a,b ))))∈∈ - flexformcursuri.flexform.ro/courses/l2/document/cluj-napoca/grupa2/copaciu... ·...
TRANSCRIPT
1. CAPITOLUL 1. Elemente de calcul vectorial şi geometrie analitică
1.1. Vectori în plan
1.1.1. Definiţii
O mărime este scalară dacă pentru determiarea ei este suficientă indicarea unui singur număr.
O mărime este vectorială dacă este determinată de următoarele trei elemente: mărime, direcţie şi sens
Se numeşte direcţie a dreptei d mulţimea formată din dreapta d şi toate dreptele paralele cu ea.
Se numeşte direcţia segmentului [[[[ ]]]] BA,AB ≠≠≠≠ , direcţia dreptei AB.
Fie dreapta d pe care se fixează două puncte (((( ))))BAB,A ≠≠≠≠ . Punctele dreptei d pot fi parcurse de la A spre B (un sens de parcurgere) sau de la B spre A (al doilea sens de parcurgere). Prin această metodă s-au definit două sensuri pe dreapta d, numite sensurile dreptei.
Parcurgerea unui segment [[[[ ]]]] BA,AB ≠≠≠≠ se poate face de la A spre B sau
de la B spre A. Astfel pe segmentul [[[[ ]]]]AB sunt definite două sensuri (opuse).
O pereche(((( )))) PB,A ∈∈∈∈ se numeşte segment orientat sau vector legat şi
se notează AB , unde A este originea, iar B este extremitatea. Dacă BA ≠≠≠≠ dreapta determinată de punctele A şi B se numeşte dreaptă suport.
Vectorul AA se numeşte vector nul.
Doi vectori legaţi nenuli AB şi CD au aceeaşi direcţie dacă dreptele lor suport sunt paralele sau coincid.
Dacă PD,C,B,A ⊂⊂⊂⊂ sunt patru puncte necoliniare, vectorii AB şi
CD au acelaşi sens dacă au aceeaşi direcţie şi punctele B şi D sunt în acelaşi semiplan determinat de dreapta AC.
Se numeşte lungimea sau norma vectorului AB numărul real şi pozitiv care reprezintă distanţa d(A,B) între punctele A şi B şi se simbolizează prin
AB .
Doi vectori legaţi AB şi CD sunt egali dacă şi numai dacă A=C şi B=D.
Doi vectori legaţi se numesc echipolenţi şi se notează AB ~ CD dacă au aceeaşi direcţie, acelaşi sens şi acelaşi modul.
Se numeşte vector liber PPPPVVVV mulţimea tuturor vectorilor legaţi
echipolenţi cu un vector legat dat ar
. PPPPVVVV∈∈∈∈a
r
. (Cu alte cuvinte, un vector este
liber dacă originea sa poate fi aleasă în mod arbitrar în plan).
Se spune că vectorul liber AB este determinat de vectorul legat AB sau
că vectorul legat AB este un reprezentant al vectorului liber AB şi acest
lucru se reprezintă prin ABAB ∈∈∈∈ .
Dacă A=B, atunci vectorul liber AA se numeşte vector nul, notat 0, de modul 0, direcţie şi sens arbitrar.
Doi vectori liberi sunt egali dacă au: � aceeaşi direcţie (adică pot fi situaţi pe aceeaşi dreaptă suport sau pe
drepte suport paralele), � acelaşi sens, � acelaşi modul.
Vectorul liber u de normă 1 se numeşte versor. Se consideră o dreaptă x'x pe care se fixează punctul O (originea). În
origine ca punct de aplicaţie, se consideră un versor situat pe dreaptă, notat cu
1i,OAi ========rr
, reprezentând versorul dreptei. Prin fixarea versorului pe
dreaptă, aceasta devine axă. Astfel pe această dreaptă există o origine, un sens de parcurgere şi o unitate de măsură a lungimilor.
Doi vectori se numesc ortogonali dacă direcţiile lor sunt perpendiculare. Doi vectori care au aceeaşi direcţie şi acelaşi modul, dar sensuri opuse se
numesc vectori opuşi. Dacă b,a sunt vectori opuşi, atunci se scrie ab −−−−==== .
Pentru AB şi BA avem ABBA −−−−====
Proprietate: Fiind dat un punct O în plan, PPPPVVVV∈∈∈∈∀∀∀∀a există un unic punct
M în plan, astfel încât aOM ==== .
1.1.2. Operaţii elementare cu vectori liberi 1.1.2.1. Adunarea a doi vectori Suma a doi sau mai mulţi vectori este tot un vector, care se poate obţine
cu ajutorul unei construcţii geometrice efectuate asupra acestora. a) Adunarea a doi vectori după regula paralelogramului
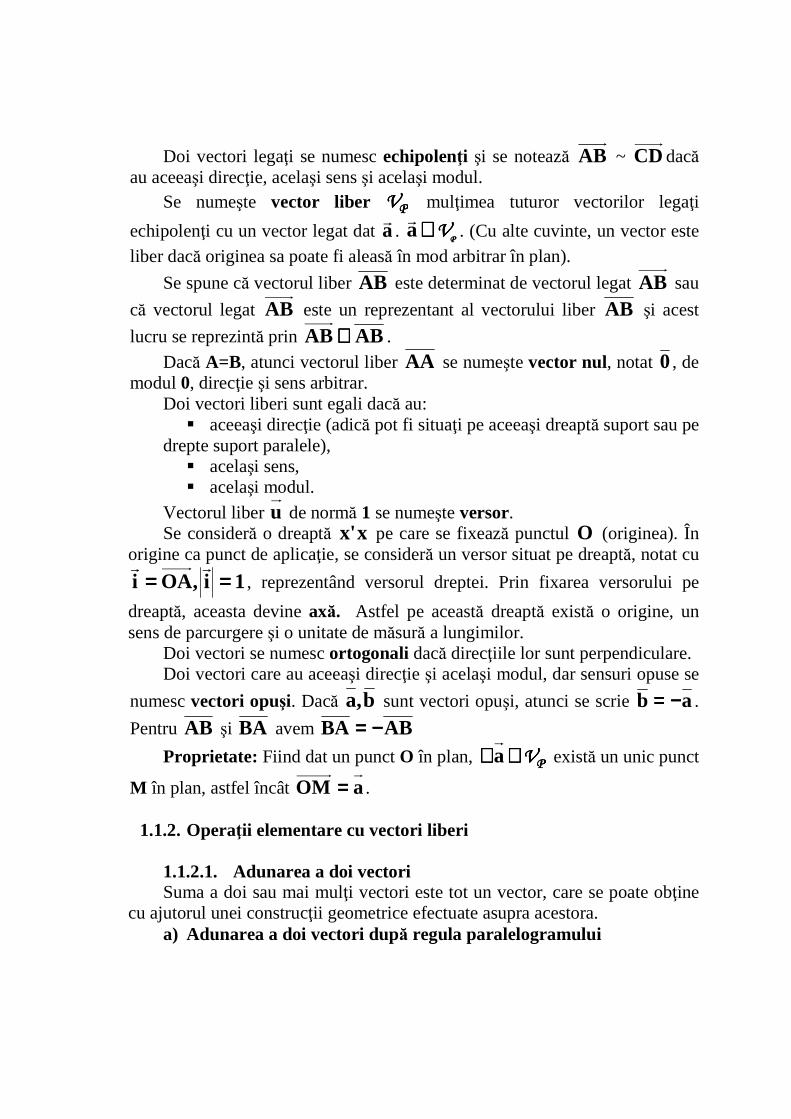
Fie doi vectori liberi PPPPVVVV∈∈∈∈b,a şi bOB,aOA ∈∈∈∈∈∈∈∈ . Se construieşte
paralelogramul de laturi OA şi OB: OBCA (Fig.1).
Vectorul c, de reprezentant OC , (care porneşte din originea comună)
reprezintă prin definiţie suma vectorilor a şi b şi se notează prin bac ++++==== . Această regulă prin care s-a obţinut vectorul sumă se numeşte regula paralelogramului.
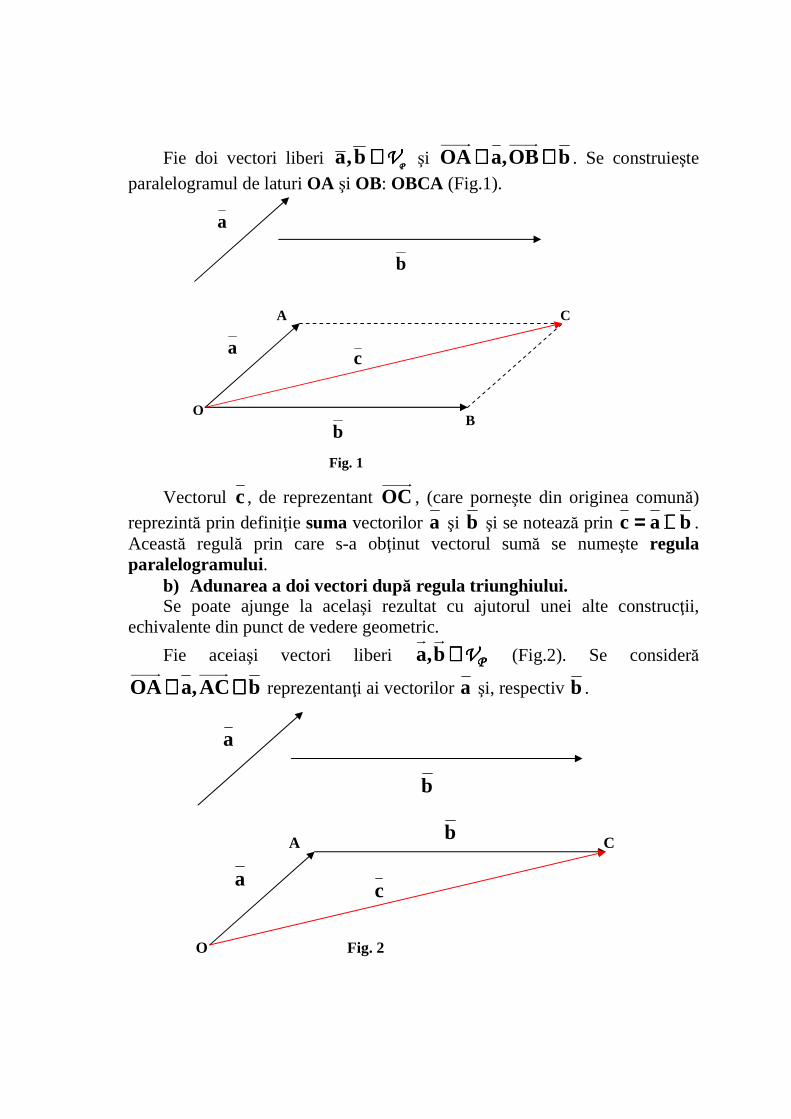
b) Adunarea a doi vectori după regula triunghiului. Se poate ajunge la acelaşi rezultat cu ajutorul unei alte construcţii,
echivalente din punct de vedere geometric.
