proiect_la_disciplina_proiectarea_sistemelor_electromecanice.doc
TRANSCRIPT
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 1/38
Universitatea " Dunărea de Jos " - GalaţiFacultatea de Automatică, Calculatoare, Inginerie Electrică şi
Electronică!eciali area # Electromecanică
An III
Proiect la disciplinaPROIECTAREA SISTEMELOR
ELECTROMECANICE
TEMĂ DE PROIECT
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 2/38
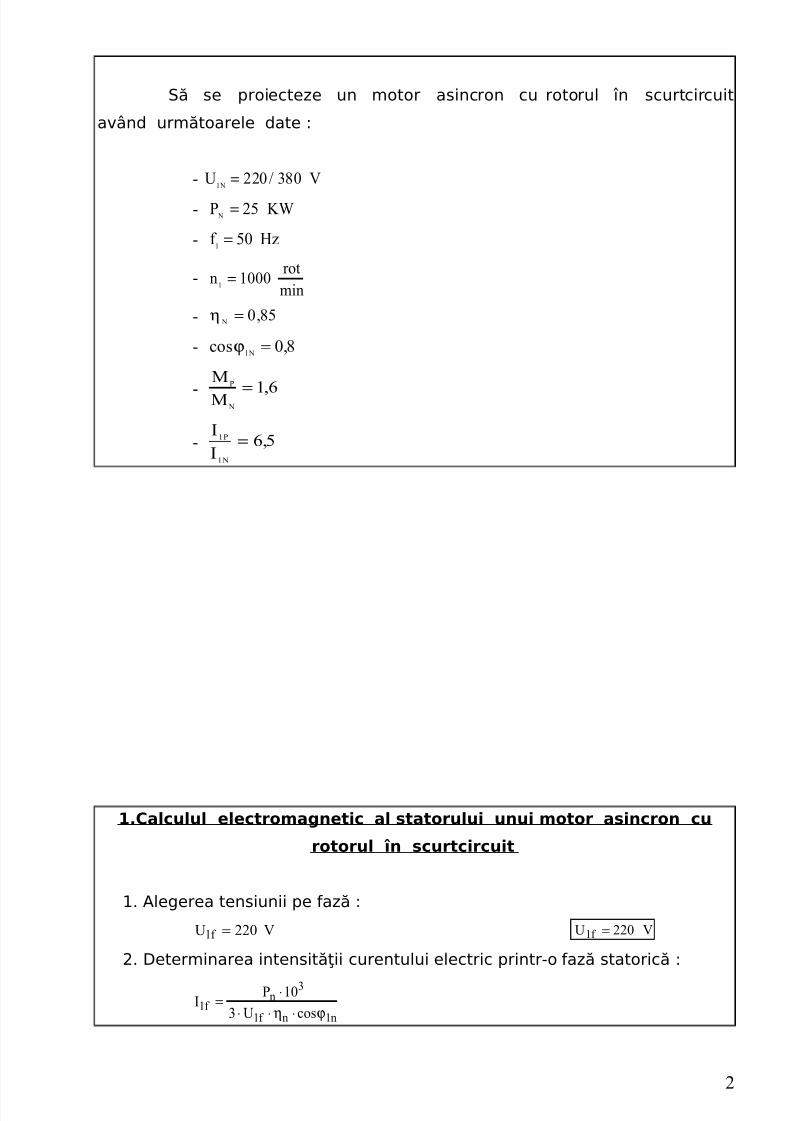
Să se proiecteze un motor asincron cu rotorul în scurtcircuit
având următoarele date :
- U V N1 220 380= /
- P KW N = 25
- f Hz1 50=
- n rot
1 1000=min
- η N = 0 85,
- cos ,ϕ1 0 8 N =
-MM
P
N =1 6,
-II
P
N
1
1
6 5= ,
1.Calculul electroma netic al statorului unui motor asincron curotorul !n scurtcircuit
1. Alegerea tensiunii pe fază :
U Vf 1 220= U Vf 1 220=
2. Determinarea intensită ii curentului electric printr-o fază statorică :
I P
Uf n
f n n1
3
1 1
103
= ⋅
⋅ ⋅ ⋅η ϕcos
2
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 3/38
I f 1
325 103 220 0 8 0 85
= ⋅
⋅ ⋅ ⋅, , I Af 1 55 704= ,
!. Alegerea raportului λ τ= i :
λτ
= i li lungimea ideală a pac#etului de tole $
τ pasul polar $
! f
n= ⋅60 1
1p numărul de perec#i de poli $
! = ⋅ =60 501000
3 ! = 3
pentru ( ) ! = ∈3 1 7 2 3, , """ ,λ Alegem λ = 1 55,
%. &alculul diametrului interior al statorului :
# P
in
n n= ⋅
⋅
103
1η ϕcosS i putere aparentă $
$ % & # !
f ii= + ⋅ ⋅⋅
2
13
λD i diametrul interior $
a ' cm $
pentru p 2 ( 1)2 cm $
# i = ⋅⋅ =
25 100 8 0 85 36764 706
3
, , , # VAi =36764 706,
$ i = + ⋅ ⋅
⋅ =5 1 2
36764 706 321 50
2252
3, ,
, ,'3 $ mmi = 225 '3,
'. Determinarea pasului polar :
τ π= ⋅⋅
$ !
i2
τ = ⋅
⋅
=31415 2252 3
118 2'6, ,'3
, τ =118 2'6, mm
*. Determinarea lungimii ideale a ma+inii :
i = ⋅λ τ
i = ⋅ =2 1 118 2'6 248 421, , , mmi = 248 421,
,. Determinarea numărului de crestături ale miezului feromagnetic statoric.
Alegerea numărului de crestături pe pol +i fază :
a ( 1 2> Alegem ( 1 4= ( 1 4=
( ) m ! (1 12= ⋅ ⋅ ⋅ ) 1 2 3 3 4 72= ⋅ ⋅ ⋅ = ) cr*st+ t ri1 72=
. Determinarea pasului dentar :
3
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 4/38
t $
zi
11
= ⋅π
t131415 225
72 ' 86= ⋅ =, ,'3
, t mm1 ' 86= ,
/. Alegerea numărului de crestături rotorice 0 2 :
pentru p ! +i 0 1 ,2 crestături avem : 0 2 ∈ 2 ) 2% )! 3
Alegem 0 2 '% ) cr*st+ t ri2 54=
1 . Determinarea pasului înfă+urării statorice :
4 1 5 . ... . ' ⋅τ 4 1∈0 0 8 0 8 118 2'6 '4 63, , , ,⋅ = ⋅ =τ mm
0 85 0 85 118 2'6 100 55, , , ,⋅ = ⋅ =τ mm
Alegem - mm1 '8= - mm1 '8= 11. Determinarea factorului de repartizare a înfă+urării statorice :
K m
(m (
( 11
1
2
2
= ⋅
⋅⋅ ⋅
sin
sin
π
π K ( 1
314152 3
4 31415
2 3 4
0 '576= ⋅
⋅⋅ ⋅
=sin
,
sin , ,
K ( 1 0 '576= ,
12. Determinarea factorului de scurtare:
K -
#11
2= ⋅sin.
πτ
K #1180
2'8
118 2'60 '63'= ⋅
=sin
,,
K #1 0 '63'= ,
1!. Determinarea factorului de înfă+urare :
K K K 1 ( #= ⋅1 1
K 1 0 '576 0 '63' 0 '23= ⋅ =, , , K 1 0 '23= ,
1%. Alegerea coe6cientului de satura ie :7 S1≠1 Alegem K #1 1 4= , K #1 1 4= ,
1'. Alegerea factorului de acoperire polară α i +i factorului de formă al
cîmpului 7 β :
- pentru K #1 1 4= , ) avem : α i = 1 0815,
K β = 0 718,
1*. Alegerea induc iei în între6er :
( ) δ = 0 6 0 ', """ ,
4
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 5/38
pentru !
mm
==
⇒ =3
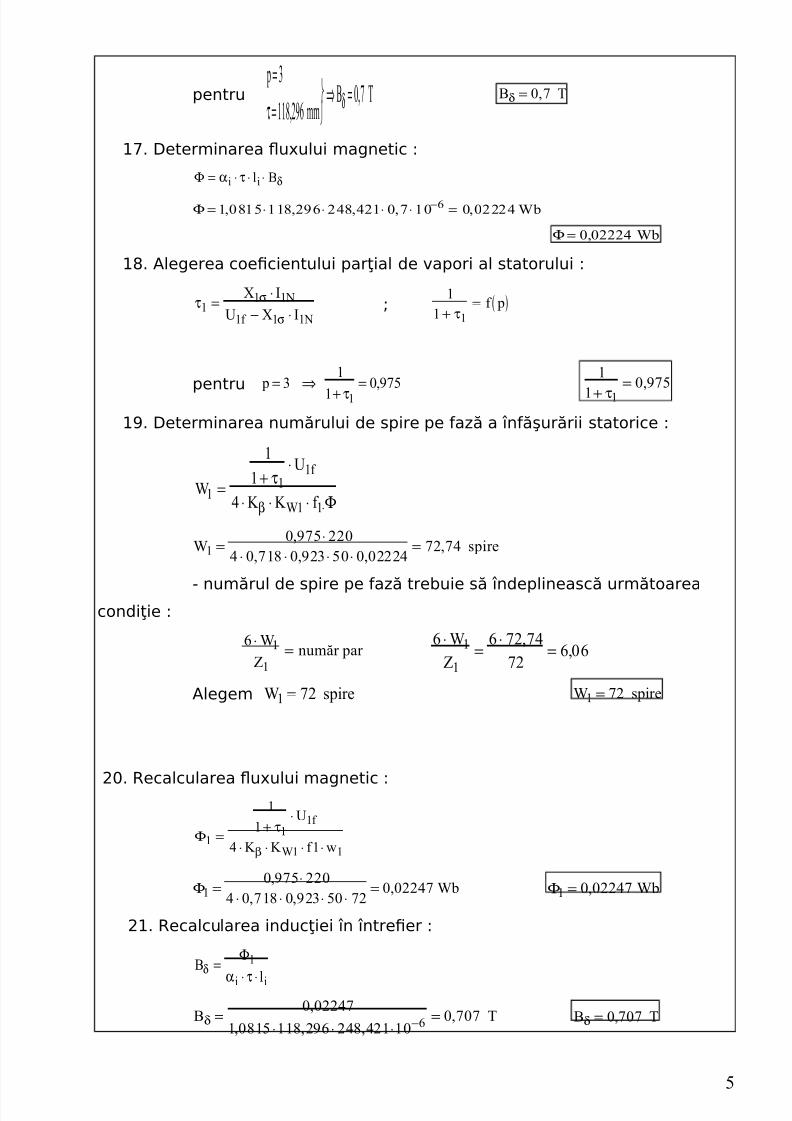
118 2'60 7τ δ,, δ = 0 7,
1,. Determinarea 8u9ului magnetic :
Φ = ⋅ ⋅ ⋅α τ δi i
Φ = ⋅ ⋅ ⋅ ⋅ =−1 0815 118 2'6 248 421 0 7 10 0 022246, , , , , W&
Φ = 0 02224, W&
1 . Alegerea coe6cientului par ial de vapori al statorului :
τ σσ
11 1
1 1 1= ⋅
− ⋅
IU I
N
f N$ ( )1
1 1+ =
τ f !
pentru ! = ⇒
+ =3
1
10 '75
1τ ,
1
1 0 '751+ =
τ ,
1/. Determinarea numărului de spire pe fază a înfă+urării statorice :
WU
K K f
f
W1
11
1 1
11
4= + ⋅
⋅ ⋅ ⋅ ⋅τ
β Φ
W s!ir*10 '75 220
4 0 718 0 '23 50 0 02224 72 74= ⋅
⋅ ⋅ ⋅ ⋅ =,, , ,
,
- numărul de spire pe fază tre(uie să îndeplinească următoareacondi ie :
6 1
1
⋅ =W)
n m r !%r 6 6 72 74
72 6 061
1
⋅ = ⋅ =W)
,,
Alegem W s!ir*1 72= W s!ir*1 72=
2 . ecalcularea 8u9ului magnetic :
Φ11
1
1 1
11
4 1= +
⋅
⋅ ⋅ ⋅ ⋅τ
β
U
K K f
f
W
Φ10 '75 220
4 0 718 0 '23 50 72 0 02247= ⋅
⋅ ⋅ ⋅ ⋅ =,, ,
, W& Φ1 0 02247= , W&
21. ecalcularea induc iei în între6er :
i iδ
α τ=⋅ ⋅
Φ1
δ =⋅ ⋅ ⋅
=−0 02247
1 0815 118 2'6 248 421 100 7076
,
, , ,, δ = 0 707,
5

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 6/38
22. &alculul păturei de curent :
A I
$f
i= ⋅ ⋅
⋅
6 1 1
π
A A cm= ⋅ ⋅
⋅ = ⋅
−6 72 55 70431415 22 5'3
33' 1,, ,
A A cm= ⋅ −33' 1
2!. Alegerea densită ii de curent din (o(ina;ul statoric :( ) A mm1
23 5 5∈ , """ / A mm124= /
2%. Determinarea sec iunii conductoarelor necesare (o(ina;ului statoric :
# I
cf = 1
1"
#c
c= ⋅4
π
# mmc = =55 7044
13 '26 2,,
mmc = ⋅ =4 13'2631415 4 21,, ,
- din S<AS alegem
6 mm
# mm
c# A#
c# A#
1
12
14
153'
=
=
,
,
n p numărul de conductoare în paralel $
n ## !
c
c # A#=
1n ! = =13 '26
153' '
,,
n ! = '
2'. Alegerea induc iei în dintele statoric :
( ) ) 1 1 5 1 7∈ −, , Alegem ) 1 1 6= ,
2*. Determinarea grosimii dintelui statoric :
&t
K )* )
11
1= ⋅
⋅
δ $7 fe-coe6cient de umplere a miezului feromagnetic
&) 1' 86 0 707
0 '3 1 6 4 68= ⋅
⋅ =, ,
, , , & mm) 1 4 68= ,
2,. Alegerea formei crestăturii statorice :
Deoarece pentru realizarea înfă+urării se folose+te conductor rotund)
crestătura statorică este su( formă de pară.
2 . Alegerea grosimii izola iei crestăturii : mmiz = 0 5,
2/. Determinarea numărului de conductoare în crestătură :
6

