mupa
DESCRIPTION
masini unelteTRANSCRIPT

1. Scopul şi conţinutul lucrării Cunoaşterea elementelor constructive ale cutiilor de viteze şi
familiarizarea cu noţiunile: grupă cinematică; raport de transfer; gamă de turaţii; ecuaţie structurală etc. Prezentarea modului de trasare a reţelei structurale şi a diagramei
structurale pentru o cutie de viteze cu structură normală, precizând informaţiile pe care le oferă aceste reprezentări. Stabilirea ecuaţiei reţelei de turaţii şi a ecuaţiei structurale a reţelei, cu
definirea regulei de formare a indicilor din ecuaţia structurală. Trasarea efectivă a reţelei structurale şi a diagramei structurale (de turaţii),
pentru cutia de viteze a maşinii de frezat 6R82 şi stabilirea ecuaţiei structurale a reţelei.
2. Consideraţii generale 2.1. Grupa cinematică
Cutia de viteze reprezintă totalitatea mecanismelor cu roţi dinţate şi cuplaje comutabile prin care se realizează variaţia în trepte a turaţiei arborelui principal, mişcarea transmiţându-se la semifabricat sau la scula aşchietoare. În cadrul acesteia, mecanismele comutabile dintre doi arbori consecutivi formează câte o grupă cinematică (de reglare). Pentru o cutie de viteze formată din m grupe cinematice legate în serie (m +1 arbori), numărul total de comutări la arborele de ieşire se calculează cu relaţia: mj qqqqq ⋅⋅⋅⋅⋅= KK21 (5.1)
RREEŢŢEEAAUUAA SSTTRRUUCCTTUURRAALLĂĂ ŞŞII DDIIAAGGRRAAMMAA SSTTRRUUCCTTUURRAALLĂĂ AA CCUUTTIIEEII DDEE VVIITTEEZZEE

MAŞINI-UNELTE ŞI PRELUCRĂRI PRIN AŞCHIERE
2
unde qj reprezintă numărul de comutări realizabile cu grupa cinematică de ordin j. La majoritatea cutiilor de viteze utilizate, numărul maxim de comutări în cadrul unei grupe cinematice este patru, iar numărul comutărilor realizat de tot ansamblul este q = 6 ÷ 48. În figura 5.1 se prezintă, spre exemplificare, o cutie de viteze cu două grupe cinematice, ce asigură la arborele de ieşire 6 turaţii (2 x 3 comutări). În fig. 5.1b este ilustrată schema de comutare a cutiei de viteze, în care sunt marcate grupele cinematice de ordinul 1 şi 2. Acestea au rapoartele de transfer parţiale i11 < i12 şi, respectiv, i21 < i22 < i23. Pentru ca cele şase turaţii de ieşire să fie în progresie geometrică, trebuie ca şi rapoartele de transfer parţiale din cadrul fiecărei grupe cinematice să formeze progresii geometrice cu raţiile φ1 şi φ2
ii =
ii = ;
ii =
22
23
21
222
11
121 ϕϕ (5.2)
2.2. Relaţia între raportul de transfer al angrenajului şi raţia seriei de turaţii
Se consideră o cutie de viteze cu două axe, la care arborele de intrare este antrenat direct de la motor (cu turaţia n0), iar la arborele de ieşire (axul
a b Fig. 5.1. Schema cinematică (a) şi schema de comutare (b) a cutiei de viteze
cu 6 trepte