Fie aceiaşi vectori liberi PPPPVVVV∈∈∈∈b,a (Fig.2). Se consideră
bAC,aOA ∈∈∈∈∈∈∈∈ reprezentanţi ai vectorilor a şi, respectiv b .
a
b
C
O
A
a
b
c
Fig. 2
a
b
C
B O
A
a
b
c
Fig. 1
Atunci vectorul sumă a vectorilor b,a este vectorul c de reprezentant
OC . Această regulă de adunare a doi vectori se numeşte regula triunghiului .
Este uşor de văzut că vectorul sumă c este vectorul care „închide” conturul
format de vectorii a şi b , având originea în originea unuia dintre vectori şi extremitatea în extremitatea celuilalt vector. Este evident că triunghiul construit prin regula triunghiului este jumătatea paralelogramului construit prin regula paralelogramului.
Observaţie: Dacă 0cba ====++++++++ , atunci cu vectorii c,b,a se poate forma un triunghi.
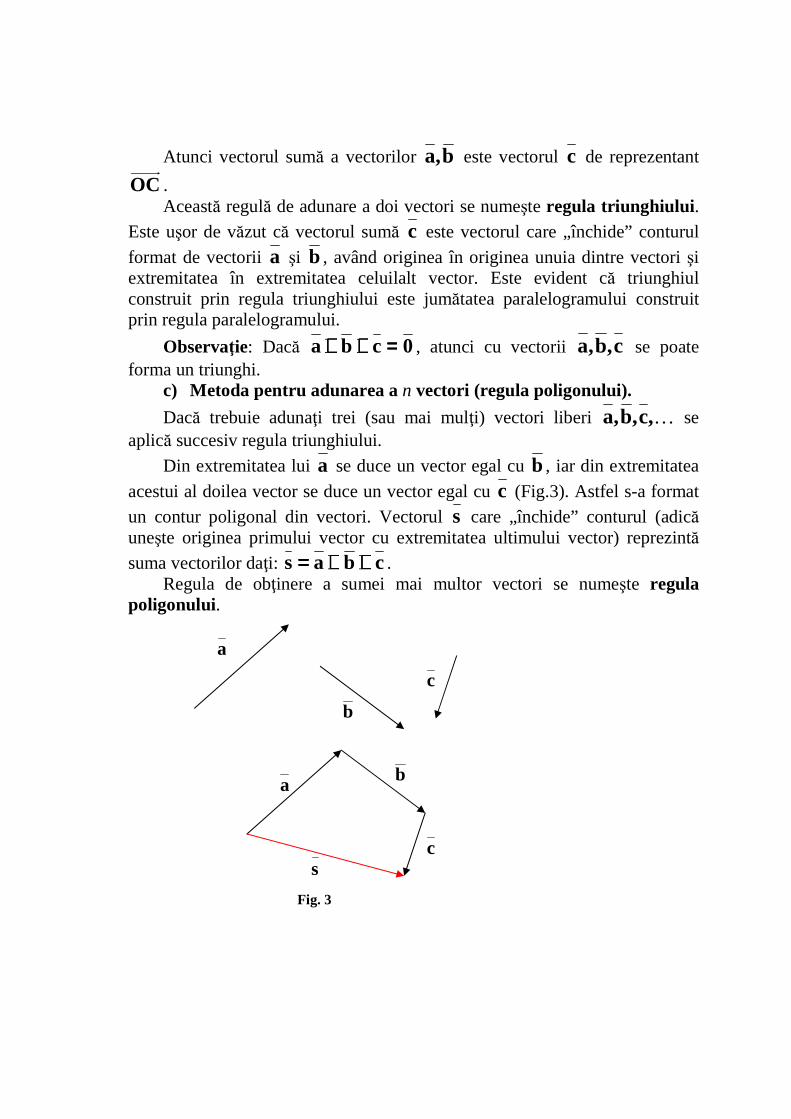
c) Metoda pentru adunarea a n vectori (regula poligonului).
Dacă trebuie adunaţi trei (sau mai mulţi) vectori liberi K,c,b,a se aplică succesiv regula triunghiului.
Din extremitatea lui a se duce un vector egal cu b , iar din extremitatea
acestui al doilea vector se duce un vector egal cu c (Fig.3). Astfel s-a format
un contur poligonal din vectori. Vectorul s care „închide” conturul (adică uneşte originea primului vector cu extremitatea ultimului vector) reprezintă
suma vectorilor daţi: cbas ++++++++==== . Regula de obţinere a sumei mai multor vectori se numeşte regula
poligonului.
Fig. 3
a
b
c
a b
cs

Observaţie: În cazul în care conturul de vectori se închide, astfel încât extremitatea unuia să coincidă cu originea următorului vector, suma vectorilor reprezintă vectorul nul.
1.1.2.2. Proprietăţi ale adunării vectorilor liberi în plan.
A1. Adunarea vectorilor este asociativă (Fig.4),
adică: (((( )))) (((( )))) VVVV∈∈∈∈∀∀∀∀++++++++====++++++++ c,b,a,cbacba .
A2. Adunarea vectorilor este comutativă (Fig. 5),
adică: VVVV∈∈∈∈∀∀∀∀++++====++++ b,a,abba .
A3. Vectorul nul 0 este elementul neutru pentru adunare (Fig. 6),
ba ++++
ab ++++
a
a
b
bFig.5
Fig. 4
ba ++++
a
b
c
(((( )))) (((( ))))cbacba ++++++++====++++++++
cb ++++

adică: VVVV∈∈∈∈∀∀∀∀====++++====++++ a,aa00a
A4. Pentru orice vector VVVV∈∈∈∈a , există (((( )))) VVVV∈∈∈∈−−−− a , pentru care
(((( )))) (((( )))) 0aaaa ====++++−−−−====−−−−++++ (Fig. 7)
(((( ))))a−−−− se numeşte opusul vectorului a. 1.1.2.3 Scăderea vectorilor
Rezultatul scăderii a doi vectori este tot un vector, care se poate obţine prin una din metodele următoare:
a) Metoda întâi. Fie VVVV∈∈∈∈b,a şi bOB,aOA ∈∈∈∈∈∈∈∈ . Atunci diferenţa lor
este vectorul x definit prin: bax −−−−==== . De aici rezultă că abx ====++++ (deci
vectorul x adunat cu vectorul b are ca rezultat vectorul a).
B
A O
a
b x
Fig.8
a
0
a−−−−
Fig. 7
a 0
a0a ====++++Fig. 6

Vectorul diferenţă x se construieşte unind extremitatea vectorului scăzător cu extremitatea vectorului descăzut (are originea în extremitatea vectorului scăzător şi extremitatea în extremitatea vectorului descăzut. Fig. 8).
Vectorul legat BA se poate exprima în funcţie de vectorii legaţi OB şi
OA ai originii şi extremităţii vectorului BA astfel:
OBOABA −= . b) Metoda a doua. Diferenţa vectorilor, ba −−−− , se poate transforma în
sumă scriind-o sub forma (((( ))))ba −−−−++++ , caz în care se poate aplica regula paralelogramului. (Fig. 9)
În paralelogramul OACB, diagonala OC este vectorul ba ++++ , iar cealaltă
diagonală (BA ) este vectorul diferenţă ba −−−− (OC’AB este paralelogram,
CO ′′′′ ~BA ). 1.1.2.4 Înmul ţirea unui vector cu un scalar
Definiţie: Fie 0a,a,0 ≠≠≠≠∈∈∈∈≠≠≠≠αααα VVVV . Produsul dintre numărul real α şi
vectorul liber a este vectorul notat aαααα având:
- aceeaşi direcţie cu a;
- aceeaşi acelaşi sens cu a, dacă 0>>>>αααα ; sens contrar lui a, dacă 0<<<<αααα ;
- modulul egal cu produsul dintre αααα şi modulul vectorului a, adică:
aa αααα====αααα .
Dacă 0====αααα sau 0a ==== atunci 0a ====αααα .
Proprietăţi ale înmulţirii unui vector cu un scalar
I1. (((( )))) VVVV∈∈∈∈∀∀∀∀ℜℜℜℜ∈∈∈∈αααα∀∀∀∀αααα++++αααα====++++αααα b,a,,baba .
