dinamica rigidului
TRANSCRIPT
5/12/2018 DINAMICA RIGIDULUI - slidepdf.com
http://slidepdf.com/reader/full/dinamica-rigidului-55a4d1b9b1652 1/12
12. Dinamica rigidului
127
12. DINAMICA RIGIDULUI
12.1. Dinamica rigidului cu axă fixă
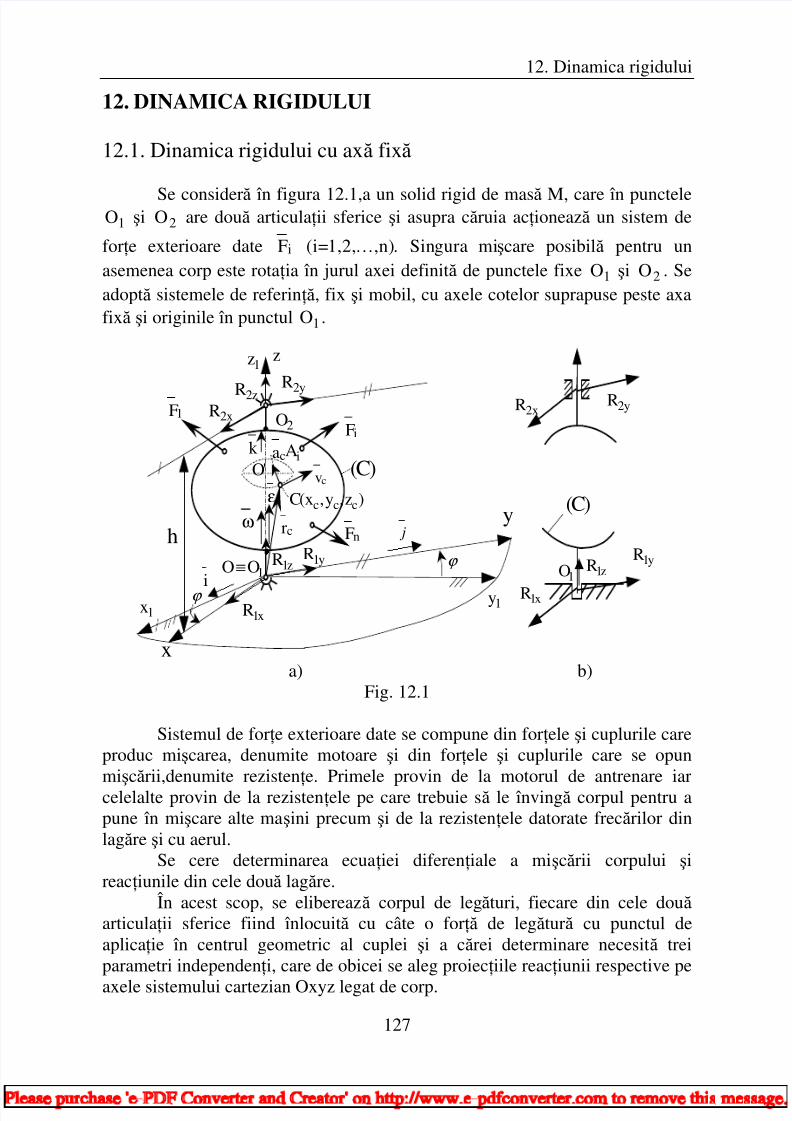
Se consideră în figura 12.1,a un solid rigid de masă M, care în punctele1O şi 2O are două articulaii sferice şi asupra căruia acionează un sistem de
fore exterioare date iF (i=1,2,…,n). Singura mişcare posibilă pentru unasemenea corp este rotaia în jurul axei definită de punctele fixe 1O şi 2O . Seadoptă sistemele de referină, fix şi mobil, cu axele cotelor suprapuse peste axafixă şi originile în punctul 1O .
a) b)Fig. 12.1
Sistemul de fore exterioare date se compune din forele şi cuplurile careproduc mişcarea, denumite motoare şi din forele şi cuplurile care se opun
mişcării,denumite rezistene. Primele provin de la motorul de antrenare iarcelelalte provin de la rezistenele pe care trebuie să le învingă corpul pentru apune în mişcare alte maşini precum şi de la rezistenele datorate frecărilor dinlagăre şi cu aerul.
Se cere determinarea ecuaiei difereniale a mişcării corpului şireaciunile din cele două lagăre.
