curs_an4_iei_roboti
TRANSCRIPT

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 1/165
1
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuple cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Robotul?
APLICAŢIILE INDUSTRIALE ALE ROBOŢILOR
1. ROBOŢI INDUSTRIALI - COMPENDIUASPECTE GENERALE
Locul roboţilor în sistemele de producţie
C ONT R OL UL
P RE L U C RĂ RI I
A U T O M A T I Z A R E
A
F A B R I C
A Ţ I E I
Fig. 4.1.1
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 2/165
2
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuple cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Robotul?
Ce este un robot industrial?
Este unanim acceptat să denumirea “ROBOT” a fost utilizată pentru prima dată în
1920 în piesa de teatru a dramaturgului ceh Karel Capek. Este vorba de R.U.R.(Rossum’s Universal Robots – Roboţii Universali a lui Rossum), în care micicreaturi antropomorfice realizate în mod artificial lucrează pentru Stăpânul lor.Capek a fist un vizionar, la fel ca Jules Verne, care a deschis o cutie cu minuni pecare inginerii azi încearcă tot mai mult să o umple.
Ca un potenţial r ăspuns la întrebarea iniţială sunt considerate următoarele definiţii:“O maşină aparent independentă de operatorul uman, inteligentă şi ascultătoare,dar impersonală.”
Concise Oxford Dictionary
“Un sistem automat ce lucrează după un program de lucru stabilit saureacţionează la stimuli externi specifici, dând impresia unor acţiuni umane.”Dicţionarul Explicativ al Limbii Române
“Un manipulator multifuncţional programabil orientat spre transportul de material,piese, scule sau sisteme specializate cu o varietate de mişcări programabile cu
scopul de a realiza sarcini variate.”Institutul American de Robotică – RIA
Toţi autorii sunt de acord în a situa debutul roboticii în 1954 prin înregistrarea decătre G. Devol a unor brevetede invenţie asupra “transferului programat dearticole” şi apoi prin întâlnirea sa cu J. Engelberger cu care a fondat societatea“Unimation” care în 1961 a implementat primul robot “Unimate”.
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 3/165
3
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuplele cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Robotul?
Elementele definitorii ale unui robot
1.Structura mecanică formată din braţe, articulaţii şi efector final, împreună seconstituie ca un tot unitar ce acţionează pe baza unor interdependenţe şi
interconexiuni ce definesc forma spaţiului operaţional şi modul de clasificare aroboţilor. Comportamentul structurii mecanice poate fi evidenţiat prin modelarematematică.
2.Tipul efectorului final (cleşte sau orice altă sculă) defineşte tipul sarcinilor pecare robotul le poate executa.
3.Tipul transmisiilor leagă elementele de acţionare de structura mecanică şidefinesc capacitatea robotului de a realiza anumite mişcări în condiţii controlate.Sub formă de fire, benzi, curele dinţate sau angrenaje transmisiile influenţează mişcările din fiecare articulaţie şi definesc drumul de parcurs şi comportamentul
dinamic al robotului.
4.Sistemul de senzori determină “adaptabilitatea” robotului la modificările ce apar în spaţiul de lucru. Aceştia pot lua forma unor dispozitive tactile, electrice sauoptice care sunt folosite pentru a obţine date asupra poziţiei articulaţiilor şi asupraobiectelor aflate în spaţiul operaţional al robotului.
5.Blocul de procesare a datelor recepţionate de la senzori determină tipul decontrol al robotului şi este caracterizat de către echipamentul de comandă numericutilizat, limbajul de programare şi restricţiile impuse pentru funcţionarea robotului.Sistemul de control determină capacitatea de programare şi “abilitatea” unui robotde a r ăspunde la diverse sarcini operaţionale sau legate de mediul de lucru,utilizarea parametrilor şi a subprogramelor.
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 4/165
4
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuple cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Antropomorfism
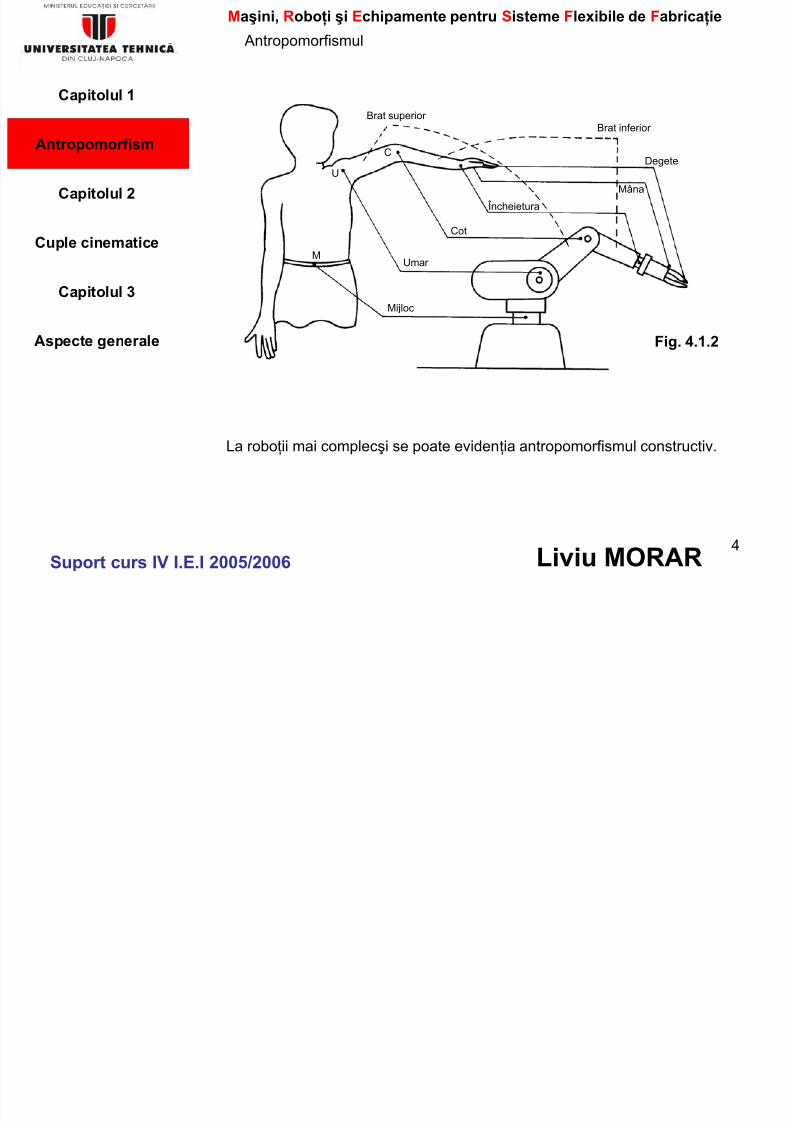
Antropomorfismul
Mijloc
Umar
Brat superior Brat inferior
Încheietura
Cot
Mâna
Degete
M
U
C
Fig. 4.1.2
La roboţii mai complecşi se poate evidenţia antropomorfismul constructiv.
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 5/165
5
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuple cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
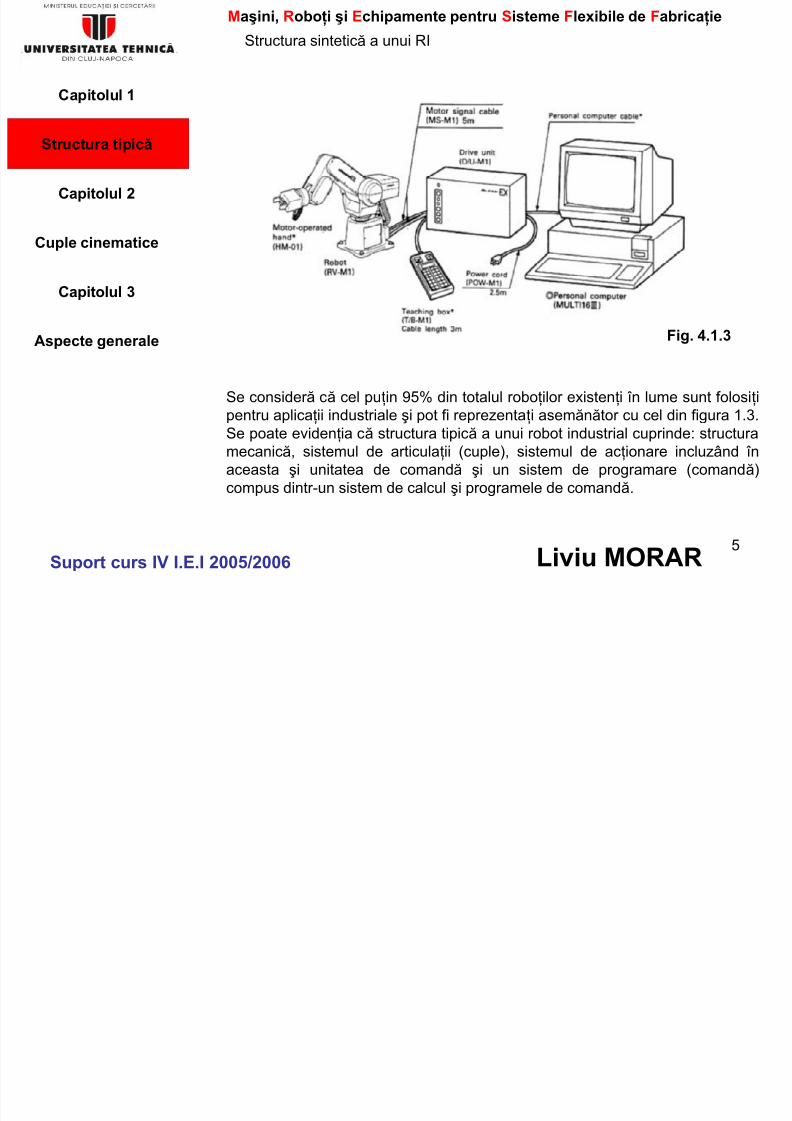
Structura sintetică a unui RI
Se consider ă că cel puţin 95% din totalul roboţilor existenţi în lume sunt folosiţi
pentru aplicaţii industriale şi pot fi reprezentaţi asemănător cu cel din figura 1.3.Se poate evidenţia că structura tipică a unui robot industrial cuprinde: structuramecanică, sistemul de articulaţii (cuple), sistemul de acţionare incluzând înaceasta şi unitatea de comandă şi un sistem de programare (comandă)compus dintr-un sistem de calcul şi programele de comandă.
Fig. 4.1.3

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 6/165
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuple cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Fig. 4.1.4
Tipul şi forma unor elemente mecanice se va exemplifica pe modelul de robot
MovemasterEX RV-M1 existent în dotarea Universităţii Tehnice din Cluj-Napoca.Aceste elemente sunt importante pentru identificarea şi nominalizarea elementelor robotului şi a poziţiei lor în configurarea structurală. Astfel se va realiza un limbajcomun de adresare a elementelor şi se defineşte lista cu numărul de elementedisponibile. În figura 1.4 este ilustrat un mod de reprezentare şi identificare aelementelor componente.
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 7/165
7
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuple cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
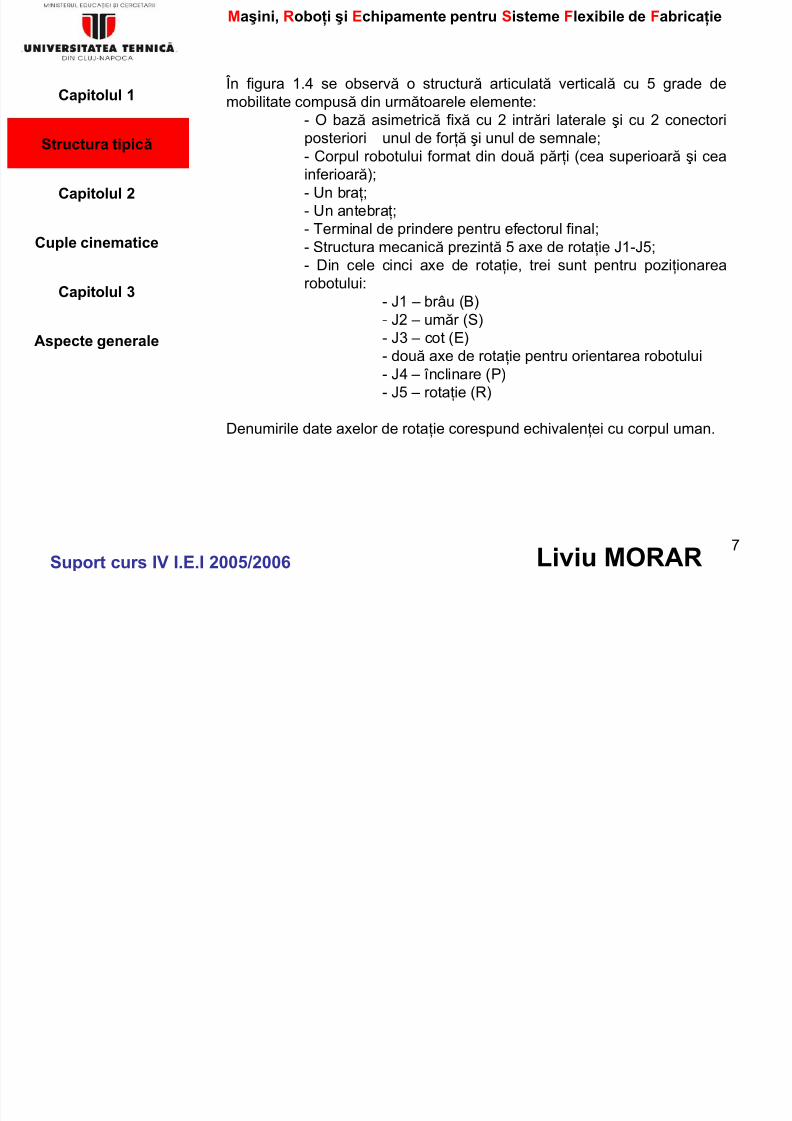
În figura 1.4 se observă o structur ă articulată verticală cu 5 grade de
mobilitate compusă din următoarele elemente:- O bază asimetrică fixă cu 2 intr ări laterale şi cu 2 conectoriposteriori unul de for ţă şi unul de semnale;- Corpul robotului format din două păr ţi (cea superioar ă şi ceainferioar ă);- Un braţ;
- Un antebraţ;- Terminal de prindere pentru efectorul final;- Structura mecanică prezintă 5 axe de rotaţie J1-J5;- Din cele cinci axe de rotaţie, trei sunt pentru poziţionarearobotului:
- J1 – brâu (B)- J2 – umăr (S)- J3 – cot (E)- două axe de rotaţie pentru orientarea robotului- J4 – înclinare (P)- J5 – rotaţie (R)
Denumirile date axelor de rotaţie corespund echivalenţei cu corpul uman.
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 8/165
8
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuple cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
2. MODELE GEOMETRICE ALE STRUCTURILOR M-U ŞI RI
Cuple cinematice. Noţiunea de grad de libertate
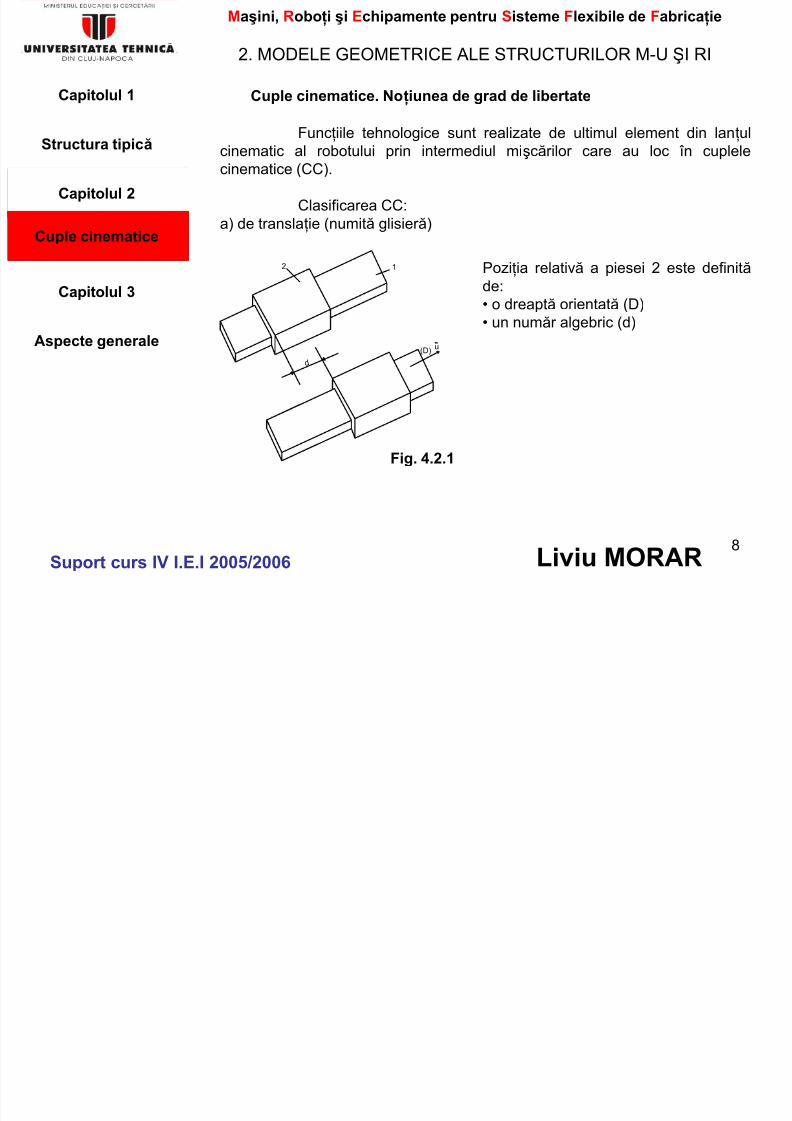
Funcţiile tehnologice sunt realizate de ultimul element din lanţulcinematic al robotului prin intermediul mişcărilor care au loc în cuplelecinematice (CC).
Clasificarea CC:a) de translaţie (numită glisier ă)
d
(D) u
12 Poziţia relativă a piesei 2 este definită de:
• o dreaptă orientată (D)• un număr algebric (d)
Fig. 4.2.1
Capitolul 2
Cuple cinematice
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 9/165
9
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuple cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
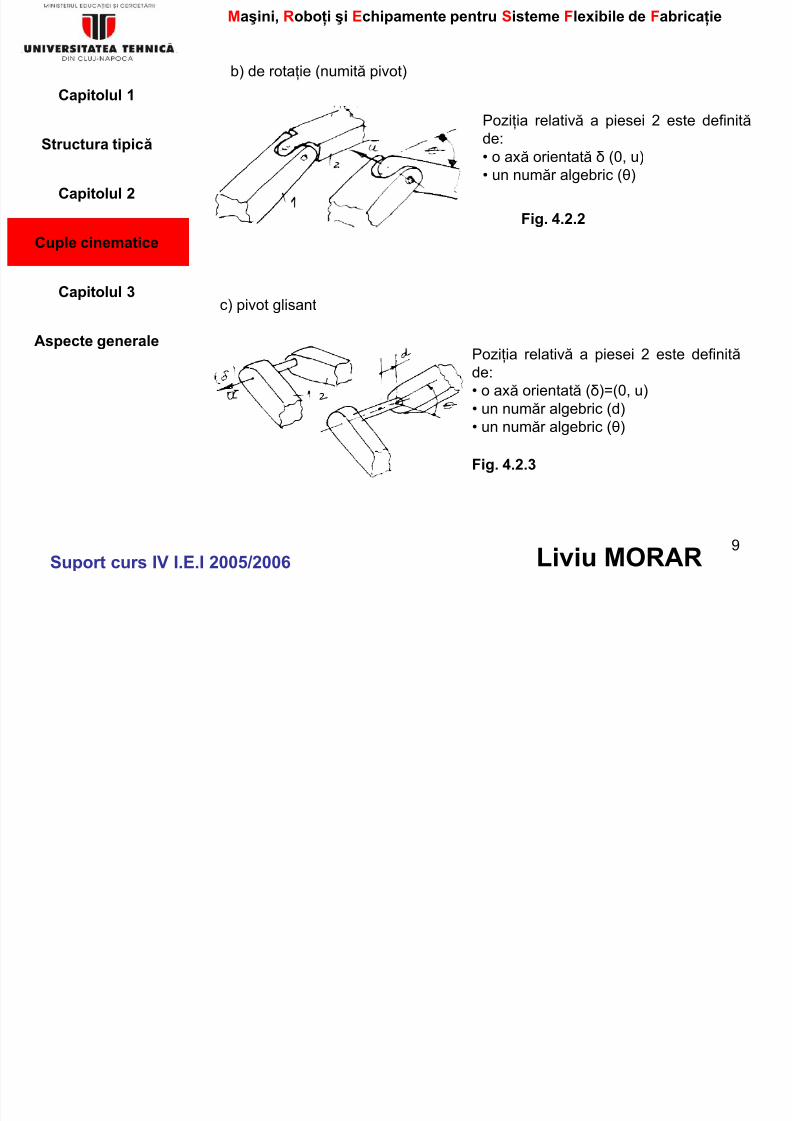
Poziţia relativă a piesei 2 este definită de:• o axă orientată δ (0, u)• un număr algebric (θ)
Fig. 4.2.2
b) de rotaţie (numită pivot)
Poziţia relativă a piesei 2 este definită de:• o axă orientată (δ)=(0, u)
• un număr algebric (d)• un număr algebric (θ)
Fig. 4.2.3
c) pivot glisant
M i i R b ţi i E hi t t Si t Fl ibil d F b i ţi
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 10/165
10
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuplele cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
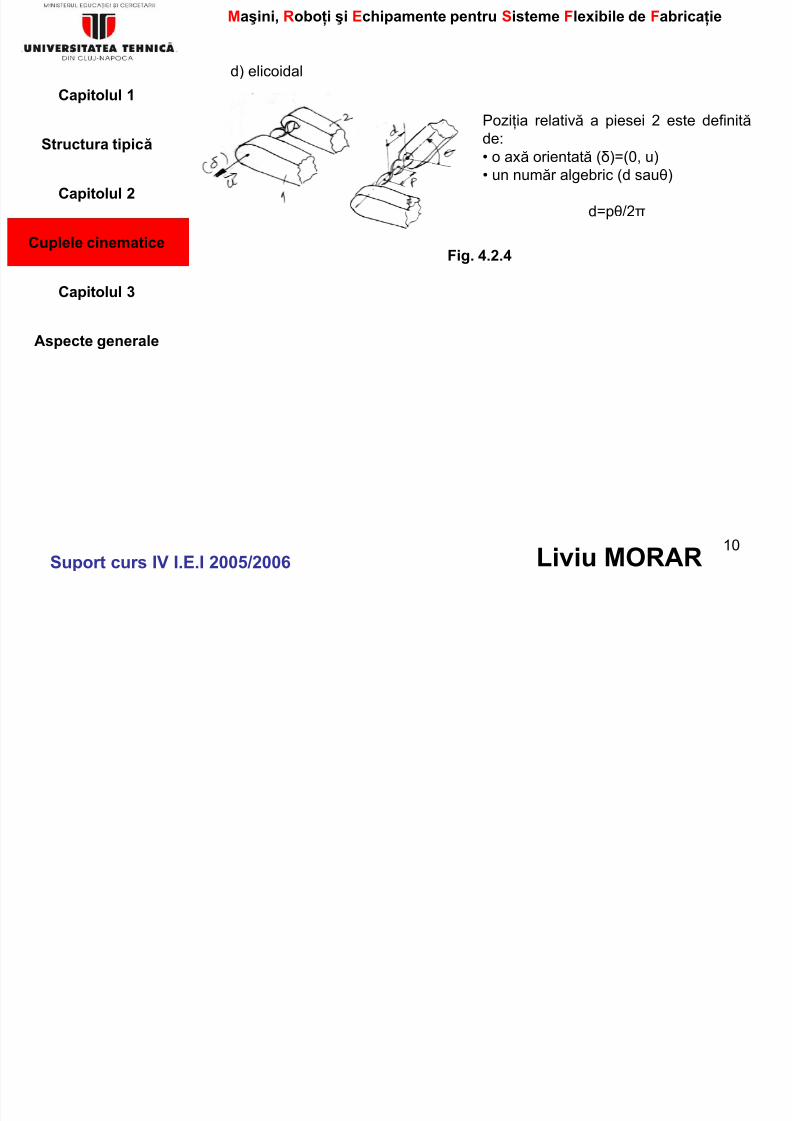
Poziţia relativă a piesei 2 este definită de:• o axă orientată (δ)=(0, u)• un număr algebric (d sauθ)
d=pθ/2π
Fig. 4.2.4
d) elicoidal
M i i R b ţi i E hi t t Si t Fl ibil d F b i ţi