Reţeaua structurală şi diagrama structurală a cutiei de viteze
3
principal al cutiei de viteze) se obţin q turaţii distincte n1 ÷ nq. Aceste turaţii trebuie să fie ordonate după o serie geometrică, astfel că termenul general al seriei poate fi exprimat în funcţie de prima turaţie din şir: ϕ⋅ −1
1k
k n = n (5.3) În acelaşi timp, fiecare turaţie nk poate fi exprimată în funcţie de turaţia n0 a axului de intrare în cutie şi de raportul de transfer ik al angrenajului de rang k, conform relaţiei: kk inn ⋅= 0 (5.4) Din relaţiile de mai sus se exprimă turaţia generică ik:
11
1
0
1 −− ϕ=ϕ= kkk i
nni (5.5)
Rezultă că rapoartele de transfer i1...iq ale angrenajelor unei cutii de viteze, pentru obţinerea unei game de q turaţii în serie geometrică cu raţia φ, trebuie să fie şi ele în progresie geometrică cu aceeaşi raţie ca a gamei de turaţii. Raportul de transfer i1 intervine ca o constantă în formarea celorlalte rapoarte de transfer. Mărimea sa este evident cea mai mică dintre toate rapoartele de transfer, deoarece asigură obţinerea turaţiei minime n1 = nmin. Pe de alta parte i1 este şi subunitar, deoarece turaţia n1 este totdeauna mai mică decât turaţia n0 a motorului electric1. Având în vedere forma generală a raportului ik, şi raportul i1 poate fi scris, ca funcţie de raţia φ, sub forma:
ϕϕ
α−α = 1 = i1 (5.6)
Ca urmare, în termenul general al seriei (5.5) raportul i1 poate fi înlocuit cu expresia (5.6), încât rezultă: ϕ α− )1( + k
k = i (5.7)
2.3. Diagrama structurală a cutiei de viteze. Pentru studiul cinematicii cutiilor de viteze, se foloseşte reprezentarea grafică denumită diagrama structurală a cutiei de viteze. Aceasta constă din transpunerea pe un număr de drepte paralele divizate logaritmic, reprezentând
1 Însăşi turaţia maximă nmax = nq este, în marea majoritate a cazurilor, mai mică decât turaţia n0 (cu cât turaţia motorului este mai mare decât turaţiile nk, cu atât stabilitatea mişcării este mai bună).

MAŞINI-UNELTE ŞI PRELUCRĂRI PRIN AŞCHIERE
4
simbolic axele cutiei de viteze, poziţiile relative pe care le au, unele în raport cu altele, turaţiile acestor axe. Considerând o cutie de viteze cu două axe, axul I fiind conducător cu turaţia n0, iar axul II condus, cu turaţiile n1 ÷.nq în progresie geometrică, pentru trasarea diagramei structurale a acesteia se procedează după cum urmează:
Se consideră termenul general al seriei de turaţii dat de relaţia (5.3) şi se logaritmează: ϕ− k + n = n k log)1(loglog 1 (5.8) Pentru turaţiile n1, n2, n3 ş.a.m.d. (adică pentru k = 1, 2, ...), expresia (5.8) devine:
n = n 11 loglog
ϕ + n = n logloglog 12 ……………………..
(5.9)
Se trasează două drepte paralele (fig.5.2) la o distanţă aleasă arbitrar: dreapta I simbolizează arborele de intrare (conducător), iar dreapta II axul de ieşire al cutiei de viteze (axul principal). Ambele drepte sunt gradate logaritmic.
Pe dreapta II se marchează (ca punct extrem stânga) mărimea log n1, de
Fig. 5.2. Metodologia de trasare a diagramei structurale

