note de curs pentru analiz…a matematic …a october 11,...
TRANSCRIPT

Note de curs pentru Analiza Matematica
October 11, 2013
Cristian Neculaescu
Ovidiu Veghes
Calea DorobanTi, 11—13 (clAdirea Ciberneticii), et. 6, cam 2625, sector 1, BucureSti
E-mail address: [email protected]
Calea DorobanTi, 11—13 (clAdirea Ciberneticii), et. 6, cam 2625, sector 1, BucureSti
URL: http://roedu4you.ro/?page_id=149
Dedicatiile vor fi mentionate atunci când materialul va fi într—o forma mai apropiata de final.

1991 Mathematics Subject Classification. MSC [2010] Primary 26—01, 33-01, 40—01; Secondary 26A03,
26A06, 26A09, 26A15, 26A24, 26A27, 26A36, 26A42, 26B05, 26B10, 26B12, JEL Classification: C60,
C61, Y80
Multimirile vor apare atunci când materialul va fimai aproape de finalizare.
Rezumat. Aceste note de curs sunt în forma foarte preliminara si vor fi modificate în continuare. Am
ales, totusi, sa pun pe site tot materialul [si nu portiuni], în primul rând pentru ca procesul didactic nu ma
asteapta pe mine ca sa termin tot ce cred ca ar trebui scris, si deoarece informatia necesara nu este numai
la începutul materialului.
Sunt recunoscator oricui are bunavointa de a—mi semnala diverse greseli/inadvertente si voi face tot
posibilul sa tin seama de ele.
Materialul este tehnoredactat de autor în LATEX, cu ajutorul produsului software "Scientific WorkPlace",
produs de Mackichan Inc. În plus, s—au folosit (sau se planuieste utilizarea viitoare a altor) produse, care
vor fi prezentate ulterior.

Cuprins
Prefata ix
Partea 1. Teme pentru examen 1
Capitolul 1. Siruri si serii numerice si de functii 3
1.1. Serii numerice 3
1.1.1. Introducere 3
1.1.2. Cazuri speciale 7
1.1.2.1. Serii aritmetice 7
1.1.2.2. Serii geometrice 8
1.1.2.3. Serii armonice 8
1.1.2.4. Numarul lui Euler e 8
1.1.2.5. Sume telescopice 10
1.1.2.6. Clasificari ale seriilor 12
1.1.3. Operatii cu serii convergente 13
1.1.4. Teste de convergenta pentru serii cu termeni pozitivi 13
1.1.5. Teste de convergenta pentru serii oarecare 19
1.1.6. Teste de convergenta pentru serii alternante 20
1.2. Siruri de functii [facultativ CIGID] 21
1.3. Serii de functii [facultativ CIGID] 30
1.4. Serii de puteri 31
1.5. Dezvoltari în serie Taylor 32
1.5.1. Câteva dezvoltari Taylor uzuale 34
iii
iv C. Neculaescu, O. Veghes
Capitolul 2. Spatii metrice si notiuni de Topologie [facultativ CIGID] 37
2.1. Spatii metrice 37
2.2. Elemente de Topologie 43
2.2.1. Multimi compacte 59
2.2.2. Multimi conexe 60
2.2.3. Topologii liniare 61
Capitolul 3. Functii reale de mai multe variabile 63
3.1. Introducere 63
3.2. Limita unei functii într—un punct [facultativ CIGID] 68
3.3. Continuitate [facultativ CIGID] 70
3.4. Derivate partiale 73
3.5. Derivate partiale de ordin superior 78
3.6. Proprietati ale functiilor diferentiabile 80
3.7. Principiul contractiei [facultativ CIGID] 89
3.8. Functii definite implicit [facultativ CIGID] 89
3.9. Polinoame Taylor de mai multe variabile [facultativ CIGID] 91
3.10. Valori extreme ale functiilor reale de mai multe variabile 93
3.11. Optimizare locala neconditionata 98
3.12. Optimizare locala conditionata 102
3.12.1. Procedura pentru functii de doua variabile: 103
3.13. Metoda celor mai mici patrate 108
Capitolul 4. Calcul integral 115
4.1. Integrale pe domeniu necompact 115
4.1.1. Integrale pe un domeniu nemarginit 116
4.2. Integrale dependente de un parametru [facultativ CIGID] 120
4.3. Functiile lui Euler 125

Analiza v
Partea 2. Recapitulari si completari [facultativ CIGID] 127
Capitolul 5. Litere grecesti 129
Capitolul 6. Multimi si notiuni adiacente 131
6.1. Multimi 131
6.1.1. Apartenenta: 131
6.1.2. Incluziune: 132
6.1.3. Egalitatea a doua multimi: 132
6.1.4. Incluziune stricta: 132
6.1.5. Familia submultimilor: 133
6.1.6. Operatii cu multimi: 133
6.2. Relatii binare 134
Capitolul 7. Elemente de Logica 137
7.1. Logica binara 137
7.2. Predicate logice 143
Capitolul 8. Multimi numerice uzuale 145
8.1. O scurta prezentare 145
8.1.1. Structura zecimala a numerelor: 145
8.2. Multimea numerelor naturale 147
8.3. Multimea numerelor rationale 147
8.4. Multimea numerelor reale 151
8.5. Multimea Rn 158
8.6. Cardinalitatea multimilor uzuale de numere 158
8.7. Ordinalitatea multimilor 162
8.7.1. Minoranti, majoranti 162
8.8. Functii 162
8.9. Functii uzuale 167

vi C. Neculaescu, O. Veghes
8.9.1. Functii elementare 167
8.9.1.1. Functia polinomiala de grad n 168
8.9.1.2. Functii rationale 168
8.9.1.3. Functii exponentiale 168
Capitolul 9. Sume finite si elemente de combinatorica 173
Capitolul 10. Siruri 175
10.1. Proprietati ale sirurilor convergente 176
10.2. Puncte—limita ale unui sir 183
10.3. Câteva limite standard 186
10.4. Siruri definite prin recurenta 187
Capitolul 11. Functii de o singura variabila reala 193
11.1. Limite 193
11.2. Continuitate 194
11.3. Derivata 207
11.3.1. Rezumat de formule de derivare 217
11.3.1.1. Reguli de derivare: 217
11.3.1.2. Tabel de derivate: 217
11.3.2. Teoreme 218
11.3.3. Diferentiala 223
11.3.4. Derivate de ordin superior 226
11.4. Extreme 226
11.5. Metode elementare de integrare 226
11.5.1. Formule de integrare directa 226
11.5.2. Integrarea prin parti 227
11.5.3. Schimbarea variabilei de integrare in integrala definita 228
Capitolul 12. Clase speciale de functii de o singura variabila 231
Analiza vii
12.1. Functii semicontinue 231
12.2. Functii monotone 231
12.3. Functii absolut continue 233
12.4. Functii convexe 233
Capitolul 13. Câteva inegalitati importante 237
Anexa A. Aplicatii în Economie 241
A.1. O problema de încalzire 241
A.2. O lista scurta de trucuri si erori retorice 241
A.3. Exemplu în Microeconomie 244
A.4. Exemplu de utilizare a seriilor în Macroeconomie 248
A.5. Paradoxul lui Zenon: Achile si Broasca Testoasa 250
A.6. Realitatea si conditiile de separabilitate 251
A.7. Functii de productie 251
A.7.1. Examples of usual production functions (from Economics): 252
A.8. Elasticitati 254
A.8.1. Elasticity for single—variable functions 254
A.8.2. Elasticity for many—variables functions 255
A.9. Functii liniare în Economics 256
A.9.1. Linear functions 256
A.9.1.1. Linear production function 256
A.9.1.2. Linear demand function 257
A.9.1.3. Linear cost of purchasing of a commodity 258
A.9.1.4. Linear amount of commodity consumed at fixed price 258
A.9.1.5. Linear total national consumption at fixed national income 258
A.9.1.6. Linear total national savings at fixed national income 258
A.10. Applications for Series (and finite difference equations) 259
A.11. Applications for functions of several variables 259

viii C. Neculaescu, O. Veghes
A.12. Applications for EODE 259
A.13. Applications for integrals 259
A.14. A note about economic terminology [Some stupid questions for Economics :)] 259
A.14.1. Quantity 259
A.14.2. Output 260
A.14.3. Producer 260
A.14.4. Cost 260
A.14.5. Value 260
A.14.6. Worth 261
A.14.7. Total Costs 261
A.14.8. Long Run 261
A.14.9. Short Run 262
A.14.10. Alternatives 262
Anexa B. Aplicatii în Computer Science 263
B.1. Database applications for Logic, Sets, Relations and functions 263
Anexa C. Informatii educationale 265
C.1. Materiale si locatii disponibile legal 265
Anexa D. Simboluri 267
Anexa E. Note despre Teoria Economica 269
E.1. Quantity 269
E.2. Worth 271
Anexa. Bibliografie 273

Prefata
Punctul de plecare al acestor note de curs este nivelul de cunostinte al unui bacalaureat cu Matematica
M2. Acest nivel include:
• Logica binara [clasa IX]
• Multimi si multimi uzuale [clasa IX]
• Algebra elementara —Precalculus [clasele V, VI, VII, VIII, IX, X]
• Geometria si Trigonometria [clasele VI, VII, VIII, IX, X]
• Geometria Analitica [clasele X, XI]
• Algebra Liniara de liceu [clasa XI]
• Algebra Abstracta —structurile algebrice de baza —monoizi, grupuri, inele, corpuri [clasa XII]
• Analiza —limite, continuitate, derivabilitate, grafice de functii, etc [clasa XI]
• Analiza —metode elementare de integrare [clasa XII].
Manualele de liceu sunt printre primele materiale care ar trebui sa fie folosite. Printre anexele de la
sfârsit pot figasite rezumate si completari ale unora dintre aceste topici. Pe parcursul întâlnirilor (cursuri,
seminarii, consultatii) sunt binevenite întrebarile si/sau comentariile.
ix

Partea 1
Teme pentru examen


CAPITOLUL 1
Siruri si serii numerice si de functii
Nota: pentru studentii CIG, din acest capitol sunt necesare urmatoarele:
• convergenta seriilor, definitii, exemple, inclusiv seria geometrica
• Criterii de convergenta pentru serii pozitive, alternate, generale, enunturi.
• serii de puteri, raza de convergenta, Teoremele Abel, Cauchy.
• exemple la punctele de mai sus
• pentru orice clarificari, discutii la curs/seminar sau pe email.
• Capitolele/sectiunile care nu sunt obligatorii pentru CIGID contin în titlu mentiunea [facultativ
CIGID]
1.1. Serii numerice
1.1.1. Introducere. Pentru o prezentare a sirurilor de numere reale se poate consulta Capitolul Siruri,
10,pagina 175.
Se considera un sir de numere reale notat (an)n∈N∗.
1.1.1. Definitie (Formal). Simbolul
∞∑n=1
anDef= a1 + a2 + · · ·+ an + · · ·
se numeste "serie" sau "serie reala" sau "serie reala infinita" [semnul "∑" vine de la litera mare greceasca
"sigma"] [notatia include indicele primului termen —jos:∞∑
n= !!!primul term en
an];
numarul an este numit "termenul [general] al seriei";
numarul Sn definit prin
Sn = a1 + a2 + a3 + · · ·+ an =n∑k=1
ak
se numeste "suma partiala de ordin n a seriei";
3

4
sirul (Sn)n∈N∗ se numeste "sirul sumelor partiale ale seriei".
1.1.2. Definitie (Informal). O serie este o "adunare discreta infinita". Un exemplu de utilizare a seriilor
în Macroeconomie, poate fi citit în sectiunea A.4, pagina 248.
1.1.3. Exemplu. Seria:∞∑n=0
(3 · 2n
5n
);
Termenul general: an = 3 · 2n
5n.
Sumele partiale: Sn =n∑k=0
ak =n∑k=0
3 · 2k
5k; în acest caz particular se poate obtine o forma explicita
pentru Sn:
Sn =n∑k=0
3 · 2k
5k= 3 ·
n∑k=0
(2
5
)k= 3 ·
1−(
2
5
)n+1
1− 2
5
= 5
[1−
(2
5
)n+1].
Se observa ca exista limita sirului Sn si este egala cu 5 [∃ limn→∞
Sn = 5].
Deoarece suma partiala a acestei serii este suma unei progresii geometrice, acest tip de serie este numit
"serie geometrica". Un exemplu de aplicatie al acestei serii la o întrebare aparuta în Filozofia Greciei
Antice poate fi citit în sectiunea A.5, pagina 250.
1.1.4. Observatie. Între sirurile (an)n∈N si (Sn)n∈N∗ exista relatia de recurenta:
Sn+1 = Sn + an+1 (sau an+1 = Sn+1 − Sn), ∀n ∈ N∗.
1.1.5. Definitie (convergenta/divergenta). Seria∞∑n=1
an este numita "convergenta" [se mai spune ca "seria
converge"] daca sirul (Sn)n∈N∗ este convergent la o valoare finita; doar în acest caz valoarea limitei lui,
limn→∞
Sn = S este numita "suma seriei"; sirul (Sn − S)n∈N∗ (diferenta dintre sirul sumelor partiale si limita
lui) sirul rest, care tinde la 0;
Seria∞∑n=1
an se numeste "divergenta" [se spune ca "seria diverge"] daca sirul (Sn)n∈N este divergent.
1.1.6. Exemplu. Pentru exemplul anterior, deoarece limn→∞
Sn = 5, seria∞∑n=0
(3 · 2n
5n
)este convergenta iar
suma seriei este 5 (valoarea limitei sirului de sume partiale). Se scrie∞∑n=0
(3 · 2n
5n
)= 5.
1.1.7. Teorema. [Testul de divergenta] limn→∞
an 6= 0⇒∑n∈N
an diverge.

5
DACA: termenul general nu tinde la zero,
ATUNCI seria este divergenta.
Demonstratie. Se foloseste echivalenta logica: (p→ q) ≡eq →ep [vezi Anexa de Logica Binara,
pagina 137] pentru a constata ca enuntul logic (an 6→ 0⇒∑n∈N
an diverge) este logic echivalent cu enuntul
logic (∑n∈N
an converge ⇒ an → 0).∑n∈N
an converge ⇒ ∃S = limn→∞
Sn ⇒ an = Sn − Sn−1 ⇒ ∃ limn→∞
an = limn→∞
(Sn − Sn−1) = S − S = 0.
1.1.8. Observatie. Testul de divergenta este un test intrinsec, în sensul ca obtine o concluzie bazându—se
numai pe informatii referitoare la seria studiata.
Natura unei serii (convergenta sau divergenta) este o informatie calitativa. În cazul în care seria este
convergenta, se poate discuta si despre suma seriei, care este o informatie cantitativa [conditionata de
informatia calitativa]. Este recomandabil sa se separe cele doua studii (calitativ si cantitativ), mai ales ca
cel cantitativ depinde de rezultatul celui calitativ.
1.1.9. Observatie. O serie poate fi privita ca o "adunare infinita" si exista diferente (care pot fi consid-
erate semnificative) între o adunare finita si o adunare infinita, ca si între proprietatile lor considerate "de
la sine întelese". Câteva dintre ele:
(1) Adunarea finita exista totdeauna; adunarea infinita exista numai în anumite cazuri.
Exemplu: seria∞∑n=0
(−1)n este divergenta [Testul de divergenta 1.1.7], asa ca se poate spune
ca∞∑n=0
(−1)n este o "adunare care nu exista/nu are sens".
Mai mult, daca se aplica proceduri de aflare a sumei seriei în situatii în care aceasta de fapt
nu exista [de exemplu daca se foloseste pentru o serie divergenta un produs software care aplica
proceduri în ipoteza ca seria este convergenta], rezultatele pot fi neasteptate.

6
Exemplu: Pentru aceeasi serie de mai sus∞∑n=0
(−1)n, urmatorul "rationament" "gaseste suma
seriei":
S = 1− 1 + 1− 1 + 1− 1 + 1 + · · · ⇒
S − 1 = −1 + 1− 1 + 1 + · · · ⇒
S − 1 = − (1− 1 + 1− 1 + 1 + · · · ) = −S ⇒
⇒ 2S = 1⇒ S =1
2.
Rezultatul este fals iar unica greseala este "notatia" S =∞∑n=0
(−1)n care ignora informatia calita-
tiva despre serie [desi suma infinita nu poate fi înlocuita cu o valoare numerica, totusi este facuta
aceasta înlocuire].
Acelasi tip de rationament este valabil în alte situatii: Sa se calculeze suma 12
+ 14
+ 18
+ 116
+
132
+ 164
+ · · · .
S = 12
+ 14
+ 18
+ 116
+ 132
+ 164
+ · · · ⇒
2S = 1 + 12
+ 14
+ 18
+ 116
+ 132
+ 164
+ · · · ⇒
2S = 1 + S ⇒
S = 1.
În acest caz notarea cu S a sumei nu este gresita, deoarece suma este o serie convergenta, asa
ca poate fi înlocuita cu o valoare numerica [au fost folosite si parti din [28]].
Concluzia ar fi ca nu procedura este gresita, ci aplicarea ei în situatii nepotrivite [Murphy:
"Când un om are un ciocan, toate lucrurile par cuie"]
(2) Adunarea finita este comutativa (rezultatul adunarii este acelasi, indiferent de ordinea în care se
opereaza adunarile); pentru o adunare infinita, schimbarea ordinii de adunare poate schimba atât
rezultatul cantitativ (suma seriei) cât si rezultatul calitativ (natura seriei).
Exemplu: Se considera seria care are primul termen 1 iar urmatorii sunt 0 [este convergenta
si are suma 1]; se rescrie fiecare 0 ca fiind 0 = −1 + 1 si se regrupeaza termenii, mai întâi toti cu

7
semnul plus, apoi toti cu semnul minus. Se obtine 1 =∞−∞ :-)
1 = 1 + 0 + 0 + · · ·+ 0 + · · · =
= 1 + (−1 + 1) + (−1 + 1) + · · · (−1 + 1) + · · · =
= (1 + · · · 1 + · · · )− (1 + · · · 1 + · · · ) =
= ∞−∞.
(3) Adunarea finita este asociativa; pentru adunarea infinita, gruparea termenilor poate conduce la
rezultate neasteptate.
Exemplu: Se considera seria care are primul termen 1 iar urmatorii sunt 0 [este convergenta si
are suma 1]; se rescrie fiecare 0 ca fiind 0 = −1 + 1 si se regrupeaza termenii. Se obtine ca 1 = 0
:-)
1 = 1 + 0 + 0 + · · ·+ 0 + · · · =
= 1 + (−1 + 1) + (−1 + 1) + · · · (−1 + 1) + · · · =
= (1− 1) + (1− 1) + · · ·+ (1− 1) + · · · =
= 0.
1.1.10. Observatie. Pentru o serie includerea/excluderea unui numar finit de termeni nu schimba natura
seriei [deoarece nu modifica existenta limitei]. Seriile∑n∈N
an si∑
n∈N\0,1,··· ,kan au aceeasi natura, dar în caz
de convergenta, suma seriei poate fimodificata.
1.1.11. Observatie. Daca o serie este convergenta, suma seriei este unica [datorita unicitatii limitei unui
sir].
1.1.2. Cazuri speciale.
1.1.2.1. Serii aritmetice. Seriile aritmetice sunt seriile pentru care diferenta dintre doi termeni consec-
utivi este constanta [termenul general este o progresie aritmetica]
an = a1 + (n− 1) d [seria cu acest termen general este divergenta]
Sumele partiale:n∑k=1
ak =n∑k=1
(a1 + (k − 1) d) = na1 +n (n− 1)
2d
[Folosite în Finante —formule de dobânda simpla]

8
1.1.2.2. Serii geometrice. Seriile geometrice sunt seriile pentru care raportul dintre doi termeni con-
secutivi este constant [termenul general este o progresie geometrica].
an = a1 · rn−1, r 6= 1.
Sumele partiale:n∑k=1
ak =n∑k=1
a1 · rk−1 = a11− rn1− r .
∞∑n=1
an =
convergenta =
a1
1− r , r ∈ (−1, 1)
divergenta, r ∈ R \ (−1, 1)
Se foloseste Sn = 1 + a+ a2 + a3 + · · ·+ an =
1− an+1
1− a , a 6= 1
n, a = 1.
de unde se obtine: limn→∞
Sn =
1
1− a, a ∈ (−1, 1)
nu exista sau infinita, in rest.
[Folosite în Finante —formule de dobânda compusa]
1.1.2.3. Serii armonice. Seriile armonice sunt seriile pentru care inversele formeaza o progresie arit-
metica:
an =1
a1 + (n− 1) d(cu toti numitorii nenuli)
Sumele partiale:n∑k=1
ak =n∑k=1
1
a1 + (k − 1) d(nu exista formule elementare)
[Interpretare: Se considera o operatie fixata de masurare pentru care se fac n observatii ordonate
(observatiile sunt comparabile); o observatie—record va fi o observatie care este cea mai mare (pâna la ea)
(cea mai mare dintre observatiile facute). Numarul mediu de observatii—record este 1 +1
2+
1
3+ · · · + 1
n[serie armonica]. Acelasi numar mediu este valabil si în alte situatii, cum ar fi o observatie care este cea
mai mica (pâna la ea).
1.1.2.4. Numarul lui Euler e. Se considera sirurile:
en =
(1 +
1
n
)nsi
En =n∑k=0
1
k![Vezi si Thm. 3.31, [39]]

9
1.1.12. Teorema. Sirurile en si En sunt convergente, iar en < En. Mai mult, cele doua siruri au aceeasi
limita.
Demonstratie. Fie en =
(1 +
1
n
)nen =
n∑k=0
Ckn
(1
n
)kCkn =
n!
k! (n− k)!=n(n− 1) · · · (n− k + 1)
k!⇒
⇒ Ckn
1
nk=n(n− 1) · · · (n− k + 1)
k!
1
nk=
1
k!· (1− 1
n) · · · (1− k − 1
n)⇒
⇒ en =n∑k=0
Ckn
1
nk=
n∑k=0
1
k!· (1− 1
n) · · · (1− k − 1
n)
⇒ en+1 =n+1∑k=0
Ckn+1
1
nk=
n+1∑k=0
1
k!· (1− 1
n+ 1) · · · (1− k − 1
n+ 1)
Cum (1− 1
n) · · · (1− k − 1
n) < (1− 1
n+ 1) · · · (1− k − 1
n+ 1), ∀k = 1, n ⇒
⇒ en ≤ en+1, ∀n ≥ 1 adica sirul en este crescator.
⇒ en =n∑k=0
1
k!·(1− 1
n) · · · (1− k − 1
n) <
n∑k=0
1
k!= En < 1+
n∑k=0
1
2k= 1+
1− 1
2n
1− 1
2
= 1+2
(1− 1
2n
)< 3⇒
⇒ en < En < 3.
En+1 − En =1
(n+ 1)!> 0⇒ sirul En este crescator.
Cum sirurile en si En sunt crescatoare si marginite superior, sunt convergente.
Mai mult, pentru m ≤ n, are loc:
en = 1 + 1 +n∑k=2
1
k!· (1− 1
n) · · · (1− k − 1
n) ≥ 1 + 1 +
m∑k=2
1
k!· (1− 1
n) · · · (1− k − 1
n)
Cum sirul en este convergent iar în membrul drept suma are un numar fixat de termeni (m termeni),
în inegalitatea de mai sus se poate trece la limita dupa n→∞ si se obtine:
limn→∞
en ≥m∑k=0
1
k!= Em.
În final se obtine:
en < En ⇒ limn→∞
en ≤ limn→∞
En,
limn→∞
en ≥ Em ⇒ limn→∞
en ≥ limm→∞
Em,
asa ca limitele celor doua siruri sunt egale.
1.1.13. Definitie. Limita comuna a sirurilor en si En este notata cu e si este numita numarul lui Euler.

10
1.1.14. Observatie. Din cele de mai sus, se poate scrie e =∞∑n=0
1
n!, în sensul ca seria este convergenta,
deoarece seria are ca sir al sumelor partiale pe En care este convergent la e.
Sirul Em poate fi privit si ca o estimare a numarului e, iar calitatea estimarii poate fi evaluata astfel:
Deoarece Em → e, cu cât m este mai mare, cu atât Em aproximeaza mai bine e; restul aproximarii
este e− Em care tinde la 0 pentru m→∞.
0 < e− Em =∞∑n=0
1
n!− Em =
∞∑n=m+1
1
n!=
1
(m+ 1)!+
1
(m+ 2)!+
1
(m+ 3)!+ · · · =
=1
(m+ 1)!
[1 +
1
m+ 2+
1
(m+ 2) (m+ 3)+ · · ·
]<
1
(m+ 1)!
[1 +
1
m+ 1+
1
(m+ 1)2 + · · ·]<
<1
(m+ 1)!
1
1− 1
m+ 1
=1
m!m.
Deci 0 < e− Em <1
m!m, informatie utila de exemplu pentru evaluarea lui m necesar ca sa se obtina
un anumit numar de zecimale exacte ale lui e.
1.1.15. Teorema (Thm. 3.32, [39]). Numarul e este irational transcendent.
1.1.2.5. Sume telescopice. O serie este numita "telescopica" daca termenul ei general an poate fi scris
ca diferenta a doi termeni consecutivi ai unui alt sir: ∃ (bn)n astfel încât an = bn+1− bn. Gasirea sirului bn
nu se poate face procedural (algoritmic) (probabil pe cazul general un asemenea sir nu poate fi gasit), asa
ca sunt prezentate în continuare câteva cazuri tipice. Avantajul unei asemenea scrieri este can∑k=1
ak =n∑k=1
(bk+1 − bk) = bn+1− b1, asa ca studiul seriei∞∑n=1
an se reduce la studiul limitei limn→∞
bn. Mai
mult, în caz de convergenta, suma seriei poate fi aflata efectiv si este limn→∞
bn − b1.

11
1.1.16. Exemplu (Serii cu sume telescopice). Fie seria∞∑n=1
1
n (n+ 1). Seria este convergenta iar sirul
sumelor partiale este o "suma telescopica", în sensul ca suma seriei poate ficalculata prin reduceri succesive:
1
k (k + 1)=
1
k− 1
k + 1, asa ca
n∑k=1
1
k (k + 1)=
n∑k=1
(1
k− 1
k + 1
)=
=1
1− 1
2/
+1
2/
− 1
3/
+
+· · ·/· · ·/
+
+1
n/
− 1
n+ 1
= 1− 1
n+ 1
⇒ Sn = 1− 1
n+ 1,
⇒ ∃ limn→∞
Sn (asa ca seria este convergenta)
iar limn→∞
Sn = 1 (asa ca suma seriei este 1)
ATENTIE:
Suman∑k=1
(1
k− 1
k + 1
)are un numar finit de termeni, asa ca nu este gresit sa se scrie
n∑k=1
(1
k− 1
k + 1
)=
n∑k=1
1
k−
n∑k=1
1
k + 1.
Pe de alta parte, în situatia∞∑n=1
(1
n− 1
n+ 1
), din cauza numarului infinit de termeni, este gresit sa
se scrie∞∑n=1
(1
n− 1
n+ 1
)=∞∑n=1
1
n−∞∑n=1
1
n+ 1;
cele doua noi serii din membrul drept sunt ambele divergente, asa ca:
∞∑n=1
(1
n− 1
n+ 1
)” = ”
∞∑n=1
1
n−∞∑n=1
1
n+ 1⇐⇒ 1” = ”∞−∞
1.1.17. Exemplu.∞∑n=1
(√n+ 2− 2
√n+ 1 +
√n)
∞∑n=1
(√n+ 2− 2
√n+ 1 +
√n)
=
=∞∑n=1
(√n+ 2−
√n+ 1 +
√n−√n+ 1
)=

12
= limn→∞
n∑k=1
(√k + 2−
√k + 1 +
√k −√k + 1
)=
= limn→∞
(√n+ 2−
√2 + 1−
√n+ 1
)= 1−
√2
1.1.18. Exercitiu. Pentru urmatoarele serii telescopice, sa se stabileasca natura iar în caz de convergenta
sa se gaseasca suma:
(1)∞∑n=1
1√n+√n+ 1
[divergenta]
(2)∞∑n=1
1
n2 + 5n+ 6
[= 1
3
](3)
∞∑n=1
1
n2 + 4n+ 3
[= 5
12
](4)
∞∑n=1
lnn
n+ 1[divergenta]
(5)∞∑n=1
3n2 + n− 1
n2 − 2n+ 3[divergenta]
1.1.2.6. Clasificari ale seriilor.
Din punct de vedere al convergentei/divergentei sirului de sume partiale:
convergenta
serie −→ divergenta −→ suma egala cu +∞ sau cu −∞
suma nu exista
Din punct de vedere al tipului termenului general:
generala (an ∈ R)
serie −→ pozitiva (an ≥ 0)
alternata (an = (−1)n bn, bn ≥ 0)
sau an · an+1 < 0

13
1.1.3. Operatii cu serii convergente.
1.1.19. Observatie (Operatii algebrice cu serii convergente, Thms. 3.47, 3.50, 3.51 [39]). Daca seriile∑n∈N
an si∑n∈N
bn sunt ambele convergente iar α ∈ R, atunci seriile∑n∈N
(an + bn) si∑n∈N
(αan) sunt tot
convergente si, mai mult, între sumele seriilor sunt relatiile:
∑n∈N
(an + bn) =∑n∈N
an +∑n∈N
bn,∑n∈N
(αan) = α∑n∈N
an.
Demonstratie. Daca seriile∑n∈N
an si∑n∈N
bn sunt ambele convergente, atunci sirurile San =n∑k=0
ak si
Sbn =n∑k=0
bk sunt convergente, deci cu Prop. 10.1.19 se obtine ca si sirul(San + Sbn
)neste tot convergent,
iar limita lui este suma limitelor celor doua siruri.
Restul demonstratiei exercitiu.
1.1.20. Observatie. În acest rezultat partea calitativa este: "∑n∈N
an si∑n∈N
bn sunt ambele convergente⇒∑n∈N
(an + bn) si∑n∈N
(αan) sunt tot convergente" iar partea cantitativa este: "∑n∈N
(an + bn) =∑n∈N
an+∑n∈N
bn"
si "∑n∈N
(αan) = α∑n∈N
an".
1.1.4. Teste de convergenta pentru serii cu termeni pozitivi. În cazul seriilor cu termen general
pozitiv (nu neaparat strict), sirul sumelor partiale este un sir crescator asa ca limita exista si este posibil
sa fie infinita (+∞). Testele care folosesc limite pot fi, în general, întarite, înlocuind limita cu o limita
inferioara sau superioara.
1.1.21. Teorema (Thm. 1.48, [10]). Pentru o serie cu termeni pozitivi, schimbarea ordinii termenilor
seriei nu schimba natura seriei si nici suma ei.
Demonstratie. Fie seria∞∑n=1
an cu an > 0 ∀n si∞∑n=1
bn o rearanjare a seriei initiale(aceiasi termeni
într—o ordine diferita).
Sirul sumelor partiale San =n∑k=1
ak este crescator (deoarece San+1 = San + an+1 > San) asa ca are limita
Sa ∈ R. La fel pentru Sbn =n∑k=1
bn → Sb ∈ R.

14
Fie m arbitrar. Deoarece b1, · · · , bm este o rearanjare a termenilor sirului (an)n, bk = ank si exista
indicele pm = max n1, · · · , nm.
Atunci Sbm ≤ Sapm ≤ Sa asa ca prin trecere la limita dupa m → ∞ se obtine ca Sb ≤ Sa. Cu un
argument similar:
Fie m arbitrar. Deoarece a1, · · · , am este o rearanjare a termenilor sirului (bn)n, ak = bnk si exista
indicele qm = max n1, · · · , nm.
Atunci Sam ≤ Sbqm ≤ Sa asa ca prin trecere la limita dupa m→∞ se obtine ca Sa ≤ Sb.
În final se obtine Sa = Sb.
1.1.22. Teorema (Test de comparare directa; Thm. 1.49, [10]). Fie doua serii cu termeni pozitivi∑n∈N
an
si∑n∈N
bn astfel încât exista un indice n0 ∈ N de la care 0 ≤ an ≤ bn, ∀n ≥ n0.
Atunci:
(1) Daca∑n∈N
bn converge atunci∑n∈N
an converge;
(2) Daca∑an diverge atunci
∑n∈N
bn diverge.
[acest test nu este intrinsec: utilizarea face apel la informatii despre o serie, pentru a obtine informatii
despre alta serie]
Demonstratie. Relatia dintre termenii generali se pastreaza si între sirurile de sume partiale [iar
natura seriilor nu se schimba prin eliminarea unui numar finit de termeni]: San ≤ Sbn ∀n de unde se
obtine ca daca Sbn este marginit, atunci San este tot marginit, iar daca S
an este nemarginit, S
bn este si ele
nemarginit.
1.1.23. Observatie. Rezultatul este de natura calitativa, în sensul ca nu spune nimic despre sumele
seriilor.
1.1.24. Exercitiu. Pentru seria∑n∈N
1
3n + 2, sa se foloseasca inegalitatea 3n + 2 ≥ 3n ⇒ 1
3n + 2≤ 1
3nsi
Testul de comparare directa 1.1.22 pentru a se studia natura seriei [suma serie date nu poate calculata
efectiv; eventual poate fi aproximata].

15
1.1.25. Exercitiu. Pentru seria∑n∈N
1√nsa se foloseasca inegalitatea
√n+√n = 2
√n ≤√n+√n+ 1⇒
1√n≥ 2√n+√n+ 1
si Testul de comparare directa 1.1.22 pentru a se studia natura seriei.
1.1.26. Teorema (Testul de comparare prin raport; Thm. 1.55, [10]). Fie doua serii cu termeni pozitivi∑n∈N
an si∑n∈N
bn astfel încât de la un indice n0 ∈ N are locan+1
an≤ bn+1
bn∀n ≥ n0.
Atunci:
(1) Daca∑n∈N
bn converge atunci∑n∈N
an converge;
(2) Daca∑n∈N
an diverge atunci∑n∈N
bn diverge.
[acest test nu este intrinsec]
Demonstratie. Se considera ca relatiaan+1
an≤ bn+1
bnare loc pentru toti n. Prin înmultirea inegal-
itatilor de la n = 0 la n = k− 1 se obtineaka0
≤ bkb0
asa ca ak ≤a0
b0
bk pentru toti k si se poate aplica Testul
de comparare directa 1.1.22 pentru a se obtine concluzia.
1.1.27. Teorema (Testul de comparare prin limita; Thm. 1.52 [10]). Se considera seriile cu termeni strict
pozitivi∑n∈N
an si∑n∈N
bn, si se presupune ca exista limita limn→∞
anbn
= λ. Atunci:
(1) Daca λ ∈ (0,∞), atunci seriile∑n∈N
an si∑n∈N
bn au aceeasi natura.
(2) Daca λ = 0, atunci:
(a) Daca∑n∈N
bn converge, si∑n∈N
an converge.
(b) Daca∑n∈N
an diverge, si∑n∈N
an diverge.
(3) Daca λ =∞, atunci:
(a) Daca∑n∈N
an converge, si∑n∈N
bn converge.
(b) Daca∑n∈N
bn diverge, si∑n∈N
an diverge.
[acest test nu este intrinsec]
Demonstratie. 1. Pentru λ ∈ (0,∞), fie ε între 0 si λ (de exemplu ε =λ
2> 0) si nε ∈ N astfel încât
∀n ≥ nε,
∣∣∣∣anbn − λ∣∣∣∣ < ε.
Se obtine:

16
−ε < anbn− λ < ε ⇐⇒ λ − ε < an
bn< λ + ε ⇐⇒ λ
2bn < an <
3λ
2bn, relatie care poate fi folosita
pentru a obtine concluzia folosind Testul de comparare directa 1.1.22.
2. ∃ limn→∞
anbn
= 0 ⇒ ∃n0 ∈ N, ∀n ≥ n0anbn
< 1 si cu Testul de comparare directa 1.1.22 se obtine:
2.a. Daca∑n∈N
bn converge, si∑n∈N
an converge, si
2.b. Daca∑n∈N
an diverge, si∑n∈N
an diverge
3. ∃ limn→∞
anbn
=∞ ⇒ ∃n0 ∈ N, ∀n ≥ n0,anbn
> 1 si cu Testul de comparare directa 1.1.22 se obtine:
3.a. Daca∑n∈N
an converge, si∑n∈N
bn converge, si
3.b. Daca∑n∈N
bn diverge, si∑n∈N
an diverge.
1.1.28. Teorema (Testul radacinii de ordin n/Testul Cauchy, Thm. 1.65, [10]). Pentru seria cu termeni
pozitivi∑n∈N
an, daca ∃ limn→∞
n√an = L ∈ (0,∞), atunci:
(1) Daca L < 1, seria converge;
(2) Daca L > 1, seria diverge;
(3) Daca L = 1, testul nu decide.
[este un test intrinsec]
Demonstratie. Daca ∃ limn→∞
n√an = L ∈ (0,∞), atunci:
1. Pentru L < 1 si pentru ε =1− L
2, ∃n0 ∈ N astfel încât
∣∣ n√an − L∣∣ < ε, ∀n ≥ n0.
⇒ −ε < n√an − L < ε⇒ L− ε < n
√an < L+ ε =
1 + L
2= ρ < 1
⇒ an < ρn si cum seria∑n∈N
ρn este convergenta (deoarece ρ ∈ (0, 1)), cu Testul de comparare directa
1.1.22 se obtine ca si seria∑n∈N
an este convergenta.
2. Pentru L > 1 se observa ca nu poate avea loc an → 0, asa ca folosind Testul de divergenta 1.1.7 se
obtine ca seria∑n∈N
an este divergenta.
3. Seria∑n∈N∗
1
neste divergenta iar seria
∑n∈N∗
1
n2este convergenta, desi pentru ambele lim
n→∞
1n√n
= 1 =
limn→∞
1
( n√n)
2 , asa ca aplicarea testului în situatia L = 1 nu poate sa decida convergenta/divergenta unei
serii.

17
1.1.29. Teorema (Testul raportului/Testul D’Alembert, Thm. 1.62, [10]). Pentru seria cu termeni
pozitivi∑n∈N
an, daca ∃ limn→∞
an+1
an= L ∈ (0,∞), atunci:
(1) Daca L < 1, seria converge;
(2) Daca L > 1, seria diverge;
(3) Daca L = 1, testul nu decide.
[este un test intrinsec]
Demonstratie. 1. Daca ∃ limn→∞
an+1
an= L ∈ (0,∞), atunci:
1. Pentru L < 1 si pentru ε =1− L
2, ∃n0 ∈ N astfel încât
∣∣∣∣an+1
an− L
∣∣∣∣ < ε, ∀n ≥ n0.
⇒ −ε < an+1
an− L < ε⇒ L− ε < an+1
an< L+ ε =
1 + L
2= ρ < 1
⇒ an+1 < ρan, ∀n ≥ n0
⇒ an < ρan−1 < ρ2an−2 < · · · < ρn−n0an0 ⇒
an < ρn−n0an0 , ∀n ≥ n0 si cum seria∑n∈N
ρn−n0an0 este convergenta, folosind Testul de comparare directa
1.1.22 se obtine ca si seria∑n∈N
an este convergenta.
2. Pentru L > 1, sirul an este crescator (de la un rang încolo), asa ca limita lui nu poate fi zero. Cu
Testul de divergenta 1.1.7 se obtine ca seria∑n∈N
an este divergenta.
3. Seria∑n∈N∗
1
neste divergenta iar seria
∑n∈N∗
1
n2este convergenta, desi pentru ambele lim
n→∞
an+1
an=
limn→∞
1
n+ 11
n
= 1 = limn→∞
1
(n+ 1)2
1
n2
, asa ca aplicarea testului în situatia L = 1 nu poate sa decida conver-
genta/divergenta unei serii.
1.1.30. Teorema (Testul integral, Thm. 1.57 [10]). Fie functia α (·) : [1,∞)→ R+ continua si descresca-
toare. Atunci seria∑n∈N
α (n) converge daca si numai daca integrala pe domeniu necompact∫∞
1α (x) dx
converge [integralele pe un domeniu necompact vor fi studiate în sectiunea 4.1. pag. 115]
[este un test intrinsec, care leaga informatia despre serii de informatia despre integrale pe domeniu
necompact]

18
Demonstratie. Pentru fiecare interval [n, n+ 1] [de lungime 1] se alege valoarea f (n) [cea mai mare
din interval], respectiv f (n+ 1) [cea mai mica valoare din interval] [deoarece functia f (·) este descresca-
toare].
Are loc: f (n+ 1) ≤n+1∫n
f (x) dx ≤ f (n), si prin adunare se obtine ca:
∞∑n=1
f (n+ 1) ≤∞∫1
f (x) dx ≤∞∑n=1
f (n), de unde se obtine concluzia.
[a fost folosita si informatie din [28], section 10.3]
x
y
∞∑n=2
f (n)
≤
x
y
∞∫1
f (x) dx
≤
x
y
∞∑n=1
f (n)
1.1.31. Teorema (Testul de condensare Cauchy, Thm. 2.3 [10]). Seriile∑n∈N
an, an > 0 si∑n∈N
2n · a2n au
ambele aceeasi natura.
Demonstratie. Seria∑n∈N
an fiind cu termeni pozitivi, din Teorema 1.1.21 putem considera termenii
rearanjati în ordine descrescatoare (si natura seriei nu se schimba).
Fie Sn =n∑k=0
ak si Tn =n∑k=0
2ka2k .
Au loc inegalitatile:
S2n−1 ≤ a0 + Tn−1 si
S2n ≥a1
2+ a2 +
1
2Tn,
de unde se obtine concluzia.
1.1.32. Teorema. Seria armonica generalizata∑n∈N∗
1
nαcu α ∈ R este:
(1) Convergenta daca α > 1.

19
(2) Divergenta daca α ≤ 1.
[aceasta serie poate fi folosita împreuna cu teste de comparatie pentru studiul altor serii]
Demonstratie. Din Testul de condensare Cauchy 1.1.31 se obtine ca seriile∑n∈N∗
1
nαsi∑n∈N∗
2n1
(2n)α=∑
n∈N∗2n(1−α) au aceeasi natura.
Seria∑n∈N∗
(21−α)n este o serie geometrica, de ratie 21−α, iar aceasta serie este convergenta când ratia
este de valoare absoluta strict subunitara si divergenta în rest.
Se obtine:
pentru α > 1, seria∑n∈N∗
1
nαeste convergenta,
pentru α ≤ 1, seria∑n∈N∗
1
nαeste divergenta.
1.1.33. Teorema (Schlömilch, Thm. 2.4 [10]). Daca an > 0 este descrescator de la un rang încolo iar
sirul nk este strict crescator astfel încât(nk+1 − nknk − nk−1
)k
este un sir marginit, atunci seriile∑n∈N
an, an > 0 si∑n∈N
(nk+1 − nk) · ank au ambele aceeasi natura.
1.1.34. Teorema (Testul Raabe, Thm. 11, [26]). Pentru seria cu termeni pozitivi∑n∈N
an, daca exista
limita limn→∞
n
(anan+1
− 1
)= L, atunci:
(1) Daca L > 1 seria converge;
(2) Daca L < 1 seria diverge;
(3) Daca L = 1 testul nu decide.
1.1.5. Teste de convergenta pentru serii oarecare.
1.1.35. Definitie. Seria∑n∈N
an este numita absolut convergenta daca seria modulelor∑n∈N|an| este
convergenta.
1.1.36. Observatie. Pentru o serie oarecare (cu an ∈ R) seria modulelor este o serie cu termeni pozitivi,
asa ca se pot aplica rezultatele din sectiunea anterioara.
1.1.37. Definitie. Seria∑n∈N
an este numita conditionat convergenta daca ea este convergenta iar seria
modulelor ei este divergenta.

20
1.1.38. Teorema. Daca o serie este absolut convergenta atunci este convergenta.
Demonstratie. Fie seria∑n∈N
an astfel încât seria∑n∈N|an| sa fie convergenta.
Deoarece 0 ≤ an+ |an| ≤ 2 |an|, seria∑n∈N
(an + |an|) este cu termeni pozitivi si este dominata de o serie
convergenta, asa ca este convergenta cu Testul de comparare directa 1.1.22.
Folosind operatiile cu serii 1.1.19 se obtine ca, deoarece seriile∑n∈N
(an + |an|) si∑n∈N|an| sunt ambele
convergente, si diferenta lor este convergenta:∑n∈N
(an + |an|)−∑n∈N|an| =
∑n∈N
(an + |an| − |an|) =∑n∈N
an.
1.1.39. Teorema (Abel). Daca∑n∈N
an converge iar (bn)n∈N este un sir marginit atunci∑n∈N
anbn converge.
1.1.40. Teorema (Dirichlet). Daca∑n∈N
an are sume partiale marginite iar (bn)n∈N este monoton cu
limn→∞
bn = 0, atunci∑n∈N
anbn converge.
1.1.6. Teste de convergenta pentru serii alternante.
1.1.41. Definitie. Seria∞∑n=0
an este numita alternanta daca an = (−1)n bn, bn > 0.
1.1.42. Teorema (Testul pentru serii alternante/Testul Leibniz, Thm. 1.75, [10]). Daca:
(1) ∃n0 ∈ N, ∀n ≥ n0, bn+1 ≤ bn.
(2) limn→∞
bn = 0.
Atunci seria alternanta∞∑n=0
(−1)n bn, bn > 0 converge.
Demonstratie. Fie Sn =n∑k=0
(−1)k bk, unde sirul (bn)n este pozitiv si descrecator [bn ≥ bn+1]
Atunci:
Sirul (bn − bn+1)n este un sir de termeni pozitivi
S2k+1 =
= (b0 − b1) + (b2 − b3) + · · ·+ (b2k − b2k+1) =
= b0 − (b1 − b2)− (b3 − b4)− · · · − (b2k−1 − b2k)− b2k+1
Din prima scriere, (bn)n si (bn − bn+1)n ≥ 0, asa ca sirul k 7→ S2k+1 (subsirul termenilor impari ai
sirului sumelor partiale) este crescator.

21
Din a doua scriere, cum fiecare paranteza este pozitiva, se obtine ca sirul k 7→ S2k+1 este marginit
superior de b0.
Sirul k 7→ S2k+1 este marginit superior si crescator, asa ca este convergent, catre o limita notata S.
S2k = S2k+1 − b2k+1, si cum fiecare sir este convergent, se obtine ca si S2k este convergent:
∃ limk→∞
S2k = limk→∞
(S2k+1 − b2k+1) = limk→∞
S2k+1 − limk→∞
b2k+1 = S − 0 = S
Se obtine ca sirul sumelor partiale (Sn)n este un sir format din doua subsiruri (al termenilor pari si al
termenilor impari), fiecare convergent la aceeasi limita S, asa ca sirul (Sn)n este convergent la S.
[De fapt, se poate demonstra în continuare ca sirul k 7→ S2k tinde descrescator la S]
1.1.43. Observatie ([2], Ex. 16, pag. 59). Daca în Testul Leibnitz se renunta la conditia 1. [de monotonie
a sirului bn], atunci se poate întâmpla orice [asa ca studiul trebuie facut pentru fiecare situatie în parte]:
(1) Seria∞∑n=1
(−1)n2 + (−1)n
neste o serie divergenta, care este alternanta, iar sirul bn =
2 + (−1)n
n> 0
tinde la zero, dar nu este monoton.
(2) Seria∞∑n=2
(−1)n1
n− (−1)neste o serie convergenta, care este alternanta, iar sirul bn =
1
n− (−1)n>
0 tinde la zero, dar nu este monoton.
1.2. Siruri de functii [facultativ CIGID]
Sectiunile despre siruri si serii de functii ["Siruri de functii", "Serii de functii", "Serii de puteri"]
urmeaza destul de fidel Capitolul 7 din [39]; [39] fiind un text deosebit, un material care îl urmeaza nu
poate fi decât de calitate mai proasta ... asa ca pentru cei care nu se sperie foarte tare de citit în limba
Engleza recomandarea ar fi sa citeasca în primul rând [39]. În cele de mai jos sunt eventual adaptate la
nevoile de programa ordinea informatiei, exercitiile/exemplele si câteodata unele detalii.
1.2.1. Definitie. Se numeste sir de functii fn (·) : U ⊂ Rn → Rm.
Punctul x0 ∈ U se numeste punct de convergenta al sirului (fn (·))n daca ∃ limn→∞
fn (x0).
Multimea Uc =x0 ∈ U ; ∃ lim
n→∞fn (x0)
se numeste multimea de convergenta a sirului.
Functia f (·) : Uc → Rm, f (x)Def= lim
n→∞fn (x) se numeste limita sirului (fn (·))n.
Sirul de functii (fn (·))n se numeste simplu (punctual) convergent catre f (·) daca Uc = U .

22
Obiectul limn→∞
fn (x), pentru x ∈ U , poate fi privit ca o limita dupa n dependenta de parametrul
x ∈ U . Întrebarile la care se încearca sa se dea un raspuns în aceasta sectiune se refera la conditii în care
caracteristici ale sirului se transfera în caracteristici ale limitei. Întrebarile sunt:
• De natura calitativa, cum ar fi:
—Daca functiile fn (·) sunt continue în x0, este limita f (·) si ea continua în x0?
—Daca functiile fn (·) sunt derivabile în x0, este limita f (·) si ea derivabila în x0?
—Daca functiile fn (·) sunt integrabile pe U , este limita f (·) si ea integrabila pe U?
• De natura cantitativa, cum ar fi:
—Care este legatura dintre limita derivatelor si derivata limitei?
—Care este legatura dintre limita integralelor si integrala limitei?
În ultima instanta, în situatiile studiate trebuie calculate succesiv doua limite, iar întrebarile
se refera la comutativitatea celor doua limite.
Raspunsul ar fi ca în general limitele nu comuta, dar sunt conditii speciale în care comuta.
1.2.2. Exemplu. Probabil unul dintre cele mai simple simple exemple este sirul dublu an,m =m
n+m[[39], Ex. 7.1]
50100
n0.0
0.5a
1.0
1.5
m
10050
00
limn→∞
(limm→∞
m
n+m
)= lim
n→∞(1) = 1
limm→∞
(limn→∞
m
n+m
)= lim
m→∞(0) = 0
limitele de mai sus se mai numesc si limite iterate;
în aceasta situatie limitele iterate sunt diferite, iar limita
limm,n→∞
m
n+mnu exista.
Se observa ca limitele [dupa m si dupa n] nu comuta.
limm→∞
m
n+m= 1 ⇐⇒ ∀ε > 0, ∀n ∈ N∗, ∃mε,n ∈ N∗,
∣∣∣∣ m
n+m− 1
∣∣∣∣ < ε.∣∣∣∣ m
n+m− 1
∣∣∣∣ < ε ⇐⇒ −ε < n
n+m< ε ⇐⇒ n+m
n>
1
ε⇐⇒ m >
n
ε− n =
(1
ε− 1
)n

23
Rangul minim care satisface conditia din definitia cu ε a limitei este m (ε, n) =
[(1
ε− 1
)n
]+ 1 ∈ N
[paranteza patrata se refera la partea întreaga a numarului].
Studiul este facut pentru valori "mici/apropiate de 0" ale lui ε, pentru care(
1
ε− 1
)este strict pozitiv.
Ceea ce se observa este ca rangul minimm (ε, n) este crescator si nemarginit ca functie de n: limn→∞
m (ε, n) =
∞.
1.2.3. Observatie. Sirul (fn (·))n este numit simplu convergent catre f (·) pe U ⇔
∀ε > 0, ∀x ∈ U, ∃n (ε, x) > 0 astfel încât ∀n ≥ n (ε, x) , ‖fn (x)− f (x)‖ < ε.
1.2.4. Definitie. Sirul de functii (fn (·))n este numit uniform convergent catre f (·) pe U daca
∀ε > 0, ∃nε ∈ N,∀x ∈ U, ∀n ≥ nε, ‖fn (x)− f (x)‖ < ε.
[Formulare echivalenta]
Pentru fiecare ε > 0 si pentru fiecare x ∈ U se defineste rangul minim:
n0 (ε, x) = min n (ε, x) ∈ N; ‖fn (x)− f (x)‖ < ε, ∀n ≥ n (ε, x) ;
Sirul (fn (·))n este numit uniform convergent catre f (·) pe U daca rangul minim n0 (ε, x) este marginit
în raport cu x, adica:
∀ε > 0, ∃n0 (ε) astfel încît ∀x ∈ U, n0 (ε, x) ≤ n0 (ε) .
1.2.5. Observatie (Criteriul Cauchy de convergenta uniforma; [39], Thm. 7.8). Sirul de functii (fn (·))neste uniform convergent pe U ⇐⇒ ∀ε > 0, ∃nε ∈ N, ∀n,m ∈ N, n ≥ nε, m ≥ nε, ∀x ∈ U ,
|fn (x)− fm (x)| < ε.
1.2.6. Observatie. Formal vorbind, diferenta dintre cele doua notiuni (convergenta simpla si convergenta
uniforma) este data (doar) de pozitionarea relativa a cuantificatorilor din definitii:
convergenta simpla: ∀x∃n [aceasta pozitionare implica dependenta lui n de x: "pentru fiecare x exista
câte un n"]

24
convergenta uniforma: ∃n∀x [aceasta pozitionare implica independenta lui n de x: "exista un acelasi
n pentru toti x"]
1.2.7. Teorema (vezi si [39], Thm. 7.9). Fie fn (·) , f (·) : U ⊂ Rn → Rm astfel încât ∀x ∈ U ,
∃ limn→∞
fn (x) = f (x) [limita punctuala]. Fie Mn = supx∈U‖fn (x)− f (x)‖.
Atunci limita este uniforma ⇐⇒ Mn → 0.
Demonstratie. Consecinta imediata a definitiei.
1.2.8. Exemplu. fn (x) = xn (1− x)n, x ∈ [0, 1]
limn→∞
fn (x) = limn→∞
xn (1− x)n = 0, ∀x ∈ [0, 1] [limita punctuala]
∂
∂x(xn (1− x)n) = nxn−1 (1− x)n−1 (1− 2x)
valoarea maxima a functiei fn (·) pe [0, 1] se atinge în xn =1
2si este fn
(1
2
)=
1
4n.
Mn =1
4n→ 0 ⇒ limita este uniforma.
0.0 0.2 0.4 0.6 0.8 1.00.00
0.05
0.10
0.15
0.20
0.25
x
y
Functiile f1 (·), f2 (·), f4 (·)
1.2.9. Exemplu. f (x) = xn (1− xn), x ∈ [0, 1]
limn→∞
fn (x) = limn→∞
xn (1− xn) = 0, ∀x ∈ [0, 1] [limita punctuala]
∂
∂x(xn (1− xn)) = −nxn−1 (2xn − 1)
valoarea maxima a functiei fn (·) pe [0, 1] se atinge în xn =1n√
2si este fn
(1n√
2
)=
1
4.

