capitolul 1 introducere - work.xentra.rowork.xentra.ro/cursuri-amg/anul...
TRANSCRIPT

Capitolul 1
Introducere
Bio�zica este stiinta care studiaz¼amodul în care prin-cipiile �zice sunt aplicate sistemelor vii.Bio�zica este o stiint¼a interdisciplinar¼a care se situ-
eaz¼a între biologie si �zic¼a, dar care este legat¼a si de altediscipline: matematic¼a, chimie, chimie �zic¼a si biochimie.Termenul de "bio�zic¼a" a fost utilizat prima dat¼a de
Karl Pearson în 1892 în cartea sa "Grammar of science"Bio�zica poate � considerat¼a ca si genetica, biochi-
mia, �ziologia un sub domeniu al biologiei. În acelasitimp bio�zica poate � considerat¼a ca o parte special-izat¼a a �zicii.Chimia bio�zic¼a si bioelectrochimia pot �considerate
subdomenii ale bio�zicii.Fizica medical¼a pe de alt¼a parte este o stiint¼a inter-
disciplinar¼a care îsi are r¼ad¼acinile în bio�zic¼a, dar careare rami�catii care ajung chiar în ingineria medical¼a.Problematica bio�zicii se poate diferentia în 3 di-
rectii:
5
6
a) aspecte �zice ale structurilor si fenomenelor bio-logice;b) tehnicile �zice utilizate în explorarea biosistemelor;c) mecanismele de interactie si efectele biologice ale
factorilor �zicii din mediul ambiant;Abordarea bio�zic¼a a fenomenelor biologice poate �
f¼acut¼a în dou¼a moduri:a) experimental, prin evaluarea dinamicii de ansam-
blu a sistemului la nivel macroscopicb) teoretic - când se urm¼areste stabilirea unor noi
legit¼ati cantitative si calitative pentru modelarea pro-ceselor nebiologice.
Capitolul 2
Biomecanica
Biomecanica studiaz¼a aspectele mecanice din struc-turile biologice, precum si efectele fortelor mecanice.Misc¼arile animalelor, în special a vertebratelor este re-alizat¼a de un sistem complex de muschi, tendoane sioase. Ele sunt legate în asa fe încât miscarea unei p¼artiimplic¼a si misc¼arile altora.
2.1 Biostatica
Obiectivul biostaticii este studiul fortelor respons-abile de echilibrul mecanic al sistemelor vii privite caun întreg.
