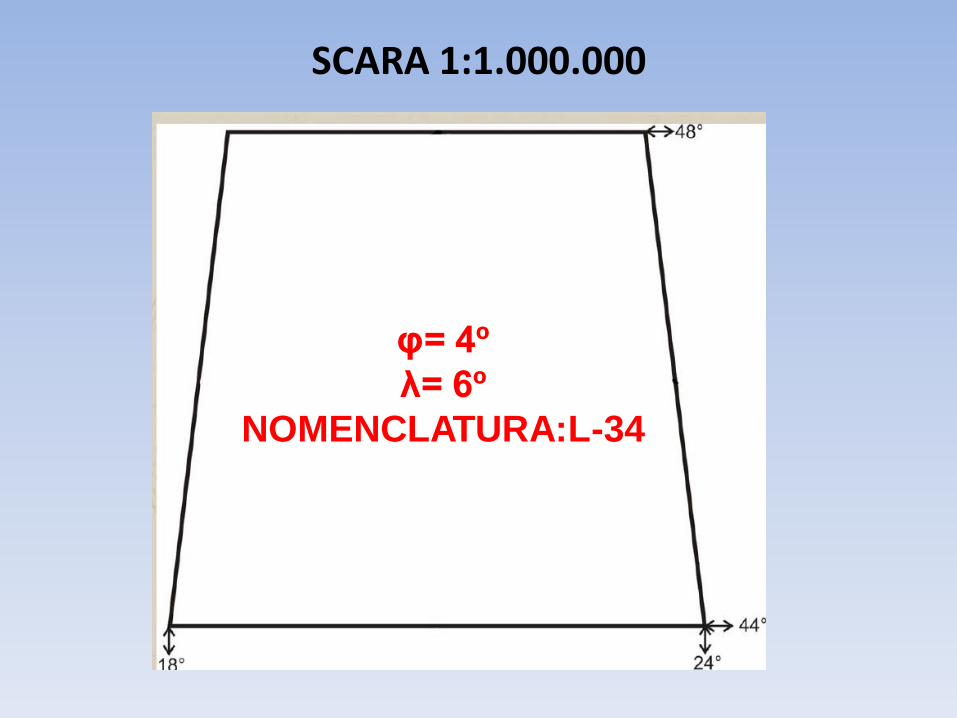
SCARA 1:1.000.000
φ= 4º
λ= 6º
NOMENCLATURA:L-34
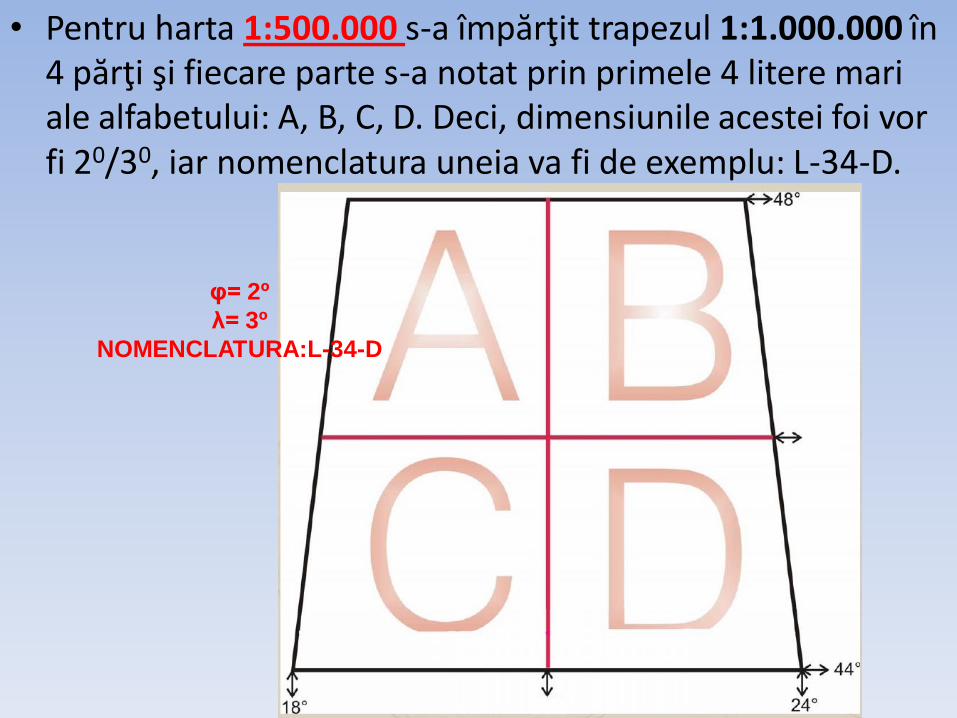
• Pentru harta 1:500.000 s-a împărţit trapezul 1:1.000.000 în 4 părţi şi fiecare parte s-a notat prin primele 4 litere mari ale alfabetului: A, B, C, D. Deci, dimensiunile acestei foi vor fi 20/30, iar nomenclatura uneia va fi de exemplu: L-34-D.
φ= 2º
λ= 3º
NOMENCLATURA:L-34-D

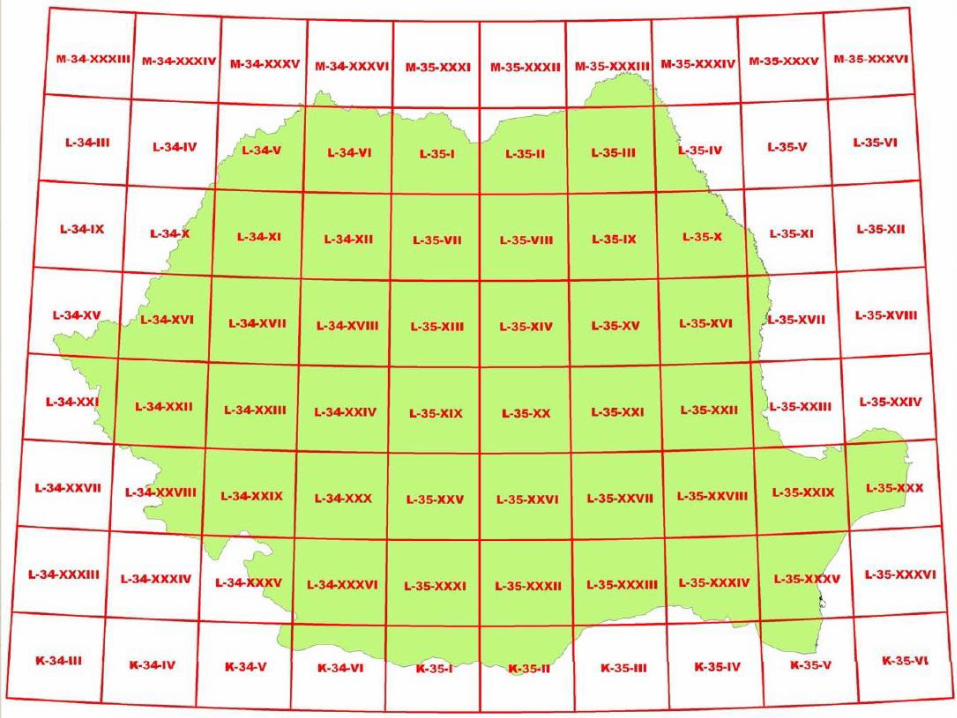
• Pentru harta 1:200.000 s-a împărţit trapezul 1:1.000.000 în 36 părţi, notându-se fiecare parte în cifre romane de la I – XXXVI. Dimensiunile acestei hărţi vor fi 40/10, iar nomenclatura L – 34 – XI.
φ= 40’
λ= 1º
NOMENCLATURA:
L-34-XXXVI
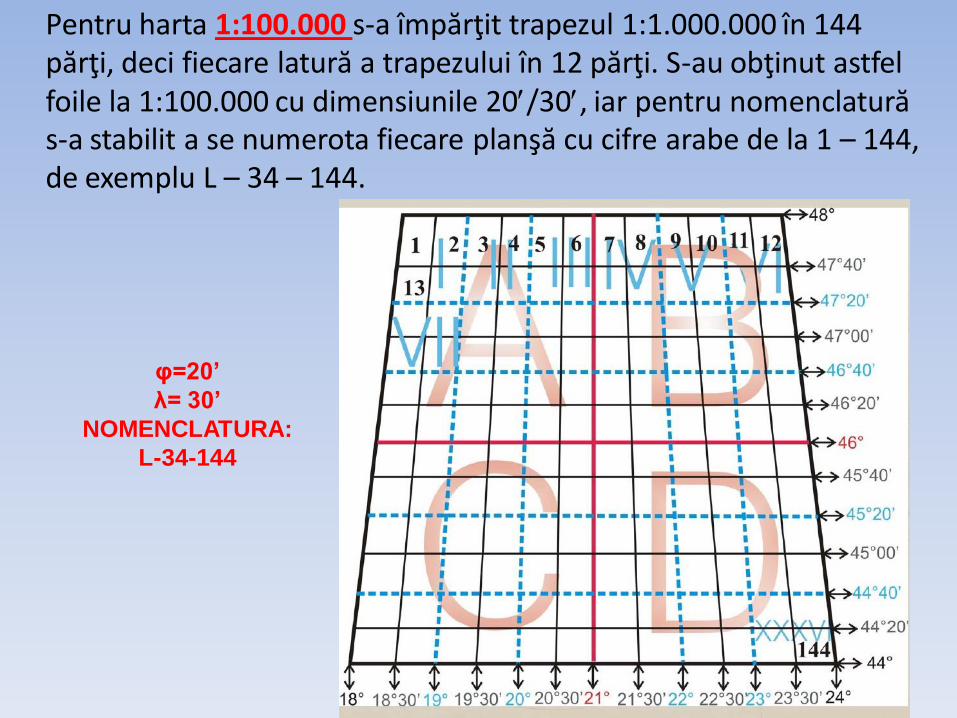
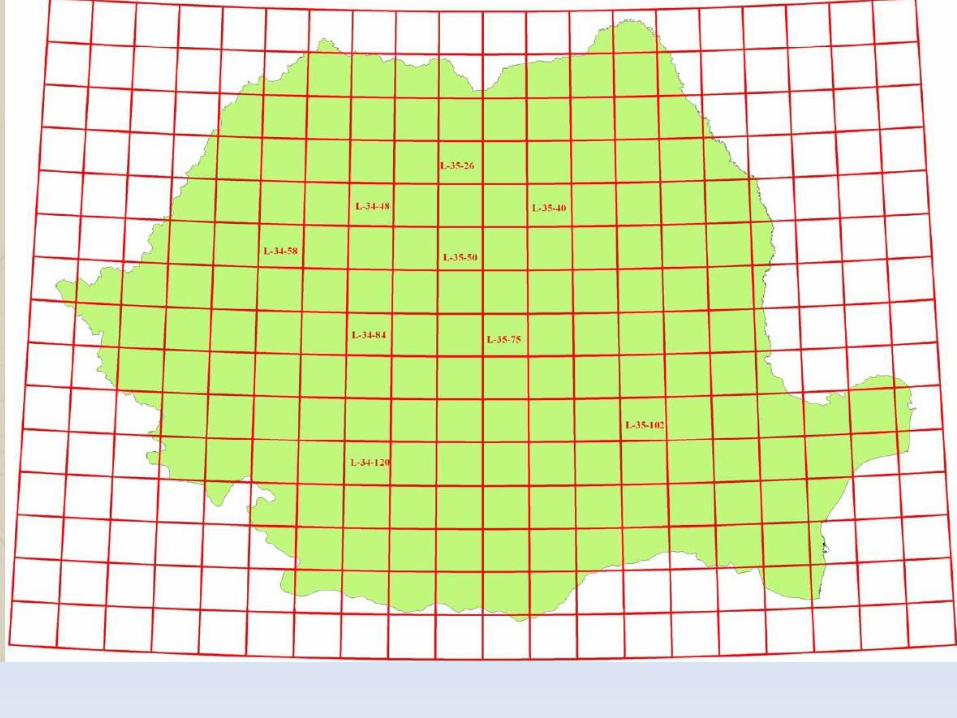
Pentru harta 1:100.000 s-a împărţit trapezul 1:1.000.000 în 144 părţi, deci fiecare latură a trapezului în 12 părţi. S-au obţinut astfel foile la 1:100.000 cu dimensiunile 20/30, iar pentru nomenclatură s-a stabilit a se numerota fiecare planşă cu cifre arabe de la 1 – 144, de exemplu L – 34 – 144.
φ=20’
λ= 30’
NOMENCLATURA:
L-34-144
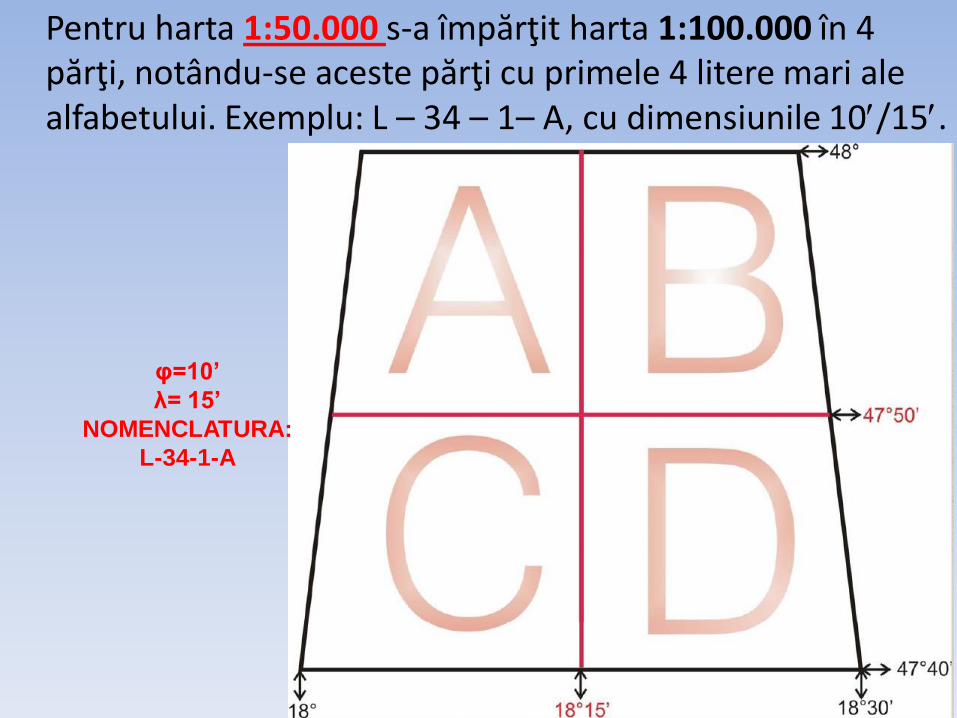
Pentru harta 1:50.000 s-a împărţit harta 1:100.000 în 4 părţi, notându-se aceste părţi cu primele 4 litere mari ale alfabetului. Exemplu: L – 34 – 1– A, cu dimensiunile 10/15.
φ=10’
λ= 15’
NOMENCLATURA:
L-34-1-A
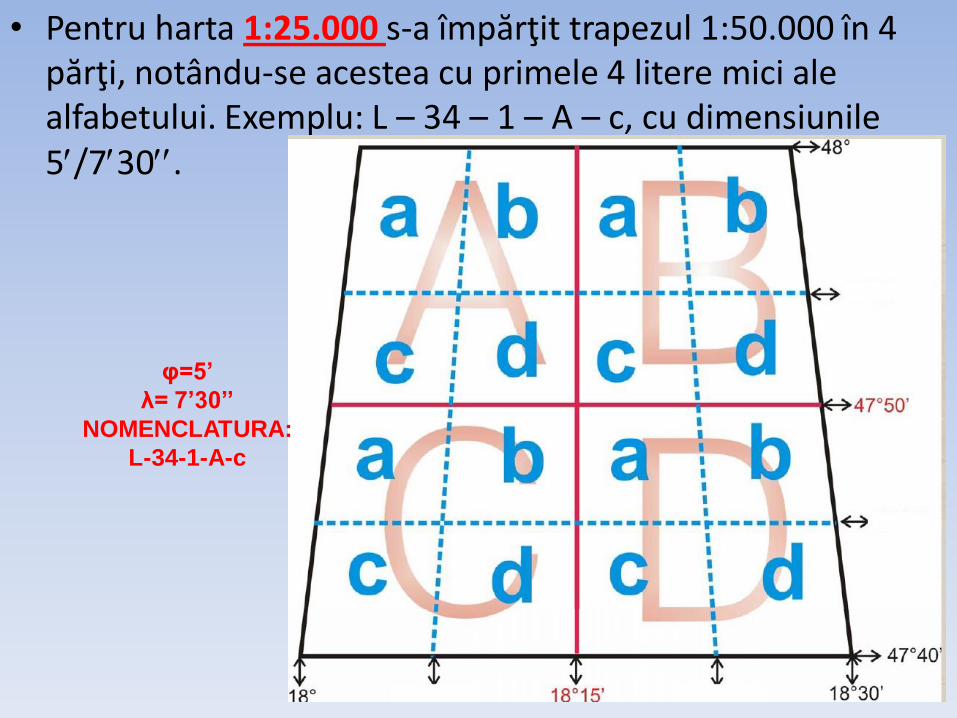
• Pentru harta 1:25.000 s-a împărţit trapezul 1:50.000 în 4 părţi, notându-se acestea cu primele 4 litere mici ale alfabetului. Exemplu: L – 34 – 1 – A – c, cu dimensiunile 5/730.