În acest scop, se eliberează corpul de legături, fiecare din cele două articulaii sferice fiind înlocuită cu câte o foră de legătură cu punctul deaplicaie în centrul geometric al cuplei şi a cărei determinare necesită treiparametri independeni, care de obicei se aleg proieciile reaciunii respective pe
axele sistemului cartezian Oxyz legat de corp.
2xR y2R
(C)
z1R1O
x1R
y1R
z1z
2O
x
1x
y
1yϕ
1OO≡
h
y2R
z2Rx2R
iAiF
cv )z,y,x(C ccc
(C)
nF
z1R
crω
x1R
ϕ
j
i
k
y1R
'Oca
ε
1F
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/12/2018 DINAMICA RIGIDULUI - slidepdf.com
http://slidepdf.com/reader/full/dinamica-rigidului-55a4d1b9b1652 2/12
Dinamica
128
Se fac notaiile:
kR jRiRFR zyx
n
1ii ++=≡∑
=
- vectorul rezultant al forelor exterioare date;
kM jMiMFOAM zyx
n
1iiiO ++=×≡∑= - vectorul moment rezultant al forelor
exterioare date faă de punctul 1OO ≡ ;
kR jRiRR 1z1y1xl1 ++= - reaciunea din lagărul 1O ;
kR jRiRR 2z2y2xl2 ++= - reaciunea din lagărul 2O ;
jhRihRROOM 2x2yl22lO +−=×≡ - vectorul moment rezultant al
reaciunilor faă de O, h fiind distana dintre centrele celor două lagăre;
cx , cy , cz - coordonatele centrului de masă al corpului în sistemul de referină
Oxyz;.Se aplică teorema mişcării centrului de masă şi teorema momentului
cinetic în raport cu punctul fix O.
l2l1C RRRaM ++= (12.1)
lOOO MMK +=& (12.2)
unde:
( ) ( ) ( ) jyωxεixωyεrωωrεa C2
CC2
CCC −+−−=××+×=
=×+∂
∂= O
OO Kω
t
KK&
= ( ) ( )=+−−×++−−∂
∂kωJ jωJiωJkωkωJ jωJiωJ
t zzyzxzzyzx
= ) ) kJ jωJεJiωJεJ z2
zxzy2
zyzx ε+−−++−
Proiectând cele două ecuaii vectoriale (12.1) şi (12.2) pe axelesistemului cartezian de referină Oxyz obinem un sistem de 6 ecuaii scalare cu
7 necunoscute (proieciile reaciunilor şi unghiul ϕ care defineşte legea demişcare a rigidului ):
2x1xxC2
C RRRxωMyM ++=−ε− (12.3)
2y1yyC2
C RRRyωMxM ++=−ε (12.4)
2z1zz RRR0 ++= (12.5)
2yx2
zyzx RhMωJεJ −=+− (12.6)
2xy2zxzy RhMωJεJ +=−− (12.7)
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/12/2018 DINAMICA RIGIDULUI - slidepdf.com
http://slidepdf.com/reader/full/dinamica-rigidului-55a4d1b9b1652 3/12
12. Dinamica rigidului
129
zz MεJ = (12.8)
Ultima ecuaie scrisă sub forma:
0
J
M
z
z =−ϕ&& (12.9)
reprezintă ecuaia diferenială a mişcării de rotaie . Integrând această ecuaie şideterminând constantele de integrare cu ajutorul condiiilor iniiale ale mişcării,
00 ω ; 0;t =ϕϕ=ϕ= & ,
se obine legea mişcării de rotaie a solidului rigid,
( )00 ,ωt, ϕϕ=ϕ (12.10)
Rezolvând primele cinci ecuaii ale sistemului se obin componentele
scalare ale reaciunilor:
2C
zxC
zyx
y1x ωxM
h
JεyM
h
JR
h
MR
−+
−+−= (12.11)
2C
zyC
zxy
x1y ωMy
h
JεMx
h
JR
h
MR
−+
−−−−= (12.12)
2zxzyy2x ω
h
J-ε
h
J
h
MR −−= (12.13)
2zyzxx2y ω
h
J-ε
h
J
h
MR += (12.14)
z2z1z RRR −=+ (12.15)
Pentru a elimina nedeterminarea se adoptă o nouă soluie constructivă constând din înlocuirea articulaiei sferice 2O cu o articulaie cilindrică (fig.12.1,b). În acest caz:
0R ;RR 2zz1z =−= (12.16)
Modulele reaciunilor vor fi în acest caz:
22y
22xl2
21z
21y
21xl1 RRR ;RRRR +=++= (12.17)
Problema reaciunilor în funcionarea maşinilor având piese în mişcarede rotaie este deosebit de importantă datorită influenei pe care o au asuprauzurii lagărelor ca urmare a frecării. Se urmăreşte ca valorile acestor reaciunisă fie cât mai mici posibil, adică egale cu valoarea lor în starea de repaus.