C
C’ B’
A
B
O b
b−−−−ba −−−−
a
ba −−−− ba ++++
Fig.9

(Înmulţirea cu scalari este distributivă faţă de adunarea vectorilor).
I2. (((( )))) VVVV∈∈∈∈∀∀∀∀ℜℜℜℜ∈∈∈∈ββββαααα∀∀∀∀ββββ++++αααα====ββββ++++αααα a,,,aaa . (Înmulţirea cu scalari este distributivă faţă de adunarea scalarilor).
I3. (((( )))) (((( )))) VVVV∈∈∈∈∀∀∀∀ℜℜℜℜ∈∈∈∈ββββαααα∀∀∀∀αβαβαβαβ====ββββαααα a,,,aa . (Asociativitatea scalarilor).
I4. VVVV∈∈∈∈∀∀∀∀====•••• a,aa1 . (Numărul 1 este element neutru pentru înmulţirea cu scalari). 1.1.2.5 Coliniaritatea a doi vectori Definiţie: Doi vectori liberi nenuli se numesc coliniari dacă au aceeaşi
direcţie. În caz contrar se numesc necoliniari. Se admite că vectorul nul este coliniar cu orice vector.
Teoremă de coliniaritate: Doi vectori nenuli VVVV∈∈∈∈b,a sunt coliniari
dacă şi numai dacă există *ℜℜℜℜ∈∈∈∈αααα astfel încât ba αααα==== . Observaţii: 1) Dacă A, B şi C sunt trei puncte, atunci ele sunt coliniare dacă şi
numai dacă vectorii AB şi AC sunt coliniari, adică dacă există *ℜℜℜℜ∈∈∈∈αααα
pentru care ACAB αααα==== .
2) Dacă vectorii AB şi CD sunt coliniari, atunci dreptele AB şi CD sunt paralele sau coincid (şi reciproc).
3) Vectorii nenuli b,a sunt coliniari dacă şi numai dacă există
ℜℜℜℜ∈∈∈∈ββββαααα, , nenule simultan, astfel încât 0ba ====ββββ++++αααα . Dacă b,a sunt
necoliniari, atunci 00ba ====ββββ====αααα⇔⇔⇔⇔====ββββ++++αααα .
1.1.3. Reper cartezian în plan 1.1.3.1 Descompunerea unui vector după două direcţii date. Bază.
Definiţie: Cuplul (((( ))))b,a format din doi vectori liberi necoliniari se
numeşte bază pentru mulţimea vectorilor din plan (((( ))))VVVV . O bază formată din versori ortogonali se numeşte bază ortonormată.
Componentele unui vector într-o bază.
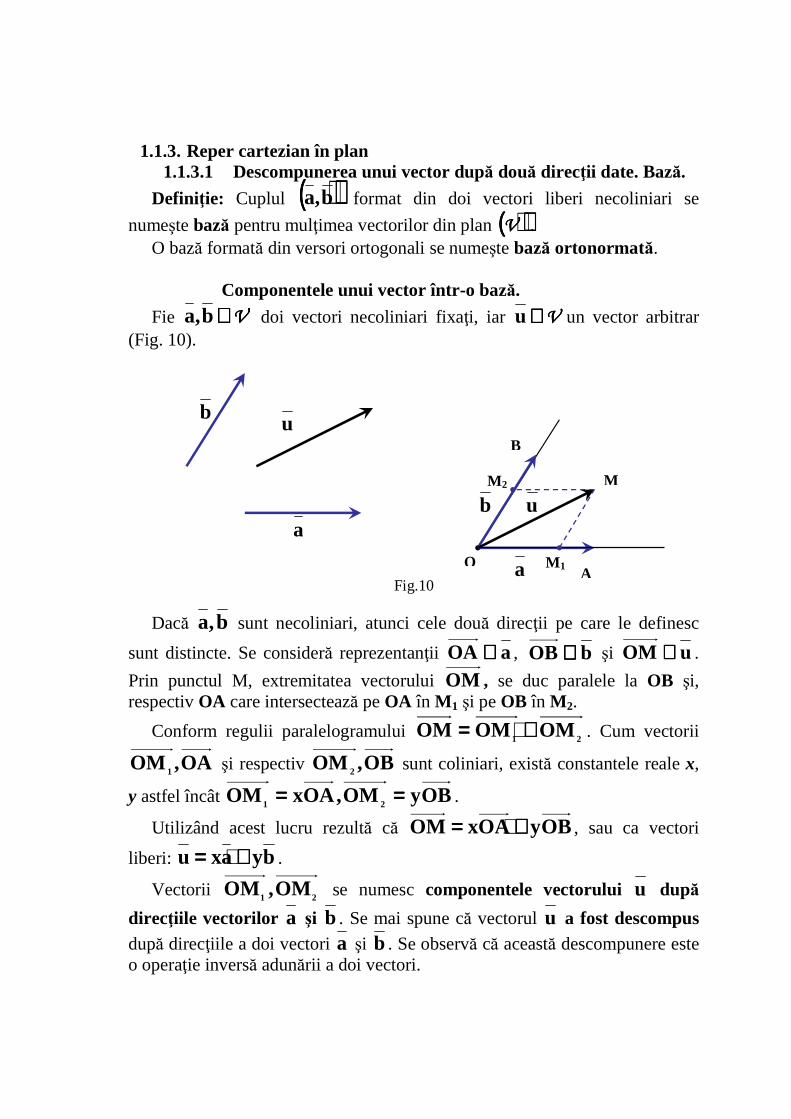
Fie VVVV∈∈∈∈b,a doi vectori necoliniari fixaţi, iar VVVV∈∈∈∈u un vector arbitrar (Fig. 10).
Dacă b,a sunt necoliniari, atunci cele două direcţii pe care le definesc
sunt distincte. Se consideră reprezentanţii aOA ∈∈∈∈ , şi uOM ∈∈∈∈ .
Prin punctul M, extremitatea vectorului OM , se duc paralele la OB şi, respectiv OA care intersectează pe OA în M 1 şi pe OB în M 2.
Conform regulii paralelogramului 21OMOMOM ++++==== . Cum vectorii
OA,OM 1 şi respectiv OB,OM 2 sunt coliniari, există constantele reale x,
y astfel încât OByOM,OAxOM21
======== .
Utilizând acest lucru rezultă că OByOAxOM ++++==== , sau ca vectori
liberi: byaxu ++++==== .
Vectorii 21 OM,OM se numesc componentele vectorului u după
direcţiile vectorilor a şi b . Se mai spune că vectorul u a fost descompus după direcţiile a doi vectori a şi b . Se observă că această descompunere este o operaţie inversă adunării a doi vectori.
bOB ∈∈∈∈
a
b u
a
b u
B
A O
M M 2
M 1
Fig.10
Numerele reale x şi y se numesc coordonatele vectorului liber u în raport
cu baza (((( ))))b,a .
Descompunerea byaxu ++++==== este unică.
Teoremă: Fie (((( ))))b,a o bază pentru VVVV . Orice vector VVVV∈∈∈∈u se scrie în
mod unic în funcţie de vectorii bazei sub forma: ℜℜℜℜ∈∈∈∈++++==== y,x,byaxu ,
numită expresia analitică a vectorului u .
Numerele x, y se numesc coordonatele vectorului u în baza (((( ))))b,a .
Notaţie: Vectorul u având coordonatele x, y în baza (((( ))))b,a se notează
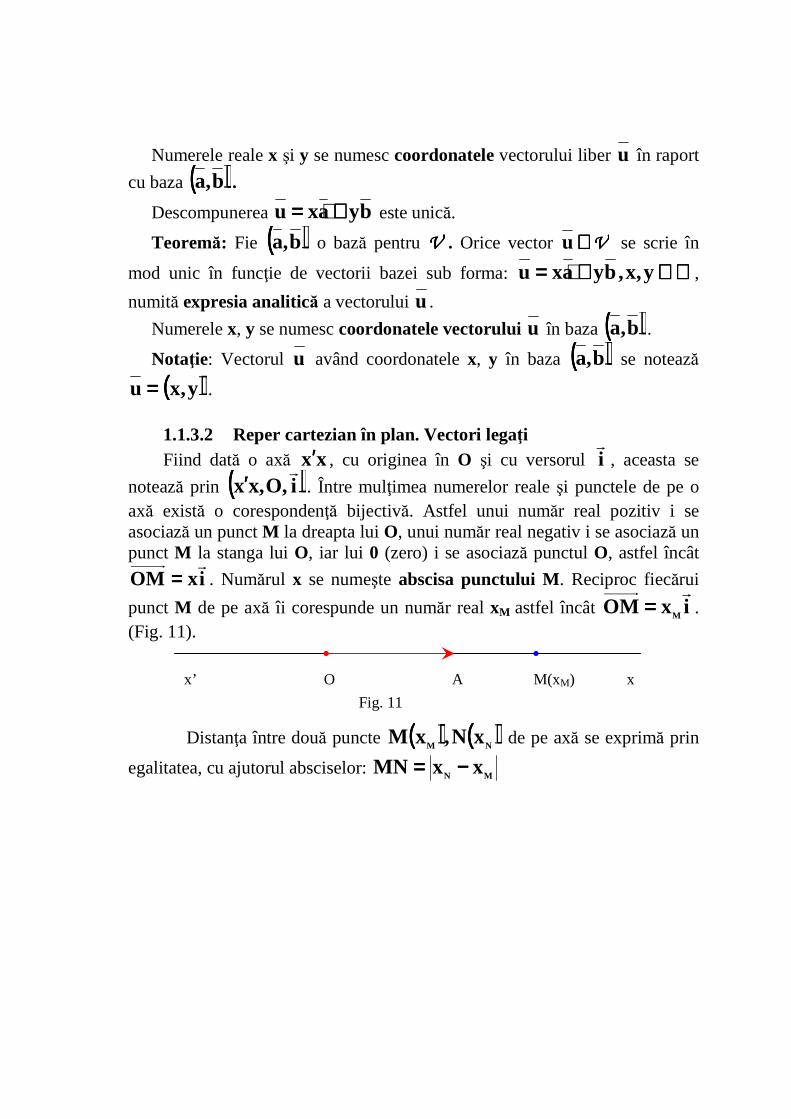
(((( ))))y,xu ==== . 1.1.3.2 Reper cartezian în plan. Vectori legaţi Fiind dată o axă xx′′′′ , cu originea în O şi cu versorul i
r
, aceasta se
notează prin (((( ))))i,O,xxr
′′′′ . Între mulţimea numerelor reale şi punctele de pe o axă există o corespondenţă bijectivă. Astfel unui număr real pozitiv i se asociază un punct M la dreapta lui O, unui număr real negativ i se asociază un punct M la stanga lui O, iar lui 0 (zero) i se asociază punctul O, astfel încât
ixOMr
==== . Numărul x se numeşte abscisa punctului M. Reciproc fiecărui
punct M de pe axă îi corespunde un număr real xM astfel încât ixOM M
r
==== . (Fig. 11).