φ=5’
λ= 7’30’’
NOMENCLATURA:
L-34-1-A-c
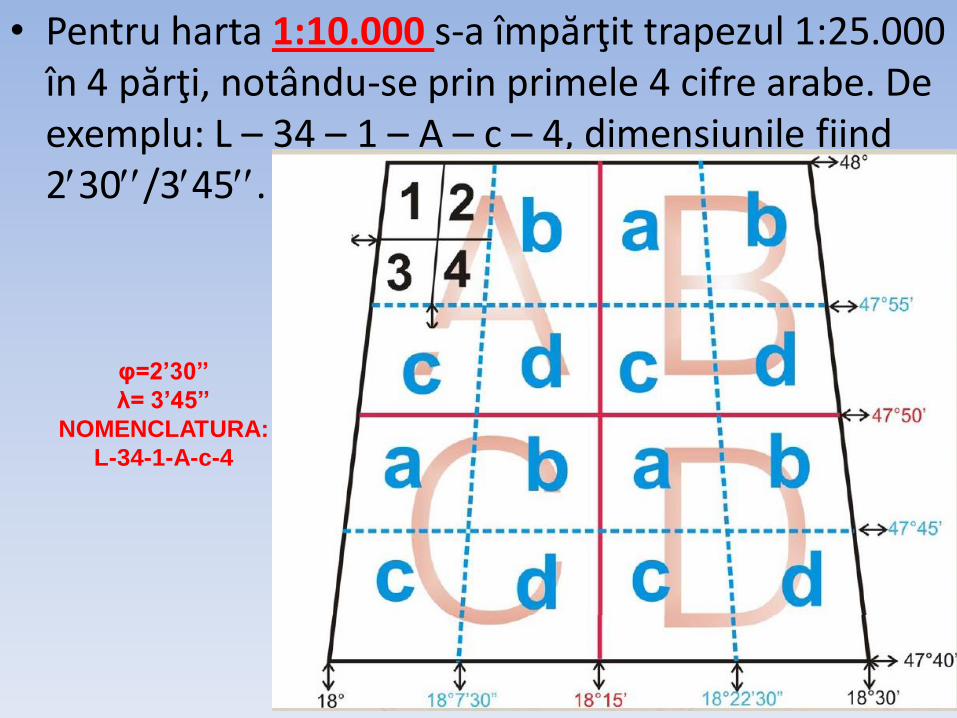
• Pentru harta 1:10.000 s-a împărţit trapezul 1:25.000 în 4 părţi, notându-se prin primele 4 cifre arabe. De exemplu: L – 34 – 1 – A – c – 4, dimensiunile fiind 230/345.
φ=2’30’’
λ= 3’45’’
NOMENCLATURA:
L-34-1-A-c-4
• Pentru harta 1:5.000 se împarte trapezul 1:10.000în 4 părţi. Fiecare trapez rezultat va aveadimensiunea 1’15’’/1’52’’,5 notându-se cu cifreromane I,II,III şi IV.
• De exemplu L-34-1-A-c-4-IV
• Pentru harta 1:2.000 fiecare trapez 1:5.000 seîmparte în 4 trapeze notate cu cifre 1,2,3,4.Dimensiunile sunt 25’’/37’’,5.
• De exemplu L-34-1-A-c-4-IV-4
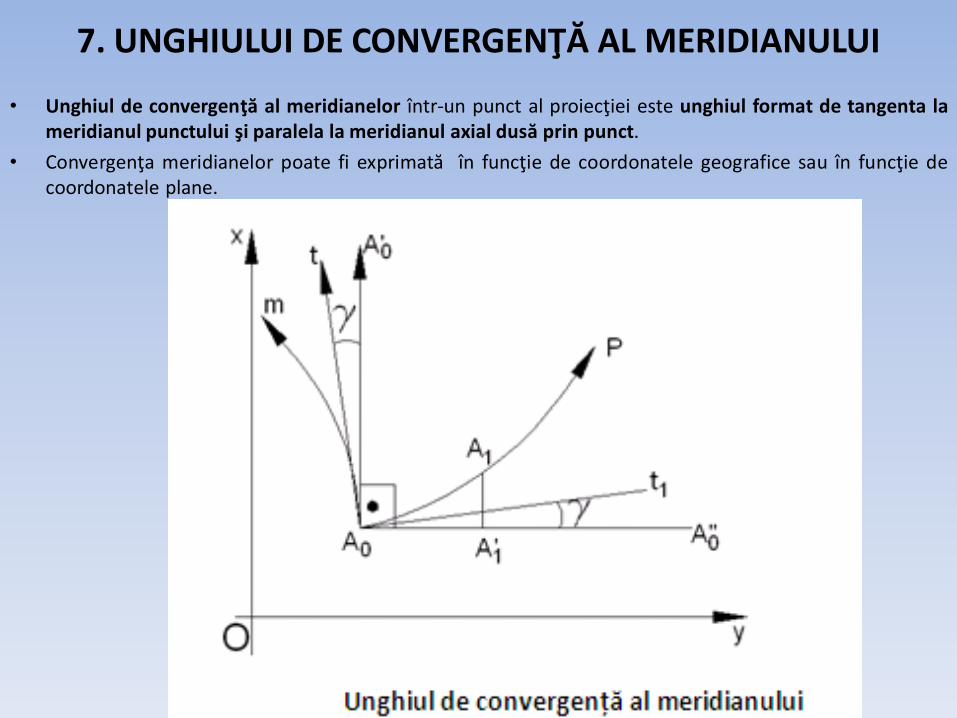
7. UNGHIULUI DE CONVERGENŢĂ AL MERIDIANULUI
• Unghiul de convergenţă al meridianelor într-un punct al proiecţiei este unghiul format de tangenta lameridianul punctului şi paralela la meridianul axial dusă prin punct.
• Convergenţa meridianelor poate fi exprimată în funcţie de coordonatele geografice sau în funcţie decoordonatele plane.
• Valorile unghiurilor de convergenţă ale meridianelor în diferite puncte se pot găsi în tabelespeciale, dar pe scurt, pot fi calculate şi cu ajutorul următoarei formule:
În care:
• ∆λ – diferenţa de longitudine dintre longitudinea punctului şi a meridianului axial al fusului respectiv;
• – latitudinea cercului paralel al punctului dat.
sin
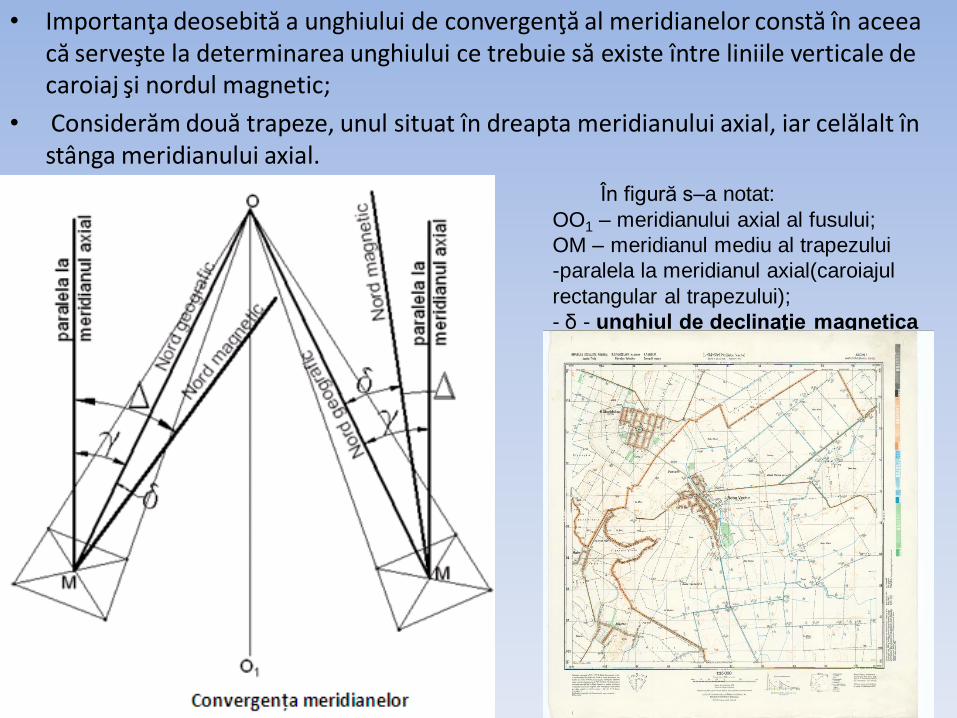
• Importanţa deosebită a unghiului de convergenţă al meridianelor constă în aceea că serveşte la determinarea unghiului ce trebuie să existe între liniile verticale de caroiaj şi nordul magnetic;
• Considerăm două trapeze, unul situat în dreapta meridianului axial, iar celălalt în stânga meridianului axial.
În figură s–a notat:
OO1 – meridianului axial al fusului;
OM – meridianul mediu al trapezului
-paralela la meridianul axial(caroiajul
rectangular al trapezului);
- δ - unghiul de declinaţie magnetica

• Unghiul de declinaţie magnetică se determină pentru fiecare trapez şi anume în punctul ce reprezintă centrul acestuia.
• Daca figurăm pentru cazul trapezului din dreapta meridianului axial (a) cele trei direcţii(direcţia caroiajului, direcţia nordului magnetic şi direcţia meridianului geografic), se poate scrie simplu că:
• Δ este unghiul dintre liniile verticale de caroiaj şi nordul magnetic.
• Acelaşi lucru pentru cazul trapezului situat în stânga meridianului axial (b) cu deosebirea că aici:
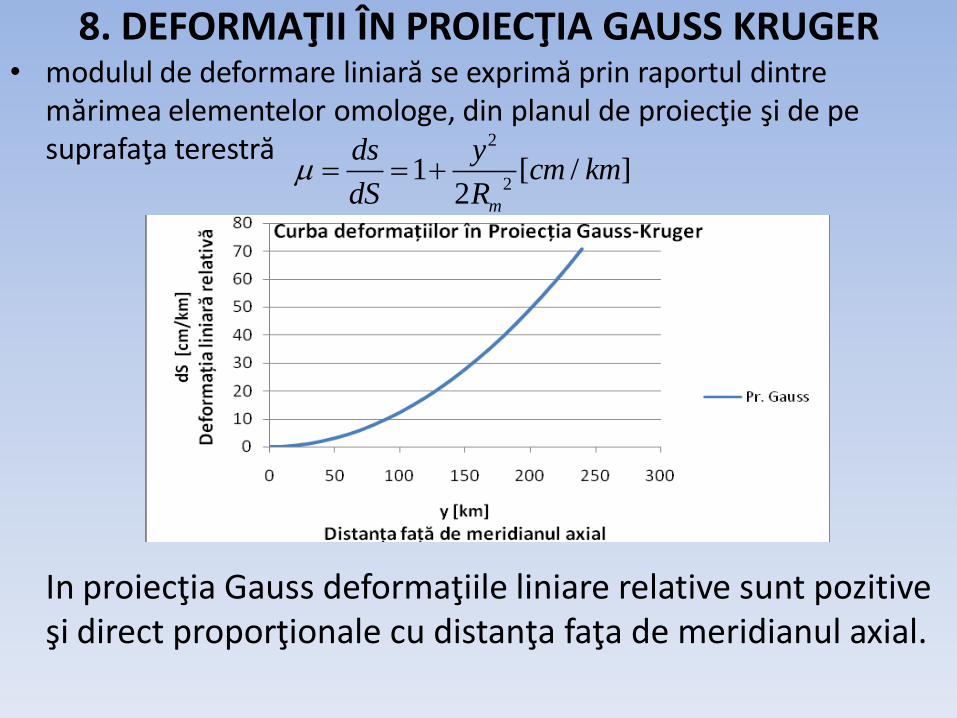
8. DEFORMAŢII ÎN PROIECŢIA GAUSS KRUGER• modulul de deformare liniară se exprimă prin raportul dintre
mărimea elementelor omologe, din planul de proiecţie şi de pe suprafaţa terestră 2
21 [ / ]
2 m
ds ycm km
dS R
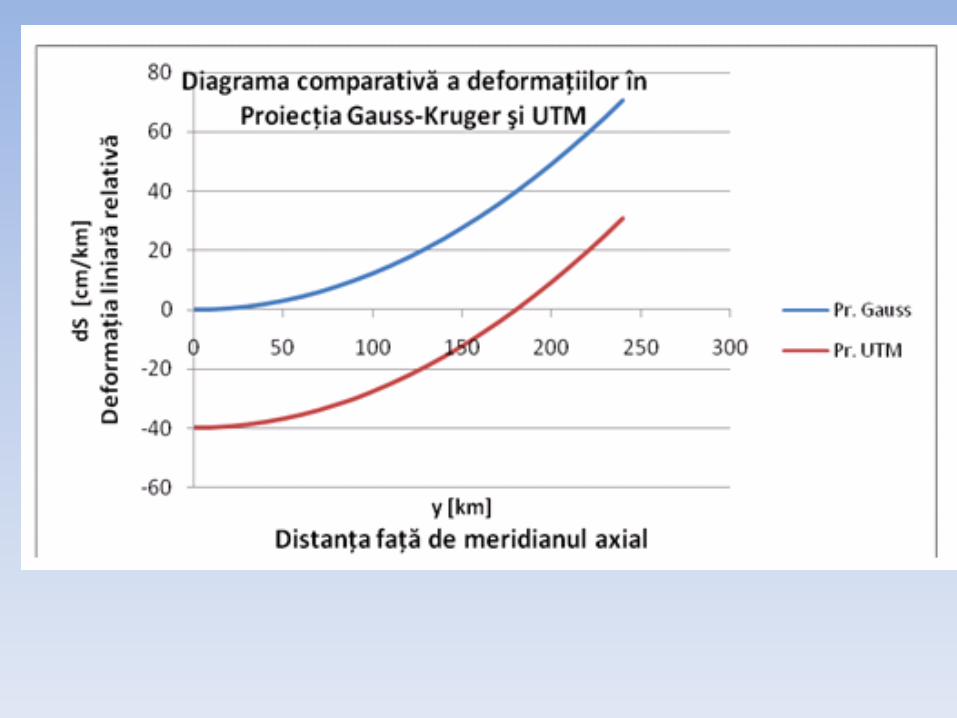
In proiecţia Gauss deformaţiile liniare relative sunt pozitive şi direct proporţionale cu distanţa faţa de meridianul axial.
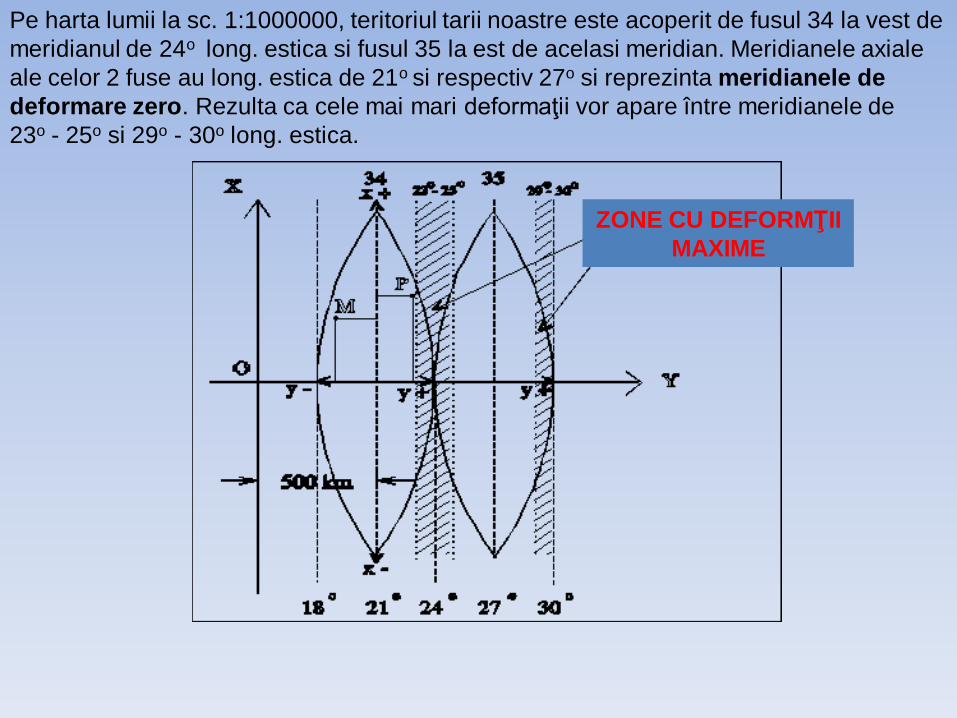
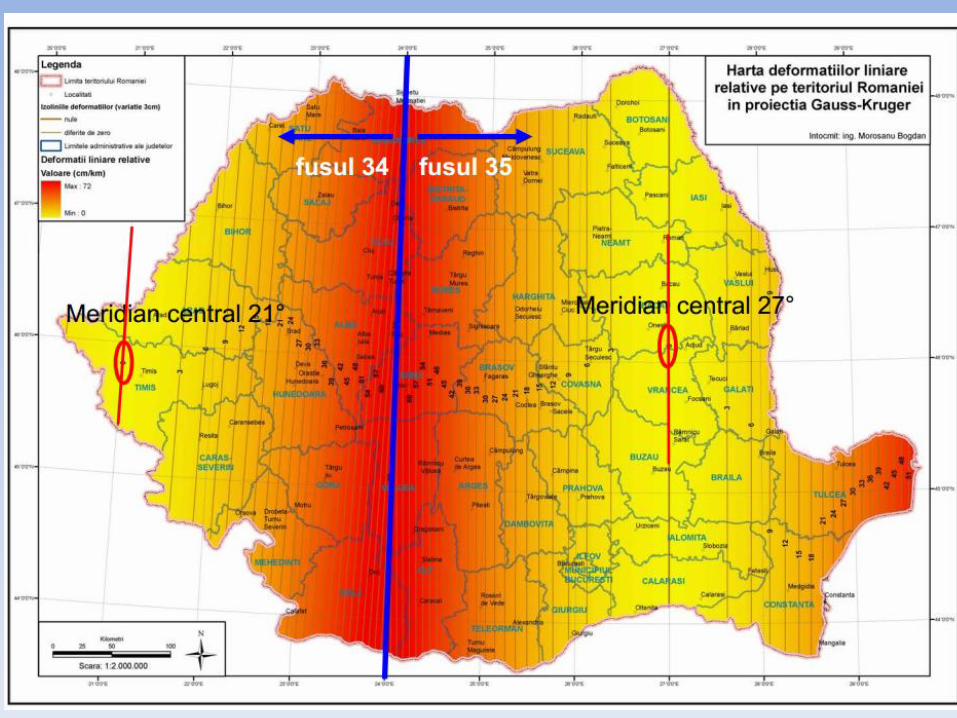
Pe harta lumii la sc. 1:1000000, teritoriul tarii noastre este acoperit de fusul 34 la vest de
meridianul de 24o long. estica si fusul 35 la est de acelasi meridian. Meridianele axiale
ale celor 2 fuse au long. estica de 21o si respectiv 27o si reprezinta meridianele de
deformare zero. Rezulta ca cele mai mari deformaţii vor apare între meridianele de
23o - 25o si 29o - 30o long. estica.
