expert lab 2 doze forta
DESCRIPTION
laborator expertizeTRANSCRIPT
Măsurarea forţelor şi calibrarea celulelor de forţă
Laborator 2
ANALIZA RISCULUI SI EXPERTIZE IN INGINERIA MECANICA – LABORATOR 3A
MĂSURAREA FORŢELOR ŞI CALIBRAREA CELULELOR DE FORŢĂ
1. Introducere2. Calibrarea dozelor tensometrice
1. Măsurarea forţelor
Forţa este o mărime fizică vectorială derivată care măsoară acţiunea unuia sau mai multor sisteme fizice asupra unui corp, prin schimbarea stării de mişcare a acestuia faţă de un sistem de referinţă dat. Acţiunea unei forţe asupra unui corp determină mişcarea şi/sau deformarea acestuia.Relaţia de definiţie a forţei ca mărime fizică este:
F= m·aUnde: m= masa, a =acceleraţia .Pământul induce asupra oricărui corp o forţă de atracţie gravitaţională ceea ce face ca greutatea fiecărui corp să se definească sub forma:
G = m·gUnde :m= masa, g = acceleraţia gravitaţională ( g = 9,806 m/s²).
Unităţi de măsură pentru forţăIn sistemul internaţional SI, forţa este o mărime derivată şi unitatea ei de măsura este newtonul ( simbolizat N ). Newtonul este forţa care imprimă unei mase de 1 kilogram o acceleraţie de 1 metru pe secunda la pătrat. In afara N se mai foloseşte dyn, stena, kg forţa (1kgf=9,80665N) şi poundal (1pdl=0,138N).
Aparate pentru măsurarea forţelor
Forţele se măsoară cu aparate numite dinamometre, care măsoară forţe cu o precizie cuprinsă între ±0,1 şi ±0,6% pentru dinamometrele etalon, şi între ±1 şi ±3% pentru dinamometrele de lucru. Constructiv, se clasifică în: dinamometre cu element elastic, hidraulice, pneumatice sau electro-mecanice.
.a) Dinamometre cu element elastic.Acestea funcţionează pe principiul măsurării deformaţiei unui
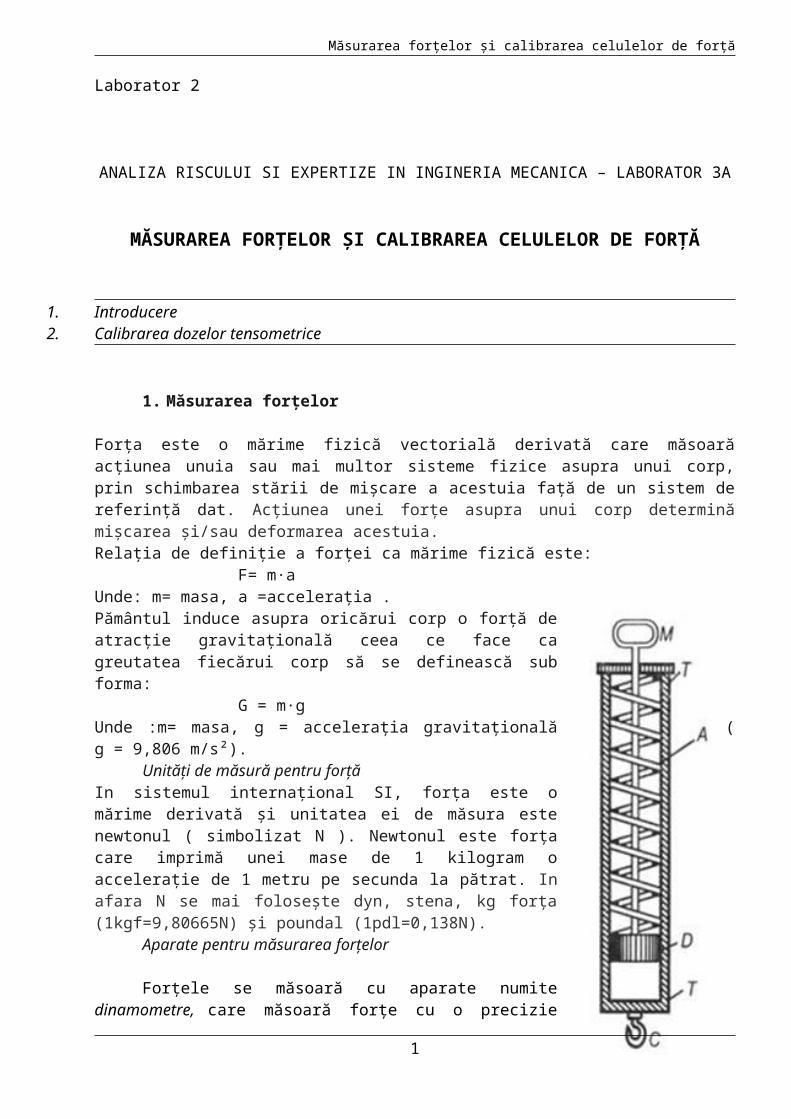
element elastic sub acţiunea unei forte. Pentru F<3000N, se pot folosi dinamometre cu arcuri elicoidale (figura 1). Dinamometrul din figura 1 poate măsura forte de maximum 2 105 N .