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/12/2018 DINAMICA RIGIDULUI - slidepdf.com
http://slidepdf.com/reader/full/dinamica-rigidului-55a4d1b9b1652 4/12
Dinamica
130
Valorile statice ale reaciunilor se obin din relaiile 12.11-12.14, facând0=ω şi 0=ε :
zS1zy
xS1yx
yS1x RR ;R
h
MR ;R
h
MR −=−−=−= (12.18)
0R ;h
MR ;
h
MR S
2zxS
2yyS
2x ==−= (12.19)
În timpul mişcării de rotaie a rigidului în lagăre apar aşa numitelecomponente dinamice ale reaciunilor, care au expresiile:
=
−+
−−=
−+
−=
0R
ωMyh
JεMxh
JR
ωMxh
JεMy
h
JR
D1z
2C
zyC
zxD1y
2C
zxC
zyD1x
;
=
−=
−−=
0R
ωh
Jεh
JR
ωh
Jε
h
JR
D2z
2zyzxD2y
2zxyzD2x
(12.20)
Un solid rigid aflat în mişcarea de rotaie în jurul unui ax fix la carecomponentele dinamice ale reaciunilor din articulaii sunt nule se spune că esteechilibrat dinamic.
Egalând cu zero componentele dinamice ale reaciunilor se obin două sisteme de ecuaii liniare şi omogene în necunoscutele ε şi 2ω . Condiiile casistemele respective să admită şi alte soluii şi afară de cele banale, care nuconvin, sunt:
0Mxh
JMy
h
J
Myh
JMx
h
J
Mxh
JMy
h
J2
czx
2
czy
czy
czx
czx
czy
=
−+
−=
−
−−
−−
(12.21)
0h
JJ
h
J
h
Jh
J
h
J2zx
2yz
zyzx
zxzy
=+
=
−
−−(12.22)
Aceste condiii sunt îndeplinite dacă:
0yx0;JJ CCzyzx ==== , (12.23)
adică dacă axa de rotaie este axă principală centrală de inerie.
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/12/2018 DINAMICA RIGIDULUI - slidepdf.com
http://slidepdf.com/reader/full/dinamica-rigidului-55a4d1b9b1652 5/12
12. Dinamica rigidului
131
Aşadar condiia ca un rigid în mişcare de rotaie să fie echilibrat dinamiceste ca axa de rotaie să fie axă principală centrală de inerie. Dacă numai
0yx CC == corpul este echilibrat static.
12.2. Dinamica mişcării planeSe consideră în figura 12.2 o placă plană (Pm) de masă M aflată în
mişcare într-un plan fix sub aciunea unui sistem de fore exterioare iF ,coplanare cu placa, aplicate în punctele iA ( ),n,2,1i …= .
Fig. 12.2
Pentru studiul mişcării se alege, ca în figura 12.2, un sistem de referin ă fix, 1111 zyxO , şi un altul mobil legat de placă, Cxyz , C fiind centru de masă al
plăcii, cu planele 111 yxO şi Cxy suprapuse.Fiind date condiiile iniiale ale mişcării:
001C1C
01C1C0
01C1C
01C1C ω;yy;xx;;yy;xx0;t =ϕ==ϕ=ϕ=== &&&&&
(12.24)se cere determinarea ecuaiilor de mişcare ale plăcii:
( )txx 1C1C = ; ( )tyy 1C1C = ; ( )tϕ=ϕ (12.25)
Aplicând teorema mişcării centrului de masă şi teorema momentuluicinetic în raport cu axa Cz, normală în centrul de masă pe planul mişcării, seobin ecuaiile difereniale ale mişcări plăcii:
( )∑∑∑===
−=ϕ==n
1i
ixiiyiz
n
1i
iy1C
n
1i
ix1C FyFxJ;FyM;FxM11
&&&&&& (12.26)
1 z
1x
1y
z
y
x
1k1O
1 j1kk =
1cr
1i
1F
i iF
( mP )
nF
j
iA
C
ca cv
1cy
1cx
ϕ
εω
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/12/2018 DINAMICA RIGIDULUI - slidepdf.com
http://slidepdf.com/reader/full/dinamica-rigidului-55a4d1b9b1652 6/12
Dinamica
132
S-au f ăcut notaiile: M-masa plăcii; zJ -momentul de inerie al plăcii în
raport cu axa Cz; 1C1C y,x -coordonatele punctului C în planul 111 y xO ; ϕ -
unghiul de rotaie dintre axa Cx şi 11 xO ;11 iyix F,F - proieciile forei iF pe axele
sistemului111
yxO ;iyix
F,F - proieciile for
ei
iF pe axele sistemului Cxy,
ii y,x -coordonatele punctului iA în planul Cxy.Prin integrarea ecuaiilor difereniale (12.26), luând în considerare
condiiile iniiale ale mişcări se obin legile de mişcare (12.25).În cazul în care placa este supusă la legături în ecuaiile (12.26) se
introduc şi reaciunile corespunzătoare ce se constituie în elemente necunoscute.Pentru a completa numărul de ecuaii la sistemul (12.26) se mai adaugă restriciile geometrice impuse de legături (ecuaiile legăturilor).
