etapa2itfps curs hidraulica
TRANSCRIPT

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 1/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
PREFAŢĂ
Sistemele de acţionare hidraulice şi pneumatice constituie un domeniu vast şi
important al tehnicii moderne. În contextul extinderii vertiginoase a transmisiilor cu fluide
sub presiune în cele mai variate domenii industriale, autorii proiectului Sistem informatic
de instruire interactiva in domeniul sistemelor de actionare hidraulice si pneumatice
(IT-FPS) elaborat în cadrul Programului 4 – PARTENERIATE ÎN DOMENIILE
PRIORITARE, condus de CENTRUL NAŢIONAL DE MANAGEMENT DE PROGRAME
au abordat, cu instrumentele moderne ale teoriei sistemelor, modelarea, simularea,
identificarea experimentală şi concepţia acestor sisteme. Lucrarea se extinde pe cinci
volume, primul dintre acestea fiind rezervat creerii bazei de cunoştinţe teoretice
specifice domeniului sistemelor de acţionare hidraulice şi pneumatice.
Noţiunea de sinteză (concepţie de sistem) are un conţinut larg. Din punct de
vedere practic, ea se refer ă la ansamblul de activităţi creatoare finalizate printr-o
documentaţie tehnică minimală, suficientă în condiţii tehnice, economice şi sociale date.
Datorită complexităţii fenomenelor asociate curgerii lichidelor în domeniile specifice
transmisiilor hidraulice volumice, stabilirea unei soluţii structurale optime,
corespunzătoare unor condiţii date, se face iterativ, etapele de sinteză alternând cu cele
de analiză. Sinteza raţională necesită cunoaşterea profundă a construcţiei şi funcţionării
elementelor sistemelor cu fluide sub presiune. Totuşi, principalul obiectiv al sintezei -
satisfacerea unor performanţe impuse - nu poate fi atins cu eforturi rezonabile f ăr ă
modelarea matematică şi simularea numerică.
O metodologie ideală de sinteză trebuie să fie analitică şi să se reducă în fond larezolvarea directă sau iterativă a unor sisteme de ecuaţii şi inecuaţii ale căror
necunoscute sunt parametrii optimi ai sistemului (geometrici, hidraulici, mecanici,
electrici, etc.).
Stabilirea parametrilor constructivi ai unui sistem hidraulic sau pneumatic
volumice implică rezolvarea sistemului de ecuaţii diferenţiale care descrie comportarea
sa dinamică. Caracterul neliniar al ecuaţiilor uzuale impune utilizarea calculatoarelor
numerice. Parametrii constructivi sunt ajustaţi până când performanţele calculate(rezerva de stabilitate, viteza de r ăspuns, precizia etc.) sunt satisf ăcătoare. În general,
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
P – 1
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 2/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
comportarea reală difer ă de cea teoretică, fiind necesare iteraţii îndelungi şi costisitoare
care includ calculul, proiectarea constructivă, execuţia şi încercarea.
Este posibilă reducerea considerabilă a acestor eforturi cu ajutorul analizei
dinamice liniare. Deşi informaţiile obţinute pe această cale sunt aproximative, ele
constituie o premiză fundamentală a utilizării raţionale şi eficiente a calculatoarelor. În
acest proiect, cele două metode de cercetare sunt utilizate în mod complementar, atât
în scopul stabilirii unor criterii de sinteză generale, cât şi pentru construirea unei imagini
concrete a influenţei parametrilor constructivi asupra comportării dinamice reale a
sistemelor hidraulice şi pneumatice.
Instrumentul fundamental de calcul numeric utilizat de autori a fost pachetul de
programe MATLAB (elaborat de corporaţia MathWorks din S.U.A.) precum şi extensiile
sale: SIMULINK, CONTROL TOOLBOX, IDENTIFICATION TOOLBOX etc. De
asemenea, autorii au utilizat programul AMESim - cel mai eficient instrument actual de
concepţie prin modelare şi simulare a sistemelor automate cu fluide, dezvoltat de
corporaţia LMS IMAGINE din Belgia.
Identificarea sistemelor studiate în lucrare a fost realizată cu sisteme de achiziţie
a datelor experimentale produse de corporaţia NATIONAL INSTRUMENTS (S.U.A.)
asistate de pachetul de programe LabVIEW, produs de aceeaşi corporaţie.
Concepţia asistată de calculator a fost abordată cu pachetul de programe PRO
ENGINEER, dezvoltat de corporaţia PARAMETRIC TECHNOLOGY din S.U.A., lider
mondial în domeniu.
Analiza structurală a echipamentelor şi sistemelor de acţionare hidraulice şi
pneumatice a fost abordată cu pachetul de programe ANSYS, produs de corporaţia cu
acelaşi nume din S.U.A., lider mondial în domeniu.
Problemele de vibraţii şi zgomote ale sistemelor hidraulice şi pneumatice au fost
abordate cu pachetul de programe produs de societatea LMS IMAGINE din Belgia, lider mondial în domeniu.
Pentru concepţia structurală a sistemelor de acţionare hidraulice şi pneumatice a
fost promovat pachetul de programe AUTOMATION STUDIO, utilizat de majoritatea
proiectanţilor de sisteme industriale complexe. Colaborarea permanentă cu corporaţia
FAMIC TECHNOLOGIES din CANADA a permis transferul tehnologic şi elaborarea
componentei de e-Learning în cadrul Laboratorului de ACŢIONĂRI HIDRAULICE ŞI
PNEUMATICE al U.P.B., care a fost acreditat de RENAR în 2009.
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
P – 2

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 3/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
Afilierea Laboratorului de Acţionări Hidraulice şi Pneumatice realizat de autori la
Reţeaua Internaţională de Laboratoare de profil - FLUID POWER NET
INTERNATIONAL (www.fluid.power.net) a constituit o premiză importantă a verificării
opiniilor tehnice exprimate în lucrare.
Membrii consor ţiului (UPB-CCEPM, INCD OPTOELECTRONICA 2000-IHP, SC INAS
SA Craiova, SC CEROB SRL şi SC LMS ROM SRL care elaborează prezentul proiect
sper ă că eforturile lor vor fi utile specialiştilor implicaţi în concepţia, execuţia,
implementarea şi exploatarea sistemelor de acţionare cu fluide, precum şi studenţilor,
doctoranzilor şi cadrelor didactice de profil. Orice apreciere constructivă, transmisă prin
poşta electronică la adresa [email protected] este binevenită pentru depăşirea
propriilor limite. Pagina de web a proiectului poate fi consultată la adresa
www.fluidpower.ro/ITFPS.
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
P – 3
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 4/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
C -1
ACTIVITĂŢI REALIZATE ÎN ETAPA 2
Prefaţa
1. Crearea bazei de cunoştinţe specifice domeniului SAHP
2. Crearea bazei de cunoştinţe tehnice generale conexe domeniului SAHP
3. Crearea bazei de cunoştinţe teoretice specifice proiectării asistate de
calculator a SAHP
4. Crearea bazei de cunoştinţe teoretice specifice modelării matematice şi
simulării numerice a SAHP
5. Crearea bazei de cunoştinţe teoretice specifice analizei SAHP cu metoda
elementului finit – MEF
Concluzii
Bibliografie generală
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 5/627
TE
FONDAT 1996
UNIVERSITATEA “POLITEHNICA” DIN BUCUREŞTIFACULTATEA ENERGETICĂ
CENTRUL DE CERCETĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI- CERTIFICAT SR EN ISO 9001:2001 -
Splaiul Independenţei nr.313, Sector 6, Bucureşti, Cod 060042; Tel.: 021-316.96.43; Fax: 021-316.96.45TM: 0722.40.25.39; E-mail: secretariat @fluid-power.pub.ro; http://www.fluid-power.pub.ro/CCEPM.htmlCod Fiscal 4183199179; Cont nr. RO38TREZ706502509X005114, Trez. Sectorului 6
PROGRAMUL
PARTENERIATE ÎN DOMENII PRIORITARE
AUTORITATEA CONTRACTANT Ă:Centrul Naţional de Management de Programe
Contractul de finanţare nr. 12-104/01.10.2008
SISTEM INFORMATIC DE INSTRUIRE INTERACTIVĂ
ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Etapa 2
Crearea bazei de cunoştinţe specifice domeniului SAHPwww.fluidpower.ro/ITFPS
PREŞEDINTE, DIRECTOR DE PROIECT,
Prof.dr.ing. Adrian BADEA Prof.dr.ing. Nicolae VASILIU
BucureştiOctombrie 2009

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 6/627
UNIVERSITATEA “POLITEHNICA” DIN BUCUREŞTI
FACULTATEA ENERGETICĂ
CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
PROGRAMUL PARTENERIATE ÎN DOMENII PRIORITAREAUTORITATEA CONTRACTANTĂ: C.N.M.P.
Contractul de finanţare nr. 12-104/01.10.2008
SISTEM INFORMATIC DE INSTRUIRE INTERACTIVĂ ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Etapa 2Crearea bazei de cunoştinţe specifice domeniului SAHP
Bucureşti, 2009
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 7/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
1 – 1
ACTIVITATEA 1
CREAREA BAZEI DE CUNOŞTINŢE SPECIFICEDOMENIULUI SAHP
CUPRINS
PARTEA I. NOŢIUNI FUNDMENTALE
1. INTRODUCERE……………………………………………………….…. 231.1. Structura transmisiilor hidraulice şi pneumatice……………………… 231.2. Clasificarea transmisiilor hidraulice şi pneumatice…………………… 271.3. Avantajele şi dezavantajele transmisiilor hidraulice şi
pneumatice………………………………………………………….…. 271.3.1 Avantaje………………………………………………………… 281.3.2 Dezavantaje……………………………………………………... 31
2. LICHIDELE UTILIZATE ÎN TRANSMISIILE HIDRAULICE…….. 332.1. Proprietăţile necesare lichidelor utilizate în transmisiile
hidraulice……………………………………………………………… 33
2.2. Proprietăţi fundamentale ale lichidelor funcţionale…………………… 332.2.1. Viscozitatea…………………………………………………….. 332.2.2. Calităţile lubrifiante………………………………………….… 382.2.3. Densitatea şi compresibilitatea………………………………… 382.2.4. Inflamabilitatea………………………………………………… 412.2.5. Compatibilitatea cu materialele sistemului………………….…. 412.2.6. Alte proprietăţi…………………………………………….….... 42
Aplicaţ ia 2.1. Determinarea modulului de elasticitate al unui amestec lichid – gaz ……………………………………………….……………….... 43
2.3. Tipuri de lichide funcţionale…………………………………………... 472.3.1. Lichide pe bază vegetală…………………………………….…. 472.3.2. Lichide pe bază minerală…………………………………….… 472.3.3. Lichide neinflamabile pe bază de apă……………………….…. 48
2.3.4. Lichide sintetice………………………………………………... 482.3.5. Lichide funcţionale produse sau utilizate în ţara noastr ă……..... 49
3. ELEMENTE DE MECANICA FLUIDELOR SPECIFICETRANSMISIILOR HIDRAULICE……………………………………… 53
3.1. Particularităţi ale utilizării legilor şi ecuaţiilor generale din mecanicafluidelor………………………………………………………………... 53
3.2. Mişcarea în conducte……………………………………………….…. 543.2.1. Mişcarea laminar ă……………………………………………… 543.2.2. Mişcarea turbulentă………………………………………….…. 57
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 8/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
1 – 2
3.3. Curgerea lichidelor prin orificii şi fante…………………………….… 603.3.1. Curgerea turbulentă………………………………………….…. 613.3.2. Curgerea laminar ă……………………………………………… 633.3.3. Rezistenţe hidraulice variabile…………………………………. 653.3.4. Fenomenul de obliterare……………………………………..... 68
Aplicaţia 3.1. Mişcarea laminar ă între două piese cilindrice circulare…... 69 Aplicaţ ia 3.2. Calculul potenţ iometrului hidraulic în regim staţ ionar ….…. 713.4. Fenomenul de gripare hidraulică……………………………………… 753.4.1 Descrierea fenomenului………………………………………… 753.4.2. Repartiţia presiunii într-un difuzor plan……………………….. 76
Aplicaţ ia 3.3. Calculul rezultantei for ţ elor de presiune pe un sertar conic amplasat într-o buc şă cilindric ă………………………………….………... 773.5. Încălzirea lichidelor funcţionale…………………………………….… 823.6. Şocul hidraulic……………………………………………………….... 83
PARTEA a II-a. CONSTRUCŢIA, FUNCŢIONAREA, CALCULUL ŞI ÎNCERCAREA MAŞINILOR HIDRAULICE VOLUMICEALE TRANSMISIILOR HIDRAULICE
4. POMPE CU PISTOANE........................................................................... 874.1. Problematica maşinilor hidraulice volumice ....................................... 87
4.1.1. Principiul de funcţionare al maşinilor hidraulice volumice ..... 874.1.2. Rela
ţii fundamentale pentru ma
şinile hidraulice volumice ...... 90
4.1.3. Problemele de studiu şi clasificarea pompelor volumice ......... 914.1.4. Recomandări privind alegerea pompelor volumice
pentru transmisii hidraulice ...................................................... 924.2. Pompe cu cilindri imobili .................................................................... 93
4.2.1. Descriere, funcţionare şi clasificare ......................................... 934.2.2. Gradul de neuniformitate al debitului pompelor cu un piston... 974.2.3. Pompe policilindrice cu cilindri imobili ................................... 99
Aplicaţ ia 4.1. Calculul hidrofoarelor pompelor cu pistoane ..................... 103 Aplicaţ ia 4.2. Calculul turaţ iei maxime a unei pompe cu un piston........... 110
4.2.4. Supapele de sens ale pompelor cu pistoane.......................... 112 Aplicaţ ia 4.3. Dimensionarea unei supape cu ventil plan circular ........... 1134.3. Pompe policilindrice cu cilindri mobili .............................................. 120
4.3.1. Descriere funcţionare şi clasificare .......................................... 1204.3.2. Calculul coeficientului de neuniformitate al debituluişi momentului pompelor cu pistoane axiale rotative ................ 123
4.3.3. Calculul sistemului de distribuţie al pompelor cupistoane axiale rotative…………………………………………… 134
Aplicaţ ia 4.4. Calculul patinelor hidrostatice ale pompelor cu disc înclinat ............................................................................ 145
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 9/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
1 – 3
5. POMPE CU PALETE CULISANTE............................................................ 1495.1. Descriere, funcţionare şi clasificare .................................................... 1495.2. Momentul, debitul şi capacitatea pompelor cu simplu efect ............... 1535.3. Calculul capacităţii, debitului şi momentului pompelor
cu dublu efect ..................................................................................... 160
6. POMPE CU ANGRENAJE CILINDRICE ................................................... 1656.1. Descriere, funcţionare şi clasificare .................................................... 1656.2. Calculul capacităţii, debitului şi momentului pompelor
cu angrenaj cilindric exterior evolventic ............................................. 172 Aplicaţ ia 6.1. Calculul solicit ării lag ărelor pompelor cuangrenaj cilindric exterior evolventic ........................................................ 186
7. MOTOARE HIDRAULICE VOLUMICE ROTATIVE ................................. 1917.1. Criterii de analiză a calităţii motoarelor hidraulice
volumice rotative.................................................................................. 1917.2. Motoare volumice rapide .................................................................... 1957.3. Motoare volumice semirapide.............................................................
203
7.4. Motoare volumice lente ...................................................................... 2097.5. Recomandări privind alegerea motoarelor volumice .......................... 229

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 10/627
PARTEA I
NOŢIUNI FUNDAMENTALE
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 11/627
1. INTRODUCERE
1.1. STRUCTURA TRANSMISIILOR HIDRAULICE
ŞI PNEUMATICE
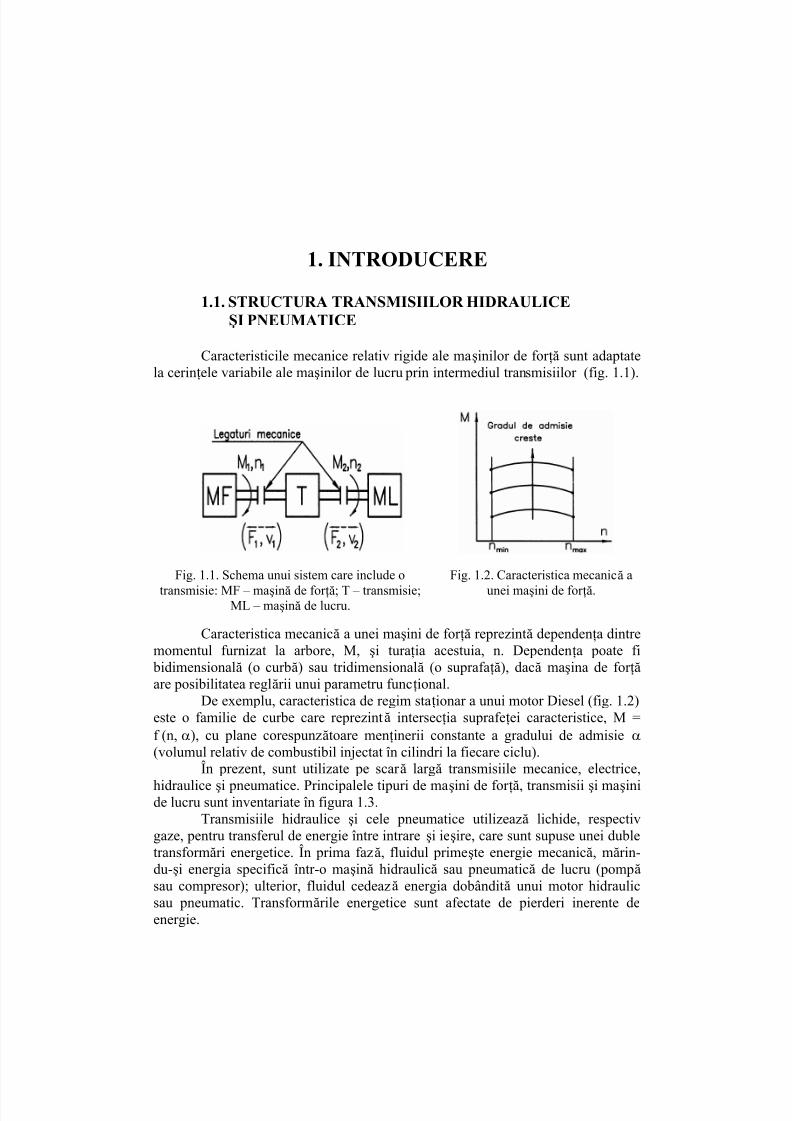
Caracteristicile mecanice relativ rigide ale maşinilor de for ţă sunt adaptatela cerinţele variabile ale maşinilor de lucru prin intermediul transmisiilor (fig. 1.1).
Fig. 1.1. Schema unui sistem care include o
transmisie: MF – maşină de for ţă; T – transmisie;ML – maşină de lucru.
Fig. 1.2. Caracteristica mecanică a
unei maşini de for ţă.
Caracteristica mecanică a unei maşini de for ţă reprezintă dependenţa dintremomentul furnizat la arbore, M, şi turaţia acestuia, n. Dependenţa poate fi
bidimensională (o curbă) sau tridimensională (o suprafaţă), dacă maşina de for ţă are posibilitatea reglării unui parametru funcţional.
De exemplu, caracteristica de regim staţionar a unui motor Diesel (fig. 1.2)este o familie de curbe care reprezintă intersecţia suprafeţei caracteristice, M =f (n, α), cu plane corespunzătoare menţinerii constante a gradului de admisie α (volumul relativ de combustibil injectat în cilindri la fiecare ciclu).
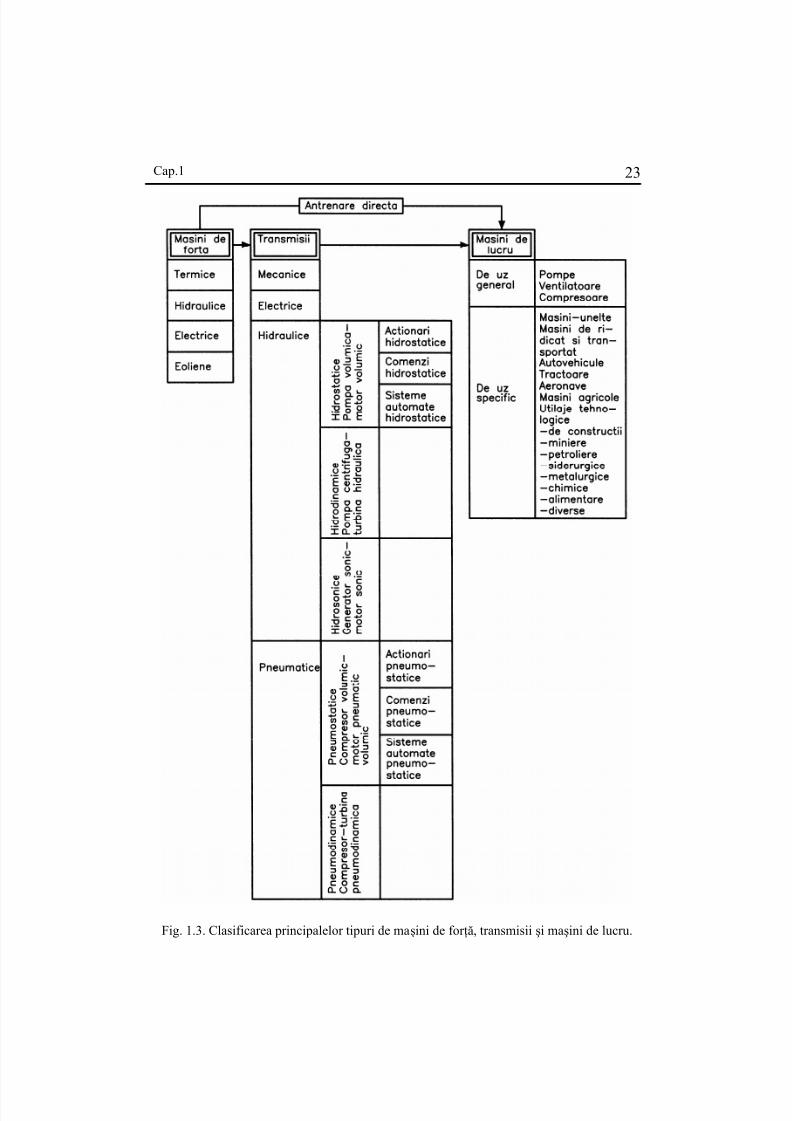
În prezent, sunt utilizate pe scar ă largă transmisiile mecanice, electrice,
hidraulice şi pneumatice. Principalele tipuri de maşini de for ţă, transmisii şi maşinide lucru sunt inventariate în figura 1.3.
Transmisiile hidraulice şi cele pneumatice utilizează lichide, respectivgaze, pentru transferul de energie între intrare şi ieşire, care sunt supuse unei dubletransformări energetice. În prima fază, fluidul primeşte energie mecanică, mărin-du-şi energia specifică într-o maşină hidraulică sau pneumatică de lucru (pompă sau compresor); ulterior, fluidul cedează energia dobândită unui motor hidraulicsau pneumatic. Transformările energetice sunt afectate de pierderi inerente deenergie.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 12/627
Cap.1 23
Fig. 1.3. Clasificarea principalelor tipuri de maşini de for ţă, transmisii şi maşini de lucru.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 13/627
Cap.124
Într-o transmisie hidraulică, o pompă transformă energia mecanică furnizată de maşina de for ţă în energie hidraulică; aceasta este retransformată înenergie mecanică de un motor hidraulic care antrenează maşina de lucru. Structuratransmisiilor pneumatice este similar ă: un compresor antrenat de maşina de for ţă alimentează cu gaz un motor pneumatic care acţionează maşina de lucru. Există şisisteme de acţionări pneumatice formate în esenţă din generatoare de gaze şimotoare pneumatice (de ex. cele utilizate pentru dirijarea unor rachete). Parametriienergiei mecanice furnizate de aceste transmisii pot fi reglaţi continuu şi în limitelargi prin mijloace relativ simple. Flexibilitatea constituie un avantaj esenţial altransmisiilor hidraulice şi pneumatice faţă de cele mecanice, asigurându-le o largă utilizare, deşi principiul lor de funcţionare implică randamente relativ mici. În
funcţie de tipul maşinilor hidraulice utilizate, transmisiile hidraulice pot fi:hidrostatice (volumice), hidrodinamice sau hidrosonice.Dacă maşinile hidraulice (pompa şi motorul), care constituie elementele
fundamentale ale transmisiei hidraulice, sunt de tip volumic, transmisia se numeşteuzual hidrostatică sau volumică, deoarece energia mecanică furnizată de maşina defor ţă este utilizată de o pompă volumică practic numai pentru creşterea energiei de
presiune a lichidului vehiculat; aceasta este retransformată în energie mecanică deun motor hidraulic volumic (fig. 1.4).
Fig. 1.4. Schema unei transmisii hidrostatice:THS - transmisie hidrostatică; BCRP - bloc de comandă, reglare şi protecţie; PV - pompă volumică; MV - motor volumic; SLP - supapă de
limitare a presiunii; ML - maşina de lucru; EM – electromotor.
Termenul "hidrostatic" este impropriu (transmiterea energiei se face princirculaţia unui lichid care în numeroase elemente de reglare şi protecţie atingeviteze de ordinul sutelor de metri pe secundă), dar este larg folosit în practică.
În cazul utilizării unei pompe centrifuge şi a unei turbine hidraulice,transmisia se numeşte hidrodinamică, deoarece în cursul transformărilor energetice

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 14/627
Cap.1 25
variaţia energiei cinetice a lichidului este comparabilă cu cea a energiei de presiune(fig. 1.5).
Energia mai poate fi transmisă prin intermediul unui lichid şi cu ajutorulundelor de presiune generate de o pompă "sonică" şi recepţionate de un motor "sonic", transmisia numindu-se în acest caz "sonică" (fig. 1.6).
Fig. 1.5. Schema unei transmisii hidrodinamice:PCF - pompă centrifugă; TCP - turbină centripetă; BR - bloc de reglare;
THD - transmisie hidrodinamică.
Fig. 1.6. Schema unei transmisii sonice:1 - pompă sonică; 2 - motor sonic.
Inventatorul transmisiilor sonice este inginerul român GoguConstantinescu, care le-a aplicat îndeosebi în domeniul militar (de exemplu, pentrusincronizarea tirului balistic cu elicele avioanelor monomotoare). Cea maiimportantă aplicaţie practică a invenţiilor brevetate de G. Constantinescu este
pompa de injecţie pentru motorul Diesel.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 15/627
Cap.126
Transmisiile "pneumostatice" utilizează maşini pneumatice volumice, iar cele "pneumodinamice" - turbomaşini pneumatice, existând şi soluţii mixte(compresor volumic - turbină pneumatică).
1.2. CLASIFICAREA TRANSMISIILOR
HIDRAULICE ŞI PNEUMATICE
In cadrul transmisiilor hidrostatice şi pneumostatice se disting, din punctulde vedere al teoriei sistemelor automate, sisteme de acţionare, sisteme de comandă şi sisteme de reglare automată.
Sistemele de acţionare şi comandă hidrostatice şi pneumostatice sunt
sisteme cu circuit deschis, în sensul că mărimea de intrare, care impune regimul defuncţionare al sistemului, nu este influenţată de efectul acţiunii sale; datorită perturbaţiilor inerente, mărimea de ieşire nu poate fi corelată în mod univoc cumărimea de intrare.
Sistemele de acţionare hidrostatice şi pneumostatice transmit în general puteri mari, randamentul lor fiind un parametru important, utilizat obligatoriu încomparaţia cu alte tipuri de transmisii.
Sistemele de comandă hidrostatice şi pneumostatice transmit în general puteri mici, iar motoarele acestora acţionează asupra elementelor de comandă alealtor transmisii care vehiculează puteri mult mai mari.
Sistemele de reglare automată hidrostatice şi pneumostatice sunt sistemecu circuit închis, deci conţin o legătur ă de reacţie care permite compararea,
continuă sau intermitentă, a mărimii de intrare cu cea de ieşire; diferenţa dintreacestea (eroarea) constituie semnalul de comandă al amplificatorului sistemului,care alimentează elementul de execuţie în scopul anulării erorii; astfel, preciziaacestor sisteme este ridicată (în regim staţionar, relaţia dintre mărimea de intrare şicea de ieşire este practic biunivocă).
Parametrii reglaţi uzual sunt: poziţia, viteza unghiular ă (liniar ă), momentularborelui (for ţa tijei) motorului hidrostatic sau pneumostatic, puterea consumată detransmisie de la maşina de for ţă etc.
În continuare, transmisiile hidrostatice vor fi numite "hidraulice", iar transmisiile pneumostatice "pneumatice".
Pentru fiecare dintre sistemele analizate se prezintă câte o schemă tipică (fig. 1.7, 1.8 şi 1.9).
1.3. AVANTAJELE ŞI DEZAVANTAJELE TRANSMISIILOR
HIDRAULICE ŞI PNEUMATICE
Transmisiile hidraulice şi pneumatice au câteva caracteristici specifice,care le diferenţiază de alte tipuri de transmisii, explicând atât larga lor r ăspândirecât şi restricţiile de utilizare.
Locul transmisiilor hidraulice şi pneumatice în cadrul transmisiilor poate fistabilit pe baza mai multor criterii de natur ă practică.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 16/627
Cap.1 27
1.3.1. Avantaje
1. Posibilitatea amplasării motoarelor hidraulice volumice într-o poziţieoarecare faţă de maşinile de for ţă constituie un avantaj major al transmisiilor hidraulice faţă de cele mecanice, simplificând considerabil proiectarea maşinilor delucru.
2. Elementele de comandă ale transmisiilor hidraulice solicită operatorilor for ţe sau momente reduse şi pot fi amplasate în locuri convenabile, conferindmaşinilor de lucru calităţi ergonomice deosebite.
3. Cuplul realizat de motoarele electrice rotative este propor ţional cuintensitatea curentului absorbit, fiind limitat de încălzirea izolaţiei şi de saturaţia
circuitului magnetic. Cuplul dezvoltat de motoarele hidraulice volumice rotativeeste propor ţional cu diferenţa de presiune dintre racordurile energetice, fiind limitatnumai de eforturile admisibile ale materialelor utilizate.
4. Căldura generată de pierderile interne, care limitează performanţeleoricărei maşini, este preluată de lichidul vehiculat şi cedată mediului ambiant
printr-un schimbător de căldur ă amplasat convenabil; ca urmare, maşinile volumiceau frecvent puteri specifice mai mari de 1 kW/kg.
5. Lichidele utilizate în transmisiile hidraulice tipice îndeplinesc şi rolul delubrifiant, asigurându-le o funcţionare îndelungată.
6. Motoarele volumice rotative pot funcţiona într-o gamă largă de turaţii;valoarea turaţiei minime stabile depinde de tipul mecanismului utilizat pentrurealizarea camerelor de volum variabil, de tipul sistemului de distribuţie şi de
precizia execuţiei. Datorită scurgerilor relativ mici, randamentul volumic al acestor motoare are valori ridicate, iar caracteristica mecanică ( M-n) are o pantă redusă;aceasta confer ă motoarelor volumice rotative o mare rigiditate statică (scădereaturaţiei la creşterea momentului rezistent este mică). În sistemele de reglareautomată a poziţiei, această calitate asigur ă o precizie deosebită şi o sensibilitateredusă la perturbaţii.
7. Motoarele electrice rotative realizează o legătur ă propor ţională întretensiune şi turaţie, iar raportul dintre momentul activ şi momentul de iner ţie al
păr ţilor mobile are o valoare redusă.Motoarele volumice rotative ofer ă o legătur ă liniar ă între debit şi viteza
unghiular ă, iar raportul dintre momentul activ şi cel de iner ţie al păr ţilor mobile areo valoare foarte mare, datorită căreia aceste motoare pot realiza porniri, opriri şi
inversări de sens rapide.În ansamblu, transmisiile hidraulice asigur ă o amplificare mare în putere
(putere utilă/putere de comandă) şi un r ăspuns bun în frecvenţă, suficient pentruaplicaţiile practice uzuale.
8. Motoarele hidraulice volumice liniare permit obţinerea unor for ţeconsiderabile cu un gabarit foarte redus, datorită presiunilor mari de lucru.
Raportul dintre for ţele active şi for ţele de iner ţie ale păr ţilor mobile arevalori ridicate, asigurând o viteză de r ăspuns mare, specifică sistemelor de
poziţionare rapidă.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 17/627
Cap.128
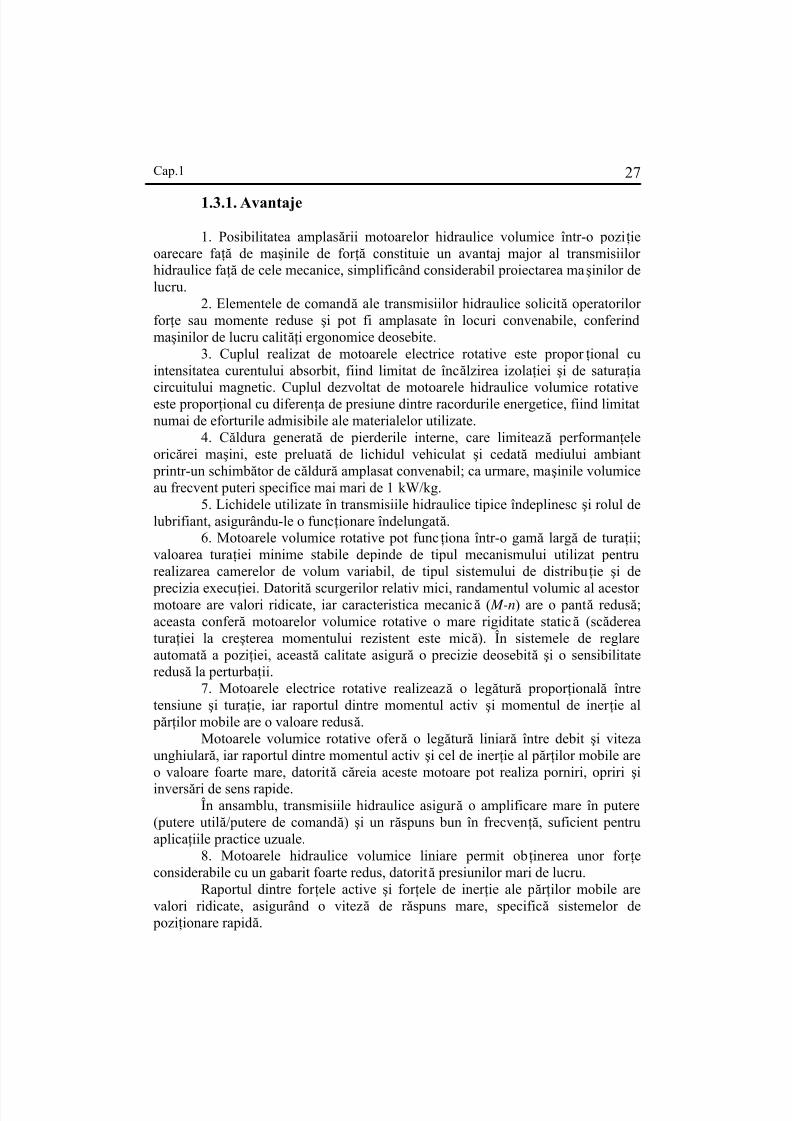
Fig. 1.7. Schema unui sistem de acţionare hidraulică:SAH-sistem de acţionare hidraulică; CHDE-cilindru hidraulic cu dublu efect şitijă bilaterală; ML-maşina de lucru; DEH-distribuitor electrohidraulic; EMA,EMB-electromagneţi; MF-maşina de for ţă; SLP-supapă de limitare a presiunii;
FA-filtru de aspiraţie; FRT-filtru de retur; R-rezervor; PV-pompa volumică.
Fig. 1.8. Schema unui sistem de comandă hidraulică cuplat cu un sistemde acţionare hidraulică: MF – maşină de for ţă; SCH – sistem de comandă hidraulic;
CHSERE – cilindru hidraulic cu simplu efect şi revenire elastică; SRP – supapă de reglare(limitare) a presiunii; SAH – sistem de acţionare hidraulic; ML – maşina de lucru.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 18/627
Cap.1 29
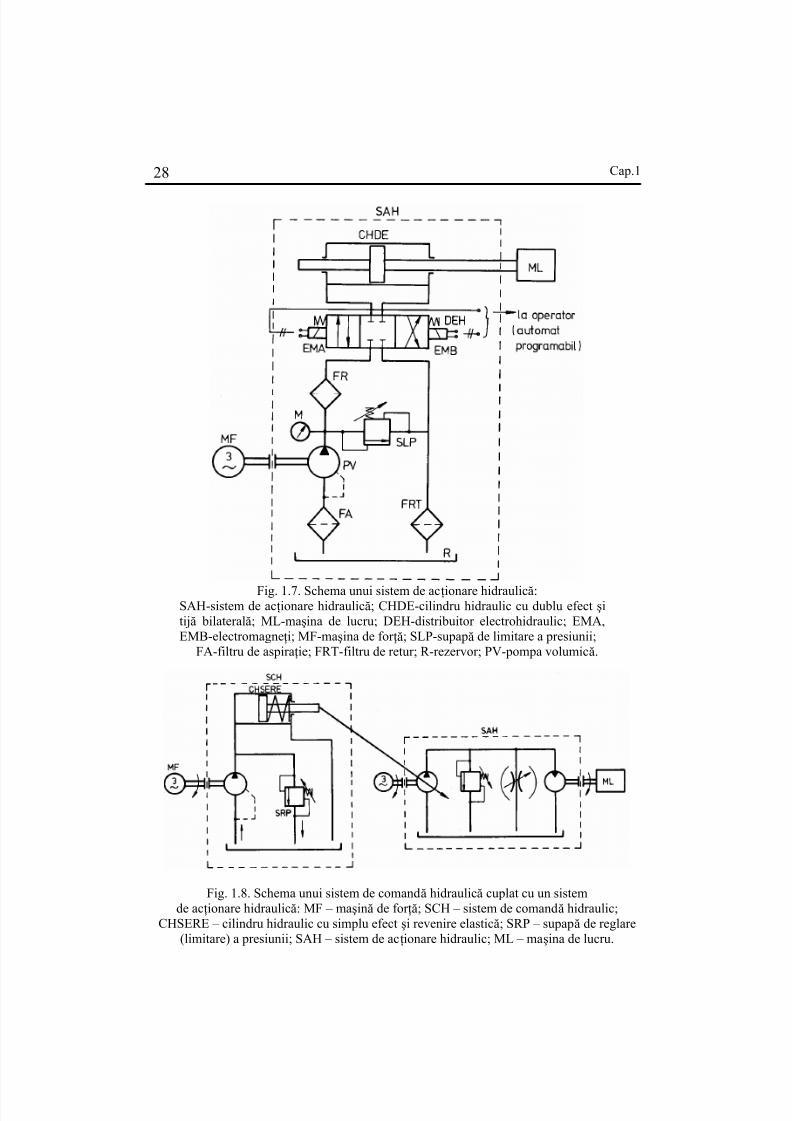
Fig. 1.9. Schema unui sistem de reglare hidraulică:a) Schema bloc: EP-element de prescriere; EC-element de comparaţie; AE-amplificator de eroare; EE-element de execuţie; IT-instalaţie tehnologică; T-traductor; i-mărimea de intrare; e-mărimea de ieşire; ε-eroarea; m-masaechivalentă a sarcinii redusă la tija pistonului; b) Schema hidraulică echivalentă:CHDE-cilindru hidraulic cu dublu efect; AEH-amplificator electrohidraulic; DE-
bloc electronic; AHP-acumulator hidropneumatic; FR-filtru de refulare; SLP-supapa de limitare a presiunii; PV-pompa volumică.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 19/627
Cap.130
Scurgerile interne ale acestor motoare sunt foarte mici, astfel că randamentul lor volumic este apropiat de unitate, viteza minimă stabilă este foarteredusă, iar rigiditatea statică este foarte mare.
9. Reglarea parametrilor funcţionali ai motoarelor volumice se face relativsimplu, utilizând fie pompe reglabile, fie rezistenţe hidraulice reglabile.
Transmisiile hidraulice pot fi conduse cu automate programabile saucalculatoare industriale prin intermediul amplificatoarelor electrohidraulice (con-vertoare electrohidraulice cu factor mare de amplificare în putere). Acest avantajeste valorificat în prezent pe scar ă largă în domeniul maşinilor-unelte, roboţilor industriali, în tehnica aerospaţială, în energetică etc.
Elaborarea semnalelor de comandă se face optim pe cale electronică, iar
executarea comenzilor - pe cale hidraulică (nervi electronici + muşchi hidraulici).Stocarea energiei hidraulice se realizează simplu, în acumulatoarehidropneumatice.
Motoarele volumice rotative le concurează pe cele electrice, îndeosebi încazul maşinilor de lucru mobile, unde gabaritul şi greutatea componentelor trebuiesă fie minime.
Motoarele volumice liniare sunt utilizate în toate aplicaţiile care necesită for ţe importante.
10. Motoarele pneumatice volumice sunt compacte, acest avantaj fiindvalorificat îndeosebi în cazul sculelor portabile.
Posibilitatea utilizării acestor motoare în uzine este favorizată de existenţareţelelor de distribuţie a aerului comprimat.
11. Viteza şi for ţa sau cuplul motoarelor pneumatice volumice pot fi regla-te simplu şi în limite largi.Funcţionarea în ciclu automat este favorizată de existenţa elementelor
logice pneumatice, precum şi a amplificatoarelor electropneumatice discrete saucontinue.
Fiind nepoluante, motoarele pneumatice volumice sunt larg utilizate îninstalaţiile nepoluante sau antiexplozive, specifice industriei alimentare, chimice,miniere, petroliere, energetice etc.
12. Utilizarea pe scar ă largă a transmisiilor hidraulice şi pneumatice creea-ză posibilitatea tipizării, normalizării şi unificării elementelor acestora. Fabricaţiade serie mare în întreprinderi specializate poate reduce substanţial costul, asigurândîn acelaşi timp o calitate ridicată.
1.3.2. Dezavantaje
1. Transmisiile hidraulice sunt scumpe deoarece includ, în afara pompelor şi motoarelor volumice, elemente de comandă, reglare şi protecţie, elemente destocare, filtrare şi transport al lichidului. Majoritatea acestor componente necesită o
precizie de execuţie ridicată (specifică mecanicii fine), materiale şi tehnologiineconvenţionale, necesare asigur ării preciziei, randamentului şi siguranţeifuncţionale impuse.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 20/627
Cap.1 31
2. Pierderile de putere care apar în cursul transformărilor energetice dinmaşinile hidraulice volumice, precum şi în elementele de legătur ă, reglare şi
protecţie, afectează semnificativ randamentul global al maşinilor de lucru echipatecu transmisii hidraulice.
3. Transmisiile hidraulice sunt poluante, deoarece au scurgeri, existândîntotdeauna pericolul pierderii complete a lichidului datorită neetanşeităţii unuisingur element.
4. Ceaţa de lichid care se formează în cazul curgerii sub presiune mare prinfisuri este foarte inflamabilă, datorită componentelor volatile ale hidrocarburilor care constituie baza majorităţii lichidelor utilizate în transmisiile hidraulice.
5. Pericolul autoaprinderii lichidului sau pierderii calităţii sale lubrifiante
limitează superior temperatura de funcţionare a transmisiilor hidraulice. Acestdezavantaj poate fi evitat prin utilizarea lichidelor de înaltă temperatur ă sau a celor neinflamabile concepute relativ recent.
6. Contaminarea lichidului de lucru constituie principala cauză a uzurii premature a transmisiilor hidraulice. În cazul în care contaminantul este abraziv, performanţele transmisiei se reduc continuu datorită creşterii jocurilor. Înfundareaorificiilor de comandă ale elementelor de reglare furnizează semnale de comandă false care pot provoca accidente grave.
7. Pătrunderea aerului în lichidul de lucru generează oscilaţii care limitează sever performanţele dinamice ale transmisiilor hidraulice.
8. Întreţinerea, depanarea şi repararea transmisiilor hidraulice necesită personal de calificare specifică, superioar ă celei corespunzătoare altor tipuri de
transmisii.9. Complexitatea metodelor de analiză şi sinteză a transmisiilor hidraulicenu permite elaborarea unei metodologii de proiectare accesibilă f ăr ă o pregătiresuperioar ă.
10. Principalul dezavantaj al transmisiilor pneumatice este randamentulfoarte scăzut.
11. Nivelul redus al presiunii de lucru limitează for ţele, momentele şi puterile transmise.
12. Compresibilitatea gazelor nu permite reglarea precisă, cu mijloacesimple, a parametrilor funcţionali ai transmisiilor pneumatice, îndeosebi în cazulsarcinilor variabile.
13. Aerul nu poate fi complet purificat, contaminanţii provocând uzura şi
coroziunea continuă a elementelor transmisiilor pneumatice.14. Apa, prezentă totdeauna în aer, pune în mare pericol funcţionarea
sistemelor pneumatice prin îngheţare.Transmisiile pneumatice le concurează pe cele electrice la puteri mici,
îndeosebi în cazurile când sunt necesare deplasări liniare realizabile simplu cuajutorul cilindrilor pneumatici.
Alegerea tipului optim de transmisie, pentru condiţii concrete date,reprezintă, în principiu, o problemă de natur ă tehnico - economică, a căreisoluţionare corectă necesită cunoaşterea detaliată a caracteristicilor tuturor soluţiilor posibile.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 21/627
2. LICHIDELE UTILIZATE ÎNTRANSMISIILE HIDRAULICE
2.1. PROPRIETĂŢILE NECESARE LICHIDELOR UTILIZATE ÎN TRANSMISIILE HIDRAULICE
Lichidele vehiculate în circuitele energetice şi de comandă ale transmisiilor
hidraulice, numite curent “hidraulice”, “de lucru” sau “funcţionale” sufer ă ciclicvariaţii importante de presiune, viteză şi temperatur ă, vin în contact cu diferitemateriale şi pot fi expuse câmpului electromagnetic, radiaţiilor nucleare, etc.Condiţiile dificile de utilizare impun lichidelor funcţionale următoarele cerinţe:calităţi lubrifiante; viscozitate acceptabilă în orice condiţii de funcţionare alesistemului; proprietăţi fizice şi chimice stabile; compatibilitate cu materialelesistemului; compresibilitate, volatilitate, tendinţă de spumare, densitate, coeficientde dilatare termică, preţ şi toxicitate reduse; calităţi antioxidante şi dielectrice;stocare şi manipulare simple.
În prezent există o gamă largă de lichide funcţionale, apar ţinând din punctde vedere chimic mai multor clase, dar nici unul nu prezintă toate calităţilenecesare unei transmisii date. Ca urmare, alegerea unui lichid constituie în generalun compromis care asigur ă satisfacerea cerinţelor esenţiale, dar impune restricţiistructurii sistemului şi condiţiilor de utilizare. Datele hotărâtoare în alegerea unuilichid sunt: gama temperaturilor de utilizare şi stocare, normale şi accidentale;gama de presiuni şi depresiuni la care este supus lichidul în regim normal şiaccidental; cerinţele anumitor materiale sau elemente componente ale sistemului;cerinţele de siguranţă; condiţii economice.
Dacă mai multe lichide satisfac comparabil aceste cerinţe, opţiunea finală este determinată de îndeplinirea celorlalte criterii.
2.2. PROPRIETĂŢILE FUNDAMENTALE ALELICHIDELOR FUNCŢIONALE
2.2.1. Viscozitatea
Viscozitatea este proprietatea fluidelor de a se opune deformărilor ce nuconstituie variaţii ale volumului lor, prin dezvoltarea unor eforturi tangenţiale.For ţa necesar ă deplasării unui strat de arie A, cu viteza du faţă de un strat adiacentsituat la distanţa dn este propor ţională cu aria A, cu gradientul vitezei după normalala direcţia de curgere, du/dn (viteza de deformare) şi cu viscozitatea dinamică afluidului, η:

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 22/627
Cap.234
dnduAF ⋅η= (2.1)
Unitatea SI a viscozităţii dinamice se numeşte poiseuille: 1Pl=1kg m-1s-1,iar unitatea CGS – poise: 1Po=1 g cm-1s-1.
Cercetări recente urmăresc definirea “viscozităţii de dilataţie” care pare agenera pierderi de energie când se impun fluidelor variaţii de volum f ăr ă deformare.
Dacă viscozitatea nu depinde de viteza de deformare, fluidul se numeşte“newtonian”. Apa, uleiurile minerale pure şi alte lichide larg utilizate în tehnică satisfac această condiţie. Numeroase lichide funcţionale, îndeosebi cele sintetice,conţin aditivi cu greutăţi moleculare mari, datorită cărora au un caracter nenewtonian; în general viscozitatea lor scade cu viteza de deformare. Această caracteristică poate fi temporar ă sau remanentă şi corespunde fie fragmentării, fierearanjării moleculelor mari datorită turbulenţei extreme, caracteristică elementelor de reglare.
În practică se utilizează curent viscozitatea cinematică definită ca raportîntre viscozitatea dinamică şi densitatea lichidului:
ρη
=ν (2.2)
Unitatea SI a acestei mărimi este 1 m2s-1 iar unitatea CGS se numeştestokes: 1 St = 1cm2s-1. Tabelele practice indică valoarea viscozităţii cinematice încentistokes: 1 cSt = 10-2 St = 1 mm2s-1. De asemenea, se utilizează încă unităţi demăsur ă tehnice, necorelate cu definiţia fizică a viscozităţii, ci cu aparatele sau
procedeele de măsur ă utilizate: grade Engler (în Europa), secunde Redwood (înMarea Britanie), secunde Saybold (în SUA) şi unităţi Barbey (în Franţa). Conversiaacestora în centistokes este indicată în figura 2.1. În calcule aproximative se poateutiliza relaţia de transformare:
E104,7sm o612 ν⋅≅⋅ν −− (2.3)
care conţine în membrul drept viscozitatea exprimată în grade Engler oE.Viscozitatea este o caracteristică esenţială a lichidelor funcţionale deoarece
asigur ă portanţă lagărelor, limitează pierderile de lichid prin elementele de etanşare
şi generează for ţe care amortizează oscilaţiile parametrilor funcţionali; în acelaşitimp, ea provoacă pierderi de energie în spaţiile dintre piesele în mişcare relativă şiîn conducte, neliniarizează caracteristicile orificiilor de comandă ş.a.
Viscozitatea lichidelor scade rapid cu temperatura (fig. 2.2) şi creşte într-omăsur ă mult mai mică cu presiunea (fig. 2.3). La temperaturi înalte scurgerileinterne ale maşinilor hidraulice volumice şi elementelor de distribuţie alterează
prohibitiv randamentul transmisiilor, iar scăderea capacităţii portante a peliculelor lubrifiante poate provoca griparea diferitelor mecanisme ale acestora. Viscozitateaexcesivă care apare la temperaturi joase generează pierderi mari de sarcină carecreează dificultăţi de aspiraţie pompelor (cavitaţie), reduce viteza motoarelor şi
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 23/627
Cap.2 35
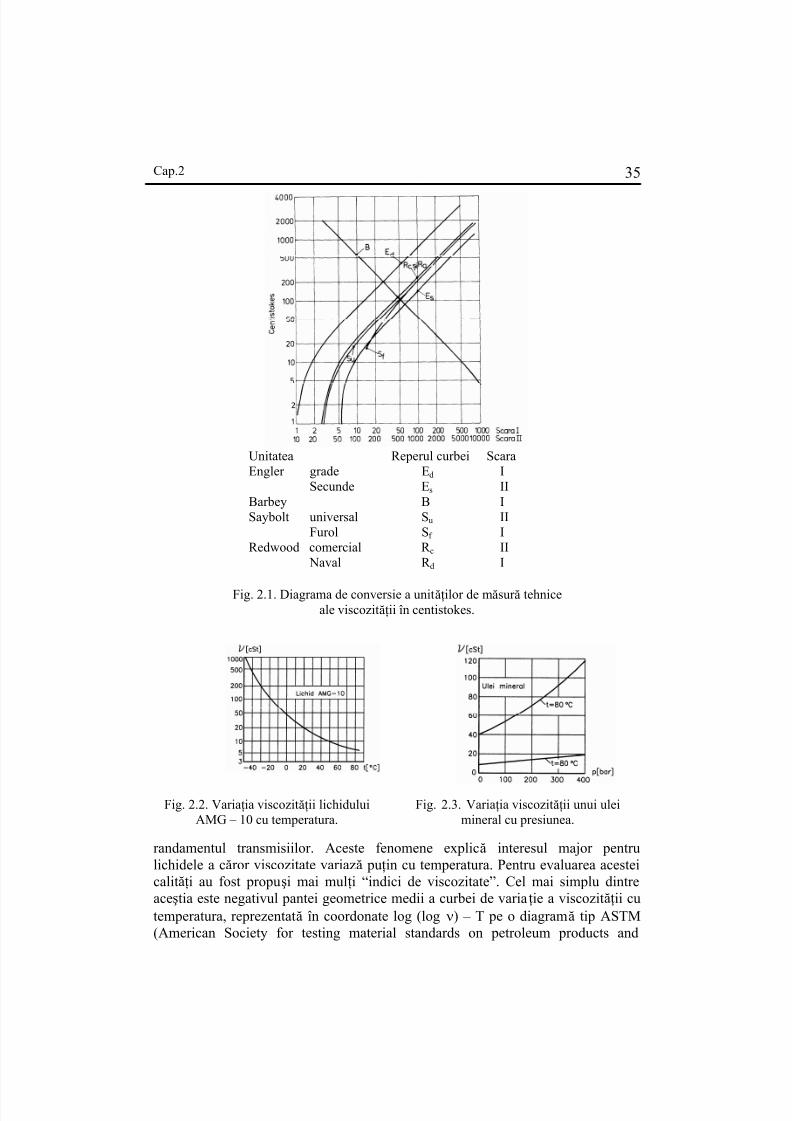
Unitatea Reperul curbei ScaraEngler grade Ed I
Secunde Es IIBarbey B ISaybolt universal Su II
Furol Sf IRedwood comercial R c II
Naval R d I
Fig. 2.1. Diagrama de conversie a unităţilor de măsur ă tehniceale viscozităţii în centistokes.
Fig. 2.2. Variaţia viscozităţii lichiduluiAMG – 10 cu temperatura.
Fig. 2.3. Variaţia viscozităţii unui uleimineral cu presiunea.
randamentul transmisiilor. Aceste fenomene explică interesul major pentrulichidele a căror viscozitate variază puţin cu temperatura. Pentru evaluarea acesteicalităţi au fost propuşi mai mulţi “indici de viscozitate”. Cel mai simplu dintreaceştia este negativul pantei geometrice medii a curbei de variaţie a viscozităţii cutemperatura, reprezentată în coordonate log (log ν) – T pe o diagramă tip ASTM(American Society for testing material standards on petroleum products and
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 24/627
Cap.236
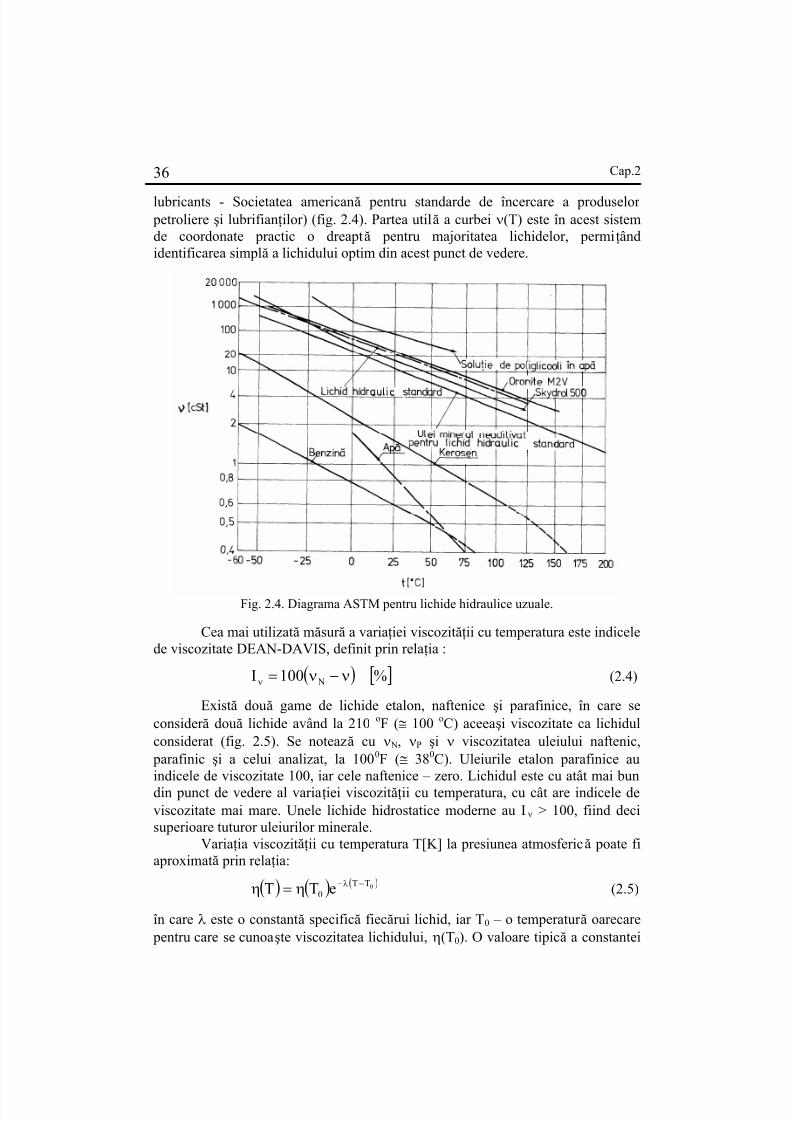
lubricants - Societatea americană pentru standarde de încercare a produselor petroliere şi lubrifianţilor) (fig. 2.4). Partea utilă a curbei ν(T) este în acest sistemde coordonate practic o dreaptă pentru majoritatea lichidelor, permiţândidentificarea simplă a lichidului optim din acest punct de vedere.
Fig. 2.4. Diagrama ASTM pentru lichide hidraulice uzuale.
Cea mai utilizată măsur ă a variaţiei viscozităţii cu temperatura este indicelede viscozitate DEAN-DAVIS, definit prin relaţia :
( ) [ ]%100I N ν−ν=ν (2.4)
Există două game de lichide etalon, naftenice şi parafinice, în care seconsider ă două lichide având la 210 oF (≅ 100 oC) aceeaşi viscozitate ca lichidulconsiderat (fig. 2.5). Se notează cu ν N, νP şi ν viscozitatea uleiului naftenic,
parafinic şi a celui analizat, la 1000F (≅ 380C). Uleiurile etalon parafinice auindicele de viscozitate 100, iar cele naftenice – zero. Lichidul este cu atât mai bundin punct de vedere al variaţiei viscozităţii cu temperatura, cu cât are indicele deviscozitate mai mare. Unele lichide hidrostatice moderne au Iν > 100, fiind decisuperioare tuturor uleiurilor minerale.
Variaţia viscozităţii cu temperatura T[K] la presiunea atmosferică poate fiaproximată prin relaţia:
( ) ( ) ( )0TT0 eTT −λ−η=η (2.5)
în care λ este o constantă specifică fiecărui lichid, iar T0 – o temperatur ă oarecare pentru care se cunoaşte viscozitatea lichidului, η(T0). O valoare tipică a constantei

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 25/627
Cap.2 37
λ este 0,015 K -1. În intervalul de temperatur ă 30…150 oC, pentru uleiurile mineralese poate utiliza relaţia:
( )n
50 t
50t ⎟
⎠
⎞⎜⎝
⎛ ν=ν (2.6)
în care n depinde de viscozitatea ν50 a uleiului la temperatura t = 50 oC, după curbadin figura 2.6.
Fig. 2.5. Diagramă pentru definirea
indicelui de viscozitate.
Fig. 2.6. Variaţia indicelui n în funcţie de
viscozitatea uleiurilor minerale la 500 C.
Comportarea unui lichid la temperaturi joase este caracterizată printemperatura la care în cursul r ăcirii apar cristale (punctul de congelare) şi printemperatura la care lichidul începe să curgă în cursul unei încălziri consecutivecongelării (punctul de curgere). Lichidele sunt inutilizabile la temperaturi mult maimari decât aceste temperaturi caracteristice. Practic, se admite că un lichid nu poatefi folosit la viscozităţi mai mari de 2000 cSt.
Influenţa presiunii asupra viscozităţii poate fi considerată liniar ă la presiuni p mai mici de 500 bar:
( ) ( )( )ν⋅+ν=ν K p1 p p at (2.7)
Valoarea coeficientului K ν depinde de viscozitatea lichidului; dacă ν50 <15 cSt, K ν ≅ 0,002, iar pentru ν50 > 15 cSt, K ν ≅ 0,003.
La presiuni mai mari, creşterea viscozităţii cu presiunea este exponenţială.De exemplu, între 1 şi 2000 bar viscozitatea uleiurilor minerale creşte de 50 …100ori, iar a celor sintetice de 15 … 25 ori.
La presiuni cuprinse între 20 000 şi 30 000 bar uleiurile minerale sesolidifică.
Variaţia viscozităţii cu temperatura şi presiunea conduce la modificareacontinuă a parametrilor funcţionali ai transmisiilor hidraulice.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 26/627
Cap.238
2.2.2. Calităţile lubrifiante
Viscozitatea determină în mare măsur ă calităţile lubrifiante ale lichidelor laviteze relative mari ale suprafeţelor adiacente, dar nu constituie elementul hotărâtor la viteze relativ mici şi sarcini mari, cînd există pericolul gripării lagărelor. Pentru
prevenirea sau reducerea uzurii acestora se utilizează cupluri de materialeantifricţiune şi se introduc în lichidele lubrifiante "aditivi de ungere". Acizii graşi,esterii lor şi alţi compuşi organici cu catenă lungă, care conţin clor, plumb, sulf saustaniu ader ă la suprafeţele metalice, împiedicând contactul acestora. Un aditivuzual de acest gen este tricrezilfosfatul.
La temperaturile locale ridicate generate de microgripaje, unii compuşi
halogenaţi se combină cu metalele formând halogenuri cu punct de topire scăzutcare netezesc suprafeţele în mişcare relativă. Din păcate aceşti aditivi nu au aceeaşieficienţă pentru toate lichidele iar stabilitatea lor chimică este redusă.
Calităţile lubrifiante ale lichidelor se estimează cu dispozitive caresimulează cazuri concrete de lagăre, sau cu pompe volumice ale căror performanţeiniţiale sunt garantate de producător (de exemplu pompele cu palete culisante cudublă acţiune VICKERS). Pierderea în greutate a pieselor solicitate la uzur ă constituie un indiciu asupra calităţilor lubrifiante ale lichidului testat. În ţaranoastr ă se utilizează dispozitive formate dintr-o bilă cu diametrul de 12,25 mm careeste apăsată cu for ţă constantă şi rotită faţă de trei bile identice plasate într-un
pahar cu lubrifiant. Cuplul necesar rotirii bilei superioare este propor ţional cucoeficientul de frecare, iar reducerea diametrelor bilelor inferioare este invers
propor ţională cu proprietăţile lubrifiante ale lichidului încercat.
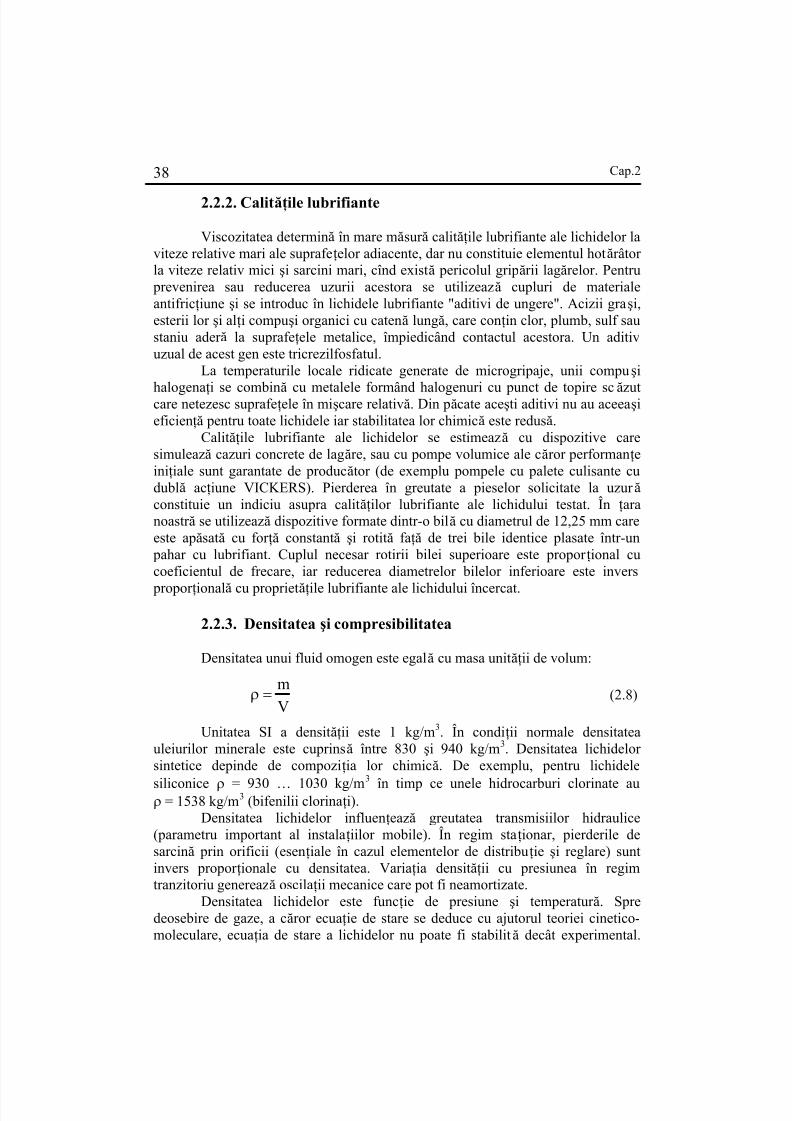
2.2.3. Densitatea şi compresibilitatea
Densitatea unui fluid omogen este egală cu masa unităţii de volum:
V
m=ρ (2.8)
Unitatea SI a densităţii este 1 kg/m3. În condiţii normale densitateauleiurilor minerale este cuprinsă între 830 şi 940 kg/m3. Densitatea lichidelor sintetice depinde de compoziţia lor chimică. De exemplu, pentru lichidele
siliconice ρ = 930 … 1030 kg/m3
în timp ce unele hidrocarburi clorinate auρ = 1538 kg/m3 (bifenilii clorinaţi).Densitatea lichidelor influenţează greutatea transmisiilor hidraulice
(parametru important al instalaţiilor mobile). În regim staţionar, pierderile desarcină prin orificii (esenţiale în cazul elementelor de distribuţie şi reglare) suntinvers propor ţionale cu densitatea. Variaţia densităţii cu presiunea în regimtranzitoriu generează oscilaţii mecanice care pot fi neamortizate.
Densitatea lichidelor este funcţie de presiune şi temperatur ă. Spredeosebire de gaze, a căror ecuaţie de stare se deduce cu ajutorul teoriei cinetico-moleculare, ecuaţia de stare a lichidelor nu poate fi stabilită decât experimental.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 27/627
Cap.2 39
Totuşi, se poate utiliza ecuaţia obţinută prin dezvoltarea în serie Taylor a densităţiiîn jurul valorii inţiale ρ0, reţinând primii trei termeni,
( ) ( )0 p
0
T
0 TTT
p p p
p−⎟
⎠
⎞⎜⎝
⎛ ∂∂
+−⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ∂ρ∂
+ρ=ρ (2.9)
deoarece variaţiile densităţii cu presiunea şi temperatura sunt mici (p0 şi T0 sunt parametrii stării iniţiale). Forma uzuală a ecuaţiei de stare liniarizate este :
( ) ( )[ 000 TT p p1 ]−α−−β+ρ=ρ (2.10)
în care, prin definiţie
T0 p
1⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ∂ρ∂
ρ=β (2.11)
este coeficientul de compresibilitate izotermă, exprimat în m2/N, iar
p0 T
1⎟ ⎠
⎞⎜⎝
⎛ ∂
ρ∂
ρ−=α (2.11′)
este coeficientul de dilatare termică izobar ă [K -1]. Relaţia (2.8) devine prindiferenţiere, pentru m = const.,
dV1
d ρ−=ρ (2.12)
deci cei doi coeficienţi caracteristici pot fi definiţi prin relaţiile echivalente
T0 p
V
V
1⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ∂∂
−=β (2.13)
p0 T
V
V
1⎟ ⎠
⎞⎜⎝
⎛ ∂∂
=α (2.14)
în care V0 este volumul iniţial al lichidului. Mărimea
T0 V
pV
1⎟ ⎠
⎞⎜⎝
⎛ ∂∂
−=β
=ε (2.15)
se numeşte modulul de elasticitate izoterm al lichidului şi se exprimă în N/m2 (uzual în bar). Se poate defini şi un modul de elasticitate adiabat, prin relaţia;
,c
c
v
pa ε=ε (2.16)
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 28/627
Cap.240
dar la lichide raportul căldurilor specifice, determinat experimental, difer ă prea puţin de unitate (1,04 … 1,15) pentru a fi considerat în calcule practice faţă deefectul aerului antrenat şi al elasticităţii sistemului. Pentru lichidele petroliere,α ≅ 7…8⋅10-4 K -1, în intervalul de temperatur ă Δt = 0…200 oC.
Lichidele sintetice se dilată mai mult la creşterea temperaturii; de exemplu,în acelaşi interval de temperatur ă, polixiloxaţii alchilici au: α ≅ 9,52 ⋅10-4 K -1.
Variaţia densităţii cu temperatura trebuie considerată în calculul volumuluirezervoarelor. Dacă acestea sunt deschise (în legătur ă cu atmosfera) creştereatemperaturii poate provoca deversarea lichidului. În cazul unui rezervor (recipient)închis, plin cu lichid, diferenţa dintre coeficientul de dilatare termică al lichidului şicel al rezervorului, αr crează suprapresiunea
( ) t p T Δα−αε=Δ (2.17)
care poate distruge rezervorul.În calcule practice, variaţia densităţii lichidelor pure cu presiunea poate fi
neglijată. La o suprapresiune de 200 bar, densitatea lichidelor funcţionale creşte cunumai 1 ... 2%.
Compresibilitatea redusă a lichidelor permite transmiterea promptă amişcării, conferind transmisiilor hidraulice o "rigiditate" ridicată; în acelaşi timp ea
poate genera şocuri de presiune importante în sistemele de distribuţie ale maşinilor hidraulice volumice, reduce debitul volumic al pompelor de înaltă presiune şimicşorează randamentul transmisiilor hidraulice, deoarece energia consumată
pentru comprimarea lichidului în pompe se pierde prin destinderea acestuia înmotoare, după efectuarea lucrului mecanic util.
În condiţii normale modulul de elasticitate al majorităţii uleiurilor mineraleeste cuprins între 17000 şi 18000 bar. Lichidele funcţionale sintetice sunt îngeneral mai elastice; de exemplu, pentru siliconi, în aceleaşi condiţii ε ≅ 10000 bar.Lichidele funcţionale pe bază de apă au o elasticitate apropiată de cea a apei: ε ≅ 20000 bar.
Modulul de elasticitate este influenţat de presiune, temperatur ă şi de aerulnedizolvat.
În gama de presiuni 0 … 500 bar, ε creşte practic liniar cu presiunea:
( ) ( ) ε⋅+ε=ε K p p p at (2.18)
Valoarea coeficientului K ε depinde de lichid şi de temperatur ă; pentruuleiurile minerale se poate considera K ε ≅ 12.
La creşterea temperaturii, modulul de elasticitate se micşorează. De exem- plu, între 40 oC şi 200 oC, ε scade în cazul uleiurilor minerale la 9000...10000 bar,iar în cazul uleiurilor siliconice – la 4200 bar.
Aerul nedizolvat micşorează considerabil modulul de elasticitate allichidelor hidrostatice.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 29/627
Cap.2 41
2.2.4. Inflamabilitatea
Pericolul de incendiu sau de explozie constituie principalul dezavantaj allichidelor funcţionale pe bază de hidrocarburi, explicând efortul considerabil depus
pentru crearea şi ameliorarea lichidelor sintetice. Incendiile pot fi provocate devaporii din rezervoarele deschise sau de contactul lichidelor cu suprafeţele caldeale instalaţiilor (metalul topit din turnătorii, tobele de eşapament ale motoarelor,discurile de frână, etc.). Aprecierea posibilităţilor de utilizare a lichidelor din acest
punct de vedere se face pe baza a trei temperaturi caracteristice.Punctul de inflamabilitate. Lichidul fiind încălzit într-un creuzet, se
apropie periodic de suprafaţa sa liber ă o flacăr ă "pilot"; punctul de inflamabilitate
este temperatura la care apare o flacăr ă de scurtă durată. Această temperatur ă estede circa 100 oC la uleiurile minerale şi de 200 oC la esteri şi silicaţi. Pentru lichide-le sintetice neinflamabile această caracteristică nu este definită, dar la circa 100 oCele încep să degaje din abundenţă vapori, uneori toxici.
Temperatura de ardere este temperatura lichidului la care vaporii săicontinuă să ardă după îndepărtarea flăcării "pilot"; între această temperatur ă şi
punctul de inflamabilitate există o diferenţă de circa 40 oC.Temperatura de autoaprindere este temperatura la care trebuie să se
încălzească o suprafaţă pentru ca o picătur ă de lichid căzută pe ea să se aprindă spontan. Această temperatur ă depinde de condiţiile de măsurare, fiind de circa 250oC pentru uleiurile minerale şi de circa 400 oC pentru esteri şi silicaţi. Practic nuexistă lichide funcţionale neinflamabile, ci doar lichide care eliminând în condiţii
concrete uzuale riscul incendiilor şi exploziilor se numesc în prezent "lichiderezistente la foc". Acestea nu trebuie confundate cu lichidele de înaltă temperatur ă care îşi conservă calităţile funcţionale la temperaturi înalte (ceea ce nu esteobligatoriu pentru lichidele neinflamabile) dar pot fi mai inflamabile decât altelichide.
2.2.5. Compatibilitatea cu materialele sistemului
Principalele materiale afectate de lichidele funcţionale sunt elastomeriifolosiţi pentru confecţionarea elementelor de etanşare şi a racordurilor elastice.
Uleiurile minerale au înlocuit uleiurile vegetale ca lichide funcţionalenumai după elaborarea elastomerilor de sinteză, deoarece dizolvă cauciucul natural.Lichidele neinflamabile din transmisiile hidraulice ale aeronavelor civile modernenu au putut fi întrebuinţate decât după crearea butililor şi a etilenpropilenelor.Pentru lichidele de înaltă temperatur ă necesare îndeosebi avioanelor supersonice şirachetelor nu există încă un elastomer ideal.
Materialele de etanşare trebuie adaptate lichidului funcţional; schimbareaacestuia impune în general schimbarea tuturor etanşărilor.
Nu există în prezent un sistem universal de testare a compatibilităţiilichidelor cu elastomerii. Etanşările corespunzătoare lichidelor pe bază de petrolsunt încercate cu ajutorul anilinei; aceasta este practic un amestec de hidrocarburisub acţiunea căruia elastomerii îşi măresc volumul. Fiecare cuplu lichid – etanşare
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 30/627
Cap.242
trebuie testat cu ajutorul unui elastomer etalon, aprovizionat de la un furnizor unic,măsurând gravimetric cantitatea de lichid absorbită. Dar deformarea etanşărilor nueste aceeaşi cu cea a elastomerilor etalon, chiar dacă sunt fabricate pe aceeaşi bază,deci testele statice sunt necesare, dar nu şi suficiente. Practic, se studiază relaţiadintre lichid şi fiecare tip de etanşare, în condiţii reale de funcţionare, (precom-
primare, mişcări relative, cicluri de suprapresiune, cicluri de temperatur ă) ur-mărindu-se îmbătrânirea accelerată şi în timp real.
Lichidele funcţionale sunt compatibile cu majoritatea materialelor metaliceîntrebuinţate curent în construcţia transmisiilor hidrostatice: oţel, aluminiu,magneziu, cupru, alamă, bronz, argint, carburi metalice sintetizate etc.
Unele lichide sintetice afectează acoperirile metalice cu zinc, cadmiu şi
cupru, formând precipitate. Lichidele pe bază de apă pot deveni electroliţi întrediverse piese metalice, provocând o coroziune intensă.Toate lichidele funcţionale trebuie supuse testului de aciditate, care
furnizează informaţii utile asupra agresivităţii chimice a acestora.
2.2.6. Alte proprietăţi
Apa, aerul şi particulele metalice favorizează oxidarea lichidelor, elasto-merilor şi a metalelor transmisiilor hidrostatice.
Cantitatea de apă admisă curent în lichidele funcţionale nu depăşeşte 100 p.p.m. În instalaţiile prevăzute cu rezervoare deschise nu se poate evita contactullichidelor cu aerul şi condensarea apei. Deşi complică structura şi întreţinerea
sistemelor, rezervoarele etanşe, presurizate pneumatic sau mecanic, suntîntotdeauna utilizate dacă siguranţa funcţională constituie o cerinţă esenţială. Dinacelaşi motiv azotul înlocuieşte aerul în majoritatea acumulatoarelor hidropneumatice care lucrează la presiuni mai mari de 63 bar. Aceste măsuri
permit mărirea sensibilă a temperaturii maxime admise în instalaţii şi a duratei deviaţă a lichidelor, micşorând în acelaşi timp pericolul de incendiu. De exemplu,lichidele petroliere pot fi întrebuinţate în aviaţie până la 135 oC, faţă de 90 oC încircuit deschis.
Circuitele etanşe, umplute cu precauţii deosebite, sunt obligatorii în cazulîntrebuinţării lichidelor de înaltă temperatur ă pe bază de silicaţi, care în prezenţaapei şi a aerului formează precipitate şi cristale deosebit de periculoase pentrusistemele hidraulice.
Proprietatea lichidelor de a-şi conserva calităţile fizice şi chimice în prezenţa apei se numeşte "stabilitate hidrolitică" şi determină în mare măsur ă durata de stocare şi de întrebuinţare.
Ameliorarea rezistenţei faţă de oxidanţi se obţine cu aditivi care au o mareafinitate pentru oxigen, dar nu influenţează proprietăţile lichidului nici în stareainiţială nici în starea oxigenată. După consumarea inhibatorilor de oxidare se
produc acizi care afectează elementele sistemului.Degajarea gazelor şi agitaţia excesivă a lichidelor în prezenţa aerului
provoacă apariţia spumei. Aceasta măreşte compresibilitatea lichidelor, favorizează oxidarea lor şi coroziunea metalelor. Stabilitatea spumei depinde de viscozitatea

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 31/627
Cap.2 43
lichidului, de tensiunea sa superficială şi de factorii poluanţi. Tendinţa de spumarese determină prin măsurarea volumului spumei generate de o cantitate constantă deaer. Transmisiile hidraulice în circuit închis nu sunt afectate de acest fenomen.Sistemele deschise necesită atât precauţii constructive (rezervoare mari cudeflectoare multiple), cât şi aditivarea lichidelor funcţionale cu antispumanţi.
În exploatare este greu să se evite contactul operatorilor cu lichidelefuncţionale şi mai ales inhalarea vaporilor acestora. Este deci necesar ca lichidelesă nu fie toxice nici înainte de întrebuinţare, nici după aceasta. Lichidele sinteticemoderne, îndeosebi cele neinflamabile, sunt toxice în anumite concentraţii.Acţiunea lor asupra mucoaselor şi îndeosebi asupra ochilor impune utilizareaecranelor protectoare la standurile de încercări ale elementelor hidraulice şi
ventilarea corespunzătoare a laboratoarelor.Presiunea vaporilor saturaţi ai lichidelor funcţionale trebuie să fie câtmai mică pentru a evita apariţia cavitaţiei, îndeosebi în cazul lichidelor carelucrează la temperaturi ridicate.
Căldura specifică şi coeficientul de conductibilitate termică trebuie să fie cât mai mari pentru a evita gradienţii mari de temperatur ă.
Este util ca lichidele funcţionale să aibă proprietăţi dielectrice, care permit folosirea electromotoarelor rotative, liniare şi unghiulare cu înf ăşur ărineizolate, simplificând construcţia convertoarelor electrohidraulice.
Culoarea şi mirosul facilitează identificarea lichidelor funcţionale.Costul este un criteriu important în alegerea lichidelor funcţionale, mai
ales în cazul instalaţiilor industriale complexe. Lichidele sintetice sunt mai scumpe
decât cele minerale. De exemplu, lichidele florurate sunt de o sută de ori maiscumpe decât cele petroliere.
Aplica ţ ia 2.1. Determinarea modulului de elasticitate al unui amestec
lichid – gaz
În scopul evaluării modulului de elasticitate real al unui sistem, seconsider ă un recipient care conţine lichid şi gaz.
În figura A.2.1-1 gazul este reprezentat concentrat, dar în realitate el segăseşte în lichid îndeosebi sub formă de bule microscopice.
Fig. A.2.1-1. Schemă de calcul a modulului de elasticitate al unui amestec lichid - gaz.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 32/627
Cap.244
La presiuni mari aerul (gazul) dizolvat are un efect neglijabil asupramodulului de elasticitate al sistemului.
Volumul iniţial total al recipientului, Vt, poate fi scris sub forma
glt VVV += (2.1.1)
unde Vl este volumul iniţial al lichidului iar Vg – volumul iniţial al gazului.Mişcarea ascendentă a pistonului măreşte presiunea amestecului din recipient cuΔ p prin scăderea volumului iniţial cu
r lgt VVVV Δ+Δ−Δ−=Δ (2.1.2)
indicele r corespunzând recipientului. Modulul de elasticitate efectiv sau "global" poate fi definit prin relaţia:
. pV
V1
t
t
e Δ
Δ=
ε (2.1.3)
Din ultimele două relaţii rezultă egalitatea:
pV
V
pV
V
V
V
pV
V
V
V1
t
r
l
l
t
l
g
g
t
g
e Δ
Δ+⎟⎟
⎠
⎞⎜⎜⎝
⎛
Δ
Δ−+⎟
⎟ ⎠
⎞⎜⎜⎝
⎛
Δ
Δ−=
ε (2.1.4)
în care:
lll V
pVΔΔ−=ε (2.1.5)
este modulul de elasticitate al lichidului,
ggg V
pV
ΔΔ
−=ε (2.1.6)
este modulul de elasticitate al gazului, iar
r tr V
pV
ΔΔ
=ε (2.1.7)
este modulul de elasticitate al recipientului în raport cu volumul total ini ţial.Introducând relaţiile (2.1.5), (2.1.6) şi (2.2.17) în relaţia (2.1.4) se obţine:
.11
V
V1
V
V1
r gl
l
gt
g
e ε+
ε⋅+
ε⋅=
ε (2.1.8)
Eliminând volunul de lichid sin aceasă relaţie,
gtl VVV −= (2.1.9)
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 33/627
Cap.2 45
rezultă
llgt
g
r e
111
V
V11
ε+⎟
⎟ ⎠
⎞⎜⎜⎝
⎛
ε−
ε+
ε=
ε (2.1.10)
Modulul de elasticitate izotermic al gazului se calculează prin diferenţierealegii Boyle-Mariotte (p⋅Vg = const.):
gg V
p
V
p
Δ−=
Δ (2.1.11)
Ţinând seama de relaţia (2.1.6) rezultă
pg =ε (2.1.12)
Dacă procesul de comprimare este adiabat, εga = pc p/cv; în cazulaerului, εga = 1,4 p.
În paranteza din relaţia (2.1.10) termenul 1/εl este neglijabil faţă determenul 1/εg, deci
gt
g
lr e
1
V
V111
ε⋅+
ε+
ε≅
ε (2.1.13)
Modulul de elasticitate efectiv este mai mic decât oricare din mărimile εr ,εe şi εgVt/Vg, relaţia (2.1.13) fiind similar ă celei de calcul a rezistenţei electriceechivalente unor rezistenţe dispuse în paralel. Utilizarea acestei relaţii necesită determinarea mai multor mărimi. Volumul total Vt se calculează geometric, iar modulul de elasticitate al lichidului pur se obţine experimental. Modulul deelasticitate al recipienţilor şi conţinutului de aer din lichid sunt mărimi greu decalculat. Dintre elementele componente ale transmisiilor hidraulice, cele maielastice sunt racordurile flexibile utilizate între distribuitoare şi motoarele a căror carcasă este mobilă.
Deplasarea radială δr a suprafeţei interioare a unui cilindru cu pereţi subţiri,corespunzătoare unei suprapresiuni interne Δ p, se calculează cu relaţia:
( ) ( )( )ie
2
i
2
eir DDe2 D1D1E2 pD + ν−−ν+⋅Δ=δ (2.1.14)
în care Di este diametrul interior; De – diametrul exterior; e – grosimea pereţilor; E-modulul de elasticitate al materialului pereţilor; ν - coeficientul lui Poisson. Dinrelaţiile (2.1.7) şi (2.1.14) rezultă:
( ) ( )( )ie
2i
2e
r DDe2
D1D1
E
21
+ν−−ν+
⋅=ε
(2.1.15)
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 34/627
Cap.246
În cazul pereţilor metalici subţiri, ν = 0,25 şi De ≅ Di, deci:
ED
e
ir ≅ε (2.1.16)
relaţie utilizată în calcule practice pentru ţevi. Dacă conductele metalice au pereţigroşi, relaţia (2.1.15) poate fi aproximată prin:
( ) 5.2
E
12
Er ≅
ν+≅ε (2.1.17)
Racordurile elastice executate din cauciuc dur sau teflon, cu inser ţii de oţel
inoxidabil, au un modul de elasticitate redus, cuprins între 700 şi 3500 bar, careeste în general indicat de producători. Utilizarea acestor racorduri în sistemeleautomate hidraulice este permisă numai pentru alimentarea distribuitoarelor şiracordarea acestora la rezervor; convertoarele (servovalvele) electrohidraulice suntamplasate frecvent chiar pe motoarele hidraulice volumice, reducând astfel laminimum volumul de lichid supus variaţiilor de presiune şi elasticitatearacordurilor.
Prezenţa aerului în lichid, chiar în cantităţi mici, reduce drastic modulul deelasticitate al sistemului. Se consider ă de exemplu un lichid petrolier (εl ≅ 15400 bar) aflat la presiunea de 35 bar, într-o conductă de oţel (E ≅ 2,1 ⋅ 106 bar) alcărei diametru este de şase ori mai mare decât grosimea pereţilor, deci εr = 3,5⋅ 105
bar şi εga = 49 bar. Dacă Vg/Vt = 1/100, εe ≅ 3600 bar, pe când în absenţa aeruluiεe≅ 14700 bar. Dacă se dublează valoarea presiunii, εe creşte la 5880 bar. Astfel se
explică interesul pentru sistemele de înaltă presiune. În calcule practice se poateadmite pentru lichide pe bază de petrol εe ≅ 7000 bar. Utilizarea unor valori incerte
pentru εe poate introduce valori mari în calculul frecvenţei de rezonanţă, caredetermină direct stabilitatea sistemelor hidrostatice.
Modulul de elasticitate efectiv nu poate fi determinat precis decâtexperimental. La presiunea atmosferică, volumul de aer nedizolvat poate atinge20% din volumul total. Pe măsura creşterii presiunii, o mare parte din aer sedizolvă în lichid şi nu mai afectează rigiditatea acestuia.
La repunerea în funcţiune a unei transmisii hidraulice după un repausîndelungat, care permite pătrunderea aerului în lichid, performanţele sistemului
sunt aleatoare până la evacuarea aerului de către pompe, odată cu lichidulvehiculat. În aceste condiţii, demarajul pompelor este zgomotos, existând pericolulapariţiei fenomenului de cavitaţie.
Principala cauză a reţinerii aerului este proiectarea sau executarea incorectă a canalelor complexe realizate prin găurire sau turnare. Toate transmisiilehidraulice trebuie prevăzute cu buşoane sau robinete de purjare. Instalaţiileimportante sunt vidate înainte de a fi puse în funcţiune (de exemplu - sistemelehidraulice ale aeronavelor).
Lichidele funcţionale sunt în general aditivate cu antispumanţi care lemăresc capacitatea de a evacua aerul f ăr ă a forma emulsii.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 35/627
Cap.2 47
2.3. TIPURI DE LICHIDE FUNCŢIONALE
2.3.1. Lichide pe bază vegetală
Aceste lichide sunt compuse din ulei de ricin (care este un bun lubrifiant)diluat, în scopul măririi fluidităţii, într-un solvent cu punct de congelare scăzut şicât mai puţin volatil. Un exemplu tipic este lichidul întrebuinţat în primele sistemede frânare ale autovehiculelor, compus din ulei de ricin şi alcool (diacetonă) în
păr ţi egale. Fiind compatibile cu cauciucurile naturale, care nu sunt afectate detemperaturile scăzute, aceste lichide sunt încă folosite în domenii specifice, deşisunt corozive, volatile (datorită solventului), inflamabile, instabile în timp şi în
raport cu variaţiile de temperatur ă etc.
2.3.2. Lichide pe bază minerală
Datorită calităţilor lubrifiante, stabilităţii chimice şi costului relativ scăzut,aceste lichide sunt larg utilizate în sistemele hidraulice care lucrează în domeniulde temperatur ă cuprins între -54 şi 135 oC. În aeronautica civilă şi în transmisiilehidraulice industriale expuse pericolului de incendiu, lichidele pe bază minerală sunt înlocuite frecvent cu lichide sintetice neinflamabile (esteri fosfatici sausilicici).
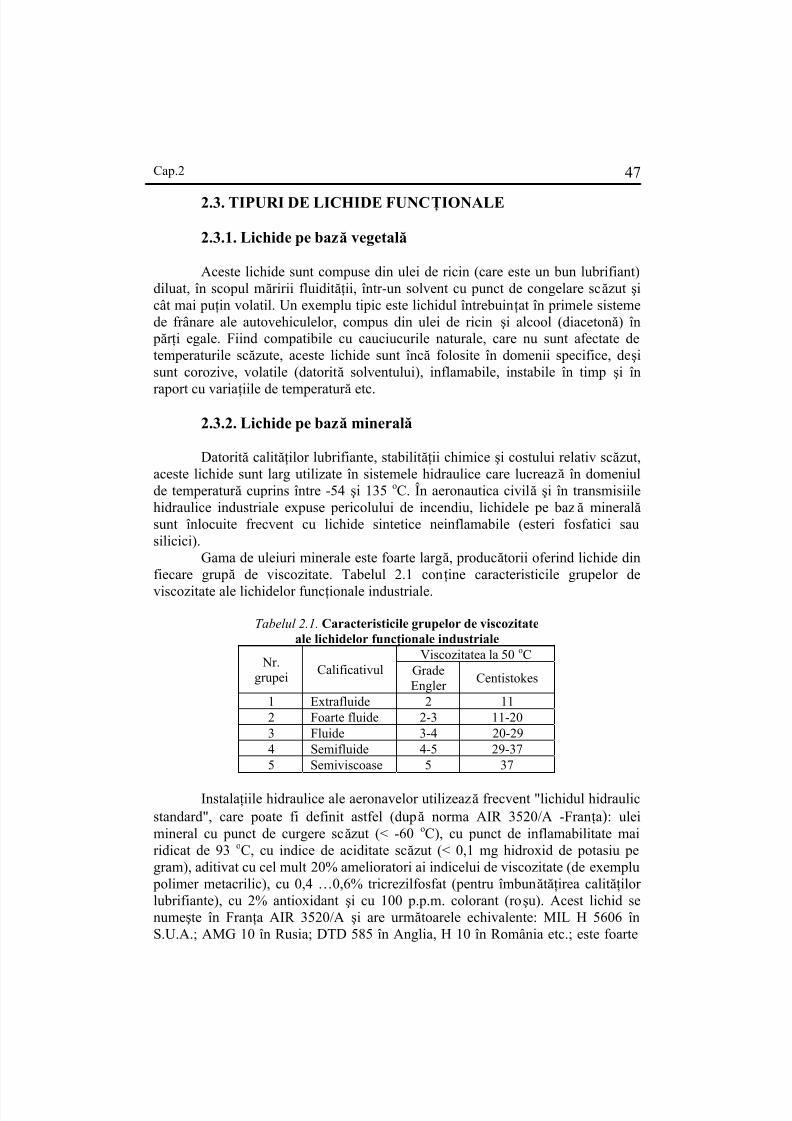
Gama de uleiuri minerale este foarte largă, producătorii oferind lichide dinfiecare grupă de viscozitate. Tabelul 2.1 conţine caracteristicile grupelor de
viscozitate ale lichidelor funcţionale industriale.
Tabelul 2.1. Caracteristicile grupelor de viscozitateale lichidelor funcţionale industriale
Viscozitatea la 50 oC Nr.
grupeiCalificativul Grade
Engler Centistokes
1 Extrafluide 2 112 Foarte fluide 2-3 11-203 Fluide 3-4 20-294 Semifluide 4-5 29-375 Semiviscoase 5 37
Instalaţiile hidraulice ale aeronavelor utilizează frecvent "lichidul hidraulicstandard", care poate fi definit astfel (după norma AIR 3520/A -Franţa): uleimineral cu punct de curgere scăzut (< -60 oC), cu punct de inflamabilitate mairidicat de 93 oC, cu indice de aciditate scăzut (< 0,1 mg hidroxid de potasiu pegram), aditivat cu cel mult 20% amelioratori ai indicelui de viscozitate (de exemplu
polimer metacrilic), cu 0,4 …0,6% tricrezilfosfat (pentru îmbunătăţirea calităţilor lubrifiante), cu 2% antioxidant şi cu 100 p.p.m. colorant (roşu). Acest lichid senumeşte în Franţa AIR 3520/A şi are următoarele echivalente: MIL H 5606 înS.U.A.; AMG 10 în Rusia; DTD 585 în Anglia, H 10 în România etc.; este foarte
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 36/627
Cap.248
stabil, netoxic, compatibil cu majoritatea elastomerilor sintetici, are un indice deviscozitate bun, dar este inflamabil.
2.3.3. Lichide neinflamabile pe bază de apă
Datorită unor neajunsuri majore (domeniu limitat de temperatur ă,viscozitate şi proprietăţi lubrifiante foarte reduse, corozivitate) apa este folosită îndeosebi pentru acţionarea unor utilaje "calde", mari consumatoare de lichid, cumsunt presele hidraulice, sau a utilajelor alimentare. Ameliorarea proprietăţilor apeise poate obţine prin amestecare cu ulei sau poliglicoli.
Emulsiile de ulei în apă conţin între 1 şi 10% ulei mineral, care
îmbunătăţeşte proprietăţile lubrifiante ale apei şi îi limitează agresivitatea chimică.Aceste emulsii au un indice de viscozitate bun şi sunt compatibile cu elastomerii şivopselele uzuale, fiind întrebuinţate pe maşini-unelte.
În emulsiile de apă în ulei, ponderea acesteia este mărită la 50…60%,asigurând un indice de viscozitate ridicat (circa 140) şi compatibilitatea cuelastomerii şi vopselele curente, dar proprietăţile lubrifiante r ămân modeste; suntfolosite îndeosebi în instalaţiile hidraulice ale utilajelor miniere, la presiuni ridicate(uzual 400 bar).
Soluţiile de poliglicoli în apă conţin apă în propor ţie de 35…65%; aucalităţi lubrifiante bune şi un indice de viscozitate ridicat (circa 150), dar suntincompatibile cu lichidele petroliere (formează precipitate chiar în prezenţa unor urme de ulei mineral), cu zincul, cadmiul şi vopselele curente (cu excepţia celei
vinilice); sunt întrebuinţate îndeosebi în marină. Vaporii de apă joacă rolul deestinctor, dar prezenţa apei limitează mult domeniul de temperatur ă; peste 60 oCapa se evapor ă intens, lichidul pierzându-şi caracterul ignifug.
2.3.4. Lichide sintetice
Necesitatea măririi siguranţei sistemelor hidraulice şi a creşteriitemperaturii lor maxime de funcţionare, corespunzător cerinţelor aeronauticiimoderne a generat cercetări intense pentru crearea lichidelor funcţionale sintetice"neinflamabile" şi a celor "de înaltă temperatur ă". Dintre lichidele utilizate saunumai studiate se analizează cele mai cunoscute.
Esterii acizilor organici sunt lichide de înaltă temperatur ă dar nu suntrezistente la foc; au punctul de inflamabilitate cuprins între 160 şi 200 oC, dar secomportă nesatisf ăcător la temperaturi scăzute şi sunt incompatibile cu anumiţielastomeri. Iniţial au fost utilizaţi ca lubrifianţi sintetici şi ca lichide funcţionale însistemele de comandă ale motoarelor termice; în prezent ele sunt întrebuinţate peunele avioane supersonice civile.
Compuşii organici halogenaţi (floruraţi sau cloruraţi) sunt neinflamabili,dar au un cost extrem de ridicat, densitate mare, indice de viscozitate redus şisuportă greu aditivii, astfel că în prezent sunt întrebuinţaţi rar.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 37/627
Cap.2 49
Siliconii sunt lichide neinflamabile de înaltă temperatur ă (pot lucra până la315 oC); indicele lor de viscozitate este ridicat, dar au proprietăţi lubrifiante slabe,spumează intens, sunt insensibili la aditivi şi scumpi; în plus, au un modul deelasticitate redus şi o comportare specială în lagăre (sunt lichide nenewtoniene).
Esterii fosfatici au calităţi lubrifiante bune, indice de viscozitate foartemare (circa 240), punct de inflamabilitate ridicat (circa 260 oC), dar au densitaterelativă mare (circa 1,08), sunt sensibili la forfecare şi toxici. Instabilitateaelastomerilor corespunzători (butilii, până la 70 – 80 oC şi etilenpropilenele, până la100 oC) limitează temperatura lor de utilizare la circa 100 oC. Aceste lichide pot ficonsiderate neinflamabile, dar nu şi lichide de înaltă temperatur ă; sunt largîntrebuinţate pe avioanele civile şi pe nave, precum şi în numeroase instalaţii
hidraulice industriale expuse pericolului de incendiu (de exemplu cele miniere). Unexemplu tipic de ester fosfatic este lichidul SKYDROL 500 A, utilizat pe avioaneleBOEING.
Silicaţii (ortosilicatesterii şi polixiloxanii) pot fi utilizaţi între –40 oC şi150 oC; marele lor defect îl constituie sensibilitatea faţă de apă şi aer, în prezenţacărora produc precipitate şi cristale, mai ales la cald. Această sensibilitate impune
precauţii severe în concepţia, umplerea şi întreţinerea sistemelor; sunt lichide deînaltă temperatur ă, dar nu sunt neinflamabile, deşi prezintă un bun nivel de securi-tate faţă de incendii. Din această categorie face parte lichidul ORONITE 8515 Autilizat în instalaţia hidraulică a avionului supersonic de pasageri CONCORDE.
Lichidele de temperatură foarte mare sunt necesare avioanelor şirachetelor hipersonice, a căror încălzire dinamică este considerabilă. Sunt studiate
în acest scop metalele lichide testate deja în circuitele primare ale reactoarelor nucleare, mercurul, sodiul, potasiul, aliaje de plumb şi bismut etc. Se încearcă deasemenea folosirea gazelor de combustie pentru dirijarea vehiculelor spaţiale, deşitemperatura lor este foarte ridicată şi conţin mari cantităţi de contaminanţi solizi(alumină).
2.3.5. Lichide funcţionale produse sau utilizate în ţara noastră
Tabelul 2.2 conţine caracteristicile unor lichide funcţionale produse în ţaranoastr ă, conform standardelor în vigoare. Toate aceste lichide sunt elaborate pe
bază de petrol.În ţara noastr ă se întrebuinţează şi alte lichide funcţionale: AMG 10 (în
instalaţiile hidraulice ale avioanelor militare), SKYDROL 500 A (pe avioaneleBAC 1-11, ROMBAC şi BOEING 707) AIR 3520A pe elicopterele PUMA şiALOUETTE etc.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 38/627
Cap.250

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 39/627
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 40/627
3. ELEMENTE DE MECANICA FLUIDELOR SPECIFICE TRANSMISIILOR HIDRAULICE
3.1. PARTICULARITĂŢI ALE UTILIZĂRII LEGILOR ŞI ECUAŢIILOR GENERALE DIN MECANICAFLUIDELOR
Proiectarea raţională a elementelor transmisiilor hidraulice şi asocierea lor corectă necesită cunoaşterea legilor şi a ecuaţiilor care descriu mişcarea fluidelor îndomeniile specifice acestor sisteme.
Evoluţia unei particule fluide într-un domeniu dat poate fi definită completcu ajutorul a şapte parametri: coordonatele centrului său de greutate în raport cu unsistem de referinţă arbitrar, presiunea, densitatea, temperatura şi viscozitatea. Suntdeci necesare şapte ecuaţii independente pentru a exprima fiecare parametru ca ofuncţie de timp sau de ceilalţi parametri. Primele trei ecuaţii - de mişcare - rezultă din legea a doua a lui Newton aplicată după cele trei direcţii ale referenţialuluiadoptat. Dacă curgerea are caracter laminar, se utilizează ecuaţiile Navier-Stokes,iar în cazul mişcării turbulente se consider ă sistemul Reynolds completat cu relaţii
semiempirice. A patra ecuaţie - de continuitate - rezultă din legea conservării ma-sei, iar legea conservării energiei (primul principiu al termodinamicii) furnizează acincea ecuaţie. Ecuaţia de stare şi ecuaţia de variaţie a viscozităţii cu temperatura şi
presiunea constituie ultimele două ecuaţii ale sistemului.Ecuaţiile de mişcare sunt ecuaţii cu derivate par ţiale neliniare; condiţiile la
limită şi iniţiale complexe, corespunzătoare curgerilor reale întâlnite în tehnică, nu permit integrarea acestora decât în cazuri particulare relativ simple. Practic, pentruanaliza regimului staţionar şi a celui tranzitoriu din circuitele energetice şi decomandă ale transmisiilor hidraulice, se utilizează ecuaţia continuităţii şi relaţia luiBernoulli, corespunzătoare mişcărilor permanente, respectiv semipermanente,ţinând seama îndeosebi de rezistenţele hidraulice majore introduse intenţionat încircuite, în scopul reglării parametrilor funcţionali, deoarece acestea constituie
rezistenţele dominante. Pierderile de sarcină relativ mici corespunzătoare elemen-telor de legătur ă (tuburi scurte, coturi, ramificaţii etc.) sunt considerate în special pentru dimensionarea conductelor de aspiraţie ale pompelor (în scopul evităriicavitaţiei) şi a racordurilor hidromotoarelor amplasate la distanţe mari de pompe.
Ecuaţiile Navier-Stokes sunt totuşi frecvent utilizate în calculul disipaţiilor volumice prin interstiţiile de mici dimensiuni ale elementelor hidraulice. Acestemişcări, realizate între suprafeţele cvasiparalele situate la distanţe foarte mici înraport cu razele lor de curbur ă, sunt dominate de for ţele de viscozitate şi pot ficonsiderate în numeroase cazuri mişcări pseudoplane de speţa a doua (Helle-Shaw), ceea ce permite calculul distribuţiei presiunii şi vitezei medii în spaţiul
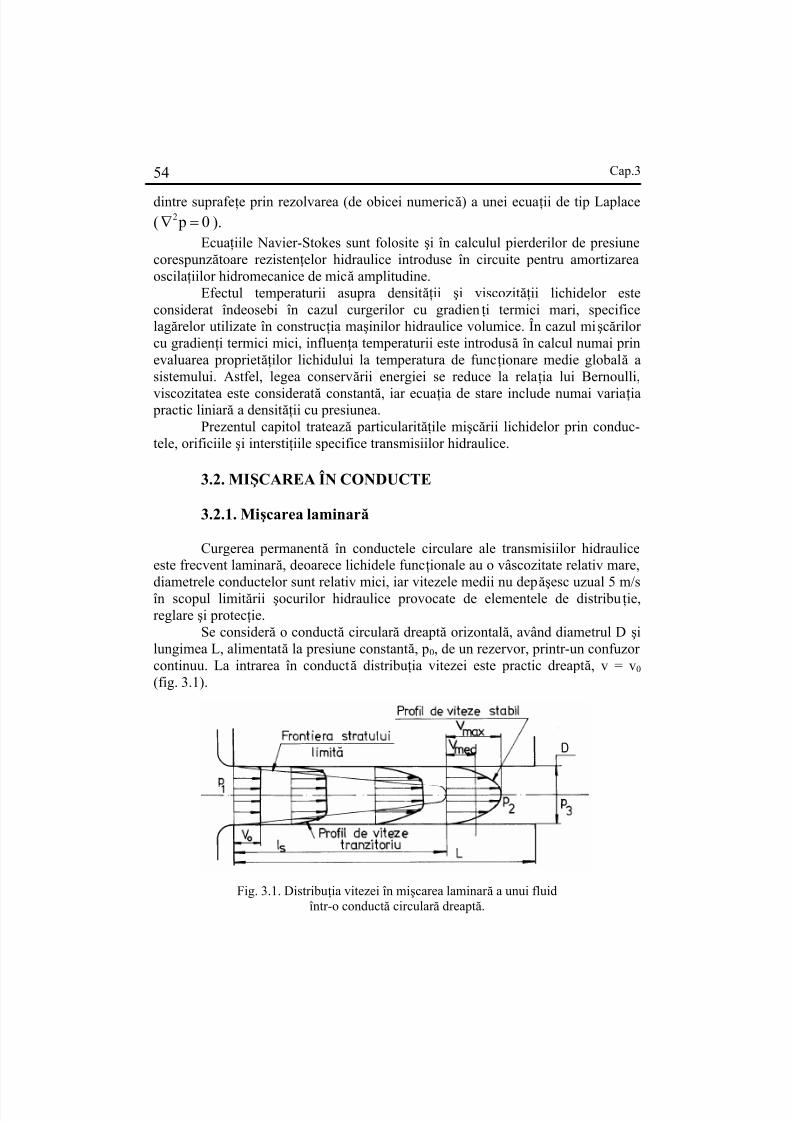
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 41/627
Cap.354
dintre suprafeţe prin rezolvarea (de obicei numerică) a unei ecuaţii de tip Laplace( ).0 p2 =∇
Ecuaţiile Navier-Stokes sunt folosite şi în calculul pierderilor de presiunecorespunzătoare rezistenţelor hidraulice introduse în circuite pentru amortizareaoscilaţiilor hidromecanice de mică amplitudine.
Efectul temperaturii asupra densităţii şi viscozităţii lichidelor esteconsiderat îndeosebi în cazul curgerilor cu gradienţi termici mari, specificelagărelor utilizate în construcţia maşinilor hidraulice volumice. În cazul mişcărilor cu gradienţi termici mici, influenţa temperaturii este introdusă în calcul numai prinevaluarea proprietăţilor lichidului la temperatura de funcţionare medie globală asistemului. Astfel, legea conservării energiei se reduce la relaţia lui Bernoulli,
viscozitatea este considerată constantă, iar ecuaţia de stare include numai variaţia practic liniar ă a densităţii cu presiunea.
Prezentul capitol tratează particularităţile mişcării lichidelor prin conduc-tele, orificiile şi interstiţiile specifice transmisiilor hidraulice.
3.2. MIŞCAREA ÎN CONDUCTE
3.2.1. Mişcarea laminară
Curgerea permanentă în conductele circulare ale transmisiilor hidrauliceeste frecvent laminar ă, deoarece lichidele funcţionale au o vâscozitate relativ mare,
diametrele conductelor sunt relativ mici, iar vitezele medii nu depăşesc uzual 5 m/sîn scopul limitării şocurilor hidraulice provocate de elementele de distribuţie,reglare şi protecţie.
Se consider ă o conductă circular ă dreaptă orizontală, având diametrul D şilungimea L, alimentată la presiune constantă, p0, de un rezervor, printr-un confuzor continuu. La intrarea în conductă distribuţia vitezei este practic dreaptă, v = v0 (fig. 3.1).
Fig. 3.1. Distribuţia vitezei în mişcarea laminar ă a unui fluidîntr-o conductă circular ă dreaptă.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 42/627
Cap.3 55
Datorită aderenţei lichidului la peretele conductei şi viscozităţii, distribuţiavitezei se modifică continuu, pe măsur ă ce lichidul pătrunde în conductă. Grosimeastratului de lichid în care are loc variaţia vitezei (stratul limită) creşte până cândacesta atinge axul conductei, rezultând o distribuţie parabolică (Hagen-Poiseuille) avitezei, care se menţine constantă de-a lungul conductei, până la intrarea înrezervorul aval, unde presiunea este menţinută constantă, p2.
Pentru un profil parabolic, viteza maximă are valoarea vmax = 2vmed = 2v0,deci pe lungimea de stabilizare a profilului vitezei, ls, raportul vmax/vmed variază între 1 şi 2. În figura 3.2 se prezintă variaţia mărimilor adimensionale (vmax/vmed) şi2 (p0 - p2) / (ρv2
med) în funcţie de mărimea adimensională L / (D⋅Re).
Fig. 3.2. Variaţia parametrilor cinematici şi dinamici adimensionali aimişcării laminare în funcţie de numărul L/(D⋅Re).
Dacă se admite că lungimea de stabilizare corespunde secţiunii în careviteza maximă este cu 1% mai mică decât viteza maximă finală, (vmax/vmed= 1,98)din grafic rezultă
ReD0575,0ls ⋅⋅= (3.1)
La limita superioar ă a mişcării laminare (Re = 2000) este necesar ă olungime de 115 diametre de conductă pentru stabilirea profilului de viteze
parabolic.Căderea de presiune în regiunea de tranziţie este generată atât de for ţele de
iner ţie cât şi de for ţele de viscozitate. Pentru conducte mai mici decât lungimea destabilizare, căderea de presiune relativă poate fi aproximată cu relaţia lui Langhaar,
28,2ReD
L64
v2
1 p p
2med
20 +⋅
=⋅ρ⋅
−(3.2)
deci

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 43/627
Cap.356
⎟ ⎠ ⎞
⎜⎝ ⎛ ⋅+
⋅π⋅⋅η⋅=−
LReD
0356,01D
QL128 p p
420 (3.3)
Primul termen corespunde for ţelor de viscozitate (relaţia Hagen-Poiseuille), iar al doilea - for ţelor de iner ţie ale stratelor care sunt accelerate pelungimea de tranziţie. Dacă muchia de intrare în conductă este ascuţită, coeficientul
pierderii de sarcină locale are valoarea ζ = 0,5, deci ultima relaţie devine
⎟ ⎠
⎞⎜⎝
⎛ ⋅+
⋅π⋅⋅η⋅
=−L
ReD0434,01
D
QL128 p p
430 (3.4)
În cazul conductelor circulare scurte, având intrarea şi ieşirea bruşte, se poate utiliza relaţia lui Shapiro, Siegel şi Keine,
⎟⎟ ⎠
⎞⎜⎜⎝
⎛
⋅+
ρ=−
ReD
L74,135,1v
2 p p 2
med30 (3.5)
valabilă pentru L / (D⋅Re) ≤ 0,001.Liniaritatea relaţiei dintre debit şi căderea de presiune, caracteristică
tuturor mişcărilor laminare, este foarte utilă în calculul circuitelor hidraulice.Conductele circulare drepte având un diametru redus, numite uzual "tuburicapilare", sunt frecvent utilizate pentru mărirea rigidităţii lagărelor hidrostatice, înstabilizarea elementelor de reglare a presiunii şi debitului, pentru amortizarea
oscilaţiilor motoarelor hidraulice volumice etc. Totuşi, mişcarea laminar ă estesensibilă la variaţiile de temperatur ă, care modifică viscozitatea lichidelor. Acestdezavantaj poate fi esenţial în unele aplicaţii şi nu poate fi evitat decât printermostatarea sistemului.
În proiectare este necesar să se dimensioneze tuburile capilare astfel încâtneliniaritatea corespunzătoare lungimii de stabilizare să fie neglijabilă. PentruL/D = 800 (valoarea limită uzuală) şi Re = 2000, paranteza din relaţia (3.4) arevaloarea 1,11, deci utilizarea relaţiei Hagen-Poiseuille în locul acestei relaţiiintroduce o eroare mai mică de 11%. Dacă se limitează eroarea de calcul la 10%rezultă
1.0L
ReD434,0 ≤
⋅(3.6)
sau
Re434,0D
L⋅≥ (3.7)
O regulă practică pentru dimensionarea tuburilor capilare este L/D ≥ 400.Totuşi rapoarte mult mai mici sunt satisf ăcătoare la numere Reynolds mici,specifice îndeosebi curgerilor alternative de frecvenţă mare.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 44/627
Cap.3 57
Tuburile capilare pot fi realizate şi prin introducerea presată a unui şurubcu profil triunghiular sau dreptunghiular într-o bucşă cilindrică circular ă. Raza dedispunere a canalului astfel format este mult mai mare decât dimensiunea sacaracteristică, permiţând calculul pierderii de presiune corespunzătoare cu ajutorulrelaţiilor stabilite pentru tuburile drepte. Astfel, în cazul unei conducte cu sec ţiuneadreptunghiular ă, de lăţime b şi înălţime h, (b ≥ h),
( )215
3
p ph2
bth
b
h1921
L12
h bQ −⋅⎟
⎠
⎞⎜⎝
⎛ ⋅⋅π
⋅π⋅
−⋅⋅η⋅
⋅= (3.8)
Dacă b = h (conductă pătrată),
( )214 p p
L4,28 bQ −⋅
⋅η⋅= (3.9)
Pentru o conductă având secţiunea de forma unui triunghi echilateral culatura b,
( 21
4
p pL185
bQ −⋅
⋅η⋅= ) (3.10)
În aceste relaţii L reprezintă lungimea conductei drepte sau lungimeadesf ăşurată a tubului curbat. Evaluarea regimului de curgere prin conducte cusecţiuni necirculare se face pe baza diametrului hidraulic, dar trebuie considerată
aproximativă; în cazul sistemelor importante sunt necesare verificări experimentalesistematice.
Observaţie. Legea Hagen-Poiseuille este stabilită şi se verifică experimental în cazul curgerii laminare izoterme; curgerile tehnice se realizează cuvariaţii de temperatur ă datorită cărora coeficientul pierderilor de sarcină liniarevariază practic în intervalul
Re
75
Re
64≤λ≤ (3.11)
3.2.2. Mişcarea turbulentă
Modelul curgerii turbulente în conducte şi ecuaţiile corespunzătoare se bazează în mare măsur ă pe observaţii experimentale. La intrarea într-o conductă circular ă (fig. 3.3) stratul limită este laminar, dar devine turbulent la mică distanţă,cu excepţia unui substrat laminar subţire.
Grosimea stratului limită turbulent creşte spre centrul conductei pe olungime de stabilizare (tranziţie) cuprinsă între 25 şi 40 de diametre; se stabileşte odistribuţie de viteze aplatisată (vmax ≅ 1,2 ⋅ vmed), care se menţine pe toată lungimeaconductei. Căderea de presiune poate fi evaluată cu relaţia echivalentă a lui Darcy
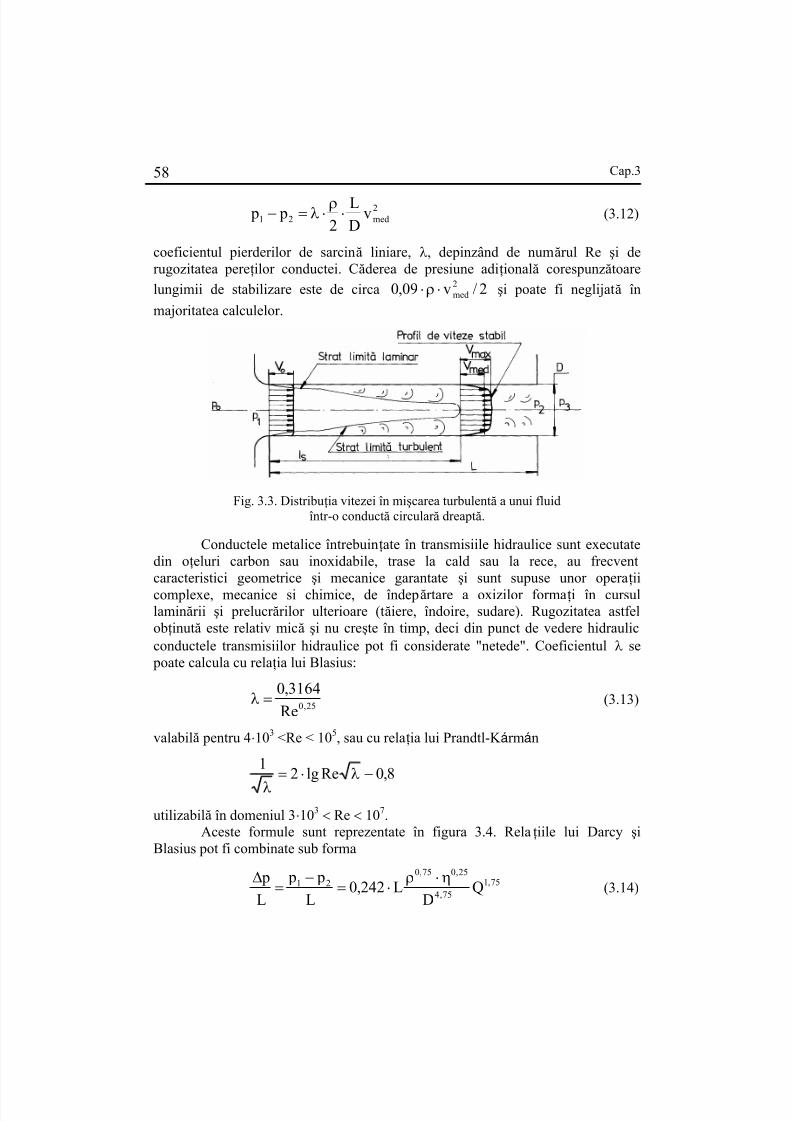
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 45/627
Cap.358
2med21 v
DL
2 p p ⋅ρ⋅λ=− (3.12)
coeficientul pierderilor de sarcină liniare, λ, depinzând de numărul Re şi derugozitatea pereţilor conductei. Căderea de presiune adiţională corespunzătoare
lungimii de stabilizare este de circa şi poate fi neglijată în
majoritatea calculelor.
2/v09,0 2med⋅ρ⋅
Fig. 3.3. Distribuţia vitezei în mişcarea turbulentă a unui fluidîntr-o conductă circular ă dreaptă.
Conductele metalice întrebuinţate în transmisiile hidraulice sunt executatedin oţeluri carbon sau inoxidabile, trase la cald sau la rece, au frecventcaracteristici geometrice şi mecanice garantate şi sunt supuse unor operaţiicomplexe, mecanice si chimice, de îndepărtare a oxizilor formaţi în cursullaminării şi prelucr ărilor ulterioare (tăiere, îndoire, sudare). Rugozitatea astfelobţinută este relativ mică şi nu creşte în timp, deci din punct de vedere hidraulicconductele transmisiilor hidraulice pot fi considerate "netede". Coeficientul λ se
poate calcula cu relaţia lui Blasius:
25,0Re
3164,0=λ (3.13)
valabilă pentru 4⋅103 <Re < 105, sau cu relaţia lui Prandtl-K ármán
8,0Relg21
−λ⋅=λ
utilizabilă în domeniul 3⋅103 < Re < 107.Aceste formule sunt reprezentate în figura 3.4. Relaţiile lui Darcy şi
Blasius pot fi combinate sub forma
75,175,4
25,075,021 Q
DL242,0
L
p p
L
p η⋅ρ⋅=
−=
Δ(3.14)

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 46/627
Cap.3 59
În figura 3.5 sunt reprezentate în coordonate logaritmice curbele Δ p/L(Q) pentru câteva diametre uzuale de conductă, conform relaţiilor Hagen-Poiseuille şiBlasius. S-a considerat un ulei mineral cu densitatea ρ = 905 kg/cm3 şi viscozitateaν = 30 ⋅ 10-6 m2/s (H30).
Fig. 3.4. Variaţia coeficientului lui Darcy în funcţie de numărul Reynolds pentru conducte netede.
Fig. 3.5. Variaţia căderii de presiune specifice în funcţie de debit pentru conductele uzuale ale transmisiilor hidraulice.
Diagrama evidenţiază creşterea gradientului presiunii în regiunea curgeriiturbulente faţă de regiunea curgerii laminare. Este deci de dorit ca mişcarea să fie
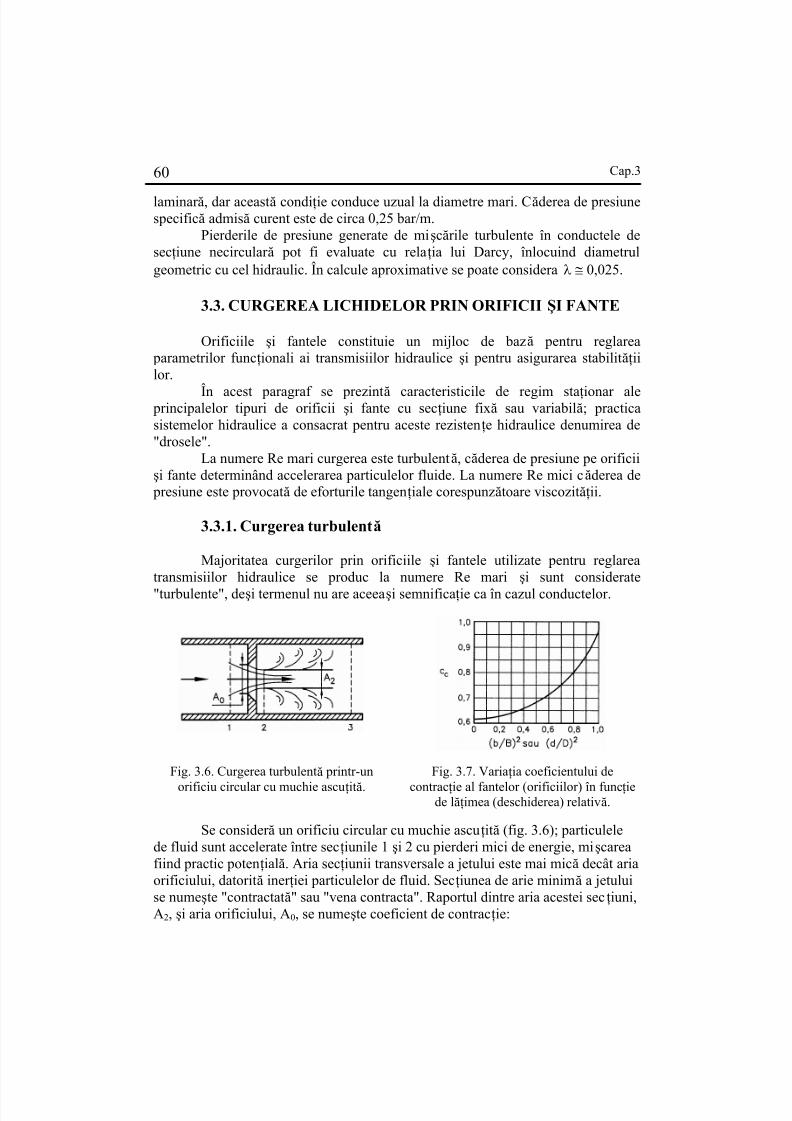
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 47/627
Cap.360
laminar ă, dar această condiţie conduce uzual la diametre mari. Căderea de presiunespecifică admisă curent este de circa 0,25 bar/m.
Pierderile de presiune generate de mişcările turbulente în conductele desecţiune necircular ă pot fi evaluate cu relaţia lui Darcy, înlocuind diametrulgeometric cu cel hidraulic. În calcule aproximative se poate considera λ ≅ 0,025.
3.3. CURGEREA LICHIDELOR PRIN ORIFICII ŞI FANTE
Orificiile şi fantele constituie un mijloc de bază pentru reglarea parametrilor funcţionali ai transmisiilor hidraulice şi pentru asigurarea stabilităţiilor.
În acest paragraf se prezintă caracteristicile de regim staţionar ale principalelor tipuri de orificii şi fante cu secţiune fixă sau variabilă; practicasistemelor hidraulice a consacrat pentru aceste rezistenţe hidraulice denumirea de"drosele".
La numere Re mari curgerea este turbulentă, căderea de presiune pe orificiişi fante determinând accelerarea particulelor fluide. La numere Re mici căderea de
presiune este provocată de eforturile tangenţiale corespunzătoare viscozităţii.
3.3.1. Curgerea turbulentă
Majoritatea curgerilor prin orificiile şi fantele utilizate pentru reglareatransmisiilor hidraulice se produc la numere Re mari şi sunt considerate
"turbulente", deşi termenul nu are aceeaşi semnificaţie ca în cazul conductelor.
Fig. 3.6. Curgerea turbulentă printr-un
orificiu circular cu muchie ascuţită.
Fig. 3.7. Variaţia coeficientului de
contracţie al fantelor (orificiilor) în funcţiede lăţimea (deschiderea) relativă.
Se consider ă un orificiu circular cu muchie ascuţită (fig. 3.6); particulelede fluid sunt accelerate între secţiunile 1 şi 2 cu pierderi mici de energie, mişcareafiind practic potenţială. Aria secţiunii transversale a jetului este mai mică decât ariaorificiului, datorită iner ţiei particulelor de fluid. Secţiunea de arie minimă a jetuluise numeşte "contractată" sau "vena contracta". Raportul dintre aria acestei secţiuni,A2, şi aria orificiului, A0, se numeşte coeficient de contracţie:
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 48/627
Cap.3 61
0
2c A
Ac = (3.15)
Accelerarea fluidului începe la o distanţă egală cu raza orificiului înamonte de acesta, iar secţiunea contractată este situată la aceeaşi distanţă în aval demuchia ascuţită, deci fluidul este accelerat pe o distanţă totală egală cu diametrulorificiului.
Pentru o fantă de lăţime b, cele două distanţe caracteristice sunt egale cu b/2.
Între secţiunile 2 şi 3 curgerea este turbulentă, producându-se un amestecviolent între jet şi lichidul din aval de orificiu. Energia cinetică acumulată de lichid
prin accelerare nu se mai recuperează, ci se transformă într-o creştere a energieiinterne, astfel că presiunile p2 şi p3 sunt egale, deşi vitezele medii corespunzătoaredifer ă; astfel zona din aval de orificiu poate fi considerată o evazare bruscă.
Pentru determinarea caracteristicii orificiului, se aplică relaţia lui Bernoulliîntre secţiunile 1 şi 2:
g2
v
g
p
g2
v
g
p
g2
v 22
212
2221
211
−ζ+ρ
+α
=ρ
+α
(3.16)
unde α1 si α2 sunt coeficienţii lui Coriolis, iar ζ1-2 - coeficientul pierderii de sarcină locale în zona de accelerare. Din ecuaţia de continuitate rezultă:
1
02c
1
22
11 A
AvcA
vA
A
Qv ⋅=== (3.17)
Admiţând că α1 ≅ α2 ≅ 1, se poate calcula viteza medie în secţiuneacontractată:
( ) vt2
21
20
2c
21
212 cv
A
Ac1
1 p p
2v ⋅=
⋅−ζ+
⋅−ρ
=
−
(3.18)
Datorită viscozităţii această viteză este mai mică decât cea teoretică,
( )21t2 p p2v −ρ
= (3.19)
coeficientul de viteză,
21
20
2c
21
t2
2v
A
Ac1
1
v
vc
⋅−ζ+
==
−
(3.20)
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 49/627
Cap.362
fiind subunitar, dar foarte apropiat de unitate: cv ≅ 0,97 ... 0,98. Caracteristica deregim staţionar a orificiului poate fi scrisă sub forma:
) p-(p2
Ac=Q 210d ρ⋅ (3.21)
în care produsul
vcd ccc ⋅= (3.22)
este coeficientul de debit al orificiului. O formă echivalentă a caracteristiciiorificiului se bazează pe un coeficient global de pierderi de sarcină ζ:
20
22021
Ag2
Q
g2
v
g
p p
⋅⋅ζ=ζ=
ρ−
(3.23)
Comparând relaţiile (3.21) şi (3.23) rezultă:
2dc
1=ζ (3.24)
Utilizând metoda transformărilor conforme, von Mises a determinatvaloarea teoretică a coeficientului de contracţie pentru o fantă de lăţime b şilungimea a >> b în funcţie de raportul b/B, în care B este lăţimea conductei în care
este amplasată fanta:
B
c barctg
B
c b
c b
B21
1c
cc
c
c⋅
⋅⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ⋅−
⋅π+
= (3.25)
Această relaţie, reprezentată în figura 3.7, poate fi întrebuinţată şi pentruorificii cu muchie ascuţită, raportul b/B fiind înlocuit cu raportul d/D. Se constată experimental că valoarea teoretică limită a coeficientului de contracţie,
611,02
c 0c =+ππ
= (3.26)
poate fi utilizată pentru toate orificiile şi fantele cu muchie ascuţită, indiferent degeometria acestora, dacă A0 << A1 şi mişcarea este turbulentă.
Orificiile circulare cu muchie ascuţită sunt utilizate îndeosebi datorită certitudinii caracteristicii de regim staţionar şi invarianţei coeficientului de debit înraport cu temperatura, dar sunt scumpe.
Orificiile lungi sunt mult mai r ăspândite datorită simplităţii execuţiei.Coeficientul lor de debit poate fi calculat cu relaţia

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 50/627
Cap.3 63
5,0d
ReD
L74,135,1
1c
⎟⎟ ⎠
⎞⎜⎜⎝
⎛
⋅+
= (3.27)
dacă
50L
ReD >
şi cu relaţia
5,0d
ReD
L6428,2
1c⎟ ⎠ ⎞
⎜⎝ ⎛
⋅+
= (3.28)
pentru
50L
ReD < .
Aceste formule sunt reprezentate în figura 3.8 şi provin din compararearelaţiilor (3.16) şi (3.19) cu relaţia (3.21); ele sunt aproximative, dar satisfac
cerinţele proiectării.
Fig. 3.8. Variaţia coeficientului de debit alunui orificiu lung în funcţie de parametruladimensional D ⋅ Re/L (numărul Reynolds
echivalent).
Fig. 3.9. Variaţia coeficientului de debit alunui orificiu cu muchie
ascuţită în funcţie de Re .
3.3.2. Curgerea laminară
La căderi mici de presiune sau temperaturi scăzute numărul Re poate fisuficient de mic pentru ca mişcarea prin orificii şi fante să devină laminar ă. Acest

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 51/627
Cap.364
regim apare în special în cazul rezistenţelor hidraulice introduse în circuite pentruamortizarea oscilaţiilor de mică amplitudine. Numărul Re definit prin relaţia
0
h
A
DQRe
⋅η⋅⋅ρ
= (3.29)
în care Dh este diametrul hidraulic, ofer ă doar o imagine aproximativă asuprainfluenţei for ţelor de iner ţie în raport cu cele de viscozitate, curgerea depinzând înmare măsur ă de geometria deschiderii. Pentru un orificiu circular, diametrulhidraulic este egal cu cel geometric, iar în cazul unei fante dreptunghiulare delungime a şi înălţime b,
( ) b2
ba2 ba4Dh ⋅≅
+⋅⋅= (3.30)
Deşi analiza care a condus la caracteristica orificiilor sub forma (3.21) nueste valabilă la numere Re mici, au fost f ăcute încercări de extindere a acesteirelaţii în domeniul mişcării laminare, prin reprezentarea coeficientului de debit înfuncţie de numărul Re. În figura 3.9 se prezintă o curbă tipică de acest gen.
Numeroase cercetări au ar ătat că la Re < 10, cd este propor ţional cu Re ,
Recd ⋅δ= . (3.31)
Mărimea δ se numeşte "coeficient de debit laminar" şi depinde de
geometria domeniului de mişcare. Din relaţiile (3.29), (3.31) şi (3.21) rezultă:
( )210h
2
p pAD2
Q −η
⋅⋅δ⋅= (3.32)
Expresiile debitului teoretic prin orificiile circulare, respectiv fantedreptunghiulare, au fost determinate de Wuest:
( )21
3
p p4,50
dQ −
η⋅⋅π
= (3.33)
( )21
2
p p32
baQ −η⋅
⋅⋅π= (3.34)
Egalând relaţia (3.32) cu relaţia (3.33), respectiv cu relaţia (3.34), se obţineδ = 0,2 pentru orificii rotunde cu muchie ascuţită şi δ = 0,157 pentru fantedreptunghiulare cu muchie ascuţită.
Viersma reprezintă aproximativ coeficientul de debit prin două asimptote(figura 3.9): cea definită de relaţia (3.31), pentru mişcarea laminar ă şi dreapta cd =0,611, pentru mişcarea turbulentă. Numărul Re de tranziţie, Ret, este definit de
punctul de intersecţie al celor două asimptote:

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 52/627
Cap.3 65
(3.35)( )2t /611,0Re δ=
Pentru δ = 0,2 rezultă Ret = 9,3; Ret creşte când δ scade.În analiza comportării dinamice a sistemelor hidraulice este necesar să se
evalueze coeficientul ( )21 p p/Q −ΔΔ pentru cădere de presiune nulă. Dacă
curgerea este considerată turbulentă, din relaţia (3.21) rezultă pentru acestcoeficient o valoare infinită. În realitate, la căderi mici de presiune curgerea estelaminar ă şi coeficientul menţionat are o valoare finită, calculabilă cu relaţia (3.32).Utilizarea relaţiilor prezentate f ăr ă evaluarea regimului de curgere poate conduce laerori importante.
3.3.3. Rezistenţe hidraulice variabile
Droselele variabile se realizează prin acoperirea unui orificiu sau a uneifante cu ajutorul unui obturator mobil care poate fi poziţionat precis. În figurile3.10 ... 3.20 se prezintă caracteristicile geometrice şi hidraulice ale tipurilor uzualede rezistenţe hidraulice variabile. Cel mai utilizat element din această categorie esteformat dintr-o bucşă prevăzută cu două degajări (camere) toroidale interioare şi unobturator (sertar) cilindric, prevăzut cu o degajare toroidală (fig.3.10).
Fig. 3.10. Drosel cu sertar cilindric.
Deplasarea axială a sertarului creează o fantă inelar ă de lăţime variabilă.La deschideri mici (x/d < 0,1), în regim turbulent, coeficientul de debit este practicconstant, cd = 0,61, dacă muchiile între care se produce curgerea sunt ascuţite.
Fig. 3.11. Drosel cu obturator plan.
Tranziţia de la curgerea laminar ă la cea turbulentă se produce la Ret ≅ 260.Unghiul θ, format de jetul axial-simetric cu axa sertarului este de cca 69o. Acest tipde drosel este larg întrebuinţat în construcţia distribuitoarelor, supapelor şi a altor elemente ale transmisiilor hidraulice, datorită simplităţii constructive şi for ţei de
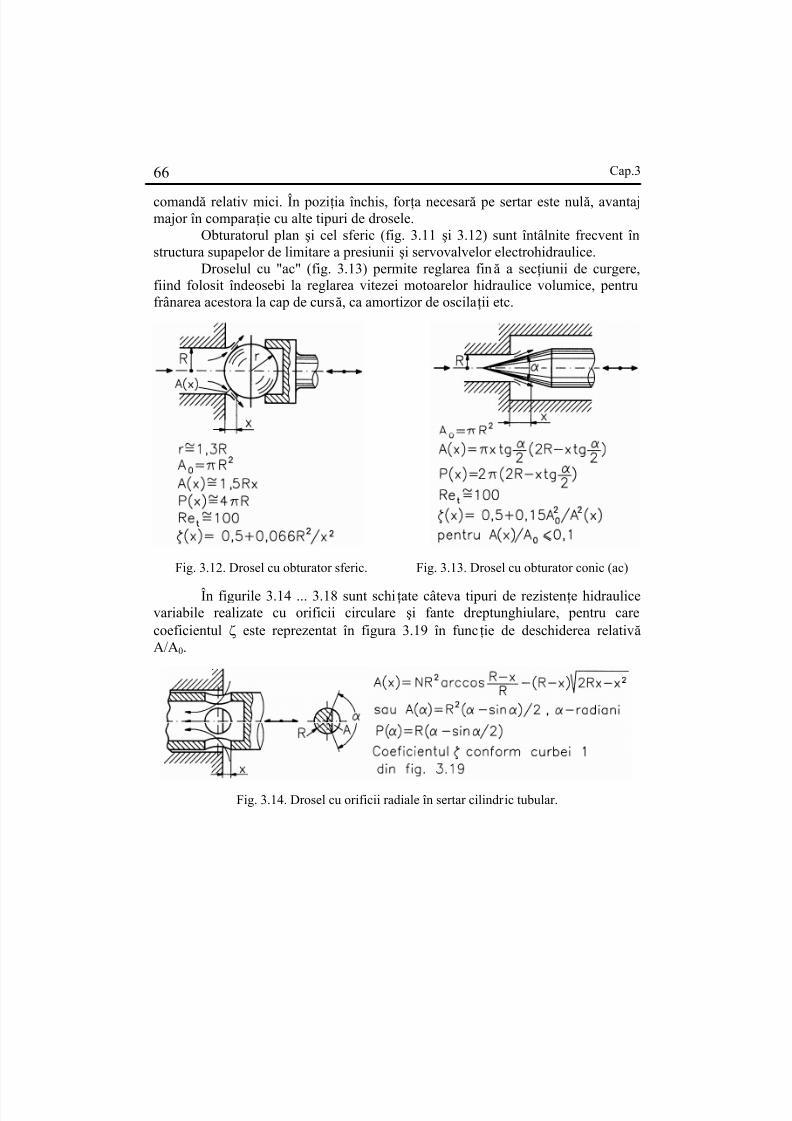
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 53/627
Cap.366
comandă relativ mici. În poziţia închis, for ţa necesar ă pe sertar este nulă, avantajmajor în comparaţie cu alte tipuri de drosele.
Obturatorul plan şi cel sferic (fig. 3.11 şi 3.12) sunt întâlnite frecvent înstructura supapelor de limitare a presiunii şi servovalvelor electrohidraulice.
Droselul cu "ac" (fig. 3.13) permite reglarea fină a secţiunii de curgere,fiind folosit îndeosebi la reglarea vitezei motoarelor hidraulice volumice, pentrufrânarea acestora la cap de cursă, ca amortizor de oscilaţii etc.
Fig. 3.12. Drosel cu obturator sferic. Fig. 3.13. Drosel cu obturator conic (ac)
În figurile 3.14 ... 3.18 sunt schiţate câteva tipuri de rezistenţe hidraulicevariabile realizate cu orificii circulare şi fante dreptunghiulare, pentru carecoeficientul ζ este reprezentat în figura 3.19 în funcţie de deschiderea relativă A/A0.
Fig. 3.14. Drosel cu orificii radiale în sertar cilindric tubular.
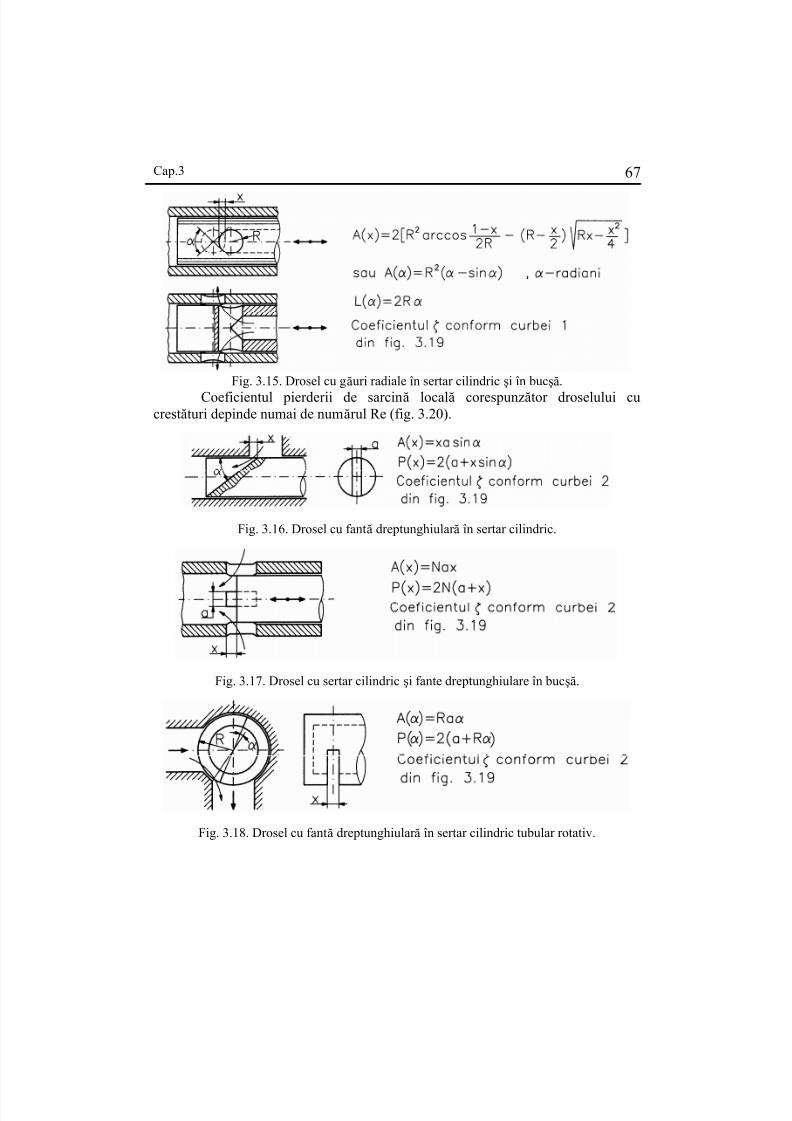
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 54/627
Cap.3 67
Fig. 3.15. Drosel cu găuri radiale în sertar cilindric şi în bucşă.
Coeficientul pierderii de sarcină locală corespunzător droselului cucrestături depinde numai de numărul Re (fig. 3.20).
Fig. 3.16. Drosel cu fantă dreptunghiular ă în sertar cilindric.
Fig. 3.17. Drosel cu sertar cilindric şi fante dreptunghiulare în bucşă.
Fig. 3.18. Drosel cu fantă dreptunghiular ă în sertar cilindric tubular rotativ.
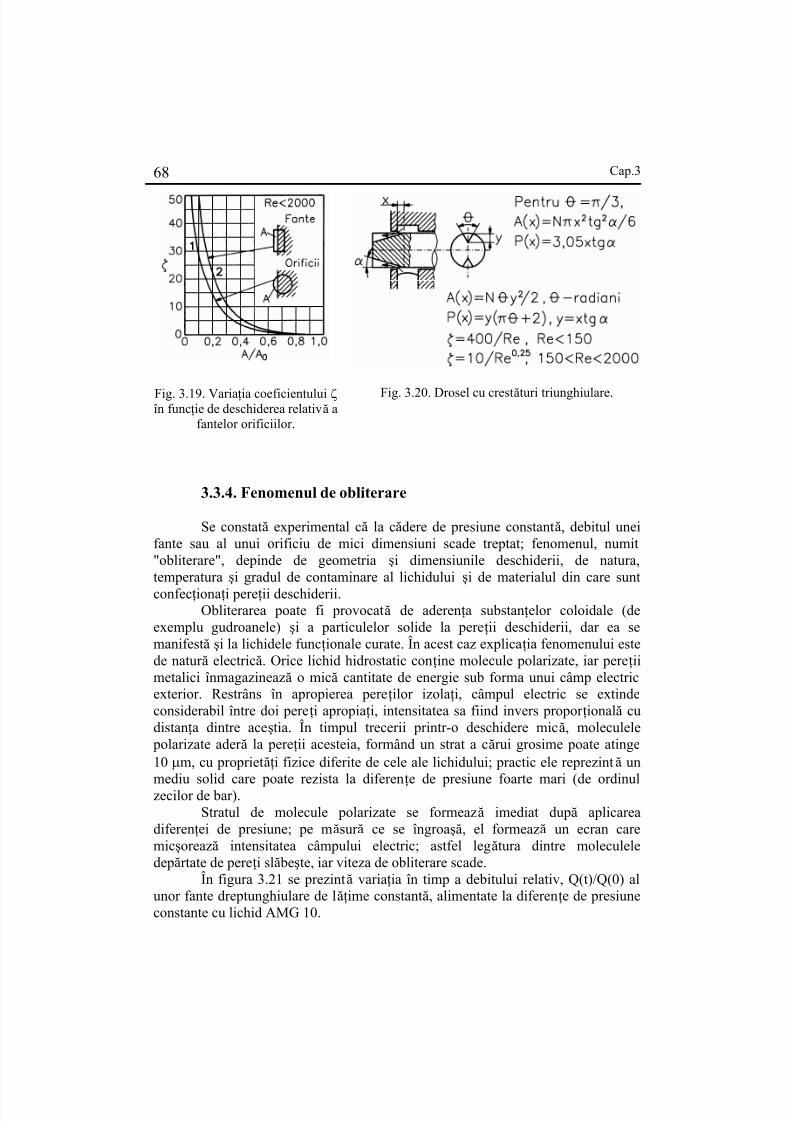
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 55/627
Cap.368
Fig. 3.19. Variaţia coeficientului ζ în funcţie de deschiderea relativă a
fantelor orificiilor.
Fig. 3.20. Drosel cu crestături triunghiulare.
3.3.4. Fenomenul de obliterare
Se constată experimental că la cădere de presiune constantă, debitul uneifante sau al unui orificiu de mici dimensiuni scade treptat; fenomenul, numit"obliterare", depinde de geometria şi dimensiunile deschiderii, de natura,temperatura şi gradul de contaminare al lichidului şi de materialul din care sunt
confecţionaţi pereţii deschiderii.Obliterarea poate fi provocată de aderenţa substanţelor coloidale (de
exemplu gudroanele) şi a particulelor solide la pereţii deschiderii, dar ea semanifestă şi la lichidele funcţionale curate. În acest caz explicaţia fenomenului estede natur ă electrică. Orice lichid hidrostatic conţine molecule polarizate, iar pereţiimetalici înmagazinează o mică cantitate de energie sub forma unui câmp electricexterior. Restrâns în apropierea pereţilor izolaţi, câmpul electric se extindeconsiderabil între doi pereţi apropiaţi, intensitatea sa fiind invers propor ţională cudistanţa dintre aceştia. În timpul trecerii printr-o deschidere mică, moleculele
polarizate ader ă la pereţii acesteia, formând un strat a cărui grosime poate atinge10 μm, cu proprietăţi fizice diferite de cele ale lichidului; practic ele reprezintă un
mediu solid care poate rezista la diferenţe de presiune foarte mari (de ordinulzecilor de bar).Stratul de molecule polarizate se formează imediat după aplicarea
diferenţei de presiune; pe măsur ă ce se îngroaşă, el formează un ecran caremicşorează intensitatea câmpului electric; astfel legătura dintre moleculeledepărtate de pereţi slă beşte, iar viteza de obliterare scade.
În figura 3.21 se prezintă variaţia în timp a debitului relativ, Q(t)/Q(0) alunor fante dreptunghiulare de lăţime constantă, alimentate la diferenţe de presiuneconstante cu lichid AMG 10.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 56/627
Cap.3 69
Fig. 3.21. Variaţia debitului relativ al unor fantedreptunghiulare de lăţime constantă în timp.
Curbele indică creşterea vitezei de obliterare la creşterea diferenţei de presiune aplicată unei fante; pentru o cădere de presiune constantă viteza deobliterare creşte la micşorarea deschiderii.
Fantele alimentate cu lichid hidraulic standard se înfundă complet dacă aulăţimea δ mai mică de 10 μm şi nu se înfundă de loc dacă deschiderea lor depăşeşte22 μm. Alte lichide, ca de exemplu uleiul pentru broşe hidrostatice, se comportă diferit în aceleaşi condiţii (figura 3.21) deşi au la bază tot petrolul.
Diminuarea graduală a debitului se observă şi în cazul orificiilor circulare.Diametrul minim care asigur ă evitarea obliter ării depinde în mare măsur ă de lichid.Pentru lichidul AMG 10 acest diametru este de 0,12 mm, iar pentru uleiul de bro şehidrostatice - 0,5 mm.
Mijlocul cel mai eficient de evitare a obliter ării constă în îndepărtareamecanică a stratului de molecule polarizate prin deplasarea relativă a pereţilor fantei. De exemplu, în cazul fantelor realizate între o bucşă şi un sertar cilindric,una dintre piese este rotită continuu (soluţie utilizată la servovalvele regulatoarelor electrohidraulice de turaţie şi putere produse de ICM Reşiţa în licenţă Neyrpic,
pentru turbine hidraulice) sau este supusă unei mişcări de translaţie alternativă cu
frecvenţă mare şi amplitudine mică (soluţie întrebuinţată la servovalvele electro-hidraulice produse de firma MOOG-S.U.A.).Stratul de molecule polarizate poate fi distrus aplicând orificiului sau fantei
o diferenţă de presiune mai mare, dar obliterarea se produce din nou, cu ointensitate sporită.
În cursul proiectării şi încercării elementelor hidraulice care conţin fante şiorificii de mici dimensiuni trebuie să se prevadă soluţii de evitare sistematică afenomenului descris.
Aplica ţ ia 3.1. Mi şcarea laminar ă între două piese cilindrice circulare
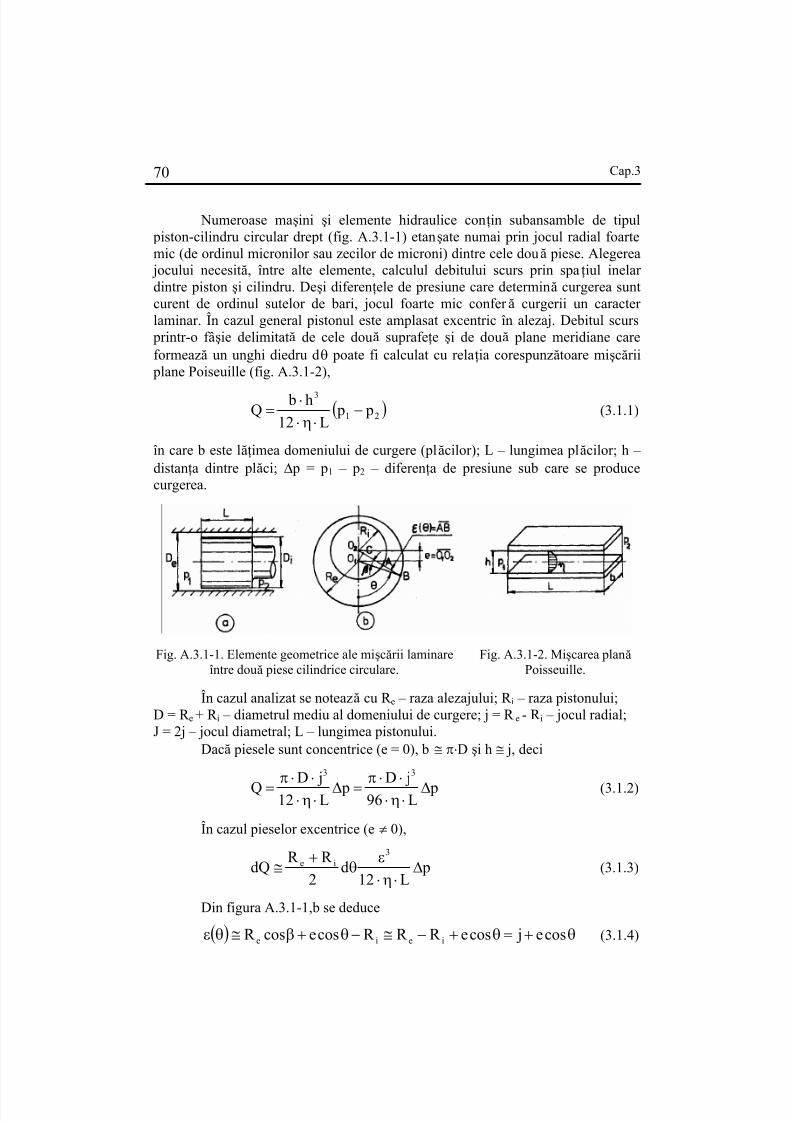
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 57/627
Cap.370
Numeroase maşini şi elemente hidraulice conţin subansamble de tipul piston-cilindru circular drept (fig. A.3.1-1) etanşate numai prin jocul radial foartemic (de ordinul micronilor sau zecilor de microni) dintre cele două piese. Alegerea
jocului necesită, între alte elemente, calculul debitului scurs prin spaţiul inelar dintre piston şi cilindru. Deşi diferenţele de presiune care determină curgerea suntcurent de ordinul sutelor de bari, jocul foarte mic confer ă curgerii un caracter laminar. În cazul general pistonul este amplasat excentric în alezaj. Debitul scurs
printr-o fâşie delimitată de cele două suprafeţe şi de două plane meridiane careformează un unghi diedru dθ poate fi calculat cu relaţia corespunzătoare mişcării
plane Poiseuille (fig. A.3.1-2),
( )21
3
p pL12
h bQ −⋅η⋅
⋅= (3.1.1)
în care b este lăţimea domeniului de curgere (plăcilor); L – lungimea plăcilor; h – distanţa dintre plăci; Δ p = p1 – p2 – diferenţa de presiune sub care se producecurgerea.
Fig. A.3.1-1. Elemente geometrice ale mişcării laminareîntre două piese cilindrice circulare.
Fig. A.3.1-2. Mişcarea plană Poisseuille.
În cazul analizat se notează cu R e – raza alezajului; R i – raza pistonului;D = R e + R i – diametrul mediu al domeniului de curgere; j = R e - R i – jocul radial;J = 2j – jocul diametral; L – lungimea pistonului.
Dacă piesele sunt concentrice (e = 0), b ≅ π⋅D şi h ≅ j, deci
pL96 jD pL12 jDQ
33
Δ⋅η⋅ ⋅⋅π=Δ⋅η⋅ ⋅⋅π= (3.1.2)
În cazul pieselor excentrice (e ≠ 0),
pL12
d2
R R dQ
3ie Δ
⋅η⋅ε
θ+
≅ (3.1.3)
Din figura A.3.1-1,b se deduce
( ) θ+=θ+−≅−θ+β≅θε cose jcoseR R R cosecosR ieie (3.1.4)

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 58/627
Cap.3 71
deci
( ) ,dcose jL12
pD2Q 3
0
θθ⋅+⋅η⋅
Δ⋅= ∫
π
(3.1.5)
sau
pJ
e61
L96
jD p
j
e
2
31
L12
jDQ
2
23
2
23
Δ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
⋅η⋅⋅⋅π
=Δ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ⋅+
⋅η⋅⋅⋅π
= (3.1.6)
Valoarea maximă a excentricităţii este emax = j = J/2 , deci debitul maximal interstiţiului inelar este:
pL12
jD5,2Q
3
max Δ⋅η⋅⋅⋅π
= (3.1.7)
Se constată că descentrarea pistonului provoacă creşterea debitului; dacă pistonul atinge cilindrul, debitul este de 2,5 ori mai mare decât în cazul în care estecentrat. Se notează cu
2
2
j
e
2
31 ⋅+=α (3.1.8)
"coeficientul de excentricitate" (1 ≤ α ≤ 2,5). Relaţia (3.4.6) devine
pL96
JDQ
3
Δ⋅η⋅⋅α⋅⋅π
= (3.1.9)
Aria de curgere dintre cei doi cilindri este S = π⋅D⋅J/2, deci ultima relaţie poate fi scrisă sub forma:
pL96
JSQ
2
Δ⋅η⋅
⋅α⋅= (3.1.10)
Debitul unei conducte circulare drepte de secţiune echivalentă, S = π⋅d2/4
şi lungime L rezultă din relaţia Hagen-Poiseuille:
L8
pS
L8
p
4
d p
L128
dQ 2
224
c ⋅η⋅π⋅Δ
⋅=⋅η⋅π⋅
Δ⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛ ⋅π=Δ⋅
⋅η⋅⋅π
= (3.1.11)
Raportul
2
c D
J
3
2
Q
Q⎟ ⎠
⎞⎜⎝
⎛ α= (3.1.12)
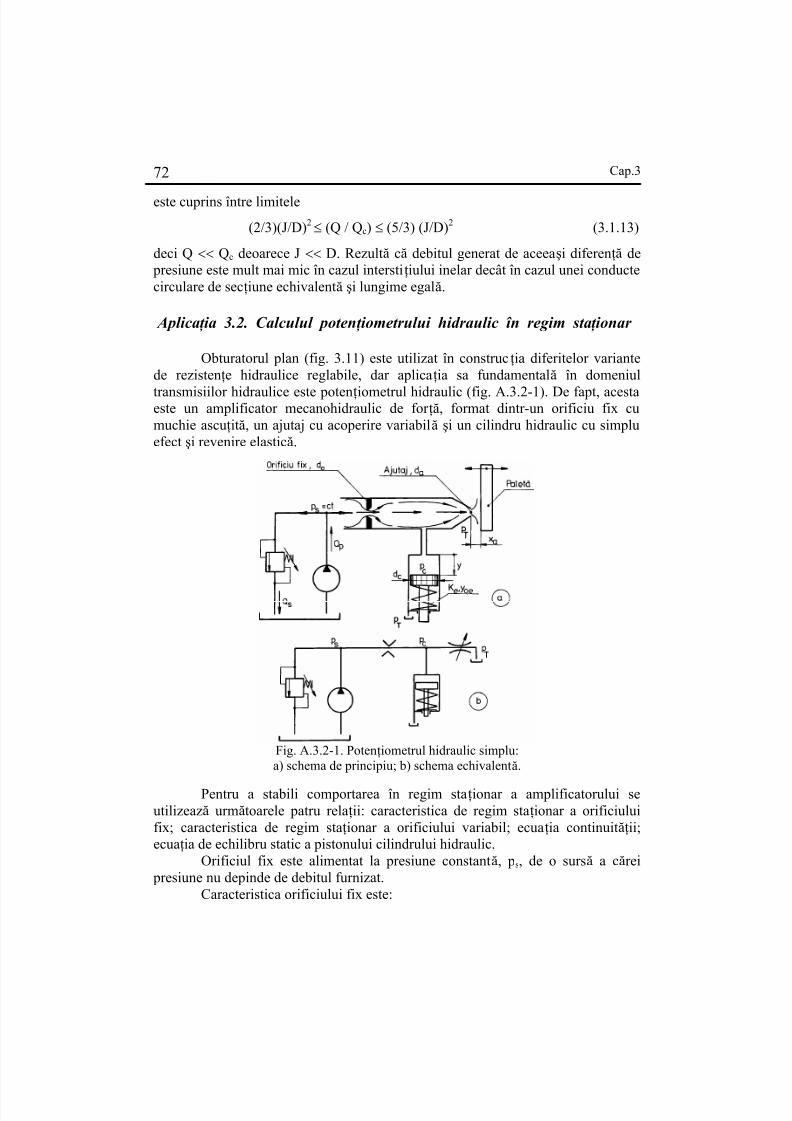
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 59/627
Cap.372
este cuprins între limitele
(2/3)(J/D)2 ≤ (Q / Qc) ≤ (5/3) (J/D)2 (3.1.13)
deci Q << Qc deoarece J << D. Rezultă că debitul generat de aceeaşi diferenţă de presiune este mult mai mic în cazul interstiţiului inelar decât în cazul unei conductecirculare de secţiune echivalentă şi lungime egală.
Aplica ţ ia 3.2. Calculul poten ţ iometrului hidraulic în regim sta ţ ionar
Obturatorul plan (fig. 3.11) este utilizat în construcţia diferitelor variantede rezistenţe hidraulice reglabile, dar aplicaţia sa fundamentală în domeniul
transmisiilor hidraulice este potenţiometrul hidraulic (fig. A.3.2-1). De fapt, acestaeste un amplificator mecanohidraulic de for ţă, format dintr-un orificiu fix cumuchie ascuţită, un ajutaj cu acoperire variabilă şi un cilindru hidraulic cu simpluefect şi revenire elastică.
Fig. A.3.2-1. Potenţiometrul hidraulic simplu:a) schema de principiu; b) schema echivalentă.
Pentru a stabili comportarea în regim staţionar a amplificatorului seutilizează următoarele patru relaţii: caracteristica de regim staţionar a orificiuluifix; caracteristica de regim staţionar a orificiului variabil; ecuaţia continuităţii;ecuaţia de echilibru static a pistonului cilindrului hidraulic.
Orificiul fix este alimentat la presiune constantă, ps, de o sursă a cărei presiune nu depinde de debitul furnizat.
Caracteristica orificiului fix este:

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 60/627
Cap.3 73
( )5,0
cs0d20
0
p p2
4
cdQ ⎥
⎦
⎤⎢⎣
⎡ρ−⋅⋅π
= (3.2.1)
unde do este diametrul orificiului; cd0 - coeficientul de debit; ρ - densitatealichidului; pc - presiunea în aval de orificiul fix.
Caracteristica orificiului variabil este:
( )5,0
Tcdaaaa
p p2cxdQ ⎥
⎦
⎤⎢⎣
⎡ρ−
⋅⋅⋅π= (3.2.2)
unde da este diametrul ajutajului; xa - distanţa dintre obturatorul plan (paletă) şi
ajutaj; pT - presiunea rezervorului, uzual neglijabilă în raport cu celelalte presiuni.În regim staţionar, cele două debite sunt egale: Q0 = Qa, deci
( ) ( )5,0
Tc0daa
5,0
cs0d
20 p p2
cxd p p2
c4
d⎥⎦
⎤⎢⎣
⎡ρ−
⋅⋅⋅π=⎥⎦
⎤⎢⎣
⎡ρ−π
(3.2.3)
Într-o primă aproximaţie, se poate admite egalitatea coeficienţilor de debit:cd0 = cda. Prin ridicare la pătrat, relaţia anterioar ă devine:
( ) ( Tc2a
2acs
40 p pxd p p
16
d−⋅=− ) (3.2.4)
Conform unei reguli de proiectare ce va fi discutată ulterior, diametrulorificiului este uzual jumătate din cel al ajutatului:
a0 d2
1d = (3.2.5)
Relaţia anterioar ă devine:
( )
20
2a
sac
d
x641
px p
+= (3.2.6)
Variaţia presiunii în spaţiul dintre cele două rezistenţe hidraulice estereprezentată în figura A.3.2-2 în funcţie de deschiderea ajutajului.
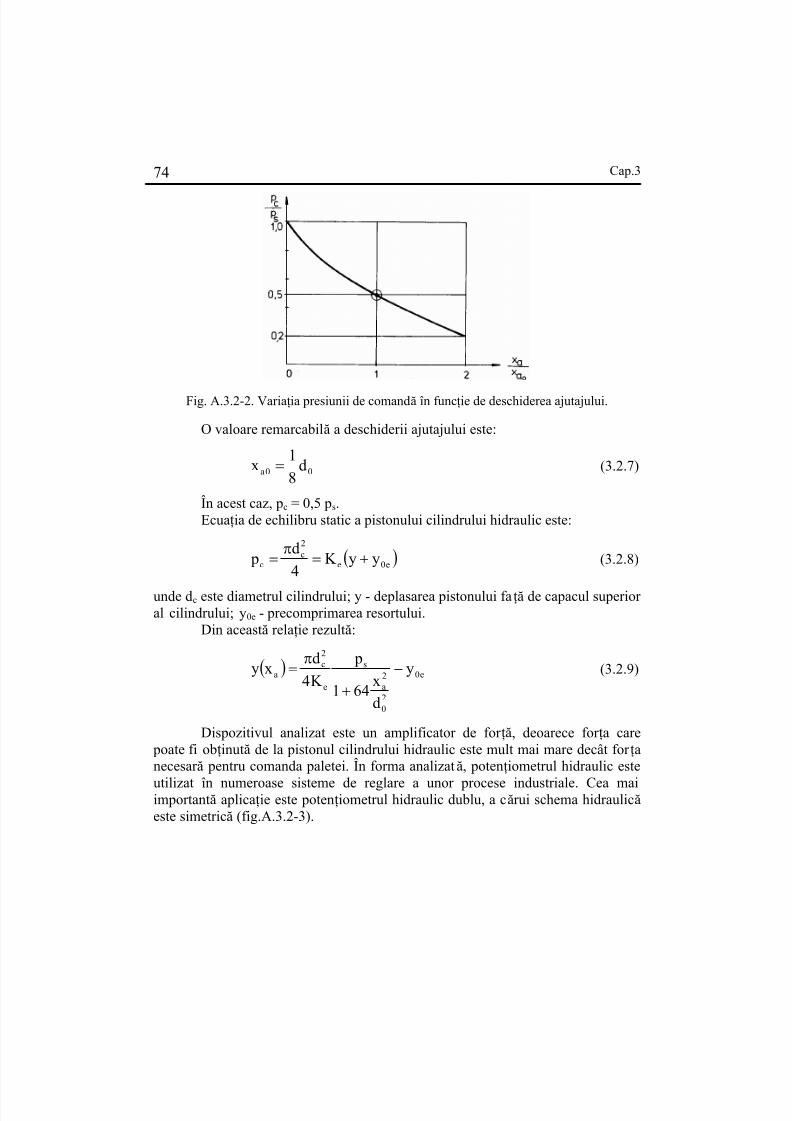
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 61/627
Cap.374
Fig. A.3.2-2. Variaţia presiunii de comandă în funcţie de deschiderea ajutajului.
O valoare remarcabilă a deschiderii ajutajului este:
00a d8
1x = (3.2.7)
În acest caz, pc = 0,5 ps.Ecuaţia de echilibru static a pistonului cilindrului hidraulic este:
( e0e
2c
c yyK 4
d p +=
π= ) (3.2.8)
unde dc este diametrul cilindrului; y - deplasarea pistonului faţă de capacul superior al cilindrului; y0e - precomprimarea resortului.
Din această relaţie rezultă:
( ) e0
20
2a
s
e
2c
a y
d
x641
p
K 4
dxy −
+
π= (3.2.9)
Dispozitivul analizat este un amplificator de for ţă, deoarece for ţa care poate fi obţinută de la pistonul cilindrului hidraulic este mult mai mare decât for ţanecesar ă pentru comanda paletei. În forma analizată, potenţiometrul hidraulic este
utilizat în numeroase sisteme de reglare a unor procese industriale. Cea maiimportantă aplicaţie este potenţiometrul hidraulic dublu, a cărui schema hidraulică este simetrică (fig.A.3.2-3).

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 62/627
Cap.3 75
Fig. A.3.2-3. Potenţiometrul hidraulic dublu:a) schema de principiu; b) schema hidraulică echivalentă.
Acest dispozitiv furnizează o diferenţă de presiune practic propor ţională cudeplasarea paletei faşă de poziţia neutr ă, x. Deschiderile celor două ajutaje devin:
xxx,xxx 0a20a1 +=−= (3.2.10)
Rezultă
( ) ( ) ( )( ) ( )
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
++
−−
+
=−=Δ
20
20a
20
20a
s2c1cc
d
xx641
1
d
xx641
1 px px px p (3.2.11)
Liniaritatea acestei relaţii (fig. A.3.2-4) este remarcabilă şi permiteutilizarea preamplificatorului dublu în structura amplificatoarelor electrohidraulice,servomecanis-melor mecanohidraulice şi electrohidraulice etc.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 63/627
Cap.376
Fig. A.3.2-4. Caracteristica unui preamplificator cu ajutaj şi paletă dublu.
3.4. FENOMENUL DE GRIPARE HIDRAULICĂ
3.4.1. Descrierea fenomenului Se consider ă un drosel cu sertar cilindric circular drept neted (fig. 3.10),
închis (x ≤ 0) şi alimentat cu lichid la o presiune oarecare. Se constată experimentalcă for ţa necesar ă pentru deplasarea axială este mult mai mare decât înainteaalimentării, deşi sertarul este echilibrat axial din punct de vedere al for ţelor de
presiune hidrostatice; dacă se întrerupe alimentarea, după un timp de ordinulzecilor de secunde sertarul poate fi deplasat din nou cu o for ţă mult mai mică.Acest fenomen se numeşte "gripare hidraulică" şi nu poate fi explicat decât printr-odistribuţie asimetrică a presiunii pe umerii sertarului, al cărei efect este lipireaacestuia de bucşă. For ţa axială necesar ă deschiderii depinde de for ţa radială neechilibrată şi de coeficientul de frecare dintre piesele metalice în contact. Timpul
necesar producerii gripajului şi dispariţiei acestuia corespunde strivirii filmului deulei, respectiv refacerii acestuia. Fenomenul nu se produce dacă sertarul şi bucşasunt perfect cilindrice sau dacă umerii sertarului sunt conici spre centrul acestuia,dar se produce întotdeauna când conicitatea umerilor este inversă. Rezultă că
pentru explicarea gripajului trebuie să se calculeze rezultanta for ţelor de presiune pe sertare conice. Jocul dintre sertar şi bucşă este mult mai mic decât diametreleacestor piese; mişcarea într-o fâşie delimitată de suprafeţele pieselor şi de două
plane meridiane apropiate este întotdeauna laminar ă şi poate fi asimilată cumişcarea într-un difuzor plan.
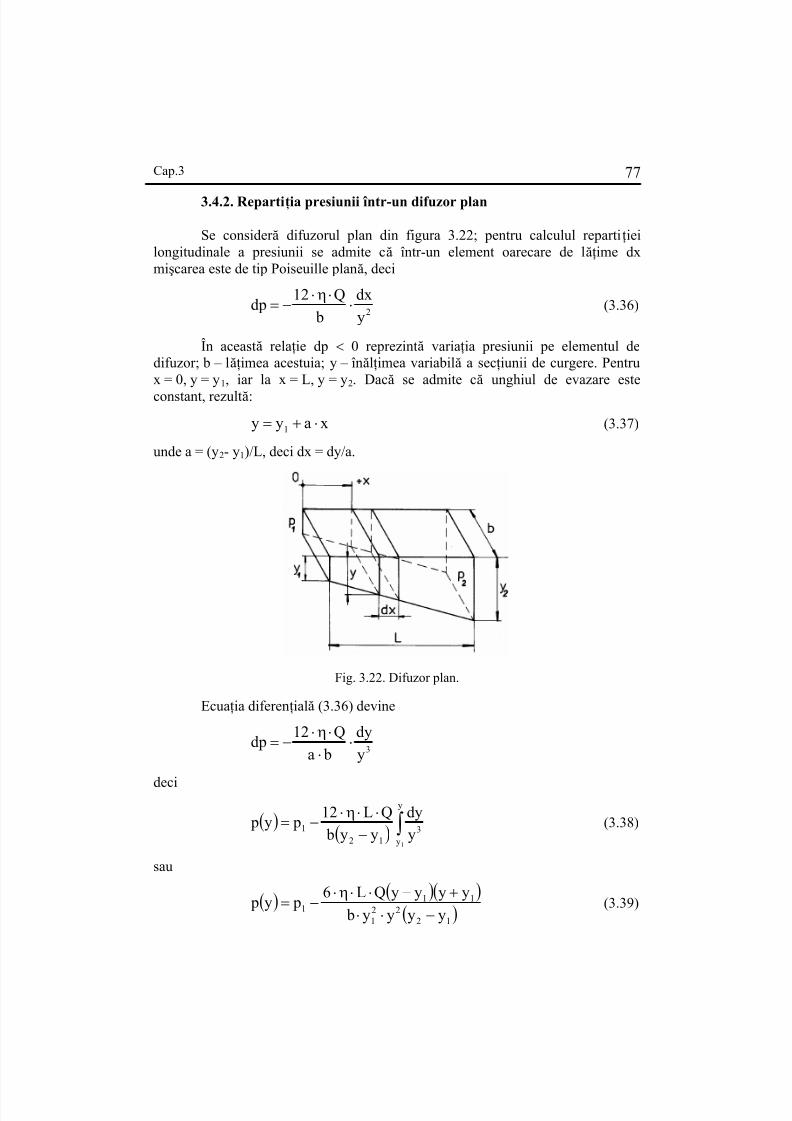
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 64/627
Cap.3 77
3.4.2. Repartiţia presiunii într-un difuzor plan
Se consider ă difuzorul plan din figura 3.22; pentru calculul repartiţieilongitudinale a presiunii se admite că într-un element oarecare de lăţime dxmişcarea este de tip Poiseuille plană, deci
2y
dx
b
Q12dp ⋅
⋅η⋅−= (3.36)
În această relaţie dp < 0 reprezintă variaţia presiunii pe elementul dedifuzor; b – lăţimea acestuia; y – înălţimea variabilă a secţiunii de curgere. Pentrux = 0, y = y1, iar la x = L, y = y2. Dacă se admite că unghiul de evazare este
constant, rezultă:
(3.37)xayy 1 ⋅+=
unde a = (y2- y1)/L, deci dx = dy/a.
Fig. 3.22. Difuzor plan.
Ecuaţia diferenţială (3.36) devine
3y
dy
ba
Q12dp ⋅
⋅⋅η⋅
−=
deci
( )( ) ∫−
⋅⋅η⋅−=
y
y3
121
1y
dy
yy b
QL12 py p (3.38)
sau
( )( )( )
( )1222
1
111 yyyy b
yyyyQL6 py p
−⋅⋅+−⋅⋅η⋅
−= (3.39)
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 65/627
Cap.378
Pentru y = L se obţine
( )Q
yy b
yyL6 p p
22
21
2121 ⋅⋅
+⋅η⋅=− (3.39′)
Relaţia (3.39) mai poate fi scrisă sub forma
( )
21
22
21
2
12
1
y
1
y
1y
1
y
1
p p
py p
−
−=
−−
(3.40)
din care s-a eliminat debitul.
Aplica ţ ia 3.3. Calculul rezultantei for ţ elor de presiune pe un sertar conic
amplasat într-o bucşă cilindrică
În cazul general axa sertarului nu este paralelă cu axa bucşei dar înclinareaacesteia este mică deoarece sertarul are uzual mai mulţi umeri care împiedică
bascularea sa. În figura A.3.3-1 s-a reprezentat numai un umăr conic de sertar,amplasat centric (a) şi excentric (b), supus unei diferenţe de presiune (p1 - p2). Sedefinesc următoarele mărimi: j1 – jocul radial la extremitatea amonte, măsurat cusertarul centrat; j2 – jocul radial la extremitatea aval, măsurat cu sertarul centrat; e –
excentricitatea sertarului; jm = (j1 + j2)/2 – jocul mediu; Δ j = (j2 – j1)/2 – semidiferenţa jocurilor, corespunzătoare conicităţii umărului.
For ţa f(θ) exercitată de lichid asupra unei fâşii de sertar cuprinsă între două plane meridiane care formează unghiul diedru dθ se calculează admiţând distribuţia presiunii dată de relaţia (3.39), f ăr ă a ţine seama de conicitate, care nu depăşeşte practic 1 ‰;
( )( )
( )
∫∫∫∫ ⋅θ
=θ
⋅=⋅θ⋅⋅=⋅=θθ
θ
2
1
2
1
2
1
2
1
y
y
y
y
y
y
y
y
dy pa
dr dy
a
dr pdxdr pds pf (3.3.1)
deci
( )( )
dyy1
y1
yy bQL6 pd
ar f
2
1
y
y21
212
1∫ ⎥⎦
⎤⎢⎣
⎡⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −−
⋅⋅η⋅−θ=θ (3.3.2)
Ţinând seama de relaţia (3.40) se obţine prin integrare
( )( ) ( )( ) ( )θ+θ
θ⋅+θ⋅θ⋅⋅=θ
21
2211
yy
y py pdLr f (3.3.3)

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 66/627
Cap.3 79
Fig. A.3.3-1. Sertar conic amplasat într-o bucşă cilindrică:a) sertar centrat; b) sertar excentric; c) elemente geometrice pentru
calculul for ţelor elementare de presiune; d) sertar lipit de bucşă.
Jocurile radiale j1 şi j2 măsurate la extremităţile sertarului, într-o secţiune poziţionată prin unghiul θ, pot fi exprimate în funcţie de jocul mediu,
( )( ) ( )
2
yyy 21
m
θ+θ=θ (3.3.4)
şi de mărimea constantă
( ) ( ) j
2
j j
2
yyy 1212 Δ=
−=
θ−θ=Δ (3.3.5)
prin relaţiile:
( ) ( ) ; jyy m1 Δ−θ=θ (3.3.6)
( ) ( ) . jyy m1 Δ+θ=θ (3.3.7)
Expresia for ţei f(θ) capătă forma simplă
( ) ( )( )⎥⎦
⎤⎢⎣
⎡
θΔ
−−+θ⋅⋅=θm
2121 y
j p p p pdr L
2
1f (3.3.8)

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 67/627
Cap.380
din care se pot trage următoarele concluzii preliminare:a) dacă conicitatea sertarului este nulă, Δ j = 0 şi for ţa elementar ă de
presiune:
( )21 p pdLr 2
1f +θ⋅⋅= (3.3.9)
este independentă de unghiul θ; rezultanta for ţelor de presiune este nulă, deci unsertar perfect cilindric nu este supus gripării hidraulice;
b) dacă sertarul este excentric şi are conicitatea orientată în sensul curgerii,Δ j > 0 şi for ţa f este mai mică decât cea corespunzătoare sertarului cilindric;diferenţa este cu atât mai mare cu cât jocul mediu ym(θ) este mai mic, fiind maximă
în zona de apropiere a sertarului de bucşă (fig. A.3.3-2) şi minimă în partea opusă;rezultanta, corespunzătoare ariei haşurate, tinde să mărească excentricitatea, deciun sertar al cărui diametru scade în sensul curgerii este supus lipirii de bucşă;
Fig. A.3.3-2. Variaţia presiunii în jurul unuisertar al cărui diametru scade în sensul
curgerii.
Fig. A.3.3-3. Variaţia coeficientului delipire, α, în funcţie de parametrul β.
c) dacă diametrul sertarului excentric creşte în sensul curgerii, Δ j < 0 şifor ţa f este mai mare decât cea corespunzătoare sertarului cilindric, fiind maximă în
partea în care sertarul se apropie de bucşă, rezultanta for ţelor de presiune tinde să anuleze excentricitatea iniţială, deci un sertar se autocentrează dacă diametrulsău creşte în sensul curgerii. Din figura A.3.3-1, c se pot calcula mărimile
( ) θ⋅+=θ cose jy 11 (3.3.10)
( ) θ⋅+=θ cose jy 22 (3.3.11)
deci

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 68/627
Cap.3 81
( ) ⎥⎦
⎤⎢⎣
⎡θ⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=θ⋅+=θ⋅+
+=θ cos
j
e1 jcose jcose
2
j jy
mmm
21m (3.3.12)
Datorită simetriei, rezultanta for ţelor elementare de presiune este situată în planul θ = 0 şi are mărimea
( ) ( )( )∫∫∫
πππ
θ+θθ
−Δ−θθ+Δ=θ=2
0 m21
2
0 m21
2
0 cos j/e1
dcos p p jrL
j2
1dcos p p jrL
2
1cosf F (3.3.13)
Prima integrală este nulă, iar a doua se rezolvă cu schimbarea de variabilă
( ) θ−
−
=θ+ cos j/e1
j/e1
cos j
e
1 m
2m
2
m(3.3.14)
după ce este scrisă sub forma:
θ
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
θ+−=
θ+
θθ= ∫∫
ππ
dcos
j
e1
11
e
j
cos j
e1
dcosI
2
0
m
m2
0
m
(3.3.15)
limitele de integrare fiind identice. Rezultă
⎟⎟ ⎠ ⎞⎜⎜
⎝ ⎛ −
−⋅π⋅−= 1
j/e11
e j21I
2m
2
m (3.3.16)
deci
( )⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −
−−
Δ⋅⋅⋅π= 1
j/e1
1 p p
e2
jLdF
2m
221 (3.3.17)
În scopul evaluării ordinului de mărime al acestei for ţe se defineşte o for ţă de referinţă corespunzătoare diferenţei de presiune p1 – p2 şi ariei secţiunii axiale asertarului, A = L⋅d:
( 21R p pdLF )−⋅= (3.3.18)
Se defineşte de asemenea un "coeficient de lipire", α, prin relaţia
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −
−
Δ⋅
π=α 1
j/e1
1
e
j
2 2m
2. (3.3.19)
For ţa de lipire capătă expresia simplă
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 69/627
Cap.382
. (3.3.20)R FF ⋅α=
În cazul contactului dintre sertar şi bucşă (cazul cel mai interesant)excentricitatea are valoarea maximă,
j je medmax Δ−= (3.3.21)
iar expresia coeficientului de lipire devine
( ) ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −
Δ−−Δ−Δ
⋅π
=α 1 j/ j j1
1
j j
j
2 2m
2mm
. (3.3.22)
Se admite ca parametru unic mărimea
12
12
m j j
j j
j
j
+−
=Δ
=β (3.3.23)
deci
( ) ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −
β−−β−β
⋅π
=α 111
1
12 2(3.3.24)
Serviciile de control tehnic al calităţii măsoar ă în mod obişnuit jocul mediu
diametral, Jm = j1 + j2 = 2 jm şi diferenţa dintre diametrele extremităţilor sertarului,( ) ( ) ( ) j4 j j2 jr 2 jr 2 2121 Δ=−=−−−=δ (3.3.25)
Expresia practică a parametrului β este
mm J2 j
j δ=
Δ=β . (3.3.26)
Valoarea β = 0 corespunde sertarului cilindric, iar β = 1 – sertarului alcărui diametru amonte este egal cu cel al bucşei.
Variaţia coeficientului α în funcţie de parametrul β este indicată în figuraA.3.3-3. Se constată că valoarea maximă a parametrului α, (0,27) corespunde uneivalori a parametrului β care apare frecvent în practică (≅ 0,3) deci forţa de lipirepoate depăşi un sfert din forţa de referinţă.
Un exemplu numeric este util pentru ilustrarea calculelor teoretice. Seconsider ă următoarele date: diametrul nominal, d = 8 mm; lungimea, L = 10 mm;diferenţa de presiune, p1 - p2 = 200 bar; jocul mediu diametral Jm = 5 μm. Rezultă FR = 160 daN; unui coeficient de frecare uzual, μ = 0,15, îi corespunde o rezistenţă axială de 5,4 daN.
Alura curbei din figura A.3.3-3 şi exemplul numeric prezentat indică faptulcă lipirea sertarului neted de bucşă nu poate fi evitată chiar dacă execuţia este
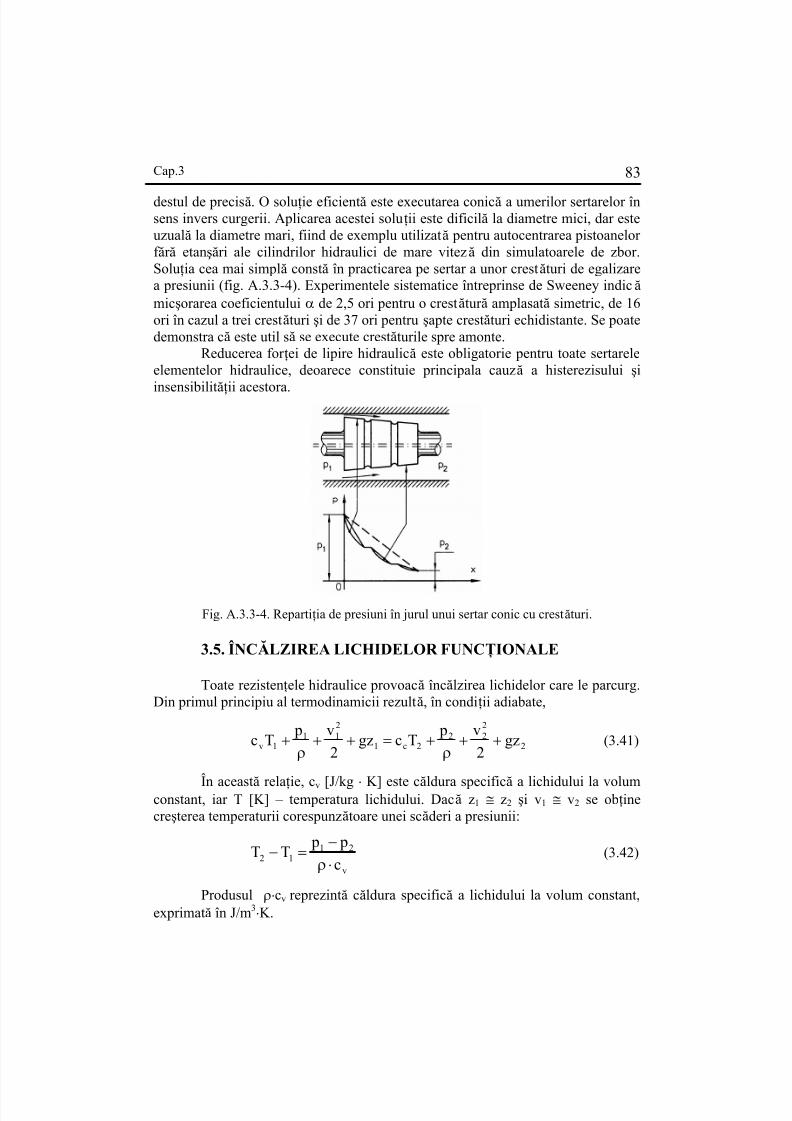
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 70/627
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 71/627
Cap.384
În cazul lichidului hidraulic standard, ρ⋅cv ≅ 1,84 J/m3⋅K, deci o cădere de presiune de 10 bar determină o încălzire a lichidului cu 0,54 K.
Relaţia (3.42) este utilă în calculul căldurii generate de o transmisiehidraulică, în calculul lagărelor hidrodinamice etc.
3.6. ŞOCUL HIDRAULIC
Regimul permanent se întâlneşte foarte rar în conductele transmisiilor hidraulice deoarece debitul real al pompelor volumice variază periodic cu frecvenţă mare, ciclurile funcţionale ale maşinilor de lucru acţionate impun variaţii de viteză sau inversări ale sensului de mişcare, for ţele şi momentele rezistente au frecvent un
caracter aleator etc.Variaţiile vitezei lichidului generează unde de presiune care se propagă rapid în întreg sistemul, suferind reflexii şi refracţii datorită variaţiilor de secţiuneşi diferitelor elemente ale transmisiei. Fenomenul se numeşte "şoc hidraulic" şi estecaracterizat prin zgomote şi şocuri de presiune considerabile, pozitive şi negative,ce pot provoca distrugerea elementelor transmisiei, îndeosebi prin oboseală.
Viteza de propagare a undelor de presiune (celeritatea) se calculează curelaţia
ρε
= ea (3.43)
în care εe este modulul de elasticitate efectiv al conductei,
( ) ( ) lr tggr l
glr e V/V ε⋅ε⋅+ε⋅ε+ε
ε⋅ε⋅ε=ε (3.44)
Valorile uzuale ale celerităţii sunt cuprinse între 900 şi 1250 m/s pentruconducte din oţel şi între 280 şi 640 m/s, pentru racordurile flexibile armate.
Dacă viteza v0 a lichidului dintr-o conductă de lungime L şi secţiune A esteanulată brusc de o vană, iar la capătul amonte al conductei se găseşte unacumulator hidropneumatic de capacitate suficient de mare pentru a menţine
presiunea constantă, la vană se formează o undă de presiune care se propagă însens contrar curgerii şi se reflectă cu schimbare de semn la acumulator.
După parcurgerea conductei în timpul t = L/a, întreaga energie cinetică alichidului se transformă în energie de presiune:
20
e
20 p
AL
2
1vAL
2
1Δ
ε⋅
=⋅⋅⋅ρ (3.45)
Suprapresiunea maximă Δ p0, creată prin închiderea bruscă a vanei, are valoarea
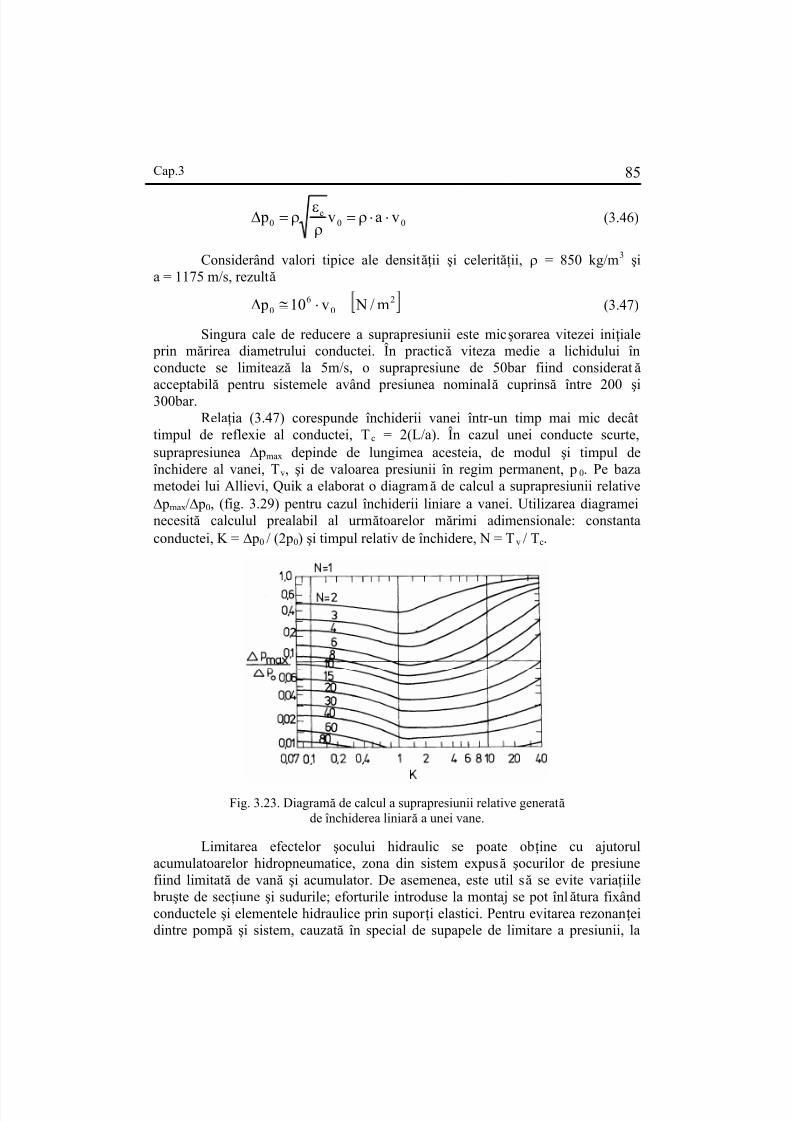
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 72/627
Cap.3 85
00e
0 vav p ⋅⋅ρ=ρε
ρ=Δ (3.46)
Considerând valori tipice ale densităţii şi celerităţii, ρ = 850 kg/m3 şia = 1175 m/s, rezultă
20
60 m/ Nv10 p ⋅≅Δ (3.47)
Singura cale de reducere a suprapresiunii este micşorarea vitezei iniţiale prin mărirea diametrului conductei. În practică viteza medie a lichidului înconducte se limitează la 5m/s, o suprapresiune de 50bar fiind considerată acceptabilă pentru sistemele având presiunea nominală cuprinsă între 200 şi300bar.
Relaţia (3.47) corespunde închiderii vanei într-un timp mai mic decâttimpul de reflexie al conductei, Tc = 2(L/a). În cazul unei conducte scurte,suprapresiunea Δ pmax depinde de lungimea acesteia, de modul şi timpul deînchidere al vanei, Tv, şi de valoarea presiunii în regim permanent, p0. Pe bazametodei lui Allievi, Quik a elaborat o diagramă de calcul a suprapresiunii relativeΔ pmax/Δ p0, (fig. 3.29) pentru cazul închiderii liniare a vanei. Utilizarea diagrameinecesită calculul prealabil al următoarelor mărimi adimensionale: constantaconductei, K = Δ p0 / (2p0) şi timpul relativ de închidere, N = Tv / Tc.
Fig. 3.23. Diagramă de calcul a suprapresiunii relative generată de închiderea liniar ă a unei vane.
Limitarea efectelor şocului hidraulic se poate obţine cu ajutorulacumulatoarelor hidropneumatice, zona din sistem expusă şocurilor de presiunefiind limitată de vană şi acumulator. De asemenea, este util să se evite variaţiile
bruşte de secţiune şi sudurile; eforturile introduse la montaj se pot înlătura fixândconductele şi elementele hidraulice prin supor ţi elastici. Pentru evitarea rezonanţeidintre pompă şi sistem, cauzată în special de supapele de limitare a presiunii, la