25
Mn =1
46→ 0 asa ca limita nu este uniforma.
0.0 0.2 0.4 0.6 0.8 1.00.00
0.05
0.10
0.15
0.20
0.25
x
y
Functiile f1 (·), f2 (·), f4 (·), f8 (·), f16 (·),
f32 (·), si ε = 0.05
Pe grafic se observa ca pentru ε fixat, desi pentru fiecare verticala x exista câte un rang n (ε, x) de la
care graficul functiei fn (·) coboara sub altitudinea ε, functiile nu ramân în "tubul" de raza ε în jurul lui 0
pe [0, 1] —sirul are o "cuta" în punctul de maxim, care desi se deplaseaza spre 1, nu scade din altitudine.
1.2.10. Teorema ([39], Thm. 7.11). Fie fn (·) un sir de functii între spatii metrice, convergent pe o
multime D la limita f (·).
Fie a ∈ D′ astfel încât pentru fiecare n ∈ N fixat, ∃ limx→ax∈D
fn (x) = an.
Atunci sirul (an)n este convergent, si ∃ limx→ax∈D
f (x) = limn→∞
an.
Cu alte cuvinte, limitele "limx→ax∈D" si " lim
n→∞" comuta: lim
x→ax∈D
(limn→∞
fn (x))
= limn→∞
(limx→ax∈D
fn (x)
).
1.2.11. Teorema. Daca (fn (·))n converge uniform la f (·) si functiile fn (·) sunt continue pe U , atunci si
f (·) este continua pe U .
Demonstratie. Fie ε > 0 si x0 ∈ U ; au loc:
din continuitatea uniforma a sirului, are loc:
∃n0 (ε) > 0 astfel încât ∀n ≥ n0 (ε) , ∀x ∈ U, ‖fn (x)− f (x)‖ < ε
3,
deci
∀x ∈ U,∥∥fn0(ε) (x)− f (x)
∥∥ < ε
3;

26
din continuitatea functiei fn0(ε) (.) în x0, are loc:
∃δ (ε) > 0, ∀x ∈ Bδε (x0) ,∥∥fn0(ε) (x)− fn0(ε) (x0)
∥∥ < ε
3;
asadar are loc:
∃δ (ε) > 0, ∀x ∈ Bδε (x0) , ‖f (x)− f (x0)‖ =
=∥∥f (x)− fn0(ε) (x) + fn0(ε) (x)− fn0(ε) (x0) + fn0(ε) (x0)− f (x0)
∥∥ 66∥∥f (x)− fn0(ε) (x)
∥∥+∥∥fn0(ε) (x)− fn0(ε) (x0)
∥∥+∥∥fn0(ε) (x0)− f (x0)
∥∥ 66 ε
3+ ε
3+ ε
3= ε.
1.2.12. Exemplu. Se studiaza sirul de functii fn (x) = n2x (1− x2)n, x ∈ [0, 1].
∃ limn→∞
fn (x) =
0, daca 1− x2 < 1,
0, daca x = 1,
0, daca x = 0.
deci sirul este simplu convergent pe [0, 1] catre functia nula.1∫0
fn (x) dx =1∫0
n2x (1− x2)ndx = −n
2
2
1∫0
(1− x2)′(1− x2)
ndx = −n
2
2
1
n+ 1(1− x2)
n∣∣x=1
x=0=
= −n2
2
1
n+ 1[0− 1] =
n2
2 (n+ 1).
În final, are loc limn→∞
1∫0
fn (x) dx 6=1∫0
limn→∞
fn (x) dx:
limn→∞
1∫0
fn (x) dx = limn→∞
n2
2 (n+ 1)=∞,
1∫0
limn→∞
fn (x) dx =1∫0
0dx = 0,
asa ca integrala si limita nu comuta.
Se observa ca, desi atât functiile fn (·) cât si functia nula sunt continue, convergenta nu este uniforma,
deoarece fn(1√
2n+ 1)→∞ [asadar reciproca la teorema anterioara nu este adevarata]

27
0.0 0.2 0.4 0.6 0.8 1.00
2
4
6
8
10
x
y
f1 (·), · · · , f10 (·)Se observa [de exemplu pe grafic] si ca sirul de functii nu este ordonat pe [0, 1], în sensul ca nu are loc
o relatie de tipul fn (x) ≥ fn+1 (x), ∀x ∈ [0, 1].
1.2.13. Teorema ([39], Thm. 7.13). Fie sirul (fn (·))n cu proprietatile:
(1) Domeniul comun de definitie K este multime compacta;
(2) Functiile fn (·) sunt continue pe K;
(3) Sirul (fn (·))n este simplu convergent pe K la functia f (·);
(4) Sirul este ordonat/monoton pe K, în sensul fn (x) ≥ f (x), ∀x ∈ K.
Atunci convergenta catre f (·) a sirului (fn (·))n este uniforma.
1.2.14. Exemplu. Conditia ca domeniul de definitie sa fie compact este esentiala:
sirul fn (x) =1
nx+ 1, x ∈ (0, 1) este monoton si converge simplu la functia nula, dar convergenta nu
este uniforma [Exercitiu!]
1.2.15. Teorema. Fie un sir de functii continue definite pe intervalul [a, b] si uniform convergente pe
acest interval catre functia f (·), ∀n ∈ N, fn (·) , f (·) : [a, b]→ R. Atunci:
∃ limn→∞
b∫a
fn (x) dx =b∫a
[limn→∞
fn (x)]dx =
b∫a
f (x) dx.
Rezultatul este valabil pentru o clasa mai larga de functii decât cele continue, este valabil pentru clasa
functiilor integrabile Riemann—Stieltjes în raport cu o functie monotona [a, b] [iar în acest context toate
integralele trebuie întelese ca integrale Riemann—Stieltjes în raport cu functia monotona] [în particular
rezultatul este valabil si pentru functii integrabile Riemann, vezi si [39], Cap. 6, respectiv Thm. 7.16]

28
Demonstratie. Deoarece functiile sunt continue pe [a, b], pentru fiecare n functia x 7→ fn (x)− f (x)
este marginita si îsi atinge marginile, asa ca exista Mn = maxx∈[a,b]
|fn (x)− f (x)|.
Din fn (·) unif→[a,b]
f (·), se obtine ca Mn → 0.∣∣∣∣ b∫a
fn (x) dx−b∫a
f (x) dx
∣∣∣∣ =
∣∣∣∣ b∫a
[fn (x)− f (x)] dx
∣∣∣∣ ≤ b∫a
|fn (x)− f (x)| dx ≤ Mn (b− a) si cum Mn → 0,
se obtine ca
∃ limn→∞
b∫a
fn (x) dx =b∫a
[limn→∞
fn (x)]dx =
b∫a
f (x) dx.
[sirul(
b∫a
fn (x) dx
)n
este un sir numeric care tinde la valoarea numericab∫a
f (x) dx]
1.2.16. Teorema. Fie un sir de functii continue definite pe intervalul [a, b] si uniform convergente pe
acest interval catre functia f (·), ∀n ∈ N, fn (·) , f (·) : [a, b]→ R. Atunci:
∃ limn→∞
b∫a
fn (x) dx =b∫a
[limn→∞
fn (x)]dx =
b∫a
f (x) dx.
1.2.17. Exemplu. fn (·) : R→ R, fn (x) =1√n
sinnx
∀x ∈ R, ∃ limx→∞
fn (x) = 0 [sirul este simplu convergent la functia nula] [se mai constata si ca functiile
fn (·) si f (·) sunt continue]
5 4 3 2 1 1 2 3 4 5
0.4
0.3
0.2
0.1
0.1
0.2
0.3
0.4
x
y
f1 (·) [negru], f20 (·) [rosu], f400 (·) [verde], f800 (·) [albastru]
Mai mult, deoarece |fn (x)| =
∣∣∣∣ 1√n
sinnx
∣∣∣∣ ≤ 1√n→ 0 [pentru n → ∞, uniform în raport cu x], sirul
este uniform convergent pe R la functia nula.
29
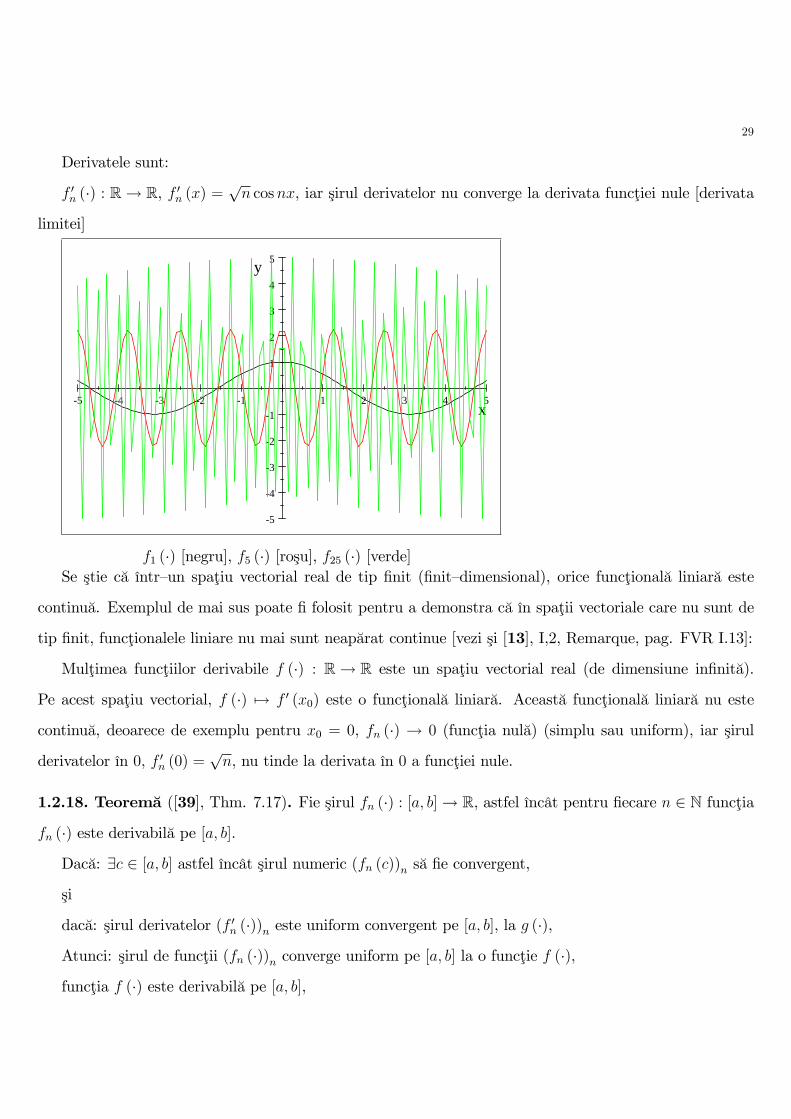
Derivatele sunt:
f ′n (·) : R→ R, f ′n (x) =√n cosnx, iar sirul derivatelor nu converge la derivata functiei nule [derivata
limitei]
5 4 3 2 1 1 2 3 4 5
5
4
3
2
1
1
2
3
4
5
x
y
f1 (·) [negru], f5 (·) [rosu], f25 (·) [verde]Se stie ca într—un spatiu vectorial real de tip finit (finit—dimensional), orice functionala liniara este
continua. Exemplul de mai sus poate fi folosit pentru a demonstra ca în spatii vectoriale care nu sunt de
tip finit, functionalele liniare nu mai sunt neaparat continue [vezi si [13], I,2, Remarque, pag. FVR I.13]:
Multimea functiilor derivabile f (·) : R→ R este un spatiu vectorial real (de dimensiune infinita).
Pe acest spatiu vectorial, f (·) 7→ f ′ (x0) este o functionala liniara. Aceasta functionala liniara nu este
continua, deoarece de exemplu pentru x0 = 0, fn (·) → 0 (functia nula) (simplu sau uniform), iar sirul
derivatelor în 0, f ′n (0) =√n, nu tinde la derivata în 0 a functiei nule.
1.2.18. Teorema ([39], Thm. 7.17). Fie sirul fn (·) : [a, b]→ R, astfel încât pentru fiecare n ∈ N functia
fn (·) este derivabila pe [a, b].
Daca: ∃c ∈ [a, b] astfel încât sirul numeric (fn (c))n sa fie convergent,
si
daca: sirul derivatelor (f ′n (·))n este uniform convergent pe [a, b], la g (·),
Atunci: sirul de functii (fn (·))n converge uniform pe [a, b] la o functie f (·),
functia f (·) este derivabila pe [a, b],

30
derivata functiei f (·) este f ′ (·) = g (·).
Altfel spus, operatiile de derivare (dupa x) si de trecere la limita (dupa n) comuta:∂
∂x
(limn→∞
fn (x))
=
limn→∞
f ′n (x).
1.3. Serii de functii [facultativ CIGID]
Notiunea de serie de functii este combinatie între serii numerice si siruri de functii; o serie de functii
"x 7→∞∑n=0
fn (x)" este o suma infinita de functii; pentru ca notiunea sa aiba sens, functiile trebuie sa fie
definite toate pe acelasi domeniu de definitie, iar în codomeniu trebuie sa fie posibila operatia de adunare.
Unei serii de functii i se asociaza sirul sumelor partiale, care este un sir de functii:
Sn (x) =n∑k=0
fk (x) [suma fiind finita pentru fiecare n, functia Sn (·) este bine definita ca functie—suma]
Caracteristicile seriei de functii∞∑n=0
fn (x) sunt studiate prin intermediul sirului sumelor partiale (Sn (·))n.
Pot avea loc urmatoarele situatii:
Sirul (Sn (·))n este divergent, situatie în care∞∑n=0
fn (x) este un obiect abstract care nu poate fi înlocuit
cu o functie x 7→∞∑n=0
fn (x) [obiectul abstract x 7→∞∑n=0
fn (x) nu are sens].
Sirul (Sn (·))n este simplu convergent, situatie în care exista functia x 7→∞∑n=0
fn (x) = f (x), iar sirul
Sn (·) converge simplu la f (·).
Sirul (Sn (·))n este uniform convergent, situatie în care exista functia x 7→∞∑n=0
fn (x) = f (x), iar sirul
Sn (·) converge uniform la f (·).
1.3.1. Teorema (Testul Weierstrass, [39], Thm. 7.10). Daca (fn (·))n este marginit de sirul (Mn)n [în
sensul ca |fn (x)| ≤Mn], uniform în raport cu x [în sensul ca marginile Mn nu depind de x], si
daca∞∑n=0
Mn este convergenta, atunci si∞∑n=0
fn (x) este uniform convergenta.
1.3.2. Teorema. Daca functiile fn (·) sunt integrabile Riemann pe [a, b] si∞∑n=0
fn (x) = f (x) uniform pe
[a, b], atunci:b∫a
f (x) dx =b∫a
[ ∞∑n=0
fn (x)
]dx =
∞∑n=0
[b∫a
fn (x) dx
][daca seria de functii integrabile Riemann converge uniform pe [a, b] la f (·), atunci si functia f (·) este
tot integrabila Riemann si este corect sa se efectueze operatia de "integrare termen cu termen"]

31
1.4. Serii de puteri
[Vezi si [39], Sectiunea 8.1]
1.4.1. Definitie. Fiind dat un sir de numere reale (an)n∈N si a ∈ R, seria∞∑n=0
an (x− a)n se numeste serie
de puteri în jurul lui a iar numerele an se numesc coeficientii seriei de puteri.
1.4.2. Observatie. Studiul unei serii de puteri "în jurul lui a"∞∑n=0
an (x− a)n se poate face fara pierdere
de generalitate folosind seria de puteri "în jurul lui 0"∞∑n=0
anyn si translatând rezultatele cu schimbarea de
variabila y 7→ x− a (sau x 7→ y + a).
1.4.3. Teorema (Abel, [39], Thm. 8.1, Corolar si Thm. 8.2). Pentru seria de puteri∞∑n=0
anxn, sa
presupunem ca ∃R > 0 (poate fi aflat un numar R) astfel încât seria de puteri este convergenta pentru
x ∈ (−R,R).
Atunci este bine definita functia f (x) =∞∑n=0
anxn, x ∈ (−R,R), si au loc afirmatiile:
∀ε > 0, seria de puteri∞∑n=0
anxn converge uniform pe [−R + ε, R− ε] la f (·),
functia f (·) este continua si derivabila pe (−R,R),
f ′ (x) =∞∑n=1
nanxn−1, ∀x ∈ (−R,R) [derivata lui f (·) este derivata "termen cu termen" a seriei de
puteri pe (−R,R)]
∀k ∈ N∗, ∃f (k) (·) [functia f (·) este derivabila de orice ordin] pe (−R,R), iar
f (k) (x) =∞∑n=k
n (n− 1) · · · (n− k + 1) anxn−k, ∀x ∈ (−R,R); în particular, f (k) (0) = k!ak [sau ak =
1
k!f (k) (0)]
Daca seria numerica∞∑n=0
anRn este convergenta, atunci ∃ lim
x→Rf (x) =
∞∑n=0
anRn [functia f (·) poate fi
prelungita prin continuitate în punctul x = R, cu o valoare egala cu suma seriei∞∑n=0
anRn]. Pentru x = −R
are loc o afirmatie similara.
1.4.4. Teorema (Cauchy—Hadamard). Pentru seria de puteri∞∑n=0
an (x− a)n, fie α = limn→∞
n√|an| (daca
exista) si R =1
α. Atunci seria de puteri converge daca |x− a| < R si diverge daca |x− a| > R (R

32
este numit raza de convergenta). Rezultatul este adevarat si daca este folosita limita (daca exista) α =
limn→∞
|an+1||an|
.
Demonstratie. Se aplica criteriul radacinii (sau al raportului).
1.4.5. Observatie. Pentru valorile x = a − R si x = a + R nu se poate decide asa ca trebuie studiat
separat fiecare caz în parte. Intervalul |[a−R, a+R]| este numit "domeniu de convergenta" si pentru
fiecare caz trebuie decis daca este deschis/închis la stânga/dreapta.
1.5. Dezvoltari în serie Taylor
1.5.1. Definitie. Fie f (·) : D ⊆ R→ R si fie x0 ∈ int (D) un punct în care functia f (·) este de n—ori
derivabila.
Atunci, pentru j = 1, n, polinomul Tj (·) definit prin:
Tj (x) =
j∑k=0
f (k) (x0)
k!(x− x0)k
este numit polinom Taylor de ordin j al functiei f (·) în x0.
Functia Rj (x) = f (x)− Tj (x), x ∈ D este numita restul Taylor de ordin j al functiei f (·) în x0.
1.5.2. Teorema (Taylor). 1 Fie functia f (·) : D ⊆ R→ R de n ori derivabila într—o vecinatate a punctului
x0 ∈ int (D) si j = 1, n fixat.
Atunci polinomul Taylor de ordin j este o aproximatie locala de ordin j a lui f (·) în x0, în sensul
ca:
∃ limx→x0
Rj(x)
(x− x0)j= 0.
Demonstratie. Din definitia polinomului Taylor rezulta ca polinomul Taylor coincide în x0 cu functia;
mai mult, coincid si derivatele lor în x0 pâna la derivata de ordin j:
Tj(x0) = f(x0),
1Acest rezultat a fost demonstrat pentru prima data de catre Brook Taylor (1685-1731) si publicat în 1715 în lucrarea"Methodus Incrementorum Directa et Inversa", lucrare care poate ficonsiderata certificatul de nastere al "diferentelor finite".Cei interesati de informatii cu savoare istorica pot gasi informatii la adresa http://en.wikipedia.org/wiki/Brook_Taylor [lastaccessed on 26.02.2012] si o traducere a lucrarii la adresa http://www.17centurymaths.com/contents/taylorscontents.html[last accessed on 26.02.2012]

33
T(i)j (x0) = f (i)(x0), ∀i = 1, j.
Se obtine ca si restul Taylor de ordin j este derivabil de j ori în x0, si
R(i)j (x0) = 0, ∀i = 0, j;
Limita din enunt se obtine prin aplicarea succesiv de j ori a regulii L’Hospital—Bernoulli:
limx→x0
Rj(x)
(x− x0)j= lim
x→x0
R′j(x)
j · (x− x0)j−1= · · · = lim
x→x0
R(j)j (x)
j!=R
(j)j (x0)
j!= 0.
1.5.3. Observatie. Daca functia f (·) este de tip polinomial de grad n, atunci f (x) = Tn (x) [polinomul
Taylor de grad n este identic cu functia] [restul este identic nul].
Demonstratie. Fie f (x) =n∑k=0
akxk, cu an 6= 0 [polinom de grad n], si
Tn (x) =n∑k=0
f (k) (x0)
k!(x− x0)k [polinomul Taylor de grad n asociat functiei în x0]
Rn (x) = f (x)− Tn (x) [Restul Taylor de ordin n]
Functia Rn (·) este tot polinom, de grad cel mult n.
Din proprietatile polinomului Taylor Tn (·), se obtine:
Tn (x0) =f (0) (x0)
0!= f (x0)⇒ Rn (x0) = 0
T ′n (x) =n∑k=1
f (k) (x0)
k!· k · (x− x0)k−1 ⇒ T ′n (x0) =
f (1) (x0)
1!· 1 = f ′ (x0)⇒ R′n (x0) = 0
În general, T (i)n (x0) = f (i)(x0), ∀i = 0, n.
Se obtine ca x0 este radacina multipla de ordin n a polinomului de grad n Rn (·), deci Rn (x) =
b (x− x0)n
Din teorema anterioara, ∃ limx→x0
Rn (x)
(x− x0)n= 0, asa ca se obtine b = 0 iar polinomul Rn (·) este identic
nul.
1.5.4. Teorema (Taylor, Thm 5.15, [39]). Fie f (·) : [a, b]→ R si n ∈ N∗.
Daca:
(1) Derivatele pâna la ordinul n exista si sunt continue pe [a, b] (pentru a si b se considera derivatele
laterale),
(2) Derivata (n+ 1) exista pe (a, b),
(3) α < β ∈ [a, b]

34
Atunci: ∃ξ ∈ (α, β) astfel încât f (β) = P (β)+f (n+1) (ξ)
(n+ 1)!(β − α)n+1, unde P (·) este polinomul Taylor
de ordin n al functiei f (·) în punctul α.
Demonstratie. Fie functia g (x) = f (x)− P (x)− f (β)− P (β)
(β − α)n+1 (x− α)n+1.
Atunci:
g(j) (x) = f (j) (x)− P (j) (x)− f (β)− P (β)
(β − α)n+1 (n+ 1)n (n− 1) · · · (n− j + 1) (x− α)n−j, ∀j = 0, n
g (α) = f (α)− P (α)− f (β)− P (β)
(β − α)n(α− α)n = 0.
g (β) = f (β)− P (β)− f (β)− P (β)
(β − α)n(β − α)n = 0.
g(j) (α) = f (j) (α)− P (j) (α)− f (β)− P (β)
(β − α)nn (n− 1) · · · (n− j + 1) (α− α)n−j = 0, ∀j = 0, n
g(n+1) (x) = f (n+1) (x)− f (β)− P (β)
(β − α)n+1 · (n+ 1)!.
Din Teorema de medie "The Mean Value Theorem" (TMVT) (for example Theorem 30.3 in [6]) pentru
g (·) pe [α, β] exista ξ1 ∈ (α, β) astfel încât g′ (ξ1) = 0.
Din TMVT pentru g′ (·) pe [α, ξ1] exista ξ2 ∈ (α, ξ1) astfel încât g′′ (ξ2) = 0.
Din TMVT pentru g(n) (·) pe [α, ξn] exista ξn+1 ∈ (α, ξn) astfel încât g(n+1) (ξn+1) = 0, adica f (n+1) (ξn+1) =
f (β)− P (β)
(β − α)n+1 · (n+ 1)!.
Pentru ξ = ξn+1 se obtine ca f (β) = P (β) +f (n+1) (ξ)
(n+ 1)!(β − α)n+1.
1.5.5. Observatie (Serii Taylor). Daca sunt îndeplinite conditiile din Teorema Taylor pentru fiecare n ∈ N
si daca restulf (n+1) (ξ)
(n+ 1)!(h)n+1 converge la 0 dupa n→∞ (uniform în raport cu h în |[a−R, a+R]|,
Atunci f (a+ h) =∞∑n=0
f (n) (α)
n!hn, pentru h ∈ |[a−R, a+R]|.
1.5.1. Câteva dezvoltari Taylor uzuale. ex =∞∑n=0
xn
n!, ∀x ∈ R
sinx =∞∑n=0
(−1)n
(2n+ 1)!x2n+1, ∀x ∈ R
cosx =∞∑n=0
(−1)n
(2n)!x2n, ∀x ∈ R
ax =∞∑n=0
lnn a
n!xn, ∀x ∈ R
sinhx =∞∑n=0
1
(2n+ 1)!x2n+1, ∀x ∈ R
35
coshx =∞∑n=0
1
(2n)!x2n, ∀x ∈ R
(1 + x)α =∞∑n=0
α (α− 1) · · · (α− n+ 1)
n!xn, |x| ≤ 1
√1 + x = 1 +
1
2x− 1 · 1
2 · 4x2 +
1 · 1 · 32 · 4 · 6x
3 − 1 · 1 · 3 · 52 · 4 · 6 · 8x
4 + · · · , |x| ≤ 1
3√
1 + x = 1 +1
3x− 1 · 2
3 · 6x2 +
1 · 2 · 53 · 6 · 9x
3 − 1 · 2 · 5 · 83 · 6 · 9 · 12
x4 + · · · , |x| ≤ 1
ln (1 + x) =∞∑n=0
(−1)n+1
nxn, ∀x ∈ (−1, 1]
1.5.6. Exercitiu.∞∑n=1
n · an
1.5.7. Exemplu.∞∑n=1
(n3 + 1) an
(n+ 1)!
1.5.8. Solutie.∞∑n=1
(n3 + 1) an
(n+ 1)!=∞∑n=1
(n+ 1) (n2 − n+ 1) an
(n+ 1)!=
=∞∑n=1
(n2 − n+ 1) an
n!=∞∑n=1
[nan
(n− 1)!− an
(n− 1)!+an
n!
]=
=∞∑n=1
nan
(n− 1)!−∞∑n=1
an
(n− 1)!+∞∑n=1
an
n!=
= ea − 1 +∞∑n=1
nan
(n− 1)!− a
∞∑n=1
an−1
(n− 1)!=
= ea − 1− a · ea +∞∑n=1
(n− 1 + 1) an
(n− 1)!=
= ea − 1− a · ea + a+∞∑n=2
(n− 1 + 1) an
(n− 1)!=
= ea − 1− a · ea + a+∞∑n=2
[(n− 1) an
(n− 1)!+
an
(n− 1)!
]=
= ea − 1− a · ea + a+ a2∞∑n=2
an−2
(n− 2)!+ a
∞∑n=2
an−1
(n− 1)!=
= ea − 1− a · ea + a+ a2ea + a (ea − 1) = ea − 1 + a2ea


CAPITOLUL 2
Spatii metrice si notiuni de Topologie [facultativ CIGID]
2.1. Spatii metrice
2.1.1. Definitie ([15]). Fie o multime nevida X ⊆ Rm. O functie d (·, ·) : X× X→ R+ ∪ ∞ cu
proprietatile:
(1) ∀x, y ∈ X, d (x, y) ≥ 0; d (x, y) > 0 daca x 6= y si d (x, x) = 0.
(2) ∀x, y ∈ X, d (x, y) = d (y, x)
(3) ∀x, y, z ∈ X, d (x, z) ≤ d (x, y) + d (y, z) [inegalitatea triunghiului]
este numita metrica pe X; perechea (X, d (·, ·)) este numita spatiu metric.
2.1.2. Observatie. Daca se înlocuieste conditia 1. cu
1’. d (x, x) = 0 si pentru x 6= y, d (x, y) 6= 0,
iar 3. cu
3’. ∀x, y, z ∈ X, d (x, y) + d (y, z) ≥ d (z, x) [circularitate, [7]],
se obtine, din 3’. si 1’. cu z = y, d (x, y) ≥ d (y, x) de unde se obtine 2. d (x, y) = d (y, x), deoarece x
si y sunt arbitrari [si de asemenea 3.]
Mai mult, din 3’. cu z = x se obtine d (x, y) + d (y, x) ≥ 0 asa ca din 2. se obtine d (x, y) ≥ 0.
2.1.3. Observatie. Un spatiu metric cu o metrica de valoare posibil infinita poate fidescompus canonic în
subspatii cu metrici finite care sunt separate între ele de metrici infinite. Relatia x ∼∞ y ⇐⇒ d (x, y) 6=∞
este o relatie de echivalenta.
2.1.4. Observatie. Daca d (·, ·) este o metrica pe X, atunci pentru orice λ ∈ R∗+ functia (x, y) 7→ λd (x, y)
este o noua metrica pe X. Spatiul metric (X, λd (·, ·)) este numit dilatarea (de factor λ a) spatiului
(X, d (·, ·)).37

38
2.1.5. Definitie. Pentru X0 ⊆ X, restrictia peste X0 × X0 a functiei d (·, ·), notata d|X0 (·, ·) : X0 × X0 →
R+∪∞ este numitametrica indusa pe X0 de metrica pe X. Perechea(X0, d|X0 (·, ·)
)este subspatiu
al spatiului metric (X, d (·, ·)) [orice submultime nevida a luiX împreuna cu metrica indusa este subspatiu
metric]
2.1.6. Observatie. O submultime X0 ⊆ X poate fi doar submultime (daca nu este dotata cu o metrica)
sau poate fi spatiu metric, dar nu subspatiu metric (daca este dotata cu o metrica, dar metrica nu este
cea indusa)
2.1.7. Definitie. Functia x 7→ d (x0, x)Not= δx0 (x) este numita distanta la x0 ∈ X. Multimea tuturor
distantelor la puncte din X este δ (X) = δx0 (·) ; x0 ∈ X.
2.1.8. Definitie. O functie u (·) : X→ R+ este numita functie de tip distanta pe X daca
∀x, y ∈ X, u (x)− u (y) ≤ d (x, y) ≤ u (x) + u (y) .
Se noteaza cu δ′ (X) multimea tuturor functiilor de tip distanta pe X.
2.1.9. Definitie. Fie doua spatii metrice, (X, d (·, ·)) si (X′, d′ (·, ·)). Se spune despre o functie f (·) :
X→ X′ ca pastreaza metrica daca
∀x, y ∈ X, d′ (f (x) , f (y)) = d (x, y) .
O functie care pastreaza metrica si este bijectiva este numita izometrie. În aceasta situatie, spatiile
(X, d (·, ·)) si (X′, d′ (·, ·)) sunt numite izometrice.
2.1.10. Definitie (metrici pe Rm). • d∞ (x, y) = maxk=1,m
|xk − yk| [metrica "maxim"]
• d∞ (a) (x, y) = maxk=1,m
ak |xk − yk|, ∀a ∈ Rm++ [a >> 0], [metrica "maxim ponderata"]
• d1 (x, y) =m∑k=1
|xk − yk| [metrica Manhattan, sau metrica taximetristului]
• d1 (x, y) (p) =m∑k=1
pk |xk − yk|, ∀p ∈ Rm++ [p >> 0] [pk > 0, ∀k = 1,m] [metrica Manhattan
ponderata, sau metrica taximetristului ponderata]

39
• d2 (x, y) =
√m∑k=1
(xk − yk)2 [metrica euclidiana]
• d2 (a) (x, y) =
√m∑k=1
ak (xk − yk)2, ∀a ∈ Rm++ [a >> 0] [metrica euclidiana ponderata]
• dp (x, y) = p
√m∑k=1
(xk − yk)p
• d (x, y) =
0, x = y
1, x 6= y[metrica discreta]
Pentru m = 2, conturul "sferei de raza 1 centrata în (0, 0)" este:
2.1.11. Observatie. Fie pentru n ∈ N∗, si pentru k = 1, n spatiile metrice (Xk, dk (·, ·)), si multimea
X =n∏k=1
Xk. Functiile:
d∞ (·, ·) : X× X→ R, definita prin d∞ (x, y) = maxk=1,n
dk (xk, yk), si
d1 (·, ·) : X× X→ R, definita prin d1 (x, y) =n∑k=1
dk (xk, yk),
sunt metrici pe X.
2.1.12. Definitie. Fie pentru n ∈ N∗, si pentru k = 1, n spatiile metrice (Xk, dk (·, ·)), si multimea
X =n∏k=1
Xk. O metrica e (·, ·) pe X este numita conservanta în raport cu metricile date daca
∀x, y ∈ X d∞ (x, y) ≤ e (x, y) ≤ d1 (x, y), unde:
d∞ (x, y) = maxk=1,n
dk (xk, yk), iar d1 (x, y) =n∑k=1
dk (xk, yk).
2.1.13. Definitie. Pentru x0 ∈ X si A ⊆ X, d (x0, A) = infx∈A
d (x0, x) este numita distanta de la punctul
x0 la multimea A. Punctul ax0 ∈ A este numit punct de apropiere maxima de x0 în A daca
d (x0, ax0) = d (x0, A).
• punctul de apropiere maxima poate sa nu existe;
• punctul de apropiere maxima poate sa nu fie unic;
• punctul de apropiere maxima poate sa fie orice punct al multimii: toate punctele unui cerc sunt
puncte de apropiere maxima fata de centru.

40
2.1.14. Definitie. PentruA,B ⊆ X, este numita distanta între doua multimi d (A,B) = infx∈Ay∈B
d (x, y) [=
infx∈A
d (x,B) = infy∈B
d (A, y)]. [from (2.3.6): inf(∪λBλ) = inf (∪λ inf Bλ)]
2.1.15. Definitie. Pentru o multime nevida ∅ 6= A ⊆ X, diam (A) = supx,y∈A
d (x, y) ∈ R+ ∪∞ este numit
diametrul multimii A.
2.1.16. Definitie. A ⊆ X este numita marginita daca diam (A) <∞.
2.1.17. Propozitie. ∀n > 2, ∀x1, · · · , xn ∈ X, d (x1, xn) ≤ d (x1, x2) + · · ·+ d (xn−1, xn).
Demonstratie. Din inegalitatea triunghiului, prin inductie.
2.1.18. Propozitie. ∀x, y, z ∈ X, |d (x, z)− d (y, z)| ≤ d (x, y)
Demonstratie. −d (x, y) ≤ d (x, z)−d (y, z) ≤ d (x, y) ⇐⇒ −d (x, y)+d (y, z) ≤ d (x, z) ≤ d (x, y)+
d (y, z) ⇐⇒ d (y, z) ≤ d (x, z) + d (x, y) ≤ d (x, y) + d (y, z) + d (x, y)
[din inegalitatea triunghiului]
2.1.19. Observatie (Proprietati ale izometriilor). (1) Daca f (·) este o izometrie între (X, d (·, ·)) si
(X′, d′ (·, ·)), atunci exista functia inversa f−1 (·), care este tot izometrie, între (X′, d′ (·, ·)) si
(X, d (·, ·)).
Dem: din definitie.
(2) Relatia de izometrie între spatii metrice este o relatie de echivalenta.
Dem: Reflexivitate, Simetrie si Tranzitivitate.
(3) Daca (X, d (·, ·)) este un spatiu metric iar X′ este o multime astfel încât exista o bijectie f (·) :
X→ X′, atunci multimea X′ poate dotata cu distanta [metrica] d′d (x′, y′) = d (f−1 (x′) , f−1 (y′))
[distanta pe X este transportata pe X′].
Dem: Din definitie.
2.1.20. Propozitie. Functia X 3 x0 7→ δx0 (·) ∈ δ (X) este bijectiva.
Demonstratie. Surjectivitatea este evidenta.

41
Fie x0, y0 ∈ X astfel încât δx0 (·) = δy0 (·) ⇒ δx0 (x) = δy0 (x), ∀x ∈ X. Fie x = y0:
Atunci: d (x0, y0) = δx0 (y0) = δy0 (y0) = d (y0, y0) = 0⇒ x0 = y0.
2.1.21. Propozitie. Pentru un element fixat x0 ∈ X, are loc:
• δx0 (x0) = 0,
• ∀x, y ∈ X, δx0 (x)−δx0 (y) ≤ d (x, y) ≤ δx0 (x)+δx0 (y) [functia δx (·) este o functie de tip distanta]
[δ (X) ⊆ δ′ (X)]
Demonstratie. Evident.
2.1.22. Propozitie. Pentru o functie u (·) : X→ R+, u (·) ∈ δ (X) ⇐⇒ u (·) este de tip distanta si
0 ∈ u (X). În acest caz, exista un unic element xu ∈ X astfel încât u (·) = δxu (·).
Demonstratie. "⇐" 0 ∈ u (X)⇒ exista xu ∈ X astfel încât u (xu) = 0, asa ca:
u (x) = u (x) − u (xu) ≤ d (x, xu) ≤ u (x) + u (xu) ⇒ d (x, x0) = u (x); mai mult, daca yu ∈ X este si
el astfel încât u (yu) = 0, atunci 0 = u (yu)− u (xu) ≤ d (yu, xu) ≤ u (yu) + u (xu) = 0 ⇒ d (yu, xu) = 0 ⇒
yu = xu.
"⇒" evident.
2.1.23. Propozitie. Fie multimea δ′ (X) ⊇ δ (X) tuturor functiilor de tip distanta pe X iar σ (u (·) , v (·)) =
supx∈X|u (x)− v (x)|.
Atunci σ (·, ·) este o metrica pe δ′ (X). Mai mult, functia X 3 x 7→ δx (·) este o izometrie între (X, d (·, ·))
si (δ′ (X) , σ (·, ·)), asa ca (X, d (·, ·)) si (δ (X) , σ (·, ·)) sunt izometrice.
Demonstratie. ∀u (·) , v (·) ∈ δ′ (X), u (x)− u (b) ≤ d (x, b) ≤ v (x) + v (b), ∀x, b ∈ X.
⇒ u (x)−v (x) ≤ u (b)+v (b), asa ca multimea |u (x)− v (x)| ; x ∈ X este marginita⇒ σ (u (·) , v (·)) ∈
R+.
σ (·, ·) este pozitiva si simetrica, iar σ (u (·) , v (·)) = 0 ⇐⇒ u (·) = v (·).
|u (x)− v (x)| ≤ |u (x)− w (x)|+ |w (x)− v (x)| ≤ σ (u (·) , w (·)) + σ (w (·) , v (·))⇒
⇒ σ (u (·) , v (·)) ≤ σ (u (·) , w (·)) + σ (w (·) , v (·))
⇒ σ (u (·) , v (·)) este o metrica pe δ′ (X).

42
|δx0 (x)− δy0 (x)| ≤ d (x0, y0)⇒ σ (δx0 (·) , δy0 (·)) = supx∈X|δx0 (x)− δy0 (x)| = |δx0 (x)− δy0 (x)| = d (x0, y0).
⇒ x 7→ δx (·) este izometrie de la (X, d (·, ·)) la (δ (X) , σ (·, ·)).
2.1.24. Propozitie. Fie, pentru n ∈ N∗ si pentru k = 1, n, spatiile metrice (Xk, dk (·, ·)), Xk 6= ∅. Atunci
multimea X =n∏k=1
Xk este spatiu metric împreuna cu fiecare dintre urmatoarele metrici:
• (x, y) 7→n∑k=1
dk (xk, yk) = d1 (x, y)
• (x, y) 7→√
n∑k=1
d2k (xk, yk) = d2 (x, y)
• (x, y) 7→ maxk=1,n
dk (xk, yk) = d∞ (x, y)
Mai mult:
• ∀x, y ∈ X, d∞ (x, y) ≤ d2 (x, y) ≤ d1 (x, y) [d2 (·, ·) este conservanta].
Demonstratie. Faptul ca sunt metrici rezulta din proprietatile metricilor componente dk (·, ·);
din inegalitatile:
d∞ (x, y) = maxk=1,n
dk (xk, yk) = dj (xj, yj) =√d2j (xj, yj) ≤
√n∑k=1
d2k (xk, yk) = d2 (x, y)
si
(d2 (x, y))2
=n∑k=1
d2k (xk, yk) ≤
(n∑k=1
dk (xk, yk)
)2
se obtine a doua inegalitate.
Când o metrica pe spatiul produs este conservanta, spatiile componente (Xk, dk (·, ·)) sunt izometrice
cu subspatiile corespunzatoare din spatiul metric produs:
2.1.25. Teorema ([41], page 15). Fie, pentru n ∈ N∗ si pentru k = 1, n spatiile metrice (Xk, dk (·, ·)),
Xk 6= ∅ si multimea X =n∏k=1
Xk dotata cu o metrica conservanta d (·, ·).
Pentru k = 1, n si pentru x0 ∈ X, fie multimea Xk,x0 =x ∈ X; xi = x0
i , ∀i = 1, n, i 6= k.
Atunci spatiile (Xk,x0 , d (·, ·)) si (Xk, dk (·, ·)) sunt izometrice iar x 7→ xk este o izometrie de la Xk,x0 la
Xk.
Demonstratie. Functia x 7→ xk este surjectiva, deoarece Xk 6= ∅.
Pentru x, y ∈ Xk,x0 , dk (xk, yk) = d∞ (x, y) ≤ d (x, y) ≤ d1 (x, y) = dk (xk, yk) ⇒ d (x, y) = dk (xk, yk).

43
Notiunea de distanta (metrica). Spatii metrice si spatii metrice complete. Punct fix, contractie.
Principiul contractiei sau teorema de punct fix (cu demonstratie). Aplicatii.
2.2. Elemente de Topologie
Scopul acestei sectiuni este sa introduca notiunile: topologie, topologie relativa, multime deschisa,
multime închisa, vecinatate, frontiera, punct de acumulare, convergenta, continuitate. Aceste notiuni au
fost deja folosite în Analiza de Liceu, dar numai în contextul multimii R si nu întotdeauna explicit (desi
sunt folosite, definirea si studierea proprietatilor nu este totdeauna facuta sistematizat); mai mult, în Liceu
demonstratiile atasate sunt de obicei evitate.
Notiunile mentionate mai sus pot fi introduse axiomatic în mai multe moduri, iar aceste moduri
alternative ofera atât diverse perspective cât si diverse variante de interpretare a notiunilor în domenii
nematematice.
Pe parcursul textului, se vor folosi paranteze patrate dupa o exprimare formala pentru a da o traducere
prescurtata, în cuvinte, a exprimarii formale.
Notiunile si demonstratiile prezentate sunt clasice, în sensul ca într—o forma eventual alternativa se
gasesc în orice text de analiza de nivel similar (pot eventual sa difere diverse detalii, cum ar fi modul
de organizare, de prezentare, exemplele, interpretarile prezentate, etc). Referinta primara pentru aceste
notiuni este [12].
2.2.1. Definitie. Se considera o multime arbitrara nevida X. Multimea (familia) de multimi τ ⊆ P (X)
este numita topologie (structura topologica) pe X daca urmatoarele axiome sunt satisfacute:
(1) ∅, X ∈ τ .
(2) D1, D2 ∈ τ ⇒ D1∩D2 ∈ τ [proprietatea intersectiei finite: intersectia unui numar finit de multimi
deschise este o multime deschisa].
(3) Di ∈ τ , i ∈ I ⇒⋃i∈IDi ∈ τ [proprietatea reuniunii arbitrare: reuniunea unui numar arbitrar
de multimi deschise este o multime deschisa; "arbitrar" se refera la numarul de elemente care
participa la reuniune, si care în acest caz poate fi finit, infinit numarabil sau nenumarabil —vezi
si anexa ??].

44
Perechea (X, τ) se numeste spatiu topologic.
Elementele din τ se numesc multimi deschise în X.
O submultime a lui X se numeste închisa în X daca X \ F (= CXF = CF ) ∈ τ [complementara ei
fata de X este deschisa; notatia folosita pentru complementara multimii F va fiCF ].
2.2.2. Exemplu (Topologia grosiera). Familia τ = ∅, X este o topologie peX, numita topologia grosiera.
2.2.3. Exemplu (Topologia discreta). Familia τ = P (X) —toate submultimile lui X —este o topologie
pe X, numita topologia discreta.
2.2.4. Exemplu (Topologia standard pe R). Topologia standard (naturala) pe R (multimea numerelor
reale) este:
τR = D ⊆ R; ∀x ∈ D ∃εx > 0, (x− εx, x+ εx) ⊆ D .
În acest context, o multime de tip (x− εx, x+ εx) se numeste vecinatate fundamentala, numarul pozitiv εx
se numeste raza vecinatatii fundamentale, x se numeste centrul vecinatatii fundamentale (asa ca o multime
este deschisa daca pentru fiecare punct al sau include câte o vecinatate fundamentala).
2.2.5. Exemplu (Topologia standard pe R). Pe multimea R = [−∞,∞] [dreapta extinsa], topologia
standard se obtine prin adaugarea la topologia standard a lui R vecinatati pentru punctele infinite:
τR = D ⊆ R; ∀x ∈ D,
x ∈ R⇒ ∃εx > 0, (x− εx, x+ εx) ⊆ D,
x =∞⇒ ∃ax ∈ R, (ax,∞] ⊆ D
x = −∞⇒ ∃bx ∈ R, [−∞, bx) ⊆ D.
Multimile de tip (a,∞] se mai numesc vecinatati fundamentale ale lui ∞, iar multimile de tip [−∞, b) se
mai numesc vecinatati fundamentale ale lui −∞.

45
2.2.6. Exemplu (Topologia standard pe Rn). Structura topologica standard pe (Rn, ‖·‖) (spatiul vectorial
real n—dimensional împreuna cu o norma fixata) este:
τ = D ⊆ Rn; ∀x ∈ D, ∃εx > 0, Bεx (x) ⊆ D ,
Bε (x0) = x ∈ Rn; ‖x− x0‖ < ε ⊆ Rn.
În acest context, o multime de tip Bε (x0) se numeste vecinatate fundamentala, numarul pozitiv εx se
numeste raza vecinatatii fundamentale, x se numeste centrul vecinatatii fundamentale (asa ca o multime
este deschisa daca pentru fiecare punct al sau include câte o vecinatate fundamentala).
2.2.7. Exemplu (Topologia standard pe un spatiu metric). Structura topologica standard pe un spatiu
metric (X, d (·, ·)) este:
τX = D ⊆ X; ∀x ∈ D, ∃εx > 0, Bεx (x) ⊆ D ,
Br (a) = x ∈ X; d (x, a) < r ⊆ X.
Sunt folosite urmatoarele notatii si notiuni:
• Br (a) = x ∈ X; d (x, a) < r [bila deschisa cu centru punctul a si de raza r] [vecinatate
fundamentala],
• Br (A) = x ∈ X; d (x,A) < r [bila deschisa cu centru multimea A si de raza r],
• Br (a) = x ∈ X; d (x, a) ≤ r [bila închisa de centru punctul a si de raza r]
• Sr (x0) = x ∈ X; d (x, x0) = r [sfera de centru punctul a si de raza r]
• O multime deschisa este o multime D ⊆ X cu proprietatea ca ∀x ∈ D, ∃εx > 0, Bεx (x) ⊆ D.
• Pentru o multime A ⊆ X, o vecinatate deschisa a lui A este orice multime deschisa care include
A. Când multimea are un singur element, o vecinatate deschisa este orice multime deschisa care
contine punctul.
• Pentru o multime A ⊆ X, o vecinatate a lui A este orice multime care include o vecinatate
deschisa a lui A. Când multimea are un singur element, o vecinatate a acelui element este orice
multime care include o multime deschisa care contine elementul. Se noteaza cu V (A) familia
tuturor vecinatatilor lui A.

46
• O familie fundamentala de vecinatati ale lui A este o familie de vecinatati ale lui A astfel
încât orice vecinatate a lui A include una din familie.
• Un sir din X este numit Cauchy daca
∀ε > 0, ∃Nε ∈ N, ∀n,m ≥ Nε, d (xn, xm) < ε;
x ∈ X este limita sirului Cauchy (xn)n daca ∀ε > 0, ∃Nε ∈ N, ∀n ≥ Nε, d (xn, x) < ε.
• Multimea X0 este numita densa în X daca fiecare punct din X este limita unui sir Cauchy din
X0.
• Y este o completare a lui X daca exista o izometrie ϕ (·) : X→Y astfel încât ϕ (X) sa fie densa
în Y .
În exemplul anterior, se observa ca spatiul vectorial n—dimensional normat (Rn, ‖·‖) este un spatiu
metric, în care metrica este d (x, y) = ‖x− y‖, asa ca din acest punct de vedere exemplele coincid. Situatia
spatiilor metrice este totusi mai generala, deoarece notiunea de spatiu metric nu contine operatii algebrice
[într—un spatiu metric, X nu este neaparat un spatiu vectorial]
2.2.8. Definitie (Compararea topologiilor). Daca (X, τ1) si (X, τ2) sunt doua topologii pe aceeasi multime,
se spune ca τ2 este mai fina decât τ1 (sau ca τ1 este mai grosiera decât τ2) daca τ1 ⊆ τ2.
2.2.9. Observatie. Fie (X, τ) un spatiu topologic si X0 ⊆ X. Familia τX0 = D ∩X0; D ∈ τ este o
topologie pe X0.
Demonstratie. 1.
∅ ∈ τ ⇒ ∅ ∈ τX0 ;
X ∈ τ ⇒ X0 = X ∩X0 ∈ τX02.
D1, D2 ∈ τX0 ⇒ ∃E1, E2 ∈ τ , D1 = E1 ∩X0, D2 = E2 ∩X0
E1, E2 ∈ τ ⇒ E1 ∩ E2 ∈ τ
⇒ D1 ∩D2 = (E1 ∩X0) ∩ (E2 ∩X0) = (E1 ∩ E2) ∩X0 ∈ τX03.

47
Di ∈ τX0 , i ∈ I ⇒ ∃Ei ∈ τ , Di = Ei ∩X0
Ei ∈ τ ⇒⋃i∈IEi ∈ τ
⇒⋃i∈IDi =
⋃i∈I
(Ei ∩X0) =
(⋃i∈IEi
)∩X0 ∈ τX0
2.2.10. Definitie. Fie (X, τ) un spatiu topologic si X0 ⊆ X. Topologia τX0 = D ∩X0; D ∈ τ se
numeste topologia indusa de (X, τ) pe X0.
2.2.11. Exemplu. Topologia τR induce o topologie pe Q ⊆ R, τQ = D ∩Q; D ∈ τR.
2.2.12. Exemplu. Reuniunea infinita de închisi nu este neaparat o multime închisa:
Pe (R, τR), pentru fiecare n ∈ N∗, multimea[
1n, 1]este închisa. Reuniunea acestor multimi închise este⋃
n∈N∗
[1n, 1]
= (0, 1], care nu este închisa.
Intersectia infinita de deschisi nu este neaparat o multime deschisa:
Pentru fiecare n ∈ N∗, multimea(− 1n, 1)este deschisa. Intersectia acestor multimi este⋂
n∈N∗
(− 1n, 1)
= [0, 1), care nu este deschisa.
Pentru fiecare n ∈ N∗, multimea(− 1n, 1n
)este deschisa. Intersectia acestor multimi este⋂
n∈N∗
(− 1n, 1n
)= 0, care nu este deschisa [este închisa]
2.2.13. Definitie. Fie (X, τ) si (X ′, τ ′) doua spatii topologice. O functie f (·) : X → X ′ se numeste
homeomorfism de spatii topologice daca:
1. f (·) este bijectiva
2. ∀D ∈ τ , f (D) ∈ τ ′ [transforma deschisii din domeniu în deschisi din codomeniu]
3. ∀D′ ∈ τ ′, f−1 (D′) ∈ τ [transforma deschisii din codomeniu în deschisi din domeniu]
2.2.14. Definitie. Fie (X, τ) un spatiu topologic si A o submultime a lui X.
(1) Multimea V ⊆ X este o vecinatate a lui x daca:
∃D ∈ τ, x ∈ D ⊆ V.
[V include un deschis care contine punctul]
Multimea (familia) tuturor vecinatatilor lui x este notata V (x)

48
Multimea V \ x se numeste vecinatate punctata.
(2) Punctul x ∈ X se numeste aderent pentru multimea A daca:
∀V ∈ V (x) , V ∩ A 6= ∅.
[Orice vecinatate a punctului întâlneste multimea]
Multimea tuturor punctelor din X aderente multimii A este notata A si numita închiderea
lui A.
(3) Punctul x ∈ X se numeste punct interior al multimii A daca:
A ∈ V (x) .
[multimea este vecinatate a punctului]
Multimea punctelor interioare lui A se noteazaA sau int (A) si se numeste interiorul lui A.
(4) Punctul x ∈ X se numeste punct de acumulare (punct limita) al multimii A daca:
∀V ∈ V (x) V ∩ A \ x 6= ∅.
[orice vecinatate a punctului întâlneste multimea în alta parte decât în punct]
Multimea punctelor de acumulare (limita) ale lui A se noteaza A′.
Caracterizare cu spatii metrice: x ∈ A′ ⇐⇒ d (x,A \ x) = 0.
(5) Un punct x ∈ X este numit punct de condensare pentru A daca fiecare vecinatate a lui x are
o multime nenumarabila de puncte comune cu A.
[O multime fara puncte de condensare este numarabila]
[Daca B este multimea punctelor de condensare pentru A, atunci fiecare punct din B este un
punct de condensare pentru B, iar A ∩ (X\B) este cel mult numarabila]
(6) Punctul x ∈ X se numeste punct de frontiera al multimii A daca:
x ∈ A ∩X \ A[Not= ∂A
].
[Punctul este aderent atât multimii cât si complementarei ei]

49
[Caracterizare în spatii metrice: x0 ∈ ∂A ⇐⇒ d (x0, A) = 0 = d (x0,X\A)]
(7) Punctul x ∈ X se numeste punct izolat al multimii A daca:
x ∈ A \ A′[Not= iso (A)
].
[punctul este aderent dar nu este de acumulare]
Caracterizare cu spatii metrice: x ∈ iso (A) ⇐⇒ d (x,A \ x) > 0.
[Daca metrica folosita este cea discreta, toate punctele sunt izolate]
(8) Punctul x ∈ X se numeste punct exterior multimii A daca:
x ∈ int (X \ A)⇔ ∃V ∈ V (x) V ∩ A = ∅.
[punctul este interior complementarei]
(9) Pentru doua multimi A si B, A este numita densa în raport cu B daca B ⊆ cl (A).
(10) Multimea A este numita nicaieri densa daca int (cl (A)) = ∅ [⇐⇒ int (X\A) este densa] [15].
(11) Spatiul X este numit separabil daca include o submultime densa si numarabila.
2.2.15. Exemplu. Pe (R, τR), se considera multimile A1 = (1, 3), A2 = [1, 3), A3 = (1, 3], A4 = [1, 3].
Atunci:
Multimea: A1 A2 A3 A4
aderenta: [1, 3] [1, 3] [1, 3] [1, 3]
interiorul: (1, 3) (1, 3) (1, 3) (1, 3)
p. acumulare: [1, 3] [1, 3] [1, 3] [1, 3]
p. izolate: ∅ ∅ ∅ ∅
p. frontiera: 1, 3 1, 3 1, 3 1, 3
p. exterioare: (−∞, 1) ∪ (3,∞) (−∞, 1) ∪ (3,∞) (−∞, 1) ∪ (3,∞) (−∞, 1) ∪ (3,∞)
2.2.16. Exemplu. Pe (R, τR), se considera multimile A1 = (1, 3)∪4, A2 = [1, 3)∪4, A3 = (1, 3]∪4,
A4 = [1, 3] ∪ 4. Atunci:

50
Multimea: A1 A2 A3 A4
aderenta: [1, 3] ∪ 4 [1, 3] ∪ 4 [1, 3] ∪ 4 [1, 3] ∪ 4
interiorul: (1, 3) (1, 3) (1, 3) (1, 3)
p. acumulare: [1, 3] [1, 3] [1, 3] [1, 3]
p. izolate: 4 4 4 4
p. frontiera: 1, 3, 4 1, 3, 4 1, 3, 4 1, 3, 4
p. exterioare:(−∞, 1) ∪ (3, 4)∪
∪(4,∞)
(−∞, 1) ∪ (3, 4)∪
∪(4,∞)
(−∞, 1) ∪ (3, 4)∪
∪(4,∞)
(−∞, 1) ∪ (3, 4)∪
∪(4,∞)
2.2.17. Exemplu. Pe (R, τR), se considera multimea A = 1
n; n ∈ N∗. Atunci:
A = A ∪ 0 [deoarece sirul tinde la 0],
int (A) = ∅ [nu are puncte interioare / nu e vecinatate pentru nici—un punct],
A′ = 0,
A \ A′ = A [toate punctele sunt izolate]
CA = R \ A,
CA = R,
∂A = A,
int (CA) = R \ (A ∪ 0) [punctele exterioare]
2.2.18. Exemplu. În (X, τ), multimile ∅ si X sunt si închise si deschise [∅ este deschisa iar complementara
ei este X care este tot deschisa].
2.2.19. Definitie. Un spatiu topologic (X, τ) se numeste separat (Hausdorff ) daca ∀x, y ∈ X, ∃Ux,y ∈
V (x) si Vx,y ∈ V (y) astfel încât Ux,y ∩Vx,y = ∅ [pentru orice doua puncte exista doua vecinatati disjuncte].
[se va folosi numai denumirea "separat", deoarece nu vor fi folosite alte tipuri de separare]
2.2.20. Observatie. Multimea R cu topologia standard este spatiu topologic separat:
x1, x2 ∈ R, x1 6= x2 ⇒ |x1 − x2| > 0. Fie raza ε =|x1 − x2|
3si fie intervalele (x1 − ε, x1 + ε),
(x2 − ε, x2 + ε).

51
Atunci x ∈ (x1 − ε, x1 + ε) ∩ (x2 − ε, x2 + ε)⇒ |x− x1| < ε si |x− x2| < ε ⇒
⇒ 3ε = |x1 − x2| ≤ |x1 − x|+ |x− x2| ≤ ε+ε = 2ε contradictie (care provine de la ipoteza ca ar exista
un element în intersectia celor doua intervale).
Rezulta ca (x1 − ε, x1 + ε) ∩ (x2 − ε, x2 + ε) = ∅.
Concluzie: În R, pentru orice doua elemente distincte exista doua vecinatati disjuncte.
2.2.21. Observatie. Daca (X, τ) este spatiu topologic separat iar X0 ⊆ X, atunci (X0, τX0) (spatiul
topologic indus de (X, τ) pe X0) este tot separat.
Demonstratie. Fie x, y ∈ X0 ⊆ X.
Deoarece (X, τ) este separat, ∃Ux,y ∈ V (x) si Vx,y ∈ V (y) astfel încât Ux,y ∩ Vx,y = ∅.
Atunci ∅ 6= Ux,y ∩ X0 si ∅ 6= Vx,y ∩ X0 sunt vecinatati ale lui x, respectiv y (în raport cu topologia
indusa) iar
(Ux,y ∩X0) ∩ (Vx,y ∩X0) ⊆ Ux,y ∩ Vx,y = ∅ ⇒ punctele admit vecinatati disjuncte si în raport cu
topologia indusa, asa ca (X0, τX0) este spatiu topologic separat.
2.2.22. Propozitie (Proprietati ale vecinatatilor).
1. V1 ∈ V (x), V1 ⊆ V2 ⇒ V2 ∈ V (x) [orice multime care contine o vecinatate a lui x este vecinatate a
lui x]
2. V1, V2 ∈ V (x)⇒ V1 ∩ V2 ∈ V (x) [intersectia dintre doua vecinatati ale lui x este o noua vecinatate
a lui x]
3. V1, V2 ∈ V (x)⇒ V1 ∪ V2 ∈ V (x) [reuniunea dintre doua vecinatati ale lui x este o noua vecinatate
a lui x]
4. V ∈ V (x)⇒ ∃W ⊆ V , W ∈ V (x), astfel încât ∀y ∈ W , W ∈ V (y) [orice vecinatate a lui x include
o vecinatate deschisa a lui x]
Demonstratie.
1.
V1 ∈ V (x)⇒ ∃D ∈ τ, x ∈ D ⊆ V1
V1 ⊆ V2
⇒ ∃D ∈ τ, x ∈ D ⊆ V2 ⇒ V2 ∈ V (x) .

