cinematica navala si radar
DESCRIPTION
cinematica navala si RADAR, Tataru Neculae, constructia PAD, Radarul JMA-5310-6TRANSCRIPT
1
CUPRINS
Cuprins……………………………………………………. 1 1. Utilizarea planşetei radar. Determinarea parametrilor
de mişcare ai ţintei………………………………………. 6 1.1. Planşeta radar – conţinut………………………………….. 6 1.2. Terminologie utilizată în lucrul cu planşeta radar………… 6 1.3. Reguli de lucru pe planşeta radar…………………………. 7 1.4. Determinarea MRi, CPA, TCPA, DA, VA, Asp………….. 8
1.4.1. Determinarea MRi, CPA, TCPA, DA, VA, Asp, în N-up…. 8 1.4.2. Determinarea MRi, CPA, TCPA, DA, VA, Asp, în H-up..... 10
2. Evitarea coliziunii imediat……………………………… 12 2.1. Evitarea coliziunii prin schimbarea drumului imediat……. 12 2.2. Evitarea coliziunii prin reducerea vitezei imediat………… 14 2.3. Evitarea coliziunii prin creşterea vitezei imediat…………. 16 2.4. Evitarea coliziunii prin stopare imediat…………………… 18 2.5. Evitarea coliziunii prin schimbarea drumului şi reducerea
vitezei imediat …...……………………………………….. 20 2.6. Evitarea coliziunii prin schimbarea drumului şi creşterea
vitezei imediat ……………………………………………. 22 3. Evitarea coliziunii după un timp alocat………………… 24
3.1. Evitarea coliziunii prin schimbarea drumului după un timp alocat………………………………………………………. 24
3.2. Evitarea coliziunii prin reducerea vitezei după un timp alocat………………………………………………………. 25
3.3. Evitarea coliziunii prin creşterea vitezei după un timp alocat……………………………………………………… 26
3.4. Evitarea coliziunii prin schimbarea drumului limitată şi reducerea vitezei după un timp alocat…………………….. 27
3.5. Evitarea coliziunii prin schimbarea drumului limitată şi creşterea vitezei după un timp alocat……………………… 28
3.6. Evitarea coliziunii prin reducerea vitezei limitată şi schimbarea drumului după un timp alocat………………… 29
3.7. Evitarea coliziunii prin creşterea vitezei limitată şi schimbarea drumului după un timp alocat………………… 30
4. Determinarea tipului de manevră executat de către nava ţintă……………………………………………….. 32
4.1. Ţinta schimbă de drum……………………………………. 32 4.2. Ţinta reduce viteza………………………………………... 33 4.3. Ţinta creşte viteza………………………………………… 34 4.4. Ţinta stopează…………………………………………….. 35
2
4.5. Ţinta schimbă drumul şi reduce viteza…………………… 36 4.6. Ţinta schimbă drumul şi creşte viteza……………………. 37
5. Cazuri particulare ale mişcării relative………………… 38 5.1. Drumuri diferite paralele de acelaşi sens ………………… 38 5.2. Drumuri diferite paralele de sens contrar………………… 39 5.3. Drumuri suprapuse de acelaşi sens……………………….. 40 5.4. Drumuri suprapuse de sens contrar………………………. 41 5.5. Ţinta fixă…………………………………………………. 42 5.6. Nava proprie fixă…………………………………………. 43
6. Evitarea coliziunii cu ţinte fixe în condiţii de derivă prin schimbarea drumului după un timp alocat………. 44
7. Construcţia PAD…………………………………………. 46 8. Evitarea ciclonului tropical……………………………... 48
8.1. Evitarea ciclonului tropical când VN>VC ………………… 4 8.2. Evitarea ciclonului tropical când VN<VC - la distanţa
maximă……………………………………………………. 49 9. Tehnica paralelelor indicatoare (TPI)………………….. 51
9.1. Un singur reper, un singur drum………………………….. 51 9.1.1. Metoda relevment, distanţă în N-up………………………. 52 9.1.2. Metoda distanţei minime în N-up…………………………. 53 9.1.3. Metoda relevment, distanţă în H-up………………………. 53 9.1.4. Metoda distanţei minime în H-up…………………………. 54
9.2. Un singur reper, mai multe drumuri...…………………….. 55 9.2.1. Metoda relevment, distanţă în N-up………………………. 56 9.2.2. Metoda distanţei minime în N-up…………………………. 57 9.2.3. Metoda relevment, distanţă în H-up………………………. 58 9.2.4. Metoda distanţei minime în H-up…………………………. 59
9.3. Mai multe repere, mai multe drumuri……………………... 60 9.3.1. Metoda relevment, distanţă în N-up………………………. 61 9.3.2. Metoda distanţei minime în N-up…………………………. 62 9.3.3. Metoda relevment, distanţă în H-up………………………. 62 9.3.4. Metoda distanţelor minime în H-up……………………… 64
10. Radarul JMA-5310-6…………………………………… 65 10.1. Elemente şi funcţii ale imaginii RADAR…………………. 65 10.2. Denumirile şi funcţiile panoului frontal de control……….. 69 10.3. Operaţiuni de bază………………………………………… 73
10.3.1. Pornirea. Oprirea. Cuplarea şi decuplarea emisiei. Reglaje iniţiale……………………………………………………... 73
10.3.2. Navigarea prin structura meniurilor şi submeniurilor……. 73 10.3.3. Reglarea luminozităţii……………………………………. 74
10.3.4. Reglarea sonorului alarmelor…………………………….. 75
3
10.3.5. Reglarea culorilor afişajului……………………………… 75 10.6. Utilizarea cursorului cu ajutorul trackball-ului…………… 75 10.7. Utilizarea EBL pentru manevră…………………………… 75 10.8. Utilizarea funcţiilor [MULTI]…………………………….. 76 10.9. Utilizarea tastelor funcţionale [USER KEY 1/2]…………. 77
10.10. Operarea cu zone de gardă [ATA GUARD ZONE]………. 77 10.11. Operarea cu sectoare de alarmare…………………………. 78 10.12. Măsurarea relevmentelor şi distanţelor…………………… 79 10.13. Simboluri ATA şi AIS……………………………………. 80
10.13.1. Simboluri ATA……………………………………………. 80 10.13.2. Simboluri AIS……………………………………………... 80
10.14. Operaţiuni ATA…………………………………………… 81 10.14.1. Achiziţia şi scoaterea din urmărire a ţintelor……………… 81 10.14.2. Setări ATA – meniul [ATA Setting]……………………… 81 10.14.3. Utilizarea paralelelor indicatoare…………………………. 82
11. Simulatorul RADAR BridgeMaster II…………………. 83 11.1. Noţiuni introductive………………………………………. 83 11.2. Pregătiri necesare înaintea utilizării………………………. 84 11.3. Butoanele de control şi meniurile radarului………………. 85
11.3.1. Controlul datelor de intrare (butoane rotative)……………. 85 11.3.2. Butoane acţionate prin apăsare…………………………… 86
11.4. Utilizarea funcţiilor ARPA………………………………. 89 11.4.1. Plotarea unei ţinte…………………………………………. 89 11.4.2. Zonele de gardă…………………………………………… 89 11.4.3. Informaţii despre ţinte…………………………………….. 89
11.5. Utilizarea unei tastaturi standard împreună cu radarul BridgeMaster II…………………………………………… 90
11.5.1. Taste active disponibile atât în modul emisie cât şi în modul standby……………………………………………. 90
11.5.2. Taste active disponibile în modul emisie…………………. 90 11.5.3. Alte taste…………………………………………………... 91
11.6. Instrucţiuni de operare……………………………………. 92 11.6.1. Pornirea radarului…………………………………………. 92 11.6.2. Cursorul…………………………………………………… 93 11.6.3. Butoane şi meniuri fixe…………………………………… 93 11.6.4. Afişarea datelor preluate de la alte instrumente de
navigaţie………………………………………………….. 93 11.6.5. Scala şi cercurile de distanţa………………………………. 94 11.6.6. Drumul navei – linia prova……………………………….. 94 11.6.7. Deplasarea poziţiei navei proprii din centrul ecranului…… 94 11.6.8. Reglaje ale emisiei………………………………………… 95
4
11.6.9. Reglaje ale semnalului video……………………………… 95 11.6.10. Drumul şi viteza navei……………………………………. 95
11.7. Moduri de reprezentare, vectori de mişcare şi urme ale ţintelor……………………………………………………. 96
11.7.1. Moduri de reprezentare…………………………………… 96 11.7.2. Moduri de mişcare………………………………………… 96 11.7.3. Vectori de mişcare………………………………………… 97 11.7.4. Urme specifice mişcării ţintelor………………………….. 97 11.7.5. EBL, ERBL şi VRM……………………………………… 97 11.7.6. Funcţii EPA, ATA şi ARPA………………………………. 97 11.7.7. Zonele de gardă şi de plotare automată…………………… 98 11.7.8. Manevrele de probă………………………………………. 98 11.7.9. Paralele indicatoare………………………………………. 99
11.7.10. Alte instrumente………………………………………….. 100 12. Simulatorul RADAR Nucleus…………………………. 101
12.1. Bila de control, cursorul şi butoanele…………………….. 101 12.2. Pornirea, oprirea şi reglarea luminozităţii ecranului……… 101
12.2.1. Culori utilizate pentru imaginea RADAR………………… 101 12.2.2. Variante de iluminare zi/noapte (DAY/NIGHT)…………. 102
12.3. Funcţiile şi elementele imaginii RADAR………………… 103 12.3.1. Zona 1 - Sistemul RADAR………………………………. 104 12.3.2. Zona 2 - Scale de distanţă. Tipuri de imagine RADAR…... 106 12.3.3. Zona 3 - Parametrii navei proprii şi cei de achiziţionare a
ţintelor…………………………………………………….. 108 12.3.4. Zona 4 - VRM, EBL şi controlul semnalelor…………….. 110 12.3.5. Zona 5 - Informaţii şi meniuri…………………………….. 116
13. Simulatorul RADAR Furuno…………………………… 121 13.1. Aspectul grafic şi distribuţia funcţiilor pe ecran………….. 121
13.1.1. Tastele localizate în partea de jos a ecranului…………….. 121 13.1.2. Secţiunea funcţiilor ARPA şi a tastelor de meniu………… 123 13.1.3. Afişarea marcajelor şi indicatoarelor……………………… 124
13.2. Tipuri de imagini radar afişate…………………………… 125 13.3. Structura meniurilor………………………………………. 126 13.4. VRM (cercuri de distanţă variabilă)………………………. 128 13.5. EBL (relevmente mobile)………………………………… 128
13.5.1. Afişarea sau ştergerea EBL………………………………. 128 13.5.2. Repoziţionarea originii EBL……………………………… 129
13.6. Setarea alarmei de gardă…………………………………. 129 13.7. Schimbarea originii cercului azimutal [OFF-CENTER]… 130 13.8. Funcţia ZOOM - dublarea scalei într-o anumită zonă….. 130 13.9. Paralele indicatoare……………………………………… 131
5
13.10 Veghea la ancoră…………………………………………. 131 13.11. Urmele ţintelor…………………………………………… 131 13.12. Plotarea electronică……………………………………… 132
13.12.1. Funcţia History………………………………………….. 132 13.12.2. Afişajul vectorial…………………………………………. 132 13.12.3. Ştergerea ţintelor achiziţionate…………………………… 133 13.12.4. Datele ţintelor achiziţionate……………………………… 133
Bibliografie selectivă…………………………………….. 134 Anexa 1 Planşeta radar…………………………………… 135
6
1. UTILIZAREA PLANŞETEI RADAR. DETERMINAREA PARAMETRILOR DE MIŞCARE AI ŢINTEI
1. 1. PLANŞETA RADAR - CONŢINUT
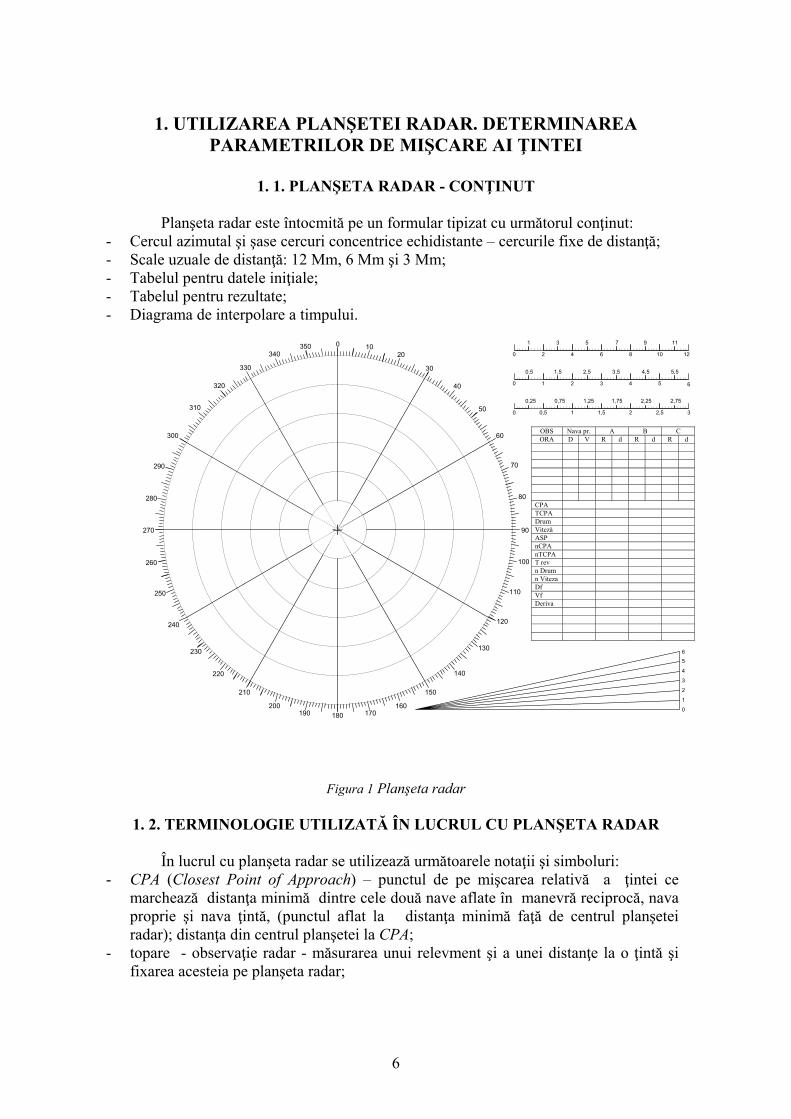
Planşeta radar este întocmită pe un formular tipizat cu următorul conţinut:
- Cercul azimutal şi şase cercuri concentrice echidistante – cercurile fixe de distanţă; - Scale uzuale de distanţă: 12 Mm, 6 Mm şi 3 Mm; - Tabelul pentru datele iniţiale; - Tabelul pentru rezultate; - Diagrama de interpolare a timpului.
0
1
2
3
4
5
6
7
8
9
10
11
12
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
0
0,25
0,5
0,75
1
1,25
1,5
1,75
2
2,25
2,5
2,75
6
3
0
1
2
3
4
5
6
OBS Nava pr. A B C ORA D V R d R d R d
CPA TCPA Drum Viteză ASP nCPA nTCPA T rev n Drum n Viteza Df Vf Deriva
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
Figura 1 Planşeta radar
1. 2. TERMINOLOGIE UTILIZATĂ ÎN LUCRUL CU PLANŞETA RADAR
În lucrul cu planşeta radar se utilizează următoarele notaţii şi simboluri:
- CPA (Closest Point of Approach) – punctul de pe mişcarea relativă a ţintei ce marchează distanţa minimă dintre cele două nave aflate în manevră reciprocă, nava proprie şi nava ţintă, (punctul aflat la distanţa minimă faţă de centrul planşetei radar); distanţa din centrul planşetei la CPA;
- topare - observaţie radar - măsurarea unui relevment şi a unei distanţe la o ţintă şi fixarea acesteia pe planşeta radar;
7
- TCPA (Time to CPA) - intervalul de timp scurs de la cea de a treia topare până la CPA, respectiv ora;
- nava ţintă - spotul luminos al unei nave descoperite pe ecranul radar; - DN - drumul navei proprii; - VN - viteza navei proprii; - D(A, B, C,…) - drumurile, ţintelor (A, B, C…); - V(A, B, C,…) – vitezele ţintelor (A, B, C…); - Asp - aspectul - relevmentul prova semicircular al ţintei la nava proprie; - TP - timpul de plotting - intervalul de timp dintre prima şi ultima observaţie radar; - tp - timpul de topare - intervalul de timp dintre două observaţii, topări; - MR - mişcarea relativă - mişcarea spotului navei ţintă pe ecranul radarului; - nDN - noul drum al navei proprii; - nVN - noua viteză a navei proprii; - nCPA - punctul de pe noua mişcare relativă a ţintei ce marchează noua distanţă
minimă dintre cele două nave aflate în manevră reciprocă - nava proprie şi nava ţintă (punctul aflat la noua distanţă minimă faţă de centrul planşetei radar pe nMR); noua distanţă minimă, ca urmare a manevrei executate de către nava proprie sau de către ţintă;
- nTCPA - timpul scurs de la momentul începerii manevrei până cea de treia plotare până la nCPA, respectiv ora;
- MRi - mişcarea relativă iniţială a ţintei; - nMR - noua mişcare relativă a ţintei; - Trev - intervalul de timp scurs între momentul începerii manevrei şi până la punctul
de pe nMR ce marchează poziţia ţintei atunci când se revine la parametrii iniţiali de mişcare (se notează ca interval de timp şi ca oră);
- dsig – distanţa de siguranţă este distanţa minimă la care poate trece o ţintă faţă de nava proprie în funcţie de caracteristicile navei (inerţie giraţie, manevrabilitate) şi condiţiile de navigaţie astfel încât navigaţia să se desfăşoare în siguranţă;
- W - Zero Speed Point (ZSP), punctul de viteză zero ce marchează originea vectorului spaţiul parcurs de nava proprie, WA0, în timpul de plotting;
- PAD – (Predicted Area of Danger) – zonă probabilă de pericol - TPI – tehnica paralelelor indicatoare.
1. 3. REGULI DE LUCRU PE PLANŞETA RADAR
În lucrul pe planşeta radar se respectă următoarele reguli: - Poziţia unei ţinte se indică prin relevmente şi distanţe măsurate simultan cu radarul
la intervale de timp (tp recomandate: 3m, 6m, 12m); - Poziţia grafică a navei proprii se află în centrul planşetei; - Distanţele se măsoară cu compasul utilizând scalele de distanţă; - Scala distanţelor este scala pe care lucrează radarul; - Vectorul spaţiu parcurs de nava proprie se trasează sub forma unei săgeţi de culoare
albastră; vectorul spaţiu parcurs de ţintă de culoare roşie iar mişcările relative (MRi şi nMR) de culoare verde – MRi se reprezintă printr-o săgeată încadrată într-un cerc iar nMR prin două săgeţi încadrate într-un cerc.
8
1. 4. DETERMINAREA MRi, CPA, TCPA, DA, VA, Asp
1. 4. 1. Determinarea MRi, CPA, TCPA, DA, VA, Asp, în N-up
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
N
CPAMRi
DA DN
ASP
R3
A0A
W
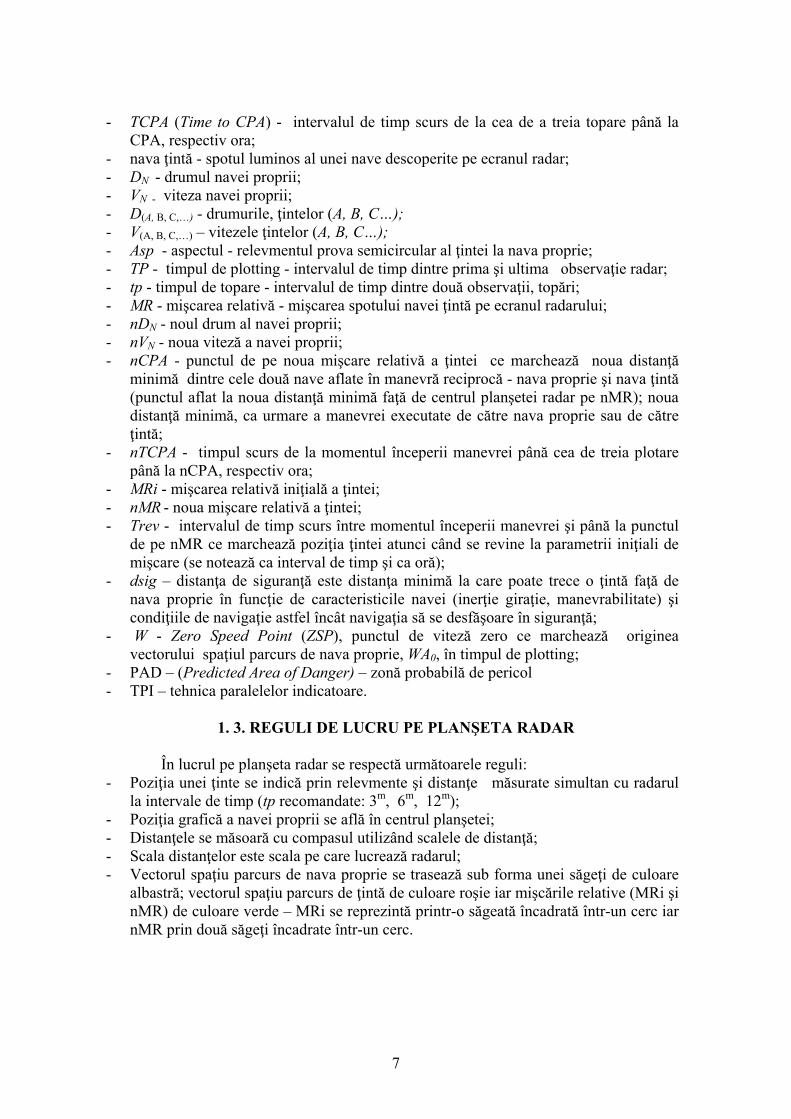
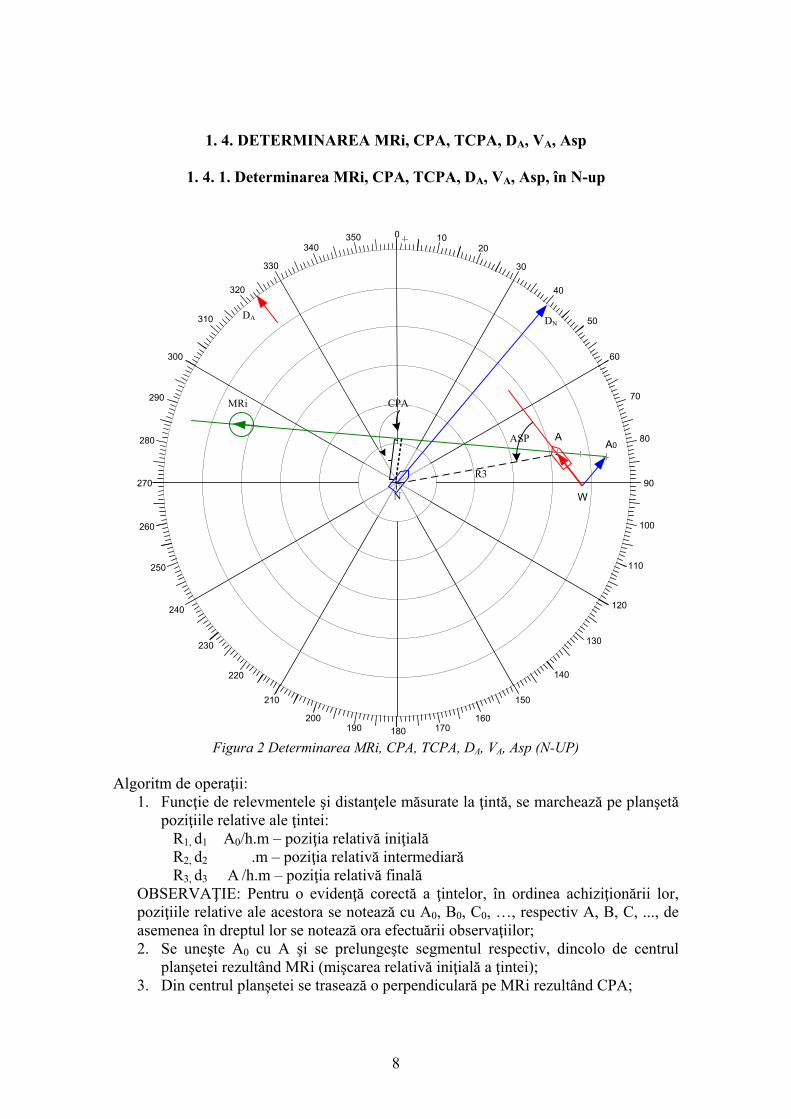
Figura 2 Determinarea MRi, CPA, TCPA, DA, VA, Asp (N-UP)
Algoritm de operaţii:
1. Funcţie de relevmentele şi distanţele măsurate la ţintă, se marchează pe planşetă poziţiile relative ale ţintei:
R1, d1 A0/h.m – poziţia relativă iniţială R2, d2 .m – poziţia relativă intermediară R3, d3 A /h.m – poziţia relativă finală OBSERVAŢIE: Pentru o evidenţă corectă a ţintelor, în ordinea achiziţionării lor, poziţiile relative ale acestora se notează cu A0, B0, C0, …, respectiv A, B, C, ..., de asemenea în dreptul lor se notează ora efectuării observaţiilor; 2. Se uneşte A0 cu A şi se prelungeşte segmentul respectiv, dincolo de centrul
planşetei rezultând MRi (mişcarea relativă iniţială a ţintei); 3. Din centrul planşetei se trasează o perpendiculară pe MRi rezultând CPA;
9
4. Se determină TCPA, comparând segmentul A0A cu segmentul AA1 (când segmentul A0A nu intră număr întreg în segmentul AA1 se utilizează diagrama de interpolare a timpului);
5. Se trasează din centrul planşetei drumul navei proprii DN; 6. Prin poziţia relativă iniţială A0, cu vârful în acesta se trasează vectorul spaţiul
parcurs de nava proprie, paralel în sens invers la DN pe care se măsoară spaţiul parcurs de nava proprie în TP (timpul de plotting) rezultând W (punctul de viteză zero);
7. Se uneşte W cu A, rezultă astfel, cu vârful în A spaţiul parcurs de ţintă în TP. Funcţie de orientarea segmentului WA, se determină DA (drumul ţintei) trasând o paralelă la WA prin centrul planşetei, respectiv funcţie de mărimea segmentului WA se determină VA (viteza ţintei);
8. Se determină Asp (aspectul ţintei – relevmentul prova semicircular de la ţintă la nava proprie) cu relaţia:
Asp = (R3 ± 180˚) – DA , unde: R3 – relevmentul al treilea la ţintă; +180˚ - când R3<180°; - 180˚- când R3>180°.
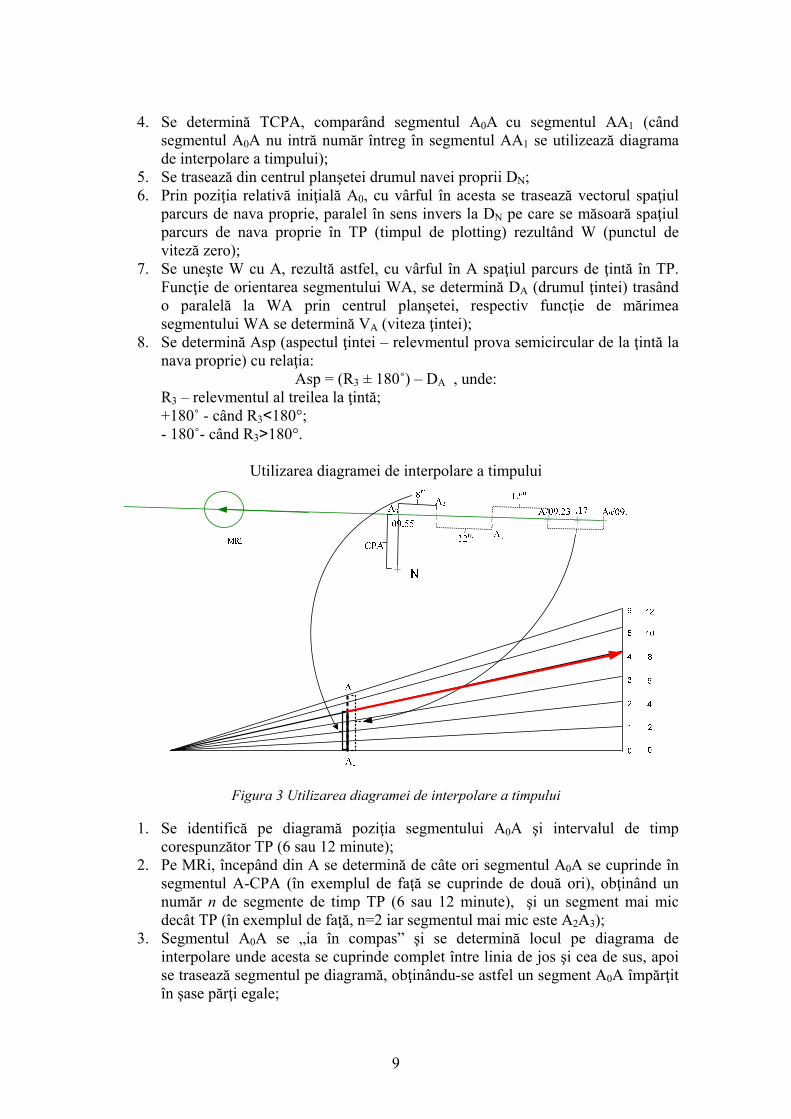
Utilizarea diagramei de interpolare a timpului
Figura 3 Utilizarea diagramei de interpolare a timpului
1. Se identifică pe diagramă poziţia segmentului A0A şi intervalul de timp
corespunzător TP (6 sau 12 minute); 2. Pe MRi, începând din A se determină de câte ori segmentul A0A se cuprinde în
segmentul A-CPA (în exemplul de faţă se cuprinde de două ori), obţinând un număr n de segmente de timp TP (6 sau 12 minute), şi un segment mai mic decât TP (în exemplul de faţă, n=2 iar segmentul mai mic este A2A3);
3. Segmentul A0A se „ia în compas” şi se determină locul pe diagrama de interpolare unde acesta se cuprinde complet între linia de jos şi cea de sus, apoi se trasează segmentul pe diagramă, obţinându-se astfel un segment A0A împărţit în şase părţi egale;
10
4. Segmentul rămas se „ia în compas” şi de jos în sus se va vedea câte părţi p din TP reprezintă acesta (în exemplul de faţă A2A3 reprezintă 4 şesimi din A0A).
5. Astfel valoarea de timp pe segmentul A-CPA este de 6n p× + , pentru TP=6 minute; 12 2n p× + × pentru TP=12 minute (În fig. 3: A-CPA reprezintă 2 12 4 2 32× + × = minute).
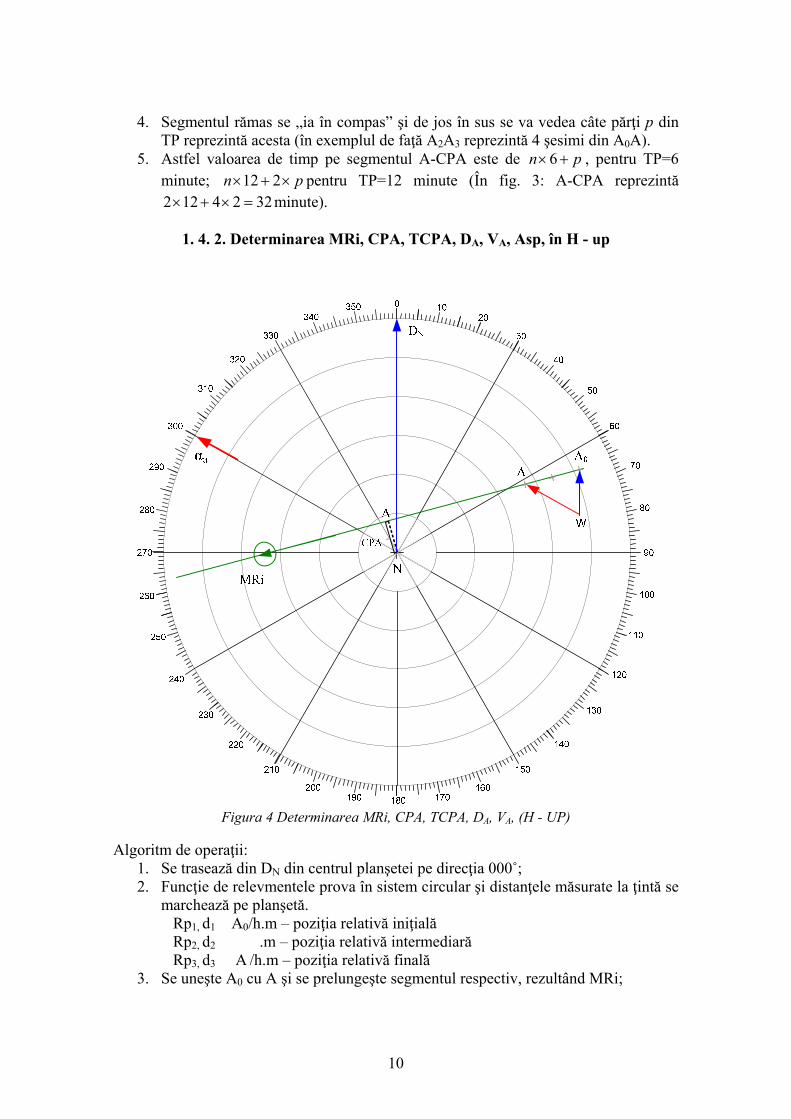
1. 4. 2. Determinarea MRi, CPA, TCPA, DA, VA, Asp, în H - up
Figura 4 Determinarea MRi, CPA, TCPA, DA, VA, (H - UP)
Algoritm de operaţii:
1. Se trasează din DN din centrul planşetei pe direcţia 000˚; 2. Funcţie de relevmentele prova în sistem circular şi distanţele măsurate la ţintă se
marchează pe planşetă. Rp1, d1 A0/h.m – poziţia relativă iniţială Rp2, d2 .m – poziţia relativă intermediară Rp3, d3 A /h.m – poziţia relativă finală 3. Se uneşte A0 cu A şi se prelungeşte segmentul respectiv, rezultând MRi;
11
4. Din centrul planşetei se trasează o perpendiculară pe MRi rezultând CPA (segmentul NA1);
5. Se determină TCPA, comparând segmentul A0A cu segmentul AA1; 6. Prin poziţia relativă iniţială A0 se trasează o paralelă în sens invers la DN pe care
se măsoară spaţiul parcurs de nava proprie în TP rezultând punctul W; 7. Se uneşte W cu A. Funcţie de orientarea segmentului WA, se determină αA
(orientarea axului longitudinal al ţintei faţă de axul longitudinal propriu), trasând o paralelă prin N la segmentul WA, drumul ţintei rezulta ca fiind:
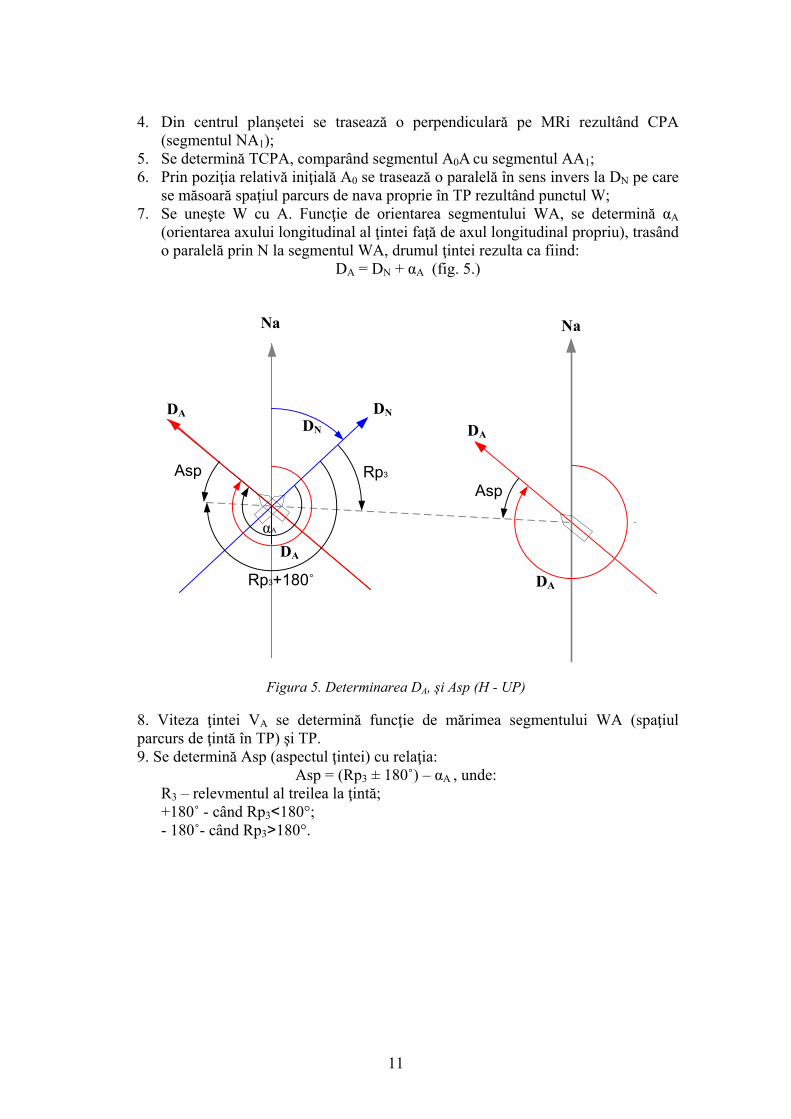
DA = DN + αA (fig. 5.)
DNDADN
Na
DA
Na
DA
DA
AspRp3Asp
Rp3+180˚
αA
Figura 5. Determinarea DA, şi Asp (H - UP)
8. Viteza ţintei VA se determină funcţie de mărimea segmentului WA (spaţiul parcurs de ţintă în TP) şi TP. 9. Se determină Asp (aspectul ţintei) cu relaţia:
Asp = (Rp3 ± 180˚) – αA , unde: R3 – relevmentul al treilea la ţintă; +180˚ - când Rp3<180°; - 180˚- când Rp3>180°.
12
2. EVITAREA COLIZIUNII IMEDIAT
2. 1. EVITAREA COLIZIUNII PRIN SCHIMBAREA DRUMULUI IMEDIAT
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
nMR
nDN
DN
W
CPA
nCPA
DA
MRi
MRi
A0`
A1
A2A3
A0A
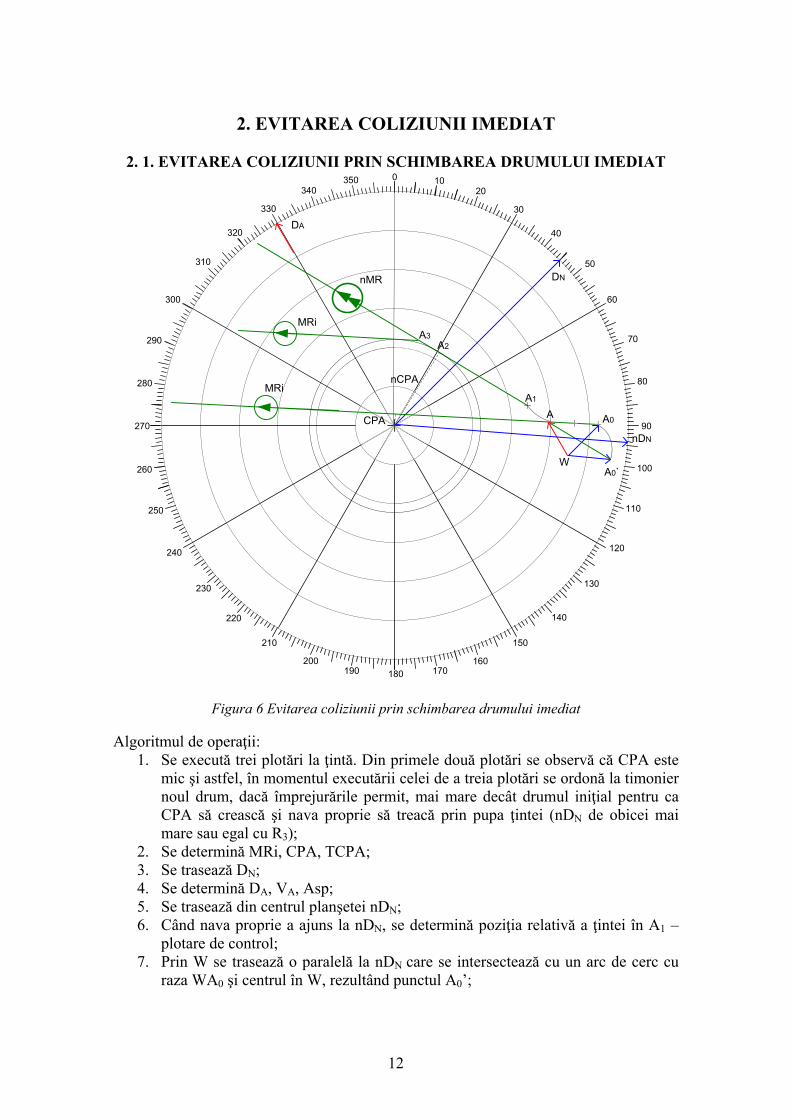
Figura 6 Evitarea coliziunii prin schimbarea drumului imediat
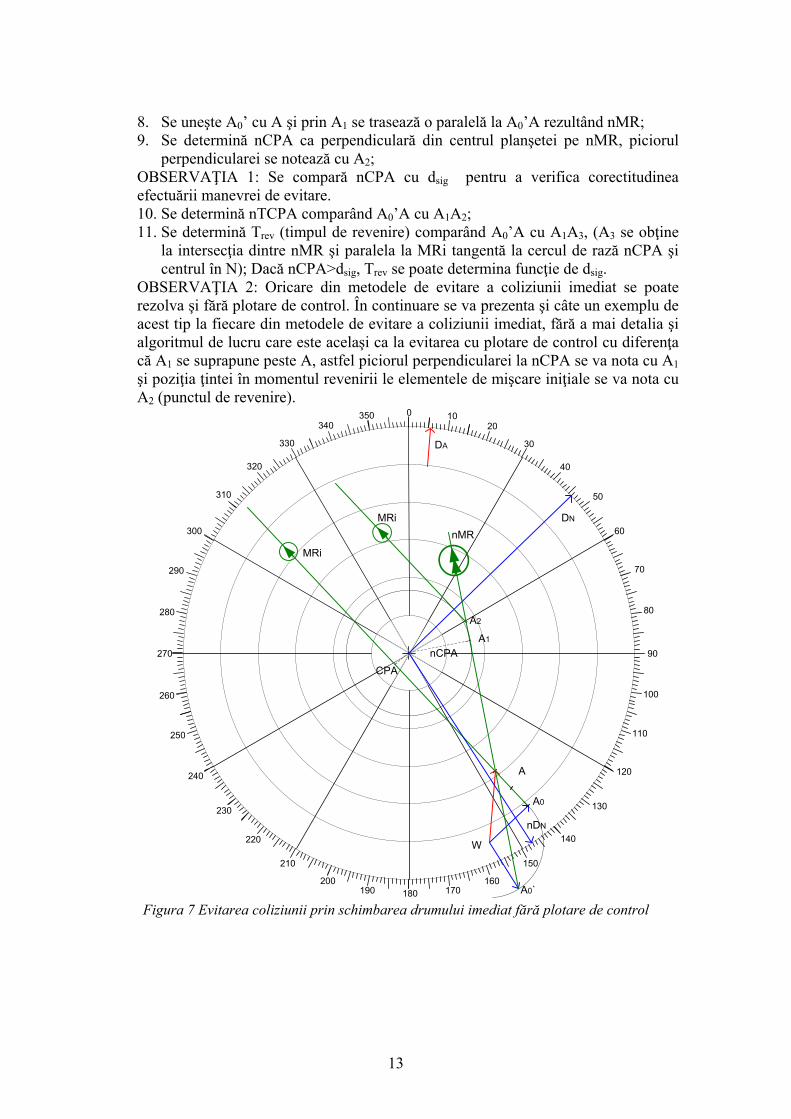
Algoritmul de operaţii: 1. Se execută trei plotări la ţintă. Din primele două plotări se observă că CPA este
mic şi astfel, în momentul executării celei de a treia plotări se ordonă la timonier noul drum, dacă împrejurările permit, mai mare decât drumul iniţial pentru ca CPA să crească şi nava proprie să treacă prin pupa ţintei (nDN de obicei mai mare sau egal cu R3);
2. Se determină MRi, CPA, TCPA; 3. Se trasează DN; 4. Se determină DA, VA, Asp; 5. Se trasează din centrul planşetei nDN; 6. Când nava proprie a ajuns la nDN, se determină poziţia relativă a ţintei în A1 –
plotare de control; 7. Prin W se trasează o paralelă la nDN care se intersectează cu un arc de cerc cu
raza WA0 şi centrul în W, rezultând punctul A0’;
13
8. Se uneşte A0’ cu A şi prin A1 se trasează o paralelă la A0’A rezultând nMR; 9. Se determină nCPA ca perpendiculară din centrul planşetei pe nMR, piciorul
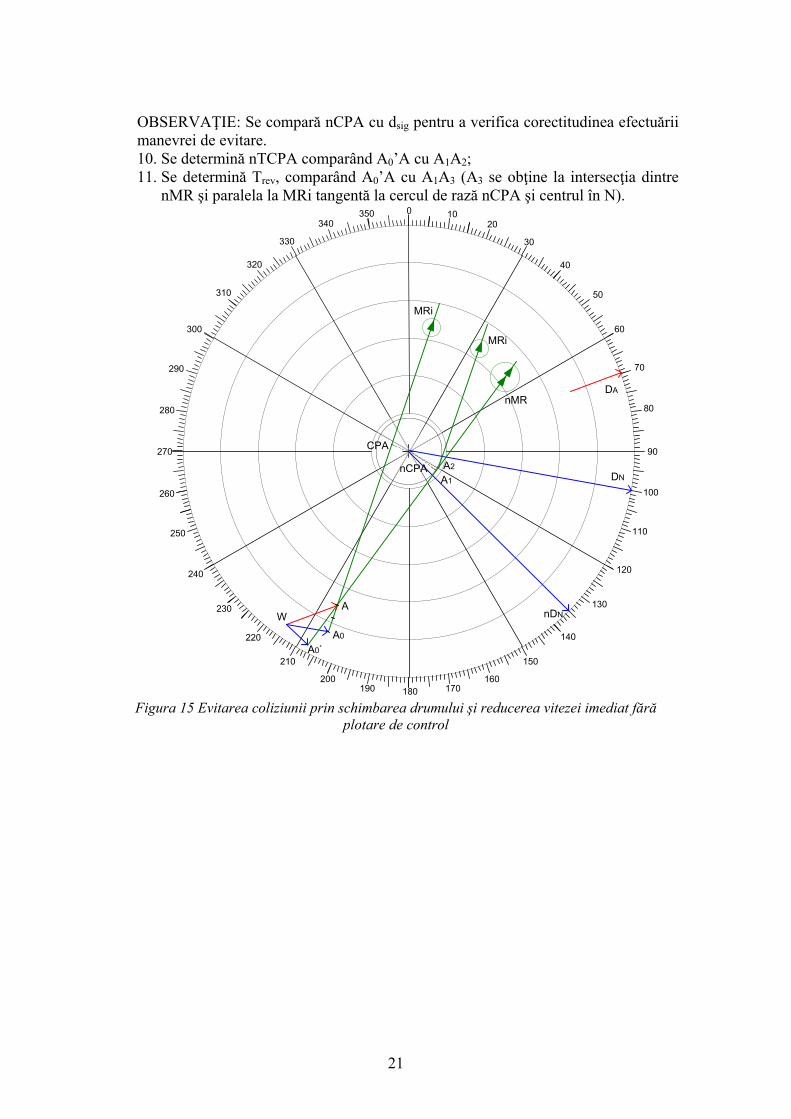
perpendicularei se notează cu A2; OBSERVAŢIA 1: Se compară nCPA cu dsig pentru a verifica corectitudinea efectuării manevrei de evitare. 10. Se determină nTCPA comparând A0’A cu A1A2; 11. Se determină Trev (timpul de revenire) comparând A0’A cu A1A3, (A3 se obţine
la intersecţia dintre nMR şi paralela la MRi tangentă la cercul de rază nCPA şi centrul în N); Dacă nCPA>dsig, Trev se poate determina funcţie de dsig.
OBSERVAŢIA 2: Oricare din metodele de evitare a coliziunii imediat se poate rezolva şi fără plotare de control. În continuare se va prezenta şi câte un exemplu de acest tip la fiecare din metodele de evitare a coliziunii imediat, fără a mai detalia şi algoritmul de lucru care este acelaşi ca la evitarea cu plotare de control cu diferenţa că A1 se suprapune peste A, astfel piciorul perpendicularei la nCPA se va nota cu A1 şi poziţia ţintei în momentul revenirii le elementele de mişcare iniţiale se va nota cu A2 (punctul de revenire).
180
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DA
DN
W
A0
A
CPAnCPA
A0`
A1
A2
MRi
MRinMR
nDN
Figura 7 Evitarea coliziunii prin schimbarea drumului imediat fără plotare de control
14
2. 2. EVITAREA COLIZIUNII PRIN REDUCEREA VITEZEI IMEDIAT
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DA
DN
W
A0`
A0
ACPA
nCPA
A1
A2
A3
MRi
MRi
nMR
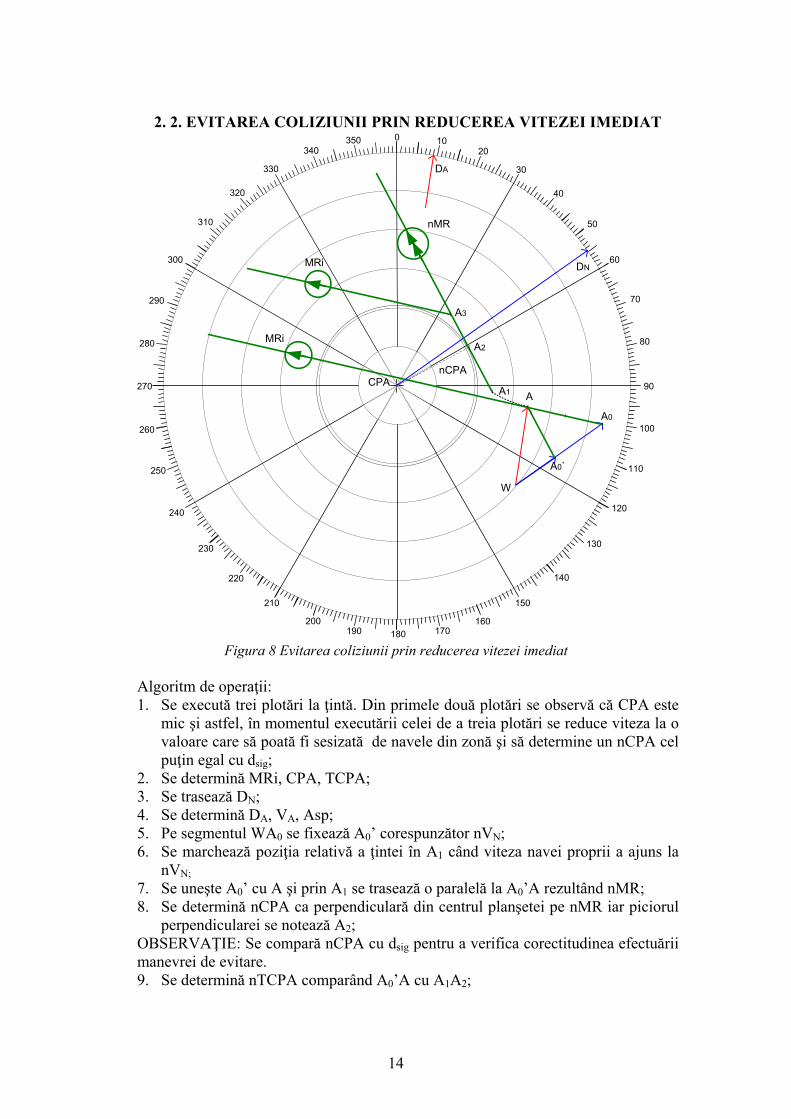
Figura 8 Evitarea coliziunii prin reducerea vitezei imediat
Algoritm de operaţii: 1. Se execută trei plotări la ţintă. Din primele două plotări se observă că CPA este
mic şi astfel, în momentul executării celei de a treia plotări se reduce viteza la o valoare care să poată fi sesizată de navele din zonă şi să determine un nCPA cel puţin egal cu dsig;
2. Se determină MRi, CPA, TCPA; 3. Se trasează DN; 4. Se determină DA, VA, Asp; 5. Pe segmentul WA0 se fixează A0’ corespunzător nVN; 6. Se marchează poziţia relativă a ţintei în A1 când viteza navei proprii a ajuns la
nVN; 7. Se uneşte A0’ cu A şi prin A1 se trasează o paralelă la A0’A rezultând nMR; 8. Se determină nCPA ca perpendiculară din centrul planşetei pe nMR iar piciorul
perpendicularei se notează A2; OBSERVAŢIE: Se compară nCPA cu dsig pentru a verifica corectitudinea efectuării manevrei de evitare. 9. Se determină nTCPA comparând A0’A cu A1A2;
15
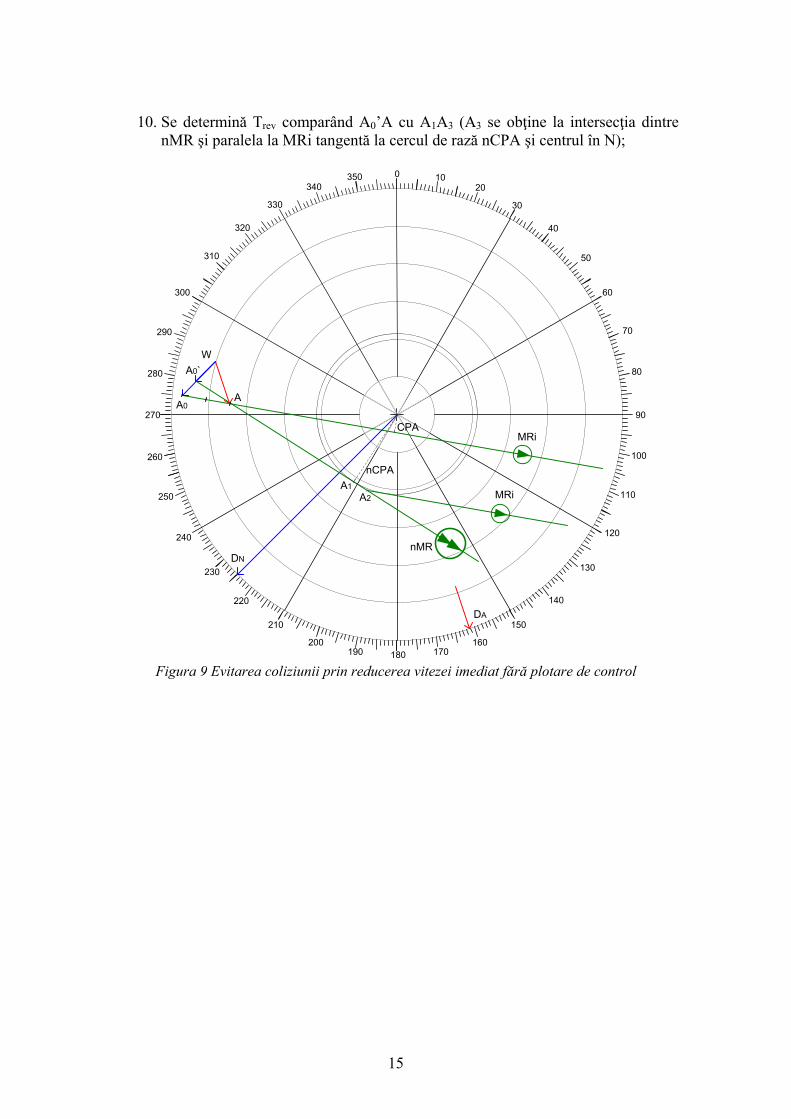
10. Se determină Trev comparând A0’A cu A1A3 (A3 se obţine la intersecţia dintre nMR şi paralela la MRi tangentă la cercul de rază nCPA şi centrul în N);
180
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DA
DN
W
A0A
CPA
nCPAA1
A2 MRi
MRi
nMR
A0`
Figura 9 Evitarea coliziunii prin reducerea vitezei imediat fără plotare de control
16
2. 3. EVITAREA COLIZIUNII PRIN CREŞTEREA VITEZEI IMEDIAT
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
AD
WA
A0
A0`
A1
DN
A3A2
nMRMRi
MRi
nCPA
CPA
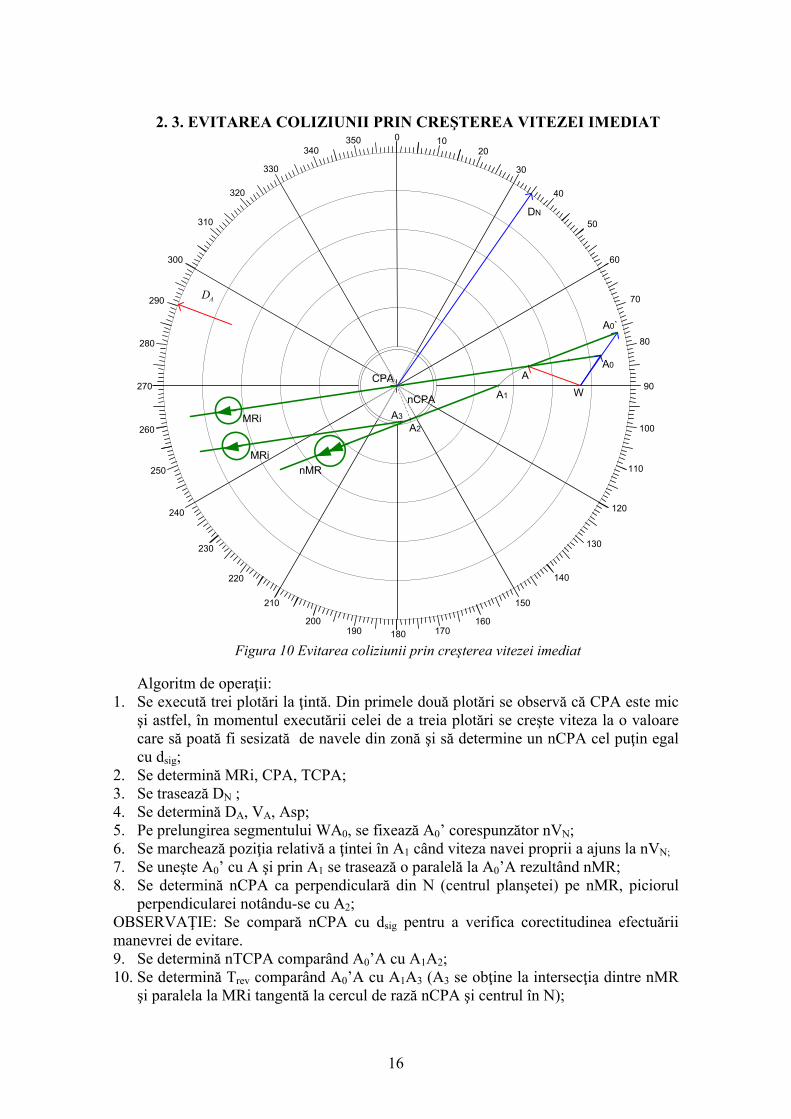
Figura 10 Evitarea coliziunii prin creşterea vitezei imediat
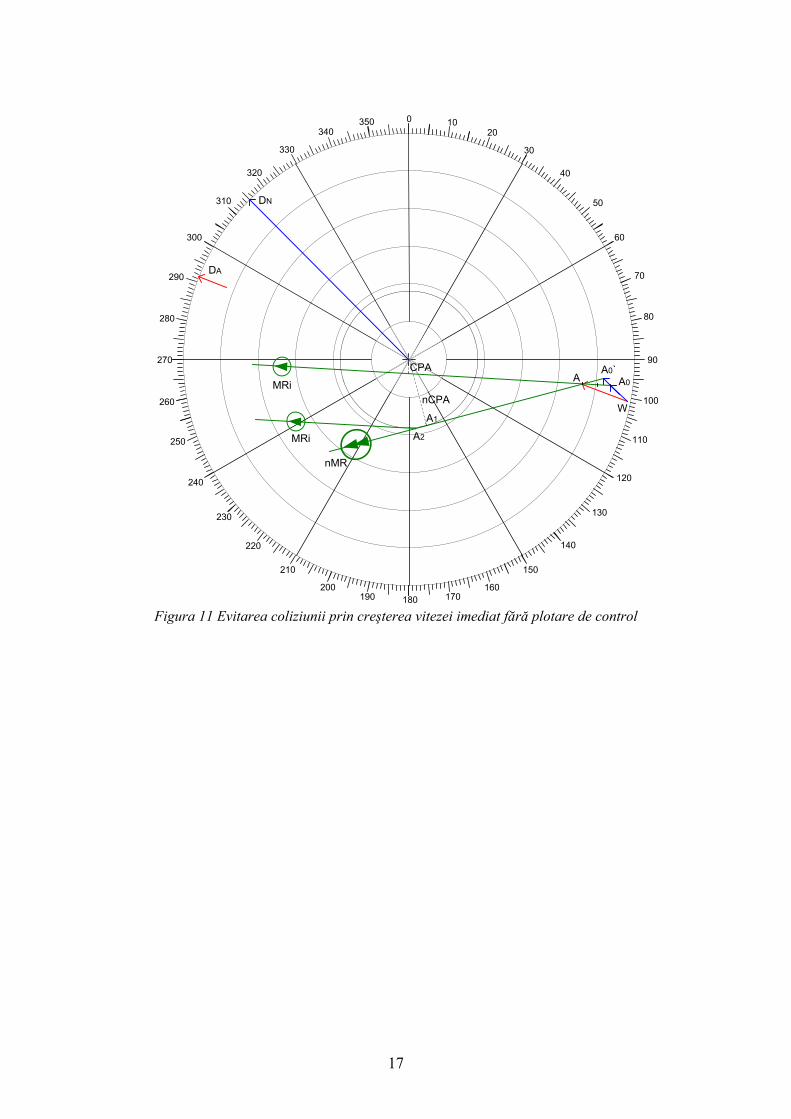
Algoritm de operaţii:
1. Se execută trei plotări la ţintă. Din primele două plotări se observă că CPA este mic şi astfel, în momentul executării celei de a treia plotări se creşte viteza la o valoare care să poată fi sesizată de navele din zonă şi să determine un nCPA cel puţin egal cu dsig;
2. Se determină MRi, CPA, TCPA; 3. Se trasează DN ; 4. Se determină DA, VA, Asp; 5. Pe prelungirea segmentului WA0, se fixează A0’ corespunzător nVN; 6. Se marchează poziţia relativă a ţintei în A1 când viteza navei proprii a ajuns la nVN; 7. Se uneşte A0’ cu A şi prin A1 se trasează o paralelă la A0’A rezultând nMR; 8. Se determină nCPA ca perpendiculară din N (centrul planşetei) pe nMR, piciorul
perpendicularei notându-se cu A2; OBSERVAŢIE: Se compară nCPA cu dsig pentru a verifica corectitudinea efectuării manevrei de evitare. 9. Se determină nTCPA comparând A0’A cu A1A2; 10. Se determină Trev comparând A0’A cu A1A3 (A3 se obţine la intersecţia dintre nMR
şi paralela la MRi tangentă la cercul de rază nCPA şi centrul în N);
17
180
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DA
DN
W
A0ACPA
nCPA
A1
MRi
MRi
nMR
A0`
A2
Figura 11 Evitarea coliziunii prin creşterea vitezei imediat fără plotare de control
18
2. 4. EVITAREA COLIZIUNII PRIN STOPARE IMEDIAT
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DA
DN
W
A0A
A1
A2
A3
CPAnCPA
nMR
MRi
MRi
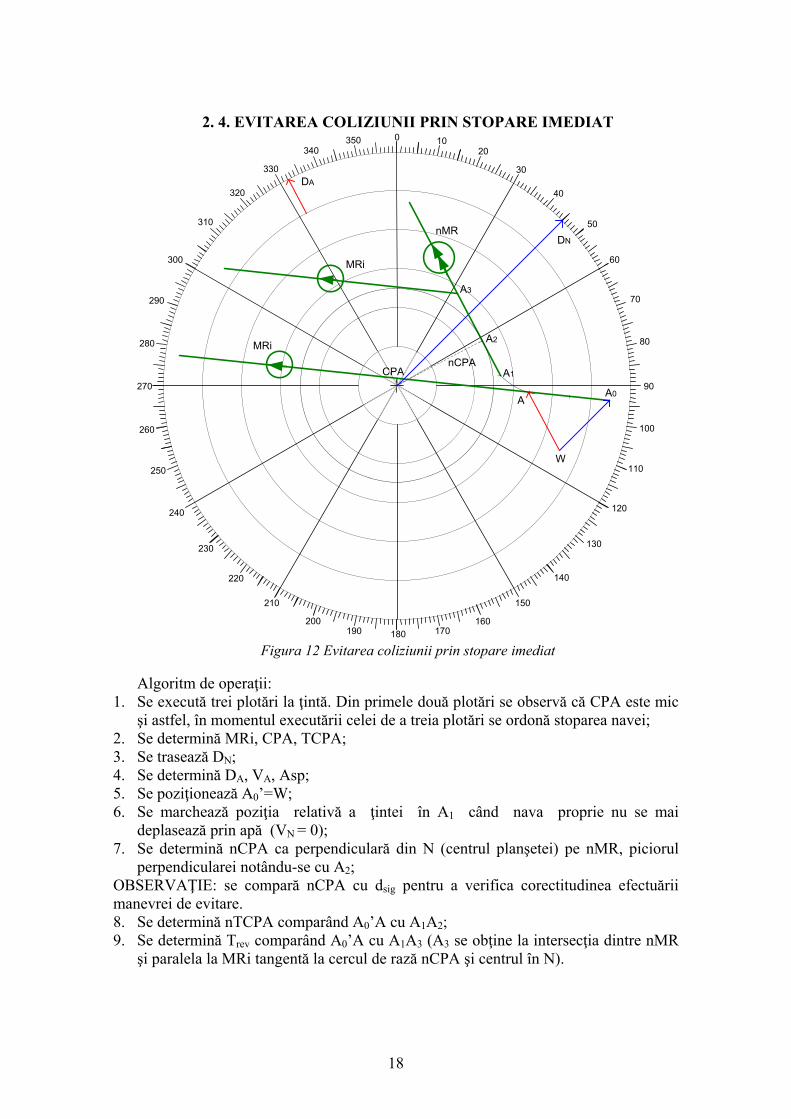
Figura 12 Evitarea coliziunii prin stopare imediat
Algoritm de operaţii:
1. Se execută trei plotări la ţintă. Din primele două plotări se observă că CPA este mic şi astfel, în momentul executării celei de a treia plotări se ordonă stoparea navei;
2. Se determină MRi, CPA, TCPA; 3. Se trasează DN; 4. Se determină DA, VA, Asp; 5. Se poziţionează A0’=W; 6. Se marchează poziţia relativă a ţintei în A1 când nava proprie nu se mai
deplasează prin apă (VN = 0); 7. Se determină nCPA ca perpendiculară din N (centrul planşetei) pe nMR, piciorul
perpendicularei notându-se cu A2; OBSERVAŢIE: se compară nCPA cu dsig pentru a verifica corectitudinea efectuării manevrei de evitare. 8. Se determină nTCPA comparând A0’A cu A1A2; 9. Se determină Trev comparând A0’A cu A1A3 (A3 se obţine la intersecţia dintre nMR
şi paralela la MRi tangentă la cercul de rază nCPA şi centrul în N).