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 7/38
nc n
zc !=
⋅ ⋅ ⋅6 1
1
nc = ⋅ ⋅ ⋅ =6 1 ' 72
72 54 n mmc = 54
! . Alegerea valorii factorului de umplere al crestăturii :
( )f ∈ −0 73 0 78, , Alegem f = 0 77,
!1. Determinarea suprafe ei ocupată de conductoarele din crestătură :
sn
f con cr c c izo
" ""= ⋅ 2
ciz c st%s iz= +1 ∆
ciz = + =14 0 005 1405, , , mmciz =1405,
s con cr " " ,, ,= ⋅ =54 14050 77 138 4382
s mmcon cr " " ,=138 438
!2. Alegerea desc#iderii crestăturii :
& mm9izo iz 9izo4 2 1≥ + ⋅ = +" "
&4 1405 2 05 2 405≥ + ⋅ =, , , & mm4 2 41= ,
!!. Determinarea înăl imii istmului :
: mm4 0 5= ,
!%. Determinarea dimensiunii por iunii active din crestătură :
( ) &
$ mm
z & i
z iz= ⋅ + − − ⋅π 2 42
1 1
=
( ) & mm= ⋅ + − − ⋅ =31415 225 4
72 4 68 2 0 5 4 352
, ,'3, , , & mm= 4 352,
!'. Determinarea înăl imii stratului activ :
t H & H #con cr*stα2
02
⋅ + ⋅ − =" "
α = = = °360 36072
51)
α = °5
0 0436 4 352 138 438 02, , ,⋅ + ⋅ − =H H H mm= 25 36,
!*. Determinarea înăl imii totale a crestăturii :
: : : Hz !%n iz1 4 4= + + ⋅ +
: z1 0 5 1 4 0 5 25 36 28 8= + + ⋅ + =, , , , : mmz1 28 8= ,
!,. Alegerea induc iei în ;ugul statoric :
( ) ;1 1 3 1 55∈ −, , Alegem ;1 1 55= ,
! . Determinarea înăl imii ;ugului statoric :
7
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 8/38
:K ;
* i ;1
12=⋅ ⋅ ⋅
Φ
: ;10 02247
2 0 248 421 1 55 31=
⋅ ⋅ ⋅ =,
,'3 , , : mm ;1 31=
!/. Determinarea diametrului e9terior al statorului :
$ $ : :* i z ;= + ⋅ + ⋅2 21 1
$ * = + ⋅ + ⋅ =225 2 28 8 2 31 345 5,'3 , , $ mm* = 345 5,
% . Determinarea raportului$$
i
* #
$$
i
*= =188
307 10 612
,,
$$
mmi
*= 0 612,
%1. Determinarea volumului de ta(lă consumată :
V $ * * i= ⋅2
V * = ⋅ =345 5 248 421 0 02'482, , , V m* = 0 02'48 3,
$. Calculul electroma netic de dimensionare a rotorului 1. Determinarea tensiunii electromotoare în (ara rotoric> :
<U
= &
f = + ⋅
⋅ ⋅
112
1
1 1
τ
< & = ⋅
⋅ ⋅ =0 '75 220
2 72 0 '231 614
,,
, < V & =1614,
2. Determinarea curentului în (ara rotoric> :
I = P
) < & N
&= ⋅ ⋅
⋅
103
2
- pentru η = 0 85, avem = = 1 14,
I & = ⋅ ⋅⋅
=1 14 25 1054 1 614
3273
,,
I A & = 327
!. Determinarea intensit> ii curentului în inelul de scurtcircuitare a coliviei
rotorice :
I I !)
i &=⋅
⋅2
2sin
π
8

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 9/38
I i =⋅
⋅ =327
2 180 3
54
1252 62sin
, I Ai =1252 62,
%. Determinarea densit> ii de curent în (are +i în inelul de scurtcircuitare :
- în (ar> : ; Amm
&%r = 3 2
- în inel : ; A
mm &%r = 3
2
'. Determinarea sec iunii (arei rotorice :
# I
; &%r &%r
&%r=
# &%r = =3273
10' # mm &%r =10' 2
*. Determinarea sec iunii inelului :
# I
;in*in*
in*=
# in* = =1252 623
417 54,
, # mmin* = 417 54 2,
,. Alegerea formei crest>turii rotorice :
& mm42 1 7= ,
& mmc2 4=
pentru p ! +i D i 22')/! mm ) : mmc2 26 5= ,
. Alegerea valorii între6erului :
δ = + −0 2
75800
, $ i
δ = + − =0 2 225 '3 75
800 0 388, ,
, δ = 0 388, mm
/. &alculul coe6cientului &arter :
= t
t &
&
t
t &
&
c =−⋅ +
⋅
−⋅ +
1
141
2
41
2
242
2
425 5δ δ
t 1 - pasul dentar statoric $
t
$
)i
1 1
31415 225 '3
72 ' 86= ⋅
= ⋅
=π , ,
, t mm1 ' 86= ,
t 2 - pasul dentar rotoric $
'
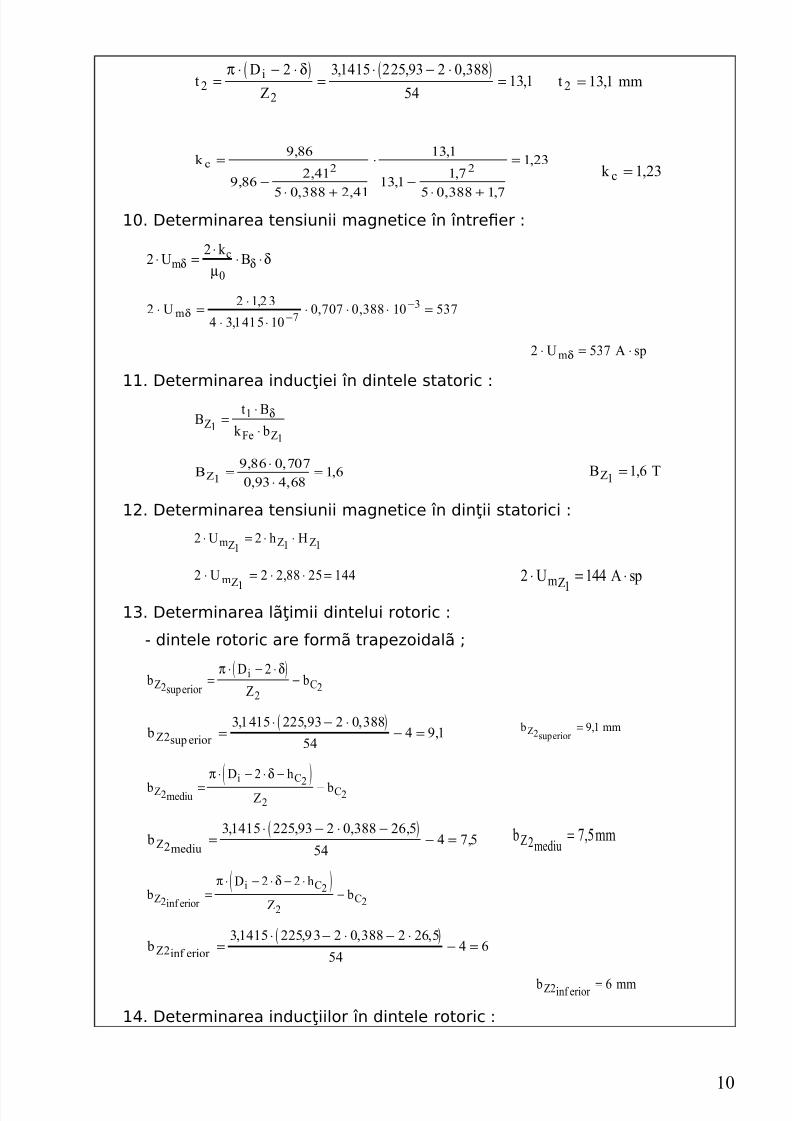
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 10/38
( ) ( )t
$
)i
22
2 31415 225 '3 2 0 388
5413 1= ⋅ − ⋅ = ⋅ − ⋅ =π δ , , ,
, t mm2 13 1= ,
= c =−⋅ +
⋅
−⋅ +
=' 86
' 86 2 41
5 0 388 2 41
13 1
13 1 1 7
5 0 388 1 7
1 232 2
,
, ,
, ,
,
, ,
, ,
, = c =1 23,
1 . Determinarea tensiunii magnetice în între6er :
2 2
0⋅ = ⋅
⋅ ⋅U =
mc
δ δµ δ
2 2 1 2 3
4 31415 100 707 0 388 10 537
73
⋅ = ⋅
⋅ ⋅⋅ ⋅ ⋅ =−
−U mδ,
,, ,
2 537⋅ = ⋅U A s!mδ
11. Determinarea induc iei în dintele statoric :
t
= &)* )
11
1
= ⋅⋅
δ
) 1' 86 0 7070 '3 4 68
1 6= ⋅
⋅ =, ,
, ,, ) 1 1 6= ,
12. Determinarea tensiunii magnetice în din ii statorici :
2 21 1 1⋅ = ⋅ ⋅U : Hm) ) )
2 2 2 88 25 1441
⋅ = ⋅ ⋅ =U m) , 2 1441
⋅ = ⋅U A s!m)
1!. Determinarea l> imii dintelui rotoric :
- dintele rotoric are form> trapezoidal> $
( ) &
$
) &) *rior
i92
2 2
2s !
= ⋅ − ⋅ −π δ
( ) &) *rior 2
31415 225 '3 2 0 388
544 ' 1s !
, , ,,= ⋅ − ⋅ − = & mm) *rior 2 ' 1
s !,=
( ) &
$ :
) &) m* i
i 992 2
2 2
2
=⋅ − ⋅ −
−π δ
( ) &) m* i2
31415 225 '3 2 0 388 26 5
544 7 5=
⋅ − ⋅ −− =
, , , ,, & mm) m* i2 7 5= ,
( ) &
$ :
) &) *rior
i 992
2
2 2
2 2
inf =⋅ − ⋅ − ⋅
−π δ
( ) &) *rior 2
3 1415 225 ' 3 2 0 388 2 26 5
544 6inf
, , , ,= ⋅ − ⋅ − ⋅ − =
& mm) *rior 2 6inf = 1%. Determinarea induc iilor în dintele rotoric :
10
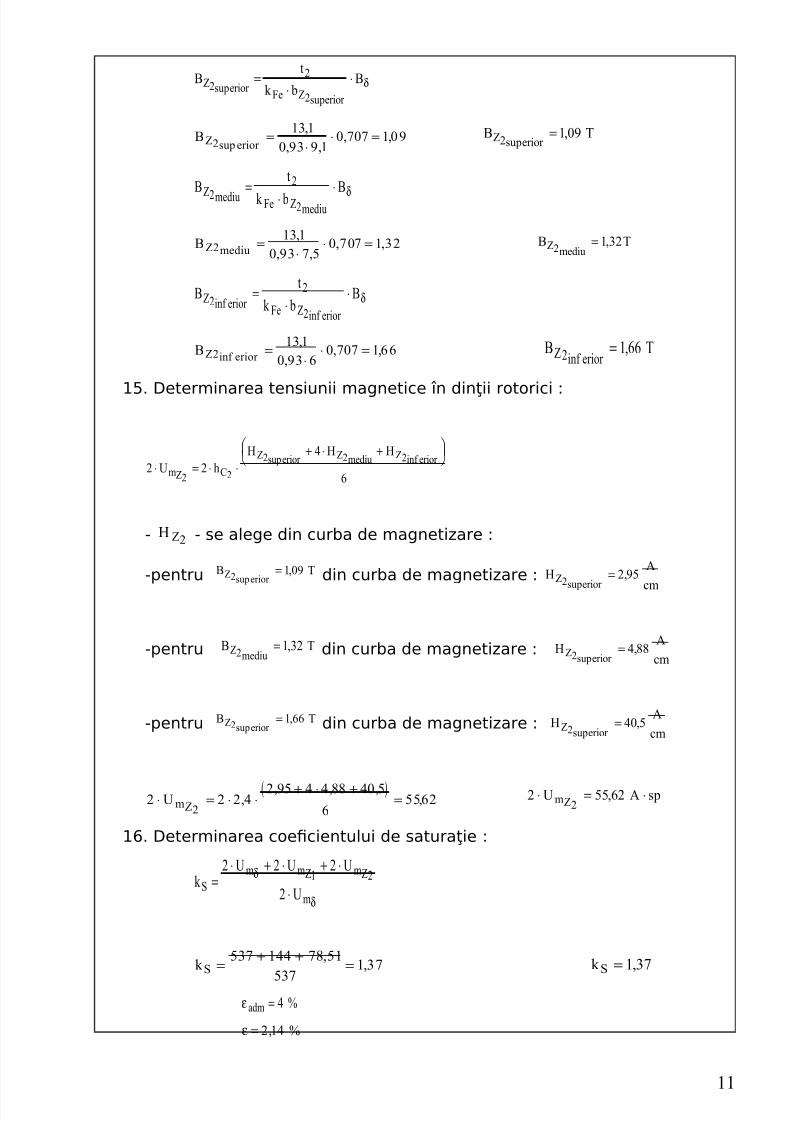
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 11/38
t
= &) *rior * ) *rior 2
2
2s !
s !
=⋅
⋅ δ
) *rior 213 1
0 '3 ' 10 707 10 '
s !,
, ,, ,=
⋅ ⋅ = ) *rior 2 1 0'
s !,=
t
= &) m* i * ) m* i2
2
2
=⋅
⋅
δ
) m* i213 1
0 '3 7 50 707 1 32=
⋅ ⋅ =,
, ,, , ) m* i2 1 32= ,
t= &) *rior * ) *rior
22
2inf
inf
=⋅
⋅ δ
) *rior 213 1
0 '3 60 707 166inf
,,
, ,=⋅
⋅ = ) *rior 2 1 66inf
,=
1'. Determinarea tensiunii magnetice în din ii rotorici :
2 24
62 2
2 2 2⋅ = ⋅ ⋅
+ ⋅ +
U :H H H
m) 9
) *rior ) m* i ) *rior s ! inf
- H ) 2 - se alege din cur(a de magnetizare :
-pentru ) *rior 2 1 0's !
,= din cur(a de magnetizare : H A
cm)
*rior 2 2 '5
s !
,=
-pentru ) m* i2 1 32= , din cur(a de magnetizare : H A
cm) *rior 2 4 88s !
,=
-pentru ) *rior 2 1 66s !
,= din cur(a de magnetizare : H A
cm) *rior 2 40 5s !
,=
( )2 2 2 42 '5 4 4 88 40 5
65562
2⋅ = ⋅ ⋅ + ⋅ + =U m ) ,
, , ,, 2 55 62
2⋅ = ⋅U A s!m) ,
1*. Determinarea coe6cientului de satura ie :
=U U U
U#m m) m)
m=⋅ + ⋅ + ⋅
⋅
2 2 2
21 2δ
δ
= # = + + =537 144 78 51
537
1 37,
, = # =1 37,
ε% m = 4 >
ε = 2 14, >
11