Fig. 1. Dinamometru cu element elastic - arc: M-mâner, T-teacă, A-arc, D-disc, C-cârlig
Sub acţiunea forţei F se deformează elementul elastic 1 care se determină deplasarea dispozitivului de indicare. Forţa se calculează cu relaţia:
1
Măsurarea forţelor şi calibrarea celulelor de forţă
F = k·dunde Feste forţa de măsurare în N, k este constanta elastică a arcului iar d este deplasarea în mm, sub acţiunea forţei F.
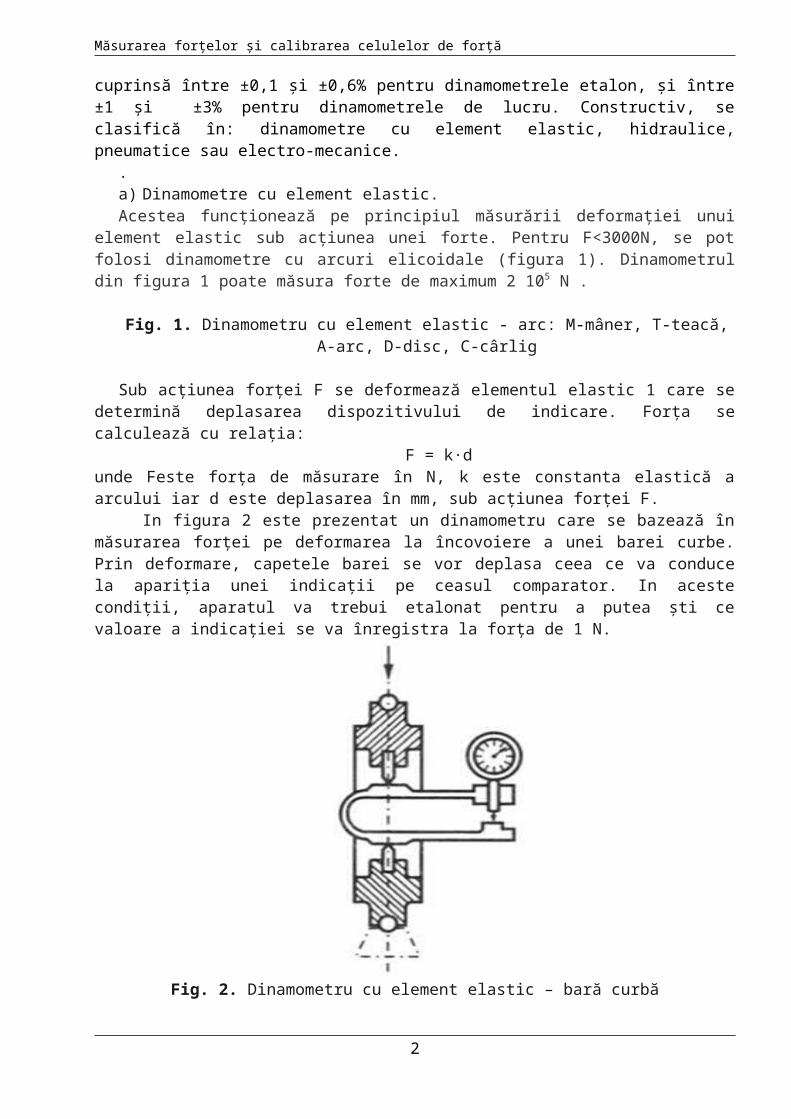
In figura 2 este prezentat un dinamometru care se bazează în măsurarea forţei pe deformarea la încovoiere a unei barei curbe. Prin deformare, capetele barei se vor deplasa ceea ce va conduce la apariţia unei indicaţii pe ceasul comparator. In aceste condiţii, aparatul va trebui etalonat pentru a putea şti ce valoare a indicaţiei se va înregistra la forţa de 1 N.