Distanţa între două puncte (((( )))) (((( ))))NM xN,xM de pe axă se exprimă prin
egalitatea, cu ajutorul absciselor: MN xxMN −−−−====
x’ x O A M(xM)
Fig. 11
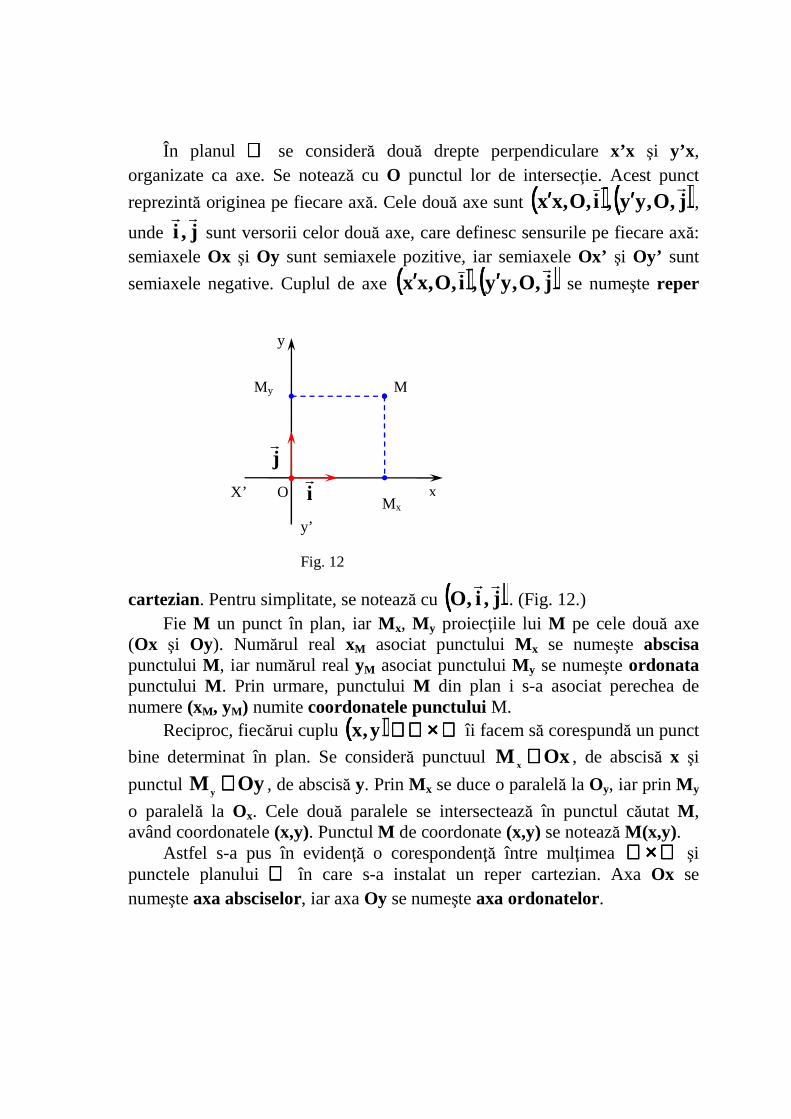
În planul ℘℘℘℘ se consideră două drepte perpendiculare x’x şi y’x , organizate ca axe. Se notează cu O punctul lor de intersecţie. Acest punct
reprezintă originea pe fiecare axă. Cele două axe sunt (((( )))) (((( ))))j,O,yy,i,O,xxr
′′′′′′′′ ,
unde j,irr
sunt versorii celor două axe, care definesc sensurile pe fiecare axă: semiaxele Ox şi Oy sunt semiaxele pozitive, iar semiaxele Ox’ şi Oy’ sunt
semiaxele negative. Cuplul de axe (((( )))) (((( ))))j,O,yy,i,O,xxr
′′′′′′′′ se numeşte reper
cartezian. Pentru simplitate, se notează cu (((( ))))j,i,Orr
. (Fig. 12.) Fie M un punct în plan, iar M x, M y proiecţiile lui M pe cele două axe
(Ox şi Oy). Numărul real xM asociat punctului M x se numeşte abscisa punctului M , iar numărul real yM asociat punctului M y se numeşte ordonata punctului M . Prin urmare, punctului M din plan i s-a asociat perechea de numere (xM, yM) numite coordonatele punctului M.
Reciproc, fiecărui cuplu (((( )))) ℜℜℜℜ××××ℜℜℜℜ∈∈∈∈y,x îi facem să corespundă un punct
bine determinat în plan. Se consideră punctuul OxM x ∈∈∈∈ , de abscisă x şi
punctul OyM y ∈∈∈∈ , de abscisă y. Prin M x se duce o paralelă la Oy, iar prin M y
o paralelă la Ox. Cele două paralele se intersectează în punctul căutat M , având coordonatele (x,y). Punctul M de coordonate (x,y) se notează M(x,y).
Astfel s-a pus în evidenţă o corespondenţă între mulţimea ℜℜℜℜ××××ℜℜℜℜ şi punctele planului ℘℘℘℘ în care s-a instalat un reper cartezian. Axa Ox se numeşte axa absciselor, iar axa Oy se numeşte axa ordonatelor.
y
x O ir
jr
M
Mx
My
y’
X’
Fig. 12

Definiţie: Fie în planul ℘℘℘℘ reperul (((( ))))j,i,Orr
, iar ℘℘℘℘∈∈∈∈M . Atunci vectorul
OM se numeşte vector legat (de punctul O) sau vector de poziţie al puncului M .
Notaţie: Vectorul legat OM se notează Mrr
. Aşadar, fiecărui punct M al planului ℘℘℘℘, în reperul considerat, i se
asociază vectorul său de poziţie Mrr
.
În plus, dacă M(x,y), atunci jyixrM
rrr ++++==== , adică coordonatele punctului
M sunt coordonatele vectorului de poziţie Mrr
, cu alte cuvinte Mrr
=(x,y).
Mulţimea vectorilor legaţi de punctul O se notează cu Oνννν .
1.1.3.3 Operaţii cu vectori legaţi. Egalitatea a doi vectori legaţi. Fie (((( ))))111 y,xr ====r
, (((( ))))222 y,xr ====r
doi vectori legaţi. Atunci are loc echivalenţa:
(((( ))))212121 yysixxrr ========⇔⇔⇔⇔==== rr
. Adunarea Fie (((( )))) (((( ))))BBBAAA y,xr,y,xr ======== rr
vectorii de poziţie ai punctelor A şi respectiv B. Atunci:
(((( )))) (((( )))) jyyixxjyixjyixrrBABABBAABA
rrrrrrrr ++++++++++++====++++++++++++====++++ .
Deci, putem da următoarea regulă: Suma a doi vectori legaţi (((( )))) (((( ))))BBBAAA y,xr,y,xr ======== rr
este vectorul
notat BA rrrr ++++ , având coordonatele (((( ))))BABA yy,xx ++++++++ .
Coordonatele vectorului sumă sunt egale cu sumele coordonatelor vectorilor. Cu alte cuvinte, adunarea vectorilor legaţi se face pe componente:
(((( )))) (((( )))) (((( ))))BABABBAA yy,xxy,xy,x ++++++++====++++ .
Desigur că (((( ))))BABABA yy,xxrr −−−−−−−−====−−−− rr
. Înmul ţirea unui vector legat cu un scalar Dacă (((( )))) ℜℜℜℜ∈∈∈∈αααα==== ,y,xr AAA
r
, atunci:
(((( )))) (((( )))) (((( )))) (((( ))))AAAAAAA y,xjyixjyixr αααααααα====αααα++++αααα====++++αααα====αααα
rrrrr
.
Regulă: Înmulţirea vectorului legat (((( ))))y,xr ====r cu scalarul ℜℜℜℜ∈∈∈∈αααα este
vectorul notat rrαααα , având coordonatele (((( ))))y,x αααααααα .