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 73/627
Cap.386
punerea în funcţiune sunt necesare modificări ale lungimilor unor conducte sauschimbarea poziţiei unor acumulatoare hidropneumatice. Inspectarea periodică a
punctelor critice poate preveni ruptura unor elemente de îmbinare.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 74/627
PARTEA a II-a
CONSTRUCŢIA, FUNCŢIONAREA,CALCULUL ŞI ÎNCERCAREA
MAŞINILOR HIDRAULICEVOLUMICE ALE TRANSMISIILOR
HIDRAULICE
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 75/627
4. POMPE CU PISTOANE
4.1. PROBLEMATICA MAŞINILOR HIDRAULICE
VOLUMICE
4.1.1. Principiul de funcţionare al maşinilor hidraulice volumice
Maşinile hidraulice volumice (pompe şi motoare) constituie componentelefundamentale ale sistemelor hidraulice de acţionare, comandă şi reglare. Pompeletransformă energia mecanică furnizată de un motor termic, electric, hidraulic sau
pneumatic în energie hidraulică, mărind practic numai energia de presiune alichidelor vehiculate. Motoarele volumice realizează transformarea inversă,convertind energia de presiune în energie mecanică. Din acest motiv, maşinilehidraulice volumice se mai numesc şi maşini hidrostatice.
În anumite condiţii, maşinile hidraulice volumice sunt reversibile, funcţiaîndeplinită fiind indicată de bilanţul energetic. Această caracteristică esteobligatorie pentru motoare în majoritatea aplicaţiilor, datorită componentelor
iner ţiale ale sarcinilor uzuale. Numeroase aplicaţii necesită inversarea sensului de mişcare al motoarelor
volumice, deci acestea trebuie să fie bidirecţionale (pot furniza acelaşi moment înambele sensuri de rotaţie ale arborelui). Pompele sunt în general unidirecţionale (camajoritatea motoarelor termice).
Motoarele disponibile pentru antrenarea pompelor au uzual turaţii ridicateşi momente mici, astfel că pompele volumice trebuie să fie "rapide" şi să aibă
performanţe cavitaţionale bune. În schimb, acţionarea sarcinilor mari, la turaţiireduse, necesită motoare volumice "lente", care funcţionează stabil la turaţii mici şifurnizează momente mari cu randamente ridicate. În practică sunt deci necesareîndeosebi pompe rapide şi motoare lente.
Reglarea turaţiei motoarelor f ăr ă disipare de energie se poate realiza prinreglarea debitului pompelor. Motoarele reglabile se utilizează numai în cazurispeciale, când domeniul de reglare al turaţiei este mare (dacă turaţia minimă continuă a motorului hidraulic este mai mică de un sfert din turaţia maximă).
Cu toate aceste deosebiri, formularea problemelor de natur ă statică,cinematică, dinamică, hidraulică, termică, organologică şi tehnologică este unitar ă
pentru cele două categorii de maşini. Deoarece pompele volumice sunt utilizate şiîn alte sisteme decât cele de acţionare, comandă şi reglare, în această lucrare sestudiază îndeosebi pompele volumice, pentru motoare fiind evidenţiate doar caracteristicile specifice.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 76/627
Cap.4 87
Pompele volumice sunt caracterizate de trecerea discontinuă a lichiduluidin racordul de aspiraţie în cel de refulare, prin camere de volum variabilconstituite din elemente ale unui mecanism numite "elemente active".
În faza de aspiraţie, camerele sunt conectate la racordul de aspiraţie,volumul lor creşte, iar presiunea scade până la valoarea necesar ă umplerii cu lichid.Când volumul camerelor devine maxim, acestea sunt închise mecanic şi apoiconectate la racordul de refulare. Urmează scăderea volumului, care producesuprapresiunea necesar ă pentru evacuarea lichidului în racordul de refulare.
Presiunea minimă posibilă în camere este presiunea de vaporizare alichidului la temperatura de funcţionare a pompei, iar presiunea de refulare poate fi,teoretic, oricât de mare, fiind practic limitată numai de rezistenţa organelor pompei.
Teoretic, o camer ă aspir ă şi refulează într-un ciclu de pompare un volumde lichid ΔV egal cu diferenţa dintre volumul său maxim Vmax şi volumul săuminim, Vmin,
minmax VVV −=Δ (4.1)
care nu depinde de presiunea de refulare, impusă practic de instalaţie.Debitul volumic teoretic mediu, Qtm, al pompei este propor ţional cu
frecvenţa de refulare, f:
Vf Qtm Δ⋅= (4.2)
Debitul volumic teoretic (instantaneu) Qt(t), aspirat sau refulat de o
camer ă, reprezintă viteza de variaţie a volumului acesteia:
( )dt
dVtQ t = (4.3)
În cazul general, acesta este variabil în timp, depinzând numai de tipulmecanismului utilizat şi de viteza de antrenare a elementului său conducător.
Dacă se utilizează o singur ă camer ă, debitul aspirat şi cel refulat au uncaracter intermitent, determinând mişcări nepermanente în conductele de aspiraţieşi de refulare. Utilizarea mai multor camere sincrone şi sinfazice măreşte debitulmediu f ăr ă a schimba caracterul intermitent al curgerii în exteriorul pompei. Prindefazarea adecvată a funcţionării camerelor, neuniformitatea debitelor poate fimicşorată până la valori admisibile pentru instalaţie. Neuniformitatea debitelor semai poate reduce cu acumulatoare hidropneumatice (hidrofoare).
Debitul volumic real, Q, este mai mic decât cel teoretic, Q t, din cauza pierderilor de lichid din spaţiile de înaltă presiune spre spaţiile de joasă presiuneale pompei, prin interstiţiile necesare mişcării relative a elementelor active.Pierderile volumice, ΔQ = Qt - Q, sunt propor ţionale cu presiunea de refulare, astfelcă debitul volumic real scade faţă de cel teoretic la creşterea presiunii (fig. 4.1).Debitul volumic real este mai mic decât cel teoretic şi din cauza compresibilităţiilichidului.
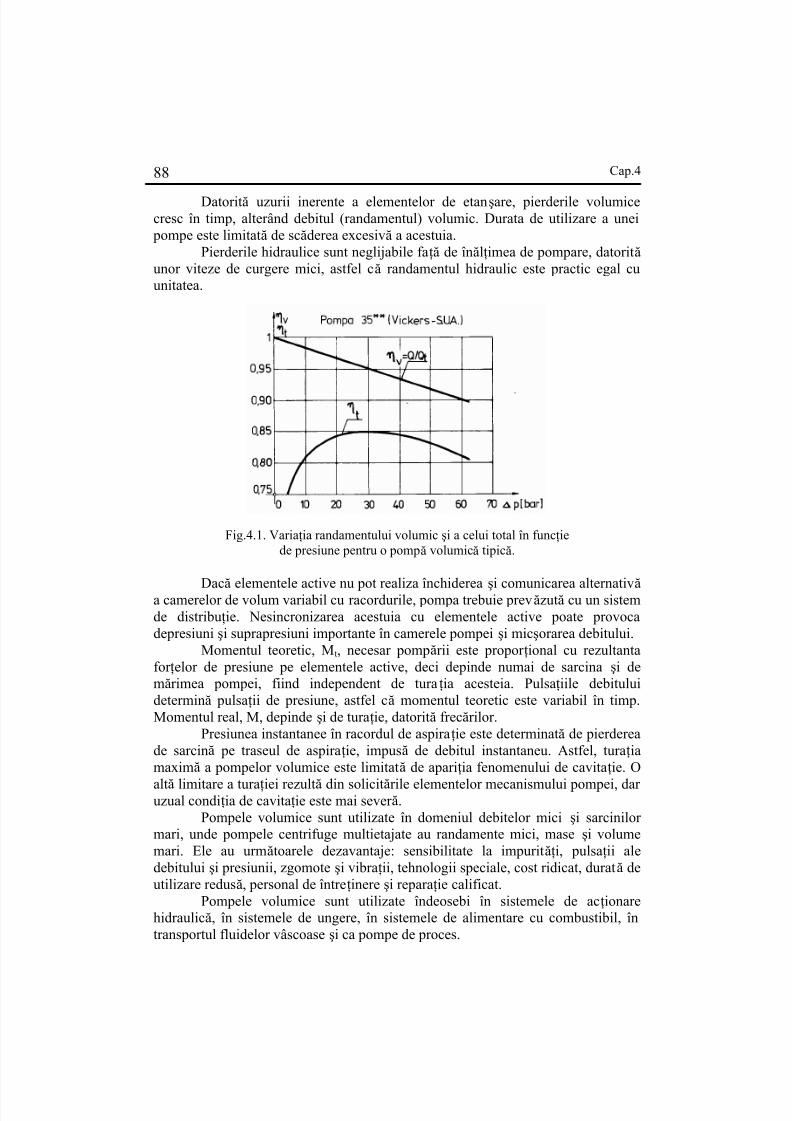
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 77/627
Cap.488
Datorită uzurii inerente a elementelor de etanşare, pierderile volumicecresc în timp, alterând debitul (randamentul) volumic. Durata de utilizare a unei
pompe este limitată de scăderea excesivă a acestuia.Pierderile hidraulice sunt neglijabile faţă de înălţimea de pompare, datorită
unor viteze de curgere mici, astfel că randamentul hidraulic este practic egal cuunitatea.
Fig.4.1. Variaţia randamentului volumic şi a celui total în funcţiede presiune pentru o pompă volumică tipică.
Dacă elementele active nu pot realiza închiderea şi comunicarea alternativă a camerelor de volum variabil cu racordurile, pompa trebuie prevăzută cu un sistemde distribuţie. Nesincronizarea acestuia cu elementele active poate provocadepresiuni şi suprapresiuni importante în camerele pompei şi micşorarea debitului.
Momentul teoretic, Mt, necesar pompării este propor ţional cu rezultantafor ţelor de presiune pe elementele active, deci depinde numai de sarcina şi demărimea pompei, fiind independent de turaţia acesteia. Pulsaţiile debituluidetermină pulsaţii de presiune, astfel că momentul teoretic este variabil în timp.Momentul real, M, depinde şi de turaţie, datorită frecărilor.
Presiunea instantanee în racordul de aspiraţie este determinată de pierdereade sarcină pe traseul de aspiraţie, impusă de debitul instantaneu. Astfel, turaţiamaximă a pompelor volumice este limitată de apariţia fenomenului de cavitaţie. O
altă limitare a turaţiei rezultă din solicitările elementelor mecanismului pompei, dar uzual condiţia de cavitaţie este mai sever ă.Pompele volumice sunt utilizate în domeniul debitelor mici şi sarcinilor
mari, unde pompele centrifuge multietajate au randamente mici, mase şi volumemari. Ele au următoarele dezavantaje: sensibilitate la impurităţi, pulsaţii aledebitului şi presiunii, zgomote şi vibraţii, tehnologii speciale, cost ridicat, durată deutilizare redusă, personal de întreţinere şi reparaţie calificat.
Pompele volumice sunt utilizate îndeosebi în sistemele de acţionarehidraulică, în sistemele de ungere, în sistemele de alimentare cu combustibil, întransportul fluidelor vâscoase şi ca pompe de proces.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 78/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 79/627
Cap.490
Prin definiţie, randamentul volumic al unei pompe este raportul dintredebitul real şi cel teoretic:
tvp Q
Q=η (4.9)
În cazul motoarelor,
Q
Q tvm =η (4.10)
Qt fiind debitul teoretic, corespunzător turaţiei şi capacităţii.
Prin definiţie, randamentul mecanic al unei pompe volumice este raportuldintre momentul teoretic şi momentul real absorbit
M
M tmp =η (4.11)
În cazul motorului,
tmm M
M=η (4.12)
momentul teoretic corespunzând capacităţii şi diferenţei de presiune dintreracorduri.
Randamentul total al unei pompe este raportul dintre puterea utilă
(hidraulică) şi puterea absorbită (mecanică):
vpmpt
vpmp p
mp
t
tvp
a
utp M2
VP
n2M
QP
M
QP
N
Nη⋅η=
η⋅η⋅
π
⋅=
⋅πη
⋅η⋅=
ω⋅⋅
==η (4.13)
În cazul motoarelor :
vmmmt p
vmmm
vm
t
tmm
a
utp M
2
VPQPn2M
QP
M
N
Nη⋅η=
π
⋅η⋅η
=
η⋅
⋅π⋅⋅η=
⋅ω⋅
==η (4.14)
4.1.3. Problemele de studiu şi clasificarea pompelor volumice
Cunoaşterea pompelor volumice interesează trei genuri de activitatetehnică: concepţia, execuţia şi utilizarea.
Concepţia are ca scop proiectarea pompei astfel încât să realizeze parametrii funcţionali (debit, sarcină, înălţime de aspiraţie etc.) şi obiectivetehnico-economice (randament maxim, cost minim, greutate minimă, fiabilitatemaximă etc.) impuse prin tema de proiectare.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 80/627
Cap.4 91
Execuţia are drept scop realizarea pompei conform proiectului, în condiţiitehnice, economice şi sociale date.
Utilizarea implică: a) alegerea, dintre pompele disponibile, a aceleia carecorespunde cel mai bine particularităţilor instalaţiei; b) montajul, punerea înfuncţiune, exploatarea, întreţinerea şi depanarea.
Rezolvarea acestor probleme necesită studierea pompelor volumice din punct de vedere hidraulic, termic, organologic, tehnologic şi economic.
Această lucrare se adresează îndeosebi cadrelor specializate în concepţia,execuţia şi utilizarea pompelor şi motoarelor volumice ale sistemelor hidraulice deacţionare, comandă şi reglare. Deşi implică numeroase cunoştinţe de profilmecanic, termic, electric, tehnologic şi economic, această lucrare tratează îndeosebi
probleme de natur ă hidraulică, abordând aspecte din celelalte domenii numai înmăsura în care acestea determină fenomenele hidraulice.Dintre problemele tratate se menţionează: debitul teoretic şi real, mediu şi
instantaneu, presiunea medie şi instantanee, caracteristicile energetice şicavitaţionale, sistemul de distribuţie, for ţele hidraulice şi echilibrarea acestora,drenarea spaţiilor secundare de volum variabil, compensarea automată a jocurilor,etanşarea, ungerea şi încercarea.
Criteriul uzual de clasificare a pompelor volumice are în vedere formaorganului activ şi genul de mişcare efectuat de acesta.
Ca elemente active se utilizează pistoane, angrenaje, palete, şuruburi etc.Se analizează în continuare, din punct de vedere hidraulic, tipurile de pompe celemai importante pentru sistemele de acţionare, comandă şi reglare hidraulice.
4.1.4. Recomandări privind alegerea pompelor volumice pentru
transmisii hidraulice
Principalele criterii utilizate în alegerea tipului optim de pompă pentru otransmisie hidrostatică sunt:
a) nivelul presiunii medii de funcţionare continuă; b) reversibilitatea;c) durata de utilizare;d) fineţea de filtrare şi calităţile lubrifiante ale lichidelor disponibile;e) nivelul de pulsaţie al presiunii şi debitului;f) gabaritul şi greutatea;
g) nivelul de zgomot.La presiuni medii mai mari de 150 bar se utilizează practic exclusiv pompe
cu pistoane.La presiuni mai mici de 150 bar concurează pompele cu roţi dinţate şi cele
cu palete culisante.Pompele cu angrenaje sunt ieftine dar au randamente relativ mici şi o
neuniformitate relativ mare a debitului, fiind şi foarte zgomotoase.Pompele cu palete culisante au zgomot redus, pulsaţie practic nulă a
debitului, sunt reglabile dar sunt scumpe deoarece necesită tehnologii evoluate.
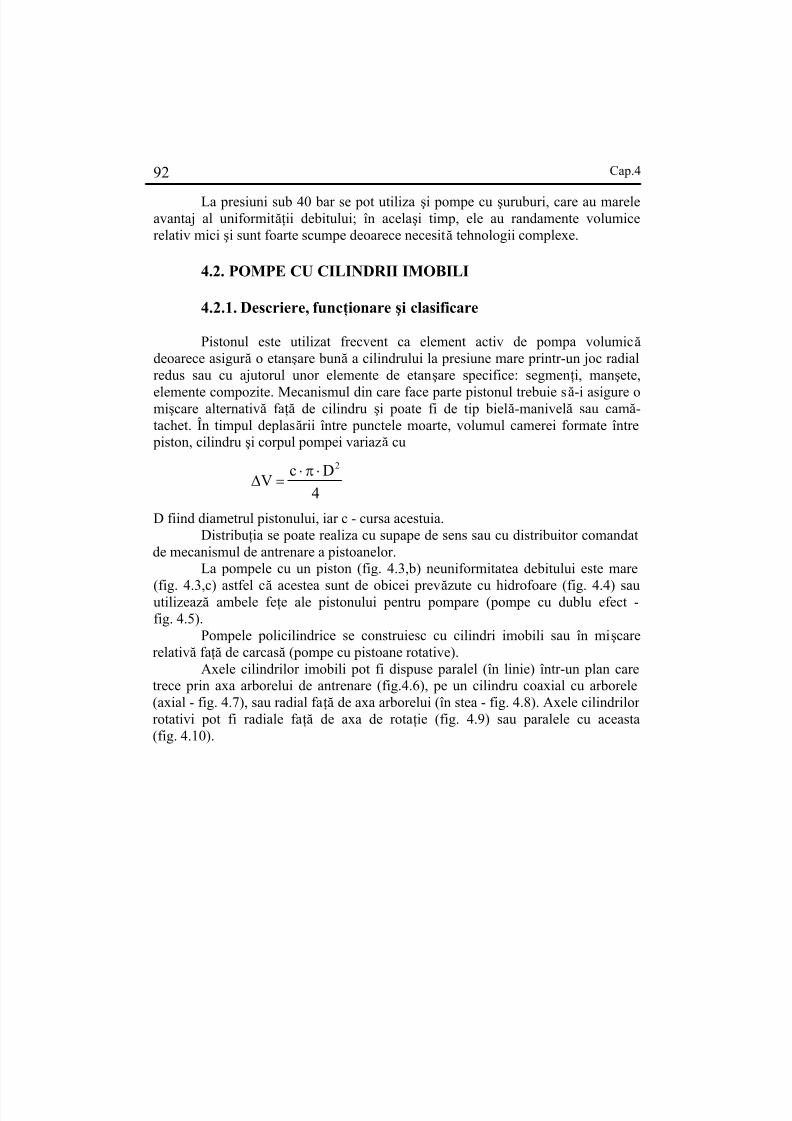
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 81/627
Cap.492
La presiuni sub 40 bar se pot utiliza şi pompe cu şuruburi, care au mareleavantaj al uniformităţii debitului; în acelaşi timp, ele au randamente volumicerelativ mici şi sunt foarte scumpe deoarece necesită tehnologii complexe.
4.2. POMPE CU CILINDRII IMOBILI
4.2.1. Descriere, funcţionare şi clasificare
Pistonul este utilizat frecvent ca element activ de pompa volumică deoarece asigur ă o etanşare bună a cilindrului la presiune mare printr-un joc radialredus sau cu ajutorul unor elemente de etanşare specifice: segmenţi, manşete,
elemente compozite. Mecanismul din care face parte pistonul trebuie să-i asigure omişcare alternativă faţă de cilindru şi poate fi de tip bielă-manivelă sau camă-tachet. În timpul deplasării între punctele moarte, volumul camerei formate între
piston, cilindru şi corpul pompei variază cu
4
DcV
2⋅π⋅=Δ
D fiind diametrul pistonului, iar c - cursa acestuia.Distribuţia se poate realiza cu supape de sens sau cu distribuitor comandat
de mecanismul de antrenare a pistoanelor.La pompele cu un piston (fig. 4.3,b) neuniformitatea debitului este mare
(fig. 4.3,c) astfel că acestea sunt de obicei prevăzute cu hidrofoare (fig. 4.4) sauutilizează ambele feţe ale pistonului pentru pompare (pompe cu dublu efect -fig. 4.5).
Pompele policilindrice se construiesc cu cilindri imobili sau în mişcarerelativă faţă de carcasă (pompe cu pistoane rotative).
Axele cilindrilor imobili pot fi dispuse paralel (în linie) într-un plan caretrece prin axa arborelui de antrenare (fig.4.6), pe un cilindru coaxial cu arborele(axial - fig. 4.7), sau radial faţă de axa arborelui (în stea - fig. 4.8). Axele cilindrilor rotativi pot fi radiale faţă de axa de rotaţie (fig. 4.9) sau paralele cu aceasta(fig. 4.10).
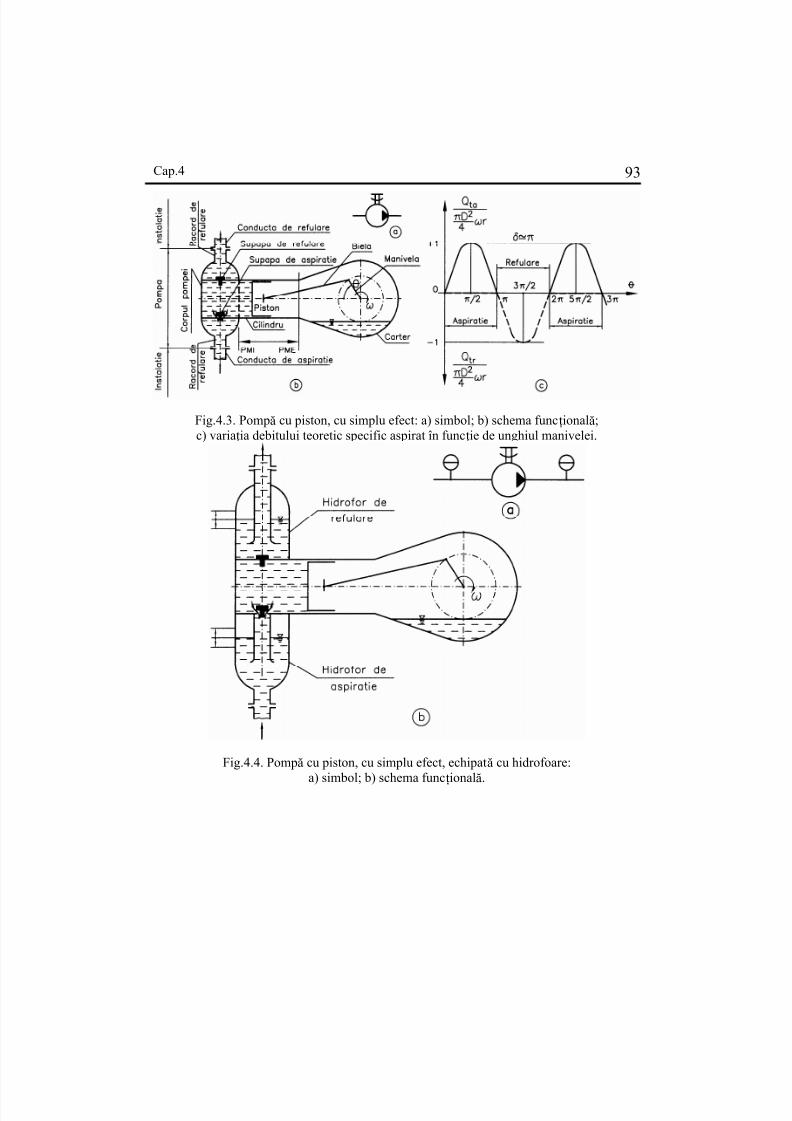
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 82/627
Cap.4 93
Fig.4.3. Pompă cu piston, cu simplu efect: a) simbol; b) schema funcţională;c) variaţia debitului teoretic specific aspirat în funcţie de unghiul manivelei.
Fig.4.4. Pompă cu piston, cu simplu efect, echipată cu hidrofoare:a) simbol; b) schema funcţională.
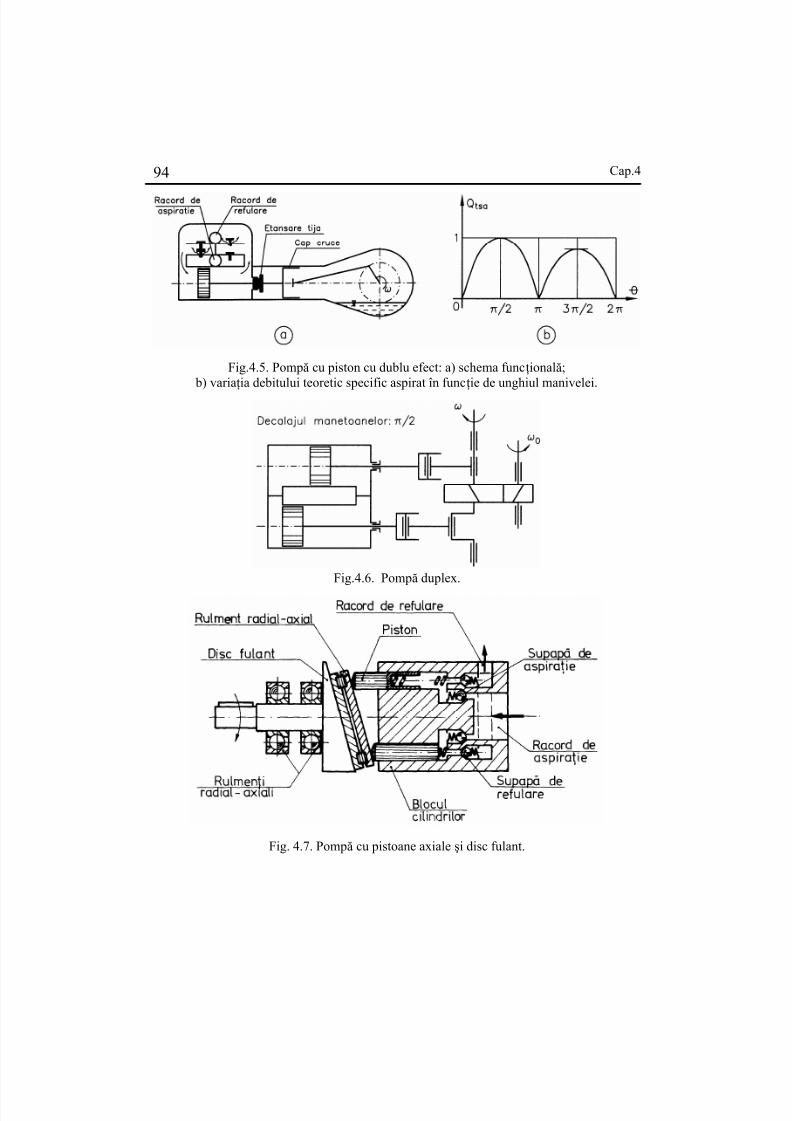
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 83/627
Cap.494
Fig.4.5. Pompă cu piston cu dublu efect: a) schema funcţională; b) variaţia debitului teoretic specific aspirat în funcţie de unghiul manivelei.
Fig.4.6. Pompă duplex.
Fig. 4.7. Pompă cu pistoane axiale şi disc fulant.
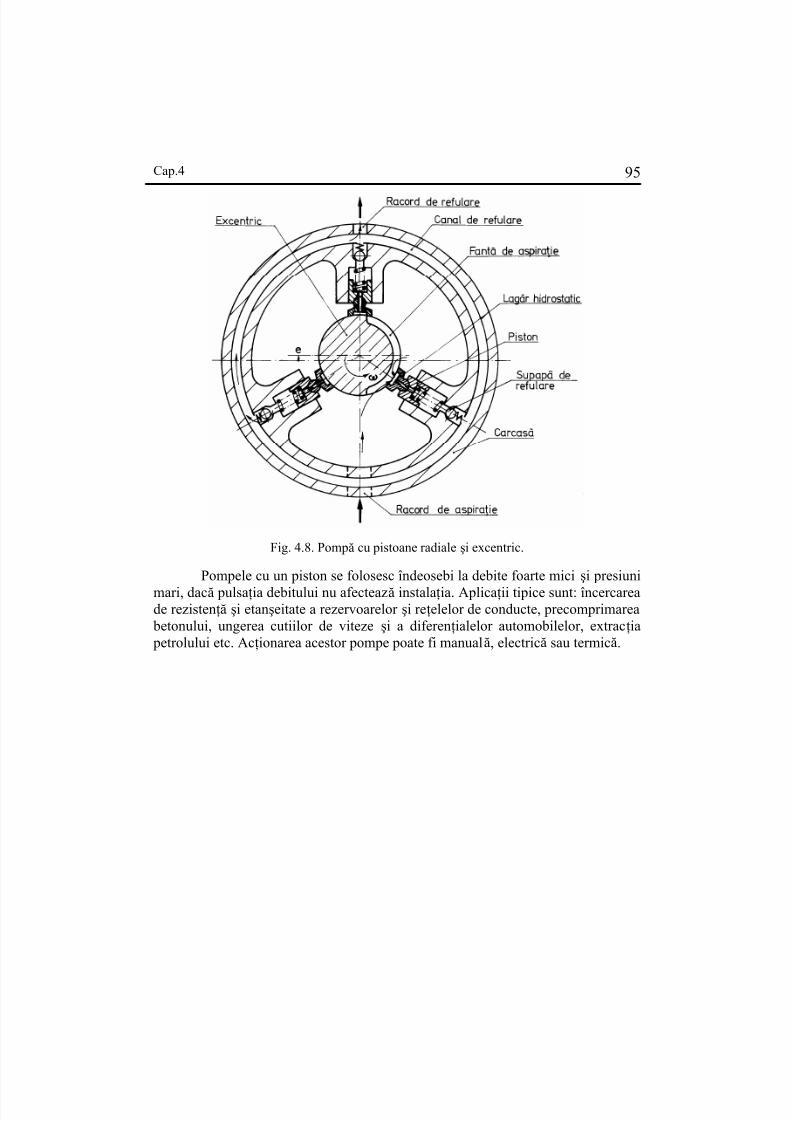
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 84/627
Cap.4 95
Fig. 4.8. Pompă cu pistoane radiale şi excentric.
Pompele cu un piston se folosesc îndeosebi la debite foarte mici şi presiuni
mari, dacă pulsaţia debitului nu afectează instalaţia. Aplicaţii tipice sunt: încercareade rezistenţă şi etanşeitate a rezervoarelor şi reţelelor de conducte, precomprimarea
betonului, ungerea cutiilor de viteze şi a diferenţialelor automobilelor, extracţia petrolului etc. Acţionarea acestor pompe poate fi manuală, electrică sau termică.
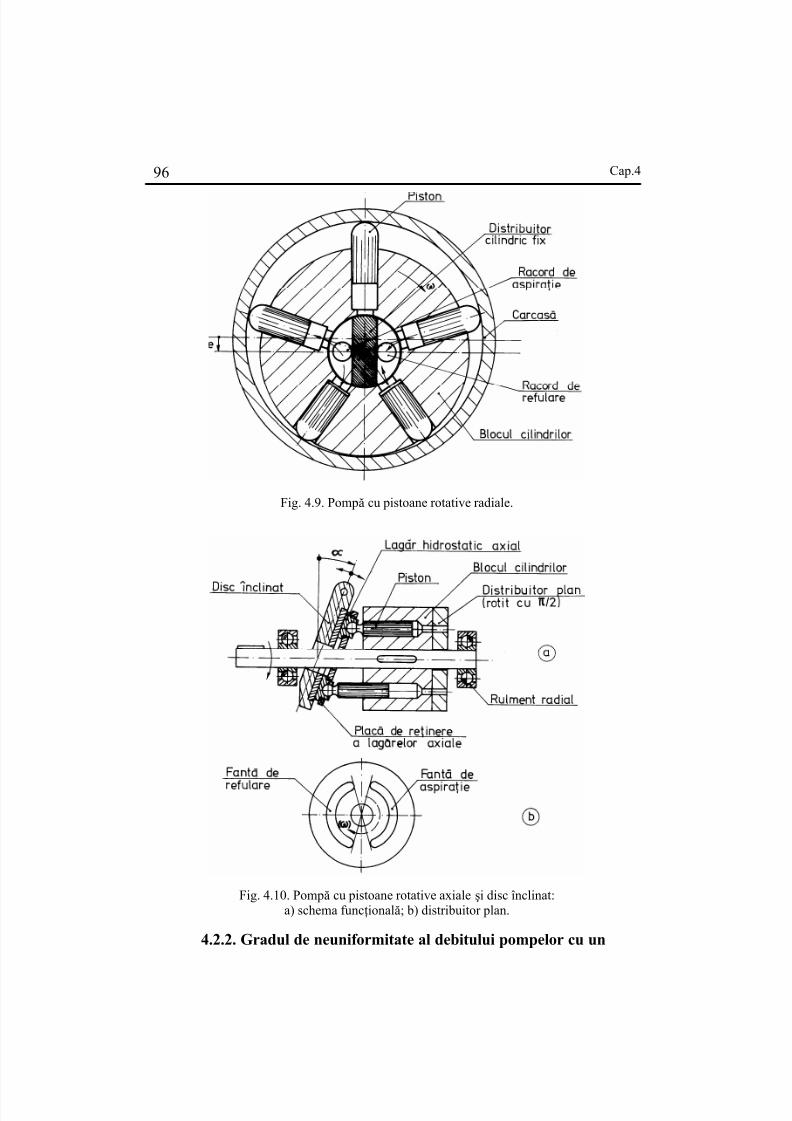
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 85/627
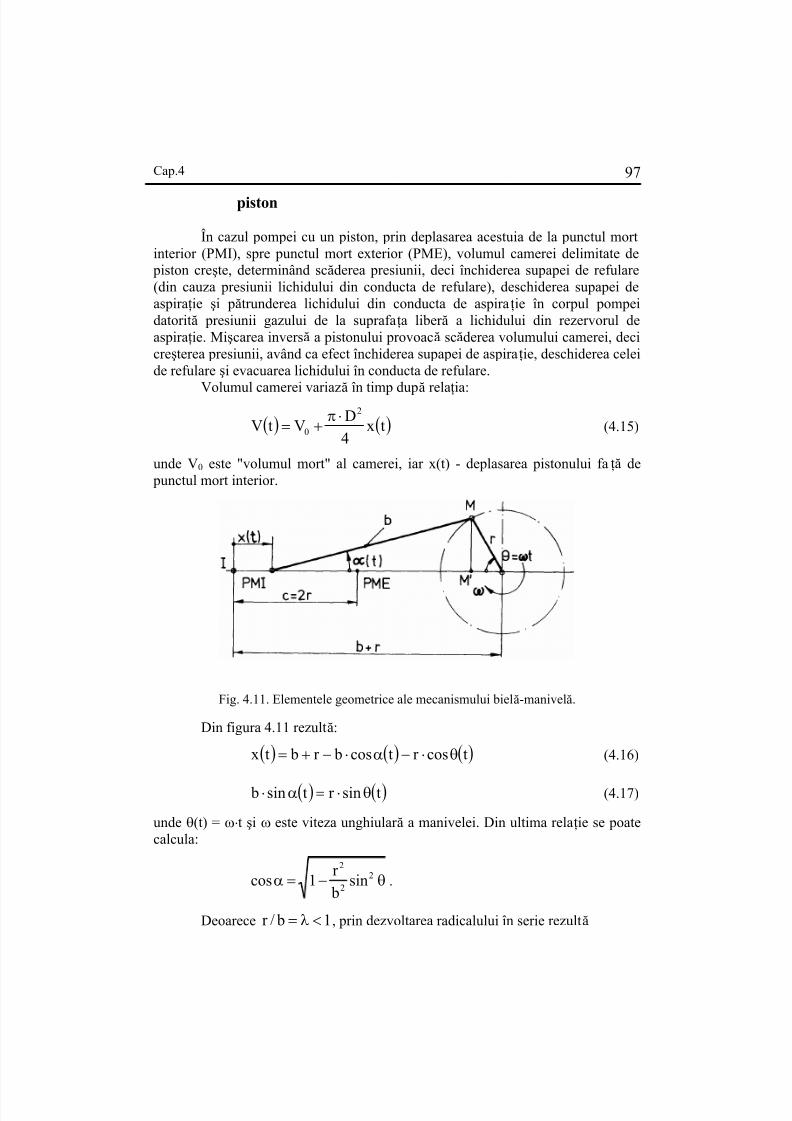
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 86/627
Cap.4 97
piston
În cazul pompei cu un piston, prin deplasarea acestuia de la punctul mortinterior (PMI), spre punctul mort exterior (PME), volumul camerei delimitate de
piston creşte, determinând scăderea presiunii, deci închiderea supapei de refulare(din cauza presiunii lichidului din conducta de refulare), deschiderea supapei deaspiraţie şi pătrunderea lichidului din conducta de aspiraţie în corpul pompeidatorită presiunii gazului de la suprafaţa liber ă a lichidului din rezervorul deaspiraţie. Mişcarea inversă a pistonului provoacă scăderea volumului camerei, decicreşterea presiunii, având ca efect închiderea supapei de aspiraţie, deschiderea celeide refulare şi evacuarea lichidului în conducta de refulare.
Volumul camerei variază în timp după relaţia:
( ) ( )tx4
DVtV
2
0
⋅π+= (4.15)
unde V0 este "volumul mort" al camerei, iar x(t) - deplasarea pistonului fa ţă de punctul mort interior.
Fig. 4.11. Elementele geometrice ale mecanismului bielă-manivelă.
Din figura 4.11 rezultă:
( ) ( ) ( )tcosr tcos br btx θ⋅−α⋅−+= (4.16)
( ) ( )tsinr tsin b θ⋅=α⋅ (4.17)
unde θ(t) = ω⋅t şi ω este viteza unghiular ă a manivelei. Din ultima relaţie se poatecalcula:
θ−=α 22
2
sin b
r 1cos .
Deoarece , prin dezvoltarea radicalului în serie rezultă 1 b/r <λ=
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 87/627
Cap.498
θλ
−≅α 22
sin2
1cos (4.18)
iar relaţia (4.16) devine
( ) ( ) ( )⎥⎦⎤
⎢⎣
⎡ θλ
+θ−≅ tsin2
tcos1r tx 2 (4.19)
Debitul teoretic instantaneu rezultă din relaţia
( )( )
dt
d
d
dx
4
D
dt
tdVtQ
2
t
θ⋅
θ⋅
⋅π== (4.20)
în care ω=θ dt/d , deci
( ) ( ) ( )⎥⎦⎤
⎢⎣
⎡ θλ
+θ⋅ω⋅π
= t2sin2
tsinr 4
DtQ
2
t (4.21)
Se numeşte debit teoretic specific instantaneu mărimea adimensională
( )( )
( ) ( )t2sin2
tsin
r 4
D
tQtQ
2t
ts θλ
+θ≅⋅ω
⋅π= (4.22)
care nu depinde de mărimea pompei. Uzual λ ≅ 1/5, astfel că debitul teoreticspecific instantaneu variază practic sinusoidal (fig. 4.3,c). Debitul teoretic mediu al pompei este
π⋅ω
⋅π=⋅⋅
⋅π=
1r
4
Dnr 2
4
DQ
44
tm (4.23)
n fiind turaţia manivelei [rot/s]. Debitul teoretic mediu specific,
π=
⋅ω⋅π
=1
r 4
D
2tm
tms
este independent de pompă.Gradul de neuniformitate al debitului, definit prin relaţia
tm
mintmaxtQ Q
QQ −=δ (4.24)
are o valoare foarte mare, π=δQ , care impune, în majoritatea aplicaţiilor,
utilizarea hidrofoarelor.
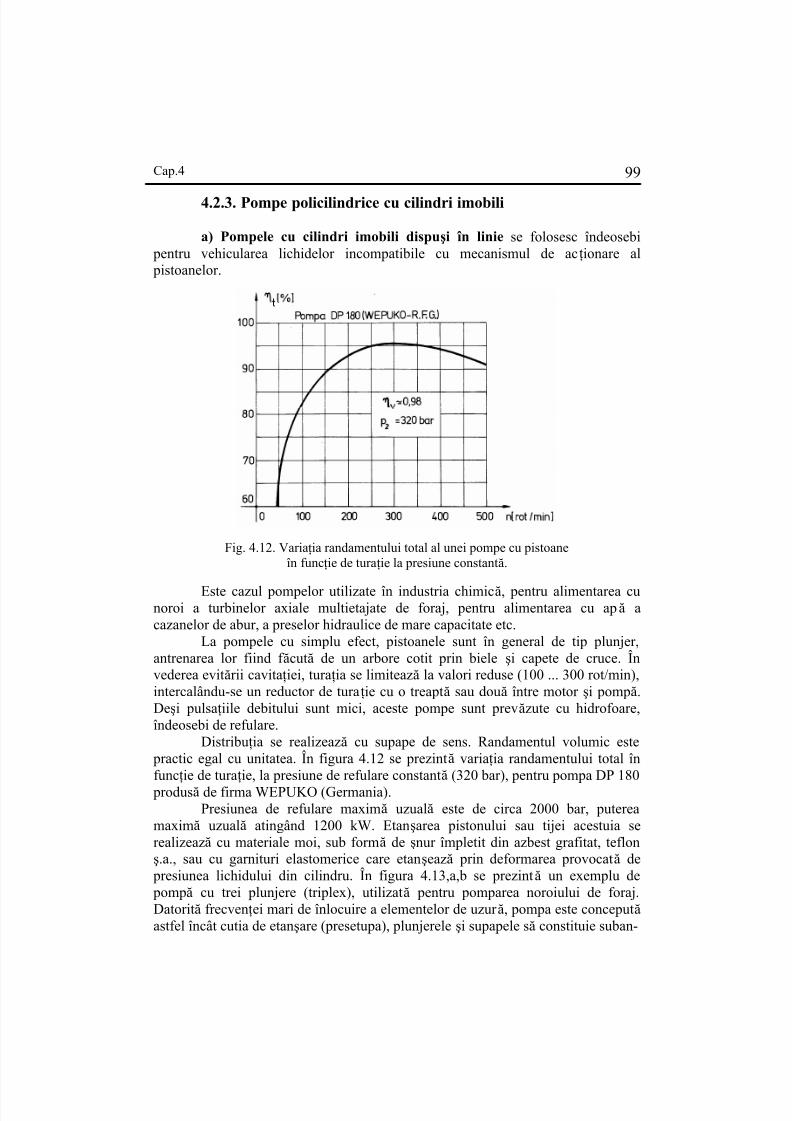
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 88/627
Cap.4 99
4.2.3. Pompe policilindrice cu cilindri imobili
a) Pompele cu cilindri imobili dispuşi în linie se folosesc îndeosebi pentru vehicularea lichidelor incompatibile cu mecanismul de acţionare al pistoanelor.
Fig. 4.12. Variaţia randamentului total al unei pompe cu pistoaneîn funcţie de turaţie la presiune constantă.
Este cazul pompelor utilizate în industria chimică, pentru alimentarea cunoroi a turbinelor axiale multietajate de foraj, pentru alimentarea cu apă acazanelor de abur, a preselor hidraulice de mare capacitate etc.
La pompele cu simplu efect, pistoanele sunt în general de tip plunjer,antrenarea lor fiind f ăcută de un arbore cotit prin biele şi capete de cruce. Învederea evitării cavitaţiei, turaţia se limitează la valori reduse (100 ... 300 rot/min),intercalându-se un reductor de turaţie cu o treaptă sau două între motor şi pompă.Deşi pulsaţiile debitului sunt mici, aceste pompe sunt prevăzute cu hidrofoare,îndeosebi de refulare.
Distribuţia se realizează cu supape de sens. Randamentul volumic este practic egal cu unitatea. În figura 4.12 se prezintă variaţia randamentului total înfuncţie de turaţie, la presiune de refulare constantă (320 bar), pentru pompa DP 180
produsă de firma WEPUKO (Germania).Presiunea de refulare maximă uzuală este de circa 2000 bar, puterea
maximă uzuală atingând 1200 kW. Etanşarea pistonului sau tijei acestuia serealizează cu materiale moi, sub formă de şnur împletit din azbest grafitat, teflonş.a., sau cu garnituri elastomerice care etanşează prin deformarea provocată de
presiunea lichidului din cilindru. În figura 4.13,a,b se prezintă un exemplu de pompă cu trei plunjere (triplex), utilizată pentru pomparea noroiului de foraj.Datorită frecvenţei mari de înlocuire a elementelor de uzur ă, pompa este concepută astfel încât cutia de etanşare (presetupa), plunjerele şi supapele să constituie suban-
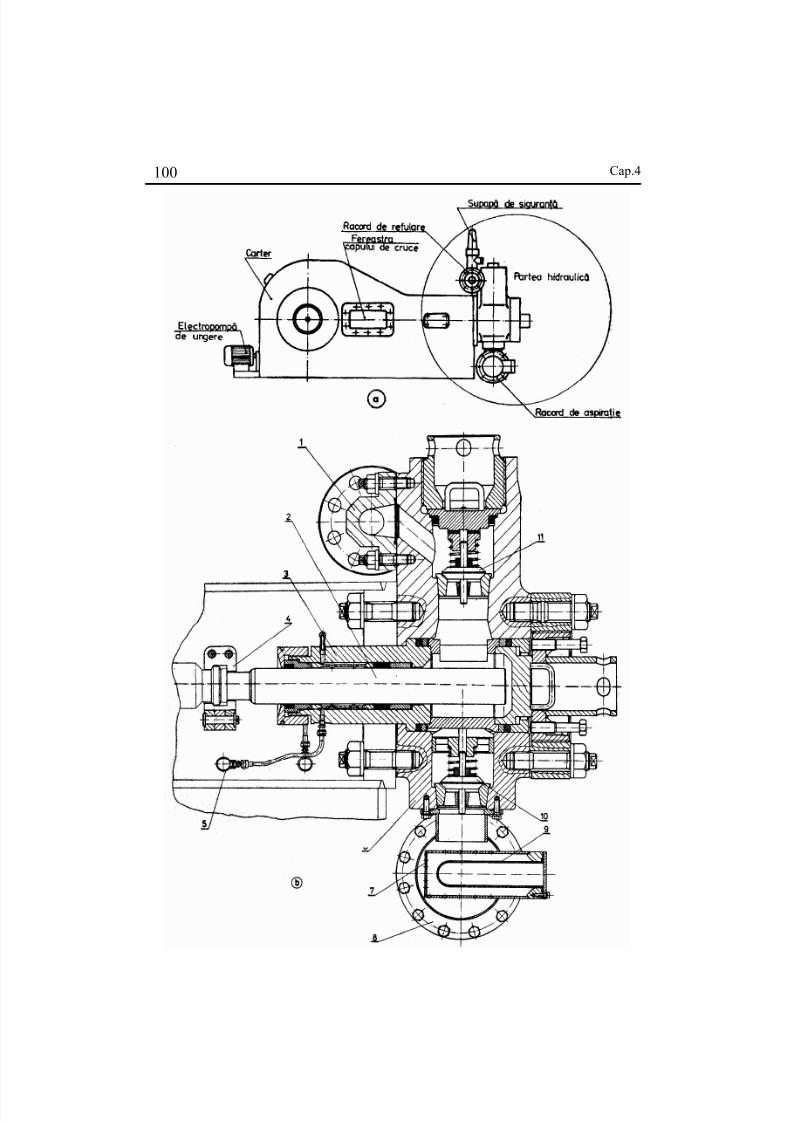
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 89/627
Cap.4100
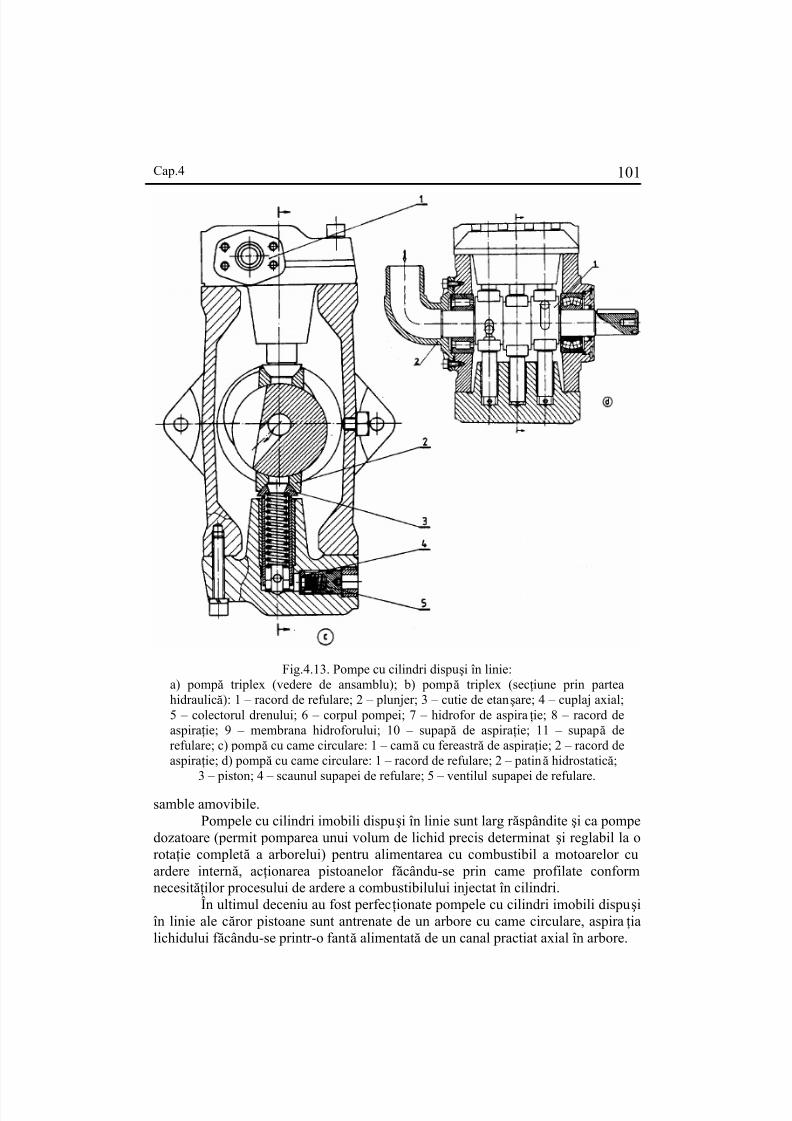
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 90/627
Cap.4 101
Fig.4.13. Pompe cu cilindri dispuşi în linie:a) pompă triplex (vedere de ansamblu); b) pompă triplex (secţiune prin parteahidraulică): 1 – racord de refulare; 2 – plunjer; 3 – cutie de etanşare; 4 – cuplaj axial;5 – colectorul drenului; 6 – corpul pompei; 7 – hidrofor de aspira ţie; 8 – racord deaspiraţie; 9 – membrana hidroforului; 10 – supapă de aspiraţie; 11 – supapă derefulare; c) pompă cu came circulare: 1 – camă cu fereastr ă de aspiraţie; 2 – racord deaspiraţie; d) pompă cu came circulare: 1 – racord de refulare; 2 – patină hidrostatică;
3 – piston; 4 – scaunul supapei de refulare; 5 – ventilul supapei de refulare.
samble amovibile.Pompele cu cilindri imobili dispuşi în linie sunt larg r ăspândite şi ca pompe
dozatoare (permit pomparea unui volum de lichid precis determinat şi reglabil la orotaţie completă a arborelui) pentru alimentarea cu combustibil a motoarelor cuardere internă, acţionarea pistoanelor f ăcându-se prin came profilate conformnecesităţilor procesului de ardere a combustibilului injectat în cilindri.
În ultimul deceniu au fost perfecţionate pompele cu cilindri imobili dispuşiîn linie ale căror pistoane sunt antrenate de un arbore cu came circulare, aspira ţialichidului f ăcându-se printr-o fantă alimentată de un canal practiat axial în arbore.
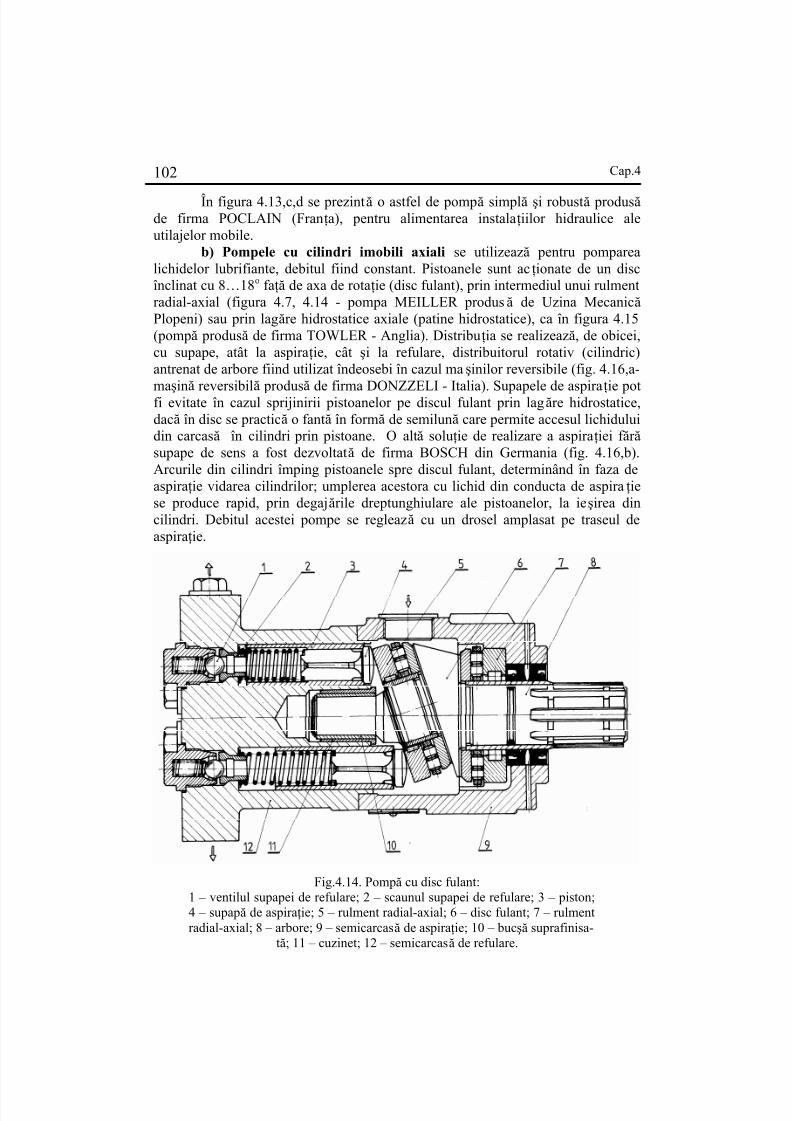
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 91/627
Cap.4102
În figura 4.13,c,d se prezintă o astfel de pompă simplă şi robustă produsă de firma POCLAIN (Franţa), pentru alimentarea instalaţiilor hidraulice aleutilajelor mobile.
b) Pompele cu cilindri imobili axiali se utilizează pentru pomparealichidelor lubrifiante, debitul fiind constant. Pistoanele sunt acţionate de un discînclinat cu 8…18o faţă de axa de rotaţie (disc fulant), prin intermediul unui rulmentradial-axial (figura 4.7, 4.14 - pompa MEILLER produsă de Uzina Mecanică Plopeni) sau prin lagăre hidrostatice axiale (patine hidrostatice), ca în figura 4.15(pompă produsă de firma TOWLER - Anglia). Distribuţia se realizează, de obicei,cu supape, atât la aspiraţie, cât şi la refulare, distribuitorul rotativ (cilindric)antrenat de arbore fiind utilizat îndeosebi în cazul maşinilor reversibile (fig. 4.16,a-
maşină reversibilă produsă de firma DONZZELI - Italia). Supapele de aspiraţie potfi evitate în cazul sprijinirii pistoanelor pe discul fulant prin lagăre hidrostatice,dacă în disc se practică o fantă în formă de semilună care permite accesul lichiduluidin carcasă în cilindri prin pistoane. O altă soluţie de realizare a aspiraţiei f ăr ă supape de sens a fost dezvoltată de firma BOSCH din Germania (fig. 4.16,b).Arcurile din cilindri împing pistoanele spre discul fulant, determinând în faza deaspiraţie vidarea cilindrilor; umplerea acestora cu lichid din conducta de aspiraţiese produce rapid, prin degajările dreptunghiulare ale pistoanelor, la ieşirea dincilindri. Debitul acestei pompe se reglează cu un drosel amplasat pe traseul deaspiraţie.
Fig.4.14. Pompă cu disc fulant:1 – ventilul supapei de refulare; 2 – scaunul supapei de refulare; 3 – piston;4 – supapă de aspiraţie; 5 – rulment radial-axial; 6 – disc fulant; 7 – rulmentradial-axial; 8 – arbore; 9 – semicarcasă de aspiraţie; 10 – bucşă suprafinisa-
tă; 11 – cuzinet; 12 – semicarcasă de refulare.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 92/627
Cap.4 103
Utilizarea supapelor permite obţinerea unor presiuni de circa 700 bar,limita actuală fiind de circa 2000 bar. În cazul distribuitoarelor rotative, presiuneade funcţionare continuă nu depăşeşte 350 bar.
Cursa de aspiraţie a pistoanelor se realizează uzual datorită unor arcuriamplasate în cilindri sau prin supraalimentare cu o pompă auxiliar ă (fig. 4.15).Aceste soluţii asigur ă contactul permanent dintre pistoane şi discul fulant în faza deaspiraţie.
Antrenarea pistoanelor prin rulment limitează presiunea maximă defuncţionare continuă la circa 250 bar datorită presiunii mari de contact dintre
pistoane şi inelul mobil al rulmentului axial şi datorită solicitării acestuia. În cazulutilizării lagărelor hidrostatice, presiunea maximă de funcţionare continuă este
limitată de ruperea peliculei portante în anumite condiţii de vâscozitate,temperatur ă şi contaminare a lichidului. Există variante constructive carefuncţionează la 2000 bar cu o înclinare a discului de circa 8o.
Deşi pulsaţia debitului acestor pompe este redusă, pulsaţia corespunzătoarea presiunii determină zgomote şi vibraţii în întreaga instalaţie, putând provocaruperea conductelor şi a altor componente prin oboseală.
c) Pompe cu cilindri imobili radiali. Se utilizează îndeosebi pentrualimentarea cu debit constant a instalaţiilor de acţionare hidraulică. Mişcarearadială a pistoanelor este provocată de un excentric prin intermediul unui rulmentradial (fig. 4.17) sau al unor lagăre hidrostatice (fig. 4.8, 4.18). Contactul dintre
pistoane şi excentric în faza de aspiraţie este asigurat de arcuri amplasate în cilindrisau exterioare acestora (în cazul pompelor de presiune mare). Distribuţia se
realizează, în general, cu supape; este posibilă înlocuirea supapelor de aspiraţie cuo fantă practicată în excentric, extinsă la circa 1800, lichidul pătrunzând în cilindri prin pistoane (fig. 4.18 - pompă produsă de firma WEPUKO - Germania).Utilizarea supapelor permite funcţionarea continuă la o presiune de refulare decirca 700 bar. Maşinile hidraulice volumice cu cilindri radiali imobili la caredistribuţia se realizează cu distribuitor rotativ se utilizează îndeosebi ca motoarelente, la presiuni sub 350 bar.
Aplica ţ ia 4.1 - Calculul hidrofoarelor pompelor cu pistoane
Calculul hidropneumatic al unui hidrofor de pompă cu piston are ca obiectdeterminarea volumului de gaz, Vmax, necesar pentru a asigura o pulsaţie impusă a
debitului. Se consider ă de exemplu un hidrofor de aspiraţie (fig. A.4.1-1) şi seadmite, într-o primă aproximaţie, că debitul conductei de aspiraţie este constant(fig. A.4.1-2).
În intervalul [θ1, θ2] pompa aspir ă din hidrofor volumul
( ) ∫∫θ
θ
θ⎟ ⎠
⎞⎜⎝
⎛ π
−θ⋅π
≅−⋅ω⋅π
=Δ2
1
2
1
d1
sinr 4
DdtQQr
4
D'V
2t
t
tmsts
2
(4.1.1)

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 93/627
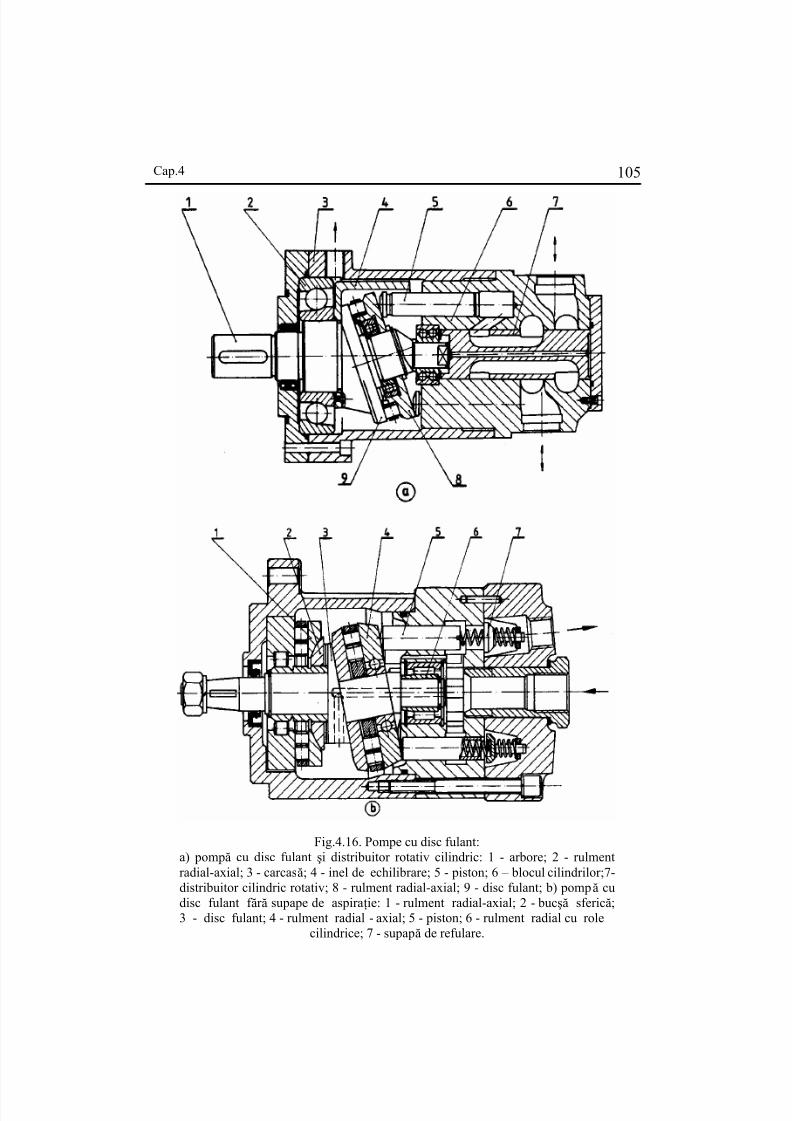
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 94/627
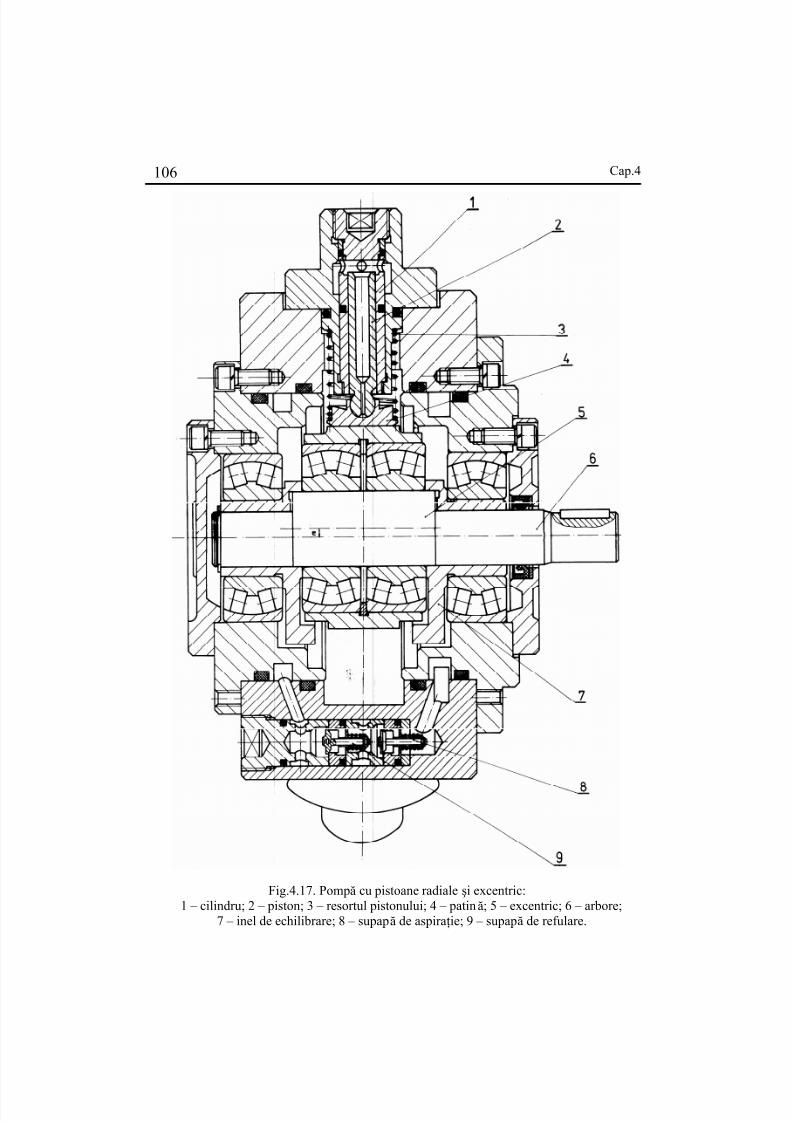
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 95/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 96/627
Cap.4 107
Fig.4.18. Pompă cu pistoane radiale şi excentric:1 – excentric cu fantă de aspiraţie; 2 – patină hidrostatică; 3 – piston; 4 – ventilul
supapei de refulare; 5 – scaunul supapei de refulare; 6 – racord de refulare.
Fig. A.4.1-1. Hidrofor de aspiraţie. Fig. A.4.1-2. Variaţia debitului teoretic specificaspirat, debitului real, presiunii şi volumului de
gaz pentru un hidrofor de aspiraţie.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 97/627
Cap.4108
Unghiurile θ1 şi θ2 rezultă din condiţia Qts = Qtms, deci sin θ1,2 = 1/π.Rezultă θ1 = 0,324 rad, θ2 = 2,817 rad şi
r 24
D55,0'V
2⋅π=Δ (4.1.2)
Asigurarea unui debit constant pe conducta de aspiraţie necesită unhidrofor de volum infinit. Practic se admit pulsaţii ale presiunii evaluate prin gradulde neuniformitate
m
minmax p p
p p −=δ (4.1.3)
deci pulsaţii ale volumului de gaz din hidrofor, evaluate prin gradul deneuniformitate
( )
mm
minmaxV V
V
V
VV Δ=
−=δ (4.1.4)
unde pm şi Vm sunt valori medii în timp. Dacă se admite că evoluţia gazului dinhidrofor este izotermă (fig. A.4.1-3),
mmmaxminminmax V pV pV p ⋅=⋅=⋅
Dacă se admite că
maxminm p p p ⋅= (4.1.5)
şi
maxminm VVV ⋅=
rezultă
mV p V
VΔ=δ=δ (4.1.6)
deci
pmVV δ⋅=Δ
Dar
max
2m
maxminmax V
VVVVV −=−=Δ .
Ultimele două relaţii conduc la ecuaţia
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 98/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 99/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 100/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 101/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 102/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 103/627
Cap.4114
( ) ( )[ ]ρ−ρ+ρ−ρ= aassg VVgF (4.3.2)
Vs fiind volumul ventilului; ρs - densitatea materialului ventilului; Va - volumularcului; ρa - densitatea materialului arcului; ρ - densitatea lichidului.
Datorită iner ţiei, numai o parte din spirele arcului (circa 30%) participă la procesul dinamic, astfel că
( )2
2
aassi dt
ydV3,0VF ⋅ρ⋅+⋅ρ−= (4.3.3)
unde y este deschiderea supapei (fig. A.4.3-1,b).For ţa elastică a arcului este
(4.3.4)( a0ae yyK F += )
în care K a este constanta elastică şi y0a - precomprimarea.Dacă mişcarea lichidului în spaţiul dintre tija ventilului şi ghidajul acesteia
este laminar ă,
dt
dyldldVAF tmttmts
f ⋅ε
⋅⋅η⋅π−=
εη⋅⋅⋅π⋅
−=⋅τ−= (4.3.5)
unde τ este efortul tangenţial pe suprafaţa tijei; A - aria laterală a păr ţii din tijă aflată în ghidaj; η - viscozitatea dinamică a lichidului; dt - diametrul tijei ventilului;ltm
- lungimea medie a tijei în ghidaj; ε - jocul radial dintre tijă şi ghidaj; vs
= dy/dt-viteza ventilului.
Pentru determinarea rezultantei for ţelor de presiune se neglijează într-o primă aproximaţie influenţa mişcării ventilului în ecuaţia de continuitate,
2sc1
21 vydcv
4
d⋅⋅⋅π⋅≅
⋅π
şi în relaţia lui Bernoulli, aplicată pe o linie de curent între intrarea şi ieşirea dinsupapă
s
22
222
211
g2
v
g2
v
g
p
g2
v
g
pζ++
⋅ρ=+
⋅ρ(4.3.6)
În aceste relaţii d1 este diametrul scaunului supapei, v1 - viteza medie alichidului la intrarea în supapă; ds - diametrul talerului, v2 - viteza medie alichidului la ieşirea din supapă; cc - coeficientul de contracţie al curentului latrecerea prin supapă; p1 şi p2 - presiunile medii în secţiunile corespunzătoarevitezelor v1 şi v2.
Din ultimele două relaţii rezultă

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 104/627
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 105/627
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 106/627
Cap.4 117
dtdQ
dgl4
dtdv
glds
dtdv
g1sd
tv
g1 t
2a
aaa
10
a
10
a ⋅⋅⋅π⋅=⋅=⋅≅
∂∂ ∫∫
−−
r
r
deci
dt
dQ
d
l4Q
d
l
d
d
d
8 p p t
2a
a2ta
a
aa4
1
4a
4a
2at1 ⋅⋅π⋅ρ
−⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ζ+λ+
⋅πρ
−= ∑ (4.3.18)
Înlocuind relaţiile (4.3.1), (4.3.3), (4.3.5) şi (4.3.16) în relaţia (4.3.1),rezultă ecuaţia de mişcare a ventilului
( ) ( )
( ) ( ) ( )[ ]dt
dyldVVgyyK
Qcy8 1d4dd4 pdtydV3,0V
tm2t
aassa0a
2s2d
221
2s2112
2
aass
⋅ε
⋅⋅η⋅π−ρ−ρ+ρ−ρ−+−
−⎟⎟ ⎠
⎞⎜⎜⎝
⎛
⋅+πρ+−π=⋅ρ+⋅ρ(4.3.19)
Ţinând seama de efectul de piston al feţei inferioare a ventilului, ecuaţia decontinuitate reală este
4
dvQQ
21
sst
⋅π+≅
deci
dtdy
4dQQ
21
ts ⋅⋅π−≅ (4.3.20)
În cazul pompei cu un piston
⎟ ⎠
⎞⎜⎝
⎛ ωλ
+ω⋅ω⋅π
≅ t2sin2
tsinr 4
DQ
2
t (4.3.21)
Comportarea dinamică a supapei este descrisă în sistemul format dinecuaţiile (4.3.19), (4.3.20), (4.3.21), (4.3.18) şi (4.3.10), a cărui soluţionare se facenumeric. O soluţie aproximativă poate fi obţinută considerând pentru coeficientulde debit şi căderea de presiune pe supapă valori medii în timp şi neglijând influenţa
termenului (λ/2) sin 2ωt în calculul debitului aspirat. Ecuaţia de continuitate devine( )
tsinr 4
Dm p p2cyd
dt
dy
4
d 221
dms
21 ω⋅ω⋅
⋅π=
ρ−
⋅⋅⋅⋅π+⋅⋅π
(4.3.22)
sau
θ⋅=⋅+θ
sin byad
dy(4.3.23)
în care

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 107/627
Cap.4118
( )ρ−
⋅⋅⋅ω
=m p p
2d
c4a 21
s
dm (4.3.24)
şi
r d
D b
2
s
⋅⎟⎟ ⎠
⎞⎜⎜⎝
⎛ = (4.3.25)
Soluţia ecuaţiei (4.3.23) este de forma
(4.3.26)( ) θ−⋅+θ⋅+θ⋅=θ aeCcosBsinAy
Datorită compresibilităţii lichidului, scăderea presiunii în corpul pompei, provocată prin deplasarea pistonului de la PMI la PME, nu se face instantaneu, decideschiderea supapei nu începe la θ = 0. Fie θ0 defazajul deschiderii supapei(fig. A.4.3-2). Iner ţia coloanei de lichid din conducta de aspiraţie determină închiderea supapei după ce pistonul ajunge la PME. Fie θ′0 unghiul de întârziere aînchiderii supapei (fig. A.4.3-2).
Fig. A.4.3-2. Legea de mişcare a talerului supapei (teoretică şi experimentală).
Dacă se admite aproximaţia θ0 = θ′0, rezultă C = 0. Constantele A şi B sedetermină înlocuind derivata dy/dt, calculată din relaţia (4.3.26) în ecuaţia (4.3.23).Se obţine
1a
bB;
1a
baA
22 +=
+⋅
=
Deschiderea supapei variază după relaţia
( θ−θ⋅+
= cossina1a
by
2) (4.3.27)
Unghiul θ0 se calculează din condiţia y(θ0) = 0, deci
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 108/627
Cap.4 119
⎟ ⎠ ⎞
⎜⎝ ⎛ =θ
a
1arctg0
Deschiderea remanentă a supapei, y0s, se realizează la θ = π:
( )1a
byy
2s0 +=π= (4.3.28)
Raportul y0/ds se alege în proiectare mai mic de 1/60.Ventilul se aşează pe scaun cu viteza
( 002's0sincosa
1a
b
dt
dyv
0
θ+θ⋅+
ω⋅−==
θ+π=θ )(4.3.29)
Pentru evitarea zgomotului excesiv şi a uzurii premature, se admite practicv0s ≤ 0,08 ... 0,12 m/s. Deschiderea maximă a supapei, ymax, se realizează la unghiulθm care satisface ecuaţia dy/dθ = 0. Se obţine
aarctg2m
π=θ ,
deci
1a
by
2
max
+
= (4.3.30)
Limita admisă în practică pentru deschiderea maximă a supapei depinde deturaţia pompei:
[mmn
10ymax ≤ ] (4.3.31)
Viteza de acces la supapă, v1, se limitează la 8 m/s, fiind cuprinsă laconstrucţiile uzuale între 1 şi 2,5 m/s.
Valoarea minimă a unghiului θ0 se calculează din condiţia de deschidere asupapei, provocată de piston:
( ) ( ) ([ ]ρ−ρ+ρ−ρ+⋅=⋅π− aassa0a21
2010 VVgyK 4d p p )
Pentru v1 = 0, p10≅ pat - ρ ⋅ g ⋅ Hag.Dacă se admite că la θ = 0 în corpul pompei p2 ≅ pat, ţinând seama de
relaţia (4.19) la θ = θ0,
( )0
2
0at
0at20 cos1r
4
D
V p
V
V p p θ−⋅⋅
⋅π⋅
ε−=
Δε−=

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 109/627
Cap.4120
V0 fiind "volumul mort" al pompei (fig. 4.3). Din aceste condiţii rezultă
( ) ( )⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡ρ−ρ+ρ−ρ+
⋅⋅π
+⋅ρ⋅ε⋅⋅π
⋅−=θ aass
a0a21
ag20
0 VVg
yK
d
4H
Dr
Vg41cos
(4.3.32)În realitate, datorită întârzierii închiderii supapei de refulare, unghiul θ0
este mai mare decât cel calculat.În figura A.4.3-2 se prezintă comparativ soluţia ecuaţiei (4.3.19) şi
rezultatul experimental pentru aceeaşi supapă.Diagnosticarea funcţionării defectuoase a supapelor se face pe baza
zgomotului, vitezei de uzur ă şi a diagramei indicate, care reprezintă variaţia presiunii în cilindrul deservit în funcţie de spaţiul parcurs de piston.
4.3. POMPE POLICILINDRICE CU CILINDRI MOBILI
4.3.1. Descriere funcţionare şi clasificare
a) Pompele cu pistoane rotative axiale sunt cele mai r ăspândite însistemele de acţionare hidraulică datorită gabaritului redus, reversibilităţii,
posibilităţii de reglare a debitului şi momentului de iner ţie redus ale păr ţii mobile.Cilindrii sunt dispuşi circular, într-un bloc, având axele paralele cu axa de rotaţie aacestuia (la unele variante axele cilindrilor sunt dispuse pe un con al cărui unghi la
vârf este de câteva grade). Mişcarea rectilinie alternativă a pistoanelor estedeterminată de un disc a cărui axă este înclinată faţă de axa blocului cilindrilor.Discul poate fi imobil (pompe cu disc înclinat, fig. 4.10, fig. 4.22 - pompă produsă de firma VICKERS din SUA) sau în mişcare de rotaţie (pompe cu bloc înclinat,fig. 4.23 - pompa 712 EX produsă de Uzina Mecanică Plopeni).
În primul caz, contactul dintre pistoane şi discul înclinat se face printr-un rulmentradial-axial sau prin patine hidrostatice. Pistoanele sunt extrase din cilindri de o plac ă dereţinere a patinelor hidrostatice, de arcuri sau prin supraalimentarea pompei la o presiunecorespunzătoare turaţiei. În cazul pompelor cu disc mobil, acesta acţionează pistoanele prin
biele, având ambele extremităţi sferice. Desprinderea bielelor de pistoane şi de disc în fazade aspiraţie este împiedicată prin mai multe procedee, cel mai r ăspândit fiind sertizarea curole profilate.
Dacă arborele pompei roteşte blocul cilindrilor, pompa se numeşte "cu discînclinat"; dacă arborele roteşte discul şi acesta antrenează blocul cilindrilor, pompase numeşte "cu bloc înclinat". În acest caz, transmiterea mişcării de la disc la blocse face cu un arbore cardanic (fig. 4.24), prin contactul lateral dintre biele şi
pistoane (fig. 4.23, fig. 4.25), sau printr-un angrenaj conic.Datorită rotaţiei blocului cilindrilor faţă de carcasă, este posibilă realizarea
distribuţiei cu distribuitor fix frontal, plan sau sferic, care limitează presiuneamaximă de funcţionare continuă la 350 ... 420 bar.
Performanţele energetice şi cavitaţionale ale pompelor cu disc înclinat şiale celor cu bloc înclinat sunt comparabile. Randamentul volumic şi cel total au
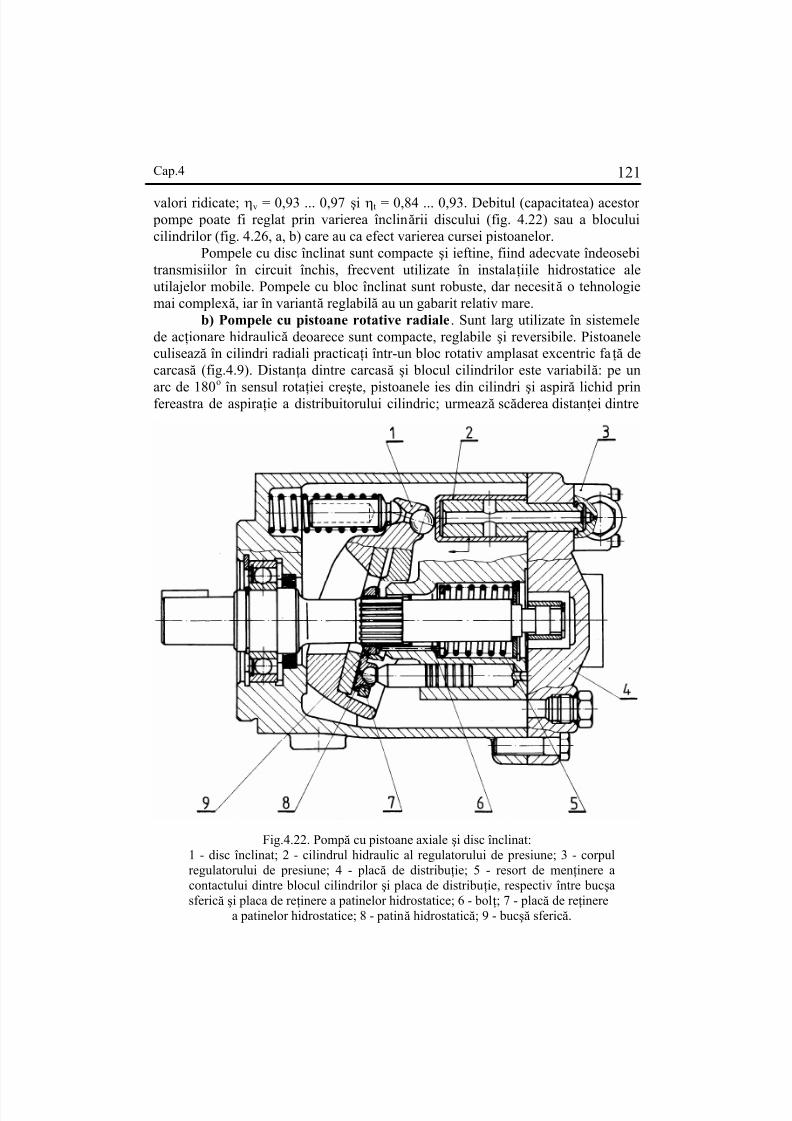
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 110/627
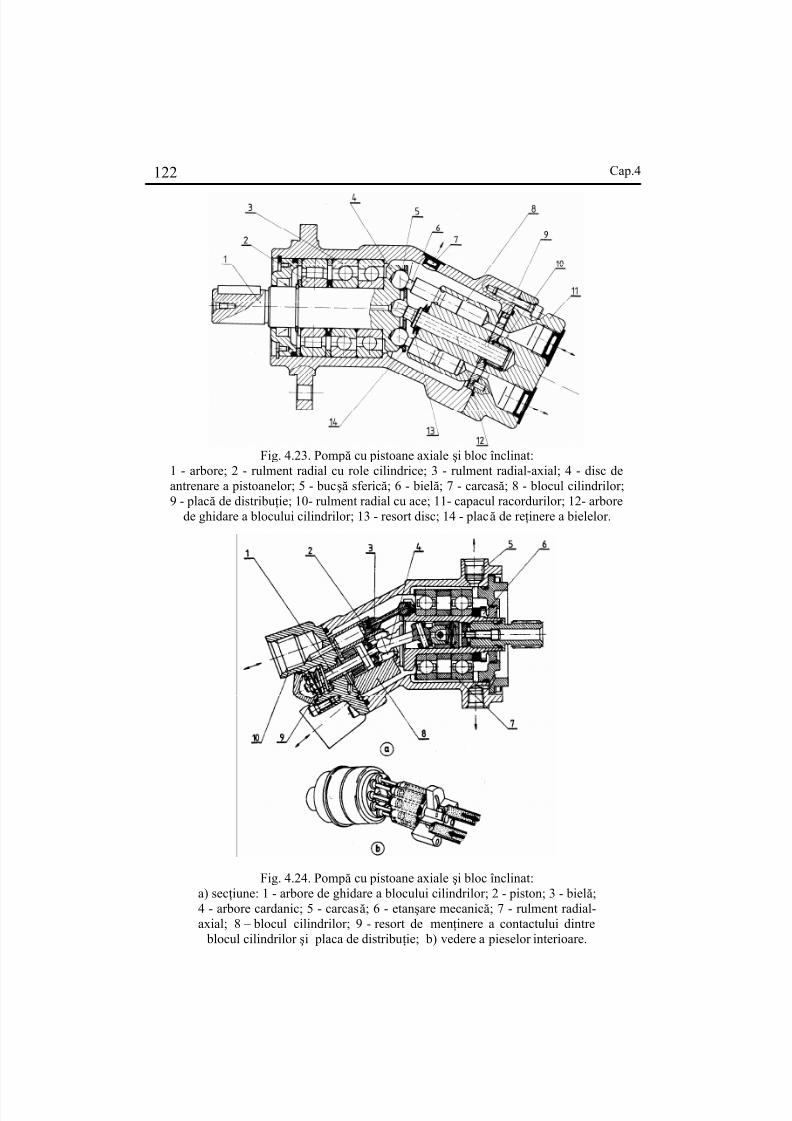
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 111/627
Cap.4122
Fig. 4.23. Pompă cu pistoane axiale şi bloc înclinat:1 - arbore; 2 - rulment radial cu role cilindrice; 3 - rulment radial-axial; 4 - disc deantrenare a pistoanelor; 5 - bucşă sferică; 6 - bielă; 7 - carcasă; 8 - blocul cilindrilor;9 - placă de distribuţie; 10- rulment radial cu ace; 11- capacul racordurilor; 12- arbore
de ghidare a blocului cilindrilor; 13 - resort disc; 14 - placă de reţinere a bielelor.
Fig. 4.24. Pompă cu pistoane axiale şi bloc înclinat:a) secţiune: 1 - arbore de ghidare a blocului cilindrilor; 2 - piston; 3 - bielă;4 - arbore cardanic; 5 - carcasă; 6 - etanşare mecanică; 7 - rulment radial-axial; 8 – blocul cilindrilor; 9 - resort de menţinere a contactului dintre blocul cilindrilor şi placa de distribuţie; b) vedere a pieselor interioare.
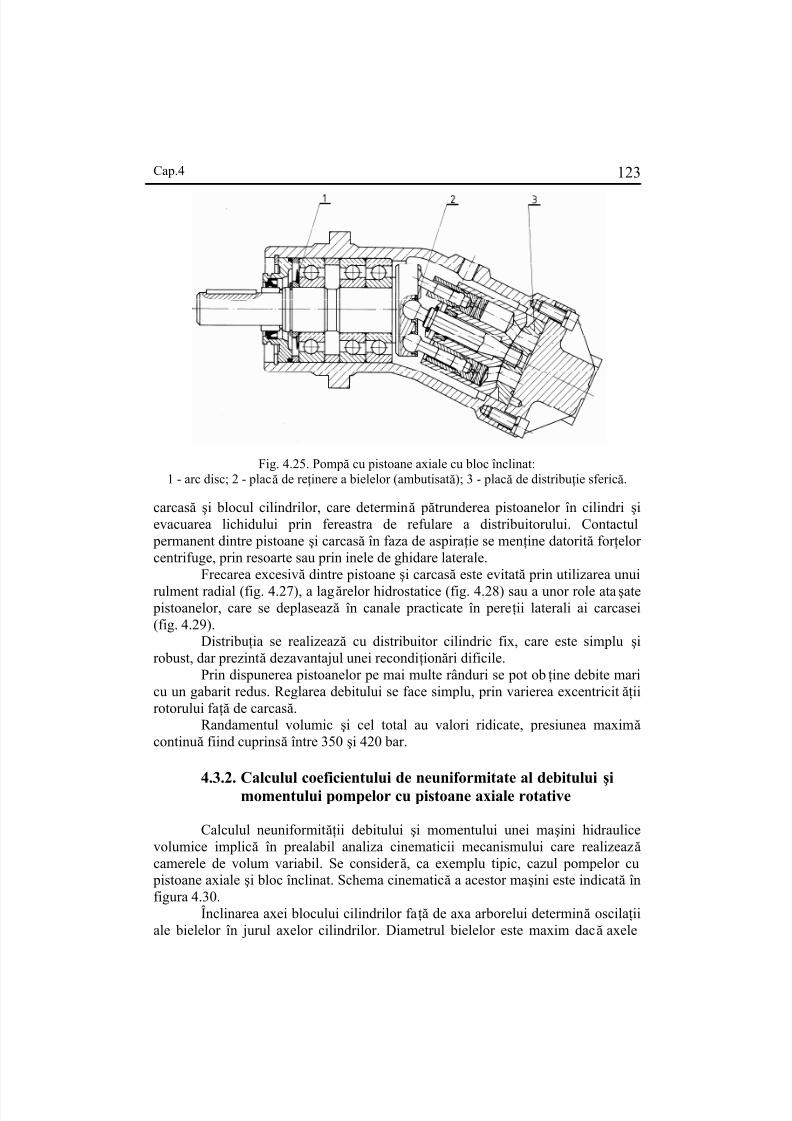
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 112/627
Cap.4 123
Fig. 4.25. Pompă cu pistoane axiale cu bloc înclinat:1 - arc disc; 2 - placă de reţinere a bielelor (ambutisată); 3 - placă de distribuţie sferică.
carcasă şi blocul cilindrilor, care determină pătrunderea pistoanelor în cilindri şievacuarea lichidului prin fereastra de refulare a distribuitorului. Contactul
permanent dintre pistoane şi carcasă în faza de aspiraţie se menţine datorită for ţelor centrifuge, prin resoarte sau prin inele de ghidare laterale.
Frecarea excesivă dintre pistoane şi carcasă este evitată prin utilizarea unui
rulment radial (fig. 4.27), a lagărelor hidrostatice (fig. 4.28) sau a unor role ataşate pistoanelor, care se deplasează în canale practicate în pereţii laterali ai carcasei(fig. 4.29).
Distribuţia se realizează cu distribuitor cilindric fix, care este simplu şirobust, dar prezintă dezavantajul unei recondiţionări dificile.
Prin dispunerea pistoanelor pe mai multe rânduri se pot obţine debite maricu un gabarit redus. Reglarea debitului se face simplu, prin varierea excentricităţiirotorului faţă de carcasă.
Randamentul volumic şi cel total au valori ridicate, presiunea maximă continuă fiind cuprinsă între 350 şi 420 bar.
4.3.2. Calculul coeficientului de neuniformitate al debitului şimomentului pompelor cu pistoane axiale rotative
Calculul neuniformităţii debitului şi momentului unei maşini hidraulicevolumice implică în prealabil analiza cinematicii mecanismului care realizează camerele de volum variabil. Se consider ă, ca exemplu tipic, cazul pompelor cu
pistoane axiale şi bloc înclinat. Schema cinematică a acestor maşini este indicată înfigura 4.30.
Înclinarea axei blocului cilindrilor faţă de axa arborelui determină oscilaţiiale bielelor în jurul axelor cilindrilor. Diametrul bielelor este maxim dacă axele
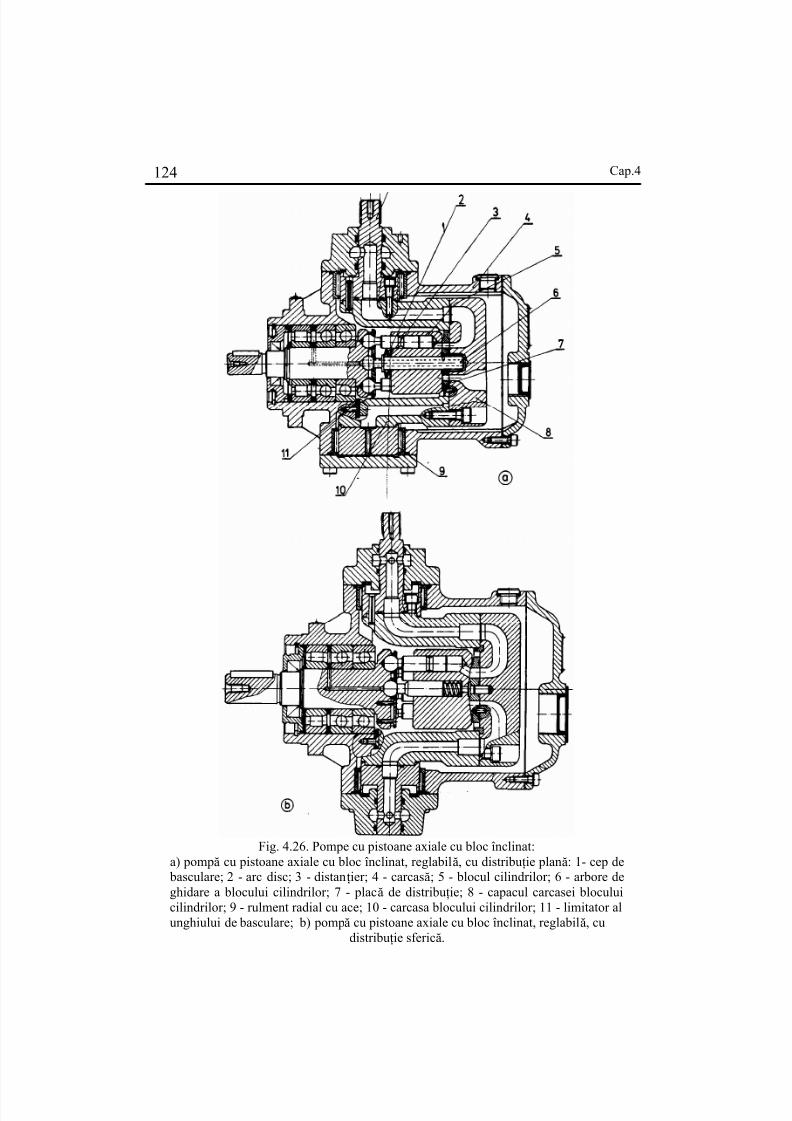
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 113/627
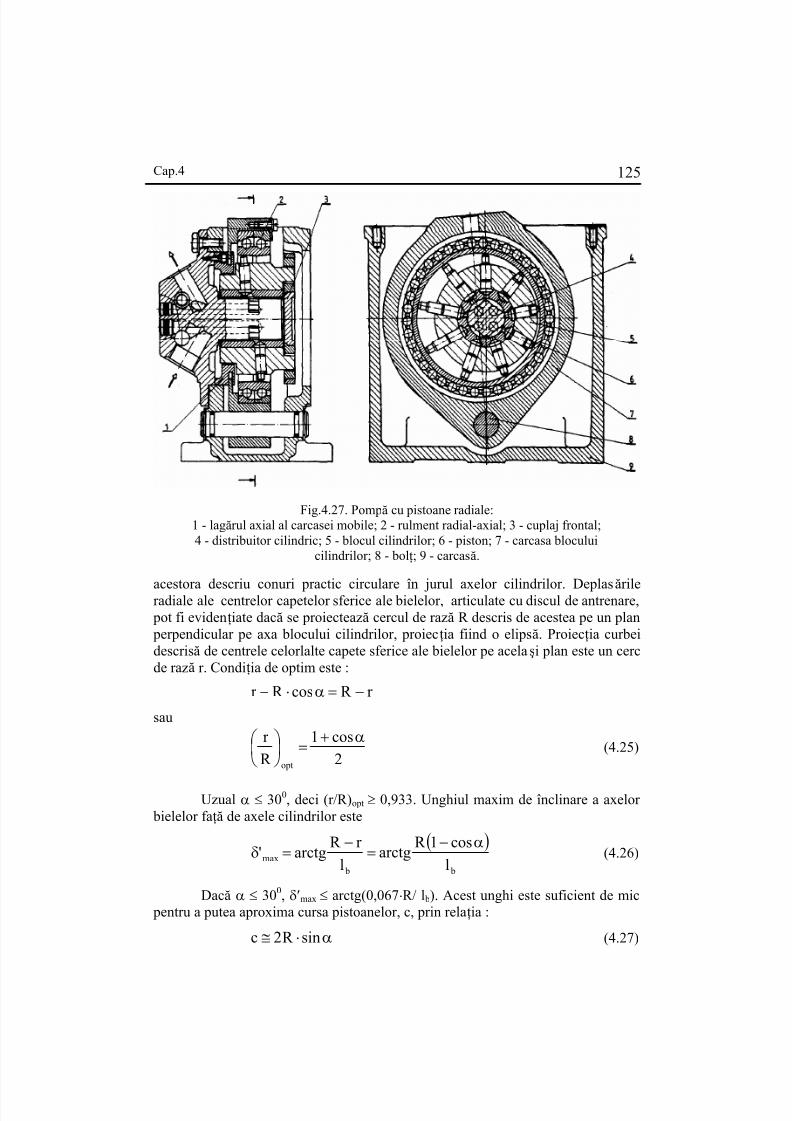
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 114/627
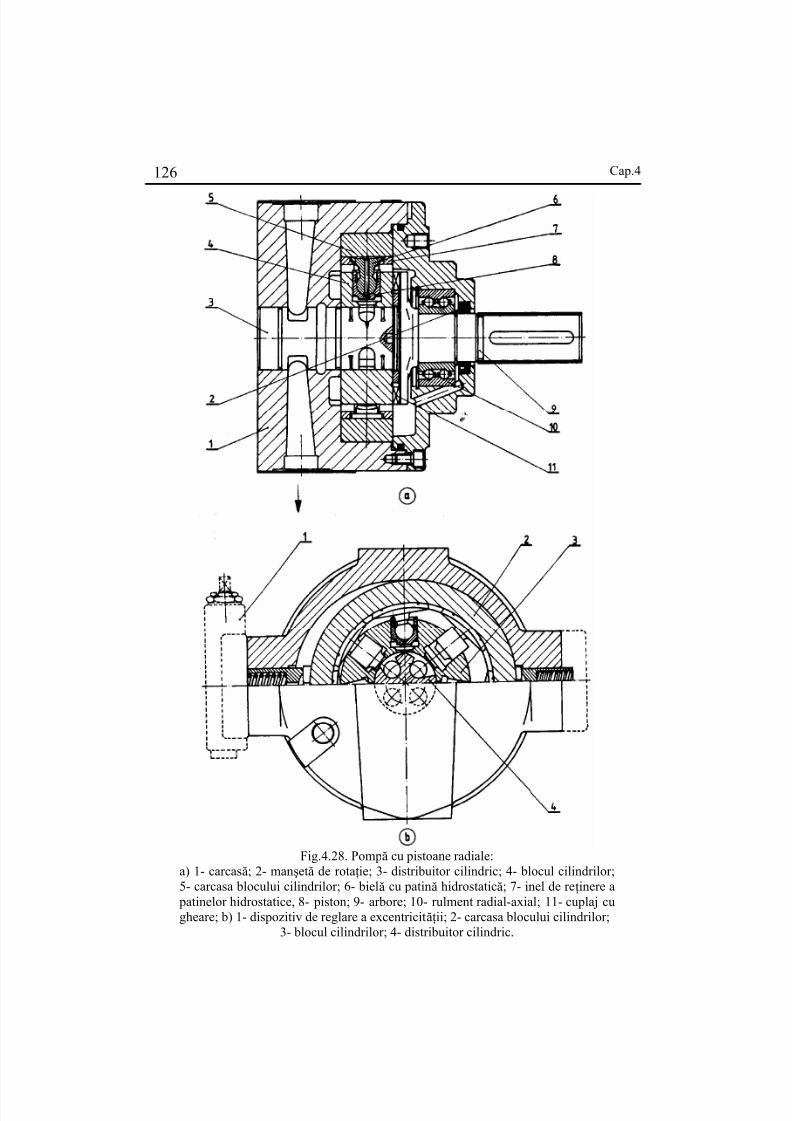
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 115/627
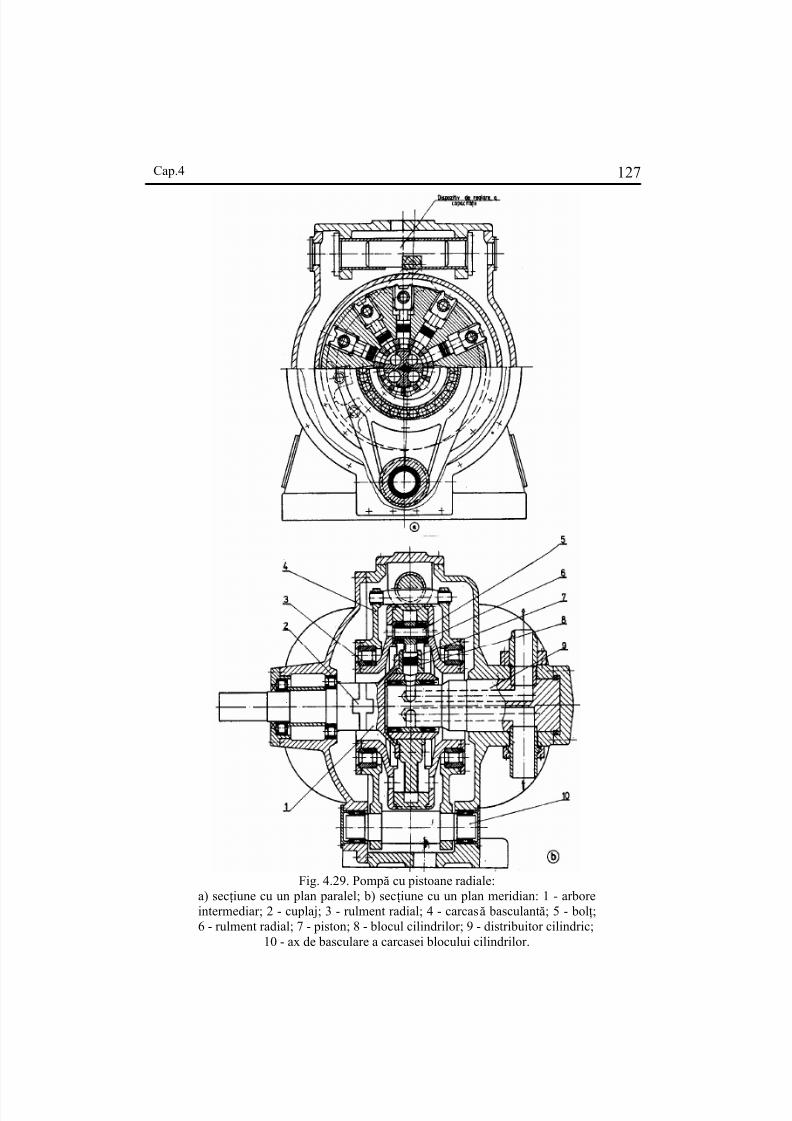
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 116/627
Cap.4 127
Fig. 4.29. Pompă cu pistoane radiale:a) secţiune cu un plan paralel; b) secţiune cu un plan meridian: 1 - arboreintermediar; 2 - cuplaj; 3 - rulment radial; 4 - carcasă basculantă; 5 - bolţ;6 - rulment radial; 7 - piston; 8 - blocul cilindrilor; 9 - distribuitor cilindric;
10 - ax de basculare a carcasei blocului cilindrilor.
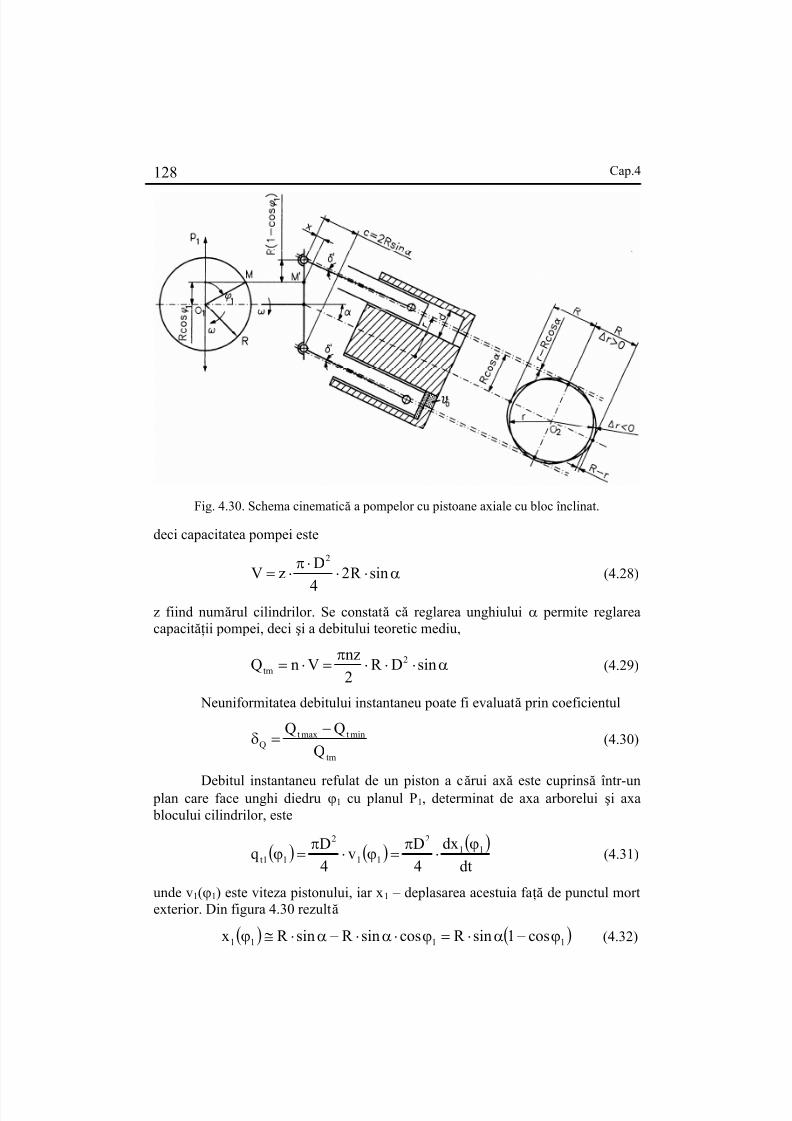
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 117/627
Cap.4128
Fig. 4.30. Schema cinematică a pompelor cu pistoane axiale cu bloc înclinat.
deci capacitatea pompei este
α⋅⋅⋅π
⋅= sinR 2
4
DzV
2
(4.28)
z fiind numărul cilindrilor. Se constată că reglarea unghiului α permite reglareacapacităţii pompei, deci şi a debitului teoretic mediu,
α⋅⋅⋅π
=⋅= sinDR 2
nzVnQ 2
tm (4.29)
Neuniformitatea debitului instantaneu poate fi evaluată prin coeficientul
tm
mintmaxtQ Q
QQ −=δ (4.30)
Debitul instantaneu refulat de un piston a cărui axă este cuprinsă într-un plan care face unghi diedru ϕ1 cu planul P1, determinat de axa arborelui şi axa blocului cilindrilor, este
( ) ( )( )
dt
dx
4
Dv
4
Dq 11
2
11
2
11t
ϕ⋅
π=ϕ⋅
π=ϕ (4.31)
unde v1(ϕ1) este viteza pistonului, iar x1 – deplasarea acestuia faţă de punctul mortexterior. Din figura 4.30 rezultă
( ) ( )1111 cos1sinR cossinR sinR x ϕ−α⋅=ϕ⋅α⋅−α⋅≅ϕ (4.32)
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 118/627
Cap.4 129
Dar
( )( )
dt
d
d
dxv 1
1
1111
ϕ⋅
ϕϕ
=ϕ
în care, pentru n = const., ϕ1 = ω⋅t şi dϕ1/dt = ω, deci
( ) 111 sinsinR v ϕ⋅α⋅⋅ω=ϕ (4.33)
Relaţia (4.31) devine
( ) 1
2
11t sinsinR 4
Dq ϕ⋅α⋅⋅ω
π=ϕ
Pistoanele care se află în faza de refulare pot fi reperate prin unghiurile
( ) π≤γ−+ϕ=ϕ 1k 1k
unde k = 1,2, …, m şi z/2π=γ iar .0 1 γ≤ϕ≤
Debitul teoretic instantaneu rezultă prin însumarea debitelor celor m pistoane care refulează la un moment dat:
( ) ( ) ( )[ ]∑∑==
γ−+ϕα⋅ω⋅π
=ϕ=ϕm
1k 1
2m
1k k tk 1t 1k sinsinR
4
DqQ (4.34)
Se definesc următoarele debite specifice, care depind numai de numărul
pistoanelor pompei:
π=
α⋅⋅ω⋅π
=z
sinR 4
D
2tm
tms (4.35)
( )( )
( )[∑=
γ−+ϕ=α⋅⋅ω
⋅πϕ
=ϕm
1k 12
1t1ts 1k sin
sinR 4
D
QQ ] (4.36)
Pentru calculul sumei se utilizează mărimea complexă
( )[ ] ( )[ ]γ−+ϕ+γ−+ϕ= ∑∑==
1k sini1k cosC 1
m
1k
m
1k 1
care poate fi scrisă sub forma
⎥⎦
⎤⎢⎣
⎡⎟ ⎠
⎞⎜⎝
⎛ −γ+ϕ+⎟
⎠
⎞⎜⎝
⎛ −γ+ϕ
γ
γ
=2
1msini
2
1mcos
2sin
2
msin
C 11
din care rezultă
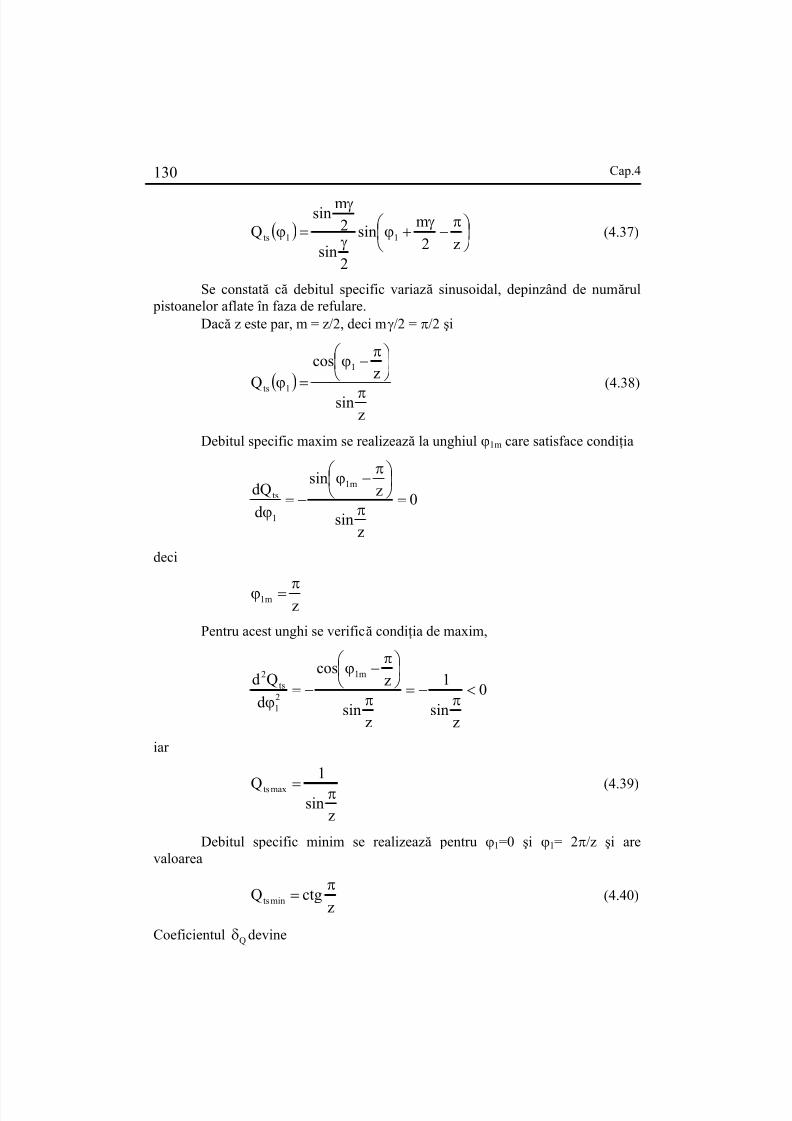
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 119/627
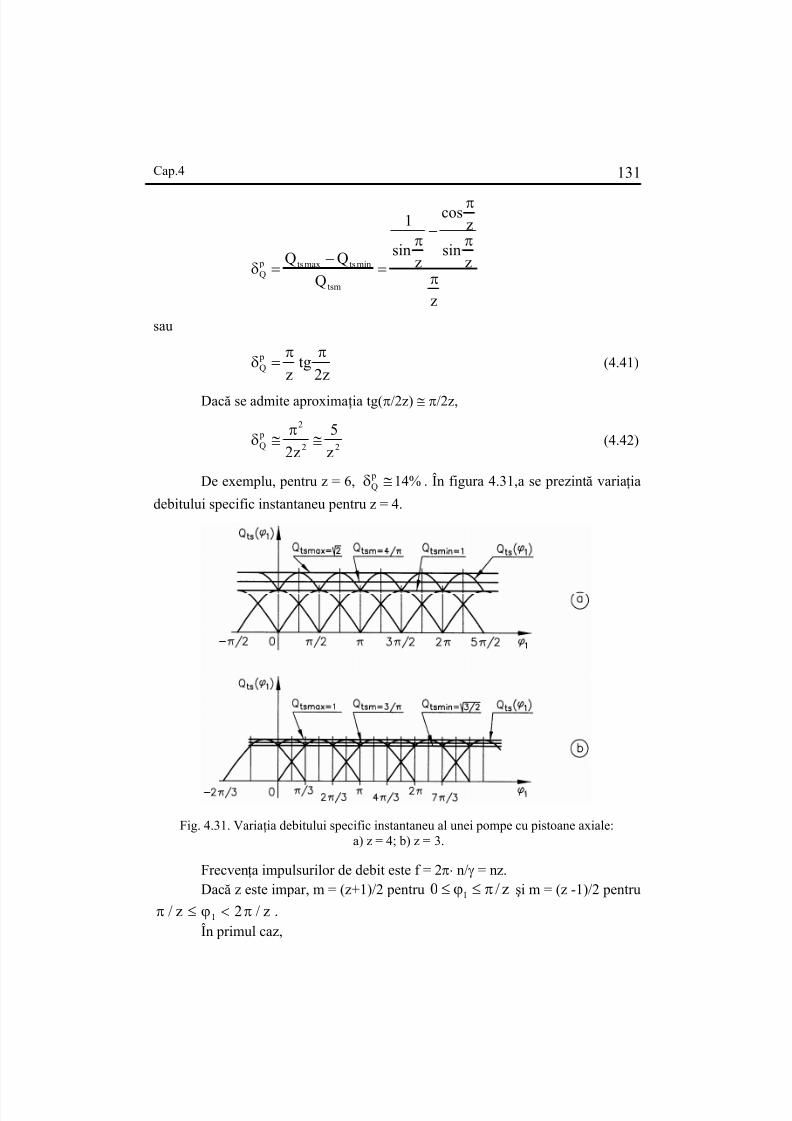
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 120/627
Cap.4 131
z
zsin
zcos
zsin
1
Q
tsm
mintsmaxts pQ π
π
π
−π
=−
=δ
sau
z2tg
z pQ
ππ=δ (4.41)
Dacă se admite aproximaţia tg(π/2z) ≅ π/2z,
22
2 pQ z
5
z2≅
π≅δ (4.42)
De exemplu, pentru z = 6, . În figura 4.31,a se prezintă variaţia
debitului specific instantaneu pentru z = 4.
%14 pQ ≅δ
Fig. 4.31. Variaţia debitului specific instantaneu al unei pompe cu pistoane axiale:a) z = 4; b) z = 3.
Frecvenţa impulsurilor de debit este f = 2π⋅ n/γ = nz.Dacă z este impar, m = (z+1)/2 pentru z/0 1 π≤ϕ≤ şi m = (z -1)/2 pentru
z/2z/ 1 π<ϕ≤π .
În primul caz,

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 121/627
Cap.4132
z2sin2
z2cos
Q1
ts π
⎟ ⎠ ⎞
⎜⎝ ⎛ π−ϕ
=
deci
z2sin2
1Q maxts π
=
şi
z2'm1
π=ϕ
Debitul specific minim se realizează pentru ϕ1 = 0 şi ϕ1 = π / z:
z2ctg
2
1Q mints
π=
În intervalul z/2z/ 1 π≤ϕ≤π , apare al doilea maxim identic cu cel din
primul interval, situat la . Debitul minim este egal cu cel din primul
inteval şi apare la ϕ
z2/3''m1 π=ϕ
1= π/z şi ϕ1=2 π/z.
Coeficientul de neuniformitate are valoarea
22
2iQ z
25,1
z8z4tg
z2≅
π≅
ππ=δ (4.43)
iar frecvenţa impulsurilor de debit este f = 2nz. De exemplu, pentru z = 7,
. În figura 4.31,b se prezintă variaţia debitului specific instantaneu
pentru z = 3.
%5,2iQ ≅δ
Din relaţiile (4.42) şi (4.43) rezultă că pulsaţia debitului este mult mai marela pompele cu număr par de pistoane faţă de cele cu număr impar. Ultimele prezintă şi avantajul unei frecvenţe duble a impulsurilor de debit, favorizând
stabilitatea funcţionării sistemelor alimentate, ale căror componente au, în general,frecvenţe proprii mai reduse.Momentul teoretic mediu al pompei se calculează cu relaţia:
α⋅Δ⋅⋅⋅=Δπ
= sin pDR z25,0 p2
VM 2
tm
Reglarea capacităţii pompei este deci echivalentă cu reglarea momentuluide antrenare. Dacă presiunea la aspiraţia pompei este neglijabilă faţă de presiuneade refulare, momentul necesar pentru deplasarea unui piston poziţionat prinunghiul ϕ1 (figura 4.32) se calculează considerând că for ţa de presiune

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 122/627
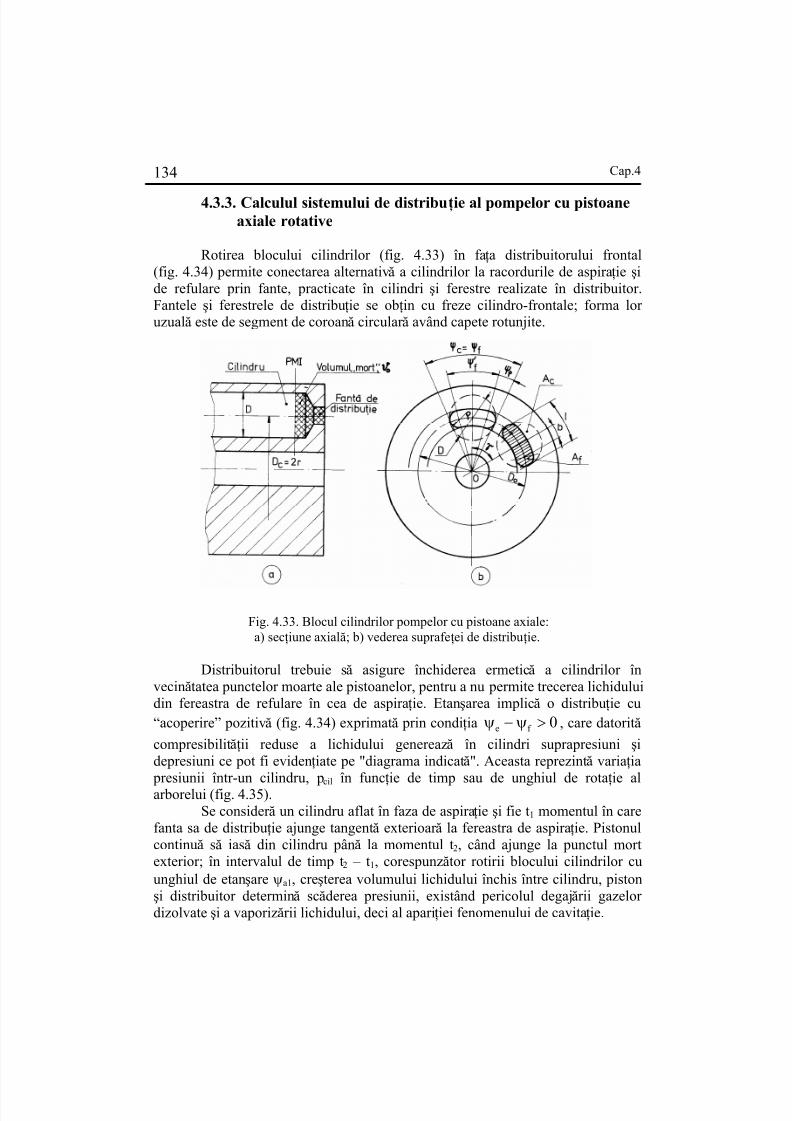
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 123/627
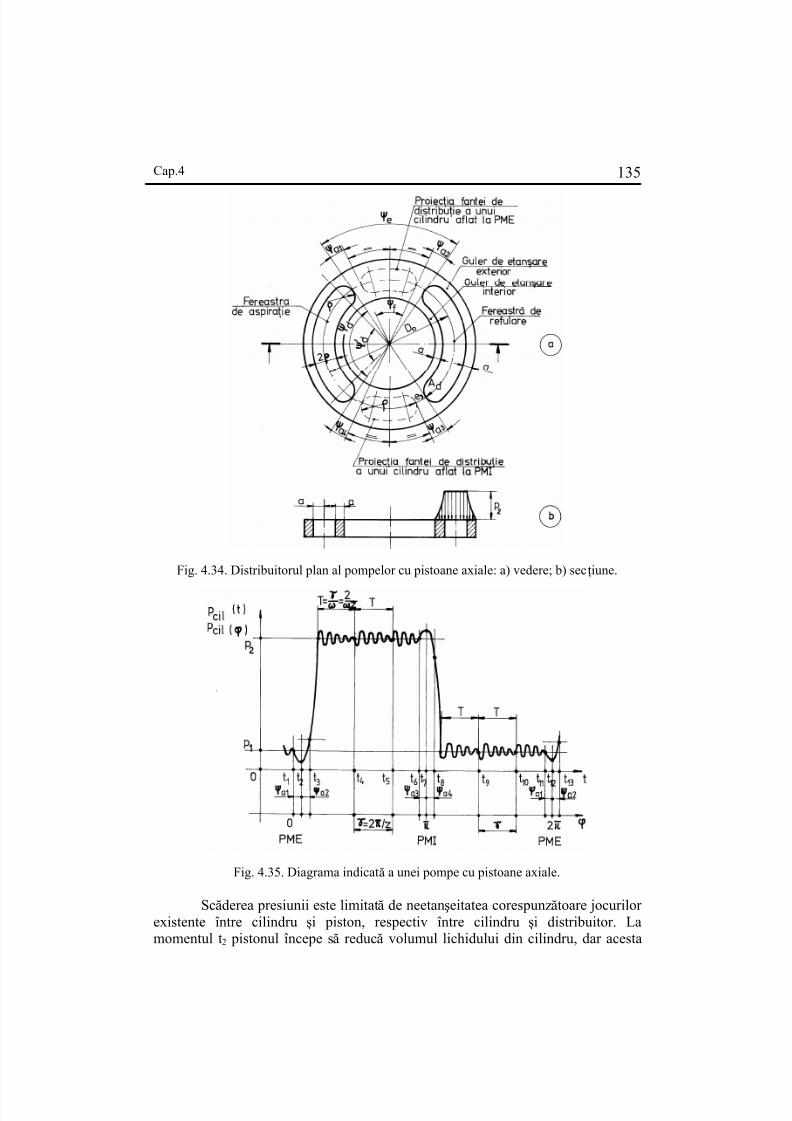
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 124/627
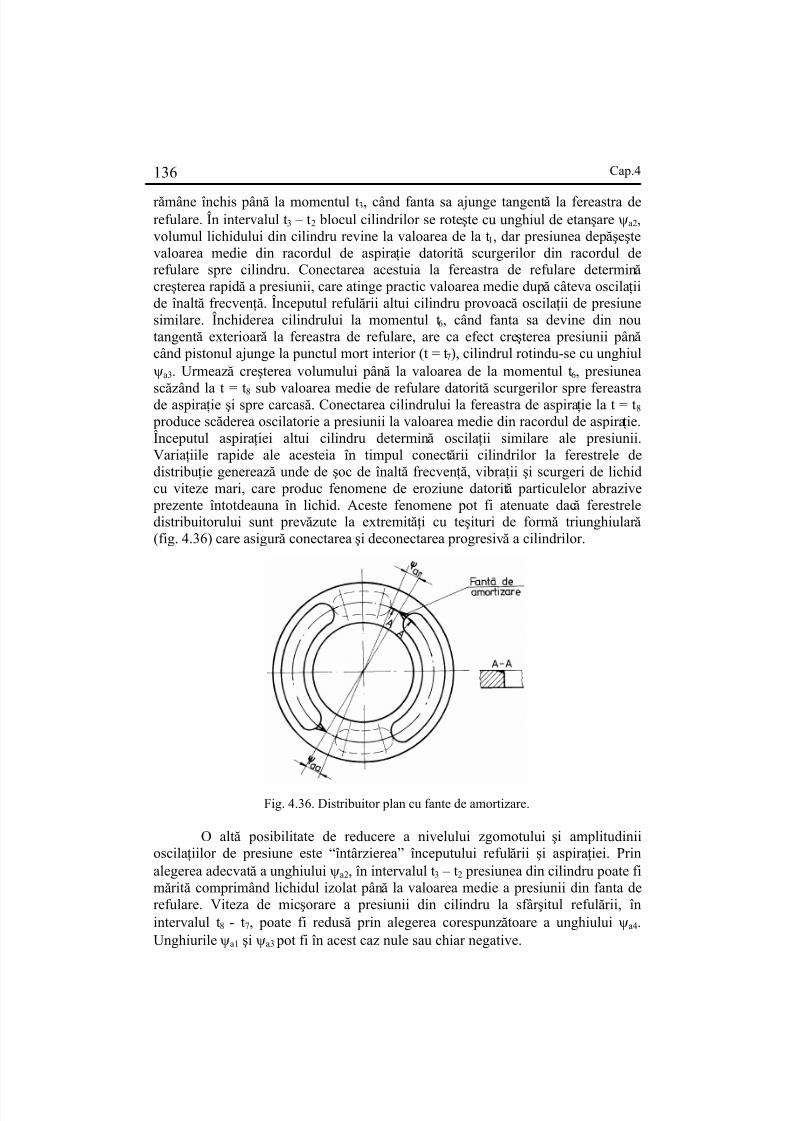
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 125/627
Cap.4136
r ămâne închis până la momentul t3, când fanta sa ajunge tangentă la fereastra derefulare. În intervalul t3 – t2 blocul cilindrilor se roteşte cu unghiul de etanşare ψa2,volumul lichidului din cilindru revine la valoarea de la t1, dar presiunea depăşeştevaloarea medie din racordul de aspiraţie datorită scurgerilor din racordul derefulare spre cilindru. Conectarea acestuia la fereastra de refulare determină creşterea rapidă a presiunii, care atinge practic valoarea medie după câteva oscilaţiide înaltă frecvenţă. Începutul refulării altui cilindru provoacă oscilaţii de presiunesimilare. Închiderea cilindrului la momentul t6, când fanta sa devine din noutangentă exterioar ă la fereastra de refulare, are ca efect creşterea presiunii până când pistonul ajunge la punctul mort interior (t = t7), cilindrul rotindu-se cu unghiulψa3. Urmează creşterea volumului până la valoarea de la momentul t6, presiunea
scăzând la t = t8 sub valoarea medie de refulare datorită scurgerilor spre fereastrade aspiraţie şi spre carcasă. Conectarea cilindrului la fereastra de aspiraţie la t = t8 produce scăderea oscilatorie a presiunii la valoarea medie din racordul de aspiraţie.Începutul aspiraţiei altui cilindru determină oscilaţii similare ale presiunii.Variaţiile rapide ale acesteia în timpul conectării cilindrilor la ferestrele dedistribuţie generează unde de şoc de înaltă frecvenţă, vibraţii şi scurgeri de lichidcu viteze mari, care produc fenomene de eroziune datorită particulelor abrazive prezente întotdeauna în lichid. Aceste fenomene pot fi atenuate dacă ferestreledistribuitorului sunt prevăzute la extremităţi cu teşituri de formă triunghiular ă (fig. 4.36) care asigur ă conectarea şi deconectarea progresivă a cilindrilor.
Fig. 4.36. Distribuitor plan cu fante de amortizare.
O altă posibilitate de reducere a nivelului zgomotului şi amplitudiniioscilaţiilor de presiune este “întârzierea” începutului refulării şi aspiraţiei. Prinalegerea adecvată a unghiului ψa2, în intervalul t3 – t2 presiunea din cilindru poate fimărită comprimând lichidul izolat până la valoarea medie a presiunii din fanta derefulare. Viteza de micşorare a presiunii din cilindru la sfâr şitul refulării, înintervalul t8 - t7, poate fi redusă prin alegerea corespunzătoare a unghiului ψa4.Unghiurile ψa1 şi ψa3 pot fi în acest caz nule sau chiar negative.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 126/627
Cap.4 137
Volumul V al spaţiului cuprins între piston, cilindru şi distribuitor variază conform relaţiei :
( ) ( )ϕ⋅π
−⋅π
+=ϕ x4
Dc
4
DVV
22
0
unde V0 este volumul "mort" al cilindrului (fig.4.33). Ţinând seama de relaţiile(4.28) şi (4.32),
( ) ( )ϕ+⋅α⋅⋅π
+=ϕ cos1sinR 4
DVV
2
0 (4.45)
La începutul refulării (ϕ = 0),
( ) α⋅⋅π
+= sinR 2
DV0V
2
0
Scăderea volumului lichidului până la ϕ = ψar ,
( ) ( ) ( ) 01cossinR 4
D0VVV ar
2
ar r <−ψ⋅α⋅⋅π
=−ψ=Δ
determină creşterea de presiune
( ) ( )
( )
0
0V
V0 p p p r
ar r >Δ
ε−=−ψ=Δ (4.46)
în care ε este modulul de elasticitate al lichidului. Dacă se cunoaşte presiuneamedie de refulare a pompei p2m, şi presiunea de aspiraţie p1m, din (4.46) sedetermină unghiul
( )⎥⎦
⎤⎢⎣
⎡⎟⎟ ⎠
⎞⎜⎜⎝
⎛ α⋅
π+
α⋅⋅ε⋅⋅π−
−=ψ sinR 2
DV
sinR D
p p41cosarc
2
02m1m2
ar (4.47)
Volumul lichidului din cilindru devine minim la ϕ = π, V (π) =V0.Pentru ϕ = π +ψaa,
( ) ( )aa
2
0aa cos1sinR 4
D
VV ψ−α⋅
⋅π
+=ψ+π
deci creşterea volumului lichidului până la începutul aspiraţiei este
( ) ( ) ( ) 0cos1sinR 4
DVVV aa
2
aaa >ψ−α⋅⋅π
=π−ψ+π=Δ
Presiunea trebuie să varieze cu
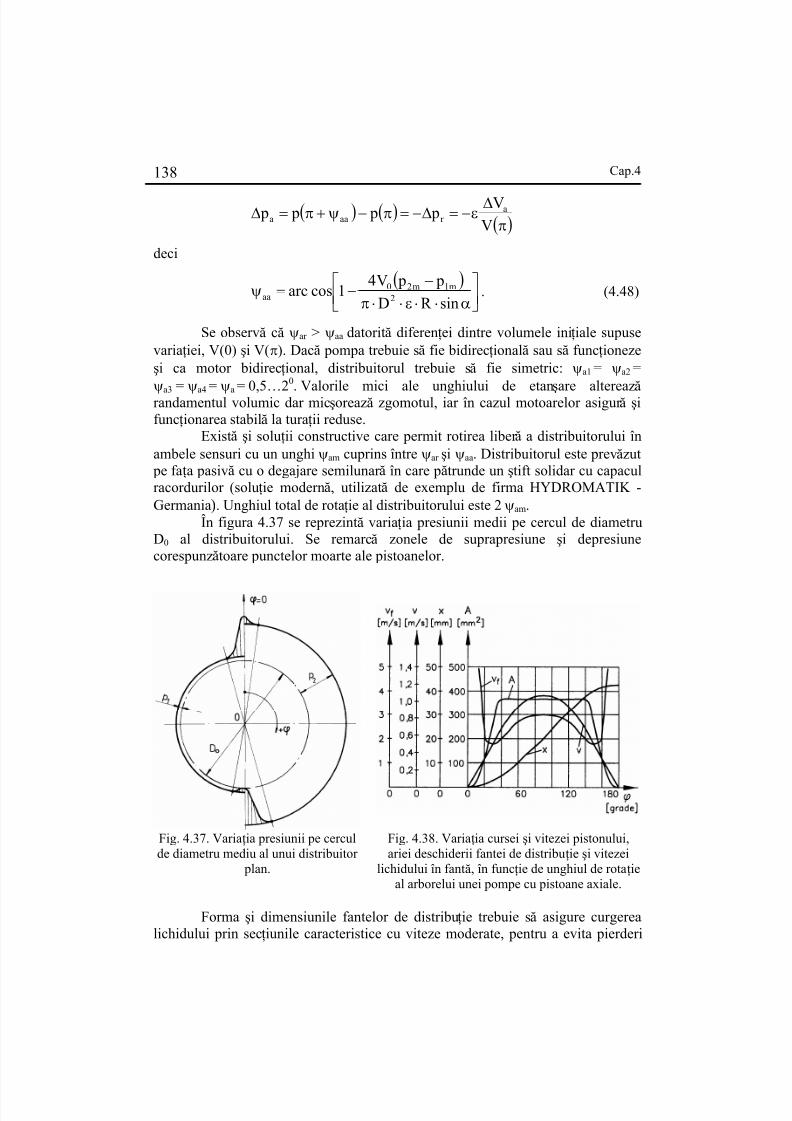
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 127/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 128/627
Cap.4 139
de sarcină exagerate. În acelaşi timp este necesar să se asigure un joc optim între blocul cilindrilor şi distribuitor, care să permită trecerea particulelor solide dinlichid cu pierderi de debit minime.
În figura 4.38 se prezintă variaţia cursei x (ϕ), vitezei pistonului v (ϕ), arieideschiderii fantei A (ϕ) şi vitezei lichidului în deschidere, vf (ϕ), pentru o pompă cu pistoane axiale tipică. Viteza vf este maximă la începutul şi sfâr şitul refulării(aspiraţiei) şi mult mai mare decât valoarea corespunzătoare vitezei maxime a pistonului, v(π/2). Simpla mărire a ariei fantelor Af nu permite micşorarea esenţială a vitezei maxime a lichidului. Evitarea cavitaţiei la începutul şi la sfâr şitulaspiraţiei necesită limitarea turaţiei sau supraalimentarea pompei. În acelaşi timp,micşorarea vitezei lichidului în fante prin mărirea ariei acestora reduce for ţa de
apăsare a blocului cilindrilor pe distribuitor (prin aria Ac – A1). Asigurareaechilibrului necesită micşorarea lăţimii gulerelor de etanşare, deci mărireagradientului de presiune radial şi creşterea pierderilor de lichid la acelaşi joc între blocul cilindrilor şi distribuitor. Viteza pistonului, v (ϕ) = ω⋅R ⋅sinα⋅sinϕ, devinemaximă la ϕ = π/2, vmax = v (π/2) = ω⋅R ⋅sinα şi în practică nu depăşeşte 4 m/s. Laϕ = π/2, fanta cilindrului este complet deschisă, deci A (π/2) = Af . Din ecuaţia decontinuitate se poate calcula:
f
c
f
cf A
AsinR
A
A
2v
2v ⋅α⋅⋅ω=⋅⎟
⎠
⎞⎜⎝
⎛ π=⎟ ⎠
⎞⎜⎝
⎛ π(4.49)
în care Ac= π⋅D2/4. Se admite vf (π/2) ≤ 8 m/s.
Raportul Af / Ac este cuprins la construcţiile uzuale între 0,42 şi 0,48 dar prin micşorarea lăţimii gulerelor de etanşare poate ajunge la 0,6. Diametrul mediude amplasare a fantelor, D0 , este, în general, egal cu diametrul de dispunere aaxelor cilindrilor, Dc = 2r, dar s-a constatat experimental că micşorarea diametruluiD0, în vederea reducerii vitezei periferice a fantelor, micşorează viteza de uzur ă asistemului de distribuţie şi permite realizarea unei presiuni medii mai mari.
Dacă D0 = Dc şi fanta se încadrează în gabaritul cilindrului, adică lungimealiniei medii a fantei, l, este practic egală cu diametrul cilindrului, aria fantei poate ficalculată cu relaţia aproximativă
( ) 2f 2D2A ρ⋅π+ρ−ρ≅
din care rezultă
0A
D24
1 f 2 =π
−ρ⋅π
+⎟ ⎠
⎞⎜⎝
⎛ π
−ρ
Soluţia acceptabilă a acestei ecuaţii este
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −−⋅≅ρ
2f
D165,1
A11D165,1
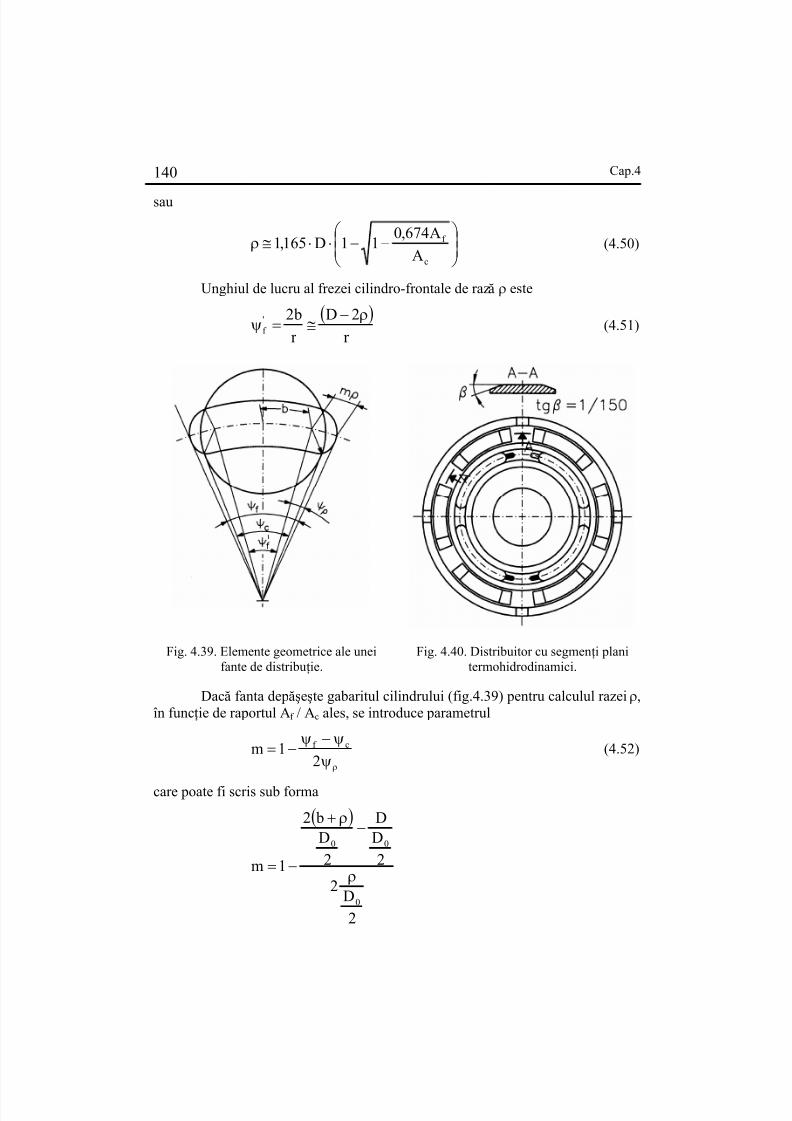
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 129/627
Cap.4140
sau
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −−⋅⋅≅ρ
c
f
A
A674,011D165,1 (4.50)
Unghiul de lucru al frezei cilindro-frontale de rază ρ este
( )r
2D
r
b2'f
ρ−≅=ψ (4.51)
Fig. 4.39. Elemente geometrice ale uneifante de distribuţie.
Fig. 4.40. Distribuitor cu segmenţi planitermohidrodinamici.
Dacă fanta depăşeşte gabaritul cilindrului (fig.4.39) pentru calculul razei ρ,în funcţie de raportul Af / Ac ales, se introduce parametrul
ρψψ−ψ
−=2
1m cf (4.52)
care poate fi scris sub forma
( )
2
D2
2
DD
2
D b2
1m
0
00
ρ
−ρ+
−=
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 130/627
Cap.4 141
din care rezultă distanţa m2D b ρ−= , deci
( )m12D2 b2l −ρ+=ρ+= .
Aria fantei devine
( ) D2m42 b2A 22f ⋅ρ+−πρ=ρ⋅π+ρ⋅≅ .
Rezultă
0
m4
A
m4
D2 f 2 =
−π
−
−π
ρ+ρ .
Soluţia acestei ecuaţii depinde de valoarea parametrului m,
( ) ⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟
⎠ ⎞
⎜⎝ ⎛ −π
π+−π
=ρ 1A
Am
41
m4
D
c
f . (4.53)
Pentru m = π/4,
D2
Af =ρ (4.54)
iar dacă
,1m4 <<π ⎥⎥⎦⎤
⎢⎢⎣⎡ ⎟
⎠ ⎞⎜
⎝ ⎛ π−π−−π−=ρ
c
f
AA4m11m4 D . (4.55)
Unghiul de frezare este:'f ψ
( )
r
m2D
r
b2'f
ρ−==ψ (4.56)
Pentru un distribuitor simetric unghiurile caracteristice sunt:- unghiul de etanşare,
(4.57)af e 2ψ+ψ=ψ
- unghiul de distribuţie,
(4.58)ed ψ−π=ψ
- unghiul de frezare a ferestrelor,
0d
'd D
4ρ−ψ=ψ (4.59)
Aria unei ferestre poate fi aproximată prin relaţia

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 131/627
Cap.4142
(4.60)20
'dd DA ρ⋅π+ρ⋅⋅ψ≅
Viteza medie a lichidului în ferestre,
20
'd
d D
Qv
ρ⋅π+ρ⋅⋅ψ= (4.61)
este limitată uzual la 4,5 m/s.Pentru calculul lăţimii gulerelor de etanşare, a, se admite că distribuţia
presiunii pe zona de etanşare (0 ≤ ρ ≤ π) este liniar ă în orice direcţie perpendicular ă pe conturul ferestrei de refulare.
Blocul cilindrilor este apăsat pe distribuitor de for ţa medie
2
zA pF c2a ⋅⋅=
şi este respins de for ţa
( ) ⎥⎦
⎤⎢⎣
⎡ −ρ+⋅π
+⋅≅ d0
2d2d A2a22
D p
2
1A pF
sau
( )[ ]d02d AaD p
2
1F +ρ+⋅π⋅≅
unde p2 este presiunea nominală de refulare. Pentru asigurarea etanşării se admiteconvenţional că for ţa de apăsare depăşeşte for ţa portantă, adică Fd = λ⋅Fa,unde λ = 0,89 ... 0,94.
Rezultă
( )[ ]d02c2 AaD p2
1A p
2
z+ρ+⋅π⋅=⋅λ
deci
( ) ρ−−⋅⋅λ
⋅π
= dc
0
AzA
D
1a (4.62)
Statistic se constată că:
3r Vaa = (4.63)
unde a este exprimat în mm, V în cm3/rot, iar ar este un coeficient care depinde decapacitatea maşinii. Pentru V ≤ 10 cm3/rot, ar ≅ 1 şi a ≥ 2 mm, iar dacă 10 cm3/rot< V ≤ 800 cm3/rot, ar ≅ (z - 1)/z şi a ≤ 6 mm.
Verificarea lăţimii gulerelor de etanşare se poate face calculând o presiunede contact convenţională,

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 132/627
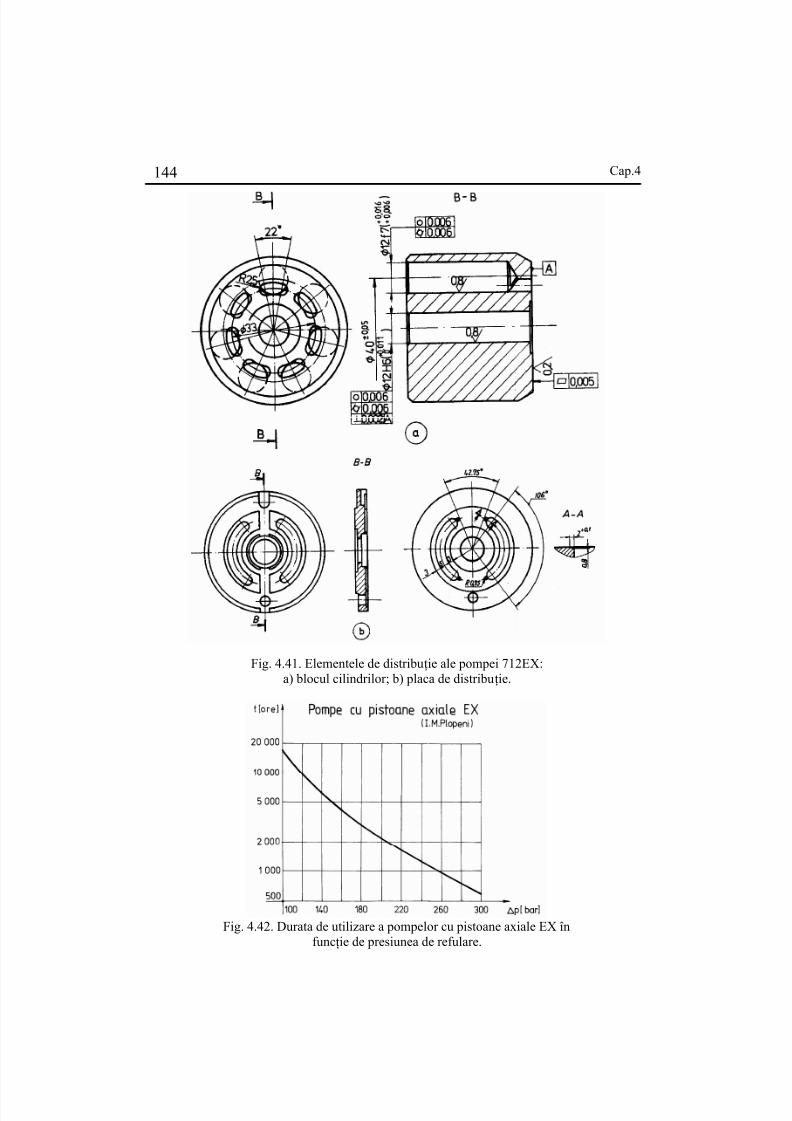
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 133/627
Cap.4144
Fig. 4.41. Elementele de distribuţie ale pompei 712EX:a) blocul cilindrilor; b) placa de distribuţie.
Fig. 4.42. Durata de utilizare a pompelor cu pistoane axiale EX înfuncţie de presiunea de refulare.
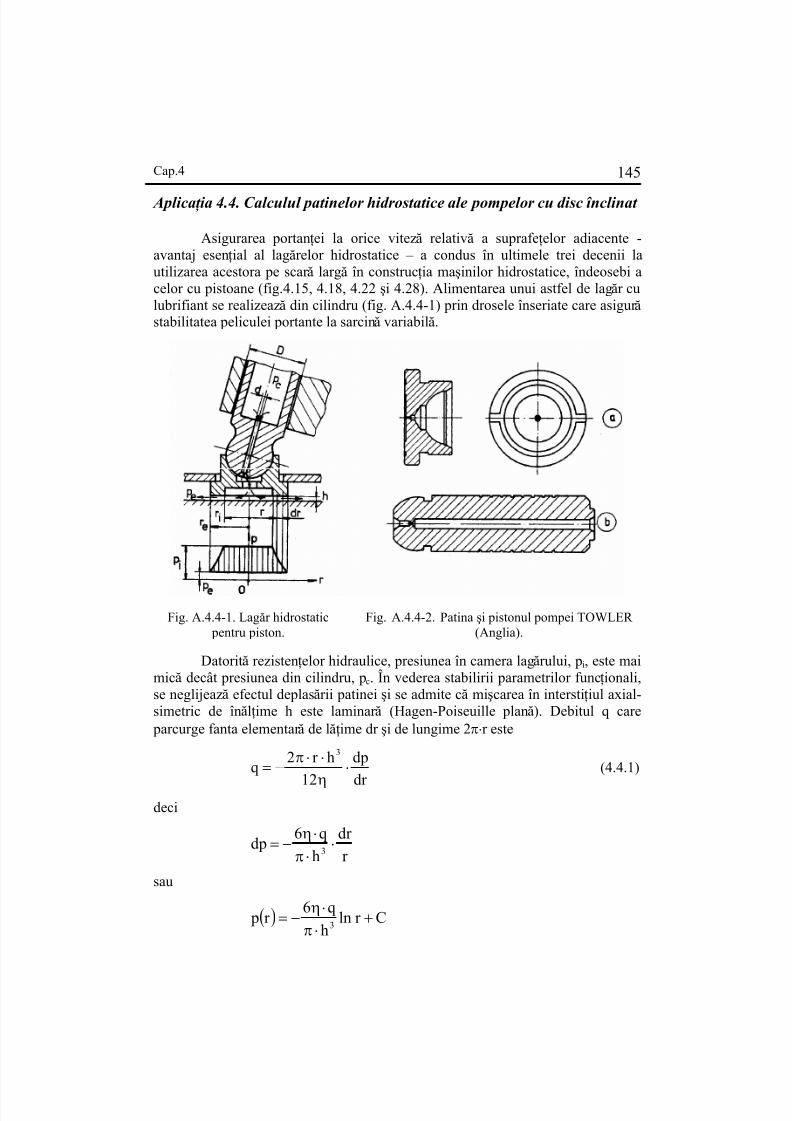
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 134/627
Cap.4 145
Aplica ţ ia 4.4. Calculul patinelor hidrostatice ale pompelor cu disc înclinat
Asigurarea portanţei la orice viteză relativă a suprafeţelor adiacente -avantaj esenţial al lagărelor hidrostatice – a condus în ultimele trei decenii lautilizarea acestora pe scar ă largă în construcţia maşinilor hidrostatice, îndeosebi acelor cu pistoane (fig.4.15, 4.18, 4.22 şi 4.28). Alimentarea unui astfel de lagăr culubrifiant se realizează din cilindru (fig. A.4.4-1) prin drosele înseriate care asigur ă stabilitatea peliculei portante la sarcină variabilă.
Fig. A.4.4-1. Lagăr hidrostatic pentru piston.
Fig. A.4.4-2. Patina şi pistonul pompei TOWLER (Anglia).
Datorită rezistenţelor hidraulice, presiunea în camera lagărului, pi, este maimică decât presiunea din cilindru, pc. În vederea stabilirii parametrilor funcţionali,se neglijează efectul deplasării patinei şi se admite că mişcarea în interstiţiul axial-simetric de înălţime h este laminar ă (Hagen-Poiseuille plană). Debitul q care parcurge fanta elementar ă de lăţime dr şi de lungime 2π⋅r este
dr
dp
12
hr 2q
3
⋅
η
⋅⋅π−= (4.4.1)
deci
r
dr
h
q6dp
3⋅
⋅π⋅η
−=
sau
( ) Cr lnh
q6r p
3+
⋅π⋅η
−=

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 135/627
Cap.4146
Se admite că la periferia interstiţiului (r = r e), p = pe = const. deci
e3e r lnh
q6 pC
⋅π⋅η
+=
Presiunea variază după relaţia:
( )r
r ln
h
q6 pr p e
3e ⋅π⋅η
+= (4.4.2)
Debitul q se determină prin condiţia p (r i) = pi,
i
e
ei3
r r ln
p p
6
h
q
−
⋅η
⋅π
= (4.4.3)
Eliminând debitul din ultimele două relaţii rezultă variaţia presiunii de-alungul razei
( )
i
e
i
e
ii
e
i
r
r ln
r
r ln
r
r ln
p
p
pr p
+= (4.4.4)
Distribuţia presiunii pe suprafaţa inferioar ă a patinei creează for ţa portantă
.( ) 2ii
r
r
r pdr r pr 2Pe
i
⋅π⋅+⋅⋅⋅π= ∫
Prin integrare se obţine
( ) 2eeei
i
e
2i
2e r p p p
r
r ln
r r
2P ⋅⋅π+−
−⋅
π= (4.4.5)
La maşinile hidrostatice, pe reprezintă presiunea carcasei, impusă de
pierderea de presiune de-a lungul drenului şi de presiunea rezervorului, deci esteneglijabilă în raport cu pi. În acest caz, relaţiile (4.4.3), (4.4.4) şi (4.4.5) devin
i
i
e
3
p
r
r ln6
hq
⋅η
⋅π= (4.4.6)
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 136/627
Cap.4 147
i
e
e
i
r
r ln
r r ln
p p = (4.4.7)
( )
i
e
2i
2ei
r
r ln
r r 2
pP
−π
= (4.4.8)
Dacă se admite că alimentarea lagărului se face printr-un tub de lungime lşi diametru d, în care curgerea este laminar ă,
( )η⋅⋅−⋅π
=l128
p pdq ic
4
(4.4.9)
Relaţiile (4.4.6) şi (4.4.9) permit determinarea diametrului droselului,
( )( )4
2i
2eic
32c
r r p p
hD pl66,10d
−−
⋅⋅⋅⋅= (4.4.10)
sau
( )4
i
eic
3i
r
r ln p p
h pl3,21d
−
⋅⋅⋅= (4.4.11)
Grosimea filmului de lubrifiant este limitată inferior de dimensiuneacaracteristică a particulelor solide conţinute de lubrifiant, care depinde de fineţeade filtrare realizabilă. Uzual, h ≥ 10 μm.
Diametrul droselului este limitat inferior de tehnologia disponibilă; îngeneral, d ≥ 0,5 mm. Lungimea droselului este limitată superior de diametrulacestuia; de exemplu, la d = 0,5 mm, lmax ≅ 4 mm.
Se admite (pc – pi) pc ≅ 0,02 … 0,03 şi r e / r i≅ 1,3 …1,4.Din punct de vedere tehnologic este mai convenabil să se utilizeze carezistenţe hidraulice orificii scurte, curgerea lichidului prin acestea fiind uzualturbulentă. Pentru calcule preliminare se poate admite cd = 0,61.
În figura A.4.4-2 se prezintă patina şi pistonul unei pompe produsă defirma TOWLER (Anglia).
Patina are un drosel cu l1= 3 mm şi d1 = 0,55 mm, iar pistonul un orificiucu l2 = 1,5 mm şi d2 = 1,5 mm. Presiunea de refulare a pompei este pc = 700 bar, iar diametrul pistoanelor D = 35,3 mm. Patina are r e = 21 mm, r i = 15 mm şi pentrumărirea stabilităţii laterale este prevăzută cu două segmente de coroană circular ă
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 137/627
Cap.4148
care asigur ă şi o portanţă termohidrodinamică. For ţa portantă necesar ă este Pnec = pc⋅π⋅D
2/4 = 68507 N. Relaţia (4.4.8) permite calculul presiunii necesare în camera patinei, pi = 679,3 bar, deci pc - pi = 20,7 bar. Din relaţia lui Bernoulli aplicată întrecilindru şi camera patinei,
22
2d
2
21
2d
2
ic Ac2
q
Ac2
q p p
⋅⋅ρ
+⋅⋅ρ
≅−
în care şi , se poate calcula debitul lagărului,4/dA 211 ⋅π= 4/dA 2
22 ⋅π=
( )
22
21
icd
AA
p p2cq
ρ+ρ
−= .
Dacă se pompează ulei cu ρ = 900 kg/m3 şi ν = 30⋅10-6 m2/srezultă q = 9,74⋅10-6 m3/s. Pentru droselul patinei, Re1 = 4q / (π⋅d1⋅ν) ≅ 751, iar pentru droselul pistonului Re2 = 4q / (π⋅d2⋅ν) ≅ 275, deci valoarea recomandată pentru coeficientul de debit este acceptabilă. Grosimea filmului de lubrifiantcorespunzătoare debitului calculat este h ≅ 13,5 μm.
Utilizarea lagărelor hidrostatice la pompele volumice permite realizareaunor presiuni mari de funcţionare continuă (până la circa 2000 bar). În cazulmotoarelor volumice, eliminarea frecării statice prin lagăre hidrostatice asigur ă
momente de pornire mari, turaţii stabile mici şi randamente mecanice ridicate. Laviteze mari ale patinei, portanţa hidrostatică este însoţită de o portanţă hidrodinamică care îmbunătăţeşte funcţionarea lagărului. Scăderea randamentuluivolumic datorită pierderilor de debit este compensată de mărirea sensibilă a durateide utilizare a maşinilor.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 138/627
5. POMPE CU PALETE CULISANTE
5.1. DESCRIERE, FUNCŢIONARE ŞI CLASIFICARE
O pompă cu palete culisante este formată dintr-o carcasă cilindrică, închisă lateral cu două capace plane şi un rotor cilindric circular antrenat de un arbore
prevăzut cu degajări (caneluri) în care culisează palete aflate permanent în contactcu carcasa, datorită for ţelor centrifuge. Carcasa pompelor "cu simplu efect" este
circular ă, (fig. 5.1,a,b) iar în cazul celor "cu dublu efect" – carcasa estecvasieliptică (fig. 5.1,c). În primul caz, datorită amplasării excentrice a rotoruluifaţă de carcasă, distanţa dintre aceste două piese variază periodic, determinânddeplasarea radială alternativă a paletelor.
Camerele de volum variabil necesare aspiraţiei şi refulării se pot realizaastfel:
a) între palete, rotor, carcasă şi capacele acesteia, la pompele cu aspiraţie şirefulare "exterioar" (fig. 5.1,a,c) distribuţia fiind asigurată de ferestrele practicateîn carcasă, într-unul din capacele acesteia sau în ambele capace;
b) între carcasă, palete, rotor, capacele carcasei şi un distribuitor cilindriccircular fix (fig.5.1,b) la pompele cu aspiraţie şi refulare "interioar ă". În cursulieşirii paletelor din rotor volumul camerelor creşte, determinând scăderea presiunii,deci aspiraţia lichidului din racordul corespunzător. Când două palete adiacentecare creează o camer ă de volum crescător ajung în poziţie simetrică faţă de axa
21OO , determinată de centrul (axa) carcasei, O1 şi centrul (axa) rotorului O2
(fig. 5.2,a), volumul camerei devine maxim şi aceasta este izolată de ambeleferestre de distribuţie; urmează faza de refulare, deoarece paletele pătrund în rotor,
provocând micşorarea volumului camerei, deci evacuarea lichidului în racordul de
refulare, până când ajung din nou simetrice faţă de axa 21OO ; în acest moment
camera este din nou izolată de ferestrele de distribuţie iar volumul său este minim.Debitul teoretic al pompelor cu simplu efect este propor ţional cu
excentricitatea rotorului faţă de carcasă, 21OOe = , deci poate fi reglat prin
translaţia carcasei faţă de rotor. Datorită acestei calităţi, pompele cu paleteculisante reglabile sunt preferabile pompelor cu roţi dinţate în numeroase sistemehidraulice (îndeosebi cele ale maşinilor-unelte) deşi la aceeaşi capacitate sunt multmai scumpe.
Rezultanta for ţelor de presiune exercitate asupra rotorului în zona derefulare solicită lagărele propor ţional cu presiunea de refulare, limitând valoareanominală a acesteia la 100 – 175 bar, în funcţie de tipul paletelor şi al lagărelor.
La pompele cu dublu efect for ţele de presiune radiale se echilibrează practic complet datorită simetriei carcasei şi numărului par de palete; descărcarealagărelor permite funcţionarea continuă la presiuni mai ridicate (175 … 210 bar).
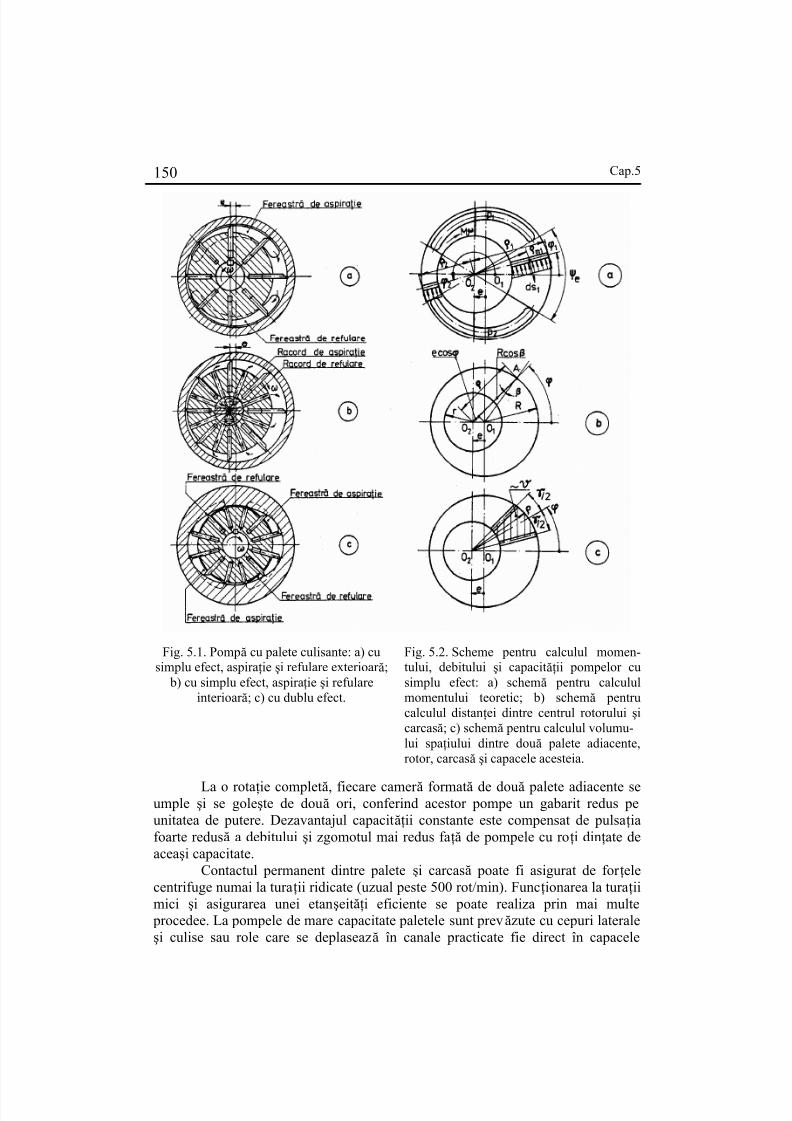
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 139/627
Cap.5150
Fig. 5.1. Pompă cu palete culisante: a) cusimplu efect, aspiraţie şi refulare exterioar ă;
b) cu simplu efect, aspiraţie şi refulareinterioar ă; c) cu dublu efect.
Fig. 5.2. Scheme pentru calculul momen-tului, debitului şi capacităţii pompelor cusimplu efect: a) schemă pentru calcululmomentului teoretic; b) schemă pentrucalculul distanţei dintre centrul rotorului şicarcasă; c) schemă pentru calculul volumu-lui spaţiului dintre două palete adiacente,rotor, carcasă şi capacele acesteia.
La o rotaţie completă, fiecare camer ă formată de două palete adiacente seumple şi se goleşte de două ori, conferind acestor pompe un gabarit redus peunitatea de putere. Dezavantajul capacităţii constante este compensat de pulsaţiafoarte redusă a debitului şi zgomotul mai redus faţă de pompele cu roţi dinţate deaceaşi capacitate.
Contactul permanent dintre palete şi carcasă poate fi asigurat de for ţelecentrifuge numai la turaţii ridicate (uzual peste 500 rot/min). Funcţionarea la turaţiimici şi asigurarea unei etanşeităţi eficiente se poate realiza prin mai multe
procedee. La pompele de mare capacitate paletele sunt prevăzute cu cepuri lateraleşi culise sau role care se deplasează în canale practicate fie direct în capacele
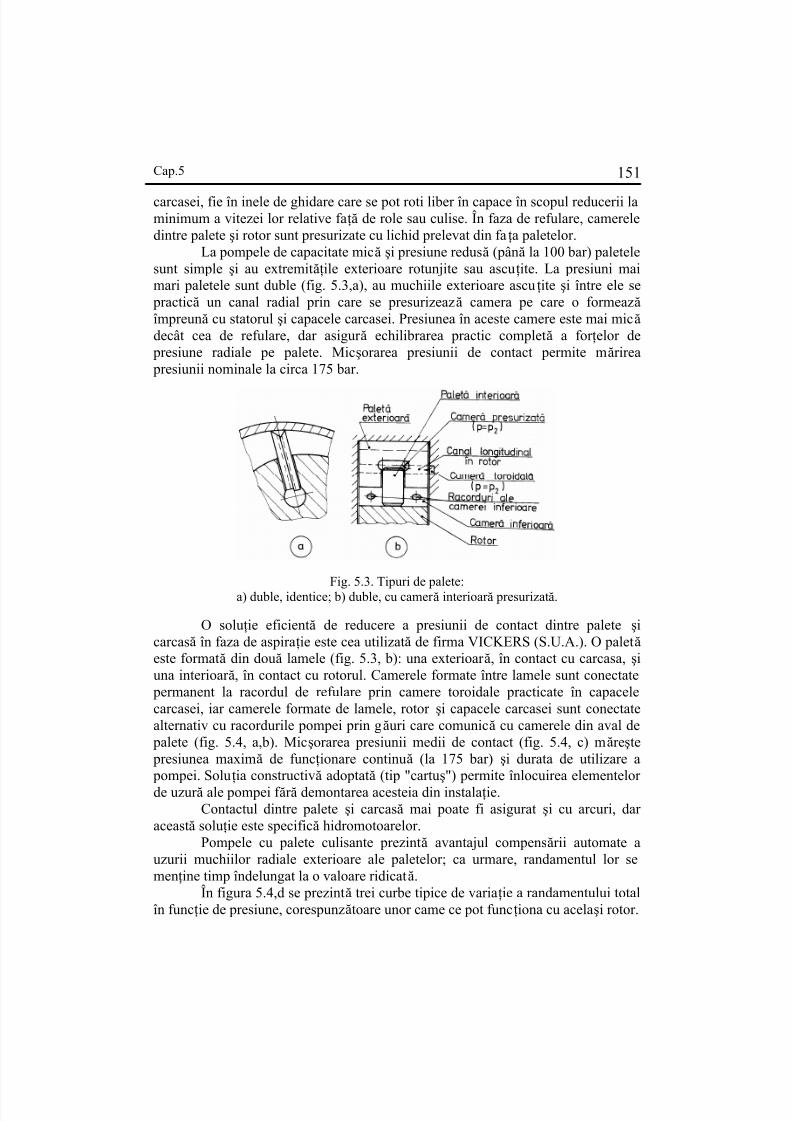
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 140/627
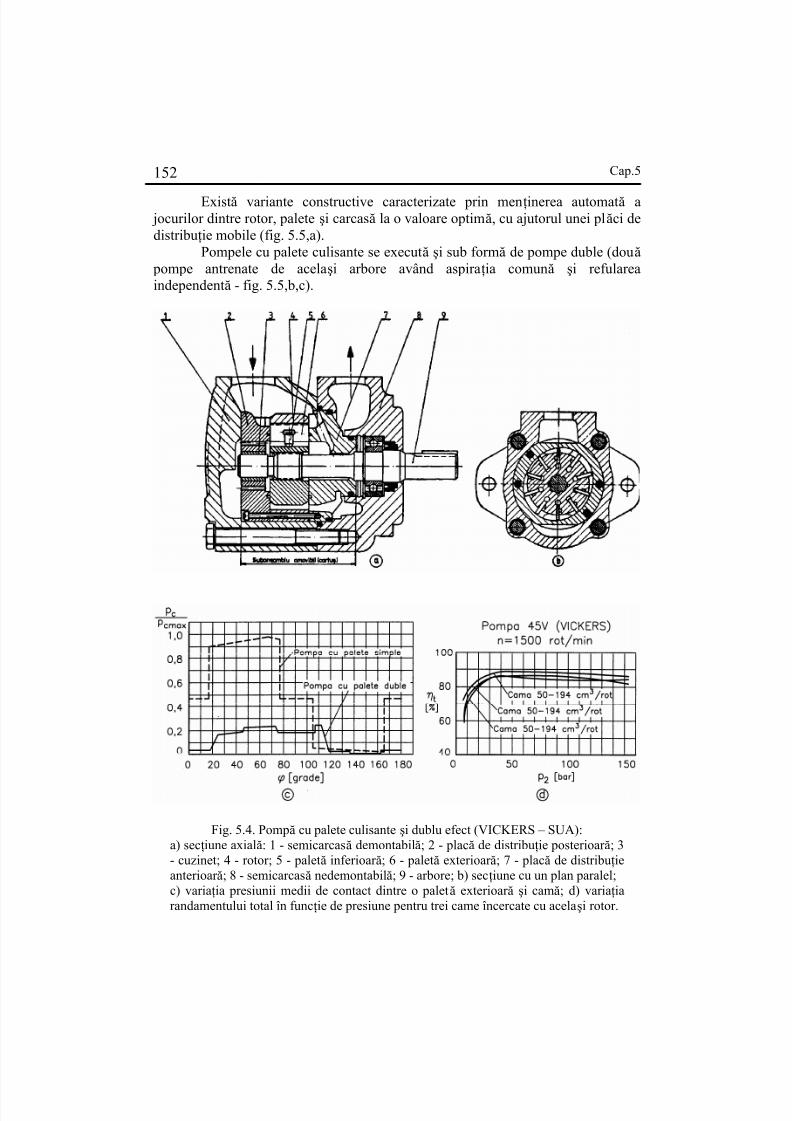
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 141/627
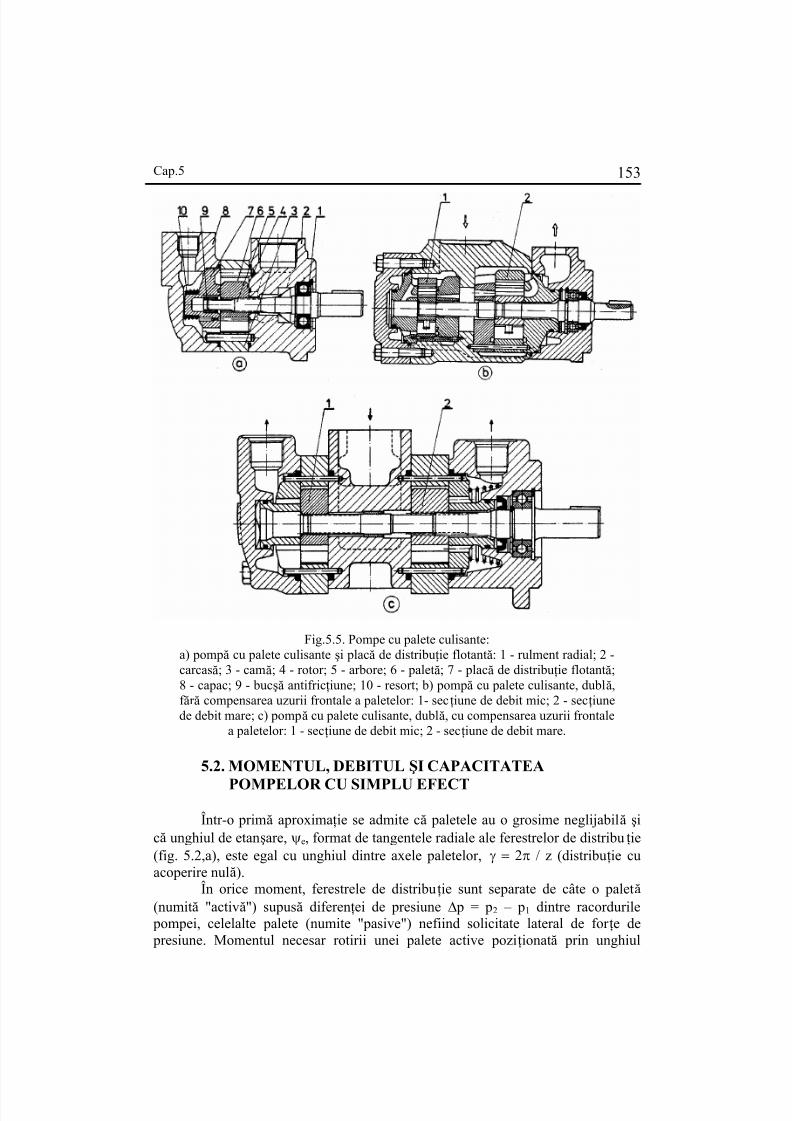
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 142/627
Cap.5 153
Fig.5.5. Pompe cu palete culisante:a) pompă cu palete culisante şi placă de distribuţie flotantă: 1 - rulment radial; 2 -carcasă; 3 - camă; 4 - rotor; 5 - arbore; 6 - paletă; 7 - placă de distribuţie flotantă;8 - capac; 9 - bucşă antifricţiune; 10 - resort; b) pompă cu palete culisante, dublă,f ăr ă compensarea uzurii frontale a paletelor: 1- secţiune de debit mic; 2 - secţiunede debit mare; c) pompă cu palete culisante, dublă, cu compensarea uzurii frontale
a paletelor: 1 - secţiune de debit mic; 2 - secţiune de debit mare.
5.2. MOMENTUL, DEBITUL ŞI CAPACITATEA
POMPELOR CU SIMPLU EFECT
Într-o primă aproximaţie se admite că paletele au o grosime neglijabilă şică unghiul de etanşare, ψe, format de tangentele radiale ale ferestrelor de distribuţie(fig. 5.2,a), este egal cu unghiul dintre axele paletelor, γ = 2π / z (distribuţie cuacoperire nulă).
În orice moment, ferestrele de distribuţie sunt separate de câte o paletă (numită "activă") supusă diferenţei de presiune Δ p = p2 – p1 dintre racordurile
pompei, celelalte palete (numite "pasive") nefiind solicitate lateral de for ţe de presiune. Momentul necesar rotirii unei palete active poziţionată prin unghiul

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 143/627
Cap.5154
z/t1 π+ω−=ϕ , cu un unghi ( ) 0dtd 1 >ω=ϕ− , se calculează din condiţia
energetică
( ) 1111 dpA pdM ⋅⋅Δ=ϕ− (5.1.)
în care A1= b⋅(ρ1 – r); ds1 = – ρm1⋅dϕ1; b – lăţimea rotorului; r – raza rotorului;ρ1(ϕ1) – distanţa dintre centrul rotorului şi carcasă: ρm1(ϕ1) = (ρ1+ r)/2 – razacentrului por ţiunii de paletă situată în afara rotorului.
Se observă că produsul A1⋅ds1 reprezintă volumul de lichid dV1 ce trece dinzona de aspiraţie către cea de refulare în intervalul de timp dt, necesar rotirii paleteicu unghiul - dϕ1, deci
( ) ( ) 02
r p bd
dV pM221
1
111 >−ρ⋅Δ⋅=
ϕ⋅Δ−=ϕ (5.2)
O paletă activă care trece din zona de refulare în zona de aspiraţie produceun moment
( )( )
02
r p b
d
dV pM
222
2
222 <
−ρ⋅Δ⋅−=
ϕ⋅Δ
=ϕ (5.3)
dV2 fiind volumul de lichid recirculat în acelaşi interval de timp, dt = - dϕ2/ω, iar ρ2(ϕ2) - distanţa dintre centrul rotorului şi carcasă pentru această paletă. Unghiurile
ϕ1 şi ϕ2 difer ă printr-o constantă, ϕ1 - ϕ2 = K ⋅γ deci dϕ1 = dϕ2. Numărul natural K depinde de numărul paletelor.Momentul teoretic necesar pompării este
( )( )2
p b
d
dV pMMM
22
21
121
ρ−ρ⋅Δ⋅=
ϕΔ−=−=ϕ (5.4)
unde
( ) 2/ p bdVdVdV 22
2121 ρ−ρ⋅Δ⋅=−= (5.5)
reprezintă volumul de lichid evacuat prin fereastra de refulare când rotorul seroteşte cu unghiul dϕ1. Debitul teoretic corespunzător este
( )( )2
b
dt
d
d
dV
dt
dVQ
22
211
11t
ρ−ρ⋅⋅ω=
ϕ⋅
ϕ==ϕ (5.6)
Se constată că variaţia momentului teoretic este similar ă cu cea a debituluiteoretic.
Din figura 5.2,b se poate calcula distanţa dintre centrul rotorului şi carcasă în funcţie de unghiul curent ϕ,
( ) β−+ϕ=β+ϕ=ϕρ 2sin1R cosecosR cose (5.7)
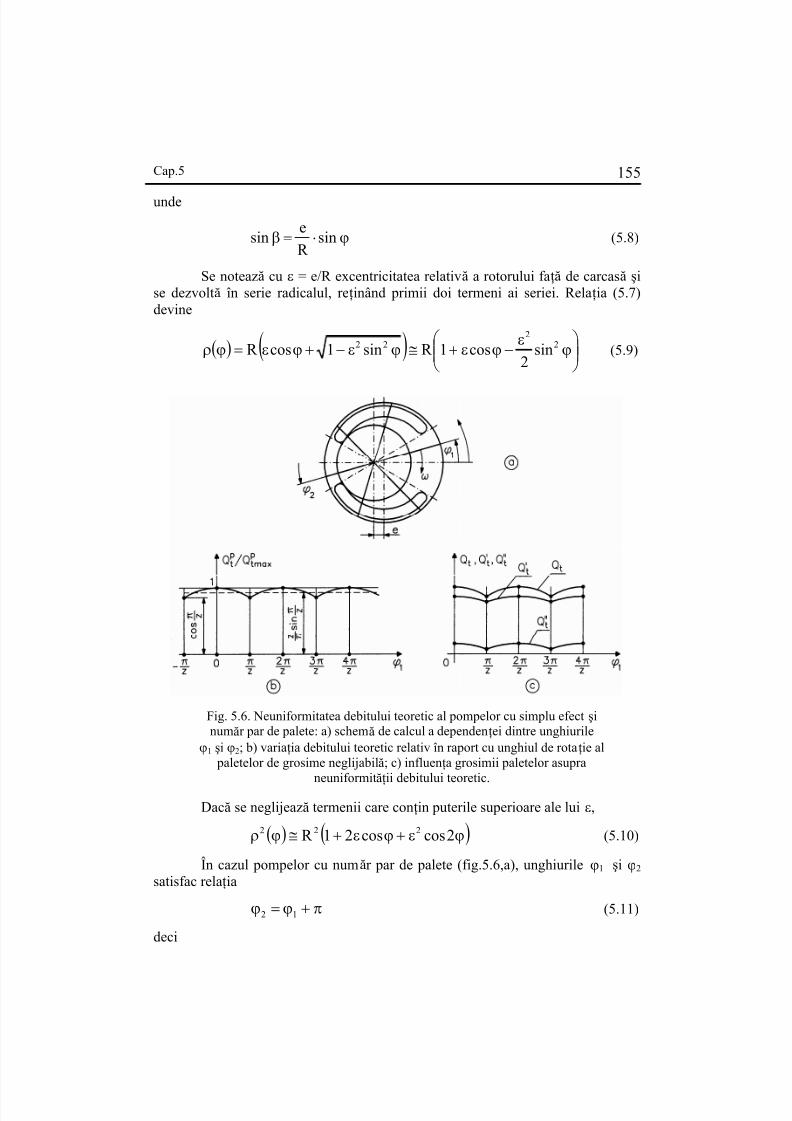
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 144/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 145/627
Cap.5156
( ) 12
12
121 2coscos21R ϕε+ϕε+≅ϕρ
şi
( ) ( )12
12
122 2coscos21R ϕε+ϕε−≅ϕρ
Debitul teoretic are caracter pulsator (fig. 5.6, b),
(5.12)( ) 12
1 pt cosR b2Q ϕ⋅⋅⋅ω⋅ε=ϕ
atingând valoarea maximă când ϕ1 = 0,
(5.13)( ) 21
pmaxt R b2Q ⋅⋅ω⋅ε=ϕ
şi valoarea minimă pentru z/2/1 π±=γ±=ϕ
⎟ ⎠
⎞⎜⎝
⎛ π⋅⋅⋅ω⋅ε=z
cosR b2Q 2 pmint (5.14)
Debitul teoretic mediu corespunzător este
( ) 11
z/
z/
211
2/
2/
pt
ptm dcosR b2
2
zdQ
1Q ϕϕ⋅⋅⋅ω⋅ε
π=ϕϕ
γ= ∫∫
π
π−
γ
γ−
sau
2sinR bz
2Q 2 p
tm
π⋅⋅⋅ω⋅ε⋅
π= . (5.15)
Coeficientul de neuniformitate al debitului teoretic,
ptm
pmint
pmaxt p
Q Q
QQ −=δ
este invers propor ţional cu numărul paletelor,
2
2 pQ
z2z2tg
zz
sinz
zcos1 π
≅ππ
=π⋅π
π−
=δ . (5.16)
La pompele cu număr impar de palete, dacă 0 ≤ ϕ1 ≤ π /z, ϕ2 = ϕ1 + π-π/z(fig. 5.7,a), iar dacă -π/z ≤ ϕ1 ≤ 0, ϕ2 = ϕ1 + π + π/z (fig. 5.7,b). În primul caz
( ) ⎥⎦
⎤⎢⎣
⎡⎟ ⎠
⎞⎜⎝
⎛ π−ϕε+⎟
⎠
⎞⎜⎝
⎛ π−ϕ⋅ε−≅ϕρ
z2cos
zcos21R 1
21
21
22
deci

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 146/627
Cap.5 157
( ) ⎥⎦
⎤⎢⎣
⎡⎟ ⎠
⎞⎜⎝
⎛ π−ϕ⎟
⎠
⎞⎜⎝
⎛ πε−⎟ ⎠
⎞⎜⎝
⎛ π−ϕ⎟
⎠
⎞⎜⎝
⎛ πεω=ϕz2
sinz2
sin21z2
cosz2
cos bR 2Q 112
1it (5.17)
Valoarea maximă a debitului teoretic se realizează pentru ϕ1 = 0:
⎥⎦
⎤⎢⎣
⎡⎟ ⎠
⎞⎜⎝
⎛ π⋅ε+⎟ ⎠
⎞⎜⎝
⎛ π⋅⋅ω⋅ε=z2
sin21z2
cosR b2Q 222imaxt (5.18)
iar valoarea minimă – pentru ϕ = π/z (fig. 5.7, c):
⎥⎦
⎤⎢⎣
⎡⎟
⎠
⎞⎜
⎝
⎛ πε−⎟
⎠
⎞⎜
⎝
⎛ π⋅⋅ω⋅ε=
z2
sin21
z2
cosR b2Q 222imaxt . (5.19)
Fig. 5.7. Neuniformitatea debitului teoretic al pompelor cu simplu efect şinumăr impar de palete: a) schemă de calcul a dependenţei dintre unghiurilecaracteristice ϕ1 şi ϕ2 pentru 0 ≤ ϕ1 ≤ π/z; b) schemă de calcul a dependenţeidintre unghiurile caracteristice ϕ1 şi ϕ2 pentru -π/z ≤ ϕ1 ≤0; c) variaţia
debitului teoretic specific în funcţie de unghiul de rotaţie al paletelor.
Debitul teroretic mediu în intervalul [0, π/z],
( ) 11
z/
0
it
itm dQ
zQ ϕϕ
π= ∫
π
are aceeaşi expresie ca în cazul pompelor cu număr par de palete:

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 147/627
Cap.5158
tm2i
tm Qz
sinR bz2Q =π⋅⋅⋅ω⋅ε⋅π
= . (5.20)
Coeficientul de neuniformitate a debitului teoretic,
( ) tmimint
imaxt
iQ Q/QQ −=δ
are o valoare mult mai mică decât în cazul pompelor cu număr par de palete,
2
2iQ zz
sinz
πε≅
π⋅ε
π=δ (5.21)
raportul
12z2
cos2 2 pQ
iQ <ε≅⎟
⎠
⎞⎜⎝
⎛ π⋅ε=δ
δ(5.22)
fiind subunitar deoarece ε << 1.Construcţiile cele mai r ăspândite au 11 sau 15 palete. În intervalul -π⁄ z ≤ϕ1≤0variaţia debitului teoretic este similar ă.
Volumul V al spaţiului dintre două palete adiacente, rotor, carcasă şicapacele acesteia variază în funcţie de poziţia planului de simetrie al paletelor înraport cu axa O1O2. Calculând valorile extreme, Vmax şi Vmin ale acestui volum se
poate determina capacitatea pompei:
. (5.23)( )minmax VVzV −=
Cu ajutorul figurii 5.2,c se construieşte funcţia
( ) ( ) ( ) ϕ⋅−ρ=ϕ⋅+ρ
⋅−ρ=ϕ ∫∫π+ϕ
π−ϕ
π+ϕ
π−ϕ
dr 2
bd
2
r r bV
z/
z/
22z/
z/
(5.24)
Ţinând seama de relaţia (5.10), aceasta devine
( ) ( ) ∫∫π+ϕ
π−ϕ
π+ϕ
π−ϕ
ϕ−ϕ⋅ϕε+ϕε+=ϕz/
z/
z/
z/
22
2
d2
br d2coscos21
2
bR V
sau
( ) ⎥⎦
⎤⎢⎣
⎡ϕ
π⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ε+ϕ⎟
⎠
⎞⎜⎝
⎛ πε+⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
π=ϕ cos
z
2sin
2cos
zsin2
R
r 1
z bR V
2
2
22 (5.25)
Maximul acestui volum se realizează la ϕ = 0,
⎥⎦
⎤⎢⎣
⎡⎟ ⎠
⎞⎜⎝
⎛ πε+⎟
⎠
⎞⎜⎝
⎛ πε+⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
π=
z
2sin
2zsin2
R
r 1
z bR V
2
2
22
max

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 148/627
Cap.5 159
iar minimul - la ϕ = π,
⎥⎦
⎤⎢⎣
⎡⎟ ⎠
⎞⎜⎝
⎛ πε+⎟
⎠
⎞⎜⎝
⎛ πε−⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
π⋅=
z
2sin
2zsin2
R
r 1
zR bV
2
2
22
min
deci
⎟ ⎠
⎞⎜⎝
⎛ π⋅⋅⋅ε⋅⋅=z
sinR z b4V 2 (5.26)
Dacă numărul paletelor este suficient de mare,
zz
sinπ
≅π
şi
. (5.27)R be4R b4V 2 ⋅⋅⋅π=⋅⋅ε⋅π≅
Debitul teoretic mediu calculat pe baza capacităţii,
zsinR z b
2
zsinR z bn4VnQ 22
tm
π⋅⋅⋅ε⋅⋅ω
π=
π⋅⋅⋅ε⋅⋅=⋅= (5.28)
este identic cu cel determinat anterior prin medierea debitului teoretic pentru număr par şi impar de palete.
Grosimea nenulă a paletelor, a, modifică variaţia debitului teoretic instan-taneu. Deplasarea alternativă a paletelor în rotor generează un debit teoretic
care poate fi recuperat dacă în capacele carcasei se prevăd ferestre de distribuţie pentru spaţiile delimitate de rotor şi palete. Dacă aceste spaţii sunt racordate numai
la aspiraţie sau numai la refulare, debitul teoretic al pompei, , se
micşorează, dar şi pulsaţia sa este mai mică decât cea teoretică. În figura 5.6,c se prezintă calitativ variaţia acestor debite pentru pompele cu număr par de palete.
''
tQ
''tt
't QQQ −=
Două palete adiacente ocupă în camera de volum maxim volumul
⎥⎦
⎤⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛ πε−
πε+⋅≅⎥
⎦
⎤⎢⎣
⎡−⎟
⎠
⎞⎜⎝
⎛ πρ⋅=Δ r z
sin2z
cos1R bar z
baV 22
max
iar în camera de volum minim – volumul
⎥⎦
⎤⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛ πε−
πε−⋅≅⎥
⎦
⎤⎢⎣
⎡−⎟
⎠
⎞⎜⎝
⎛ π+π
ρ⋅=Δ r z
sin2z
cos1R bar z
baV 22
min
Variaţia utilă de volum a unei camere se micşorează cu
zcosR ba2VVV minmax
π⋅⋅ε⋅⋅=Δ−Δ=Δ
iar capacitatea pompei cu

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 149/627
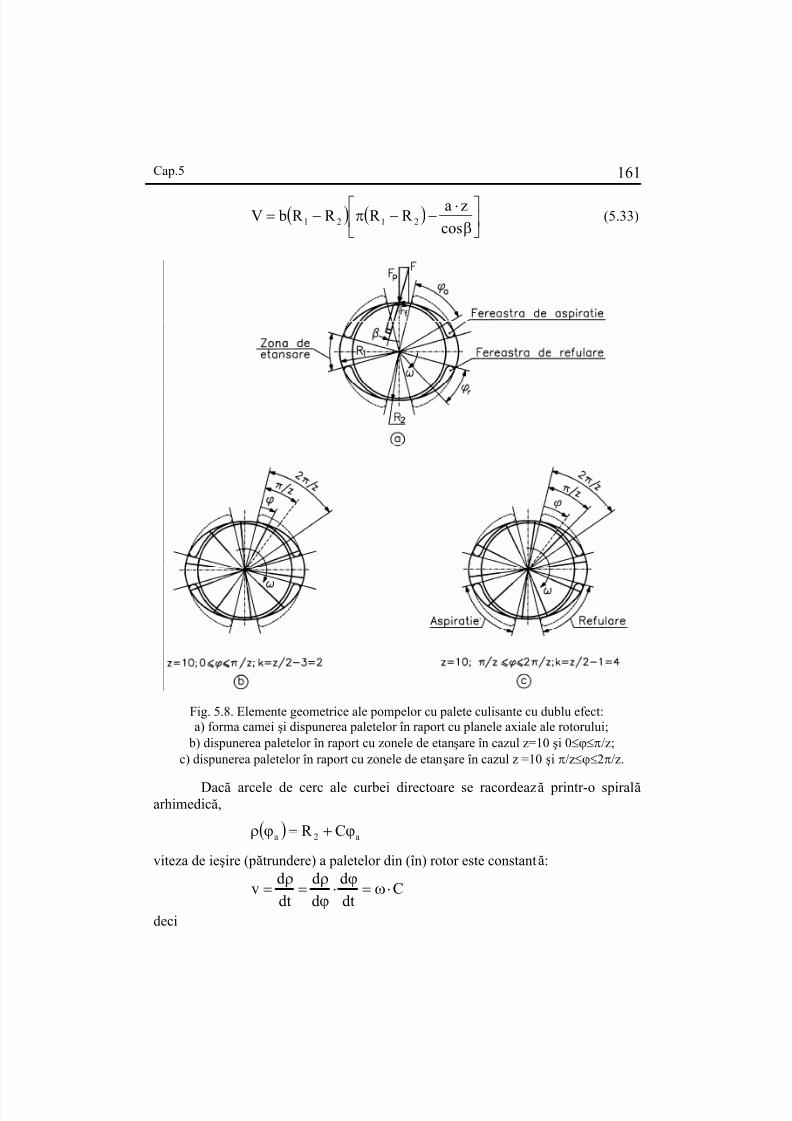
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 150/627
Cap.5 161
( ) ( ) ⎥⎦
⎤⎢⎣
⎡β
⋅−−π−=
cos
zaR R R R bV 2121 (5.33)
Fig. 5.8. Elemente geometrice ale pompelor cu palete culisante cu dublu efect:a) forma camei şi dispunerea paletelor în raport cu planele axiale ale rotorului;
b) dispunerea paletelor în raport cu zonele de etanşare în cazul z=10 şi 0≤ϕ≤π/z;c) dispunerea paletelor în raport cu zonele de etanşare în cazul z =10 şi π/z≤ϕ≤2π/z.
Dacă arcele de cerc ale curbei directoare se racordează printr-o spirală arhimedică,
( ) a2a CR ϕ+=ϕρ
viteza de ieşire (pătrundere) a paletelor din (în) rotor este constantă:
Cdt
d
d
d
dt
dv ⋅ω=
ϕ⋅
ϕρ
=ρ
=
deci
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 151/627
Cap.5162
( )ωϕ⋅+=ϕρ a
2avR . (5.34)
Fie K(ϕ) numărul paletelor care se găsesc la momentul t = ϕ/ω în zona de
refulare. Debitul pierdut datorită acestor palete este deciv baK Q ''t ⋅⋅⋅=
( ) v baK R R bQ 22
21
't ⋅⋅⋅−−⋅ω= .
Dacă z este multiplu de patru, în zonele de etanşare se vor găsi întotdeauna patru palete, iar în zonele de refulare se găsesc K = (z - 4) / 2 palete. Pentru z/2impar, în intervalul 32/zK ,z/0 r −=π≤ϕ≤ (fig. 5.8,b), iar în intervalul
12/zK ,z/2z/ r −=π≤ϕ<π (fig. 5.8,c). Rezultă că la aceste pompe este util
ca numărul de palete să fie multiplu de patru, deoarece K fiind constant, debitulteoretic este constant. În general z = 12, mai rar z = 20, dar există şi numeroasecazuri în care z =10.
Spirala arhimedică prezintă dezavantajul că la racordarea cu arcele de cercviteza are discontinuităţi cărora le corespund şocuri. Pentru evitarea acestora,spirala se racordează cu arcele de cerc prin curbe continue.
Variaţia liniar ă a vitezei este posibilă prin menţinerea constantă aacceleraţiei radiale a paletei. Curba
( )2
212a2
R R 2R
γ−
⋅ϕ+=ρ (5.35)
asigur ă în intervalul [0, γ/2] o creştere liniar ă a vitezei,
( ) ( ) 221aa R R 4
dt
dv γ−ω⋅ϕ=
ρ=ϕ
până la valoarea maximă
( )γ−
ω= 21max
R R 2v ,
acceleraţia fiind constantă,
( )
0
R R 4
dt
d2
21
2
2
>γ
−ω
=
ρ
iar
2
R R
221 +
=⎟ ⎠
⎞⎜⎝
⎛ γρ
Curba
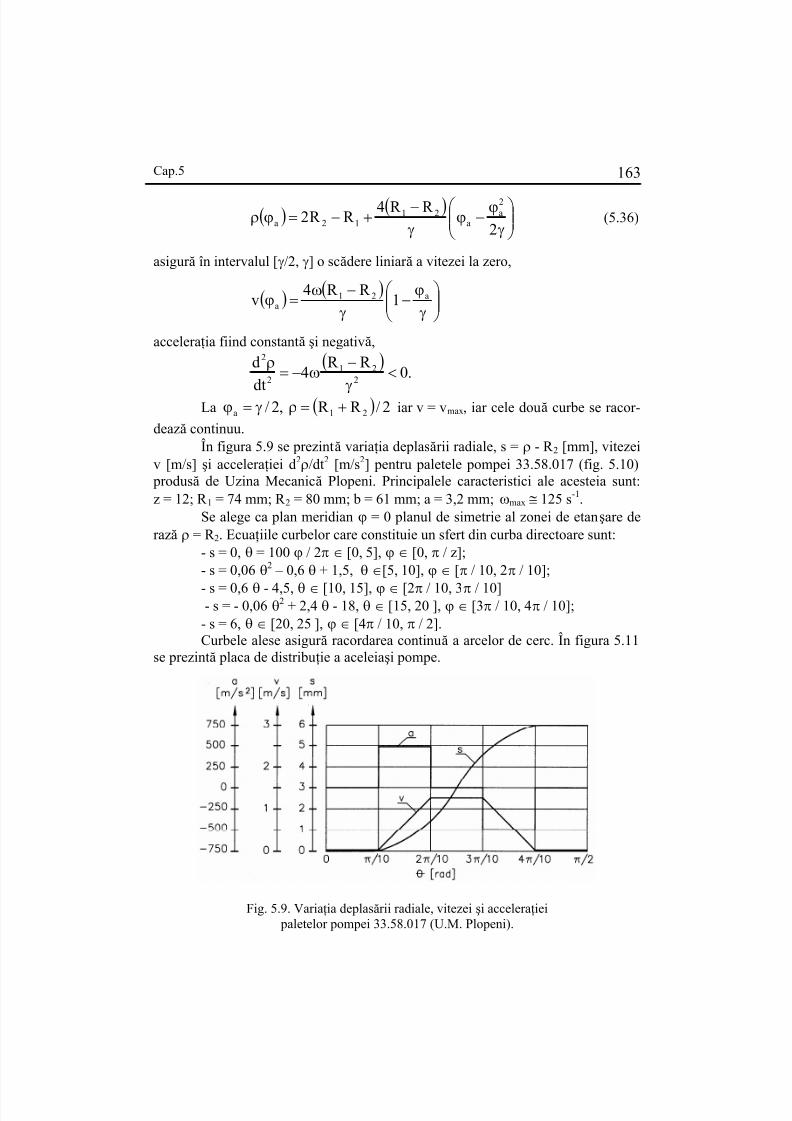
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 152/627
Cap.5 163
( )( )
⎟⎟ ⎠
⎞⎜⎜⎝
⎛
γϕ
−ϕγ−
+−=ϕρ2
R R 4R R 2
2a
a21
12a (5.36)
asigur ă în intervalul [γ/2, γ] o scădere liniar ă a vitezei la zero,
( )( )
⎟⎟ ⎠
⎞⎜⎜⎝
⎛
γ
ϕ−
γ−ω
=ϕ a21a 1
R R 4v
acceleraţia fiind constantă şi negativă,
( ).0
R R 4
dt
d2
212
2
<
γ
−ω−=
ρ
La ( 2/R R ,2/ 21a )+=ργ=ϕ iar v = vmax, iar cele două curbe se racor-
dează continuu.În figura 5.9 se prezintă variaţia deplasării radiale, s = ρ - R 2 [mm], vitezei
v [m/s] şi acceleraţiei d2ρ/dt2 [m/s2] pentru paletele pompei 33.58.017 (fig. 5.10) produsă de Uzina Mecanică Plopeni. Principalele caracteristici ale acesteia sunt:z = 12; R 1 = 74 mm; R 2 = 80 mm; b = 61 mm; a = 3,2 mm; ωmax ≅ 125 s-1.
Se alege ca plan meridian ϕ = 0 planul de simetrie al zonei de etanşare derază ρ = R 2. Ecuaţiile curbelor care constituie un sfert din curba directoare sunt:
- s = 0, θ = 100 ϕ / 2π ∈ [0, 5], ϕ ∈ [0, π / z];- s = 0,06 θ2 – 0,6 θ + 1,5, θ ∈[5, 10], ϕ ∈ [π / 10, 2π / 10];
- s = 0,6 θ - 4,5, θ ∈ [10, 15], ϕ ∈ [2π / 10, 3π / 10]- s = - 0,06 θ2 + 2,4 θ - 18, θ ∈ [15, 20 ], ϕ ∈ [3π / 10, 4π / 10];
- s = 6, θ ∈ [20, 25 ], ϕ ∈ [4π / 10, π / 2].Curbele alese asigur ă racordarea continuă a arcelor de cerc. În figura 5.11
se prezintă placa de distribuţie a aceleiaşi pompe.
Fig. 5.9. Variaţia deplasării radiale, vitezei şi acceleraţiei paletelor pompei 33.58.017 (U.M. Plopeni).

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 153/627
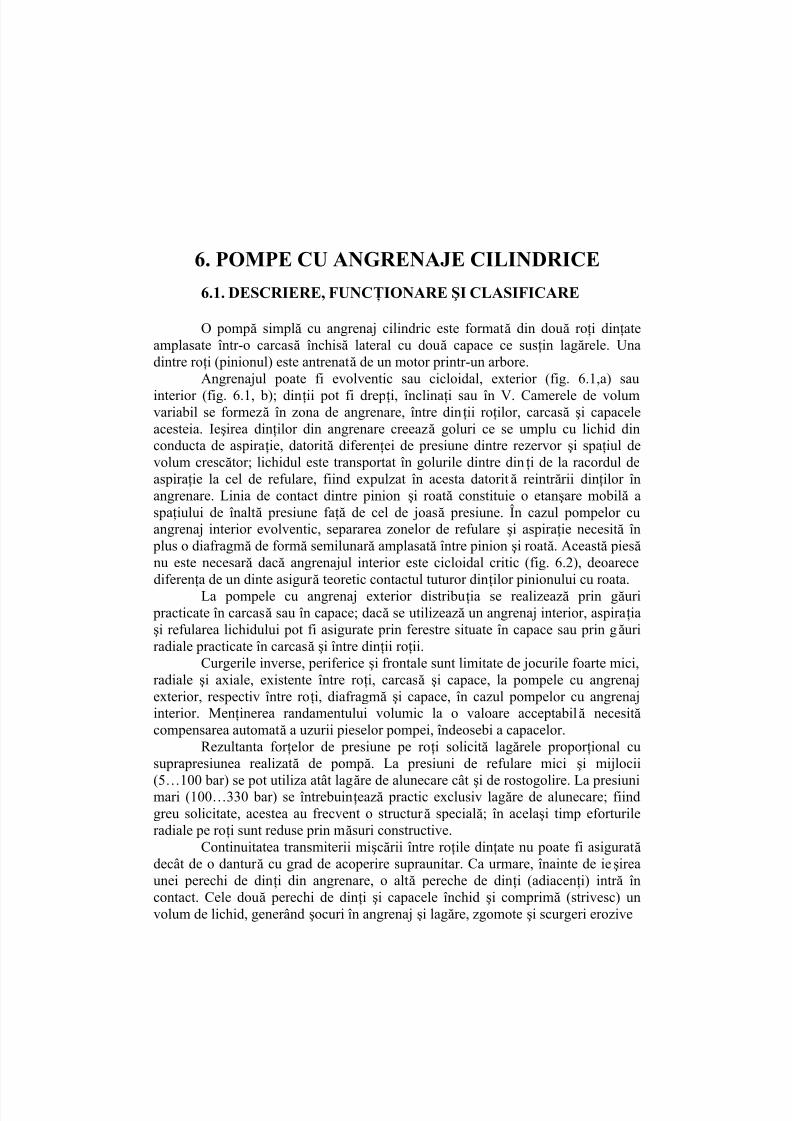
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 154/627
6. POMPE CU ANGRENAJE CILINDRICE
6.1. DESCRIERE, FUNCŢIONARE ŞI CLASIFICARE
O pompă simplă cu angrenaj cilindric este formată din două roţi dinţateamplasate într-o carcasă închisă lateral cu două capace ce susţin lagărele. Unadintre roţi (pinionul) este antrenată de un motor printr-un arbore.
Angrenajul poate fi evolventic sau cicloidal, exterior (fig. 6.1,a) sau
interior (fig. 6.1, b); dinţii pot fi drepţi, înclinaţi sau în V. Camerele de volumvariabil se formeză în zona de angrenare, între dinţii roţilor, carcasă şi capaceleacesteia. Ieşirea dinţilor din angrenare creează goluri ce se umplu cu lichid dinconducta de aspiraţie, datorită diferenţei de presiune dintre rezervor şi spaţiul devolum crescător; lichidul este transportat în golurile dintre dinţi de la racordul deaspiraţie la cel de refulare, fiind expulzat în acesta datorită reintr ării dinţilor înangrenare. Linia de contact dintre pinion şi roată constituie o etanşare mobilă aspaţiului de înaltă presiune faţă de cel de joasă presiune. În cazul pompelor cuangrenaj interior evolventic, separarea zonelor de refulare şi aspiraţie necesită în
plus o diafragmă de formă semilunar ă amplasată între pinion şi roată. Această piesă nu este necesar ă dacă angrenajul interior este cicloidal critic (fig. 6.2), deoarecediferenţa de un dinte asigur ă teoretic contactul tuturor dinţilor pinionului cu roata.
La pompele cu angrenaj exterior distribuţia se realizează prin găuri practicate în carcasă sau în capace; dacă se utilizează un angrenaj interior, aspiraţiaşi refularea lichidului pot fi asigurate prin ferestre situate în capace sau prin găuriradiale practicate în carcasă şi între dinţii roţii.
Curgerile inverse, periferice şi frontale sunt limitate de jocurile foarte mici,radiale şi axiale, existente între roţi, carcasă şi capace, la pompele cu angrenajexterior, respectiv între roţi, diafragmă şi capace, în cazul pompelor cu angrenajinterior. Menţinerea randamentului volumic la o valoare acceptabilă necesită compensarea automată a uzurii pieselor pompei, îndeosebi a capacelor.
Rezultanta for ţelor de presiune pe roţi solicită lagărele propor ţional cusuprapresiunea realizată de pompă. La presiuni de refulare mici şi mijlocii
(5…100 bar) se pot utiliza atât lagăre de alunecare cât şi de rostogolire. La presiunimari (100…330 bar) se întrebuinţează practic exclusiv lagăre de alunecare; fiindgreu solicitate, acestea au frecvent o structur ă specială; în acelaşi timp eforturileradiale pe roţi sunt reduse prin măsuri constructive.
Continuitatea transmiterii mişcării între roţile dinţate nu poate fi asigurată decât de o dantur ă cu grad de acoperire supraunitar. Ca urmare, înainte de ieşireaunei perechi de dinţi din angrenare, o altă pereche de dinţi (adiacenţi) intr ă încontact. Cele două perechi de dinţi şi capacele închid şi comprimă (strivesc) unvolum de lichid, generând şocuri în angrenaj şi lagăre, zgomote şi scurgeri erozive
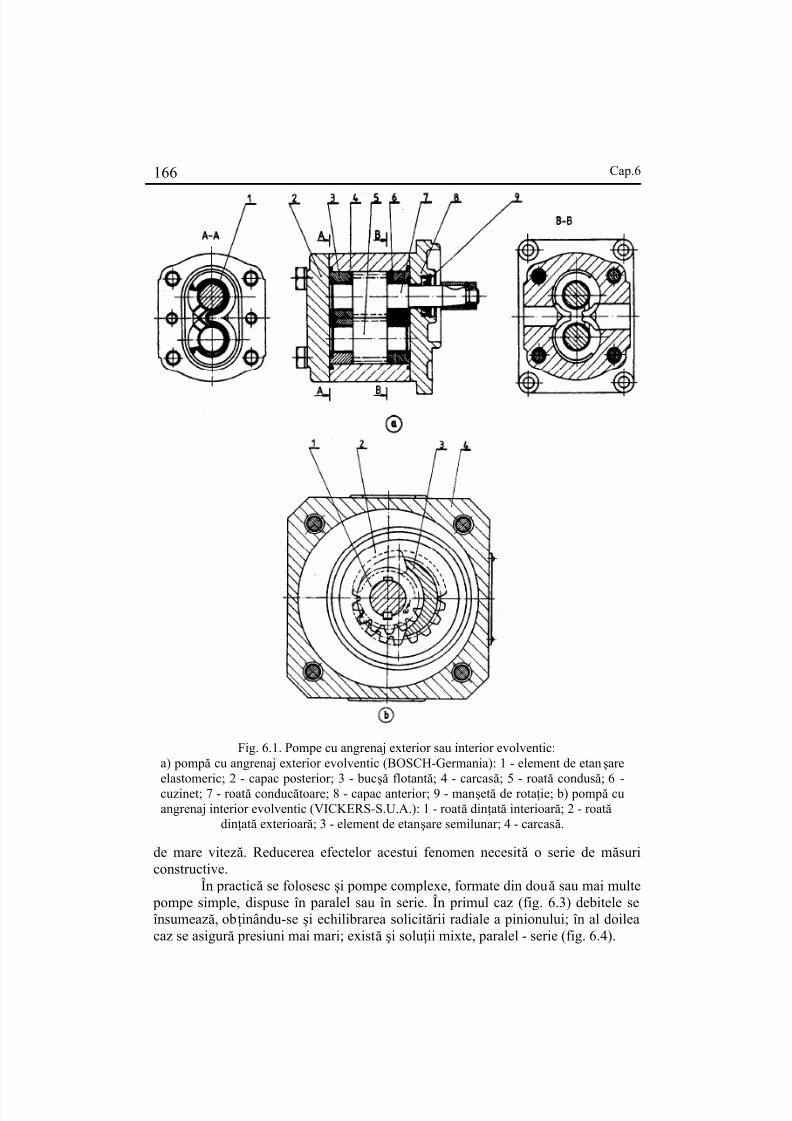
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 155/627
Cap.6166
Fig. 6.1. Pompe cu angrenaj exterior sau interior evolventic:a) pompă cu angrenaj exterior evolventic (BOSCH-Germania): 1 - element de etanşareelastomeric; 2 - capac posterior; 3 - bucşă flotantă; 4 - carcasă; 5 - roată condusă; 6 -cuzinet; 7 - roată conducătoare; 8 - capac anterior; 9 - manşetă de rotaţie; b) pompă cuangrenaj interior evolventic (VICKERS-S.U.A.): 1 - roată dinţată interioar ă; 2 - roată
dinţată exterioar ă; 3 - element de etanşare semilunar; 4 - carcasă.
de mare viteză. Reducerea efectelor acestui fenomen necesită o serie de măsuriconstructive.
În practică se folosesc şi pompe complexe, formate din două sau mai multe pompe simple, dispuse în paralel sau în serie. În primul caz (fig. 6.3) debitele seînsumează, obţinându-se şi echilibrarea solicitării radiale a pinionului; în al doileacaz se asigur ă presiuni mai mari; există şi soluţii mixte, paralel - serie (fig. 6.4).
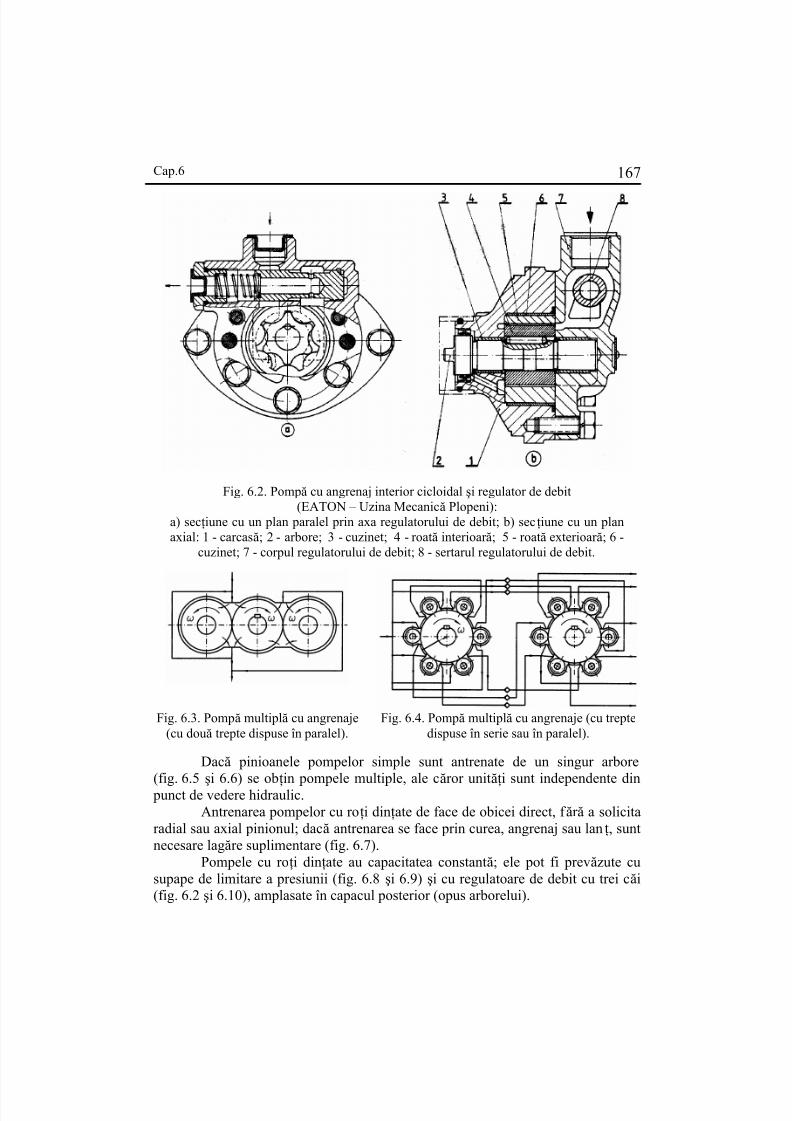
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 156/627
Cap.6 167
Fig. 6.2. Pompă cu angrenaj interior cicloidal şi regulator de debit(EATON – Uzina Mecanică Plopeni):
a) secţiune cu un plan paralel prin axa regulatorului de debit; b) secţiune cu un planaxial: 1 - carcasă; 2 - arbore; 3 - cuzinet; 4 - roată interioar ă; 5 - roată exterioar ă; 6 -
cuzinet; 7 - corpul regulatorului de debit; 8 - sertarul regulatorului de debit.
Fig. 6.3. Pompă multiplă cu angrenaje(cu două trepte dispuse în paralel).
Fig. 6.4. Pompă multiplă cu angrenaje (cu treptedispuse în serie sau în paralel).
Dacă pinioanele pompelor simple sunt antrenate de un singur arbore
(fig. 6.5 şi 6.6) se obţin pompele multiple, ale căror unităţi sunt independente din punct de vedere hidraulic.Antrenarea pompelor cu roţi dinţate de face de obicei direct, f ăr ă a solicita
radial sau axial pinionul; dacă antrenarea se face prin curea, angrenaj sau lanţ, suntnecesare lagăre suplimentare (fig. 6.7).
Pompele cu roţi dinţate au capacitatea constantă; ele pot fi prevăzute cusupape de limitare a presiunii (fig. 6.8 şi 6.9) şi cu regulatoare de debit cu trei căi(fig. 6.2 şi 6.10), amplasate în capacul posterior (opus arborelui).
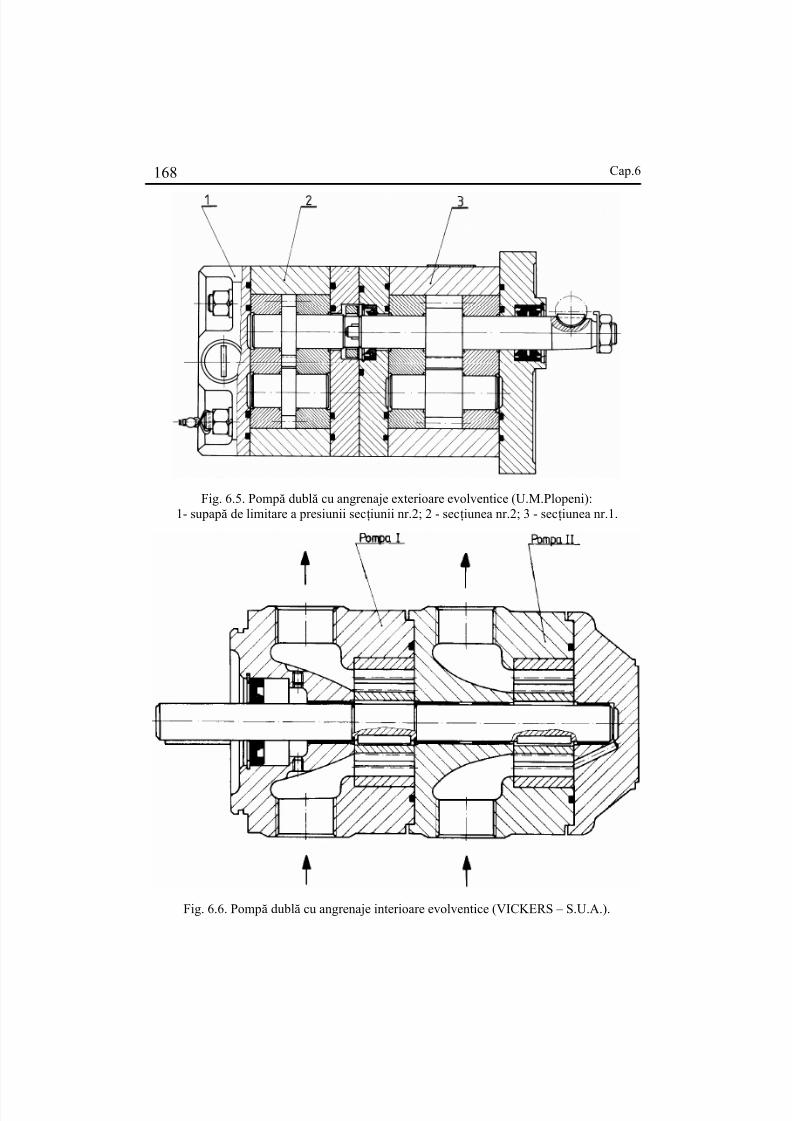
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 157/627
Cap.6168
Fig. 6.5. Pompă dublă cu angrenaje exterioare evolventice (U.M.Plopeni):1- supapă de limitare a presiunii secţiunii nr.2; 2 - secţiunea nr.2; 3 - secţiunea nr.1.
Fig. 6.6. Pompă dublă cu angrenaje interioare evolventice (VICKERS – S.U.A.).
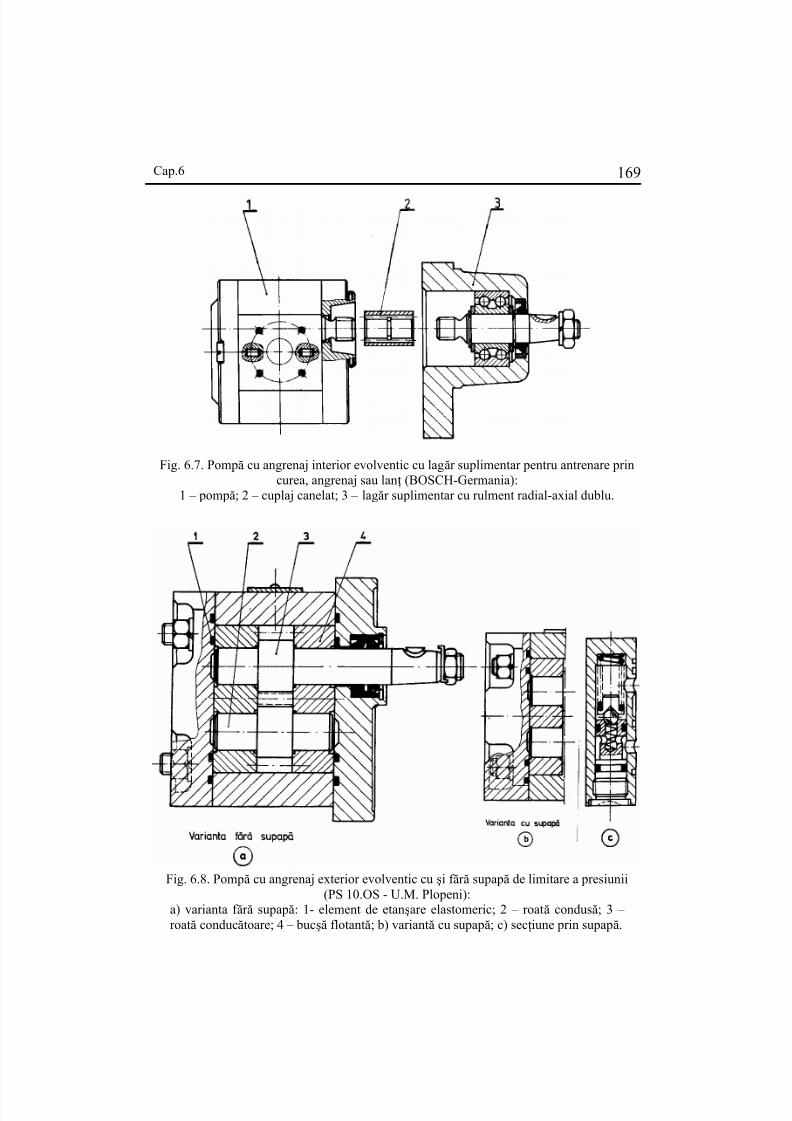
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 158/627
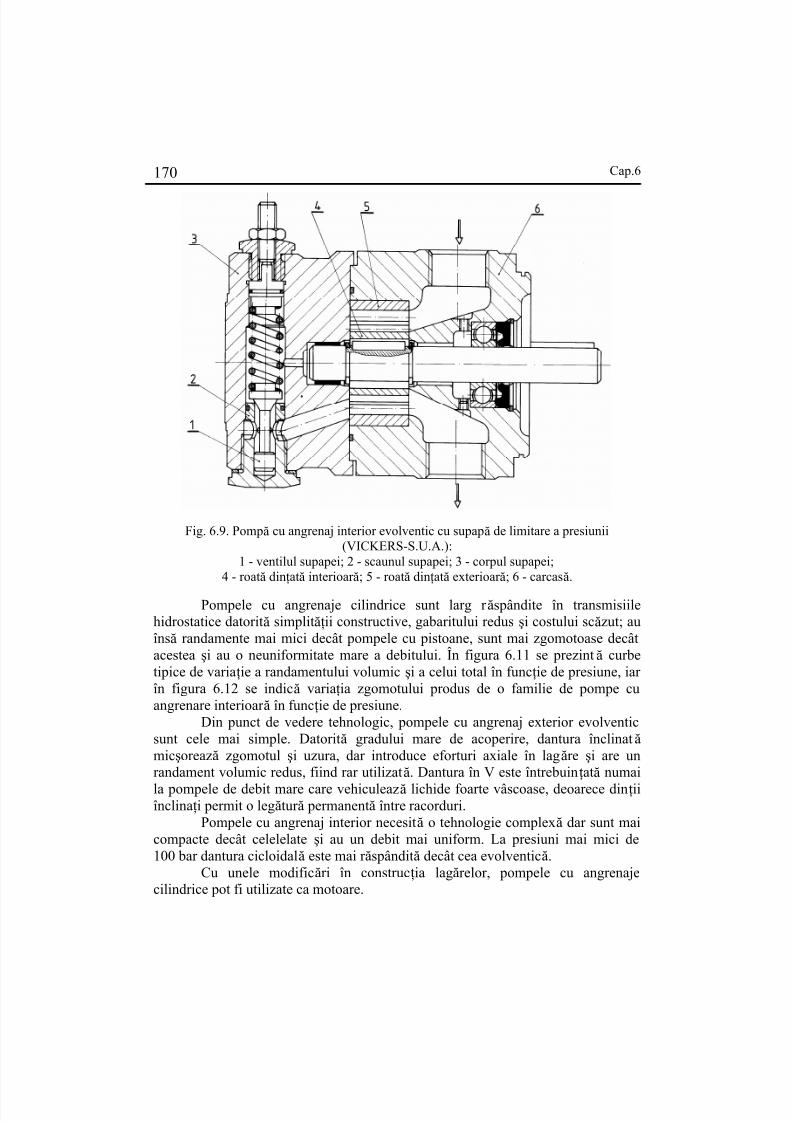
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 159/627
Cap.6170
Fig. 6.9. Pompă cu angrenaj interior evolventic cu supapă de limitare a presiunii(VICKERS-S.U.A.):
1 - ventilul supapei; 2 - scaunul supapei; 3 - corpul supapei;4 - roată dinţată interioar ă; 5 - roată dinţată exterioar ă; 6 - carcasă.
Pompele cu angrenaje cilindrice sunt larg r ăspândite în transmisiilehidrostatice datorită simplităţii constructive, gabaritului redus şi costului scăzut; auînsă randamente mai mici decât pompele cu pistoane, sunt mai zgomotoase decâtacestea şi au o neuniformitate mare a debitului. În figura 6.11 se prezintă curbetipice de variaţie a randamentului volumic şi a celui total în funcţie de presiune, iar în figura 6.12 se indică variaţia zgomotului produs de o familie de pompe cuangrenare interioar ă în funcţie de presiune.
Din punct de vedere tehnologic, pompele cu angrenaj exterior evolventicsunt cele mai simple. Datorită gradului mare de acoperire, dantura înclinată micşorează zgomotul şi uzura, dar introduce eforturi axiale în lagăre şi are unrandament volumic redus, fiind rar utilizată. Dantura în V este întrebuinţată numai
la pompele de debit mare care vehiculează lichide foarte vâscoase, deoarece dinţiiînclinaţi permit o legătur ă permanentă între racorduri.
Pompele cu angrenaj interior necesită o tehnologie complexă dar sunt maicompacte decât celelelate şi au un debit mai uniform. La presiuni mai mici de100 bar dantura cicloidală este mai r ăspândită decât cea evolventică.
Cu unele modificări în construcţia lagărelor, pompele cu angrenajecilindrice pot fi utilizate ca motoare.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 160/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 161/627
Cap.6172
6.2. CALCULUL CAPACITĂŢII, DEBITULUI ŞI
MOMENTULUI POMPELOR CU ANGRENAJ
CILINDRIC EXTERIOR EVOLVENTIC
Se consider ă un angrenaj format din roţi identice (cazul uzual). Un dinte al pinionului începe să evacueze lichidul dintre doi dinţi ai roţii înainte de intrarea înangrenare şi anume când vârful său, V1 pătrunde în cercul exterior al roţii(fig. 6.13); similar, un dinte V2 al roţii dezlocuieşte lichidul dintre doi dinţi ai
pinionului după ce pătrunde în cercul exterior al acestuia.Intrarea dinţilor în contact se produce în punctul S2 determinat de
intersecţia liniei de angrenare K 1K 2 cu cercul exterior al roţii. Din acest moment,
dinţii aflaţi în angrenare evacuează lichidul aflat între ei prin contact după unsegment de dreaptă. În plan normal la axele roţilor, punctul de contact A sedeplasează pe dreapta de angrenare spre punctul S1 aflat la intersecţia acesteia cucercul exterior al pinionului. Când punctul de contact ajunge în punctul B(fig. 6.14) situat la distanţa p b (pasul pe cercul de bază) de punctul S2, în angrenareintr ă încă o pereche de dinţi care împreună cu prima închide o cantitate de lichid;volumul acestuia scade până când punctele de angrenare ajung simetrice faţă deaxa centrelor, O1O2. Dacă spaţiul de volum descrescător nu este conectat laracordul de refulare (sau la cel de aspiraţie), lichidul din el este strivit, mărindmomentul activ al pinionului şi momentul pasiv al roţii; rezultă astfel o solicitaresuplimentar ă pulsatorie a organelor pompei, zgomote şi vibraţii, ce pot fi par ţialevitate dacă lichidul strivit este evacuat în zona de refulare printr-o degajare
practicată într-unul din capacele carcasei. După ce primul punct de angrenaredepăşeşte punctul D, situat la distanţa p b/2 de polul angrenării P, volumul spaţiuluidintre dinţi creşte şi lichidul este depresurizat brusc; dacă acest spaţiu este izolat dezona de aspiraţie, gradul de umplere al golurilor se diminuează şi pompa cavitează,
producând zgomote puternice. Şi acest fenomen poate fi evitat par ţial cu ajutorulunei degajări amplasate în aceeaşi poziţie faţă de axa centrelor ca şi cea necesar ă asigur ării continuităţii refulării (fig. 6.13).
La pompele de presiune mică şi medie, cele două degajări se execută deobicei cu o freză-deget, având forma din figura 6.13. Dacă dantura este corijată,distanţa dintre degajări se calculează cu relaţia:
'coscosm'cos pd b α⋅α⋅⋅π=α⋅= (6.1)
în care α este unghiul cremalierei de referinţă; α′ – unghiul de angrenare; m – modulul danturii. Ţinând seama de egalitatea
ξ+α+
=α=α2z
coszcos
'A
A'cos (6.2)
în care A este distanţa normală dintre axele roţilor, A′ – distanţa dintre axele roţilor deplasate, ξ - coeficientul de corijare şi z – numărul de dinţi ai roţilor, relaţia (6.1)devine:
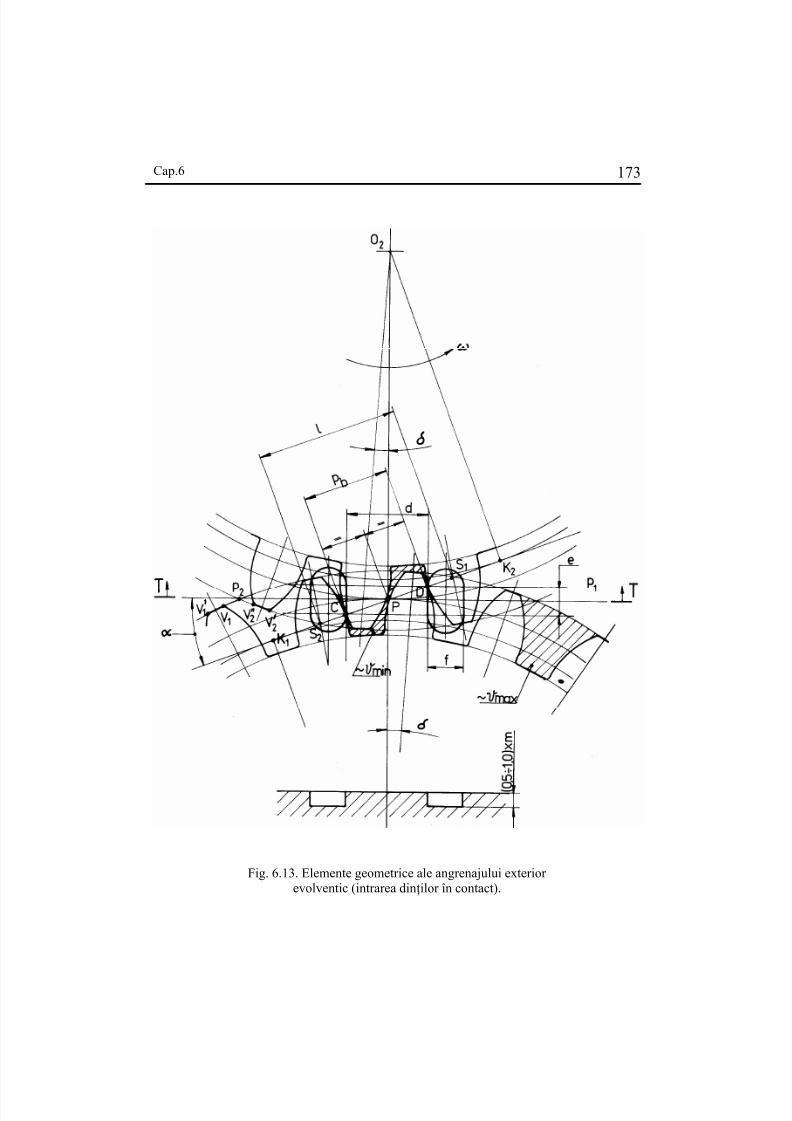
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 162/627
Cap.6 173
Fig. 6.13. Elemente geometrice ale angrenajului exterior evolventic (intrarea dinţilor în contact).