ZONE CU DEFORMŢII
MAXIME

• Această proiecţie este o variantă particulara a proiecţiei Gauss -Krüger, utilizată în Statele Unite ale Americii şi în alte ţări, având o importanţă deosebită în ultimul timp şi pentru România datorită integrării în noile structuri politice şi militare.
• În sistemul UTM (Universal Transversal Mercator) proiecţia suprafeţei Pământului se face pe un cilindru a cărui axă este perpendiculară pe axa polilor.
• Cilindrul de proiecţie este modificat prin reducerea dimensiunilor sale eliptice şi aducerea lui în secanta cu elipsoidul de-a lungul a 2 linii paralele cu meridianul central (axial).
• Pentru a evita folosirea coordonatelor negative, s-a introdus utilizarea coordonatelor false, şi anume:
PROIECŢIA UTM
' 10.000.000
' 500.000
N m N
E m E

1 - axul cilindrului situat în plan ecuatorial;
2 - meridianul axial ce se reprezintă printr-un segment de dreaptă care este axă de simetrie;
3 - meridianele de secanta;
4 - meridianul de margine al fusului de 6 ;
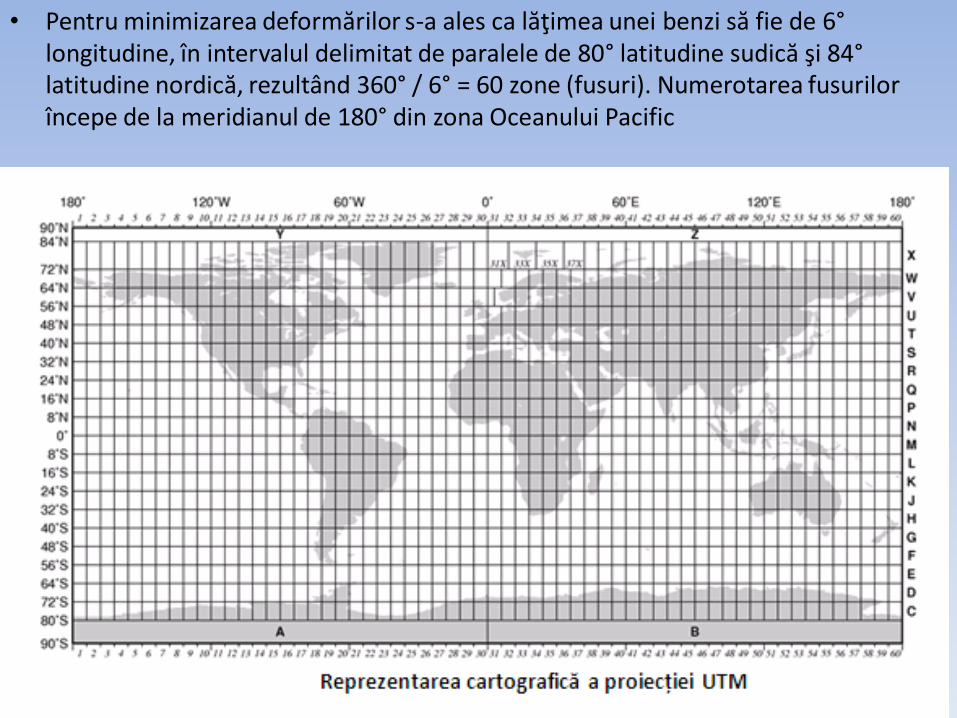
• Pentru minimizarea deformărilor s-a ales ca lăţimea unei benzi să fie de 6°longitudine, în intervalul delimitat de paralele de 80° latitudine sudică şi 84°latitudine nordică, rezultând 360° / 6° = 60 zone (fusuri). Numerotarea fusurilor începe de la meridianul de 180° din zona Oceanului Pacific
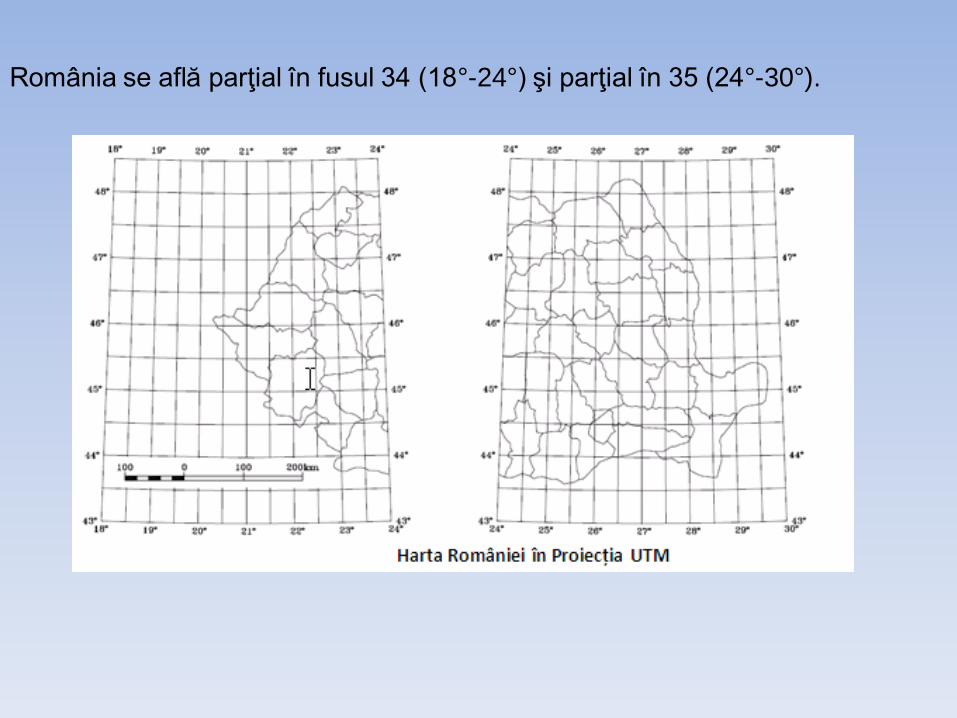
România se află parţial în fusul 34 (18°-24°) şi parţial în 35 (24°-30°).
• Sistemul U.T.M. care foloseşte proiecţia Mercator se pretează la întreg globul terestru având avantajul ca reduce erorile de reprezentare în plan datorita introducerii unui factor de scara, care face ca deformările liniare de la marginea fusului proiectat în plan sa se reducă la jumătate.
• Adoptându-se sistemul de reprezentare pe fuse de 6° longitudine, reprezentarea în plan este destul de fidela.
• Un dezavantaj al reprezentării pe fuse duce la o îngreunare a calculelor în zona de vecinătate a fusului, dar acest lucru se poate îmbunătăţi cu ajutorul tehnicii modeme de calcul.
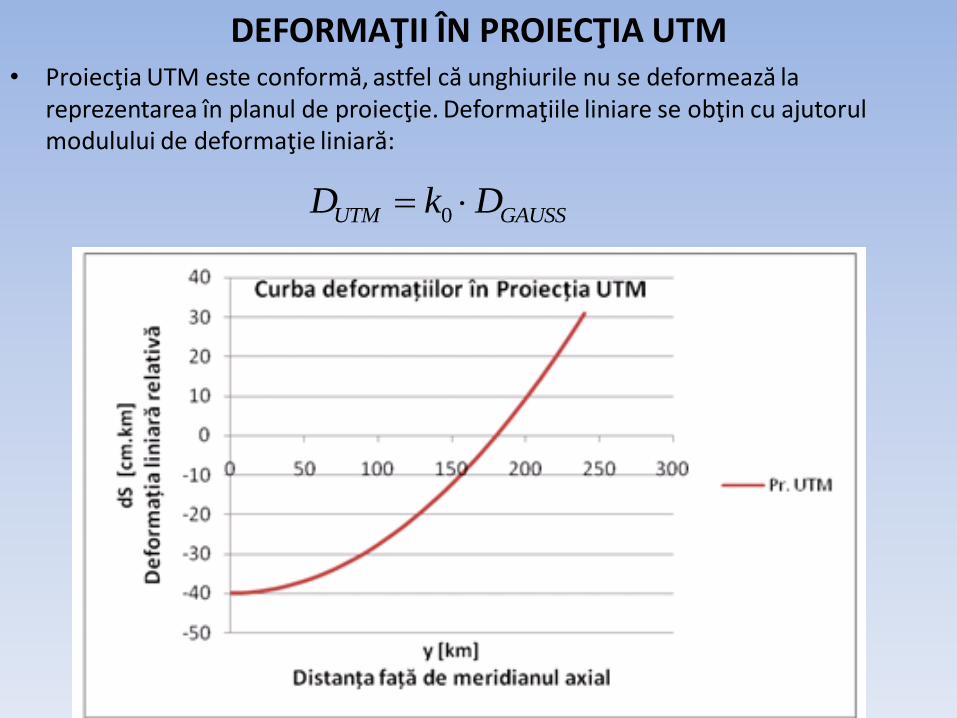
DEFORMAŢII ÎN PROIECŢIA UTM• Proiecţia UTM este conformă, astfel că unghiurile nu se deformează la
reprezentarea în planul de proiecţie. Deformaţiile liniare se obţin cu ajutorul modulului de deformaţie liniară:
0UTM GAUSSD k D
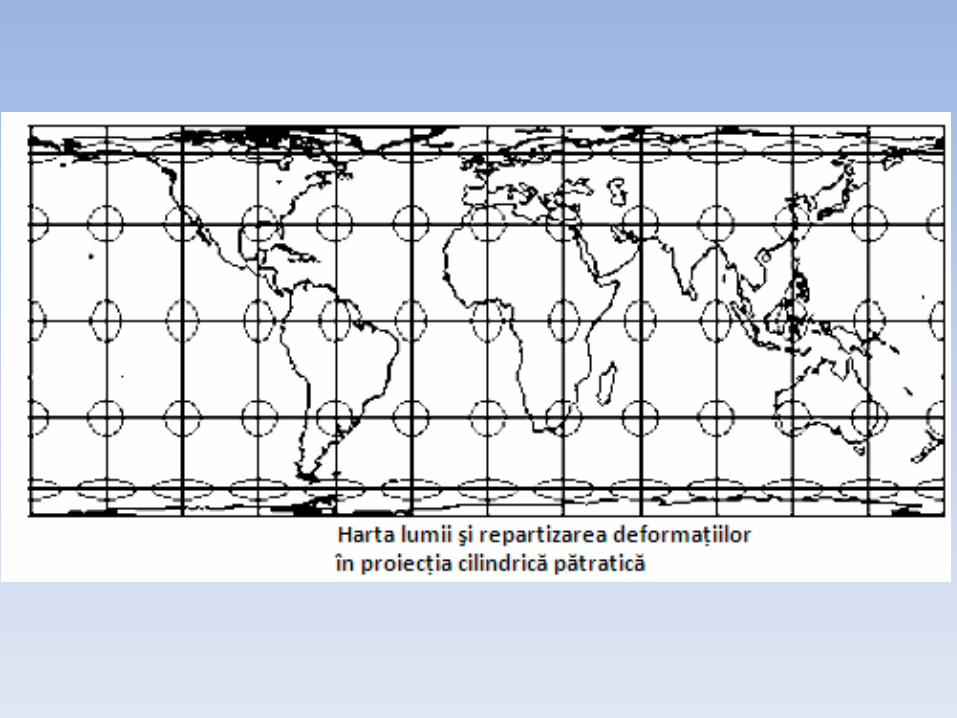
PROIECŢII CILINDRICE DREPTE
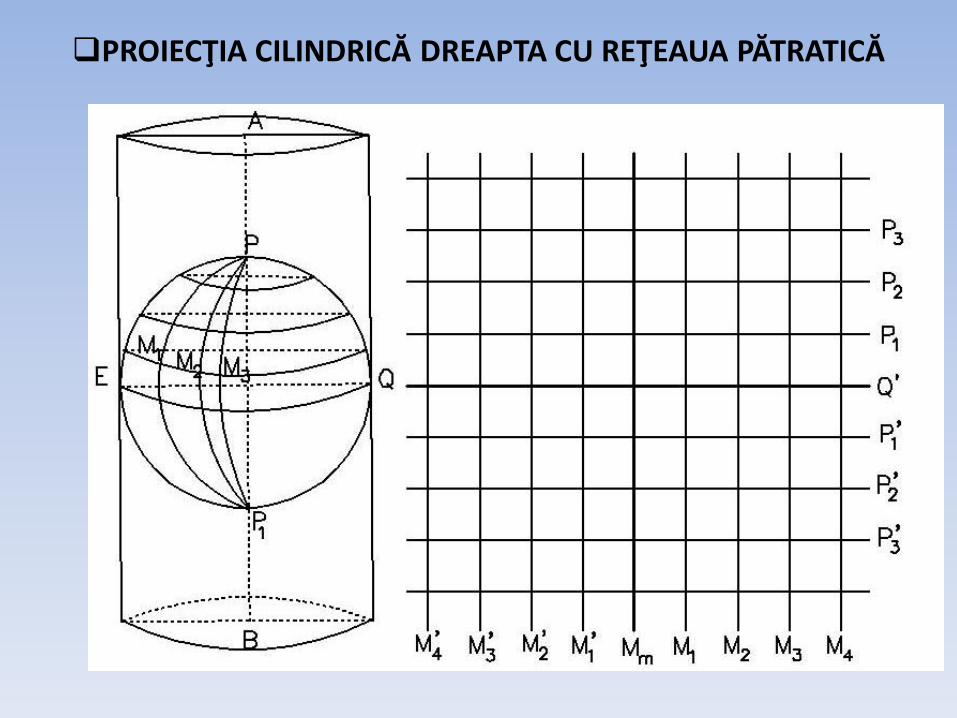
PROIECŢIA CILINDRICĂ DREAPTA CU REŢEAUA PĂTRATICĂ
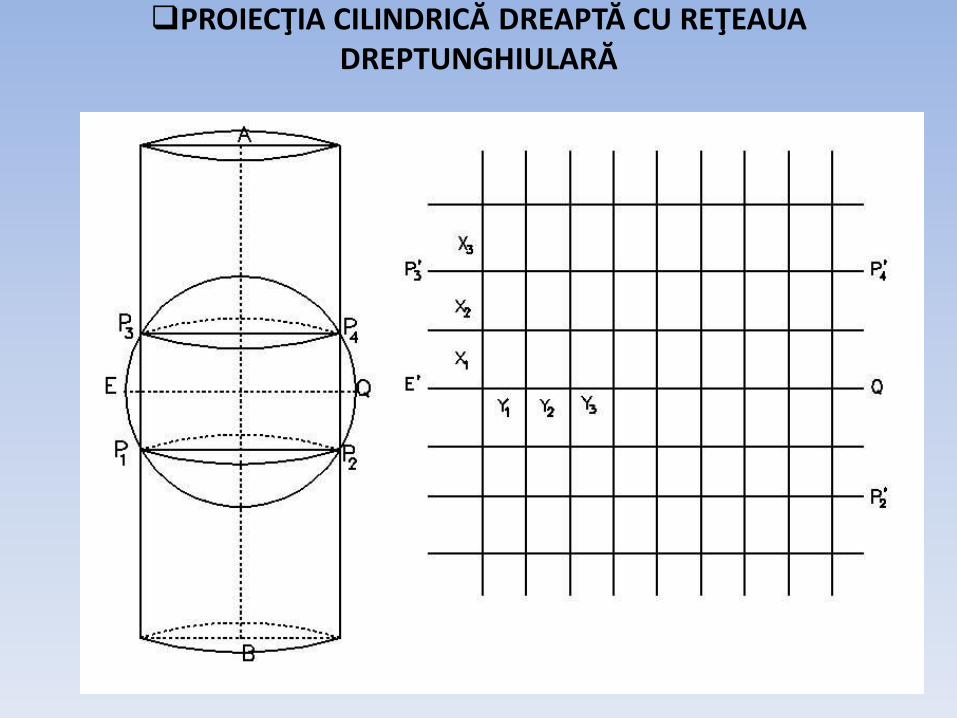
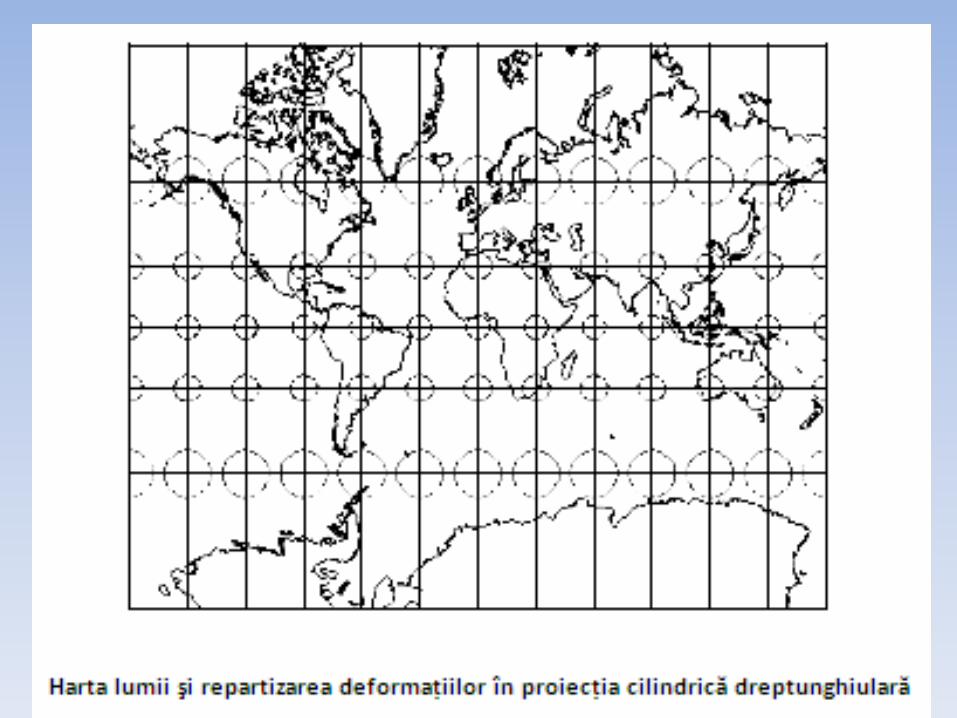
PROIECŢIA CILINDRICĂ DREAPTĂ CU REŢEAUA DREPTUNGHIULARĂ
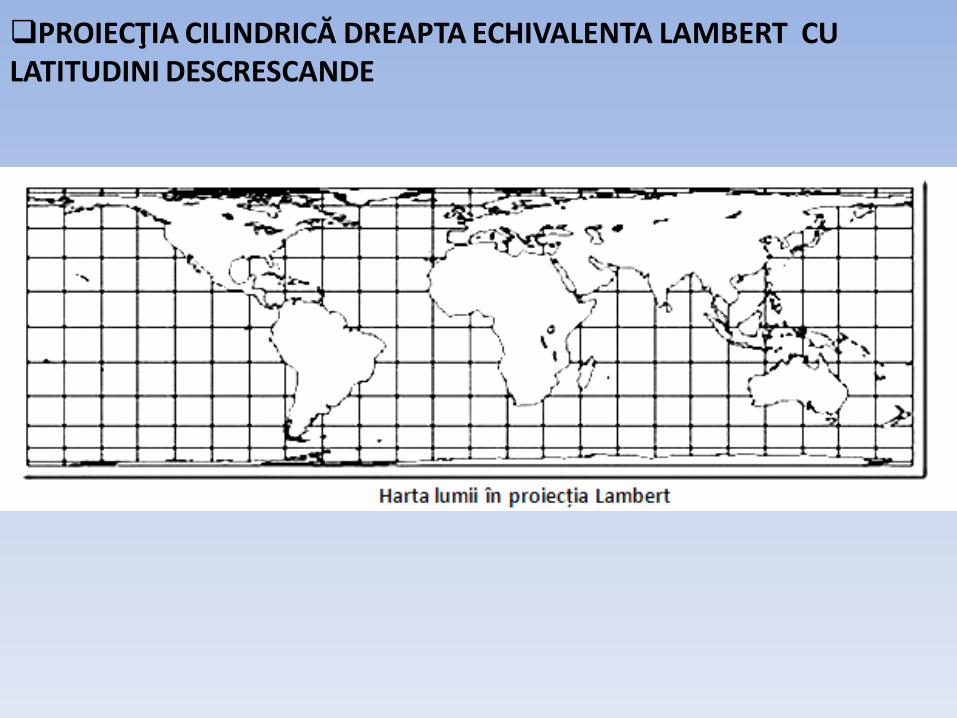
PROIECŢIA CILINDRICĂ DREAPTA ECHIVALENTA LAMBERT CU LATITUDINI DESCRESCANDE
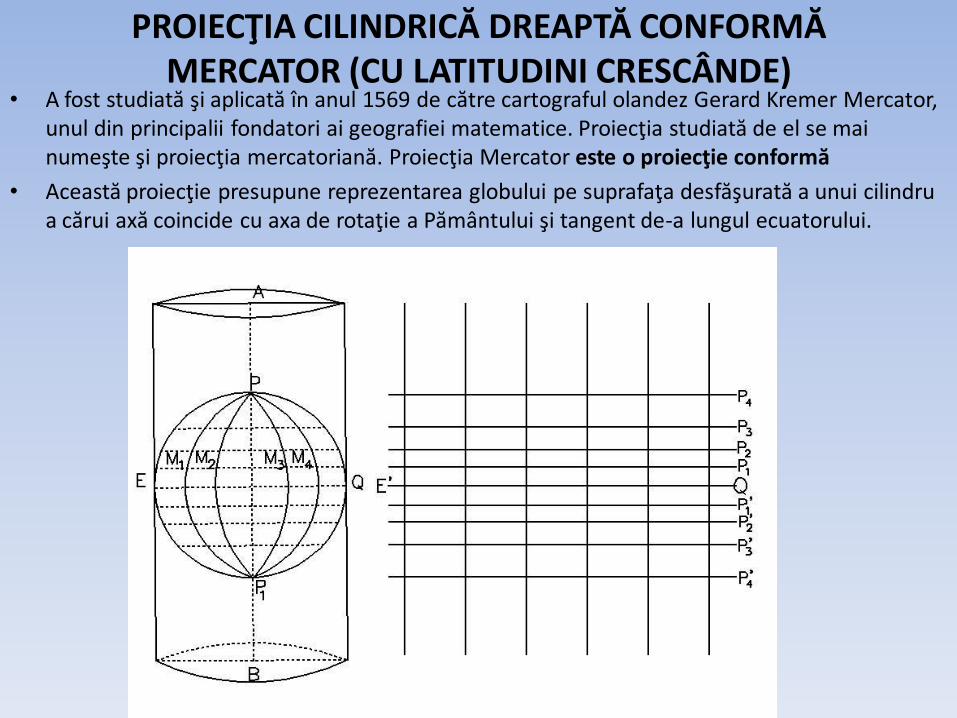
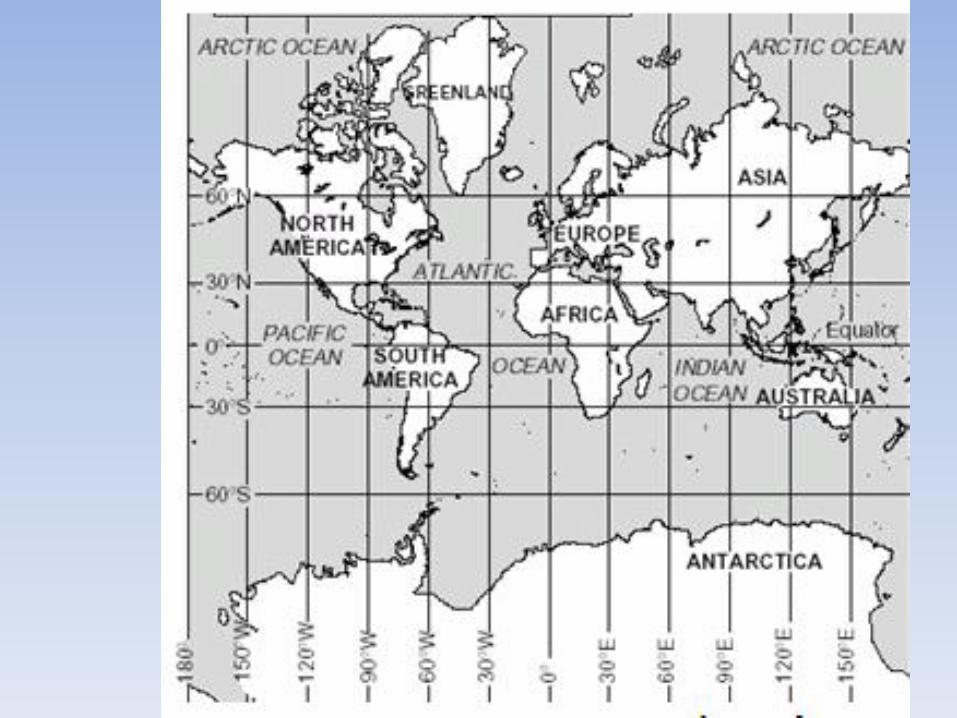