1.2. Vectori în spaţiu
1.2.1 Definiţii 1.2.1.1 Reper cartezian in spaţiu. Coordonate carteziene în spaţiu.
Distanţa intre două puncte în spaţiu Un element de forma (((( ))))z,y,x , unde ℜℜℜℜ∈∈∈∈z,y,x , se numeşte triplet
ordonat de numere reale. Tripletele (((( )))) (((( ))))
222111 z,y,x,z,y,x sunt egale dacă şi numai dacă
212121 zz,yy,xx ============ . În acest caz vom nota (((( )))) (((( ))))222111 z,y,xz,y,x ==== .
Pentru tripletul (((( ))))z,y,x , numerele x, y şi z poartă numele de componente ale sale.
Mulţimea tuturor tripletelor ordonate de numere reale este dată de produsul cartezian ℜℜℜℜ××××ℜℜℜℜ××××ℜℜℜℜ şi se simbolizează 3ℜℜℜℜ .
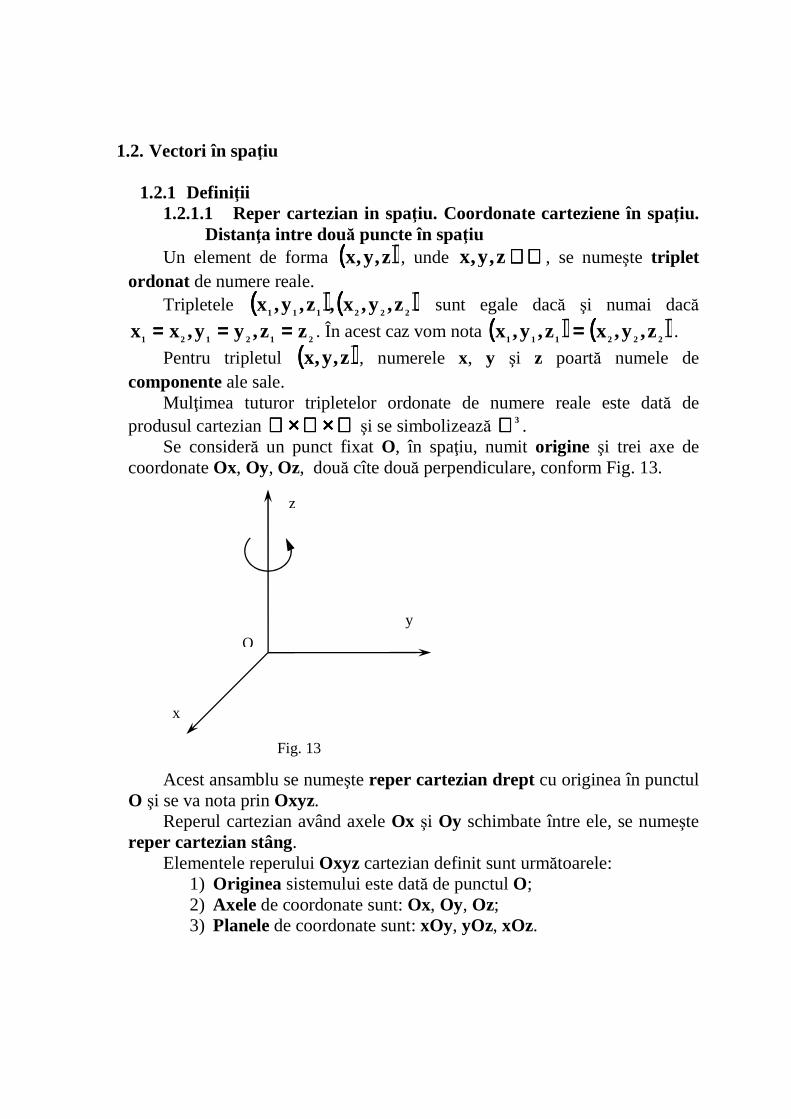
Se consideră un punct fixat O, în spaţiu, numit origine şi trei axe de coordonate Ox, Oy, Oz, două cîte două perpendiculare, conform Fig. 13.
Acest ansamblu se numeşte reper cartezian drept cu originea în punctul
O şi se va nota prin Oxyz. Reperul cartezian având axele Ox şi Oy schimbate între ele, se numeşte
reper cartezian stâng. Elementele reperului Oxyz cartezian definit sunt următoarele:
1) Originea sistemului este dată de punctul O; 2) Axele de coordonate sunt: Ox, Oy, Oz; 3) Planele de coordonate sunt: xOy, yOz, xOz.
z
x
y
O
Fig. 13

Fie P un punct în spaţiu şi Px, Py, Pz proiecţiile lui P pe axele de coordonate Ox, Oy, Oz ale reperului cartezian Oxyz. (Fig. 14.)
Coordonata lui Px se notează cu xP şi se numeşte abscisa lui P,
coordonata lui Py se notează cu yP şi se numeşte ordonata lui P, iar coordonata lui Pz se notează cu zP şi se numeşte cota lui P.
În acest mod, punctului P i se asociază tripletul ordonat (((( )))) 3
PPP z,y,x ℜℜℜℜ∈∈∈∈ .
Invers, având tripletul ordonat (((( )))) 3z,y,x ℜℜℜℜ∈∈∈∈ , pe axele Ox, Oy, Oz se consideră punctele Px, Py, Pz având coordonatele x, z, y. Se construieşte paralelipipedul drept cu vâfurile în punctele O, Px, Py, Pz, iar vârful acestuia, opus vârfului O se notează cu P. Punctul P astfel obţinut are abscisa x, ordonata y şi cota z.
Această construcţie arată că există o corespondenţă biunivocă de forma (((( ))))
PPPz,y,xP a , între mulţimea punctelor din spaţiu şi mulţimea tripletelor
ordonate din 3ℜℜℜℜ . Avînd această corespondenţă şi utilizînd notaţiile precedente, tripletul
(((( ))))PPP z,y,x poartă numele de coordonatele carteziene ale punctului P relativ la reperul Oxyz.
Se spune că punctul P este de coordonate (((( ))))PPP z,y,x şi se notează
(((( ))))PPP z,y,xP
Teoremă (formula distanţei): Distanţa dintre punctele (((( ))))1111 z,y,xP şi
(((( ))))2222 z,y,xP este dată de formula:
(((( )))) (((( )))) (((( ))))121212 zzyyxx222
21PP −−−−−−−−−−−− ++++++++==== .
z
x
y
O
Fig. 14
Pz
Py
Px
P

Teoremă: Dacă punctul P împarte segmentul [[[[ ]]]]21PP în raportul r, atunci
puntul P este:
++++++++
++++++++
++++++++
r1rzz
,r1ryy
,r1rxx
P 212121 .
1.2.1.2. Vector legat în spaţiu. Vector liber în spaţiu O pereche(((( ))))B,A de puncte din spaţiu se numeşte segment orientat sau
vector legat şi se notează AB , unde A este originea, iar B este extremitatea.
Dacă BA ≠≠≠≠ , dreapta determinată de punctele A şi B se numeşte dreaptă suport.
Vectorul AA se numeşte vector nul.
Se numeşte lungimea sau norma vectorului AB numărul real şi pozitiv care reprezintă distanţa d(A,B) între punctele A şi B şi se simbolizează prin
AB .
Doi vectori legaţi, nenuli, AB şi CD au aceeaşi direcţie dacă dreptele lor suport sunt paralele sau coincid.
Vectorii AB şi CD au acelaşi sens dacă au aceeaşi direcţie şi punctele B şi D sunt în acelaşi semispaţiu determinat de planul care conţine dreapta AC şi este perpendicular pe dreptele lor suport.
Doi vectori legaţi AB şi CD se numesc echipolenţi şi se notează AB
~ CD , dacă segmentele [[[[ ]]]]AD şi [[[[ ]]]]BC au acelaşi mijloc.
Se remarcă faptul că AB ~ CD dacă şi numai dacă ACDB este paralelogram (cu vârfurile în această ordine) care eventual poate fi şi degenerat. (Fig. 15)
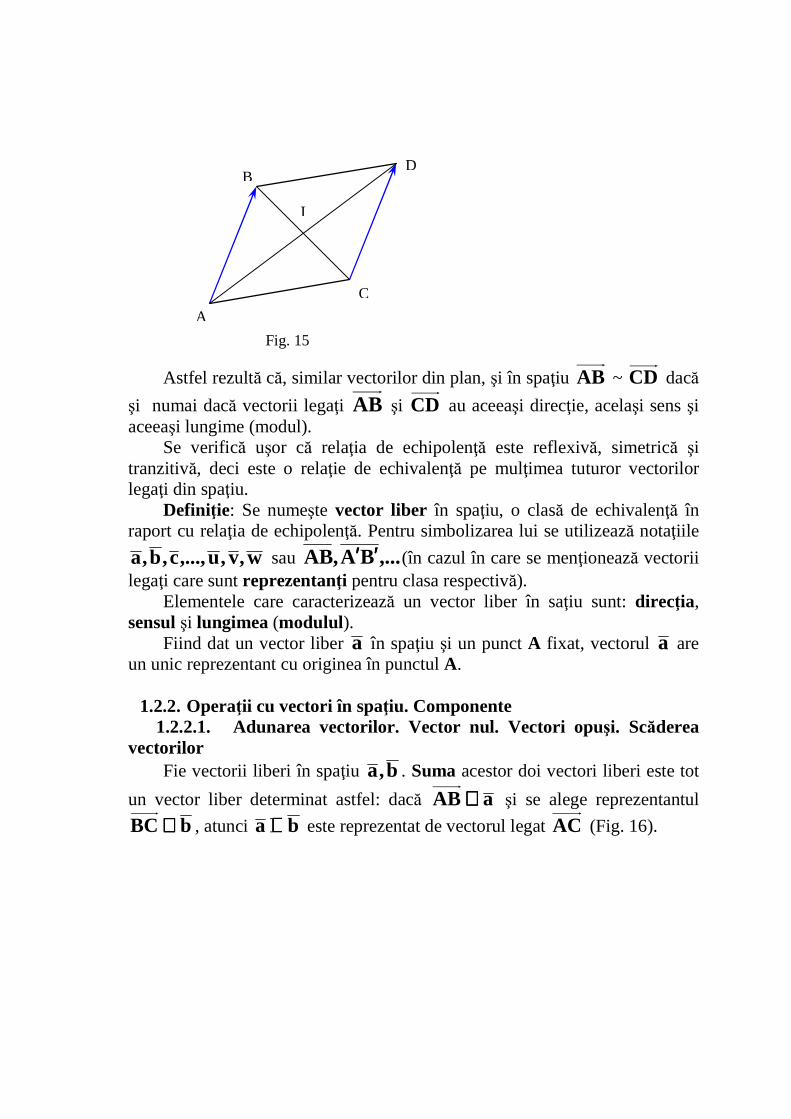
Astfel rezultă că, similar vectorilor din plan, şi în spaţiu AB ~ CD dacă
şi numai dacă vectorii legaţi AB şi CD au aceeaşi direcţie, acelaşi sens şi aceeaşi lungime (modul).