19
180
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DA
DN
W
A0 ACPA
nCPA
A1
MRi
MRi
nMR
A0`
A2
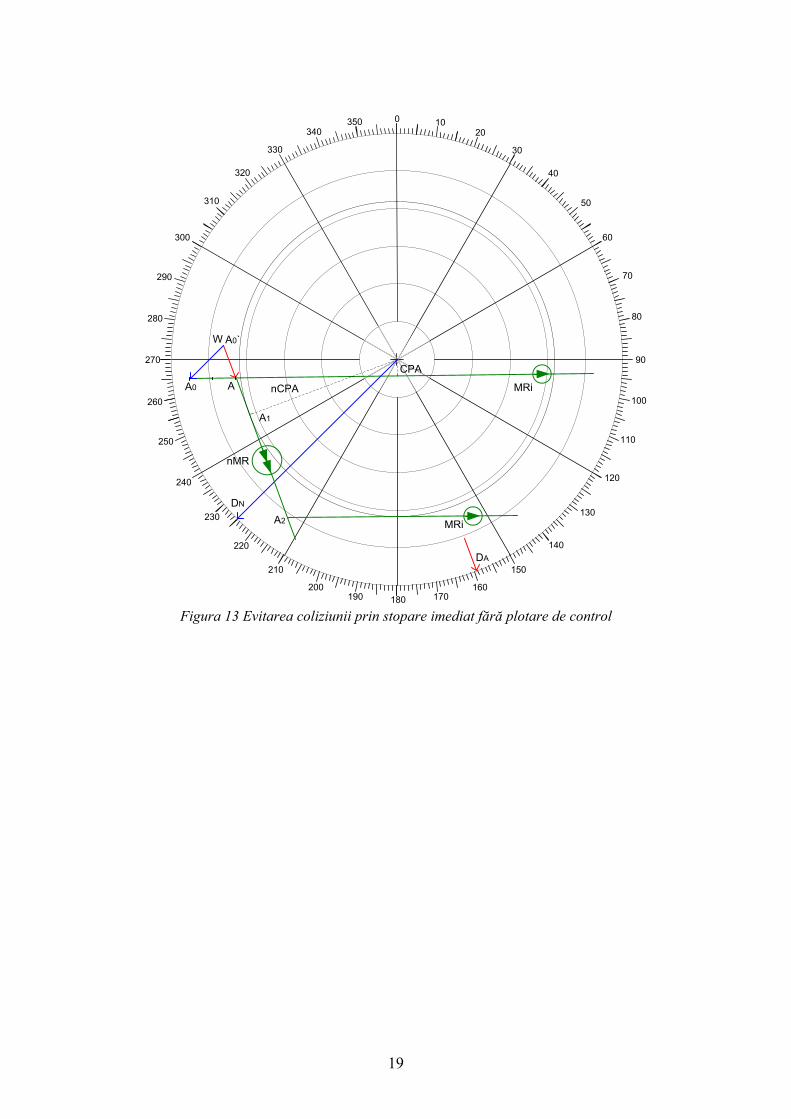
Figura 13 Evitarea coliziunii prin stopare imediat fără plotare de control
20
2. 5. EVITAREA COLIZIUNII PRIN SCHIMBAREA DRUMULUI ŞI REDUCEREA VITEZEI IMEDIAT
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
A0
AA1
WA0`
nDNA2A3
DN
DA
MRi
MRi
nCPA
CPA
nMR
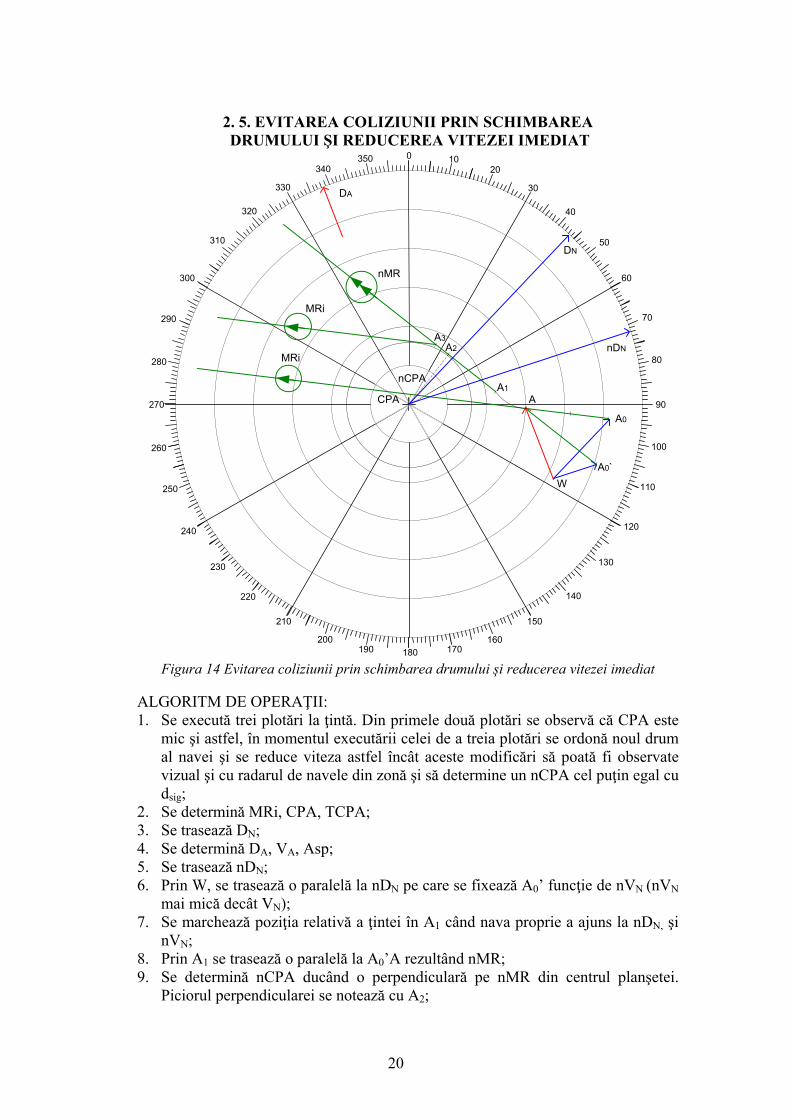
Figura 14 Evitarea coliziunii prin schimbarea drumului şi reducerea vitezei imediat
ALGORITM DE OPERAŢII: 1. Se execută trei plotări la ţintă. Din primele două plotări se observă că CPA este
mic şi astfel, în momentul executării celei de a treia plotări se ordonă noul drum al navei şi se reduce viteza astfel încât aceste modificări să poată fi observate vizual şi cu radarul de navele din zonă şi să determine un nCPA cel puţin egal cu dsig;
2. Se determină MRi, CPA, TCPA; 3. Se trasează DN; 4. Se determină DA, VA, Asp; 5. Se trasează nDN; 6. Prin W, se trasează o paralelă la nDN pe care se fixează A0’ funcţie de nVN (nVN
mai mică decât VN); 7. Se marchează poziţia relativă a ţintei în A1 când nava proprie a ajuns la nDN, şi
nVN; 8. Prin A1 se trasează o paralelă la A0’A rezultând nMR; 9. Se determină nCPA ducând o perpendiculară pe nMR din centrul planşetei.
Piciorul perpendicularei se notează cu A2;
21
OBSERVAŢIE: Se compară nCPA cu dsig pentru a verifica corectitudinea efectuării manevrei de evitare. 10. Se determină nTCPA comparând A0’A cu A1A2; 11. Se determină Trev, comparând A0’A cu A1A3 (A3 se obţine la intersecţia dintre
nMR şi paralela la MRi tangentă la cercul de rază nCPA şi centrul în N).
180
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DA
DN
W
A0
A
CPA
nCPAA1
A2
MRi
MRi
nMR
nDN
A0`
Figura 15 Evitarea coliziunii prin schimbarea drumului şi reducerea vitezei imediat fără
plotare de control

22
2. 6. EVITAREA COLIZIUNII PRIN SCHIMBAREA DRUMULUI ŞI CREŞTEREA VITEZEI IMEDIAT
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
290
300
310
320
330
340350 0 10
A1 A0
A0`
A
W
nMR
MRi
MRi
nCPA
CPA
A3
A2
DADN
nDN
Figura 16 Evitarea coliziunii prin schimbarea drumului şi creşterea vitezei imediat
Algoritm de operaţii:
1. Se execută trei plotări la ţintă. Din primele două plotări se observă că CPA este mic şi astfel, în momentul executării celei de a treia plotări se ordonă noul drum al navei şi se creşte viteza astfel încât aceste modificări să poată fi observate vizual şi cu radarul de navele din zonă şi să determine un nCPA cel puţin egal cu dsig;
2. Se determină MRi, CPA, TCPA; 3. Se trasează DN; 4. Se determină DA, VA, Asp; 5. Se trasează nDN de la centrul planşetei; 6. Prin W, se trasează o paralelă la nDN pe care se fixează A0’ funcţie de nVN (nVN
mai mare decât VN); 7. Se marchează poziţia relativă a ţintei în A1 când nava proprie a ajuns la nDN şi nVN; 8. Prin A1 se trasează o paralelă la A0’A rezultând nMR; 9. Se determină nCPA, trasând o perpendiculară din centrul planşetei pe nMR iar
piciorul perpendicularei se notează cu A2; OBSERVAŢIE: Se compară nCPA cu dsig pentru a verifica corectitudinea efectuării manevrei de evitare.
23
10. Se determină nTCPA comparând A0’A cu A1A2; 11. Se determină Trev, comparând segmentul A0’A cu A1A3 (A3 se obţine la intersecţia
dintre nMR şi paralela la MRi tangentă la cercul de rază nCPA şi centrul în N).
180
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DA
DN
W
A0
A
CPA
nCPA
A1MRi
MRi
nMR
A0`
A2
nDN
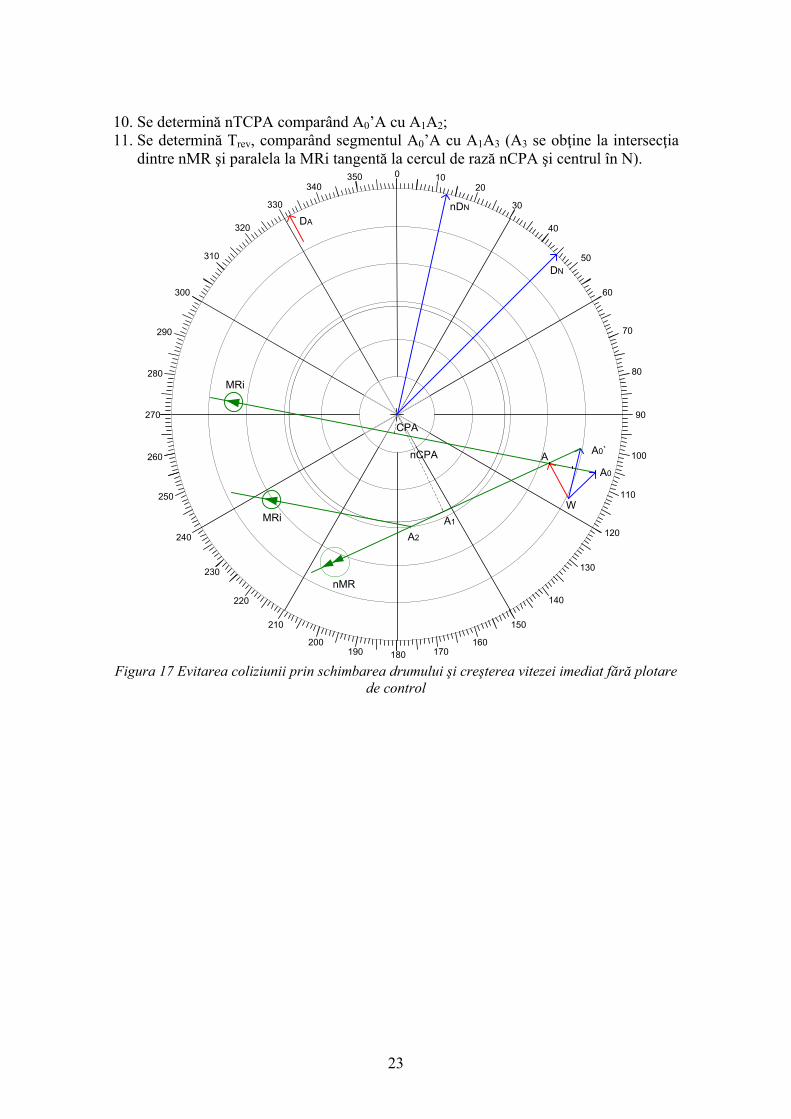
Figura 17 Evitarea coliziunii prin schimbarea drumului şi creşterea vitezei imediat fără plotare
de control
24
3. EVITAREA COLIZIUNII DUPĂ UN TIMP ALOCAT
3. 1. EVITAREA COLIZIUNII PRIN SCHIMBAREA DRUMULUI DUPĂ UN TIMP ALOCAT
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
W
nCPA
CPAA0
AA1
A0`
DN
DA
nDN
nMR
MRi
MRi
A2A3
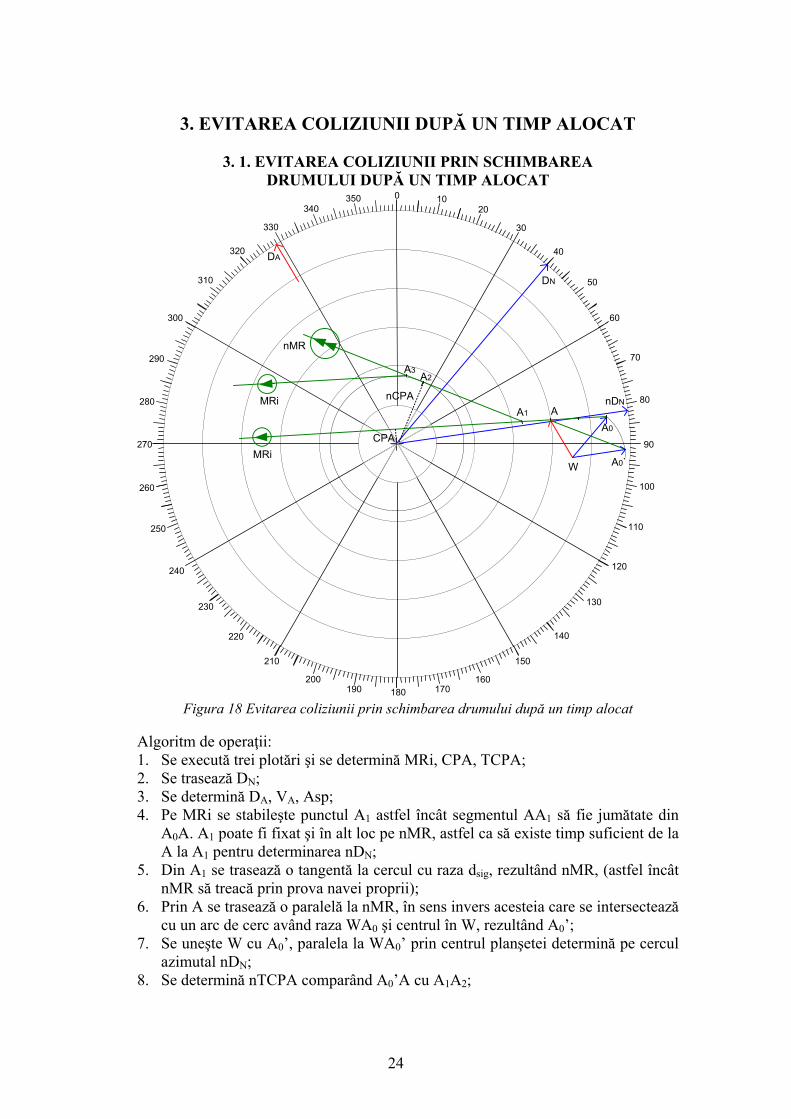
Figura 18 Evitarea coliziunii prin schimbarea drumului după un timp alocat
Algoritm de operaţii: 1. Se execută trei plotări şi se determină MRi, CPA, TCPA; 2. Se trasează DN; 3. Se determină DA, VA, Asp; 4. Pe MRi se stabileşte punctul A1 astfel încât segmentul AA1 să fie jumătate din
A0A. A1 poate fi fixat şi în alt loc pe nMR, astfel ca să existe timp suficient de la A la A1 pentru determinarea nDN;
5. Din A1 se trasează o tangentă la cercul cu raza dsig, rezultând nMR, (astfel încât nMR să treacă prin prova navei proprii);
6. Prin A se trasează o paralelă la nMR, în sens invers acesteia care se intersectează cu un arc de cerc având raza WA0 şi centrul în W, rezultând A0’;
7. Se uneşte W cu A0’, paralela la WA0’ prin centrul planşetei determină pe cercul azimutal nDN;
8. Se determină nTCPA comparând A0’A cu A1A2;
25
9. Se determină Trev comparând A0’A cu A1A3 (A3 se obţine la intersecţia dintre nMR şi paralela la MRi tangentă la cercul de rază nCPA şi centrul în N);
3. 2. EVITAREA COLIZIUNII PRIN REDUCEREA
VITEZEI DUPĂ UN TIMP ALOCAT
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DA
nMR
MRi
MRiA0 A
A1
A2A3
DN
nCPA
CPA
W
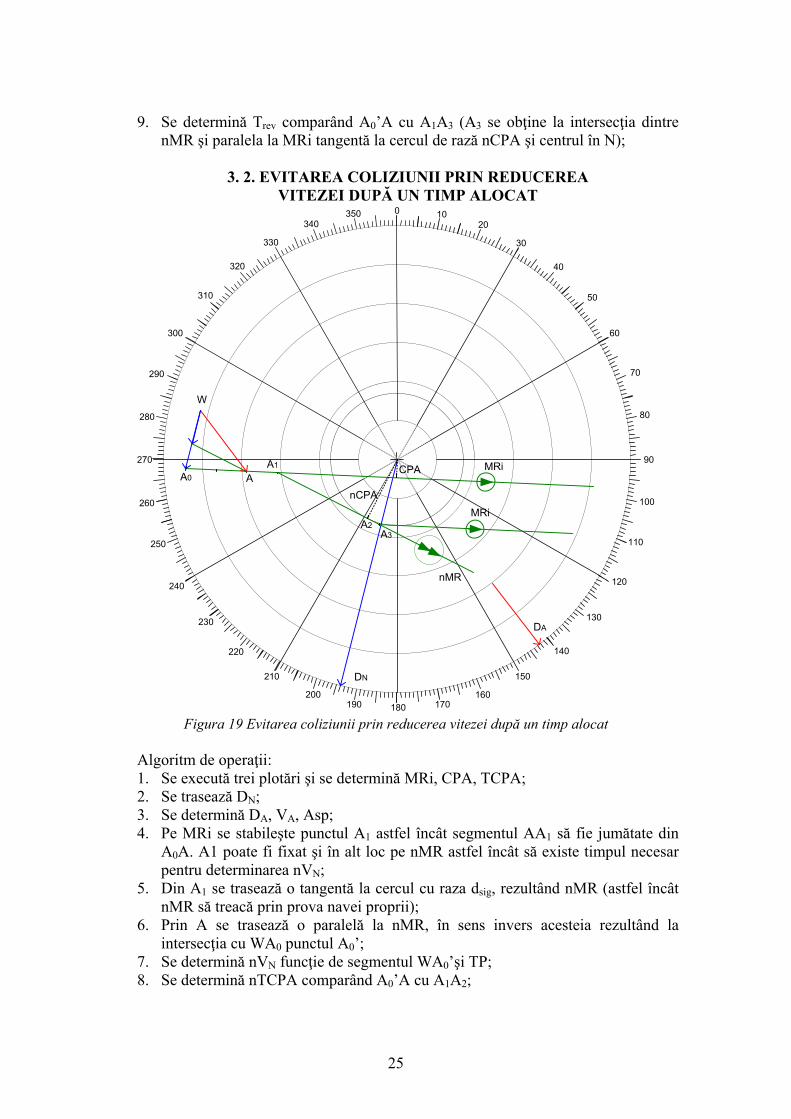
Figura 19 Evitarea coliziunii prin reducerea vitezei după un timp alocat
Algoritm de operaţii: 1. Se execută trei plotări şi se determină MRi, CPA, TCPA; 2. Se trasează DN; 3. Se determină DA, VA, Asp; 4. Pe MRi se stabileşte punctul A1 astfel încât segmentul AA1 să fie jumătate din
A0A. A1 poate fi fixat şi în alt loc pe nMR astfel încât să existe timpul necesar pentru determinarea nVN;
5. Din A1 se trasează o tangentă la cercul cu raza dsig, rezultând nMR (astfel încât nMR să treacă prin prova navei proprii);
6. Prin A se trasează o paralelă la nMR, în sens invers acesteia rezultând la intersecţia cu WA0 punctul A0’;
7. Se determină nVN funcţie de segmentul WA0’şi TP; 8. Se determină nTCPA comparând A0’A cu A1A2;
26
9. Se determină Trev comparând A0’A cu A1A3 (A3 se obţine la intersecţia dintre nMR şi paralela la MRi tangentă la cercul de rază nCPA şi centrul în N);
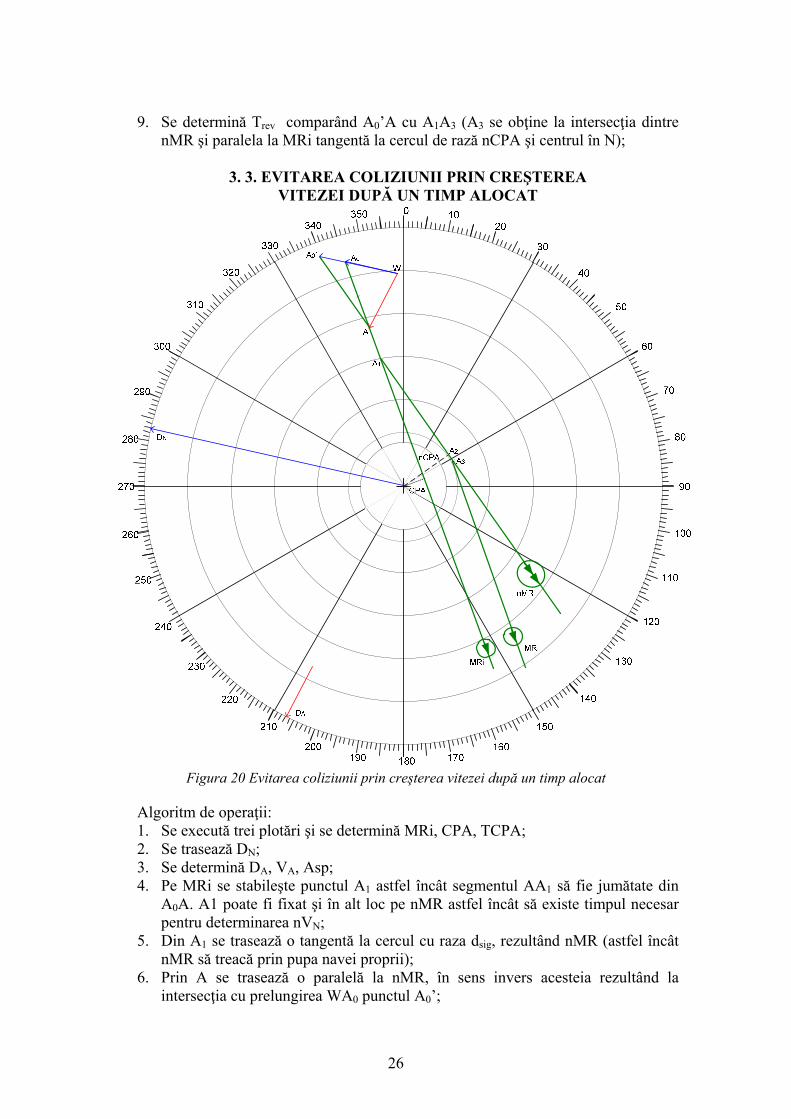
3. 3. EVITAREA COLIZIUNII PRIN CREŞTEREA
VITEZEI DUPĂ UN TIMP ALOCAT
Figura 20 Evitarea coliziunii prin creşterea vitezei după un timp alocat
Algoritm de operaţii: 1. Se execută trei plotări şi se determină MRi, CPA, TCPA; 2. Se trasează DN; 3. Se determină DA, VA, Asp; 4. Pe MRi se stabileşte punctul A1 astfel încât segmentul AA1 să fie jumătate din
A0A. A1 poate fi fixat şi în alt loc pe nMR astfel încât să existe timpul necesar pentru determinarea nVN;
5. Din A1 se trasează o tangentă la cercul cu raza dsig, rezultând nMR (astfel încât nMR să treacă prin pupa navei proprii);
6. Prin A se trasează o paralelă la nMR, în sens invers acesteia rezultând la intersecţia cu prelungirea WA0 punctul A0’;
27
7. Se determină nVN funcţie de segmentul WA0’şi TP; 8. Se determină nTCPA comparând A0’A cu A1A2; 9. Se determină Trev comparând A0’A cu A1A3 (A3 se obţine la intersecţia dintre
nMR şi paralela la MRi tangentă la cercul de rază nCPA şi centrul în N);
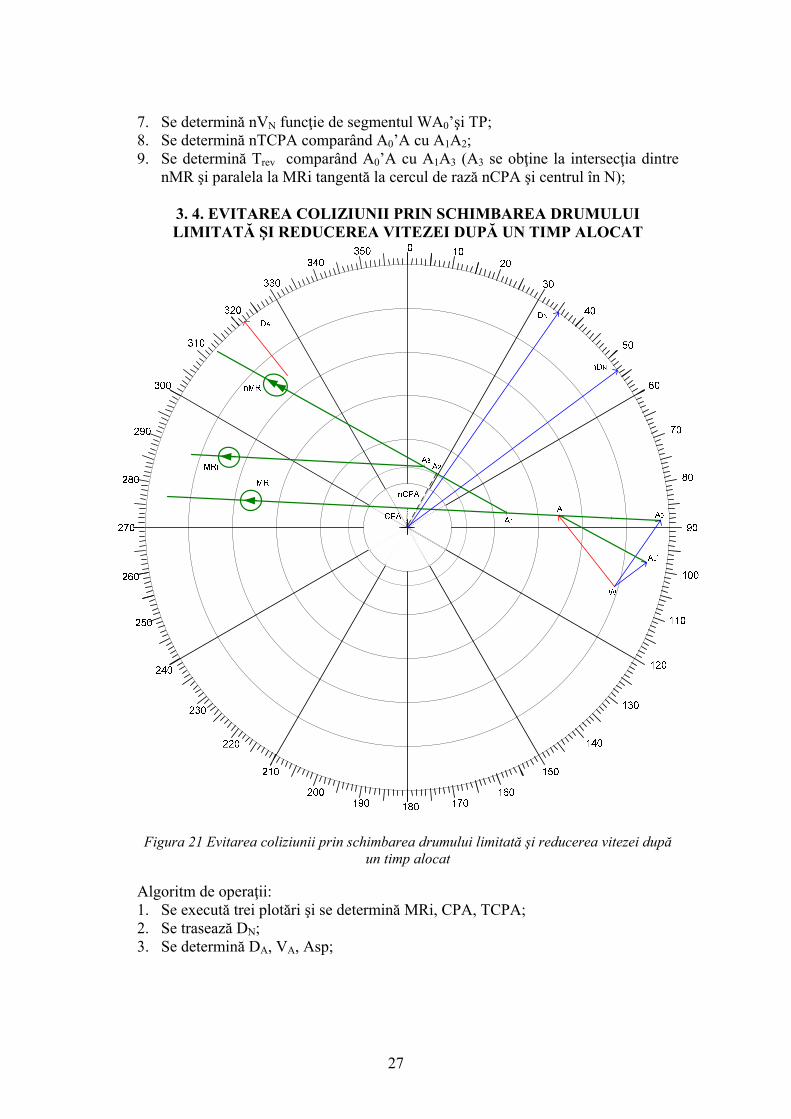
3. 4. EVITAREA COLIZIUNII PRIN SCHIMBAREA DRUMULUI LIMITATĂ ŞI REDUCEREA VITEZEI DUPĂ UN TIMP ALOCAT
Figura 21 Evitarea coliziunii prin schimbarea drumului limitată şi reducerea vitezei după
un timp alocat
Algoritm de operaţii: 1. Se execută trei plotări şi se determină MRi, CPA, TCPA; 2. Se trasează DN; 3. Se determină DA, VA, Asp;
28
4. Pe MRi se stabileşte punctul A1 astfel încât segmentul AA1 să fie jumătate din A0A. A1 poate fi fixat şi în alt loc pe nMR astfel încât să existe timpul necesar pentru determinarea nVN;
5. Din A1 se trasează o tangentă la cercul cu raza dsig, rezultând nMR (astfel încât nMR să treacă prin prova navei proprii);
6. Din centrul planşetei se trasează nDNLim (valoarea maximă a noului drum al navei permisă de condiţiile concrete de navigaţie pentru evitare prin schimbarea drumului);
7. Prin W se trasează o paralelă la nDNLim; 8. Prin A se trasează o paralelă la nMR, în sens invers acesteia care se intersectează
cu paralela la nDNLim în A0’; 9. Se determină nVN funcţie de segmentul WA0’şi TP; 10. Se determină nTCPA comparând A0’A cu A1A2; 11. Se determină Trev comparând A0’A cu A1A3 (A3 se obţine la intersecţia dintre
nMR şi paralela la MRi tangentă la cercul de rază nCPA şi centrul în N);
3. 5. EVITAREA COLIZIUNII PRIN SCHIMBAREA DRUMULUI LIMITATĂ ŞI CREŞTEREA VITEZEI DUPĂ UN TIMP ALOCAT
Algoritm de operaţii: 1. Se execută trei plotări şi se determină MRi, CPA, TCPA; 2. Se trasează DN; 3. Se determină DA, VA, Asp; 4. Pe MRi se stabileşte punctul A1 astfel încât segmentul AA1 să fie jumătate din
A0A. A1 poate fi fixat şi în alt loc pe nMR astfel încât să existe timpul necesar pentru determinarea nVN;
5. Din A1 se trasează o tangentă la cercul cu raza dsig, rezultând nMR (astfel încât nMR să treacă prin pupa navei proprii);
6. Din centrul planşetei se trasează nDNLim (valoarea maximă a noului drum al navei permisă de condiţiile concrete de navigaţie pentru evitare prin schimbarea drumului);
7. Prin W se trasează o paralelă la nDNLim; 8. Prin A se trasează o paralelă la nMR, în sens invers acesteia care se intersectează
cu paralela la nDNLim în A0’; 9. Se determină nVN funcţie de segmentul WA0’şi TP; 10. Se determină nTCPA comparând A0’A cu A1A2; 11. Se determină Trev comparând A0’A cu A1A3 (A3 se obţine la intersecţia dintre
nMR şi paralela la MRi tangentă la cercul de rază nCPA şi centrul în N);
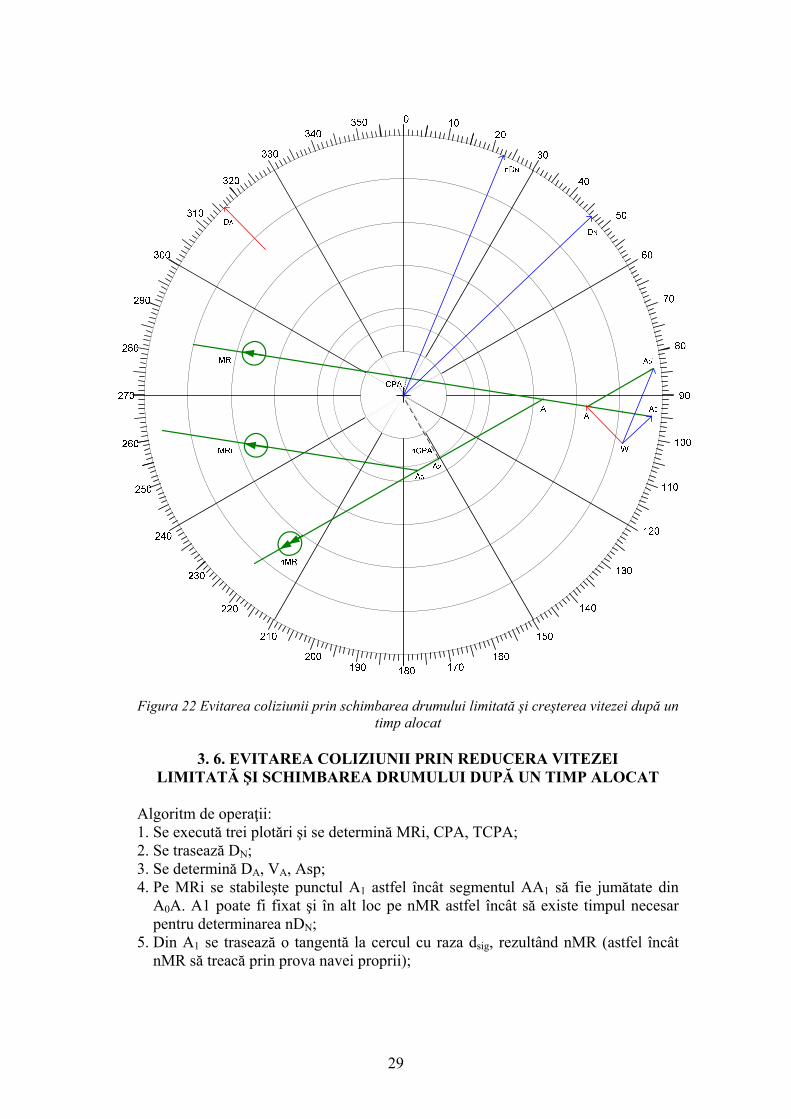
29
Figura 22 Evitarea coliziunii prin schimbarea drumului limitată şi creşterea vitezei după un
timp alocat
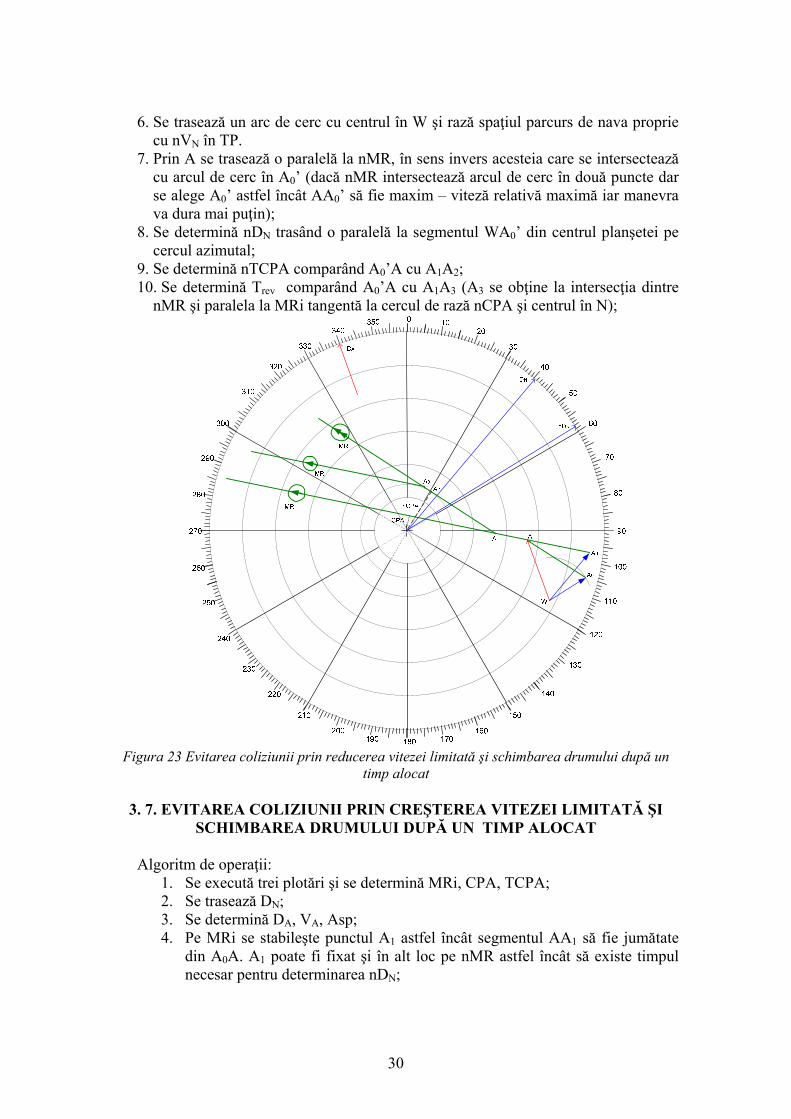
3. 6. EVITAREA COLIZIUNII PRIN REDUCERA VITEZEI LIMITATĂ ŞI SCHIMBAREA DRUMULUI DUPĂ UN TIMP ALOCAT
Algoritm de operaţii: 1. Se execută trei plotări şi se determină MRi, CPA, TCPA; 2. Se trasează DN; 3. Se determină DA, VA, Asp; 4. Pe MRi se stabileşte punctul A1 astfel încât segmentul AA1 să fie jumătate din
A0A. A1 poate fi fixat şi în alt loc pe nMR astfel încât să existe timpul necesar pentru determinarea nDN;
5. Din A1 se trasează o tangentă la cercul cu raza dsig, rezultând nMR (astfel încât nMR să treacă prin prova navei proprii);
30
6. Se trasează un arc de cerc cu centrul în W şi rază spaţiul parcurs de nava proprie cu nVN în TP.
7. Prin A se trasează o paralelă la nMR, în sens invers acesteia care se intersectează cu arcul de cerc în A0’ (dacă nMR intersectează arcul de cerc în două puncte dar se alege A0’ astfel încât AA0’ să fie maxim – viteză relativă maximă iar manevra va dura mai puţin);
8. Se determină nDN trasând o paralelă la segmentul WA0’ din centrul planşetei pe cercul azimutal;
9. Se determină nTCPA comparând A0’A cu A1A2; 10. Se determină Trev comparând A0’A cu A1A3 (A3 se obţine la intersecţia dintre
nMR şi paralela la MRi tangentă la cercul de rază nCPA şi centrul în N);
Figura 23 Evitarea coliziunii prin reducerea vitezei limitată şi schimbarea drumului după un
timp alocat
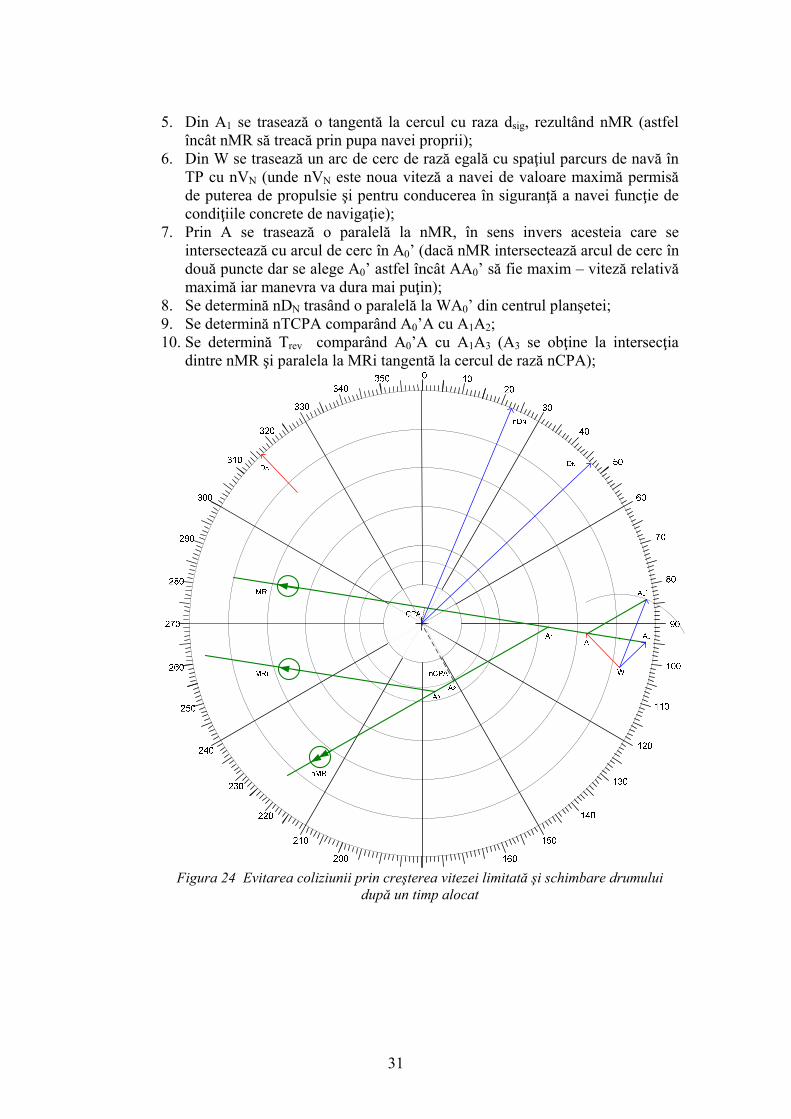
3. 7. EVITAREA COLIZIUNII PRIN CREŞTEREA VITEZEI LIMITATĂ ŞI SCHIMBAREA DRUMULUI DUPĂ UN TIMP ALOCAT
Algoritm de operaţii:
1. Se execută trei plotări şi se determină MRi, CPA, TCPA; 2. Se trasează DN; 3. Se determină DA, VA, Asp; 4. Pe MRi se stabileşte punctul A1 astfel încât segmentul AA1 să fie jumătate
din A0A. A1 poate fi fixat şi în alt loc pe nMR astfel încât să existe timpul necesar pentru determinarea nDN;
31
5. Din A1 se trasează o tangentă la cercul cu raza dsig, rezultând nMR (astfel încât nMR să treacă prin pupa navei proprii);
6. Din W se trasează un arc de cerc de rază egală cu spaţiul parcurs de navă în TP cu nVN (unde nVN este noua viteză a navei de valoare maximă permisă de puterea de propulsie şi pentru conducerea în siguranţă a navei funcţie de condiţiile concrete de navigaţie);
7. Prin A se trasează o paralelă la nMR, în sens invers acesteia care se intersectează cu arcul de cerc în A0’ (dacă nMR intersectează arcul de cerc în două puncte dar se alege A0’ astfel încât AA0’ să fie maxim – viteză relativă maximă iar manevra va dura mai puţin);
8. Se determină nDN trasând o paralelă la WA0’ din centrul planşetei; 9. Se determină nTCPA comparând A0’A cu A1A2; 10. Se determină Trev comparând A0’A cu A1A3 (A3 se obţine la intersecţia
dintre nMR şi paralela la MRi tangentă la cercul de rază nCPA);
Figura 24 Evitarea coliziunii prin creşterea vitezei limitată şi schimbare drumului după un timp alocat
32
4. DETERMINAREA TIPULUI DE MANEVRĂ EXECUTAT DE CĂTRE NAVA ŢINTĂ
În situaţia în care ţinta, fiind în postura de navă neprivilegiată, execută manevra
de evitare a coliziunii, ofiţerul de cart va monitoriza continuu manevra acesteia. Activitatea de monitorizare a manevrei ţintei presupune rezolvarea triunghiului
de coliziune din timp pentru a determina DA şi VA şi după ce nava a terminat manevra, ajungând la noii parametri de mişcare: nDA şi nVA, determinarea acestora prin rezolvarea triunghiul de evitare.
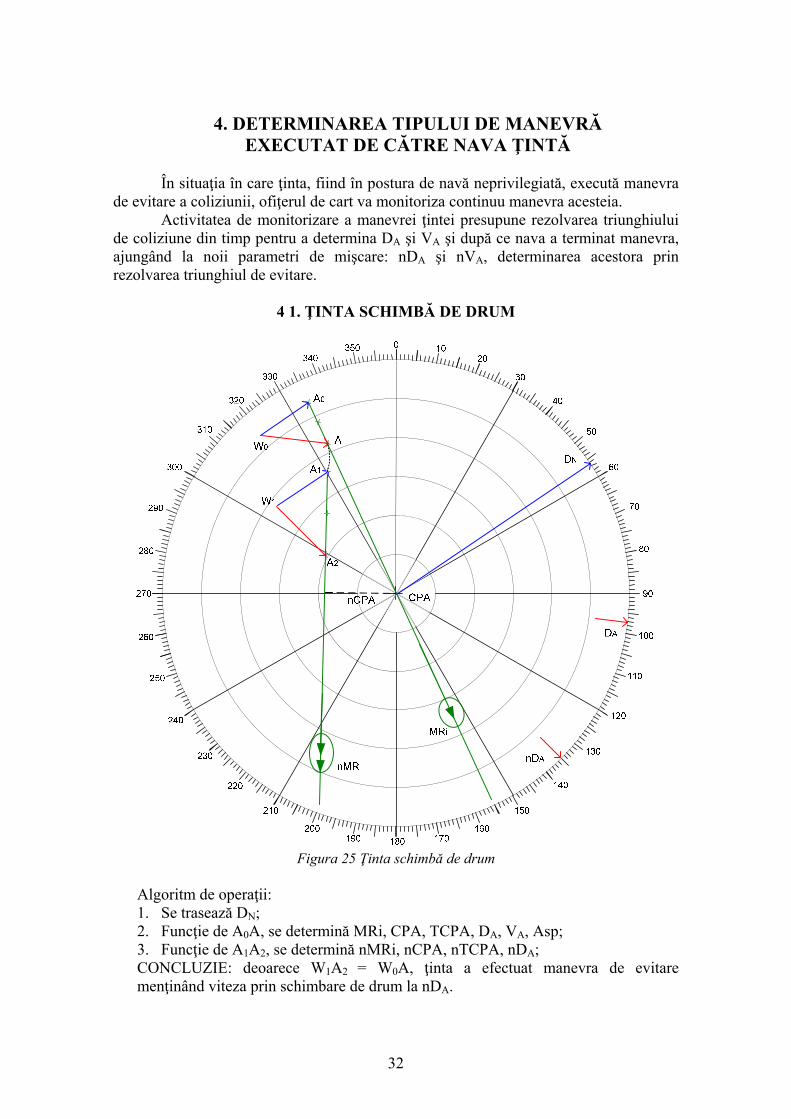
4 1. ŢINTA SCHIMBĂ DE DRUM
Figura 25 Ţinta schimbă de drum
Algoritm de operaţii: 1. Se trasează DN; 2. Funcţie de A0A, se determină MRi, CPA, TCPA, DA, VA, Asp; 3. Funcţie de A1A2, se determină nMRi, nCPA, nTCPA, nDA; CONCLUZIE: deoarece W1A2 = W0A, ţinta a efectuat manevra de evitare menţinând viteza prin schimbare de drum la nDA.
33
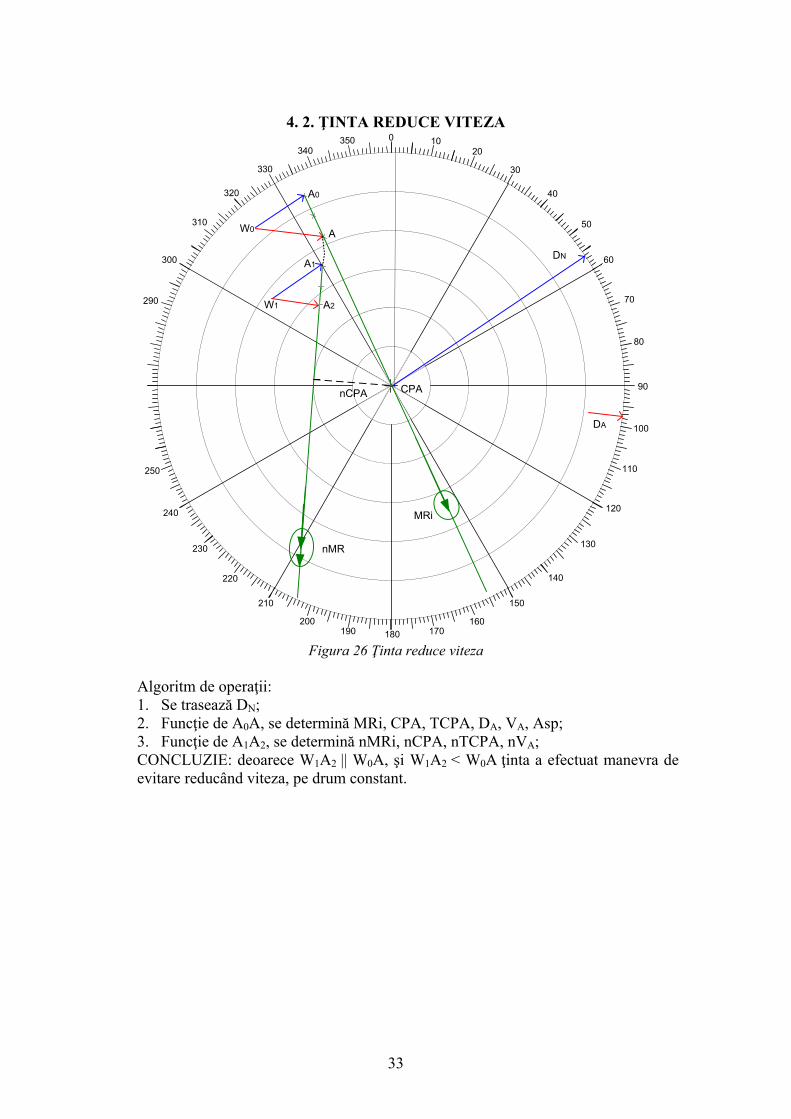
4. 2. ŢINTA REDUCE VITEZA
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
290
300
310
320
330
340350 0 10
MRi
nMR
A0
A
A1
A2
W0
W1
CPAnCPA
DA
DN
Figura 26 Ţinta reduce viteza
Algoritm de operaţii: 1. Se trasează DN; 2. Funcţie de A0A, se determină MRi, CPA, TCPA, DA, VA, Asp; 3. Funcţie de A1A2, se determină nMRi, nCPA, nTCPA, nVA; CONCLUZIE: deoarece W1A2 || W0A, şi W1A2 < W0A ţinta a efectuat manevra de evitare reducând viteza, pe drum constant.
34
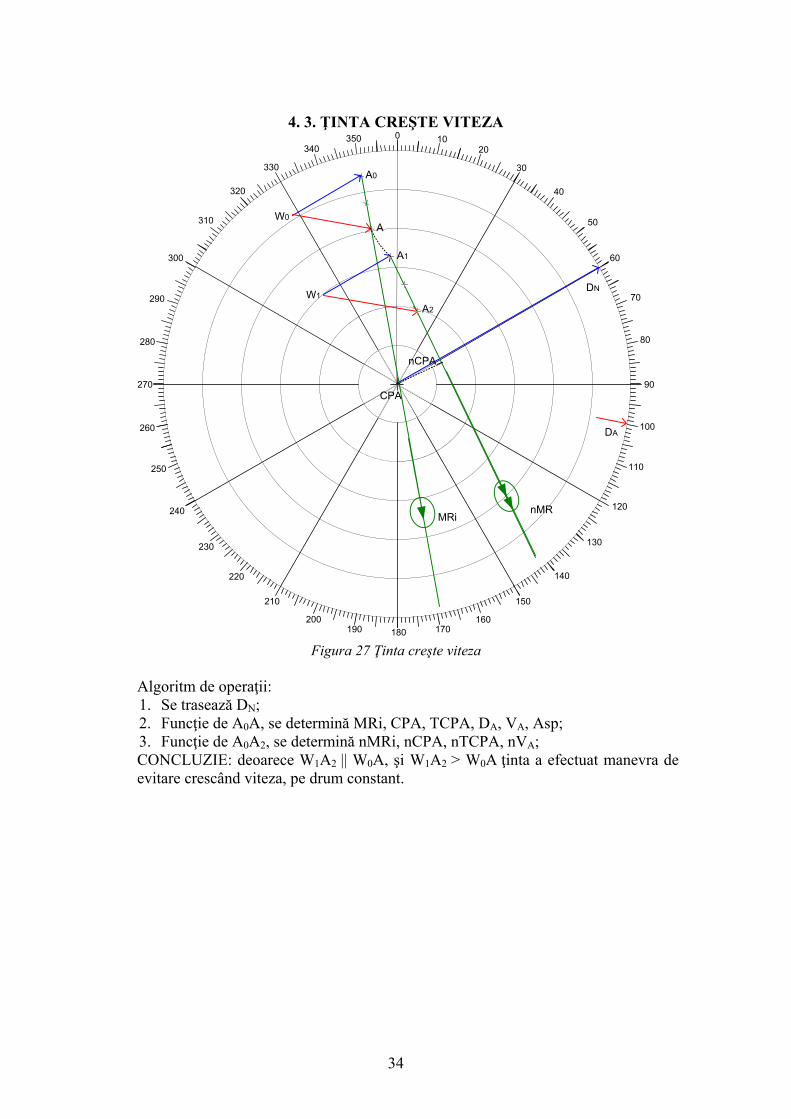
4. 3. ŢINTA CREŞTE VITEZA 20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
CPA
nCPA
A1
A2
A0
AW0
W1
MRinMR
DA
DN
Figura 27 Ţinta creşte viteza
Algoritm de operaţii: 1. Se trasează DN; 2. Funcţie de A0A, se determină MRi, CPA, TCPA, DA, VA, Asp; 3. Funcţie de A0A2, se determină nMRi, nCPA, nTCPA, nVA; CONCLUZIE: deoarece W1A2 || W0A, şi W1A2 > W0A ţinta a efectuat manevra de evitare crescând viteza, pe drum constant.