12.3. Dinamica rigidului cu punct fix
12.3.1. Ecuaiile dinamice ale lui Euler
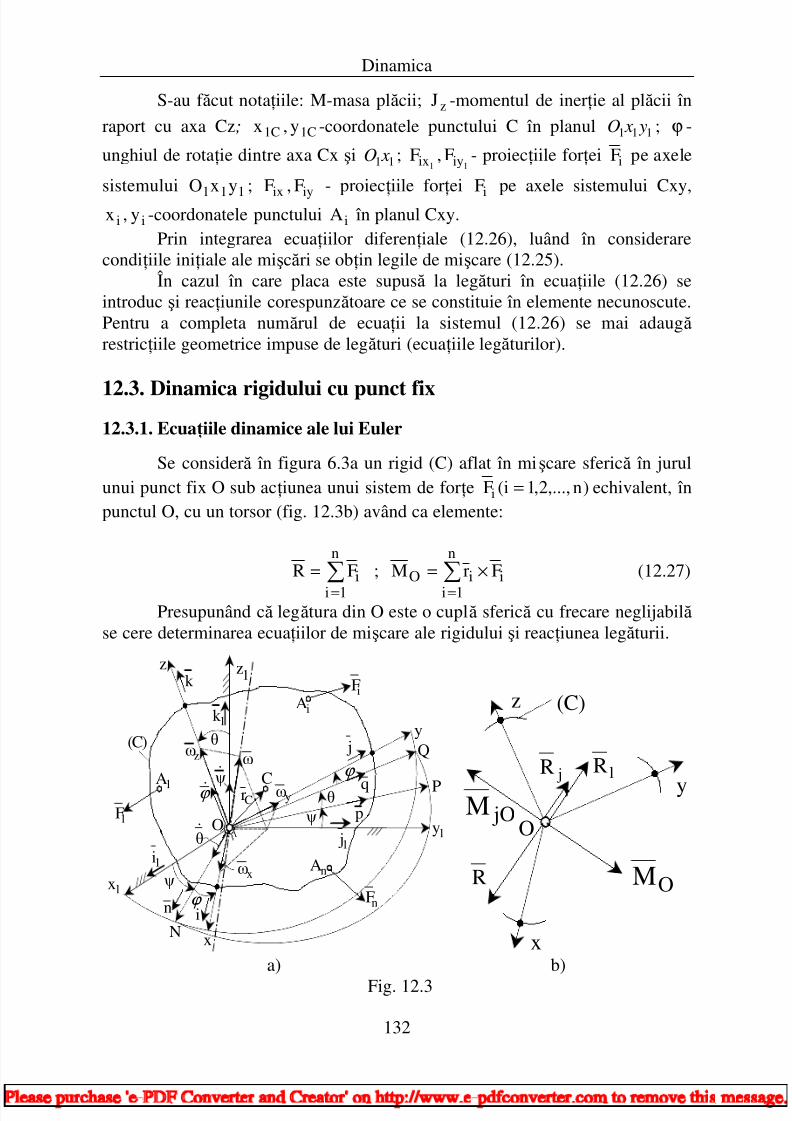
Se consideră în figura 6.3a un rigid (C) aflat în mişcare sferică în jurulunui punct fix O sub aciunea unui sistem de fore )n,...,2,1i(Fi = echivalent, înpunctul O, cu un torsor (fig. 12.3b) având ca elemente:
∑∑==
×==n
1iiiO
n
1ii FrM ; FR (12.27)
Presupunând că legătura din O este o cuplă sferică cu frecare neglijabilă se cere determinarea ecuaiilor de mişcare ale rigidului şi reaciunea legăturii.
a) b)Fig. 12.3
iϕ
θ
O
ψ
ϕ
θ
ψ
qp
Cψ&
θ&
ϕ & Cr
zω
yω
xω
ω
n nF
1F
iF
1A
nA
iA
(C)
N x
y
z
Q
P
j
k
1k
1 j1i
1x
1y
1z
R
(C)
jR
OM
lR
jOM
z
y
x
O
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.