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 11/165
11
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuple cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Nume legătur ă Mişcare relativă Număr grade delibertate
Simbol
Pivot 1 rotaţie 1
Glisier ă 1 translaţie 1
Glisier ă elicoidală 1 rotaţie şi1 translaţieconjugată
1
Pivot glisant 1 rotaţie
1 translaţie
2
Cuplă sferică 3 rotaţii 3
Sfer ă cu deget 2 rotaţii 2
Articulaţie plană 1 rotaţie2 translaţii
3
Articulaţiecircular ă
3 rotaţii1 translaţie
4
Articulaţie de tipcontact punctiform
3 rotaţii2 translaţii
5
Tabelul 4.2.1
Cuple cinematice uzuale
Maşini Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 12/165
12
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuplele cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
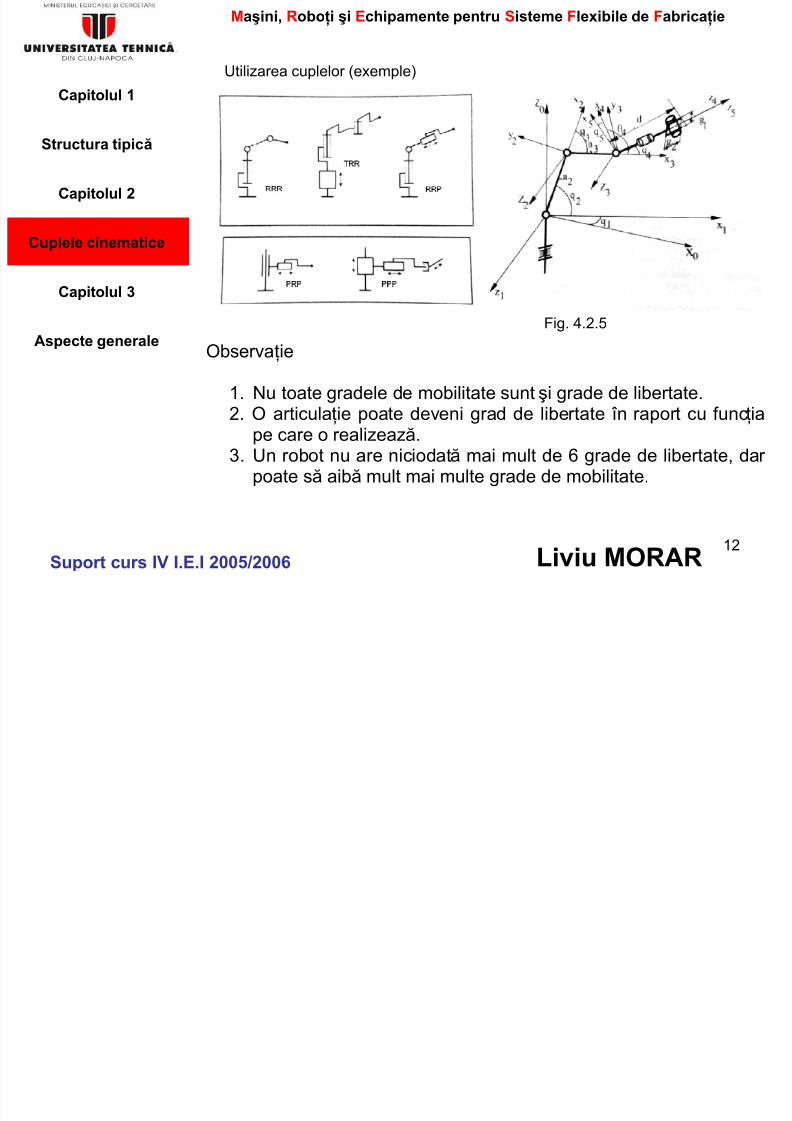
Utilizarea cuplelor (exemple)
Observaţie
1. Nu toate gradele de mobilitate sunt şi grade de libertate.
2. O articulaţie poate deveni grad de libertate în raport cu funcţiape care o realizează.
3. Un robot nu are niciodată mai mult de 6 grade de libertate, dar poate să aibă mult mai multe grade de mobilitate.
Fig. 4.2.5
Maşini Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 13/165
13
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
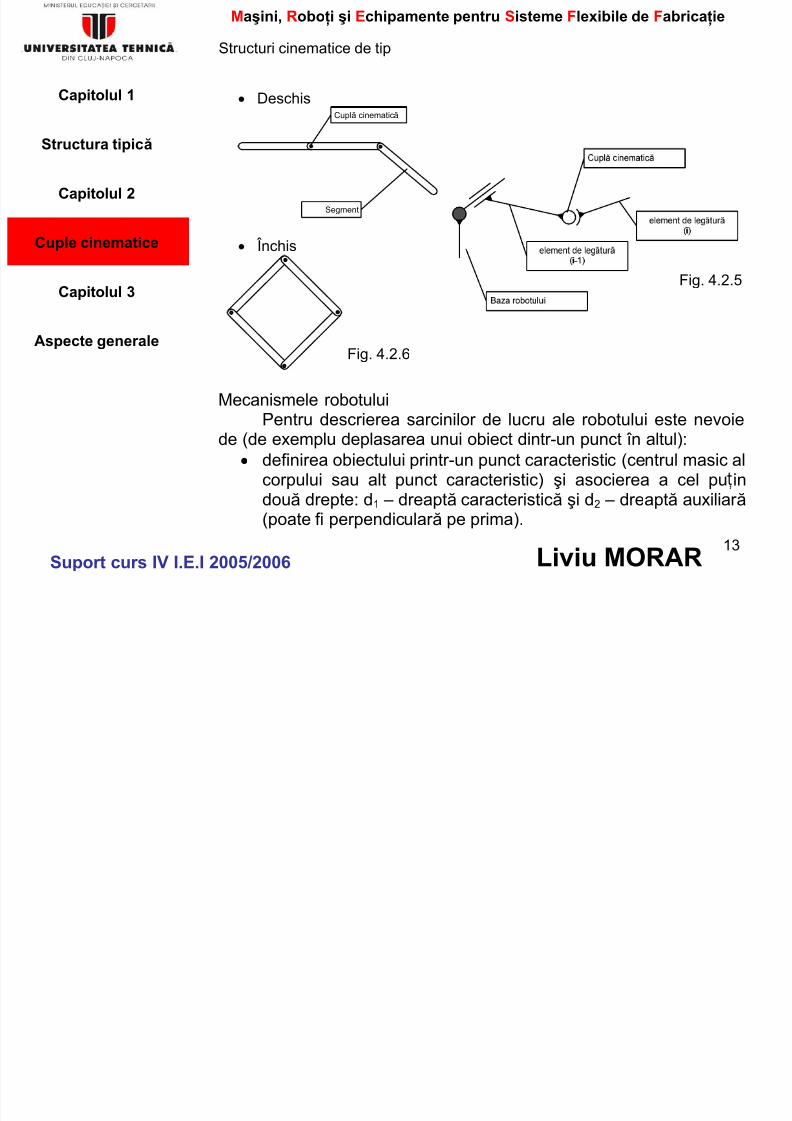
Structuri cinematice de tip
• Deschis Cuplă cinematică
Segment
• Închis
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cuple cinematice
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Mecanismele robotuluiPentru descrierea sarcinilor de lucru ale robotului este nevoie
de (de exemplu deplasarea unui obiect dintr-un punct în altul):
• definirea obiectului printr-un punct caracteristic (centrul masic alcorpului sau alt punct caracteristic) şi asocierea a cel puţindouă drepte: d1 – dreaptă caracteristică şi d2 – dreaptă auxiliar ă
(poate fi perpendicular ă pe prima).
Fig. 4.2.5
Fig. 4.2.6
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 14/165
14
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
• definirea sarcinii de lucru, de exemplu punctul iniţial M1 şi celfinal M2, în sistemul O0X0Y0Z0, traiectoria şi eventualelerestricţii. Dreptele definesc orientarea spaţială a obiectului
manipulat.• definirea mecanismului generator de traiectorie MGT,
mecanismul format din cuplele cinematice care fac posibilădeplasarea punctului caracteristic, pe traiectoria impusă.
• definirea mecanismului de orientare, MO, mecanism necesar
pentru orientarea spaţială a obiectului (în exemplu indicatrealizează trei rota ii). Mecanismul generator de traiectorieasigur ă deplasarea obiectului, ce urmează a fi manipulat, dinpunctul M1 în punctul M2, după una din traiectoriile T(T’).Obiectul este definit prin dreptele caracteristice (d1) şi auxiliar ă
(d2). Mecanismul de orientare asigur ă pozi ionarea corectă aobiectului în raport cu piesa în care urmează a se monta.
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Simbolizarea
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
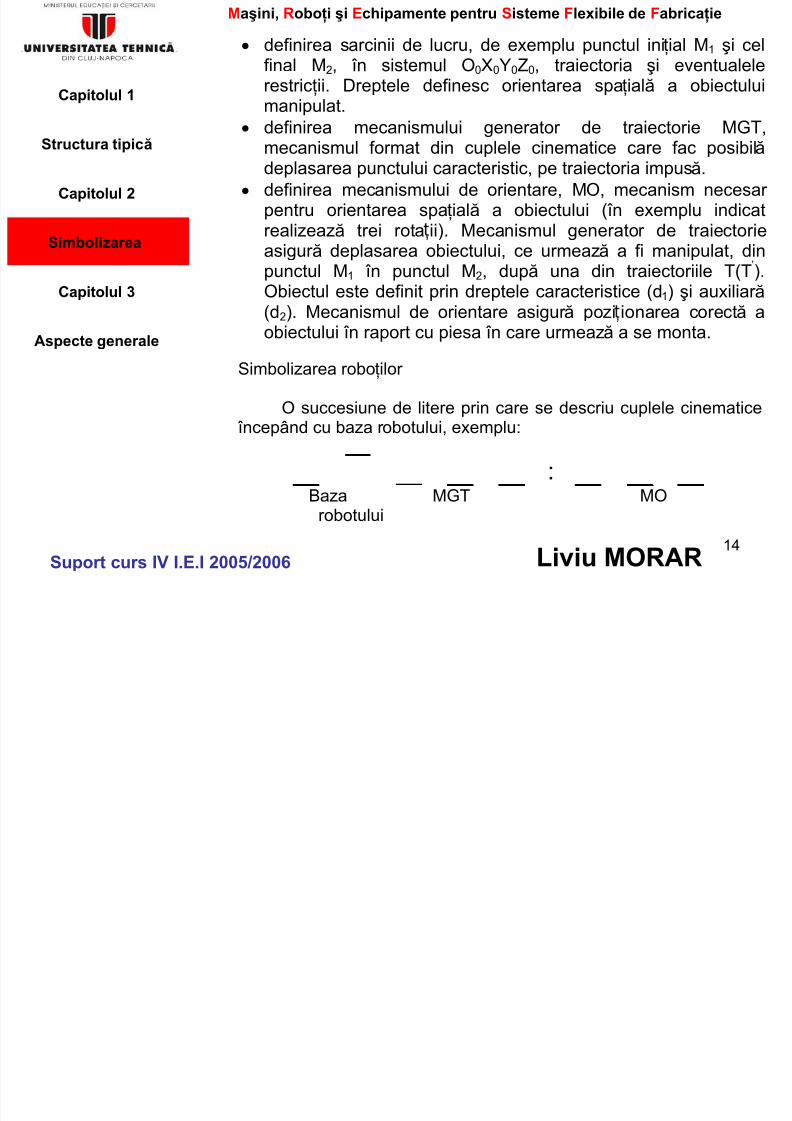
Simbolizarea roboţilor
O succesiune de litere prin care se descriu cuplele cinematice începând cu baza robotului, exemplu:
:Baza MGT MO
robotului
Maşini Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 15/165
15
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Simbolizarea
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Prima liter ă defineşte, în cazul roboţilor deplasabili, tipul traiectoriei. În literatura de specialitate mai sunt notate cuplele cinematice
astfel:
Cuplă Tip Denumire ReprezentareL linear
R rotative
T oscilaţieLI LE
V revolver LI
LE
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 16/165
16
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Domeniul de lucru
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Tipuri de configuraţii pentru roboţi• corp şi braţ (MGT)
- coordonate polare TRL; RTL; TTL
- coordonate cilindrice TLL; LTL; LVL- coordonate carteziene LLL- roboţi articulaţi TRR, VVR
• încheietur ă (MO)- cu două axe: RT
- cu trei axe: TRT; RRR
Domeniul de lucru al robotuluiPrin convenţie: spaţiul în care poate fi deplasat punctul caracteristical suprafeţei de montare a mecanismului de prehensiune.
Fig. 4.2.7
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 17/165
17
ţ ţ
Elemente de matematică cu aplicaţii la RI
Utilizare:descrierea stării roboţilor – cinematica directă, cinematicainversă;
CINEMATICA DIRECTĂ: determinarea mişcărilor relative dintre
elementele lanţului cinematic (implicit poziţia şi orientarea EF) înfunc ie de parametrii independen i din cuple ► POZI IA RELATIVĂ AEF ÎN RAPORT DE BAZA ROBOTULUI ◄ P(EF)=f(BR).
CINEMATICA INVERSĂ: se cunoaşte poziţia EF, se determină
elementele MATRICEI DE TRECERE, adică pozi iile relative alerobotului: P(Ci)=f(EF).
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
RI şi matematica
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 18/165
18
Poziţia EF: descriere în diferitesisteme
• Reper: sistemul decoordonate (cartezian)R: poziţia punctului M în
R⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=
z
y
x
RM )(
• Baza: spaţiul vectorial cese poate ataşa reperului
),,( k ji ),,()( k ji B = i, j, k – vectori unitari- paraleli cu axele XX’,
YY’, ZZ’ - sens: în sensul creşterii gradaţiei de pe fiecare axă
k c jbiar ⋅+⋅+⋅=
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Cinematica directă
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
coordonate cilindrice
cc
b
a
=
=
=
ϕ ρ
ϕ ρ
sin
cos
ρ – raza polar ă
Fig. 4.2.8
Sistemul de coordonate
(4.2.1)
(4.2.2)
(4.2.3)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 19/165
19
coordonate omogene – permit scrieri „condensate”
0)( ≠===⎟⎟⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎜⎜
⎝
⎛
= ω ω ω ω
ω
C
c
B
b
A
aC
B
A
RM H
ω – factor de omogenitate.
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Sistemul de coordonate
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Poziţia EF (caz general): un reper 3D descris în 3D
Spaţiul
Spaţiul de lucru al mecanismului deprehensiune (EF) este descris(definit) prin:
- poziţia punctului M (lacapătul f ălcilor)
- direcţia normal
ăde
deschidere, n
- direcţia de alunecare, a
- direcţia de glisare, g
Suprafaţa
activă a
f ălcilor Fig. 4.2.9
(4.2.4)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 20/165
20
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Operatorul de
schimbare a bazei
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Operatorul de schimbare a bazei:permite descrierea unui reper oarecare (Re) înreperul (Ro) al bazei.
Notaţii:
),,()( 1111 k ji B = şi ⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
=1
1
1
1)(cb
a
BU
),,()(2222
k ji B = şi
⎟
⎟⎟
⎠
⎞
⎜
⎜⎜
⎝
⎛
=
2
2
2
2)(
c
b
a
BU
Expresiile intrinseci ale vectorului U :
- plecând de la (B1) 111111k c jbiau ⋅+⋅+⋅=
- plecând de la (B2) 222222k c jbiau ⋅+⋅+⋅=
Se cunosc: a2, b2, c2, de găsit a1, b1, c1.
(B1)i1
j1
k 1
Vector descris în
(B2))
u
(B2)
k 2
j2 i2
Fig. 4.2.10
(4.2.5)
(4.2.6)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 21/165
21
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Operatorul de
schimbare a bazei
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Problema nu are sens dacă nu se cunoaşte baza (B2) în raport de
baza (B1), adică coordonatele vectorilor 222
,, k ji în (B1):
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ ⋅
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ =
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=
2
2
2
1
1
1
121212)()()(
c
ba
c
ba
Bk B j Bi
k ji
k ji
k ji
k
k
k
j
j
j
i
i
i
γ γ γ
β β β α α α
γ
β
α
γ
β
α
γ
β
α
Ca urmare Operatorul de schimbare a bazei este:
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ =
k ji
k ji
k ji
B B
γ γ γ
β β β
α α α
21/
Se citeşte: matricea coordonatelor bazei (B2) în baza (B1)
„ primul indice este cel aferent bazei noi, luat ă ca referinţă, al doileaindice cel al bazei vechi ”.
(4.2.7)
(4.2.8)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 22/165
22
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Operatorul de
schimbare a bazei
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Altă formă:
⎥
⎥⎥
⎦
⎤
⎢
⎢⎢
⎣
⎡
=
333231
232221
131211
12
aaa
aaa
aaa
A
în care
213321232113
213221222112
213121212111
k k ak jak ia
jk a j ja jia
ik ai jaiia
⋅=⋅=⋅=
⋅=⋅=⋅=
⋅=⋅=⋅=
2112 p p p
r Ar r ⋅+=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
2
2
2
333231
232221
131211
1
1
1
z
y
x
aaa
aaa
aaa
r
r
r
z
y
x
z
y
x
x1
y1
z1
i1k 1
j1
r pr p1
z2r p2
y2
x2
j2
k 2
i2
P
Fig. 4.2.11
(4.2.9)
(4.2.10)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 23/165
23
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Operatorul de
schimbare a bazei
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
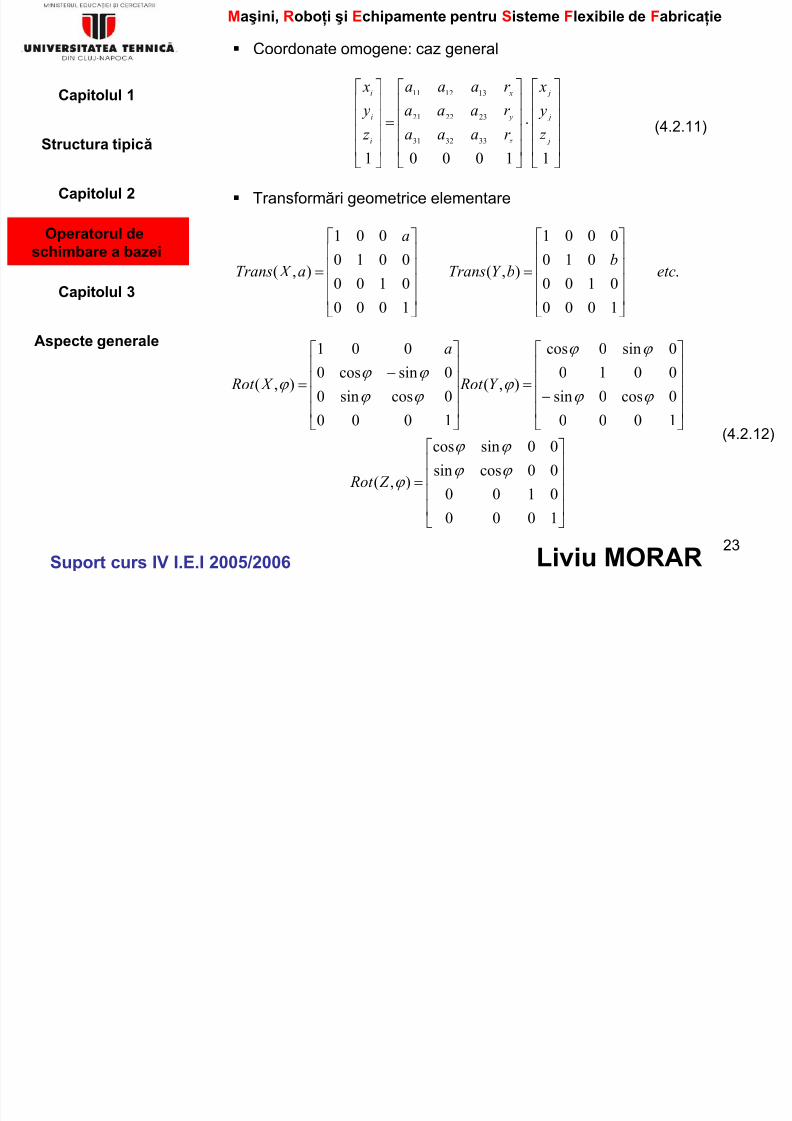
Coordonate omogene: caz general
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⋅
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
110001
333231
232221
131211
j
j
j
z
y
x
i
i
i
z
y
x
r aaa
r aaa
r aaa
z
y
x
Transformări geometrice elementare
.
1000
0100
010
0001
),(
1000
0100
0010
001
),( etcb
bY Trans
a
a X Trans
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥
⎥⎥⎥
⎦
⎤
⎢
⎢⎢⎢
⎣
⎡
−=
⎥
⎥⎥⎥
⎦
⎤
⎢
⎢⎢⎢
⎣
⎡
−=
1000
0100
00cossin
00sincos
),(
1000
0cos0sin
0010
0sin0cos
),(
1000
0cossin0
0sincos0
001
),(
ϕ ϕ
ϕ ϕ
ϕ
ϕ ϕ
ϕ ϕ
ϕ ϕ ϕ
ϕ ϕ ϕ
Z Rot
Y Rot
a
X Rot
(4.2.11)
(4.2.12)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 24/165
24
Descrierea structurii
Pentru descrierea geometrică a legăturii dintre două solide:
• se asociază un reper fiecăruia, cele două repere au unul saumai multe elemente care r ămân comune în cursul deplasăriipermise de articulaţie;
• poziţia relativă curentă a celor două repere se descrie prinparametrii scalari ce pot fi independenţi sau nu;
• segmentele interne ale structurii fac obiectul a două
legături
fiecare;• segmentele exterioare ale structurii au o singur ă legătur ă.
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Elemente privind
descrierea structurii
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Unui segment intern a structurii i se asociază obligatoriu două repere(R2 şi R2
’).
Poziţia reperelor (R1) şi (R2’)
este descrisă prin:
• coincidenţa axelor 11
z O
şi '
2
'
2 z a
• parametrul „d”• parametrul „θ”• poziţia reperului (R2
’) şi(R2) rezultă din
geometria segmentului 2, poziţia suprafeţelor de legătur ă
apar ţinătoare segmentului 2: (R2’
/R2)
Fig. 4.2.12
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 25/165
25
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Elemente privind
descrierea structurii
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Poziţia relativă a reperelor ataşate segmentelor (1) şi (2) poate fidescrisă prin coordonatele (R1/ R2
’):
(R1/ R2) = (R1/ R2’)* (R2
’/R2)
Operatorul (R1/R2’) este definit constantele şi variabilele legăturii
(1)/(2). În operatorul (R2’/R2) numai constante ale segmentului (2).
Pentru segmente de la extremitate se asociază un singur reper - segmentul iniţial, reperul (R0) se confundă cu (R0
’)- segmentul terminal, reperul (Rn) se confundă cu (Rn
’)
Descrierea lanţului cinematic(R0/Rn) = (R0/R1)*(R1/R2)*…* (Rn-1/Rn)
Descrierea structurii articulate este realizată prin:• ataşarea de repere pe elementele lanţului ce permit definirea
parametrilor constanţi pentru fiecare;• parametrii constanţi şi variabilele legăturilor care descriu poziţia
relativă a celor două segmente a unuia în raport de altele.
(4.2.13)
(4.2.14)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 26/165
26
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Elemente privind
descrierea structurii
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
CONVENŢIA HARTEMBERG-DENAVIT
Condiţii de aplicare: structuri deschise, cuple de tip pivot
(rotaţie), glisier ă (translaţie paralelă cu ghidajul).Convenţii:
1. numerotare segmente în ordine crescătoare, începândcu indicele 0 (baza robotului). O structur ă de n+1
elemente care conţin n legături, deci n coordonatearticulate2. reperul analizat este asociat legăturii din AVAL3. într-o cuplă, axa (0, z) se alege confundată cu:
a. axa de rotaţie – pentru pivot
b. o dreaptă oarecare invariantă – pentru glisier ă.Sensul vectorului unitar z este arbitrar, dar acelaşipentru ambele repere asociate cuplului respectiv.
4. a doua axă a legăturii ( x,0 este perpendiculara
comună pe axele (H
’
, z
’
) şi ( z ,0 . Rezultă că segmentul„i”, reperele (Ri’) şi (Ri) au în comun axa
i x , cu sensul
de la Hi la Oi. Se alegeii
x x ='
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 27/165
27
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Elemente privind
descrierea structurii
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Consecinţe ale convenţiilor de parametrizare:
Pentru un segment curent (i), reperul (Ri) este definit prin:- vectorul unitar
i z (definit în cupla din AVAL)
- vectorul unitar i
x (definit prin perpendiculara comună a celor două axe asociate celor două cuple)
- punctul Oi.
Pentru segmentul curent (i), reperul (Ri’) este definit prin:
- vectorul )( 1
''
−= i z z z ii
definit prin cupla aval a segmentului
precedent- vectorulii
x x =' - punctul Hi
Obs. În practică se pot ignora vectorii '
1−i z şi '
1−i x
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
P t i t l i
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 28/165
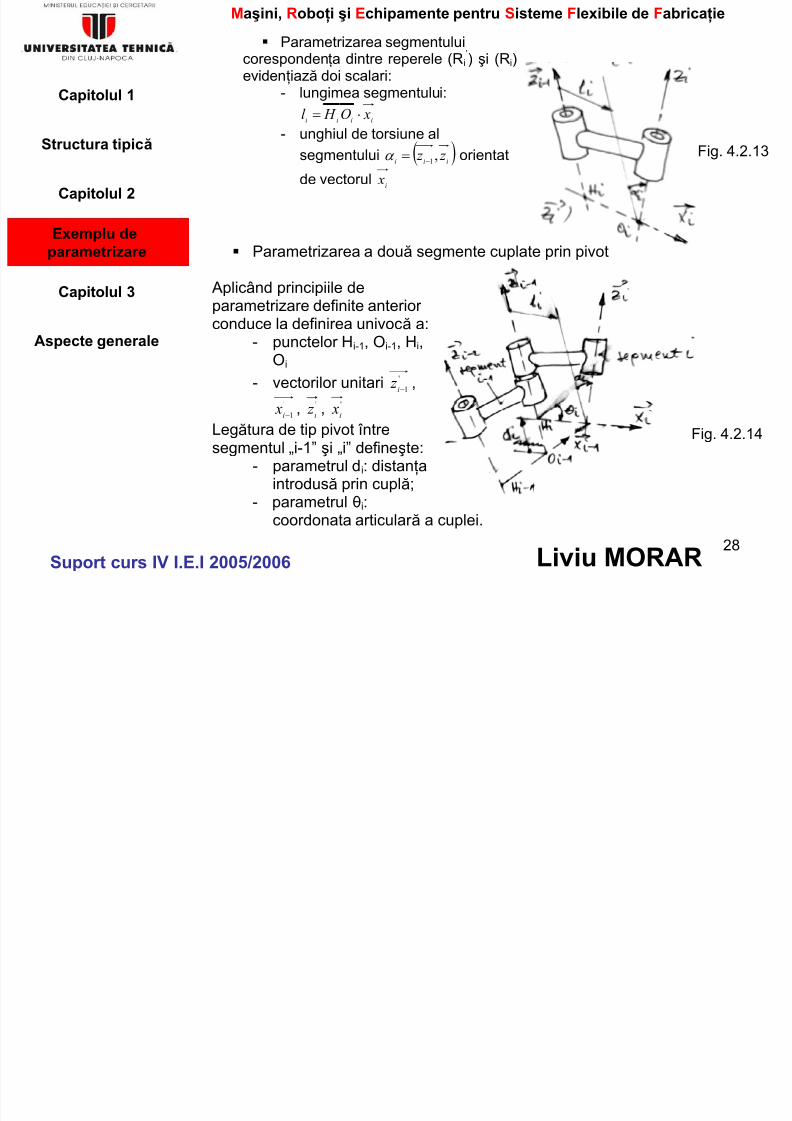
28
Parametrizarea segmentuluicorespondenţa dintre reperele (Ri
’) şi (Ri)evidenţiază doi scalari:
- lungimea segmentului:
iiii xO H l ⋅= - unghiul de torsiune al
segmentului )iii
z z ,1−=α orientat
de vectoruli
x
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Exemplu de
parametrizare
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Parametrizarea a două segmente cuplate prin pivot
Aplicând principiile de
parametrizare definite anterior conduce la definirea univocă a:- punctelor Hi-1, Oi-1, Hi,
Oi
- vectorilor unitari '
1−i z ,'
1−i x ,
'
i z ,
'
i x Legătura de tip pivot întresegmentul „i-1” şi „i” defineşte:
- parametrul di: distanţaintrodusă prin cuplă;
- parametrul θi:
coordonata articular ă a cuplei.
Fig. 4.2.13
Fig. 4.2.14
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Re ltă corespondenţa dintre reperele (R ) şi (R )este definită de

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 29/165
29
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Exemplu de
parametrizare
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Rezultă: corespondenţa dintre reperele (Ri-1) şi (Ri)este definită de:- li, lungimea segmentului (i);- αi, unghiul de torsiune a segmentului (i);- di, distanţa introdusă de cuplă între (i-1)/(i);
- θi, coordonata cuplei (variabilă).
Parametrizarea a două segmente cuplate prin glisier ă Cupla de tip glisier ă defineşte numai direcţia axei, poziţia axei estearbitrar ă, ca urmare face obiectul unei alegeri. Prezenţa cupleipermite definirea:
- parametrul ( )iiix x ,
1−=Θ unghi introdus de cuplă
- parametrul1−⋅=
iiiiz O H d - coordonata articular ă a cuplei.
Rezultă între reperele (Ri-1) şi (Ri)
trei parametrii:- li, lungimea segmentului (i);- αi, unghiul de torsiune segment (i);- θi, unghiul introdus de cuplă legătura (i-1)/(i);variabila articular ă: di.
Fig. 4.2.15
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 30/165
30
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Exemplu de
parametrizare
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Notă: Alegerea axei cuplei ( )1−iδ de
translaţie (glisier ă) nu este dictată de realizarea tehnologică aglisierei. Figura …… indică posibilitatea simplificării operaţieide parametrare. Pentru segmentul„i+1” axele cuplei (pivot) sunt
definite în mod univoc, iar ca oconsecinţă punctele Hi+1 şi Oi+1 sunt bine precizate. Se poateobţine simplificarea amintită alegând axa (
1−iδ a cuplei de translaţie)să treacă prin punctul Hi+1. Rezultă lungimea segmentului li=0.
Operatorul de schimbare a bazei (parametrizare Denavit-Hartenberg)
Operatorul de schimbare a bazei (trecerea de la un reper laurmătorul) prin patru transformări geometrice elementare. Trecereade la reperul (Ri-1) la (Ri) rezultă din figura …
Fig. 4.2.16
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 31/165
31
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Exemplu de
parametrizare
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
(Ri-1) definit prin Oi-1, 1−i x ,1−i
z
(Ri) definit prin O
i,
i
x ,i
z Repere intermediare utilizate(R’), (R’’), (R’’’)
(R’) definit prin Hi, 1−i x ,1−i
z
(R’’) definit prin Hi, i x ,
1−i z
(R’’’) definit prin Oi, i x , 1−i z
Transformările: )()( '
1R R
i→− :
translaţie vector 11 −− ⋅=−
iiiz d H O
)()( ''' R R → : rotaţia axei 1−ii z H cu unghiul θi )()( ''''' R R → : translaţia
iiiixl O H =−1
)()( '''
i R R → : rotaţia axei
iixO cu unghiul αi
( )
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=−
1000
100
00100001
/ '
1
i
id
R R ( )
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛ −
=
1000
0100
00cossin00sincos
/ ''' ii
ii
R Rθ θ θ θ
Fig. 4.2.17
(4.2.15)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 32/165
32
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Exemplu de
parametrizare
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
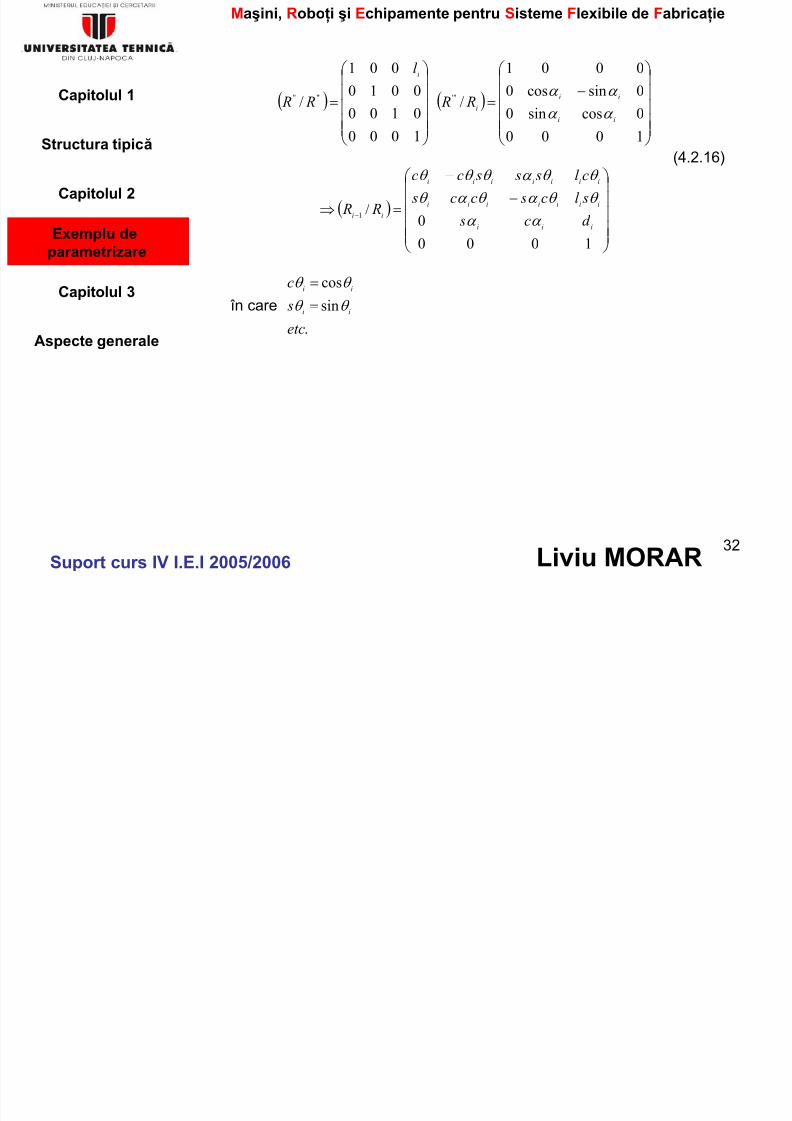
( )⎟⎟⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎜⎜
⎝
⎛
=
1000
0100
0010
001
/
'''''
il
R R ( )
⎟⎟⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎜⎜
⎝
⎛
−=
1000
0cossin0
0sincos0
0001
/
'''
ii
ii
i R R
α α
α α
( )⎟⎟⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎜⎜
⎝
⎛
−
−
=⇒ −
1000
0/1
iii
iiiiiii
iiiiiii
iid c s
sl c scc s
cl s s scc
R R α α
θ θ α θ α θ
θ θ α θ θ θ
în care
.
sin
cos
etc
s
c
ii
ii
θ θ
θ θ
=
=
(4.2.16)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 33/165
33
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Aplicaţii parametrizare
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Exemplu
Expresia operatorului
( )
mmd mml
ααπ
α
100300
1sin0cos2
2
2
222
=
=
−==−=
( )
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−
−
=
1000010
0
0
2
2222
2222
21
d
sθ l cθ sθ
cθ l sθ cθ
/R R
Fig. 4.2.18
(4.2.17)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Unghiurile EULER

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 34/165
34
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Aplicaţii parametrizare
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Unghiurile EULER
Se consider ă 2 baze (B1), (B2) compuse din 3 vectori unitari, 2câte 2 ortogonali.
Operatorul de schimbare a bazei(B1/B2):
Se consider ă două bazeintermediare (Bp) şi (Bt)
- trecerea de la (B1) la (B
p): rota
ţie
în jurul lui1
k cu ψ - trecerea de la (Bp) la (Bt): rotaţie în
jurul lui pi cu θ
- trecerea de la (Bt) la (B2): rotaţie în
jurul lui t k cu φ
Fig. 4.2.19
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
⎞⎛⎞⎛ ψψ 0010sincos

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 35/165
35
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Aplicaţii parametrizare
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
( ) ( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −
=
θ θ
θ θ ψ ψ
ψ ψ
cossin0
sincos0
001
/
100
0cossin
0sincos
/1 t p p
B B B B
( ) ( ) ( ) ( ) ( )21212
////
100
0cossin
0sincos
/ B B B B B B B B B Bt t p pt
××=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −
= ϕ ϕ
ϕ ϕ
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−+−+
−−−
=
θ ϕ θ ϕ θ
θ ψ ϕ θ ψ ϕ ψ ϕ θ ψ ϕ ψ
θ ψ ϕ θ ψ ϕ ψ ϕ θ ψ θ ψ
cc s s s
scccc s s sccc s
s scc s sc sc scc
B B21
/
Valorile ψ, θ şi φ fiind date operatorul de schimbare a bazei estedefinită univoc.Reciproca: Se dă operatorul de schimbare a bazei:
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=
k ji
k ji
k ji
B B
γ γ γ
β β β
α α α
21/
se poate demosntra că acestuia îi corespund un set de trei valori,unul sing, θ, φ, ψ ce se calculează cu relaţia:
( )( )θ β θ α ψ
θ γ θ γ ϕ
γ θ
sin/;sin/2
sin/;sin/2
arccos
k k
ji
k
ATAN
ATAN
−=
=
=
(4.2.20)
(4.2.18)
(4.2.19)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 36/165
36
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Aplicaţii parametrizare
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Obs. ⇒ ARCTANGvu ATAN :),(2 o valoare unică când sunt
cunoscute sinusul (valoarea u) şi cosinusul (valoarea v).
Caz particular:( )
iik ATAN α β ϕ ψ θ γ ,201 =+=⇒=
( )iik
ATAN α β ϕ ψ π θ γ ,21 =−=⇒−=
Ca urmare unghiurile ψ, θ, φ constituie un sistem de coordonate abazei (B2) în baza (B1).
( )
⎟
⎟⎟
⎠
⎞
⎜
⎜⎜
⎝
⎛
=
ϕ
θ
ψ
E B B
21/
Indicele „E”marchează faptul că este vorba de coordonatele bazei B2
în B1 şi nu operatorul de schimbare a bazei (B1/B2).
(4.2.21)
(4.2.22)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Modelul geometric direct (MGD)
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 37/165
37
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
directe
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
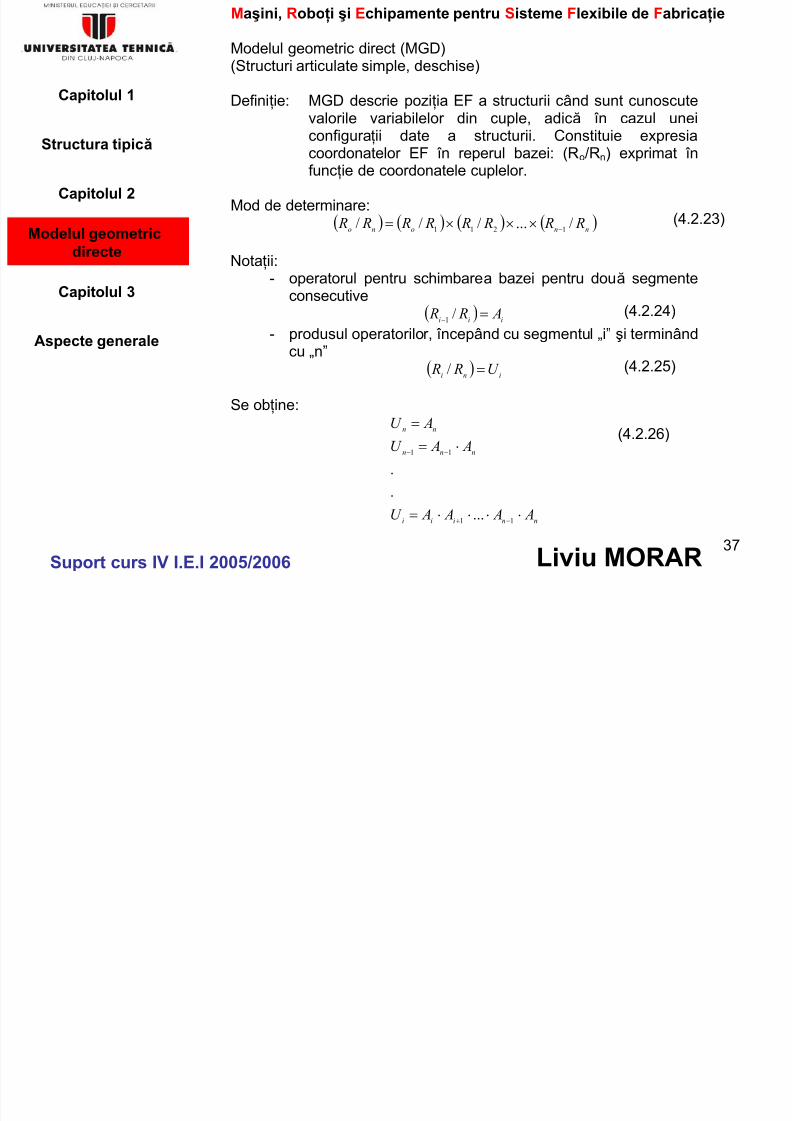
Modelul geometric direct (MGD)(Structuri articulate simple, deschise)
Definiţie: MGD descrie poziţia EF a structurii când sunt cunoscutevalorile variabilelor din cuple, adică în cazul uneiconfiguraţii date a structurii. Constituie expresiacoordonatelor EF în reperul bazei: (Ro/Rn) exprimat înfuncţie de coordonatele cuplelor.
Mod de determinare:( ) ( ) ( ) ( )
nnonoR R R R R R R R /...///
1211 −×××=
Notaţii:- operatorul pentru schimbarea bazei pentru două segmente
consecutive
( ) iii A R R =− /1 - produsul operatorilor, începând cu segmentul „i” şi terminând
cu „n”( )
iniU R R =/
(4.2.23)
(4.2.24)
(4.2.25)
Se obţine:
nniii
nnn
nn
A A A AU
A AU
AU
⋅⋅⋅⋅=
⋅==
−+
−−
11
11
...
.
.
(4.2.26)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 38/165
38
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
direct
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Cu aceste notaţii se obţine:( )
nnnoA A A A AU R R ⋅⋅⋅⋅⋅== −13211
.../
Notă:Expresia termenilor matricii devine complexă. Se propune
notarea fiecărui termen în parte conform (Up)ij – reprezintă termenulde rang i, j din matricea Up.Ex. (U2)34: reprezintă termenul situat pe linia a 3-a, coloana a 4-a din
matricea U2.
(4.2.27)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 39/165
39
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
direct
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Robot de tip SCARA
Date
0000
0
0000
43.2.1.
4321
4321
4321
====
====
====
d d d
al l Ll Ll
Seg Seg Seg Seg
θ
α α α α
Variabile: θ1, θ2, d3, θ4
Fig. 4.2.20
(4.2.28)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
⎟ ⎞
⎜⎛ ⋅−
⎟ ⎞
⎜⎛ ⋅− 00
222111c L scc L sc
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 40/165
40
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
direct
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
⎟⎟⎟⎟⎟
⎠⎜⎜⎜⎜⎜
⎝
⋅=
⎟⎟⎟⎟⎟
⎠⎜⎜⎜⎜⎜
⎝
⋅=
1000
0100
0
1000
0100
02122
2
111
1
s Lc s A
s Lc s A
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⋅−
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
1000
0100
0
0
1000
100
0010
0001
444
444
4
3
3
sac s
ca sc
Ad
A
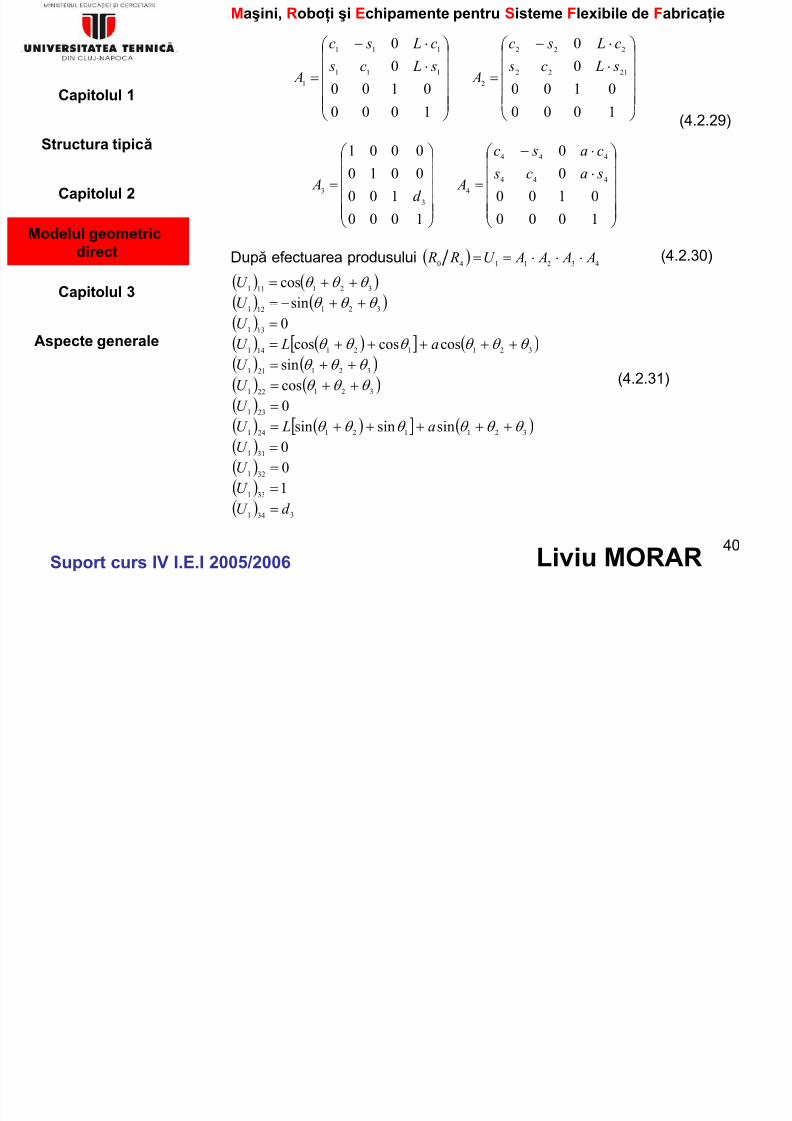
După efectuarea produsului ( )4321140
A A A AU R R ⋅⋅⋅==
( ) ( )321111
cos θ θ θ ++=U ( ) ( )
321121sin θ θ θ ++−=U
( ) 0131 =U
( ) ( )[ ] ( )321121141
coscoscos θ θ θ θ θ θ +++++= a LU ( ) ( )
321211sin θ θ θ ++=U
( ) ( )321221
cos θ θ θ ++=U ( ) 0
231=U
( ) ( )[ ] ( )321121241sinsinsin θ θ θ θ θ θ +++++= a LU
( ) 0311
=U ( ) 0
321=U
( ) 1331
=U ( )
3341d U =
(4.2.29)
(4.2.30)
(4.2.31)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 41/165
41
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
direct
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Exprimarea coordonatelor în sens Euler, a (R4) în (R0) conduce,conform matricii (2.20) la ( )
33
cos U Arc=θ în care dacă se înlocuieştetermenul U33 rezultă ( )1cos Arc=θ , adică 0=θ .
Corelând matricea (2.21) şi relaţia (2.23) rezultă:( ) ( )[ ]
421421cos,sin2 θ θ θ θ θ θ ϕ ψ ++++=+ ATAN
adică 421
θ θ θ ϕ ψ ++=+
Alegând arbitrar, unul din cele două unghiuri identic nule, de exemplu0=ϕ expresiile coordonatelor efectorului final, cu parametrizarea
Euler, furnizează modelul geometric direct al robotului considerat:( )[ ] ( )
421121coscoscos θ θ θ θ θ θ +++++= a L x
( )[ ] ( )421121 sinsinsin θ θ θ θ θ θ +++++= a L y 3
d z =
421θ θ θ ψ ++=
0
0
=
=
ϕ
θ
(4.2.32)
(4.2.33)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Modelul geometric invers