2.1.1 Forte si momente
Un sistem mecanic r¼amâne în echilibru dac¼a:a) rezultanta fortelor care actioneaz¼a asupra sistemu-
lui este nul¼a.b) momentul rezultant al fortelor este nul.
7
8
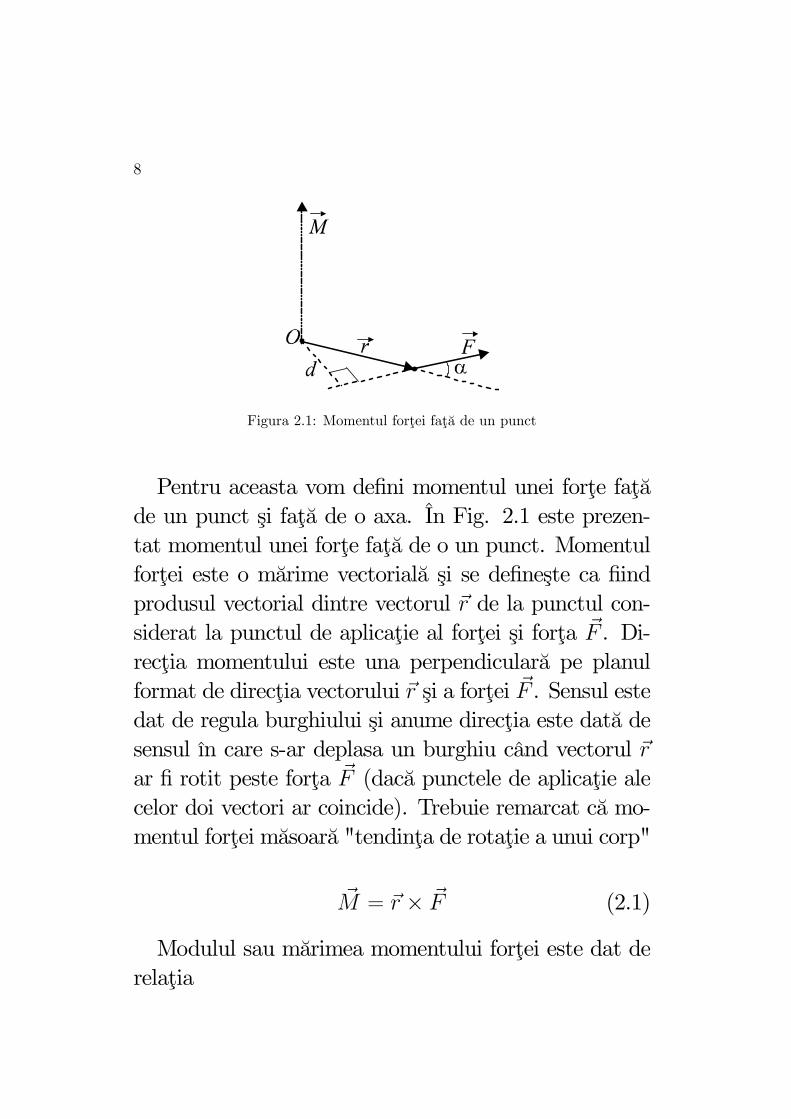
Figura 2.1: Momentul fortei fat¼a de un punct
Pentru aceasta vom de�ni momentul unei forte fat¼ade un punct si fat¼a de o axa. În Fig. 2.1 este prezen-tat momentul unei forte fat¼a de o un punct. Momentulfortei este o m¼arime vectorial¼a si se de�neste ca �indprodusul vectorial dintre vectorul ~r de la punctul con-siderat la punctul de aplicatie al fortei si forta ~F . Di-rectia momentului este una perpendicular¼a pe planulformat de directia vectorului ~r si a fortei ~F . Sensul estedat de regula burghiului si anume directia este dat¼a desensul în care s-ar deplasa un burghiu când vectorul ~rar � rotit peste forta ~F (dac¼a punctele de aplicatie alecelor doi vectori ar coincide). Trebuie remarcat c¼a mo-mentul fortei m¼asoar¼a "tendinta de rotatie a unui corp"