5/12/2018 DINAMICA RIGIDULUI - slidepdf.com
http://slidepdf.com/reader/full/dinamica-rigidului-55a4d1b9b1652 7/12
12. Dinamica rigidului
133
Pentru rezolvarea problemei utilizăm teorema de mişcare a centrului demasă şi teorema de variaie a momentului cinetic în raport cu punctul fix O:
=
+=
OO
lC
MK
RRaM&
(12.28)
care puse sub forma:
=
−−=
OO
Cl
MK
aMRR&
(12.29)
şi proiectate pe axele reperului mobil conduc la:
+−++−+−=
−++−++−=
++−++−+−=
])zωω()yεωω()xεωω[(MRR
])zεωω()yωω()xεωω[(MRR
])zεωω()yεωω()xωω([MRR
C2x
2ycxyzCyxzzlz
Cxzyc2z
2xCzxyyly
CyzxczyxC2y
2zxlx
(12.30)
=−+
=−+
=−+
zyxxyzz
yxzzxyy
xzyyzxx
Mω)ωJ(JεJ
Mω)ωJ(JεJ
Mω)ωJ(JεJ
(12.31)
S-a considerat ca sistemul de referină Oxyz, legat de corpul rigid, estesistem principal de inerie.
În capitolul 14 se va arăta că vectorul CaM− este vectorul rezultant alforelor de inerie jR .
Ecuaiile (12.31) se numesc ecuaiile difereniale ale mişcării rigiduluicu punct fix sau ecua iile dinamice ale lui Euler . Cu ajutorul lor se rezolvă celedoua probleme fundamentale:
a) Se dau momentele axiale:
ϕϕ=
ϕϕ=
ϕϕ=
),θ,ψ,θ,ψ,(t,MM
),θ,ψ,θ,ψ,(t,MM
),θ,ψ,θ,ψ,(t,MM
zzyy
xx
&&&
&&&
&&&
(12.32)
şi condiiile iniiale ale mişcării:
000
000
θθ;;ψψ
θθ;;ψψ 0t
&&&&&& =ϕ=ϕ=
=ϕ=ϕ== (12.33)
Se cer ecuaiile de mişcare:
(t)θ(t);θψ(t);ψ ϕ=ϕ== (12.34)
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/12/2018 DINAMICA RIGIDULUI - slidepdf.com
http://slidepdf.com/reader/full/dinamica-rigidului-55a4d1b9b1652 8/12
Dinamica
134
Viteza unghiulară ω poate fi exprimată în două moduri:
kω jωiωω zyx ++= ; knθkψθψω 1 ⋅ϕ+⋅+⋅=ϕ++= &&&&&& (12.35)
Formula a doua (12.35) care exprimă faptul că viteza unghiulară arigidului este egală cu suma dintre viteza unghiulară de precesie, nutaie şi derotaie proprie a fost obinută pe baza compunerii rotaiilor concurente:
32211030 ωωωω ++= ; ϕ==== &&&32211030 ω ;θω ;ψω ;ωω (12.36)
Egalând cele două expresii (12.35) şi înmulindu-le succesiv cu versoriik, j,i obinem proieciile vitezei unghiulare pe axele mobile (a se vedea şi
relaia (8.141):
ϕ+=
ϕ−ϕ=ϕ+ϕ=
&&
&&
&
&
cosθψω
sinθcossinθψωcosθsinsinθψω
z
y
x(12.37)
Proieciile acceleraiei unghiulare ε pe axele mobile rezultă dinderivarea relaiilor (12.37) în raport cu timpul (a se vedea şi relaia (8.144):
−ϕ+=ϕϕ−ϕϕ−ϕ+ϕ−ϕ=
ϕϕ+ϕϕ−ϕ+ϕ+ϕ=
sinθθψcosθψεsinsinθψcosθcoscosθθψsinθcossinθψε
cossinθψsinθsincosθθψcosθsinsinθψε
zy
x
&&&&&&&&&
&&
&
&&
&&
&&&&&&&&&&
(12.38)
Înlocuind (12.32),(12.37) şi (12.38) în (12.31) se obin 3 ecuaiidifereniale de forma:
=ϕϕϕ
=ϕϕϕ
=ϕϕϕ
0),θ,ψ,,θ,ψ,θ,ψ,(t,f
0),θ,ψ,,θ,ψ,θ,ψ,(t,f
0),θ,ψ,,θ,ψ,θ,ψ,(t,f
3
2
1
&&&&&&&&&
&&&&&&&&&
&&&&&&&&&
(12.39)
Prin integrarea sistemului (12.39), inând seama de condiiile iniiale (12.33),rezultă ecuaiile de mişcare:
(t) ;θ(t)θ ;ψ(t)ψ ϕ=ϕ== (12.40)
Sistemul (12.31) nu a fost integrat analitic decât în trei cazuri particulare:
1) Cazul Euler-Poinsot care presupune 0MMM zyx === ,
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/12/2018 DINAMICA RIGIDULUI - slidepdf.com
http://slidepdf.com/reader/full/dinamica-rigidului-55a4d1b9b1652 9/12
12. Dinamica rigidului
135
2) Cazul Lagrange-Poisson în care se consideră yxCC JJ;0yx === ,
3) Cazul Sofia Kovalevskaia în care zyxC J2JJ;0z === .