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 42/165
42
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Modelul geometric invers
Dacă se doreşte comanda unei structuri mecanice oarecare,
problema se pune în sens invers: se cunosc poziţiile pe care trebuiesă le atingă efectorul final, trebuie cunoscute valorile coordonatelor cuplelor care corespund sarcinii definite (poziţiile efectorului final).
Exemplu de rezolvare
( )[ ] ( ) xa L =+++++ 421121 coscoscos θ θ θ θ θ θ ( )[ ] ( ) ya L =+++++
421121sinsinsin θ θ θ θ θ θ
z d =3
ψ θ θ θ =++
421
Relaţiile anterioare constituie un sistem de patru ecuaţii cu patru
necunoscute.
(4.2.34)
Prin combinarea ecuaţiilor (4.2.34)se obţine:( ) [ ] A La x =−=++ ψ θ θ θ coscoscos
121
( ) [ ] B La =−=++ ψ θ θ θ cossinsin121
Valorile A şi B sunt cunoscute:
( ) 121coscos θ θ θ −=+ A
( )121
sinsin θ θ θ −=+ B Prin ridicare la pătrat se obţine
( ) C B A B A =+=+ 2sincos 22
11θ θ
(4.2.35)
(4.2.36)
(4.2.37)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Cu: Φ=Φ= sincos R B R A se obţine 222 R B =+ de unde22
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 43/165
43
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
22 B A R +±= Alegând semnul lui R acelaşi cu B
)/( Brctg =Φ
; cosΦ este totdeauna pozitiv conform alegerii R.Expresia … permite să se scrie:( ) R B AΦθ 2/)(sin 22
1+=+
Necunoscuta (θ1) este izolată în ecuaţia (4.2.38). Se obţin două valori:
( )[ ] R B A ArcΦ 2/sin22'
1+=+θ ( )[ ] R B A ArcΦ 2/sin 22''
1+−=+ π θ
care, în funcţie de valorile date, conduc la expresiile:( )[ ] ( ) B A Arctg R B A Arc /2/sin 22'
1−+=θ
( )[ ] ( ) B A Arctg R B A Arc /2/sin 22''
1−+−=π θ
Ca urmare se obţin două valori pentru θ1 ce corespund pentru două configuraţii care satisfac poziţia impusă a EF.n continuare, rezolvarea problemei nu pune probleme:
( )121
coscos θ θ θ −=+ A ( )
121sinsin θ θ θ −=+ B
au valorile: θ1 = θ1’ şi θn = θ1
’’.Se cunosc valorile sin şi cos de ( )
21θ θ + (ecuaţiile 4.2.41) ceea ce
conduce la:( )
1121cos,sin2 θ θ θ θ −−=+ A B ATAN
De data aceasta soluţia 2θ este unică (una pentru fiecare valoare 1θ ).
(4.2.38)
(4.2.39)
(4.2.40)
(4.2.41)
(4.2.42)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Valori rezultate:( )[ ] ( )22'θ
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 44/165
44
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
( )[ ] ( ) B A Arctg R B A Arc /2/sin 22'
1−+=θ
( )[ ] ( ) B A Arctg R B A Arc /2/sin 22''
1−+−=π θ
( ) 1112 cos,sin2 θ θ θ θ −−−= A B ATAN z d =
3
214θ θ ψ θ −−=
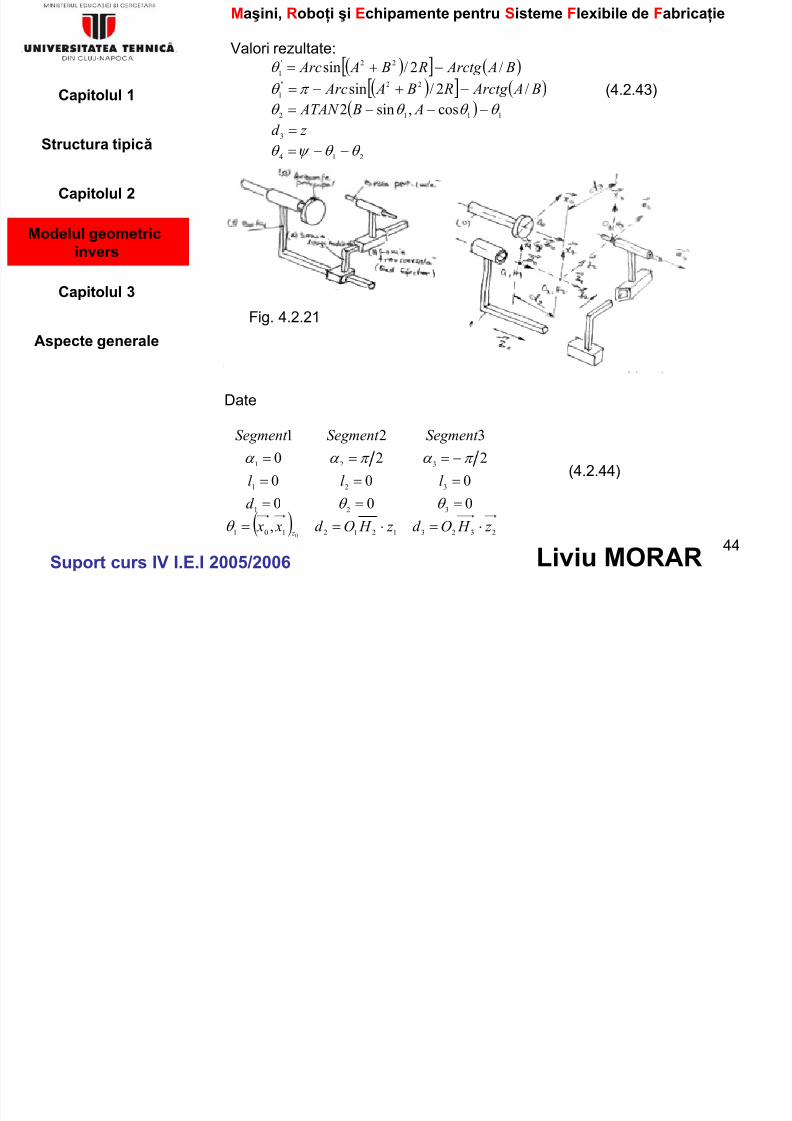
Date
( ) 23231212101
321
321
321
0,
000
000
220
321
z H Od z H Od x x
d
l l l
Segment Segment Segment
z ⋅=⋅==
===
===
−===
θ
θ θ
π α π α α
(4.2.43)
(4.2.44)
Fig. 4.2.21
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
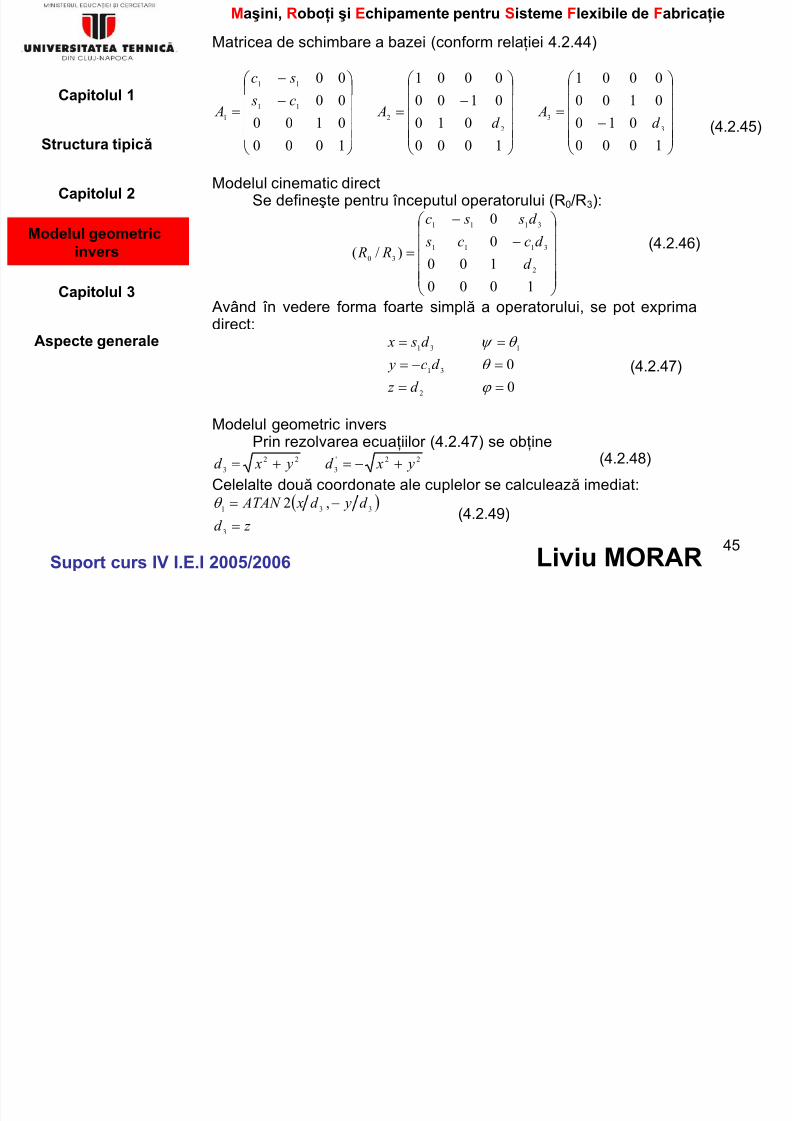
Matricea de schimbare a bazei (conform relaţiei 4.2.44)
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 45/165
45
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică ⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−=⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−
=⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−
−
=
1000
010
0100
0001
1000
010
0100
0001
1000
0100
00
00
3
3
2
2
11
11
1d Ad A
c s
sc
A
Modelul cinematic directSe defineşte pentru începutul operatorului (R0/R3):
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛ −
−
=
1000
100
0
0
)/(2
3111
3111
30d
d cc s
d s sc
R R
Având în vedere forma foarte simplă a operatorului, se pot exprimadirect:
0
0
2
31
131
==
=−=
==
ϕ
θ
θ ψ
d z
d c y
d s x
Modelul geometric inversPrin rezolvarea ecuaţiilor (4.2.47) se obţine
22'
3
22
3y xd y xd +−=+=
Celelalte două coordonate ale cuplelor se calculează imediat:( )
z d
d yd x ATAN
=
−=
3
331,2θ
(4.2.46)
(4.2.47)
(4.2.48)
(4.2.49)
(4.2.45)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de FabricaţieCentru de prelucrare cu 4 axe RTTT (BXYZ)
C t l d l t d ti i t l E i t ţ i d

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 46/165
46
Capitolul 1
Modelul geometric
invers
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Liviu MORARSuport curs IV I.E.I 2005/2006
Centrul de prelucrare este de tip orizontal. Existenţa axei derotaţie B face posibilă prelucrarea tuturor suprafeţelor laterale alepiesei.
Parametrizare. Având în vedere structura simplă este posibilă adoptarea unei parametrizări mai simplă decât parametrizareaDenavit-Hartenberg. Ca urmare nu este posibilă aplicarea relaţieigenerale (…).
Fig. 4.2.22
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Cele patru repere se deduc unul din celălalt prin simple translaţii.

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 47/165
47
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
p p p p ţExcepţie face rotaţia mesei.
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−=
1000
0100
010
0001
1000
100
0010
0001
1000
0100
0010
001
1000
00
0010
00
4
4
3
3
2
2
11
11
1
d A
d A
d
Ac s
sc
A
Modelul cinematic direct
( )
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
+−−
+
=
1000
0
010
0
312111
4
312111
40d cd sc s
d
d sd c sc
R R
(4.2.50)
(4.2.51)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Coordonatele, considerând parametrizarea Euler, sunt:2dd
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 48/165
48
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
2
2
3121
14
3121
π ϕ
θ θ
π ψ
−=+−=
==
=+=
d cd s z
d y
d sd c x
Modelul cinematic invers – se obţine prin rezolvarea sistemuluimodelului cinematic direct
yd
z xd z xd
=
+=−=
=
4
3
2
1
cossinsincos
θ θ θ θ
θ θ
(4.2.52)
(4.2.53)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
SISTEMUL DE ACŢIONARE ŞI CONTROL3.
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 49/165
49
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Ţ
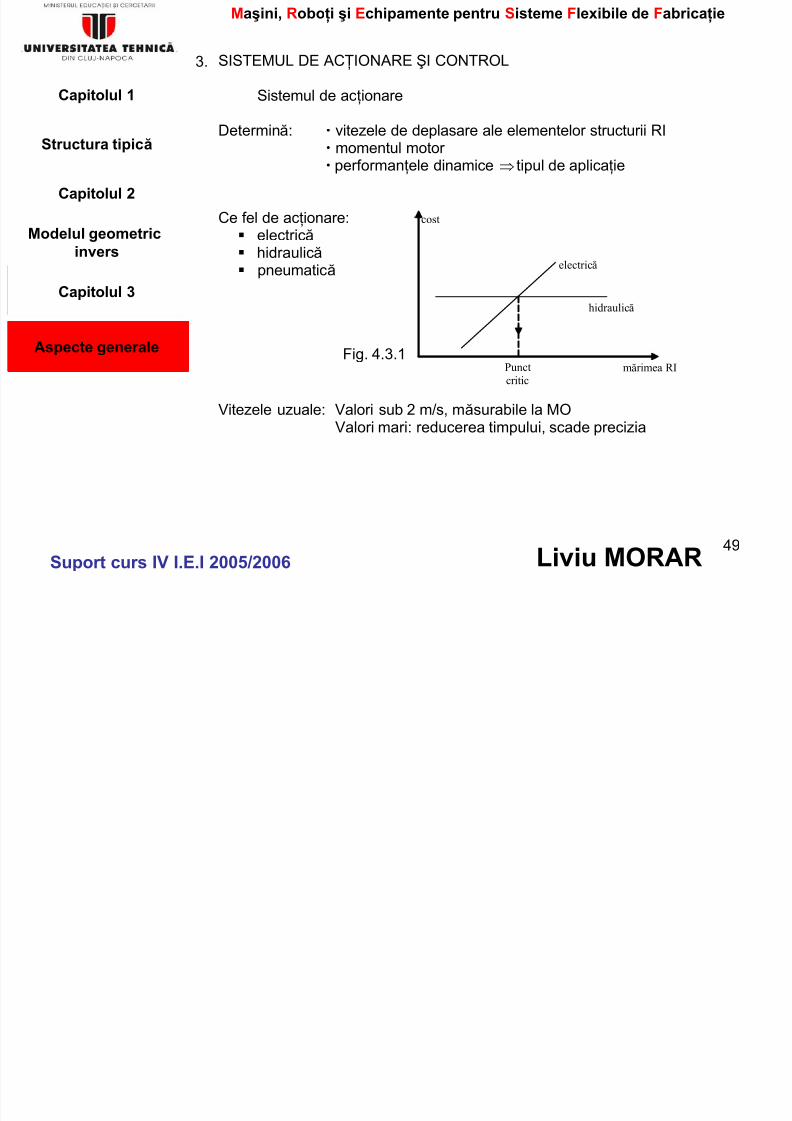
Sistemul de acţionare
Determină: vitezele de deplasare ale elementelor structurii RI momentul motor performanţele dinamice ⇒ tipul de aplicaţie
Ce fel de acţionare: electrică hidraulică pneumatică
Vitezele uzuale: Valori sub 2 m/s, măsurabile la MOValori mari: reducerea timpului, scade precizia
electrică
hidraulică
cost
mărimea RIPunct
critic
Capitolul 3
Aspecte generale Fig. 4.3.1
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de FabricaţieMod de programare
Discuţie: t/distanţă v

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 50/165
50
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Aspecte generale
Structura tipică
Capacitate portantă Se consider ă pentru poziţia cea mai defavorabilă a braţului.
CP CP EF GGG =+ ' ;
CP G - specificat în prospect.
Clasificarea RI, din punct de vedere a sistemului de control: roboţi secvenţiali: nu utilizează sisteme servo; limitatori
mecanici; roboţi de tipul PCP – prin autoînvăţare. Sistem de control maievoluat „învăţare”;
roboţi cu control continuu al deplasării (CP) şi autoînvăţare.Sistemul de control complex, acceptă interpolare şiautoînvăţare;
roboţi inteligenţi – interacţionează cu mediul prin intermediulsenzorilor.
timp/distanţă
vMo
deplasări lungi
deplasăriscurte
Fig. 4.3.2
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Precizia mişcării
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 51/165
51
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Precizie
Structura tipică
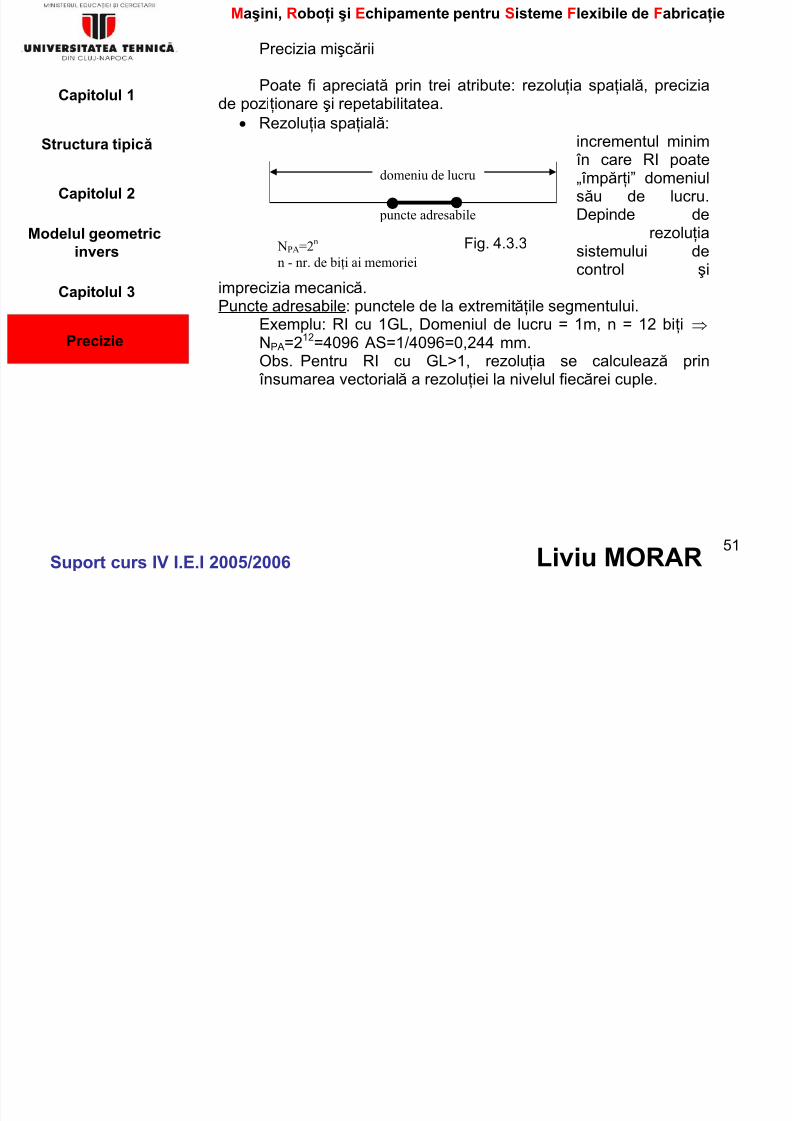
Poate fi apreciată prin trei atribute: rezoluţia spaţială, preciziade poziţionare şi repetabilitatea.
• Rezoluţia spaţială:incrementul minim în care RI poate„împăr ţi” domeniulsău de lucru.
Depinde derezoluţiasistemului decontrol şi
imprecizia mecanică.Puncte adresabile: punctele de la extremităţile segmentului.
Exemplu: RI cu 1GL, Domeniul de lucru = 1m, n = 12 biţi ⇒NPA=212=4096 AS=1/4096=0,244 mm.Obs. Pentru RI cu GL>1, rezoluţia se calculează prin însumarea vectorială a rezoluţiei la nivelul fiecărei cuple.
domeniu de lucru
puncte adresabile
NPA=2n
n - nr. de biţi ai memoriei
Fig. 4.3.3
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
• Precizia de poziţionare:posibilitatea

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 52/165
52
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Precizie
Structura tipică
Puncte adresabile
P1 P P2
Precizie
Rezoluţia sistemului
Punct
atins
ppoziţionării EF într-unpunct dorit din spaţiu
de lucru ⇒ Preciziaeste măsura în careRI poate poziţiona EFcât mai aproape depunctul adresabil.
Text Text Text Text Text Text
Text Text Text Text Text Text
Considerând imprecizia mecanică, precizia se consider ă ca fiind jumătate din valoarea rezoluţiei spaţiale.
Puncte adresabile
P1 P P2
Precizie
Rezoluţia sistemului
Punct
atins
Fig. 4.3.4
Fig. 4.3.5
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
• Repetabilitatea:it t RI d
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 53/165
53
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Precizie
Structura tipică
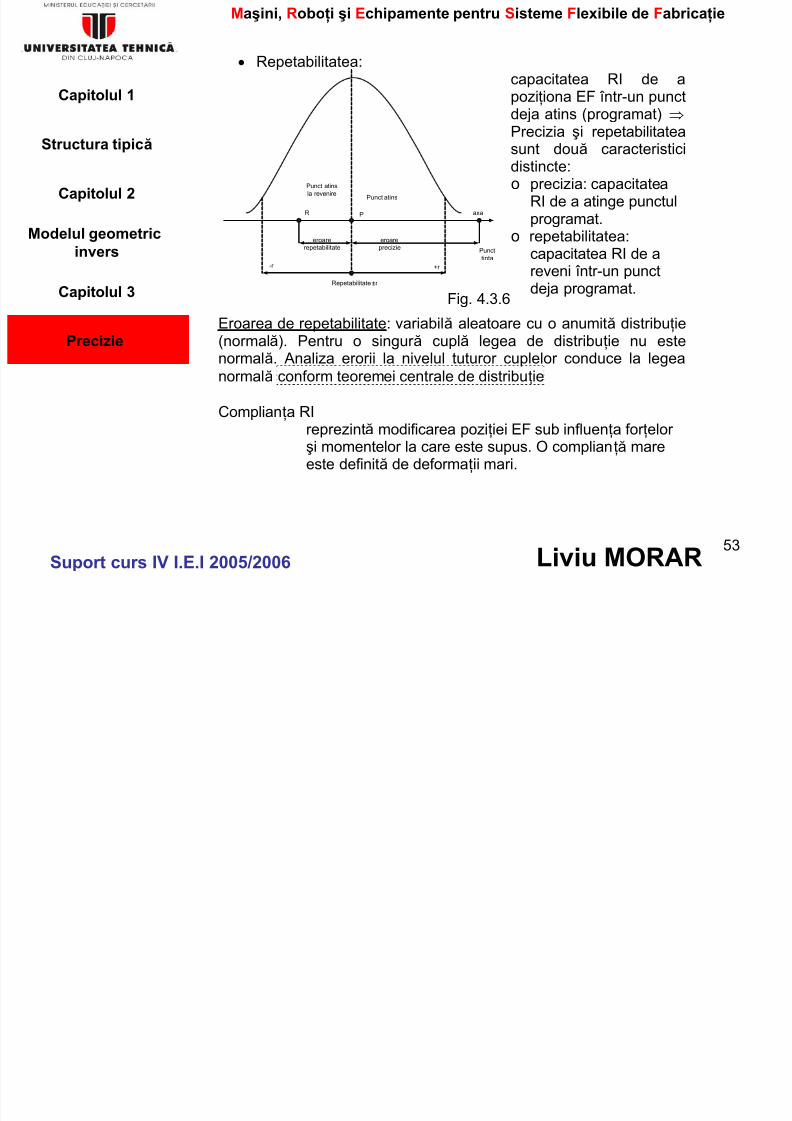
capacitatea RI de apoziţiona EF într-un punct
deja atins (programat) ⇒Precizia şi repetabilitateasunt două caracteristicidistincte:o precizia: capacitatea
RI de a atinge punctul
programat.o repetabilitatea:
capacitatea RI de areveni într-un punctdeja programat.
Eroarea de repetabilitate: variabilă aleatoare cu o anumită distribuţie(normală). Pentru o singur ă cuplă legea de distribuţie nu estenormală. Analiza erorii la nivelul tuturor cuplelor conduce la legeanormală conform teoremei centrale de distribuţie
Complianţa RIreprezintă modificarea poziţiei EF sub influenţa for ţelor şi momentelor la care este supus. O complianţă mareeste definită de deformaţii mari.
Punct atinsla revenire
Punct atins
RP
axa
Puncttinta
eroareprecizie
eroarerepetabilitate
Repetabilitate ±r
+r -r
Fig. 4.3.6
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Sistemul de control al RI
Aspecte generale

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 54/165
54
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Precizie
Structura tipică
Aspecte generale
Comportarea unui sistem automat de control (PAC) estedescrisă de un ansamblu de ecuaţii algebrice şi diferenţiale prin carese exprimă dependenţa mărimii de ieşire de cea de intrare.
Analiza sistemului: r ăspunsul sistemului la mărimile de intrare.
Reprezentarea sistemului► matematiccaz general:
componentele sistemului sunt descrise prinecuaţii liniare sau liniarizate.
x(t)b+dt
dx(t)b+...+
dt
x(t)d b
+dt
x(t)d b= y(t)a+
dt
dy(t)a...+
dt
y(t)d a+
dt
y(t)d a
011-m
1-m
1-m
m
m
m011-n
1-n
1-nn
n
n
unde coeficienţii ai şi bi sunt consideraţi constanţi, iar pentru sistemefizic realizabile n>m.
Rezolvarea ecuaţiei diferenţiale de mai sus este laborioasă şiutilizarea ei în practică este complicată. Sunt de preferat exprimărimai simple care permit o exprimare mai rapidă a calităţilor dinamiceale sistemului. În acest sens se adoptă ipoteze simplificatoare cum ar
fi:
(4.3.1)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
- condiţii iniţiale nule;- intr ări standard (treaptă, impuls, rampă, sinus).

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 55/165
55
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Precizie
Structura tipică
( p , p , p , )
Exemplu: X K F
s⋅=
în care: F- este for ţa care acţionează asupra arcului;X- deformarea arcului;
Ks- constanta de elasticitate a arcului.
Sistem complex
y- deplasarea masei blocului;
M- masa blocului;Ks- constanta elastică a arcului;Kd- coeficientul de amortizare;X- deplasarea capătului arcului.
M
K d K s
yx
Fig. 4.3.7
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Suma de for ţe:
2
2
dt
yd M - datorită acceleraţiei;

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 56/165
56
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Precizie
Structura tipică
2dt ţ
dt
dy
K d - datorită amortizării; x K y K
s s− - datorită arcului.
x K y K dt
dy K
dt
yd M
s sd =++⇒
2
2
x- mărimea de intrare;y- mărimea de ieşire.
O modalitate simplă de rezolvare a ecuaţiilor diferenţiale detipul este dată de utilizarea transformatei Laplace.
Pentru:
⎩⎨⎧
≥≠ 0t daca 0
0<t daca 0 = f(t)
se defineşte transformata Laplace:
dt t f e s F t f L st )()()]([0
⋅== ∫ ∞
−
unde ω σ j+= s este o variabilă complexă.
(4.3.2)
(4.3.3)
(4.3.4)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Transformata Laplace face trecerea de la domeniul real avândca variabilă independentă timpul, la domeniul complex având cavariabilă s Prin aplicarea transformatei Laplace transformăm o

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 57/165
57
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Transformata Laplace
Funcţia de transfer
Structura tipică
variabilă s. Prin aplicarea transformatei Laplace transformăm oecuaţie diferenţială într-o ecuaţie polinomială (operaţia de diferenţiere
se reduce la o simplă operaţie de înmulţire):
Y(s) s= F(s) atunci dt
y(t)d = f(t) Daca n
n
n
Revenirea la domeniul real (după rezolvarea ecuaţieipolinomiale) se realizează prin aplicarea transformatei Laplaceinverse:
{F(s)} L= f(t)1−
Aplicând transformata Laplace ecuaţiei diferenţiale iniţiale obţinem:
X(s)b+ sX(s)b+...+ X(s) sb+
X(s) sb=Y(s)a+ sY(s)a+...+Y(s) sa+Y(s) sa
01
1-m
1-m
m
m01
1-n
1-n
n
n
Definimfunc
ţ ia de transfer
ca raportul dintre transformataLaplace a mărimii de ieşire şi transformata Laplace a mărimii deintrare, pentru condiţii iniţiale nule:
a+ sa+...+ sa+ sa
b+ sb+...+ sb+ sb=
X(s)
Y(s)= H(s)
01
1-n
1-n
n
n
01
1-m
1-m
m
m
(4.3.5)
(4.3.6)
(4.3.7)
(4.3.8)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de FabricaţieAlte forme uzuale de exprimare ale funcţiei de transfer sunt:
11 +⋅++⋅ sb
sb
mm
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 58/165
58
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Transformata Laplace
Funcţia de transfer
Structura tipică
1...
1...
)(
0
1
0
00
+++
+⋅++⋅
⋅=
saa s
aa
sb
sb
K s H nn
care scoate în evidenţă factorul de propor ţionalitate:
0
0
a
b K =
care corespunde raportului dintre semnalele de ieşire şi de intrare înregim staţionar.Transformata Laplace este tratată în mod detaliat în
Pentru acest regim, K > 1 corespunde unui efect de amplificare,iar K < 1 corespunde unui efect de atenuare.
))...((
))...((')(
1
1
n
m
p
qs s s s
z s z s
s
K s H
−−
−−⋅=
unde soluţiile z j , (j = 1,2,…,m) şi s j , (j = 1,2,…,n-p) se numesc zerourile,respectiv polii funcţiei de transfer şi pot avea forme reale, imaginare,complexe, distincte sau multiple.
Cu p
q s s-a notat polul sq, cu ordinul de multiplicitate p, iar cu
n
m
a
b
K =
' s-a notat un coeficient f ăr ă semnificaţie deosebită.
(4.3.9)
(4.3.10)
(4.3.11)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
∏ ∏= =
⎟⎟⎠
⎞⎜⎜⎝
⎛ +⋅+⋅⋅+
1 2
1 1
2
21
21)1(
m
j
m
j j
s s sT K ω
ζ
ω

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 59/165
59
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Transformata Laplace
Funcţia de transfer
Structura tipică∏ ∏= =
= =
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⋅+⋅⋅+
⎠⎝ ⋅=1 2
1 1
22
1 1
121)1(
)(n
j
n
j j j
j
j j j j
p
s s sT s
K s H
ω ζ
ω
ω ω ,
unde2121
mmnn p +>++ ,reprezintă una din cele mai r ăspândite forme descriere a funcţiei de transfer, deoarece scoate în evidenţă factorul depropor ţionalitate K, polii de origine multiplă de ordinul p, constantelede timp T j, factorii de amortizare ζ j, şi pulsaţiile naturale ω j, parametricare contribuie la interpretarea fenomenologică mai completă afuncţiei de transfer.
Utilitatea funcţiei de transfer derivă din simplitatea operaţiilor matematice bazate pe această funcţie şi a interpretărilor
fenomenologice directe şi simple care rezultă. Astfel, din punct devedere al analizei , se consider ă cunoscut semnalul de intrare i(t) şifuncţia de transfer H(s), pentru care interesează determinareasemnalului de ieşire e(t), respectiv:
I(s) H(s)= E(s) ⋅
de unde, aplicând transformata Laplace inversă rezultă:
I(s)][H(s) L=e(t) ⋅−1
(4.3.12)
(4.3.13)
(4.3.14)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Pentru sintez ă, fiind cunoscute semnalele de intrare i(t) şi deieşire e(t), se urmăreşte stabilirea structurii elementului care este
bil f t tă t f S t d t i tf l

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 60/165
60
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Transformata Laplace
Funcţia de transfer
Structura tipică
capabil a efectua această transformare. Se poate determina astfelfuncţia de transfer sub forma:
][][ e(t) L= E(s) şii(t) L= I(s) unde I(s)
E(s)= H(s)
Pentru exemplul prezentat:
( ) ( ) ( ) ( ) s X K sY K sY s K sY Ms s sd ⋅=⋅+⋅⋅+2
( )( )
sd
s
K s K Ms
K
s X
sY
+⋅+=
2
■ Diagrama bloc
Reprezentarea funcţionării sistemului, din punct devedere grafic propune utilizarea blocurilor funcţionale,săgeţi pentru fluxul semnalelor, puncte de sumare şideviaţie.
(4.3.15)
(4.3.16)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
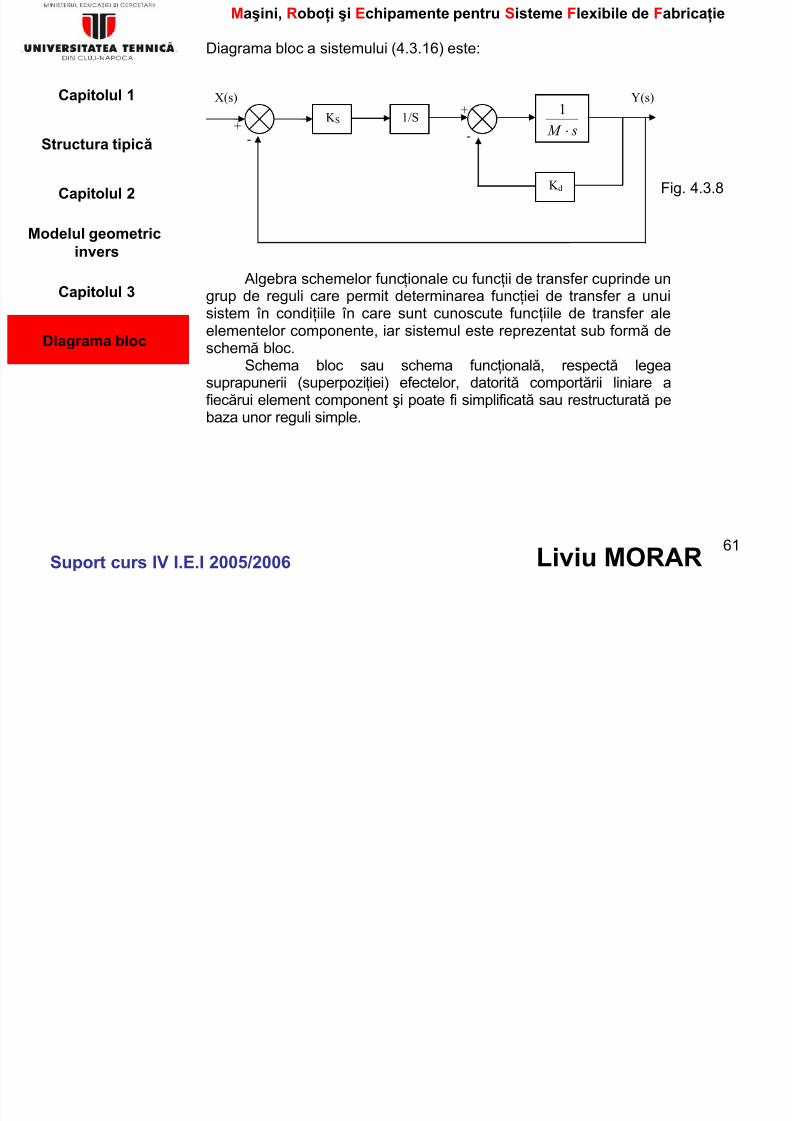
Diagrama bloc a sistemului (4.3.16) este:
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 61/165
61
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Diagrama bloc
Structura tipică
Algebra schemelor funcţionale cu funcţii de transfer cuprinde ungrup de reguli care permit determinarea funcţiei de transfer a unuisistem în condi
ţiile în care sunt cunoscute func
ţiile de transfer ale
elementelor componente, iar sistemul este reprezentat sub formă deschemă bloc.
Schema bloc sau schema funcţională, respectă legeasuprapunerii (superpoziţiei) efectelor, datorită comportării liniare afiecărui element component şi poate fi simplificată sau restructurată pe
baza unor reguli simple.
K S 1/S
sM ⋅
1
K d
X(s) Y(s)
+-
+
-
Fig. 4.3.8
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
În figura 4.3.9 se prezintă cele trei conexiuni de bază aleelementelor, respectiv în serie (fig. 4.3.9 a), în paralel (fig. 4.3.9 b) şicu reacţie (fig. 4.3.9 c).