35
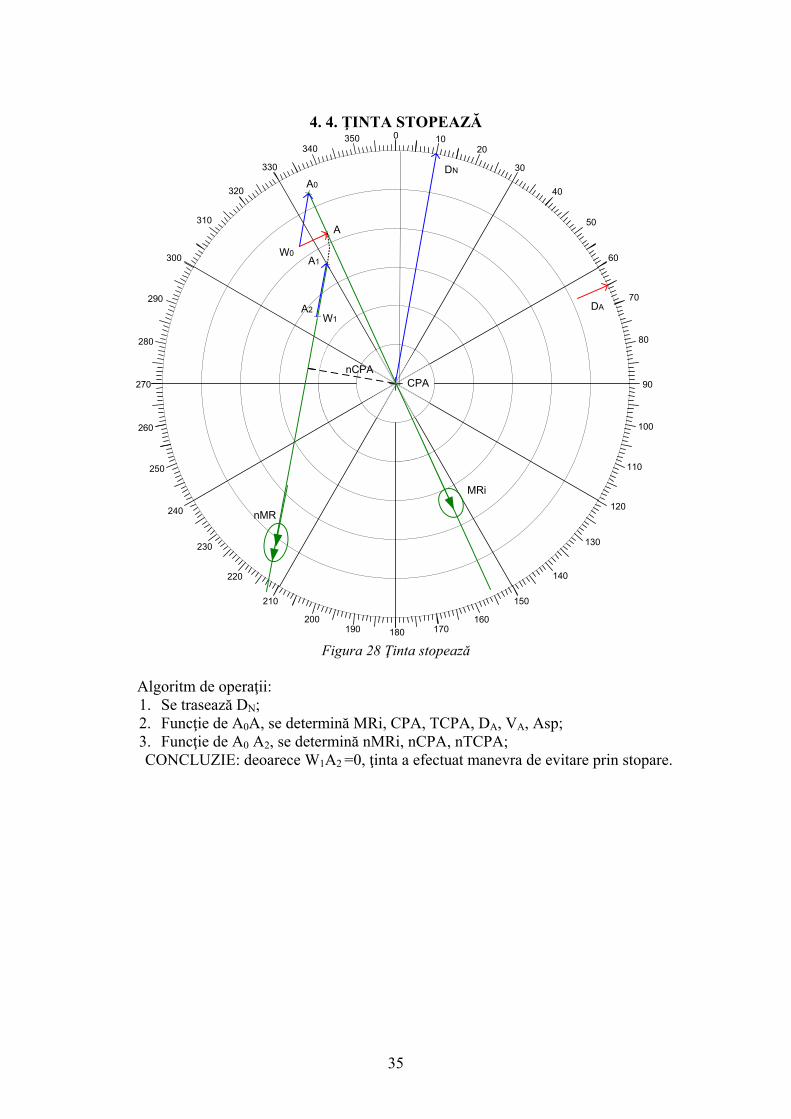
4. 4. ŢINTA STOPEAZĂ 20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
nCPA
MRi
nMR
CPA
A0
A
A1
A2 DA
DN
W0
W1
Figura 28 Ţinta stopează
Algoritm de operaţii: 1. Se trasează DN; 2. Funcţie de A0A, se determină MRi, CPA, TCPA, DA, VA, Asp; 3. Funcţie de A0 A2, se determină nMRi, nCPA, nTCPA; CONCLUZIE: deoarece W1A2 =0, ţinta a efectuat manevra de evitare prin stopare.
36
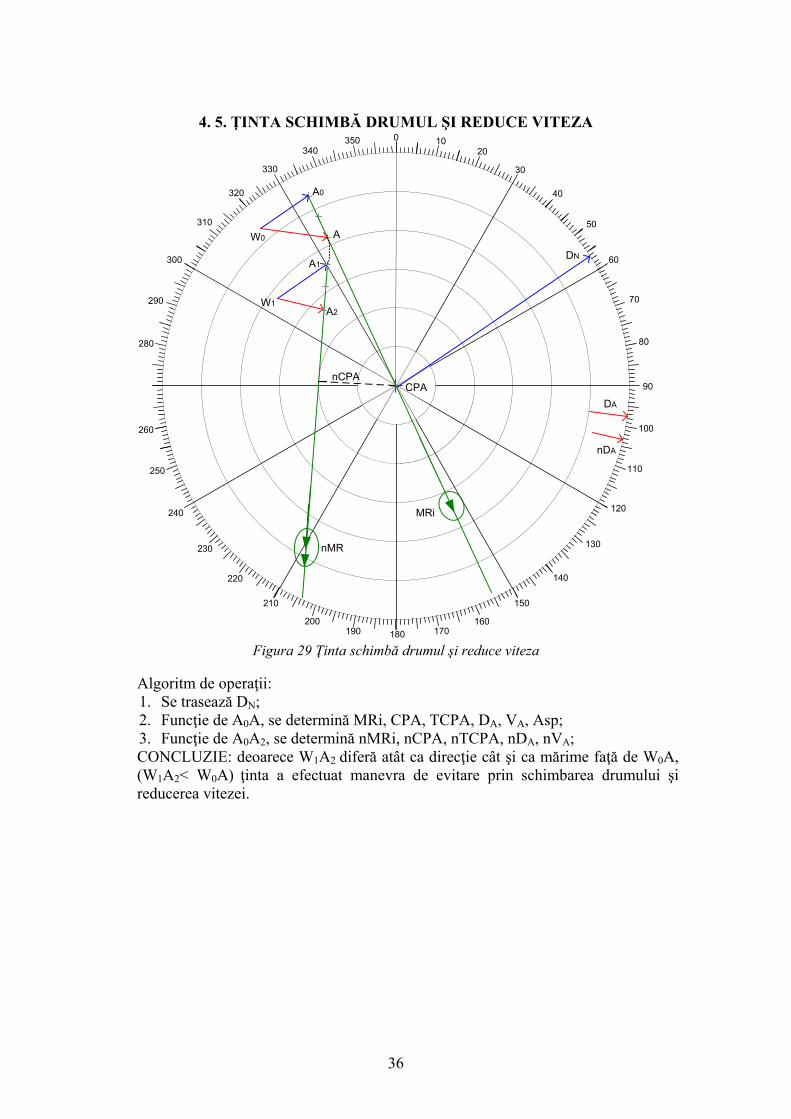
4. 5. ŢINTA SCHIMBĂ DRUMUL ŞI REDUCE VITEZA
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
280
290
300
310
320
330
340350 0 10
DA
nDA
CPAnCPA
W0
W1
A0
A1
A
A2
nMR
MRi
DN
Figura 29 Ţinta schimbă drumul şi reduce viteza
Algoritm de operaţii: 1. Se trasează DN; 2. Funcţie de A0A, se determină MRi, CPA, TCPA, DA, VA, Asp; 3. Funcţie de A0A2, se determină nMRi, nCPA, nTCPA, nDA, nVA; CONCLUZIE: deoarece W1A2 diferă atât ca direcţie cât şi ca mărime faţă de W0A, (W1A2< W0A) ţinta a efectuat manevra de evitare prin schimbarea drumului şi reducerea vitezei.
37
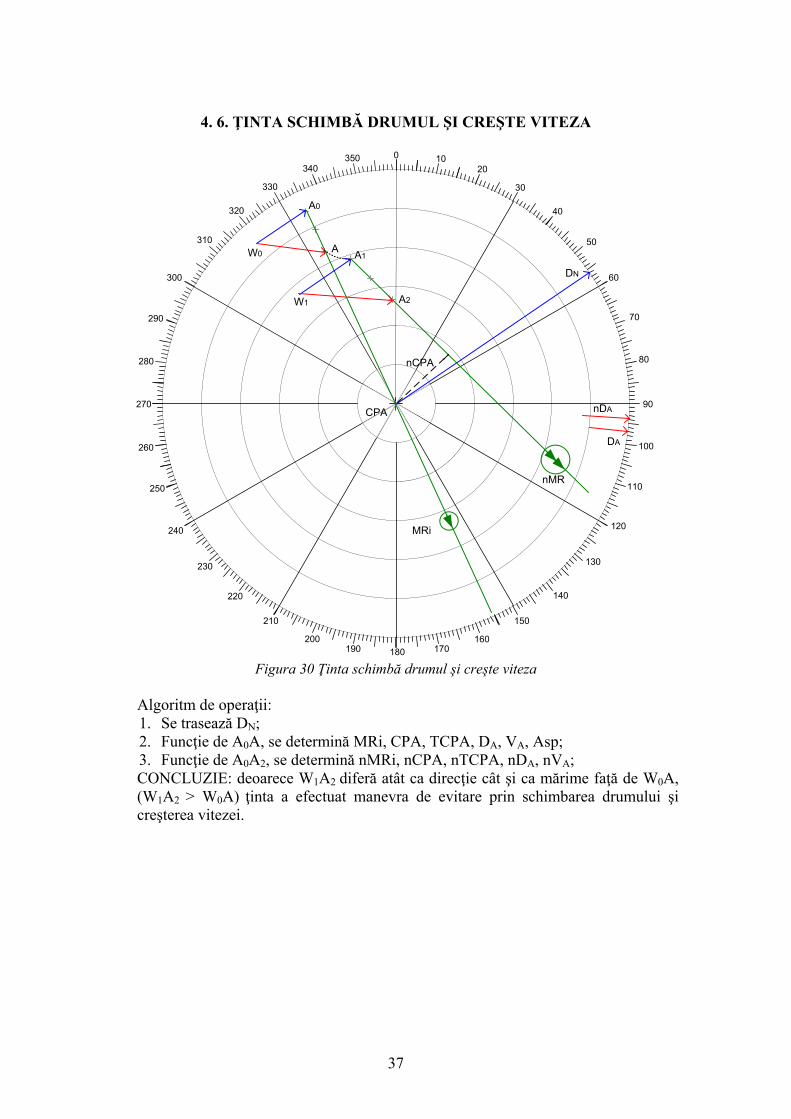
4. 6. ŢINTA SCHIMBĂ DRUMUL ŞI CREŞTE VITEZA
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
nDA
DA
DN
nCPA
CPA
nMR
MRi
W0
W1
A0
A A1
A2
Figura 30 Ţinta schimbă drumul şi creşte viteza
Algoritm de operaţii: 1. Se trasează DN; 2. Funcţie de A0A, se determină MRi, CPA, TCPA, DA, VA, Asp; 3. Funcţie de A0A2, se determină nMRi, nCPA, nTCPA, nDA, nVA; CONCLUZIE: deoarece W1A2 diferă atât ca direcţie cât şi ca mărime faţă de W0A, (W1A2 > W0A) ţinta a efectuat manevra de evitare prin schimbarea drumului şi creşterea vitezei.
38
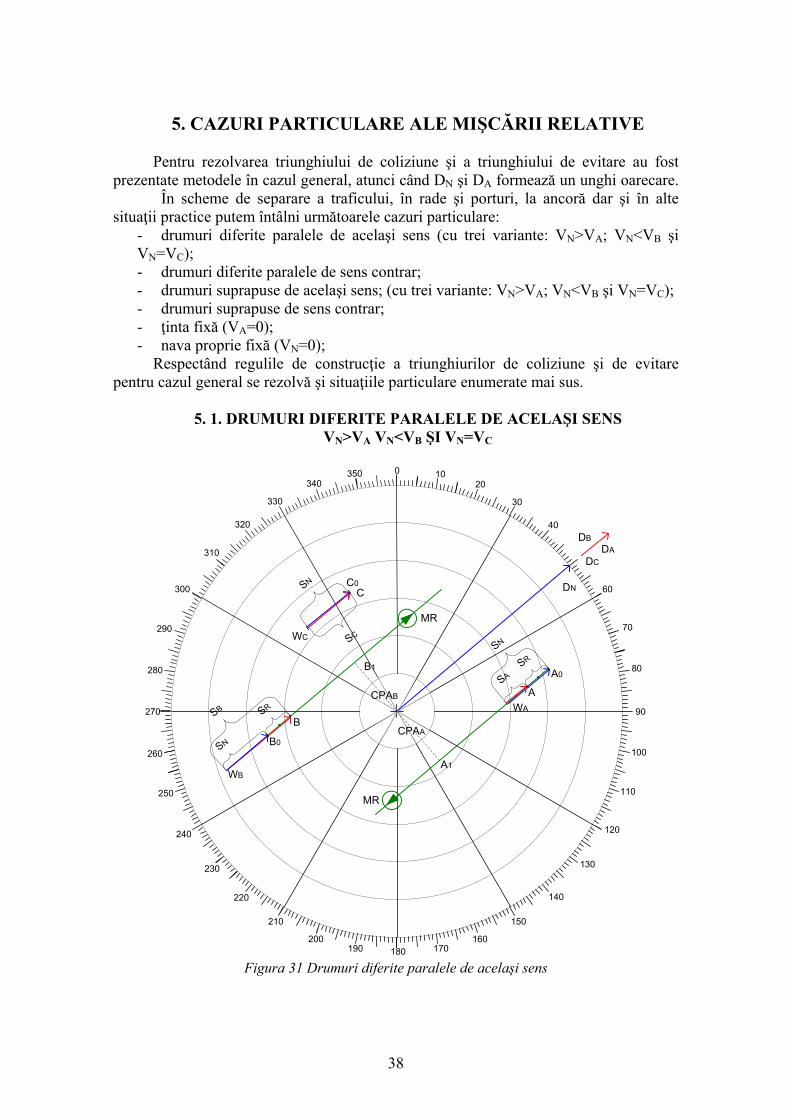
5. CAZURI PARTICULARE ALE MIŞCĂRII RELATIVE
Pentru rezolvarea triunghiului de coliziune şi a triunghiului de evitare au fost prezentate metodele în cazul general, atunci când DN şi DA formează un unghi oarecare. În scheme de separare a traficului, în rade şi porturi, la ancoră dar şi în alte situaţii practice putem întâlni următoarele cazuri particulare:
- drumuri diferite paralele de acelaşi sens (cu trei variante: VN>VA; VN<VB şi VN=VC); - drumuri diferite paralele de sens contrar; - drumuri suprapuse de acelaşi sens; (cu trei variante: VN>VA; VN<VB şi VN=VC); - drumuri suprapuse de sens contrar; - ţinta fixă (VA=0); - nava proprie fixă (VN=0);
Respectând regulile de construcţie a triunghiurilor de coliziune şi de evitare pentru cazul general se rezolvă şi situaţiile particulare enumerate mai sus.
5. 1. DRUMURI DIFERITE PARALELE DE ACELAŞI SENS
VN>VA VN<VB ŞI VN=VC
20
30
40
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DN
DA
A0
A
B0
B
WB
WA
MR
MR
DB
CPAA
CPAB
A1
B1 SR
SA
SN
SB
SN
SR
C0C
WC
SN
SC
DC
Figura 31 Drumuri diferite paralele de acelaşi sens
39
- Când viteza navei este mai mare decât viteza ţintei (VN>VA), mişcarea relativă a ţintei este de sens contrar DA şi DN iar viteza relativă a ţintei este VR=VN-VA;
- Dacă viteza navei este mai mică decât viteza ţintei VN<VB, mişcarea relativă a ţintei este de acelaşi sens cu DA şi DN iar viteza relativă a ţintei este VR=VB-VN;
- Dacă viteza navei este egală cu viteza ţintei, viteza relativă este nulă iar spotul ţintei se va afla într-un punct fix pe ecranul radarului în mişcare relativă (VR=0).
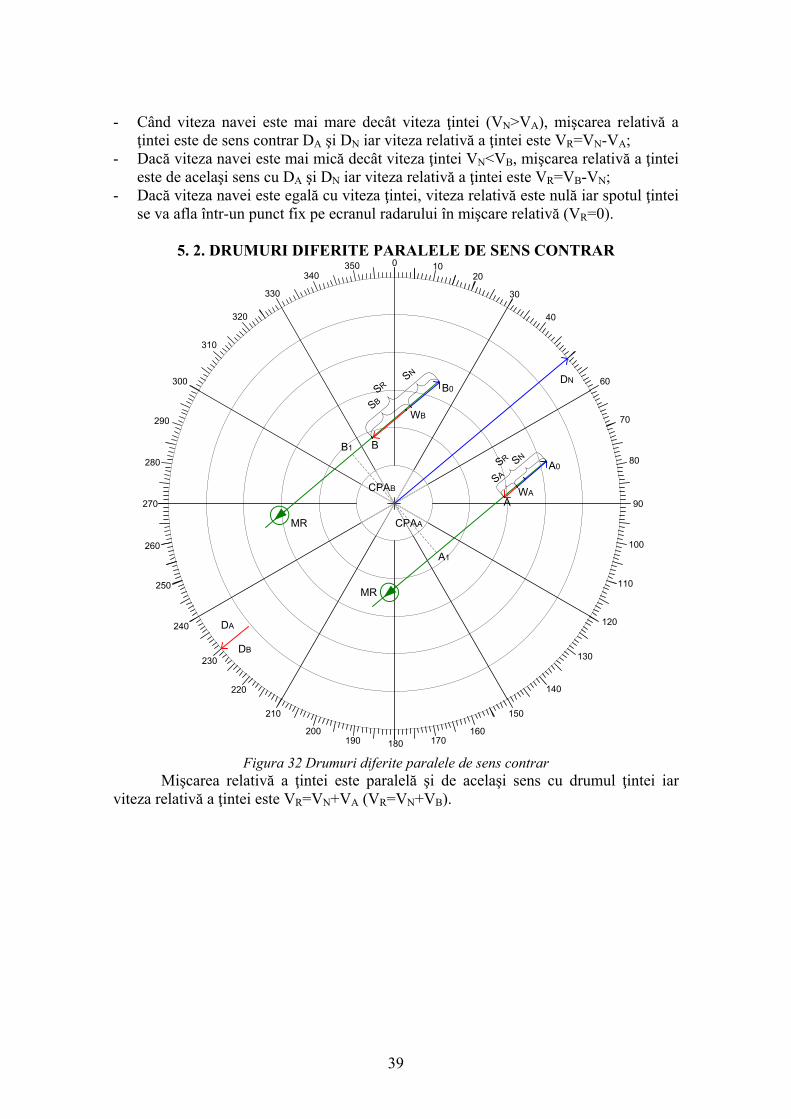
5. 2. DRUMURI DIFERITE PARALELE DE SENS CONTRAR
20
30
40
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DN
DA
A0
A
B0
B
WB
WA
MR
MR
DB
CPAA
CPAB
A1
B1
SN
SASR
SB
SN
SR
Figura 32 Drumuri diferite paralele de sens contrar
Mişcarea relativă a ţintei este paralelă şi de acelaşi sens cu drumul ţintei iar viteza relativă a ţintei este VR=VN+VA (VR=VN+VB).
40
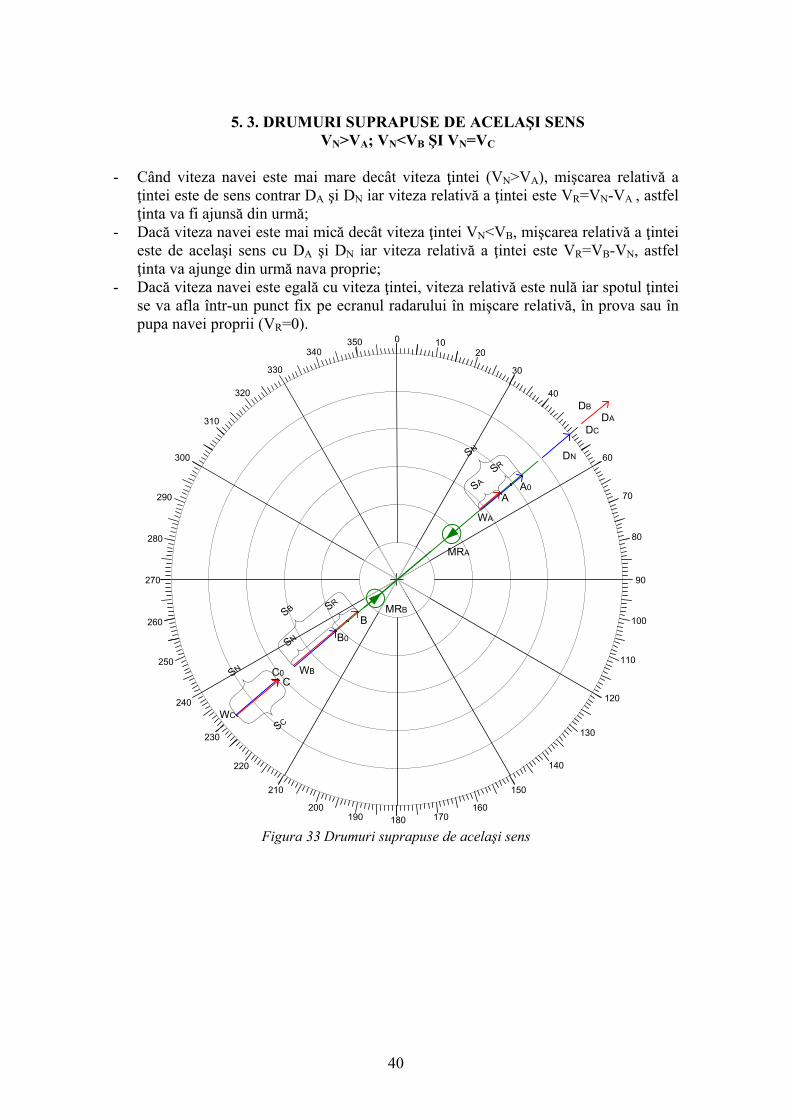
5. 3. DRUMURI SUPRAPUSE DE ACELAŞI SENS VN>VA; VN<VB ŞI VN=VC
- Când viteza navei este mai mare decât viteza ţintei (VN>VA), mişcarea relativă a
ţintei este de sens contrar DA şi DN iar viteza relativă a ţintei este VR=VN-VA , astfel ţinta va fi ajunsă din urmă;
- Dacă viteza navei este mai mică decât viteza ţintei VN<VB, mişcarea relativă a ţintei este de acelaşi sens cu DA şi DN iar viteza relativă a ţintei este VR=VB-VN, astfel ţinta va ajunge din urmă nava proprie;
- Dacă viteza navei este egală cu viteza ţintei, viteza relativă este nulă iar spotul ţintei se va afla într-un punct fix pe ecranul radarului în mişcare relativă, în prova sau în pupa navei proprii (VR=0).
20
30
40
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DN
DA
A0A
B0
B
WB
WA
MRB
MRA
DB
SR
SA
SN
SB
SN
SR
C
DC
C0
WC
SN
SC
Figura 33 Drumuri suprapuse de acelaşi sens
41
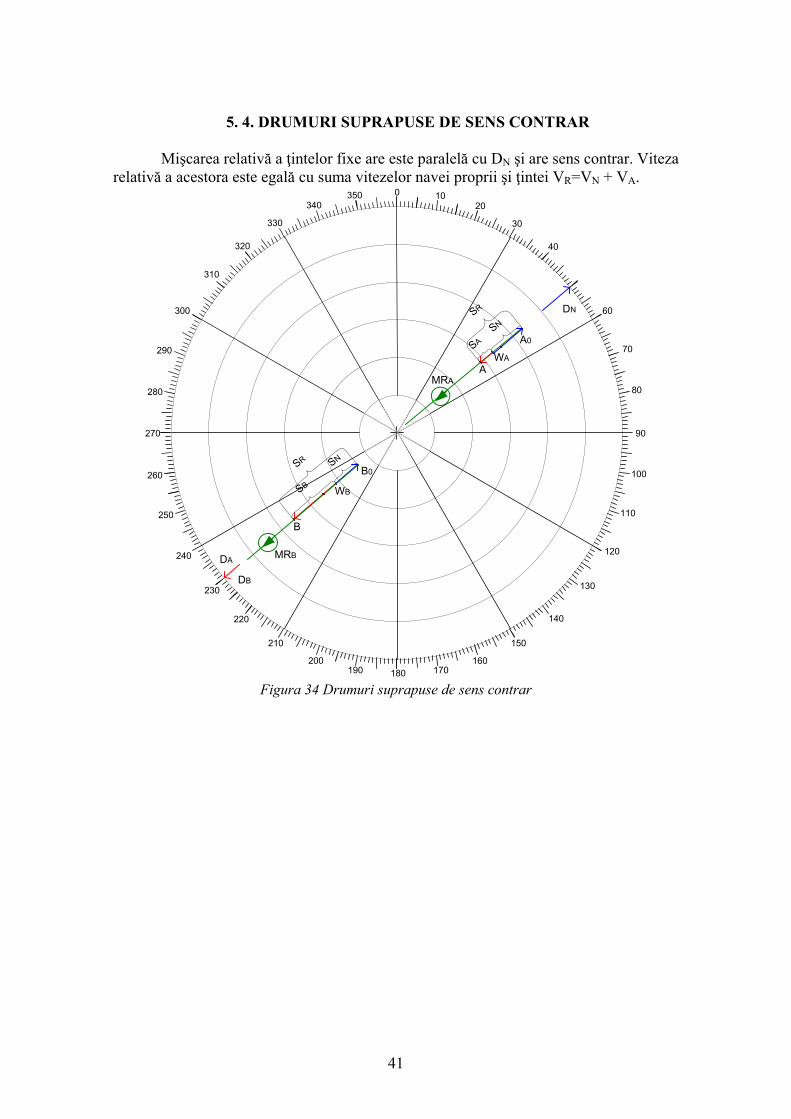
5. 4. DRUMURI SUPRAPUSE DE SENS CONTRAR Mişcarea relativă a ţintelor fixe are este paralelă cu DN şi are sens contrar. Viteza
relativă a acestora este egală cu suma vitezelor navei proprii şi ţintei VR=VN + VA.
20
30
40
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DN
A0
A
B0
B
WB
WA
MRB
MRA
SR
SASN
SB
SNSR
DA
DB
Figura 34 Drumuri suprapuse de sens contrar
42
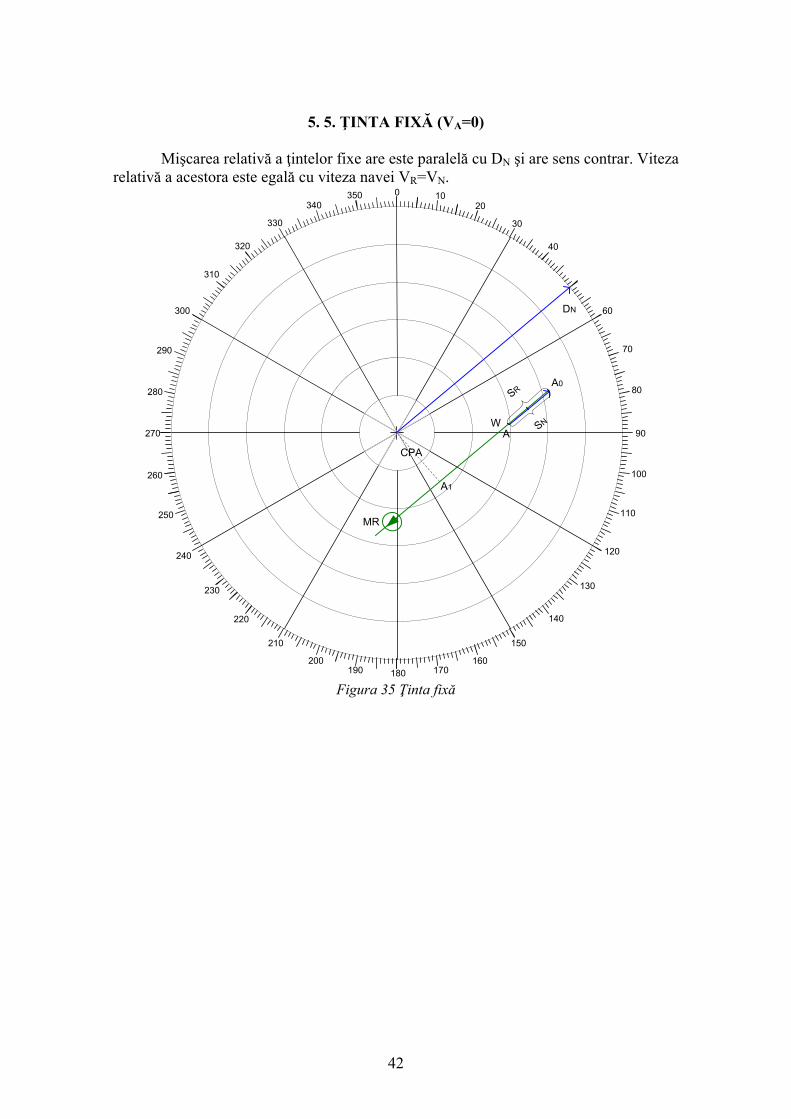
5. 5. ŢINTA FIXĂ (VA=0)
Mişcarea relativă a ţintelor fixe are este paralelă cu DN şi are sens contrar. Viteza relativă a acestora este egală cu viteza navei VR=VN.
20
30
40
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DN
A0
AW
MR
CPA
A1
SR
SN
Figura 35 Ţinta fixă
43
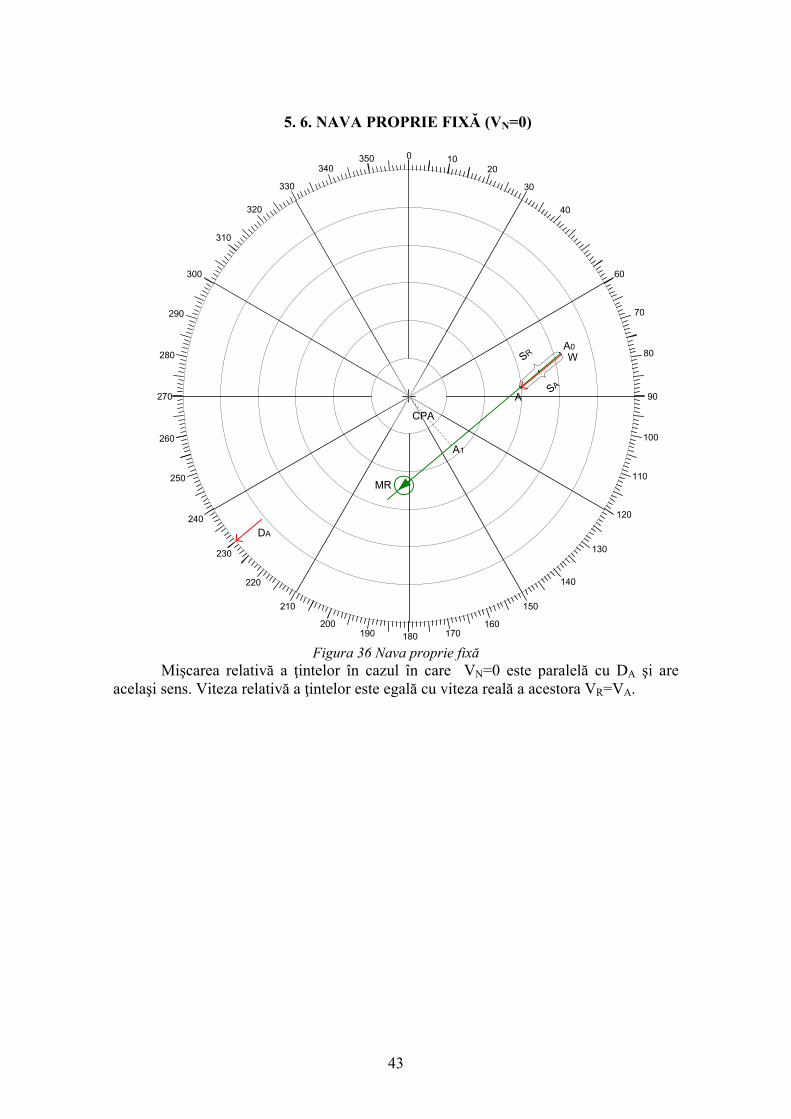
5. 6. NAVA PROPRIE FIXĂ (VN=0)
20
30
40
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
A0
A
W
MR
CPA
A1
SR
SA
DA
Figura 36 Nava proprie fixă
Mişcarea relativă a ţintelor în cazul în care VN=0 este paralelă cu DA şi are acelaşi sens. Viteza relativă a ţintelor este egală cu viteza reală a acestora VR=VA.
44
6. EVITAREA COLIZIUNII CU ŢINTE FIXE ÎN CONDIŢII DE DERIVĂ PRIN SCHIMBAREA DRUMULUI DUPĂ UN TIMP
ALOCAT
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DN
nMR
MRi
nDN
W
A
A0
A0`A1
DirC
nDf
Df
nCPA
CPA
A2
MRi
A3
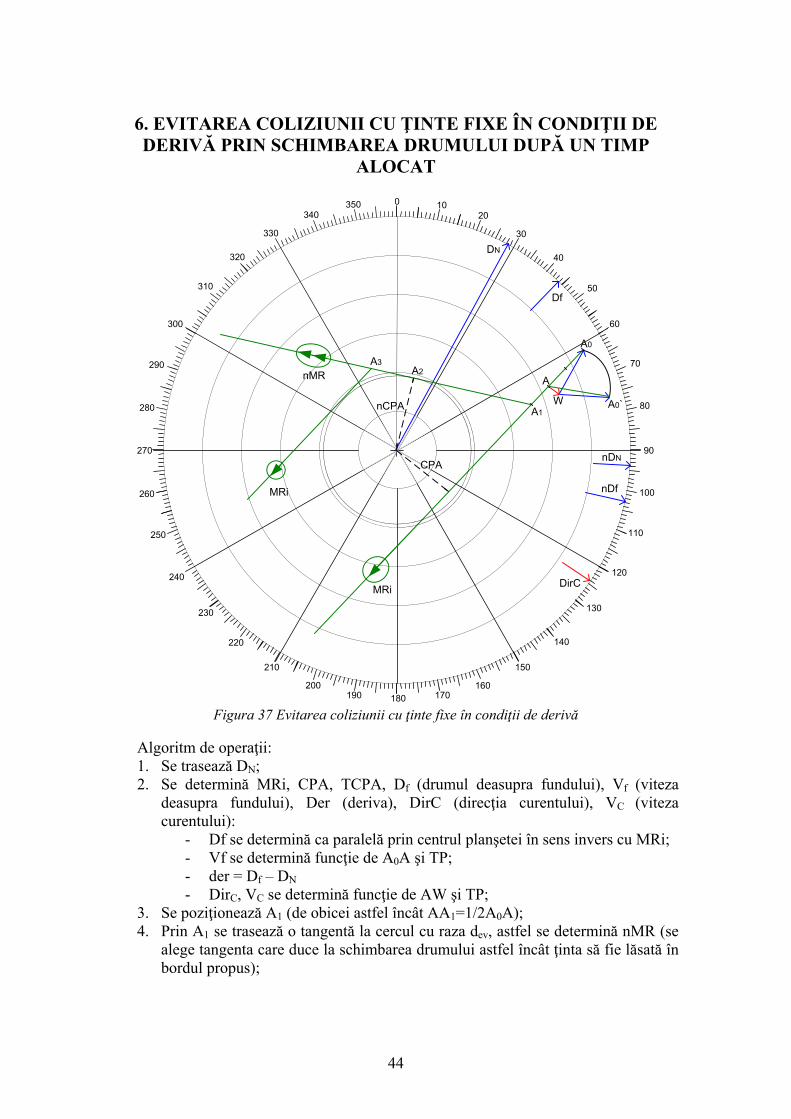
Figura 37 Evitarea coliziunii cu ţinte fixe în condiţii de derivă
Algoritm de operaţii: 1. Se trasează DN; 2. Se determină MRi, CPA, TCPA, Df (drumul deasupra fundului), Vf (viteza
deasupra fundului), Der (deriva), DirC (direcţia curentului), VC (viteza
curentului): - Df se determină ca paralelă prin centrul planşetei în sens invers cu MRi; - Vf se determină funcţie de A0A şi TP; - der = Df – DN - DirC, VC se determină funcţie de AW şi TP;
3. Se poziţionează A1 (de obicei astfel încât AA1=1/2A0A); 4. Prin A1 se trasează o tangentă la cercul cu raza dev, astfel se determină nMR (se
alege tangenta care duce la schimbarea drumului astfel încât ţinta să fie lăsată în bordul propus);
45
5. Prin A se trasează o paralelă la nMR în sens invers acestuia care se intersectează cu un arc de cerc cu raza WA0 şi centrul în W, rezultând A0’;
6. Se determină nDN ca paralelă prin centrul planşetei la WA0’; 7. Se determină nDf ca paralelă în sens invers la nMR; 8. Se determină nVf funcţie de A0’A şi TP; nDer = nDf – nDN. 9. Se trasează o perpendiculară din centrul planşetei pe nMR iar piciorul
perpendicularei se notează cu A2. 10. Se construieşte grafic revenirea trasând o paralelă la MRi, tangentă la cercul de
rază nCPA; intersecţia dintre aceasta şi nMR se notează A3. Se determină nTCPA şi Trev comparând A0A cu A1A2 şi respectiv A1A3.
46
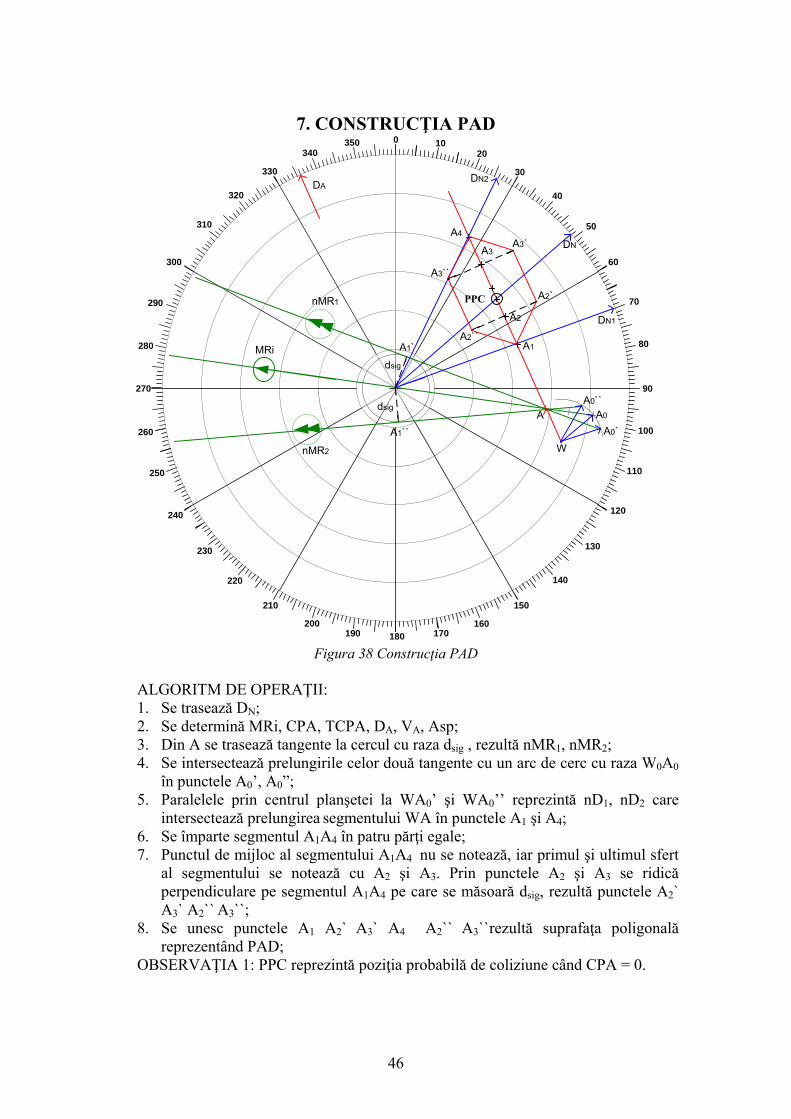
7. CONSTRUCŢIA PAD 20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
PPC
DN
DA
MRi
A0AA0`
A0``
W
nMR1
nMR2
DN1
DN2
A1
A4
A2
A3
A2`
A2``
A3``
A3`
A1`
A1``
dsig
dsig
Figura 38 Construcţia PAD
ALGORITM DE OPERAŢII: 1. Se trasează DN; 2. Se determină MRi, CPA, TCPA, DA, VA, Asp; 3. Din A se trasează tangente la cercul cu raza dsig , rezultă nMR1, nMR2; 4. Se intersectează prelungirile celor două tangente cu un arc de cerc cu raza W0A0
în punctele A0’, A0”; 5. Paralelele prin centrul planşetei la WA0’ şi WA0’’ reprezintă nD1, nD2 care
intersectează prelungirea segmentului WA în punctele A1 şi A4; 6. Se împarte segmentul A1A4 în patru părţi egale; 7. Punctul de mijloc al segmentului A1A4 nu se notează, iar primul şi ultimul sfert
al segmentului se notează cu A2 şi A3. Prin punctele A2 şi A3 se ridică perpendiculare pe segmentul A1A4 pe care se măsoară dsig, rezultă punctele A2` A3` A2`` A3``;
8. Se unesc punctele A1 A2` A3` A4 A2`` A3``rezultă suprafaţa poligonală reprezentând PAD;
OBSERVAŢIA 1: PPC reprezintă poziţia probabilă de coliziune când CPA = 0.

47
OBSERVAŢIA 2: În funcţie de raportul vitezelor A NV V şi de poziţia ţintei faţă de nava proprie pot rezulta: un PAD, două PAD-uri sau nici un PAD. OBSERVAŢIA 3: Forma PAD se modifică în mod continuu, pe timpul deplasării celor două nave.
48
8. EVITAREA CICLONULUI TROPICAL
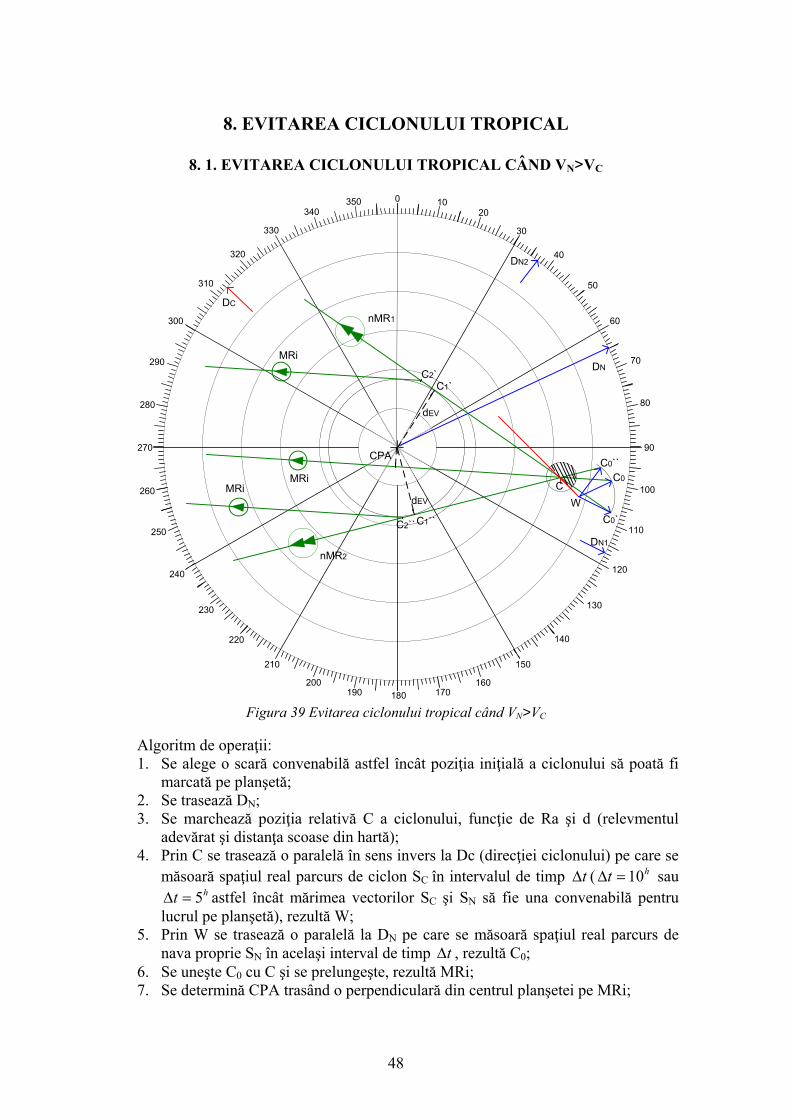
8. 1. EVITAREA CICLONULUI TROPICAL CÂND VN>VC
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DN
DN1
DN2
DC
W
MRiMRi
MRi
CC0
C0``
C0`
C1`
C1``C2``
C2`
CPA
nMR1
nMR2
dEV
dEV
Figura 39 Evitarea ciclonului tropical când VN>VC
Algoritm de operaţii: 1. Se alege o scară convenabilă astfel încât poziţia iniţială a ciclonului să poată fi
marcată pe planşetă; 2. Se trasează DN; 3. Se marchează poziţia relativă C a ciclonului, funcţie de Ra şi d (relevmentul
adevărat şi distanţa scoase din hartă); 4. Prin C se trasează o paralelă în sens invers la Dc (direcţiei ciclonului) pe care se
măsoară spaţiul real parcurs de ciclon SC în intervalul de timp tΔ ( ht 10=Δ sau ht 5=Δ astfel încât mărimea vectorilor SC şi SN să fie una convenabilă pentru
lucrul pe planşetă), rezultă W; 5. Prin W se trasează o paralelă la DN pe care se măsoară spaţiul real parcurs de
nava proprie SN în acelaşi interval de timp tΔ , rezultă C0; 6. Se uneşte C0 cu C şi se prelungeşte, rezultă MRi; 7. Se determină CPA trasând o perpendiculară din centrul planşetei pe MRi;
49
8. Se determină TCPA comparând C0C cu CCPA (se utilizează diagrama de interpolare până la cea de a cincia linie împărţind segmentul C0C în cinci părţi egale de o oră (∆t═5h) sau două ore (∆t═10h);
9. Din C se trasează tangente la cercul cu raza dEV (distanţa de evitare) şi se prelungesc în sens invers, rezultă astfel nMR1 şi nMR2;
10. Cu centrul în W şi raza WC0 se trasează un cerc şi se intersectează cu aceste prelungiri în punctele C0’, C0”;
11. Se uneşte W cu punctele C0’şi C0”, paralelele prin centrul planşetei la segmentele WC0’, WC0” determinând nDN1, nDN2, variantele posibile de drumuri de evitare;
12. Funcţie de emisfera în care se află nava, se stabileşte care este semicercul periculos şi care este semicercul manevrabil şi se alege varianta de nMR (de aici rezultă şi varianta de nDN) care face ca ciclonul să treacă faţă de nava proprie cu un sector mai mare din semicercul manevrabil. În exemplul de faţă se presupune că ciclonul şi nava se află în emisfera nordică, ciclonul fiind în faza de formare are direcţie NW iar semicercul periculos se găseşte în partea nordică a direcţiei acestuia, astfel nMR1 este cel care trebuie ales, respectiv nDN1;
13. Se determină nTCPA prin compararea C0’C cu C C1’, respectiv C0”C cu C C1”; 14. Se construieşte grafic revenirea trasând tangente la cercul de rază nCPA,
paralelă cu MRi. Punctele de intersecţie dintre nMR şi paralelele la MRi se notează cu C2’, C2”;
15. Se determină Trev prin compararea segmentelor C0’C cu C C2’, respectiv C0”C cu C C2”.
OBSERVAŢIA 1: Revenirea în practică nu se face exact la drumul iniţial ci la drumul convenabil conform planului marşului pentru a ajunge în timpul cel mai scurt la destinaţie, verificându-se în prealabil dacă nMR, rezultat pe noul drum nu taie cercul cu rază dEV, astfel nava proprie sa se apropie în revenire la o distanţă periculoasă faţă de ciclon. OBSERVAŢIA 2: Distanţa de evitare se stabileşte în funcţie de forţa ciclonului şi de caracteristicile navei dar aceasta, de obicei nu e mai mică de 200 Mm.
8. 2. EVITAREA CICLONULUI TROPICAL
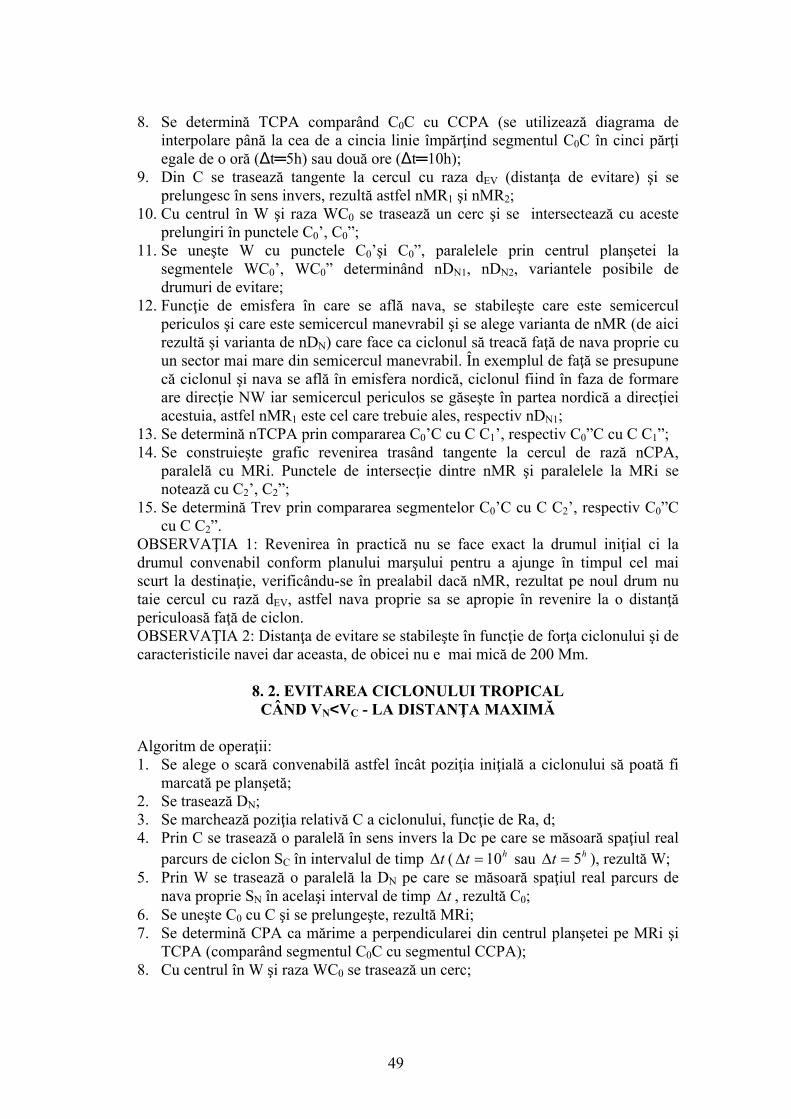
CÂND VN<VC - LA DISTANŢA MAXIMĂ
Algoritm de operaţii: 1. Se alege o scară convenabilă astfel încât poziţia iniţială a ciclonului să poată fi
marcată pe planşetă; 2. Se trasează DN; 3. Se marchează poziţia relativă C a ciclonului, funcţie de Ra, d; 4. Prin C se trasează o paralelă în sens invers la Dc pe care se măsoară spaţiul real
parcurs de ciclon SC în intervalul de timp tΔ ( ht 10=Δ sau ht 5=Δ ), rezultă W; 5. Prin W se trasează o paralelă la DN pe care se măsoară spaţiul real parcurs de
nava proprie SN în acelaşi interval de timp tΔ , rezultă C0; 6. Se uneşte C0 cu C şi se prelungeşte, rezultă MRi; 7. Se determină CPA ca mărime a perpendicularei din centrul planşetei pe MRi şi
TCPA (comparând segmentul C0C cu segmentul CCPA); 8. Cu centrul în W şi raza WC0 se trasează un cerc;
50
9. Din C se trasează tangenta la acest cerc care trece la o distanţă mai mare de centrul planşetei astfel se determină nMR, apoi se măsoară nCPA = dmax, trasând o perpendiculară din centrul planşetei pe nMR (piciorul perpendicularei se notează C1);
10. Punctul de tangenţă se notează cu C0’ trasând o paralelă la WC0’prin centrul planşetei obţinem nDN corespunzător evitării ciclonului la dmax.
11. Se construieşte grafic revenirea trasând o tangentă la cercul de rază nCPA, paralelă cu MRi. Punctul de intersecţie dintre nMR şi paralela la MRi se notează cu C2.
12. Se determină nTCPA prin compararea C0’C cu C C1; 13. Se determină Trev prin compararea segmentelor C0’C cu C C2; OBSERVAŢIE: Revenirea în practică nu se face exact la drumul iniţial ci la drumul convenabil conform planului marşului pentru a ajunge în timpul cel mai scurt la destinaţie, verificându-se în prealabil dacă nMR, rezultat pe noul drum nu taie cercul cu rază dmax, astfel nava proprie sa se apropie în revenire la o distanţă periculoasă faţă de ciclon.
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
CPA
MRi
W
C0 C
nMR
C1
C2
C0`
MRi
DN
nDN
DC
Figura 40 Evitarea ciclonului tropical la distanţa maximă
51
9. TEHNICA PARALELELOR INDICATOARE (TPI)
TPI reprezintă o procedură de conducere în siguranţă a navei pe bază de observaţii radar care se bazează pe proprietatea ţintelor fixe de a se deplasa pe ecranul radarului pe o direcţie paralelă cu drumul deasupra fundului, în sens contrar acestuia.
Paralelele indicatoare (PI) sunt linii trasate pe ecranul radar, paralele cu drumul deasupra fundului în N-up şi cu linia prova în H-up pe care se urmăreşte menţinerea reperului radar fix, manevrând în mod corespunzător nava.
TPI se utilizează la treceri prin locuri înguste, în scheme de separare a traficului, la ancoraj, în operaţiuni de căutare şi salvare pe mare, intrări/ieşiri în/din porturi.
Trasarea paralelelor indicatoare se poate face prin două metode: metoda relevmentelor şi distanţelor şi metoda distanţelor minime. În practică se utilizează harta cu marşul preliminar din care se extrag parametrii R, d sau dmin pe baza cărora sa trasează PI corespunzătoare pentru fiecare Df ce trebuie urmat de către navă.
Funcţie de complexitatea situaţiei există următoarele cazuri de trasare a PI: - un singur drum şi un singur reper; - un singur reper şi mai multe drumuri; - mai multe drumuri mai multe repere.
Având în vedere situaţiile speciale pentru care se trasează paralelele indicatoare se va utiliza în permanenţă scala cea mai precisă a radarului, astfel de multe ori se va executa saltul de scală şi se va trasa curba de giraţie atunci când scala permite acest lucru.
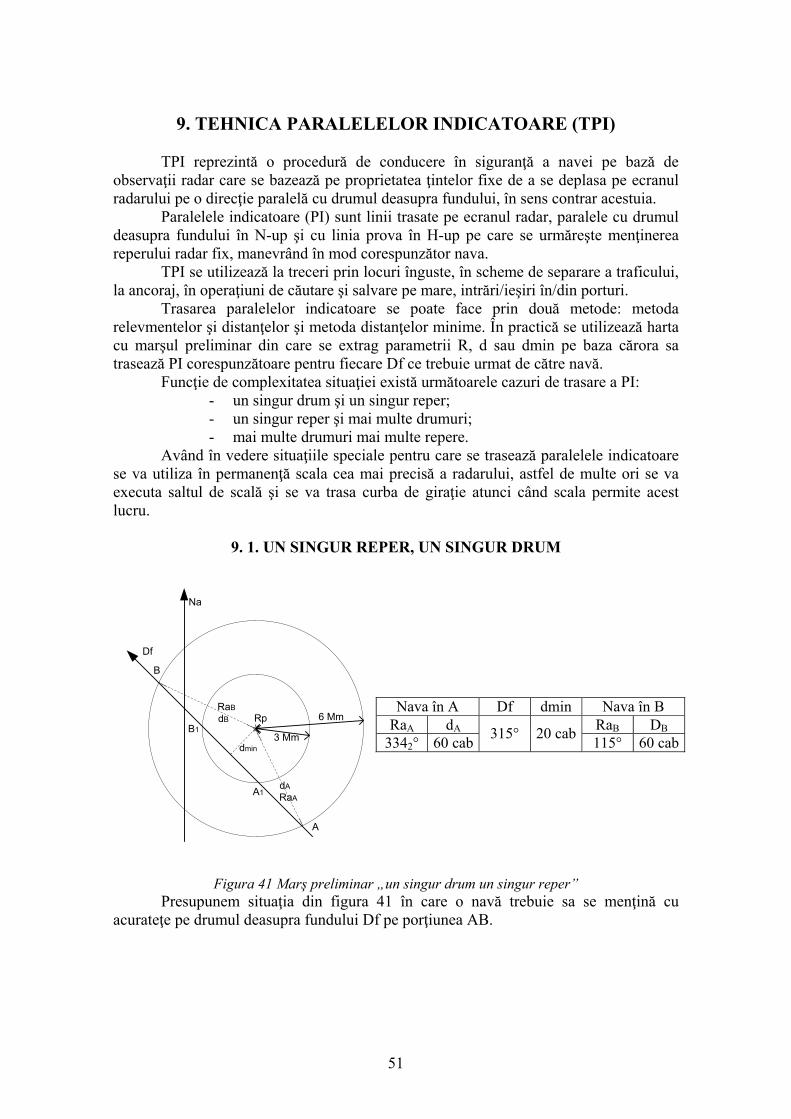
9. 1. UN SINGUR REPER, UN SINGUR DRUM
Na
Df
A
B
Rp
dmin3 Mm
6 Mm
RaA
RaB
dA
dBNava în A Df dmin Nava în B
RaA dA RaB DB 3342° 60 cab 315° 20 cab 115° 60 cab
A1
B1
Figura 41 Marş preliminar „un singur drum un singur reper”
Presupunem situaţia din figura 41 în care o navă trebuie sa se menţină cu acurateţe pe drumul deasupra fundului Df pe porţiunea AB.
52
9. 1. 1. METODA RELEVMENT, DISTANŢĂ ÎN N-UP 20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
Df
B
A
B1`
A`
dmin
dA
RaA
dBRaB
A1
B1
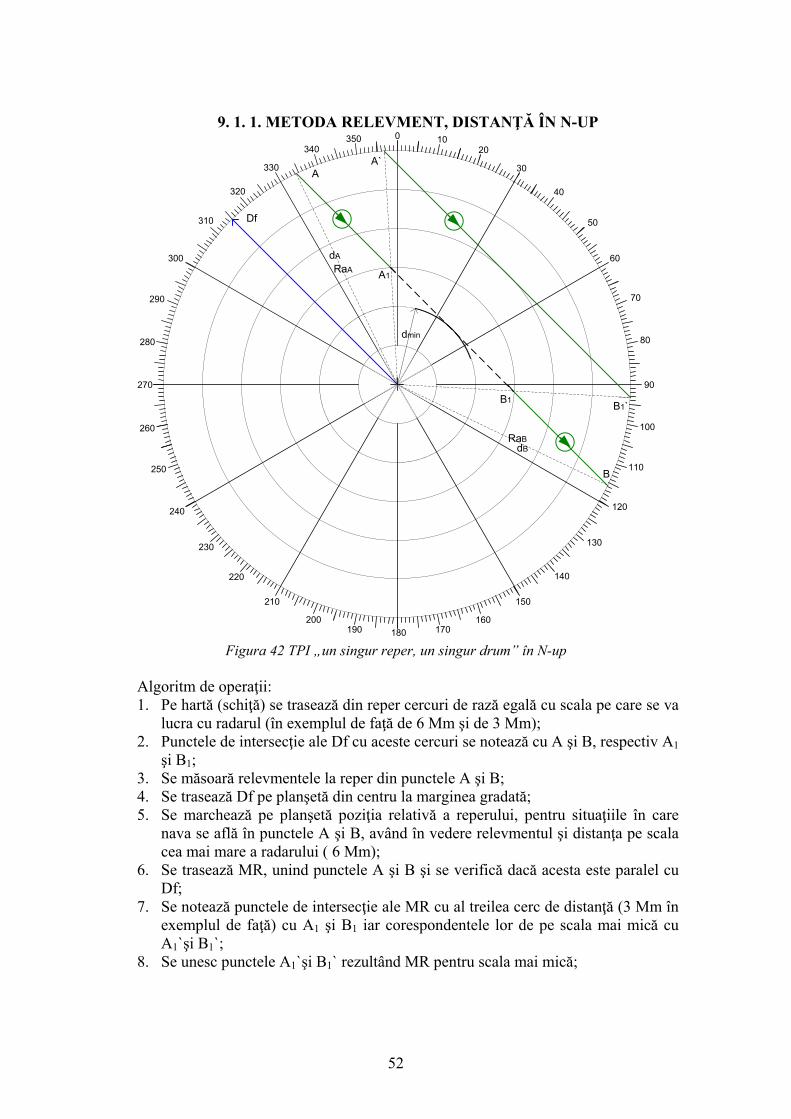
Figura 42 TPI „un singur reper, un singur drum” în N-up
Algoritm de operaţii: 1. Pe hartă (schiţă) se trasează din reper cercuri de rază egală cu scala pe care se va
lucra cu radarul (în exemplul de faţă de 6 Mm şi de 3 Mm); 2. Punctele de intersecţie ale Df cu aceste cercuri se notează cu A şi B, respectiv A1
şi B1; 3. Se măsoară relevmentele la reper din punctele A şi B; 4. Se trasează Df pe planşetă din centru la marginea gradată; 5. Se marchează pe planşetă poziţia relativă a reperului, pentru situaţiile în care
nava se află în punctele A şi B, având în vedere relevmentul şi distanţa pe scala cea mai mare a radarului ( 6 Mm);
6. Se trasează MR, unind punctele A şi B şi se verifică dacă acesta este paralel cu Df;
7. Se notează punctele de intersecţie ale MR cu al treilea cerc de distanţă (3 Mm în exemplul de faţă) cu A1 şi B1 iar corespondentele lor de pe scala mai mică cu A1`şi B1`;
8. Se unesc punctele A1`şi B1` rezultând MR pentru scala mai mică;
53
9. Se trasează cu culoare verde MR ce va fi urmărită de către ofiţerul de cart pe timpul deplasării navei din punctul A în punctul B, astfel din A în A1 pe scala mai mare, din A1` în B1` pe scala mai mică iar din B1 în B tot pe scala mai mare.
9. 1. 2. METODA DISTANŢEI MINIME ÎN N-UP
Algoritm de operaţii: 1. Pe hartă (schiţă) se trasează din reper cercuri de rază egală cu scala pe care se va
lucra cu radarul (în exemplul de faţă de 6 Mm şi de 3 Mm); 2. Punctele de intersecţie ale Df cu aceste cercuri se notează cu A şi B, respectiv A1
şi B1; 3. Se trasează Df pe planşetă din centru la marginea gradată; 4. Se trasează un cerc cu rază dmin din centrul planşetei; 5. Se trasează o paralelă la Df invers acestuia în bordul în care se află reperul,
tangentă la cercul de rază dmin (rezultă MR pe scala cea mai mare – 6 Mm), punctele de intersecţie cu cercul gradat se notează cu A şi B;
6. Pentru saltul de scală, daca este cazul, se notează punctele de intersecţie ale PI cu al treilea cerc de distanţă (3 Mm în exemplul de faţă) cu A1 şi B1 iar corespondentele lor de pe scala mai mică cu A1`şi B1`;
7. Se unesc punctele A1`şi B1` rezultând MR pentru scala mai mică; 8. Se trasează cu culoare verde MR ce va fi urmărită de către ofiţerul de cart pe
timpul deplasării navei din punctul A în punctul B, astfel din A în A1 pe scala mai mare, din A1` în B1` pe scala mai mică iar din B1 în B tot pe scala mai mare.