Reţeaua structurală şi diagrama structurală a cutiei de viteze
5
exemplu în punctul A. El corespunde primei turaţii n1. Apoi, la distanţe egale (considerate ca fiind log φ) se marchează punctul B corespunzător turaţiei n2, punctul C corespunzător turaţiei n3 ş.a.m.d. până la marcarea tuturor turaţiilor de pe axul II. Rezultă, în final, punctele A, B, C, D, ... Q echidistante, deoarece segmentele de dreaptă AB, BC, CD, ... sunt egale între ele, ca reprezentând grafic logaritmul aceleiaşi mărimi: raţia φ. Această remarcă conduce la simplificarea construcţiilor grafice, în sensul că reprezentarea unei game de turaţii în serie geometrică se poate face marcând, pe o dreapta oarecare, punctele A, B, C, ... Q echidistante, distanţa dintre două puncte consecutive fiind considerată ca reprezentând logaritmul ratiei φ. Axul conducător I este de asemenea gradat logaritmic, la aceeaşi scară şi corespunzatoare pe verticală gradaţiilor dreptei II. Marcarea turaţiei n0 pe axul I, prin punctul N, trebuie să ţină cont de mărimea acestei turaţii în raport cu valoarea turaţiilor de pe axul II, în particular cu poziţia punctului A a turaţiei n1.
Astfel, având în vedere legătura dintre turaţia n1 şi n0, dedusă din relaţia (5.4): i n = n 101 (5.4’) cât şi forma data raportului i1 ca funcţie de raţia φ (v.rel. 5.6), rezultă:
ϕα n = in = n 11
10 (5.10)
Logaritmând, rezultă: ϕα logloglog 10 + n =n (5.11) Ultima relaţie permite reprezentarea grafică a poziţiei punctului N (corespunzător turaţiei n0) pe dreapta I, la distanţă αlogφ de punctul M – ales analog punctului A de pe axul II (şi considerat la distanţa log n1 de origine).
După marcarea turaţiilor pe cele două drepte (prin punctele A, B, C,...Q pe axul II şi punctul N pe axul I), se uneşte, prin drepte, punctul N cu punctele A, B, C, ... Q, ceea ce simbolizează că cele q turaţii ale axului II provin din unica turaţie n0 a axului I. Diagrama structurală astfel obţinută se completează prin notarea fascicolului de drepte duse din punctul N cu i1, i2, ... iq, reprezentând rapoartele parţiale de transfer din grupa cinematica I – II. Metodica de trasare a diagramei structurale prezentate în fig. 5.2 a avut la bază luarea, ca origine de marcare a turaţiilor, turaţia n1 indicată prin punctul A. Din această cauză, pentru toate celelalte turaţii (n2, n3, ... nq de pe axul II cât şi n0 de pe axul I), ce sunt mai mari decât n1, segmentele reprezentate prin logaritmi (log φ, 2 log φ, 3 log φ, ... ) sunt considerate pozitive.
MAŞINI-UNELTE ŞI PRELUCRĂRI PRIN AŞCHIERE
6
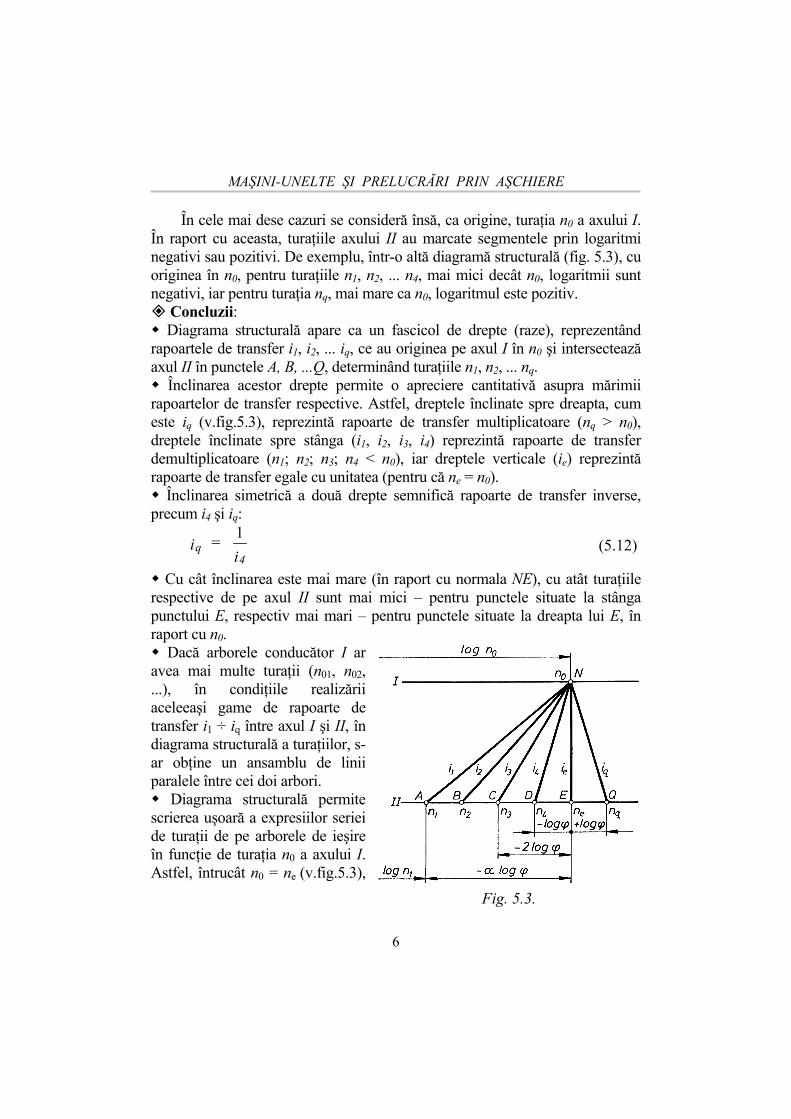
În cele mai dese cazuri se consideră însă, ca origine, turaţia n0 a axului I. În raport cu aceasta, turaţiile axului II au marcate segmentele prin logaritmi negativi sau pozitivi. De exemplu, într-o altă diagramă structurală (fig. 5.3), cu originea în n0, pentru turaţiile n1, n2, ... n4, mai mici decât n0, logaritmii sunt negativi, iar pentru turaţia nq, mai mare ca n0, logaritmul este pozitiv.
Concluzii: Diagrama structurală apare ca un fascicol de drepte (raze), reprezentând
rapoartele de transfer i1, i2, ... iq, ce au originea pe axul I în n0 şi intersectează axul II în punctele A, B, ...Q, determinând turaţiile n1, n2, ... nq.
Înclinarea acestor drepte permite o apreciere cantitativă asupra mărimii rapoartelor de transfer respective. Astfel, dreptele înclinate spre dreapta, cum este iq (v.fig.5.3), reprezintă rapoarte de transfer multiplicatoare (nq > n0), dreptele înclinate spre stânga (i1, i2, i3, i4) reprezintă rapoarte de transfer demultiplicatoare (n1; n2; n3; n4 < n0), iar dreptele verticale (ie) reprezintă rapoarte de transfer egale cu unitatea (pentru că ne = n0).
Înclinarea simetrică a două drepte semnifică rapoarte de transfer inverse, precum i4 şi iq:
i
= i4
q1 (5.12)
Cu cât înclinarea este mai mare (în raport cu normala NE), cu atât turaţiile respective de pe axul II sunt mai mici – pentru punctele situate la stânga punctului E, respectiv mai mari – pentru punctele situate la dreapta lui E, în raport cu n0.
Dacă arborele conducător I ar avea mai multe turaţii (n01, n02, ...), în condiţiile realizării aceleeaşi game de rapoarte de transfer i1 ÷ iq între axul I şi II, în diagrama structurală a turaţiilor, s-ar obţine un ansamblu de linii paralele între cei doi arbori.
Diagrama structurală permite scrierea uşoară a expresiilor seriei de turaţii de pe arborele de ieşire în funcţie de turaţia n0 a axului I. Astfel, întrucât n0 = ne (v.fig.5.3),
Fig. 5.3.