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 62/165
62
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Diagrama bloc
Structura tipică
Conexiunea în serie constă în legarea ieşirii unui element la intrareaelementului următor:
)(
)()(,
)(
)()(
2
2
2
1
1
1 s I
s E s H
s I
s E s H ==
şi
)()( 21 s I s E =
Fig. 4.3.9
(4.3.17)
(4.3.18)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
C i l l 1
Funcţia de transfer a elementului echivalent va fi:
( )( ) s E s E s E
H( ))()()( 12
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 63/165
63
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Diagrama bloc
Structura tipică
(s) H (s) H s I s I s I
= H(s) 21 ⋅=⋅=)(
)(
)(
)(
)(
)(
1
1
2
2
Generalizând, pentru n elemente conectate în serie, se obţinerelaţia:
(s) H = H(s) j
n
1= j
∏
Conexiunea în paralel constă în legarea aceleiaşi intr ări la toateelementele şi însumarea algebrică a ieşirilor. Vom avea:
)(
)(
)(,)(
)(
)(
2
2
1
1 s I
s E
s H s I
s E
s H ==
şi
)()()(21
s E s E s E ±=
Funcţia de transfer a elementului echivalent va fi:
(s) H (s) H s I
s E s E
s I
s E = H(s) 21 ±±=
±±=
)(
)()(
)(
)( 21
(4.3.19)
(4.3.20)
(4.3.21)
(4.3.22)
(4.3.23)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
C it l l 1
Generalizând, pentru n elemente conectate în paralel, se obţinerelaţia:
(s)H=H(s)n
∑ (4 3 24)

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 64/165
64
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Diagrama bloc
Structura tipică
(s) H = H(s) j
1= j
∑
În cazul conexiunii în paralel însumarea se consider ă algebrică.Conexiunea cu reacţie constă în introducerea la intrarea I(s), a
unui semnal dependent de semnalul de ieşire, R(s), care se numeştesemnal de reacţie.
Dacă A(s)=I(s)+R(s), reacţia se numeşte pozitivă, iar dacă(s)=I(s)-R(s), reacţia se numeşte negativă.
Funcţia de transfer a elementului de pe circuitul direct este:
)(
)()(
s A
s E s H
d =
Funcţia de transfer de pe circuitul de reacţie:
)(
)()(
s E
s R s H
r =
Funcţia de transfer a elementului echivalent va fi:
(s) H (s) H 1
(s) H
s A
s E
s E
s R
s A
s E
s R s A
s E
s I
s E = H(s)
d r
d
⋅±=
⋅
==
)(
)(
)(
)(1
)(
)(
)()(
)(
)(
)(
mm
(4.3.24)
(4.3.25)
(4.3.26)
(4.3.27)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Semnele (+) şi (-) de la numitor în cazul conexiunii cu reacţiecorespund reacţiei negative respectiv reacţiei pozitive. Dacă pecircuitul de reacţie nu există element de reacţie, atunci se consider ă

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 65/165
65
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Diagrama bloc
Structura tipică
r (s)=1, iar reacţia se numeşte unitar ă.
Cu ajutorul rezultatelor generale se poate utiliza o algebr ă aschemelor funcţionale în sensul simplificării sau restructur ăriiacestora. În continuare sunt prezentate câteva exemple simple careilustrează modul de utilizare al algebrei schemelor funcţionale. Pentrusimplificarea notaţiilor s-a eliminat utilizarea parantezelor la notaţiile I şi E precum şi la notaţia H .
Fig. 4.3.10
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
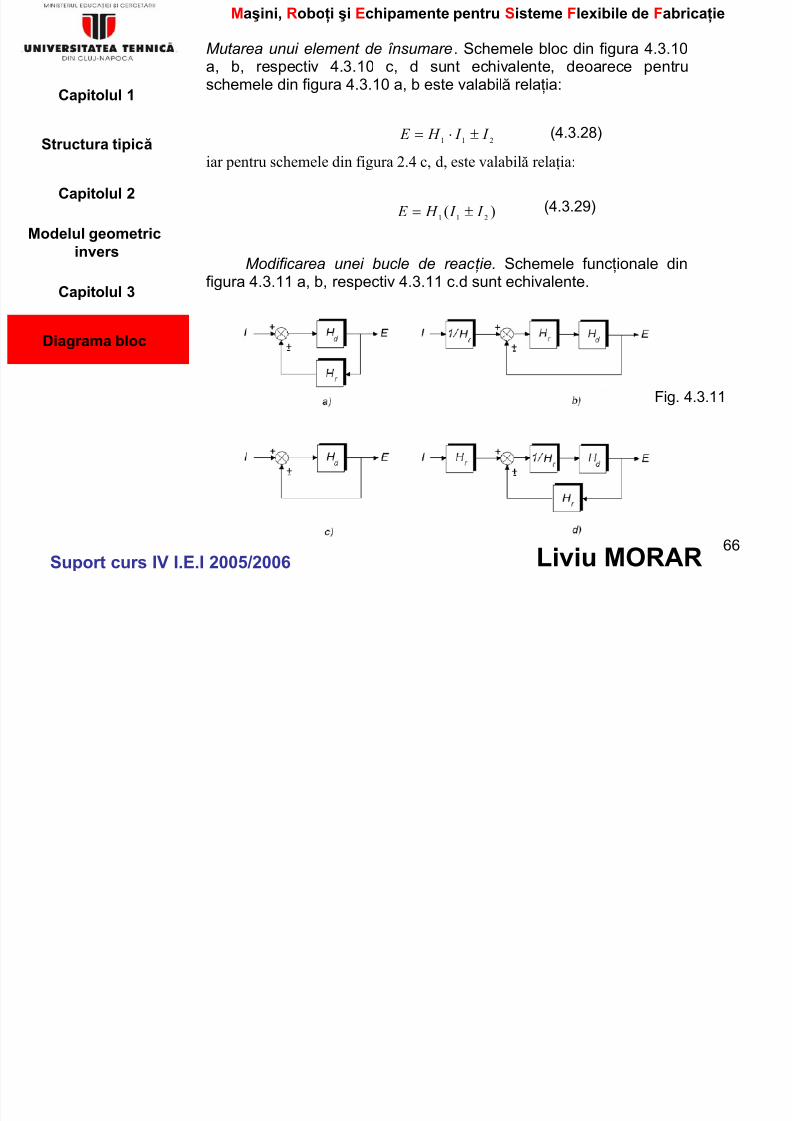
Mutarea unui element de însumare. Schemele bloc din figura 4.3.10a, b, respectiv 4.3.10 c, d sunt echivalente, deoarece pentruschemele din figura 4.3.10 a, b este valabilă relaţia:
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 66/165
66
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Diagrama bloc
Structura tipică 211I I H E ±⋅=
iar pentru schemele din figura 2.4 c, d, este valabilă relaţia:
)(211
I I H E ±=
Modificarea unei bucle de reac ţ ie. Schemele funcţionale dinfigura 4.3.11 a, b, respectiv 4.3.11 c.d sunt echivalente.
Fig. 4.3.11
(4.3.28)
(4.3.29)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Pentru figura 4.3.11 a, b este valabilă relaţia:
H
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 67/165
67
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Diagrama bloc
Structura tipică
r d
d
H H
H H
⋅±
=1
0
iar pentru figura 2.25 c, d este valabilă relaţia:
d
d
H
H H
±
=1
0
unde H 0 corespunde funcţiei echivalente de transfer definită derelaţia:
I
E
H =
0
(4.3.30)
(4.3.31)
(4.3.32)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Suprapunerea semnalelor. Dacă asupra unui sistem acţioneazămai multe semnale de intrare, atunci semnalul de ieşire poate ficonsiderat ca efect al suprapunerii efectelor acestor semnale (fig.4 3 12)

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 68/165
68
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Diagrama bloc
Structura tipică
4.3.12).
n cazul sistemului având două semnale de intrare, din figura4.3.12 a, se poate stabili câte o funcţie de transfer între o mărime deintrare şi ieşire, cealaltă intrare fiind considerată nulă, după care se însumează cele două efecte, respectiv:
2
321
2
1
321
21
11I
H H +H
H + I
H H H
H H E = ⋅⋅
+
unde:
Fig. 4.3.12
(4.3.33)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
321
21
1
10 2 H H H +1
H H =|
I
E = H
0= I I (4.3.34)

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 69/165
69
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Diagrama bloc
Structura tipică
şi:
321
2
2
012 1 H H H +1
H =|
I
E = H
=0 I
În figura 4.3.12 b se arată că semnalul de ieşire rezultă prinsuprapunerea efectelor celor două semnale de intrare.
Simplificarea schemelor func ţ ionale. În figura 4.3.13 esteexemplificată simplificarea unei scheme funcţionale complexe.
(4.3.35)
Fig. 4.3.13
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
În componenţa schemei bloc din figura 4.3.13 a, care urmează a fisimplificată, există o reacţie pozitivă, între punctele a şi b, pentru carese poate scrie:
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 70/165
70
Capitolul 1
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Diagrama bloc
Structura tipică32
2
1 H H
H H
ab−
=
Astfel, între punctele c, d rezultă trei blocuri legate în serie,respectiv:
41H H H H
abcd ⋅⋅=
care se încadrează într-un circuit de reacţie negativă, astfel încâtfuncţia de transfer echivalentă rezultă sub forma:
542132
421
5
011 H H H H H H
H H H
H H
H
I
E H cd
cd
+−=
⋅+==
ceea ce corespunde funcţiei de transfer a unui singur element,prezentat în figura 4.3.13 b, care poate înlocui din punct de vederefuncţional sistemul iniţial.
(4.3.36)
(4.3.37)
(4.3.38)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Aplicaţie:Indicaţi diagrama bloc pentru setul de ecuaţii:
( ) ( ) ( ) ( ) ( ) ( ) s Z sW sV sY s X sW −=−= ;
( ) ( ) ( ) ( ) ( )( ) ( )sZsssYssVssZ =+++⋅=+⋅ 65;25 2
(4.3.39)

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 71/165
71
p
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Ecuaţia caracteristică
Structura tipică
( ) ( ) ( ) ( ) ( )( ) ( ) s Z s s sY s sV s s Z =+++=+ 65;25
( ) s X - mărimea de intrare( ) sY - mărimea de ieşire.
Ecuaţia caracteristică Derivă din modelul matematic al sistemului. Pentru (4.3.14),
ecuaţia caracteristică este:02 =+⋅+
sd K s K Ms
Obs: Se obţine egalând cu zero numitorul funcţiei de transfer.
Rădăcinile ecuaţiei caracteristice ( ) sunt:
MK K K s
sd d
2
4
2
2
2,1
−±−=
W(s)
65
12 ++ s s
X(s) Y(s)
+-
+
- 5
2
+
+
s
s
Z(s)
(4.3.40)
(4.3.41)
Fig. 4.3.14
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Valorile Ks, Kd, M influenţează performanţele sistemului.

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 72/165
72
p
Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Ecuaţia caracteristică
Structura tipică
a) Sistem neamortizat 0=d
K
M
K j s s±=
2,1
pentru X: treaptă unitar ă ( ) ( ) ( ) xt C t C t ynn
+⋅+⋅= ϖ ϖ cossin21
M
K s
n=ϖ - frecvenţa naturală.
b) Sistem subamortizat: sd
MK K 4<
M
K MK j
M
K s
d sd
2
4
2
22
2,1
−±−=
cu notaţiile M
K MK
M
K a d s
d d
2
4;
2
22 −== ϖ
d ja s ϖ ±−=
2,1
( ) ( ) ( )[ ] xt C t C et yd d
at +⋅+⋅= − ϖ ϖ cossin21
d ϖ - frecvenţa de amortizare.
(4.3.42)
(4.3.43)
(4.3.44)
Fig. 4.3.15
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
a) Sistem cu amortizare critică: sd
MK K 42 =
M
K s d
22,1
−= (4 3 45)

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 73/165
73Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Tipuri semnale
de comandă
Structura tipică
M 2
( ) xeC eC t y at at
+⋅+⋅=−−
21 b) Sistem supraamortizat:
sd MK K 42 >
M
MK K bba s
sd
2
)4(;
22
2,1
−=±−=
( ) ( ) ( ) xeC eC t y t bat ba ++= −−+−
21
Semnale
• Treaptă unitar ă:
( )⎩⎨⎧ ≥
<=− τ
τ τ t t t U
10
( )[ ] ( ) s st
sdt et U t U L τ ε τ τ −
∞− ⋅=⋅−=− ∫
1
0
când ( )[ ] s
t U L1
0 ==τ tτ
U(t-τ)
(4.3.45)
(4.3.46)
(4.3.47) Fig. 4.3.16
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
• Rampă
( )⎩⎨⎧ <
=01
00
t
t t v
V(t)
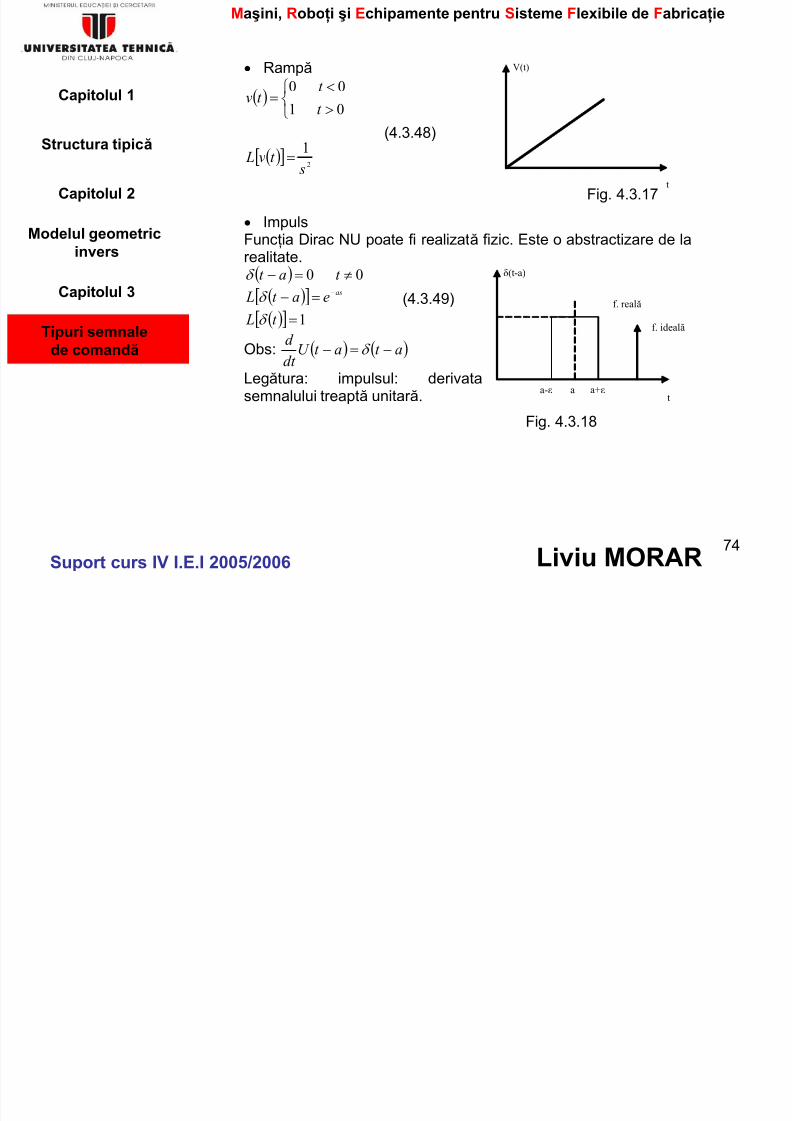
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 74/165
74Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Tipuri semnale
de comandă
Structura tipică
( )⎩⎨
> 01 t
( )[ ]2
1
st v L =
• ImpulsFuncţia Dirac NU poate fi realizată fizic. Este o abstractizare de larealitate.
( ) 00 ≠=− t at δ
( )[ ]
( )[ ] 1=
=− −
t L
eat L as
δ
δ
Obs: ( ) ( )at at U dt
d −=− δ
Legătura: impulsul: derivatasemnalului treaptă unitar ă.
t
ta-ε a a+ε
δ(t-a)
f. reală
f. ideală
(4.3.48)
(4.3.49)
Fig. 4.3.17
Fig. 4.3.18
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1(4.3.50)
• Sinusoidal( ) ( )ϕ ω ϕ ω +=+= t X xt X x cossin
considerând relaţiile Euler:t jt jt jt j eeee ω ω ω ω −− +−

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 75/165
75Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Tipuri semnale
de comandă
Structura tipică
Fig. 4.3.19
2cos2sin
ee
t j
ee
t ω ω
+
== (4.3.51)rezultă că semnalul sinusoidal poate fi interpretat ca o sumă de două funcţii exponenţiale.Funcţiile (4.3.51) fiind complex conjugate, analiza uneia estesuficientă, soluţia pentru a doua fiind conjugata primeia:
( ) ( ) ( )[ ]⇒+++=+ ϕ ϖ ϕ ϖ ϕ ϖ t jt X Xe t j sincos
reprezintă un vector învârtitor în planulcomplex în sisteme mecanice lineare,pulsaţia ω=constantă ⇒ unghiul de rotaţie
„ωt” poate fi omis:ϕ ϕ X Xe j =
Expresia pune în valoare singurele mărimi semnificative alesemnalului sinusoidal: modulul şi faza.
( ) ( ) ( ) s I sY s E ⋅= cu ( ) ( )[ ] 1tL == δ s I ( ) ( ) sY s E =
t
i
cos(ωt+φ)
ωt+φ
sin(ωt+φ)
(4.3.52)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Funcţia y(t) care îndeplineşte condiţia (4.3.52) poartă numele defuncţie pondere:
( ) ( )t yt e = Funcţia pondere este originalul funcţiei de transfer şi totodată
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 76/165
76Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Tipuri semnalede comandă
Structura tipică
u cţ a po de e es e o g a u u cţ e de a s e ş o oda ă
r ăspunsul elementului la un semnal impuls în origine.
• Funcţia indicială: r ăspunsul unui element la un semnal treaptăunitar. S-a introdus deoarece funcţia pondere nu poate firiguros ridicată experimental (imposibilitatea realizării unuisemnal impuls, riguros matematic).
( ) ( ) ( ) τ τ τ d t u yt et
∫ −=0
deoarece ( ) 1=−τ t u pentru orice τ >t
( ) ( ) ( )∫ ==t
t Ad yt e0
τ τ
( )t A - funcţia indicială.
(4.3.53)
(4.3.54)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
În acest paragraf se va opera cu noţiunea de element, care sereprezintă sub forma unui dreptunghi (fig. 4.3.20 şi prezintă următoarele proprietăţi:- reprezintă o unitate fenomenologică sau funcţională simplă şi bine
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 77/165
77Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Tipuri semnalede comandă
Structura tipicădeterminată;- posedă cel puţin o intrare şi o ieşire (e), excepţie f ăcând elementele de
însumare, la care există mai multe intr ări şi o singur ă ieşire;
- transferul de semnale este unidirecţional ,întotdeauna de la intrare spre
ieşire;
- semnalul de ieşire (e) nu depinde decât de semnalul de intrare (i) şide structura elementului.
Scopul analizei elementelor simple const ă în studiul comport ării
istemelor, în regim tranzitoriu şi sta ţ ionar, cunoscând parametrii care
definesc aceste sisteme şi semnalele care ac ţ ioneaz ă asupra acestora.
i e Fig. 4.3.20
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
În acest scop, se procedează, de obicei, la descompunereaunui sistem (considerat a avea o structur ă complexă), în elementesimple, având - in mod uzual - numitorul funcţiei de transfer de gradul

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 78/165
78Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Tipuri semnalede comandă
Structura tipicăcel mult doi, ceea ce permite simplificarea metodelor de analiză şicunoaşterea directă a contribuţiei fiecărui element, sau a unui grupde elemente, asupra comportării întregului sistem.
Dacă elementele simple nu posedă proprietatea acumulăriienergiei (deci nu posedă iner ţie, sau constantă de timp mecanică,termică, electrică etc.), se numesc elemente ideale, iar dacă posedă proprietatea acumulării energiei (respectiv, posedă iner ţie sau con-stante de timp), se numesc elemente reale. Numărul constantelor detimp, evidenţiat la numitorul funcţiei de transfer, defineşte ordinulelementului real, iar forma polinomului de la număr ător, defineşteacţiunea (sau tipul) acestui element, ca de exemplu: acţiunea
propor ţională (P), integratoare (I), derivativă (D), sau combinaţii aleacestor acţiuni.
In unele cazuri, elementul posedă şi o constantă de timp mort(T m ) , care determină o comportare particular ă.
Pe lingă factorul de propor ţionalitate K şi constantele de timp T
şi T m, comportarea elementelor simple mai poate fi studiată şi prinintermediul altor parametri, ca de exemplu factorul de amortizare ( ζ )
şi pulsaţia naturală ω n, care sunt tot funcţii de T şi T m, ceea ce asigur ă uneori posibilitatea unei tratări mai intuitive sau mai complete afenomenelor.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
A. Elemente idealeFiind lipsite de iner ţie, deci şi de constante de timp, polinomul
(s) al numitorului funcţiei de transfer este de grad nul, astfel incitaceste elemente se mai numesc şi elemente de ordinul zero.
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 79/165
79Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Elemente ideale
Structura tipică În tabelul 4.3.1 se prezintă ecuaţia de definiţie şi funcţia detransfer a elementelor ideale. Răspunsul la frecvenţă şi r ăspunsul
indicial sunt reprezentate grafic în tabelul 4.32.Coeficienţii (parametrii) constanţi din această tabelă corespund cu
factorul de propor ţionalitate (K p ), constanta de integrare (i
iT
K 1
= ),
constanta de timp cu efect de integrare (T I ), constanta de derivare(K D=T D ) şi constanta de timp cu efect de derivare (T D ).
Din ecuaţiile de definiţie, se poate observa că semnalul deieşire, este format - funcţie de cazul considerat - din însumarea
efectelor propor ţionale (K I i), integratoare ( ∫ ∫ = idt
T idt K
i I
1
), respectivderivative (
dt
diT
dt
di K D D =⋅ ), în raport cu timpul. Cele trei efecte de mai
sus pot fi regăsite şi sub forma analitică a funcţiei de transfer
respectiv K I pentru acţiunea propor ţională, sT s
K
I
I 1= pentru acţiunea
integratoare şi sT s K D D
= pentru acţiunea derivativă.Răspunsul la frecvenţă corespunde unor drepte verticale, cu
excepţia elementului P 0 pentru care apare sub forma unui punct.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Răspunsul indicial conţine cele trei efecte sus amintite, sub formacoeficientului de propor ţionalitate K P pentru efectul propor ţional, a unei
creşteri uniforme în raport cu timpul t T
t K I
I ⋅=⋅1 pentru efectul integrator

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 80/165
80Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Elemente ideale
Structura tipicăşi a unui impuls )(T)(K DD t t ∂=∂⋅ pentru efectul derivativ. Deoarece legeasuperpoziţiei efectelor este valabilă pentru elementele liniare, rezultă căr ăspunsul indicial poate însuma, după caz, o parte sau toate efectelesus amintite.Datorită lipsei iner ţiei elementelor ideale, r ăspunsul indicial aparesimultan cu momentul aplicării semnalului treaptă unitar ă, de laintrare.
Deoarece toate elementele (fenomenele) din tehnică posedăiner ţie (în măsur ă mai mare sau mai mică), rezultă că astfel de ele-mente ideale nu există. Totuşi multe elemente pot fi aproximate aavea o comportare ideală, ca de exemplu amplificatoarele operaţio-nale, care pot realiza - practic cu erori neglijabile - comport
ările P
0 , I
0 ,
D0 , PD0 şi PID0.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 81/165
81Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Elemente ideale
Structura tipică
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
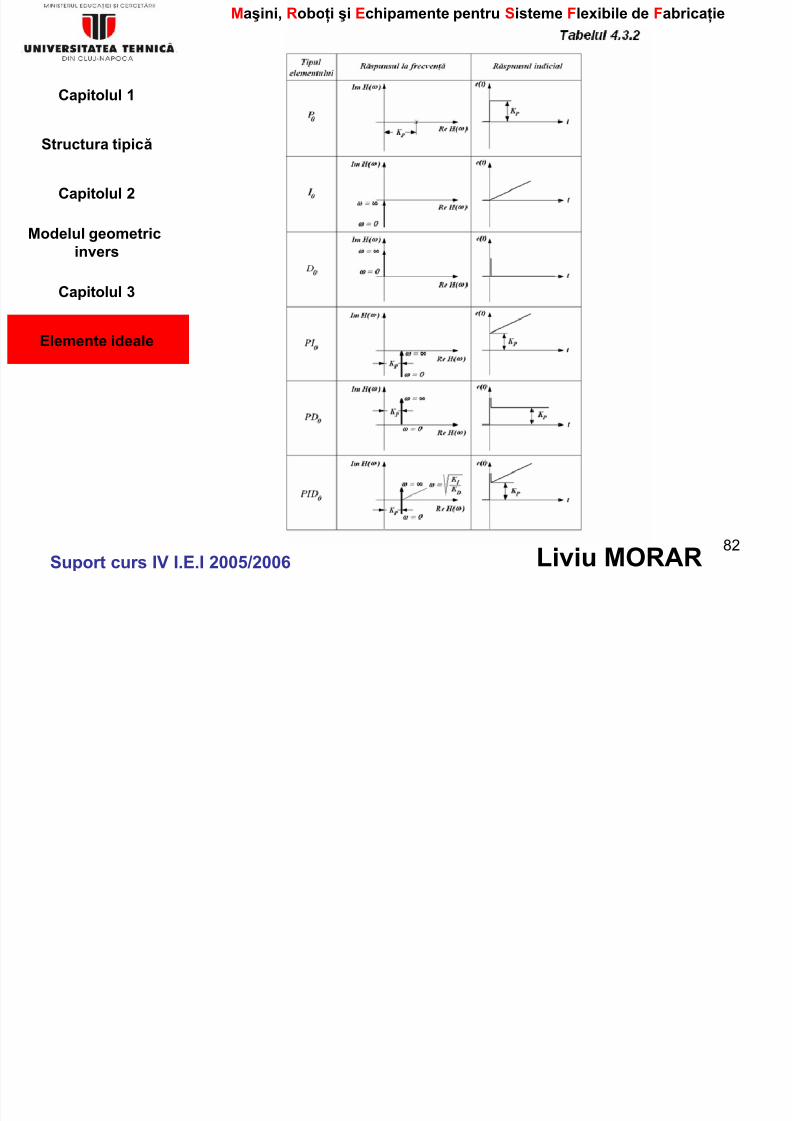
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 82/165
82Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Elemente ideale
Structura tipică
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
B) Elemente reale
Posedă iner ţie şi au corespondenţă cu numeroase fenomenedin tehnică. După cum polinomul A(s) al numitorului funcţiei de

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 83/165
83Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Elemente reale
Structura tipicătransfer este de gradul 1 sau 2, există una, respectiv două constantede timp.
Elementul P 1, sau cu acţiune propor ţională de ordinul 1, estedefinit de ecuaţia:
edt
deT i K
P +=
1
unde K P este factorul de propor ţionalitate, iar T 1 este constanta detimp.
Din (4.3.55) rezultă
1)(
1
1+
= sT
K s H P
P
pentru care, în figura 4.3.21 a, se reprezintă r ăspunsul la frecvenţă,iar în figura 4.3.21 b este reprezentat r ăspunsul indicial obţinut din:
(4.3.55)
(4.3.56)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 84/165
84Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Elemente reale
Structura tipică
)1()1
1
()( 1
1
1 T
t
n P
P e K
s sT
K Lt e
−− −⋅=⋅
+
=
Se observă că acest r ăspuns este o funcţie exponenţială, caretinde asimptotic spre K p, cu subtangenta in origine egală cu T 1. Spredeosebire de elementul ideal P 0 , acum r ăspunsul indicial nu poate
urmări variaţia treaptă şi se apropie la 98% din valoarea asimptoteiK p, după un interval de timp 4T 1 (cu en s-a notat baza logaritmilor naturali).
Aceste elemente prezintă comportare de filtru trece jos, cu
întârziere de fază, teoretic in limitele de la 0 la2
π .
(4.3.57)
Fig. 4.3.21
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Elementul P 2 , sau cu acţiune propor ţională de ordinul 2,este definitde ecuaţia:
edt
deT T
dt
ed T T i K
P +++⋅= )(
212
2
21 (4.3.58)
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 85/165
85Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Elemente reale
Structura tipicăsau
edt
de
dt
ed i K
nn
P +⋅+⋅=
ω
ζ
ω
212
2
2
unde T 1 şi T 2 sunt cele două constante de timp, iar
21
21
2 T T
T T +=ζ
şi
21
1
T T n
=ω
reprezintă factorul de amortizare, respectiv pulsaţia naturală.
Din relaţiile (4.3.60) şi (4.3.61) rezultă:
1211)( 22
21
2
21
2
++
=
+++
=
se s
K
sT T sT T
K H
nn
P P
P
ω ω
pentru care, in figura 4.3.22 a se reprezintă r ăspunsul la frecvenţă,având drept parametru pe curbe ζ = const . Elementul fiind de ordinuldoi, se parcurg două cadrane, comportarea fiind tot de filtru trece jos,cu întârziere de fază, având limita superioar ă 0, iar limita inferioar ă
cuprinsă între – π/2 şi -π.
(4.3.61)
(4.3.60)
(4.3.59)
(4.3.62)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 86/165
86Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Elemente reale
Structura tipică
Răspunsul indicial se obţine din relaţia:
)1
121
()(2
2
1
s s
e s
K Lt e
nn
P ⋅
++
= −
ω ω
care pe baza teoremei dezvoltării, conduce la următoarele treiconcluzii
a) Cazul 0 <ζ < 1, pentru care
⎥⎦
⎤
⎢⎣
⎡
Φ+⋅−⋅−−=
−
)1sin(11)(2
2 t e
e
K t e n
t e
n
P
n
ω ζ
ω
unde
ζ
ζ 21−
=Φtg
Fig. 4.3.22
(4.3.63)
(4.3.64)
(4.3.65)
Maşini, Robo
ţişi Echipamente pentru Sisteme Flexibile de Fabrica
ţie
Capitolul 1
Cu en s-a notat în acest caz baza logaritmilor naturali, pentru a seevita confuzia cu notaţia utilizată pentru semnalul de ieşire.
Se observă caracterul periodic amortizat al r ăspunsuluiindicial, care tinde spre K P pentru t ∞ (regim staţionar). Pulsaţia

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 87/165
87Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Elemente reale
Structura tipicăproprie a oscilaţiilor este:
21 ζ ω ω −=
n P
fiind mai mică decât pulsaţia naturala ω n datorita factorului de
amortizare ζ . În cazul extrem ζ =0 , r ăspunsul indicial prezintă oscilaţii întreţinute, cu pulsaţia ω n , respectiv:
)]2/sin(1[)( π ω +−= t K t en P
Revenind la relaţia (4.3.67) se observă că efectul de amortizareeste condiţionat de termenul t ne
ζω − şi este cu atât mai mare, cu câtfactorul de amortizare ζ este mai mare.
b) Cazul ζ =1, conduce la r ăspunsul indicial de forma
])11[)(t
nn P
net K t e ω ω
−⋅+−=
care corespunde unei comportări aperiodice exponenţiale sireprezintă şi reprezintă o limită a regimului periodic amortizat.
(4.3.66)
(4.3.67)
(4.3.68)
Maşini, Robo
ţişi Echipamente pentru Sisteme Flexibile de Fabrica
ţie
Capitolul 1
c) Cazul ζ> 1, conduce la un r ăspuns indicial de forma
)1()( 21
1
t s
na
t s
n P eC eC K t e ++= (4.3.69)
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 88/165
88Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Elemente reale
Structura tipicăunde
12
2,1−±= ζ ζω
n s
21
2
1 s s
sc
−=
12
1
2 s s
sc
−=
In figura 4.3.22.b sunt prezentate formele r ăspunsului indicial,pentru 0 < ζ < 1, ζ =1 şi ζ > 1.
Se poate observa importanţa factorului de amortizare e asupra
evoluţiei r ăspunsului indicial şi anume:
0 <ζ < 1: regim subamortizat (periodic amortizat);ζ =1: regim critic amortizat (aperiodic, amortizat la limită)ζ > 1: regim supraamortizat (aperiodic amortizat).
(4.3.70)
Maşini, Robo
ţişi Echipamente pentru Sisteme Flexibile de Fabrica
ţie
Capitolul 1
Se deosebesc următoarele pulsaţii- pulsaţia proprie, 21 ζ ω ω −=
n pw , reprezintă pulsaţia cu care
oscilează r ăspunsul indicial, in prezenţa amortizării.- pulsaţia naturală ω n reprezintă pulsaţia cu care ar oscila
ă l i di i l i i t ti ă ii l (ζ 0)

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 89/165
89Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Elemente reale
Structura tipicăr ăspunsul indicial, in ipoteza amortizării nule ( ζ =0);
- pulsaţia de rezonanţă 221 ζ ω ω −=nr
reprezintă pulsaţiapentru care modulul funcţiei de transfer este maxim, in raportcu w.
În tehnică elementele P l şi P 2 sunt foarte r ăspândite, ca deexemplu: traductoare de m
ăsur
ă, elemente de execu
ţie, servomotoa-
re, procese tehnologice in domeniul termoenergetic, acţionări elec-trice, instalaţii chimice etc.
Pe baza celor prezentate mai sus se pot trage câtevaconcluzii:
a) Structura elementului este definită de ecuaţia diferenţială
care stabileşte dependenţa semnalului de ieşire în raport cu semnalulde intrare.b) Evoluţia in timp a semnalului de ieşire depinde atât de
structura elementului cât şi de forma semnalului de intrare in raportcu timpul.
c) Număr ătorul funcţiei de transfer defineşte comportarea
elementului (P,I,D, sau combinaţii ale acestora).d) Gradul n al numitorului funcţiei de transfer corespunde cunumărul constantelor de timp şi nu influenţează regimul staţionar ( 0), ci numai regimul tranzitoriu ( ω ∞ ).
e) Efectul propor ţional se regăseşte la majoritatea elementelor întâlnite în tehnică şi influenţează r ăspunsul la frecvenţă mai ales în
regim staţionar ( ω 0).
Maşini, Robo
ţişi Echipamente pentru Sisteme Flexibile de Fabrica
ţie
Capitolul 1
f) Efectul integrator introduce o variaţie crescătoare în raport cutimpul asupra r ăspunsului indicial şi deplasează capătul de frecvenţă pentru ω 0 , spre partea inferioar ă a unei asimptote verticale dinsemiplanul stâng.
g) Efectul derivativ accelerează creşterea r ăspunsului indicial în
i t it i (ω ∞) i t t ă l l f ţă i