52
2.
V1 ∈ V (x)⇒ ∃D1 ∈ τ, x ∈ D1 ⊆ V1
V2 ∈ V (x)⇒ ∃D2 ∈ τ, x ∈ D2 ⊆ V2
D1, D2 ∈ τ ⇒ D = D1 ∩D2 ∈ τ
⇒ ∃D (= D1 ∩D2) ∈ τ, x ∈ D ⊆ V1∩V2 ⇒⇒ V1∩V2 ∈ V (x) .
3.
V1 ∈ V (x)⇒ ∃D1 ∈ τ, x ∈ D1 ⊆ V1
V2 ∈ V (x)⇒ ∃D2 ∈ τ, x ∈ D2 ⊆ V2
D1, D2 ∈ τ ⇒ D = D1 ∪D2 ∈ τ
⇒ ∃D (= D1 ∪D2) ∈ τ , x ∈ D ⊆ V1 ∪ V2 ⇒ V1 ∪ V2 ∈ V (x).
4. V ∈ V (x)⇒ ∃D ∈ τ , x ∈ D ⊆ V ; fie W := D. Atunci:
* W ⊆ V ,
* W ∈ V (x) (pentru ca x ∈ D ⊆ D),
* ∀y ∈ W are loc: y ∈ W ⊆ W ⇒ W ∈ V (y).
2.2.23. Propozitie (Proprietati ale interiorului unei multimi).
1. int (A) ⊆ A [interiorul este inclus în multime].
2. A ⊆ B ⇒ int (A) ⊆ int (B).
3. A = int (A) ⇐⇒ A ∈ τ [⇐⇒ ∀x ∈ A, A ∈ V (x), din definitie] [o multime este egala cu interiorul
sau ⇐⇒ este deschisa ⇐⇒ este vecinatate pentru orice punct al sau]
4. int (A) =⋃D∈τD⊆A
D si int (A) ∈ τ [interiorul unei multimi este deschis si este cel mai mare (în sensul
incluziunii) deschis inclus în multime, în sensul: D ∈ τ si D ⊆ A ⇒ D ⊆ int (A)]
5. int (int (A)) = int (A) [proprietate de idempotenta a interiorului].
6. int (A) ∪ int (B) ⊆ int (A ∪B) [reuniunea (finita a) interioarelor este inclusa (strict, în general) în
interiorul reuniunii (finite)]
7. int (A)∩ int (B) = int (A ∩B) [intersectia (finita a) interioarelor este egala cu interiorul intersectiei
(finite)]
8. Daca I este infinita,⋃i∈Iint (Ai) ⊆ int(
⋃i∈IAi) [daca multimea de indici este infinita, 6. ramâne
valabil]
9. Daca I este infinita, int(⋂i∈IAi) ⊆
⋂i∈Iint (Ai) [daca multimea de indici este infinita, din 7. nu este
valabila decât una dintre incluziuni]

53
10. int (A) ∩ ∂A = ∅
11. int (A) = A \ ∂A
12. ∂A = A \ int (A).
Demonstratie.
1.
x ∈ int (A)⇒ A ∈ V (x)⇒ ∃Dx ∈ τ , x ∈ Dx ⊆ A⇒ x ∈ A⇒ int (A) ⊆ A.
2.
x ∈ int (A) ⇒ ∃Dx ∈ τ , x ∈ Dx ⊆ A ⇒ ∃Dx ∈ τ , x ∈ Dx ⊆ B ⇒ x ∈ int (B).
3.
x ∈ int (A) ⇐⇒ ∃Dx ∈ τ , x ∈ Dx ⊆ A.
int (A) = A =⋃x∈Ax ⊆
⋃x∈A
Dx ⊆⋃x∈A
A = A ⇒ A = int (A) =⋃x∈A
Dx, care este o reuniune arbitrara
de deschisi ⇒ A ∈ τ .
Reciproc: A ∈ τ ⇒ ∀x ∈ A, x ∈ A ⊆ A ⇒ A ∈ V (x) ⇒ x ∈ int (A) ⇒ int (A) ⊆ A ⊆ int (A) ⇒
A = int (A).
4.
D ∈ τ , D ⊆ A ⇒ ∀x ∈ D, x ∈ D ⊆ A ⇒ x ∈ int (A) ⇒ D ⊆ int (A) ⇒⋃D∈τD⊆A
D ⊆ A.
Reciproc, x ∈ int (A) ⇒ ∃Dx ∈ τ , x ∈ Dx ⊆ A ⇒ ∃D ∈ τ si D ⊆ A astfel încât x ∈ D ⇒
int (A) ⊆⋃D∈τD⊆A
D.
Deoarece int (A) =⋃D∈τD⊆A
D (care este o reuniune arbitrara de deschisi), int (A) ∈ τ .
5.
Din 4. ⇒ int (A) ∈ τ iar din 3. ⇒ int (int (A)) = int (A).
6.
x ∈ int (A) ∪ int (B) ⇒ x ∈ int (A) sau x ∈ int (B) ⇒ ∃D1x ∈ τ , x ∈ D1
x ⊆ A sau ∃D2x ∈ τ ,
x ∈ D2x ⊆ B; deoarece pentru fiecare dintre multimile A, B deschisul corespunzator poate sa existe sau
nu, se face conventia ca daca deschisul nu exista, este înlocuit cu multimea vida ∅; astfel se poate forma o

54
multime Dx prin reunirea tuturor deschisilor: ∃∅ 6= Dx = D1x∪D2
x ∈ τ , x ∈ Dx ⊆ A∪B ⇒ x ∈ int (A ∪B)
⇒ int (A) ∪ int (B) ⊆ int (A ∪B).
Reciproc incluziunea nu este adevarata (în general). Examinarea demonstratiei primei incluziuni sug-
ereza o modalitate de gasire a unui contraexemplu: trebuie cautata o situatie în care un punct sa fie
interior reuniunii dar sa nu fie interior niciuneia dintre multimi.
Fie A = [1, 2), B = [2, 3]. Atunci:
int (A) = (1, 2), int (B) = (2, 3), int (A) ∪ int (B) = (1, 2) ∪ (2, 3)
A ∪B = [1, 3], int (A ∪B) = (1, 3)
multimea int (A) ∪ int (B) = (1, 2) ∪ (2, 3) este inclusa strict în multimea int (A ∪B) = (1, 3).
7.
x ∈ int (A ∩B)⇒ A ∩ B ∈ V (x) dar A ∩ B ⊆ A⇒ A ∈ V (x)⇒ x ∈ int (A). Analog x ∈ int (B)⇒
x ∈ int (A) ∩ int (B)
Reciproc: x ∈ int (A) ∩ int (B) ⇒ x ∈ x ∈ int (A) si x ∈ int (B) ⇒ ∃D1x, D
2x ∈ τ , x ∈ D1
x ⊆ A si
x ∈ D2x ⊆ B ⇒ pentru Dx = D1
x ∩D2x au loc: Dx ∈ τ , x ∈ Dx ⊆ A ∩B ⇒ x ∈ int (A ∩B).
8.
x ∈⋃i∈Iint (Ai) ⇒ ∃ix ∈ I, x ∈ int (Aix) ⇒ ∃ix ∈ I si ∃Dix
x ∈ τ , x ∈ Dixx ⊆ Aix ; exista doua
tipuri de indici: indici pentru care exista un deschis si indici pentru care nu exista, iar pentru cei din
urma se înlocuieste deschisul cu multimea vida (care este multime deschisa) ⇒ ∃∅ 6= Dx =⋃i∈IDix ∈ τ ,
x ∈ Dx ⊆⋃i∈IAi ⇒ x ∈ int
(⋃i∈IAi
)⇒⋃i∈Iint (Ai) ⊆ int
(⋃i∈IAi
).
Incluziunea reciproca nu are loc nici pe cazul finit (vezi contraexemplul de la 6.), deci cu atât mai
putin pe cazul infinit.
9.
Fie x ∈ int(⋂i∈IAi
)⇒ ∃D ∈ τ , ∀j ∈ I, x ∈ D ⊆
⋂i∈IAi ⊆ Aj ⇒ ∀j ∈ I, x ∈ int (Aj)⇒ x ∈
⋂j∈I
int (Aj).
Incluziunea reciproca nu are loc, în general.
Se poate construi un contraexemplu bazat pe comportamentul "sirului dublu"(
1n, 1m
)n,m∈N∗ [exemplu
preluat si adaptat din [20], ex. 17, pag. 19]:
Fie multimile:

55
∀n ∈ N∗, An = R2 \ ( 1n, 1m
); m ∈ N∗
Atunci:
int (An) = An \ (1
n, 0) = R2 \ (( 1
n, 0) ∪ ( 1
n, 1m
); m ∈ N∗)
[punctul (1
n, 0), desi este în multime, nu este în interiorul ei deoarece un sir din afara multimii tinde la
acest punct]
intersectia acestor interioare este:⋂n∈N∗
int (An) =⋂n∈N∗
(An \
(1n, 0))
= R2 \ (( 1n, 1m
); n,m ∈ N∗ ∪ ( 1n, 0); n ∈ N∗)
Intersectia multimilor este:⋂n∈N∗
An =⋂n∈N∗
(R2 \ ( 1
n, 1m
); m ∈ N∗)
= R2 \ ( 1n, 1m
); n,m ∈ N∗
Interiorul intersectiei este:
int
( ⋂n∈N∗
An
)= int
(R2 \ ( 1
n, 1m
); n,m ∈ N∗)
= R2\(( 1
n, 1m
); n,m ∈ N∗ ∪ ( 1n, 0); n ∈ N∗ ∪ (0, 1
m); m ∈ N∗ ∪ (0, 0)
)Este vizibil ca intersectia interioarelor contine puncte pe care interiorul intersectiilor nu le contine
[punctele (0, 1m
); m ∈ N∗ ∪ (0, 0)]
10.
x ∈ ∂A ⇒ x ∈ A ∩ CA ⇒ ∀V ∈ V (x), V ∩ CA 6= ∅ ⇒ orice deshis care contine x întersecteaza
complementara multimii, deci nu poate fi inclus în multime ⇒ int (A) ∩ ∂A = ∅.
11.
int (A) = A \ ∂A
int (A) ⊆ A si din punctul anterior int (A) ∩ ∂A = ∅ ⇒ int (A) ⊆ A \ ∂A.
A \ ∂A = A ∩ C (∂A) = A ∩ C(A ∩ CA
)= A ∩
(CA ∪ C
(CA))
=
= A ∩(CA ∪ C
(CA))
C (int (A)) = CA;
C (A \ ∂A) = C (A ∩ C (∂A)) = CA ∪ ∂A = CA ∪(A ∩ CA
)=(CA ∪ A
)∩(CA ∪ CA
)=
=(CA ∪ A
)∩ CA
CA ⊆ CA ∪ A ??
2.2.24. Propozitie (Legaturi dintre interior si aderenta, prin complementara).
1. CA = int (CA) [complementara aderentei este egala cu interiorul complementarei]

56
2. C (int (A)) = CA [complementara interiorului este egala cu aderenta complementarei]
Demonstratie.
1.
x ∈ CA ⇐⇒ x 6∈ A ⇐⇒ ∃V0 ∈ V (x), V0 ∩ A = ∅ ⇐⇒ ∃V0 ∈ V (x), V0 ⊆ CA ⇐⇒ x ∈ int (CA).
2.
x ∈ C (int (A)) ⇐⇒ x 6∈ int (A) ⇐⇒ ∀D astfel încât x ∈ D ∈ τ , D * A ⇐⇒ ∀D astfel încât
x ∈ D ∈ τ , D ∩ CA 6= ∅ ⇐⇒ ∀V ∈ V (x), V ∩ CA 6= ∅ ⇐⇒ x ∈ CA.
2.2.25. Propozitie (Proprietati ale aderentei unei multimi).
1. A ⊆ A
2. A ⊆ B ⇒ A ⊆ B.
x ∈ CA ⇐⇒ x ∈ ext (A)
3. ∂A ⊆ A
4. A = int (A) ∪ ∂A
5. A = A ∪ A′
3. A este multime închisa ⇐⇒ A = A
A = A ⇐⇒ ∂A ⊆ A
?? A = A ⇐⇒ A′ ⊆ A
4. A =⋂
F închisaF⊇A
F
5. A = A
6. A ∪B = A ∪ B
7. A ∩B ⊆ A ∩ B⋃i∈IAi ⊆
⋃i∈IAi⋂
i∈IAi ⊆
⋂i∈IAi
Demonstratie.
1.
x ∈ A ⇒ ∀V ∈ V (x), V ∩ A 6= ∅ ⇒ x ∈ A.

57
2.
Fie x ∈ A ⇒ ∀V ∈ V (x) , V ∩ A 6= ∅. Dar A ⊆ B asa ca ∀V ∈ V (x) , V ∩ B ⊇ V ∩ A 6= ∅, deci
∀V ∈ V (x), V ∩B 6= ∅ ⇒ x ∈ B.
2.2.26. Propozitie (Proprietati ale multimii punctelor de acumulare).
1. A ⊆ B ⇒ A′ ⊆ B′.
(A′)′ = A′
2. A′ ⊆ A
3. (A ∪B)′ = A′ ∪B′.
4. (A ∩B)′ ⊆ A′ ∩B′.
Demonstratie.
1.
Fie x ∈ A′ ⇒ ∀V ∈ V (x) , V ∩ A\x 6= ∅. Dar A ⊆ B asa ca ∀V ∈ V (x) , V ∩ B ⊇ V ∩ A 6= ∅, deci
∀V ∈ V (x), V ∩B\x 6= ∅ ⇒ x ∈ B′.
2.
3.
2.2.27. Exemplu. Pe(R, τR
), multimile uzuale au urmatoarele puncte importante:
Multimea: N Z Q
aderenta: N ∪ ∞ Z ∪ −∞,+∞ R
interiorul: ∅ ∅ ∅
puncte acumulare: ∞ −∞,∞ R
puncte izolate: N Z ∅
puncte frontiera: N ∪ ∞ Z ∪ −∞,+∞ R
puncte exterioare: R \ N R \ Z ∅

58
2.2.28. Observatie. Multimea Q este o multime densa în R [în sensul ca între orice doua numere reale
distincte exista un numar rational].
În topologia (Q, τQ) multimile (a, b)Q sunt deschise: afirmatia este evidenta daca a,b ∈ Q [(ax, bx)Q
este interval rational cu capete rationale]. Daca a, b ∈ R \Q [sau daca macar unul dintre capete este
irational], ∀x ∈ (a, b)Q, din densitatea lui Q în R se obtin ax, bx ∈ Q astfel încât a < ax < x < bx < b, asa
ca x ∈ (ax, bx)Q ⊆ (a, b)Q, si cum (ax, bx)Q este un interval rational cu capete rationale, este deschis, deci
(a, b)Q include un deschis care contine x. Rezulta ca (a, b)Q este vecinatate pentru element al sau, deci
deschis.
Numerele√
2 si√
3 sunt irationale, asa ca[√
2,√
3]Q = Q∩
[√2,√
3]
=(√
2,√
3)Q = Q∩
(√2,√
3).
Multimea(√
2,√
3)Q este si deschisa si închisa, iar complementara ei fata de Q este
(−∞,
√2)Q ∪(√
3,∞)Q.
Frontiera ei este multimea vida.
În general, toate intervalele rationale de capete irationale sunt multimi închis—deschise si de frontiera
nula.
Reformulare: în Q, orice element are vecinatati arbitrar de mici cu frontiera vida.
Spatiul (Q, τQ) este total neconex [în sensul ca orice multime care contine cel putin doua puncte
distincte este neconexa]
2.2.29. Definitie. Fie (X, τ) si K ⊆ X. Multimea K se numeste compacta daca:
∀ (Di)i∈I ⊆ τ, cu K ⊆⋃i∈IDi, ∃J ⊆ I, J finita, cu K ⊆
⋃i∈J
Di.
[din orice acoperire arbitrara cu deschisi a lui K se poate extrage o subacoperire finita]
3. , .
Prop:
Dem:

59
Prop: Fie τ = CD; D ∈ τ. Atunci τ are proprietatile:
1. ∅, X ∈ τ .
2. F1, F2 ∈ τ ⇒ F1 ∪ F2 ∈ τ .
3. Fi ∈ τ , i ∈ I ⇒⋂i∈IFi ∈ τ .
Dem: Ex.
Prop:
Prop:
3. V (x) este baza de vecinatati pentru x.
4. Familia D ∈ τ ; x ∈ D este baza de vecinatati pentru x.
5. Daca B (x) este baza de vecinatati pentru x, atunci ∀U, V ∈ B (x) ∃W ∈ B (x), W ⊆ U ∩ V .
Dem: Ex.
2.2.1. Multimi compacte.
2.2.30. Definitie. Fie un spatiu metric (X, d (·, ·)), o submultime X0 ⊆ X si o familie arbitrara (Gα)α∈A
de deschisi din X. Familia (Gα)α∈A este numita acoperire deschisa daca X0 ⊆⋃α∈A
Gα.
2.2.31. Definitie. Fie un spatiu metric (X, d (·, ·)) si o submultime X0 ⊆ X. Multimea X0 este numita
compacta (relativ la X) daca din orice acoperire deschisa a sa (din X) se poate extrage o subacoperire
finita [X0 ⊆⋃α∈A
Gα cu Gα deschisi ⇒ ∃n ∈ N∗, ∃α1,· · · , αn ∈ A, X0 ⊆n⋃i=1
Gαi ] [Axioma Borel—Lebesgue]
2.2.32. Definitie. O multime este numita relativ compacta daca închiderea ei este compacta.
2.2.33. Definitie. Un spatiu este numit local compact daca pentru fiecare punct exista câte o vecinatate
compacta.
2.2.34. Definitie. Fie un spatiu metric (X, d (·, ·)) si o submultime X0 ⊆ X. Multimea X0 este numita
precompacta daca: pentru fiecare ε > 0, exista o acoperire finita a lui X0 cu multimi de diametru mai
mic decât ε. [echivalent: ∀ε > 0, ∃Xε finita, astfel încât ∀x ∈ X0, d (x,Xε) < ε]
2.2.35. Teorema ([39], Thm. 2.33, pag. 37). Fie K ⊆ Y ⊆ X.
Atunci: K este compact relativ la Y ⇐⇒ K este compact relativ la X.

60
2.2.36. Teorema ([39], Thm. 2.34, pag. 37). Submultimile compacte ale unui spatiu metric sunt multimi
închise.
2.2.37. Teorema ([39], Thm. 2.35, pag. 37). Submultimile închise ale multimilor compacte sunt multimi
compacte [F închis, K compact, F ⊆ K ⇒ F compact].
2.2.38. Corolar. Daca F este închisa si K este compacta, atunci F ∩K este compacta.
2.2.39. Teorema ([39], Thm. 2.36, pag. 38). Fie (Kα)α∈A o familie de submultimi compacte ale lui X.
Daca familia (Kα)α∈A are proprietatea intersectiei finite nevide:
∀A0 finita, A0 ⊆ A,⋂
α∈A0Kα 6= ∅,
Atunci⋂α∈A
Kα 6= ∅.
2.2.40. Corolar. Orice sir descrescator de multimi compacte are intersectia nevida [(Kn)n sir astfel încât
fiecare Kn este compact iar Kn+1 ⊆ Kn, atunci∞⋂n=1
Kn 6= ∅].
2.2.41. Teorema ([39], Thm. 2.37, pag. 38). Orice submultime infinita a unei multimi compacte are
macar un punct de acumulare în multimea compacta.
2.2.42. Teorema ([39], Thm. 2.41, pag. 40). [1 ⇐⇒ 2 se mai numeste Teorema Heine—Borel] Pentru o
multime E ⊆ Rn, daca E are una dintre urmatoarele proprietati, atunci le are si pe celelalte doua:
(1) E este închisa si marginita,
(2) E este compacta,
(3) Orice submultime infinita a lui E are un punct de acumulare în E.
2.2.43. Teorema (Weierstrass, [39], Thm. 2.42, pag. 40). Orice sir marginit din Rk are un punct—limita
în Rk.
2.2.2. Multimi conexe.
2.2.44. Definitie. Doua multimi A si B sunt numite separate daca ambele intersectii A ∩ B si A ∩ B
sunt vide [nici—un punct din A nu este în închiderea lui B si nici—un punct din B nu este în închiderea lui
A]

61
2.2.45. Definitie. O multime A ⊆ X este numita conexa daca nu este reuniunea a doua multimi nevide
separate.
Alternativ:
O multime A ⊆ X este numita conexa daca nu exista nici—o pereche de multimi deschise G1, G2 cu
proprietatile:
A ⊂ G1 ∪G2,
A ∩G1 6= ∅,
A ∩G2 6= ∅,
A ∩G1 ∩G2 = ∅.
2.2.46. Observatie. Pentru doua multimi, sa fie separate înseamna mai mult decât sa fie disjuncte: [1, 2]
si (2, 3) sunt disjuncte dar nu sunt separate; (1, 2) si (2, 3) sunt disjucte si separate.
Notiunea de multime conexa generalizeaza notiunea de interval real.
2.2.47. Definitie. Spatiul (X, d (·, ·)) este numit conex daca singurele multimi care sunt si închise si
deschise sunt ∅ si X [nu exista nici—o pereche de submultimi nevide, deschise, disjuncte si care acopera
spatiul].
2.2.48. Definitie. O submultime este conexa daca subspatiul atasat este conex.
2.2.49. Observatie. Un spatiu este conex daca pentru fiecare punct exista câte un sistem fundamental
de vecinatati conexe.
2.2.50. Teorema ([39], Thm. 2.47, pag. 42). O submultime reala A ⊆ R este conexa ⇐⇒ ∀x, y ∈ A
∀z între x si y, z ∈ A.
2.2.3. Topologii liniare. top-vs-3.pdf


CAPITOLUL 3
Functii reale de mai multe variabile
Functii vectoriale. Functii partiale. Functie reala de mai multe variabile reale. Limite, limite iterate.
Legatura dintre limita globala si limitele iterate. Continuitate partiala si continuitate. Derivabilitate
partiala a functiilor de mai multe variabile.
Derivate partiale de ordin superior. Criteriul lui Schwarz (enunt + exemple). Diferentiabilitatea
functiilor de mai multe variabile. Legatura dintre diferentiabilitate, derivabilitate si continuitate (cu
demonstratie). Criteriul lui Young.
Diferentiala unei functii. Diferentiale de ordin superior. Formula lui Taylor pentru functii de mai multe
variabile. Hessiana si convexitatea functiilor. Transformari regulate. Exemple.
Puncte de extrem local. Punct stationar. Conditia suficienta ca un punct stationar sa fie punct de
extrem local simplu (cu demonstratie). Metoda celor mai mici patrate. Aplicatii.
Dependenta functionala (exemplu, fara demonstratie). Functii implicite, teorema functiilor implicite
(enunt). Aplicatii în modelarea microeconomica. Extreme cu legaturi (exemplu, fara demonstratie).
Aplicatii în cercetarile operationale.
3.1. Introducere
Recapitulari recomandate:
Din [6]:
Cap 2 "One—Variable Calculus: Foundations"
Cap 3: "One—Variable Calculus: Applications"
Cap 4: "One—Variable Calculus: Chain Rule"
Cap 5: "Exponents and Logarithms"
Din [22]:
Cap I: "Introduction to Analysis"
63

64
Cap II: "Differentiation of functions"
Cap III: "The extrema of a function and the geometric applications of a derivative"
[Vezi si Cap 12, 13, [6]] Functiile vectoriale de variabila vectoriala au forma generala:
f (·) : D ⊂ Rn → Rm. Când m = 1, functia este o functie scalara (de variabila vectoriala).
Notatia f (·) este folosita pentru a distinge între functia însasi si f (x) (care este un element din
codomeniu) si sa sugereze numarul de variabile relevante pentru studiul functiei. În [6] este sugerata
notatia x 7→ f (x), care este o notatie alternativa cu acelasi rol: sa distinga între functie si un element al
codomeniului.
Graficul functiei este multimea:
G (f (·)) = Gf(·) = (x, f (x)) ; x ∈ D ⊂ Rn × Rm
Unele operatii cu aceste tipuri de functii sunt operatii similare cu operatiile definite pe codomeniu, cum
ar fi: adunare vectoriala, multiplicare cu un scalar, produs scalar. Alte operatii sunt specifice functiilor,
cum ar fi: compunere si trecere la limita.
3.1.1. Definitie. Pentru functiile f (·) : D ⊂ Rn → E ⊂ Rm, g (·) : E ⊂ Rm → Rp, noua functie obtinuta
prin compunere este functia (g f) (·) : D ⊂ Rn → Rp, definita prin: (g f) (x) = g (f (x)). Operatia este
posibila doar daca f (D) ⊆ E (multimea imaginilor lui f (·) este inclusa în domeniul lui g (·)).
3.1.2. Definitie. Functia f (·) : D ⊂ Rn → Rm este numita marginita (pe multimea D) daca multimea
f (D) este marginita:
∃M > 0,∀x ∈ D, ‖f (x)‖ ≤M.
(⇔ functia scalara x 7→ ‖f (x)‖ este marginita).
3.1.3. Observatie (Câteva exemple de functii vectoriale). Fiecare dintre functiile urmatoare sunt consid-
erate definite pe structuri algebrice adecvate (de cele mai multe ori spatii liniare):
• Functii liniare (operatori liniari):
f (·) : Rn → Rm, f (x) = Ax

65
(A este matrice iar x este vector coloana)
4
2
0
x
z
y0
2
04
10
2
20
20
4
10 2
4
f (x, y) = 2x+ 3y
• Functii biliniare:
f (·, ·) : Rn × Rm → R, f (x, y) = xTAy
(A este matrice, x si y sunt vecori coloana)
• Forme patratice:
f (·) : Rn → R, f (x) =n∑i=1
aijxixj = xTAx.
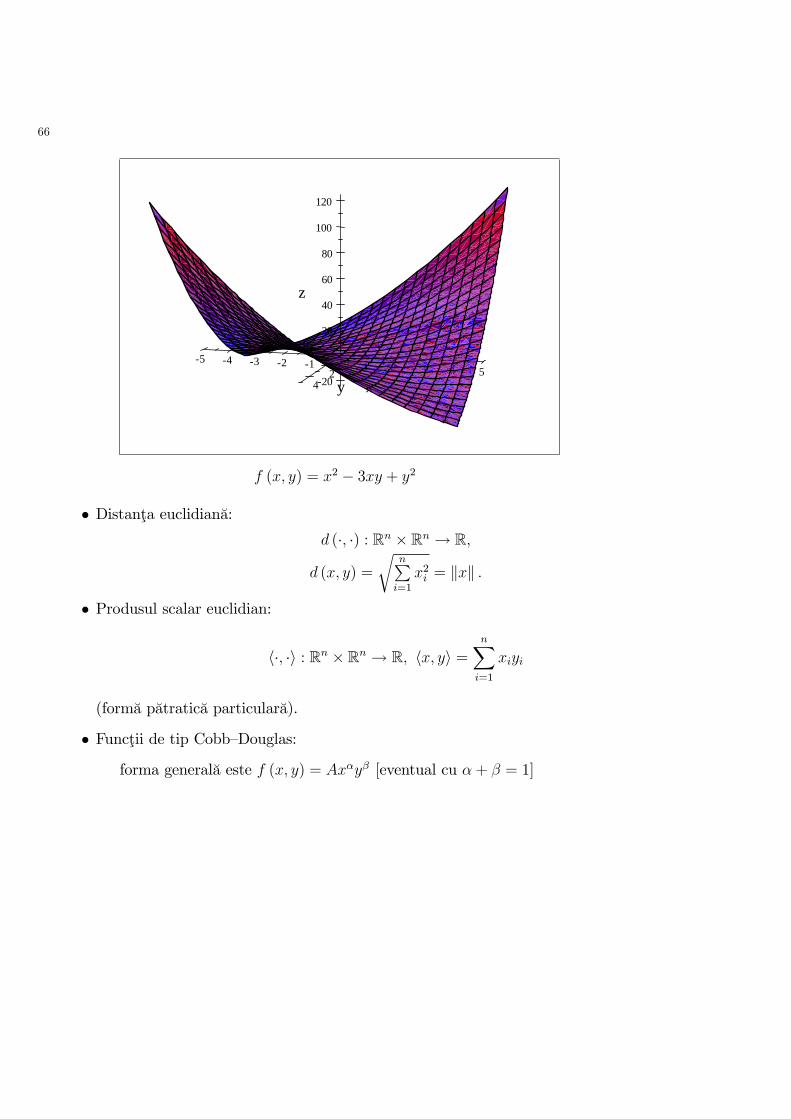
66
40z
60
100
80
120
204
42
5
20
234
y x
001 0 1 2
243 5
f (x, y) = x2 − 3xy + y2
• Distanta euclidiana:d (·, ·) : Rn × Rn → R,
d (x, y) =
√n∑i=1
x2i = ‖x‖ .
• Produsul scalar euclidian:
〈·, ·〉 : Rn × Rn → R, 〈x, y〉 =n∑i=1
xiyi
(forma patratica particulara).
• Functii de tip Cobb—Douglas:
forma generala este f (x, y) = Axαyβ [eventual cu α + β = 1]

67
24
0
y
z0
4
2
0
4
2 x
22
4 442
f (x, y) = 3√xy2
• Functii de tip CES [Constant Elasticity of Substitution]:
forma generala este: f (x, y) = A (αxα + (1− α) ya)b/a, a ∈ (−∞, 1]
108
6
x
420
04
8 106
y20.0
0.5
1.0z
1.5
2.0
f (x, y) =
(3
10x−5 +
7
10y−5
)−1/10
• Functie de productie de tip Leontief: f (x) = A mini=1,n
xiai

68
24
1y2
0
x
24
z 02
4
42 0
1
f (x, y) = minx
2,y
3
• Alte exemple:
0.4
4
0.22
xy0 4
0.020
z2
0.2
42
4
0.4
f (x, y) =xy
x2 + y2
32
44
y
2z
x00
442 2
3
f (x, y) =xy√x2 + y2
44
y
4
x
2 2002
424
z4
f (x, y) = x sin1
y
3.2. Limita unei functii într—un punct [facultativ CIGID]
Se considera o functie f (·) : D ⊂ Rn → Rm. Notiune de limita a functiei într—un punct are sens doar
în puncte de acumulare ale domeniului de definitie D.
Fie x0 ∈ D′ si un sir (xn)n∈N astfel încât:
1. xn ∈ D, ∀n ∈ N
2. xn 6= x0, ∀n ∈ N
3. xn → x0.

69
Daca sirul (f (xn))n∈N este de asemenea convergent catre o valoare l (care poate fi infinita), atunci l
este punct—limita al lui f (·) în x0.
Fie LIMx→x0
f (x) = l; l este punct—limita al lui f (·) în x0 multimea tuturor punctelor—limita ale lui
f (·) în x0.
Fie lim infx→x0
f (x) = inf LIMx→x0
f (x) limita inferioara a lui f (·) în x0 si lim supx→x0
f (x) = sup LIMx→x0
f (x) limita
superioara a lui f (·) în x0.
Ex: Pentru functia f (x, y) = x · sin 1
y,
nu exista limita: limy→0
x sin1
y, iar LIM
y→0
(x sin
1
y
)= [−x, x]
LIMx→0
(LIMy→0
(x sin
1
y
))= LIM
x→0[−x, x] = 0.
exista limita: limx→0
x sin1
y= 0,
exista limita: limy→0
(limx→0
x sin1
y
)= 0,
exista limita: lim(x,y)→(0,0)
x sin1
y= 0.
3.2.1. Definitie. Fie f (·) : D ⊂ Rn → Rm si x0 ∈ D′ (punct de acumulare al domeniului). Functia f (·)
are limita l în x0 daca:
∀U ∈ V (l) ( în Rm) , ∃V ∈ V(x0)
( în Rn) , f(V ∩D \ x0
)⊆ U.
Se noteaza limx→x0
f (x) = l [sau: limx→x0x∈D
f (x) = l sau limD3x→x0
f (x) = l]
3.2.2. Observatie (Definitii echivalente pentru limita functiei). [vezi si [39], Thm. 4.2, pag. 84]
Cu siruri: limx→x0
f (x) = l⇔
∀xk → x0, xk ∈ D \ x0, f (xk)→ l.
Cu ε− δ : limx→x0
f (x) = l⇔
∀ε > 0,∃δε > 0,∀x ∈ D \ x0 cu∥∥x− x0
∥∥ < δε, ‖f (x)− l‖ < ε.

70
3.2.3. Observatie. Daca ∃ limx→x0
f (x), LIMx→x0
f (x) =
limx→x0
f (x)
iar lim inf
x→x0f (x) = lim sup
x→x0f (x) =
limx→x0
f (x).
3.2.4. Observatie. Daca functiile f (·) , g (·) : D ⊂ Rn → Rm au limite în x0 ∈ D′, atunci au limita
si urmatoarele functii, în acelasi punct [operatiile algebrice care au sens în codomeniu]: functia—suma,
functia—diferenta, functia—produs (daca produsul a doua elemente are sens în codomeniu —de exemplu
produsul scalar, sau produsul daca m = 1), functia—raport (daca m = 1 si limx→x0
g (x) 6= 0).
Demonstratie. Din proprietatile corespunzatoare pentru limite de siruri.
3.3. Continuitate [facultativ CIGID]
3.3.1. Definitie. Functia f (·) : D ⊂ Rn → Rm este numita continua în x0 ∈ D daca
∀U ∈ V(f(x0)), ∃V ∈ V
(x0), f (V ∩D) ⊂ U.
[Echivalent]
Daca x0 ∈ D este punct izolat al domeniului D, functia este continua în x0.
Daca x0 ∈ D nu este izolat, continuitatea înseamna ca functia are limita în x0 iar valoarea limitei este
egala cu valoarea functiei în punct:
∃ limx→x0
f (x) = f (x0) .
3.3.2. Teorema (Thm. 13.4, [6]). [Vezi si [39], Thm. 4.9, pag. 87] Fie functiile f (·) , g (·) : D ⊂ Rn → Rm
si scalarii α, β ∈ R. Daca f (·) si g (·) sunt ambele continue pe D, atunci urmatoarele functii sunt si ele
continue:
(f + g) (·), (f − g) (·), 〈f, g〉 (·), ‖f‖ (·), (αf + βg) (·).
3.3.3. Teorema (Thm. 13.5, [6]). [Vezi si [39], Thm. 4.10, pag. 87] O functie cu valori vectoriale este
continua daca si numai daca toate componentele sale (care sunt functii scalare) sunt continue.

71
3.3.4. Teorema (Thm. 13.7, [6]). [Vezi si [39], Thm. 4.7, pag. 86] Daca doua functii sunt continue
iar compunerea lor este posibila, atunci si functia compusa este continua [o functie continua de o functie
continua este continua].
3.3.5. Teorema ([39], Thm. 4.8, pag. 86). Daca X si Y sunt spatii metrice, atunci f (·) : X → Y este
continua pe X ⇐⇒ ∀ deschis D ⊆ Y , f−1 (D) este deschis în X [o functie este continua daca si numai
daca preimaginea prin functie a oricarui deschis din codomeniu este un deschis în domeniu] [afirmatia
ramâne adevarata daca se înlocuieste "deschis" cu "închis", datorita comportamentului preimaginii fata
de complementara: f−1 (CD) = C (f−1 (D))]
3.3.6. Exemplu. Functia f (x, y) =
xy
x2+y2, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)este partial continua în (0, 0) în raport cu
fiecare variabila, în sensul ca fiecare dintre urmatoarele limite exista si este egala cu valoarea functiei în
punct
4
2
0.5420
0 z2
x4
y2
4
0.5
f (x, y) = xyx2+y2
∃ limx→0
(limy→0
f (x, y)
)= 0 = f (0, 0)
si
∃ limy→0
(limx→0
f (x, y))
= 0 = f (0, 0)
dar nu este continua în (0, 0), deoarece limita
lim(x,y)→(0,0)
f (x, y) nu exista.
Demonstratie. Fie sirurile xn =a
n, yn =
b
n, cu a, b ∈ R∗ fixati. Sirurile satisfac:
xn → 0 si yn → 0, si (xn, yn) 6= (0, 0).

72
Atunci f (xn, yn) =
a
n· bn(a
n
)2
+
(b
n
)2 =ab
a2 + b2adica valoarea limitei depinde de de a si b (prin schim-
barea valorilor se obtine o alta valoare a limitei). Deci lim(x,y)→(0,0)
f (x, y) nu exista.
3.3.7. Exemplu. Continuitate partiala [Ex. 13.21, p. 295, [6]]: continuitate în raport cu o singura
variabila, toate celelalte variabile fiind considerate constante (în Teoria Economica: CETERIS PARIBUS).
Functia f (x, y) = x sin1
yare în (0, 0) limita egala cu 0 iar limita iterata lim
x→0
(limy→0
f (x, y)
)nu exista.
Legaturile dintre continuitate si continuitate partiala The connection between continuity and partial
continuity is not a simple one and only with supplementary conditions may be said more about it.
3.3.8. Definitie. Continuitate uniforma: f (·) : D ⊂ Rn → Rm este uniform continua pe D daca
∀ε > 0, ∃δε > 0, ∀x0 ∈ D, ,
∀x ∈ D, ‖x− x0‖ < δε, ‖f (x)− f (x0)‖ < ε
3.3.9. Observatie. Continuitate pe multimi compacte:
(1) [Vezi si [39], Thm. 4.15, pag. 89] Orice functie continua pe o multime compacta este marginita
pe acea multime [functia f (·) : R→ R, f (x) = x este nemarginita pe domeniul necompact R,
asa ca este esentiala conditia de compacitate a domeniului].
(2) [Vezi si [39], Thm. 4.19, pag. 91] Orice functie continua pe o multime compacta este uniform
continua pe acea multime.
(3) [Vezi si [39], Thm. 4.14, pag. 89] Imaginea directa printr—o functie continua a unei multimi
compacte este o multime compacta.
(4) [Vezi si [39], Thm. 4.16, pag. 89] O functie scalara continua pe o multime compacta îsi atinge
valorile extreme pe acel compact [functia f (·) : (1,∞)→ R, f (x) =1
xeste continua pe domeniul
necompact (1,∞), si are marginile 1 si 0, pe care nu le atinge].
(5) [Vezi si [39], Thm. 4.17, pag. 90] Daca o functie definita pe un compact si cu valori într—un
spatiu metric este continua si bijectiva, atunci inversa ei este tot continua [functia f (·) : [0, 2π)→

73
(x, y) ; x2 + y2 = 1, definita prin f (t) = (sin t, cos t), este continua, este bijectiva, iar inversa ei
nu este continua în (1, 0). Se observa ca domeniul [0, 2π) nu este compact].
3.3.10. Teorema ([39], Thm. 4.22, pag. 93). Imaginea directa printr—o functie continua a unei multimi
conexe este o multime conexa.
3.3.11. Definitie. Functiile care transforma multimile conexe în multimi conexe se numesc functii cu
proprietatea Darboux [si nu sunt neaparat continue].
3.4. Derivate partiale
O functie scalara f (·) : D ⊆ R → Rm este derivabila în t0 ∈ int (D) daca urmatoarea limita exista si
este finita:
limt→t0
f (t)− f (t0)
t− t0.
3.4.1. Exemplu. Functia f (·) : [−2, 2] → R3, definita prin f (t) =
(cos t, sin t,
t
2π
)(care reprezinta o
elice în forma parametrizata) are graficul:
x
0.5 0.0
0.5y
z 0.0
0.5
0.01.00.51.0
0.50.5 1.01.0
f (t) =
(cos t, sin t,
t
2π
)Pentru fiecare t ∈ (−2, 2), derivata este f ′ (t) =
(− sin t, cos t,
1
2π
).
3.4.2. Definitie (Vezi si sectiunea "Differentiation", Cap. 9, [39]). O functie vectoriala f (·) : D ⊂ Rn →
Rm este numita diferentiabila în x0 ∈ int (D) daca exista T (x0) (·) ∈ L (Rn,Rm) (un operator liniar)
astfel încât sa existe si sa fie nula limita:
limx→x0
‖f (x)− f (x0)− T (x0) (x− x0)‖‖x− x0‖ = 0.

74
[În limita de mai sus norma de la numarator este pe Rm iar norma de la numitor este pe Rn]
Operatorul liniar T (x0) (·) este numit diferentiala (Fréchet) a functiei f (·) în x0 si este notat
f ′ (x0) sau df (x0) sau f ′ (x0; ·) sau f ′ (x0) (·) sau df (x0; ·) sau df (x0) (·). În unele texte, acest obiect este
numit derivata functiei f (·) în x0.
Operatorul T (x0) (·) : Rn → Rm este reprezentat astfel:
Rm 3 T(x0)
(dx)Not= df
(x0)dx =
(f1)′x1 (x0) (f1)′x2 (x0) · · · (f1)′xn (x0)
(f2)′x1 (x0) (f2)′x2 (x0) · · · (f2)′xn (x0)
· · · · · · · · · · · ·
(fm)′x1 (x0) (fm)′x2 (x0) · · · (fm)′xn (x0)
︸ ︷︷ ︸
m linii si n coloane
·
dx1
...
dxn
,
unde componentele matricii sunt numite derivate partiale si sunt definite astfel:
(fi)′xj
(x0)
=∂fi∂xj
(x0)
= limxj→x0j
fi(x0
1, · · · , x0j−1, xj, x
0j+1, · · · , xn
)− fi
(x0
1, · · · , x0j−1, x
0j , x
0j+1, · · · , xn
)xj − x0
j
,
adica derivata componentei fi (·) privita ca functie (numai) de variabila xj, pastrând toate celelalte variabile
constante si egale cu componentele corespunzatoare ale lui x0.
3.4.3. Observatie. Pentru o functie f (·) : D ⊆ Rn → Rm, exista o anumita ambiguitate referitoare la
întrebarea: în ce fel de punct al domeniului se discuta despre diferentiabilitate? Ambiguitatea
începe cu observatia ca limita care defineste derivata partiala nu are nevoie ca x0 sa fie punct interior al
domeniului, este suficient ca acest punct sa fie din D ∩ D′. Prin extensie, s—ar putea spune ca D ∩ D′
este suficient si pentru limita din definitia diferentiabilitatii. Si totusi, este nevoie ca punctul x0 în care
se discuta diferentiabilitatea sa fie chiar punct interior domeniului, iar motivul este dat de necesitatea ca
diferentiala f ′ (x0) sa fie operator liniar, definit pe toata multimea Rn.
Diferentiala lui f (·) în x0 [în directia h] este operatorul liniar:
f ′ (x0; ·) : Rn → R, f ′ (x0;h) =n∑i=1
∂f
∂xi(x0)hi = f ′ (x0)·h, unde f ′ (x0) =
(∂f
∂x1
(x0) , · · · , ∂f∂xi
(x0) , · · · , ∂f∂xn
(x0)
)=
∇f (x0) este numit gradientul functiei f (·) în x0.

75
Pentru fiecare h ∈ Rn, f ′ (x0;h) este derivata functiei (−εh, εh) 3 t 7→ g (t) = f (x0 + th) în t = 0 [mai
poate fi scrisa astfel:∂
∂t(g (x0 + th))
∣∣∣∣t=0
].
Ceea ce se întâmpla este ca în descrierea de mai sus e nevoie ca pentru fiecare directie posibila h ∈ Rn
sa existe εh > 0 astfel încât, ∀t ∈ (−εh, εh), sa existe/sa aiba sens f (x0 + th). Altfel spus, pentru fiecare
directie posibila h ∈ Rn sa existe εh > 0 astfel încât, ∀t ∈ (−εh, εh), x0 + th ∈ D. Aceasta conditie
este satisfacuta daca x0 este punct interior domeniului, dar nu si daca x0 este punct de acumulare al
domeniului.
Concluzia ar fi: daca x0 este punct interior domeniului, atunci diferentiala ca operator liniar (daca
exista) este definita pe tot Rn; daca x0 este numai punct de acumulare si care nu este interior, diferentiala
ca operator liniar nu poate fi definita pe tot Rn. De fapt, aceste argumente justifica algerea/optiunea
[de delimitare a situatiilor] ca punctul în care se discuta diferentiabilitatea sa fie interior; alte variante si
eventuale extensii/discutii, desi valabile si valoroase, nu fac parte din prezentarea "clasica" a notiunilor,
ci din extensiile de tip nonsmooth.
3.4.4. Teorema ([39], Thm. 9.17, pag. 215). Daca o functie este diferentiabila într—un punct, atunci
este si derivabila partial în acel punct, iar reprezentarea diferentialei este:
[df(x0)]
=
(f1)′x1 (x0) (f1)′x2 (x0) · · · (f1)′xn (x0)
(f2)′x1 (x0) (f2)′x2 (x0) · · · (f2)′xn (x0)
· · · · · · · · · · · ·
(fm)′x1 (x0) (fm)′x2 (x0) · · · (fm)′xn (x0)
︸ ︷︷ ︸
m linii si n coloane
.
[din punct de vedere al algebrei liniare, sensul este: reprezentarea operatorului liniar df (x0) în bazele
standard din Rn, respectiv Rm este matricea de mai sus]
3.4.5. Exemplu. Fie functia f (·, ·) : R2 → R2, definita prin f (x, y) = (f1 (x, y) , f2 (x, y)) = (x3 − 2xy2 + y3 − 3, x3 + 2xy2 − y3 + 3)
Graficele componentelor sunt:

76
200y
100 0 224xz 00
24
4
21004200
f1 (x, y) = x3 − 2xy2 + y3 − 3
yx400200
4 422 0z 002 24
200
4
400
f2 (x, y) = x3 + 2xy2 − y3 + 3Derivatele partiale sunt:∂f1
∂x(x, y) = 3x2 − 2y2
∂f1
∂y(x, y) = −4xy + 3y2
∂f2
∂x(x, y) = 3x2 + 2y2
∂f2
∂y(x, y) = 4xy − 3y2
Diferentiala functiei este:
df (x, y) =
∂f1
∂x(x, y)
∂f1
∂y(x, y)
∂f2
∂x(x, y)
∂f2
∂y(x, y)
· dx
dy
=
=
∂f1
∂x(x, y) dx+
∂f1
∂y(x, y) dy
∂f2
∂x(x, y) dx+
∂f2
∂y(x, y) dy
=
=
(3x2 − 2y2) dx+ (−4xy + 3y2) dy
(3x2 + 2y2) dx+ (4xy − 3y2) dy
3.4.6. Observatie. Pentru operatori liniari sunt utilizate urmatoarele definitii echivalente de norme op-
eratoriale:
‖T‖ = inf M ≥ 0; ‖T (x)‖ 6M ‖x‖ , ∀x ∈ Rn =
= sup‖x‖=1
‖T (x)‖ = sup‖x‖61
‖T (x)‖ .
3.4.7. Observatie. 1. Diferentiala într—un punct, daca exista, este unica.
2. Definitia diferentialei în x0 este echivalenta cu:
∃T (x0) (·) ∈ L (Rn,Rm) , ∃U ∈ V (x0) , ∃ω (·) : U → Rm cu limx→x0
ω (x) = 0,
astfel încât f (x) = f (x0) + T (x0) (x− x0) + ‖x− x0‖ · ω (x) .

77
3.4.8. Observatie (Conditii explicite de diferentiabilitate pentru functii de doua variabile). f (·, ·) :
D ⊆ R2 → R este diferentiabila în (x0, y0) ∈ int (D) daca exista numerele λµ ∈ R, ε > 0 si functia
ω (·, ·) : Bε (x0)×Bε (y0)→ R astfel încât:
(1) ∃ lim(x,y)→(x0,y0)
ω (x, y) = 0,
(2) f (x, y) = f (x0, y0) +λ (x− x0) +µ (y − y0) +ω (x, y)√
(x− x0)2 + (y − y0)2, ∀ (x, y) ∈ Bε (x0)×
Bε (y0) [când conditia este satisfacuta, numerele λ si µ sunt chiar valorile derivatelor partiale ale
functiei în (x0, y0)).
3.4.9. Exemplu. Functia f (x, y) =xy√x2 + y2
este continua în (0, 0), are derivate partiale în (0, 0) dar
nu este diferentiabila în (0, 0).
00
1
y 2
42
3
4 2z 0
2 4
32x1
2
4
f (x, y) =xy√x2 + y2
O interpretare geometrica ar fi ca desi se pot duce drepte tangente la suprafata în (0, 0), nu se poate
duce un plan tangent în (0, 0).
Demonstratie. Derivatele partiale (0, 0) sunt:∂f
∂x(0, 0) = lim
x→0
f (x, 0)− f (0, 0)
x− 0= 0,
∂f
∂y(0, 0) = lim
y→0
f (0, y)− f (0, 0)
y − 0= 0;
Daca functia f (·, ·) ar fi diferentiabila în (0, 0), atunci ar fi satfacuta relatia:
f (x, y) = f (0, 0) +∂f
∂x(0, 0) · x+
∂f
∂y(0, 0) · y + ω (x, y)
√x2 + y2,

78
asa ca functia ω (·, ·) ar trebui sa fie ω (x, y) =f (x, y)√x2 + y2
=xy
x2 + y2. dar aceasta functie nu are limita în
(0, 0), asa ca functia f (·, ·) nu este diferentiabila.
3.5. Derivate partiale de ordin superior
Derivate partiale de ordin 2:∂2f
∂xi∂xj(x) = f ′′xixj (x) =
(f ′xi)′xj
(x) [se obtin prin derivarea partiala a
derivatelor partiale de ordin I].
3.5.1. Exemplu. Pentru functia f1 (·, ·) : R2 → R, definita prin f1 (x, y) = x3−2xy2 +y3−3, cu derivatele
partiale de ordin I:∂f1
∂x(x, y) = 3x2 − 2y2
∂f1
∂y(x, y) = −4xy + 3y2
si diferentiala:
df1 (x, y) = (3x2 − 2y2) dx+ (−4xy + 3y2) dy,
derivatele partiale de ordin II sunt:∂2f1
∂x2(x, y) = (3x2 − 2y2)
′x = 6x
∂2f1
∂x∂y(x, y) = (3x2 − 2y2)
′y = −4y
∂2f1
∂y∂x(x, y) = (−4xy + 3y2)
′x = −4y
∂2f1
∂y2(x, y) = (−4xy + 3y2)
′y = 6y
Se observa derivatele partiale de ordin II mixte sunt egale [∂2f1
∂x∂y(x, y) =
∂2f1
∂y∂x(x, y)].
Diferentiala de ordin 2 a functiei f (·) în x0 [în directia h] este functionala patratica f ′′ (x0; ·) : Rn →
R, definita prin:
f ′′ (x0;h) =n∑i=1
n∑j=1
∂2f
∂xi∂xj(x0)hihj = ht ·
(∂2f
∂xi∂xj(x0)
)i,j=1,n
· h = ht · f ′′ (x0) · h, unde matricea
f ′′ (x0) =
(∂2f
∂xi∂xj(x0)
)i,j=1,n
este numita Hessiana lui f (·) în x0.
Pentru fiecare h ∈ Rn, exista εh > 0 astfel încât ∀t ∈ (−εh, εh), are sens f (x0 + th) iar f ′′ (x0;h)
este derivata de ordin doi a functiei (−εh, εh) 3 t 7→ g (t) = f (x0 + th) în t = 0 [se mai scrie astfel:
f ′′ (x0;h) =∂2
∂t2(g (x0 + th))
∣∣∣∣t=0
si se citeste "derivata de ordin 2 a functiei g (·) în directia h" sau "derivata

79
de ordin doi a functiei t 7→ g (x0 + th), calculata în t = 0"]. Directia h mai este scrisa sub forma
h = dx = (dx1 · · · dxn).
3.5.2. Exemplu. Diferentiala de ordin II pentru doua variabile este:
d2f (x, y) =[dx dy
]·
∂2f1
∂x2(x, y)
∂2f1
∂x∂y(x, y)
∂2f1
∂y∂x(x, y)
∂2f1
∂y2(x, y)
· dx
dy
d2f (x, y) =
[dx dy
]·
6x −4y
−4y 6y
· dx
dy
d2f (x, y) = 6x · dx2 − 8y · dxdy + 6y · dy2
3.5.3. Teorema (Young). Daca derivatele partiale de ordin II mixte sunt continue, atunci∂2f
∂xi∂xj(x) =
∂2f
∂xj∂xi(x).
Fie f (·, ·) : D⊆R2 → R si (a, b) ∈ int (D).
3.5.4. Definitie. Polinomul Taylor de ordin n al functiei f (·, ·) în (a, b) este polinomul de doua variabile:
Tn(x, y) = f(a, b) + 11!
[∂f
∂x(a, b)(x− a) +
∂f
∂y(a, b)(y − b)
]+
+ 12!
[∂2f
∂x2(a, b)(x− a)2 + 2
∂2f
∂x∂y(a, b)(x− a)(y − b) +
∂2f
∂y2(a, b)(y − b)2
]+ ...
· · ·+ 1
n!
[∂
∂x(x− a) +
∂
∂y(y − b)
](n)
f(a, b)
Rn(x, y) = f(x, y)− Tn(x, y) este restul de ordin n.
3.5.5. Definitie. Diferentiala de ordin II:
d2f (α) =n∑
i,j=1
∂2f
∂xi∂yj(a) · dxidxj =
=[dx1 dx2 · · · dxn
]·
∂2f
∂x1∂x1
(a) · · · ∂2f
∂xn∂x1
(a)
... · · · ...∂2f
∂x1∂xn(a) · · · ∂2f
∂xn∂xn(a)
·dx1
dx2
...
dxn

80
3.6. Proprietati ale functiilor diferentiabile
3.6.1. Observatie. Daca functia f (·) : U = int (U) ⊂ Rn → Rm este diferentiabila în fiecare punct din
U , atunci diferentiala pe U este o noua functie cu valori în L (Rn,Rm):
df (·) : U → L (Rn,Rm) .
3.6.2. Teorema ([39], Thm. 9.12, pag. 213). Daca o functie este diferentiabila într—un punct, atunci
diferentiala este unica
3.6.3. Teorema ([39], Thm. 5.2, pag. 104). Daca o functie este diferentiabila într—un punct, atunci este
si continua în acel punct.
3.6.4. Observatie. Exista functii continue într—un punct dar care nu sunt diferentiabile în acel punct.
Exemplu: f (x) = |x| în x0 = 0.
3.6.5. Observatie. Existenta derivatei pe un interval nu implica si continuitatea derivatei.
Exemplu: f (x) =
x2 sin1
x, x 6= 0
0, x = 0.are derivata f ′ (x) =
2x sin1
x− cos
1
x, x 6= 0
0, x = 0.care nu este
continua în 0. [f ′ (0) = limx→0
f (x)− f (0)
x− 0= lim
x→0
x2 sin1
xx
= limx→0
x sin1
x= 0]
[în 0 functia f ′ (·) are o discontinuitate de speta II]
3.6.6. Observatie. Existenta derivatelor partiale nu implica si continuitatea functiei în acel punct.
Exemplu: functia f (x, y) =
xy
x2 + y2, (x, y) 6= (0, 0) ,
0, (x, y) = (0, 0) .
∃f ′x (0, 0) = limx→0
f (x, 0)− f (0, 0)
x− 0= lim
x→0
0
x= 0,
∃f ′y (0, 0) = limy→0
f (0, y)− f (0, 0)
y − 0= lim
y→0
0
y= 0,
si totusi functia nu este continua în (0, 0).
3.6.7. Observatie. Operatorii liniari pe spatii vectoriale finit—dimensionale sunt functii continue si difer-
entiabile. În fiecare punct, diferentiala operatorului este operatorul însusi.