PROIECŢIA CILINDRICĂ DREAPTĂ CONFORMĂ MERCATOR (CU LATITUDINI CRESCÂNDE)
• A fost studiată şi aplicată în anul 1569 de către cartograful olandez Gerard Kremer Mercator, unul din principalii fondatori ai geografiei matematice. Proiecţia studiată de el se mai numeşte şi proiecţia mercatoriană. Proiecţia Mercator este o proiecţie conformă
• Această proiecţie presupune reprezentarea globului pe suprafaţa desfăşurată a unui cilindru a cărui axă coincide cu axa de rotaţie a Pământului şi tangent de-a lungul ecuatorului.
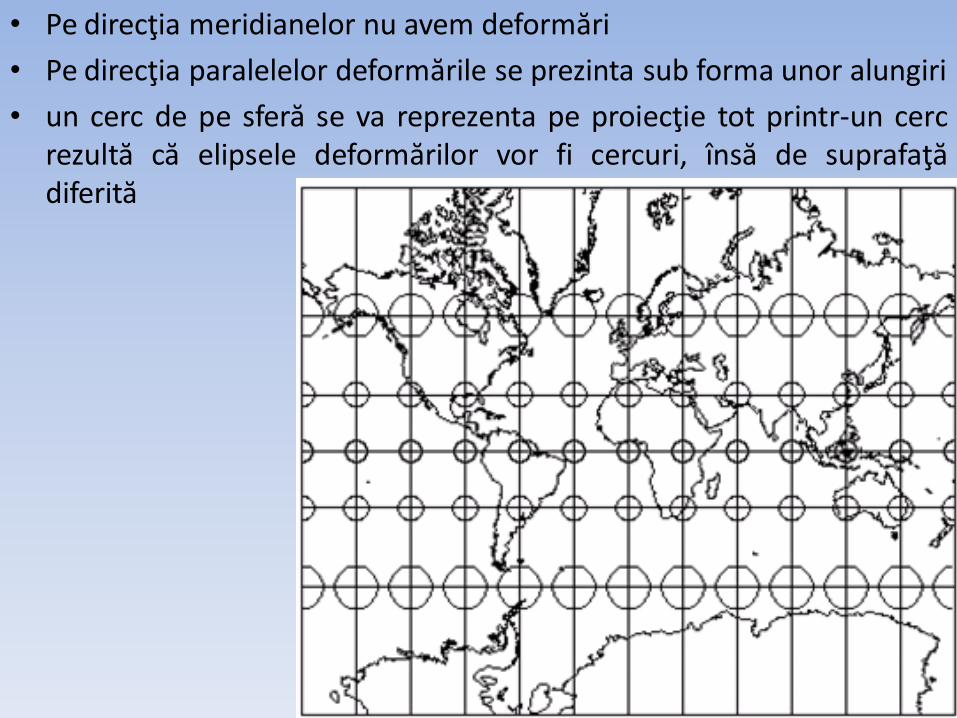
• Pe direcţia meridianelor nu avem deformări
• Pe direcţia paralelelor deformările se prezinta sub forma unor alungiri
• un cerc de pe sferă se va reprezenta pe proiecţie tot printr-un cercrezultă că elipsele deformărilor vor fi cercuri, însă de suprafaţădiferită
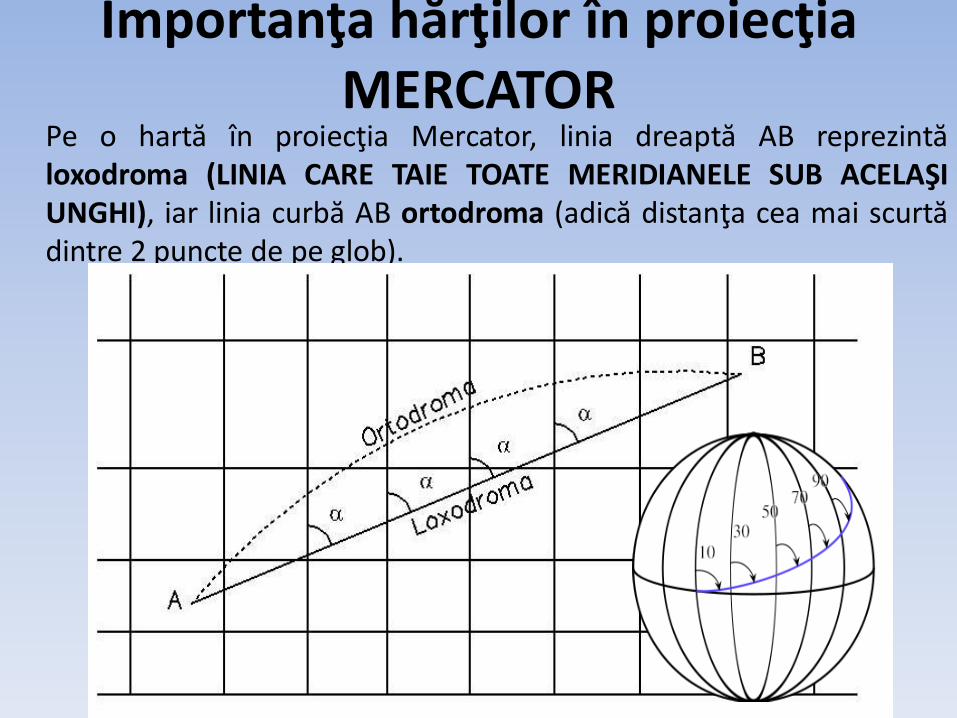
Importanţa hărţilor în proiecţia MERCATOR
Pe o hartă în proiecţia Mercator, linia dreaptă AB reprezintăloxodroma (LINIA CARE TAIE TOATE MERIDIANELE SUB ACELAŞIUNGHI), iar linia curbă AB ortodroma (adică distanţa cea mai scurtădintre 2 puncte de pe glob).
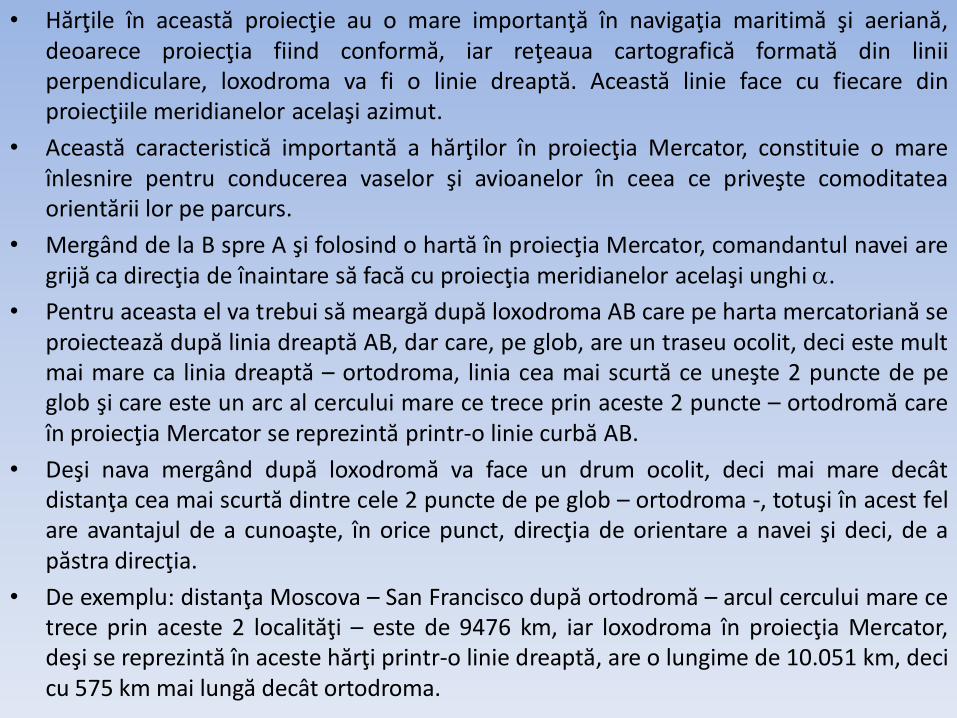
• Hărţile în această proiecţie au o mare importanţă în navigaţia maritimă şi aeriană,deoarece proiecţia fiind conformă, iar reţeaua cartografică formată din liniiperpendiculare, loxodroma va fi o linie dreaptă. Această linie face cu fiecare dinproiecţiile meridianelor acelaşi azimut.
• Această caracteristică importantă a hărţilor în proiecţia Mercator, constituie o mareînlesnire pentru conducerea vaselor şi avioanelor în ceea ce priveşte comoditateaorientării lor pe parcurs.
• Mergând de la B spre A şi folosind o hartă în proiecţia Mercator, comandantul navei aregrijă ca direcţia de înaintare să facă cu proiecţia meridianelor acelaşi unghi .
• Pentru aceasta el va trebui să meargă după loxodroma AB care pe harta mercatoriană seproiectează după linia dreaptă AB, dar care, pe glob, are un traseu ocolit, deci este multmai mare ca linia dreaptă – ortodroma, linia cea mai scurtă ce uneşte 2 puncte de peglob şi care este un arc al cercului mare ce trece prin aceste 2 puncte – ortodromă careîn proiecţia Mercator se reprezintă printr-o linie curbă AB.
• Deşi nava mergând după loxodromă va face un drum ocolit, deci mai mare decâtdistanţa cea mai scurtă dintre cele 2 puncte de pe glob – ortodroma -, totuşi în acest felare avantajul de a cunoaşte, în orice punct, direcţia de orientare a navei şi deci, de apăstra direcţia.
• De exemplu: distanţa Moscova – San Francisco după ortodromă – arcul cercului mare cetrece prin aceste 2 localităţi – este de 9476 km, iar loxodroma în proiecţia Mercator,deşi se reprezintă în aceste hărţi printr-o linie dreaptă, are o lungime de 10.051 km, decicu 575 km mai lungă decât ortodroma.