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 90/165
90Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Echipamentul de control
Structura tipicăregim tranzitoriu ( ω ∞ ) şi roteşte r ăspunsul la frecvenţă in senstrigonometric.
h) Avansul de fază este introdus de efectul derivativ, iar întârzierea de fază este introdusă de efectul integrator şi de iner ţiile(mecanică. electrică. termică etc.) evidenţiate prin constantele detimp, astfel încât, din acest punct de vedere, cele două efecte sunt
antagoniste.
Echipamentul de control În domeniul RI prin echipament de control se înţelege
echipamentul de comandă şi cel de acţionare (vezi fig. )Controlul fiecărei cuple se realizează cu P μ .
Semnalul de- intrare: poziţie sau viteză
- ieşire
ECA Cuplă
Traductor poziţie/viteză
poziţie/viteză
I+
-
E(t) C(t)
μP
poziţie/viteză
Fig. 4.3.23
Maşini, Robo
ţişi Echipamente pentru Sisteme Flexibile de Fabrica
ţie
Capitolul 1
Regulatorul – elementul care determină performanţa sistemului.Generează semnalul de comandă, c.
Clasificarea semnalelor de comandă:
de tip l pornit/oprit (On/Off)
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 91/165
91Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 2
Capitolul 3
Echipamentul de control
Structura tipică- de tipul pornit/oprit (On/Off);- de tipul propor ţional;- de tipul integral;- de tipul propor ţional şi integral (PI);- de tipul propor ţional şi derivativ (PD);- de tipul propor ţional, integral şi derivativ (PID).
• Control: On/Off. „Regulatorul” produce nivelele: complet închis/deschis ale semnalului de comandă:
( ) ( )
( ) 0
0
2
1
>=
<=
t iM
t iM t c (4.3.71)
Maşini, Robo
ţişi Echipamente pentru Sisteme Flexibile de Fabrica
ţie
Capitolul 1
• Control: Propor ţional (P). se utilizează când semnalul decomandă trebuie să aibă o variaţie liniar ă, propor ţională cueroarea. Acţionează ca un amplificator cu coeficientul deamplificare Kp:
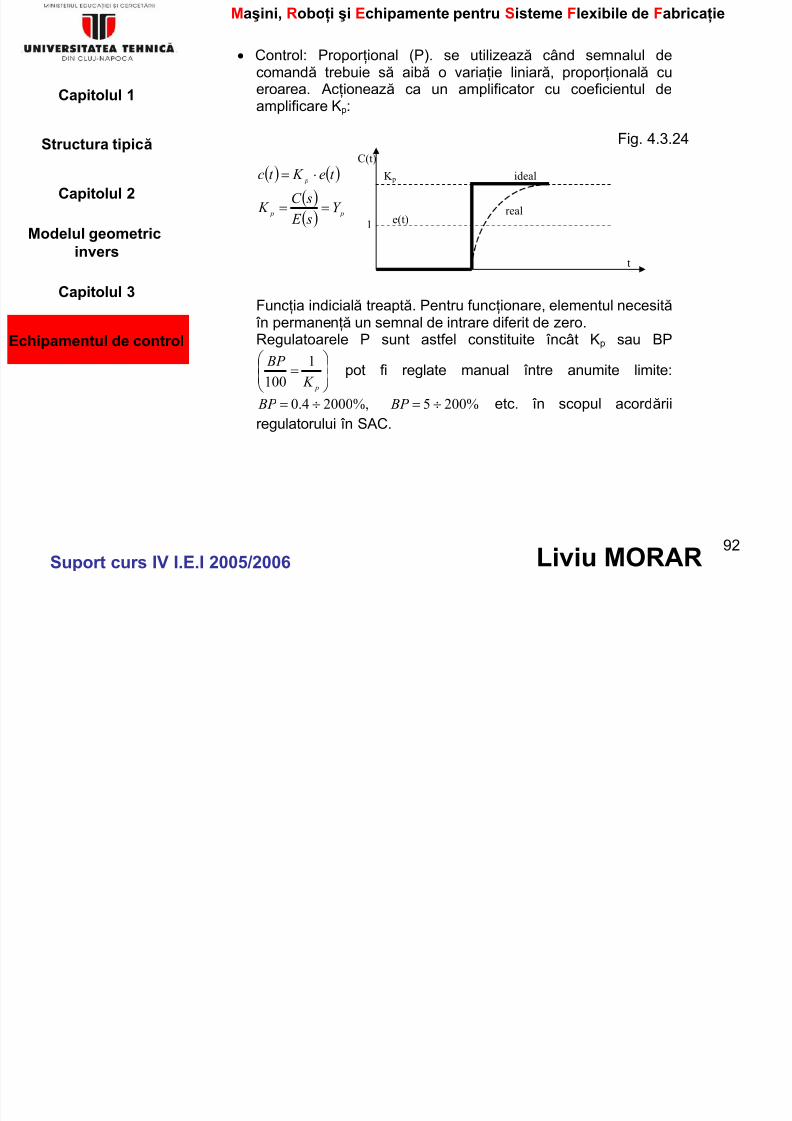
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 92/165
92Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Echipamentul de control
Structura tipică
( ) ( )
( )( ) p p
p
Y s E
sC K
t e K t c
==
⋅=
Funcţia indicială treaptă. Pentru funcţionare, elementul necesită
în permanenţă un semnal de intrare diferit de zero.Regulatoarele P sunt astfel constituite încât Kp sau BP
⎟⎟
⎠
⎞⎜⎜⎝
⎛ =
p K
BP 1
100pot fi reglate manual între anumite limite:
%2005%,20004.0 ÷=÷= BP BP etc. în scopul acordăriiregulatorului în SAC.
C(t)
t
ideal
reale(t)
K p
1
Fig. 4.3.24
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1 C(t)
BP=20%
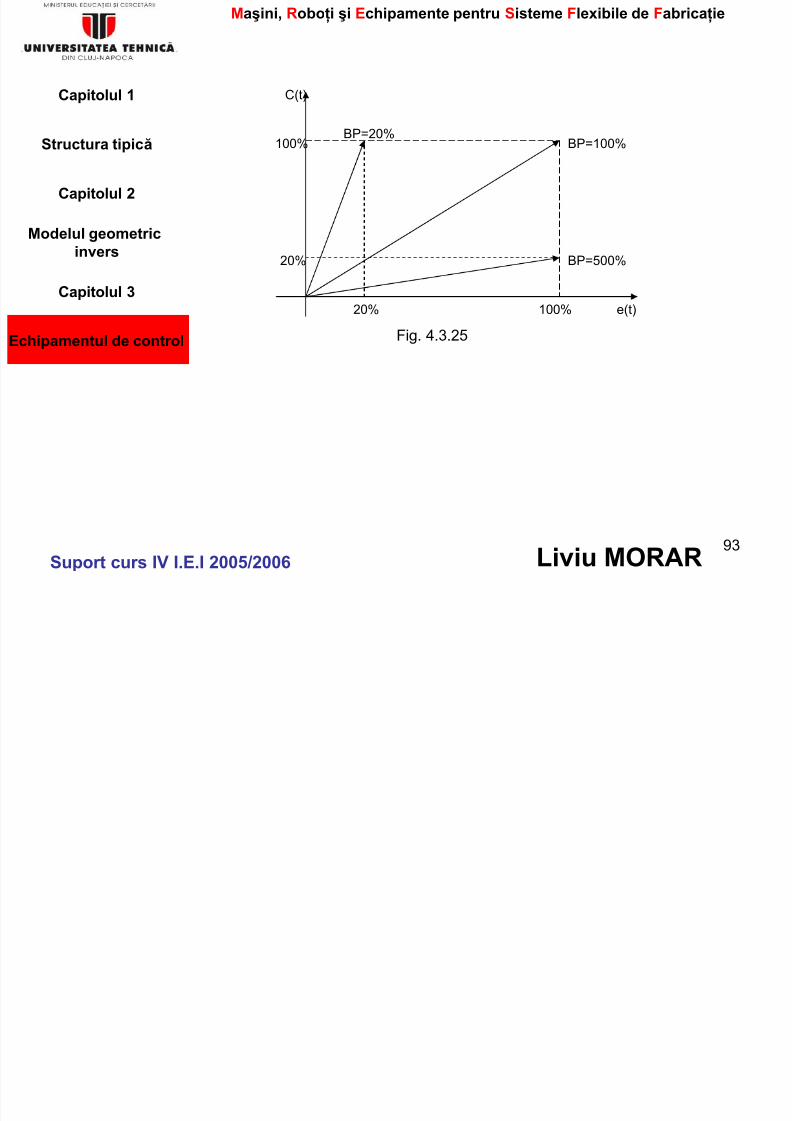
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 93/165
93Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Echipamentul de control
Structura tipică 100%
20%
20% 100% e(t)
BP=500%
BP=100%BP=20%
Fig. 4.3.25
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
• Control: Integral (I)
( ) ( )IdtteKtc = ∫
C(t)
Fig 4 3 26
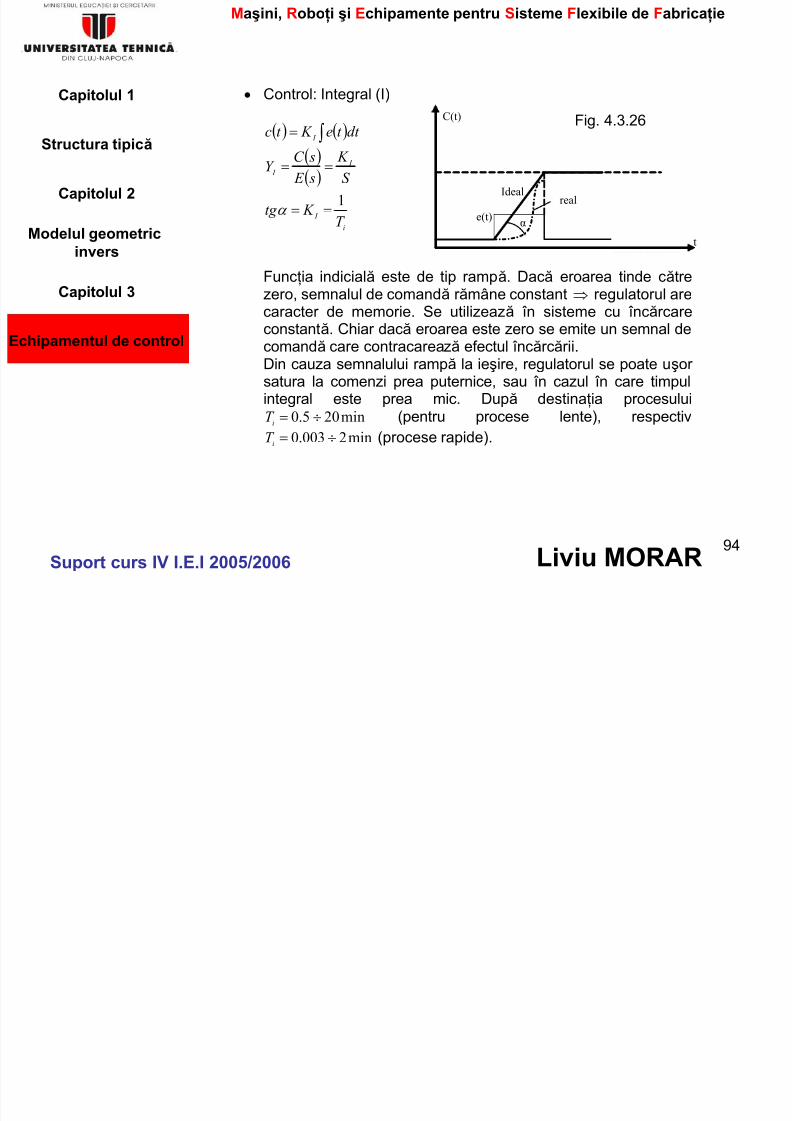
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 94/165
94Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Echipamentul de control
Structura tipică( ) ( )
( )( )
i
I
I
I
I
T
K tg
S
K
s E
sC Y
dt t e K t c
1==
==
= ∫
α
Funcţia indicială este de tip rampă. Dacă eroarea tinde cătrezero, semnalul de comandă r ămâne constant ⇒ regulatorul arecaracter de memorie. Se utilizează în sisteme cu încărcare
constantă. Chiar dacă eroarea este zero se emite un semnal decomandă care contracarează efectul încărcării.Din cauza semnalului rampă la ieşire, regulatorul se poate uşor satura la comenzi prea puternice, sau în cazul în care timpulintegral este prea mic. După destinaţia procesului
min205.0 ÷=i
T (pentru procese lente), respectiv
min2003.0 ÷=iT (procese rapide).
Idealreal
e(t)
tα
Fig. 4.3.26
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
• Control: PI. Combină efectele controlului propor ţional şiintegral: are un efect propor ţional cu mărimea erorii e(t) şi cuintegrala în timp a erorii. Din reprezentarea funcţiei indiciale se
observă saltul de la început datorită caracterului proporţionalK

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 95/165
95Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Echipamentul de control
Structura tipicăobservă saltul de la început datorită caracterului propor ţional.
( ) ( ) ( )
( )( ) sT
sT K
sT K
s E
sC Y
dt t eT
K t e K t c
i
i
p
i
p PI
i
p
p
⋅
+⋅=⎟⎟
⎠
⎞⎜⎜⎝
⎛
⋅+==
+⋅= ∫
111
C(t)
t
idealreal
e(t)
K p
1
Fig. 4.3.27
(4.3.72)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
ă
• Control: PD. Este denumit şi element de anticipare de ordinul I.Mărimea de ieşire este formată din două componente: unapropor ţională cu mărimea erorii, iar cealaltă propor ţională cuderivata acesteia.
( ) ( ) ( ) ( )t deTteKcsaut deTteKc ⎥⎤⎢⎡ +=+⋅= '
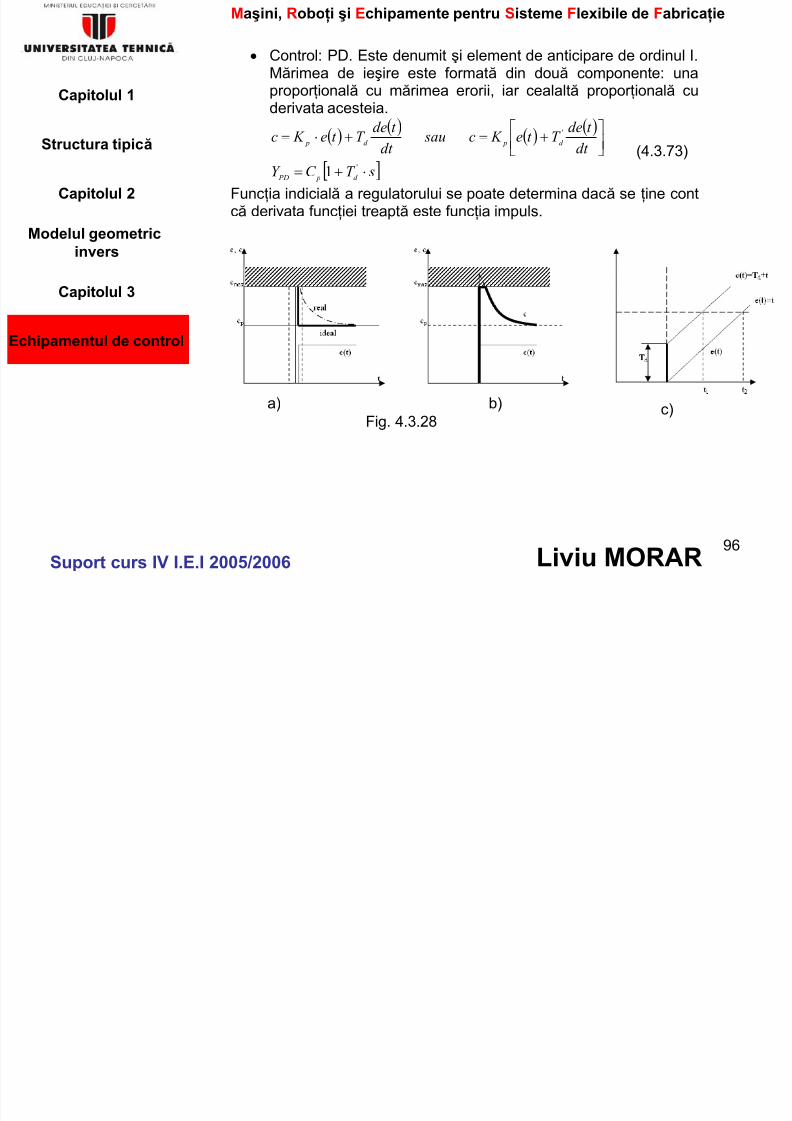
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 96/165
96Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Echipamentul de control
Structura tipică ( ) ( ) ( ) ( )
[ ] sT C Y
dt T t e K c sau
dt T t e K c
d p PD
d pd p
⋅+=
⎥⎦⎤⎢⎣
⎡ +=+=
'1
Funcţia indicială a regulatorului se poate determina dacă se ţine contcă derivata funcţiei treaptă este funcţia impuls.
Fig. 4.3.28a) b) c)
(4.3.73)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
St t ti i ă
Funcţia impuls nu poate fi realizată practic decât aproximativ. În cazulregulatoarelor PD, efectul D este limitat totdeauna de amplitudineamaximă a semnalului de ieşire Cmax, respectiv de valoarea desaturaţie a regulatorului (fig. 4.3.28,b). efectul derivativ se face simţitnumai în regim tranzitoriu şi corespunde la un efect de for ţare a
semnalului de comandă. Valori uzuale:
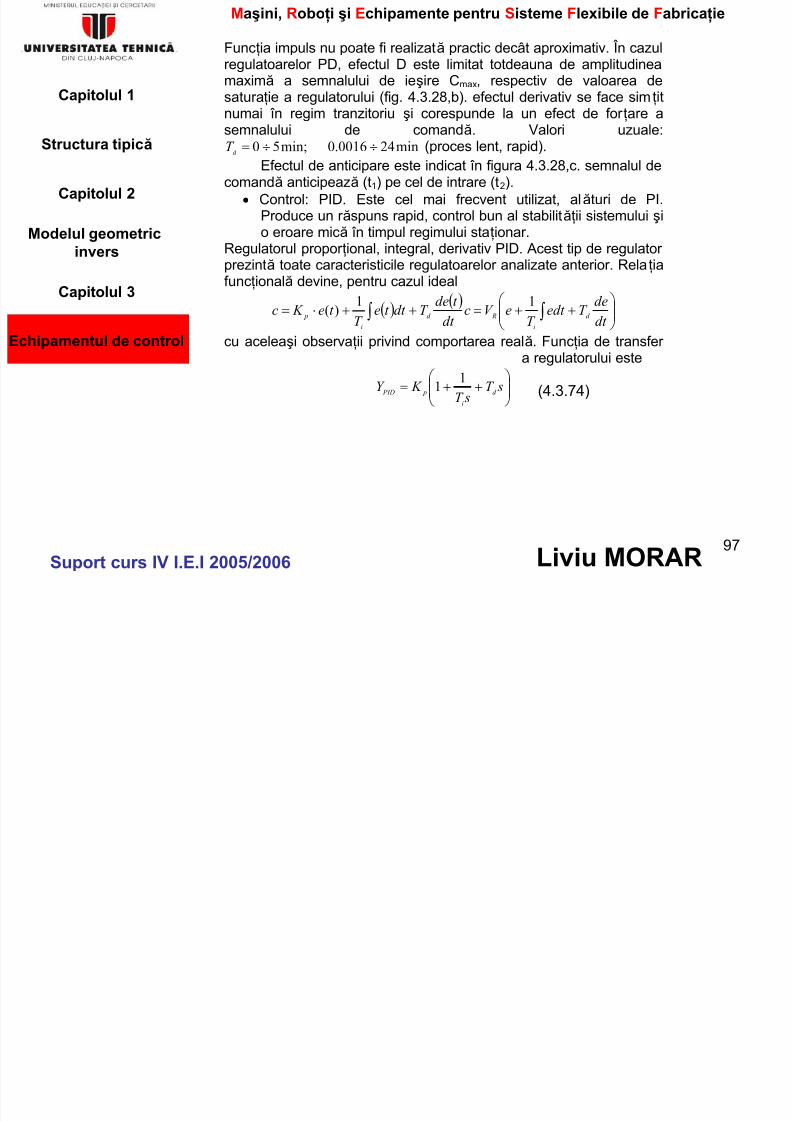
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 97/165
97Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Echipamentul de control
Structura tipică min240016.0min;50 ÷÷=d
T (proces lent, rapid).Efectul de anticipare este indicat în figura 4.3.28,c. semnalul de
comandă anticipează (t1) pe cel de intrare (t2).• Control: PID. Este cel mai frecvent utilizat, alături de PI.
Produce un r ăspuns rapid, control bun al stabilităţii sistemului şi
o eroare mică în timpul regimului staţionar.Regulatorul propor ţional, integral, derivativ PID. Acest tip de regulator prezintă toate caracteristicile regulatoarelor analizate anterior. Relaţiafuncţională devine, pentru cazul ideal
( )( )
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++=++⋅= ∫ ∫
dt
deT edt
T eV c
dt
t deT dt t e
T t e K c
d
i
Rd
i
p
11)(
cu aceleaşi observaţii privind comportarea reală. Funcţia de transfer a regulatorului este
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ ++= sT
sT K Y
d
i
p PID
11 (4.3.74)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
St t ti i ă
Funcţia indicială se obţine din combinarea efectelor P, I, D. Se vedecă acest tip de regulator combină efectul D de for ţare a regimuluitranzitoriu, cu efectul I de memorie. În consecinţă la ieşirea acestuiregulator se poate obţine o mărime de ieşire chiar dacă a este nul.Factorul de amplificare V
Rca
şi constantele de timp T
i şi T
dpot fi
variate în limite largi, ca la exemplele anterioare, permiţând pe

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 98/165
98Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Echipamentul de control
Structura tipicăş şg , p , p ţ p
această cale o acordare a regulatorului în raport cu procesul pe care îl conduce, în vederea realizării performanţelor impuse.
cd
cmax
k p
e
ideal
real
t
ci
c p
Fig. 4.3 29
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Analiza sistemului de controlSe face separat pentru regimul tranzitoriu şistaţionar.
• Regimul tranzitoriu (sistem de gradul doi)
( ) s K sY
cu dsM K K
ζω2
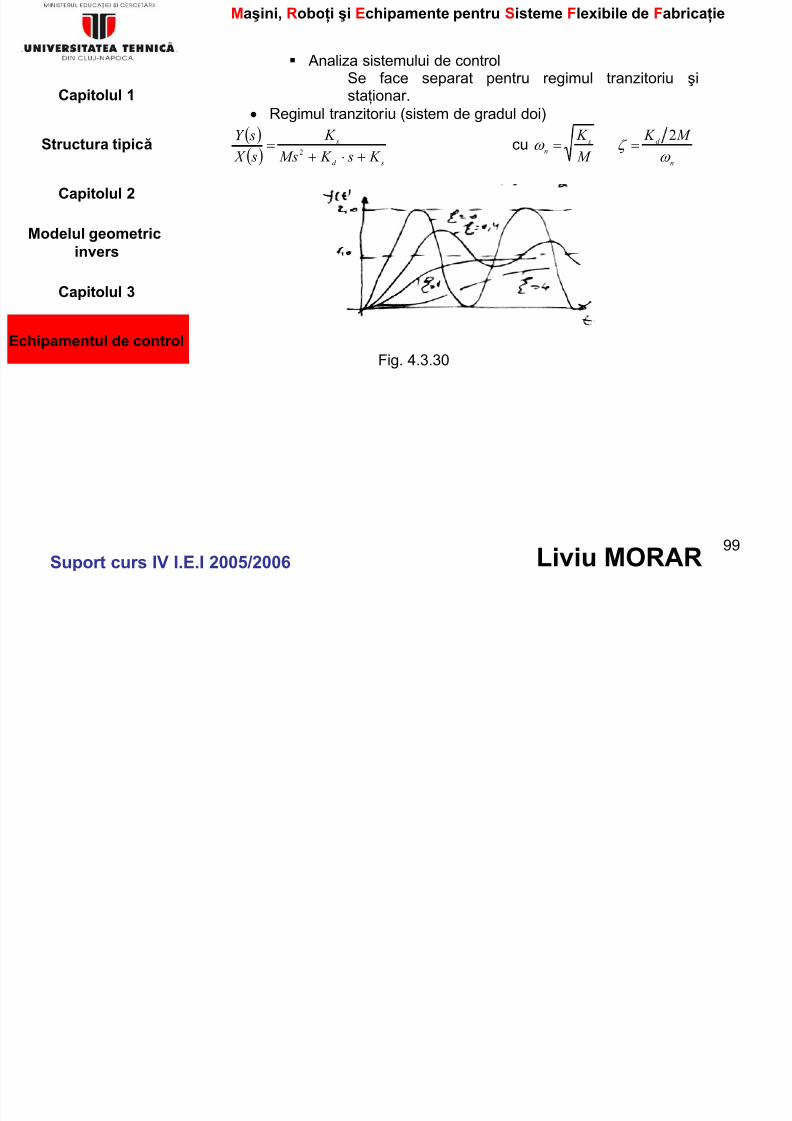
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 99/165
99Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Echipamentul de control
Structura tipică( )( )
sd
s
K s K Ms s X +⋅+=
2cu
n
d s
nM ω
ζ ω ==
Fig. 4.3.30
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Performanţele sistemelor automate liniare continue. Indici deperformanţă
Atât în sinteza cât şi în analiza sistemelor automate este
necesar să se cunoască modul în care r ăspunde sistemul lasemnalele de intrare sau semnale perturbatoare Performanţa unui

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 100/165
100Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Indici de performanţă
Structura tipică
Regimul tranzitoriuşi staţionar
semnalele de intrare sau semnale perturbatoare. Performanţa unuisistem se apreciază prin intermediul unor indici de calitate (deperformanţă) aşa cum este ilustrat în figura 2.17, după aspectulregimului tranzitoriu şi staţionar al r ăspunsului indicial (r ăspuns obţinutprin aplicarea la intrare a unui semnal de tip treaptă).
Fig. 4.3.31
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
- eroarea staţ ionar ă ε st =y st -y p reprezintă diferenţa dintre valoareaprescrisă y p şi valoarea staţionar ă y st , considerată la sfâr şitulregimului tranzitoriu, pentru care toate derivatele acestui semnal înraport cu timpul se anulează;
- suprareglajul σ 1 = y max - y st , reprezintă diferenţa între valoareamaximă a ieşirii ymax şi valoarea staţionară sau procentual:

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 101/165
101Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Regimul tranzitoriuşi staţionar
Structura tipică p ţmaximă a ieşirii y max şi valoarea staţionar ă sau procentual:
[%] 100 y
y- y= st
1 ⋅max
maxσ
Pentru sistemele de ordinul doi, valoarea lui σ este o funcţie defactorul de amortizare ζ şi relaţia dintre ele are forma:
)-1
(-=2ζ
π ζ σ exp
- amortizarea este diminuarea progresivă a componentei tranzitorii asemnalului de ieşire. Se poate aprecia cantitativ prin gradul deamortizare δ definit ca diferenţa dintre două abateri succesive deacelaşi sens, raportată la prima dintre ele:
σ
σ
σ
σ σ δ
1
3
1
31-1=
-=
(4.3.75)
(4.3.76)
(4.3.77)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
- durata procesului tranzitoriu sau timpul de stabilizare t s reprezintă intervalul de timp cuprins între momentul aplicării semnalului treaptă unitar ă până când mărimea de ieşire este cuprinsă în domeniul Δ = ±
0.05 y st ; - timpul de întârziere t
i este definit ca fiind timpul necesar ca m
ărimea
de ieşire să crească de la 0 la 0.5 y st ;

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 102/165
102Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Exemplu
Structura tipică- timpul de creştere t c reprezintă intervalul de timp în care mărimeade ieşire evoluează între 0.1 y st şi 0.90 y st .
În afar ă de mărimile caracteristice prezentate, exprimate înfuncţie de timp, există posibilitatea aprecierii performanţelor unui
sistem şi în domeniul frecvenţelor.
• Regimul permanent
Sistemul atinge regimul staţionar?Teorema valorii finale, din teoria sistemelor, ofer ă o metodă der ăspuns:
( ) ( ) s sF t f st limlim
0→∞→
= în care ( ) ( )[ ]t f L s F =
Exemplu: pentru M=2 Kd=6 Ks=5, ( ) ( )t xt e = : treaptă unitar ă, relaţia ( )
devine: ( )( )
( )[ ] ( )
( ) 1562
51
562
511;
562
5
20
22
limlim =++
⋅⋅=
++⋅=⇒=
++=
→∞→ s s s st f
s sS sY
S t x L
s s s X
sY
st
(4.3.78)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Schema bloc de comandă a unei cuple cinematice
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 103/165
103Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Exemplu
Structura tipică
g F - încărcare datorită for ţelor de gravitaţie
t J - moment de iner ţie totalRegulator PI (PID). Amortizarea se controlează prin factorul deamplificare tahogenerator.Valorile Kp, KI, Kv modificabile pentru a putea realiza performanţeledorite.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Viteză Moment
motor
Momentdisp.
g F

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 104/165
104Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Exemplu
p
s
K I
K p
K m
s J t
⋅
1
s
1
K V
AV K t
At
Semnal
intrare +
- - -
+
+
+
-Poziţie
motor
Const. de
tensiune m.
Const.
tahogener.
Const. trad. deplasare (Encoder)
Fig. 4.3.32
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Programarea roboţilor
Metode de programare
Metode de programare prin învăţareMetode bazate pe limbaje de programare

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 105/165
105Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Programarea roboţilor
p Metode bazate pe limbaje de programare Metoda Cyber Teach Tool (CTT)
■ Metoda Cyber Teach Tool (CTT)Generarea traiectoriei şi programarea robotului se face într-o
manier ă intuitivă utilizând „cutia de învăţare”, recunoaşterea vocii şivizualizare stereoscopică tridimensională.
Componente şi arhitectur ă „cutia” de învăţare cuprinde
• Set cască – ochelarii stereo, 3D, pentru vizualizare, – sistem de urmărire, ataşabil pe cască; – dispozitiv de recunoaştere/sinteza vocii.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
• Dispozitivul de învăţare – senzor de urmărire (emitere/recepţie); – comandă preluare poziţie; – interfaţă cu PC.
Fig. 4.3.33
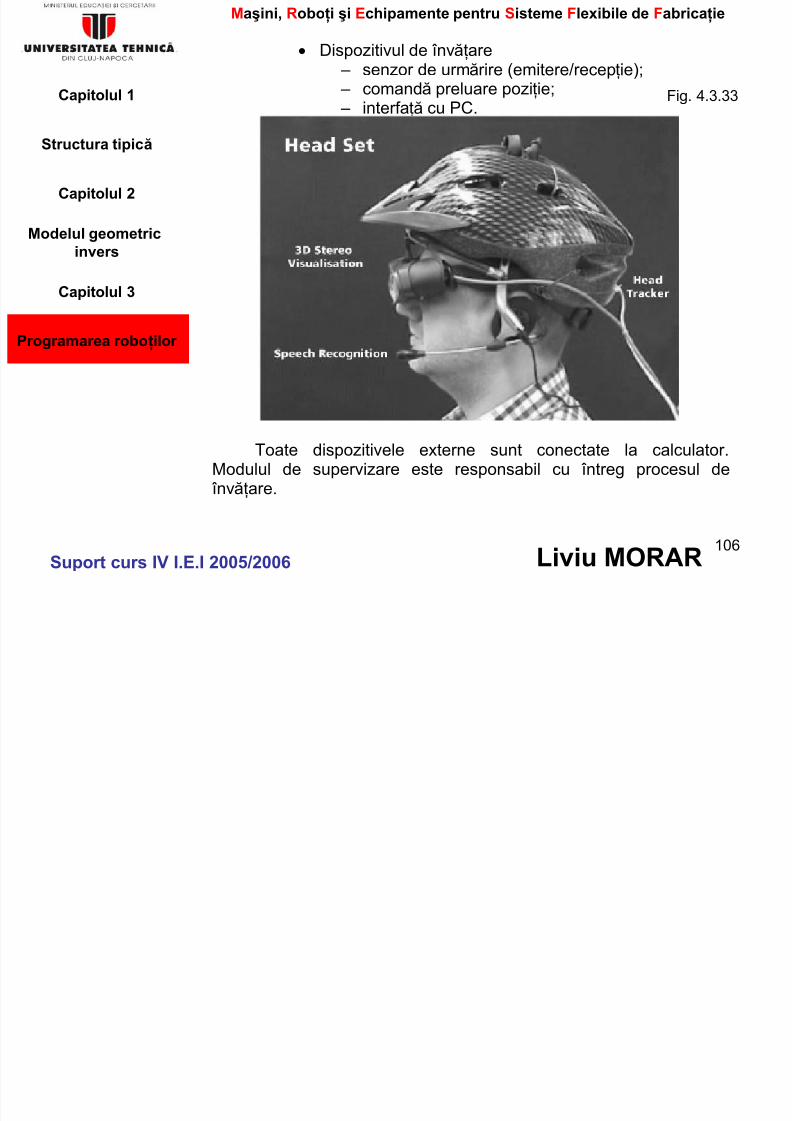
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 106/165
106Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Programarea roboţilor
Toate dispozitivele externe sunt conectate la calculator.Modulul de supervizare este responsabil cu întreg procesul de învăţare.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Informaţii de natur ă senzitivă sunt accesibile în timpulprocesului de învăţare. Utilizatorul poate exprima deciziile salebazându-se pe ce aude şi vede.
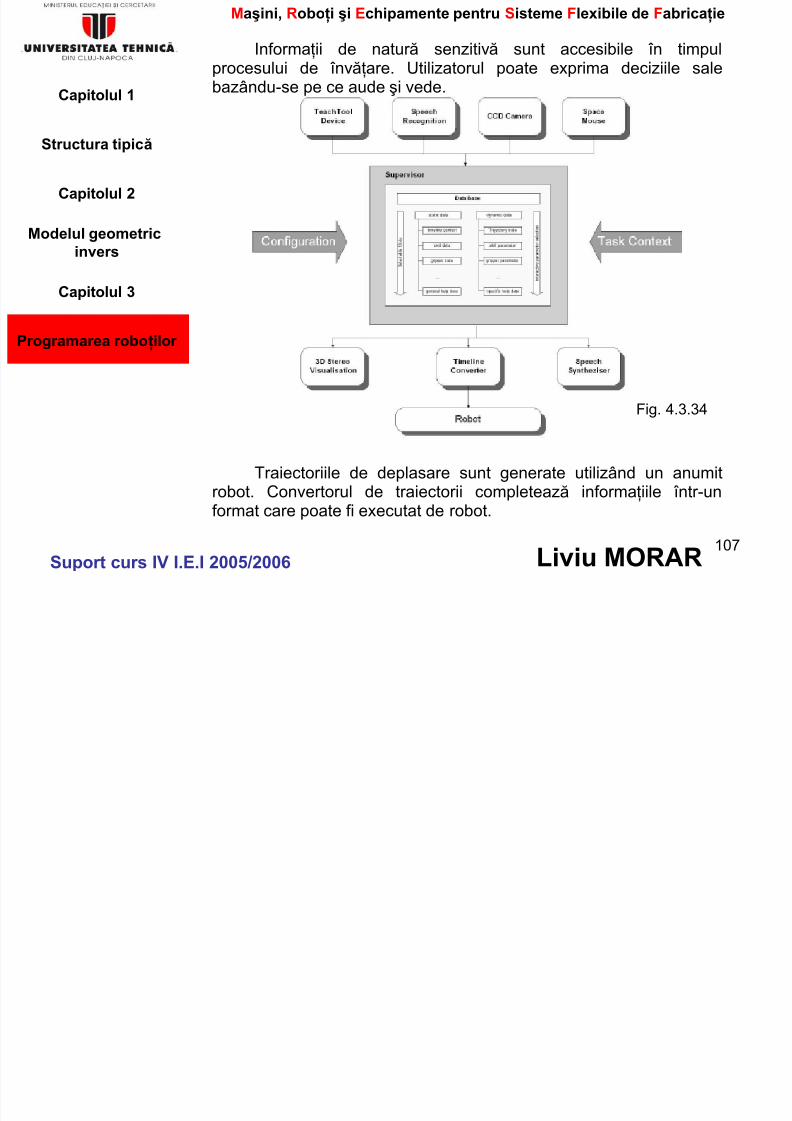
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 107/165
107Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Programarea roboţilor
Traiectoriile de deplasare sunt generate utilizând un anumitrobot. Convertorul de traiectorii completează informaţiile într-unformat care poate fi executat de robot.
Fig. 4.3.34
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Informaţiile de deplasare se obţin utilizând dispozitivul de învăţare prin poziţionarea sa în punctul necesar şi solvareacoordonatelor acelui punct. Prin repetare se obţine traiectorianecesar ă.
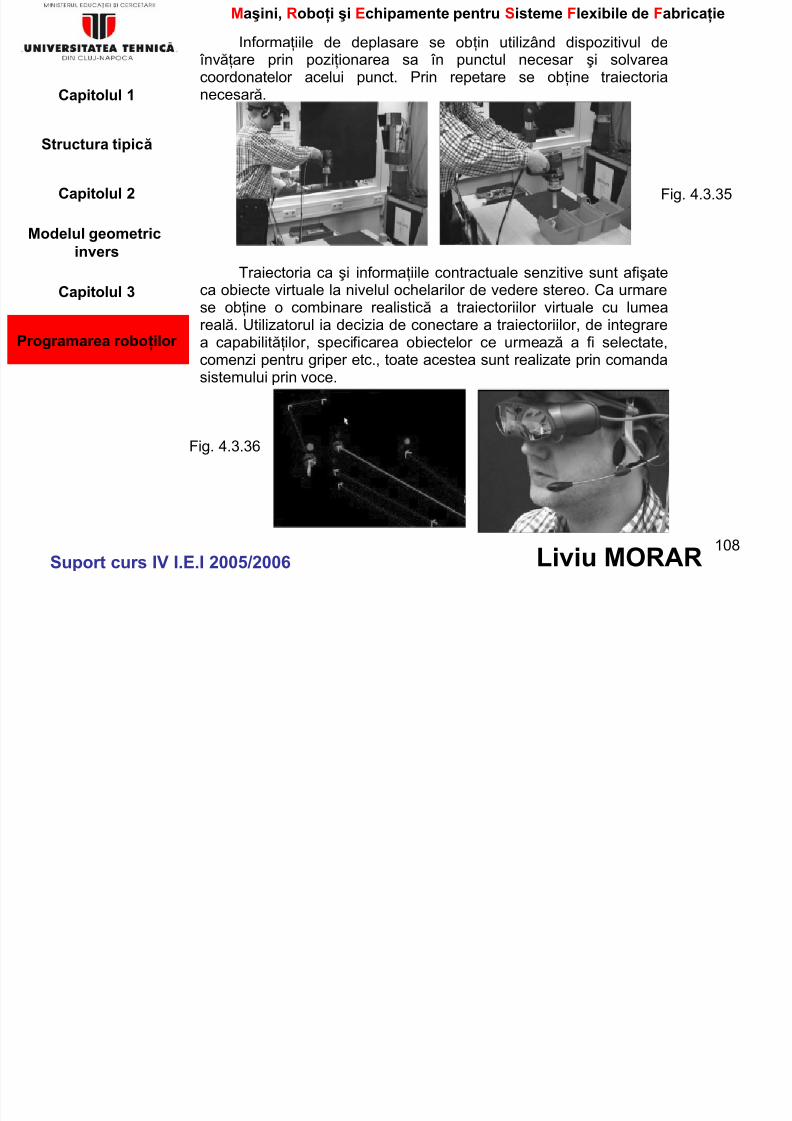
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 108/165
108Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Programarea roboţilor
Traiectoria ca şi informaţiile contractuale senzitive sunt afişateca obiecte virtuale la nivelul ochelarilor de vedere stereo. Ca urmarese obţine o combinare realistică a traiectoriilor virtuale cu lumeareală. Utilizatorul ia decizia de conectare a traiectoriilor, de integrarea capabilităţilor, specificarea obiectelor ce urmează a fi selectate,comenzi pentru griper etc., toate acestea sunt realizate prin comandasistemului prin voce.
Fig. 4.3.35
Fig. 4.3.36
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Un avantaj imediat al CTT este acela că programarea vizualăpermite verificarea imediată a rezultatului programării.