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 12/38
1,. Determinarea induc iei în ;ugul statoric :
= :* 1
12=⋅ ⋅ ⋅
Φ
i= − ⋅ = − ⋅ =2 248 421 2 0 388 247 645δ , , , mm = 247 645,
1
0 02247
2 0 '3 247 645 311 57=
⋅ ⋅ ⋅
=,
, ,,
1 1 57= ,
1 . Determinarea lungimii liniei de cîmp medii în ;ugul statoric :
( )$ :
!*
11
2=⋅ −⋅
π
( )1
3 1415 345 5 31
2 3164 672= ⋅ −
⋅ =
, ,, mm1 164 672= ,
1/. Determinarea tensiunii magnetice în ;ugul statoric :
U Hm 1 1 1= ⋅ ⋅ξ
- ξ -coe6cient ce ine cont de repartizarea neuniform> a cîmpului în ;ugul
statoric $
U m 10 335 16 4672 211 116 3'= ⋅ ⋅ =, , , , U A s!m 1
116 3'= ⋅,
2 . Determinarea în>l imi ;ugului rotoric :
( ): $ : i 9 %? % r @*nti %ti*2 20 5 2 2 2= − ⋅ − ⋅ − − ⋅" δ
- %?-diammetrul a9ului în por iunea în care se plaseaz> miezulferomagnetic rotoric $
mm%? = 40
- pentru IP 44 se consider> % r @*nti %ti* = 0 $
( ): 2 0 5 225 '3 2 0 388 2 26 5 40 66= − ⋅ − ⋅ − =, , , , : mm2 66=
21. Determinarea lungimii liniei de cîmp medii în ;ugul rotoric :
( )$ :
! ;i c
222 2
2=⋅ − ⋅ − ⋅
⋅
⋅π δ
( ) ;2
3 1415 225 '3 2 0 388 2 26 5
2 3'014= ⋅ − ⋅ − ⋅
⋅ =, , , ,
, mm ;2 '014= ,
22. Determinarea induc iei în ;ugul rotoric :
= :* 2
22=⋅ ⋅ ⋅
Φ
12

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 13/38
2 60 02247
2 0 '3 247 645 66 100 73'=
⋅ ⋅ ⋅ ⋅=−
,
, ,, 2 0 73'= ,
2!. Determinarea tensiunii magnetice în ;ugul rotoric :
U Hm 2 2 2= ⋅ ⋅ξ
U m 20 335 '014 14 42 27= ⋅ ⋅ =, , , , U A s!m 2
42 27= ⋅,
2%. Determinarea tensiunii magnetice pentru întreg circuitul magnetic :
2 2 2 21 2 1 2
⋅ = ⋅ + ⋅ + ⋅ + +U U U U U Um m m) m) m mδ
2 537 144 55 62 116 3' 42 27 8'5 28⋅ = + + + + =U m , , , ,
2 8'5 28⋅ = ⋅U A s!m ,
2'. Determinarea intensit> ii curentului de magnetizare :
I ! U
=
mµ = ⋅ ⋅
⋅ ⋅
2
2 7 1 1,
I Aµ = ⋅⋅ ⋅
=3 8'5 282 7 0 '23 72
14 '68,
, ,, I Aµ = 14 '68,
2*. Determinarea raportuluiI
I N
µ1
:
I
I N
µ1
100 30 40>⋅ ≤ =
I
I N
µ1
14 '6855 704 0 26'7= =
,, ,
I
I N
µ1 100 26 87⋅ = , >
%.Calculul re&isten'elor (i reactan ' elor 1. Determinarea rezisten ei statorice pe faz> :
c n s9 c%s!
P c1
1
1= ⋅
⋅⋅ ⋅ρ
ρ9 c%mmm
= ⋅0 0235
2,
Ω
( ) s! f = ⋅ +2 1
mm
= %f f -
== ⋅ + ⋅247 645
21 1 1
,
τ
13
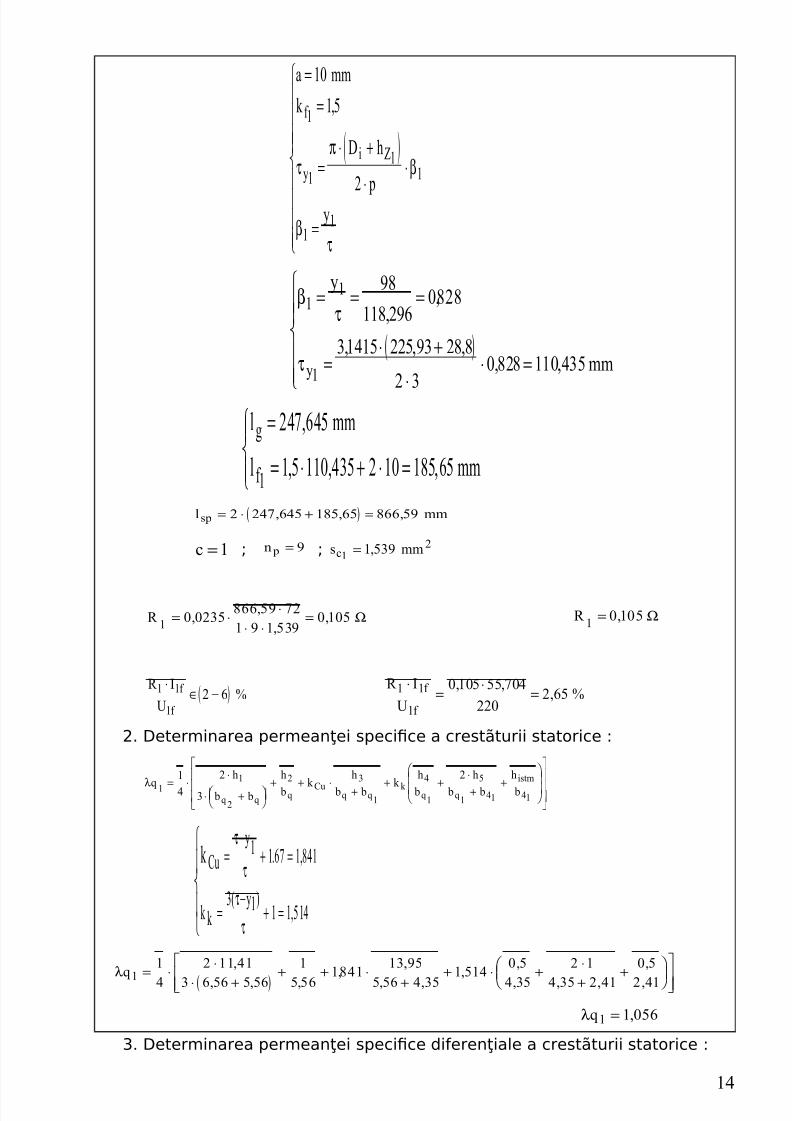
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 14/38
( )
% mm
=
$ :
!
-
f
-i )
==
=⋅ +⋅
⋅
=
10
15
2
1
11
1
11
,
τπ
β
βτ
( )
βτ
τ
11
1
'8118 2'6
0828
31415 225 '3 28 8
2 30 828 110 435
= = =
= ⋅ +
⋅ ⋅ =
-
mm-
,,
, , ,, ,
mm
mmf
== ⋅ + ⋅ =247 645
15 110 435 2 10 185 651
,
, , ,
( ) mms! = ⋅ + =2 247 645 185 65 866 5', , ,
c =1 $ n ! = ' $ s mmc121 53'= ,
1 0 0235 866 5' 721 ' 1 53'
0 105= ⋅ ⋅
⋅ ⋅ =, ,
,, Ω 1 0 105= , Ω
( ) I
Uf
f
1 1
12 6
⋅∈ − >
IU
f
f
1 1
1
0 105 55 704220
2 65⋅ = ⋅ =, ,
, >
2. Determinarea permean ei speci6ce a crest>turii statorice :
λ( :
& &
: & =
: & & =
: &
: & &
: &
( ( ( 9 ( ( = ( (
istm1
1
2
2 3
1
4
1
5
1 41 41
14
2
3
2
= ⋅ ⋅
⋅ + + + ⋅ + + + ⋅
+ +
=9-
==-
= −
+ =
= − + =
ττ
ττ
1 1 1 841
3 1 1 1 514
"67 ,
. /,
( )
λ(1
1
4
2 11 41
3 6 56 5 56
1
5 561841
13 '5
5 56 4 351 514
0 5
4 35
2 1
4 35 2 41
0 5
2 41= ⋅ ⋅
⋅ + + + ⋅
+ + ⋅ + ⋅
+ +
,
, , ,,
,
, ,,
,
, , ,
,
,
λ( 1 1 056= ,
!. Determinarea permean ei speci6ce diferen iale a crest>turii statorice :
14

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 15/38
λ δc
t =
= 11 1
2
11 '=
⋅⋅ ⋅,
λ 1' 810 '23 2
11 '1 230 3881 4716= ⋅
⋅ ⋅ =, ,
, , ,, λ 1 1 4716= ,
%. Determinarea permean ei sc>p>rilor frontale :
λ ττ
τf i
f #( -
= 11
11
120 34 0 64= ⋅ ⋅ − ⋅ −
⋅
⋅, ,
λf 12 0 '110 34
3248 421
185 65 0 64 118 2'6 '8
118 2'6118 2'6 0 '63'= ⋅ − ⋅ −
⋅
⋅ =,,
, , ,
,, , ,
λ f 1 0 '11= ,
'. Determinarea reactan ei de sc>p>ri a statorului :
( )? f
! (i
( f σ λ λ λ11 1
2
1 1 1 1
10 158100 100
10= ⋅ ⋅
⋅ ⋅ ⋅ + + ⋅ −,
( )? σ1
210 158
50100
72100
248 4213 4
1 0 56 1 4716 0 '11 10 0 2'1= ⋅ ⋅
⋅ ⋅ ⋅ + + ⋅ =−,
,, , , , Ω
σ1 0 2'1= , Ω
*. Determinarea rezisten ei (arei rotorice :
# & Ai
&%r= ⋅ ⋅
−ρ 10
3
& = ⋅ ⋅ = ⋅− −11'
248 42110'
10 1 1' 103 4,, Ω & = ⋅
−11' 10 4, Ω
,. Determinarea rezisten ei inelului de scurtcircuitare :
$
) #in* Aim* i
in*= ⋅
⋅⋅
⋅ −ρ
π2
310
$ $ :Im* i i 9= − ⋅ −2 2δ
$ mm
I m* i
in*
= − ⋅ − =
= ⋅ ⋅
⋅ ⋅
− = ⋅ −
225 '3 2 0 388 24 201154
11'
3,1415201 15454 417 54
10 3 1 475 10 6
, , ,
,,
, Ω
in* = ⋅ −1 475 10 6, Ω
. Determinarea rezisten ei coliviei rotorice :
!)
in* &2
2
2
2
= ⋅
⋅
⋅
+
sin π
15

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 16/38
24 42 1 6'8
2 180 2
54
11' 10 1 434 10= ⋅
⋅ ⋅
+ ⋅ = ⋅
− −,
sin
, , Ω
241 434 10= ⋅
−, Ω
/. Determinarea coe6cientului de raportare a rezisten ei +i reactan ei
rotorice la înf>+urarea statoric> :
( )=
m =
)=⋅ ⋅ ⋅4 1 1 1
2
2
( )= = ⋅ ⋅ ⋅ =
4 3 72 0 '23
72'81 422
2,, = = '81 422,
1 . Determinarea rezisten ei rotorului raportat> la înf>+urarea statoric> :
= 2 2B= ⋅
24'81 422 11' 10 0 140B , , ,= ⋅ ⋅ =− Ω 2 0140B ,= Ω
11. Determinarea permean ei speci6ce a crest>turii rotorice negli;ând
fenomenul de refulare :
λ(c istm
c
istm: :
&
:
&22 2
2
2
42
13
= ⋅ −
+
λ ( 213
26 5 0 54
0 51 7
2 46= ⋅ − + =, , ,,
, λ ( 2 2 46= ,
12. Determinarea permean ei diferen iale a crest>turii rotorice :
λδc
t= 22
11 '=
⋅ ⋅,
λ 213 1
11 ' 1 23 0 3882 3=
⋅ ⋅ =,
, , ,, λ 2 2 3= ,
1!. Determinarea permean ei de sc>p>ri a inelului :
λπ
f in* m* i
i
in* m* i$
) !)
$
% &2
22
2
2 3
2
4 7
2
= ⋅
⋅ ⋅ ⋅ ⋅
⋅ ⋅
+ ⋅
,
sin
,
% :c≥ 2 $ & #
%in*=
% mm
& mm
f
=
= =
= ⋅
⋅ ⋅ ⋅ ⋅
⋅
⋅
+ ⋅ =
27417 54
2715 46
2 3 201154
54 248 421 2 180 2
54
4 7 201 15427 2 1 5 46 0 3462 2
,,
, ,
, sin
, ,, ,λ
16

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 17/38
λ f 2 0 346= ,
1%. Determinarea reactan ei de sc>p>ri a rotorului :
f i ( f σ λ λ λ2 1 2 2 2'7 ' 10= ⋅ ⋅ ⋅ + +
⋅ −,
( )σ2' 47 ' 50 248 421 2 46 2 3 0 346 10 5 01 10= ⋅ ⋅ ⋅ + + ⋅ = ⋅− −, , , , , ,
σ24501 10= ⋅ −,
1'. Determinarea reactan ei de sc>p>ri a rotorului raportat> la stator :
= σ σ2 2B= ⋅
σ24'81 422 5 01 10 0 4'B , , ,= ⋅ ⋅ =− Ω σ2 0 4'B ,= Ω
1*. &alculul coe6cientului de sc>p>ri al statorului :
τ σ µ
σ µ11 1
1 1 1= ⋅
− ⋅
I
U If
τ10 2'1 14 '68
220 0 2'1 14 '680 0202= ⋅
− ⋅ =, ,
, ,, τ1 0 0202= ,
1,. Determinarea coe6cientului de sc>p>ri a rotorului :
τ τσ
σ22
11= ⋅
B
τ2
0 4'
0 2'10 0202 0 034= ⋅ =,
,, , τ
2 0 034= ,
1 . Determinarea rezisten ei de scurtcircuit a motorului :
( ) = = + + ⋅1 1 21 τ B
( ) = = + + ⋅ =0 105 1 0 0202 0 1 40 0 247, , , , Ω = = 0 247, Ω
1/. Determinarea reactan ei de scurtcircuit a motorului :
( ) = σ σ στ= + + ⋅1 1 21 B
( )= σ = + + ⋅ =0 2'1 1 0 0202 0 4' 0 75, , , , Ω
= σ = 0 75, Ω
2 . Determinarea impedan ei de scurtcircuit a motorului :
) = = = = +2 2σ
) = = + =0 247 0 75 0 78'2 2, , , ) = = 0 78', Ω
21. Determinarea curentului de scurtcircuit negli;ând fenomenul de
refulare :
( )I
U
)= f
= = ⋅ +1 21 τ
( )I = =
⋅ + =220 1 0 034
0 78'288
,
, I A= =288
17