~M = ~r � ~F (2.1)
Modulul sau m¼arimea momentului fortei este dat derelatia
9
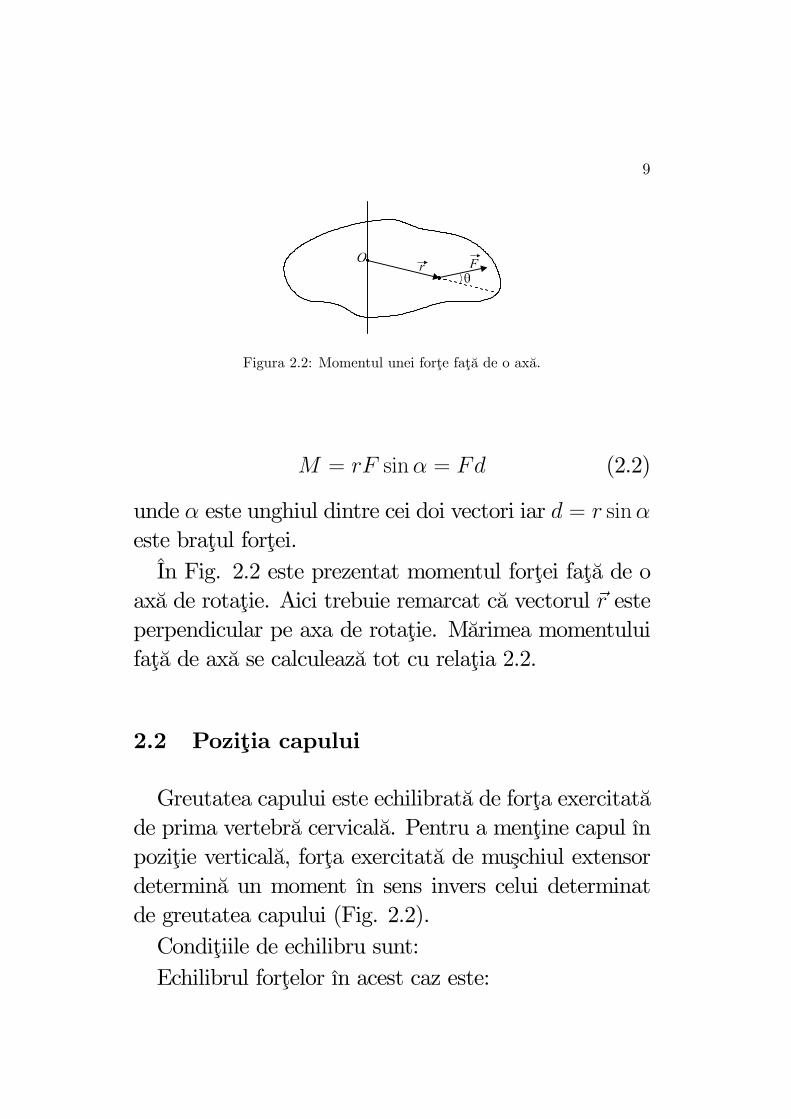
Figura 2.2: Momentul unei forte fat¼a de o ax¼a.
M = rF sin� = Fd (2.2)
unde � este unghiul dintre cei doi vectori iar d = r sin�este bratul fortei.În Fig. 2.2 este prezentat momentul fortei fat¼a de o
ax¼a de rotatie. Aici trebuie remarcat c¼a vectorul ~r esteperpendicular pe axa de rotatie. M¼arimea momentuluifat¼a de ax¼a se calculeaz¼a tot cu relatia 2.2.
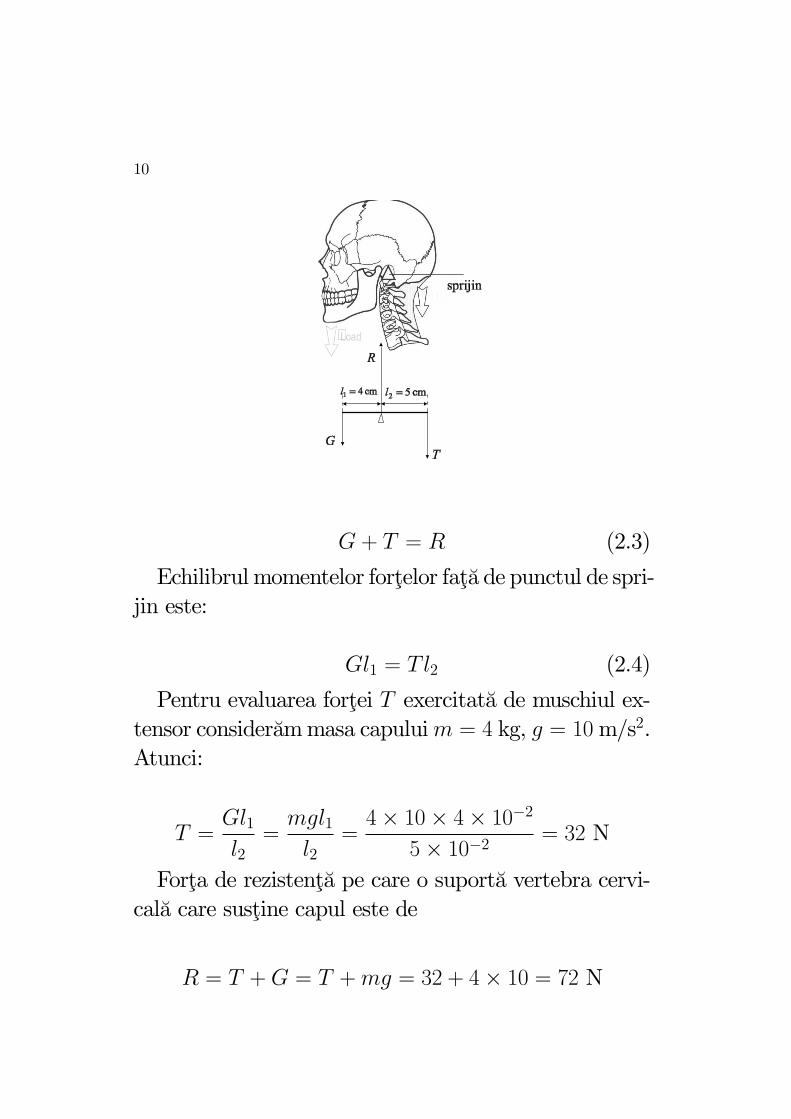
2.2 Pozitia capului
Greutatea capului este echilibrat¼a de forta exercitat¼ade prima vertebr¼a cervical¼a. Pentru a mentine capul înpozitie vertical¼a, forta exercitat¼a de muschiul extensordetermin¼a un moment în sens invers celui determinatde greutatea capului (Fig. 2.2).Conditiile de echilibru sunt:Echilibrul fortelor în acest caz este:
10
G + T = R (2.3)