Fig. 2. Dinamometru cu element elastic – bară curbă
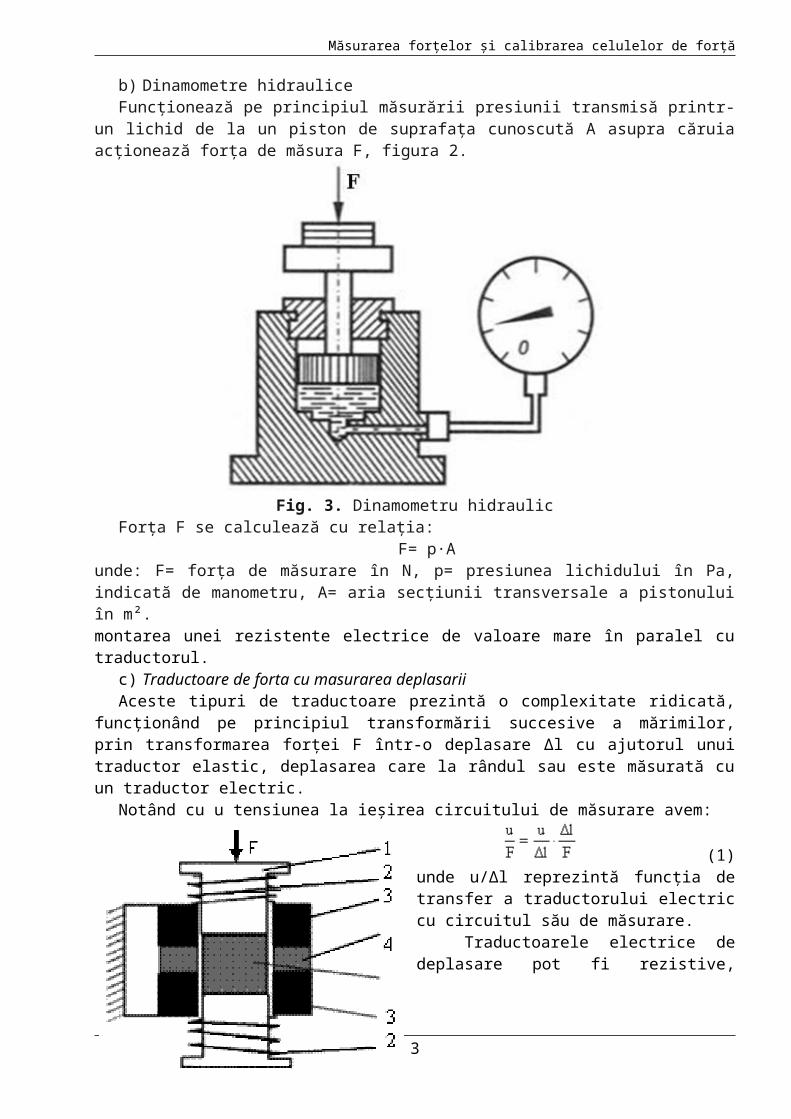
b) Dinamometre hidrauliceFuncţionează pe principiul măsurării presiunii transmisă printr-un lichid de la un piston
de suprafaţa cunoscută A asupra căruia acţionează forţa de măsura F, figura 2.
Fig. 3. Dinamometru hidraulicForţa F se calculează cu relaţia:
F= p·A
2
Măsurarea forţelor şi calibrarea celulelor de forţă
unde: F= forţa de măsurare în N, p= presiunea lichidului în Pa, indicată de manometru, A= aria secţiunii transversale a pistonului în m².montarea unei rezistente electrice de valoare mare în paralel cu traductorul.
c) Traductoare de forta cu masurarea deplasariiAceste tipuri de traductoare prezintă o complexitate ridicată, funcţionând pe principiul
transformării succesive a mărimilor, prin transformarea forţei F într-o deplasare Δl cu ajutorul unui traductor elastic, deplasarea care la rândul sau este măsurată cu un traductor electric.
Notând cu u tensiunea la ieşirea circuitului de măsurare avem:
(1)unde u/Δl reprezintă funcţia de transfer a traductorului electric cu circuitul său de măsurare.