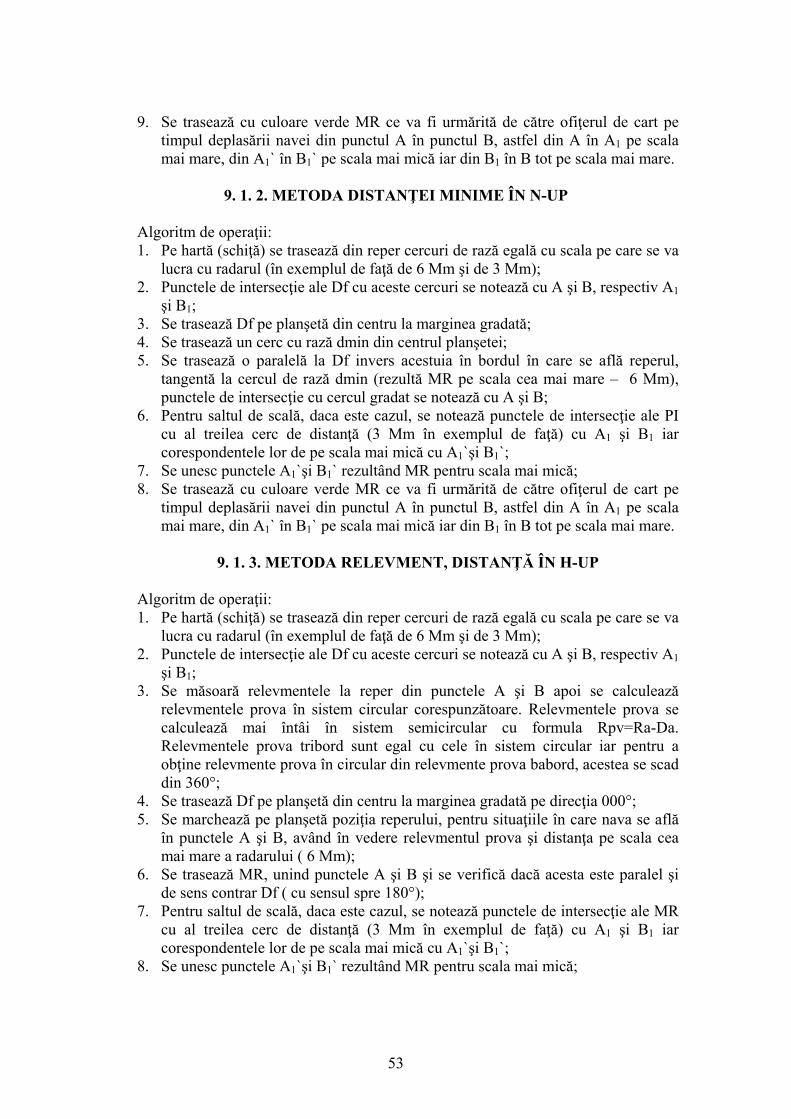
9. 1. 3. METODA RELEVMENT, DISTANŢĂ ÎN H-UP
Algoritm de operaţii: 1. Pe hartă (schiţă) se trasează din reper cercuri de rază egală cu scala pe care se va
lucra cu radarul (în exemplul de faţă de 6 Mm şi de 3 Mm); 2. Punctele de intersecţie ale Df cu aceste cercuri se notează cu A şi B, respectiv A1
şi B1; 3. Se măsoară relevmentele la reper din punctele A şi B apoi se calculează
relevmentele prova în sistem circular corespunzătoare. Relevmentele prova se calculează mai întâi în sistem semicircular cu formula Rpv=Ra-Da. Relevmentele prova tribord sunt egal cu cele în sistem circular iar pentru a obţine relevmente prova în circular din relevmente prova babord, acestea se scad din 360°;
4. Se trasează Df pe planşetă din centru la marginea gradată pe direcţia 000°; 5. Se marchează pe planşetă poziţia reperului, pentru situaţiile în care nava se află
în punctele A şi B, având în vedere relevmentul prova şi distanţa pe scala cea mai mare a radarului ( 6 Mm);
6. Se trasează MR, unind punctele A şi B şi se verifică dacă acesta este paralel şi de sens contrar Df ( cu sensul spre 180°);
7. Pentru saltul de scală, daca este cazul, se notează punctele de intersecţie ale MR cu al treilea cerc de distanţă (3 Mm în exemplul de faţă) cu A1 şi B1 iar corespondentele lor de pe scala mai mică cu A1`şi B1`;
8. Se unesc punctele A1`şi B1` rezultând MR pentru scala mai mică;
54
9. Se trasează cu culoare verde MR ce va fi urmărită de către ofiţerul de cart pe timpul deplasării navei din punctul A în punctul B, astfel din A în A1 pe scala mai mare, din A1` în B1` pe scala mai mică iar din B1 în B tot pe scala mai mare.
Pentru cazul de faţă RaA=334°2; Df=315° rezultă RpvA=019°2 RaB=115°0; Df=315° (115°0 +360°- 315°) rezultă RpvB=160°0
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
DfA
B
A1`
B1`
dmin
RpvAdA
RpvB
dB
A1
B1
Figura 43 TPI „un singur reper, un singur drum” în H-up
9. 1. 4. METODA DISTANŢEI MINIME ÎN H-UP
Algoritm de operaţii: 1. Pe hartă (schiţă) se trasează din reper cercuri de rază egală cu scala pe care se va
lucra cu radarul (în exemplul de faţă de 6 Mm şi de 3 Mm); 2. Punctele de intersecţie ale Df cu aceste cercuri se notează cu A şi B, respectiv A1
şi B1; 3. Se trasează Df pe planşetă din centru la marginea gradată pe direcţia 000°; 4. Se trasează un cerc cu rază dmin din centrul planşetei; 5. Se trasează o paralelă la Df în bordul în care se află reperul, tangentă la cercul de
rază dmin (rezultă MR pe scala cea mai mare – 6 Mm), punctele de intersecţie cu cercul gradat se notează cu A şi B;
55
6. Pentru saltul de scală, dacă este cazul, se notează punctele de intersecţie ale MR cu al treilea cerc de distanţă (3 Mm în exemplul de faţă) cu A1 şi B1 iar corespondentele lor de pe scala mai mică cu A1`şi B1`;
7. Se unesc punctele A1`şi B1` rezultând MR pentru scala mai mică; 8. Se trasează cu culoare verde MR ce va fi urmărită de către ofiţerul de cart pe
timpul deplasării navei din punctul A în punctul B, astfel din A în A1 pe scala mai mare, din A1` în B1` pe scala mai mică iar din B1 în B tot pe scala mai mare.
9. 2. UN SINGUR REPER, MAI MULTE DRUMURI
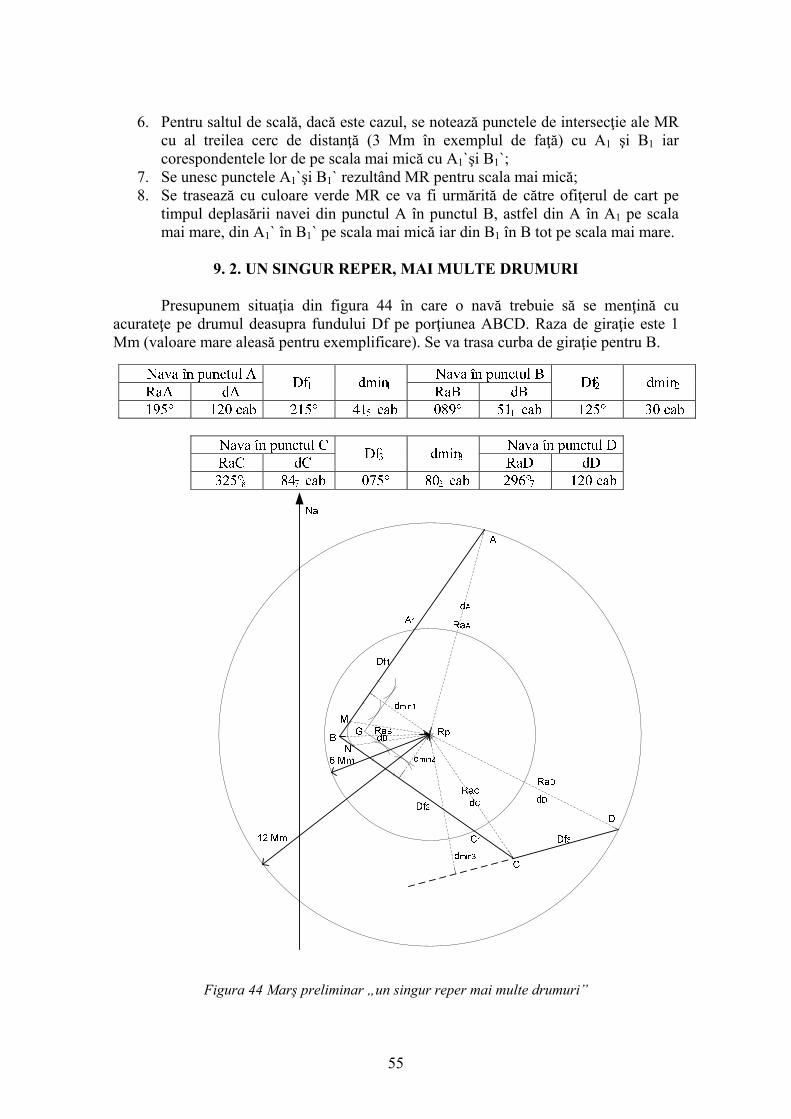
Presupunem situaţia din figura 44 în care o navă trebuie să se menţină cu
acurateţe pe drumul deasupra fundului Df pe porţiunea ABCD. Raza de giraţie este 1 Mm (valoare mare aleasă pentru exemplificare). Se va trasa curba de giraţie pentru B.
Figura 44 Marş preliminar „un singur reper mai multe drumuri”
56
Pentru trasarea curbei de giraţie pe schiţă, hartă sau planşetă se foloseşte următoarea metodă practică: - se trasează două arce de cerc spre interiorul giraţiei având raza egală cu raza de giraţie; - se trasează tangenta la cele două arce de cerc; - se procedează la fel şi pentru drumul final; - la intersecţia celor două tangente se determină centrul giraţiei G; - cu centrul în G se trasează un arc de cerc cu aceeaşi rază care va tangenta drumul iniţial în M şi drumul final în N; - când nava va ajunge în punctul M se va pune cârma în bordul giraţiei iar în punctul N nava va ajunge la noul drum.
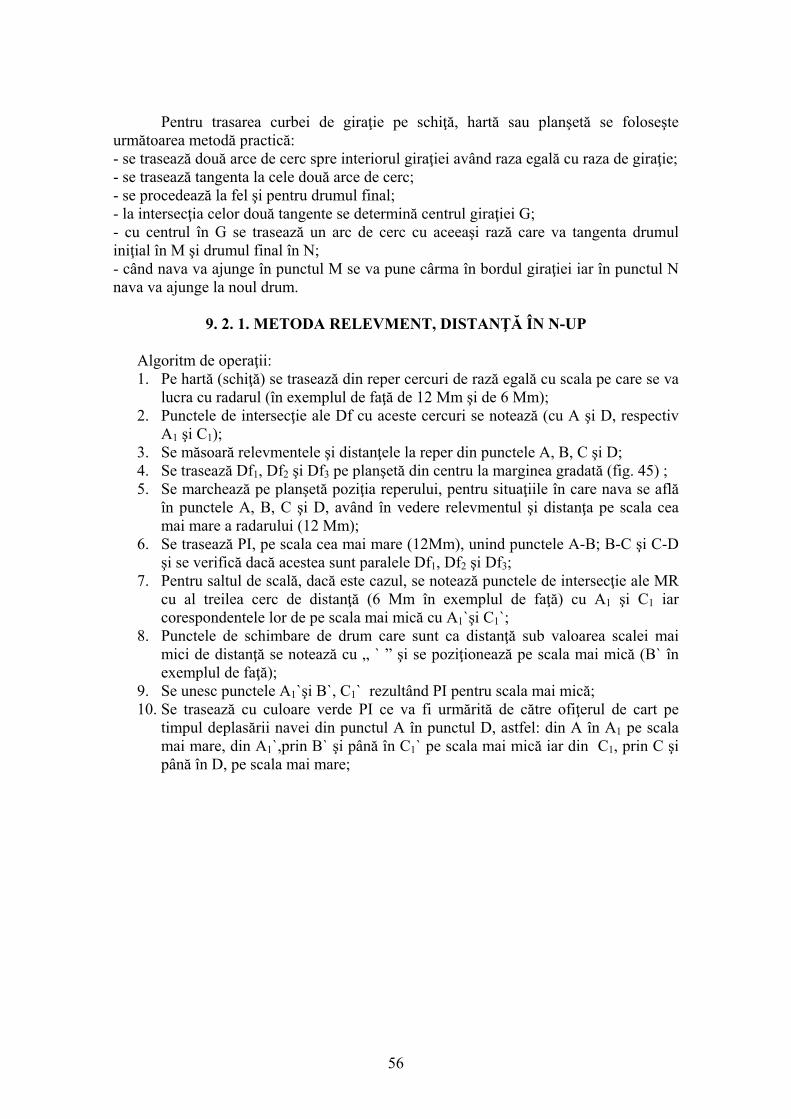
9. 2. 1. METODA RELEVMENT, DISTANŢĂ ÎN N-UP Algoritm de operaţii: 1. Pe hartă (schiţă) se trasează din reper cercuri de rază egală cu scala pe care se va
lucra cu radarul (în exemplul de faţă de 12 Mm şi de 6 Mm); 2. Punctele de intersecţie ale Df cu aceste cercuri se notează (cu A şi D, respectiv
A1 şi C1); 3. Se măsoară relevmentele şi distanţele la reper din punctele A, B, C şi D; 4. Se trasează Df1, Df2 şi Df3 pe planşetă din centru la marginea gradată (fig. 45) ; 5. Se marchează pe planşetă poziţia reperului, pentru situaţiile în care nava se află
în punctele A, B, C şi D, având în vedere relevmentul şi distanţa pe scala cea mai mare a radarului (12 Mm);
6. Se trasează PI, pe scala cea mai mare (12Mm), unind punctele A-B; B-C şi C-D şi se verifică dacă acestea sunt paralele Df1, Df2 şi Df3;
7. Pentru saltul de scală, dacă este cazul, se notează punctele de intersecţie ale MR cu al treilea cerc de distanţă (6 Mm în exemplul de faţă) cu A1 şi C1 iar corespondentele lor de pe scala mai mică cu A1`şi C1`;
8. Punctele de schimbare de drum care sunt ca distanţă sub valoarea scalei mai mici de distanţă se notează cu „ ` ” şi se poziţionează pe scala mai mică (B` în exemplul de faţă);
9. Se unesc punctele A1`şi B`, C1` rezultând PI pentru scala mai mică; 10. Se trasează cu culoare verde PI ce va fi urmărită de către ofiţerul de cart pe
timpul deplasării navei din punctul A în punctul D, astfel: din A în A1 pe scala mai mare, din A1`,prin B` şi până în C1` pe scala mai mică iar din C1, prin C şi până în D, pe scala mai mare;
57
Figura 45 TPI „un singur reper, mai multe drumuri” în N-up
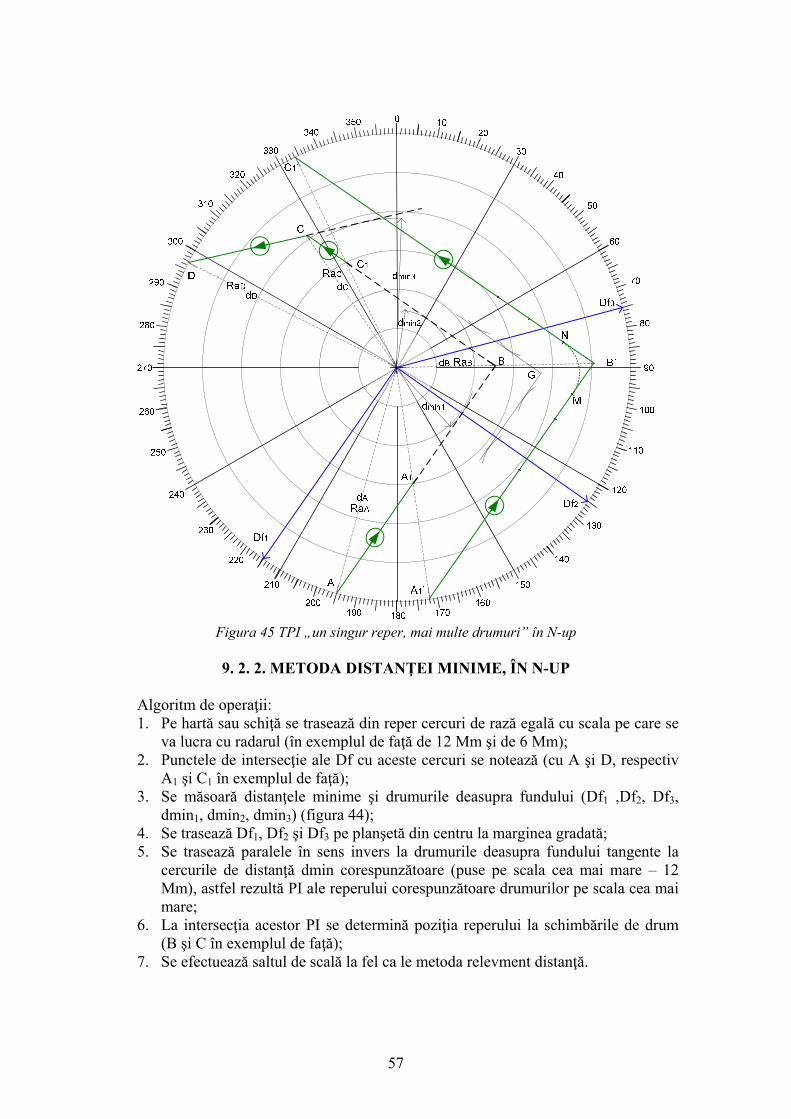
9. 2. 2. METODA DISTANŢEI MINIME, ÎN N-UP
Algoritm de operaţii: 1. Pe hartă sau schiţă se trasează din reper cercuri de rază egală cu scala pe care se
va lucra cu radarul (în exemplul de faţă de 12 Mm şi de 6 Mm); 2. Punctele de intersecţie ale Df cu aceste cercuri se notează (cu A şi D, respectiv
A1 şi C1 în exemplul de faţă); 3. Se măsoară distanţele minime şi drumurile deasupra fundului (Df1 ,Df2, Df3,
dmin1, dmin2, dmin3) (figura 44); 4. Se trasează Df1, Df2 şi Df3 pe planşetă din centru la marginea gradată; 5. Se trasează paralele în sens invers la drumurile deasupra fundului tangente la
cercurile de distanţă dmin corespunzătoare (puse pe scala cea mai mare – 12 Mm), astfel rezultă PI ale reperului corespunzătoare drumurilor pe scala cea mai mare;
6. La intersecţia acestor PI se determină poziţia reperului la schimbările de drum (B şi C în exemplul de faţă);
7. Se efectuează saltul de scală la fel ca le metoda relevment distanţă.
58
9. 2. 3. METODA RELEVMENT, DISTANŢĂ ÎN H-UP
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
A
B
B1
C1
C
C1`
B1`
B`
A1
A1`
D
C2
dC
dCdB
dB
dmin3
Df1Df2Df3
dmin1
dmin2
RpvC
dA
RpvA
RpvB
RpvBRpvC
dD
RpvD
Figura 46 TPI „un singur reper, mai multe drumuri” în H-up
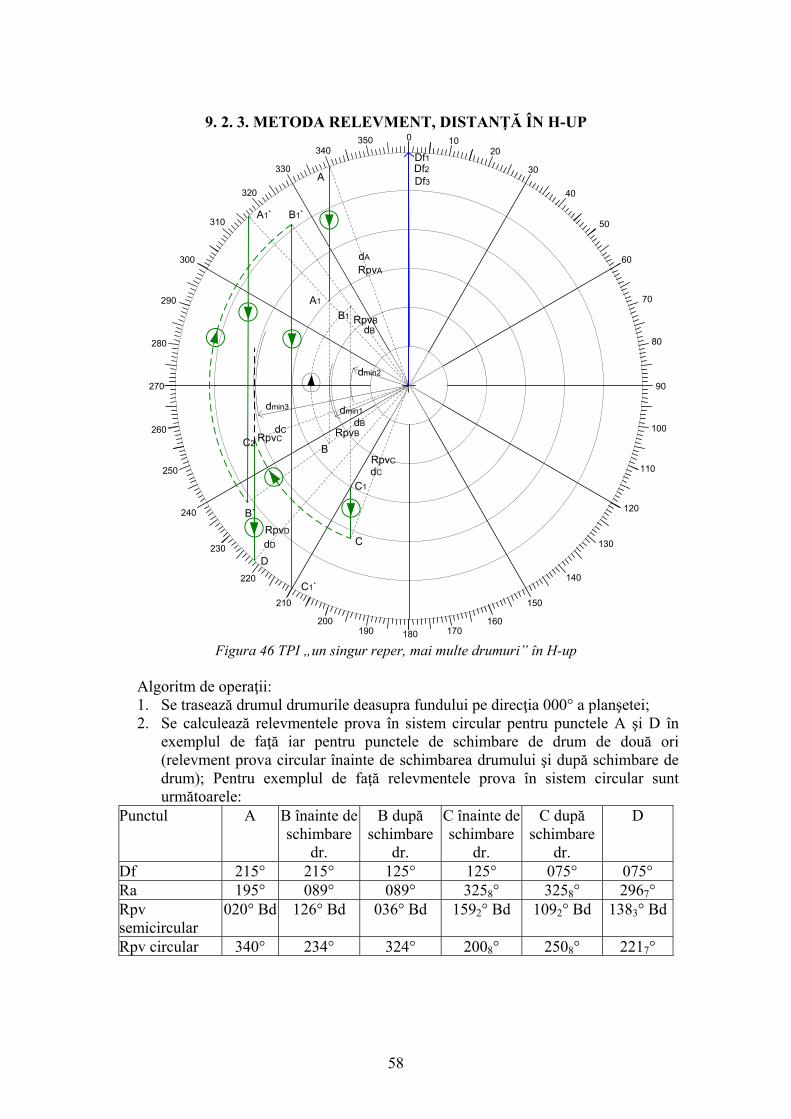
Algoritm de operaţii: 1. Se trasează drumul drumurile deasupra fundului pe direcţia 000° a planşetei; 2. Se calculează relevmentele prova în sistem circular pentru punctele A şi D în
exemplul de faţă iar pentru punctele de schimbare de drum de două ori (relevment prova circular înainte de schimbarea drumului şi după schimbare de drum); Pentru exemplul de faţă relevmentele prova în sistem circular sunt următoarele:
Punctul A B înainte de schimbare
dr.
B după schimbare
dr.
C înainte de schimbare
dr.
C după schimbare
dr.
D
Df 215° 215° 125° 125° 075° 075° Ra 195° 089° 089° 3258° 3258° 2967° Rpv semicircular
020° Bd 126° Bd 036° Bd 1592° Bd 1092° Bd 1383° Bd
Rpv circular 340° 234° 324° 2008° 2508° 2217°
59
3. Se fixează poziţiile punctelor A, B, B1, C, C2, D pe planşetă utilizând distanţele şi relevmentele prova pe scala cea mai mare (12 Mm în exemplul de faţă), unde cu B1 şi C2 se notează poziţia reperului după schimbarea drumului;
4. Se trasează PI pe scala cea mai mare (12 Mm) unind punctele A cu B; B1 cu C şi C2 cu D şi se verifică dacă sunt paralele cu Df;
OBSERVAŢIE: Deoarece imaginea radar este H-up, cât timp nava girează (spre stânga în exemplul de faţă), drumul rămâne pe direcţia 000° a planşetei şi radarului iar reperul se deplasează în sens invers, astfel se modifică relevmentul prova prin modificarea drumului dar relevmentul adevărat şi distanţa rămân constante; 5. Se execută saltul de scală la scala mai mică, pe porţiunea A1C1, unde A1 şi C1
sunt intersecţiile MR cu cel de al treilea cerc de pe planşeta radar; 6. Se trasează cu verde mişcarea relativă urmărită de către ofiţerul de cart pe durata
cât nava se deplasează din punctul A în punctul B pe scalele corespunzătoare (în exemplul de faţă de la A la B1 pe scala de 12 Mm; de la A1` la C1` pe scala de 6 Mm iar de la C1 la D pe scala de 12 Mm);
9. 2. 4. METODA DISTANŢELOR MINIME ÎN H-UP
Algoritm de operaţii: 1. Se trasează arce de cerc având ca rază distanţa minimă în bordul în care se află
reperul în cazul respectiv, pe scala cea mai mare a radarului; 2. Se trasează pe direcţia 180° paralele indicatoare tangente la cercurile de rază
dmin; 3. Poziţiile relative ale reperelor la schimbarea drumului se determină utilizând
distanţele la reper la momentul schimbării de drum prin intersectarea mişcării relative a acestora cu cercuri trasate din centrul planşetei şi rază - distanţa la reper în momentul respectiv. Pentru a se determina care din cele două puncte de intersecţie ale acestor cercuri cu MR este punctul de schimbare de drum trebuie studiată harta şi observat dacă reperul se află în acel moment înaintea traversului sau înapoia lui (de exemplu pentru porţiunea AB, se trasează o tangentă pe direcţia 180° în babord la cercul de rază dmin1; se trasează un arc de cerc cu raza dB din centrul planşetei ce va intersecta mişcarea relativă în două puncte; se observă în hartă (schiţă) că în punctul B reperul se află înapoia traversului, deci se va alege punctul de intersecţie aflat în pupa babord pe planşetă);
4. După ce se trasează paralelele indicatoare pe scala cea mai mare , se efectuează saltul de scală pe porţiunea încadrată în cel de-al treilea cerc de pe planşetă şi se trasează cu verde mişcarea relativă a reperului pe scalele corespunzătoare.
OBSERVAŢIE: Şi în imagine radar H-up se poate trasa curba de giraţie pe planşetă, determinând relevmentele prova în circular şi distanţa din schiţă pentru momentul punerii cârmei şi pentru momentul în care nava revine la noul drum sau pentru metoda distanţelor minime, determinând distanţa corespunzătoare aceloraşi momente. Astfel pe planşetă mişcarea relativă a reperului pe timpul manevrei de schimbare a drumului nu va fi pe arc de cerc ci pe o curbă oarecare, distanţa la momentul ajungerii la noul drum fiind diferită de distanţa în momentul punerii cârmei.
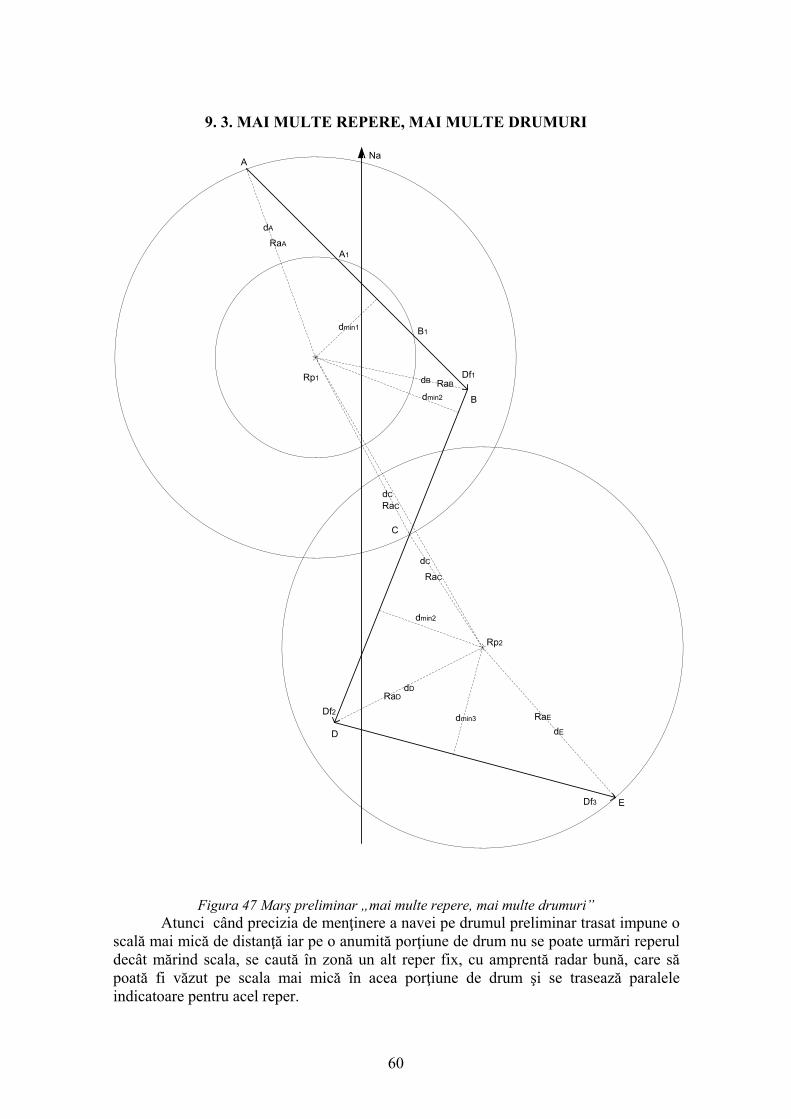
60
9. 3. MAI MULTE REPERE, MAI MULTE DRUMURI
Na
Rp1
Rp2
A
C
D
B
Df1
Df2
Df3
dmin1
dmin2
dmin3
dA
RaA
dB RaB
RaCdC
RaC
dC
dmin2
A1
B1
E
RaDdD
RaE
dE
Figura 47 Marş preliminar „mai multe repere, mai multe drumuri”
Atunci când precizia de menţinere a navei pe drumul preliminar trasat impune o scală mai mică de distanţă iar pe o anumită porţiune de drum nu se poate urmări reperul decât mărind scala, se caută în zonă un alt reper fix, cu amprentă radar bună, care să poată fi văzut pe scala mai mică în acea porţiune de drum şi se trasează paralele indicatoare pentru acel reper.
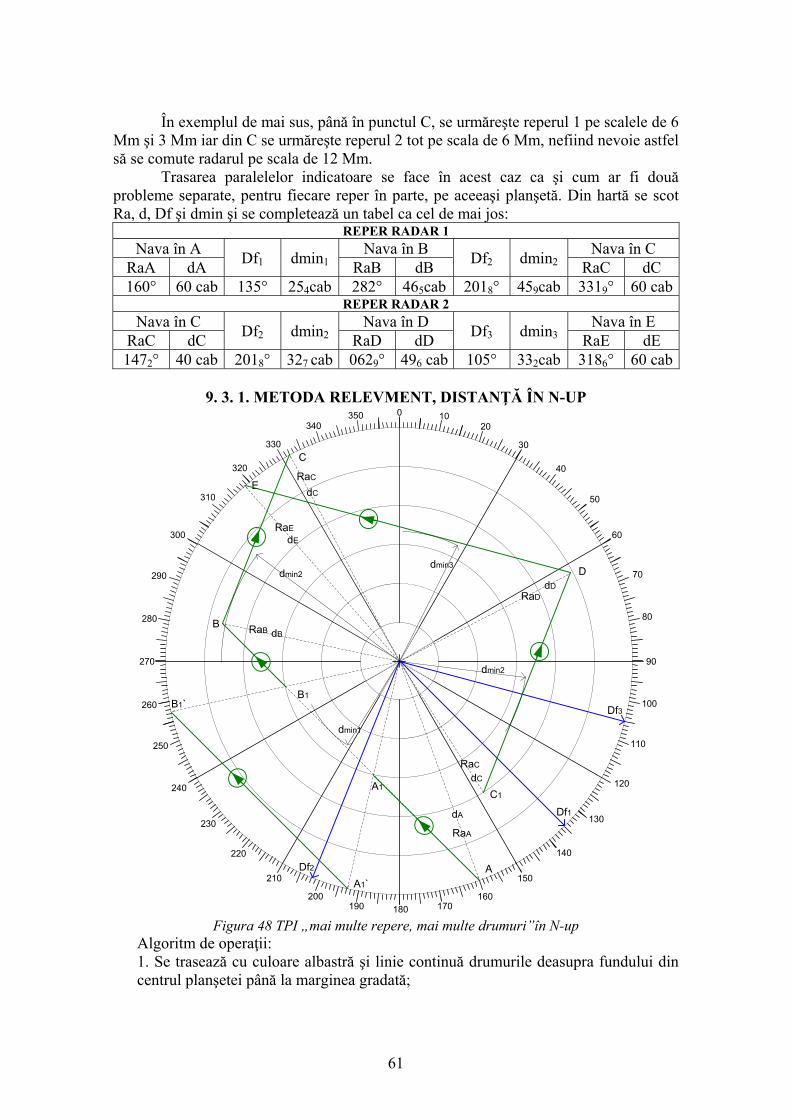
61
În exemplul de mai sus, până în punctul C, se urmăreşte reperul 1 pe scalele de 6 Mm şi 3 Mm iar din C se urmăreşte reperul 2 tot pe scala de 6 Mm, nefiind nevoie astfel să se comute radarul pe scala de 12 Mm. Trasarea paralelelor indicatoare se face în acest caz ca şi cum ar fi două probleme separate, pentru fiecare reper în parte, pe aceeaşi planşetă. Din hartă se scot Ra, d, Df şi dmin şi se completează un tabel ca cel de mai jos:
REPER RADAR 1 Nava în A Df1 dmin1
Nava în B Df2 dmin2 Nava în C
RaA dA RaB dB RaC dC 160° 60 cab 135° 254cab 282° 465cab 2018° 459cab 3319° 60 cab
REPER RADAR 2 Nava în C Df2 dmin2
Nava în D Df3 dmin3 Nava în E
RaC dC RaD dD RaE dE 1472° 40 cab 2018° 327 cab 0629° 496 cab 105° 332cab 3186° 60 cab
9. 3. 1. METODA RELEVMENT, DISTANŢĂ ÎN N-UP
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
Df1
Df2
Df3
A
A1
B1
A1`
B1`
B
C
C1
D
E
dmin3
dmin2
dmin2
dmin1
RaA
dA
RaB dB
RaC
dC
RaC
dC
RaDdD
RaEdE
Figura 48 TPI „mai multe repere, mai multe drumuri”în N-up
Algoritm de operaţii: 1. Se trasează cu culoare albastră şi linie continuă drumurile deasupra fundului din centrul planşetei până la marginea gradată;
62
2. Funcţie de valorile R şi d din tabel se fixează pe planşetă poziţiile punctelor A, B şi C faţă de reperul 1; C, D şi E faţă de reperul 2; 3. Se trasează paralelele indicatoare pentru scala mai mare (6 Mm), unind punctele A cu B şi B cu C pentru reperul 1 şi C cu D şi D cu E pentru reperul 2; 4. Se verifică dacă segmentele trasate sunt paralele cu Df corespunzătoare; 5. Pe porţiunea AB se face saltul de scală între A1şi B1; 6. Cu culoare verde se trasează PI ce vor fi urmărite de către ofiţerul de cart pe timpul deplasării navei din punctul A în punctul E, astfel: - din A în A1 la Rp1, pe scala de 6 Mm; - din A1` în B1` la Rp1 pe scala de 3 Mm; - din B1 în C la Rp1 pe scala de 6 Mm; - din C (fixat faţă de Rp2) în D la Rp2 pe scala de 6 Mm; - din D în E la Rp2 pe scala de 6 Mm.
9. 3. 2. METODA DISTANŢEI MINIME ÎN N-UP
Algoritm de operaţii: 1. Se trasează cu culoare albastră şi linie continuă drumurile deasupra fundului din
centrul planşetei până la marginea gradată; 2. În bordul în care se află reperul se trasează arce de cerc de valoare dmin (pentru
scala cea mai mare) şi paralele la Df corespunzătoare, tangente la aceste arce de cerc, mai întâi faţă de Rp1 şi apoi faţă de Rp2;
3. La intersecţia MR cu cercul gradat al planşetei rezultă punctele A, şi C la Rp1 şi D la Rp2;
4. La intersecţia paralelelor la Df1 şi Df2 (trasat la dmin2 faţă de Rp1) rezultă punctul B iar la intersecţia paralelei la Df2 (trasat la dmin2 faţă de Rp2) cu paralela la Df3 rezultă punctul D;
5. Saltul de scală şi trasarea de culoare verde a PI urmărite de către ofiţerul de cart se face la fel ca la metoda relevmentelor şi distanţelor.
9. 3. 3. METODA RELEVMENT, DISTANŢĂ ÎN H-UP
Algoritm de operaţii: 1. Se trasează cu culoare albastră şi linie continuă drumurile deasupra fundului pe
direcţia 000° a planşetei; 2. Se calculează relevmentele prova în sistem circular pentru poziţia navei în
punctele A, B, C faţă de reperul 1; C, D, E faţă de reperul 2. În punctele B şi D se calculează relevmentele prova şi înainte şi după schimbarea drumului.
3. Se fixează poziţia reperelor pe planşetă, cu ajutorul relevmentului prova şi distanţei pentru toate punctele calculate, apoi se trasează PI mai întâi pe scala cea mai mare a radarului (6 Mm);
4. Se face saltul de scală la scala mai mică (3 Mm) pe porţiunea de PI ce intersectează cercul al treilea de pe planşetă – distanţa la reper se încadrează în scala mai mică (în exemplul de faţă pe porţiunea A1B1);
5. Se trasează cu culoare verde mişcarea relativă a celor două repere pe scalele la care se va utiliza radarul pe porţiunea de drum de la A la E (pentru exemplul de faţă de la A la A1 pe scala de 6 Mm, de la A1` la B1` pe 3 Mm iar de la B1 până la E pe scala de 6 Mm);
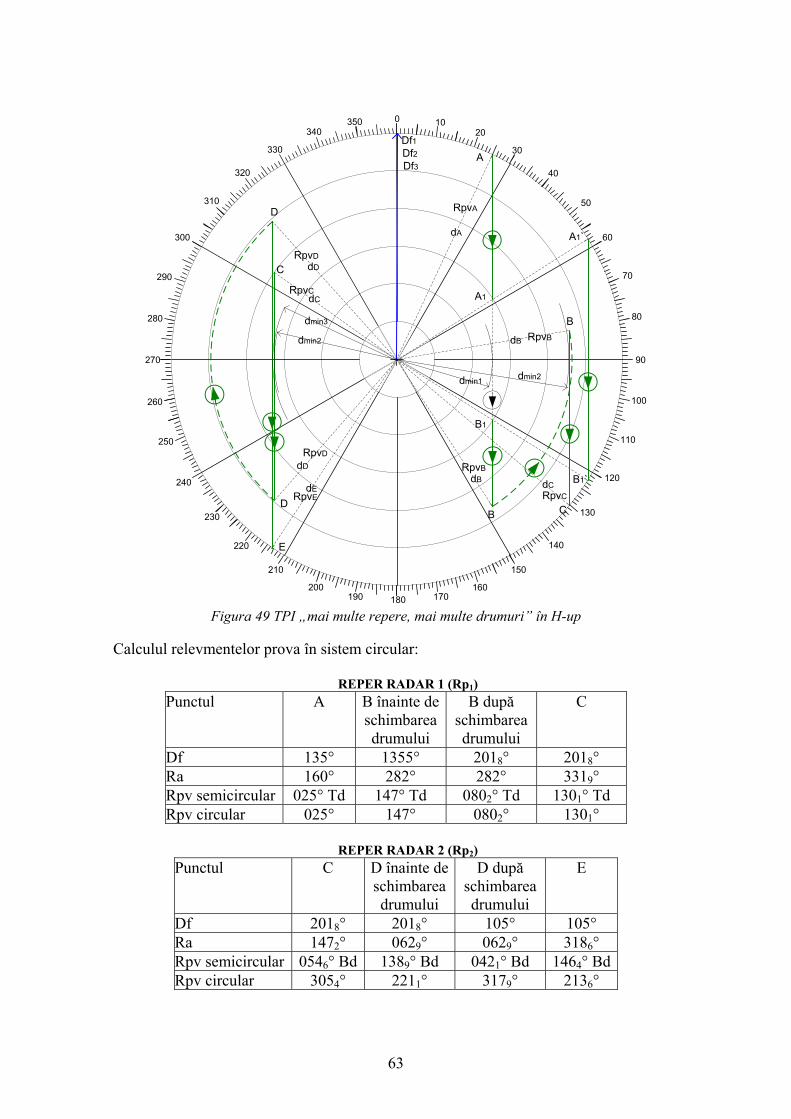
63
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0 10
Df1Df2Df3
A
B
A1
A1`
B1`
B1
dmin1
RpvBdB
RpvA
dA
BRpvBdB
C
dmin2
RpvCdC
E
D
D
C
dmin2
dmin3
RpvEdE
dDRpvD
RpvDdD
RpvCdC
Figura 49 TPI „mai multe repere, mai multe drumuri” în H-up
Calculul relevmentelor prova în sistem circular:
REPER RADAR 1 (Rp1) Punctul A B înainte de
schimbarea drumului
B după schimbarea drumului
C
Df 135° 1355° 2018° 2018° Ra 160° 282° 282° 3319° Rpv semicircular 025° Td 147° Td 0802° Td 1301° Td Rpv circular 025° 147° 0802° 1301°
REPER RADAR 2 (Rp2)
Punctul C D înainte de schimbarea drumului
D după schimbarea drumului
E
Df 2018° 2018° 105° 105° Ra 1472° 0629° 0629° 3186° Rpv semicircular 0546° Bd 1389° Bd 0421° Bd 1464° Bd Rpv circular 3054° 2211° 3179° 2136°
64
9. 3. 4. METODA DISTANŢELOR MINIME ÎN H-UP Algoritm de operaţii: 1. Se trasează cu culoare albastră şi linie continuă drumurile deasupra fundului pe
direcţia 000° a planşetei; 2. În bordul în care se află reperul se trasează arce de cerc cu raza dmin (pentru
scala cea mai mare) şi paralele la Df, tangente la aceste arce de cerc, mai întâi faţă de Rp1 şi apoi faţă de Rp2;
3. La intersecţia PI cu cercul gradat al planşetei rezultă punctele A, şi C la Rp1 şi D la Rp2;
4. Pentru determinarea punctelor B şi D înainte şi după schimbarea drumului se intersectează paralelele la Df cu arce de cerc de valoare dB şi dC, şi se alege punctul de intersecţie corespunzător în funcţie de poziţia pe hartă a reperului în momentul respectiv: înaintea sau înapoia traversului;
5. Punctul C faţă de Rp2 se fixează intersectând arcul de cerc de rază dC cu paralela la Df tangentă la cercul de rază dmin2, în bordul babord şi se alege punctul de intersecţie aflat înaintea traversului navei proprii (în conformitate cu harta);
6. Se trasează apoi paralelele indicatoare pentru scala cea mai mare (6 Mm), astfel: - din A până în B înainte de schimbarea drumului faţă de Rp1; - din B după schimbarea drumului până în C faţă de Rp1; - din C până în D înainte de schimbarea drumului faţă de Rp2; - din D după schimbarea drumului până în E faţă de Rp2;
7. Saltul de scală şi trasarea cu culoare verde a PI urmărite de către ofiţerul de cart se face la fel ca la metoda relevmentelor şi distanţelor.
65
10. RADARUL ATA TIP JMA-5310-6
Configuraţia sistemului radar prezentat în acest capitol este următoarea: - Unitate centrală: JRC JMA-5310-6; - Antenă: NKE-2100; - Bloc ATA: NCA-877; - Bloc AIS: NQA-4230; - Display: NCD-4510; - Procesor: NDC-1273.
10. 1. ELEMENTE ŞI FUNCŢII ALE IMAGINII RADAR
1. Mărirea, micşorarea scalei de distanţă (între 0,125 Mm şi 96 Mm). 2. Se afişează distanţa între cercurile fixe.
3. Setarea lungimii impulsului: [SP] – scurt - pentru scalele mici de distanţe, [MP] - mediu - pentru scalele medii, [LP] – lung - pentru scalele mari.
4.
Setarea radarului pe mişcare reală [TM] sau pe mişcare relativă [RM]. Pe mişcare reală poziţia navei proprii se mişca din centrul ecranului la 66% din raza cercului azimutal înspre înapoi astfel încât să fie vizibilă o distanţă cât mai mare în prova.
5. Setarea tipului de imagine radar (N-up, C-up sau H-up). Când se setează imagine radar H-up, radarul trebuie să fie pe mişcare relativă.
6. Indicator emisie antenă [TRANSMIT], încălzire [PREHEAT] sau în aşteptare [STANDBY]
7. Selectarea lungimii de undă a purtătoarei [X-BAND] - 9 Ghz - pentru scalele mari sau [S-BAND] - 3 Ghz - pentru scalele mici. Aceasta este în funcţie de tipul de antenă. Acest tip de radar este dotat cu antenă pentru [X-BAND].
8. Selectarea conexiuni cu antenele (dacă sunt mai multe antene se indică antena utilizată).
9. Funcţia [ZOOM] (dublează scala de distanţe mutând poziţia navei proprii din centrul ecranului spre înapoi). Se activează funcţia [ZOOM], se mută cursorul în poziţia dorită pentru mărirea imaginii, apoi se apasă tasta [ENT]
10. Afişarea tipului de interferenţă [IR 1] – [IR OFF] folosit pentru detectarea obiectelor mici; [IR 2] – [IR LOW]; [IR 3] – [IR MEDIUM]; [IR 4] – [IR HIGH] - atunci când nu este necesară detectarea obiectelor foarte mici.
11. Indică expandarea ţintelor [ENH OFF] - când nu se realizează expandare – pentru rezoluţie bună [ENH LEVEL 1]; [ENH LEVEL 2]; [ENH LEVEL 3] - pentru vizualizarea obiectelor mici.
12.
Procesarea video a ţintelor: [PROC OFF] - fără procesare video; [3SCAN CORR] - când apar recepţii parazitarea datorate ploii sau ninsorii; [4SCAN CORR] - pentru iluminarea suplimentară a ţintelor atunci când apar reflexii parazite; [5SCAN CORR] - pentru ţintele mici ascunse de reflexii parazite; [REMAIN] - când ambardeea este puternică; [PEAK HOLD] - pentru vizualizarea ţintelor mici cu probabilitate mică de detecţie.
13.
Indică aplicarea unor funcţii speciale în setarea radarului: [FUNC OFF] - nici o funcţie specială nu este aplicată; [FUNC1] – [COAST] - pentru distanţe scurte; [FUNC2] – [DEEP SEA] - pentru navigaţie oceanică; [FUNC3] – [FISH NET] - pentru obiecte mici; [FUNC4] – [STROM] pentru condiţii meteo grele.
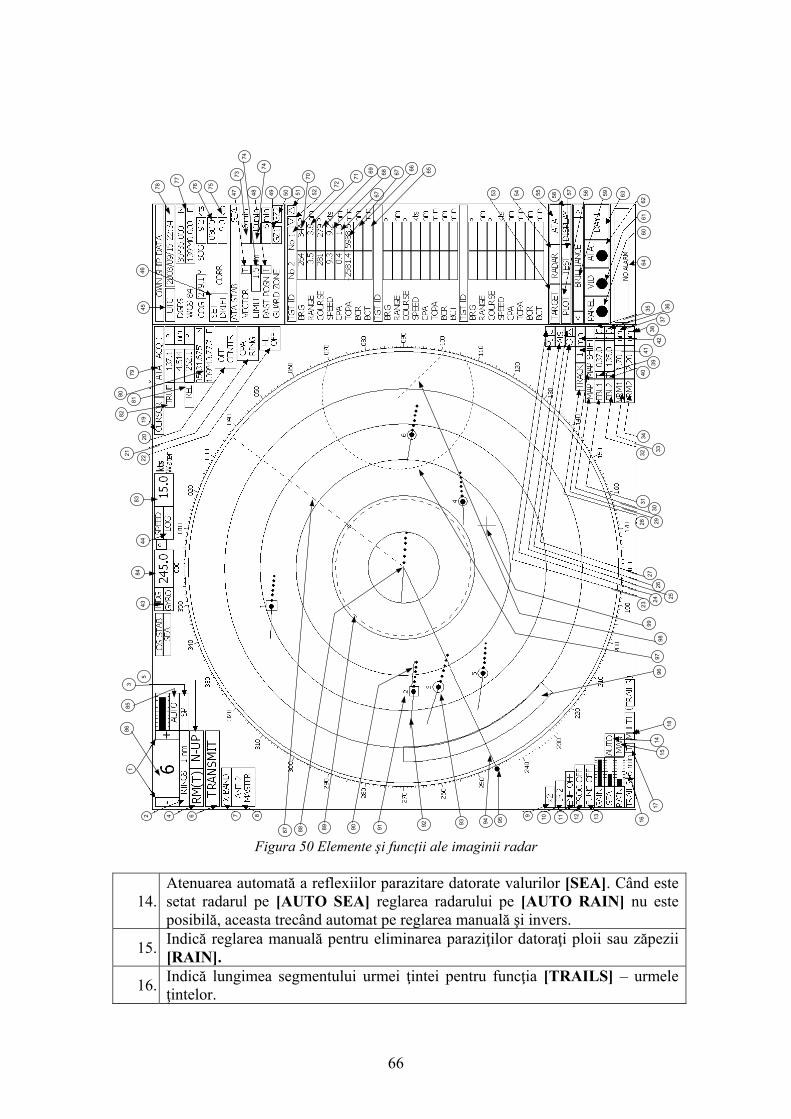
66
1
2 4 6 87 9 10 11 12 13 16
1715
14
18
23
24 25
2627
28 2930
3132
33
3440
3941
4238
373635
6460
6162
6359565758555453525150494847
1920
22
21
4645
4443
5
3
6566
67686973
74
7576
77
78
79
80
81
82
8384
8586
87 88 89 90 91 92 93 94 95
9697
98
99
67
70 71
72
74
Figura 50 Elemente şi funcţii ale imaginii radar
14. Atenuarea automată a reflexiilor parazitare datorate valurilor [SEA]. Când este setat radarul pe [AUTO SEA] reglarea radarului pe [AUTO RAIN] nu este posibilă, aceasta trecând automat pe reglarea manuală şi invers.
15. Indică reglarea manuală pentru eliminarea paraziţilor datoraţi ploii sau zăpezii [RAIN].
16. Indică lungimea segmentului urmei ţintei pentru funcţia [TRAILS] – urmele ţintelor.
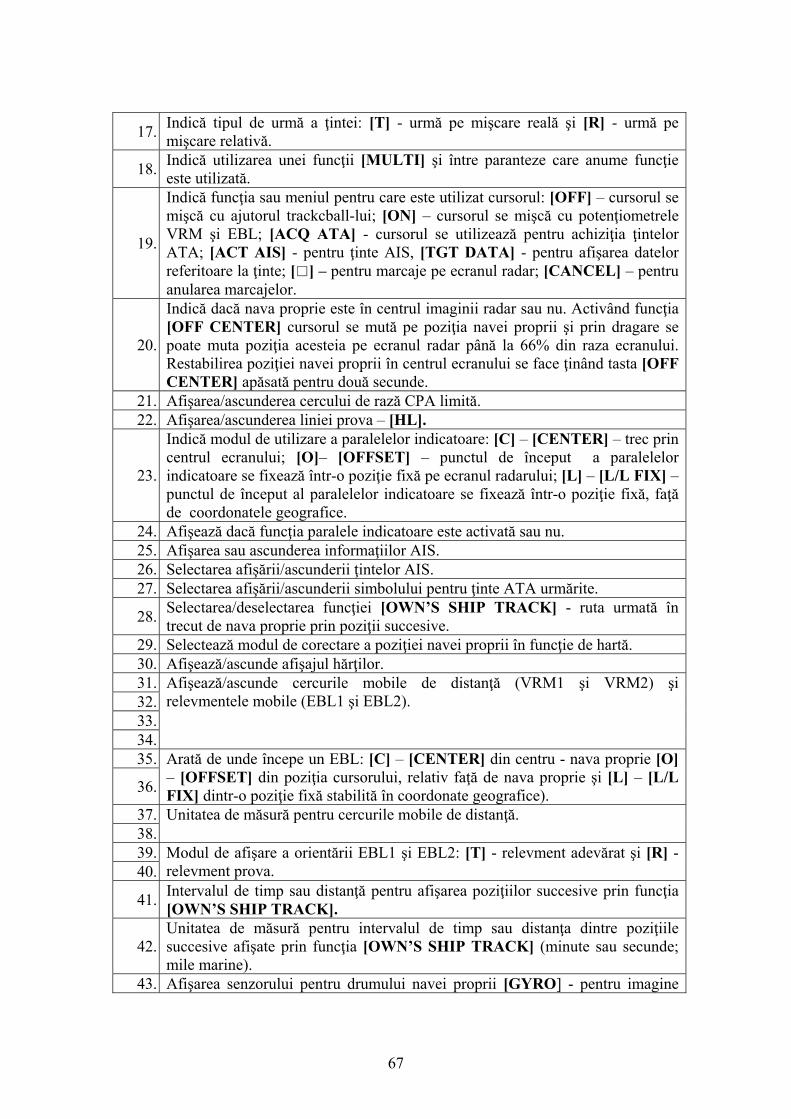
67
17. Indică tipul de urmă a ţintei: [T] - urmă pe mişcare reală şi [R] - urmă pe mişcare relativă.
18. Indică utilizarea unei funcţii [MULTI] şi între paranteze care anume funcţie este utilizată.
19.
Indică funcţia sau meniul pentru care este utilizat cursorul: [OFF] – cursorul se mişcă cu ajutorul trackcball-lui; [ON] – cursorul se mişcă cu potenţiometrele VRM şi EBL; [ACQ ATA] - cursorul se utilizează pentru achiziţia ţintelor ATA; [ACT AIS] - pentru ţinte AIS, [TGT DATA] - pentru afişarea datelor referitoare la ţinte; [□] – pentru marcaje pe ecranul radar; [CANCEL] – pentru anularea marcajelor.
20.
Indică dacă nava proprie este în centrul imaginii radar sau nu. Activând funcţia [OFF CENTER] cursorul se mută pe poziţia navei proprii şi prin dragare se poate muta poziţia acesteia pe ecranul radar până la 66% din raza ecranului. Restabilirea poziţiei navei proprii în centrul ecranului se face ţinând tasta [OFF CENTER] apăsată pentru două secunde.
21. Afişarea/ascunderea cercului de rază CPA limită. 22. Afişarea/ascunderea liniei prova – [HL].
23.
Indică modul de utilizare a paralelelor indicatoare: [C] – [CENTER] – trec prin centrul ecranului; [O]– [OFFSET] – punctul de început a paralelelor indicatoare se fixează într-o poziţie fixă pe ecranul radarului; [L] – [L/L FIX] – punctul de început al paralelelor indicatoare se fixează într-o poziţie fixă, faţă de coordonatele geografice.
24. Afişează dacă funcţia paralele indicatoare este activată sau nu. 25. Afişarea sau ascunderea informaţiilor AIS. 26. Selectarea afişării/ascunderii ţintelor AIS. 27. Selectarea afişării/ascunderii simbolului pentru ţinte ATA urmărite.
28. Selectarea/deselectarea funcţiei [OWN’S SHIP TRACK] - ruta urmată în trecut de nava proprie prin poziţii succesive.
29. Selectează modul de corectare a poziţiei navei proprii în funcţie de hartă. 30. Afişează/ascunde afişajul hărţilor. 31. Afişează/ascunde cercurile mobile de distanţă (VRM1 şi VRM2) şi
relevmentele mobile (EBL1 şi EBL2). 32. 33. 34. 35. Arată de unde începe un EBL: [C] – [CENTER] din centru - nava proprie [O]
– [OFFSET] din poziţia cursorului, relativ faţă de nava proprie şi [L] – [L/L FIX] dintr-o poziţie fixă stabilită în coordonate geografice). 36.
37. Unitatea de măsură pentru cercurile mobile de distanţă. 38. 39. Modul de afişare a orientării EBL1 şi EBL2: [T] - relevment adevărat şi [R] -
relevment prova. 40.
41. Intervalul de timp sau distanţă pentru afişarea poziţiilor succesive prin funcţia [OWN’S SHIP TRACK].
42. Unitatea de măsură pentru intervalul de timp sau distanţa dintre poziţiile succesive afişate prin funcţia [OWN’S SHIP TRACK] (minute sau secunde; mile marine).
43. Afişarea senzorului pentru drumului navei proprii [GYRO] - pentru imagine
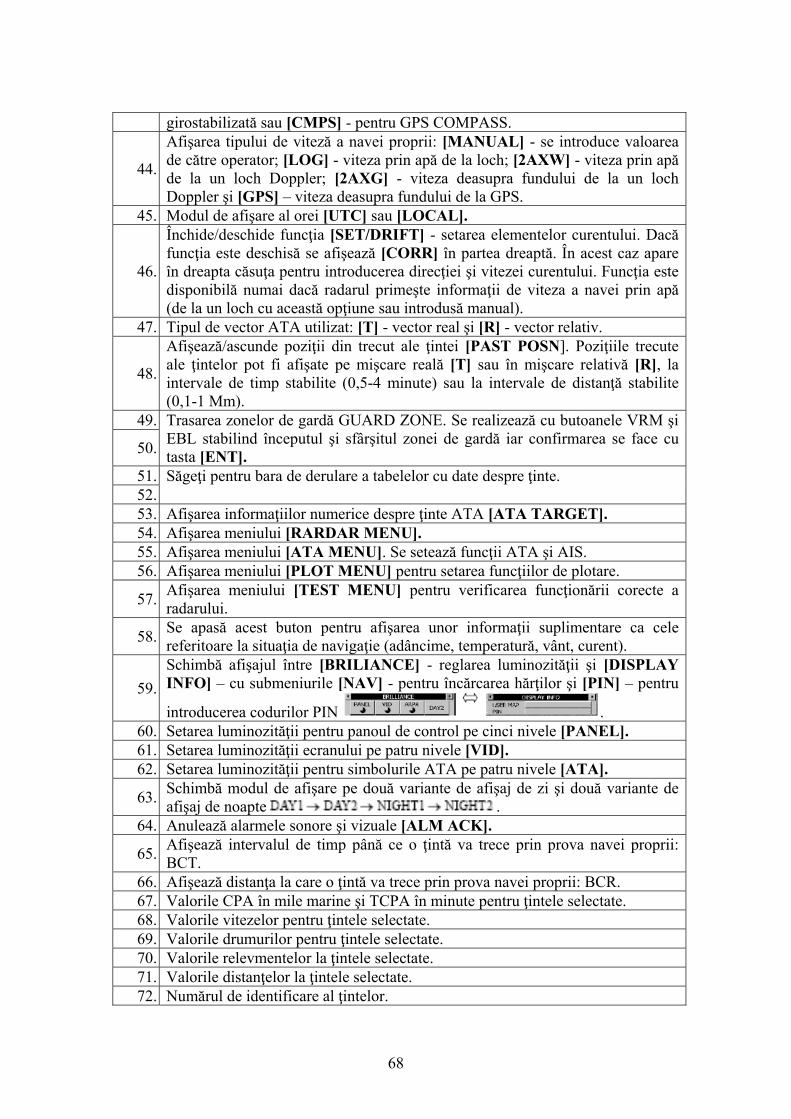
68
girostabilizată sau [CMPS] - pentru GPS COMPASS.
44.
Afişarea tipului de viteză a navei proprii: [MANUAL] - se introduce valoarea de către operator; [LOG] - viteza prin apă de la loch; [2AXW] - viteza prin apă de la un loch Doppler; [2AXG] - viteza deasupra fundului de la un loch Doppler şi [GPS] – viteza deasupra fundului de la GPS.
45. Modul de afişare al orei [UTC] sau [LOCAL].
46.
Închide/deschide funcţia [SET/DRIFT] - setarea elementelor curentului. Dacă funcţia este deschisă se afişează [CORR] în partea dreaptă. În acest caz apare în dreapta căsuţa pentru introducerea direcţiei şi vitezei curentului. Funcţia este disponibilă numai dacă radarul primeşte informaţii de viteza a navei prin apă (de la un loch cu această opţiune sau introdusă manual).
47. Tipul de vector ATA utilizat: [T] - vector real şi [R] - vector relativ.
48.
Afişează/ascunde poziţii din trecut ale ţintei [PAST POSN]. Poziţiile trecute ale ţintelor pot fi afişate pe mişcare reală [T] sau în mişcare relativă [R], la intervale de timp stabilite (0,5-4 minute) sau la intervale de distanţă stabilite (0,1-1 Mm).
49. Trasarea zonelor de gardă GUARD ZONE. Se realizează cu butoanele VRM şi EBL stabilind începutul şi sfârşitul zonei de gardă iar confirmarea se face cu tasta [ENT]. 50.
51. Săgeţi pentru bara de derulare a tabelelor cu date despre ţinte. 52. 53. Afişarea informaţiilor numerice despre ţinte ATA [ATA TARGET]. 54. Afişarea meniului [RARDAR MENU]. 55. Afişarea meniului [ATA MENU]. Se setează funcţii ATA şi AIS. 56. Afişarea meniului [PLOT MENU] pentru setarea funcţiilor de plotare.