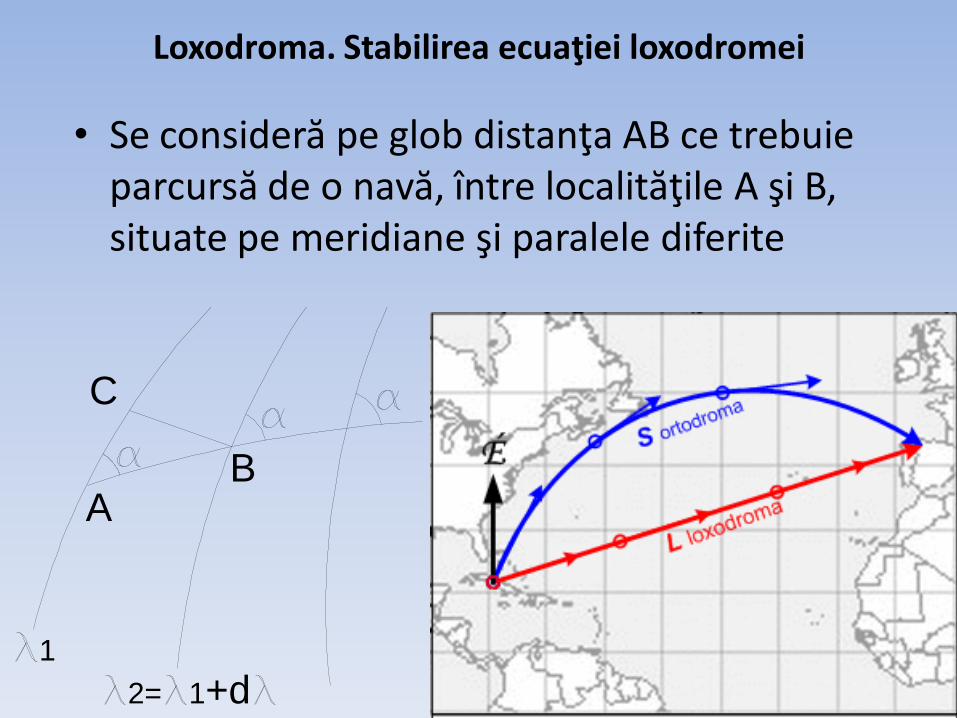
Loxodroma. Stabilirea ecuaţiei loxodromei
• Se consideră pe glob distanţa AB ce trebuie parcursă de o navă, între localităţile A şi B, situate pe meridiane şi paralele diferite
AB
C
1
2= 1+d
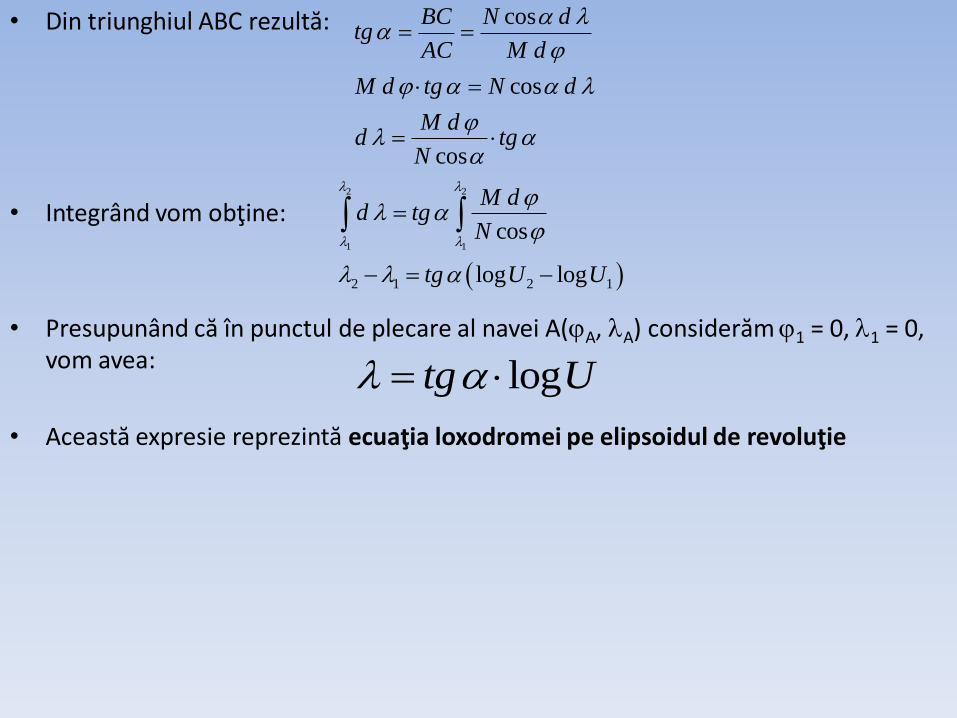
• Din triunghiul ABC rezultă:
• Integrând vom obţine:
• Presupunând că în punctul de plecare al navei A(A, A) considerăm 1 = 0, 1 = 0, vom avea:
• Această expresie reprezintă ecuaţia loxodromei pe elipsoidul de revoluţie
cos
cos
cos
BC N dtg
AC M d
M d tg N d
M dd tg
N
2 2
1 1
2 1 2 1
cos
log log
M dd tg
N
tg U U
logtg U
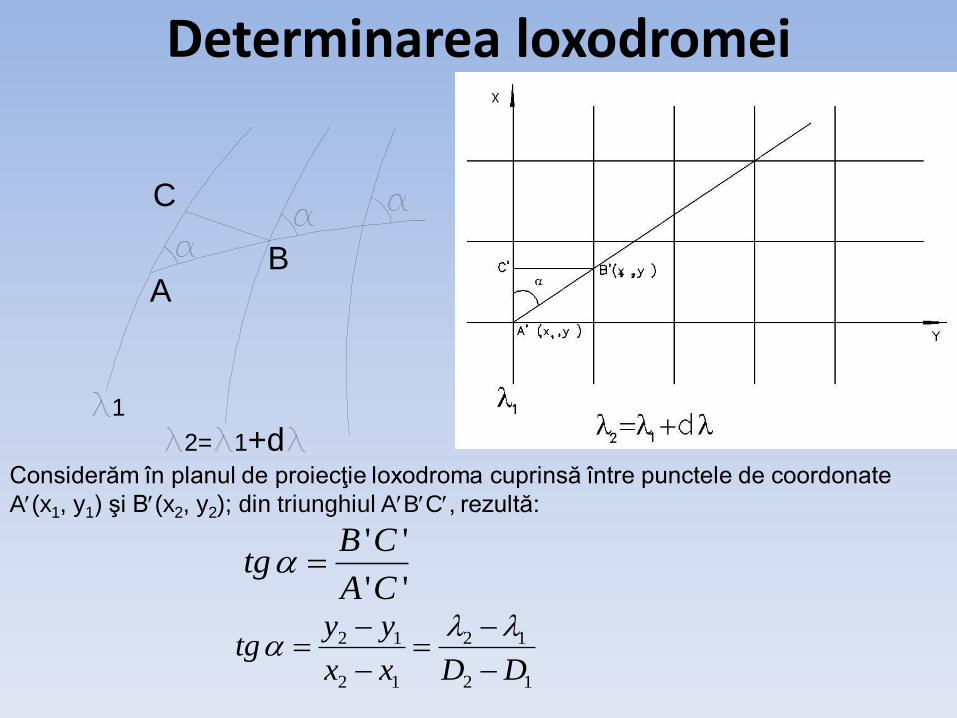
Determinarea loxodromei
AB
C
1
2= 1+dConsiderăm în planul de proiecţie loxodroma cuprinsă între punctele de coordonate
A(x1, y1) şi B(x2, y2); din triunghiul ABC, rezultă:
' '
' '
B Ctg
A C
2 1 2 1
2 1 2 1
y ytg
x x D D

PROIECŢII AZIMUTALE
• CLASIFICAREA PROIECŢIILOR AZIMUTALE
După poziția planului de proiecție faţă de sfera terestră dată de valoarea latitudinii 0 a polului proiecţiei Q0(0,λ0) se disting:
• Proiecţii azimutale drepte (normale sau polare) pentru latitudinea = 900;
• Proiecţii azimutale oblice pentru latitudinea 00 900
• Proiecţii azimutale transversale pentru latitudinea = 00
• După caracterul deformaţiilor, proiecţiile azimutale se împart în trei grupe:
• Proiecţii azimutale conforme
• Proiecţii azimutale echivalente
• Proiecţii azimutale echidistante pe anumite direcţii.
După modul de proiectare pe o suprafaţă plană, proiecţiile azimutale au fost împărţite în următoarele doua categorii:
• Proiecţii azimutale neperspective, ce se obţin în urma unor proiectări teoretice a suprafeţei Pământului pe o suprafaţă plană
• Proiecţii azimutale perspective, la care proiectarea suprafeţei Pământului pe un plan de proiecţie se face printr-o proiectare propriu-zisă, pe baza utilizării legilor perspectivei liniare, unde punctul de vedere este situat pe unul din diametrele sferei sau pe prelungirea acestuia, iar planul de proiecţie este perpendicular pe diametrul sferei terestre.

• Prin proiectarea aceluiasi punct B de pe sfera de raza R pe un plan de proiectie tangent la sfera in punctul Q0(φ0, λ0) ,pe baza folosirii legilor perspectivei liniare s-au obtinutimaginile plane Bi',B2',B3', B4
’, B5' ale punctului B.
• In functie de distanta D, dintre punctui de vedere V, care poate fi V1, V2, V3, V4 si V5 si centrul O1al sferei terestre,se disting:
• proiectii azimutale perspective centrale, cu V1=O1 si D=0 ;
• proiectii azimutale perspective interioare, cu V2 si 0<D<R ;
• proiectii azimutale perspective stereografice, cu V3=Q si D=R ;
• proiectii azimutale perspective exterioare, cu V4 si R<D<∞ ;
• proiectii azimutale perspective ortografice, cu V5=∞ si D=∞ ;
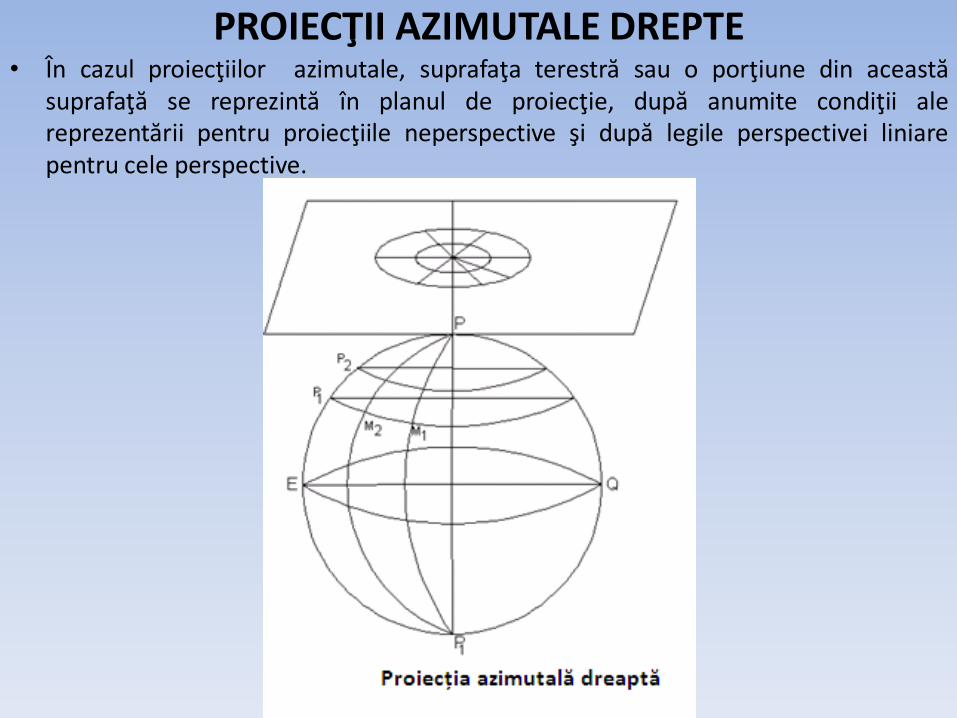
PROIECŢII AZIMUTALE DREPTE• În cazul proiecţiilor azimutale, suprafaţa terestră sau o porţiune din această
suprafaţă se reprezintă în planul de proiecţie, după anumite condiţii alereprezentării pentru proiecţiile neperspective şi după legile perspectivei liniarepentru cele perspective.
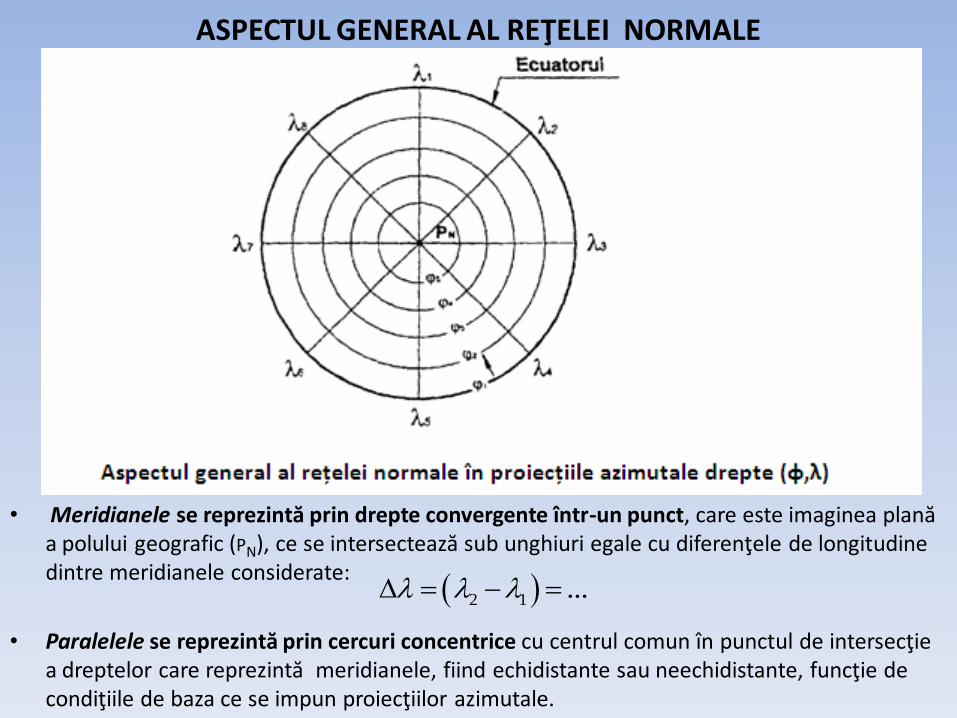
ASPECTUL GENERAL AL REŢELEI NORMALE
• Meridianele se reprezintă prin drepte convergente într-un punct, care este imaginea plană a polului geografic (PN), ce se intersectează sub unghiuri egale cu diferenţele de longitudine dintre meridianele considerate:
• Paralelele se reprezintă prin cercuri concentrice cu centrul comun în punctul de intersecţie a dreptelor care reprezintă meridianele, fiind echidistante sau neechidistante, funcţie de condiţiile de baza ce se impun proiecţiilor azimutale.
2 1 ...
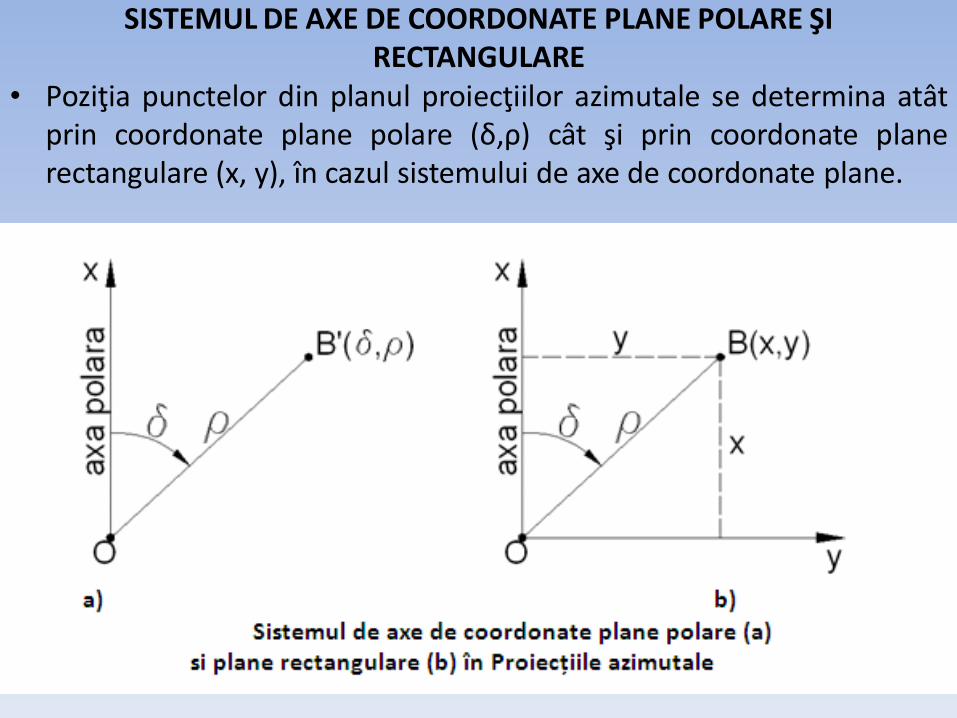
SISTEMUL DE AXE DE COORDONATE PLANE POLARE ŞI RECTANGULARE
• Poziţia punctelor din planul proiecţiilor azimutale se determina atâtprin coordonate plane polare (δ,ρ) cât şi prin coordonate planerectangulare (x, y), în cazul sistemului de axe de coordonate plane.