81
3.6.8. Observatie. Un operator T (·, ·) ∈ L (Rn,Rm;Rp) (operator biliniar, T (·, ·) : Rn×Rm → Rp ) este
continuu si diferentiabil în fiecare punct; mai mult,
dT (x0, y0) (x, y) = T (x0, y) + T (x, y0) .
În particular, patratul normei euclidiene f (x) = ‖x‖2 =n∑k=1
x2k are diferentiala:
df(x0)
(x) = 2
n∑k=1
x0kxk = 2 〈x, x0〉 .
3.6.9. Teorema (Regula lantului). [Diferentiala unei functii compuse] [[39], Teoremele 5.5 pag. 105 si
9.15 pag 214]
Fie U = int (U) ⊂ Rn, V = int (V ) ⊂ Rm, si functiile f (·) : U → V , g (·) : V → Rp astfel încât f (·) sa
fie diferentiabila în x0 ∈ U iar g (·) sa fie diferentiabila în f (x0). Atunci functia compusa
h (·) = (g f) (·) : U → Rp
este si ea diferentiabila în x0 iar legatura dintre diferentiala functiei compuse si diferentialele functiilor
care se compun este:
d (g f) (x0) = dg(f(x0)) df
(x0).
Demonstratie. Deoarece functia f (·) este diferentiabila în x0 iar functia g (·) este diferentiabila în
f (x0), se poate scrie:
f (x) = f (x0) + f ′ (x0) (x− x0) + ‖x− x0‖ωf,x0 (x) , ∀x ∈ U,
g (y) = f (x0) + g′ (f (x0)) (y − f (x0)) + ‖y − f (x0)‖ωg,f(x0) (y) , ∀y ∈ V,
cu limx→x0
ωf,x0 (x) = 0 (∈ Rm) si limy→f(x0)
ωg,f(x0) (y) = 0 (∈ Rp) ;
82
prin înlocuirea lui y cu f (x) se obtine:
g (f (x)) = f (x0) + g′ (f (x0)) (f (x)− f (x0)) + ‖f (x)− f (x0)‖ωg,f(x0) (f (x)) =
= f (x0) + g′ (f (x0)) (f ′ (x0) (x− x0) + ‖x− x0‖ωf,x0 (x)) +
+ ‖f ′ (x0) (x− x0) + ‖x− x0‖ωf,x0 (x)‖ωg,f(x0) (f (x)) ≤
≤ f (x0) + g′ (f (x0)) f ′ (x0) (x− x0) +
+ ‖x− x0‖(g′ (f (x0))ωf,x0 (x) + (‖f ′ (x0)‖+ ‖ωf,x0 (x)‖)ωg,f(x0) (f (x))
)=
= f (x0) + g′ (f (x0)) f ′ (x0) (x− x0) + ‖x− x0‖ωgf,x0 (x) ,
unde ωgf,x0 (x) = g′ (f (x0))ωf,x0 (x) + (‖f ′ (x0)‖+ ‖ωf,x0 (x)‖)ωg,f(x0) (f (x))
iar limx→x0
ωgf,x0 (x) = 0 (∈ Rp)
3.6.10. Observatie (Formamatriciala a regulii lantului). dh (x0) ∈ L (Rn,Rp) (un operator liniar reprezen-
tat printr—o matrice p× n):
Rp 3 dh(x0)dx =
(h1)′x1 (x0) (h1)′x2 (x0) · · · (h1)′xn (x0)
(h2)′x1 (x0) (h2)′x2 (x0) · · · (h2)′xn (x0)
· · · · · · · · · · · ·
(hp)′x1
(x0) (hp)′x2
(x0) · · · (hp)′xn
(x0)
︸ ︷︷ ︸
p linii si n coloane
·
dx1
...
dxn
df (x0) ∈ L (Rn,Rm) (un operator liniar reprezentat printr—o matrice p×m):
Rm 3 df(x0)dx =
(f1)′x1 (x0) (f1)′x2 (x0) · · · (f1)′xn (x0)
(f2)′x1 (x0) (f2)′x2 (x0) · · · (f2)′xn (x0)
· · · · · · · · · · · ·
(fm)′x1 (x0) (fm)′x2 (x0) · · · (fm)′xn (x0)
︸ ︷︷ ︸
m linii si n coloane
·
dx1
...
dxn

83
dg (u0) ∈ L (Rm,Rp) (un operator liniar reprezentat printr—o matrice m× n):
Rp 3 dg(u0)du =
(g1)′u1 (u0) (g1)′u2 (u0) · · · (g1)′um (u0)
(g2)′u1 (u0) (g2)′u2 (u0) · · · (g2)′um (u0)
· · · · · · · · · · · ·
(gp)′u1
(u0) (gp)′u2
(u0) · · · (gp)′um
(u0)
︸ ︷︷ ︸
p linii si m coloane
·
du1
...
dum
iar relatia are forma matriciala: (p× n) = (p×m) · (m× n), si anume:(h1)′x1 (x0) (h1)′x2 (x0) · · · (h1)′xn (x0)
(h2)′x1 (x0) (h2)′x2 (x0) · · · (h2)′xn (x0)
· · · · · · · · · · · ·
(hp)′x1
(x0) (hp)′x2
(x0) · · · (hp)′xn
(x0)
·
dx1
...
dxn
=
=
(g1)′u1 (f (x0)) (g1)′u2 (f (x0)) · · · (g1)′um (f (x0))
(g2)′u1 (f (x0)) (g2)′u2 (f (x0)) · · · (g2)′um (f (x0))
· · · · · · · · · · · ·
(gp)′u1
(f (x0)) (gp)′u2
(f (x0)) · · · (gp)′um
(f (x0))
·
·
(f1)′x1 (x0) (f1)′x2 (x0) · · · (f1)′xn (x0)
(f2)′x1 (x0) (f2)′x2 (x0) · · · (f2)′xn (x0)
· · · · · · · · · · · ·
(fm)′x1 (x0) (fm)′x2 (x0) · · · (fm)′xn (x0)
·
dx1
...
dxn
3.6.11. Exercitiu. Date fiind functiile u (·, ·) si v (·, ·), sa se gaseasca derivatele partiale ale functiilor [se
considera ca toate conditiile de existenta pentru expresiile functiilor si pentru derivatele lor partiale sunt
satisfacute]:
1. f (x, y) = u (x, y)v(x,y) ,
2. g (x, y) =√u (x, y) + v (x, y),
3. h (x, y) = arctan u(x,y)v(x,y)
.
3.6.12. Solutie. 1. f (x, y) = u (x, y)v(x,y) = elnu(x,y)v(x,y) = ev(x,y) lnu(x,y)

84
f ′x (x, y) =∂
∂x
(u (x, y)v(x,y)
)=
∂
∂x
(ev(x,y) lnu(x,y)
)= ev(x,y) lnu(x,y) · ∂
∂x(v (x, y) lnu (x, y)) =
= u (x, y)v(x,y)
(v′x (x, y) lnu (x, y) + v (x, y) · u
′x (x, y)
u (x, y)
).
f ′y (x, y) exercitiu.
2. g′x (x, y) =∂
∂x
(√u (x, y) + v (x, y)
)=
u′x (x, y) + v′x (x, y)
2√u (x, y) + v (x, y)
.
g′y (x, y) exercitiu.
3. exercitiu.
3.6.13. Exercitiu. Daca u (x, y) = ex+y2 si v (x, y) = x2+y, sa se gaseasca derivatele partiale ale functiilor:
f (x, y) = ln (u2 (x, y) + v (x, y)) ,
g (x, y) = arctan u(x,y)v(x,y)
.
3.6.14. Solutie. Exercitiu.
3.6.15. Exercitiu. Sa se verifice ca functiile verifica ecuatiile (diferentiale cu derivate partiale):
1. f (x, y) = ϕ(yx
)verifica xf ′x + yf ′y = 0.
2. f (x, y, z) = ϕ (xy, x2 + y2 − z2) verifica xzf ′x − yzf ′y + (x2 − y2) f ′z = 0.
3.6.16. Solutie. 1. Exercitiu.
2. În functia f (x, y, z) = ϕ (xy, x2 + y2 − z2), functia ϕ (·, ·) este o functie de doua variabile, care vor
fi notate u si v.
f ′x (x, y, z) =∂
∂x(ϕ (xy, x2 + y2 − z2)) = ϕ′u (xy, x2 + y2 − z2)· ∂
∂x(xy)+ϕ′v (xy, x2 + y2 − z2)· ∂
∂x(x2 + y2 − z2) =
= ϕ′u (xy, x2 + y2 − z2) · y + ϕ′v (xy, x2 + y2 − z2) · 2x
f ′y (x, y, z) =∂
∂y(ϕ (xy, x2 + y2 − z2)) = ϕ′u (xy, x2 + y2 − z2)· ∂
∂y(xy)+ϕ′v (xy, x2 + y2 − z2)· ∂
∂y(x2 + y2 − z2) =
= ϕ′u (xy, x2 + y2 − z2) · x+ ϕ′v (xy, x2 + y2 − z2) · 2y
f ′z (x, y, z) =∂
∂z(ϕ (xy, x2 + y2 − z2)) = ϕ′u (xy, x2 + y2 − z2)· ∂
∂z(xy)+ϕ′v (xy, x2 + y2 − z2)· ∂
∂z(x2 + y2 − z2) =
= ϕ′u (xy, x2 + y2 − z2) · 0 + ϕ′v (xy, x2 + y2 − z2) · (−2z) = −2zϕ′v (xy, x2 + y2 − z2)
Se înlocuieste în ecuatie:
xzf ′x (x, y, z)− yzf ′y (x, y, z) + (x2 − y2) f ′z (x, y, z) =
= xz (yϕ′u (xy, x2 + y2 − z2) + 2xϕ′v (xy, x2 + y2 − z2))−

85
−yz (xϕ′u (xy, x2 + y2 − z2) + 2yϕ′v (xy, x2 + y2 − z2)) +
+ (x2 − y2) (−2zϕ′v (xy, x2 + y2 − z2)) =
= (xyz − xyz)ϕ′u (xy, x2 + y2 − z2) + (xz (2x)− yz (2y)− 2z (x2 − y2))ϕ′v (xy, x2 + y2 − z2) =
= 0 · ϕ′u (xy, x2 + y2 − z2) + (2x2z − 2y2z − 2x2z + 2y2z)ϕ′v (xy, x2 + y2 − z2) = 0,
deci functia f (·, ·, ·) verifica ecuatia.
Sigur ca, în redactarea solutiei, scrierea explicita a argumentelor functiilor îngreuneaza mult scrisul si
cititul. S—a preferat, totusi, aceasta varianta, pentru a fi cât mai vizibile toate detaliile rezolvarii. Pentru
examen/lucrari, omiterea acestei explicitari nu este neaparat o greseala.
Derivatele partiale (fara explicitarea argumentelor) sunt:
f ′x = ϕ′u∂
∂x(xy) + ϕ′v
∂
∂x(x2 + y2 − z2) = ϕ′uy + ϕ′v2x
f ′y = ϕ′u∂
∂y(xy) + ϕ′v
∂
∂y(x2 + y2 − z2) = ϕ′ux+ ϕ′v2y
f ′z = ϕ′u∂
∂z(xy) + ϕ′v
∂
∂z(x2 + y2 − z2) = ϕ′u · 0 + ϕ′v (−2z) = −2zϕ′v
xzf ′x − yzf ′y + (x2 − y2) f ′z =
= xz (yϕ′u + 2xϕ′v)−yz (xϕ′u + 2yϕ′v)+(x2 − y2) (−2zϕ′v) = (xyz − xyz)ϕ′u+(xz (2x)− yz (2y)− 2z (x2 − y2))ϕ′v =
0
Este vizibil ca fiecare varianta de redactare are plusuri si minusuri: varianta explicita este mai greoaie
dar mai usor de înteles, pe când varianta fara argumente scrise explicit este mai simpla, dar mai criptica
(mai ales pentru cei care sunt la momentul când învata prima data aceste lucruri, si acum încearca sa
le patrunda). În ultima instanta, dupa ce lucrurile au fost întelese, modul de prezentare este alegerea
fiecaruia, atâta vreme cât este corect.
3.6.17. Observatie. Daca f (x) = T (g1 (x) , g2 (x)), cu T (·, ·) ∈ L (Rn,Rm;Rp) si g1 (·) : Rq → Rn,
g2 (·) : Rq → Rm diferentiabile în x0, atunci f (·) este diferentiabila în x0 si
df(x0)v = T
(dg1
(x0)v, g2
(x0))
+ T(g1
(x0), dg2
(x0)v),∀v ∈ Rq.

86
3.6.18. Teorema ([39], Thm. 9.19, pag 218). Daca f (·) : D ⊆ Rn → Rm are domeniul D convex si
deschis iar f (·) este diferentiabila pe D, si exista un numar M > 0 astfel încât
∀x ∈ D, ‖f ′ (x)‖ ≤M,
Atunci:
∀a, b ∈ D, ‖f (a)− f (b)‖ ≤M ‖a− b‖ .
[Daca diferentiala este marginita pe D, atunci functia este lipschitziana pe D, iar marginea este constanta
de lipschitzianitate]
Daca, în plus, ∀x ∈ D, f ′ (x) = 0, atunci f (·) este constanta pe D.
Nota: În cele doua inegalitati, fiecare norma este corespunzatoare spatiului din care face parte elementul
caruia i se aplica norma:
‖a− b‖ este norma pe Rn, ‖f (a)− f (b)‖ este norma pe Rm, ‖f ′ (x)‖ este norma operatoriala pe
L (Rn,Rm).
3.6.19. Definitie. Functia f (·) : D = int (D) ⊆ Rn → Rm este numita continuu diferentiabila pe
D daca exista si este continua functia f ′ (·) : D → L (Rn,Rm) [se mai foloseste denumire de functie de
clasa C1 pe D]
3.6.20. Teorema ([39], Thm.9.21, pag. 219). O functie f (·) : D = int (D) ⊆ Rn → Rm este de clasa C1
pe D ⇐⇒
⇐⇒ toate derivatele partiale ale functiei exista si sunt continue pe D [∀i = 1,m, ∀j = 1, n, ∃ ∂fi∂xj
(·)
continua pe D]
3.6.21. Teorema (Denjoy—Bourbaki). [The Mean Value Theorem, [24], vol. I, (8.5.1)] [Premier théorème
des accroissements finis] Fie B = (rk)k∈N ⊂ [a, b], f (·) : [a, b]→ Rm, g (·) : [a, b]→ R, astfel încât:
(1) f (·), g (·) continue pe [a, b] iar g (·) crescatoare pe [a, b];
(2) f (·), g (·) diferentiabila pe [a, b] \B;
(3) ‖df (t)‖ 6 dg (t) , ∀t ∈ [a, b] \B.

87
Atunci:
‖f (b)− f (a)‖ 6 g (b)− g (a) .
3.6.22. Teorema ([24], vol. I, (8.5.2)). Daca f (·) : [a, b] → Rn este continua pe [a, b], diferentiabila pe
[a, b] \B (B numarabila) iar ‖f ′ (t)‖ ≤M , ∀t ∈ [a, b] \B, atunci
‖f (b)− f (a)‖ 6M (b− a) .
Demonstratie. Se aplica The Mean Value Theorem cu g (t) = Mt.
3.6.23. Teorema. Daca f (·) : [a, b]→ Rn este continua pe [a, b], diferentiabila pe [a, b]\B (B numarabila)
iar f ′ (t) = 0 (∈ Rn), atunci f (·) este constanta pe [a, b]. [rezultat mentionat ca un comentariu în [24],
vol. I, Ch. VIII, Section 6, page 162, ca aplicatie la The Mean Value Theorem]
3.6.24. Teorema ([24], vol. I, Th. (8.5.4)). Fie U = int (U) convexa⊂ Rn si f (·) : U → Rm diferentiabila
pe U . Atunci:
‖f (v)− f (u)‖ 6 ‖v − u‖ supx∈[u,v]
‖f ′ (x)‖ , ∀u, v ∈ U.
Demonstratie. Let u, v ∈ U and g (·) : [0, 1]→ Rm, g (t) = (1− t)u+ tv. Apply [[24], vol. I, (8.5.2)]
for the function h (t) = (f g) (t). We have g′ (t) = v − u and
h′ (t) = f ′ (g (t)) g′ (t) = f ′ ((1− t)u+ tv) (v − u)
so that
‖h′ (t)‖ = ‖f ′ ((1− t)u+ tv) (v − u)‖ ≤ ‖f ′ ((1− t)u+ tv)‖ · ‖(v − u)‖ 6
6 ‖(v − u)‖ supt∈[0,1]
‖f ′ ((1− t)u+ tv)‖ = ‖(v − u)‖ supx∈[u,v]
‖f ′ (x)‖ .
Then
‖f (u)− f (v)‖ = ‖h (1)− h (0)‖ 6 (1− 0) supt∈[0,1]
‖h′ (t)‖ 6 ‖(v − u)‖ supx∈[u,v]
‖f ′ (x)‖

88
3.6.25. Corolar. Fie U = int (U) convexa ⊂ Rn si f (·) : U → Rm diferentiabila pe U . Daca exista
M ≥ 0 astfel încât
‖f ′ (x)‖ 6M, ∀x ∈ U,
atunci
‖f (x1)− f (x2)‖ 6M ‖x1 − x2‖ , ∀x1, x2 ∈ U.
[f (·) este lipshitziana pe U ]
3.6.26. Teorema ([24], vol. I, Th. (8.6.2)). [Seconde théorème des accroissements finis] Fie U deschisa,
convexa în Rn si f (·) : U → Rm diferentiabila pe U . Atunci
∀a, b ∈ U si c ∈ [a, b] ,
‖f (b)− f (a)− f ′ (c) (b− a)‖ 6 ‖b− a‖ supx∈[a,b]
‖f ′ (x)− f ′ (c)‖ .
Demonstratie. Consider a, b ∈ U and c ∈ [a, b], and the function g (·) : U → Rm defined by
g (x) = f (x)− (f ′ (c)) (x) .
Then
g′ (x) = f ′ (x)− f ′ (c)
and, by Mean Value Theorem, we have
‖g (b)− g (a)‖ 6 ‖b− a‖ supx∈[a,b]
‖g′ (x)‖ ,
which means
‖f (b)− f (a)− f ′ (c) (b− a)‖ 6 ‖b− a‖ supx∈[a,b]
‖f ′ (x)− f ′ (c)‖ .
3.6.27. Corolar. Fie D deschisa, convexa în Rn, f (·) : D → Rm diferentiabila pe D. Daca f ′ (x) = 0,
∀x ∈ D atunci f (·) este constanta pe D.

89
3.6.28. Teorema ([24], vol. I, Th. (8.6.3)). Fie U deschisa, convexa în Rn, si fn (·) : U → Rm un sir de
functii diferentiabile astfel încât:
(1) Exista x0 ∈ U astfel încât sirul numeric (fn (x0))n este Cauchy;
(2) ∀u ∈ U , ∃εu > 0 astfel încât Bεu (u) ⊆ U si(f ′n|Bεu (u) (·)
)n(sirul de restrictii ale derivatelor la
bila Bεu (u)) converge uniform.
Atunci, pentru fiecare u ∈ U , sirul(fn|Bεu (u) (·)
)nconverge uniform pe Bεu (u).
Mai mult, daca f (x) = limn→∞
fn (x), ∀x ∈ U iar g (x) = limn→∞
f ′n (x), ∀x ∈ U , atunci g (·) = f ′ (·) on U .
3.7. Principiul contractiei [facultativ CIGID]
Vezi sectiunea 10.4, pag. 187.
3.8. Functii definite implicit [facultativ CIGID]
3.8.1. Teorema (Teorema Functiilor Implicite). Fie U = int (U) ⊆ Rn×Rm si h (·, ·) : U → Rm continuu
diferentiabila pe U si (a, b) ∈ U astfel încât:
(1) h (a, b) = 0,
(2)∂h
∂y(·, ·) = D2h (·, ·) : U → L (Rm,Rm) este continua pe U ,
(3)∂h
∂y(a, b) = D2h (a, b) ∈ L (Rm,Rm) este bijectiva (inversabila).
Atunci ∃r > 0 si ∃ϕ (·) : Br (a)→ Rm astfel încât:
(1) (a) (x, ϕ (x)) ∈ U , ∀x ∈ Br (a),
(b) ϕ (·) este continua pe Br (a),
(c) h (x, ϕ (x)) = 0, ∀x ∈ Br (a),
(d) ϕ (a) = b,
(e) ϕ (·) este unica.
Mai mult, ϕ (·) este diferentiabila în a si:
ϕ′ (a) = −(∂h
∂y(a, b)
)−1
∂h∂x
(a, b) .

90
Demonstratie. Fie
T :=
(∂h
∂y(a, b)
)−1
∈ L (Rm,Rn)
si
f (x, y) := y − (T h) (x, y) , ∀x, y ∈ U.
Are loc f (x, y) = y ⇔ h (x, y) = 0 (deoarece T este inversabila).
Fie α, r, ρ astfel încât se poate aplica pentru f (·, ·) versiunea parametrica a principiului contractiei:
din continuitatea lui∂h
∂y(·, ·) se obtine ∀ε ∈
(0, 1‖T‖
),∃r1, ρ > 0 astfel încât:
Br1 (a)× Bρ (b) ⊂ U∥∥∥∂h∂y (x1, y1)− ∂h∂y
(x2, y2)∥∥∥ < ε
2,∀ (x1, y1) , (x2, y2) ∈ Br1 (a)× Bρ (b)
Se obtin inegalitatile:
‖f (x, y1)− f (x, y2)‖ = ‖y1 − y2 − T (h (x, y1)− h (x, y2))‖ =
=∥∥T (T−1 (y1 − y2)
)− T (h (x, y1)− h (x, y2))
∥∥ ≤≤ ‖T‖
∥∥(T−1 (y1 − y2))− (h (x, y1)− h (x, y2))
∥∥ =
= ‖T‖∥∥∥∥(∂h∂y (a, b) (y1 − y2)
)− (h (x, y1)− h (x, y2))
∥∥∥∥ ≤≤ 1
2ε
∥∥∥∥h (x, y1)− h (x, y2)− ∂h
∂y(x, y1) (y1 − y2) +
∂h
∂y(x, y1) (y1 − y2)− ∂h
∂y(a, b) (y1 − y2)
∥∥∥∥ ≤≤ 1
2ε
(∥∥∥∥h (x, y1)− h (x, y2)− ∂h
∂y(x, y1) (y1 − y2)
∥∥∥∥+
∥∥∥∥(∂h∂y (x, y1)− ∂h
∂y(a, b)
)(y1 − y2)
∥∥∥∥)
3.8.2. Exercitiu. Functiile u = ϕ (x, y) si v = ψ (x, y) sunt definite implicit de relatiile: u + v = x + y,
xu+ yv = 1. Sa se afle derivatele lor partiale.
3.8.3. Solutie. Relatiile care definesc functiile se rescriu astfel: u+ v = x+ y,
xu+ yv = 1⇒
ϕ (x, y) + ψ (x, y) = x+ y,
xϕ (x, y) + yψ (x, y) = 1.

91
Se deriveaza partial fiecare relatie:
În raport cu prima variabila:
ϕ′x (x, y) + ψ′x (x, y) = 1,
xϕ′x (x, y) + ϕ (x, y) + yψ′x (x, y) = 0,
care este un sistem de doua ecuatii si doua necunoscute, ϕ′x (x, y) si ψ′x (x, y). Se rezolva: ϕ′x (x, y) = 1− ψ′x (x, y) ,
x (1− ψ′x (x, y)) + ϕ (x, y) + y (1− ψ′x (x, y)) = 0⇒ (x+ y)ψ′x (x, y) = ϕ (x, y)⇒
⇒
ϕ′x (x, y) = 1− ψ′x (x, y) = 1− ϕ (x, y)
x+ y=x+ y − ϕ (x, y)
x+ y.
ψ′x (x, y) =ϕ (x, y)
x+ y.
Nota: Nu s—a facut nici un fel de studiu calitativ al problemei. Solutia ilustreaza doar partea de calcul
brut. În situatia când se va cere si studiul calitativ, acest lucru va fi cerut explicit în enunt.
3.9. Polinoame Taylor de mai multe variabile [facultativ CIGID]
Fie f (·, ·) : A = int (A)⊆R2 → R si (a, b) ∈ A. Daca f (·, ·) este de n ori diferentiabila în (a, b), atunci
derivatele partiale mixte de acelasi ordin sunt egale.
3.9.1. Definitie. Polinomul:
Tn(x, y) = f(a, b) + 11!
[∂f(a,b)∂x
(x− a) + ∂f(a,b)∂y
(y − b)]
+
+ 12!
[∂2f(a,b)∂x2
d2x+ 2∂2f(a,b)∂x∂y
dxdy + ∂2f(a,b)∂y2
]+ ...
+ 1n!
[∂∂x
(x− a) + ∂∂y
(y − b)](n)
f(a, b)
este numit Polinom Taylor de grad n al functiei f (·, ·) în (a, b) iar
Rn(a, b) = f(a, b)− Tn(a, b)
este restul de ordin n al polinomului Taylor de grad n.
3.9.2. Teorema. Fie functia f (·, ·) : A = int (A)⊆R2 → R, diferentiabila de n + 1 ori în vecinatatea
A ⊇ V ∈ V ((a, b)). Atunci ∀(x, y) ∈ V , ∃ (α, β) ∈ [x, a]× [y, b] astfel încât:
Rn(x, y) =1
(n+ 1)!
[∂
∂x(x− a) +
∂
∂y(y − b)
](n+1)
f(α, β)

92
Demonstratie. Fie (x, y) ∈ V si x (t) = a+ (x− a) t, y (t) = b+ (y − b) t, t ∈ [0, 1] si functia:
F (t) = f(x(t), y(t)) = f(a+ (x− a)t, b+ (y − b)t).
F (0) = f(a, b), F (1) = f(x, y). Functia F (·) este de n+ 1 ori diferentiabila pe (0, 1), asa ca se poate scrie
formula Taylor pentru o singura variabila, cu restul în forma Lagrange:
F (t) = F (0) +t
1!F ′(0) +
t2
2!F”(0) + ...+
tn
n!F (n)(0) +
tn+1
(n+ 1)!F (n+1)(θ), 0 < θ < t.
Pentru t = 1 are loc:
F (1) = F (0) +1
1!F ′(0) +
1
2!F”(0) + ...+
1
n!F (n)(0) +
1
(n+ 1)!F (n+1)(θ), 0 < θ < 1.
De asemenea, pentru k = 1, 2, ..., n+ 1, are loc
dkF (t) = (δ
δxdx(t) +
δ
δy(t))(k) · f(x(t), y(t)) = (
δ
δx(x− a) +
δ
δy(y − b))(k)(dt)k · f(x(t), y(t)),
Se obtine cadkF (t)
dtk=
[δ
δdx(x− a) +
δ
δdx(y − b)
](k)
f(x(t), y(t)),
sidkF (0)
dtk= F (k)(0) =
[δ
δx(x− a) +
δ
δy(y − b)
](k)
f(a, b).
În final se obtine:
f(x, y) = f(a, b) + 11!
(δ
δx(x− a) +
δ
δy(y − b)
)f(a, b) + 1
2!
(δ
δx(x− a) +
δ
δy(y − b)
)2
f(a, b) + ...+
+ 1n!
(δ
δx(x− a) +
δ
δy(y − b)
)(n)
f(a, b) + 1(n+1)!
(δ
δx(x− a) +
δ
δy(y − b)
)(n+1)
f(α, β)
Se obtine si
Rn(x, y) = 1(n+1)!
(δ
δx(x− a) +
δ
δy(y − b)
)(n+1)
f(α, β),
cu α = a+ θ · (x− a), β = b+ θ · (y − b), 0 < θ < 1.
3.9.3. Teorema. Daca functia f (·, ·) : A = int (A)⊆R2 → R este diferentiabila de n + 1 ori într—
o vecinatate a lui (a, b), atunci exista o functie ω (·, ·) : A → R continua si nula în (a, b) astfel încât
Rn(x, y) = 1n!ρn(x, y) · ω(x, y), unde δ(x, y) =
√(x− a)2 + (y − b)2.

93
3.9.4. Observatie. Daca (x, y) 6= (a, b), atunciRn(x, y)
ρn(x, y)= 1
n!·ω(x, y), iar lim
(x,y)→(a,b)
Rn(x, y)
ρn(x, y)= 0, deoarece
lim(x,y)→(a,b)
ω(x, y) = ω(a, b) = 0.
3.10. Valori extreme ale functiilor reale de mai multe variabile
Conceptele referitoare la valorile extreme ale unei functii au sens datorita unei caracteristici a codome-
niului, si anume ca pe codomeniu exista o relatie de ordine totala. Pentru toate functiile considerate,
codomeniul va fi R iar relatia de ordine va fi cea obisnuita ≤. Mai mult, functiile vor avea domeniul de
definitie de tip finit, în senul ca este o submultime a lui Rn.
Notiunile de puncte de extrem care urmeaza sunt obtinute prin combinarea a trei caracteristici:
• caracteristica globala (proprietatea are loc pe tot domeniul) sau locala (proprietatea are loc pe
o vecinatate a punctului)
• caracteristica de extrem (punctul este de minim sau de maxim)
• caracteristica de conditionare (punctul nu este interior) sau neconditionare (punctul este
interior)
3.10.1. Definitie (Puncte extreme si concepte referitoare la valori extreme). Fie f (·) : A⊆Rn → R si
x0 ∈ A.
(1) Punctul x0 ∈ A este punct de minim global al functiei f (·) pe A daca:
f(x0)≤ f (x) , ∀x ∈ A.
Valoarea f (x0) este minimul global al functiei f (·) pe A.
(2) Punctul x0 ∈ A este punct de minim global strict al functiei f (·) pe A daca:
f(x0)< f (x) , ∀x ∈ A \ x0.
Valoarea f (x0) este minimul global strict al functiei f (·) pe A.
(3) Punctul x0 ∈ A este punct de maxim global al functiei f (·) pe A daca:
f(x0)≥ f (x) , ∀x ∈ A.

94
Valoarea f (x0) este maximul global al functiei f (·) pe A.
(4) Punctul x0 ∈ A este punct de maxim global strict al functiei f (·) pe A daca:
f(x0)> f (x) , ∀x ∈ A \ x0.
Valoarea f (x0) este maximul global strict al functiei f (·) pe A.
(5) Punctul x0 ∈ A este punct de minim local al functiei f (·) pe A daca:
∃V ∈ V(x0), f(x0)≤ f (x) , ∀x ∈ A ∩ V.
Valoarea f (x0) este un minim local al lui f (·) pe A.
Punctul x0 ∈ A este punct de minim local strict al functiei f (·) pe A daca:
∃V ∈ V(x0), f(x0)≤ f (x) , ∀x ∈ A ∩ V \ x0.
Valoarea f (x0) este un minim local strict al lui f (·) pe A.
(6) Punctul x0 ∈ A este un punct de maxim local pentru f (·) daca:
∃V ∈ N(x0), f(x0)≥ f (x) , ∀x ∈ A ∩ V.
Valoare f (x0) este un maxim local al lui f (·) pe A.
Punctul x0 ∈ A este un punct de maxim local strict pentru f (·) daca:
∃V ∈ N(x0), f(x0)≥ f (x) , ∀x ∈ A ∩ V \ x0.
Valoare f (x0) este un maxim local strict al lui f (·) pe A.
(7) Un punct x0 ∈ A de extrem (local sau global, minim sau maxim) este numit neconditionat /
nerestrictionat / liber pentru f (·) pe A daca x0 ∈ int (A) [este punct interior al lui A] si este
numit conditionat /restrictionat / legat daca x0 /∈ int (A)1.
1Definitia punctului de extrem neconditionat ca punct interior al domeniului este data explicit de Magnus Hestenes în [[29],introducere la Sec. 1.3 si la Sec. 3.2]

95
(8) Marginea inferioara a functiei f (·) pe A este notata infx∈A
f (x) si este marginea inferioara
(posibil infinita) a multimii f (A) [ infx∈A
f (x) = inf f (A)].
(9) Marginea superioara a functiei f (·) pe A este notata supx∈A
f (x) si este marginea superioara
(posibil infinita) a multimii f (A) [supx∈A
f (x) = sup f (A)].
3.10.2. Exemplu. Functia f (·) : (−1, 1)→ R, definita prin f (x) = x2 are în x0 = 0 un punct de minim
global neconditionat. Functia nu are puncte de maxim (nici libere, nici conditionate).
Functia g (·) : [−1, 1] → R, definita prin g (x) = x2 are în x0 = 0 un punct de minim global
neconditionat, iar în x1 = −1 si în x2 = 1 are puncte de maxim global, care sunt conditionate (nu
sunt interioare).
1.0 0.5 0.0 0.5 1.0
0.5
1.0
1.5
2.0
x
y
3.10.3. Exemplu. Functia f (·) : R→ R, definita prin f (x) = sin x, are în fiecare punct de forma
xk1 =π
2+ 2kπ =
4k + 1
2π, k ∈ Z câte un punct neconditionat de maxim, atât local cât si global, iar în
fiecare punct de forma xk2 =3π
2+ 2kπ =
4k + 3
2π, k ∈ Z câte un punct neconditionat de minim, atât local
cât si global.
10 8 6 4 2 2 4 6 8 10
1.5
1.0
0.5
0.5
1.0
1.5
x
y

96
3.10.4. Exemplu. Functia f (·) : R→ R, definita prin f (x) = x3−x, are în x0 =
√3
3un punct de minim
local neconditionat (si care nu este global), în x1 = −√
3
3un punct de maxim local neconditionat (si care
nu este global), nu are puncte de extrem global.
2 1 1 2
6
4
2
2
4
6
x
y
3.10.5. Exemplu. Functia f (·) : (1, 3)→ R, definita prin f (x) = x, nu are puncte de extrem (nici libere,
nici conditionate).
1.0 1.5 2.0 2.5 3.00
1
2
3
4
x
y
3.10.6. Exemplu. Functia f (·) : (−2, 2)→ R, definita prin f (x) = |x|, are în x0 = 0 un punct de minim
global neconditionat.
2 1 0 1 2
1
2
3
x
y
3.10.7. Observatie. infx∈A
f (x) = α ⇐⇒

97
1. α ≤ f (x), ∀x ∈ A
si
2. ∀β > α, ∃xβ ∈ A, f (xβ) < β.
3.10.8. Teorema (Thm. 2.1, [29]). Fie o functie continua f (·) : A ⊆ Rn → R, pe un domeniu A închis
(A = A).
Se presupune ca exista β ∈ R astfel încât multimea Aβ = x ∈ A; f (x) ≤ β este nevida si marginita.
Atunci exista macar un punct x0 ∈ A astfel încât f (x0) = infx∈A
f (x) (functia îsi atinge infimul pe A).
Demonstratie. Fie α = infx∈A
f (x) = inf f (A); se observa ca f (x) ≥ α, ∀x ∈ A.
1. Daca β < α, atunci Aβ ar fi vida, ceea ce este o contradictie cu ipoteza. Se obtine ca β ≥ α.
2. Daca β = α, deoarece Aβ este nevida, exista puncte x ∈ A astfel încât f (x) ≤ α, si cum pentru
toate punctele din A are loc si f (x) ≥ α, se obtine ca daca β = α atunci toate punctele multimii nevide
Aβ au caracteristica ceruta în enunt.
3. Fie β > α.
Deoarece α = infx∈A
f (x), are loc α = inf f (A), asa ca pozitia valorii α fata de multimea f (A) poate fi
una din urmatoarele doua variante:
3.1. Valoarea α nu este punct de acumulare pentru multimea f (A); în acest caz, pentru a pastra
caracteristica de infimum al multimii f (A), valoarea α trebuie sa fie un punct izolat pentruf (A). Se
obtine ca α ∈ f (A) asa ca exista un punct x0 ∈ A pentru care α = f (x0).
3.2. Valoarea α este punct de acumulare pentru multimea f (A); în acest caz exista macar un sir
(yn)n∈N astfel încât yn ∈ f (A), ∀n ∈ N si yn → α; din yn ∈ f (A), ∀n ∈ N se obtine existenta unui sir
xn ∈ A astfel încât yn = f (xn)→ α.
Deoarece β > α, iar codomeniul este separat (ca spatiu topologic), sirul (f (xn))n∈N va satisface (even-
tual de la un rang încolo) f (xn) ≤ β (i.e.: ∃n0 ∈ N astfel încât ∀n ≥ n0, f (xn) ≤ β) asa ca sirul (xn)n∈N
poate fi considerat cu proprietatile:
xn ∈ A, ∀n ∈ N,
f (xn)→ α si

98
f (xn) ≤ β (i.e. xn ∈ Aβ, ∀n ∈ N).
Deoarece Aβ este marginit, sirul (xn)n∈N este de asemenea marginit asadar se poate extrage din el un
subsir (xnk)k∈N convergent la un punct x0 ∈ A = A (deoarece xn ∈ Aβ ⊆ A = A).
Deoarece functia f (·) este continua, f (x0) = limk→∞
f (xnk) = α, asa ca f (·) îsi atinge valoarea minima
într—un punct.
3.10.9. Teorema (Thm. 2.2, [29]). Fie f (·) : A ⊆ Rn → R si α = infx∈A
f (x). Se presupune ca exista
b > α astfel încât, ∀β < b, multimea Aβ este compacta.
Atunci exista un punct x0 ∈ A astfel încât f (x0) = α (f (·) îsi atinge valoarea minima). [Cerinta din
teorema anterioara ca functia sa fie continua este înlocuita cu cerinta de compacitate nu pentru o singura
multime de nivel, ci pentru toate]
Demonstratie. Pentru β, β1 ∈ (α, b] cu β < β1 multmile Aβ si Aβ1 sunt nevide, compacte si Aβ ⊆ Aβ1 ,
se obtine ca intersectia lor⋂
β∈(α,b]
Aβ este nevida.
Pentru x0 ∈⋂
β∈(α,b]
Aβ are loc f (x0) ≤ β, ∀β ∈ (α, b] ceea ce înseamna f (x0) ≤ α = infx∈A
f (x), adica
f (x0) = α.
3.10.10. Teorema (Thm. 2.3, [29]). Fie f (·) : A ⊆ Rn → R. Daca f (·) este continua iar A este
compacta, atunci exista punctele x0, x1 ∈ A astfel încât f (x) ∈ [f (x0) , f (x1)], ∀x ∈ A. [Când functia
este continua iar domeniul este compact, functia îsi atinge si valoarea minima si valoarea maxima]
3.10.11. Teorema (Thm. 2.5, [29]). Fie f (·) : A ⊆ Rn → R astfel încât A0 ⊆ A, Bδ (A0) ⊆ A,
A0 compacta iar f (·) continua pe Bδ (A0) [functia este continua într—o vecinatate Bδ (A0) a multimii
compacte A0, iar Bδ (A0) = x ∈ Rn; ∃x0 ∈ A0, ‖x− x0‖ < δ].
Daca f (x) > β, ∀x ∈ A0, atunci inegalitatea are loc si pe vecinatatea Bδ (A0). [Demonstratia prin
contradictie]
3.11. Optimizare locala neconditionata
3.11.1. Teorema (Thm. 3.1, [29]). Fie o functie f (·) : A ⊆ Rn → R de clasa C2 si x0 ∈ int (A).
Daca x0 este minim neconditionat, atunci f ′ (x0) = 0 iar f ′′ (x0) este pozitiv definita [nestrict].

99
3.11.2. Teorema (Thm. 3.2, [29]). Fie o functie f (·) : A ⊆ Rn → R de clasa C2 si x0 ∈ int (A).
Daca f ′ (x0) = 0 si f ′′ (x) este strict pozitiv definita, atunci ∃δ,m > 0 astfel încât f (x) ≥ f (x0) +
m ‖x− x0‖, ∀x ∈ x ∈ Rn; ‖x− x0‖ < δ ⊆ A, asa ca x0 este un minim neconditionat local strict.
O solutie x0 a sistemului f ′ (x) = 0 [în necunoscuta x] este numita punct critic [stationar], iar
valoarea functiei f (x0) este numita valoare critica. Un punct critic x0 este numit nedegenerat daca
f ′′ (x0) este nesingulara (determinantul este nenul).
3.11.3. Teorema (Thm. 3.5, [29]). Fie o functie f (·) : A ⊆ Rn → R de clasa C2 si x0 ∈ int (A) un punct
critic nedegenerat.
Atunci:
Punctul x0 este minim local ⇐⇒ f ′′ (x0) este pozitiv definita [nestrict].
Punctul x0 este maxim local ⇐⇒ f ′′ (x0) este negativ definita [nestrict].
[Rezultatul afirma ca nedegenerarea înlocuieste cerinta de definire stricta a functionalei patratice]
3.11.4. Observatie. Procedura pentru functii de 2 variabile:
(1) Se rezolva complet sistemul (FOC) :
f ′x (x, y) = 0
f ′y (x, y) = 0
(2) Pentru fiecare solutie (x0, y0) a sistemului (FOC),
(a) Se calculeaza Hessiana: Hf (x0, y0) =
f ′′x2 (x0, y0) f ′′xy (x0, y0)
f ′′yx (x0, y0) f ′′y2 (x0, y0)
(b) Se decide:
detHf (x, y) f ′′x2 (x, y) (x, y)
> 0 < 0 maximum
> 0 > 0 minimum
< 0 sa (nu este extrem)
= 0 procedura nu decide
3.11.5. Observatie. pentru cazul general: pentru fiecare punct critic α, se considera functionala patratica
ϕ (α) =n∑
i,j=1
∂2f
∂xi∂yj(α) · αiαj.

100
Daca:
(1) ϕ (·) este strict negativ definita, atunci α este punct de extrem [maxim local neconditionat].
(2) ϕ (·) este strict pozitiv definita, atunci α este punct de extrem [minim local neconditionat].
(3) ϕ (·) este nedefinita, atunci α nu este extrem [este punct sa].
(4) ϕ (·) este pozitiv/negativ definita [dar nu strict], procedura nu decide.
3.11.6. Observatie. Hessiana Hf (·) este matricea functionalei patratice:
Hf (a) =
(∂2f
∂xi∂xj(a)
)i,j=1,n
=
∂2f
∂x1∂x1
(a) · · · ∂2f
∂xn∂x1
(a)
... · · · ...∂2f
∂x1∂xn(a) · · · ∂2f
∂xn∂xn(a)
Hessiana (si forma patratica atasata ϕ (·)) este strict pozitiv definita ⇐⇒ toti determinantii sunt
strict pozitivi ∀j = 1, n, ∆j > 0 si este strict negativ definita⇐⇒ ∀j = 1, n, (−1)j ∆j > 0, unde
∆j =
∣∣∣∣∣∣∣∣∣∣∣
∂2f
∂x1∂x1
(a) · · · ∂2f
∂xj∂x1
(a)
... · · · ...∂2f
∂x1∂xj(a) · · · ∂2f
∂xj∂xj(a)
∣∣∣∣∣∣∣∣∣∣∣.
3.11.7. Exemplu. Urmatoarea functie are un minim local unic.
f (·, ·) : R2 → R, f (x, y) = 5x2 + 4xy + y2 − 6x− 2y + 6
4
4
2
x
2
000
22
4 4
300
200
100z
y
f (x, y) = 5x2 + 4xy + y2 − 6x− 2y + 6 f ′x (x, y) = (5x2 + 4xy + y2 − 6x− 2y + 6)′x = 10x+ 4y − 6
f ′y (x, y) = (5x2 + 4xy + y2 − 6x− 2y + 6)′y = 4x+ 2y − 2
⇒

101
⇒ (FOC)
10x+ 4y − 6 = 0
4x+ 2y − 2 = 0⇒
5x+ 2y = 3
2x+ y = 1⇒ (1,−1)
f ′′x2 (x, y) = (10x+ 4y − 6)′x = 10
f ′′xy (x, y) = (10x+ 4y − 6)′y = 4
f ′′yx (x, y) = (4x+ 2y − 2)′x = 4
f ′′y2 (x, y) = (4x+ 2y − 2)′y = 2
⇒ d2f (x, y) = 10dx2 + 8dxdy + 2dy2
Hessiana este H (x, y) =
10 4
4 2
; H (1,−1) =
10 4
4 2
, detH (1,−1) = 20 − 4 = 16 > 0 asa
ca punctul (1,−1) este extrem local si deoarece f ′′x2 (x, y) = 10 > 0, punctul este minim local. Valoarea
minima locala a functiei este f (1,−1) = 5− 4 + 1− 6 + 2 + 6 = 4.
3.11.8. Exemplu. Pentru urmatoarea functie, punctul critic nu este de extrem:
f (·, ·) : R2 → R, f (x, y) = x2 − y2
4
2010
z 24
010
y2 0
20 x2 4420
f (x, y) = x2 − y2 f ′x (x, y) = (x2 − y2)′x = 2x
f ′y (x, y) = (x2 − y2)′y = −2y
⇒ (FOC)
2x = 0
−2y = 0⇒ (0, 0) punct critic.
f ′′x2 (x, y) = (2x)′x = 2
f ′′xy (x, y) = (2x)′y = 0
f ′′yx (x, y) = (−2y)′x = 0
f ′′y2 (x, y) = (−2y)′y = −2
⇒ H (x, y) =
2 0
0 −2
, H (0, 0) =
2 0
0 −2
, detH (0, 0) = −4 <
0 asa ca punctul critic (0, 0) nu este extrem local.

102
3.12. Optimizare locala conditionata
3.12.1. Teorema ([6], Th. 18.1; Conditii necesare de optimalitate pentru 2 variabile cu o restrictie de
tip egalitate). Fie functiile de clasa C1 f (·, ·) , h (·, ·) : R2 → R si (x, y) o solutie a problemei (de maxim
cu restrictii)
max(x,y)
f (x, y) ,
cu restrictia h (x, y) = c,
astfel încât (x, y) nu este punct critic al lui h (·, ·)2. Atunci exista un numar real λ astfel încât punctul(x, y, λ
)este punct critic al functiei
L (x, y;λ) = f (x, y)− λ [h (x, y)− c] .
[Functia L (·, ·; ·) este numita "Lagrangian" sau "functia lui Lagrange"]
Demonstratie. Sa presupunem ca (x, y) este o solutie a problemei de maxim restrictionat.
Fie sistemul de doua ecuatii în (x, y) dat de: f (x, y) = f (x, y)
h (x, y) = c.
Acest sistem admite solutia (x, y).
Fie matricea Jacobiana în (x, y),
f ′x (x, y) f ′y (x, y)
h′x (x, y) h′y (x, y)
.Daca rangul matricii ar fi doi, din Teorema Functiei Implicite am obtine pentru fiecare (α, β) dintr—
o vecinatate a lui (f (x, y) , c) (vecinatate cu (f (x, y) , c) ca punct interior) câte o solutie (xα,β, yα,β) a
sistemului
f (x, y) = α
h (x, y) = β.
În particular, pentru ε > 0 suficient de mic exista o solutie (xε, yε) a sistemului
f (x, y) = f (x, y) + ε
h (x, y) = c.,
ceea ce înseamna ca h (xε, yε) = c ((xε, yε) satisface restrictia) si f (xε, yε) = f (x, y) + ε > f (x, y) ((xε, yε)
este mai mare decât (x, y)) ceea ce este o contradictie cu ipoteza ca (x, y) este un maxim cu restrictii.
2Aceasta conditie este numita "Non Degenerate Constraint Qualification" [NDCQ] [Conditie de restrictie nedegenerata]

103
Asadar matricea
f ′x (x, y) f ′y (x, y)
h′x (x, y) h′y (x, y)
nu poate avea rang doi [si din cauza conditiei de nedegener-
are a restrictiei NDCQ trebuie sa fie de rang unu]. Se obtine ca liniile sunt coliniare, adica exista
un scalar notat λ astfel încât(f ′x (x, y) f ′y (x, y)
)= λ
(h′x (x, y) h′y (x, y)
), ceea ce înseamna ca f ′x (x, y) = λh′x (x, y)
f ′y (x, y) = λh′y (x, y). Împreuna cu h (x, y) = c, asta înseamna ca
(x, y, λ
)este punct critic al functiei
L (·, ·; ·) de valoare L(x, y, λ
)= f (x, y).
3.12.2. Teorema ([6], Th. 19.7; Conditii suficiente pentru 2 variabile si o restrictie de tip egalitate). În
aceleasi conditii ca mai sus, sa presupunem ca(x, y, λ
)este un punct critic al functiei Lagrange astfel
încât determinantul bordat
∣∣∣∣∣∣∣∣∣∣0 h′x (x, y) h′y (x, y)
h′x (x, y) L′′x2(x, y, λ
)L′′xy
(x, y, λ
)h′y (x, y) L′′yx
(x, y, λ
)L′′y2
(x, y, λ
)∣∣∣∣∣∣∣∣∣∣> 0. Atunci (x, y) este un maxim
local cu restrictii.
3.12.1. Procedura pentru functii de doua variabile: [opt] f (x, y) restrictionata de g (x, y) = 0
1. Se afla punctele critice ale lui g (·, ·).
2. Se considera functia Lagrange:
L (x, y;λ) = f (x, y)− λg (x, y)
3. Se rezolva sistemul (FOC) cu restrictii:
(CFOC) :
L′x (x, y) = 0
L′y (x, y) = 0
g (x, y) = 0
Pentru fiecare solutie(x, y; λ
)a sistemului (CFOC) astfe încât (x, y) sa nu fie punct critic al lui g (·, ·):
4. Se diferentiaza legatura: g′x (x, y) dx+ g′y (x, y) dy = 0
5. Se stabileste natura functionalei patratice:
L′′x2(x, y; λ
)dx2 + 2L′′xy
(x, y; λ
)dxdy + L′′y2
(x, y; λ
)dy2∣∣∣g′x(x,y)dx+g′y(x,y)dy=0
Functionala patratica de mai sus se afla astfel:

104
5.1 Se afla diferentiala de ordin 2 a functiei (x, y) 7→ L(x, y; λ
)[care este o functionala patratica în
variabilele dx si dy]
5.2 Din diferentierea legaturii de la 4. se expliciteaza dx ca functie de dy [sau invers] si se înlocuieste
în functionala obtinuta în 5.1
5.3 Functionala patratica de la 5.2 este numai în dx [sau dy], si i se stabileste natura:
daca este strict pozitiv definita, punctul studiat este extrem conditionat [maxim local conditionat]
daca este strict negativ definita, punctul studiat este extrem conditionat [minim local conditionat]
în toate celelalte situatii (inclusiv când (x, y) este punct critic pentru g (·, ·)), metoda nu decide
Metoda alternativa: matrice Hessiana bordata
0
∂g
∂x(x, y)
∂g
∂y(x, y)
∂g
∂x(x, y)
∂2L
∂x2
(x, y; λ
) ∂2L
∂x∂y
(x, y; λ
)∂g
∂y(x, y)
∂2L
∂y∂x
(x, y; λ
) ∂2L
∂y2
(x, y; λ
)
3.12.3. Exemplu. f (x, y) = xy cu restrictia x+ y = 1
g (x, y) = x+ y; nu are puncte critice
L (x, y;λ) = xy + λ (x+ y − 1)
∂L
∂x(x, y;λ) = y + λ
∂L
∂y(x, y;λ) = x+ λ⇒
(CFOC) :
y + λ = 0
x+ λ = 0
x+ y = 1
⇒
y = −λ
x = −λ
−2λ = 1⇒ λ = −1
2
⇒ solutie unica(
1
2,1
2;−1
2
)
(CSOC) :
Alternativa 1: se diferentiaza restrictia
x+ y − 1 = 0 ⇒ dx+ dy = 0|(x,y)=(1/2,1/2) ⇒ dx+ dy = 0⇒ dy = −dx.
[se calculeaza diferentiala de ordin 2 pentru functia (x, y) 7→ L
(x, y;−1
2
)]

105
d2(x,y)L
(x, y;−1
2
)= L′′x2
(x, y;−1
2
)dx2 + 2L′′xy
(x, y;−1
2
)dxdy + L′′y2
(x, y;−1
2
)dy2 =
= 2dxdy
se restrictioneaza aceasta functionala la ceea ce s—a obtinut prin diferentierea legaturii, dy = −dx. Se
obtine:
d2(x,y)L
(1
2,1
2;−1
2
)∣∣∣∣dy=−dx
= 2dxdy|dy=−dx = −2dx2 < 0 (functionala strict negativ definita în dx), asa
ca punctul(
1
2,1
2
)este punct de maxim conditionat.
Alternativa 2: matrice Hessiana bordata0
∂g
∂x(x0, y0)
∂g
∂y(x0, y0)
∂g
∂x(x0, y0)
∂2L
∂x2(x0, y0;λ0)
∂2L
∂x∂y(x0, y0;λ0)
∂g
∂y(x0, y0)
∂2L
∂y∂x(x0, y0;λ0)
∂2L
∂y2(x0, y0;λ0)
=
0 1 1
1 0 1
1 1 0
determinantul este:
∆3 =
∣∣∣∣∣∣∣∣∣0 1 1
1 0 1
1 1 0
∣∣∣∣∣∣∣∣∣ = 2 > 0 asa ca punctul(
1
2,1
2
)este maxim conditionat.
10
y0
10
10
x
z
10
10
10
00
În poza se observa intersectia dintre suprafata z = xy si planul (în spatiu) x + y = 1 (care reprezinta
legatura). Functia care trebuie optimizata (în sensul aflarii altitudinii maxime si minime) este curba de
intersectie a suprafetei cu planul (si în acest caz este o curba în spatiu).
Ecuatia în forma parametrica a acestei intersectii [curba în spatiu] este:

106 x = t ∈ R,
y = 1− t,
z = t (1− t) .Desi metoda multiplicatorilor Lagrange este utilizata în situatiile în care nu pot fi facute explicitari,
exemplul de fata este suficient de simplu/particular încât asemenea explicitari sa fie posibile.
A afla extremele functiei f (x, y) = xy cu restrictia x + y = 1 este acelasi lucru cu explicitarea lui y
ca functie de x [y = 1 − x], introducerea în functia initiala a acestei explicitari si rezolvarea problemei
rezultata:
x 7→ u (x) = x (1− x) ⇒
u′ (x) = 1− 2x ⇒ punct critic x0 =1
2,
u′′ (x) = −2 < 0 ⇒ x0 =1
2este extrem [maxim], iar valoarea corespunzatoare pentru y este y0 =
1− x0 =1
2.
3.12.4. Exemplu. Sa se afle extremele conditionate ale functiei f (·, ·, ·) : (0,∞)3 → R, f(x, y, z) = xyz,
cu restrictia x+ y + z = 3.
Solutie: Problema este
[opt]xyz
s.t.
x+ y + z = 3
x, y, z > 0
Functia lui Lagrange:
L(x, y, z;λ) = xyz − λ(x+ y + z − 3); derivatele partiale:
L′x(x, y, z;λ) =∂
∂x(xyz − λ(x+ y + z − 3)) = −λ+ yz
L′y(x, y, z;λ) =∂
∂y(xyz − λ(x+ y + z − 3)) = −λ+ xz
L′z(x, y, z;λ) =∂
∂z(xyz − λ(x+ y + z − 3)) = −λ+ xy
Sistemul (CFOC):

107
yz − λ = 0
xz − λ = 0
xy − λ = 0
x+ y + z − 3 = 0
⇒ x = y = z si λ = x2 = y2 = z2; deci λ > 0 si x = y = z =√λ de unde se
obtine 3√λ− 3 = 0⇒
√λ = 1⇒ λ = 1
asadar sistemul are o solutie unica (1, 1, 1; 1).
Derivatele partiale de ordin 2 ale functiei (x, y, z) 7→ L (x, y, z; 1) sunt:
L′′x2(x, y, z; 1) = 0
L′′y2(x, y, z; 1) = 0
L′′z2(x, y, z; 1) = 0
L′′xy(x, y, z; 1) =∂2
∂x∂y(xyz − (x+ y + z − 3)) = z
L′′xz(x, y, z; 1) =∂2
∂x∂z(xyz − (x+ y + z − 3)) = y
L′′yx(x, y, z; 1) =∂2
∂y∂x(xyz − (x+ y + z − 3)) = z
L′′yz(x, y, z; 1) =∂2
∂y∂z(xyz − (x+ y + z − 3)) = x
L′′zx(x, y, z; 1) =∂2
∂z∂x(xyz − (x+ y + z − 3)) = y
L′′zy(x, y, z;λ) =∂2
∂z∂y(xyz − λ(x+ y + z − 3)) = x
Derivatele partiale ale legaturii:∂
∂x(x+ y + z − 3) = 1
∂
∂y(x+ y + z − 3) = 1
∂
∂z(x+ y + z − 3) = 1
Alternativa 1: matricea Hessiana bordata0 1 1 1
1 0 z y
1 z 0 x
1 y x 0
care în punctul critic conditionat (1, 1, 1) este
0 1 1 1
1 0 1 1
1 1 0 1
1 1 1 0
iar determinantul este
−3 < 0 asa ca punctul (1, 1, 1) este maxim local conditionat.
108
Alternativa 2: se diferentiaza legatura x+ y + z − 3 = 0 si se obtine dx+ dy + dz = 0.
Se calculeaza diferentiala de ordin 2 a functiei (x, y, z) 7→ L (x, y, z; 1) si se înlocuieste în ea relatia
obtinuta din diferentierea legaturii dx+ dy + dz = 0:
d2(x,y,z)L (1, 1, 1; 1)
∣∣∣dx+dy+dz=0
= 2dxdy + 2dxdz + 2dydz|dz=−dx−dy =
= 2 (dxdy − dx (dx+ dy)− dy (dx+ dy)) =
= −2 (dx2 + dxdy + dy2) care este o functionala în dx si dy, strict negativ definita asa ca punctul
(1, 1, 1) este maxim local conditionat.
3.13. Metoda celor mai mici patrate
Aceasta metoda consta în minimizarea patratelor erorilor de aproximare si se pare ca a fost introdusa
în 1805 de catre Adrien—Marie Legendre. Se presupune ca au fost facute n observatii iar valorile obtinute
sunt (x1, y1), (x2, y2), · · · (xn, yn).
• Se considera doua variabile X si Y despre care se stie [se face ipoteza] ca sunt conectate printr—un
model teoretic de forma Y = f (X; θ), unde θ este o lista de parametri.
• Se colecteaza n observatii facute despre valorile celor doua variabile X si Y
• Pentru variabila X se observa valorile x1, · · · , xn iar pentru variabila Y se observa valorile y1,
· · · , yn. În plus, se observa si o legatura între observatiile celor doua variabile: când pentru X
apare observatia i, care este xi, apare si observatia i pentru Y , care este yi.
• Datorita tipului de model teoretic (în care Y este privit ca o functie de X), Y mai este numita
variabila dependenta sau variabila raspuns, iar X variabila independenta
• Se presupune de obicei ca observatiile nu sunt exacte, ci imprecise, contaminate, contin mici
perturbatii aleatoare
• Metoda gaseste o estimare θ a parametrilor θ, care este cea mai buna din anumite puncte de
vedere (care vor fi prezentate).
• Estimarea începe cu urmatoarele consideratii: conform modelului teoretic, daca pentru X s—a
obtinut valoarea xi, pentru Y ar trebui sa se obtina valoarea f (xi; θ). Deoarece valoarea obtinuta
este yi, se obtine o eroare la observatia i, data de εi = yi − f (xi; θ) [este o eroare teoretica,

109
deoarece depinde de modelul teoretic]. În figura de mai jos este vizibila pozitionarea pe axa Oy
a erorii εi.
• Metoda celor mai mici patrate cauta parametrii θ astfel încât suma patratelor erorilor la fiecare
observatie sa fie minima:
• Eroarea totala este E (θ) =n∑i=1
ε2i =
n∑i=1
(yi − f (xi; θ))2.
• Estimatorul θ este cautat astfel încât E(θ)
= minθE (θ).
• Metoda celor mai mici patrate nu este singura metoda care obtine o estimare a parametrilor θ.
În literatura de specialitate sunt considerate si alte metode, cum ar fi:
—minθ
maxi=1,n|εi|,
—minθ
n∑i=1
|εi|.
• Cel mai simplu exemplu este modelul liniar afin: f (x; a, b) = ax + b, cu θ = (a, b); modelul
teoretic afirma ca între variabilele X si Y exista o legatura de tip liniar; metoda celor mai mici
patrate cauta, dintre toate dreptele posibile, pe cea care este "cea mai apropiata" de observatiile
disponibile, y = ax+ b.
• Metoda celor mai mici patrate foloseste patratul distantei verticale dintre perechea observata
(xi, yi) si perechea teoretica (xi, axi + b): (axi + b− yi)2.
• Eroarea totala este suma patratelor erorilor, privita ca functie de parametrii modelului teoretic:
E (a, b) =n∑i=1
(axi + b− yi)2 .