57. Afişarea meniului [TEST MENU] pentru verificarea funcţionării corecte a radarului.
58. Se apasă acest buton pentru afişarea unor informaţii suplimentare ca cele referitoare la situaţia de navigaţie (adâncime, temperatură, vânt, curent).
59. Schimbă afişajul între [BRILIANCE] - reglarea luminozităţii şi [DISPLAY INFO] – cu submeniurile [NAV] - pentru încărcarea hărţilor şi [PIN] – pentru
introducerea codurilor PIN . 60. Setarea luminozităţii pentru panoul de control pe cinci nivele [PANEL]. 61. Setarea luminozităţii ecranului pe patru nivele [VID]. 62. Setarea luminozităţii pentru simbolurile ATA pe patru nivele [ATA].
63. Schimbă modul de afişare pe două variante de afişaj de zi şi două variante de afişaj de noapte .
64. Anulează alarmele sonore şi vizuale [ALM ACK].
65. Afişează intervalul de timp până ce o ţintă va trece prin prova navei proprii: BCT.
66. Afişează distanţa la care o ţintă va trece prin prova navei proprii: BCR. 67. Valorile CPA în mile marine şi TCPA în minute pentru ţintele selectate. 68. Valorile vitezelor pentru ţintele selectate. 69. Valorile drumurilor pentru ţintele selectate. 70. Valorile relevmentelor la ţintele selectate. 71. Valorile distanţelor la ţintele selectate. 72. Numărul de identificare al ţintelor.
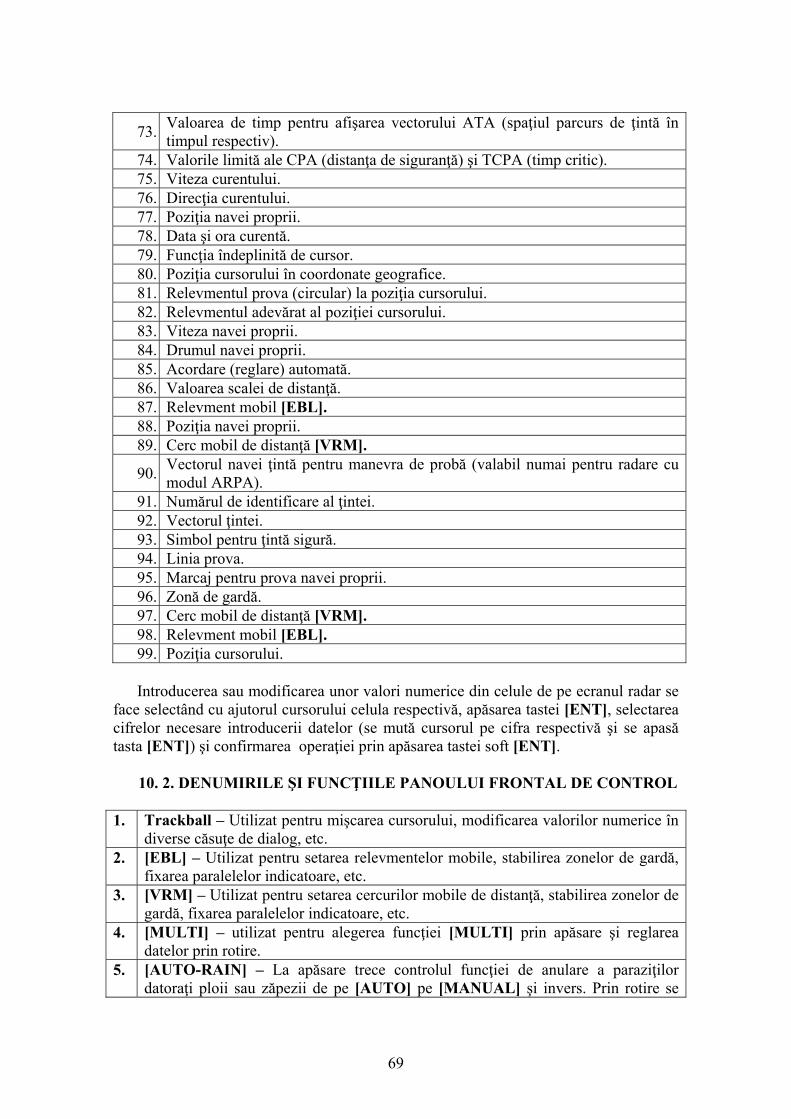
69
73. Valoarea de timp pentru afişarea vectorului ATA (spaţiul parcurs de ţintă în timpul respectiv).
74. Valorile limită ale CPA (distanţa de siguranţă) şi TCPA (timp critic). 75. Viteza curentului. 76. Direcţia curentului. 77. Poziţia navei proprii. 78. Data şi ora curentă. 79. Funcţia îndeplinită de cursor. 80. Poziţia cursorului în coordonate geografice. 81. Relevmentul prova (circular) la poziţia cursorului. 82. Relevmentul adevărat al poziţiei cursorului. 83. Viteza navei proprii. 84. Drumul navei proprii. 85. Acordare (reglare) automată. 86. Valoarea scalei de distanţă. 87. Relevment mobil [EBL]. 88. Poziţia navei proprii. 89. Cerc mobil de distanţă [VRM].
90. Vectorul navei ţintă pentru manevra de probă (valabil numai pentru radare cu modul ARPA).
91. Numărul de identificare al ţintei. 92. Vectorul ţintei. 93. Simbol pentru ţintă sigură. 94. Linia prova. 95. Marcaj pentru prova navei proprii. 96. Zonă de gardă. 97. Cerc mobil de distanţă [VRM]. 98. Relevment mobil [EBL]. 99. Poziţia cursorului. Introducerea sau modificarea unor valori numerice din celule de pe ecranul radar se
face selectând cu ajutorul cursorului celula respectivă, apăsarea tastei [ENT], selectarea cifrelor necesare introducerii datelor (se mută cursorul pe cifra respectivă şi se apasă tasta [ENT]) şi confirmarea operaţiei prin apăsarea tastei soft [ENT].
10. 2. DENUMIRILE ŞI FUNCŢIILE PANOULUI FRONTAL DE CONTROL
1. Trackball – Utilizat pentru mişcarea cursorului, modificarea valorilor numerice în
diverse căsuţe de dialog, etc. 2. [EBL] – Utilizat pentru setarea relevmentelor mobile, stabilirea zonelor de gardă,
fixarea paralelelor indicatoare, etc. 3. [VRM] – Utilizat pentru setarea cercurilor mobile de distanţă, stabilirea zonelor de
gardă, fixarea paralelelor indicatoare, etc. 4. [MULTI] – utilizat pentru alegerea funcţiei [MULTI] prin apăsare şi reglarea
datelor prin rotire. 5. [AUTO-RAIN] – La apăsare trece controlul funcţiei de anulare a paraziţilor
datoraţi ploii sau zăpezii de pe [AUTO] pe [MANUAL] şi invers. Prin rotire se
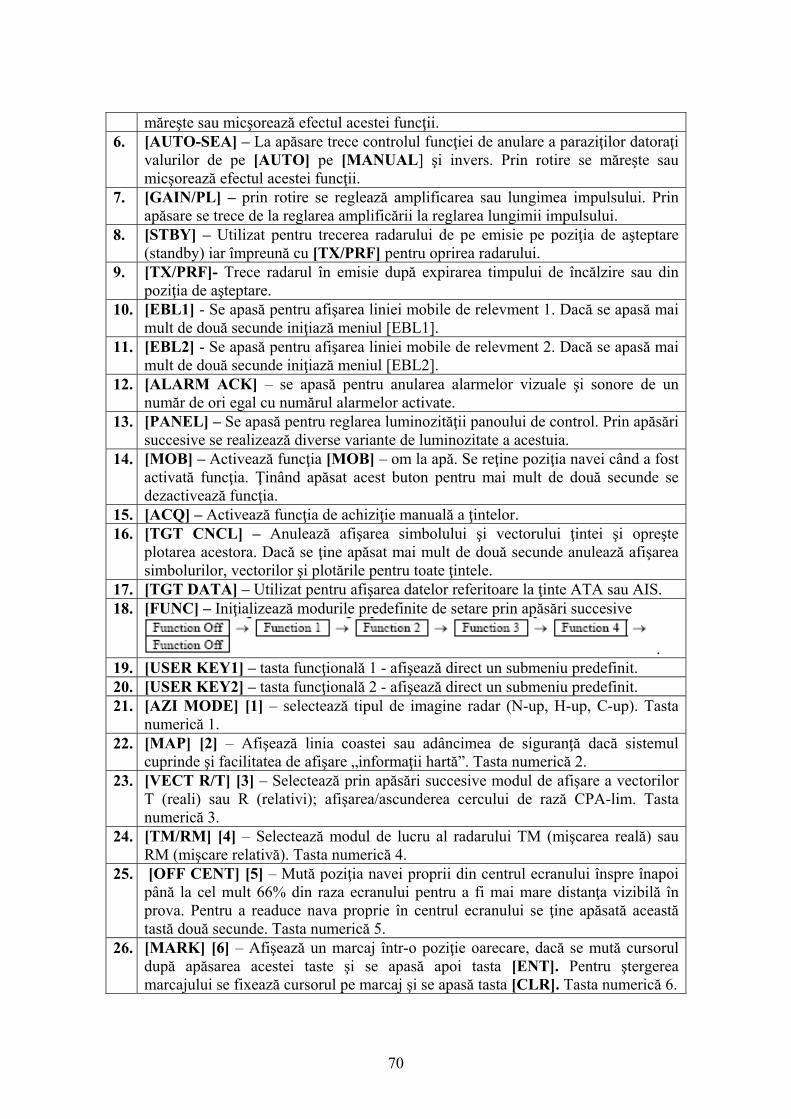
70
măreşte sau micşorează efectul acestei funcţii. 6. [AUTO-SEA] – La apăsare trece controlul funcţiei de anulare a paraziţilor datoraţi
valurilor de pe [AUTO] pe [MANUAL] şi invers. Prin rotire se măreşte sau micşorează efectul acestei funcţii.
7. [GAIN/PL] – prin rotire se reglează amplificarea sau lungimea impulsului. Prin apăsare se trece de la reglarea amplificării la reglarea lungimii impulsului.
8. [STBY] – Utilizat pentru trecerea radarului de pe emisie pe poziţia de aşteptare (standby) iar împreună cu [TX/PRF] pentru oprirea radarului.
9. [TX/PRF]- Trece radarul în emisie după expirarea timpului de încălzire sau din poziţia de aşteptare.
10. [EBL1] - Se apasă pentru afişarea liniei mobile de relevment 1. Dacă se apasă mai mult de două secunde iniţiază meniul [EBL1].
11. [EBL2] - Se apasă pentru afişarea liniei mobile de relevment 2. Dacă se apasă mai mult de două secunde iniţiază meniul [EBL2].
12. [ALARM ACK] – se apasă pentru anularea alarmelor vizuale şi sonore de un număr de ori egal cu numărul alarmelor activate.
13. [PANEL] – Se apasă pentru reglarea luminozităţii panoului de control. Prin apăsări succesive se realizează diverse variante de luminozitate a acestuia.
14. [MOB] – Activează funcţia [MOB] – om la apă. Se reţine poziţia navei când a fost activată funcţia. Ţinând apăsat acest buton pentru mai mult de două secunde se dezactivează funcţia.
15. [ACQ] – Activează funcţia de achiziţie manuală a ţintelor. 16. [TGT CNCL] – Anulează afişarea simbolului şi vectorului ţintei şi opreşte
plotarea acestora. Dacă se ţine apăsat mai mult de două secunde anulează afişarea simbolurilor, vectorilor şi plotările pentru toate ţintele.
17. [TGT DATA] – Utilizat pentru afişarea datelor referitoare la ţinte ATA sau AIS. 18. [FUNC] – Iniţializează modurile predefinite de setare prin apăsări succesive
. 19. [USER KEY1] – tasta funcţională 1 - afişează direct un submeniu predefinit. 20. [USER KEY2] – tasta funcţională 2 - afişează direct un submeniu predefinit. 21. [AZI MODE] [1] – selectează tipul de imagine radar (N-up, H-up, C-up). Tasta
numerică 1. 22. [MAP] [2] – Afişează linia coastei sau adâncimea de siguranţă dacă sistemul
cuprinde şi facilitatea de afişare „informaţii hartă”. Tasta numerică 2. 23. [VECT R/T] [3] – Selectează prin apăsări succesive modul de afişare a vectorilor
T (reali) sau R (relativi); afişarea/ascunderea cercului de rază CPA-lim. Tasta numerică 3.
24. [TM/RM] [4] – Selectează modul de lucru al radarului TM (mişcarea reală) sau RM (mişcare relativă). Tasta numerică 4.
25. [OFF CENT] [5] – Mută poziţia navei proprii din centrul ecranului înspre înapoi până la cel mult 66% din raza ecranului pentru a fi mai mare distanţa vizibilă în prova. Pentru a readuce nava proprie în centrul ecranului se ţine apăsată această tastă două secunde. Tasta numerică 5.
26. [MARK] [6] – Afişează un marcaj într-o poziţie oarecare, dacă se mută cursorul după apăsarea acestei taste şi se apasă apoi tasta [ENT]. Pentru ştergerea marcajului se fixează cursorul pe marcaj şi se apasă tasta [CLR]. Tasta numerică 6.
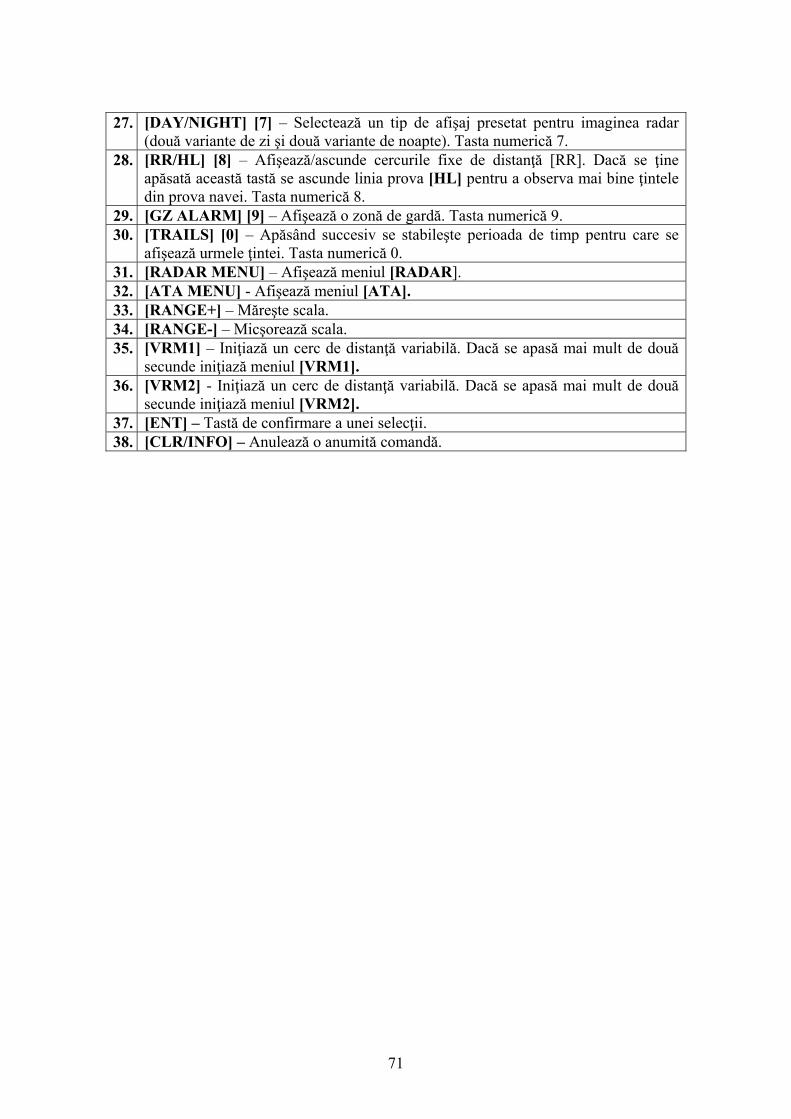
71
27. [DAY/NIGHT] [7] – Selectează un tip de afişaj presetat pentru imaginea radar (două variante de zi şi două variante de noapte). Tasta numerică 7.
28. [RR/HL] [8] – Afişează/ascunde cercurile fixe de distanţă [RR]. Dacă se ţine apăsată această tastă se ascunde linia prova [HL] pentru a observa mai bine ţintele din prova navei. Tasta numerică 8.
29. [GZ ALARM] [9] – Afişează o zonă de gardă. Tasta numerică 9. 30. [TRAILS] [0] – Apăsând succesiv se stabileşte perioada de timp pentru care se
afişează urmele ţintei. Tasta numerică 0. 31. [RADAR MENU] – Afişează meniul [RADAR]. 32. [ATA MENU] - Afişează meniul [ATA]. 33. [RANGE+] – Măreşte scala. 34. [RANGE-] – Micşorează scala. 35. [VRM1] – Iniţiază un cerc de distanţă variabilă. Dacă se apasă mai mult de două
secunde iniţiază meniul [VRM1]. 36. [VRM2] - Iniţiază un cerc de distanţă variabilă. Dacă se apasă mai mult de două
secunde iniţiază meniul [VRM2]. 37. [ENT] – Tastă de confirmare a unei selecţii. 38. [CLR/INFO] – Anulează o anumită comandă.
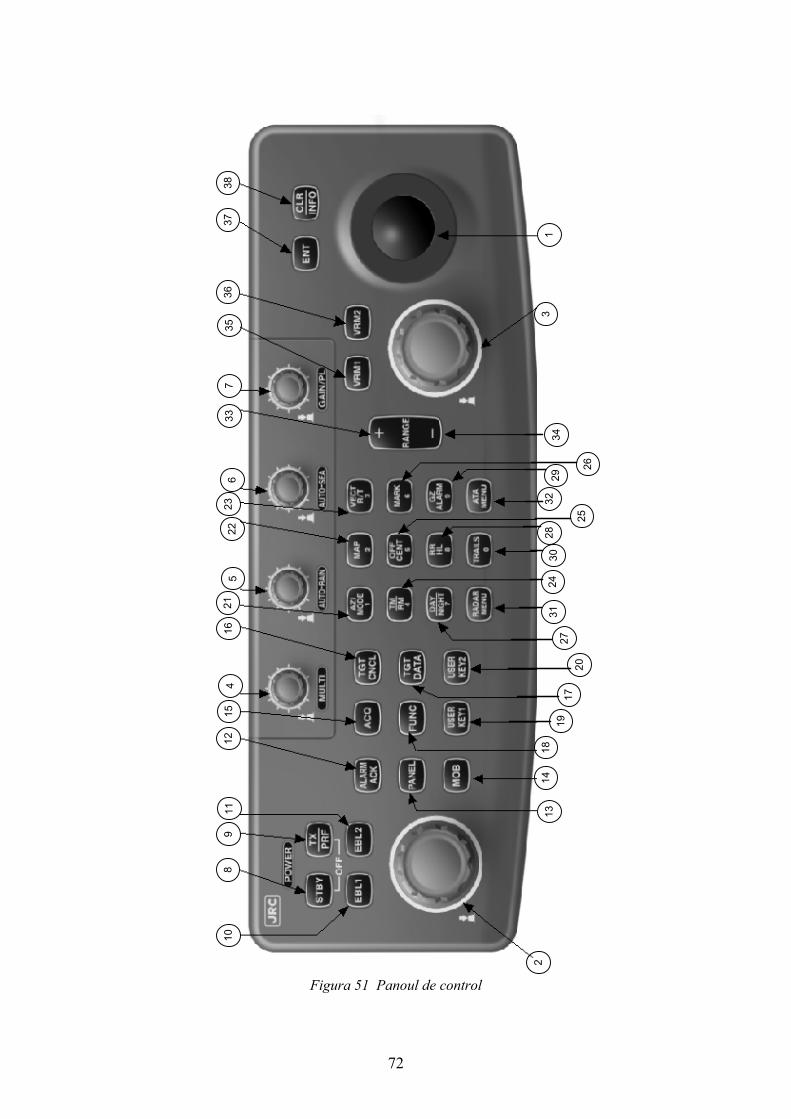
72
2223
610
89
1112
415
3637
385
2116
337
35
213
1418
1917
2027
3124
3028
25
3229
26
343
1
Figura 51 Panoul de control
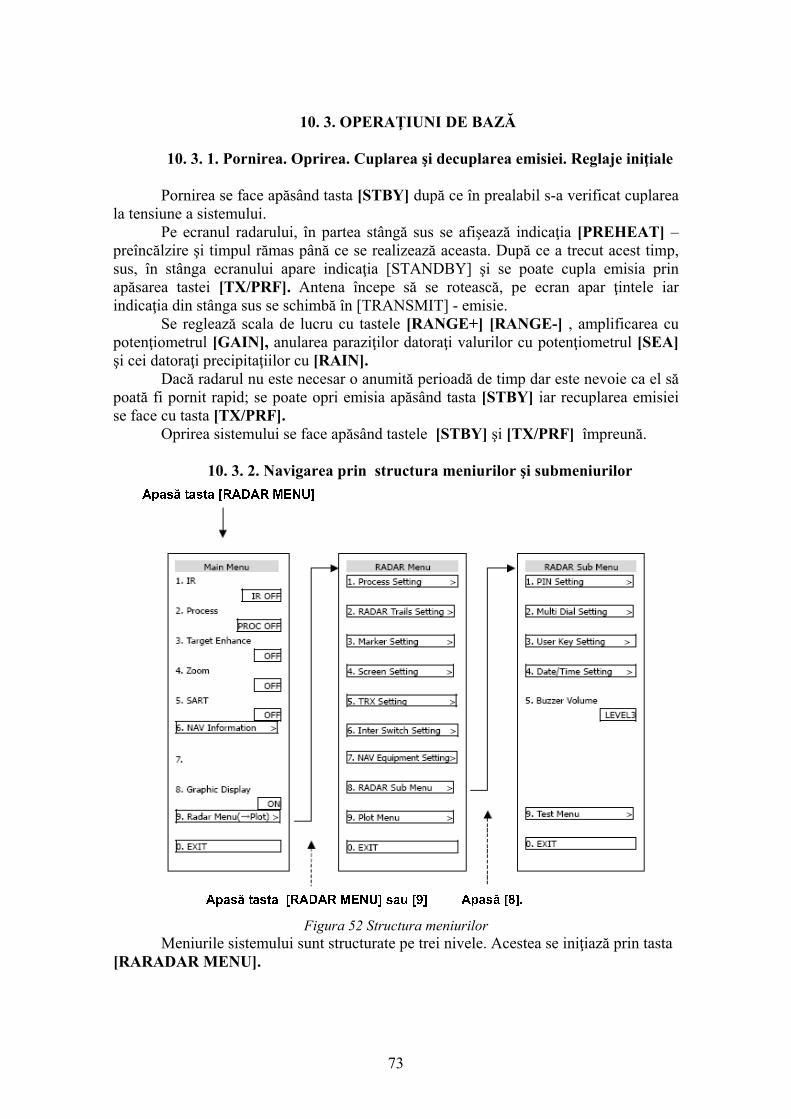
73
10. 3. OPERAŢIUNI DE BAZĂ
10. 3. 1. Pornirea. Oprirea. Cuplarea şi decuplarea emisiei. Reglaje iniţiale
Pornirea se face apăsând tasta [STBY] după ce în prealabil s-a verificat cuplarea la tensiune a sistemului. Pe ecranul radarului, în partea stângă sus se afişează indicaţia [PREHEAT] – preîncălzire şi timpul rămas până ce se realizează aceasta. După ce a trecut acest timp, sus, în stânga ecranului apare indicaţia [STANDBY] şi se poate cupla emisia prin apăsarea tastei [TX/PRF]. Antena începe să se rotească, pe ecran apar ţintele iar indicaţia din stânga sus se schimbă în [TRANSMIT] - emisie. Se reglează scala de lucru cu tastele [RANGE+] [RANGE-] , amplificarea cu potenţiometrul [GAIN], anularea paraziţilor datoraţi valurilor cu potenţiometrul [SEA] şi cei datoraţi precipitaţiilor cu [RAIN]. Dacă radarul nu este necesar o anumită perioadă de timp dar este nevoie ca el să poată fi pornit rapid; se poate opri emisia apăsând tasta [STBY] iar recuplarea emisiei se face cu tasta [TX/PRF]. Oprirea sistemului se face apăsând tastele [STBY] şi [TX/PRF] împreună.
10. 3. 2. Navigarea prin structura meniurilor şi submeniurilor
Figura 52 Structura meniurilor
Meniurile sistemului sunt structurate pe trei nivele. Acestea se iniţiază prin tasta [RARADAR MENU].
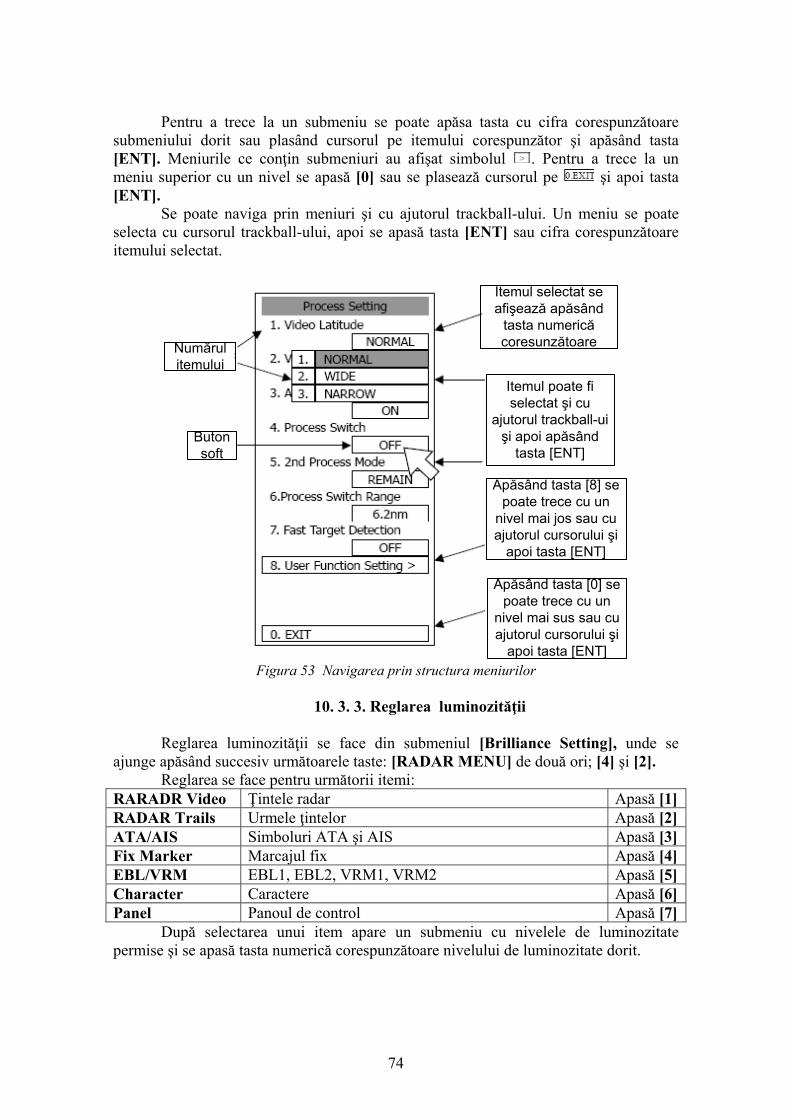
74
Pentru a trece la un submeniu se poate apăsa tasta cu cifra corespunzătoare submeniului dorit sau plasând cursorul pe itemului corespunzător şi apăsând tasta [ENT]. Meniurile ce conţin submeniuri au afişat simbolul . Pentru a trece la un meniu superior cu un nivel se apasă [0] sau se plasează cursorul pe şi apoi tasta [ENT]. Se poate naviga prin meniuri şi cu ajutorul trackball-ului. Un meniu se poate selecta cu cursorul trackball-ului, apoi se apasă tasta [ENT] sau cifra corespunzătoare itemului selectat.
Numărul itemului
Buton soft
Itemul selectat se afişează apăsând
tasta numerică coresunzătoare
Itemul poate fi selectat şi cu
ajutorul trackball-ui şi apoi apăsând
tasta [ENT]
Apăsând tasta [8] se poate trece cu un
nivel mai jos sau cu ajutorul cursorului şi
apoi tasta [ENT]
Apăsând tasta [0] se poate trece cu un
nivel mai sus sau cu ajutorul cursorului şi
apoi tasta [ENT] Figura 53 Navigarea prin structura meniurilor
10. 3. 3. Reglarea luminozităţii
Reglarea luminozităţii se face din submeniul [Brilliance Setting], unde se
ajunge apăsând succesiv următoarele taste: [RADAR MENU] de două ori; [4] şi [2]. Reglarea se face pentru următorii itemi:
RARADR Video Ţintele radar Apasă [1] RADAR Trails Urmele ţintelor Apasă [2] ATA/AIS Simboluri ATA şi AIS Apasă [3] Fix Marker Marcajul fix Apasă [4] EBL/VRM EBL1, EBL2, VRM1, VRM2 Apasă [5] Character Caractere Apasă [6] Panel Panoul de control Apasă [7]
După selectarea unui item apare un submeniu cu nivelele de luminozitate permise şi se apasă tasta numerică corespunzătoare nivelului de luminozitate dorit.
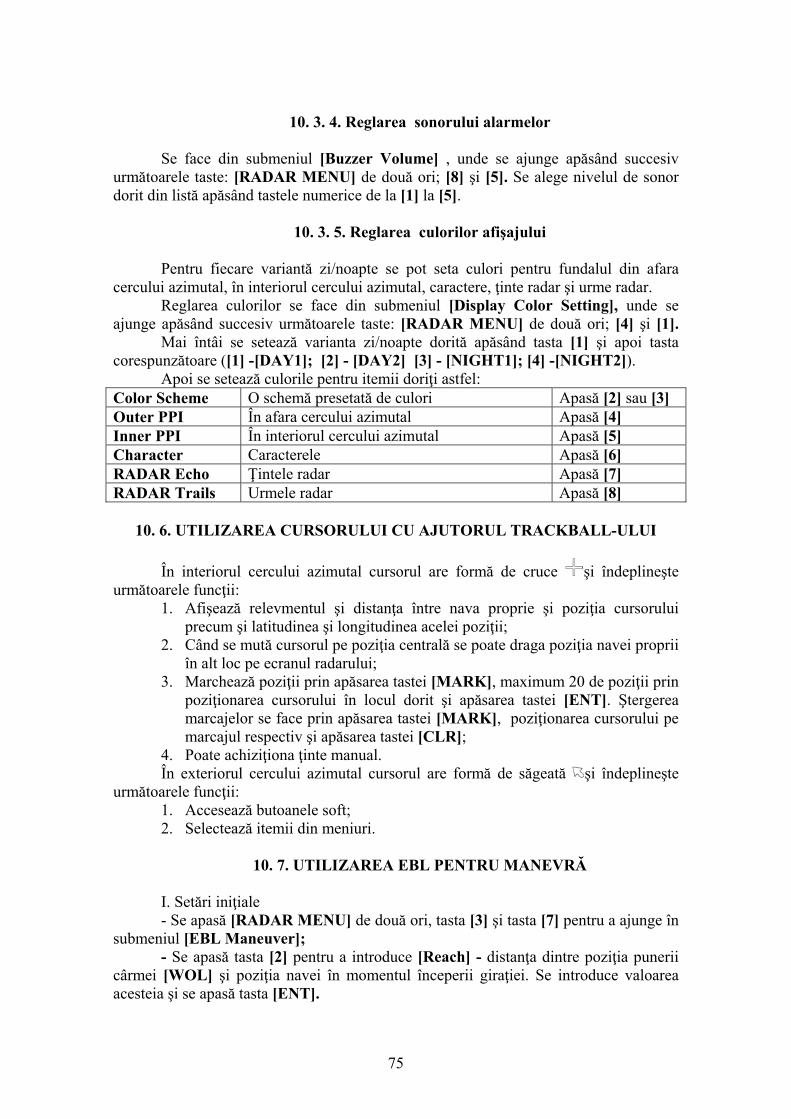
75
10. 3. 4. Reglarea sonorului alarmelor Se face din submeniul [Buzzer Volume] , unde se ajunge apăsând succesiv
următoarele taste: [RADAR MENU] de două ori; [8] şi [5]. Se alege nivelul de sonor dorit din listă apăsând tastele numerice de la [1] la [5].
10. 3. 5. Reglarea culorilor afişajului
Pentru fiecare variantă zi/noapte se pot seta culori pentru fundalul din afara
cercului azimutal, în interiorul cercului azimutal, caractere, ţinte radar şi urme radar. Reglarea culorilor se face din submeniul [Display Color Setting], unde se
ajunge apăsând succesiv următoarele taste: [RADAR MENU] de două ori; [4] şi [1]. Mai întâi se setează varianta zi/noapte dorită apăsând tasta [1] şi apoi tasta corespunzătoare ([1] -[DAY1]; [2] - [DAY2] [3] - [NIGHT1]; [4] -[NIGHT2]).
Apoi se setează culorile pentru itemii doriţi astfel: Color Scheme O schemă presetată de culori Apasă [2] sau [3] Outer PPI În afara cercului azimutal Apasă [4] Inner PPI În interiorul cercului azimutal Apasă [5] Character Caracterele Apasă [6] RADAR Echo Ţintele radar Apasă [7] RADAR Trails Urmele radar Apasă [8]
10. 6. UTILIZAREA CURSORULUI CU AJUTORUL TRACKBALL-ULUI
În interiorul cercului azimutal cursorul are formă de cruce şi îndeplineşte
următoarele funcţii: 1. Afişează relevmentul şi distanţa între nava proprie şi poziţia cursorului
precum şi latitudinea şi longitudinea acelei poziţii; 2. Când se mută cursorul pe poziţia centrală se poate draga poziţia navei proprii
în alt loc pe ecranul radarului; 3. Marchează poziţii prin apăsarea tastei [MARK], maximum 20 de poziţii prin
poziţionarea cursorului în locul dorit şi apăsarea tastei [ENT]. Ştergerea marcajelor se face prin apăsarea tastei [MARK], poziţionarea cursorului pe marcajul respectiv şi apăsarea tastei [CLR];
4. Poate achiziţiona ţinte manual. În exteriorul cercului azimutal cursorul are formă de săgeată şi îndeplineşte
următoarele funcţii: 1. Accesează butoanele soft; 2. Selectează itemii din meniuri.
10. 7. UTILIZAREA EBL PENTRU MANEVRĂ I. Setări iniţiale - Se apasă [RADAR MENU] de două ori, tasta [3] şi tasta [7] pentru a ajunge în
submeniul [EBL Maneuver]; - Se apasă tasta [2] pentru a introduce [Reach] - distanţa dintre poziţia punerii
cârmei [WOL] şi poziţia navei în momentul începerii giraţiei. Se introduce valoarea acesteia şi se apasă tasta [ENT].
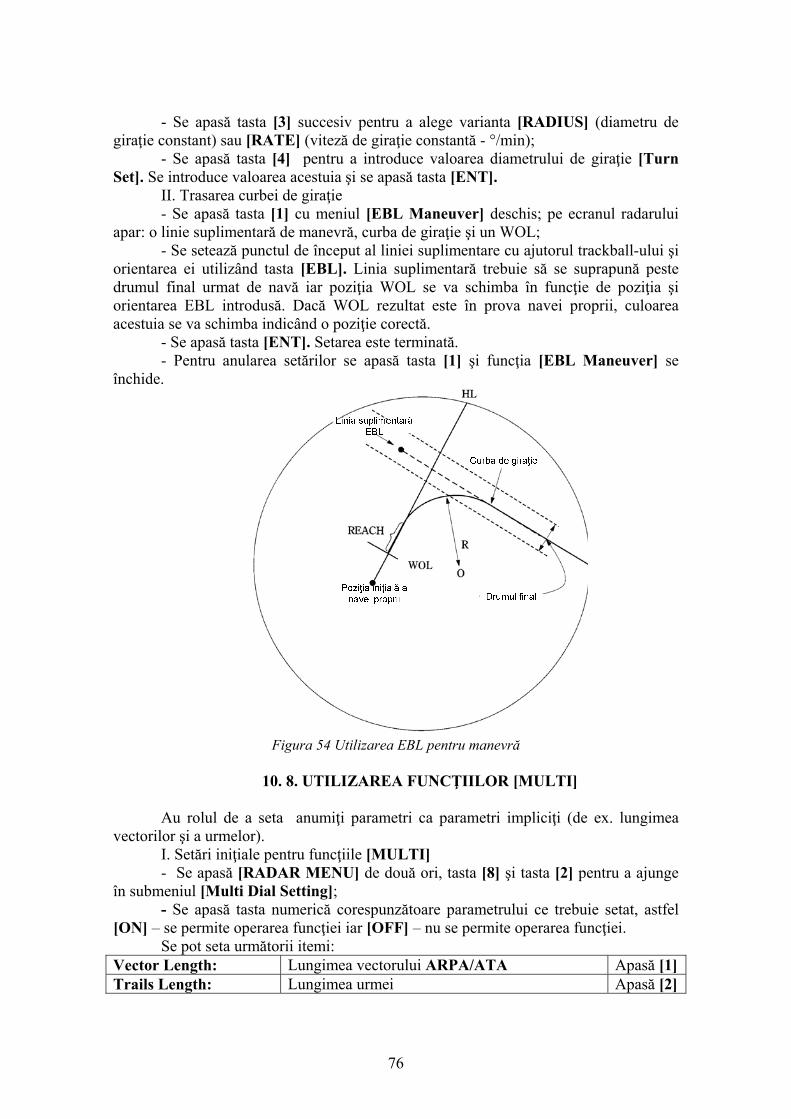
76
- Se apasă tasta [3] succesiv pentru a alege varianta [RADIUS] (diametru de giraţie constant) sau [RATE] (viteză de giraţie constantă - °/min);
- Se apasă tasta [4] pentru a introduce valoarea diametrului de giraţie [Turn Set]. Se introduce valoarea acestuia şi se apasă tasta [ENT].
II. Trasarea curbei de giraţie - Se apasă tasta [1] cu meniul [EBL Maneuver] deschis; pe ecranul radarului
apar: o linie suplimentară de manevră, curba de giraţie şi un WOL; - Se setează punctul de început al liniei suplimentare cu ajutorul trackball-ului şi
orientarea ei utilizând tasta [EBL]. Linia suplimentară trebuie să se suprapună peste drumul final urmat de navă iar poziţia WOL se va schimba în funcţie de poziţia şi orientarea EBL introdusă. Dacă WOL rezultat este în prova navei proprii, culoarea acestuia se va schimba indicând o poziţie corectă.
- Se apasă tasta [ENT]. Setarea este terminată. - Pentru anularea setărilor se apasă tasta [1] şi funcţia [EBL Maneuver] se
închide.
Figura 54 Utilizarea EBL pentru manevră
10. 8. UTILIZAREA FUNCŢIILOR [MULTI]
Au rolul de a seta anumiţi parametri ca parametri impliciţi (de ex. lungimea
vectorilor şi a urmelor). I. Setări iniţiale pentru funcţiile [MULTI] - Se apasă [RADAR MENU] de două ori, tasta [8] şi tasta [2] pentru a ajunge
în submeniul [Multi Dial Setting]; - Se apasă tasta numerică corespunzătoare parametrului ce trebuie setat, astfel
[ON] – se permite operarea funcţiei iar [OFF] – nu se permite operarea funcţiei. Se pot seta următorii itemi:
Vector Length: Lungimea vectorului ARPA/ATA Apasă [1] Trails Length: Lungimea urmei Apasă [2]
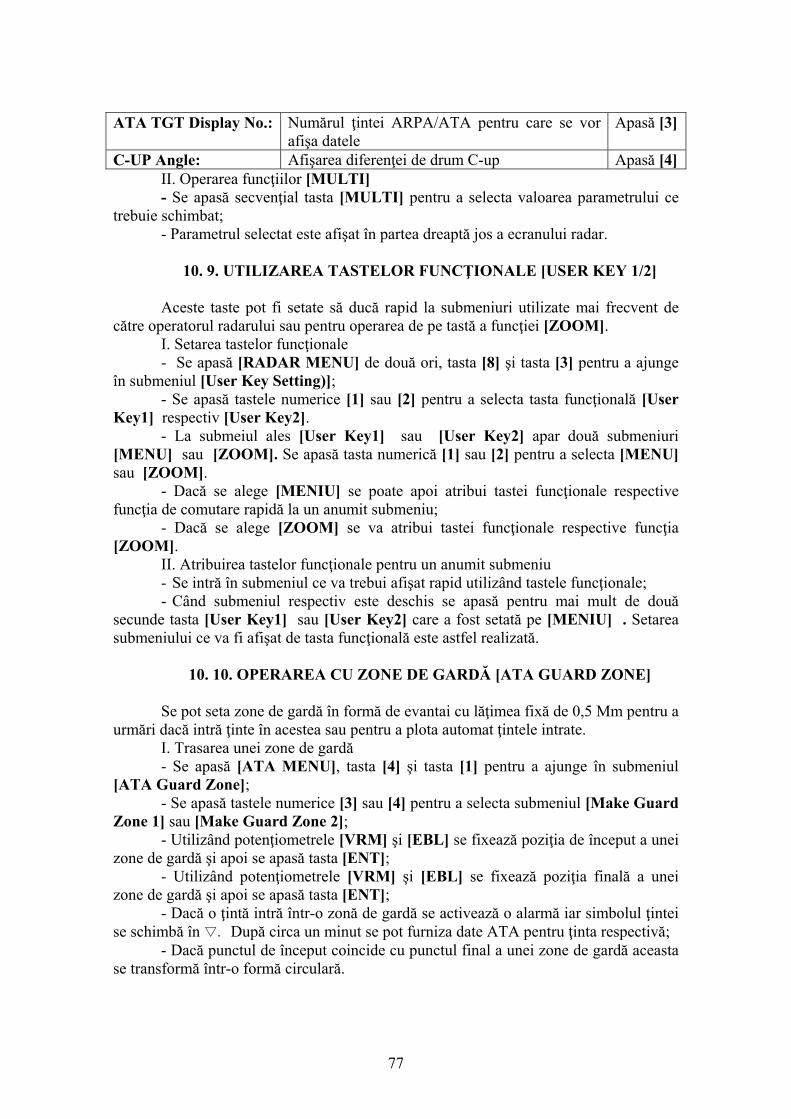
77
ATA TGT Display No.: Numărul ţintei ARPA/ATA pentru care se vor afişa datele
Apasă [3]
C-UP Angle: Afişarea diferenţei de drum C-up Apasă [4] II. Operarea funcţiilor [MULTI] - Se apasă secvenţial tasta [MULTI] pentru a selecta valoarea parametrului ce
trebuie schimbat; - Parametrul selectat este afişat în partea dreaptă jos a ecranului radar.
10. 9. UTILIZAREA TASTELOR FUNCŢIONALE [USER KEY 1/2] Aceste taste pot fi setate să ducă rapid la submeniuri utilizate mai frecvent de
către operatorul radarului sau pentru operarea de pe tastă a funcţiei [ZOOM]. I. Setarea tastelor funcţionale - Se apasă [RADAR MENU] de două ori, tasta [8] şi tasta [3] pentru a ajunge
în submeniul [User Key Setting)]; - Se apasă tastele numerice [1] sau [2] pentru a selecta tasta funcţională [User
Key1] respectiv [User Key2]. - La submeiul ales [User Key1] sau [User Key2] apar două submeniuri
[MENU] sau [ZOOM]. Se apasă tasta numerică [1] sau [2] pentru a selecta [MENU] sau [ZOOM].
- Dacă se alege [MENIU] se poate apoi atribui tastei funcţionale respective funcţia de comutare rapidă la un anumit submeniu;
- Dacă se alege [ZOOM] se va atribui tastei funcţionale respective funcţia [ZOOM].
II. Atribuirea tastelor funcţionale pentru un anumit submeniu - Se intră în submeniul ce va trebui afişat rapid utilizând tastele funcţionale; - Când submeniul respectiv este deschis se apasă pentru mai mult de două
secunde tasta [User Key1] sau [User Key2] care a fost setată pe [MENIU] . Setarea submeniului ce va fi afişat de tasta funcţională este astfel realizată.
10. 10. OPERAREA CU ZONE DE GARDĂ [ATA GUARD ZONE]
Se pot seta zone de gardă în formă de evantai cu lăţimea fixă de 0,5 Mm pentru a
urmări dacă intră ţinte în acestea sau pentru a plota automat ţintele intrate. I. Trasarea unei zone de gardă - Se apasă [ATA MENU], tasta [4] şi tasta [1] pentru a ajunge în submeniul
[ATA Guard Zone]; - Se apasă tastele numerice [3] sau [4] pentru a selecta submeniul [Make Guard
Zone 1] sau [Make Guard Zone 2]; - Utilizând potenţiometrele [VRM] şi [EBL] se fixează poziţia de început a unei
zone de gardă şi apoi se apasă tasta [ENT]; - Utilizând potenţiometrele [VRM] şi [EBL] se fixează poziţia finală a unei
zone de gardă şi apoi se apasă tasta [ENT]; - Dacă o ţintă intră într-o zonă de gardă se activează o alarmă iar simbolul ţintei
se schimbă în ▽. După circa un minut se pot furniza date ATA pentru ţinta respectivă; - Dacă punctul de început coincide cu punctul final a unei zone de gardă aceasta
se transformă într-o formă circulară.
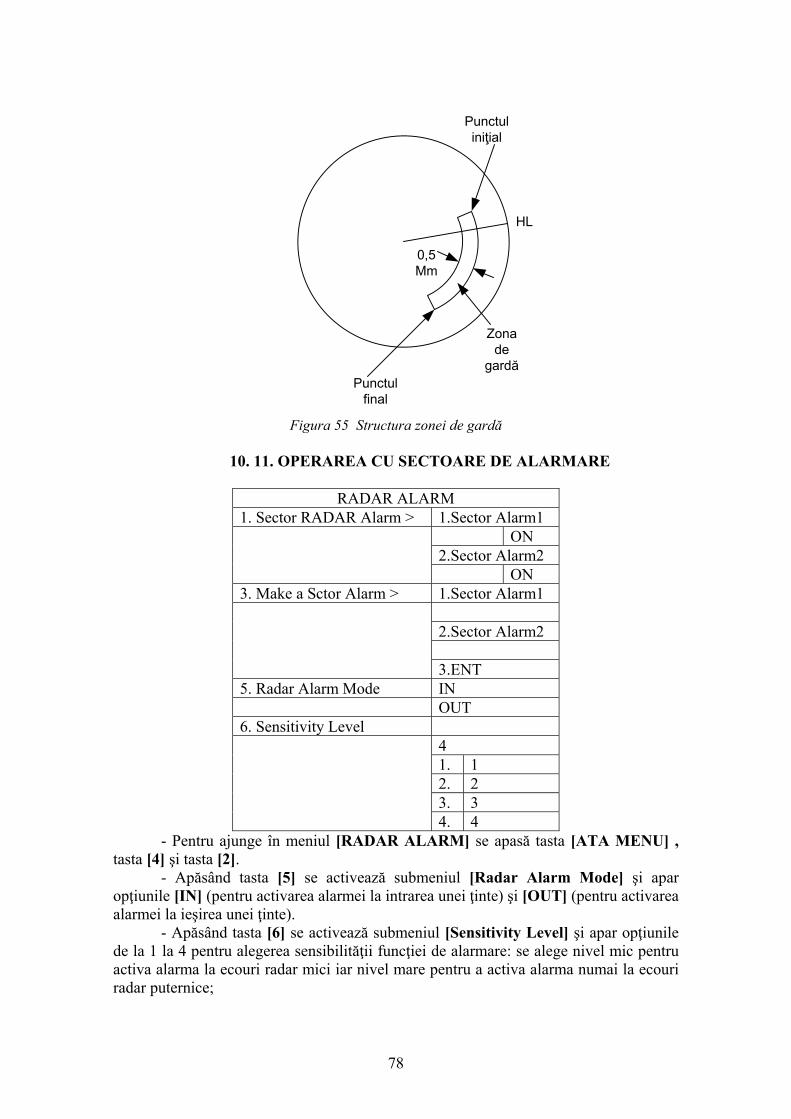
78
HL
Zona de
gardăPunctul
final
Punctul iniţial
0,5 Mm
Figura 55 Structura zonei de gardă
10. 11. OPERAREA CU SECTOARE DE ALARMARE
RADAR ALARM
1. Sector RADAR Alarm > 1.Sector Alarm1 ON
2.Sector Alarm2 ON
3. Make a Sctor Alarm > 1.Sector Alarm1
2.Sector Alarm2 3.ENT
5. Radar Alarm Mode IN OUT 6. Sensitivity Level 4
1. 1 2. 2 3. 3 4. 4
- Pentru ajunge în meniul [RADAR ALARM] se apasă tasta [ATA MENU] , tasta [4] şi tasta [2].
- Apăsând tasta [5] se activează submeniul [Radar Alarm Mode] şi apar opţiunile [IN] (pentru activarea alarmei la intrarea unei ţinte) şi [OUT] (pentru activarea alarmei la ieşirea unei ţinte).
- Apăsând tasta [6] se activează submeniul [Sensitivity Level] şi apar opţiunile de la 1 la 4 pentru alegerea sensibilităţii funcţiei de alarmare: se alege nivel mic pentru activa alarma la ecouri radar mici iar nivel mare pentru a activa alarma numai la ecouri radar puternice;
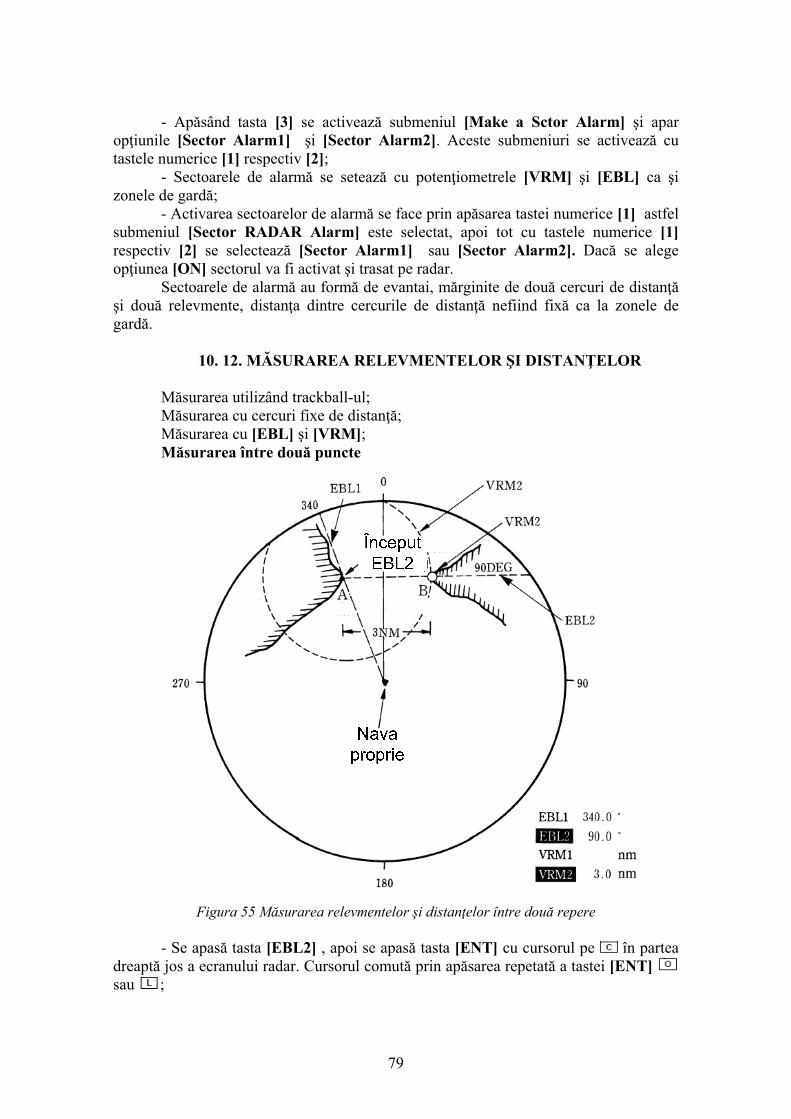
79
- Apăsând tasta [3] se activează submeniul [Make a Sctor Alarm] şi apar opţiunile [Sector Alarm1] şi [Sector Alarm2]. Aceste submeniuri se activează cu tastele numerice [1] respectiv [2];
- Sectoarele de alarmă se setează cu potenţiometrele [VRM] şi [EBL] ca şi zonele de gardă;
- Activarea sectoarelor de alarmă se face prin apăsarea tastei numerice [1] astfel submeniul [Sector RADAR Alarm] este selectat, apoi tot cu tastele numerice [1] respectiv [2] se selectează [Sector Alarm1] sau [Sector Alarm2]. Dacă se alege opţiunea [ON] sectorul va fi activat şi trasat pe radar.
Sectoarele de alarmă au formă de evantai, mărginite de două cercuri de distanţă şi două relevmente, distanţa dintre cercurile de distanţă nefiind fixă ca la zonele de gardă.
10. 12. MĂSURAREA RELEVMENTELOR ŞI DISTANŢELOR
Măsurarea utilizând trackball-ul; Măsurarea cu cercuri fixe de distanţă; Măsurarea cu [EBL] şi [VRM]; Măsurarea între două puncte
Figura 55 Măsurarea relevmentelor şi distanţelor între două repere
- Se apasă tasta [EBL2] , apoi se apasă tasta [ENT] cu cursorul pe în partea
dreaptă jos a ecranului radar. Cursorul comută prin apăsarea repetată a tastei [ENT] sau ;
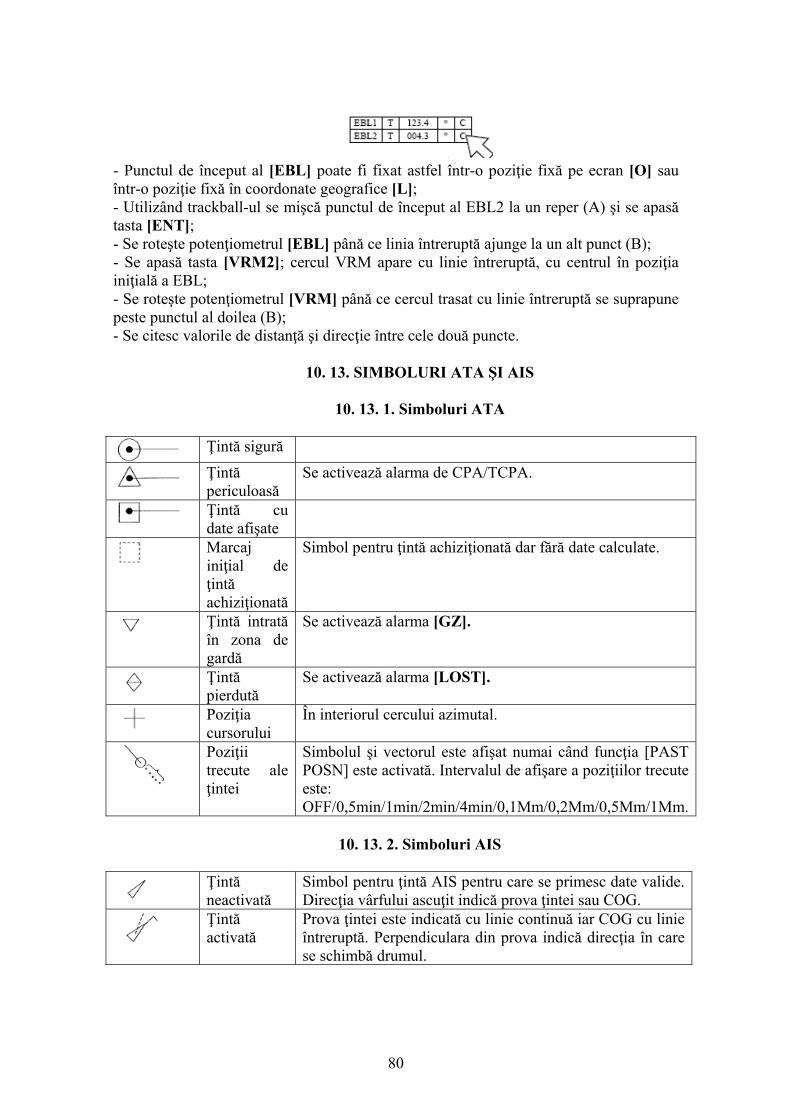
80
- Punctul de început al [EBL] poate fi fixat astfel într-o poziţie fixă pe ecran [O] sau într-o poziţie fixă în coordonate geografice [L]; - Utilizând trackball-ul se mişcă punctul de început al EBL2 la un reper (A) şi se apasă tasta [ENT]; - Se roteşte potenţiometrul [EBL] până ce linia întreruptă ajunge la un alt punct (B); - Se apasă tasta [VRM2]; cercul VRM apare cu linie întreruptă, cu centrul în poziţia iniţială a EBL; - Se roteşte potenţiometrul [VRM] până ce cercul trasat cu linie întreruptă se suprapune peste punctul al doilea (B); - Se citesc valorile de distanţă şi direcţie între cele două puncte.
10. 13. SIMBOLURI ATA ŞI AIS
10. 13. 1. Simboluri ATA
Ţintă sigură
Ţintă periculoasă
Se activează alarma de CPA/TCPA.
Ţintă cu date afişate
Marcaj iniţial de ţintă achiziţionată
Simbol pentru ţintă achiziţionată dar fără date calculate.
Ţintă intrată în zona de gardă
Se activează alarma [GZ].
Ţintă pierdută
Se activează alarma [LOST].
Poziţia cursorului
În interiorul cercului azimutal.
Poziţii trecute ale ţintei
Simbolul şi vectorul este afişat numai când funcţia [PAST POSN] este activată. Intervalul de afişare a poziţiilor trecute este: OFF/0,5min/1min/2min/4min/0,1Mm/0,2Mm/0,5Mm/1Mm.
10. 13. 2. Simboluri AIS
Ţintă neactivată
Simbol pentru ţintă AIS pentru care se primesc date valide. Direcţia vârfului ascuţit indică prova ţintei sau COG.
Ţintă activată
Prova ţintei este indicată cu linie continuă iar COG cu linie întreruptă. Perpendiculara din prova indică direcţia în care se schimbă drumul.
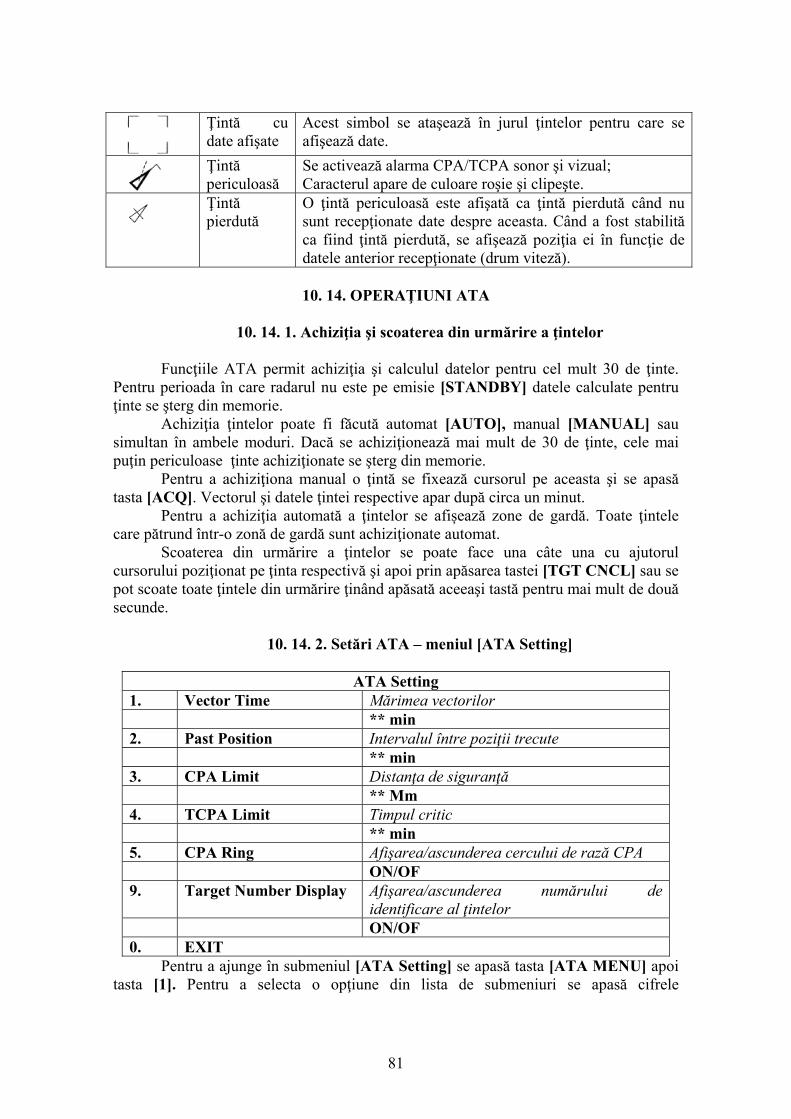
81
Ţintă cu date afişate
Acest simbol se ataşează în jurul ţintelor pentru care se afişează date.
Ţintă periculoasă
Se activează alarma CPA/TCPA sonor şi vizual; Caracterul apare de culoare roşie şi clipeşte.
Ţintă pierdută
O ţintă periculoasă este afişată ca ţintă pierdută când nu sunt recepţionate date despre aceasta. Când a fost stabilită ca fiind ţintă pierdută, se afişează poziţia ei în funcţie de datele anterior recepţionate (drum viteză).