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 163/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 164/627
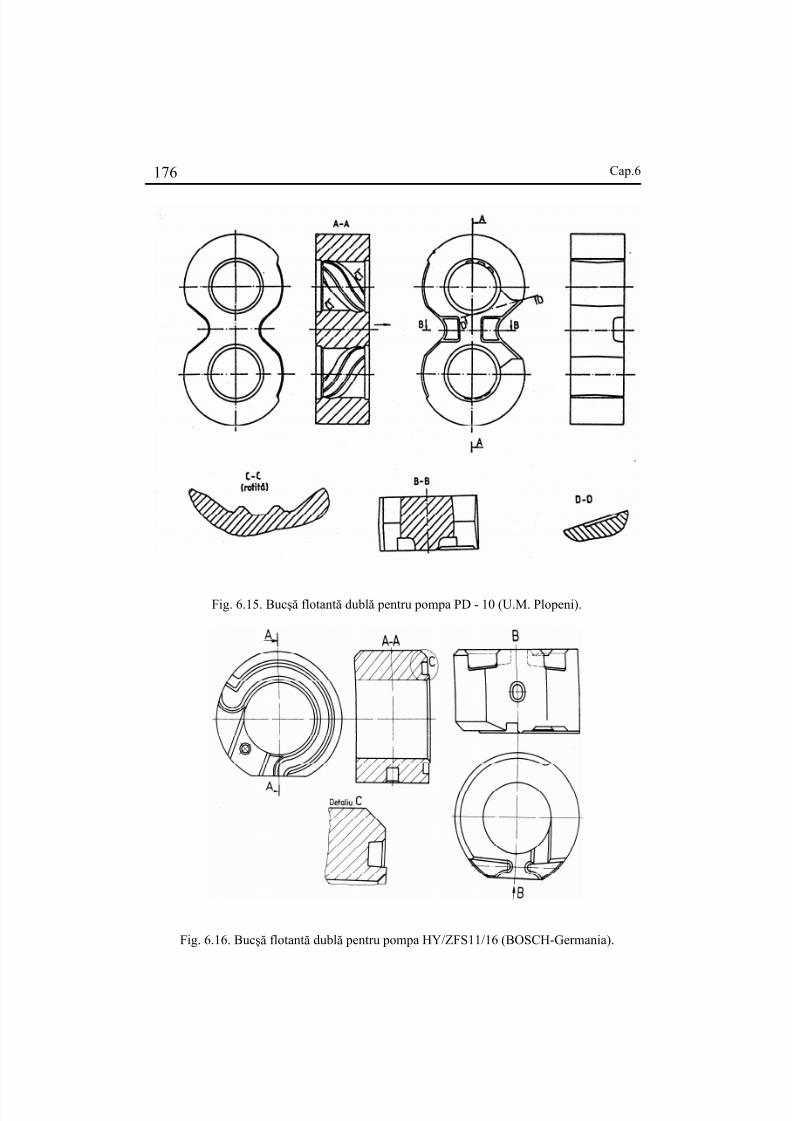
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 165/627
Cap.6176
Fig. 6.15. Bucşă flotantă dublă pentru pompa PD - 10 (U.M. Plopeni).
Fig. 6.16. Bucşă flotantă dublă pentru pompa HY/ZFS11/16 (BOSCH-Germania).
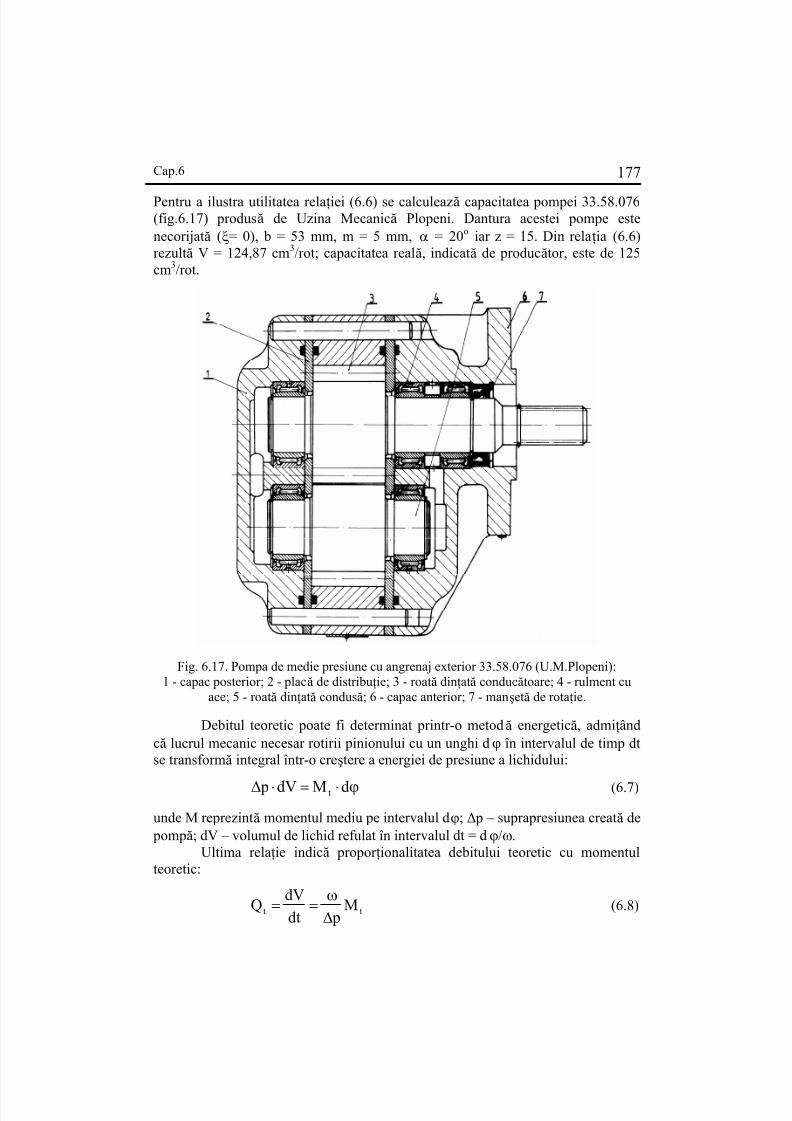
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 166/627
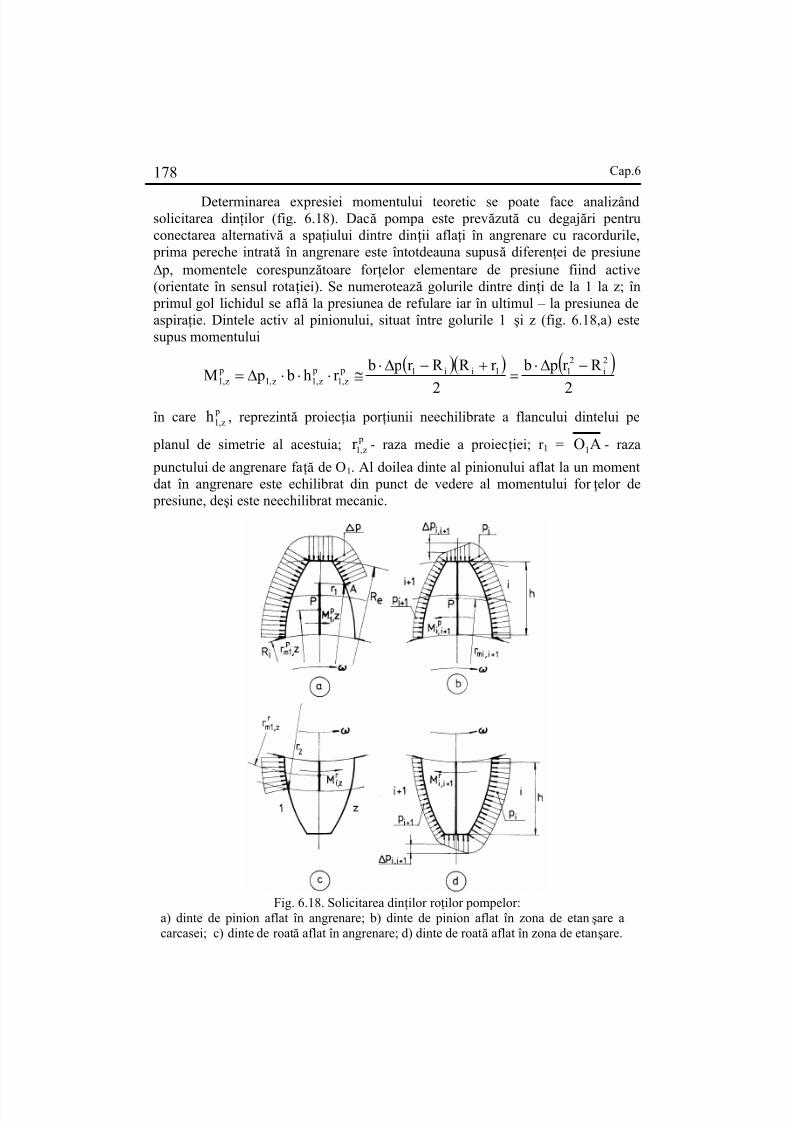
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 167/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 168/627
Cap.6 179
Un dinte al pinionului, aflat în zona de etanşare a carcasei, între golurile işi i+1 (fig. 6.18,b), este supus unei diferenţe de presiune Δ pi,i+1< Δ p ce crează unmoment pasiv (rezistent)
( )( ) ( )2
pR R b
2
R R R R p br h b pM
p1i,i
2i
2eieie
p1i,i p
1i,i p
1i,i p
1i,i p
1i,i++
++++
Δ−=
+−Δ≅⋅⋅⋅Δ=
Ceilalţi dinţi ai pinionului, aflaţi în afara zonei de etanşare (în zona derefulare sau în cea de aspiraţie) sunt echilibraţi tangenţial. Momentul for ţelor de
presiune pe dinţii pinionului este:
( ) ( )∑∑ ++ Δ−+−Δ⋅
−=+=n
m
p1i,i
2i
2e
2i
21
n
m
p1i,i
pz,1
p pR R 2
bR r
2
p bMMM
m şi n fiind numerele de ordine ale dinţilor care încadrează zona de etanşare. Dar
p pn
m
p1i,i Δ=Δ∑ +
deci
( )21
2e
p r R 2
p bM −
Δ⋅= (6.9)
În mod similar se calculează momentul for ţelor de presiune ce solicită primul dinte al roţii aflat în angrenare (fig. 6.18,c),
( )( ) ( )2
R R p b
2
R r R r p br h b pM
2i
2ei2i2r
z,ir
z,ir
z,ir
z,i
−⋅Δ⋅=
+−⋅Δ⋅≅⋅⋅⋅Δ−=
şi momentul corespunzător unui dinte al roţii situat în zona de etanşare delimitată de golurile k şi l (fig. 6.18,d):
( )( )
( )2
pR R b
2
R R R R b pr h b pM
r 1i,i
2i
2e
ieier 1i,i
r 1i,i
r 1i,i
r 1i,i
r 1i,i
+
+++++
Δ⋅−=
=+−
⋅⋅Δ≅⋅⋅⋅Δ−=
S-a notat cu r 2 = O2A raza punctului de angrenare faţă de O2. Momentulrezultant al for ţelor de presiune pe roată este
( ) ( )∑∑ ++ Δ−+Δ−−=+=l
k
r 1i,i
2i
2e
2i
22
l
k
r 1i,i
r z,1
r pR R 2
b pR r
2
bMMM
sau
( )22
2e
r r R 2
p bM −
Δ⋅= (6.10)

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 169/627
Cap.6180
deoarece
p pl
k
r 1i,i Δ=Δ∑ +
Acest moment este preluat de pinion prin dinţii ce angrenează.Momentul teoretic al pompei depinde de poziţia punctului de contact pe
dreapta de angrenare:
2
r r R 2 p bMMM
22
21
2er p
t
−−⋅Δ⋅=+= (6.11)
Paranteza poate fi exprimată în funcţie de distanţa dintre punctul deangrenare şi polul angrenării, PAx = . Din triunghiul AO2P (fig. 6.19) se
calculează ( ),2/cosxR 2xR r r 22
r 22 α−π−+= iar din triunghiul APO1 se obţine
R ( ,2/cosxR 2xR )r 22
r α+π−+=r 21 r fiind raza cercurilor de rulare.
Fig. 6.19. Schiţă pentru calcululmomentului teoretic în func
ţie de distan
ţa
dintre punctul de angrenare şi polulangrenării.
Fig. 6.20. Schiţă pentru calculul distanţeidintre punctul de angrenare
şi polul
angrenării.
Relaţia (6.11) devine
22r
2et xR R p bM −−⋅Δ⋅= (6.12)
Expresia debitului teoretic (6.8) capătă forma
( ) 22r
2et xR R bxQ −−⋅⋅ω= (6.13)

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 170/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 171/627
Cap.6182
( )3
1
cos
12z41
QQQ
22tm
mintmaxtQ
−⎥⎦⎤
⎢⎣⎡
α⋅π+ξ+
=−=δ (6.21)
este invers propor ţional cu numărul de dinţi. Coeficientul de corijare are uzualvaloarea ξ = 0,5 iar α = 20o, deci
27,1z
17,2Q +
≅δ (6.22)
Pentru z = 10 (valoarea uzuală), δQ ≅19,2 % (real: 14%); neuniformitatea
debitului pompelor cu roţi dinţate este mult mai mare decât cea a pompelor cu pistoane rotative, explicând restricţia de utilizare în sistemele automate hidraulice.Relaţia (6.20) permite calculul capacităţii teoretice:
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ α⋅
π−+ξ+⋅β⋅π== 2
23tm cos
1212zm2
n
QV (6.23)
Această relaţie conduce în general la erori pozitive. De exemplu, pentru pompa PD 10 (fig. 6.22) produsă de Uzina Mecanică Plopeni, b = 16,33 mm, m =3,25 mm, z = 9, ξ = 0,3375 şi α = 20o. Capacitatea calculată este de 10,78 cm3/rot,iar cea reală, indicată de producător este – 10 cm3/rot (eroare: + 7,8%).
Dacă lichidul strivit între dinţi nu este recuperat, ci este evacuat la
aspiraţie, relaţia (6.13) este variabilă pentru x ∈ [-l/2, p b - l/2], limitele intervaluluicorespunzând punctelor S2 şi B ce marchează începutul angrenării unei perechi dedinţi şi intrarea în angrenare a altei perechei de dinţi. Debitul teoretic instantaneuare discontinuităţi (fig. 6.21,b) iar debitul teoretic se micşorează. Volumul de lichidΔVs pierdut în fiecare perioadă de refulare se calculează prin compararea graficelor debitelor teoretice din figurile 6.21,a şi b:
( ) ( ) ( )[ ] .dt pxQxQdttQV2/ p
2/l/ p
btt
t
t
s
b
b
2
1
∫∫−
−−==Δ
Aici,
( ) ( )
2
b
2
r
2
e
22
r
2
e btt) px(R R bxR R b pxQxQ −−−ω⋅−−−ω⋅=−−
iar dt = x/ω ⋅ R b, deci
( ) ( )2 b
2/ p
2/l p
b bs plz2
bdxx p p bV
b
b
−⋅π
=−⋅=Δ ∫−
Lungimea liniei de angrenare este l = π m ε cosα′ = π m ε cosα / (y + 2ξ);capacitatea pompei se micşorează cu
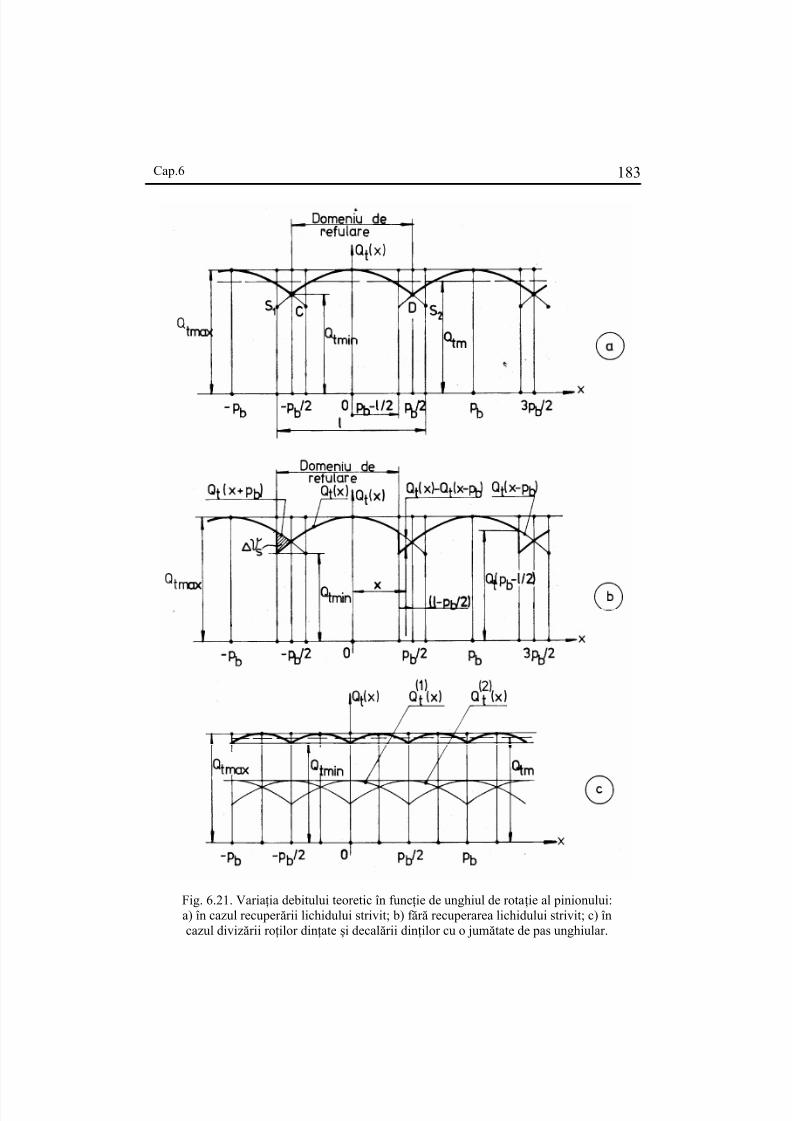
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 172/627
Cap.6 183
Fig. 6.21. Variaţia debitului teoretic în funcţie de unghiul de rotaţie al pinionului:a) în cazul recuper ării lichidului strivit; b) f ăr ă recuperarea lichidului strivit; c) încazul divizării roţilor dinţate şi decalării dinţilor cu o jumătate de pas unghiular.
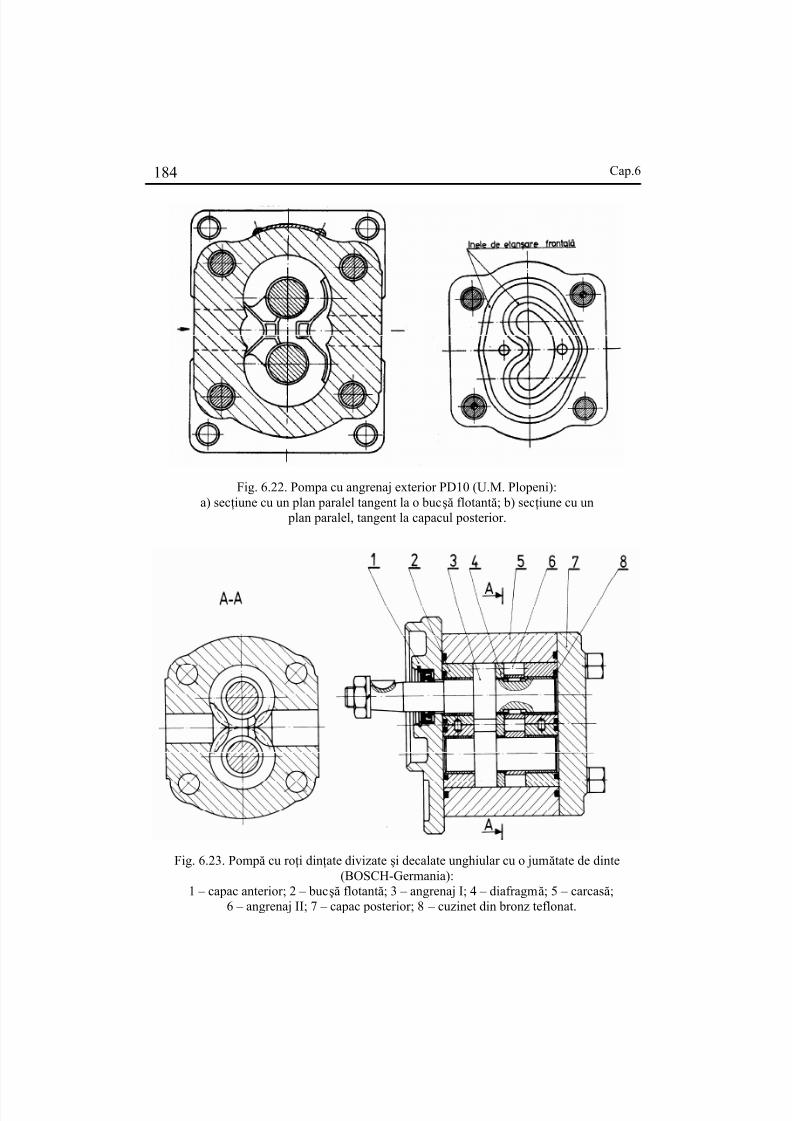
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 173/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 174/627
Cap.6 185
223
ss 12z
z
2
cosmVzV
3
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −
ξ+εα⋅β⋅⋅π
=Δ⋅=Δ . (6.24)
De exemplu, pentru pompa PD 10, ε = 1,21 şi ΔVs = 0,037 cm3/rot(neglijabil faţă de V).
Neuniformitatea debitului unei pompe cu roţi dinţate poate fi micşorată foarte mult dacă se împart roţile în două păr ţi egale, amplasate pe aceiaşi arbori,dar decalate unghiular cu o jumătate de pas (fig. 6.23).
Pompa iniţială se transformă astfel în două pompe dispuse în paralel dar având debitele defazate cu p b / 2, (fig. 6.21, c). Prin această operaţie debitul teoreticdevine:
( ) ( )( ) ( )( ) ( ) ⎟ ⎠
⎞⎜⎝
⎛ −+=+=2
pxQ5,0xQ5,0xQxQxQ b
tt2
t1t
't
sau
( ) .2
pxx
8
pR R bxQ b2
2 b2
r 2e
't ⎟⎟
⎠
⎞⎜⎜⎝
⎛ ⋅−−−−⋅ω=
Din condiţia :
0x22
p b
dx
dQ b't =⎟
⎠
⎞⎜⎝
⎛ −⋅ω= ,
se găseşte abscisa punctului de debit maxim în intervalul [0, p b / 2]:
( )4
pQx b'
maxt =
deci
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ απ−+ξ+⋅β⋅ω=⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−⋅ω=
16
cos12zm
16
pR R bQ
223
2 b2
r 2e
'maxt
Debitul devine minim pentru x = 0 şi x = p b / 2:
( ) ⎟⎟ ⎠ ⎞
⎜⎜⎝ ⎛ απ−+ξ+ω=⎟⎟
⎠ ⎞
⎜⎜⎝ ⎛ −−ω=⎟
⎠ ⎞⎜
⎝ ⎛ ==
16cos12z b
8 pR R b
2 pQ0QQ
222 b2r
2e
b't
't
'mint
(6.25)Debitul teoretic mediu r ămâne acelaşi:
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ απ−+ξ+⋅β⋅ω==
12
cos12zmQQ
223
tm'tm
Expresia gradului de neuniformitate a debitului devine

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 175/627
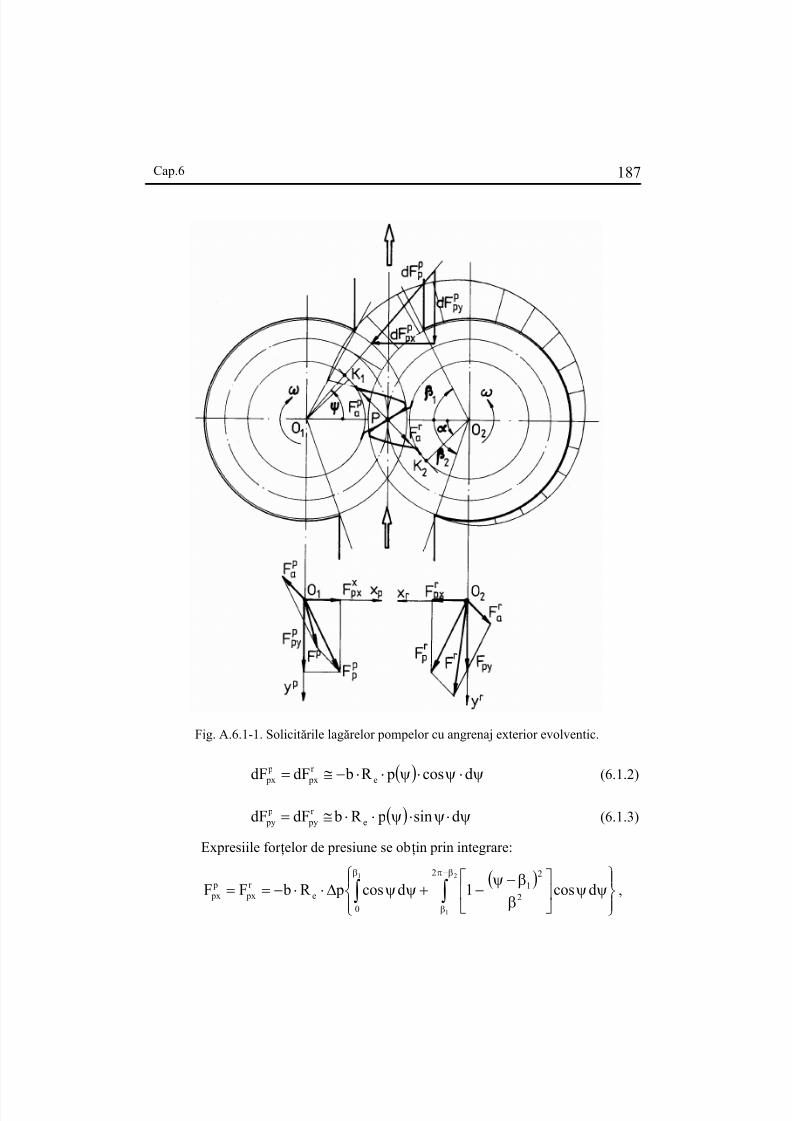
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 176/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 177/627
Cap.6188
( )
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
ψψ⎥⎦
⎤⎢⎣
⎡
ββ−ψ
−+ψψΔ⋅⋅== ∫ ∫β β−π
β
2 2
10
2
2
21
er
py p py dsin1dsin pR bFF ,
sau
( )⎥⎦⎤
⎢⎣
⎡ β+βθ
+βθ
Δ⋅−== 212e
r px
p px sinsin
1cos
pR b2FF , (6.1.4)
( ) ⎥⎦
⎤⎢⎣
⎡ +β+βθ
+βθ
Δ⋅⋅== 1sinsin2
sin2
pR bFF 2122er
py p py . (6.1.5)
For ţa medie de angrenare acţionează după dreapta de angrenare şi poate ficalculată cu relaţia:
( )2r
2e
b bmaxta R R
R
p b
2
1
R
1M
2
1F −
Δ⋅⋅== (6.1.6)
în care R b = (m⋅z⋅cosα) / 2. Ţinând seama că ( )12zmR R 22r
2e +ξ+=− , relaţia
anterioar ă devine:
( )12zcosz
pmF
2
a +ξ+α⋅Δ⋅⋅β
= (6.1.7)
Componentele acestei for ţe sunt:
(6.1.8)r axa
pax F'sinFF −=α⋅−=
(6.1.9)r aya
pay F'cosFF −=α⋅−=
Lagărele sunt solicitate de for ţele:
( ) ( )2 pay
p py
2 pax
p px
p FFFFF +++= (6.1.10)
( ) ( )2r
ayr
py
2r ax
r px
r
FFFFF +++= (6.1.11)
Se constată că lagărul pinionului este mai puţin solicitat decât cel al roţii.În calcule aproximative se poate admite că
. (6.1.12)( ) er p R b p90,085,0FF ⋅⋅⋅÷≅≅
La pompele de înaltă presiune este obligatorie micşorarea for ţelor caresolicită lagărele, în paralel cu utilizarea unor materiale antifricţiune speciale. Deexemplu, cuzineţii pompelor produse de firma BOSCH (Germania) au următoareastructur ă: baza este executată din oţel carbon; după cuprare electrolitică se depune,
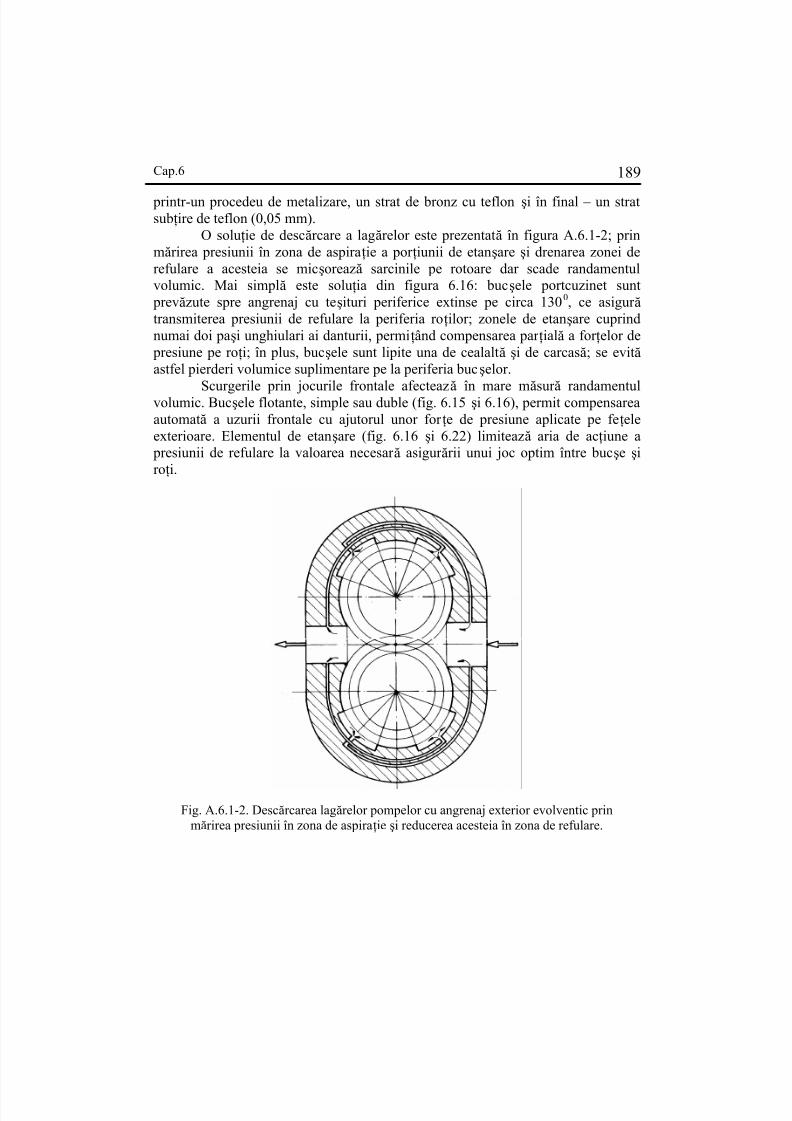
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 178/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 179/627
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 180/627
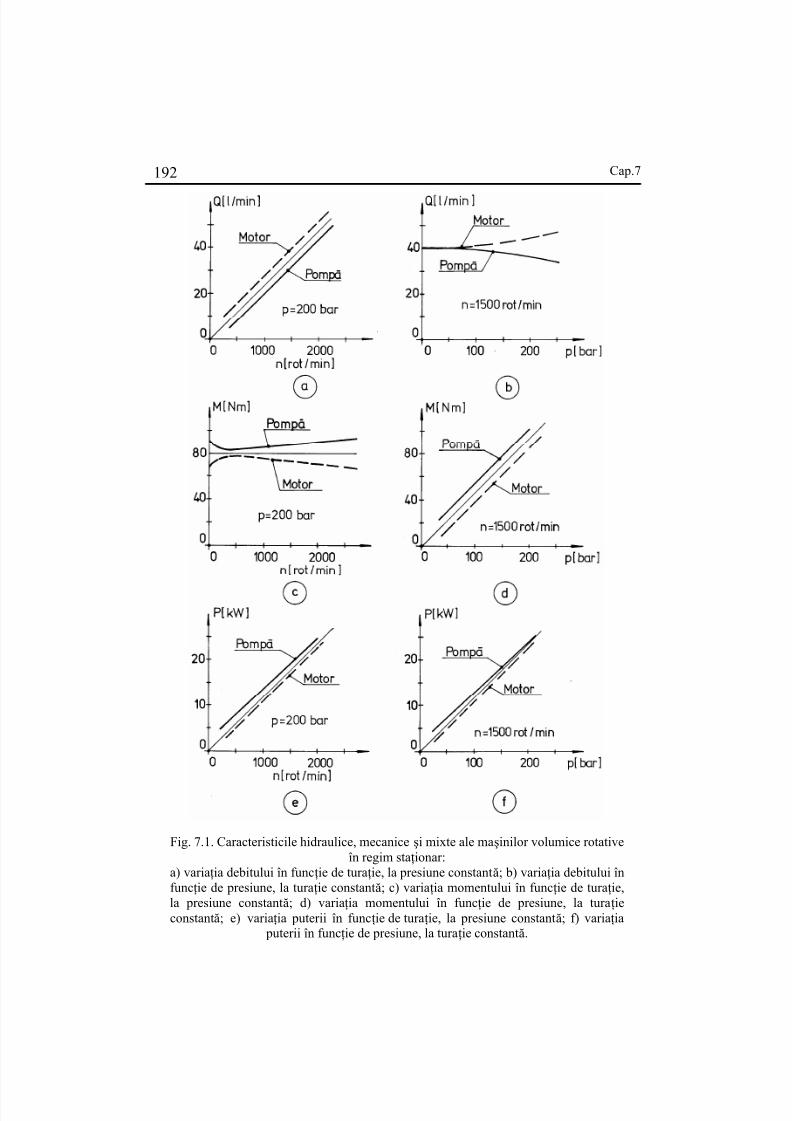
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 181/627
Cap.7192
Fig. 7.1. Caracteristicile hidraulice, mecanice şi mixte ale maşinilor volumice rotativeîn regim staţionar:
a) variaţia debitului în funcţie de turaţie, la presiune constantă; b) variaţia debitului înfuncţie de presiune, la turaţie constantă; c) variaţia momentului în funcţie de turaţie,la presiune constantă; d) variaţia momentului în funcţie de presiune, la turaţieconstantă; e) variaţia puterii în funcţie de turaţie, la presiune constantă; f) variaţia
puterii în funcţie de presiune, la turaţie constantă.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 182/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 183/627
Cap.7194
Fig. 7.3. Caracteristica universală a motorului orbital OMS200(DANFOSS – DANEMARCA).
panta medie a caracteristicii de turaţie (moment - turaţie la presiune constantă), presiunea de pornire în gol etc.
Performanţele dinamice depind în mare măsur ă de raportul dintremomentul de pornire (demaraj) şi momentul de iner ţie al păr ţilor mobile, redus la
arbore.Cea mai importantă caracteristică a motoarelor volumice este capacitatea
lor de a funcţiona stabil la turaţii scăzute. Din acest punct de vedere există motoarelente (nmin = 1…10 rot/min), semirapide (10…50 rot/min) şi rapide(50…400 rot/min).
La turaţii reduse, generate de debite mici şi presiuni mari, corespunzătoareunor momente apropiate de cel nominal, scurgerile interne Qs devin compatibile cudebitul Q şi motorul se opreşte, fenomen denumit "lipire" (în limba engleză – "stick"). Oprirea motorului provoacă scăderea rapidă a momentului rezistent, deci a
presiunii şi implicit a scurgerilor interne; ca urmare, motorul reporneşte, fenomennumit "alunecare" (în limba engleză – "slip").
Turaţia minimă stabilă a unui motor poate fi micşorată numai prinmicşorarea pierderilor sale interne, deci a raportului Qs/Q, adică prin mărirearandamentului volumic. Acelaşi efect se obţine prin mărirea numărului de cicluriefectuate pe o rotaţie de camerele de volum variabil, deci prin mărirea capacităţiimotorului.
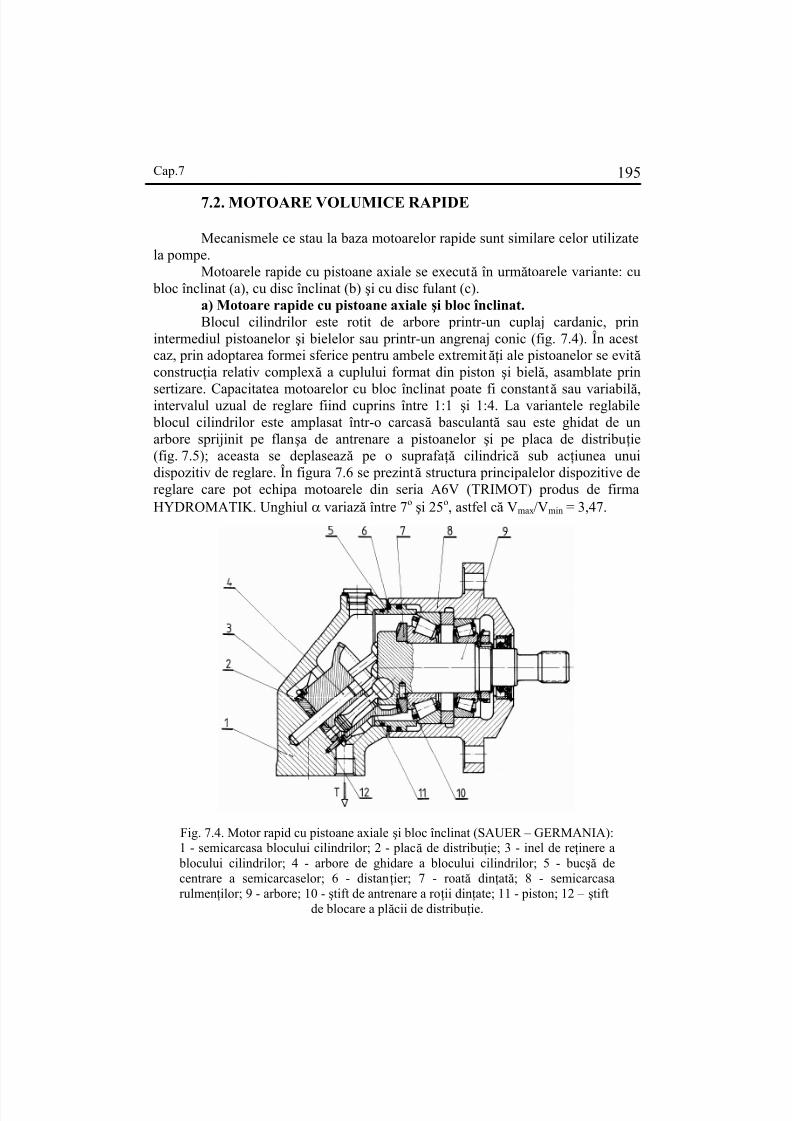
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 184/627
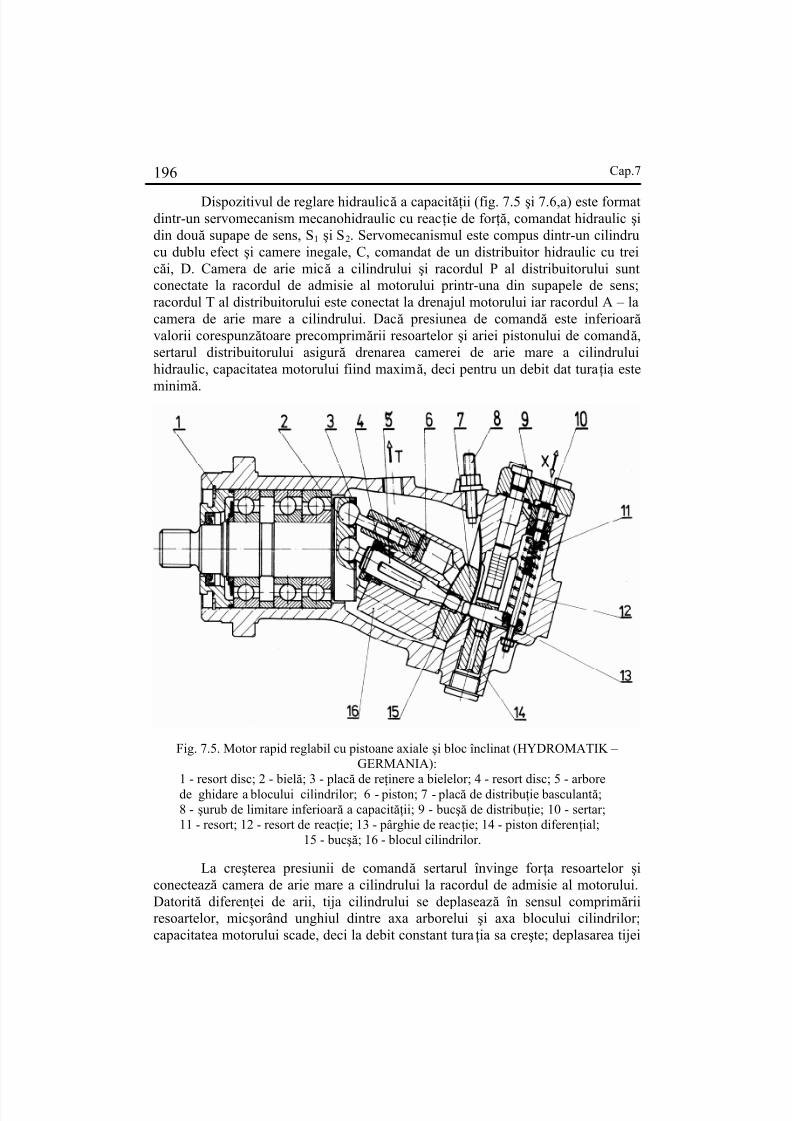
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 185/627
Cap.7196
Dispozitivul de reglare hidraulică a capacităţii (fig. 7.5 şi 7.6,a) este formatdintr-un servomecanism mecanohidraulic cu reacţie de for ţă, comandat hidraulic şidin două supape de sens, S1 şi S2. Servomecanismul este compus dintr-un cilindrucu dublu efect şi camere inegale, C, comandat de un distribuitor hidraulic cu treicăi, D. Camera de arie mică a cilindrului şi racordul P al distribuitorului suntconectate la racordul de admisie al motorului printr-una din supapele de sens;racordul T al distribuitorului este conectat la drenajul motorului iar racordul A – lacamera de arie mare a cilindrului. Dacă presiunea de comandă este inferioar ă valorii corespunzătoare precomprimării resoartelor şi ariei pistonului de comandă,sertarul distribuitorului asigur ă drenarea camerei de arie mare a cilindruluihidraulic, capacitatea motorului fiind maximă, deci pentru un debit dat turaţia este
minimă.
Fig. 7.5. Motor rapid reglabil cu pistoane axiale şi bloc înclinat (HYDROMATIK – GERMANIA):
1 - resort disc; 2 - bielă; 3 - placă de reţinere a bielelor; 4 - resort disc; 5 - arborede ghidare a blocului cilindrilor; 6 - piston; 7 - placă de distribuţie basculantă;8 - şurub de limitare inferioar ă a capacităţii; 9 - bucşă de distribuţie; 10 - sertar;11 - resort; 12 - resort de reacţie; 13 - pârghie de reacţie; 14 - piston diferenţial;
15 - bucşă; 16 - blocul cilindrilor.
La creşterea presiunii de comandă sertarul învinge for ţa resoartelor şiconectează camera de arie mare a cilindrului la racordul de admisie al motorului.Datorită diferenţei de arii, tija cilindrului se deplasează în sensul comprimăriiresoartelor, micşorând unghiul dintre axa arborelui şi axa blocului cilindrilor;capacitatea motorului scade, deci la debit constant turaţia sa creşte; deplasarea tijei
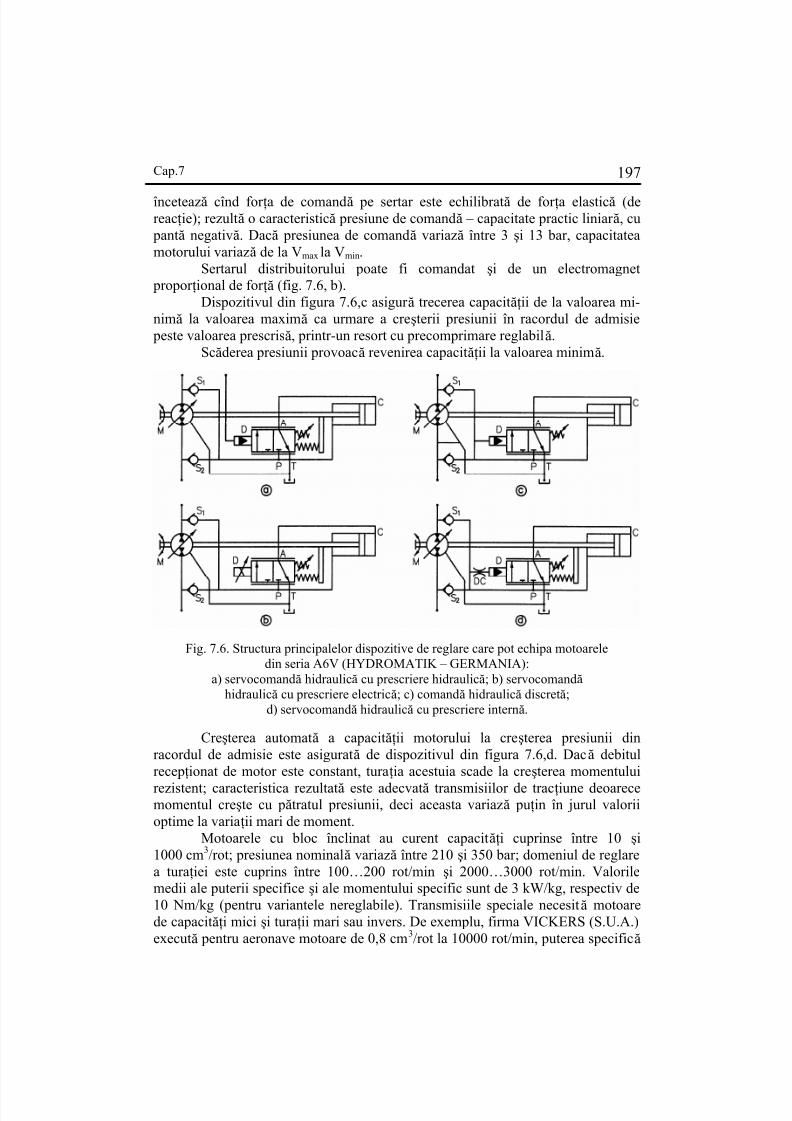
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 186/627
Cap.7 197
încetează cînd for ţa de comandă pe sertar este echilibrată de for ţa elastică (dereacţie); rezultă o caracteristică presiune de comandă – capacitate practic liniar ă, cu
pantă negativă. Dacă presiunea de comandă variază între 3 şi 13 bar, capacitateamotorului variază de la Vmax la Vmin.
Sertarul distribuitorului poate fi comandat şi de un electromagnet propor ţional de for ţă (fig. 7.6, b).
Dispozitivul din figura 7.6,c asigur ă trecerea capacităţii de la valoarea mi-nimă la valoarea maximă ca urmare a creşterii presiunii în racordul de admisie
peste valoarea prescrisă, printr-un resort cu precomprimare reglabilă.Scăderea presiunii provoacă revenirea capacităţii la valoarea minimă.
Fig. 7.6. Structura principalelor dispozitive de reglare care pot echipa motoareledin seria A6V (HYDROMATIK – GERMANIA):
a) servocomandă hidraulică cu prescriere hidraulică; b) servocomandă hidraulică cu prescriere electrică; c) comandă hidraulică discretă;
d) servocomandă hidraulică cu prescriere internă.
Creşterea automată a capacităţii motorului la creşterea presiunii dinracordul de admisie este asigurată de dispozitivul din figura 7.6,d. Dacă debitulrecepţionat de motor este constant, turaţia acestuia scade la creşterea momentului
rezistent; caracteristica rezultată este adecvată transmisiilor de tracţiune deoarecemomentul creşte cu pătratul presiunii, deci aceasta variază puţin în jurul valoriioptime la variaţii mari de moment.
Motoarele cu bloc înclinat au curent capacităţi cuprinse între 10 şi1000 cm3/rot; presiunea nominală variază între 210 şi 350 bar; domeniul de reglarea turaţiei este cuprins între 100…200 rot/min şi 2000…3000 rot/min. Valorilemedii ale puterii specifice şi ale momentului specific sunt de 3 kW/kg, respectiv de10 Nm/kg (pentru variantele nereglabile). Transmisiile speciale necesită motoarede capacităţi mici şi turaţii mari sau invers. De exemplu, firma VICKERS (S.U.A.)execută pentru aeronave motoare de 0,8 cm3/rot la 10000 rot/min, puterea specifică
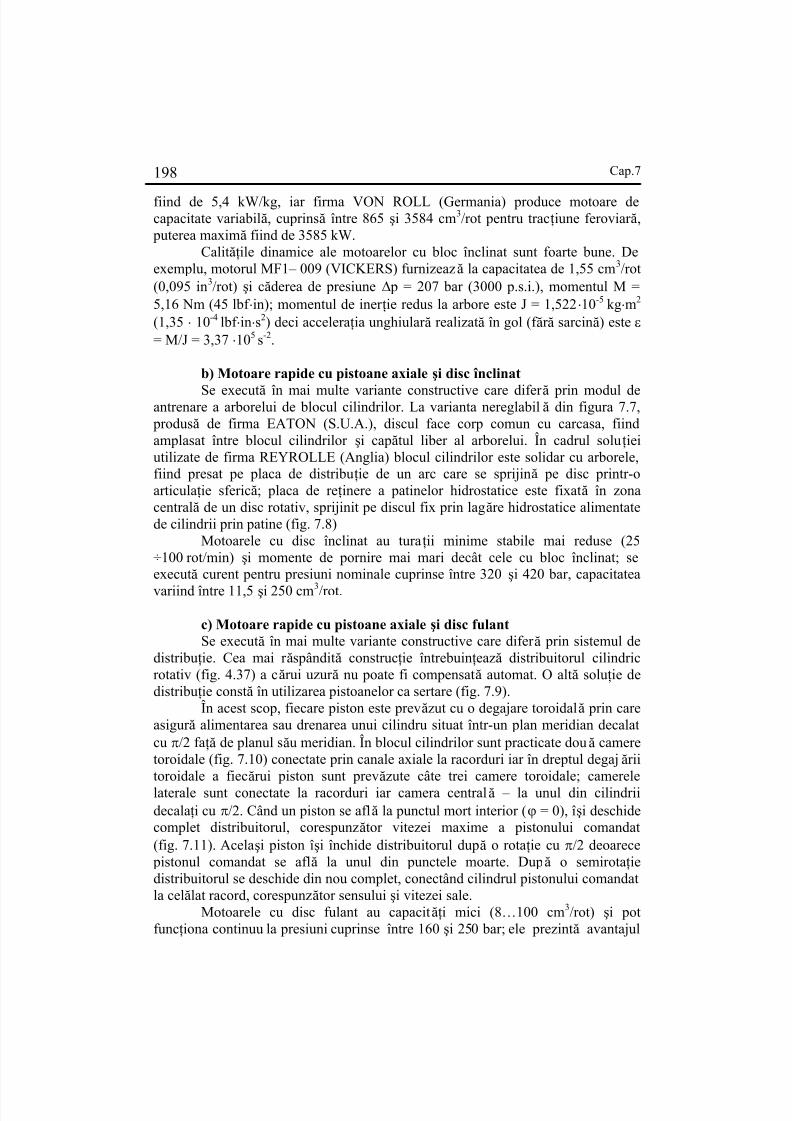
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 187/627
Cap.7198
fiind de 5,4 kW/kg, iar firma VON ROLL (Germania) produce motoare decapacitate variabilă, cuprinsă între 865 şi 3584 cm3/rot pentru tracţiune feroviar ă,
puterea maximă fiind de 3585 kW.Calităţile dinamice ale motoarelor cu bloc înclinat sunt foarte bune. De
exemplu, motorul MF1– 009 (VICKERS) furnizează la capacitatea de 1,55 cm3/rot(0,095 in3/rot) şi căderea de presiune Δ p = 207 bar (3000 p.s.i.), momentul M =5,16 Nm (45 lbf ⋅in); momentul de iner ţie redus la arbore este J = 1,522⋅10-5 kg⋅m2
(1,35 ⋅ 10-4 lbf ⋅in⋅s2) deci acceleraţia unghiular ă realizată în gol (f ăr ă sarcină) este ε = M/J = 3,37 ⋅105 s-2.
b) Motoare rapide cu pistoane axiale şi disc înclinat
Se execută în mai multe variante constructive care difer ă prin modul deantrenare a arborelui de blocul cilindrilor. La varianta nereglabilă din figura 7.7, produsă de firma EATON (S.U.A.), discul face corp comun cu carcasa, fiindamplasat între blocul cilindrilor şi capătul liber al arborelui. În cadrul soluţieiutilizate de firma REYROLLE (Anglia) blocul cilindrilor este solidar cu arborele,fiind presat pe placa de distribuţie de un arc care se sprijină pe disc printr-oarticulaţie sferică; placa de reţinere a patinelor hidrostatice este fixată în zonacentrală de un disc rotativ, sprijinit pe discul fix prin lagăre hidrostatice alimentatede cilindrii prin patine (fig. 7.8)
Motoarele cu disc înclinat au turaţii minime stabile mai reduse (25÷100 rot/min) şi momente de pornire mai mari decât cele cu bloc înclinat; seexecută curent pentru presiuni nominale cuprinse între 320 şi 420 bar, capacitatea
variind între 11,5 şi 250 cm3/rot.
c) Motoare rapide cu pistoane axiale şi disc fulant
Se execută în mai multe variante constructive care difer ă prin sistemul dedistribuţie. Cea mai r ăspândită construcţie întrebuinţează distribuitorul cilindricrotativ (fig. 4.37) a cărui uzur ă nu poate fi compensată automat. O altă soluţie dedistribuţie constă în utilizarea pistoanelor ca sertare (fig. 7.9).
În acest scop, fiecare piston este prevăzut cu o degajare toroidală prin careasigur ă alimentarea sau drenarea unui cilindru situat într-un plan meridian decalatcu π/2 faţă de planul său meridian. În blocul cilindrilor sunt practicate două cameretoroidale (fig. 7.10) conectate prin canale axiale la racorduri iar în dreptul degajăriitoroidale a fiecărui piston sunt prevăzute câte trei camere toroidale; camerelelaterale sunt conectate la racorduri iar camera centrală – la unul din cilindriidecalaţi cu π/2. Când un piston se află la punctul mort interior (ϕ = 0), îşi deschidecomplet distribuitorul, corespunzător vitezei maxime a pistonului comandat(fig. 7.11). Acelaşi piston îşi închide distribuitorul după o rotaţie cu π/2 deoarece
pistonul comandat se află la unul din punctele moarte. După o semirotaţiedistribuitorul se deschide din nou complet, conectând cilindrul pistonului comandatla celălat racord, corespunzător sensului şi vitezei sale.
Motoarele cu disc fulant au capacităţi mici (8…100 cm3/rot) şi potfuncţiona continuu la presiuni cuprinse între 160 şi 250 bar; ele prezintă avantajul

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 188/627
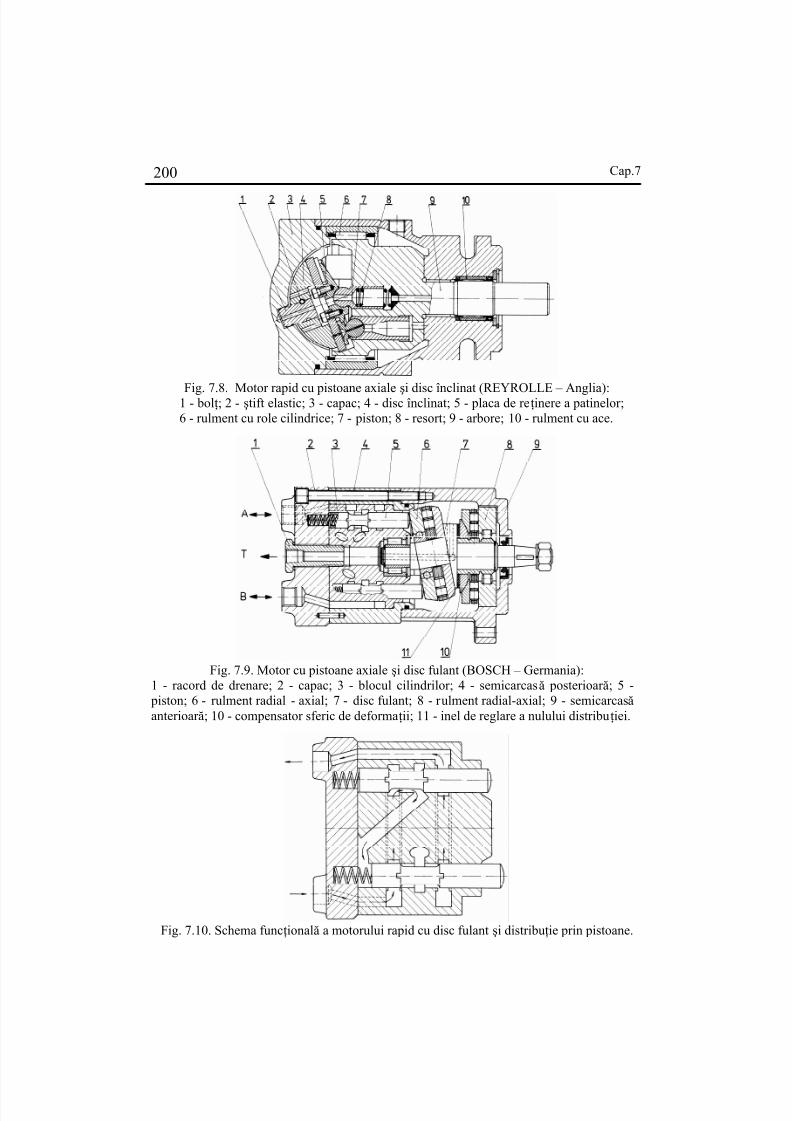
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 189/627
Cap.7200
Fig. 7.8. Motor rapid cu pistoane axiale şi disc înclinat (REYROLLE – Anglia):1 - bolţ; 2 - ştift elastic; 3 - capac; 4 - disc înclinat; 5 - placa de reţinere a patinelor;6 - rulment cu role cilindrice; 7 - piston; 8 - resort; 9 - arbore; 10 - rulment cu ace.
Fig. 7.9. Motor cu pistoane axiale şi disc fulant (BOSCH – Germania):1 - racord de drenare; 2 - capac; 3 - blocul cilindrilor; 4 - semicarcasă posterioar ă; 5 -
piston; 6 - rulment radial - axial; 7 - disc fulant; 8 - rulment radial-axial; 9 - semicarcasă anterioar ă; 10 - compensator sferic de deformaţii; 11 - inel de reglare a nulului distribuţiei.
Fig. 7.10. Schema funcţională a motorului rapid cu disc fulant şi distribuţie prin pistoane.
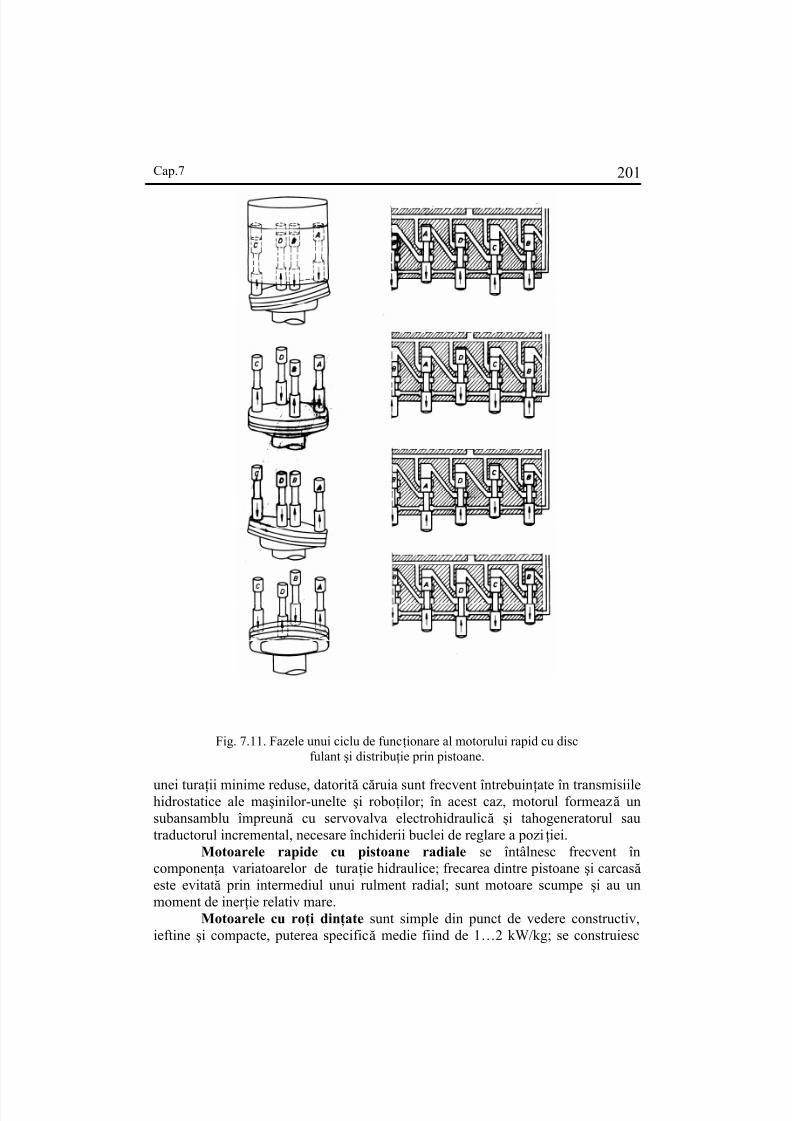
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 190/627
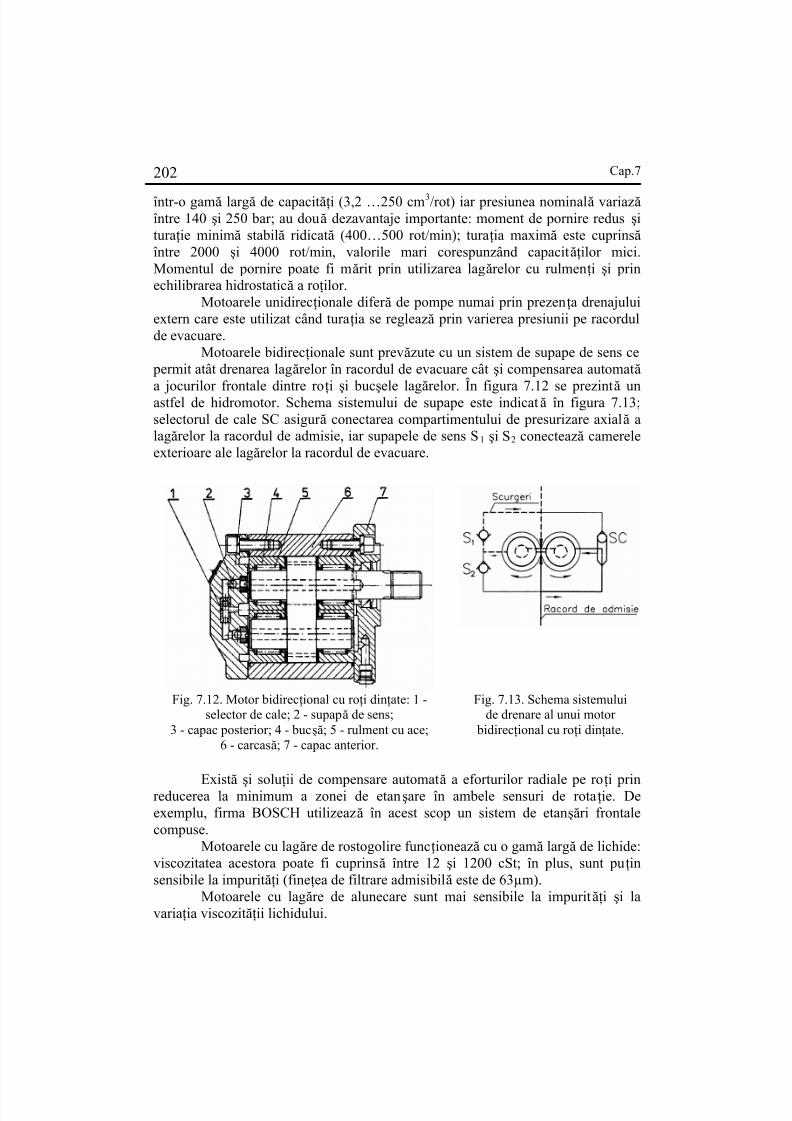
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 191/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 192/627
Cap.7 203
Pentru maşinile de lucru ce solicită fie momente mari la turaţii mici, fiemomente mici la turaţii mari se construiesc motoare duble ("cu două viteze")formate din două motoare cu roţi dinţate de capacităţi diferite, cuplate pe acelaşiarbore. În regim lent funcţionează ambele secţiuni, capacitatea fiind maximă; înregim rapid, un distribuitor hidraulic (comandat hidraulic) şuntează racordurilesecţiunii de capacitate mare, alimentând numai secţiunea de capacitate mică.
Motoarele cu roţi dinţate multiple (în paralel) sunt întrebuinţate înconstrucţia divizoarelor de debit necesare sincronizării mai multor motoarevolumice şi a amplificatoarelor rotative de presiune utilizate pentru mărirea
presiunii la admisia unui motor peste valoare corespunzătoare pompei.
7.3. MOTOARE VOLUMICE SEMIRAPIDE
Se realizează cu palete culisante şi cu pistoane radiale.Motoarele cu palete culisante se construiesc în gama de capacităţi
cuprinsă între 30 şi 300 cm3/rot; presiunea nominală variază între 140 şi 175 bar;momentele şi puterile specifice sunt mai mari decât cele ale motoarelor cu roţidinţate: 9…11 Nm/kg, respectiv 2…3 kW/kg; turaţiile minime stabile variază între50 şi 200 rot/min, iar cele maxime ating 1 800…2 800 rot/min.
Din punct de vedere constructiv aceste motoare difer ă de pompele cu dubluefect doar prin prezenţa unor arcuri necesare menţinerii contactului permanent între
palete şi carcasă (camă) la turaţii mici. Arcurile pot fi elicoidale sau de tip"balansoar". În primul caz, ele sunt amplasate sub palete, fiind comprimate în
fazele de evacuare şi relaxate în fazele de admisie. Denumirea ultimelor provinedin faptul că execută o mişcare oscilatorie în jurul unor bolţuri presate în degajări
practicate lateral în rotor (fig. 7.14); sunt executate din sârmă de oţel înalt aliat şi presează radial câte două palete decalate cu π/2. Când o paletă aflată în faza deevacuare pătrunde în rotor, cealaltă iese din acesta deoarece se află în faza deadmisie; astfel, arcurile oscilează în jurul bolţurilor f ăr ă a suferi încovoierisuplimentare faţă de cele iniţiale (de montaj), deci for ţele exercitate asupra
paletelor sunt constante.
Fig. 7.14. Motor semirapid cu palete culisante.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 193/627
Cap.7204
Motoarele cu palete culisante sunt mai scumpe decât cele cu roţi dinţate; caşi acestea au un moment de pornire redus, dar au o funcţionare liniştită şi asigur ă un moment practic constant.
Motoarele semirapide cu pistoane radiale sunt larg r ăspândite datorită momentelor mari furnizate (90…240000 Nm), turaţiilor minime reduse(5...20 rot/min, în funcţie de capacitate), randamentelor ridicate în întreg domeniulde funcţionare, zgomotului redus (max. 60 dB), posibilităţii de a funcţiona culichide neinflamabile (emulsii de ulei şi apă, soluţii de poliglicoli în apă, esterifosfatici) şi cerinţelor modeste privind filtrarea (25…75 µm). Presiunea nominală aacestor motoare variază între 200 şi 400 bar, iar turaţia maximă – între 20 şi 2000rot/min, în funcţie de capacitate.
Pistoanele sunt dispuse radial într-o carcasă fixă, pe un rând sau pe două rânduri şi acţionează arborele printr-un excentric; frecarea dintre acesta şi biele seelimină, practic, fie prin rulmenţi radiali (fig. 7.15) fie prin lagăre hidrostatice(fig. 7.16); desprinderea patinelor de excentric în cazul sarcinilor negative esteîmpiedicată de două inele cu secţiune dreptunghiular ă; în acelaşi regim (de
pompare) bielele acţionează pistoanele prin intermediul unor bucşe sfericesecţionate şi a unor inele de siguranţă.
Bielele nu mai sunt necesare dacă cilindrii sunt oscilanţi; în cazul soluţieiconstructive din figura 7.17 (utilizată de firma VICKERS), cilindrii oscilează pe
plăci sferice fixe, contactul permanent dintre aceste piese fiind asigurat de resoarte;construcţia prezentată în figura 7.18, brevetată de firma PLEIGER (Germania), esteşi mai simplă din punct de vedere cinematic: cilindrii sunt reduşi la bucşe oscilante
sferice. Distribuţia poate fi realizată cu distribuitor rotativ frontal, plan (fig. 7.15)sau cilindric (fig. 7.16) sau cu sertare (fig. 7.18). Rezultanta for ţelor de presiune pedistribuitorul plan tinde să provoace bascularea acestuia, deci trebuie compensată automat prin lagăre hidrostatice axiale (fig. 7.19); rezultanta for ţelor de presiunetinde să lipească distribuitorul cilindric de bucşă, provocând uzura prematur ă acelor două piese şi alterând randamentul volumic, deci trebuie compensată automat
prin lagăre hidrostatice radiale (fig. 7.20). Tendinţa actuală este de a se renunţa ladistribuitorul cilindric în favoarea celui plan, deoarece ultimul asigur ă compensareaautomată a uzurii şi poate fi uşor recondiţionat prin rectificare, lepuire şi rodareîmpreună cu placa de distribuţie, care este în general amovibilă.
Distribuitoarele cu sertare asigur ă un randament volumic ridicat, dar
necesită o precizie mare de execuţie a corpului; sertarele sunt comandate prin rolede un excentric sincron cu arborele şi decalat (rotit) cu π/2 faţă de excentriculacţionat de pistoane, deoarece sertarul unui piston aflat la unul din punctele moartetrebuie să fie situat în poziţie simetrică faţă de camerele conectate la racorduri;deplasarea centripetă a sertarelor este asigurată de un inel ce înconjoar ă rolele.
Lagărele hidromotoarelor semirapide cu pistoane radiale sunt în generalsupradimensionate pentru a putea prelua sarcinile radiale şi axiale importanteintroduse prin cuplarea directă cu mecanismele acţionate. Producătorii indică îndiagrame complexe durata de utilizare medie a rulmenţilor în funcţie de căderea de
presiune între racorduri, de mărimea şi poziţia sarcinii radiale faţă de un plan de
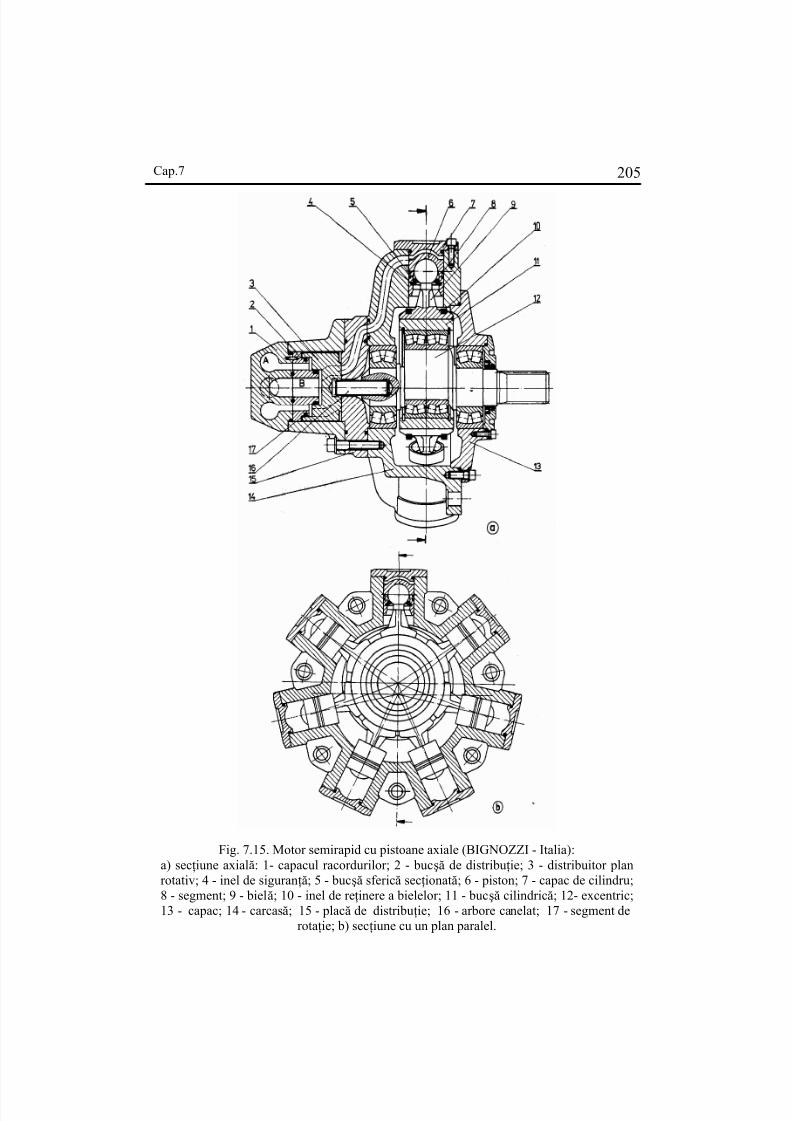
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 194/627
Cap.7 205
Fig. 7.15. Motor semirapid cu pistoane axiale (BIGNOZZI - Italia):a) secţiune axială: 1- capacul racordurilor; 2 - bucşă de distribuţie; 3 - distribuitor planrotativ; 4 - inel de siguranţă; 5 - bucşă sferică secţionată; 6 - piston; 7 - capac de cilindru;8 - segment; 9 - bielă; 10 - inel de reţinere a bielelor; 11 - bucşă cilindrică; 12- excentric;13 - capac; 14 - carcasă; 15 - placă de distribuţie; 16 - arbore canelat; 17 - segment de
rotaţie; b) secţiune cu un plan paralel.
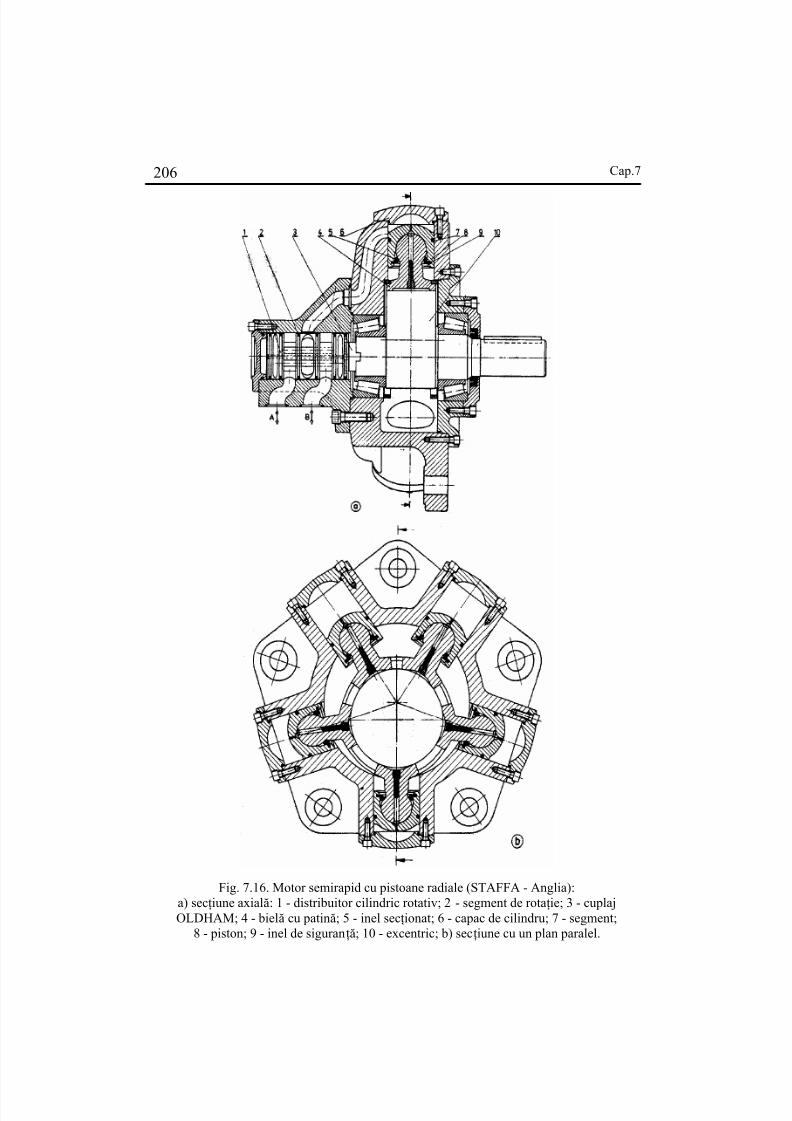
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 195/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 196/627
Cap.7 207
Fig. 7.17. Motor semirapid cu pistoane radiale (VICKERS-S.U.A.):1 - glisier ă sferică; 2 - cilindru oscilant; 3 - piston cu patină
hidrostatică; 4 - etanşare compusă.
referinţă ales convenabil, perpendicular pe axa arborelui (fig. 7.21). Durata deutilizare, notată cu LB 10, reprezintă numărul de ore de funcţionare după care 10%din rulmenţi se uzează peste limita admisă. Durata de utilizare medie, notată cuLB 50, corespunde ieşirii din funcţiune a 50% din rulmenţi şi este de patru ori maimare decât prima. O altă caracteristică mecanică importantă a acestor motoare esteviteza de alunecare sub sarcină negativă, care se produce când orificiile energeticesunt închise şi arborele este acţionat de sarcină (regim tipic în funcţionareamacaralelor). Această caracteristică este asociată de producători cu randamentulvolumic în diagrame de tipul celei din figura 7.22. Funcţionarea continuă în regimde pompă (frână) necesită presurizarea racordului de evacuare în scopul evităriicavitaţiei. De exemplu, pentru hidromotorul STAFFA B400, p2 = 2 + n2/1300 [bar],unde n este turaţia [rot/min].
Randamentul maxim al hidromotoarelor semirapide cu pistoane radiale
este cuprins între 91 şi 97%; în figura 7.23 se prezintă ca exemplu caracteristicauniversală a hidromotorului STAFFA B400.În unele transmisii este necesar ă blocarea arborelui hidromotorului la
întreruperea alimentării; în acest caz motorul încorporează o frână cu bandă sau cudiscuri, acţionată de un cilindru hidraulic cu simplu efect (fig. 7.24). Comandacilindrului se face automat prin racordarea camerei active la pompă (fig. 7.25);creşterea presiunii de refulare determină deblocarea arborelui, iar resoartele –
blocarea.Hidromotoarele semirapide cu pistoane radiale pot încorpora şi reductoare
planetare; se obţin astfel momente de ordinul a 400000 Nm. În figura 7.26 se
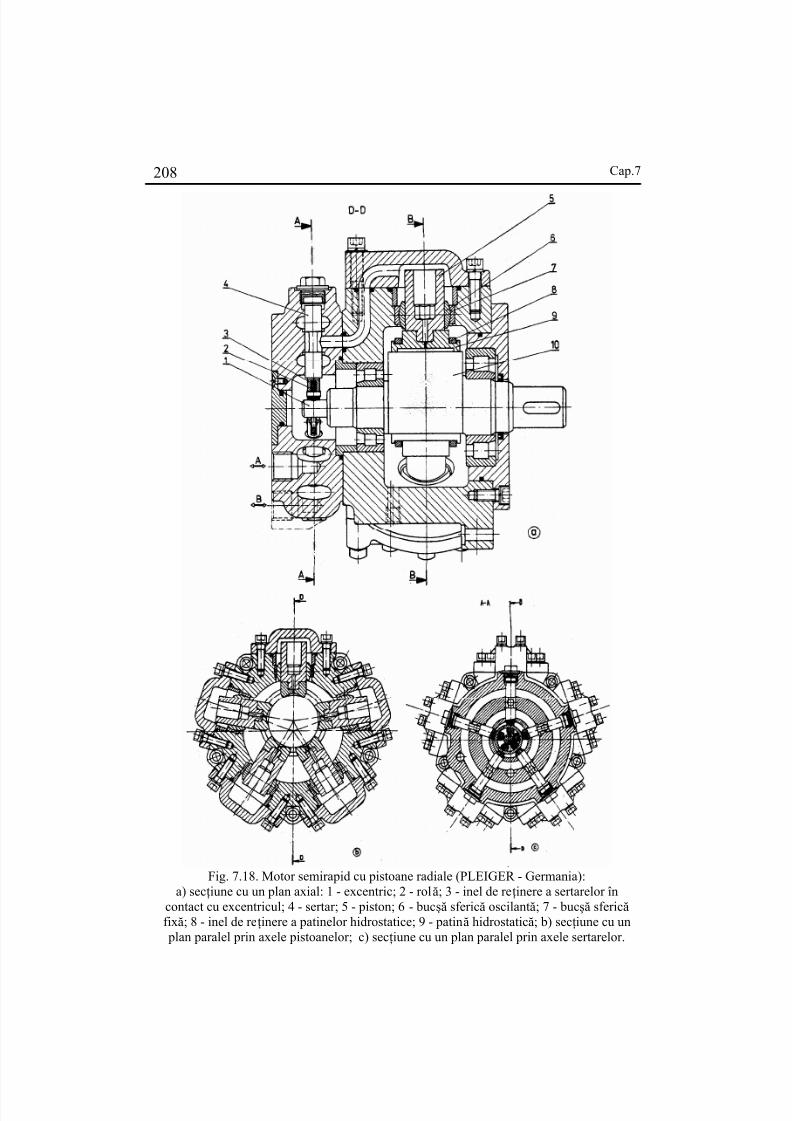
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 197/627
Cap.7208
Fig. 7.18. Motor semirapid cu pistoane radiale (PLEIGER - Germania):a) secţiune cu un plan axial: 1 - excentric; 2 - rolă; 3 - inel de reţinere a sertarelor în
contact cu excentricul; 4 - sertar; 5 - piston; 6 - bucşă sferică oscilantă; 7 - bucşă sferică fixă; 8 - inel de reţinere a patinelor hidrostatice; 9 - patină hidrostatică; b) secţiune cu un plan paralel prin axele pistoanelor; c) secţiune cu un plan paralel prin axele sertarelor.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 198/627
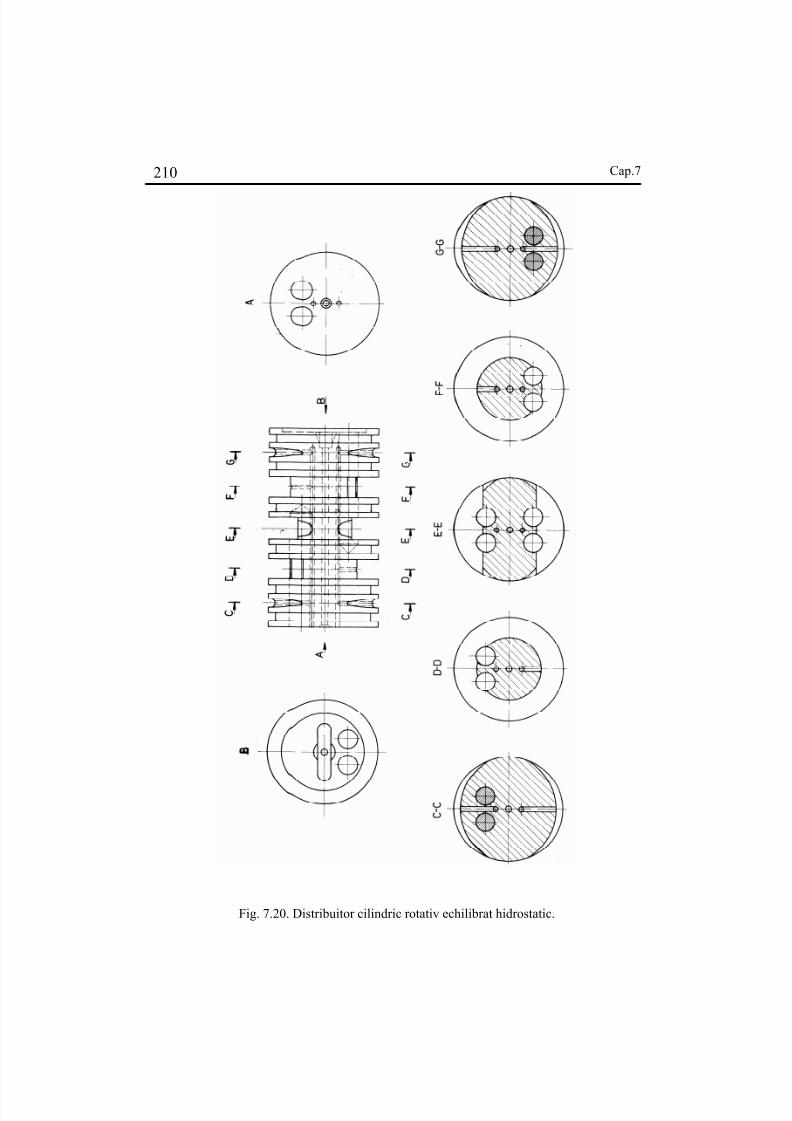
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 199/627
Cap.7210
Fig. 7.20. Distribuitor cilindric rotativ echilibrat hidrostatic.
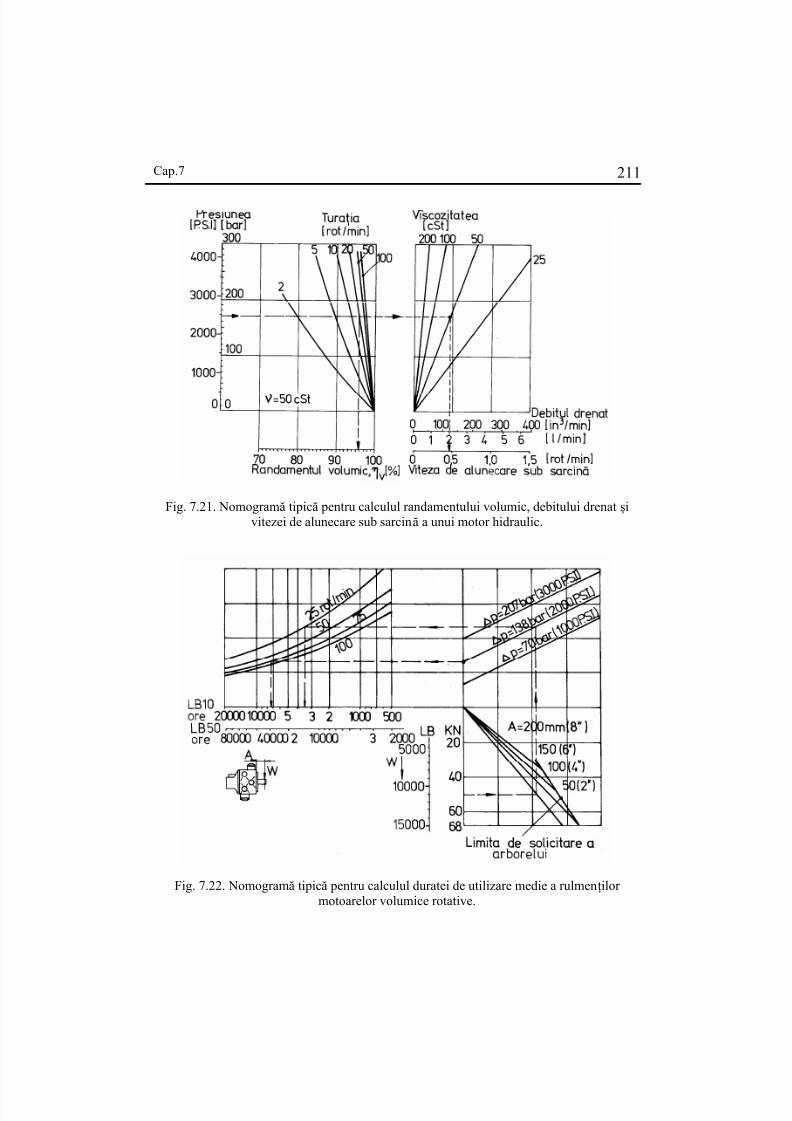
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 200/627
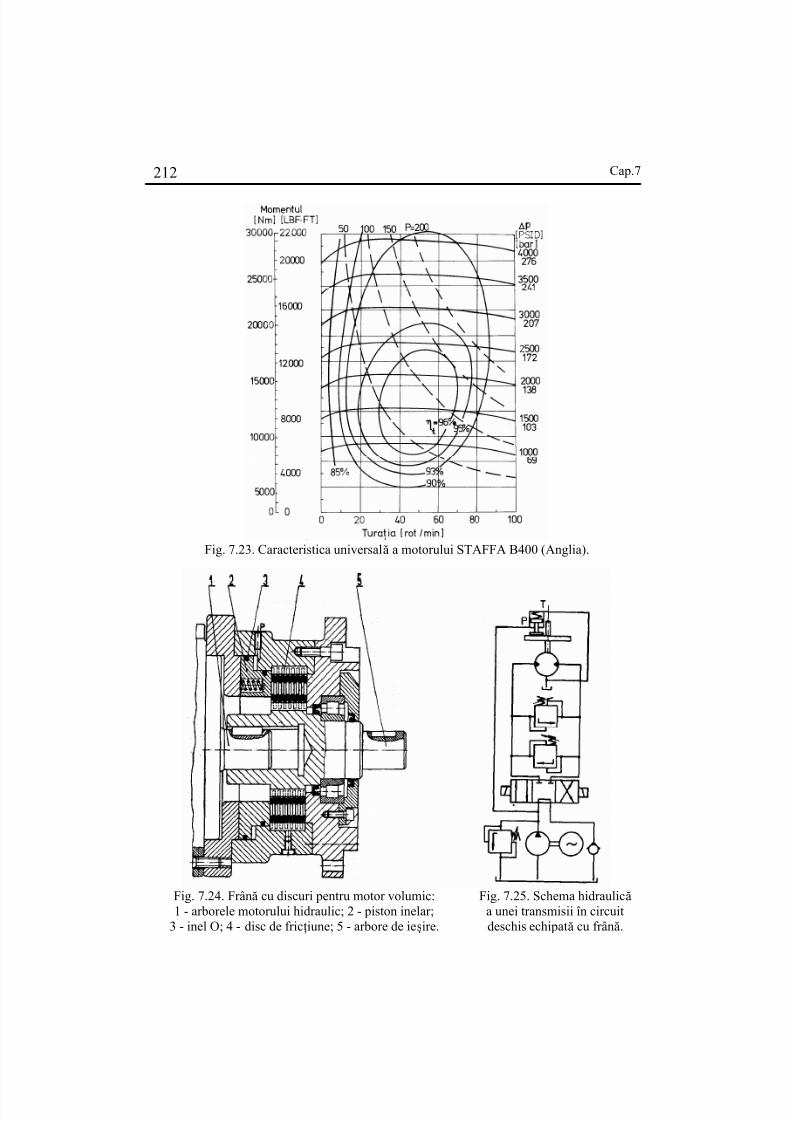
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 201/627
Cap.7212
Fig. 7.23. Caracteristica universală a motorului STAFFA B400 (Anglia).
Fig. 7.24. Frână cu discuri pentru motor volumic:1 - arborele motorului hidraulic; 2 - piston inelar;
3 - inel O; 4 - disc de fricţiune; 5 - arbore de ieşire.
Fig. 7.25. Schema hidraulică a unei transmisii în circuitdeschis echipată cu frână.
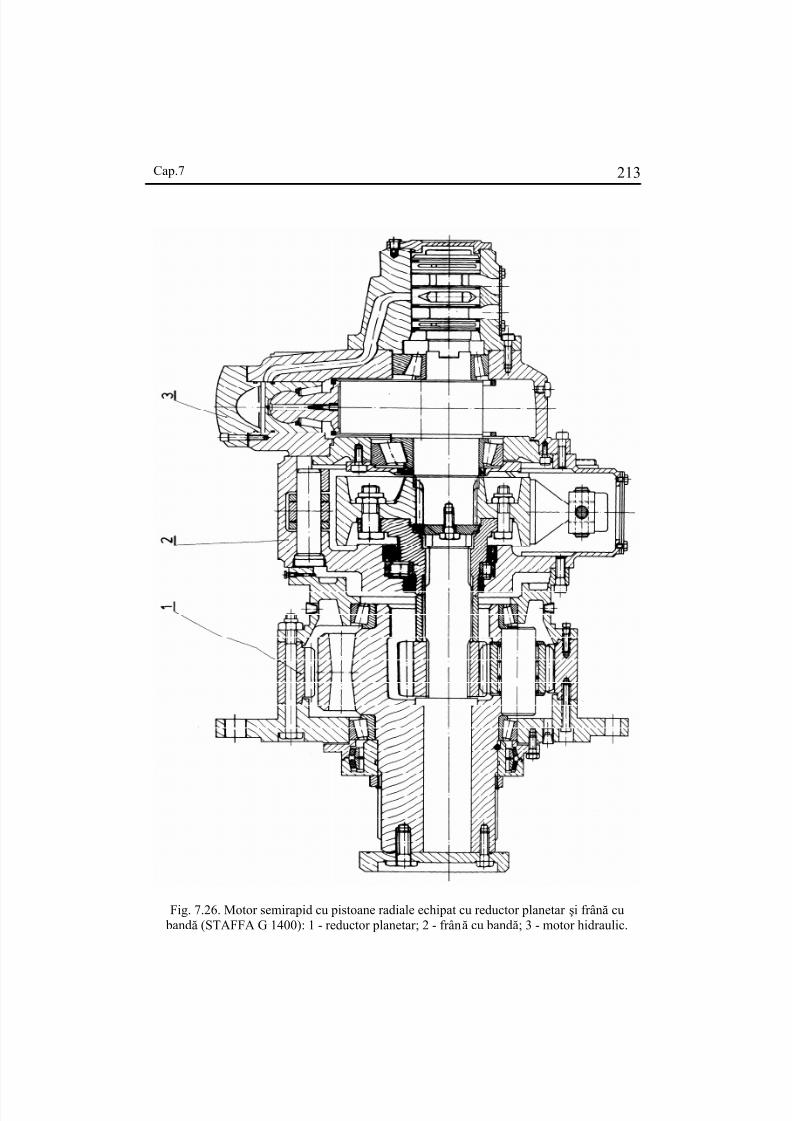
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 202/627
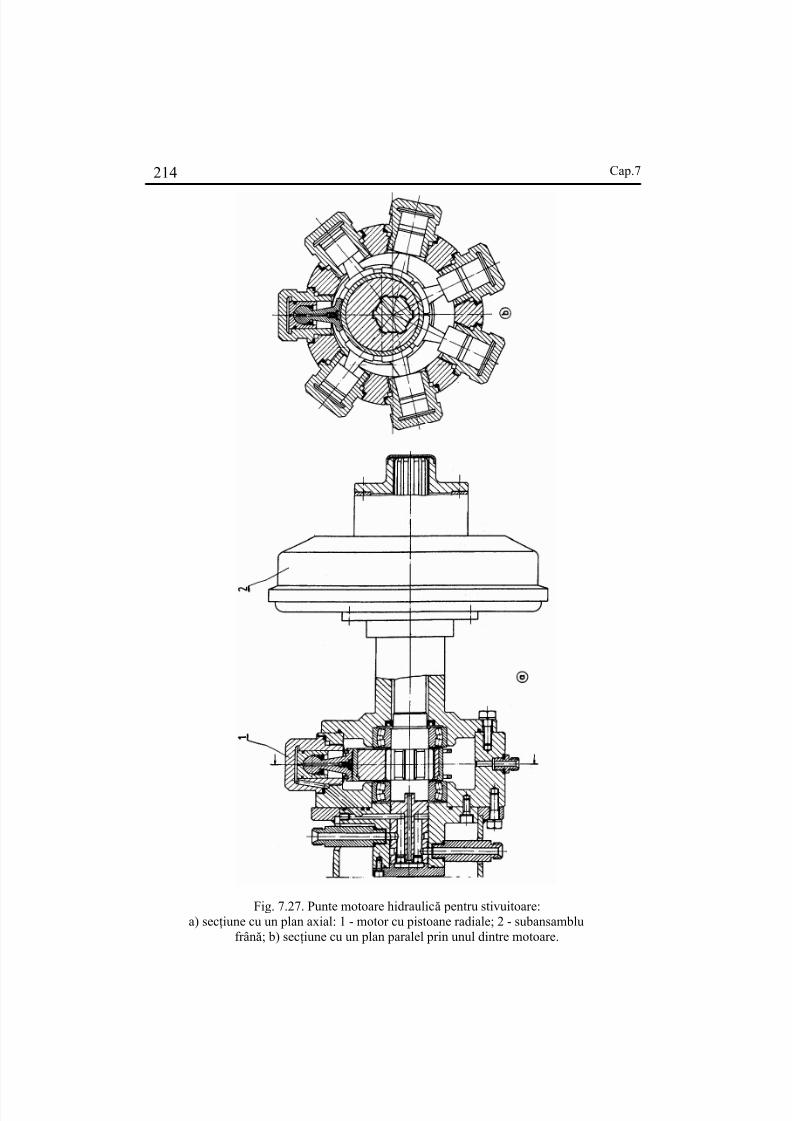
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 203/627
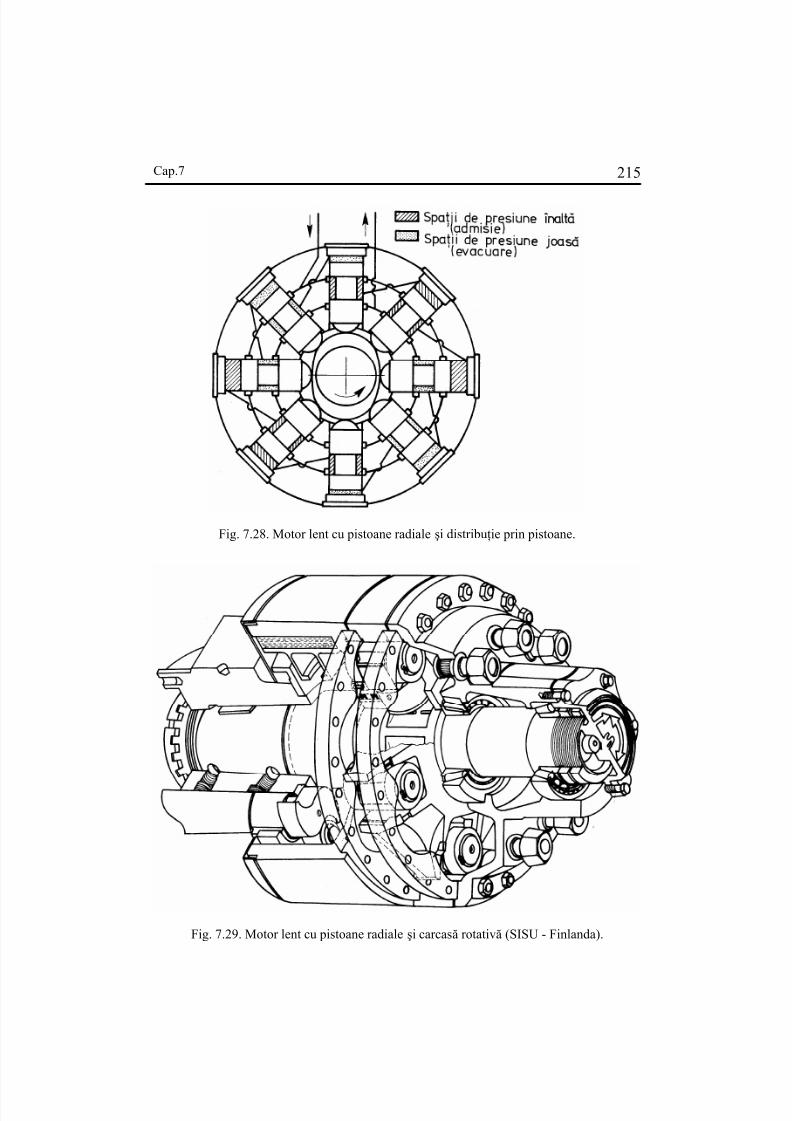
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 204/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 205/627
Cap.7216
Fig. 7.30. Motor lent cu pistoane radiale şi carcasă rotativă, cu două capacităţi:1 - racord flotant; 2 - arc disc; 3 - placă de distribuţie flotantă; 4 - etanşare
mecanică; 5 - distribuitor frontal rotativ; 6 - placă de distribuţie fixă; 7 - distribuitor cu trei căi; 8 - carcasă rotativă; 9 - arbore de sincronizare a distribuitorului cucamele; 10 - rulment cu role cilindrice duble; 11 - traversă; 12 - colivie pentru
bilele ghidajelor traversei; 13 - camă; 14 - piston mic; 15 - cilindru; 16-piston mare.
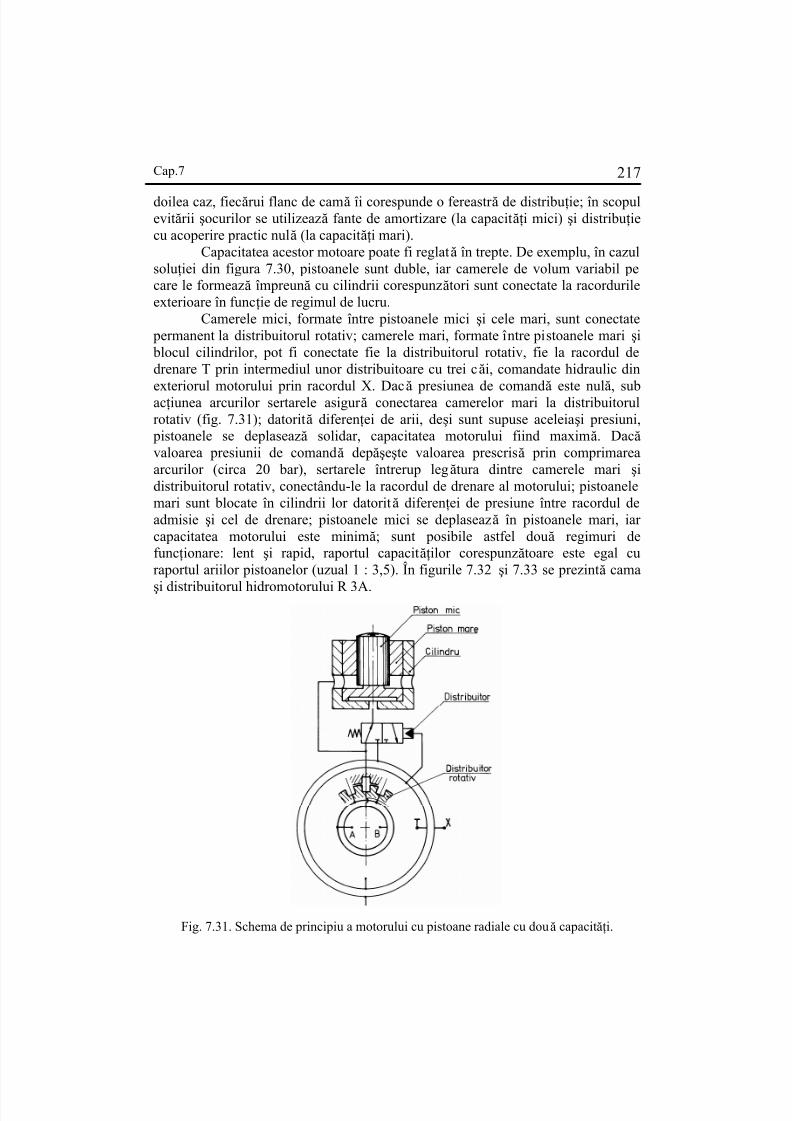
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 206/627
Cap.7 217
doilea caz, fiecărui flanc de camă îi corespunde o fereastr ă de distribuţie; în scopulevitării şocurilor se utilizează fante de amortizare (la capacităţi mici) şi distribuţiecu acoperire practic nulă (la capacităţi mari).
Capacitatea acestor motoare poate fi reglată în trepte. De exemplu, în cazulsoluţiei din figura 7.30, pistoanele sunt duble, iar camerele de volum variabil pecare le formează împreună cu cilindrii corespunzători sunt conectate la racordurileexterioare în funcţie de regimul de lucru.
Camerele mici, formate între pistoanele mici şi cele mari, sunt conectate permanent la distribuitorul rotativ; camerele mari, formate între pistoanele mari şi blocul cilindrilor, pot fi conectate fie la distribuitorul rotativ, fie la racordul dedrenare T prin intermediul unor distribuitoare cu trei căi, comandate hidraulic din
exteriorul motorului prin racordul X. Dacă presiunea de comandă este nulă, subacţiunea arcurilor sertarele asigur ă conectarea camerelor mari la distribuitorulrotativ (fig. 7.31); datorită diferenţei de arii, deşi sunt supuse aceleiaşi presiuni,
pistoanele se deplasează solidar, capacitatea motorului fiind maximă. Dacă valoarea presiunii de comandă depăşeşte valoarea prescrisă prin comprimareaarcurilor (circa 20 bar), sertarele întrerup legătura dintre camerele mari şidistribuitorul rotativ, conectându-le la racordul de drenare al motorului; pistoanelemari sunt blocate în cilindrii lor datorită diferenţei de presiune între racordul deadmisie şi cel de drenare; pistoanele mici se deplasează în pistoanele mari, iar capacitatea motorului este minimă; sunt posibile astfel două regimuri defuncţionare: lent şi rapid, raportul capacităţilor corespunzătoare este egal curaportul ariilor pistoanelor (uzual 1 : 3,5). În figurile 7.32 şi 7.33 se prezintă cama
şi distribuitorul hidromotorului R 3A.
Fig. 7.31. Schema de principiu a motorului cu pistoane radiale cu două capacităţi.
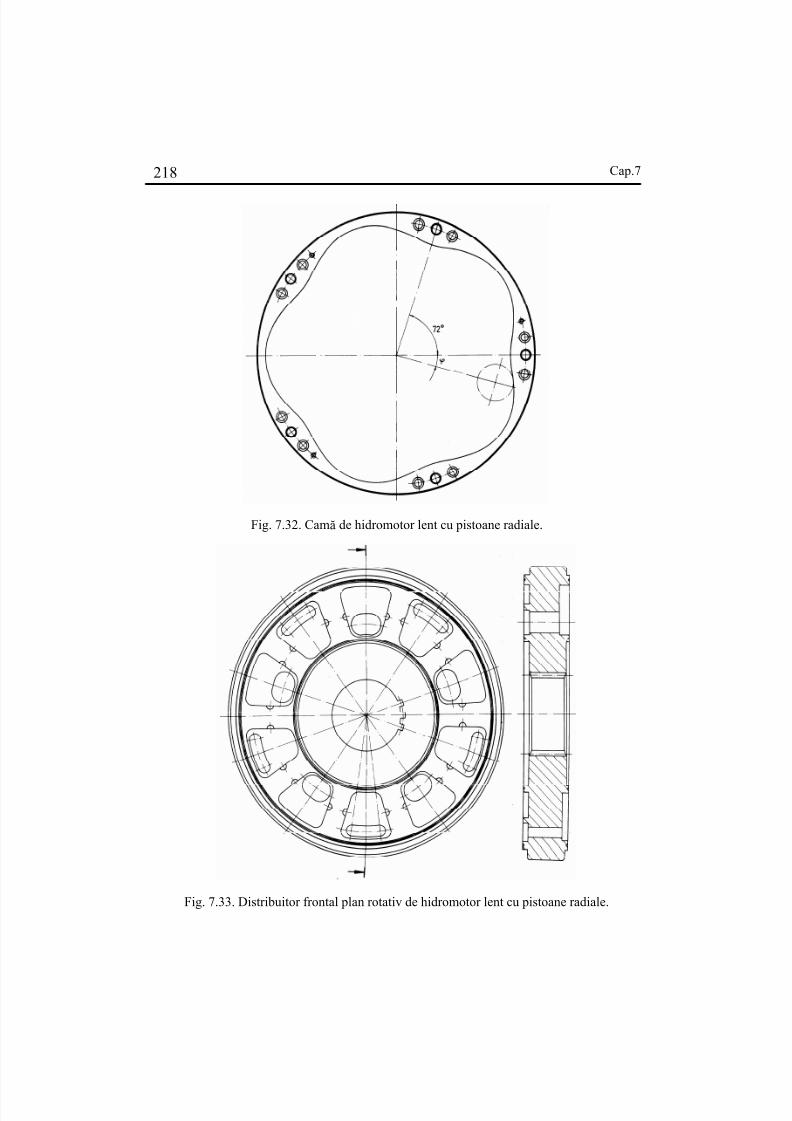
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 207/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 208/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 209/627
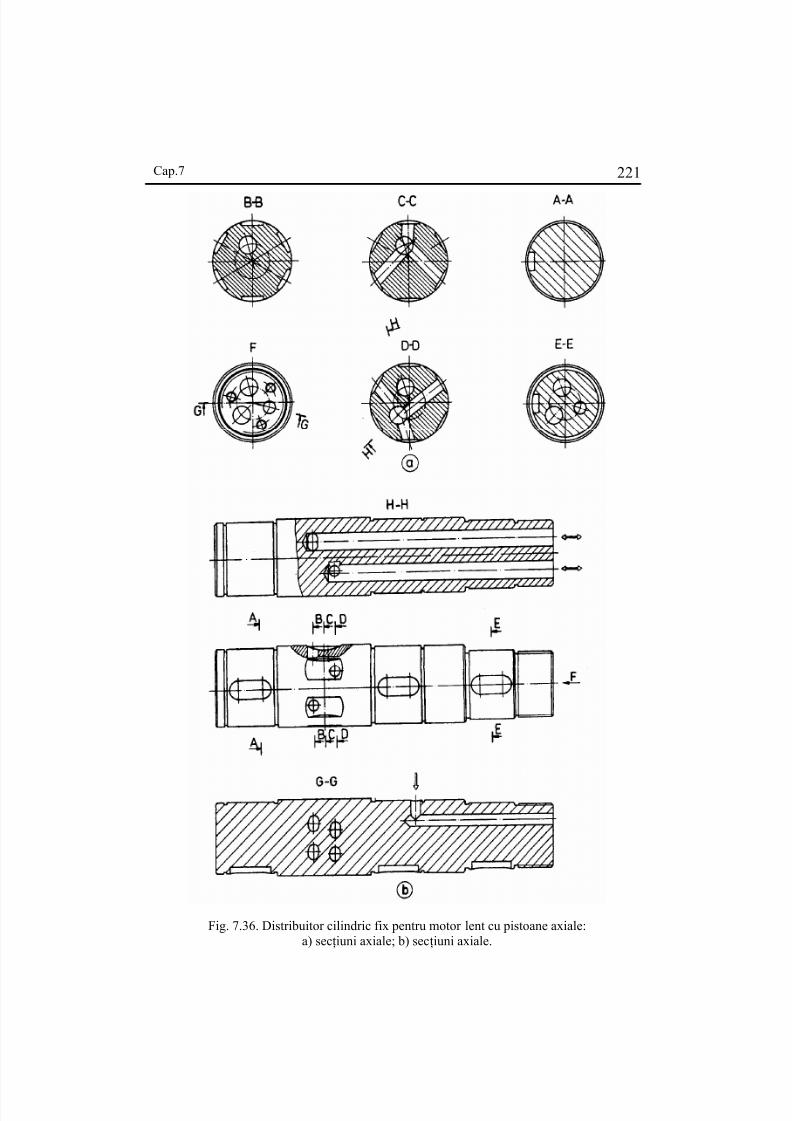
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 210/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 211/627
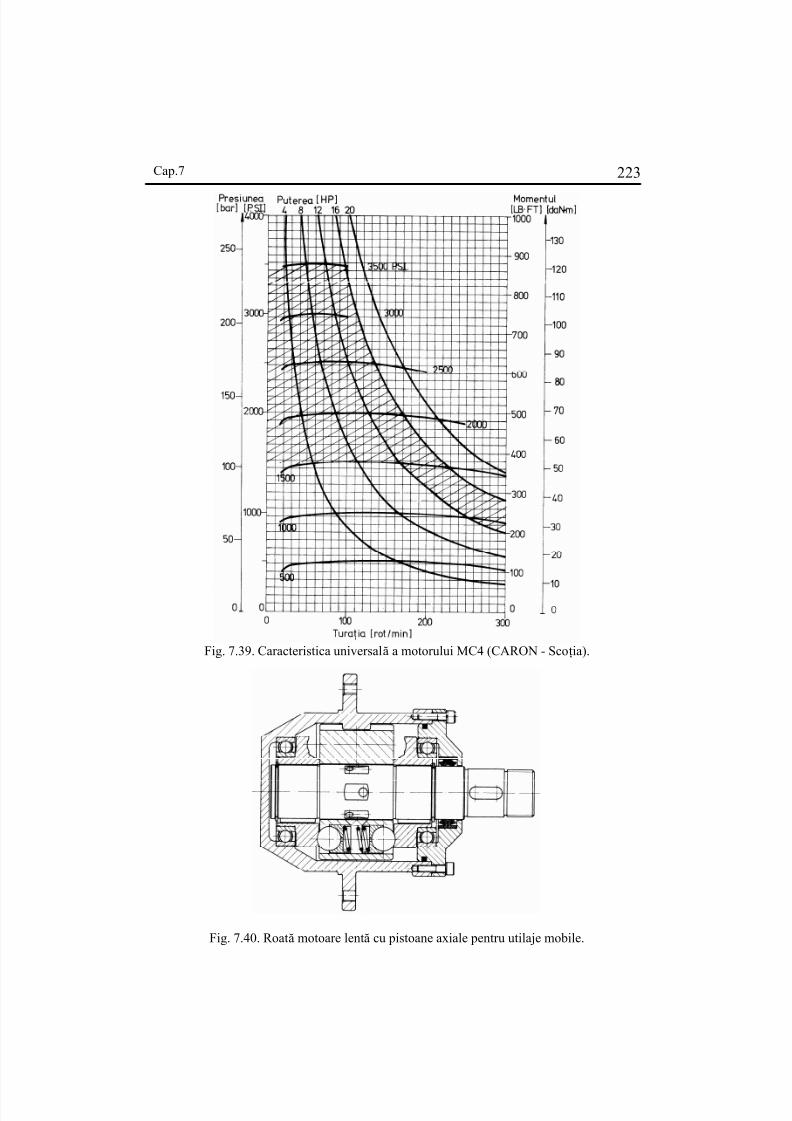
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 212/627
Cap.7 223
Fig. 7.39. Caracteristica universală a motorului MC4 (CARON - Scoţia).
Fig. 7.40. Roată motoare lentă cu pistoane axiale pentru utilaje mobile.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 213/627
Cap.7224
Fig. 7.41. Dispozitive pentru execuţia motoarelor lente cu pistoane axiale:a) dispozitiv de frezare şi rectificare a camelor: 1 - arbore conducător; 2 - coroană dinţată; 3 - bolţ; 4 - arbore port-camă; b) dispozitiv de găurire radială interioar ă.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 214/627
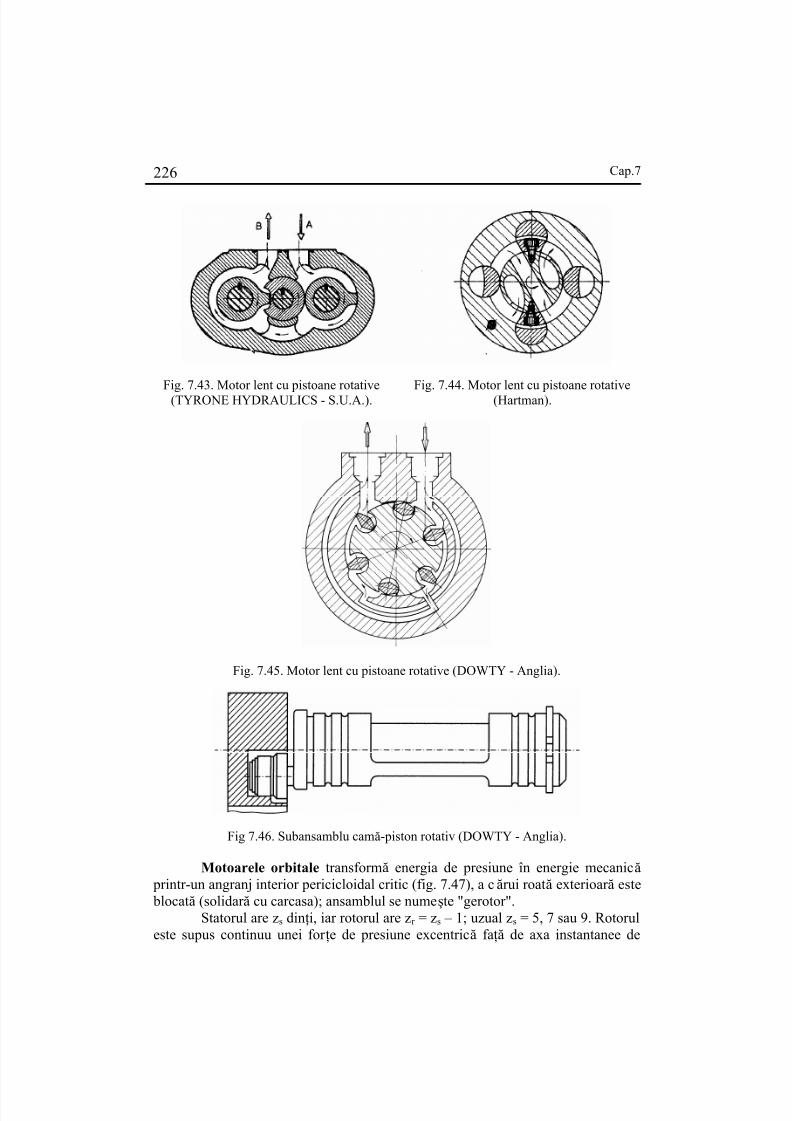
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 215/627
Cap.7226
Fig. 7.43. Motor lent cu pistoane rotative(TYRONE HYDRAULICS - S.U.A.).
Fig. 7.44. Motor lent cu pistoane rotative(Hartman).
Fig. 7.45. Motor lent cu pistoane rotative (DOWTY - Anglia).
Fig 7.46. Subansamblu camă-piston rotativ (DOWTY - Anglia).
Motoarele orbitale transformă energia de presiune în energie mecanică printr-un angranj interior pericicloidal critic (fig. 7.47), a cărui roată exterioar ă este blocată (solidar ă cu carcasa); ansamblul se numeşte "gerotor".
Statorul are zs dinţi, iar rotorul are zr = zs – 1; uzual zs = 5, 7 sau 9. Rotoruleste supus continuu unei for ţe de presiune excentrică faţă de axa instantanee de
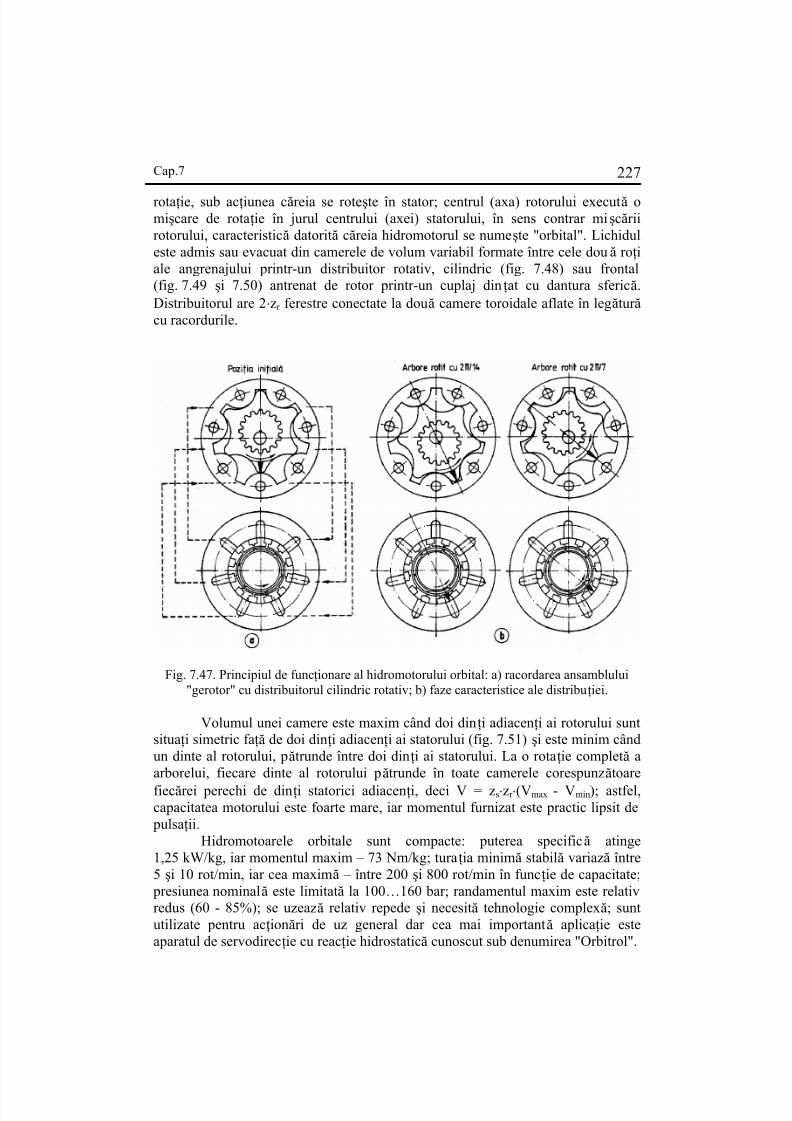
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 216/627
Cap.7 227
rotaţie, sub acţiunea căreia se roteşte în stator; centrul (axa) rotorului execută omişcare de rotaţie în jurul centrului (axei) statorului, în sens contrar mişcăriirotorului, caracteristică datorită căreia hidromotorul se numeşte "orbital". Lichiduleste admis sau evacuat din camerele de volum variabil formate între cele două roţiale angrenajului printr-un distribuitor rotativ, cilindric (fig. 7.48) sau frontal(fig. 7.49 şi 7.50) antrenat de rotor printr-un cuplaj dinţat cu dantura sferică.Distribuitorul are 2⋅zr ferestre conectate la două camere toroidale aflate în legătur ă cu racordurile.
Fig. 7.47. Principiul de funcţionare al hidromotorului orbital: a) racordarea ansamblului"gerotor" cu distribuitorul cilindric rotativ; b) faze caracteristice ale distribuţiei.
Volumul unei camere este maxim când doi dinţi adiacenţi ai rotorului suntsituaţi simetric faţă de doi dinţi adiacenţi ai statorului (fig. 7.51) şi este minim cândun dinte al rotorului, pătrunde între doi dinţi ai statorului. La o rotaţie completă aarborelui, fiecare dinte al rotorului pătrunde în toate camerele corespunzătoare
fiecărei perechi de dinţi statorici adiacenţi, deci V = zs⋅zr ⋅(Vmax - Vmin); astfel,capacitatea motorului este foarte mare, iar momentul furnizat este practic lipsit de
pulsaţii.Hidromotoarele orbitale sunt compacte: puterea specifică atinge
1,25 kW/kg, iar momentul maxim – 73 Nm/kg; turaţia minimă stabilă variază între5 şi 10 rot/min, iar cea maximă – între 200 şi 800 rot/min în funcţie de capacitate;
presiunea nominală este limitată la 100…160 bar; randamentul maxim este relativredus (60 - 85%); se uzează relativ repede şi necesită tehnologie complexă; suntutilizate pentru acţionări de uz general dar cea mai importantă aplicaţie esteaparatul de servodirecţie cu reacţie hidrostatică cunoscut sub denumirea "Orbitrol".
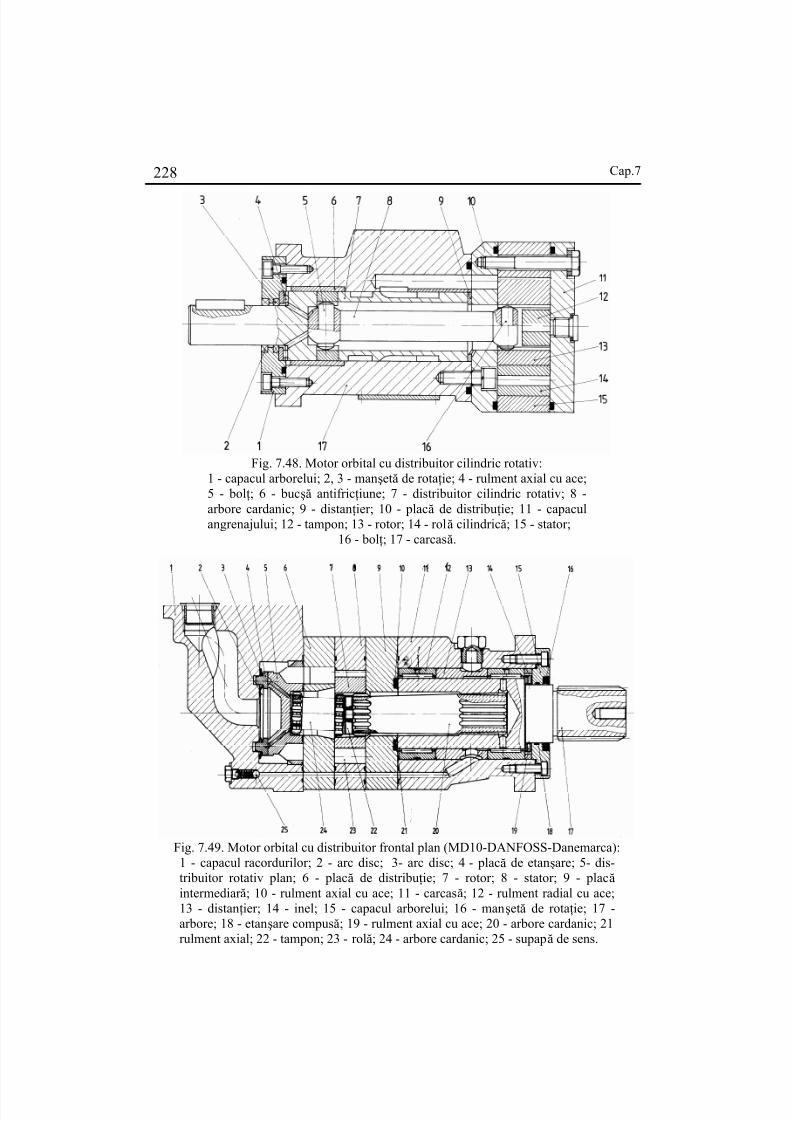
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 217/627
Cap.7228
Fig. 7.48. Motor orbital cu distribuitor cilindric rotativ:1 - capacul arborelui; 2, 3 - manşetă de rotaţie; 4 - rulment axial cu ace;5 - bolţ; 6 - bucşă antifricţiune; 7 - distribuitor cilindric rotativ; 8 -arbore cardanic; 9 - distanţier; 10 - placă de distribuţie; 11 - capaculangrenajului; 12 - tampon; 13 - rotor; 14 - rolă cilindrică; 15 - stator;
16 - bolţ; 17 - carcasă.
Fig. 7.49. Motor orbital cu distribuitor frontal plan (MD10-DANFOSS-Danemarca):1 - capacul racordurilor; 2 - arc disc; 3- arc disc; 4 - placă de etanşare; 5- dis-tribuitor rotativ plan; 6 - placă de distribuţie; 7 - rotor; 8 - stator; 9 - placă intermediar ă; 10 - rulment axial cu ace; 11 - carcasă; 12 - rulment radial cu ace;13 - distanţier; 14 - inel; 15 - capacul arborelui; 16 - manşetă de rotaţie; 17 -arbore; 18 - etanşare compusă; 19 - rulment axial cu ace; 20 - arbore cardanic; 21rulment axial; 22 - tampon; 23 - rolă; 24 - arbore cardanic; 25 - supapă de sens.
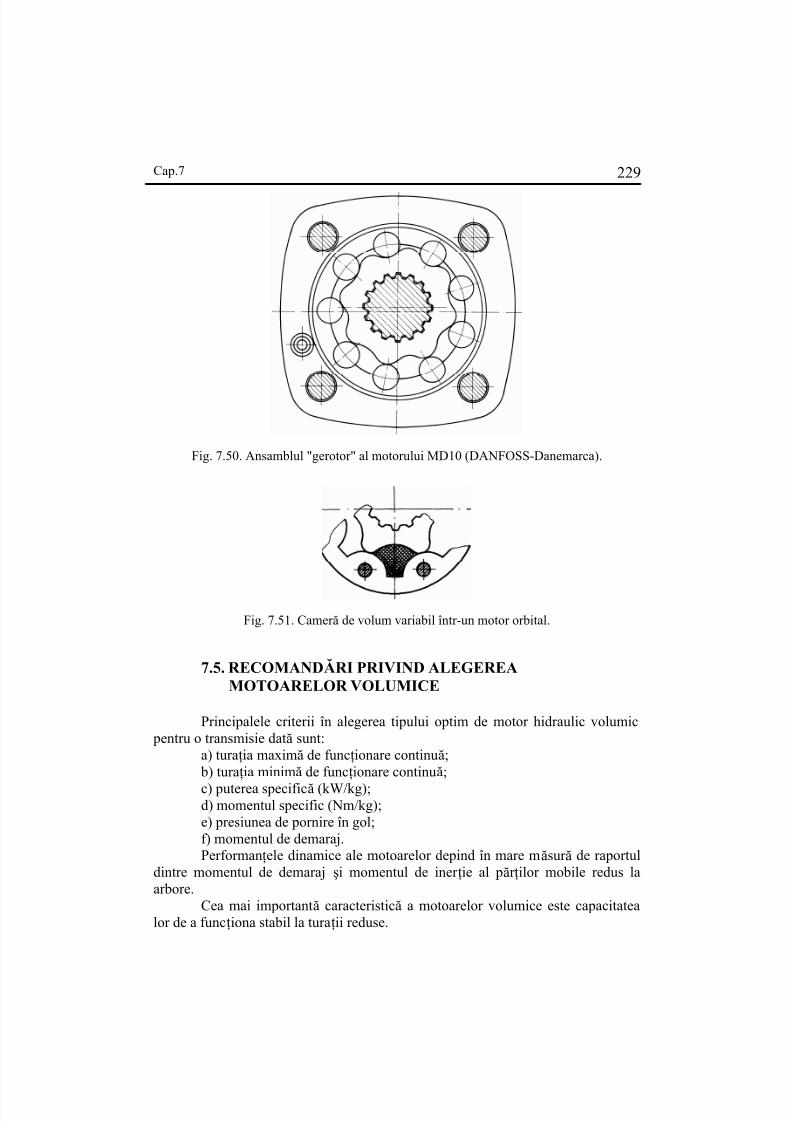
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 218/627
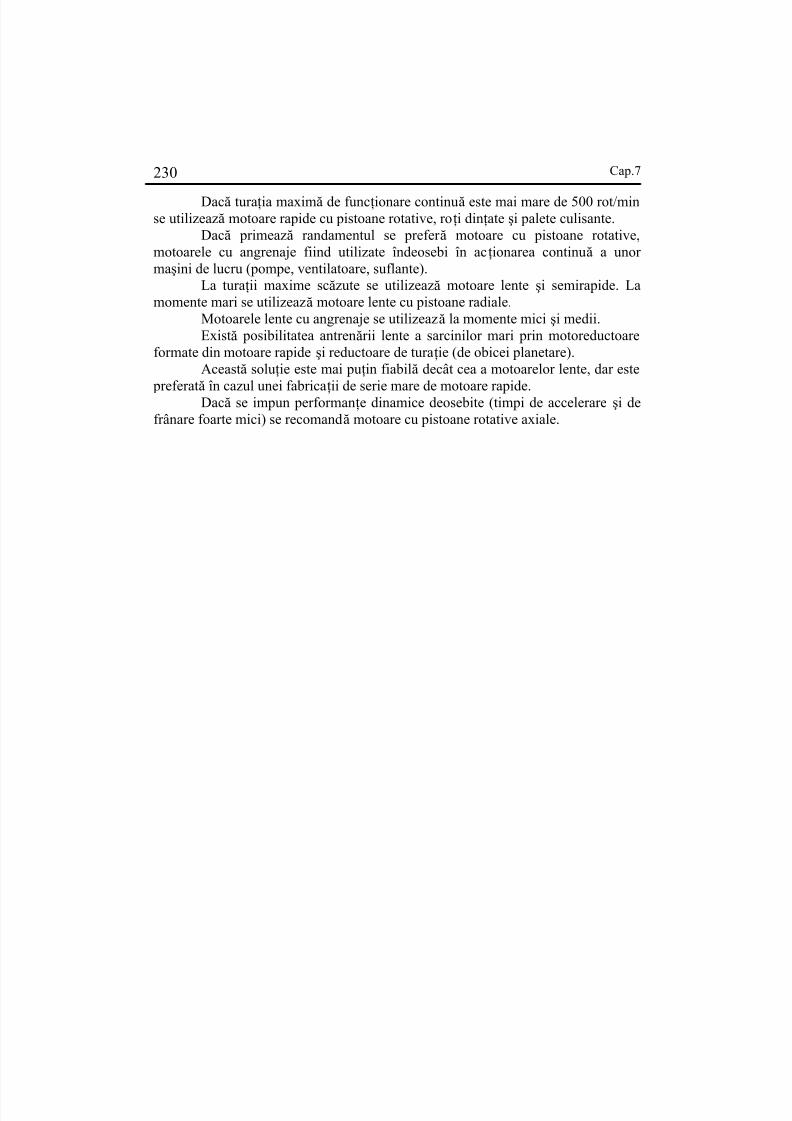
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 219/627
Cap.7230
Dacă turaţia maximă de funcţionare continuă este mai mare de 500 rot/minse utilizează motoare rapide cu pistoane rotative, roţi dinţate şi palete culisante.
Dacă primează randamentul se prefer ă motoare cu pistoane rotative,motoarele cu angrenaje fiind utilizate îndeosebi în acţionarea continuă a unor maşini de lucru (pompe, ventilatoare, suflante).
La turaţii maxime scăzute se utilizează motoare lente şi semirapide. Lamomente mari se utilizează motoare lente cu pistoane radiale.
Motoarele lente cu angrenaje se utilizează la momente mici şi medii.Există posibilitatea antrenării lente a sarcinilor mari prin motoreductoare
formate din motoare rapide şi reductoare de turaţie (de obicei planetare).Această soluţie este mai puţin fiabilă decât cea a motoarelor lente, dar este
preferată în cazul unei fabricaţii de serie mare de motoare rapide.Dacă se impun performanţe dinamice deosebite (timpi de accelerare şi defrânare foarte mici) se recomandă motoare cu pistoane rotative axiale.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 220/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-1
ACTIVITATEA 2CREAREA BAZEI DE CUNOŞTINŢE TEHNICE GENERALE
CONEXE DOMENIULUI SAHP
În cadrul acestei activităţi, colectivul Laboratorului de Acţionări Hidraulice şiPneumatice din U.P.B. a elaborat definiţiile principalelor cunoştinţe tehnice generalespecifice domeniului abordat. Informaţiile incluse în definiţii corespund pe fondstandardelor internaţionale, dar sunt mai detaliate şi corespund experienţei echipei decercetare.
Acumulator / accumulator / accumulateur / Recipient pentru stocarea fluidelor sub presiune ca rezervă de energie. Acumulator hidropneumatic / hydraulic accumulator / accumulateur oleo-
pneumatique / Aparat care acumulează energie într-un gaz sub presiune, prin umplerecu lichid şi o restituie prin golire. Acumulator hidropneumatic cu membrană / hydropneumatic bladder accumulator /accumulateur oleopneumatique a vessie / Acumulator hidropneumatic în care lichidul şi gazul sunt separate de o membranăelastică. Acumulator hidropneumatic cu piston / hydropneumatic piston accumulator /accumulateur oleopneumatique a piston separateur/ Acumulator hidropneumatic în care lichidul şi gazul sunt separate de un piston cuelemente de etanşare elastomerice.Aditiv / additive / additif /
Substanţă adăugată în cantitate mică unui fluid, în scopul amelior ării unei proprietăţifizice sau obţinerii unei noi proprietăţi, necesare unei aplicaţii. Aer antrenat / entrained air /aie entrainee/Bule de aer amestecate mecanic cu un lichid, avînd tendinţa de separare. Aer dizolvat / disolved air / air dissolu / Aer dispersat la nivel molecular într-un lichid, formând o singur ă fază. Aer saturat / saturated air / air saturee / Aer cu umiditate relativă 100% şi punct de rouă egal cu temperatura sa. Aer standard / standard air / air standard / Aer la temperatura de 200C, presiune absolută de 760 mm col. Hg şi umiditate relativăde 36%.
Agent higroscopic regenerativ / regenerative / regenerative /Substanţă higroscopică avînd calitatea de a-şi reface capacitatea de separe a apei.Alezajul cilindrului hidraulic (pneumatic) / cylinder bore / alesage du verin /Diametrul interior al corpului cilindrului hidraulic (pneumatic). Amortizare fluidă / fluid cushioning / ammortissment par fluide /Reducerea vitezei de impact prin laminarea unui fluid cu o rezistenţă hidraulică. amortizare mecanică / mechanical cushioning / ammortissment mécanique /Reducerea vitezei de impact printr-un element elastic. Amortizare viscoasă / viscous damping / amortissement visqueux / Amortizarea oscilaţiilor unui sistem mecanic prin mişcarea unei componente a acestuia în contact cu un lichid.
Amortizor de şocuri mecanice / cushion / amortisseur /Dispozitiv care asigur ă reducerea vitezei de impact dintre două corpuri solide în
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 221/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-2
mişcare relativă prin acumulare temporar ă de energie şi disiparea ulterioar ă a acesteia.Amortizor de şocuri pentru aparate de măsur ă a presiunii / gage damper (snubber)/amortisseur pour les apareils de mesure de la pression /Orificiu sau fantă cu geometrie fixă sau variabilă, amplasat pe racordul unui aparat demăsur ă a presiunii, în scopul protejării elementului sensibil al acestuia faţă de variaţiilerapide ale presiunii fluidului. Amortizor de zgomot hidraulic / hidraulic silencer / silencieux hydraulique /Dispozitiv care diminuează zgomotul produs de un lichid la trecerea prin componentecare îi modifică viteza ca mărime sau direcţie. Amortizor de zgomot pneumatic / pneumatic silencer / silencieux pneumatique /Dispozitiv destinat diminuării zgomotului produs prin evacuarea gazului din elementulde distribuţie al unui sistem de acţionare pneumatic. Amortizor hidraulic / hydraulic damper (dashpot) / amortisseur hydraulique /Dispozitiv de amortizare a oscilaţiilor sistemelor mecanice care disipează energiaacestora prin laminarea unui lichid prin orificii sau fante.
Amplificator / intensifier /amplificateur /Sistem de amplificare a unui semnal f ăr ă distorsionarea acestuia.Amplificator hidraulic / hydraulic amplifier / amplificateur hydraulique /Dispozitiv hidraulic care amplifică puterea de comandă: distribuitor cu sertar cuacoperire negativă, critică sau pozitivă, potenţiometru hidraulic dublu cu ajutaje şipaletă, injector rotativ etc. Amplificator cu refulare în impulsuri / single shot intensifier / amplificateur avecimpulsions / Amplificator de presiune cu refulare în impulsuri.Amplificator de presiune / pressure amplifier / multiplicateur de pression /Echipament format dintr-un cilindru hidraulic cu dublu efect, comandat printr-un
distribuitor direcţional, care acţionează o pompă liniar ă cu distribuţie prin supape desens, realizând creşterea presiunii prin diferenţa dintre ariile pistoanelor celor douămaşini hidraulice. Amplificator de presiune cu dublu efect / double acting amplifier / multiplicateur adouble effet / Amplificator de presiune cu refulare periodică. Amplificator de presiune cu simplu efect / single acting amplifier / multiplicateur asimple effet / Amplificator de presiune cu refulare intermitentă.Aparat director / guide vane / directrice /Organ de reglare a debitului turbinelor cu reacţiune (Francis, Kaplan, Bulb) format din
profile hidrodinamice rotite sincron de doi cilindri hidraulici prin intermediul unui inelghidat radial şi axial. Aparate de distribuţie şi reglare / valve and control assemblies / appareils dedistribution et de regulation / Aparate care alimentează motoarele cu fluid sub presiune şi reglează parametriifuncţionali ai acestora Apă dizolvată / dissolved water / l eau dissolu / Apă dispersată la nivel molecular într-un lichid, formând o singur ă fază. Apă liber ă / free water / l eau libre / Apă aflată sub formă de picături într-un recipient cu un fluid şi care tinde să seacumuleze la baza sau la vârful recipientului în funcţie de greutatea specifică relativă a
fluidului. Arbore / rotating shaft / arbre tournant /
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 222/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-3
Piesă cilindrică în mişcare de rotaţie, care transmite un moment între douăcomponente mecanice. Aria tijei cilindrului / piston rod area / section de la tige du piston / Aria secţiunii transversale a tijei pistonului. Aria utilă a pistonului / effective piston area / surface utile du piston /
Aria pe care acţionează presiunea fluidului pentru a realiza for ţa de acţionare. Bloc hidraulic / manifold block / bloc collecteur /Corp care realizează racordarea a două sau mai multe elemente hidraulice princanalizaţii interioare şi racordarea acestora la circuitele adiacente prin orificiiexterioare. Blocare hidraulică / sticking / collage / Blocarea unui piston datorată creşterii for ţei de frecare prin repartiţia asimetrică apresiunii în spaţiul inelar dintre piston şi cilindru. Cale (canal) / way (flow paths) / voie (canal) /Spaţiu tubular prin care fluidul circulă în interiorul unui element de acţionare sau al unui
bloc hidraulic. Capacitate (cilindree) efectivă <V e> / effective displacement / cylindree effective /Raportul dintre debitul volumic real de lichid care parcurge o maşină hidraulicăvolumică şi viteza de rotaţie a arborelui acesteia. Capacitate (cilindree) teoretică <V t > /theoretical displacement /cylindree théorétique /Volumul teoretic de lichid care parcurge o maşină hidraulică volumică la o rotaţiecompletă a arborelui său sub diferenţă de presiune nulă între racorduri, în absenţacavitaţiei. Capacitate de aerare / breathing capacity / capacitee d’aeration /Debitul specific de aer antrenat de un jet de lichid.Capacitate de stocare a lichidului / fluid capacity / capacitee de fluide /
Volumul de lichid maxim care poate fi stocat într-un recipient.Capacitatea cilindrului / cylinder capacity / cylindree /Volumul de lichid care poate fi dislocat de pistonul unui cilindru la o cursă completă;pentru cilindrii cu dublă acţiune, capacitatea corespunde deplasării pistonului în ambeledirecţii. Capacitatea cilindrului la extensie / extending cylinder capacity / capacite du verin al’extension /Volumul de lichid necesar pentru ieşirea completă a tijei pistonului din cilindru. Capacitatea cilindrului la retragere / retracting cylinder capacity / cylindree ducylinder aux rappel /Volumul de lichid necesar pentru retragerea completă a tijei pistonului în cilindru.
Capacul cilindrului / cylinder head /tete du verin /Piesă de închidere a cilindrului care acoper ă aria cuprinsă între alezajul culindrului şitija pistonului. Caracteristica regulatorului de debit / flow characteristic curve / courbecaracteristique d ecoulement /Relaţia dintre debitul furnizat motorului hidraulic de regulator şi presiunea din racordulde admisie al motorului.Cartuş filtrant / filter cartridge / cartouche de filtre /Element amovibil de filtrare realizat din ţesătur ă metalică sau textilă, hârtie, ceramică poroasă, particule de bronz sinterizat şi alte materiale poroase. Cavitaţie / cavitation / cavitation /
Fenomen distructiv generat de scăderea excesivă a presiunii într-un lichid.Cădere de presiune < Δ p> / pressure drop / chute de pression /
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 223/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-4
Diferenţa dintre presiunile măsurate simultan în două puncte ale unui circuit de fluid.Cilindree de comandă <V cd > / driving displacement / cylindrée de commande /Volumul de lichid necesar pentru comutarea stării unei componente de sistem hidraulicsau pneumatic.Cilindree geometrică (volum geometric) <V g > / geometric displacement / cylindree
géométrique / Suma volumelor camerelor active formate între piesele în mişcarerelativă ale unei pompe sau ale unui motor; în cazul pompelor şi motoarelor reglabile,cilindreea geometrică se calculează pentru volumul maxim al camerelor active, pe bazadimensiunilor nominale ale pieselor care formează camerele active, f ăr ă a se ţineseama de tolerenţe sau deformaţii.Cilindri hidraulici dispuşi în tandem / tandem cylinder / vérin tandem / Element de execuţie compus, alcătuit din doi cilindri hidraulici ale căror pistoane suntamplasate simetric pe aceeaşi tijă în scopul obţinerii unei for ţe egale cu suma for ţelor realizate pe fiecare piston şi acţionării unei sarcini amplasate între pistoane. Cilindru cu frânare la cap de cursă / cushioned cylinder / verin a amortisseur de fins
de course / Cilindru cu sistem de reducere a vitezei la capătul cursei. Cilindru cu membrană (camer ă cu membrană) / diaphragm cylinder / vérin àdiaphragme / Cilindru în care for ţa utilă se obţine prin acţiunea fluidului asupra uneimembrane elastice. Cilindru cu piston de tip plunjer / plunger (ram) cylinder / verin type plunger /Cilindru la care pistonul are acelaşi diametru cu tija. Cilindru cu piston rotitor / rotating cylinder / verin a tige rotative /Cilindru al cărui piston se pot roti în raport cu corpul.Cilindru cu poziţii multiple / multi-position cylinder / vérin multiposition /Element de execuţie compus, constituit din două sau mai multe pistoane montate pe
aceeaşi tijă care se deplasează în interiorul aceluiaşi corp divizat în mai multe cameredistincte cu racordare independentă, în scopul realizării mai multor poziţii de lucru. Cilindru cu readucere gravitaţională / gravity return cylinder / vérin à retour par gravité / Cilindru cu simplă acţiune la care readucerea se produce datorită greutăţiimecanismului acţionat. Cilindru cu tijă bilaterală / double rod cylinder / vérin à double tige transverante /Cilindru al cărui piston este amplasat pe o tijă care traversează ambele capace alecorpului.Cilindru cu tijă unilaterală / single rod cylinder / vérin à simple tige /Cilindru al cărui piston este amplasat pe o tijă care traversează un singur capac alcorpului.
Cilindru diferenţial / tie rod cylinder / verin differentiel /Cilindru cu tijă unilaterală al cărui piston poate acţiona sarcina în ambele sensuri subacţiunea fluidului de lucru. Cilindru dublu / dual stroke cylinder / verin double /Combinaţie de doi cilindri coaxiali care asigur ă două mişcări succesive. Cilindru duplex / duplex cylinder / vérin duplex / Ansamblu constituit din doi cilindri cu racorduri independente, ale căror pistoaneacţionează aceeaşi tijă în scopul obţinerii a trei sau patru poziţii de lucru, conformcerinţelor mecanismului acţionat. Cilindru hidraulic / hydraulic cylinder / vérin /Motor hidraulic al cărui organ activ execută o mişcare liniar ă alternativă.
Cilindru hidraulic cu dublu efect / double acting cylinder / vérin à double effet /Cilindru hidraulic al cărui piston se deplasează în ambele sensuri sub acţiunea
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 224/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-5
lichidului de lucru. Cilindru hidraulic cu piston / piston cylinder / vérin à piston /Cilindru hidraulic a cărei for ţă utilă se obţine prin acţiunea lichidului asupra unui piston.Cilindru hidraulic cu simplu efect / simple acting cylinder / vérin à simple effet /Cilindru hidraulic la care organul de lucru se deplasează într-un singur sens subacţiunea lichidului de lucru, revenirea fiind asigurată de un resort sau de o masă. Cilindru hidraulic cu simplu efect / single acting hydraulic cylinder / vérin à simpleeffet / Cilindru hidraulic al cărui piston se deplasează într-un singur sens sub acţiuneapresiunii lichidului de lucru şi revine în poziţia iniţială sub acţiunea masei organuluiacţionat sau a unui resort. Cilindru reglabil / adjustable stroke cylinder / verin a course reglable /Cilindru prevăzut cu opritori reglabili la unul sau la ambele capete ale cursei pistonului.Cilindru rotativ / rotary actuator cylinder / verin rotatif /Cilindru cu piston plonjor de formă toroidală, adecvat acţionării vanelor cu obturator rotativ.
Cilindru telescopic / telescopic cylinder / vérin télescopique /Cilindru a cărui cursă totală rezultă prin însumarea deplasărilor unor pistoane tubularedispuse concentric şi acţionând secvenţial, începând cu pistonul de diametru maxim;poate fi cu simplu efect sau dublu efect. Circuit / circuit / circuit / sistem de transmitere a informaţiei sau energiei realizat princonectarea unor componente compatibile. Circuit de acţionare cu reglare pe ieşire / meter – out circuit / circuit de controle-sortie / Circuit de acţionare hidraulic sau pneumatic la care reglarea vitezei elementuluide execuţie se face printr-o rezistenţă variabilă amplasată pe racordul de evacuare. Circuit de acţionare cu reglare pe intrare / meter – in circuit / circuit de controle-entree / Circuit de acţionare hidraulic sau pneumatic la care reglarea vitezei
elementului de execuţie se face printr-o rezistenţă variabilă amplasată pe racordul deadmisie. Circuit de comandă secvenţial / sequence circuit / circuit de séquence / Sistem electric, hidraulic sau pneumatic care stabileşte ordinea de realizare a fazelor unui ciclu de acţionare. Circuit de fluid / circuit / circuit / sistem obţinut prin conectarea raţională a unor componente hidraulice sau pneumatice. Circuit de reglare a debitului / flow control circuit / circuit de réglage du débit /Sistem de reglare a vitezei unui motor prin reglarea debitului de fluid furnizat acestuiaconform unei referinţe externe. Circuit de reglare a presiunii / pressure control circuit / circuit de réglage de la
pression / Sistem de reglare a for ţei sau momentului unui motor prin reglarea presiuniifluidului de lucru furnizat acestuia. Circuit de reglare a vitezei / speed control circuit / circuit de réglage de la vitesse /Sistem de reglare a vitezei unui motor conform unei referinţe externe, prin reglareavolumică sau disipativă a debitului furnizat de pompă. Circuit de reglare disipativă a vitezei / meter – in circuit / régulation sur alimentation /Sistem de reglare disipativă a vitezei unui motor hidraulic sau pneumatic prin laminareadebitului furnizat acestuia de pompă sau compresor. Circuit de siguranţă / safety circuit / circuit de sécurité /Circuit care asigur ă evitarea funcţionării necontrolate şi protecţia la suprasarcină. Circuit de sincronizare / synchronising circuit / circuit de syncronisation /
Sistem de reglare automată a vitezei a două motoare hidraulice sau pneumatice pentrua realiza aceeaşi lege de mişcare.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 225/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 226/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 227/627
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 228/627
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 229/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-10
Durată de exploatare preconizată în care o componentă sau un sistem î şi menţineperformanţele nominale în condiţiile de lucru specificate; se poate exprima şi în termenistatistici ca probabilitate. Efect Coandă / Coanda effect / effet Coanda /Fenomenul de aderare a unui jet iniţial liber la un perete curb care nu-l înconjoar ăcomplet. Electromotor liniar / force motor / electromotoeur lineaire /Convertor electro-mecanic liniar utilizat în etajul de intrare ale servovalvelor electrohidraulice şi electropneumatice. Element (cartuş) filtrant / filter element / élément filtrant /Parte amovibilă a unui filtru care asigur ă reţinerea contaminanţilor solizi sau coloidali. Element de acţionare pilotat / pilot-operated element / élement piloté /Element de sistem de acţionare cu două sau mai multe etaje de amplificare în putere acomenzii; primul etaj se numeşte pilot. Element de execuţie hydraulic (pneumatic) / hydraulic (pneumatic) actuator /
actuateur hydraulique (pneumatique) /Maşină care transformă energia de presiune a unui lichid (gaz) în energie mecanică.Element de prindere / mounting element / élément de fixation / Element utilizat pentru montarea unei componente într-o instalaţie. Element de reglare a debitului / flow control valve / appareil de reglage du debit /Element care reglează debitul furnizat unui motor printr-o rezistenţă variabilă dispusă înserie sau în paralel cu acesta.Element de reglare hidraulic (pneumatic) / control valve / valve de commande / Aparat care reglează debitul, presiunea într-unul dintre racorduri sau diferenţa depresiune dintre racordurile unui motor hidraulic. Element de reglare hidraulic (pneumatic) / fluid control device / element de
commande a fluide /Element folosit pentru reglarea paramerilor funcţionali ai unui sistem prin laminareafluidului, prin divizarea debitului etc.Element de sistem de acţionare hidropneumatică / component / composant /Parte componentă a unui sistem de acţionare care serveşte la generarea, distribuţia,reglarea, transportul, condiţionarea sau transformarea energiei de presiune. Element logic AND (ŞI) / AND device /element logique AND /Element de circuit logic a cărui ieşire se află în starea logică 1 dacă şi numai dacătoate semnalele de intrare se află în starea logică 1. Emulsie / emulsion / emulsion /Dispersie omogenă a două lichide nemiscibile.
Emulsie de apă în ulei / water in oil emulsion / emulsion de l eau in huile /Dispersie de apă într-o fază continuă de ulei (lichid utilizat în presele hidraulice deforjă). Emulsie de ulei în apă / oil in water emulsion / emulsion de huile in l eau /Dispersie de ulei într-o fază continuă de apă (lichid utilizat în presele hidraulice deforjă). Etaj final / output stage / etage finale /Etajul final de amplificare al unei servovalve; uzual acesta este un distribuitor cu sertar cilindric şi acoperire critică. Etaj de amplificare / stage / etage d'amplification /Subansmblu al unei servovalve care include un amplificator de putere; servovalvele pot
avea două sau mai multe etaje de amplificare cu reacţii interne. Etanşarea tijei / rod gland / press-garniture /
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 230/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-11
Element elastomeric de etanşare a tijei unui cilindru.Exhaustor / air bleeder / aspirateur d air /Ventilator utilizat pentru evacuarea aerului dintr-o incintă.Factor de amplificare / gain / amplification /Raportul dintre amplitudinea semnalului de ieşire şi cea a semnalului de intrare aplicatunui amplificator analogic. Factor de amplificare în presiune / pressure gain / amplification en pression /Raportul între presiunea de ieşire şi cea de intrare a unui amplificator de presiune. Factor de filtrare < βu > / filtration ratio / facteur de filtration /Raportul dintre numărul de particule mai mari de o anumită dimensiune caracteristică(μm) prezente în lichidul nefiltrat şi numărul de particule mai mari decît aceeaşidimensiune (μm) decelabile în fluidul filtrat. Filtru – cartuş / spin-on filter / filtre cartouche /Filtru amovibil de joasă presiune realizat sub formă de cilindru cu renuri, intercalat încircuit printr-un niplu filetat amplasat pe traseul dintre pompă şi motorul hidraulic; este
larg utilizat în circuitele auxiliare de condiţionare a uleiului şi în circuitele de ungere alemotoarelor cu ardere internă. Filtru / filter / filtre /Element care reţine impurităţile solide şi poluanţii insolubili dintr-un fluid. Filtru cu sistem de purjare / filter with water trap / filtre avec purgeur /Filtru prevăzut cu sistem de evacuare periodică a apei condensate.Filtru de rezervă / by-pass (reserve) filter / filtre de reserve /Filtru amplasat în paralel cu filtrul de serviciu, intrînd în funcţiune la atingerea uneianumite căderi de presiune pe filtrul de serviciu. Filtru hidraulic / hydraulic filter / filtre hydraulique /Filtru care reţine impurităţile solide şi poluanţii coloidali incluşi în lichidul de lucru.
Filtru intermediar / afterfilter / post filtre /Filtru amplasat după uscătorul de aer comprimat în scopul protejării echipamentuluisituat în aval faţă de particulele solide sicative. Filtru magnetic / magnetic filter / filtre magnétique / Filtru care reţine poluanţii cu ajutorul cîmpului magnetic produs de rondele de ferităamplasate pe un suport nemagnetic. Filtru metalic grosier / strainer filter / filtre de toile metalique tissee /Filtru realizat din plasă de sârmă din alamă sau oţel inoxidabil, destinat reţineriiimpurităţilor cu diametrul mediu de ordinul a 50 micrometri. Filtru pneumatic / air filter / filtre à air /Filtru care reţine inpurităţile solide şi apa din aerul comprimat.
Fineţea nominală de filtrare < δ n > / rated filtering accuracy / finess nominale defiltration / Mărimea convenţională a particulelor conţinute de lichidul de lucru carepermite funcţionarea continuă a unui echipament în condiţii stabilite prin documentaţiatehnică.Fluid / fluid / fluide /Lichid, gaz sau combinaţii ale acestora. Fluid anticoroziv / anticorrosive fluid / fluide anticorrosive /Fluid care conţine inhibitori de coroziune pentru metale. Fluid apos / aqueous fluid / fluide aqueuse /Lichid funcţional polifazic rezistent la foc (neinflamabil) datorită prezenţei apei.Fluid hidraulic (funcţional) / hydraulic fluid / fluide hydraulique /
Lichid complex utilizat ca mediu de transmitere în sistemele de acţionare hidraulice; înalicaţiile industriale se utilizează hidrocarburi aditivate, soluţii apoase sau sintetice.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 231/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-12
Fluid Newtonian / Newtonian fluid / fluide Newtoniene /Fluid a cărui vâscozitate este independentă de eforturile tangenţiale. Fluid pneumatic / pneumatic fluid / fluide pneumatique /Fluid gazos utilizabil într-un sistem de acţionaare pneumatică. Fluid rezistent la foc / fire resistant fluid / fluide resistant a l allumage /
Fluid care se aprinde la o temperatur ă ridicată şi are o capacitate redusă de propagarea flăcării. Fluid sintetic / synthetic fluid / fluide de synthèse /Fluid hidraulic obţinut prin sinteză şi nu prin extracţie sau rafinare; poate conţine aditivicare îi confer ă calităţi lubrifiante la tempeaturi ridicate sau rezistenţă la foc. For ţa de blocare <F f > / fixing force / force de fixation /For ţa necesar ă pentru împiedicarea mişcării necontrolate a sarcinii sistemului deacţionare. For ţa de comandă < F cd > / driving force / force de comande / For ţa necesar ă pentru realizarea unei comenzi.
For ţa de conectare < F c > / connecting force / force de connexion / For ţa necesar ă la intrarea în elementul de comandă al unui sistem pentru punerea înfuncţiune. For ţa de demaraj < F d > / starting up force / force de démarrage /For ţa necesar ă pentru scoaterea din starea de repaus a păr ţii mobile a unui sistem deacţionare aflat sub sarcină. For ţa de poziţionare < F p > / positioning force / force de positionnement / For ţa necesar ă unui element de execuţie liniar pentru atingerea unei anumite poziţii.For ţa de reglare < F r > / controlling force / force de réglage / For ţa necesar ă pentru comanda unui element de reglare. For ţa nominală < F n > / nominal force / force nominale /
For ţa furnizată de un element de execuţie în regim nominal. For ţă teoretică a cilindrului / theoretical cylinder force / force theorique du verin /For ţa calculată prin înmulţirea presiunii cu aria efectivă a pistonului, neglijând frecarea; în cazul cilindrilor cu dublă acţiune, for ţa se calculează pentru ambele direcţii demişcare ale pistonului. Frecare fluidă / fluid friction / frottement fluide /For ţă de frecare datorată vâscozităţii unui fluid. Frecvenţa de conectare< f c > / connecting frequency / fréquence de connexion / Numărul ciclurilor de conectare – deconectare în unitatea de timp. Frecvenţă de recirculare / re-cycling freqency / fréquence de recirculation / Numărul ciclurilor de trecere a întregului volum de lichid de lucru printr-un sistem de
acţionare hidraulică, în unitatea de timp. Grad de umplere < χ > / degree of fullness / degré de remplissage / Pentru lichide: raportul dintre cilindreea efectivă şi cilindreea geometrică; pentru gaze:raportul dintre cilindreea efectivă la presiunea de intrare şi cilindreea geometrică.Gripare hidraulică / hydraulic lock / blocage hydraulique /Imobilizarea unui sertar cilindric circular datorată repartiţiei asimetrice a presiunii pesuparafaţa laterală, generată de erori de execuţie. Grup de condiţionare a lichidelor funcţionale / conditioning unit / groupe deconditionnement /Echipament de preparare a lichidului destinat unui sistem de acţionare hidraulică,format dintr-un rezervor, o pompă volumică, o supapă de limitare a presiunii, un sistem
de termostatare, un sistem de eliminare a aerului prin vidare, un set de filtre de fineţecrescătoare şi un sistem de supraveghere a fineţei de filtrare.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 232/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-13
Grup de motoare / driving assemblies (motors) / groupes moteurs / Ansamblu de motoare hidraulice rotative care acţionează aceeaşi sarcină în paralelsau prin intermediul unor angrenaje (uzual – planetare). Grup de pompare / driven assemblies (pumps) / generateur de fluide sous pression /Subansamblu format uzual dintr-o pompă hidraulică antrenată de un motor electricprintr-un cuplaj (elastic) ; pompa mai poate fi acţionată de un motor hidraulic,pneumatic, de o turbină eoliană etc.Grup de preparare a aerului comprimat / air conditioner / conditionneur d’air /Subsistem de preparare a aerului comprimat destinat acţionării pneumatice formatdintr-un filtru cu separator de apă, o supapă reducătoare de presiune şi un sistem deungere. Grup de ulei sub presiune (GUP) / constant pressure supply system / centralehydraulique /Subsistem de preparare a lichidului sub presiune necesar unui sistem hidraulic deacţionare, comandă sau reglare automată ; este format dintr-un rezervor cu suprafaţă
liber ă, unul sau mai multe grupuri de pompare, filtre, supape de limitare a presiunii,acumulatoare hidropneumatice, schimbătoare de căldur ă, încălzitoare, blocurihidraulice, distribuitoare direcţionale, distribuitoare propor ţionale, servovalve etc. Histerezis / hysteresis / hysteresis /Fenomen ireversibil care constă în faptul că succesiunea stărilor unui sistem,determinată de variaţia unui parametru, difer ă de succesiunea stărilor determinate devariaţia în sens contrar a aceluiaşi parametru. Histerezisul servovalvei / servovalve hysteresis /hysteresys de servovalve /Diferenţa între intensitatea curentului de comandă al servovalvei necesar pentru aproduce acelaşi debit în cursul unui ciclu complet de variaţie a curentului, atunci cândservovalva funcţionează la o frecvenţă care nu generează efecte dinamice
semnificative. Inhibitor / inhibitor / inhibiteur /Substanţă care adăugată în cantitate mică unui fluid, împiedică sau modifică unelereacţii chimice precum coroziunea sau oxidarea. Interfaţă / interface device / interface /Componentă care transformă o informaţie cu o anumită structur ă într-o informaţie cualtă structur ă. Înălţime de frecare / friction head / chute de frottement / înălţimea necesar ă pentru învingerea frecării dintre particulele de fluid în mişcare şisuprafaţa interioar ă a căii de curgere. Înălţimea de frecare depinde de viteza decurgere, tipul, diametrul şi particularităţile căii de curgere şi ale conexiunilor, precum şi
de caracteristicile fluidului. Înălţime statică /static head / hauteur statique / Înălţimea coloanei de fluid situată deasupra unui anumit punct. Incălzitor / heater / rechauffeur / Aparat care emite căldur ă, mărind temperatura fluidelor sau corpurilor solide dinapropierea sa. Jet / jet / jet /Fluidul care curge printr-un orificiu. Jet ataşat / attache a jet / jet attaché /Jet care ader ă la un perete prin efect Coandă. Jet finit / confined jet / jet confiné /
Jet a cărui curgere este influenţată de pereţii care îl înconjoar ă. Jet liber / free jet / jet libre /
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 233/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-14
Jet care se scurge în afara unor pereţi, sau f ăr ă contact direct cu pereţii care îl înconjoar ă. Jet principal / main (power) jet / jet principal /Jet laminar sau turbulent care parcurge canalul de alimentare a unui element fluidic(f ăr ă piese mobile). Legea lui Bernoulli / Bernoulli s law / loi de Bernoulli /Energia specifică a unui lichid, corespunzătoare presiunii şi vitezei, se menţineconstantă pe o linie de curent în absenţa frecărilor sau aportului de energie. Legea lui Boyle / Boyle s law / loi de Boyles /Presiunea absolută a unei mase date de gaz variază invers propor ţional cu volumulacesteia, dacă temperatura r ămâne constantă. Legea lui Charle / Charle s Law / loi du Charle /Volumul unei mase date de gaz variază direct propor ţional cu temperatura absolută,dacă presiunea acesteia r ămâne constantă. Dispozitive logice fluidice / fluid logic devices / composantes fluidiques /
Dispozitive de prelucrare a semnalelor analogice sau digitale care utilizează jeturi defluid, similare dispozitivelor electronice.Logică fluidică / digital fludics / logique fluidique /Sisteme de calcul logic cu fluide care realizează transmiterea şi prelucrareainformaţiilor numerice cu ajutorul componentelor f ăr ă piese mobile. Ungător / lubricator / lubrificateur /Dispozitiv prin care se introduce lubrifiant în aerul comprimat destinat acţionărilor pneumatice. Macara hidraulică / hydraulic crane / grue hydraulique /Macara echipată cu mecanisme hidraulice de rotaţie, translaţie, blocare sub sarcină,stabilizare antiruliu şi antitangaj, ridicarea şi coborîrea sarcinii, frînarea acesteia,
limitarea automată a sarcinii etc.Manometru / pressure gage / manometre / Aparat de măsur ă a presiunii dintr-un sistem la care este conectat. Debitmetru / flowmeter / debitmetre / Aparat de măsur ă a debitului volumic sau masic al unui fluid printr-o conductă sau uncanal.Fluid de lucru / working medium / fluid de travail /Fluid folosit pentru transmiterea energiei sau informaţiei.Miscibilitatea fluidelor / fluid miscibility / miscibilite des fluides /Capacitatea fluidelor de a fi amestecate în orice propor ţii f ăr ă separare de faze. Modul de compresiune / bulk modulus / module de compression /
Măsur ă a rezistenţei la compresiune a unui fluid; mărimea inversă se numeşte „modulde elasticitate”.Moment de comandă < M cd > / driving moment / couple de commande /Momentul necesar efectuării unei comenzi. Moment de conectare < M c > / connecting moment / couple de connexion /Moment aplicat la intrarea elementului de comandă al echipamentului sau instalaţiei.Moment de demarare < M d > / starting up moment / couple de démarrage /Momentul necesar scoaterii din starea de repaus a pieselor rotitoare aflate sub sarcină.Moment de reglare <M r > / controlling moment / couple de réglage /Momentul necesar efectuării reglării parametrilor funcţionali ai unui sistem. Moment nominal < M n> / nominal moment / couple nominal /
Momentul dezvoltat de un motor în regim nominal. Motor alternativ / reciprocating motor / moteur alternatif /
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 234/627
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 235/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-16
Motor hidraulic de capacitate fixă / fixed displacement hydraulic motor / moteur hydraulic volumetrique / Motor hidraulic volumic a cărui capacitate nu poate fi modificată (prin construcţie).Motor liniar autocomandat / self-controled linear motor / moteur linéaire avecautocommande / Motor liniar hidraulic sau pneumatic cu mişcare alternativă periodică, comandat printr-un distribuitor direcţional inversor activat la cap de cursă pe cale mecanică sauelectrică.Motor multiplu / multiple motor / moteur multiple / Ansamblu de două sau mai multe motoare funcţionând în paralel, acţionând acelaşiarbore. Motor pneumatic rotativ / air rotary motor / moteur d air rotatif /Maşină care transformă energia de presiune a unui gaz în lucru mecanic; organul deieşire poate realiza o mişcare de rotaţie completă sau par ţială. Motor pneumatic volumic de capacitate fixă / fixed capacity pneumatic motor /
moteur pneumatique a cylindree fixe /Motor pneumatic de capacitate fixă, stabilită prin construcţie. Motor pneumatic volumic de capacitate variabilă / variable capacity pneumaticmotor / moteur pneumatique a cylindree variable /Motor pneumatic a cărui capacitate se reglează prin modificarea volumului maxim alcamerelor dintre elementele active; este utilizat în sistemele de reglare automată, fiindprevăzut cu tahogenerator. Motor bidirecţional / over centre motor / moteur réversible /Motor la care sensul de rotaţie a arborelui poate fi inversat prin inversarea sensului decurgere a fluidului prin racordurile energetice. Motor rotativ / rotary motor / moteur rotatif /
Motor la care arborele are o mişcare de rotaţie continuă. Motor hidraulic (pneumatic) unidirecţional / uni-flow motor / moteur unidirectionnel /Motor hidraulic sau pneumatic cu sens de rotaţie impus prin construcţie. Motor volumic / displacement motor / moteur volumétrique /Maşină care transformă energia de presiune a fluidului de lucru în energie mecanică. Multiplicator de presiune / pressure intensifier / multiplicateur de pression /Sistem format din două maşini volumice care realizează multiplicarea presiunii unuifluid prin transferul energiei dintr-un circuit de joasă presiune (primar) intr-un circuit de înaltă presiune (secundar). Neuniformitatea debitului < δ Q > / flow non-uniformity / irrégularité du débit /Raportul diferenţei dintre debitul maxim şi minim şi valoarea medie a debitului obţinută
prin integrarea pe o perioadă de refulare.Neuniformitatea momentului < δ M > / moment non-uniformity / irrégularité du couple/ Raportul diferenţei dintre valoarea maximă şi minimă a momentului şi valoarea mediea momentului obţinută prin integrarea pe o perioadă de admisie.Neuniformitatea presiunii < δ p > / pressure non-uniformity / irrégularité de la pression/Raportul diferenţei dintre presiunea instantanee maximă şi cea minimă şi valoareamedie a presiunii obţinută prin integrare în funcţie de timp pe o perioadă defuncţionare.Neuniformitatea turaţiei < δ n > / speed non-uniformity / irregularite du nombre detours / Raportul diferenţei dintre valorile turaţiei maxime şi minime şi valoarea medie a
turaţiei obţinută prin integrarea pe o perioadă de admisie.Niplu / niple / nipple /
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 236/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-17
Element de racordare a două conducte. Numărul Reynolds / Reynolds number / nombre Reynolds /Raportul dintre for ţele de iner ţie şi for ţele de vâscozitate specifice unei mase de fluidaflată în curgere permanentă; pentru conducte circulare drepte, trecerea de la regimullaminar la cel turbulent se produce în domeniul Re = 2000 ÷ 4000. Obturator (sertar, ventil) / valving element / élément mobile / Piesă mobilă dintr-un aparat care asigur ă funcţia de distribuţie, comandă sau reglare. Orificii de legătur ă / connecting ports / oriffices de connexion /Orificii de intrare şi ieşire a fluidului de lucru prevăzute în elementele hidraulice şipneumatice.Orificiu de alimentare / supply port / orifice d´alimentation /Orificiu prin care fluidul pătrunde într-un element de acţionare.Orificiu de comandă / control port / orifice de commande /Orificiu prin care fluidul de comandă pătrunde într-un element de comandă, reglare sauprotecţie.
Orificiu de drenaj / drain port / orifice de fuite /Orificiu prin care pierderile de debit (scurgerile interne) sunt evacuate la rezervor .orificiu de purjare / air exhaust port / orifice d´ évacuation /Orificiu prin care este evacuat în atmosfer ă aerul utilizat în elementele de execuţiepneumatice.Orificiu de evacuare / output port / orifice de sortie /Orificiu prin care se evacuează lichidul din elementul de acţionare. Orificiu de retur / return port / orifice de retour /Orificiu prin care fluidul evacuat din distribuitor revine în rezervor. Placă de distribuţie / valve plate / glace de distribution /Placă de distribuţie pentru maşini volumice cu pistoane rotative.
Pierdere de presiune < Δ p p > / pressure loss / perte de pression /Reducerea presiunii în sensul curgerii, între două puncte ale unui circuit, datorităpierderilor corespunzătoare viscozităţii, rugozităţii frontierelor solide, variaţiei vitezei camărime şi direcţie etc. Pierdere de putere < ΔP > / power loss / perte de puissance /Diferenţa dintre puterile specifice ale curentului de fluid în doua puncte ale unui circuit,ca urmare a transformărilor şi schimburilor energetice. Îmbinare de conducte / Pipeline junction / raccordement de conduites /Subansamblu prin care se realizează racordarea conductelor între ele sau cu alteelemente de circuit; ca piese de îmbinare se utilizează flanşe, bucşe plane, cilindrice,conice sau sferice strânse cu piuliţe olandeze sau elemente compuse din metal şi
elastomeri.Racord filetat / threated niple /raccord visse / Îmbinare a două conducte printr-un niplu, o bucşă sferică sau conică şi o piuliţăolandeză. Pneumatica / pneumatics / pneumatique /Ştiinţa care se ocupă cu studiul legilor care descriu curgerea aerului sub presiune. Pompă alternativă / reciprocating pump / pompe alternative /Pompă cu unul sau mai multe pistoane acţionate printr-un excentric sau un arbore cotit,la care distribuţia se realizează prin supape de sens. Pistoanele pot fi în contact directcu lichidul pompat sau pot realiza aceaşi funcţie prin intermediul unei diafragme care lesepar ă de lichidele agresive.
Pompă bidirecţională / reversible pump / pompe bidirectionelle /Pompă la care sensul de curgere a fluidului aspirat şi refulat poate fi inversat prin

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 237/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-18
schimbarea sensului de rotaţie a arborelui de antrenare. Pompă centrifugă / rotodynamic pump / pompe centrifuge / Pompă care măreşte energia cinetică şi de presiune a lichidului aspirat pe seamafor ţelor centrifuge generate de rotaţia continuă a unui rotor paletat.Pompă cu angrenaj (cu roţi dinţate) / gear pump / pompe à engrenages /
Pompă volumică rotativă la care camerele de volum variabil se realizează între douăsau mai multe roţi dinţate aflate în angrenare. Pompă cu angrenaj exterior / external gear pump / pompe à engrenages extériuers /Pompă cu angrenaj la care dantura roţilor este exterioar ă. Pompă cu angrenaj interior / internal gear pump / pompe à engrenages intériuers /Pompă cu angrenaj la care dantura uneia dintre roţi este interioar ă. Pompă cu cilindree fixă (constantă) / fixed displacement pump / pompe à cylindréefixe / Pompă la care volumul de fluid deplasat la o rotaţie completă a arborelui nupoate fi modificat. Pompă cu cilindree variabilă / variable displacement pump / pompe à cylindrée
variable / Pompă la care volumul de fluid deplasat în cursul unei rotaţii complete aarborelui poate fi variat în timpul funcţionării prin intermediul unui organ de reglare. Pompă cu dublă acţiune / double acting pump / pompe à double effet /Pompă care realizează două aspiraţii şi două refulări la o rotaţie completă a arboreluide antrenare. Pompă cu palete / vane pump / pompe à palettes coulissante /Pompă rotativă la care camerele de volum variabil se realizează între palete radialesau par ţial înclinate care culisează într-un rotor cilindric sprijinindu-se pe o camă circular ă sau eliptică. Pompă cu palete culisante echilibrată / balanced vane pump / pompe à paletteséchilibribrée /
Pompă cu palete la care for ţele de presiune radiale care acţionează asupra rotoruluisunt egale şi opuse datorită formei simetrice a camei (eliptică). Pompă cu palete neechilibrată / unbalanced vane pump / pompe à palettes nonéchilibribrée /Pompă cu palete la care for ţele radiale care acţionează asupra rotorului nu suntcompensate deoarece cama circular ă care determină pătrunderea paletelor în rotor este amplasată excentric. Pompă cu pistoane rotative / piston pump / pompe à pistons /Pompă alternativă la care organele de lucru sunt pistoane amplasate într-un bloc decilindri antrenat de arbore. Pompă cu pistoane axiale / axial piston pump / pompe à pistons axiaux /
Pompă cu pistoane rotative ale căror axe sunt amplasate pe suprafaţa laterală a unuicilindru sau a unui con.Pompă cu pistoane axiale cu bloc înclinat / bent axis piston pump / pompe àpistons axiaux à axe brisé /Pompă cu pistoane axiale la care axa blocului cilindrilor este înclinată faţă de axaarborelui de antrenare. Pompă cu pistoane axiale cu disc înclinat / swash plate piston pump / pompe àpistons axiaux a plateau incline /Pompă cu pistoane axiale la care axa blocului cilindrilor este identică cu axa arborelui,mişcarea rectilinie alterntivă a pistoanelor fiind provocată de un disc înclinat faţă de axaarborelui.
Pompă cu pistoane în linie / in-line piston pump / pompe à pistons en ligne /Pompă cu mai multe pistoane cu axe paralele între ele şi situate într-un plan
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 238/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 239/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-20
Pompă-motor cu cilindree variabilă / variable capacity pump-motor / pompe-moteur à cylindrée variable / Pompă-motor la care volumul de fluid deplasat la un ciclu func ţional poate fi variatprintr-un dispozitiv adecvat. Priză de putere / power take – off / prise de puissance /
Arbore disponibil într-o transmisie mecanică pentru antrenarea unei pompe sau a unuiorgan de lucru. Poziţie de descărcare completă (la variatoare hidraulice) / fully by-passing position/ position vidange complète /Poziţie neutr ă, în care toate orificiile energetice (P, A, B) sunt legate la bazin (T). Poziţie de montare / mounting position / position de montage /Poziţie a unui echipament care îi asigur ă capacitatea de funcţionare. Poziţie de repaus (la variatoare hidraulice) / normal position / position de repos / Poziţia arborelui de ieşire după încetarea acţiunii for ţei de comandă sau a semnaluluide pilotare.
Poziţia „deschis” (la variatoare hidraulice) / open position / position ouverte / Poziţie a elementului de comandă în care racordul de alimentare este conectat laorificiul (orificiile) de ieşire (consumatori). Poziţia finală (la variatoare hidraulice) / actuated position / position finale /Poziţie extremă a elementului de comandă sub acţiunea for ţelor de comandă. Poziţie funcţională (la variatoare hidraulice) / valve element position / positionfonctionelle / Poziţia elementului de comandă care asigur ă funcţionarea normală a sistemului. Poziţie intermediar ă (la variatoare hidraulice)/ intermediate position / positionintermediaire /Orice poziţie între poziţia neutr ă şi cea finală.
Poziţia „închis” (la variatoare hidraulice) / closed position / position fermée / Poziţie a elementului de comandă în care racordul de intrare nu este conectat laorificiul de ieşire. Poziţia „liber” (la variatoare hidraulice) / free position / position libre / Poziţie a elementului de comandă pentru care pompa se află la cilindree nulă. Presă hidraulică manuală / manual hydraulic press / presse hydraulique a commandemanuelle /Sistem de acţionare hidraulic destinat amplificării for ţei aplicate manual pistonului uneipompe, bazat pe diferenţa dintre aria pistonului pompei şi aria pistonul cilindruluihidraulic.Presă hidraulică / hydraulic press / presse hydraulique /
Sistem de acţionare hidraulică destinat obţinerii unor for ţe mari necesare proceselor industriale. Valorile mari ale for ţelor se obţin cu ajutorul unor pompe de presiune înaltăcare alimentează cilindri hidraulici de mari dimensiuni.Presiune de aspiraţie <pa> / suction pressure / pression d’aspiration /Presiunea măsurată în imediata apropiere a orificiului de intrare al unei pompe.Presiune de comandă <pcd > / driving pressure / pression de commande /Presiunea în circuitul de comandă.Presiune de conectare <pc > / connecting pressure / pression de connexion /Presiunea de reglare necesar ă pentru conectarea echipamentului sau a instalaţiei.Presiune de distrugere <pdi > / failure pressure / pression de distruction /Presiunea statică la care echipamentul sau instalaţia se deteriorează şi pierde mediul
de lucru presiune de drenare <pdr > / draining pressure / pression de purge (fuite)/
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 240/627
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 241/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-22
Puterea necesar ă pentru punerea în funcţine a unui echipament sau a unei instalaţii. Putere de durata <P d > / lasting power / puissance de durèe /Puterea consumată de un echipament în regim de durată.Putere de ieşire <P 2 > / outlet power / puissance de sortie / Puterea produsă de echipament sau instalaţie. Putere de intrare <P 1> / inlet power / puissance d’entrèe /Puterea absorbită de echipament sau instalaţie. Putere de încercare <P î > / test power / puissance d’essai /Puterea consumată în regim de încercare. Putere de lucru <P l > / working power / puissance de travail /Puterea consumată de echipament în regim de lucru. Putere de reglare <P r > / controling power / puissance de règlage /Puterea consumată pentru reglarea echipamentului sau instalaţiei, în regim de lucru. Putere hidraulică <P h> / hydraulic power / puissance hydraulique / Derivata par ţială a energiei curentului de lichid în raport cu timpul.
Putere nominală <P n> / rated power / puissance nominale /Putere consumată de echipament în regim nominal. Putere pneumatică <P p> / pneumatic power / puissance pneumatique / Derivata par ţială sa energiei curentului de un gaz în raport cu timpul. Racord / fitting / raccord / Element destinat îmbinării etanşe a conductelor, între ele sau cu diverse componenteale sistemelor cu fluide sub presiune. Racord cu cot (cot) / elbow fitting / coude /Racord cu două căi ale căror axe formează un unghi între ele; uzual, acesta este de90o. Racord de purjare / exhaust port / orifice d’evacuation d’air /
Racord controlat printr-un robinet comandat manual în scopul evacuării aeruluinedizolvat din lichidul de lucru. Racord flexibil / hose / tuyau /Conductă flexibilă elastomerică, a cărei dimensiune nominală este diametrul interior. Racord flexibil armat / hose with steel layers/ flexible /Tub flexibil elastomeric armat cu împletitur ă de oţel inoxidabil, cu racorduri metalicedemontabile. Racord în cruce (cruce) / cross fitting / raccord en croix /Racord cu patru căi. Racord în T (teu) / tee fitting / raccord en té /Racord în formă de T, cu trei căi.
Racord în Y/”Y” fitting / raccord en Y /Racord în formă de Y, cu trei căi. Racord rapid / quick release coup link / raccord rapide / Dispozitiv care permite cuplarea şi decuplarea racordurilor flrxibile prin deplasareaaxială a unui manşon.Randamentul maşinii hidraulice / efficiency / rendement /Raportul dintre puterea de ieşire şi cea de intrare.Randament hidraulic <ηh> / hydraulic efficiency / rendement hydraulique / Componentă a randamentului unei maşini hidraulice corespunzătoare pierderilor depresiune necesare curgerii lichidului prin maşină. Randament mecanic <ηm> / hydromechanical efficiency / rendement mècanique /
Componentă a randamentului unei maşini hidraulice care ţine seama de pierderile demoment sau for ţă prin frecări interne.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 242/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-23
Randament total <η> / total efficiency / rendement total / Raportul dintre puterea produsă şi puterea consumată de de maşina hidraulică. Randament volumic al pompei <ηv > / pump volumetric efficiency /rendementvolumetrique / Raportul dintre debitul volumic corespunzător unei presiuni din domeniul de exploatareşi debitul corespunzător presiunii minime din acelaşi domeniu. Randamentul mecanic al motorului hidraulic / hydromechanical efficiency /rendement mecanique /Raportul între momentul efectiv şi cel teoretic, corespunzător capacităţii şi căderii depresiune.Randamentul volumic al motorului hidraulic / volumetric hydraulic motor efficiency /rendement volumetrique /raportul dintre debitul volumic teoretic corespunzător capacităţii şi vitezei de rotaţiei şidebitului volumic consumat. Raport de amplificare / ratio of intensification / rapport d’amplification /
Raportul între presiunea secundar ă şi cea primar ă, sau între debitul primar şi celsecundar al unui amplificator.Răcitor / cooler / refoidisseur / (refrigerant)Echipament care elimină căldura acumulată în lichidul de lucru, evitândsupraâncălzirea acestuia.Răcitor intermediar / intercooler (aftercooler) / postrefrigerateur /Echipament care asigur ă r ăcirea unui gaz după comprimarea acestuia. Răspuns în frecvenţă / frequency response / reponse en frequance / Atenuarea amplitudinii mărimii de ieşire a unui sistem de reglare automată excitat laintrare cu un semnal de formă sinudoidală de frecvenţă variabilă şi amplitudineconstantă.
Reacţie mecanică / mechanical feed – back / retroaction mecanique /Legătur ă de reacţie mecanică în servomecanisme prin pîrghii, came, cabluri, lanţuri,roţi dinţate etc. Reducţie / reducer fitting / réduction / Racord cu două căi avînd orificii de diametre diferite. Sistem de eliminare a apei prin refrigerare / refrigerated / refrigeree /Sistem de eliminare a apei cu ajutorul unui compresor frigorific şi a unui schimbător decăldur ă. Regim ciclic stabilizat / cyclical stabilized regime / règime cyclique stabile / Regim în care parametrii funcţionali variază după legi periodice. Regim de durată <d> / lasting regime / règime de travail continuel /
Regim în care se realizează durata de funcţionare stabilită în documentaţia tehnică. Regim de exploatare / operating conditions / règime de service (d`exploatation) / Regim în care este posibilă utilizarea practică a echipamentului sau instalaţiei conformdocumentaţiei tehnice de execuţie. Regim de încercare <i> / test duty / règime d`essai / Totalitatea condiţiilor de lucru în care se fac încercările nedestructive aleechipamentului sau instalaţiei. Regim de lucru <L> / working conditions / règime travail / Totalitatea condiţiilor de funcţionare în care se utilizează efectiv echipamentul sauinstalaţia. Regim nestabilizat / non-stabilized working conditions / règime nonstabilizè /
Totalitatea condiţiilor de funcţionare în care parametrii funcţioali nu se stabilizează. Regim nominal <n> / nominal duty / règime nominal /

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 243/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-24
Regimul convenţional de referinţă pentru care echipamentul sau instalaţia au fostconstruite în vederea utilizării continueregim stabilizat / stabilized working conditions / règime stabilizè / Totalitatea condiţiilor de funcţionare în care parametrii principali nu variază sensibil. Reglare prin variaţia presiunii de comandă / control by application or release of
pressure / commande par application –ou par baisse de la pression /Sistem de reglare în buclă deschisă realizat prin variaţia presiunii aplicate unui elementde execuţie. Regulator automat al debitului (presiunii, puterii) pompei / pump governor system/ régulation sur pompe /Sistem automat care realizează reglarea debitului, presiunii sau puterii absorbite de opompă volumică Regulator de debit cu două căi (regulator de debit amplasat în serie) / two-wayflow control valve / régulateur de débit à deux voies /Regulator de debit la care supapa compensatoare este normal deschisă, surplusul de
debit fiind eliminat printr-un alt aparat (o supapă de siguranţă). Regulator de debit cu trei căi (regulator de debit amplasat în derivaţie) / three-wayflow control valve / régulateur de débit à trios voies /Regulator de debit la care supapa compensatoare este normal închisă, surplusul dedebit fiind deversat prin acesta la rezervor sau la un consumator secundar.Regulator de debit (viteză) / flow control valve / régulateur de débit / Aparat de reglare a debitului prin intermediul unui drosel şi a unei supapecompensatoare, care menţine constantă căderea de presiune pe drosel Regulator de temperatur ă / temperature controller / regulateur de temperature /Controler care menţine temperatura unui sistem la o valoare prescrisă. Regulator de temperatur ă / temperature controller / régulateur de temperature/
Sistem automat de reglare a temperaturii unui fluidRegulator de viteză / speed governor / regulateur de vitesse /Regulator de viteză şi putere pentru agregate energetice.Releu de debit / flow switch / fluxostat / Aparat care conţine un contact electric normal-deschis acţionat la atingerea unei valoriprereglate a debitului. Releu de presiune diferenţial / differential pressure swtich / contact à pressiondifférentielle / Aparat care conţine unul sau mai multe contacte electrice acţionate laatingerea unei valori prereglate a presiunii diferenţiale.Transmisie / drives / transmissions /Sistem de adaptare a caracteristicilor mecanice relativ rigide ale maşinilor de for ţă la
cerinţele variabile ale maşinilor de lucruRezervor / reservoirs / reservoirs /Element de stocare a unui lichid.Rezervor cu suprafaţă liber ă / reservoir open to atmosphere / reservoir a l’air libre Rezervor al cărui lichid este în contact cu atmosfera.Reţea hidraulică / pneumatică / pipe installation / installation de tuyautere/ Ansamblu de conducte destinate curgerii fluidului într-o acţionarehidrostatică/pneumostatică.Reyn / reyn / reyn /unitate de măsur ă pentru vâscozitate absolută în sistemul anglo-saxon; se exprimă înlb/in2.
Rezervor de aer / receiver / réservoir d´aire /Rezervor destinat stocării aerului sub presiune.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 244/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-25
Rezervor etanş / reservoir sealed / réservoir etanche /Rezervor închis, capabil să izoleze etanş un fluid de atmosfer ă.Rezervor hidraulic / hydraulic reservoir / reservoir hydraulique /Rezervor pentru depozitarea şi condiţionarea lichidului dintr-un sistem hidraulic. Rezervor presurizat / pressure sealed reservoir / reservoir sous pression /
rezervor închis etanş pentru depozitarea fluidelor sub presiune. Rezistenţă hidraulică variabilă (drosel) / throttle valve / regulateur de debit /Element de reglare hidraulic care introduce o cădere de presiune utilizată pentrumăsurarea debitului sau reglarea acestuia prin variaţia ariei de curgere a unui orificiu.Robinet cilindric / cylindrical plug shut-off valve / robinet à tournant cylindrique / Robinet al cărui element mobil este un cilindru cu mişcare de rotaţie perforattransversal; datorită jocului radial dintre obturator şi corp este necesar ă etanşareaexternă a cilindrului prin elemente elastomerice. Robinet conic / tapered plug shut-off valve / robinet à tournanant conique/ Robinet rotitor la care elementul mobil este un con perforat transversal care asigura şi
etanşarea externă; este utilizat îndeosebi pentru gaze la presiuni reduse. Robinet cu sertar cilindric / slide shut-off valve / robinet à tiroir / Robinet la care închiderea şi deschiderea orificiilor se realizează prin intermediul unuielement mobil de formă cilindrică numit sertar, care se deplasează axial, paralel cusuprafaţa bucşei în care se află orificiile de arie variabilă. Robinet de izolare / shut – off valve / robinet d’isolement /Robinet utilizat pentru închiderea etanşă a unui circuit. Robinet plan / gate valve / robinet vanne / Robinet la care elementul mobil este plan şi se deplasează perpendicular pe direcţiade curgere a fluidului. Racord rotitor / rotary connection / racord rotatif /
Racord orientabil care permite conectarea conductelor rigide sau flexibile în direcţieperpendicular ă pe axa de rotaţie, sub un unghi oarecare.
Sarcină <P>,<F>,<M> / load / charge / Rezistenţa înregistrată la ieşirea dintr-un element de execuţie, exprimată sub formă depresiune, for ţă sau moment. Schemă de conexiuni / connection diagram / schéma de connexions / Reprezentarea schematică a principalelor componente ale unei instalaţii de acţionarehidraulică sau pneumatică în scopul evidenţierii tuturor componentelor funcţionale,racordurilor, conductelor şi elementelor de susţinere şi fixare ale acestora. Schimbător de căldur ă / Heat exchangers / Echangeurs de chaleur /
Aparat care realizează transferul de căldur ă între două fluide f ăr ă ca acestea să intre încontact; sunt utilizate în numeroase aplicaţii practice: ca radiatoare, în sisteme decondiţionare a aerului, în centrale electrice etc. Senzor / sensor / capteur /Element care detectează şi transmite schimbările condiţiilor exterioare la circuitul sausistemul de prelucrare a informaţiei. Semnalizator de nivel / liquid level switch / commutateur de niveau / Senzor care conţine un contact electric acţionat la atingerea unei valori prereglate anivelului de lichid. Separator de apă / water trap / séparateur d´eau /Dispozitiv de eliminarea apei din aerul utilizat în sistemele de acţionare pneumatice.
Servocilindru / linear servomotor / servomoteur linéaire /Element de execuţie liniar care incorporează elementul de comandă.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 245/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 246/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-27
servovalve electropneumatique /Servovalvă a cărei mărime de intrare este de natur ă electrică, analogică sau digitală,iar mărimea de ieşire este presiunea în racordul de ieşire sau diferenţa de presiunedintre racorduri. Servomecanism mecanohidraulic / hydromechanical servomechanism /asservissement hydraulique en position avec retour mecanique en position /Sistem automat de reglare a poziţiei cu reacţie mecanică.Servomecanism mecanohidraulic / hydromechanical servomechanism /asservissement hydraulique en position avec retour mecanique en position /Sistem automat de reglare a poziţiei cu reacţie mecanică. Servovalvă electrohidraulică cu centrare elastică / spring centerd electrohydraulicservovalve / servovalve electohydraulique a retroaction barometrique / Servovalvă cu motor de cuplu şi potenţiometru hidraulic dublu al cărui etaj de putereeste format dintr-un distribuitor de reglare cu centrul închis critic, centrat cu resoarterigide.
Servovalvă electrohidraulică cu reacţie de for ţă / force feedback electrohydraulicservovalve / servovalve electrohydraulique a retroaction mecanique /Servovalvă cu motor de cuplu şi potenţiometru hidraulic dublu al cărui etaj de putereeste format dintr-un distribuitor de reglare cu centrul închis critic, al cărui sertar readucemotorul de cuplu în poziţia de echilibru printr-o pîrghie. Servovalvă electrohidraulică cu reacţie electrică / electric feedback electrohydraulicservovalve / servovalve electrohydraulique a reaction electrique /Servovalvă cu motor de cuplu şi potenţiometru hidraulic dublu al cărui etaj de putereeste format dintr-un distribuitor de reglare cu centrul închis critic, al cărui sertar estedeplasat în poziţia corespunzătoare semnalului de comandă prin intermediul unuitraductor de poziţie inductiv.
Servomecanism mecanohidraulic / hydromechanical servomechanism /asservissement hydraulique en position avec retour mecanique en position /Sistem automat de reglare a poziţiei cu reacţie mecanică.Servomecanism mecanohidraulic / hydromechanical servomechanism /asservissement hydraulique en position avec retour mecanique en position /Sistem automat de reglare a poziţiei cu reacţie mecanică. Servovalvă electrohidraulică cu centrare elastică / spring centerd electrohydraulicservovalve / servovalve electohydraulique a retroaction barometrique / Servovalvă cu motor de cuplu şi potenţiometru hidraulic dublu al cărui etaj de putereeste format dintr-un distribuitor de reglare cu centrul închis critic, centrat cu resoarterigide.
Servovalvă electrohidraulică cu reacţie de for ţă / force feedback electrohydraulicservovalve / servovalve electrohydraulique a retroaction mecanique /Servovalvă cu motor de cuplu şi potenţiometru hidraulic dublu al cărui etaj de putereeste format dintr-un distribuitor de reglare cu centrul închis critic, al cărui sertar readucemotorul de cuplu în poziţia de echilibru printr-o pîrghie. Sistem de acţionare hidrostatică / hydraulic fluid power / transmission hydraulique /Sistem de transmitere a energiei mecanice produsă de o maşină de for ţă unei maşinide lucru prin intermediul a două maşini hidraulice volumice care modifică energia depresiune a unui lichid. Sistem de acţionare pneumostatică / pneumatic fluid power / transmissionpneumatique / Sistem de transmitere a energiei mecanice produsă de o maşină de
for ţă unei maşini de lucru prin intermediul a două maşini pneumatice volumice caremodifică energia de presiune a unui gaz.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 247/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-28
Sistem de comandă la distanţă / remote control system / système de commande adistance /Sistem care permite comanda unei instalaţii aflată la distanţă faţă de operator. Sistem de comandă hidraulic (pneumatic) / open loop control system / système decommande /
Sistem de acţionare prin intermediul căruia se realizează comanda unui sistem deacţionare de putere mult mai mare. Sistem de r ăcire / cooling system / système de refroidissement /Sistem destinat eliminării excesului de căldur ă dintr-un fluid. Sistem de r ăcire cu aer / air cooling system / système de refroidissement à air /Sistem de r ăcire care realizează evacuarea căldurii prin intermediul aerului. Sistem de r ăcire cu lichid / liquid cooling system / système de refroidissement àliquide / Sistem de r ăcire care realizează evacuarea căldurii prin intermediul unuilichid.Sistem de r ăcire prin refrigerare / refrigeration cooling system / système de
refroidissement par réfrigération / Sistem de r ăcire care elimină excesul de căldur ă prin detenta unui gaz frigorificcomprimat.Sistem de reglare prin decompresie / pneumatic unloading system / regulationpneumatique par décompression /Sistem de acţionare pneumatică care realizează for ţa prin scăderea presiunii în cameraactivă. Sistem de reglare prin pornire/oprire / start-stop pressure control / regulation par marche-arret / Sistem de reglare bipoziţional (de tip releu). Sistem electropneumatic de reglare a vitezei / pneumatic variable speed control /
régulation pneumatique à vitesse variable / Sistem automat care reglează viteza prin două servovalve electropneumaticecomandate cu impulsuri modulate în durată. Sistem de reglare automată cu fluide sub presiune / fluid control system /systemeautomatique de reglage a boucle fermee a fludes sous pression /Sistem de reglare cu circuit închis al cărui element de execuţie este hidraulic saupneumatic; conţine o legătur ă de reacţie care permite compararea continuă sauintermitentă a mărimii de intrare cu cea de ieşire; diferenţa dintre acestea (eroarea)constituie semnalul de comandă al amplificatorului sistemului (hidraulic, pneumatic,electrohidraulic, electropneumatic sau hibrid) care alimentează elementul de execuţie în scopul anulării erorii; astfel, precizia acestor sisteme este ridicată: în regim staţionar,
relaţia dintre mărimea de intrare şi cea de ieşire este practic biunivocă. Parametriireglaţi uzual sunt: poziţia, viteza unghiular ă (liniar ă), momentul arborelui (for ţa tijei)motorului hidraulic sau pneumatic, puterea consumată de sistem de la maşina de for ţăetc. Stabilitate la suprasarcini dinamice / stability to dynamic overload / stabilitè auxsurchàrges dynamiques / Suprasarcina maximă la care este garantată funcţionarea stabilă a sistemului deacţionare. Stabilitatea fluidului / fluid stability / stabilitee d une fluide /Rezistenţa unui fluid la modificarea ireversibilă a proprietăţilor sale favorabile. Stabilitatea la oxidare a unui fluid / oxidation fluid stability / stabilitee d une fluide a
l oxidation /Rezistenţa unui fluid la modificarea ireversibilă a proprietăţilor sale provocată de
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 248/627
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 249/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-30
Suprafaţa pistonului <A> / piston area / surface du piston / Proiecţia suprafeţei active a pistonului pe un plan perpendicular pe direcţia mişcării lui.Sursă de alimentare cu aer la presiune constantă / pneumatic pressure source /source de pression pneumatique /Sistem de comprimare, uscare, filtrare şi reducere a presiunii aerului conform cerinţeisistemului alimentat. Sursă de alimentare cu ulei la presiune constantă / hydraulic pressure source /source de pression hydraulique /Sistem de comprimare, filtrare şi reglare a presiunii lichidului de lucru conform cerinţeisistemului alimentat. Temperatura de drenare <T dr > / draining off temperature / témpereture de drainage /Temperatura mediului de lucru la ieşirea din racordul de drenare.Temperatura de lucru <T l > / working temperature / témpereture de travail /Temperatura lichidului funcţional în regim de lucru. Temperatura la iesire <T 2 > / outlet temperature / témpereture de sortie /
Temperatura mediului de lucru măsurată la ieşirea din motorul hidraulic.Temperatura la intrare <T 1> / inlet temperature / témpereture de d'entrèe /Temperatura mediului de lucru măsurată la intrarea in pompă.Temperatura locală <T lc > / local temperature / témpereture locale /Temperatura lichidului într-o secţiune a sistemului de acţionare. Temperatura mediului ambiant <T e> / ambient temperature / témpereture ambiente /Temperatura mediului care înconjoar ă sistemul de acţionare.Temperatura mediului de lucru <T> / working fluid temperature / témpereture defluide de travail /Temperatura mediului de lucru la presiunea medie, măsurată într-o secţiunespecificată.
Temperatura nominală <T n> / rated temperature / témpereture nominale /Temperatura convenţională de referinţă la care sistemul de acţionare hidraulică saupneumatică poate funcţiona continuu în condiţiile stabilite prin documentaţia tehnică. Releu de temporizare pneumatic / pneumatic time delay unit / temporisateur pneumatique / Aparat care întîrzie transmiterea sau suprimarea unui semnal pneumatic continuu de laorificiul de intrare la orificiul de ieşire după un interval de timp prestabilit, fix saureglabil. Tensiune superficială / surface tension / tension de surface /Tensiunea la suprafaţa unui lichid aflat în contact cu un alt fluid şi care tinde sădetermine o formă sferică a lichidului şi să aibe o suprafaţă de umectare minimă.
Timp de acţionare sub sarcină <t c > / under load rest time / temps de stationnementsous charge /Timpul în care elementele active ale sistemului de acţionare se află sub sarcină. Timp de comutare <t c > / switching time / temps de commutation /Timpul scurs din momentul elabor ării comenzii pană în momentul comutării stăriielementului de execuţie. Traductor / sensor / capteur / Aparat care converteşte o mărime fizică într-un semnal electric - tensiune sau curent. Transformator pneumo-hidraulic / air – oil actuator / echangeur de pressionhydraulique – pneumatique / Amplificator de presiune care consumă aer comprimat pentru a produce ulei sub
presiune. Transmisie hidrostatică / hydrostatic transmission / transmission hydrostatique /