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 109/165
109Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Programareaprin învăţare
■ Prin învăţare:• deplasarea manuală (prin „păşire”) este utilizată pentru a
descrie curbe continue (în special) ex: roboţii de vopsire,sudarea după traiectorii complexe etc. Constă în ducerea EF,manual, după traiectoria dorită.
• Mecanic, prin activarea motoarelor este utilizată pentrudeplasarea EF printr-o serie de puncte. Se utilizează cutia de
învăţare.
Fig. 4.3.37
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Punctţintă
Programul robotului:
• Traiectoria, în spaţiul delucru, după care EF este
deplasat de către robot.Pentru un robot cu 6cuple (3 pentru MGT şi 3

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 110/165
110Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Programareaprin învăţare
cuple (3 pentru MGT şi 3pentru MO), fiecare punctde pe traiectorie este
definit de 6 valori
a coordonatelor.Pentru un punct înspaţiu în
programulrobotului –definind poziţia şi
orientarea EF,există mai mult deun set decoordonateAxa 1
Axa 2
1,1
1,2 2,2
2,1
Fig. 4.3.38
Fig. 4.3.39
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
• posibile a cuplelor pentru a atinge acel punct. Difer ă orientarea.Obs. Specificareaunui punct înspaţiu pentru EFnu defineşte unic
coordonatele
Axa 2
1,2 2,2
Traiectorie alcătuită
din secvenţe limitate

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 111/165
111Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Programareaprin învăţare
cuplelor.Specificarea
coordonatelor
cuplelor robotuluidefineşte NUMAIun punct în spaţiu.
Punctele specificate în acest fel se denumesc „coordonatelearticulaţiilor”.Avantajul: rezultă în mod univoc şi orientarea EF.
• Problema definirii unei secvenţe de puncte în spaţiuCondiţii: un RI de tipul punct cu punct, cartezian, 2 axe, două
puncte adresabile pe fiecare axă
Axa 12,1
Traiectorie servo
controlată
Fig. 4.3.40
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Program 1 Program 2
Pas Deplasare Comentariu Pas Deplasare Comentariu
1 1,1 Depl. Stg. jos 1 1,1 Depl. Stg. jos2 2,1 2 2,13 2 2 3 1 2

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 112/165
112Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Programareaprin învăţare
3 2,2 3 1,24 1,1 4 1,15 1,1
Diferenţa între cele 2 programe: lipsa numai a punctului (2,2).
Comentarii:program 1: deplasarea de la un punct la altul implică numai deplasarea într-o cuplă, cealaltă nu.program 2: apar deplasări în ambele cuple. Cum se facedeplasarea:
fie 2,1 la 1,2 direct
fie 2,1→ (2,2)→ (1,2)Care din traiectorii?Răspunsul nu este unul lipsit de importanţă. Nu există oregulă generală. Roboţii programaţi manual „deplasează”ambele cuple simultan. Cei servo ambele axe.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
• Metode pentru definirea poziţiei în spaţiu:1. la nivelul fiecărei cuple cinematice2. în coordonate XYZ (coordonatele mediului)î 3. sistemul de coordonate al sculei.
Fig. 4.3.41

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 113/165
113Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Programareaprin învăţare
1.Implică deplasări succesive, la nivelul fiecărei cuple.2.Cutia de programare. Pentru a înlătura acest dezavantaj, mulţi
roboţi acceptă, în regimul de învăţare, deplasarea în coordonateXYZ. Scula este definită în sistemul de coordonate al mediului, cuoriginea situată în corpul RI. Pentru roboţi cartezieni cele douămetode sunt practic echivalente. Pentru coordonate cilindrice, polare:controlul trebuie să rezolve un sistem de ecuaţii. Pentru deplasări încoordonatele XYZ, scula este menţinută de controler într-o poziţie cuorientare constantă.3.Unii roboţi au posibilitatea de a defini punctul în sistemul decoordonate al sculei (EF): planul XY este orientat paralel cu suprafaţade aşezare a EF, axa Z fiind perpendicular ă pe acest plan (direcţia dealunecare, a , fig. 4.3.41)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Necesitatea definirii punctelor:- pentru a preciza punctele de lucru pentru EF;- pentru a evita obstacolele.Viteza de deplasare: Controlată prin „cutia de învăţare”.
• Interpolarea
Condiţii: RI cartezian 2 axe8
(y) Fig. 4.3.42
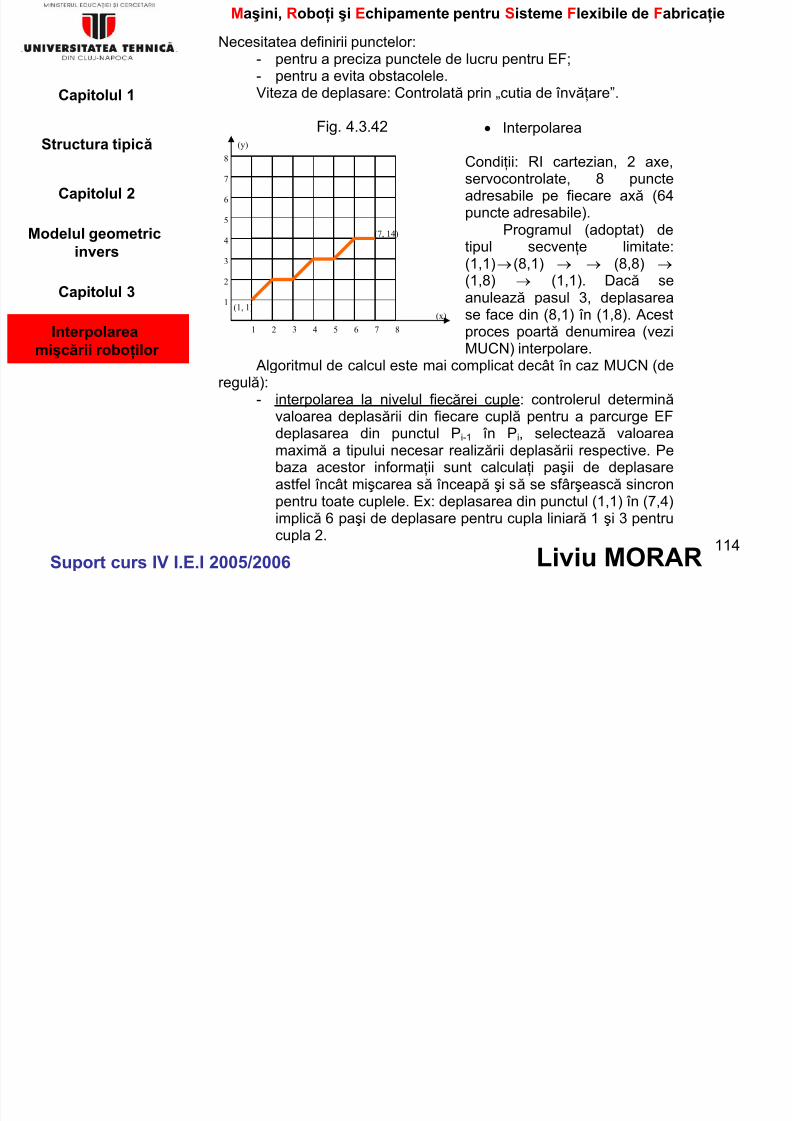
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 114/165
114Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Interpolareamişcării roboţilor
Condiţii: RI cartezian, 2 axe,servocontrolate, 8 puncteadresabile pe fiecare axă (64puncte adresabile).
Programul (adoptat) detipul secvenţe limitate:(1,1)→ (8,1) → → (8,8) →(1,8) → (1,1). Dacă seanulează pasul 3, deplasarease face din (8,1) în (1,8). Acest
proces poartă denumirea (veziMUCN) interpolare.Algoritmul de calcul este mai complicat decât în caz MUCN (de
regulă):- interpolarea la nivelul fiecărei cuple: controlerul determină
valoarea deplasării din fiecare cuplă pentru a parcurge EF
deplasarea din punctul Pi-1 în Pi, selectează valoareamaximă a tipului necesar realizării deplasării respective. Pebaza acestor informaţii sunt calculaţi paşii de deplasareastfel încât mişcarea să înceapă şi să se sfâr şească sincronpentru toate cuplele. Ex: deplasarea din punctul (1,1) în (7,4)implică 6 paşi de deplasare pentru cupla liniar ă 1 şi 3 pentru
cupla 2.
1 2 3 4 5 6 7 8
(x)
1
2
3
4
5
6
7
(7, 14)
(1, 1)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Tabelul 4.3.3

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 115/165
115Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Interpolareamişcării roboţilor
În interpolarea liniar ă, controlerul RI calculează traiectorialiniar ă între 2 puncte şi dezvoltă o secvenţă de puncte adresabile înlungul traiectoriei prin care trece EF.
Condiţii: RI are 2 axe, unacircular ă, cealaltă liniar ă, pentrufiecare axă există 8 puncte
adresabile. Reţeaua rezultată este de tip polar ⇒ deplasări delungimi diferite (din punct devedere a geometriei euclidiene).De comparat deplasarea din(1,1) în (3,2) cu (1,7) în (3,8).Rezultă implicaţii în algoritmi deinterpolare.
Tipuri de interpolare:- la nivel de cuple;- liniar ă;- circular ă;- deplasări line neregulate (învăţare manuală).
Fig. 4.3.43
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Comenzi speciale: WAIT, SIGNAL, DELAY În cadrul oricărei staţii de lucru RI interacţionează cu mediul.
Orice sarcină care trebuie executată trebuie „integrată” în mediu.Corelarea acţiunii RI cu mediul se face prin semnale pe care leprimeşte sau le transmite:
SIGNAL Mprin care se dictează controlerului RI să transmită „afar ă” un semnalpe linia M (portul M).
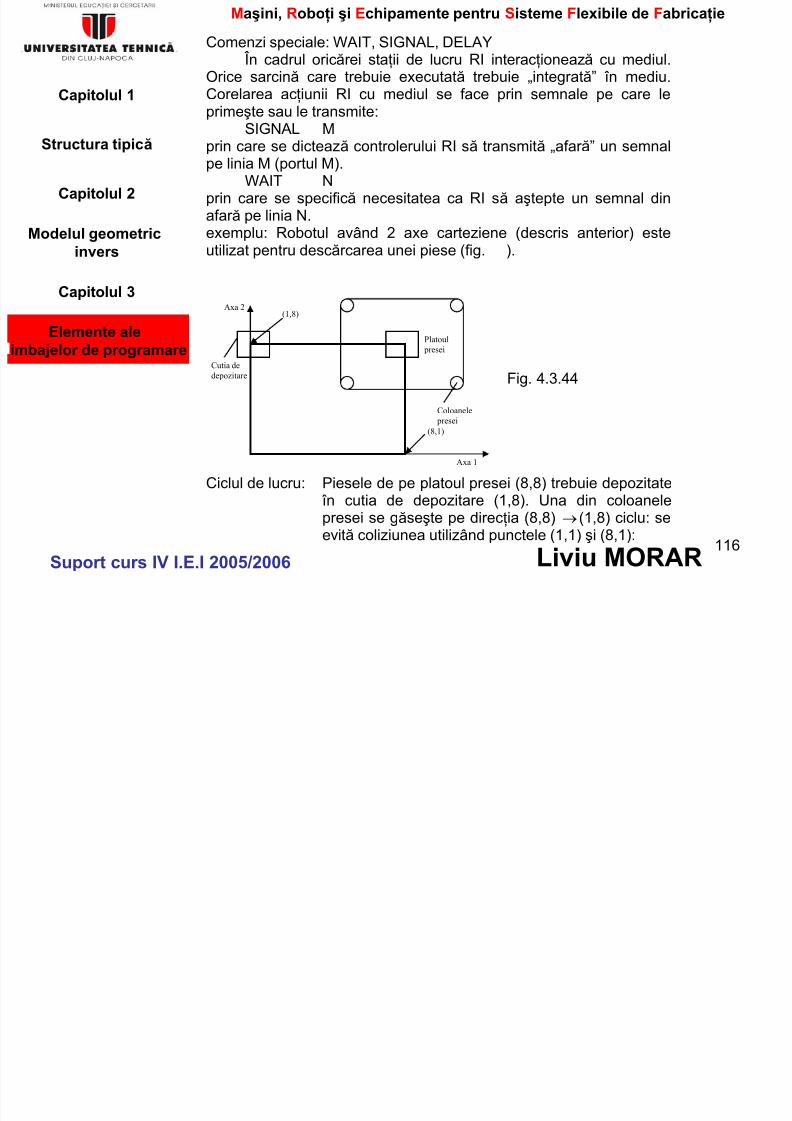
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 116/165
116Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Elemente aleimbajelor de programare
pe linia M (portul M).WAIT N
prin care se specifică necesitatea ca RI să aştepte un semnal dinafar ă pe linia N.
exemplu: Robotul având 2 axe carteziene (descris anterior) esteutilizat pentru descărcarea unei piese (fig. ).
Ciclul de lucru: Piesele de pe platoul presei (8,8) trebuie depozitate în cutia de depozitare (1,8). Una din coloanelepresei se găseşte pe direcţia (8,8) → (1,8) ciclu: se
evită coliziunea utilizând punctele (1,1) şi (8,1):
Platoul
presei
Coloanele
presei
(8,1)
(1,8)
Cutia de
depozitare
Axa 1
Axa 2
Fig. 4.3.44
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Pas Deplasare/semnal Comentariu
0 1,1 Start in „Home position”
1 8,1 Deplasare în poziţia de aşteptare
2 WAIT 11 Aşteaptă deschiderea presei3 8,8 Deplasare în punctul de apucare a presei
4 SIGNAL 5 Comandă închiderea griperului
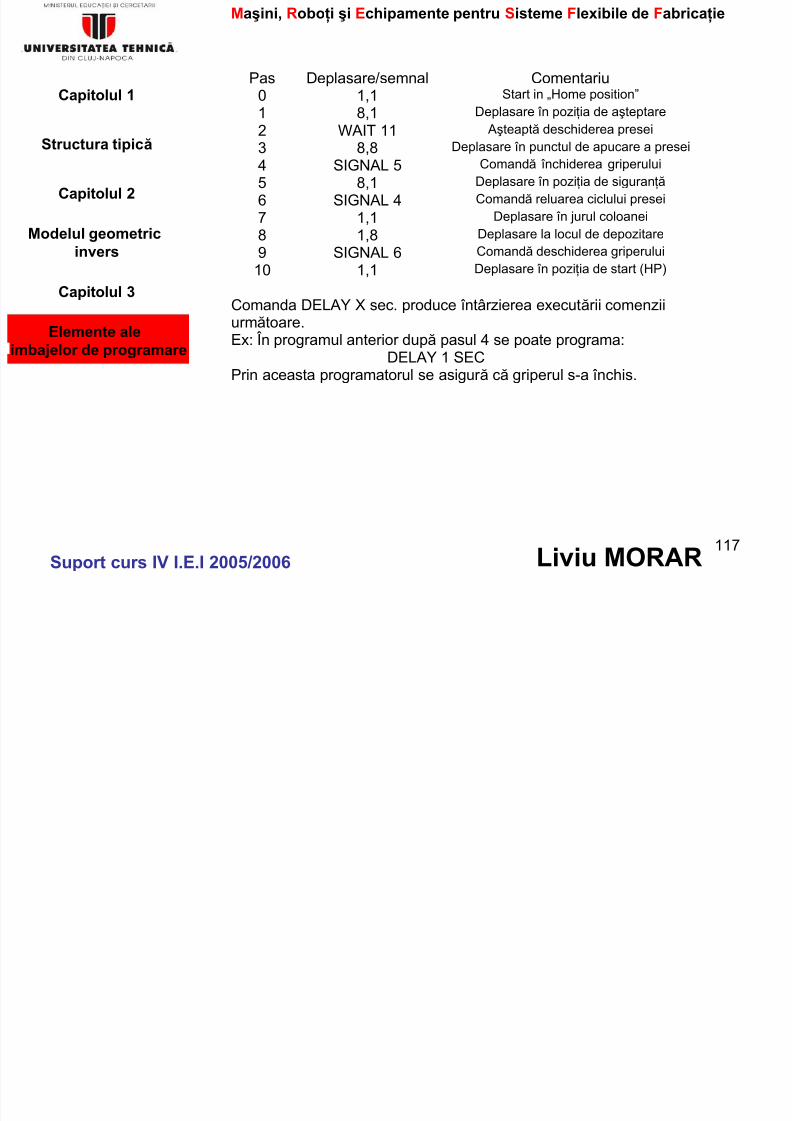
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 117/165
117Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Elemente aleimbajelor de programare
4 SIGNAL 5 g p
5 8,1 Deplasare în poziţia de siguranţă
6 SIGNAL 4 Comandă reluarea ciclului presei
7 1,1 Deplasare în jurul coloanei
8 1,8 Deplasare la locul de depozitare9 SIGNAL 6 Comandă deschiderea griperului
10 1,1 Deplasare în poziţia de start (HP)
Comanda DELAY X sec. produce întârzierea executării comenziiurmătoare.
Ex: În programul anterior după pasul 4 se poate programa:DELAY 1 SEC
Prin aceasta programatorul se asigur ă că griperul s-a închis.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
■ SubprogramePermit divizarea programului în segmente convenabile.
Echipamentele de control ale RI activează subprogramele fie prinapelarea lor (în cadrul programului) fie ca urmare a unui semnalextern.
Întreruperea executării subprogramului: prin semnal extern(urgenţă).Exemplu: Încărcarea unei navete 6*4 = 24 poziţii Puncte ABOVE 1

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 118/165
118Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Elemente aleimbajelor de programare
Exemplu: Încărcarea unei navete 6 4 24 poziţii. Puncte ABOVE 1,….., ABOVE 24 situate deasupra celor 24 poziţii, LOC 1, …, LOC 24.Punctul de preluare: „INTER” situat deasupra conveiorului:Instrucţiunea de deplasare
MOVE punct
ABOVE I INTER
PICK-UP
BANDA NAVETA
LOC I
Fig. 4.3.45
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Comanda Comentariu Pas Comanda ComentariuMOVE SAFE Deplasare în poziţia de
start22 MOVE ABOVE 2
WAIT 12 Aşteaptă semnalulpentru comanda începerii ciclului
(comanda pentru a lua ultima piesă)
(comanda RI pentru a lua prima piesă) 232 MOVE INTER

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 119/165
119Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Elemente aleimbajelor de programare
(comanda RI pentru a lua prima piesă) 232MOVE INTER 233 WAIT 12
WAIT 12 Aşteaptă piesa peconveior
234 SIGNAL 5
SIGNAL 5 Comandă deschiderea
mec. de prehensiune
235 MOVE PICK-UP
MOVE PICK-UP 236 SIGNAL 6SIGNAL 6 Comandă închiderea
mec. de prehensiune237 MOVE INTER
MOVE INTER 238 MOVE ABOVE 24MOVE ABOVE 1 239 MOVE LOC 24
MOVE LOC1 Piesa în prima poziţie anavetei
240 SIGNAL 5
SIGNAL 5 241 MOVE ABOVE 24MOVE ABOVE ! (naveta este plină)
(comanda RI pentru a lua piesa a doua) 242 MOVE INTERMOVE INTER 243 SIGNAL 7 Semnalează paleta
plină
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Secvenţe care se repetă:
SubrutinaFETCH
13
14
15
16
1718
MOVE INTER
WAIT 12
SIGNAL 5
MOVE PICK-UP
SIGNAL 6MOVE INTER
Deplasare la punctulintermediar deasupraconveioruluiAşteaptă următoarea piesă Deschide griperulDeplasează griperul pentru a
prinde piesa Închide griperulDeplasare la punctulintermediar
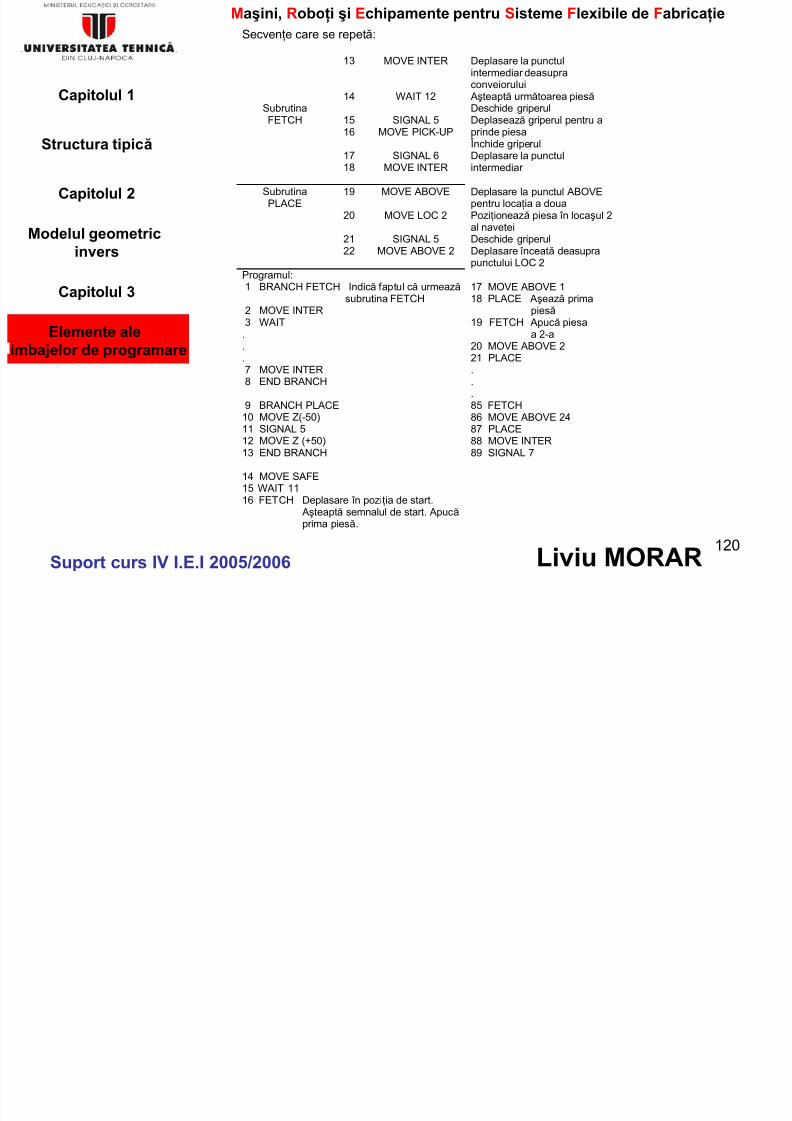
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 120/165
120Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Elemente aleimbajelor de programare
SubrutinaPLACE
19
20
2122
MOVE ABOVE
MOVE LOC 2
SIGNAL 5MOVE ABOVE 2
Deplasare la punctul ABOVEpentru locaţia a douaPoziţionează piesa în locaşul 2al naveteiDeschide griperulDeplasare înceată deasuprapunctului LOC 2
Programul:1 BRANCH FETCH Indică faptul că urmează
subrutina FETCH2 MOVE INTER3 WAIT
..
.7 MOVE INTER8 END BRANCH
9 BRANCH PLACE10 MOVE Z(-50)11 SIGNAL 5
12 MOVE Z (+50)13 END BRANCH
14 MOVE SAFE15 WAIT 1116 FETCH Deplasare în poziţia de start.
Aşteaptă semnalul de start. Apucă prima piesă.
17 MOVE ABOVE 118 PLACE Aşează prima
piesă 19 FETCH Apucă piesa
a 2-a20 MOVE ABOVE 221 PLACE...85 FETCH86 MOVE ABOVE 2487 PLACE
88 MOVE INTER89 SIGNAL 7
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Panoul de programare (cutia de învăţare)
Funcţii implementate
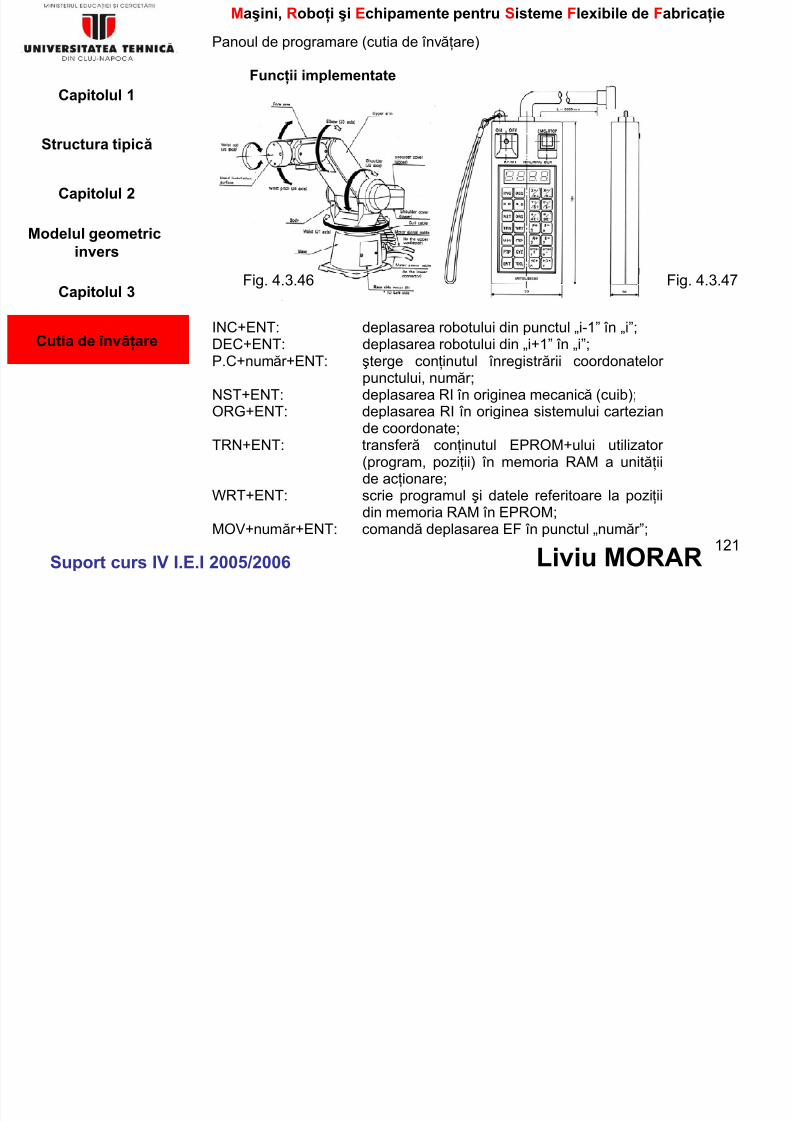
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 121/165
121Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Cutia de învăţareINC+ENT: deplasarea robotului din punctul „i-1” în „i”;DEC+ENT: deplasarea robotului din „i+1” în „i”;P.C+număr+ENT: şterge conţinutul înregistr ării coordonatelor
punctului, număr;NST+ENT: deplasarea RI în originea mecanică (cuib);ORG+ENT: deplasarea RI în originea sistemului cartezian
de coordonate;TRN+ENT: transfer ă conţinutul EPROM+ului utilizator
(program, poziţii) în memoria RAM a unităţiide acţionare;
WRT+ENT: scrie programul şi datele referitoare la poziţiidin memoria RAM în EPROM;
MOV+număr+ENT: comandă deplasarea EF în punctul „număr”;
Fig. 4.3.46 Fig. 4.3.47
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
STEP+număr+ENT: execută programul pas cu pas începând cusecvenţa „număr”;
PTP: regim de deplasare „PTP” prin activareafiecărei cuple;
XYZ: selectează poziţionarea în regimul de
coordonate cartezian;TOOL: activează orientarea sculei;ENT: materializează comenzile;
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 122/165
122Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Cutia de învăţare
;X+/B+: produce deplasarea MO după axa X+ (sistem
cartezian) sau rotirea după J1 în sens pozitiv;
X-/B-: produce deplasarea MO după axa X- (sistemcartezian) sau rotirea după J1;Y+/S+: deplasarea după Y+ sau J2+;Y-/S-: deplasarea după Y+ sau J2-;Z+/E+, 4: deplasarea după Z+ sau J3+, tasta 4;Z-/E-, 5: deplasarea după Z+ sau J3-, tasta 5;
P+ 3: rotirea MO în direcţia J4 „+”, se menţine poziţiacurentă determinată prin comanda TL(TOOL), tasta 3;
P- 8: rotirea MO în direcţia J4 „-”, se menţine poziţiacurentă determinată prin comanda TL
(TOOL), tasta 8;R+ 2: roteşte MO în direcţia J5+, tasta 2;R- 7: roteşte MO în direcţia J5-, tasta 7;OPTION+ 1: comandă deplasarea în sens pozitiv după axa
opţională, tasta 1;
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
OPTION- 6: comandă deplasarea în sens negativ dupăaxa opţională, tasta 6;
→← O O: comandă deschiderea griperului, tasta O;→← C 5: comandă închiderea greiferului, tasta 5;
AFIŞAJ: pe 4 biţi indicând:• numărul poziţiei (INC, DEC, PS, PC, MOV
active),• numărul liniei din program (STEP activă);

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 123/165
123Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Cutia de învăţare
Instrucţiuni de poziţionare/mişcare
DP (decrement Position) deplasarea robotului într-o poziţie,predefinită, cu o unitate mai mică decâtcea curentă;DP
DW (Draw) produce deplasarea EF într-o poziţiesituată, faţă de cea curentă, cu <X>,<Y>, <Z>;DW <X>, <Y>, <Z>(DW 10.5, 20.5, -3.4)
HE (Here) atribuie un anumit număr punctului încare se găseşte;HE 5
10 LPRINT „MO 10” deplasare la poziţia 1020 LPRINT „DW 10,0,0” deplasare pe axa X cu 10 mm
30 LPRINT „HE 11” identifică poziţia ca fiind poziţia 11
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
HO (Home) stabileşte poziţia de referinţă în sistemulcartezian;10 LPRINT „HO”
IP (Increment Position) deplasează robotul într-o poziţie notată cu o unitate în plus;IP
MA (Move Approch) produce deplasarea EF din poziţia „a” înb” cu MP deschis (O) sau închis (C);
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 124/165
124Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Cutia de învăţare
„b cu MP deschis (O) sau închis (C);MA <nr. poz. (a)>, <nr. poz. (b)> [, O, C]MA 2, 6, 0
10 LPRINT “HE1”20 LPRINT “PD 5, 0, 0, 30, 0, 0” definirea punctului 530 LPRINT “MA 1, 5, C”
MC (Move Continuous) produce deplasarea robotului dinpunctual “a” în “b” prin punctele
predefinite, situate între cele două;MC <poz. pct. (a)>, <poz. pct. (b)>MC 21, 26
MJ (Move Joint) produce mişcarea fiecărei articulaţii(rotire);
MJ [<J1>], [<J2>], [<J3>], [<J4>], [<J5>]MJ 10, 20, /30, 40, /50MO (Move) produce deplasarea EF într-o poziţie
specificată cu (O, C);MO 2, C
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
MP (Move Position) deplasează EF într-o poziţie specificată;MP [<X>], [<Y>], [<Z>], [<J4>], [<J5>]Mp 0, 380, 30, -70, -80
MS (Move Straight) deplasează robotul, într-o poziţiespecificată, după o traiectorie liniar ă cetrece prin punctele specificate;
MS <nr. poziţie>, <nr. puncte intermediare> [, O, C]MT (Move Tool) deplasează EF din poziţia curentă într
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 125/165
125Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Cutia de învăţare
MT (Move Tool) deplasează EF din poziţia curentă într-un punct situat la o anumită distanţă depunctul specificat;
MT <nr. poz. pct. specificat>, [<distanţă>] [, C, O]NT (Nest) revenirea robotului în originea
mecanică;NT
OG (Origin) deplasează robotul în originea
sistemului de coordinate;OG
PA (Pallet Assign) defineşte numărul de puncte pe rândurişi coloane pentru o paletă specificată;
PA <nr. paletei>, <nr. puncte pe coloană>, <nr. puncte pe rând>
PA 3, 20, 30PD (Position define) definirea unui anumit punct prin poziţie
şi unghi;PD <nr. poz. pct>, [<X>], [<Y>], [<Z>], [<J4>], [<J5>]PD 10, 0, 380, 30, -70, -40
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
SP (Speed) specifică viteza de deplasare şi timpulde accelerare/decelerare;SP <val. viteză> [, <H sau L>]H=0.35 sL=0.5 s
0≤ val. viteză≤ 9SP 7, H
TL (Tool) stabileşte distanţa dintre suprafaţa de
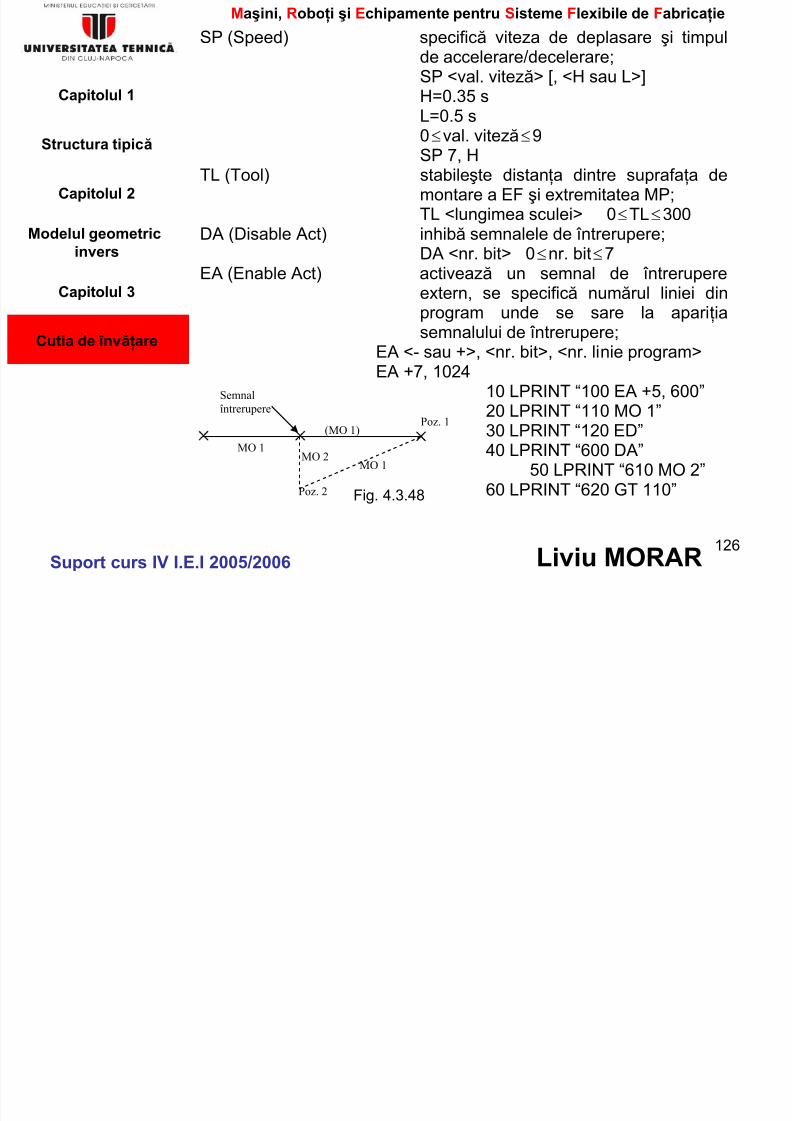
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 126/165
126Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Cutia de învăţare
( ) ş ţ p ţmontare a EF şi extremitatea MP;TL <lungimea sculei> 0≤ TL≤ 300
DA (Disable Act) inhibă semnalele de întrerupere;DA <nr. bit> 0≤ nr. bit≤ 7EA (Enable Act) activează un semnal de întrerupere
extern, se specifică numărul liniei dinprogram unde se sare la apariţia
semnalului de întrerupere;EA <- sau +>, <nr. bit>, <nr. linie program>EA +7, 1024
10 LPRINT “100 EA +5, 600”20 LPRINT “110 MO 1”30 LPRINT “120 ED”40 LPRINT “600 DA”
50 LPRINT “610 MO 2”60 LPRINT “620 GT 110”
Poz. 1
Poz. 2
MO 1MO 2
MO 1
(MO 1)
Semnal
întrerupere
Fig. 4.3.48
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
În linia 100 se declar ă un semnal de întrerupere, dacă apare, se sarela linia 600 pe durata deplasării către poziţia 1. Conform 610 se facedeplasarea în poziţia 2 MO 2, apoi în linia 110 din cauza instrucţiunii“GT 110”.EQ (If Equal) produce un salt dacă conţinutul
registrului intern este egal cu o valoarespecificată;EQ <val. comparată>, <salt la linia nr>

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 127/165
127Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Cutia de învăţare
pEQ 128, 1024
10 LPRINT “100 ID” ID- primeşte valoarea, de la un semnal extern, pe portul 100
20 LPRINT “110 EQ 100, 130”30 LPRINT “120 ED”40 LPRINT “130 MO 7”
GS (GO SUB) permite saltul la o subrutină;GS <nr. linie>
10 LPRINT “20 GS 100”……
…200 LPRINT “90 ED”210 LPRINT “100 MO 11”220 LPRINT “110 MO 12”230 LPRINT “120 RT” RT- Return (revenire în program)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
GT (GO TO) salt la linie;GT <nr. linie>GT 1024
LG (If Larger) produce un salt la o anumită linie dacă conţinutul unui registru este mai mare
decât o valoare specificată (vezi EQ);LG <val. comp.>, <salt la linia nr.>LG 128, 1024
NE (If Net Equal) vezi LG;