10. 14. OPERAŢIUNI ATA
10. 14. 1. Achiziţia şi scoaterea din urmărire a ţintelor
Funcţiile ATA permit achiziţia şi calculul datelor pentru cel mult 30 de ţinte.
Pentru perioada în care radarul nu este pe emisie [STANDBY] datele calculate pentru ţinte se şterg din memorie.
Achiziţia ţintelor poate fi făcută automat [AUTO], manual [MANUAL] sau simultan în ambele moduri. Dacă se achiziţionează mai mult de 30 de ţinte, cele mai puţin periculoase ţinte achiziţionate se şterg din memorie.
Pentru a achiziţiona manual o ţintă se fixează cursorul pe aceasta şi se apasă tasta [ACQ]. Vectorul şi datele ţintei respective apar după circa un minut.
Pentru a achiziţia automată a ţintelor se afișează zone de gardă. Toate ţintele care pătrund într-o zonă de gardă sunt achiziţionate automat.
Scoaterea din urmărire a ţintelor se poate face una câte una cu ajutorul cursorului poziţionat pe ţinta respectivă şi apoi prin apăsarea tastei [TGT CNCL] sau se pot scoate toate ţintele din urmărire ţinând apăsată aceeaşi tastă pentru mai mult de două secunde.
10. 14. 2. Setări ATA – meniul [ATA Setting]
ATA Setting
1. Vector Time Mărimea vectorilor ** min 2. Past Position Intervalul între poziţii trecute ** min 3. CPA Limit Distanţa de siguranţă ** Mm 4. TCPA Limit Timpul critic ** min 5. CPA Ring Afişarea/ascunderea cercului de rază CPA ON/OF 9. Target Number Display Afişarea/ascunderea numărului de
identificare al ţintelor ON/OF 0. EXIT
Pentru a ajunge în submeniul [ATA Setting] se apasă tasta [ATA MENU] apoi tasta [1]. Pentru a selecta o opţiune din lista de submeniuri se apasă cifrele
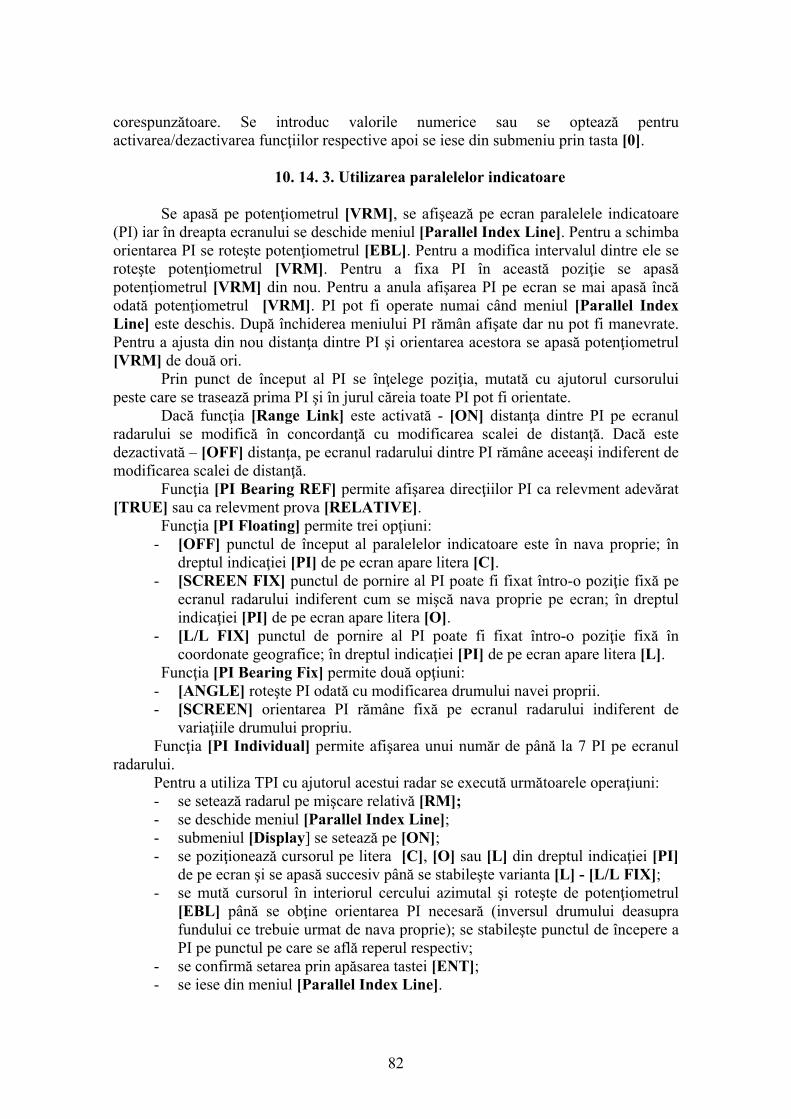
82
corespunzătoare. Se introduc valorile numerice sau se optează pentru activarea/dezactivarea funcţiilor respective apoi se iese din submeniu prin tasta [0].
10. 14. 3. Utilizarea paralelelor indicatoare
Se apasă pe potenţiometrul [VRM], se afişează pe ecran paralelele indicatoare
(PI) iar în dreapta ecranului se deschide meniul [Parallel Index Line]. Pentru a schimba orientarea PI se roteşte potenţiometrul [EBL]. Pentru a modifica intervalul dintre ele se roteşte potenţiometrul [VRM]. Pentru a fixa PI în această poziţie se apasă potenţiometrul [VRM] din nou. Pentru a anula afişarea PI pe ecran se mai apasă încă odată potenţiometrul [VRM]. PI pot fi operate numai când meniul [Parallel Index Line] este deschis. După închiderea meniului PI rămân afişate dar nu pot fi manevrate. Pentru a ajusta din nou distanţa dintre PI şi orientarea acestora se apasă potenţiometrul [VRM] de două ori.
Prin punct de început al PI se înţelege poziţia, mutată cu ajutorul cursorului peste care se trasează prima PI şi în jurul căreia toate PI pot fi orientate.
Dacă funcţia [Range Link] este activată - [ON] distanţa dintre PI pe ecranul radarului se modifică în concordanţă cu modificarea scalei de distanţă. Dacă este dezactivată – [OFF] distanţa, pe ecranul radarului dintre PI rămâne aceeaşi indiferent de modificarea scalei de distanţă.
Funcţia [PI Bearing REF] permite afişarea direcţiilor PI ca relevment adevărat [TRUE] sau ca relevment prova [RELATIVE].
Funcţia [PI Floating] permite trei opţiuni: - [OFF] punctul de început al paralelelor indicatoare este în nava proprie; în
dreptul indicaţiei [PI] de pe ecran apare litera [C]. - [SCREEN FIX] punctul de pornire al PI poate fi fixat întro-o poziţie fixă pe
ecranul radarului indiferent cum se mişcă nava proprie pe ecran; în dreptul indicaţiei [PI] de pe ecran apare litera [O].
- [L/L FIX] punctul de pornire al PI poate fi fixat întro-o poziţie fixă în coordonate geografice; în dreptul indicaţiei [PI] de pe ecran apare litera [L].
Funcţia [PI Bearing Fix] permite două opţiuni: - [ANGLE] roteşte PI odată cu modificarea drumului navei proprii. - [SCREEN] orientarea PI rămâne fixă pe ecranul radarului indiferent de
variaţiile drumului propriu. Funcţia [PI Individual] permite afişarea unui număr de până la 7 PI pe ecranul
radarului. Pentru a utiliza TPI cu ajutorul acestui radar se execută următoarele operaţiuni: - se setează radarul pe mişcare relativă [RM]; - se deschide meniul [Parallel Index Line]; - submeniul [Display] se setează pe [ON]; - se poziţionează cursorul pe litera [C], [O] sau [L] din dreptul indicaţiei [PI]
de pe ecran şi se apasă succesiv până se stabileşte varianta [L] - [L/L FIX]; - se mută cursorul în interiorul cercului azimutal şi roteşte de potenţiometrul
[EBL] până se obţine orientarea PI necesară (inversul drumului deasupra fundului ce trebuie urmat de nava proprie); se stabileşte punctul de începere a PI pe punctul pe care se află reperul respectiv;
- se confirmă setarea prin apăsarea tastei [ENT]; - se iese din meniul [Parallel Index Line].
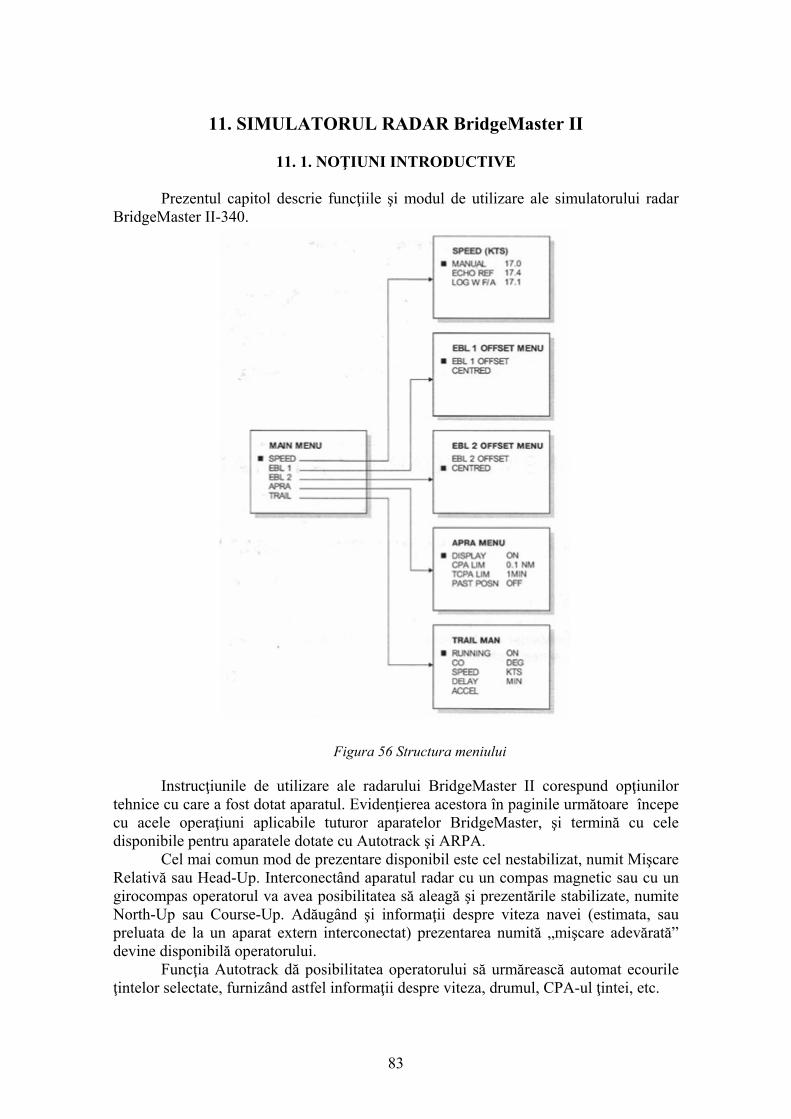
83
11. SIMULATORUL RADAR BridgeMaster II
11. 1. NOŢIUNI INTRODUCTIVE Prezentul capitol descrie funcţiile şi modul de utilizare ale simulatorului radar
BridgeMaster II-340.
Figura 56 Structura meniului
Instrucţiunile de utilizare ale radarului BridgeMaster II corespund opţiunilor
tehnice cu care a fost dotat aparatul. Evidenţierea acestora în paginile următoare începe cu acele operaţiuni aplicabile tuturor aparatelor BridgeMaster, şi termină cu cele disponibile pentru aparatele dotate cu Autotrack şi ARPA.
Cel mai comun mod de prezentare disponibil este cel nestabilizat, numit Mişcare Relativă sau Head-Up. Interconectând aparatul radar cu un compas magnetic sau cu un girocompas operatorul va avea posibilitatea să aleagă şi prezentările stabilizate, numite North-Up sau Course-Up. Adăugând şi informaţii despre viteza navei (estimata, sau preluata de la un aparat extern interconectat) prezentarea numită „mişcare adevărată” devine disponibilă operatorului.
Funcţia Autotrack dă posibilitatea operatorului să urmărească automat ecourile ţintelor selectate, furnizând astfel informaţii despre viteza, drumul, CPA-ul ţintei, etc.
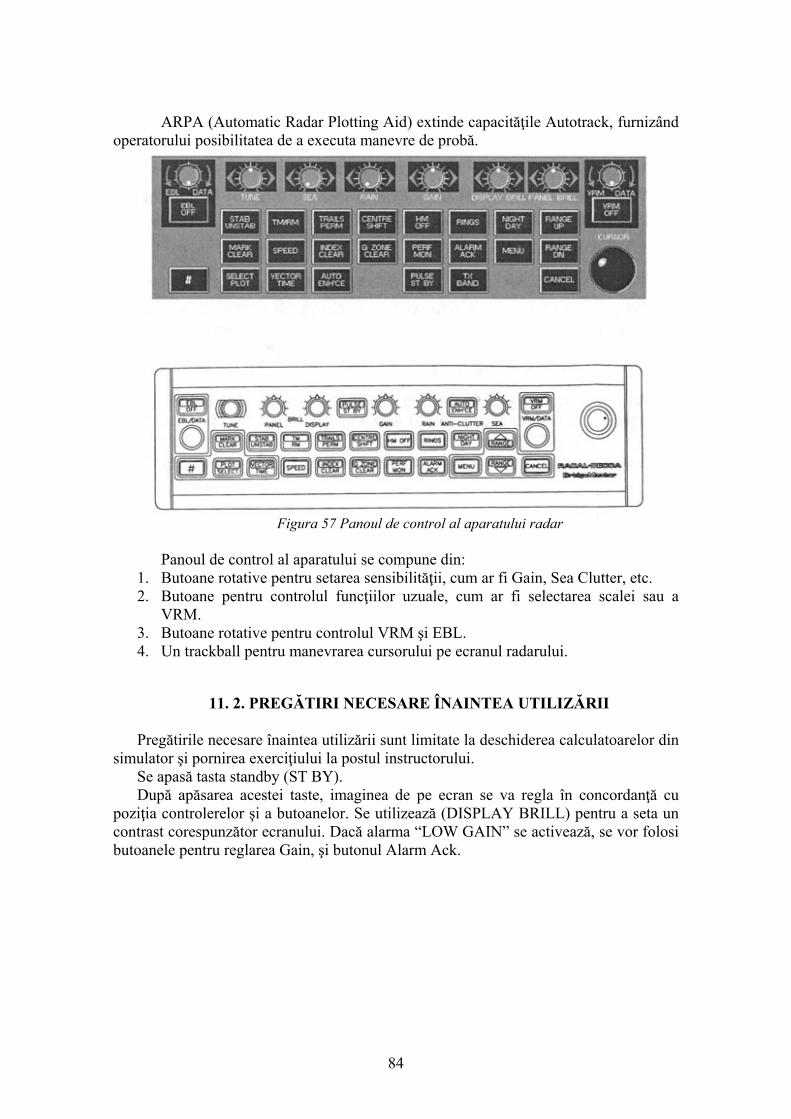
84
ARPA (Automatic Radar Plotting Aid) extinde capacităţile Autotrack, furnizând operatorului posibilitatea de a executa manevre de probă.
Figura 57 Panoul de control al aparatului radar Panoul de control al aparatului se compune din:
1. Butoane rotative pentru setarea sensibilităţii, cum ar fi Gain, Sea Clutter, etc. 2. Butoane pentru controlul funcţiilor uzuale, cum ar fi selectarea scalei sau a
VRM. 3. Butoane rotative pentru controlul VRM şi EBL. 4. Un trackball pentru manevrarea cursorului pe ecranul radarului.
11. 2. PREGĂTIRI NECESARE ÎNAINTEA UTILIZĂRII
Pregătirile necesare înaintea utilizării sunt limitate la deschiderea calculatoarelor din
simulator şi pornirea exerciţiului la postul instructorului. Se apasă tasta standby (ST BY). După apăsarea acestei taste, imaginea de pe ecran se va regla în concordanţă cu
poziţia controlerelor şi a butoanelor. Se utilizează (DISPLAY BRILL) pentru a seta un contrast corespunzător ecranului. Dacă alarma “LOW GAIN” se activează, se vor folosi butoanele pentru reglarea Gain, şi butonul Alarm Ack.
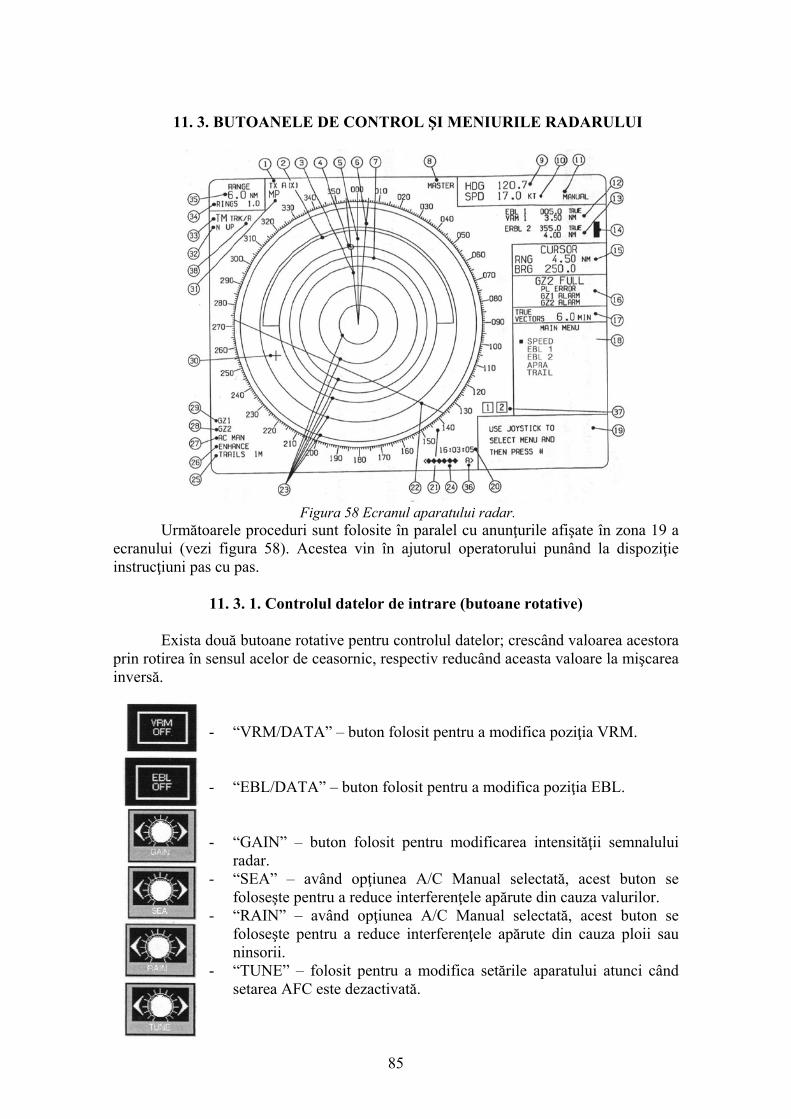
85
11. 3. BUTOANELE DE CONTROL ŞI MENIURILE RADARULUI
Figura 58 Ecranul aparatului radar.
Următoarele proceduri sunt folosite în paralel cu anunţurile afişate în zona 19 a ecranului (vezi figura 58). Acestea vin în ajutorul operatorului punând la dispoziţie instrucţiuni pas cu pas.
11. 3. 1. Controlul datelor de intrare (butoane rotative)
Exista două butoane rotative pentru controlul datelor; crescând valoarea acestora prin rotirea în sensul acelor de ceasornic, respectiv reducând aceasta valoare la mişcarea inversă.
- “VRM/DATA” – buton folosit pentru a modifica poziţia VRM.
- “EBL/DATA” – buton folosit pentru a modifica poziţia EBL.
- “GAIN” – buton folosit pentru modificarea intensităţii semnalului radar.
- “SEA” – având opţiunea A/C Manual selectată, acest buton se foloseşte pentru a reduce interferenţele apărute din cauza valurilor.
- “RAIN” – având opţiunea A/C Manual selectată, acest buton se foloseşte pentru a reduce interferenţele apărute din cauza ploii sau ninsorii.
- “TUNE” – folosit pentru a modifica setările aparatului atunci când setarea AFC este dezactivată.
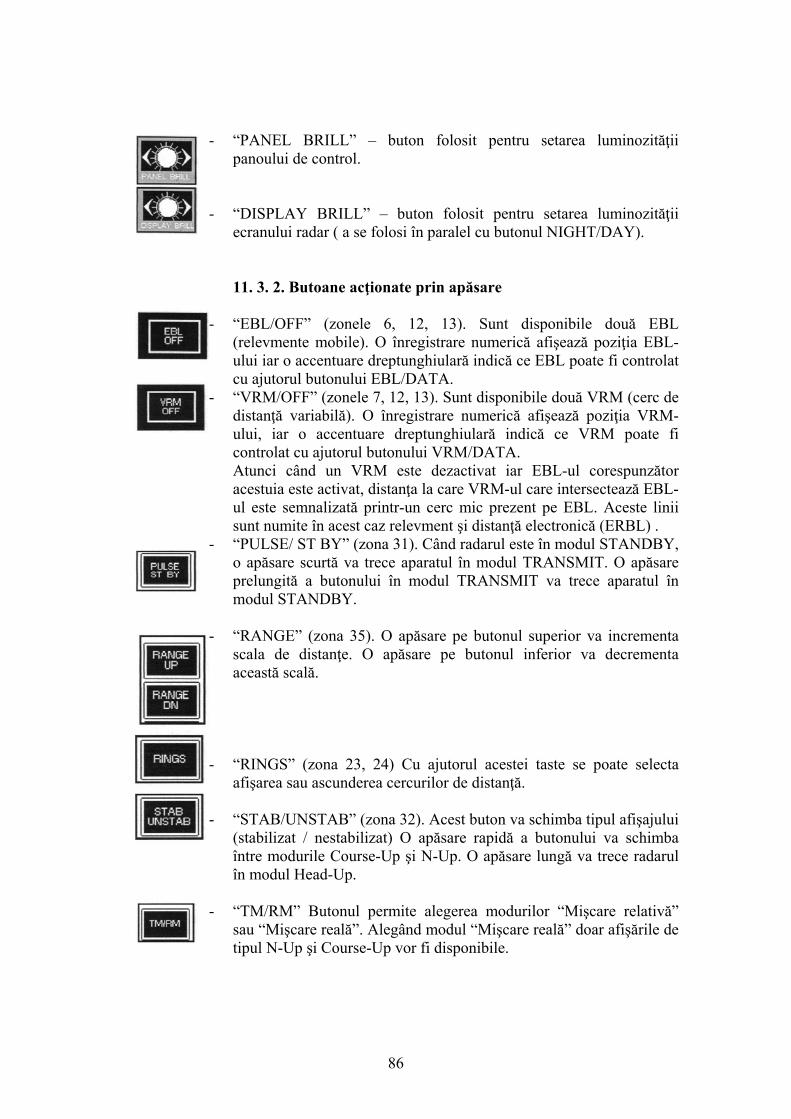
86
- “PANEL BRILL” – buton folosit pentru setarea luminozităţii
panoului de control.
- “DISPLAY BRILL” – buton folosit pentru setarea luminozităţii ecranului radar ( a se folosi în paralel cu butonul NIGHT/DAY). 11. 3. 2. Butoane acţionate prin apăsare
- “EBL/OFF” (zonele 6, 12, 13). Sunt disponibile două EBL
(relevmente mobile). O înregistrare numerică afişează poziţia EBL-ului iar o accentuare dreptunghiulară indică ce EBL poate fi controlat cu ajutorul butonului EBL/DATA.
- “VRM/OFF” (zonele 7, 12, 13). Sunt disponibile două VRM (cerc de distanţă variabilă). O înregistrare numerică afişează poziţia VRM-ului, iar o accentuare dreptunghiulară indică ce VRM poate fi controlat cu ajutorul butonului VRM/DATA. Atunci când un VRM este dezactivat iar EBL-ul corespunzător acestuia este activat, distanţa la care VRM-ul care intersectează EBL-ul este semnalizată printr-un cerc mic prezent pe EBL. Aceste linii sunt numite în acest caz relevment şi distanţă electronică (ERBL) .
- “PULSE/ ST BY” (zona 31). Când radarul este în modul STANDBY, o apăsare scurtă va trece aparatul în modul TRANSMIT. O apăsare prelungită a butonului în modul TRANSMIT va trece aparatul în modul STANDBY.
- “RANGE” (zona 35). O apăsare pe butonul superior va incrementa
scala de distanţe. O apăsare pe butonul inferior va decrementa această scală.
- “RINGS” (zona 23, 24) Cu ajutorul acestei taste se poate selecta
afişarea sau ascunderea cercurilor de distanţă.
- “STAB/UNSTAB” (zona 32). Acest buton va schimba tipul afişajului (stabilizat / nestabilizat) O apăsare rapidă a butonului va schimba între modurile Course-Up şi N-Up. O apăsare lungă va trece radarul în modul Head-Up.
- “TM/RM” Butonul permite alegerea modurilor “Mişcare relativă”
sau “Mişcare reală”. Alegând modul “Mişcare reală” doar afişările de tipul N-Up şi Course-Up vor fi disponibile.
87
- “TRAILS/PERM” (zona 25). O apăsare scurta a acestui buton va seta urmele lăsate de ţinte în modurile “scurte”, ”lungi” sau le va dezactiva. O apăsare lungă va face urmele permanente.
- “AUTO/ENH’CE” (zona 26, 27). O apăsare scurtă va schimba funcţia “Auto-Clutter” între modurile automat şi manual. O apăsare lungă va activa/dezactiva funcţia “Enhance” – expandare.
- “CENTRE/SHIFT” Acest buton poate fi folosit în trei moduri: - O apăsare scurtă a acestui buton va centra imaginea radar. Ţinând acest buton apăsat şi folosind trackball-ul se poate muta poziţia navei proprii până la o distanţă maximă de două treimi din raza ecranului. - Când este afişat meniul “EBL OFFSET”, acest buton este folosit pentru a poziţiona originea EBL. - O apăsare lungă a acestui buton va poziţiona nava la două treimi din raza faţă de centrul ecranului, într-o manieră similară modului “Mişcare Reală”, drumul navei trecând prin centrul ecranului. - “HM OFF” (zona 5). Acest buton este folosit pentru a ascunde
indicaţia de drum (aceasta este ascunsă atâta timp cât butonul este apăsat).
- “MARK/CLEAR”. O apăsare scurtă a acestui buton va plasa un semn
în locul marcat de cursor. Tot o apăsare scurtă va şterge un astfel de semn indicat de cursor. O apăsare lungă va şterge toate semnele. Sunt disponibile 20 astfel de semne.
- “PLOT/SELECT” (zona 18). O apăsare scurtă a acestui buton va
executa o plotare pe ţinta indicată de cursor. După 30 de secunde se poate face o a doua plotare, iar drumul şi viteza ţintei, CPA şi TCPA vor fi afişate.
- “CANCEL” (zona 15, 18). Pentru a renunţa la o plotare se va
poziţiona cursorul pe ţintă şi se va apasa acest buton. O apăsare lungă a acestui buton va şterge toate plotările efectuate.
- “VECTOR/TIME” (zona 17). O apăsare scurtă va permite
schimbarea între vectori reali şi relativi. Timpul vectorilor (mărimea acestora) se poate seta ţinând acest buton apăsat şi acţionând oricare dintre butoanele rotative.
- “SPEED” (zona 10, 18). O apăsare scurtă a butonului va deschide un meniu conţinând modurile disponibile:

88
MANUAL (viteza estimată), acest mod este folosit în mod normal în momentul în care nu exista informaţii despre viteză. ECHO REF, acest mod poate fi activat doar dacă radarul este prevăzut cu ARPA. Pentru a-l selecta se va indica cu ajutorul cursorului ţinta fixă, şi se va efectua o apăsare lungă a butonului. Acest mod va pune la dispoziţie o imagine radar stabilizată deasupra fundului.
SERIAL LOG. Acest mod implică o imagine stabilizată prin apă. - “INDEX/CLEAR” (zona 18, 22). Sunt disponibile două paralele
indicatoare. O apăsare scurtă a acestui buton va afişa prima linie indicatoare. Apăsând butonul “#” aceasta poate fi mutată în poziţia dorită. O apăsare lungă a acestui buton va şterge paralelele indicatoare.
- “G ZONE/CLEAR” (zona 2, 28, 29). Sunt disponibile două zone de
gardă ajustabile în dimensiune şi acoperire unghiulară. Prima zonă poate fi definită pe o scală de 3 mile marine iar cea de a doua poate fi definită pe scala de 6 mile marine. O apăsare scurtă a acestui buton va selecta zona ce poate fi editată în acel moment. Orice ţintă ce intră în aceste zone va fi plotată automat şi indicată cu ajutorul culorii roşu.
- “MENU” (zona 18, 19). Acest buton este folosit pentru a afişa meniul principal. A doua apăsare a acestui buton va şterge acest meniu de pe ecran. Se va folosi trackball-ul pentru a naviga în meniu, şi tasta “#” pentru a selecta opţiunea dorită.
- “#” (zona 19). Buton folosit pentru a selecta o opţiune din meniuri sau pentru a confirma înregistrarea unor date.
- “ALARM ACK”. O apăsare scurtă a acestui buton va opri alarma cu cea mai mare prioritate. Doar o singură alarmă poate fi oprită la un moment dat.
- “NIGHT/DAY”. O apăsare scurtă a acestui buton va selecta una din
cele patru opţiuni de intensitate a luminii afişate pe ecran (setări pentru noapte). O apăsare lungă a butonului va seta luminozitatea standard pentru folosirea pe timp de zi.
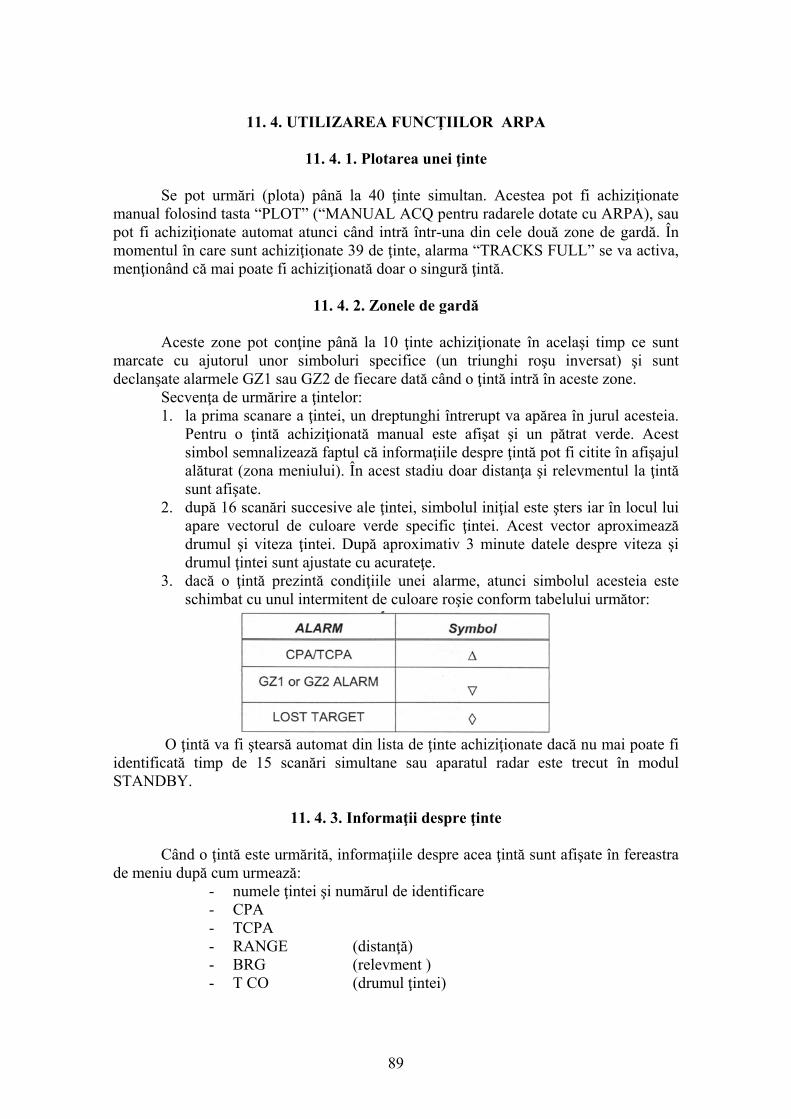
89
11. 4. UTILIZAREA FUNCŢIILOR ARPA
11. 4. 1. Plotarea unei ţinte Se pot urmări (plota) până la 40 ţinte simultan. Acestea pot fi achiziţionate manual folosind tasta “PLOT” (“MANUAL ACQ pentru radarele dotate cu ARPA), sau pot fi achiziţionate automat atunci când intră într-una din cele două zone de gardă. În momentul în care sunt achiziţionate 39 de ţinte, alarma “TRACKS FULL” se va activa, menţionând că mai poate fi achiziţionată doar o singură ţintă.
11. 4. 2. Zonele de gardă Aceste zone pot conţine până la 10 ţinte achiziţionate în acelaşi timp ce sunt marcate cu ajutorul unor simboluri specifice (un triunghi roşu inversat) şi sunt declanşate alarmele GZ1 sau GZ2 de fiecare dată când o ţintă intră în aceste zone. Secvenţa de urmărire a ţintelor:
1. la prima scanare a ţintei, un dreptunghi întrerupt va apărea în jurul acesteia. Pentru o ţintă achiziţionată manual este afişat şi un pătrat verde. Acest simbol semnalizează faptul că informaţiile despre ţintă pot fi citite în afişajul alăturat (zona meniului). În acest stadiu doar distanţa şi relevmentul la ţintă sunt afişate.
2. după 16 scanări succesive ale ţintei, simbolul iniţial este şters iar în locul lui apare vectorul de culoare verde specific ţintei. Acest vector aproximează drumul şi viteza ţintei. După aproximativ 3 minute datele despre viteza şi drumul ţintei sunt ajustate cu acurateţe.
3. dacă o ţintă prezintă condiţiile unei alarme, atunci simbolul acesteia este schimbat cu unul intermitent de culoare roşie conform tabelului următor:
O ţintă va fi ştearsă automat din lista de ţinte achiziţionate dacă nu mai poate fi identificată timp de 15 scanări simultane sau aparatul radar este trecut în modul STANDBY.
11. 4. 3. Informaţii despre ţinte Când o ţintă este urmărită, informaţiile despre acea ţintă sunt afişate în fereastra de meniu după cum urmează:
- numele ţintei şi numărul de identificare - CPA - TCPA - RANGE (distanţă) - BRG (relevment ) - T CO (drumul ţintei)
90
- SPEED (viteza ţintei) O imagine alternativă poate fi selecţionată apăsând butonul DATA SELECT, având cursorul poziţionat pe o zonă liberă a ecranului. Această vedere va afişa informaţii limitate (numărul de identificare al ţintei, CPA şi TCPA) despre mai multe ţinte simultan (maxim 5).
11. 5. UTILIZAREA UNEI TASTATURI STANDARD ÎMPREUNĂ CU RADARUL BRIDGEMASTER II
Notă: pe parcursul următoarelor pagini sunt folosite prescurtările: LS – tasta SHIFT stânga; RS – tasta SHIFT dreapta; LC – tasta CONTROL stânga; RC – tasta CONTROL dreapta.
11. 5. 1. Taste active disponibile atât în modul emisie cât şi în modul standby <P> Apăsare scurtă
pentru a trece aparatul în emisie atunci când este în modul standby
pentru a schimba între valorile lungimii de undă disponibile în modul emisie
Apăsare lungă pentru a trece aparatul în modul
standby <B> Apăsare scurtă
folosit pentru a schimba între modurile de iluminare pentru noapte
Apăsare lungă folosită pentru a schimba
luminozitatea pentru operare pe timpul zilei
RS + <B> creşte luminozitatea ecranului
LS + <B> scade luminozitatea ecranului.
11. 5. 2. Taste active disponibile în modul emisie
<Up>
folosită pentru a naviga în meniul radarului, dacă acesta este afişat.
LC
91
folosit pentru a mări raza VRM, dacă meniul radarului nu este afişat.
<Down> folosită pentru a naviga în
meniul radarului, dacă acesta este afişat.
LC folosită pentru a micşora raza
VRM, dacă meniul radarului nu este afişat.
RC folosită ca înlocuitor al
trackball-ului. <Left> LC
folosită pentru rotirea EBL în sens trigonometric.
<Right> LC
folosită pentru rotirea EBL în sensul acelor de ceasornic.
RC folosită ca înlocuitor al
trackball-ului.
11. 5. 3. Alte taste
<Ctrl + Alt + M> - Afişează meniul principal. <Ctrl + Alt + S> - Afişează meniul viteze. <Ctrl + Alt + A> - Afişează meniul ARPA. <Ctrl + Alt + T> - Afişează meniul manevră de probă <G> LC + <G> / RC + <G> - folosit pentru a mări / micşora valoarea Gain. <R> LC + <R> / RC + <R> - folosit pentru a mări / micşora valoarea Rain Clutter.
<S> LC + <S> / RC + <S> - folosit pentru a mări / micşora valoarea Sea Clutter.
<T> LC + <T> / RC + <T> - folosit pentru a mări / micşora valoarea Tune Clutter. <BackSpace> sau <ESC> - înlocuieşte tasta “CANCEL”. <RETURN> - înlocuieşte tasta “ENTER”.
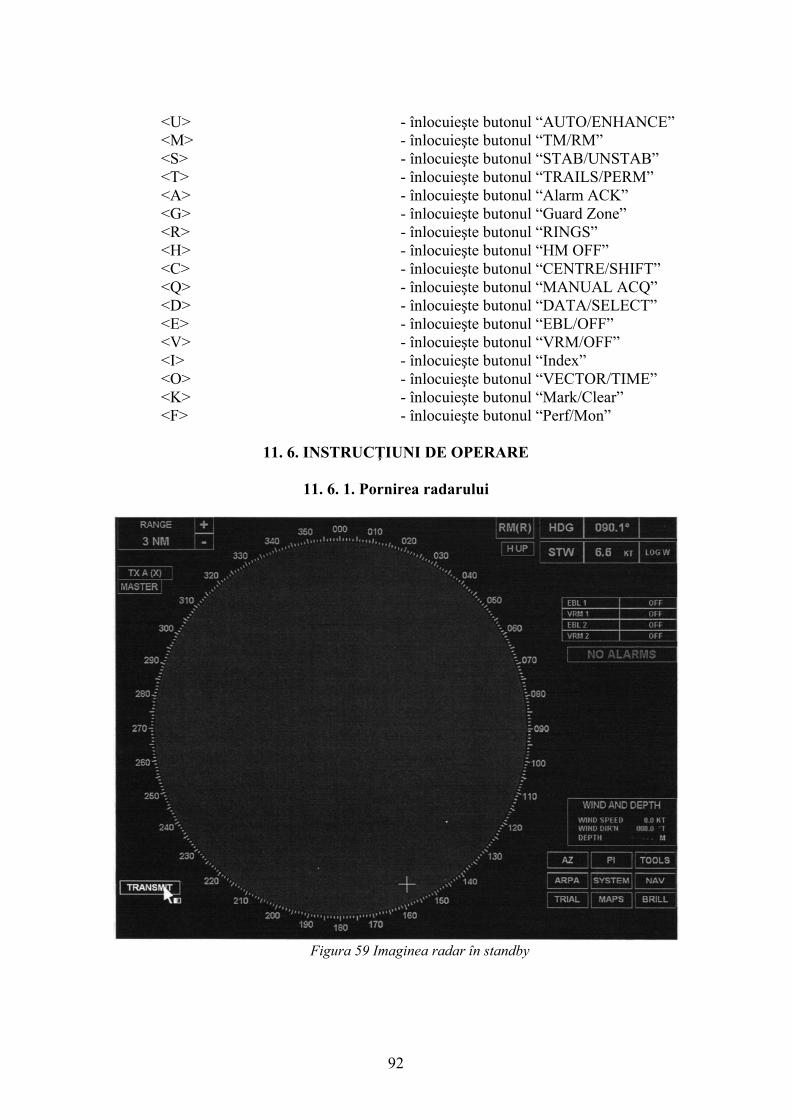
92
<U> - înlocuieşte butonul “AUTO/ENHANCE” <M> - înlocuieşte butonul “TM/RM” <S> - înlocuieşte butonul “STAB/UNSTAB” <T> - înlocuieşte butonul “TRAILS/PERM” <A> - înlocuieşte butonul “Alarm ACK” <G> - înlocuieşte butonul “Guard Zone” <R> - înlocuieşte butonul “RINGS” <H> - înlocuieşte butonul “HM OFF” <C> - înlocuieşte butonul “CENTRE/SHIFT” <Q> - înlocuieşte butonul “MANUAL ACQ” <D> - înlocuieşte butonul “DATA/SELECT” <E> - înlocuieşte butonul “EBL/OFF” <V> - înlocuieşte butonul “VRM/OFF” <I> - înlocuieşte butonul “Index” <O> - înlocuieşte butonul “VECTOR/TIME” <K> - înlocuieşte butonul “Mark/Clear” <F> - înlocuieşte butonul “Perf/Mon”
11. 6. INSTRUCŢIUNI DE OPERARE
11. 6. 1. Pornirea radarului
Figura 59 Imaginea radar în standby
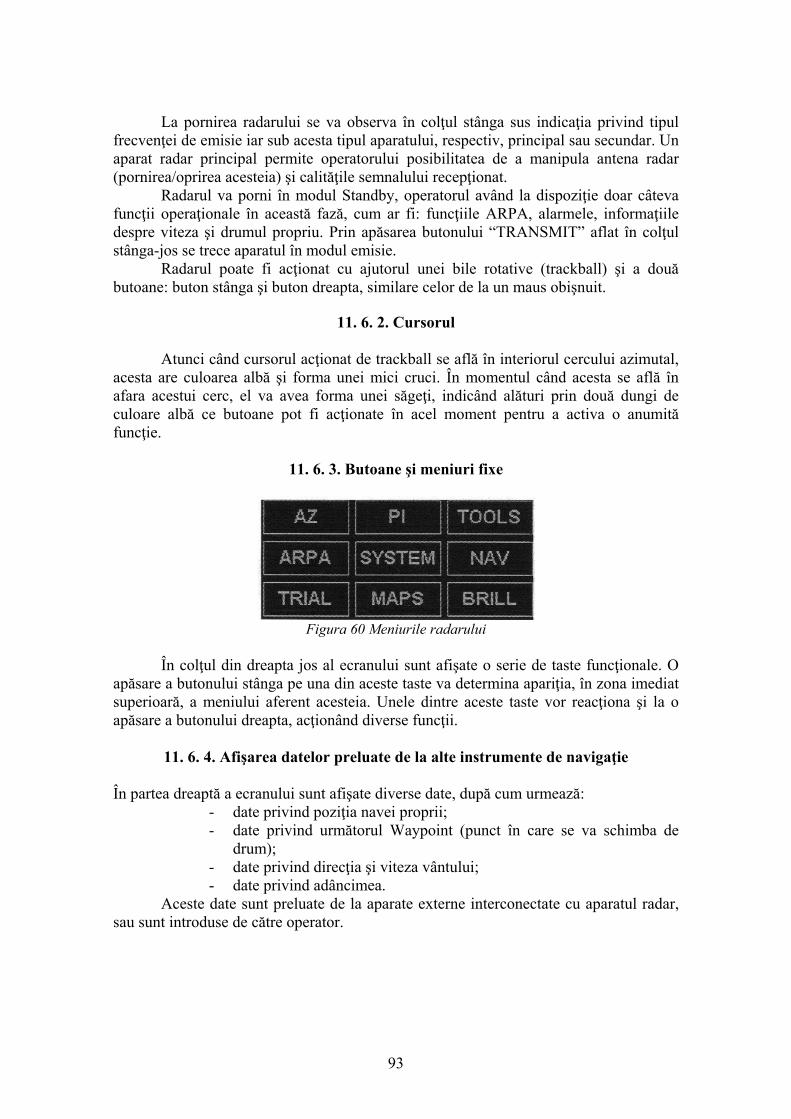
93
La pornirea radarului se va observa în colţul stânga sus indicaţia privind tipul frecvenţei de emisie iar sub acesta tipul aparatului, respectiv, principal sau secundar. Un aparat radar principal permite operatorului posibilitatea de a manipula antena radar (pornirea/oprirea acesteia) şi calităţile semnalului recepţionat. Radarul va porni în modul Standby, operatorul având la dispoziţie doar câteva funcţii operaţionale în această fază, cum ar fi: funcţiile ARPA, alarmele, informaţiile despre viteza şi drumul propriu. Prin apăsarea butonului “TRANSMIT” aflat în colţul stânga-jos se trece aparatul în modul emisie. Radarul poate fi acţionat cu ajutorul unei bile rotative (trackball) şi a două butoane: buton stânga şi buton dreapta, similare celor de la un maus obişnuit.
11. 6. 2. Cursorul
Atunci când cursorul acţionat de trackball se află în interiorul cercului azimutal, acesta are culoarea albă şi forma unei mici cruci. În momentul când acesta se află în afara acestui cerc, el va avea forma unei săgeţi, indicând alături prin două dungi de culoare albă ce butoane pot fi acţionate în acel moment pentru a activa o anumită funcţie.
11. 6. 3. Butoane şi meniuri fixe
Figura 60 Meniurile radarului
În colţul din dreapta jos al ecranului sunt afişate o serie de taste funcţionale. O apăsare a butonului stânga pe una din aceste taste va determina apariţia, în zona imediat superioară, a meniului aferent acesteia. Unele dintre aceste taste vor reacţiona şi la o apăsare a butonului dreapta, acţionând diverse funcţii.
11. 6. 4. Afişarea datelor preluate de la alte instrumente de navigaţie În partea dreaptă a ecranului sunt afişate diverse date, după cum urmează:
- date privind poziţia navei proprii; - date privind următorul Waypoint (punct în care se va schimba de
drum); - date privind direcţia şi viteza vântului; - date privind adâncimea.
Aceste date sunt preluate de la aparate externe interconectate cu aparatul radar, sau sunt introduse de către operator.
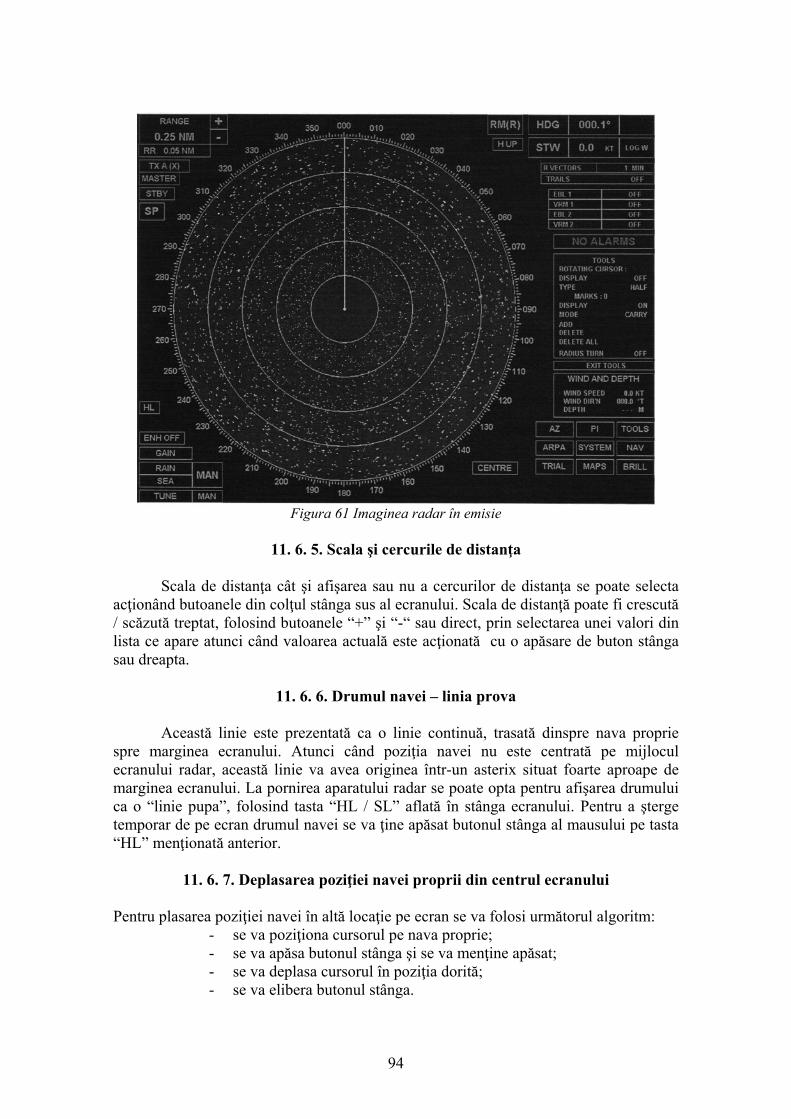
94
Figura 61 Imaginea radar în emisie
11. 6. 5. Scala şi cercurile de distanţa
Scala de distanţa cât şi afişarea sau nu a cercurilor de distanţa se poate selecta acţionând butoanele din colţul stânga sus al ecranului. Scala de distanţă poate fi crescută / scăzută treptat, folosind butoanele “+” şi “-“ sau direct, prin selectarea unei valori din lista ce apare atunci când valoarea actuală este acţionată cu o apăsare de buton stânga sau dreapta.
11. 6. 6. Drumul navei – linia prova
Această linie este prezentată ca o linie continuă, trasată dinspre nava proprie spre marginea ecranului. Atunci când poziţia navei nu este centrată pe mijlocul ecranului radar, această linie va avea originea într-un asterix situat foarte aproape de marginea ecranului. La pornirea aparatului radar se poate opta pentru afişarea drumului ca o “linie pupa”, folosind tasta “HL / SL” aflată în stânga ecranului. Pentru a şterge temporar de pe ecran drumul navei se va ţine apăsat butonul stânga al mausului pe tasta “HL” menţionată anterior.
11. 6. 7. Deplasarea poziţiei navei proprii din centrul ecranului Pentru plasarea poziţiei navei în altă locaţie pe ecran se va folosi următorul algoritm:
- se va poziţiona cursorul pe nava proprie; - se va apăsa butonul stânga şi se va menţine apăsat; - se va deplasa cursorul în poziţia dorită; - se va elibera butonul stânga.
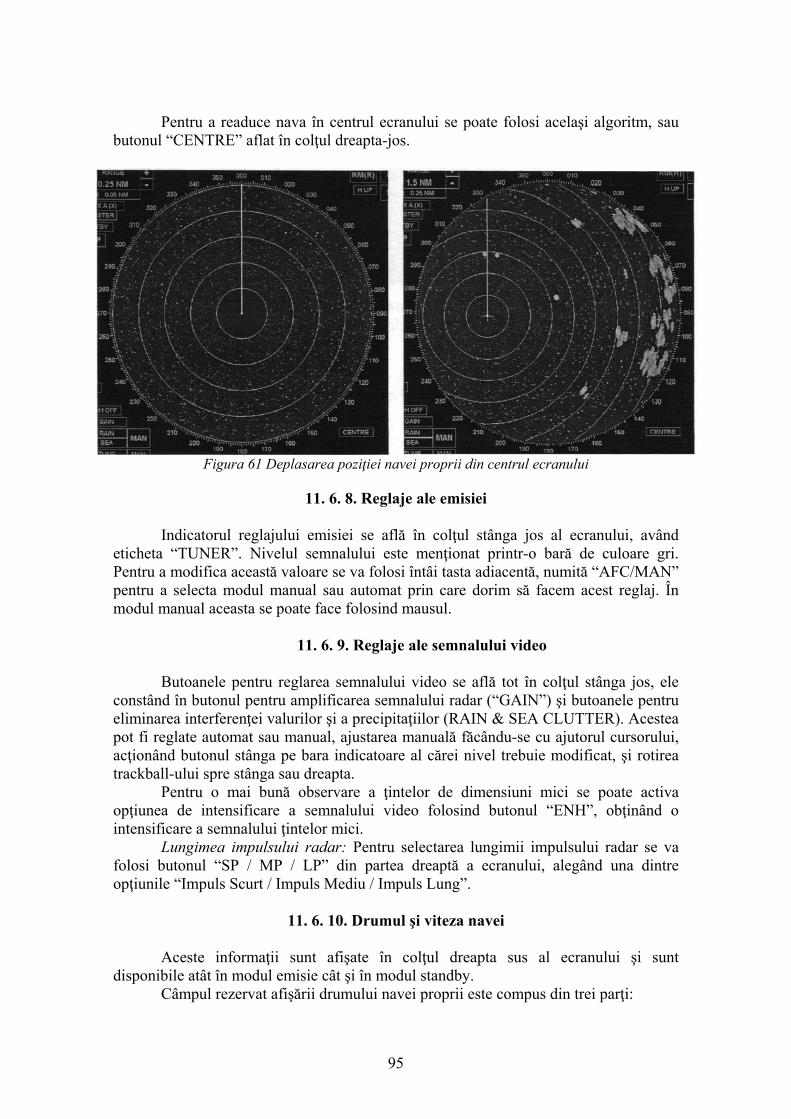
95
Pentru a readuce nava în centrul ecranului se poate folosi acelaşi algoritm, sau butonul “CENTRE” aflat în colţul dreapta-jos.
Figura 61 Deplasarea poziţiei navei proprii din centrul ecranului
11. 6. 8. Reglaje ale emisiei
Indicatorul reglajului emisiei se află în colţul stânga jos al ecranului, având eticheta “TUNER”. Nivelul semnalului este menţionat printr-o bară de culoare gri. Pentru a modifica această valoare se va folosi întâi tasta adiacentă, numită “AFC/MAN” pentru a selecta modul manual sau automat prin care dorim să facem acest reglaj. În modul manual aceasta se poate face folosind mausul.
11. 6. 9. Reglaje ale semnalului video
Butoanele pentru reglarea semnalului video se află tot în colţul stânga jos, ele constând în butonul pentru amplificarea semnalului radar (“GAIN”) şi butoanele pentru eliminarea interferenţei valurilor şi a precipitaţiilor (RAIN & SEA CLUTTER). Acestea pot fi reglate automat sau manual, ajustarea manuală făcându-se cu ajutorul cursorului, acţionând butonul stânga pe bara indicatoare al cărei nivel trebuie modificat, şi rotirea trackball-ului spre stânga sau dreapta. Pentru o mai bună observare a ţintelor de dimensiuni mici se poate activa opţiunea de intensificare a semnalului video folosind butonul “ENH”, obţinând o intensificare a semnalului ţintelor mici. Lungimea impulsului radar: Pentru selectarea lungimii impulsului radar se va folosi butonul “SP / MP / LP” din partea dreaptă a ecranului, alegând una dintre opţiunile “Impuls Scurt / Impuls Mediu / Impuls Lung”.
11. 6. 10. Drumul şi viteza navei Aceste informaţii sunt afişate în colţul dreapta sus al ecranului şi sunt disponibile atât în modul emisie cât şi în modul standby. Câmpul rezervat afişării drumului navei proprii este compus din trei parţi:
96
- eticheta “HDG”; - drumul adevărat (va fi scris cu roşu atunci când se determina o eroare
de interconectare cu compasul); - drumul deasupra fundului (afişat doar dacă viteza selectată este
viteza deasupra fundului, şi este mai mare de 1 nod). Câmpul destinat afişării vitezei navei proprii este compus din trei părţi:
- eticheta, care poate fi STW (viteza prin apă) sau SOG (viteza deasupra fundului);
- valoarea vitezei în noduri; - modul de determinare al vitezei (poate fi schimbat utilizând
trackball-ul).
11. 7. MODURI DE REPREZENTARE, VECTORI DE MIŞCARE ŞI URME ALE ŢINTELOR
Modurile de prezentare a imaginii în funcţie de mişcare se pot alege folosind butoanele din colţul dreapta sus, la stânga câmpurilor rezervate prezentării vitezei şi drumului navei proprii. Pentru reglarea vectorilor şi a urmelor asociate ţintelor de pe ecran, se vor folosi butoanele situate imediat sub câmpurile rezervate vitezei şi drumului navei proprii.
11. 7. 1. Moduri de reprezentare
Datele recepţionate de către radar de la un compas magnetic sau girocompas pot fi procesate pentru a reproduce o imagine radar stabilizată. Sunt disponibile două tipuri de imagini stabilizate, North-Up (cu Nordul adevărat în sus) şi Course-Up (cu drumul navei în sus). Fără informaţiile primite de la un compas, imaginea radar este una nestabilizată, Head-Up (cu prova sus).
11. 7. 2. Moduri de mişcare Acestea determină modul în care nava proprie este reprezentată pe ecranul radarului, ca un punct staţionar, sau în mişcare, influenţând de asemenea şi reprezentarea tuturor celorlalte ţinte. Modurile disponibile sunt : - RM(R) - Mişcare relativă – urme relative (nava proprie este reprezentată ca un punct
fix în centrul ecranului, iar toate urmele ţintelor sunt reprezentate relativ la mişcarea navei proprii, însemnând că şi ţintele fixe vor avea urme, dacă nava proprie se deplasează);
- RM(T) - Mişcare relativă – urme adevărate (nava proprie este reprezentată ca un punct fix în centrul ecranului, totuşi, ţintele vor avea urme pe direcţiile reale de mişcare, astfel ca ţintele fixe nu vor prezenta urme;
- TM - mişcare adevărată. (nava proprie se mişcă pe ecranul radar, ţintele fixe nu prezintă urme).
97
11. 7. 3. Vectori de mişcare Vectorii de mişcare au rolul de a indica direcţia de mişcare şi viteza ţintelor. Lungimea acestora reprezintă mărimea vitezei, iar orientarea reprezintă drumul urmat de acestea. Vectorii pot fi reali şi relativi, cei reali reprezentând viteza şi drumul ţintelor prin apă / deasupra fundului, iar cei relativi reprezintă mişcarea ţintelor relativ la mişcarea navei proprii.
11. 7. 4. Urme specifice mişcării ţintelor Pe lângă afişarea vectorilor de mişcare a ţintelor, operatorul poate opta pentru afişarea unor urme de o anumită lungime, lăsate în urma lor de către ţinte, pentru a putea ţine mai uşor evidenţa mişcărilor acestora. Aceste urme depind de modul de mişcare prezentat de aparatul radar, astfel că vor fi reale sau relative la mişcarea navei proprii. Ele pot fi: scurte, lungi, permanente sau dezactivate.
11. 7. 5. EBL, ERBL şi VRM Sunt disponibile două EBL (relevmente mobile) şi două VRM (cercuri de distanţă variabilă), asociate după cum urmează: EBL1 şi VRM1 formează un grup, iar EBL2 şi VRM2 formează celălalt grup. Dacă un EBL este activat fără a-i activa VRM-ul corespunzător, acesta se transformă în ERBL (relevment electronic şi marcă de distanţă). Un EBL sau VRM poate fi activat apăsând butonul stânga pe căsuţa ce indică numele respectivului EBL sau VRM. Pentru a regla valoarea unghiului sau distanţei, se va folosi aceeaşi metodă, pointerul indicând acum căsuţa adiacentă, cea care afişează valorile respective. Pentru a manevra mai uşor un VRM şi un RBL, sau un ERBL, se poate poziţiona cursorul în interiorul cercului azimutal, la intersecţia dintre cercul VRM şi EBL, şi utilizând metoda de “dragare” folosită şi la mutarea poziţiei navei proprii, se va muta respectivul punct în zona de interes. O metodă facilă de a preleva rapid un relevment şi o distanţă la o anumită ţintă se rezumă la a plasa cursorul pe respectiva ţintă şi a efectua o apăsare prelungită a butonului stânga. Un EBL şi VRM-ul corespunzător se vor activa în punctul respectiv.
11. 7. 6. Funcţii EPA, ATA şi ARPA În modul emisie, orice ţintă care apare pe ecranul radarului la o distanţă de maxim 40 Mm poate fi plotată şi urmărită. Metoda folosită pentru aceasta poate fi plotarea manuală (la aparatele EPA) sau automată (ATA şi ARPA). După ce a fost plotată, informaţiile referitoare la respectiva ţintă pot fi urmărite până când ţinta este anulată. O indicaţie despre configuraţia radarului se află în tastele fixe, după cum se poate vedea în figura de mai jos. Această indicaţie poate fi ARPA, ATA sau EPA.