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 18/38
22. Determinarea raportuluiI
I=
N1 :
II
=
N1
28855 704
5 17= =,
, I
I=
N15 17= ,
2!. Determinarea factorului de putere la scurtcircuit :
cosϕ1= =
=
)=
cos ,
,,ϕ1
0 2470 78'
0 267= = = cos ,ϕ1 0 267= =
2%. Determinarea coe6cientului de refulare a curentului din (ara rotoric> :
ξ π
ρ=
⋅ ⋅⋅
⋅ ⋅⋅
−2
10
102 15
2
: & f
&c &%rrotor
c A
&
& &%rrotor
c2
1≈
ξ = ⋅ ⋅⋅
⋅ =−2 3 1415 26 5
1050 10
11'
1 625, ,
, ξ = 1 62,
2'. Determinarea coe6cientului de ma;orare a rezisten ei +i de mic+orare a
reactan ei ca urmare a fenomenului de refulare a curentului rotoric :( ) ( )( ) ( )=
s:
c:r = ⋅ ⋅ + ⋅
⋅ − ⋅ξ ξ ξ
ξ ξ2 2
2 2
sin
cos
( ) ( )( ) ( )=
s:c:
=⋅ ⋅ ⋅ − ⋅
⋅ − ⋅
32
2 22 2ξ
ξ ξξ ξ
sincos
( ) ( )s: s:2 2 1 62 12 74⋅ = ⋅ =ξ , ,
( ) ( )c: c:2 2 1 62 12 78⋅ = ⋅ =ξ , ,
( ) ( )sin sin , ,2 2 1 62 0 056⋅ = ⋅ =ξ
( ) ( )cos cos , ,2 2 1 62 0 0'8⋅ = ⋅ =ξ
= r = ⋅ +− =ξ 12 74 0 056
12 78 0 ''81 75'
, ,, ,
, = r =1 75',
= =⋅
⋅ −
− =3
2 1 6 2
12 74 0 056
12 78 0 ''8
0 ''6
,
, ,
, ,
, = = 0 ''6,
2*. Determinarea rezisten ei rotorului raportat> la înf>+urarea statoric>
atunci când se consider> fenomenul de refulare :
18

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 19/38
= =
!)
! r &i
2
2
22
2
B
sin
= ⋅ ⋅ + ⋅
⋅ ⋅
π
A !24
6
2'81 422 1 75' 11 ' 10
2 1 475 10
2 180 3
54
0 22'B , , , ,
sin
,= ⋅ ⋅ ⋅ + ⋅ ⋅
⋅ ⋅
=− −
!2 0 22'B ,= Ω
2,. Determinarea reactan ei rotorului raportat> la înf>+urarea statoric>
atunci când se consider> fenomenul de refulare :
= f = i ( f σ λ λ λ2 1 2 2 2'
7 ' 10B
,= ⋅ ⋅ ⋅ ⋅ ⋅ + + ⋅ −
( )σ2''81 4 22 7 ' 50 248 421 0 ''6 2 46 2 3 0 346 10 0 4'B , , , , , , , ,= ⋅ ⋅ ⋅ ⋅ ⋅ + + ⋅ =−
σ2 0 4'B ,= Ω
2 . Determinarea rezisten ei de pornire a motorului :
( ) ! != + + ⋅1 1 21 τ B
( ) ! = + + ⋅ =0 105 1 0 0202 0 22' 0 338, , , , ! = 0 338, Ω 2/. Determinarea reactan ei de pornire a motorului :
( ) ! !σ σ τ σ= + + ⋅1 1 21 B
( ) !σ = + + ⋅ =0 2'1 1 0 0202 0 4' 0 7', , , , !σ = 0 7', Ω
! . Determinarea impedan ei de pornire a motorului:
) ! ! != +2 2σ
) ! = + =0 338 0 7' 0 85'2 2, , , ) ! = 0 85', Ω
!1. Determinarea coe6cientului de sc>p>ri a rotorului atunci când se
consider> fenomenul de refulare :
τ τ
σ
σ2
2
1 1 !
!
= ⋅
B
τ20 4'
0 2'10 0202 0 034 ! = ⋅ =,
,, , τ 2 0 034 ! = ,
1'
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 20/38
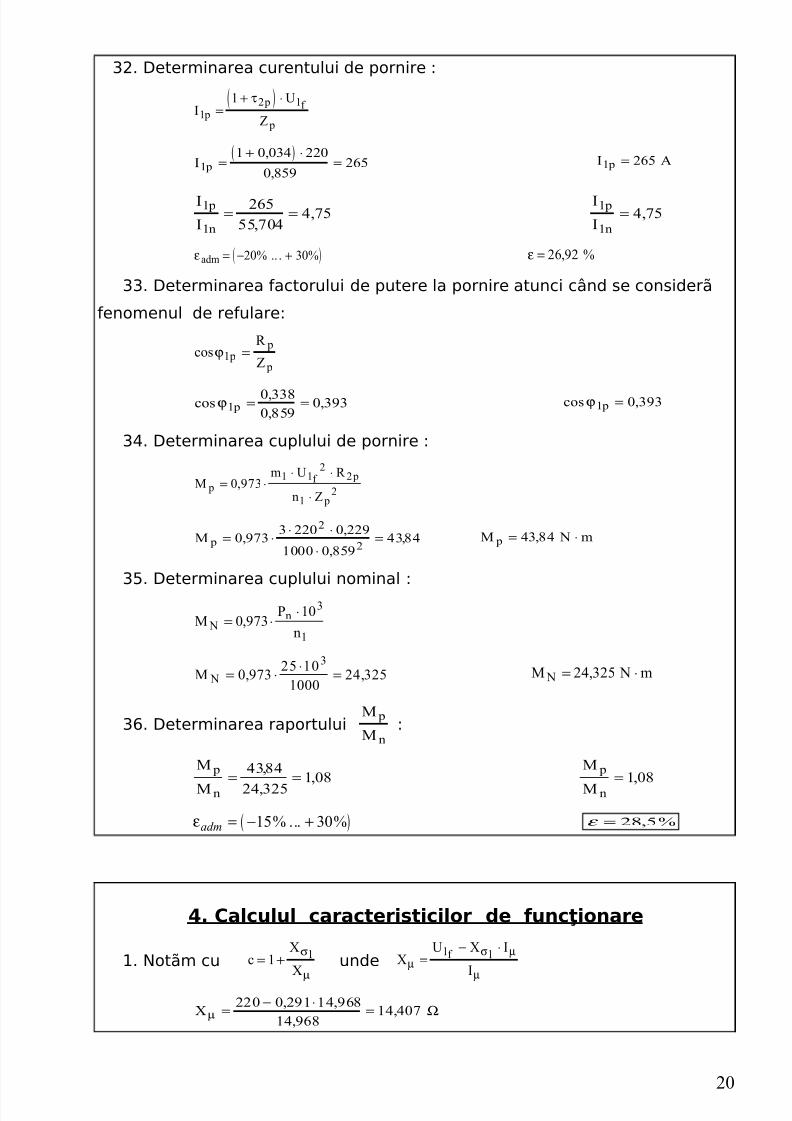
!2. Determinarea curentului de pornire :
( )I
U
) ! ! f
!1
2 11=
+ ⋅τ
( )I !1
1 0 034 220
0 85'265= + ⋅ =,
, I A !1 265=
I
I !
n
1
1
26555 704
4 75= =,
, I
I !
n
1
14 75= ,
( )ε% m = − +20> 30>""" ε = 26 '2, >
!!. Determinarea factorului de putere la pornire atunci când se consider>
fenomenul de refulare:
cosϕ1! !
!
)=
cos ,,
,ϕ10 3380 85'
0 3'3 ! = = cos ,ϕ1 0 3'3 ! =
!%. Determinarea cuplului de pornire :
Mm U
n ) !
f !
!= ⋅
⋅ ⋅
⋅0 '73
1 12
2
12
,
M ! = ⋅ ⋅ ⋅
⋅=0 '73
3 220 0 22'
1000 0 85'4384
2
2,
,
,, M N m ! = ⋅43 84,
!'. Determinarea cuplului nominal :
M P
n Nn= ⋅ ⋅
0 '73 10 3
1,
M N = ⋅ ⋅ =0 '73
25 101000
24 3253
, , M N m N = ⋅24 325,
!*. Determinarea raportuluiM
M !
n :
M
M
!
n = =4384
24 3251 08
,
,,
M
M
!
n =1 08,
( )15> """ 30>admε = − + >5,28=ε
). Calculul caracteristicilor de *unc'ionare
1. ?ot>m cu c = +1 1σ
µ unde
U I
If
µσ µ
µ=
− ⋅1 1
µ = − ⋅ =220 0 2'1 14 '6814 '68
14 407, ,
,, Ω
20
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 21/38
c = + =1 0 2'114 407
1 02,,
, c =1 02,
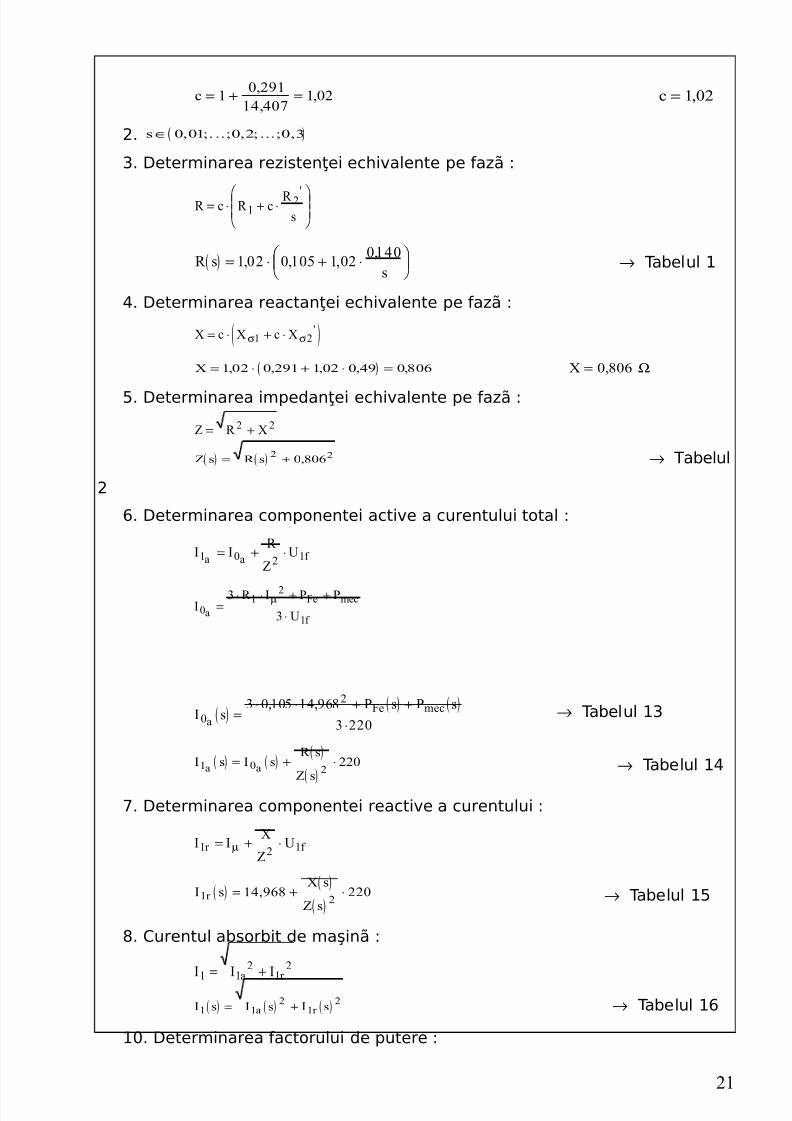
2. ( )s ∈ 0 0 0,01C" ""C ,2C """C ,3
!. Determinarea rezisten ei ec#ivalente pe faz> :
c c s
= ⋅ + ⋅
1
2B
( ) ss
= ⋅ + ⋅
1 02 0 105 1 02
0140, , ,
, → <a(elul 1
%. Determinarea reactan ei ec#ivalente pe faz> :
( ) c c = ⋅ + ⋅σ σ1 2B
( ) = ⋅ + ⋅ =1 02 0 2'1 1 02 0 4' 0 806, , , , , = 0 806, Ω
'. Determinarea impedan ei ec#ivalente pe faz> :
) = +2 2
( ) ( )) s A s= +2 20 806, → <a(elul
2
*. Determinarea componentei active a curentului total :
I I
)U% % f 1 0 2 1= + ⋅
I I P P
U%* m*c
f 0
1 2
1
3
3= ⋅ ⋅ + +
⋅
µ
( ) ( ) ( )I s
P s P s%
* m*c0
23 0 105 14 '68
3 220= ⋅ ⋅ + +
⋅
, , → <a(elul 1!
( ) ( ) ( )( )
I s I s s
) s% %1 0 2
220= + ⋅ → <a(elul 1%
,. Determinarea componentei reactive a curentului :
I I
)Ur f 1 2 1= + ⋅µ
( ) ( )( )
I s s
) sr 1 2
14 '68 220= + ⋅, → <a(elul 1'
. &urentul a(sor(it de ma+in> :
I I I% r 1 12
12= +
( ) ( ) ( )I s I s I s% r 1 12
12= + → <a(elul 1*
1 . Determinarea factorului de putere :
21
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 22/38
cosϕ11
1= I
I%
( )( ) ( )( )cos ϕ1
1
1s
I s
I s%= → <a(elul 1,
11. Determinarea puterii a(sor(ite de la re ea :
P U If 1 1 1 13= ⋅ ⋅ ⋅cosϕ
( ) ( ) ( )P s I s s1 1 13 220= ⋅ ⋅ ⋅cos ϕ → <a(elul 1
12. Determinarea pierderilor @oule în înf>+urarea statoric> :
P I1 1 123= ⋅ ⋅
( ) ( )P s I s1 123 0 105= ⋅ ⋅, → <a(elul 1/
1!. Alegerea pierderilor suplimentare la func ionarea în sarcin> :
P P# = ⋅0 005 1,
( ) ( )P s P s# = ⋅0 005 1, → <a(elul 2
1%. Determinarea puterii electromagnetice ce se transfer> din stator în
rotor prin între6er:
P P P P P*m * #= − − − ⋅1 1 0 5,
( ) ( ) ( ) ( ) ( )P s P s P s P s P s*m * #= − − − ⋅1 1 0 5, → <a(elul 21
1'. Determinarea pierderilor @oule în înf>+urarea rotoric> :
P s P *m2 = ⋅
( ) ( )P s s P s *m2 = ⋅ → <a(elul 22
1*. Determinarea puterii utile la a9 :
( )P s P P P*m # m*c2 1 0 5= − ⋅ − ⋅ −,
( ) ( ) ( ) ( ) ( )P s s P s P s P s*m # m*c2 1 0 5= − ⋅ − ⋅ −, → <a(elul 2!
1,. Determinarea randamentului :
η = PP
2
1
( ) ( )( )η s
P s
P s= 2
1 → <a(elul 2%
1 . Determinarea tura iei la a9ul motorului :
( )n s n2 11= − ⋅
( ) ( )n s s n2 11= − ⋅ → <a(elul 2'
1/. Determinarea cuplului electromagnetic dezvoltat :
M P
n= ⋅0 '75 2
2,
22
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 23/38
( ) ( )( )M s
P s
n s= ⋅0 '75 2
2, → <a(elul 2*
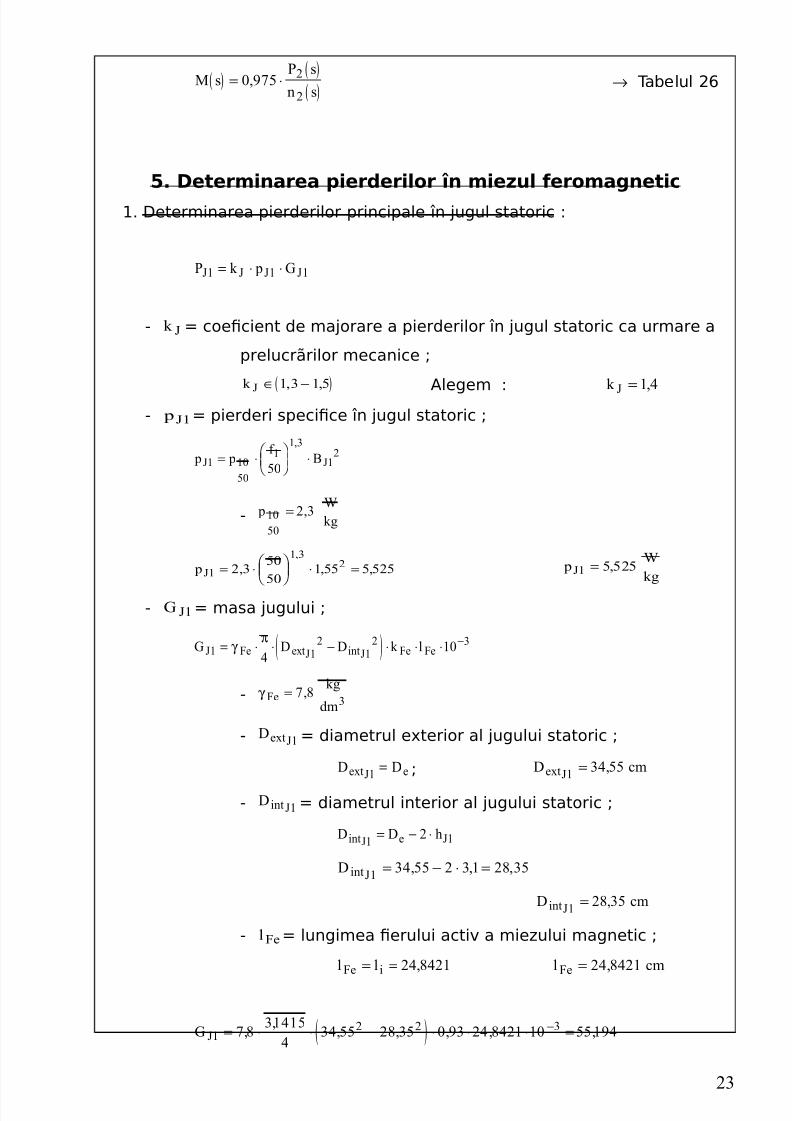
+. Determinarea pierderilor !n mie&ul *eroma netic 1. Determinarea pierderilor principale în ;ugul statoric :
P = ! D 1 1 1= ⋅ ⋅
- = coe6cient de ma;orare a pierderilor în ;ugul statoric ca urmare a
prelucr>rilor mecanice $
( )= ∈ −1 3 1 5, ,Alegem :
= =
1 4,
- ! 1 pierderi speci6ce în ;ugul statoric $
! ! f
1 1050
11
12
50= ⋅
⋅,3
- ! W
=1050
2 3= ,
! 1
122 3
5050
1 55 5 525= ⋅
⋅ =, , ,,3
! W
=1 5 525= ,
- D 1 masa ;ugului $
( )D $ $ = * *?t * *1 12
12 3
410= ⋅ ⋅ − ⋅ ⋅ ⋅ −γ π
int
- γ *=
m= 7 8
3,
- $ *?t 1 diametrul e9terior al ;ugului statoric $
$ $*?t *1 = $ $ cm*?t 1 34 55= ,
- $ int 1 diametrul interior al ;ugului statoric $
$ $ : * int 1 12= − ⋅
$ int , , ,1 34 55 2 3 1 28 35= − ⋅ =
$ cmint ,1 28 35=
- * lungimea 6erului activ a miezului magnetic $
* i= = 24 8421, cm* = 24 8421,
( )D 12 2 37 8
314154
34 55 28 35 0 '3 24 8421 10 55 1'4= ⋅ ⋅ − ⋅ ⋅ ⋅ =−, ,
, , , , ,
23