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 128/165
128Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Cutia de învăţare
NE (If Net Equal) vezi LG;NE <val. comp.>, <salt la linia nr.>
RT (Return) la terminarea unei subroutine se
produce saltul înapoi în programulprincipal;RT
SM (If Smaller) vezi LG;SM 128, 1024
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Structura tipică
Exemplu
Poz. 1- punct deapucare;Poz. 2- punct deplasare a piesei;Poz 10, 20 punctesituate la 20/30
Poz. 20
Poz. 10
3 0
2 0
Fig. 4.3.49
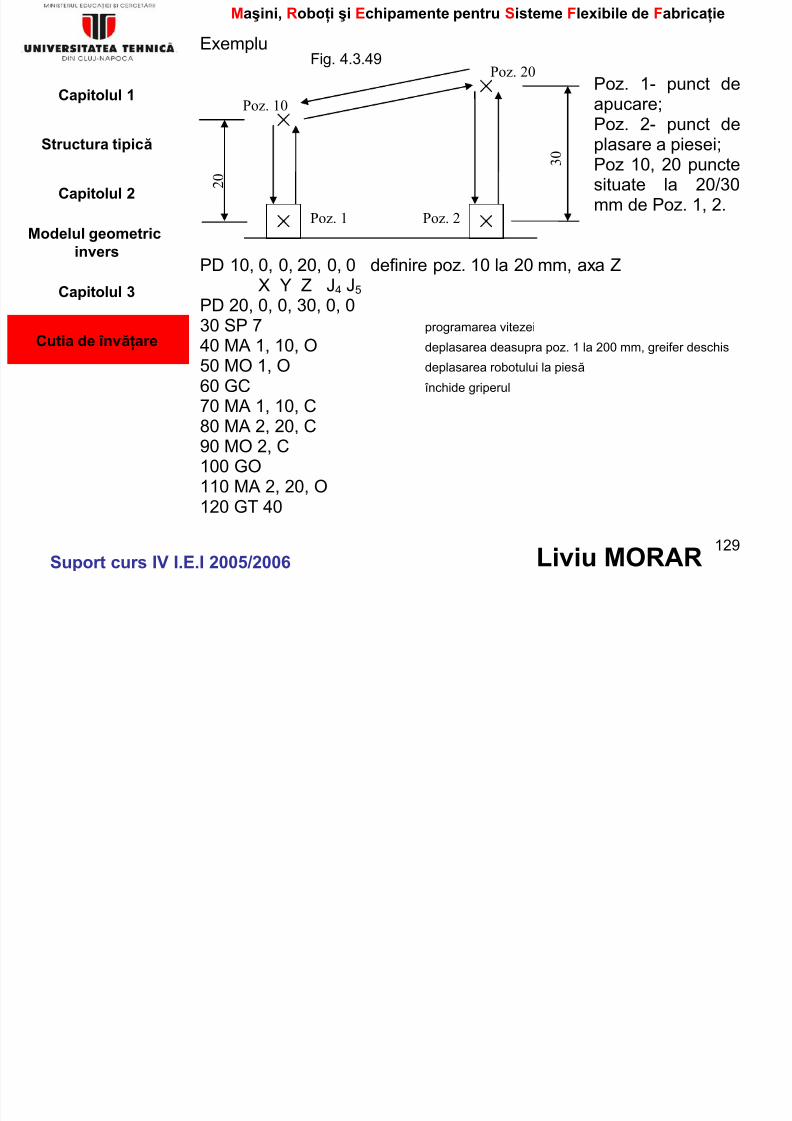
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 129/165
129Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Cutia de învăţare
situate la 20/30mm de Poz. 1, 2.
PD 10, 0, 0, 20, 0, 0 definire poz. 10 la 20 mm, axa ZX Y Z J4 J5
PD 20, 0, 0, 30, 0, 030 SP 7 programarea vitezei
40 MA 1, 10, O deplasarea deasupra poz. 1 la 200 mm, greifer deschis
50 MO 1, O deplasarea robotului la piesă
60 GC închide griperul 70 MA 1, 10, C80 MA 2, 20, C
90 MO 2, C100 GO110 MA 2, 20, O120 GT 40
Poz. 1 Poz. 2
2
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
C it l l 2
Structura tipică
■ Limbaje de programare• Limbaje textuale
- WAVE- 1973 (Stanford Artificial Intelligence Laboratory)- AL- 1974
- VAL- 1979 (pentru roboţii PUMA)- AUTO PASS (IBM)- AML, MCL [McDonnell-Douglas- US AIRFORCE (APT)]

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 130/165
130Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Prima generaţie
limbaje de programare
Prima generaţie de limbajeReprezintă o combinaţie de instrucţiuni specifice cutiei de
învăţare şi de mişcare descrise prin limbaj. Acceptăsemnale de tip binar (ex: VAL). Sunt „limbaje de mişcare”. A doua generaţie de limbaje
Adaugă facilităţi specifice RI inteligenţi. Sunt denumite şilimbaje structurate. Ex: AML, MCL, RAILFacilităţi oferite:
- controlul mişcării (identic cu prima generaţie);- prelucrarea unor semnale complexe analogice;- inteligenţă limitată: reconfigurarea comportării RI funcţie de
condiţiile de mediu;- prelucrare şi comunicare date.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
C it l l 2
Structura tipică
→ Procesarea programului:• interpretor – (VAL)• compilator – (MCL)
→ Elementele limbajului:• constante, variabile, alte date obiect;• instrucţiuni de mişcare;• instrucţiuni pentru comanda EF şi a senzorilor;• calcule şi operaţii.
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 131/165
131Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
A doua generaţie
limbaje de programare
■Constante, variabile
agregarea: set ordonat de constante şi variabile<50.25, 25.46, 14.681, 125.08, 38.26>, <*we*, *they*>DEFINE A1=POINT <50.25, 25.46, 14.681, 125.08, 38.26>
X Y Z pentru MO■Instrucţiuni de mişcare
MOVE A1 (interpretată la nivelul cuplelor)
MOVES A1 - în VALII- interpolare liniar ă MOVE A1 VIA A2instrucţiuni pentru realizarea ciclului de transfer a pieselor APPRO A1, 50 - apropierea EF de A1 la 50 mm (axa Z)MOVES A1
SIGNALDEPART 50 - deplasare după Z+ cu 50 mmdeplasări incrementaleDMOVE (1, 10) . deplasarea cuplei liniare 1 cu 10 mmDMOVE <4, 5, 6>, <30, -60, 90> - deplasarea pe axele 4, 5, 6
cu 30, -60, 90 mm
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
În limbajul AL se poate specifica şi care legătur ă (braţ) al robotuluiurmează a se deplasa: MOVE ARM 2 TI A1.
Programarea vitezei: SPEED 60IPS, SPEED 75 (75%)
■Definirea punctului
HERE A1 - poziţia în care se găseşte EF devine A1DEFINE A1 = POINT <30, 20.5, 14, 16.8, 20, 11.47>
D fi i t i t i i
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 132/165
132Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
A doua generaţie
limbaje de programare
■Definirea traiectorieiDEFINE PATH 1 = PATH (A1, A2, A3, A4)
MOVE PATH 1 - deplasarea robotului între puncteletraiectoriei
■Definirea sistemului de referinţă DEFINE FRAME 1 = FRAME (A1, A2, A3)
A1 – originea sistemului;A2 – un punct în lungul axei X;A3 – un punct în lungul axei Y.
■Mecanismul de prehensiuneOPEN, CLOSE sau OPEN I, CLOSE I – cu acţiune imediată
■Comunicarea cu senzoriiSIGNAL 3, ONSIGNAL 3, OFF SIGNAL 105, 4-5 (tensiunea de 4,5 V)
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
■Calcule, operaţii etc.: +, -, *, **, /, =, SIN(A)…, ACOT(A), ABS(X),SQRTC(X)
EQ – egal cu NORNE – nu este egal ANDGT – mai mare de … OR
LT – mai mic de NOT■Controlul desf ăşur ării programului
salt necondiţionat GO TO 10
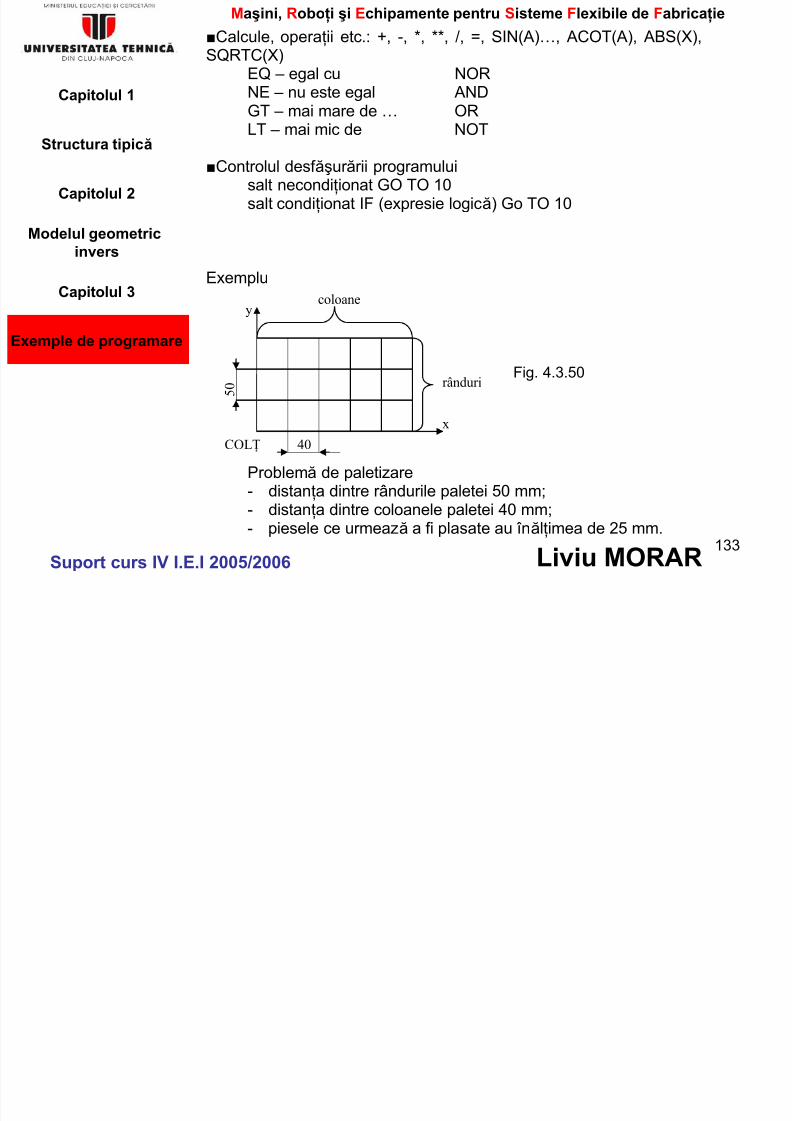
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 133/165
133Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Exemple de programare
ţsalt condiţionat IF (expresie logică) Go TO 10
Exemplu
Problemă de paletizare- distanţa dintre rândurile paletei 50 mm;- distanţa dintre coloanele paletei 40 mm;- piesele ce urmează a fi plasate au înălţimea de 25 mm.
x
ycoloane
rânduri
40
5 0
COLŢ
Fig. 4.3.50
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
Variabile:- ROW – numărul rândului;- COLUMN – numărul coloanei;- X – valoarea coordonatei X;
- Y – valoarea coordonatei Y.Poziţia variabilelor:- DROP – punctul în care se amplasează piesa în paletă.
Constante:PICK UP l d l i l d i
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 134/165
134Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Exemple de programare
- PICK-UP – punctul de preluare a pieselor de pe conveior;- CORNER – colţul paletei din care începe umplerea.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
PROGRAM PALETIZARE
DEFINE PICK-UP=JOINTS(1, 2, 3, 4, 5)DEFINE CORNER=JOINTS(1, 2, 3, 4, 5)
DEFINE DROP=COORDINATES(X, Y)OPEN IROW=0 iniţializare ROW10 y=ROW*50 – calculul coordonatei y

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 135/165
135Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Exemple de programare
y yCOLUMN=0 iniţializare COLUMN
20 X=COLUMN*40 – calculul coordonatei xDROP=CORNER+<x,y> definirea punctului în care se plasează
piesaAPPRO PICKUP, 50 – secvenţă preluare piesă MOVES PICKUPCLOSE IDEPAR 50APPRO DROP, 50 secvenţă pentru plasarea pieseiMOVES DROPOPEN ICOLUMN=COLUMN+1
IF COLUMN LT 6 GO TO 20ROW=ROW+1IF ROW LT 4 GO TO 10END PROGRAM
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
■Subrutine: BRANCH FETCH – începutul subrutineiEND BRANCH – sfâr şit subrutină SUBROUTINE PLACE(N) cu un singur parametru
Apelare subrutină CALL PLACE(5)
Revenire în programRETURN sau END BRANCH
Exemplu: anterior generalizare maximă prin: MAXCOL MAXROW

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 136/165
136Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 2
Capitolul 3
Exemple de programare
Exemplu: anterior, generalizare maximă prin: MAXCOL, MAXROW,YSPACE, XSPACE
SIGNAL 1 - iniţiază procedura de aducere a paletei goale;WAIT 11 - confirmă aducerea paletei;SIGNAL 2 - iniţiază transferul paletei;WAIT 12 - confirmă îndepărtarea paletei.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
PROGRAM PALETIZARE
DEFINE PICKUP=JOINTS(1, 2, 3, 4, 5)DEFINE CORNER=JOINTS(1, 2, 3, 4, 5)DEFINE DROPE=COORDINATES(X, Y)OPEN I
5 SIGNAL 1WAIT 11CALL PALLET(MAXCOL=6, MAXROW=4,XSPACE=40, YSPACE=50)S G
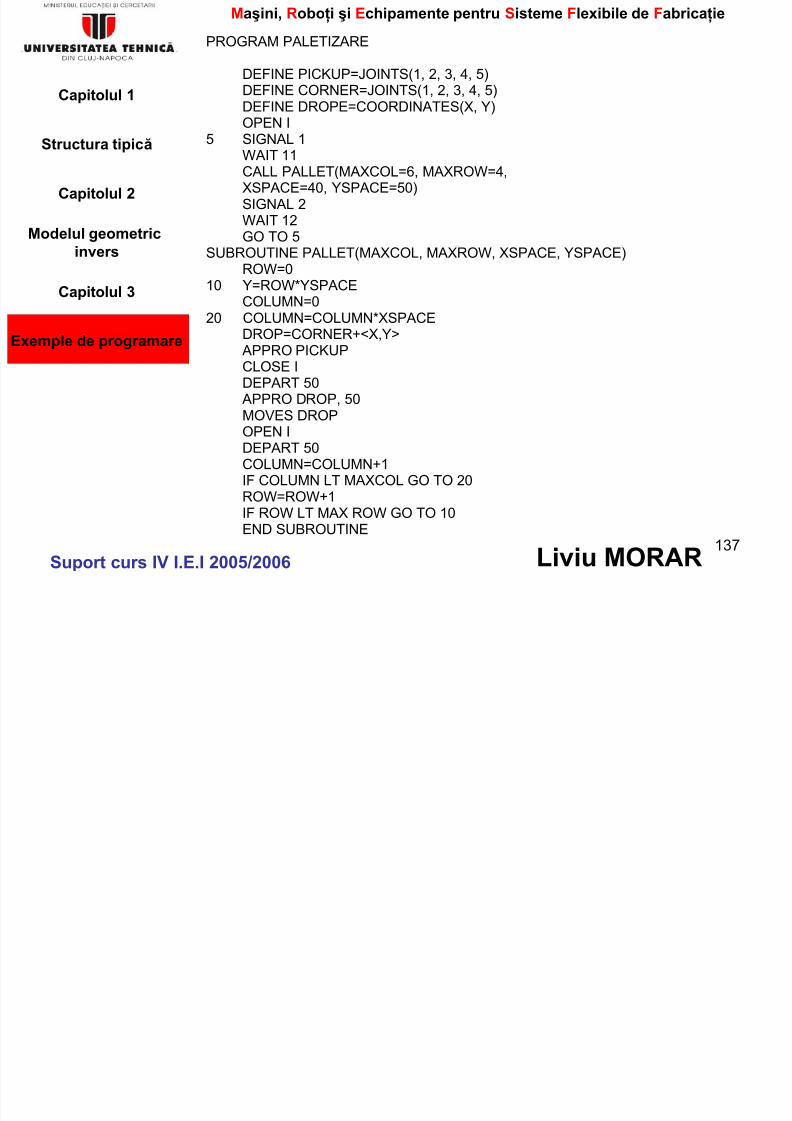
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 137/165
137Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
p
Capitolul 3
Exemple de programare
SIGNAL 2WAIT 12
GO TO 5SUBROUTINE PALLET(MAXCOL, MAXROW, XSPACE, YSPACE)ROW=0
10 Y=ROW*YSPACECOLUMN=0
20 COLUMN=COLUMN*XSPACEDROP=CORNER+<X,Y>APPRO PICKUPCLOSE IDEPART 50APPRO DROP, 50MOVES DROPOPEN I
DEPART 50COLUMN=COLUMN+1IF COLUMN LT MAXCOL GO TO 20ROW=ROW+1IF ROW LT MAX ROW GO TO 10END SUBROUTINE
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
Aspecte privind proiectarea CFF
Structura CF robotizateRI lucrează, în general, cu alte echipamente: conveioare,maşini care realizează procese, dispozitive, scule etc.
Împreună formează o celulă de lucru.
Aspecte: legate de proiectarea fizică a celulei şi proiectareasistemului de control care coordonează activităţilecomponentelor celulei.
Organizarea celulelor de fabricaţie:
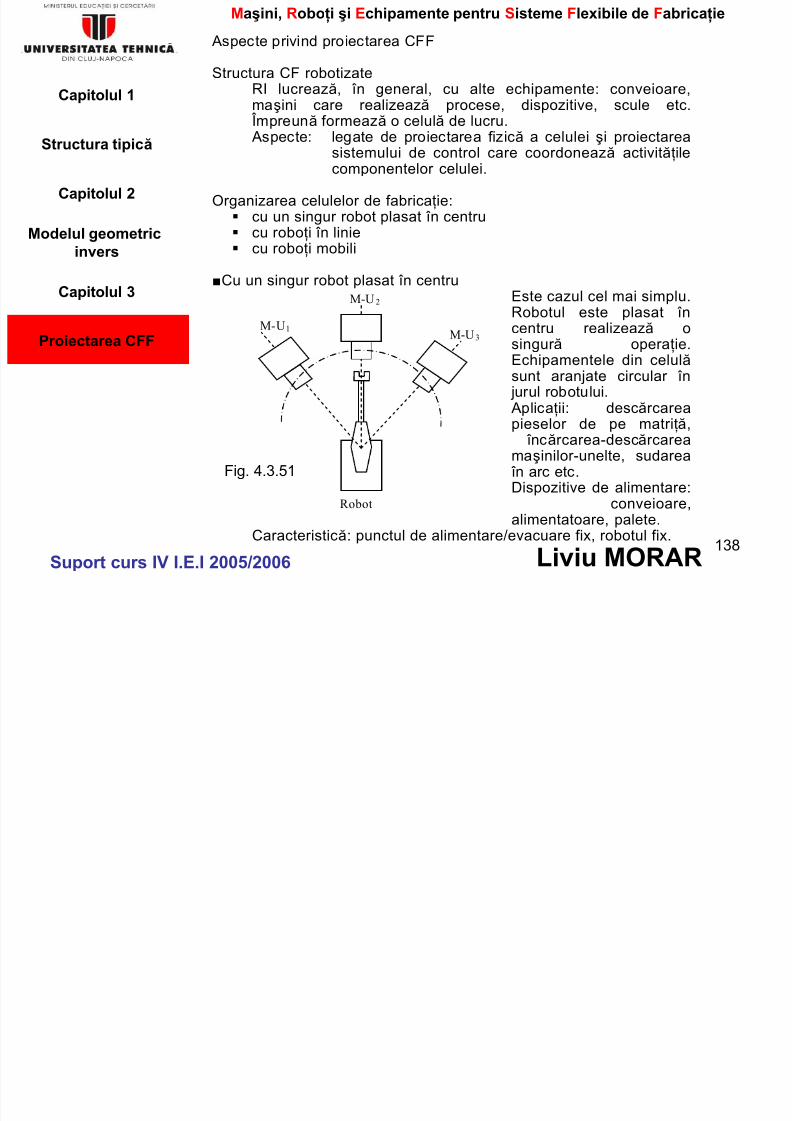
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 138/165
138Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
p
Capitolul 3
Proiectarea CFF
Organizarea celulelor de fabricaţie: cu un singur robot plasat în centru
cu roboţi în linie cu roboţi mobili
■Cu un singur robot plasat în centruEste cazul cel mai simplu.Robotul este plasat încentru realizează o
singur ă operaţie.Echipamentele din celulă sunt aranjate circular în
jurul robotului.Aplicaţii: descărcareapieselor de pe matriţă,
încărcarea-descărcareamaşinilor-unelte, sudarea în arc etc.Dispozitive de alimentare:
conveioare,alimentatoare, palete.
Caracteristică: punctul de alimentare/evacuare fix, robotul fix.
Robot
M-U1
M-U2
M-U3
Fig. 4.3.51
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
■Cu roboţi în liniePiese
conveior
Fig. 4.3.52
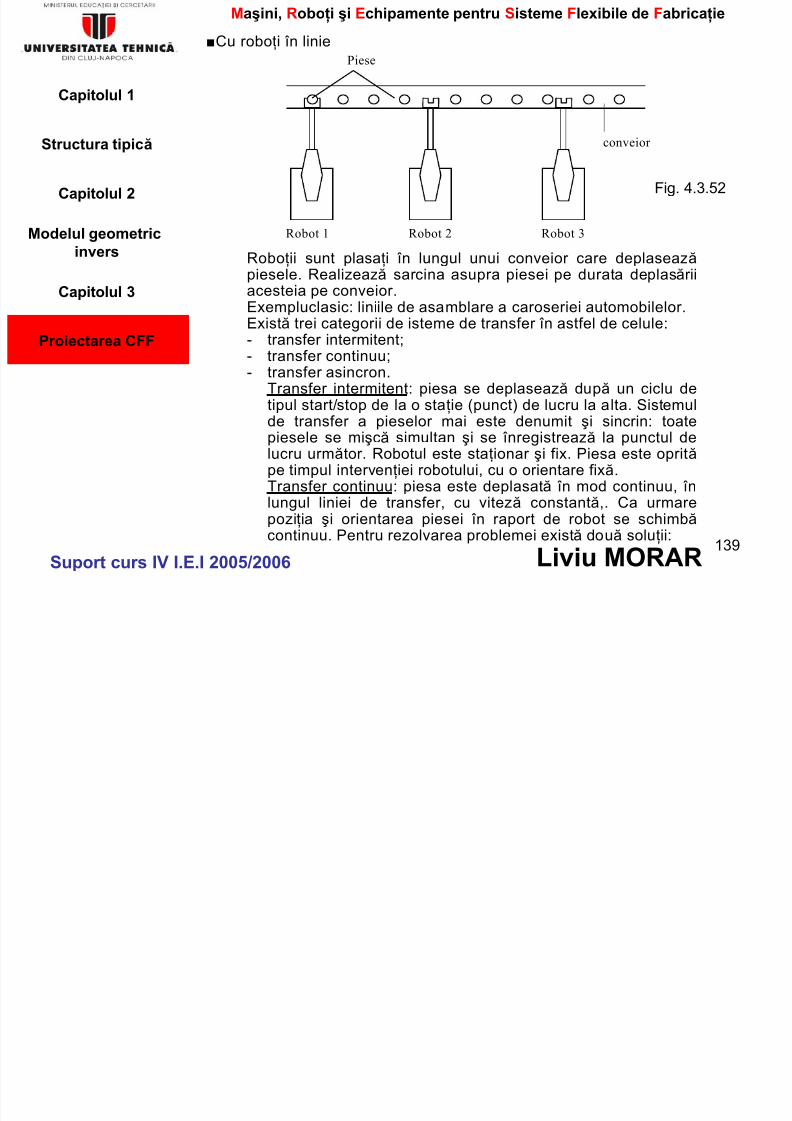
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 139/165
139Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 3
Proiectarea CFF
Roboţii sunt plasaţi în lungul unui conveior care deplaseazăpiesele. Realizează sarcina asupra piesei pe durata deplasăriiacesteia pe conveior.Exempluclasic: liniile de asamblare a caroseriei automobilelor.Există trei categorii de isteme de transfer în astfel de celule:
- transfer intermitent;- transfer continuu;- transfer asincron.
Transfer intermitent: piesa se deplasează după un ciclu detipul start/stop de la o staţie (punct) de lucru la alta. Sistemulde transfer a pieselor mai este denumit şi sincrin: toate
piesele se mişcă simultan şi se înregistrează la punctul delucru următor. Robotul este staţionar şi fix. Piesa este oprită pe timpul intervenţiei robotului, cu o orientare fixă.Transfer continuu: piesa este deplasată în mod continuu, înlungul liniei de transfer, cu viteză constantă,. Ca urmarepoziţia şi orientarea piesei în raport de robot se schimbă continuu. Pentru rezolvarea problemei există două soluţii:
Robot 1 Robot 2 Robot 3
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
a) un sistem de transport a robotului pentru deplasareaacestuia în lungul liniei de transfer a pieselor;
b) robot fix, prevăzut cu sistem de urmărire.Cazul a) - poziţia relativă a piesei şi robotului r ămâneconstantă pe durata intervenţiei robotului. Dezavantaje:
existenţa căii de transport a RI: capital suplimentar,complexitate sporită în sistemul de control pentrumenţinerea constantă a poziţiei etc. Problema coliziunii încazul existenţei mai multor roboţi în lungul liniei.Cazul b) – robotul este fix manipulatorul din dotare este
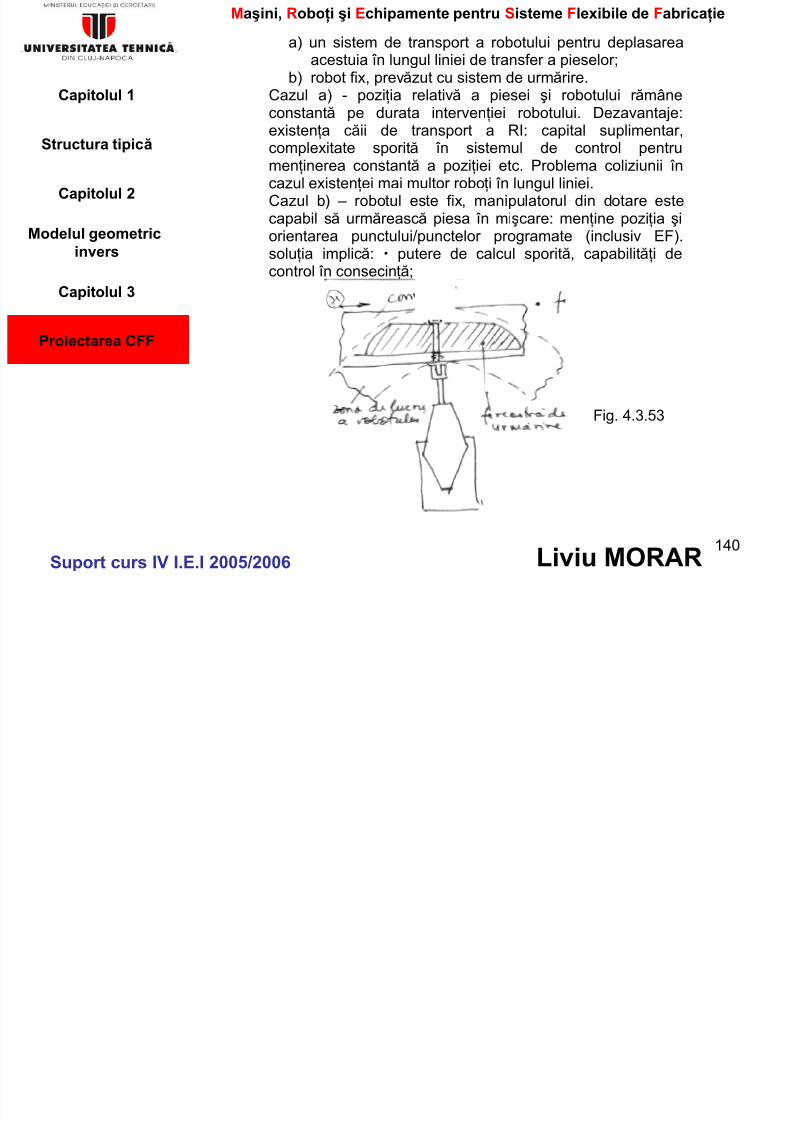
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 140/165
140Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 3
Proiectarea CFF
Cazul b) robotul este fix, manipulatorul din dotare estecapabil să urmărească piesa în mişcare: menţine poziţia şi
orientarea punctului/punctelor programate (inclusiv EF).soluţia implică: putere de calcul sporită, capabilităţi decontrol în consecinţă;
Fig. 4.3.53
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
fereastra de urmărire: intersecţia dintre zona de lucru arobotului şi linia de deplasare a piesei pe conveior. Reducezona de operare a robotului; necesitatea existenţei unor senzori pe conveior. Este necesar să se cunoască:momentul în care piesa pătrunde în fereastra de urmărire, ce
piesă se prelucrează (dacă se prelucrează mai multe tipuri).Alţi senzori trebuie să furnizeze informaţii referitoare lapoziţia şi viteza piesei în timpul ciclului pentru a se coordonacu sistemul de urmărire a robotului.

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 141/165
141Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 3
Proiectarea CFF
Transfer asincron fiecare piesă se deplasează independent în lungul conveiorului după un model de tip start/stop. Când într-un punct de lucru al liniei este terminat ciclul robotului,piesa se deplasează spre următorul punct de lucru. Caurmare, la un moment dat, unele piese sunt în mişcare, iar altele staţionează pentru a fi prelucrate. Dezavantajulprincipal: sistemul de control cel mai complex deoarecefiecare „piesă” trebuie „înzestrată” cu un sistem propriu decontrol al transportului.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
■Aranjament cu roboţi mobili:a) la sol;b) suspendaţi. Fig. 4.3.54
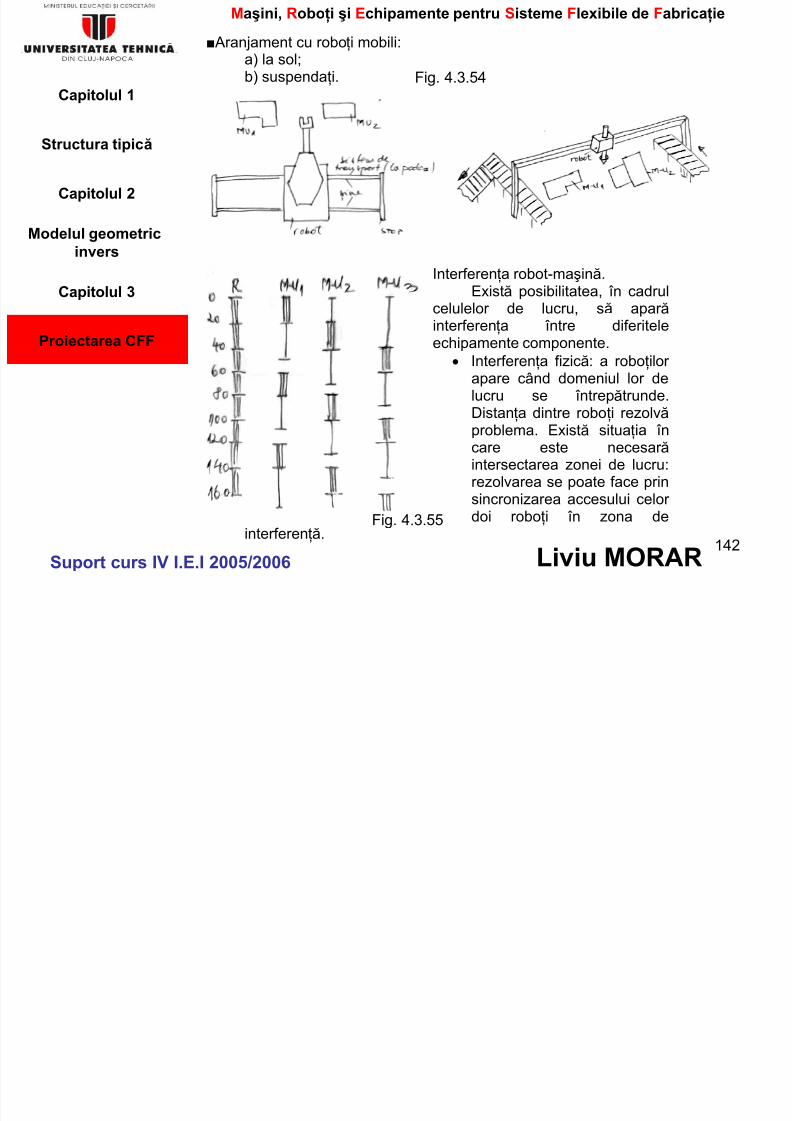
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 142/165
142Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 3
Proiectarea CFF
Interferenţa robot-maşină.Există posibilitatea, în cadrul
celulelor de lucru, să apar ăinterferenţa între diferitele
echipamente componente.• Interferenţa fizică: a roboţilor
apare când domeniul lor delucru se întrepătrunde.Distanţa dintre roboţi rezolvăproblema. Există situaţia în
care este necesar ăintersectarea zonei de lucru:rezolvarea se poate face prinsincronizarea accesului celor doi roboţi în zona de
interferenţă.Fig. 4.3.55
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
• Interferenţa cu maşina: poate apare când un robot deserveştemai multe maşini. În astfel de situaţii pot să apar ă perioade de„mers în gol” la unele maşini în timp ce altele lucrează. Seexprimă în procente prin raportul: timpul total de aşteptare a
tuturor maşinilor împăr ţit cu timpul de deservire a lor de cătrerobot.
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 143/165
143Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 3
Proiectarea CFF
Exemplu
Ciclul de lucru pentru cele trei maşini-unelte este identic: 50 scompus din 20 s timp pentru încărcare/descărcare efectuată de robotşi 30 s timp de prelucrare. În celulă există un singur robot pentrudeservirea maşinilor-unelte. Timpul de mers în gol (aşteptare) pentru
maşinile-unelte 3*10=30 s, timpul pentru deservirea maşinilor:3*20=60 s %50
60
30==⇒ IM
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
Discuţie:- când apare interferenţa?- ce se întâmplă dacă timpul pentru deservirea unei maşini şi
cel de lucru nu este acelaşi pentru toate maşinile? Ce
secvenţă?
Controlul celulei de fabricaţie
Funcţia principală a controlerului este aceea de a asigura

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 144/165
144Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 3
Proiectarea CFF
Funcţia principală a controlerului este aceea de a asiguracoordonarea diferitelor activităţi din celulă: controlul secvenţelor,
interferenţa cu operatorul, monitorizarea de siguranţă. Sunt asiguratefie de controlerul robotului, fie de un controler programabil (automatprogramabil).Controlul secvenţelor . Este funcţia de bază a controlerului celulei întimpul funcţionării automate. Se exercită prin:
- controlul secvenţei activităţilor din celulă;
- controlul activităţilor simultane;- generează decizii privind desf ăşurarea ciclului în celulă pe
baza evenimentelor ce apar în celulă;- generează decizii privind oprirea/amânarea ciclului pe baza
evenimentelor din celulă.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 145/165
145Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 3
Proiectarea CFF
Ciclul de lucru:• Robotul preia piesa de pe CA (timp în gol pentru m-u);• Încarcă m-u (timp în gol pentru m-u);• Se prelucreaz
ăpiesa (timp în gol pentru robot);
• Robotul evacuează piesa (CE) (timp în gol pentru m-u);• Robotul se deplasează în punctual de start (CA).
Fig. 4.3.56
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
Ciclul de lucru presupune activităţi aproape exclusiv secvenţiale.Excepţie poate face CA. Controlerul celulei asigur ă ca activităţile săse desf ăşoare în secvenţa corectă şi că fiecare pas este îndeplinit înainte de a se iniţia următorul.Griper dublu produce creşterea productivităţii. Discuţie.
Funcţii asociate cu celulele complexe:- efectuarea calculelor (vezi exemplul cu paleta 6x4);- decizii la evenimente speciale (defectarea unui echipament);- realizarea unor cicluri neregulate (schimbarea periodică a
sculelor).