Se verifică uşor că relaţia de echipolenţă este reflexivă, simetrică şi tranzitivă, deci este o relaţie de echivalenţă pe mulţimea tuturor vectorilor legaţi din spaţiu.
Definiţie: Se numeşte vector liber în spaţiu, o clasă de echivalenţă în raport cu relaţia de echipolenţă. Pentru simbolizarea lui se utilizează notaţiile
w,v,u,...,c,b,a sau ,...BA,AB ′′′′′′′′ (în cazul în care se menţionează vectorii legaţi care sunt reprezentanţi pentru clasa respectivă).
Elementele care caracterizează un vector liber în saţiu sunt: direcţia, sensul şi lungimea (modulul).
Fiind dat un vector liber a în spaţiu şi un punct A fixat, vectorul a are un unic reprezentant cu originea în punctul A.
1.2.2. Operaţii cu vectori în spaţiu. Componente
1.2.2.1. Adunarea vectorilor. Vector nul. Vectori opuşi. Scăderea vectorilor
Fie vectorii liberi în spaţiu b,a . Suma acestor doi vectori liberi este tot
un vector liber determinat astfel: dacă aAB ∈∈∈∈ şi se alege reprezentantul
bBC ∈∈∈∈ , atunci ba ++++ este reprezentat de vectorul legat AC (Fig. 16).
A
B
C
D
I
Fig. 15
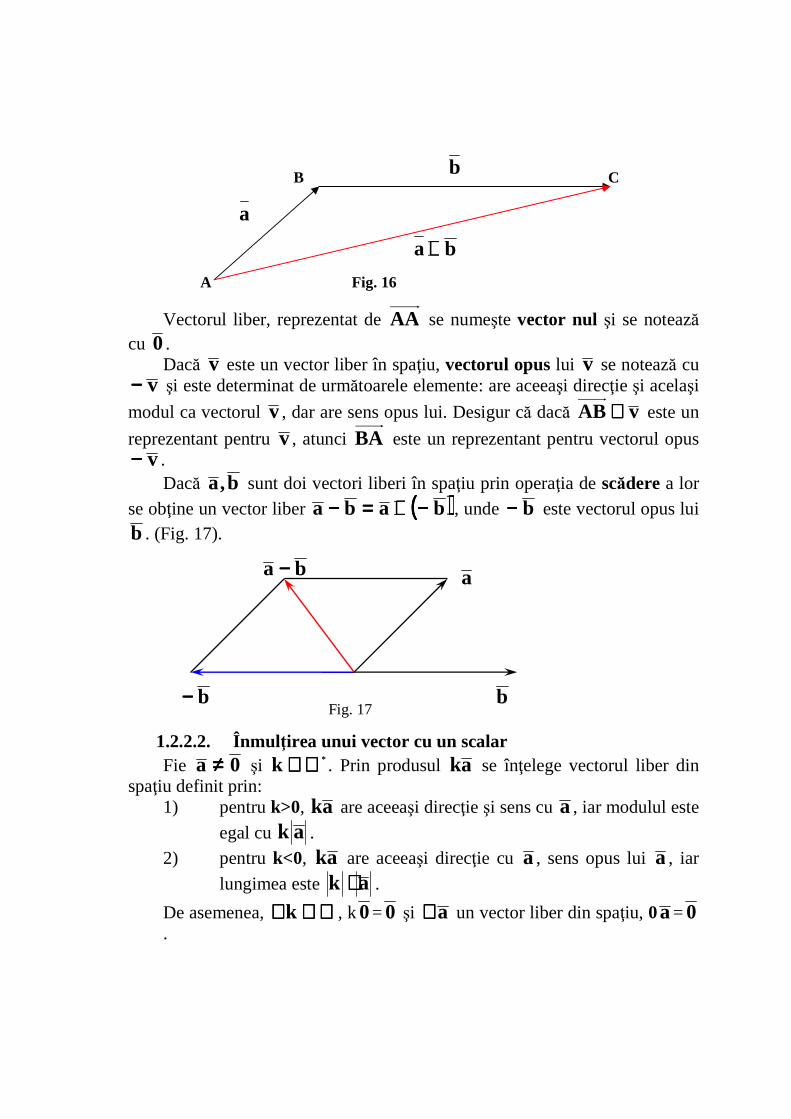
Vectorul liber, reprezentat de AA se numeşte vector nul şi se notează
cu 0. Dacă v este un vector liber în spaţiu, vectorul opus lui v se notează cu
v−−−− şi este determinat de următoarele elemente: are aceeaşi direcţie şi acelaşi
modul ca vectorul v , dar are sens opus lui. Desigur că dacă vAB ∈∈∈∈ este un
reprezentant pentru v , atunci BA este un reprezentant pentru vectorul opus v−−−− .
Dacă b,a sunt doi vectori liberi în spaţiu prin operaţia de scădere a lor
se obţine un vector liber (((( ))))baba −−−−++++====−−−− , unde b−−−− este vectorul opus lui b . (Fig. 17).
1.2.2.2. Înmul ţirea unui vector cu un scalar Fie 0a ≠≠≠≠ şi *k ℜℜℜℜ∈∈∈∈ . Prin produsul ak se înţelege vectorul liber din
spaţiu definit prin: 1) pentru k>0, ak are aceeaşi direcţie şi sens cu a , iar modulul este
egal cu ak .
2) pentru k<0, ak are aceeaşi direcţie cu a , sens opus lui a , iar
lungimea este ak ⋅⋅⋅⋅ .
De asemenea, ℜℜℜℜ∈∈∈∈∀∀∀∀k , k0=0 şi a∀∀∀∀ un vector liber din spaţiu, 0a=0.
a
bb−−−−
ba −−−−
Fig. 17
C
A
B
a
b
Fig. 16
ba ++++
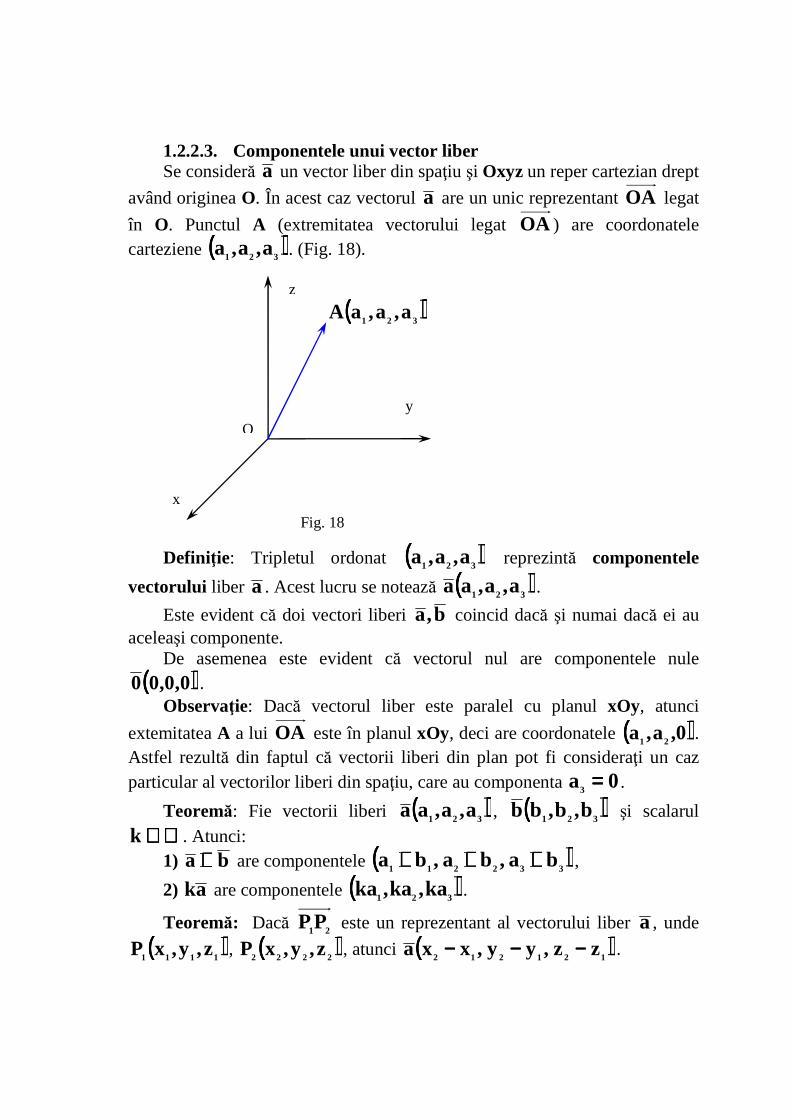
1.2.2.3. Componentele unui vector liber Se consideră a un vector liber din spaţiu şi Oxyz un reper cartezian drept
având originea O. În acest caz vectorul a are un unic reprezentant OA legat
în O. Punctul A (extremitatea vectorului legat OA ) are coordonatele carteziene (((( ))))321 a,a,a . (Fig. 18).