Echilibrul momentelor fortelor fat¼a de punctul de spri-jin este:
Gl1 = T l2 (2.4)
Pentru evaluarea fortei T exercitat¼a de muschiul ex-tensor consider¼ammasa capuluim = 4 kg, g = 10m/s2.Atunci:
T =Gl1l2=mgl1l2
=4� 10� 4� 10�2
5� 10�2 = 32 N
Forta de rezistent¼a pe care o suport¼a vertebra cervi-cal¼a care sustine capul este de
R = T +G = T +mg = 32 + 4� 10 = 72 N

11
1Newton = 1kg m/s2.Dac¼a presupunem c¼a prima vertebr¼a cervical¼a c¼a este
în form¼a de disc cu aria de S = 4 cm2 si c¼a forta esteuniform distribuit¼a (fapt ce nu este în totalitate ade-v¼arat), presiunea exercitat¼a pe vertebr¼a este:
p =R
S=
72 N4� 10�4 m2 = 1; 8� 10
5 N/m
Ca observatie not¼am c¼a presiunea atmosferic¼a are val-oarea p0 = 1 atm = 1; 013� 105 N/m2.
2.2.1 Pârghii
Pârghiile sunt masinile cele mai simple. O pârghieeste orice corp rigid, mobil în jurul unei axe asuprac¼aruia actioneaz¼a urm¼atoarele forte: forta activ¼a F ,forta de rezistent¼a care trebuie învins¼a si forta de