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 24/38
D =1 551'4= ,
P 1 1 4 5 525 551 '4 426 '25= ⋅ ⋅ =, , , , P W1 426 '25= ,
2. Determinarea pierderilor principale în din ii statorici :
P = ! D) ) ) )1 1 1 1= ⋅ ⋅
- = )1
coe6cient de ma;orare a pierderilor în din ii statorici
= )1 1 8= ,
- ! )1 pierderi speci6ce în din ii statorici $
! ! f
) )1 1050
11 3
12
50= ⋅
⋅"
! )1
122 3
5050
1 6 5 888= ⋅
⋅ =, , ,,3
! W
=)1 5 888= ,
- D )1 masa din ilor $D : & = )) ) ) * * *1 1 1 1
310= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ −γ
D )132 88 0 468 0 '3 24 8421 72 7 8 10 17 48= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ =−, , , , , ,
D =)1 17 48= ,
P)1 18 5 888 17 48 185 26= ⋅ ⋅ =, , , , P W)1 185 26= ,
!. Determinarea pierderilor principale în miezul feromagnetic :
P P P* !r )" = +1 1
P * !r" , , ,= + =426 '25 185 26 612 185 P W* !r" ,= 612 185
%. Determinarea pierderilor suplimentare în 6er la func ionarea în gol :
a Determinarea pierderilor de suprafa > :
- P #1,2 pierderi de suprafa > statorice) respectiv rotorice $
P !t &
t = !# * * #1
1 41
11
42 10= ⋅ ⋅ −
⋅ ⋅ ⋅ ⋅ ⋅ −τ
P !t &
t = !# * * #2
2 42
22
42 10= ⋅ ⋅ −
⋅ ⋅ ⋅ ⋅ ⋅ −τ
- t 1,2 pasul dentar statoric) respectiv rotoric $
- &41,2 desc#iderea c>tre între6er a crest>turii statorice)
respectiv rotorice $
- ! #1,2 pierderi speci6ce de suprafa > statorice) respectiv
rotorice $
24