Reţeaua structurală şi diagrama structurală a cutiei de viteze
7
iar turaţiile axului II se pot scrie în funcţie de ne: ϕn = n eq ; …. ϕ0 n = n ee ; …. ϕ−1 n = n e4 ; …. ϕ−2 n = n e3 ; … (5.13) rezultă prin înlocuire : ϕn = nq 0 ; .… ϕ0
0 n = ne ; .… ϕ−10 n = n4 ; .… ϕ−2
0 n = n3 ; … (5.14) Pentru a uşura notarea pe diagramele structurale, mărimile segmentelor
reprezentând log φ, 2 log φ, 3 log φ..... k log φ, se pot nota conventional cu ϕϕϕ k ,..... , 2 , (5.15) astfel că diagrama precedentă (v.fig.5.3), pentru q = 6, va căpăta aspectul din figura 5.4. Din această diagramă se poate uşor deduce seria de turaţii a axului II, în funcţie de turaţia n0 a axului I:
ϕ=ϕ=ϕ=
ϕ=ϕ=ϕ=−
−−−
060
051
04
203
302
401
......;.....;
.....;.....;.....;
nnnnnn
nnnnnn (5.16)
Logaritmând şi utilizând notaţia convenţională menţionată, aceeaşi serie de turaţii se va scrie în forma (5.17):
ϕ+==ϕ−=
ϕ−=ϕ−=ϕ−=
060504
030201
............;........;
.....;2.....;3......;4
nnnnnn
nnnnnn (5.17)
expresii care se pot citi astfel: în diagrama structurală, turaţia n1 este situată la stânga turaţiei n0 cu patru intervale corespunzătoare raţiei de bază φ; .... turaţia n6 este situată la dreapta turaţiei n0 cu un interval corespunzător raţiei de bază φ.
2.4. Reţeaua structurală (diagrama structurală simetrică) a cutiei de viteze
Reţeaua structurală sau diagrama structurală simetrică este o reprezentare grafică bazată pe aceleaşi criterii constructive ca şi cele ale diagramei structurale, cu excepţia originii (turaţia n0 a axului de intrare), care se situează simetric faţă de intervalul nmin – nmax, adică n1 – nq. Ca urmare, este o reprezentare simplificată, simetrică, ce ilustrează numai comutările grupelor cinematice şi are utilitate la studiul diagramelor de turaţii, în scopul alegerii variantei optime. Reţeaua structurală a turaţiilor corespunzătoare diagramei structurale din fig. 5.4 este reprezentată în fig. 5.5.