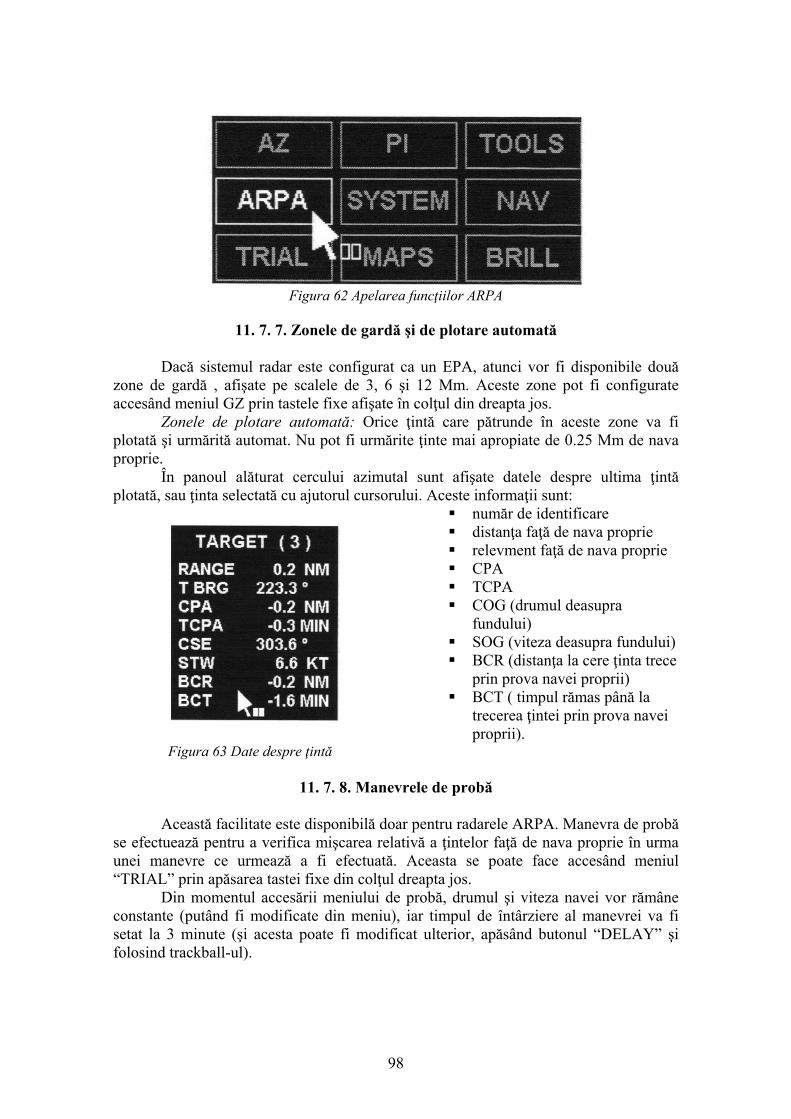
98
Figura 62 Apelarea funcţiilor ARPA
11. 7. 7. Zonele de gardă şi de plotare automată Dacă sistemul radar este configurat ca un EPA, atunci vor fi disponibile două zone de gardă , afişate pe scalele de 3, 6 şi 12 Mm. Aceste zone pot fi configurate accesând meniul GZ prin tastele fixe afişate în colţul din dreapta jos. Zonele de plotare automată: Orice ţintă care pătrunde în aceste zone va fi plotată şi urmărită automat. Nu pot fi urmărite ţinte mai apropiate de 0.25 Mm de nava proprie. În panoul alăturat cercului azimutal sunt afişate datele despre ultima ţintă plotată, sau ţinta selectată cu ajutorul cursorului. Aceste informaţii sunt:
număr de identificare distanţa faţă de nava proprie relevment faţă de nava proprie CPA TCPA COG (drumul deasupra
fundului) SOG (viteza deasupra fundului) BCR (distanţa la cere ţinta trece
prin prova navei proprii) BCT ( timpul rămas până la
trecerea ţintei prin prova navei proprii).
Figura 63 Date despre ţintă
11. 7. 8. Manevrele de probă Această facilitate este disponibilă doar pentru radarele ARPA. Manevra de probă se efectuează pentru a verifica mişcarea relativă a ţintelor faţă de nava proprie în urma unei manevre ce urmează a fi efectuată. Aceasta se poate face accesând meniul “TRIAL” prin apăsarea tastei fixe din colţul dreapta jos. Din momentul accesării meniului de probă, drumul şi viteza navei vor rămâne constante (putând fi modificate din meniu), iar timpul de întârziere al manevrei va fi setat la 3 minute (şi acesta poate fi modificat ulterior, apăsând butonul “DELAY” şi folosind trackball-ul).
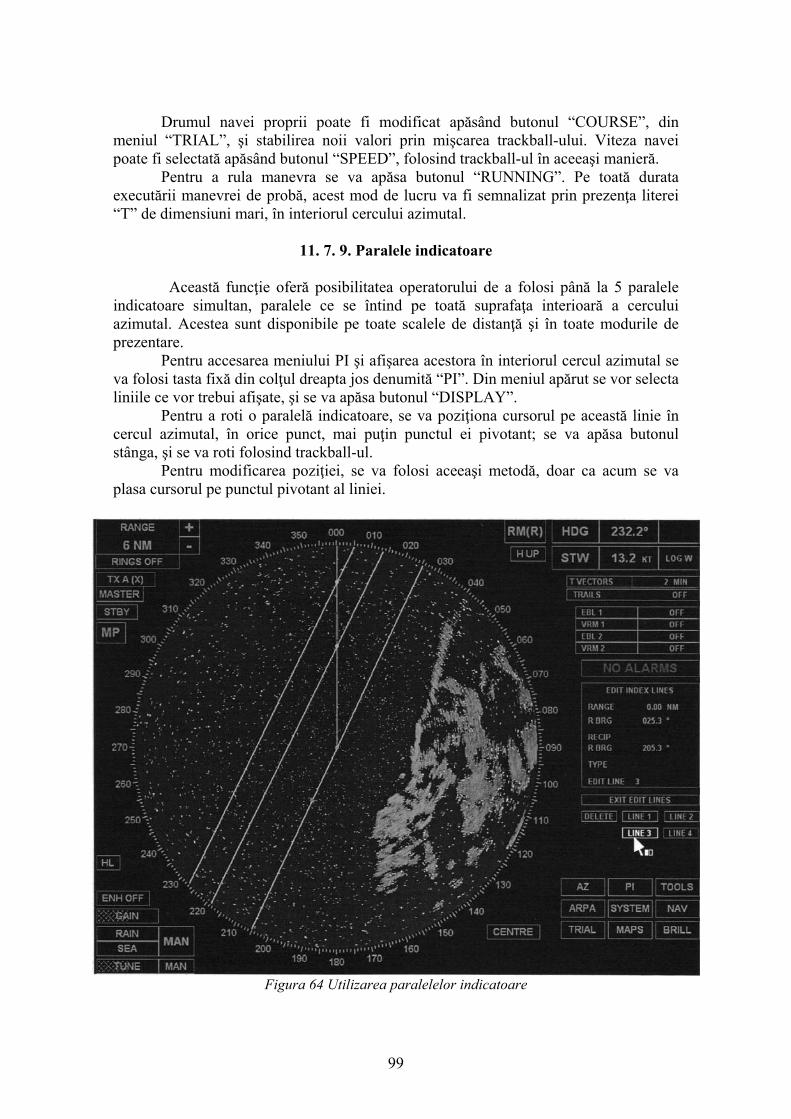
99
Drumul navei proprii poate fi modificat apăsând butonul “COURSE”, din meniul “TRIAL”, şi stabilirea noii valori prin mişcarea trackball-ului. Viteza navei poate fi selectată apăsând butonul “SPEED”, folosind trackball-ul în aceeaşi manieră. Pentru a rula manevra se va apăsa butonul “RUNNING”. Pe toată durata executării manevrei de probă, acest mod de lucru va fi semnalizat prin prezenţa literei “T” de dimensiuni mari, în interiorul cercului azimutal.
11. 7. 9. Paralele indicatoare Această funcţie oferă posibilitatea operatorului de a folosi până la 5 paralele indicatoare simultan, paralele ce se întind pe toată suprafaţa interioară a cercului azimutal. Acestea sunt disponibile pe toate scalele de distanţă şi în toate modurile de prezentare. Pentru accesarea meniului PI şi afişarea acestora în interiorul cercul azimutal se va folosi tasta fixă din colţul dreapta jos denumită “PI”. Din meniul apărut se vor selecta liniile ce vor trebui afişate, şi se va apăsa butonul “DISPLAY”. Pentru a roti o paralelă indicatoare, se va poziţiona cursorul pe această linie în cercul azimutal, în orice punct, mai puţin punctul ei pivotant; se va apăsa butonul stânga, şi se va roti folosind trackball-ul. Pentru modificarea poziţiei, se va folosi aceeaşi metodă, doar ca acum se va plasa cursorul pe punctul pivotant al liniei.
Figura 64 Utilizarea paralelelor indicatoare
100
11. 7. 10. Alte instrumente Prin accesarea meniului “TOOLS”, utilizând tasta fixă numită “TOOLS”, se obţine acces la anumite funcţii suplimentare ale radarului, cum ar fi marcarea a până la 20 puncte de interes în interiorul cercului azimutal, planificarea unei giraţii, afişarea profilului navei, etc.
Figura 65 Alte instrumente
101
12. SIMULATORUL RADAR NUCLEUS Funcţiile radarului Nucleus se pot selecta cu ajutorul a 3 butoane şi a unei bile (trackerball) care controlează mişcarea cursorului pe ecran.
12. 1. BILA DE CONTROL, CURSORUL ŞI BUTOANELE
Bila de control (trackerball) este folosită pentru a poziţiona cursorul pe funcţia ce urmează a fi activată şi pentru a schimba parametrii acelei funcţii. Cursorul este reprezentat sub forma unui "plus"(+) în interiorul cercului azimutal, iar în afară acestuia sub forma unei "săgeţi" (↑). Când o funcţie este selectată cu ajutorul unui buton, cursorul este automat repoziţionat pe funcţia respectivă. Cele 3 butoane sunt utilizate pentru a activa sau a selecta o funcţie particulară. Ghidajul de folosire al acestor butoane este afişat în casetele de apăsare a butoanelor, situate în partea de jos a ecranului, pe centru. Când o funcţie este activată, casetele de apăsare a butoanelor afişează aceleaşi date ca şi casetele de informaţii afişate sub funcţia respectiva. Pe ecran este afişată alternativ o casetă de culoare roşie care conţine legenda. O funcţie care a fost activată anterior, cum ar fi EBL, poate fi reselectată prin poziţionarea cursorului în apropierea funcţiei, apoi prin apăsarea butonului din centru. 12. 2. PORNIREA, OPRIREA ŞI REGLAREA LUMINOZITĂŢII ECRANULUI Ecranul poate fi pornit cu ajutorul butonului "ON/OFF" aflat în partea stângă a panoului radarului. Luminozitatea pentru zi sau noapte, contrast, nivelul alarmelor sonore se reglează prin selectarea casetei CRT situată în partea de jos a ecranului, în dreapta. Prin apăsarea simultană a celor 3 butoane se creşte luminozitatea şi contrastul ecranului.
12. 2. 1. Culori utilizate pentru imaginea RADAR
Culorile ecranului sunt împărţite în 3 grupe principale, după cum urmează: - în interiorul şi exteriorul cercului azimutal - numai în interiorul cercului azimutal - culorile radarului Culorile folosite în interiorul şi exteriorul cercului azimutal sunt: - gri/albastru = fundalul ecranului - roşu = avertismentele - verde = cursorul/măsurătorile - albastru marin = fundalul casetelor - gri = fundalul casetelor care apar în jos după selectarea unei funcţii (pop-down) - turcoaz = scara relevmentelor, conturul de jos şi din dreapta al casetelor - albastru roial = casetele scoase în evidenţă - alb = text, conturul de sus şi din stânga al casetelor Culorile folosite numai în interiorul cercului azimutal sunt: - albastru = fundalul radarului - roşu = punctele de schimbare de drum, EBL 2, VRM 2 - verde = linia prova, EBL 1, VRM 1
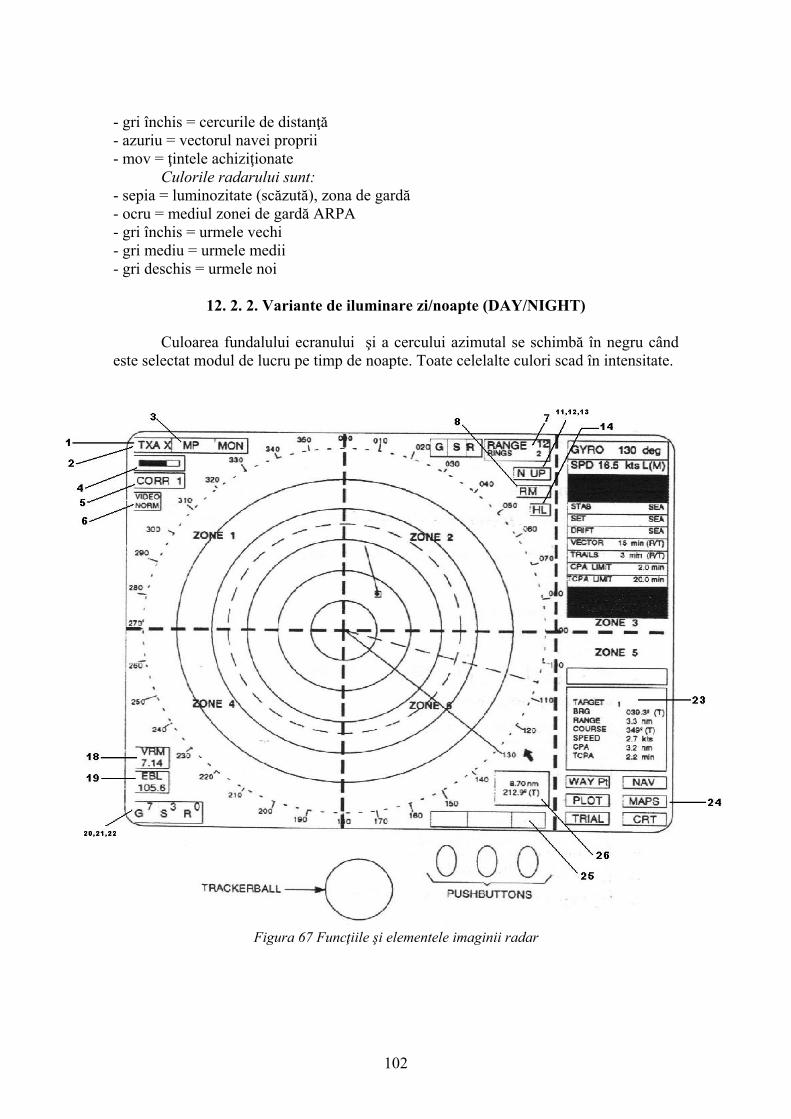
102
- gri închis = cercurile de distanţă - azuriu = vectorul navei proprii - mov = ţintele achiziţionate Culorile radarului sunt: - sepia = luminozitate (scăzută), zona de gardă - ocru = mediul zonei de gardă ARPA - gri închis = urmele vechi - gri mediu = urmele medii - gri deschis = urmele noi
12. 2. 2. Variante de iluminare zi/noapte (DAY/NIGHT)
Culoarea fundalului ecranului şi a cercului azimutal se schimbă în negru când este selectat modul de lucru pe timp de noapte. Toate celelalte culori scad în intensitate.
Figura 67 Funcţiile şi elementele imaginii radar MAGINII RADAR
103
12. 3. FUNCŢIILE ŞI ELEMENTELE IMAGINII RADAR Zona 1 - Sistemul RADAR 01- modul de aşteptare (STAND BY), pornire a emisiei (RUN); 02- selectarea frecvenţei purtătoarei semnalului radar; 03- impulsuri scurte, medii şi lungi; 04- reglarea radarului şi a performanţelor (reglajul fin); 05- corelarea şi anularea interferenţelor; 06- expandarea ţintelor. Zona 2 - Scale de distanţă. Tipuri de imagine RADAR 07- scala şi cercurile de distanţă; 08- mişcarea relativă; 09- mişcarea adevărată (opţional); 10- modul de afişare centrat (opţional); 11- afişarea imaginii radar cu nordul sus (North-Up); 12- afişarea imaginii radar cu drumul sus (Course-Up); 13- afişarea imaginii radar cu prova sus (Head-Up); 14- ascunderea/afişarea liniei prova (HL). Zona 3 - Parametrii navei proprii şi cei de achiziţionare a ţintelor 15- parametrii navei proprii; 16- parametrii de achiziţionare a ţintelor; 17- parametrii manevrei de încercare. Zona 4 - VRM, EBL şi controlul semnalelor 18- cercul de distanţă variabilă (VRM); 19- linia mobilă de relevment (EBL); 20- reglajul amplificării (GAIN); 21- reglajul pentru anularea paraziţilor datoraţi valurilor (SEA); 22- reglajul pentru anularea paraziţilor datoraţi ploii sau ninsorii (RAIN). Zona 5 - Informaţii şi meniuri 23- informaţiile referitoare la ţintă; 24- meniuri pentru reglajele ecranului, pentru harţi, manevra de încercare şi pentru achiziţionarea ţintelor. Zona 6 – Operarea cursorului 25- selectarea butoanelor; 26- modul cursorului.

104
12. 3. 1. Zona 1 - Sistemul RADAR 12. 3. 1. 1. Pornirea şi trecerea în emisie a radarului (RUN)
Ecranul conţine următoarele casete cu instrucţiuni:
Se plasează cursorul pe TX AX şi se apasă butonul din stânga pentru a trece radarul în emisie. 12. 3. 1. 2. Modul de aşteptare (STANDBY) Pentru a modifica starea de operare a sistemului, de la "pornit" la "aşteptare", se plasează cursorul pe caseta TX şi se apasă butonul din stânga. Ecranul conţine următoarele casete:
Ecranul revine la starea de aşteptare, iar ţintele nu mai sunt afişate. 12. 3. 1. 3. Poziţionarea cursorului şi funcţiile iniţiale ale butoanelor după pornire Poziţia cursorului şi funcţiile butoanelor depind de pornirea radarului, fie prin selectarea casetei GO TO RUN, fie prin selectarea casetei RUN. Dacă cursorul se afla în afara cercului azimutal, după 30 de secunde de nefolosire a trackerball-ului sau a butoanelor, cursorul revine pe o poziţie standard, setată la instalarea radarului, iar pentru butoane apar următoarele casete:
După selectarea casetei GO TO RUN din ecranul de aşteptare, cursorul este poziţionat în centrul cercului azimutal, iar pentru butoane apar următoarele casete:
12. 3. 1. 4. Impulsuri scurte, medii şi lungi (radarul principal) Lungimile impulsurilor se activează automat, dar numai pentru radarul principal, când sunt selectate următoarele scale: - impuls scurt (SP) : pentru scale de la 25 cabluri, până la 1,5 mile;
105
- impuls mediu (MP) : pentru scale de la 3 mile, până la 24 mile; - impuls lung (LP): pentru scale de 48 mile, până la 96 mile. Pentru schimba valoarea implicită a impulsului se selectează caseta SP/MP/LP, apoi apare un submeniu ce permite selectarea opţiunilor pentru scala folosită. În cazul scalei de 3 mile, casetele pentru cele 3 butoane permit modificarea lungimii impulsului, de la mediu la scurt sau lung: - prin apăsarea butonului stânga se reduce lungimea impulsului, iar prin apăsarea butonului dreapta se creşte lungimea acestuia.
12. 3. 1. 5. Corelarea şi anularea interferenţelor Corelarea semnalului este folosită pentru a reduce interferenţele radar (CORR 1) şi pentru a reduce neuniformităţile (CORR 2). Sunt disponibile trei niveluri de corelare: - CORR 0: corelarea este oprită, radarul afişează imaginea standard; - CORR 1: este pornită anularea interferenţelor. În acest mod, semnale consecutive sunt comparate şi sunt reprezentate pe radar numai cele prezente în ambele emisii. Interferenţa altor radare este anulată, iar bruiajul receptorului este redus; - CORR 2: corelarea semnalului reduce neuniformităţile şi păstrează doar semnalele radar corelate după două scanări succesive ale antenei. Ţintele vagi, sunt afişate pe ecranul radarului cu o culoare de intensitate medie când nu sunt "văzute" la o scanare, cu o culoare de intensitate scăzută când nu sunt "văzute" la două scanări consecutive, sau sunt şterse definitiv de pe ecranul radar dacă nu sunt "văzute" nici după trei scanări. De asemenea interferenţa altor radare este anulată, iar bruiajul receptorului este redus şi mai mult. Notă: Navele rapide generează viteze relative ridicate ale ţintelor, corelarea fiind astfel redusă. Pentru evitarea acestui fenomen, se foloseşte o scanare mai rapidă, aceasta putând actualiza poziţia ţintei mai des. O lungime mai mare a impulsului îmbunătăţeşte corelarea, totuşi ţintele apropiate, care se deplasează cu viteze tangenţiale mari, nu pot fi corelate. 12. 3. 1. 6. Reglaje Prin această funcţie este permisă reglarea manuală a receptorului radar (numai pentru radarele principale). Funcţia nu este disponibila pe radarele secundare şi are doar un efect limitat pe sistemele cu reglare automată a frecvenţei. SELECTARE: Pentru a regla manual radarul, trebuie îndepliniţi următorii paşi: - se selectează caseta TUNE; - se ţine apăsat oricare dintre cele 3 butoane, apoi, sub caseta TUNE va apărea o bară de control roşie care indică valoarea selectată; - cu butonul încă apăsat, se mişcă trackerball-ului spre stânga sau spre dreapta pentru a alege o valoare optimă, apoi se eliberează butonul. Notă: Pentru a se asigură că reglarea automată a frecvenţei funcţionează corect în cadrul receptorului, bara de control roşie, care apare sub caseta TUNE, trebuie fixată în poziţia de mijloc. Dacă reglarea automată a frecvenţei nu mai funcţionează corect pe reglajul manual, selectarea unei valori optime se va face prin mişcarea trackerball-ului spre stânga sau spre dreapta.
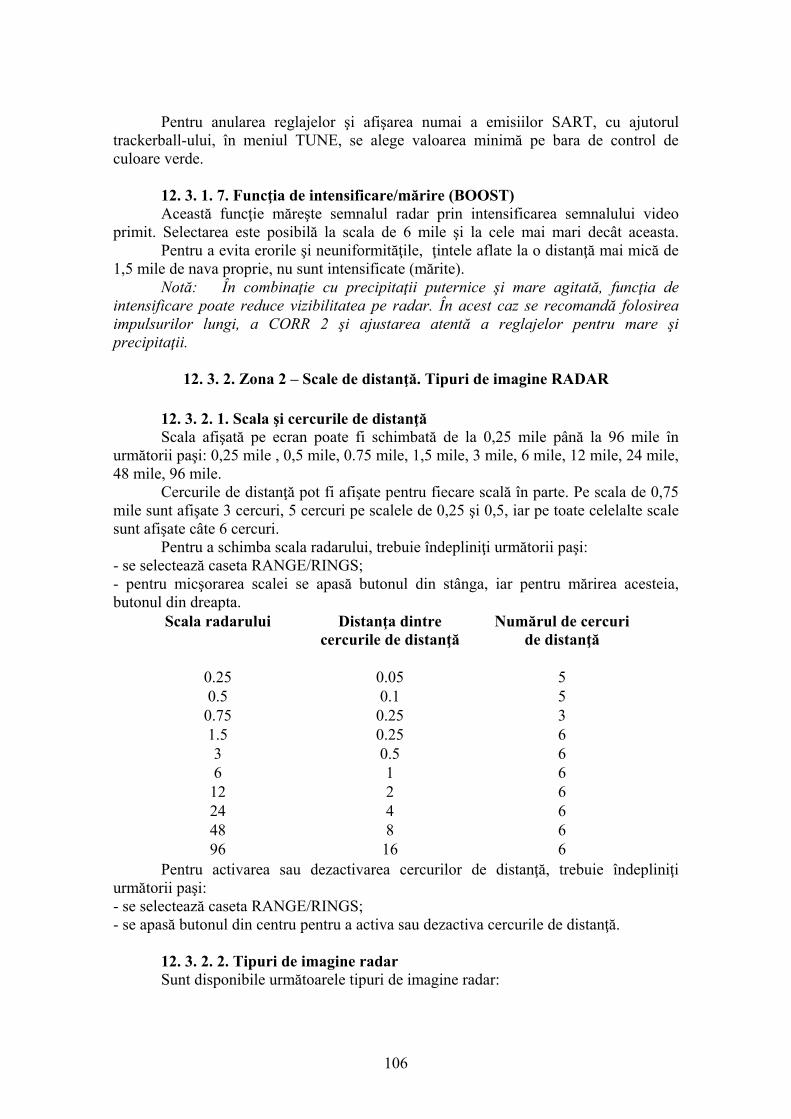
106
Pentru anularea reglajelor şi afişarea numai a emisiilor SART, cu ajutorul trackerball-ului, în meniul TUNE, se alege valoarea minimă pe bara de control de culoare verde. 12. 3. 1. 7. Funcţia de intensificare/mărire (BOOST) Această funcţie măreşte semnalul radar prin intensificarea semnalului video primit. Selectarea este posibilă la scala de 6 mile şi la cele mai mari decât aceasta. Pentru a evita erorile şi neuniformităţile, ţintele aflate la o distanţă mai mică de 1,5 mile de nava proprie, nu sunt intensificate (mărite). Notă: În combinaţie cu precipitaţii puternice şi mare agitată, funcţia de intensificare poate reduce vizibilitatea pe radar. În acest caz se recomandă folosirea impulsurilor lungi, a CORR 2 şi ajustarea atentă a reglajelor pentru mare şi precipitaţii.
12. 3. 2. Zona 2 – Scale de distanţă. Tipuri de imagine RADAR 12. 3. 2. 1. Scala şi cercurile de distanţă Scala afişată pe ecran poate fi schimbată de la 0,25 mile până la 96 mile în următorii paşi: 0,25 mile , 0,5 mile, 0.75 mile, 1,5 mile, 3 mile, 6 mile, 12 mile, 24 mile, 48 mile, 96 mile. Cercurile de distanţă pot fi afişate pentru fiecare scală în parte. Pe scala de 0,75 mile sunt afişate 3 cercuri, 5 cercuri pe scalele de 0,25 şi 0,5, iar pe toate celelalte scale sunt afişate câte 6 cercuri. Pentru a schimba scala radarului, trebuie îndepliniţi următorii paşi: - se selectează caseta RANGE/RINGS; - pentru micşorarea scalei se apasă butonul din stânga, iar pentru mărirea acesteia, butonul din dreapta.
Scala radarului Distanţa dintre cercurile de distanţă
Numărul de cercuri de distanţă
0.25 0.05 5 0.5 0.1 5 0.75 0.25 3 1.5 0.25 6 3 0.5 6 6 1 6 12 2 6 24 4 6 48 8 6 96 16 6
Pentru activarea sau dezactivarea cercurilor de distanţă, trebuie îndepliniţi următorii paşi: - se selectează caseta RANGE/RINGS; - se apasă butonul din centru pentru a activa sau dezactiva cercurile de distanţă. 12. 3. 2. 2. Tipuri de imagine radar Sunt disponibile următoarele tipuri de imagine radar:
107
- imaginea radar cu nordul sus în mişcare adevărată şi mişcare relativă (North-Up); - imaginea radar cu drumul sus în mişcare adevărată şi mişcare relativă (Course-Up); - imaginea radar cu prova sus în mişcare relativă (Head-Up). MIŞCAREA RELATIVĂ Cu radarul în mişcare relativă, poziţia navei proprii se găseşte în centrul cercului azimutal sau într-o poziţie exterioară acestuia. Toate ţintele sunt afişate cu viteza relativă şi pe direcţia mişcării relative. Ţintele au urme relative, în timp ce pentru nava proprie nu este afişată nicio urmă. Dacă se schimbă drumul navei proprii, direcţia ţintei se modifica cu acelaşi unghi. Ţintele care vin la coliziune vor avea un relevment constant odată cu micşorarea distanţei. Ţintele care par a fi staţionare, au de fapt, aceeaşi viteză şi drumul paralel cu drumul navei proprii. MIŞCAREA ADEVĂRATĂ În mişcare adevărată reprezentarea are loc cu nava proprie poziţionată în afara centrului cercului azimutal, iar aceasta va avea mişcarea în direcţia liniei prova cu viteza reală. Ţintele vor avea pe ecranul radar drumul, viteza şi urmele adevărate. Schimbarea de direcţie a navei proprii nu va afecta drumurile ţintelor, dar linia prova va arăta această schimbare. Ţintele care vin la coliziune vor avea un relevment constant odată cu micşorarea distanţei. Ca şi în mişcarea relativă, poziţia navei proprii poate fi selectată, apoi mişcată cu ajutorul trackerball-ului şi în cele din urmă fixată prin apăsarea casetei OFFSET în altă poziţie. IMAGINEA RADAR CU PROVA SUS (Head-Up) În mişcarea relativă, prova navei este indicată de linia prova, poziţionată pe cercul azimutal pe relevmentul de 000°. Când nava proprie îşi schimbă drumul, imaginea radar se roteşte exact cu acelaşi unghi, dar în sens opus. Când nava are drumul constant, ţintele staţionare se mişcă către partea inferioară a ecranului cu o viteză egala cu cea a navei proprii. Ţintele cu aceeaşi direcţie şi viteză cu cea a navei proprii par staţionare. Celelalte ţinte se mişcă cu viteză relativă şi direcţia mişcării relative. Notă: Reprezentarea cu prova sus (Head-Up) nu este disponibilă în mişcarea adevărată. IMAGINEA RADAR CU NORDUL SUS (North-Up) Această reprezentare este stabilizată cu ajutorul girocompasului şi poate fi selectată atât în mişcarea relativă cât şi în cea adevărată. Imaginea radar este redată în permanenţă cu nordul în partea de sus a cercului azimutal, pe relevmentul de 000°. Linia prova indică direcţia de deplasare a navei. În mişcare relativă, nava proprie poate avea o anumită poziţie în inreriorul cercului azimutal, fie ea în centru sau nu, iar mişcările ţintelor sunt relative la drumul şi viteza navei proprii. Ţintele cu aceeaşi viteză şi acelaşi drum apar ca fiind staţionare, iar ţintele fixe vor avea urme reprezentând opusul vectorului navei proprii. IMAGINEA RADAR CU DRUMUL SUS (Course-Up) Această mişcare este stabilizată cu ajutorul girocompasului, disponibilă atât în mişcare relativă cât şi în mişcare adevărată. Drumul navei se va afla întotdeauna pe
108
relevmentul de 000° al cercului azimutal. Schimbările mici de drum au ca efect deplasarea liniei prova de pe relevmentul de 000°, dar imaginea nu se va roti. Linia prova a navei poate fi oricând reactualizată prin selectarea casetei COURSE UP, iar imaginea se va alinia la noul drum. Selectarea mişcării relative/ mişcării adevărate/ modului de afişare centrat Pentru selectarea mişcării relative/mişcării adevărate, trebuie îndepliniţi următorii paşi: - se selectează caseta RM/TM. Sub aceasta vor apărea alte casete; - se alege modul dorit. Selectarea reprezentărilor cu nordul sus/ drumul sus/ prova sus - se selectează caseta N/ C/ H UP. Sub aceasta vor apărea următoarele casete: N UP/ C UP/ H UP; - se alege reprezentarea dorită. Funcţia de reprezentare în afara centrului cercului azimutal (OFFCENTRE) Această facilitate permite utilizatorului să mute poziţia navei proprii oriunde în afara centrului cercului azimutal, în limita a 70% din lungimea razei (excepţie face scala de 96 mile). Funcţia poate fi utilizată atât în mişcare relativă, sau adevărată, cât şi în modul de afişare centrat. Pentru activarea acestei facilitaţi se asigură ca nicio altă funcţie nu este selectată, apoi trebuie îndepliniţi următorii paşi: - se poziţionează cursorul în originea cercului azimutal (în centru); - din cele 3 butoane se apasă cel din centru, apoi, pe ecran va apărea următoarea casetă:
- casetele de apăsare a butoanelor vor afişa:
- pentru a anula comanda, se apasă butonul din centru (CANCEL); - pentru repoziţionarea originii, se selectează noua poziţie cu ajutorul trackerball-ului, apoi se apasă butonul din dreapta (OFFSET); - apăsând butonul din dreapta (RESET), originea se mută în centrul cercului azimutal pentru mişcarea relativă şi modul de afişare centrat, iar pentru mişcarea adevărată într-o poziţie care conferă vizibilitate maximă în prova.
12. 3. 3. Zona 3 - Parametrii navei proprii şi cei de achiziţionare a ţintelor 12. 3. 3. 1. Nava proprie, achiziţionarea ţintelor şi urmele acestora GIRO: Radarul e conectat la un girocompas şi afişează în dreapta sus drumul giro. Valoarea drumului poate fi reglată ţinând apăsate simultan butoanele din stânga şi din dreapta, apoi prin rotirea trackerball-ului. VITEZA: Viteza afişată pe ecranul radarului este preluată din două surse: prima dintre ele redă viteza prin apă, iar cea de-a doua redă viteza deasupra fundului. În calculele cinematice viteză poate fi introdusa manual. Cele doua surse pot fi: un loch relativ (viteza prin apă / butonul stâng), sau un loch Doppler (viteza deasupra
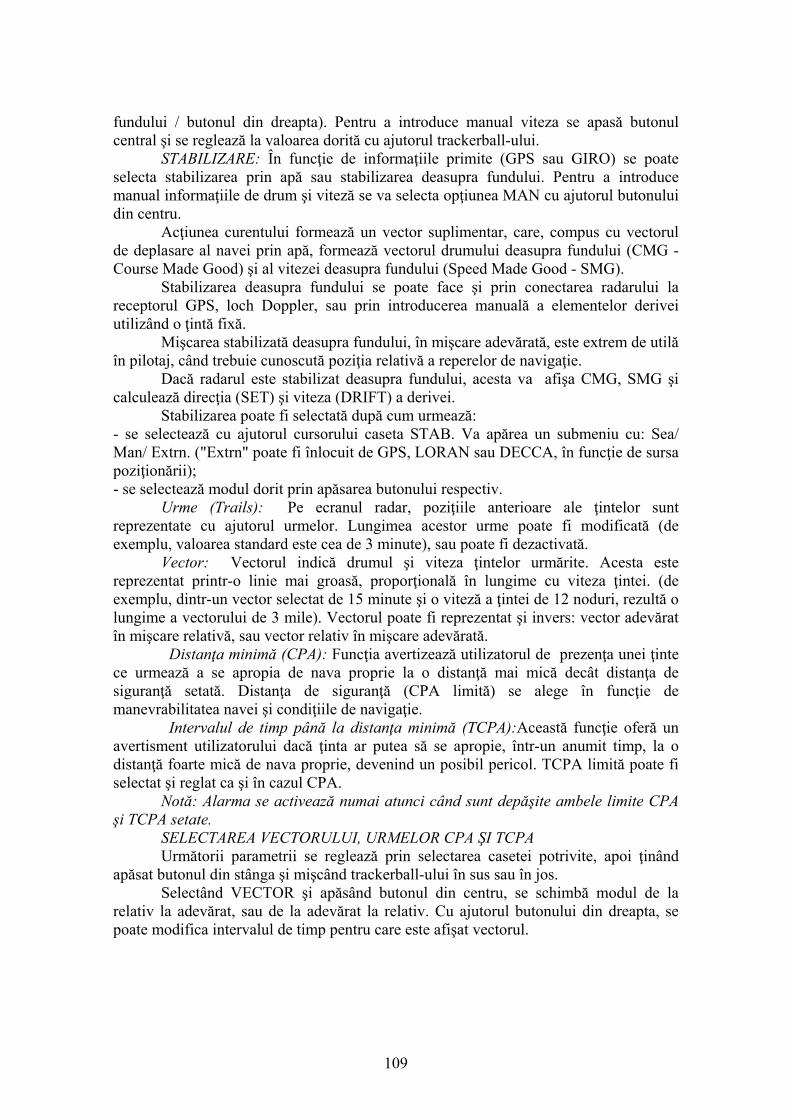
109
fundului / butonul din dreapta). Pentru a introduce manual viteza se apasă butonul central şi se reglează la valoarea dorită cu ajutorul trackerball-ului. STABILIZARE: În funcţie de informaţiile primite (GPS sau GIRO) se poate selecta stabilizarea prin apă sau stabilizarea deasupra fundului. Pentru a introduce manual informaţiile de drum şi viteză se va selecta opţiunea MAN cu ajutorul butonului din centru. Acţiunea curentului formează un vector suplimentar, care, compus cu vectorul de deplasare al navei prin apă, formează vectorul drumului deasupra fundului (CMG - Course Made Good) şi al vitezei deasupra fundului (Speed Made Good - SMG). Stabilizarea deasupra fundului se poate face şi prin conectarea radarului la receptorul GPS, loch Doppler, sau prin introducerea manuală a elementelor derivei utilizând o ţintă fixă. Mişcarea stabilizată deasupra fundului, în mişcare adevărată, este extrem de utilă în pilotaj, când trebuie cunoscută poziţia relativă a reperelor de navigaţie. Dacă radarul este stabilizat deasupra fundului, acesta va afişa CMG, SMG şi calculează direcţia (SET) şi viteza (DRIFT) a derivei. Stabilizarea poate fi selectată după cum urmează: - se selectează cu ajutorul cursorului caseta STAB. Va apărea un submeniu cu: Sea/ Man/ Extrn. ("Extrn" poate fi înlocuit de GPS, LORAN sau DECCA, în funcţie de sursa poziţionării); - se selectează modul dorit prin apăsarea butonului respectiv. Urme (Trails): Pe ecranul radar, poziţiile anterioare ale ţintelor sunt reprezentate cu ajutorul urmelor. Lungimea acestor urme poate fi modificată (de exemplu, valoarea standard este cea de 3 minute), sau poate fi dezactivată. Vector: Vectorul indică drumul şi viteza ţintelor urmărite. Acesta este reprezentat printr-o linie mai groasă, proporţională în lungime cu viteza ţintei. (de exemplu, dintr-un vector selectat de 15 minute şi o viteză a ţintei de 12 noduri, rezultă o lungime a vectorului de 3 mile). Vectorul poate fi reprezentat şi invers: vector adevărat în mişcare relativă, sau vector relativ în mişcare adevărată.
Distanţa minimă (CPA): Funcţia avertizează utilizatorul de prezenţa unei ţinte ce urmează a se apropia de nava proprie la o distanţă mai mică decât distanţa de siguranţă setată. Distanţa de siguranţă (CPA limită) se alege în funcţie de manevrabilitatea navei şi condiţiile de navigaţie.
Intervalul de timp până la distanţa minimă (TCPA):Această funcţie oferă un avertisment utilizatorului dacă ţinta ar putea să se apropie, într-un anumit timp, la o distanţă foarte mică de nava proprie, devenind un posibil pericol. TCPA limită poate fi selectat şi reglat ca şi în cazul CPA. Notă: Alarma se activează numai atunci când sunt depăşite ambele limite CPA şi TCPA setate. SELECTAREA VECTORULUI, URMELOR CPA ŞI TCPA Următorii parametrii se reglează prin selectarea casetei potrivite, apoi ţinând apăsat butonul din stânga şi mişcând trackerball-ului în sus sau în jos. Selectând VECTOR şi apăsând butonul din centru, se schimbă modul de la relativ la adevărat, sau de la adevărat la relativ. Cu ajutorul butonului din dreapta, se poate modifica intervalul de timp pentru care este afişat vectorul.
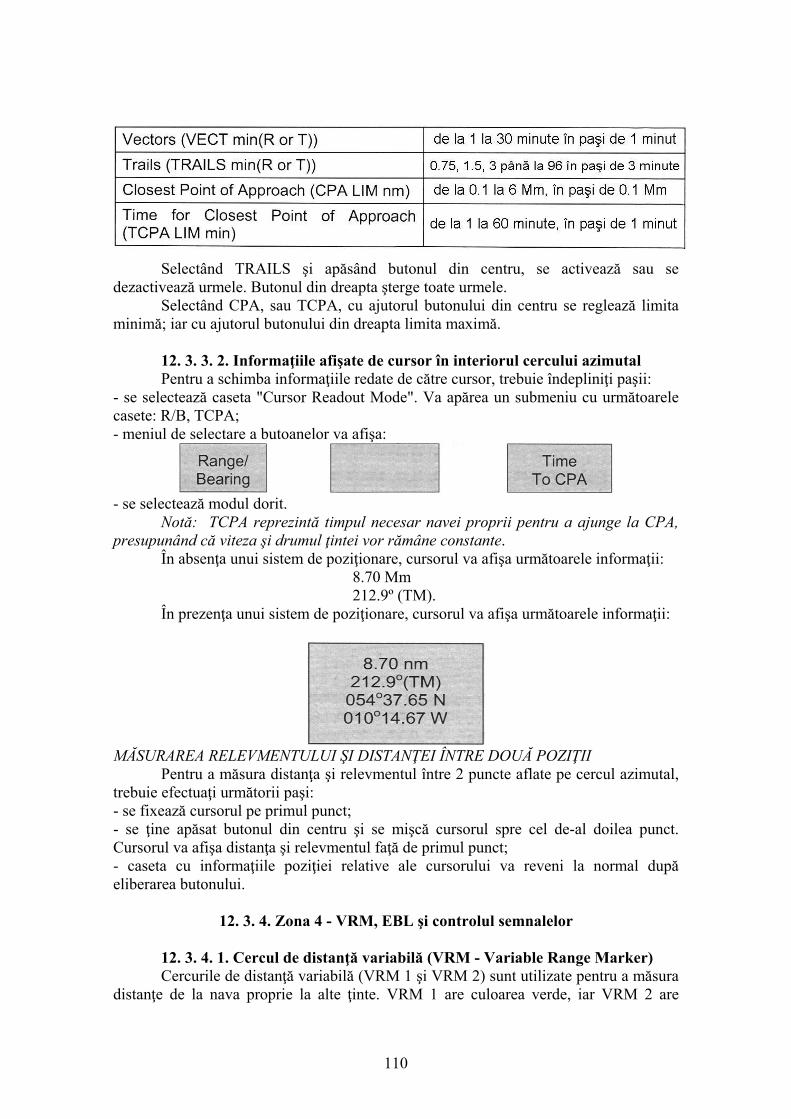
110
Selectând TRAILS şi apăsând butonul din centru, se activează sau se dezactivează urmele. Butonul din dreapta şterge toate urmele. Selectând CPA, sau TCPA, cu ajutorul butonului din centru se reglează limita minimă; iar cu ajutorul butonului din dreapta limita maximă. 12. 3. 3. 2. Informaţiile afişate de cursor în interiorul cercului azimutal Pentru a schimba informaţiile redate de către cursor, trebuie îndepliniţi paşii: - se selectează caseta "Cursor Readout Mode". Va apărea un submeniu cu următoarele casete: R/B, TCPA; - meniul de selectare a butoanelor va afişa:
- se selectează modul dorit. Notă: TCPA reprezintă timpul necesar navei proprii pentru a ajunge la CPA, presupunând că viteza şi drumul ţintei vor rămâne constante. În absenţa unui sistem de poziţionare, cursorul va afişa următoarele informaţii: 8.70 Mm 212.9º (TM). În prezenţa unui sistem de poziţionare, cursorul va afişa următoarele informaţii:
MĂSURAREA RELEVMENTULUI ŞI DISTANŢEI ÎNTRE DOUĂ POZIŢII Pentru a măsura distanţa şi relevmentul între 2 puncte aflate pe cercul azimutal, trebuie efectuaţi următorii paşi: - se fixează cursorul pe primul punct; - se ţine apăsat butonul din centru şi se mişcă cursorul spre cel de-al doilea punct. Cursorul va afişa distanţa şi relevmentul faţă de primul punct; - caseta cu informaţiile poziţiei relative ale cursorului va reveni la normal după eliberarea butonului.
12. 3. 4. Zona 4 - VRM, EBL şi controlul semnalelor 12. 3. 4. 1. Cercul de distanţă variabilă (VRM - Variable Range Marker) Cercurile de distanţă variabilă (VRM 1 şi VRM 2) sunt utilizate pentru a măsura distanţe de la nava proprie la alte ţinte. VRM 1 are culoarea verde, iar VRM 2 are
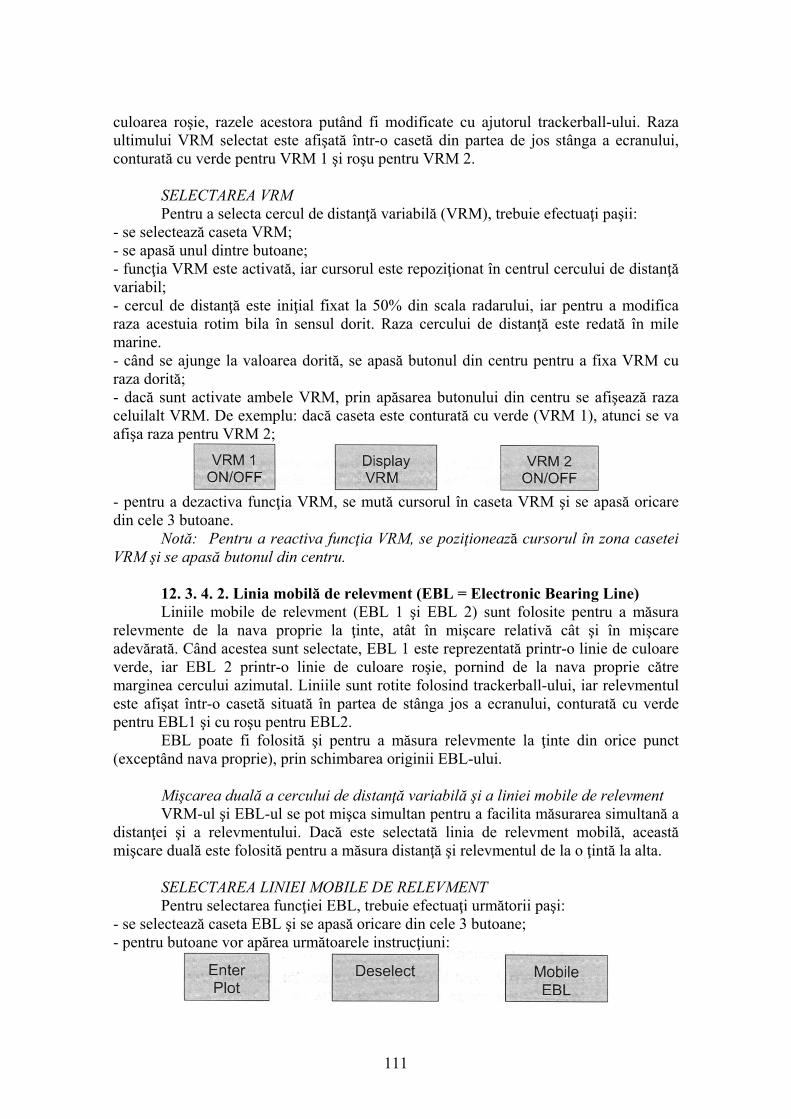
111
culoarea roşie, razele acestora putând fi modificate cu ajutorul trackerball-ului. Raza ultimului VRM selectat este afişată într-o casetă din partea de jos stânga a ecranului, conturată cu verde pentru VRM 1 şi roşu pentru VRM 2. SELECTAREA VRM Pentru a selecta cercul de distanţă variabilă (VRM), trebuie efectuaţi paşii: - se selectează caseta VRM; - se apasă unul dintre butoane; - funcţia VRM este activată, iar cursorul este repoziţionat în centrul cercului de distanţă variabil; - cercul de distanţă este iniţial fixat la 50% din scala radarului, iar pentru a modifica raza acestuia rotim bila în sensul dorit. Raza cercului de distanţă este redată în mile marine. - când se ajunge la valoarea dorită, se apasă butonul din centru pentru a fixa VRM cu raza dorită; - dacă sunt activate ambele VRM, prin apăsarea butonului din centru se afişează raza celuilalt VRM. De exemplu: dacă caseta este conturată cu verde (VRM 1), atunci se va afişa raza pentru VRM 2;
- pentru a dezactiva funcţia VRM, se mută cursorul în caseta VRM şi se apasă oricare din cele 3 butoane. Notă: Pentru a reactiva funcţia VRM, se poziţionează cursorul în zona casetei VRM şi se apasă butonul din centru. 12. 3. 4. 2. Linia mobilă de relevment (EBL = Electronic Bearing Line) Liniile mobile de relevment (EBL 1 şi EBL 2) sunt folosite pentru a măsura relevmente de la nava proprie la ţinte, atât în mişcare relativă cât şi în mişcare adevărată. Când acestea sunt selectate, EBL 1 este reprezentată printr-o linie de culoare verde, iar EBL 2 printr-o linie de culoare roşie, pornind de la nava proprie către marginea cercului azimutal. Liniile sunt rotite folosind trackerball-ului, iar relevmentul este afişat într-o casetă situată în partea de stânga jos a ecranului, conturată cu verde pentru EBL1 şi cu roşu pentru EBL2. EBL poate fi folosită şi pentru a măsura relevmente la ţinte din orice punct (exceptând nava proprie), prin schimbarea originii EBL-ului. Mişcarea duală a cercului de distanţă variabilă şi a liniei mobile de relevment VRM-ul şi EBL-ul se pot mişca simultan pentru a facilita măsurarea simultană a distanţei şi a relevmentului. Dacă este selectată linia de relevment mobilă, această mişcare duală este folosită pentru a măsura distanţă şi relevmentul de la o ţintă la alta. SELECTAREA LINIEI MOBILE DE RELEVMENT Pentru selectarea funcţiei EBL, trebuie efectuaţi următorii paşi: - se selectează caseta EBL şi se apasă oricare din cele 3 butoane; - pentru butoane vor apărea următoarele instrucţiuni:
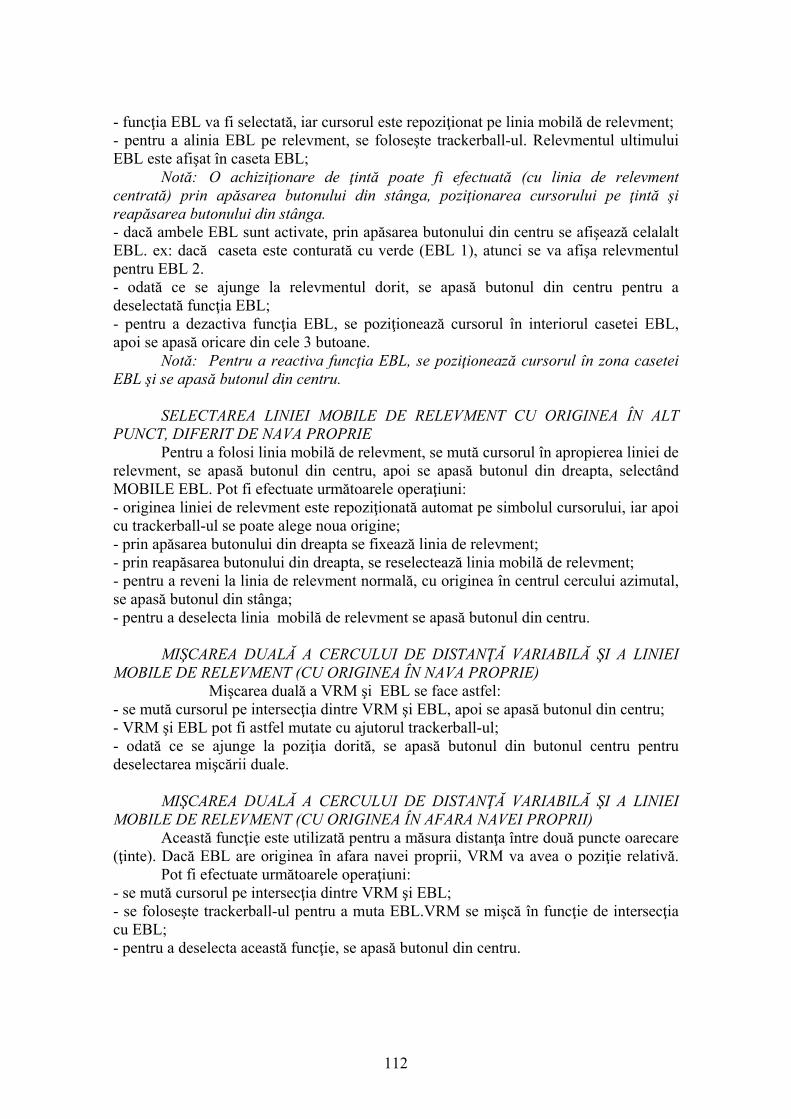
112
- funcţia EBL va fi selectată, iar cursorul este repoziţionat pe linia mobilă de relevment; - pentru a alinia EBL pe relevment, se foloseşte trackerball-ul. Relevmentul ultimului EBL este afişat în caseta EBL; Notă: O achiziţionare de ţintă poate fi efectuată (cu linia de relevment centrată) prin apăsarea butonului din stânga, poziţionarea cursorului pe ţintă şi reapăsarea butonului din stânga. - dacă ambele EBL sunt activate, prin apăsarea butonului din centru se afişează celalalt EBL. ex: dacă caseta este conturată cu verde (EBL 1), atunci se va afişa relevmentul pentru EBL 2. - odată ce se ajunge la relevmentul dorit, se apasă butonul din centru pentru a deselectată funcţia EBL; - pentru a dezactiva funcţia EBL, se poziţionează cursorul în interiorul casetei EBL, apoi se apasă oricare din cele 3 butoane. Notă: Pentru a reactiva funcţia EBL, se poziţionează cursorul în zona casetei EBL şi se apasă butonul din centru. SELECTAREA LINIEI MOBILE DE RELEVMENT CU ORIGINEA ÎN ALT PUNCT, DIFERIT DE NAVA PROPRIE Pentru a folosi linia mobilă de relevment, se mută cursorul în apropierea liniei de relevment, se apasă butonul din centru, apoi se apasă butonul din dreapta, selectând MOBILE EBL. Pot fi efectuate următoarele operaţiuni: - originea liniei de relevment este repoziţionată automat pe simbolul cursorului, iar apoi cu trackerball-ul se poate alege noua origine; - prin apăsarea butonului din dreapta se fixează linia de relevment; - prin reapăsarea butonului din dreapta, se reselectează linia mobilă de relevment; - pentru a reveni la linia de relevment normală, cu originea în centrul cercului azimutal, se apasă butonul din stânga; - pentru a deselecta linia mobilă de relevment se apasă butonul din centru. MIŞCAREA DUALĂ A CERCULUI DE DISTANŢĂ VARIABILĂ ŞI A LINIEI MOBILE DE RELEVMENT (CU ORIGINEA ÎN NAVA PROPRIE) Mişcarea duală a VRM şi EBL se face astfel: - se mută cursorul pe intersecţia dintre VRM şi EBL, apoi se apasă butonul din centru; - VRM şi EBL pot fi astfel mutate cu ajutorul trackerball-ul; - odată ce se ajunge la poziţia dorită, se apasă butonul din butonul centru pentru deselectarea mişcării duale. MIŞCAREA DUALĂ A CERCULUI DE DISTANŢĂ VARIABILĂ ŞI A LINIEI MOBILE DE RELEVMENT (CU ORIGINEA ÎN AFARA NAVEI PROPRII) Această funcţie este utilizată pentru a măsura distanţa între două puncte oarecare (ţinte). Dacă EBL are originea în afara navei proprii, VRM va avea o poziţie relativă. Pot fi efectuate următoarele operaţiuni: - se mută cursorul pe intersecţia dintre VRM şi EBL; - se foloseşte trackerball-ul pentru a muta EBL.VRM se mişcă în funcţie de intersecţia cu EBL; - pentru a deselecta această funcţie, se apasă butonul din centru.
113
12. 3. 4. 3. Reglajul amplificării (GAIN), pentru anularea bruiajelor datorate valurilor (SEA) şi datorate precipitaţiilor (RAIN) Aceste reglaje trebuie efectuate cu multă atenţie, deoarece folosirea neglijentă a acestora poate duce la pierderea ţintelor mici sau apropiate. Reglajul amplificării (GAIN) Prin acest reglaj se modifică amplificarea semnalului radar, rezultatul fiind vizibil pe ecran. Amplificarea poate fi mărită atâta timp cât fundalul ecranului rămâne uniform vizibil. Reglajul se face cu corelarea dezactivată (CORR 0). Dacă se foloseşte o amplificare prea puternică, se va obţine o calitate slabă a imaginii însoţită de un bruiaj considerabil. Dacă amplificarea este prea slabă, se vor pierde ţintelor cu semnal slab şi se va reduce a distanţa de detecţie. Pe vreme cu precipitaţii (ploaie, grindină, ninsoare), reducerea amplificării are ca rezultat o imagine mai clară pe ecranul radar. Nivelul de amplificare poate fi ales de la 0 (minim) la 9 (maxim), modul obişnuit de operare fiind adesea între 6 şi 8. Notă: Amplificarea nu se reglează pe un nivel foarte ridicat, deoarece bruiajul creat va afecta negativ calitatea imaginii. Anularea bruiajului datorat valurilor (SEA) Acest reglaj reduce neuniformităţile create de valuri. Atenuarea maximă are loc la distanţă zero, dar aceasta scade apoi iar pe la aproximativ 6 mile atenuarea dispare definitiv. Crescând reglajul, se reduc neuniformităţile din apropiere. Nivelul reglajului poate fi ales de la 0 (minim) la 9 (maxim), modul obişnuit de operare fiind adesea între 3 şi 5. Un nivel redus al reglajului se foloseşte împreună cu impulsurile scurte, în timp ce un nivel ridicat se foloseşte împreună cu impulsurile lungi. Anularea bruiajului datorat valurilor se face întotdeauna pe CORR 0 sau CORR 1. Alegerea unui reglaj corect se face prin simpla observaţie a ecranului radar. Dacă nivelul reglajului este prea ridicat, ţintele apropiate pot dispărea. Nu se setează NICIODATĂ anularea bruiajului datorat valurilor astfel încât să atenueze toate neuniformităţile; trebuie lăsată o mică rezervă. Atenuarea neuniformităţilor rămase se poate face cu ajutorul corelării, pe modul CORR 2 (scan to scan). Notă: 1. Când funcţia nu e utilizată, anularea bruiajului datorat valurilor trebuie setata întotdeauna pe nivelul 0; 2. Lungimea impulsului afectează reglajul „SEA”; ex: folosirea impulsurilor scurte necesită un nivel scăzut al reglajului; 3. Reglajul „SEA” trebuie efectuat astfel încât să se poată ajunge la un compromis între atenuarea neuniformităţilor şi afişarea consistentă a ţintelor. Anularea automata a bruiajului datorat valurilor ( SEA(Auto) ) Acest reglaj presupune atenuarea automată a neuniformităţilor. Nivelul reglajului automat poate fi reglat foarte bine şi cu ajutorul reglajului de amplificare. Acest mod este folosit cu succes la mare liberă, fiind mai puţin folositor în apropierea uscatului. Semnalul emis de o radiobaliză (RACON) poate fi uneori redus, dar nu definitiv anulat. Pentru un randament mai bun, reglajul automat se foloseşte împreună cu CORR 2.
114
Anularea bruiajului datorat precipitaţiilor (RAIN) Acest reglaj reduce neuniformităţile de pe ecranul radar datorate ploii, grindinii sau ninsorii. Această funcţie foloseşte semnalele radar primite pentru a produce un prag de referinţă. Reglajul mută acest prag de referinţă astfel încât să confere o atenuare mai mare sau mai mică a semnalului radar. Reglajul atenuează de asemenea şi neuniformităţile create de valuri, dar este foarte probabil să anuleze definitiv semnalul radar emis de radiobalize (RACON). Nivelul acestui reglaj variază de la 0 (minim) la 9 (maxim), modul obişnuit de operare fiind între 3 şi 5. Notă: Când funcţia nu e folosită, anularea bruiajului datorat ploii sau ninsorii puternice trebuie setata întotdeauna pe nivelul 0. Acest reglaj trebuie folosit pentru a păstra ţintele mici pe ecranul radar. Se recomandă micşorarea reglajului de amplificare pentru a facilita detectarea ţintelor pe vreme cu precipitaţii abundente. Folosirea bandei S este de asemenea avantajoasă în condiţii de precipitaţii abundente. Pentru a modifica reglajul pentru amplificare, pentru valuri şi pentru precipitaţii, se efectuează următorii paşi: - se selectează caseta G/ S/ R, situată în partea stângă jos a ecranului (sau partea dreaptă sus a ecranului); - pentru reglajul „GAIN” se apasă butonul din stânga, pentru „SEA” butonul din centru, iar pentru „RAIN” butonul din dreapta. Se deplasează trackerball-ul în sus sau în jos până când se ajunge la reglajul dorit. Mişcarea foarte rapidă a trackerball-ului, când se reduce amplificarea, sau se creşte reglajul pentru valuri sau precipitaţii, se pot pierde urmelor ţintelor. Notă: Prin selectarea casetei G/ S/ R are loc o schimbare de culoare a conturului acesteia: din albastru în negru. - pentru a deselecta funcţia G/ S/ R, se mută cursorul în afara casetei respective. Anularea automată a bruiajului datorat valurilor (Auto Sea Clutter) Pentru a seta această funcţie pe automat (A), trebuie îndepliniţi următorii paşi: - se selectează reglajul pentru marea (SEA), apoi se roteşte trackerball-ului rapid în jos până când în caseta va apărea litera A. În modul automat, urmele ţintelor sunt şterse de pe ecranul radar; - pentru a deselecta reglajul automat, se roteşte trackerball-ul rapid în sus. 12. 3. 4. 4. Linia prova (HL) Această funcţie permite ştergerea temporară a liniei prova (HL) pentru a vizualiza mai bine ţintele din prova. Pentru a şterge temporar linia prova şi celelalte instrumente grafice, trebuie îndepliniţi următorii paşi: - se selectează caseta HL; - se ţine apăsat orice buton pentru a efectua operaţiunea; - se eliberează butonul pentru a reveni la normal. 12. 3. 4. 5. Alarme Alarmele radarului pot fi vizuale şi/sau auditive. Când intervine o alarmă, pe ecranul radarului este afişată o casetă conturată cu roşu conţinând descrierea alarmei respective. Pot fi afişate două tipuri de alarme:
115
- alarmă de utilizator (vizuală) - cauza fiind o greşeală de operare; - alarmă de sistem (audio-opţional şi vizuală) - detectată de procesorul central al radarului. Alarma de utilizator Acest tip de alarmă este afişat când utilizatorul plasează cursorul incorect şi se apasă unul dintre butoane. Se va afişa următorul mesaj:
Alarma de sistem Acest tip de alarmă este datorat de erorilor din sistem, şi se pot afişa următoarele mesaje: - "NO VIDEO" - "NO SYNC" - "NO AZIMUTH" - "NO GYRO" (Compass) - în acest caz sistemul revine imediat la reprezentarea în mişcare relativă cu prova sus (Head-Up), iar după 10 secunde caseta GYRO este înlocuită de o casetă conturată cu roşu, conţinând următorul mesaj: "GYRO FAILED". În acest moment nu se pot face achiziţionări de ţinte. Când sistemul GYRO redevine funcţional, în caseta de avertizare se va afişa următorul mesaj: [ADJUST GYRO AFTER FAILURE], apoi caseta GYRO va afişa: [ADJUST GYRO] - "NO HEADING LINE" Notă: Când sunt pornite alarmele "NO AZIMUTH" şi "NO HEADING LINE", reprezentarea radar este ştearsă. Dezactivarea alarmelor Alarmele de utilizator: aceste alarme sunt afişate doar pentru câteva secunde, apoi sunt înlăturată automat. Alarmele de sistem: pentru aceste alarme este necesară o diagnosticare. Alarmele sonore se aud pentru aproximativ 5 secunde, în timp ce caseta roşie, care conţine mesajul alarmelor, va rămâne afişată până la înlăturarea erorii. 12. 3. 4. 6. Achiziţionarea ţintelor (plotting controls) Pentru a achiziţiona o singură ţintă şi pentru a se obţine informaţii despre aceasta, trebuie îndepliniţi următorii paşi: - se plasează cursorul pe ţintă şi se apasă butonul din stânga ENTER PLOT( pentru achiziţionare). În poziţia ţintei va apărea simbolul de achiziţionare [ ]; - informaţiile despre ţintă, cu excepţia relevmentului şi a distanţei, vor fi disponibile abia la prima reactualizare a poziţiei acesteia. Sistemul poate accepta o reactualizare minimă de 1 secundă; - pentru a reactualiza ţinta achiziţionată, se plasează cursorul deasupra simbolului [ ] acesteia şi se apasă butonul din centru. Prin clipire, simbolul va accepta selectarea. Apoi se fixează cursorul deasupra poziţiei actuale a ţintei şi se apasă butonul de achiziţionare ENTER PLOT (butonul din stânga). Se generează un vector ce reprezintă viteza şi direcţia de deplasare a ţintei. Notă: Vectorii respectivi sunt relativi în mişcare relativă, sau adevăraţi în mişcare adevărată.