b) Se dau ecuaiile de mişcare de forma (12.40) şi se cer:;)M,M,(MM zyxO ).R,R,(RR lzlylxl
Problema se rezolvă cu relaiile (12.30) şi (12.31), în care se introducexpresiile (12.37) şi (12.38).
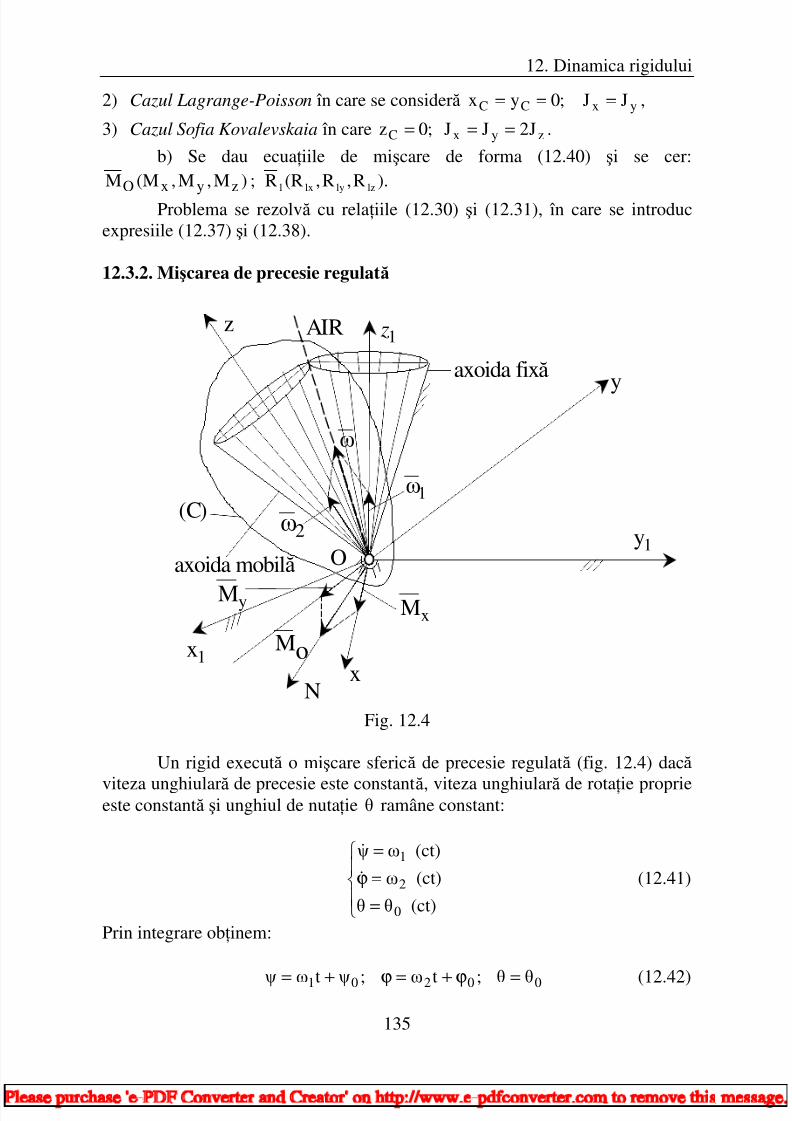
12.3.2. Mişcarea de precesie regulată
Fig. 12.4
Un rigid execută o mişcare sferică de precesie regulată (fig. 12.4) dacă
viteza unghiulară de precesie este constantă, viteza unghiulară de rotaie proprieeste constantă şi unghiul de nutaie θ ramâne constant:
=
=ϕ
=
(ct) θθ
(ct) ω
(ct) ωψ
0
2
1
&
&
(12.41)
Prin integrare obinem:
00201 θθ;tω;ψtωψ =ϕ+=ϕ+= (12.42)
axoida mobilă
yMxM
AIR
2ω
1ω
O
ω
(C)
Nx
y
z
1x
1y
1 z
axoida fixă
oM
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/12/2018 DINAMICA RIGIDULUI - slidepdf.com
http://slidepdf.com/reader/full/dinamica-rigidului-55a4d1b9b1652 10/12
Dinamica
136
Se urmăreşte determinarea momentului OM al forelor ce trebuie
aplicate rigidului astfel încât să execute o mişcare sferică având legile demişcare (12.42). Utilizând relaiile (12.37) şi (12.38) obinem:
+=
ϕ⋅=ϕ⋅=
21z
1y1x
ωcosθωω
cossinθωωsinsinθωω
;
=
ϕ⋅−=ϕ⋅=
0ε
sinsinθωωεcossinθωωε
z
21y21x
(12.43)
Înlocuind (12.43) în (12.31) rezultă:
ϕ⋅ϕ⋅−=
ϕ⋅+−+−=
ϕ⋅+−+=
cossinθsinω)J(JM
sinθsinω)]ωθcosω)(J(Jω[JM
cosθsinω)]ωθcosω)(J(Jω[JM
221xyz
121xz2yy
121yz2xx
(12.44)
Considerând ca xy JJ = , relaiile (12.44) se pot pune sub forma:
=
ϕ⋅⋅
−+−=
ϕ⋅⋅
−+=
0M
sinθsinωωθcosω
ω)J(JJM
cosθsinωωθcosω
ω)J(JJM
z
21
2
1xzzy
212
1xzzx
(12.45)