MAŞINI-UNELTE ŞI PRELUCRĂRI PRIN AŞCHIERE
8
2.5. Ecuaţia reţelei de turaţii Ecuaţia structurală a reţelei. Se consideră o cutie de viteze cu trei axe (v.fig.5.1a), cu o grupă cinematică de două angrenaje între axele I şi II şi o grupă de trei angrenaje între axele II şi III, a cărei diagramă structurală este prezentată în figura 5.6. Angrenajele z1/z'1 şi z2/z'2, având rapoartele de transfer i11 şi respectiv i12, transformă unica turaţie n0 a axului I în două turaţii: n'1 şi n'2 :
'2
20120
'2'
1
10110
'1 ;
zz n = i n = n
zz n = i n = n (5.18)
Fiecare din aceste turaţii sunt transformate de a doua grupă de angrenaje z3/z'3, z5/z'5 şi z4/z'4, având rapoartele de transfer i21, i22 şi i23 în două grupe de câte trei turaţii:
şi i n = ni n = ni n = n 23
'1322
'1221
'11 ;;
i n = ni n = ni n = n 23'2622
'2521
'24 ;;
(5.19)
în care n1 = nmin şi n6 = nmax. Turaţiile n1 ÷ n6 ale axului principal sunt în progresie geometrică, cu raţia φ, astfel că, în diagrama structurală (v.fig.5.6), ele vor fi echidistante, de marime ϕ . Turaţiile n'1 şi n'2 ale axului II sunt la o distanţă grafică 'ϕ , egală
Fig. 5.4. Diagrama structurală a cutiei de viteze
Fig. 5.5. Reţea structurală (diagrama structurală simetrică)
a cutiei de viteze

Reţeaua structurală şi diagrama structurală a cutiei de viteze
9
cu 3ϕ , adică φ' = φ3, astfel încât mărimea turaţiei n'2 în funcţie de n'1 se va scrie: 3'
1''
1'2 ϕϕ n= n = n (5.20)
Din studierea diagramei structurale (v. fig.5.6) şi a reţelei structurale (fig.4.7), se observă că cele şase turaţii de la axul principal III se obţin printr-un grup de 3 turaţii, care provin din grupul precedent de 2 turaţii, care, la rândul lor, rezultă din turaţia unică n0.
Această remarcă se poate scrie sub forma egalităţii 1236 ××= (5.21) sau, mai simplu, 236 ×= (5.21’) relaţie căreia i se pot adauga, sub formă de indici, raţiile turaţiilor respective: '236 ϕϕϕ ×= (5.22) sau, pentru că ϕ=ϕ 3' (5.23) rezultă: ϕϕϕ ×= 3236 (5.24)
Relaţia arată că cele 6 turaţii de raţie φ ale axului principal (numită raţie de bază) se obţin dintr-o grupă cinematică de 3 turaţii de aceeaşi raţie φ, turaţii care la rândul lor rezultă din 2 turaţii de raţie φ' = φ3 ale axului precedent.
Fig. 5.7. Reţeaua structurală pentru cutia de viteze cu 6 trepte
Fig. 5.6. Diagramă structurală pentru cutia de viteze cu 6 trepte

MAŞINI-UNELTE ŞI PRELUCRĂRI PRIN AŞCHIERE
10
Pentru că φ apare ca indice comun, el poate fi subînţeles, simplificând astfel notaţia. Expresia de mai sus devine: 311 236 ×= (5.25) Ecuaţia (5.25) este denumită ecuaţia structurală a reţelei şi poate fi citită astfel: cele 6 turaţii ale axului principal, se obţin dintr-o grupă de trei turaţii cu raţia egală cu raţia de bază (indicele 1 la ambele cifre 6 şi 3), provenind dintr-o altă grupă de 2 turaţii, ce are raţia egală cu raţia de bază la puterea a treia. Regula enunţată trebuie respectată la proiectarea oricărei cutii de viteze cu structură normală. În reţeaua structurală din fig. 5.7 raportul de transfer i22 asigură obţinerea turaţiei n2. Într-o altă construcţie (fig. 5.8), acelaşi raport de transfer i22 poate determina turaţia n3, turaţia n2 obţinându-se prin raportul i21 de la turaţia n'2. Din reţeaua structurală din fig. 5.8, rezultă că grupa cinematica II – III are cele 3 turaţii în serie geometrică cu raţia φ1 = φ2, în timp ce grupa cinematica I – II are cele 2 turaţii în progresie geometrică cu raţia φ' = φ. Bineînţeles că ecuaţia structurală a reţelei din fig. 5.8 pune în evidenţă aceste deosebiri faţă de reţeaua din fig. 5.7, luând o altă formă: 121 236 ×= (5.26) Indicii cifrelor din ecuaţia structurală indică pe diagramă mărimi de segmente, în raport cu mărimea segmentului determinat de două turaţii succesive de pe axul principal, segment luat ca unitate de măsură. Ecuaţia structurală a reţelei (v. rel. 5.25) mai poate fi citită: cele 6 turaţii ale axului principal, cu o anumită raţie (numită raţie de bază), rezultă dintr-o grupă de 3 turaţii având aceeaşi raţie şi dintr-o grupă de 2 turaţii, cu raţia egală cu raţia de bază la puterea a treia. Generalizând observaţiile de mai sus, în cazul unei cutii de viteze cu w axe, numărul de turaţii q ale axului principal w se obţine ca produs al grupelor de turaţii a, b, c, ... pe care fiecare ax le primeşte de la axul precedent:
Fig. 5.8. Reţea structurală pentru cutia
de viteze cu 6 trepte