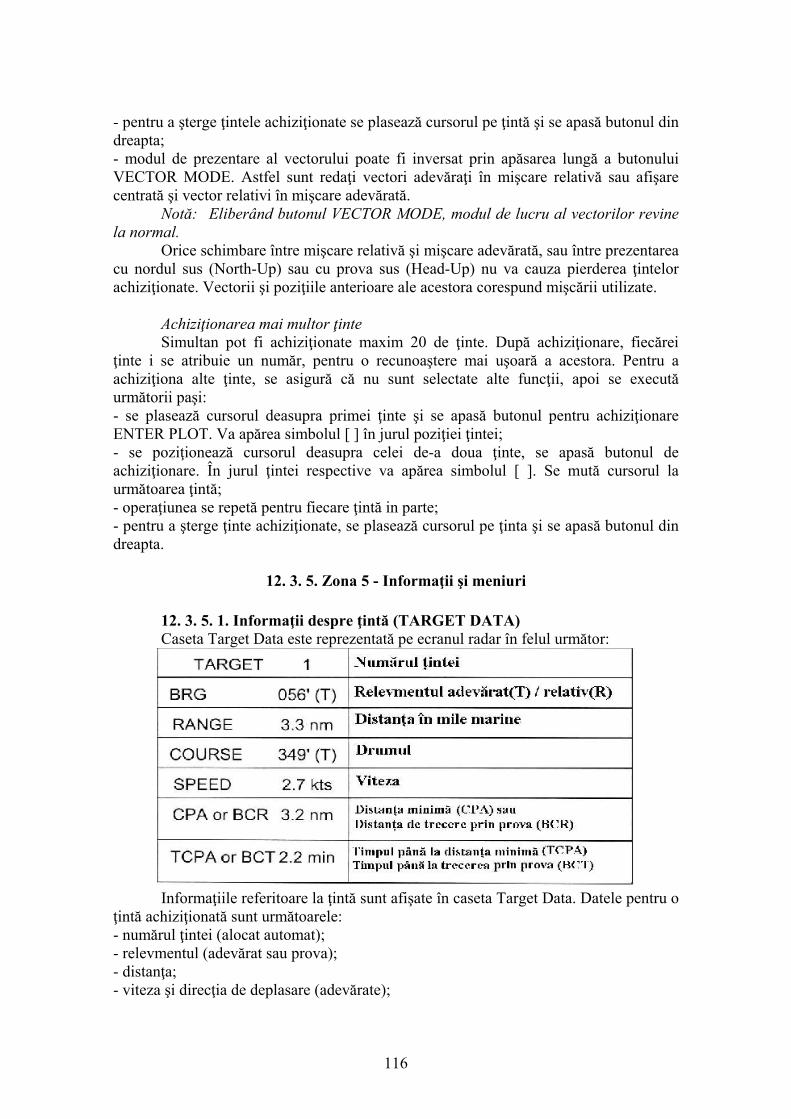
116
- pentru a şterge ţintele achiziţionate se plasează cursorul pe ţintă şi se apasă butonul din dreapta; - modul de prezentare al vectorului poate fi inversat prin apăsarea lungă a butonului VECTOR MODE. Astfel sunt redaţi vectori adevăraţi în mişcare relativă sau afişare centrată şi vector relativi în mişcare adevărată. Notă: Eliberând butonul VECTOR MODE, modul de lucru al vectorilor revine la normal. Orice schimbare între mişcare relativă şi mişcare adevărată, sau între prezentarea cu nordul sus (North-Up) sau cu prova sus (Head-Up) nu va cauza pierderea ţintelor achiziţionate. Vectorii şi poziţiile anterioare ale acestora corespund mişcării utilizate. Achiziţionarea mai multor ţinte Simultan pot fi achiziţionate maxim 20 de ţinte. După achiziţionare, fiecărei ţinte i se atribuie un număr, pentru o recunoaştere mai uşoară a acestora. Pentru a achiziţiona alte ţinte, se asigură că nu sunt selectate alte funcţii, apoi se execută următorii paşi: - se plasează cursorul deasupra primei ţinte şi se apasă butonul pentru achiziţionare ENTER PLOT. Va apărea simbolul [ ] în jurul poziţiei ţintei; - se poziţionează cursorul deasupra celei de-a doua ţinte, se apasă butonul de achiziţionare. În jurul ţintei respective va apărea simbolul [ ]. Se mută cursorul la următoarea ţintă; - operaţiunea se repetă pentru fiecare ţintă in parte; - pentru a şterge ţinte achiziţionate, se plasează cursorul pe ţinta şi se apasă butonul din dreapta.
12. 3. 5. Zona 5 - Informaţii şi meniuri 12. 3. 5. 1. Informaţii despre ţintă (TARGET DATA) Caseta Target Data este reprezentată pe ecranul radar în felul următor:
Informaţiile referitoare la ţintă sunt afişate în caseta Target Data. Datele pentru o ţintă achiziţionată sunt următoarele: - numărul ţintei (alocat automat); - relevmentul (adevărat sau prova); - distanţa; - viteza şi direcţia de deplasare (adevărate);
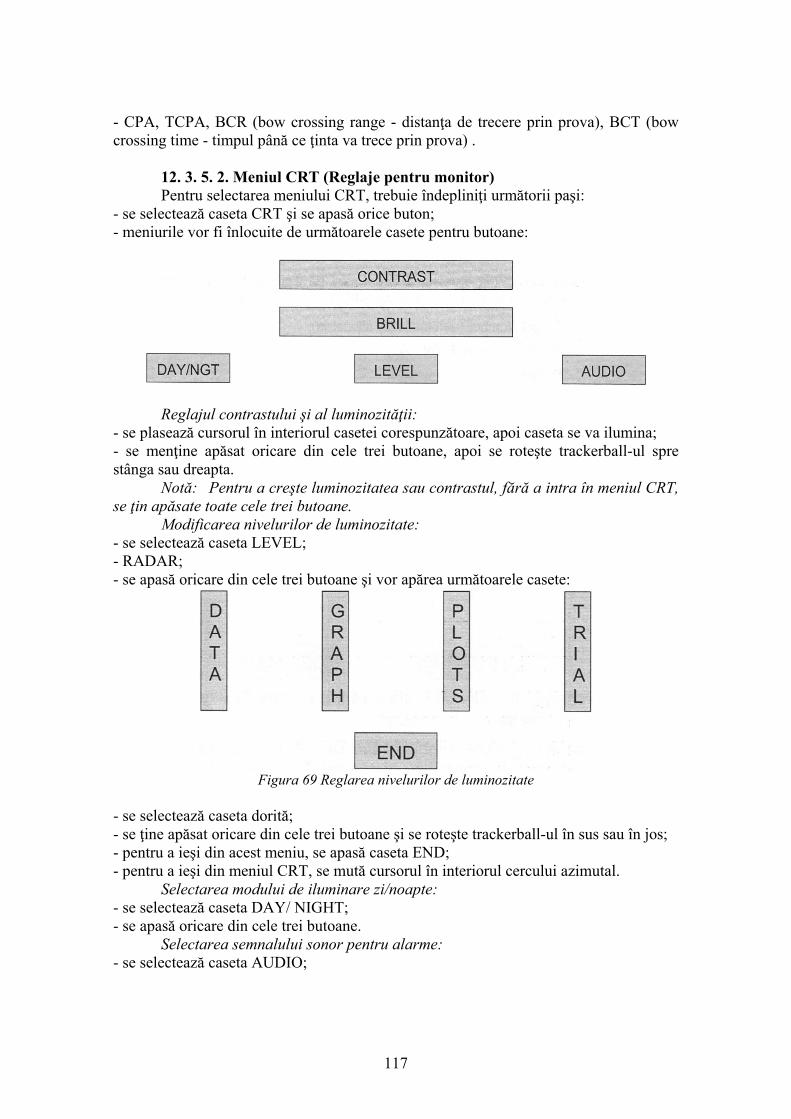
117
- CPA, TCPA, BCR (bow crossing range - distanţa de trecere prin prova), BCT (bow crossing time - timpul până ce ţinta va trece prin prova) . 12. 3. 5. 2. Meniul CRT (Reglaje pentru monitor) Pentru selectarea meniului CRT, trebuie îndepliniţi următorii paşi: - se selectează caseta CRT şi se apasă orice buton; - meniurile vor fi înlocuite de următoarele casete pentru butoane:
Reglajul contrastului şi al luminozităţii: - se plasează cursorul în interiorul casetei corespunzătoare, apoi caseta se va ilumina; - se menţine apăsat oricare din cele trei butoane, apoi se roteşte trackerball-ul spre stânga sau dreapta. Notă: Pentru a creşte luminozitatea sau contrastul, fără a intra în meniul CRT, se ţin apăsate toate cele trei butoane. Modificarea nivelurilor de luminozitate: - se selectează caseta LEVEL; - RADAR; - se apasă oricare din cele trei butoane şi vor apărea următoarele casete:
Figura 69 Reglarea nivelurilor de luminozitate
- se selectează caseta dorită; - se ţine apăsat oricare din cele trei butoane şi se roteşte trackerball-ul în sus sau în jos; - pentru a ieşi din acest meniu, se apasă caseta END; - pentru a ieşi din meniul CRT, se mută cursorul în interiorul cercului azimutal. Selectarea modului de iluminare zi/noapte: - se selectează caseta DAY/ NIGHT; - se apasă oricare din cele trei butoane. Selectarea semnalului sonor pentru alarme: - se selectează caseta AUDIO;
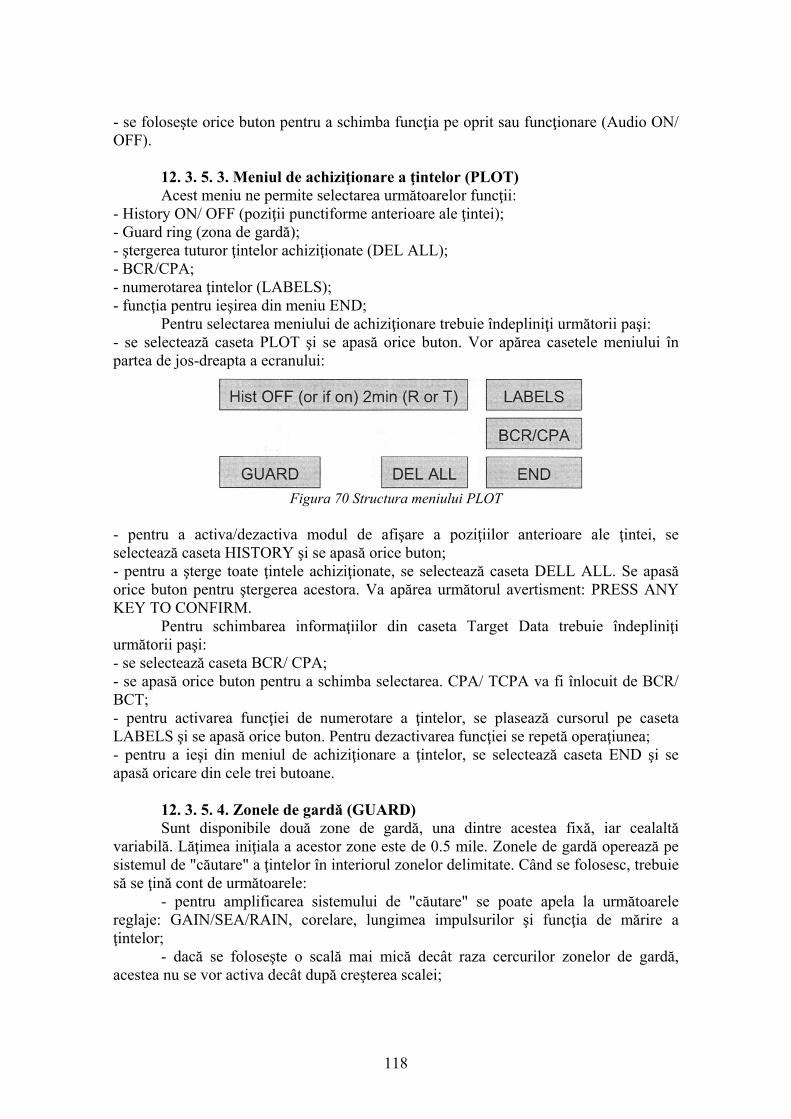
118
- se foloseşte orice buton pentru a schimba funcţia pe oprit sau funcţionare (Audio ON/ OFF). 12. 3. 5. 3. Meniul de achiziţionare a ţintelor (PLOT) Acest meniu ne permite selectarea următoarelor funcţii: - History ON/ OFF (poziţii punctiforme anterioare ale ţintei); - Guard ring (zona de gardă); - ştergerea tuturor ţintelor achiziţionate (DEL ALL); - BCR/CPA; - numerotarea ţintelor (LABELS); - funcţia pentru ieşirea din meniu END; Pentru selectarea meniului de achiziţionare trebuie îndepliniţi următorii paşi: - se selectează caseta PLOT şi se apasă orice buton. Vor apărea casetele meniului în partea de jos-dreapta a ecranului:
Figura 70 Structura meniului PLOT - pentru a activa/dezactiva modul de afişare a poziţiilor anterioare ale ţintei, se selectează caseta HISTORY şi se apasă orice buton; - pentru a şterge toate ţintele achiziţionate, se selectează caseta DELL ALL. Se apasă orice buton pentru ştergerea acestora. Va apărea următorul avertisment: PRESS ANY KEY TO CONFIRM. Pentru schimbarea informaţiilor din caseta Target Data trebuie îndepliniţi următorii paşi: - se selectează caseta BCR/ CPA; - se apasă orice buton pentru a schimba selectarea. CPA/ TCPA va fi înlocuit de BCR/ BCT; - pentru activarea funcţiei de numerotare a ţintelor, se plasează cursorul pe caseta LABELS şi se apasă orice buton. Pentru dezactivarea funcţiei se repetă operaţiunea; - pentru a ieşi din meniul de achiziţionare a ţintelor, se selectează caseta END şi se apasă oricare din cele trei butoane. 12. 3. 5. 4. Zonele de gardă (GUARD) Sunt disponibile două zone de gardă, una dintre acestea fixă, iar cealaltă variabilă. Lăţimea iniţiala a acestor zone este de 0.5 mile. Zonele de gardă operează pe sistemul de "căutare" a ţintelor în interiorul zonelor delimitate. Când se folosesc, trebuie să se ţină cont de următoarele: - pentru amplificarea sistemului de "căutare" se poate apela la următoarele reglaje: GAIN/SEA/RAIN, corelare, lungimea impulsurilor şi funcţia de mărire a ţintelor; - dacă se foloseşte o scală mai mică decât raza cercurilor zonelor de gardă, acestea nu se vor activa decât după creşterea scalei;
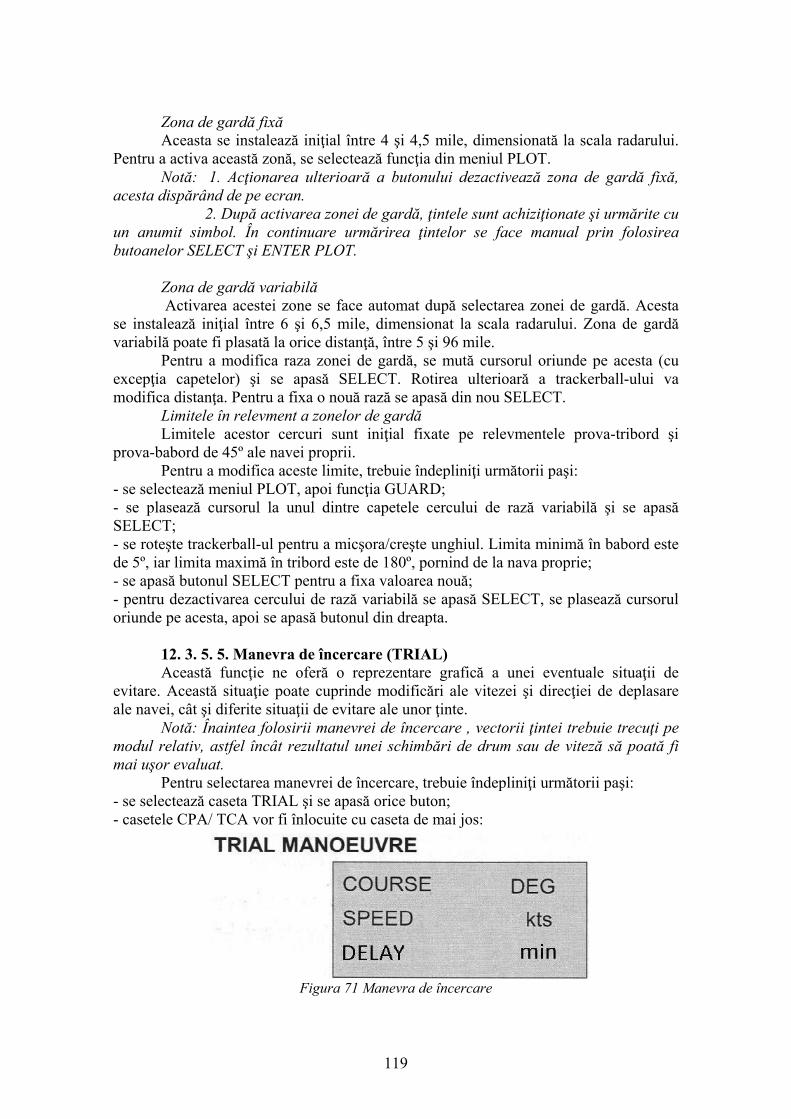
119
Zona de gardă fixă Aceasta se instalează iniţial între 4 şi 4,5 mile, dimensionată la scala radarului. Pentru a activa această zonă, se selectează funcţia din meniul PLOT. Notă: 1. Acţionarea ulterioară a butonului dezactivează zona de gardă fixă, acesta dispărând de pe ecran. 2. După activarea zonei de gardă, ţintele sunt achiziţionate şi urmărite cu un anumit simbol. În continuare urmărirea ţintelor se face manual prin folosirea butoanelor SELECT şi ENTER PLOT. Zona de gardă variabilă Activarea acestei zone se face automat după selectarea zonei de gardă. Acesta se instalează iniţial între 6 şi 6,5 mile, dimensionat la scala radarului. Zona de gardă variabilă poate fi plasată la orice distanţă, între 5 şi 96 mile. Pentru a modifica raza zonei de gardă, se mută cursorul oriunde pe acesta (cu excepţia capetelor) şi se apasă SELECT. Rotirea ulterioară a trackerball-ului va modifica distanţa. Pentru a fixa o nouă rază se apasă din nou SELECT. Limitele în relevment a zonelor de gardă Limitele acestor cercuri sunt iniţial fixate pe relevmentele prova-tribord şi prova-babord de 45º ale navei proprii. Pentru a modifica aceste limite, trebuie îndepliniţi următorii paşi: - se selectează meniul PLOT, apoi funcţia GUARD; - se plasează cursorul la unul dintre capetele cercului de rază variabilă şi se apasă SELECT; - se roteşte trackerball-ul pentru a micşora/creşte unghiul. Limita minimă în babord este de 5º, iar limita maximă în tribord este de 180º, pornind de la nava proprie; - se apasă butonul SELECT pentru a fixa valoarea nouă; - pentru dezactivarea cercului de rază variabilă se apasă SELECT, se plasează cursorul oriunde pe acesta, apoi se apasă butonul din dreapta. 12. 3. 5. 5. Manevra de încercare (TRIAL) Această funcţie ne oferă o reprezentare grafică a unei eventuale situaţii de evitare. Această situaţie poate cuprinde modificări ale vitezei şi direcţiei de deplasare ale navei, cât şi diferite situaţii de evitare ale unor ţinte. Notă: Înaintea folosirii manevrei de încercare , vectorii ţintei trebuie trecuţi pe modul relativ, astfel încât rezultatul unei schimbări de drum sau de viteză să poată fi mai uşor evaluat. Pentru selectarea manevrei de încercare, trebuie îndepliniţi următorii paşi: - se selectează caseta TRIAL şi se apasă orice buton; - casetele CPA/ TCA vor fi înlocuite cu caseta de mai jos:
Figura 71 Manevra de încercare
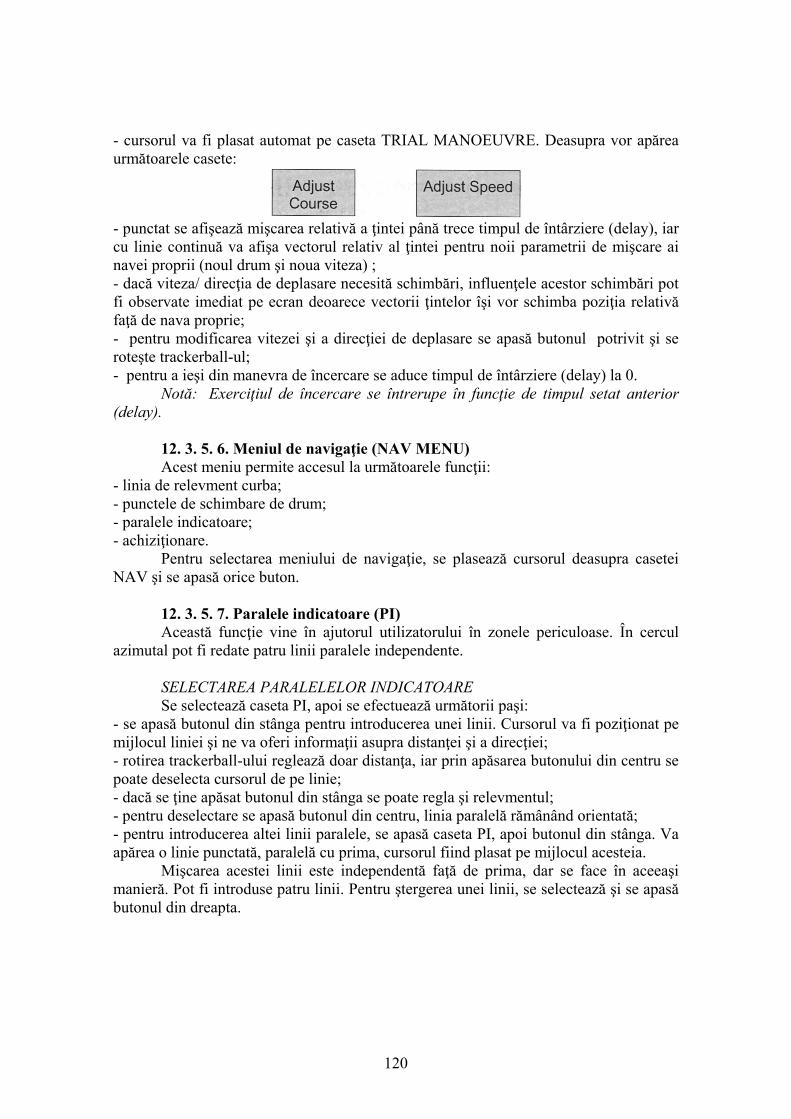
120
- cursorul va fi plasat automat pe caseta TRIAL MANOEUVRE. Deasupra vor apărea următoarele casete:
- punctat se afişează mişcarea relativă a ţintei până trece timpul de întârziere (delay), iar cu linie continuă va afişa vectorul relativ al ţintei pentru noii parametrii de mişcare ai navei proprii (noul drum şi noua viteza) ; - dacă viteza/ direcţia de deplasare necesită schimbări, influenţele acestor schimbări pot fi observate imediat pe ecran deoarece vectorii ţintelor îşi vor schimba poziţia relativă faţă de nava proprie; - pentru modificarea vitezei şi a direcţiei de deplasare se apasă butonul potrivit şi se roteşte trackerball-ul; - pentru a ieşi din manevra de încercare se aduce timpul de întârziere (delay) la 0. Notă: Exerciţiul de încercare se întrerupe în funcţie de timpul setat anterior (delay). 12. 3. 5. 6. Meniul de navigaţie (NAV MENU) Acest meniu permite accesul la următoarele funcţii: - linia de relevment curba; - punctele de schimbare de drum; - paralele indicatoare; - achiziţionare. Pentru selectarea meniului de navigaţie, se plasează cursorul deasupra casetei NAV şi se apasă orice buton. 12. 3. 5. 7. Paralele indicatoare (PI) Această funcţie vine în ajutorul utilizatorului în zonele periculoase. În cercul azimutal pot fi redate patru linii paralele independente. SELECTAREA PARALELELOR INDICATOARE Se selectează caseta PI, apoi se efectuează următorii paşi: - se apasă butonul din stânga pentru introducerea unei linii. Cursorul va fi poziţionat pe mijlocul liniei şi ne va oferi informaţii asupra distanţei şi a direcţiei; - rotirea trackerball-ului reglează doar distanţa, iar prin apăsarea butonului din centru se poate deselecta cursorul de pe linie; - dacă se ţine apăsat butonul din stânga se poate regla şi relevmentul; - pentru deselectare se apasă butonul din centru, linia paralelă rămânând orientată; - pentru introducerea altei linii paralele, se apasă caseta PI, apoi butonul din stânga. Va apărea o linie punctată, paralelă cu prima, cursorul fiind plasat pe mijlocul acesteia. Mişcarea acestei linii este independentă faţă de prima, dar se face în aceeaşi manieră. Pot fi introduse patru linii. Pentru ştergerea unei linii, se selectează şi se apasă butonul din dreapta.
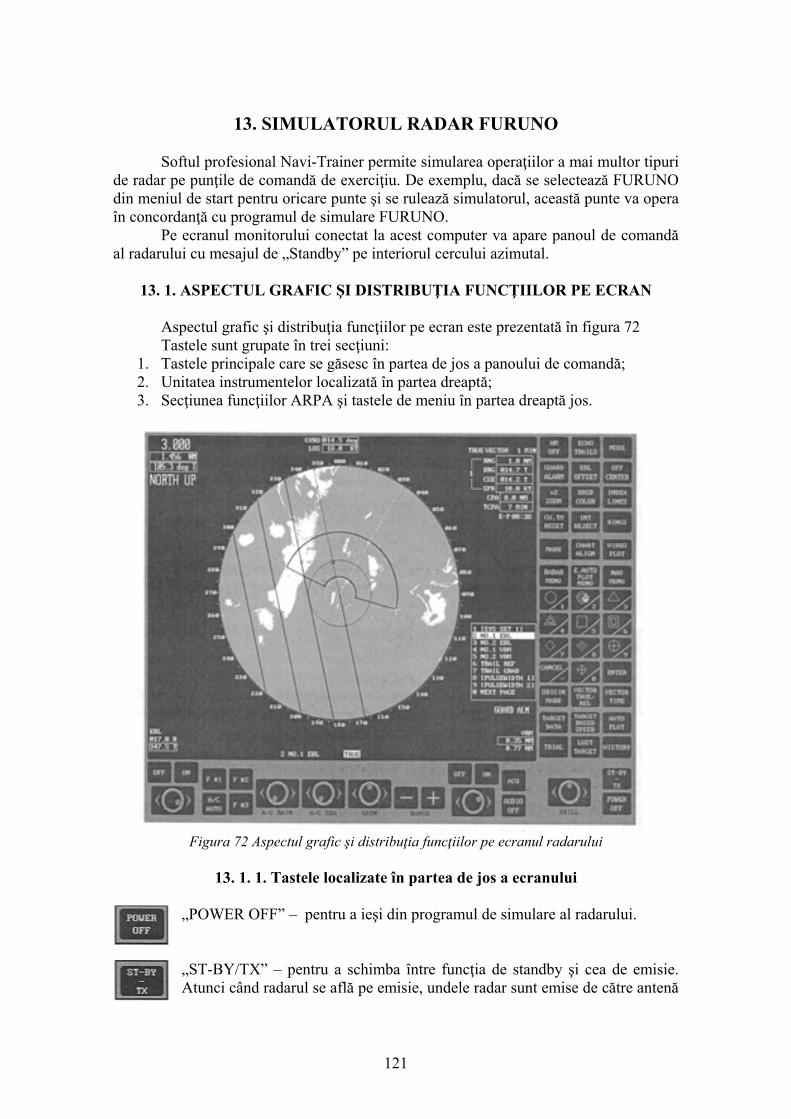
121
13. SIMULATORUL RADAR FURUNO Softul profesional Navi-Trainer permite simularea operaţiilor a mai multor tipuri de radar pe punţile de comandă de exerciţiu. De exemplu, dacă se selectează FURUNO din meniul de start pentru oricare punte şi se rulează simulatorul, această punte va opera în concordanţă cu programul de simulare FURUNO.
Pe ecranul monitorului conectat la acest computer va apare panoul de comandă al radarului cu mesajul de „Standby” pe interiorul cercului azimutal.
13. 1. ASPECTUL GRAFIC ŞI DISTRIBUŢIA FUNCŢIILOR PE ECRAN Aspectul grafic şi distribuţia funcţiilor pe ecran este prezentată în figura 72 Tastele sunt grupate în trei secţiuni:
1. Tastele principale care se găsesc în partea de jos a panoului de comandă; 2. Unitatea instrumentelor localizată în partea dreaptă; 3. Secţiunea funcţiilor ARPA şi tastele de meniu în partea dreaptă jos.
Figura 72 Aspectul grafic şi distribuţia funcţiilor pe ecranul radarului
13. 1. 1. Tastele localizate în partea de jos a ecranului
„POWER OFF” – pentru a ieşi din programul de simulare al radarului. „ST-BY/TX” – pentru a schimba între funcţia de standby şi cea de emisie. Atunci când radarul se află pe emisie, undele radar sunt emise de către antenă
122
şi ecourile ţintelor vor apărea pe ecran. „BRILL” – pentru a regla luminozitatea. „ACQ” – folosit pentru a achiziţiona ţinte.
„AUDIO OFF” – pentru a opri alarma sonoră. „VRM” – tastă rotativă. Măsoară distanţa la o ţintă. Se apasă ON pentru a afişa un VRM, apoi se operează tasta rotativă pentru a seta VRM-ul în marginea interioara a ţintei. Valoarea distanţei va apărea în partea de jos a ecranului. „RANGE” – pentru a selecta raza cercului azimutal cuprins între 0.125; 0.25; 0.5; 0.75; 1.5; 3; 6; 12; 16; 24; 32; 48; 120 Mm. „A/C SEA” – pentru a reduce paraziţii datoraţi valurilor din vecinătatea navei proprii. „A/C RAIN” – pentru a reduce paraziţii datoraţi ploii şi zăpezii. „A/C AUTO” – pentru a reduce în mod automat paraziţii datoraţi valurilor şi precipitaţiilor. „EBL” – relevment mobil; tastă rotativă. Pentru a măsura relevmentul la o ţintă. Se apasă ON pentru a afişa un EBL, apoi se operează butonul corespunzător pentru a intersecta ţinta cu EBL-ul. Valoarea relevmentului va fi afişată în partea de jos. „HM OFF” – se ţine apăsat pentru a şterge marcajul liniei prova (heading mark). „ECHO TRAILS” – pentru a afişa urmele ţintelor. „MODE” – pentru a selecta modul de afişare (North-Up, True Motion, Head-Up, Cursor gyro head-up, Course-up). „GUARD ALARM” – pentru a seta, dezactiva şi anula zona de gardă. „EBL OFFSET” – pentru a muta/reseta centrul EBL-ului.
123
„OFF CENTER” – pentru a reseta poziţia navei proprii. „X 2 ZOOM” – pentru a dubla mărimea zonei dintre nava proprie şi o poziţie de pe ecran, mutând nava proprie înspre înapoi. „BKGD COLOR” – setează culoarea de fundal. „INDEX LINES” – afişează/ascunde paralele indicatoare. „CU, TM RESET” – în modul „course-up” se aduce linia prova este 000o; în modul true motion” (mişcare adevărată) poziţia navei proprii se afişează la 50% din raza ecranului în direcţia pupa. „INT REJECT” – pentru a reduce interferenţele de la alte radare. Este setat la valoarea „2” pentru folosire în mod curent. „RINGS” – afişează/ascunde cercurile fixe de distanţă (range rings) şi reglează intensitatea luminozităţii lor (intervalul dintre inele este: 0.025; 0.05; 0.1; 0.25; 0.5; 1; 2; 4; 8; 20 Mm).
13. 1. 2. Secţiunea funcţiilor ARPA şi a tastelor de meniu
„RADAR MENU” – afişează meniurile radarului. „E, AUTO PLOT MENU” – afişează meniul plotting-ului electronic (plotting manual) sau meniul plottingului automat (opţional). „NAV MENU” – afişează meniurile de navigaţie
„TASTE NUMERICE” – se introduc valori numerice.
„CANCEL” – pentru a şterge marcajul ţintelor achiziţionate (scoate ţintele din urmărire). „ENTER” – tastă de confirmare.
124
„ORIGIN MARK” – pentru a afişa/ascunde marcajul de origine.
„VECTOR TRUE/REL” – pentru a seta vectorul ţintei ca vector real sau relativ.
„VECTOR TIME” – setează lungimea vectorului ţintei.
„TARGET DATA” – afişează date despre ţinta achiziţionată. „TARGET BASED SPEED” – afişează viteza navei în raport cu o ţintă fixă. „AUTO PLOT” – pentru a porni/opri achiziţia automată a ţintelor. „TRIAL” – pentru a executa manevra „trial” (de încercare).
„LOST TARGET” – şterge ţintele pierdute.
„HISTORY” – afişează poziţiile trecute ale ţintelor urmărite.
13. 1. 3. Afişarea marcajelor şi indicatoarelor
Afişajul general al ecranului radar este prezentat în figura 73. Elementele de pe ecran sunt dispuse în jurul cercului azimutal în următoarea ordine: - colţul sus stânga – informaţii despre tipul de imagine radar şi poziţia cursorului
radar; - partea de sus a zonei centrale – informaţii despre drumul şi viteza navei proprii; - colţul din dreapta sus – informaţii ARPA; - centru dreapta – meniuri (afişate la cererea operatorului); - dreapta jos – informaţii despre zona de gardă, urme ale ţintelor şi cercuri de
distanţă variabilă; - mijlocul parţii de jos – parametrii reglaţi din meniu (afişaţi la cererea
operatorului); - colţul din stânga jos – informaţii despre resetarea poziţiei navei proprii şi a EBL-
ului.
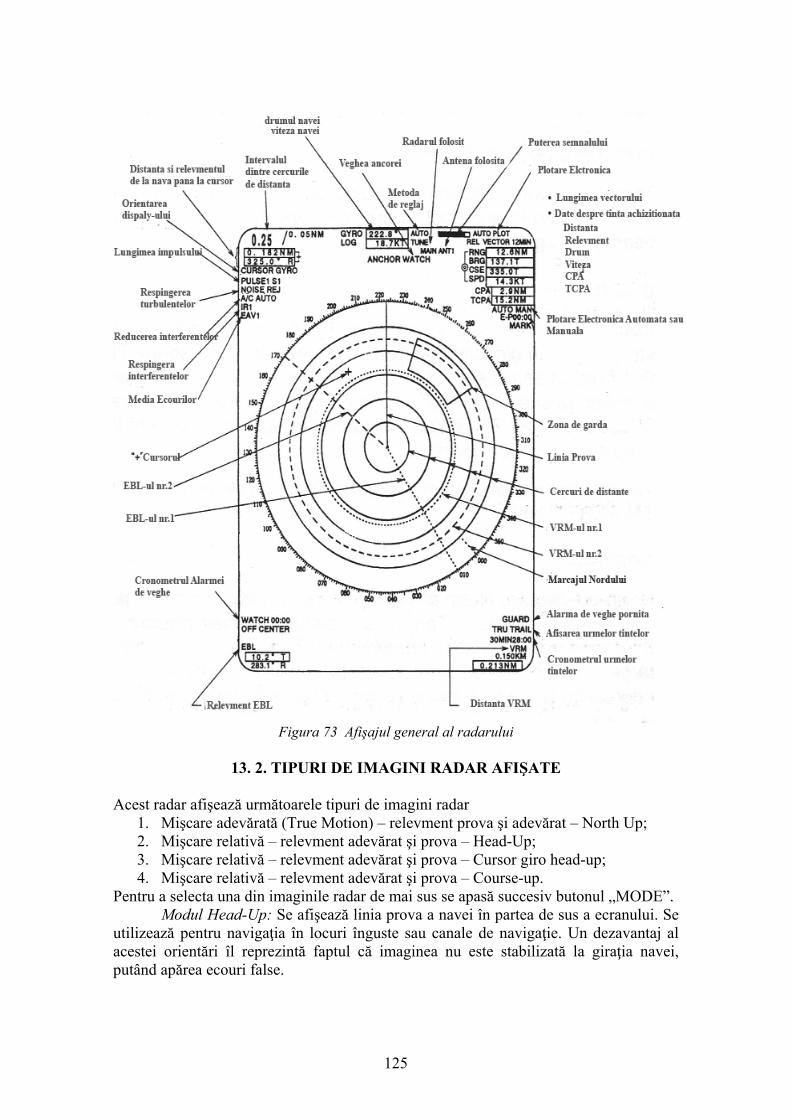
125
Figura 73 Afişajul general al radarului
13. 2. TIPURI DE IMAGINI RADAR AFIŞATE
Acest radar afişează următoarele tipuri de imagini radar
1. Mişcare adevărată (True Motion) – relevment prova şi adevărat – North Up; 2. Mişcare relativă – relevment adevărat şi prova – Head-Up; 3. Mişcare relativă – relevment adevărat şi prova – Cursor giro head-up; 4. Mişcare relativă – relevment adevărat şi prova – Course-up.
Pentru a selecta una din imaginile radar de mai sus se apasă succesiv butonul „MODE”. Modul Head-Up: Se afişează linia prova a navei în partea de sus a ecranului. Se utilizează pentru navigaţia în locuri înguste sau canale de navigaţie. Un dezavantaj al acestei orientări îl reprezintă faptul că imaginea nu este stabilizată la giraţia navei, putând apărea ecouri false.
126
Modul Cursor Gyro Head-Up: Această orientare funcţionează la fel ca şi modul head-up cu diferenţa ca scala relevmentului este conectată la girocompas. Acest lucru permite aflarea cu uşurinţa a relevmentului adevărat. Cercul azimutal se roteşte astfel încât în orice moment pe partea centrală de sus este afişat drumul giro. Modul Course-Up: se afişează drumul navei în partea de sus a ecranului radar. Pentru a porni această funcţie, se conduce nava în direcţia dorită şi apoi se selectează course-up. Marcajul direcţiei este fixat mai întâi la zero grade şi apoi se mişcă odată cu înaintarea navei. Deoarece direcţia dorită este întotdeauna la zero grade, se poate afla dacă nava este abătută de la drum. Imaginea este stabilizată la giraţia navei, deci nu vor fi afişate ecouri false. Pentru a schimba direcţia marcata, se îndreaptă nava pe noul drum şi apoi se apasă butonul „CU,TM RESET”, astfel linia prova revine pe direcţia 000o. Modul North-Up: afişează nordul în partea de sus a ecranului. Ţintele sunt afişate la distanţele măsurate în direcţia adevărată de la nava proprie, apărând ca şi cum se vizualizează o hartă marină. Deoarece navele nu se mişcă, imaginea este stabilizată la giraţia navei. Această orientare este folositoare pentru navigaţia în mare liberă. True Motion – Mişcare Reală: afişează nava proprie şi mişcarea reală a ţintelor. Deoarece marcajul navei proprii este în mişcare, acesta se opreşte când poziţia sa este la 75% din raza cercului azimutal folosit. Dacă se doreşte ca nava proprie să se mişte continuu pe ecran se poate reveni în mod automat cu marcajul navei proprii la 50% în direcţia pupa. Acest lucru poate fi efectuat prin setarea TM AUTO RESET pe poziţia ON în meniul FUNCTIONS (din meniul radarului). Se poate reveni de asemenea şi manual prin apăsarea butonului „CU, TM RESET”. Alarma de veghe Aceasta funcţionează ca un ceas cu alarmă, emiţând un sunet atunci când timpul prestabilit s-a scurs. Pentru a preveni emiterea sunetului, trebuie să fie apăsat butonul AUDIO OFF înainte ca timpul setat să se scurgă. Intervalul de timp poate fi setat la 6 minute, 10 minute, 12 minute, 15 minute sau 20 de minute. Această funcţie asigură supravegherea continuă a radarului.
13. 3. STRUCTURA MENIURILOR
Tastele meniului Acest radar are 3 taste de meniu: RADAR MENU, E.AUTO PLOT MENU şi NAV MENU. Tabelul de mai jos descrie funcţiile acestor taste: Tasta Meniului Funcţia RADAR MENU - Afişează funcţiile meniului E.AUTO PLOT MENU - Setează mărimea marcajului în plotarea electronică a
ţintelor - Setează condiţiile în plotare automată (dacă radarul este dotat cu Auto Plotter)
NAV MENIU - Selectează datele de navigaţie care vor fi afişate - Cu conexiunea unui Auto Plotter (opţional), afişează de asemenea meniul Video Plotter-ului
Setarea opţiunilor meniului
Procedura următoare va ilustra modul în care se pot seta opţiunile meniului
127
1. Se apasă tasta meniului corespunzătoare; 2. Se apasă tasta numerică pentru a selecta item-ul respectiv; 3. Se apasă aceeaşi tastă numerica de la pasul 2; 4. Se apasă tasta ENTER pentru a înregistra opţiunea selectată; 5. Pentru a schimba opţiunea unui alt item se repetă paşii de la 2 la 4; 6. Pentru a termina se apasă tasta meniului de la pasul 1. Descrierea meniului radarului Se apasă tasta RADAR MENU, pe ecran vor apărea următoarele opţiuni: 1. Pulsewidth 2. Echo Stretch 3. Echo Average 4. Echo Color 5. Ship’s speed 6. Index Lines 7. Radar Pentru a continua se apasă tasta numerică 7 şi vor fi afişate: 1. Functions 2. No. 1 EBL 3. No. 2 EBL 4. No. 1 VRM 5. No. 2 VRM 6. Trail Grad – nu este operaţional 7. Pulsewidth 1 8. Pulsewidth 2 9. Next Page Pentru a vizualiza şi restul opţiunilor se apasă tasta 9 – NEXT Page 1. Previous Page 2. Cursor Ref 3. Guard Alarm 4. Bearing Scale
Meniul Descrierea Funcţiile meniului PULSE WIDTH Lungimea impulsului - poate fi selectată pentru scale cuprinse
între 0.75 şi 24 de mile. Se pot seta doua lungimi ale impulsului (1 şi 2) pentru fiecare scala în parte.
ECHO STRETCH Expandarea ţintei. ECHO COLOR Culoarea ţintelor. SHIP’S SPEED Setează metoda de introducere a vitezei navei; manual sau de la
loch. Când este selectat manual pe ultima linie a afişajului va fi afişat „6 SHIP SPEED MAN = **.** KTS”, iar de la tastele numerice se poate introduce valoare numerica a vitezei.
INDEX LINES Afişează paralele indicatoare. Meniul RADAR1 No.1 EBL Setează relevmentul de referinţa pentru fiecare EBL; adevărat
sau prova. No.2 EBL No.1 VRM Selectează unitatea de măsura a razei pentru fiecare VRM;
128
No.2 VRM kilometri, mile marine şi mile terestre. TRAIL GRAD Gradarea ţintei în luminozitate – nu este operaţionala această
funcţie. PULSEWIDTH 1 Setează lungimea impulsului pentru butonul nr.1 din meniul
funcţiilor pentru scale cuprinse între 0.75 şi 24 mile. PULSEWIDTH 2 Setează lungimea impulsului pentru butonul nr.2 din meniul
funcţiilor pentru scale cuprinse între 0.75 şi 24 mile. Meniul RADAR2 CURSOR REF Afişează relevmentul cursorului ca relevment prova sau
adevărat. GUARD ALARM Setează tipul alarmei. „IN” generează o alarma când ţintele intră
în zona de gardă şi „OUT” atunci când ţintele ies din zona de gardă.
BEARING SCALE Scala la care operează relevmentele mobile.
13. 4. VRM (CERCURI DE DISTANŢĂ VARIABILĂ)
Afişarea sau ştergerea VRM-urilor Pentru a afişa/şterge VRM-urile:
1. Se apasă tasta „VRM ON”. VRM nr.1 va apărea şi se va afişa distanţa măsurată în colţul din dreapta jos;
2. Se apasă tasta „VRM ON” din nou. VRM-ul nr.2 va fi afişat şi distanţa măsurata va fi afişată în dreapta jos;
3. Fiecare apăsare a tastei „VRM ON” va selecta VRM-ul corespunzător pentru măsurarea distanţei, prin operarea tastei rotative VRM. În colţul din dreapta jos va apărea valoarea relevmentului măsurat;
4. Pentru a şterge un VRM, se apasă tasta „VRM OFF”. Marcajul activ şi informaţia despre el vor fi şterse. Se apasă tasta din nou pentru a şterge VRM-ul rămas în caz că acesta a fost activat. Selectarea unităţii de măsură: Unitatea de măsură pentru fiecare VRM poate fi setată pentru a fi măsurată în
mile marine, kilometrii şi mile terestre în meniul RADAR 1.
13. 5. EBL (RELEVMENTE MOBILE)
13. 5. 1. Afişarea sau ştergerea EBL
1. Se apasă tasta „EBL ON”. EBL-ul nr.1 va apărea şi într-o căsuţă (în partea din stânga jos) cu culoarea relevmentului va fi afişată valoarea acestuia;
2. Se apasă tasta „EBL ON” din nou. EBL-ul nr.2 va apărea şi căsuţa corespunzătoare se va colora mai intens;
3. Fiecare apăsare a tastei EBL ON va selecta pe rând unul din EBL-uri pentru măsurarea relevmentului prin operarea tastei rotative EBL. Căsuţa dreptunghiulară se va colora în mod corespunzător selectării unuia din cele două relevmente mobile;
4. Pentru a şterge un EBL se apasă tasta EBL OFF. Marcajul inactiv şi afişajul său vor fi şterse. Se apasă tasta din nou pentru a şterge şi celălalt EBL.
129
Selectarea relevmentului referinţă: Relevmentul referinţa pentru fiecare EBL poate fi selectat la adevărat (true) sau prova (relative), în meniul RADAR 1.
13. 5. 2. Repoziţionarea originii EBL
Predicţia drumului altor ţinte Se urmează procedura de mai jos pentru a prezice drumul altei ţinte:
1. Se afişează EBL-ul nr.1 sau nr.2; 2. Se operează trackball-ul pentru a seta cursorul pe ţinta al cărui
drum trebuie determinat; 3. Se apasă tasta EBL OFFSET. Originea EBL-ului selectat se va muta în poziţia
cursorului; 4. Se apasă tasta EBL OFFSET din nou pentru fixarea EBL-ului în poziţia dorită; 5. Se aşteaptă câteva minute. Se operează tasta rotativă EBL pentru a intersecta
ţinta cu EBL-ul; 6. Dacă EBL-ul trece prin poziţia navei proprii, ţinta s-ar putea afla pe un drum de
coliziune cu nava proprie; 7. Pentru a anula repoziţionarea EBL-ului se apasă tasta EBL OFFSET.
Măsurarea distantei şi a relevmentului dintre două ţinte 1. Se afişează EBL-ul nr.1 sau nr.2; 2. Se apasă tasta EBL OFFSET. Originea EBL-ulului se mută în
poziţia cursorului; 3. Se operează trackball-ul pentru a poziţiona cursorul pe ţinta de
la care trebuie măsurate distanţa şi relevmentul spre altă ţintă; 4. Se apasă tasta EBL OFFSET pentru a fixa originea EBL-ului; 5. Se operează tasta rotativă până intersectează cea de a 2-a ţintă; 6. Se operează tasta rotativă VRM pentru a regla VRM-ul nr.1 (sau nr.2) până
intersectează cealaltă ţintă; 7. Relevmentul şi distanţa dintre cele două ţinte vor fi afişate în partea de jos a
ecranului.
13. 6. SETAREA ALARMEI DE GARDĂ Alarma de gardă porneşte atunci când o ţintă intră în zona de gardă setată de către utilizator. Se poate seta ca alarma să pornească când ţinta intră în zonă sau când iese din aceasta. Valoarea unghiulară a zonei de gardă poate fi setată între 0o şi 360o. Notă: Alarma este un ajutor pentru prevenirea coliziunilor, dar acest lucru nu îl scuteşte pe operator de responsabilitatea de a menţine o veghe vizuală pentru posibilele situaţii de coliziune. Tipuri de alarme Alarma „ IN”: Această alarmă porneşte când ţintele radar intră în zona de gardă. Ţinta care intră în această zonă clipeşte. Alarma „OUT”: Această alarmă porneşte când ţintele radar ies din zona de gardă. Selectarea tipului de alarmă: Se poate selecta tipul de alarmă la „In” sau „Out” în meniul RADAR 2 din GUARD ALARM Setarea zonei de gardă
130
1. Se operează trackball-ul pentru a poziţiona cursorul acolo unde, trebuie setată marginea din stânga sus (stânga jos) a zonei de gardă. Se apasă tasta „GUARD ALARM”. Va apărea pe ecran „SET GUARD” în colţul din dreapta jos a ecranului;
2. Se roteşte trackball-ul în sensul acelor de ceasornic pentru a poziţiona cursorul acolo unde trebuie setată marginea din dreapta jos (dreapta sus) a zonei de gardă. Se apasă tasta „GUARD ALARM”. Indicaţia „GUARD ALARM” va înlocui indicaţia „SET GUARD”. Zona de gardă este astfel setată.
Observaţii asupra zonei de gardă - Se poate de asemenea seta ca zonă de gardă un sector circular dacă punctul de
început al zonei de gardă este setat în aceeaşi poziţie cu punctul final. - Zona de gardă rămâne pe ecran atunci când scala radarului se schimbă. Dacă
scala radarului este mai mică decât raza zonei de gardă, indicaţia „GUARD ALM” va fi înlocuită de indicaţia „GUARD OUT”. În acest caz se creşte scala radarului pentru a afişa zona de gardă.
Dezactivarea alarmei: Atunci când o ţintă intra în zona de gardă, porneşte alarma sonoră şi ţinta vizată începe să clipească. Se poate opri alarma sonoră prin apăsarea tastei „GUARD ALARM”. Indicaţia „GUARD ACKN” va fi înlocuit de „GUARD ALM”. Acest lucru dezactivează alarma de gardă. Pentru a fi reactivată se apasă tasta „GUARD ALARM” din nou. „GUARD ALM” înlocuieşte „GUARD ACKN”. Anularea zonei de gardă: Se apasă şi se tine apăsat butonul „GUARD ALARM” (pentru cel puţin 3 secunde) pentru a şterge zona de gardă şi indicatorul „GUARD ALM”.
13. 7. SCHIMBAREA ORIGINII CERCULUI AZIMUTAL (OFF-CENTER) De exemplu pentru a schimba originea în partea de sus:
1. Se operează trackball-ul pentru a poziţiona cursorul în partea de sus faţă de centrul normal al cercului azimutal;
2. Se apasă tasta „OFF CENTER”. Poziţia navei proprii se mută în poziţia cursorului şi vederea înspre înainte se măreşte.
Anularea schimbării originii centrului cercului azimutal: Se apasă tasta „OFF CENTER”; poziţia navei proprii se mută în centrul ecranului radar.
13. 8. FUNCŢIA ZOOM DUBLAREA SCALEI ÎNTR-O ANUMITĂ ZONĂ
Pentru a dubla mărimea zonei adiacente, de exemplu, la o mică insulă din bordul tribord al navei proprii, se procedează astfel: 1. Se operează trackball-ul pentru a poziţiona cursorul în zona care se doreşte a fi mărită;
2. Se apasă tasta „X2 ZOOM”. Zona dintre cursor şi nava proprie este dublată. Mesajul „ZOOM” va apărea în partea din stânga jos a ecranului.
Anularea: Se apasă tasta „X2 ZOOM”. Nota: Funcţia zoom este inoperantă atunci când funcţia off-center este pornită.
131
13. 9. PARALELE INDICATOARE Se pot afişa paralele indicatoare cu EBL-ul nr.2. (EBL-ul nr.2 trebuie să fie afişat înainte de operarea paralelor indicatoare). Ele sunt utile pentru menţinerea cu acurateţe a navei pe drumul deasupra fundului utilizând un reper fix. Se pot opera paralele indicatoare cu ajutorul tastei rotative EBL. Distanţa dintre linii poate fi modificată cu VRM-ul nr. 2 sau prin introducere manuală a distanţei de la tastele numerice. Afişarea Paralelelor Indicatoare:
1. Se apasă tasta „INDEX LINES” apoi pe ecran vor fi afişate paralele indicatoare. 2. Se operează tasta rotativă EBL pentru a roti EBL-ul nr.2 şi paralele indicatoare
Setarea distanţei între paralele indicatoare: 1. Se apasă tasta „RADAR MENU”; 2. Se apasă tasta 6 pentru a selecta „INDEX LINES”; 3. Se apasă tasta „6” din nou pentru a selecta metoda de a introduce a distanţei,
cu VRM-ului nr.2 sau de la tastele numerice. Se poate modifica distanţa între paralelele indicatoare cu VRM-ul nr.2 sau se introduce manual distanţa între paralele cu ajutorul tastelor numerice;
4. Se apasă tasta „ENTER”.
13. 10. VEGHEA LA ANCORĂ Funcţiile de veghe la ancoră mai ales în modul standby, sunt utile pentru a informa utilizatorul dacă ancora grapează. Pentru ca funcţia să fie operabilă sunt necesare date de navigaţie şi informaţii fizice despre navă. Atunci când se porneşte veghea la ancoră o figură de forma unei nave va apărea pe ecran; de asemenea, va fi afişată o linie punctată pornind de la prova navei. Un cerc care arată raza alarmei poate fi afişat pe ecran. Atunci când mişcarea navei depăşeşte cea a razei de alarmă, porneşte un sunet pentru a informa despre acest lucru. Acesta poate fi oprit prin apăsarea tastei „AUDIO OFF”. Această funcţie nu este operaţională în simulator.
13. 11. URMELE ŢINTELOR Se pot afişa urmele tuturor ecourilor pentru a determina mişcarea ţintelor. Urmele pot fi afişate în mişcare adevărată sau relativă şi în diferite gradări ale luminozităţii. Referinţa relevment: Se pot afişa urmele ţintelor în mişcare adevărată sau relativă. Mişcarea adevărată necesită date de intrare referitoare la viteza şi drumul navei proprii. Procedura:Se apasă alternativ tasta VECTOR TRUE/REL. Gradarea luminozităţii urmelor: nu este operaţională în simulator. Pornirea afişării urmelor ecourilor Se apasă tasta „ECHO TRAILS” pentru a porni aceasta funcţie, apoi:
- Perioada de timp pentru afişarea urmelor apare în colţul din dreapta jos; - Urmele ţintelor încep să se mărească; - Când timpul de urmărire se scurge, cronometrul se opreşte şi urmele cele mai
vechi sunt şterse.
132
Selectarea timpului de urmărire Timpul de urmărire apare pe ecran pentru confirmare. Când timpul de urmărire se scurge vechile urme sunt şterse. Se poate selecta timpul de urmărire prin apăsarea tastei „ECHO TRAILS”. Fiecare apăsare a tastei până în primele 5 secunde de la apăsarea precedentă va schimba timpul de urmărire în ordinea următoare: 30 de secunde, 1 minut, 3 minute, 6 minute, 15 minute, 30 minute şi continuu. Ştergerea Urmelor Se ţine apăsat butonul ECHO TRAILS (mai mult de 3 secunde) până când toate urmele vor fi şterse. Apoi urmele se vor forma din nou. Anularea afişării urmelor: Se apasă tasta „ECHO TRAILS”.
13. 12. PLOTAREA ELECTRONICĂ Se pot achiziţiona manual 10 ţinte şi afişa succesiv datele referitoare la acestea. Pentru fiecare ţintă achiziţionată, acest radar plotează ultimele 5 poziţii, afişează date de navigaţie, viteză şi drum printr-un vector. Datele afişate pentru ţintă sunt:
- Relevment (de la nava proprie); - Distanţa; - Drum; - Viteza; - CPA; - TCPA.
13. 12. 1. Funcţia History
Ultimele 4 poziţii ale ţintelor achiziţionate sunt afişate pe ecran prin puncte. Punctele sunt şterse unul câte unul pentru a face loc ultimei poziţii. Paşi pentru efectuarea unei plotări: Pentru a achiziţiona o ţinta:
1. Se operează trackball-ul pentru a poziţiona cursorul pe ţinta dorită; 2. Se apasă tasta „ACQ”.
13. 12. 2. Afişajul vectorial Dacă o ţintă este achiziţionată, după minim 2 rotaţii ale antenei se calculează elementele ţintei (drum, viteza, CPA, TCPA). Se afişează apoi vectorul ţintei (spaţiul parcurs de ţinta în viitor pentru o anumită perioadă de timp). VECTOR TIME – intervalul de timp pentru care este afişat vectorul ţintei. Se poate selecta intervalul de timp pentru vectorul ţintei prin apăsarea succesiva a butonului VECTOR TIME (de la 1 la 10 minute). VECTOR BEARING REFERENCE – referinţa relevmentului – relevmentul vectorilor poate fi afişat ca relevment adevărat sau prova prin apăsare tastei „VECTOR TRUE/REL”.
133
13. 12. 3. Ştergerea ţintelor achiziţionate Cu ajutorul trackball-ului,l una câte una:
1. Se operează trackball-ul pentru a poziţiona cursorul pe marcajul ţintei ce urmează a fi ştearsă;
2. Se apasă tasta „CANCEL”. Toate ţintele: Se ţine apăsată tasta „CANCEL” (mai mult de 5 secunde) până când toate ţintele achiziţionate dispar.
13. 12. 4. Datele ţintelor achiziţionate
Datele de navigaţie despre ţintele achiziţionate vor apărea în colţul din dreapta sus a ecranului. Aceste date sunt: - RANGE: distanţa de la nava proprie până la ultima poziţie a ţintei; - BEARING: relevmentul de la nava proprie până la ţintă, în relevment adevărat sau prova; - COURSE: drumul ţintei; - SPEED: viteza reală a ţintei; - CPA: distanţa până la punctul de cea mai mare apropiere; - TCPA: timpul până la CPA.
134
Bibliografie
1. R. Boşneagu Radarul anticoliziune-ARPA, ed. ANMB, Constanţa, 1999 2. R. Boşneagu Navigaţie şi hidrometeorologie marină, ed. ANMB, Constanţa,
1997 3. R. Boşneagu Cinematică navală şi navigaţie radar, ANMB, Constanţa, 20034. C. Ciubotaru Utilizarea observaţiilor radar în cinematica navală, ed. IMMB,
Constanţa, 1984 5. D. House Navigation for Masters, Editura Witherby & Co Ltd.London,
1995 6. G. J SONNENBERG Radar and Electronic Navigation, ed. Butterwoths,
Londra, 1988 7. *** Marine radar equipment JMA-5310-6 Instrution manual,
Japan Radio Co., Ltd, 2003 8. *** Navi-trainer professional 3000 Trainee manual, Transas Marine
Ltd. March, 2001