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 25/38
( ) ! = ) n
t#1 01 2
4
15
0 120 5
1010= ⋅ ⋅
⋅
⋅ ⋅ ⋅,"
( ) ! = ) n
t#2 02 2
4
15
0 220 5
1010= ⋅ ⋅
⋅
⋅ ⋅ ⋅,"
- = 0 coe6cient de corec ie $
( )= 0 1 6 2∈ −, Alegem = 0 1 8= ,
- 0 amplitudinea oscila iei induc iei magnetice la
suprafa a piesei polare $
= 90 0= ⋅ ⋅β δ
- β0 coe6cient ce se alege în func ie de &41,2
δ
( )β0 0 2 0 4∈ −, , Alegem β0 0 3= , - = 9 coe6cientul &arter $
- δ induc ia în între6er $
0 1 3 1 23 0 707 113= ⋅ ⋅ =, , , , 0 1 13= ,
( ) ( ) !n s
#124
1520 5 18
72
1010 113 0 '68= ⋅ ⋅
⋅
⋅ ⋅ ⋅, , , ,"
→ <a(elul !
( ) ( ) !n s
#224
1 520 5 18
54
1010 113 131= ⋅ ⋅
⋅
⋅ ⋅ ⋅, , , ,"
→ <a(elul %
( )P ! s# #1 142 3
' 68 2 41' 68
11 82'6 24 8421 0 '3 10= ⋅ ⋅ −
⋅ ⋅ ⋅ ⋅ ⋅
−, ,,
, , , → <a(elul '
( )P ! s# #2 242 3
13 1 1 713 1
11 82'6 24 8421 0 '3 10= ⋅ ⋅ −
⋅ ⋅ ⋅ ⋅ ⋅
−, ,,
, , , → <a(elul *
( Determinarea pierderilor de pulsa ie :
- P ! 1,2 pierderi de pulsa ie în din ii statorici) respectiv rotorici $
( )P =
) n s D ! ! )1 0
1 24 1
2
11010= ⋅
⋅⋅ ⋅
⋅B
( )P =
) n s D ! ! )2 0
2 24 2
2
21010= ⋅
⋅⋅ ⋅
⋅B
- = 0 0 1B ,=
- ! 1,2 amplitudinea oscila iei induc iei magnetice în din ii
statorici) respectiv rotorici $
25
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
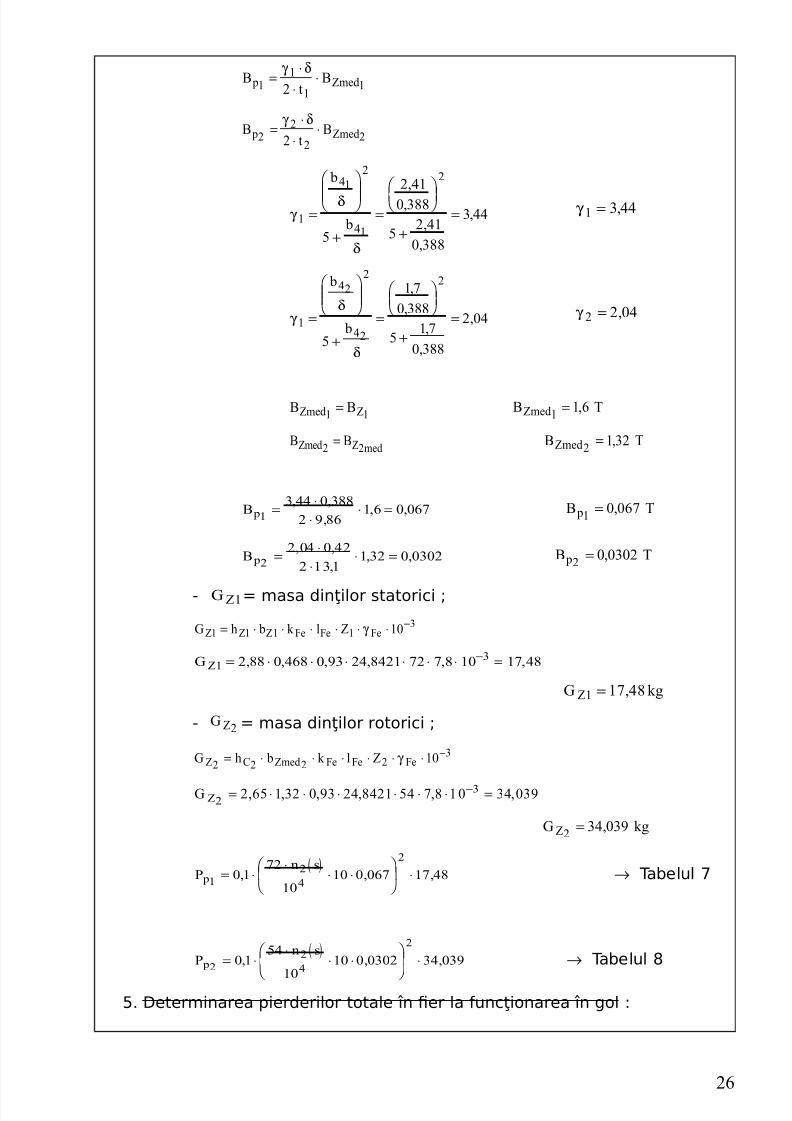
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 26/38
t ! )m*11
1 12
= ⋅⋅
⋅γ δ
t ! )m*22
222
= ⋅⋅
⋅γ δ
γ δ
δ
1
412
41
2
5
2 410 388
5 2 41
0 388
3 44=
+=
+=
&
&
,,
,,
, γ 1 3 44= ,
γ δ
δ
1
422
42
2
5
1 70 388
5 1 70 388
2 04=
+=
+=
&
&
,,
,,
, γ 2 2 04= ,
)m* )1 1= )m* 1 1 6= ,
)m* ) m*2 2= )m* 2 1 32= ,
! 13 44 0 388
2 ' 861 6 0 067= ⋅
⋅ ⋅ =, ,
,, , ! 1 0 067= ,
! 22 04 0 42
2 1 3 11 32 0 0302= ⋅
⋅ ⋅ =, ,,
, , ! 2 0 0302= ,
- D )1 masa din ilor statorici $
D : & = )) ) ) * * *1 1 1 1310= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ −γ
D )132 88 0 468 0 '3 24 8421 72 7 8 10 17 48= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ =−, , , , , ,
D =)1 17 48= ,
- D ) 2 masa din ilor rotorici $
D : & = )) 9 )m* * * *2 2 2 2310= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ −γ
D ) 232 65 1 32 0 '3 24 8421 54 7 8 1 0 34 03'= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ =−, , , , , ,
D =) 2 34 03'= ,
( )P
n s ! 1
24
2
0 172
1010 0 067 17 48= ⋅
⋅⋅ ⋅
⋅, , , → <a(elul ,
( )P
n s ! 2
24
2
0 154
1010 0 0302 34 03'= ⋅
⋅⋅ ⋅
⋅, , , → <a(elul
'. Determinarea pierderilor totale în 6er la func ionarea în gol :
26
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 27/38
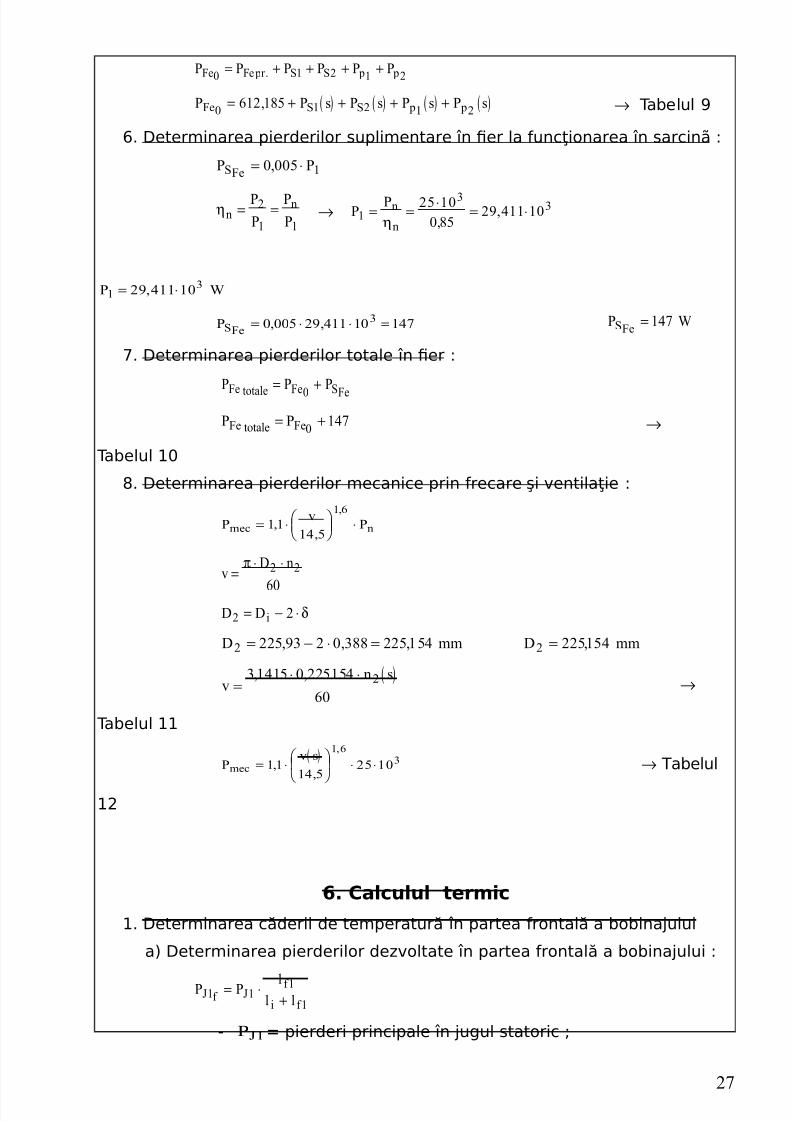
P P P P P P* *!r # # ! !0 1 2 1 2= + + + +"
( ) ( ) ( ) ( )P P s P s P s P s* # # ! !0 1 2 1 2612 185= + + + +, → <a(elul /
*. Determinarea pierderilor suplimentare în 6er la func ionarea în sarcin> :
P P# * = ⋅0 005 1,
ηnnP
PPP
= =2
1 1 → P
Pn
n1
3 325 100 85
2' 411 10= = ⋅ = ⋅η ,
,
P W132' 411 10= ⋅,
P# * = ⋅ ⋅ =0 005 2' 411 10 1473, , P W# * =147
,. Determinarea pierderilor totale în 6er :
P P P
* tot% * * # *= +0
P P* tot% * *= +0 147 →
<a(elul 1
. Determinarea pierderilor mecanice prin frecare +i ventila ie :
P @
Pm*c n= ⋅
⋅1 1
14 5
1 6,
,
,
@ $ n= ⋅ ⋅π 2 2
60 $ $ i2 2= − ⋅δ
$ mm2 225 '3 2 0 388 225154= − ⋅ =, , , $ mm2 225154= ,
( )
@n s
= ⋅ ⋅3 1415 0 225154
602, ,
→
<a(elul 11
( )P
@ sm*c = ⋅
⋅ ⋅1 1
14 525 10
1 63,
,
,
→ <a(elul
12
,. Calculul termic 1. Determinarea căderii de temperatură în partea frontală a (o(ina;ului
a Determinarea pierderilor dezvoltate în partea frontală a (o(ina;ului :
P P f f i f
1 1 11
= ⋅ +
- P 1 pierderi principale în ;ugul statoric $
27
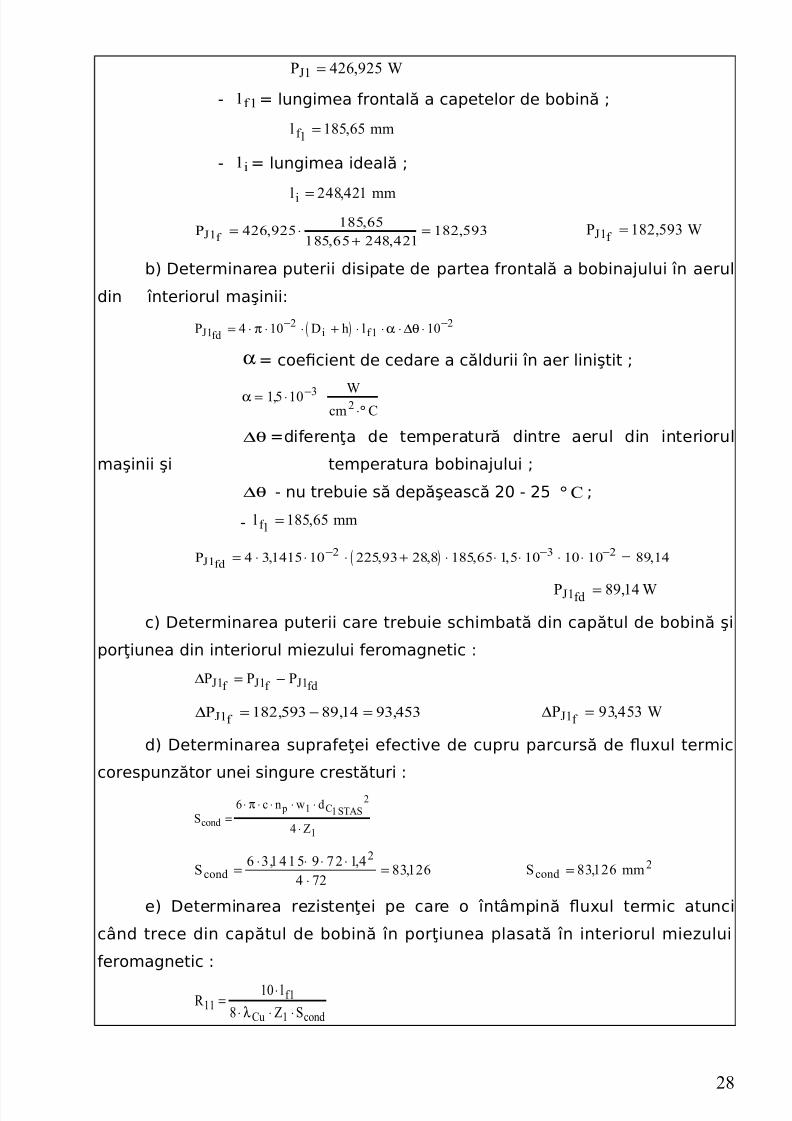
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 28/38
P W1 426 '25= ,
- f1 lungimea frontală a capetelor de (o(ină $
mmf 1 185 65= ,
- i lungimea ideală $
mmi = 248 421,
P f 1 426 '25 185 65
185 65 248 421182 5'3= ⋅ + =,
,, ,
, P Wf 1 182 5'3= ,
( Determinarea puterii disipate de partea frontală a (o(ina;ului în aerul
din înteriorul ma+inii:
( )P $ : f i f 12
124 10 10= ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅− −π α ∆θ
α coe6cient de cedare a căldurii în aer lini+tit $
α = ⋅⋅°
−15 10 32, W
cm 9
∆θ diferen a de temperatură dintre aerul din interiorul
ma+inii +i temperatura (o(ina;ului $
∆θ - nu tre(uie să depă+ească 2 - 2' ° 9 $
- mmf 1 185 65= ,
( )P f12 3 24 3 1415 10 225 '3 28 8 185 65 1 5 10 10 10 8' 14= ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅ ⋅ =− − −, , , , , ,
P Wf1 8' 14= ,
c Determinarea puterii care tre(uie sc#im(ată din capătul de (o(ină +i
por iunea din interiorul miezului feromagnetic :
∆P P Pf f f1 1 1= −
∆P f 1 182 5'3 8' 14 '3 453= − =, , , ∆P Wf 1 '3 453= ,
d Determinarea suprafe ei efective de cupru parcursă de 8u9ul termic
corespunzător unei singure crestături :
#c n
)con ! 9 # A#=
⋅ ⋅ ⋅ ⋅ ⋅⋅
6
4
1 12
1
π
# con = ⋅ ⋅ ⋅ ⋅⋅
=6 3 1 4 1 5 ' 7 2 1 44 72
831262, ,
, # mmcon = 83126 2,
e Determinarea rezisten ei pe care o întâmpină 8u9ul termic atunci
când trece din capătul de (o(ină în por iunea plasată în interiorul miezului
feromagnetic :
) #
f
9 con11
1
1
10
8= ⋅
⋅ ⋅ ⋅λ
28
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 29/38
- λ 9W
cm 9=
⋅°3 8,
11 2310 18 565
8 38 72 83126 100 102 10= ⋅
⋅ ⋅ ⋅ ⋅= ⋅−
−,
, ,, 11 0102= , Ω
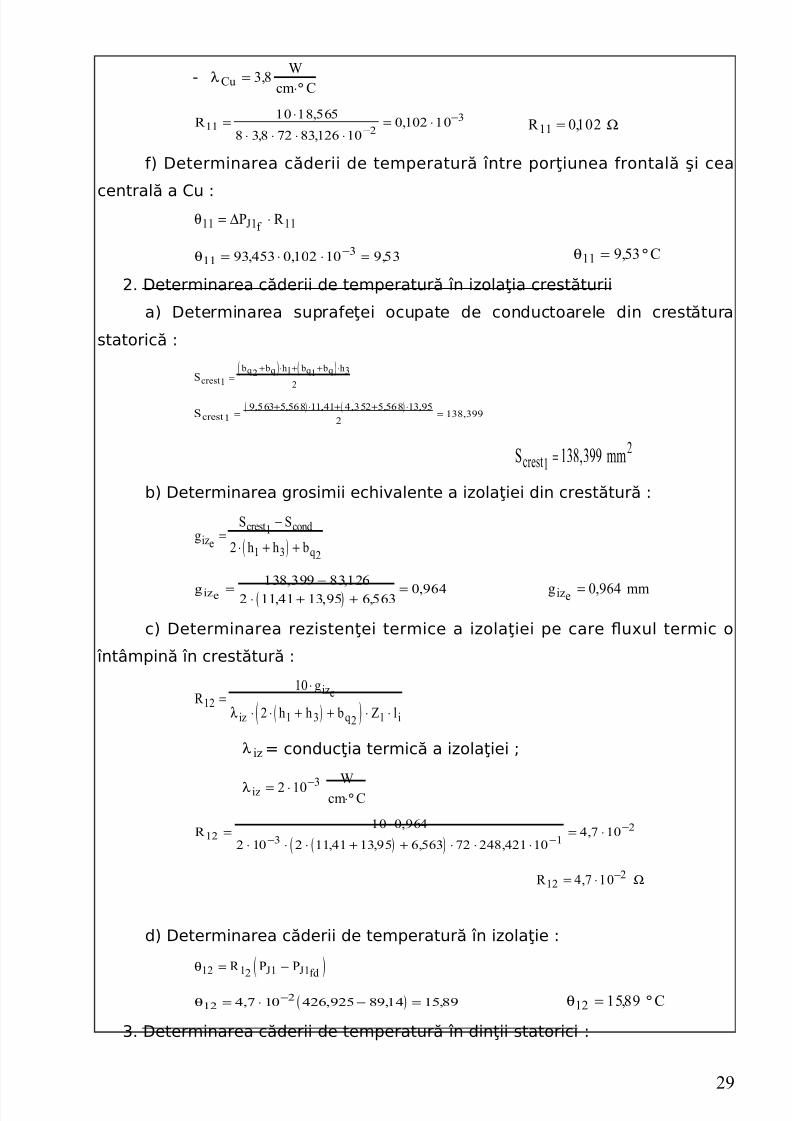
f Determinarea căderii de temperatură între por iunea frontală +i cea
centrală a &u :θ11 1 11= ⋅∆P f
θ113'3 453 0 102 10 ' 53= ⋅ ⋅ =−, , , θ11 ' 53= °, 9
2. Determinarea căderii de temperatură în izola ia crestăturii
a Determinarea suprafe ei ocupate de conductoarele din crestătura
statorică :
( ) ( )# cr*st
&( &( : &( &( :1
2 1 1 3
2=
+ ⋅ + + ⋅
( ) ( )# cr*st 1
' 563 5 568 11 4 352 5 568 13 '52
138,3''= + ⋅ + + ⋅ =, , ,41 , , ,
# mmcr*st12138 3''= ,
( Determinarea grosimii ec#ivalente a izola iei din crestătură :
( )# #
: : &iz*cr*st con
(=
−⋅ + +
1
1 3 22
( )iz * = −
⋅ + + =138 3'' 83126
2 11 41 13 '5 6 563 0 '64, ,
, , , , mmiz* = 0 '64,
c Determinarea rezisten ei termice a izola iei pe care 8u9ul termic o
întâmpină în crestătură :
( )( )
: : & )
iz*
iz ( i12
1 3 2 1
10
2=
⋅
⋅ ⋅ + + ⋅ ⋅λ
λ iz conduc ia termică a izola iei $
λ iz Wcm 9= ⋅ ⋅°−2 10 3
( )( ) 12 3 1210 0 '64
2 10 2 11 41 13 '5 6 563 72 248 421 104 7 10= ⋅
⋅ ⋅ ⋅ + + ⋅ ⋅ ⋅= ⋅− −
−,
, , , ,,
1224 7 10= ⋅
−, Ω
d Determinarea căderii de temperatură în izola ie :
( )θ12 12 1 1= − P P f
( )θ 1224 7 10 426 '25 8' 14 15 8'= ⋅ − =−, , , , θ12 158'= °, 9
!. Determinarea căderii de temperatură în din ii statorici :
2'