110
Se foloseste metoda de aflare a extremelor locale neconditionate pentru aflarea estimatorilor a si b:∂E
∂a(a, b) = 2
n∑i=1
(axi + b− yi)xi∂E
∂b(a, b) = 2
n∑i=1
(axi + b− yi)⇒
⇒ (FOC) :
∂E
∂a(a, b) = 0
∂E
∂b(a, b) = 0
⇒
2
n∑i=1
(axi + b− yi)xi = 0
2n∑i=1
(axi + b− yi) = 0⇒
(
n∑i=1
x2i
)a+
(n∑i=1
xi
)b =
n∑i=1
xiyi(n∑i=1
xi
)a+
(n∑i=1
1
)b =
n∑i=1
yi
⇒
⇒
a =
n
(n∑i=1
xiyi
)−(
n∑i=1
xi
)(n∑i=1
yi
)n
(n∑i=1
x2i
)−(
n∑i=1
xi
)2
b =
(n∑i=1
x2i
)(n∑i=1
yi
)−(
n∑i=1
xi
)(n∑i=1
xiyi
)n
(n∑i=1
x2i
)−(
n∑i=1
xi
)2 .
∂2E
∂a2(a, b) = 2
n∑i=1
x2i > 0
∂2E
∂b2(a, b) = 2n
∂2E
∂a∂b(a, b) =
∂2F
∂b∂a(a, b) = 2
n∑i=1
xi
⇒
Matricea Hessiana este: H (a, b) =
2n∑i=1
x2i 2
n∑i=1
xi
2n∑i=1
xi 2n
detH (a, b) = 4n
n∑i=1
x2i − 4
(n∑i=1
xi
)2
≥ 0 din inegalitatea Cauchy—Buniakowski—Schwarz [cu yi = 1];
mai mult, determinantul este strict pozitiv în ipoteza ca valorile xi sunt diferite, pentru indici i diferiti.
Din conditiile suficiente de ordin 2 se obtine ca punctul(a, b)este punct de minim global strict.
3.13.1. Observatie (inegalitatea Cauchy—Buniakowski—Schwarz). :
∀n ∈ N,∀xi, yi ∈ R(
n∑i=1
xiyi
)2
≤(
n∑i=1
x2i
)(n∑i=1
y2i
).
Demonstratie. Se observa ca (xit+ yi)2 ≥ 0 ∀t ∈ R ⇒ x2
i t2 + 2xiyit+ y2
i ≥ 0 ∀t ∈ R
Se aduna de la 1 la n:

111(n∑i=1
x2i
)t2 + 2
(n∑i=1
xiyi
)t+
n∑i=1
y2i ≥ 0 ∀t ∈ R.
Expresia de mai sus este o functie de gradul doi în variabila t, care este pozitiva pentru toti t, asa ca
discriminantul acestei functii trebuie sa fie negativ sau cel mult nul (altfel functia ar avea doua radacini
distincte iar între ele semnul functiei ar fi negativ).
⇒ 4
(n∑i=1
xiyi
)2
− 4
(n∑i=1
x2i
)(n∑i=1
y2i
)≤ 0 asa ca(
n∑i=1
xiyi
)2
≤(
n∑i=1
x2i
)(n∑i=1
y2i
), care încheie demonstratia.
Dreapta y = ax + b este modelul teoretic care estimeaza cel mai bine observatiile considerate, tinând
cont de ipoteza teoretica [modelul cautat este de tip liniar afin] si de metoda de asamblare a erorilor pentru
fiecare observatie. Dreapta y = ax+ b mai este numita si dreapta de regresie.
Valoarea E(a, b)este eroarea de evaluare.
Limbaj econometric:
n este dimensiunea de selectie
i este indicele observatiei
X este variabila considerata independenta (cu valori observate x1, · · · , xn) (pot fimai multe variabile
independente) (variabila explicativa)
X =1
n
n∑i=1
xi este observatia medie a lui X (media de selectie).
Y este variabila considerata dependenta (de X) (cu valori observate y1, · · · , yn) (variabila explicata).
Y =1
n
n∑i=1
yi este observatia medie a lui Y (media de selectie).
Perechile (xi, yi) sunt dependentele observate.
Modelul teoretic este y = ax+ b
Estimarea prin metoda celor mai mici patrate a modelului teoretic este y = ax+ b
Pentru fiecare i, yi = axi + b este valoarea teoretica a observatiei i
εi = yi − yi este eroarea observata, care este o estimare a erorii teoretice εi
Scopul modelului este sa explice Y în termeni de X
Diverse dificultati ale acestei explicatii:

112
1. Nu se va obtine niciodata o relatie exacta de forma Y = aX + b. Cum poate fi inclusa în
model/procedura posibilitatea ca alti factori (necunoscuti) în afara lui X sa influenteze/afecteze Y ?
2. Cum se poate gasi cea mai potrivita/adecvata relatie functionala dintre X si Y ?
3. Cum putem fi siguri ca între variabile este gasita o relatie de tip ceteris paribus?
Proprietati:
1.n∑i=1
(xi − X
)= 0
Dem: Din definitie.
2.n∑i=1
(xi − X
)xi =
n∑i=1
(xi − X
)2
Proof:n∑i=1
(xi − X
)xi =
n∑i=1
(xi − X
) (xi − X + X
)=
n∑i=1
(xi − X
)2+
n∑i=1
(xi − X
)X =
n∑i=1
(xi − X
)2.
3.n∑i=1
(Y − yi
)xi =
n∑i=1
(xi − X
) (Y − yi
).
Proof:n∑i=1
(Y − yi
)xi =
n∑i=1
(Y − yi
) (xi − X + X
)=
n∑i=1
(Y − yi
) (xi − X
)+
n∑i=1
(Y − yi
)X =
n∑i=1
(Y − yi
) (xi − X
).
4. b = Y − Xa
Proof:
Din (FOC) se obtine ca valorile(a, b)satisfac the relatia:(
n∑i=1
xi
)a+ nb =
n∑i=1
yi
∣∣∣∣ : n ⇒ xa+ b = y ⇒ b = y − xa.
5.n∑i=1
εi = 0
Proof:
εi = yi − axi − b asa ca din (FOC) se obtine:n∑i=1
εi =n∑i=1
(yi − axi − b
)=
n∑i=1
(yi − axi − Y + Xa
)=
n∑i=1
(yi − Y
)+ a
n∑i=1
(X − xi
)= 0.
6.n∑i=1
xiεi = 0
Proof:n∑i=1
xiεi =n∑i=1
xi (yi − yi) =n∑i=1
xi
(yi − axi − b
)=
n∑i=1
xiyi − an∑i=1
x2i − b
n∑i=1
xi =
=n∑i=1
xiyi − an∑i=1
x2i −
(Y − Xa
) n∑i=1
xi =n∑i=1
xiyi − Yn∑i=1
xi − a(
n∑i=1
x2i − X
n∑i=1
xi
)=
=n∑i=1
xiyi − Yn∑i=1
xi − a(
n∑i=1
x2i −
1
n
(n∑i=1
xi
)(n∑i=1
xi
))=

113
=n∑i=1
xiyi − Yn∑i=1
xi −n
(n∑i=1
xiyi
)−(
n∑i=1
xi
)(n∑i=1
yi
)n
(n∑i=1
x2i
)−(
n∑i=1
xi
)2 · 1
n·(n
n∑i=1
x2i −
(n∑i=1
xi
)2)
=
=n∑i=1
xiyi − Yn∑i=1
xi −1
n
[n
(n∑i=1
xiyi
)−(
n∑i=1
xi
)(n∑i=1
yi
)]= 0.
⇒ 0 =n∑i=1
(axi + b− yi
)xi =
n∑i=1
(axi + Y − Xa− yi
)xi =
n∑i=1
(a(xi − X
)+ Y − yi
)xi ⇒
⇒(
n∑i=1
(xi − X
)xi
)a =
n∑i=1
(Y − yi
)xi
au loc:n∑i=1
(xi − X
)xi =
n∑i=1
(xi − X
)2
sin∑i=1
(Y − yi
)xi =
n∑i=1
(xi − X
) (Y − yi
).
Se obtine:(n∑i=1
(xi − X
)2)a =
n∑i=1
(xi − X
) (Y − yi
)⇒ a =
n∑i=1
(xi − X
) (Y − yi
)n∑i=1
(xi − X
)2
E (a, b) =n∑i=1
(axi + b− yi)2 =n∑i=1
(axi − axi + axi + b− b+ b− yi
)2
=n∑i=1
((axi + b− yi
)+ xi (a− a) + b− b
)2
=
=n∑i=1
(axi + b− yi
)2
+n∑i=1
(xi (a− a) +
(b− b
))2
+ 2n∑i=1
(axi + b− yi
)(xi (a− a) + b− b
)=
= E(a, b)
+n∑i=1
(xi (a− a) +
(b− b
))2
+2 (a− a)n∑i=1
(axi + b− yi
)xi︸ ︷︷ ︸
=0 from FOC
+2(b− b
) n∑i=1
(axi + b− yi
)︸ ︷︷ ︸
=0 from FOC
=
= E(a, b)
+n∑i=1
(xi (a− a) +
(b− b
))2
care demonstreaza direct din conditiile de ordin I faptul ca
valoarea minima a expresiei E (a, b) este atinsa când a = a si b = b.

CAPITOLUL 4
Calcul integral
For an introduction in integrals and economic applications, see:
"Blume Simon Mathematics for Economists With answers 1994", Appendix A4, pages 887—893
From "Berck Strom Sydsaeter Economists Mathematical Manual 2005":
Chapter 9 "Integration"
Formulas for integrals on a noncompact domain: 9.45—9.49;
Formulas for the gamma function: 9.53—9.60;
Formulas for the beta function: 9.61—9.62.
From "Demidovich B. (ed.) Problems in mathematical analysis Mir 1970": Chapter V, Sec. 3 (Im-
proper integrals), ex. 1606, 1608, 1609,
Integrale generalizate. Integrale definite pe intervale necompacte. Criterii de convergenta (fara demon-
stratie).Integrale cu parametrii pe interval compact sau necompact (fara demonstratie).
Integrala euleriana gama: definitie si proprietati.(demonstrarea unor proprietati). Integrala euleriana
beta: definitie si proprietati .(demonstrarea unor proprietati). Integrala dubla: definitie, proprietati.
Domeniu simplu conex în raport cu una din axe. Teorema de descompunere. Mod de calcul.Trecerea
de la coordonate carteziene la coordonate polare cu ajutorul transformarilor regulate. Aplicatii în teoria
probabilitatilor: integrala Euler —Poisson.
4.1. Integrale pe domeniu necompact
Integralele studiate în clasa a XII -a sunt integrale calculate numai pe domenii de integrare de forma
[a, b] (intervale compacte). Una dintre posibilele extinderi este cazul în care functia de integrat este definita
115

116
pe intervale necompacte, de tipul: [a, b), (a, b], [a,∞), (−∞, a] sau pe domenii reductibile reuniuni între
formele de mai sus, cum ar fi: (a, b) = (a, c] ∪ [c, b), (−∞,∞) = (−∞, c] ∪ [c,∞), etc.
4.1.1. Integrale pe un domeniu nemarginit. Fie f (·) : [a,∞)→ R o functie integrabila pe orice
interval [c, d] ⊂ [a,∞).
4.1.1. Definitie. Daca limita limb→∞
b∫a
f(x)dx exista si este finita, se spune ca functia f (·) este integrabila
(în sens generalizat) pe [a,∞), sau ca∞∫a
f(x)dx este convergenta. În aceasta situatie, valoarea integralei
este chiar valoarea limitei∞∫a
f(x)dx = limb→∞
b∫a
f(x)dx. În caz contrar se spune ca integrala∞∫a
f(x)dx este
divergenta.
Convergenta integraleib∫−∞
f(x)dx se defineste similar, cu ajutorul limitei lima→−∞
b∫a
f(x)dx.
Integrala∞∫−∞
f(x)dx este numita convergenta daca pentru orice a ∈ R integralelea∫−∞
f (x) dx si∞∫a
f (x) dx
sunt (în mod independent) convergente.
4.1.2. Definitie. Integrala∞∫a
f(x)dx este numita absolut convergenta daca integrala∞∫a
|f(x)| dx este con-
vergenta.
Obs: Orice integrala absolut convergenta este convergenta.
4.1.3. Propozitie (Criteriu de comparatie). Se considera functiile f (·), g (·) : [a,∞)→ R integrabile pe
orice interval [c, d] ⊂ [a,∞).
(1) Daca 0 ≤ |f(x)| ≤ g(x), ∀x ≥ A ≥ a si daca∞∫a
g(x)dx este convergenta, atunci∞∫a
f(x)dx este
absolut convergenta.
(2) Daca f(x) ≥ g(x) ≥ 0, ∀x ≥ A ≥ a si daca∞∫a
g(x)dx este divergenta, atunci∞∫a
f(x)dx este
divergenta.
Demonstratie.
Sa notam F (u) =u∫A
f(x)dx,G(u) =u∫A
g(x)dx si F1(u) =u∫A
| f(x) | dx, u ≥ A.In ipoteza de la
punctul 1. rezulta ca functiile F1si G sunt nenegative si monoton crescatoare pe [A,∞). Cum∞∫a
g(x)dx =

117
A∫a
f(x)dx + limu→∞
u∫A
g(x)dx varezulta ca F1(u) ≤ G(u) ≤∞∫A
g(x)dx < ∞, oricare ar fi u ∈ [A,∞).De aici,
folosind definitia cu siruri a limitei unei functii si faptul ca orice sir crescator si marginit superior este
convergent, rezulta ca limu→∞
F1(u) exista si este finita. DeciA∫a
| f(x) | dx este convergenta si∞∫a
f(x)dx este
absolutr convergenta.
Pentru demonstrarea punctului 2 observam ca, din f(x) ≥ g(x) ≥ 0, oricare ar fi x ≥ A, rezulta ca
F (u) ≥ G(u), u ∈ [A,∞), si cum limu→∞
u∫A
g(x)dx = ∞, vom avea si limu→∞
G(u) = ∞, deci limu→∞
F (u) = ∞, de
unde rezulta divergenta integralei∞∫a
f(x)dx.
In aplicatii se dovedeste util urmatorul criteriu de convergenta:
Propozitia 1.2.Fie f : [a,∞) → R, f(x) ≥ 0 oricare ar fi x ≥ A ≥ a, f integrabila pe orice interval
[a, b] ⊂ [A,∞).Daca limx→∞
xαf(x) = l este finita, avem:
a) daca α > 1, atunci∞∫a
f(x)dx este convergenta;
b) daca α ≥ 1 si l 6= 0, atunci∞∫a
f(x)dx este divergenta.
Demonstratie.a)Din faptul ca limx→∞
xαf(x) = l rezulta ca oricare ar fiε > 0 exista δ (ε) ≥ A, δ (ε) > 0,
astfel incat|xαf(x)− l| < ε, oricare ar fi x > δ(ε), deci xαf(x) < l + ε oricare ar fi x > δ (ε).
Inegalitatea precedenta se mai scrie 0 ≤ f (x) < l+εxα, x > δ (ε) si cum
∞∫δ(ε)
dxxαeste convergenta pentru
α > 1 , din criteriul de comparatie rezulta convergenta integralei∞∫δ(ε)
f(x)dx, deci si a∞∫a
f(x)dx.
b) Cum l > 0 , vom alege un ε > 0, astfel incat l − ε > 0 si gasim δ (ε) > 0, δ (ε) ≥ A cu proprietatea
xαf(x)−l > −ε,oricare ar fix > δ (ε) , deci xαf(x) > l−ε, x > δ (ε) .Deducem ca f(x) > l−εxα, x > δ (ε) .Dar
pentru α ≤ 1∞,∫δ(ε)
dxxαeste divergenta si aplicand criteriul de comparatie obtinem ca
∞∫a
f(x)dx este si ea
convergenta.
Integrale ale unor functii nemarginite
Sa consideram o functie f : (a, b]→ R, a finit, integrabila pe orice interval [c, d] ⊂ (a, b] cu proprietatea
ca limx→ax>a
|f(x)| =∞.

118
Definitia 2.1.Daca limc→a
b∫c
c>a
f(x)dx exista si este finita, vom spune ca f este integrabila in sens generalizat
pe(a, b] sau cab∫a
f(x)dx este convergenta. In caz contrar, spunem cab∫a
f(x)dx este divergenta.
Observatia2.1.Integrala in sens generalizat, de mai susb∫a
f(x)dx se mai noteaza prinb∫a+
f(x)dx.
Definitia 2.2. Fie f : [a, b) → R integrabila pe orice [c, d] ⊂ [a, b).Daca limd→a
b∫c
d>a
f(x)dx exista si este
finita, vom spune ca f este integrabila in sens generalizat pe [a, b) sau cab∫a
f(x)dxeste convergenta.In caz
contrar,spunem ca integrala respectiva este divergenta.
Observatia 2.2.Integrala in sens generalizatb∫a
f(x)dx de mai sus se mai noteaza prinb−∫a
f(x)dx .
Definitia 2.3.
Fie f : [a, e) ∪ (e, b] → R integrabila pe orice [c, d] ⊂ [a, e) ∪ (e, b], astfel incat limx→e|f(x)| = ∞
. Daca limu,v→eu<e,v>e
[u∫a
f(x)dx+b∫v
f(x)dx
]exista si este finita, spunem ca functia f este integrabila (in sens
generalizat) pe [a,b] sau cab∫a
f(x)dx este convergenta. O conditie mai slaba este existenta limitei (finite)
limε→0ε>0
[c−ε∫a
f(x)dx+b∫e+ε
f(x)dx
], caz in care spunem ca f este integrabila in sensul valorii principale pe [a,b].
In caz contrar, spunem ca integrala este divergenta.
Propozitia 2.1.Fie f : (a, b]→ R+,a finit, integrabila pe orice [c, d] ⊂ (a, b]. Presupunem ca exista si
este finitalimx→ax>a
(x− a)αf(x) = l.In aceste conditii
a) daca α > 1, atuncib∫a+
f(x)dx este convergenta;
b) daca α ≥ 1 si l 6= 0 atuncib∫a
f(x)dx este divergenta.
Demonstratie.
Un calcul simplu ne arata cab∫a
i(x−a)α
dx este convergenta pentru α > 1 si divergenta pentru α ≥ 1.
Din faptul ca limx→ax>a
(x − a)αf(x) = l rezulta ca pentru orice ε > 0 gasim un δ(ε) > 0,astfel incat,
oricare ar fi x ∈ (a, b] cu x < a + δ(ε) sa avem |(x− a)αf(x)− l| < ε, inegalitatea echivalenta cu i− ε <
(x − a)αf(x) < l + ε. De aici deducem ca 0 ≤ f(x) < l+ε(x−a)α
si, pentru α < 1, conform celor de

119
mai inainte pe baza criteriului comparatiei, rezulta caa+δ(ε)∫a+
f(x)dx este convergenta, deci sib∫a+
f(x)dx este
convergenta.
In cazul α ≥ 1 alegem ε > 0 astfel incat l− ε > 0 si vom scrie pentru orice x ∈ (a, a+ δ(ε)),cu δ(ε) > 0
corespunzator ales, ca f(x)> l−ε(x−a)α
> 0.
Integralaa+δ(ε)∫a+
l−ε(x−a)α
dx fiind divergenta, va rezulta, pe baza criteriului comparatiei, caa+δ(ε)∫a+
f(x)dx este
divergenta. Cumb∫
a+δ(ε)
f(x)dx nu influenteaza natura integralei luate intre a si b, vom avea ca sib∫a+
f(x)dx
este divergenta.
Observatia 2.3. In practica pot aparea si integrale de tipulb∫a+
f(x)dx.Pentru stabilirea convergentei,
alegem un punct oarecare c intre a si b si analizam natura integralelorc∫a+
f(x)dx sib−∫a+
f(x)dx.Daca ambele
sunt convergente, rezulta ca sib−∫a+
f(x)dx este convergenta.
I (α) =1∫0
dx
(1− x)α= − lim
u1
u∫0
(1− x)′ dx
(1− x)α1−x=t
= − limu1
1−u∫1
dt
tα
Pentru α 6= 1, I (α) = − limu1
t−α+1
−α + 1
∣∣∣∣t=1−u
t=1
=
= − limu1
[(1− u)−α+1
−α + 1− 1
−α + 1
]=
1
1− α α < 1
∞ α > 1
Pentru α = 1, I (1) = limu1
u∫0
dx
1− x = − limu1
ln (1− x)|x=ux=0 =
= − limu1
ln (1− u) = +∞.
Deci integrala este divergenta pentru α ≥ 1 si convergenta pentru α < 1.
Daca exista α ∈ R astfel încât limita
limxx0
(x0 − x)α · f (x) = l ∈ (0,∞) ,
atunci I (α) six0∫a
f (x) dx au aceeasi natura.
∞∫0
xne−xdx = n!

120
4.2. Integrale dependente de un parametru [facultativ CIGID]
Se considera functiile:
f(·, ·) : [a, b]× [c, d]→ R, astfel încât pentru fiecare y ∈ [c, d] fixat, functia x 7→ f(x, y) este integrabila
pe [a, b].
α (·), β (·) : [c, d]→ [a, b],
Functia F (·) : [c, d]→ R, definitã prin
F (y) =
∫ β(y)
α(y)
f (x, y) dx
este numita "integrala (în variabila x) dependenta de parametru (parametrul y)"
Functia f(x, y) tinde uniform, în punctul y0 ∈ [c, d], catre functia ϕ (·) : [a, b]→ R, daca
∀ε > 0,∃δε > 0, |y − y0| < δε ⇒ |f(x, y)− ϕ (x)| < ε,∀x ∈ [a, b]
1. Daca exista limitele
limy→y0
α(y) = α0, limy→y0
β(y) = β0, limy→y0
f(x, y) = ϕ (x)
(ultima limita fiind uniforma în raport cu x), atunci functia ϕ (·) este integrabilã pe [a, b] si exista
limita
limy→y0
∫ β(y)
α(y)
f (x, y) dx =
∫ β0
α0
ϕ (x) dx.
2. Daca functia f (·, ·) este continua pe [a, b] × [c, d], iar functiile α (·) si β (·) sunt continue pe [c, d],
atunci functia F (·) este continua pe intervalul [c, d].
3.Daca functia f (·, ·) este continua pe [a, b] × [c, d], admite derivata partiala în raport cu y, continua
pe [a, b]× [c, d], iar functiile α (·) si β (·) sunt derivabile pe [c, d], atunci F (·) este derivabila pe [c, d] si are
loc relatia
F ′ (y) =
∫ β(y)
α(y)
∂f
∂x(x, y) dx+ f (β(y), y) β′(y)− f (α(y), y)α′(y)

121
[numita formula lui Leibniz]
4. Daca functia f (·, ·) este continua pe [a, b]× [c, d], atunci are loc relatia
∫ b
a
(∫ d
c
f (x, y) dy
)dx =
∫ d
c
(∫ b
a
f (x, y) dx
)dy
Integralele de forma I (y) =b∫a
f (x, y) dx sau, mai general, de forma J (y) =b(y)∫a(y)
f (x, y) dx se
numesc „integrale care depind de un parametru”si apar în mod curent în aplicatii. Functia f (x, y) este
definita pe o multime [a, b]× Y, unde Y este un interval ⊂ R, si daca f (x, y) este integrabila pentru orice
(x, y) ∈ [a, b]× Y, a (y) sau b (y) sunt functii definite pe Y.
Definitie. Fie f (x, y) o functie definita pe X×Y si y0 un punct de acumulare al lui Y care poate
sa apartina sau sa nu apartina lui Y . Fie g (x) = lim f (x, y) pentru orice x ∈ X. Spunem ca f (x, y) tinde
uniform pe multimea X catre
g (x) daca pentru orice numar ε 0 exista un numar η (ε) 0 astfel încât sa avem |f (x, y)− g (x)| ≺ ε
daca |y − y0| ≺ η (ε) oricare ar fi x ∈ X.
Suntem în masura acum sa dam urmatoarea teorema care ne da regula de intervelire a operatiei de
integrare cu operatia de trecere la limita.
Teorema. Fie f (x, y) o functie definita pe [a, b] × Y continua pe [a, b] oricare ar fi y ∈ Y. Daca
exista g (x) = limy→y0
f (x, y) , unde y0 este un punct de acumulare al lui Y si daca f (x, y) tinde uniform
catre g (x) pe [a, b] în punctul y0 , atunci
limy→y0
b∫a
f (x, y) dx =b∫a
[limy→y0
f (x, y)
]dx =
b∫a
g (x) dx.
Demonstratie. Functia g (x) este continua pe [a, b] . Într-adevar, daca consideram un sir arbitrar
y1, y2, ..., yn, ..., y ∈ Y,
convergent catre y0 ,sirul de functii
f (x, y1) , f (x, y2) , ..., f (x, yn) , ...

122
este uniform convergent catre f (x, y0) ≡ g (x) pe [a, b] , deci conform unei teoreme demonstrate la
siruri uniform convergente de functii continue, functia limita g (x) este o functie continua pe [a, b] . Functia
g (x) fiind continua pe [a, b] este integrabila pe [a, b] si putem scrie∣∣∣∣ b∫a
f (x, y) dx−b∫a
g (x) dx
∣∣∣∣ ≤ b∫a
|f (x, y)− g (x)| dx.
Tinând seama ca f (x, y) tinde uniform catre g (x) pe [a, b] , deci pentru orice numar ε 0 exista un
numar η (ε) 0 astfel încât sa avem |f (x, y)− g (x)| ≺ εb−a , daca |y − y0| ≺ η (ε) pentru orice x ∈ [a, b],
rezulta ca∣∣∣∣ b∫a
f (x, y) dx−b∫a
g (x) dx
∣∣∣∣ ≺ ε, daca |y − y0| ≺ η (ε) ,
deci
limy→y0
b∫a
f (x, y) dx =b∫a
g (x) dx =b∫a
[limy→y0
f (x, y)
]dx.
Teorema este demonstrata.
2. Derivarea integralelor care depind de un parametru.
Integrala definitab(y)∫a(y)
f (x, y) dx, y ∈ [c, d] , reprezinta o functie F (y) pe [c, d] ; sa vedem în ce
conditii F (y) este derivabila si cum se calculeaza F′(y) . Rezultatul este continut în urmatoarea
Teorema. Fie f (x, y) o functie continua cu derivata partiala f′y (x, y) continua pe intervalul I =
[α, β] × [c, d]. Daca functiile a (y) si b (y) definite pe [c, d] au derivate continue pe [c, d] , iar curbele
x = a (y) , x = b (y) se afla în I , atunci functia F (y) , data de F (y) =b(y)∫a(y)
f (x, y) dx, este derivabila pe
[c, d] si
F′(y) =
b(y)∫a(y)
ϑ f (x,y)ϑy
dx+ b′ (y) f [b (y) , y]− a′ (y) f [a (y) , y] . (1)
Demonstratie. Sa notam a (y) = a, b (y) = b, a (y0) = a0, b (y0) = b0;
avem evident
F (y) =b0∫a0
f (x, y) dx+b∫b0
f (x, y) dx−a∫a0
f (x, y) dx, F (y0) =b0∫a0
f (x, y0) dx,
deci

123
F (y)−F (y0)y−y0 =
b0∫a0
f(x,y)−f(x,y0)y−y0 dx+ 1
y−y0
b∫b0
f (x, y) dx− 1y−y0
a∫a0
f (x, y) dx.
Sa ne ocupam de fiecare integrala din partea a doua.
a) Daca aplicam formula lui Lagrange, avem în prima integrala
f(x,y)−f(x,y0)y−y0 = f
′y (x, y0 + θ (y − y0)) , 0 ≺ θ ≺ 1,
deoarece f′y este continua pe I. Functia f
′y fiind uniform continua pe I urmeaza ca pentru orice numar
ε 0 exista η (ε) 0 astfel încât
∣∣∣f(x,y)−f(x,y0)y−y0 − f ′ (x, y0)
∣∣∣ =∣∣f ′y (x, y0 + θ (y − y0))− f ′y (x, y0)
∣∣pentru orice|y − y0| ≺ η (ε) si orice x ∈ [a, b], deci diferenta f(x,y)−f(x,y0)
y−y0 tinde uniform catre f′y (x, y0)
când y → y0, si, conform teoremei precedente, avem
limy→y0
b0∫a0
f(x,y)−f(x,y0)y−y0 dx =
b0∫a0
[limy→y0
f(x,y)−f(x,y0)y−y0
]dx =
b0∫a0
ϑ f (x,y0)ϑy
dx.
b) În a doua integrala din partea a doua aplicam formula mediei pentru integrale, deci
1y−y0
b∫b0
f (x, y) dx = b(y)−b(y0)y−y0 f [b (y0) + θ (b (y)− b (y0)) , y]
si la limita obtinem
limy→y0
1y−y0
b∫b0
f (x, y) dx = b′ (y0) f [b (y0) , y0] ;
deoarece b este derivabila pe [c, d] , f (x, y) este continua pe [α, β]× [c, d] , iar y0 ∈ [c, d] .
Acelasi rezultat îl obtinem si pentru a treia integrama din partea a doua, anume
limy→y0
1y−y0
∫f (x, y) dx = a′ (y0) f [a (y0) , y0] .
Rezultatele obtinute sunt adevarate pentru orice punct y0 (de acumulare) al intervalului [c, d] .
Teorema este demonstrata.
Ex:

124
1) Pentru t ∈ R, F (t) =b∫a
|x · t| · g (x) dx =
−tb∫a
|x| · g (x) dx t < 0
0 t = 0
tb∫a
|x| · g (x) dx t > 0
Functia este continua si este derivabila în t = 0 daca si numai dacab∫a
|x| · g (x) dx = 0.
2) Fie F (t) =a∫0
(b∫
0
f (t+ x+ y) dy
)dx, cu f (·) de clasa C1.
Fie G (x, t) =b∫
0
f (t+ x+ y) dy, atunci F (t) =a∫0
G (x, t) dx⇒
⇒ F ′ (t) =a∫0
∂G
∂t(x, t) dx =
a∫0
(b∫
0
f ′ (t+ x+ y) dy
)dx
∂G
∂t(x, t) =
b∫0
f ′ (t+ x+ y) dy
3)∞∫0
arctan ax
x (1 + x2)dx, a ≥ 0
Fie F (a) =∞∫0
arctan ax
x (1 + x2)dx ⇒ F (0) = 0 si F (1) =
∞∫0
arctanx
x (1 + x2)dx =
1
2
∞∫0
(arctan2 x)′
xdx =
=1
2
arctan2 x
x
∣∣∣∣∞0
+1
2
∞∫0
arctan2 x
x2dx =
1
2
∞∫0
arctan2 x
x2dx
∞∫0
arctanx
x (1 + x2)dx =
∞∫0
(lnx)′arctanx
(1 + x2)dx = lnx
arctanx
(1 + x2)
∣∣∣∣∞0
−
−∞∫0
lnx
(arctanx
(1 + x2)
)′dx =
limx0
x lnxarctanx
x= 0
∂
∂x
(arctanx
(1 + x2)
)= −−1+2(arctanx)x
(1+x2)2
Pentru a 6= 0, 1,
F ′ (a) =∞∫0
∂
∂a
(arctan ax
x (1 + x2)
)dx =
∞∫0
1
x (1 + x2)· x
1 + a2x2dx =
=∞∫0
dx
(1 + x2) (1 + a2x2)1
(1 + x2) (1 + a2x2)=α1x+ β1
1 + x2+α2x+ β2
1 + a2x2⇒
1 = (α1x+ β1) (1 + a2x2) + (α2x+ β2) (1 + x2)
x = i ⇒ 1 = (α1i+ β1) (1− a2) ⇒ α1 = 0, β1 =1
1− a2

125
x =i
a⇒ 1 =
(α2i
a+ β2
)(1− 1
a2
)⇒ α2 = 0, β2 =
a2
a2 − 1
⇒∞∫0
dx
(1 + x2) (1 + a2x2)=∞∫0
1
1− a2
1 + x2+
a2
a2 − 11 + a2x2
dx =
=1
1− a2
∞∫0
dx
1 + x2+
a2
a2 − 1
∞∫0
dx
1 + a2x2=
π
2 (1− a2)+
πa
2 (a2 − 1)=
=π (1− a)
2 (1− a2)=
π
2 (1 + a)∞∫0
dx
1 + a2x2
ax=t=
1
a
∞∫0
dt
1 + t2=
π
2a
Deci F ′ (a) =π
2 (1 + a), F (0) = 0 ⇒
F (a) =π
2ln (1 + a) + C
F (0) = 0
⇒ C = 0 si F (a) =π
2ln (1 + a)
4.3. Functiile lui Euler
Integrala
Γ (a) =∞∫0
e−x · xa−1dx, a ∈ (0,∞) este numita integrala Gamma.
Integrala
B (p, q) =1∫0
xp−1 · (1− x)q−1 dx, p, q ∈ (0,∞) este numita integrala Beta.
4.3.1. Teorema. Pentru orice a ∈ (0,∞), integrala Γ (a) este convergenta.
4.3.2. Teorema. Pentru orice p, q ∈ (0,∞), integrala B (p, q) este convergenta.
4.3.3. Teorema (Proprietati ale integralei Gamma). (1) Γ (·) este o functie convexa de clasaC∞ (0,∞).
(2) * Γ (1) = 1.
(3) * Γ (n+ 1) = n!, ∀n ∈ N.
(4) * Γ
(1
2
)=√π.
(5) * Γ (a) > 0 ∀a ∈ (0,∞).
(6) * Γ (a+ 1) = a · Γ (a), ∀a ∈ (0,∞).
(7) * For a ∈ (0, 1), Γ (a) · Γ (1− a) =π
sin (πa).
(8) * Γ (a) · Γ(a+ 1
2
)= Γ (2a) [Formula lui Legendre].

126
(9) lima0
a · Γ (a) = 1.
(10) lima→∞
Γ (a+ 1)
e−x · aa ·√
2πa= 1 [Formula lui Stirling]
(11) Γ(n) (a) =∫∞
0e−x · xa−1 · (lnx)n dx
(12) [Alte rezultate importante, demonstrabile cu proprietatile functiei Gamma]
(a) lima→∞
Γ (a+ t)
at · Γ (a)= 1,
(b) limm→∞
(m+ n)!
m! ·mn= 1,
(c) limm→∞
1 · 3 · · · · · (2m− 1)
2 · 4 · · · · · (2m)·√m = 1 [Formula lui Wallis],
(d) mm·a · Γ (a) · Γ(a+ 1
m
)· · · · · Γ
(a+ m−1
m
)= (2π)
m−12 ·√m · Γ (ma) [Formula lui Gauss]
4.3.4. Teorema (Proprietati ale functiei Beta). (1) * B (p, q) > 0.
(2) * B (p, q) =Γ (p) · Γ (q)
Γ (p+ q).
(3) B (·, ·) is a class C∞ ((0,∞)× (0,∞)) function.
(4) * B (p, q) = B (q, p).
4.3.5. Teorema (Integrale reductibile la functii Euler). (1) * [Integrala Poisson]∞∫0
e−x2dx =
√π
2.
(2) ** For p, q > 0,
π2∫
0
sin2p−1 x · cos2q−1 xdx =1
2B (p, q).
(3) **∞∫0
e−x2 · xn−1dx =
1
2Γ(n
2
).
(4) ** For a > 0, β > 0, α > −1,∞∫0
e−a·xβ · xαdx = 1
β·a1β· Γ(α+1β
)(5) * [Integralele lui Fresnel]
∞∫0
cosx√xdx =
∞∫0
sinx√xdx =
√π
2.
(6) **b∫a
(x− a)m (b− x)n dx = (b− a)m+n+1 B (m+ 1, n+ 1)
(7) *b∫a
√(x− a) (b− x)dx =
π
8(b− a)2.
(8) *b∫a
1√(x− a) (b− x)
dx = π.
(9) ** For |t| < 1,
π2∫
0
tant xdx =π
2· 1
costπ
2
.
Partea 2
Recapitulari si completari [facultativ CIGID]

Informatiile din aceasta parte [Recapitulare si completari] au în comun urmatoarele caracteristici:
• Nu vor apare direct printre subiecte [dar pot apare indirect]
• Vor apare ca elemente ale altor subiecte
• Vor fi necesare în mai multe situatii pentru întelegerea altor subiecte

CAPITOLUL 5
Litere grecesti
Urmatorul tabel descrie literele grecesti: numele literei, corespondentul în litere latine, litera în format
mic si în format mare.
Nume Latin Mic Mare
alpha a α
beta b β
chi c χ
delta d δ ∆
epsilon e ε
epsilon (varianta) e ε
phi f φ Φ
phi (varianta) f ϕ
gamma g γ Γ
eta h η
iota i ι
kappa k κ
lambda l λ Λ
mu m µ
nu n ν
Nume Latin Mic Mare
omicron o o
pi p π Π
pi (varianta) p $
theta q θ Θ
theta (varianta) q ϑ
rho r ρ
rho (varianta) r %
sigma s σ Σ
sigma (varianta) s ς
tau t τ
upsilon u υ Υ
omega w ω Ω
xi x ξ Ξ
psi y ψ Ψ
zeta z ζ
129


CAPITOLUL 6
Multimi si notiuni adiacente
6.1. Multimi
Printre caracteristicile secolelor XIX si XX în matematica se numara si definitivarea constructiei
matematicii ca sistem axiomatic. Una dintre constatari este ca, axiomatic vorbind, totul porneste de
la notiunea de multime. Notiunea însasi de multime nu poate fi definita. De altfel, pentru orice stiinta se
ridica întrebarea: „Ce notiuni foloseste acea stiinta dar nu le poate defini riguros?”. Pentru matematica,
raspunsul este: „Notiunea de multime”. În general, raspunsurile posibile pentru aceasta întrebare sunt
consecinte ale ciclului de rezultate teoretice obtinute de Kurt Gödel în prima jumatate a secolului XX,
despre incompletitudinea unui sistem axiomatic. În esenta si fara a se intra în mai multe detalii, s—a
stabilit ca orice sistem axiomatic este fie incomplet fie contradictoriu. Asta înseamna, printre altele, ca
orice stiinta necontradictorie trebuie sa se astepte la probleme indecidabile si sa aiba maturitatea de a le
depasi. Pe de alta parte, orice stiinta care are pretentia ca defineste/explica toate notiunile pe care le
foloseste, este expusa (odata cu evolutia ei) la aparitia de contradictii.
Acest text va folosi o descriere imperfecta a notiunii de multime: O multime este o colectie de obiecte.
Pentru a explicita imperfectiunea acestei descrieri, se sugereza întrebari cum ar fi: "Ce este o colectie?",
"Ce este un obiect?". Notiunea de multime va fi considerata "notiune primitiva", în sensul ca avem o
oarecare intuitie despre ea, dar nu o definim formal. Cititorul interesat în mai multa (si mai avansata)
informatie poate consulta, de exemplu, [?] sau [23].
6.1.1. Apartenenta: Se numeste "apartenenta" si se noteaza cu "∈" relatia dintre un obiect/element
a si o multime A; exista doua posibilitati mutual exclusive:
• fie a ∈ A (obiectul este element al multimii A),
Exemplu:
a = 2, A = 2, 3, 4, 2 ∈ 2, 3, 4131

132
sau
• a 6∈ A (obiectul nu este element al multimii A)
Exemplu:
a = 5, A = 2, 3, 4, 5 6∈ 2, 3, 4
• Se considera ca nu poate avea loc A ∈ A [o multime nu poate fi element al ei însasi]. Aceasta
alegere conduce la Paradoxul lui Bertand Russel privind "Multimea tuturor multimilor", care
expliciteaza dificultatile de definire a notiunii: daca s—ar considera multimea tuturor multimilor,
atunci aceasta ar fi la rândul ei tot o multime, asa ca ar fi element al ei însasi —contradictie.
6.1.2. Incluziune: se numeste "incluziune" si se noteaza cu "⊆" relatia (partiala) dintre doua multimi
A si B; exista trei posibilitati:
• A ⊆ B [A este inclus în B] [∀x ∈ A, x ∈ B] (fiecare element al lui A este si element al lui B)
(scriere alternativa: B ⊇ A [B include A]) (B mai este numit " o submultime a lui A")
[Exemplu: 2, 3 ⊆ 2, 3, 4]
sau
• B ⊆ A
sau
• Nici A ⊆ B, si nici B ⊆ A [A * B SI B * A]
Exemplu:
A = 2, 3, 4, B = 2, 3, 5, 2, 3, 4 * 2, 3, 5 SI 2, 3, 5 * 2, 3, 4
6.1.3. Egalitatea a doua multimi: doua multimi A si B se numesc "egale" daca A ⊆ B SI B ⊆ A
(multimile au exact aceleasi elemente). Exista doua posibilitati:
• A = B (multimile sunt egale)
• A 6= B (multimile sunt diferite)
6.1.4. Incluziune stricta: se numeste "incluziune stricta" si se noteaza cu "⊂" relatia dintre doua
multimi A si B definita prin:
A ⊂ B ⇐⇒ A ⊆ B SI A 6= B.

133
6.1.5. Familia submultimilor: se numeste "familia tuturor submultimilor lui Ω" [the powerset of
Ω] si se noteaza cu P (Ω) multimea:
P (Ω) = A; A ⊆ Ω .
6.1.6. Operatii cu multimi:
Reuniune: A ∪B = x; x ∈ A SAU x ∈ B
Intersectie: A ∩B =x; x ∈ A SI x ∈ B
Diferenta: A \B =
x; x ∈ A SI x 6∈ B
Produs cartezian: A×B =
(x, y) ; x ∈ A SI x ∈ B
6.1.1. Observatie (Proprietati ale operatiilor cu multimi). Fie A, B, C ∈ P (Ω). Prin CA se va întelege
complementara multimii A fata de Ω. Operatiile cu multimi au urmatoarele proprietati:
(1) A ∪ A = A (idempotenta reuniunii);
(2) A ∪ Ω = Ω (proprietatea de ultim element a reuniunii);
(3) A ∩ A = A (idempotenta intersectiei);
(4) A ∩ Ω = A (proprietatea de element neutru a intersectiei);
(5) A ∪ ∅ = A (proprietatea de element neutru a reuniunii);
(6) A ∩ ∅ = ∅ (proprietatea de prim element a intersectiei);
(7) A ∪B = B ∪ A (comutativitatea reuniunii);
(8) A ∩B = B ∩ A (comutativitatea reuniunii);
(9) A ∪ (B ∪ C) = (A ∪B) ∪ C = A ∪B ∪ C (asociativitatea reuniunii);
(10) A ∩ (B ∩ C) = (A ∩B) ∩ C = A ∩B ∩ C (asociativitatea intersectiei);
(11) A ∪ (B ∩ C) = (A ∪B) ∩ (A ∪ C) (distributivitatea reuniunii fata de intersectie);
(12) A ∩ (B ∪ C) = (A ∩B) ∪ (A ∩ C) (distributivitatea intersectiei fata de reuniune);
(13) A ∪ (A ∩B) = A;
(14) A ∩ (A ∪B) = A;
(15) A ∪ CA = Ω;
(16) A ∩ CA = ∅;

134
(17) CCA = A;
(18) C (A ∪B) = CA ∩ CB; C(⋃i∈IAi
)=⋂i∈ICAi (relatiile lui DeMorgan);
(19) C (A ∩B) = CA ∪ CB; C(⋂i∈IAi
)=⋃i∈ICAi (relatiile lui DeMorgan);
(20) A \B = A ∩ CB (diferenta a doua multimi);
(21) A \B = A ∩ CB (set difference);
(22) A \ (B ∪ C) = (A \B) \ C;
(23) A \ (B ∩ C) = (A \B) ∪ (A \ C);
(24) (A ∪B) \ C = (A \ C) ∪ (B \ C);
(25) (A ∩B) \ C = A ∩ (B \ C) = (A \ C) ∩B;
(26) A× (B ∪ C) = (A×B) ∪ (A× C);
(27) A× (B ∩ C) = (A×B) ∩ (A× C);
(28) A× (B \ C) = (A×B) \ (A× C);
Cititorul interesat într—o introducere aplicabila poate consulta [21] (mai ales pentru aplicatii în baze
de date)
6.2. Relatii binare
6.2.1. Definitie (See also [5], 1.10, page 2). Fiind date doua multimi X, Y si o multime GR ⊆ X × Y ,
tripletul R = (X, Y,GR) este numit relatie binara (corespondenta) între X si Y .
X este numit domeniul lui R,
Y este numit codomeniul (multimea tinta a) lui R iar
GR este numit graficul lui R.
MultimeaDR = x ∈ X; ∃y ∈ Y, (x, y) ∈ GR ⊆ X este numita domeniul efectiv al lui R (preimaginea
lui Y prin R).
Multimea ImR = y ∈ Y ; ∃x ∈ X, (x, y) ∈ GR ⊆ Y este numita imaginea lui R.
Relatia R−1 = (Y,X,GR−1), definita prin GR−1 = (y, x) ; (x, y) ∈ GR ⊆ Y × X este numita relatia
inversa relatiei R.

135
Relatia 1X = (X,X,G1X ), definita prin G1X = (x, x) ; x ∈ X ⊆ X×X este numita relatia identitate
peste X.
6.2.2. Observatie. Doua relatii sunt egale daca cele doua triplete sunt egale.
6.2.3. Definitie. Fiind date trei multimi X, Y , Z si doua relatii R1 = (X, Y,GR1), R2 = (Y, Z,GR2),
relatia R = (X,Z,GR), unde GR =
(x, z) ; x ∈ X, z ∈ Z SI ∃y ∈ Y a. î. (x, y) ∈ GR1 SI (y, z) ∈ GR2
este numita relatia compusa (notata R2 R1) (R2 R1 = R).
6.2.4. Observatie. Operatia de compunere a relatiilor este asociativa si nu este comutativa.
6.2.5. Definitie. Relatia R = (X,X,GR) este numita relatie de preordine daca satisface conditiile:
(1) Reflexivitate: G∆X⊆ GR (∀x ∈ X, (x, x) ∈ GR);
(2) Tranzitivitate: (x, y), (y, z) ∈ GR ⇒ (x, z) ∈ GR.
6.2.6. Definitie. Relatia R = (X,X,GR) este numita relatie de echivalenta daca este o relatie de
preordine si are proprietatea suplimentara GR−1 ⊆ GR ((x, y) ∈ GR ⇒ (y, x) ∈ GR) (simetrie). Multimea
x = y ∈ X; (x, y) ∈ GR este numita clasa de echivalenta a lui x în raport cu R. Multimea claselor
de echivalenta ale elementelor din X în raport cu R este notata X/R (si mai este numita multimea
factor).
6.2.7. Observatie. Proprietati ale claselor de echivalenta:
(1) x ∈ x, ∀x ∈ X;
(2) (x, y) ∈ R⇔ x = y;
(3) (x, y) /∈ R⇔ x ∩ y = ∅.
6.2.8. Definitie. Relatia R = (X,X,GR) este numita relatie de ordine daca este o relatie de preordine
si are proprietatea suplimentara: GR ∩GR−1 = G1X ((x, y) ∈ GR si (y, x) ∈ GR ⇒ x = y) (antisimetrie).
O relatie de ordine este numita totala daca satisface conditia ∀x, y ∈ X, (x, y) ∈ GR SAU (y, x) ∈ GR
(GR ∪GR−1 = X ×X) si partiala daca nu satisface conditia.
Perechea (X,R) este numita multime ordonata total|partial (de relatia totala|partiala R).

136
O multime ordonata este numita inductiv ordonata daca orice submultime total ordonata este ma-
jorata.
6.2.9. Definitie. În Teoria Economica o relatie de preordine este numita preferinta daca este totala
(în sensul ca ∀x, y ∈ X, (x, y) ∈ GR SAU (y, x) ∈ GR (GR ∪ GR−1 = X × X)) iar xRy înseamna "x
este cel putin la fel de bun|preferat ca si y". Relatiile derivate din R sunt relatia de indiferenta [adica
(x, y) ∈ GR and (y, x) ∈ GR] si relatia de preferinta stricta [adica (x, y) ∈ GR and (y, x) 6∈ GR].
6.2.10. Observatie (Lema Zorn). Orice multime inductiv ordonata are un element maximal.
6.2.11. Observatie. Daca R este o relatie de ordine pe X, atunci R−1 este tot relatie de ordine pe X
(relatia de ordine duala).
Demonstratie. Reflexivitate: x ∈ X ⇒ (x, x) ∈ GR ⇒ (x, x) ∈ GR−1 ;
Tranzitivitate: Fie (x, y) ∈ GR−1 si (y, z) ∈ GR−1 ⇒ (y, x) ∈ GR si (z, y) ∈ GR ⇒ (z, x) ∈ GR ⇒
(x, z) ∈ GR−1 ;
Antisimetrie: (x, y) ∈ GR−1 si (y, x) ∈ GR−1 ⇒ (x, y) ∈ GR si (y, x) ∈ GR ⇒ x = y

CAPITOLUL 7
Elemente de Logica
7.1. Logica binara
Logica matematica binara se ocupa de operatii cu enunturi logice si de evaluarea valorii lor de adevar;
se considera numai enunturi logice cu o valoare de adevar din doua posibile. Desi aceasta conventie este
restrictiva, nu este scopul prezentarii de fata sa includa alte situatii, cum ar fienunturile logice "Eu mint",
sau "Acest enunt este fals". Prezentarea de mai jos se refera doar la acele enunturi carora li se poate atasa
o valoare de adevar. Nu sunt incluse comenzile (enunturile imperative), interogatiile, exclamatiile, ci doar
enunturile de tip declarativ.
7.1.1. Definitie. (OPERATII CU ENUNTURI LOGICE):
(1) NEGATIA LOGICA (NON):
p ep
0 1
1 0
Ex:
p: "2 + 3 = 5" ⇒ ep: "2 + 3 6= 5".
p: "Ioana are o casa" ⇒ ep: " Ioana nu are o casa".
(2) CONJUNCTIA LOGICA (SI):
p q p ∧ q
0 0 0
0 1 0
1 0 0
1 1 1
Ex:
p: "Ioana are o casa", q: "Ioana are o asigurare de casa" ⇒ p ∧ q: "Ioana are o casa si o
asigurare de casa"
137

138
p: "2 este numar natural", q: "2 este numar întreg" ⇒ p ∧ q: "2 este si numar natural si
întreg"
În limbaj formal: (2 ∈ N) ∧ (2 ∈ Z)⇒ 2 ∈ N ∩ Z (2 face parte din intersectia multimilor)
(3) DISJUNCTIA LOGICA (SAU) (SAU INCLUSIV):
p q p ∨ q
0 0 0
0 1 1
1 0 1
1 1 1
Ex:
p: "Ioana are o casa", q: "Ioana are o masina" ⇒ p ∨ q: "Ioana are o casa sau o masina"
(4) (SAU EXCLUSIV):
p q p∨q
0 0 0
0 1 1
1 0 1
1 1 0
Este mai rar folosit si poate fi descris cu ajutorul celorlalti conectori.
Ex:
p: "Ioana are o casa", q: "Ioana are o masina"⇒ p∨q: "Ioana are fie o casa, fie o masina (dar
nu ambele)"
(5) IMPLICATIA LOGICA (Daca—Atunci):
(a) Din adevar implica numai adevar
(b) Din fals implica orice.

139
Din definitie rezulta urmatoarea tabla de adevar pentru implicatia logica:
p q p→ q
0 0 1
0 1 1
1 0 0
1 1 1
Pentru structura p→ q, se mai folosesc denumirile: p: "ipoteza", q: "concluzie".
Ex:
p: "Ioana are o casa", q: "Ioana are o masina" ⇒ p→ q: "Daca Ioana are o casa, atunci are
o masina".
Ex: Enuntul logic: "1 6 66 64
=1
4" este un exemplu de rationament fals care ajunge la o concluzie
corecta.
Se cere sa se simplifice fractia16
64; desi rezultatul este
1
4(cel obtinut în rationament), modul
prin care a fost obtinut (se simplifica cifra 6 de sus cu cea de jos) este gresit.
(6) ECHIVALENTA LOGICA (Daca—si—numai—daca):
p q p↔ q
0 0 1
0 1 0
1 0 0
1 1 1
Echivalenta logica poate fi definita folosind ceilalti conectori: p↔ q ≡ (p→ q) ∧ (q → p)
Ex:
p: "Ioana are o masina", q: "Ioana are carnet de conducere" ⇒ p ↔ q: "Ioana are o masina
daca si numai daca are carnet de conducere"
7.1.2. Definitie. [Tautologie] Un enunt logic este numit "tautologie" daca este adevarat indiferent de
valoarea de adevar a enunturilor componente.
Ex: p: "Ioana are o masina" ⇒ p∨ep: "Ioana are o masina sau nu" este o tautologie.
140
7.1.3. Definitie. [Enunturi echivalente] Doua enunturi logice se numesc "echivalente" daca p↔ q este o
tautologie.
7.1.4. Definitie. [Enunturi mai puternice] Se spune despre un enunt logic p ca "este mai tare decât" un
enunt logic q daca p→ q este tautologie si q → p nu este tautologie.
Ex: Pentru orice doua enunturi p, q, enuntul p ∧ q este mai tare decât enuntul q.
Exercitiu: Sa se decida daca pentru enunturile "(p ∧ q)→ r" si "p→ r" se poate afirma ca unul dintre
ele este mai puternic decât celalalt.
7.1.5. Definitie. [Contradictie] Un enunt logic este numit "contradictie" daca este fals indiferent de
valoarea de adevar a enunturilor componente.
Ex: p: "Ioana are o masina" ⇒ p∧ep: "Ioana are o masina si nu are" este o contradictie.
Toate enunturile logice pot fiexprimate folosind enunturi descriptive si conectorii logici e, ∨, ∧. Se vor
prezenta pe scurt proprietatile acestor conectori logici si legaturile dintre ei si alte operatii logice.
7.1.6. Observatie. (PROPRIETATI ALE CONECTORILOR e, ∨, ∧) (Pot fi verificate cu
table de adevar):
(1) e (ep) ≡ p (principiul tertului exclus)
Dem: tabla de adevar
(2) p ∨ q ≡ q ∨ p (comutativitate)
Dem: tabla de adevar
(3) p ∨ (q ∨ r) ≡ (p ∨ q) ∨ r (asociativitate)
Dem: tabla de adevar
(4) p ∨ 1 ≡ 1 (proprietatea de ultim element)
Dem: tabla de adevar
(5) p ∨ 0 ≡ p (proprietatea de element neutru)
Dem: tabla de adevar
(6) p ∨ p ≡ p (idempotenta)
Dem: tabla de adevar
141
(7) p ∧ q ≡ q ∧ p (comutativitate)
Dem: tabla de adevar
(8) p ∧ p ≡ p (idempotenta)
Dem: tabla de adevar
(9) p ∧ (q ∧ r) ≡ (p ∧ q) ∧ r (asociativitate)
Dem: tabla de adevar
(10) p ∧ 0 ≡ 0 (proprietatea de prim element)
Dem: tabla de adevar
(11) p ∧ 1 ≡ p (proprietatea de element neutru)
Dem: tabla de adevar
(12) e (p ∨ q) ≡ep∧eq (Regulile lui DeMorgan)
Dem: tabla de adevar
Ex: Sa se afle negatia enuntului logic "În vacanta merg la mare sau la munte". Se noteaza p:
"În vacanta merg la mare" si q: "În vacanta merg la munte"; enuntul initial este p ∨ q. Negatia
este e (p ∨ q) ≡ep∧eq, care poate fi tradusa: "În vacanta nu merg nici la mare si nici la munte".
(13) e (p ∧ q) ≡ep∨eq
Dem: tabla de adevar
(14) p ∧ (q ∨ r) ≡ (p ∧ q) ∨ (p ∧ r) (distributivitatea conjunctiei fata de disjunctie)
Dem: tabla de adevar
(15) p ∨ (q ∧ r) ≡ (p ∨ q) ∧ (p ∨ r)
Dem: tabla de adevar
7.1.7. Teorema. [Reducerea disjunctiei exclusive la e, ∨, ∧]
p∨q ≡ (p ∨ q)∧e (p ∧ q) ≡ (p∧eq) ∨ (q∧ep) .
Demonstratie. Tabla de adevar.

142
7.1.8. Teorema. [Reducerea echivalentei la implicatie]
p↔ q ≡ (p→ q) ∧ (q → p) .
Demonstratie. Tabla de adevar.
7.1.9. Teorema. (Reducerea implicatiei logice la operatii elementare)
p→ q ≡ep ∨ q.
Demonstratie. Prin tabla de adevar.
7.1.10. Teorema. (Negarea implicatiei logice)
e (p→ q) ≡ p∧eq.
Demonstratie. e (p→ q) ≡e (ep ∨ q) ≡e (ep)∧eq ≡ p∧eq.
Exemplu:
p: "Mi—e foame",
q: "Manânc"
⇒ p→ q: "Daca mi—e foame, manânc"
⇒ e (p→ q) ≡ p∧eq: "Mi—e foame si nu manânc".
Un raspuns frecvent întâlnit la întrebarea "Cum se neaga "Daca mi—e foame, manânc"?" este r: "Daca
nu mi—e foame, nu manânc".
Se observa ca r ≡ (ep)→ (eq) iar tabla de adevar arata ca cele doua enunturi logice spun altceva:
p q p→ q e (p→ q) (ep)→ (eq)
0 0 1 0 1
0 1 1 0 0
1 0 0 1 1
1 1 1 0 1

143
Se mai observa ca r ≡ (ep) → (eq) ≡ (eep) ∨ (eq) ≡ p∨eq ≡ q → p asa ca r spune, de fapt, acelasi
lucru ca si enuntul: "Daca manânc, mi—e foame".
7.1.11. Teorema. (Principiul demonstratiei prin reducere la absurd)
p→ q ≡ (eq)→ (ep).
Demonstratie. p→ q ≡ep ∨ q ≡ q∨ep ≡e (eq)∨ep ≡ (eq)→ (ep).
7.1.12. Exercitiu (M. Gardner). Sa se determine care dintre urmatoarele enunturi este adevarat:
• Exact un enunt este fals.
• Exact doua enunturi sunt false.
• Exact trei enunturi sunt false.
• Exact patru enunturi sunt false.
7.1.13. Exercitiu (M. Gardner). [Prin traducere s—ar pierde din savoarea problemei] Professor White,
Professor Brown and Professor Black were lunching together. "Isn’t it remarkable", said the lady, "that
our names are White, Black, and Brown and one of us has black hair, one has brown hair, and one has
white hair."
"It is indeed", answered the one with the black hair as Professor Black bit into his sandwich, "and
have you noticed that not one has hair color to match our name?"
The lady’s hair is not brown. What is the color of Professor Black’s hair?
7.2. Predicate logice
7.2.1. Definitie. Se numeste predicat logic orice functie p (·) : D → P care are drept codomeniu o
multime de enunturi logice (domeniul poate fi privit ca multimea de parametri ai predicatului)
Predicatele logice pot fiprivite si ca reformulari ale unor constructii de tip "daca—atunci": a spune "un
patrat este un dreptunghic" este acelasi lucru cu "daca x este un patrat, atunci x este un dreptunghi" sau
"orice patrat este un dreptunghi". Formularea "x este un dreptunghi" este un predicat p (x) unde x este
o figura geometrica.