reacti-une care actioneaz¼a în punctul de sprijin. Astfel opârghie este caracterizat¼a de trei puncte principale:- punctul de aplicatie al fortei F- punctul de aplicatie al fortei de rezistent¼a R- punctul de sprijinConditia ca o pârghie s¼a realizeze echilibrul este ca
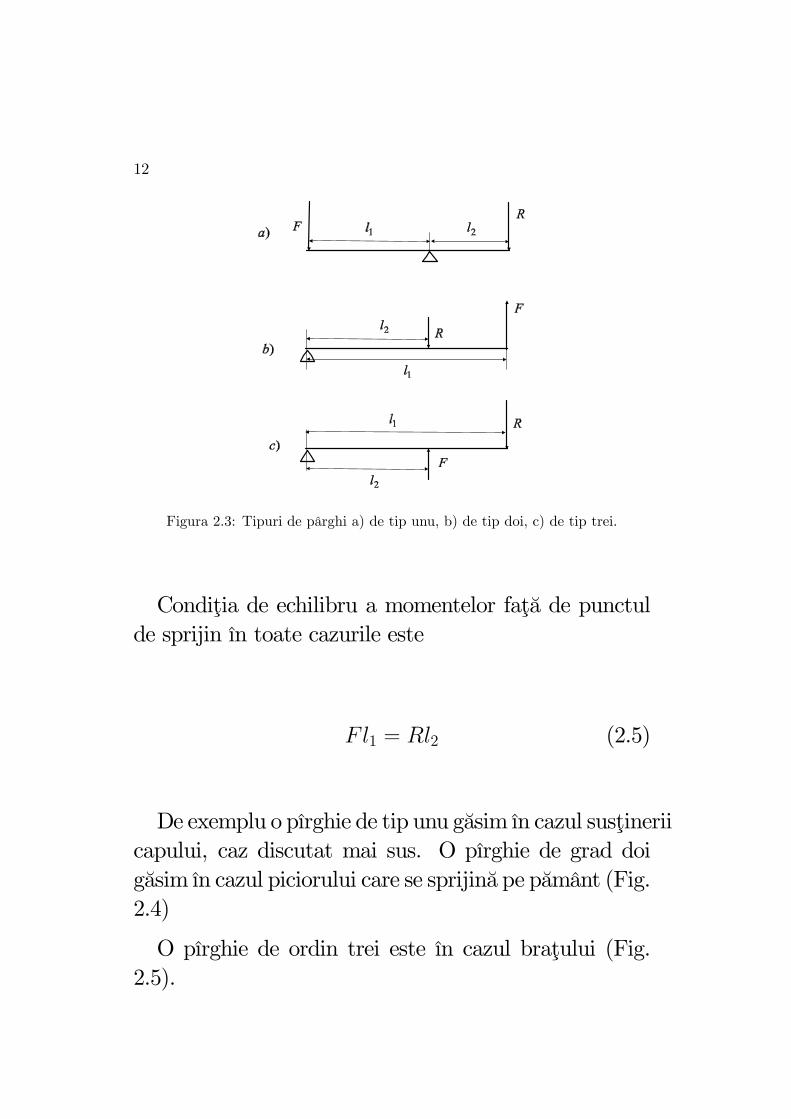
momentele fortei F si al fortei de rezistent¼a R s¼a �eegale.Pârghiile sunt de trei tipuri: de tip unu (Fig. 2.3a),
de tip doi (Fig.2.3b), de tip trei (Fig.2.3c)
12
Figura 2.3: Tipuri de pârghi a) de tip unu, b) de tip doi, c) de tip trei.
Conditia de echilibru a momentelor fat¼a de punctulde sprijin în toate cazurile este
Fl1 = Rl2 (2.5)
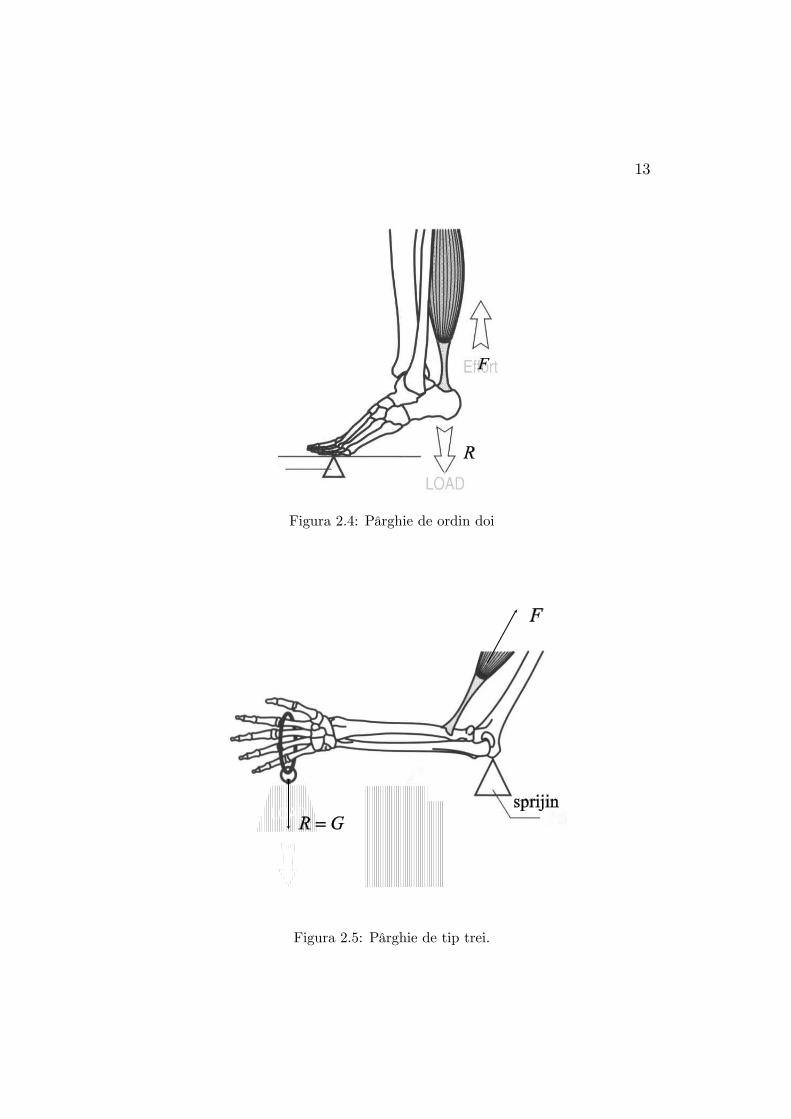
De exemplu o pîrghie de tip unu g¼asim în cazul sustineriicapului, caz discutat mai sus. O pîrghie de grad doig¼asim în cazul piciorului care se sprijin¼a pe p¼amânt (Fig.2.4)
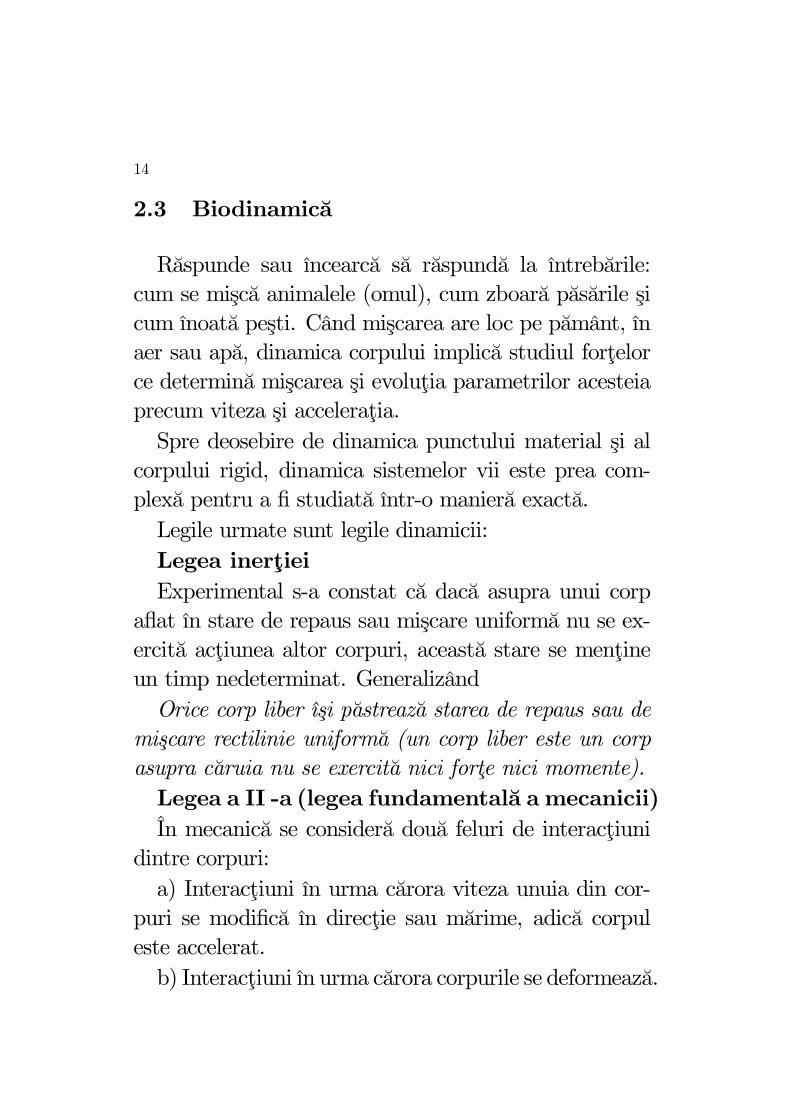
O pîrghie de ordin trei este în cazul bratului (Fig.2.5).