Definiţie: Tripletul ordonat (((( ))))321 a,a,a reprezintă componentele
vectorului liber a . Acest lucru se notează (((( ))))321 a,a,aa .
Este evident că doi vectori liberi b,a coincid dacă şi numai dacă ei au aceleaşi componente.
De asemenea este evident că vectorul nul are componentele nule (((( ))))0,0,00 .
Observaţie: Dacă vectorul liber este paralel cu planul xOy, atunci
extemitatea A a lui OA este în planul xOy, deci are coordonatele (((( ))))0,a,a 21.
Astfel rezultă din faptul că vectorii liberi din plan pot fi consideraţi un caz particular al vectorilor liberi din spaţiu, care au componenta 0a3 ==== .
Teoremă: Fie vectorii liberi (((( ))))321 a,a,aa , (((( ))))321 b,b,bb şi scalarul
ℜℜℜℜ∈∈∈∈k . Atunci: 1) ba ++++ are componentele (((( ))))332211 ba,ba,ba ++++++++++++ ,
2) ak are componentele (((( ))))321 ka,ka,ka .
Teoremă: Dacă 21PP este un reprezentant al vectorului liber a , unde
(((( ))))1111 z,y,xP , (((( ))))2222 z,y,xP , atunci (((( ))))121212 zz,yy,xxa −−−−−−−−−−−− .
z
x
y
O
Fig. 18
(((( ))))321
a,a,aA

1.2.2.4. Proprietăţi ale operaţiilor cu vectori liberi în spaţiu
1) abba ++++====++++ - adunarea este comutativă; 2) (((( )))) (((( ))))cbacba ++++++++====++++++++ - adunarea este asociativă;
3) aa00a ====++++====++++ - 0 este element neutru faţă de adunare; 4) (((( )))) (((( )))) 0aaaa ====++++−−−−====−−−−++++ - a−−−− este simetricul lui a ;
5) (((( )))) (((( ))))aa αβαβαβαβ====ββββαααα ;
6) (((( )))) baba αααα++++αααα====++++αααα - înmulţirea cu scalari este distributivă faţă de adunarea vectorilor;
7) (((( )))) aaa ββββ++++αααα====ββββ++++αααα - înmulţirea cu scalari este distributivă faţă de adunarea scalarilor;
8) aa1 ====⋅⋅⋅⋅
1.2.2.5. Modulului unui vector liber în spaţiu. Versorii axelor de coordonate
Fie vectorul liber (((( ))))321 a,a,aa . Modulul (lungimea) lui a este dat de
formula:
aaa2
3
2
2
2
1a ++++++++==== .
Definiţie: Vectorii liberi (((( ))))0,0,1i , (((( ))))0,1,0j , (((( ))))1,0,0k se numesc versori ai axelor de coordonate. În Fig. 19 sunt desenaţi reprezentanţii
vectorilor i , j , k care au originea în O.
Deoarece 1kji ============ , vectorii liberi i , j , k sunt unitari .
z
x
y
O
Fig. 19
kj
i

1.2.2.6. Baza canonică a spaţiului vectorial al vectorilor liber din
spaţiu şi plan Se notează cu 3V mulţimea vectorilor liberi din spaţiu, împreună cu
operaţiile de adunare şi înmulţire cu scalari definite anterior: (((( )))) bab,a,VVV 333 ++++→→→→×××× a ,
(((( )))) aa,,VV 33 αααααααα→→→→××××ℜℜℜℜ a .
Teoremă : Au loc următoarele afirmaţii: 1) (((( ))))⋅⋅⋅⋅++++ ,,V3 este un spaţiu vectorial real izomorf cu (((( ))))⋅⋅⋅⋅++++ℜℜℜℜ ,,3 . În
consecinţă 3Vdim 3 ====ℜℜℜℜ .
2) {{{{ }}}}k,j,i formează o bază canonică în 3V , numită baza canonică a acestui spaţiu vectorial.
Dacă (((( ))))321 a,a,aa , atunci are loc descompunerea:
kajaiaa 321 ++++++++====
Se notează cu 2V mulţimea vectorilor liberi din plan, împreună cu
operaţiile de adunare şi înmulţire cu scalari definite anterior: (((( )))) bab,a,VVV 222 ++++→→→→×××× a ,
(((( )))) aa,,VV 22 αααααααα→→→→××××ℜℜℜℜ a . Teoremă : Au loc următoarele afirmaţii: 1) (((( ))))⋅⋅⋅⋅++++ ,,V2
este un spaţiu vectorial real izomorf cu (((( ))))⋅⋅⋅⋅++++ℜℜℜℜ ,,2 . În
consecinţă 2Vdim 2 ====ℜℜℜℜ .
2) {{{{ }}}}j,i formează o bază canonică în2V , numită baza canonică a acestui
spaţiu vectorial. 3)
2V este un subspaţiu vectorial al lui 3V .
Dacă (((( ))))21 a,aa , atunci are loc descompunerea: jaiaa 21 ++++==== . 1.2.2.7. Produsul scalar a doi vectori liberi. Proprietăţile produsului
scalar. Definiţie: Fiind daţi doi vectori liberi în spaţiu nenuli 3Vb,a ∈∈∈∈ , unghiul
determinat de aceşti vectori este unghiul format de direcţiile lor, ţinînd seama de sensul lor. (Fig. 20)
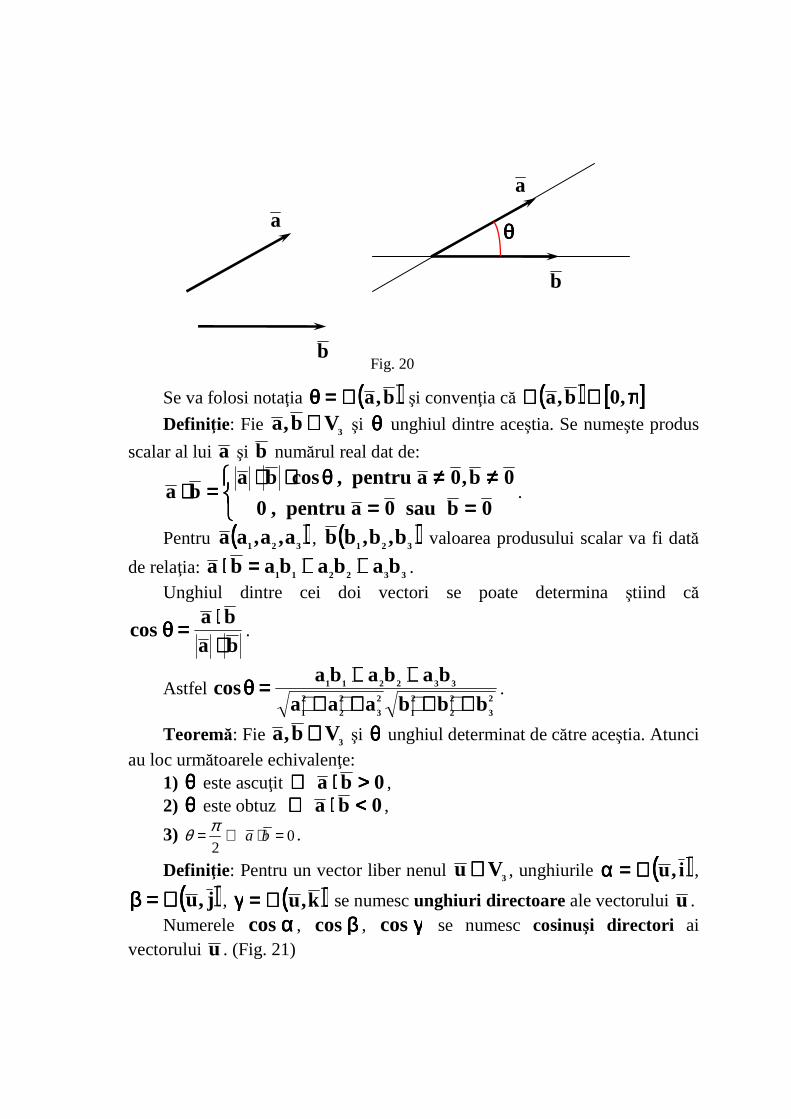
Se va folosi notaţia (((( ))))b,a∠∠∠∠====θθθθ şi convenţia că (((( )))) [[[[ ]]]]ππππ∈∈∈∈∠∠∠∠ ,0b,a
Definiţie: Fie 3Vb,a ∈∈∈∈ şi θθθθ unghiul dintre aceştia. Se numeşte produs
scalar al lui a şi b numărul real dat de:
========≠≠≠≠≠≠≠≠θθθθ⋅⋅⋅⋅⋅⋅⋅⋅
====⋅⋅⋅⋅0bsau0apentru,0
0b,0apentru,cosbaba .