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 250/627

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 251/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
2-32
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 252/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-1
ACTIVITATEA 3
CREAREA BAZEI DE CUNOŞTINŢE TEORETICE SPECIFICE
PROIECTĂRII ASISTATE DE CALCULATOR A SAHP
1. Optimizarea proiectării asistate de calculator prin facilitati de e-Learning
Marile firme producătoare de solutii CAD/CAM/FEA măresc productivitateaconcepţiei de produse noi apelând la resursele portalurilor de e-Learning sau PrecisionLearning. Orice utilizator poate accesa on-line cursuri de pregătire generale sauspecifice, care il conduc rapid către atingerea performanţelor înalte, cerute de companii,reducind astfel costurile cu planificarea si specializarea fiecărui angajat. Totodată, înplan academic, toate aceste resurse asigur ă un grad ridicat de pregatire al viitorilor speciali
şti. PTC-University (fig.1) reprezinta un model de resurse e-Learning si
Precision-Learning, avind optiuni de evaluare si examinare de tip Pro/Ficiency pentrufiecare nivel de activitate de training. Acest model va face obiectul interconectarii cuportalul de e-Learning elaborat în cadrul proiectului ITFPS. Sistemul de e-Learningpoate fi structurat dupa cum urmeaza.
a) E-Learning Enterprise la nivel de organizaţieBazat pe un concept unic si extensiv al PLM si o metodologie unica la nivel de
rol – Precision Learning Metodology, portalul PTC University constituie o soluţie deeducaţie la nivel CAD/CAM/FEA sau PLM completă şi flexibilă.
b) Metodologii exacte de educaţie (Precision Learning Methodology)Portalul PTC University dispune de un conţinut structurat, bazat pe tehnologii
moderne, dispune de servicii complete de training, adaptind si evaluând timpii alocaţi decătre fiecare utilizator activităţii de instruire.HTPrecision Learning Programs TH sunt acţiuni prin care se definesc curicullum-uri
individuale în scopul acceler ării procesului de instruire şi sporirii productivităţiiconcepţiei.
Pro/FICIENCY sunt resurse care realizeaza testarea si evaluarea fiecărui procesde training.
HTRole-based Learning Paths sunt programe pentru definirea TH proceselor deinstruire orientate pe nivele si roluri pentru fiecarui membru al sistemului de învăţământ.
Conceptului PLM (HTPrecision Learning Programs TH) include instrumente de training
la nivel departamental in cadrul unei firme, având sistem partajare a resurselor.Metodele de Precision-Learning permite accesul la tehnologiile aferente PLM, orientatepe aplicaţii specifice, asigurând servicii prin care orice organizaţie de concepţie işisporeşte productivitatea. Aceste metode r ăspund cerinţelor de sporire a productivităţiiresurselor existente de CAD-Pro/ENGINEER cu 65%. Reducerea timpului de proiectarepermite mărirea timpului alocat inovarii şi reducerea costurilor.
Prin programul Precision-Learning fiecare specialist dispune de următoarelefacilităţi: -training dedicat: studenţii şi specialiştii au acces la o specializare corespunzătoarepostului;-training permanent: specialistii si studentii au la dispozitie toate materialele de training,
pe faze sau etape, structurate pe nivele, intr-un timp de evaluare precis;

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 253/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-2
-o suita de instrumente media: acestea ofer ă mijloace video si interactive, care reductimpul şi costurile de instruire;-orice activitate este măsurată: sistemul de instruire include programul HPro/FICIENCYH
ca instrument de evaluare a eficienţei personale şi colective.
Fig.1 Pagina de web PTC UNIVERSITY
PTC Pro/FICIENCY este un set de instrumente prin care se testeaza si seevalueaza nivelurile pregătirii individuale sau în cadrul unei echipe. Bazat pe resurseweb, acesta asigur ă ridicarea nivelului de pregătire, defineşte durata proceselor deeducaţie, relevă competenţa asigurată prin standardele interne ale companiei, definind
practic o cale eficientă de creştere a productivităţii activităţii de concepţie.
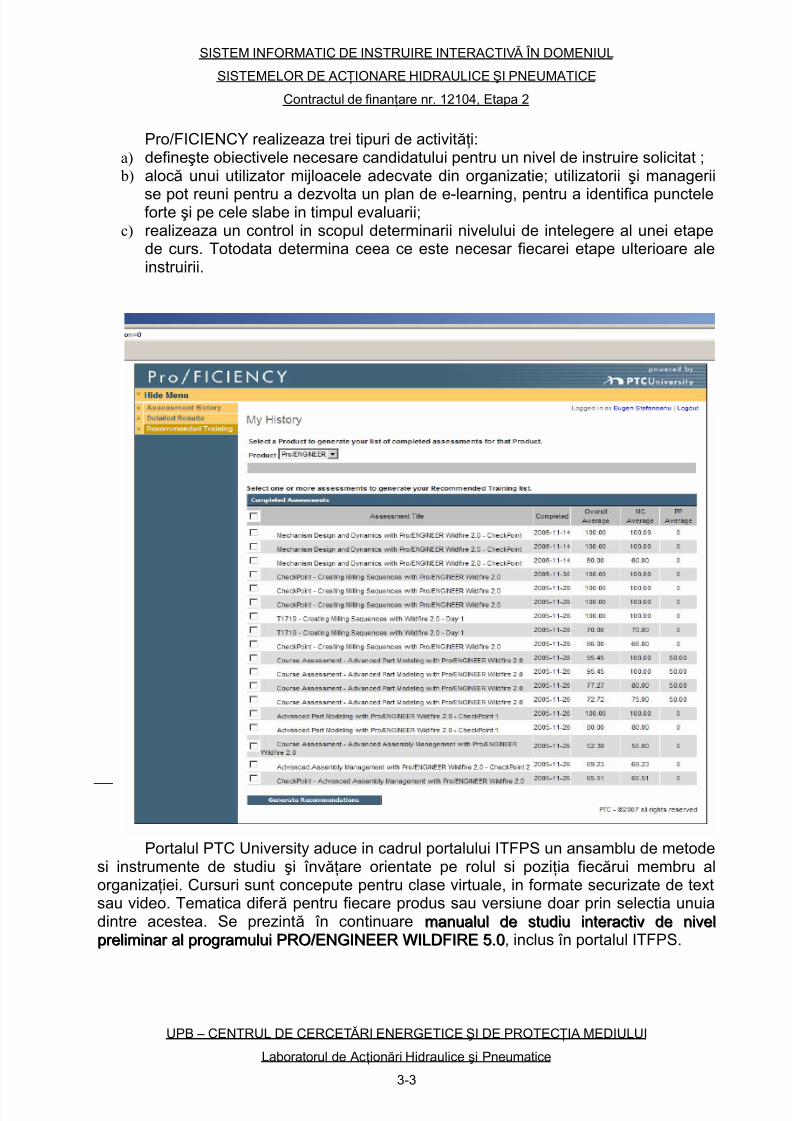
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 254/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-3
Pro/FICIENCY realizeaza trei tipuri de activităţi:a) defineşte obiectivele necesare candidatului pentru un nivel de instruire solicitat ; b) alocă unui utilizator mijloacele adecvate din organizatie; utilizatorii şi managerii
se pot reuni pentru a dezvolta un plan de e-learning, pentru a identifica puncteleforte şi pe cele slabe in timpul evaluarii;c) realizeaza un control in scopul determinarii nivelului de intelegere al unei etape
de curs. Totodata determina ceea ce este necesar fiecarei etape ulterioare aleinstruirii.
Portalul PTC University aduce in cadrul portalului ITFPS un ansamblu de metodesi instrumente de studiu şi învăţare orientate pe rolul si poziţia fiecărui membru alorganizaţiei. Cursuri sunt concepute pentru clase virtuale, in formate securizate de textsau video. Tematica difer ă pentru fiecare produs sau versiune doar prin selectia unuiadintre acestea. Se prezintă în continuare mmaannuuaalluull ddee ssttuuddiiuu iinntteer r aaccttiivv ddee nniivveell ppr r eelliimmiinnaar r aall ppr r ooggr r aammuulluuii PPRROO//EENNGGIINNEEEERR WWIILLDDFFIIRREE 55..00, inclus în portalul ITFPS.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 255/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-4
22.. MMAANNUULLUULL DDEE SSTTUUDDIIUU IINNTTEERRAACCTTIIVV AALL PPRROOGGRRAAMMUULLUUII
PPRROO / /EENNGGIINNEEEERR WWIILLDDFFIIRREE 55..00

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 256/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-5
Table of Contents
TU
Interactive ModelingUT
......................................................................................6
TUMolded Part
Design
EfficiencyUT .....................................................................18
TUSheet Metal Design & WeldingUT ....................................................................25
TUFlexible Assembly UT .........................................................................................40
TU
SimulationUT
....................................................................................................50
TUDrawing Workflow and EfficiencyUT ................................................................62
TUPro/ENGINEER ManikinUT ................................................................................73
TU
Tolerance Analysis
UT
........................................................................................79
CAD Files
The CAD files required for this tutorial can be download from this location:
HTUhttp://download.ptc.com/products/proe/wildfire5/tutorial/wf5_how_student_v2.zipUTH
Document Format & Printing
This document is setup to be printed with (2) pages per sheet to minimize the
total number
of
printed
pages.
If
available,
please
setup
your
printer
for
multi
‐
page printing.
Conventions
Information is provided at the start of many tasks.
Tips are provided along the way, with time‐saving or alternate techniques.
Notes are
provided
with
additional
useful
details,
which
may
not
be
required
to
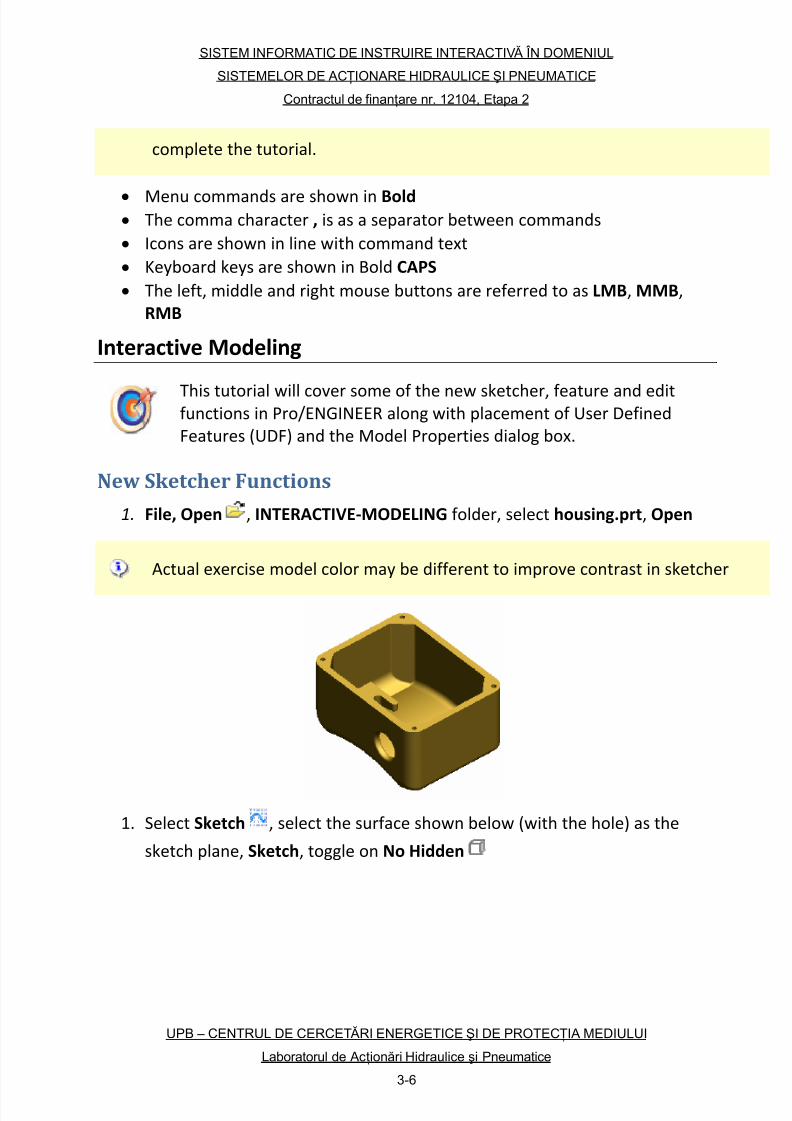
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 257/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-6
complete the tutorial.
• Menu commands
are
shown
in
Bold
• The comma character , is as a separator between commands
• Icons are shown in line with command text
• Keyboard keys are shown in Bold CAPS
• The left, middle and right mouse buttons are referred to as LMB, MMB,
RMB
Interactive Modeling
This tutorial
will
cover
some
of
the
new
sketcher,
feature
and
edit
functions in Pro/ENGINEER along with placement of User Defined
Features (UDF) and the Model Properties dialog box.
New Sketcher Functions
1. File, Open , INTERACTIVE‐MODELING folder, select housing.prt, Open Actual exercise model color may be different to improve contrast in sketcher
1. Select Sketch , select the surface shown below (with the hole) as the
sketch plane, Sketch, toggle on No Hidden
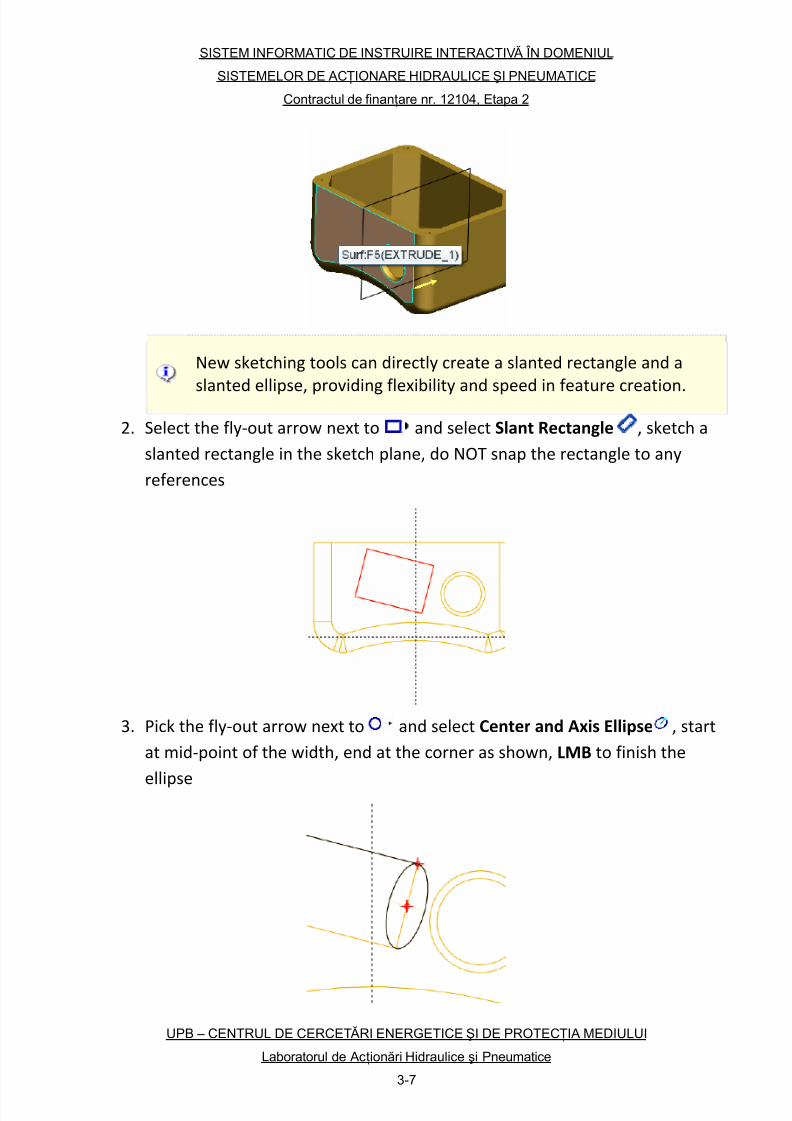
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 258/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-7
New sketching tools can directly create a slanted rectangle and a
slanted
ellipse,
providing
flexibility
and
speed
in
feature
creation.
2. Select the fly‐out arrow next to and select Slant Rectangle , sketch a
slanted rectangle in the sketch plane, do NOT snap the rectangle to any
references
3. Pick the fly‐out arrow next to and select Center and Axis Ellipse , start
at mid‐point of the width, end at the corner as shown, LMB to finish the
ellipse
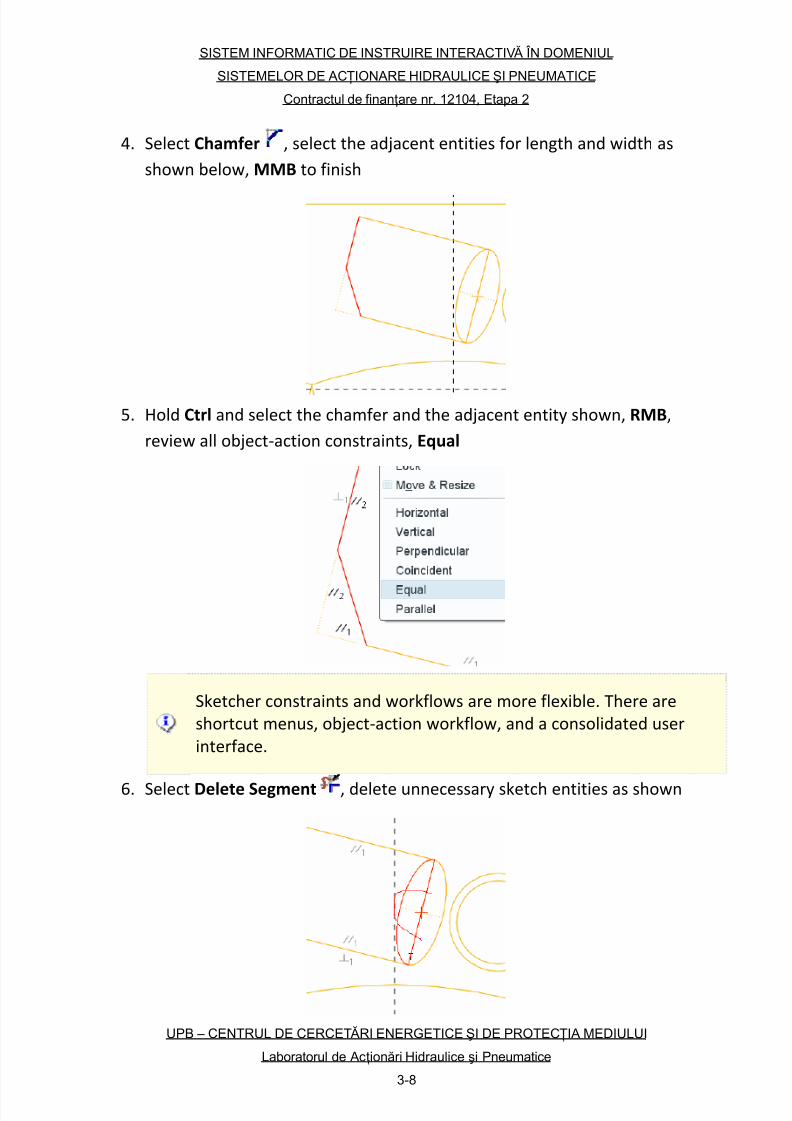
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 259/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-8
4. Select Chamfer , select the adjacent entities for length and width as
shown below, MMB to finish
5. Hold Ctrl and select the chamfer and the adjacent entity shown, RMB,
review all object‐action constraints, Equal
Sketcher constraints and workflows are more flexible. There are
shortcut menus, object‐action workflow, and a consolidated user
interface.
6. Select Delete
Segment
, delete
unnecessary
sketch
entities
as
shown

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 260/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-9
In the follow tasks, make sure to use the fly‐out to select Geometry
Centerline or Point. These are different than regular sketcher
counterparts.
Depending on
how
the
sketch
is
used,
they
can
produce datum features in the model.
7. Select the fly‐out arrow next to and select Geometry Centerline ,
sketch a geometry centerline snapped to two corners as shown below
8. Select the fly‐out arrow next to and select Geometry Point , sketch a
point at any position inside the sketch, MMB to confirm
9. Select Done to finish sketch
10. Toggle on Shading display , Named View List , sketcher, toggle on
Datum Axis and Datum Point , review the datum axis and the datum
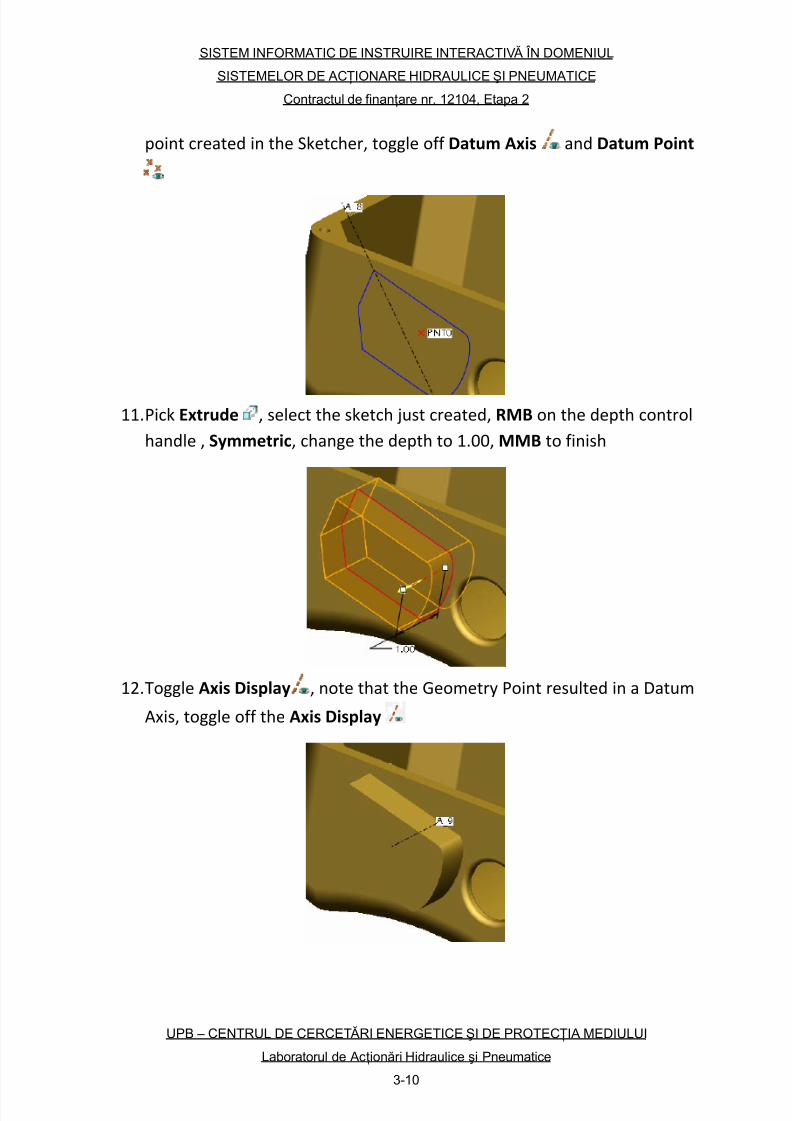
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 261/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-10
point created in the Sketcher, toggle off Datum Axis and Datum Point
11. Pick Extrude , select the sketch just created, RMB on the depth control
handle , Symmetric, change the depth to 1.00, MMB to finish
12. Toggle Axis Display , note that the Geometry Point resulted in a Datum
Axis, toggle off the Axis Display
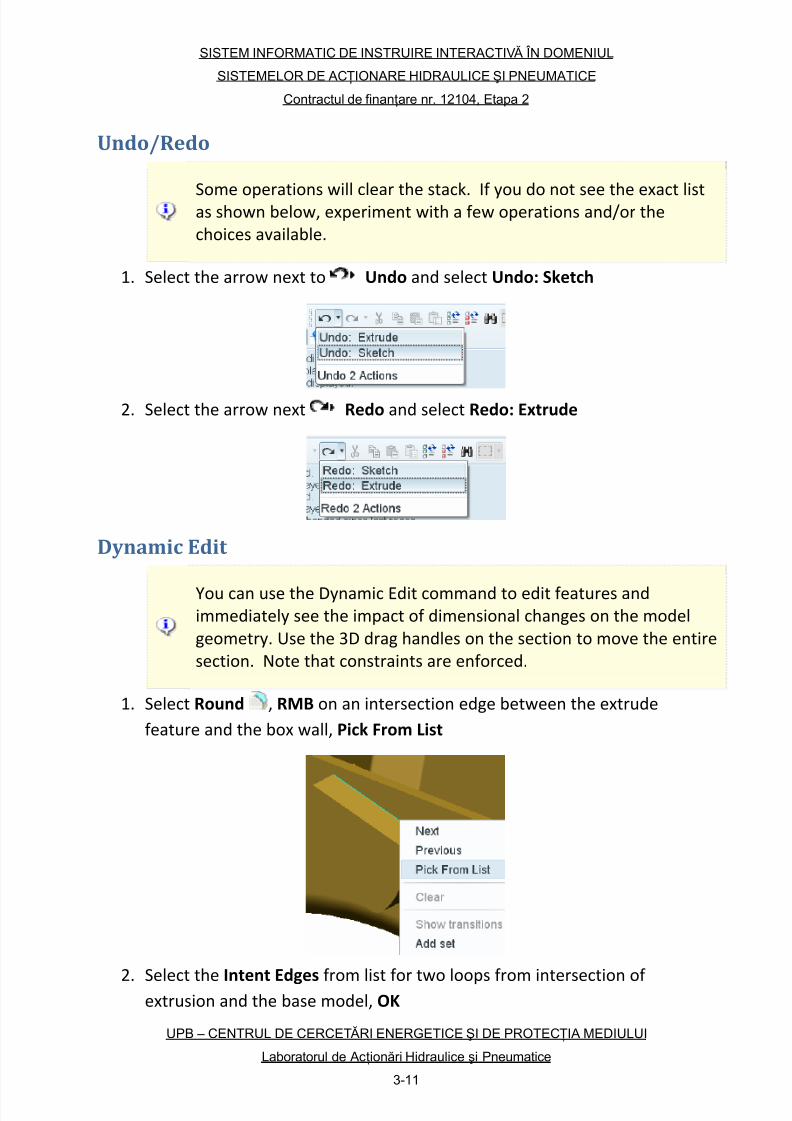
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 262/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-11
Undo/Redo
Some
operations
will
clear
the
stack.
If
you
do
not
see
the
exact
list
as shown below, experiment with a few operations and/or the
choices available.
1. Select the arrow next to Undo and select Undo: Sketch
2. Select the arrow next Redo and select Redo: Extrude
Dynamic Edit
You can
use
the
Dynamic
Edit
command
to
edit
features
and
immediately see the impact of dimensional changes on the model
geometry. Use the 3D drag handles on the section to move the entire
section. Note that constraints are enforced.
1. Select Round , RMB on an intersection edge between the extrude
feature and the box wall, Pick From List
2. Select
the
Intent
Edges
from
list
for
two
loops
from
intersection
of
extrusion and the base model, OK

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 263/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-12
3. Change the round radii to 0.12, MMB to confirm
4. Select the extrude feature just created in the Model Tree or in the graphics
window, RMB
Dynamic
Edit,
select
3D
drag
handle
where
the
cursor
points
as shown below
5. Move the entire feature towards the hole, review the dynamic changes
6. LMB on the graphic window to exit the dynamic edit

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 264/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-13
Failure and Diagnostics
In Pro/ENGINEER
Wildfire
5.0,
you
can
deal
with
failures
now
or
later,
and models can now be saved with failed features. “Failed” geometry
is shown when possible.
1. Named View List , No_Resolve, select the BOSS_1 protrusion feature in
the Model Tree, RMB Dynamic Edit, RMB in the graphics window, check
Show/Hidden All Dims
2. Drag the
dim
R.13
control
handle
where
the
cursor
points,
dynamically
change the cut narrower until the feature fails and becomes red, LMB in
the graphics window to exit

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 265/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-14
There
is
no
resolve
mode
in
Pro/ENGINEER
Wildfire
5.0.
You
are
given a warning and options to fix the failing feature(s).
3. Click OK to accept the result and we will fix the fails later on, review the
failed features highlighted in the Model Tree
4. Select BOSS_1 feature in the Model Tree, RMB Edit Definition, click
Placement in the dashboard, Edit…, drag and redefine the sketch until no
intersected entities
Dynamic Edit can be used again for this step

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 266/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-15
5. Select Done , confirm, review the resolved features
User Defined
Feature
(UDF)
You can place user‐defined feature (UDFs) using the new on‐surface
coordinate system as a reference. You can preview the UDF geometry
as it is being placed on the model, and also can see an immediate
display of changes in variable dimensions and even specify additional
rotations about the placement coordinate system
1. Toggle on
Csys
Display
, Insert,
User
‐Defined
Feature…,
browse
to
INTERACTIVE‐MODELING folder and select boss_udf.gph, Open
2. Check View source model option, resize the BOSS_UDF_GP window, OK,
pick the boss surface to specify the placement reference, toggle off
Annotation display
3. Drag the two green placement handles to specify the location references

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 267/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-16
4. Drag the location handle and move, review the immediate udpates
5. Select Variables
tab,
change
the
rib_instance
from
3 to
6,
Enter,
preview
the changes of UDF boss in the graphics window
6. Select Options, Adjustments tabs to review options, select , toggle off
Csys Display
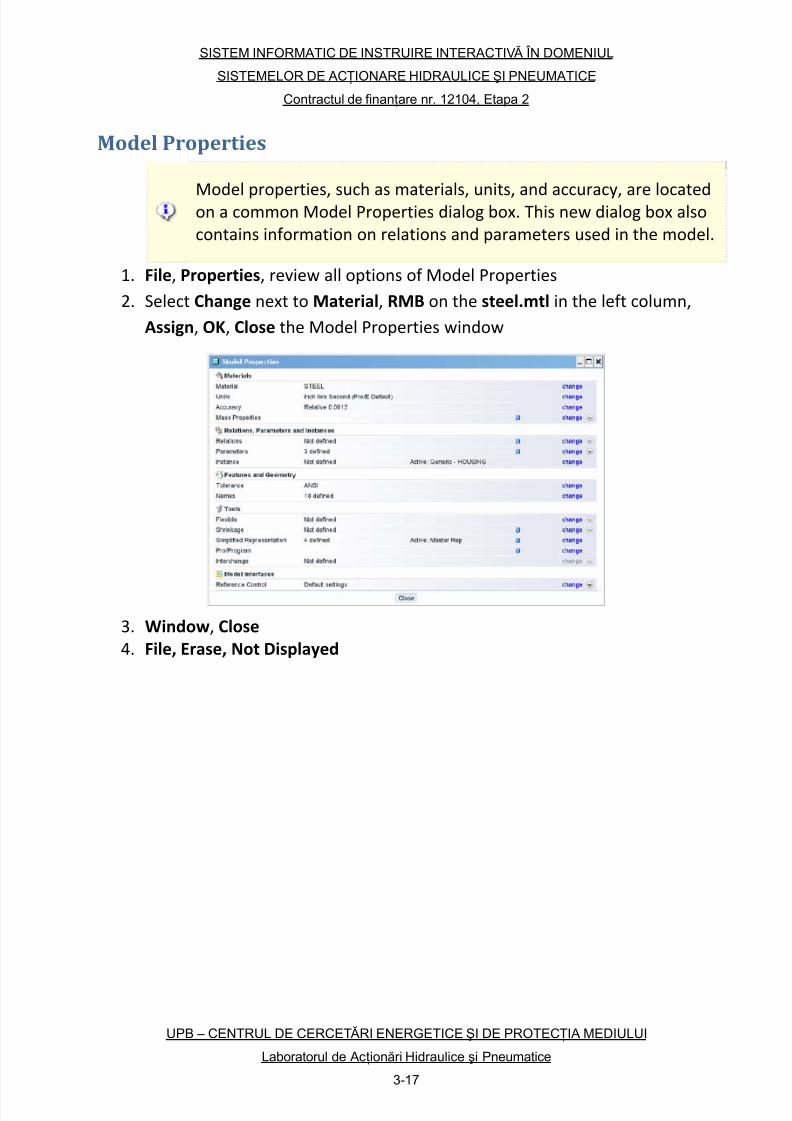
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 268/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-17
Model Properties
Model
properties,
such
as
materials,
units,
and
accuracy,
are
located
on a common Model Properties dialog box. This new dialog box also
contains information on relations and parameters used in the model.
1. File, Properties, review all options of Model Properties
2. Select Change next to Material, RMB on the steel.mtl in the left column,
Assign, OK, Close the Model Properties window
3. Window, Close
4. File, Erase, Not Displayed

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 269/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-18
Molded Part Design Efficiency
This tutorial will show some the new features and enhancements to
assist in the design of cast and molded parts including geometry
patterns, the new trajectory rib feature and enhancements to draft
check analysis.
Pattern Enhancements
1. File, Open , PART‐MOLDED folder, gearbox.prt, Open
2. Select Hole 1 in the Model Tree, Pattern
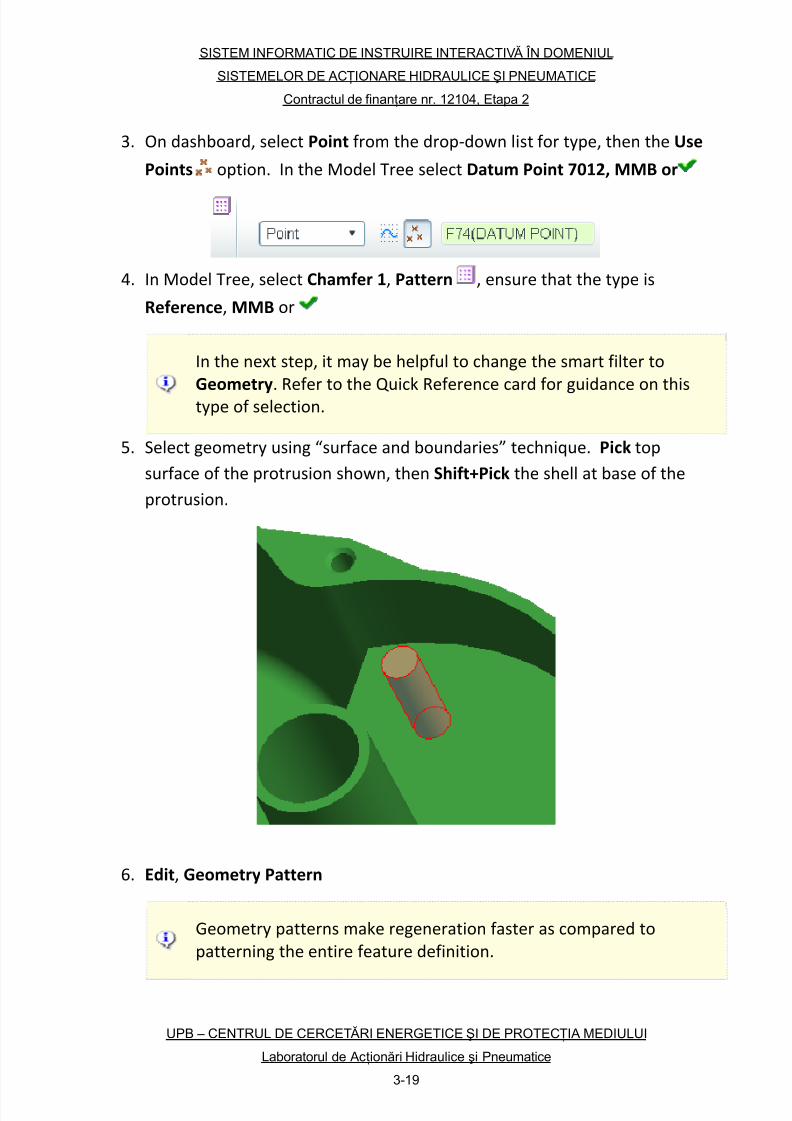
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 270/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-19
3. On dashboard, select Point from the drop‐down list for type, then the Use
Points option. In the Model Tree select Datum Point 7012, MMB or
4. In Model Tree, select Chamfer 1, Pattern , ensure that the type is
Reference, MMB or
In the next step, it may be helpful to change the smart filter to
Geometry.
Refer
to
the
Quick
Reference
card
for
guidance
on
this
type of selection.
5. Select geometry using “surface and boundaries” technique. Pick top
surface of the protrusion shown, then Shift+Pick the shell at base of the
protrusion.
6. Edit, Geometry Pattern
Geometry patterns make regeneration faster as compared to
patterning the entire feature definition.
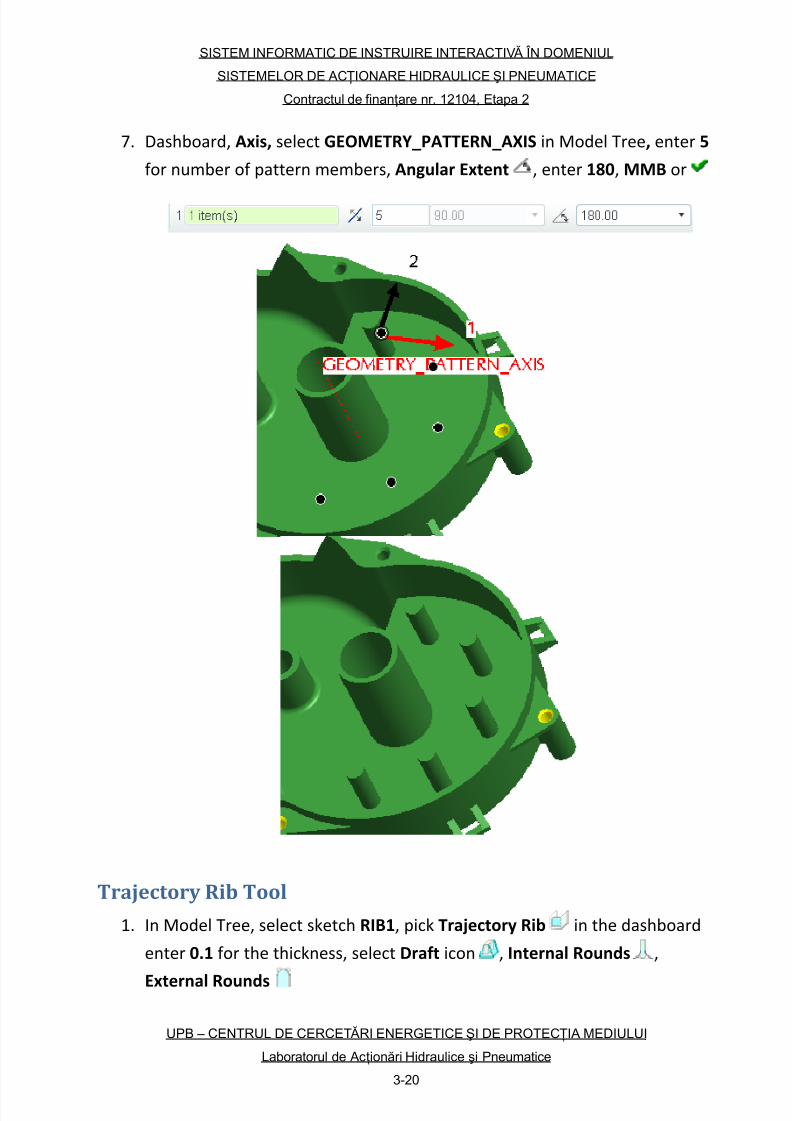
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 271/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-20
7. Dashboard, Axis, select GEOMETRY_PATTERN_AXIS in Model Tree, enter 5
for number of pattern members, Angular Extent , enter 180, MMB or
Trajectory Rib Tool
1. In Model Tree, select sketch RIB1, pick Trajectory Rib in the dashboard
enter 0.1 for the thickness, select Draft icon , Internal Rounds ,
External Rounds
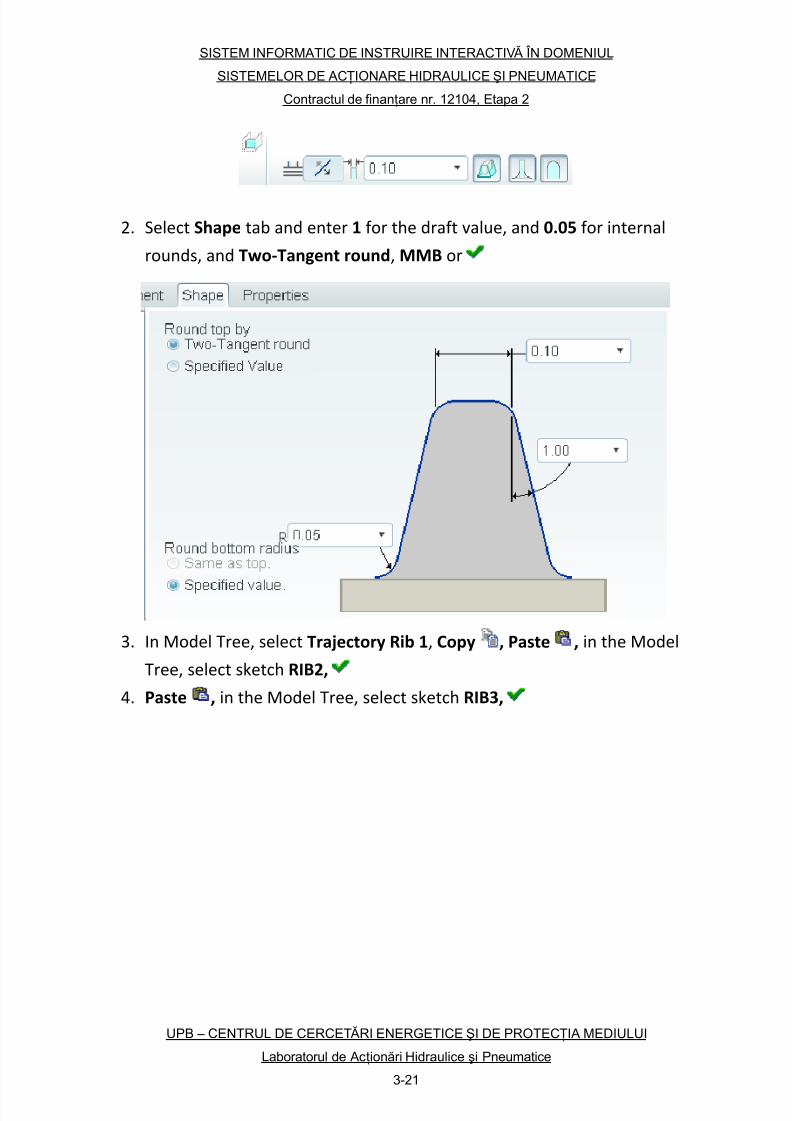
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 272/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-21
2. Select Shape tab and enter 1 for the draft value, and 0.05 for internal
rounds, and Two‐Tangent round, MMB or
3. In Model Tree, select Trajectory Rib 1, Copy , Paste , in the Model
Tree, select sketch RIB2,
4. Paste , in the Model Tree, select sketch RIB3,

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 273/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-22
Draft Analysis
1. Analysis, Geometry, Draft ,select GEARBOX.PRT in the Model Tree,
Direction, Surf:F27(SHELL)

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 274/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-23
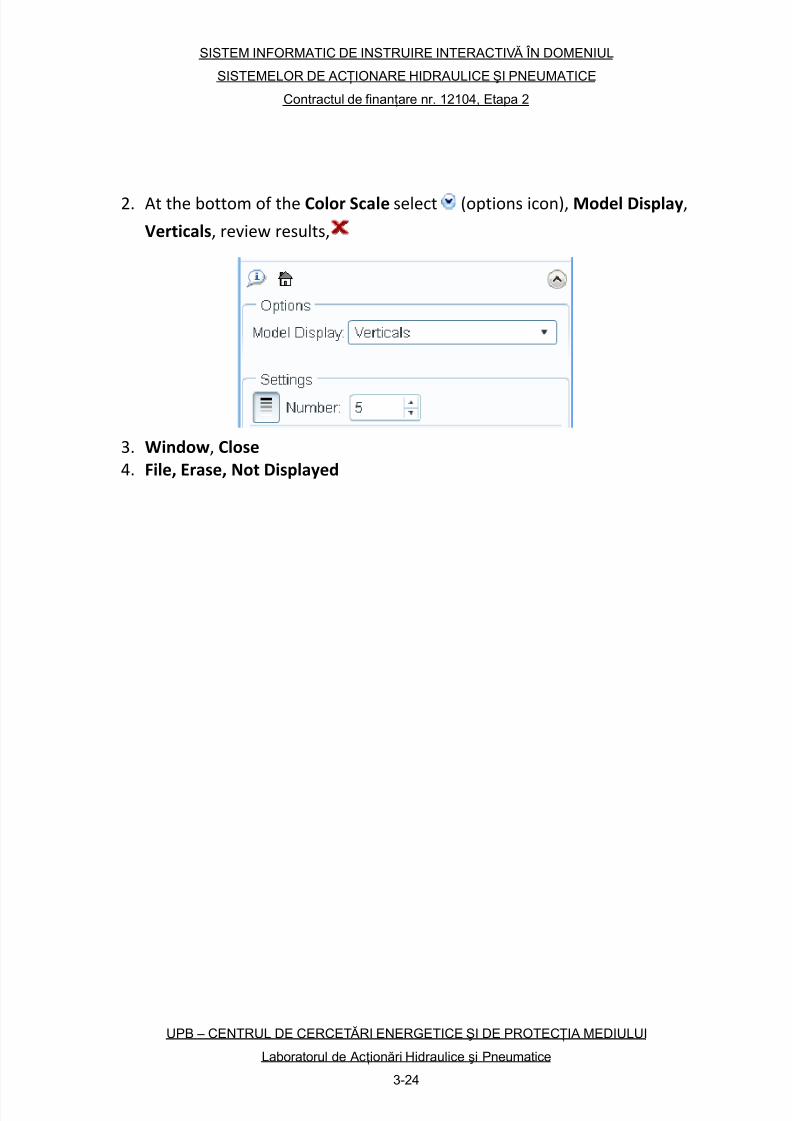
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 275/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-24
2. At the
bottom
of
the
Color
Scale
select
(options
icon),
Model
Display,
Verticals, review results,
3. Window, Close
4. File, Erase, Not Displayed
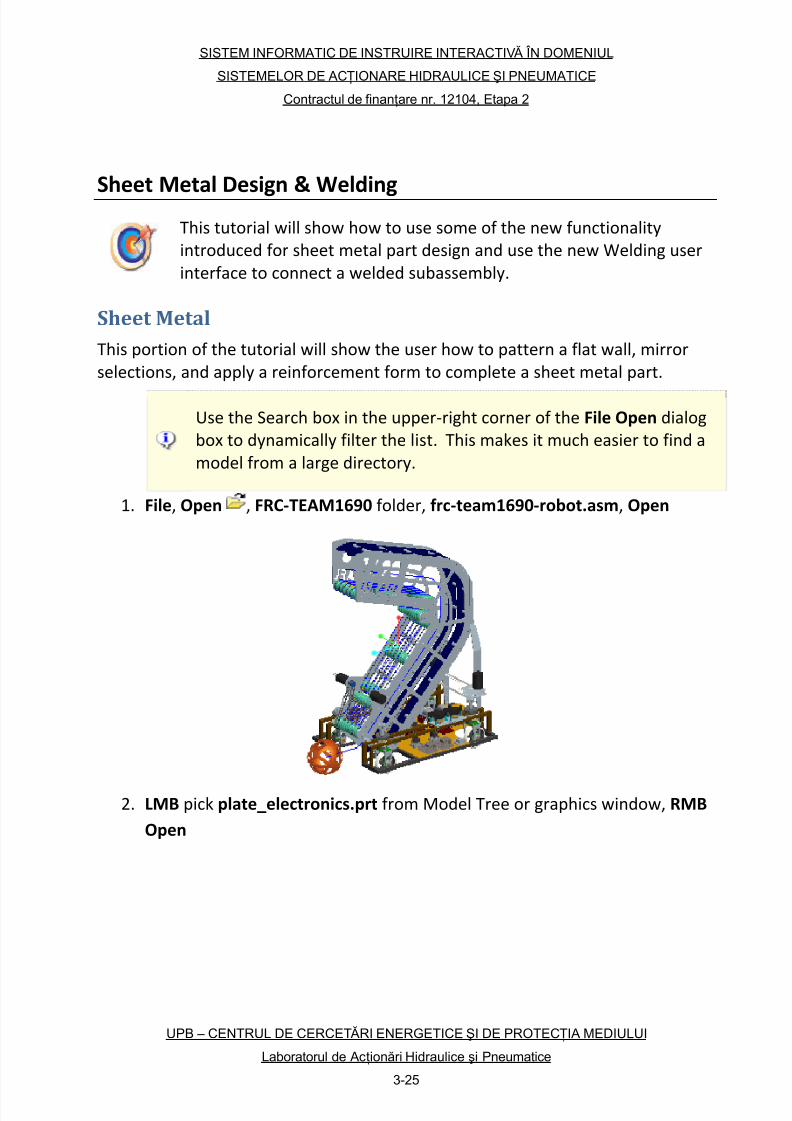
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 276/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-25
Sheet Metal Design & Welding
This tutorial will show how to use some of the new functionality
introduced for sheet metal part design and use the new Welding user
interface to connect a welded subassembly.
Sheet Metal
This portion of the tutorial will show the user how to pattern a flat wall, mirror
selections, and apply a reinforcement form to complete a sheet metal part.
Use the Search box in the upper‐right corner of the File Open dialog
box to dynamically filter the list. This makes it much easier to find a
model from a large directory.
1. File, Open , FRC‐TEAM1690 folder, frc‐team1690‐robot.asm, Open
2. LMB pick plate_electronics.prt from Model Tree or graphics window, RMB
Open
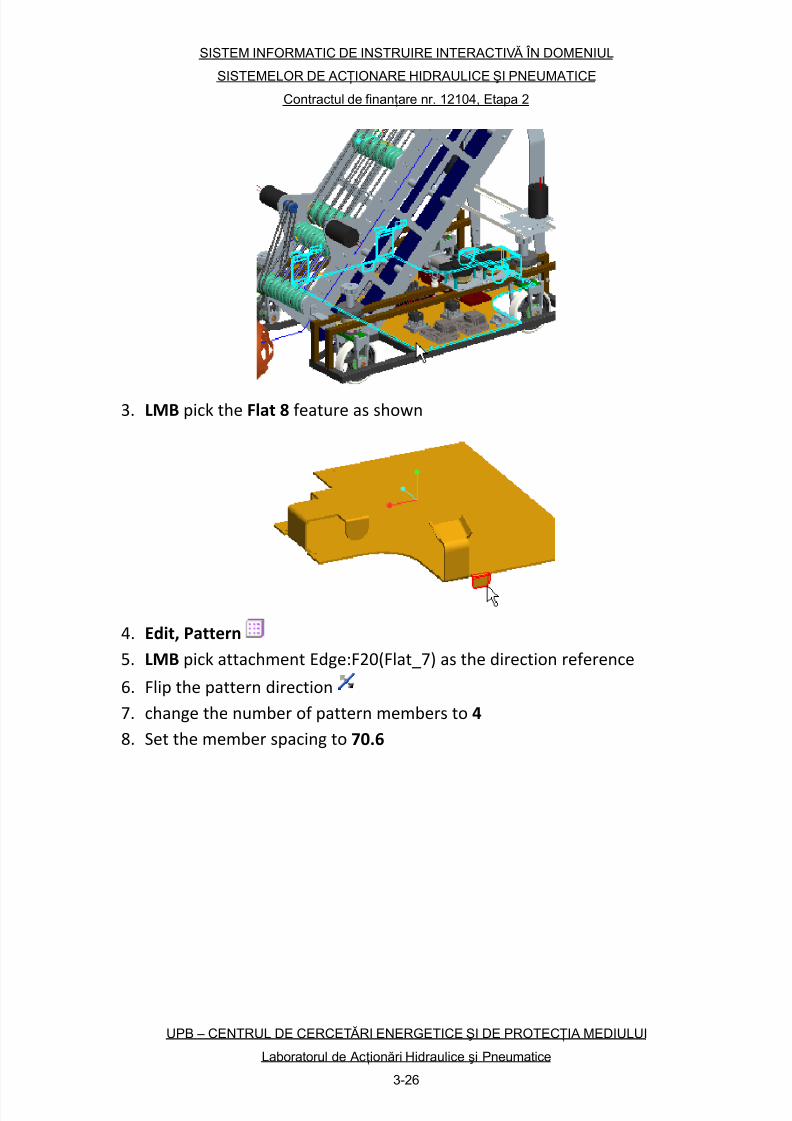
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 277/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-26
3. LMB pick the Flat 8 feature as shown
4. Edit, Pattern
5. LMB pick attachment Edge:F20(Flat_7) as the direction reference
6. Flip the pattern direction
7. change the number of pattern members to 4
8. Set the member spacing to 70.6
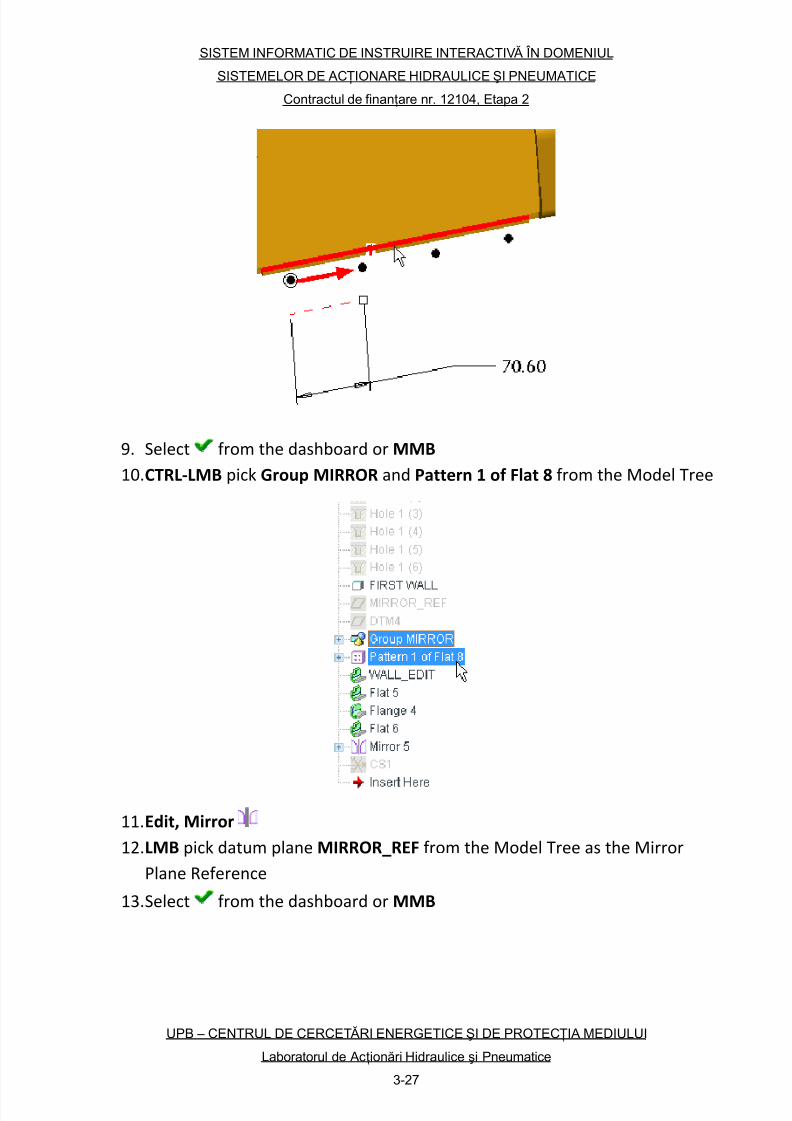
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 278/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-27
9. Select from the dashboard or MMB
10. CTRL‐LMB pick Group MIRROR and Pattern 1 of Flat 8 from the Model Tree
11. Edit, Mirror
12. LMB pick datum plane MIRROR_REF from the Model Tree as the Mirror
Plane Reference
13. Select from the dashboard or MMB
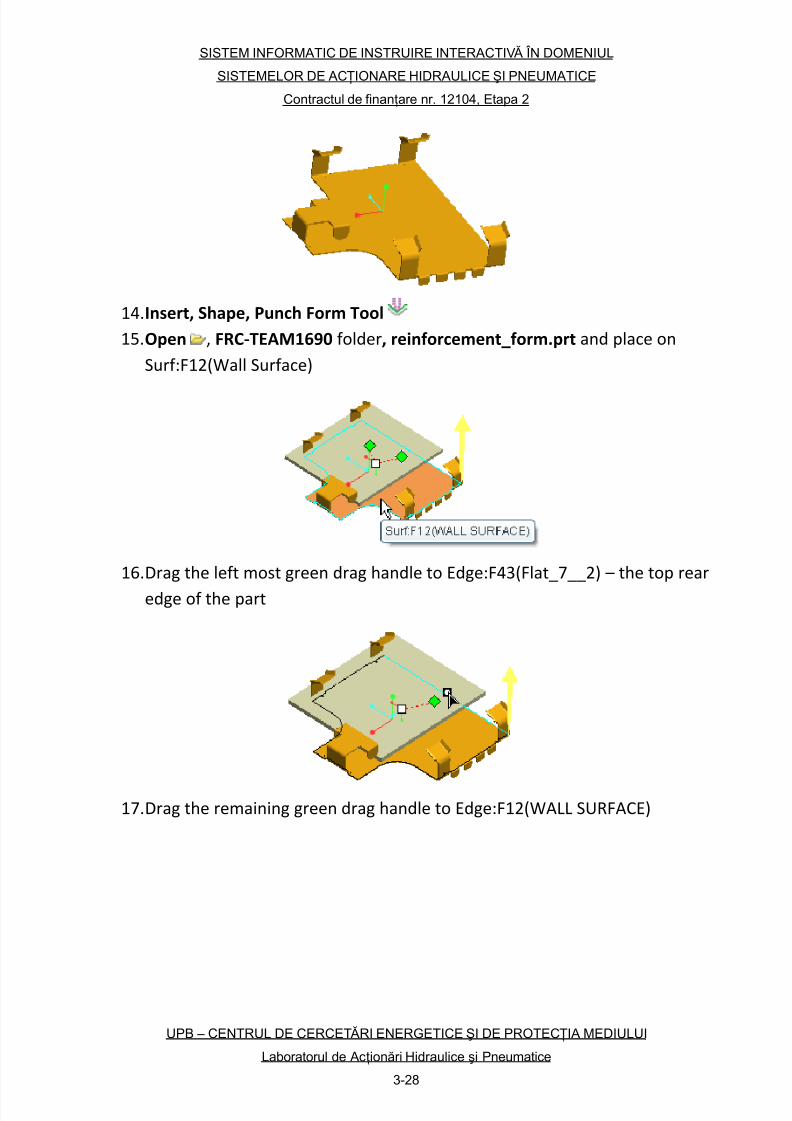
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 279/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-28
14. Insert, Shape, Punch Form Tool
15. Open , FRC‐TEAM1690 folder, reinforcement_form.prt and place on
Surf:F12(Wall Surface)
16. Drag the left most green drag handle to Edge:F43(Flat_7__2) – the top rear
edge of
the
part
17. Drag the remaining green drag handle to Edge:F12(WALL SURFACE)

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 280/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-29
18. Select the placement tab check the Add rotation about first axis and enter
180 degrees
19. Enter 200 for the offset value from the first reference and 125 for the
second reference

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 281/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-30
20. Ensure the yellow direction arrow is facing down or LMB the arrow
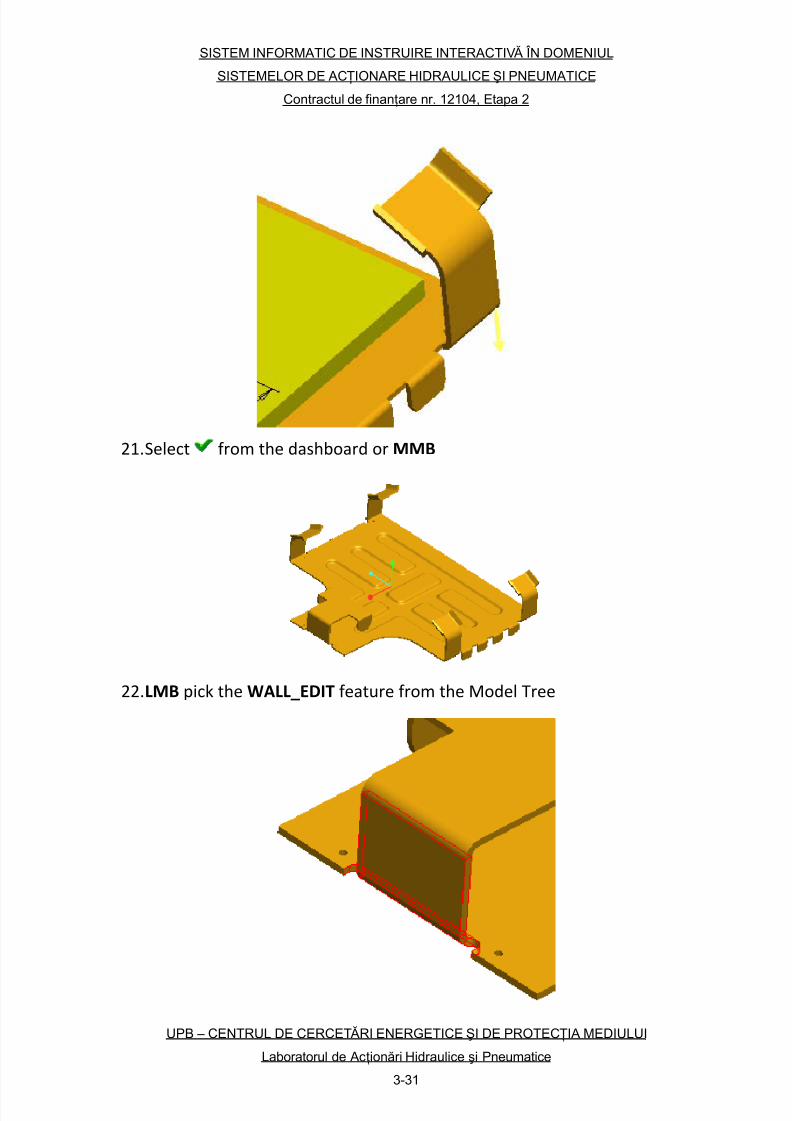
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 282/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-31
21. Select from the dashboard or MMB
22. LMB pick the WALL_EDIT feature from the Model Tree
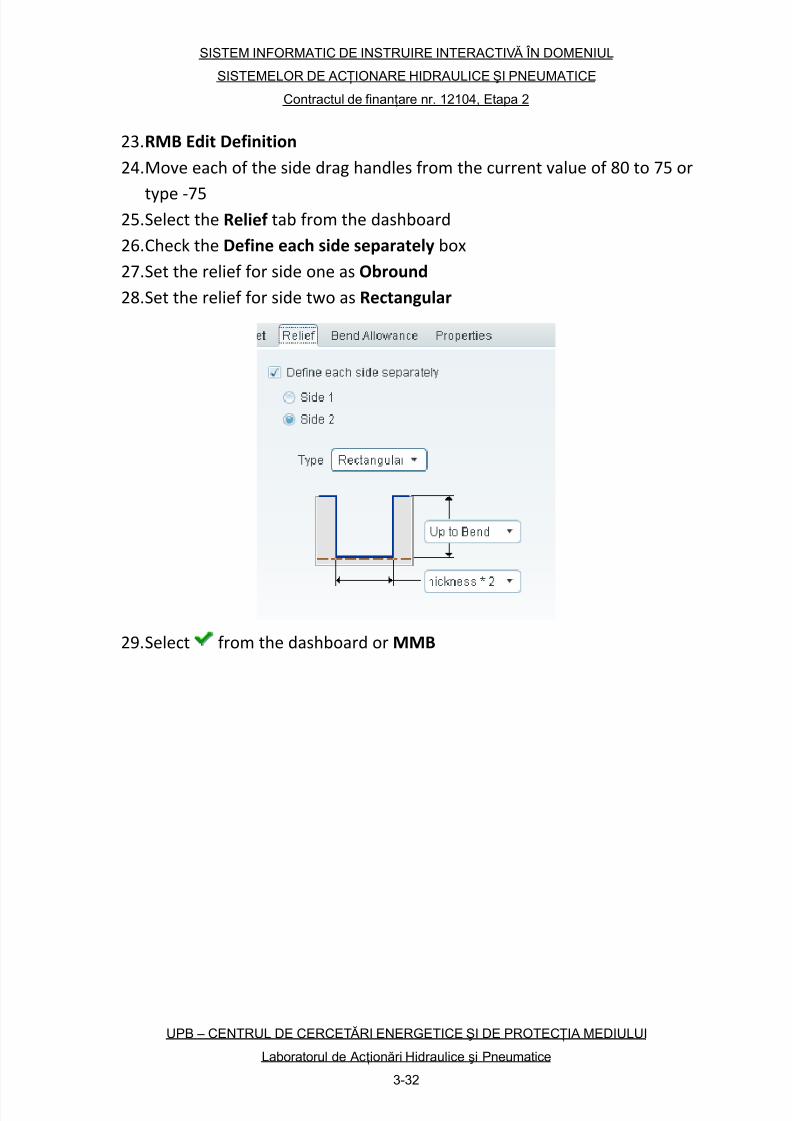
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 283/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-32
23. RMB Edit Definition
24. Move each of the side drag handles from the current value of 80 to 75 or
type‐75
25. Select the Relief tab from the dashboard
26. Check the Define each side separately box
27. Set the relief for side one as Obround
28. Set the relief for side two as Rectangular
29. Select from the dashboard or MMB
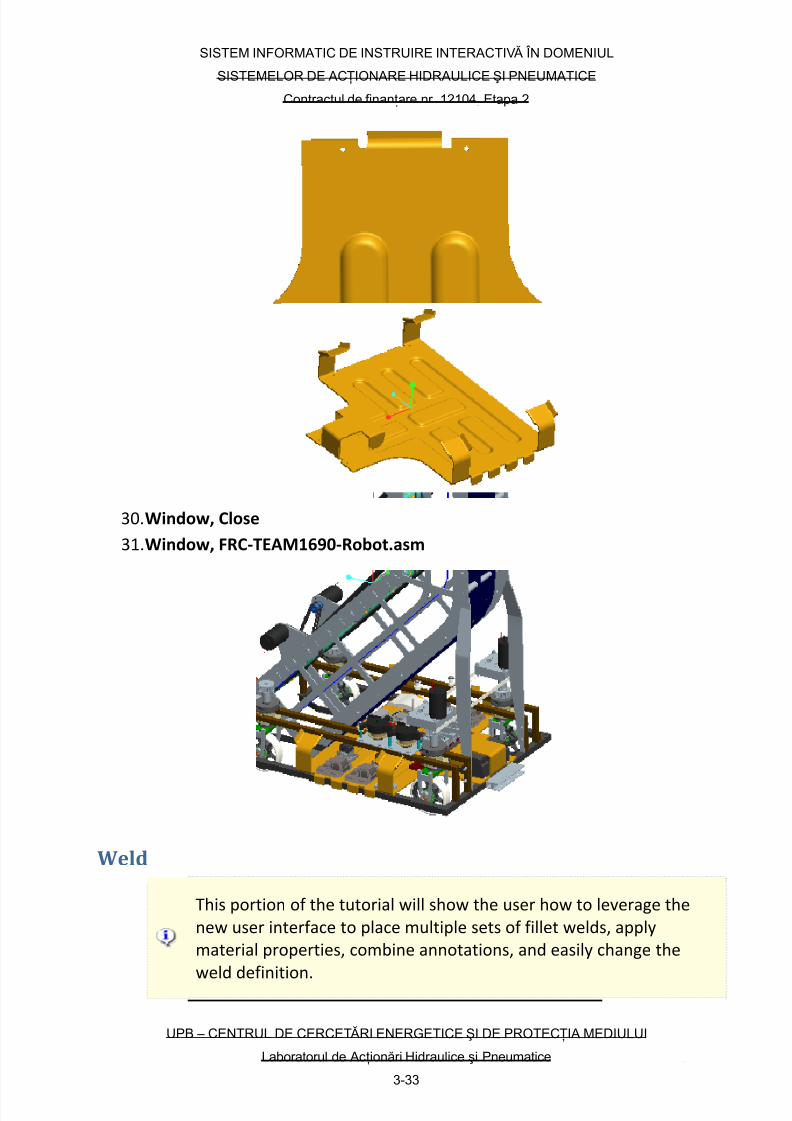
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 284/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-33
30. Window, Close
31. Window, FRC‐TEAM1690‐Robot.asm
Weld
This portion of the tutorial will show the user how to leverage the
new user interface to place multiple sets of fillet welds, apply
material properties, combine annotations, and easily change the
weld definition.
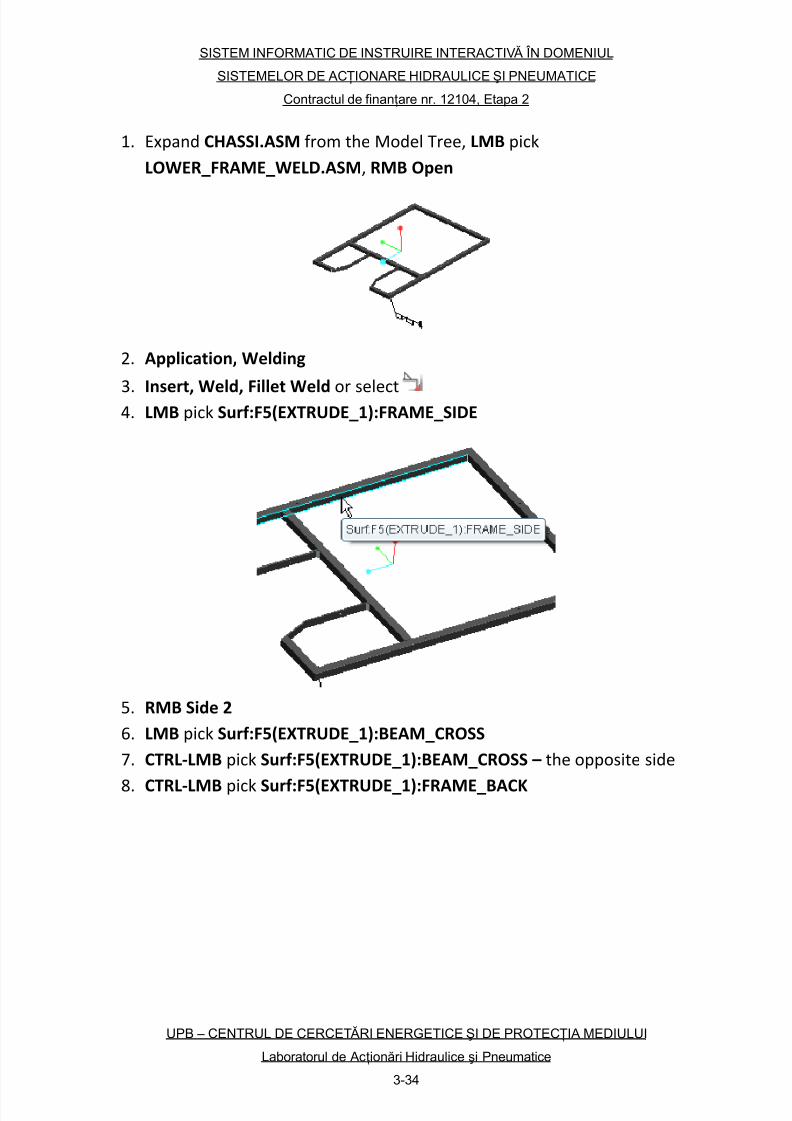
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 285/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-34
1. Expand CHASSI.ASM from the Model Tree, LMB pick
LOWER_FRAME_WELD.ASM, RMB Open
2. Application, Welding
3. Insert,
Weld,
Fillet
Weld
or
select
4. LMB pick Surf:F5(EXTRUDE_1):FRAME_SIDE
5. RMB Side 2
6. LMB pick Surf:F5(EXTRUDE_1):BEAM_CROSS
7. CTRL‐LMB pick Surf:F5(EXTRUDE_1):BEAM_CROSS – the opposite side
8. CTRL‐LMB pick
Surf:F5(EXTRUDE_1):FRAME_BACK
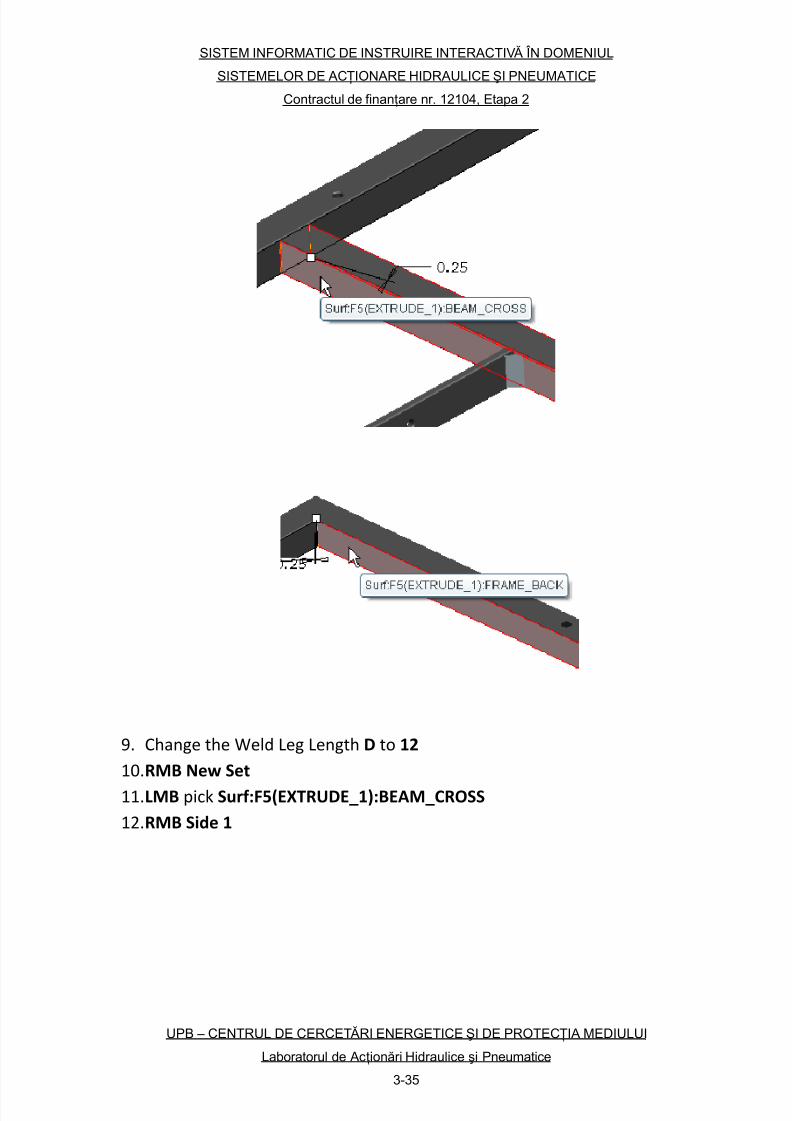
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 286/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-35
9. Change the Weld Leg Length D to 12
10. RMB New Set
11. LMB pick Surf:F5(EXTRUDE_1):BEAM_CROSS
12. RMB Side 1
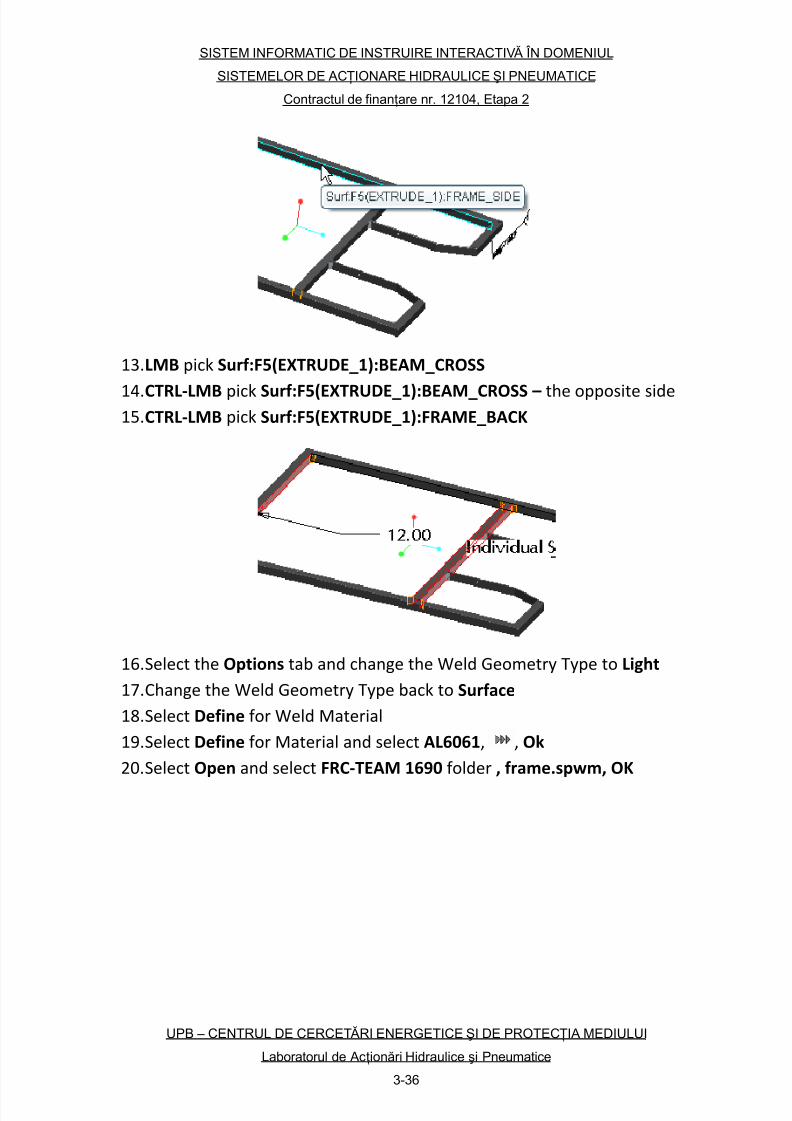
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 287/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-36
13. LMB pick Surf:F5(EXTRUDE_1):BEAM_CROSS
14. CTRL‐LMB pick
Surf:F5(EXTRUDE_1):BEAM_CROSS
–
the
opposite
side
15. CTRL‐LMB pick Surf:F5(EXTRUDE_1):FRAME_BACK
16. Select the Options tab and change the Weld Geometry Type to Light
17. Change the Weld Geometry Type back to Surface
18. Select Define for Weld Material
19. Select Define for Material and select AL6061, , Ok
20. Select Open and select FRC‐TEAM 1690 folder , frame.spwm, OK
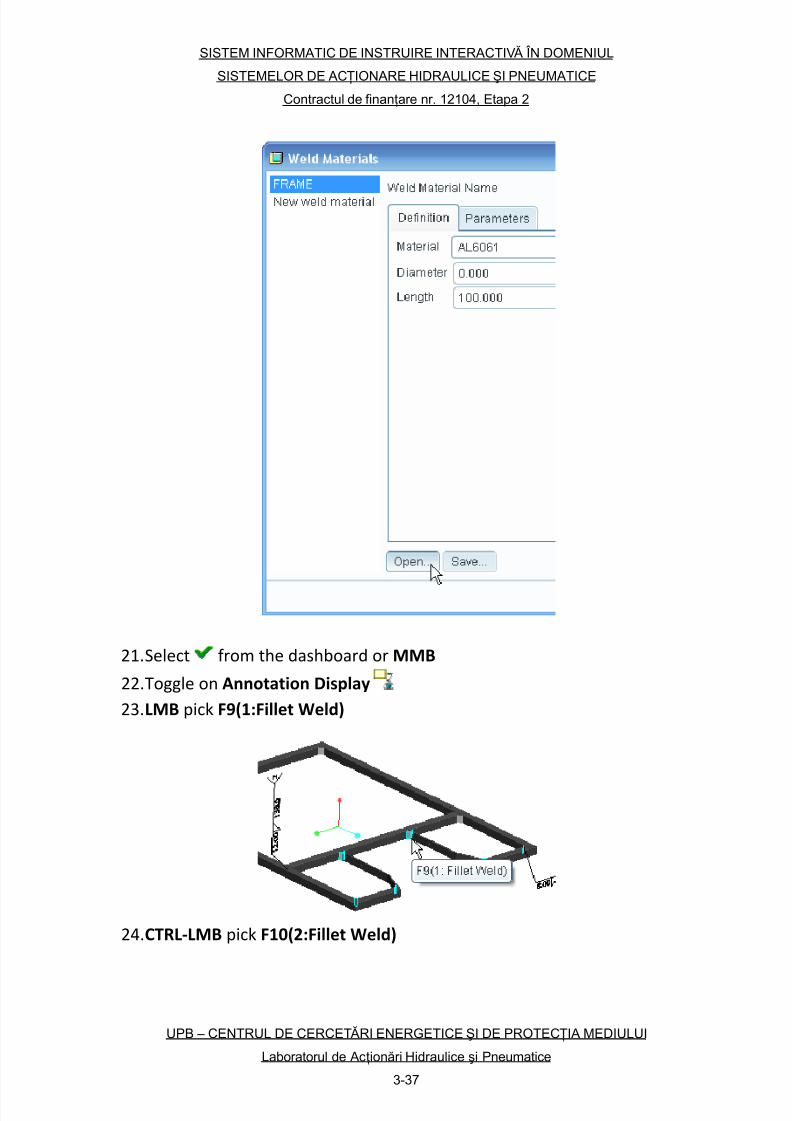
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 288/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-37
21. Select from the dashboard or MMB
22. Toggle on Annotation Display
23. LMB pick F9(1:Fillet Weld)
24. CTRL‐LMB pick F10(2:Fillet Weld)
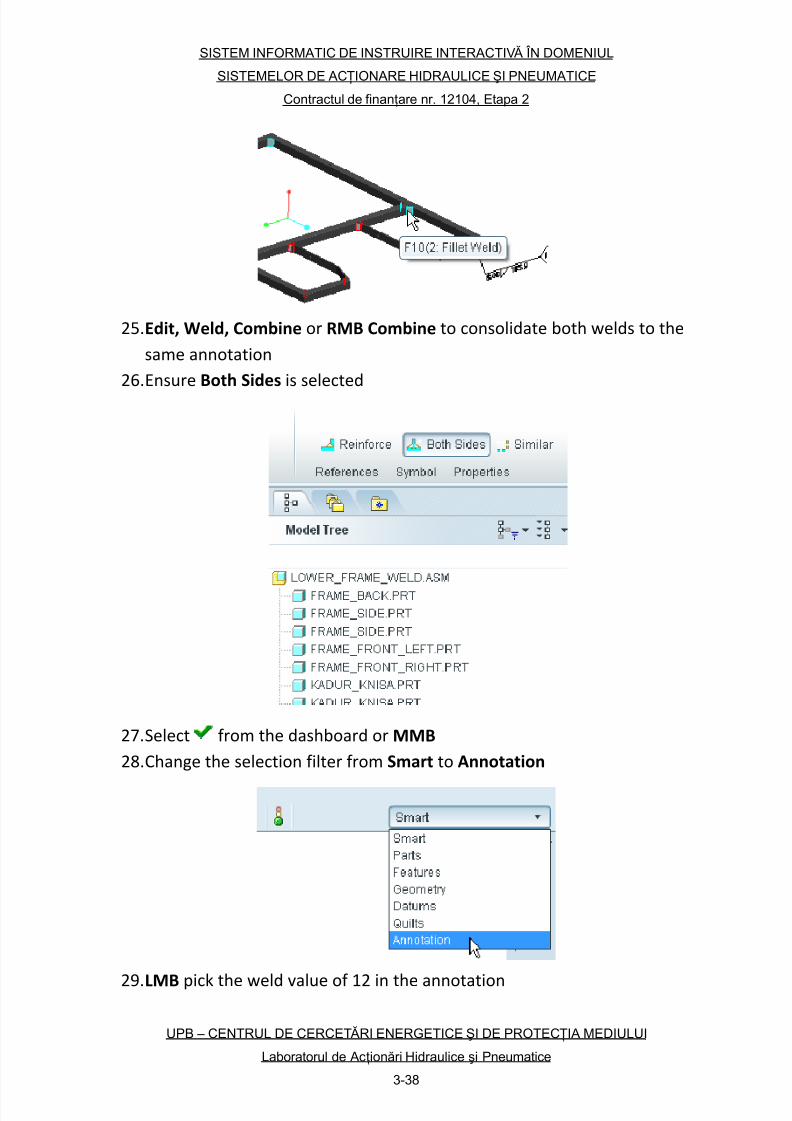
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 289/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-38
25. Edit, Weld, Combine or RMB Combine to consolidate both welds to the
same annotation
26. Ensure Both Sides is selected
27. Select from the dashboard or MMB
28. Change the selection filter from Smart to Annotation
29. LMB pick
the
weld
value
of
12
in
the
annotation
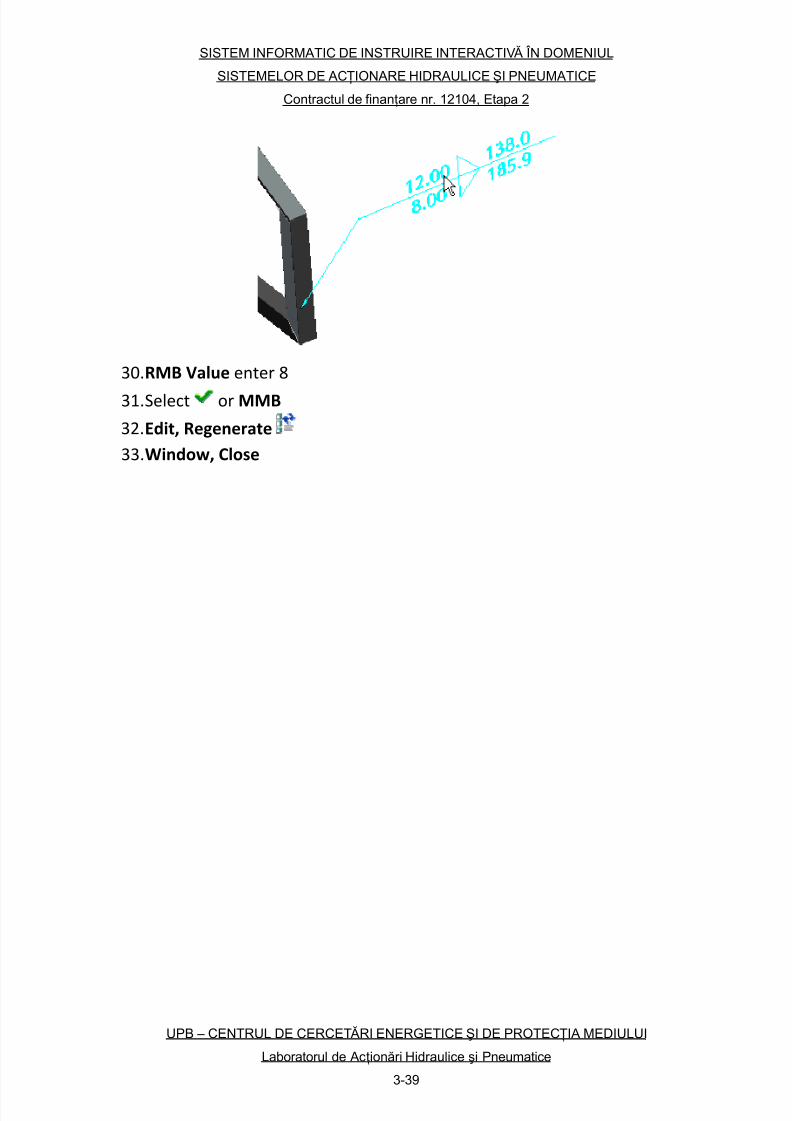
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 290/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-39
30. RMB Value enter 8
31. Select
or MMB
32. Edit, Regenerate
33. Window, Close
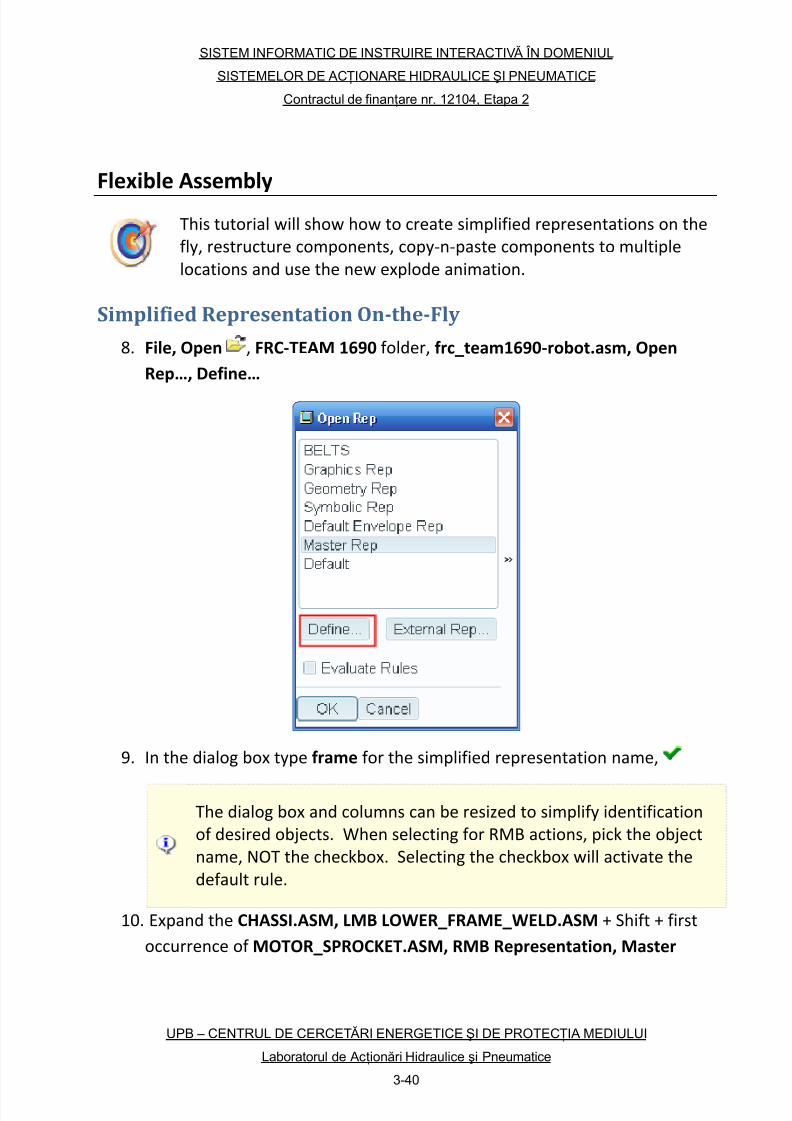
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 291/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-40
Flexible Assembly
This tutorial will show how to create simplified representations on the
fly, restructure components, copy‐n‐paste components to multiple
locations and use the new explode animation.
Simplified Representation On-the-Fly
8. File, Open , FRC‐TEAM 1690 folder, frc_team1690‐robot.asm, Open
Rep…, Define…
9. In the dialog box type frame for the simplified representation name,
The dialog box and columns can be resized to simplify identification
of desired objects. When selecting for RMB actions, pick the object
name, NOT the checkbox. Selecting the checkbox will activate the
default rule.
10. Expand the CHASSI.ASM, LMB LOWER_FRAME_WELD.ASM + Shift + first
occurrence of MOTOR_SPROCKET.ASM, RMB Representation, Master
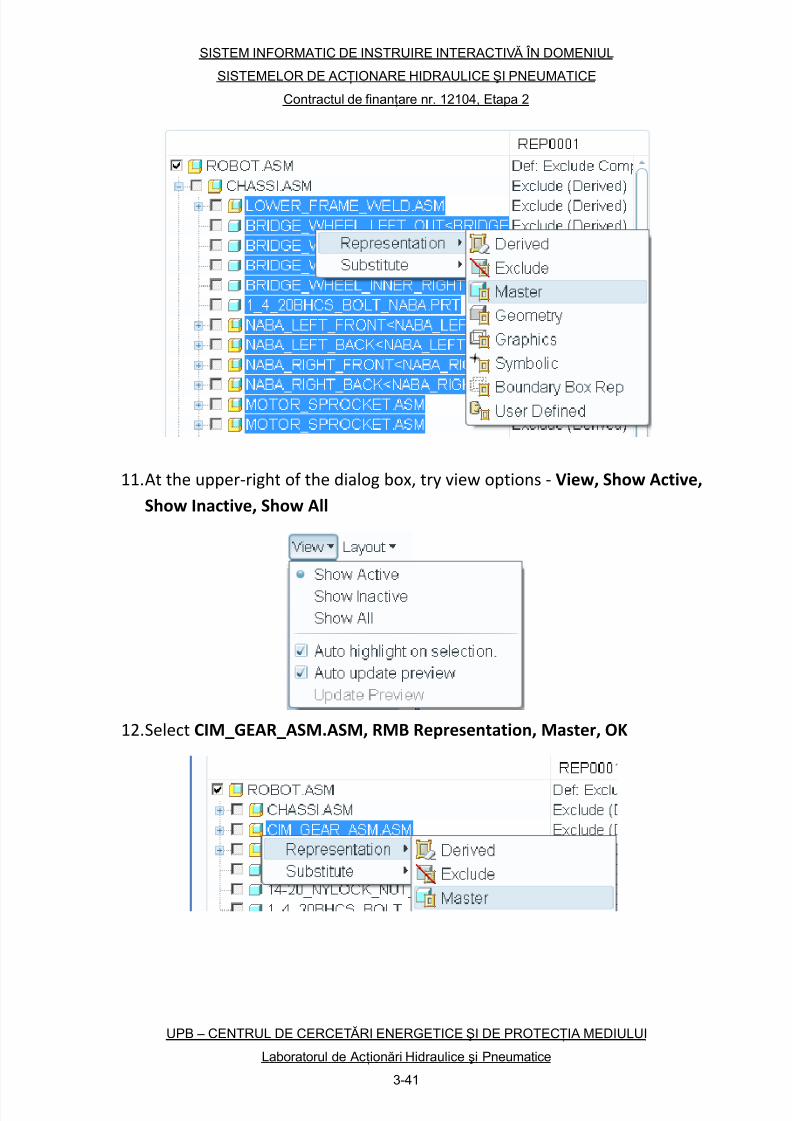
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 292/627
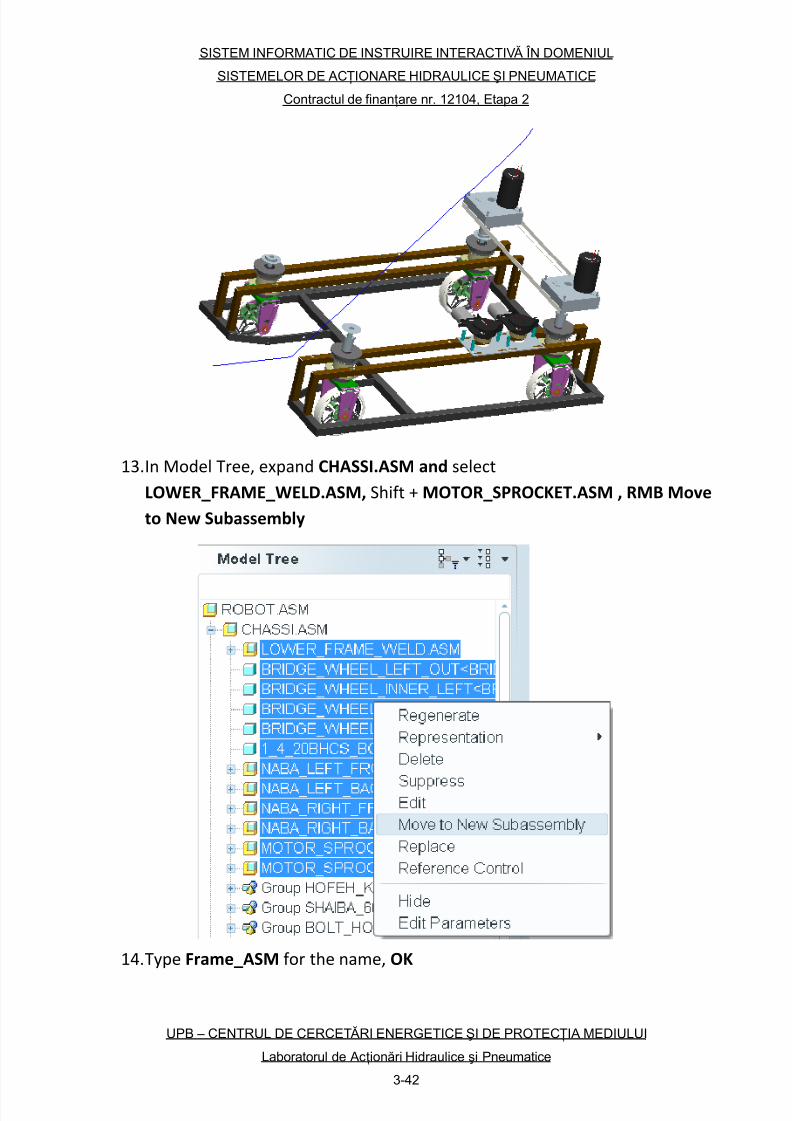
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 293/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-42
13. In Model Tree, expand CHASSI.ASM and select
LOWER_FRAME_WELD.ASM, Shift + MOTOR_SPROCKET.ASM , RMB Move
to New Subassembly
14. Type Frame_ASM for the name, OK
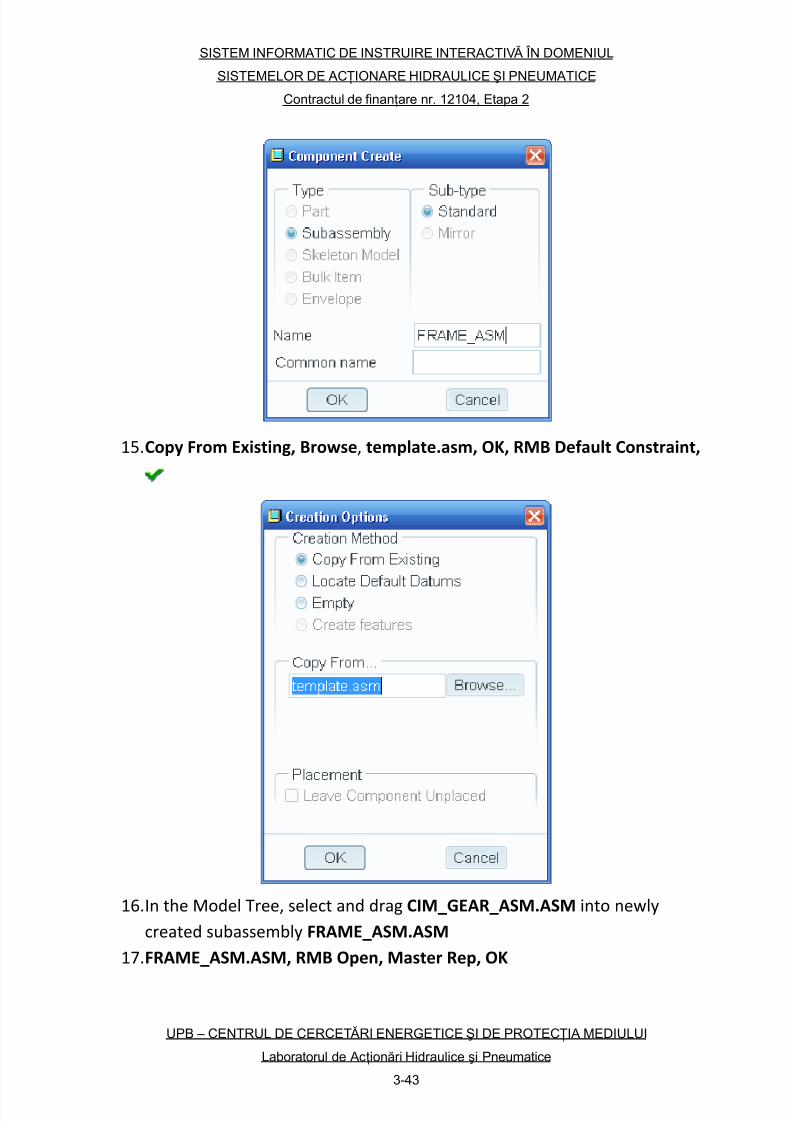
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 294/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-43
15. Copy From Existing, Browse, template.asm, OK, RMB Default Constraint,
16. In the Model Tree, select and drag CIM_GEAR_ASM.ASM into newly
created subassembly FRAME_ASM.ASM
17. FRAME_ASM.ASM, RMB Open, Master Rep, OK
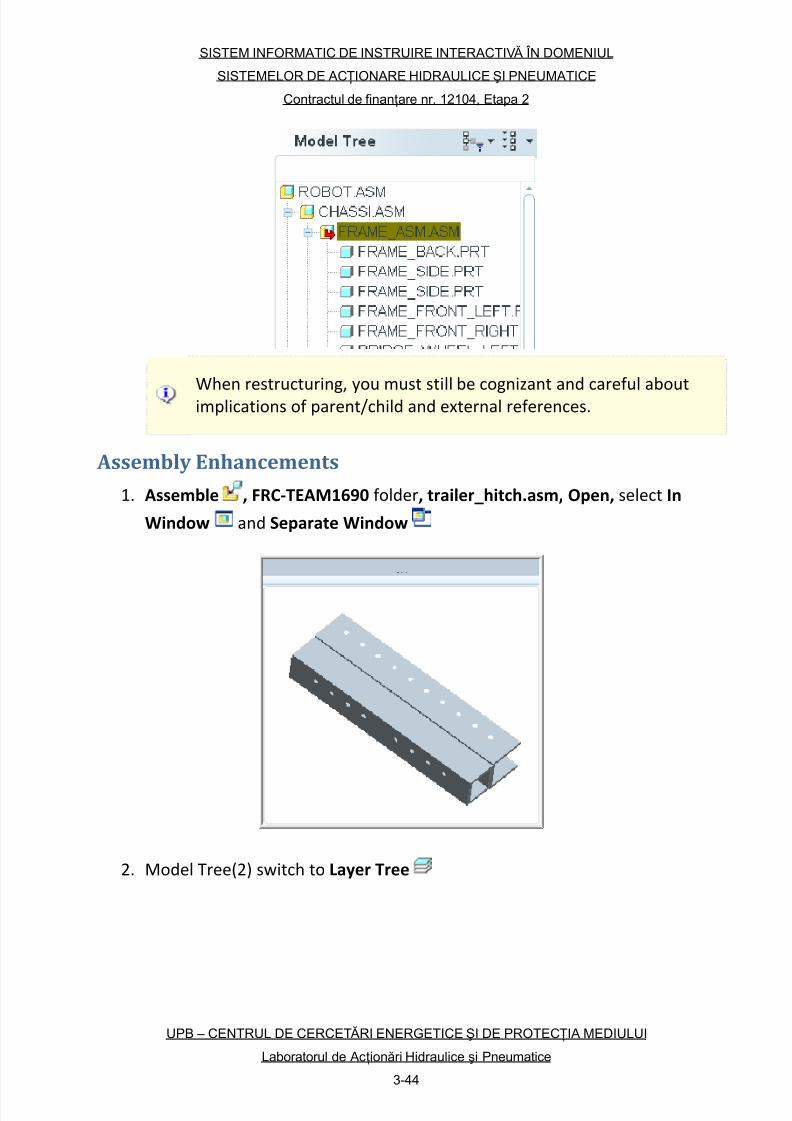
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 295/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-44
When
restructuring,
you
must
still
be
cognizant
and
careful
about
implications of parent/child and external references.
Assembly Enhancements
1. Assemble , FRC‐TEAM1690 folder, trailer_hitch.asm, Open, select In
Window and Separate Window
2. Model Tree(2) switch to Layer Tree
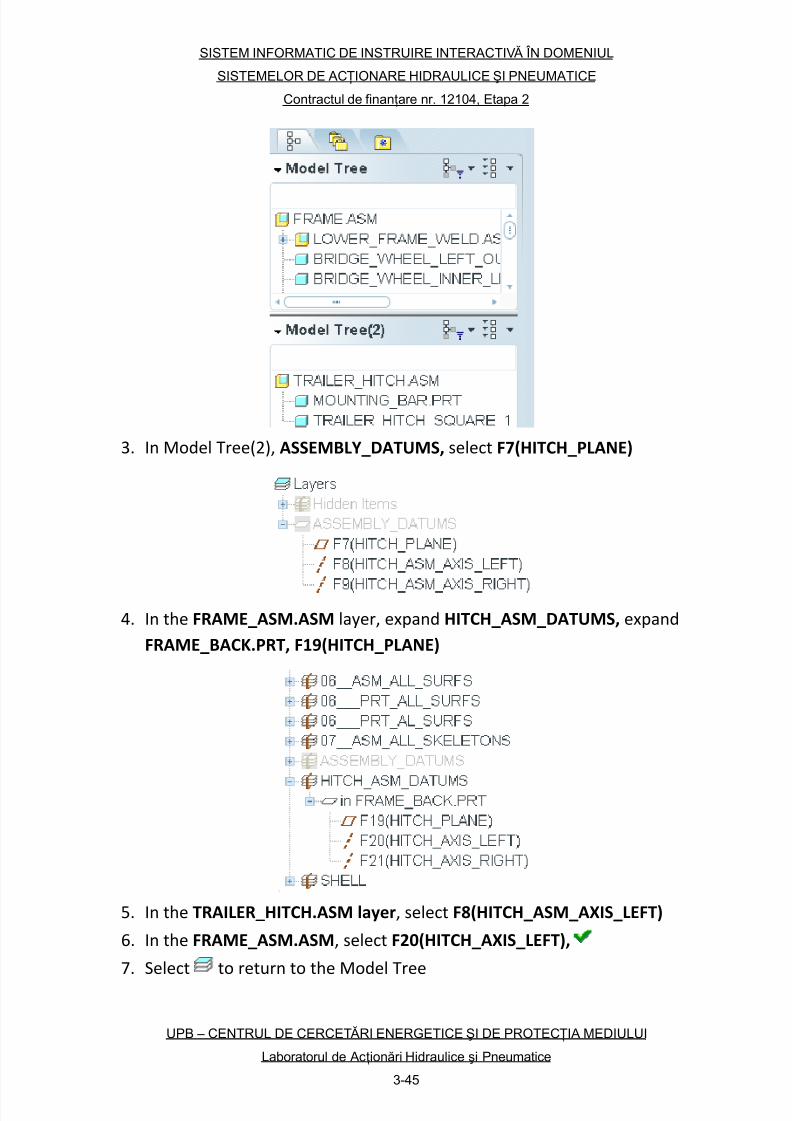
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 296/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-45
3. In Model Tree(2), ASSEMBLY_DATUMS, select F7(HITCH_PLANE)
4. In the FRAME_ASM.ASM layer, expand HITCH_ASM_DATUMS, expand
FRAME_BACK.PRT, F19(HITCH_PLANE)
5. In the TRAILER_HITCH.ASM layer, select F8(HITCH_ASM_AXIS_LEFT)
6. In the FRAME_ASM.ASM, select F20(HITCH_AXIS_LEFT),
7. Select to return to the Model Tree
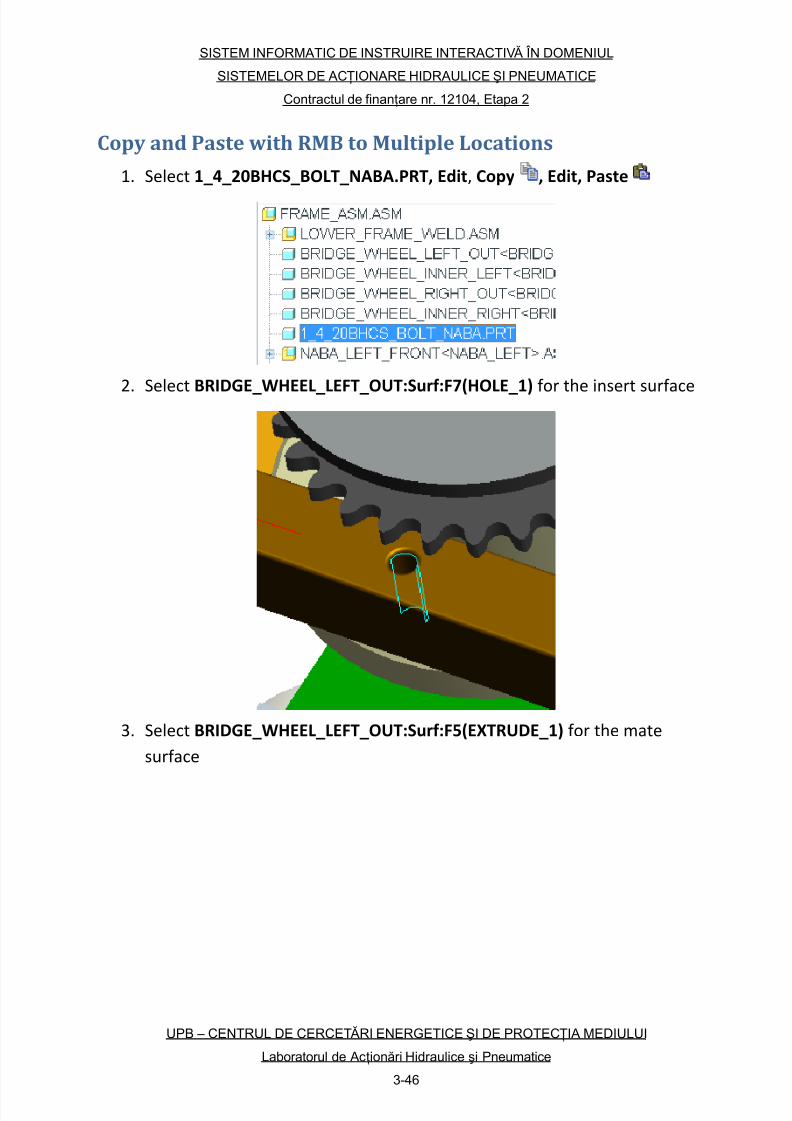
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 297/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-46
Copy and Paste with RMB to Multiple Locations
1. Select 1_4_20BHCS_BOLT_NABA.PRT, Edit, Copy , Edit, Paste
2. Select
BRIDGE_WHEEL_LEFT_OUT:Surf:F7(HOLE_1)
for
the
insert
surface
3. Select BRIDGE_WHEEL_LEFT_OUT:Surf:F5(EXTRUDE_1) for the mate
surface
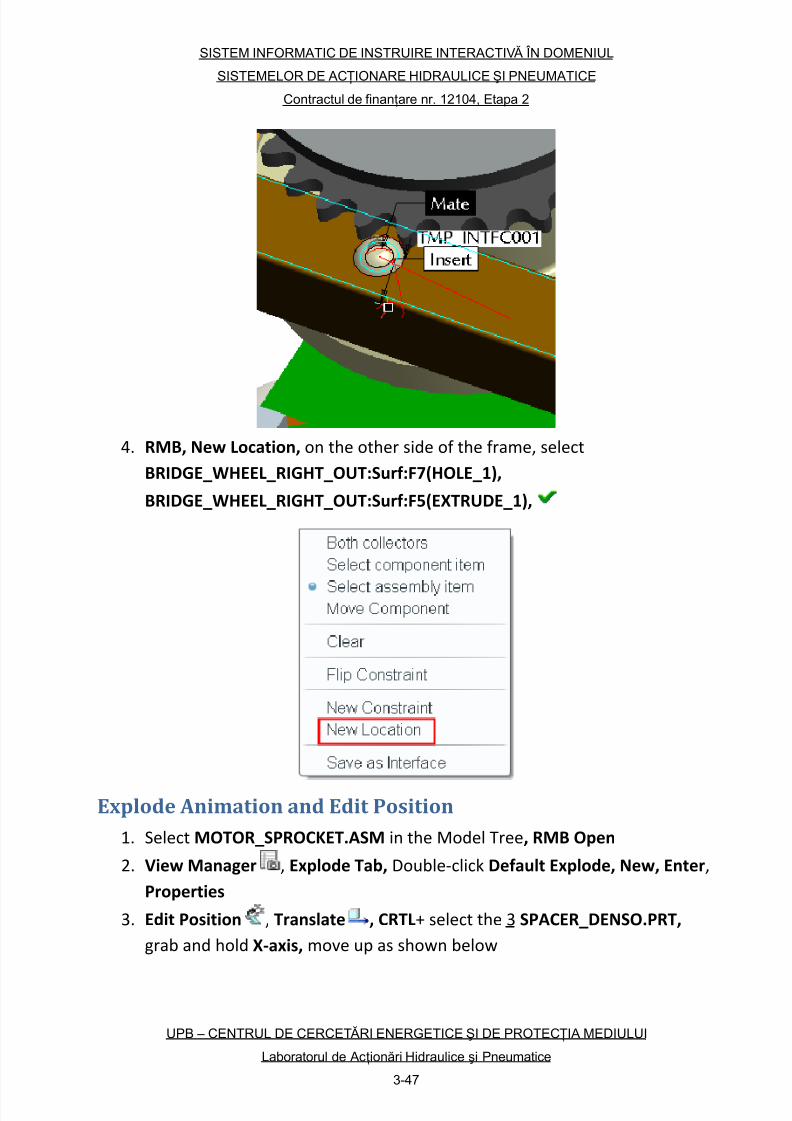
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 298/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-47
4. RMB, New Location, on the other side of the frame, select
BRIDGE_WHEEL_RIGHT_OUT:Surf:F7(HOLE_1),
BRIDGE_WHEEL_RIGHT_OUT:Surf:F5(EXTRUDE_1),
Explode Animation and Edit Position
1. Select MOTOR_SPROCKET.ASM in the Model Tree, RMB Open
2. View Manager , Explode Tab, Double‐click Default Explode, New, Enter,
Properties
3. Edit Position , Translate , CRTL+ select the U3U SPACER_DENSO.PRT,
grab and hold X‐axis, move up as shown below
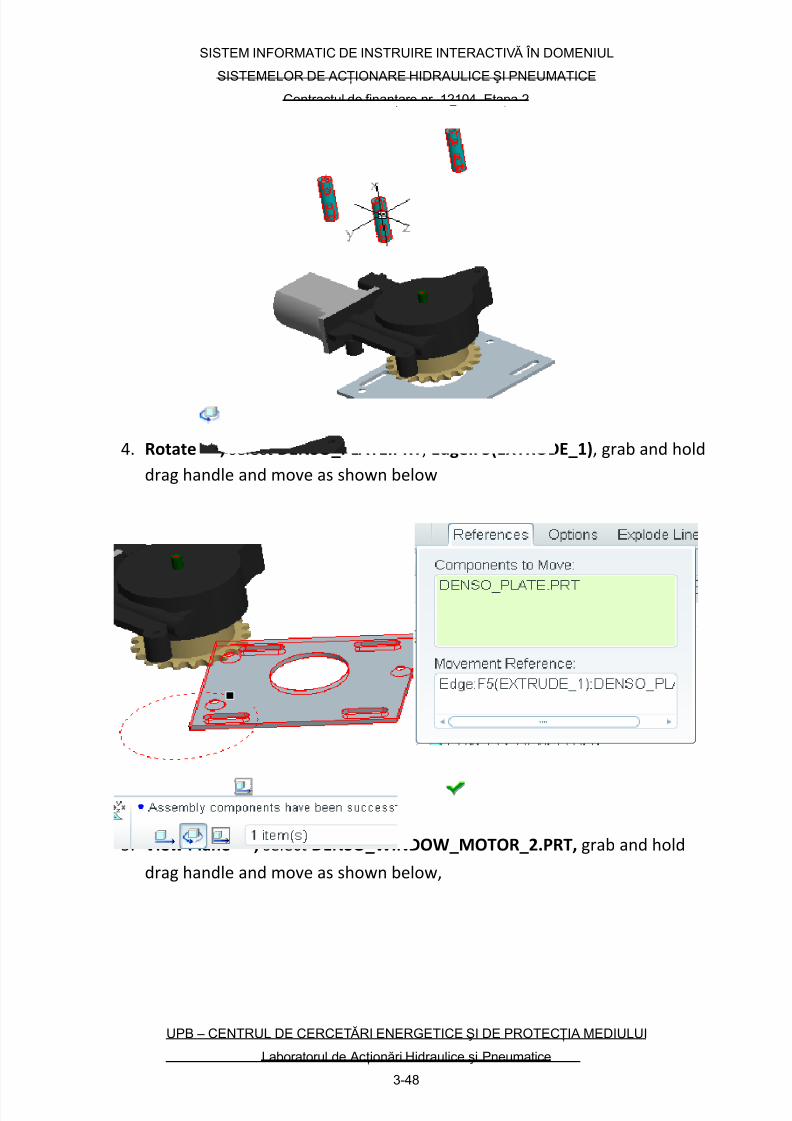
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 299/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-48
4. Rotate , select DENSO_PLATE.PRT, Edge:F5(EXTRUDE_1), grab and hold
drag handle and move as shown below
5. View Plane , select DENSO_WINDOW_MOTOR_2.PRT, grab and hold
drag handle and move as shown below,
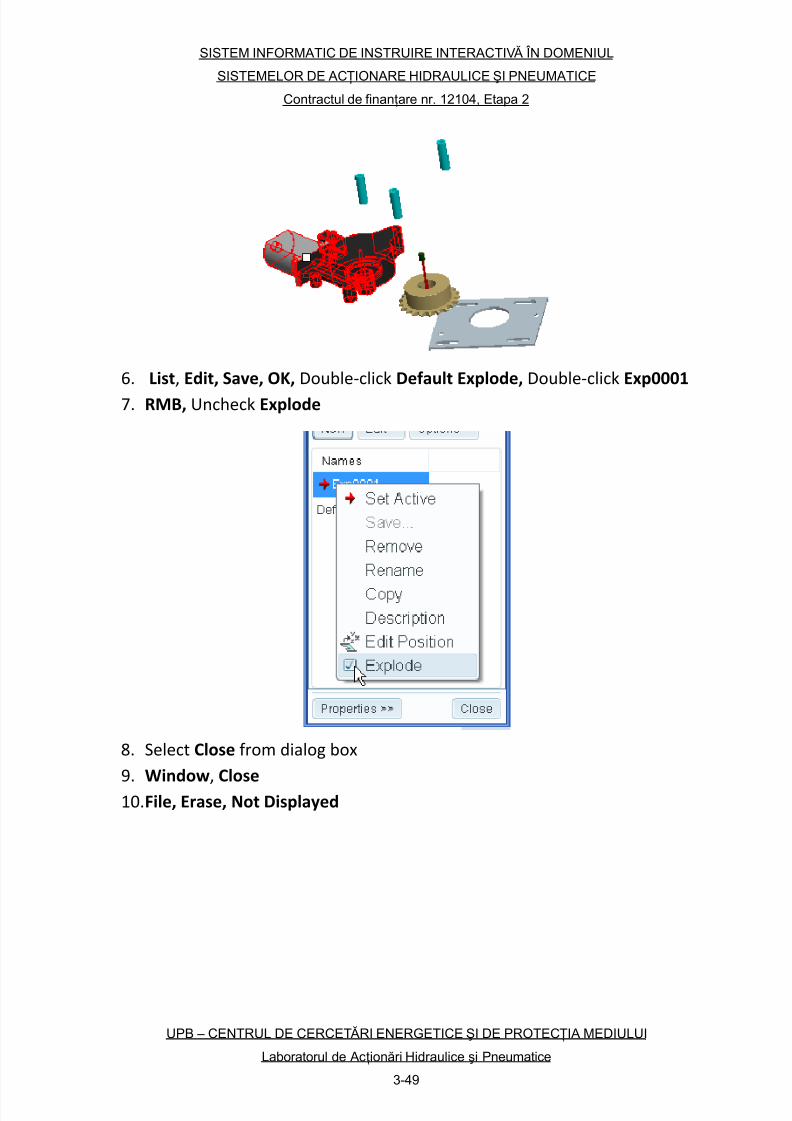
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 300/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-49
6. List, Edit, Save, OK, Double‐click Default Explode, Double‐click Exp0001
7. RMB, Uncheck Explode
8. Select Close from dialog box
9. Window, Close
10. File, Erase, Not Displayed

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 301/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-50
Simulation
This tutorial will show how to set up one of the new mechanism
connections for enhanced machine simulation, then setup, run, and
analyze the results of a structural analysis of a model using Mechanica.
Mechanism Belt Connection
This portion of the tutorial will show the user how to set up a belt
connection
within
mechanism
mode.
1. File, Open , FRC‐TEAM1690 folder, frc‐team1690‐robot.asm, Open
2. View, View Manager or select , double click Belts simplified rep, Close
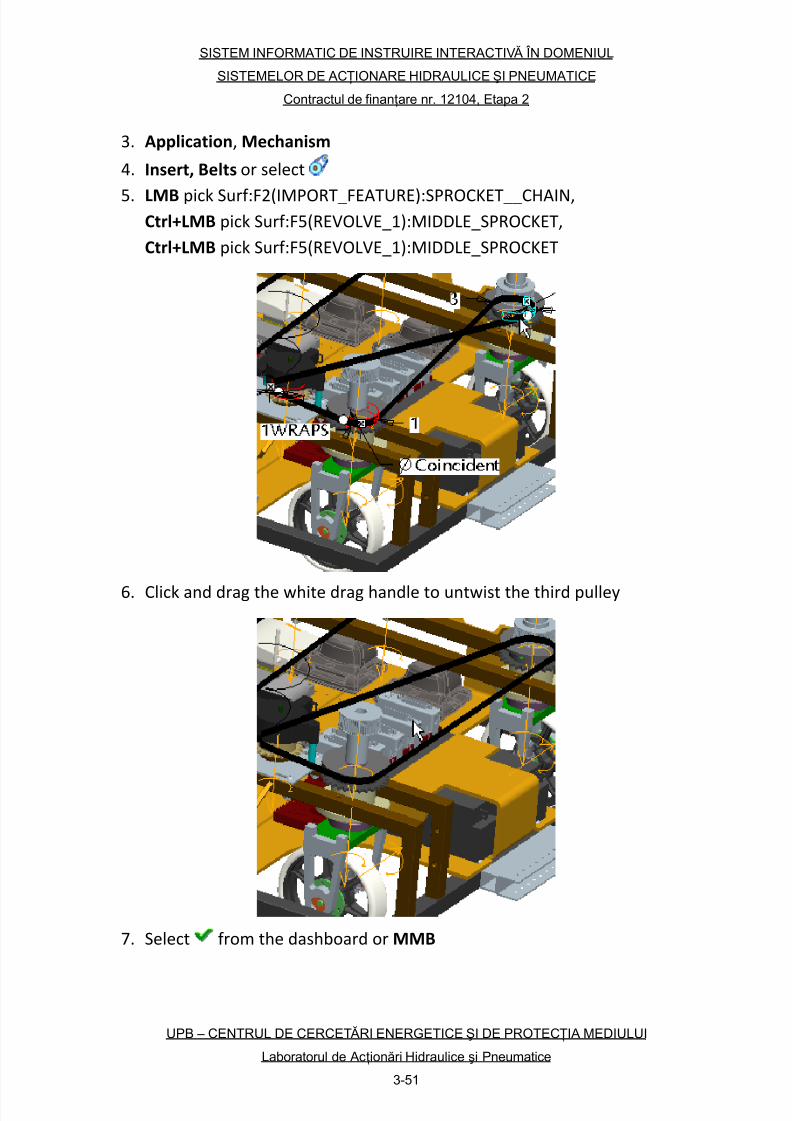
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 302/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-51
3. Application, Mechanism
4. Insert, Belts or select
5. LMB pick
Surf:F2(IMPORT_FEATURE):SPROCKET__CHAIN,
Ctrl+LMB pick Surf:F5(REVOLVE_1):MIDDLE_SPROCKET,
Ctrl+LMB pick Surf:F5(REVOLVE_1):MIDDLE_SPROCKET
6. Click and
drag
the
white
drag
handle
to
untwist
the
third
pulley
7. Select from the dashboard or MMB
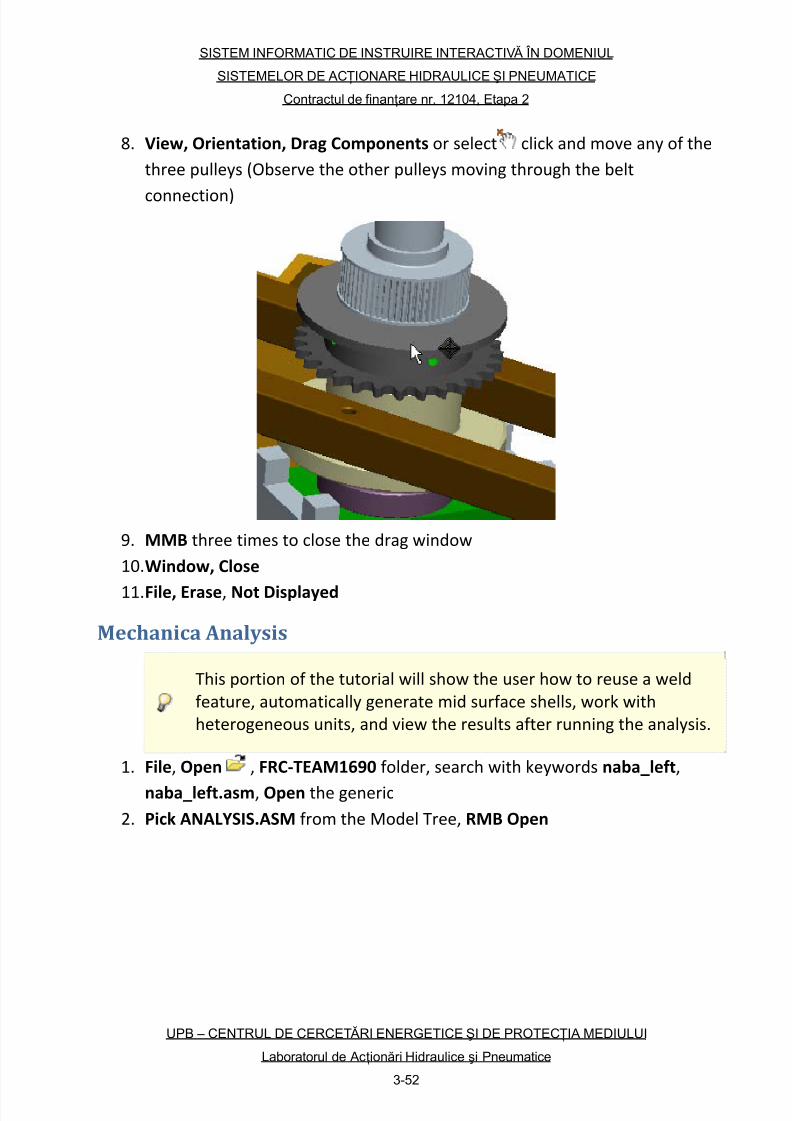
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 303/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-52
8. View, Orientation, Drag Components or select click and move any of the
three pulleys (Observe the other pulleys moving through the belt
connection)
9. MMB three times to close the drag window
10. Window, Close
11. File, Erase, Not
Displayed
Mechanica Analysis
This portion of the tutorial will show the user how to reuse a weld
feature, automatically generate mid surface shells, work with
heterogeneous units, and view the results after running the analysis.
1. File, Open , FRC‐TEAM1690 folder, search with keywords naba_left,
naba_left.asm, Open
the
generic
2. Pick ANALYSIS.ASM from the Model Tree, RMB Open
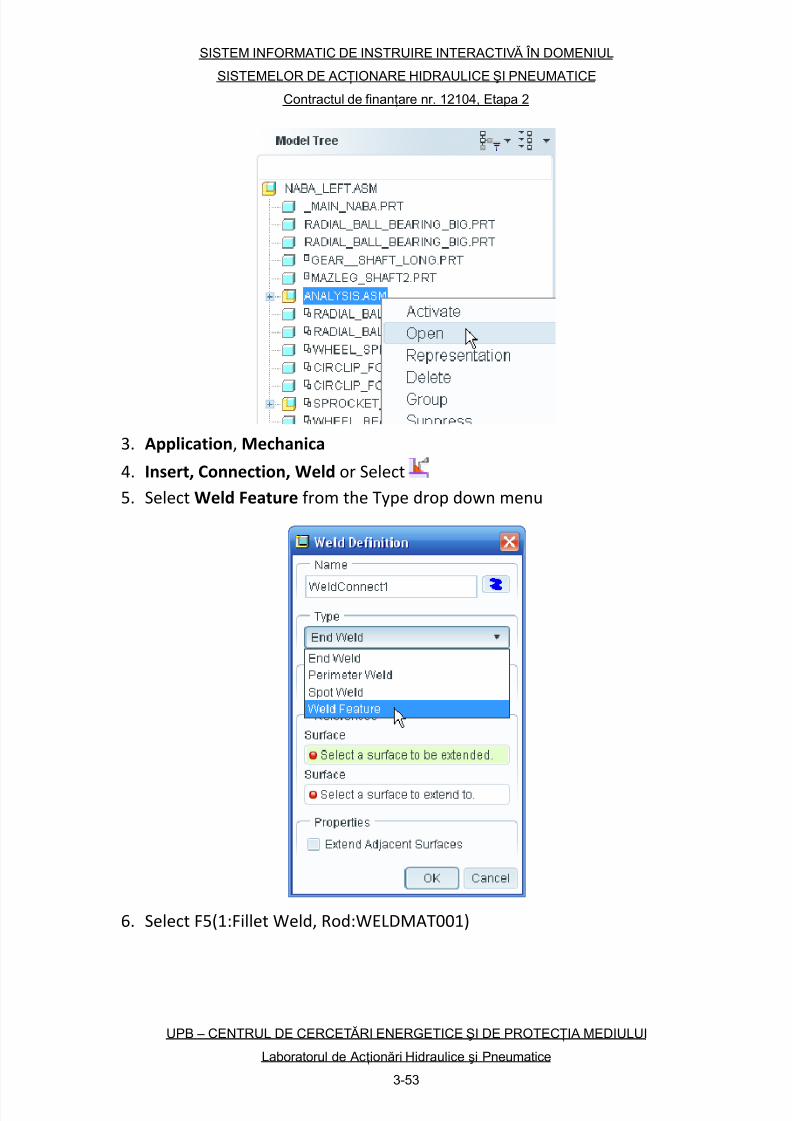
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 304/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-53
3. Application, Mechanica
4. Insert, Connection, Weld or Select
5. Select Weld Feature from the Type drop down menu
6. Select F5(1:Fillet Weld, Rod:WELDMAT001)
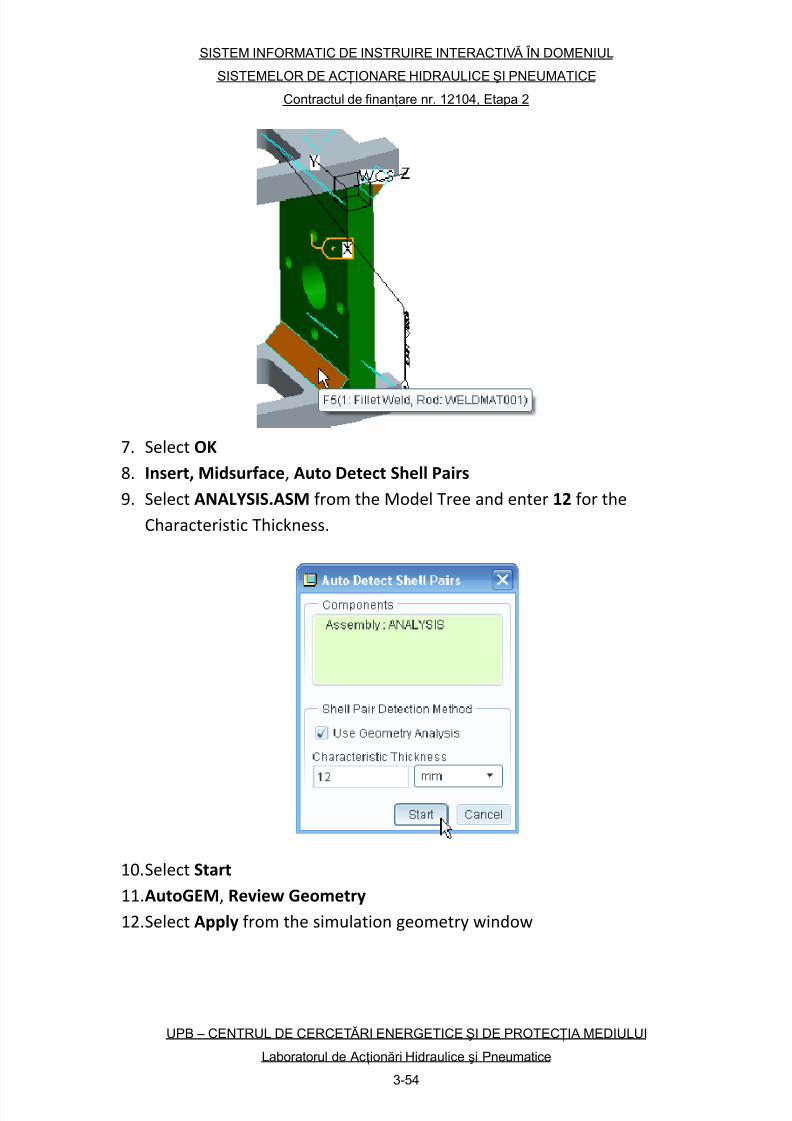
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 305/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-54
7. Select OK
8. Insert, Midsurface, Auto Detect Shell Pairs
9. Select ANALYSIS.ASM from the Model Tree and enter 12 for the
Characteristic Thickness.
10. Select Start
11. AutoGEM, Review Geometry
12. Select Apply from the simulation geometry window
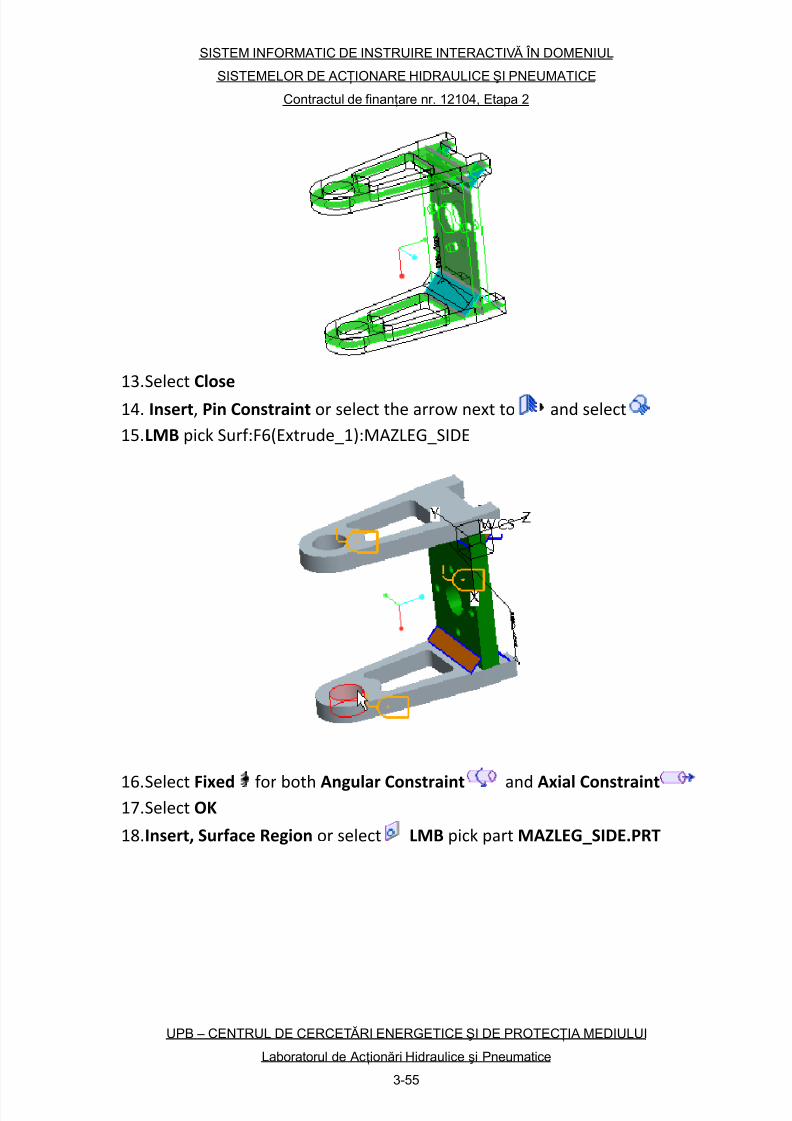
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 306/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-55
13. Select Close
14. Insert, Pin Constraint or select the arrow next to and select
15. LMB pick Surf:F6(Extrude_1):MAZLEG_SIDE
16. Select Fixed
for
both
Angular
Constraint
and
Axial
Constraint
17. Select OK
18. Insert, Surface Region or select LMB pick part MAZLEG_SIDE.PRT
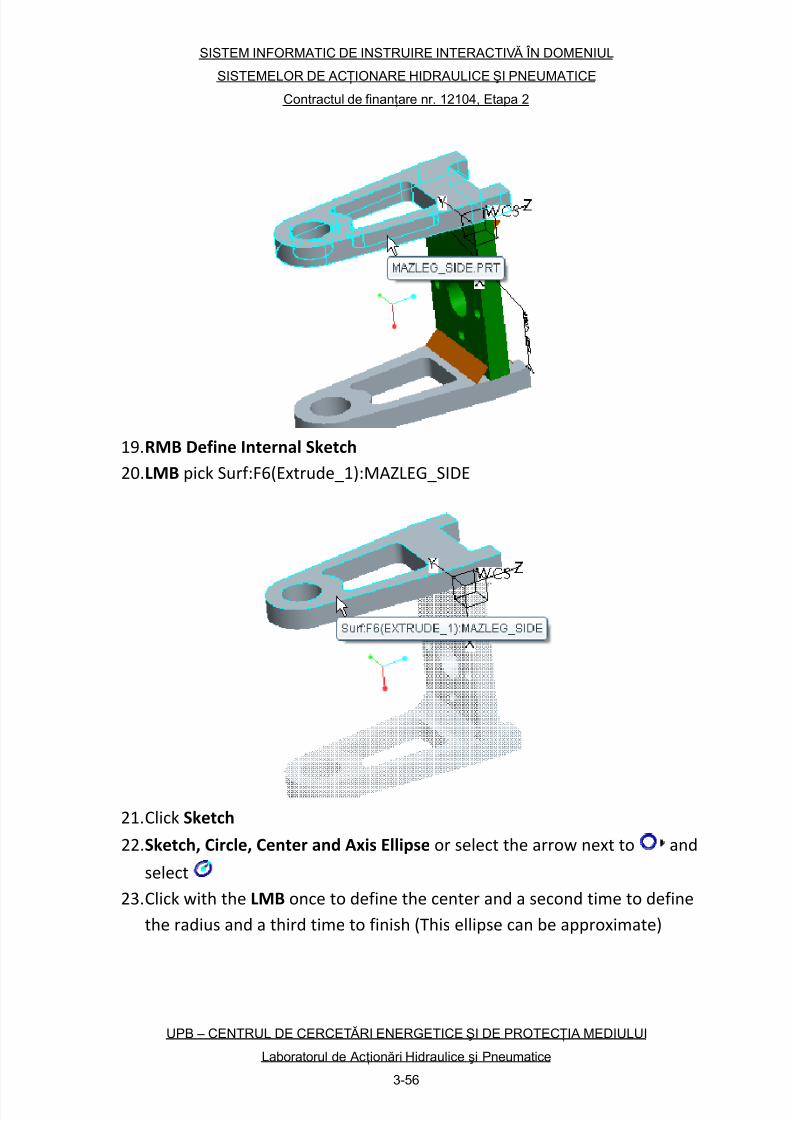
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 307/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-56
19. RMB Define Internal Sketch
20. LMB pick Surf:F6(Extrude_1):MAZLEG_SIDE
21. Click Sketch
22. Sketch, Circle, Center and Axis Ellipse or select the arrow next to and
select
23. Click with the LMB once to define the center and a second time to define
the radius and a third time to finish (This ellipse can be approximate)
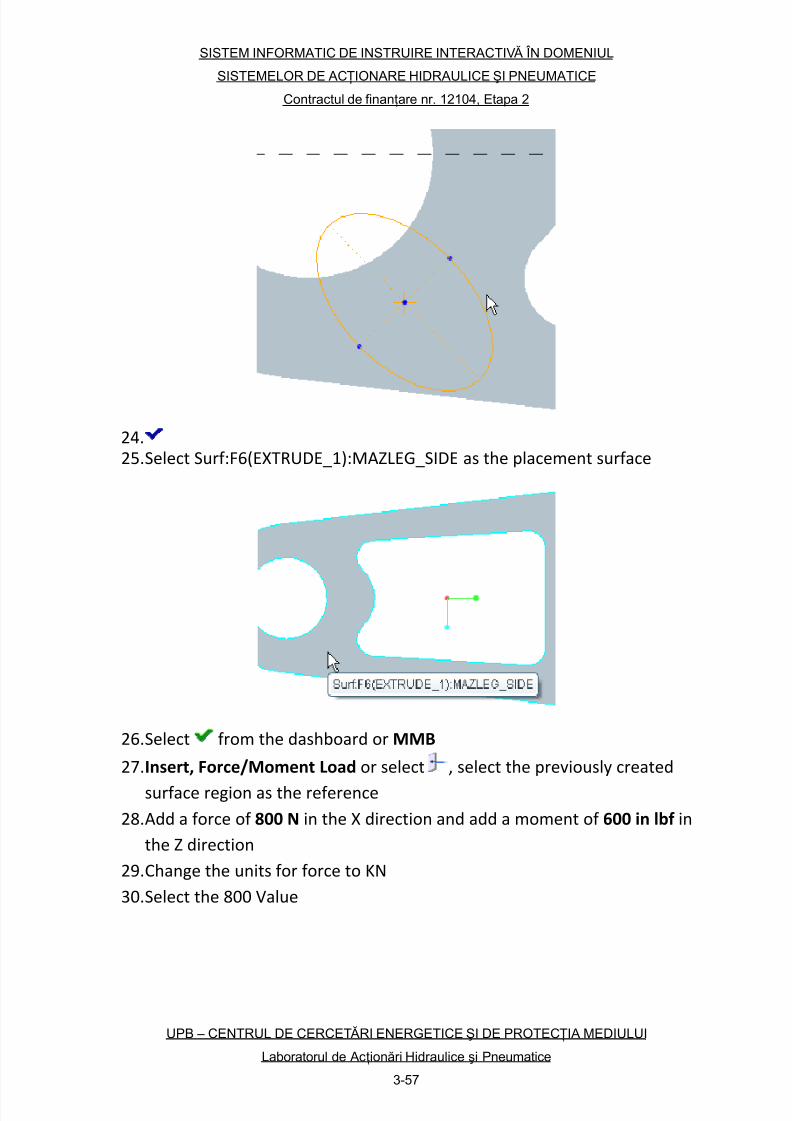
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 308/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-57
24. 25. Select Surf:F6(EXTRUDE_1):MAZLEG_SIDE as the placement surface
26. Select from the dashboard or MMB
27. Insert, Force/Moment Load or select , select the previously created
surface region
as
the
reference
28. Add a force of 800 N in the X direction and add a moment of 600 in lbf in
the Z direction
29. Change the units for force to KN
30. Select the 800 Value

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 309/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-58
31. RMB Convert to Unit, lbf
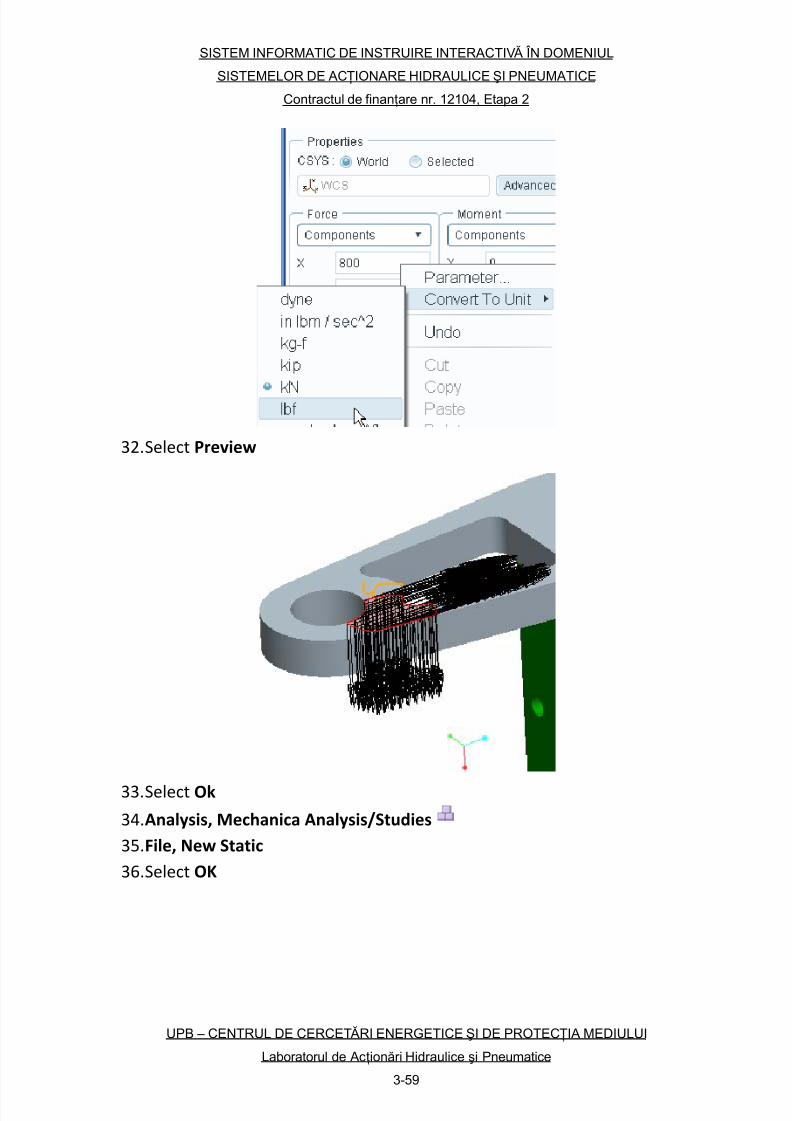
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 310/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-59
32. Select Preview
33. Select Ok
34. Analysis, Mechanica Analysis/Studies
35. File, New Static
36. Select OK
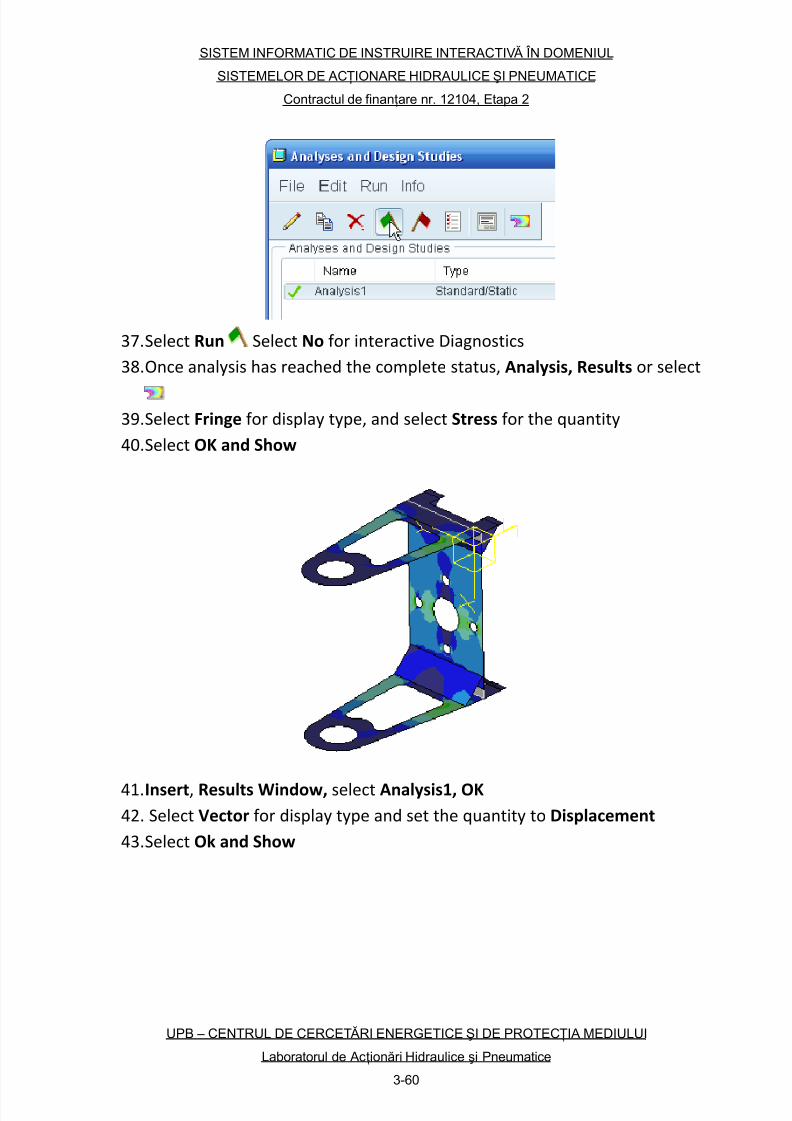
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 311/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-60
37. Select Run Select No for interactive Diagnostics
38. Once analysis has reached the complete status, Analysis, Results or select
39. Select Fringe for display type, and select Stress for the quantity
40. Select OK and Show
41. Insert, Results Window, select Analysis1,
OK
42. Select Vector for display type and set the quantity to Displacement
43. Select Ok and Show
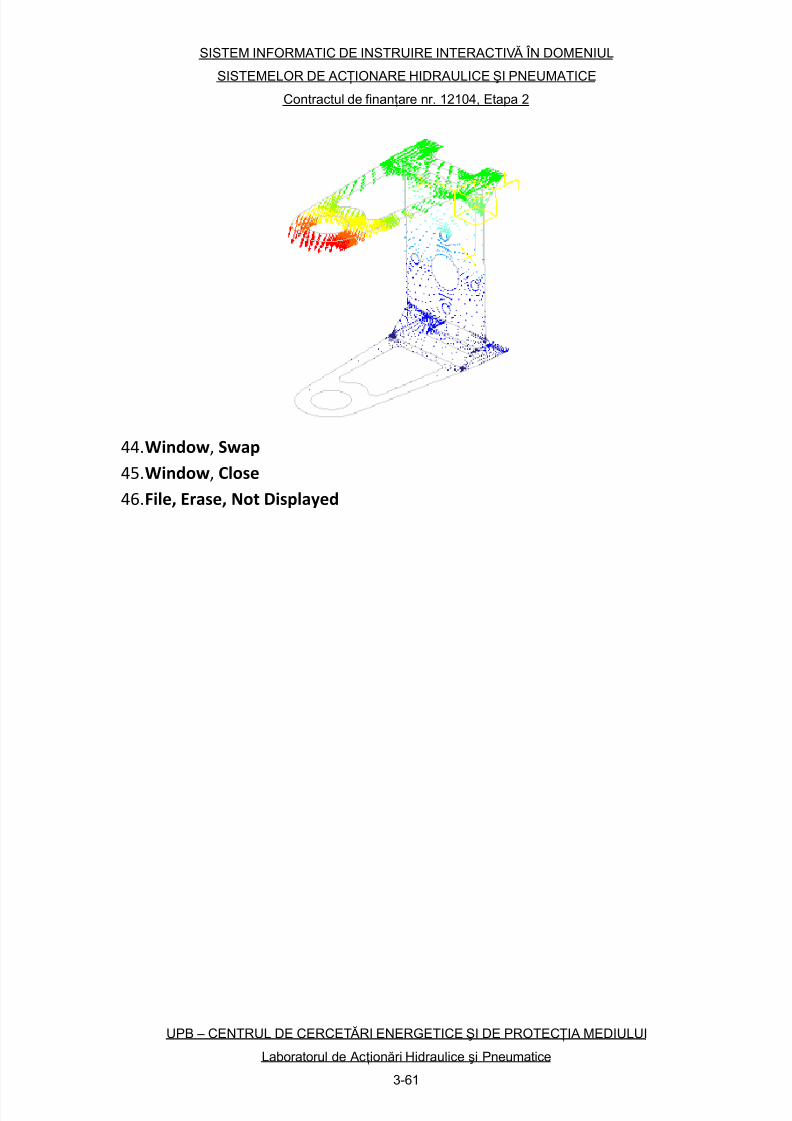
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 312/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-61
44. Window, Swap
45. Window, Close
46. File, Erase, Not Displayed

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 313/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-62
Drawing Workflow and Efficiency
Pro/ENGINEER includes many new enhancements for creating and
working with 2D drawings and improved interaction with 3D drawings.
• Improved creation and display of 2D & 3D annotations
• Improved display and management of annotations
• Easy creation and manipulation of geometry annotation
• Enhanced user
experience
and
productivity
• Enhanced capabilities and support for 2D documentation
• Enhanced capabilities and support for 2D print and plotting
Task -Based User Interface
1. File, Open , FTC‐ROBOT folder, search with keywords ftc, ftc‐robot.drw,
Open
Now drawing commands are re‐organized into a ribbon‐style user
interface. The new user interface (UI) is designed to display only
those drawing commands which are appropriate for the current task.
2. Select Table tab, Annotate, Sketch, Review, Publish and review the ribbon‐
style top level UI
3. Select Layout
tab,
hold
Alt
and
select
the
balloon
in
the
drawing
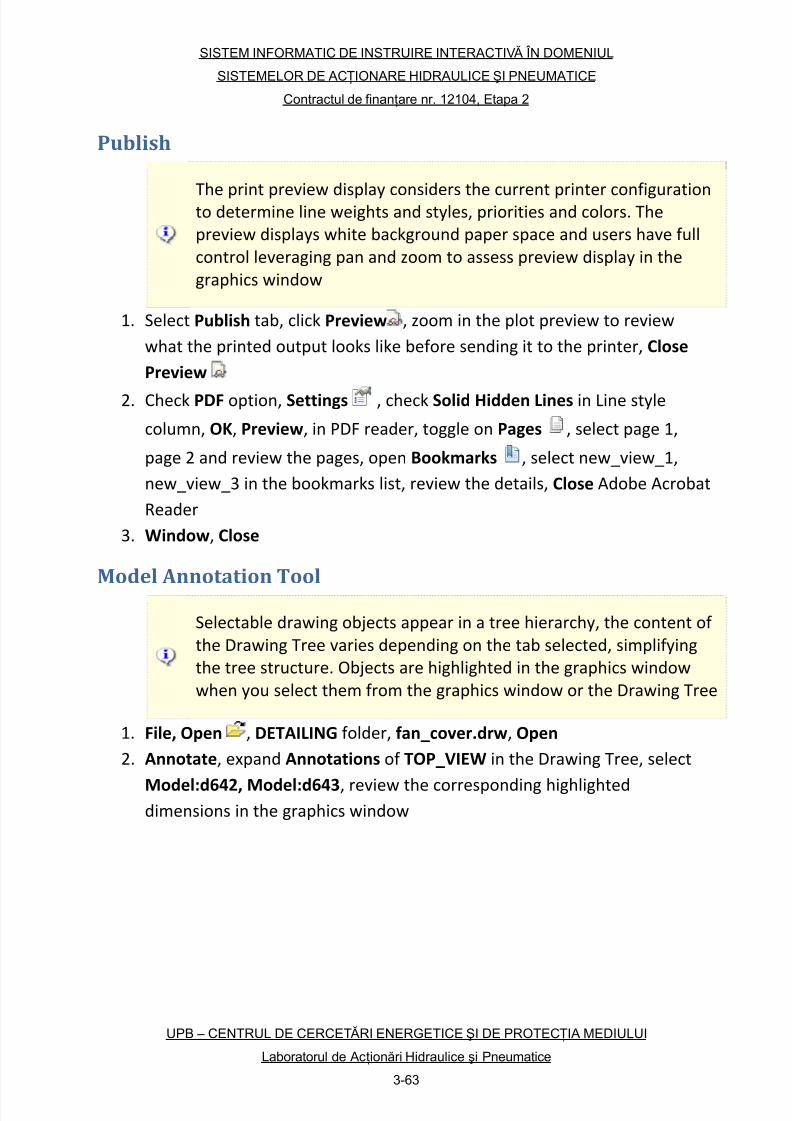
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 314/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-63
Publish
The
preview
display
considers
the
current
printer
configuration
to determine line weights and styles, priorities and colors. The
preview displays white background paper space and users have full
control leveraging pan and zoom to assess preview display in the
graphics window
1. Select Publish tab, click Preview , zoom in the plot preview to review
what the printed output looks like before sending it to the printer, Close
Preview
2. Check PDF
option,
Settings
, check
Solid
Hidden
Lines
in
Line
style
column, OK, Preview, in PDF reader, toggle on Pages , select page 1,
page 2 and review the pages, open Bookmarks , select new_view_1,
new_view_3 in the bookmarks list, review the details, Close Adobe Acrobat
Reader
3. Window, Close
Model Annotation Tool
Selectable drawing objects appear in a tree hierarchy, the content of
the Drawing Tree varies depending on the tab selected, simplifying
the tree structure. Objects are highlighted in the graphics window
when you select them from the graphics window or the Drawing Tree
1. File, Open , DETAILING folder, fan_cover.drw, Open
2. Annotate, expand Annotations of TOP_VIEW in the Drawing Tree, select
Model:d642, Model:d643,
review
the
corresponding
highlighted
dimensions in the graphics window
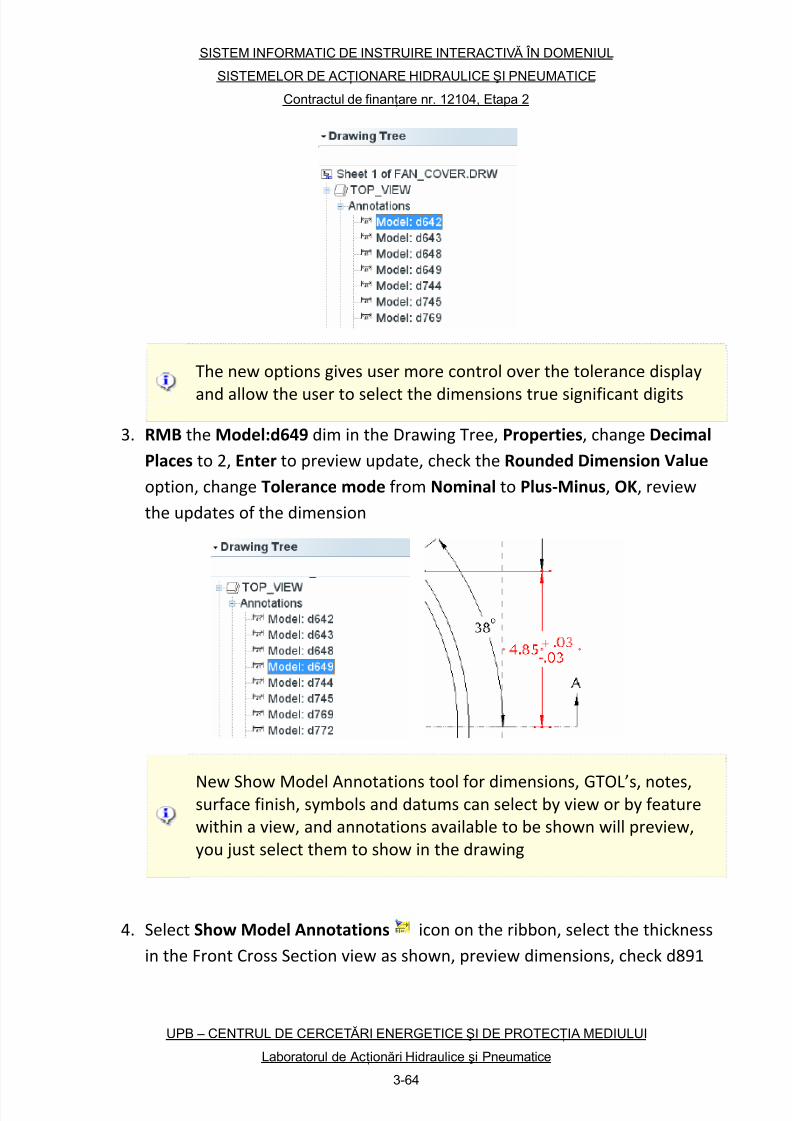
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 315/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-64
The new options gives user more control over the tolerance display
and allow
the
user
to
select
the
dimensions
true
significant
digits
3. RMB the Model:d649 dim in the Drawing Tree, Properties, change Decimal
Places to 2, Enter to preview update, check the Rounded Dimension Value
option, change Tolerance mode from Nominal to Plus‐Minus, OK, review
the updates of the dimension
New Show
Model
Annotations
tool
for
dimensions,
GTOL’s,
notes,
surface finish, symbols and datums can select by view or by feature
within a view, and annotations available to be shown will preview,
you just select them to show in the drawing
4. Select Show Model Annotations icon on the ribbon, select the thickness
in the Front Cross Section view as shown, preview dimensions, check d891

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 316/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-65
which stands for the thickness of the part, OK, select the .10THICK and
move it to empty area
5. Select Show Model Annotations icon, select the BOT_EXT_CUT feature
from the Model Tree, preview the dimensions showing up, Cancel
6. Select Show Model Annotations icon, pick model edge as shown below,
see the difference in what dimensions appear, Cancel
7. Select Geometry Tolerance from the Insert ribbon, select , Reference
Type: Feature
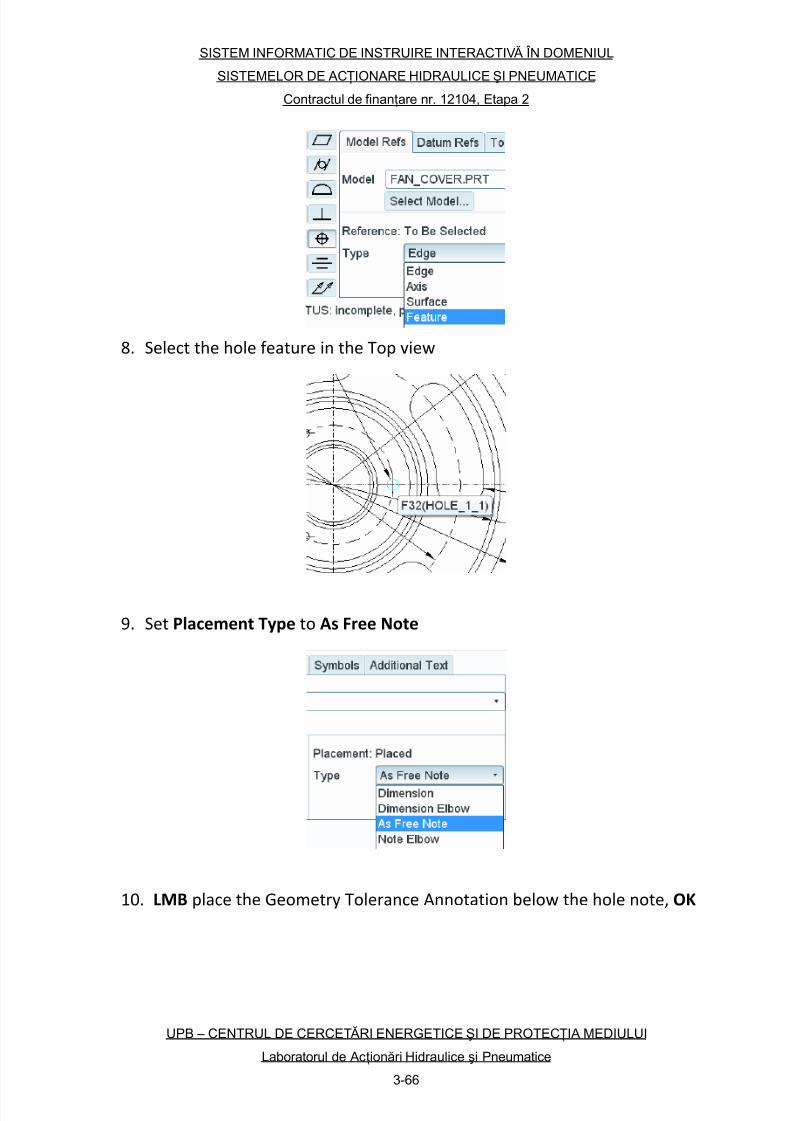
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 317/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-66
8. Select the hole feature in the Top view
9. Set Placement Type to As Free Note
10. LMB place the Geometry Tolerance Annotation below the hole note, OK
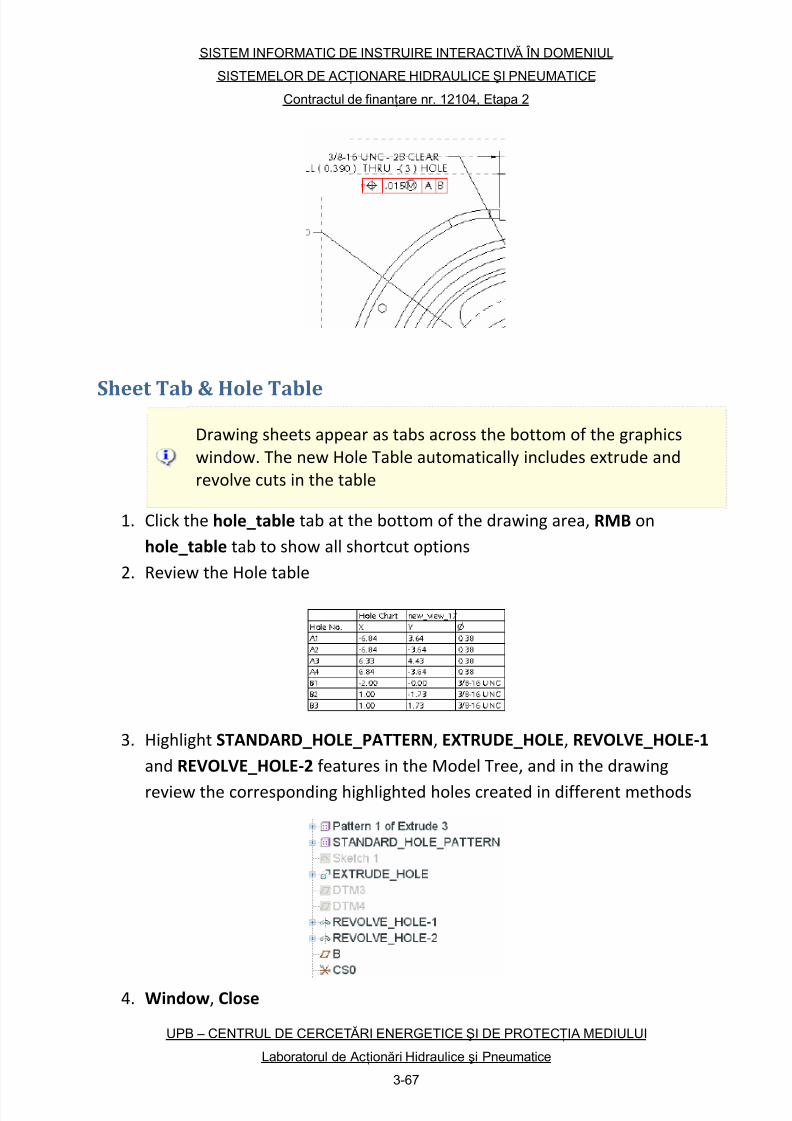
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 318/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-67
Sheet Tab
&
Hole
Table
Drawing sheets appear as tabs across the bottom of the graphics
window. The new Hole Table automatically includes extrude and
revolve cuts in the table
1. Click the hole_table tab at the bottom of the drawing area, RMB on
hole_table tab to show all shortcut options
2. Review the Hole table
3. Highlight STANDARD_HOLE_PATTERN, EXTRUDE_HOLE, REVOLVE_HOLE‐1
and REVOLVE_HOLE‐2 features in the Model Tree, and in the drawing
review the
corresponding
highlighted
holes
created
in
different
methods
4. Window, Close

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 319/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-68
Combined View Tab
1. File, Open , DETAILING folder, bracket.prt, Open,
toggle on
Annotation
Display
if
necessary
You can easily navigate between the combined states of a model
without opening the View Manager. Combined or All states appear as
tabs, each with a thumbnail preview, in the graphics window
2. Select View Manager , All, check Display combined views, Close
3. Move cursor to combined view tabs at the bottom of the graphics window,
show the
thumbnail
preview
of
combined
view
4. Click Mbd‐00‐Front tab, Mbd‐01‐Bottom, Mbd‐02‐Left, Mbd‐03‐Right,
Show_All combined view tabs to review the model information from
different angles, RMB on Show_All view tab, preview all shortcut options,
select Redefine, change Orientation to 3D‐Detail,
Layer Visibility
You can
create
layer
visibility
states
from
the
View
Manager,
and
you
can toggle the display of all layer‐assigned content.
1. Select , select View Manager , Layers, double‐click Mbd‐00‐Front,
Mbd‐01‐Bottom, Mbd‐02‐Left, Mbd‐03‐Right, Show_All, and review the
corresponding layers visibility changes in the Layer Tree
2. RMB on ANNOT_ALL_TBLOCK in the Layer Tree on the Navigator, Hide,
Repaint
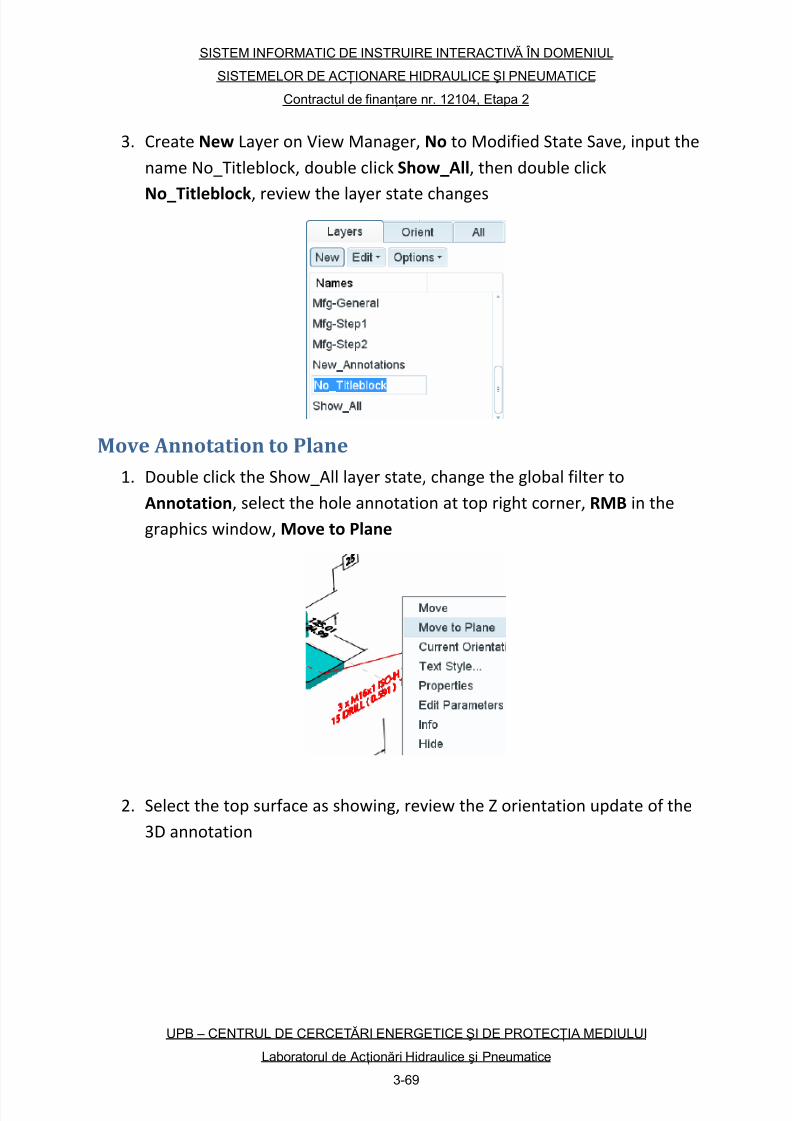
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 320/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-69
3. Create New Layer on View Manager, No to Modified State Save, input the
name No_Titleblock, double click Show_All, then double click
No_Titleblock, review
the
layer
state
changes
Move Annotation to Plane
1. Double click the Show_All layer state, change the global filter to
Annotation, select the hole annotation at top right corner, RMB in the
graphics window, Move to Plane
2. Select the top surface as showing, review the Z orientation update of the
3D annotation

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 321/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-70
Target
Datum
Annotation
1. Named View List , Datum_Target, Insert, Cosmetic, Designated Area,
select the sketch circle, MMB to confirm
3. Select Datum Target Annotation , OK to Add Annotation, Name: D, check
Geometry reference option, select the top surface of the part
4. Select a point
on
the
top
surface
to
place
the
annotation
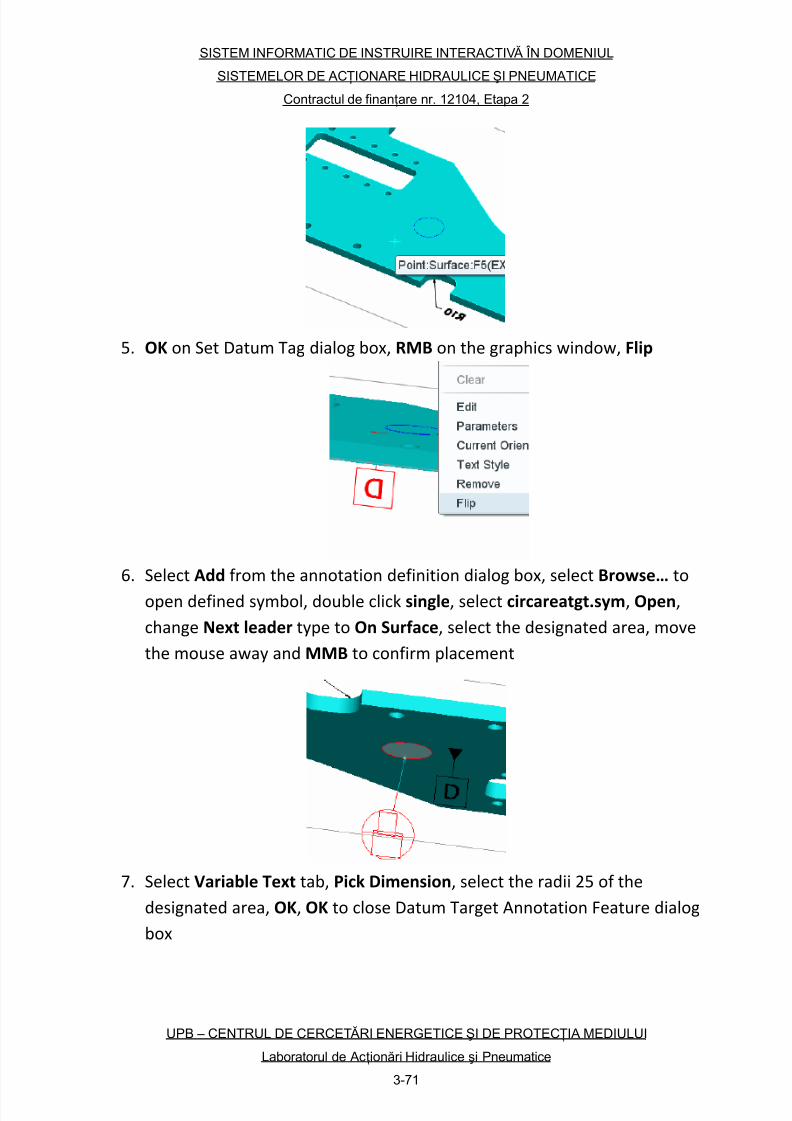
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 322/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-71
5. OK on Set Datum Tag dialog box, RMB on the graphics window, Flip
6. Select Add from the annotation definition dialog box, select Browse… to
open defined symbol, double click single, select circareatgt.sym, Open,
change Next leader type to On Surface, select the designated area, move
the mouse away and MMB to confirm placement
7. Select Variable Text tab, Pick Dimension, select the radii 25 of the
designated area, OK, OK to close Datum Target Annotation Feature dialog
box

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 323/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-72
8. Select the datum target annotation, RMB Select Reference
9. Window, Close
10. File, Erase, Not Displayed
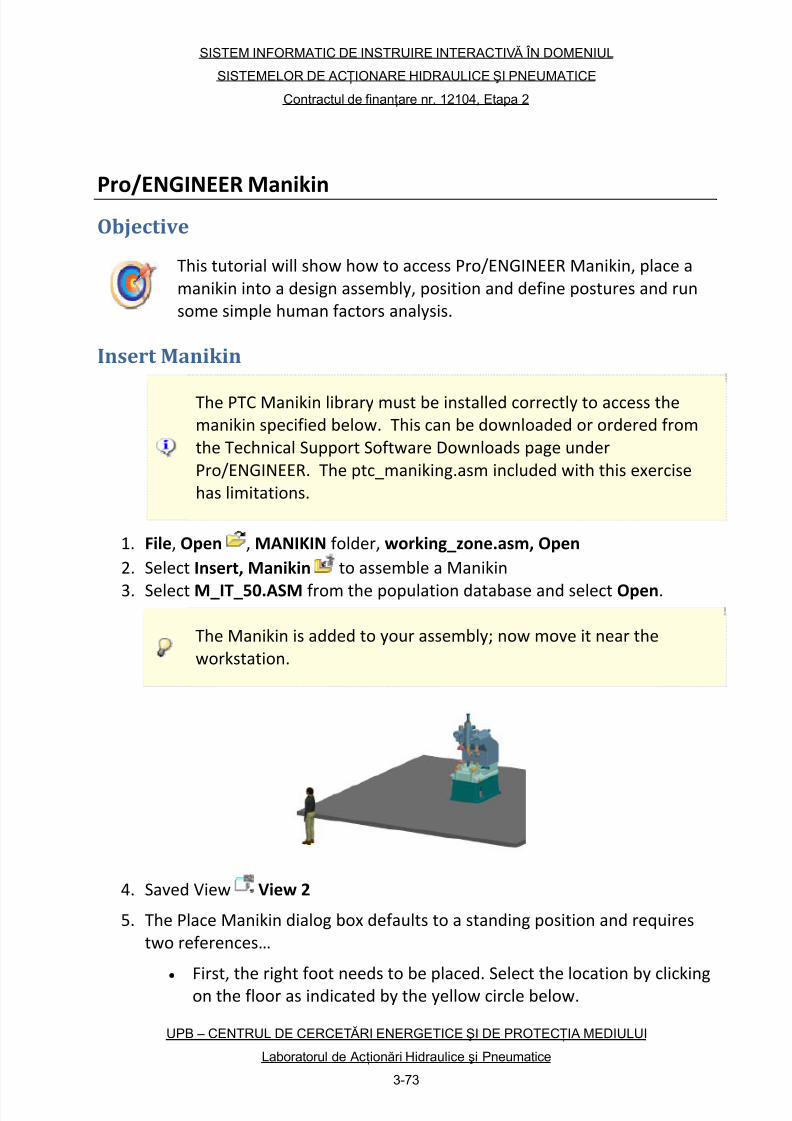
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 324/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-73
Pro/ENGINEER Manikin
Objective
This tutorial will show how to access Pro/ENGINEER Manikin, place a
manikin into a design assembly, position and define postures and run
some simple human factors analysis.
Insert Manikin
The PTC
Manikin
library
must
be
installed
correctly
to
access
the
manikin specified below. This can be downloaded or ordered from
the Technical Support Software Downloads page under
Pro/ENGINEER. The ptc_maniking.asm included with this exercise
has limitations.
1. File, Open , MANIKIN folder, working_zone.asm, Open
2. Select Insert, Manikin to assemble a Manikin
3. Select M_IT_50.ASM
from
the
population
database
and
select
Open.
The Manikin is added to your assembly; now move it near the
workstation.
4. Saved View View 2
5. The Place Manikin dialog box defaults to a standing position and requires
two references…
• First,
the
right
foot
needs
to
be
placed.
Select
the
location
by
clicking
on the floor as indicated by the yellow circle below.
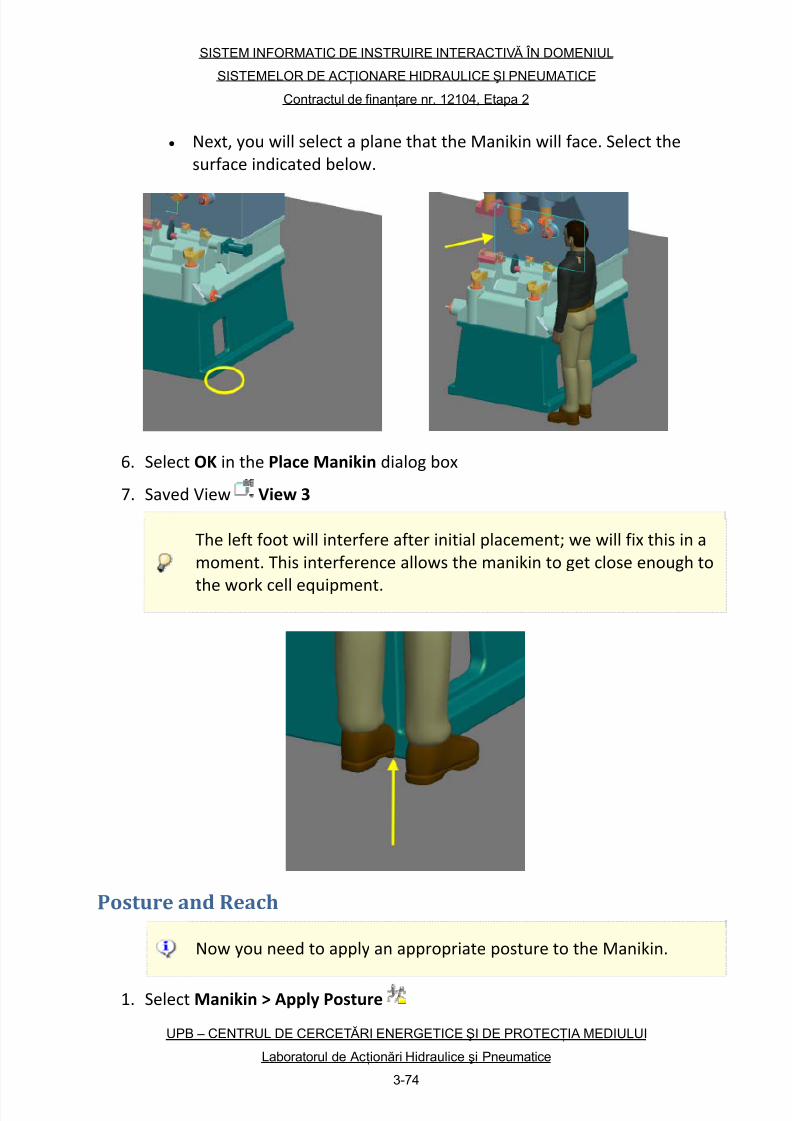
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 325/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-74
• Next, you will select a plane that the Manikin will face. Select the
surface indicated below.
6. Select OK in the Place Manikin dialog box
7. Saved View View 3
The left foot will interfere after initial placement; we will fix this in a
moment. This interference allows the manikin to get close enough to
the work
cell
equipment.
Posture and Reach
Now you need to apply an appropriate posture to the Manikin.
1. Select Manikin > Apply Posture

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 326/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-75
2. In the Macro folder, select the CARRYING_BOX.MPD posture and Apply
3. Toggle the Reach Envelope on; select Manikin, Reach Envelope
4. Saved View View 4
5. Toggle the reach envelopes off; select Manikin, Reach Envelope
6. Saved View
View
5
In addition to applying postures to the Manikin, you can manipulate
the Manikin into a desired position. You will use 2D drag to move the
right hand and arm.
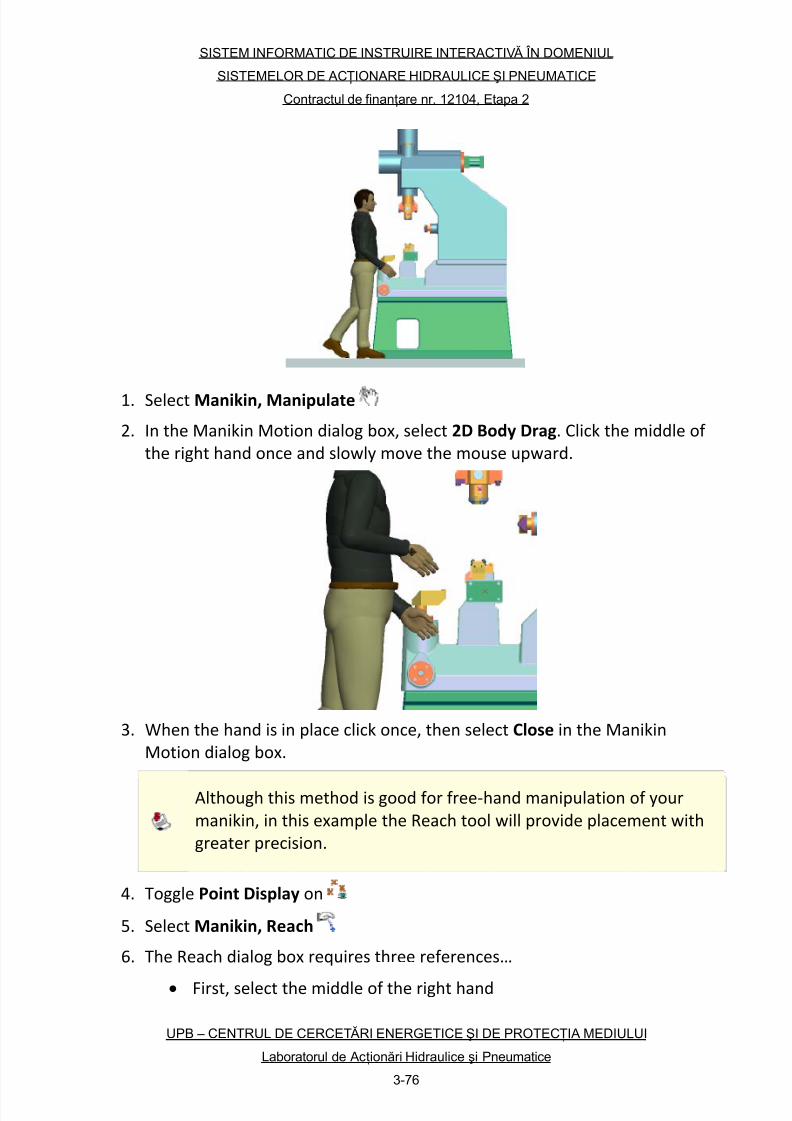
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 327/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-76
1. Select Manikin,
Manipulate
2. In the Manikin Motion dialog box, select 2D Body Drag. Click the middle of
the right hand once and slowly move the mouse upward.
3. When the hand is in place click once, then select T
CloseTT
T
in the Manikin
Motion dialog box.
Although this method is good for free‐hand manipulation of your
manikin, in this example the Reach tool will provide placement with
greater precision.
4. Toggle Point Display on
5. Select Manikin, Reach
6. The Reach dialog box requires three references…
• First, select
the
middle
of
the
right
hand
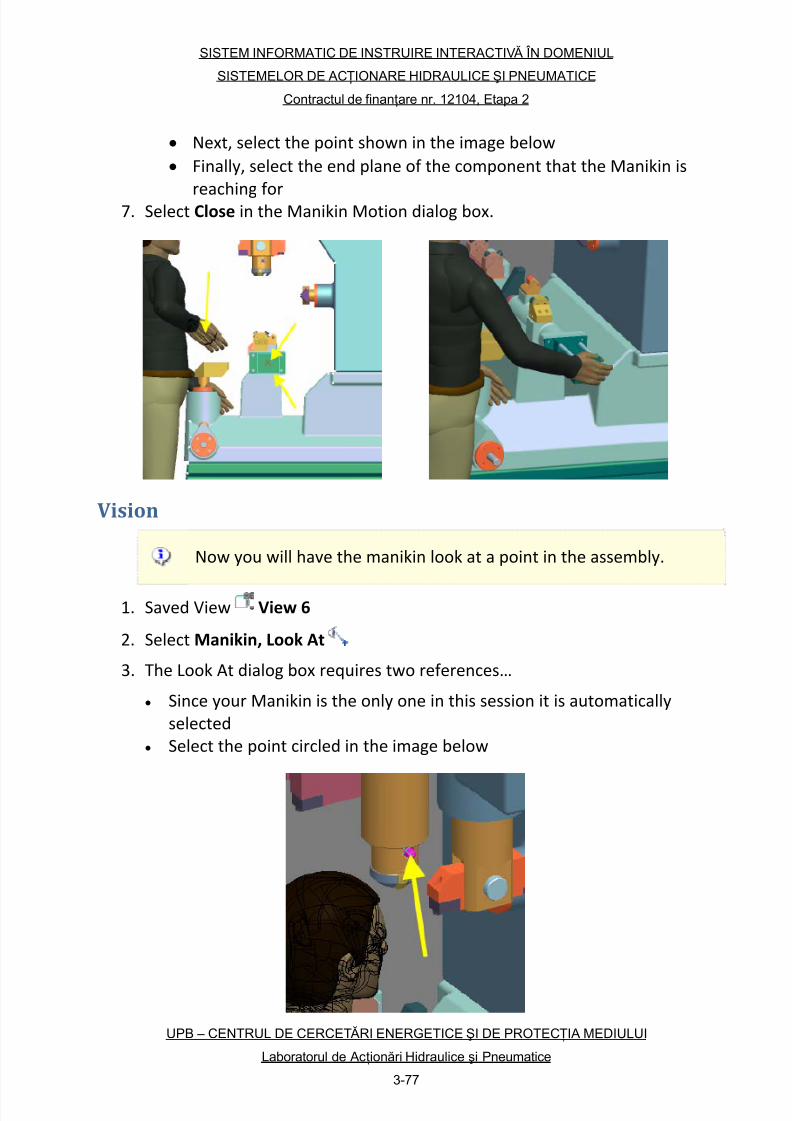
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 328/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-77
• Next, select the point shown in the image below
• Finally, select the end plane of the component that the Manikin is
reaching
for
7. Select Close in the Manikin Motion dialog box.
Vision
Now you will have the manikin look at a point in the assembly.
1. Saved View View 6
2. Select Manikin, Look At
3. The Look At dialog box requires two references…
• Since your Manikin is the only one in this session it is automatically
selected
• Select the point circled in the image below
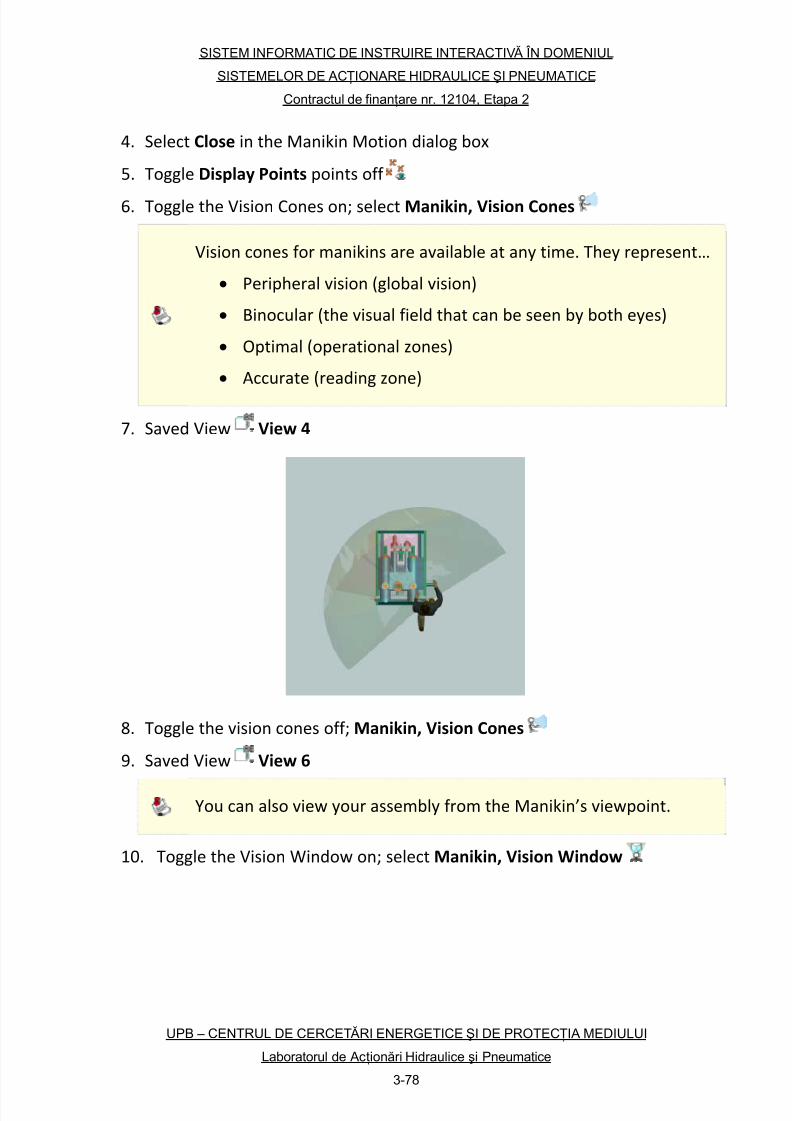
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 329/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-78
4. Select Close in the Manikin Motion dialog box
5. Toggle Display Points points off
6. Toggle the
Vision
Cones
on;
select
Manikin, Vision Cones
Vision cones for manikins are available at any time. They represent…
• Peripheral vision (global vision)
• Binocular (the visual field that can be seen by both eyes)
• Optimal (operational zones)
• Accurate (reading zone)
7. Saved View View 4
8. Toggle the vision cones off; Manikin, Vision Cones
9. Saved View View 6
You can also view your assembly from the Manikin’s viewpoint.
10. Toggle the Vision Window on; select Manikin, Vision Window

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 330/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-79
11. Toggle the
vision
window
off;
select
Manikin,
Vision
Window
12. Saved View View 7
13. Window, Close
14. File, Erase, Not Displayed
Tolerance Analysis
The objective of this analysis is to determine whether it is possible to
assemble the
PCB
into
the
assembly.
The
current
assembly
process
specifies that the bottom screws are to be installed and tightened first.
Next, the plug is snapped into holes in the PCB
Then the PCB assembly is placed into the assembly and the top screws
inserted and tightened. There should be a minimal gap between the
plug and the pan, but an interference condition could prevent the ability
to insert the screws into the PCB

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 331/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-80
Open Model
and
Set
the
View
1. TFile, OpenT , TOLERANCE‐ANALYSIS folder, Tcircuit‐card.asm T, Open
2. T
Saved ViewT
T
ISO
3. TTools, Options, set tol_display to Yes T
Initiate Tolerance Analysis Measurement
1. Analysis, Tolerance Study
The Tolerance Analysis Manager dialog box lists all of the existing
tolerance analysis measurements in this model. You can add, edit,
and delete tolerance analysis measurements from this dialog box.
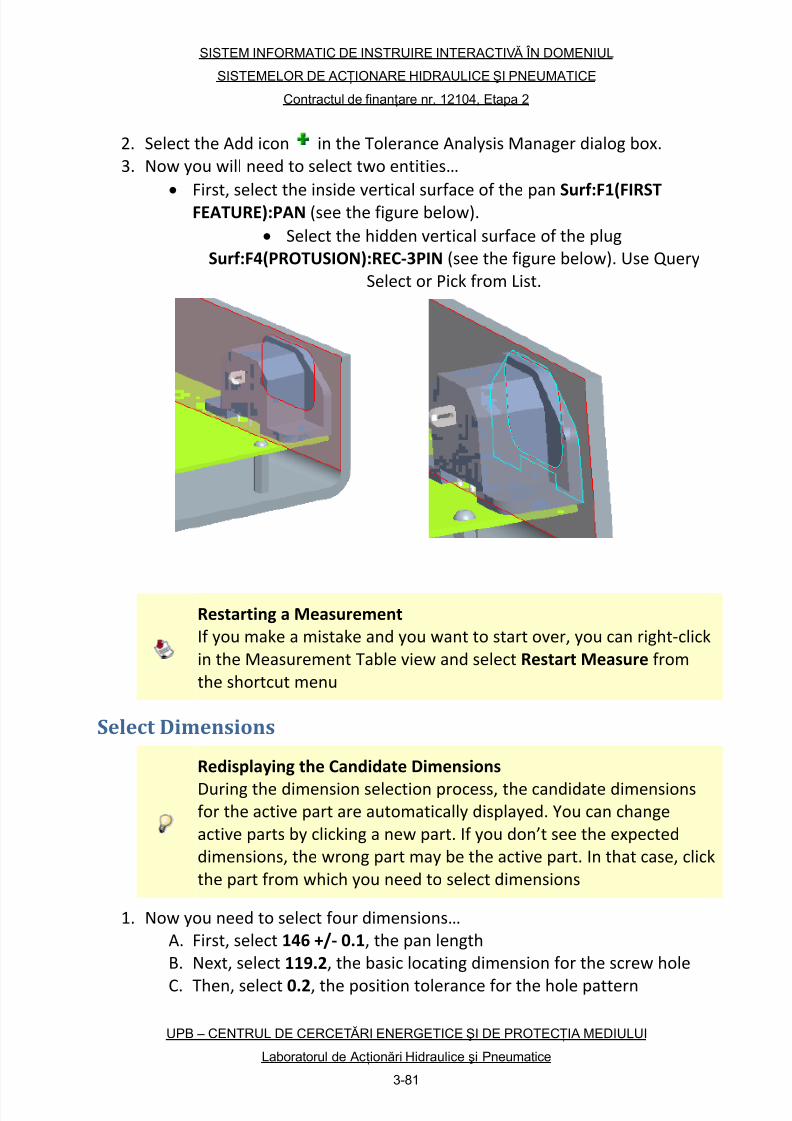
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 332/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-81
2. Select the Add icon in the Tolerance Analysis Manager dialog box.
3. Now you will need to select two entities…
•
First,
select
the
inside
vertical
surface
of
the
pan
Surf:F1(FIRST
FEATURE):PAN (see the figure below).
• Select the hidden vertical surface of the plug
Surf:F4(PROTUSION):REC‐3PIN (see the figure below). Use Query
Select or Pick from List.
Restarting a Measurement
If you make a mistake and you want to start over, you can right‐click
in the Measurement Table view and select Restart Measure from
the shortcut menu
Select Dimensions
Redisplaying the Candidate Dimensions
During the
dimension
selection
process,
the
candidate
dimensions
for the active part are automatically displayed. You can change
active parts by clicking a new part. If you don’t see the expected
dimensions, the wrong part may be the active part. In that case, click
the part from which you need to select dimensions
1. Now you need to select four dimensions…
A. First, select 146 +/‐ 0.1, the pan length
B. Next, select 119.2, the basic locating dimension for the screw hole
C. Then, select
0.2,
the
position
tolerance
for
the
hole
pattern
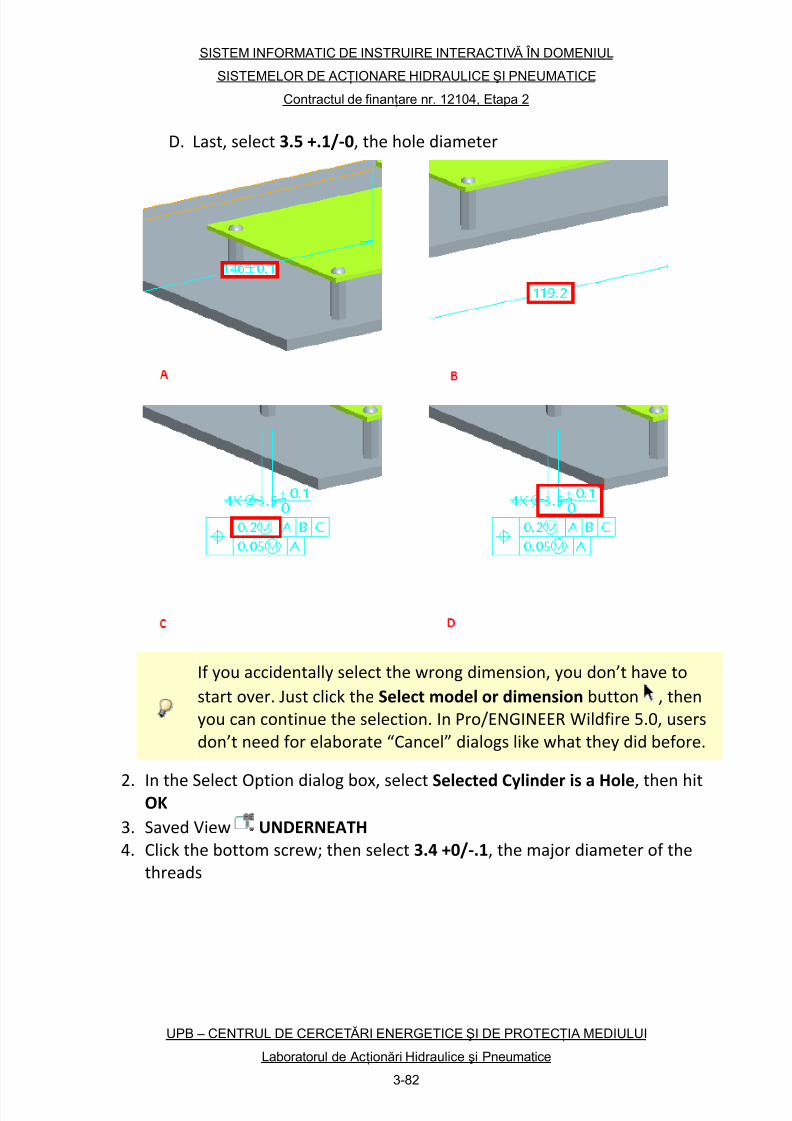
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 333/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-82
D. Last, select 3.5 +.1/‐0, the hole diameter
If you accidentally select the wrong dimension, you don’t have to
start over. Just click the Select model or dimension button , then
you can continue the selection. In Pro/ENGINEER Wildfire 5.0, users
don’t need for elaborate “Cancel” dialogs like what they did before.
2. In the
Select
Option
dialog
box,
select
Selected
Cylinder
is
a Hole,
then
hit
OK
3. Saved View UNDERNEATH
4. Click the bottom screw; then select 3.4 +0/‐.1, the major diameter of the
threads

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 334/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-83
5. In the
Select
Option
dialog
box,
select
Selected
Cylinder
is
a Pin,
then
OK
Explore the Tolerance Analysis Extension
1. RMB Fit to Width in the Dimension Loop Diagram
2. Click the various objects in the Name column of Measurement Table. Then
click the various objects in the Dimension Loop Diagram. Notice the cross‐
highlighting between
the
two