FORMULELE DE CALCUL ALE COORDONATELOR PLANE POLARE ŞI RECTANGULARE
F( )
x cos
y sin
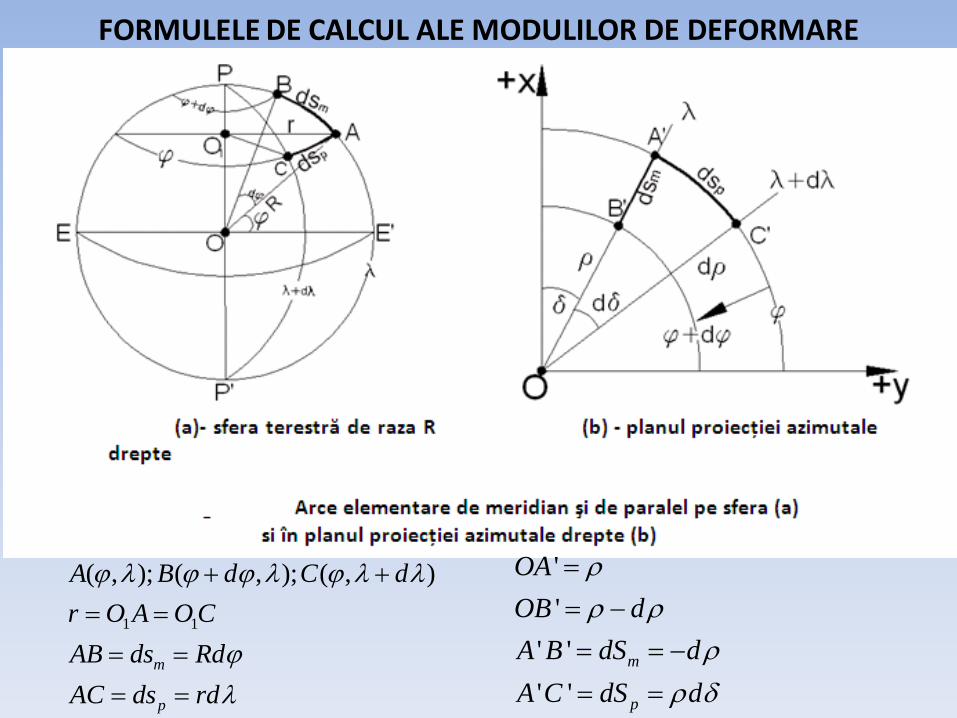
FORMULELE DE CALCUL ALE MODULILOR DE DEFORMARE
1 1
( , ); ( , ); ( , )
m
p
A B d C d
r O A O C
AB ds Rd
AC ds rd
'
'
' '
' '
m
p
OA
OB d
A B dS d
A C dS d
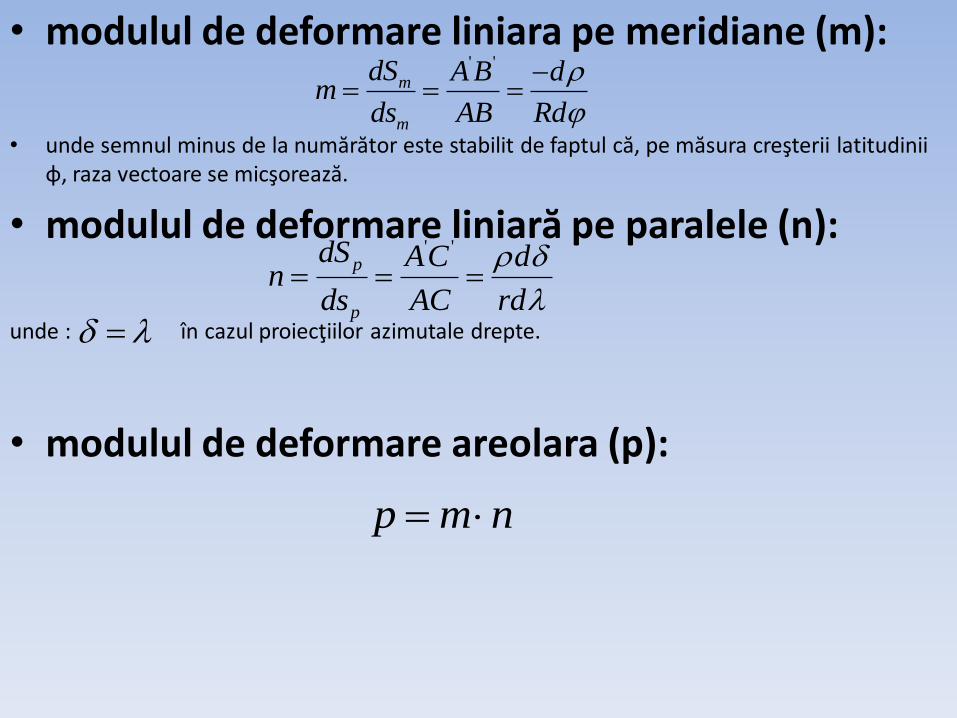
• modulul de deformare liniara pe meridiane (m):
• unde semnul minus de la numărător este stabilit de faptul că, pe măsura creşterii latitudinii φ, raza vectoare se micşorează.
• modulul de deformare liniară pe paralele (n):
unde : în cazul proiecţiilor azimutale drepte.
• modulul de deformare areolara (p):
' '
m
m
dS A B dm
ds AB Rd
' 'p
p
dS AC dn
ds AC rd
p m n
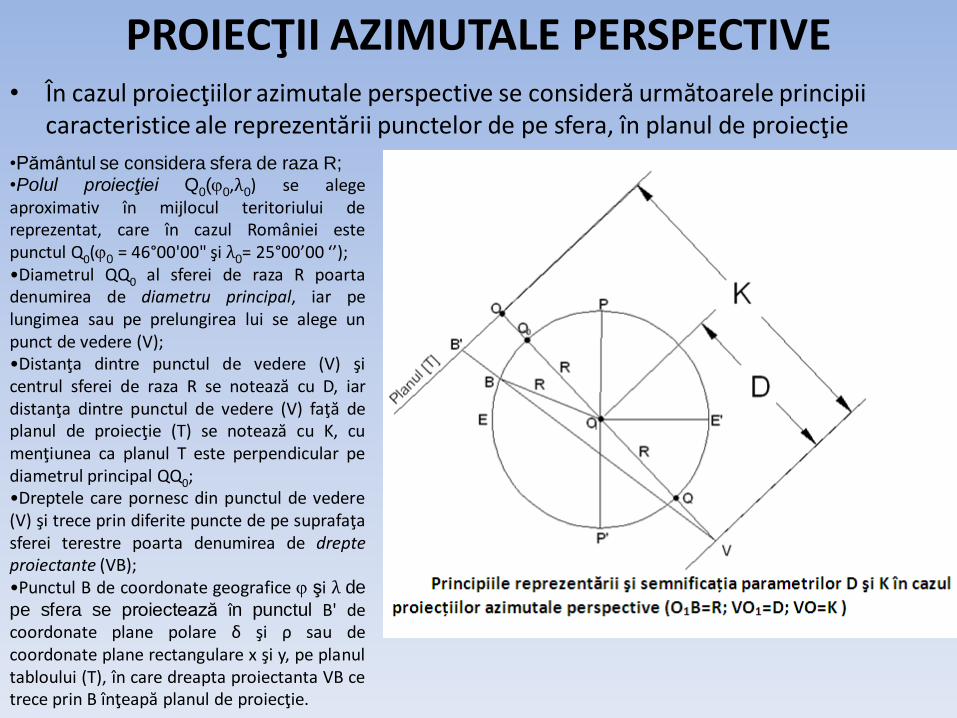
PROIECŢII AZIMUTALE PERSPECTIVE• În cazul proiecţiilor azimutale perspective se consideră următoarele principii
caracteristice ale reprezentării punctelor de pe sfera, în planul de proiecţie
•Pământul se considera sfera de raza R;•Polul proiecţiei Q0(0,λ0) se alegeaproximativ în mijlocul teritoriului dereprezentat, care în cazul României estepunctul Q0(0 = 46°00'00" şi λ0= 25°00’00 ‘’);•Diametrul QQ0 al sferei de raza R poartadenumirea de diametru principal, iar pelungimea sau pe prelungirea lui se alege unpunct de vedere (V);•Distanţa dintre punctul de vedere (V) şicentrul sferei de raza R se notează cu D, iardistanţa dintre punctul de vedere (V) faţă deplanul de proiecţie (T) se notează cu K, cumenţiunea ca planul T este perpendicular pediametrul principal QQ0;•Dreptele care pornesc din punctul de vedere(V) şi trece prin diferite puncte de pe suprafaţasferei terestre poarta denumirea de drepteproiectante (VB);•Punctul B de coordonate geografice şi λ de
pe sfera se proiectează în punctul B' decoordonate plane polare δ şi ρ sau decoordonate plane rectangulare x şi y, pe planultabloului (T), în care dreapta proiectanta VB cetrece prin B înţeapă planul de proiecţie.
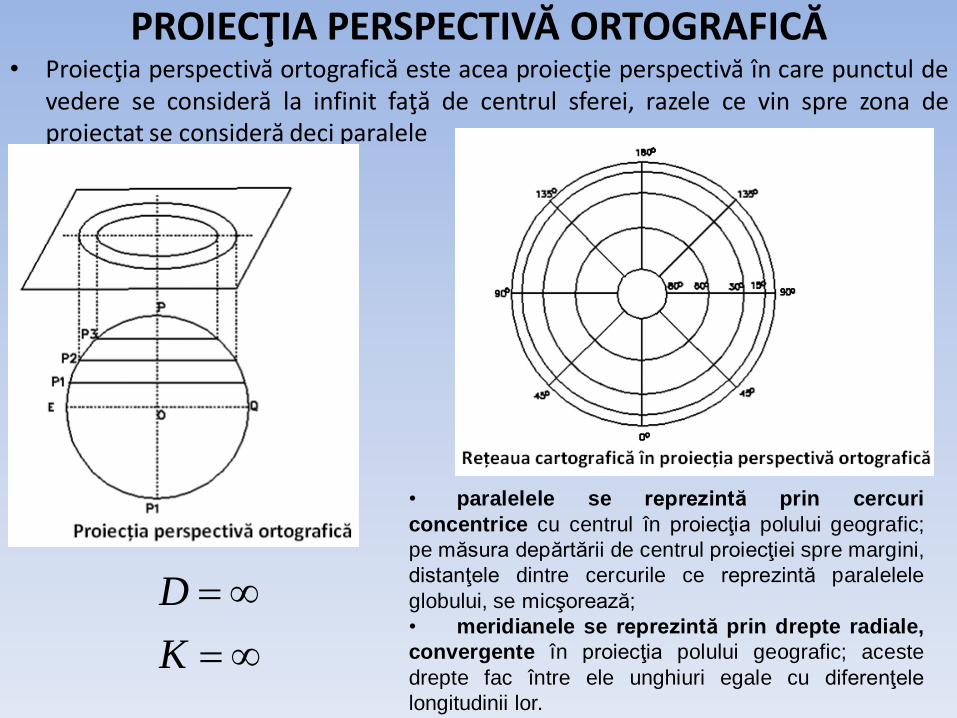
PROIECŢIA PERSPECTIVĂ ORTOGRAFICĂ• Proiecţia perspectivă ortografică este acea proiecţie perspectivă în care punctul de
vedere se consideră la infinit faţă de centrul sferei, razele ce vin spre zona deproiectat se consideră deci paralele
D
K
• paralelele se reprezintă prin cercuri
concentrice cu centrul în proiecţia polului geografic;
pe măsura depărtării de centrul proiecţiei spre margini,
distanţele dintre cercurile ce reprezintă paralelele
globului, se micşorează;
• meridianele se reprezintă prin drepte radiale,
convergente în proiecţia polului geografic; aceste
drepte fac între ele unghiuri egale cu diferenţele
longitudinii lor.
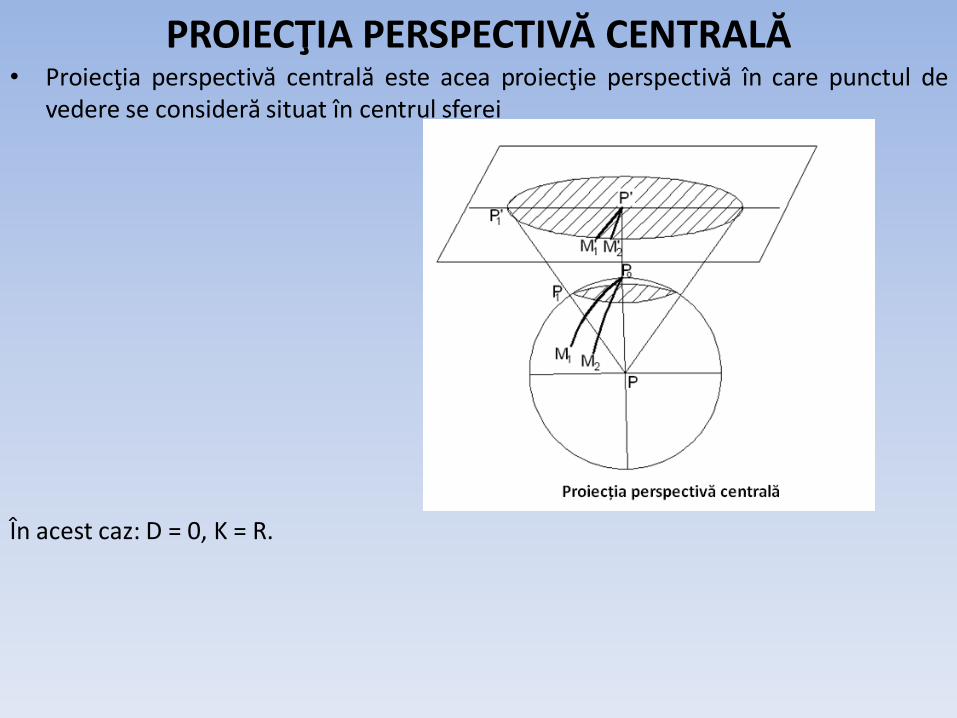
PROIECŢIA PERSPECTIVĂ CENTRALĂ• Proiecţia perspectivă centrală este acea proiecţie perspectivă în care punctul de
vedere se consideră situat în centrul sferei
În acest caz: D = 0, K = R.
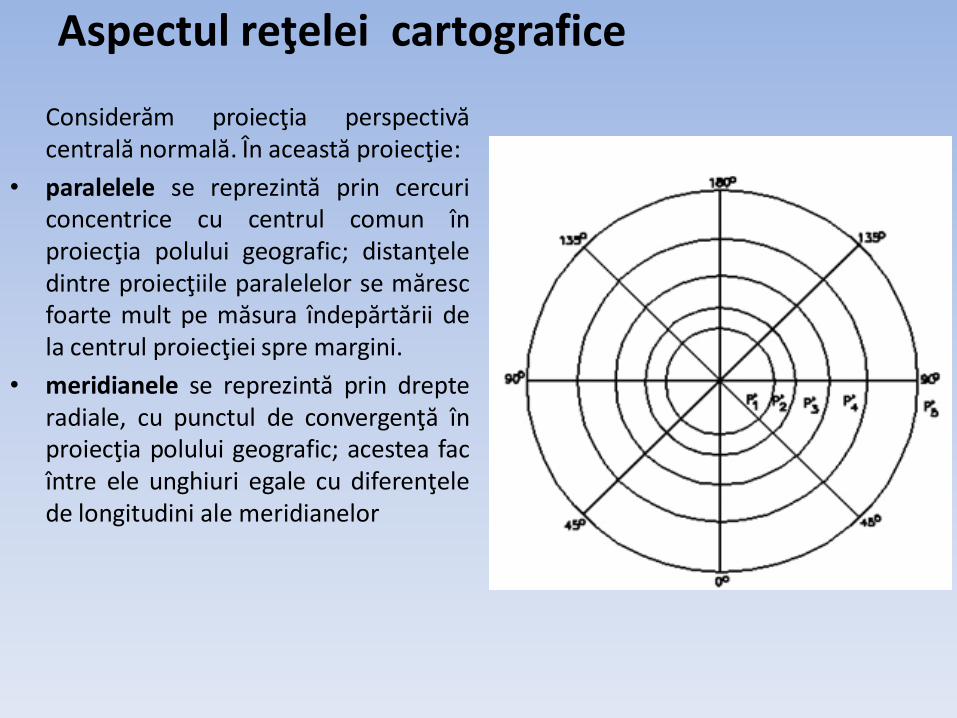
Aspectul reţelei cartografice
Considerăm proiecţia perspectivăcentrală normală. În această proiecţie:
• paralelele se reprezintă prin cercuriconcentrice cu centrul comun înproiecţia polului geografic; distanţeledintre proiecţiile paralelelor se mărescfoarte mult pe măsura îndepărtării dela centrul proiecţiei spre margini.
• meridianele se reprezintă prin drepteradiale, cu punctul de convergenţă înproiecţia polului geografic; acestea facîntre ele unghiuri egale cu diferenţelede longitudini ale meridianelor
PROIECŢIA STEREOGRAFICĂ 1970• Proiecția azimutală perspectivă stereografică oblică conformă, cu planul de proiecţie secant
unic 1970, fiind denumita şi „ Proiecţia STEREO - 70 ", a fost folosită începând cu anul 1973 la întocmirea planurilor topografice de baza la scările 1 : 2 000, 1 : 5 000 şi 1 : 10 000, precum şi a hărţii cadastrale la scara 1 : 50 000. Acest sistem de proiecţie s-a adoptat, având la baza elementele elipsoidului Krasovski -1940 şi planul de referinţă pentru cote MAREA NEAGRA - 1975.