Pentru (((( ))))321 a,a,aa , (((( ))))321 b,b,bb valoarea produsului scalar va fi dată
de relaţia: 332211 babababa ++++++++====⋅⋅⋅⋅ . Unghiul dintre cei doi vectori se poate determina ştiind că
baba
cos⋅⋅⋅⋅⋅⋅⋅⋅====θθθθ .
Astfel 2
3
2
2
2
1
2
3
2
2
2
1
332211
bbbaaabababa
cos++++++++++++++++
++++++++====θθθθ .
Teoremă: Fie 3Vb,a ∈∈∈∈ şi θθθθ unghiul determinat de către aceştia. Atunci
au loc următoarele echivalenţe: 1) θθθθ este ascuţit 0ba >>>>⋅⋅⋅⋅⇔⇔⇔⇔ , 2) θθθθ este obtuz 0ba <<<<⋅⋅⋅⋅⇔⇔⇔⇔ ,
3) 02
a bπθ = ⇔ ⋅ = .
Definiţie: Pentru un vector liber nenul 3Vu ∈∈∈∈ , unghiurile (((( ))))i,u∠∠∠∠====αααα ,
(((( ))))j,u∠∠∠∠====ββββ , (((( ))))k,u∠∠∠∠====γγγγ se numesc unghiuri directoare ale vectorului u . Numerele ααααcos , ββββcos , γγγγcos se numesc cosinuşi directori ai
vectorului u . (Fig. 21)
a
b
a
b
θθθθ
Fig. 20

Teoremă: Cei trei cosinuşi directori ale vectorului
3321 Vkujuiuu ∈∈∈∈++++++++==== sunt daţi de relaţiile:
uu
cos 1====αααα , uu
cos 2====ββββ , uu
cos 3====γγγγ .
Observaţie: Dacă 3Vu ∈∈∈∈ este un vector liber în spaţiu, atunci versorul
său uu
se exprimă prin intermediul cosinuşilor directori a lui u astfel:
(((( )))) (((( )))) (((( ))))kcosjcosicosuu γγγγ++++ββββ++++αααα==== .
Proprietăţile algebrice ale produsului scalar
Teoremă: Dacă 3Vc,b,a ∈∈∈∈ sunt vectori liberi în spaţiu, atunci produsul scalar are următoarele proprietăţi:
1) abba ⋅⋅⋅⋅====⋅⋅⋅⋅ (comutativitate), 2) (((( )))) cabacba ⋅⋅⋅⋅++++⋅⋅⋅⋅====++++⋅⋅⋅⋅ (distributivitate faţă de adunare),
3) (((( )))) (((( )))) (((( ))))bababa λλλλ⋅⋅⋅⋅====⋅⋅⋅⋅λλλλ====⋅⋅⋅⋅λλλλ ,
4) 2
aaa ====⋅⋅⋅⋅ .
z
x
y O
Fig. 21
k
j
i
ββββαααα
γγγγ
1.2.2.8. Produsul vectorial a doi vectori liberi. Proprietăţile produsului vectorial.
Definiţie: Dacă kujuiuu 321 ++++++++==== , kvjvivv 321 ++++++++==== sunt doi
vectori liberi din 3V , produsul vectorial al lor este vectorul notat prin vu ××××
şi definit prin:
321
321
vvv
uuu
kji
vu ====×××× .
Dezvoltând acest determinant rezultă:
kvv
uuj
vv
uui
vv
uuvu
21
21
13
13
32
32 ++++++++====×××× .
Teoremă : Fie v,u doi vectori liberi în spaţiu, atunci:
1) (((( )))) 0vuu ====××××⋅⋅⋅⋅ ( vu ×××× este ortogonal pe u ),
2) (((( )))) 0vuv ====××××⋅⋅⋅⋅ ( vu ×××× este ortogonal pe v ),
3) (((( ))))2222vuvuvu ⋅⋅⋅⋅−−−−====×××× (identitatea lui Lagrange).
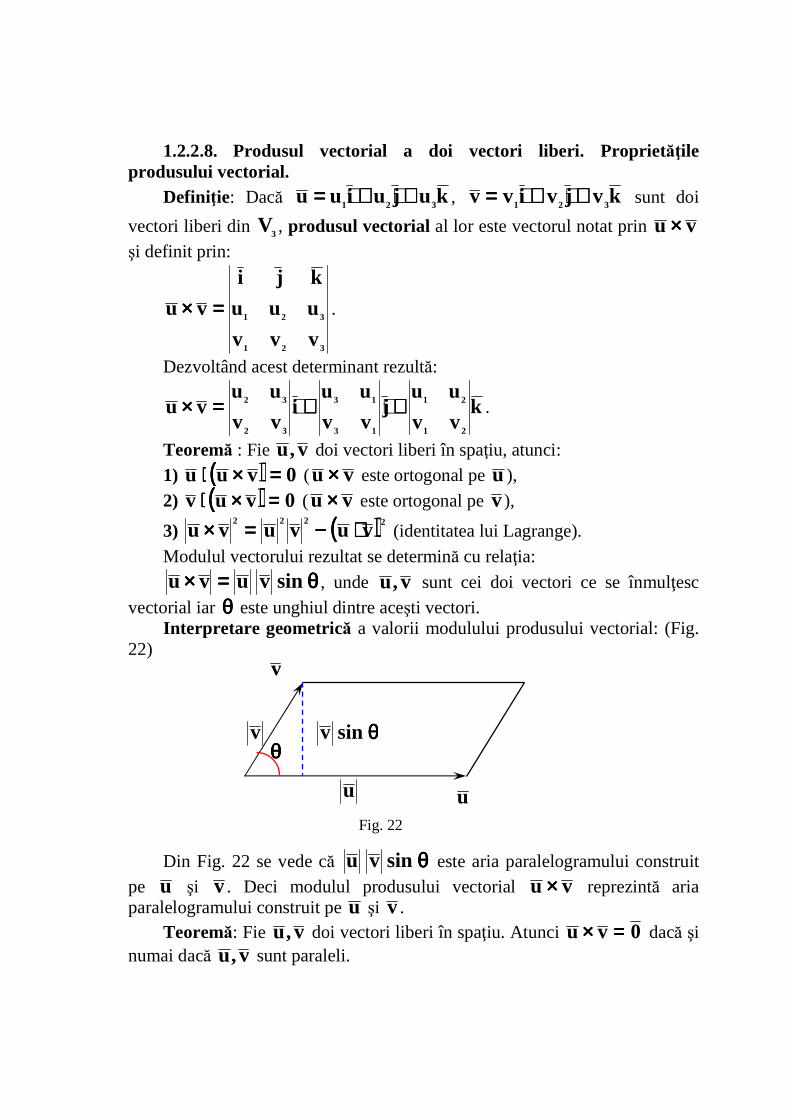
Modulul vectorului rezultat se determină cu relaţia:
θθθθ====×××× sinvuvu , unde v,u sunt cei doi vectori ce se înmulţesc
vectorial iar θθθθ este unghiul dintre aceşti vectori. Interpretare geometrică a valorii modulului produsului vectorial: (Fig.
22)
Din Fig. 22 se vede că θθθθsinvu este aria paralelogramului construit
pe u şi v . Deci modulul produsului vectorial vu ×××× reprezintă aria paralelogramului construit pe u şi v .
Teoremă: Fie v,u doi vectori liberi în spaţiu. Atunci 0vu ====×××× dacă şi numai dacă v,u sunt paraleli.
θθθθ
v
v
u u
θθθθsinv
Fig. 22

Proprietăţile algebrice ale produsului vectorial: Fie vectorii 3Vw,v,u ∈∈∈∈ şi ℜℜℜℜ∈∈∈∈λλλλ . Au loc următoarele relaţii:
1) (((( ))))uvvu ××××−−−−====×××× (anticomutativitate),
2) (((( )))) wuvuwvu ××××++++××××====++++×××× (distributivitate faţă de adunare),
3) (((( )))) (((( )))) (((( ))))vuvuvu λλλλ××××====××××λλλλ====××××λλλλ ,
4) 0u00u ====××××====×××× , 5) 0uu ====×××× . Interpretare geometrică: Fiind daţi vectorii liberi nenuli v,u , produsul
lor vectorial vu ×××× este un vector determinat de următoarele elemente: 1) vu ×××× este ortogonal pe u şi v (direcţia lui vu ×××× este
perpendiculară pe planul (((( ))))v,u ); 2) sensul lui vu ×××× este dat de regula mâinii drepte sau „regula
burghiului” (sensul de înaintare a unui burghiu când se roteşte vectorul u spre v ).
3) lungimea (modulul) are aceeaşi valoare ca valoarea ariei paralelogramului construit pe vectorii v,u .
1.2.2.9. Produsul mixt al trei vectori. Proprietăţi. Definiţie: Fie vectorii liberi c,b,a . Numărul (((( )))) (((( ))))cbac,b,a ××××⋅⋅⋅⋅==== se
numeşte produsul mixt al vectorilor c,b,a .
Dacă (((( ))))321 a,a,aa , (((( ))))321 b,b,bb , (((( ))))321 c,c,cc atunci produsul mixt se poate exprima astfel:
(((( ))))321
321
321
ccc
bbb
aaa
c,b,a ==== .
1.2.2.10. Proprietăţile algebrice ale produsului mixt Fie c,b,a vectori liberi în spaţiu. Atunci:
1) (((( )))) (((( )))) (((( ))))a,c,bb,a,cc,b,a ======== (invarianţă la permutări circulare);
2) (((( ))))c,b,a reprezintă volumul paralelipipedului construit pe vectorii
c,b,a ;
3) (((( )))) 0c,b,a ==== dacă şi numai dacă c,b,a sunt vectori coplanari.