144
7.2.2. Definitie. Afirmatia "pentru orice valoare posibila a lui x, are loc p (x)" se formalizeaza prin
"∀x, p (x)" iar semnul "∀" se numeste "cuantificator logic universal".
7.2.3. Definitie. Afirmatia "exista o valoare posibila a lui x, pentru care are loc p (x)" se formalizeaza
prin "∃x, p (x)" iar semnul "∃" se numeste "cuantificator logic existential".
7.2.4. Definitie. Afirmatia "exista o unica valoare posibila a lui x, pentru care are loc p (x)" se formal-
izeaza prin "∃!x, p (x)" si are semnificatia
∃!x, p (x) ≡ (∃x, p (x)) ∧ ((p (x1) ∧ p (x2))→ x1 = x2) .
Negatii ale enunturilor logice obtinute din predicate cu cuantificatori:
e (∀x, p (x)) ≡ ∃x, ep (x) ,
e (∃x, p (x)) ≡ ∀x, ep (x)
7.2.5. Exemplu. Negatia enuntului logic: „Toti oamenii sunt muritori”este: "Exista oameni nemuritori",
deoarece structura este e (∀x p (x)) ≡ ∃xep (x).
7.2.6. Exemplu. Negatia enuntului logic: „Orice om nervos, tipa" este "exista oameni nervosi si care nu
tipa", deoarece structura este e (∀x (p (x)→ q (x))) ≡ ∃x (p (x)∧eq (x)).
7.2.7. Observatie. Cuantificatorii logici (existential si universal) nu comuta:
∀x ∃yx p (x, y) 6= ∃y∀xp (x, y)

CAPITOLUL 8
Multimi numerice uzuale
8.1. O scurta prezentare
Multimea Definitia Numele
N 0, 1, 2, · · · , n, · · · Multimea numerelor naturale
Z 0, 1,−1, 2,−2, · · · , n,−n, · · · Multimea întregilor
Qab; a ∈ Z, b ∈ N∗
Multimea numerelor rationale
R va fi definita ulterior Multimea numerelor reale
C a+ bi; a, b ∈ R Multimea numerelor complexe
N ⊂6=Z ⊂6=Q ⊂6=R ⊂6=C
−3 ∈ Z \ N, −3
2∈ Q \ Z,
√2 ∈ R \ Q.
Demonstratie. Presupunem prin reducere la absurd ca√
2 ∈ Q. Atunci exista a, b ∈ N astfel încât√
2 =a
b⇒ 2b2 = a2 ⇒ a este multiplu de 2 ⇒ a = 2k ⇒ 2b2 = 4k2 ⇒ b2 = 2k2 ⇒ b este multiplu de 2 ⇒
fractiaa
bse poate simplifica prin 2. Deci, daca
√2 ar fi rational, atunci ar fi o fractie simplificabila prin 2
de oricâte ori, ceea ce este o contradictie.
8.1.1. Structura zecimala a numerelor: Fractii zecimale:
Fractii Cu numar finit de zecimale[∈ Q] 1, 2
zecimale Cu numar infinit de zecimale[∈ Q] periodice simple 0, (3)
[∈ Q] periodice mixte 0, 2 (3)
[6∈ Q] neperiodice π
8.1.1. Observatie. Fie a ∈ 0, 1, · · · , 9. Atunci numarul x = 0, (a) =a
9:
Demonstratie. x = 0, (a) = 0, aaaaaaaa · · · = 1
10· (a, (a)) =
1
10· (a+ 0, (a)) =
145
146
=1
10· (a+ x) ⇒ 10x = a+ x ⇒ 9x = a ⇒ x =
a
9.
Analog, 0, (a1 · · · ak) =a1 · · · ak10k − 1
=a1 · · · ak99 · · · 9︸ ︷︷ ︸k ori
Formula pentru fractii zecimale periodice mixte se obtine similar.
Numerele irationale se reprezinta ca fractii zecimale neperiodice: structura lor zecimala nu se repeta.
Câteva numere irationale:
π = 3, 141592653589793238462643383279502 884197169399375105820974944592307816406286208998628034825342117068 · · ·
e = 2, 718281828459045235360287471352662497757247093699959574966967627724076630353547594571382178525166427 · · ·
ln 2 = 0, 693147180559945309417232121458176568075500134360 2552541206800094933936219696947156058633269964186875 · · ·
8.1.2. Observatie. Exista tendinta ca axiomatica atasata constructiei multimilor uzuale de numere sa fie
privita ca "de interes strict matematic", "pedanta", "specioasa", "lipsita de interes practic". Un argument
care contrazice aceste perspective este nevoia de a explica aceste notiuni unui computer, adica raspunsul la
întrebarea "Cum convingi un computer sa opereze cu aceste numere?". Notiunile matematice prezentate
în continuare despre multimile uzuale de numere sunt folosite la scrierea/conceperea de algoritmi care sa
implementeze în produse software numere de diverse tipuri.
Exemple de utilizare a produselor software (cum ar fi produse software de calcul tabelar) arata limite
care trebuie cunoscute si luate în considerare atunci când sunt folosite pentru rezolvarea unor situatii prac-
tice. Sintaxa "= (1 + 10ˆ (−16) = 1)" este o întrebare adresata produsului Excel referitoare la egalitatea
dintre numerele 1 si 1 + 10ˆ (−16): sunt aceste doua numere egale? Raspunsul produsului software este
"DA", asa ca aceasta limitare afecteaza orice este programat în Excel, de exemplu calcule care au nevoie
de acuratete mai mare de 16 zecimale sau proceduri de calcul suficient de complexe/lungi ca propagarea
erorii initiale sa devina semnificativa din perspectiva scopului calculului.
În acest text nu se vor aborda probleme de natura numerica —eventual vor fimentionate.

147
8.2. Multimea numerelor naturale
Punctul de plecare al prezentarii este ipoteza ca exista o multime de numere naturale, notata N si cu
elemente N = 1, 2, · · · , n, · · · , care satisface axiomele [Axiomele Peano [vezi [33]]] [demonstatia existentei
—justificarea corectitudinii ipotezei de mai sus poate fi gasita în [?], si nu face obiectul acestei prezentari]:
(1) Numarul 1 este numar natural
(2) Pentru fiecare numar x, exista exact un numar natural, numit "succesorul lui x" si notat x′. [în
varianta "vulgara", succesorul poate fi considerat x+ 1]
(3) Totdeauna x′ 6= 1.
(4) Daca x′ = y′, atunci x = y.
(5) [Axioma Inductiei] Fie o multime M de numere naturale, cu proprietatile:
I. 1 ∈M
II. x ∈M ⇒ x′ ∈M .
Atunci M contine toate numerele naturale.
Operatii cu numere naturale: adunare, înmultire, scadere, împartire.
Adunarea este o aplicare repetata a succesorului: n+m = (((n+ 1) + 1) · · · ) + 1︸ ︷︷ ︸m ori
Proprietati ale adunarii pe N:
...........................................
Înmultirea este o adunare repetata: n ·m = n+ n+ · · ·+ n︸ ︷︷ ︸m ori
Proprietati:
............................
8.3. Multimea numerelor rationale
O problema provenita din lumea araba: Problema împartirii camilelor.
Un barbat avea 3 fii si 17 camile. Pe patul de moarte îsi cheama fii si le spune:
"Cel mai mare sa ia jumatate din camile"
"Cel mijlociu sa ia o treime din camile"

148
"Cel mai mic sa ia a noua parte din camile"
Si îsi da sufletul. Cum au împartit fii camilele?
Notiunile de "fractie" sau de "numar rational" sunt notiuni abstracte; importanta cunoasterii lor poate
fi masurata cu observatia ca Excel nu "cunoaste" aceste notiuni. Exista produse software specializate
capabile sa opereze cu aceste concepte.
Notiunile vor fi introduse în urmatoarea ordine: fractie, fractii echivalente, numar rational, ordonarea
fractiilor [stricta si nestricta], ordonarea numerelor rationale [stricta si nestricta], suma fractiilor, produsul
fractiilor,
Un motiv important al introducerii fractiilor este observatia ca în numere naturale exista împartiri care
nu pot fi efectuate.
De exemplu, întrebarea "ce numar natural este rezultatul împartirii lui 8 la 2" este 4, dar întrebarea
"ce numar natural este rezultatul împartirii lui 8 la 3" nu are raspuns.
O metoda de rezolvare a acestei dificultati este sa se îmbogateasca "mediul ambient" în care se lucreaza:
se înlocuieste multimea N cu o noua multime Q+ [numere rationale pozitive] în care întrebarea va capata
raspuns: "ce numar rational pozitiv este rezultatul împartirii lui 8 la 3" este8
3.
Se numeste fractie [pozitiva] orice pereche (a, b) ∈ N× N∗. Notatia uzuala folosita este ab.
8.3.1. Definitie. Doua fractii (a, b) si (c, d) sunt numite echivalente daca a·d = b·c[ab∼ c
d⇐⇒ a · d = b · c
]8.3.2. Observatie. Relatia "∼" fiind o relatie de echivalenta 8.3.8 pe N × N∗, multimea N × N∗ se
organizeaza în clase de echivalenta (în raport cu "∼"):a
b= c
d;c
d∼ a
b.
8.3.3. Definitie. Clasa de echivalentaa
ba fractiei
a
bse numeste numarul rational
a
b[notatia folosita de
obicei nu estea
bcia
b, si este sarcina celui care foloseste aceste obiecte sa distinga în context între fractie
si numar rational]
8.3.4. Definitie. Se spune despre fractiaa
bca este mai mare decât fractia
c
d[a
b>c
d] daca ad > bc.

149
8.3.5. Definitie. Se spune despre fractiaa
bca este mai mare sau echivalenta cu fractia
c
d[a
b& c
d] daca
ad ≥ bc.
8.3.6. Definitie. Se spune despre doua numere rationalea
bsic
dca
a
b>c
ddaca exista fractiile
a1
b1
∈ a
b
sic1
d1
∈ c
dastfel încât
a1
b1
>c1
d1
[daca relatia are loc între câte un reprezentant al numerelor rationale]
[definitia este corecta —în sensul ca nu depinde de reprezentanti —datorita 8.3.9, 5.]
8.3.7. Definitie. Se spune despre doua numere rationalea
bsic
dca
a
b& c
ddaca exista fractiile
a1
b1
∈ a
b
sic1
d1
∈ c
dastfel încât
a1
b1
& c1
d1
[daca relatia are loc între câte un reprezentant al numerelor rationale]
[definitia este corecta —în sensul ca nu depinde de reprezentanti —datorita 8.3.9, 6.]
8.3.8. Observatie. Relatia "∼" este o relatie de echivalenta pe N× N∗.
1. Relatia "∼" este reflexiva: ab∼ a
b.
Dem: ab = ab.
2. Relatia "∼" este simetrica: a1
b1
∼ a2
b2
⇒ a2
b2
∼ a1
b1
.
Dem: a1b2 = b1a2 ⇒ a2b1 = b2a1 [comutativitatea înmultirii numerelor întregi si simetria relatiei de
egalitate]
3. Relatia "∼" este tranzitiva:a1
b1
∼ a2
b2a2
b2
∼ a3
b3
⇒ a1
b1
∼ a3
b3
.
Dem:
a1
b1
∼ a2
b2a2
b2
∼ a3
b3
⇒ a1b2 = b1a2 si a2b3 = b2a3.
Daca a2 = 0, atunci a1 = 0 si a3 = 0, asa caa1
b1
∼ a3
b3
.
Daca a2 6= 0, prin înmultirea celor doua relatii se obtine:
a1a2b2b3 = a2a3b1b2
de unde prin simplificare cu a2 si cu b2 se obtine
a1b3 = a3b1 ⇒a1
b1
∼ a3
b3
.
8.3.9. Observatie. Alte proprietati ale relatiei "∼":
1. ∀c ∈ N∗, ab∼ ac
bc

150
Dem:
2. Doua fractiia
bsic
dpot fi numai într—una dintre situatiile:
a
b∼ c
d,a
b>c
dsau
a
b<c
d.
Dem:
3. Dacaa
b>c
d, atunci
c
d<a
b.
4. Dacaa
b& c
d, atunci
c
d. a
b.
5. Dacaa
b>c
d,a
b∼ a1
b1
sic
d∼ c1
d1
, atuncia1
b1
>c1
d1
[relatia de ordine stricta ramâne adevarata pentru
toate fractiile echivalente cu cele initiale]
6. Dacaa
b& c
d,a
b∼ a1
b1
sic
d∼ c1
d1
, atuncia1
b1
& c1
d1
[relatia de ordine ramâne adevarata pentru toate
fractiile echivalente cu cele initiale]
7.a1
b1
>a2
b2
sia2
b2
>a3
b3
⇒ a1
b1
>a3
b3
[relatia de ordine stricta între fractii este tranzitiva]
Dem: a1b2 > b1a2 si a2b3 > b2a3; daca a2 ar fi 0 atunci si a1 ar fi 0 iar fractiile ar fi echivalente, deci
a2 > 0.
Prin înmultire se obtine a1b2a2b3 > b1a2b2a3 ⇒ a1b3 > b1a3 ⇒a1
b1
>a3
b3
.
8.a1
b1
& a2
b2
sia2
b2
>a3
b3
⇒ a1
b1
>a3
b3
9.a1
b1
>a2
b2
sia2
b2
& a3
b3
⇒ a1
b1
>a3
b3
10.a1
b1
& a2
b2
sia2
b2
& a3
b3
⇒ a1
b1
& a3
b3
11. Dacaa
b> 0, exista
c
d>a
b.
Dem: ab > 0 ⇒ ab+ ab > ab ⇒ (a+ a) b > ab ⇒ a+ a
b>a
b.
12. Dacaa
b> 0, exista
c
dastfel încât
a
b>
c
d> 0 [pentru orice fractie nenula, exista o alta fractie
nenula mai mica decât ea]
Dem: ab > 0 ⇒ ab+ ab > ab > 0 ⇒ (b+ b) a > ab > 0 ⇒ a
b>
a
b+ b> 0.
13. Dacaa
b>c
d> 0, atunci exista
x
yastfel încât
a
b>x
y>c
d> 0 [exista o fractie cuprinsa între orice
doua fractii distincte] [de fapt demonstratia este facuta pentrua
b>a+ c
b+ d>c
d> 0]
Dem: La relatia ad > bc se aduna pe rând ab respectiv cd:
ad > bc⇒ ad+ ab > bc+ ab⇒ a (b+ d) > b (a+ c) ⇒ a
b>a+ c
b+ d
ad > bc⇒ ad+ cd > bc+ cd⇒ d (a+ c) > c (b+ d)⇒ a+ c
b+ d>c
d.

151
O prima caracterizare ar fi: Q este multimea fractiilor, sau multimea numerelor rationale.
8.4. Multimea numerelor reale
În contiuare vor fi prezentate proprietati ale multimii numerelor reale R. Urmând optiunile facute de
Jean Dieudonné în [24], aceste proprietati vor fi tratate ca axiome (nu vor fi demonstrate); cei interesati
pot gasi demonstatii ale afirmatiilor de exemplu în [?].
Multimea numerelor reale este o multime pe care sunt definite:
• doua operatii:
— [adunare] (x, y) 7→ x+ y
— [înmultire] (x, y) 7→ x · y
• O relatie x ≤ y,
astfel încât:
• (R,+, ·) este corp comutativ:
—x+ (y + z) = (x+ y) + z
—x+ y = y + x
—0 + x = x+ 0 = x
—x+ (−x) = (−x) + x = 0
—x · (y · z) = (x · y) · z
—x · y = y · x
—1 · x = x · 1 = x
—∀x 6= 0, ∃x−1
[=
1
x
], x · x−1 = x−1 · x = 1
—x · (y + z) = x · y + x · z
• Relatia ≤ este o relatie de ordine totala pe R:
—x ≤ y si y ≤ z ⇒ x ≤ z
—x ≤ y si y ≤ x ⇒ x = y
—∀x, y ∈ R, x ≤ y sau y ≤ x
—se mai folosesc relatiile:
∗ x = y

152
∗ x < y ⇐⇒ x ≤ y si x 6= y
∗ x ≥ y ⇐⇒ y ≤ x
• (R,+, ·,≤) este corp comutativ ordonat, în sensul ca relatia de ordine este compatibila cu struc-
tura de corp comutativ:
—x ≤ y ⇒ ∀z ∈ R, x+ z ≤ y + z
—0 ≤ x si 0 ≤ y ⇒ 0 ≤ x · y
• (R,+, ·,≤) este corp comutativ ordonat archimedian:
—∀x, y ∈ R cu 0 < x, 0 ≤ y, ∃n ∈ N astfel încât y ≤ n · x [proprietatea Archimede poate fi
interpretata astfel: orice lungime y poate masurata cu un bat de lungime x, iar acel n pentru
care (n− 1) · x ≤ y ≤ n · x este raspunsul la întrebarea "de câte ori se cuprinde batul de
lungime x în lungimea y?"]
• (R,+, ·,≤) satsface proprietatea de intersectie nevida pentru un sir descrescator de
intervale închise, în sensul:
Daca ([an, bn])n este un sir descrescator [adica [an+1, bn+1] ⊆ [an, bn]] de intervale reale închise,
∅ 6=⋂n∈N
[an, bn].
• Alte proprietati ale relatiei de ordine pe R:
—∀x, y ∈ R, are loc exact una dintre situatiile: x < y, y < x, x = y.
—x ≤ y si y < z ⇒ x < z
—x < y si y ≤ z ⇒ x < z
—Orice submultime reala finita are cel mai mare element si cel mai mic element
—Orice submultime reala finita poate fi ordonata crescator.
—Daca pentru doua siruri finite de numere reale (xi)i=1,n si (yi)i=1,n are loc xi ≤ yi, ∀i = 1, n,
atuncin∑i=1
xi ≤n∑i=1
yi. Daca, în plus, macar pentru un indice i0 are loc xi0 < yi0 , atuncin∑i=1
xi <n∑i=1
yi.
—x+ z ≤ y + z ⇐⇒ x ≤ y; x+ z < y + z ⇐⇒ x < y.
—x ≤ y ⇐⇒ 0 ≤ y− x ⇐⇒ x− y ≤ 0 ⇐⇒ −y ≤ −x; x < y ⇐⇒ 0 < y− x ⇐⇒ x− y <
0 ⇐⇒ −y < −x.

153
—xi ≥ 0, ∀i = 1, n ⇒n∑i=1
xi ≥ 0;n∑i=1
xi = 0 si xi ≥ 0, ∀i = 1, n ⇒ xi = 0, ∀i = 1, n.
—valoarea absoluta a unui numar real este: |x| =
x, x ≥ 0
−x, x < 0.
∗ |x| = 0 ⇐⇒ x = 0
∗ x+ =|x|+ x
2[partea pozitiva a lui x]
∗ x− =|x| − x
2[partea negativa a lui x]
∗ x = x+ − x−
∗ |x| = x+ + x−
∗ |x| ≤ a ⇐⇒ −a ≤ x ≤ a ⇐⇒ x ∈ [−a, a]
∗ |x| < a ⇐⇒ −a < x < a ⇐⇒ x ∈ (−a, a)
∗ |x+ y| ≤ |x|+ |y|;∣∣∣∣ n∑i=1
xi
∣∣∣∣ ≤ n∑i=1
|xi|
∗ ||x| − |y|| ≤ |x− y|
∗ |x · y| = |x| · |y|
—x2 ≥ 0; x2 = 0⇒ x = 0; x 6= 0⇒ x2 > 0
—pentru z ≥ 0, x ≤ y ⇒ xz ≤ yz
Proprietati ale relatiei de ordine pe R
- Axioma lui Cantor pentru (R,+, .) :
∀A ⊂ x ∈ R; x ≥ 0 ne-vida ∃ mA ∈ R, cel mai mare minorant, în sensul urmator:
1) mA ≤ x ∀x ∈ A
2) Daca µ ∈ R este minorant în sensul ca: µ ≤ x ∀ x ∈ A atunci µ ≤ mA.
(i.e. corpul (R,+, .) este „complet ordonat”; vezi N. Boboc, Analiza 1, 1999, Univ. Bucuresti)
-Reprezentare geometrica pe „dreapta”.
1.2. Marginile unei multimi
In aceasta sectiune reluam si dezvoltam unele dintre proprietatile numerelor reale (din R) pentru a
obtine rezultate auxiliare („instrumente”) esentiale nu numai pentru constructia „teoriei” ci si pentru
studiul si rezolvarea corecta, riguroasa, a unor probleme de analiza matematica; notiunile si rezultatele
154
(propozitii, leme, teoreme) din aceasta sectiune se refera în primul rând la relatia de ordine „naturala”din
multimea numerelor reale, R.
Definitia 1.2.1. Multimea ne-vida A ⊂ R se numeste:
(a) majorata (sau, „marginita superior”) daca are un majorant în sensul ca exista β ∈ R astfel
încât: x ≤ β ∀ x ∈ A; în acest caz, cel mai mic majorant (daca exista !), este (prin definitie), numarul
real M ∈ R cu proprietatile:
1) x ≤M ∀ x ∈ A (adica M este majorant);
2) Daca β ∈ R este majorant (β ≥ x ∀ x ∈ A) atunci β ≥M ;
cel mai mic majorant se mai numeste marginea superioara a multimii A si se noteaza: M =
supA;
(b)minorata (sau „marginita inferior”) daca are un minorant în sensul ca exista α ∈ R astfel încât:
x ≥ α ∀ x ∈ A; în acest caz, cel mai mare minorant (daca exista !), este (prin definitie), numarul real
m ∈ R cu proprietatile:
1) x ≥ m ∀ x ∈ A (adica m este minorant);
2) Daca α ∈ R este minorant (α ≤ x ∀ x ∈ A) atunci α ≤ m;
cel mai mare minorant se mai numeste marginea inferioara a multimii A si se noteaza: m =
inf A.
(c) marginita daca A este atât majorata cât si minorata deci (echivalent), daca exista numerele
reale α, β ∈ R astfel încât: α ≤ x ≤ β ∀ x ∈ A sau, înca, daca exista k ∈ R astfel încât |x| ≤ k ∀ x ∈ A
unde |x| este modulul („valoarea absoluta”) a numarului real x.
Cu aceste notiuni „Axioma lui Cantor”din Sectiunea 1.1 se poate „reformula”în modul urmator:
Teorema 1.2.2. (Axioma lui Cantor). Daca A ⊂ R este ne-vida atunci:
(a) Daca A este minorata („marginita inferior”) atunci exista marginea inferioara inf A = m ∈ R
(în sensul Def.1.2.1)) iar aceasta este unica;
(b) Daca A este majorata („marginita superior”) atunci exista marginea superioara supA = M ∈ R
(în sensul Def.1.2.1)) iar aceasta este unica.

155
Demonstratie. (a): Daca A este minorata atunci are un minorant, α ∈ R si atunci, în baza Axiomei lui
Cantor din Sectiunea 1.1, multimea „auxiliara”A1 = x− α; x ∈ A ⊂ y ∈ R; y ≥ 0 admite o margine
inferioara (unica !) m1 ∈ R; ramâne sa demonstram ca m := m1 + α = inf A. Daca µ ∈ R este minorant
pentru A atunci, evident, µ− α este minorant pentru A1 deci (deoarece m1 este cel mai mare minorant),
µ− α ≤ m1 = m− α deci µ ≤ m ceea ce înseamna ca m = m1 + α=inf A.
(b): Se rationeaza în acelasi mod, având în vedere existenta unui majorant β ∈ R, utilizând multimea
auxiliara A1 = β − x; x ∈ A precum si faptul ca m1 = inf A1 daca si numai daca M := β −m1 = supA
(exercitiu !).
Observam aici ca, asa cum este formulata, Axioma lui Cantor din Sectiunea 1.1 afirma doar existenta
marginii inferioare a une multimi din R+ = [0,∞), deci marginita inferior de α = 0.
O alta consecinta fundamentala a Axiomei lui Cantor este proprietatea urmatoare care, în alt context
(mult mai abstract) este deasemenea o „axioma”:
Teorema 1.2.3 (Axioma lui Arhimede). Daca (R,+, .) verifica Axioma lui Cantor atunci pentru
oricare numere reale x > 0, y ≥ 0 exista n ∈ N∗ astfel încât: n.x ≥ y.
Demonstratie. Presupunem, prin reducere la absurd, ca exista x0 > 0 si y0 ≥ 0 astfel încât n.x0 ≤
y0 ∀ n ∈ N∗; în acest caz, multimea A := n.x0; n ∈ N∗ ⊂ R este majorata (de y0) deci, conf. T.1.2.2
are marginea superioara supA = M ≤ y0; mai departe, deaorece M este majorant, în particular rezulta:
M ≥ (n + 1)x0 ∀ n ∈ N∗ deci M − x0 < M este deasemenea majorant, contradictie cu faptul ca M este
cel mai mic majorant.
Utilizând rationamente ceva mai complexe (care nu sunt neaparat necesare la acest nivel) se poate
demonstra ca Axioma lui Arhimede este echivalenta cu urmatoarea afirmatie:
Corolar 1.2.4 (Partea întreaga a unui numar întreg). Daca (R,+, .) verifica Axioma lui Cantor atunci
pentru oricare numar real x ∈ R exista un singur numar întreg [x] ∈ Z (numit partea întreaga a lui
x) astfel încât: [x] ≤ x < [x] + 1.
O alta consecinta, deosebit de importanta, a Axiomei lui Cantor este urmatoarea afirmatie care, de
obicei, este numita „proprietatea de densitate a multimii numerelor rationale”:

156
Corolar 1.2.5 (Proprietatea de densitate a lui Q în R). Daca (R,+, .) verifica Axioma lui Cantor
atunci pentru oricare doua numere reale x < y exista un numar rational r ∈ Q astfel încât: x < r < y.
In sectiunea 1.13 de mai jos vom interpreta aceasta proprietate cu ajutorul notiunii de ,limita a unui
sir”(convergent).
Afirmatia din Cor.1.2.5 mai este interpretata si în modul urmator: dreapta reala, R, este un
continuum adica o multime „fara goluri”.
Dupa cum vom constata în cele ce urmeaza, cele mai multe dintre teoremele fundamentale ale Analizei
Matematice (elementare) de care ne ocupam, pot fi demonstrate utilizând în mod esential urmatoarele
„caracterizari”ale marginilor inf A, supA, din T.1.2.2 (Axioma lui Cantor).
Teorema 1.2.6 (Caracterizarea marginii superioare). Daca multimea ne-vida A ⊂ R este majorata
(„marginita superior”) si supA = M ∈ R este marginea superioara (în sensul Def.1.2.1)) atunci
∀ ε > 0 ∃ xε ∈ A astfel încât: M − ε < xε ≤M.
In particular, ∀ n ∈ N∗ ∃ xn ∈ A astfel încât: M − 1n< xn ≤M.
Demonstratie. Presupunând, prin reducere la absurd, ca proprietatea din enunt nu este adevarata
deducem (prin negatie logica) faptul ca exista ε0 > 0 astfel încât x ≤ M − ε0 ∀ x ∈ A (varianta x > M
fiind exclusa de faptul ca M este majorant pentru A); aceasta înseamna ca M − ε0 < M este majorant
ceea ce contrazice definitia lui M = supA (de cel mai mic majorant).
In particular, pentru n ∈ N∗ se considera ε = 1npentru a obtine existenta unui punct xn = xε ∈ A cu
proprietatea din enunt.
Observam ca fiecare dintre cele doua proprietati din enunt împreuna cu faptul ca M este majorant
implica faptul ca M coincide cu marginea superioara supA (exercitiu !).
Rationând în mod cu totul similar obtinem urmatorul rezultat simetric:
Teorema 1.2.7 (Caracterizarea marginii inferioare). Daca multimea ne-vida A ⊂ R este minorata
(„marginita inferior”) si inf A = m ∈ R este marginea inferioara (în sensul Def.1.2.1)) atunci ∀ ε >
0 ∃ xε ∈ A astfel încât: m+ ε > xε ≥ m.
In particular, ∀ n ∈ N∗ ∃ xn ∈ A astfel încât: m+ 1n> xn ≥ m.

157
Demonstratie. Exercitiu ! (vezi demonstratia T.1.2.6).
In Analiza Matematica cele mai des utilizate multimi sunt intervalele (marginite sau ne-marginite)
definite dupa cum urmeaza:
Definitia 1.2.8 (interval). O multime I ⊂ R se numeste interval marginit daca exista numerele
reale a, b ∈ R, a < b astfel încât I este una din multimile urmatoare:
I = [a, b] := x ∈ R; a ≤ x ≤ b − interval compact (închis si marginit);
I = [a, b) := x ∈ R; a ≤ x < b − interval închis la la stânga si deschis la dreapta;
I = (a, b] := x ∈ R; a < x ≤ b interval deschis la stânga si închis dreapta;
I = (a, b) := x ∈ R; a < x < b interval deschis si marginit.
Multimea I ⊂ R se numeste interval ne-marginit (la dreapta, la stânga sau, respectiv, bilateral-
nemarginit) daca exista numerele reale a sau b ∈ R, astfel încât I este una din multimile urmatoare:
I = (a,∞) := x ∈ R; a < x ; I = [a,∞) := x ∈ R; a ≤ x ;
I = (−∞, b) := x ∈ R; x > b ; I = (−∞, b] := x ∈ R; x ≥ b
I = R = (−∞,∞).
Propozitia 1.13.3. Pentru orice numar rational, x ∈ Q exista un sir de numere irationale,
in ⊂ R \Q, astfel încât: limn→∞
in = x.
Demonstratie. Având în vedere faptul bine cunoscut conform caruia√
2 ∈ R \Q (este irational),
numerele in = x+√
2n+1
, n ∈ N sunt irationale, afirmatie care se obtine imediat prin reducere la absurd; pe
de alta parte, utilizând „limita remarcabila”
limn→∞
√2
n+ 1= 0
deducem ca limn→∞
in = x.
• Pe multimea numerelor rationale se considera multimea sirurilor Cauchy [vezi definitia 10.1.4].
Doua siruri Cauchy rationale (pn)n∈N si (qn)n∈N sunt echivalente daca sirul—diferenta (pn − qn)n∈N
tinde la 0, limn→∞
(pn − qn) = 0.

158
Un numar real este definit ca fiind o clasa de echivalenta formata din toate sirurile Cauchy de
numere rationale echivalente cu un sir Cauchy fixat.
• Proprietatile multimii R sunt grupate în trei categorii: proprietati de corp, proprietati de ordine
si proprietati de completitudine.
• Structura (R,+) este grup abelian cu element nul 0.
—Structura (Z,+) este subgrup în structura (R,+);
—Structura (Z,+) este grup ciclic, în sensul ca este generata de un singur element, elementul
1 (sau −1).
—Structura (Z,+) este cel mai mic subgrup în (R,+) care contine 1.
8.5. Multimea Rn
8.6. Cardinalitatea multimilor uzuale de numere
??
8.6.1. Definitie. O multime se numeste numarabila daca exista o bijectie între ea si multimea numerelor
naturale. (Definitie echivalenta: o multime se numeste numarabila daca poate fi pusa sub forma unui sir
în care orice termen sa poata fi atins dupa un numar finit de pasi)
• N este o multime numarabila, pentru ca poate fi pusa sub forma:
N = 0, 1, 2, · · · , n, · · · , în care fiecare termen poate fi atins dupa un numar finit de pasi (se
construieste un sir care contine toate elementele multimii si în care indicele fiecarui element este
finit)
8.6.2. Observatie. Pot ficonstruite modalitati „proaste”de numarare: daca aceleasi elemente ale sirului
sunt puse astfel încât mai întâi se numara toate numerele pare si apoi toate numerele impare, la cele impare
nu se ajunge dupa un numar finit de pasi, deci desi multimea este numarabila, procedeul de numarare este
gresit.

159
• Z este o multime numarabila: elementele multimii pot fi puse sub forma unui sir, astfel:
a0 = 0, a1 = 1, a2 = −1, a3 = 2, a4 = −2, · · ·
Z = 0, 1,−1, 2,−2, · · · , n,−n, · · ·
(se alterneaza numerele întregi negative cu cele întregi pozitive).
• Multimea Q este numarabila: Un procedeu adecvat de numarare este cel al lui Cantor:
Este clar ca daca se reuseste numararea adecvata a numerelor rationale pozitive, procedeul
poate fi folosit si pentru numararea adecvata a numerelor rationale negative si folosind procedeul
de numarare a numerelor întregi (alternarea numerelor pozitive cu cele negative) se obtine o
numarare adecvata a multimii Q.
Procedeul de numarare al lui Cantor (pentru numerele rationale pozitive):
Se organizeaza numerele rationale pozitive într—un tabel în care linia i este ocupata de fractiile
cu numaratorul i iar coloana j de fractiile cu numitorul j; se obtine un tablou cu un numar infinit
de linii si de coloane, dar cu diagonalele secundare finite.1
1
1
2
1
2
6
1
3· · · 1
n· · ·
3
2
1
5
2
2
2
3· · · 2
n· · ·
4
3
1
3
2
3
3· · · 3
n· · ·
· · · · · · · · · · · · · · · · · ·m
1
m
2
m
3· · · m
n· · ·
· · · · · · · · · · · · · · · · · ·
Diagonalele sunt:1
1
1
2
1
23
2
1
6
1
35
2
24
3
1
· · ·
Numararea pe aceste diagonale secundare duce la atingerea fiecarui termen dupa un numar
finit de pasi.
• Se observa ca functia f (m,n) : N∗×N∗ → Q∗+, definita prin f (m,n) =m
neste o functie surjectiva
(pentru ca orice fractie pozitiva provine de la perechea (m,n) unde m este numaratorul, iar n
este numitorul) si nu este injectiva (pentru ca perechi diferite de numere naturale pot conduce la
fractii egalem1
n1
=m2
n2
, în senul ca m1n2 = m2n1). Asta înseamna ca multimea N∗×N∗ este "mai

160
bogata" decât multimea Q∗+, în sensul ca între cardinalitatile lor este relatia: |N∗ × N∗| ≥∣∣Q∗+∣∣.
Daca se demonstreaza ca N∗ × N∗ este numarabila, se obtine de aici ca si Q∗+ este numarabila.
Cum N∗ × N∗ ⊆ N× N, este suficient sa se arate ca N× N este numarabila.
Se defineste functia g (·, ·) : N× N→ N prin g (m,n) = n + (m+n)(m+n+1)2
. Functia g (·, ·) este
o bijectie.
Functia g (·, ·) este injectie:
Fie (m,n) si (m′, n′) astfel încât g (m,n) = g (m′, n′).
Daca m+ n < m′ + n′, atunci
g (m′, n′) > (m+n+1)(m+n+2)2
+ n′ = (m+n+1)(m+n)2
+m+ n+ 1 + n′
> (m+n)(m+n+1)2
+ n = g (m,n) .
Daca m+ n > m′ + n′ atunci g (m,n) > g (m′, n′).
Cele doua presupuneri contrazic relatia g (m,n) = g (m′, n′).
Singura varianta ramasa este m+n = m′+n′, varianta care conduce pentru început la n′ = n,
dupa care la m′ = m.
Se obtine ca din g (m,n) = g (m′, n′) rezulta (m,n) = (m′, n′).
Functia g (·, ·) este surjectie.
Pentru k ∈ N arbitrar cautam (m,n) ∈ N× N astfel încât g (m,n) = k.
Daca notam s = m+ n suntem condusi la ecuatia
n+s (s+ 1)
2= k.
Sistemul s(s+1)
26 k < (s+1)(s+2)
2
s ∈ N
are ca solutie s =[−1+
√8k+1
2
]. Obtinem
n = k − s(s+1)2
m = s− k + s(s+1)2
.

161
Am probat astfel ca (m,n) ∈ N× N verifica g (m,n) = k.
În consecinta N× N ∼ N si în consecinta cardN× N = cardN = ℵ0.
8.6.3. Teorema. Multimea R nu este numarabila
Demonstratie. Demonstratie:
Demonstram ca intervalul [0, 1] (⊂ R) nu este numarabil, prin reducere la absurd: presupunem ca ar
fi numarabil. Atunci ar exista un sir astfel încât [0, 1] = x1, x2, · · · , xn, · · · .
Construim sirul de intervale închise (Ik)k∈N astfel:
1) sectionam intervalul [0, 1] în trei intervale [0, 1] =[0, 1
3
]∪[
13, 2
3
]∪[
23, 1]închise si de lungimi egale
iar dintre acestea alegem ca I1 un interval care nu contine x1. Deci dupa alegere se obtine intervalul I1 cu
proprietatile:
a) I1 = [a1, b1] ⊂ [0, 1] (I1 este un interval închis, inclus în [0, 1]).
b) b1 − a1 = 13.
c) x1 6∈ I1.
2) Pentru fiecare k > 1 aplicam intervalului Ik−1 procedura de la pasul 1) (cu intervalul Ik−1 în locul
intervalui [0, 1]) pentru a obtine intervalul Ik cu urmatoarele proprietati:
a) Ik = [ak, bk] ⊂ Ik−1 (Ik este un interval închis, inclus în Ik−1)
b) bk − ak = bk−1−ak−13
.
c) xk 6∈ Ik.
Se obtine astfel sirul de intervale (Ik)k>0 cu urmatoarele proprietati:
a) toate elementele sirului sunt intervale închise, incluse în [0, 1] iar sirul este descrescator (în sensul
ca Ik ⊂ Ik−1)
b) lungimea intervalului Ik este 13k.
c) xj 6∈ Ik ∀j = 1, k
Din aceste proprietati se observa ca marginile intervalelor formeaza doua siruri (ak)k>0 crescator si
(bk)k>0 descrescator, toate elementele sirului (ak)k>0 fiind mai mici decât toate elementele sirului (bk)k>0.
Pentru ca cele doua siruri sunt monotone si marginite, sunt convergente la limitele notate a, respectiv b

162
si are loc a ≤ b. Se obtine ca intersectia⋂k>0
Ik = [a, b] (deci, în particular, nevida) iar orice element al
acestei intersectii nu poate fi membru al sirului (xn)n>0 (din constructia sirului de intervale). Asadar a
fost gasit macar un element din [0, 1] care nu este element al sirului, contradictie cu presupunerea ca [0, 1]
s—ar putea scrie sub forma unui sir, în care fiecare termen sa poata fi atins dupa un numar finit de pasi.
Rezulta ca multimea R nu este numarabila.
8.6.4. Teorema. Multimea tuturor sirurilor infinite de 0 si 1 este nenumarabila.
Demonstratie. Presupunem ca multimea poate fipusa sub forma unui sir s1 = (sn1 )n∈N, s2 = (sn2 )n∈N,
· · · de siruri de 0 si 1. Se construieste sirul s = (sn)n∈N astfel: sn =
0, daca snn = 1
1, daca snn = 0. Sirul s este un nou
sir de 0 si 1, care nu poate coincide cu niciunul dintre sirurile initiale (prin constructie), contradictie.
• Nota: (R,Q) este spatiu vectorial de dimensiune egala cu cardinalitatea lui R.
8.7. Ordinalitatea multimilor
8.7.1. Minoranti, majoranti. O submultime A a lui R se numeste majorata (minorata) daca exista
un element a ∈ R astfel încât x ≤ a (x ≥ a), ∀x ∈ A; elementul a este numit "majorant al lui A"
("minorant al lui A"). Un element a este maximal (minimal) daca este majorant (minorant) si a ∈ A.
Un element a este marginea superioara a lui A daca:
1. a este majorant al lui A.
2. a este cel mai mic dintre majoranti (daca a′ ∈ R este alt majorant al lui A, atunci a ≤ a′)
8.8. Functii
8.8.1. Definitie (Vezi si [5], 1.22, pag 5). O functie este o relatie f = (X, Y,Gf ) cu proprietatile:
(1) ∀x ∈ X, ∃y ∈ Y , (x, y) ∈ Gf ;
(2) (x, y1) ∈ Gf si (x, y2) ∈ Gf ⇒ y1 = y2.
O notatie uzuala este f (·) : X → Y iar legatura dintre f (·) si Gf este data de:
Gf = (x, f (x)) ; x ∈ X .

163
8.8.2. Observatie. Doua functii sunt egale daca cele doua triplete (din definitie) sunt egale.
8.8.3. Observatie. Functia identitate pe multimea X se noteaza 1X si este functia 1X (·) : X → X,
1X (x) = x, ∀x ∈ X.
8.8.4. Observatie (Vocabular tipic, vezi si 13.1, 13.5 [6]). Fie functia f (·) : X → Y .
Multimea X este numita domeniul de definitie al functiei f (·).
Multimea Y este numita codomeniul functiei f (·).
Multimea Gf este numita graficul functiei f (·).
Multimea f (X) = f (x) ; x ∈ X (⊆ Y ) este numita imaginea lui X prin f (·) (sau domeniul efectiv).
Pentru o submultime a domeniului A ⊆ X, multimea f (A) = f (x) ; x ∈ A (⊆ Y ) este numita
imaginea directa a lui A prin f (·).
Pentru o submultime a codomeniului B ⊆ Y , multimea f−1 (B) = x ∈ X; f (x) ∈ B (⊆ X) este
numita preimaginea lui B prin f (·).
8.8.5. Observatie. Definitia adoptata pentru notiunea de functie se bazeaza pe notiunea de multime si
pe operatiile cu multimi, si este în stil Bourbaki. Pentru a aprecia justa valoare a acestei definitii, ar
trebui luate în considerare diverse surogate folosite pe post de definitii, care sunt incomplete sau gresite si
care nu fac altceva decât sa trivializeze notiunea de functie. Fara a da prea multe exemple din literatura
actuala (mai ales din diverse manuale pentru diverse clase), mentionam ca, desi istoric vorbind la un
moment dat asemenea caracterizari ale functiilor au fost folosite, la ora actuala (probabil cam de 50 de
ani încoace), literatura de specialitate considera Definitia 8.8.1 drept singura valida. Încercari de înlocuire
a definitiei prin caracterizari cum ar fi: "functia este o formula", "functia este o procedura", "functia este
un procedeu", "functia este o metoda", si altele, sunt sortite esecului. Desi unele dintre aceste variante
pot fi utilizate pentru a îmbogati întelegerea si comentariile despre functii, toate sufera de un defect
comun: transfera întrebarea "Ce este o functie?" spre întrebari de genul: "Ce este o formula?", "Ce este
un procedeu/procedura?", "Ce este o metoda?", iar aceste transferuri nu fac decât sa amestece si mai mult
notiunile (fara a defini cumva oricare dintre aceste noi obiecte). În ultima instanta, si Definitia 8.8.1 face
un transfer: transfera notiunea de functie spre notiunea de multime, transfer care în Matematica actuala

164
se face cu toate definitiile. Câteva exemple ar trebui sa arunce lumina asupra acestor aspecte, si vor fi
prezentate dupa notiunile "injectivitate", "surjectivitate", "bijectivitate".
8.8.6. Observatie (Vezi si Thm. 13.6, [6]). Pentru o functie f (·) : X → Y urmatoarele afirmatii sunt
adevarate (pentru A ∈ P (X), CA se refera la complementara fata deX, adicaX\A iar pentru B ∈ P (Y ),
CB se refera la complementara fata de Y , adica Y \B):
(1) ∀A1, A2 ∈ P (X) , A1 ⊆ A2 ⇒ f (A1) ⊆ f (A2)
(2) ∀B1, B2 ∈ P (Y ) , B1 ⊆ B2 ⇒ f−1 (B1) ⊆ f−1 (B2)
(3) ∀A ∈ P (X) , ∀B ∈ P (Y ) , f (A) ⊆ B ⇔ A ⊆ f−1 (B)
(4) ∀A ∈ P (X) , f (f−1 (A)) ⊆ A ⊆ f−1 (f (A))
(5) ∀A ∈ P (X) , ∀B ∈ P (Y ) , f (A ∩ f−1 (B)) = f (A) ∩B
(6) ∀ (Bi)i∈I ⊆ P (Y ) , f−1(⋃i∈IBi) =
⋃i∈If−1 (Bi)
(7) ∀ (Bi)i∈I ⊆ P (Y ) , f−1(⋂i∈IBi) =
⋂i∈If−1 (Bi)
(8) ∀B ∈ P (Y ) , f−1 (CB) = Cf−1 (B)
(9) ∀ (Ai)i∈I ⊆ P (X) , f(⋃i∈IAi) =
⋃i∈If (Ai)
(10) ∀ (Ai)i∈I ⊆ P (X) , f(⋂i∈IAi) ⊆
⋂i∈If (Ai)
Demonstratie. Exercitiu
Cititorii interesati într—o introducere aplicabila ar trebui sa consulte si [21] (mai ales pentru aplicatii
în baze de date)
8.8.7. Definitie (Compunere). Daca functiile f (·) : X → Y si g (·) : Z → T sunt astfel încât f (X) ⊆ Z
atunci se poate considera o noua functie, numita compunerea lui g (·) cu f (·) si notata gf , definita astfel:
(g f) (·) : X → T , (g f) (x) = g (f (x)).
Compunerea nu este definita pentru toate perechile posibile de functii. Când este definita, este asocia-
tiva dar nu este comutativa (chiar si când ambele compuneri sunt posibile).
8.8.8. Definitie. O functie f (·) : X → Y este numita surjectiva daca:
∀y ∈ Y, ∃xy ∈ X, f (xy) = y,
165
sau (echivalent) daca f (X) = Y .
8.8.9. Definitie. O functie f (·) : X → Y este numita injectiva daca
∀x1, x2 ∈ A, x1 6= x2 ⇒ f (x1) 6= f (x2) .
8.8.10. Definitie. O functie f (·) : X → Y este numita inversabila daca exista o alta functie g (·) : Y → X
astfel încât (f g) (·) = 1Y (·) si (g f) (·) = 1X (·).
8.8.11. Observatie (Surjectivitate în termeni de ecuatii, vezi si p. 297, [6]). O functie f (·) : X → Y
este surjectiva daca si numai daca ecuatia f (x) = y (privita ca o ecuatie în necunoscuta x ∈ X si cu
parametru y ∈ Y ) are macar câte o solutie în X pentru fiecare valoare posibila a parametrului din Y .
8.8.12. Observatie (Surjectivitate în termeni de grafice). O functie f (·) : X → Y este surjectiva daca
si numai daca pentru fiecare y0 ∈ Y (de pe axa verticala) intersectia Gf ∩ (x, y0) ; x ∈ X este nevida
(intuitiv: graficul functiei întâlneste fiecare orizontala dusa prin codomeniu).
8.8.13. Observatie (Injectivitate în termeni de ecuatii, vezi si p. 297, [6]). O functie f (·) : X → Y este
injectiva daca si numai daca ecuatia f (x) = y (privita ca o ecuatie în necunoscuta x ∈ X si cu parametru
y ∈ Y ) are cel mult câte o solutie pentru fiecare valoare posibila a parametrului din Y .
8.8.14. Observatie (Injectivitate în termeni de grafice). O functie f (·) : X → Y este injectiva daca
si numai daca pentru fiecare y0 ∈ Y intersectia Gf ∩ (x, y0) ; x ∈ X are cel mult un element (intuitiv:
graficul functiei are cel mult câte un punct comun cu fiecare linie orizontala corespunzatoare codomeniului).
8.8.15. Observatie. Daca o functie este inversabila, functia din definitie este unica. Aceasta unica functie
este numita functia inversa functiei f (·) si este notata f−1 (·).
Demonstratie. Sa presupunem, prin reducere la absurd, ca ar exista doua functii g1 (·), g2 (·) : Y → X
care satisfac definitia:
f g1 = 1Y si g1 f = 1X ,
f g2 = 1Y si g2 f = 1X .
Atunci g1 = g1 1Y = g1 (f g2) = (g1 f)g2 = 1X g2 = g2, asa ca cele doua functii sunt egale.

166
8.8.16. Teorema. Fie o functie f (·) : A → B. Functia f (·) este inversabila daca si numai daca este
bijectiva.
Demonstratie. „⇒”Presupunem ca f ar fi inversabila, adica: ∃g (·) : B → A astfel încât f g = 1B
si g f = 1A.
Trebuie demonstrat ca f este injectiva si surjectiva.
Surjectivitatea:
Fie y ∈ B; pentru ca f g = 1B, are loc (f g) (y) = 1B (y) ⇐⇒ f (g (y)) = y asa ca pentru y ∈ B
exista xy ∈ A (cu xy = g (y)) astfel încât f (xy) = y, deci f (·) este surjectiva.
Injectivitatea:
Fie x1, x2 ∈ A astfel încât f (x1) = f (x2); atunci g (f (x1)) = g (f (x2)) ⇒ (g f) (x1) = (g f) (x2)
dar g f = 1A ⇒ (g f) (x1) = 1A (x1) = x1 iar (g f) (x2) = 1A (x2) = x2 ⇒ x1 = x2. Deci functia f
este injectiva.
Din injectivitate si surjectivitate rezulta ca functia f este bijectiva.
„⇐”Presupunem ca f (·) este bijectiva si aratam ca f este inversabila:
Din surjectivitatea lui f (·) rezulta ca pentru fiecare y ∈ B exista xy ∈ A astfel încât f (xy) = y.
Definim functia g (·) : B → A prin g (y) = xy;
functia g este bine definita:
a) pentru fiecare y ∈ B exista g (y) (pentru ca functia f este surjectiva)
b) pentru fiecare y ∈ B nu exista mai multe imagini g (y) (pentru ca daca ar exista doua valori x1 si
x2 pentru care f (x1) = f (x2) = y, atunci din injectivitatea functiei f (·) rezulta ca x1 = x2)
g este inversa lui f :
∀y ∈ B, (f g) (y) = f (g (y)) = f (xy) = y ⇒ f g = 1B
∀x ∈ A, notam f (x) = y0 ⇒ xy0 = x si are loc: g (f (x)) = g (y0) = xy0 = x⇒ g f = 1A.
8.8.17. Exemplu. Sa consideram f (x) = x2. Este functia injectiva/surjectiva/bijectiva/inversabila?
Întrebarea în forma ei de mai sus este prost pusa, deoarece se da doar forma functiei, fara a se spune
nimic despre domeniu si codomeniu.
În diverse situatii pentru domeniu si pentru codomeniu, raspunsul este diferit:

167
Functia Expresia Injectiva Surjectiva Bijectiva Inversabila
f1 (·) : R→ R f1 (x) = x2 NU NU NU NU
f2 (·) : R→ R+ f2 (x) = x2 NU DA NU NU
f3 (·) : R+→ R f3 (x) = x2 DA NU NU NU
f4 (·) : R+→ R+ f4 (x) = x2 DA DA DA DA
f5 (·) : Q+→ R+ f5 (x) = x2 DA NU NU NU
f6 (·) : Q+→ Q+ f6 (x) = x2 DA NU NU NU
Forma standard a functiei care are aceasta forma este f1 (·) : R→ R, definita prin f1 (x) = x2; în
aceasta situatie, functia nu este injectiva, nu este surjectiva, nu este bijectiva, nu este inversabila.
Functia f2 (·) : R→ R+, definita prin f2 (x) = x2; în aceasta situatie, functia nu este injectiva, este
surjectiva, nu este bijectiva, nu este inversabila.
Functia f3 (·) : R+→ R, definita prin f3 (x) = x2; în aceasta situatie, functia este injectiva, nu este
surjectiva, nu este bijectiva, nu este inversabila.
Functia f4 (·) : R+→ R+, definita prin f4 (x) = x2; în aceasta situatie, functia este injectiva, este
surjectiva, este bijectiva, este inversabila.
Functia f5 (·) : Q+→ R+, definita prin f5 (x) = x2; în aceasta situatie, functia este injectiva, nu este
surjectiva, nu este bijectiva, nu este inversabila.
Functia f6 (·) : Q+→ Q+, definita prin f6 (x) = x2; în aceasta situatie, functia este injectiva, nu este
surjectiva, nu este bijectiva, nu este inversabila.
8.9. Functii uzuale
8.9.1. Functii elementare.
8.9.1. Definitie. Se numeste monom orice expresie de forma axn11 xn22 · · ·xnmm [a este o constanta, care mai
este numita si coeficientul monomului, x1, · · · , xm sunt variabile la diferite puteri naturale, iar singura
operatie din expresie este cea de înmultire]. Se numeste polinom orice suma de monoame. Se numeste
binom o suma de doua monoame. Se numeste trinom o suma de trei monoame.

168
Se numeste gradul monomului suma exponentilor variabilelor. Se numeste gradul în xk al monomului
exponentul lui xk, adica nk. Un monom fara variabile (constant nenul) are gradul 0. Monomul constant
nul are gradul −∞. Scrierea standard a unui monom se face scriind mai întâi constantele/parametrii
(eventual, daca sunt mai multe litere, în ordine alfabetica), iar apoi variabilele (în ordine alfabetica).
Se numeste gradul polinomului valoarea maxima a gradelor monoamelor. Scrierea standard a unui
polinom se face în ordinea descrescatoare a gradelor monoamelor.
Doua monoame se numesc asemenea daca au acelasi grad în fiecare variabila [daca difera doar prin
coeficient]. Doua monoame pot fi adunate doar daca sunt asemenea, iar în acest caz monomul suma are
exact aceeasi structura de variabile, iar coeficientul este suma coeficientilor monoamelor adunate.
8.9.2. Observatie. Reguli de calcul cu litere:
• a (b+ c) = ab+ ac [distributivitatea înmultirii fata de adunare]
• ab+ ac = a (b+ c) [factor comun]
• (a+ b) (a− b) = a2 − b2 [diferenta de patrate]
• (a± b)2 = a2 ± 2ab+ b2 [patratul sumei/diferentei]
• (a− b) (a2 + ab+ b2) = a3 − b3 [diferenta de cuburi]
• (a+ b) (a2 − ab+ b2) = a3 + b3 [suma de cuburi]
• (a+ b)3 = a3 + b3 + 3a2b+ 3ab2 = a3 + b3 + 3ab (a+ b) [suma la cub]
• (a− b)3 = a3 − b3 − 3a2b+ 3ab2 = a3 − b3 − 3ab (a− b) [diferenta la cub]
8.9.1.1. Functia polinomiala de grad n. f (·) : R→ R, f (x) =n∑k=0
akxk, ak ∈ R, k = 0, n.
Pentru n = 0 se obtine functia constanta, f (·) : R→ R, f (x) = a, a ∈ R∗.
Pentru n = 1 se obtine functia de gradul I, f (·) : R→ R, f (x) = ax+ b, a, b ∈ R, a 6= 0.
Pentru n = 2 se obtine functia de gradul II, f (·) : R→ R, f (x) = ax2 + bx+ c, a, b, c ∈ R, a 6= 0.
8.9.1.2. Functii rationale. f (·) : D → R, f (x) =P (x)
Q (x), unde P (·) si Q (·) sunt functii polinomiale iar
D = x ∈ R; Q (x) 6= 0 ⊆ R.
8.9.1.3. Functii exponentiale. f (·) : R→ (0,∞), f (x) = ax, a ∈ R∗ \ 1. Functia este bijectiva iar
inversa ei este functia logaritmica.