• La adoptarea proiecţiei stereografice - 1970 s-au avut în vedere o serie de principii, care satisfac atât cerinţele de precizie, cat şi avantajele reprezentărilor cartografice, din care se menţionează :
• Teritoriul de reprezentat are o forma aproximativ rotundă, ce poate fi încadrat într-un cere cu raza de circa 300 km ;
• Suprafaţă teritoriului României se poate reprezenta pe un singur plan de proiecţie, obţinându-se un sistem unic de coordonate plane rectangulare, cu originea în punctul central al proiecţiei;
• Suprafaţă terestra se proiectează după legile perspectivei liniare
• Proiecţia fiind conformă, îndeplineşte condiţiile de simetrie faţă de meridianul de longitudine λ0 al punctului central;
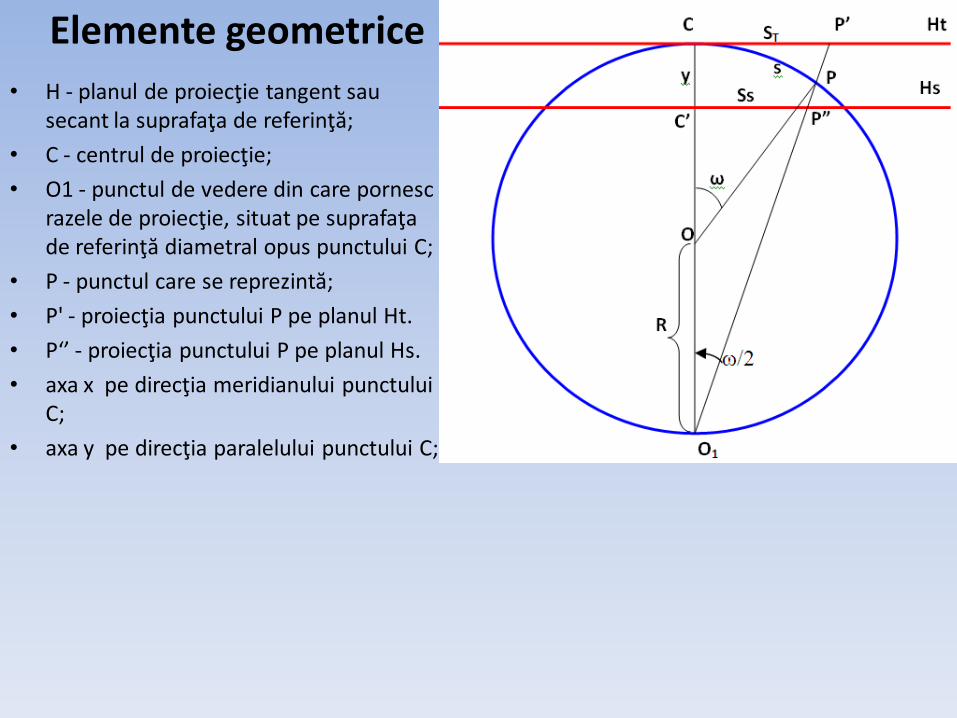
Elemente geometrice
• H - planul de proiecţie tangent sau secant la suprafaţa de referinţă;
• C - centrul de proiecţie;
• O1 - punctul de vedere din care pornesc razele de proiecţie, situat pe suprafaţa de referinţă diametral opus punctului C;
• P - punctul care se reprezintă;
• P' - proiecţia punctului P pe planul Ht.
• P‘’ - proiecţia punctului P pe planul Hs.
• axa x pe direcţia meridianului punctului C;
• axa y pe direcţia paralelului punctului C;

• Coordonatele geografice ale punctului C sunt:
• Punctul C este situat în apropierea oraşului Făgăraş.
0
0
0
0
46
λ 25

Parametrii Elipsoidului de referințăKrasovski - 1940
• Elipsoidul de referinţă Krasovski - 1940, care s-a folosit în proiecţia Gauss, în perioada 1951 - 1973, a fost menţinut şi în proiecţia Stereografica - 1970, fiind orientat la PULKOVO (RUSIA) şi având următorii parametrii de baza :
• Semiaxa mare: a = 6 378 245,000 000 m
• Semiaxa mică: b = 6 356 863,018 770 m
• Turtirea geometrică: α= 0,003 352 329 869
• Prima excentricitate: e2=0, 006 693 421 623
• Raza medie de curbură: Ro =6 378 956, 681 m

Adâncimea planului de proiecţie secant unic -1970
În vederea reducerii deformaţiilor s-a adoptat planul secant unic - 1970, la adâncimea H = 3 189,478 m faţă de planul tangent
În urma intersectării sferei de raza Ro cu planul secant, a rezultat un cerc al deformaţiilor nule, cu raza
ro = 201,718 km.
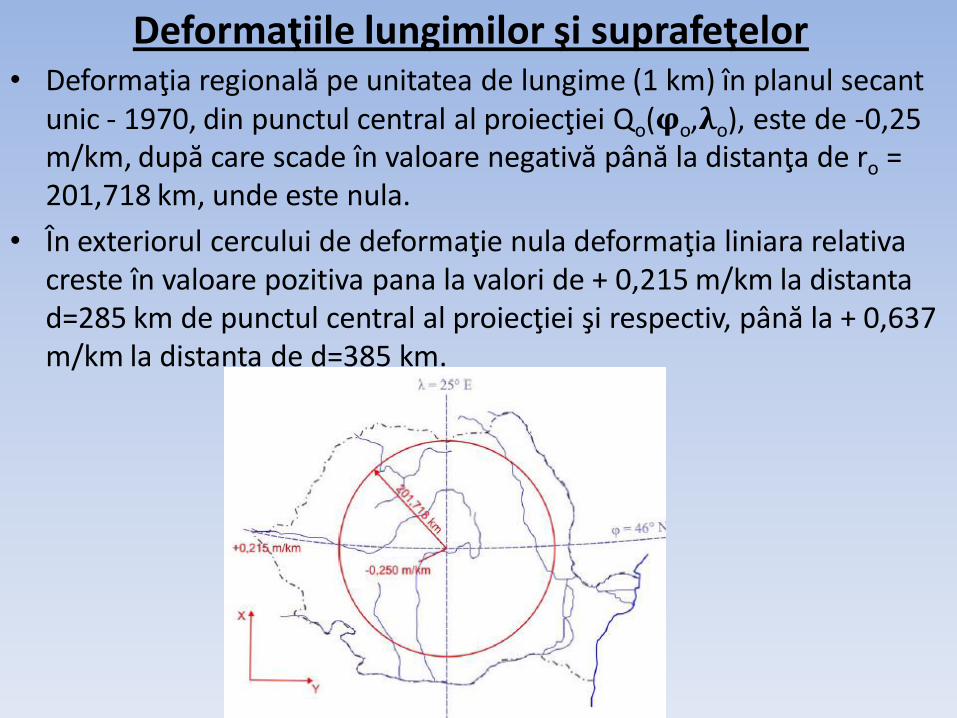
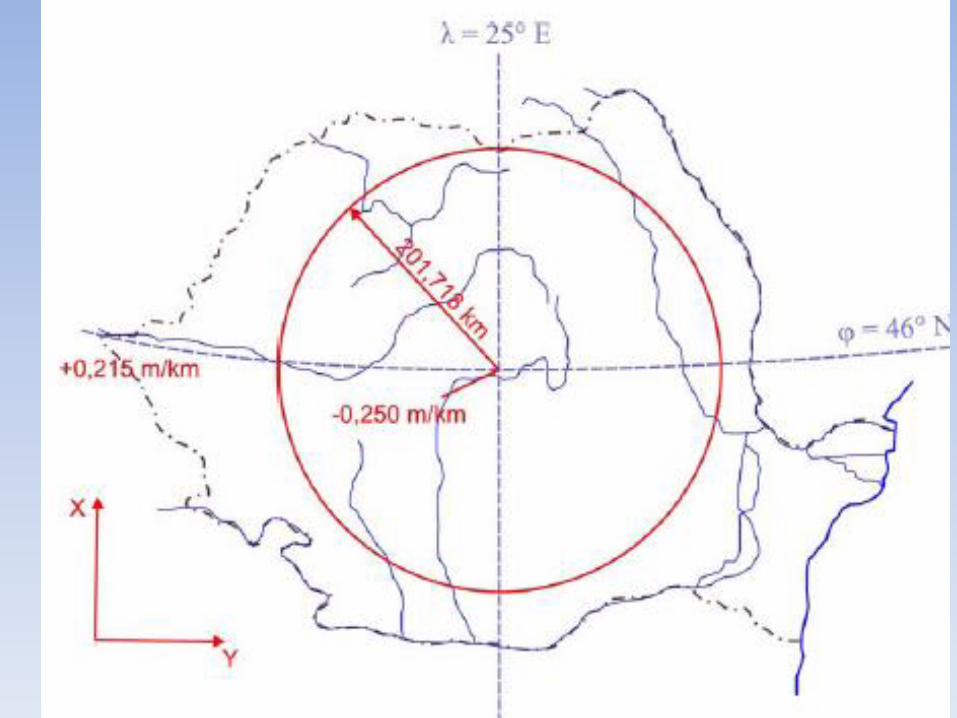
Deformaţiile lungimilor şi suprafeţelor• Deformaţia regională pe unitatea de lungime (1 km) în planul secant
unic - 1970, din punctul central al proiecţiei Qo(𝛗o,𝛌o), este de -0,25 m/km, după care scade în valoare negativă până la distanţa de ro = 201,718 km, unde este nula.
• În exteriorul cercului de deformaţie nula deformaţia liniara relativa creste în valoare pozitiva pana la valori de + 0,215 m/km la distanta d=285 km de punctul central al proiecţiei şi respectiv, până la + 0,637 m/km la distanta de d=385 km.
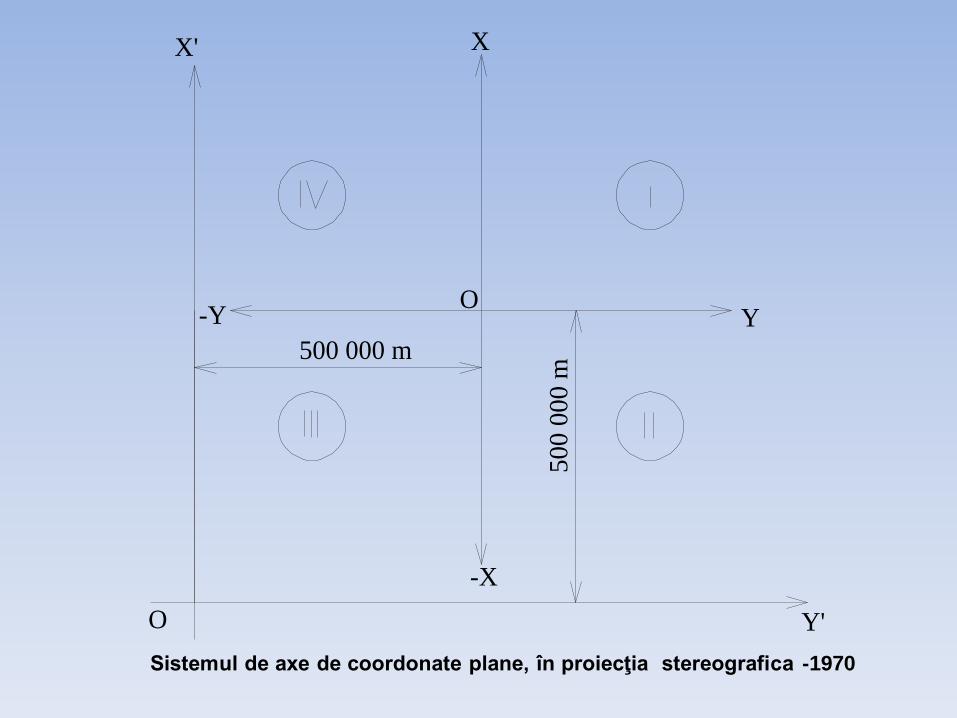
Sistemul axelor de coordonate rectangulare plane
• Originea sistemului (O) reprezintă imaginea plană a punctului central al proiecţiei Qo(𝛗o,𝛌o), fiind situat aproximativ în centrul tarii, unde :
• axa absciselor (XX') orientata pe direcţia Nord - Sud reprezintă imaginea plană a meridianului punctului central Qo, de longitudine 𝛌o
= 25°;
• axa ordonatelor (YY') orientata pe direcţia Est - Vest reprezintă tangenta la proiecţia paralelei punctului central Qo, de latitudine 𝛗o = 46°.
• Pentru lucrările topo-cadastrale şi pentru unele calcule cartografice se foloseşte sistemul convenţional de axe, care a rezultat din translarea sistemului cu originea în punctul O (Xo = 0,000 m şi Yo = 0,000 m) cu cate + 500 000, 000 m spre vest şi respectiv spre sud, obţinându-se punctul O' cu Xo = 500 000,000 m şi Yo = 500 000,000 m
500 000 m
50
0 0
00
m-X
X
Y-Y
X'
Y'O
O
Sistemul de axe de coordonate plane, în proiecţia stereografica -1970
• Modulul sau coeficientul de reducere la scaraPentru transformarea coordonatelor plane stereografice (X<70>;Y <70>)din planul tangent - 1970, în planul secant unic - 1970, paralel cu celtangent se efectuează înmulţirea acestora cu modulul sau coeficientulde reducere la scară:
• Modulul sau coeficientul de revenire la scaraPentru transformarea inversă a coordonatelor plane stereografice (X<70>;Y<70>) din planul secant unic - 1970, în planul tangent - 1970, se efectuează înmulţirea acestora cu coeficientul de revenire la scara :
1C=1 0,999 750 000
4000
1 1C' 1,000250063
0,999750000C
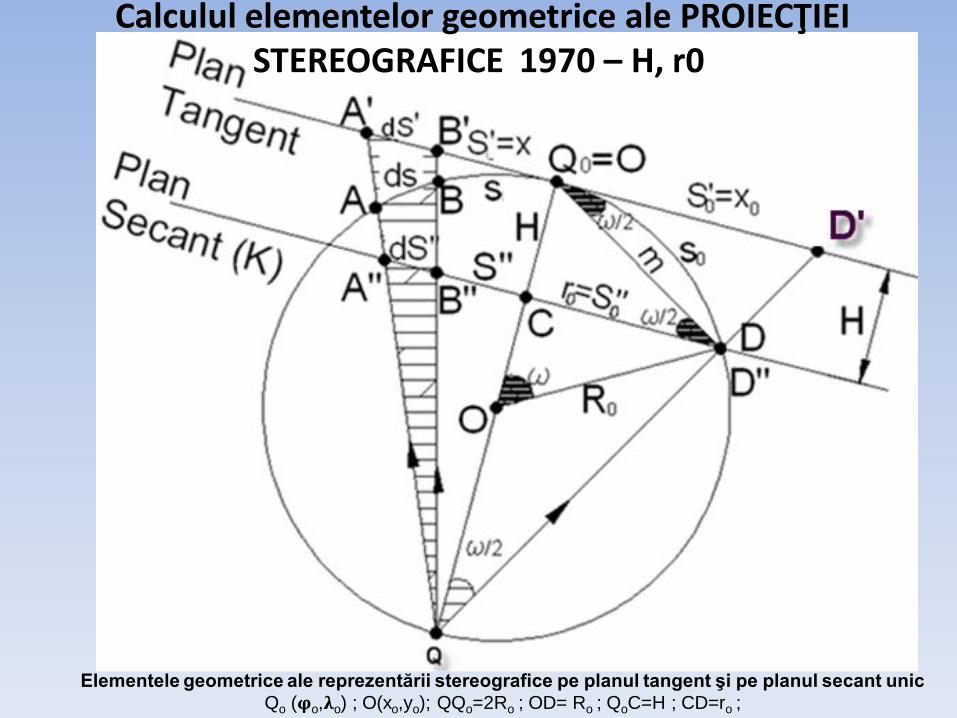
Calculul elementelor geometrice ale PROIECŢIEI STEREOGRAFICE 1970 – H, r0
Elementele geometrice ale reprezentării stereografice pe planul tangent şi pe planul secant unic
Qo (𝛗o,𝛌o) ; O(xo,yo); QQo=2Ro ; OD= Ro ; QoC=H ; CD=ro ;
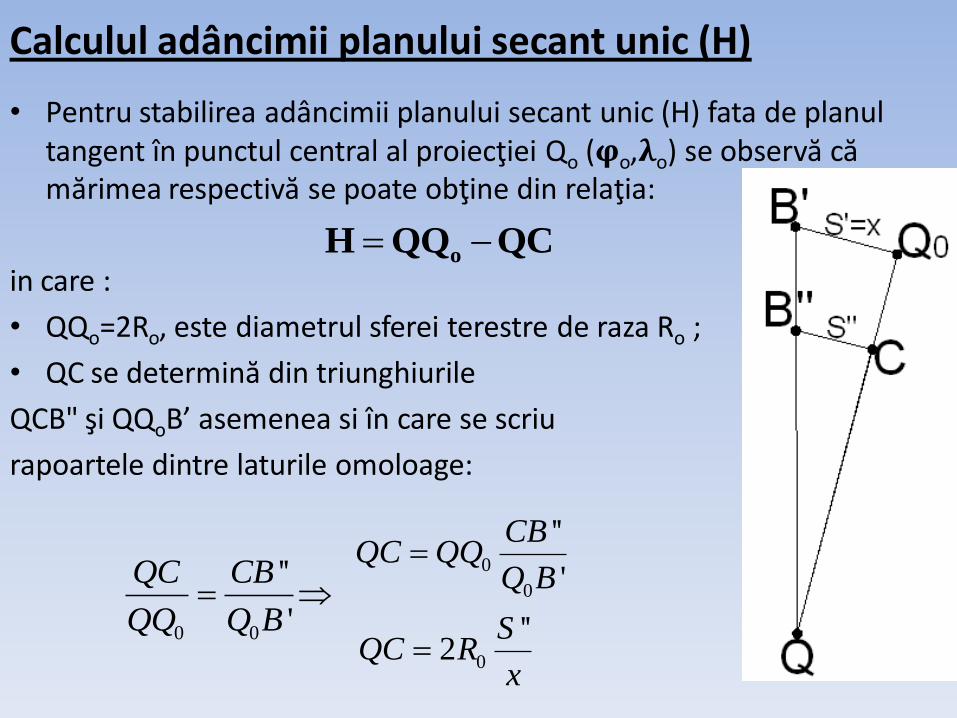
Calculul adâncimii planului secant unic (H)
• Pentru stabilirea adâncimii planului secant unic (H) fata de planul tangent în punctul central al proiecţiei Qo (𝛗o,𝛌o) se observă că mărimea respectivă se poate obţine din relaţia:
in care :
• QQo=2Ro, este diametrul sferei terestre de raza Ro ;
• QC se determină din triunghiurile
QCB" şi QQoB’ asemenea si în care se scriu
rapoartele dintre laturile omoloage:
oH QQ QC
0 0
''
'
QC CB
QQ Q B
0
0
0
''
'
'' 2
CBQC QQ
Q B
SQC R
x
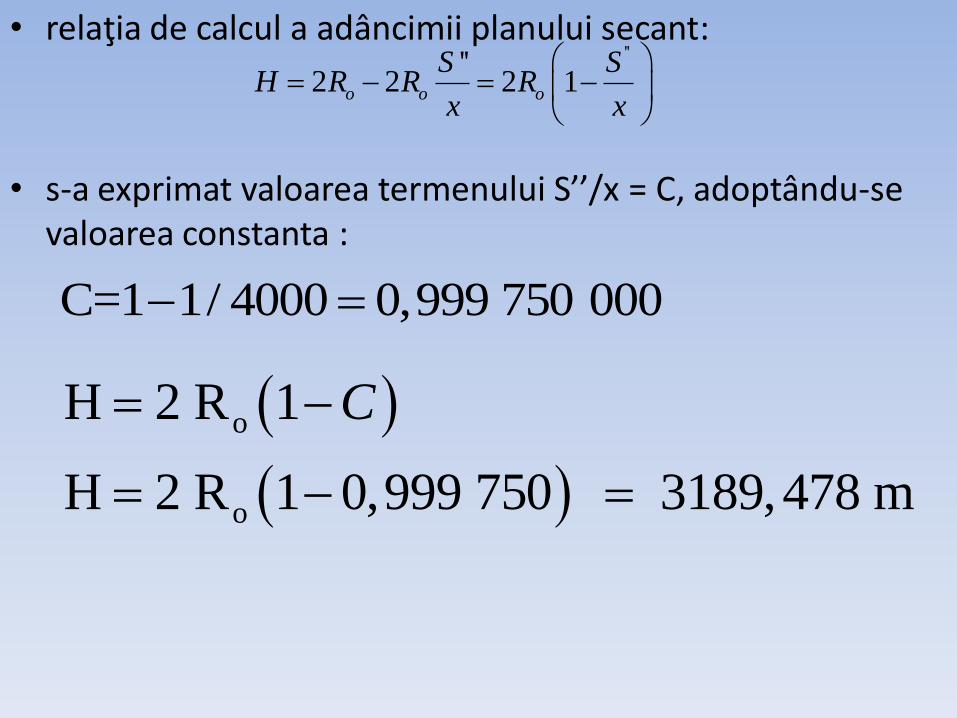
• relaţia de calcul a adâncimii planului secant:
• s-a exprimat valoarea termenului S’’/x = C, adoptându-se valoarea constanta :
''
2 2 2 1''
o o o
SH
SR R R
x x
C=1 1/ 4000 0,999 750 000
o
o
H 2 R 1
H 2 R 1 0,999 750 3189,478 m
C
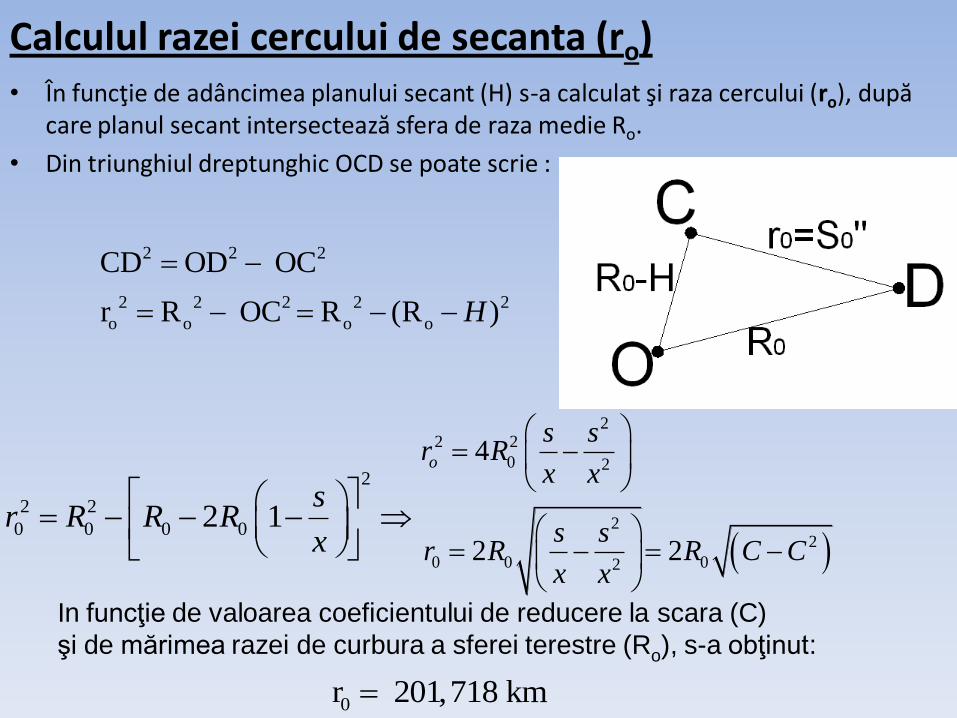
Calculul razei cercului de secanta (ro)• În funcţie de adâncimea planului secant (H) s-a calculat şi raza cercului (ro), după
care planul secant intersectează sfera de raza medie Ro.