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 335/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-84
T
Resume the
Dimension
Selection
Process
1. Saved View ISO
2. Choose the Select Model or Dimension icon in the Tolerance Analysis
dialog box
3. Click the PCB to display the candidate dimensions for that part; then select
3.5 +0.1/‐0, the hole diameter
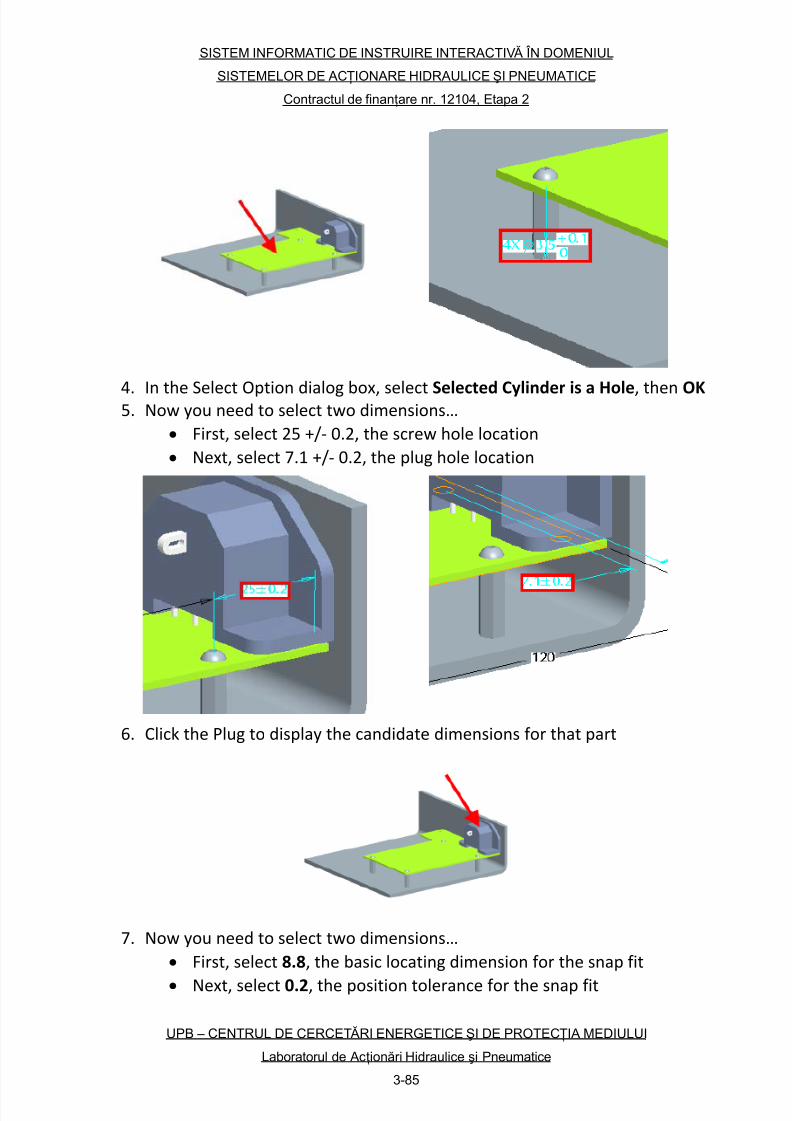
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 336/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-85
4. In the
Select
Option
dialog
box,
select
Selected
Cylinder
is
a Hole,
then
OK
5. Now you need to select two dimensions…
• First, select 25 +/‐ 0.2, the screw hole location
• Next, select 7.1 +/‐ 0.2, the plug hole location
6. Click the Plug to display the candidate dimensions for that part
7. Now you need to select two dimensions…
• First, select 8.8, the basic locating dimension for the snap fit
• Next, select
0.2,
the
position
tolerance
for
the
snap
fit
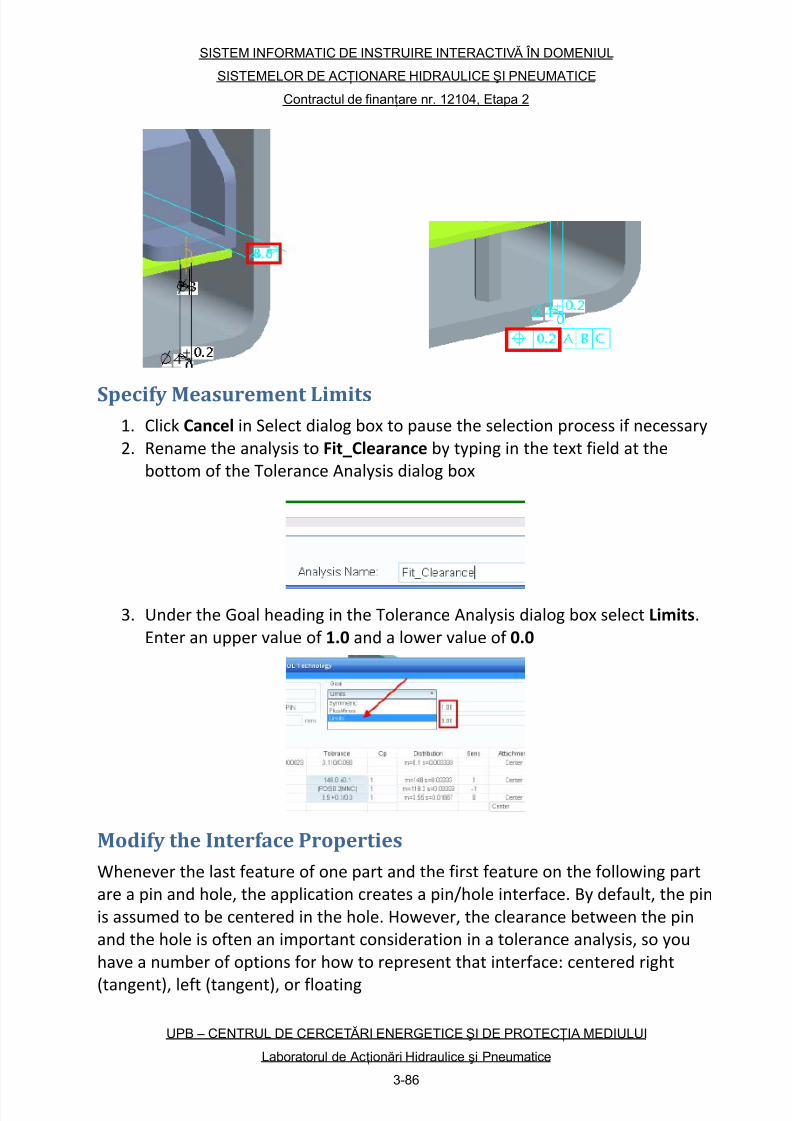
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 337/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-86
Specify Measurement
Limits
1. Click Cancel in Select dialog box to pause the selection process if necessary
2. Rename the analysis to Fit_Clearance by typing in the text field at the
bottom of the Tolerance Analysis dialog box
3. Under the Goal heading in the Tolerance Analysis dialog box select Limits.
Enter an upper value of 1.0 and a lower value of 0.0
Modify the Interface Properties
Whenever the last feature of one part and the first feature on the following part
are a pin and hole, the application creates a pin/hole interface. By default, the pin
is assumed to be centered in the hole. However, the clearance between the pin
and the hole is often an important consideration in a tolerance analysis, so you
have a number of options for how to represent that interface: centered right
(tangent), left
(tangent),
or
floating
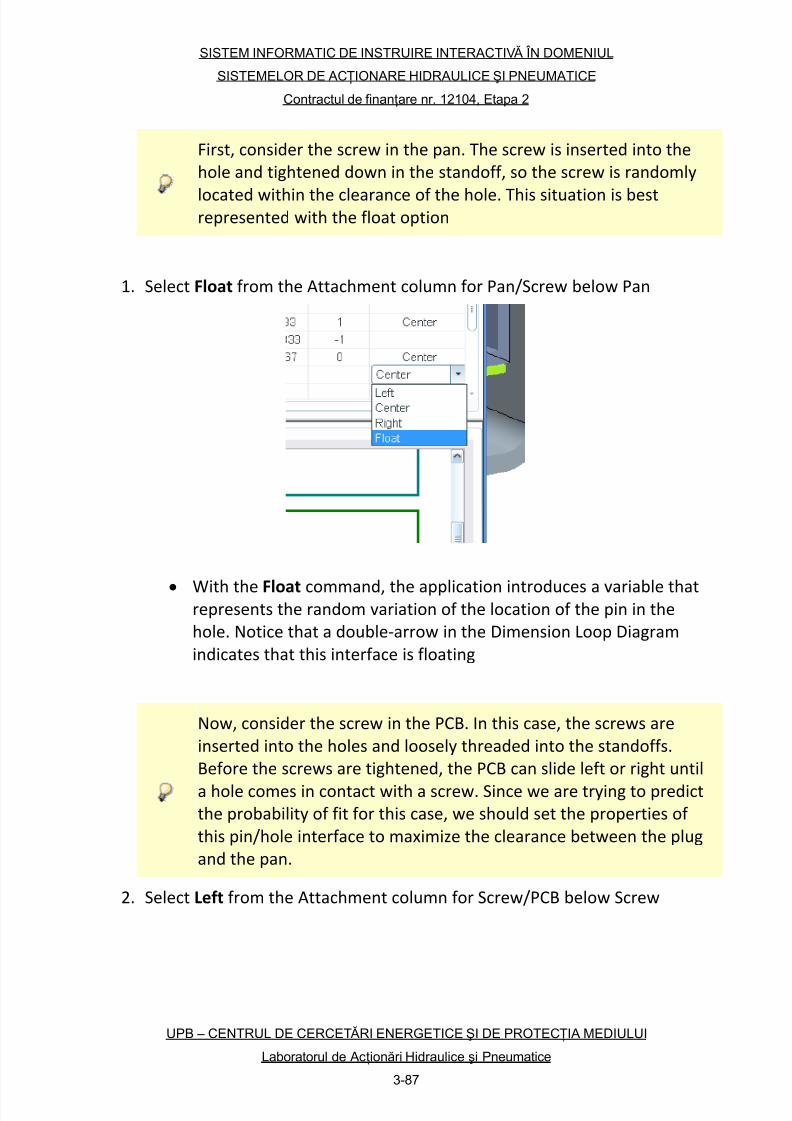
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 338/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-87
First, consider the screw in the pan. The screw is inserted into the
hole and tightened down in the standoff, so the screw is randomly
located within
the
clearance
of
the
hole.
This
situation
is
best
represented with the float option
1. Select Float from the Attachment column for Pan/Screw below Pan
• With the
Float
command,
the
application
introduces
a variable
that
represents the random variation of the location of the pin in the
hole. Notice that a double‐arrow in the Dimension Loop Diagram
indicates that this interface is floating
Now, consider the screw in the PCB. In this case, the screws are
inserted into the holes and loosely threaded into the standoffs.
Before the screws are tightened, the PCB can slide left or right until
a hole
comes
in
contact
with
a screw.
Since
we
are
trying
to
predict
the probability of fit for this case, we should set the properties of
this pin/hole interface to maximize the clearance between the plug
and the pan.
2. Select Left from the Attachment column for Screw/PCB below Screw
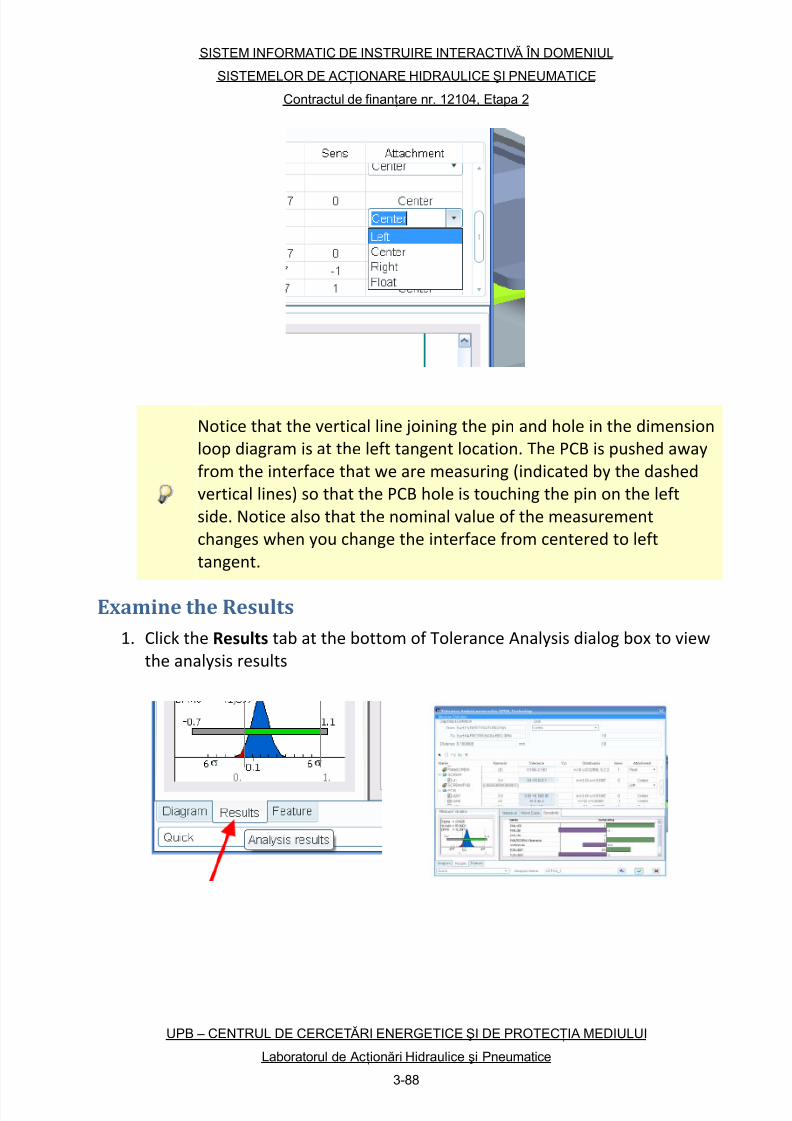
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 339/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-88
Notice that the vertical line joining the pin and hole in the dimension
loop diagram is at the left tangent location. The PCB is pushed away
from the interface that we are measuring (indicated by the dashed
vertical lines) so that the PCB hole is touching the pin on the left
side. Notice also that the nominal value of the measurement
changes when you change the interface from centered to left
tangent.
Examine the Results
1. Click the Results tab at the bottom of Tolerance Analysis dialog box to view
the analysis results
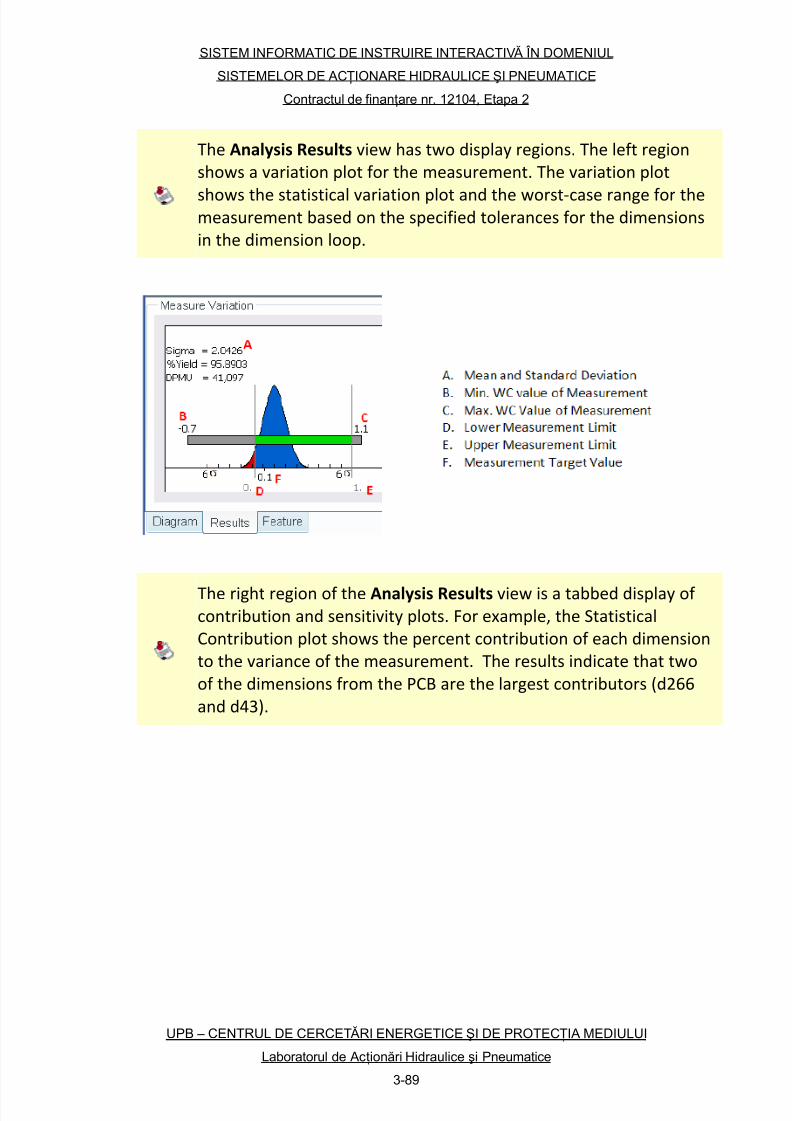
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 340/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-89
The Analysis Results view has two display regions. The left region
shows a variation plot for the measurement. The variation plot
shows the
statistical
variation
plot
and
the
worst
‐case
range
for
the
measurement based on the specified tolerances for the dimensions
in the dimension loop.
The right
region
of
the
Analysis
Results
view
is
a tabbed
display
of
contribution and sensitivity plots. For example, the Statistical
Contribution plot shows the percent contribution of each dimension
to the variance of the measurement. The results indicate that two
of the dimensions from the PCB are the largest contributors (d266
and d43).
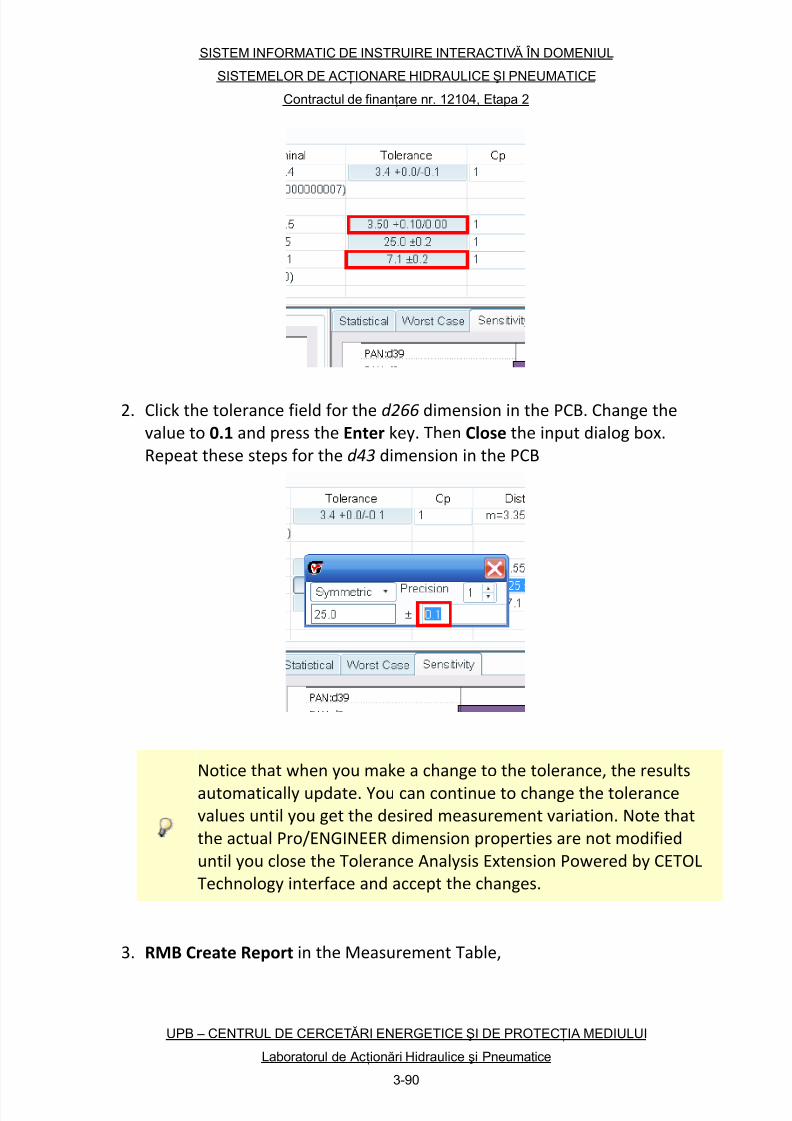
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 341/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-90
2. Click the tolerance field for the d266 dimension in the PCB. Change the
value to 0.1 and press the Enter key. Then Close the input dialog box.
Repeat these steps for the d43 dimension in the PCB
Notice that when you make a change to the tolerance, the results
automatically update.
You
can
continue
to
change
the
tolerance
values until you get the desired measurement variation. Note that
the actual Pro/ENGINEER dimension properties are not modified
until you close the Tolerance Analysis Extension Powered by CETOL
Technology interface and accept the changes.
3. RMB Create Report in the Measurement Table,

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 342/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
3-91
The report is displayed in the Pro/ENGINEER browser. Click in the
Tolerance Analysis Extension Powered by CETOL Technology window
to save the tolerance analysis measurement feature, update the
modified Pro/ENGINEER tolerances and close the application
4. Select Saved, and then to save the analysis
5. Window, Close
6. File, Erase, Not Displayed
Congratulations! You have completed the tutorials in this Hands On
Workshop!
Thank you
for
your
participation
and
we
look
forward
to
having you attend another Hands On Workshop in the future.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 343/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-1
ACTIVITATEA 4
CREAREA BAZEI DE CUNOŞTINŢE TEORETICE SPECIFICEMODELĂRII MATEMATICE ŞI SIMULĂRII NUMERICE A SAHP
1. FORMULAREA PROBLEMELOR STUDIATE
Prima parte acestui capitol este consacrată analizei particularităţilor şi
performanţelor programului AMESim (Advanced Modeling and Simulation Software),
produs de Societatea IMAGINE din Franţa
şi utilizat pe scar
ălarg
ăde produc
ătorii
reputaţi de echipamente hidropneumatice noi. Se prezintă structura programului,
componenţa bibliotecilor de elemente şi sisteme mecanice, hidraulice, termice,
electromecanice, electrohidraulice, electropneumatice şi mixte, procedura de elaborare
a reţelelor de simulare, procedura de compilare a programelor şi reprezentare grafică a
rezultatelor. Aceste informaţii generale sunt ilustrate prin două exemple tipice din
domeniul sistemelor automate hidraulice.
A doua parte a prezentului capitol este consacrat concepţiei sistemelor
hidropneumatice din componente tipizate. Conform concepţiei proiectului, se
prezintă 9 lecţii ce pot fi parcurse on-line, în cadrul sistemului de e-Learning conceput
de consor ţiul elaborator al proiectului.
1.1 Limbaje de simulare numerică
Noţiunea de sinteză a sistemelor tehnice are un conţinut larg. Din punct de
vedere practic, ea se refer ă la ansamblul de activităţi creatoare finalizate printr-o
documentaţie tehnică minimală, suficientă în condiţii tehnice, economice şi sociale date.Datorită complexităţii fenomenelor asociate curgerii lichidelor în domeniile specifice
transmisiilor hidraulice volumice, stabilirea unei soluţii structurale optime,
corespunzătoare unor condiţii date, se face iterativ, etapele de sinteză alternând cu cele
de analiză. Sinteza raţională necesită cunoaşterea profundă a construcţiei şi funcţionării
elementelor transmisiilor hidraulice volumice. Totuşi, principalul obiectiv al sintezei -
satisfacerea unor performanţe impuse - nu poate fi atins cu eforturi rezonabile f ăr ă
modelare matematică şi simulare numerică.
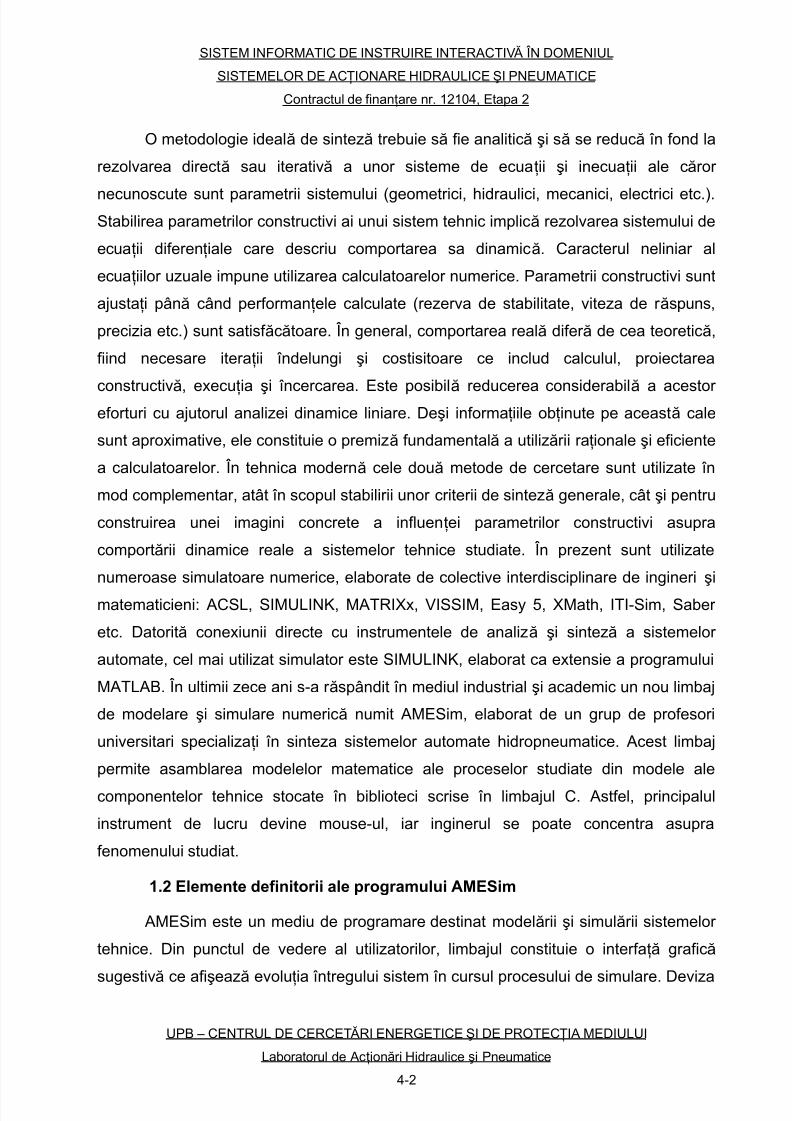
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 344/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-2
O metodologie ideală de sinteză trebuie să fie analitică şi să se reducă în fond la
rezolvarea directă sau iterativă a unor sisteme de ecuaţii şi inecuaţii ale căror
necunoscute sunt parametrii sistemului (geometrici, hidraulici, mecanici, electrici etc.).Stabilirea parametrilor constructivi ai unui sistem tehnic implică rezolvarea sistemului de
ecuaţii diferenţiale care descriu comportarea sa dinamică. Caracterul neliniar al
ecuaţiilor uzuale impune utilizarea calculatoarelor numerice. Parametrii constructivi sunt
ajustaţi până când performanţele calculate (rezerva de stabilitate, viteza de r ăspuns,
precizia etc.) sunt satisf ăcătoare. În general, comportarea reală difer ă de cea teoretică,
fiind necesare iteraţii îndelungi şi costisitoare ce includ calculul, proiectarea
constructivă, execuţia şi încercarea. Este posibilă reducerea considerabilă a acestor eforturi cu ajutorul analizei dinamice liniare. Deşi informaţiile obţinute pe această cale
sunt aproximative, ele constituie o premiză fundamentală a utilizării raţionale şi eficiente
a calculatoarelor. În tehnica modernă cele două metode de cercetare sunt utilizate în
mod complementar, atât în scopul stabilirii unor criterii de sinteză generale, cât şi pentru
construirea unei imagini concrete a influenţei parametrilor constructivi asupra
comportării dinamice reale a sistemelor tehnice studiate. În prezent sunt utilizate
numeroase simulatoare numerice, elaborate de colective interdisciplinare de ingineri şi
matematicieni: ACSL, SIMULINK, MATRIXx, VISSIM, Easy 5, XMath, ITI-Sim, Saber
etc. Datorită conexiunii directe cu instrumentele de analiză şi sinteză a sistemelor
automate, cel mai utilizat simulator este SIMULINK, elaborat ca extensie a programului
MATLAB. În ultimii zece ani s-a r ăspândit în mediul industrial şi academic un nou limbaj
de modelare şi simulare numerică numit AMESim, elaborat de un grup de profesori
universitari specializaţi în sinteza sistemelor automate hidropneumatice. Acest limbaj
permite asamblarea modelelor matematice ale proceselor studiate din modele ale
componentelor tehnice stocate în biblioteci scrise în limbajul C. Astfel, principalul
instrument de lucru devine mouse-ul, iar inginerul se poate concentra asupra
fenomenului studiat.
1.2 Elemente definitorii ale programului AMESim
AMESim este un mediu de programare destinat modelării şi simulării sistemelor
tehnice. Din punctul de vedere al utilizatorilor, limbajul constituie o interfaţă grafică
sugestivă ce afişează evoluţia întregului sistem în cursul procesului de simulare. Deviza

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 345/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-3
creatorilor acestui instrument ingineresc este “To create Good Models without Writing a
Single Line of Code” (“A genera modele matematice corecte f ăr ă a scrie instruc ţ iuni”).
Simbolurile utilizate de AMESim pentru a reprezenta componente elementaresau complexe sunt bazate pe simboluri standardizate utilizate în inginerie, precum
simbolurile ISO ale componentelor hidropneumatice sau diagramele bloc ale sistemelor
automate; în cazul în care nu există simbouri standard pentru componentele modelate,
limbajul utilizează pictograme uşor de recunoscut de către ingineri. Ca exemplu tipic, se
prezintă în figura 1 un servomecanism electrohidraulic constituit din componente
standardizate, iar în figura 2 se prezintă modelul sistemului de frânare al unui automobil
construit cu pictograme sugestive. În AMESim schemele sistemelor tehnice seconstruiesc introducând simboluri sau pictograme preluate din biblioteci în suprafaţa
activă a ecranului. Procesul de simulare ce urmează după elaborarea schemei conţine
următoarele etape:
a) modelarea matematică a componentelor asociate pictogramelor;
b) definirea parametrilor componentelor;
c) executarea integr ării numerice;
d) interpretarea rezultatelor ce descriu comportarea sistemului prin grafice
adecvate.
Principalul instrument de comunicare cu limbajul este mouse-ul, utilizarea
claviaturii fiind menţinută la cel mai redus nivel posibil. Meniul principal al programului
este prezentat în figura 3. Limbajele clasice de simulare nu sunt capabile să comunice
cu alte limbaje inginereşti. AMESim include o interfaţă completă pentru Matlab, sporind
esenţial capacitatea de analiză a limbajului. Ca orice limbaj de modelare şi simulare,
AMESim acceptă sisteme de ecuaţii ce definesc comportarea dinamică a sistemelor
inginereşti implementate sub formă de coduri numerice denumite „modele ale
sistemului”. Un model este construit din ecuaţii şi din descrierile numerice ale tuturor
componentelor sistemului. Acestea sunt considerate submodele şi sunt definite în
număr mare în cadrul bibliotecilor limbajului. Bibliotecile de bază sunt rezervate
sistemelor automate şi sistemelor mecanice. În afara acestora, limbajul include
biblioteci de componente hidraulice, rezistenţe hidraulice, pneumatice, termice,
termohidraulice, sisteme de r ăcire, sisteme de propulsie şi sisteme de conducte.
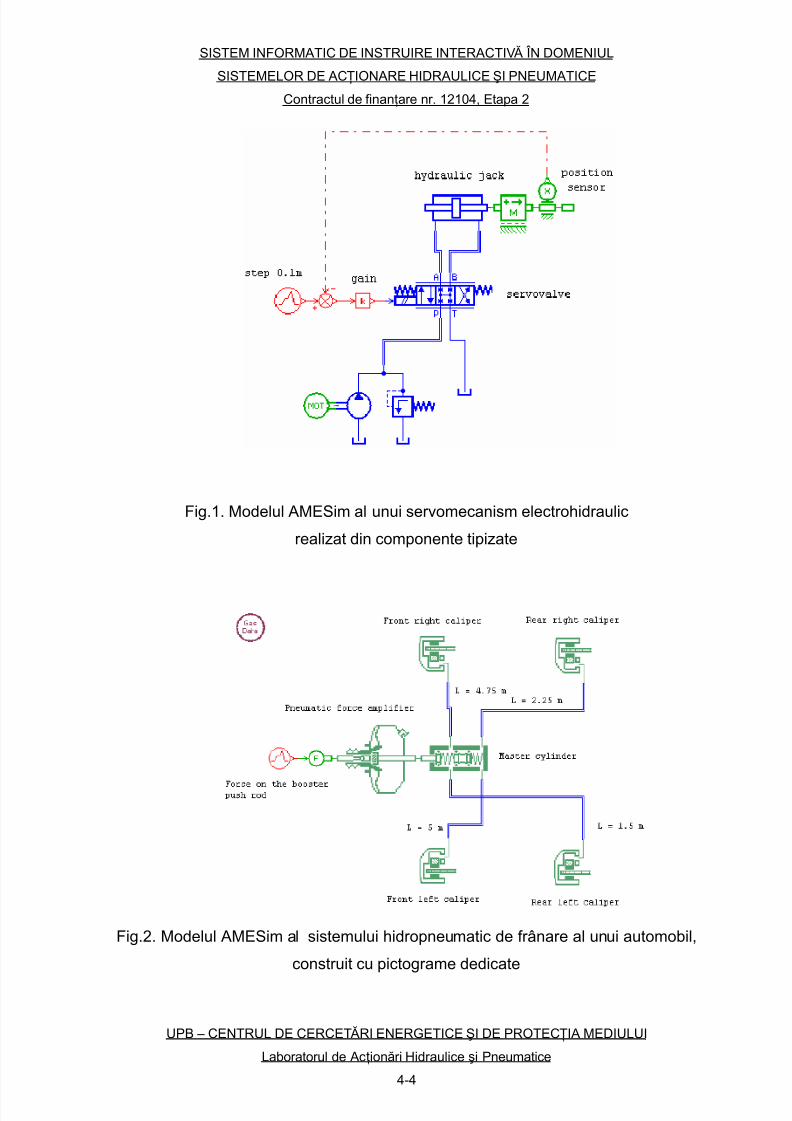
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 346/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.1. Modelul AMESim al unui servomecanism electrohidraulic
realizat din componente tipizate
Fig.2. Modelul AMESim al sistemului hidropneumatic de frânare al unui automobil,
construit cu pictograme dedicate
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-4
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 347/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-5
Bibliotecile de bază sunt rezervate sistemelor automate şi sistemelor mecanice.
În afara acestora, limbajul include biblioteci de componente hidraulice, rezistenţe
hidraulice, pneumatice, termice, termohidraulice, sisteme de r ăcire, sisteme depropulsie şi sisteme de conducte. Nucleul limbajului permite următoarele activităţi:
crearea unor noi sisteme; modificarea structurii unui sistem existent; schimbarea
submodelelor constituite din componente elementare; încărcarea sistemelor dezvoltate
de producător; schimbarea parametrilor şi elaborarea fişierelor de comenzi indirecte;
integrarea numerică individuală sau prin comenzi indirecte (în stivă); reprezentarea
grafică a rezultatelor şi executarea analizei liniarizate.
AMECustom este o componentă a mediului AMESim ce permite personalizareasubmodelelor şi supercomponentelor. Un obiect personalizat se bazează pe un obiect
generic peste care se aplică o „mască”. Singurii parametrii accesibili sunt cei ce
urmează a fi testaţi. Utilizatorii avansaţi ai limbajului AMESim pot utiliza extensia
AMESet pentru a crea noi pictograme şi submodele. Sistemele proprii limbajului sunt
create şi testate de utilizatori avansaţi. Pentru tehnicienii destinaţi studierii influenţei
diver şilor parametri a fost elaborată extensia AMERun.
Societatea Imagine a elaborat în colaborare cu firme de prestigiu în domeniul
ingineriei numeroase biblioteci şi submodele dintre care se menţionează: Mechanical,
Control, Hydraulic, Hydraulic Component Design, Hydraulic Resistance, Pneumatic,
Thermal, Thermal Hydraulic, Thermal Pneumatic, Therma Hydraulic Component
Design, Power Train, Filling, Cooling System, Electro-Mechanical, Two-Phase Flow şi
Air Conditioning. Ultimele două biblioteci sunt accesibile numai pentru testare. Cele mai
utilizate biblioteci sunt prezentate în fig. 4...10. Limbajul AMESim poate fi utilizat în
patru moduri: modul Sketch, modul Submodel, modul Parameter şi modul Run.
În modul Sketch se poate construi un nou sistem, se poate modifica sau
completa un sistem existent; acesta constituie primul pas al simulării.
Modul Submodel permite selectarea unui submodel pentru fiecare componentă
a sistemului; acest mod nu poate fi utilizat dacă cel puţin un circuit nu este complet în
sensul definirii tuturor conexiunilor de tip intrare-ieşire.
Modul Parameter permite examinarea şi schimbarea parametrilor submodelelor,
copierea parametrilor submodelelor şi setarea parametrilor globali, selectarea unei zone
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 348/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
a modelului şi afişarea parametrilor componentelor în această zonă, precum şi
specificarea unei simulări în stivă.
Fig.3. Meniul principal al programului AMESim
Fig.4. Biblioteca de componente mecanice
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-6

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 349/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.5. Biblioteca de semnale, comenzi şi observatoare de stare
Fig.6. Biblioteca de componente hidraulice
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-7

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 350/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.7. Biblioteca de proiectare a componentelor sistemelor de acţionări hidraulice
Fig.8. Biblioteca de proiectare a componentelor termohidraulice ale sistemelor de
acţionări hidraulice
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-8
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 351/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.9. Biblioteca de rezistenţe hidraulice
Fig.10. Biblioteca de echipamente mecanice
La activarea modului Parameter , AMESim compilează sistemul. Prin compilare
se creează un fişier executabil care conţine toţi parametrii sistemului. În modul Run
sunt posibile următoarele acţiuni: lansarea simulărilor individuale sau în stivă;
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-9
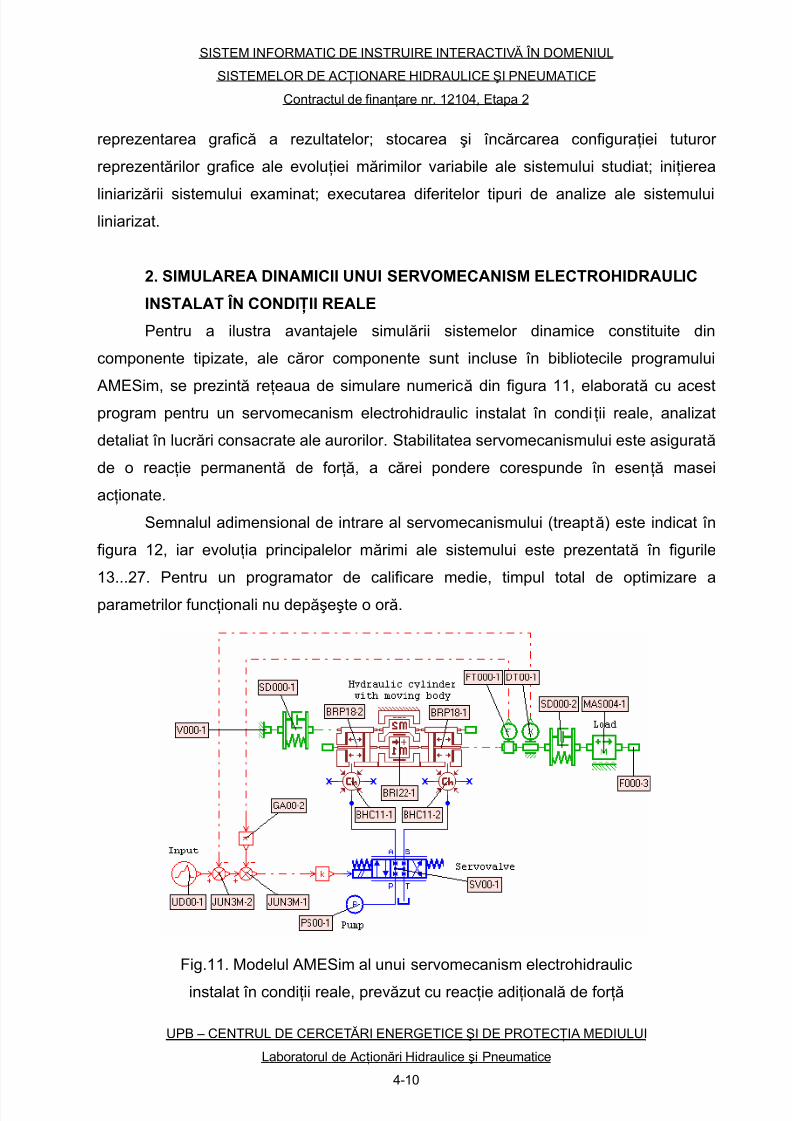
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 352/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
reprezentarea grafică a rezultatelor; stocarea şi încărcarea configuraţiei tuturor
reprezentărilor grafice ale evoluţiei mărimilor variabile ale sistemului studiat; iniţierea
liniarizării sistemului examinat; executarea diferitelor tipuri de analize ale sistemuluiliniarizat.
2. SIMULAREA DINAMICII UNUI SERVOMECANISM ELECTROHIDRAULIC
INSTALAT ÎN CONDIŢII REALE
Pentru a ilustra avantajele simulării sistemelor dinamice constituite din
componente tipizate, ale căror componente sunt incluse în bibliotecile programului
AMESim, se prezintă reţeaua de simulare numerică din figura 11, elaborată cu acestprogram pentru un servomecanism electrohidraulic instalat în condiţii reale, analizat
detaliat în lucr ări consacrate ale aurorilor. Stabilitatea servomecanismului este asigurată
de o reacţie permanentă de for ţă, a cărei pondere corespunde în esenţă masei
acţionate.
Semnalul adimensional de intrare al servomecanismului (treaptă) este indicat în
figura 12, iar evoluţia principalelor mărimi ale sistemului este prezentată în figurile
13...27. Pentru un programator de calificare medie, timpul total de optimizare a
parametrilor funcţionali nu depăşeşte o or ă.
Fig.11. Modelul AMESim al unui servomecanism electrohidraulic
instalat în condiţii reale, prevăzut cu reacţie adiţională de for ţă
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-10

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 353/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.12. Semnalul adimensional de intrare al servomecanismului
(0,1 din semnalul nominal)
Fig.13. Evoluţia debitului racordului A al servovalvei
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-11

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 354/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.14. Evoluţia debitului racordului B al servovalvei
Fig.15. Evoluţia presiunii în racordul A al servovalvei
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-12
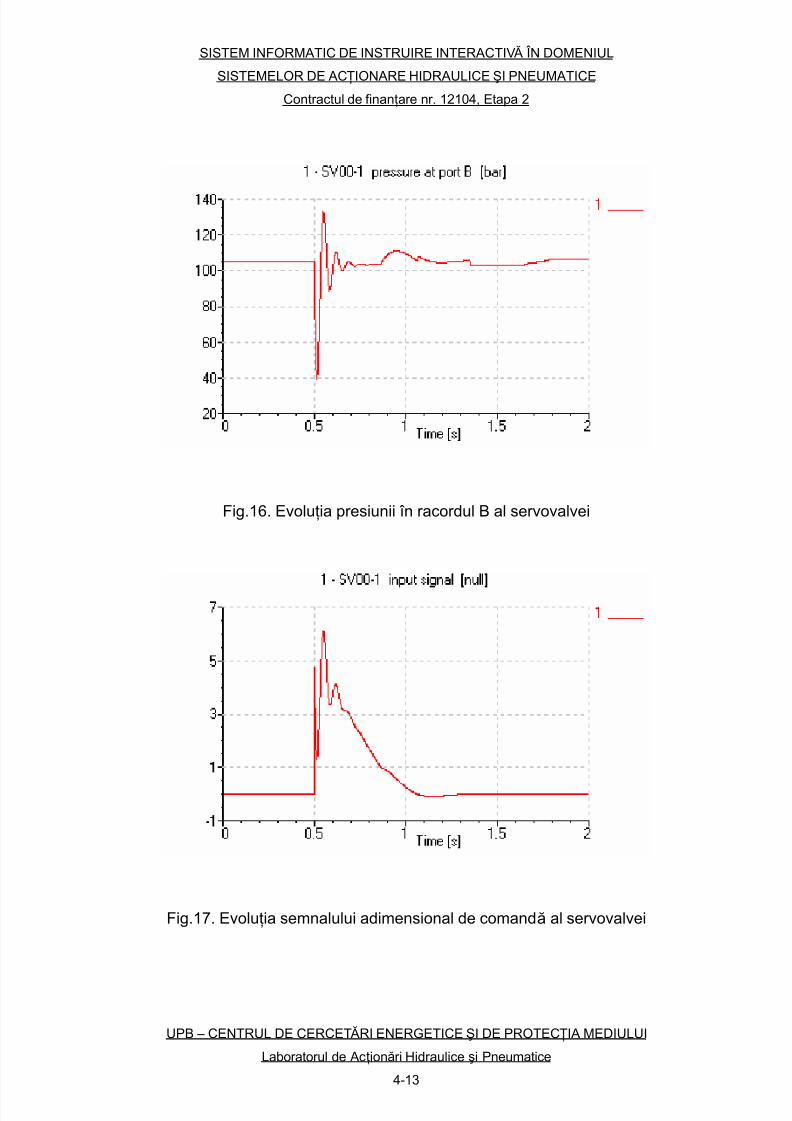
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 355/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.16. Evoluţia presiunii în racordul B al servovalvei
Fig.17. Evoluţia semnalului adimensional de comandă al servovalvei
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-13
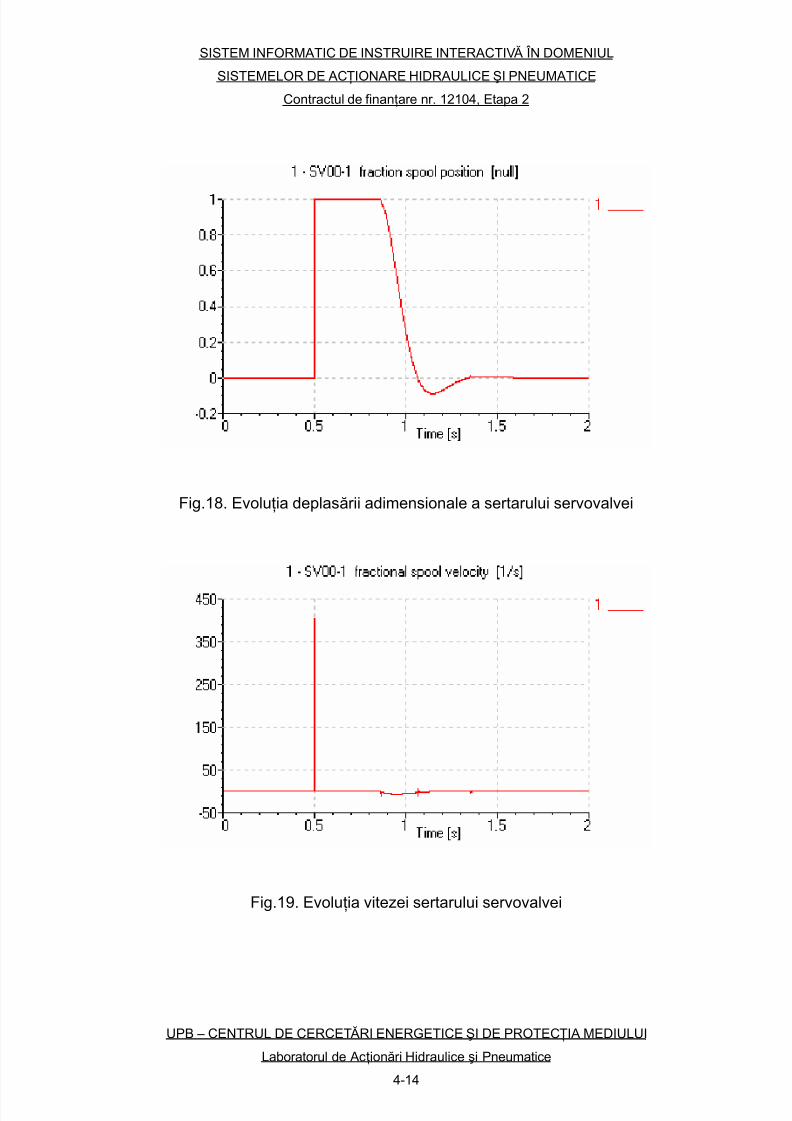
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 356/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.18. Evoluţia deplasării adimensionale a sertarului servovalvei
Fig.19. Evoluţia vitezei sertarului servovalvei
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-14

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 357/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.20. Evoluţia for ţei la tija pistonului cilindrului hidraulic
Fig.21. Evoluţia vitezei pistonului cilindrului hidraulic
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-15
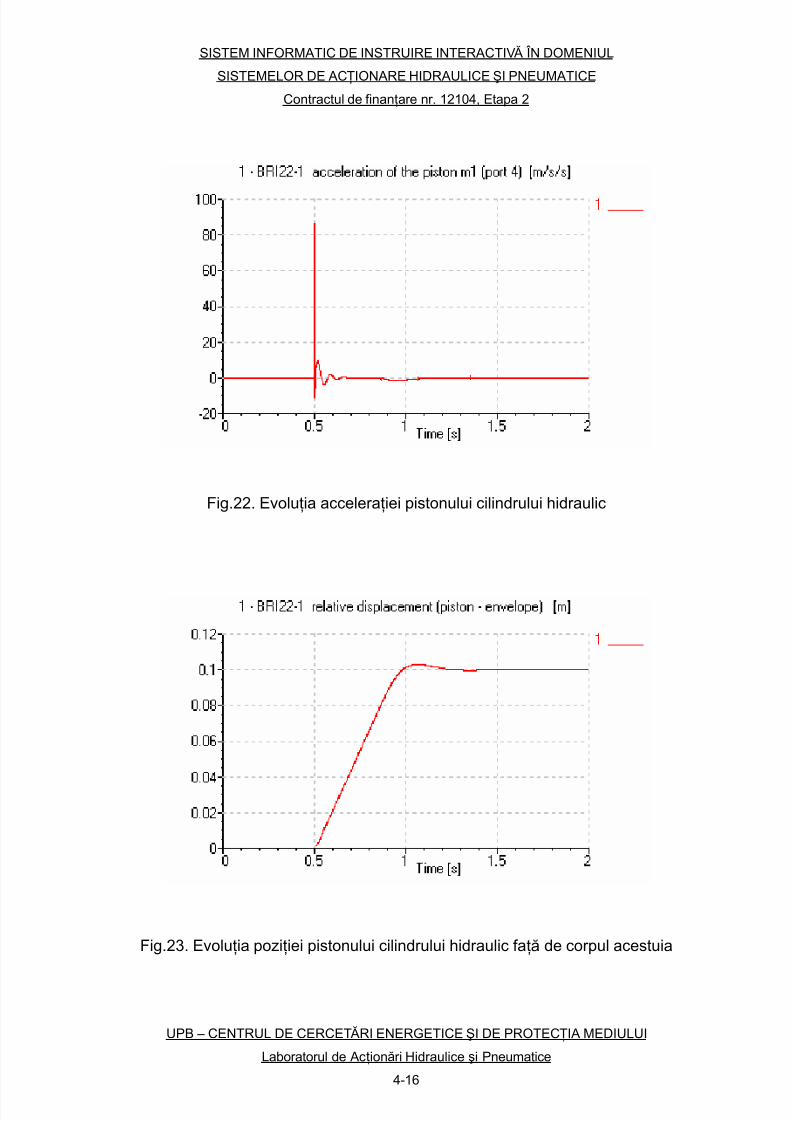
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 358/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.22. Evoluţia acceleraţiei pistonului cilindrului hidraulic
Fig.23. Evoluţia poziţiei pistonului cilindrului hidraulic faţă de corpul acestuia
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-16
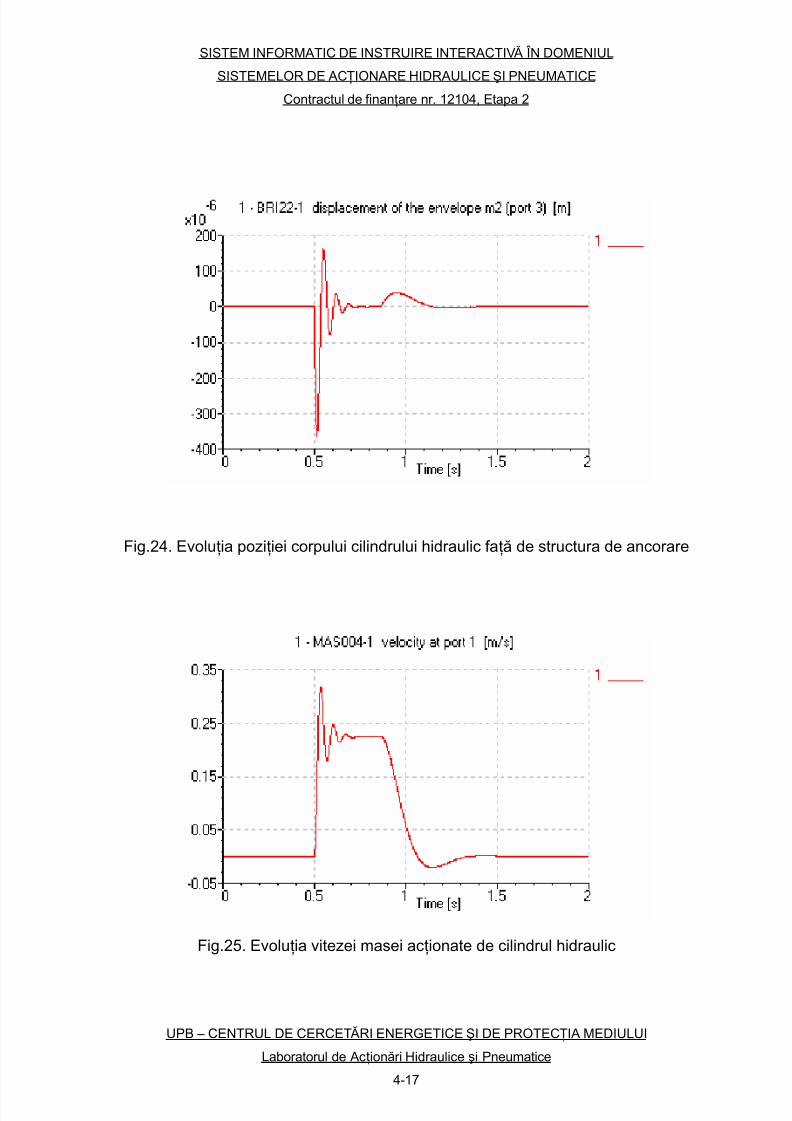
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 359/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.24. Evoluţia poziţiei corpului cilindrului hidraulic faţă de structura de ancorare
Fig.25. Evoluţia vitezei masei acţionate de cilindrul hidraulic
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-17
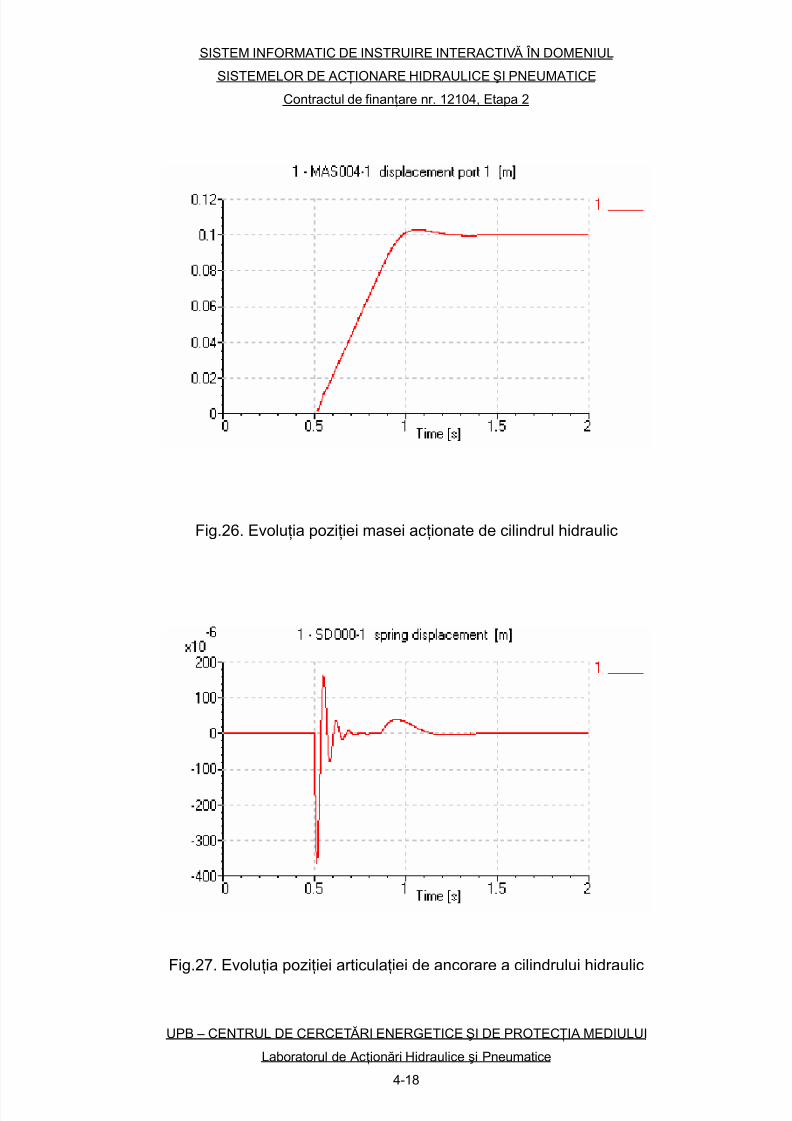
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 360/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.26. Evoluţia poziţiei masei acţionate de cilindrul hidraulic
Fig.27. Evoluţia poziţiei articulaţiei de ancorare a cilindrului hidraulic
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-18

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 361/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-19
3. SIMULAREA DINAMICII UNEI POMPE CU PISTOANE RADIALE
Modelarea şi simularea pompelor volumice cu programul AMESim relevă
fenomene tranzitorii de mare complexitate, validate prin cercetări experimentale de
mare amploare. În ultimele două decenii au fost studiate intens pompele cu pistoane
radiale de mică capacitate (fig.28) utilizate în sistemele de alimentare cu motorină la
presiune constantă a injectoarelor motoarelor cu aprindere prin compresie. Structura
unui astfel de sistem („Common rail”-„Rampă comună”) este indicată în figura 29.
Pompa alimentează injectoarele printr-un distribuitor numit „rampă”, prevăzut cu un
traductor de presiune şi cu o supapă electrohidraulică comandată cu impulsuri modulate
în durată. Supapa menţine presiunea la intrarea în injectoare la o valoare cuprinsă între600 şi 2000 bar, în funcţie de regimul de funcţionare al motorului Diesel. Injectoarele
sunt de fapt supape electrohidraulice pilotate (bietajate) al căror timp de r ăspuns este
de ordinul a 50 μs. Etajul de comandă este electromagnetic sau piezoceramic. Pentru a
asigura stabilitatea sistemului de reglare a volumului dozat de un injector la un nivel de
ordinul a 1 mm3/h este esenţială atenuarea pulsaţiilor presiunii din rampă prin măsuri
structurale şi constructive la nivelul pompei. Dinamica acesteia se studiază cu schema
de simulare numerică din figura 30, elaborată cu elemente din biblioteca mecanică aprogramului AMESim. Evoluţia principalelor mărimi de natur ă mecanică şi hidraulică
specifice pompei este prezentată în fig.31...41.

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 362/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.28. Pompă cu pistoane radiale pentru sisteme de injecţie electronică de motorină
Fig.29. Sistem “Common Rail”: 1- injector; 2 - racord de alimentare a injectorului;
3 - supapă electrohidraulică; 4 - rampă; 5 - traductor de presiune; 6 - pompă.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-20
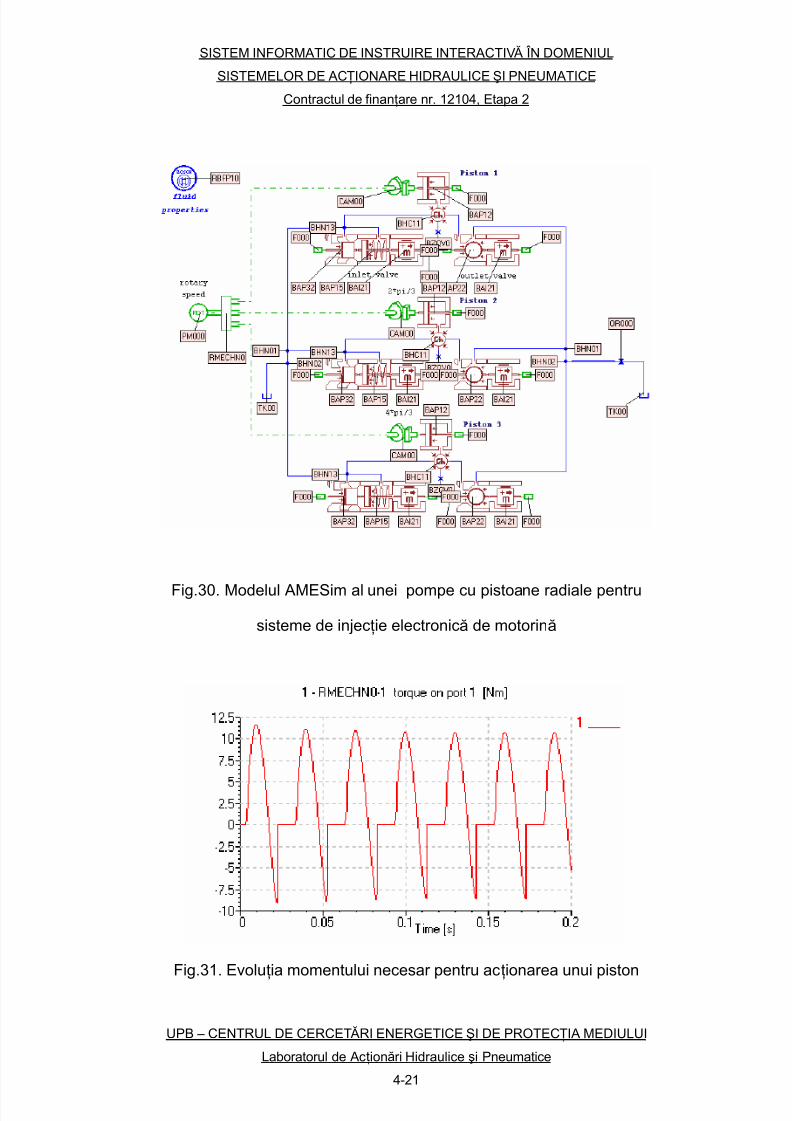
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 363/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.30. Modelul AMESim al unei pompe cu pistoane radiale pentru
sisteme de injecţie electronică de motorină
Fig.31. Evoluţia momentului necesar pentru acţionarea unui piston
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-21
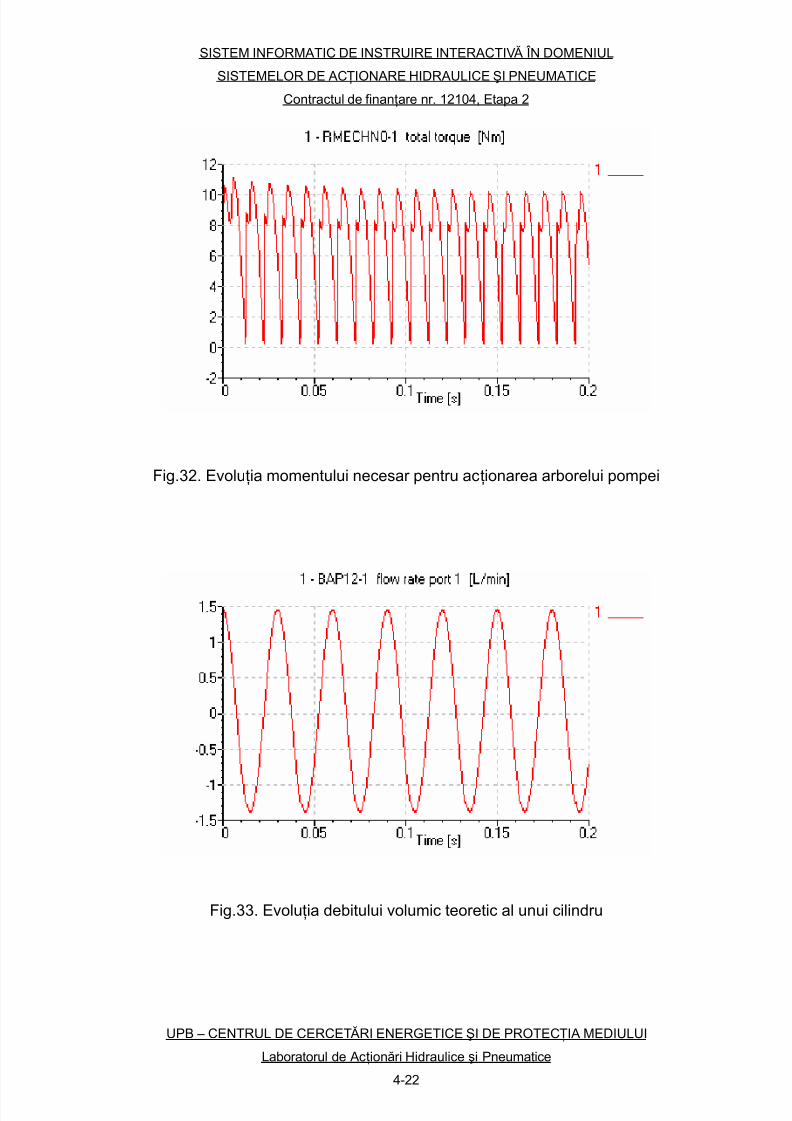
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 364/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.32. Evoluţia momentului necesar pentru acţionarea arborelui pompei
Fig.33. Evoluţia debitului volumic teoretic al unui cilindru
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-22
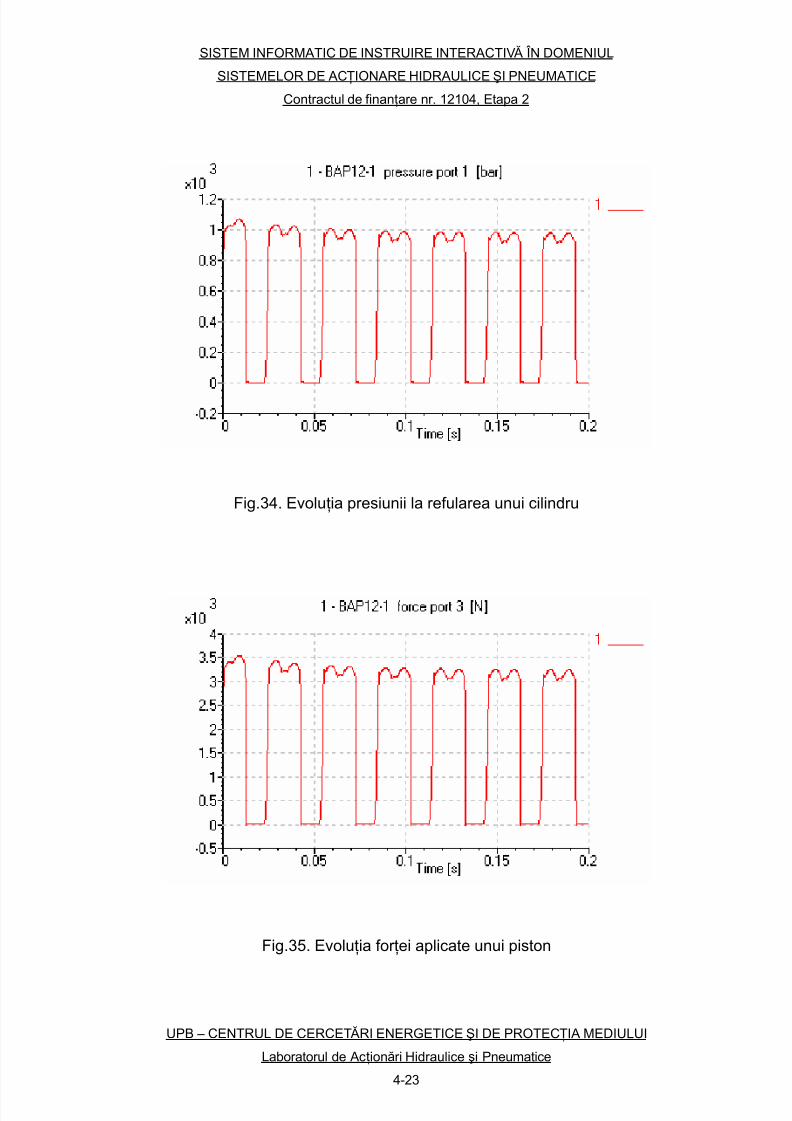
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 365/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.34. Evoluţia presiunii la refularea unui cilindru
Fig.35. Evoluţia for ţei aplicate unui piston
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-23
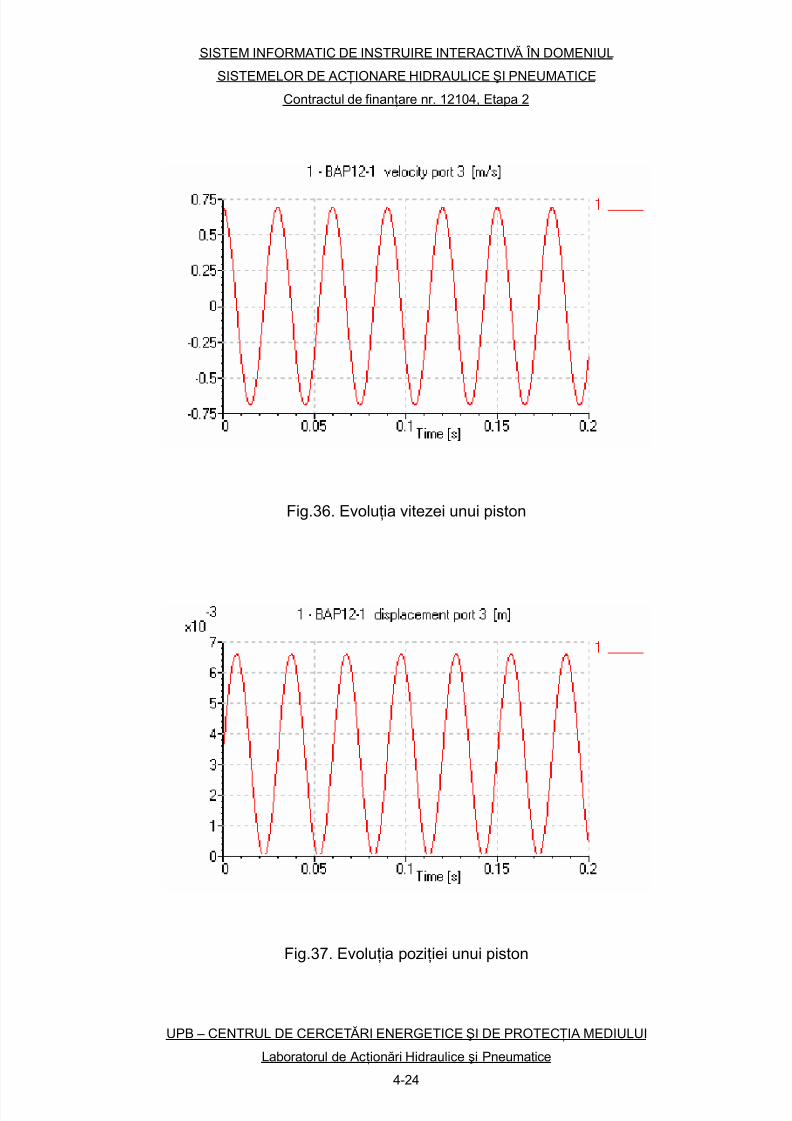
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 366/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.36. Evoluţia vitezei unui piston
Fig.37. Evoluţia poziţiei unui piston
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-24

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 367/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.38. Evoluţia debitului real al unui cilindru
Fig.39. Evoluţia vitezei medii a lichidului în orificiul unei supape de refulare
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-25
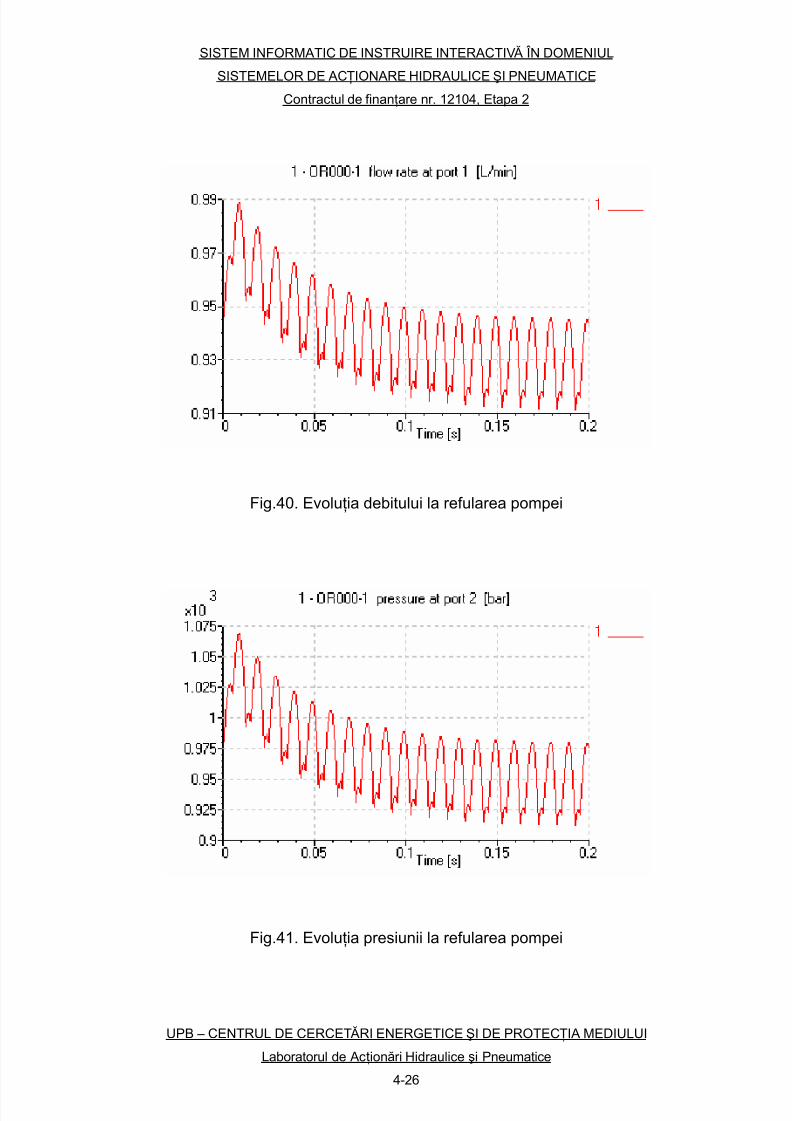
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 368/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig.40. Evoluţia debitului la refularea pompei
Fig.41. Evoluţia presiunii la refularea pompei
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-26
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 369/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-27
4. RECOMANDĂRI DE UTILIZARE PENTRU CONCEPŢIA SISTEMELOR NOI
Se constată că simularea numerică a sistemelor formate din componente de uz
general este mult mai simplă cu AMESim, permiţând optimizarea rapidă a parametrilor constructivi şi funcţionali necesari în practică. Datorită multiplelor posibilităţi oferite de
limbaj pentru elaborarea submodelelor cu ajutorul bibliotecilor interdisciplinare, AMESim
a fost adoptat ca instrument fundamental de concepţie la producătorii reputaţi de
sisteme automate cu fluide: AEROSPATIALE, BOSCH, DAIMLER-CRIYSLER,
FERRARI, MATRA, GENERAL MOTORS etc. Sistemele de frânare antiderapante
(ABS), sistemele de stabilizare electrohidraulice ale autoturismelor (EBS), sistemele de
injecţie electrohidraulice de benzină şi motorină multipunct (Common Rail), transmisiileautomate hidraulice, servodirecţiile, suspensiile hidropneumatice, sistemele de dirijare
ale rachetelor etc. au fost optimizate cu acest limbaj. Intefaţarea cu mediul de
programare MATLAB a lărgit esenţial posibilităţile de analiză şi de sinteză robustă ale
programului prezentat. În anexa volumului dedicat primei etape a prezentului proiect s-a
prezentat modulul de e-Learning al societăţii LMS IMAGINE pentru programul AMESim.
În faza următoare a contractului se vor prezenta aplicaţiile majore ale limbajului în
formatul de e-Learning conceput de echipa de realizare a proiectului.
5. CONCEPŢIA SISTEMELOR HIDROPNEUMATICE DIN COMPONENTE
TIPIZATE CU PROGRAMUL “AUTOMATION STUDIO”
Practica industrială a relevat necesitatea reducerea gradului de detaliere al
modelelor matematice ale componentelor tipizate până la nivelul accesibil proiectanţilor
de sisteme de uz general, ale căror componente au performanţe statice şi dinamice
specificate de producători. Astfel, procesul de simulare numerică realizat în scopul
alegerii corecte a componentelor tipizate pentru a satisface performanţe impuse se
simplifică considerabil, f ăr ă a afecta precizia calculelor.
În cadrul colabor ării dintre Laboratorul de Acţionări Hidraulice şi Pneumatice al
UPB-CCEPM şi Societatea FAMIC TECHNOLOGIES, s-a elaborat un prim set de lecţii
de simulare numerică cu AUTOMATION STUDIO după şablonul propus în cadrul primei
faze a prezentului contract. Lecţiile prezintă gradual componentele şi valenţele acestui
program, care fac posibilă utilizarea sa de către proiectanţii cu studii superioare de
licenţă. Elaborarea lecţiilor va continua în cadrul etapei 3 a proiectului.
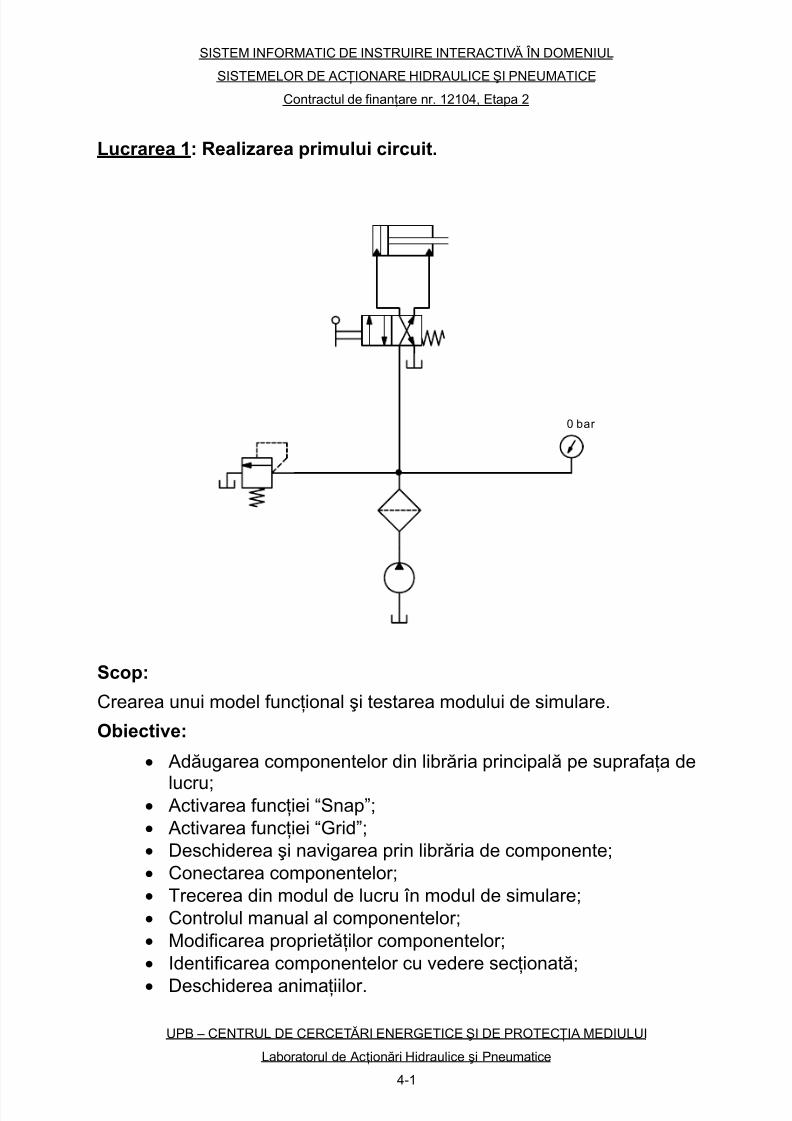
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 370/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Lucrarea 1: Realizarea primului circuit.
0 bar
Scop:
Crearea unui model funcţional şi testarea modului de simulare.
Obiective:
• Adăugarea componentelor din libr ăria principală pe suprafaţa de
lucru;• Activarea funcţiei “Snap”;• Activarea funcţiei “Grid”;• Deschiderea şi navigarea prin libr ăria de componente;• Conectarea componentelor;• Trecerea din modul de lucru în modul de simulare;• Controlul manual al componentelor;• Modificarea proprietăţilor componentelor;• Identificarea componentelor cu vedere secţionată;• Deschiderea animaţiilor.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-1
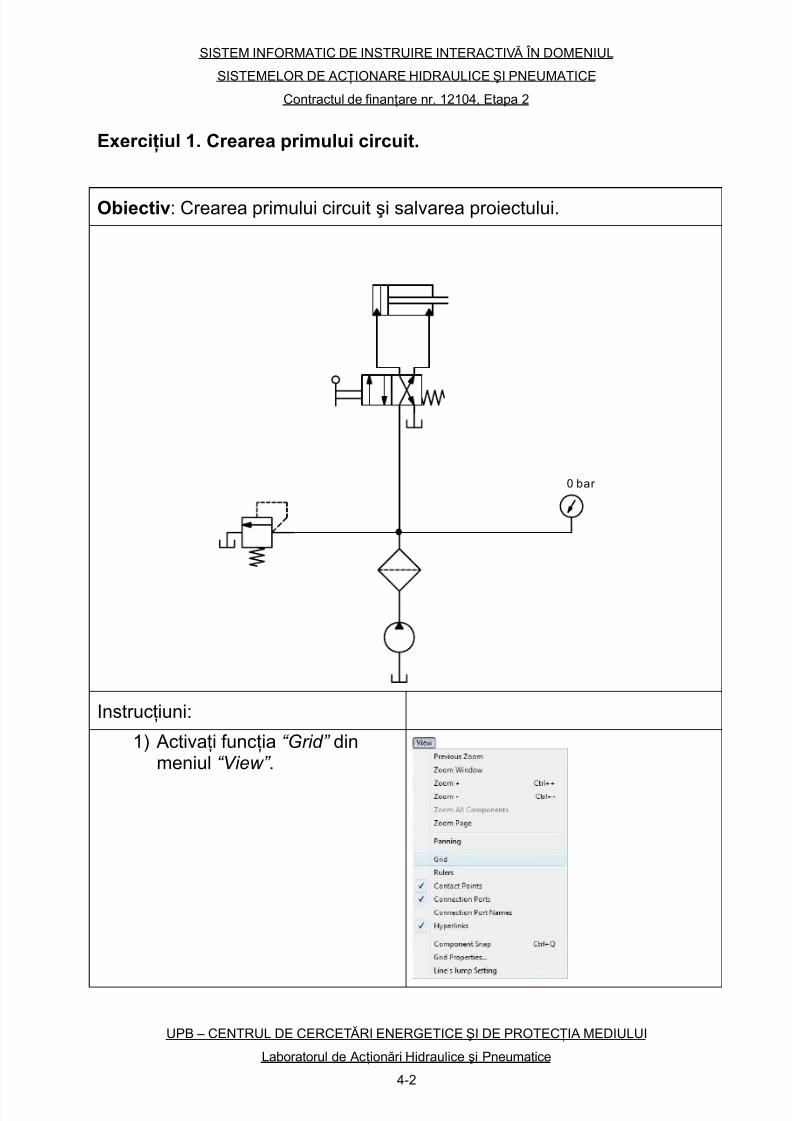
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 371/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Exerciţiul 1. Crearea primului circuit.
Obiectiv: Crearea primului circuit şi salvarea proiectului.
0 bar
Instrucţiuni:
1) Activaţi funcţia “Grid” dinmeniul “View” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-2

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 372/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
2) Activaţi funcţia “Component Snap” din meniul “View” .
3) Deschideţi “Library Explorer” din submeniul “Display” , aflat
în meniul “Window” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-3

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 373/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
4) Căutaţi toate componentele în libr ăria “Hydraulic” .
5) Aduceţi componentele pediagrama de lucru, conformschemei circuitului de la
începutul exerciţiului.
6) Conectaţi componentele între
ele folosind porturile deconexiuni, marcate cucerculeţe roşii, după cum sevede în partea dreaptă.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-4
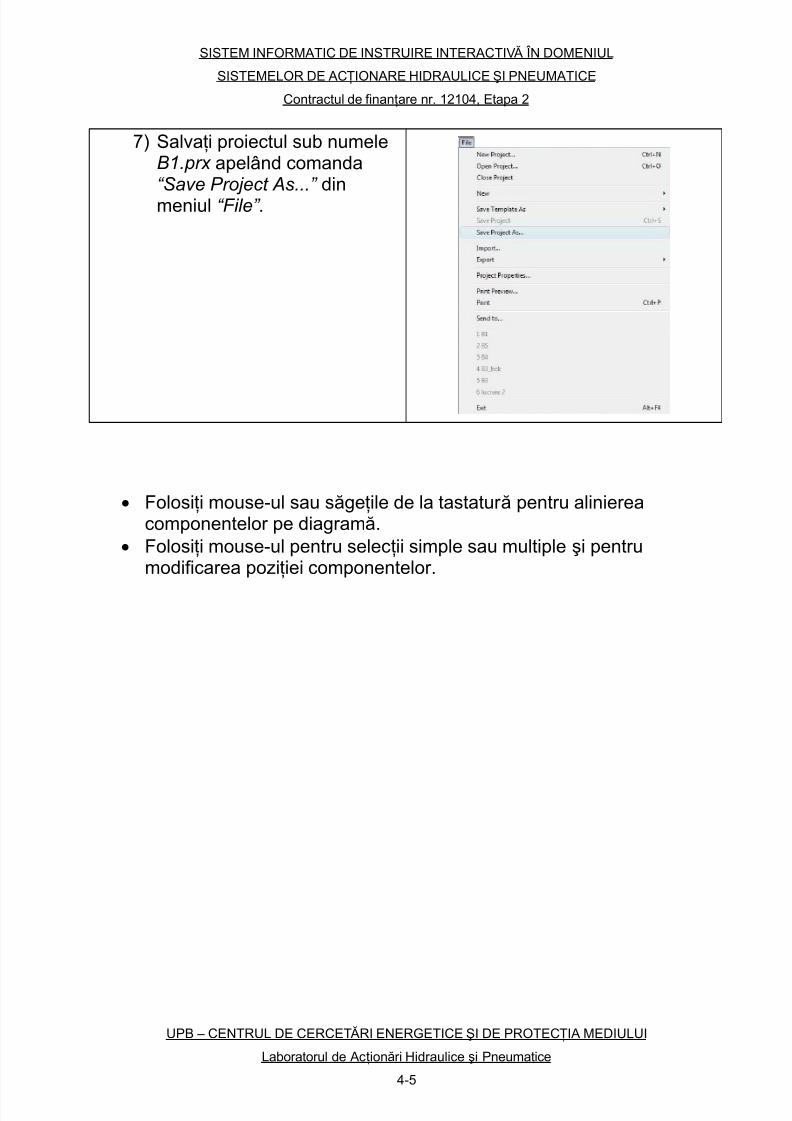
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 374/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
7) Salvaţi proiectul sub numeleB1.prx apelând comanda“Save Project As...” dinmeniul “File” .
• Folosiţi mouse-ul sau săgeţile de la tastatur ă pentru aliniereacomponentelor pe diagramă.
• Folosiţi mouse-ul pentru selecţii simple sau multiple şi pentrumodificarea poziţiei componentelor.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-5

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 375/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Exerciţiul 2. Simularea primului circuit.
Obiectiv: Pornirea simulării şi controlul componentelor.
Instrucţiuni:
8) Folosind circuitul creat
în exerciţiul anterior,simularea poate fipornită în 3 moduri:
• meniul “Simulation” ;• folosind combinaţia
de taste CTRL+F1; • folosind butonul
verde după cum sevede în partea
dreaptă.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-6
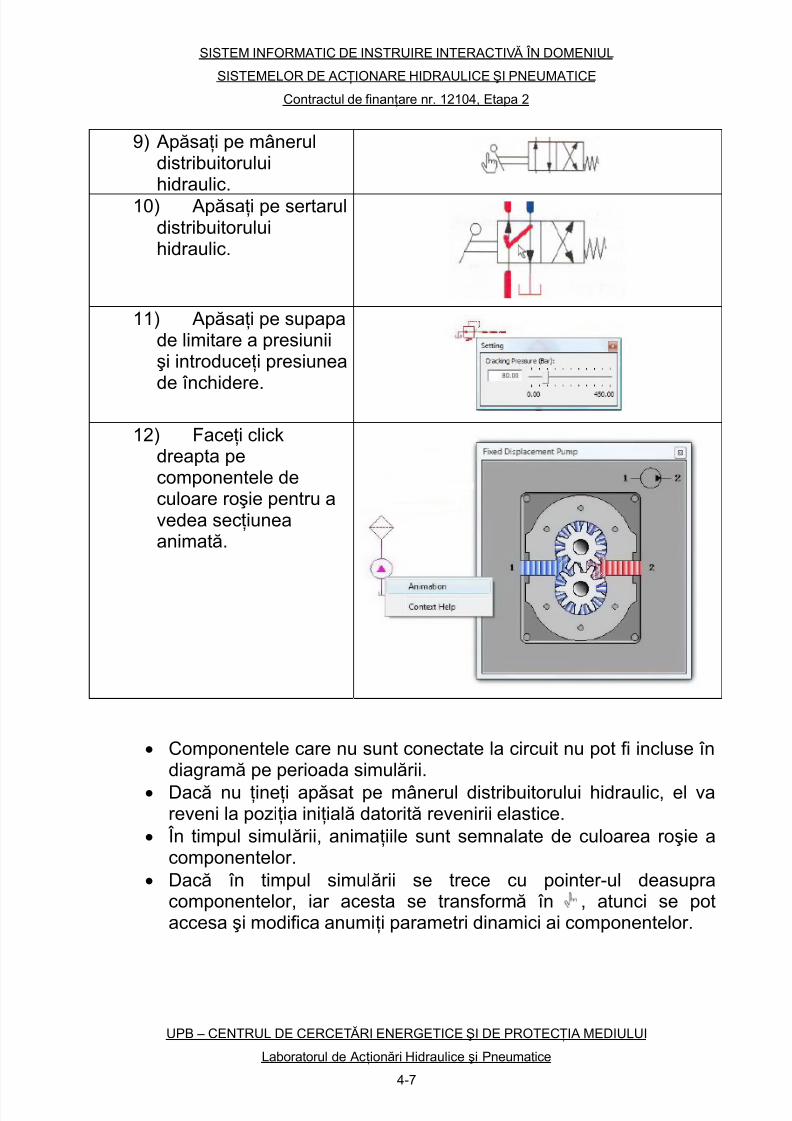
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 376/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
9) Apăsaţi pe mâneruldistribuitoruluihidraulic.
10) Apăsaţi pe sertaruldistribuitoruluihidraulic.
11) Apăsaţi pe supapade limitare a presiuniişi introduceţi presiuneade închidere.
12) Faceţi clickdreapta pecomponentele deculoare roşie pentru avedea secţiuneaanimată.
• Componentele care nu sunt conectate la circuit nu pot fi incluse îndiagramă pe perioada simulării.
• Dacă nu ţineţi apăsat pe mânerul distribuitorului hidraulic, el vareveni la poziţia iniţială datorită revenirii elastice.
• În timpul simulării, animaţiile sunt semnalate de culoarea roşie acomponentelor.
• Dacă în timpul simulării se trece cu pointer-ul deasupracomponentelor, iar acesta se transformă în , atunci se potaccesa şi modifica anumiţi parametri dinamici ai componentelor.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-7
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 377/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Lucrarea 2: Configurarea spaţiului de lucru în Automation Studio.
Scop:
Configurarea interfeţei de lucru.
Obiective:
• Accesarea utilitarelor (Toolbars) de administrare a interfeţei
folosind meniurile şi/sau tastatura;• Afişarea/Ascunderea ferestrelor şi a meniurilor;• Mărimea şi poziţionarea ferestrelor;• Organizarea meniurilor.
Exerciţiul 1. Configurarea interfeţei de lucru.
Obiectiv: Reorganizarea meniurilor şi a ferestrelor independent deconfiguraţia iniţială a Automation Studio.
Înainte de configurare. După configurare.
Instrucţiuni:
1) Mutaţi orice bar ă de meniuapăsând pe linia verticală
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-8
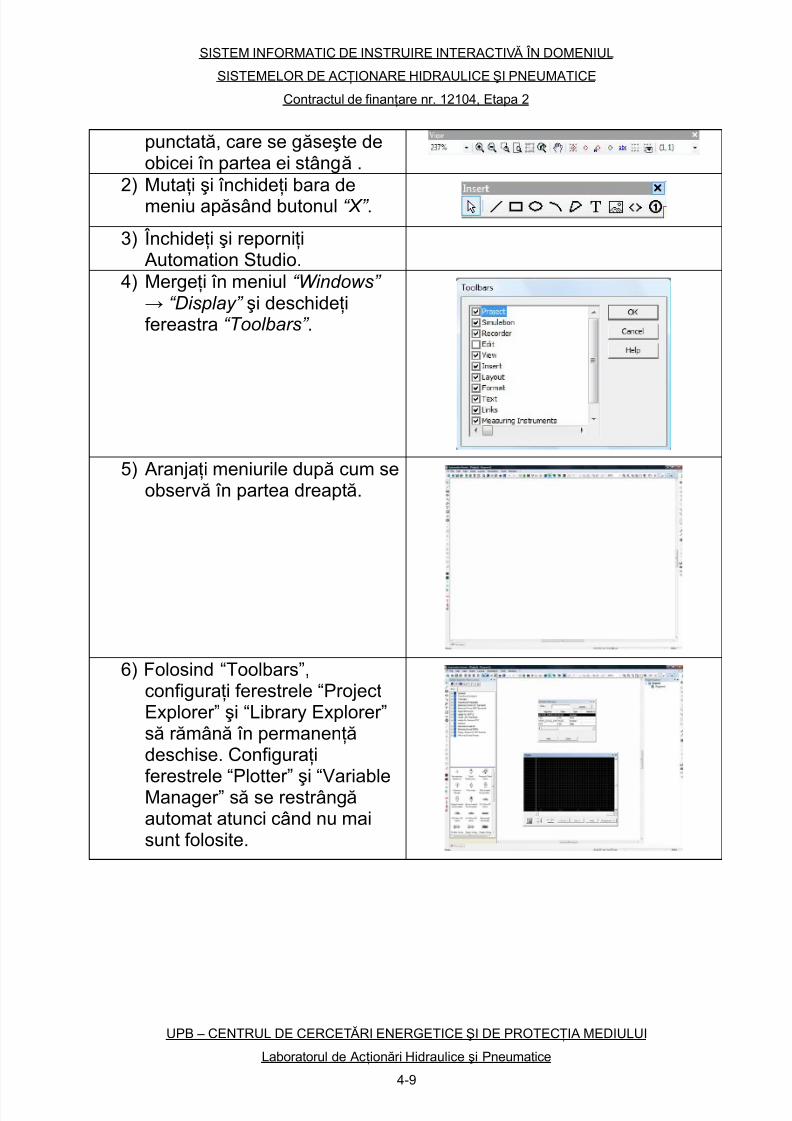
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 378/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
punctată, care se găseşte deobicei în partea ei stângă .
2) Mutaţi şi închideţi bara demeniu apăsând butonul “X” .
3) Închideţi şi reporniţi Automation Studio.
4) Mergeţi în meniul “Windows” → “Display” şi deschideţifereastra “Toolbars” .
5) Aranjaţi meniurile după cum seobservă în partea dreaptă.
6) Folosind “Toolbars”,configuraţi ferestrele “ProjectExplorer” şi “Library Explorer”să r ămână în permanenţă deschise. Configuraţi
ferestrele “Plotter” şi “VariableManager” să se restrângă automat atunci când nu maisunt folosite.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-9

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 379/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Lucrarea 3: Administrarea proiectului.
Scop:
Crearea, organizarea şi salvarea proiectului.
Obiective:
• Adăugarea diagramelor în proiect;• Crearea sub-directoarelor;• Mutarea, copierea, ştergerea şi redenumirea diagramelor;• Mutarea şi copierea diagramelor din proiecte diferite;• Organizarea ferestrelor şi afişarea diagramelor;• Recuperarea unui proiect în cazul în care se opreşte calculatorul;• Organizarea exerciţiilor acestei lucr ări.
Exerciţiul 1. Organizarea proiectului.
Obiectiv: Salvarea şi structurarea proiectului.
Instrucţiuni:
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-10
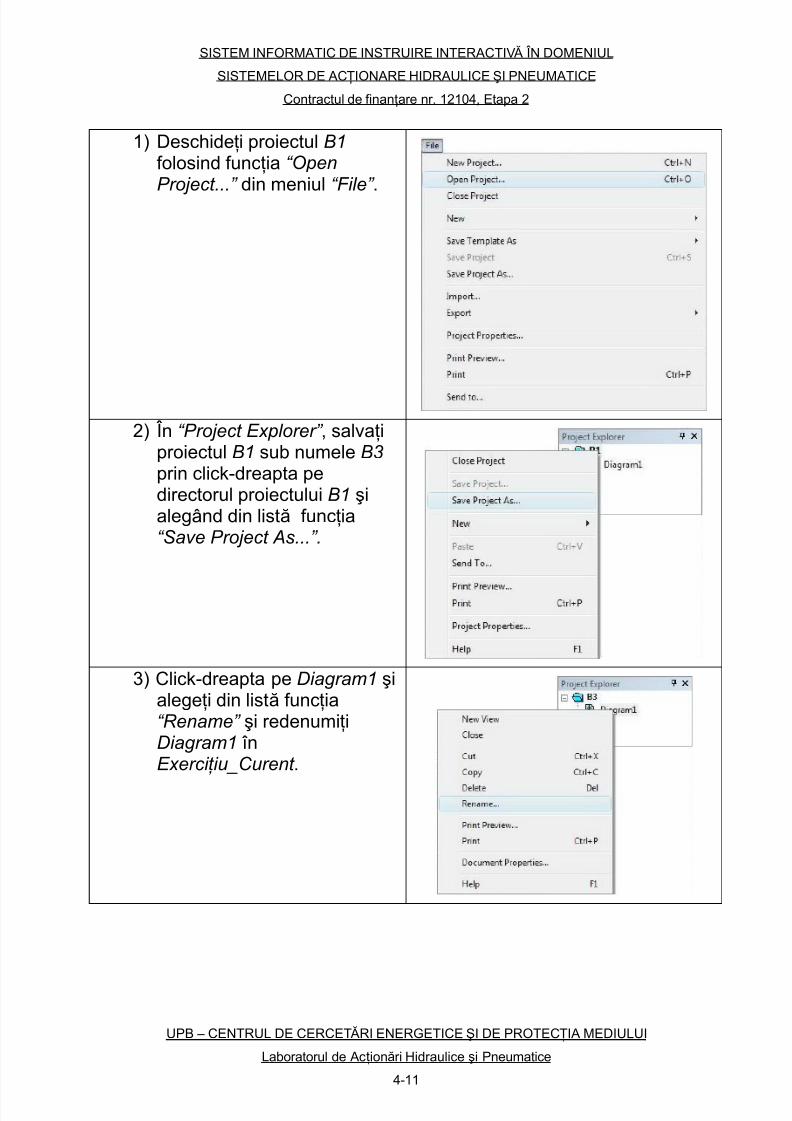
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 380/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
1) Deschideţi proiectul B1 folosind funcţia “OpenProject...” din meniul “File” .
2) În “Project Explorer” , salvaţiproiectul B1 sub numele B3 prin click-dreapta pedirectorul proiectului B1 şialegând din listă funcţia“Save Project As...”.
3) Click-dreapta pe Diagram1 şialegeţi din listă funcţia“Rename” şi redenumiţiDiagram1 înExerci ţ iu_Curent .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-11

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 381/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
4) Click-dreapta pe directorulproiectului B3 şi alegeţi dinlistă “New” şi apoi “Folder” şicreaţi un director numitExerci ţ ii .
5) Click-dreapta peExerci ţ iu_curent şi selectaţifuncţia “Copy”.
6) Click-dreapta pe directorulExerci ţ ii
şi selecta
ţi din list
ă
funcţia “Paste” .
7) Click-dreapta pe Diagram1 şi
alegeţi din listă funcţia“Rename” şi redenumiţiDiagram1 în B3_1.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-12
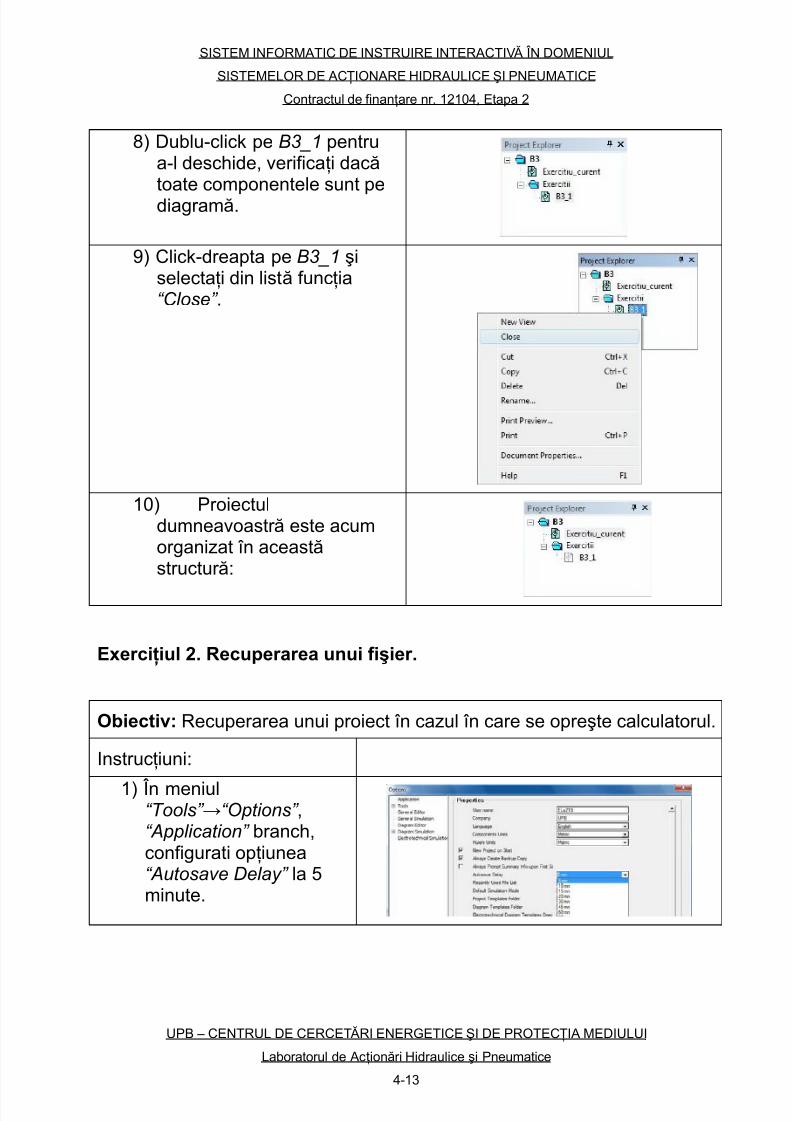
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 382/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
8) Dublu-click pe B3_1 pentrua-l deschide, verificaţi dacă toate componentele sunt pediagramă.
9) Click-dreapta pe B3_1 şiselectaţi din listă funcţia“Close” .
10) Proiectuldumneavoastr ă este acumorganizat în această structur ă:
Exerciţiul 2. Recuperarea unui fişier.
Obiectiv: Recuperarea unui proiect în cazul în care se opreşte calculatorul.
Instrucţiuni:
1) În meniul“Tools” →“Options” ,“Application” branch,configurati opţiunea“Autosave Delay” la 5minute.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-13
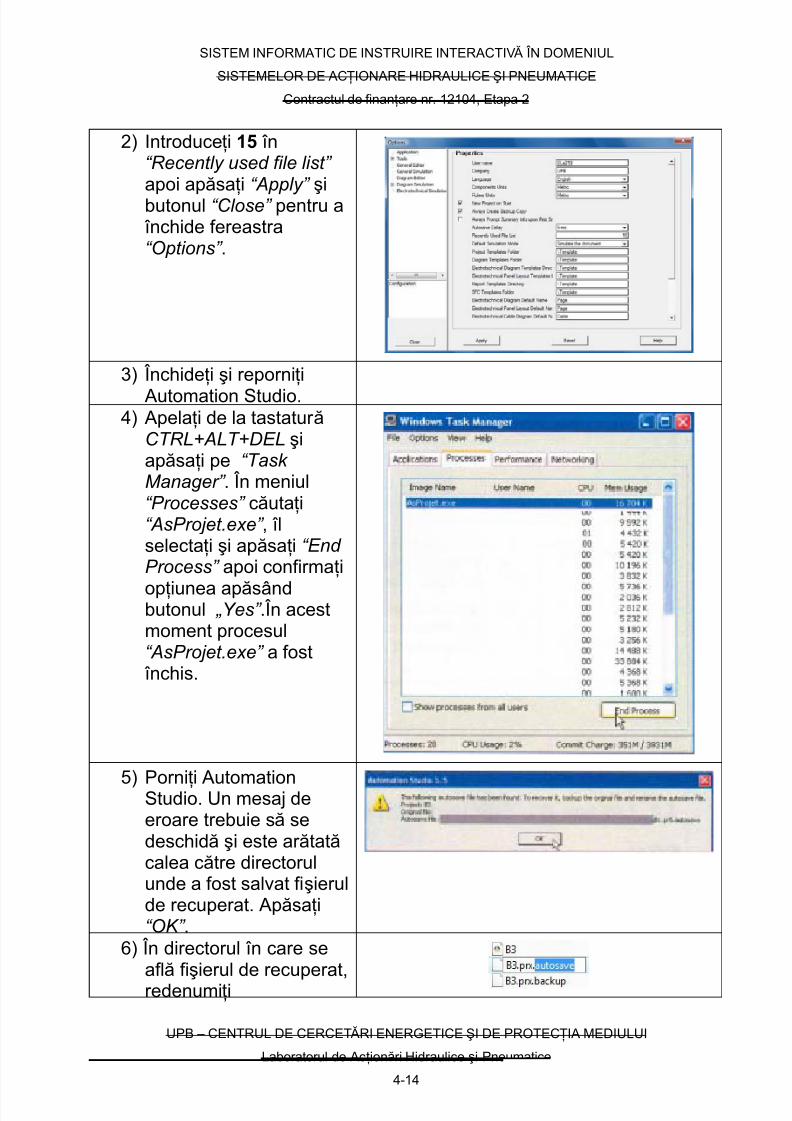
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 383/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
2) Introduceţi 15 în“Recently used file list” apoi apăsaţi “Apply” şibutonul “Close” pentru a
închide fereastra“Options” .
3) Închideţi şi reporniţi
Automation Studio.4) Apelaţi de la tastatur ă
CTRL+ALT+DEL şiapăsaţi pe “Task Manager” . În meniul“Processes” căutaţi“AsProjet.exe” , îlselectaţi şi apăsaţi “End Process” apoi confirmaţi
opţiunea apăsândbutonul „Yes” .În acestmoment procesul“AsProjet.exe” a fost
închis.
5) Porniţi AutomationStudio. Un mesaj deeroare trebuie să sedeschidă şi este ar ătată calea către directorulunde a fost salvat fişierulde recuperat. Apăsaţi“OK” .
6) În directorul în care seaflă fişierul de recuperat,redenumiţi
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-14
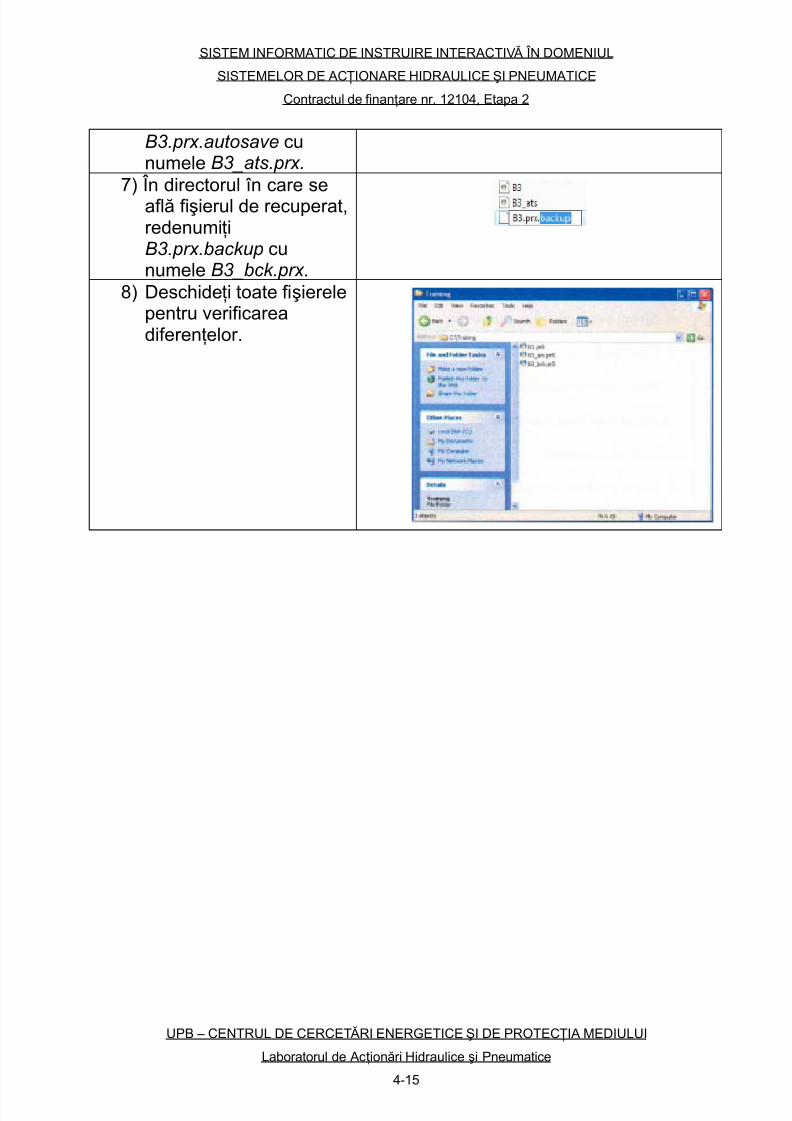
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 384/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
B3.prx.autosave cunumele B3_ats.prx.
7) În directorul în care seaflă fişierul de recuperat,redenumiţiB3.prx.backup cunumele B3_bck.prx .
8) Deschideţi toate fişierelepentru verificareadiferenţelor.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-15
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 385/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-16
Lucrarea 4: Editarea optimizată a modelelor.
Scop:
Crearea circuitelor, folosind operaţii eficiente ca “insert”, “copy”, “display” şi“move”.
Manipularea eficientă a componentelor.
Obiective:
• Poziţia, mărirea şi micşorarea ferestrei de lucru;• Identificarea metodelor de adăugare a componentelor;• Copierea şi multiplicarea componentelor;• Selectarea multiplă;• Gruparea obiectelor;• Mutarea şi rotirea obiectelor;• Organizarea exerciţiilor acestei lucr ări;•
Alinierea, distribuirea, mărirea/micşorarea şi transformareaobiectelor;• Unirea/Despăr ţirea elementelor componente;• Familiarizarea cu comenzile rapide de la tastatur ă.
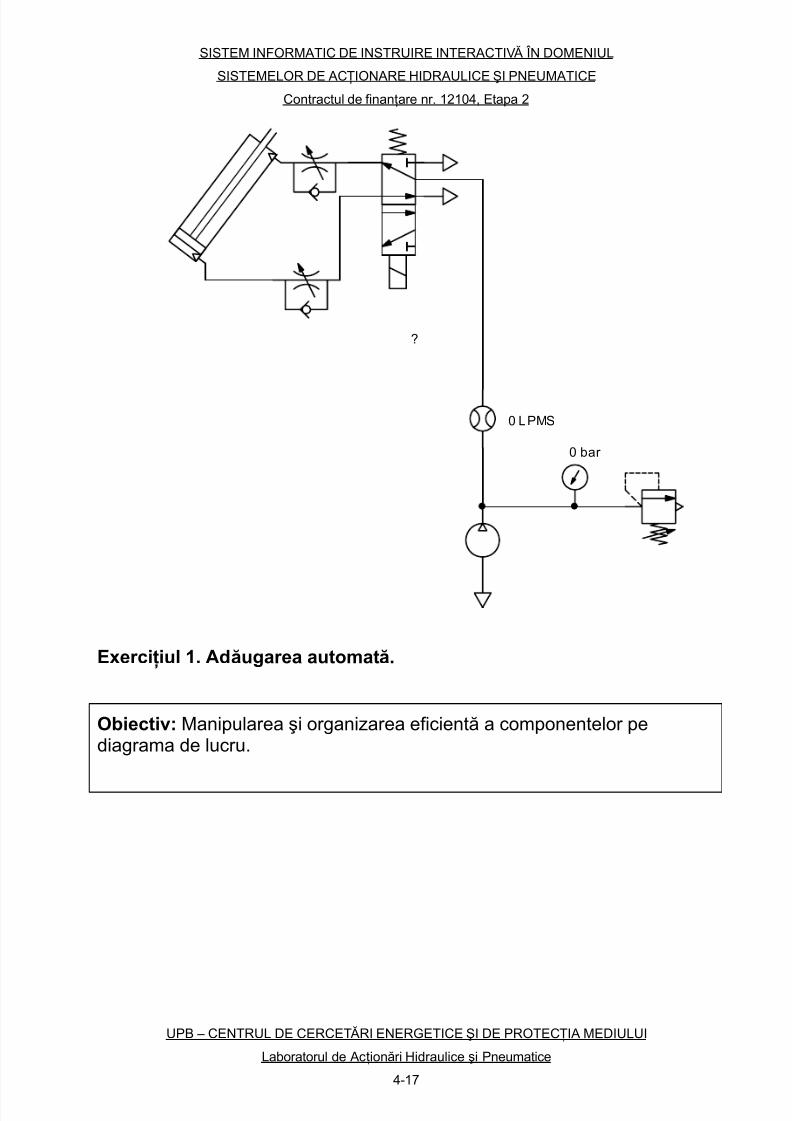
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 386/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
0 bar
0 LPMS
?
Exerciţiul 1. Adăugarea automată.
Obiectiv: Manipularea şi organizarea eficientă a componentelor pediagrama de lucru.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-17
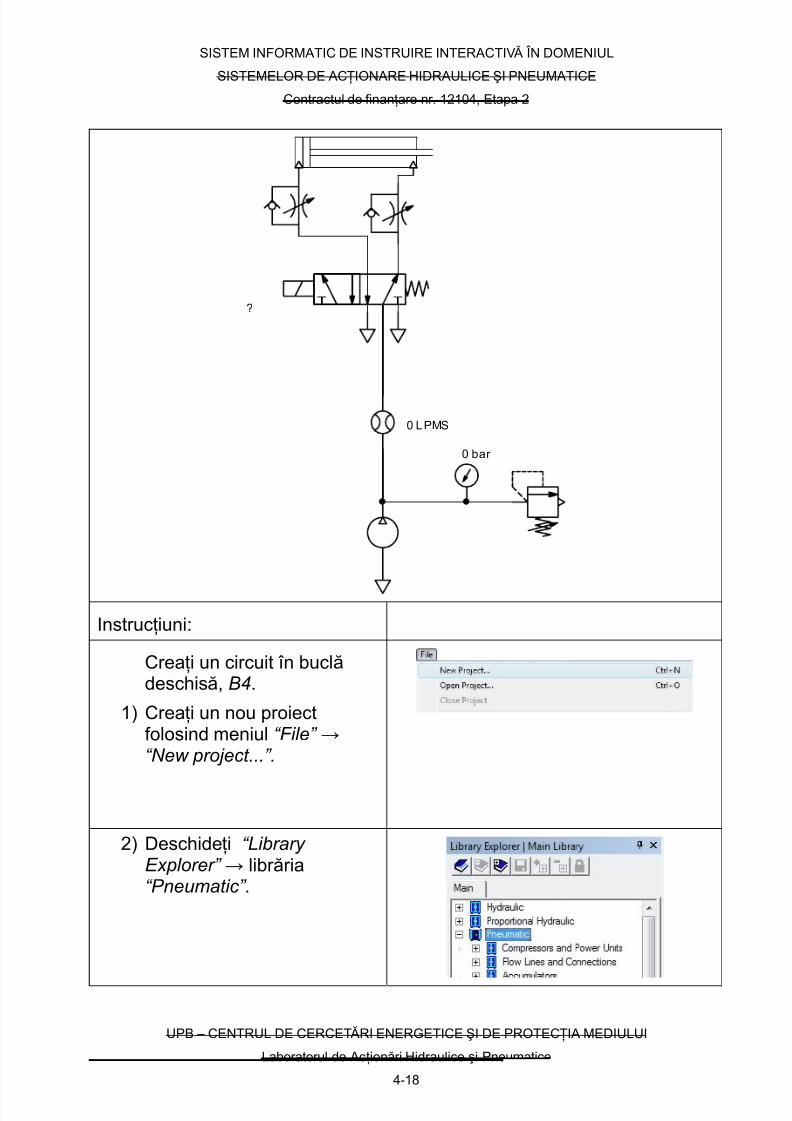
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 387/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
?
0 bar
0 LPMS
Instrucţiuni:
Creaţi un circuit în buclă deschisă, B4.
1) Creaţi un nou proiectfolosind meniul “File” → “New project...”.
2) Deschideţi “Library Explorer” → libr ăria“Pneumatic” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-18

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 388/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
3) Adăugaţi pe diagrama delucru un cilindru pneumatic,un distribuitor pneumatic, unrezervor şi o supapă delimitare a presiunii.
?
4) Uniţi componentele între elefolosind liniile de presiune şicopiaţi rezervorul pentru a-l
conecta la distribuitor şicompresor după cum sevede în partea dreaptă.
5) Adăugaţi componentele carelipsesc, folosind libr ăria“Pneumatic” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-19
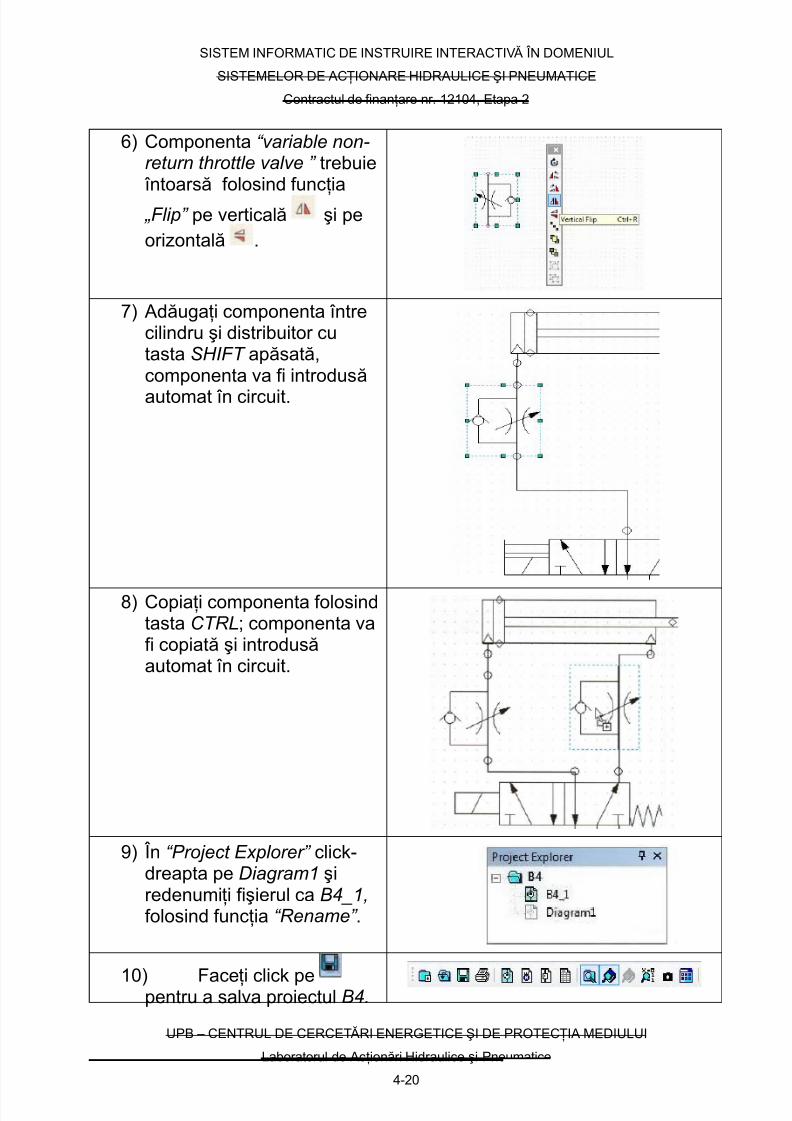
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 389/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
6) Componenta “variable non-return throttle valve ” trebuie
întoarsă folosind funcţia
„Flip” pe verticală şi peorizontală .
7) Adăugaţi componenta întrecilindru şi distribuitor cutasta SHIFT apăsată,componenta va fi introdusă
automat în circuit.
8) Copiaţi componenta folosindtasta CTRL; componenta vafi copiată şi introdusă automat în circuit.
9) În “Project Explorer” click-dreapta pe Diagram1 şiredenumiţi fişierul ca B4_1, folosind funcţia “Rename” .
10) Faceţi click pepentru a salva proiectul B4.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-20
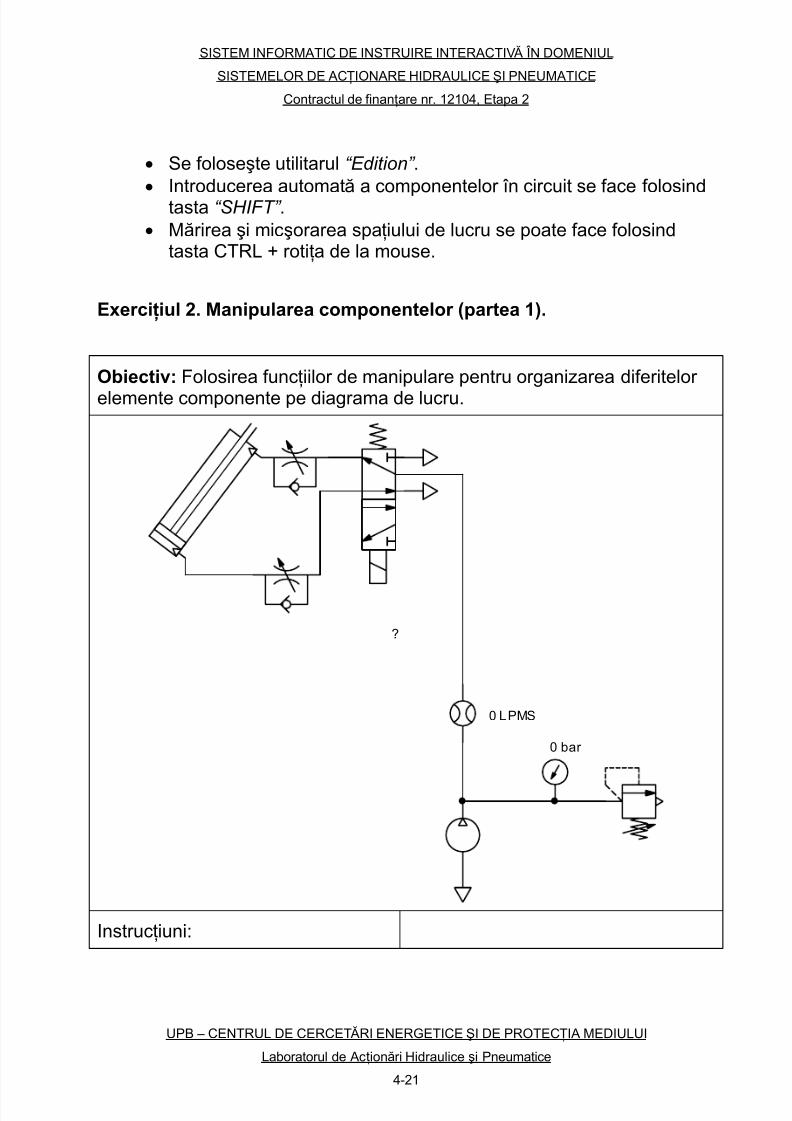
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 390/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
• Se foloseşte utilitarul “Edition” .• Introducerea automat
ăa componentelor în circuit se face folosind
tasta “SHIFT” .• Mărirea şi micşorarea spaţiului de lucru se poate face folosind
tasta CTRL + rotiţa de la mouse.
Exerciţiul 2. Manipularea componentelor (partea 1).
Obiectiv: Folosirea funcţiilor de manipulare pentru organizarea diferitelor
elemente componente pe diagrama de lucru.
0 bar
0 LPMS
?
Instrucţiuni:
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-21
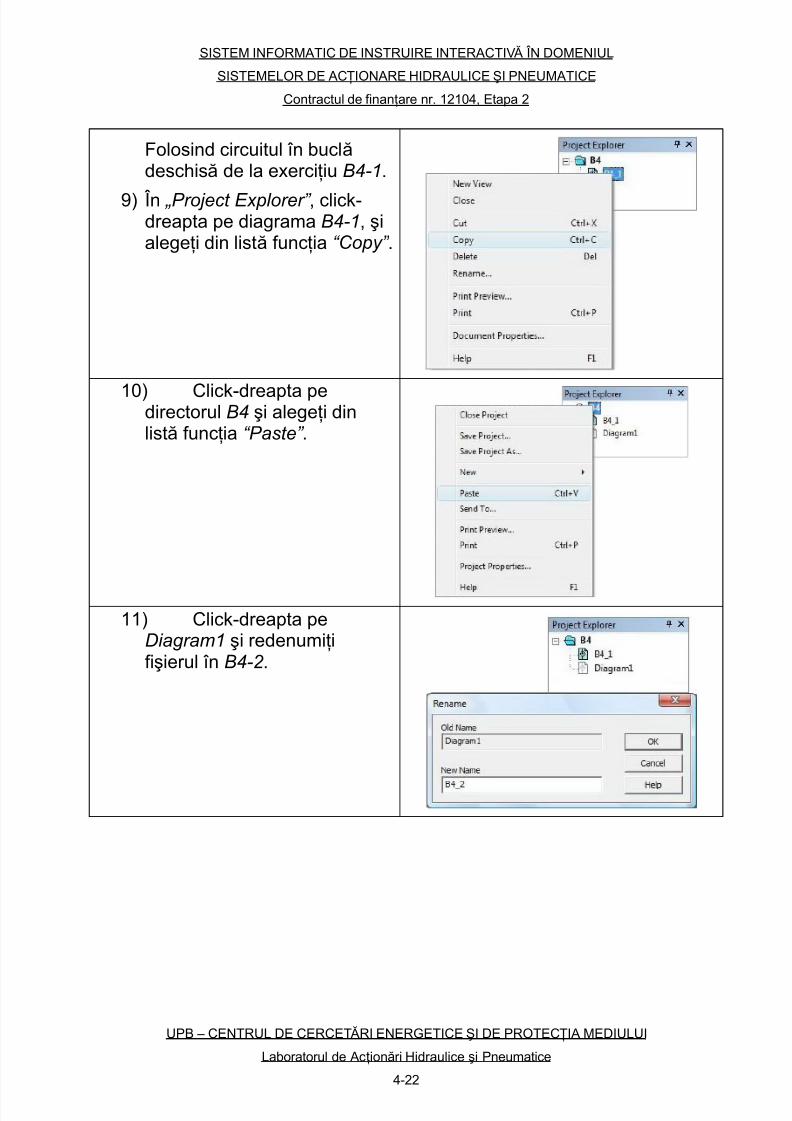
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 391/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Folosind circuitul în buclă deschisă de la exerciţiu B4-1.
9) În „Project Explorer” , click-dreapta pe diagrama B4-1, şialegeţi din listă funcţia “Copy” .
10) Click-dreapta pedirectorul B4 şi alegeţi dinlistă funcţia “Paste” .
11) Click-dreapta peDiagram1 şi redenumiţifişierul în B4-2 .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-22
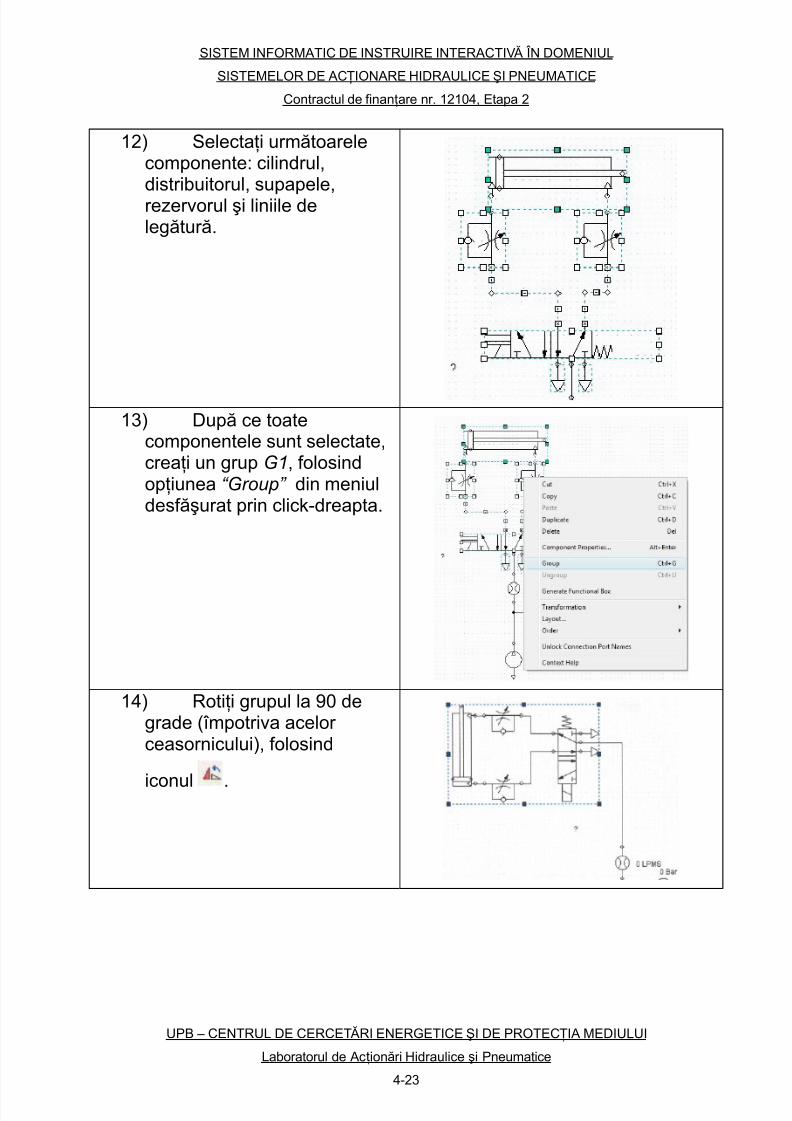
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 392/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
12) Selectaţi următoarelecomponente: cilindrul,distribuitorul, supapele,rezervorul şi liniile delegătur ă.
13) După ce toatecomponentele sunt selectate,creaţi un grup G1, folosindopţiunea “Group” din meniuldesf ăşurat prin click-dreapta.
14) Rotiţi grupul la 90 degrade (împotriva acelor ceasornicului), folosind
iconul .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-23
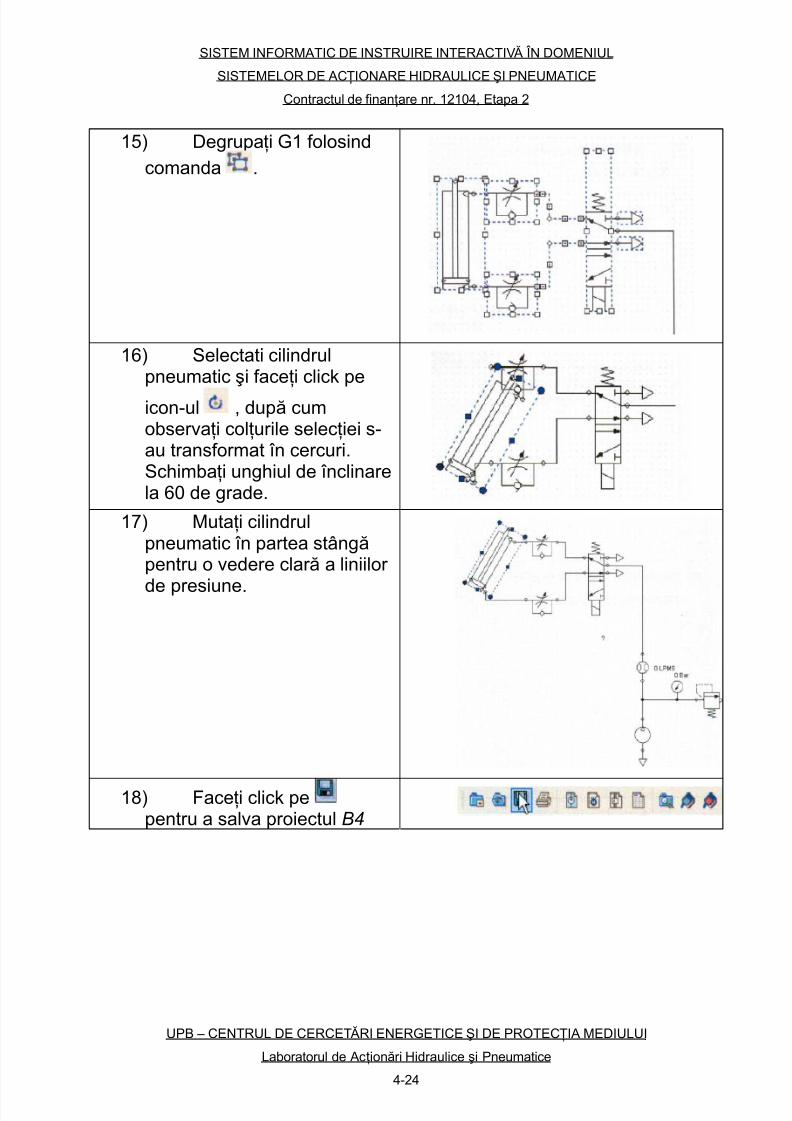
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 393/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
15) Degrupaţi G1 folosind
comanda .
16) Selectati cilindrulpneumatic şi faceţi click pe
icon-ul , după cumobservaţi colţurile selecţiei s-au transformat în cercuri.Schimbaţi unghiul de înclinarela 60 de grade.
17) Mutaţi cilindrulpneumatic în partea stângă pentru o vedere clar ă a liniilor
de presiune.
18) Faceţi click pepentru a salva proiectul B4
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-24
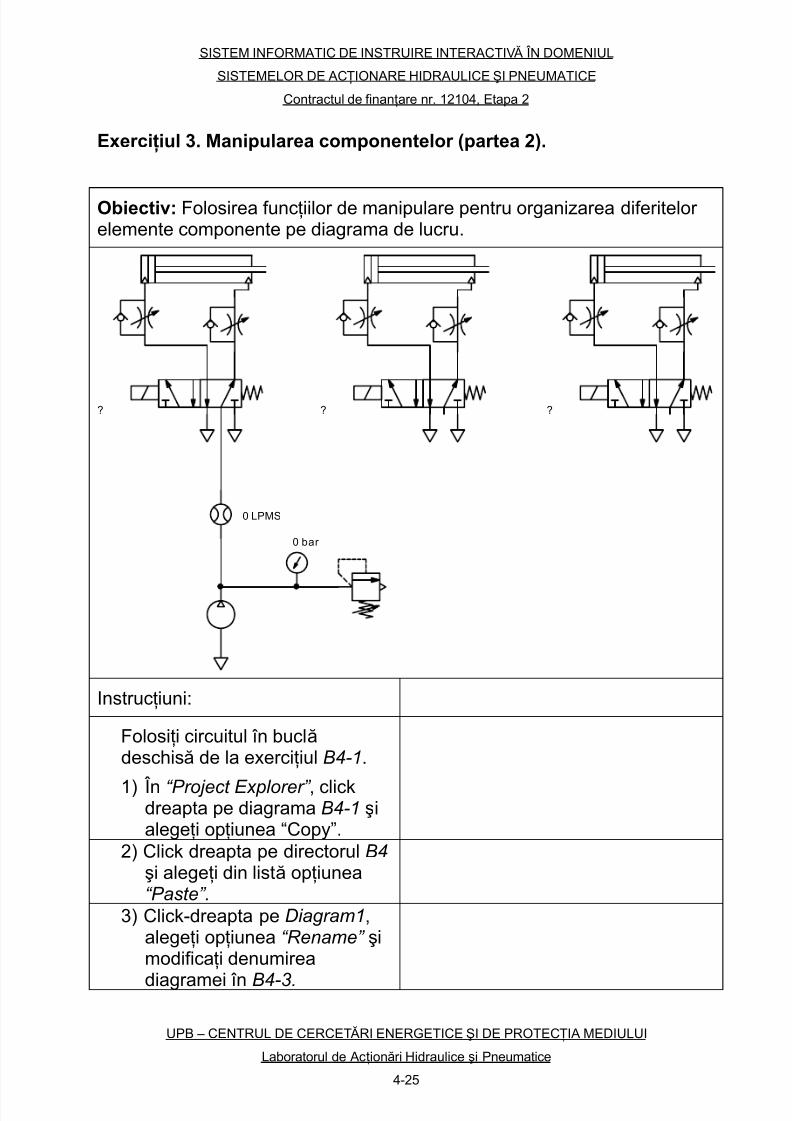
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 394/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Exerciţiul 3. Manipularea componentelor (partea 2).
Obiectiv: Folosirea funcţiilor de manipulare pentru organizarea diferitelor elemente componente pe diagrama de lucru.
?
0 bar
0 LPMS
??
Instrucţiuni:
Folosiţi circuitul în buclă deschisă de la exerciţiul B4-1.
1) În “Project Explorer” , clickdreapta pe diagrama B4-1 şialegeţi opţiunea “Copy”.
2) Click dreapta pe directorul B4 şi alegeţi din listă opţiunea“Paste”.
3) Click-dreapta pe Diagram1,alegeţi opţiunea “Rename” şimodificaţi denumirea
diagramei în B4-3.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-25
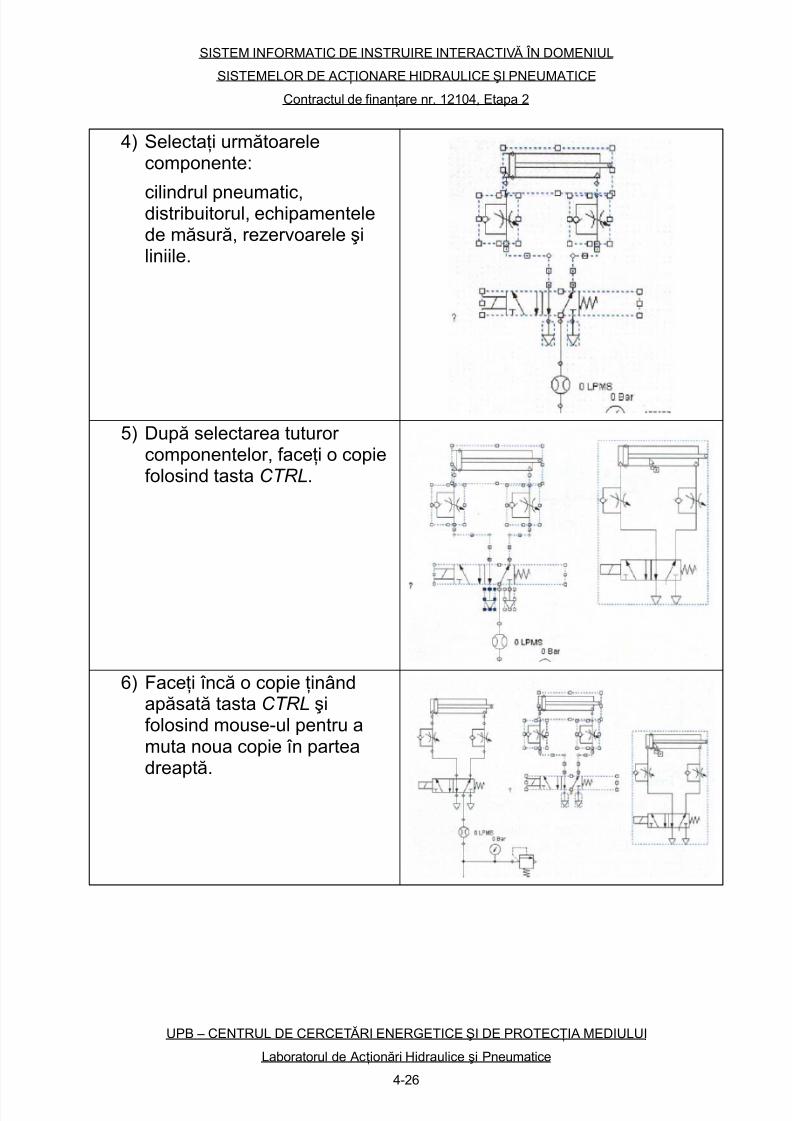
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 395/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
4) Selectaţi următoarelecomponente:
cilindrul pneumatic,distribuitorul, echipamentelede măsur ă, rezervoarele şiliniile.
5) După selectarea tuturor componentelor, faceţi o copiefolosind tasta CTRL.
6) Faceţi încă o copie ţinândapăsată tasta CTRL şifolosind mouse-ul pentru amuta noua copie în parteadreaptă.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-26

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 396/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
7) Creaţi 2 grupuri individuale
folosind opţiunea “Group” .
8) Prima dată selectaţi cilindruldin partea stângă apoi ţineţiapăsată tasta SHIFT pentru aselecta cele două grupuri din
partea dreaptă.
9) Aliniaţitoţi cilindrii prin apăsarea
icon-ului . După
deschiderea ferestrei “Layout” , în “ Align” faceţi click pe
butonul pentru aliniere şi
pe butonul pentrudistribuirea egală a spaţiuluidintre componente.
10) Faceţi click pe
pentru a salva proiectul B4-3.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-27
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 397/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-28
Lucrarea 5: Controlul circuitului.
Scop:
Automatizarea circuitului de control.
Manipularea eficientă a componentelor.
Obiective:
• Găsirea elementelor de control;• Definirea elementelor emiţător şi receptor;• Alocarea şi folosirea variabilelor;• Afişarea variabilelor;• Identificarea variabilelor;• Identificarea restricţiilor între receptor şi emiţător;

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 398/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
0 bar
0 LPMS
A2 A1
S1
S11-1GRP4.A1
1-1GRP4.A2
L1
EXT1-1IC1
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
COM
1-1OC1
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
COM
EXT
END
RUNG1"1-1IC1.IN0"
"1-1IC1.IN1"
( )
"1-1OC1.OUT0"
"1-1OC1.OUT0"
"1-1IC1.IN2"
"1-1OC1.OUT0"
( )
"1-1OC1.OUT1"
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-29
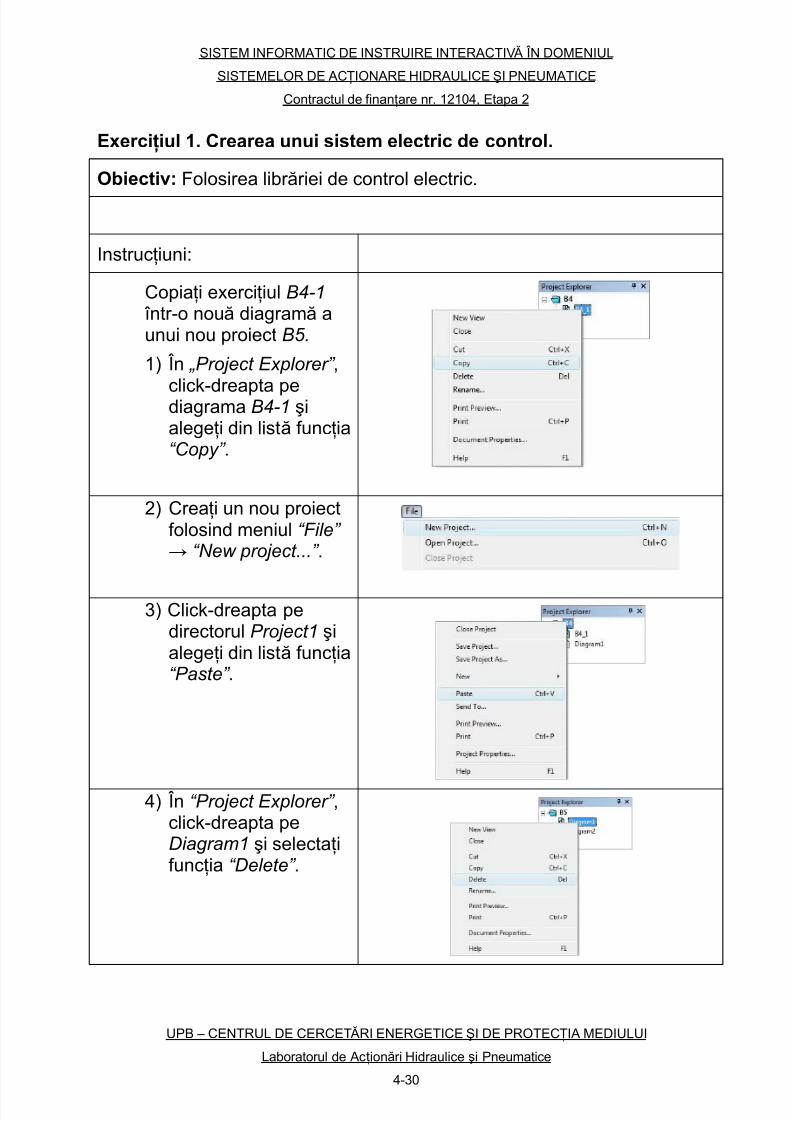
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 399/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Exerciţiul 1. Crearea unui sistem electric de control.
Obiectiv: Folosirea libr ăriei de control electric.
Instrucţiuni:
Copiaţi exerciţiul B4-1 într-o nouă diagramă aunui nou proiect B5.
1) În „Project Explorer” ,
click-dreapta pediagrama B4-1 şialegeţi din listă funcţia“Copy” .
2) Creaţi un nou proiectfolosind meniul “File” → “New project...” .
3) Click-dreapta pedirectorul Project1 şialegeţi din listă funcţia“Paste” .
4) În “Project Explorer” ,click-dreapta peDiagram1 şi selectaţifuncţia “Delete” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-30

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 400/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
5) În “Project Explorer” ,click-dreapta peDiagram2 şi selectaţifuncţia “Rename” .Schimbaţi denumireaDiagram2 în B5-1.
6) În “Library Explorer” faceţi click pe“Electrical Control(JIC or IEC Standard)” înfuncţie de standardulpreferat.
7) Introduceţi îndiagramă o sursă detensiune de 24V, unbuton normal deschisşi un solenoid.
8) Când solenoidul este
introdus pe diagramă se va deschideautomat o fereastr ă cu proprietăţilevariabilei. La “Tag Name” introduceţi S1şi faceţi click pe OK.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-31
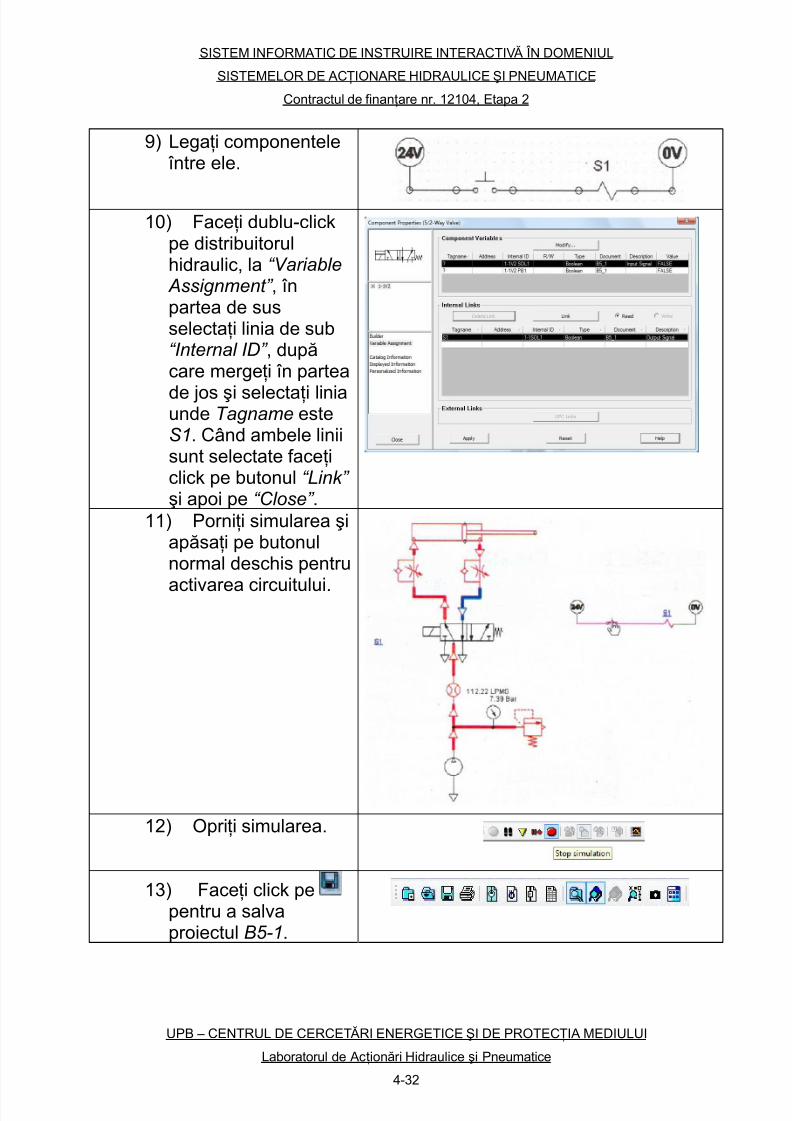
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 401/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
9) Legaţi componentele între ele.
10) Faceţi dublu-clickpe distribuitorulhidraulic, la “Variable
Assignment” , înpartea de susselectaţi linia de sub“Internal ID” , după care mergeţi în partea
de jos şi selectaţi liniaunde Tagname esteS1. Când ambele liniisunt selectate faceţiclick pe butonul “Link” şi apoi pe “Close” .
11) Porniţi simularea şiapăsaţi pe butonulnormal deschis pentru
activarea circuitului.
12) Opriţi simularea.
13) Faceţi click pepentru a salvaproiectul B5-1.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-32
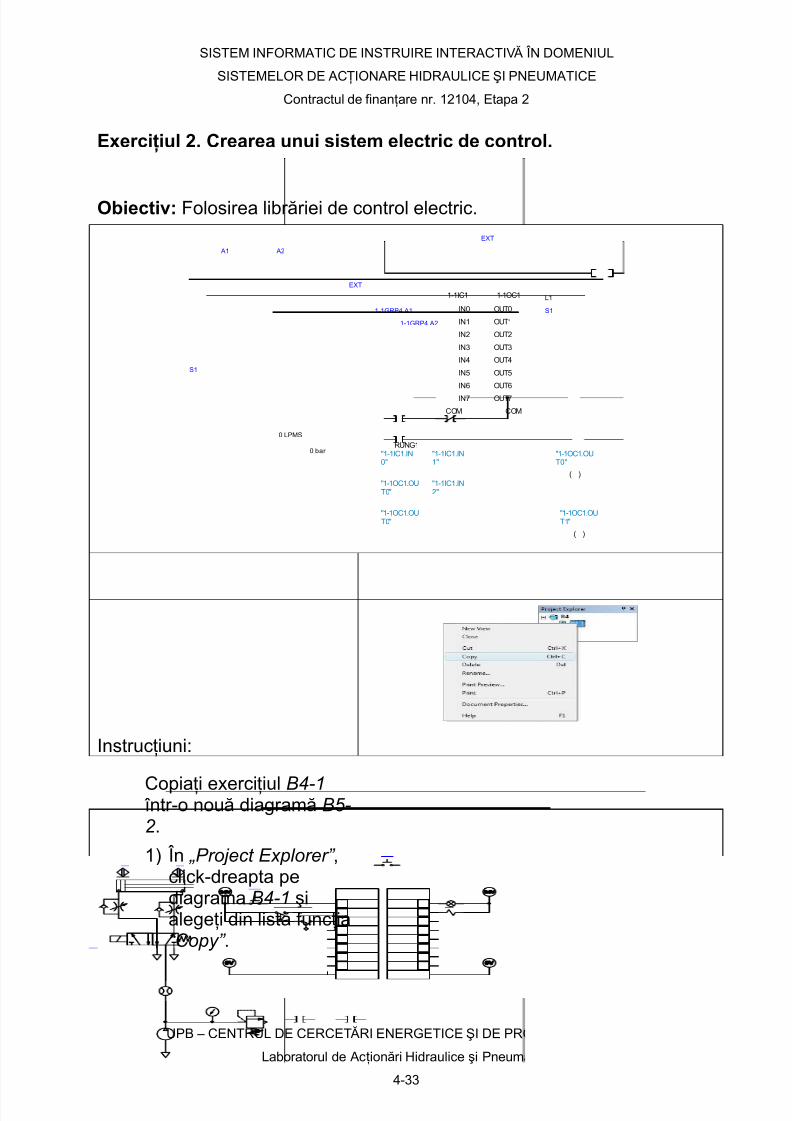
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 402/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Exerciţiul 2. Crearea unui sistem electric de control.
Obiectiv: Folosirea libr ăriei de control electric.
0 bar
0 LPMS
A2 A1
S1
S11-1GRP4.A1
1-1GRP4.A2
L1
EXT
1-1IC1
IN0
IN1
IN2
IN3
IN4
IN5
IN6
IN7
COM
1-1OC1
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
COM
EXT
END
RUNG1"1-1IC1.IN0"
"1-1IC1.IN1"
( )
"1-1OC1.OUT0"
"1-1OC1.OUT0"
"1-1IC1.IN2"
"1-1OC1.OUT0"
( )
"1-1OC1.OUT1"
Instrucţiuni:
Copiaţi exerciţiul B4-1 într-o nouă diagramă B5-2 .
1) În „Project Explorer” ,click-dreapta pediagrama B4-1 şialegeţi din listă funcţia“Copy” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-33
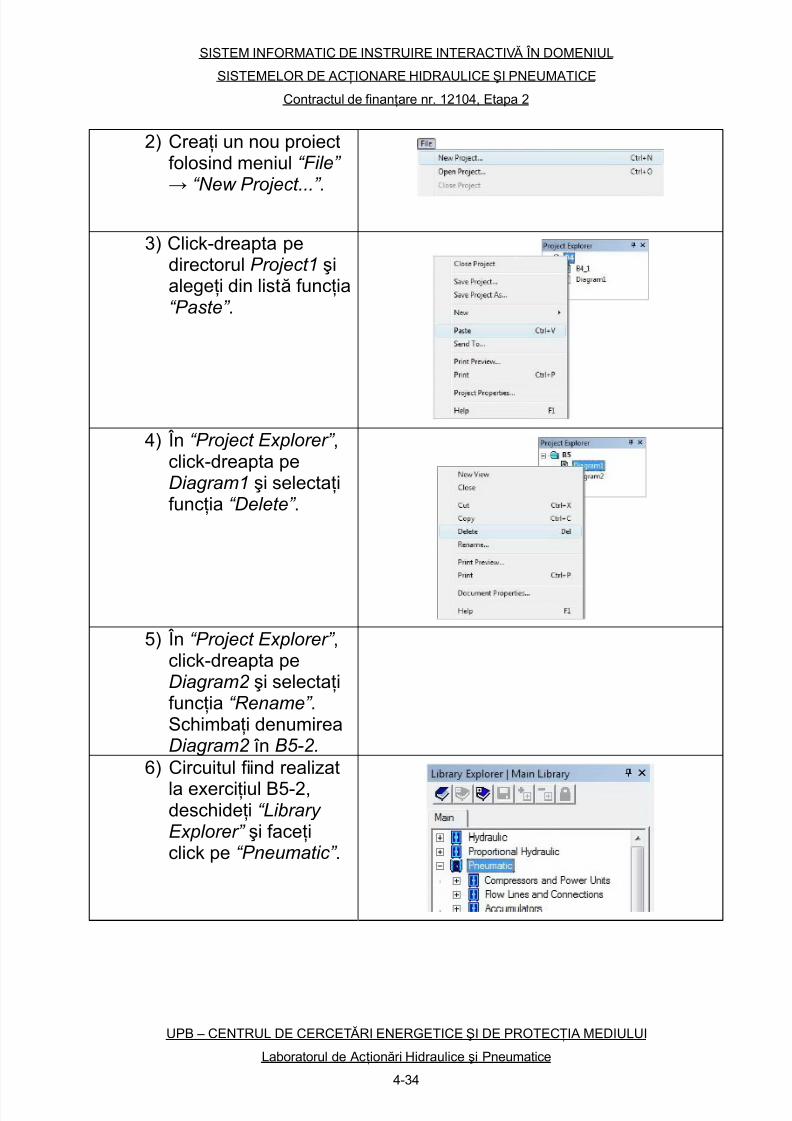
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 403/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
2) Creaţi un nou proiectfolosind meniul “File” → “New Project...”.
3) Click-dreapta pedirectorul Project1 şialegeţi din listă funcţia“Paste” .
4) În “Project Explorer” ,click-dreapta peDiagram1 şi selectaţifuncţia “Delete” .
5) În “Project Explorer” ,click-dreapta peDiagram2 şi selectaţifuncţia “Rename” .Schimbaţi denumireaDiagram2 în B5-2.
6) Circuitul fiind realizat
la exerciţiul B5-2,deschideţi “Library Explorer” şi faceţiclick pe “Pneumatic” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-34

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 404/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
7) Adăugaţi pe diagramă un senzor deproximitate.
8) Denumirea senzoruluide proximitate va fi
A1.
9) Adăugaţi pe diagramă
un alt senzor deproximitate A2.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-35
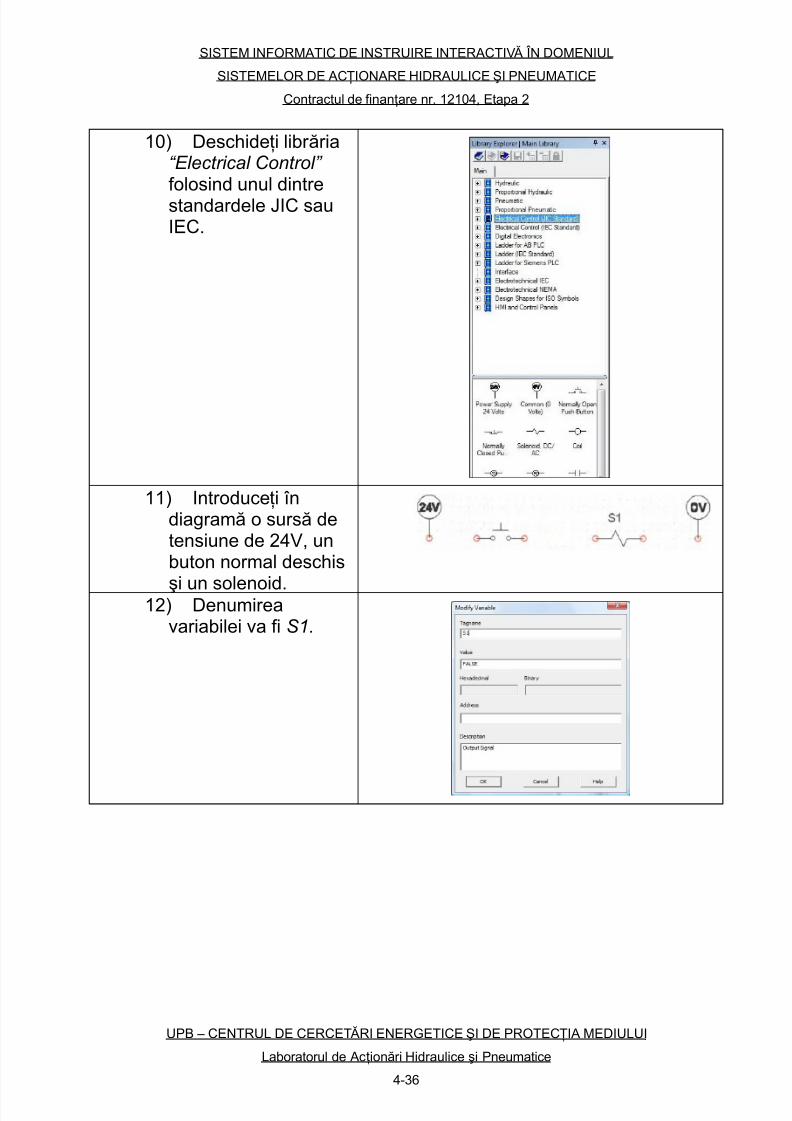
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 405/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
10) Deschideţi libr ăria“Electrical Control” folosind unul dintrestandardele JIC sauIEC.
11) Introduceţi îndiagramă o sursă detensiune de 24V, unbuton normal deschis
şi un solenoid.12) Denumireavariabilei va fi S1.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-36
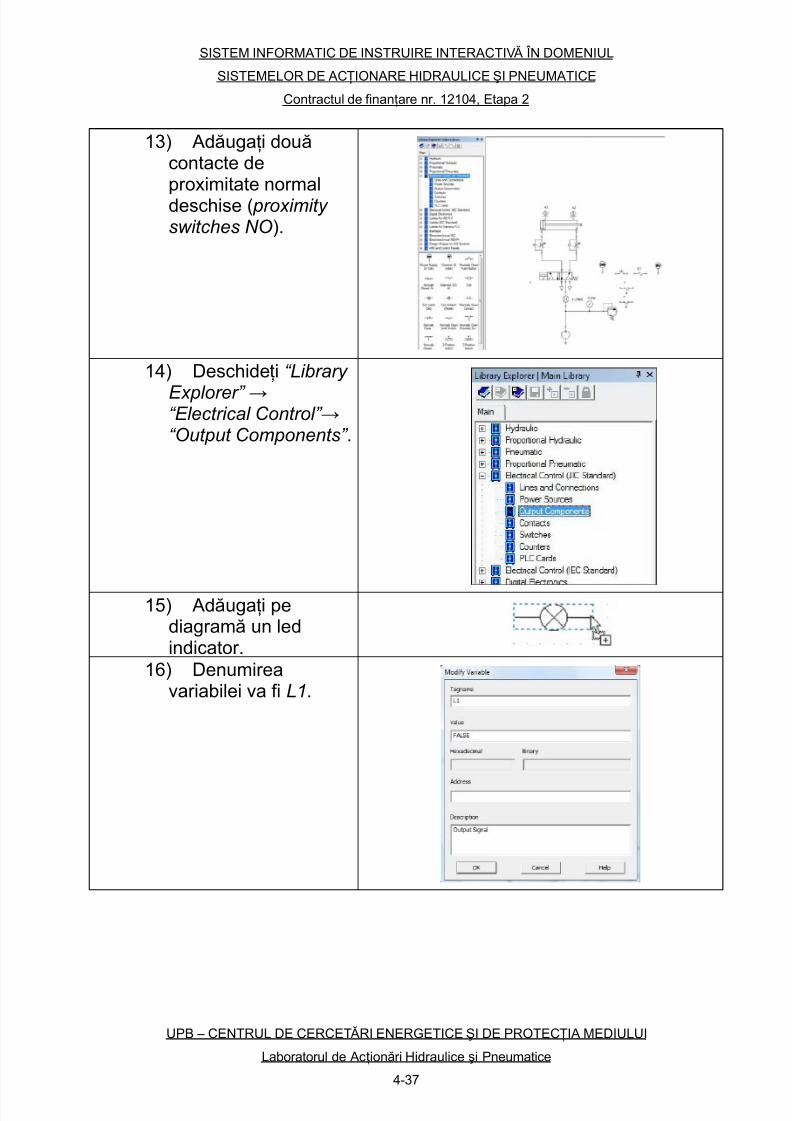
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 406/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
13) Adăugaţi două contacte deproximitate normaldeschise ( proximity switches NO).
14) Deschideţi “Library
Explorer” → “Electrical Control” → “Output Components” .
15) Adăugaţi pediagramă un ledindicator.
16) Denumireavariabilei va fi L1.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-37
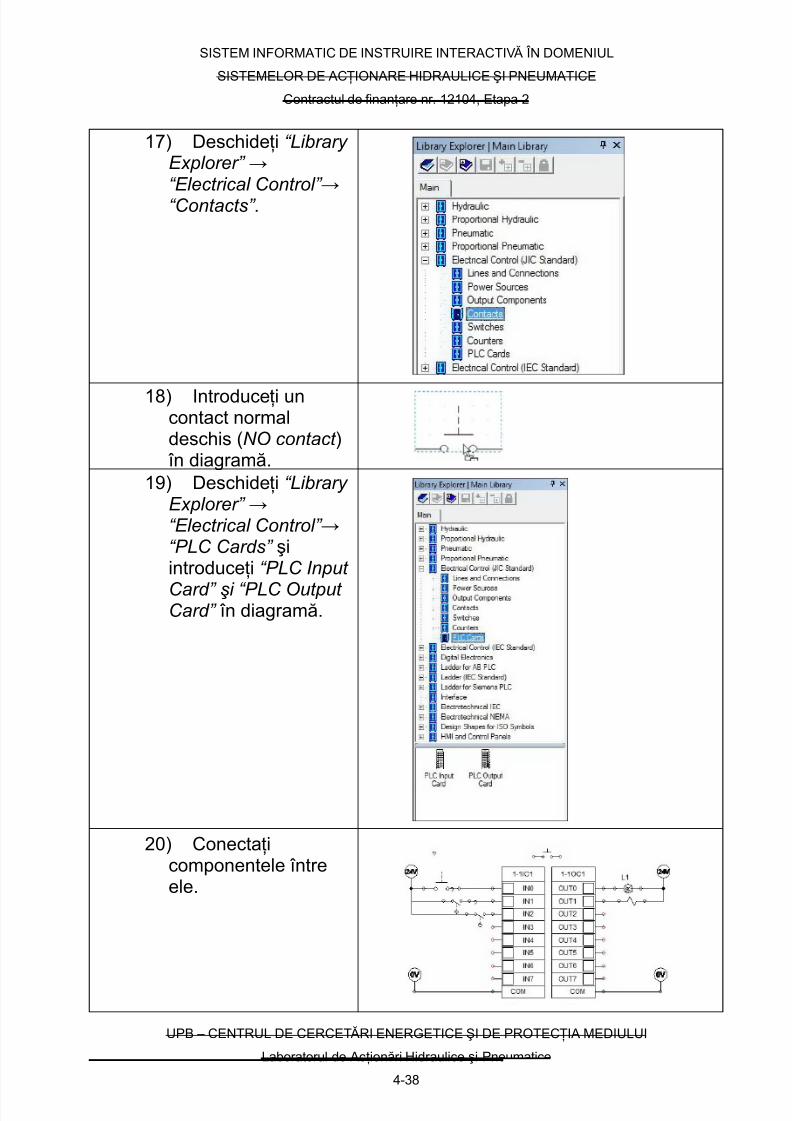
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 407/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
17) Deschideţi “Library Explorer” → “Electrical Control” → “Contacts” .
18) Introduceţi uncontact normaldeschis (NO contact )
în diagramă.19) Deschideţi “Library
Explorer” → “Electrical Control” → “PLC Cards” şiintroduceţi “PLC Input
Card” şi “PLC Output Card” în diagramă.
20) Conectaţicomponentele întreele.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-38
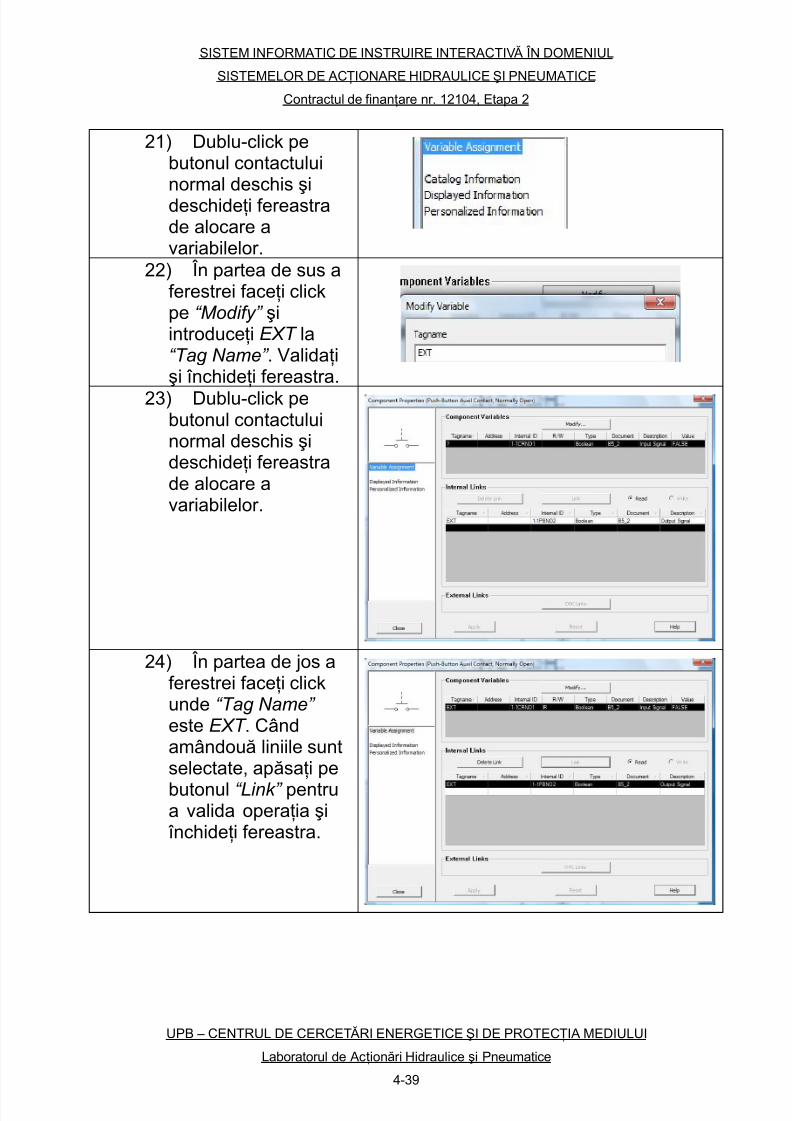
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 408/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
21) Dublu-click pebutonul contactuluinormal deschis şideschideţi fereastrade alocare avariabilelor.
22) În partea de sus aferestrei faceţi clickpe “Modify” şiintroduceţi EXT la“Tag Name” . Validaţişi închideţi fereastra.
23) Dublu-click pebutonul contactuluinormal deschis şideschideţi fereastrade alocare avariabilelor.
24) În partea de jos aferestrei faceţi clickunde “Tag Name” este EXT . Cândamândouă liniile suntselectate, apăsaţi pe
butonul “Link” pentrua valida operaţia şi
închideţi fereastra.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-39
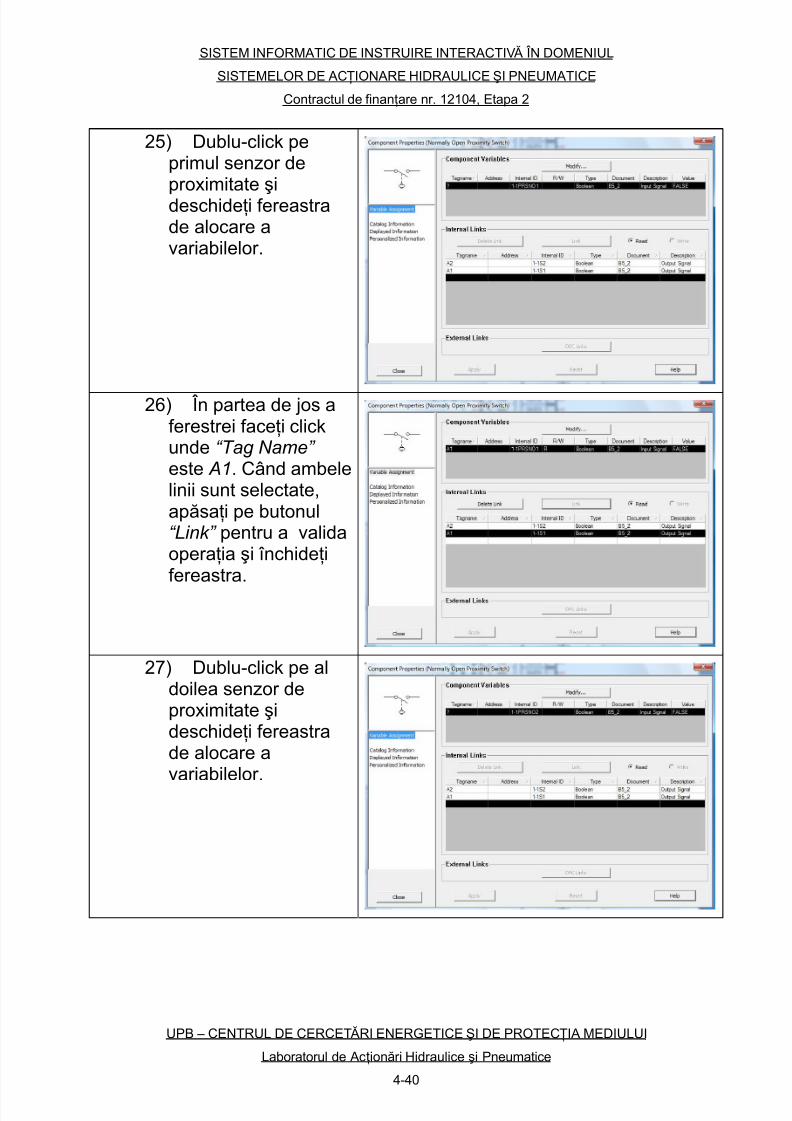
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 409/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
25) Dublu-click peprimul senzor deproximitate şideschideţi fereastrade alocare avariabilelor.
26) În partea de jos aferestrei faceţi clickunde “Tag Name” este A1. Când ambelelinii sunt selectate,apăsaţi pe butonul“Link” pentru a validaoperaţia şi închideţifereastra.
27) Dublu-click pe aldoilea senzor deproximitate şideschideţi fereastrade alocare avariabilelor.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-40
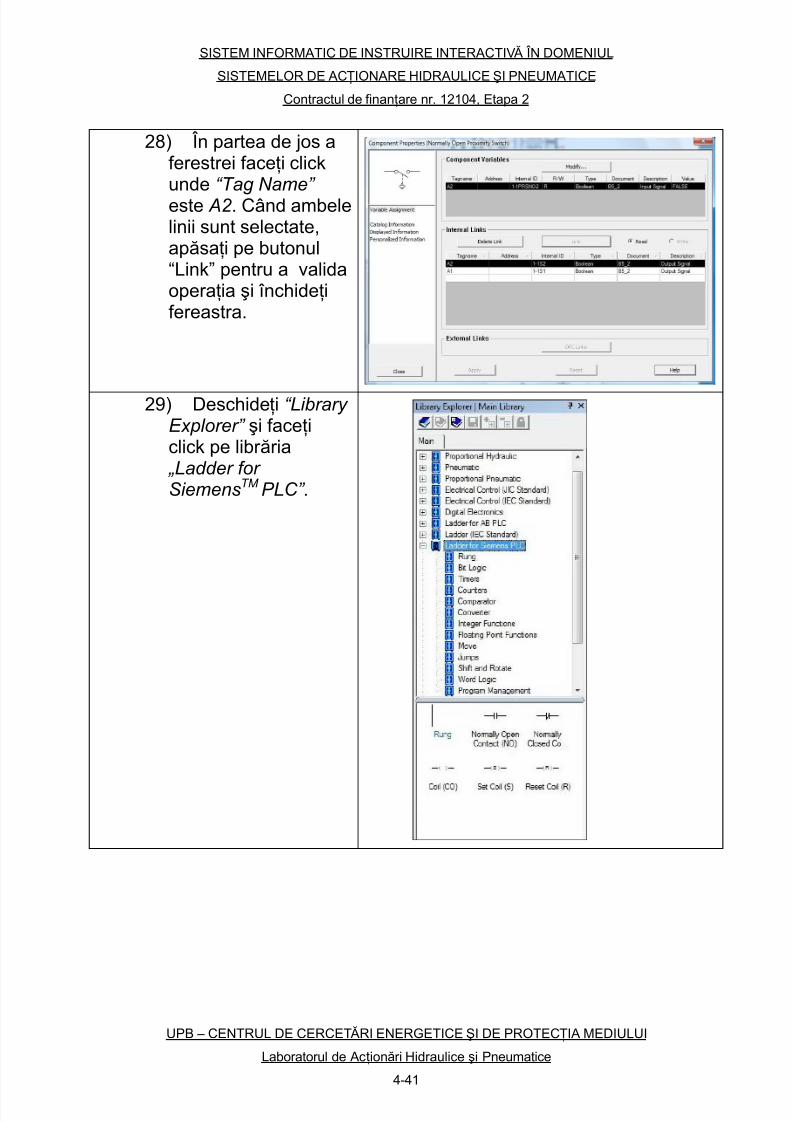
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 410/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
28) În partea de jos aferestrei faceţi clickunde “Tag Name” este A2 . Când ambelelinii sunt selectate,apăsaţi pe butonul“Link” pentru a validaoperaţia şi închideţifereastra.
29) Deschideţi “Library Explorer” şi faceţiclick pe libr ăria
„Ladder for SiemensTM PLC” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-41
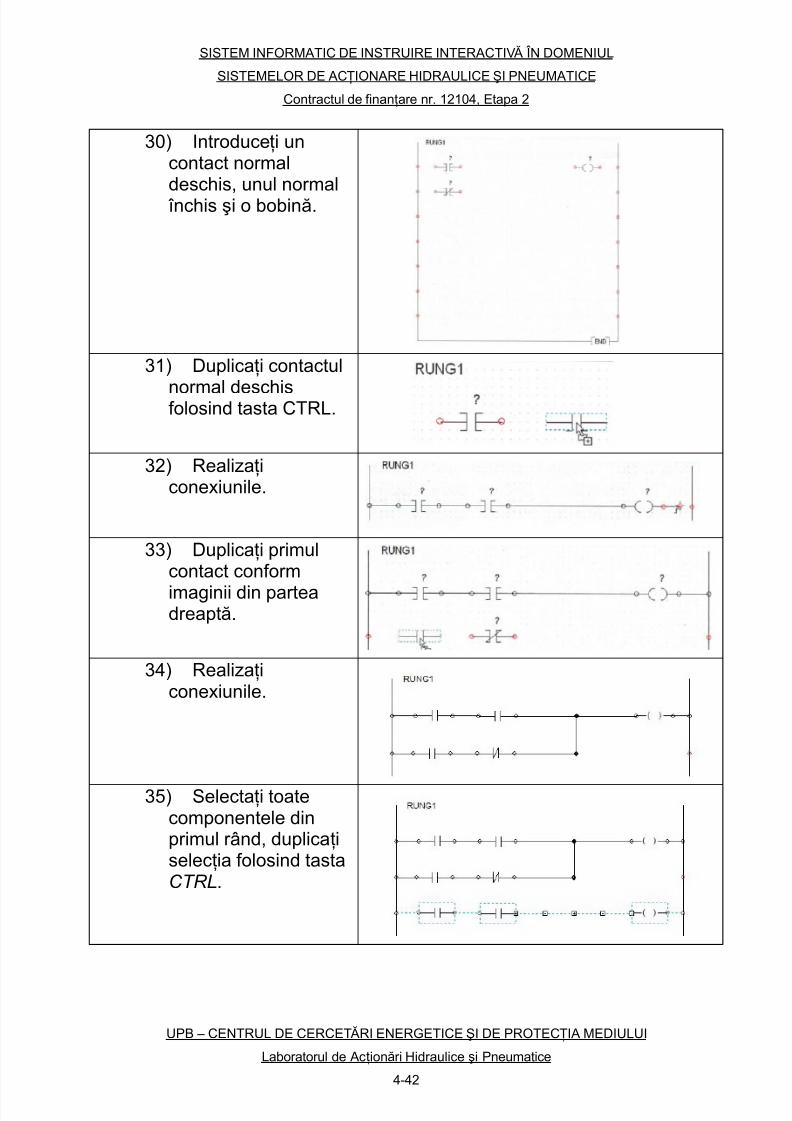
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 411/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
30) Introduceţi uncontact normaldeschis, unul normal
închis şi o bobină.
31) Duplicaţi contactul
normal deschisfolosind tasta CTRL.
32) Realizaţiconexiunile.
33) Duplicaţi primulcontact conform
imaginii din parteadreaptă.
34) Realizaţiconexiunile.
35) Selectaţi toatecomponentele dinprimul rând, duplicaţiselecţia folosind tastaCTRL.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-42
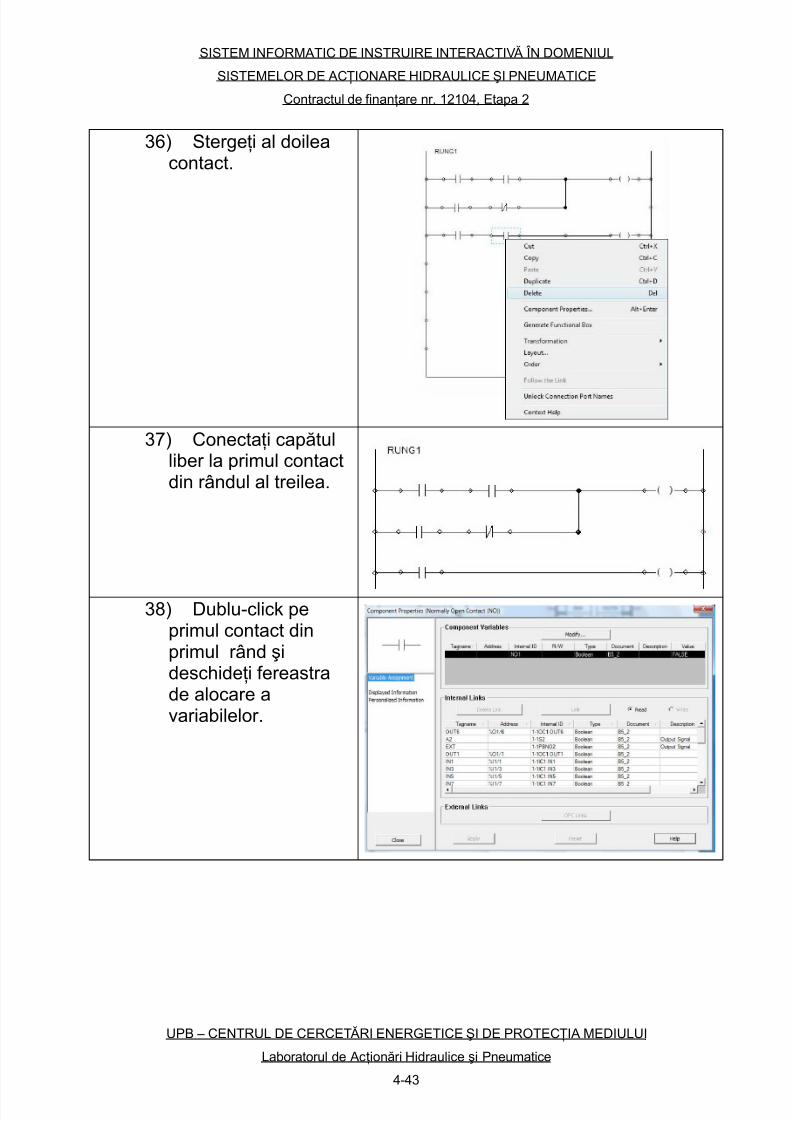
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 412/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
36) Stergeţi al doileacontact.
37) Conectaţi capătulliber la primul contactdin rândul al treilea.
38) Dublu-click peprimul contact dinprimul rând şideschideţi fereastrade alocare avariabilelor.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-43

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 413/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
39) În partea de jos aferestrei faceţi clickunde “Tag Name” este IN0 . Cândamândouă liniile suntselectate, apăsaţi pebutonul “Link” pentrua valida operaţia şi
închideţi fereastra.
40) Dublu-click pe aldoilea contact dinprimul rând şideschideţi fereastrade alocare avariabilelor.
41) În partea de jos aferestrei faceţi clickunde “Tag Name” este IN1. Cândamândouă liniile suntselectate, apăsaţi pebutonul “Link” pentrua valida operaţia şi
închideţi fereastra.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-44

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 414/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
42) Dublu-click pebobina contact dinprimul rând şideschideţi fereastrade alocare avariabilelor.
43) În partea de jos aferestrei faceţi clickunde “Tag Name” este OUT0 . Cândamândouă liniile suntselectate, apăsaţi pebutonul “Link” pentrua valida operaţia şi
închideţi fereastra.
44) Dublu-click peprimul contact din aldoilea rând şideschideţi fereastrade alocare avariabilelor.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-45
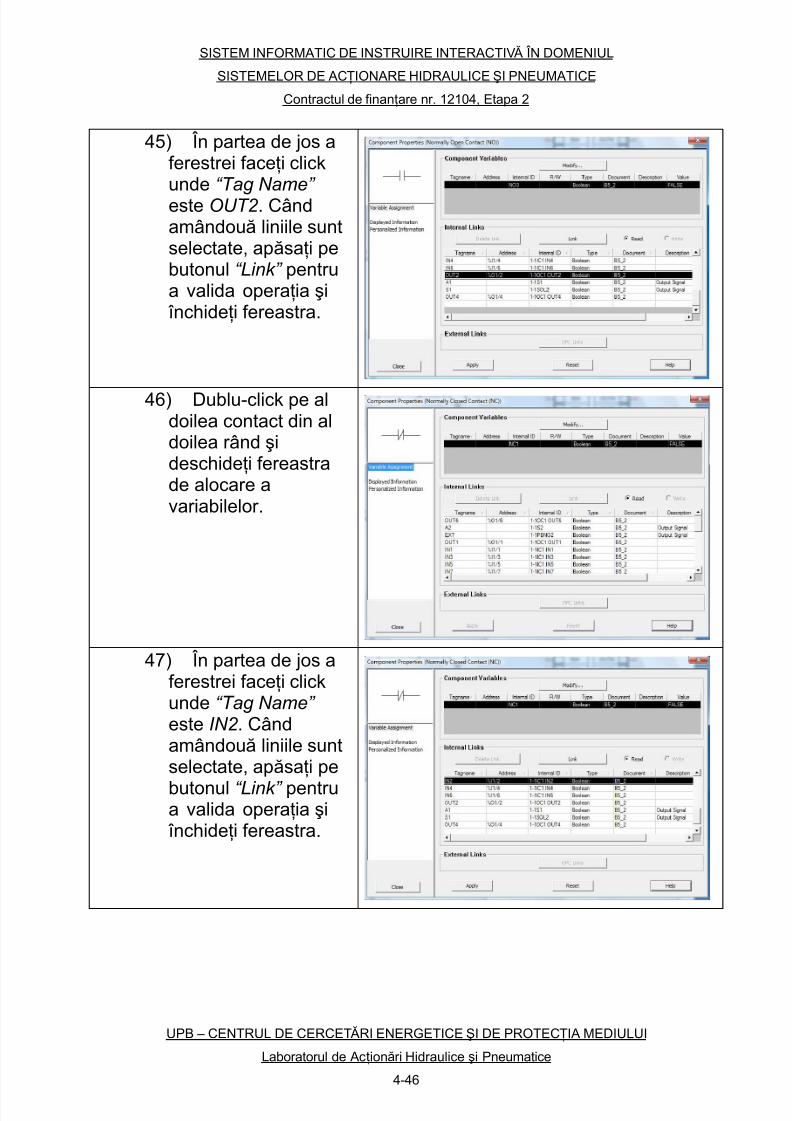
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 415/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
45) În partea de jos aferestrei faceţi clickunde “Tag Name” este OUT2 . Cândamândouă liniile suntselectate, apăsaţi pebutonul “Link” pentrua valida operaţia şi
închideţi fereastra.
46) Dublu-click pe aldoilea contact din aldoilea rând şideschideţi fereastrade alocare avariabilelor.
47) În partea de jos aferestrei faceţi clickunde “Tag Name” este IN2 . Cândamândouă liniile suntselectate, apăsaţi pe
butonul “Link” pentrua valida operaţia şi
închideţi fereastra.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-46
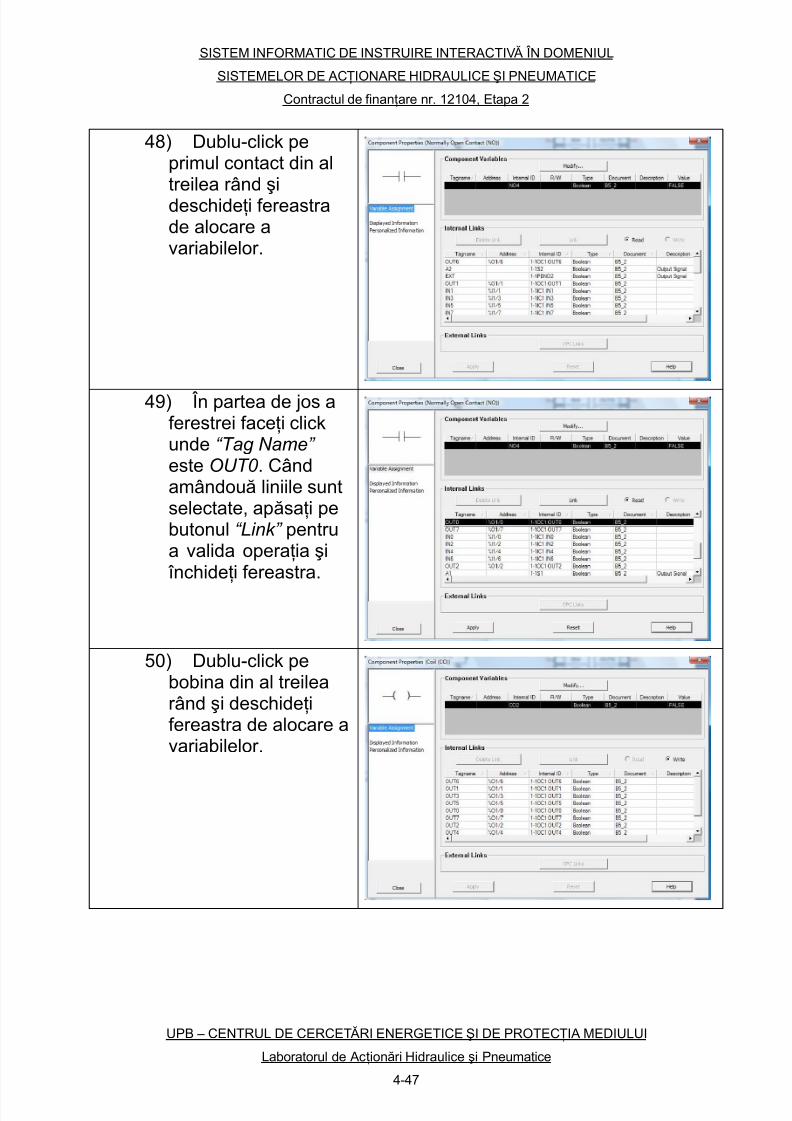
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 416/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
48) Dublu-click peprimul contact din altreilea rând şideschideţi fereastrade alocare avariabilelor.
49) În partea de jos aferestrei faceţi clickunde “Tag Name” este OUT0 . Cândamândouă liniile suntselectate, apăsaţi pebutonul “Link” pentrua valida operaţia şi
închideţi fereastra.
50) Dublu-click pebobina din al treilearând şi deschideţifereastra de alocare avariabilelor.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-47

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 417/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
51) În partea de jos aferestrei faceţi clickunde “Tag Name” este OUT1. Cândamândouă liniile suntselectate, apăsaţi pebutonul “Link” pentrua valida operaţia şi
închideţi fereastra.
52) Porniţi simularea şiapăsaţi pe butonulEXT.
53) Opriţi simularea.
54) Faceţi click pepentru a salvaproiectul B5-1.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-48

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 418/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-1
Lucrarea 6: Simulare, testare şi analiză.
Scop:
Simularea întregului proiect sau a unei păr ţi din acesta şi studiereacomportării sistemului testat .
Obiective:
• Simularea întregului proiect sau a unor diagrame selectate;• Folosirea simulării “pas cu pas” sau simularea cu pas încet şi
normal;• Alocarea şi folosirea variabilelor;• Interpretarea timpului de simulare;• Setarea vitezei de simulare;• Afişarea valorilor variabilelor în funcţie de timp ;• Colectarea datelor;• Configurarea modului de afişare.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 419/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Exerciţiul 1. Selectarea elementelor pentru simulare.
Obiectiv: Simularea întregului proiect sau numai a unei păr ţi componente.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-2
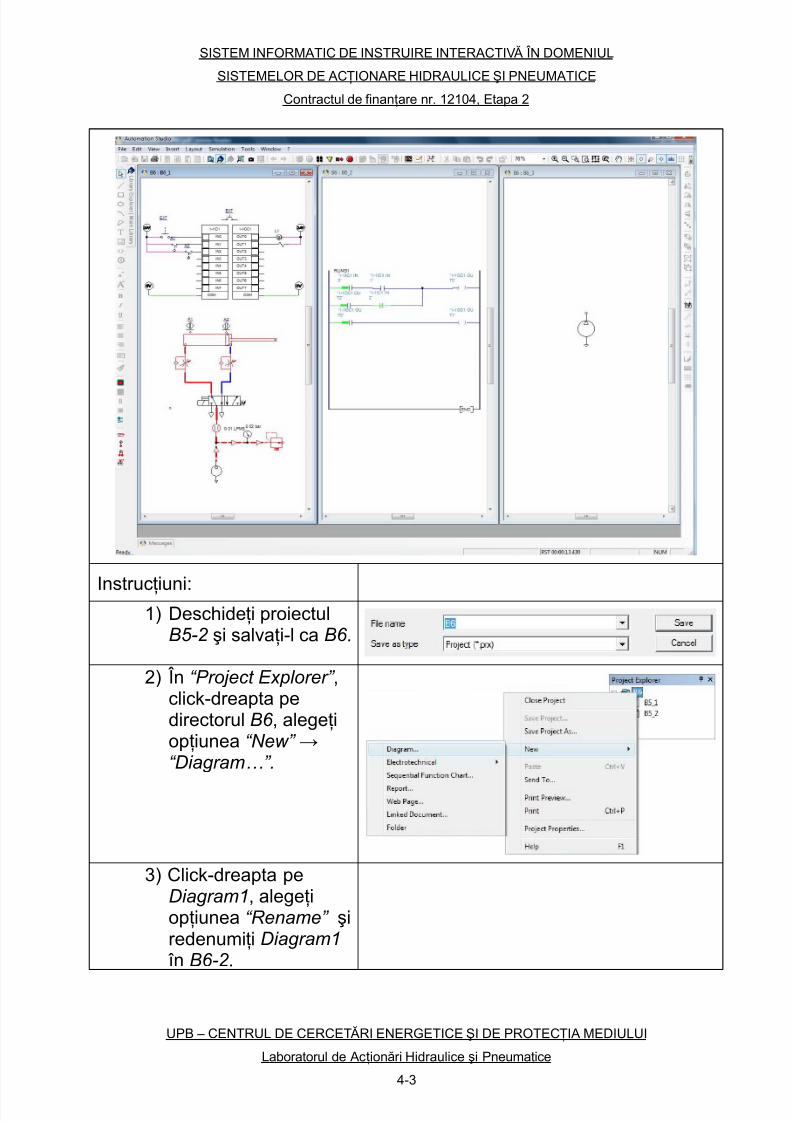
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 420/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Instrucţiuni:1) Deschideţi proiectul
B5-2 şi salvaţi-l ca B6 .
2) În “Project Explorer” ,click-dreapta pedirectorul B6 , alegeţiopţiunea “New” → “Diagram…”.
3) Click-dreapta peDiagram1, alegeţiopţiunea “Rename” şiredenumiţi Diagram1
în B6-2 .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-3
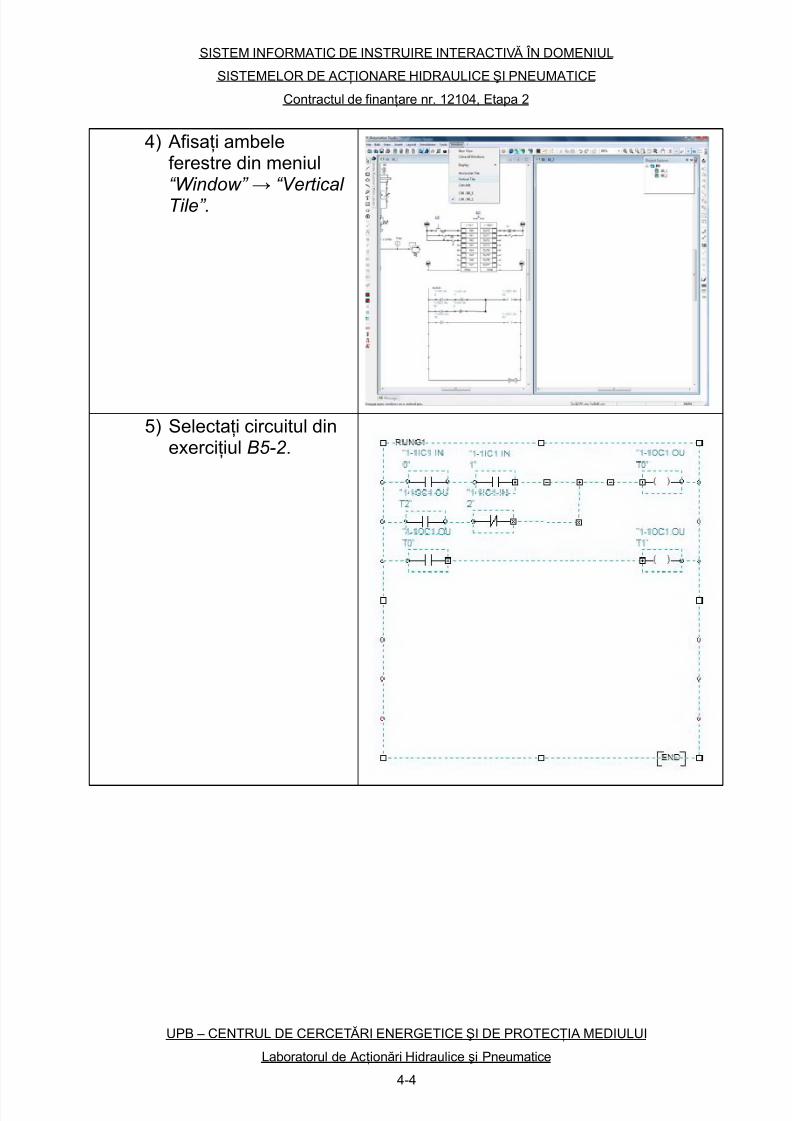
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 421/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
4) Afisaţi ambeleferestre din meniul“Window” → “Vertical Tile”.
5) Selectaţi circuitul dinexerciţiul B5-2 .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-4

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 422/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
6) Click pecomponenteleselectate şi mutaţicomponentele îndiagrama B6-2.
7) Click pe fereastra dindreapta şi apoi faceţiclick pe .
8) Click în fereastra dinpartea stângă şi apoi
pe .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-5
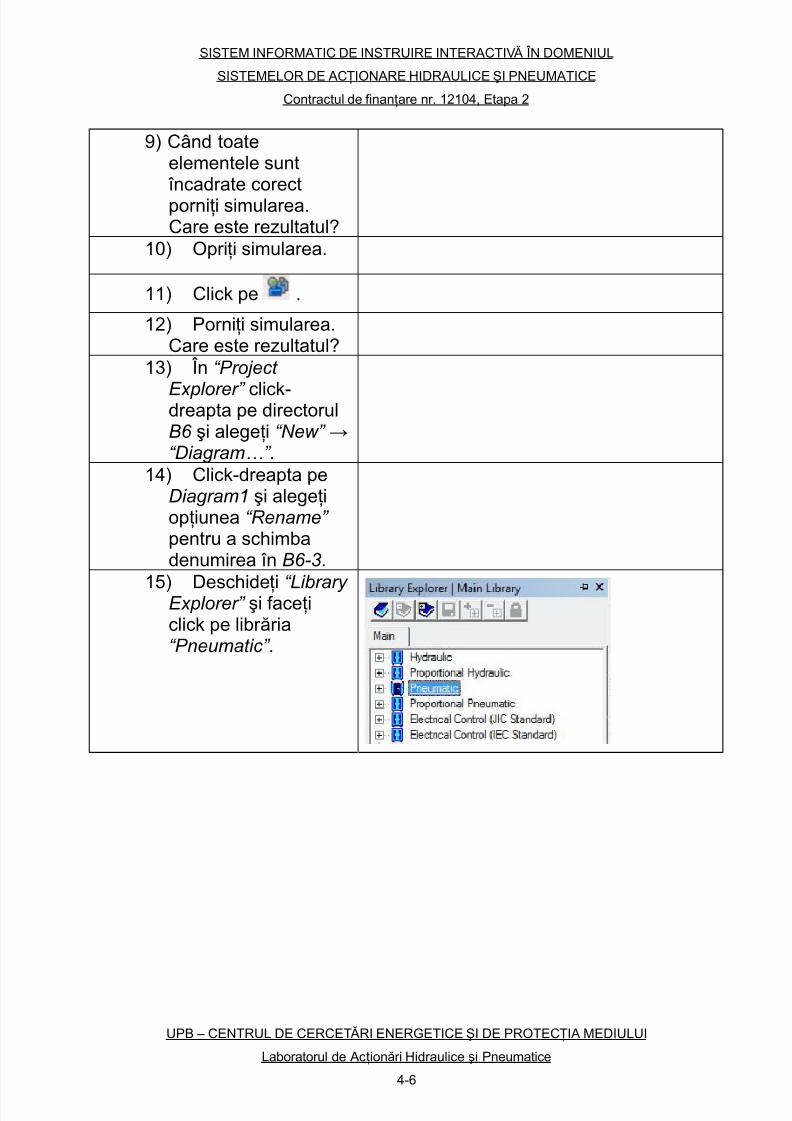
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 423/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
9) Când toateelementele sunt
încadrate corectporniţi simularea.Care este rezultatul?
10) Opriţi simularea.
11) Click pe .
12) Porniţi simularea.Care este rezultatul?
13) În “Project
Explorer” click-dreapta pe directorulB6 şi alegeţi “New” → “Diagram…” .
14) Click-dreapta peDiagram1 şi alegeţiopţiunea “Rename” pentru a schimbadenumirea în B6-3.
15) Deschideţi “Library Explorer” şi faceţiclick pe libr ăria“Pneumatic” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-6