Traductoarele electrice de deplasare pot fi rezistive, capacitive sau inductive, ultimele având o utilizare mai frecventă .
Principial, în figura 4 se prezintă un traductor inductiv diferenţial de tip transformator: 1 - tijă; 2 - arcuri spirale; 3 - înfăşurări; 4 - distanţier; 5 - miez magnetic.
Fig. 4. Traductor inductiv diferenţial
Traductoarele de elastice utilizate (arcuri spirale, inele dinamometrice, console) prezintă deformaţii mari pentru sarcini mici şi sunt prevăzute cu opritoare (limitatoare) de deplasare mecanică pentru a nu se deteriora la suprasarcini accidentale.
Miezul magnetic plasat pe axa tijei mobile asupra căreia acţionează forţa F, se poziţionează în raport cu înfăşurările traductorului cu ajutorul celor două arcuri cu sensul de înfăşurare opus, în scopul compensării erorilor de temperatură.
Tensiunea de ieşire nominală poate fi de ordinul 1V la tensiuni de alimentare de câţiva volţi, frecvenţa de lucru atinge ordinul kilohertzilor, iar domeniul de măsurare al acestor traductoare este de circa ±1 daN pentru deplasări de ±0,5 mm.
d) Dinamometrele electromecanice. Acestea folosesc captori electrici care transformă deformaţiile mecanice în variaţii ale
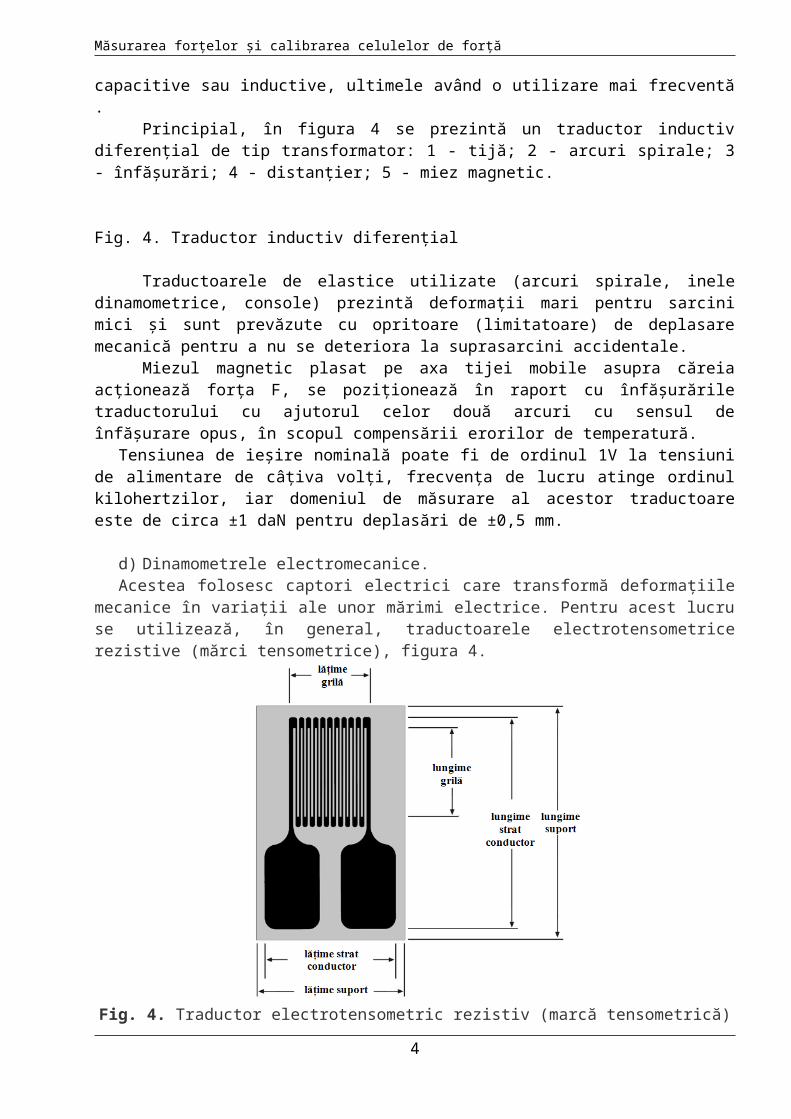
unor mărimi electrice. Pentru acest lucru se utilizează, în general, traductoarele electrotensometrice rezistive (mărci tensometrice), figura 4.