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 146/165
146Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometricinvers
Capitolul 3
Proiectarea CFF
)
Interfaţa cu operatorul. Scopul acestei funcţii este de a asiguraintervenţia operatorului uman în desf ăşurarea ciclului celulei. Oasemenea necesitate poate să apar ă:
• operatorul uman face parte integrantă din celulă;• situaţii de oprire de urgenţă;• editare programe sau introducere date de către operator.
Monitorizarea. Comunicarea cu mediul: interblocaje, detectareaerorilor de funcţionare. Semnale de tip WAIT, SIGNAL.Detectarea erorilor este acompaniată de acţiune de soluţionare. Încontextul unei celule automate de prelucrare incluzând un robot potsă apar ă următoarele categorii de erori:
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
1.sculă -uzur ă 2.piesă -lipsă piesă -rupere -piesă greşită -vibraţii -piesă defectă
-sculă lipsă -dimensiuni mai-sculă greşit mari/mici încărcată
3 m-u -vibraţii 4 dispozitiv -piesă în dispozitiv
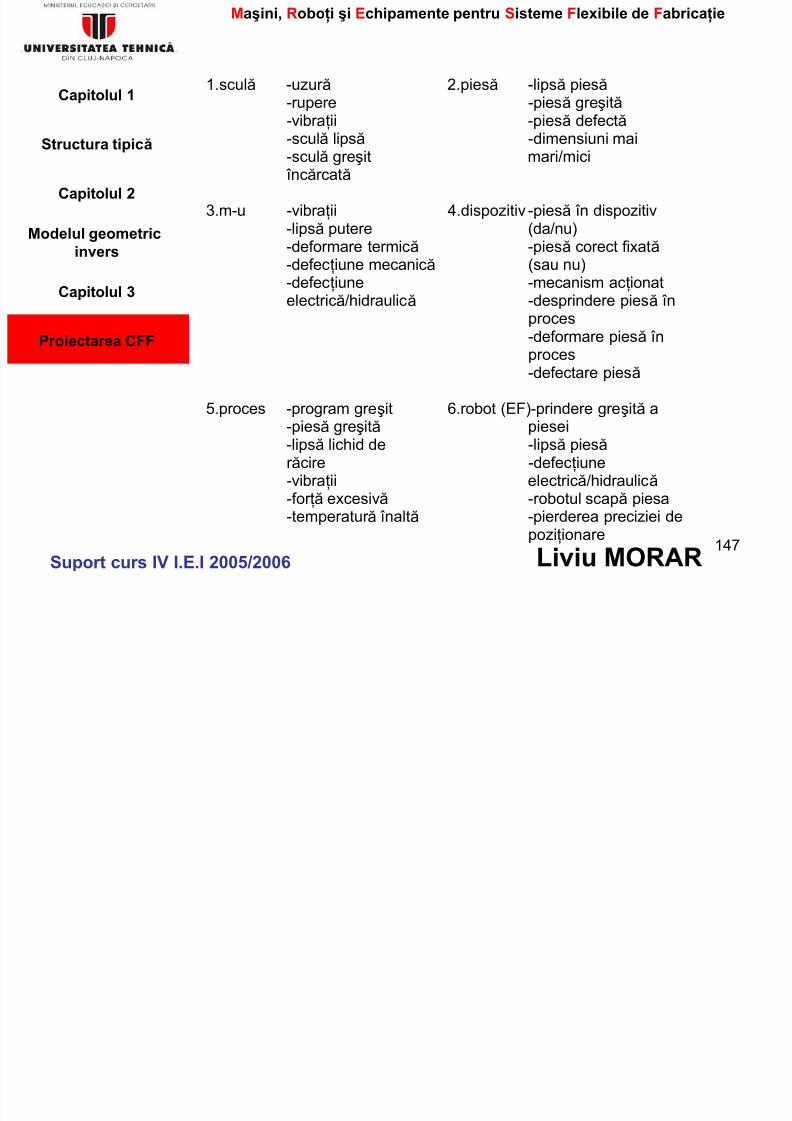
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 147/165
147Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
Proiectarea CFF
3.m u vibraţii 4.dispozitiv piesă în dispozitiv-lipsă putere (da/nu)
-deformare termică -piesă corect fixată -defecţiune mecanică (sau nu)-defecţiune -mecanism acţionatelectrică/hidraulică -desprindere piesă în
proces
-deformare piesă înproces-defectare piesă
5.proces -program greşit 6.robot (EF)-prindere greşită a-piesă greşită piesei
-lipsă lichid de -lipsă piesă r ăcire -defecţiune-vibraţii electrică/hidraulică -for ţă excesivă -robotul scapă piesa-temperatur ă înaltă -pierderea preciziei de
poziţionare
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
Strategii de remediere
• ajustare la sfâr şitul ciclului, nivel de urgenţă scăzut. Robotulactivează subrutina necesar ă pentru remediere;
• ajustarea în timpul ciclului, nivel de urgenţă suficient de seriospentru a interveni în timpul ciclului, dar procesul nu trebuie
oprit. Se apelează o rutină specială;• oprirea procesului şi apelarea rutinei de cercetare;• oprirea procesului – apelare pentru HELP.
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 148/165
148Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
Proiectarea CFF
Exemple
pentru prima categorie: cade piesa, logic se va comandapreluarea piesei următoare;
a doua categorie: piesă prea mare – se va comanda otrecere suplimentar ă pentru aşchiereapăr ţii în plus;
a treia categorie: defectarea sculei – se apelează pentru
înlocuirea ei;a patra categorie: o defecţiune hidraulică.
Echipamentul de control al celulei
Există mai multe opţiuni: controlerul robotului, controlerulprogramabil, un calculator independent (PC).
Controlerul robotului. Interfaţa cu echipamentele din celulă serealizează prin porturi de intrare (10÷25 linii) şi de ieşire (10÷25 linii).Există şi posturi de intrare rezervate pentru blocări de siguranţă(5 linii).
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
Controlerul programabil (PC), introdus prin anii ’60. Este un dispozitivdigital cu memorie programabilă capabilă să genereze semnale deieşire în concordanţă cu logica de operare a celulei. Funcţiile tipice îndeplinite de PC sunt:
- controlul funcţiilor de tip releu: generarea unui semnal deieşire bazat pe reguli logice aplicate semnalelor de intrare;
- funcţii de coordonare în timp – generarea unui semnal deieşire de o anumită durată;
- funcţii de numărare;- funcţii aritmetice;- funcţii analogice de comandă: simularea unor funcţii

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 149/165
149Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
funcţii analogice de comandă: simularea unor funcţiianalogice-propor ţional, integral, derivativ.
Alte funcţii implementate: referitoare la diagnoză, interfaţa operator,monitorizare avarie etc.
Calculator cu rol de controler programabil. Îndeplineşte funcţiileamintite plus alte funcţii în întreprindere (controlul celulei în time-
sharing). Coordonarea mai ultor celule. Prelucrarea unor produsediferite.
Analiza ciclului de lucru al robotului
Generalizarea metodei MTT (Methods Time Measurement) →
RTM (Robot Time Motion). Cuprinde 10 elemente distincte clasificate în 4 categorii:- elemente de mişcare;- elemente de senzorică;- elemente ale MO;- elemente de întârziere, rezultat din condiţiile procesului.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
Element Simbol Definirea elementului Parametrii1 Rn Segmentul – n:
Deplasarea f ăr ă sarcină, în lungul unei traiectoriialcătuite din n segmente
Deplasare, viteză
2 Mn Idem, dar cu obiect Deplasare, viteză
3 O Rn Idem , pentru reorientare Deplasare, viteză
4 SE i Stop în poziţia de eroare4.1 SE1 Aducerea imediată a RI în
poziţia de start, f ăr ă a seaştepta resetarea cuplelor
4.2 SE2 Aducerea în poziţia desiguranţă cu o eroare

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 150/165
150Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
siguranţă, cu o eroareadmisă
5 SF i Stop: for ţă sau moment La atingerea valoriifor ţei sau momentului
5.1 SF1 Stop: condiţia de for ţă atinsă
5.2 SF2 Idem – pentru moment
5.3 SF3 Idem: for ţă+moment
5.4 SF4 Idem: la contact
6 VI RI înzestrat cu vedereartificială
Funcţie de timp
7 GRi Apucarea obiectului Distanţa7.1 GR1 Apucare simplă Dechis/închis
7.2 GR2 Apucare cu centrareamâinii
7.3 GR3 Închiderea secvenţială a
degetelor 8 RE Eliberarea obiectului
9 T Întârziere, când RI faceparte din proces
Funcţie timp
10 D Idem, când RI aşteaptă terminarea procesului
Funcţie timp
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
Element Simbol Timp, s Parametrii1 R1 s/v +0,40 s>v/2,5
0,40 s<v/2,5s –distanţă, mv- viteză, m/s
2 M1 sarcină: <0,5 kgs/v +0,40 s>v/2,5
0,40 s<v/2,5
sarcină: 0,5 ÷ 2,5 kgs/v +0,40 s>v/2,5
0,40 s<v/2,5
sarcină: 2 5 ÷ 7 5 kg

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 151/165
151Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
sarcină: 2,5 ÷ 7,5 kgs/v +0,40 s>v/2,5
0,40 s<v/2,54.1 SE1 0,1v
7.1 GR1 0,1
8 RE 0,1
9 T T
10 D D
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
Exemplu: Robotul deplasează piesa de 1,5 kg de la un conveior laaltul:
Robot 3 0

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 152/165
152Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM - RI ia piesa de pe primul conveior;- RI transportă piesa pe cel de al doilea conveior;- Se deplasează în poziţia de aşteptare (punctul de
poziţionare).Piesele sosesc din 15 în 15 s, Tc(robot) = 15 s.
Punct de start
Punct de poziţionare
Fig. 4.3.57
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
Detalierea elementelor ciclului:
Pas Descrierea elementului1 Conveiorul aduce piesele din 15 în 15 s. Robotul se găseşte în
punctul de poziţionare deasupra conveiorului.
2 Robotul se apropie de piesă cu MP deschis, v=30 mm/s.3 Robotul închide greiferul cu piesa apucată.
4 Robotul ridică piesa la 30 mm, v=30 mm/s.
5 Robotul deplasează piesa, la aceeaşi înălţime, deasupraconveiorului doi, v=150 mm/s.
6 Robotul plasează piesa, greiferul trebuie orientat astfel ca mişcarea
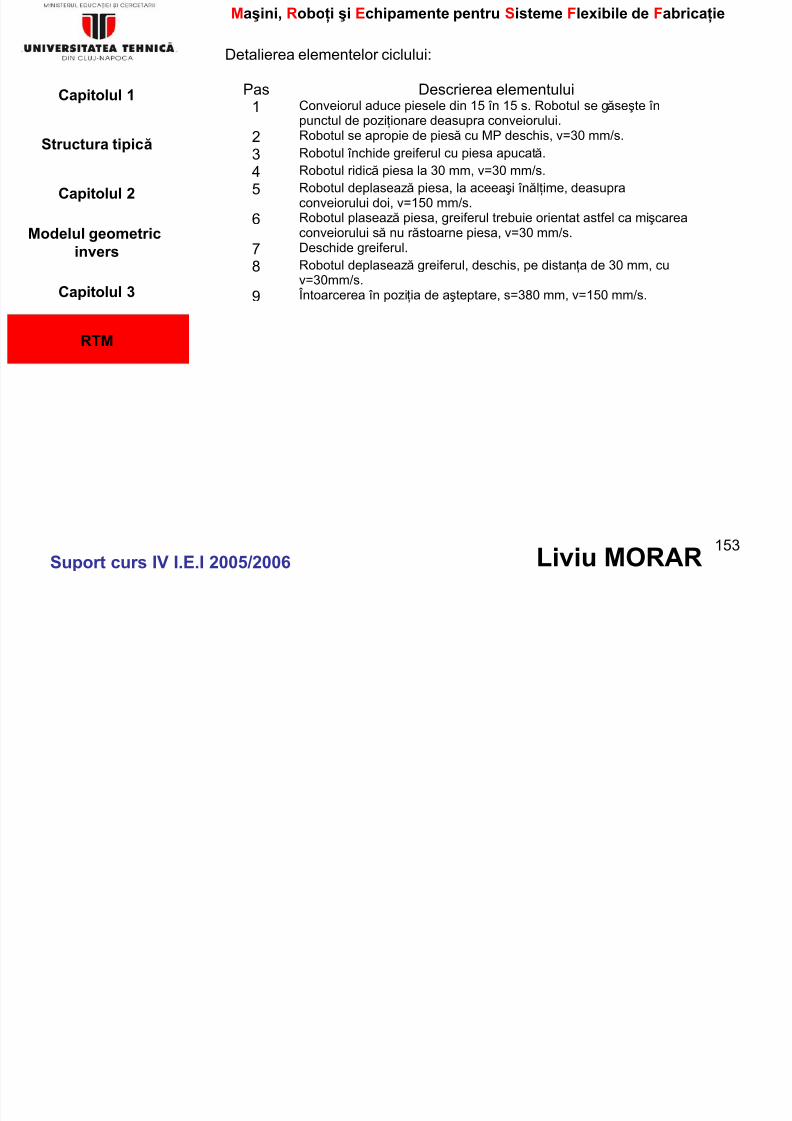
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 153/165
153Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
6 p p , g şconveiorului să nu r ăstoarne piesa, v=30 mm/s.
7 Deschide greiferul.8 Robotul deplasează greiferul, deschis, pe distanţa de 30 mm, cu
v=30mm/s.9 Întoarcerea în poziţia de aşteptare, s=380 mm, v=150 mm/s.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
Timpii calculaţi pentru elemente sunt indicate în cele ce urmează:
Pas SimbolRTM
Distanţamm
Viteză Mm/s
Întârzieres
Timp Descriere
1 D - - 15 15 Aducerea
piesei2 R1 30 30 - 1,4 Apropiere de
piesă 3 GR1 - - - 0,1 Apucare
piesă 4 M1 30 30 - 1,6 Ridicare
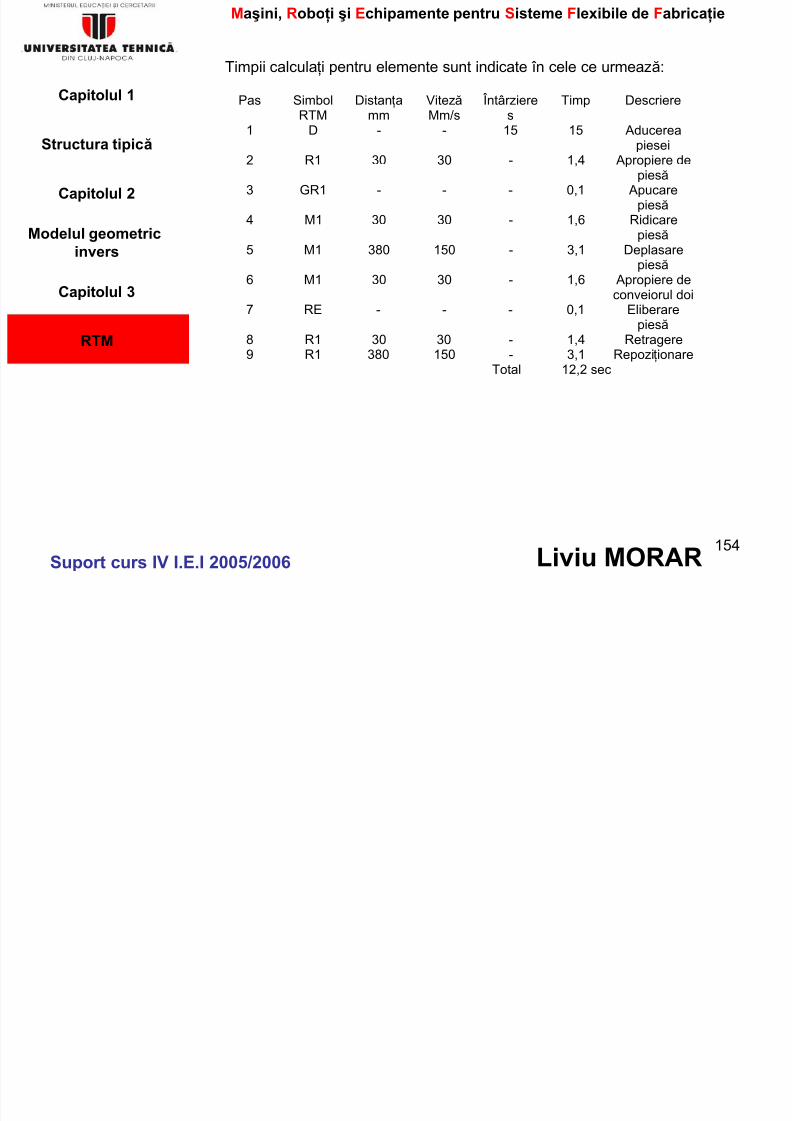
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 154/165
154Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
4 M1 30 30 1,6 Ridicarepiesă
5 M1 380 150 - 3,1 Deplasarepiesă
6 M1 30 30 - 1,6 Apropiere deconveiorul doi
7 RE - - - 0,1 Eliberarepiesă
8 R1 30 30 - 1,4 Retragere9 R1 380 150 - 3,1 RepoziţionareTotal 12,2 sec
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
APLICAŢII
I. Încărcarea-descărcarea unei m-u pentru frezatCiclul de lucru al m-u mult mai lung decât al robotuluiCiclul de lucru:
- preluare piesă de pe conveior (inclus timpul de
aştepatare pentru ajungerea în poziţie a piesei) 2,6 s- deplasarea braţului de la conveior la m-u 1,7 s- încărcarea m-u, retragere braţ în poziţia de aşteptare 1,1 s- descărcare maşină 0,8 s- deplasare braţ de la m-u la conveior 1,7 s- depozitare piesă 0,3 s
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 155/165
155Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
p p ,Total 8,2 s
Productivitatea zilnică (2 schimburi)Timpul de prelucrare pe m-u este de 24 s. Se consider ă 20%
timp pentru rodaje, întreţinere etc.a) dispozitiv de prehensiune simplu
zibucQ /14312,32
8,0360082=
⋅⋅⋅=
b) dispozitiv dublu de prehensiuneCiclu:
- timp de prelucrare 24,0 s- încărcarea m-u 1,1 s- descărcarea m-u 0,8 s
Total 25,9 s
zibucQ /17799,25
8,0360082 =⋅⋅⋅=
Creşterea de productivitate
%3,241431
14311779=
−=ΔQ
Discuţie.
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Capitolul 2
Structura tipică
I. Încărcare-descărcare presă Obs: Ciclul de operare presă mult mai scurt decât ciclul robotului
Ciclul de lucrudispozitiv de prehensiune simplu
-operare presă……………….0,9 s-descărcare presă…………..0,8 s-deplasare la conveior………1,7 s-depozitare piesă……………0,3 spreluare piesă nouă 2 6 s
Ciclul de lucru,mecanism dublu
-descărcare presă…………..0,8 s-încărcare presă…………….1,1 s-deplasare la conveior………1,7 s-depozitare piesă……………0,3 spreluare piesă nouă 2 6 s

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 156/165
156Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
-preluare piesă nouă………..2,6 s
-deplasare la presă………….1,7 s-încărcare presă……………..1,1 s
Total………..9,1 s
-preluare piesă nouă………..2,6 s
-deplasarea la piesă………..1,7 sTotal………..8,2 s
schi pieseQ schimb piese /75,28092,8
8,036008/8,2531
1,9
8,036008=
⋅⋅==
⋅⋅=
%9,108,2531
8,253175,2809=
−=ΔQ
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
M d l l t i
Capitolul 2
Structura tipică
I. Încărcarea secvenţială a maşinilor-unelte
Fig. 4.3.58
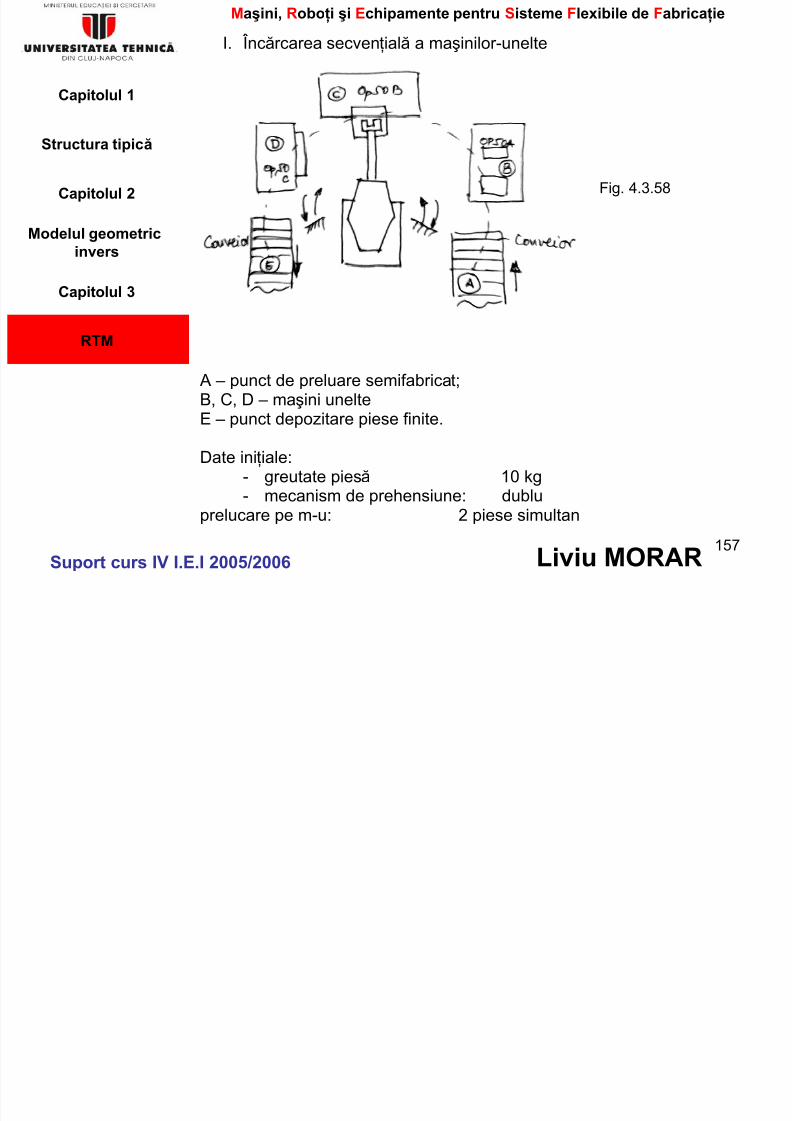
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 157/165
157Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
A – punct de preluare semifabricat;B, C, D – maşini unelteE – punct depozitare piese finite.
Date iniţiale:- greutate piesă 10 kg- mecanism de prehensiune: dublu
prelucare pe m-u: 2 piese simultan
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
M d l l t i
Capitolul 2
Structura tipică
Constrângeri: după ce sistemul este încărcat şi operaţional, rotrebuie să urmărească o secvenţă fixă de paşi pentru a deservi toateSecvenţa rigidă trebuie păstrată indiferent de reltimp prelucrare/timp deplasare/timp încărcare (descărcare).
Mod de stabilire a secvenţei: prin analiza fazelor, de la ultima maşinciclu către prima. Pentru staţia (m-u) „i”:
1.-descărcarea maşinii la staţia „i”2.-deplasarea la staţia „i+1”3 -încărcarea maşinii la staţia i+1”

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 158/165
158Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
3. încărcarea maşinii la staţia „i+1
4.-deplasarea înapoi la staţia „i-1”5.-descărcarea maşinii la staţia „i-1”6.-deplasarea la staţia „i”7.-reîncărcarea maşinii la staţia „i”
La deplasarea înspre înapoi a robotului în sistem paşii 5, 6, 7 p
secvenţa „i” devin 1, 2, 3 pentru secvenţa „i-1”. Când se ajunge la staţrobotul se va deplasa la ultima staţie pentru a o descărca.
Timpul de prelucrarecaz 1 caz 2
- la maşina 1 (staţia B) 9,1 min 2,0 min- la maşina 2 (staţia C) 9,0 min 1,0 min- la maşina 3 (staţia D) 5,0 min 2,0 min- timp de prelucrare/încărcare piesă la toate staţiile 0,1/0,1 min- timp pentru deplasări
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Modelul geometric
Capitolul 2
Structura tipică
LaDe la
A B C D EA - 0,3 0,6 0,9 1,2
B 0,3 - 0,3 0,6 0,9
Tabelul 4.3.4
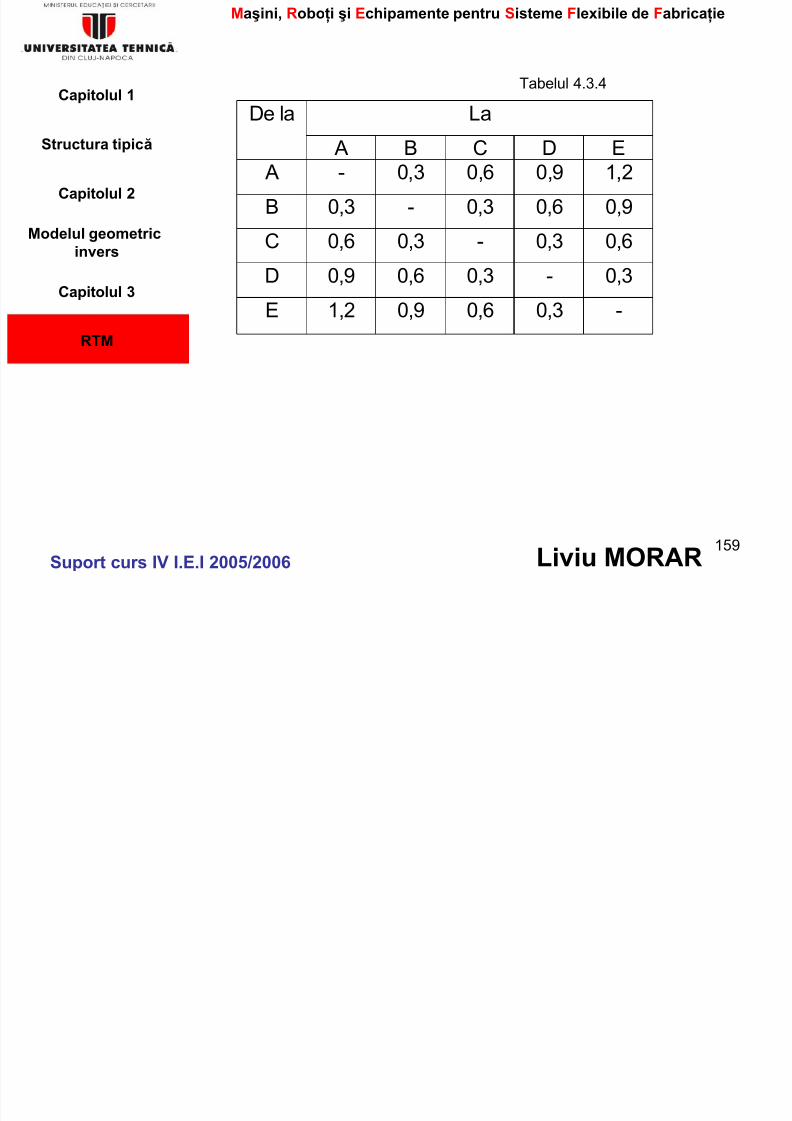
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 159/165
159Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
C 0,6 0,3 - 0,3 0,6D 0,9 0,6 0,3 - 0,3
E 1,2 0,9 0,6 0,3 -
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Modelul geometric
Capitolul 2
Structura tipică
Tabelul 4.3.5

5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 160/165
160Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Modelul geometric
Capitolul 2
Structura tipică
Tabelul 4.3.5(continuare)
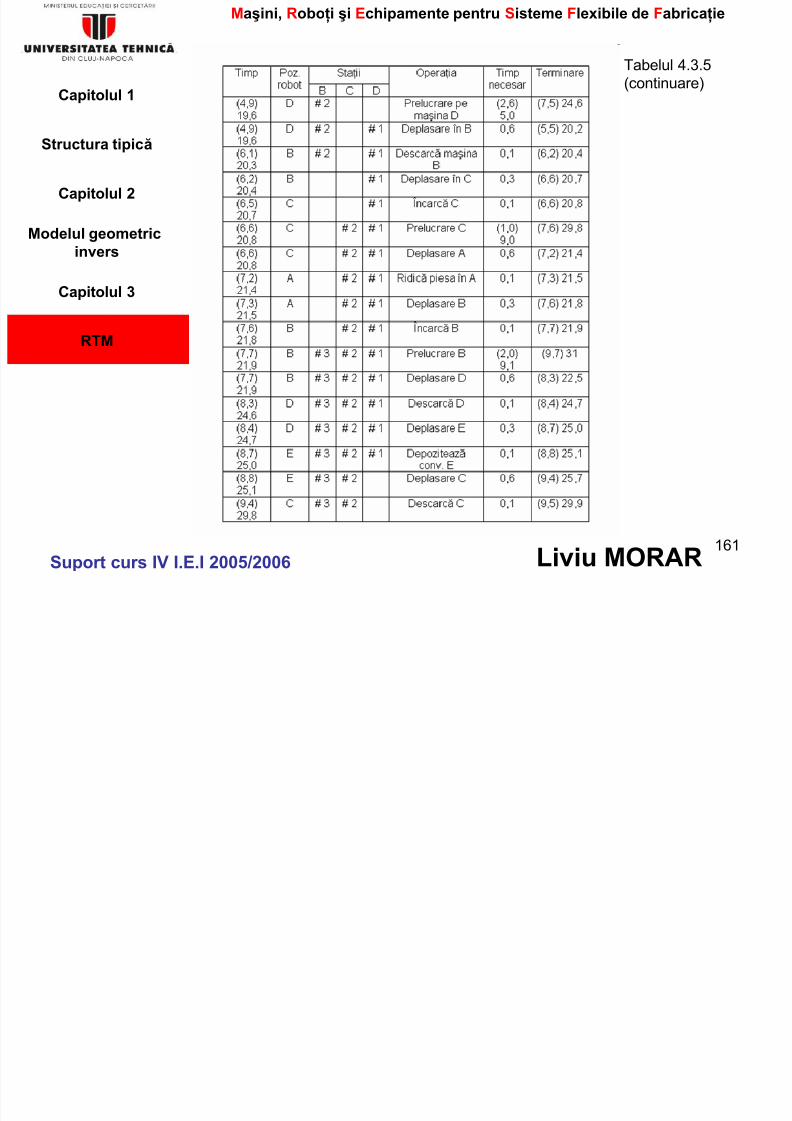
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 161/165
161Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Modelul geometric
Capitolul 2
Structura tipică
Tabelul 4.3.5(continuare)
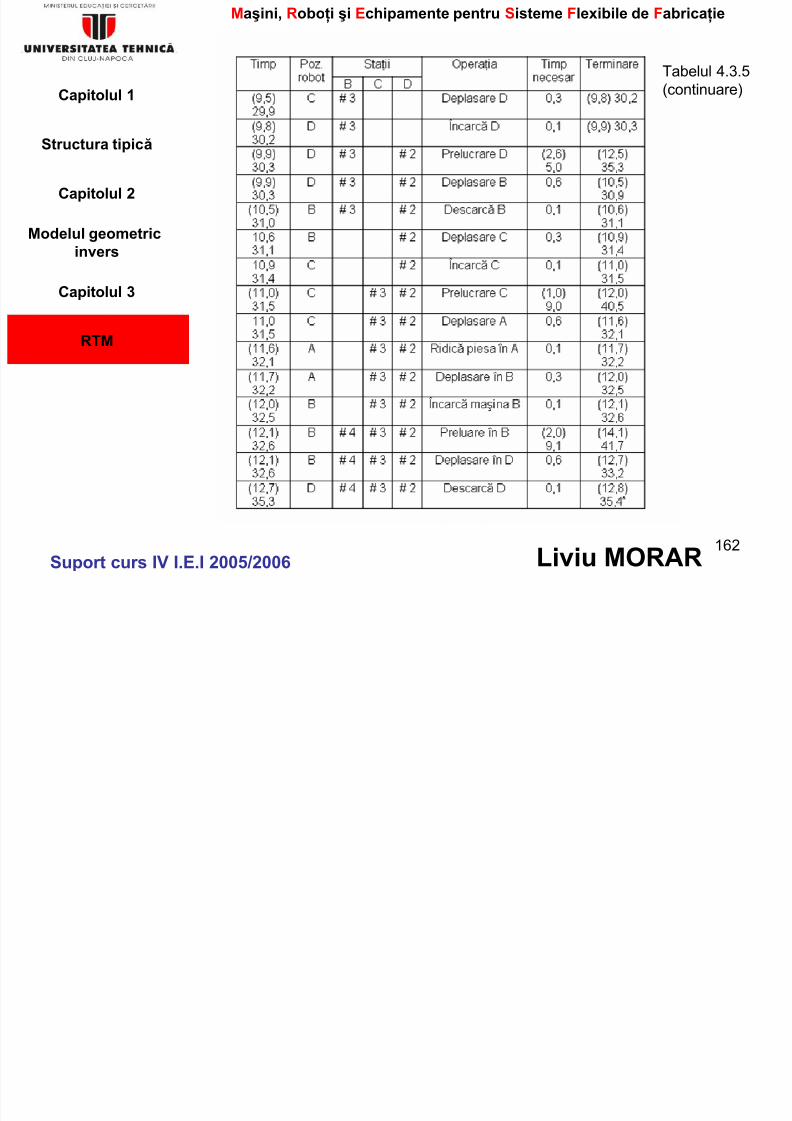
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 162/165
162Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Modelul geometric
Capitolul 2
Structura tipică
După ce sistemul este complet încărcat, diferenţa de timp dintredescărcări succesive ale aceleiaşi staţii (ex. D) reprezintă timpul pe ciDescarcă D, piesa # 2 35,4-Descarcă D, piesa # 1 24,7
Tc=10,7 min
hbucQ /6,57,10
min60=⇒
De ce s-au considerat cele două exemple: influenţa timpuluiprelucrare
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 163/165
163Liviu MORARSuport curs IV I.E.I 2005/2006
Modelul geometric
invers
Capitolul 3
RTM
prelucrare.- când timpul de prelucrare este mare (primul caz) robotul tre
să aştepte;- când Tprel<Tciclu robot: timpul pe ciclu al sistemului limitat de ti
pe ciclu al robotului.
Calculul timpului pe ciclu al robotuluiTimpul pe ciclu al robotului poate fi divizat în două păr ţi:- descărcarea unei anumite maşini- ….- …. segment α
- ….- reîncărcarea aceleiaşi maşini- toate celelalte operaţii ale robotului }segment β
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Modelul geometric
Capitolul 2
Structura tipică
Exemplu
- Descarcă D 0,1 min- Deplasare E 0,3 min- Depozitează în E 0,1 min
- Deplasare în C 0,6 min segment α = 1,6 min- Descarcă C 0,1 min- Deplasare D 0,3 min- Încarcă D 0,1 min
- Deplasare B 0,6 min
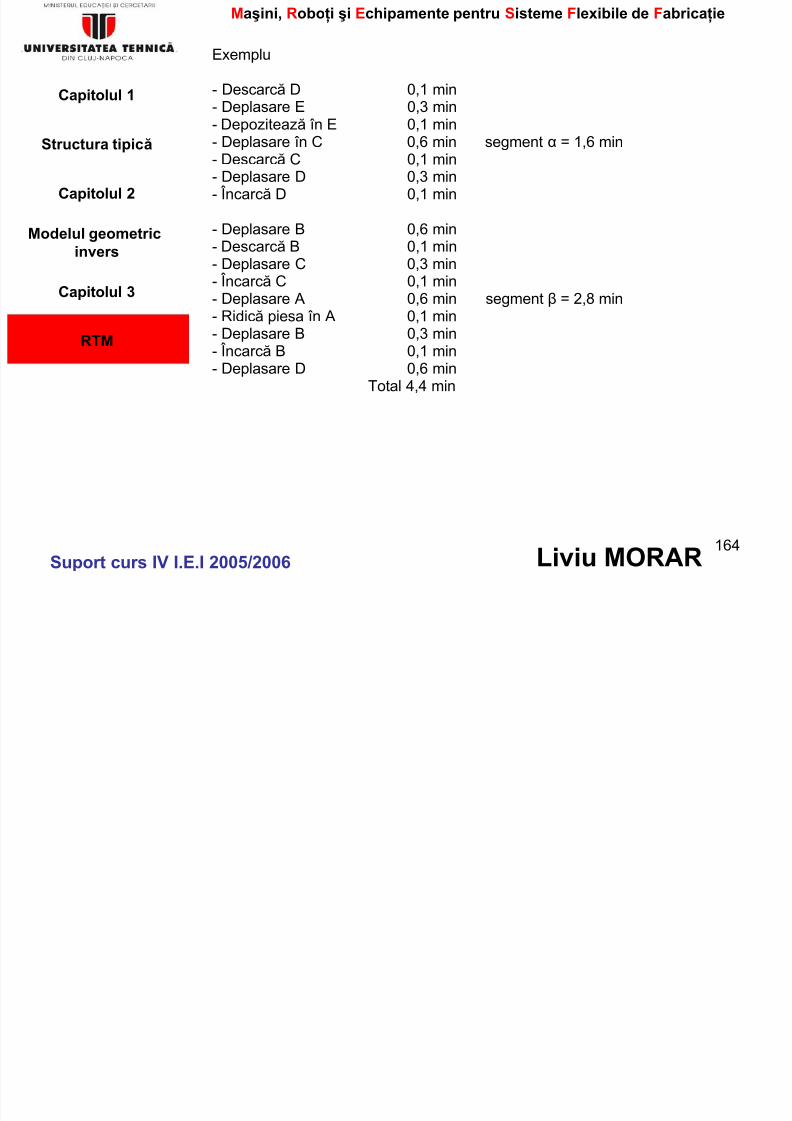
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 164/165
164
Liviu MORARSuport curs IV I.E.I 2005/2006
g
invers
Capitolul 3
RTM
- Descarcă B 0,1 min- Deplasare C 0,3 min- Încarcă C 0,1 min- Deplasare A 0,6 min segment β = 2,8 min- Ridică piesa în A 0,1 min- Deplasare B 0,3 min
- Încarcă B 0,1 min- Deplasare D 0,6 min
Total 4,4 min
Maşini, Roboţi şi Echipamente pentru Sisteme Flexibile de Fabricaţie
Capitolul 1
Modelul geometric
Capitolul 2
Structura tipică
Utilizând procedura de calcul a segmentelor „α” şi „β” se poate simpcalculul timpului pe ciclu al sistemului:
• se calculează segmentele α şi β ale robotului;• determinarea timpului maxim de maşină pentru toate staţiile, M;
a) dacă M≤ β T= α + β
b) dacă M> β T= α + MVerificare:pentru exemplu: 1,98,26,1 === M β α
min/ciclu7,101,96,1 =+=+=⇒ T α Timpul pentru ciclu sistemului
5/12/2018 curs_an4_iei_roboti - slidepdf.com
http://slidepdf.com/reader/full/cursan4ieiroboti 165/165
165
Liviu MORARSuport curs IV I.E.I 2005/2006
g
invers
Capitolul 3
RTM
pu pe u c c u s s e u u 6.28,26,1 === M β α
min/ciclu4,48,26,1 =+=+=⇒ β α T