13
Figura 2.4: Pârghie de ordin doi
Figura 2.5: Pârghie de tip trei.
14
2.3 Biodinamic¼a
R¼aspunde sau încearc¼a s¼a r¼aspund¼a la întreb¼arile:cum se misc¼a animalele (omul), cum zboar¼a p¼as¼arile sicum înoat¼a pesti. Când miscarea are loc pe p¼amânt, înaer sau ap¼a, dinamica corpului implic¼a studiul fortelorce determin¼a miscarea si evolutia parametrilor acesteiaprecum viteza si acceleratia.Spre deosebire de dinamica punctului material si al
corpului rigid, dinamica sistemelor vii este prea com-plex¼a pentru a � studiat¼a într-o manier¼a exact¼a.Legile urmate sunt legile dinamicii:Legea inertieiExperimental s-a constat c¼a dac¼a asupra unui corp
a�at în stare de repaus sau miscare uniform¼a nu se ex-ercit¼a actiunea altor corpuri, aceast¼a stare se mentineun timp nedeterminat. GeneralizândOrice corp liber îsi p¼astreaz¼a starea de repaus sau de
miscare rectilinie uniform¼a (un corp liber este un corpasupra c¼aruia nu se exercit¼a nici forte nici momente).Legea a II -a (legea fundamental¼a a mecanicii)În mecanic¼a se consider¼a dou¼a feluri de interactiuni
dintre corpuri:a) Interactiuni în urma c¼arora viteza unuia din cor-
puri se modi�c¼a în directie sau m¼arime, adic¼a corpuleste accelerat.b) Interactiuni în urma c¼arora corpurile se deformeaz¼a.
15
Experimental s-a constatat c¼a acceleratia c¼ap¼atat¼ade un corp asupra c¼aruia actioneaz¼a o fort¼a este pro-portional¼a cu forta care actioneaz¼a asupra lui. Astfellegea a doua se formuleaz¼a astfel:Acceleratia pe care o cap¼at¼a un corp datorit¼a actiunii
unei forte este direct proportional¼a cu m¼arimea aceleiforte si colinear¼a cu ea.
~a =~F
m(2.6)
În relatia de mai sus m este un parametru ce car-acterizeaz¼a corpul respectiv si poart¼a numele de mas¼a,interpretat ca �ind cantitatea de substant¼a continut¼a înacel corp.Legea a III - a (principiul actiunii si reacti-
unii)Dac¼a un corp actioneaz¼a asupra altui corp cu o fort¼a
~F12, al doilea corp actioneaz¼a asupra primului cu o fort¼a~F21egal¼a în m¼arime si de sens contrar cu prima fort¼a.
~F21 = �~F12 (2.7)
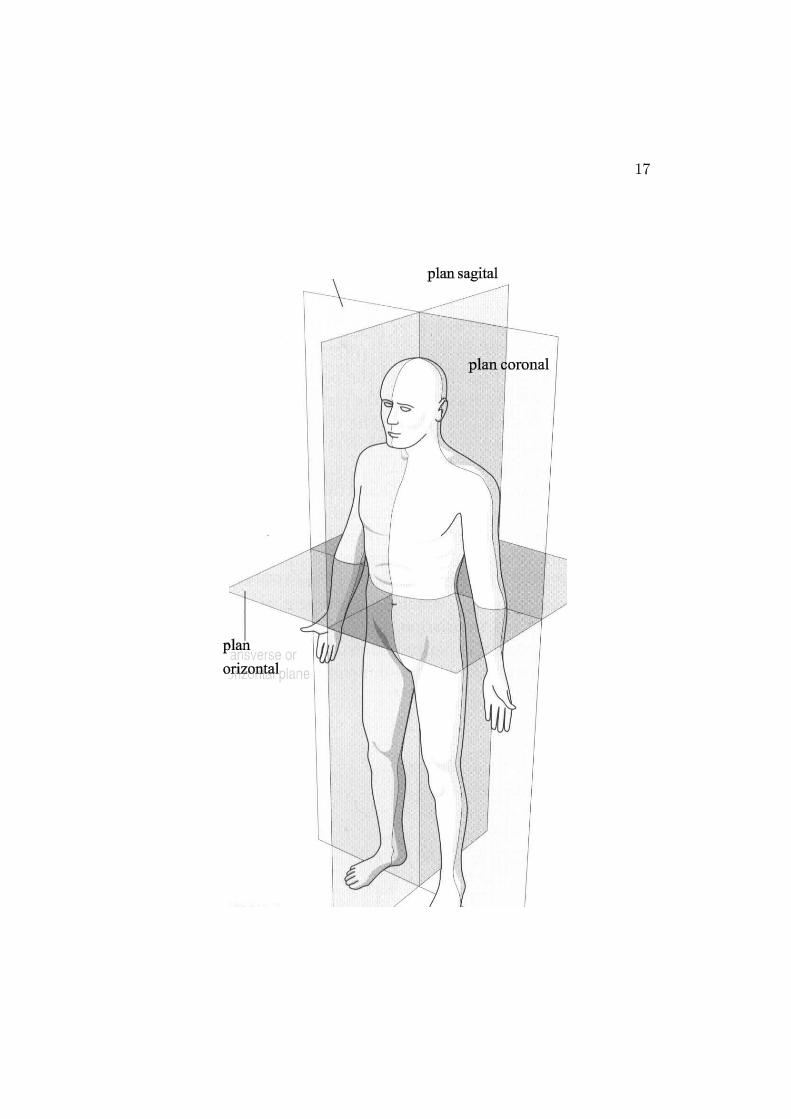