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 424/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
16) Adăugaţi îndiagrama B6-3 osursă de presiune.
17) Porniţi simularea.Care este rezultatul?
18) Click pepentru a deschidefereastra “Select Items to Simulate” .
19) Selectaţi B6-1 şi B6-2 pentru simulare.
20) Click pe pentrua simula selecţia.
21) Porniţi simularea.Care este rezultatul?
22) Faceţi click pepentru a salvaproiectul B6 .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-7
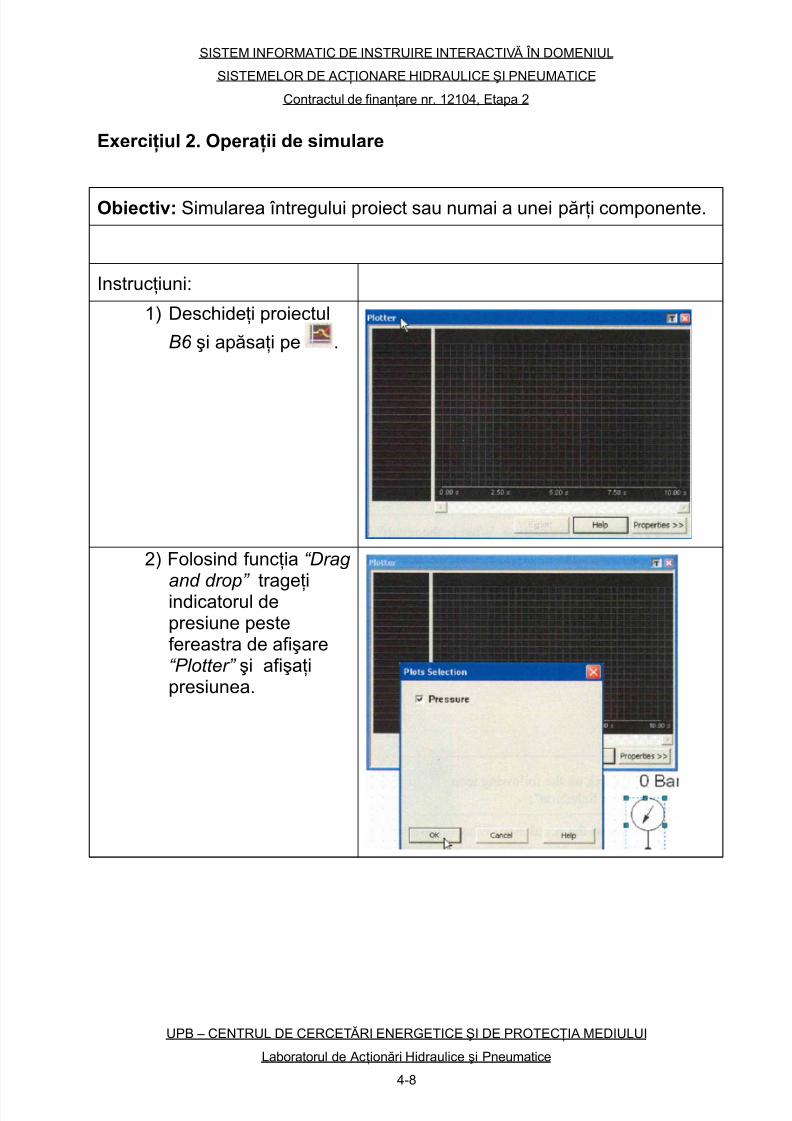
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 425/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Exerciţiul 2. Operaţii de simulare
Obiectiv: Simularea întregului proiect sau numai a unei păr ţi componente.
Instrucţiuni:
1) Deschideţi proiectul
B6 şi apăsaţi pe .
2) Folosind funcţia “Drag
and drop” trageţiindicatorul depresiune pestefereastra de afişare“Plotter” şi afişaţipresiunea.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-8
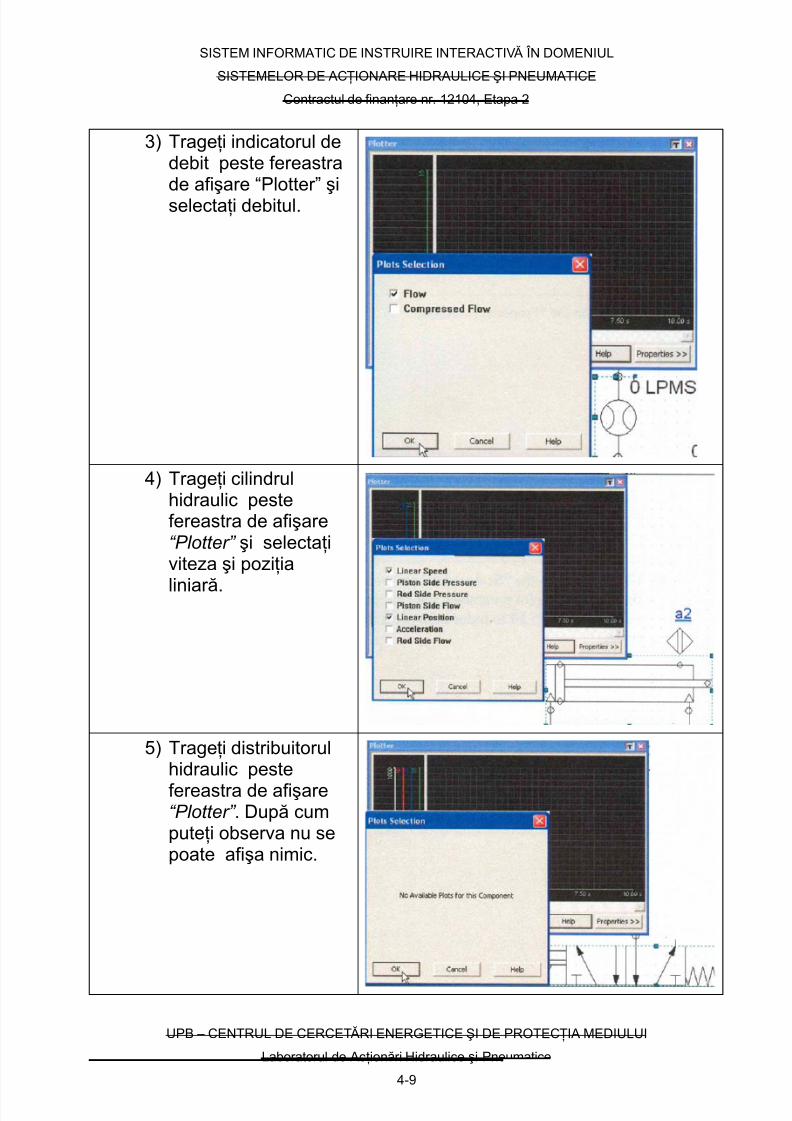
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 426/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
3) Trageţi indicatorul dedebit peste fereastrade afişare “Plotter” şiselectaţi debitul.
4) Trageţi cilindrulhidraulic pestefereastra de afişare“Plotter” şi selectaţiviteza şi poziţia
liniar ă.
5) Trageţi distribuitorulhidraulic peste
fereastra de afişare“Plotter” . După cumputeţi observa nu sepoate afişa nimic.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-9
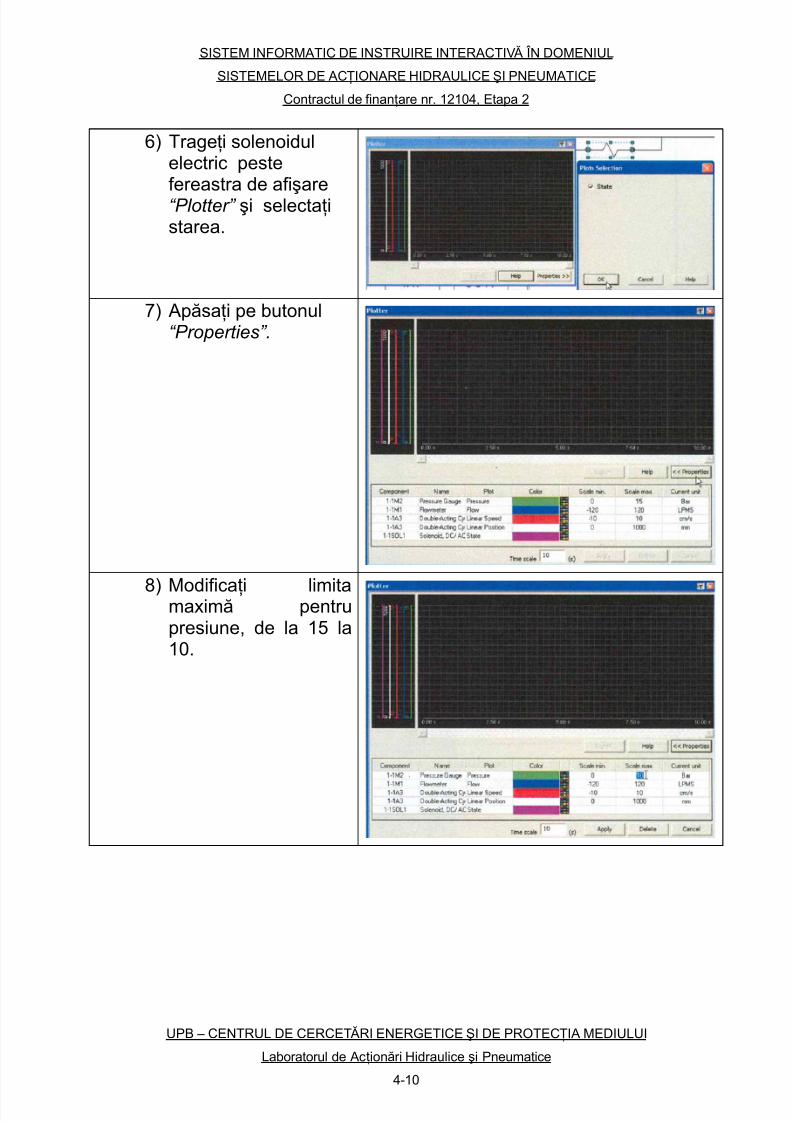
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 427/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
6) Trageţi solenoidulelectric pestefereastra de afişare“Plotter” şi selectaţistarea.
7) Apăsaţi pe butonul“Properties”.
8) Modificaţi limitamaximă pentrupresiune, de la 15 la10.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-10
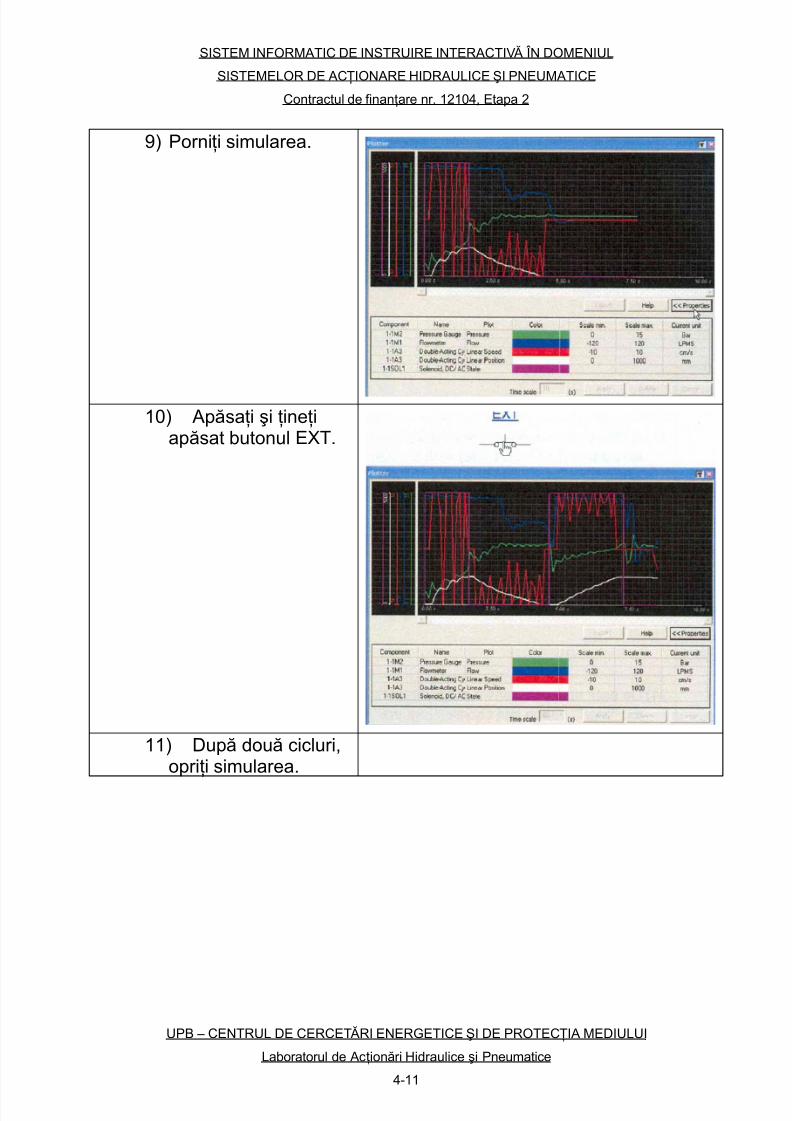
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 428/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
9) Porniţi simularea.
10) Apăsaţi şi ţineţiapăsat butonul EXT.
11) După două cicluri,opriţi simularea.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-11
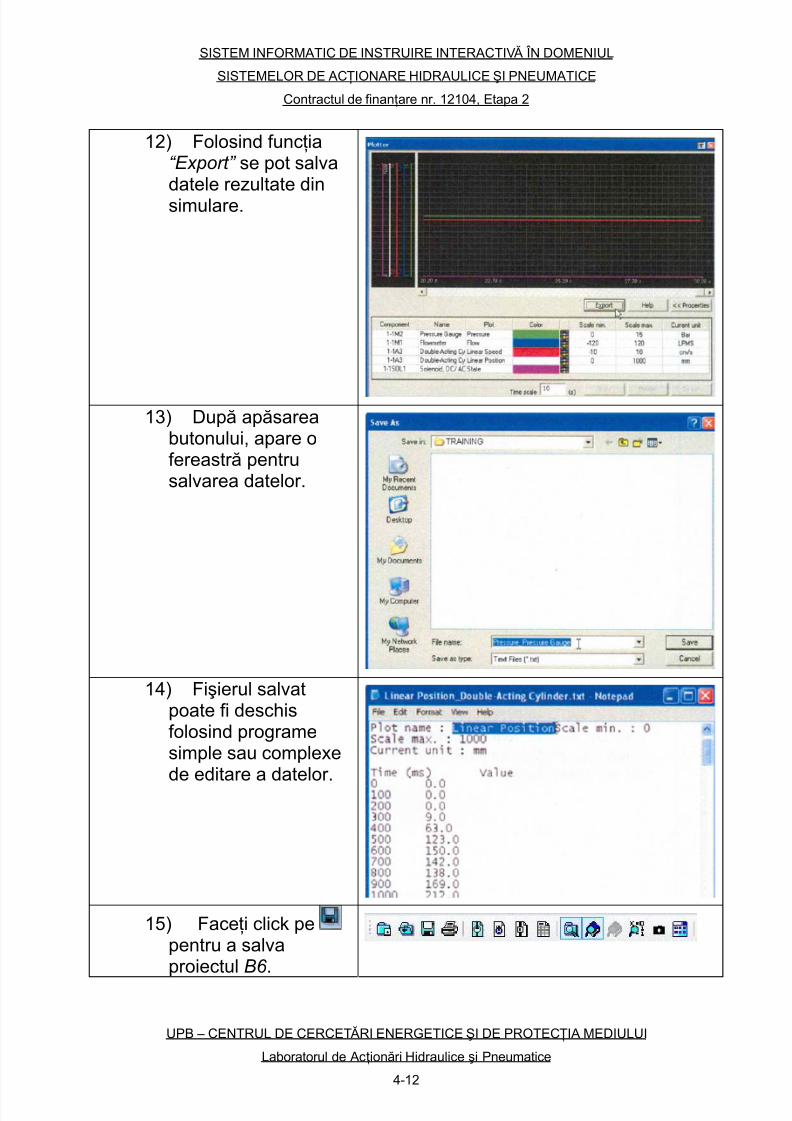
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 429/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
12) Folosind funcţia“Export” se pot salvadatele rezultate dinsimulare.
13) După apăsareabutonului, apare ofereastr ă pentrusalvarea datelor.
14) Fişierul salvatpoate fi deschisfolosind programesimple sau complexede editare a datelor.
15) Faceţi click pepentru a salvaproiectul B6 .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-12
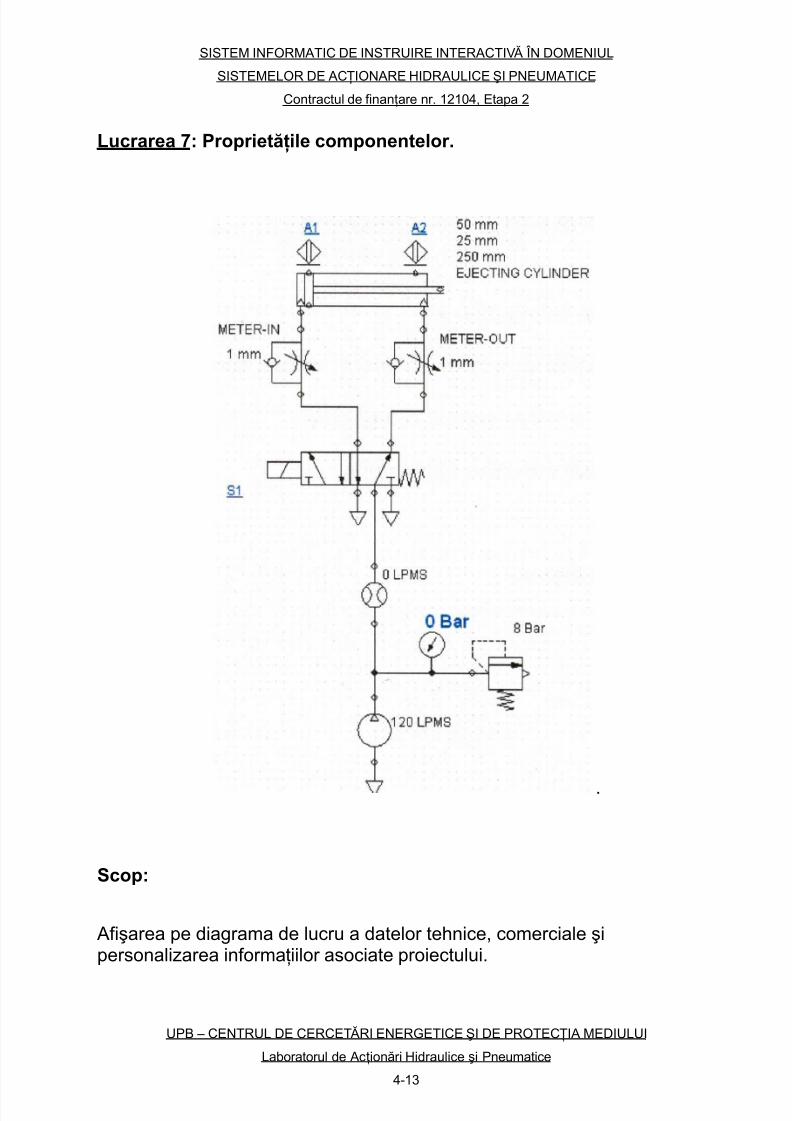
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 430/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Lucrarea 7: Proprietăţile componentelor.
.
Scop:
Afişarea pe diagrama de lucru a datelor tehnice, comerciale şipersonalizarea informaţiilor asociate proiectului.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-13
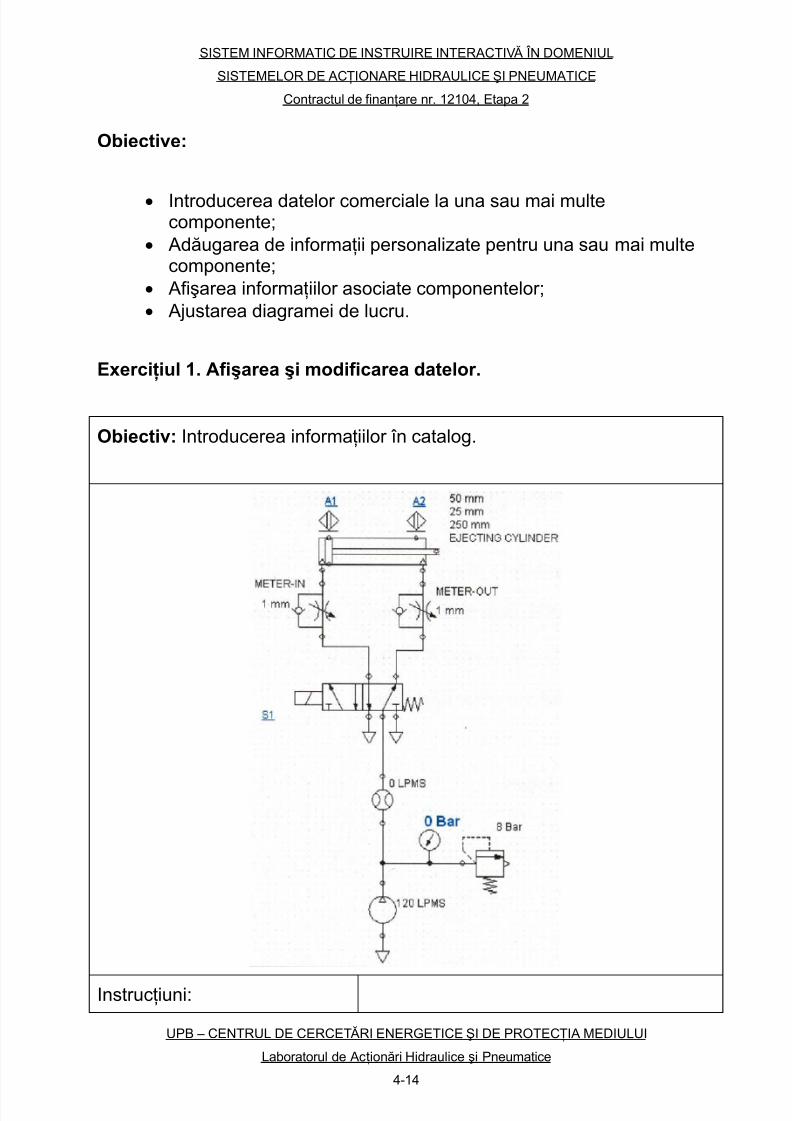
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 431/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Obiective:
• Introducerea datelor comerciale la una sau mai multecomponente;
• Adăugarea de informaţii personalizate pentru una sau mai multecomponente;
• Afişarea informaţiilor asociate componentelor;• Ajustarea diagramei de lucru.
Exerciţiul 1. Afişarea şi modificarea datelor.
Obiectiv: Introducerea informaţiilor în catalog.
Instrucţiuni:
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-14

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 432/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
23) Deschideţiproiectul B6 şi salvaţi-l ca B7 .
24) În “Project Explorer” click-dreapta pe directorulB6-3 şi alegeţi dinlistă opţiunea“Delete” .
25) Click-dreapta peB6-1, alegeţi opţiunea“Rename” şi
redenumiţi Diagram1 în B7-1.
26) Click-dreapta peB6-2 , alegeţi opţiunea“Rename” şiredenumiţi B6-2 înB7-2 .
27) În diagrama B7-1,dublu-click pe
compresor şi apoi pesecţiunea “Displayed Information” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-15
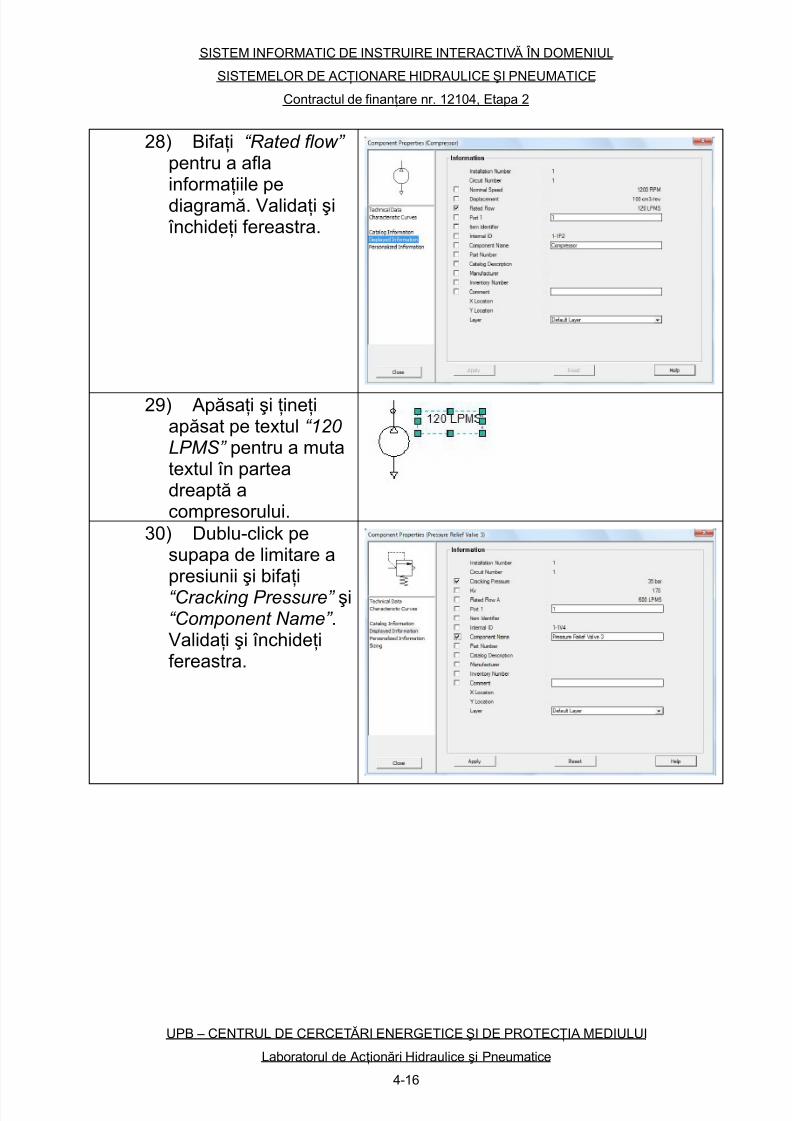
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 433/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
28) Bifaţi “Rated flow” pentru a aflainformaţiile pediagramă. Validaţi şi
închideţi fereastra.
29) Apăsaţi şi ţineţiapăsat pe textul “120 LPMS” pentru a mutatextul în parteadreaptă acompresorului.
30) Dublu-click pesupapa de limitare apresiunii şi bifaţi“Cracking Pressure” şi“Component Name” .Validaţi şi închideţifereastra.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-16
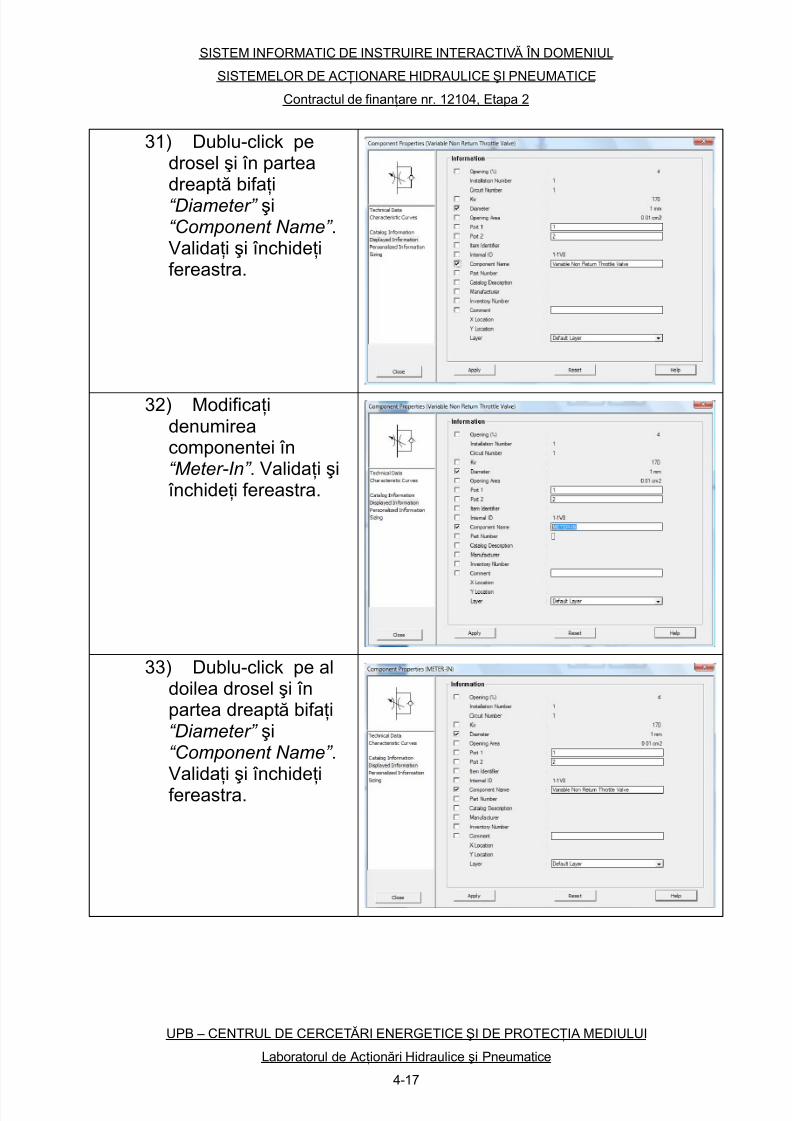
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 434/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
31) Dublu-click pedrosel şi în parteadreaptă bifaţi“Diameter” şi“Component Name” .Validaţi şi închideţifereastra.
32) Modificaţidenumireacomponentei în“Meter-In” . Validaţi şi
închideţi fereastra.
33) Dublu-click pe aldoilea drosel şi înpartea dreaptă bifaţi“Diameter” şi“Component Name” .Validaţi şi închideţifereastra.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-17

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 435/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
34) Modificaţidenumireacomponentei în“Meter-Out”. Validaţişi închideţi fereastra.
35) Dublu-click pecilindrul hidraulic şi înpartea dreaptă bifaţi“Function”, “PistonDiameter”, “Rod Diameter” şi “Stroke” .Validaţi şi închideţifereastra.
36) Introduceţi“EJECTINGCYLINDER” cafuncţie. Validaţi şi
închideţi fereastra.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-18

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 436/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
37) Apăsaţi şi ţineţiapăsat pe textul“EJECTINGCYLINDER” pentru amuta textul în parteadreaptă a cilindruluipneumatic.
38) Dublu-click petextul indicatorului depresiune şi modificaţiproprietăţile conform
imaginii din parteadreaptă.
39) Click pe “Color” şialegeţi albastru(linia
4, coloana 5). Validaţişi închideţi fereastra.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-19

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 437/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
40) Dublu-click petextul indicatorului dedebit şi modificaţiproprietăţile conformimaginii din parteadreaptă.
41) Click pe “Color” → “Define CustomColor” , click încoloana verde apoiclick pe „Add customcolor” → „Ok” .
42) Selectaţi textulEXT şi SL1 folosindtasta SHIFT .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-20
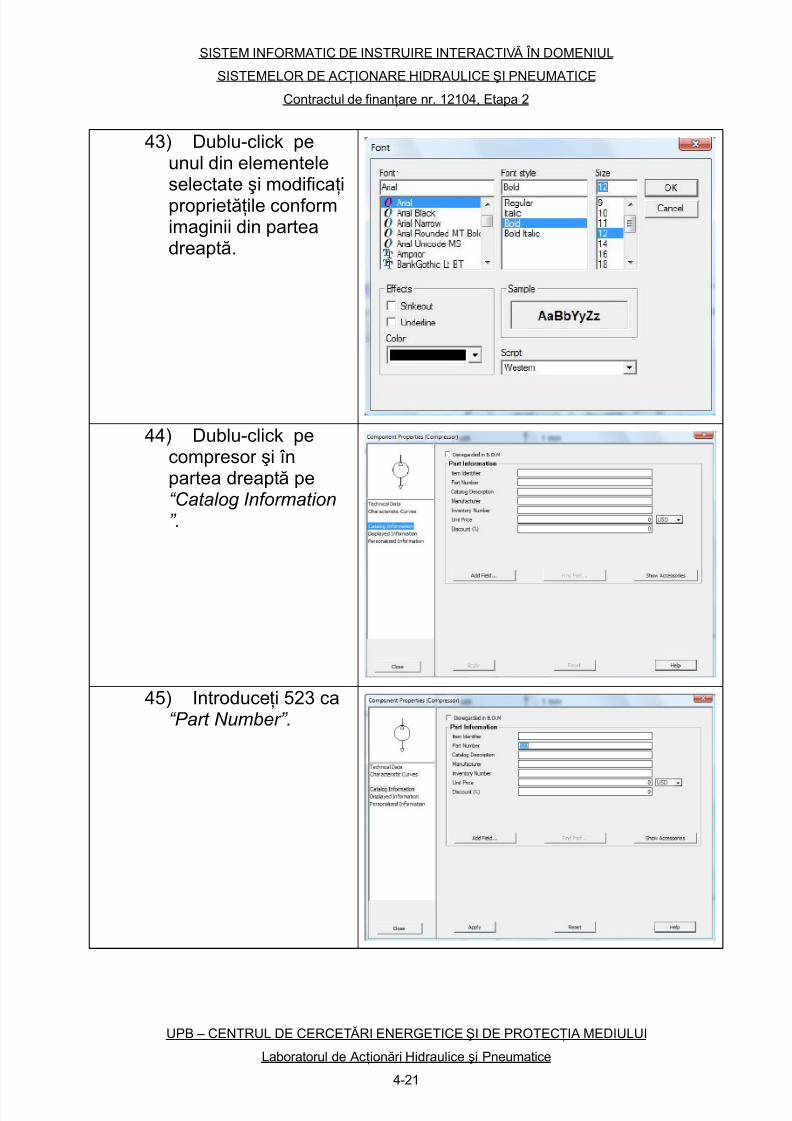
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 438/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
43) Dublu-click peunul din elementeleselectate şi modificaţiproprietăţile conformimaginii din parteadreaptă.
44) Dublu-click pecompresor şi înpartea dreaptă pe“Catalog Information”.
45) Introduceţi 523 ca“Part Number”.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-21
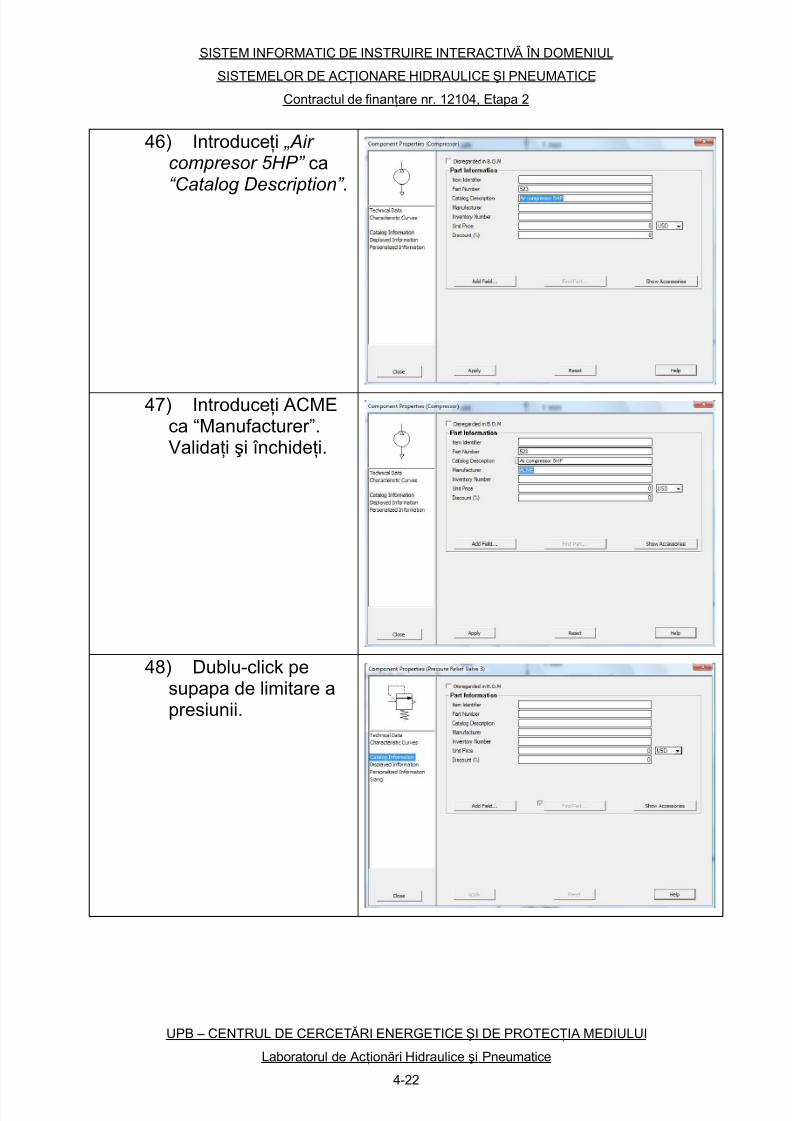
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 439/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
46) Introduceţi „Air compresor 5HP” ca“Catalog Description”.
47) Introduceţi ACMEca “Manufacturer”.Validaţi şi închideţi.
48) Dublu-click pesupapa de limitare apresiunii.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-22
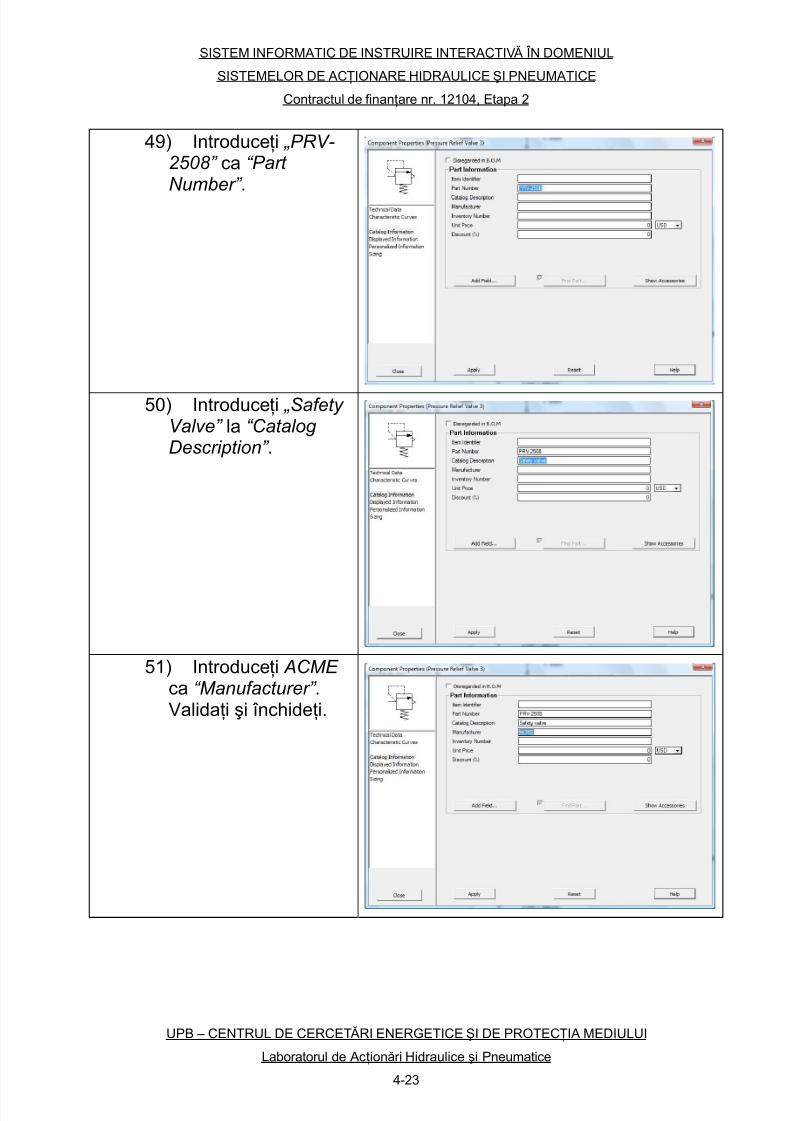
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 440/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
49) Introduceţi „PRV-2508” ca “Part Number” .
50) Introduceţi „Safety Valve” la “Catalog Description” .
51) Introduceţi ACME ca “Manufacturer” .Validaţi şi închideţi.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-23
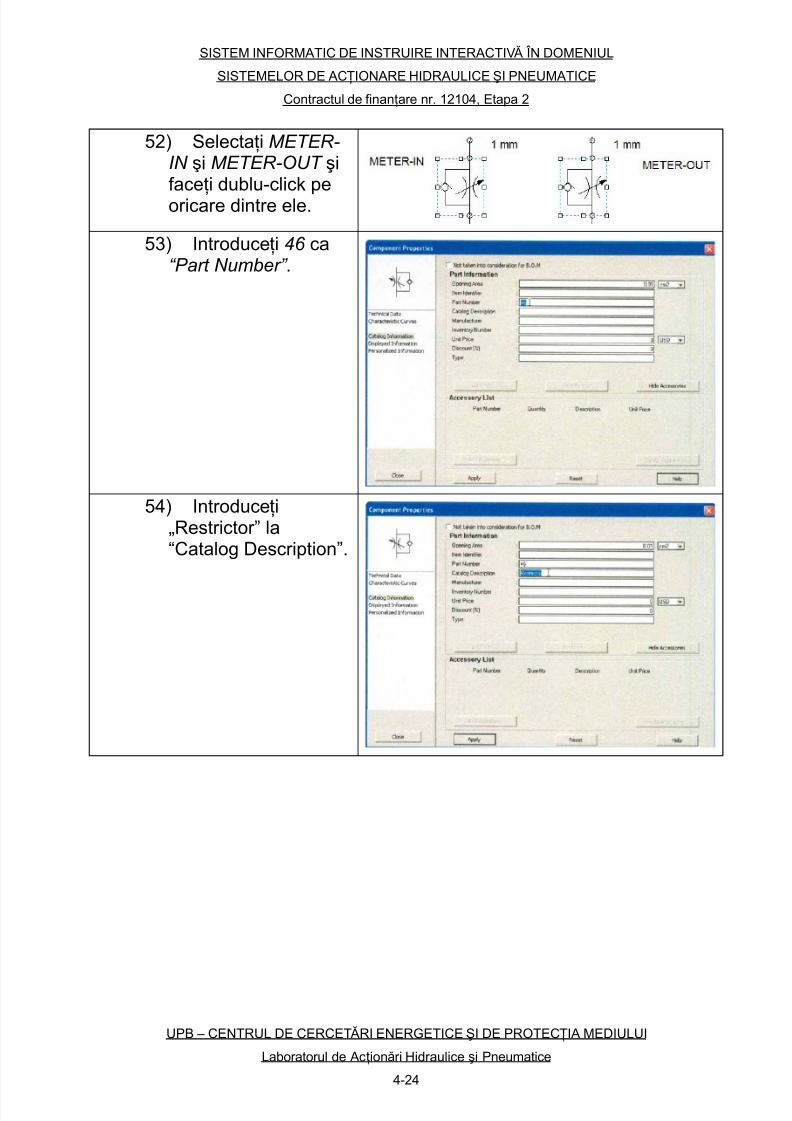
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 441/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
52) Selectaţi METER-IN şi METER-OUT şifaceţi dublu-click peoricare dintre ele.
53) Introduceţi 46 ca“Part Number” .
54) Introduceţi„Restrictor” la“Catalog Description”.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-24
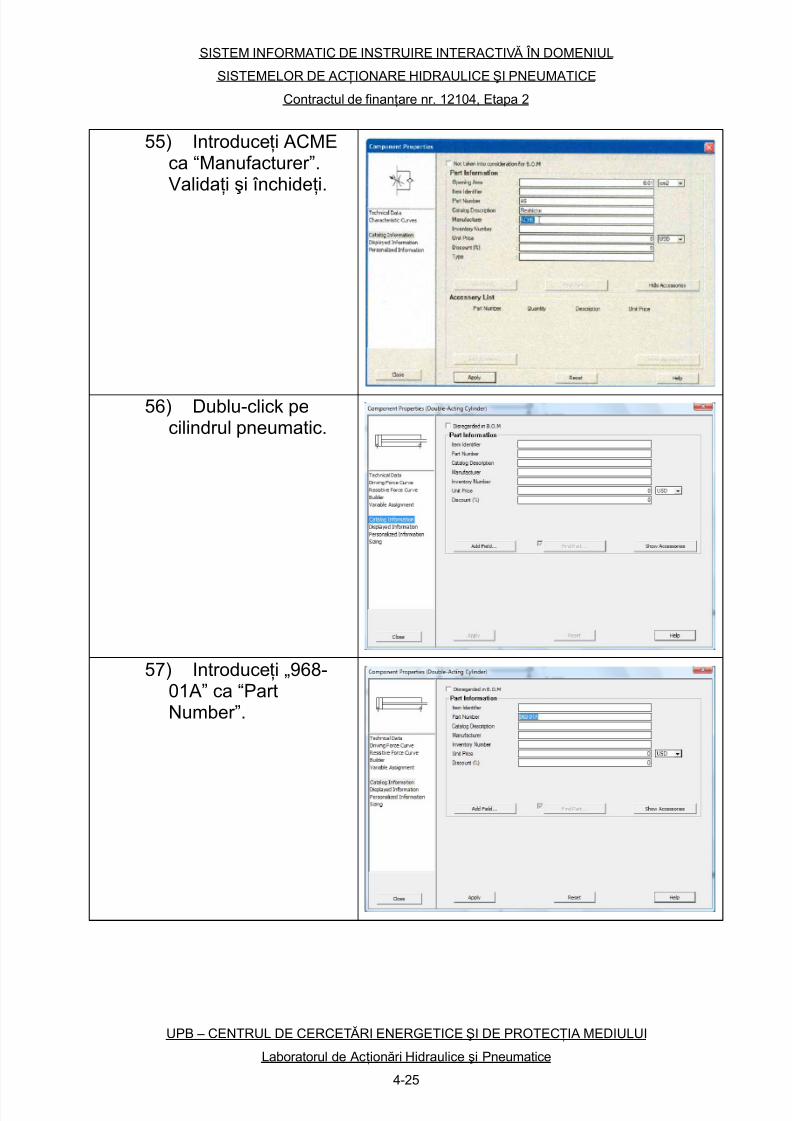
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 442/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
55) Introduceţi ACMEca “Manufacturer”.Validaţi şi închideţi.
56) Dublu-click pecilindrul pneumatic.
57) Introduceţi „968-01A” ca “PartNumber”.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-25
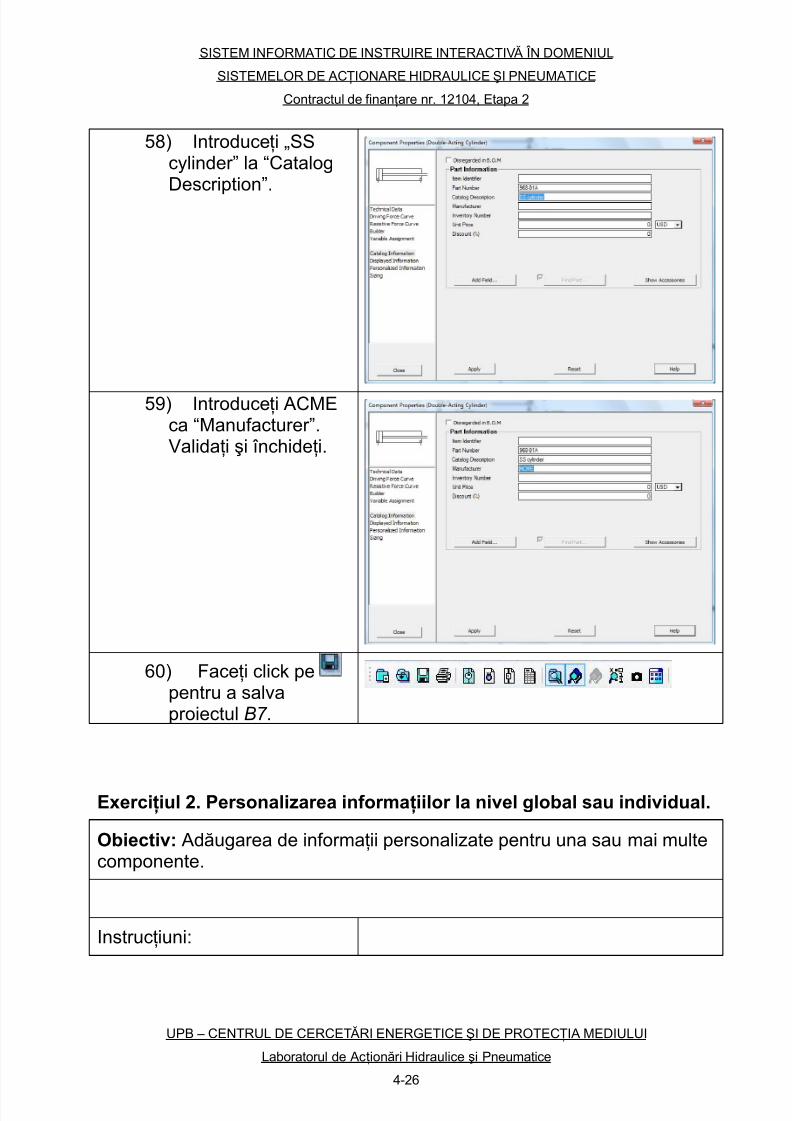
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 443/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
58) Introduceţi „SScylinder” la “CatalogDescription”.
59) Introduceţi ACMEca “Manufacturer”.Validaţi şi închideţi.
60) Faceţi click pepentru a salvaproiectul B7 .
Exerciţiul 2. Personalizarea informaţiilor la nivel global sau individual.
Obiectiv: Adăugarea de informaţii personalizate pentru una sau mai multecomponente.
Instrucţiuni:
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-26
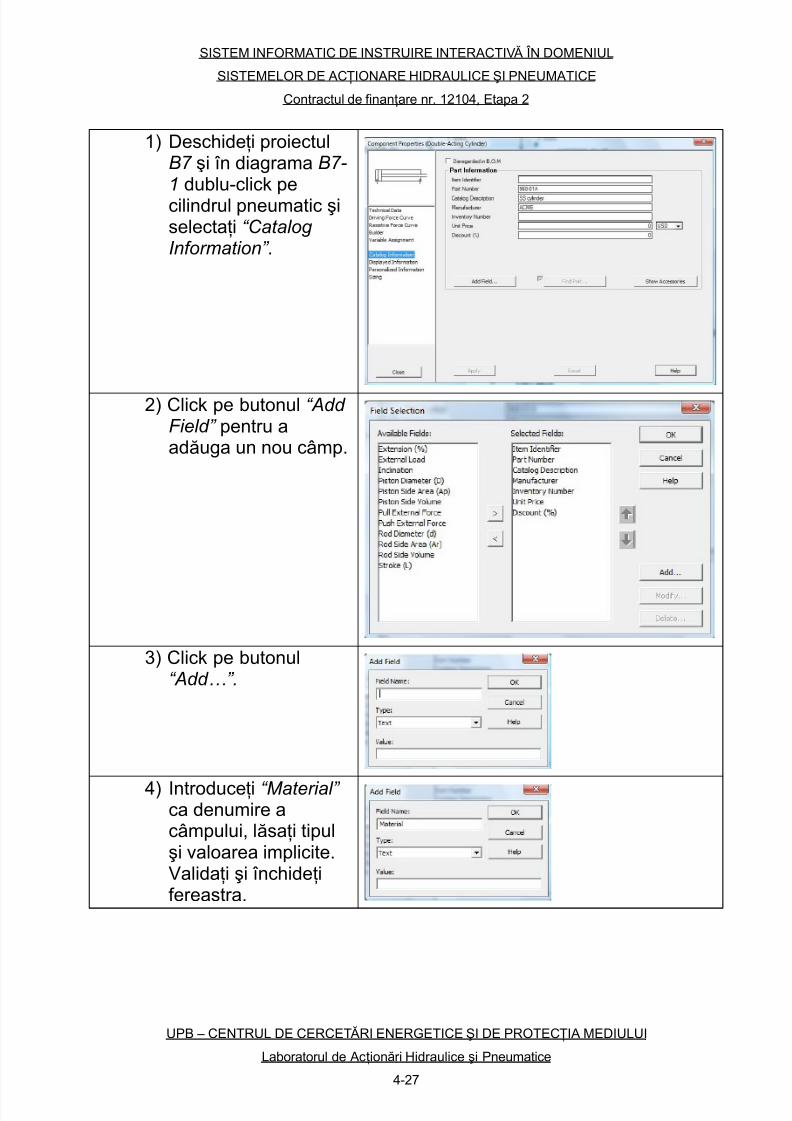
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 444/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
1) Deschideţi proiectulB7 şi în diagrama B7-1 dublu-click pecilindrul pneumatic şiselectaţi “Catalog Information” .
2) Click pe butonul “Add Field” pentru aadăuga un nou câmp.
3) Click pe butonul“Add…”.
4) Introduceţi “Material” ca denumire acâmpului, lăsaţi tipulşi valoarea implicite.Validaţi şi închideţifereastra.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-27

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 445/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
5) Puteţi observaprezenţa câmpului“Material” în listă înculoarea albastr ă.Validaţi si inchideţifereastra.
6) Dublu-click pecompresor; se poateobserva că nu există câmpul “Material” deoarece a fost creatnumai pentru cilindru.
7) În meniul “Tools” selectaţi opţiunea“Field Configuration…” .
8) Click pe butonul“Add…”.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-28

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 446/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
9) Introduceţi “Weight” ca denumire acâmpului, schimbaţitipul în “Real” şi lăsaţivaloarea implicită.
10) Înainte de a validaaceastă configurare,puteţi observa că “Weight” a fostadăugat în lista
câmpurilor personalizate.
11) Dublu-click pecilindrul pneumatic,unde puteţi observacă noul câmp a fostintrodus în lista
informaţiilor decatalog.
12) Dublu-click pecompresor, undeputeţi observa că noulcâmp a fost introdus
în lista informaţiilor decatalog datorită faptului că a fostconfigurat ca un câmpglobal.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-29
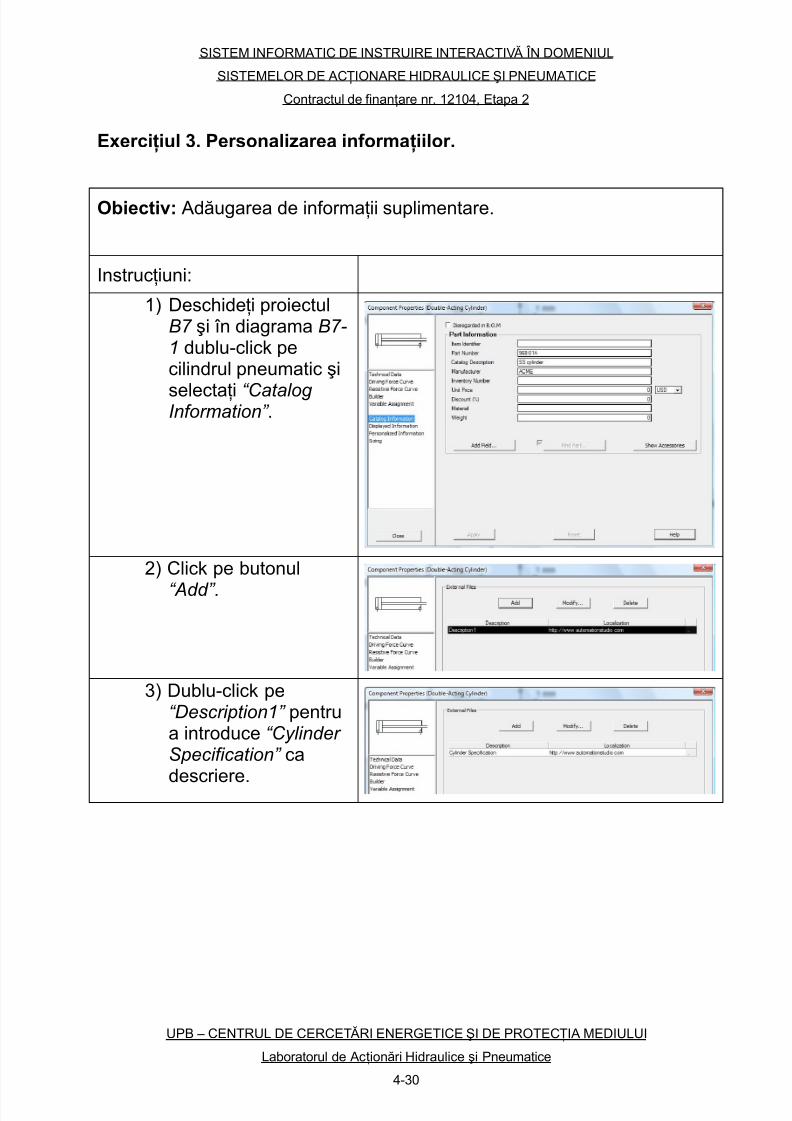
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 447/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Exerciţiul 3. Personalizarea informaţiilor.
Obiectiv: Adăugarea de informaţii suplimentare.
Instrucţiuni:
1) Deschideţi proiectulB7 şi în diagrama B7-1 dublu-click pecilindrul pneumatic şi
selectaţi “Catalog Information” .
2) Click pe butonul
“Add” .
3) Dublu-click pe“Description1” pentrua introduce “Cylinder Specification” ca
descriere.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-30
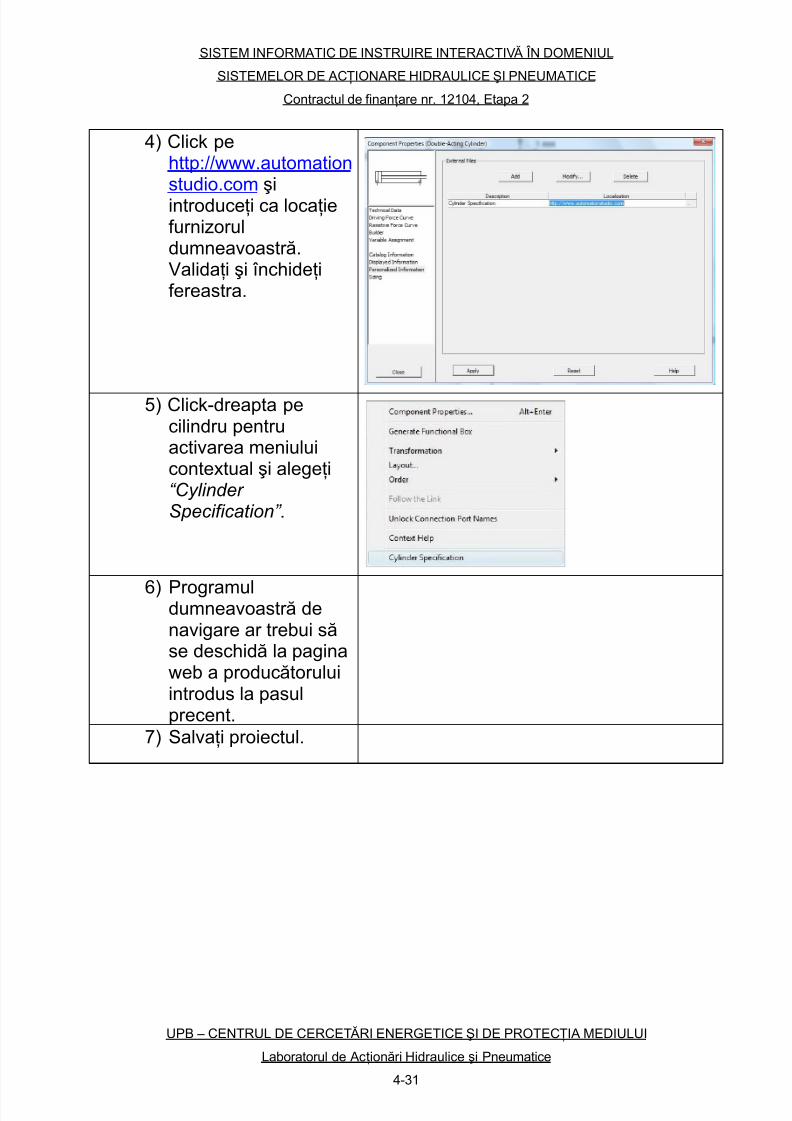
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 448/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
4) Click pehttp://www.automationstudio.com şiintroduceţi ca locaţiefurnizoruldumneavoastr ă.Validaţi şi închideţifereastra.
5) Click-dreapta pecilindru pentruactivarea meniuluicontextual şi alegeţi“Cylinder Specification” .
6) Programuldumneavoastr ă denavigare ar trebui să se deschidă la paginaweb a producătoruluiintrodus la pasulprecent.
7) Salvaţi proiectul.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-31
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 449/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Lucrarea 8: Instrumente grafice.
Scop:
Folosirea uneltelor pentru desenare şi a fişierelor DXF.
Obiective:
• Introducerea şi modificarea formelor simple pe diagramă;• Gruparea componentelor;• Adăugarea de imagini pe diagrama de lucru;• Formatarea globală a spaţiului de lucru;• Alinierea, modificarea şi schimbarea mărimii componentelor pe
diagramă.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-1
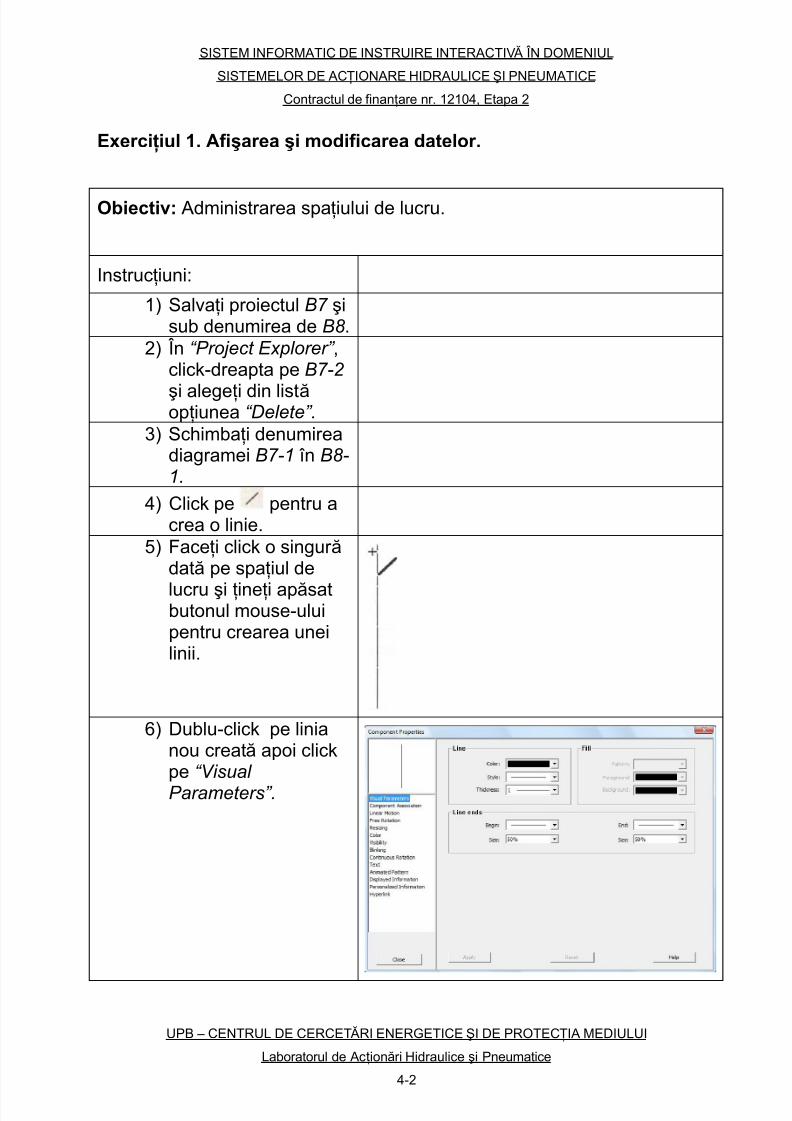
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 450/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Exerciţiul 1. Afişarea şi modificarea datelor.
Obiectiv: Administrarea spaţiului de lucru.
Instrucţiuni:
1) Salvaţi proiectul B7 şisub denumirea de B8 .
2) În “Project Explorer” ,click-dreapta pe B7-2
şi alegeţi din listă opţiunea “Delete”. 3) Schimbaţi denumirea
diagramei B7-1 în B8-1.
4) Click pe pentru acrea o linie.
5) Faceţi click o singur ă dată pe spaţiul de
lucru şi ţineţi apăsatbutonul mouse-uluipentru crearea uneilinii.
6) Dublu-click pe linianou creată apoi clickpe “Visual Parameters”.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-2
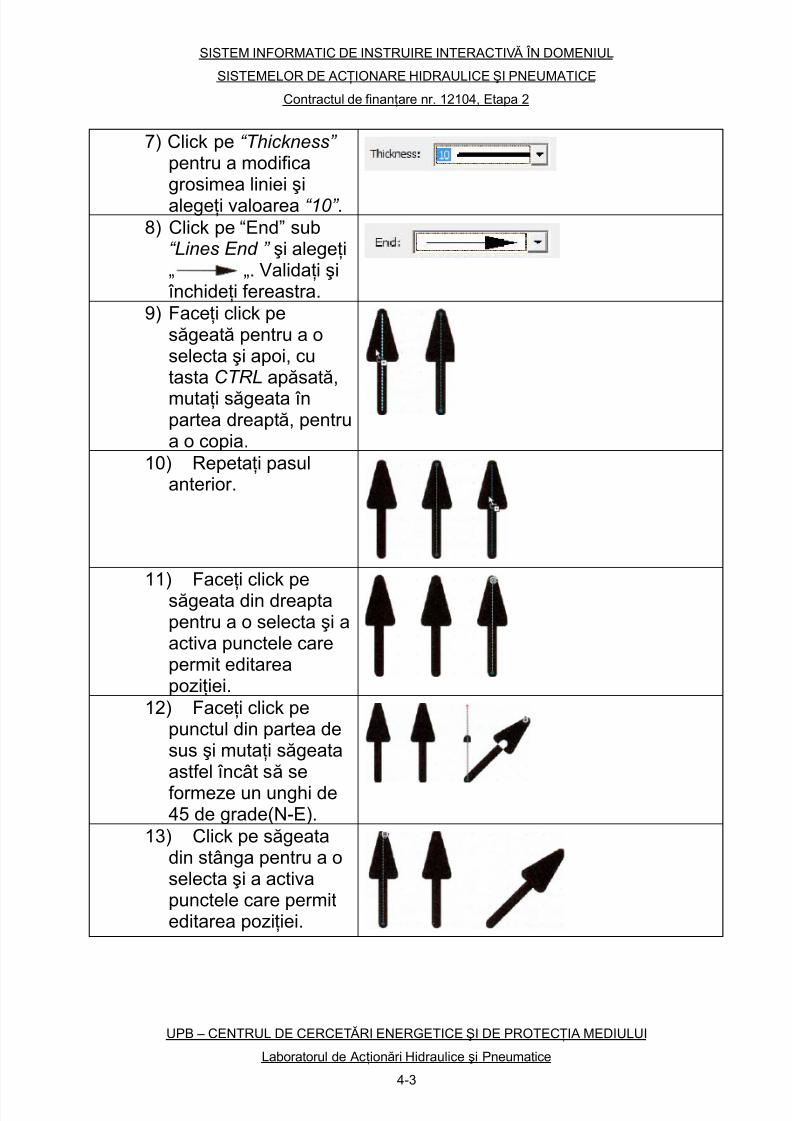
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 451/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
7) Click pe “Thickness” pentru a modificagrosimea liniei şialegeţi valoarea “10” .
8) Click pe “End” sub“Lines End ” şi alegeţi„ „. Validaţi şi
închideţi fereastra.9) Faceţi click pe
săgeată pentru a oselecta şi apoi, cutasta CTRL apăsată,
mutaţi săgeata înpartea dreaptă, pentrua o copia.
10) Repetaţi pasulanterior.
11) Faceţi click pesăgeata din dreaptapentru a o selecta şi aactiva punctele carepermit editareapoziţiei.
12) Faceţi click pepunctul din partea desus şi mutaţi săgeataastfel încât să seformeze un unghi de45 de grade(N-E).
13) Click pe săgeatadin stânga pentru a oselecta şi a activapunctele care permiteditarea poziţiei.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-3
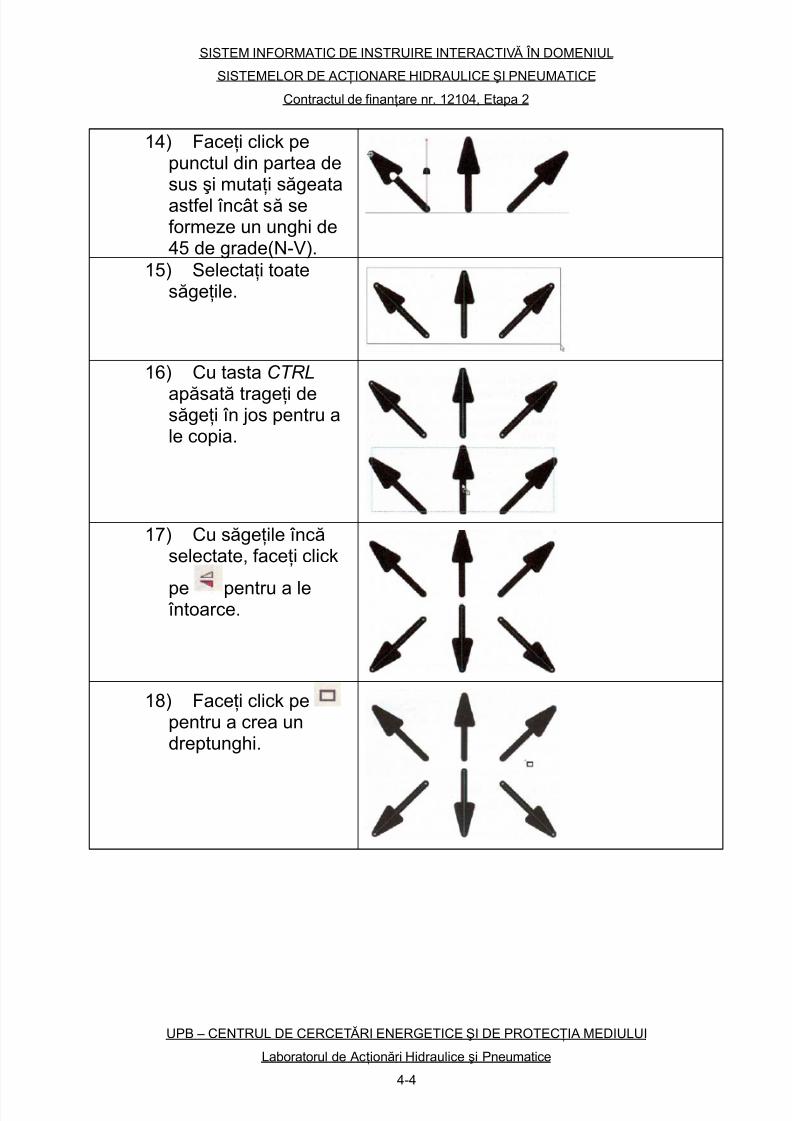
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 452/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
14) Faceţi click pepunctul din partea desus şi mutaţi săgeataastfel încât să seformeze un unghi de45 de grade(N-V).
15) Selectaţi toatesăgeţile.
16) Cu tasta CTRL
apăsată trageţi desăgeţi în jos pentru ale copia.
17) Cu săgeţile încă selectate, faceţi click
pe pentru a le întoarce.
18) Faceţi click pepentru a crea undreptunghi.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-4
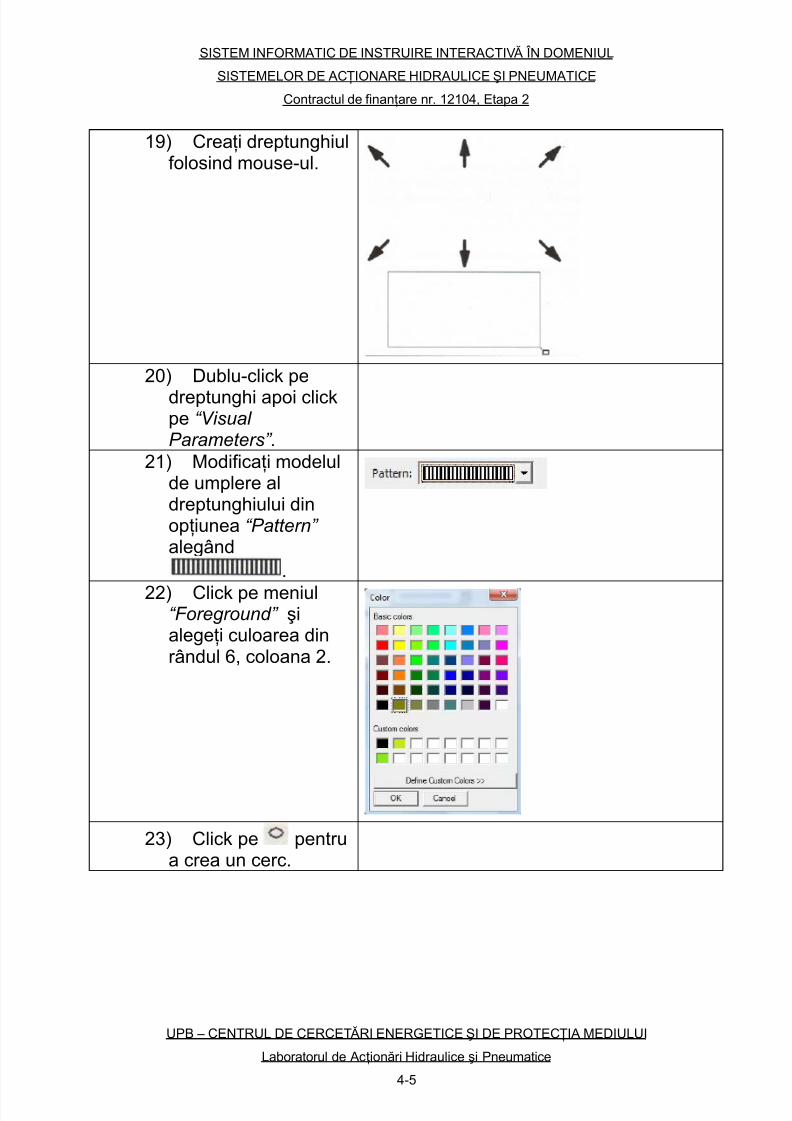
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 453/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
19) Creaţi dreptunghiulfolosind mouse-ul.
20) Dublu-click pe
dreptunghi apoi clickpe “Visual Parameters”.
21) Modificaţi modelulde umplere aldreptunghiului dinopţiunea “Pattern” alegând
.
22) Click pe meniul“Foreground” şialegeţi culoarea dinrândul 6, coloana 2.
23) Click pe pentrua crea un cerc.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-5

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 454/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
24) Creaţi cerculfolosind mouse-ul.
25) Dublu-click pe cercşi deschideţi “Visual Parameters”.
26) Modificaţi modelul
de umplere al cerculuidin opţiunea “Pattern” alegând
.27) Funcţia pentru
crearea elipselor ar trebui să fie încă activă, în caz contrar o reactivaţi.
28) Creaţi o elipsă înmijlocul cercului.
29) Dublu-click peelipsă şi deschideţi“Visual Parameters”.
30) Modificaţi modelulde umplere al cerculuidin opţiunea “Pattern” alegând
.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-6
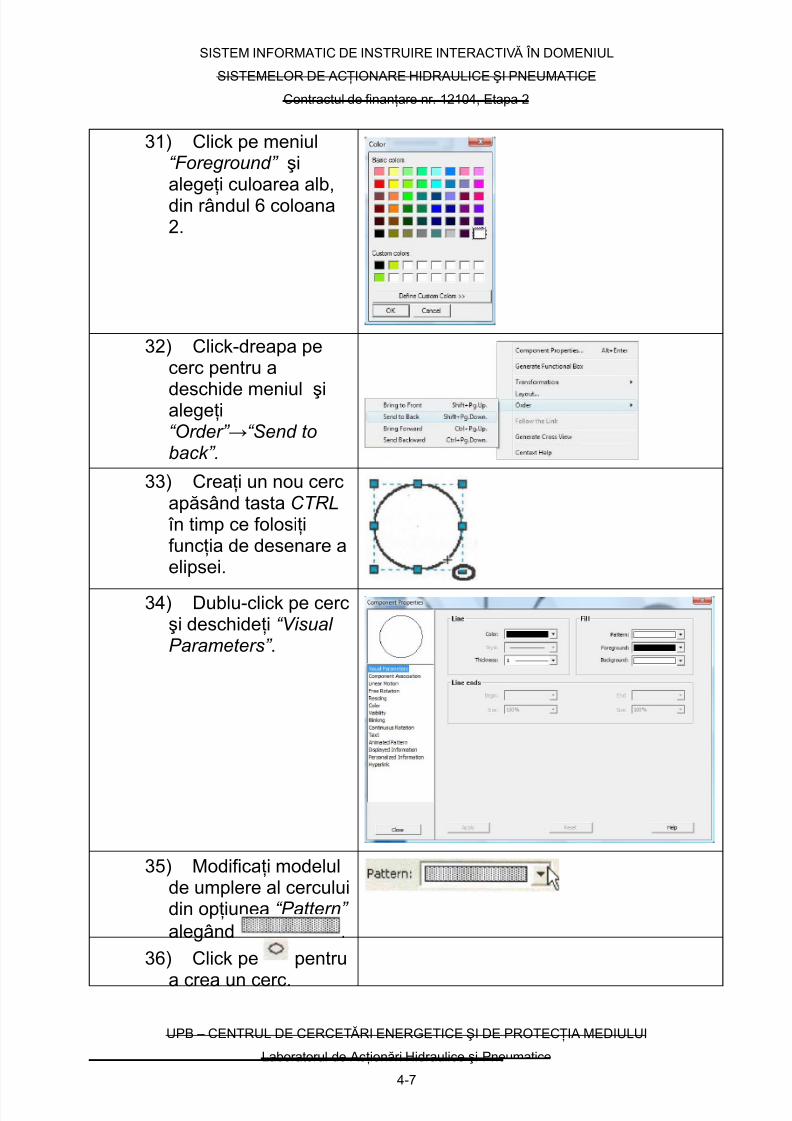
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 455/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
31) Click pe meniul“Foreground” şialegeţi culoarea alb,din rândul 6 coloana2.
32) Click-dreapa pecerc pentru a
deschide meniul şialegeţi“Order” →“Send toback”.
33) Creaţi un nou cercapăsând tasta CTRL
în timp ce folosiţifuncţia de desenare aelipsei.
34) Dublu-click pe cercşi deschideţi “Visual Parameters” .
35) Modificaţi modelulde umplere al cerculuidin opţiunea “Pattern” alegând .
36) Click pe pentru
a crea un cerc.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-7
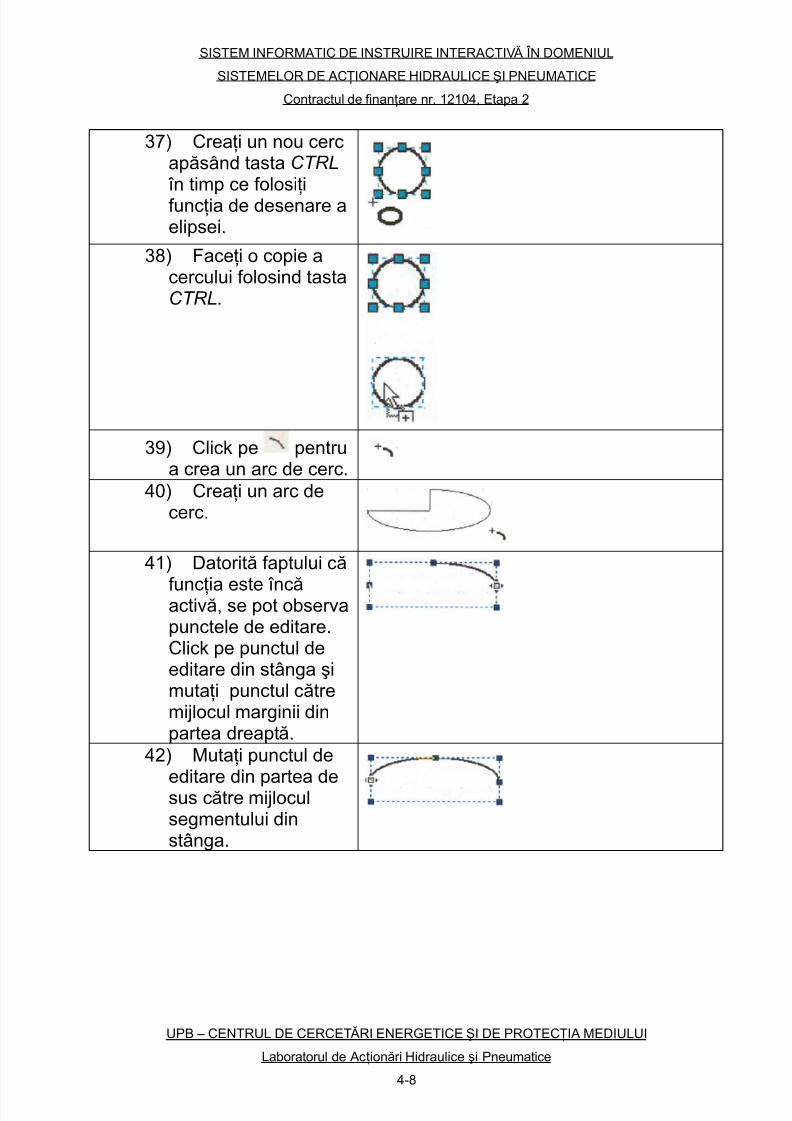
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 456/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
37) Creaţi un nou cercapăsând tasta CTRL
în timp ce folosiţifuncţia de desenare aelipsei.
38) Faceţi o copie acercului folosind tastaCTRL.
39) Click pe pentrua crea un arc de cerc.
40) Creaţi un arc decerc.
41) Datorită faptului că
funcţia este încă activă, se pot observapunctele de editare.Click pe punctul deeditare din stânga şimutaţi punctul cătremijlocul marginii dinpartea dreaptă.
42) Mutaţi punctul de
editare din partea desus către mijloculsegmentului dinstânga.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-8
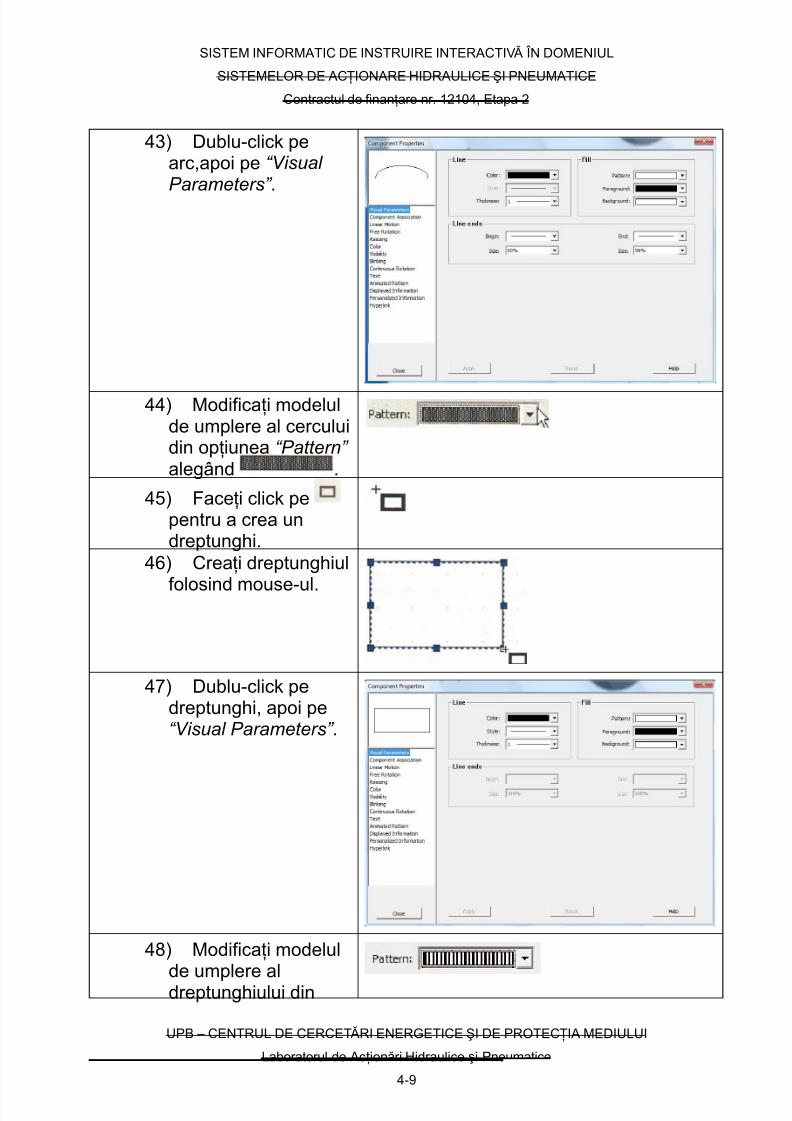
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 457/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
43) Dublu-click pearc,apoi pe “Visual Parameters” .
44) Modificaţi modelulde umplere al cerculuidin opţiunea “Pattern” alegând .
45) Faceţi click pepentru a crea undreptunghi.
46) Creaţi dreptunghiul
folosind mouse-ul.
47) Dublu-click pedreptunghi, apoi pe“Visual Parameters” .
48) Modificaţi modelulde umplere aldreptunghiului din
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-9
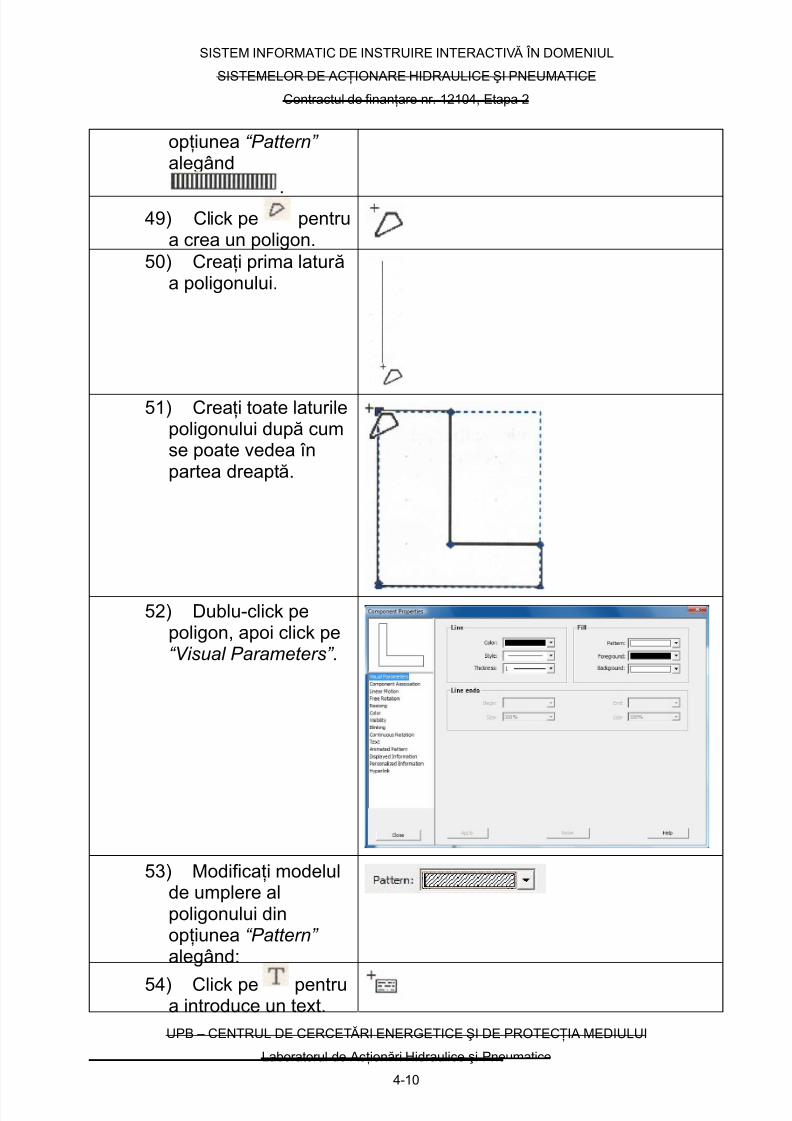
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 458/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
opţiunea “Pattern” alegând
.49) Click pe pentru
a crea un poligon.50) Creaţi prima latur ă
a poligonului.
51) Creaţi toate laturilepoligonului după cumse poate vedea înpartea dreaptă.
52) Dublu-click pepoligon, apoi click pe“Visual Parameters” .
53) Modificaţi modelulde umplere alpoligonului dinopţiunea “Pattern” alegând:
54) Click pe pentrua introduce un text.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-10
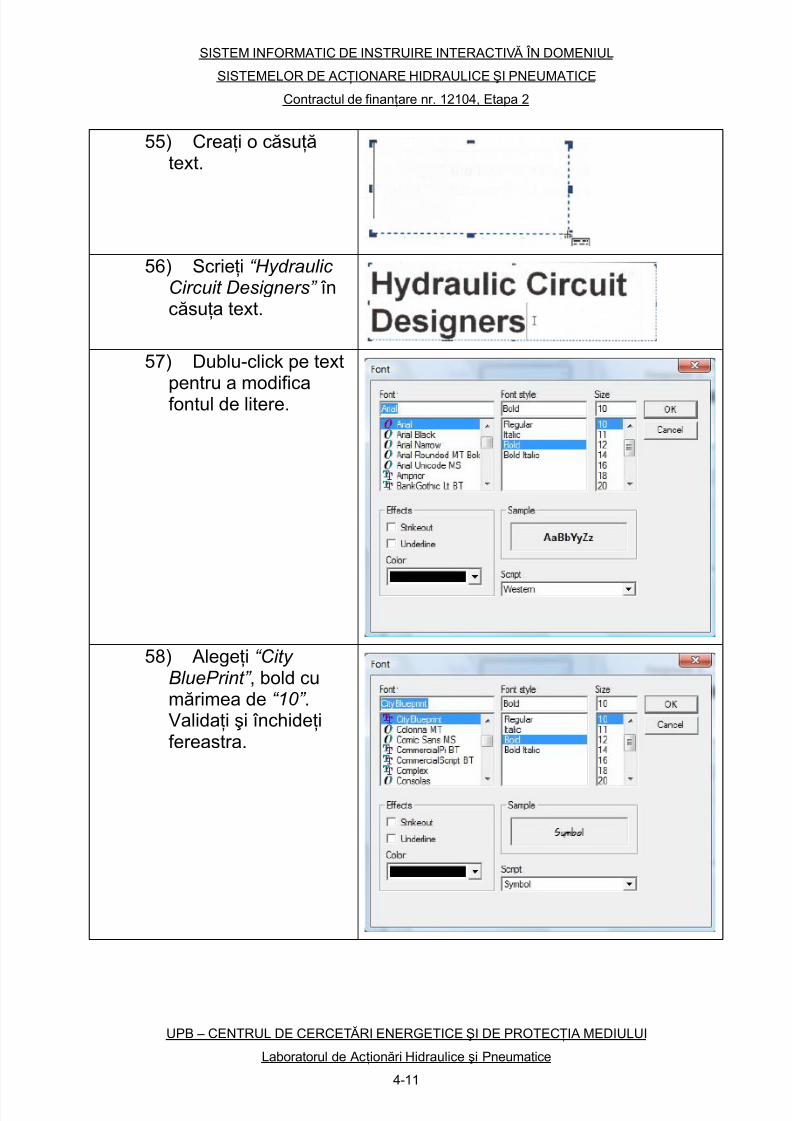
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 459/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
55) Creaţi o căsuţă text.
56) Scrieţi “Hydraulic Circuit Designers” încăsuţa text.
57) Dublu-click pe text
pentru a modificafontul de litere.
58) Alegeţi “City BluePrint” , bold cumărimea de “10” .Validaţi şi închideţifereastra.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-11
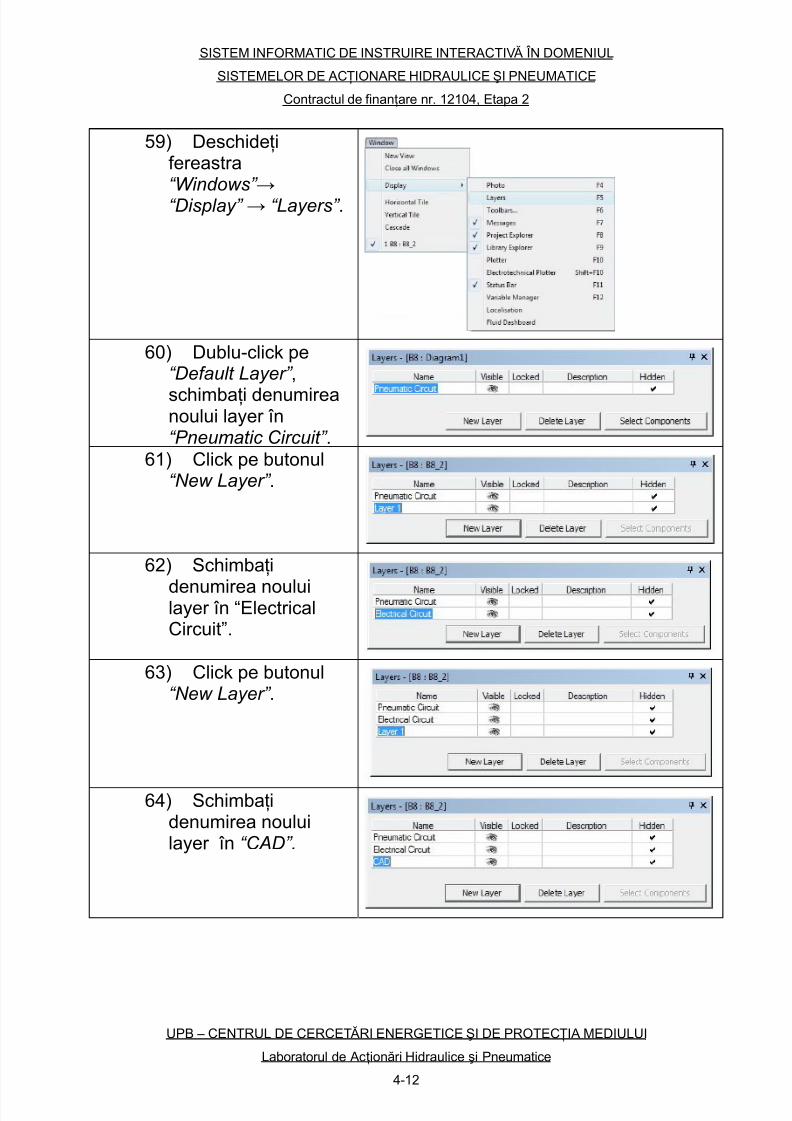
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 460/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
59) Deschideţifereastra“Windows” → “Display” → “Layers” .
60) Dublu-click pe“Default Layer” ,
schimbaţi denumireanoului layer în“Pneumatic Circuit” .
61) Click pe butonul“New Layer” .
62) Schimbaţi
denumirea nouluilayer în “ElectricalCircuit”.
63) Click pe butonul“New Layer” .
64) Schimbaţidenumirea nouluilayer în “CAD”.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-12

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 461/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
65) Inchideţi fereastra“Layers” .
66) Selectaţi toatecomponenteleelectrice.
67) Dublu-click peoricare dintre ele şideschideţi “Displayed Information” .
68) Click pe meniul“Layer” şi alegeţi“Electrical Components” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-13
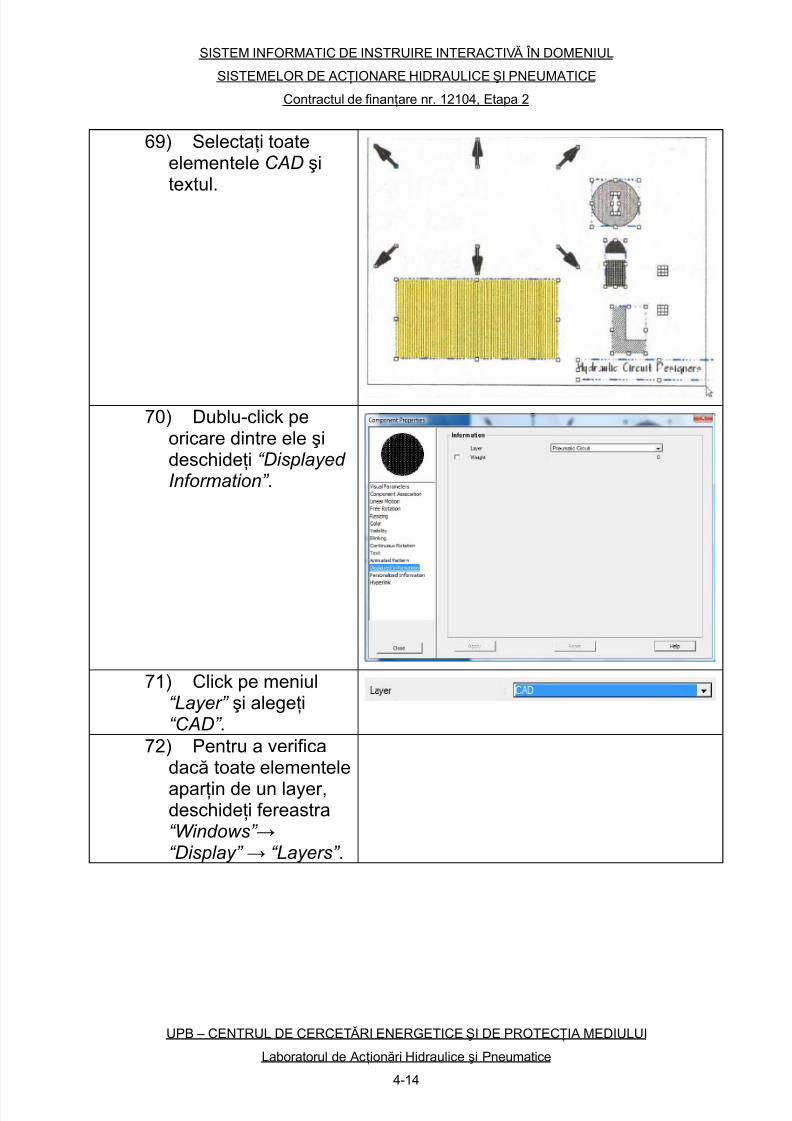
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 462/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
69) Selectaţi toateelementele CAD şitextul.
70) Dublu-click peoricare dintre ele şideschideţi “Displayed Information” .
71) Click pe meniul“Layer” şi alegeţi“CAD” .
72) Pentru a verificadacă toate elementele
apar ţin de un layer,deschideţi fereastra“Windows” → “Display” → “Layers” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-14
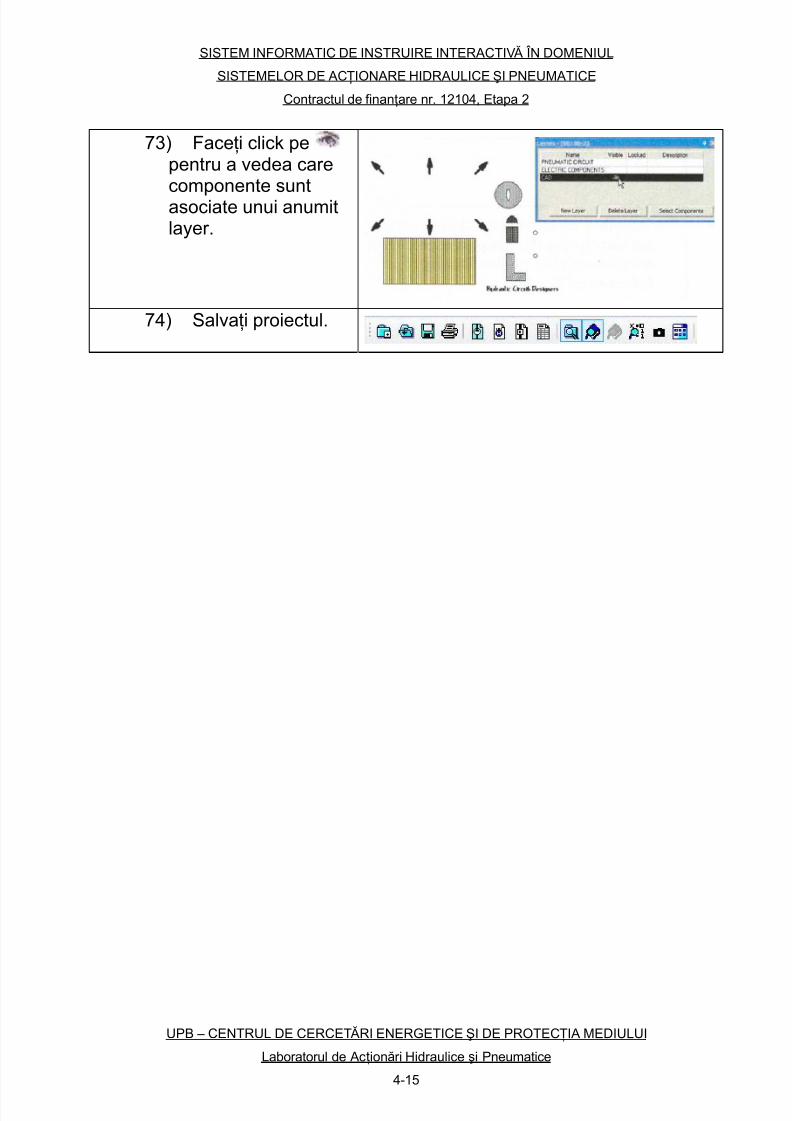
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 463/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
73) Faceţi click pepentru a vedea carecomponente suntasociate unui anumitlayer.
74) Salvaţi proiectul.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-15

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 464/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Exerciţiul 2. Realizarea casetei de titlu.
Obiectiv: Realizarea casetei de titlu folosind funcţiile CAD.
Instrucţiuni:
1) Deschideţi B8 şi creaţio nouă diagramă delucru.
2) În “Project Explorer” ,schimbaţi denumireadiagramei în B8-2.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-16

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 465/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
3) Dublu-click pediagrama B8-1 şiselectaţi toateelementele CAD şitextul.
4) Click-dreapta → “Copy” .
5) Mergeţi înapoi îndiagrama B8-2 , click-dreapta → “Paste” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-17
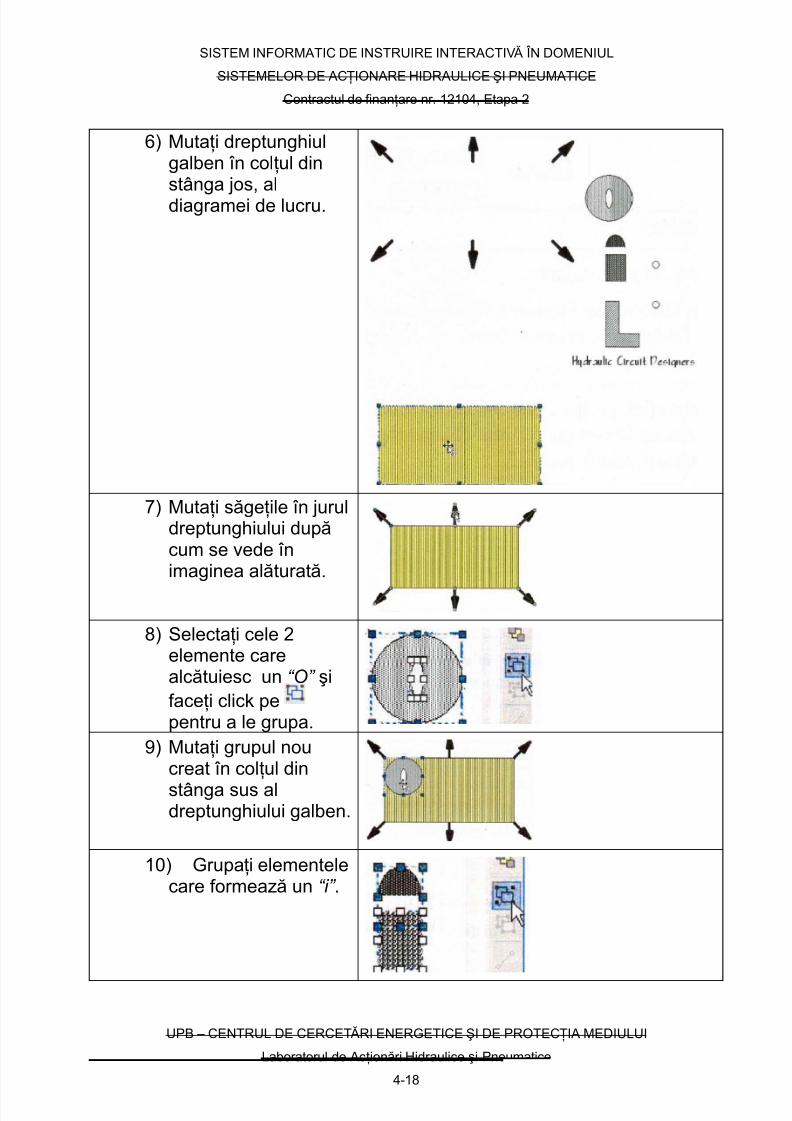
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 466/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
6) Mutaţi dreptunghiulgalben în colţul dinstânga jos, aldiagramei de lucru.
7) Mutaţi săgeţile în juruldreptunghiului după cum se vede înimaginea alăturată.
8) Selectaţi cele 2elemente carealcătuiesc un “O” şifaceţi click pepentru a le grupa.
9) Mutaţi grupul noucreat în colţul din
stânga sus aldreptunghiului galben.
10) Grupaţi elementelecare formează un “i” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-18

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 467/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
11) Mutaţi grupulconform imaginiialăturate.
12) Mutaţi poligonul “L” conform imaginiialăturate.
13) Mutaţi unul din
cerculeţele albe între“O” şi “i” .
14) Mutaţi al doileacerc alb între “i” şi “L” .
15) Mutaţi textul“Hydraulic CircuitDesigners” în parteade jos adreptunghiului galben.
16) Click-dreapta pedreptunghiul galben şialegeţi “Order” → “Send to Back”.
17) Selectaţi şi grupaţitoate componentele.
18) Activaţi “Grid” din
meniul “View” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-19
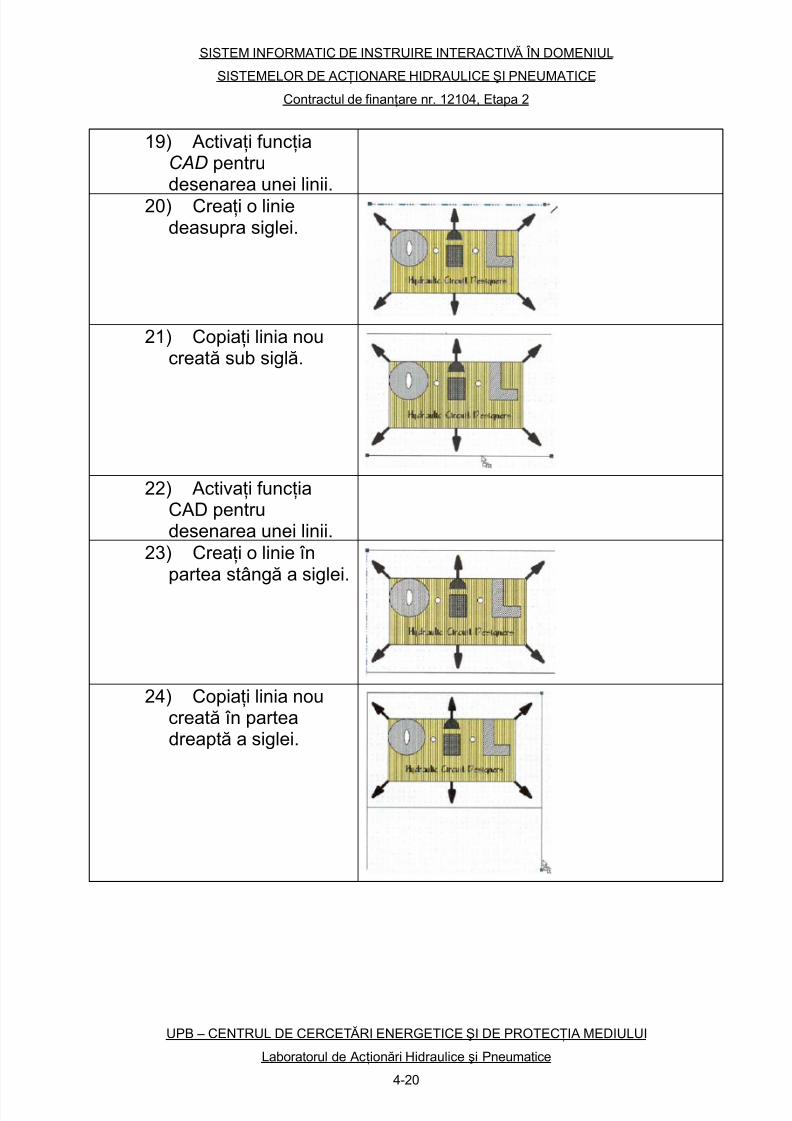
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 468/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
19) Activaţi funcţiaCAD pentrudesenarea unei linii.
20) Creaţi o liniedeasupra siglei.
21) Copiaţi linia noucreată sub siglă.
22) Activaţi funcţiaCAD pentrudesenarea unei linii.
23) Creaţi o linie înpartea stângă a siglei.
24) Copiaţi linia noucreată în parteadreaptă a siglei.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-20
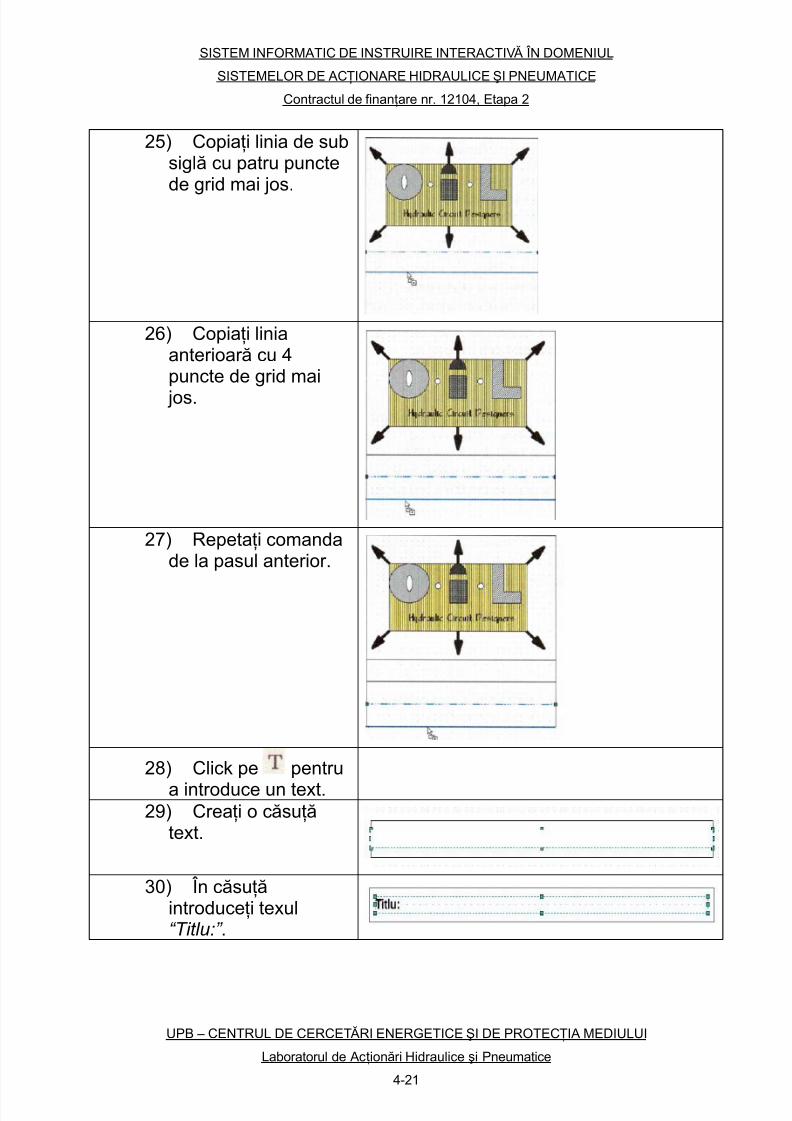
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 469/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
25) Copiaţi linia de subsiglă cu patru punctede grid mai jos.
26) Copiaţi liniaanterioar ă cu 4puncte de grid mai
jos.
27) Repetaţi comandade la pasul anterior.
28) Click pe pentru
a introduce un text.29) Creaţi o căsuţă
text.
30) În căsuţă introduceţi texul“Titlu:” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-21
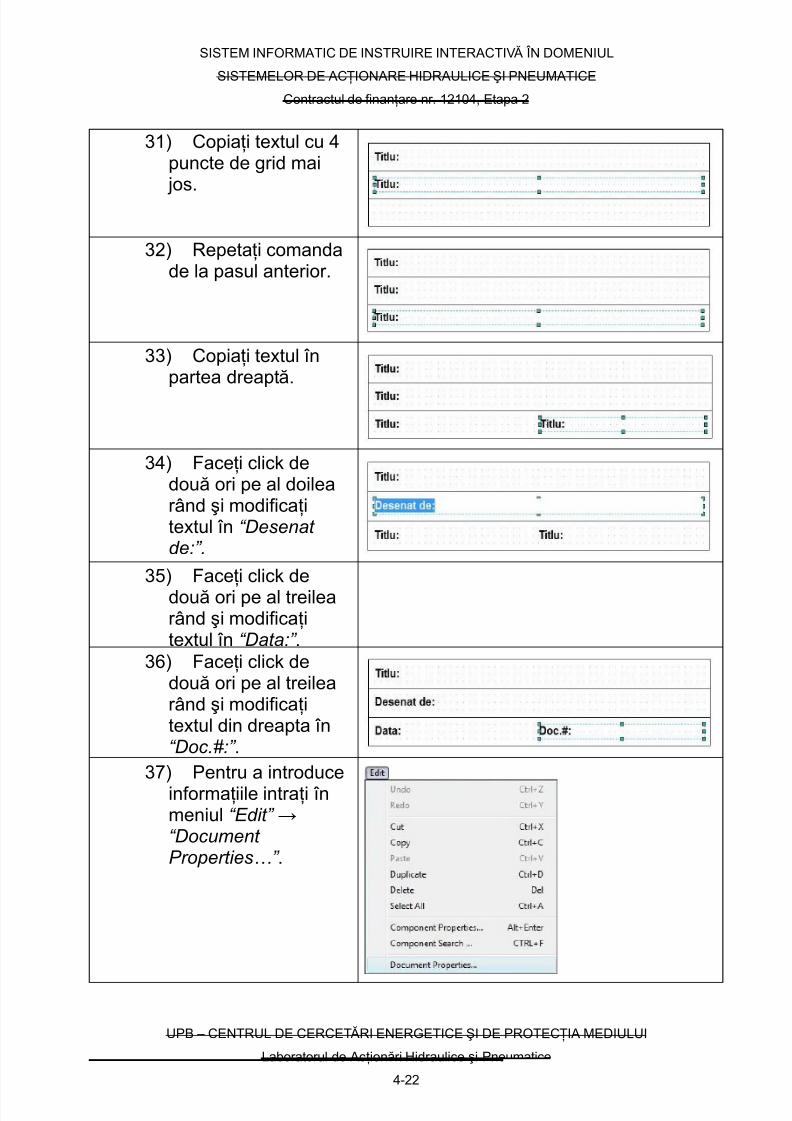
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 470/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
31) Copiaţi textul cu 4puncte de grid mai
jos.
32) Repetaţi comandade la pasul anterior.
33) Copiaţi textul înpartea dreaptă.
34) Faceţi click dedouă ori pe al doilearând şi modificaţitextul în “Desenat de:”.
35) Faceţi click dedouă ori pe al treilearând şi modificaţitextul în “Data:” .
36) Faceţi click dedouă ori pe al treilearând şi modificaţitextul din dreapta în“Doc.#:” .
37) Pentru a introduceinformaţiile intraţi înmeniul “Edit” → “Document Properties…” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-22

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 471/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
38) Click pe “Standard” sub “Summary Info” .
39) Introduceţi “My first title bloc” ca titlu.
40) Introduceţi “314” ca număr aldocumentului.
41) Introduceţi numeledumneavoastr ă la“Drawn by” .
42) Apăsaţi pepentru a introduce unnou câmp.
43) Creaţi un câmp îndreapta textului“Titlu” .
44) După ce sedeschide “PropertiesManager” faceţi click
pe “Current Diagram” sub “Categories” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-23

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 472/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
45) Click pe “Title” în“Field Name” . Validaţişi închideţi fereastra.
46) Apăsaţi pepentru a introduce unnou câmp.
47) Creaţi un câmp îndreapta textului“Desenat de” .
48) După ce sedeschide “PropertiesManager” faceţi clickpe “Current Diagram” sub “Categories” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-24
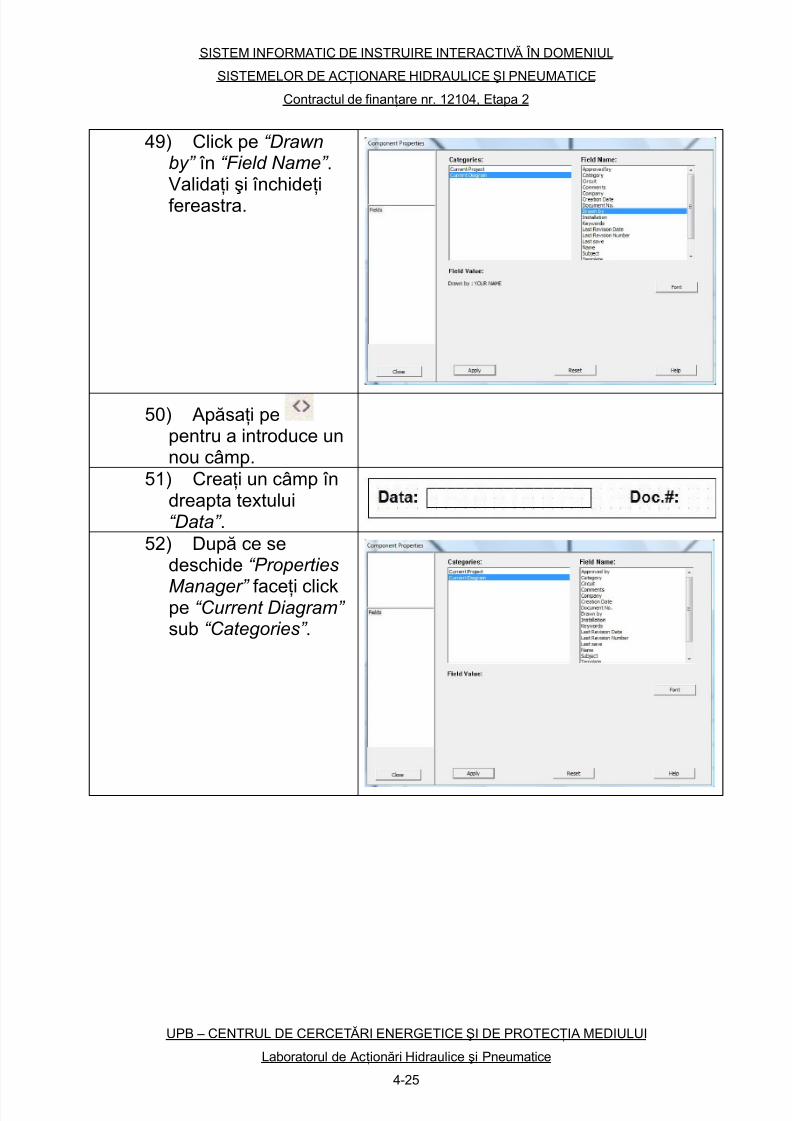
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 473/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
49) Click pe “Drawnby” în “Field Name” .Validaţi şi închideţifereastra.
50) Apăsaţi pepentru a introduce unnou câmp.
51) Creaţi un câmp îndreapta textului“Data” .
52) După ce sedeschide “Properties
Manager” faceţi clickpe “Current Diagram” sub “Categories” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-25
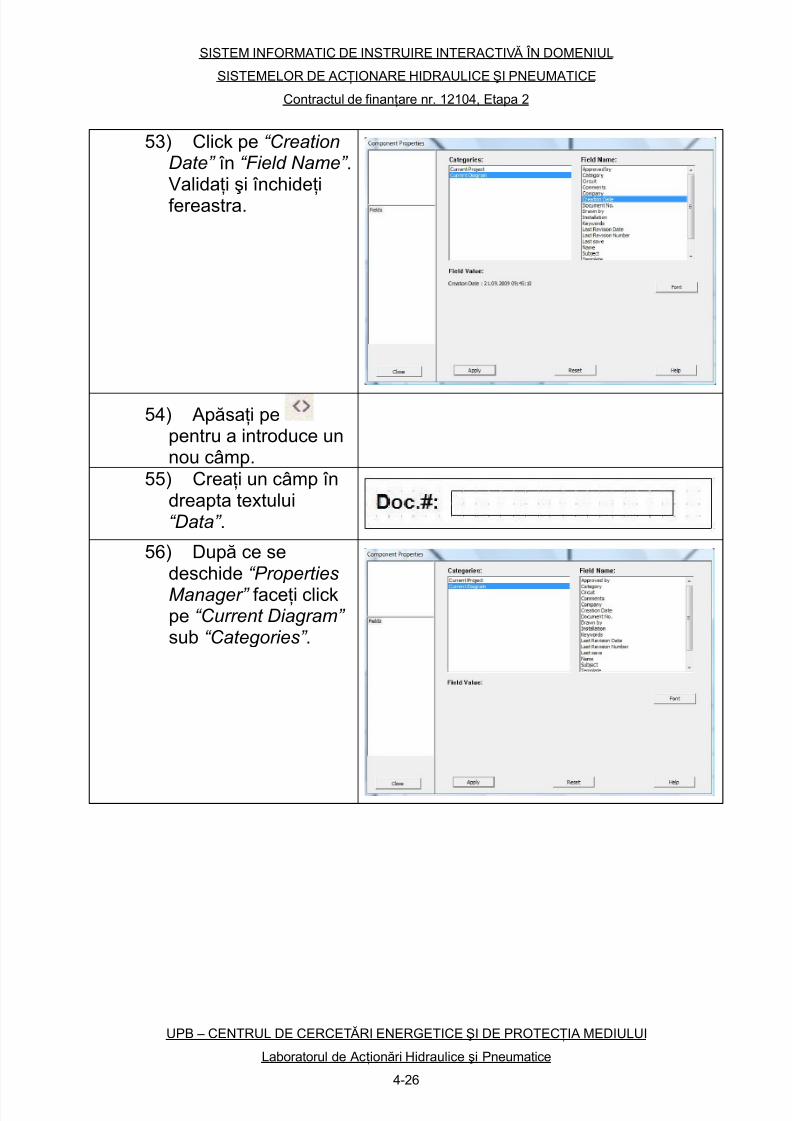
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 474/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
53) Click pe “CreationDate” în “Field Name” .Validaţi şi închideţifereastra.
54) Apăsaţi pepentru a introduce unnou câmp.
55) Creaţi un câmp îndreapta textului“Data” .
56) După ce sedeschide “Properties
Manager” faceţi clickpe “Current Diagram” sub “Categories” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-26
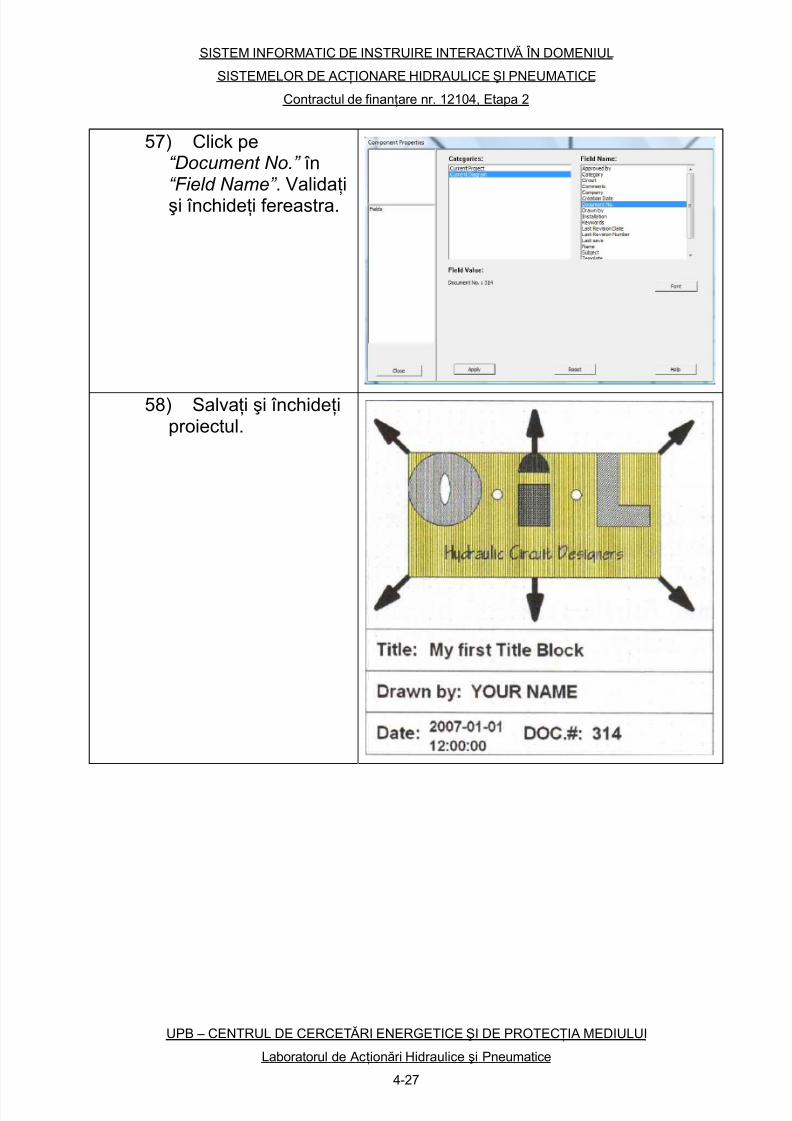
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 475/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
57) Click pe“Document No.” în“Field Name” . Validaţişi închideţi fereastra.
58) Salvaţi şi închideţiproiectul.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-27
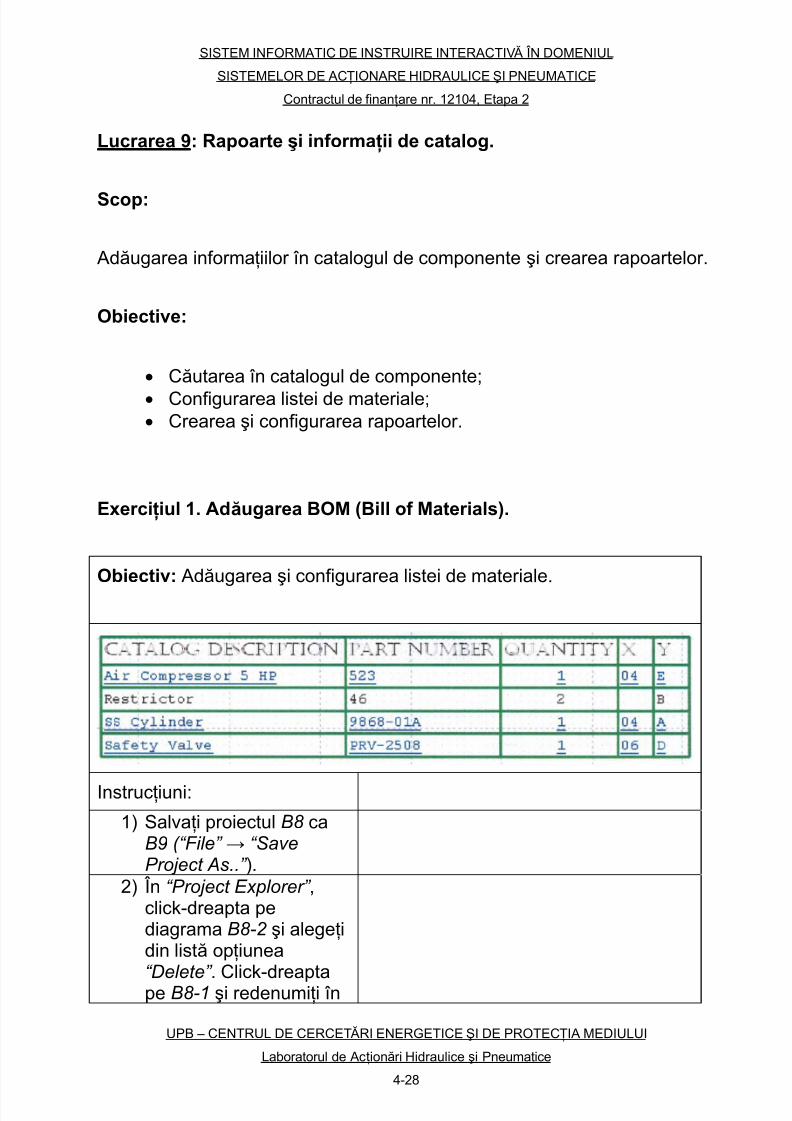
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 476/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Lucrarea 9: Rapoarte şi informaţii de catalog.
Scop:
Adăugarea informaţiilor în catalogul de componente şi crearea rapoartelor.
Obiective:
• Căutarea în catalogul de componente;• Configurarea listei de materiale;• Crearea şi configurarea rapoartelor.
Exerciţiul 1. Adăugarea BOM (Bill of Materials).
Obiectiv: Adăugarea şi configurarea listei de materiale.
Instrucţiuni:
1) Salvaţi proiectul B8 caB9 (“File” → “SaveProject As..” ).
2) În “Project Explorer” ,click-dreapta pediagrama B8-2 şi alegeţidin listă opţiunea“Delete” . Click-dreaptape B8-1 şi redenumiţi în
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-28
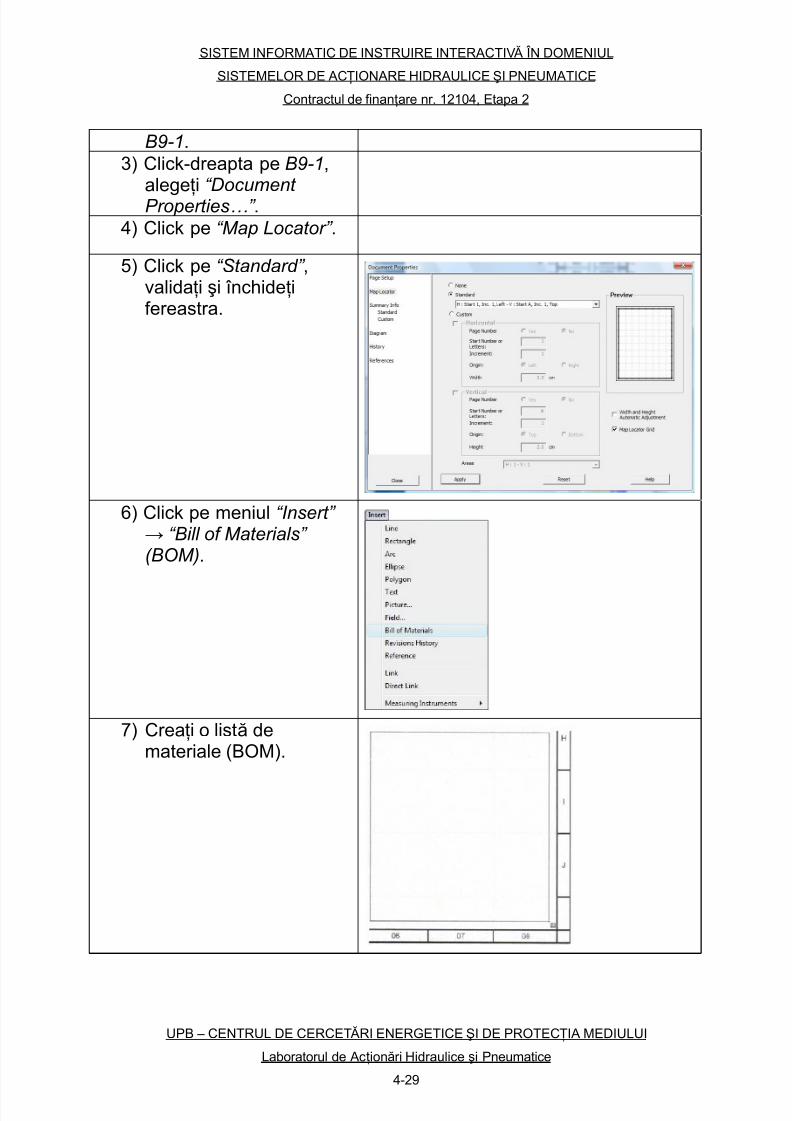
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 477/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
B9-1.3) Click-dreapta pe B9-1,
alegeţi “Document Properties…” .
4) Click pe “Map Locator” .
5) Click pe “Standard” ,validaţi şi închideţifereastra.
6) Click pe meniul “Insert” → “Bill of Materials” (BOM).
7) Creaţi o listă demateriale (BOM).
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-29
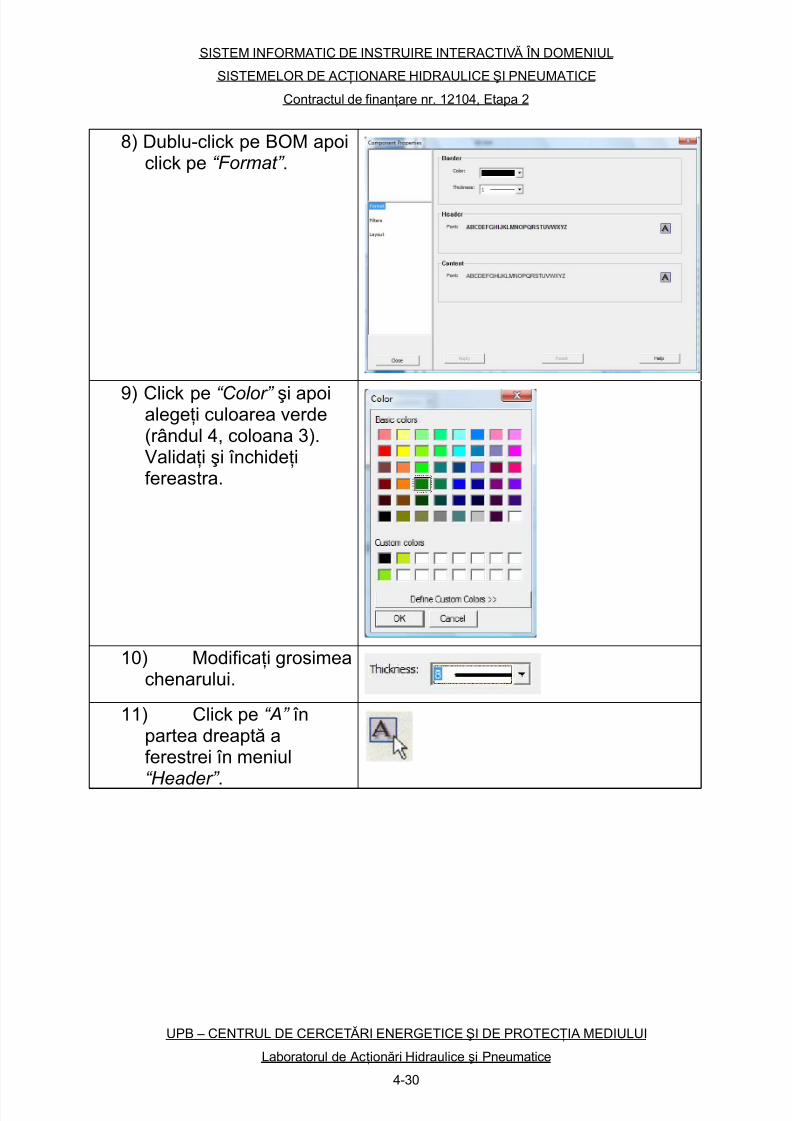
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 478/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
8) Dublu-click pe BOM apoiclick pe “Format” .
9) Click pe “Color” şi apoialegeţi culoarea verde(rândul 4, coloana 3).Validaţi şi închideţifereastra.
10) Modificaţi grosimeachenarului.
11) Click pe “A” înpartea dreaptă aferestrei în meniul
“Header” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-30
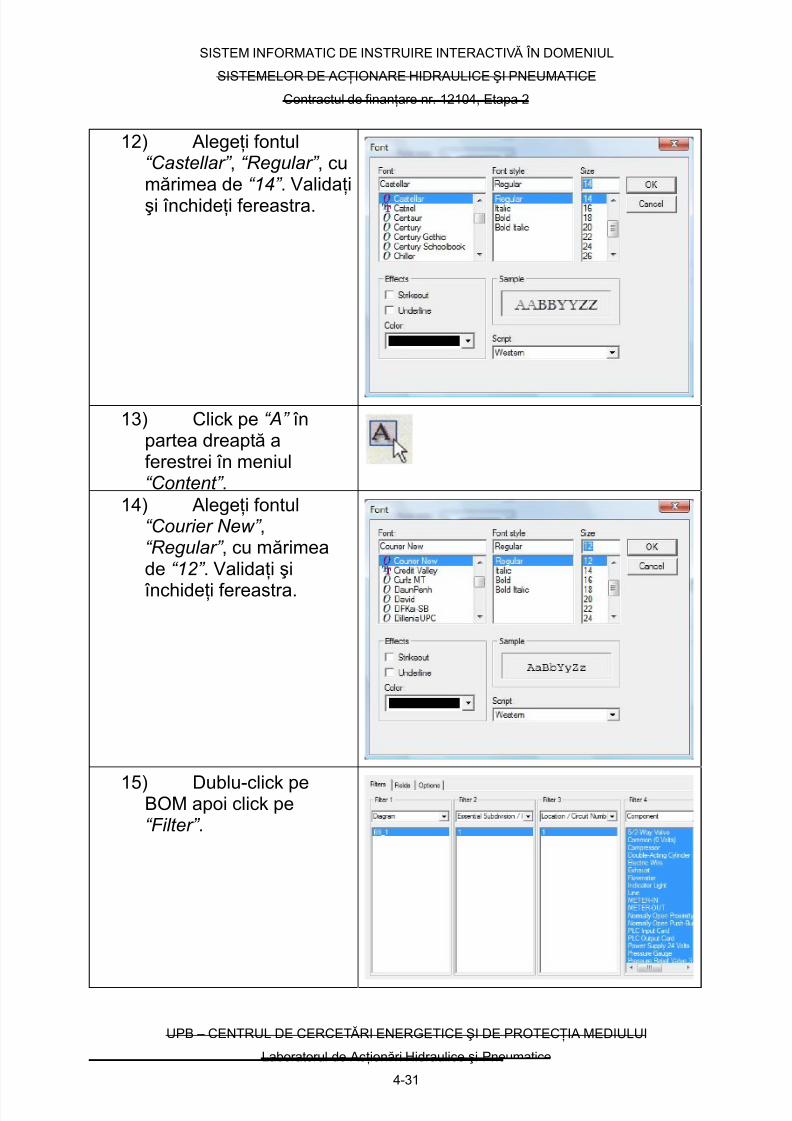
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 479/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
12) Alegeţi fontul“Castellar” , “Regular” , cumărimea de “14” . Validaţişi închideţi fereastra.
13) Click pe “A” înpartea dreaptă aferestrei în meniul“Content” .
14) Alegeţi fontul“Courier New” ,“Regular” , cu mărimeade “12” . Validaţi şi
închideţi fereastra.
15) Dublu-click peBOM apoi click pe“Filter” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-31
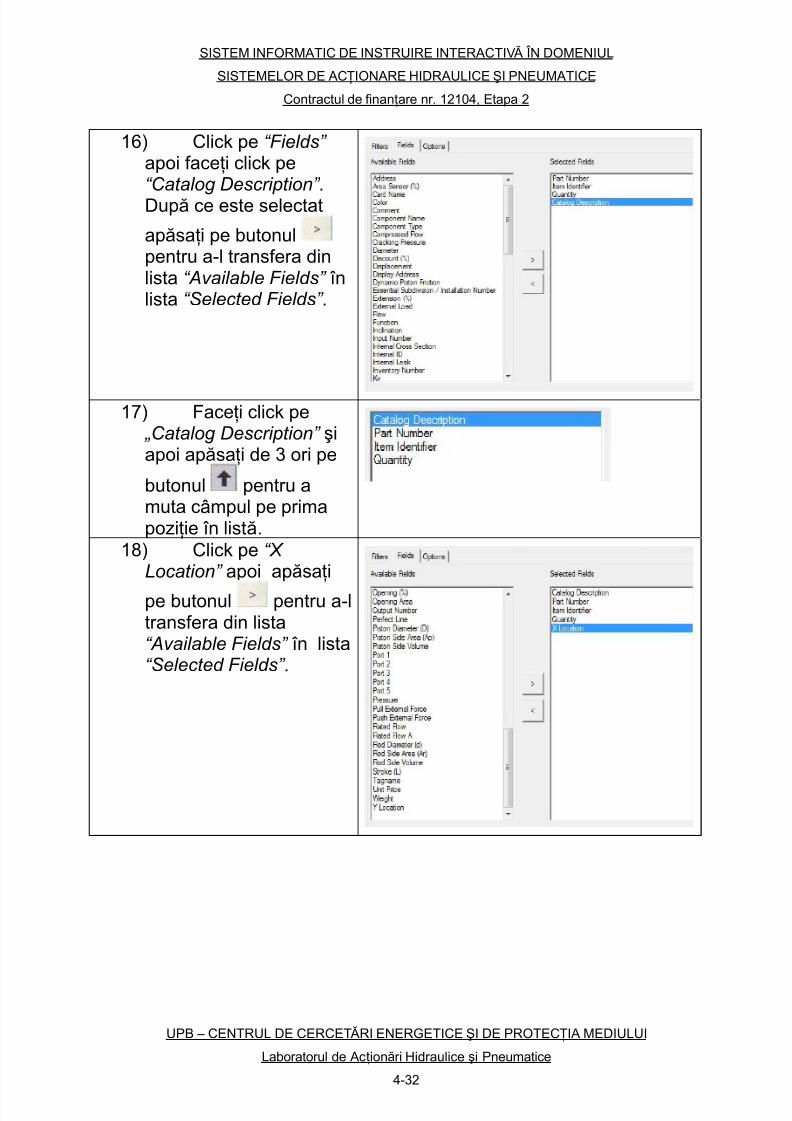
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 480/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
16) Click pe “Fields” apoi faceţi click pe“Catalog Description” .După ce este selectat
apăsaţi pe butonulpentru a-l transfera dinlista “Available Fields” înlista “Selected Fields” .
17) Faceţi click pe „Catalog Description” şiapoi apăsaţi de 3 ori pe
butonul pentru amuta câmpul pe primapoziţie în listă.
18) Click pe “X Location” apoi apăsaţi
pe butonul pentru a-ltransfera din lista“Available Fields” în lista“Selected Fields” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-32
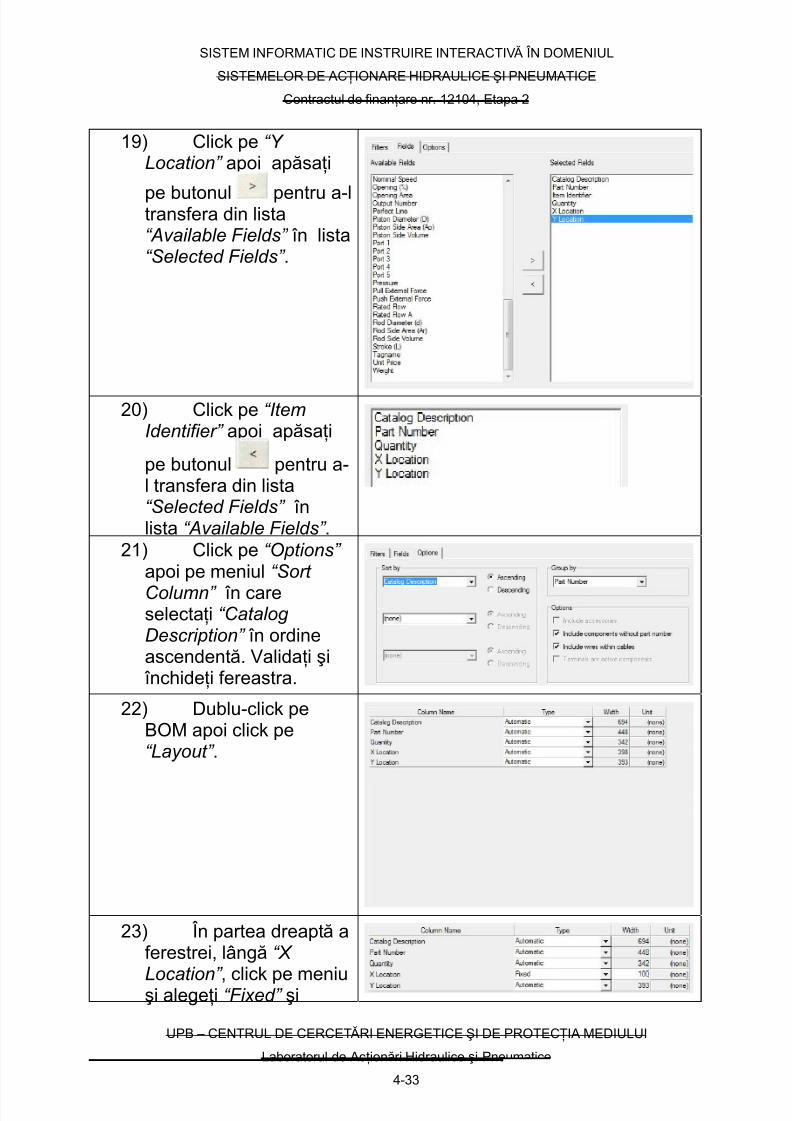
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 481/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
19) Click pe “Y Location” apoi apăsaţi
pe butonul pentru a-ltransfera din lista“Available Fields” în lista“Selected Fields” .
20) Click pe “ItemIdentifier” apoi apăsaţi
pe butonul pentru a-l transfera din lista“Selected Fields” înlista “Available Fields” .
21) Click pe “Options” apoi pe meniul “Sort
Column” în careselectaţi “Catalog Description” în ordineascendentă. Validaţi şi
închideţi fereastra.
22) Dublu-click peBOM apoi click pe“Layout” .
23) În partea dreaptă aferestrei, lângă “X
Location” , click pe meniuşi alegeţi “Fixed” şi
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-33

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 482/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
modificaţi valoarea de la“378” la “100” .
24) Repetaţi operaţiapentru “Y Location” .
25) Selectaţi toatecomponentele hidrauliceşi copiaţi-le unde aveţispaţiu liber. Observaţi că lista de materiale secompletează automat.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-34
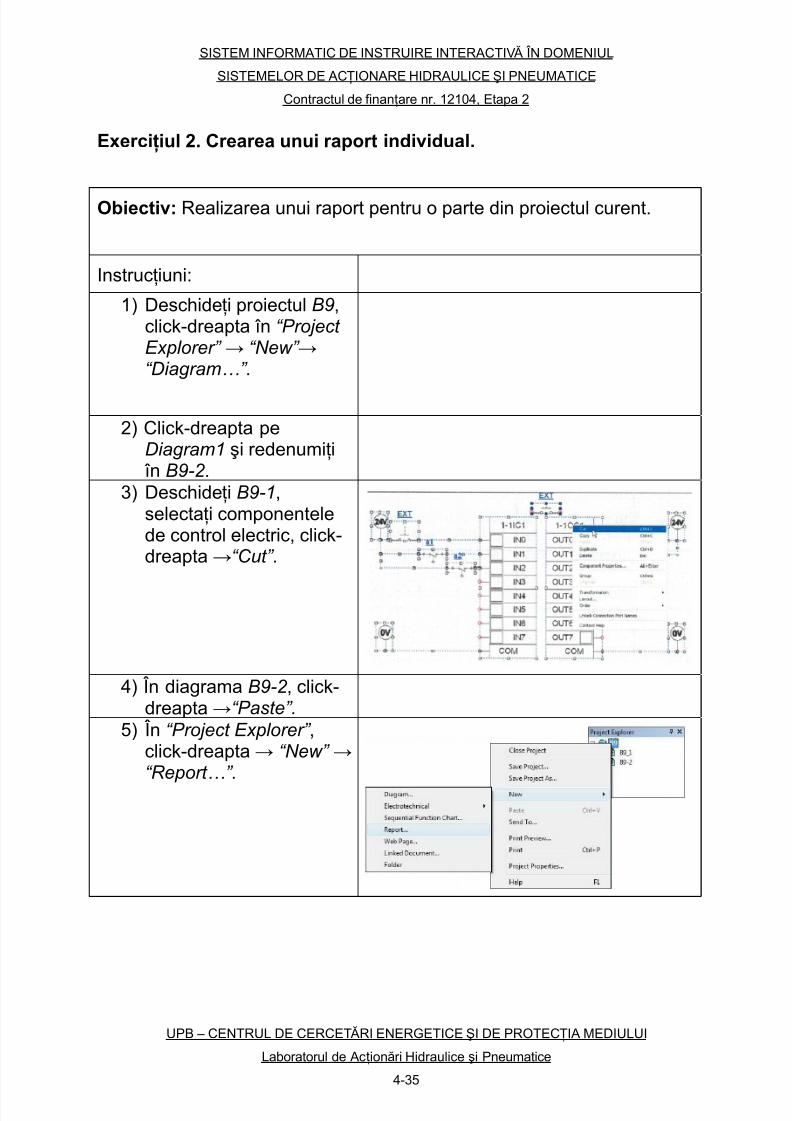
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 483/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Exerciţiul 2. Crearea unui raport individual.
Obiectiv: Realizarea unui raport pentru o parte din proiectul curent.
Instrucţiuni:
1) Deschideţi proiectul B9,click-dreapta în “Project Explorer” → “New” → “Diagram…” .
2) Click-dreapta peDiagram1 şi redenumiţi
în B9-2 .3) Deschideţi B9-1,
selectaţi componentelede control electric, click-dreapta→“Cut” .
4) În diagrama B9-2 , click-dreapta →“Paste”.
5) În “Project Explorer” ,click-dreapta → “New” → “Report…” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-35
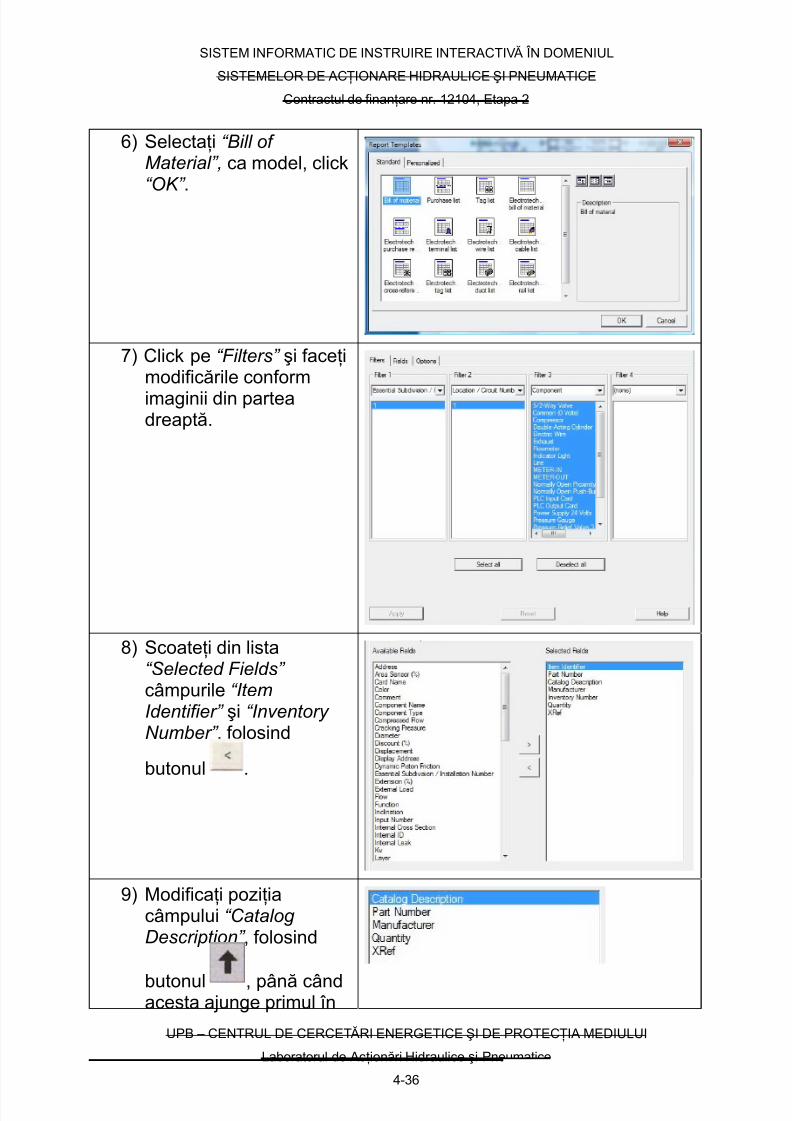
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 484/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
6) Selectaţi “Bill of Material”, ca model, click“OK” .
7) Click pe “Filters” şi faceţimodificările conform
imaginii din parteadreaptă.
8) Scoateţi din lista“Selected Fields” câmpurile “ItemIdentifier” şi “Inventory Number” , folosind
butonul .
9) Modificaţi poziţiacâmpului “Catalog Description” , folosind
butonul , până cândacesta ajunge primul în
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-36
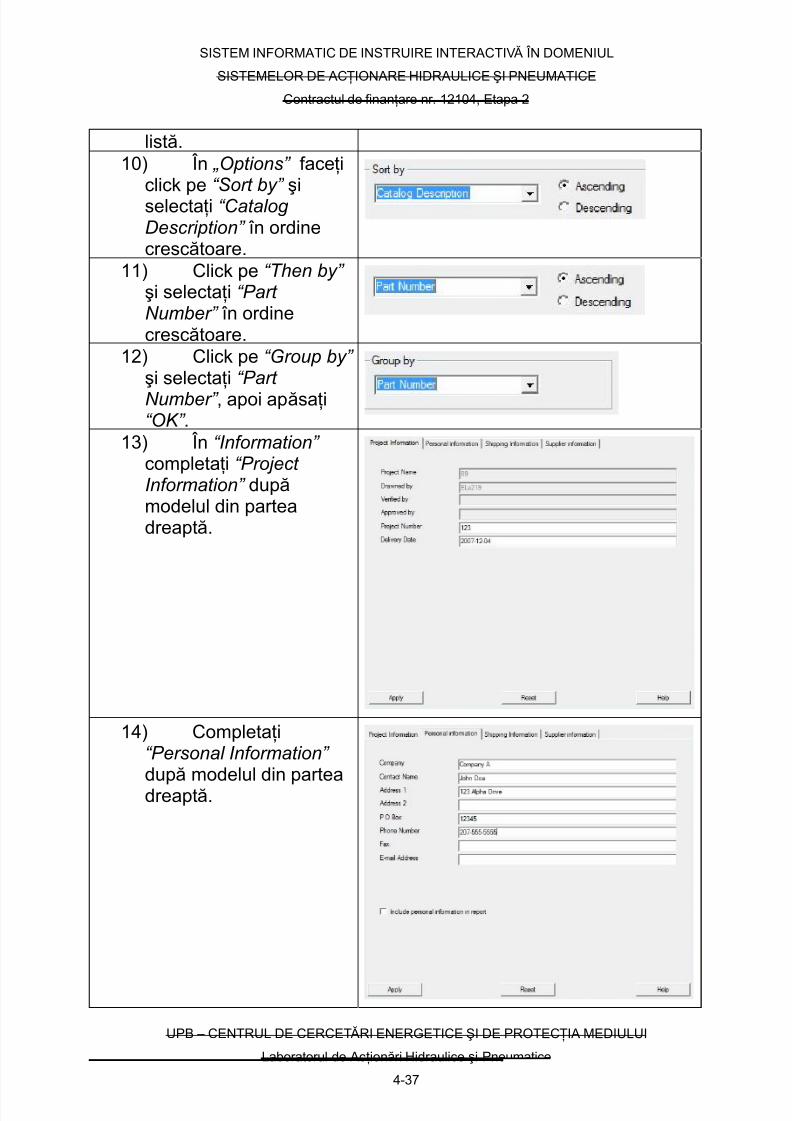
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 485/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
listă.10) În „Options” faceţi
click pe “Sort by” şiselectaţi “Catalog Description” în ordinecrescătoare.
11) Click pe “Then by” şi selectaţi “Part Number” în ordinecrescătoare.
12) Click pe “Group by” şi selectaţi “Part
Number” , apoi apăsaţi“OK” .
13) În “Information” completaţi “Project Information” după modelul din parteadreaptă.
14) Completaţi“Personal Information” după modelul din parteadreaptă.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-37
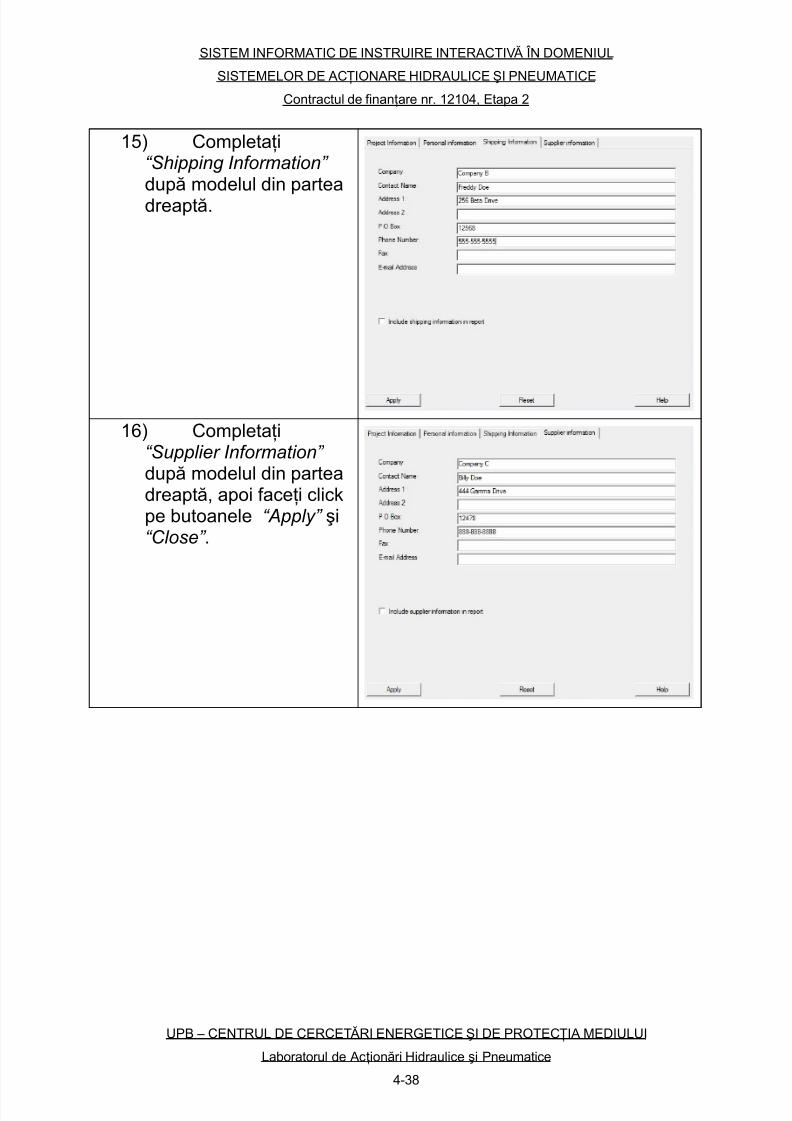
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 486/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
15) Completaţi“Shipping Information” după modelul din parteadreaptă.
16) Completaţi“Supplier Information” după modelul din parteadreaptă, apoi faceţi clickpe butoanele “Apply” şi“Close” .
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-38
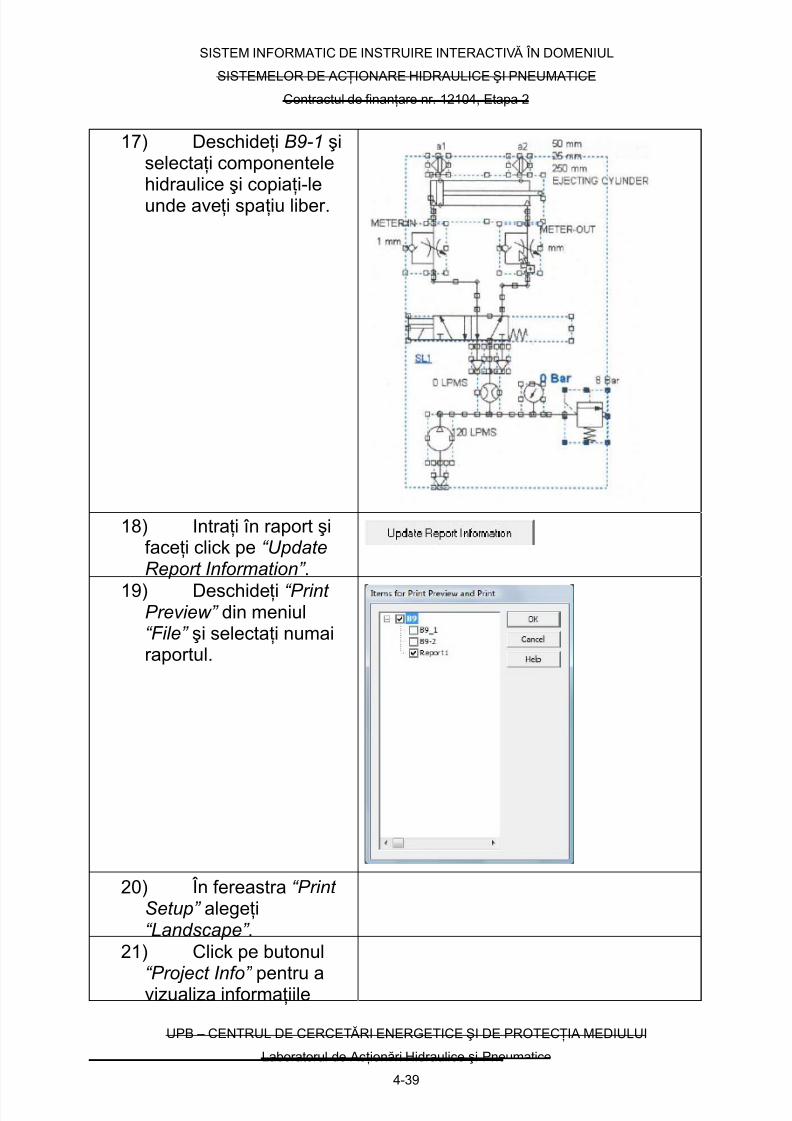
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 487/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
17) Deschideţi B9-1 şiselectaţi componentelehidraulice şi copiaţi-leunde aveţi spaţiu liber.
18) Intraţi în raport şifaceţi click pe “UpdateReport Information” .
19) Deschideţi “Print Preview” din meniul“File” şi selectaţi numairaportul.
20) În fereastra “Print Setup” alegeţi“Landscape” .
21) Click pe butonul
“Project Info” pentru avizualiza informaţiile
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-39

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 488/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
despre proiect.22) Dacă vreţi să
imprimaţi, apăsaţi „Print” ,dacă nu apăsaţi „Close” .
23) Salvaţi proiectul.
Laboratorul de Acţionări Hidraulice şi Pneumatice
4-40

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 489/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
ACTIVITATEA 5
CREAREA BAZEI DE CUNOŞTINŢE TEORETICE SPECIFICEANALIZEI SAHP CU METODA ELEMENTULUI FINIT – MEF
CUPRINS
PREFAŢĂ 1. INTRODUCERE
1.1 Ce este MEF şi unde se aplica ?1.2 Cunoştinţe necesare pentru a realiza programe cu elemente finite1.3 Cunoştinţe necesare unui utilizator al MEF1.4 Concepte de bază în MEF1.5 Discretizarea şi tipuri de elemente finite1.6 Factori de influenţă a discretizării
1.7 Exemple practice de discretizări2. METODA DEPLASĂRILOR
2.1 Aplicaţie2.2 Matricea de rigiditate a elementului bar ă articualtă 2D - generalităţi2.3 Expresia matricei de rigiditate în coordonate locale2.4 Expresia matricei de rigiditate în coordonate globale2.5 Asamblarea matricei de rigiditate a structurii2.6 Impunerea condiţiilor la limită şi rezolvarea2.7 Semnificaţia fizică a elementelor matricei de rigiditate2.8 Matricea de rigiditate a elementului grindă 2D2.9 Influenţa numerotǎrii nodurilor asupra formei matricei de rigiditate globale a
structurii2.10 Rezolvarea sistemelor de ecuaţii liniare ordinare2.11 Rezolvarea sistemelor de ecuaţii liniare cu legături
3. ELEMENTE DE TEORIA ELASTICITĂŢII ÎN FORMĂ MATRICEALĂ 3.1 Introducere3.2 Definiţii şi notaţii3.3 Transformarea mărimilor la schimbarea axelor de coordonate3.4 Relaţii între deplasări şi deformaţii specifice3.5 Relaţii de echilibru (Cauchy)3.6 Relaţii constitutive ale materialului
4. METODE ENERGETICE ÎN ANALIZA STRUCTURILOR4.1 Expresii energetice4.2 Tensiuni iniţiale şi variaţia de temperatur ă 4.3 Principiul energiei potenţiale totale minime4.4 Metoda de aproximare Rayleigh-Ritz
5. SCURTĂ PREZENTARE A METODEI ELEMENTELOR FINITE5.1 Metoda elementelor finite: variantă localizată a metodei Rayleigh-Ritz5.2 Proprietăţile matricei de rigiditate ale unui element finit5.3 Asamblarea ecuaţiilor de echilibru ale elementelor 5.4 Efectul tensiunilor iniţiale şi efectul termoelastic5.5 Efectul aşezării pe medii elastice
5.6 Efectul încărcării cu for ţe de iner ţie5.7 Elementul finit triunghiular cu deformaţie specifică constantă
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-1
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 490/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
6. ELEMENTE FINITE PATRULATERE PLANE6.1 Elementul finit patrulater cu patru noduri, izoparametric6.2. Calculul matricei de rigiditate al elementelor patrulatere6.3 Integrarea numerică folosind metoda Gauss-Legendre6.4 Elementul finit patrulater cu patru noduri, neconform6.5 Condensarea statică a gradelor de libertate interioare6.6 Elementul patrulater plan izoparametic cu opt noduri6.7 Elementul patrulater plan cu nouă noduri6.8 Calculul deformaţiilor specifice şi a tensiunilor în elementele finite
7. ELEMENTUL HEXAEDRAL CU OPT NODURI8. ELEMENTUL SHELL CU OPT NODURI9. CONCLUZII FINALE10. BIBLIOGRAFIE
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-2
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 491/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
PREFAŢĂ
Obiectivul principal al cursului este introducerea metodei elementelor finitepentru calculul numeric aproximativ al problemelor inginereşti în SAHP. Cursul seaxează în principal pe rezolvarea problemelor de analiză structurală dar prezintă şielemente din analiza termică şi de curgere a fluidelor. Metoda deplasărilor care stă laoriginea metodei elementelor finite este dezvoltată progresiv punându-se accent peformularea izoparametrică a elementelor finite. Prezentarea asigur ă o bază teoretică fundamentală solidă şi prezintă aspectele necesare pentru a aborda o serie deprobleme structurale cu ajutorul progamelor cu elemente finite.
Studentul poate obţine suportul teoretic fundamental al metodei elementelor finiteaplicată în analiza structurilor, putând estima tensiuni, deformaţii şi deplasări încontextul aproximării metodei precum şi a implementării în cadrul unui program decalcul.
Odată stăpânite bazele metodei elementelor finite, precum şi dispunând de
programe consacrate acestora se poate trece cu uşurinţă de la un domeniu de activitatela altul întrucât de cele mai multe ori ecuaţiile matematice care guvernează fenomenelesunt similare.
Acest curs se adresează cursanţilor care doresc să dobândească cunoştinţe debază referitoare la calcule de rezistenţă pentru structuri cu o geometrie complicată utilizând metoda elementelor finite.
Se prezintă aspectele teoretice, ipotezele de lucru precum şi a particularităţile demodelare (idealizare) în rezolvarea unor aplicaţii care asigur ă acumularea experienţeinecesare pentru analiza şi proiectarea sistemelor reale de inginerie mecanică.Principiile care se fixează sunt: 1. existenţa unor soluţii aproximative pentru problemelecu condiţii la limită; 2. Definirea problemelor continue/discrete; 3. Analiza structurală a
modelelor 2D; Folosirea celor utilizate elemente finite: bare articulate, grinzi, QUAD,BRICK şi SHELLL; 5. Generarea discretizării şi implicaţiile ei în analizele cu elementefinite.
Modelarea este o cale fundamentală şi cantitativă de percepţie a sistemelor şifenomenelor. Simularea corespunde aproximării tradiţionale dintre teorie şi experiment.Modelarea şi simularea ca întreg, permite abordarea unei clase largi de probleme fizicefiind posibilă numai folosind capacitatea de calcul a computerelor actuale. Prinmodelare şi simulare se pot aborda rapid probleme care au implicaţii în mai multediscipline.
Parcurgerea şi promovarea corespunzătoare a acestui curs, precum şistâpânirea disciplinelor cu care aceasta interfer ă, confer ă studentului o serie de
deprinderi inginereşti, care sunt enumerate în continuare.a) În general:
-abilitatea de a aplica cunoştinţe de matematică, programare şi inginerie;-abilitatea de a proiecta un sistem, o componentă a sa sau un proces care trebuie să asigure unele cerinţe de proiectare;-abilitatea de a identifica, formula şi rezolva o serie de probleme inginereşti;-abilitatea de a folosi tehnici moderne în practica inginerească;-familiarizarea cu noţiunile esenţiale ale metodei şi programelor de calcul cuelemente finite.
b) Concret, studenţii pot aborda o serie de probleme de analiză structurală pentru caresunt capabili să:
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-3
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 492/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
1. Obţină matricele de rigiditate pentru o structur ă plană din bare utilizând tehnicaasamblării directe;
2. Utilizeze principiul energiei potenţiale minime şi metoda Rayleigh-Ritz pentru aobţine soluţii aproximative la unele probleme structurale cu posibilitatea de a incorporaelementele finite izoparametrice;
3. Rezolve şi să analizeze o serie de structuri cu comportare liniar elastică (cadreplane, stare plană de tensiune/deformaţie, structuri axial simetrice şi chiar structuri 3Ddin bare, solide sau învelişuri) utilizând metoda elementelor finite cu programeconsacrate sau cu programe de firmă;
4. Poată citi şi să discute aplicaţii din literatura de specialitate;5. Fie în măsur ă a depista şi discuta o serie de greşeli care pot apare în procesul de
modelare, rezolvare şi interpretare a rezultatelor.Pentru parcurgerea acestui curs sunt necesare cunoştinţe de “Analiză
matematică I & II”, “Programarea şi utilizarea calculatoarelor I & II”, “Matematici specialeI & II”, "Mecanică", “Rezistenţa materialelor I & II”.
Pentru încheierea acestui capitol studentul va trebui să rezolve testele deverificare a cunoştinţelor existente în modulul următor.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-4
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 493/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
1. INTRODUCERE
1.1 Ce este MEF şi unde se aplicǎ ?
Metoda elementelor finite (MEF) este o metodǎ generalǎ de rezolvare aproximativǎ a ecuaţiilor diferenţiale cu derivate par ţiale care descriu sau nu fenomene fizice. PrincipialMEF constǎ în descompunerea domeniului de analiză în por ţiuni de formă geometrică simplă, analiza acestora şi recompunerea domeniului respectând anumite cerinţematematice.
Problema derivatelor par ţiale este redusǎ la un sistem de ecuaţii algebrice, la oproblemǎ de valori şi vectori proprii sau la un sistem de ecuaţii diferenţiale ordinare deordinul unu sau doi. Rezolvarea sistemelor de ecuaţii sau a problemelor de valori si vectoriproprii ar fi practic imposibilǎ dacǎ nu s-ar dispune de CALCULATOR şi SOFT - totalitateaprogramelor de calcul care realizeazǎ funcţionalitatea şi folosirea calculatorului inclusiv aunui program cu elemente finite. Pentru rezolvarea unei aplicaţii este nevoie şi de un
ANALIST, adică o persoană care să fie în măsur ă a folosi calculatorul şi programul cuelemente finite pentru a rezolva o aplicaţie. Din punct de vedere al domeniilor de aplicaţie metoda poate fi extinsǎ în orice
domeniu de activitate care descrie un fenomen cu ajutorul unor ecuaţii diferenţiale. Pânǎ în prezent metoda s-a dezvoltat în mod deosebit în domenii ca: analiza structuralǎ; analizatermicǎ; analiza fluidelor; analiza electricǎ; analiza magneticǎ, dar şi în analizafenomenelor complexe interdisciplinare cum ar fi: analiza termoelastică, analiza cuplată termic şi structural, analiza interacţiunii fluid-solid; analiza electro-magnetică; analizapiezoelectrică şi altele.
Se menţionează că această disciplină este relativ tânăr ă, astfel într-un un scurtistoric se pot menţiona:
-1943 – Courant studiază r ăsucirea - problema Saint Venant, prin discretizare cutriunghiuri;-1953 – 1959 Se formulează şi definitivează metoda deplasărilor la Boeing de
către Turner;-1960 – Se utilizează pentru prima dată termenul de element finit de către
Clough;-1967 – Apare prima carte despre metoda elementelor finite - Zienkiewicz şi
Cheung. MEF se aplică şi în alte domenii decât structural (termal, fluid,electromagnetic);
-1965 – 1972 se lucrează pentru dezvoltarea programului NASTRAN -1965 – apare programul SAMCEF
-1970 – apare programul ANSYS -1973 – apare SAP4 primul cod MEF sursă free;-1975 – apare ADINA -1978 – apare ABAQUS -1985 – apare COSMOS-M .
1.2 Cunoştinţe necesare pentru a realiza programe cu elemente finite
MEF are un caracter pluridisciplinar. Implementarea unor programe cu elementefinite pentru anumite tipuri de probleme sau chiar a unui program general de calcul îndomeniul ingineriei mecanice, cu precǎdere pentru calcule ale structurilor de rezistenţǎ,
impune stǎpânirea diciplinelor (vezi Fig. 1.1):
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-5
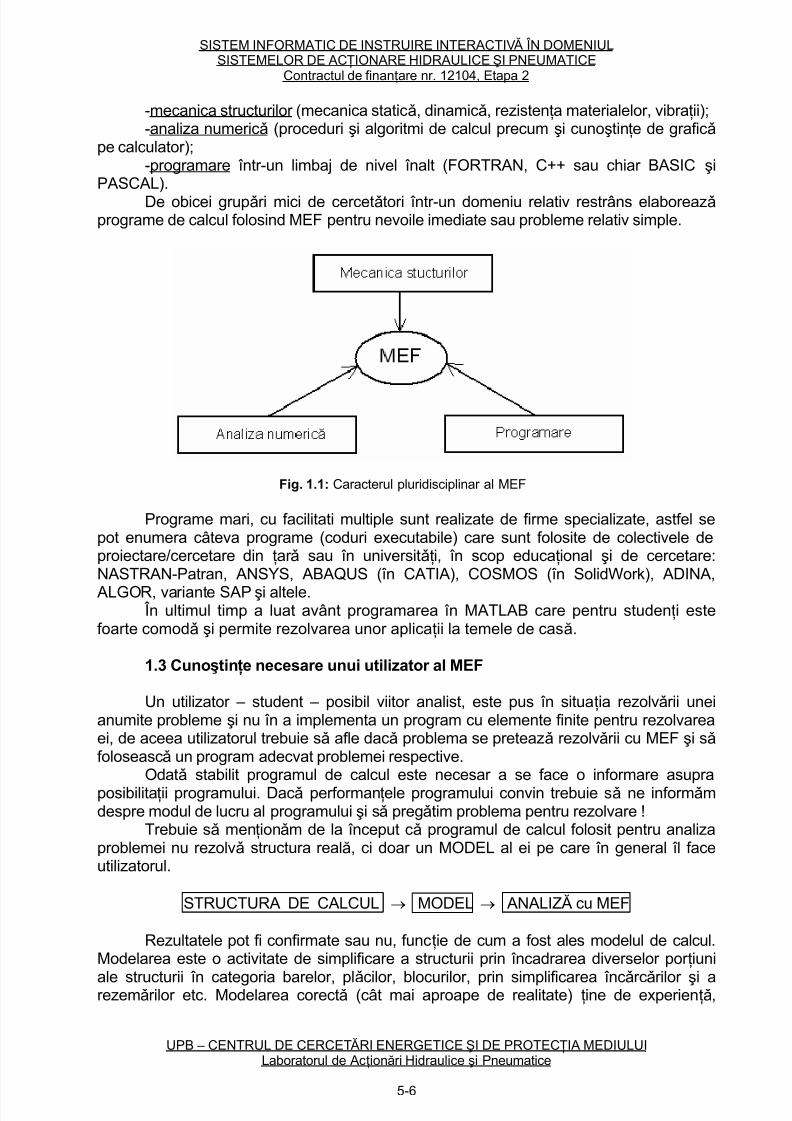
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 494/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
-mecanica structurilor (mecanica staticǎ, dinamicǎ, rezistenţa materialelor, vibraţii);-analiza numericǎ (proceduri şi algoritmi de calcul precum şi cunoştinţe de graficǎ
pe calculator);-programare într-un limbaj de nivel înalt (FORTRAN, C++ sau chiar BASIC şi
PASCAL).De obicei grupǎri mici de cercetǎtori într-un domeniu relativ restrâns elaboreazǎ
programe de calcul folosind MEF pentru nevoile imediate sau probleme relativ simple.
Fig. 1.1: Caracterul pluridisciplinar al MEF
Programe mari, cu facilitati multiple sunt realizate de firme specializate, astfel sepot enumera câteva programe (coduri executabile) care sunt folosite de colectivele deproiectare/cercetare din ţar ǎ sau în universitǎţi, în scop educaţional şi de cercetare:NASTRAN-Patran, ANSYS, ABAQUS (în CATIA), COSMOS (în SolidWork), ADINA,
ALGOR, variante SAP şi altele. În ultimul timp a luat avânt programarea în MATLAB care pentru studenţi este
foarte comodǎ şi permite rezolvarea unor aplicaţii la temele de casă.
1.3 Cunoştinţe necesare unui utilizator al MEF
Un utilizator – student – posibil viitor analist, este pus în situaţia rezolvǎrii uneianumite probleme şi nu în a implementa un program cu elemente finite pentru rezolvareaei, de aceea utilizatorul trebuie sǎ afle dacǎ problema se preteazǎ rezolvǎrii cu MEF şi sǎ foloseascǎ un program adecvat problemei respective.
Odatǎ stabilit programul de calcul este necesar a se face o informare asupraposibilitaţii programului. Dacǎ performanţele programului convin trebuie sǎ ne informǎmdespre modul de lucru al programului şi sǎ pregǎtim problema pentru rezolvare !
Trebuie sǎ menţionǎm de la început cǎ programul de calcul folosit pentru analizaproblemei nu rezolvǎ structura reală, ci doar un MODEL al ei pe care în general îl faceutilizatorul.
STRUCTURA DE CALCUL → MODEL → ANALIZ Ă cu MEF
Rezultatele pot fi confirmate sau nu, funcţie de cum a fost ales modelul de calcul.Modelarea este o activitate de simplificare a structurii prin încadrarea diverselor por ţiuni
ale structurii în categoria barelor, plǎcilor, blocurilor, prin simplificarea încǎrcǎrilor şi arezemǎrilor etc. Modelarea corectǎ (cât mai aproape de realitate) ţine de experienţǎ,
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-6
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 495/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
inspiraţie şi nu mai puţin de cunoaşterea bazelor teoretice ale metodei. De regulă unmodel se dezvoltă funcţie de scopul analizei.
Scopul cursului şi a lucr ǎrilor de laborator este de a scoate în evidenţǎ uneleaspecte ale modelǎrii şi a fixa noţiunile generale ale MEF astfel încât dupǎ promovareaacestei discipline utilizatorul (studentul) sǎ poatǎ aborda şi utiliza, cu mici rezerve, oricecod de MEF.
Cunoştinţele necesare se dobândesc pe mǎsur ǎ ce utilizatorul rezolvǎ diverseprobleme. Nu trebuie uitat faptul cǎ pentru a rezolva corect o problemǎ este absolutnecesar ǎ (nu şi suficientă) livrarea tuturor datelor care definesc problema.
Programele de firmǎ respectǎ anumite reguli generale de introducere a datelor (notaţii unificate, ordonarea comenzilor de pregǎtire a datelor, import modele din CAD,etc), ceea ce faciliteazǎ lucrul la programe diferite pentru utilizatori experimentaţi. Pentru începǎtori este indicat a se folosi un singur program de lucru.
Odatǎ stabilit modelul de calcul, se impune pregǎtirea datelor de intrare pentrurezolvarea problemei. Fiecare program cu elemente finite prezintǎ particularitǎti care
trebuie învǎţate dar existǎ o serie de reguli de bazǎ ale metodei care odatǎ stǎpânitepermite abordarea oricǎrui program cu elemente finite.Indiferent de metoda abordată, analiza unei structuri reale prezintă câteva etape
esenţiale:-structura reală se identifică, prin folosirea unor ipoteze simplificatoare, cu un
model fizic primar, numit “model conceptual”;-modelul primar serveşte la formularea unui “model matematic”, adică la un set
de ecuaţii care urmează a fi rezolvate;-rezultatele obţinute sunt interpretate şi dacă există motive întemeiate acestea
pot fi validate. Astfel seria celor două modele conceptual şi matematic pot fi folosite şipentru alte probleme similare.
1.4 Concepte de bază în MEF
Un domeniu solid oarecare, considerat plan numai din considerente deprezentare (Fig. 1.2.a), este raportat la un sistem de referinţă cartezian XOY , este încărcat cu o for ţă F şi încastrat pe conturul din stânga. Fiecare punct al domeniuluiprezintă o deplasare pe direcţia OX , notată ( )Y X u , şi una pe direcţia OY , ( )Y X v , .Domeniul prezentat poate fi identificat cu un model de calcul conceptual, totuşi încontinuare acesta se va numi structur ă. Problema prezentată reprezintă practic o bar ă de secţiune variabilă în consolă încărcată în capătul liber pentru care se caută soluţia,adică de exemplu săgeata şi tensiunea echivalentă maximă.
Din punct de vedere matematic, în teoria elasticităţii, problema prezentată estedescrisă de un set de ecuaţii diferenţiale cu derivate par ţiale şi de anumite condiţii lalimită. Pentru anumite cazuri particulare, adică forme geometrice simple şi încărcăribine alese, există soluţii analitice pentru expresiile câmpului deplasărilor şi altensiunilor. În general problema nu se poate rezolva pe cale analitică. Se menţionează că o rezolvare analitică prezintă soluţii pentru o infinitate de puncte din domeniul deanaliză. Se spune că domeniul de analiză reprezintă o structur ă continuă. O alternativă de a rezolva astfel de probleme o constituie metoda elementelor finite (MEF).
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-7

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 496/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
(a) (b)
Fig. 1.2: Abordarea unei probleme în MEF. (a) Domeniu de analiză;(b) Discretizarea domeniului de analiză
Pentru a rezolva problema cu MEF, domeniul de analiză (sau volumul structurii)notat V , se împarte într-un număr NE de subdomenii sau fragmente (por ţiuni de formă geometrică relativ simplă, fiecare de volum V
e) numite elemente finite. Deoarece
elementele finite nu se intersectează între ele se poate scrie că . Fiecare
element finit se numerotează (este identificat printr-un număr), de obicei de la 1 lanumărul total de elemente finite NE . Raportarea la un element oarecare se face deobicei printr-un indice superior (“e” pentru un element oarecare).
∑=
=NE
e
eV V 1
Elementele finite se pun în evidenţă (geometric) prin intermediul unor puncte, deexemplu colţurile triunghiului, dacă elementul finit are forma unui triunghi. Aceste punctepoartă denumirea de noduri . Elementele finite "se leagă" (interacţionează) între ele prinintermediul nodurilor comune, astfel că în domeniul de analiză există un număr finit denoduri. Similar elementelor, nodurile se numerotează, de obicei, de la 1 la numărul total
de noduri NN .Operaţia de împăr ţire a unui domeniu în noduri şi elemente finite de un singur tip
sau chiar mai multe tipuri, precum şi numerotarea acestora, adică atribuirea unor numere de identificare, poartă denumirea de discretizare (Fig. 1.2,b). Discretizarea nueste unică, în general ea se realizează astfel încât să r ăspundă unor cerinţe practice.
Pentru exemplul prezentat, fiecare nod din domeniul de analiză are o deplasareposibilă pe orizontală-axa OX şi una pe verticală-axa OY , se poate spune că există doiparametri independenţi care definesc unic deplasarea unui nod în plan. Aceşti parametripoartă denumirea de grade de libertate ataşate nodului. De obicei, gradele de libertateale tuturor nodurilor definite reprezintă necunoscutele primare ale problemei în MEF, înexemplul de faţă, gradele de libertate nodate UX şi UY definesc deplasarea "posibilă" aunui nod oarecare.
Pentru unele noduri (1, 2 , 3 şi 4 din încastrare), deplasările sunt nule, deci înaceste puncte gradele de libertate se definesc "potenţial", ele nu reprezintă necunoscute. Numărul total de grade de libertate al problemei N se obţine prin însumarea gradelor de libertate active ale tuturor nodurilor. Prin grade de libertateactive se înţeleg acele grade de libertate care definesc o deplasare necunoscută.
Din cele prezentate mai sus rezultă că un domeniu continuu cu un număr infinitde grade de libertate este transpus într-un model discret cu N grade de libertate, decinecunoscutele problemei se limitează funcţie de discretizare.
Deoarece analiza cu elemente finite este dependentă de implementarea unor
programe de calcul, mărimile cu care aceasta lucrează sunt de regulă vectori şi matrice.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-8
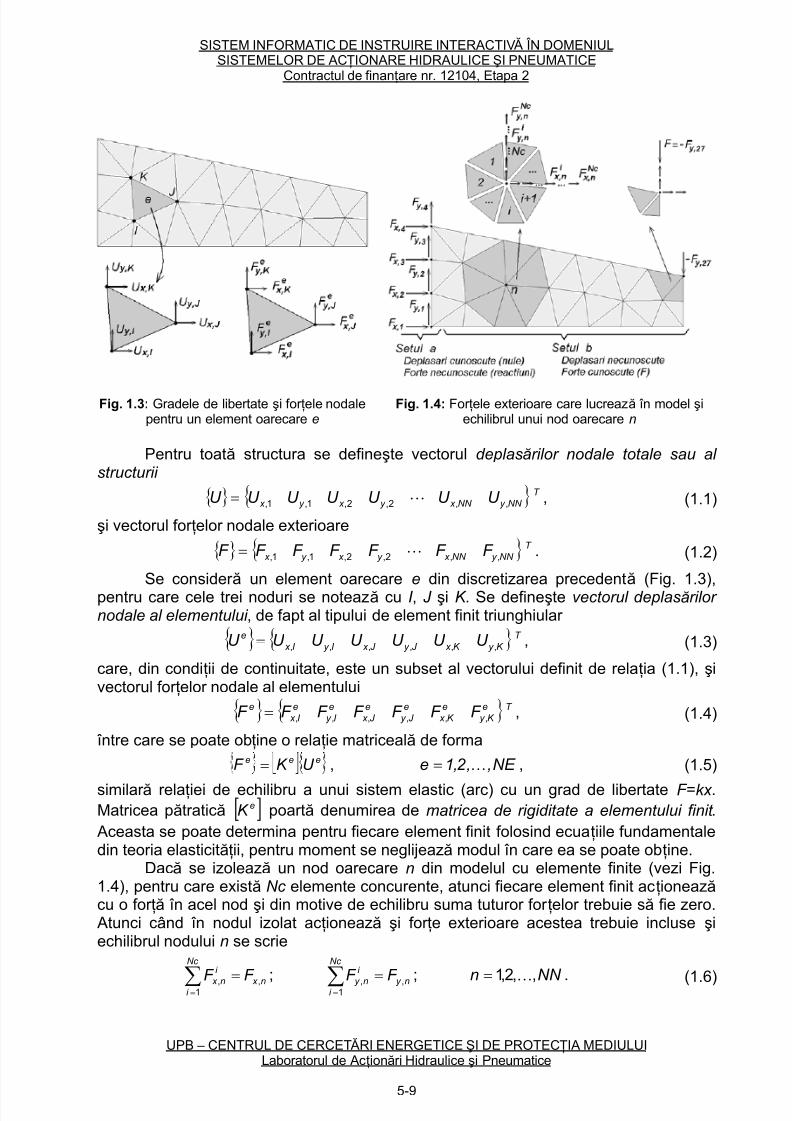
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 497/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig. 1.3: Gradele de libertate şi for ţele nodalepentru un element oarecare e
Fig. 1.4: For ţele exterioare care lucrează în model şiechilibrul unui nod oarecare n
Pentru toată structura se defineşte vectorul deplasărilor nodale totale sau al structurii
{ } { } T
NN y NN x y x y x U U U U U U U ,,2,2,1,1, L= , (1.1)
şi vectorul for ţelor nodale exterioare
{ } { } T
NN y NN x y x y x F F F F F F F ,,2,2,1,1, L= . (1.2)
Se consider ă un element oarecare e din discretizarea precedentă (Fig. 1.3),pentru care cele trei noduri se notează cu I , J şi K . Se defineşte vectorul deplasărilor nodale al elementului , de fapt al tipului de element finit triunghiular
{ } { } T
K y K x J y J x I y I x
e U U U U U U U ,,,,,,= , (1.3)
care, din condiţii de continuitate, este un subset al vectorului definit de relaţia (1.1), şivectorul for ţelor nodale al elementului
{ } { }T e
K y
e
K x
e
J y
e
J x
e
I y
e
I x
e F F F F F F F ,,,,,,= , (1.4)
între care se poate obţine o relaţie matriceală de formaeee U K F = , NE ,,2 ,1e K= , (1.5)
similar ă relaţiei de echilibru a unui sistem elastic (arc) cu un grad de libertate F =kx .Matricea pătratică [ ]eK poartă denumirea de matricea de rigiditate a elementului finit . Aceasta se poate determina pentru fiecare element finit folosind ecuaţiile fundamentaledin teoria elasticităţii, pentru moment se neglijează modul în care ea se poate obţine.
Dacă se izolează un nod oarecare n din modelul cu elemente finite (vezi Fig.1.4), pentru care există Nc elemente concurente, atunci fiecare element finit acţionează cu o for ţă în acel nod şi din motive de echilibru suma tuturor for ţelor trebuie să fie zero. Atunci când în nodul izolat acţionează şi for ţe exterioare acestea trebuie incluse şiechilibrul nodului n se scrie
n x
Nc
i
i
n x F F ,1 ,=
∑= ; ;ny
Nc
i
i
ny F F ,1 ,=
∑= NN n ,,2,1 K=
. (1.6)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-9

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 498/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Dacă seţine seama de cele NN 2 ecuaţii (6), şi în expresiile sumelor se introducfor ţele obţinute din relaţiile (5), se obţine o relaţie matriceală de forma
{ } [ ]{ }U K F = , (1.7)
în care [ este numită matricea de rigiditate global ă a structurii . Această operaţie de
obţinere a matricei de rigiditate globale din matricele de rigiditate a elementelor poartă denumirea de asamblarea matricei de rigiditate global ă şi se prezintă sugestiv înschema
]K
[ ]{ } { } [ ]{ } { }F U K F U K ASAMBLARE
NE e
eee == →= ,,2,1 K
.
Dimensiunea matricei de rigiditate [ ]K este NN NN 22 × şi de obicei aceastarezultă singular ă, deci din ecuaţia (1.7) nu se pot obţine direct deplasările necunoscute.Dacă însă se ţine seama de condiţiile la limită, adică pentru unele noduri se cunoscdeplasările iar pentru altele for ţele exterioare aplicate şi gradele de libertate se clasifică
în două seturi (vezi Fig. 1.4):-a) deplasări cunoscute (de cele mai multe ori nule) şi for ţe exterioare reacţiuni
necunoscute;-b) deplasări necunoscute şi for ţe exterioare aplicate cunoscute;
atunci ecuaţiile (1.7) se pot partiţiona (rearanja) în raport cu acestea astfel
[ ] [ ][ ] [ ]
{ }{ }
{ }{ } ⎭
⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡
b
a
b
a
bbba
abaa
F
F
U
U
K K
K K . (1.8)
Din a doua ecuaţie matriceală (1.8) rezultă deplasările necunoscute
{ } [ ] { } [ ] { }( )ababbbb U K F K U -1
= , (1.9)
iar apoi din prima ecuaţie (1.8) rezultă for ţele necunoscute (reacţiunile){ } [ ] { } [ ] { }babaaaa U K U K F += . (1.10)
Deplasarea nodului 27 (vezi Fig. 1.2.b) pe direcţia OY reprezintă practic săgeatamaximă a grinzii. Din formularea completă a MEF, folosind deplasările nodale, se potobţine şi tensiunile în elemente. Aceste aspecte însă se prezintă în ale capitole.
Cunoscând câmpul deplasărilor în cele NN noduri se poate reprezenta, scalatpentru o vizualizare convenabilă, configuraţia deformatei structurii (Fig. 1.5,a). Dacă însă matricele de rigiditate ale elementelor nu au fost "adecvat" calculate, având învedere că elementele sunt legate între ele numai în noduri, uneori e posibil cadeformata să fie în realitate ca în figura 1.5,b, adică să apar ă goluri sau suprapuneri între laturile elementelor finite adiacente, adică nu este îndeplinită condiţia decontinuitate între laturile comune elementelor finite. Rezultă că modul în care sunt“proiectate” elementele finite este foarte important şi practic soluţia unor problemedepinde esenţial de formularea elementelor finite care trebuie să satisfacă unele cerinţefundamentale pentru a putea fi incluse în categoria elementelor finite dintr-un program.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-10
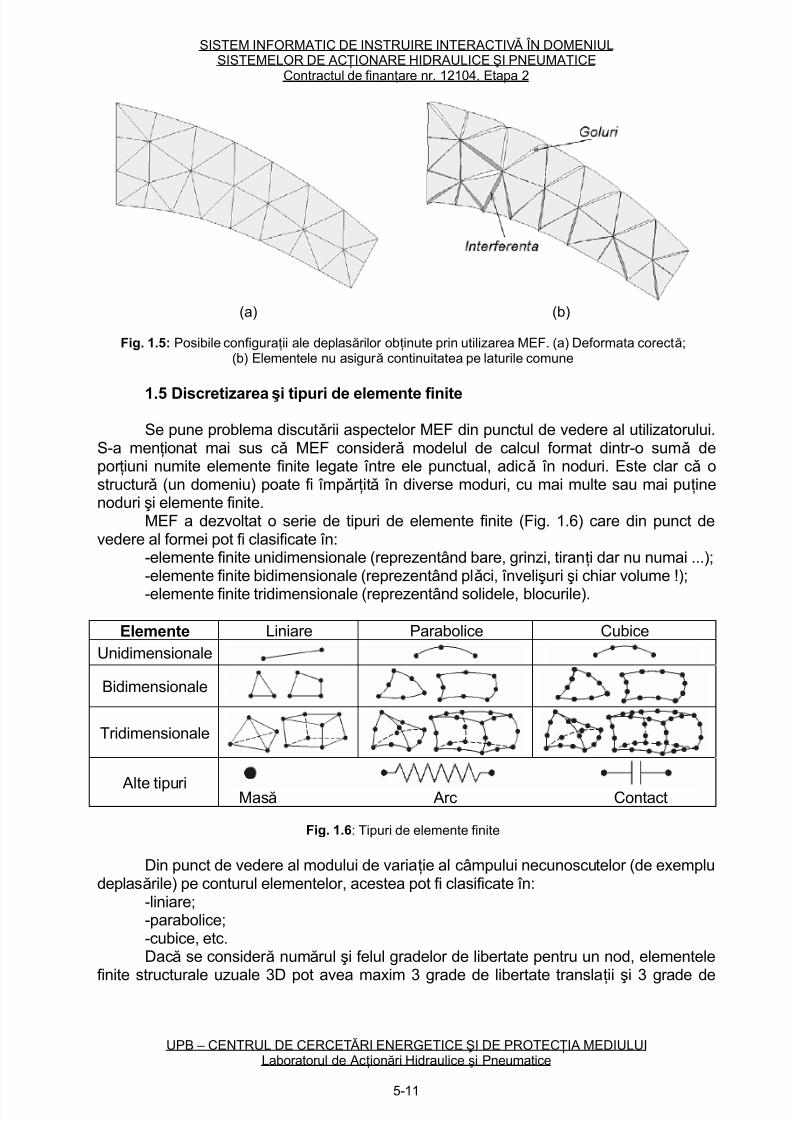
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 499/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
(a) (b)
Fig. 1.5: Posibile configuraţii ale deplasărilor obţinute prin utilizarea MEF. (a) Deformata corectă;(b) Elementele nu asigur ă continuitatea pe laturile comune
1.5 Discretizarea şi tipuri de elemente finite
Se pune problema discutǎrii aspectelor MEF din punctul de vedere al utilizatorului.S-a menţionat mai sus cǎ MEF consider ǎ modelul de calcul format dintr-o sumǎ depor ţiuni numite elemente finite legate între ele punctual, adicǎ în noduri. Este clar cǎ ostructur ǎ (un domeniu) poate fi împǎr ţitǎ în diverse moduri, cu mai multe sau mai puţinenoduri şi elemente finite.
MEF a dezvoltat o serie de tipuri de elemente finite (Fig. 1.6) care din punct devedere al formei pot fi clasificate în:
-elemente finite unidimensionale (reprezentând bare, grinzi, tiranţi dar nu numai ...);-elemente finite bidimensionale (reprezentând plǎci, învelişuri şi chiar volume !);
-elemente finite tridimensionale (reprezentând solidele, blocurile).
Elemente Liniare Parabolice Cubice
Unidimensionale
Bidimensionale
Tridimensionale
Alte tipuri Masă Arc Contact
Fig. 1.6: Tipuri de elemente finite
Din punct de vedere al modului de variaţie al câmpului necunoscutelor (de exempludeplasările) pe conturul elementelor, acestea pot fi clasificate în:
-liniare;-parabolice;-cubice, etc.Dacă se consider ă numărul şi felul gradelor de libertate pentru un nod, elementele
finite structurale uzuale 3D pot avea maxim 3 grade de libertate translaţii şi 3 grade de
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-11
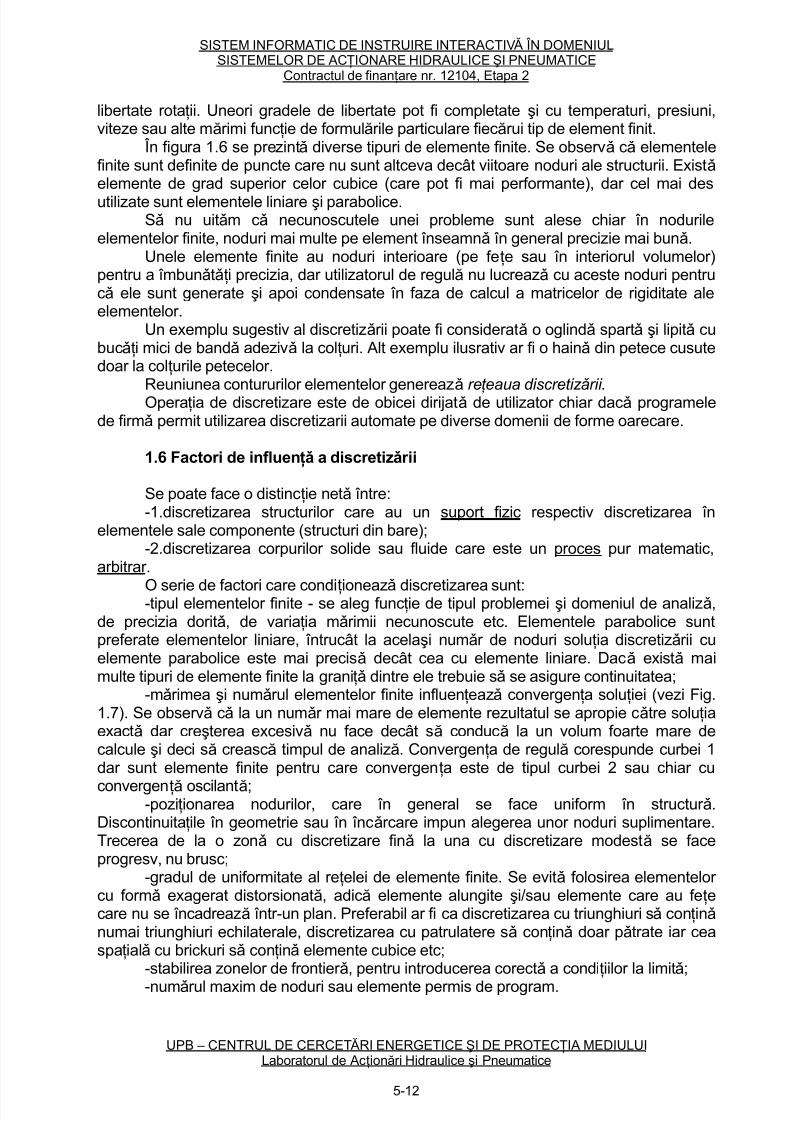
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 500/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
libertate rotaţii. Uneori gradele de libertate pot fi completate şi cu temperaturi, presiuni,viteze sau alte mărimi funcţie de formulările particulare fiecărui tip de element finit.
În figura 1.6 se prezintǎ diverse tipuri de elemente finite. Se observǎ cǎ elementelefinite sunt definite de puncte care nu sunt altceva decât viitoare noduri ale structurii. Existǎ elemente de grad superior celor cubice (care pot fi mai performante), dar cel mai desutilizate sunt elementele liniare şi parabolice.
Sǎ nu uitǎm cǎ necunoscutele unei probleme sunt alese chiar în nodurileelementelor finite, noduri mai multe pe element înseamnǎ în general precizie mai bunǎ.
Unele elemente finite au noduri interioare (pe feţe sau în interiorul volumelor)pentru a îmbunǎtǎţi precizia, dar utilizatorul de regulă nu lucreazǎ cu aceste noduri pentrucǎ ele sunt generate şi apoi condensate în faza de calcul a matricelor de rigiditate aleelementelor.
Un exemplu sugestiv al discretizǎrii poate fi consideratǎ o oglindǎ spartǎ şi lipitǎ cubucǎţi mici de bandǎ adezivǎ la colţuri. Alt exemplu ilusrativ ar fi o hainǎ din petece cusutedoar la colţurile petecelor.
Reuniunea contururilor elementelor genereazǎ reţ eaua discretiz ǎrii .Operaţia de discretizare este de obicei dirijatǎ de utilizator chiar dacǎ programelede firmǎ permit utilizarea discretizarii automate pe diverse domenii de forme oarecare.
1.6 Factori de influenţǎ a discretizǎrii
Se poate face o distincţie netǎ între:-1.discretizarea structurilor care au un suport fizic respectiv discretizarea în
elementele sale componente (structuri din bare);-2.discretizarea corpurilor solide sau fluide care este un proces pur matematic,
arbitrar.
O serie de factori care condiţioneazǎ discretizarea sunt:-tipul elementelor finite - se aleg funcţie de tipul problemei şi domeniul de analizǎ,de precizia doritǎ, de variaţia mǎrimii necunoscute etc. Elementele parabolice suntpreferate elementelor liniare, întrucât la acelaşi numǎr de noduri soluţia discretizǎrii cuelemente parabolice este mai precisǎ decât cea cu elemente liniare. Dacǎ existǎ maimulte tipuri de elemente finite la graniţǎ dintre ele trebuie sǎ se asigure continuitatea;
-mǎrimea şi numǎrul elementelor finite influenţeazǎ convergenţa soluţiei (vezi Fig.1.7). Se observǎ cǎ la un numǎr mai mare de elemente rezultatul se apropie cǎtre soluţiaexactǎ dar creşterea excesivǎ nu face decât să conducă la un volum foarte mare decalcule şi deci să crească timpul de analiză. Convergenţa de regulă corespunde curbei 1dar sunt elemente finite pentru care convergenţa este de tipul curbei 2 sau chiar cu
convergenţă oscilantă;-poziţionarea nodurilor, care în general se face uniform în structur ǎ.
Discontinuitaţile în geometrie sau în încǎrcare impun alegerea unor noduri suplimentare.Trecerea de la o zonǎ cu discretizare finǎ la una cu discretizare modestă se faceprogresv, nu brusc;
-gradul de uniformitate al reţelei de elemente finite. Se evitǎ folosirea elementelor cu formǎ exagerat distorsionată, adică elemente alungite şi/sau elemente care au feţecare nu se încadrează într-un plan. Preferabil ar fi ca discretizarea cu triunghiuri sǎ conţinǎ numai triunghiuri echilaterale, discretizarea cu patrulatere sǎ conţinǎ doar pǎtrate iar ceaspaţialǎ cu brickuri sǎ conţinǎ elemente cubice etc;
-stabilirea zonelor de frontier ǎ, pentru introducerea corectǎ a condiţiilor la limitǎ;
-numǎrul maxim de noduri sau elemente permis de program.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-12
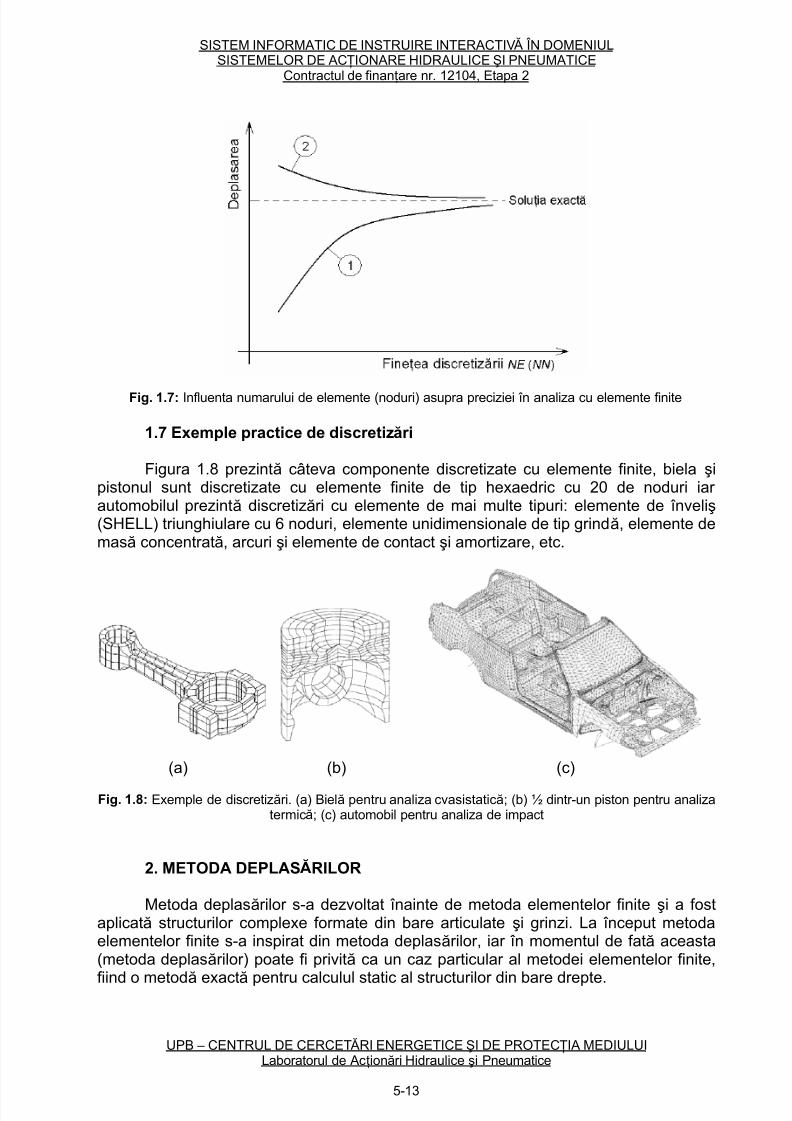
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 501/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig. 1.7: Influenta numarului de elemente (noduri) asupra preciziei în analiza cu elemente finite
1.7 Exemple practice de discretizări
Figura 1.8 prezintă câteva componente discretizate cu elemente finite, biela şipistonul sunt discretizate cu elemente finite de tip hexaedric cu 20 de noduri iar automobilul prezintă discretizări cu elemente de mai multe tipuri: elemente de înveliş (SHELL) triunghiulare cu 6 noduri, elemente unidimensionale de tip grindă, elemente demasă concentrată, arcuri şi elemente de contact şi amortizare, etc.
(a) (b) (c)
Fig. 1.8: Exemple de discretizări. (a) Bielă pentru analiza cvasistatică; (b) ½ dintr-un piston pentru analizatermică; (c) automobil pentru analiza de impact
2. METODA DEPLASĂRILOR
Metoda deplasărilor s-a dezvoltat înainte de metoda elementelor finite şi a fostaplicată structurilor complexe formate din bare articulate şi grinzi. La început metodaelementelor finite s-a inspirat din metoda deplasărilor, iar în momentul de fată aceasta(metoda deplasărilor) poate fi privită ca un caz particular al metodei elementelor finite,
fiind o metodă exactă pentru calculul static al structurilor din bare drepte.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-13