3
Măsurarea forţelor şi calibrarea celulelor de forţă
Fig. 4. Traductor electrotensometric rezistiv (marcă tensometrică)
Aceste traductoare funcţionează pe baza efectului tensorezistiv descoperit de lordul Kelvin în 1856, efect ce constă în modificarea rezistenţei electrice în funcţie de tensiunea mecanică, prin modificarea lungimii, secţiunii şi rezistivităţii electrice. Aceste traductoare se realizează cu filament semiconductor. Filamentul semiconductor, care este decupat chimic sau depus mecanic dintr-un monocristal semiconductor cu lungimi de până la un milimetru si grosimi de ordinul 10-2mm, este conectat la doua conductoare şi montat pe un suport .
Datorita deformării suportului, rezistenta R a mărcilor tensometrice se va modifica ca urmare a variaţiei lungimii l, a secţiunii S, respectiv a rezistivităţii electrice ρ. Ca urmare, sensibilitatea acestor traductoare este data de:
(1)Luând în considerare un conductor rotund cu diametrul d, secţiunea acestuia
variază prin intermediul diametrului, care, la rândul sau depinde de variaţia lungimii după relaţia:
(2)μ fiind coeficientul lui Poisson cu valori cuprinse între 0,2 ÷ 0,4. Fenomenul rezistiv este pus în evidenta prin termenul Δρ/ρ care este proporţional cu variaţia volumului V, adică:
(3)c fiind constanta lui Bridgman, cu valori aproape unitare pentru metale, +100 pentru semiconductoare "p" si -100 pentru semiconductoare "n". Ţinând cont ca V=π·d2·l/4, relaţia (1) devine:
(4)unde k reprezintă sensibilitatea relativă, care pentru c si μ date are valoarea k ≈ 2 la traductoare metalice, k ≈ ± 100 la traductoarele semiconductoare în funcţie de tipul semiconductorului "p" sau "n".
4
Măsurarea forţelor şi calibrarea celulelor de forţă
Trebuie reţinut faptul că, pe lângă sensibilitatea longitudinală manifestată în lungimea firului, apare si o sensibilitate transversala kt:
(5)unde Rl este rezistenta firului pe porţiunea longitudinala, iar R t este rezistenta firului pe porţiunea transversală. Sensibilitatea transversala este cu atât mai mică cu cât R t<<Rl, nedepăşind 2% din cea transversala. Din acest motiv, la traductoarele cu folie, porţiunile transversale sunt mari.
Referitor la influenţa temperaturii, se produc concomitent trei fenomene: dilatarea piesei, dilatarea firului traductorului şi modificarea rezistenţei acestuia. Alegând convenabil materialele, devine posibilă compensarea acestor efecte (realizare dificilă în practică) prin compensarea erorilor cu temperatura utilizând montaje diferenţiale sau montaje compensate termic.
Pentru măsurarea forţei, se utilizează patru traductoare electrotensometrice care se lipesc pe elementele deformabile elastic sub acţiunea forţei, aşezându-se, din punct de vedere electric sub forma punţii Wheatstone completă, figura 5, în care toate braţele punţii sunt ocupate de câte o marcă tensometrică, două dintre acestea fiind supuse solicitării de tracţiune iar celelalte două fiind supuse solicitării de compresiune .
Fig. 5. Montarea mărcii tensometrice în puntea Wheatstone
Aparatele pentru măsurarea forţei ce utilizează traductoare electrotensometrice se numesc celule de forţă sau doze tensometrice, figura 6.