169
Vom trece acum in revista unele functii importante, in legatura cu proprietatile de monotonie, mar-
ginire, periodicitate.
a) Orice functie polinomiala P este definita pe intreg R si nu este marginita si nici periodica (in cazul
cand gr P ≥ 1). Monotonia lui P trebuie studiata de la caz la caz. Daca gr P ≥ 1, atunci functia
P este monotona pe intreg R, iar graficul lui P este o dreapta. Functia P : R → R definita prin
P (x) = x2,∀x ∈ R nu este monotona pe R si are numai valori pozitive. Functia P : R → R,P (x) = x2
este crescatoare si este nemarginita pe R.
b) Orice functie rationala f = PQ
(P,Q fiind polinomiale) are ca domeniu maxim de definitie D = x ∈
R|Q(x) 6= 0. Daca Q nu are radacini reale, atunci D = R. Nu se poate afirma, in general, nimic despre
marginirea sau monotonia functiilor rationale. De exemplu, functia f : R∗ → R, f(x) = 1xeste strict
descrescatoare pe (−∞, 0) si pe (0,∞) dar functia g (·) : R∗→R,f(x) = 1x2nu este monotona pe R∗.
c) Functia exponentiala este definita pe intreg R, f : R → (0,∞), f(x) = 10x, avand valori strict
pozitive. Ea este strict crescatoare pe R, bijectiva si nu este marginita (figura I.18.a). Inversa ei este
functia logaritmica lg : (0,∞) → R, x → lg x (figura I.18.b) care este, de asemenea, strict crescatoare pe
intervalul (0,∞).
Daca a > 0, a 6= 1, atunci pentru orice x se poate defini ax = 10x·lg a si, cu acesta, functia exponentiala
in baza a, anume f : R → (0,∞), f(x) = ax.Aceasta functie este bijectiva si inversa ei este functia
logaritmica loga(ln baza a). Daca a > 1, atunci ambele functii sunt strict crescatoare, iar daca 0 < a < 1,
ele sunt strict descrescatoare.
Daca α ∈ R este fixat se poate, de asemenea, defini functia putere de exponent α, h : (0,∞) → R,
h(x) = xα = 10x·lg x. Pentru valori particulare ale lui α, domeniul maxim de definitie D al functiei putere
se modifica. De exemplu, pentru α = 3 avem D = R, pentru α = 12, D = (0,∞), iar pentru α = −1
2,
D = (0,∞).
d) Functia-sinus sin : R → R este marginita si periodica de perioada principala 2π; ea nu este
monotona pe R si nu este bijectiva. Restragand convenabil domeniul de definitie si domeniul de valori,
anume considerand functia sin : [−π2, π
2] → [−1, 1] se obtine o functie bijectiva, strict crescatoare (notata
pentru comoditate la fel ca la inceput, fiind de fapt alta functie). Graficul acestei functii este indicat

170
in figura I.19,a. Inversa ei sin−1 = arcsin : [−1, 1] → [−π2, π
2] este, de asemenea, strict crescatoare si are
graficul indicat in figura I.19,b.
Functia cos (·) : R→ R nu necesita un studiu aparte, deoarece cosx = sin(π2−x),∀x ∈ R. De asemenea,
functia arccos (·) : [−1, 1] → [0, π] nu necesita un studiu special, deoarece arccosx = x2− arcsinx,∀x ∈
[−1,1].
e) Functia-tangenta este definita pe multimea D = R \ cosx = 0 = R \ (2k+ 1)π2| k ∈ Z. Aceasta
functie este periodica, de perioada principala π si este nemarginita. Functia tan (·) : (−π2, π
2) → R este
strict crescatoare, nemarginita si bijectiva, iar inversa ei, arctan : R→(−π2, π
2) este strict crescatoare si
marginita (figura I.20)
Functiile cot, arccot nu necesita un studiu special deoarece cotx = tan(π2− x), pentru orice x ∈ R,
x 6= kπ(k ∈ Z) si arccotx = π2− arctanx,∀x ∈ R.
8.9.3. Observatie. Termenul "pe portiuni" sau "cu acolada" [în Engleza "piecewise"] este un termen
generic care sugereaza ca functia poseda o anumita proprietate nu pe tot domeniul de definitie, ci pe
anumite submultimi ale domeniului.
Despre functia f (·) : A→ B se poate spune ca "are proprietatea P pe portiuni", daca exista o partitie
(Ai)i∈I a lui A [partitie în sensul ca⋃i∈IAi = A si ∀i 6= j, Ai ∩ Aj = ∅] astfel încât ∀i ∈ I, f |Ai (·) are
proprietatea P.
8.9.4. Exemplu. Functia f (x) =
x+ 1, x ≤ 1
2x, x > 1este de gradul I pe portiuni, dar nu este de gradul I.
8.9.5. Definitie. [Functie liniara] [See also [5], 19.32, page 137] Given two linear spaces over the same
field of scalars, (V1,K) and (V2,K), a function T (·) : V1 → V2 is called linear if:
(1) ∀x, y ∈ V1, T (x+ y) = T (x) + T (y)
(2) ∀x ∈ V1, ∀α ∈ K, T (αx) = αT (x).
Alternative names: linear transformation, linear operator.

171
The simplest case: V1 = V2 = K = R, T (·) : R→ R, T (x) = ax + b [See also [6], section 2.2, page
16]1.
8.9.6. Definitie. [Piecewise linear function] A function is called "piecewise linear" if there is a partition
of its domain such that for each piece the restriction of the function on that piece coincides with the
restriction of a linear function on the same piece.
The function f (·) : V1 → V2 is called "piecewise linear" if there is a partition of V1 denoted by (V1i)i∈I
such that:
∀i ∈ I, ∃Ti (·) : V1 → V2 linear, such that:
f |V1i (·) = T |V1i (·)
[That is, ∀x ∈ V1i, f (x) = Ti (x)] .
8.9.7. Definitie. Functia f (·) : D ⊆ R→ R se numeste monotona pe intervalul I ⊆ D, daca este
crescatoare [în sensul: ∀x1, x2 ∈ I, cu x1 ≤ x2, f(x1) ≤ f(x2)] sau daca este descrescatoare [în sensul:
∀x1, x2 ∈ I, cu x1 ≤ x2, f(x1) ≥ f(x2)].
8.9.8. Definitie. Fiind date o functie f (·) : A → B si o multime A0 ⊆ A, este numita ecuatie expresia
f (x) = 0, x ∈ A0 [A0 se numeste domeniul de definitie al ecuatiei]. Se numeste solutie a ecuatiei orice
element x0 care satisface f (x0) = 0 si x0 ∈ A0 [o ecuatie poate sa nu aiba nici—o solutie, sa aiba solutie
unica sau sa aiba mai multe solutii]. Se numeste multimea solutiilor ecuatiei multimea formata din toate
solutiile ecuatiei. Doua ecuatii se numesc echivalente daca au aceeasi multime de solutii.
Daca într—o ecuatie se înlocuieste semnul egal "=" cu unul dintre semnele ≤, ≥, <, >, expresia
care se obtine este numita inecuatie. Multimea A0 este numita domeniul inecuatiei, iar multimea solutiilor
inecuatiei este formata din toate elementele care satisfac inecuatia. Doua inecuatii sunt numite echivalente
daca au aceeasi multime de solutii.
1Interesting to note: while the word "linear" is extensively used in Economics, it is relatively hard to find a complete definitionfor "linear function", especially for the simplest case.


CAPITOLUL 9
Sume finite si elemente de combinatorica
Câteva formule si exercitiin∑k=1
1 = n
n∑k=1
k =n (n+ 1)
2n∑k=1
k2 =n (n+ 1) (2n+ 1)
6n∑k=1
k3 =
(n (n+ 1)
2
)2
1 + x+ x2 + · · ·+ xn =
1− xn+1
1− x , x 6= 1
n+ 1, x = 1
1 + x+ x2 + · · ·+ xn + · · · = limn→∞
(1 + x+ x2 + · · ·+ xn) =
1
1− x, x ∈ (−1, 1)
6 ∃ or ∞ otherwise∞∑n=1
2n + 2 · 3n + 5n
3n + 5n
173


CAPITOLUL 10
Siruri
Sirurile au mai fost studiate în Liceu. Din motive de conectare a informatiei vechi cu informatia noua,
în aceasta sectiune sunt reluate notiunile si adaugate completari.
O idee care va fi urmarita este diferenta dintre sirurile reale si sirurile rationale.
Studiul sirurilor a fost facut în liceu în contextul multimii R. În acest capitol sirurile vor fi prezentate
direct pe multimea Rn; printre diferentele de prezentare se numara:
• Metrica/distanta pe R este notata |·| (si se refera la valoarea absoluta sau modulul unui numar
real) iar metrica pe Rm este notata ‖·‖ (si se refera la o metrica oarecare pe Rm; daca este
important/semnificativ care metrica anume este folosita, acest lucru va fi precizat explicit)
• Vecinatatea fundamentala pe R are forma x ∈ (a− ε, a+ ε) sau |x− a| < ε, iar pe Rm are forma
Bε (a) = x ∈ Rm; ‖x− a‖ < ε.
• Pe R este folosita relatia de ordine uzuala, iar pe Rm nu este folosita o relatie de ordine.
• Sirurile din Qm vor fi numite tot "siruri rationale".
10.0.9. Definitie. Un sir de elemente din multimea X 6= ∅ este o functie cu codomeniul X: a (·) : N→ X.
Se noteaza: a (n) = an (valoarea n se mai numeste: indicele/rangul/pozitia termenului în sir)
10.0.10. Definitie. Multimea an; n ∈ N este multimea valorilor sirului.
10.0.11. Definitie. Sirul real (an)n∈N se numeste crescator/strict crescator/descrescator/strict descresca-
tor daca exista un rang k ∈ N astfel încât ∀n ≥ k, an [≤ / < / ≥ / >] an+1.
10.0.12. Definitie. Sirul (an)n∈N ⊆ (Rm, ‖·‖) se numeste marginit daca exista M ∈ R+ astfel încât
‖an‖ ≤M , ∀n ∈ N.
10.0.13. Definitie. Sirul (bk)k∈N este un subsir al sirului (an)n∈N daca: ∀k ∈ N, ∃nk ∈ N,
bk = ank , SI
0 ≤ n1 < n2 < · · · < nk < · · · .
175

176
10.1. Proprietati ale sirurilor convergente
Fie spatiul topologic (X, τ) [ne va interesa în special structura topologica a multimilor R respectiv Rn,
eventual cu topologia data de o norma]
10.1.1. Definitie (Definitia cu vecinatati a convergentei unui sir). Sirul (an)n∈N ⊆ X este convergent la
a ∈ X daca:
∀V ∈ V (a) , ∃nV ∈ N, an ∈ V, ∀n ≥ nV .
[fiecare posibila vecinatate a limitei contine toti termenii sirului, începând cu un anumit indice] [fiecare
posibila vecinatate a limitei "scapa" câte un numar finit de termeni ai sirului]
10.1.2. Observatie. O notatie folosita este an → a; notatii alternative sunt an →n→∞
a, anX→
n→∞a, an
X→ a
[în functie de nivelul de detalii dorit].
De exemplu:(1 +
1
n
)nR→ e înseamna "sirul
((1 +
1
n
)n)n∈N∗
este convergent în multimea R catre limita e ∈ R"(1 +
1
n
)n Q6−→ înseamna "sirul
((1 +
1
n
)n)n∈N∗
nu este convergent în multimea Q"
Sirul(
1 +1
n
)npoate fi considerat atât sir de numere reale cât si sir de numere rationale; desi sirul
ramâne neschimbat, considerarea lui în contexte/medii ambiente diferite face ca acelasi sir sa aiba carac-
teristici diferite: numarul lui Euler e este un numar real dar nu este rational, asa ca sirul converge ca sir
de numere reale dar nu converge ca sir de numere rationale.
Alte definitii ale convergentei —echivalente în contexte similare:
10.1.3. Definitie. • Definitia cu ε: Sirul (an)n∈N ⊆ (Rm, ‖·‖) este convergent la a ∈ Rm daca:
∀ε > 0 ∃nε ∈ N ∀n ≥ nε ‖an − a‖ < ε.
• Fiecare vecinatate contine toti termenii sirului de la un anumit rang/indice încolo.
• Fiecare vecinatate a limitei are câte un numar finit de termeni ai sirului pe care nu îi contine.

177
10.1.4. Definitie. Sirul (an)n∈N ⊆ (Rm, ‖·‖) este numit sir Cauchy daca are proprietatea:
∀ε > 0, ∃nε ∈ N, ∀n, p ≥ nε, ‖an − ap‖ < ε.
Sirul (an)n∈N ⊆ (X, d (·, ·)) este numit sir Cauchy daca are proprietatea:
∀ε > 0, ∃nε ∈ N, ∀n, p ≥ nε, d (an, ap) < ε.
10.1.5. Definitie. Un spatiu metric (X, d (·, ·)) în care fiecare sir Cauchy este convergent este numit
complet [sau spatiu Banach].
10.1.6. Observatie. Notiunea de sir Cauchy poate fi privita ca o rafinare a notiunii de sir convergent,
din cel putin doua puncte de vedere:
(1) În cazul în care spatiul este complet, ofera posibilitatea de a vorbi despre un sir convergent fara
a se cunoaste valoarea efectiva a limitei.
(2) În cazul în care spatiul nu este complet (asa cum este multimea Q), mediul ambient imper-
fect/sarac contine siruri care se comporta ca niste siruri convergente dar nu sunt convergente,
deoarece limita lor paraseste multimea. Notiunea de sir Cauchy ofera posibilitatea de a vorbi/opera
despre/cu aceste tipuri de siruri.
(3) Sirul an =n∑k=1
1keste un sir divergent, iar |an+p − an| =
n+p∑k=n+1
1keste o valoare care poate fi facuta
oricât de mica (dupa n), pentru orice p fixat.
Cu toate acestea, pentru p = 2n + 1 se obtine |an+p − an| =n+2n+1∑k=n+1
1k
=1
n+ 1+ · · · +
1
n+ (n+ 1)>
2n+ 1
n+ (n+ 1)= 1, asa ca |an+p − an| = |an+2n+1 − an| nu are un comportament uni-
form fata de p. Definitia sirului Cauchy cere ca ∀ε > 0, ∃nε ∈ N, ∀n ≥ nε, ∀p ∈ N, |an+p − an| < ε,
adica |an+p − an| sa fie mai mica decât ε uniform în raport cu p (indiferent de posibilele alegeri
ale lui p).
Acest comportament poate fi vazut de exemplu pentru sirul bn =1
n(care converge spre zero).

178
|bn+p − bn| =
∣∣∣∣ 1
n+ p− 1
n
∣∣∣∣ =p
n (n+ p)<
1
n, ∀p ∈ N asa ca pentru ∀ε > 0, ∃nε ∈ N [nε =[
1
ε
]+ 1] [suntem interesati de valori "mici" ale lui ε, foarte apropiate de 0] astfel încât n ≥ nε ⇒
n >
[1
ε
]⇒ 1
n< ε iar |bn+p − bn| < ε ∀n ≥ nε, ∀p ∈ N.
De exemplu, chiar daca lui p i s—ar atribui valori "ciudate", cum ar fi:
p = n⇒ p
n (n+ p)=
n
n (n+ n)=
1
2n<
1
n, sau
p = n3 ⇒ p
n (n+ p)=
n3
n (n+ n3)=
n
1 + n2<
1
n,
fractiap
n (n+ p)nu se comporta neasteptat.
10.1.7. Propozitie. Multimea R (ca spatiu topologic) satisface conditia de separabilitate:
∀x, y ∈ R, x 6= y, ∃V0 ∈ V (x) , U0 ∈ V (y) , V0 ∩ U0 = ∅,
iar limita unui sir, daca exista, este unica.
Demonstratie. Deoarece x 6= y, |x− y| > 0; pentru ε0 =|x− y|
3, (x− ε0, x+ ε0)∩ (y − ε0, y + ε0) =
∅.
Prin reducere la absurd: se presupune ca ar exista doua limite f1, f2 ∈ R, care sunt distincte f1 6= f2;
atunci, pentru i = 1, 2 are loc: ∀V ∈ V (fi) , ∃niV ∈ N, fn ∈ V , ∀n ≥ niV .
Fie doua vecinatati disjuncte pentru f1 si f2: Vi ∈ V (fi), V1 ∩ V2 = ∅.
Atunci ∀n ≥ max(n1V1, n2
V2
), fn ∈ V1∩V2 = ∅ contradictie (care provine de la presupunerea ca f1 6= f2).
Se obtine f1 = f2.
10.1.8. Propozitie. Daca X (ca spatiu topologic) satisface conditia de separare 2.2.19, atunci limita
sirului (daca exista) este unica.
Demonstratie. Prin reducere la absurd: presupunem ca exista doua elemente f1, f2 ∈ X, f1 6= f2
astfel încât pentru i = 1, 2 avem: ∀V ∈ V (fi) , ∃niV ∈ N, fn ∈ V , ∀n ≥ niV . Fie doua vecinatati disjuncte
ale elementelor f1 si f2: Vi ∈ V (fi), V1∩V2 = ∅. Atunci ∀n ≥ max(n1V1, n2
V2
), fn ∈ V1∩V2 = ∅ contradictie
(din ipoteza ca ar exista doua limite distincte). Deci f1 = f2.

179
10.1.9. Propozitie. Daca sirul (fn)n∈N ⊆ R este crescator si marginit superior atunci este convergent.
Demonstratie. Fie sirul real (fn)n≥0 crescator si marginit superior. Din axioma Cantor [în R, orice
submultime nevida si majorata admite o margine superioara], ∃M = supnan ∈ R (M este marginea supe-
rioara a multimii fn; n ∈ N). Atunci ∀ε > 0 numarul M − ε nu este majorant al multimii fn; n ∈ N
asa ca ∃nε ∈ N astfel încât fnε > M − ε; din monotonia sirului rezulta ca ∀n ≥ nε fn > M − ε asa ca
∀n ≥ nε are loc M − ε < fnε ≤ fn ≤ M < M + ε, ceea ce înseamna ca |fn −M | ≤ ε ∀n ≥ nε si deci
fn →M .
10.1.10. Observatie. Precizarea din enunt —ca sirul este real —este semnificativa: daca sirul ar firational,
afirmatia nu ar mai fi adevarata.
În Q, multimea x ∈ Q; x2 < 2 =(−√
2,√
2)∩Q este nevida, este majorata (de exemplu de valoarea
2) dar nu are margine superioara (rationala).
De exemplu sirul rational an =n∑k=0
1
k!este crescator, marginit superior (de exemplu de 3), dar ca sir
de numere rationale nu este convergent.
Demonstratie. an =n∑k=0
1
k!este crescator:
an+1 − an =1
(n+ 1)!> 0.
an este marginit superior:
n∑k=0
1
k!≤ 1 +
n−1∑k=0
1
2k= 1 +
1− 1
2n
1− 1
2
≤ 3.
an → e /∈ Q.
10.1.11. Propozitie. Daca sirul (fn)n∈N ⊆ R este descrescator si marginit inferior atunci este convergent.
Demonstratie. Exercitiu
10.1.12. Propozitie. Daca sirul real (bn)n≥0 converge la b 6= 0, atunci toti termenii de la un indice încolo
sunt nenuli, adica: ∃n0 ∈ N∗, ∀n ≥ n0, bn 6= 0. Mai mult, sirul real(
1
bn
)n≥n0
converge la1
b, adica
∃ limn→∞
1
bn=
1
limn→∞
bn.

180
Demonstratie. Fie b > 0 (cazul b < 0 se trateaza similar si este lasat exercitiu) si V0 = (b− ε0, b+ ε0)
o vecinatate a lui b care nu contine 0 (b 6= 0 asa ca b si 0 pot fi separate, în sensul ca exista doua vecinatati
disjuncte). Din bn → b ⇒ ∃n0 ∈ N astfel încât ∀n ≥ n0 bn ∈ V0 asa ca în particular bn 6= 0 si, mai mult,
bn > b− ε0.
bn → b ⇒ ∀ε > 0 ∃nε ∈ N, ∀n ≥ nε |bn − b| < ε; pentru n1ε = max
nε(b−ε0)b, n0
:∣∣∣∣ 1
bn− 1
b
∣∣∣∣ =
∣∣∣∣b− bnbnb
∣∣∣∣ =|bn − b||bn| · |b|
≤ 1
(b− ε0) · b · |bn − b| ≤ε · (b− ε0) · b
(b− ε0) · b = ε.
Deci1
bn→ 1
b.
10.1.13. Propozitie (Inegalitatea dintre doua siruri convergente se pastreaza prin trecere la limita). Daca
sirurile de numere reale (an)n≥0 si (bn)n≥0 sunt convergente si daca ∃n0 ∈ N astfel încât an ≤ bn ∀n ≥ n0,
atunci limn→∞
an ≤ limn→∞
bn (daca între termenii sirurilor are loc o inegalitate de la un rang încolo iar sirurile
sunt convergente, atunci inegalitatea se pastreaza si pentru limitele lor) (daca inegalitatea dintre termenii
sirurilor este stricta, nu se poate trage concluzia ca între limite ar exista tot o inegalitate stricta).
Demonstratie. Fie a, respectiv b limitele sirurilor; se demonstreaza ca a ≤ b prin reducere la absurd.
Daca s—ar întâmpla ca b < a, atunci (din separabilitatea structurii topologice pe R) ∃V1 ∈ V (a),
∃V2 ∈ V (b) cu V1∩V2 = ∅. ∃N1 ∈ N astfel încât an ∈ V1 ∀n ≥ N1 si ∃N2 ∈ N astfel încât bn ∈ V2 ∀n ≥ N2.
Fie M = max(n0, N1, N2); pentru ∀n ≥ M are loc: an ≤ bn, an ∈ V1, bn ∈ V2, si deoarece b < a and
V1 ∩ V2 = ∅, se obtine an ≤ bn (din ipoteza) si bn > an (din pozitia relativa a vecinatatilor), ceea ce este o
contradictie. Rezulta ca a ≤ b.
10.1.14. Corolar (Teorema clestelui). Daca (an)n≥0, (bn)n≥0, (cn)n≥0 sunt siruri reale pentru care ∃n0 ∈ N
astfel încât an ≤ bn ≤ cn ∀n ≥ n0 si daca an → l si cn → l (aceeasi limita), atunci sirul (bn)n≥0 este si el
convergent si, mai mult, limita sa este tot l.
Demonstratie. Pentru l ∈ R, 0 ≤ bn − an ≤ cn − an. Sirul (cn − an)n≥0 converge la 0 asa ca ∀ε > 0
∃nε ∈ N astfel încât |cn − an| < ε ∀n ≥ nε. Atunci ∀n ≥ nε, |bn − an| ≤ |cn − an| < ε asa ca (bn − an)n≥0
este tot convergent la 0. Din bn = (bn − an) + an rezulta ca bn → l. Cazurile l = ∞ sau l = −∞ sunt
lasate exercitii.

181
10.1.15. Propozitie (Lema Cesaro—Stolz). Daca (bn)n∈N este real, nemarginit si strict crescator si daca
∃ limn→∞
an+1−anbn+1−bn = l, atunci exista si limita lim
n→∞anbnsi. mai mult, este egala cu l.
Demonstratie. limn→∞
an+1−anbn+1−bn = l ⇒ ∀ε > 0, ∃nε ∈ N, ∀n ≥ nε,
∣∣∣an+1−anbn+1−bn − l∣∣∣ < ε. Deoarece (bn)n∈N
icreste strict si este nemarginit, bn+1 − bn > 0, ∀n ∈ N.
⇒ −ε < an+1−anbn+1−bn − l < ε ⇒ ε + l < an+1−an
bn+1−bn < ε + l ⇒ (−ε+ l) (bn+1 − bn) < an+1 − an <
(ε+ l) (bn+1 − bn), ∀n ≥ nε
Prin adunarea relatiilor pentru n de la nε la m− 1 > nε se obtine:
(−ε+ l)
( \bnε+1 − bnε
)<
\anε+1 − anε < (ε+ l)
( \bnε+1 − bnε
)(−ε+ l)
( \bnε+2 −
\bnε+1
)<
\anε+2 −
\anε+1 < (ε+ l)
( \bnε+2 −
\bnε+1
)........... \........... \........ \............. \............... \............... \.........
(−ε+ l)
( \bm−1 −
\bm−2
)<
\am−1 −
\am−2 < (ε+ l)
( \bm−1 −
\bm−2
)(−ε+ l)
(bm −
\bm−1
)< am −
\am−1 < (ε+ l)
(bm −
\bm−1
)Prin adunare termen cu termen de la nε la m− 1 se obtine:
(−ε+ l) (bm − bnε) < am − anε < (ε+ l) (bm − bnε), ∀m ≥ nε
Se împarte relatia prin bm (m poate fi ales astfel încât bm sa fie strict pozitiv):
(−ε+ l)(
1− bnεbm
)< am
bm− anε
bm< (ε+ l)
(1− bnε
bm
), ∀m ≥ nε
si prin rearanjarea termenilor,
−ε− (−ε+ l) bnεbm
+ anεbm
< ambm− l < ε− (ε+ l) bnε
bm+ anε
bm, ∀m ≥ nε
se obtine:∣∣∣ambm − l∣∣∣ < max∣∣∣−ε− (−ε+ l) bnε
bm+ anε
bm
∣∣∣ , ∣∣∣ε− (ε+ l) bnεbm
+ anεbm
∣∣∣ ≤≤ ε+ max
∣∣∣(−ε+ l) bnεbm
+ anεbm
∣∣∣ , ∣∣∣(ε+ l) bnεbm
+ anεbm
∣∣∣.Cum sirul cm := max
∣∣∣(−ε+ l) bnεbm
+ anεbm
∣∣∣ , ∣∣∣(ε+ l) bnεbm
+ anεbm
∣∣∣ este convergent la 0, exista un indice
mε astfel încât |cm| < ε, ∀m ≥ mε.
Atunci∣∣∣ambm − l∣∣∣ < 2ε, ∀m ≥ mε adica ∃ lim
m→∞ambm
= l
10.1.16. Propozitie (Orice sir convergent este marginit). Daca sirul (fn)n∈N este convergent atunci este
marginit.

182
Demonstratie. Fie f ∈ R si (fn)n≥0 ⊆ R astfel încât fn → f .
Din definitie se obtine ca pentru ε = 1 ∃n1 ∈ N astfel încât ∀n ≥ n1 fn ∈ Bε (f), adica ∀n ≥ n1,
‖fn‖ ≤ ‖fn − f‖+ ‖f‖ ≤ ‖f‖+ 1. Atunci ∀n ∈ N ‖fn‖ ≤M := max ‖f‖+ 1, ‖f0‖ , · · · , ‖fn1−1‖.
10.1.17. Propozitie. Daca ∃l ∈ R si ∃(gn)n≥0 > 0 din R cu gn → 0 si ∃k ∈ N astfel încât ‖fn − l‖ ≤ gn
∀n ≥ k, atunci sirul (fn)n∈N converge iar limn→∞
fn = f .
Demonstratie. Fie ε > 0 arbitrar. Din gn → 0 se obtine existenta unui indice nε ∈ N astfel încât
gn < ε ∀n ≥ nε; pentru Nε = max(nε, k) are loc ‖fn − f‖ ≤ gn < ε.
10.1.18. Propozitie. Daca (un)n∈N, (vn)n∈N sunt siruri reale convergente la 0, atunci ∀α, β ∈ R sirul
(αun + βvn)n∈N converge tot la 0.
Demonstratie. Fie α 6= 0 si β 6= 0 (celelalte cazuri: (α = 0 si β 6= 0) sau (α 6= 0 si β = 0) sau (α = 0
and β = 0) sunt lasate exercitii).
Pentru ε > 0 arbitrar exista indicii N1,ε, N2,ε astfel încât ‖un‖ <ε
2 |α|∀n ≥ N1,ε si ‖vn‖ <
ε
2 |β|∀n ≥ N2,ε.
Fie indicele Nε = max(N1,ε, N2,ε); atunci ∀n ≥ Nε are loc
‖αun + βvn‖ ≤ ‖αun‖+ ‖βvn‖ = |α| · ‖un‖+ |β| · ‖vn‖ <ε
2+ε
2= ε,
asa ca limn→∞
(αun + βvn) = 0.
10.1.19. Propozitie. Daca sirurile reale (an)n≥0, (bn)n≥0 sunt convergente, atunci sirurile (an + bn)n≥0,
(an · bn)n≥0 sunt tot convergente si, mai mult,
limn→∞
(an + bn) = limn→∞
an + limn→∞
bn (limita sumei este egala cu suma limitelor) (operatia de trecere la
limita comuta cu operatia de adunare),
limn→∞
(an · bn) = ( limn→∞
an) · ( limn→∞
bn) (limita produsului este egala cu produsul limitelor) (operatia de
trecere la limita comuta cu operatia de înmultire).
Demonstratie. Fie a respectiv b limitele sirurilor.
an → a⇒ ∀ε > 0 ∃n1ε ∈ N, ∀n ≥ n1
ε, |an − a| < ε

183
bn → b⇒ ∀ε > 0 ∃n2ε ∈ N, ∀n ≥ n2
ε, |bn − b| < ε
Pentru ε > 0 arbitrar fixat si pentru un indice n ≥ nε := maxn1ε/2, n
2ε/2
, se obtine:
|(an + bn)− (a+ b)| = |(an − a) + (bn − b)| ≤ |an − a|+ |bn − b| ≤ε
2+ε
2= ε.
Fie a 6= 0 (cazul a = 0 este lasat exercitiu). Deoarece (bn)n≥0 este convergent, este si marginit asa
ca exista un numar real M > 0 astfel încât |bn| ≤ M ∀n ∈ N; pentru ε > 0 fixat si pentru indicele
n ≥ nε := maxn1ε/2M , n
2ε/2|a|
, se obtine:
|anbn − ab| = |anbn − abn + abn − ab| = |(an − a)bn + a(bn − b)| ≤ |an − a| |bn|+ |a| |bn − b| ≤
≤ ε
2M·M + |a| ε
2 |a| =ε
2+ε
2= ε
10.1.20. Corolar. În aceleasi conditii, limn→∞
(αan + βbn) = α limn→∞
an + β limn→∞
bn, ∀α, β ∈ R.
Demonstratie. Exercitiu.
10.2. Puncte—limita ale unui sir
10.2.1. Definitie. Se numeste punct—limita al sirului (an)n∈N un element b ∈ X pentru care exista un
subsir (bk)k∈N convergent la b (fiecare vecinatate a punctului—limita contine câte un numar infinit de
elemente ale sirului).
10.2.2. Propozitie. Daca un sir este convergent, atunci sirul are un unic punct—limita, iar orice subsir
al sau este tot convergent catre aceeasi limita.
Demonstratie. Ex.
10.2.3. Propozitie (Vezi si [29], Appendix, Thm. 3.1, pag. 407). Daca D ⊆ R, atunci: x ∈ D′ ⇐⇒
∃ (xn)n ⊆ D \ x, xn → x[un punct este de acumulare pentru o multime daca si numai daca macar un sir
din multime tinde la punct cu valori distincte de punct] [O multime reala este închisa daca si numai daca
multimea contine toate limitele sirurilor ei convergente].
Demonstratie. x ∈ D′ ⇐⇒ ∀V ∈ V (x), V ∩D \ x 6= ∅ ⇐⇒ ∀n ∈ N∗, ∃xn ∈(x− 1
n, x+ 1
n
)∩
D \ x ⇐⇒ ∃ (xn)n ⊆ D \ x, |xn − x| < 1n⇐⇒ ∃ (xn)n ⊆ D \ x, xn → x.

184
10.2.4. Propozitie (Teorema Bolzano—Weierstrass). (Lema E. Cesaro 1859-1906) Daca sirul (fn)n∈N ⊆ R
este marginit, atunci exista macar un subsir al sirului, care este convergent (sirul are macar un punct—
limita).
Demonstratie. Daca sirul (fn)n≥0 ⊆ R este marginit, atunci multimea fn; n ∈ N este marginita,
adica, pentru m = infn∈N
fn > −∞ siM = supn∈N
fn <∞, are loc ca fn; n ∈ N ⊆ [m,M ]. Fie I1 acel interval
dintre intervalele [m, m+M2
] sau [m+M2,M ] care contine o infinitate de termeni ai sirului (daca ambele contin
câte o infinitate, se alege oricare dintre intervale); atunci lungimea l(I1) = M−m2
si exista un indice k1 ∈ N
astfel încât fk1 ∈ I1. Fie I2 intervalul ales dintre "jumatatile lui I1", care contine o infinitate de termeni
ai sirului; atunci l (I2) =l (I1)
2=M −m
22si exista un indice k2 ∈ N cu k2 > k1 astfel încât fk2 ∈ I2. Se
obtine prin inductie un sir de intervale (Ip)p∈N cu proprietatile:
Ip = [αp, βp] ⊆ [m,M ]
Ip+1 ⊂ Ip ∀p ∈ N
l (Ip) =M −m
2p,
∀p ∈ N ∃kp ∈ N astfel încât fkp ∈ Ip si sirul de numere naturale (kp)p∈N este strict crescator. Se obtine
ca m = α0 ≤ α1 ≤ · · · ≤ αp · · · ≤ · · · βn ≤ · · · ≤ β1 ≤ β0 = M si βp − αp = b−a2p, adica sirurile (αp)p∈N
si (βp)p∈N sunt monotone si marginite, deci convergente catre o limita comuna care se noteaza cu f . Are
loc f ∈⋂p∈N
Ip asa ca∣∣fkp − f ∣∣ < M −m
2pp→∞→ 0. Se obtine ca sirul
(fkp)p∈N (subsir al lui (fn)n∈N) este
convergent.
10.2.5. Observatie. Pentru un sir (fn)n∈N ⊆ Q afirmatia nu este adevarata.
10.2.6. Propozitie ([39], T. 3.7). Multimea punctelor—limita ale unui sir real (an)n∈N este o multime
închisa [de fapt se demonstreaza ca multimea punctelor—limita îsi contine toate punctele de acumulare]
[din demonstratie se observa ca rezultatul este valabil chiar pentru spatii metrice]
Demonstratie. Fie x ∈ L [element al închiderii multimii]. Trebuie demonstrat ca x ∈ L [x este
punct—limita]
Daca x ∈ L, atunci x este punct—limita [gata].
Daca x ∈ L \ L, atunci x este punct de acumulare al multimii punctelor—limita L.

185
Fie n1 ∈ N astfel încât an1 6= x si fie δ = d (x, an1) [daca nu exista un asemenea n1, înseamna ca ∀n ∈ N,
an = x, adica sirul ar fi constant iar x ar fi chiar valoarea constanta a sirului —în acest caz L = x [gata]]
Deoarece x este punct de acumulare al lui L, ∀k > 1, ∃yk ∈ L cu d (yk, x) <δ
2k.
Fie k = 2. Deoarece y2 ∈ L, ∃n2 > n1 astfel încât d (an2 , y2) <δ
4.
Se obtine ca d (x, an2) ≤ d (x, y2) + d (y2, an2) <δ
4+δ
4=δ
2.
Fie k = 3. Deoarece y3 ∈ L, exista rangul n3 ∈ N astfel încât n3 > n2 iar d (y3, an3) <δ
23.
Se obtine ca d (x, an3) ≤ d (x, y3) + d (y3, an3) <δ
23+
δ
23=
δ
22.
Pentru k oarecare se obtine ca exista rangul nk ∈ N astfel încât nk > nk−1 si d (x, ank) <δ
2k−1.
În final se obtine un subsir al lui (an)n∈N si anume subsirul (ank)k∈N cu proprietatea ca d (x, ank) <δ
2k−1,
adica subsirul converge la x, ceea ce înseamna ca x ∈ L.
10.2.7. Observatie. Pentru un sir real oarecare, daca sirul este nemarginit (inferior si/sau superior) atunci
punctul/punctele de la infinit sunt puncte—limita ale sirului. Daca sirul este marginit, din Prop. 10.2.4 se
obtine existenta macar a unui punct—limita. Se obtine ca pentru orice sir real multimea punctelor—limita
este nevida si închisa în R.
10.2.8. Definitie. Fie sirul real (an)n∈N si fie L ⊆ R multimea tuturor punctelor—limita ale sirului.
Marginea inferioara a multimii L este numita limita inferioara a sirului si este notata lim infn→∞
an, iar
marginea superioara a multimii L este numita limita superioara a sirului si este notata lim supn→∞
an.
10.2.9. Propozitie (Proprietati ale limitelor superioare/inferioare [vezi si [10], Prop. 1.32, [39], T. 3.17]).
Fie sirurile reale (an)n∈N si (bn)n∈N. Atunci:
(1) Valorile lim infn→∞
an si lim supn→∞
an sunt puncte—limita ale sirului an.
(2) lim infn→∞
an = supn
(inf am; m ≥ n)
(3) lim supn→∞
an = infn
(sup am; m ≥ n)
(4) infnan ≤ lim inf
n→∞an ≤ lim sup
n→∞an ≤ sup
nan.
(5) lim infn→∞
an = lim supn→∞
an ⇐⇒ ∃ limn→∞
an = lim infn→∞
an = lim supn→∞
an.
(6) lim supn→∞
(an + bn) ≤ lim supn→∞
an + lim supn→∞
bn.

186
(7) lim infn→∞
(an + bn) ≥ lim infn→∞
an + lim infn→∞
bn.
(8) Pentru α > 0, lim infn→∞
(αan) = α lim infn→∞
an si lim supn→∞
(αan) = α lim supn→∞
an.
(9) an ≤ bn ⇒ lim infn→∞
an ≤ lim infn→∞
bn si lim supn→∞
an ≤ lim supn→∞
bn.
Demonstratie. 1. Din Prop. 10.2.6 se stie ca multimea punctelor limita L ⊆ R este închisa, asa ca îsi
contine marginile inferioara si superioara, adica valorile lim infn→∞
an si lim supn→∞
an sunt puncte—limita ale sirului
an [exista subsiruri ale sirului initial care au aceste valori ca si limite] [lim infn→∞
an ∈ L si lim supn→∞
an ∈ L].
2. Fie sirul βn = sup am; m ≥ n ⊆ R; deoarece am; m ≥ n+ 1 ⊆ am; m ≥ n, rezulta ca
βn+1 ≤ βn [sirul este descrescator] iar limita lui [în R] este infnβn.
Analog sirul αn = inf am; m ≥ n ⊆ R este crescator, iar limita lui [în R] este supnαn.
Pentru fiecare n, daca βn nu este un element al sirului initial, atunci este un punct—limita, asa ca infnβn
este limita unei combinatii de elemente ale sirului cu elemente din L, care este multime închisa, asa ca
infnβn ∈ L. Mai mult, inf
nβn este chiar marginea superioara a multimii de puncte—limita, pentru ca:
Fie x > infnβn ⇒ ∃n0 ∈ N, x > βn0 ⇒ ∃n0 ∈ N, x > sup am; m ≥ n0 ⇒ ∃n0 ∈ N, ∀n ≥ n0, x > an
si x > βn0 ⇒ x nu poate fi punct—limita al sirului.
3. Analog supnαn este chiar marginea inferioara a multimii de puncte—limita.
4. Evident marginea inferioara a unei multimi este mai mica decât marginea ei superioara.
5. Daca marginile inferioara si superioara sunt egale, atunci sirul are un singur punct—limita, adica
orice subsir tinde la aceeasi limita, ceea ce înseamna ca sirul este convergent.
6. lim supn→∞
(an + bn) = infn
(sup am + bm; m ≥ n) ≤ infn
(sup
am + lim sup
n→∞bn; m ≥ n
)= inf
n
(sup am; m ≥ n+ lim sup
n→∞bn
)=
= infn
(sup am; m ≥ n) + lim supn→∞
bn = lim supn→∞
an + lim supn→∞
bn.
7. Analog
8., 9. Exercitii.
10.3. Câteva limite standard
limn→∞
qn =
0, q ∈ (−1, 1)
1, q = 1
nu exista, în rest

187
Fie p ∈ N∗, P (X) =p∑
k=0
akXk un polinom, cu ap 6= 0. Atunci lim
n→∞P (n) = lim
n→∞apn
p = ap · ∞.
Fie p, q ∈ N∗, P (X) =p∑
k=0
akXk si Q (X) =
q∑k=0
bkXk polinoame, ap 6= 0 si bq 6= 0 [coeficientii ap si bq
se mai numesc coeficienti dominanti ]. Atunci: limn→∞
P (n)
Q(n)=
0, p < q
apbq· ∞, p > q
apbq, p = q
[Demonstratia se face prin procedura numita "factor comun fortat"]
limn→∞
P (n)
Q(n)= lim
n→∞
p∑k=0
aknk
q∑k=0
bknk= lim
n→∞
np[
p∑k=0
aknk−q]
nq[
q∑k=0
bknk−p]
În fiecare paranteza patrata, fiecare n este la exponent negativ [care tinde la 0 pentru n→∞], în afara
coeficientilor dominanti. Se obtine:
limn→∞
P (n)
Q(n)= lim
n→∞np−q
apbq, de unde concluzia.
10.4. Siruri definite prin recurenta
10.4.1. Definitie. O functie f (·) : X → X se numeste contractie daca ∃α ∈ (0, 1) astfel încât
∀x, y ∈ X, d (f (x) , f (y)) ≤ α · d (x, y) .
10.4.2. Definitie. Un spatiu metric în care orice sir fundamental este sir convergent se numeste spatiu
metric complet.
Obs: Daca f (·) este contractie pe X atunci este uniform continua pe X.
Prop: Daca (X, d (·, ·)) este spatiu metric si f (·) : X → X este o contractie, atunci sirul (definit prin
recurenta) xn+1 = f (xn), x0 = a ∈ X este sir Cauchy.
Dem:
10.4.3. Teorema. (Teorema de punct fix pentru contractii) Fie (X, d) spatiu metric complet si fie T (·) :
X → X o contractie. Atunci:
(1) T (·) este continua.

188
(2) ∀x0 ∈ X, sirul definit prin relatia de recurenta xn+1 = T (xn) este convergent.
(3) Limita sirului este unicul punct fix (notat x) al functiei T (·) si are loc
d (xn, x) ≤ αn
1− αd (x0, x1) .
Demonstratie. 1. Fie ε > 0 si x0 ∈ X. Atunci, pentru orice x ∈ X cu d (x, x0) <ε
α= δε,
d (f (x) , f (x0)) ≤ αd (x, x0) < α · δε = ε, deci functia este continua.
Demonstratie cu siruri: Fie (xn)n∈N un sir convergent la x0. Atunci are loc
d (T (xn) , T (x0)) ≤ αd (xn, x0)n→∞→ 0⇒ ∃ lim
n→∞T (xn) = T (x0) .
2. Fie n > m; au loc relatiile:
d (xn, xm) = d (T (xn−1) , T (xm−1)) ≤ αd (xn−1, xm−1) ≤ · · · ≤ αmd (xn−m, x0) ≤
≤ αm (d (x0, x1) + d (x1, x2) + · · · d (xn−m−1, xn−m)) ≤
≤ αmd (x0, x1) (1 + α + · · ·αn−m−1) ≤ αmd(x0,x1)1−α .
Din faptul ca α ∈ (0, 1) ⇒ sirul este Cauchy, deci (pentru ca spatiul este complet) convergent; se noteaza
cu x limita sa. T fiind continua, are loc prin trecere la limita în relatia de recurenta
T (x) = x,
adica limita sirului este punct fix al functiei. Din faptul ca functia este contractie, rezulta ca daca ar exista
doua puncte fixe atunci
d (T (x1) , T (x2)) = d (x1, x2) ≤ αd (x1, x2)⇒ x1 = x2,
deci punctul fix este unic. Mai mult, are loc
d (xn, xm) ≤ αmd (x0, x1)
1− αn→∞⇒ d (x, xm) ≤ αmd (x0, x1)
1− α .
Obs: Daca X0 = X0 ⊆ X este astfel încât T (X0) ⊆ X0 atunci x ∈ X0.

189
Obs: Daca (X, d (·, ·)) este spatiu metric complet, T (·) : X → X si ∃n0 ∈ N∗ astfel încât T n0 (·) : X →
X este contractie (de constanta α), atunci:
T (·) are un unic punct fix x
∀x ∈ X, ∀k ∈ N, d(T kn0 (x) , x
)≤ αkd (x, x)
Teo (Conditiile suficiente Blackwell pentru ca o functie sa fie contractie):
Fie X ⊆ Rn, B (X) spatiul functiilor marginite f (·):X → R împreuna cu norma sup. Fie T (·) :
B (X)→ B (X) care satisface:
a. (monotonie) f (·) , g (·) ∈ B (X) si f (·) ≤ g (·) [i.e. f (x) ≤ g (x) ∀x ∈ X]⇒ T (f (·)) (·) ≤ T (g (·)) (·)
[i.e. T (f (·)) (x) ≤ T (g (·)) (x) ∀x ∈ X]
b. ∃α ∈ (0, 1) a.î. T (a+ f (·)) (·) ≤ T (f (·)) (·) + αa, ∀f (·) ∈ B (X), ∀a ≥ 0.
Atunci T (·) este o contractie de constanta α.
Dem: Fie f (·) , g (·) ∈ B (X). Atunci din (f − g) (·) ≤ ‖f (·)− g (·)‖ si din (g − f) (·) ≤ ‖f (·)− g (·)‖
au loc f (·) ≤ g (·) + ‖f (·)− g (·)‖ si g (·) ≤ f (·) + ‖f (·)− g (·)‖.
⇒ T (f (·)) (·) ≤ T (g (·) + ‖f (·)− g (·)‖) (·) ≤ T (g (·)) (·) + α ‖f (·)− g (·)‖
si
⇒ T (g (·)) (·) ≤ T (f (·) + ‖f (·)− g (·)‖) (·) ≤ T (f (·)) (·) + α ‖f (·)− g (·)‖
Se obtine:
‖T (f (·)) (·)− T (g (·)) (·)‖ ≤ α ‖f (·)− g (·)‖.
Exemplu:
T (v (·)) (k) = maxy∈[0,f(k)]
[U (f (k)− y) + βv (y)]
unde:....
10.4.4. Teorema. (Principiul contractiilor parametrizat) Fie x0 ∈ Rn, y0 ∈ Rm, r, ρ > 0 si f (·, ·) :
Br (x0)×Bρ (y0)→ Rm continua cu proprietatile:
(1) (contractivitate locala în a doua variabila, constanta în raport cu prima variabila):
∃α ∈ (0, 1) , ‖f (x, y1)− f (x, y2)‖ ≤ α ‖y1 − y2‖ ,∀x ∈ Br (x0) ,∀y1, y2 ∈ Bρ (y0)

190
(2) (marginire locala a functiei partiale x 7→ f (x, y0))
‖f (x, y0)− y0‖ < ρ (1− α) , ∀x ∈ Br (x0) .
Atunci exista o aplicatie continua unica ϕ (·) : Br (x0)→ Bρ (y0) cu proprietatea ca
f (x, ϕ (x)) = ϕ (x) , ∀x ∈ Br (x0) .
Demonstratie. Fie
ϕ0 (·) : Br (x0)→ Rm, ϕ0 (x) := y0, ∀x ∈ Br (x0) ,
ϕn+1 (·) : Br (x0)→ Rm, ϕn+1 (x) := f (x, ϕn (x)) , ∀x ∈ Br (x0) , ∀n ∈ N;
Se demonstreaza ca:
(i) ϕn (Br (x0)) ⊂ Bρ (y0) ,∀n ∈ N;
(ii) (ϕn (.))n este sir Cauchy uniform pe Br (x0) ;
(iii) ϕ (Br (x0)) ⊂ Bρ (y0) ;
(iv) ϕ (.) este unica cu aceste proprietati;
(i) ϕn (Br (x0)) ⊂ Bρ (y0) ,∀n ∈ N; se demonstreaza prin inductie: pentru n = 0, ϕ0 (x) = y0 ⇒ afirmatia
este adevarata; pentru n = 1, ϕ1 (x) = f (x, ϕ0 (x)) = f (x, y0) si are loc
‖ϕ1 (x)− ϕ0 (x)‖ = ‖ϕ1 (x)− y0‖ = ‖f (x, y0)− y0‖2.< ρ (1− α) < ρ⇒ ϕ1 (x) ∈ Bρ (y0) .
Pentru cazul general, au loc:
‖ϕ2 (x)− ϕ1 (x)‖ = ‖f (x, ϕ1 (x))− f (x, ϕ0 (x))‖ ≤ α ‖ϕ1 (x)− ϕ0 (x)‖
‖ϕ3 (x)− ϕ2 (x)‖ = ‖f (x, ϕ2 (x))− f (x, ϕ1 (x))‖ ≤ α ‖ϕ2 (x)− ϕ1 (x)‖ ≤ α2 ‖ϕ1 (x)− ϕ0 (x)‖
.................................
‖ϕn+1 (x)− ϕn (x)‖ ≤ αn ‖ϕ1 (x)− ϕ0 (x)‖ , de unde

191
‖ϕn+1 (x)− y0‖ ≤
≤ ‖ϕn+1 (x)− ϕn (x)‖+ · · ·+ ‖ϕ3 (x)− ϕ2 (x)‖+ ‖ϕ2 (x)− ϕ1 (x)‖+ ‖ϕ1 (x)− y0‖
≤ ‖ϕ1 (x)− y0‖ (αn + · · ·+ α + 1) < ‖ϕ1 (x)− y0‖∞∑n=0
αn = ‖ϕ1(x)−y0‖1−α < ρ
⇒ ϕn (Br (x0)) ⊂ Bρ (y0) .
(ii) Sirul (ϕn (.))n este sir Cauchy uniform pe Br (x0) pentru ca
‖ϕn+p (x)− ϕn (x)‖ ≤ ‖ϕn+p (x)− ϕn+p−1 (x)‖+ · · ·+ ‖ϕn+1 (x)− ϕn (x)‖ ≤
≤ ‖ϕn+1 (x)− ϕn (x)‖ (αp−1 + · · ·+ α + 1) <
< αn‖ϕ1(x)−ϕ0(x)‖1−α < ραn →
n→∞0 ∀p ∈ N.
Mai mult, din faptul ca functiile ϕn (.) sunt continue iar limita este Cauchy uniforma, urmeaza ca sirul
de functii este uniform convergent (din faptul ca spatiul vectorial care contine codomeniul este complet)
catre o functie continua ϕ (.) : Br (x0)→ Rm.
(iii) ϕ (Br (x0)) ⊂ Bρ (y0) pentru ca
‖ϕn+1 (x)− y0‖ <‖ϕ1 (x)− y0‖
1− α ,
de unde
‖ϕ (x)− y0‖ = limn→∞
‖ϕn+1 (x)− y0‖ ≤‖ϕ1 (x)− y0‖
1− α ≤ ρ.
Trecând la limita în relatia de recurenta
ϕn+1 (x) = f (x, ϕn (x)) ,∀x ∈ Br (x0)
urmeaza ca
ϕ (x) = f (x, ϕ (x)) ,∀x ∈ Br (x0) .
(iv) Unicitatea functiei ϕ (.) rezulta din faptul ca, daca ar exista o alta functie (notata φ (.) ) care sa
satisfaca
φ (x) = f (x, φ (x)) , ∀x ∈ Br (x0) ,

192
atunci ar avea loc
‖ϕ (x)− φ (x)‖ = ‖f (x, ϕ (x))− f (x, φ (x))‖ ≤ α ‖ϕ (x)− φ (x)‖
de unde rezulta ϕ (·) = φ (·), pentru ca α ∈ (0, 1).

CAPITOLUL 11
Functii de o singura variabila reala
11.1. Limite
Se considera o functie f (·) : D ⊂ R → R. Notiunea de limita a functiei într—un punct are sens doar
în puncte de acumulare ale domeniului de definitie D.
11.1.1. Definitie. Fie f (·) : D ⊂ R → R si x0 ∈ D′ (punct de acumulare al domeniului). Functia f (·)
are limita l în x0 daca:
∀U ∈ V (l) , ∃VU ∈ V (x0) , f (VU ∩D \ x0) ⊆ U.
Se noteaza limx→x0
f (x) = l [sau: limx→x0x∈D
f (x) = l sau limD3x→x0
f (x) = l]
11.1.2. Observatie. Limita unei functii reale într—un punct, daca exista, este unica.
Demonstratie. Prin reducere la absurd:
Preuspunem ca functia f (·) : D ⊂ R→ R ar avea în x0 ∈ D′ doua limite distincte l1 si l2. Atunci:
∀U1 ∈ V (l1) , ∃VU1 ∈ V (x0) , f (VU1 ∩D \ x0) ⊆ U1, si
∀U2 ∈ V (l2) , ∃VU2 ∈ V (x0) , f (VU2 ∩D \ x0) ⊆ U2
Cele doua limite fiind distincte, exista U01 ∈ V (l1) si U0
2 ∈ V (l2) astfel încât U1 ∩ U2 = ∅.
Se obtin doua vecinatati VU01 si VU02 ale lui x0,pentru care:
f (VU1 ∩D \ x0) ⊆ U1, si
f (VU2 ∩D \ x0) ⊆ U2.
În final, se obtine o vecinatate ∅ 6= V0 = VU01 ∩ VU02 pentru care:
f (V0 ∩D \ x0) ⊆ f (VU1 ∩D \ x0) ⊆ U1 si
f (V0 ∩D \ x0) ⊆ f (VU2 ∩D \ x0) ⊆ U2, adica
∅ 6= f (V0 ∩D \ x0) ⊆ U1 ∩ U2 = ∅, ceea ce este o contradictie.
11.1.3. Observatie (Definitii echivalente pentru limita functiei). [vezi si [39], Thm. 4.2, pag. 84]193

194
Cu siruri: limx→x0
f (x) = l⇔
∀xk → x0, xk ∈ D \ x0, f (xk)→ l.
Cu ε− δ : limx→x0
f (x) = l⇔
∀ε > 0, ∃δε > 0,∀x ∈ D \ x0 cu 0 < |x− x0| < δε, |f (x)− l| < ε.
11.1.4. Observatie. Pentru functii reale f (·) : D ⊆ R→ R, pentru a ∈ D′ în anumite situatii particulare
se poate vorbi despre limite laterale:
daca ∃r > 0 astfel încât (a− r, a) ∩D 6= ∅, atunci are sens notiunea de limita laterala la stânga în a,
notata prin limx→ax<a
f (x) sau limxa
f (x), si care poate sa existe sau nu.
daca ∃r > 0 astfel încât (a, a+ r) ∩D 6= ∅, atunci are sens notiunea de limita laterala la dreapta în a,
notata prin limx→ax>a
f (x) sau limxa
f (x), si care poate sa existe sau nu.
11.1.5. Observatie. Daca pentru functia reala f (·) : D ⊆ R→ R au sens în a ∈ D′ notiunile de limita,
limita la dreapta si limita la stânga, atunci ∃ limx→a
f (x) ⇐⇒ ∃ limxa
f (x) SI ∃ limxa
f (x) SI limxa
f (x) =
limxa
f (x), iar în aceasta situatie valoarea limitei este egala cu valoarea comuna a limitelor laterale.
11.1.6. Observatie. Situatia ca limita unei functii reale într—un punct nu exista poate fi caracterizata
folosind definitia echivalenta cu siruri a limitei: exista doua siruri distincte (x1n)n si (x2
n) ⊆ D \ a, astfel
încât x1n → a, x2
n → a, f (x1n1)→ l1, f (x2
n)→ l2, iar l1 6= l2.
11.1.7. Definitie. Fie f (·) : D ⊆ R→ R, a ∈ D′ si l ∈ R astfel încât exista un sir (xn)n ⊆ D \ a, cu
xn → a si f (xn)→ l. Atunci l se numeste punct—limita al functiei f (·) în a.
11.2. Continuitate
Aceasta sectiune se inspira mult din materialele pregatite de Profesorul Stefan Mirica, cu ocazia
pregatirii manualului [17]. Profesorului Mirica i s—a parut atragatoare ideea de a mentiona [desi, probabil

195
ca la nivel de clasa a XI—a rezultatele sunt putin cam prea "mature"] rezultate referitoare la legatura din-
tre proprietatea Darboux, monotonie si continuitate. Dupa stiinta mea, interesul fusese stârnit de studii
referitoare la lema Zygmund, al carei studiu oricum ar trebui continuat.
11.2.1. Definitie (definitia cu vecinatati). Functia f (·) : D ⊆ R→ R este numita continua în punctul
x0 ∈ E daca:
∀V ∈ V (f (x0)) , ∃UV ∈ V (x0) , f (UV ∩D) ⊆ V.
Functia f (·) este numita continua pe o multime, daca este continua în fiecare punct al acelei multimi.
Când conditia nu este îndeplinita, functia este numita discontinua în punctul x0 ∈ D.
11.2.2. Observatie. Deoarece x0 ∈ D, iar vecinatatile lui x0 îl contin pe x0, UV ∩D 6= ∅ indiferent care
ar fi vecinatatea UV .
Punctul x0 ∈ D în care se discuta continuitatea poate fi de doua feluri:
(1) x0 ∈ D si x0 /∈ D′ (desi punctul este în multime, nu este punct de acumulare al multimii; adica
x0 este punct izolat al domeniului)
în aceasta situatie, pentru vecinatatile UV "mici" (din jurul lui x0), UV ∩ D = x0 asa ca
f (UV ∩D) = f (x0) ⊆ V (incluziune care este satifacuta totdeauna, deoarece V este vecinatate
a lui f (x0)). Se obtine regula:
Orice functie este continua în orice punct izolat al domeniului de definitie.
Se observa ca în aceasta situatie problema existentei/nonexistentei limitei nu se pune/nu are
sens.
(2) x0 ∈ D si x0 ∈ D′ (punctul este si în multime si punct de acumulare al multimii)
în aceasta situatie, definitia cu vecinatati a continuitatii "se traduce" astfel:
∃ limx→x0x∈D
f(x) = f(x0),
adica:
(a) exista limita functiei (pe domeniul D)
(b) valoarea de la a. a limitei este egala cu valoarea functiei în x0.