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 502/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Prezentarea metodei deplasărilor constituie pentru cititorul care stăpâneşteelementele de bază din rezistenţa materialelor o mai uşoar ă înţelegere a unor noţiuni debază cum ar fi matricea de rigiditate a unui element şi asamblarea matricei de rigiditatea structurii.
Se consider ă o structur ă simplă din bare articulate în plan, pentru care seprezintă modul de obţinere a matricei de rigiditate a elementului în coordonate locale şiglobale, modul de asamblare a matricei de rigiditate a stucturii, impunerea condiţiilor lalimită şi rezolvarea problemei pentru o analiză statică liniar ă.
2.1 Aplicaţie
Structura din Fig. 2.1,a este formată dintr-o serie de bare articulate în planulXOY, pentru care se presupun cunoscute elementele geometrice şi materialul din careacestea sunt confecţionate. Articulaţiile sunt de tip cilindric şi în bolţurile care asigur ă îmbinarea barelor se aplică o serie de for ţe exterioare conoscute F şi 2F precum şi o
serie de for ţe de legătur ă (reacţiuni) în articulaţia din stânga şi reazemul simplu dindreapta. Dacă se presupune că nu interesează decât comportarea celor 5 bare (Fig.2.1,b) şi bolţurile se consider ă rigide, modelul conceptual se prezintă în Fig. 2,a.
(a) (b)
Fig. 2.1: Structur ă din bare articulate. (a) Modul de fixare şi încărcare;(b) elementele componente care se analizează
Structura din Fig. 2.2,a, raportată la sistemul global de referinţă XOY , esteformată din cinci bare articulate în plan. Cunoscând lungimea l , ariile barelor deparametru A, modulul de elasticitate longitudinal E , constant la toate barele, şi valoareaparametrului F care defineşte for ţele, se cere să se determine deplasările nodurilor,
reacţiunile în reazeme şi for ţele axiale (eforturile) în bare.
(a) (b)
Fig. 2.2: Modelul de calcul. (a) datele problemei; (b) discretizarea: noduri şi elemente de tip bar ă articulată 2D
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-14
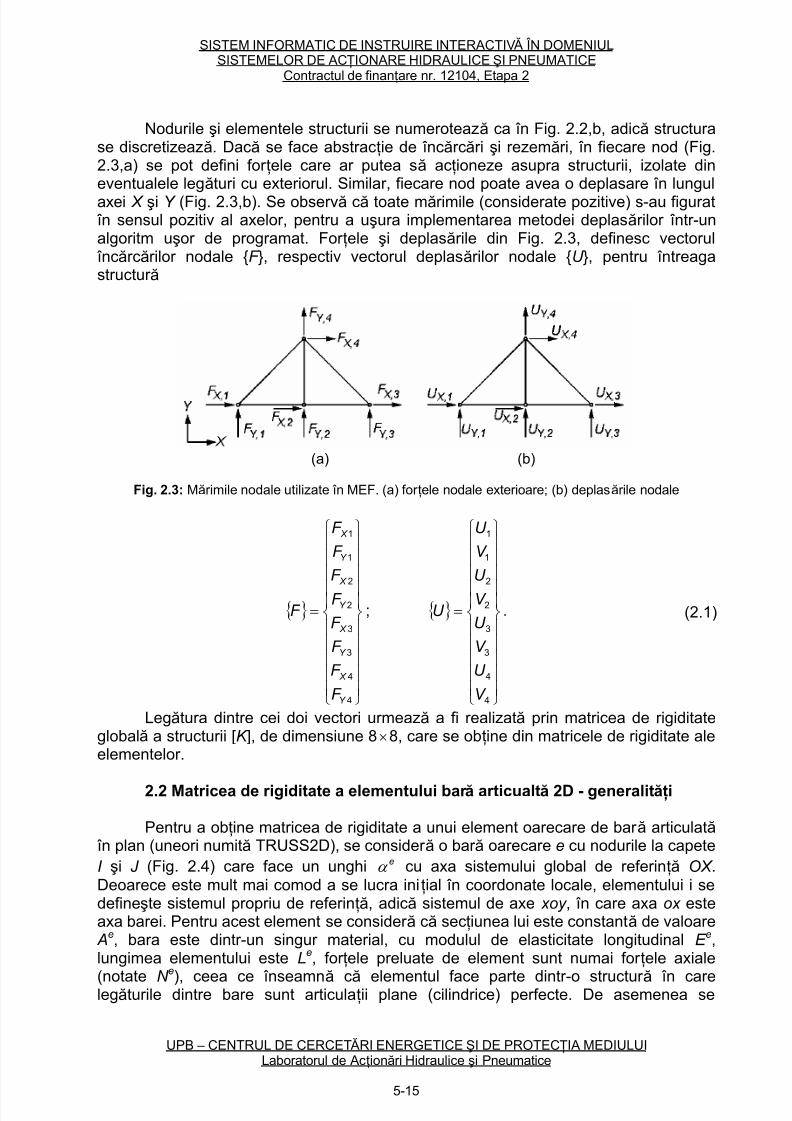
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 503/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Nodurile şi elementele structurii se numerotează ca în Fig. 2.2,b, adică structura
se discretizează. Dacă se face abstracţie de încărcări şi rezemări, în fiecare nod (Fig.2.3,a) se pot defini for ţele care ar putea să acţioneze asupra structurii, izolate dineventualele legături cu exteriorul. Similar, fiecare nod poate avea o deplasare în lungulaxei X şi Y (Fig. 2.3,b). Se observă că toate mărimile (considerate pozitive) s-au figurat în sensul pozitiv al axelor, pentru a uşura implementarea metodei deplasărilor într-unalgoritm uşor de programat. For ţele şi deplasările din Fig. 2.3, definesc vectorul încărcărilor nodale {F }, respectiv vectorul deplasărilor nodale {U }, pentru întreagastructur ă
(a) (b)
Fig. 2.3: Mărimile nodale utilizate în MEF. (a) for ţele nodale exterioare; (b) deplasările nodale
; .{ }
⎪⎪⎪⎪⎪
⎭
⎪⎪
⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪
⎪⎪⎪
⎨
⎧
=
4
4
3
3
2
2
1
1
Y
X
Y
X
Y
X
Y
X
F
F
F
F
F
F
F
F
F { }
⎪⎪⎪⎪⎪
⎭
⎪⎪
⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪
⎪⎪⎪
⎨
⎧
=
4
4
3
3
2
2
1
1
V
U
V
U
V
U
V
U
U (2.1)
Legătura dintre cei doi vectori urmează a fi realizată prin matricea de rigiditateglobală a structurii [K ], de dimensiune 8×8, care se obţine din matricele de rigiditate aleelementelor.
2.2 Matricea de rigiditate a elementului bar ă articualtă 2D - generalităţi
Pentru a obţine matricea de rigiditate a unui element oarecare de bar ă articulată în plan (uneori numită TRUSS2D), se consider ă o bar ă oarecare e cu nodurile la capeteI şi J (Fig. 2.4) care face un unghi cu axa sistemului global de referinţă OX .Deoarece este mult mai comod a se lucra iniţial în coordonate locale, elementului i sedefineşte sistemul propriu de referinţă, adică sistemul de axe xoy , în care axa ox esteaxa barei. Pentru acest element se consider ă că secţiunea lui este constantă de valoare A
eα
e, bara este dintr-un singur material, cu modulul de elasticitate longitudinal E e,lungimea elementului este L
e, for ţele preluate de element sunt numai for ţele axiale
(notate N
e
), ceea ce înseamnă că elementul face parte dintr-o structur ă în carelegăturile dintre bare sunt articulaţii plane (cilindrice) perfecte. De asemenea se
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-15
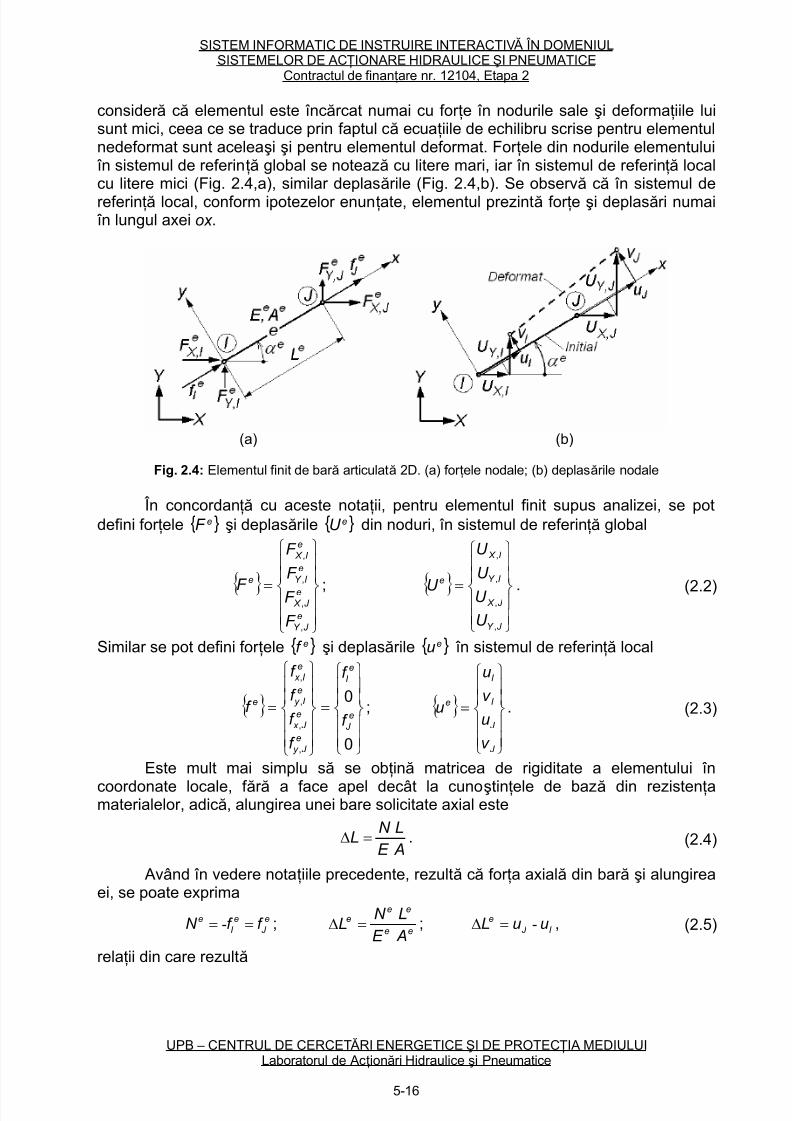
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 504/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
consider ă că elementul este încărcat numai cu for ţe în nodurile sale şi deformaţiile luisunt mici, ceea ce se traduce prin faptul că ecuaţiile de echilibru scrise pentru elementulnedeformat sunt aceleaşi şi pentru elementul deformat. For ţele din nodurile elementului în sistemul de referinţă global se notează cu litere mari, iar în sistemul de referinţă localcu litere mici (Fig. 2.4,a), similar deplasările (Fig. 2.4,b). Se observă că în sistemul dereferinţă local, conform ipotezelor enunţate, elementul prezintă for ţe şi deplasări numai în lungul axei ox .
(a) (b)
Fig. 2.4: Elementul finit de bar ă articulată 2D. (a) for ţele nodale; (b) deplasările nodale
În concordanţă cu aceste notaţii, pentru elementul finit supus analizei, se potdefini for ţele şi deplasările din noduri, în sistemul de referinţă global{ eF } { }eU
{ }⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
=e
J Y
eJ X
e
I Y
e
I X
e
F
F
F
F
F
,
,
,
,
; .{ }⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
=
J Y
J X
I Y
I X
e
U
U
U
U
U
,
,
,
,
(2.2)
Similar se pot defini for ţele şi deplasările în sistemul de referinţă local{ }ef { }eu
{ }
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
=
0
0
,
,
,
,
e
J
e
I
e
J y
e
J x
e
I y
eI x
e
f
f
f
f
f
f
f ; .{ }
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
=
J
J
I
I
e
v
u
v
u
u (2.3)
Este mult mai simplu să se obţină matricea de rigiditate a elementului în
coordonate locale, f ăr ă a face apel decât la cunoştinţele de bază din rezistenţamaterialelor, adică, alungirea unei bare solicitate axial este
AE
LN L =Δ . (2.4)
Având în vedere notaţiile precedente, rezultă că for ţa axială din bar ă şi alungireaei, se poate exprima
e
J
e
I
e f f N == - ;ee
eee
AE
LN L =Δ ; ,I J
e uuL -=Δ (2.5)
relaţii din care rezultă
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-16

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 505/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
( )
( )⎪⎪⎩
⎪⎪⎨
⎧
=
=
J I J
J I I
uuL
AE f
uuL
AE f
--
-
, (2.6)
în care s-a renunţat la indicele elementului e.
2.3 Expresia matricei de rigiditate în coordonate locale
Considerând relaţiile de definiţie (2.3), împreună cu relaţiile (2.6), se poate scrie
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
e
J y
e
J y
e
I x
e
I x
J
J
I
I
f
f
f
f
v
u
v
u
L
AE
,
,
,
,
0000
0101
0000
0101
-
-
⇔ [ ]{ } { }eee f uk = , (2.7)
relaţie în care se pune în evidenţă matricea de rigiditate a elementului încoordonate locale
[ ek ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
=
0000
0101
0000
0101
L
AE k e . (2.8)
2.4 Expresia matricea de rigiditate în coordonate globale
Pentru a obţine matricea de rigiditate în coordonate globale se folosesc relaţiilede legătur ă între deplasările şi for ţele locale şi globale.
Transformarea deplasărilor. Din Fig. 2.4,b rezultă
⎪⎪
⎩
⎪⎪
⎨
⎧
+=
+=
+−=
+=
α α
α α
α α
α α
cossin
sincos
cossin
sincos
,,
,,
,,
,,
J Y J X I
J Y J X I
I Y I X I
I Y I X I
U U v
U U u
U U v
U U u
⇔
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
J Y
J X
I Y
I X
J
J
I
I
U
U
U
U
v
u
v
u
,
,
,
,
cossin00
sincos00
00cossin
00sincos
α α
α α
α α
α α
. (2.9)
Dacă
se defineşte matricea de transformare
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−=
c s
sc
c s
sc
T e
00
00
00
00
cossin00
sincos00
00cossin
00sincos
α α
α α
α α
α α
, (2.10)
în care s-a notat α cos=c , α sin=s , relaţia (2.9) se rescrie
eee U T u = . (2.11)
Transformarea for ţ elor. Din Fig. 2.4,a rezultă
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-17
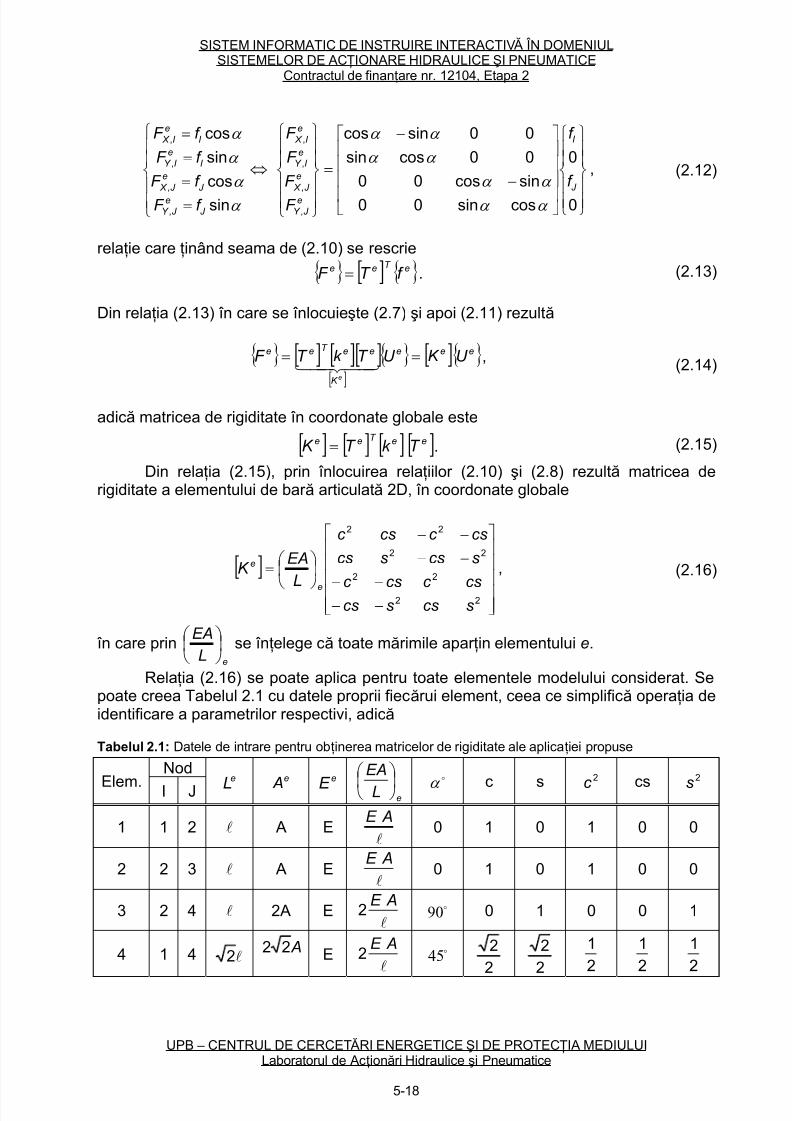
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 506/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
⎪⎪
⎩
⎪⎪
⎨
⎧
=
=
=
=
α
α
α
α
sin
cos
sin
cos
,
,
,
,
J
e
J Y
J
e
J X
I
e
I Y
I
e
I X
f F
f F
f F
f F
⇔ ,
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥
⎥⎥⎥
⎦
⎤
⎢
⎢⎢⎢
⎣
⎡
−
−
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
0
0
cossin00
sincos00
00cossin
00sincos
,
,
,
,
J
I
e
J Y
e
J X
eI Y
e
I X
f
f
F
F
F
F
α α
α α
α α
α α
(2.12)
relaţie care ţinând seama de (2.10) se rescrie
{ } [ ] { }eT ee f T F = . (2.13)
Din relaţia (2.13) în care se înlocuieşte (2.7) şi apoi (2.11) rezultă
{ } [ ] [ ][ ][ ]
{ } [ ]{ }eee
K
eeT ee U K U T k T F e
==4 434 421
, (2.14)
adică matricea de rigiditate în coordonate globale este
[ ] [ ] [ ] [ ]eeT ee T k T K = . (2.15)
Din relaţia (2.15), prin înlocuirea relaţiilor (2.10) şi (2.8) rezultă matricea derigiditate a elementului de bar ă articulată 2D, în coordonate globale
[ ]
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
−−
−−
⎟
⎠
⎞⎜
⎝
⎛ =
22
22
22
22
scsscscsc csc
scsscs
csc csc
L
EAK
e
e , (2.16)
în care prineL
EA⎟
⎠
⎞⎜⎝
⎛ se înţelege că toate mărimile apar ţin elementului e.
Relaţia (2.16) se poate aplica pentru toate elementele modelului considerat. Sepoate creea Tabelul 2.1 cu datele proprii fiecărui element, ceea ce simplifică operaţia deidentificare a parametrilor respectivi, adică
Tabelul 2.1: Datele de intrare pentru obţinerea matricelor de rigiditate ale aplicaţiei propuse
Nod
Elem. I Je
L e
A e
E eL
EA
⎟ ⎠
⎞
⎜⎝
⎛ o
α c s2
c cs2
s
1 1 2 l A El
AE 0 1 0 1 0 0
2 2 3 l A El
AE 0 1 0 1 0 0
3 2 4 l 2A E 2l
AE o
90 0 1 0 0 1
4 1 4 l2A22
E 2
l
AE o
45 2
2
2
2
2
1
2
1
2
1
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-18

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 507/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
5 3 4 l2A22
E 2
l
AE o
135 -22
22
2
1-
2
1
2
1
Folosind datele din Tabelul 2.1 rezultă matricele de rigiditate ale elementelor, în
coordonate globale:
[ ] [ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
==
0000
0101
0000
0101
21
l
EAK K ;
[ ]
⎥
⎥⎥⎥
⎦
⎤
⎢
⎢⎢⎢
⎣
⎡
−
−=
2020
0000
2020
0000
3
l
EAK
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
−−
−−
−−
=
1111
1111
1111
1111
4
l
EAK ;
[ ]⎥⎥⎥
⎥
⎦
⎤
⎢⎢⎢
⎢
⎣
⎡
−−
−−
−−
−−
=
1111
1111
1111
1111
5
l
EAK .
Se observă că matricele de rigiditate ale elementelor sunt simetrice, au valori maimari sau egale cu zero pe diagonala principală şi sunt deficiente de rang. Rangulmatricelor este 4-3=1, unde 4 este dimensiunea matricei iar 3 este numărul de mişcăride corp rigid al elementului: translaţie pe direcţiile axelor OX şi OY şi rotaţie faţă de axaOZ.
2.5 Asamblarea matricei de rigiditate a structurii
Dacă se izolează nodurile şi elementele modelului discretizat (Fig. 2.5) trebuieintroduse for ţele interioare la nivelul fiecărui element finit şi respectiv nod. Semenţionează că aceste for ţe apar perechi, au sensuri opuse şi sunt egale în moduldouă câte două. Echilibrul elementelor este asigurat de relaţia (2.5,a). Din echilibrulnodurilor se poate obţine o relaţie matriceală generală care include for ţele nodaleexterioare şi deplasările nodale f ăr ă a ţine seama de condiţiile la limită particulare.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-19
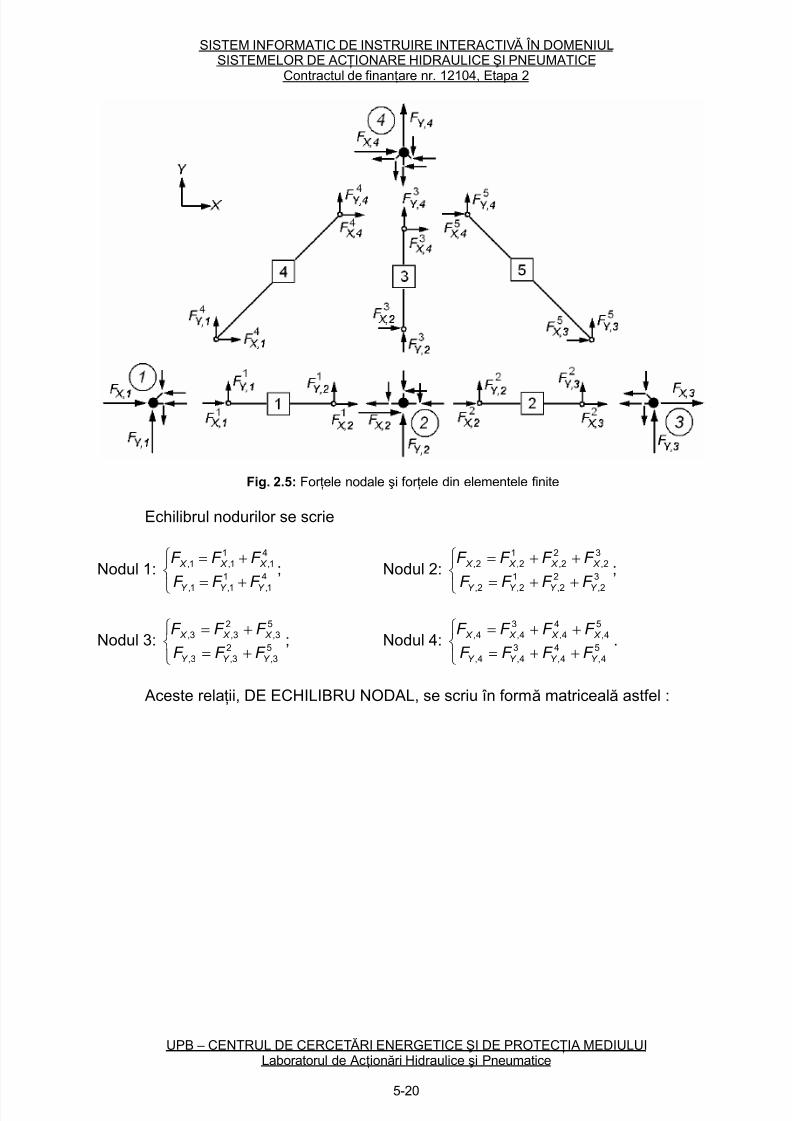
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 508/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig. 2.5: For ţele nodale şi for ţele din elementele finite
Echilibrul nodurilor se scrie
Nodul 1: ; Nodul 2: ;
⎩
⎨⎧
+=
+=4
1,
1
1,1,
41,
11,1,
Y Y Y
X X X
F F F
F F F
⎩
⎨⎧
++=
++=3
2,
2
2,
1
2,2,
32,
22,
12,2,
Y Y Y Y
X X X X
F F F F
F F F F
Nodul 3: ; Nodul 4: .⎩⎨⎧
+=
+=5
3,2
3,3,
53,
23,3,
Y Y Y
X X X
F F F
F F F
⎩⎨⎧
++=
++=5
4,4
4,3
4,4,
54,
44,
34,4,
Y Y Y Y
X X X X
F F F F
F F F F
Aceste relaţii, DE ECHILIBRU NODAL, se scriu în formă matriceală astfel :
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-20
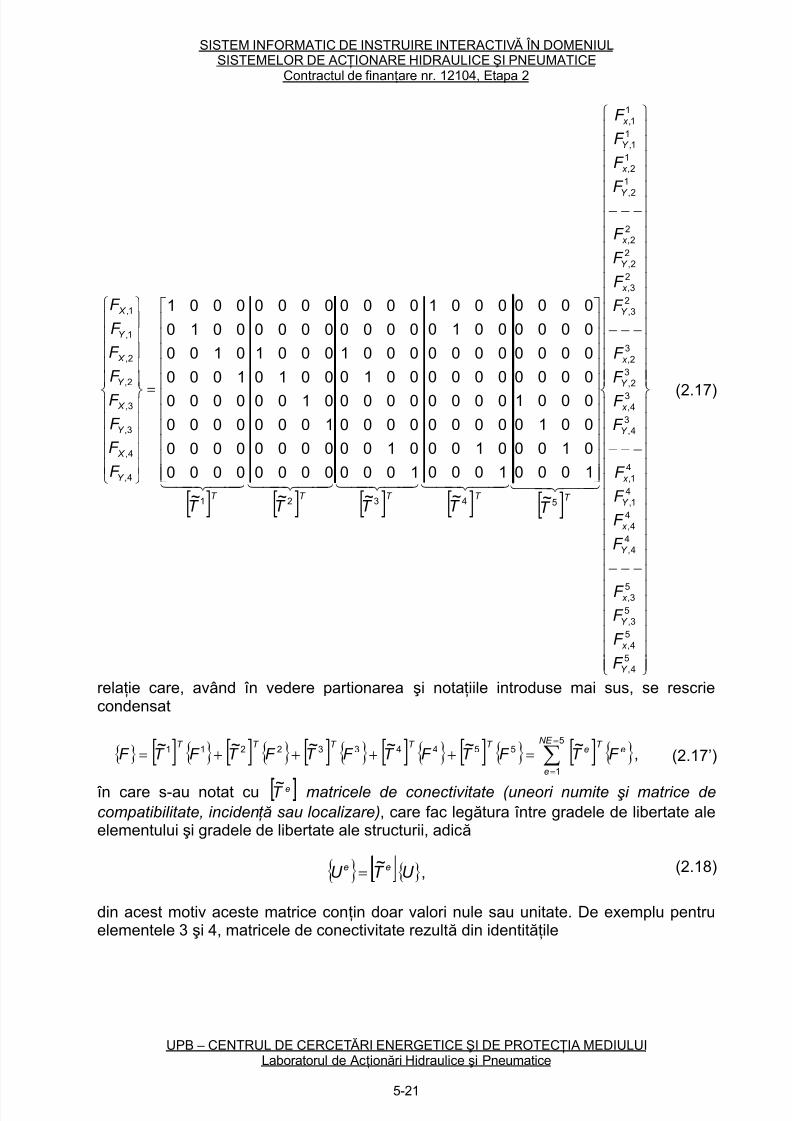
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 509/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
[ ] [ ] [ ] [ ] [ ]
⎪⎪⎪⎪⎪⎪
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪⎪
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎪⎪⎪⎪
⎨
⎧
−−−
−−−
−−−
−−−
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
54,
54,
53,
53,
44,
44,
41,
41,
34,
34,
32,
32,
23,
23,
22,
22,
1
2,
12,
11,
11,
54321
4,
4,
3,
3,
2,
2,
1,
1,
~
1000
0100
0010
0001
0000
0000
0000
0000
~
1000
0100
0000
0000
0000
0000
0010
0001
~
1000
0100
0000
0000
0010
0001
0000
0000
~
0000
0000
1000
0100
0010
0001
0000
0000
~
0000
0000
0000
0000
1000
0100
0010
0001
Y
x
Y
x
Y
x
Y
x
Y
x
Y
x
Y
x
Y
x
Y
x
Y
x
T T T T T
Y
X
Y
X
Y
X
Y
X
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
T T T T T
F
F
F
F
F
F
F
F
4 4 34 4 214 4 34 4 214 434 4214 434 4214 434 421
(2.17)
relaţie care, având în vedere partionarea şi notaţiile introduse mai sus, se rescriecondensat
{ } [ ] { } [ ] { } [ ] { } [ ] { } [ ] { } [ ] { }∑=
=
=++++=5
1
5544332211 ~~~~~~ NE
e
eT
eT T T T T
F T F T F T F T F T F T F , (2.17’)
în care s-au notat cu [ ]eT ~ matricele de conectivitate (uneori numite şi matrice de
compatibilitate, incidenţă sau localizare), care fac legătura între gradele de libertate aleelementului şi gradele de libertate ale structurii, adică
{ } { }U T U ee ~= , (2.18)
din acest motiv aceste matrice conţin doar valori nule sau unitate. De exemplu pentruelementele 3 şi 4, matricele de conectivitate rezultă din identităţile
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-21

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 510/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥
⎥
⎦
⎤
⎢⎢⎢
⎢
⎣
⎡
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
4,
4,
3,
3,
2,
2,
1,
1,
4,
4,
2,
2,
10000000
01000000
00001000
00000100
Y
X
Y
X
Y
X
Y
X
Y
X
Y
X
U
U
U
U
U
U
U
U
U
U
U
U
; .
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥
⎥
⎦
⎤
⎢⎢⎢
⎢
⎣
⎡
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
4,
4,
3,
3,
2,
2,
1,
1,
4,
4,
1,
1,
10000000
01000000
00000010
00000001
Y
X
Y
X
Y
X
Y
X
Y
X
Y
X
U
U
U
U
U
U
U
U
U
U
U
U
Dacă în relaţia (2.17’) se introduc relaţiile (2.14) şi apoi (2.18) rezultă
{ } [ ] [ ] [ ] { } [ ] { } [ ]{ }U K U K U T K T F NE
e
eNE
e
eeT e =⎟⎟ ⎠
⎞⎜⎜⎝
⎛ =⎟⎟
⎠
⎞⎜⎜⎝
⎛ = ∑∑
~~~. (2.19)
Matricele de rigiditate ale elementelor se expandează în vederea asamblării,pentru aceasta se foloseşte relaţia de transformare
[ ] [ ] [ ] [ ]eeT
ee T K T K ~~~
= , (2.20)
iar matricea de rigiditate a structurii rezultă prin simpla însumare a acestora
[ ] [ ]∑=
=NE
e
eK K 1
~. (2.21)
Matricele de rigiditate expandate ale celor cinci elemente sunt:
nodul → 1 2 3 4
1 0 -1 0 0 0 0 00 0 0 0 0 0 0 0
1
-1 0 1 0 0 0 0 00 0 0 0 0 0 0 0
2
0 0 0 0 0 0 0 0[ ]l
EAK =1~
0 0 0 0 0 0 0 0
3
0 0 0 0 0 0 0 00 0 0 0 0 0 0 0
4
1 2 3 4
0 0 0 0 0 0 0 00 0 0 0 0 0 0 0
1
0 0 1 0 -1 0 0 00 0 0 0 0 0 0 0
2
0 0 -1 0 1 0 0 0[ ]l
EAK =2~
0 0 0 0 0 0 0 03
0 0 0 0 0 0 0 00 0 0 0 0 0 0 0
4
1 2 3 40 0 0 0 0 0 0 0
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-22
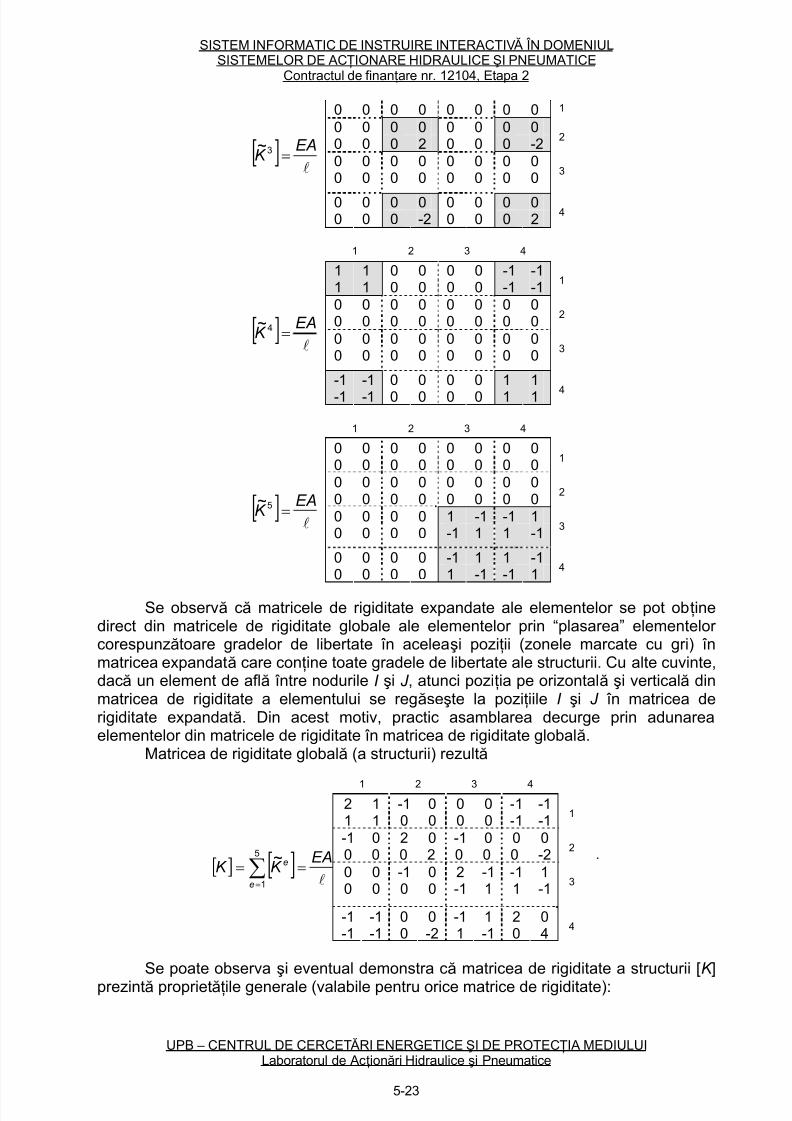
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 511/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 00 0 0 2 0 0 0 -2
2
0 0 0 0 0 0 0 0[ ]l
EAK =3~
0 0 0 0 0 0 0 03
0 0 0 0 0 0 0 00 0 0 -2 0 0 0 2
4
1 2 3 4
1 1 0 0 0 0 -1 -11 1 0 0 0 0 -1 -1
1
0 0 0 0 0 0 0 00 0 0 0 0 0 0 0
2
0 0 0 0 0 0 0 0[ ]l
EAK =4~
0 0 0 0 0 0 0 03
-1 -1 0 0 0 0 1 1
-1 -1 0 0 0 0 1 1 4
1 2 3 4
0 0 0 0 0 0 0 00 0 0 0 0 0 0 0
1
0 0 0 0 0 0 0 00 0 0 0 0 0 0 0
2
0 0 0 0 1 -1 -1 1[ ]l
EAK =5~
0 0 0 0 -1 1 1 -1
3
0 0 0 0 -1 1 1 -10 0 0 0 1 -1 -1 1
4
Se observă că matricele de rigiditate expandate ale elementelor se pot obţinedirect din matricele de rigiditate globale ale elementelor prin “plasarea” elementelor corespunzătoare gradelor de libertate în aceleaşi poziţii (zonele marcate cu gri) înmatricea expandată care conţine toate gradele de libertate ale structurii. Cu alte cuvinte,dacă un element de află între nodurile I şi J , atunci poziţia pe orizontală şi verticală dinmatricea de rigiditate a elementului se regăseşte la poziţiile I şi J în matricea derigiditate expandată. Din acest motiv, practic asamblarea decurge prin adunareaelementelor din matricele de rigiditate în matricea de rigiditate globală.
Matricea de rigiditate globală (a structurii) rezultă
1 2 3 42 1 -1 0 0 0 -1 -11 1 0 0 0 0 -1 -1
1
-1 0 2 0 -1 0 0 00 0 0 2 0 0 0 -2
2
0 0 -1 0 2 -1 -1 1[ ] [ ]l
EAK K
e
e == ∑=
5
1
~
0 0 0 0 -1 1 1 -1
3
-1 -1 0 0 -1 1 2 0-1 -1 0 -2 1 -1 0 4
4
.
Se poate observa şi eventual demonstra că matricea de rigiditate a structurii [K ]
prezintă proprietăţile generale (valabile pentru orice matrice de rigiditate):
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-23
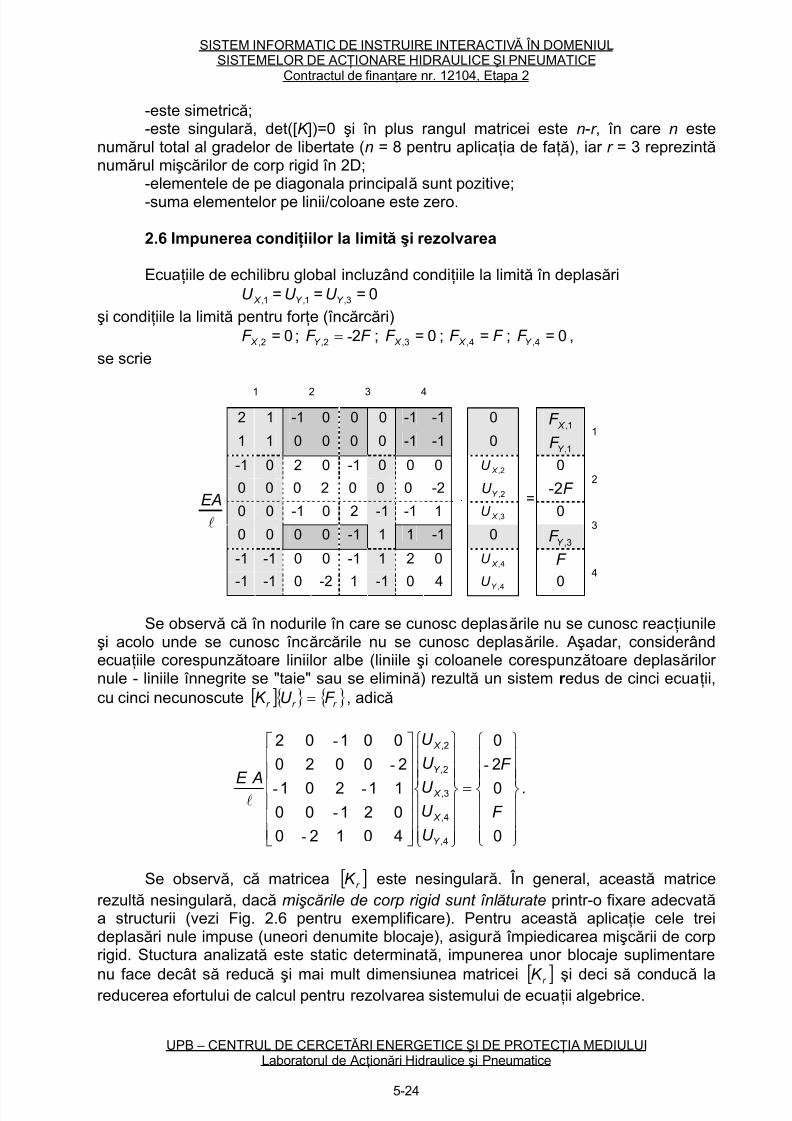
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 512/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
-este simetrică;-este singular ă, det([K ])=0 şi în plus rangul matricei este n-r , în care n este
numărul total al gradelor de libertate (n = 8 pentru aplicaţia de faţă), iar r = 3 reprezintă numărul mişcărilor de corp rigid în 2D;
-elementele de pe diagonala principală sunt pozitive;-suma elementelor pe linii/coloane este zero.
2.6 Impunerea condiţiilor la limită şi rezolvarea
Ecuaţiile de echilibru global incluzând condiţiile la limită în deplasări0=== 3,1,1, Y Y X U U U
şi condiţiile la limită pentru for ţe (încărcări)0=2, X F ; F F Y 22, -= ; ; ; ,0=3, X F F F X =4, 0=4,Y F
se scrie
1 2 3 4
2 1 -1 0 0 0 -1 -1 01, X F
1 1 0 0 0 0 -1 -1 01,Y F
1
-1 0 2 0 -1 0 0 0 2, X U 0
0 0 0 2 0 0 0 -2 2,Y U -2F 2
0 0 -1 0 2 -1 -1 1.
3, X U 0l
EA
0 0 0 0 -1 1 1 -1 0
=
3,Y F 3
-1 -1 0 0 -1 1 2 0 4, X U F
-1 -1 0 -2 1 -1 0 44,Y
U 04
Se observă că în nodurile în care se cunosc deplasările nu se cunosc reacţiunileşi acolo unde se cunosc încărcările nu se cunosc deplasările. Aşadar, considerândecuaţiile corespunzătoare liniilor albe (liniile şi coloanele corespunzătoare deplasărilor nule - liniile înnegrite se "taie" sau se elimină) rezultă un sistem r edus de cinci ecuaţii,cu cinci necunoscute [ ] , adică { } { }r r r F U K =
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎢⎢
⎣
⎡
0
0
2
0
40120
0210011201
20020
00102
4,
4,
3,
2,
2,
F
F
U
U
U
U
U
AE
Y
X
X
Y
X
-
-
-
--
-
-
l .
Se observă, că matricea [ ]r K este nesingular ă. În general, această matricerezultă nesingular ă, dacă mi şc ările de corp rigid sunt înl ăturate printr-o fixare adecvată a structurii (vezi Fig. 2.6 pentru exemplificare). Pentru această aplicaţie cele treideplasări nule impuse (uneori denumite blocaje), asigur ă împiedicarea mişcării de corprigid. Stuctura analizată este static determinată, impunerea unor blocaje suplimentare
nu face decât să reducă şi mai mult dimensiunea matricei [ ]r K şi deci să conducă lareducerea efortului de calcul pentru rezolvarea sistemului de ecuaţii algebrice.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-24
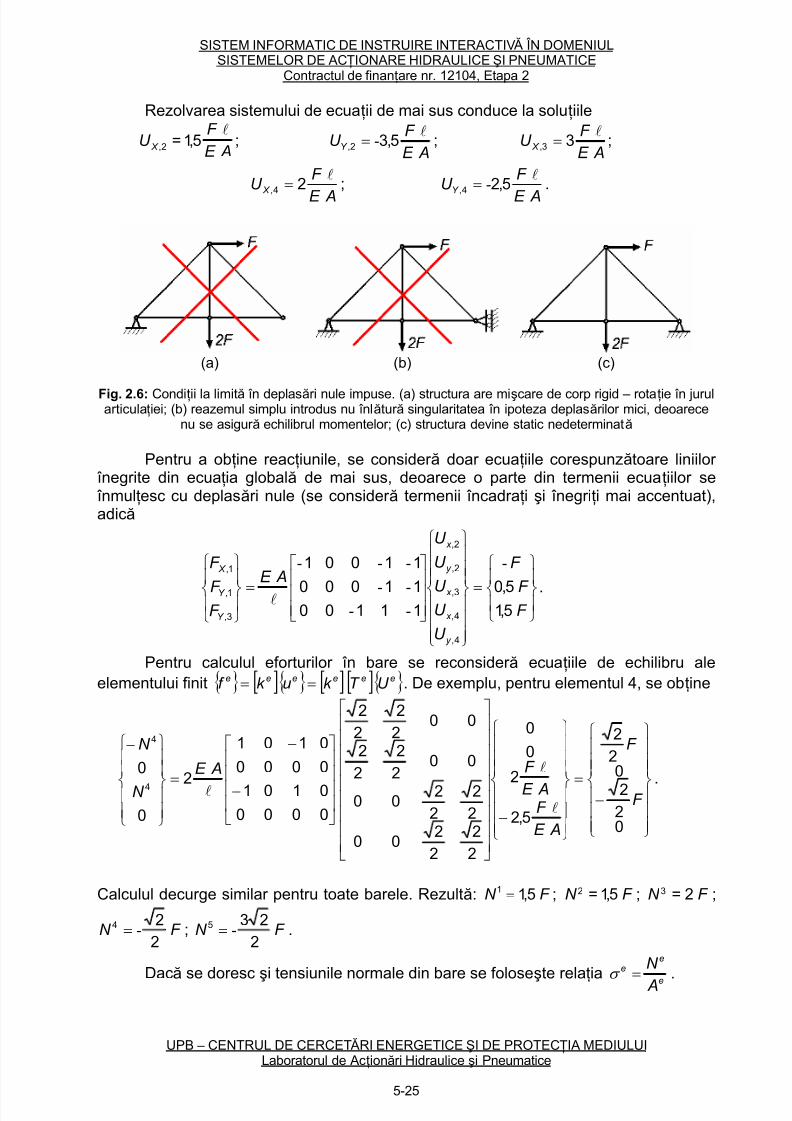
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 513/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Rezolvarea sistemului de ecuaţii de mai sus conduce la soluţiile
AE
F U X
l5,1=2, ;
AE
F U Y
l5,32, -= ;
AE
F U X
l33, = ;
AE
F U X
l24, = ;
AE
F U Y
l5,24, -= .
(a) (b) (c)
Fig. 2.6: Condiţii la limită în deplasări nule impuse. (a) structura are mişcare de corp rigid – rotaţie în jurularticulaţiei; (b) reazemul simplu introdus nu înlătur ă singularitatea în ipoteza deplasărilor mici, deoarece
nu se asigur ă echilibrul momentelor; (c) structura devine static nedeterminată
Pentru a obţine reacţiunile, se consider ă doar ecuaţiile corespunzătoare liniilor înegrite din ecuaţia globală de mai sus, deoarece o parte din termenii ecuaţiilor se înmulţesc cu deplasări nule (se consider ă termenii încadraţi şi înegriţi mai accentuat),adică
⎪⎭
⎪
⎬
⎫
⎪⎩
⎪
⎨
⎧
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎪⎭
⎪
⎬
⎫
⎪⎩
⎪
⎨
⎧
F F
F
U
U U
U
U
AE
F F
F
y
x
x
y
x
Y
Y
X
5,15,0
1110011000
11001
4,
4,
3,
2,
2,
3,
1,
1, -
--
--
---
l .
Pentru calculul eforturilor în bare se reconsider ă ecuaţiile de echilibru aleelementului finit { } [ ]{ } [ ] [ ]{ }eeeeee U T k uk f == . De exemplu, pentru elementul 4, se obţine
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−
⎥⎥⎥⎥⎥
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎢⎢⎢⎢
⎣
⎡
⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎣
⎡
−
−
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧−
022
02
2
5,2
2
0
0
2
2
2
200
22
2200
002
2
2
2
002
2
2
2
00000101
0000
0101
20
04
4
F
F
AE
F AE
F AE
N
N
l
l
l .
Calculul decurge similar pentru toate barele. Rezultă: ; ; ;F N 5,11 = F N 5,1=2 F N 2=3
F N 2
24-= ; F N
2
235-= .
Dacă
se dorescşi tensiunile normale din bare se folose
şte rela
ţia
e
ee
A
N =σ .
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-25
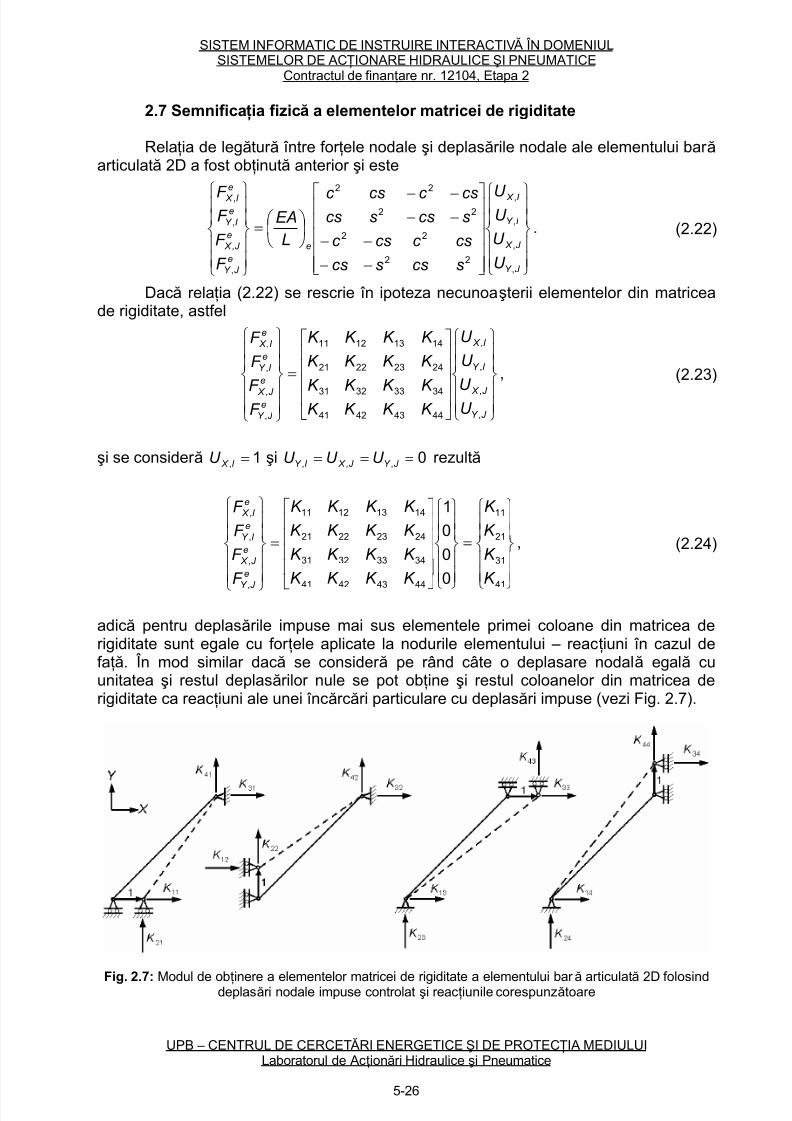
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 514/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
2.7 Semnificaţia fizică a elementelor matricei de rigiditate
Relaţia de legătur ă între for ţele nodale şi deplasările nodale ale elementului bar ă articulată 2D a fost obţinută anterior şi este
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
−−−−
⎟ ⎠
⎞⎜⎝
⎛ =
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
J Y
J X
I Y
I X
e
e
J Y
e
J X
e
I Y
e
I X
U
U
U U
scsscs
csc csc
scsscscsc csc
L
EA
F
F
F F
,
,
,
,
22
22
22
22
,
,
,
,
. (2.22)
Dacă relaţia (2.22) se rescrie în ipoteza necunoaşterii elementelor din matriceade rigiditate, astfel
⎪⎪⎭
⎪⎪
⎬
⎫
⎪⎪⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎭
⎪⎪
⎬
⎫
⎪⎪⎩
⎪⎪
⎨
⎧
J Y
J X
I Y
I X
e
J Y
e
J X
e
I Y
e
I X
U U
U
U
K K K K K K K K
K K K K
K K K K
F F
F
F
,
,
,
,
44434241
34333231
24232221
14131211
,
,
,
,
, (2.23)
şi se consider ă 1, =I X U şi 0,,, === J Y J X I Y U U U rezultă
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
41
31
21
11
44434241
34333231
24232221
14131211
,
,
,
,
0
0
0
1
K
K
K
K
K K K K
K K K K
K K K K
K K K K
F
F
F
F
e
J Y
e
J X
e
I Y
eI X
, (2.24)
adică pentru deplasările impuse mai sus elementele primei coloane din matricea derigiditate sunt egale cu for ţele aplicate la nodurile elementului – reacţiuni în cazul defaţă. În mod similar dacă se consider ă pe rând câte o deplasare nodală egală cuunitatea şi restul deplasărilor nule se pot obţine şi restul coloanelor din matricea derigiditate ca reacţiuni ale unei încărcări particulare cu deplasări impuse (vezi Fig. 2.7).
Fig. 2.7: Modul de obţinere a elementelor matricei de rigiditate a elementului bar ă articulată 2D folosinddeplasări nodale impuse controlat şi reacţiunile corespunzătoare
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-26
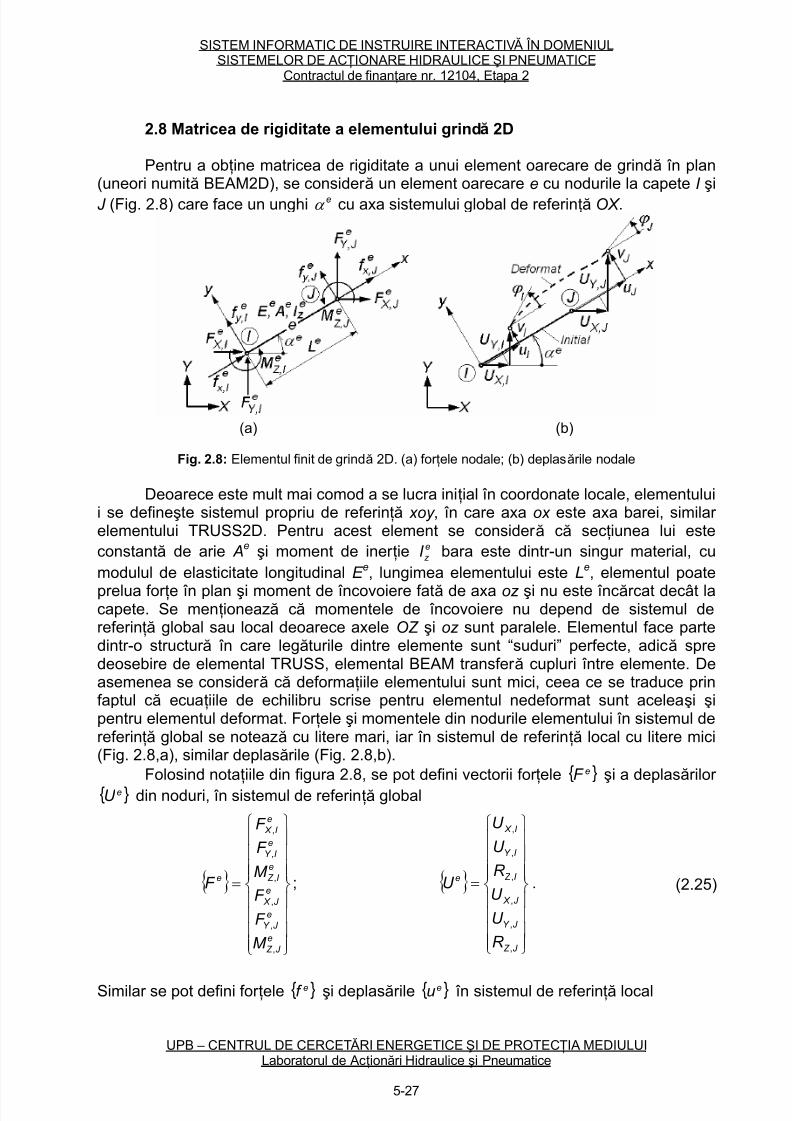
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 515/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
2.8 Matricea de rigiditate a elementului grindă 2D
Pentru a obţine matricea de rigiditate a unui element oarecare de grindă în plan(uneori numită BEAM2D), se consider ă un element oarecare e cu nodurile la capete I şiJ (Fig. 2.8) care face un unghi cu axa sistemului global de referinţă OX .eα
(a) (b)
Fig. 2.8: Elementul finit de grindă 2D. (a) for ţele nodale; (b) deplasările nodale
Deoarece este mult mai comod a se lucra iniţial în coordonate locale, elementuluii se defineşte sistemul propriu de referinţă xoy , în care axa ox este axa barei, similar elementului TRUSS2D. Pentru acest element se consider ă că secţiunea lui esteconstantă de arie A
e şi moment de iner ţie bara este dintr-un singur material, cumodulul de elasticitate longitudinal E
e
z I e, lungimea elementului este L
e, elementul poate
prelua for ţe în plan şi moment de încovoiere fată de axa oz şi nu este încărcat decât lacapete. Se menţionează că momentele de încovoiere nu depend de sistemul dereferinţă global sau local deoarece axele OZ şi oz sunt paralele. Elementul face partedintr-o structur ă în care legăturile dintre elemente sunt “suduri” perfecte, adică spredeosebire de elemental TRUSS, elemental BEAM transfer ă cupluri între elemente. Deasemenea se consider ă că deformaţiile elementului sunt mici, ceea ce se traduce prinfaptul că ecuaţiile de echilibru scrise pentru elementul nedeformat sunt aceleaşi şipentru elementul deformat. For ţele şi momentele din nodurile elementului în sistemul dereferinţă global se notează cu litere mari, iar în sistemul de referinţă local cu litere mici(Fig. 2.8,a), similar deplasările (Fig. 2.8,b).
Folosind notaţiile din figura 2.8, se pot defini vectorii for ţele şi a deplasărilor din noduri, în sistemul de referinţă global
{ eF }}{ eU
{ }
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
e
J Z
e
J Y
e
J X
e
I Z
e
I Y
e
I X
e
M
F
F
M
F
F
F
,
,
,
,
,
,
; .{ }
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
J Z
J Y
J X
I Z
I Y
I X
e
R
U
U
R
U
U
U
,
,
,
,
,
,
(2.25)
Similar se pot defini for ţele şi deplasările în sistemul de referinţă local{ }ef { }eu
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-27
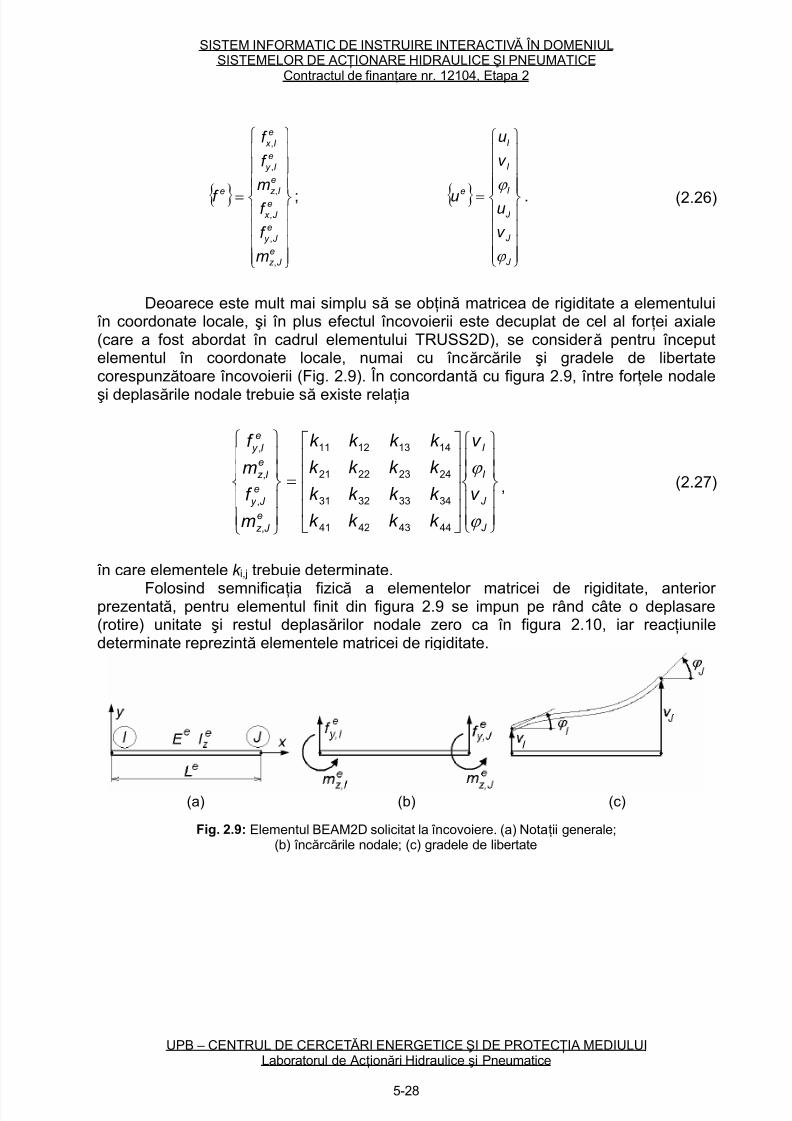
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 516/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
{ }
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
e
J z
e
J y
e
J x
e
I z
e
I y
e
I x
e
m
f
f
m
f
f
f
,
,
,
,
,
,
; { } .
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
J
J
J
I
I
I
e
v
u
v
u
u
ϕ
ϕ
(2.26)
Deoarece este mult mai simplu să se obţină matricea de rigiditate a elementului
în coordonate locale, şi în plus efectul încovoierii este decuplat de cel al for ţei axiale(care a fost abordat în cadrul elementului TRUSS2D), se consider ă pentru începutelementul în coordonate locale, numai cu încărcările şi gradele de libertatecorespunzătoare încovoierii (Fig. 2.9). În concordantă cu figura 2.9, între for ţele nodale
şi deplasările nodale trebuie să existe relaţia
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
J
J
I
I
e
J z
e
J y
e
I z
e
I y
v
v
k k k k
k k k k
k k k k
k k k k
m
f
m
f
ϕ
ϕ
44434241
34333231
24232221
14131211
,
,
,
,
, (2.27)
în care elementele k i,j trebuie determinate.
Folosind semnificaţia fizică a elementelor matricei de rigiditate, anterior prezentată, pentru elementul finit din figura 2.9 se impun pe rând câte o deplasare(rotire) unitate şi restul deplasărilor nodale zero ca în figura 2.10, iar reacţiuniledeterminate reprezintă elementele matricei de rigiditate.
(a) (b) (c)
Fig. 2.9: Elementul BEAM2D solicitat la încovoiere. (a) Notaţii generale;(b) încărcările nodale; (c) gradele de libertate
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-28

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 517/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig. 2.10: Modul de obţinere a elementelor matricei de rigiditate a elementului grindă 2D folosinddeplasări nodale impuse controlat şi reacţiunile corespunzătoare
Fig. 2.11: Sistemul dublu static nedeterminat şi diagramele de eforturi corespunzătoare pentru primul cazdin figura 5 (momentele M 01 şi M 02 sunt nule)
De exemplu, pentru primul caz de încărcare din cele patru, folosind metodaeforturilor (prezentată la rezistenţa materialelor), for ţele nodale se obţin rezolvândsistemul dublu static nedeterminat din figura 2.11, care conduce la sistemul de ecuaţii
⎩⎨⎧
=+
=+
0
1
222121
212111
X X
X X
δ δ
δ δ . (2.28)
Coeficienţiiij δ se calculează folosind metoda Mohr-Maxwell, adică
∫=eL
j i e
z
eij dx mmI E
1δ . Rezultă
( )3112
e
ez
e
L
I E X = şi
( )226
e
ez
e
L
I E X = iar reacţiunile din dreapta se
obţin din condiţiile de echilibru. În mod similar se obţin şi restul coloanelor din matriceainclusă în relaţia (2.27). Dacă se renunţă la indicele e, matricea corespunzătoare încovoierii se poate scrie în sistemul de referinţă local astfel
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-29
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 518/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎢⎢⎢⎢
⎣
⎡
−
−−−
−
−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
J
J
J
I
I
I
z
e
J z
e
J y
e
J x
e
I z
e
I y
e
I x
v u
v
u
LLLL
LL
LLLL
LL
L
EI
m
f f
m
f
f
ϕ
ϕ
22
22
3
,
,
,
,
,
,
460260
61206120 000000
260460
61206120
000000
, (2.29)
iar matricea corespunzătoare solicitării axiale, vezi relaţia (2.8), se scrie
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
J
J
J
I
I
I
e
J z
e
J y
e
J x
e
I z
e
I y
e
I x
v
u
v
u
L
EA
mf
f
m
f
f
ϕ
ϕ
000000000000
001001
000000
000000
001001
,
,
,
,
,
,
. (2.30)
Prin suprapunerea efectelor, din relaţiile (2.29) şi (2.30) rezultă matricea derigiditate a elementului BEAM2D în coordonate locale
[ ]
⎥⎥⎥
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−−
−
−
−
−
=
22
22
22
22
3
460260
61206120
0000
260460
61206120
0000
LLLL
LLI
AL
I
ALLLLL
LL
I
AL
I
AL
L
EI k
z z
z z
z e . (2.31)
Deoarece relaţia de legătur ă dintre gradele de libertate în coordonate locale şiglobale se poate scrie (vezi şi relaţia (2.10))
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥
⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎢⎢⎢
⎣
⎡
−
−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
J Z
J Y
J X
I Z
I Y
I X
J
J
J
I
I
I
R
U
U
R
U
U
c s
sc
c s
sc
v
u
v
u
,
,
,
,
,
,
100000
0000
0000
000100
0000
0000
ϕ
ϕ
⇒ [ ]
⎥⎥⎥⎥⎥
⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎢⎢⎢
⎣
⎡
−
−
=
100000
0000
0000
000100
0000
0000
c s
sc
c s
sc
T e
, (2.32)
în care s-a notat α cos=c , α sin=s , conform relaţiei (2.15) matricea de rigiditate aelementului BEAM2D în coodonate globale rezultă
[ ] [ ] [ ] [ ]66666666 ××××
= eeT ee T k T K . (2.33)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-30
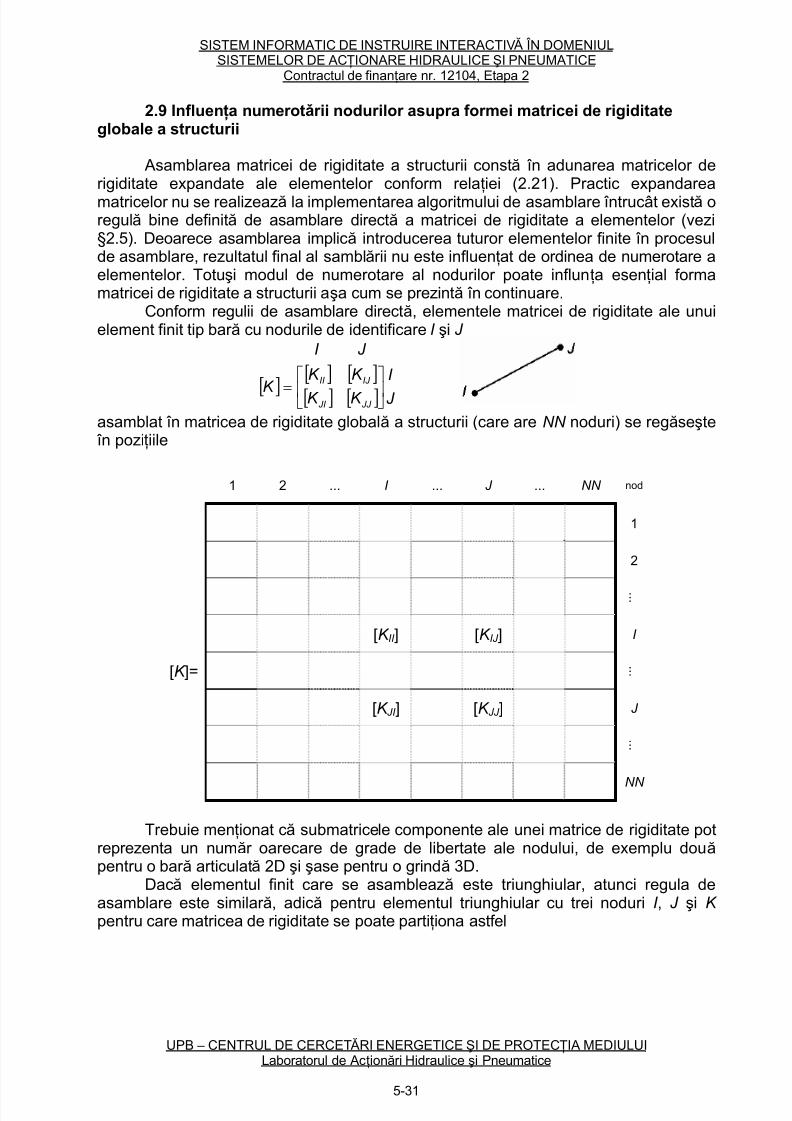
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 519/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
2.9 Influenţa numerotǎrii nodurilor asupra formei matricei de rigiditateglobale a structurii
Asamblarea matricei de rigiditate a structurii constă în adunarea matricelor derigiditate expandate ale elementelor conform relaţiei (2.21). Practic expandareamatricelor nu se realizează la implementarea algoritmului de asamblare întrucât există oregulă bine definită de asamblare directă a matricei de rigiditate a elementelor (vezi§2.5). Deoarece asamblarea implică introducerea tuturor elementelor finite în procesulde asamblare, rezultatul final al samblării nu este influenţat de ordinea de numerotare aelementelor. Totuşi modul de numerotare al nodurilor poate influnţa esenţial formamatricei de rigiditate a structurii aşa cum se prezintă în continuare.
Conform regulii de asamblare directă, elementele matricei de rigiditate ale unuielement finit tip bar ă cu nodurile de identificare I şi J
[ ] =K
[ ] [ ]
[ ] [ ] J
I
K K
K K
J I
JJ JI
IJ II
⎥⎦
⎤
⎢⎣
⎡
asamblat în matricea de rigiditate globală a structurii (care are NN noduri) se regăseşte
în poziţiile
1 2 ... I ... J ... NN nod
1
2
...
[K II ] [K IJ ] I
[K ]=.
.
.
[K JI ] [K JJ ] J
.
.
.
NN
Trebuie menţionat că submatricele componente ale unei matrice de rigiditate potreprezenta un număr oarecare de grade de libertate ale nodului, de exemplu două pentru o bar ă articulată 2D şi şase pentru o grindă 3D.
Dacă elementul finit care se asamblează este triunghiular, atunci regula deasamblare este similar ă, adică pentru elementul triunghiular cu trei noduri I , J şi K pentru care matricea de rigiditate se poate partiţiona astfel
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-31
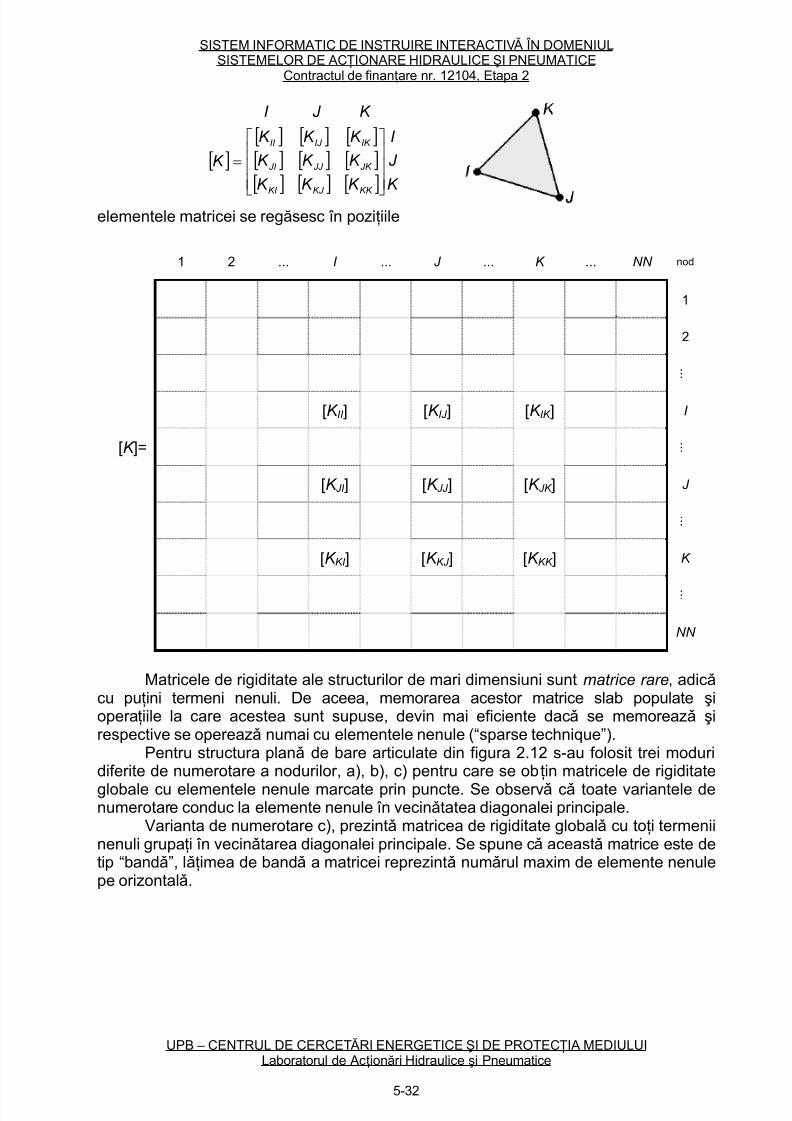
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 520/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
[ ] =K
[ ] [ ] [ ][ ] [ ] [ ][ ] [ ] [ ] K
J
I
K K K
K K K
K K K
K J I
KK KJ KI
JK JJ JI
IK IJ II
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
elementele matricei se regăsesc în poziţiile
1 2 ... I ... J ... K ... NN nod
1
2
.
.
.
[K II ] [K IJ ] [K IK ] I
[K ]=.
.
.
[K JI ] [K JJ ] [K JK ] J
.
.
.
[K KI ] [K KJ ] [K KK ] K
...
NN
Matricele de rigiditate ale structurilor de mari dimensiuni sunt matrice rare, adicǎ cu puţini termeni nenuli. De aceea, memorarea acestor matrice slab populate şioperaţiile la care acestea sunt supuse, devin mai eficiente dacǎ se memoreazǎ şirespective se opereazǎ numai cu elementele nenule (“sparse technique”).
Pentru structura planǎ de bare articulate din figura 2.12 s-au folosit trei moduridiferite de numerotare a nodurilor, a), b), c) pentru care se obţin matricele de rigiditate
globale cu elementele nenule marcate prin puncte. Se observǎ cǎ toate variantele denumerotare conduc la elemente nenule în vecinǎtatea diagonalei principale.
Varianta de numerotare c), prezintǎ matricea de rigiditate globalǎ cu toţi termeniinenuli grupaţi în vecinǎtarea diagonalei principale. Se spune cǎ aceastǎ matrice este detip “bandǎ”, lǎţimea de bandǎ a matricei reprezintǎ numǎrul maxim de elemente nenulepe orizontalǎ.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-32
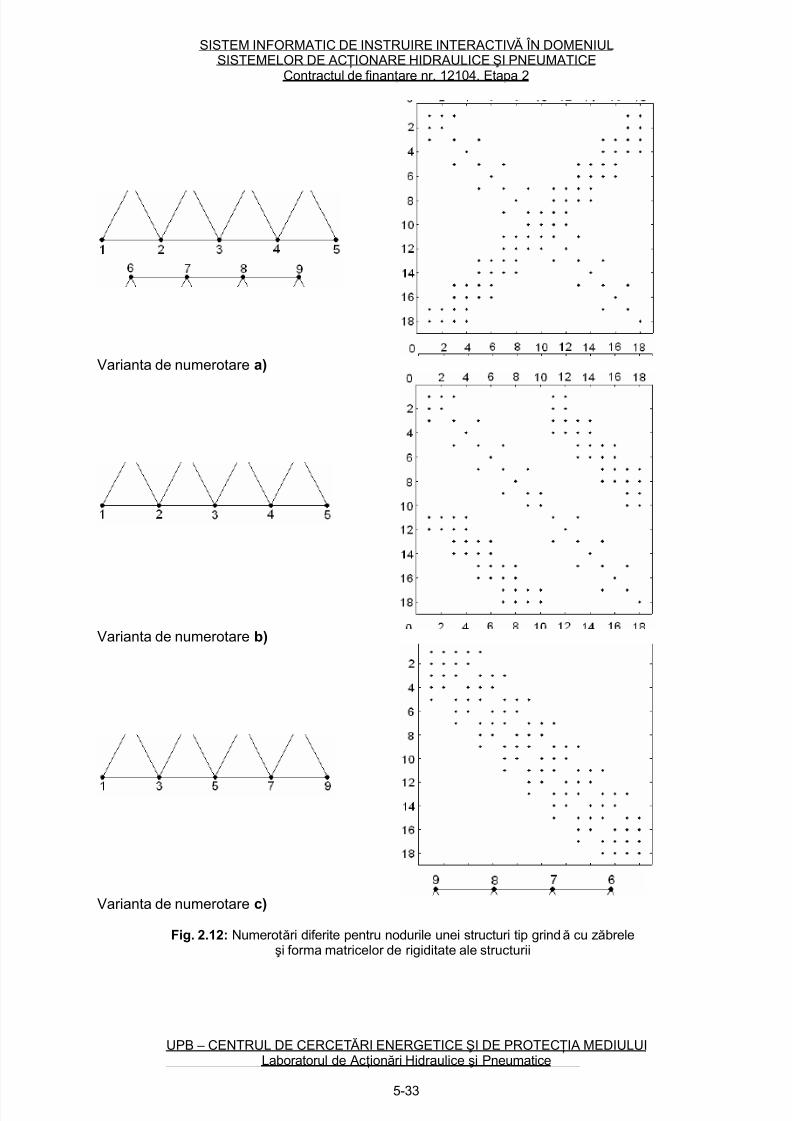
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 521/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Varianta de numerotare a)
Varianta de numerotare b)
Varianta de numerotare c)
Fig. 2.12: Numerotări diferite pentru nodurile unei structuri tip grindă cu zăbreleşi forma matricelor de rigiditate ale structurii
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-33
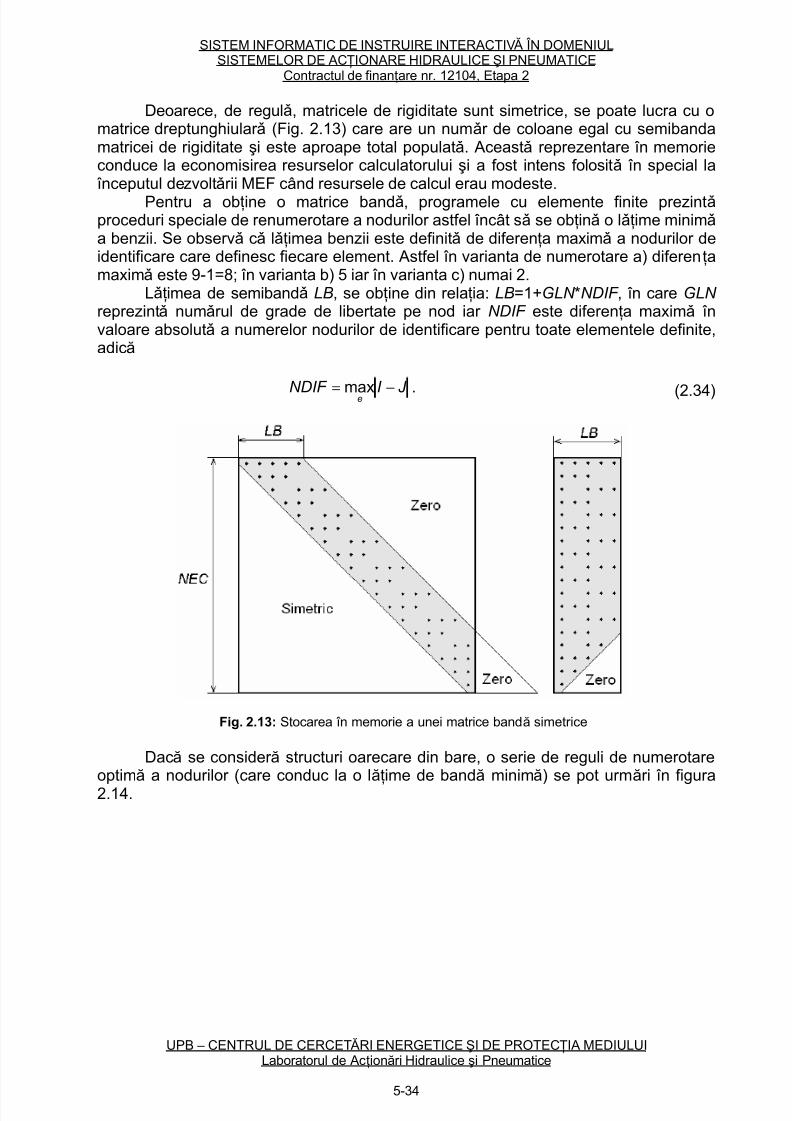
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 522/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Deoarece, de regulǎ, matricele de rigiditate sunt simetrice, se poate lucra cu omatrice dreptunghiular ǎ (Fig. 2.13) care are un numǎr de coloane egal cu semibandamatricei de rigiditate şi este aproape total populatǎ. Aceastǎ reprezentare în memorieconduce la economisirea resurselor calculatorului şi a fost intens folositǎ în special la
începutul dezvoltǎrii MEF când resursele de calcul erau modeste.Pentru a obţine o matrice bandǎ, programele cu elemente finite prezintǎ
proceduri speciale de renumerotare a nodurilor astfel încât sǎ se obţinǎ o lǎţime minimǎ a benzii. Se observǎ cǎ lǎţimea benzii este definitǎ de diferenţa maximǎ a nodurilor deidentificare care definesc fiecare element. Astfel în varianta de numerotare a) diferen ţamaximǎ este 9-1=8; în varianta b) 5 iar în varianta c) numai 2.
Lǎţimea de semibandǎ LB, se obţine din relaţia: LB=1+GLN *NDIF , în care GLN reprezintǎ numǎrul de grade de libertate pe nod iar NDIF este diferenţa maximǎ învaloare absolutǎ a numerelor nodurilor de identificare pentru toate elementele definite,adică
J I NDIF e −= max . (2.34)
Fig. 2.13: Stocarea în memorie a unei matrice bandă simetrice
Dacă se consider ă structuri oarecare din bare, o serie de reguli de numerotareoptimă a nodurilor (care conduc la o lăţime de bandă minimă) se pot urmări în figura2.14.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-34
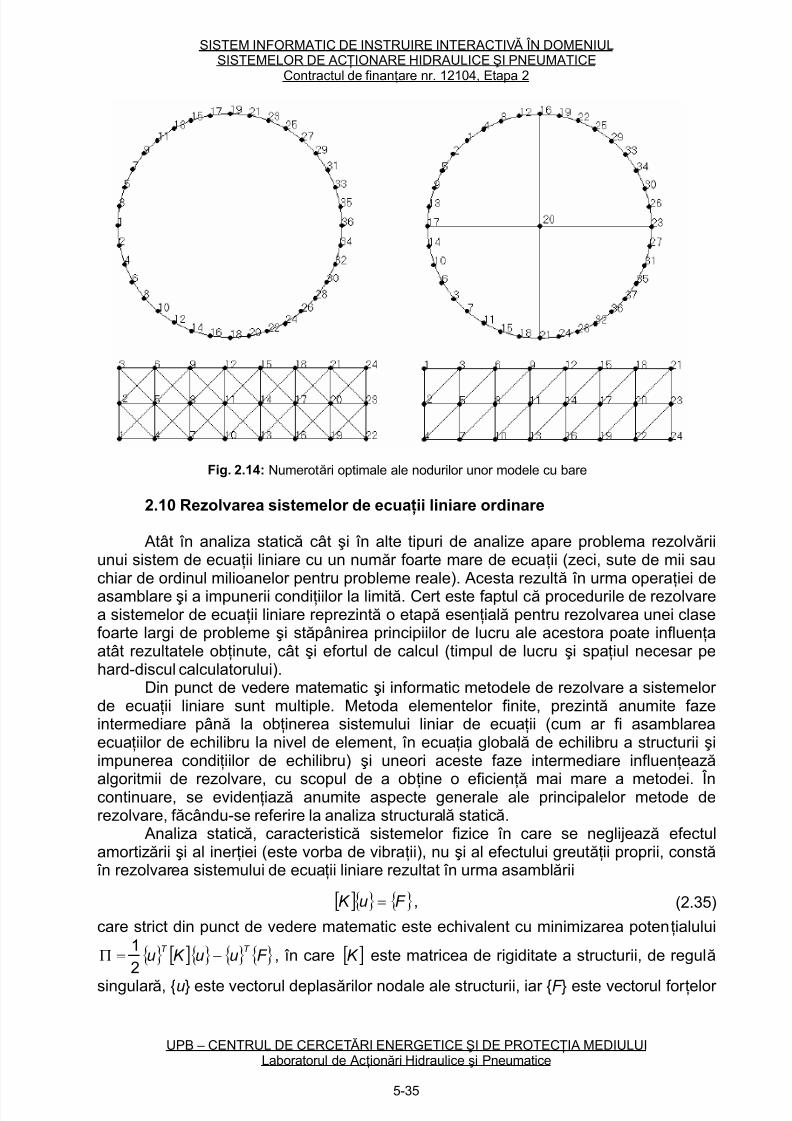
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 523/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig. 2.14: Numerotări optimale ale nodurilor unor modele cu bare
2.10 Rezolvarea sistemelor de ecuaţii liniare ordinare
Atât în analiza statică cât şi în alte tipuri de analize apare problema rezolvăriiunui sistem de ecuaţii liniare cu un număr foarte mare de ecuaţii (zeci, sute de mii sauchiar de ordinul milioanelor pentru probleme reale). Acesta rezultă în urma operaţiei deasamblare şi a impunerii condiţiilor la limită. Cert este faptul că procedurile de rezolvarea sistemelor de ecuaţii liniare reprezintă o etapă esenţială pentru rezolvarea unei clasefoarte largi de probleme şi stăpânirea principiilor de lucru ale acestora poate influenţaatât rezultatele obţinute, cât şi efortul de calcul (timpul de lucru şi spaţiul necesar pehard-discul calculatorului).
Din punct de vedere matematic şi informatic metodele de rezolvare a sistemelor de ecuaţii liniare sunt multiple. Metoda elementelor finite, prezintă anumite fazeintermediare până la obţinerea sistemului liniar de ecuaţii (cum ar fi asamblareaecuaţiilor de echilibru la nivel de element, în ecuaţia globală de echilibru a structurii şiimpunerea condiţiilor de echilibru) şi uneori aceste faze intermediare influenţează
algoritmii de rezolvare, cu scopul de a obţine o eficienţă mai mare a metodei. Încontinuare, se evidenţiază anumite aspecte generale ale principalelor metode derezolvare, f ăcându-se referire la analiza structurală statică.
Analiza statică, caracteristică sistemelor fizice în care se neglijează efectulamortizării şi al iner ţiei (este vorba de vibraţii), nu şi al efectului greutăţii proprii, constă
în rezolvarea sistemului de ecuaţii liniare rezultat în urma asamblării
[ ]{ } { }F uK = , (2.35)
care strict din punct de vedere matematic este echivalent cu minimizarea poten ţialului
{ } [ ]{ } { } { }F uuK uT T
−=Π2
1, în care [ ]K este matricea de rigiditate a structurii, de regulă
singular ă, {u} este vectorul deplasărilor nodale ale structurii, iar {F } este vectorul for ţelor
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-35

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 524/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
nodale aplicate structurii. Vectorul { }u are în general două componente, a deplasărilor
impuse (de cele mai multe ori nule) şi a deplasărilor necunoscute { } . Deplasările
cunoscute introduc o componentă a for ţelor de reacţiune
{ }r u au
{ }r F , iar pentru deplasările
necunoscute se cunosc for ţele aplicate structurii { }aF , deci, folosind această
partiţionare, se poate scrie
{ } { } { } { }{ } ⎭
⎬⎫
⎩⎨⎧
=+=r
ar a
F
F F F F . (2.36)
For ţele aplicate structurii provin din for ţele aplicate direct în noduri, for ţeleproduse de o mişcare cu acceleraţie constantă a structurii şi/sau a câmpuluigravitaţional, for ţe produse de variaţiile de temperatur ă (efectul termoelastic) şi for ţeechivalente, produse de presiunea care lucrează pe elemente.
Partiţionarea ecuaţiei (2.35) în concordanţă cu gradele de libertate “a” şi “r”conduce la relaţia matriceală
[ ] [ ][ ] [ ]
{ }{ }
{ }{ } ⎭
⎬⎫
⎩⎨⎧=
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡
r
a
r
a
rr ra
ar aa
F
F
u
u
K K
K K . (2.37)
Din prima ecuaţie (2.37) rezultă deplasările necunoscute
{ } [ ] { } [ ] { }( )r ar aaaa uK F K u −=−1
, (2.38)
iar apoi, din a doua ecuaţie, cunoscând toate deplasările, rezultă reacţiunile
{ } [ ] { } [ ] { }r rr arar uK uK F += . (2.39)
Se observă că deplasările necunoscute pot fi obţinute dacă submatricea derigiditate este nesingular ă, adică structura nu are mişcare de solid rigid sau
mecanism. Dacă totuşi echilibrul este asigurat de for ţele aplicate, se poate face unartificiu de înlăturare a singularităţii matricei, fie prin fixarea unor deplasări care suprimă mişcarea de corp rigid sau mecanism, fie prin introducerea adiţională de elemente înmatricea respectivă care nu modifică considerabil matricea de rigiditate, dar care otransformă în matrice pozitiv definită. Trebuie menţionat că deşi în ecuaţia (2.39) apareinversa unei submatrice din matricea de rigiditate globală a structurii, aceasta nu secalculează practic niciodată. Metodele de rezolvare a sistemelor de ecuaţii suntimplementate astfel încât numărul de operaţii pentru rezolvarea lor să fie minim.
[ ]aaK
Metodele de rezolvare a ecuaţiilor liniare în forma matriceală (2.35) se potclasifica în:
A. metode exacte, cum ar fi metoda de eliminare Gauss, metoda de factorizareCholeski sau metoda de rezolvare frontală şi
B. metode aproximative, cum ar fi metoda gradienţilor conjugaţi sau a relaxării.Metodele exacte de rezolvare se refer ă la faptul că există algoritmi bine definiţi,
care după un număr de paşi dinainte fixat - dependent de dimensiunea problemei,conduc la obţinerea soluţiei exacte, în ipoteza că erorile de reprezentare a numerelor încalculator (de trunchiere) sunt nesemnificative. Pentru reprezentarea în dublă precizie şiprobleme de dimensiuni acceptabile, bine condiţionate numeric (adică cu valori aleraportului dintre cea mai mare şi cea mai mică valoare de pe diagonala principală amatricei de rigiditate, cât mai aproape de unitate), metodele de rezolvare exactă s-audovedit destul de eficiente, ani de-a rândul. Aceste metode ţin seama de simetria şi
caracterul bandă al matricei de rigiditate, pentru a fi mai eficiente. Pentru a obţine omatrice cu o lăţime cât mai mică a benzii, numerotarea iniţială a nodurilor se schimbă
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-36
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 525/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
(se face renumerotarea nodurilor folosind algoritmi consacraţi), dacă se foloseştealgoritmul de eliminare Gauss, sau se renumerotează elementele dacă se foloseştealgoritmul de rezolvare frontală. Acesta din urmă s-a impus în perioada în care memoriaRAM a calculatoarelor era relativ limitată şi se bazează pe combinarea fazei deasamblare cu cea de eliminare a ecuaţiilor (în memoria ROM). Algoritmul este foartesofisticat, dar este stabil şi se foloseşte pe scar ă largă şi în momentul de faţă.
Metodele de rezolvare exactă prezintă două faze, prima este denumită eliminaresau triunghiularizare, iar cea de-a doua retrosubstituţ ie. Deoarece aceste metode suntdescrise pe larg în diverse căr ţi şi tratate, cei interesaţi sunt invitaţi să consulte lucr ăriconsacrate acestora.
Metoda gradienţilor conjugaţi cunoaşte diverse variante de implementare cum ar fi:
1. “Jacobi Conjugate Gradient” (JCG), recomandat pentru probleme binecondiţionate numeric, algoritm implementat pentru matrice reale şi complexe, simetriceşi nesimetrice;
2. “Preconditioned Conjugate Gradient” (PCG) implementat pentru matrice reale,simetrice şi pozitiv definite;3. “Incomplete Choleski Conjugate Gradient” (ICCG) mai robust decât primele
două, implementat pentru matrice reale şi complexe, simetrice şi nesimetrice. PCG estede circa 4-10 ori mai rapid decât JCG, iar ICCG este în general mai rapid decât JCG.
În metodele aproximative soluţia sistemului (2.35) cu condiţiile la limită impuse,se determină ca sumă a seriei vectorilor { j p
{ } { } { } { }mm pa pa pau +++= K2211 , (2.40)
în care m este mai mic decât dimensiunea matricei [ ]K iar { j p sunt corecţii succesive
ale soluţiei. Valoarea de start a acestor vectori poate influenţa foarte mult numărul de
iteraţii m. Rata de convergenţă este propor ţională cu r ădăcina pătrată a numărului decondiţionare a matricei , iar criteriul de convergenţă este de regulă [ ]K
{ } { }{ } { }
2ε ≤
F F
R R T
j
T
j , (2.41)
în care { { } [ ]{ j j uK F R −= poate fi privit ca un reziduu pentru j u - vectorul deplasare
determinat la pasul j . De obicei se consider ă acceptabil pentru aplicaţii, dar poate fi redus dacă este necesar.
510−=ε
Pentru dimensiuni mari ale matricilor de rigiditate, care în general con ţin multezerouri (motiv pentru care se numesc şi "matrice rare" = “sparse”), tehnicile de operarecu acestea s-au dovedit foarte eficiente pentru creşterea vitezei de calcul, prin
înlăturarea operaţiilor aritmetice cu zero şi spaţiul necesar, deoarece pentru valorilenule nu se alocă spaţiu în memorie.
Metodele de rezolvare aproximativă, prin iterarea soluţiei, s-au dovedit a fi multmai eficiente, în primul rând, ca viteză de calcul şi s-au impus odată cu creştereamemoriei centrale (RAM) a calculatoarelor. Unele firme au introdus noţiunea de FFE("Fast Finite Element"), pentru anumite versiuni ale programelor care foloseau o astfelde procedur ă de rezolvare, eventual combinată cu alte facilităţi sau proceduri pentrucreşterea vitezei de analiză a programelor cu elemente finite.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-37

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 526/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
2.11 Rezolvarea sistemelor de ecuaţii liniare cu legături
Condiţiile la limită în deplasări (şi rotiri) pot fi interpretate, din punct de vederematematic, ca nişte restricţii asociate unui sistem de ecuaţii. Aceste restricţii pot fi relaţiisimple de impunere a unor deplasări, sau relaţii cinematice între anumite grade delibertate. Uneori acestea poartă denumirea de relaţ ii de leg ătur ă între mărimile nodale.
Câteva exemple de relaţii cinematice între o serie de grade de libertate pentrustucturi simple de cadre plane se prezintă în figurile 15 - 17.
1. Blocaje: 01, = X U ; ;01, =Y U 01, =Z R
2. Relaţie cinematică: 3,3, 3 X Y U U =
(a) (b)
Fig. 2.15: Cadru plan cu un reazem simplu înclinat faţă de sistemul de referinţă global.(a) Discretizare; (b) Relaţii de legătur ă între gradele de libertate
1. Blocaje: 01, = X U ; ;01, =Y U 01, =Z R ;
05, =Y U
2. Relaţii cinematice (cuplaje):
3,2, X X U U = ;
3,2, Y Y U U =
(a) (b)
Fig. 2.16: Grindă cu articulaţie intermediar ă. (a) Discretizare cu nodurile 2 şi 3 coincidente;(b) Relaţii de legătur ă între gradele de libertate
1. Blocaje: 01, = X U ; ;01, =Y U 01, =Z R
2. Relaţii cinematice:
2,2,3, Z X X R aU U ⋅−= ;
3,2, Y Y
U U = ;3,2, Z Z
R R =
(a) (b)
Fig. 2.17: Grinzi cuplate rigid. (a) Discretizare în care nu se include elementul rigid;(b) Relaţii de legătur ă între gradele de libertate
Procedeele matematice de rezolvare a unui sistem de ecuaţii cu restricţii suntmultiple. Cele mai utilizate metode sunt eliminarea unui număr de ecuaţii egal cu
numărul condiţiilor de restricţie, metoda multiplicatorilor Lagrange şi metoda func ţ iei de penalizare.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-38
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 527/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Din punct de vedere fizic, o resticţie poate să includă un singur grad de libertate,cum ar fi, spre exemplu, impunerea unei deplasări nodale pe o anumită direcţie (blocajsau deplasare cunoscută), sau mai multe grade de libertate, ca, de exemplu, condiţia cape două grade de libertate o mărime nodală să aibă aceeaşi valoare nenulă, iniţialnecunoscută. Restricţiile impuse mai multor grade de libertate (restricţii multipunct)sunt, în general, produse de prezenţa elementelor rigide sau a unor modelări depreluare a mişcărilor de mecanism.
Dacă ecuaţia de echilibru static a unei structuri asamblate, pentru care s-auimpus sau nu anumite condiţii la limită în deplasări este (2.35), care în continuare sescrie
[ ]{ } { }F U K = , (2.42)
adică vectorul deplasărilor {u} devine {U } iar restricţiile - ecuaţii liniar independente, suntscrise în forma
[ ]{ } { }QU C = , (2.43)
se pune problema de a rezolva ecuaţia (2.42) care să satisfacă condiţiile (2.43).Matricea [C ] este o matrice dreptunghiular ă cu termeni constanţi, care are un număr delinii egal cu numărul de restricţii. Vectorul {Q} este, de asemenea, un vector deconstante. De cele mai multe ori, în practică, este un vector cu toate elementele nule. Încontinuare, se prezintă câteva metode de includere a restricţiilor în ecuaţia de echilibrua modelului structurii.
1. Metoda eliminării. Ecuaţia (2.42), care conţine n grade de libertate, se poate aranja
astfel încât vectorul deplasărilor nodale să fie de forma { } { } { }{ }T T
e
T
r U U U = , în care
reprezintă deplasările "r eţinute" (în număr de r ), iar { }r U { }eU deplasările care urmează
a fi "eliminate" (în număr de e, deci n = r + e). În aceste condiţii ecuaţia (2.43) poate firescrisă în forma
[ ] [ ][ ]{ }{ }
{ }0=⎭⎬⎫
⎩⎨⎧
e
r
er U
U C C . (2.44)
Deoarece numărul de ecuaţii liniar independente r , este mai mic decât numărulecuaţiilor de echilibru n, rezultă că matricea [ ]eC este pătratică şi nesingular ă. Din
ecuaţia (2.44) rezultă
{ } [ ] [ ]{ }r r ee U C C U 1−
−= , (2.45)
relaţie care poate fi înglobată în transformarea{ }{ }
[ ][ ] [ ]
{ }r
r e
r
e
r U
C C
I
U
U ⎥⎦
⎤⎢⎣
⎡
−=
⎭⎬⎫
⎩⎨⎧
−1 , (2.46)
care poate fi rescrisă sub forma
{ } [ ]{ }11 ×××
=r
r r nn
U T U ; [ ][ ]
[ ] [ ]⎥⎦
⎤⎢⎣
⎡
−= −
r e
r
C C
I T 1 , (2.47)
în care [ este matricea identitate.]r I
Dacă ecuaţia (2.47.a) se înlocuieşte în (2.42) care se înmulţeşte la stânga cutranspusa matricei de transformare [T ], rezultă un sistem de r ecuaţii, adică
[ ]{ } { }r r r F U K = , (2.48)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-39
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 528/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
în care
[ ] [ ] [ ][T K T K T
r = ] ; { } [ ] { }F T F T
r = . (2.49)
Matricea [T ] se poate obţine şi în mod direct, prin formularea directă a relaţiei(2.47.a). Dacă deplasările impuse sunt nule, adică { } { }0=eU , atunci ,[ ] [ r r I C = ] [ ] [ ]0=eC
şi matricea de rigiditate redusă se obţine prin eliminarea liniilor şi coloanelor corespunzătoate deplasărilor nule, adică corespund setului r
[ ] [ ] rr r K K = , (2.50)
şi se ajunge la rezolvarea unui sistem de ecuaţii ordinare, prezentată în paragrafulprecedent.
2. Metoda multiplicatorilor Lagrange. Această metodă se bazează pe minimizareaunei funcţii în care variabilele nu sunt liniar independente. În cazul analizei structurale,
se pleacă de la expresia potenţialului, în forma matriceală { } [ ]{ } { } { }F U U K U T T
−=Π
2
1 şi
se obţine
{ } [ ]{ } { } { } { } [ ]{ } { }( )QU C F U U K U T T T
−+−=Π λ 21
, (2.51)
adică la expresia potenţialului se adună ecuaţia (2.43) înmulţită cu vectorul { } carereprezintă multiplicatorii Lagrange şi au semnificaţia unor for ţe care "păstrează"echilibrul structurii.
T λ
Condiţiile de staţionaritate a ecuaţiei (2.51), adică { }
{ }0=⎭⎬⎫
⎩⎨⎧
∂
Π∂
U şi
{ }{ }0=
⎭⎬⎫
⎩⎨⎧
∂
Π∂
λ
conduc la sistemul de ecuaţii
[ ] [ ][ ] [ ]
{ }{ }
{ }{ }⎭
⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡
Q
F U
C
C K T
λ 0. (2.52)
Acest sistem are dimensiunea n+r , mai mare decât a sistemului iniţial (2.42), iar pentrurezolvarea lui poate fi adaptată procedura de eliminare Gauss, deşi matricea care setriunghiularizează are termeni nuli pe diagonala principală.
3. Metoda func ţ iei de penalizare. Această metodă conduce la determinareaaproximativă a necunoscutelor şi deci la satisfacerea aproximativă a restricţiilor, adică relaţia (2.43), se rescrie în forma
{ } [ ]{ } { }QU C r −= (2.53)şi se introduce în expresia potenţialului astfel:
{ } [ ]{ } { } { } { } [ ]{ }r r F U U K U T T T α
2
1
2
1+−=Π . (2.54)
Mărimea suplimentar ă { } [ ]{ }r r T α
2
1din expresia potenţialului poartă denumirea de
funcţie de penalizare. Matricea [ ]α se alege de formă diagonală. Dacă expresia (2.53)se introduce în expresia potenţialului (2.54) şi se pune condiţia de minim pentru
potenţial{ }
{ }0=
⎭⎬⎫
⎩⎨⎧
∂
Π∂
U , se obţine
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-40

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 529/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
[ ] [ ] [ ][ ]( ){ } { } [ ] [ ] [ ]QC F U C C K T T α α +=+ . (2.55)
Matricea [ ] , numită matrice de penalizare, se adaugă la matricea de rigiditate a
structurii, iar vectorul [ ] se adună la vectorul încărcărilor nodale iniţiale. Dacă
[ ] [ ]C C T α
[ ] [ ]QC T α
[ ] [ ]0=α atunci restricţiile aplicate sunt neglijate. Dacă norma matricei [ ]α creştevectorul deplasărilor nodale { se modifică în aşa fel încât restricţiile sunt din ce în ce
mai bine ("aproape") satisf ăcute. Este de dorit ca matricea
}U
[ ]α să conţină termeniadimensionali, adică independenţi de gradele de libertate, care pot fi deplasări şi rotiri.
Această metodă păstrează nealterată dimensiunea iniţială a problemei, dar dincauza matricei [ ]α , care trebuie să aibă termeni mult mai mari decât valorile rigidităţilor corespunzătoare diagonalei principale a matricei [K ], poate conduce la apariţia unor probleme numerice, deoarece valoarea parametrului de condiţionare (numărul decondiţionare) a matricei [ ] [ ] [ ][ ]C C K
T α + creşte foarte mult şi la limită aceasta poate
deveni singular ă.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-41

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 530/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-42
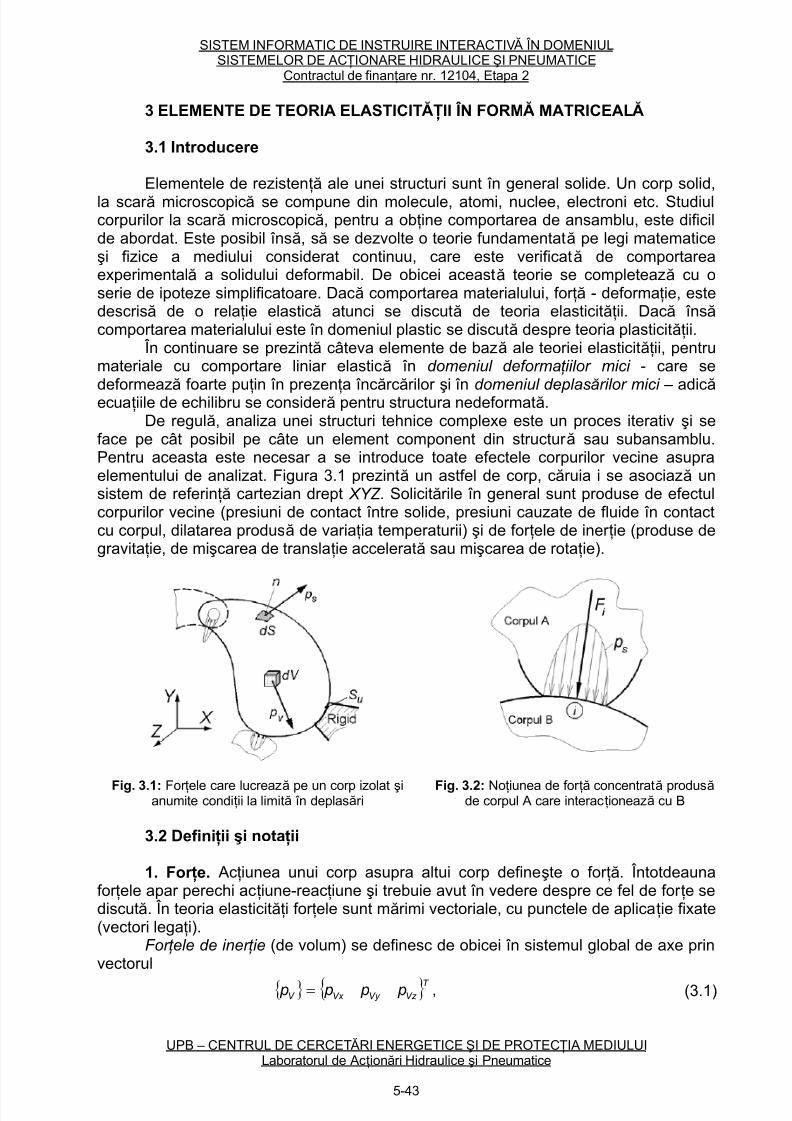
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 531/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
3 ELEMENTE DE TEORIA ELASTICITĂŢII ÎN FORMĂ MATRICEALĂ
3.1 Introducere
Elementele de rezistenţă ale unei structuri sunt în general solide. Un corp solid,la scar ă microscopică se compune din molecule, atomi, nuclee, electroni etc. Studiulcorpurilor la scar ă microscopică, pentru a obţine comportarea de ansamblu, este dificilde abordat. Este posibil însă, să se dezvolte o teorie fundamentată pe legi matematiceşi fizice a mediului considerat continuu, care este verificată de comportareaexperimentală a solidului deformabil. De obicei această teorie se completează cu oserie de ipoteze simplificatoare. Dacă comportarea materialului, for ţă - deformaţie, estedescrisă de o relaţie elastică atunci se discută de teoria elasticităţii. Dacă însă comportarea materialului este în domeniul plastic se discută despre teoria plasticităţii.
În continuare se prezintă câteva elemente de bază ale teoriei elasticităţii, pentrumateriale cu comportare liniar elastică în domeniul deformaţ iilor mici - care se
deformează foarte puţin în prezenţa încărcărilor şi în domeniul deplasărilor mici – adică ecuaţiile de echilibru se consider ă pentru structura nedeformată.De regulă, analiza unei structuri tehnice complexe este un proces iterativ şi se
face pe cât posibil pe câte un element component din structur ă sau subansamblu.Pentru aceasta este necesar a se introduce toate efectele corpurilor vecine asupraelementului de analizat. Figura 3.1 prezintă un astfel de corp, căruia i se asociază unsistem de referinţă cartezian drept XYZ . Solicitările în general sunt produse de efectulcorpurilor vecine (presiuni de contact între solide, presiuni cauzate de fluide în contactcu corpul, dilatarea produsă de variaţia temperaturii) şi de for ţele de iner ţie (produse degravitaţie, de mişcarea de translaţie accelerată sau mişcarea de rotaţie).
Fig. 3.1: For ţele care lucrează pe un corp izolat şianumite condiţii la limită în deplasări
Fig. 3.2: Noţiunea de for ţă concentrată produsă de corpul A care interacţionează cu B
3.2 Definiţii şi notaţii
1. For ţe. Acţiunea unui corp asupra altui corp defineşte o for ţă. Întotdeaunafor ţele apar perechi acţiune-reacţiune şi trebuie avut în vedere despre ce fel de for ţe sediscută. În teoria elasticităţi for ţele sunt mărimi vectoriale, cu punctele de aplicaţie fixate(vectori legaţi).
For ţ ele de iner ţ ie (de volum) se definesc de obicei în sistemul global de axe prinvectorul
{ } { }T Vz Vy Vx V p p p p = , (3.1)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-43

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 532/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
în care , , sunt funcţii continue, de obicei pe tot domeniul de analiză.Vx p Vy p Vz p
For ţ ele de presiune (de suprafaţă), care acţionează numai pe conturuldomeniului de analiză, se definesc în sistemul global de axe, sau uneori în sisteme dereferinţă locale, prin vectorul
{ } { }T Sz Sy Sx S p p p p = , (3.2) în care , , sunt funcţii continue pe suprafeţele pe care se aplică.Sx p Sy p Sz p
For ţ ele concentrate reprezintă suma for ţelor de presiune (vezi Fig. 3.2) carelucrează pe o suprafaţă foarte mică în comparaţie cu suprafaţa totală a domeniului deanaliză. Acestea sunt mărimi "echivalente" cu care se lucrează uneori în scopulsimplificării problemei atunci când nu interesează efectul local şi se notează
{ } { }T
z i y i x i i F F F F ,,,= (3.3)
Uneori distribuţia for ţelor de presiune este de aşa natur ă încât se reduce la un torsor echivalent, adică o for ţă concentrată şi un moment.
2. Deplasări. Deplasarea defineşte modificarea poziţiei unui punct în raport cuun sistem de referinţă fix. Ea are o componentă elastică şi una de corp rigid.
Câmpul deplasărilor , se defineşte prin vectorul
{ } { }T w v uu = , (3.4)
în care u = u( x,y,z ), v = v ( x,y,z ), w = w ( x,y,z ) reprezintă funcţiile deplasărilor liniare pecele trei direcţii ale sistemului de referinţă considerat, de obicei, sistemul de referinţă global. Pentru plăci, învelişuri şi bare se introduc şi rotirile, care împreună cudeplasările, formează deplasările generalizate.
3. Tensiuni. Gradul de solicitare al unui corp într-un punct adică un element devolum infinitesimal, se defineşte prin tensorul tensiunilor care are nouă componente,dintre care şase independente. Starea de tensiune într-un punct se defineşte însistemul de referinţă global (Fig. 3.3,a), sau în alt sistem de referinţă, prin vectorultensiunilor independente (deoarece
yx xy τ τ = ,zy yz τ τ = şi xz zx τ τ = )
{ } { }T
zx yz xy z y x τ τ τ σ σ σ σ = , (3.5)
sau echivalent, prin tensiunile principale 321 σ σ σ >> , în sistemul de referinţă rotit faţă
de sistemul de referinţă global (Fig. 3.3,b) Z Y X ′′′ , numit sistem de referinţă principal aldirecţiilor tensiunilor principale. Tensiunile σ sunt normale iar tensiunile τ tangenţiale.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-44

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 533/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
(a) (b)
Fig. 3.3: Tensorul tensiunilor. (a) În coordonate carteziene globale; (b) În coordonatele tensiunilor principale
4. Deformaţii specifice. Similar tensiunilor se defineşte vectorul deformaţiilor
specifice{ } { }T
zx yz xy z y x γ γ γ ε ε ε ε = , (3.6)
în care ε sunt deformaţii specifice liniare, iar γ deformaţii specifice unghiulare.Se menţionează că tensiunile şi deformaţiile specifice sunt mărimi tensoriale.
Având în vedere simetria acestor mărimi, pentru simplitate, se utilizează vectorii asociaţiprezentaţi mai sus.
3.3 Transformarea mărimilor la schimbarea axelor de coordonate
Fie două sisteme de referinţă carteziene drepte XYZ şi Z Y X ′′′, rotite între ele,sistemul al doilea fiind definit prin cosinusurile directoare , m, n dintre perechile de axe
ale celor două sisteme de referinţă, astfell
Axele X Y Z
X ′ 1l 1m 1n
Y ′ 2l 2m 2n
Z ′ 3l 3m 3n
În continuare, mărimile notate cu prim reprezintă valorile raportate la sistemul de
referinţă notat cu prim, iar celelalte corespund sistemului de referinţă iniţial.
Transformarea deplasărilor şi rotirilor se efectuează cu o relaţie de forma
{ } [ ]{ }uu λ =′ , (3.7)
în care
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
333
222
111
nm
nm
nm
l
l
l
λ , (3.8)
este matricea cosinusurilor directoare.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-45
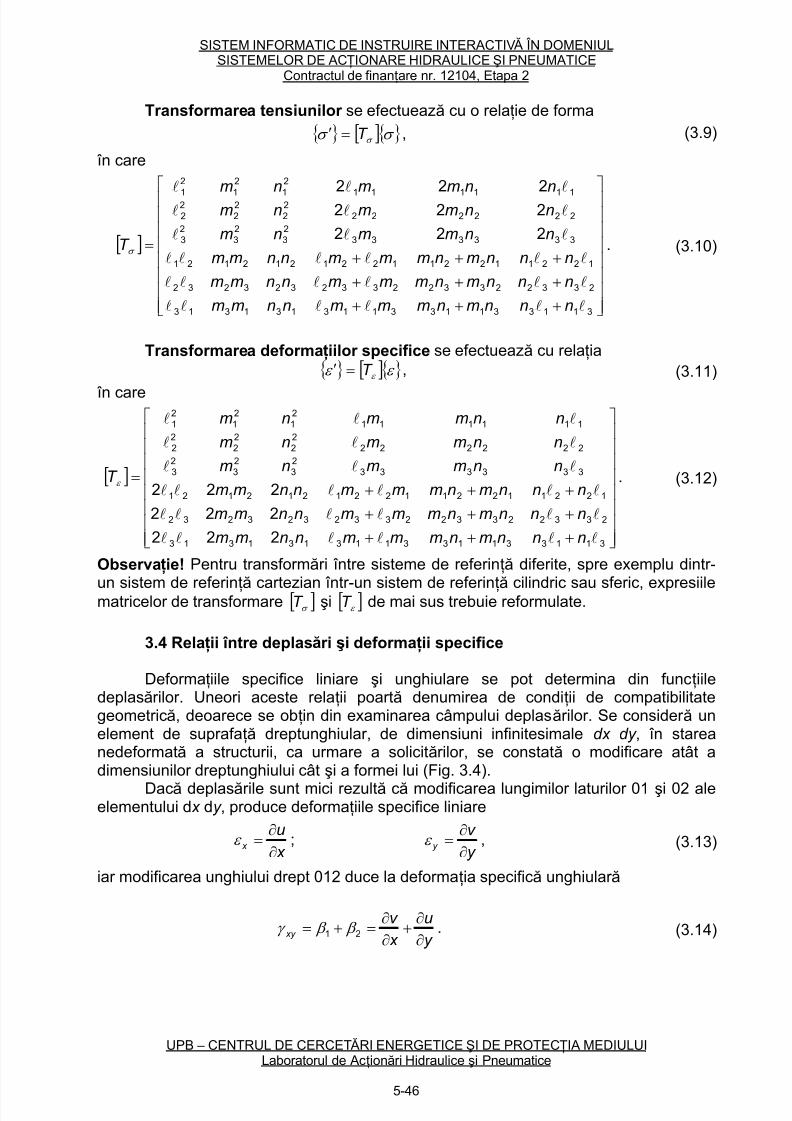
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 534/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Transformarea tensiunilor se efectuează cu o relaţie de forma
{ } [ ]{ }σ σ σ T =′ , (3.9)
în care
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+++
+++
+++=
311331133113131313
233223322332323232
122112211221212121
33333323
23
23
22222222
22
22
111111
2
1
2
1
2
1
222
222
222
llllll
llllll
llllll
lll
lll
lll
nnnmnmmmnnmm
nnnmnmmmnnmm
nnnmnmmmnnmm
nnmmnm
nnmmnm
nnmmnm
T σ . (3.10)
Transformarea deformaţiilor specifice se efectuează cu relaţia
{ } [ ]{ }ε ε ε T =′ , (3.11)
în care
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+++
+++
+++=
311331133113131313
233223322332323232
122112211221212121
33333323
23
23
22222222
22
22
11111121
21
21
222
222
222
llllll
llllll
llllll
lll
lll
lll
nnnmnmmmnnmm
nnnmnmmmnnmm
nnnmnmmmnnmm
nnmmnm
nnmmnm
nnmmnm
T ε . (3.12)
Observaţie! Pentru transformări între sisteme de referinţă diferite, spre exemplu dintr-
un sistem de referinţă cartezian într-un sistem de referinţă cilindric sau sferic, expresiilematricelor de transformare şi[ σ T ] [ ]ε T de mai sus trebuie reformulate.
3.4 Relaţii între deplasări şi deformaţii specifice
Deformaţiile specifice liniare şi unghiulare se pot determina din funcţiiledeplasărilor. Uneori aceste relaţii poartă denumirea de condiţii de compatibilitategeometrică, deoarece se obţin din examinarea câmpului deplasărilor. Se consider ă unelement de suprafaţă dreptunghiular, de dimensiuni infinitesimale dx dy , în stareanedeformată a structurii, ca urmare a solicitărilor, se constată o modificare atât adimensiunilor dreptunghiului cât şi a formei lui (Fig. 3.4).
Dacă deplasările sunt mici rezultă că modificarea lungimilor laturilor 01 şi 02 aleelementului d x dy , produce deformaţiile specifice liniare
x
u x
∂
∂=ε ;
y
v y
∂
∂=ε , (3.13)
iar modificarea unghiului drept 012 duce la deformaţia specifică unghiular ă
y
u
x
v xy
∂
∂+
∂
∂=+= 21 β β γ . (3.14)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-46
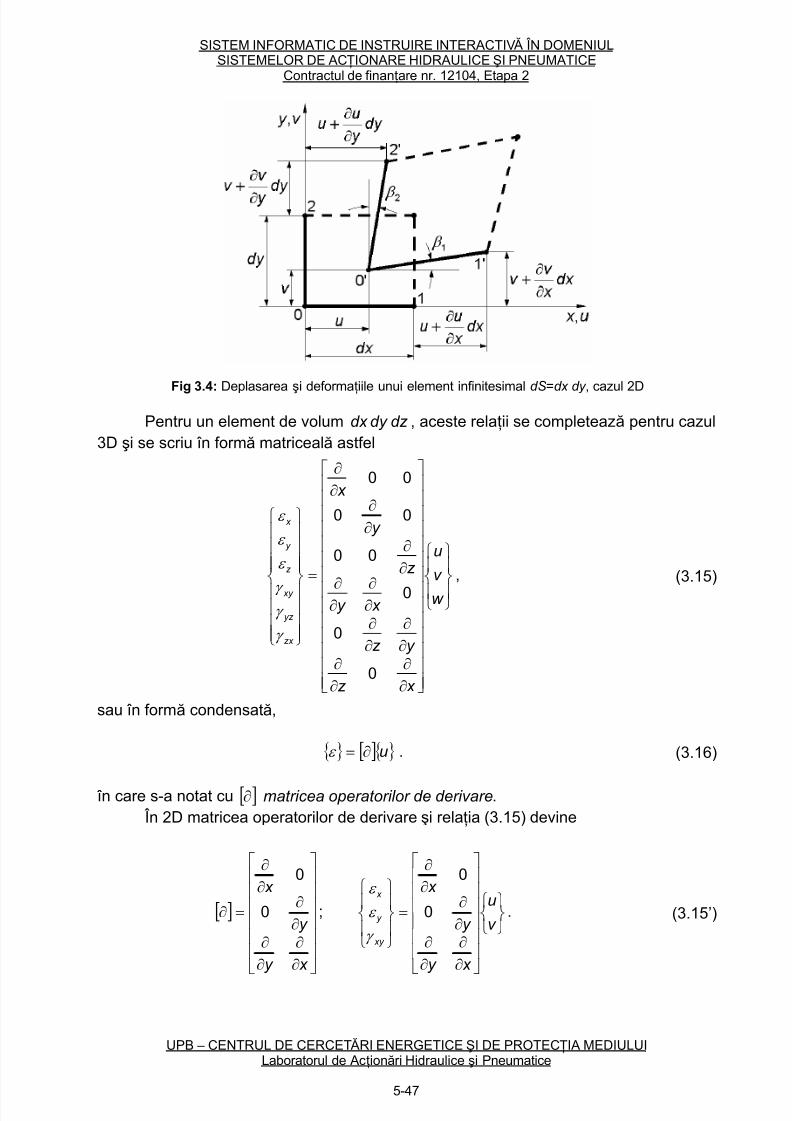
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 535/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig 3.4: Deplasarea şi deformaţiile unui element infinitesimal dS=dx dy , cazul 2D
Pentru un element de volum , aceste relaţii se completează pentru cazul3D şi se scriu în formă matriceală astfel
dz dy dx
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂
∂
∂
∂∂
∂
∂
∂∂∂∂∂
∂
∂∂
∂∂
∂
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
w
v
u
x z
y z
x y
z
y
x
zx
yz
xy
z
y
x
0
0
0
00
00
00
γ
γ γ
ε
ε
ε
, (3.15)
sau în formă condensată,
{ } [ ]{ }u∂=ε . (3.16)
în care s-a notat cu [ ]∂ matricea operatorilor de derivare.
În 2D matricea operatorilor de derivare şi relaţia (3.15) devine
[ ]
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∂
∂
∂
∂∂
∂∂
∂
=∂
x y
y
x
0
0
;⎭⎬⎫
⎩⎨⎧
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∂
∂
∂
∂∂
∂∂
∂
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
v
u
x y
y
x
xy
y
x
0
0
γ
ε
ε
. (3.15’)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-47
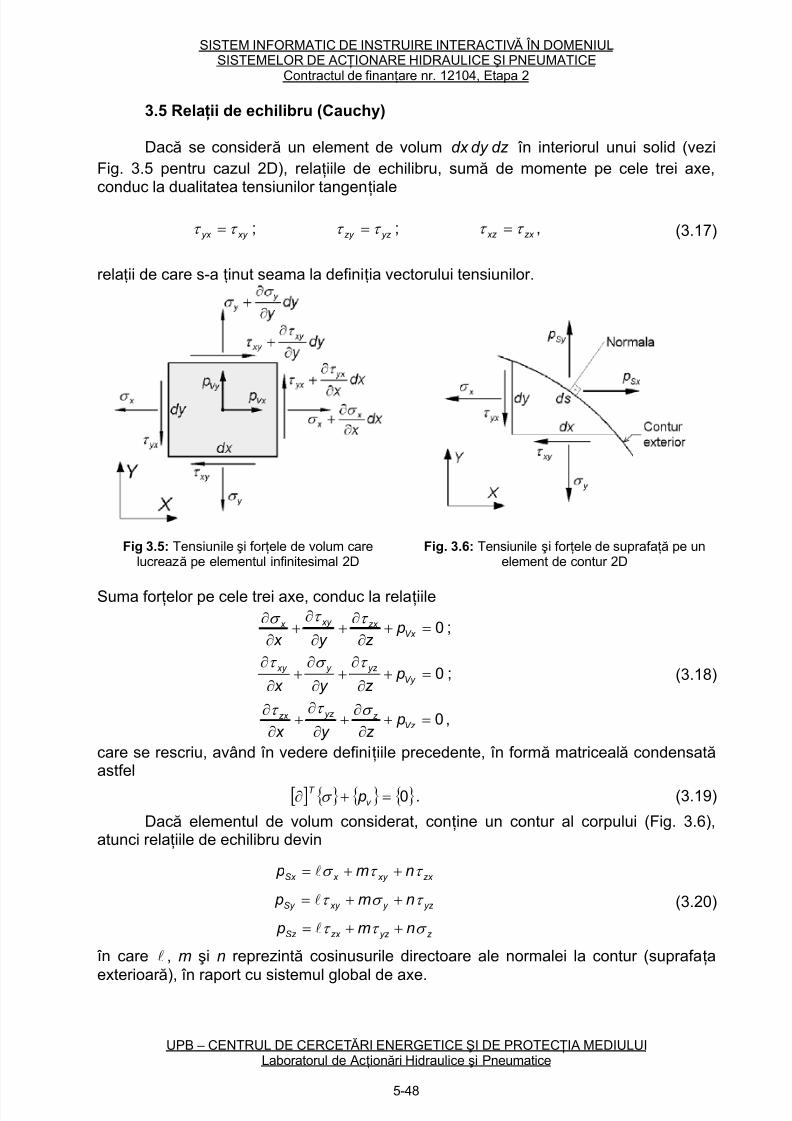
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 536/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
3.5 Relaţii de echilibru (Cauchy)
Dacă se consider ă un element de volum în interiorul unui solid (veziFig. 3.5 pentru cazul 2D), relaţiile de echilibru, sumă de momente pe cele trei axe,conduc la dualitatea tensiunilor tangen
ţiale
dz dy dx
xy yx τ τ = ; yz zy τ τ = ; zx xz τ τ = , (3.17)
relaţii de care s-a ţinut seama la definiţia vectorului tensiunilor.
Fig 3.5: Tensiunile şi for ţele de volum carelucrează pe elementul infinitesimal 2D
Fig. 3.6: Tensiunile şi for ţele de suprafaţă pe unelement de contur 2D
Suma for ţelor pe cele trei axe, conduc la relaţiile
0=+∂
∂+
∂
∂+
∂
∂Vx
zx xy x pz y x
τ τ σ ;
0=+∂
∂+
∂
∂+
∂
∂Vy
yz y xy p
z y x
τ σ τ ;
0=+∂
∂+
∂
∂+
∂
∂Vz
z yz zx pz y x
σ τ τ ,
(3.18)
care se rescriu, având în vedere definiţiile precedente, în formă matriceală condensată astfel
[ ] { } { } { }0=+∂ v
T pσ . (3.19)
Dacă elementul de volum considerat, conţine un contur al corpului (Fig. 3.6),atunci relaţiile de echilibru devin
zx xy x Sx nm p τ τ σ ++= l
yz y xy Sy nm p τ σ τ ++= l
z yz zx Sz nm p σ τ τ ++= l
(3.20)
în care , m şi n reprezintă cosinusurile directoare ale normalei la contur (suprafaţa
exterioar ă), în raport cu sistemul global de axe.
l
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-48
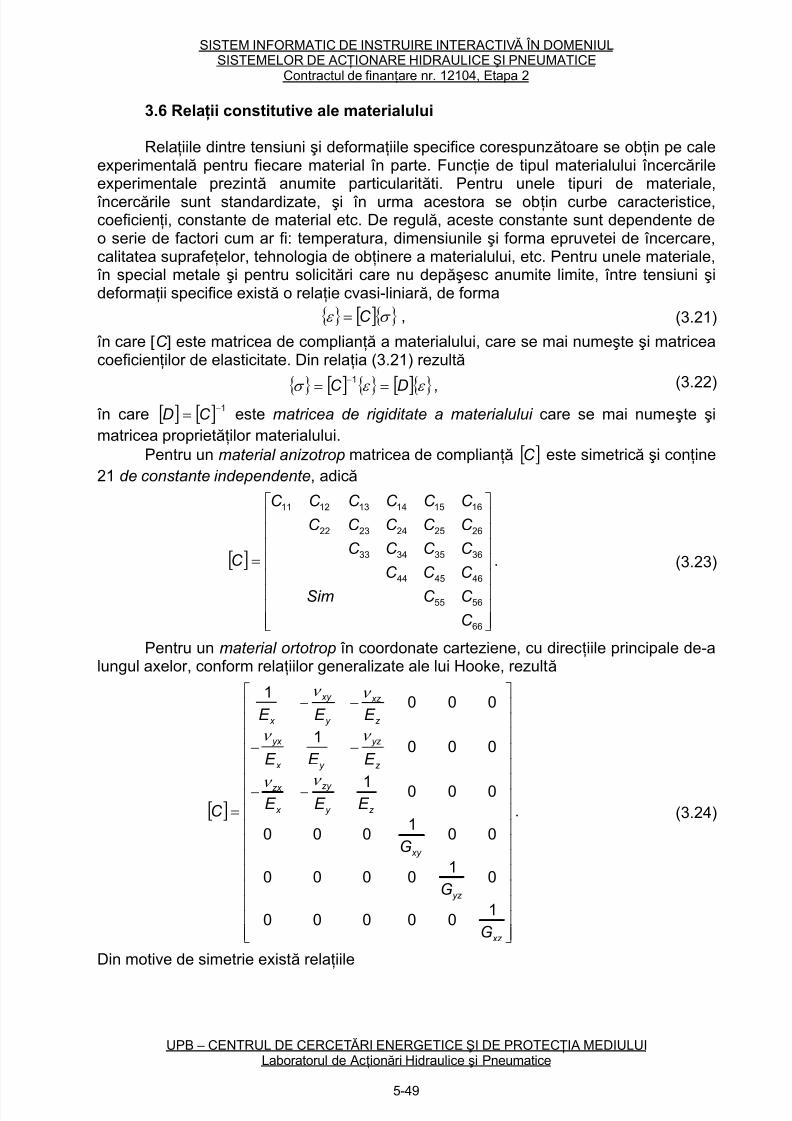
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 537/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
3.6 Relaţii constitutive ale materialului
Relaţiile dintre tensiuni şi deformaţiile specifice corespunzătoare se obţin pe caleexperimentală pentru fiecare material în parte. Funcţie de tipul materialului încercărileexperimentale prezintă anumite particularităti. Pentru unele tipuri de materiale, încercările sunt standardizate, şi în urma acestora se obţin curbe caracteristice,coeficienţi, constante de material etc. De regulă, aceste constante sunt dependente deo serie de factori cum ar fi: temperatura, dimensiunile şi forma epruvetei de încercare,calitatea suprafeţelor, tehnologia de obţinere a materialului, etc. Pentru unele materiale, în special metale şi pentru solicitări care nu depăşesc anumite limite, între tensiuni şideformaţii specifice există o relaţie cvasi-liniar ă, de forma
{ } [ ]{ }σ ε C = , (3.21)
în care [C ] este matricea de complianţă a materialului, care se mai numeşte şi matriceacoeficienţilor de elasticitate. Din relaţia (3.21) rezultă
{ } [ ] { } [ ]{ }ε ε σ DC ==
−1
,(3.22)
în care este matricea de rigiditate a materialului care se mai numeşte şimatricea proprietăţilor materialului.
[ ] [ ] 1−= C D
Pentru un material anizotrop matricea de complianţă [ ]C este simetrică şi conţine21 de constante independente, adică
[ ]
⎥⎥⎥
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎢⎢⎢⎢⎢
⎣
⎡
=
66
5655
464544
36353433
2625242322
161514131211
C
C C Sim
C C C
C C C C
C C C C C
C C C C C C
C . (3.23)
Pentru un material ortotrop în coordonate carteziene, cu direcţiile principale de-alungul axelor, conform relaţiilor generalizate ale lui Hooke, rezultă
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
−−
=
xz
yz
xy
z y
zy
x
zx
z
yz
y x
yx
z
xz
y
xy
x
G
G
G
E E E
E E E
E E E
C
100000
01
0000
001
000
0001
0001
0001
ν ν
ν ν
ν ν
. (3.24)
Din motive de simetrie există relaţiile
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-49

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 538/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
y
xy
x
yx
E E
ν ν = ;
z
xz
x
zx
E E
ν ν = ;
z
yz
y
zx
E E
ν ν = , (3.25)
astfel încât din cele 12 constante de material, nouă sunt independente.Pentru un material izotrop, ţinând seama de relaţia dintre modulul de elasticitate
longitudinal E , transversal G şi coeficientul de contracţie transversală ν , adică
( )ν +=
12E
G , (3.26)
rezultă
[ ]( )
( )( )⎥
⎥⎥
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎢⎢⎢⎢⎢
⎣
⎡
++
+
−
−−
=
ν
ν
ν
ν
ν ν
12012
0012
0001
0001
0001
1
Sim
E C , (3.27)
din care, prin inversare, rezultă matricea de rigiditate a materialului omogen, liniar şiizotrop
[ ]( )( )
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
−
−
−
−+=
ν
ν
ν
ν
ν ν
ν ν ν
ν ν
2
1
021
002
10001
0001
0001
211Sim
E D . (3.28)
Pentru sistemul de referinţă cilindric, utilizat pentru structurile axial simetrice,relaţiile (3.24) - (3.28) au alte forme.
Pentru cazul 2D, există două formulări distincte:a) Stare plană de tensiuni (SPT), dacă 0=== xz yz z τ τ σ , din relaţia (3.22) rezultă
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
xy
y
x
xy
x
x
E
γ
ε
ε
ν ν
ν
ν τ
σ
σ
2
100
01
01
1 2 . (3.29)
Se menţionează că în SPT ( )y x z E
σ σ ν
ε +−= .
b) Stare plană de deformaţ ie (SPD), dacă 0=== xz yz z γ γ ε , similar din relaţia (3.22)
rezultă
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-50

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 539/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
( )( ) ⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
−
−+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
xy
y
x
xy
x
x E
γ
ε
ε
ν
ν ν
ν ν
ν ν τ
σ
σ
2
100
01
01
211. (3.30)
În SPD tensiunea normală planului 2D rezultă ( )( )
( )y x z
E ε ε
ν ν
ν σ +
−+=
211.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-51

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 540/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
4. METODE ENERGETICE ÎN ANALIZA STRUCTURILOR
Acest capitol foloseşte notaţiile şi definiţiile prezentate în capitolul 3, introduceexpresiile energetice în formă matriceală şi apoi prezintă modul de rezolvareaproximativă a unor probleme de analiză structurală plecând de la o funcţională careare suport fizic.
4.1 Expresii energetice
1. Lucrul mecanic. Lucrul mecanic este suma dintre produsul for ţelor şideplasările produse pe direcţiile lor. În continuare, se are în vedere lucrul mecanic alfor ţelor care produc deplasări elastice, deci se consider ă că domeniul de analiză nu aredeplasări de corp rigid. For ţele aplicate unui element de volum dV , pot fi for ţe exterioare- for ţe de volum, for ţe de suprafaţă sau for ţe echivalente concentrate şi for ţe interioare -tensiuni, toate considerate constante.
Lucrul mecanic al for ţelor de volum, se scrie{ } { }dV puW V
T
V e ∫= , (4.1)
similar, lucrul mecanic al for ţelor de suprafaţă, rezultă
{ } { }dS puW S
T
Se ∫= , (4.2)
iar lucrul mecanic al for ţelor concentrate este
{ } { }i T
i
i e F uW ∑= . (4.3)
2. Energia potenţială de deformaţie. Un corp liniar elastic, acumulează oenergie internă, exprimată prin
{ } { }dV U T
V σ ε ∫=
2
1. (4.4)
3. Energia potenţială a for ţelor exterioare. Această energie notată , se
defineşte prin pW
e p W W −= . (4.5)
Dacă se consider ă, drept for ţe exterioare, for ţele de volum şi for ţele de suprafaţă,
energia potenţială a for ţelor exterioare se scrie{ } { } { } { }dS pudV puW S
T
SV
T
V p ∫∫ −−= . (4.6)
4.2 Tensiuni iniţiale şi variaţia de temperatur ă
Orice componentă supusă analizei este obţinută prin procedee tehnologice şieste supusă unor tratamente termice sau mecanice care induc în material o distribuţiede tensiuni iniţiale, care se suprapun peste tensiunile mecanice produse de solicitări.Prezenţa unor tensiuni iniţiale este însoţită de deformaţiile corespunzătoare, dar este
suficient să se cunoască una dintre ele dacă materialul are o comportare liniar elastică.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-52

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 541/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Din cauza unor variaţii de temperatur ă la care lucrează materialul, acesta sedilată dacă temperatura creşte sau se contractă dacă temperatura scade. De obicei seacceptă o temperatur ă iniţială (de referinţă) la care corpul nu prezintă influenţe produsede temperatur ă. Dacă dilatarea este liber ă, corpul î şi modifică dimensiunile (apare { }0ε )
f ăr ă apariţia unor tensiuni iniţiale. Dacă dilatarea este total împiedicată, atunci, corpulnu poate suferi deformaţii, dar apar tensiuni iniţiale termice { }0σ . Dacă dilatarea este
par ţial împiedicată, atunci în corp apar atât deformaţii specifice termice cât şi tensiunitermice. De obicei se face o distincţie între deformaţiile şi tensiunile termice şi celemecanice, deoarece ele se însumează.
În prezenţa unor tensiuni iniţiale { }0σ şi a unor deformaţii specifice iniţiale { }0ε ,
indiferent de modul de producere, relaţia (3.22) se rescrie în forma
{ } [ ] { } { }( ) { }00 σ ε ε σ +−= D . (4.7)
Deformaţiile specifice produse de dilatarea liber ă a unui material ortotrop, sunt date de
relaţia{ } { }T
z y x T 0000 α α α ε Δ= (4.8)
în care x α ,y α , z α sunt coeficienţii de dilatare termică pe cele trei direcţii principale, iar
este variaţia de temperatur ă.T ΔDacă în relaţia (4.7) se consider ă tensiunile iniţiale { } { }00 =σ şi deformaţiile
specifice mecanice { } { }0=ε , efectul variaţiei de temperatur ă pentru un corp cu dilatareatotal împiedicată este
{ } [ ]{ }0ε σ D−=
(4.9) Pentru un material omogen şi izotrop α α α α === z y x şi ţinând seama de relaţia (3.28)
se obţine
{ } { } { }T T E 000111
210ν
α σ σ
−
Δ−== . (4.10)
Variaţia de temperatur ă produce modificări sesizabile ale constantelor elastice ale
materialului, ducând la probleme neliniare. De cele mai multe ori însă, pentru a lucra cuo singur ă valoare a constantelor de material, în special pentru variaţii ale temperaturii
apropiate de variaţiile temperaturii mediului înconjur ător (circa ) se consider ă valorile medii ale constantelor, în ipoteza că se cunoaşte temperatura iniţială şivariaţia ei . Astfel, pentru coeficientul de dilatare termică al unui material izotrop,deoarece
°± 50i T
T Δ( )T α , în practică, de cele mai multe ori, se lucrează cu valoarea medie
∫Δ+
Δ=
T T
T m
i
i
dT T
α α 1
. (4.11)
4.3 Principiul energiei potenţiale totale minime
În continuare o parte din relaţiile discutate anterior sunt rescrise în formă matriceală compactă doar pentru a simplifica prezentarea.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-53

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 542/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Pentru a rezolva o problemă independentă de timp cum ar fi analiză statică liniar ă pentru obţinerea stării de tensiuni şi deformaţii, în teoria elasticităţii trebuie să seţină seama de patru tipuri de ecuaţii, care în domeniul liniar elastic al deplasărilor micisunt:
Nr. Tipul ecuaţiei Expresii în formă compactă
Definită derelaţia
1. Relaţii de echilibru, adică pentru oricepunct din domeniul de analiză şi de pecontur suma for ţelor este nulă
[ ] { } { } { }0=+∂T
pσ v (3.19) şi(3.20)
2. Relaţii de compatibilitate geometrică între deplasări şi deformaţii specifice
{ } [ ]{ }u∂=ε (3.16)
3. Relaţii constitutive ale materialului,obţinute experimental
{ } [ ]{ }σ ε C = sau
{ } [ ]{ }ε σ D= ;(3.22)
4.
Condiţii la limită în for ţe şi deplasări
(presiuni, for ţe de iner ţie, variaţii detemperatur ă, deformaţii sau tensiuniiniţiale cunoscute, deplasări impuse etc).
Funcţie de aplicaţie -
Ecuaţiile diferenţiale care descriu un fenomen fizic se spune că definescproblema în formă "exactă" ("strong form"), pentru că ele sunt valabile pentru toatepunctele din domeniul de analiză.
O funcţională, care implicit conţine ecuaţiile diferenţiale, se spune că descrieproblema în formă "slabă" ("weak form"), deoarece satisface anumite condiţii la nivelglobal (în sensul unei medieri pe domeniul de analiză).
Metoda elementelor finite este o metodă aproximativă de rezolvare a ecuaţiilor cu derivate par ţiale care se bazează pe "echivalarea" mediului continuu printr-un modelde calcul discret. Ecuaţiile diferenţiale sunt transformate în ecuaţii liniare. Mărimile caredefinesc o problemă prin funcţii continue (o infinitate de valori) se limitează la un număr finit de necunoscute - grade de libertate, alese arbitrar de analist.
Gradele de libertate sunt mărimi (cantitative) independente, utilizate pentru adefini configuraţia unui sistem. În MEF gradele de libertate reprezintă mărimi utilizatepentru definirea variaţiei spaţiale a unui domeniu de analiză.
MEF este fundamentată teoretic. Din punct de vedere matematic există maimulte modalităţi de a obţine relaţiile de bază cu care operează MEF. Una dintre acestea(în analiza structurală) este folosirea în formă variaţională a energiei potenţ iale totale.
Această abordare teoretică este sugestivă şi poate fi uşor interpretată fizic.Configuraţia de echilibru a unui sistem se poate analiza şi prin intermediulenergiei potenţiale totale. Energia potenţială se exprimă în formă integrală (din punct devedere matematic poartă numele de funcţională). O funcţională este, aşadar, o expresieintegrală care conţine implicit ecuaţile diferenţiale care descriu un fenomen anume. Înanaliza structurală, se foloseşte de obicei, expresia energiei potenţiale totale.Funcţionalele se întâlnesc şi în descrierea fenomenelor termice, electrice, în uneleprobleme de curgere a fluidelor, în acustică, etc.
Energia potenţială totală a unui sistem elastic conservativ, , se defineşte casuma energiei potenţiale de deformaţie notată U şi potenţialul for ţelor aplicate dinexterior (al sarcinilor) notat
Π
pW
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-54
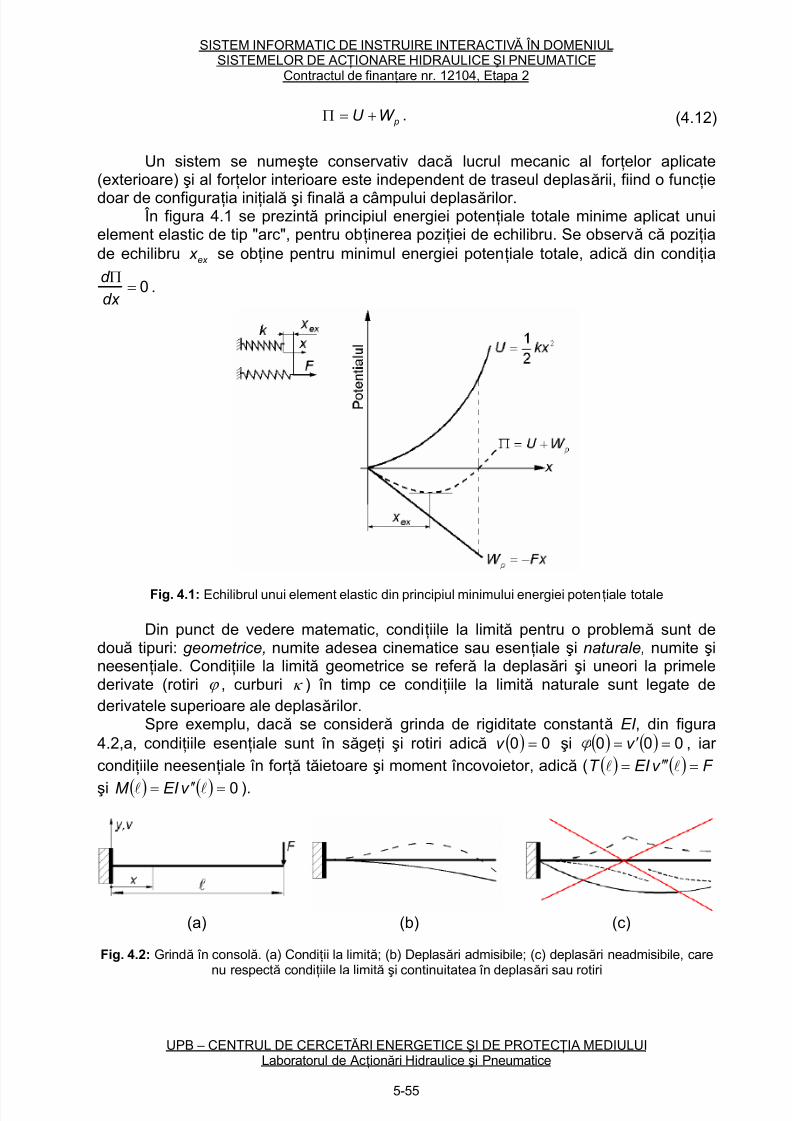
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 543/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
pW U +=Π . (4.12)
Un sistem se numeşte conservativ dacă lucrul mecanic al for ţelor aplicate
(exterioare) şi al for ţelor interioare este independent de traseul deplasării, fiind o funcţie
doar de configuraţia iniţială şi finală a câmpului deplasărilor. În figura 4.1 se prezintă principiul energiei potenţiale totale minime aplicat unui
element elastic de tip "arc", pentru obţinerea poziţiei de echilibru. Se observă că poziţiade echilibru se obţine pentru minimul energiei potenţiale totale, adică din condiţiaex x
0=Π
dx
d .
Fig. 4.1: Echilibrul unui element elastic din principiul minimului energiei potenţiale totale
Din punct de vedere matematic, condiţiile la limită pentru o problemă sunt dedouă tipuri: geometrice, numite adesea cinematice sau esenţiale şi naturale, numite şineesenţiale. Condiţiile la limită geometrice se refer ă la deplasări şi uneori la primelederivate (rotiri ϕ , curburi κ ) în timp ce condiţiile la limită naturale sunt legate dederivatele superioare ale deplasărilor.
Spre exemplu, dacă se consider ă grinda de rigiditate constantă EI , din figura4.2,a, condiţiile esenţiale sunt în săgeţi şi rotiri adică ( ) 00 =v şi ( ) ( ) 000 =′= v , iar
condiţiile neesenţiale în for ţă tăietoare şi moment încovoietor, adică ( ( ) ( ) F v EI T =′′′= ll
şi ).( ) ( ) 0=′′= ll v EI M
(a) (b) (c)
Fig. 4.2: Grindă în consolă. (a) Condiţii la limită; (b) Deplasări admisibile; (c) deplasări neadmisibile, carenu respectă condiţiile la limită şi continuitatea în deplasări sau rotiri
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-55

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 544/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
O funcţie de clasă C m (continuă şi derivabilă până la ordinul m), este admisibil ă dacă satisface condiţiile la limită esenţiale. Configuraţiile deformatelor din figura 4.2,bsunt exemple de funcţii admisibile iar cele din figura 4.2,c sunt funcţii neadmisibile.Funcţiile admisibile nu trebuie neapărat să coincidă cu forma reală a deformatei.
Deplasările virtuale { }uδ sunt deplasări admisibile, care în plus satisfacurmătoarele condiţii: sunt independente de for ţele aplicate structurii şi sunt infinitezimale(li se pot aplica regulile calculului diferenţial). For ţele aplicate structurii r ămân constantepentru exprimarea variaţiei energiei potenţiale totale faţă de poziţia de echilibru.
Din relaţia (4.12), ţinând seama de relaţiile (4.4), (4.6) şi (3.22), rezultă
{ } [ ]{ } { } { } { } { }∫∫∫ −−=ΠS
S
T
V V
T
V
T dS pudV pudV D ε ε
2
1. (4.13)
Principiul energiei potenţiale totale se enunţă astfel: la echilibru, variaţ ia energiei potenţ iale totale pe deplasări virtuale este zero, sau, matematic
0=Πδ , 0=+=Π pW U δ δ δ . (4.14)
Echilibrul stabil implică satisfacerea suplimentar ă a relaţiei02 >Πδ . (4.15)
Variaţia energiei potenţiale de deformaţie se obţine prin „derivarea” relaţiei (4.4)şi includerea relaţiei (3.22), rezultă
{ } [ ]{ } { } [ ]{ } { } [ ]{ }dV DdV DdV DU V
T
V
T
V
T ε δε δε ε ε δε δ ∫∫∫ =+=
2
1
2
1, (4.16)
în care s-a folosit relaţia { } [ ]{ }( ) { } [ ] { } { } [ ]{ }ε δε ε δε δε ε DDDT T T T T
== şi proprietatea de
simetrie a matricei de rigiditate a materialului, adică [ ] [ ]DDT
= .
Variaţia energiei potenţiale a for ţelor exterioare se obţine din (4.6) şi rezultă { } { } { } { }∫∫ −−=
SS
T
V V
T
p dS pudV puW δ δ δ . (4.17)
4.4 Metoda de aproximare Rayleigh-Ritz
Aplicarea metodei Rayleigh-Ritz unei funcţionale face ca ea să nu mai conţină expresii integrale. De regulă aceasta duce la un sistem de ecuaţii algebrice liniare.Dacă funcţia necunoscută, respectiv deplasarea, se înlocuieşte cu o funcţie admisibilă,definită prin intermediul unor parametri, atunci din relaţia (4.14) se pot găsi valorileparametrilor pentru care funcţia admisibilă aleasă aproximează cel mai bine funcţia
exactă.
Exemplul 1. Se consider ă grinda simplu rezemată, de rigiditate constantă EI dinfigura 4.3, care este încărcată cu o sarcină uniform distribuită. Dacă se doreşteobţinerea săgeţii maxime (neglijând efectul for ţei tăietoare), se poate alege drept funcţie
admisibilă ( )l
x v x v m
π sin= , care satisface condiţiile la limită esenţiale.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-56

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 545/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig. 4.3: Grindă simplu rezemată solicitată cu osarcină uniform distribuită
Fig. 4.4: Grindă simplu rezemată solicitată cu osarcină distribuită liniar
În expresia (4.13) se introduc relaţiile { } ( ) x v u = , { } 0=V p , { }b
p pS = , [ ] E D = ,
{ }
dx
du x == ε ε ,
dx
dv y u −= , ,dx dAdV = dx bdS = , şi expresia potenţialului
devine
dAy I A∫= 2
dx x
pv dx x
v EI mm ∫∫ −⎟⎟ ⎠
⎞⎜⎜⎝
⎛ =Π
ll lll
π π π sinsin
21 2
2
2
2
.
Efectuând calculele, din condiţia 0=Π
mdv
d , se obtine
EI
pv m
4
5
4 l
π = .
Pentru alte funcţii de aproximare se obţin alte valori (vezi tabelul. 4.1). Expresia
exactă a săgeţii maxime esteEI
pv m
4
384
5 l= şi se obţine dacă funcţia admisibilă
coincide cu funcţia exactă, adică un polinom de gradul patru. Deci, dacă se alege ofuncţie admisibilă adecvată, metoda aproximativă Rayleigh-Ritz poate conduce şi lasoluţii exacte.
Tabelul 4.1: Funcţii de aproximare pentru fibra medie deformată a aplicaţiei din figura 4.3Funcţia de aproximare Săgeata maximă v m Eroarea relativă a săgeţii
[%]
( )l
x v x v m
π sin= 0,013071
EI
p 4l +0,39
( ) ⎟ ⎠
⎞⎜⎝
⎛ −=ll
x x v x v m 1 0,010416
EI
p 4l -20,00
( ) ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −−⎟
⎠
⎞⎜⎝
⎛ −=
2
2
11llll
x x x x v x v m 0,0130208
EI
p 4l 0
Exemplul 2. Pentru grinda din figura 4.4, ecuaţia fibrei medii deformate seaproximează cu polinoame de ordinul doi, trei, patru şi cinci. Aplicând metoda Rayleigh-Ritz, săgeata maximă se obţine pentru x = şi se prezintă în tabelul 4.2. Pentru
polinomul de ordinul trei, calculele decurg astfel:mv 0 x
-deoarece ( ) ( ) 00 == lv v , rezultă că polinomul are doar două constanteindependente;
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-57
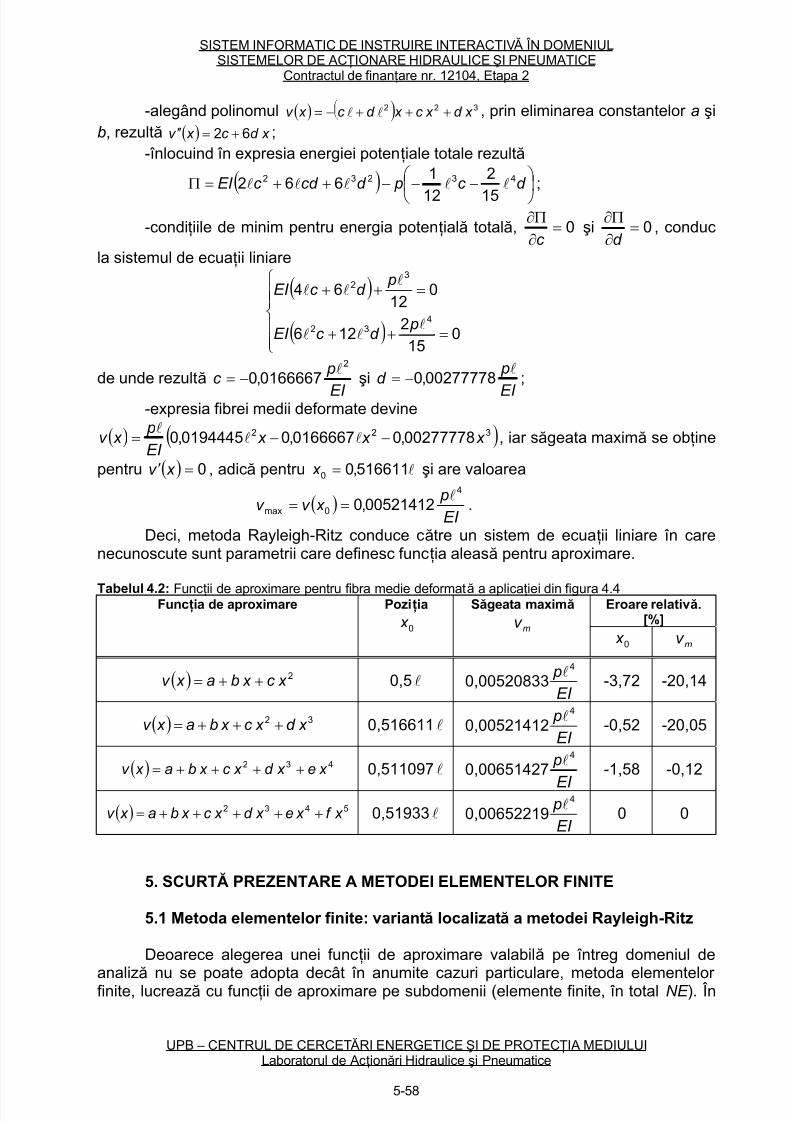
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 546/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
-alegând polinomul ( ) ) 322 x d x c x d c x v +++−= ll , prin eliminarea constantelor a şib, rezultă ;( ) x d c x v 62 +=′′
-înlocuind în expresia energiei potenţiale totale rezultă
( ) ⎟
⎠
⎞⎜
⎝
⎛ −−−++=Π d c pd cd c EI 43232
15
2
12
1662 lllll ;
-condiţiile de minim pentru energia potenţială totală, 0=∂
Π∂
c şi 0=
∂
Π∂
d , conduc
la sistemul de ecuaţii liniare
( )
( )⎪⎪⎩
⎪⎪⎨
⎧
=++
=++
015
2126
012
64
432
32
lll
lll
pd c EI
pd c EI
de unde rezultă EI
pc
2
0166667,0l
−= şiEI
pd
l00277778,0−= ;
-expresia fibrei medii deformate devine
( ) ( )322 00277778,00166667,00194445,0 x x x EI
p x v −−= ll
l, iar săgeata maximă se obţine
pentru , adică pentru( ) 0=′ x v l516611,00 = x şi are valoarea
( )EI
p x v v
4
0max 00521412,0l
== .
Deci, metoda Rayleigh-Ritz conduce către un sistem de ecuaţii liniare în carenecunoscute sunt parametrii care definesc funcţia aleasă pentru aproximare.
Tabelul 4.2: Funcţii de aproximare pentru fibra medie deformată a aplicaţiei din figura 4.4Eroare relativă.
[%]Funcţia de aproximare Poziţia
0 x
Săgeata maximă
mv
0 x mv
( ) 2 x c x ba x v ++= 0,5 l 0,00520833EI
p 4l -3,72 -20,14
( ) 32 x d x c x ba x v +++= 0,516611l 0,00521412EI
p 4l -0,52 -20,05
( ) 432 x e x d x c x ba x v ++++= 0,511097l 0,00651427
EI
p 4l -1,58 -0,12
( ) 5432 x f x e x d x c x ba x v +++++= 0,51933l 0,00652219EI
p 4l 0 0
5. SCURTĂ PREZENTARE A METODEI ELEMENTELOR FINITE
5.1 Metoda elementelor finite: variantă localizată a metodei Rayleigh-Ritz
Deoarece alegerea unei funcţii de aproximare valabilă pe întreg domeniul deanaliz
ănu se poate adopta decât în anumite cazuri particulare, metoda elementelor
finite, lucrează cu funcţii de aproximare pe subdomenii (elemente finite, în total NE ). În
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-58

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 547/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
virtutea proprietăţiilor integralelor sau a însumării energiilor componentelor, energiapotenţială totală, pentru toate cele NE elemente finite, se exprimă astfel
∑=
Π=ΠNE
e
e
1
, (5.1)
iar principiul energiei potenţiale totale minime devine
01
=Π∑=
NE
e
eδ . (5.2)
Având în vedere că energia potenţială totală a unui element este strict pozitivă,din relaţia (5.2) rezultă
0=Πeδ , (5.3)
relaţie care stă la baza ecuaţiei statice a fiecărui element finit. Domeniul de analiză sepoate discretiza în elemente de acelaşi tip, de exemplu elemente de placă,triunghiulare, cu trei noduri sau în elemente finite de tipuri diferite (bare, plăci şi solide).
Pentru fiecare tip de element finit se face o investigare matematică separată.Câmpul deplasărilor pentru un element finit ( )z y x ue ,, se aproximează prin
funcţii admisibile ( )[ z y x N ,, ] denumite func ţ ii de interpolare sau func ţ ii de formă, valabile
pe tot domeniul elementului. Dacă deplasările nodale sunt { }eU , atunci se poate
demonstra că există o relaţie de forma ( ){ } ( )[ ]{ }eee U z y x N z y x u ,,,, = , sau în formă condensată
{ } [ ] eU N u = , (5.4)
de unde rezultă
{ } [ ] eU N u δ δ = ; { } { } [ ]T T
eT N U u δ δ = . (5.5)Deoarece { } [ ]{ }u∂=ε , considerând relaţia (5.4) rezultă
{ } [ ][ ] [ ] ee U BU N =∂=ε , (5.6)
şi se poate scrie în continuare
[ ] [ ][ ]N B ∂= ; { } [ ]{ }eU B δ δε = ; { } { } [ ]T T eT BU δ δε = . (5.7)
Folosind relaţiile (5.4) - (5.7) ecuaţia (5.3) în care se ţine seama de expresiapotenţialului devine
{ } [ ][ ] [ ]{ } { } [ ] { } { } [ ] { } 0=−−=Π ∫∫∫ eee
S
S
T T e
V
V
T T ee
V
T T ee dS pN U dV pN U dV U BDBU δ δ δ δ . (5.8)
{ }T eU δ este o deplasare virtuală nenulă, independentă de solicitare, iar { }eU este constant, relaţia (5.8) se rescrie sub forma
{ } [ ] [ ][ ] { } { } [ ] { } [ ] { } ⎟ ⎠ ⎞⎜
⎝ ⎛ +=⎟
⎠ ⎞⎜
⎝ ⎛ ∫∫∫ eee S
S
T
V V
T T ee
V
T T e dS pN dV pN U U dV BDBU δ δ , (5.9)
sau condensateee F U K = , (5.10)
în care s-a notat
[ ] [ ] [ ] [ ]dV BDBK
eV
T e
∫= ,
(5.11)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-59
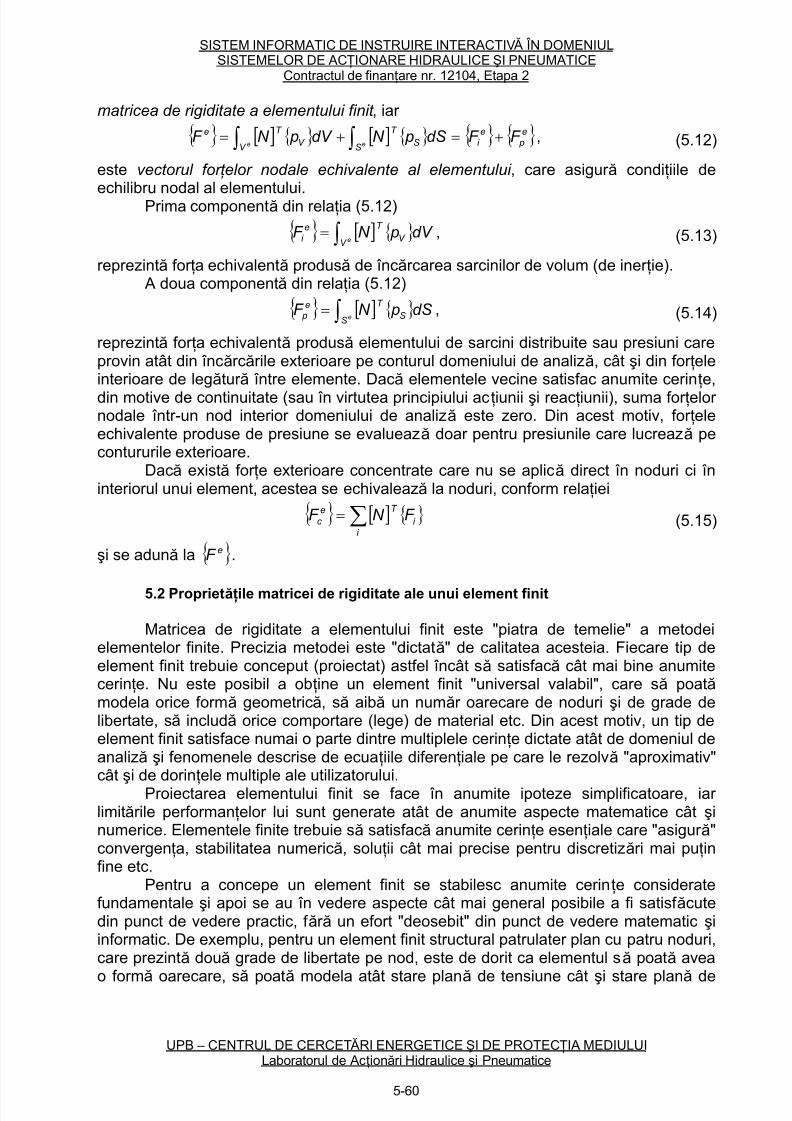
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 548/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
matricea de rigiditate a elementului finit , iar
{ } [ ] { } [ ] { } { } { }e
p
e
i S
S
T
V V
T e F F dS pN dV pN F ee
+=+= ∫∫ , (5.12)
este vectorul for ţ elor nodale echivalente al elementului , care asigur ă condiţiile de
echilibru nodal al elementului.Prima componentă din relaţia (5.12)
{ } [ ] { }∫=eV
V
T e
i dV pN F , (5.13)
reprezintă for ţa echivalentă produsă de încărcarea sarcinilor de volum (de iner ţie). A doua componentă din relaţia (5.12)
{ } [ ] { }∫=eS
S
T e
p dS pN F , (5.14)
reprezintă for ţa echivalentă produsă elementului de sarcini distribuite sau presiuni careprovin atât din încărcările exterioare pe conturul domeniului de analiză, cât şi din for ţeleinterioare de legătur ă între elemente. Dacă elementele vecine satisfac anumite cerinţe,
din motive de continuitate (sau în virtutea principiului acţiunii şi reacţiunii), suma for ţelor nodale într-un nod interior domeniului de analiză este zero. Din acest motiv, for ţeleechivalente produse de presiune se evaluează doar pentru presiunile care lucrează pecontururile exterioare.
Dacă există for ţe exterioare concentrate care nu se aplică direct în noduri ci îninteriorul unui element, acestea se echivalează la noduri, conform relaţiei
{ } [ ] { }∑=i
i
T e
c F N F (5.15)
şi se adună la { }eF .
5.2 Proprietăţile matricei de rigiditate ale unui element finit
Matricea de rigiditate a elementului finit este "piatra de temelie" a metodeielementelor finite. Precizia metodei este "dictată" de calitatea acesteia. Fiecare tip deelement finit trebuie conceput (proiectat) astfel încât să satisfacă cât mai bine anumitecerinţe. Nu este posibil a obţine un element finit "universal valabil", care să poată modela orice formă geometrică, să aibă un număr oarecare de noduri şi de grade delibertate, să includă orice comportare (lege) de material etc. Din acest motiv, un tip deelement finit satisface numai o parte dintre multiplele cerinţe dictate atât de domeniul deanaliză şi fenomenele descrise de ecuaţiile diferenţiale pe care le rezolvă "aproximativ"cât şi de dorinţele multiple ale utilizatorului.
Proiectarea elementului finit se face în anumite ipoteze simplificatoare, iar limitările performanţelor lui sunt generate atât de anumite aspecte matematice cât şinumerice. Elementele finite trebuie să satisfacă anumite cerinţe esenţiale care "asigur ă"convergenţa, stabilitatea numerică, soluţii cât mai precise pentru discretizări mai puţinfine etc.
Pentru a concepe un element finit se stabilesc anumite cerinţe consideratefundamentale şi apoi se au în vedere aspecte cât mai general posibile a fi satisf ăcutedin punct de vedere practic, f ăr ă un efort "deosebit" din punct de vedere matematic şiinformatic. De exemplu, pentru un element finit structural patrulater plan cu patru noduri,care prezintă două grade de libertate pe nod, este de dorit ca elementul să poată avea
o formă oarecare, să poată modela atât stare plană de tensiune cât şi stare plană de
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-60
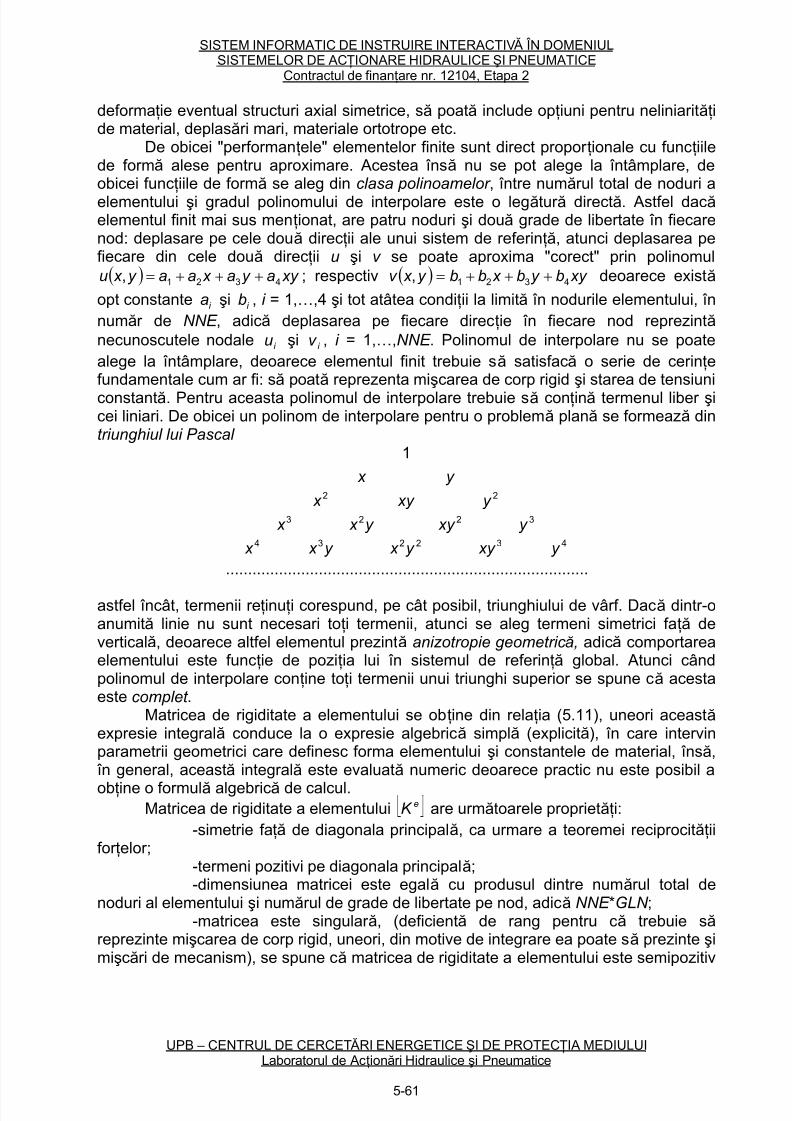
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 549/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
deformaţie eventual structuri axial simetrice, să poată include opţiuni pentru neliniarităţide material, deplasări mari, materiale ortotrope etc.
De obicei "performanţele" elementelor finite sunt direct propor ţionale cu funcţiilede formă alese pentru aproximare. Acestea însă nu se pot alege la întâmplare, deobicei funcţiile de formă se aleg din clasa polinoamelor , între numărul total de noduri aelementului şi gradul polinomului de interpolare este o legătur ă directă. Astfel dacă elementul finit mai sus menţionat, are patru noduri şi două grade de libertate în fiecarenod: deplasare pe cele două direcţii ale unui sistem de referinţă, atunci deplasarea pefiecare din cele două direcţii u şi v se poate aproxima "corect" prin polinomul
; respectiv( ) xy ay a x aay x u 4321, +++= ( ) xy by b x bby x v 4321, +++= deoarece există
opt constante şi , i = 1,…,4 şi tot atâtea condiţii la limită în nodurile elementului, înnumăr de NNE , adică deplasarea pe fiecare direcţie în fiecare nod reprezintă necunoscutele nodale şi , i = 1,…,NNE . Polinomul de interpolare nu se poatealege la întâmplare, deoarece elementul finit trebuie să satisfacă o serie de cerinţefundamentale cum ar fi: să poată reprezenta mişcarea de corp rigid şi starea de tensiuni
constantă. Pentru aceasta polinomul de interpolare trebuie să conţină termenul liber şicei liniari. De obicei un polinom de interpolare pentru o problemă plană se formează dintriunghiul lui Pascal
i a i b
i u i v
432234
3223
22
1
y xy y x y x x
y xy y x x
y xy x
y x
..................................................................................
astfel încât, termenii reţinuţi corespund, pe cât posibil, triunghiului de vârf. Dacă dintr-oanumită linie nu sunt necesari toţi termenii, atunci se aleg termeni simetrici faţă deverticală, deoarece altfel elementul prezintă anizotropie geometric ă, adică comportareaelementului este funcţie de poziţia lui în sistemul de referinţă global. Atunci cândpolinomul de interpolare conţine toţi termenii unui triunghi superior se spune că acestaeste complet .
Matricea de rigiditate a elementului se obţine din relaţia (5.11), uneori această expresie integrală conduce la o expresie algebrică simplă (explicită), în care intervinparametrii geometrici care definesc forma elementului şi constantele de material, însă, în general, această integrală este evaluată numeric deoarece practic nu este posibil a
obţine o formulă algebrică de calcul.Matricea de rigiditate a elementului eK are următoarele proprietăţi:
-simetrie faţă de diagonala principală, ca urmare a teoremei reciprocităţiifor ţelor;
-termeni pozitivi pe diagonala principală;-dimensiunea matricei este egală cu produsul dintre numărul total de
noduri al elementului şi numărul de grade de libertate pe nod, adică NNE *GLN ;-matricea este singular ă, (deficientă de rang pentru că trebuie să
reprezinte mişcarea de corp rigid, uneori, din motive de integrare ea poate să prezinte şimişcări de mecanism), se spune că matricea de rigiditate a elementului este semipozitiv
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-61

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 550/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
definită deoarece energia potenţială asociată unor deplasări nodale aleatoare
{ } [ ]{ } 02
1≥eeT e U K U .
Semnificaţia fizică a elementelor ale matriceiij K eK este cea de for ţe nodale
produse de deplasarea pe direcţia j egală cu 1 şi restul deplasărilor nule.
5.3 Asamblarea ecuaţiilor de echilibru ale elementelor
Folosind relaţia (5.9), în care se înlocuieşte relaţia (5.11) şi (5.12), pentru întregdomeniul de analiză se obţine considerând (5.2)
{ } [ ]{ } { } { } 011
=− ∑∑==
NE
e
eT eNE
e
eeT e F U U K U δ δ . (5.16)
Dacă vectorul deplasărilor nodale ale fiecărui element eU se exprimă funcţie de
vectorul deplasărilor corespunzător întregului domeniu de analiză , prin intermediul
matricei de conectivitate
{ }U
eT ~ adică
{ } { }U T U ee ~= , (5.17)
se obţin relaţiile { } { }U T U ee δ δ ~
= ; { } { } [ ] T eT T e T U U
~δ δ = care înlocuite în (5.16) conduc la
{ } [ ] [ ] [ ]{ } { } [ ] { } 0~~~
11
=− ∑∑==
NE
e
eT
eT NE
e
eeT
eT F T U U T K T U δ δ , (5.18)
de unde rezultă (deoarece { } { }0≠T
U δ ) ecuaţia globală de echilibru, pentru domeniuldiscretizat
[ ]{ } { }F U K = , (5.19)
în care [K ] este matricea de rigiditate a structurii şi se obţine prin asamblarea matricelor de rigiditate ale elementelor, adică adunarea matricelor de rigiditate "expandate" ale
elementelor, eK ~
:
[ ] [ ]∑=
=NE
e
eK K 1
~; [ ] [ ] [ ] [ ]ee
T ee T K T K
~~~= . (5.20)
{F } este vectorul încărcărilor nodale al structurii şi se obţine prin asamblarea încărcărilor echivalente ale elementelor, adică adunarea încărcărilor "expandate" ale elementelor
e
F
~
, în care se includ numai for ţele exterioare:{ } {∑
=
=NE
e
eF F 1
~ }; { } [ ] { }eT
ee F T F ~~
= . (5.21)
Practic asamblarea se realizează f ăr ă "expandarea" matricelor de rigiditate şi avectorilor încărcărilor, prin aşa numita asamblare direct ă, care ţine seama de matriceade conectivitate a structurii.
Dacă matricea de rigiditate şi vectorul for ţelor echivalente în nodurileelementeului se determină într-un sistem de referinţă diferit de sistemul de referinţă global (în sistemul de referinţă local al elementului) atunci matricea de rigiditate aelementului în coordonate globale [ ]eK se obţine din maticea de rigiditate în coordonate
locale [ ]ek folosind relaţia de transformare
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-62
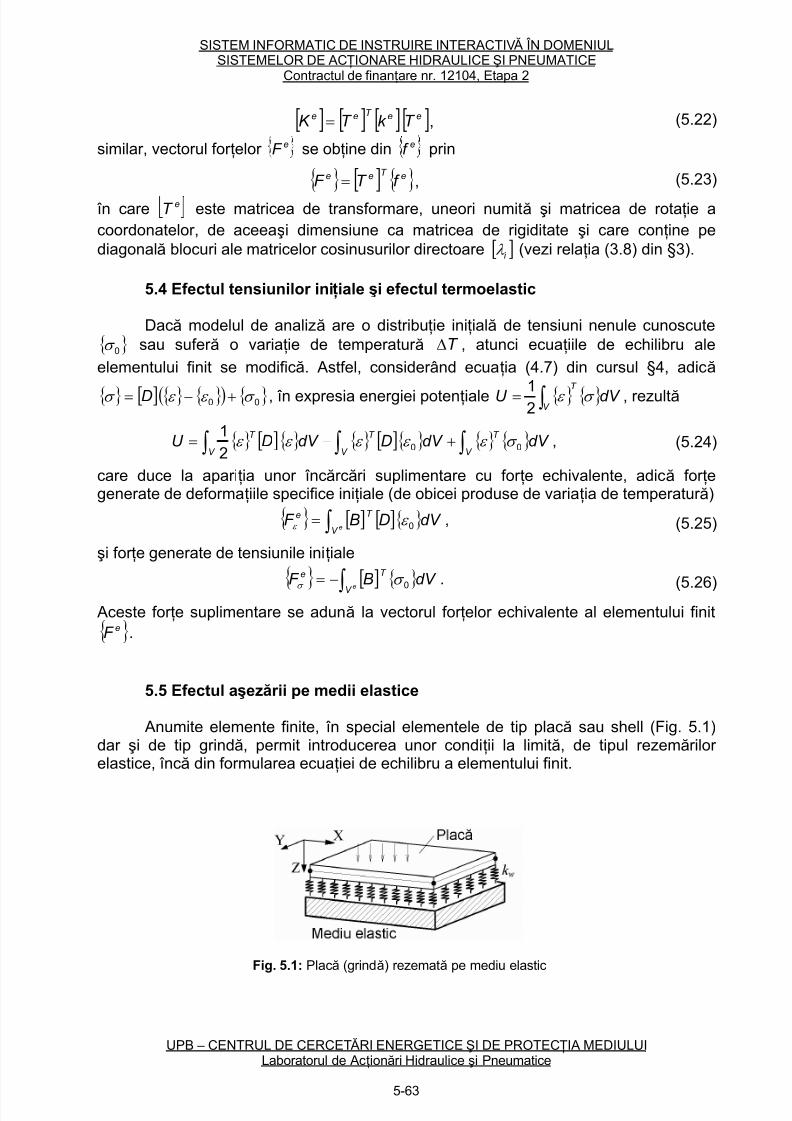
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 551/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
[ ] [ ] [ ][ ]eeT ee T k T K = , (5.22)
similar, vectorul for ţelor eF se obţine din ef prin
{ } [ ] { }eT ee f T F = , (5.23)
în care eT este matricea de transformare, uneori numită şi matricea de rotaţie acoordonatelor, de aceeaşi dimensiune ca matricea de rigiditate şi care conţine pediagonală blocuri ale matricelor cosinusurilor directoare [ ]i λ (vezi relaţia (3.8) din §3).
5.4 Efectul tensiunilor iniţiale şi efectul termoelastic
Dacă modelul de analiză are o distribuţie iniţială de tensiuni nenule cunoscute{ }0σ sau sufer ă o variaţie de temperatur ă T Δ , atunci ecuaţiile de echilibru ale
elementului finit se modifică. Astfel, considerând ecuaţia (4.7) din cursul §4, adică
{ } [ ] { } { }( ) { }00 σ ε ε σ +−= D , în expresia energiei potenţiale { } { }dV U T
V σ ε ∫= 21 , rezultă
{ } [ ]{ } { } [ ]{ } { } { }dV dV DdV DU V
T
V
T
V
T
002
1σ ε ε ε ε ε ∫∫∫ +−= , (5.24)
care duce la apariţia unor încărcări suplimentare cu for ţe echivalente, adică for ţegenerate de deformaţiile specifice iniţiale (de obicei produse de variaţia de temperatur ă)
{ } [ ] [ ]{ }dV DBF eV
T e
0ε ε ∫= , (5.25)
şi for ţe generate de tensiunile iniţiale
{ }[ ] { }dV BF
eV
T e
0
σ σ
∫−= .
(5.26) Aceste for ţe suplimentare se adună la vectorul for ţelor echivalente al elementului finit{ }eF .
5.5 Efectul aşezării pe medii elastice
Anumite elemente finite, în special elementele de tip placă sau shell (Fig. 5.1)dar şi de tip grindă, permit introducerea unor condiţii la limită, de tipul rezemărilor elastice, încă din formularea ecuaţiei de echilibru a elementului finit.
Fig. 5.1: Placă (grindă) rezemată pe mediu elastic
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-63

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 552/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
În general, se consider ă că presiunea exercitată de fundaţie asupra elementuluifinit este propor ţională cu deplasarea normală în fundaţie prin coeficientul de rigiditate
[N/mw k 3], adică w k p w f = , sau în formă matriceală
{ } { }uk p w f = . (5.27)
Energia potenţială suplimentar ă a for ţelor exterioare (presiunea ) estef p
{ } { } f S
f
T
f p dS puW ef
∫=, . (5.28)
Dacă pentru aproximarea deplasării se alege expresia
{ } [ ] e
n U N u = , (5.29)
în care reprezintă funcţiile de formă pentru aproximarea deplasării normale laplacă, se obţine
[ nN ]
{ } [ ] [ ] { }e
f nS
T
nw
T e
f p U dSN N k U W ef
⎟ ⎠ ⎞⎜
⎝ ⎛ = ∫δ δ , (5.30)
de unde rezultă o componentă suplimentar ă a matricei de rigiditate a elementului,generată de efectul fundaţiei
[ ] [ ] [ ] f nS
T
nw
e
f dSN N k K ef
∫= (5.31)
care se adună la matricea de rigiditate definită prin relaţia (5.11). Aceste condiţii la limită în deplasări normale elementelor finite, incluse în (5.31) conduc la reducerea graduluide singularitate al matricei de rigiditate, deoarece o parte din mişcările de corp rigid suntsuprimate.
5.6 Efectul încărcării cu for ţe de iner ţie
Vectorul for ţelor de volum, generate de o mişcare accelerată (sau gravitaţie), seexprimă prin
{ }{ } [ ] { }
2
2
2
2
t
U N
t
u p
e
V ∂
∂−=
∂
∂−= ρ ρ (5.32)
în care s-a ţinut seama de relaţia (5.4). Dacă densitatea materialului ρ este constantă
şi acceleraţia nodală care se notează { } { e
e
U t
U &&=∂
∂2
2
}, este cunoscută (spre exemplu
acceleraţia gravitaţională), atunci din relaţia (5.22) se obţine
{ } [ ] [ ] { } [ ]{ }eeeV
T ei U M U dV N N F e &&&& == ∫ ρ (5.33)
în care
[ ] [ ] [ ]dV N N M eV
T e
∫= ρ , (5.34)
este matricea de masă (coerentă cu funcţiile de formă statice) a elementului finit. Această matrice rezultă pozitiv definită.
5.7 Elementul finit triunghiular cu deformaţie specifică constantă
Acest tip de element finit poartă denumirea uzuală de CST („Constant Strain
Triangle”), se foloseşte rar în practică, dar prezintă avantajul unei formulări simple care
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-64
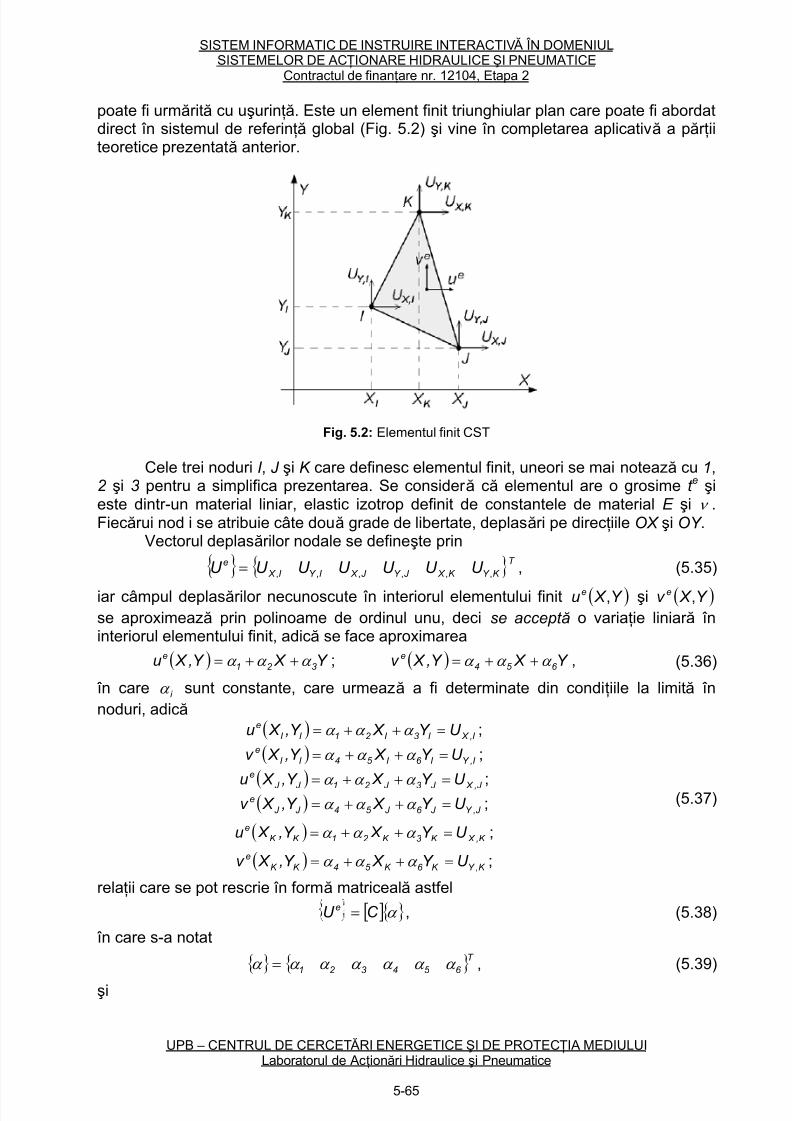
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 553/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
poate fi urmărită cu uşurinţă. Este un element finit triunghiular plan care poate fi abordatdirect în sistemul de referinţă global (Fig. 5.2) şi vine în completarea aplicativă a păr ţiiteoretice prezentată anterior.
Fig. 5.2: Elementul finit CST
Cele trei noduri I , J şi K care definesc elementul finit, uneori se mai notează cu 1,2 şi 3 pentru a simplifica prezentarea. Se consider ă că elementul are o grosime t e şieste dintr-un material liniar, elastic izotrop definit de constantele de material E şi ν .Fiecărui nod i se atribuie câte două grade de libertate, deplasări pe direcţiile OX şi OY .
Vectorul deplasărilor nodale se defineşte prin
{ } { }T
K Y K X J Y J X I Y I X
e U U U U U U U ,,,,,,= , (5.35)
iar câmpul deplasărilor necunoscute în interiorul elementului finit şi( )Y X ue , ( )Y X v e , se aproximează prin polinoame de ordinul unu, deci se accept ă o variaţie liniar ă îninteriorul elementului finit, adică se face aproximarea
( ) Y X Y , X u 32 1e α α α ++= ; ( ) Y X Y , X v 6 5 4
e α α α ++= , (5.36)
în care i α sunt constante, care urmează a fi determinate din condiţiile la limită înnoduri, adică
( ) I , X I 3I 2 1I I
e U Y X Y , X u =++= α α α ;
( ) I ,Y I 6 I 5 4I I
e U Y X Y , X v =++= α α α ;
( ) J , X J 3J 2 1J J
e
U Y X Y , X u =++= α α α ;( ) J ,Y J 6 J 5 4J J
e U Y X Y , X v =++= α α α ;
( ) K , X K 3K 2 1K K e U Y X Y , X u =++= α α α ;
( ) K ,Y K 6 K 5 4K K
e U Y X Y , X v =++= α α α ;
(5.37)
relaţii care se pot rescrie în formă matriceală astfel
[ ]{ }α C U e = , (5.38)
în care s-a notat
{ } { }T
6 5 432 1 α α α α α α α = , (5.39)
şi
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-65

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 554/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
[ ]
⎥⎥⎥⎥
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎢⎢⎢⎢
⎣
⎡
=
K K
K K
J J
J J
I I
I I
Y X 10 0 0
0 0 0 Y X 1Y X 10 0 0
0 0 0 Y X 1
Y X 10 0 0
0 0 0 Y X 1
C . (5.40)
Din relaţia (5.38) rezultă
{ } [ ] { }eU C 1−
=α . (5.41)
Pentru a face mai simplu inversarea matricei [C ], se observă că ecuaţiile (5.37)se pot rescrie astfel
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
K , X
J , X
I , X
3
2
1
K K
J J
I I
U
U
U
Y X 1
Y X 1
Y X 1
α
α
α
; ,⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
K ,Y
J ,Y
I ,Y
6
5
4
K K
J J
I I
U
U
U
Y X 1
Y X 1
Y X 1
α
α
α
(5.38’)
deoarece deplasările în lungul axelor OX şi OY sunt decuplate, iar inversarea se facenumai pentru matricea de dimensiune 3×3. Determinantul acestei matrice reprezintă dublul ariei triunghiului IJK , adică
K K
J J
I I
e
Y X 1
Y X 1
Y X 1
A2 = , (5.42)
care este pozitivă dacă numerotarea nodurilor elementului IJK se face în sensul rotirii
axei OX către axa OY (sensul trigonometric). Termenii matricei inverse se obţin folosindregulile elementare de algebr ă matriceală şi rezultă
( )K , X 3J , X 2 I , X 1e1 U aU aU a A2
1++=α ; ( )K , X 3J , X 2 I , X 1e2 U bU bU b
A2
1++=α ;
( )K , X 3J , X 2 I , X 1e3 U c U c U c A2
1++=α ; ( )K ,Y 3J ,Y 2 I ,Y 1e4 U aU aU a
A2
1++=α ;
( )K ,Y 3J ,Y 2 I ,Y 1e5 U bU bU b A2
1++=α ; ( )K ,Y 3J ,Y 2 I ,Y 1e6 U c U c U c
A2
1++=α ;
(5.43)
în care s-a notat
J K K J 1 Y X Y X a −= ; K J 1 Y Y b −= ; J K X X c −=1 ;
K I I K 2 Y X Y X a −= ; I K 2 Y Y b −= ; K I X X c −=2 ;
I J J I 3 Y X Y X a −= ; J I 3 Y Y b −= ; I J 3 X X c −= .(5.44)
Înlocuind relaţiile (5.43) în (5.36) rezultă în formă matriceală
{ } ( )( )
{ } [ ]{ }e
e
ee U N
Y X
Y X
Y X v
Y X uu =⎥
⎦
⎤⎢⎣
⎡=
⎭⎬⎫
⎩⎨⎧
= α 1000
0001
,
,, (5.45)
în care
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-66

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 555/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
[ ] ⎥⎦
⎤⎢⎣
⎡=
321
321
000
000
N N N
N N N N , (5.46)
este matricea func ţ iilor de formă, iar
( )Y c X ba A2 1N 111e1 ++= ;
( )Y c X ba A
N e 3222 2
1++= ;
( )Y c X ba A2
1N 333e3 ++= ,
(5.47)
sunt funcţiile de formă, polinomiale de gradul unu, întocmai cum au fost alese.Se poate ar ăta că pentru cele trei noduri I , J , K sau echivalent 1, 2 şi 3, funcţiile
de formă verifică relaţiile
( ) 1,1 =I I Y X N ; ( ) 0,1 =J J Y X N ; ( ) 0,1 =K K Y X N ;( ) 0,2 =I I Y X N ; ( ) 1,2 =J J Y X N ; ( ) 0,2 =K K Y X N ;
( ) 0,3 =I I Y X N ; ( ) 0,3 =J J Y X N ; ( ) 1,3 =K K Y X N ;
(5.48)
adică funcţiile de formă N i iau valoarea unu în nodul i şi zero în restul nodurilor, aşacum se prezintă în figura 5.3. Mai mult, se poate ar ăta (folosind relaţiile (5.47) şi (5.44),că
( ) 1,3
1
=∑=
Y X N i
i , (5.49)
aceste relaţii sunt proprietăţi generale ale funcţiilor de formă.
(a) (b)
Fig. 5.3: Reprezentarea 3D a unei funcţii 2D, de variabile X şi Y . (a) Variaţia funcţiilor de formă pentru
elementul CST. (b) Deplasare rezultantă în interiorul unui element finit de tip CST, φ este deplasarea
rezultantă ( )
Y X ue , sau( )
Y X v e ,
Calculul matricei de rigiditate. Expresia generală de calcul a matricei derigiditate a fost obţinută anterior, vezi relaţia (5.11) care pentru elementul CST devine
[ ] [ ] [ ][ ]dV BDBK eV
T e
63333666 ××××∫= , (5.50)
în care matricea derivatelor funcţiilor de formă este
[ ] [ ][ ]622363 ×××
∂= N B . (5.51)
Matricea operatorilor de derivare şi relaţia între deformaţii specifice şi deplasări în 2D a fost prezentată în §3, acestea sunt
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-67

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 556/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
[ ]
⎥⎥
⎥⎥⎥⎥
⎦
⎤
⎢⎢
⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂
∂∂
∂
=∂
x y
y
x
0
0
;⎭⎬⎫
⎩⎨⎧
⎥⎥
⎥⎥⎥⎥
⎦
⎤
⎢⎢
⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂
∂∂
∂
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
v
u
x y
y
x
xy
y
x
0
0
γ
ε
ε
. (5.52)
Matricea de rigiditate a materialului în 2D, stare plană de tensiune - SPT saudeformaţie – SPD (vezi relaţiile (3.29) şi (3.30) din §3) sunt
SPT: [ ]
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−=
2
100
01
01
1 2ν
ν
ν
ν
E D ; SPD: [ ]
( )( )⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
−
−+=
ν
ν ν
ν ν
ν ν
2
100
01
01
211
E D . (5.53)
Din (5.52) şi (5.46) rezultă
[ ]
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂∂
∂
∂
∂
∂
∂∂
∂
∂
∂
∂
∂
=⎥⎦
⎤⎢⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∂
∂
∂
∂∂
∂∂
∂
=
X
N
Y
N
X
N
Y
N
X
N
Y
N Y
N
Y
N
Y
N X
N
X
N
X
N
N N N
N N N
X Y
X
X
B
322211
321
321
321
321 000
000
000
0000
0
.
Efectuînd derivatele funcţiilor de formă din (5.47), relaţia precedentă devine
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
332211
321
321
000
000
21
bc bc bc
c c c
bbb
AB
e. (5.54)
Matricea [B] este o matrice de constante deoarece bi şi c i pentru i = 1, 2, 3 suntconstante conform (5.44). Tot o matrice de constante este şi matricea de rigiditate amaterialului, deci
[ ] [ ] [ ][ ] [ ] [ ][ ] [ ] [ ][ ] eeT
V
T
V
T e t ABDBdV BDBdV BDBK ee
63333663333663333666 ××××××××××
=== ∫∫ . (5.55)
În concluzie, matricea de rigiditate a elementului se obţine prin simpla înmulţire aunor matrice şi a matricei rezultante cu un scalar.
Echivalarea sarcinilor distribuite pe element. Se consider ă o încărcaredistribuită liniar pe latura unui element triunghiular (Fig. 5.4,a) care trebuie „echivalată”conform relaţiei (5.14), adică
{ } [ ] { }∫×××
=eS
S
T e
p dS pN F 122616
. (5.14’)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-68
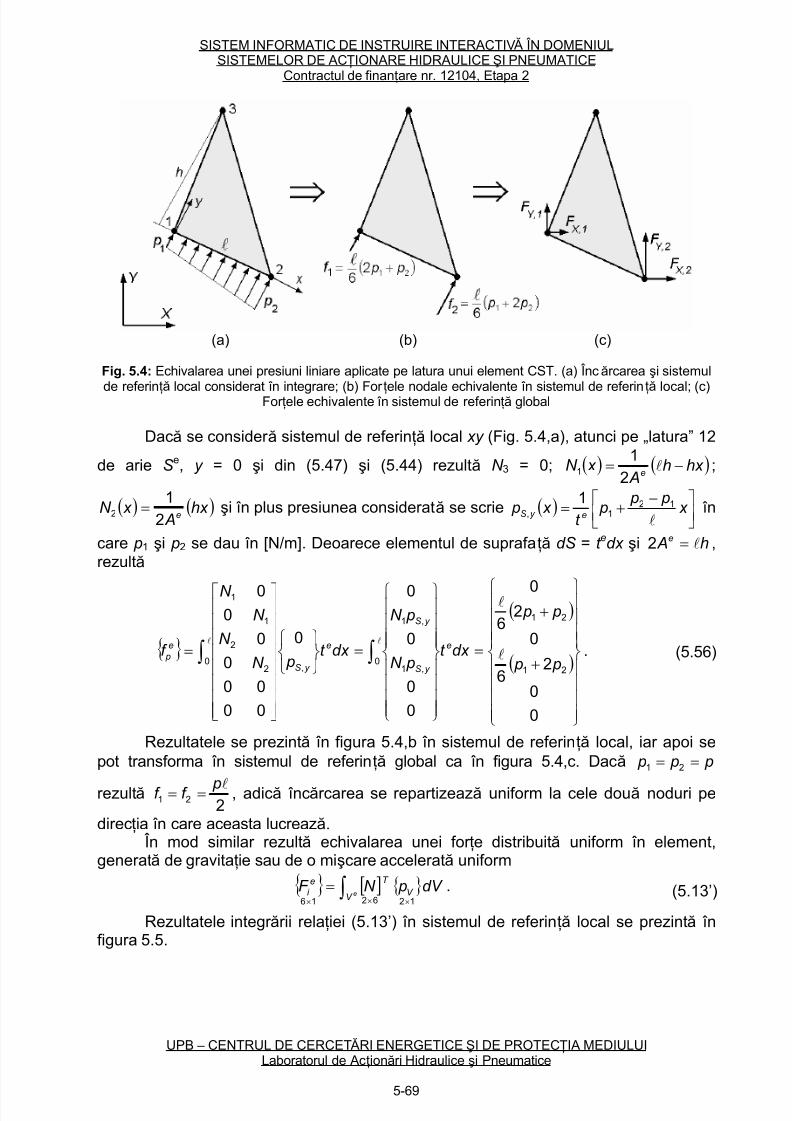
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 557/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
(a) (b) (c)
Fig. 5.4: Echivalarea unei presiuni liniare aplicate pe latura unui element CST. (a) Încărcarea şi sistemul
de referinţă local considerat în integrare; (b) For ţele nodale echivalente în sistemul de referinţă local; (c)For ţele echivalente în sistemul de referinţă global
Dacă se consider ă sistemul de referinţă local xy (Fig. 5.4,a), atunci pe „latura” 12
de arie Se, y = 0 şi din (5.47) şi (5.44) rezultă N 3 = 0; ( ) ( )hx h A
x N e
−= l2
11 ;
( ) (hx A
x N e2
12 = ) şi în plus presiunea considerată se scrie ( ) ⎥⎦
⎤⎢⎣
⎡ −+= x
p p p
t x p
ey Sl
121,
1în
care p1 şi p2 se dau în [N/m]. Deoarece elementul de suprafaţă dS = t edx şi ,rezultă
h Ael=2
{ }
( )
( )
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
+
+
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
= ∫∫
0
0
26
0
26
0
0
0
0
0
0
00
00
0
0
00
21
21
0,1
,1
0,2
2
1
1
p p
p p
dx t pN
pN
dx t pN
N
N
N
f e
y S
y S
e
y S
e
p l
l
ll
. (5.56)
Rezultatele se prezintă în figura 5.4,b în sistemul de referinţă local, iar apoi sepot transforma în sistemul de referinţă global ca în figura 5.4,c. Dacă p p p == 21
rezultă 221l pf f == , adică încărcarea se repartizează uniform la cele două noduri pe
direcţia în care aceasta lucrează. În mod similar rezultă echivalarea unei for ţe distribuită uniform în element,
generată de gravitaţie sau de o mişcare accelerată uniform
{ } [ ] { }∫×××
=eV
V
T e
i dV pN F 126216
. (5.13’)
Rezultatele integr ării relaţiei (5.13’) în sistemul de referinţă local se prezintă înfigura 5.5.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-69

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 558/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig. 5.5: Echivalarea unei for ţe de iner ţie distribuite (în câmp gravitaţional) într-un element CST
Calculul deformaţiilor specifice şi a tensiunilor. Deformaţiile specifice se
determină după determinarea deplasărilor nodale, folosind relaţia (5.6), adică
166313 ×××
= eee U Bε , (5.57)
iar tensiunile se obţin din
133313 ×××
= eee D ε σ . (5.58)
Deoarece matricele eB şi eD sunt constante, atunci pe tot volumul elementului
finit deformaţiile specifice şi tensiunile sunt constante. Între elemente apar discontinuităţi care sunt nerealiste iar pentru reducerea salturilor se impune folosirea
unor discretizări foarte fine. Uneori se consider ă că tensiunile obţinute sunt corectenumai în centrul elementului finit, iar alteori tensiunile se mediaz ă la nodurile comune mai multor elemente finite.
În zonele cu concentări puternice de tensiune (cu gradienţi mari) se impunefolosirea unui număr mai mare de elemente finite în timp ce în zonele cu tensiuneconstantă se pot folosi mai puţine elemente finite. Acest mod de discretizare „adaptivă”conduce la modele de calcul eficiente, adică precizia creşte f ăr ă un efort de calculconsiderabil.
Reguli practice de discretizare cu elemente CST. Forma ideală a unuielement finit de tip CST este triunghiul echilateral. Orice element puternic distorsionat,adică cu unghiuri foare mici sau mari conduce la rezultate - tensiuni constante întinsepe toată suprafaţa elementului şi deci a domeniului ocupat de element în discretizare.
Dacă se consider ă un model de „placă” în consolă solicitată la încovoiere,discretizată uniform cu 45 de noduri şi 64 de elemente finite aranjate în diverse forme(Fig. 5.6) tensiunile normale maxime X σ care rezultă sunt diferite.
Un model de discretizare „adaptat” scopului de a obţine tensiunile maxime dinzona încastr ării se prezintă în figura 5.7.
Dacă discretizarea se rafinează progresiv în zona for ţei aplicate atunci tensiuniledin elementele vecine for ţei concentrate cresc continuu la infinit. Se spune că o for ţă concentrată produce singularit ăţ i în tensiuni . Pentru evitarea singularităţilor pe
discretizări fine se impune aplicarea for ţelor sub forma unor presiuni distribuite,apropiate de distribuţia reală. În practică nu există for ţă concentrat ă, aceasta este o
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-70