Relaiile (12.45) arată că vectorul OM este dirijat după axa nodurilor. Într-
adevăr:
ϕ=−
tgM
M
x
y(12.46)
Vectorul OM poate fi exprimat prin produsul vectorial:
,ωωθcosω
ω)J(JJM 21
2
1xzzO ×⋅
−+= (12.47)
modulul lui fiind
θsinωωθcos
ω
ω)J(JJM 21
2
1xzzO ⋅⋅⋅
−+= (12.48)
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/12/2018 DINAMICA RIGIDULUI - slidepdf.com
http://slidepdf.com/reader/full/dinamica-rigidului-55a4d1b9b1652 11/12
12. Dinamica rigidului
137
Dacă 12 ωω >> , atunci momentul rezultant poate fi aproximat cu:
21zO ωωJM ×= ; θsinωωJM 21zO ⋅⋅= (12.49)
Aşadar, pentru a avea o mişcare de precesie regulată a unui rigid derevoluie care se roteşte în jurul unui punct fix de pe axa de revoluie, estenecesar ca momentul rezultant al forelor ce acionează asupra rigidului să fie
plasat pe axa nodurilor, având expresia (12.48) sau (12.49) atunci când .02
1 ≅ω
ω
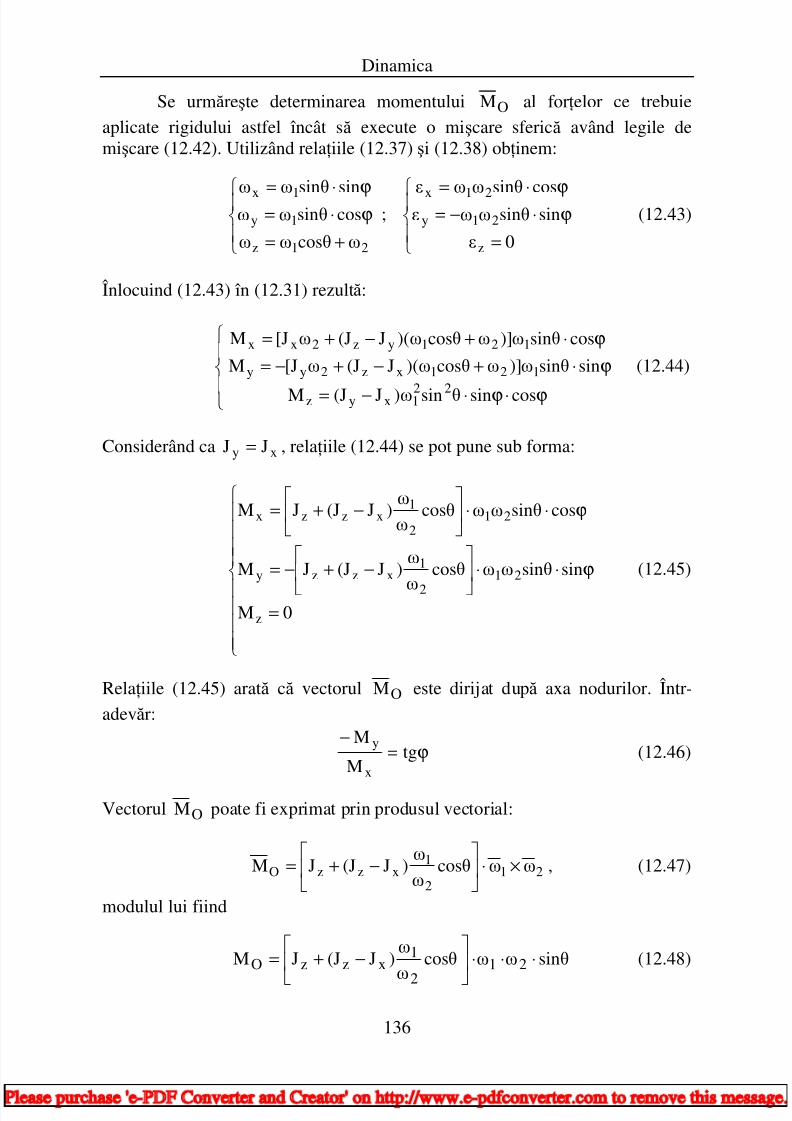
12.3.2. Giroscopul
Giroscopul este un rigid cu un punct fix O al cărui elipsoid de inerie
corespunzător acestui punct este de rotaie faă de axa mobilă Oz, solidară curigidul ( y x J J = ) în jurul careia are o mişcare relativă de rotaie cu viteza
unghiulară 2ω foarte mare şi asupra căruia acionează numai greutatea proprie
G (fig. 6.5). Adesea centrul de greutate corespunde cu punctul fix.
Fig. 6.5Se observă că:
( ) θsinhGnkGkhGOCM 1O =−×=×= (12.50)
0MO
h
ϕ
θ
ψ
G
C
iϕ
θ
ψ
n
Nx
y
z
j
k
1x
1y
1 z
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.