Forta ~F12 poart¼a numele de actiune, iar ~F21 poart¼anumele de reactiune. Trebuie observat c¼a cele dou¼a forteactioneaz¼a asupra unor corpuri diferite.Misc¼ari ale diverselor p¼arti ale corpuluiPentru aceasta consider¼am trei plane (Fig.2.3) care
împart corpul omenesc: planul sagital (median), planul
16
orizontal si planul coronar.Ca exemple de misc¼ari ale corpului omenesc amintim:- �exia: apropierea a dou¼a segmente unite între ele
prin articulatii (apropierea antrebatului de brat)-extensia: îndep¼artarea a dou¼a segmente unite între
ele prin articulatii- abductia: dep¼artarea de planul sagital a unei ex-
tremit¼ati a corpului sau a unui segment (ridicare uneimâini)-adductia: apropierea de planul sagital a unei extren-
it¼ati a corpului sau a unui segment
2.3.1 Locomotie
Miscarea corpului este rezultanta unor factoria) interni: impulsul nervos, contractia muscular¼a si
activitatea sistemului de pârghii a organismului datoratsistemului ososb) externi:- gravitatia care este o caracteristic¼a a oric¼arui corp
a�at în câmpul gravitational al p¼amântului. Ea esteforta cu care câmpul gravitational actioneaz¼a asupraoric¼arui corp si se exprim¼a ca
G = mg (2.8)
unde m este masa corpului iar g = 9; 8 m/s2 este accel-eratia gravitational¼a. Trebuie remarcat c¼a aceasta este
17
18
mai mare la ecuator si mai mic¼a la poli P¼amântului.- presiunea atmosferic¼a are valoarea normal¼a p0 =
1; 013�105N/m2. Ea scade cu altitudinea, iar la în¼altimeade 5000 m devine egal¼a cu p = p0=2.- rezistenta R la înaintare în aer pentru viteze ceva
mai mari este de forma:
R = kSv2 (2.9)
unde S este sectiunea corpului (0,035 - 0,14 m2), vitezav de deplasare si k este un coe�cient de rezistent¼a. Lao vitez¼a de 42 km/h valoarea coe�cientului k în aer este0,079 Ns2/m4si în ap¼a 73 Ns2/m4 deoarece deplasareaîn ap¼a se face mult mai greu.- forta de frecare
F = �N (2.10)
unde � este coe�cientul de frecare la alunecare, iar Neste forta de reactiune a planului pe care se a�¼a corpul.Frecarea este important¼a în timpul delas¼arii deoarece înlipsa ei am aluneca.