• Din triunghiul dreptunghic OCD se poate scrie :
2 2 2
2 2 2 2 2
o o o o
CD OD OC
r R OC R (R )H
2
2
0 0 00
2 2 1s
r R R Rx
22 2
0 2
22
0 0 02
4
2 2
o
s sr R
x x
s sr R R C C
x x
0r 201,718 km
In funcţie de valoarea coeficientului de reducere la scara (C)
şi de mărimea razei de curbura a sferei terestre (Ro), s-a obţinut:
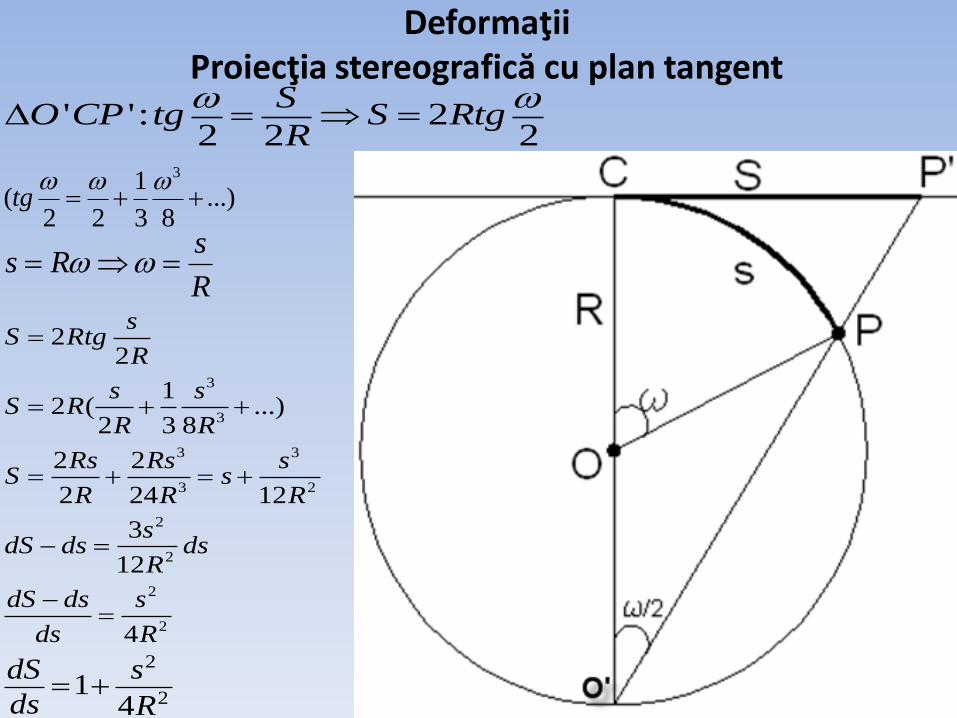
DeformaţiiProiecţia stereografică cu plan tangent
' ': 22 2 2
SO CP tg S Rtg
R
ss R
R
31( ...)
2 2 3 8tg
3
3
3 3
3 2
2
2
2
2
2
2
22
12 ( ...)
2 3 8
2 2
2 24 12
3
12
4
14
sS Rtg
R
s sS R
R R
Rs Rs sS s
R R R
sdS ds ds
R
dS ds s
ds R
dS s
ds R
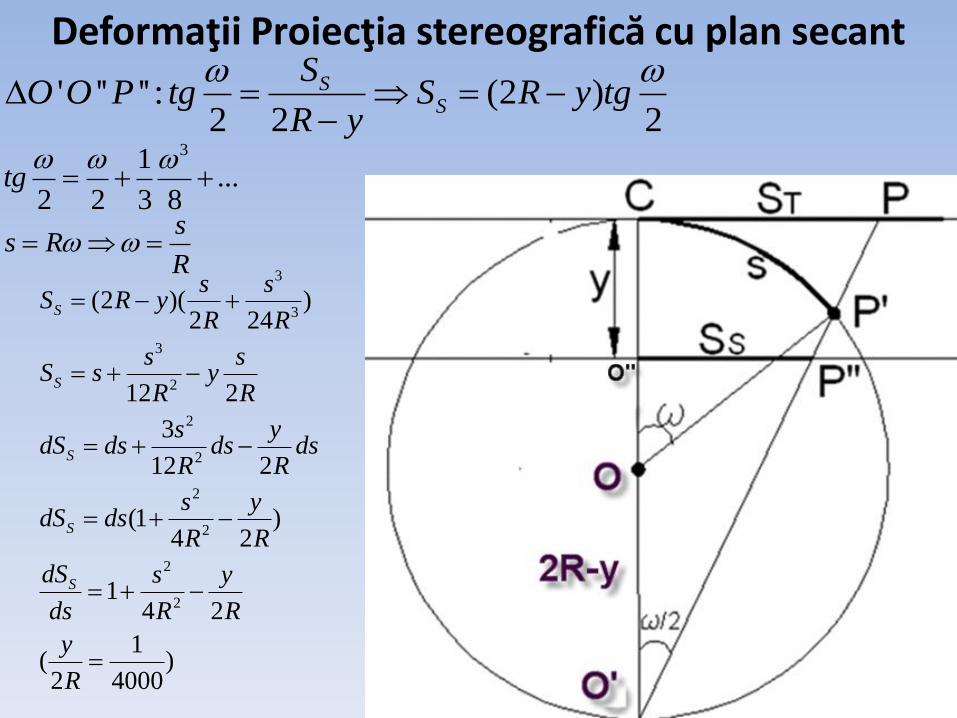
Deformaţii Proiecţia stereografică cu plan secant
' '' '' : (2 )2 2 2
SS
SO O P tg S R y tg
R y
31
...2 2 3 8
tg
ss R
R
3
3
3
2
2
2
2
2
2
2
(2 )( )2 24
12 2
3
12 2
(1 )4 2
14 2
1( )2 4000
S
S
S
S
S
s sS R y
R R
s sS s y
R R
s ydS ds ds ds
R R
s ydS ds
R R
dS s y
ds R R
y
R
• Se observă că în planul secant deformaţia este mai mică decât în planul tangent cu 1/4.000
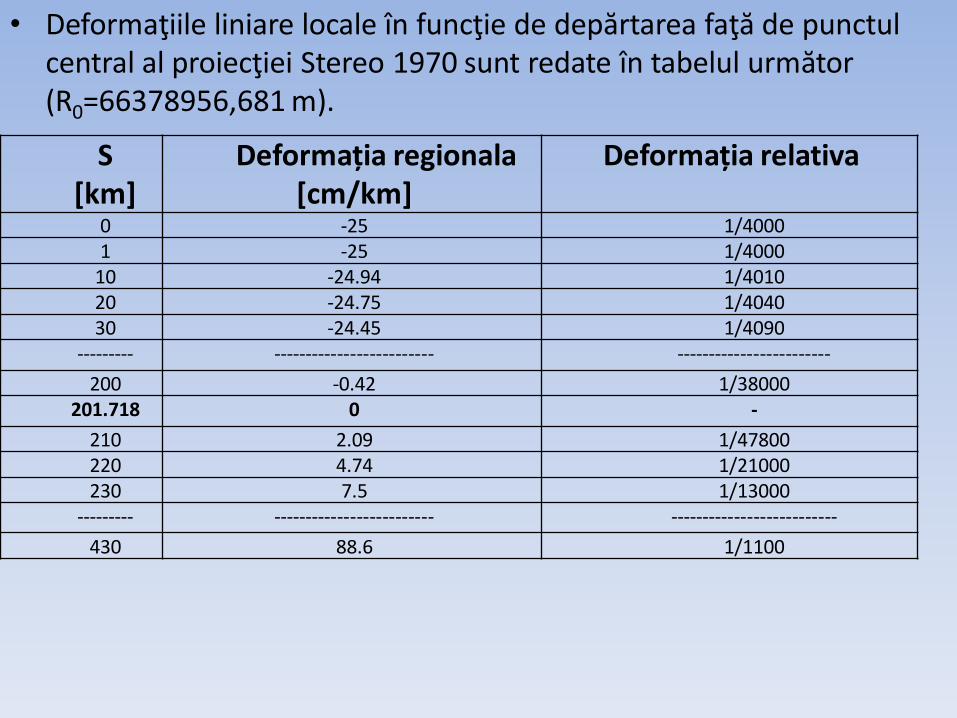
• Deformaţiile liniare locale în funcţie de depărtarea faţă de punctul central al proiecţiei Stereo 1970 sunt redate în tabelul următor (R0=66378956,681 m).
S[km]
Deformația regionala[cm/km]
Deformația relativa
0 -25 1/40001 -25 1/4000
10 -24.94 1/401020 -24.75 1/404030 -24.45 1/4090
--------- ------------------------- ------------------------
200 -0.42 1/38000201.718 0 -
210 2.09 1/47800220 4.74 1/21000230 7.5 1/13000
--------- ------------------------- --------------------------
430 88.6 1/1100
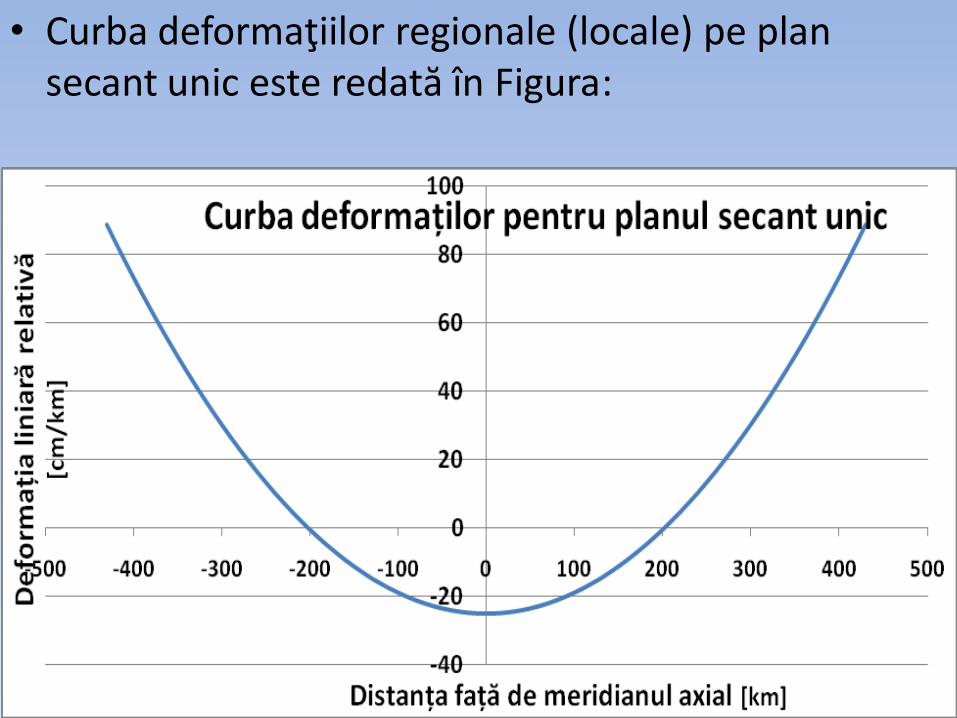
• Curba deformaţiilor regionale (locale) pe plan secant unic este redată în Figura:
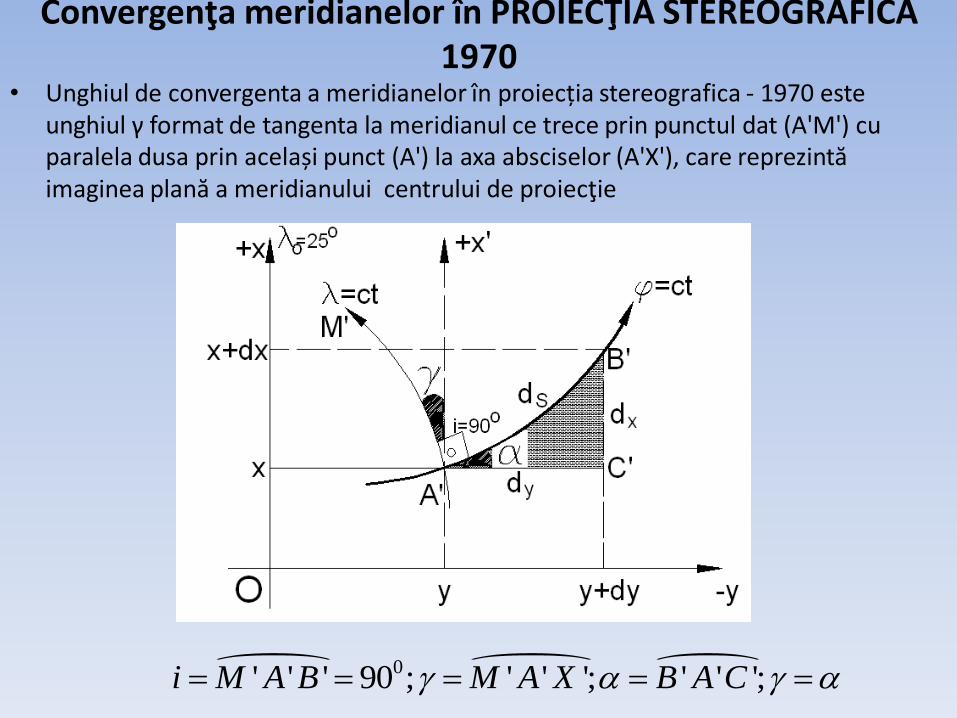
Convergenţa meridianelor în PROIECŢIA STEREOGRAFICĂ1970
• Unghiul de convergenta a meridianelor în proiecția stereografica - 1970 este unghiul γ format de tangenta la meridianul ce trece prin punctul dat (A'M') cu paralela dusa prin același punct (A') la axa absciselor (A'X'), care reprezintă imaginea plană a meridianului centrului de proiecţie
0' ' ' 90 ; ' ' '; ' ' ';i M A B M A X B A C