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 30/38
a Determinarea rezisten ei termice ce se opune 8u9ului termic la
trecerea prin din ii statorici :
- se consideră că doar ;umătate din dinte este parcurs de 8u9 termic $
:
& = )* ) i *22
1 1
5= ⋅
⋅ ⋅ ⋅ ⋅λ
λ * conduc ia termică a 6erului
λ *W
cm 9=
⋅°0 6,
2235 28 8
0 6 4 68 248 421 0 '3 723 083 10= ⋅
⋅ ⋅ ⋅ ⋅ = ⋅ −,, , , ,
,
2233 083 10= ⋅
−, Ω
( Determinarea căderii de temperatură în din ii statorici :
( )θ22 1 1 1 2 22= − + + + ⋅P P P P P f ) #
( )θ 223426 '25 8' 14 185 126 605 56 301 3 083 10 3 65= − + + + ⋅ ⋅ =−, , , , , ,
θ22 3 65= °, 9
%. Determinarea căderii de temperatură în;ugul statoric
a Determinarea rezisten ei termice a ;ugului statoric :
( )
:
$ : K * * i *33
1
1
10= ⋅
⋅ ⋅ − ⋅ ⋅λ π
( ) 33 1210 31
0 6 31415 345 5 31 248 421 0 '3 103 '7' 10= ⋅
⋅ ⋅ − ⋅ ⋅ ⋅= ⋅−
−, , , , ,
,
3323 '7' 10= ⋅
−, Ω
( Determinarea căderii de temperatură în ;ugul statoric :
( )θ33 1 1 2 33= − + + + ⋅P P P P P f * t #
( )θ 332426 '25 8' 14 70' 5' 605 56 301 3 '7' 10 6 63= − + + + ⋅ ⋅ =−, , , , , ,
θ33 6 63= °, 9 '. Determinarea căderii de temperatură în între6erul parazit dintre
pac#etul de tole +i carcasă
δ !%r%zit mm= 0 001,
a Determinarea rezisten ei termice între suprafa a carcasei +i aerul de
răcire :
$ %*r * i
340 01=⋅ ⋅ ⋅
,
λ π
λ %*r W
cm 9= ⋅
⋅°−2 4 10 4,
30
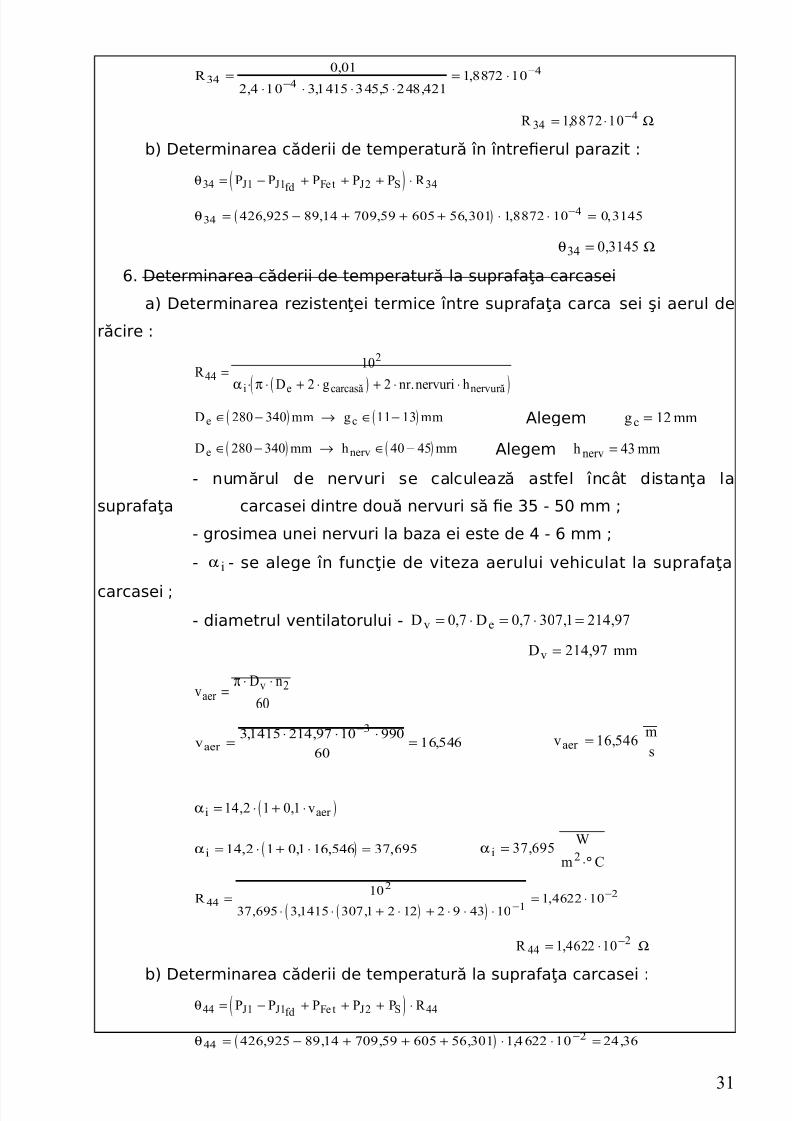
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 31/38
34 440 01
2 4 10 31415 345 5 248 4211 8872 10=
⋅ ⋅ ⋅ ⋅= ⋅−
−,
, , , ,,
34418872 10= ⋅
−, Ω
( Determinarea căderii de temperatură în între6erul parazit :
( )θ34 1 1 2 34= − + + + ⋅P P P P P f * t #
( )θ344426 '25 8' 14 70' 5' 605 56 301 1 8872 10 0 3145= − + + + ⋅ ⋅ =−, , , , , ,
θ34 0 3145= , Ω
*. Determinarea căderii de temperatură la suprafa a carcasei
a Determinarea rezisten ei termice între suprafa a carca sei +i aerul de
răcire :
( )( )
$ nr n*r@ ri :
i * c%rc%s n*r@ r
44
210
2 2=
⋅ ⋅ + ⋅ + ⋅ ⋅α π "
( ) ( )$ mm mm* c∈ − → ∈ −280 340 11 13 Alegem mmc =12
( ) ( )$ mm : mm* n*r@∈ − → ∈ −280 340 40 45 Alegem : mmn*r@ = 43
- numărul de nervuri se calculează astfel încât distan a la
suprafa a carcasei dintre două nervuri să 6e !' - ' mm $
- grosimea unei nervuri la (aza ei este de % - * mm $
- α i - se alege în func ie de viteza aerului ve#iculat la suprafa a
carcasei $- diametrul ventilatorului - $ $@ *= ⋅ = ⋅ =0 7 0 7 307 1 214 '7, , , ,
$ mm@ = 214 '7,
@ $ n
%*r @= ⋅ ⋅π 2
60
@%*r = ⋅ ⋅ ⋅ =
−31415 214 '7 10 ''060
16 5463, ,
, @ m
s%*r =16 546,
( )α i %*r @= ⋅ + ⋅14 2 1 0 1, ,
( )α i = ⋅ + ⋅ =14 2 1 0 1 16 546 37 6'5, , , , α iW
m 9=
⋅°37 6'5
2,
( )( ) 44
2
1210
37 6'5 3 1415 307 1 2 12 2 ' 43 101 4622 10=
⋅ ⋅ + ⋅ + ⋅ ⋅ ⋅= ⋅−
−, , ,
,
4421 4622 10= ⋅
−, Ω
( Determinarea căderii de temperatură la suprafa a carcasei :( )θ44 1 1 2 44= − + + + ⋅P P P P P f * t #
( )θ442426 '25 8' 14 70' 5' 605 56 301 1 4 622 10 24 36= − + + + ⋅ ⋅ =−, , , , , ,
31

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 32/38
θ44 24 36= °, 9
,. Determinarea încălzirii (o(ina;ului statoric
θ θ θ θ θ θ θW1 11 12 22 33 34 44= + + + + +
θW1 ' 53 15 8' 2 521 3 65 0 314 24 36 60 27= + + + + + =, , , , , , ,
θW 91 60 27= °,
-. Calculul mecanicDimensionarea ar orelui
1. Determinarea cuplului nominal
M
P
nnn
n= ⋅'56
M n = ⋅ ='56 251000
23 ', M %N mn = ⋅23 ',
2. Determinarea diametrului de cap al ar(orelui
a Determinarea diametrului minim 5 fără pană :
= Mn
t0
23
10
0 2= ⋅ ⋅
⋅, τ
- = = 2- M n cuplul nominal
- τ t rezisten a admisi(ilă la torsiune :
- pentru B= * τ t%N
cm= 300
2
0
23 2 23 ' 10
0 2 3003 62= ⋅ ⋅
⋅ =,
,, cm0 3 62= ,
- rezisten a la rupere : σ %Ncm= 5000 2
- δ = 20 >
( Se alege din S<AS 2,'' C ,% diametrul capului ar(orelui .
mm# A# = 36
!. Determinarea diametrului ma9im la mi;locul ma+inii
# A#m%? . , , = − ⋅1 2 1 3
m%? . , , = − ⋅1 2 1 3 36
→ ( )
m%? , ,∈ −43 2 46 8
. Alegem mmm%?
= 45
B(s : - dacă rămâne un spa iu de % - ' mm între a9 +i ;ugul rotoric se
prevăd nervuri +i găuri pentru ventila ie $
32

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 33/38
Calculul s/ e'ii (i 0ite&ei criticeI I - moment de iner ie al por iunii " i " a ar(orelui dat de formula :
I
ii= ⋅π 4
64
- pentru partea stângă :
I #1
431415 3 764
' 2= ⋅ =, ,, I cm#1
4' 2= ,
I 2#
431415 3 864
10 23= ⋅ =, ,, I cm2#
410 23= ,
I #3
431415 3 '64
11 35= ⋅ =, ,, I cm#3
41135= ,
I #4
431415 4 0
6412 56= ⋅ =, , , I cm#4 412 56= ,
- pentru partea dreaptă :
I 1
431415 3 864
10 23= ⋅ =, ,, I cm1
410 23= ,
I 2
431415 3 '64
11 35= ⋅ =, ,, I cm2
411 35= ,
I 3
431415 4 0
64
12 56= ⋅ =, ,, I cm3
412 56= ,
# ? ?
Ii i
ii1
31
3
1
4= −∑ −
=
- pentru ? cm1 4= → # cm#136 '5= ,
- pentru ? cm2 6= → # cm2#314 85= ,
- pentru ? cm3 8= → # cm#3326=
- pentru ? cm4 10= → # cm#4338=
# ? ?
Ii i
ii2
31
3
1
3= −∑ −
=
- pentru ? cm1 6= → # cm1314 85= ,
- pentru ? cm2 8= → # cm2326=
- pentru ? cm3 10= → # cm3338=
- D - greutatea rotorului) inclusiv a păr ii corespunzătoare a
ar(orelui $
- i - diametrul por iunii i a ar(orelui $
33