Reţeaua structurală şi diagrama structurală a cutiei de viteze
11
ponmcbaq ⋅⋅⋅⋅⋅⋅⋅= K (5.27) Aceasta expresie se numeste ecuaţia reţelei de turaţii. Dacă în ecuaţia reţelei de turaţii se trece şi raţia – sub formă de indici, în dreapta factorilor, se obţine ecuaţia structurală a reţelei, având forma generală: 0......11 1⋅⋅⋅⋅⋅⋅= ⋅⋅⋅⋅⋅⋅⋅⋅⋅ ncbamcbabaa oncbaq K (5.28) Regula de formare a indicilor, care trebuie respectată la proiectarea oricărei cutii de viteze cu structură normală, poate fi formulată astfel:
Într-o ecuaţie structurală, formarea indicilor începe prin marcarea indicelui 1, unuia din factori; produsul dintre acesta şi factorul respectiv se plasează ca indice oricăruia dintre factorii liberi ai ecuaţiei structurale. În continuare, se procedează similar cu noul indice obţinut.
3. Materiale necesare desfăşurării lucrării Schema cinematică a cutiei de viteze a maşinii de frezat 6R82 (fig. 5.9),
studiată la lucrarea 4 (v. fig. 4.4); Schema fluxului cinematic pentru lanţul cinematic principal, dezvoltată în
lucrarea 4 (v. fig. 4.5); Gama de turaţii nominale (nnom) şi gama de turaţii teoretice calculate
(cinematice) (ncin) la arborele principal, centralizate în cadrul lucrării de laborator 4 (v. tab. 4.3), cât şi raţia gamei de turaţii, conform relaţiei (4.11) şi tab. 4.1.
4. Metodologia desfăşurării lucrării practice 1. Se studiază schema cinematică a cutiei de viteze a maşinii de frezat 6R82
(v. fig. 5.9) şi se retranscrie schema fluxului cinematic (completată la lucrarea 4 de laborator) (v. fig. 4.5), verificând ca rapoartele de transfer din cadrul fiecărei grupe cinematice să fie trecute în ordine crescătoare;
2. Sub schema fluxului cinematic se marchează, în dreptul fiecărei grupe cinematice, numărul de rapoarte parţiale realizat de respectiva grupă şi, prin înmulţire, se deduce ecuaţia reţelei de turaţii (fără indici), ca în relaţia 5.27. În ecuaţie, vor fi trecuţi numai factorii diferiti de 1, în ordine inversă (de la arborele principal V către axul I de intrare în cutie): CBAN ××=1 (5.29)