Fig. 6. Celule de forţă sau doze tensometrice
5

Măsurarea forţelor şi calibrarea celulelor de forţă
2. Calibrarea dozelor tensometrice
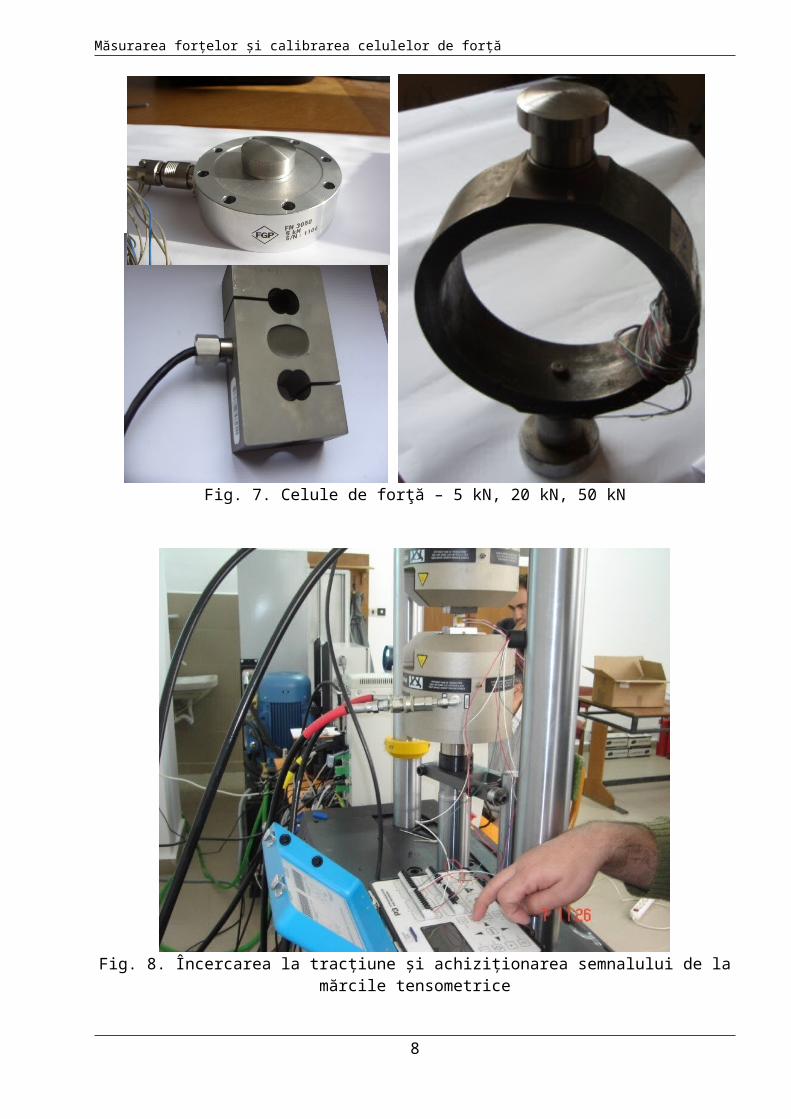
In cadrul laboratorului se vor calibra trei tipuri de doze tensometrice (celule de forţă) prezentate în figura 7. Valorile pentru forţă ale celor trei doze tensometrice sunt: 5 kN, 20 kN şi 50 kN. Calibrarea se face pe maşina universală de încercat INSTRON 8801, cu achiziţia semnalelor de forţă şi timp de la maşina de încercat şi achiziţia semnalului de la mărcile tensometrice la puntea Vishay P3, figura 8. Tot la puntea tensometrică se achiziţionează şi semnalul de timp, prestabilit la intervalul de achiziţionare de 1 secundă, acelaşi interval fiind stabilit şi la maşina de încercat. Cele două fişiere de date, de la maşina de încercat şi de la puntea Vishay se suprapun, având în vedere semnalul de timp comun. In aceste condiţii, se obţine o variaţie a forţei în raport cu semnalul dat de puntea tensometrică. Prin reprezentarea grafică a acestor semnale se obţine o dreaptă de calibrare, aşa cum sun cele arătate în figurile 9 şi 10.
Astfel, dacă se doreşte măsurarea ulterioară a forţelor, se va utiliza doza tensometrică cu aceeaşi punte Vishay. Aşa cum se poate vedea în figurile 9 şi 10, reprezentarea grafică a semnalelor obţinute se poate aproxima cu o dreaptă. Atunci când se face o măsurătoare cu o doză calibrată, semnalul obţinut la puntea tensometrică se înmulţeşte cu coeficientul ce dă pantea dreptei de aproximare şi se obţinea valoarea forţei.
Fig. 7. Celule de forţă – 5 kN, 20 kN, 50 kN
6
Măsurarea forţelor şi calibrarea celulelor de forţă
Fig. 8. Încercarea la tracţiune şi achiziţionarea semnalului de la mărcile tensometrice
Fig. 9. Calibrare doza forţă 20 kN
7
Măsurarea forţelor şi calibrarea celulelor de forţă
Fig. 10. Calibrare doza forţă 50 kN
8