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 34/38
- Determinarea săge ii ar(orelui la mi;locul 6erului rotoric datorată
greută ii proprii $
( )f D
< & # & #D =
⋅ ⋅⋅ ⋅ + ⋅
3 2 22
1 12
2
- < - modulul de elasticitate longitudinală a ar(orelui $
- < %Ncm
= ⋅2 1 10 62
,
D D D %= +
( ) ( )
( ) ( ) ( )
m A ? A ? ? A ? ?
A A ? A ? ?
% 7* 7* 7*
7* i 7*6 6
7*6 6 6
= ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ − + ⋅ ⋅ ⋅ +
+ ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ −
−γ π γ π γ π
γ π γ π γ π
12
1 22
2 1 32
3 2
42
1
2
1 2
2
2 1
m m m ) ;= +2 2
( )m =
$ : ; * * i
i 9 %?2
22
22 2
4 4= ⋅ ⋅ ⋅
⋅ − ⋅ − ⋅− ⋅γ
π δ π
m m m ) ;= +2 2
( )D D D m m % %= + = ⋅ +' 81,
( )D D D m m % %= + = ⋅ +' 81,
f cmD = ⋅ −0 3 10 6,
Alegerea e9centricită ii ini iale a ar(orelui
- pentru ( ) mm# A# ∈ −31 50 e9centricitatea ε = 0 015,
Determinarea for ei de atrac ie unilaterală datorată e9centricită ii ini iale
totale :
( )P $
= *i
i i
c0
200 '81 2= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅
⋅ ⋅, δ π α
δ
- * f D0 = +ε
* 060 015 0 3 10= + ⋅
−, ,
( )P %N020 '81 2 0 738 3 1415 188
228 85 0 680 42 116
0 015 61531= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅
⋅ ⋅ =, , ,
, ,, ,
,
P %N0 61531=Determinarea săge ii ini iale a a9ului datorată atrac iei magnetice
unilaterale :
34
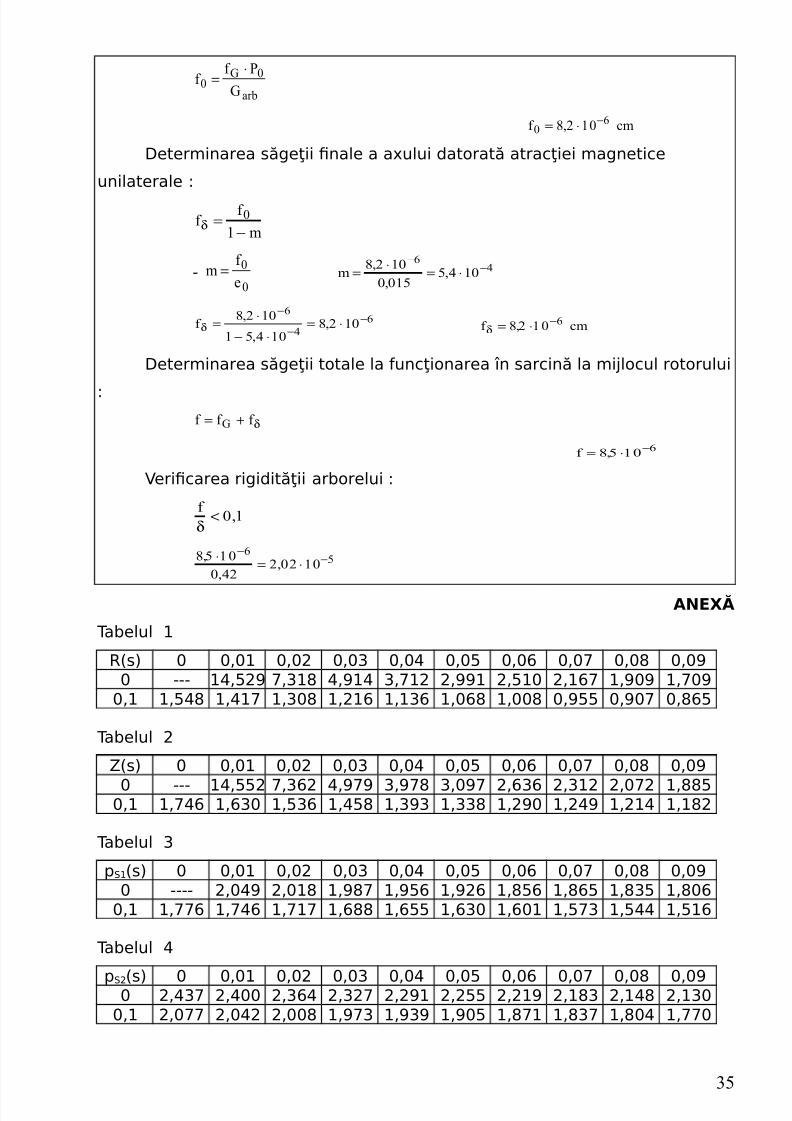
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 35/38
f f P
DD
%r&0
0= ⋅
f cm068 2 10= ⋅
−,
Determinarea săge ii 6nale a a9ului datorată atrac iei magnetice
unilaterale :
f f
mδ =−
01
- m f
*= 0
0m = ⋅ = ⋅
− −8 2 100 015
5 4 106
4,,
,
f δ = ⋅
− ⋅= ⋅
−−
−8 2 10
1 5 4 108 2 10
6
46,
,, f cmδ = ⋅
−8 2 1 0 6,
Determinarea săge ii totale la func ionarea în sarcină la mi;locul rotorului
:f f f D= + δ
f = ⋅ −8 5 1 0 6,
eri6carea rigidită ii ar(orelui :
f δ < 0 1,
8 5 1 00 42
2 02 106
5,,
,⋅ = ⋅− −
ANE Ă <a(elul 1
5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /--- 1%)'2/ ,)!1 %)/1% !),12 2)//1 2)'1 2)1*, 1)/ / 1), /
)1 1)'% 1)%1, 1)! 1)21* 1)1!* 1) * 1) )/'' )/ , ) *'
<a(elul 2
05s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /
--- 1%)''2 ,)!*2 %)/,/ !)/, !) /, 2)*!* 2)!12 2) ,2 1) ')1 1),%* 1)*! 1)'!* 1)%' 1)!/! 1)!! 1)2/ 1)2%/ 1)21% 1)1 2
<a(elul !
p S15s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- 2) %/ 2) 1 1)/ , 1)/'* 1)/2* 1) '* 1) *' 1) !' 1) *
)1 1),,* 1),%* 1),1, 1)* 1)*'' 1)*! 1)* 1 1)',! 1)'%% 1)'1*
<a(elul %
p S25s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /2)%!, 2)% 2)!*% 2)!2, 2)2/1 2)2'' 2)21/ 2)1 ! 2)1% 2)1!)1 2) ,, 2) %2 2) 1)/,! 1)/!/ 1)/ ' 1) ,1 1) !, 1) % 1),,
35
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 36/38
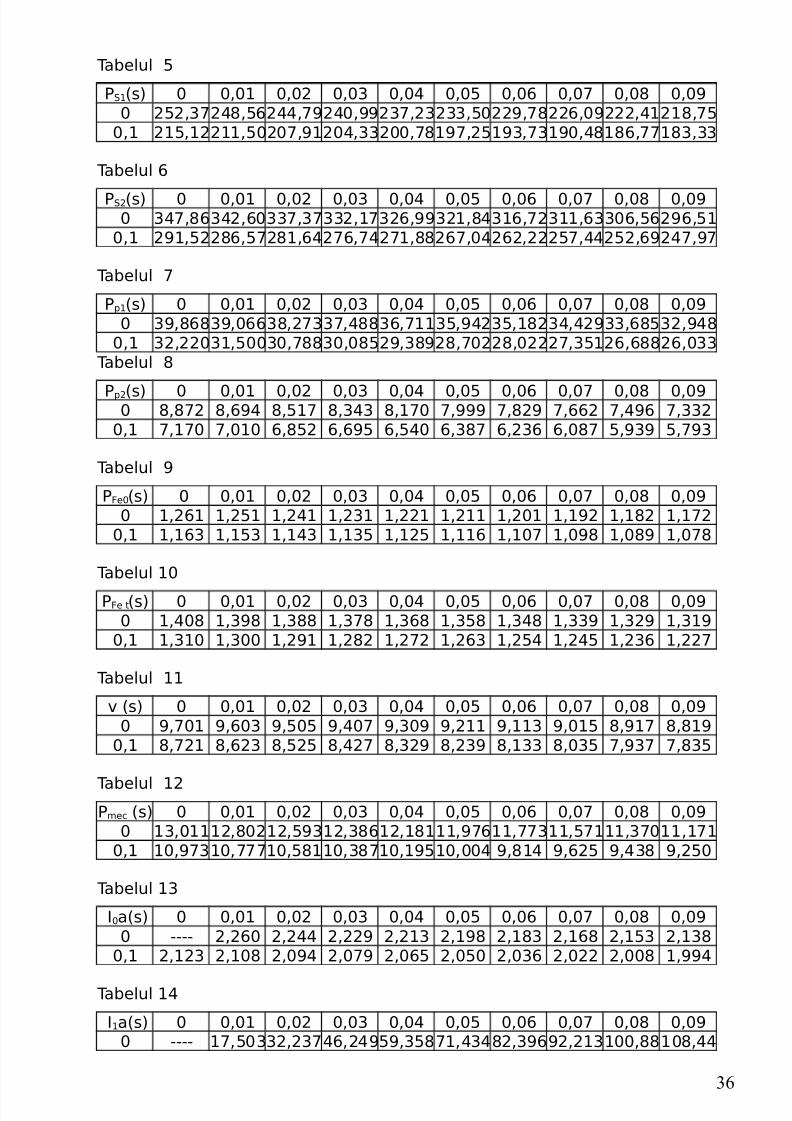
<a(elul '
ES15s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /2'2)!,2% )'*2%%),/2% )//2!,)2!2!!)' 22/), 22*) /222)%121 ),'
)1 21')12211)' 2 ,)/12 %)!!2 ), 1/,)2'1/!),!1/ )% 1 *),,1 !)!!
<a(elul *
ES25s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /!%,) *!%2)* !!,)!,!!2)1,!2*)//!21) %!1*),2!11)*!! *)'*2/*)'1
)1 2/1)'22 *)',2 1)*%2,*),%2,1) 2*,) %2*2)222',)%%2'2)*/2%,)/,
<a(elul ,
Ep1 5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /!/) * !/) **! )2,!!,)% !*),11!')/%2!')1 2!%)%2/!!)* '!2)/%
)1 !2)22 !1)' ! ), ! ) '2/)! /2 ), 22 ) 222,)!'12*)* 2*) !! <a(elul
Ep2 5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /) ,2 )*/% )'1, )!%! )1, ,)/// ,) 2/ ,)**2 ,)%/* ,)!!2)1 ,)1, ,) 1 *) '2 *)*/' *)'% *)! , *)2!* *) , ')/!/ '),/!
<a(elul /
EFe 5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /1)2*1 1)2'1 1)2%1 1)2!1 1)221 1)211 1)2 1 1)1/2 1)1 2 1)1,2
)1 1)1*! 1)1'! 1)1%! 1)1!' 1)12' 1)11* 1)1 , 1) / 1) / 1) ,
<a(elul 1
EFe t 5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /1)% 1)!/ 1)! 1)!, 1)!* 1)!' 1)!% 1)!!/ 1)!2/ 1)!1/
)1 1)!1 1)! 1)2/1 1)2 2 1)2,2 1)2*! 1)2'% 1)2%' 1)2!* 1)22,
<a(elul 11
v 5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) //), 1 /)* ! /)' ' /)% , /)! / /)211 /)11! /) 1' )/1, ) 1/
)1 ),21 )*2! )'2' )%2, )!2/ )2!/ )1!! ) !' ,)/!, ,) !'
<a(elul 12Emec 5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /
1!) 1112) 212)'/!12)! *12)1 111)/,*11),,!11)',111)!, 11)1,1)1 1 )/,!1 ),,,1 )' 11 )! ,1 )1/'1 ) % /) 1% /)*2' /)%! /)2'
<a(elul 1!
Ga5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- 2)2* 2)2%% 2)22/ 2)21! 2)1/ 2)1 ! 2)1* 2)1'! 2)1!
)1 2)12! 2)1 2) /% 2) ,/ 2) *' 2) ' 2) !* 2) 22 2) 1)//%
<a(elul 1%
G1a5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- 1,)' !!2)2!,%*)2%/'/)!' ,1)%!% 2)!/*/2)21!1 ) 1 )%%
36

8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 37/38
)1 11%)/*12 )%/12')1!12 )/*1!2) *1!%)'21!*)%11!,) 11! ), 1!/)!
<a(elul 1'
G1r5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- 1'), /1 )1,*21)/ !2,) 2/!!)11%% ) !!%,)' %'')' 1*!) ',
)1 ,2)2*' *)* /) 2!/,)1/'1 ')1%112) 212 )2112,)2 1!%) !1% )%'
<a(elul 1*
G1 5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- 2!)',2!,) /'1)2 *')22!, ),!*/1)* ,1 !),*11')1 12') '
)1 1!'), 1%') 11'!)',1*1)% 1* ) 1,')',1 1) 21 ,)* 1/2)/%1/,)
<a(elul 1,
cos5f1 ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- ),%2 ) ,1 )/ ! )/1 )/ , ) // ) ) ,* ) *2
)1 ) %* ) !1 ) 1' ),/ ), 2 ),** ),' ),!% ),1/ ), %
<a(elul 1
E1 5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- 1)1'' 2)12, !) '2 !)/1, %),1% ')%! *) * *)*' ,)1',
)1 ,)' , ,)/'2 )2' )'11 ),1* ) , /) ! /) /' /)1'/ /)1//
<a(elul 1/
E @15s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /
---- ) 1, ) %! ) 2 )1!% )1/' )2*% )!!/ )%1 )%//)1 )' )**2 ),%! ) 21 ) /, )/,1 1) %1 )1)1 1)1,2 1)2!!
<a(elul 2
ES5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- ',),*21 *)! 1'2)*21/') 2!'),!2,1)/1! %)2/!!2)/1!',) ,
)1 !,/)!,!/,)*!%12)/%%2')',%!') 1%%!)/2%' )1*%'%), %',)/ %'/)/*
<a(elul 21
Eem 5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- )//% 1)/!/ 2) 2! !)*!* %)!!, ')*2% ')'/* *) / *)' ,
)1 *) '' ,)1!/ ,)!*' ,)'!/ ,)** ,),' ,) 1! ,) ! ,) !/ ,) 1/
<a(elul 22
E @25s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- ) 1 ) ! ) % )1%' )21 )! 1 )!/1 )% , )' '
)1 )* ' ), ' ) ! )/ 1) ,! 1)1*! 1)2' 1)!!2 1)%11 1)% '
<a(elul 2!
E25s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- )/,/ 1) /% 2),2/ !)%,/ %)1!/ %), ')1 ')' ' ')/ !
)1 *)1' *)!!! *)%'/ *)'!, *)',2 *)',1 *)'% *)% 2 *)% % *)! /
37
8/18/2019 Proiect_la_disciplina_Proiectarea_sistemelor_electromecanice.DOC
http://slidepdf.com/reader/full/proiectladisciplinaproiectareasistemelorelectromecanicedoc 38/38
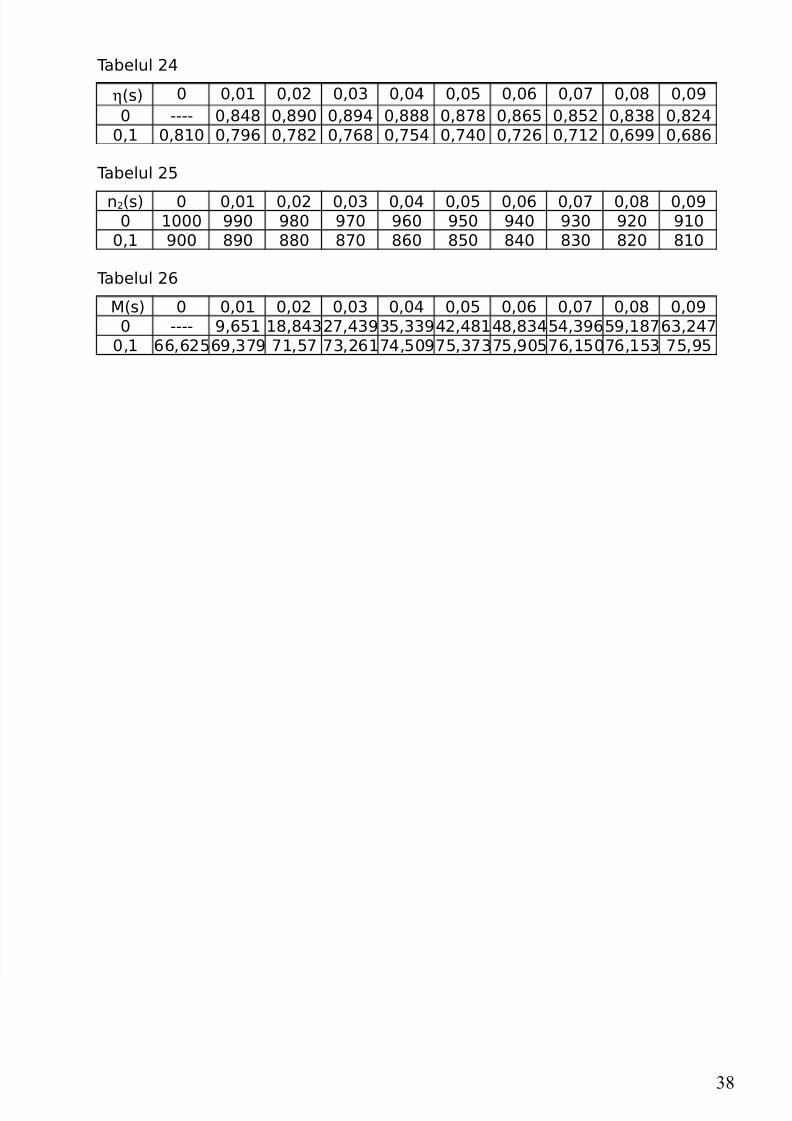
<a(elul 2%
η5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- ) % ) / ) /% ) ) , ) *' ) '2 ) ! ) 2%
)1 ) 1 ),/* ), 2 ),* ),'% ),% ),2* ),12 )*// )* *
<a(elul 2'
n 25s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /1 // / /, /* /' /% /! /2 /1
)1 / / , * ' % ! 2 1
<a(elul 2*
H5s ) 1 ) 2 ) ! ) % ) ' ) * ) , ) ) /---- /)*'1 1 ) %!2,)%!/!')!!/%2)% 1% ) !%'%)!/*'/)1 ,*!)2%,
)1 **)*2'*/)!,/ ,1)', ,!)2*1,%)' /,')!,!,')/ ',*)1' ,*)1'! ,')/'