MAŞINI-UNELTE ŞI PRELUCRĂRI PRIN AŞCHIERE
12
în care s-a notat cu N numărul de trepte de turaţii de la axul principal (N = 18), iar prin A, B, C – numărul de rapoarte de transfer din grupa cinematica IV-V, III-IV şi, respectiv, II-III. În grupa cinematică I-II există un singur raport de transfer şi, prin urmare, nu apare în relaţia (5.27’).
3. Pentru calcularea indicilor, în vederea completării ecuaţiei structurale a reţelei în forma: CBA kkk CBA ××=118 (5.30) vor fi parcurse următoarele etape: se calculează raţia fiecărei grupe cinematice:
43
65"
87
43'109
138"
1211
109'1716
1514
;:),(
;:),(
:),(
zzzz
zzzzIIIIIC
zzzz
zzzzIVIIIB
zzzzVIVA
CC
BB
A
=ϕ=ϕ
=ϕ=ϕ
=ϕ
(5.31)
cunoscând raţia de bază (v. rel.4.11): φ = φ10 = 1,26 şi relaţia generală de dependenţă dintre raţia de bază şi raţiile intermediare φA, φB, φC:
"'"' "'"' ;;;; CCBBA kC
kC
kB
kB
kA ϕ=ϕϕ=ϕϕ=ϕϕ=ϕϕ=ϕ (5.32)
se calculează indicii din ecuaţia structurală (5.30):
ϕϕ
=ϕϕ
=
ϕϕ
=ϕϕ
=
ϕϕ
=
loglog;
loglog
loglog;
logloglog
log
""
''
""
''
CC
CC
BB
BB
AA
kk
kk
k
(5.33)
se rotunjesc indicii calculaţi la valori întregi şi se completează cu ei ecuaţia structurală. Se certifică egalităţile k’B = k”B = kB ; k’C = k”C = kC. se verifică regula de formare a indicilor. 4. Se trasează reţeaua structurală a cutiei de viteze, având la bază ecuaţia
structurală. Pentru aceasta: se trasează un număr de segmente de dreaptă orizontale şi echidistante, egal
cu numărul de arbori din componenţa cutiei de viteze şi se notează corespunzător;

Reţeaua structurală şi diagrama structurală a cutiei de viteze
13
se marchează la nivelul arborelui principal V, prin cerculeţe (balustrări) echidistante, cele 18 turaţii de ieşire, din care se ridică drepte verticale subţiri (orientative), ce intersectează toţi arborii; se notează în partea stângă a reţelei, între arbori, numărul de rapoarte parţiale
de transfer din fiecare grupă cinematică) cu indicele lui (datele se pot culege din ecuaţia structurală); se începe trasarea diagramei structurale simetrice fie de la axul principal V
spre axul I, fie invers, după marcarea turaţiei unice n01 pe axul I, simetric dispusă faţă de turaţiile de pe axul V (la jumătatea distanţei dintre turaţia n9 şi n10). Raportul unic de transfer din grupa cinematica I-II va fi reprezentat printr-o verticală, ce porneşte din turaţia unică n01 de pe axul I şi determină o turaţie unică pe n21 la nivelul axului II. Deoarece în grupa cinematică II-III sunt trei rapoarte de transfer, urmează a se trasa trei segmente de la turaţia unică n21 de pe axul II spre axul III.
Fig. 5.9. Schema cinematică a cutiei de viteze a maşinii de frezat 6R82

MAŞINI-UNELTE ŞI PRELUCRĂRI PRIN AŞCHIERE
14
Segmentul central, reprezentând cel de-al doilea raport ca valoare dintre cele trei, va fi vertical, cel mai mic raport va fi reprezentat printr-un segment înclinat spre stânga, iar cel mai mare printr-un segment cu înclinare dreapta; în acest mod, turaţiile n31, n32 şi n33 de pe axul III (C la număr) vor fi dispuse simetric faţă de n21 şi la o distanţă între ele de kC ori mai mare decât distanţa de bază (dintre două turaţii succesive de pe axul V). În continuare, din fiecare turaţie a axului III (în total C turaţii), vor fi duse câte B segmente (raze) pe axul IV (finalizate cu balustrări), dispuse simetric faţă de turaţia din care provin şi situate între ele la o distanţă constantă, de kB ori mai mare ca distanţa de bază. Procedura este identică şi pentru reprezentarea rapoartelor de transfer din grupa cinematica IV-V. reţeaua structurală poate fi completată prin notarea rapoartelor parţiale de
transfer (ca raport al numerelor de dinţi) şi a turaţiilor arborilor intermediari: n21 – pe axul II; n31, n32, ... – pe axul III; n41, n42, n43, ... – pe axul IV, turaţii ce se pot calcula uşor urmărind traseele din reţeaua structurală; la nivelul arborelui principal V, sub turaţiile n1 ÷ n18, se notează, pe rânduri
separate, turaţiile de ieşire nominale şi cele calculate (cinematice); 5. Se trasează diagrama structurală a cutiei de viteze, folosindu-se reţeaua
structurală. Cel mai corect şi general mod de trasare se bazează pe calcularea turaţiilor intermediare şi marcarea acestora pe axe în funcţie de valoarea lor, raportată la valorile turaţiilor pe arborele de ieşire, urmată de unirea turaţiilor (a balustrărilor) prin segmente, ca în reţeaua structurală2. Pentru trasarea unei diagrame structurale cu structură normală (ca în cazul structurii cutiei de viteze a maşinii 6R82), când este trasată deja reţeaua structurală, se poate utiliza un mod simplificat, ce nu face absolut necesară cunoaşterea tuturor turaţiilor intermediare. În acest scop: se reprezintă prin linii orizontale şi echidistante cei cinci arbori ai cutiei de
viteze şi se marchează pe axul V turaţiile n1 ÷ n18 echidistante, din care se duc drepte verticale subţiri (orientative), ce intersectează toţi arborii (se formează un caroiaj); se calculează turaţiile minime de la nivelul fiecărui arbore intermediar (n21 –
la arborele II, n31 – la arborele III, n41 – la arborele IV), urmărind (în reţeaua structurală deja trasată) traseul de obţinere a turaţiei minime n1 (de la axul I pănă la axul V) şi se figurează în diagramă, respectând scara (se folosesc 2 Atât la trasarea reţelei structurale cât şi a diagramei structurale, se fac mici aproximări, pentru ca turaţiile intermediare sau de ieşire să fie marcate în punctele de intersecţie ale verticalelor cu arborii (nodurile reţelei), sau la mijlocul distanţei dintre acestea.