5/12/2018 DINAMICA RIGIDULUI - slidepdf.com
http://slidepdf.com/reader/full/dinamica-rigidului-55a4d1b9b1652 12/12
Dinamica
138
θsinhGMO = (12.51)
Prin urmare momentul OM acionează după axa nodurilor şi respectă
condiia de precesie regulată.
Notând cuO jO KM &−= (12.52)
teorema de variaie a momentului cinetic poate fi scrisă sub forma:
0MM jOO =+ (12.53)
Vectorul jOM se numeşte momentul rezultant al forelor de inerie, iar
ecuaia (12.53) ecuaie de echilibru cineto-static (a se vedea capitolul 14).Vectorul 0 jg MM = se numeşte moment giroscopic şi este momentul cu
care giroscopul acionează prin legăturile sale asupra sistemului în care estemontat. Luând în considerare (12.49) rezultă
12z21zg ωωJωωJM ×=×−= (12.54)
sinθωωJM 12zg = (12.55)
Egalând (12.55) cu (12.51) rezultă
2z1
ωJ
hGω
⋅
⋅= (12.56)
Viteza unghiulară de precesie 1ω este cu atât mai mică cu cât viteza
unghiulară de rotaie proprie 2ω este mai mare şi cu cât centrul de greutate algiroscopului va fi mai apropiat de punctul O. În realitate frecările din lagăre
conduc la micşorarea vitezei unghiulare 2ω şi creşterea vitezei unghiulare 1ω .Dintre aplicaiile tehnice ale giroscopului se pot enumera: restabilizator
în cazul trenurilor monorai; combaterea tangajului şi ruliului în navigaie;meninerea direciei avioanelor şi rachetelor. În calculul şi proiectarea arborilorturbinelor, momentul giroscopic are o pondere apreciabilă.
Please purchase 'e-PDF Converter and Creator' on http://www.e-pdfconverter.com to remove this message.