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 559/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
for ţă echivalent ă a unei presiuni de contact, prin urmare se recomandă pe cât posibilsimularea realităţii.
(a) Discretizare care conduce la favorizarea anizotropiei geometrice
(b) Discretizare în „X” cu un singur element în zona tensiunilor maxime
(c) Discretizare în „X” cu două elemente în zona tensiunilor maxime
Fig. 5.6: Distribuţia tensiunilor SX în elementele unei „plăci” în consolă discretizată uniform cu 45 nodurişi 64 elemente finite de tip CST solicitată la încovoiere
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-71
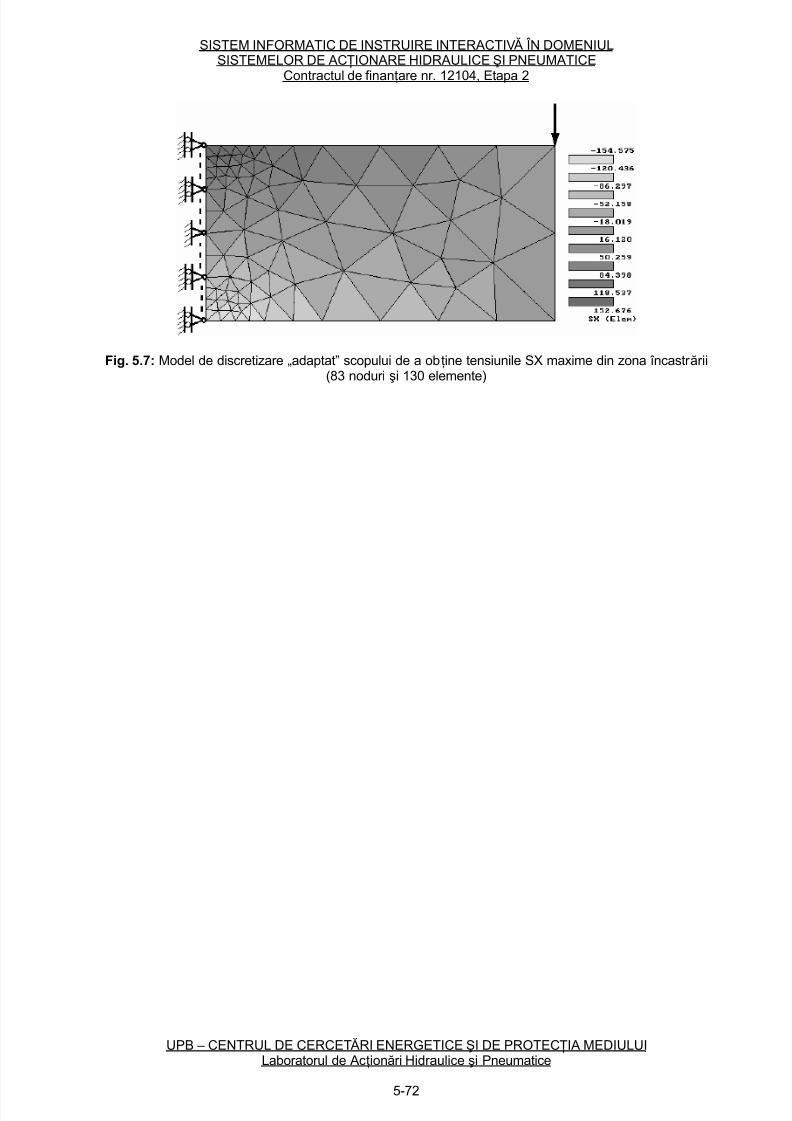
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 560/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig. 5.7: Model de discretizare „adaptat” scopului de a obţine tensiunile SX maxime din zona încastr ării(83 noduri şi 130 elemente)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-72
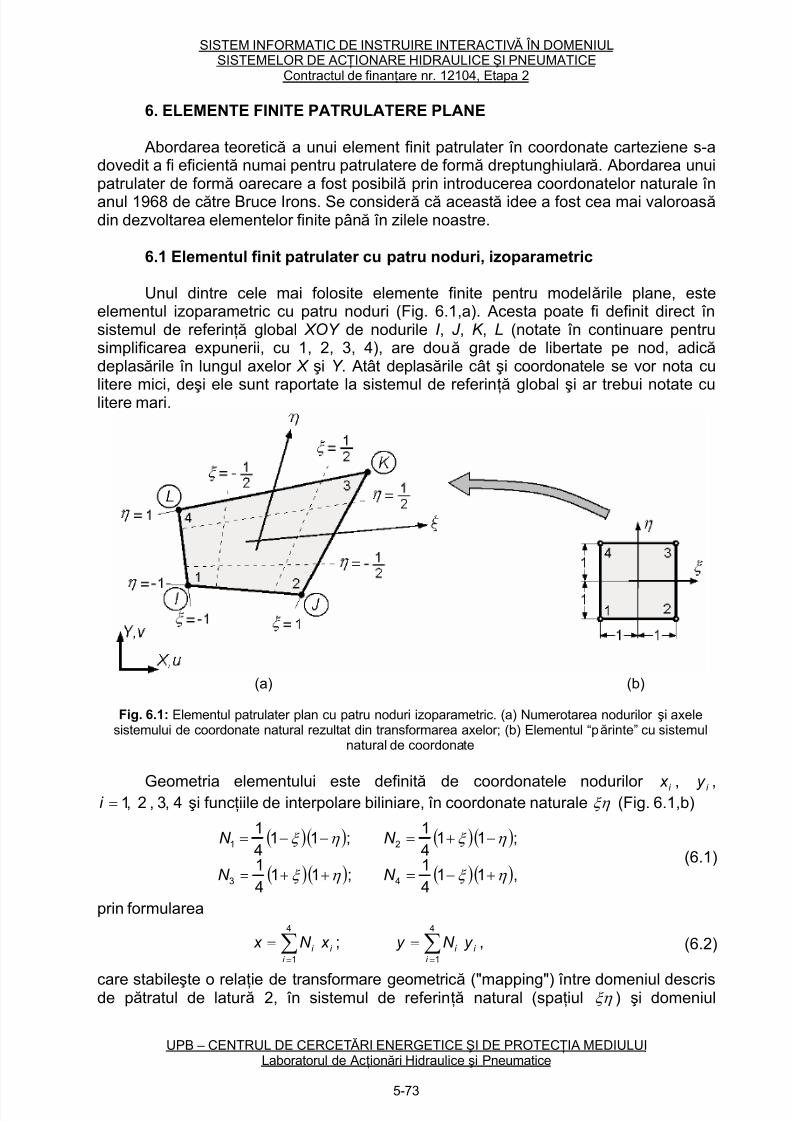
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 561/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
6. ELEMENTE FINITE PATRULATERE PLANE
Abordarea teoretică a unui element finit patrulater în coordonate carteziene s-adovedit a fi eficientă numai pentru patrulatere de formă dreptunghiular ă. Abordarea unuipatrulater de formă oarecare a fost posibilă prin introducerea coordonatelor naturale înanul 1968 de către Bruce Irons. Se consider ă că această idee a fost cea mai valoroasă din dezvoltarea elementelor finite până în zilele noastre.
6.1 Elementul finit patrulater cu patru noduri, izoparametric
Unul dintre cele mai folosite elemente finite pentru modelările plane, esteelementul izoparametric cu patru noduri (Fig. 6.1,a). Acesta poate fi definit direct însistemul de referinţă global XOY de nodurile I , J , K , L (notate în continuare pentrusimplificarea expunerii, cu 1, 2, 3, 4), are două grade de libertate pe nod, adică deplasările în lungul axelor X şi Y . Atât deplasările cât şi coordonatele se vor nota cu
litere mici, deşi ele sunt raportate la sistemul de referinţă global şi ar trebui notate culitere mari.
(a) (b)
Fig. 6.1: Elementul patrulater plan cu patru noduri izoparametric. (a) Numerotarea nodurilor şi axelesistemului de coordonate natural rezultat din transformarea axelor; (b) Elementul “părinte” cu sistemul
natural de coordonate
Geometria elementului este definită de coordonatele nodurilor , ,şi funcţiile de interpolare biliniare, în coordonate naturalei x i y
4,3,2,1=i ξη (Fig. 6.1,b)
( )( ) ( )( )
( )( ) ( )( ,1141
;1141
;1141
;1141
43
21
η ξ η ξ
η ξ η ξ
+−=++=
−+=−−=
N N
N N
) (6.1)
prin formularea
i
i
i x N x ∑=
=4
1
; ,i
i
i y N y ∑=
=4
1
(6.2)
care stabileşte o relaţie de transformare geometrică ("mapping") între domeniul descrisde pătratul de latur ă 2, în sistemul de referinţă natural (spaţiul ξη ) şi domeniul
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-73

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 562/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
patrulaterului din sistemul de coordonate XOY . Această relaţie transpune axelesistemului de referinţă ξη din figura 6.1,b în figura 6.1,a astfel încât acestea r ămân liniidrepte, trec prin mijloacele laturilor elementului, dar nu mai păstrează unghiul dreptdintre axe şi intersecţia lor nu corespunde centrului de greutate al patrulaterului de oform
ăoarecare.Câmpul deplasărilor necunoscute se aproximează prin aceleaşi funcţii de
interpolare ca şi geometria elementului, motiv pentru care se spune că elemental esteizoparametric , deci
i
i
i uN u ∑=
=4
1
; ,i
i
i v N v ∑=
=4
1
(6.3)
în care , , , sunt deplasările nodurilor pe direcţiile axelor OX şi OY .i u i v 4,3,2,1=i
6.2. Calculul matricei de rigiditate al elementelor patrulatere
Pentru stabilirea matricei de rigiditate a elementului se foloseşte relaţia integrală obţinută în §5, şi particularizată pentru elementul patrulater, adică
[ ] [ ] [ ] [ ]dV BDBK eV
T e
83333888 ××××∫= , (6.4)
în care , [D] se obţine pentru descrierea 2D a comportării materialului, (stareplană de tensiuni sau deformaţie şi uneori chiar pentru modelare axial simetrică),dV =tdS, în care t este grosimea elementului şi dS elementul infinitesimal de suprafaţă.Dacă se consider ă deplasările nodale descrise de vectorul
[ ] [ ][ ]N B ∂=
{ } { }T e v uv uv uv uU 44332211= , (6.5)
atunci relaţia de aproximare matriceală { } [ ]e
U N u = se scrie explicit, folosind relaţiile(6.3) astfel
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎥⎦
⎤⎢⎣
⎡=
⎭⎬⎫
⎩⎨⎧
4
4
3
3
2
2
1
1
4321
4321
0000
0000
v
u
v
u
v
u
v
u
N N N N
N N N N
v
u. (6.6)
Problema esenţială care apare în relaţia de calcul (6.4) a matricei de rigiditateeste că matricea funcţiilor de formă [N ] este exprimată în coordonate naturale, iar operatorul de derivare [ se aplică în coordonate globale x , y . Deoarece funcţiile de
formă definite de (6.1) sunt în coordonate naturale
]∂
i N ξη , iar x şi y conţin funcţiile , înseamnă că trebuie folosite regulile de derivare a funcţiilor compuse, care în formă matriceală se scriu astfel
i N
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-74

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 563/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
( )[ ]
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
∂
∂∂
∂
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
∂
∂∂
∂
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∂
∂
∂
∂∂
∂
∂
∂
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
∂
∂∂
∂
y
x J
y
x y x
y x
η ξ
η η
ξ ξ
η
ξ , . (6.7)
Matricea ( )[ ]η ξ ,J poartă denumirea de jacobianul transformării, şi se notează deobicei
[ ]
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∂
∂
∂
∂∂
∂
∂
∂
=
η η
ξ ξ
y x
y x
J . (6.8)
Ţinând seama de relaţiile (6.2), jacobianul se poate obţine efectuând produsulmatriceal
[ ] ⎥⎦
⎤⎢⎣
⎡=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∂
∂
∂
∂
∂
∂
∂
∂∂
∂∂
∂∂
∂∂
∂=
2221
1211
44
33
22
11
4321
4321
J J
J J
y x
y x
y x
y x
N N N N
N N N N
J
η η η η
ξ ξ ξ ξ . (6.9)
Deoarece în relaţia (6.7) interesează derivata în coordinate carteziene, se obţine
( )[ ]
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
∂
∂∂
∂
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
∂
∂∂
∂
−
η
ξ η ξ
1,J
y
x , (6.10)
unde, pentru calculul inversei jacobianului, trebuie calculat determinantul[ ] 21122211det J J J J J −= , (6.11)
şi apoi inversa matricei jacobianului rezultă
[ ][ ] ⎥
⎦
⎤⎢⎣
⎡
−
−=⎥
⎦
⎤⎢⎣
⎡=
−
1121
1222
*22
*21
*12
*111
det
1
J J
J J
J J J
J J J . (6.12)
Folosind relaţiile (6.10) şi (6.12) elementele componente ale matricei în plandevin
[ ]∂
η ξ ∂
∂+
∂
∂=
∂
∂ *
12
*
11J J
x ;
η ξ ∂
∂+
∂
∂=
∂
∂ *
22
*
21J J
y .
(6.13)Matricea operatorilor de derivare (vezi §3, relaţia (3.15’)), este
[ ]
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∂
∂
∂
∂∂
∂∂
∂
=∂
x y
y
x
0
0
. (6.14)
Derivata matricei funcţiilor de formă se exprimă în coordonate naturale astfel
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-75

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 564/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
[ ]
⎥⎥⎥
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎢⎢⎢⎢
⎣
⎡
⎥⎥
⎥⎥⎥⎥
⎦
⎤
⎢⎢
⎢⎢⎢⎢
⎣
⎡
⎥⎥
⎥⎥⎥⎥
⎦
⎤
⎢⎢
⎢⎢⎢⎢
⎣
⎡
⎥⎥
⎥⎥⎥⎥
⎦
⎤
⎢⎢
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎢⎢⎢⎢
⎣
⎡
∂∂+
∂∂
∂∂+
∂∂
∂
∂+
∂
∂∂
∂+
∂
∂
=
====
×
4321
*12
*11
*22
*21
*22
*21
*12
*11
830
0
i i i i
i i i i
i i
i i
N J
N J
N J
N J
N J
N J
N J
N J
B
η ξ η ξ
η ξ
η ξ
, (6.15)
în care s-a scris explicit doar prima partiţie a matricei în care 1N N i = .Din relaţiile (3.29) şi (3.30), rezultă matricea de rigiditate a materialului în plan.
De exemplu, pentru starea plană de tensiune rezultă
[ ]
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−=
×
2
100
01
01
1 233 ν
ν
ν
ν
E D . (6.16)
Elementul de arie se transformă prin [ ] η ξ d d J dy dx dS det== şi astfel expresiamatricei de rigiditate în coordonate naturale se obţine
[ ] ( )[ ] [ ] ( )[ ] ( )[ ] η ξ η ξ η ξ η ξ d d J t BDBK T e
∫ ∫− −×
=1
1
1
188,det,, . (6.17)
Calculul analitic al relaţiei (6.17) este complicat. Mai mult, matricea conţine 64 determeni, dintre care 40 trebuie determinaţi, ceilalţi obţinându-se din simetria matricei derigiditate. Din aceste motive se recurge la calculul numeric al acestor integrale. Există mai multe metode de integrare numerică aproximativă, dar cea mai folosită în MEF estemetoda de integrare Gauss-Legendre.
6.3 Integrarea numerică folosind metoda Gauss-Legendre
Conform acestei metode, evaluarea numerică a integralei unei funcţii de o
variabilă decurge astfel:( ) dx x f I b
a∫=
1. se face schimbarea de variabilă ( ) ( ξ ξ ++−= 12
12
ba x ) care transformă limitele de
integrare între -1 şi 1; rezultă ( ) ξ d abdx −=2
1 şi ( ) ( ) ( ) ( )⎟
⎠
⎞⎜⎝
⎛ ++−−= ξ ξ ξ φ 1
21
22
1 baf ab ;
2. integrala se transformă în ; adică într-o sumă ponderată de n
valori ale funcţiei de integrat în coordonate naturale
( ) ( )i
n
i
i hd I ξ φ ξ ξ φ ∑∫=
−≈=
1
1
1
ξ . Valoarea lui n se numeşte ordin
de integrare, sunt factori de pondere, iar i h i ξ definesc pozi ţ iile punctelor Gauss.Dacă funcţia de integrat este polinomială, se demonstrează că pentru polinoame
de grad 2n-1, integrarea este exactă, altfel integrarea este aproximativă şi creşte înprecizie odată cu creşterea ordinului de integrare. În tabelul 6.1 se prezintă coordonatele punctelor Gauss şi ponderile corespunzătoare pentru primele patru ordinede integrare. Figura 6.2 redă interpretarea geometrică a integr ării pentru primele treiordine de integrare.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-76
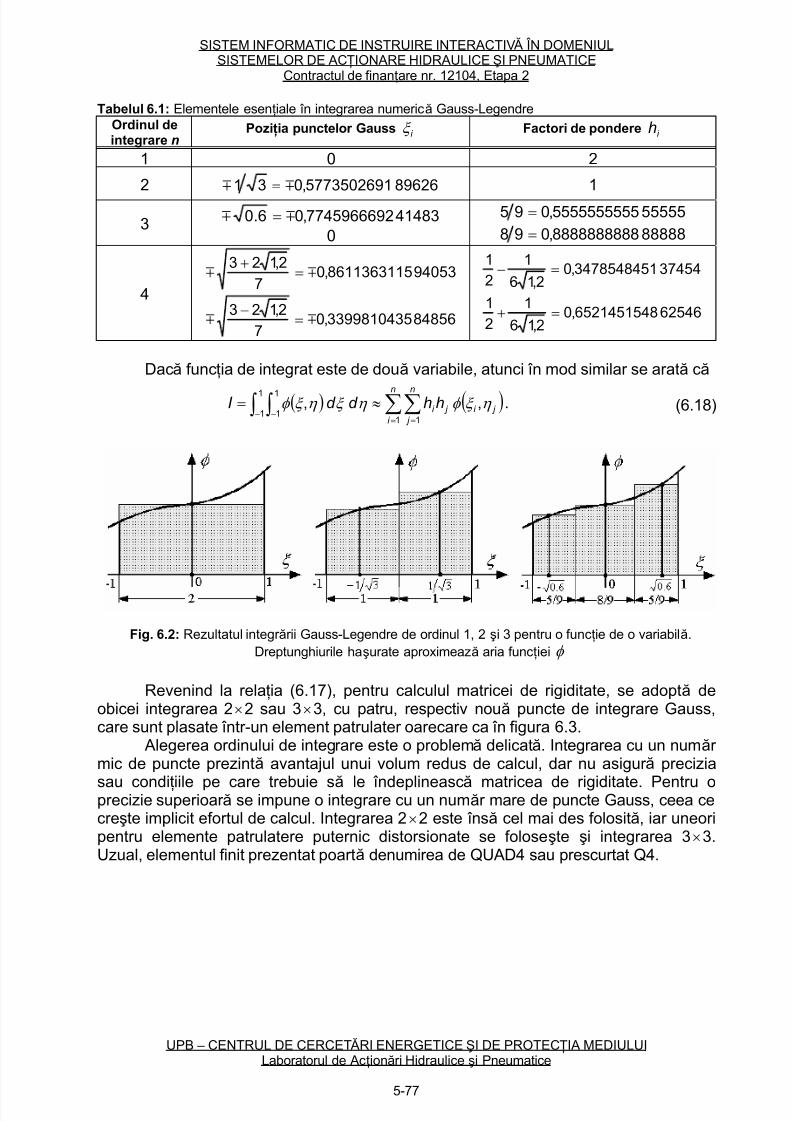
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 565/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Tabelul 6.1: Elementele esenţiale în integrarea numerică Gauss-LegendreOrdinul deintegrare n
Poziţia punctelor Gauss i ξ Factori de pondere i h
1 0 2
2 896265773502691,031 mm = 1
3 414837745966692,06.0 mm = 0
555555555555555,095 = 888888888888888,098 =
4
940538611363115,07
2,123mm =
+
848563399810435,07
2,123mm =
−
374543478548451,02,16
1
2
1=−
625466521451548,02,16
1
2
1=+
Dacă funcţia de integrat este de două variabile, atunci în mod similar se arată că
( ) ( ) j i
n
i
j
n
j
i hhd d I η ξ φ η ξ η ξ φ ,,1 1
1
1
1
1 ∑ ∑∫ ∫= =
− −≈= . (6.18)
Fig. 6.2: Rezultatul integr ării Gauss-Legendre de ordinul 1, 2 şi 3 pentru o funcţie de o variabilă.Dreptunghiurile haşurate aproximează aria funcţiei φ
Revenind la relaţia (6.17), pentru calculul matricei de rigiditate, se adoptă deobicei integrarea 2×2 sau 3×3, cu patru, respectiv nouă puncte de integrare Gauss,care sunt plasate într-un element patrulater oarecare ca în figura 6.3.
Alegerea ordinului de integrare este o problemă delicată. Integrarea cu un număr mic de puncte prezintă avantajul unui volum redus de calcul, dar nu asigur ă precizia
sau condiţiile pe care trebuie să le îndeplinească matricea de rigiditate. Pentru oprecizie superioar ă se impune o integrare cu un număr mare de puncte Gauss, ceea cecreşte implicit efortul de calcul. Integrarea 2×2 este însă cel mai des folosită, iar uneoripentru elemente patrulatere puternic distorsionate se foloseşte şi integrarea 3×3.Uzual, elementul finit prezentat poartă denumirea de QUAD4 sau prescurtat Q4.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-77
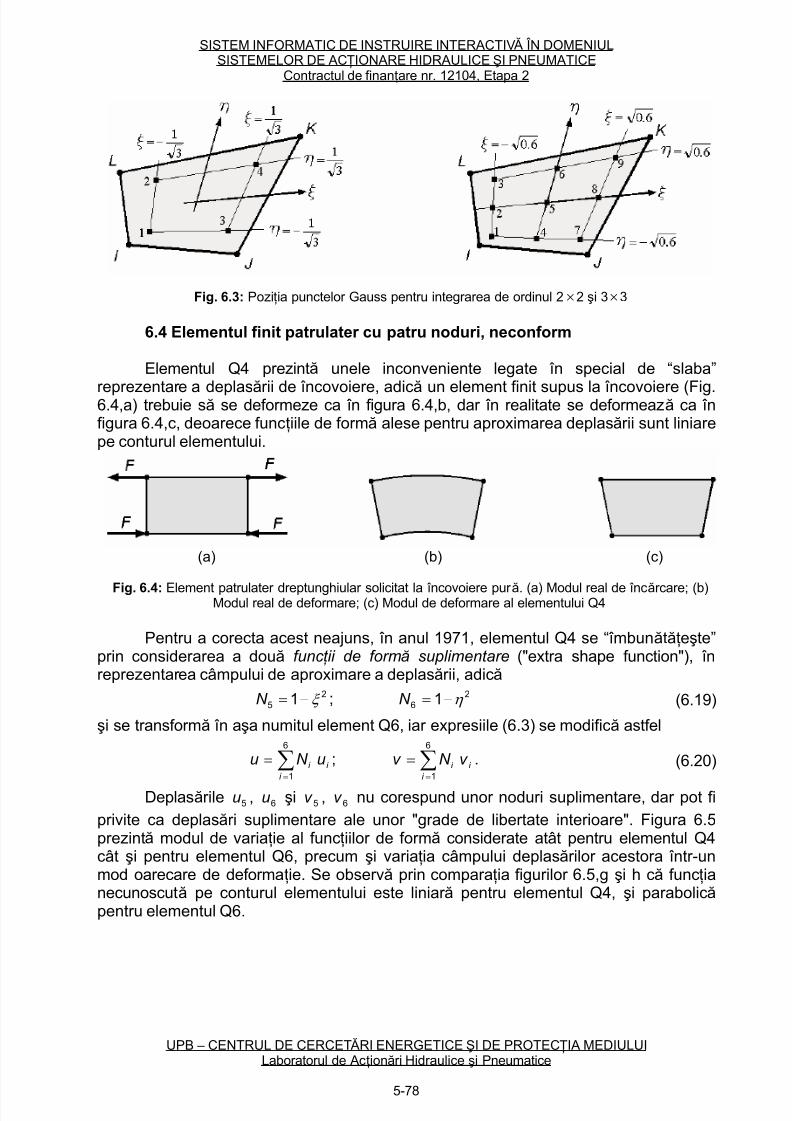
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 566/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig. 6.3: Poziţia punctelor Gauss pentru integrarea de ordinul 2× 2 şi 3× 3
6.4 Elementul finit patrulater cu patru noduri, neconform
Elementul Q4 prezintă unele inconveniente legate în special de “slaba”
reprezentare a deplasării de încovoiere, adică un element finit supus la încovoiere (Fig.6.4,a) trebuie să se deformeze ca în figura 6.4,b, dar în realitate se deformează ca înfigura 6.4,c, deoarece funcţiile de formă alese pentru aproximarea deplasării sunt liniarepe conturul elementului.
(a) (b) (c)
Fig. 6.4: Element patrulater dreptunghiular solicitat la încovoiere pur ă. (a) Modul real de încărcare; (b)Modul real de deformare; (c) Modul de deformare al elementului Q4
Pentru a corecta acest neajuns, în anul 1971, elementul Q4 se “îmbunătăţeşte”prin considerarea a două func ţ ii de formă suplimentare ("extra shape function"), înreprezentarea câmpului de aproximare a deplasării, adică
25 1 ξ −=N ; 2
6 1 η −=N (6.19)
şi se transformă în aşa numitul element Q6, iar expresiile (6.3) se modifică astfel
i
i
i uN u ∑=
=6
1
; .i
i
i v N v ∑=
=6
1
(6.20)
Deplasările , şi , nu corespund unor noduri suplimentare, dar pot fi
privite ca deplasări suplimentare ale unor "grade de libertate interioare". Figura 6.5prezintă modul de variaţie al funcţiilor de formă considerate atât pentru elementul Q4cât şi pentru elementul Q6, precum şi variaţia câmpului deplasărilor acestora într-unmod oarecare de deformaţie. Se observă prin comparaţia figurilor 6.5,g şi h că funcţianecunoscută pe conturul elementului este liniar ă pentru elementul Q4, şi parabolică pentru elementul Q6.
5u 6u 5v 6v
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-78
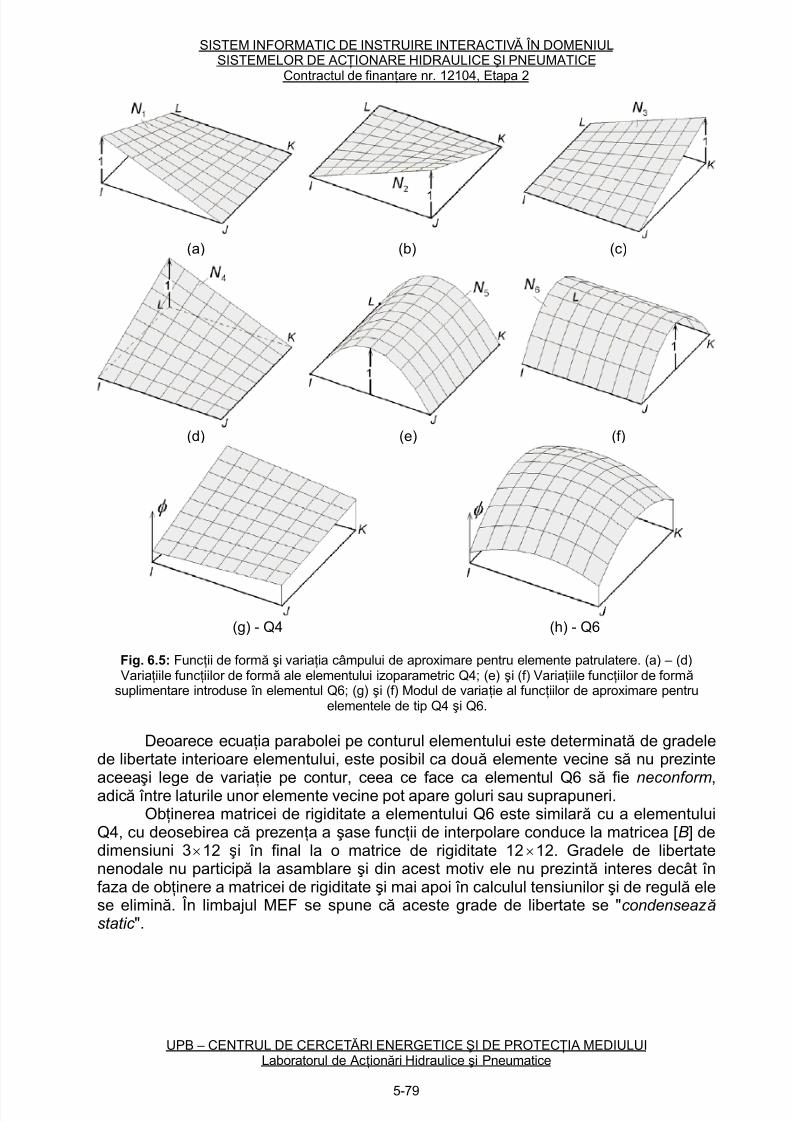
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 567/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
(a) (b) (c)
(d) (e) (f)
(g) - Q4 (h) - Q6
Fig. 6.5: Funcţii de formă şi variaţia câmpului de aproximare pentru elemente patrulatere. (a) – (d)Variaţiile funcţiilor de formă ale elementului izoparametric Q4; (e) şi (f) Variaţiile funcţiilor de formă
suplimentare introduse în elementul Q6; (g) şi (f) Modul de variaţie al funcţiilor de aproximare pentruelementele de tip Q4 şi Q6.
Deoarece ecuaţia parabolei pe conturul elementului este determinată de gradelede libertate interioare elementului, este posibil ca două elemente vecine să nu prezinte
aceeaşi lege de variaţie pe contur, ceea ce face ca elementul Q6 să fie neconform,adică între laturile unor elemente vecine pot apare goluri sau suprapuneri.Obţinerea matricei de rigiditate a elementului Q6 este similar ă cu a elementului
Q4, cu deosebirea că prezenţa a şase funcţii de interpolare conduce la matricea [B] dedimensiuni 3×12 şi în final la o matrice de rigiditate 12 ×12. Gradele de libertatenenodale nu participă la asamblare şi din acest motiv ele nu prezintă interes decât înfaza de obţinere a matricei de rigiditate şi mai apoi în calculul tensiunilor şi de regulă elese elimină. În limbajul MEF se spune că aceste grade de libertate se "condenseaz ă static ".
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-79
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 568/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
6.5 Condensarea statică a gradelor de libertate interioare
Gradele de libertate ale unui element care nu participă la asamblare deoarece nuse “leagă” de alte grade de libertate pot fi eliminate în faza de formulare a matricei derigiditate a unui element finit pentru a lucra cu matrice de dimensiuni mai mici. Încategoria acestor grade de libertate intr ă şi cele corespunzătoare nodurilor interioareale unor elemente finite, cum ar fi de exemplu un element patrulater cu cinci noduri,dintre care un nod este plasat în centrul de greutate al patrulaterului.
Acest procedeu de eliminare a unor grade de libertate, este folosit pe scar ă largă în MEF, şi se întâlneşte atât la nivelul unui element finit, sau al unei substructuri , şi chiar în anumite tehnici de rezolvare a sistemelor de ecuaţii liniare, cum ar fi metoda derezolvare frontală a unui sistem de ecuaţii liniare. O substructur ă sau echivalent unsuperelement este o colecţie de elemente finite care sunt descrise matematic printr-unnumăr oarecare de noduri sau grade de libertate dintre cele definite iniţial. De regulă gradele de libertate păstrate sunt numite “master” iar cele eliminate “slave”. Gradele de
libertate master se aleg de către utilizator şi de regulă corespund conturului exterior alcolecţiei de elemente finite care se tratează ca un superelement.Gradele de libertate ale elementului Q6, care trebuie eliminate, sunt , , şi
, adică vectorul { din partiţionarea ecuaţiilor elementului finit5u 5v 6u
6v }bU
[ ] [ ][ ] [ ]
{ }{ }
{ }{ }⎭
⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡
b
a
b
a
bbba
abaa
F
F
U
U
K K
K K , (6.21)
în care dimensiunile submatricelor şi a subvectorilor sunt
[ ][ ] [ ]
[ ] [ ]⎥⎥
⎦
⎤
⎢⎢
⎣
⎡=
××
××
×4484
4888
1212 bbba
abaae
K K
K K
K ; { }{ }
{ }⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
×
×
× 14
18
112 b
ae
U
U
U ; { }{ }
{ }⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
×
×
× 14
18
112 b
ae
F
F
F . (6.22)
Ecuaţia matriceală (6.21) se rescrie în forma
[ ]{ } [ ]{ } { }ababaaa F U K U K =+ ;
[ ]{ } [ ]{ } { }bbbbaba F U K U K =+ .(6.21')
Din ecuaţia (6.21',b) rezultă o relaţie de legătur ă între deplasărilecorespunzătoare gradelor de libertate interioare { }bU şi deplasările nodale { }aU
{ } [ ] { } [ ]{ }( )ababbbb U K F K U −=−1
, (6.23)
care prin înlocuire în relaţia (6.21',a) conduce la
[ ] [ ] [ ] [ ]{ } { } [ ] [ ] { }bbbabaababbabaa F K K F U K K K K 11 −−
−=− . (6.24)
de unde se observă că matricea de rigiditate condensată este
[ ] [ ] [ ] [ ] [ ]babbabaa
e
c K K K K K 1
88
−
×
−= , (6.25)
în care se regăsesc numai gradele de libertate corespunzătoare nodurilor elementului şicare urmează să participe la asamblare întocmai ca matricea elementului Q4. Această matrice se consider ă de fapt matricea elementului Q6 şi în general conduce la rezultatenet superioare în comparaţie cu matricea elementului Q4.
Trebuie menţionat că vectorul încărcărilor nodale al elementului condensat
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-80
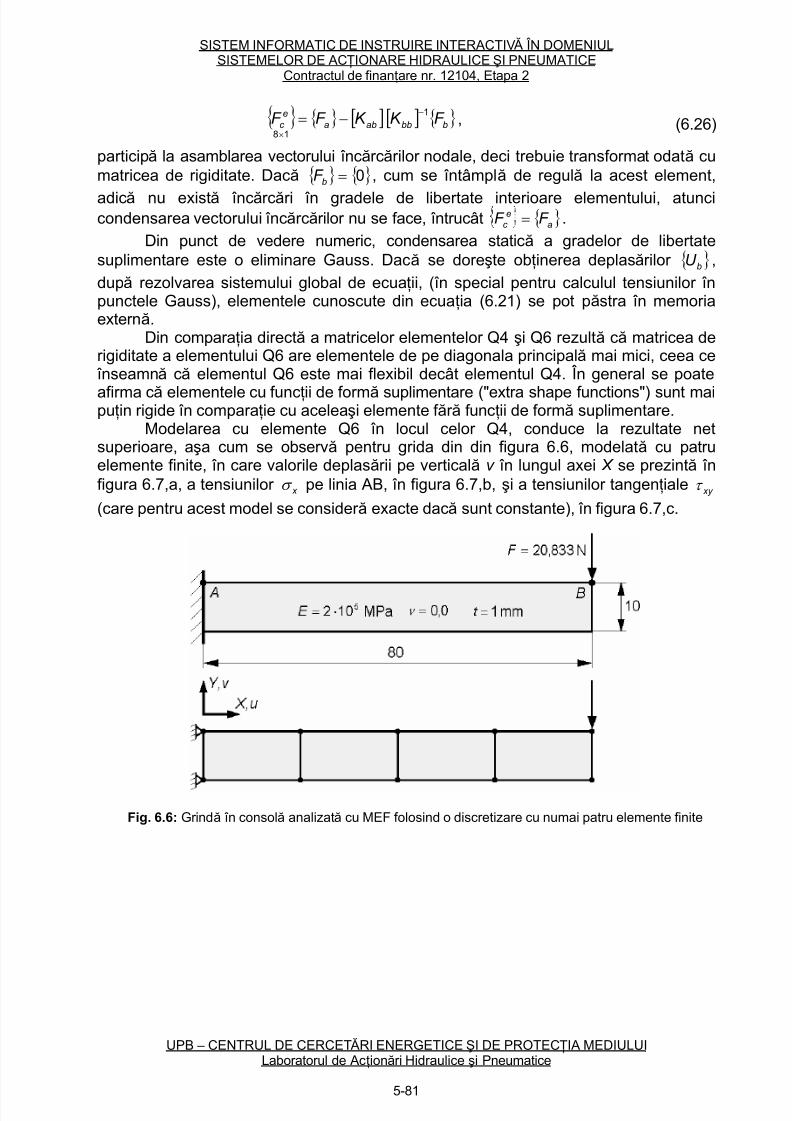
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 569/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
{ } { } [ ][ ] { }bbbaba
e
c F K K F F 1
18
−
×
−= , (6.26)
participă la asamblarea vectorului încărcărilor nodale, deci trebuie transformat odată cumatricea de rigiditate. Dacă { } { }0=bF , cum se întâmplă de regulă la acest element,
adică nu există încărcări în gradele de libertate interioare elementului, atuncicondensarea vectorului încărcărilor nu se face, întrucât { }a
e
c F F = .
Din punct de vedere numeric, condensarea statică a gradelor de libertatesuplimentare este o eliminare Gauss. Dacă se doreşte obţinerea deplasărilor { }bU ,
după rezolvarea sistemului global de ecuaţii, (în special pentru calculul tensiunilor înpunctele Gauss), elementele cunoscute din ecuaţia (6.21) se pot păstra în memoriaexternă.
Din comparaţia directă a matricelor elementelor Q4 şi Q6 rezultă că matricea derigiditate a elementului Q6 are elementele de pe diagonala principală mai mici, ceea ce
înseamnă că elementul Q6 este mai flexibil decât elementul Q4. În general se poate
afirma că elementele cu funcţii de formă suplimentare ("extra shape functions") sunt maipuţin rigide în comparaţie cu aceleaşi elemente f ăr ă funcţii de formă suplimentare.Modelarea cu elemente Q6 în locul celor Q4, conduce la rezultate net
superioare, aşa cum se observă pentru grida din din figura 6.6, modelată cu patruelemente finite, în care valorile deplasării pe verticală v în lungul axei X se prezintă înfigura 6.7,a, a tensiunilor x σ pe linia AB, în figura 6.7,b, şi a tensiunilor tangenţiale xy τ
(care pentru acest model se consider ă exacte dacă sunt constante), în figura 6.7,c.
Fig. 6.6: Grindă în consolă analizată cu MEF folosind o discretizare cu numai patru elemente finite
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-81
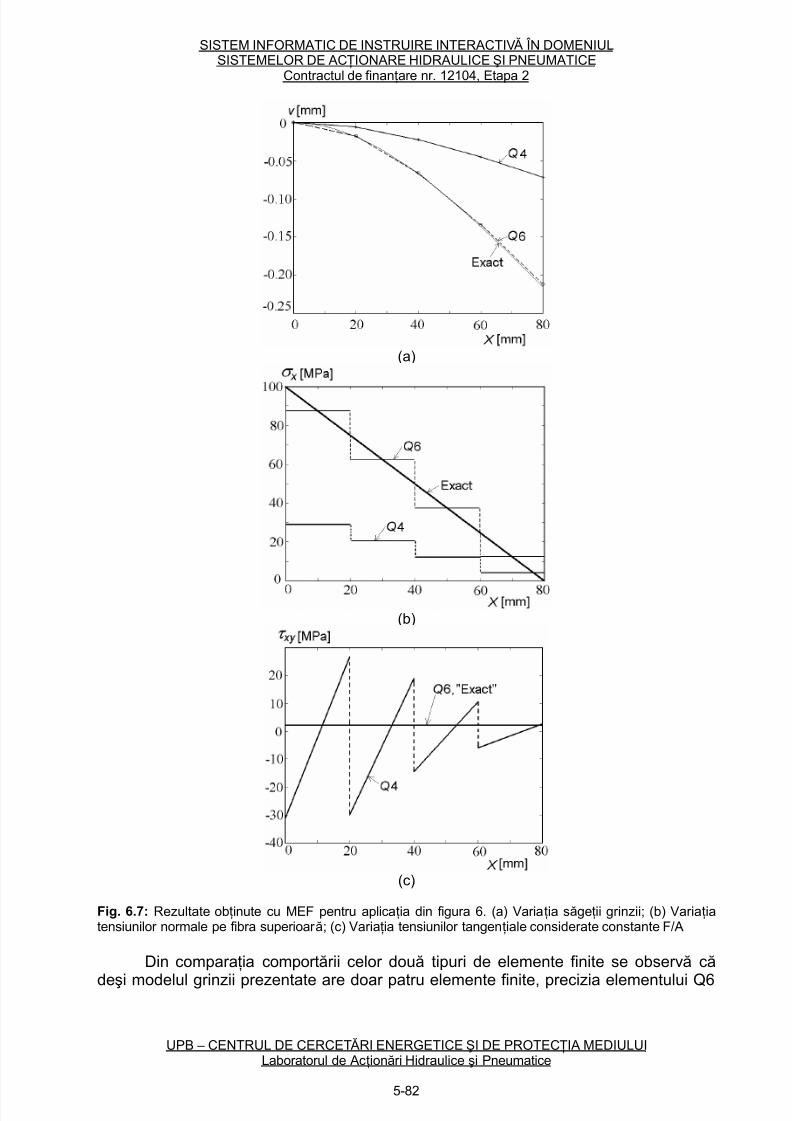
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 570/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
(a)
(b)
(c)
Fig. 6.7: Rezultate obţinute cu MEF pentru aplicaţia din figura 6. (a) Variaţia săgeţii grinzii; (b) Variaţiatensiunilor normale pe fibra superioar ă; (c) Variaţia tensiunilor tangenţiale considerate constante F/A
Din comparaţia comportării celor două tipuri de elemente finite se observă că
deşi modelul grinzii prezentate are doar patru elemente finite, precizia elementului Q6
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-82

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 571/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
este foarte bună pentru calculul deplasărilor şi satisf ăcătoare pentru valorile tensiunilor.Modul de calcul al tensiunilor se prezintă într-un paragraf din continuare.
6.6 Elementul patrulater plan izoparametic cu opt noduri
Unul dintre cele mai eficiente elemente finite pentru modelările plane esteelementul izoparametric cu opt noduri (Fig. 6.8.). Acesta este definit în sistemul dereferinţă global XOY de nodurile I , J , K , L, M , N , O, P notate în continuare pentrusimplificarea expunerii cu 1, 2, 3, 4, 5, 6, 7, 8, şi prezintă două grade de libertate penod, adică deplasările în lungul axelor X şi Y .
(a) (b) (c)
Fig. 6.8: Elementul patrulater izoparametric cu opt noduri. (a) Numerotarea nodurilor şi axele sistemuluide coordonate natural rezultat din transformarea axelor când laturile elementului sunt drepte; (b) Axelesistemului de coordonate natural rezultat din transformarea axelor când laturile elementului sunt curbe;
(c) Elementul “părinte” cu sistemul natural de coordonate
Elementul poate avea laturi drepte (Fig. 6.8,a) sau curbe (Fig. 6.8,b), iar nodurilede pe laturile elementului pot fi plasate la mijlocul lor, sau puţin deplasate (Fig 6.8,b).
Funcţiile de formă care aproximează atât geometria elementului cât şi câmpuldeplasărilor se scriu folosind proprietăţile lor de a avea valoarea unu în nodul i şi zero înrest, adică
( ) ( ) ( η ξ η ξ ++−−−= 1114
11N ) ; ( ) ( )η ξ −−= 11
2
1 25N ;
( ) ( ) ( η ξ η ξ +−−+−= 111
4
12N ); ( ) ( )2
6 11
2
1η ξ −+=N ;
( ) ( ) ( η ξ η ξ −−++−= 11141
3N ); ( ) ( )η ξ +−= 1121 2
7N ;
( ) ( ) ( η ξ η ξ −++−−= 1114
14N ); ( ) ( )2
8 112
1η ξ −−=N .
(6.27)
Uneori se spune că elementul este de tip "serendipity", deoarece funcţiile de
formă , se pot scrie ca produs al ecuaţiilor dreptelor care trec prin nodurileelementului părinte după descoperirile extraordinare ale personajul legendar Serendipal novelelor lui Horace Walpole din secolul 18.
i N
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-83

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 572/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Modul de determinare al matricei de rigiditate este similar cu cel pentru obţinereamatricei de rigiditate a elementului Q4, şi are dimensiunile de 16×16. În continuare,acest element este denumit Q8. Pentru integrarea matricei de rigiditate în patru puncteGauss, rangul matricei este 12, ceea ce arată că elementul prezintă un mod demecanism, dacă integrarea este în nouă puncte Gauss, rangul matricei devine 13 şimodul de mecanism dispare. În mod uzual ordinul de integrare este , iar elementulasamblat în cadrul unei structuri nu mai prezintă pericolul apariţiei modurilor cinematice.
22 ×
Variaţia câtorva funcţii de formă în cadrul elementului, precum şi variaţia uneifuncţii de aproximare φ se prezintă în figura 6.9. Elementul Q8 este conform, variaţiadeplasării pe conturul laturilor este parabolică ca şi a elementului Q6, dar utilizarea luiconduce de regulă la o precizie mai mare. La limită elementul poate degenera într-unelement triunghiular cu şase noduri, şi de aceea se recomandă a fi utilizat în specialpentru modelări ale unor domenii de analiză cu geometrie complicată şi cu por ţiunicurbe, deoarece forma elementului conduce la aproximări foarte bune ale geometriei înraport cu elementul Q4 sau Q6.
(a) (b)
(c) (d)
Fig. 6.9: Funcţii de formă şi variaţia câmpului de aproximare pentru elementul patrulater izoparametricQ8. (a) – (c) Variaţiile unor funcţii de formă ale elementului Q8; (d) Modul de variaţie al funcţiei de
aproximare pentru elementul de tip Q8.
6.7 Elementul patrulater plan cu nouă noduri
Performanţele elementului patrulater cu opt noduri se pot îmbunătăţi prinintroducerea unui nod suplimentar în centrul elementului (Fig. 6.10,a). Acest elementfinit cu nouă noduri, de tip "Lagrange" (funcţiile de formă se pot obţine prin interpolareLagrange), este definit similar cu elementul precedent.
Funcţiile de formă pentru acest element rezultă prin interpolare Lagrange şi sunt:
( ) ( ) ( ) 9851 41211141N N N N −+−−−= η ξ ; ( ) ( ) 925 411121
N N −−−= η ξ ; (6.28)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-84
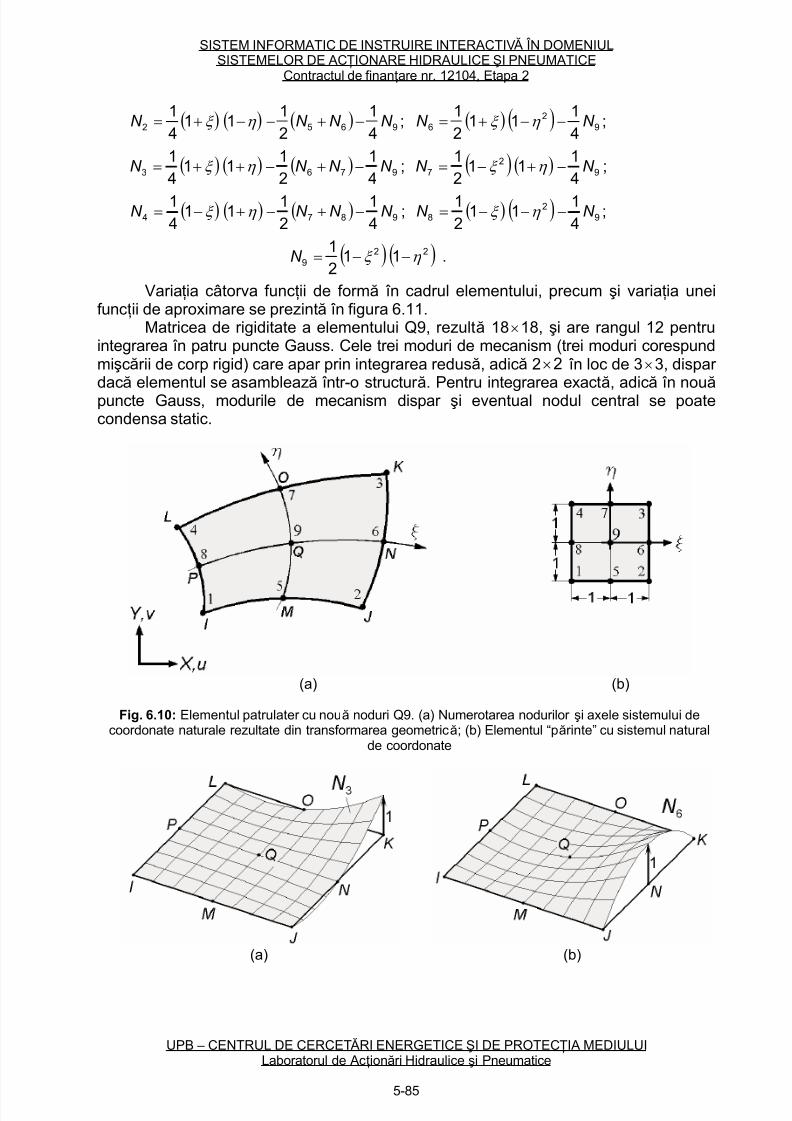
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 573/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
( ) ( ) ( ) 9652 4
1
2
111
4
1N N N N −+−−+= η ξ ; ( ) ( ) 9
26 4
111
2
1N N −−+= η ξ ;
( ) ( ) ( ) 9763 41
21
1141
N N N N −+−++= η ξ ; ( ) ( ) 92
7 41
1121
N N −+−= η ξ ;
( ) ( ) ( ) 9874 41
2111
41 N N N N −+−+−= η ξ ; ( ) ( ) 9
28 4
11121 N N −−−= η ξ ;
( ) ( )229 11
21
η ξ −−=N .
Variaţia câtorva funcţii de formă în cadrul elementului, precum şi variaţia uneifuncţii de aproximare se prezintă în figura 6.11.
Matricea de rigiditate a elementului Q9, rezultă 18×18, şi are rangul 12 pentruintegrarea în patru puncte Gauss. Cele trei moduri de mecanism (trei moduri corespundmişcării de corp rigid) care apar prin integrarea redusă, adică 2 2× în loc de 3× 3, dispar dacă elementul se asamblează într-o structur ă. Pentru integrarea exactă, adică în nouă puncte Gauss, modurile de mecanism dispar şi eventual nodul central se poatecondensa static.
(a) (b)
Fig. 6.10: Elementul patrulater cu nouă noduri Q9. (a) Numerotarea nodurilor şi axele sistemului decoordonate naturale rezultate din transformarea geometrică; (b) Elementul “părinte” cu sistemul natural
de coordonate
(a) (b)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-85
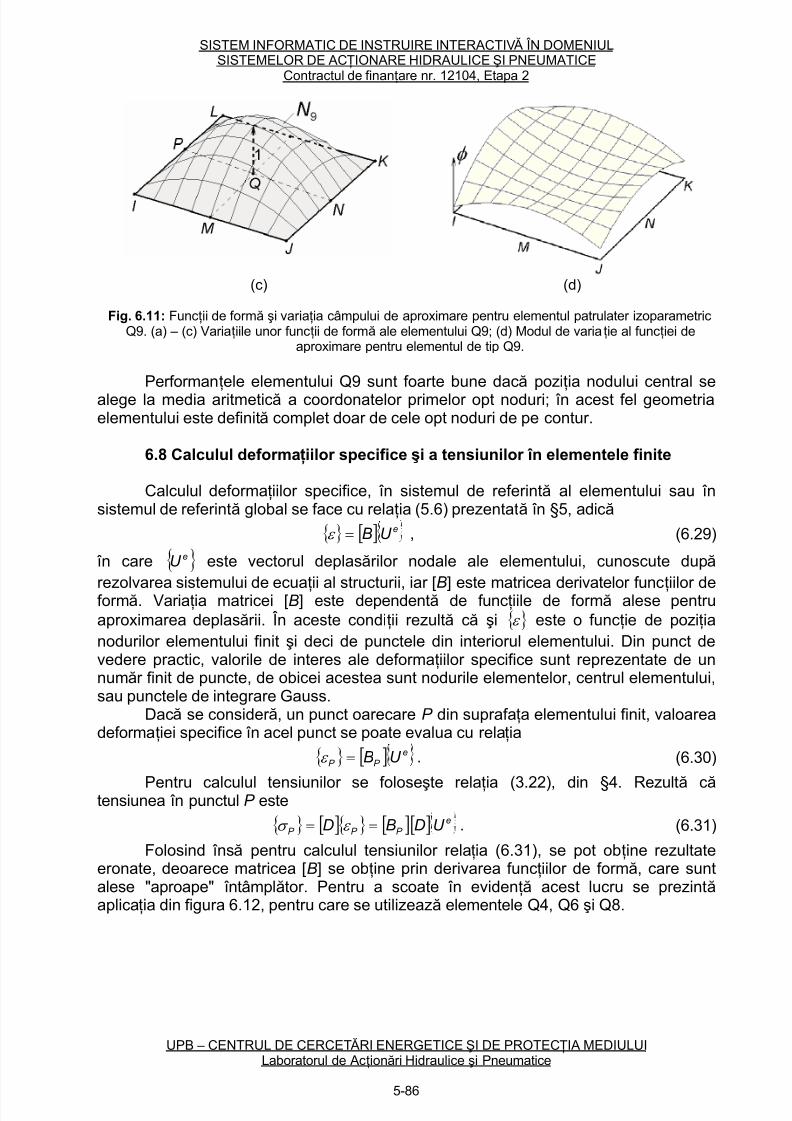
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 574/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
(c) (d)
Fig. 6.11: Funcţii de formă şi variaţia câmpului de aproximare pentru elementul patrulater izoparametricQ9. (a) – (c) Variaţiile unor funcţii de formă ale elementului Q9; (d) Modul de variaţie al funcţiei de
aproximare pentru elementul de tip Q9.
Performanţele elementului Q9 sunt foarte bune dacă poziţia nodului central sealege la media aritmetică a coordonatelor primelor opt noduri; în acest fel geometriaelementului este definită complet doar de cele opt noduri de pe contur.
6.8 Calculul deformaţiilor specifice şi a tensiunilor în elementele finite
Calculul deformaţiilor specifice, în sistemul de referintă al elementului sau însistemul de referintă global se face cu relaţia (5.6) prezentată în §5, adică
{ } [ ] eU B=ε , (6.29)
în care { }eU este vectorul deplasărilor nodale ale elementului, cunoscute după
rezolvarea sistemului de ecuaţii al structurii, iar [B] este matricea derivatelor funcţiilor deformă. Variaţia matricei [B] este dependentă de funcţiile de formă alese pentruaproximarea deplasării. În aceste condiţii rezultă că şi { }ε este o funcţie de poziţianodurilor elementului finit şi deci de punctele din interiorul elementului. Din punct devedere practic, valorile de interes ale deformaţiilor specifice sunt reprezentate de unnumăr finit de puncte, de obicei acestea sunt nodurile elementelor, centrul elementului,sau punctele de integrare Gauss.
Dacă se consider ă, un punct oarecare P din suprafaţa elementului finit, valoareadeformaţiei specifice în acel punct se poate evalua cu relaţia
{ } [ ] e
P P U B=ε . (6.30)
Pentru calculul tensiunilor se foloseşte relaţia (3.22), din §4. Rezultă că tensiunea în punctul P este
{ } [ ]{ } [ ][ ] e
P P P U DBD == ε σ . (6.31)
Folosind însă pentru calculul tensiunilor relaţia (6.31), se pot obţine rezultateeronate, deoarece matricea [B] se obţine prin derivarea funcţiilor de formă, care suntalese "aproape" întâmplător. Pentru a scoate în evidenţă acest lucru se prezintă aplicaţia din figura 6.12, pentru care se utilizează elementele Q4, Q6 şi Q8.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-86
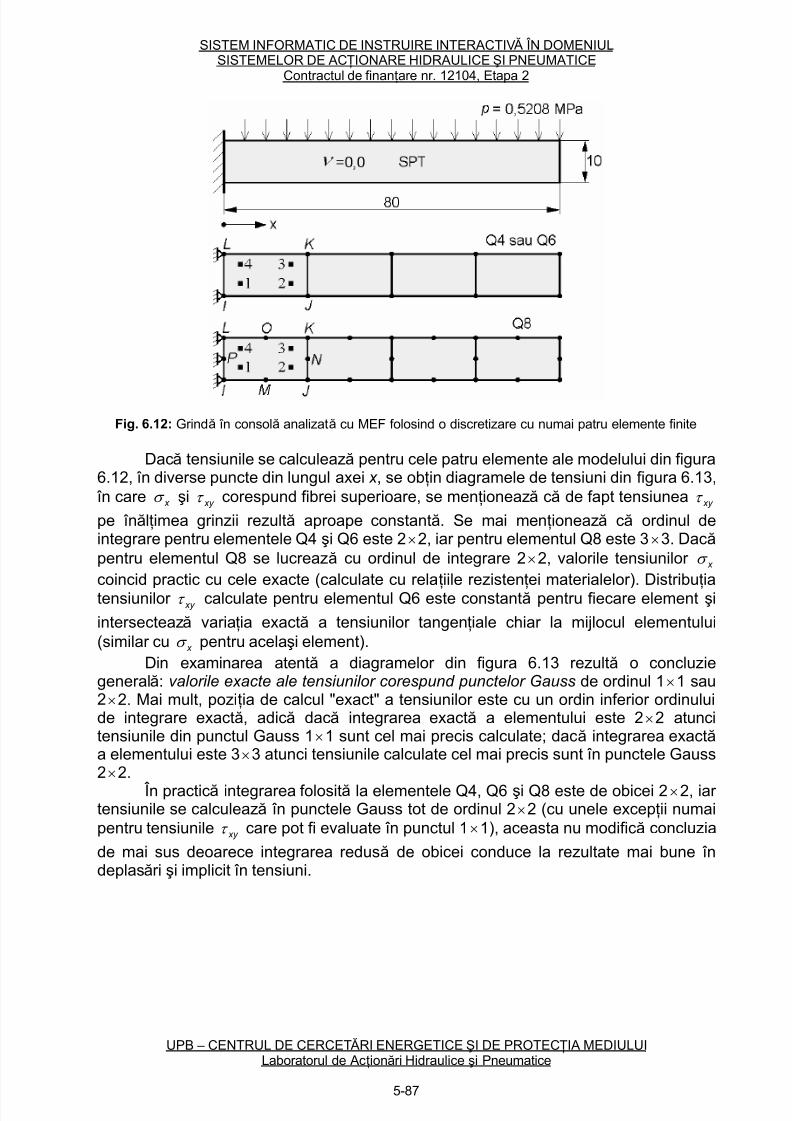
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 575/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig. 6.12: Grindă în consolă analizată cu MEF folosind o discretizare cu numai patru elemente finite
Dacă tensiunile se calculează pentru cele patru elemente ale modelului din figura6.12, în diverse puncte din lungul axei x , se obţin diagramele de tensiuni din figura 6.13,
în care x σ şi xy τ corespund fibrei superioare, se menţionează că de fapt tensiunea xy τ
pe înălţimea grinzii rezultă aproape constantă. Se mai menţionează că ordinul deintegrare pentru elementele Q4 şi Q6 este 2×2, iar pentru elementul Q8 este 3×3. Dacă pentru elementul Q8 se lucrează cu ordinul de integrare 2× 2, valorile tensiunilor x σ coincid practic cu cele exacte (calculate cu relaţiile rezistenţei materialelor). Distribuţiatensiunilor xy τ calculate pentru elementul Q6 este constantă pentru fiecare element şi
intersectează variaţia exactă a tensiunilor tangenţiale chiar la mijlocul elementului(similar cu x σ pentru acelaşi element).
Din examinarea atentă a diagramelor din figura 6.13 rezultă o concluziegenerală: valorile exacte ale tensiunilor corespund punctelor Gauss de ordinul 1×1 sau2×2. Mai mult, poziţia de calcul "exact" a tensiunilor este cu un ordin inferior ordinuluide integrare exactă, adică dacă integrarea exactă a elementului este 2×2 atuncitensiunile din punctul Gauss 1×1 sunt cel mai precis calculate; dacă integrarea exactă a elementului este 3×3 atunci tensiunile calculate cel mai precis sunt în punctele Gauss2×2.
În practică integrarea folosită la elementele Q4, Q6 şi Q8 este de obicei 2× 2, iar tensiunile se calculează în punctele Gauss tot de ordinul 2×2 (cu unele excepţii numaipentru tensiunile xy τ care pot fi evaluate în punctul 1×1), aceasta nu modifică concluzia
de mai sus deoarece integrarea redusă de obicei conduce la rezultate mai bune îndeplasări şi implicit în tensiuni.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-87
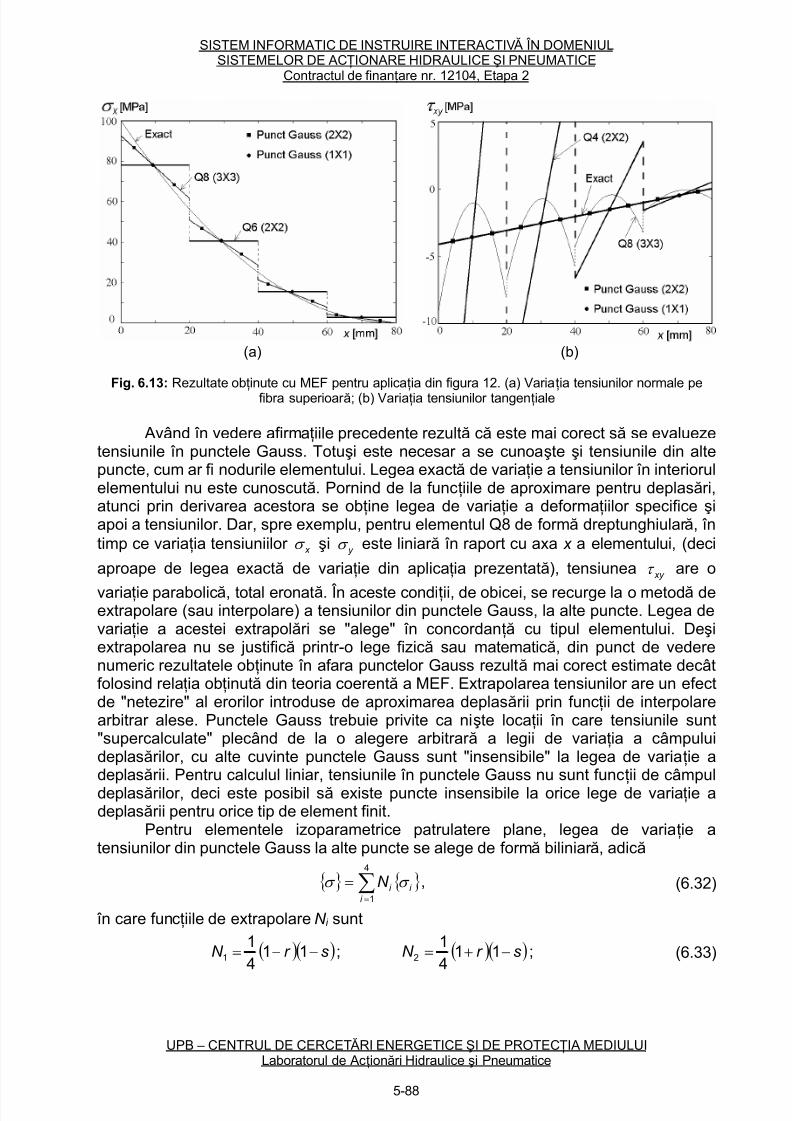
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 576/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
(a) (b)
Fig. 6.13: Rezultate obţinute cu MEF pentru aplicaţia din figura 12. (a) Variaţia tensiunilor normale pefibra superioar ă; (b) Variaţia tensiunilor tangenţiale
Având în vedere afirmaţiile precedente rezultă că este mai corect să se evaluezetensiunile în punctele Gauss. Totuşi este necesar a se cunoaşte şi tensiunile din altepuncte, cum ar fi nodurile elementului. Legea exactă de variaţie a tensiunilor în interiorulelementului nu este cunoscută. Pornind de la funcţiile de aproximare pentru deplasări,atunci prin derivarea acestora se obţine legea de variaţie a deformaţiilor specifice şiapoi a tensiunilor. Dar, spre exemplu, pentru elementul Q8 de formă dreptunghiular ă, întimp ce variaţia tensiuniilor x σ şi y σ este liniar ă în raport cu axa x a elementului, (deci
aproape de legea exactă de variaţie din aplicaţia prezentată), tensiunea xy τ are o
variaţie parabolică, total eronată. În aceste condiţii, de obicei, se recurge la o metodă deextrapolare (sau interpolare) a tensiunilor din punctele Gauss, la alte puncte. Legea devariaţie a acestei extrapolări se "alege" în concordanţă cu tipul elementului. Deşiextrapolarea nu se justifică printr-o lege fizică sau matematică, din punct de vederenumeric rezultatele obţinute în afara punctelor Gauss rezultă mai corect estimate decâtfolosind relaţia obţinută din teoria coerentă a MEF. Extrapolarea tensiunilor are un efectde "netezire" al erorilor introduse de aproximarea deplasării prin funcţii de interpolarearbitrar alese. Punctele Gauss trebuie privite ca nişte locaţii în care tensiunile sunt"supercalculate" plecând de la o alegere arbitrar ă a legii de variaţia a câmpuluideplasărilor, cu alte cuvinte punctele Gauss sunt "insensibile" la legea de variaţie adeplasării. Pentru calculul liniar, tensiunile în punctele Gauss nu sunt funcţii de câmpuldeplasărilor, deci este posibil să existe puncte insensibile la orice lege de variaţie adeplasării pentru orice tip de element finit.
Pentru elementele izoparametrice patrulatere plane, legea de variaţie atensiunilor din punctele Gauss la alte puncte se alege de formă biliniar ă, adică
{ } { }∑=
=4
1i
i i N σ σ , (6.32)
în care funcţiile de extrapolare N i sunt
( )( sr N −−= 1141
1 ); ( )( sr N −+= 1141
2 ) ; (6.33)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-88
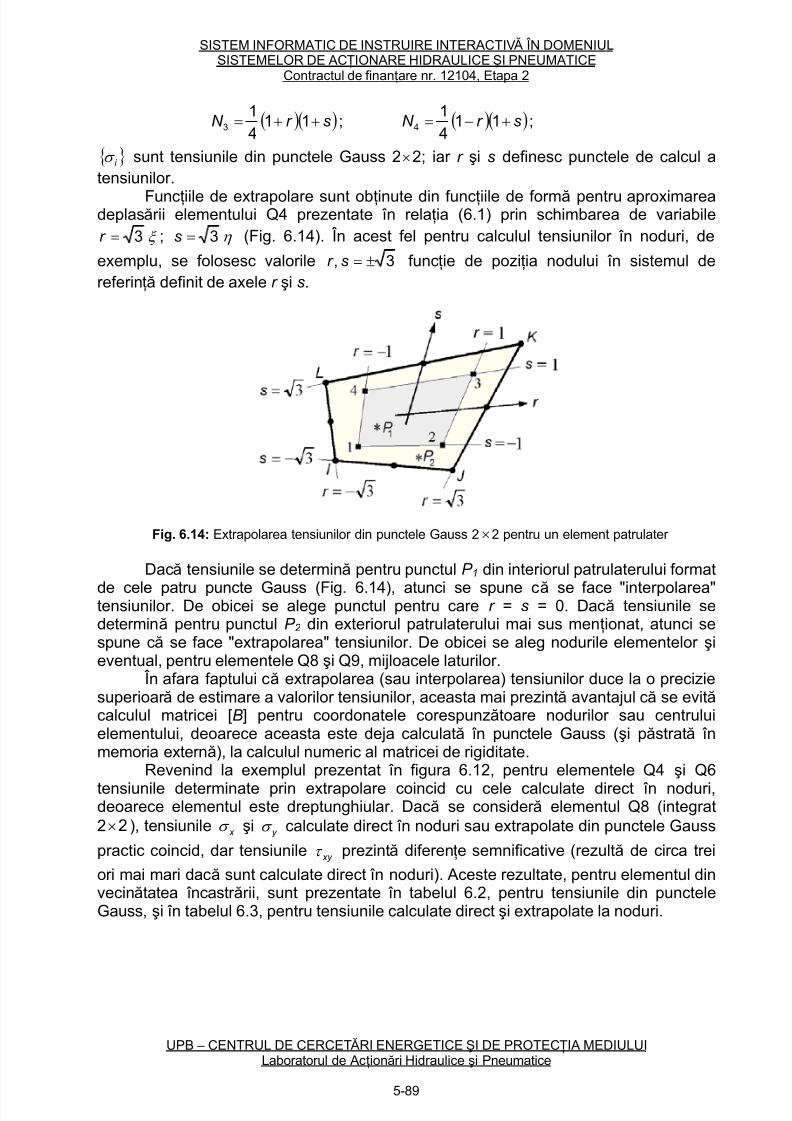
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 577/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
( )( sr N ++= 114
13 ) ; ( )( sr N +−= 11
4
14 );
{ }i σ sunt tensiunile din punctele Gauss 2×2; iar r şi s definesc punctele de calcul atensiunilor.
Funcţiile de extrapolare sunt obţinute din funcţiile de formă pentru aproximareadeplasării elementului Q4 prezentate în relaţia (6.1) prin schimbarea de variabile
ξ 3=r ; η 3=s (Fig. 6.14). În acest fel pentru calculul tensiunilor în noduri, de
exemplu, se folosesc valorile 3, ±=sr funcţie de poziţia nodului în sistemul dereferinţă definit de axele r şi s.
Fig. 6.14: Extrapolarea tensiunilor din punctele Gauss 2× 2 pentru un element patrulater
Dacă tensiunile se determină pentru punctul P 1 din interiorul patrulaterului format
de cele patru puncte Gauss (Fig. 6.14), atunci se spune că se face "interpolarea"tensiunilor. De obicei se alege punctul pentru care r = s = 0. Dacă tensiunile sedetermină pentru punctul P 2 din exteriorul patrulaterului mai sus menţionat, atunci sespune că se face "extrapolarea" tensiunilor. De obicei se aleg nodurile elementelor şieventual, pentru elementele Q8 şi Q9, mijloacele laturilor.
În afara faptului că extrapolarea (sau interpolarea) tensiunilor duce la o preciziesuperioar ă de estimare a valorilor tensiunilor, aceasta mai prezintă avantajul că se evită calculul matricei [B] pentru coordonatele corespunzătoare nodurilor sau centruluielementului, deoarece aceasta este deja calculată în punctele Gauss (şi păstrată înmemoria externă), la calculul numeric al matricei de rigiditate.
Revenind la exemplul prezentat în figura 6.12, pentru elementele Q4 şi Q6
tensiunile determinate prin extrapolare coincid cu cele calculate direct în noduri,deoarece elementul este dreptunghiular. Dacă se consider ă elementul Q8 (integrat2 ), tensiunile2× x σ şi y σ calculate direct în noduri sau extrapolate din punctele Gauss
practic coincid, dar tensiunile xy τ prezintă diferenţe semnificative (rezultă de circa trei
ori mai mari dacă sunt calculate direct în noduri). Aceste rezultate, pentru elementul dinvecinătatea încastr ării, sunt prezentate în tabelul 6.2, pentru tensiunile din puncteleGauss, şi în tabelul 6.3, pentru tensiunile calculate direct şi extrapolate la noduri.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-89

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 578/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Tabelul 6.2: Tensiunile tangenţiale din punctele Gauss pentru elementul Q8 din zona încastr ării înaplicaţia din figura 6.12
Punctul GaussTensiunea1 2 3 4
xy τ -3,8959 -3,3195 -3,9966 -3,3702
Tabelul 6.3: Tensiunile tangenţiale din noduri pentru elementul Q8 din zona încastr ării în aplicaţia dinfigura 6.12
Nodul elementuluiTensiunea xy τ I J K L M N O P
Calculată direct în noduri
-11,336 -10,522 -10,338 -11,607 0,0078 -10,409 -0,0353 -11,451
Extrapolată dinpunctele Gauss
-4,0312 -3,2168 -3,0328 -4,3016 -3,6240 -3,1248 -3,6672 -4,1664
În concluzie, se poate afirma, că tensiunile calculate prin extrapolare au în
general valori mai precise decât cele obţinute prin calculul direct în noduri. Dacă elementele finite sunt distorsionate avantajul extrapolării este considerabil mai mare.Programele de firmă prezintă opţiuni de alegere a estimării tensiunilor pentru diverseelemente finite.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-90
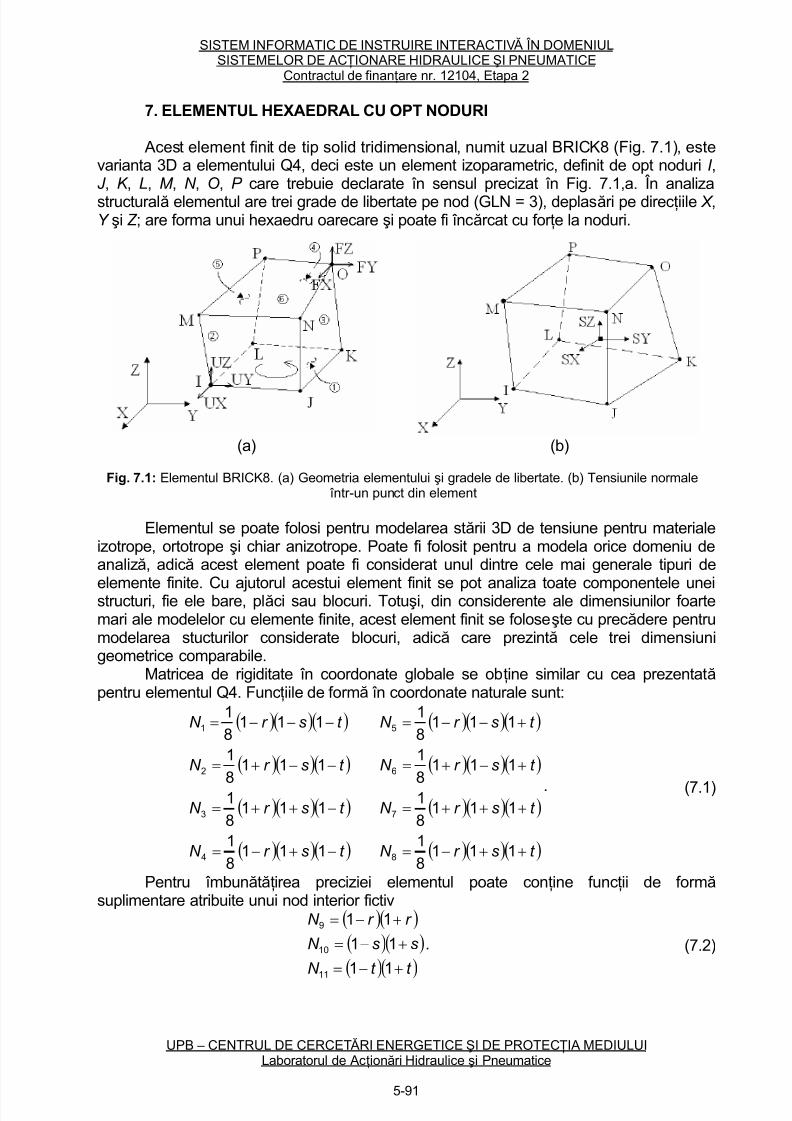
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 579/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
7. ELEMENTUL HEXAEDRAL CU OPT NODURI
Acest element finit de tip solid tridimensional, numit uzual BRICK8 (Fig. 7.1), estevarianta 3D a elementului Q4, deci este un element izoparametric, definit de opt noduri I ,J , K , L, M , N , O, P care trebuie declarate în sensul precizat în Fig. 7.1,a. În analizastructurală elementul are trei grade de libertate pe nod (GLN = 3), deplasări pe direcţiile X ,Y şi Z ; are forma unui hexaedru oarecare şi poate fi încărcat cu for ţe la noduri.
(a) (b)
Fig. 7.1: Elementul BRICK8. (a) Geometria elementului şi gradele de libertate. (b) Tensiunile normale într-un punct din element
Elementul se poate folosi pentru modelarea stării 3D de tensiune pentru materialeizotrope, ortotrope şi chiar anizotrope. Poate fi folosit pentru a modela orice domeniu deanaliză, adică acest element poate fi considerat unul dintre cele mai generale tipuri de
elemente finite. Cu ajutorul acestui element finit se pot analiza toate componentele uneistructuri, fie ele bare, plăci sau blocuri. Totuşi, din considerente ale dimensiunilor foartemari ale modelelor cu elemente finite, acest element finit se foloseşte cu precădere pentrumodelarea stucturilor considerate blocuri, adică care prezintă cele trei dimensiunigeometrice comparabile.
Matricea de rigiditate în coordonate globale se obţine similar cu cea prezentată pentru elementul Q4. Funcţiile de formă în coordonate naturale sunt:
( )( )( )
( )( )( )
( )( )( )
( )( )( t sr N
t sr N
t sr N
t sr N
−+−=
−++=
−−+=
−−−=
1118
1
1118
1
111
8
1
1118
1
4
3
2
1
)
( )( )( )
( )( )( )
( )( )( )
( )( )( t sr N
t sr N
t sr N
t sr N
++−=
+++=
+−+=
+−−=
1118
1
1118
1
111
8
1
1118
1
8
7
6
5
)
. (7.1)
Pentru îmbunătăţirea preciziei elementul poate conţine funcţii de formă suplimentare atribuite unui nod interior fictiv
( )( )( )(( )( )t t N
ssN
r r N
+−=
+−= )+−=
11
11
11
11
10
9
. (7.2)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-91

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 580/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Matricea de rigiditate a materialului [D] este cea prezentată în (3.28). Ordinul deintegrare al matricei de rigiditate se alege automat 2, 3 sau foarte rar 4.
Pe lângă încărcarile cu for ţe concentrate, elementul permite încărcări cu presiunidistribuite liniar sau constante pe feţele elementului, care se identifică prin numere de la 1la 6 (vezi Fig. 7.1,a). Aceste presiuni se echivalează la nodurile elementului cu for ţeconcentrate folosind relaţia (5.14).
Rezultatele unei analize conduce la obţinerea deplasărilor nodale – notate UX, UYşi UZ sau DX, DY şi DZ funcţie de programul disponibil şi apoi a tensiunile în sistemulglobal de axe – notate SX, SY, SZ, SXY SYZ, SXZ (vezi Fig. 7.1,b, în care s-au figuratdoar tensiunile normale), adică tensorul complet al tensiunilor la nodurile elementului,precum şi în centrul lui, tensiunile principale S1, S2, S3 şi unghiurile corespunzătoare deorientare. Se menţionează că tensiunile se calculează în punctele Gauss 2×2× 2 şi apoise extrapolează la noduri tot cu funcţiile definite de (7.1).
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-92
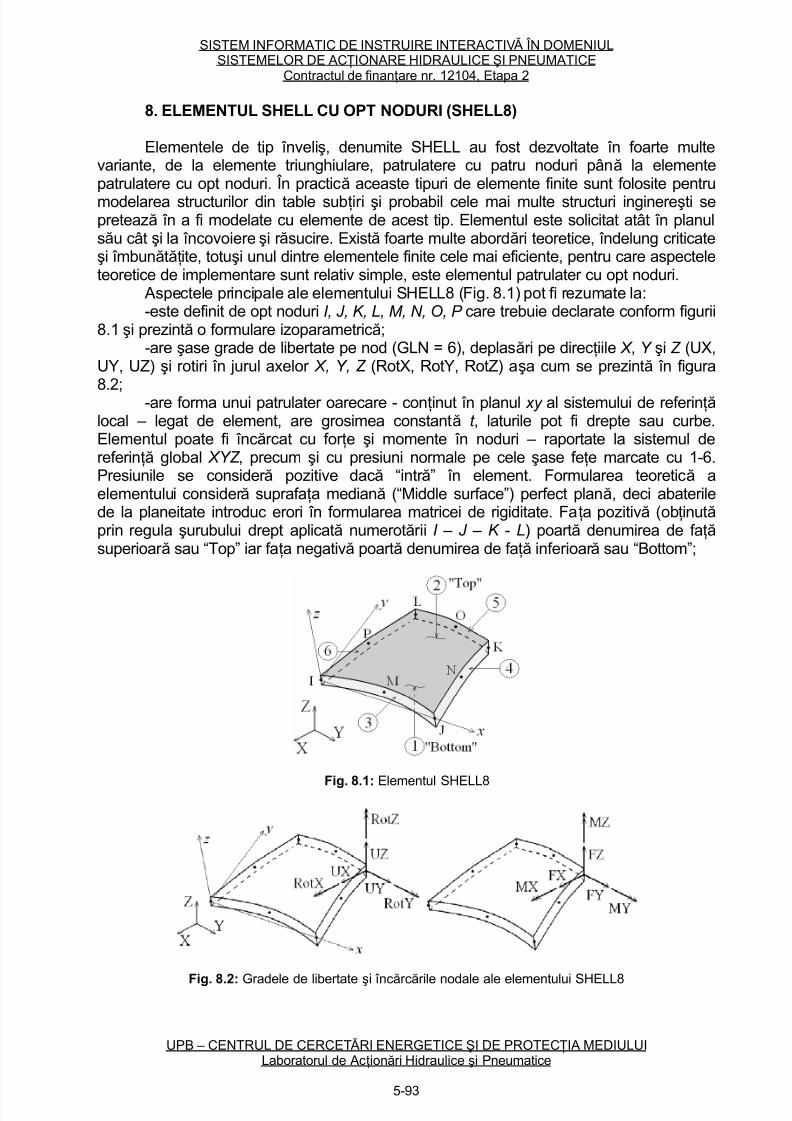
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 581/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
8. ELEMENTUL SHELL CU OPT NODURI (SHELL8)
Elementele de tip înveliş, denumite SHELL au fost dezvoltate în foarte multevariante, de la elemente triunghiulare, patrulatere cu patru noduri până la elementepatrulatere cu opt noduri. În practică aceaste tipuri de elemente finite sunt folosite pentrumodelarea structurilor din table subţiri şi probabil cele mai multe structuri inginereşti sepretează în a fi modelate cu elemente de acest tip. Elementul este solicitat atât în planulsău cât şi la încovoiere şi r ăsucire. Există foarte multe abordări teoretice, îndelung criticateşi îmbunătăţite, totuşi unul dintre elementele finite cele mai eficiente, pentru care aspecteleteoretice de implementare sunt relativ simple, este elementul patrulater cu opt noduri.
Aspectele principale ale elementului SHELL8 (Fig. 8.1) pot fi rezumate la:-este definit de opt noduri I, J, K, L, M, N, O, P care trebuie declarate conform figurii
8.1 şi prezintă o formulare izoparametrică;-are şase grade de libertate pe nod (GLN = 6), deplasări pe direcţiile X , Y şi Z (UX,
UY, UZ) şi rotiri în jurul axelor X, Y, Z (RotX, RotY, RotZ) aşa cum se prezintă în figura
8.2; -are forma unui patrulater oarecare - conţinut în planul xy al sistemului de referinţă local – legat de element, are grosimea constantă t , laturile pot fi drepte sau curbe.Elementul poate fi încărcat cu for ţe şi momente în noduri – raportate la sistemul dereferinţă global XYZ , precum şi cu presiuni normale pe cele şase feţe marcate cu 1-6.Presiunile se consider ă pozitive dacă “intr ă” în element. Formularea teoretică aelementului consider ă suprafaţa mediană (“Middle surface”) perfect plană, deci abaterilede la planeitate introduc erori în formularea matricei de rigiditate. Faţa pozitivă (obţinută prin regula şurubului drept aplicată numerotării I – J – K - L) poartă denumirea de faţă superioar ă sau “Top” iar faţa negativă poartă denumirea de faţă inferioar ă sau “Bottom”;
Fig. 8.1: Elementul SHELL8
Fig. 8.2: Gradele de libertate şi încărcările nodale ale elementului SHELL8
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-93

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 582/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
-elementul se poate folosi pentru modelarea învelişurilor şi plăcilor de grosimeconstantă pe por ţiuni, adică din componenţa unor structuri preponderent realizate dintable, considerate materiale izotrope, dar există şi variante ale elementului pentrumateriale ortotrope sau chiar anizotrope;
-matricea de rigiditate în coordonate locale se obţine prin suprapunerea matricei derigiditate de membrană cu matricea de rigiditate de placă (încovoiere) ca în figura 7.3. Semenţionează că formularea matricei de rigiditate membrană nu conţine gradele delibertate
zϕ (“drilling” = de sfredelire) acestea fiind introduse într-un mod aproximativ prin
intermediul matricei [k t ].Matricea de rigiditate a elementului în coordonate locale se poate scrie simbolic
[ ] { }
[ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] [ ]⎪⎪⎪
⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢
⎢⎢⎢⎢⎢
⎣
⎡
=
×××
×××
×××
××
yi
xi
i
zi
i
i
p
t
m
w
v
u
k
k
k
uk
ϕ
ϕ
ϕ
24248241624
24888168
24168161616
1484848
00
00
00
, (8.1)
în care ş.a.m.d. sunt gradele de libertate nodale în sistemul de
referinţă local xyz .
{ T
i uuuu 821 L= }
Element Membrană + Element Placă = Element Shell
Fig. 8.3: Formarea elementului Shell8 plan
Cele trei matrice nenule din (8.1) se obţin din relaţiile:[ ] [ ] [ ][ ]∫=
V mm
T
mm dV BDBk , (8.2)
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎢⎢
⎣
⎡
=
1
1
1
1
11
1
1
β β β β β β β
β β β β β β β
β β β β β β β
β β β β β β β
β β β β β β β β β β β β β β
β β β β β β β
β β β β β β β
α EV k t , (8.3)
[ ] [ ] [ ][ ]∫=
V p p
T
p p dV BDBk , (8.4)
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-94

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 583/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
în care [ şi]mB pB se obţin prin derivarea funcţilor de formă, având în vedere
aproximaţiile câmpului deplasărilor. [ ]mD şi pD sunt matricele de rigiditate ale
materialului, prezentate mai jos, iar E este modulul de elasticitate longitudinal, V este
volumul elementului finit, 7
1−=
β , iar coeficientul α se consider ă 0,003. Matricea [ ]t k afost aleasă astfel încât să înlăture singularitatea matricei [ ]k şi să poată reprezentamişcările de corp rigid relativ la gradele de libertate rotiri normale la elementul finit.
Funcţiile de formă sunt definite în coordonate naturale ξ şi η astfel
( ) ( ) ( η ξ η ξ ++−−−= 1114
11N ); ( ) ( )η ξ −−= 11
2
1 25N ;
( ) ( ) ( η ξ η ξ +−−+−= 1114
12N ); ( ) ( )2
6 112
1η ξ −+=N ;
( ) ( ) ( η ξ η ξ −−++−= 1114
13N ); ( ) ( )η ξ +−= 112
1 27N ;
( ) ( ) ( η ξ η ξ −++−−= 1114
14N ) ; ( ) ( )2
8 112
1η ξ −−=N .
(8.5)
Matricele de rigiditate (elasticitate) ale materialului sunt
[ ]⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎣
⎡
−−=
2100
01
01
1 2 ν ν
ν
ν
E D
m;
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
κ
κ
ν
ν
G
G
G
E E
E E
D p
0000
0000
0000
000
000
,(8.6)
în care( )ν +
=12
E G este modulul de elasticitate transversal al materialului; ν este
coeficientul lui Poisson iar ⎟ ⎠
⎞⎜⎝
⎛ +=
2252,01;2,1max
t
Aκ este un coeficient de corecţie
pentru distribuţia parabolică a tensiunilor de forfecare care se consider ă constantă pegrosimea elementului; A este aria elementului finit.
Aproximarea câmpului deplasărilor în interiorul elementelor finite pentrudeplasările de membrană, respectiv placă se face cu relaţiile:
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡=
⎭⎬⎫
⎩⎨⎧
∑= i
i
i i
i
v
u
N
N
v
u 8
1 0
0; .
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∑=
yi
xi
i
i
i
i
i w
N
zN
zN
w
v
u
ϕ
ϕ 8
1 00
00
00
(8.7)
Deoarece funcţiile de formă sunt definite în coordonate naturale, derivarea în raport
cu coordonatele x şi y implică folosirea derivatelor funcţiilor compuse şi deci calculul
inversei Jacobianului [J ]. Dacă se folosesc notaţiile
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-95

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 584/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
[ ] ⎥⎦
⎤⎢⎣
⎡=
∗∗
∗∗−
2221
12111
J J
J J J ;
⎪⎪⎩
⎪⎪⎨
⎧
∂
∂+
∂
∂=
∂
∂+
∂
∂=
∗∗
∗∗
η ξ
η ξ
i i i
i i i
N J
N J b
N J
N J a
2221
1211
, (8.8)
atunci matricele derivatelor funcţiilor de formă rezultă din
{ } [ ]{ }116163
8
1
0
0
××=
=⎭⎬⎫
⎩⎨⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
= ∑ mm
i
i
i
i i
i
i
xy
y
x
m d Bv
u
ab
b
a
γ
ε
ε
ε ; (8.9’)
{ } [ ]{ }124245
8
1
00
0
00
00
××=
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥
⎥⎥⎥⎥
⎦
⎤
⎢⎢
⎢⎢⎢⎢
⎣
⎡
−
−
−
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
= ∑ p p
yi
xi
i
i
i i
i i
i i
i
i
xz
yz
xy
y
x
p d B
w
N aN b
zbza
zb
za
ϕ
ϕ
γ γ
γ
ε
ε
ε , (8.9’’)
în care { şi}md { pd sunt componentele vectorilor deplasare în coordonate locale.
Integralele (8.2) şi (8.4) se transformă în integrale de suprafaţă deoarece integrareape direcţia z (grosimea plăcii) se face f ăr ă dificultăţi analitic. Totuşi integralele de suprafaţă
în coordonate naturale se efectuează numeric folosind integrarea Gauss-Legendre înminim 2×2 puncte Gauss.
Odată cunoscută matricea de rigiditate în coordonate locale se poate determinamatricea de rigiditate a elementului în coordonate globale folosind relaţia de transformare
[ ] [ ] [ ] [ ]4848484848484848 ××××
= T k T K T e , (8.10)
în care matricea de transformare [ ]T este funcţie de matricea [ ]λ a cosinusurilor directoare dintre cele două sisteme de referinţă local-global, adică
[ ] [ ] 16,,2,1 K== i diag T λ ; .
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
333
222
111
][
nml
nml
nml
λ (8.11)
Elementul permite încărcări cu presiuni distribuite liniar (biliniar) sau constante pe
feţele elementului, care se identifică prin numere de la 1 la 6 (vezi Fig. 8.1). Acestepresiuni se echivalează numeric la nodurile elementului cu for ţe concentrate conformrelaţiei generale
{ } [ ] { }dA pN F T
A
e
∫= . (8.12)
Se menţionează că această echivalare (coerentă funcţiilor de formă) conduce la
ditribuţii de for ţe nodale care aparent par “bizare”. Spre exemplu echivalarea unor presiuniconstante pe un element dreptunghiular se prezintă în Fig. 8.4.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-96
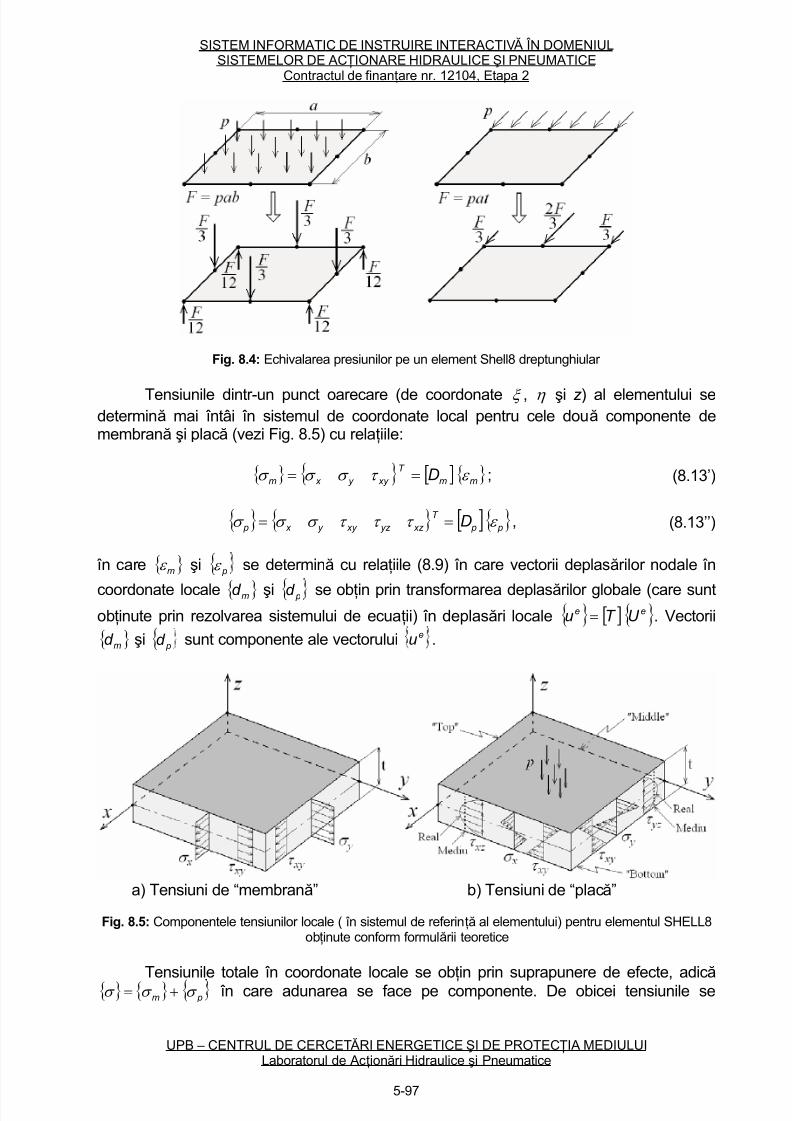
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 585/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Fig. 8.4: Echivalarea presiunilor pe un element Shell8 dreptunghiular
Tensiunile dintr-un punct oarecare (de coordonate ξ , η şi z ) al elementului sedetermină mai întâi în sistemul de coordonate local pentru cele două componente demembrană şi placă (vezi Fig. 8.5) cu relaţiile:
{ } { } [ ]{ }mm
T
xy y x m D ε τ σ σ σ == ; (8.13’)
{ } { } [ ]{ } p p
T
xz yz xy y x p D ε τ τ τ σ σ σ == , (8.13’’)
în care { }mε şi { pε se determină cu relaţiile (8.9) în care vectorii deplasărilor nodale în
coordonate locale { şi}md { pd se obţin prin transformarea deplasărilor globale (care suntobţinute prin rezolvarea sistemului de ecuaţii) în deplasări locale { } [ ]{ }ee U T u = . Vectorii
şi{ md } { pd sunt componente ale vectorului eu .
a) Tensiuni de “membrană” b) Tensiuni de “placă”
Fig. 8.5: Componentele tensiunilor locale ( în sistemul de referinţă al elementului) pentru elementul SHELL8obţinute conform formulării teoretice
Tensiunile totale în coordonate locale se obţin prin suprapunere de efecte, adică { } { } { pm σ σ σ += în care adunarea se face pe componente. De obicei tensiunile se
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-97

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 586/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
calculează într-un număr limitat de puncte (nodurile elementului şi centrul său) alese de pefeţele “Top”, “Middle” şi “Bottom”. Se observă că din calcul tensiunile z σ sunt nule, iar
pentru corecţie în faza de postprocesare uneori se atribuie p z
−=σ pe faţa în care există presiune aplicată cu variaţie liniar ă la zero pe faţa opusă dar numai pentru feţele 1 şi 2.
Tensiunile locale dintr-un punct sunt transformate în tensiuni globale (în sistemul dereferinţă global notate SX, SY, SZ, SXY, SYZ, SZX ) folosind relaţia
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+++
+++
+++=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
xz
yz
xy
z
y
x
T
nnnmnmmmnnmm
nnnmnmmmnnmm
nnnmnmmmnnmm
nnmmnm
nnmmnm
nnmmnm
SXZ
SYZ
SXY
SZ
SY
SX
τ
τ
τ
σ
σ
σ
311331133113131313
233223322332323232
122112211221212121
33333323
23
23
22222222
22
22
11111121
21
21
222
222
222
llllll
llllll
llllll
lll
lll
lll
. (8.14)
Pentru creşterea preciziei tensiunile se determină de regulă în punctele Gauss(unde valorile sunt cel mai bine estimate) şi apoi acestea se expandează la noduri
folosind funcţiile de formă 6.33.22×
Tensiunile principale în noduri se pot calcula odată cu calculul tensiunilor înelemente sau tensiunile componente ale tensorului tensiune se pot media la noduri şi apoise pot calcula tensiunile principale S1 > S2 > S3 în noduri.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-98
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 587/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
9. CONCLUZII FINALE
Aspectele teoretice fundamentale ale MEF au fost prezentate pe scurt în acestcurs, cu referiri la anumite tipuri de elemente finite de tip bar ă şi grindă 2D, triunghiulareşi patrulatere plane, care se pot generaliza şi pentru alte tipuri de elemente finite, planesau de volum. S-au prezentat pe scurt elementul tridimensional de tip hexaedric cu optnoduri şi un element de tip Shell cu opt noduri. Pentru o modelare eficientă, fiecare tipde element finit trebuie analizat din punct de vedere teoretic, astfel încât să secunoască limitele şi performanţele lui.
Utilizarea funcţiilor de formă, a integr ării numerice precum şi calculul tensiunilor sunt câteva aspecte esenţiale discutate. Utilizatorul MEF trebuie să stăpânească bineaceste noţiuni, precum şi alte aspecte prezentate în alte lucr ări, f ăr ă de care, utilizareametodei elementelor finite poate fi deficitar ă în ceea ce priveşte rezultatele obţinuteşi/sau interpretarea lor.
Pentru a stăpâni elementele teoretice de bază ale MEF se recomandă studierea
unor lucr ări de specialitate prezentate în bibliografia recomandată precum şi studiuldocumentaţiei care însoţeşte orice program cu elemente finite.Se recomandă ca înainte de a rezolva o problemă reală să se facă un test cu
programul avut la dispoziţie pentru un model simplificat similar celui real şi pentru carese cunosc soluţiile analitice sau din lucr ări de specialitate.
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-99
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 588/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
10. BIBLIOGRAFIE
1. I. Pascariu, Elemente finite. Concepte-Aplicaţ ii , Editura Militar ă, Bucureşti, 1985
2. M. Blumenfeld, Introducere în metoda elementelor finite, Editura Tehnică, Bucureşti,
19953. Şt. Sorohan, I.N. Constantinescu, Practica model ării şi analizei cu elemente finite,Editura Politehnica Press, Bucureşti, 2003
4. Şt. Sorohan, C. Petre, Programe şi aplicaţ ii cu elemente finite, Editura Printech,Bucureşti, 2004
5. M. Radeş, Finite Element Analysis, Editura Printech, 2006
Laboratorul de Acţionări Hidraulice şi Pneumatice
5-100
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 589/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
B-1
BIBLIOGRAFIE GENERALĂ
1. AFEC-Info, 2004, Communication electronique. „ProgrammeLeonardo da Vinci",
http: // www.afecinfo.free.fr/afec/index.htm.
2. Alava, Seraphin, 2004, „Cyberapprendre, undefideformation", http://www.educnet.-
education.fr/cdi/alava2 . htm.
3. Alava, Seraphin, 2005, „Enjeux reels ou virtuels des technologies educatives",
http: // www.perso.wanadoo.fr/alava/TIC2002/alavacoursl . htm.
4. Bellier, Sandra, 2001, Le e-learning, Editions Liaisons, Paris.
5. Bernard, Michel, 1999, Penser la mise â distance en formation, Editions Harmattan,
6. Cantoni, Lorenzo; Botturi, Luca, 2005, „E-Learning Meeting Modular Education, the Case of Learning
Objects", Revue Suisse de Science de Education, 27, nr. 2, Academic Press, Freiburg.
7. Carre, Philippe, 2005, Dictionnaire encyclopedique de Veducation et de la formation, Editions
Nathan Universite, http:I lwww.membres.lycos.fr /autografINaviguer%20AF3.htm.
8. Casteignau, Guy, 2003, „Vers des communautes virtuelles d'apprentissage",Medialog, nr. 46,
mai 2003, http:llwww.ac-creteil.fr/medialog/ARCHlVE46/
9. Casteignau, Guy, 2005, „Contribution prospective au volet formation du schema d'acces aux serviced'information et de communication", http:l/ www.mtic.pm.gouv.fr
10. Charbit, Claire; Fernandez, Valerie 2002, „Les trajectoires d'adoption des TIC dans les
systemes productifs localises: vers des communautes virtuelles?",
11. Workshop, „TIC et reorganisation spaţiale des activites economiques", ENST Bretagne, Brest,
21-22 noiembrie 2002.
12. Drucker, Johanna (ed.), 1997, „The Virtualisation of Art Practice: Body Knowledge and the
Engineering World View", Digital Reflections: The Dialogue of Art and Technology, CAA Art
Journal Fall.13. Duclos, Denis, 2002, Societe-monde: le temps des ruptures, Editions de la Decouverte, Paris.
14. Farrel, Glen M., 2001, „The Chancing Faces of Virtual Education: Rapport prepare by
Commonwealth of Learning", http : //www. col.org/virtualed .
15. Frumos, Florin, 2006, Reconsider ări ale didacticii din perspectiva psihologiei cognitive (teză de
doctorat în ştiinţele educaţiei), ianuarie 2006, Facultatea de Psihologie şi Ştiinţe ale educaţiei,
Universitatea „Al.I. Cuza", Iaşi.
16. Ghiuţă, Alexandru-Ionuţ, 2002, „Le management du savoir et son implementation", http: //www.
alexandru, levillage. org.
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 590/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
B-2
17. Hadzilacos, Thamasis, 2005,„La formation des enseignants et leur role dans la societe de
communication", in Pierre Chauve et al., Apprendre et enseigner dans la societe de
communication, Les Editions du Conseil de l'Europe, Strasbourg.
18. Hebrard, Christophe 2001, „Le village virtuel 3d. Introduction a une etimologie des
communautes virtuelles", http: // www.alor.univ-montp3.fr/cerce/revue.htm.
19. Levy, Pierre, 1995, Qu'est-ce que le virtuel ?, Edition de la Decouverte, Paris.
20. Levy, Pierre, 2005, „Cyberspace et cyberculture", http:llwww.uoc.es/
21. Linard, Monique, 2000, „Un autre role pour les enseignants", Moniteur '92, nr. 40, decembrie,
http :// www.crdp.ac-versailles.fr/cddp92/Monit40/propos40.htm.
22. Lopez, Javier Suso, 2001, „Grille d'analyse des manuels/ensembles pedagogiques de FLE",http://www.ugr.es/Jsuso. Lovink, Geert, 2004, Cultura digital ă, traducere de Laura Bucur, Editura
Idea Design & Prinţ, Cluj-Napoca.
23. Manolescu, Ion, 2003, Videologia. O teorie tehno-cultural ă a imaginii globale, Editura Polirom,
Iaşi.
24. Mark, Gloria, 2001, „Social Foundations for Collaboration in Virtual Environmets", in Ted
Tschang, Tarcisio Della Senta, Acces to Knowledge. New Information Technologies and The
Emergence ofthe Virtual University, International Association of Universities and Elsevier Ltd, Oxford,
Paris, Tokyo.
25. Virtuel d'Internet", La revue des Echanges (AFIDES), voi. 15, nr.2, iunie.
26. Perriault, Jacques, 1996, La communication du savoir ă distance, Editions Harmattan, Paris.
27. Perrot, Thierry, 2005, „Grille d'evaluation d'une site internet pedagogique", http:
/ /www.polarfle.com.
28. Philipbert, Yannick, 2001, „L'education dans l'internet", http :// 7barthes.ens.fr
29. Potolea, Dan, 2005, „La formation des enseignants et leur role dans la societe de
communication", in Pierre Chauve et al., op. cit.
30. Pouts-Lajus, Serge, 2004, „Present et avenir des communautes delocalisees recherche",
Revue Frangaise de Pedagogie, nr. 121 („Education comparee "), octombrie-noiembrie-decembrie.
31. Seguin, Pierre (coord.), 2005, „Internet: une technologie pour l'apprentissage", raport,
Ministere du l'Education du Quebec, http: 17www.colvir.net/ pedagogie/parealintex. html.
32. Serres, Michel, 1997, „La redemption du savoir", Quart Monde, nr. 163, Paris.
33. Sharma, Sushil K.; Kitchens, Fred L., 2004, „Web Services Architecture for M-Learning",
Electronic Journal on e-Learning, vol. 2, tom 1, februarie, pp.203-216, http://www.ejel.org .
34. Stancu, Alexandru, 1997, „Învăţământul deschis la distanţă", in Stancu Alexandru (coord,),
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 591/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL
SISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
B-3
Tehnologii educaţ ionale moderne, Universitatea „Al.I. Cuza", Iaşi, Centrul pentru învăţământ
Deschis la Distanţă.35. Szczypula, Janusz; Tschang, Ted; Vikas, Om, 2001, „Reforming the Educaţional Knowledge
Base", in Ted Tschang, Tarcisio Della Senta, op. cit.
36. Wright, Clayton, R., 2005, „Distance Education Initiatives in Canada", http:IIwww. old.
macewan. ca.
37. *** AEL. Platformă universal ă de E-learning, 2006, SIVECO România SA, http:
I lwww.siveco.ro/products_ael.jsp.
38. *** Conseil de l'Europe, 2005, Apprendre et enseigner dans la societe de communication, Les
Editions du Conseil de l'Europe, Strasbourg (autori: Pierre Chauve, Gilles Ferreol, Adrian Neculau,Emil Păun, Thamasis Hadzilacos, Sonner Yildirim, Chronis Kynigos, Dan Potolea, Bernard Dumont,
Ştefan Aufenanger).
39. *** Ministere de l'Education du Quebec, 2002, Portofolio sur support numerique. Document
dInformation, Bibliotheque naţionale du Quebec.
40. SIEMENS, G. e-Learnspace everything elearning – Categories of e-Learning , oct.
2004
41. VLADA, M. e-Learning şi software, Conf. Naţională de Învăţământ Virtual, Ed.
Universitatea din Bucureşti, 2003, ISBN 973-575-822-9
42. 2010: Fosternig European e-Learning Content to Make Lisbon a Reality, European
e-Learning Industry Group, Oct. 2005 (www.elig.org)
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 592/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
CONCLUZII
Conceptul de e-Learning este insuficient definit şi cunoscut. Este evident că “e” nu
înseamnă “electronic” ci trebuie asociat unor noţiuni precum evoluţ ie, extindere,
dezvoltare, creştere. Un sondaj efectuat în mai multe instituţii reputate, preocupate de
calitatea pregătirii propriului personal, a condus la constatări surprinzătoare. Astfel,
dintre cei 259 de manageri-instructori chestionaţi asupra instrumentelor cheie pe care
le-ar putea utiliza pentru a crea un sistem de e-Learning, 66% au indicat PowerPoint,
63% - Microsoft Word, 61% - Macromedia´s Dreamweawer şi 47% - Flash (repondenţii
puteau indica unul sau mai multe instrumente). Elaborarea unui document Word sau
efectuarea unei prezentări PowerPoint, finalizate cu salvarea acestora ca fişier “HTML”
nu constituie un proces de instruire în manier ă e-Learning. În mod similar, pregătirea şi
efectuarea unei prezentări în cadrul unei conferinţe on-line nu reprezintă o activitate de
e-Learning. O contribuţie importantă în definirea conceptului în discuţie are Centrul
pentru Dezvoltare si Inovare în Educatie este o organizatie non-guvernamentala care are drept
scop sustinerea initiativelor educationale prin proiecte si programe în domeniile elearning,
educatie pentru cetatenie, formarea personalului didactic
Procesul de e-Learning înglobeaz ă metode şi tehnici tradi ţ ionale sau moderne de
transmitere a cunoştinţ elor. Folosind tehnologii IT&C (procesare multimedia şi
comunicare asincronă sau sincronă ), el permite persoanei care îl utilizeaz ă să înţ eleag ă
şi să st ă pânesc ă cunoştinţ e şi îndemânări într-un domeniu al cunoaşterii [2] .
e-Learning reprezintă un mediu de educaţie cu tendinţă continuu ascendentă, un
proces colaborativ, orientat spre creşterea performanţei individuale şi organizaţionale.
În esenţă, succesul său rezultă din accesul prietenesc şi eficient la informaţiile şi
cunoştinţele cele mai noi, la formele cele mai evoluate de prezentare, de asimilare şi deevaluare a cunoştinţelor, asigurând acces diferenţiat celor mai diverse categorii de
cursanţi, adresare către cele mai diverse categorii de largă instruire şi formare
permanentă, folosirea unor instrumente precum: platforme web, sisteme de
comunicare, elaborare de documente şi managementul cunoştinţelor.
Pentru a uşura înţelegerea sensului procesului de e-Learning şi a înlătura confuziile
care pot apare în legătur ă cu modalităţile de realizare şi cu utilitatea acestui sistem
modern de instruire, în Tabelul 1 se prezintă comparativ “ce este” şi “ce nu este” o
instruire de tip e-Learning.
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 1
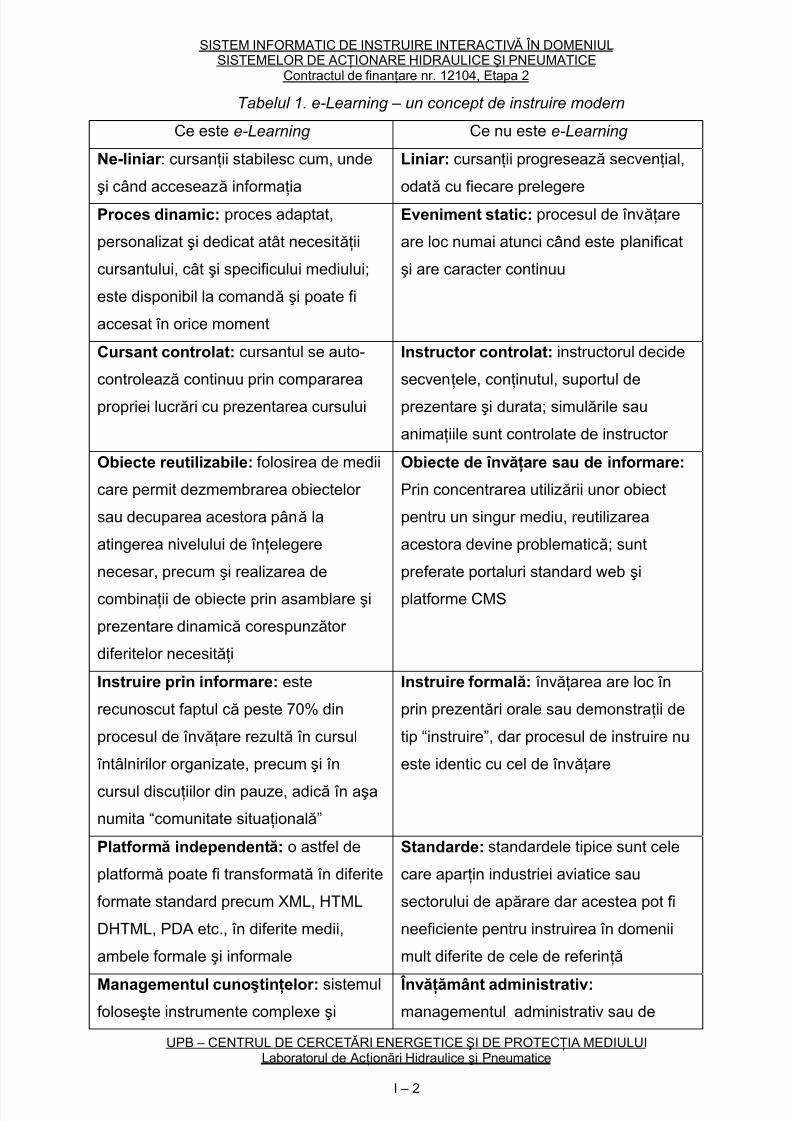
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 593/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
Tabelul 1. e-Learning – un concept de instruire modern
Ce este e-Learning Ce nu este e-Learning
Ne-liniar : cursanţii stabilesc cum, unde
şi când accesează informaţia
Liniar: cursanţii progresează secvenţial,
odată cu fiecare prelegere
Proces dinamic: proces adaptat,
personalizat şi dedicat atât necesităţii
cursantului, cât şi specificului mediului;
este disponibil la comandă şi poate fi
accesat în orice moment
Eveniment static: procesul de învăţare
are loc numai atunci când este planificat
şi are caracter continuu
Cursant controlat: cursantul se auto-
controlează continuu prin compararea
propriei lucr ări cu prezentarea cursului
Instructor controlat: instructorul decide
secvenţele, conţinutul, suportul de
prezentare şi durata; simulările sau
animaţiile sunt controlate de instructor
Obiecte reutilizabile: folosirea de medii
care permit dezmembrarea obiectelor
sau decuparea acestora până la
atingerea nivelului de înţelegere
necesar, precum şi realizarea de
combinaţii de obiecte prin asamblare şi
prezentare dinamică corespunzător
diferitelor necesităţi
Obiecte de învăţare sau de informare:
Prin concentrarea utilizării unor obiect
pentru un singur mediu, reutilizarea
acestora devine problematică; sunt
preferate portaluri standard web şi
platforme CMS
Instruire prin informare: este
recunoscut faptul că peste 70% din
procesul de învăţare rezultă în cursul
întâlnirilor organizate, precum şi în
cursul discuţiilor din pauze, adică în aşa
numita “comunitate situaţională”
Instruire formală: învăţarea are loc în
prin prezentări orale sau demonstraţii de
tip “instruire”, dar procesul de instruire nu
este identic cu cel de învăţare
Platformă independentă: o astfel de
platformă poate fi transformată în diferite
formate standard precum XML, HTML
DHTML, PDA etc., în diferite medii,
ambele formale şi informale
Standarde: standardele tipice sunt cele
care apar ţin industriei aviatice sau
sectorului de apărare dar acestea pot fi
neeficiente pentru instruirea în domenii
mult diferite de cele de referinţă
Managementul cunoştinţelor: sistemulfoloseşte instrumente complexe şi
Învăţământ administrativ:managementul administrativ sau de
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 2
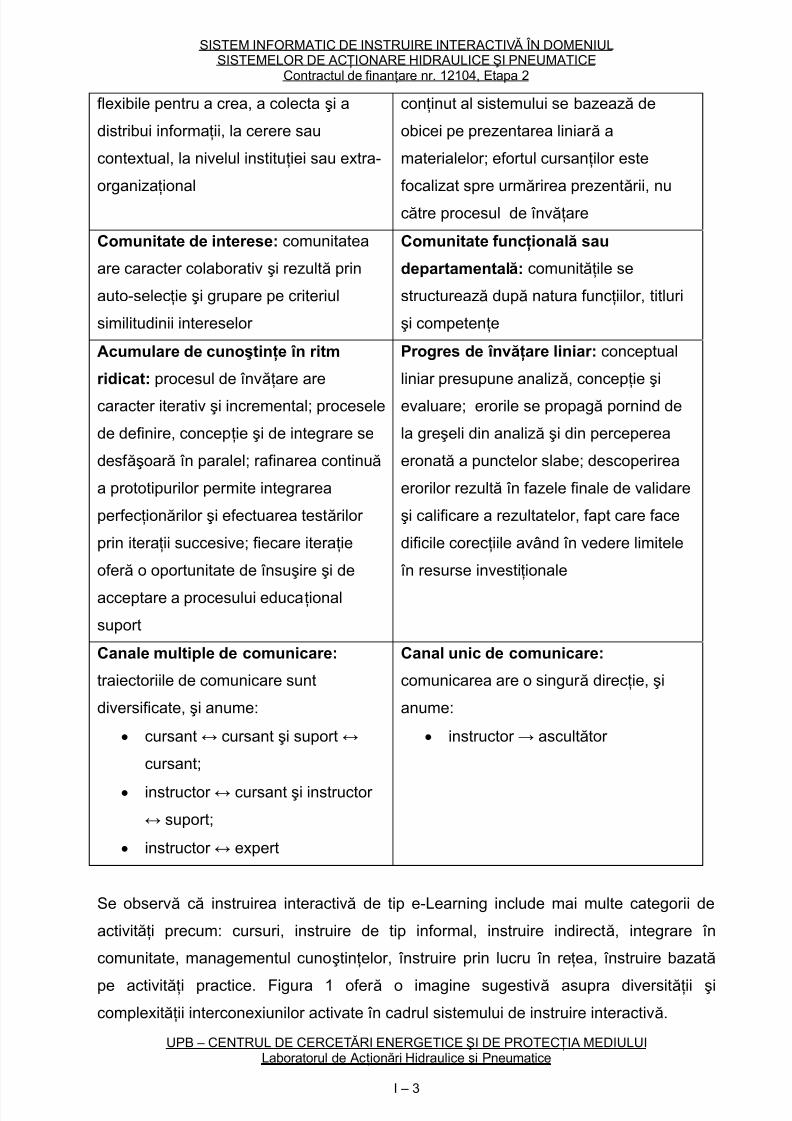
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 594/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
flexibile pentru a crea, a colecta şi a
distribui informaţii, la cerere sau
contextual, la nivelul instituţiei sau extra-
organizaţional
conţinut al sistemului se bazează de
obicei pe prezentarea liniar ă a
materialelor; efortul cursanţilor este
focalizat spre urmărirea prezentării, nu
către procesul de învăţare
Comunitate de interese: comunitatea
are caracter colaborativ şi rezultă prin
auto-selecţie şi grupare pe criteriul
similitudinii intereselor
Comunitate funcţională sau
departamentală: comunităţile se
structurează după natura funcţiilor, titluri
şi competenţe
Acumulare de cunoştinţe în ritm
ridicat: procesul de învăţare are
caracter iterativ şi incremental; procesele
de definire, concepţie şi de integrare se
desf ăşoar ă în paralel; rafinarea continuă
a prototipurilor permite integrarea
perfecţionărilor şi efectuarea testărilor
prin iteraţii succesive; fiecare iteraţie
ofer ă o oportunitate de însuşire şi de
acceptare a procesului educaţional
suport
Progres de învăţare liniar: conceptual
liniar presupune analiză, concepţie şi
evaluare; erorile se propagă pornind de
la greşeli din analiză şi din perceperea
eronată a punctelor slabe; descoperirea
erorilor rezultă în fazele finale de validare
şi calificare a rezultatelor, fapt care face
dificile corecţiile având în vedere limitele
în resurse investiţionale
Canale multiple de comunicare:
traiectoriile de comunicare sunt
diversificate, şi anume:
• cursant ↔ cursant şi suport ↔
cursant;
• instructor ↔ cursant şi instructor
↔ suport;
• instructor ↔ expert
Canal unic de comunicare:
comunicarea are o singur ă direcţie, şi
anume:
• instructor → ascultător
Se observă că instruirea interactivă de tip e-Learning include mai multe categorii de
activităţi precum: cursuri, instruire de tip informal, instruire indirectă, integrare în
comunitate, managementul cunoştinţelor, înstruire prin lucru în reţea, înstruire bazată
pe activităţi practice. Figura 1 ofer ă o imagine sugestivă asupra diversităţii şicomplexităţii interconexiunilor activate în cadrul sistemului de instruire interactivă.
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 3
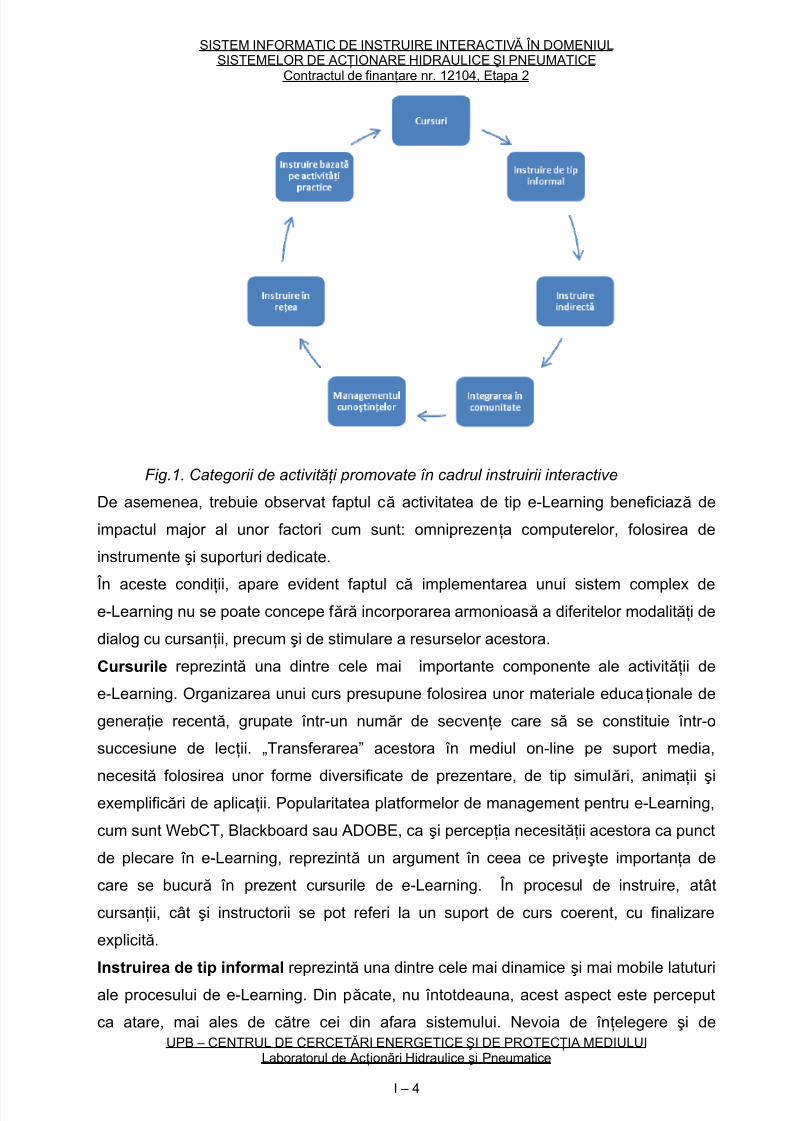
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 595/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
Fig.1. Categorii de activit ăţ i promovate în cadrul instruirii interactive
De asemenea, trebuie observat faptul că activitatea de tip e-Learning beneficiază de
impactul major al unor factori cum sunt: omniprezenţa computerelor, folosirea de
instrumente şi suporturi dedicate.
În aceste condiţii, apare evident faptul că implementarea unui sistem complex dee-Learning nu se poate concepe f ăr ă incorporarea armonioasă a diferitelor modalităţi de
dialog cu cursanţii, precum şi de stimulare a resurselor acestora.
Cursurile reprezintă una dintre cele mai importante componente ale activităţii de
e-Learning. Organizarea unui curs presupune folosirea unor materiale educaţionale de
generaţie recentă, grupate într-un număr de secvenţe care să se constituie într-o
succesiune de lecţii. „Transferarea” acestora în mediul on-line pe suport media,
necesită folosirea unor forme diversificate de prezentare, de tip simulări, animaţii şi
exemplificări de aplicaţii. Popularitatea platformelor de management pentru e-Learning,
cum sunt WebCT, Blackboard sau ADOBE, ca şi percepţia necesităţii acestora ca punct
de plecare în e-Learning, reprezintă un argument în ceea ce priveşte importanţa de
care se bucur ă în prezent cursurile de e-Learning. În procesul de instruire, atât
cursanţii, cât şi instructorii se pot referi la un suport de curs coerent, cu finalizare
explicită.
Instruirea de tip informal reprezintă una dintre cele mai dinamice şi mai mobile latuturi
ale procesului de e-Learning. Din păcate, nu întotdeauna, acest aspect este perceput
ca atare, mai ales de către cei din afara sistemului. Nevoia de înţelegere şi deUPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUI
Laboratorul de Acţionări Hidraulice şi Pneumatice
I – 4
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 596/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
acumulare, ca şi interesul pentru confirmarea înţelegerii corecte şi pentru identificarea
posibilităţilor de folosire a noilor cunoştinţe reprezintă principalul motor al implicării
cursantului în instruirea informală. În 2003, Jay Cross spunea: „Atunci când lucr ăm,
înţelegem mai mult în timpul pauzelor decât în sala de curs. Descoperim cum să ne
facem treaba prin instruirea informală, întrebînd o persoană din compartimentul vecin,
folosind modalităţi de tip <help> sau simplu lucrând în comun pentru a rezolva o temă.
Învăţământul de tip formal, din clasă, de la seminar sau de la episoadele de tip on-line,
contribuie numai în propor ţie de10÷20% la ceea ce învăţăm lucrând direct”.
Instruirea indirectă vizează consolidarea informaţiilor transmise şi preluate de cursanţi
în cursul prelegerilor sau prin sistemele mediilor informatice on-line. Astfel, instruirea
indirectă rezultă practic inconştient, în perioadele de aparentă pauză, în cursul cărora
cursanţii sunt stimulaţi să dialogheze direct (face-to-face). Argumentele folosite în
aceste discuţii rezultă din modul propriu de percepere a suportului de curs de către
fiecare cursant şi, mai ales, din experienţa şi informaţiile conexe pe care acesta le poate
evoca. Rolul de stimulator şi de moderator în instruirea indirectă revine instructorului
care este chemat să pună în valoare aşa numitul efect al componentei sociale a
procesului de e-Learning.
Integrarea în comunitate. Provocările cu care se confruntă cursantul la locul său de
muncă sunt deopotrivă complexe şi în continuă evoluţie. Depăşirea acestora necesită
diferite perspective în înţelegerea fidelă a soluţiilor potenţiale, precum şi a mediului de
implementare a acestora. Succesul în acest efort rezultă în mare parte prin dialogul cu
colegii de curs din aceiaşi unitate sau din alte unităţi cu probleme similare. Prin aceasta,
comunitatea are o puternică contribuţie la propagarea tacită a cunoştinţelor.
Managementul cunoştinţelor are valoare reală în economia cunoaşterii. În fapt,
managementul cunoştinţelor cumulează acţiuni de identificare, de alocare şi de
prelucrare până la faza de a transforma noile cunoştinţe în valori accesibile,semnificative pentru activitatea companiei. Multe companii fac efortul de a pune în
valoare acumulările disponibile la nivelul personalului propriu prin crearea unor
comunităţi de practici. Acest tip de management se poate referi la: instruire şi
dezvoltare, managementul de informare, identificarea efectului realizat asupra clientului,
captarea efectelor favorabile reuşite la client, generarea de noi competenţe, crearea de
echipe virtuale şi de comunităţi de practici, precum şi de sisteme de management a
acumulărilor.
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 5
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 597/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
Instruirea prin lucru în reţea. Procesul de înstruire prin activitate de grup rezultă în
contextul vizării unor obiective globale, a unor concepte sau a unor teme de sinteză.
Procesul de grupare a factorilor implicaţi este liber consimţit şi se poate referi
deopotrivă la persoane, grupuri de persoane şi resurse. Este probabil cea mai evoluată
formă de management a cunoştinţelor de care pot beneficia persoanele implicate în
reţea. În acelaşi timp, un astfel de proces permite persoanelor care participă la lucrul în
reţea să-şi dezvolte calităţile într-un context stabil, care le apar ţine ca domeniu de
specializare.
Instruirea bazată pe activităţi practice. Sistemele de instruire practică pot să se
folosească de suportul unor platforme electronice sau să se implice direct în activitatea
productivă efectuată de către cursant. Interesul în această formă de instruire este acela
de transmitere punctuală de cunoştinţe, în zonele de maximă necesitate pentru
dezvoltarea competenţelor cursantului. Instruirea trebuie condusă cu atenţie pentru a se
asigura controlul transmiterii şi preluării corecte a cunoştinţelor, cu referire cât mai
precisă la nevoile reale ale cursantului. Organizaţia care face instruiruirea are obligaţia
de a suporta efortul investiţional necesar realizării bazei materiale şi a suportului de
accesare necesar. Provocările în această direcţie pornesc de la preocupări precum: în
ce situaţie îi va fi necesar cursantului să cunoască aceasta? cum trebuie condusă
activitatea practică? cum va proceda cursantul pentru a înţelege aceasta? Apare
recomandat ca instruirea bazată pe activităţi practice să combine efortul de instruire
legat de suportul de curs cu cel efectuat de cursant în cadrul organizaţiei din care face
parte, astfel încât să se poată acoperi o gamă cât mai largă de modalităţi de adresare.
Factori de impact. Categoriile de e-Learning descrise mai sus pot fi influenţate de mai
mulţi factori precum: accesibilitatea, calitatea platformelor de curs sau a instrumentelor
aferente (fig.2).
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 6
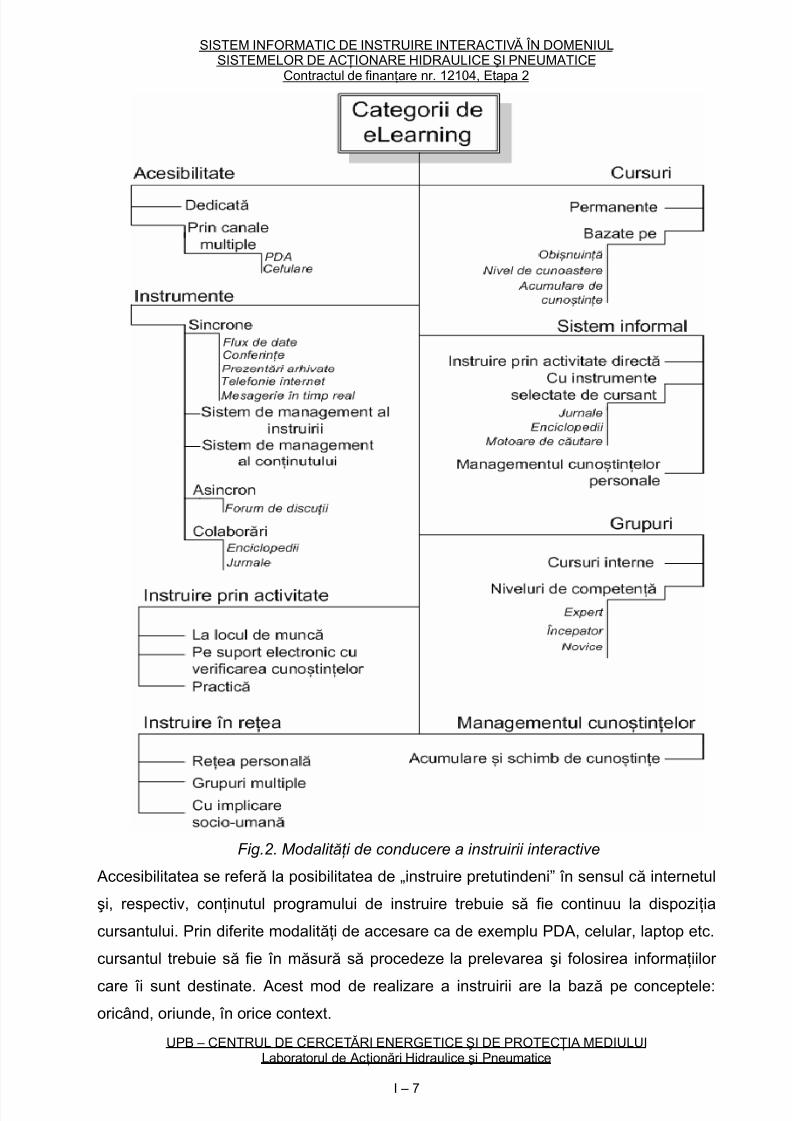
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 598/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
Fig.2. Modalit ăţ i de conducere a instruirii interactive
Accesibilitatea se refer ă la posibilitatea de „instruire pretutindeni” în sensul că internetul
şi, respectiv, conţinutul programului de instruire trebuie să fie continuu la dispoziţia
cursantului. Prin diferite modalităţi de accesare ca de exemplu PDA, celular, laptop etc.
cursantul trebuie să fie în măsur ă să procedeze la prelevarea şi folosirea informaţiilor
care îi sunt destinate. Acest mod de realizare a instruirii are la bază pe conceptele:
oricând, oriunde, în orice context.
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 7
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 599/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
Platforma de curs şi instrumentele pentru furnizarea serviciului de e-Learning pot fi
organizate în funcţie de nivelul de complexitate al tehnologiilor de comunicare folosite.
Exemple de astfel de platforme şi de instrumente sunt:
-sistem de management al instruirii (Learning Management Systems – LMS);
-sistem de management al conţinutului instruirii (Learning Content Management
Systems – LCMS);
-managementul identităţii şi a dreptului de proprietate asupra componentei digitale a e-
Learning-ului ca alcătuire şi mod de folosire legală;
-sisteme de gestionare a bazei de date, cu menţiunea că aceasta poate fi partajată şi
gestionată sub formă de subsisteme;
-instrumente de comunicare, cu menţiunea că instrumentele de uz general cum este de
exemplu Skype pot afecta calitatea comunicării; alte instrumente uşor de utilizat precum
blog-urile au fost adoptate cu succes.
Comunicarea poate fi sincronă sau asincronă. Forma sincronă se refer ă la comunicarea
în timp real, de exemplu sub formă de acces direct al cursantului la conferinţe sau
prezentări. Furnizarea de informaţii cu decalaj în timp presupune punerea în valoare a
sistemelor de management (LMS), a suporturilor colaborative sau a discuţiilor de tip
secvenţial.
Managementul cunoştinţelor trebuie înţeleas în sensul abilităţii de utilizare strategică
a informaţiei în scopul atingerii unui obiectiv practic, de afacere. Managementul
cunoştinţelor reprezintă o activitate organizaţională destinată creerii unui mediu social şi
a unei infrastructuri tehnice, astfel încât competenţa să poată fi atinsă, transmisă şi
asimilată.
Procesul de predare-înv ăţ are-examinare capătă noi dimensiuni şi caracteristici prin
utilizarea tehnologiilor e-Learning . Sistemul de învăţământ din ţara noastr ă este în mod
direct şi determinant implicat în fundamentarea şi construirea societăţii informaţionale.O societate informaţ ional ă se naşte într-un mediu în care marea majoritate a membrilor
ei are acces la tehnologii IT&C şi utilizează frecvent tehnologiile informaţionale, atât
pentru instruire şi perfecţionare profesională, cât şi pentru activităţi personale privind
rezolvarea unor probleme economice, sociale, etc.
Software Educaţ ional reprezint ă orice produs software, în orice format (exe sau nu),
care poate fi utilizat pe orice calculator şi care reprezint ă un subiect, o temă, un
experiment. o lec ţ ie, un curs, etc., fiind o alternativ ă sau unica soluţ ie faţă de metodeleeducaţ ionale tradi ţ ionale (tabla, creta, etc).
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 8

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 600/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
Etapele de verificare şi de evaluare a cunoştintelor şi deprinderilor în însuşirea
competenţelor corespunzătoare scenariului didactic pot fi implementate sau nu în
software educaţional, acest lucru fiind în funcţie de particularităţile cunoştinţelor
corespunzătoare unei discipline didactice. De exemplu, este cazul disciplinelor din
domeniile IT&C şi Informaticii care au ca suport utilizarea calculatorului în obţinerea
competenţelor. În acest caz, obţinerea competenţelor trebuie să se realizeze în urma
verificării şi evaluării atât a cunoştinţelor însuşite, cât şi a deprinderilor în utilizarea
corectă şi eficientă a calculatorului. Acestea trebuie să se obţină prin prezentarea de
către cel examinat, direct la calculator a diverselor proiecte, astfel încât să demonstreze
profesorului - examinator gradul / nivelul competenţei.
Construirea unei societăţi informaţionale nu se poate realiza f ăr ă cercetare şi proiecte
de investiţii, atât în domeniul IT&C, cât şi în domeniul educaţiei. Dezideratul final fiind
competenţa, nici o tehnologie, nici o teorie, nici o abordare nu va elimina sau neglija
relaţia profesor-elev/student. Toate vor fi instrumente comode şi eficiente la îndemâna
profesorului şi elevului/studentului.
Unele reprezentări pot fi reproduse sau simulate doar prin intermediul calculatorului
care ofer ă metode şi tehnici privind grafica, animaţia, sunetul. De exemplu,
reprezentările 3-dimensionale sau referitoare la desf ăşurarea dinamică a unor
fenomene fizice, chimice, biologice, etc nu pot fi reprezentate sau studiate decât
folosind calculatorul. Competenţ a implică experienţă în rezolvarea problemelor dintr-un
anumit domeniu de activitate. Competenţ a şi experienţ a în rezolvarea problemelor se
pot obţine doar dacă permanent se are în vedere interdependenţa realitatea fizic ă-
realitatea virtual ă, şi dacă se întreprind eforturi pentru î nsuşirea de noi cunoştinţ e,
pentru conoaşterea corespunzătoare a tuturor aspectelor privind modelul fizic, respectiv
modelul virtual.
Tehnologiile de e-Learning utilizate în prezent sunt rezultatul evoluţiei metodelor pedagogice şi psihologice din educaţie, precum şi a tehnologiilor IT&C (tehnologii Web,
tehnologii multimedia, tehnologii de comunicaţie). Astfel, utilizarea sistemului Internet, a
programelor de elaborare a produselor Web, a înregistr ărilor audio/video, a stocării
informaţiilor pe CD-uri, a implementării rezultatelor din domeniul graficii pe calculator au
f ăcut posibilă elaborarea de cursuri online, de software educaţional pentru diverse
discipline, de biblioteci şi campusurilor virtuale.
Este de aşteptat ca în viitor să apar ă platforme ce au la bază arhitecturi demanagement care folosesc servicii Web (format XML). Componentele de software şi de
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 9
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 601/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
sisteme ce se vor auto-descrie, adică printr-un protocol standard vor putea fi accesate
şi deschise comod şi eficient. Exemple de astfel de platform pot fi: Smart Display,
Tablet PC, Media Center, SPOT(Smart Personal Object Technology).
În viziunea europeană, sistemul e-Learning este considerat ca o componentă cheie a
tuturor acţiunilor care vizează realizarea obiectivelor de la Lisabona, susţinerea creşterii
economice, precum şi a numărului şi calităţii oferelor de muncă.
Recent a fost constituit “European e-Learning Industry Group” (eLIG), un consor ţiu de
40 de companii lidere în domeniul ITC, organizaţii, edituri şi europene de material
educaţional, în parteneriat cu instituţii din sectorul educaţional (Anexa I). Acest grup a
aderat cu entuziasm la evaluarea semestrială a Strategiei de la Lisabona şi sprijină în
totalitate eforturile Comisiei Europene de transpunere în practică până în 2010 a
dezideratului Agendei Lisabona de a transforma UE în cea mai competitiva economie
bazată pe cunoaştere şi inovare.
“European e-Learning Industry Group” acţionează pentru producţia şi utilizarea pe scar ă
largă a resurselor de informare în format digital, ca parte a planului de acţiune al
Comunităţii Europene pentru stimularea creşterii economice, a numărului şi calităţii
locurilor de muncă în Europa. Adăugarea componentei electronice la sistemul de
instruire a introdus alţi factori în ecuaţia maximizării eficienţei educaţiei (de exemplu,
compatibilitate tehnologică şi infrastructur ă). De asemenea, a confirmat importanţa
conţinutului multimedia ca pilon fondator al Educaţiei: cu cât tehnologia se propagă mai
mult în sălile de curs şi în viaţa cotidiană, cu atât mai mult se simte nevoia unui conţinut
multimedia bogat şi de calitate care să poată fi portat în mod eficient şi reactualizat
pentru diferite dispozitive, platforme şi infrastructuri. Contribuţia sa la evaluarea
intermediar ă a Agendei Lisabona face referire la importanţa cunoştinţelor şi
competenţelor relevante pentru competitivitatea în UE, în special a celor dobândite prin
intermediul e-Learning. eLIG formulează recomandări menite să direcţioneze acţiunileComisiei Europeane şi ale statelor membre partenere în sensul stimulării pieţei,
identificării schimbărilor cu care se confruntă industria, al susţinerii aplicării standardelor
deschise, instruirii personalului didactic şi inovativ, inclusiv formularea de recomandări
privind dezvoltarea sectoarelor multimedia.
e-Learning-ul nu este considerat ca obiectiv în sine, ci mai degrabă o modalitate de a
face sistemul de educaţie şi de instruire mai eficace, mai universal. Ca motor puternic al
societăţii bazată pe cunoaştere, sistemul e-Learning are capacitatea de a transformaeducaţia, generând iniţiative majore, necesare în identificarea de noi abilităţi şi
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 10
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 602/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
comportamente. Acest sistem se extinde dincolo de procesul educational bazat pe
cursuri, folosind noi tehnologii, cum ar fi software-ul de colaborare şi de comunicare,
mesagerie internet şi blog-uri sau reţele de socializare, pentru a da numai câteva
exemple. Noul sistem cuprinde concepte precum management de conţinut,
management de cunoaştere, suport de performanţă, practică de producţie şi cooperare
virtuală.
Într-un mediu în continuă schimbare, modalităţile tradiţionale de instruire şi de formare
nu mai sunt adecvate pentru înzestrarea cetăţenilor cu abilităţile şi cunoştinţele
necesare pentru a deveni competitivi pe piaţa for ţei de muncă. Procesul de instruire
continuă este un imperativ al perioadei actuale, care necesită noi căi de abordare. În
acest context, instruirea interactivă în sistemul e-Learning se afirmă ca un factor cheie
în societatea viitorului. În paralel, dezvoltarea şi îmbunătăţirea continuă a infrastucturii
ITC şi a reţelelor de înaltă performanţă vor fi factori de succes în societatea cunoaşterii
şi, prin urmare, pentru competitivitatea europeană. Tehnologia este suportul care
permite transformarea modului în care se munceşte, se învaţă şi se valorifică timpul
liber. Accesul la instruire trebuie să fie universal, în timp ce învăţatul trebuie
personalizat, iar conţinutul multimedia îmbogăţit şi transformat într-o experienţă
personalizată. Aceasta se va întâmpla pe deplin în momentul în care nevoia de instruire
va fi reală şi accesul va fi disponibil în orice loc, datorită noilor platforme mobile de
muncă şi instruire. Impactul se va resimţi la nivelul tuturor grupurilor din economie şi
societate - mari corporaţii şi IMM-uri, elevi, profesori şi părinţi.
Societăţile media europene se confruntă cu paradoxul convergenţei tehnologiilor multi
media în contexul unei fragmentări şi localizări din ce în ce mai accentuate, pe de altă
parte, diversitatea culturală şi diversitatea lingvistică reprezintă însăşi esenţa spaţiului
european. Transformarea industriei de profil este abia la început, dificultăţile fiind
uriaşe: de la protecţia investiţiei până la stabilirea unor standarde de inter-operabilitatereală a conţinutului media. eLIG consider ă acest lucru ca pe un factor cheie pentru
implementarea Agendei Lisabona.
Utilizarea e-Learning-ului ca instrument de marketing şi de vânzări a fost experimentată
cu succes de către o serie de firme mici, mari şi mijlocii. Astfel au fost identificate efecte
directe mai ales asupra segmentului final, de exemplu: timp mai scurt de intrare pe
piaţă, profit marginal mai mare al produselor şi serviciilor, ca şi micşorarea costurilor. Pe
viitor, popularizarea şi creşterea investiţiilor în dezvoltarea acestui domeniu de aplicaree-Learning-ului va duce la o adoptare mai uşoar ă a produsului în special de către IMM-
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 11
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 603/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
uri. Mai mult decât atât, e-Learning-ul poate asigura economii importante printr-o mai
bună utilizare a timpului şi reducerea costurilor, de exemplu, reducerea numărului de
săli de curs.
e-Learning-ul este considerat ca sistem de susţinere a creşterii numărului şi calităţii
locurilor de muncă. Importanţa atitudinii în ceea ce priveşte transformarea muncii, şi a
procesului de învaţare continuă este recunoscută de către toţi factorii implicaţi. Marea
majoritate a cunoştinţelor dobândite în procesul de instruire continuă provin din procese
aflate în afara cadrului formal sau al cursurilor planificate. Studiile indică faptul că acest
proces de instruire este valabil pentru 80% din ceea ce oamenii acumulează de fapt.
Noile tehnologii de comunicare şi de colaborare pot îmbunătăţi procesul de instruire "la
locul de muncă" sau ca parte din viaţa noastr ă. Este esenţial ca firmele să aibă deplină
înţelegere asupra nevoii de instruire a angajaţilor şi asupra implicaţiilor neglijării acestui
proces. Instruirea angajaţilor le este esenţială pentru dezvoltarea de zi cu zi a afacerii.
Procesul de invăţarea trebuie să fie în centrul atentiei nu numai pentru companiile mari,
dar, de asemenea, şi a IMM-urilor europene. E-Learning-ul este un instrument cu un
cost redus şi eficient în promovarea şi dezvoltarea for ţei de muncă.
Abilităţile strategiilor de guvernare ale statelor membre şi asocierea dezvoltării
planurilor de acţiune sunt vitale pentru asigurarea mobilităţii lucr ătorilor şi pentru
umplerea lacunelor în abilităţile utilizatorilor ITC. Astfel de strategii, inclusiv e-Learning-
ul vor permite guvernelor să ridice for ţa de muncă la nivelul cerinţelor economice prin
formarea adaptată cerinţelor faţă de fiecare angajat. Noile metode de învăţare şi, mai
ales, de instruire continuă pot ajuta for ţa de muncă să se integreze mai repede într-o
piaţă a muncii aflată într-o schimbare rapidă şi, de asemenea, să beneficieze de şanse
reale de angajare. Observaţia este valabila şi pentru cei care sunt în şomaj; pentru ca
perspectivele locului de muncă să crească, aceştia au nevoie de acces la conţinutul
electronic relevant de la locul de muncă, care implică în mod evident competenţe îndomeniul ITC. Dezvoltarea planurilor de acţiune ar trebui să includă soluţii pentru sedii
deschise publicului, unde persoanele interesate să poată câştiga competenţe. De
asemenea, pentru a reduce barierele în ceea ce priveşte mobilitatea for ţei de munca, ar
trebui să se asigure disponibilitatea conţinutului sistemului electronic cu privire la
calificările recunoscute de UE în fiecare dintre limbile oficiale ale UE. Conţinuturile
programelor europene ar trebui să prevadă parteneriate între domeniile public si privat,
între editori şi ceilalţi furnizori de servicii. Scopul ar fi acela de a asigura ca învăţământul
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 12

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 604/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
şi calificarea sunt într-adevar disponibile în fiecare limbă oficial UE. Prin astfel de
măsuri e-Learning-ul poate facilita schimbări majore de organizare în toate sectoarele.
e-Learning-ul este considerat un sistem de învăţământ coerent prin faptul că ofer ă o
bază pentru dezvoltarea profesională personalizată necesar ă în materie de inovare,
dezvoltare economică şi creştere a nivelului de trai. Punerea în aplicare a unor noi
metode de învăţare poate duce la o mai bună înţelegere şi asimilare a conţinutului de
către studenţi, reducând astfel rata restanţelor. De asemenea, noile metode permit
instituţiilor educaţionale, la toate nivelurile, să fie mai eficiente din punct de vedere
pedagogic şi al costurilor, în a face faţă creşterii continue a numărului de studenţi,
precum şi în faţa constrângerilor continue a infrastructurii deja existente. În 2002 şi
2003, Finlanda a fost prima dintre ţările OCDE şi tările lider care se bazează foarte mult
pe implicarea activă a profesorilor în utilizarea ITC pentru a îmbunătăţi performanţele la
literatur ă, matematică şi ştiinţă. Aceste schimbări au generat noi tipuri de studenţi, noi
procese de învăţare şi noi abordări pentru evaluarea celor învăţate, care, la rândul lor,
au contribuit la o schimbare în metodele de predare şi în rolul profesorilor. Profesorii şi
asistenţii universitari nu mai pot fi doar furnizori de cunoaştere ci, mai degrabă,
facilitatori proactivi care să promoveze cunoaşterea colaborativă şi orientarea
studenţilor spre învăţare în diferite medii, navigare în aceste medii şi procesare a
multitudinii de resurse informaţionale, şi folosire a acestor resurse în rezolvarea
problemelor şi luarea deciziilor pe cont propriu. Schimbarea este necesar ă şi în ceea ce
priveşte modul în care şcolile sunt structurate sub aspect arhitectural şi al soluţiilor de
management. Reforma intruirii profesorilor trebuie să fie extinsă pentru a include
managementul şcolii, competenţelor de conducere şi de management al schimbării.
Transformarea sistemului educational european din punctul de vedere al modului de
predare şi de învăţare, atât în interiorul, cât şi în afara cadrului şcolar este o provocare
la nivel global, în măsur ă să susţină realizarea societăţii cunoaşterii pentru Europa, caun întreg, inclusiv în noile ţări aderate. Integrarea socială trebuie considerată ca fiind
propor ţională cu participarea cetăţenilor la educaţie şi formare profesională. În acelaşi
timp, este acceptată ca un mijloc de a depăşi inegalitatea socială şi de prevenire a
excluziunii sociale. Dovezile demonstrează că utilizarea TIC-ului în educaţia
aprofundată poate depăşi obstacolele în asigurarea implicării în procesul educaţional a
grupurilor marginalizate. Comunităţile de învatamant online, precum şi instrumentele
specifice e-Learning-ului s-au dovedit a spori coeziunea socială şi legatura dintrecetăţenii europeni în formarea de centre virtuale de învăţământ.
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 13
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 605/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
Un motiv pentru care a intervenit o încetinire a ritmului de dezvoltare a e-Learning-ului
în Europa a fost acela că investiţiile publice au neglijat concentrarea pe tipuri de
cunoştinţe necesare Industriei Uniunii Europeane, care să asigure poziţionarea acesteia
ca lieder de nivel mondial. Rezultatul a fost o lipsă de investiţii publice în stimularea e-
Learning-ului de înaltă calitate, utilizabil într-o gamă largă de state membre. În schimb,
fondurile disponibile publicului au fost direcţionate în principal către conectare şi către
unelte hardware necesare accesului la Internet. Software-ul necesar back-office-ului
infrastructurii şi serviciilor IT, inclusiv formării profesorilor a fost neglijat. Rularea şi
disponibilitatea instrumentelor de acces, cum ar fi PC-urile, staţiile de lucru şi facilităţile
de bandă largă este mai ridicată în ţările cu infrastructur ă competitivă, dar r ămâne
scăzută în multe ţări şi zone cu populaţie f ăr ă acces la aceste tehnologii. Evoluţiile
internaţionale în unele păr ţi din Asia arată că sunt mobilizate noile tipuri de facilităţile de
bandă largă şi aceste evoluţii declanşează produse şi servicii educaţionale cu un
conţinut nou şi mai bogat. Realizarea unei infrastructuri extinse la clasă mondială ar
trebui să fie o piatr ă de temelie a Strategiei de la Lisabona. Aceasta îndeamnă către
promovarea unui proces pedagogic de bună calitate şi o formare adecvată a
profesorilor într-un mediu interoperabil de arhitectur ă IT.
Europa trebuie să stimuleze publicarea şi distribuirea noilor modele e-Content pentru
educaţie, viabile din punct de vedere economic, avansate tehnologic şi adecvate din
punct de vedere pedagogic, considerând diferenţele culturale şi interesul pentru
specificul proceselor de instruire.
European e-Learning Industry Group a formulat recomandări către guvernele europene
ca investiţiile publice să se bazeze pe o strategie coerentă şi să echilibreze mai bine
cele patru elemente cheie ale unei politici publice de eLearning: infrastructura,
standardele deschise, calitatea conţinutului şi al serviciilor şi formarea profesorilor,
pentru a maximiza beneficiile utilizatorilor finali. Se consider ă că autorităţile publice potajuta la accelerarea promovării e-Learning-ului prin utilizarea puterii lor pentru
achiziţionarea suportului de infrastructur ă şi impulsionarea noilor reţele de instruire. În
plus, autorităţile publice ar trebui să preia iniţiativa de punere în aplicare a politicilor de
e-Learning pentru proprii lor angajaţi. În continuare, politicile UE ar trebui:
- să stimuleze Industria Europeană de Editare a Conţinutului Educaţional pentru a
produce conţinuturi e-Learning multi-lingve şi multi-curriculare pentru dispozitive de e-
Learning "tradiţionale" , de exemplu CD / DVD şi bazate pe web, precum şi noiinstrumente, de exemplu, Palm PC-uri, e-Books, telefoane mobile3G;
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 14
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 606/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
-să promoveze pionieratul de noi modele de afaceri şi de distribuţie pentru includerea
editării conţinutului de e-Learning, DRM (Managementul Drepturilor Digitale) şi
comer ţului cu obiecte de învăţare;
-să promoveze transferabilitatea rapidă a patrimoniului european care conţine noi
modele şi dispozitive de publicare, de exemplu, bazate pe locaţie şi acces la conţinut
mobil;
-să se asigure că patrimoniul european de conţinut este depozitat în condiţii de
siguranţă pentru generaţiile viitoare prin investirea în biblioteci digitale de pe teritoriul
UE.
Un aspect important este cel de gestionare a drepturilor de proprietate intelectuală şi a
condiţiilor de licenţiere internaţională şi certificarea creditelor de învăţare online -
eCredits. Programele UE dedicate dezvoltării de conţinut media de interes public prin
parteneriat public privat cum ar fi Programele de e-Learning sau de e-Content sunt în
oarecare măsur ă adaptate la nevoile industriei media. În continuare, o mare problemă
care r ămâne de rezolvat: este cea a modelelor durabile de afaceri pentru creatorii de
conţinut educaţional. Astfel de procese de instruire ar trebui dezvoltate acolo unde
gestionarea licenţelor şi a drepturilor de autor este o problema rezolvată. Acest fapt ar
ajuta la susţinerea unor modele de media profitabile, cu costuri mici create dupa
modelul “open source”, protejand locurile de muncă europene în contextul noii industrii.
Din păcate, există un posibil dezechilibru în alocarea fondurilor Uniunii Europeane către
afaceri incompatibile şi costuri ascunse, comparativ cu modelul “liber”. Alocările
considerate de multe ori gratuite, dar de fapt finanţate din fonduri publice rulate prin
instituţii neverificate sunt periculoase. De exemplu, în această situaţie pot fi plăţile ded
salarii către profesori ce produc material educaţional gratuit, incluzând adesea materiale
deja publicate între materialele “noi”, dar care nu se conformeaza obligaţiei de a obţine
permisiunea autorului original al materialului pe care il refolosesc.Industria de profil este preocupata de aştepătrile unor instituţii educatioanle ca
materialul didactic sa fie gratuit, văzând în abordarea necomerciala a problemei singura
soluţie viabilă pentru o piaţă a educaţiei diversificată din punct de vedere cultural şi
lingvistic. Capacitatea de a oferi o dezvoltare durabilă şi de calitate a reurselor
educaţionale, respectănd drepturile de proprietate intelectuală este elementul cheie
capabil să genereze multe locuri de muncă, dar toate acestea presupun la rândul lor un
cost. Realizarea conţinutului publicaţiilor necesită mult timp, efort şi, pe deasupra,presupune resurse şi tehnologii care sunt disponibile pentru companiile prezente deja
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 15
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 607/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
pe piaţă. Problema care se pune în continuare este cum vor reuşi Uniunea Europeana
şi statele membre să abordeze această problemă în contextul, pe de o parte, al
dezvoltării distribuţiei pe scara largă a conţinutului media şi, pe de altă parte,
dezvoltarea modelului bazat pe parteneriate public-private, drepturi de autor permisive
şi management digital al drepturilor de autor.
Recomandarea European e-Learning Industry Group către guvernele UE este de a se
acţiona spre dezvoltarea ITC care ar trebui să fie echilibrată în privinţa condiţiilor de
licenţiere şi finanţarea achiziţiilor de resurse educaţionale. Finanţarea nu trebuie privită
ca o alternativă la licenţiere. Diferite modele de dezvoltare a resurselor educaţionale
dau naştere la diferite modele de cercetare şi finanţare. De exemplu: informaţii de
actualitate, informaţii de actualitate plus mijloace de accesare a informaţiilor, cursuri
interactive, bibliografii, informări personalizate etc.
Luând în considerare stadiul actual în care se caută idei pentru direcţii de dezvoltare a
conţinutului media, eLIG recomandă insistent să se ţină seama de nevoile şi necesităţile
industriei de profil selectând propuneri bazate pe termeni de licenţiere corecţi creând
bazele unei dezvoltări durabile în domeniu. Este necesar ca Uniunea Europeana şi
statele partenere să aibă în vedere faptul că nu se pot oferi soluţii universale.
Obiectivele ce trebie îndeplinite determină mijloace de rezolvare a problemei şi nu
invers. Chiar dacă în unele cazuri conţinutul media “open source” poate servi mai bine
interesele utilizatorilor, licenţierea şi implicarea finanţării publice sunt esenţiale în
asigurarea dezvoltării durabile a industriei de profil în contextul unui mediu concuren ţial.
Este necesar ă studierea cu atenţie a constrângerilor impuse în industria media dacă se
doreşte atingerea obiectivelor de la Lisabona cu privire la creşterea economică şi
crearea de noi locuri de muncă în sectorul educaţional. Privind consultarea opiniei
publice în privinţa noii strategii europene a unei societăţi informaţionale, Comisia
Europeana subliniază necesitatea unor acţiuni urgente care să încurajeze editurile să investeasca în crearea de conţinut digital. eLIG susţine acest punct de vedere. Un
sistem digital al drepturilor de proprietate intelectuala (DRM) ar trebui să includă
informaţii asupra drepturilor de autor, conţinutul pachetului şi a mijloacelor tehnologice
de protecţie într-un format inter-operabil. Comisia Europeana nu sprijină punctul de
vedere conform căruia e-Lerning-ul necesită un sistem propriu de management al
drepturilor de proprietate intelectuală. Nu sunt dovezi care să sprijine necesitatea unei
legislaţii a drepturilor de autor în domeniul educaţiei. Excepţiile asupra “copyright”trebuie să r ămână excepţii ce nu se resfrâng asupra utilizării normale a proprietăţii
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 16

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 608/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
intelectuale protejate. Se recomandă autorităţilor publice să iniţieze campanii de
informare în aceasta privinţă. Rolul educatorilor şi comportamentul cadrelor didactice
este esenţial în facilitarea inţelegerii de către publicul larg a faptului că drepturile de
autor, diversitatea şi calitatea materialelor educaţionale sunt chestiuni complementare.
Un aspect important este acela de menţinere a unor condiţii propice pentru asigurarea
unei concurenţe loiale în timp ce se explorează noi modele de afaceri bazate pe
parteneriate public- privat. Editorii şi distribuitorii de conţinut media, fie el gratuit sau nu,
pot ridica problema loialităţii concurenţei. În particular, sectorul televiziunilor publice din
Europa deţine o poziţie privilegiată pe piaţa de e-Learning, fiind încurajat şi în unele
cazuri chiar sprijinit să producă conţinut educaţional de calitate, distribuit apoi
comercial. In cazul sectorului educational, ITC este din ce în ce mai mult condus prin
parteneriate public-private. Tradiţional, acest parteneriat s-a concentrat în asigurarea
infrastructurii şi conectivităţii. Totusi, în contextul extinderii e-Learning-ului, acest
parteneriat se extinde incluzând sistemul de management al conţinutului media,
motoare de căutare şi medii virtuale de învaţare. Un concept durabil de dezvoltare în
aceasta direcţie ar putea fi deschiderea ca parteneriatele public-private să includă
dezvoltatori de conţinut media în parteneriat cu sisteme de management al dreptului de
autor-dezvoltator de medii virtuale de învaţare, astfel încât conţinutul media să devină
parte integrantă a sistemului de e-Learning.
European e-Learning Industry Group a adrest guvernelor europene recomandarea de
incurajare a partenerialetelor public-private, în condiţiile în care membrii acestor
parteneriate să fie evaluaţi sub aspectul cadrului legal referitor la publicarea
informatiilor, cadru ce poate fi diferit pentru fiecare stat membru în parte. A fost salută şi
încurajată strategia de dezvoltare i2010 cu privire la dezvoltarea durabilă a industriei
media europene. S-a apreciat ca fiind crucial ca finanţarea şi stimularea industriei
media să fie stabilite astfel încât sectorul comercial să continue să investească înparteneriate public-private. Autoritaţile publice ar trebui să aibă o percepţie mai bună
asupra rolului industriei media în viitorul e-Learning-ului. Dezvoltarea unei solu ţii e-
Learning flexibile şi coerente din punct de vedere pedagogic adaptată nevoilor pieţei şi
politicilor educaţionale are o mare valoare, dar şi un cost pe măsur ă. Strategia
Comunitatii Europene în privinţa e-Learning-ului nu poate fi atinsă de guverne şi instituţii
educaţionale izolate. De aceea, sunt necesare parteneriatele public-private în care rolul
fiecărui membru să fie bine stabilit.
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 17

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 609/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
Parteneriatele public-private interdisciplinare pot fi promovate de exemplu prin aplicaţii
pilot, atât pentru platforme mobile cât şi platforme statice de învăţare. În cadrul acestor
proiecte interdiscuiplinare se vor reuni: operatori de telefonie mobilă şi fixă, televiziuni,
autori consacraţi, edituri, biblioteci şi libr ării virtuale, instituţii educaţionale şi culturale.
Astfel se demonstrează sustenabilitatea şi eficienţa acestui concept, ce ofer ă
integrarea informaţiilor din mai multe domenii în contextul dorit de utilizator, oriunde s-ar
afla acesta.
Recomandările European e-Learning Industry Group către guverne sunt de a se
încuraja utilizarea e-Learning-ului în cadrul IMM-urilor şi al comunităţilor mai putin
obişnuite cu tehnologia ITC, deoarece “nu este nevoie să reinventăm roata”.
Şcolarizarea oamenilor îni folosirea ITC în activităţi educaţionale şi profesionale sunt de
mult demonstrate a reprezenta concepte complementare. Această recomandare se
aplică şi profesorilor, cu următoarele particularităţi: în general, profesorii apar ţin
categoriei utilizatorilor uzuali ai tehnologiilor ITC, folosind-o în mod curent atât în
scopuri personale, cât şi profesionale. Considerând dotarea cu echipamente a mediului
profesional din care provin, accesul la internet şi frecvenţa utilizării tehnologiei, doar
puţini dintre profesori necesită cursuri de specializare în noţiunile de bază ale ITC.
Totuşi marea majoritate a profesorilor necesită cursuri ITC focalizate pe implicaţiile
pedagogice ale tehnologiei şi folosirea acesteia în cadrul actului educaţional. Cele de
mai sus constituie un exemplu de învăţământ ITC profesional şi personalizat pentru o
anumită categorie de utilizatori. European e-Learning Industry Group a încurajat
Uniunea Europeana şi statele membre să investească mai mult în educarea şi formarea
cetăţenilor în domeniul internetului şi tehnologiei comunicaţiilor. Acţiunile de educare
vor fi sprijinite prin programe de învaţare continuă implementate de statele membre.
Astfel eLIG susţine în totalitate recomndările similare formulate în documentul i2010.
Una dintre cele mai importante provocări în dezvoltarea instruirii prin e-Learning esteaceea de armonizare a instrumentelor şi a conţinutului aplicaţiilor la nivelul UE. Raportul
Euridice asupra competentelor cheie în cadrul învăţământului obligatoriu subliniază
nevoia unei transformări a sistemului educaţional de bază astfel încât acesta să poata
juca un rol în dezvoltarea aptitudinilor, competentelor şi valorilor necesare tinerilor
pentru a se putea integra personal şi professional în “societatea cunoaşterii”. Ultimele
lucr ări ale programului Pisa în definirea competenţelor cheie, işi găseşte ecoul în cadrul
criteriilor de clasificare a competenţelor după cum urmează: folosirea interactivă ainstrumentelor, interacţiunea în cadrul unor grupuri eterogene, libera iniţiativă. Astfel, în
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 18
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 610/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
măsura în care învăţământul obligatoriu se reinventează în secolul 21, se observă
apariţia unei direcţii preponderente ce transcende barierele lingvistice şi de curriculum.
Acest nucleu comun de competenţe se afirmă într-un timp în care există un interes
general pentru o abordare a învăţământului structurat pe materii. Astfel, deşi există înca
o cerere pentru învăţământ tradiţional bazat pe materii, existş oportunitatea dezvoltării
educaţiei digitale care prin dezvoltarea competenţelor cheie stabilite mai sus va ajuta la
atingerea obiectivelor documetului i2010. Tehnologia jocurilor de calculator este un
exemplu excelent despre cum abilităţi generice - comunicare, rezolvare de probleme,
abstractizare, motivare, lucrul în echipă şi abilităţi de învăţare - sunt dezvoltate într-un
mediu informal. Jocurile au un caracter cu adevarat global depăşind cu mult graniţele
naţionale. Această caracteristică trebuie exploatată de sectorul educaţional aşa cum se
întamplă în momentul de faţă în SUA. Încorporand principiile specific jocurilor de
calculator cu ajutorul partenerilor de cercetare şi a instituţiilor educaţionale şi cu sprijinul
Uniunii Europene în industria mass-media poate prelua un rol major în sectorul
educaţional, marcând astfel un punct de cotitur ă faţă de formele de educaţie anterioare.
Având în vedere impactul globaliză îrii şi necesitatea ca cetăţenii să fie lucr ători
competenţi in orice situaţie, oriunde în lume, există o oportunitate ca autorii europeni de
materiale educaţionale să devină cu adevarat competivi pe piaţa globală.
Învăţământul superior, reconversia profesioanală şi învăţământul continuu sunt din ce în
ce mai mult abordate la un nivel internaţional, pentru a se putea acoperi cererea pieţei
de for ţă de muncă înalt calificată şi mobilă. Învăţământul în domenii precum
matematica, ştiinţele aplicate şi literatura se pot baza pe principii similare. Schimbarea
interesului de la învatamantul bazat pe materii către învăţământul bazat pe abilităţi nu
elimină nevoia cunoştinţelor specifice pentru fiecare materie şi limbă în parte; de
asemea, nu se poate neaga nici faptul că educaţia depinde de diverse modele
pedagogice, fiecare cu avantajele şi dezavantajele sale. Eforturile de armonizare şi decreare a unui nucleu multi-media comun, nu trebuie privite ca o amenin ţare la adresa
diversităţii lingvistice şi culturale. În continuare, industria de profil va trebui să se
adreseze nevoilor specifice la nivel curricular şi national. In privinţa aducerii acestui
nucleu educaţional către şcoli, tendinţa actuală bazată pe finanţare şi gestionare
centralizată trebuie înlocuita prin parteneriate public - private. La nivel local şi/sau
naţional, nucleul de abilităţi poate fi promovat în fiecare şcoală în parte; în acelaşi timp,
şcolile urmează să fie libere să achiziţioneze orice alt material educaţional din bugeteproprii.
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 19
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 611/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
Adresându-se Comisiei Europene, European e-Learning Industry Group a formulat
recomandarea de a explora posibilitatea unei apropieri bazate pe parteneriate public-
private pentru a realiza dezideratul acestui nucleu educaţional comun. Şi anume, se
doreşte crearea de parteneriate între industria media, guvernele naţionale şi instituţiile
de cercetare, parteneriate ce au drept scop distribuirea nucleului de competen ţe într-o
manier ă centralizată. In acest context, centralizarea nu se refera la un nivel de decizie
în particular, ci înseamnă pur şi simplu alocarea de resurse bugetare către şcoli, pentru
achiziţionarea unui anumit set de resurse. Finanţarea publică trebuie să r ămână
focalizată pe metodele tradiîionale de educaţie acolo unde abilităţile învăţate depind de:
materia studiată, limba şi conţinutul curricular. Finanţarea în conceptul de nucleu comun
trebuie să r ămână complementar ă.
Astazi, apariţia standardelor deschise permite interoperarea conţinutului de e-Learning,
oferind în acelaşi timp un grad mai mare de protecţie şi de amortizare a investiţiilor prin
integrarea conţinutului media în soluţii e-Learning. Uneori soluţiile e-Learning „închid”
utilizatorul în soluţia oferită de un singur comerciant. Europa prin angajamentul său
către standardele deschise şi interoperabilitate poate prelua initiativa în acest domeniu,
ajutând conceptul e-Learning să atingă acel punct unde noi tehnologii schimbă lumea în
care tr ăim. Din ce în ce mai mult, guvernele naţionale profită de astfel de oportunităţi
pentru dezvoltarea de programe naţionale de e-Learning. Industria media poate
beneficia enorm din aceste programe guvernamentale. Multe politici guvernamentale
prevăd demararea de proiecte structurale de mare amploare implicând o multitudine de
parteneri şi abordând probleme precum: reţeaua de comunicatie natională,
infrastructura, indexarea, gestiunea şi schimbul informaţiilor media digitale în scopuri
educaţionale, de formare profesională şi alte forme de învăţământ. Pentru a concura în
”societeatea cunoasterii”, sistemul educaţional european trebuie să adopte rapid o
abordare comună şi concertată în scopul definirii şi promovării standardelor deinteroperabilitate pentru tehnologii e-Learning, având continut multi-media capabil de
portare pan-europeană.
European e-Learning Industry Group susţine de multă vreme punctul de vedere
conform căruia standardele tehnice deschise în domeniul gestionării, editării şi
distribuirii conţinutului media sunt singurele capabile să atingă cu adevarat
interoperabilitatea completă. Prin acest concept de interoperabilitate completă, bazată
pe standarde deschise, se iau în considerare şi vederile Comisiei Europene cu privire lae-Learning, în sensul că:
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 20
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 612/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
- un instrument poate fi considerat interoperabil dacă procesul poate fi descris prin
specificaţii care sunt independente de instrument;
- standardele curente pentru conţinutul media nu tratează suficient problema semanticii
procesului de învăţare; dxista o lipsă de interoperabilitate între conceptele procesului de
învăţământ la nivelul semantic ce poate fi remediată prin utilizarea de profile diferite
pentru fiecare utilizator.
În conformitate cu Raportul Comisiei Europene privind consultarea mediului de lucru pe
continutul e-learning, vom vedea subiecte R&D importante nepromovate în tehnologii şi
standarde de conţinut care să permită a fi reutilizate în scopuri de educaţie sau în
mediile de afaceri. Mai multe proiecte ar trebui să se desf ăşoare prin activităţi de reţea
mai bine definite şi prin transferuri de cunoştinţe între exper ţii tehnici şi producătorii de
conţinut responsabili de abordări didactice. Programele de finanţare care îmbunătăţesc
apropierea între tehnologie şi particularităţile de producţie ale partenerilor vor asigura
îmbunătăţiri ale calităţii produselor şi vor facilita îndeplinirea cerinţelor locale.
Referindu-se la conţinutul instruirii continue, European e-Learning Industry Group
consider ă că acesta trebuie să se bazeze pe standardele industriei. Desf ăşurarea unei
platforme e-Learning interoperabile care suportă standardele educaţionale
internaţionale de conţinut trebuie să fie in conformitate cu strategia de e-Learning şi să
se reflecte în standardele de achiziţii publice în cadrul Comunităţii Europene. De aceea
apare recomandat ca editorii şi furnizorii de tehnologie e-Learning sa fie implicaţi în
acest proces de standardizare. În timp ce sistemele de învăţământ sunt specifice
fiecărei ţări, organismele europene de standardizare ar trebui să lucreze cu grupuri
internaţionale de industrie pentru a elabora standarde şi a defini profile Pan-europene
(IEEE, CEN ş.a.). Utilizarea sistematică a noilor tehnologii (de exemplu, XML, servicii
Web şi tehnologii Semantic Web), soluţii arhitecturale (de exemplu, Managementul
Conţinutului Sistemelor de Învăţământ), şi a standardelor de interoperabilitate trebuie să fie promovate rapid printre păr ţile interesate de la industria europeana la cei ce
elaborează şi editează materiale educaţionale.
Nu este suficientă numai proiectarea conţinutului în funcţie de standardele acceptate, ci
este important să existe asigurarea că diferitele arhive de conţinut sunt disponibile
pentru căutare şi regăsire printr-o metodă standard. Această problemă necesită
finanţare specifică pentru a se asigura că toate materialele disponibile ascunse în cele
mai multe comunităţi de învăţământ pot fi auto-editate într-o arhivă de resurse
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 21
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 613/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
educaţionale. Pentru aceasta, trebuie luate in considerare probleme precum
multilingvismul, schemele de metadate şi drepturile digitale.
Finanţarea suplimentar ă ar trebui să fie dedicata pentru cercetare şi activităţi care au ca
scop furnizarea de soluţii de îmbunătăţire a designului conţinutului şi de stocare, cu
scopul automatizării reutilizării şi facilitării localizării bazate pe condiţiile de acordare a
licenţelor. Astfel de activităţi de cercetare-dezvoltare sunt în mod clar calea de urmat
pentru a dezvolta o piaţă europeană pentru conţinut educaţional. Desigur, nu s-ar putea
crea conţinut european independent faţă de culturile naţionale dar, cu siguranţă, s-ar
oferi condiţiile tehnice necesare stimulării circulaţiei materialelor de învăţare.
Unul dintre beneficiile tehnologiei educaţionale este capacitatea de a permite
profesorilor să-şi personalizeze conţinutul cursurilor pentru a servi propriilor nevoi, ca şi
pentru a găsi, a accesa, a crea, a folosi şi a se adapta la resursele de care au nevoie.
Folosirea e-Learning-ului permite o mai mare flexibilitate de utilizare şi de reutilizare în
toate sectoarele. Totuşi, la nivelul UE, teste cum ar fi Celebrate au furnizat o dovadă
clar ă că şi în rândul unei comunitati de profesori competenţi şi voluntari în domeniul
ITC, există insuficiente stimulente pentru a dezvolta materiale educaţionale reutilizabile
de calitate.
Ca urmare, s-a formulat recomandarea ca aspriraţiile către flexibilitate să fie raportate la
realitate. Astfel va putea prevala faptul că majoritatea profesorilor dispun de timp şi
abilităţi limitate pentru selectarea sau crearea materialelor educaţionale. Instrumentele
pedagogice interactive trebuie să-şi justifice costul oferind mai mult decât animaţii
simple, flash-uri sau liste de site-uri generate prin motoare de căutare.
Pentru orice strategie de e-Learning este importantă recunoaşterea şi îmbunătăţirea
planurilor în concordanţă cu gama de instrumente deja oferite de editori în vederea
susţinerii unor aplicaţii cu înalt grad de flexibilitate. Conceptul de „granularitate” nu ar
trebui folosit în detrimentul unui conţinut de calitate superioar ă.Editorii privesc cu entuziasm faptul că profesorii sunt destul de experimentaţi pentru a-
şi crea singuri suportul de curs, acesta urmând a fi re-utilizat si re-localizat. De fapt,
sunt aceiaşi profesori care lucrează împreună cu editorii la crearea de noi materiale
didactice.
În ceea ce privesc modalităţile de evaluare şi de îmbunătăţire a calităţii materialului
didactic, acest aspect este strâns legat de cele ar ătate anterior . Astfel, numai într-o
oarecare măsur ă şi, din păcate, calitatea materialului eLearning nu a reuşit întotdeauna să fie la nivelul aşteptărilor utilizatorilor. Unele state membre au adoptat
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 22
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 614/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
sisteme facultative de management a calităţii produselor educaţionale digitale. De
asemenea există şi sisteme independente. Căutarea unor criterii şi metode comune de
evaluare este un subiect aprins de dezbatere, dar sistemele de asiguare a calităţii nu
pot fi izolate de modelele pedagogige pe care se bazează conţinutul media. Vor fi
necesare cercetări suplimentare pentru a determina modul în care programele de
asigurare a calităţii pot fi independente de tendinţele culturale, politice şi lingvistice.
Editorii sunt ferm convinşi că asiguarea calităţii conţinutului reprezintă centrul acestui
demers care este denumit proces editorial.
De exemplu, cel mai important aspect în procesul editării unei publicaţii ştinţiifice este
reprezentat de verificarea că o lucrare ştiinţifică î şi merită numele de ştiinţifică. Chiar şi
publicaţiile ştinţiifice cu acces deschis se bazează pe evaluarea reciprocă datorită
modului de r ăspândire a informaţiilor. În ceea ce privesc resursele educaţionale, ca
manuale, echipe „autoritare” formate din diverse competenţe ca profesori şi exper ţi în
pedagogie, acestea r ămân necesare în garantarea satisfacerii nevoilor pedagogice.
European e-Learning Industry Group a formulat către guvernele UE recomandarea de a
se preocupa de asigurarea calităţii de conţinut, astfel încât profesorii şi cei în curs de
instruire să aibe posibilitatea de a selecta cele mai bune resurse. Există convingerea
fermă că procesul editorial reprezintă cheia garantării celei mai bune calităţi,
constituind elementul de control în realizarea unor publicaţii de valoare. Prin urmare, se
consider că pentru a încuraja calitatea este necesar ă stimularea pieţei de conţinut,
astfel încât succesul comercial să se sprijine pe un bun ciclu de dezvoltare. Evident, în
continuare sunt necesare cercetări pentru a determina modul în care programele de
asigurare a calităţii pot fi independente de tendinţele culturale, politice şi lingvistice.
O modalitate importantă pentru dezvoltarea unui conţinut educaţional consistent şi
interactiv o reprezintă conexiunea de bandă largă. Imaginea unei conexiuni în bandă
largă în Europa r ămâne fragmentată. Extinderea conexiunilor în bandă largă este maiputernică în acele ţări care au infrastructur ă competitiva, dar r ămâne foarte scăzută în
multe ţări în care se menţin zone f ăr ă acces la aceste conexiuni.
În ultimii ani, mai multe guverne UE au iniţiat programme investiţionale de amploare în
domeniul TIC. Aceste acţiuni s-au înregistrat în mare măsur ă independent şi
nesincronizat, dar au avut ca efect creşterea rapidă a mediei generale de extindere a
conexiunilor pentru TIC în şcoli şi instituţii de învăţământ superior. Totuşi, din cauza
caracterului nesincronizat, au intervenit diferenţe majore în diferite ţări europene şisectoare, existând o creştere a riscului de divizare digitală în dezvoltarea e-Learning-
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 23
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 615/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
ului atât între ţările Uniunii Europene, cât şi între sectoare. Aceste diferenţe ar trebui să
fie monitorizate şi recuperate rapid pentru a minimiza variaţia în ecuatia dezvoltarii e-
Learning-ului european.
În prezent, în Europa accentul r ămâne pe "cantitatea" de bandă largă şi nu pe "calitate".
Nu există nici un accent pe nevoia de a oferi dezvoltări preferenţiale generaţiilor de
conexiuni avansate care să permită crearea de conţinut şi servicii educaţionale mai
bogate şi mai inovative. Evoluţiile internaţionale în unele păr ţi din Asia arată că
următoarea generaţie de conexiune în bandă largă este aproape şi aceste evoluţii
declanşează produse şi servicii cu conţinut educaţional nou şi mai bogat. Realizarea
unei infrastructuri de clasă mondială care să fie capabil de calitate înaltă şi cumunicaţii
rapide pentru educaţie ar trebui să fie o preocupare major ă pentru anul 2010. Există
convingerea că asistăm la un salt uriaş în Tehnologiile Educationale datorită apariţiei
mobilului, legăturilor f ăr ă fir şi tehnologiilor de conexiune în bandă largă care, împreună
cu tehnologiile de reţea şi ambient, sunt susceptibile de a schimba dramatic modul în
care vom percepe Educaţia, Învăţamantului, Sistemul Educaţional de mâine. Aceste
tehnologii sunt abia apărute dar progresează cu o rată susţinută de pătrundere în
obiceiurile societăţii zilelor noastre, oferind imagini ale modului în care acestea ar putea
afecta viitoarele scenarii, inclusiv o gamă largă de impacturi educaţionale: pe bază de
locaţie şi de învăţământ prin telefonie mobilă, programe TV educaţionale interactive,
infrastructuri wireless în campusuri, sisteme de brokeraj cu conţinut federativ.
Pentru a concura în societatea bazată pe cunoaştere, Sistemul Educational European
trebuie să facă un salt rapid spre tehnologiile emergente ar ătate mai înainte. De aceea,
s-a formular recomandarea către guvernele UE pentru dezvoltarea inovării tehnologice
în scopul anticipării capabilităţilor de învăţare şi de cunoaştere. Astfel se pot obţine
avantaje competitive în comunitatea internaţionala. Balansarea inovării pedagogice şi
tehnologice în noile infrastructuri este cheia către succes; noile sisteme de bandă largă,mobile şi tehnologii f ăr ă fir trebuie să fie experimentate împreuna cu noi servicii de
învăţare. De exemplu,. învăţământ bazat pe locaţie, învăţământ legat de ambianţă, în
acest fel dezvoltând noi modele pedagogice şi de afaceri. De aceea, se consider ă că
Politicile Educationale ale UE trebuie să încurajeze:
- investiţii în noi infrastructuri 3G pentru bandă largă, mobile şi sisteme f ăr ă fir şi, de
asemenea, “centre” de computere interconectate ;
- abordări combinate pentru învăţământului bazat pe şcoli cu experienţele locale bazatepe ambienţă şi accesul mobil la informaţie;
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 24
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 616/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
-promovarea sectoarelor pilot interdisciplinare, de exemplu Educatie, “Patrimoniu
Cultural”, “eGuvern”, Managementul Sanătăţii.
Un model semnificativ în ceea ce priveşte atitudinea faţă de sistemul educational prin
instruire asistată este cel al Marii Britanii. Guvernul britanic a investit 1 miliard de lire
sterline în ITC în educaţie din 1997 până în 2004 şi a atins scopuri competitive. Toate
facultăţile şi universităţile au acum conexiuni de bandă largă. Peste 99% din şcoli sunt
conectate la Internet, dintre care 60% cu viteze de bandă largă, ţinta fiind de a ajunge la
100% până în 2006.
Există un calculator la 8 copii în învăţământul primar şi un calculator la 5 copii în
învăţământul secundar. 48% din şcolile primare şi 82% din şcolile secundare din Anglia
au table interactive, cu o medie de 1 la fiecare şcoală primar ă şi 4,3 la fiecare şcoală
secundar ă. Peste 96% dintre profesorii disponibili în Anglia s-au înscris pentru
instruire ITC şi peste 80% dintre aceştia sunt încrezători în capacităţile lor de a folosi
ITC.
Totuşi, lansarea accesului la conexiune cu bandă largă nu este totul. Investiţiile publice
în resurse de calitate pentru învăţământ este continuu şi semnificativ în tot Sistemul de
Credit e-Learning (eLCs). În zona şcolilor primare şi secundare, au fost alocate 100 de
milioane de lire sterline pentru fiecare an academic 2003/2004, 2004/2005 şi
2005/2006 sub formă de grad-uri cu fonduri de la Guvern. În fiecare an academic,
fiecărei şcoli eligibile i-au fost alocate 1000 lire plus 10 lire pentru fiecare elev. Până în
aprilie 2006, şcolile eligibile au primit un total, f ăr ă precedent, de 330 de milioane de lire
sterline de la eLCs. Acestea au fost destinate achiziţionării de obiecte pentru învatare
sau pentru a se face abonamente la resurse de învăţare. Acestea pot fi selectate dintr-
un catalog foarte variat multimedia, disponibil pe portalul naţional:
www.curriculumonline.gov.uk.
După cum a raportat Departamentul Britanic pentru Educaţie şi Abilităţi în planul său deacţiune de 5 ani privind TIC în educaţie, aceste evoluţii majore permit ca experienţa în
educaţie să fie adaptată şi personalizată în mai multe moduri, şi anume:
-prin noi niveluri de suport de învăţare, cum ar fi informaţie on-line, consiliere şi
orientare, inclusiv servicii suport de oferire a compatibilităţii cu promoţii de tip
‘Direct.gov ‘ care permit potenţialilor studenţi, de exemplu, să completeze formulare
UCAS şi să aplice pentru împrumuturi online;
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 25

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 617/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
-prin modificări în natura învăţării proprii, în sensul că cele mai bune materiale
interactive deja fac posibilă angajarea studenţilor aflaţi în zone îndepărtate să înveţe în
propriul lor ritm, în propriul timp, în propriul stil, să înveţe singuri şi împreună;
-prin lucru mai productiv şi mai rapid pentru profesori; astfel, TIC face mai uşoar ă
notarea muncii şi monitorizarea progresului elevilor; TIC permite atât predarea la nivelul
întregii clase, folosind o tablă albă interactivă, cât şi lucrul cu persoane fizice sau
grupuri la propriile lor ecrane;
-prin noi forme de colaborare, în sensul că reţele devin o caracteristică în curs de
generalizare în peisajul şcolar - reţele şcolilor lucrând împreună pentru a rezolva
probleme în comun, reţele şcolilor şi agenţii de îngrijire împăr ţind informaţii despre copii
vulnerabili, reţele şcolilor, colegiilor şi universităţilor dezvoltând şi punând la dispoziţie
materiale; învăţământul comunităţii, pentru familii şi adulţi care doresc să-şi actualizeze
abilităţile, ofer ă o altă formă de reţea, legături de TIC de hub-uri de educaţie, cum ar fi
şcoli şi colegii.
Punerea în aplicare se va întinde pe un număr de ani, pe măsur ă ce se dezvoltă
infrastructura necesar ă. Dar în viitorul imediat, Departamentul Britanic al Educaţiei şi a
Competenţelor aşteaptă:
-o mai largă alegere curricular ă, de exemplu, prin parteneriate între şcoli şi colegii
folosind video conferinţe şi materiale interactive pentru a extinde numărul de limbi pe
care o şcoală le poate oferi;
-activităţi de învăţare bine pregătite, prezentate prin table albe interactive şi puse la
dispoziţie în ţara de origine, prin extranetul şcolii sau facultăţii;
-reţele virtuale între educaţie şi industrie, care facilitează o mai mare colaborare şi
înţelegere;
-evaluare on-line personalizată, cu feedback.
Creşterea calităţii şi eficienţei în educaţia asistată de calculator reprezintă o preocuparereală pentru multe instituţii din Romania.
Considerând ca prioritar ă necesitatea de progres în domeniul educaţiei şi instruirii
continue, mai mulţi reprezentanţi ai societăţii civile, ai comunităţii academice, ai
mediului de afaceri, precum şi lideri de opinie în domeniul utilizării noilor tehnologii
pentru educaţie şi formare au iniţiat Proiectul „Elearning.Romania”. Partenerii care
alcătuiesc Grupul de iniţiativă al proiectului Elearning.Romania sunt ar ătaţi în Anexa 2.
Treptat, alături de aceştia se coalizează o comunitate de persoane şi instituţii animatede aceleaşi interese şi subscriind la valori comune.
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 26
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 618/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
Proiectul Elearning.Romania î şi propune creşterea calităţii şi eficienţei în educaţia
asistată de calculator, prin oferirea de suport teoretic, prin diseminarea bunelor practici
şi a experienţelor locale în e-Learning, prin informarea continuă cu privire la iniţiativele
şi evenimentele semnificative din domeniu, prin promovarea celor mai bune soluţii,
sisteme şi servicii pentru elearning. Astfel, comunitatea Elearning.Romania susţine
eforturile Ministerului Educaţiei Cercetării şi Inovării, ale Ministerului Comunicaţiilor şi
Tehnologiei Informaţiei, precum şi ale altor instituţii cu rol de decizie, pentru proiectarea,
implementarea şi evaluarea impactului programelor naţionale de elearning. Pe de altă
parte, un rol important asumat este acela de a oferi factorilor decizionali sugestii de
ameliorare, de a semnala direcţiile oportune de dezvoltare ale acestor programe, de a
argumenta continuarea sau stoparea lor, prin raportare continuă la rezultatele concrete
şi la beneficiile practice.
Următoarele obiective orientează activităţile desf ăşurate de partenerii
Elearning.Romania:
-crearea unui spaţiu de comunicare între specialişti, practicieni, cercetători, lideri de
opinie şi factori de decizie în domeniul e-Learning;
-promovarea experienţelor pozitive, semnificative pentru practica utilizării noilor
tehnologii în educaţie atât la nivelul învăţământului universitar şi preuniversitar, cât şi în
zona educaţiei nonformale;
-susţinerea activităţii practicienilor şi specialiştilor în e-Learning prin explorarea
sistematică şi prezentarea unor resurse teoretico-metodologice disponibile la nivel
naţional, european şi mondial;
-prezentarea oportunităţilor de formare şi de informare în domeniul e-Learning şi
instruirii asistate de calculator;
-susţinerea activităţii instituţiilor guvernamentale prin oferirea unui canal de comunicare
şi informare în privinţa politicilor, a strategiilor şi a programelor naţionale deimplementare a noilor tehnologii în sistemul de învăţământ;
-crearea şi utilizarea unui instrument de cercetare a opiniilor practicienilor şi
specialiştilor în utilizarea noilor tehnologii în educaţie, datele obţinute având rol de
feedback pentru iniţiativele naţionale în domeniu.
Ariile de interes pentru comunitatea Elearning Romania au fost conturate după cum
urmează:
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 27
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 619/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
-e-Learning universitar, vizând utilizarea noilor tehnologii la nivelul învăţământului
superior; soluţii şi sisteme de e-Learning pentru universităţi, servicii de asistenţă şi
suport în dezvoltarea sistemelor de e-Learning;
-software educaţional pentru prezentări de aplicaţii dezvoltate pentru uz didactic,
prezentări ale experienţelor de utilizare a noilor tehnologii în clasă, instruire asistată de
calculator, la nivel preuniversitar;
-politici şi strategii destinate secvenţelor strategice ale programelor naţionale şi
internaţionale de implementare a noilor tehnologii în educaţie, orientări prospective,
prezentări de căr ţi albe;
-echipamente constând din soluţii tehnice, instrumente şi tehnologii de suport pentru e-
Learning şi instruire asistată de calculator, echipamente multimedia;
-proiecte constând din prezentări ale proiectelor semnificative pentru dezvoltarea
domeniului e-Learning;
-studii şi rapoarte cuprinzând rezultatele ale cercetărilor şi ale evaluărilor realizate în
domeniul e-Learning/ instruirii asistate de calculator;
-situri de prezentare a resurselor teoretice şi practice disponibile pe situri româneşti sau
str ăine, recomandări de adrese web;
-publicaţii cum ar fi apariţii editoriale în domeniul e-Learning, prezentări de monografii,
broşuri, reviste şi alte publicaţii periodice, recenzii, analize critice ale apariţiilor
editoriale;
-evenimente în sensul de prezentări ale principalelor conferinţe, seminarii şi întâlniri de
lucru desf ăşurate pe tema utilizării noilor tehnologii în educaţie;
-cursuri online oferind oportunităţi de formare continuă şi dezvoltare personală prin
cursuri online; e-Training, soluţii şi sisteme de e-Learning pentru formare continuă;
-anunţuri incluse în secţiuni de informare cu privire la noi programe, apeluri pentru
proiecte, oportunităţi de angajare, solicitări de parteneriate etc.Situl <elearning.ro> conţine articole propuse de către editori şi de către utilizatori,
structurate pe categoriile prezentate mai sus. Orice membru al comunităţii
Elearning.Romania poate propune un articol pentru a fi publicat pe site şi promovat prin
intermediul revistei electronice asociate sistemului elearning.ro. Articolele propuse sunt
validate de un Consiliu editorial, format din editorii coordonatori şi din reprezentanţi ai
partenerilor Elearning.Romania. Criteriile de validare sunt formulate pe baza principiilor
fundamentale ale proiectului Elearning.Romania, principii care susţin nonpartizanatulpolitic, echidistanţa faţă de principalele teorii, faţă de curentele de opinie şi faţă de
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 28
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 620/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
actorii instituţionali ai domeniului utilizării TIC în educaţie, corectitudinea metodologică,
teoretică, semantică, gramaticală, precum şi promovarea exclusiv a valorilor autentice şi
a iniţiativelor constructive.
Opiniile şi informaţiile prezentate în materialele publicate pe situl Elearning.Romania
apar ţin autorilor. Acestea nu reprezintă în mod necesar poziţia oficială a partenerilor.
Editor Elearning.Romania poate fi orice utilizator care are o contribu ţie semnificativă la
dezvoltarea resurselor şi materialelor disponibile pe situl <elearning.ro> pentru întreaga
comunitate de practicieni, factori de decizie şi cercetători în e-Learning.
Preocupări pentru dezvoltarea învăţământului interactive există în mai multe centre
universitare din ţar ă.
La Universitatea „Al. I. Cuza” Iaşi, Facultatea de Informatică au fost create oportunităţi
de comunicare în cadrul unor sit-uri de e-Learning . Actualmente există situri de e-
learning foarte dezvoltate, oferind o mulţime de facilităţi atât pentru studenţi, cât şi
pentru profesori. De exemplu, un astfel de site, propune un mecanism de comunicare la
nivelul sit-ului astfel încât fiecare student să poată obţine o perspectivă asupra
informaţiilor furnizate în concordanţă cu educaţia, cultura şi ariile sale de interes. Acest
mecanism se bazează pe gestionarea dinamică a unei ontologii cu date despre studenţi
şi pe diverse posibilităţi de personalizare a interfeţei. A fost luat în consideraţie faptul
că, atât la nivel imagistic, cât şi textual, pentru fiecare utilizator trebuie adoptat un limbaj
specific şi oferit cadrul de discuţii propice pentru realizarea unei comunicări autentice.
Ontologia propusă spre dezvoltare permite semnalarea afinităţilor de interese şi
preocupări ale utilizatorilor. Pe viitor, se va avea crearea de sit-uri care să asigure
condiţii pentru discutarea unor modalităti efective de colaborare între diverse
tipuri de specialişti.
Pornind de la preocupările comune pentru utilizarea metodelor statistice în studiul e-
learning-ului în învăţământul superior românesc, trei universităţi, şi anume:- Universitatea “Al.I.Cuza” Iaşi, Facultatea de Economie şi Administrarea Afacerilor;
- Academia de Studii Economice Bucureşti, Catedra de Statistică şi Econometrie şi
- Academia de Studii Economice Bucureşti, Catedra de Statistică şi Econometrie
Acestea au iniţiat un studiu asupra modurilor în care se foloseşte e-Learning în
învî ţământul superior românesc.
Studiul atrage atenţia asupra faptului că învăţarea pe baza tehnologiei devine o practică
în învăţământul superior. Studiul se bazează pe o anchetă efectuată în rândulstudenţilor unei prestigioase instituţii de învăţământ superior din România, Universitatea
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 29

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 621/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
„Alexandru Ioan Cuza” din Iaşi. Prin aplicarea unor metode statistice corespunzătoare,
s-a încercat identificarea unor posibile diferenţe în rezultatele obţinute pe sexe, medii,
facultăţi, timp petrecut la calculator. Deasemenea, analiza scoate în evidenţă opţiuni
educaţional relevante care pot fi considerate specifice studenţilor din universităţile din
România. Rezultatele cercetării încurajează autorii să extinde studiul şi asupra altor
variabile, identificând şi alte asocieri posibile.
Academia de Studii Economice Bucuresti, Facultatea de Management împreună cu
Universitatea D’Artois din Franţa au reuşit interconectarea prin intermediul unei
platforme e-Learning. Sistemul a fost construit după un model flexibil, atât din punct de
vedere organizatoric, cât si din punctul de vedere al materialelor de instruire, astfel încât
să permită desf ăsurarea de procese de învăţare sincrone sau, după caz, asincron.
Din punctul de vedere al structurii, sistemul de e-Learning asigur ă facilităţi pentru
transferul de cunostinţe prin dezvoltarea şi publicarea de conţinut educaţional sub forma
de cursuri sau biblioteci virtuale şi verificarea şi testarea cunostinţelor folosind simulări
manageriale, scenarii sau studii de caz pentru evaluare.
Specialistii apreciază că piaţa e-Learning este structurată în trei mari sectoare.
- Sectorul academic, care este apreciat ca fiind cel mai mare consumator de produse
e-Learning. În S.U.A., spre exemplu, o statistică recentă a relevat faptul că peste 25%
din populaţie este implicată, în mod direct sau indirect, în primirea sau furnizarea de
servicii specifice unei anumite forme de învăţământ.
-Sectorul corporativ, format din companii si instituţii publice care utilizează e-Learning-
ul în scopul perfecţionării profesionale a personalului propriu. Aceasta este cea mai
dinamică piaţă, caracterizată prin investiţii mari în implementarea de sisteme de
învăţământ la distanţă. Un exemplu sugestiv îl consituie compania General Electric,
care a investit, în anul 2004, peste 500. mil $ pentru activităţi de training on-line.
-Sectorul consumatorilor individuali, care include beneficiarii proceselor de formarecontinuă. În acest sens, în S.U.A. se apreciază că, anual, se derulează peste 200.000
de cursuri de formare continuă, între care ponderea celor derulate folosind mijloace
electronice este în continuă crestere.
În concluzie, specialiştii acestor institute consider că indiferent de specificul pieţei,
investiţiile în perfecţionarea resurselor umane se număr ă printre cele mai importante. În
acest context, un sistem de e-Learning asigur ă o instruire unitar ă, o mai bună
monitorizare a rezultatelor obţinute de cursanţi şi traineri, evaluarea metodelor didactice
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 30
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 622/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
folosite, planificarea resurselor (instructori, săli de curs), economie de timp şi
optimizarea procesului de învăţare organizaţională.
O altă preocupare de profil există la Academia de Studii Economice din Bucuresti –
Facultatea Management. Aceasta se refer ă la operaţionalizarea tehnicilor de e-Learning
în cadrul unui program de master. Cadrele didactice care au iniţiat acţiunea au
organizat un program internaţional de master cu dublă diplomă, în parteneriat cu
Universitatea D’Artois din localitatea Arras, Franţa. Acesta este inclus în oferta
educaţională a celor două instituţii organizatoare pentru anul universitar 2006-2007, sub
numele de “Managementul Întreprinderii si al Teritoriului”(MIT ). Originalitatea şi
caracterul de noutate al acestui program de master este reliefat cel puţin de
următoarele două aspecte:
- procesul de instruire al cursanţilor depăşeşte paradigmele tradiţionale ale
învăţământului clasic, legat de restricţii de timp şi spaţiul de învăţare, prin introducerea
tehnicilor de e-Learning;
- absolvirea masterului urmează a fi certificată prin eliberarea unei duble diplome –
una recunoscută de Ministerul Educaţiei Cercetării şi Inovării din România, iar cea de-a
doua recunoscută de Ministerul Educaţiei Naţionale, de Învăţământ Superior şi de
Cercetare din Franţa.
MIT ofer ă posibilitatea perfecţionării şi acumulării de noi cunostinţe pentru managerii,
specialiştii şi exper ţii din domenii de interes la nivel naţional şi european – mediul de
afaceri, administraţie şi servicii publice de interes general. Un argument suplimentar
care susţine scopul pe care şi-l propune MIT decurge şi din faptul că, în ultimii ani, în
cadrul companiilor naţionale şi în special internaţionale, în procesele de recrutare si
selecţie a personalului tendinţa este aceea de a lua în considerare în mod esenţial,
experienţa profesională şi pregătirea educaţională. Pentru funcţiile de management se
constată din ce în ce mai mult o preferinţă a angajatorilor pentru absolvenţii programelor de master, aceştia din urmă dobândind prin intermediul acestei alternative, competenţe
care îi pot califica pentru poziţii de “top management” în companii performante în ţar ă
sau str ăinătate. Programul MIT este proiectat sub aspect structural şi funcţional într-un
ansamblu interdisciplinar si tehnologic, cu elemente reprezentative ale culturii
organizaţionale ale celor două universităţi organizatoare, urmărind realizarea a două
obiective strategice:
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 31
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 623/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
− dobândirea statutului de promotor al programelor de tip master la nivelul Academiei
de Studii Economice din Bucuresti, în cadrul cărora procesul de instruire al cursanţilor
este asigurat prin platforme de e-Learning;
− deschiderea scolii superioare românesti de învăţământ economic spre mediul
european, prin formarea unor specialisti recunoscuţi în ţările membre UE.
În contextul reformei învăţământului românesc, precum şi în spiritul alinierii la cerinţele
integr ării în Uniunea Europeană, organizatorii acestui program de master au orientat
modul lui de desf ăsurare în direcţia satisfacerii necesităţii de perfecţionare a
specialistilor, managerilor, funcţionarilor publici etc., f ăr ă ca acestia să fie constrânsi ca
spaţiu şi timp de învăţăre. Astfel, aprofundarea unor cunostinţe şi dobândirea altora cu
caracter de noutate de către fiecare cursant, va fi susţinută de ansamblul tehnicilor
specifice platformei e-Learning. Prin particularităţile sale, MIT îi încurajează pe cursanţi
să privească studiul ca pe un proces continuu şi să se perfecţioneze în practica şi
problematica cea mai actuală din sfera economică si cea a administraţiei, pe o
infrastructur ă modernă informatică şi de comunicaţii. În esenţă, platforma e-Learning
care va asigura operaţionalizarea procesului de instruire al cursanţilor este alcătuită sub
aspect structural dintr-o serie de module:
− Biblioteca digital ă, care reuneşte ansamblul suporturilor de curs, pentru fiecare
disciplină inclusă în curricula programului de master. De aici, cursanţii pot consulta în
format electronic, căr ţile de referinţă în domeniul de interes, având şi posibilitatea
“navigării” cu diverse motoare de căutare, pentru a identifica si alte referinţe din
literatura de specialitate;
− Biblioteci de teste de autoevaluare, care sunt structurate pe discipline şi ofer ă
cursantului posibilitatea unei evaluări proprii si obiective. Astfel de teste pot fi regăsite la
sfârsitul fiecărei lecţii parcurse sau după fiecare capitol, fiind diferenţiate după gradul de
dificultate, timpii de r ăspuns etc. Avantajul folosirii acestor tehnici de autoevaluare estelegat în primul rând de factorii psihologici si motivaţionali, cursantul beneficiind de un
mediu “intim” (el şi calculatorul) pentru a-şi testa nivelul cunostinţelor;
− Testele de evaluare, grupate de asemenea, pe discipline, permit realizarea
interacţiunii între profesor si cursant, printr-un proces flexibil care înlătur ă anumite
restricţii clasice aflate în cadrul activităţilor de examinare. Sub aspect func ţional ,
platforma e-Learning implementată în cadrul programului de master ofer ă o multitudine
de funcţii, tratarea lor exhaustivă depăsind însă limitele prezentului articol. Câteva dintrecele mai importante funcţionalităţi se refer ă la:
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 32

7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 624/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
− posibilitatea obţinerii unui set complex de rapoarte, utile atât echipei de management
a programului (evidenţe statistice, centralizări cursanţi, taxe de studiu etc), cât şi fiecărui
cadru didactic, component al corpului profesoral (situaţii individuale referitoare la
evoluţia cursantului în cadrul procesului de instruire, rapoarte care reflectă prin diversi
indicatori, gradul de implicare al cursantului etc);
− existenţa forumului electronic, axat pe tratarea unor subiecte de interes general, la
nivelul unei grupe de cursanţi, sau a unor discuţii orientate profesor-cursant, sau
cursant-cursant (prin moduri de lucru de tip sincron sau asincron).
Instruirea masteranzilor în sistem e-Learning nu exclude întâlnirile “face to face”, dintre
cursant si tutor. Astfel, în cadrul programului MIT, pentru fiecare disciplină din curicula
universitar ă sunt prevăzute activităţi tutoriale, destinate dezbaterii unor probleme pe
marginea materialelor parcurse de către cursanţi şi, de asemenea, ateliere de lucru de
tip “work shop” cu o puternică tentă aplicativă, unde pot fi discutate cazuri reale din
domeniile de specialitate ale masterului. O sumar ă analiză comparativă între modul
tradiţional de instruire şi cel interactiv, bazat pe tehnologie informatică evidenţiază o
serie de elemente care au ca scop promovarea învăţământului modern bazat pe e-
Learning şi crearea în constiinţa potenţialilor cursanţi a ideii de pregătire şi
perfecţionare, f ăr ă constrângeri legate de spaţiu şi timp. Folosirea e-Learning-ului
pentru instruire, formare şi dezvoltare a diverselor abilităţi profesionale este marcată de
câteva dimensiuni fundamentale:
− Eficient ă. Majoritatea cursanţilor nu au timpul necesar şi nici motivarea respectivă
pentru a se forma ca autodidacţi. Studiul individual după cursuri tipărite distrage, de
multe ori, atenţia cititorului şi nu focalizează suficient de bine concentrarea spre scopul
final al instruirii. Cu siguranţă, e-Learning-ul va funcţiona mult mai eficient decât simpla
citire a unui manual.
− Economie. Odată cu creşterea numărului de cursanţi, devine din ce în ce mai eficientsă se implementeze un sistem de e-Learning decât să se folosească instruirea clasică.
Conform „Training Magazine”, cheltuielile se reduc cu 50% - 70% prin înlocuirea
instruirilor bazate exclusiv pe prezenţa profesorului, cu soluţii e-Learning.
− Caracter practic . În multe cazuri, persoanele care doresc să se instruiască printr-un
program de pregătire sunt dispersate pe arii geografice întinse. A trimite această
mulţime de cursanţi la un centru unic de instruire, pentru cursuri ce se desf şăoar ă într-o
sală obişnuită este la fel de nepractică şi ineficientă ca şi trimiterea unui profesor spre
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 33
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 625/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
toate aceste orase, într-un „circuit academic”. Şi aici, e-Learning-ul poate fi util, prin
reducerea atât a costurilor, cât şi timpilor de deplasare.
− Standardizare. În mod firesc, modul de învăţare şi de comportament al cursanţilor
este diferit şi ca urmare, nivelul de cunostinţe asimilate pe parcursul instruirii clasice
este extrem de eterogen. Sistemul e-Learning standardizează nivelul de informaţii
transmise cursantului si ofer ă tehnici prin care cantitatea de cunostinţe asimilate este
evaluată obiectiv.
− Performanţă mare de înv ăţ are. S-a demonstrat faptul că instruirea asistată de
calculator este mai puţin intimidantă pentru cursant decât metodele clasice. Grijile si
stresul de a nu face greseli în faţa colegilor şi a profesorului sunt eliminate. Simulările
pentru folosirea diverselor aplicaţii ofer ă cursantului posibilitatea de a exersa, f ăra riscul
distrugerii sistemului si f ăra teama de a nu greşi – ceea ce, în situaţiă clasică, ar
conduce la rezultate negative. Prin e-Learning cursanţii pot învăţa independent si în
propriul lor ritm, ceea ce conduce la o crestere a factorului de reţinere a cunostinţelor cu
până la 50%, faţă de instruirile conduse de profesor.
− Flexibilitate. Deoarece e-Learning-ul este disponibil utilizatorului final oricând doreste
acesta şi practic de oriunde, atâta timp cât există o conexiune la Internet, profesorii au
acum la îndemână un mijloc modern şi flexibil pentru transmiterea efectivă şi în timp
real a informaţiilor către cursanţi. e-Learning-ul ajută la atingerea obiectivelor
educaţionale într-un interval de timp mai scurt decăt instruirile clasice, reducând timpul
în care cursantul parcurge materialele de studiu.
În anul 2006, Ministerul Administraţiei şi Internelor şi Inspectoratul General al Poliţiei
Române au inaugurat o platform informatică intitulată “Sistemul Informatic e-Learning”.
Noul sistem informatic este destinat perfecţionări asistate de calculator a personalului.
În faza iniţialã, 10.000 de poliţişti vor beneficia de avantajele tehnologiei în procesul de
instruire. Valoarea investiţiei se ridicã, pânã în prezent, la aproximativ 900.000 euro,dintre care 50.000 Euro reprezintã costurile platformei de e-Learning, ale serverelor de
suport, ale celor 2 cursuri interactive, precum şi a training-ului şi suportului tehnic pentru
platformã. Aceste componente ale proiectului au fost realizate de S.C. SIVECO
Romania SA. De asemenea, la cele 41 de inspectorate judeţene de poliţie, cele trei
instituţii de învãþãmânt ale Poliţiei, Direcţia Generalã de Poliţie a Municipiului Bucureşti
şi Inspectoratul General al Poliţiei Române au fost create laboratoare de învaţãmânt,
dotate cu câte 9 calculatoare fiecare, imprimantă, precum şi proiector cu tablãinteligentã. Poliţia Românã este prima dintre instituţiile similare din regiune care a
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 34
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 626/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIULSISTEMELOR DE ACŢIONARE HIDRAULICE ŞI PNEUMATICE
Contractul de finanţare nr. 12104, Etapa 2
introdus sistemul informatic de pregãtire a personalului şi, totodatã, printre puţinele
structuri din Europa care folosesc platforme de acest tip. Avantajele folosirii unei soluţii
de instruire asistatã de calculator, complementarã instruirii clasice, sunt:
- posibilitatea de instruire acceleratã a unui numãr mare de poliţişti. Poliţia Românã se
aflã în proces de suplimentare a personalului, în conformitate cu recomandãrile Uniunii
Europene;
- completarea instruirii clasice cu instruire prin calculator, la distanţã, asigurã o pregãtire
de calitate şi în timp scurt. Accesul la informaþie prin e-Learning este foarte rapid şi
este posibil de accesat de mase mari de personal;
- în plus, dupã finalizarea instruirii, poliţiştii pot reveni asupra aspectelor studiate, în
funcţie de necesităţi.
- prin e-Learning, cursantul are şi posibilitatea de a studia de la distanţã, în ritmul
propriu, folosirea acestui sistem pentru instruire determinând atingerea rapidã a
obiectivelor operaţionale şi scãderea timpilor neproductivi.
- e-Learning-ul permite reducerea deplasărilor asociate instruirii, generând şi avantaje
economice.
UPB – CENTRUL DE CERCET ĂRI ENERGETICE ŞI DE PROTECŢIA MEDIULUILaboratorul de Acţionări Hidraulice şi Pneumatice
I – 35
7/22/2019 Etapa2ITFPS Curs Hidraulica
http://slidepdf.com/reader/full/etapa2itfps-curs-hidraulica 627/627
SISTEM INFORMATIC DE INSTRUIRE INTERACTIV Ă ÎN DOMENIUL