Reţeaua structurală şi diagrama structurală a cutiei de viteze
15
pentru orientare valorile turaţiilor de la arborele principal); se trece, de asemenea, şi turaţia n01 pe axul I de intrare; prin unirea turaţiilor minime cu segmente de dreaptă, se marchează cele mai
mici rapoarte parţiale de transfer din toate grupele cinematice; faţă de acest traseu (ce indică modul de obţinere a turaţiei minime de ieşire
n1), se marchează la nivelul fiecărui ax, spre dreapta, celelalte turaţii intermediare şi se figurează rapoartele parţiale de transfer (v.reţeaua structurală), cu respectarea numărului de rapoarte şi a raţiilor intermediare; se notează pe diagramă rapoartele parţiale de transfer, ca rapoarte ale
numerelor de dinţi ai roţilor în angrenare; la nivelul arborelui principal, sub turaţiile n1 ÷ n18, se notează, pe rânduri
separate, turaţiile de ieşire nominale şi cele calculate (cinematice).
5. Conţinutul referatului Ca parte teoretică, referatul va trebui să conţină următoarele puncte:
definiţia grupei cinematice; numărul de comutări într-o cutie de viteze şi schema de comutare a cutiei de viteze (fig. 5.1b); relaţia de legătură între rapoartele de transfer într-o cutie de viteze, pentru
obţinerea unei game de q turaţii în serie geometrică; modul de trasare a diagramei structurale (etapele de lucru), pentru o cutie de
viteze cu doi arbori şi informaţiile furnizate de aceasta (fig.5.2); semnificaţia reţelei structurale a cutiei de viteze; ecuaţia structurală a reţelei (semnificaţie, rel. 5.25, fig. 5.7); ecuaţia reţelei de turaţii şi ecuaţia structurală a reţelei, în formele lor generale
(rel. 5.27; 5.28); regula de formare a indicilor. Ca parte practică, se urmăresc punctele paragrafului 4, finalizându-se cu
ecuaţia reţelei de turaţii, ecuaţia structurală a reţelei, reţeaua structurală a cutiei de viteze şi diagrama structurală a acesteia; din diagrama structurală (de turaţii) se calculează rapoartele parţiale de
transfer extreme (cel mai mic şi cel mai mare), precizând dacă acestea se încadrează în valorile limită admise în construcţia cutiilor de viteze:
2;41
maxmin ≤≥ ii (5.34)

MAŞINI-UNELTE ŞI PRELUCRĂRI PRIN AŞCHIERE
16
6. Referinţe bibliografice 1. Botez,E. – Maşini-unelte, vol.I - Teoria. Editura Tehnică, Bucureşti, 1977. <pag.95-103; 107-113; 116-122; 126-128> 2. Gheghea,I., Plahteanu,B., Mitoşeriu,C., Ghionea,A. – Maşini-unelte şi
agregate. Editura Didactică şi Pedagogică, Bucureşti, 1983. <pag.34-39> 3. Moraru,V. – Teoria şi proiectarea maşinilor-unelte. Editura Didactică şi
Pedagogică Bucureşti, 1985.