196
(3) Deoarece limita poate fi descrisa cu limite laterale, continuitatea functiei f (·) în punctul x0 ∈
D ∩D′ se generalizeaza la "continuitate laterala a functiei f (·) în punctul x0 ∈ D".
11.2.3. Definitie. Functia f (·) : D ⊆ R→ R se numeste continua la stânga/dreapta în punctul x0 ∈ E
daca:
∃ limx→x0,x<x0
x∈D
f(x) = f (x0) / ∃ limx→x0,x>x0
x∈D
f(x) = f (x0)
11.2.4. Propozitie (Definitii echivalente ale continuitatii pentru x0 ∈ D ∩ D′). Fie f (·) : D → R si
x0 ∈ D ∩D′. Atunci urmatoarele afirmatii sunt echivalente:
(1) Functia f (·) este continua în x0.
(2) Pentru orice sir (xn)n∈N cu proprietatile:
(a) xn ∈ D, ∀n ∈ N
(b) xn 6= x0, ∀n ∈ N
(c) xn → x0,
are loc: ∃ limn→∞
f (xn) = f (x0).
Conditia b. nu apare, de obicei, în texte, deoarece se considera (în mod corect) ca atâta vreme
cât se discuta despre continuitate, eventuala limita oricum este evaluata doar din punct de vedere
al egalitatii ei cu valoarea functiei în punct, asa ca faptul ca unii termeni ai sirului (sau chiar toti)
coincid cu x0 poate fi considerata o "impuritate" neglijabila. Conditia a fost adaugata pentru a
micsora ambiguitatea atunci când se cauta contraexemple care eventual sa arate ca o functie nu
este continua.
(3) Toate limitele laterale (care au sens) ale functiei f (·) în x0, exista si sunt egale cu limita limx→x0x∈D
f (x)
si cu valoarea functiei în punct, f (x0).
Precizarea facuta "limitele laterale care au sens" se refera la situatiile de tip D = [a, b] si
x0 = a (situatie în care limita la stânga nu are sens) sau x0 = b (situatie în care limita la dreapta
nu are sens).
(4) ∀ε > 0, ∃δε > 0, ∀x ∈ D \ x0, |x− x0| < δε, |f(x)− f(x0)| < ε.
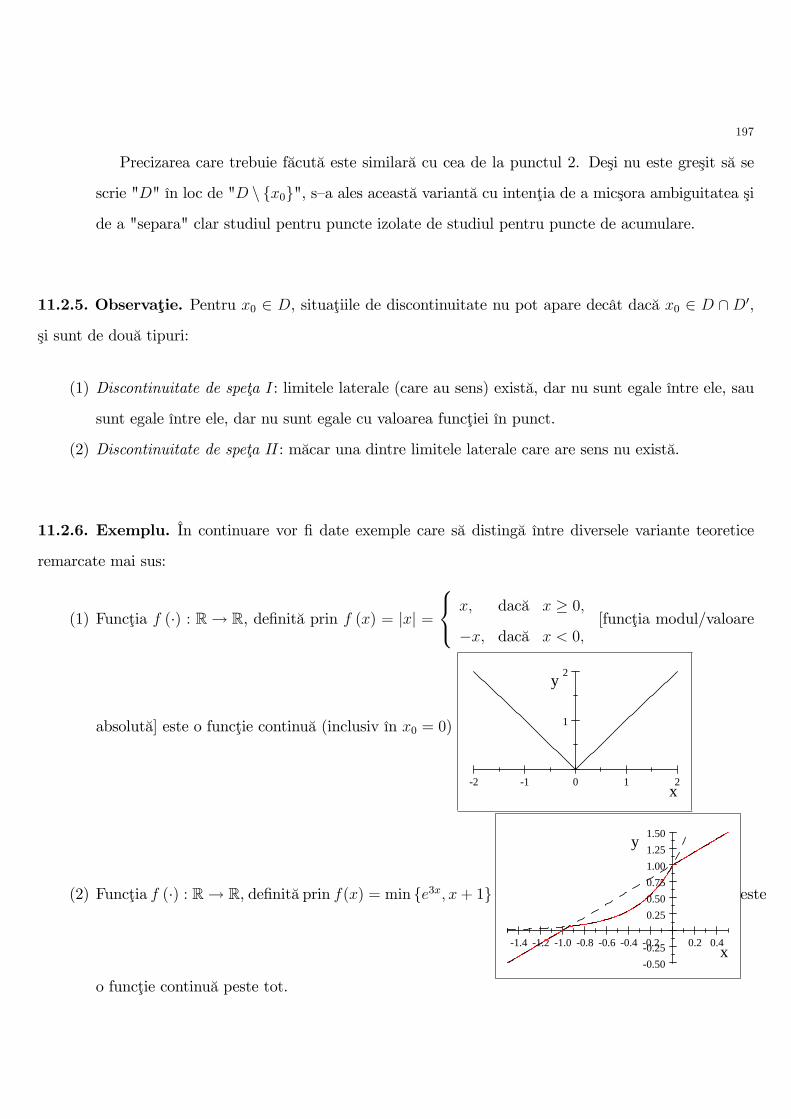
197
Precizarea care trebuie facuta este similara cu cea de la punctul 2. Desi nu este gresit sa se
scrie "D" în loc de "D \ x0", s—a ales aceasta varianta cu intentia de a micsora ambiguitatea si
de a "separa" clar studiul pentru puncte izolate de studiul pentru puncte de acumulare.
11.2.5. Observatie. Pentru x0 ∈ D, situatiile de discontinuitate nu pot apare decât daca x0 ∈ D ∩D′,
si sunt de doua tipuri:
(1) Discontinuitate de speta I : limitele laterale (care au sens) exista, dar nu sunt egale între ele, sau
sunt egale între ele, dar nu sunt egale cu valoarea functiei în punct.
(2) Discontinuitate de speta II : macar una dintre limitele laterale care are sens nu exista.
11.2.6. Exemplu. În continuare vor fi date exemple care sa distinga între diversele variante teoretice
remarcate mai sus:
(1) Functia f (·) : R→ R, definita prin f (x) = |x| =
x, daca x ≥ 0,
−x, daca x < 0,[functia modul/valoare
absoluta] este o functie continua (inclusiv în x0 = 0)
2 1 0 1 2
1
2
x
y
(2) Functia f (·) : R→ R, definita prin f(x) = min e3x, x+ 1
1.4 1.2 1.0 0.8 0.6 0.4 0.2 0.2 0.4
0.500.25
0.250.500.751.001.251.50
x
y
este
o functie continua peste tot.

198
(3) Functia f (·) : R→ R, definita prin f(x) =
x2 + 1, daca x ≤ 0
x+ 2, daca x > 02 1 1 2
2
2
x
y
Aceasta functie este continua în ∀x ∈ R∗, iar în x0 = 0 este discontinua de speta I.
(4) Functia f (·) : R→ R, definita prin f(x) =
sin 1x, daca x 6= 0,
λ, daca x = 0,, cu λ ∈ R fixat, este continua
în ∀x ∈ R∗, iar în x0 = 0 este discontinua de speta II, oricare ar fi valoarea paramerului λ
1.0 0.5 0.5 1.0
1.0
0.5
0.5
1.0
x
y
(5) Functia f (·) : R→ R, definita prin f(x) =
1, daca x ∈ Q,
0, daca x ∈ R \Q,[cunoscuta sub numele de
functia lui Dirichlet1] este o functie care în orice punct x ∈ R are câte o discontinuitate de speta
II; desi nu poate fireprezentata (riguros) grafic, poza alaturata ar trebui sa sugereze reprezentarea
ei grafica: graficul este compus din punctele irationale ale liniei întrerupte (y = 0) si din punctele
rationale ale liniei punctate (y = 1).
4 2 2 4
1
1
2
x
y
(6) Functia f (·) : R→ R, definita prin f(x) =
0, daca x = 0 sau x ∈ R \Q,1q, daca x = p
q, q ∈ N∗, p ∈ Z, (p, q) = 1 (relativ prime între ele)
[cunoscuta sub numele de functia lui Riemann], care este continua în punctele x ∈ 0 ∪ (R \Q)
si discontinua de speta II în punctele x ∈ Q∗. Studiul functiei se face folosind rezultate de tipul:
1P. L. Dirichlet (1805—1859)

199
• Daca (pn)n ⊆ Z si pn → p cu p ∈ R, atunci p ∈ Z, sirul (pn)n este constant de la un rang
încolo iar p pastreaza semnul valorii constante a sirului.
• Daca sirurile (pn)n ⊆ Z si (qn)n ⊆ N∗ sunt astfel încât (pn, qn) = 1 iar sirul(pnqn
)n
→ x0 cu
x0 ∈ R \Q (un sir de fractii ireductibile care tinde la un numar irational), atunci qn → +∞.
• Daca sirurile (pn)n ⊆ Z si (qn)n ⊆ N∗ sunt astfel încât (pn, qn) = 1 iar sirul(pnqn
)n
→ x0
cu x0 ∈ Q∗, atunci fie qn → ∞ si pn → ±∞, fie(pnqn
)n
contine un subsir de numitor si
numarator constanti (astfel încât fractia este egala cu x0).
• Daca sirurile (pn)n ⊆ Z si (qn)n ⊆ N∗ sunt astfel încât (pn, qn) = 1 iar sirul(pnqn
)n
→ x0 cu
x0 = 0, atunci fie qn →∞ fie sirul (qn)n este constant de la un rang încolo iar sirul (pn)n este
nul de la un rang încolo.
(7) Functiile elementare: polinomiala, putere (inclusiv functia radical), exponentiala, logaritmica,
trigonometrica, trigonometrica inversa, sunt continue în fiecare punct al domeniului lor de definitie.
Mai mult, operatiile algebrice (care au sens) (se au în vedere operatiile de adunare, scadere,
înmultire cu un numar real, înmultire, împartire) cu functii elementare conduc la functii continue
în fiecare punct al domeniului lor. Când doua functii pot fi compuse, compunerea lor este si ea o
functie continua.
(8) Daca functiile f (·), g (·) : D ⊆ R → R sunt continue în punctul x0 ∈ D, atunci functiile
x 7→ min f (x) , g (x), x 7→ max f (x) , g (x), definite pentru toti x ∈ D, sunt si ele continue în
x0 ∈ D.
Justificarea poate folosi, de exemplu, relatiile min a, b = 12[a + b − |a− b|], max a, b =
12[a+ b+ |a− b|], compunearea functiilor si faptul ca functia modul este continua.
11.2.7. Propozitie. Fie f (·) : D ⊆ R→ R o functie continua în x0 ∈ D. Atunci au loc afirmatiile:
(1) f(x0) > 0 [< 0] ⇒ ∃δx0 > 0, f(x) > 0 [< 0], ∀x ∈ (x0 − δx0 , x0 + δx0) ∩ D [daca functia este
continua într—un punct si diferita de zero în acel punct, atunci îsi pastreaza semnul pe o întreaga
vecinatate a acelui punct; în particular, este diferita de zero pe o întreaga vecinatate a acelui
punct]

200
(2) ∃δx0 > 0 si ∃M ∈ R+, |f(x)| < M , ∀x ∈ (x0−δx0 , x0 +δx0)∩D [daca functia este continua într—un
punct, atunci este local—marginita în acel punct]
Demonstratie. Functia este continua în x0, asa ca:
∀ε > 0, ∃δε > 0, |f (x)− f (x0)| < ε, ∀x ∈ (x0 − δε, x0 + δε) ∩ D [δε ar trebui scris δx0,ε, în sensul ca
depinde si de x0: schimbarea punctului x0 conduce la schimbarea valorii δ]
⇒ ∀ε > 0, ∃δε > 0, f (x0)− ε < f (x) < f (x0) + ε, ∀x ∈ (x0 − δε, x0 + δε) ∩D.
1. Fie f (x0) > 0. Fie ε0 > 0 fixat, astfel încât f (x0)−ε0 > 0 [adica 0 < ε0 < f (x0)]. Atunci f (x) > 0,
∀x ∈ (x0 − δ0, x0 + δ0) ∩D.
2. Fie ε0 > 0 fixat si fie M = max|f (x0)− ε| + 1, |f (x0) + ε| + 1. Atunci |f(x)| < M , ∀x ∈
(x0 − δ0, x0 + δ0) ∩D.
11.2.8. Teorema (Weierstrass). Fie o functie f (·) : D ⊆ R→ R care este continua pe intervalul compact
[închis si marginit] [a, b] ⊆ D.
Atunci ∃ xm, xM ∈ [a, b] astfel încât:
−∞ < infx∈[a,b]
f(x) = f(xm) ≤ f(x) ≤ f(xM) = supx∈[a,b]
f(x) <∞, ∀x ∈ [a, b] .
[Orice functie continua pe o multime compacta este marginita si îsi atinge marginile; caracteristica de
interval a multimii [a, b] nu intervine esential]
Demonstratie. Prin reducere la absurd:
Daca functia nu ar fi marginita pe [a, b], atunci ∀n ∈ N, ∃xn ∈ [a, b], f (xn) > n. Se obtine sirul
(xn)n ⊆ [a, b] din care [deoarece este marginit] se poate extrage un subsir yk = xnk astfel încât (yk)k este
convergent [se foloseste Propozitia 10.2.4] la o valoare x0 ∈ [a, b].
S—a obtinut pe de—o parte ca yk → x0 iar pe de alta parte din ipoteza initiala f (yk)→∞. Cum functia
f (·) este continua în x0, se obtine o contradictie: ∞ > f (x0) = limk→∞
f (yk) =∞. Contradictia provine de
la ipoteza falsa ca functia f (·) nu ar fimarginita pe [a, b].
Fie m = infx∈[a,b]
f (x) [marginea inferioara a valorilor functiei f (·) pe [a, b]]. Din cele de mai sus, se stie
deja ca m > −∞.

201
Din definitia marginii inferioare se obtine:
∀n ∈ N, ∃xn ∈ [a, b], m +1
n> f (xn) ≥ m [adica, pentru fiecare n, valoarea m +
1
nnu este margine
inferioara, asa ca este depasita de valoarea functiei într—un anumit punct].
Se obtine sirul (xn)n ⊆ [a, b] din care se poate extrage un subsir yk = xnk astfel încât (yk)k este
convergent [se foloseste Propozitia 10.2.4] la o valoare xm ∈ [a, b].
Functia f (·) fiind continua în xm, se obtine:
m+1
k> f (yk) ≥ m, ∀k ∈ N ⇒ prin trecere la limita dupa k →∞,
m ≥ f (xm) ≥ m ⇒ f (xm) = m.
Demonstratia pentru existenta punctului xM se face similar.
11.2.9. Observatie. Daca se renunta la conditii, rezultatul nu mai este adevarat:
(1) Daca multimea nu este închisa, functia nu este neaparat marginita: multimea (0, 1] nu este închisa,
iar functia f (·) : (0, 1]→ R definita prin f (x) =1
x, este continua pe (0, 1], dar nu este marginita
pe (0, 1].
(2) Daca functia nu este continua, atunci nu este neaparat marginita, chiar daca multimea pe care
este studiata este compacta: multimea [0, 1] este închisa si marginita, dar functia f (·) : [0, 1]→ R
definita prin f (x) =
1
x, x 6= 0
0, x = 0, nu este continua pe [0, 1] [nu este continua în 0], si nu este
marginita pe [0, 1].
(3) Faptul ca "mediul ambient" al rezultatului este multimea R este esential: functia f (·) : [0, 2] ∩
Q→ Q, definita prin f (x) =1
x2 − 2este bine definita [numitorul se anuleaza în
√2 ∈ [0, 2], dar
aceasta valoare este irationala], multimea [0, 2] ∩Q este marginita si relativ închisa în Q [dar nu
este închisa], functia f (·) este continua pe [0, 2] ∩Q, si totusi functia este nemarginita.
11.2.10. Observatie. O reformulare a Teoremei 11.2.8 este:
∃ xm, xM ∈ [a, b], −∞ < m = f(xm) ≤ M = f(xM) < ∞, f([a, b]) ⊆ [m,M ] [imaginea directa a
intervalului [a, b] prin functia f (·) este inclusa într—un interval ale carui capete le atinge].
Se ridica întrebarea: sunt cumva valori între cele doua capete [m si M ] care sa nu fie atinse de functia
f (·)?

202
Raspunsul la aceasta întrebare este negativ [toate valorile din intervalul [m,M ] sunt atinse de functia
f (·)], iar aceasta caracteristica [de atingere a valorilor intermediare] poarta numele de "proprietatea lui
Darboux2".
11.2.11. Definitie. Fie f (·) : D ⊆ R→ R o functie si I ⊆ D un interval inclus în domeniul functiei. Se
spune ca f (·) are proprietatea Darboux pe intervalul I daca:
∀a, b ∈ I, cu a < b, ∀λ dintre f (a) si f (b), ∃xλ ∈ (a, b) astfel încât f (xλ) = λ [se foloseste exprimarea
"λ dintre f (a) si f (b)" pentru ca nu se stie care dintre valorile f (a), f (b) este mai mare] [nu este exclusa
situatia în care cele doua valori ar fi egale: daca f (a) = f (b) —de exemplu daca functia este constanta,
atunci proprietatea este verificata trivial].
Alte interpretari, echivalente:
(1) Ecuatia f (x)− λ = 0, de necunoscuta x ∈ (a, b) si de parametru λ între f (a) si f (b), are macar
câte o solutie xλ ∈ (a, b) pentru fiecare valoare posibila a parametrului λ.
(2) Pentru orice interval I0 de capete a si b, astfel încât I0 ⊆ I, imaginea directa a intervalului I0 prin
functia f (·) [f (I0)] contine intervalul de capete f (a) si f (b).
11.2.12. Observatie. Pentru ca o functie sa aiba proprietatea Darboux, nu este suficient sa trans-
porte un interval (sau intervalul maxim) într—un interval — trebuie sa transporte toate subintervalele.
De exemplu functia f (·) : [0, 3] → R, definita prin f (x) =
x, daca x ∈ [0, 2),
x− 1, daca x ∈ [2, 3],este o functie
pentru care f ([0, 3]) = [0, 2] [deci intervalul [0, 3] este transportat într—un interval, si anume [0, 2]],
0 1 2 30
1
2
x
y
dar f([
2− 14, 2 + 1
4
])=[1, 1 + 1
4
]∪ [2− 1
4, 2), care nu este un interval.
2Gaston Darboux, matematician francez, 1842-1917.

203
11.2.13. Propozitie. Daca functia f (·) : D ⊆ R→ R are proprietatea Darboux pe intervalul I ⊆ D,
atunci f(I) ⊆ R este un interval.
Demonstratie. O submultime J ⊂ R [în acest caz J = f(I)] este numita interval [de una din formele
(a, b), [a, b), (a, b], [a, b]] daca ∀α, β ∈ J , cu α < β, (α, β) ⊂ J .
Fie α, β ∈ J = f(I), cu α < β. Atunci exista xα, xβ ∈ I astfel încât f(xα) = α, f(xβ) = β si, mai
mult, xα 6= xβ [din α 6= β; daca xα = xβ, atunci ar fi o valoare în care functia ar lua doua valori distincte
—contradictie].
Din proprietatea Darboux se obtine ca pentru orice λ ∈ (α, β) exista xλ situat între xα si xβ [asa ca
xλ ∈ I, deoarece I este interval] astfel încât f(xλ) = λ ∈ f(I) si deci (α, β) ⊂ J = f(I).
Reciproca Propozitiei anterioare, desi nu este adevarata pe caz general, este adevarata pentru functii
monotone:
11.2.14. Propozitie. Daca functia f (·) : D ⊆ R → R este monotona pe intervalul I ⊆ D si daca
f(I) ⊆ R este interval,
atunci f (·) are proprietatea Darboux pe I.
Demonstratie. Fie f (·) crescatoare pe I, si fie a, b ∈ I, a < b, si λ ∈ (f(a), f(b)).
f(a), f(b) ∈ f(I) (care este interval) ⇒ ∃xλ ∈ I, f(xλ) = λ.
Deoarece functia f (·) este crescatoare iar f (a) < λ = f(xλ) < f (b), se obtine ca a < xλ < b, asa ca
functia f (·) are proprietatea Darboux pe I.
11.2.15. Teorema (Darboux). Daca functia f (·) : D ⊆ R→ R este continua pe intervalul I ⊆ D, atunci
f (·) are proprietatea Darboux pe I.
Demonstratie. Fie a, b ∈ I, a < b, fie f (a) < f (b) si fie λ ∈ (f(a), f(b)).
Fie multimea A = x ∈ [a, b]; f(x) < λ; A este marginita [fiind inclusa în [a, b]] iar marginea ei
superioara supA ∈ [a, b].
1. supA ∈ (a, b) [nu poate fi nici a, nici b]
Deoarece f (a) < λ < f (b), au loc a ∈ A si b /∈ A.

204
Mai mult, functia f (·) fiind continua si cele doua inegalitati fiind stricte, exista câte o vecinatate a lui
a [deci în A] si o vecinatate a lui b [deci în afara lui A], pentru care inegalitatile se pastreaza [în sensul:
∃Va ∈ V (a), Va ⊆ A si ∃Vb ∈ V (b), Vb ∩ A = ∅], asa ca nici a si nici b nu pot fi supA.
2. f (supA) = λ.
supA fiind marginea superioara a multimii A, are loc:
∀n ∈ N∗, ∃xn ∈ A, supA ≥ xn > supA − 1n, asa ca sirul (xn)n are proprietatile: xn ∈ A si lim
n→∞xn =
supA.
Cum functia f (·) este continua, din f (xn) < λ, prin trecere la limita se obtine f (supA) ≤ λ.
Daca, prin reducere la absurd, f (supA) < λ [inegalitatea ar fi stricta], atunci, cu un rationament
similar cu cel de la 1., s—ar obtine o întreaga vecinatate a lui supA pentru care inegalitatea ar fi stricta,
ceea ce contrazice faptul ca supA este supremul multimii A.
În final se obtine ca f (supA) = λ, adica [sumarizând] exista o valoare strict între a si b în care se
atinge valoarea λ din codomeniu, adica functia f (·) are proprietatea Darboux.
11.2.16. Observatie. Desi functiile continue au proprietatea Darboux [în sensul teoremei anterioare],
continuitatea nu este o conditie necesara pentru ca o functie sa aiba proprietatea Darboux:
Functia f (·) : R→ R, definita prin f (x) =
sin 1x, daca x 6= 0,
0, daca x = 0,, desi nu este continua în 0 [si se
observa ca discontinuitatea este de speta II], are proprietatea Darboux1.0 0.5 0.5 1.0
1.0
0.5
0.5
1.0
x
y
11.2.17. Observatie. Pentru o functie f (·) : D ⊆ R→ R care este continua pe intervalul I ⊆ D se obtine
ca f(I) este interval; mai mult, daca intervalul I este compact, [închis si marginit, de forma I = [a, b]],
atunci f(I) este tot interval compact [în codomeniu].
11.2.18. Observatie. Daca functia f (·) : D ⊆ R→ R are proprietatea Darboux pe intervalul I ⊆ D iar
x0 ∈ I,

205
Atunci limitele laterale ale functiei f (·) în punctul x0, daca exista, sunt egale cu valoare functiei în
punct.
Cu alte cuvinte:
Daca o functie are proprietatea Darboux iar într—un punct nu este continua, atunci limitele laterale în
acel punct fie sunt egale cu valoarea functiei, fie nu exista —deci discontinuitatea nu poate fi de speta I,
poate fi numai de speta II.
Daca functia are discontinuitati de speta I, atunci nu are proprietatea Darboux.
Demonstratie. Daca, prin reducere la absurd, limita laterala ar exista dar ar fi diferita de valoarea
functiei, limx→x0
x∈I,x<x0
f (x) = l < f (x0), atunci [chiar si daca l = −∞] s—ar obtine o întreaga vecinatate laterala
la stânga lui x0 pentru care valorile functiei ar fi strict mai mici ca valoarea functiei în x0, f (x0), asa ca ar
exista valori intermediare între l si f (x0) care nu ar putea fi atinse de puncte care sunt situate la stânga
lui x0 —cu alte cuvinte, functia nu ar avea proprietatea Darboux.
11.2.19. Observatie. Pentru o functie cu proprietatea Darboux pe intervalul I, daca a, b ∈ I iar f (a) ·
f (b) < 0 [valorile functiei în cele doua puncte sunt de semne contrare], atunci exista o valoare x0 între a
si b pentru care f (x0) = 0.
Aceasta informatie este utila în studiul ecuatiei f (x) = 0:
• daca, pentru functia f (·) cu proprietatea Darboux, se identifica doua asemenea valori, se poate
justifica existenta unei solutii a ecuatiei f (x) = 0 între a si b
• daca, pentru functia f (·) cu proprietatea Darboux pe I, se poate constata ca ecuatia f (x) = 0
nu are nici—o radacina pe un subinterval al lui I, atunci functia pastreaza semn constant pe acel
interval [pentru ca, daca si—ar schimba semnul, ar trebui sa atinga si valoarea 0]. De exemplu, o
asemenea functie are semn constant între doua solutii consecutive ale ecuatiei f (x) = 0.
11.2.20. Observatie. Daca o functie are proprietatea Darboux si este monotona, atunci este chiar con-
tinua.
Justificarea se obtine din faptul ca eventualele discontinuitati ale functiilor monotone sunt disconti-
nuitati de speta I [eventualele discontinuitati nu pot fi de speta II] [monotonia atrage existenta limitelor

206
laterale, care exista tot timpul dar pot sa nu fie egale —iar valoare functiei este egala cu una dintre ele,
sau poate fi situata între ele], iar cum eventualele discontinuitati ale unei functii cu proprietatea Darboux
sunt numai de speta II, se obtine ca o functie monotona are proprietatea Darboux daca si numai daca este
continua.
11.2.21. Observatie. Daca functia f (·) : [a, b]→ R este continua si injectiva, atunci este strict monotona.
Demonstratie. Deoarece a 6= b iar functia este injectiva, f(a) 6= f(b). Fie f(a) < f(b).
1. f(a) < f(x), ∀x ∈ (a, b);
Prin reducere la absurd: daca ar exista x0 ∈ (a, b) cu f (x0) ≤ f (a) < f (b), atunci f (x0) 6= f (a) (din
injectivitate) iar din proprietatea Darboux valoarea f (a) ar treui sa fie atinsa undeva între x0 si b, ceea
ce ar fi o contradictie cu injectivitatea functiei [valoarea f (a) ar fi atinsa si în a si undeva între x0 si b].
2. f(x) < f(b), ∀x ∈ (a, b) [se justifica similar]
Se obtine: ∀x ∈ (a, b), f(a) < f(x) < f(b)
Pentru doua valori x1 si x2, cu x1 < x2 si x1, x2 ∈ (a, b), daca se repeta rationamentul anterior pentru
intervalul [x1, b], se obtine ca f (x1) < f (x2) < f (b), adica functia este strict crescatoare.
11.2.22. Observatie. Daca I este un interval real iar functia f (·) : I → f (I) este continua si injectiva,
atunci:
Functia f (·) este strict monotona [din observatia anterioara]
codomeniul f (I) este un interval,
functia f (·) este inversabila, iar inversa f−1 (·) : f (I)→ I este strict monotona (cu aceeasi monotonie
ca functiei f (·)) si continua
Demonstratie. Se presupune ca f (·) este strict descrescatoare.
Atunci inversa ei, f−1 (·), este tot descrescatoare.
Fie y1 < y2, y1, y2 ∈ J = f(I) si fie f−1 (y1) = x1 ∈ I, f−1 (y2) = x2 ∈ I
⇒ f (x1) = y1, f (x2) = y2
x1 si x2 pot fi într—una dintre situatiile:
x1 < x2 ⇒ y1 > y2 [f (·) este strict descrescatoare] fals

207
x1 = x2 ⇒ y1 = y2 [f (·) este strict descrescatoare] fals
x1 > x2 ⇒ y1 < y2 [f (·) este descrescatoare], care este singura alternativa posibila.
⇒ x1 > x2 ⇒ f−1 (y1) > f−1 (y2)
S—a obtinut ca y1 < y2, y1, y2 ∈ J ⇒ f−1 (y1) > f−1 (y2), asa ca f−1 (·) este strict descrescatoare.
Functia f−1 (·) este strict monotona iar multimea f−1 (f (I)) [aceasta multime este: "imaginea directa
prin functia inversa f−1 a multimii f (I)] este:
f−1 (f (I)) = f−1 (y) ; y ∈ f (I) = I, asa ca:
Functia f−1 (·) este strict monotona iar imaginea directa prin ea a intervalului f (I) este interval, deci
din Observatia 11.2.14 rezulta ca are Proprietatea Darboux.
Functia f−1 (·) este strict monotona si are Proprietatea Darboux, asa ca din Observatia 11.2.20 rezulta
ca este continua.
11.3. Derivata
11.3.1. Definitie. Fie f (·) : D ⊆ R→ R o functia si x0 ∈ int (D). Limita:
f ′ (x0) = limx→x0
f (x)− f (x0)
x− x0
= limh→0
f (x0 + h)− f (x0)
h,
este numita derivata functiei f (·) în x0.
Daca exista f ′ (x0) ∈ [−∞,∞], se spune ca f (·) are derivata în x0;
Daca exista f ′ (x0) ∈ (−∞,∞), se spune ca f (·) este derivabila în x0; functia este numita derivabila
pe A ⊆ D daca este derivabila în fiecare punct al multimii A; punctul x0 este numit punct de derivabilitate
al functiei f (·). Functia x 7→ f ′ (x) definita pe multimea Df ′ a tuturor punctelor de derivabilitate ale
functiei f (·) este numita derivata functiei f (·).
[printre modalitatile importante de studiu ale derivatei se afla si limitele laterale ale limitei din definitie.
Faptul ca aceste limite laterale pot fi considerate generalizari într—un anumit sens al derivatei, cu titlul
"derivate laterale", este deja un pas spre Analiza Nonsmooth, o punte de legatura dinspre clasic spre
cercetarea actuala, asa ca acest pas înainte este amânat]

208
11.3.2. Observatie. O interpretare (din punct de vedere geometric) a derivatei este: derivata este
panta tangentei la grafic în punct.
Ecuatia tangentei la grafic în punctul (x0, f (x0)) este:
y − f (x0) = f ′ (x0) (x− x0)
Justificarea se face astfel:
Se considera doua puncte de pe graficul functiei: (x0, f (x0)) si (x1, f (x1)).
Ecuatia dreptei care trece prin cele doua puncte este:x− x0
x1 − x0
=y − f (x0)
f (x1)− f (x0).
Prin rearanjare se obtine: y − f (x0) =f (x1)− f (x0)
x1 − x0
· (x− x0).
Prin trecere la limita dupa x1 → x0 (geometric: când punctul (x1, f (x1)) se apropie de punctul
(x0, f (x0))), se obtine ca limx1→x0
f (x1)− f (x0)
x1 − x0
= f ′ (x0) si ca, geometric, secanta a devenit tangenta
(punctele (x1, f (x1)) si (x0, f (x0)) s—au confundat)
Se obtine: y − f (x0) = f ′ (x0) (x− x0), care este ecuatia tangentei la graficul functiei f (·) în punctul
(x0, f (x0)).
În acest context, derivata functiei în x0 este panta tangentei la grafic în x0.
Se observa ca, desi intuitia geometrica ne îndeamna sa consideram tangenta ca fiind dreapta de ecuatie
y− f (x0) = f ′ (x0) (x− x0) (care trece prin punctul (x0, f (x0))), în sens formal tangenta va ficonsiderata
paralela prin origine la aceasta dreapta, care are ecuatia: y = f ′ (x0)x.
Pentru a se tine totusi cont de legaturile intuitive (si de traditie), ecuatia y = f ′ (x0)x se scrie de obicei
sub forma dy = f ′ (x0) dx, în care dy si dx sunt noi variabile, cu semnificatia dy = y − y0 [variatia lui y în
jurul lui y0 = f (x0)] si dx = x− x0 [variatia lui x în jurul lui x0]
Poza de mai jos ilustreaza cele prezentate, folosind functia f (x) = x2 si x0 = 1. Graficul functiei este
desenat cu negru, tangenta prin punctul (1, 1) are ecuatia y − 1 = 2 (x− 1) (si este desenata cu verde),
paralela prin origine are ecuatia y = 2x (si este desenata cu rosu), iar în plus sunt desenate câteva secante
care trec toate prin (1, 1) si sunt desenate punctat cu albastru.

209
0 1 2 3 4 50
5
10
15
20
25
x
y
11.3.3. Observatie. Exista functii care au derivata dar nu sunt derivabile. Exemple:
(1) Functia f (·) : R→ R, definita prin f (x) = 3√x.
f ′ (0) = limx→0
3√x− 0
x= lim
x→0
13√x2
= ∞, asa ca limita exista, dar este infinita [tangenta este
verticala]
2 1 1 2
2
1
1
2
x
y
Se observa ca functia este continua (inclusiv în 0), iar tangenta la grafic în x = 0 este verticala.
(2) Functia f (·) : R→ R, definita prin f (x) =
x, x 6= 1
2, x = 1.
f ′ (1) = limx→1
f (x)− f (1)
x− 1= lim
x→1
x− 2
x− 1, limita care nu exista [deoarece limitele laterale sunt∞
si −∞], asa ca functia nici nu are derivata, nici nu este derivabila. Se observa ca functia nu este
continua în x = 1.
(3) Functia f (·) : R→ R, definita prin f (x) = |x|.
f ′ (0) = limx→0
|x|x, limita care nu exista [deoarece limitele laterale sunt 1 si −1], asa ca functia
nici nu are derivata, nici nu este derivabila. Se observa ca functia este continua [inclusiv în x = 0].

210
11.3.4. Teorema. Daca f (·) : D ⊆ R→ R este derivabila în x0 ∈ int (D), atunci f (·) este continua în
x0.
Demonstratie. Daca f (·) este derivabila în x0, atunci limita f ′ (x0) = limx→x0
f (x)− f (x0)
x− x0
exista si
este finita. Cum numitorul [x−x0] tinde la zero, singura posibilitate de a se obtine pentru limita o valoare
finita este ca si numaratorul [f (x)−f (x0)] sa tinda tot spre zero, pentru ca limita sa se încadreze în cazul
de nedeterminare0
0.
Se obtine ca exista limita limx→x0
[f (x)− f (x0)] = 0, adica [deoarece f (x0) este constant] ∃ limx→x0
f (x) =
f (x0), asa ca functia f (·) este continua în x0.
11.3.5. Observatie. Reciproca teoremei anterioare nu este adevarata: exista functii continue si care nu
sunt derivabile. Exemple de asemenea situatii se afla printre exemplele de dinaintea teoremei.
11.3.6. Teorema. Fie functiile f (·), g (·) : D ⊆ R→ R, derivabile în x0 ∈ int (D). Atunci:
(1) Functia "suma" (f + g) (·) : D → R este derivabila în x0 iar (f + g)′ (x0) = f ′ (x0) + g′ (x0).
[se observa ca acelasi tip de relatie scrisa nu în punctul x0, ci între derivate, este mai pre-
tentioasa, doarece nu se stie relatia dintre domeniile maxime de derivabilitate ale celor trei functii
implicate; este posibil ca o scriere de genul (f + g)′ (·) = f ′ (·) + g′ (·) sa nu aiba sens, din cauza
domeniilor de definitie diferite ale celor trei functii]
(2) Functia "produs cu o constanta α ∈ R", (αf) (·) : D → R este derivabila în x0 iar (αf)′ (x0) =
αf ′ (x0).
(3) Functia "produs" (f · g) (·) : D → R este derivabila în x0 iar (f · g)′ (x0) = f ′ (x0) ·g (x0)+f (x0) ·
g′ (x0).
(4) Daca g (x0) 6= 0, functia "raport"(f
g
)(·) : x ∈ D; g (x) 6= 0 → R este derivabila în x0 iar(
f
g
)′(x0) =
f ′ (x0) g (x0)− f (x0) g′ (x0)
g2 (x0).
Demonstratie. 1.
(f + g)′ (x0) = limx→x0
(f + g)(x)− (f + g)(x0)
x− x0
= limx→x0
[f(x)− f(x0)
x− x0
+g(x)− g(x0)
x− x0
]=

211
= limx→x0
f(x)− f(x0)
x− x0
+ limx→x0
g(x)− g(x0)
x− x0
= f ′ (x0) + g′ (x0) [se stie ca fiecare limita în parte exista si
este finita].
2.
(αf)′ (x0) = limx→x0
(αf) (x)− (αf) (x0)
x− x0
= limx→x0
α [f (x)− f (x0)]
x− x0
= α limx→x0
[f (x)− f (x0)]
x− x0
= αf ′ (x0).
3.
(f · g)′ (x0) = limx→x0
(f · g) (x)− (f · g) (x0)
x− x0
= limx→x0
f (x) · g (x)− f (x) · g (x0) + f (x) · g (x0)− f (x0) · g (x0)
x− x0
=
= limx→x0
f (x) · [g (x)− g (x0)] + g (x0) · [f (x)− f (x0)]
x− x0
=
= limx→x0
[f (x) · g (x)− g (x0)
x− x0
]+ lim
x→x0
[g (x0) · f (x)− f (x0)
x− x0
]=
= limx→x0
f (x) · limx→x0
g (x)− g (x0)
x− x0
+ g (x0) · limx→x0
f (x)− f (x0)
x− x0
=
= f (x0) · g′ (x0) + g (x0) · f ′ (x0).
4.
Functia g (·) este diferita de 0 în x0 si este derivabila în x0, asa ca ca este si continua în x0. Fiind
continua si nenula în x0, este nenula pe o întreaga vecinatate în jurul lui x0, asa ca pentru x în acea
vecinatate au sens expresiile de mai jos:(f
g
)′(x0) = lim
x→x0
(fg
)(x)−
(fg
)(x0)
x− x0
= limx→x0
f(x)g(x)− f(x0)
g(x0)
x− x0
= limx→x0
f(x)g(x0)−f(x0)g(x)g(x)g(x0)
x− x0
=
= limx→x0
f (x) g (x0)− f (x0) g (x)
(x− x0) g (x) g (x0)= lim
x→x0
f (x) g (x0)− f (x0) g (x0) + f (x0) g (x0)− f (x0) g (x)
(x− x0) g (x) g (x0)=
= limx→x0
g (x0) · [f (x)− f (x0)] + f (x0) [g (x0)− g (x)]
(x− x0) g (x) g (x0)= [deoarece toate limitele implicate exista, iar
operatiile implicate exista si ele]
= limx→x0
g (x0) · f(x)−f(x0)x−x0 + f (x0) g(x0)−g(x)
x−x0g (x) g (x0)
=g (x0) · lim
x→x0f(x)−f(x0)
x−x0 + f (x0) limx→x0
g(x0)−g(x)x−x0
limx→x0
g (x) g (x0)=
=f ′ (x0) g (x0)− f (x0) g′ (x0)
g2 (x0).
11.3.7. Teorema. Fie functiile f (·) : Df ⊆ R→ R si g (·) : Dg ⊆ R→ R astfel încât f (Df ) ⊆ Dg si fie
functia compusa (g f) (·) : Df → R.
Daca f (·) este derivabila în x0 si g (·) este derivabila în f (x0),

212
Atunci (g f) (·) este derivabila în x0 iar între derivatele functiilor are loc relatia:
(g f)′(x0) = g′(f(x0)) · f ′(x0).
Demonstratie. (g f)′(x0) = limx→x0
(g f)(x)− (g f)(x0)
x− x0
= limx→x0
g (f(x))− g (f(x0))
x− x0
=
(∗) = limx→x0
[g (f(x))− g (f(x0))
f (x)− f (x0)· f (x)− f (x0)
x− x0
]=
(∗∗) = limx→x0
g (f(x))− g (f(x0))
f (x)− f (x0)· limx→x0
f (x)− f (x0)
x− x0
= g′(f(x0)) · f ′(x0).
Daca linia (∗) (respectiv prima limita din linia (∗∗)) nu induce probleme, atunci rationamentul de mai
sus este valid.
Nu sunt probleme cu aceasta limita daca exista o vecinatate a lui x0 pentru care f (x) 6= f (x0), pentru
orice x din vecinatate.
Daca aceasta conditie nu este satisfacuta, asta (prin negare) înseamna ca oricât de aproape ne—am afla
de x0, poate fi gasita o valoare x pentru care f (x) = f (x0). Cu alte cuvinte, exista un sir (xn)n astfel
încât xn 6= x0, xn → x0 iar f (xn) = f (x0) —situatie în care numitorul limitei limx→x0
g (f(x))− g (f(x0))
f (x)− f (x0)se
anuleaza în orice vecinatate a lui x0 [si atunci limita nu poate fi folosita în rationament]
În aceasta situatie:
Limita limn→∞
f (xn)− f (x0)
xn − x0
= 0, asa ca 0 este un punct limita al limitei limx→x0
f (x)− f (x0)
x− x0
.
Cum f (·) este derivabila în x0, limita limx→x0
f (x)− f (x0)
x− x0
exista asa ca este chiar egala cu 0. Se obtine
f ′ (x0) = 0.
Limita limn→∞
g (f(xn))− g (f(x0))
x− x0
= limn→∞
g (f (x0))− g (f (x0))
xn − x0
= 0, pentru sirul special (xn)n.
Pentru un sir (ξn)n care nu contine un subsir unde f (x) = f (x0), rationamentul initial este valid, asa
ca:
limn→∞
(g f)(ξn)− (g f)(x0)
ξn − x0
= limn→∞
g (f(ξn))− g (f(x0))
f (ξn)− f (x0)· limn→∞
f (ξn)− f (x0)
ξn − x0
= g′ (f (x0))·f ′ (x0) = 0
se obtine ca limita (g f)′(x0) exista în toate cazurile iar valoarea ei în situatia speciala este 0.
11.3.8. Observatie (Functia exponentiala generalizata). [caz special de compunere] Se dau functiile u (·),
v (·) : D → R∗+ derivabile în x0 ∈ int (D).
Atunci functia x 7→ u (x)v(x), x ∈ D, este derivabila în x0, iar derivata ei este:

213
u (x)v(x) = elnu(x)v(x) = ev(x) lnu(x) ⇒(u (x)v(x)
)′=(ev(x) lnu(x)
)′= ev(x) lnu(x) · (v (x) lnu (x))′ =
u (x)v(x)
(v′ (x) lnu (x) +
v (x)u′ (x)
u (x)
).
În contextul Observatiei 11.2.22, fie functia f (·) : D ⊆ R→ R, I interval, I ⊆ D, f (·) continua si
injectiva pe I.
Atunci J = f (I) este interval, f (·) este strict monotona pe I, iar restrictia (notata la fel) f (·) : I → J
este inversabila.
Functia inversa f−1 (·) : J → I exista, este continua si strict monotona.
11.3.9. Teorema. Se considera x0 ∈ int (I) în care f (·) este derivabila. Atunci f−1 (·) are derivata în
f (x0) = y0, iar derivata este:
(f−1)′(y0) =
valoare finita, f ′ (x0) 6= 0
∞, f ′ (x0) = 0 si f (·) crescatoare
−∞, f ′ (x0) = 0 si f (·) descrescatoare.Mai mult, în cazul f ′ (x0) 6= 0 [f−1 (·) derivabila în y0], are loc relatia:
(f−1)′(y0) =1
f ′(x0)=
1
f ′(f−1(y0)).
Demonstratie. Studiem limita (f−1)′(y0) = limy→y0
f−1 (y)− f−1 (y0)
y − y0
folosind definitia cu siruri:
Fie (yn)n ⊆ J cu proprietatile: yn ∈ J , yn 6= y0, yn → y0.
Din yn ∈ J ⇒ ∃xn ∈ I \ x0, yn = f (xn), deci xn = f−1 (yn) si cum f−1 (·) este continua, xn → x0.
Functia f (·) este derivabila în x0 asa ca ∃ limn→∞
f (xn)− f (x0)
xn − x0
= f ′ (x0).
Daca f ′ (x0) 6= 0, atunci:
limyn→∞
f−1 (yn)− f−1 (y0)
yn − y0
= limyn→∞
xn − x0
f (xn)− f (x0)=
1
limn→∞
f (xn)− f (x0)
xn − x0
=1
f ′ (x0).
Daca f ′ (x0) = 0, atunci limita de mai sus este infinita
Daca f (·) este crescatoare, f−1 (·) este tot crescatoare, iar raportul f (xn)− f (x0)
xn − x0
este pozitiv [în
sensul xn < x0 ⇒ f (xn) < f (x0)], asa ca limita este +∞.
Daca f (·) este descrescatoare, f−1 (·) este tot descrescatoare, iar raportul f (xn)− f (x0)
xn − x0
este negativ,
asa ca limita este −∞.

214
11.3.10. Observatie (Derivate ale unor functii uzuale). Pentru urmatoarele functii uzuale [definite pe
domeniul lor maxim de definitie; toate functiile considerate sunt continue pe domeniile lor], derivatele lor
sunt:
(1) [functia constanta] Pentru f (·) : R→ R, definita prin f (x) = c, derivata este: f ′ (·) : R→ R,
f ′ (x) = 0.
[∀x0, limx→x0
c− cx− x0
= 0]
(2) [functia putere naturala] Pentru f (·) : R→ R, definita prin f (x) = xn, n ∈ N∗, derivata este:
f ′ (·) : R→ R, f ′ (x) = nxn−1.
[∀x0, limx→x0
xn − xn0x− x0
= limx→x0
[xn−1 + xn−2x0 + · · ·+ xxn−2
0 + xn−10
]= nxn−1
0 ]
(3) [functia radical par] Pentru f (·) : [0,∞)→ R+, definita prin f (x) = n√x, n par, n ∈ N∗, derivata
este: f ′ (·) : (0,∞)→ R, f ′ (x) =1
nn√xn−1
.
[∀x0 > 0, limx→x0
n√x− n√x0
x− x0
= limx→x0
1n√xn−1 + n
√xn−2x0 + ...+ n
√xxn−2
0 + n√xn−1
0
=1
nn√xn−1
]
(4) [functia radical impar] Pentru f (·) : R→ R, definita prin f (x) = n√x, n impar, n ∈ N∗ \ 1,
derivata este: f ′ (·) : R∗→ R, f ′ (x) =1
nn√xn−1
, iar în x0 = 0 functia are derivata dar nu este
derivabila.
[∀x0 6= 0, limx→x0
n√x− n√x0
x− x0
= limx→x0
1n√xn−1 + n
√xn−2x0 + ...+ n
√xxn−2
0 + n√xn−1
0
=1
nn√xn−1
]
[limx→0
n√x− n√x0
x− x0
= limx→0
n√x
x= lim
x→0
1n√xn−1
=∞, pentru ca n− 1 este par]
[desi aparent functiile radical par si radical impar au aceeasi formula pentru derivata, domeniile
de definitie si comportamentele difera; în particular, pentru x0 = 0, problema derivatei pentru
puterea para nu se pune pentru ca punctul nu este interior, iar problema derivatei pentru puterea
impara se pune dar derivata este infinita]
[din punct de vedere strict al formulei, formula ramâne valabila chiar pentru exponent real:
pentru α ∈ R, (xα)′ = αxα−1]
(5) [functia logaritm natural] Pentru f (·) : (0,∞)→ R, definita prin f (x) = lnx, derivata este:
f ′ (·) : (0,∞)→ R, f ′ (x) =1
x.

215
[∀x0 > 0, limx→x0
lnx− lnx0
x− x0
= limx→x0
ln
[(x
x0
) 1x−x0
]1∞= lim
x→x0ln
((1 +x− x0
x0
) x0x−x0
) 1x−x0
·x−x0x0
=
ln e1x0 =
1
x0
]
[functia logaritm general, f (·) : (0,∞)→ R, definita prin f (x) = loga x, a ∈ R+ \ 1, se
reduce la logaritm natural]
(6) [functia exponentiala] Pentru f (·) : R→ R, definita prin f (x) = ex, derivata este: f ′ (x) = ex.
justificare folosind derivata functiei inverse: daca g (·) : (0,∞) → R, g (x) = lnx, atunci
g−1 (·) : R→ (0,∞), g−1 (y) = ey.
g′ (x) =1
x, iar (g−1)
′(y) =
1
g′ (g−1 (y))=
1
g′ (ey)=
11
ey
= ey.
Pentru o justificare directa, trebuie folosita limita speciala limx→0
ex − 1
x= 1.
(7) [functia putere reala] Pentru functia f (·) : (0,∞)→ R, definita prin f (x) = xα, α ∈ R, derivata
ei este f ′ (·) : (0,∞)→ R, f ′ (x) = αxα−1.
[xα = elnxα = eα lnx; se foloseste derivarea compunerii si derivata logaritmului:(xα)′ = eα lnx ·α
x= αxα−1]
(8) [functia exponentiala de baza reala] Pentru functia f (·) : R→ R, definita prin f (x) = ax, cu
a ∈ (0,∞) \ 1, derivata este f ′ (·) : R→ R, f ′ (x) = ax · ln a.
[ax = ex ln a ⇒ (ax)′ = ex ln a · ln a = ax · ln a]
(9) [functia sinus] Pentru functia f (·) : R→ R, definita prin f (x) = sinx, f ′ (·) : R→ R, f ′ (x) =
cosx.
[ limx→x0
sinx− sinx0
x− x0
= limx→x0
sin x−x02· cos x+x0
2x−x0
2
= limx→x0
cos x+x02
= cosx0]
Desi domeniul maxim de definitie este R, functia este periodica si este inversabila doar pe o
restrictie a domeniului,[−π
2, π
2
](pentru injectivitate) combinata cu o restrictie a codomeniului
(pentru surjectivitate).
Cu modificarea domeniului si a codomeniului, se obtine o functie inversabila f (·) :[−π
2, π
2
]→
[−1, 1], f (x) = sin x, care are inversa f−1 (·) : [−1, 1]→[−π
2, π
2
], f−1 (y) = arcsin y.

216
(10) [functia cosinus] Pentru functia f (·) : R→ R, definita prin f (x) = cosx, f ′ (·) : R→ R, f ′ (x) =
− sinx.
[ limx→x0
cosx− cosx0
x− x0
= limx→x0
− sin x−x02· sin x+x0
2x−x0
2
= − limx→x0
sin x+x02
= sinx0]
Cu modificarea domeniului si a codomeniului, se obtine o functie inversabila f (·) : [0, π] →
[−1, 1], f (x) = cos x, care are inversa f−1 (·) : [−1, 1]→ [0, π], f−1 (y) = arccos y.
(11) [functia tangenta] Pentru functia f (·) : R \ 2k+12π; k ∈ Z → R, definita prin f (x) = tanx =
sinx
cosx, derivata este f ′ (·) : R \ 2k+1
2π; k ∈ Z → R, f ′ (x) =
1
cos2 x= 1 + tan2 x.
[(
sinx
cosx
)′=
cos2 x+ sin2 x
cos2 x]
Cu modificarea domeniului, se obtine o functie inversabila f (·) :(−π
2, π
2
)→ R, f (x) = tan x,
care are inversa f−1 (·) : R→(−π
2, π
2
), f−1 (y) = arctan y.
(12) [functia cotangenta] Pentru functia f (·) : R \ kπ; k ∈ Z → R, definita prin f (x) = cotx =
cosx
sinx, derivata este f ′ (·) : R \ kπ; k ∈ Z → R, f ′ (x) = − 1
sin2 x= −1− cot2 x.
[(cosx
sinx
)′=− sin2 x− cos2 x
sin2 x]
Cu modificarea domeniului, se obtine o functie inversabila f (·) : (0, π) → R, f (x) = cotx,
care are inversa f−1 (·) : R→ (0, π), f−1 (y) = arccot y.
(13) [functia arc—sinus] Pentru functia f (·) : [−1, 1]→[−π
2, π
2
], definita prin f (y) = arcsin y, derivata
este f ′ (·) : (−1, 1)→ R∗+, f ′ (y) =1√
1− y2.
Pentru y ∈ (−1, 1) ⇐⇒ x = arcsin y ∈(−π
2, π
2
), se aplica 11.3.9: arcsin (sinx) = x ⇒
arcsin′ (y) =1
cos (arcsin y)=
1√1− y2
.
Punctele y = −1 si y = 1 nu sunt puncte interioare, asa ca nu se discuta derivarea.
Se poate discuta derivarea laterala, dar în aceste cazuri derivatele laterale sunt infinite (deoarece
y = ±1⇒ x = ±π2iar derivata functiei directe x 7→ sinx este x 7→ cosx, care în ±π
2se anuleaza).
(14) [functia arc—cosinus] Pentru functia f (·) : [−1, 1]→ [0, π], definita prin f (y) = arccos y, derivata
este f ′ (·) : (−1, 1)→ R∗+, f ′ (y) = − 1√1− y2
.
[Se procedeaza similar cu procedura de la arcsin]
(15) [functia arc—tangenta] Pentru functia f (·) : R→(−π
2, π
2
), definita prin f (y) = arctan y, derivata
este f ′ (·) : R→ R, f ′ (y) =1
1 + y2.

217
[Se procedeaza similar cu procedura de la arcsin]
(16) [functia arc—cotangenta] Pentru functia f (·) : R→ (0, π), definita prin f (y) = arccot y, derivata
este f ′ (·) : R→ R, f ′ (y) = − 1
1 + y2.
[Se procedeaza similar cu procedura de la arcsin]
11.3.1. Rezumat de formule de derivare.
11.3.1.1. Reguli de derivare:
• (αf (x)± βg (x))′ = αf (x)′ ± βg (x)′
• (f (x) · g (x))′ = f (x)′ · g (x) + f (x) · g′ (x)
•(f(x)g(x)
)′=f (x)′ · g (x)− f (x) · g′ (x)
g2 (x)• (g (f (x)))′ = g′(f (x)) · f ′ (x)
• (f−1)′ (y) = 1f ′(f−1(y))
.
11.3.1.2. Tabel de derivate:

218
Functia DerivataFunctia
compusa
Derivata functiei
compuse
c (constanta) 0 - -
x 1 u (x) u′ (x)
xa, a ∈ R a · xa−1 ua (x) a · ua−1 (x) · u′ (x)
n√x, n ∈ N∗ 1
nn√xn−1
n√u (x)
u′ (x)
n n√un−1 (x)
ex ex eu(x) eu(x)u′ (x)
ax, a > 0, a 6=1 ax ln a au(x) au(x) · ln a · u′ (x)
lnx, x ∈ (0,∞)1
xlnu (x)
u′ (x)
u (x)
loga x, a > 0, a 6=11
x · ln a loga u (x)u′ (x)
u (x) · ln asinx, x ∈ R cosx sinu (x) (cosu (x)) · u′ (x)
cosx, x ∈ R − sinx cosu (x) −(sinu (x)) · u′ (x)
tanx, x ∈ (−π2, π
2)
1
cos2 xtanu (x)
u′ (x)
cos2 u (x)
cotx, x ∈ (0, π) − 1
sin2 xcotu (x) − u′ (x)
sin2 u (x)
arcsinx, x ∈ (−1, 1)1√
1− x2arcsinu (x)
u′ (x)√1− u2 (x)
arccosx, x ∈ (−1, 1) − 1√1− x2
arccosu (x) − u′ (x)√1− u2 (x)
arctanx, x ∈ R 1
1 + x2arctanu (x)
u′ (x)
1 + u2 (x)
arccotx, x ∈ R − 1
1 + x2arccotu (x) − u′ (x)
1 + u2 (x)
11.3.2. Teoreme.
11.3.11. Teorema (P. Fermat). Fie f (·) : D ⊆ R→ R, astfel încât:
(1) x0 este punct interior de minim local [∃ε > 0, (x0 − ε, x0 + ε) ⊆ D si ∀x ∈ (x0 − ε, x0 + ε),
f (x0) ≤ f (x)]
(2) exista f ′(x0) ∈ R.
Atunci f ′(x0) = 0.

219
[Concluzia ramâne aceeasi daca în ipoteza 1. x0 ar fi punct interior de maxim local, în sensul: ∃ε > 0,
(x0 − ε, x0 + ε) ⊆ D si ∀x ∈ (x0 − ε, x0 + ε), f (x0) ≥ f (x)]
[Ipoteza 1. poate fi reformulata astfel: x0 este un punct interior de extrem local]
Demonstratie. Din existenta limitei f ′(x0) ∈ R rezulta existenta limitelor laterale, de aceeasi valoare
cu cea a limitei:
∃ limxx0
f (x)− f (x0)
x− x0
= limxx0
f (x)− f (x0)
x− x0
= limx→x0
f (x)− f (x0)
x− x0
= f ′ (x0).
Deoarece x0 este punct interior de minim local, se obtine:
pentru x x0 [x < x0],f (x)− f (x0)
x− x0
≤ 0 ⇒ limxx0
f (x)− f (x0)
x− x0
≤ 0
pentru x x0 [x > x0],f (x)− f (x0)
x− x0
≥ 0 ⇒ limxx0
f (x)− f (x0)
x− x0
≥ 0
Deoarece aceste limite au ambele valoarea constanta f ′ (x0), rezulta ca aceasta valoare este si mai mica
si mai mare ca zero, deci nula.
11.3.12. Teorema (M. Rolle). Fie f (·) : [a, b]→ R cu proprietatile:
(1) f (·) continua pe [a, b];
(2) f (·) derivabila pe [a, b];
(3) f (a) = f (b).
Atunci: ∃c ∈ (a, b), f ′ (c) = 0.
Demonstratie. Se foloseste Teorema Weierstrass 11.2.8 pentru a se obtine existenta a doua puncte
xm, xM ∈ [a, b] astfel încât
∀x ∈ [a, b], f (xm) ≤ f (x) ≤ f (xM). În particular, f (xm) ≤ f (a) = f (b) ≤ f (xM).
Daca aceste puncte ar fi si interioare, s—ar putea aplica Teorema Fermat 11.3.11. În continuare se va
studia în ce conditii aceste puncte sunt interioare.
Deoarece f (xm) ≤ f (a) = f (b) ≤ f (xM), exista doua variante:
f (xm) = f (xM) ⇒ f (xm) = f (a) = f (b) = f (x) = f (xM) ⇒ functia f (·) este constanta pe [a, b],
asa ca ∃c ∈ (a, b), f ′ (c) = 0.
f (xm) < f (xM) ⇒
f (xm) < f (a) = f (b) ≤ f (xM), caz în care xm ∈ (a, b),

220
sau
f (xm) ≤ f (a) = f (b) < f (xM), caz în care xM ∈ (a, b).
Se obtine ca, daca f (xm) < f (xM), macar unul dintre punctele xm sau xM este interior, si cum aceste
puncte sunt si de extrem, se poate aplica Teorema Fermat 11.3.11 pentru a se obtine un punct c ∈ (a, b)
pentru care f ′ (c) = 0.
11.3.13. Observatie. În conditiile din Teorema Rolle 11.3.12 se obtin urmatoarele rezultate care leaga
informatii despre radacinile functiei cu informatii despre radacinile derivatei:
(1) Daca x1 < x2 sunt radacini ale functiei f (·) [solutii din [a, b] ale ecuatiei f (x) = 0], atunci exista
c ∈ (x1, x2) ⊆ [a, b], radacina a functiei f ′ (·) [solutie din (x1, x2) a ecuatiei f ′ (x) = 0].
(2) Daca c1 < c2 sunt doua radacini consecutive din (a, b) ale functiei f ′ (·) [consecutive în sensul
ca ∀x ∈ (c1, c2), f ′ (x) 6= 0], atunci functia f (·) are în (c1, c2) cel mult o radacina, dupa cum
urmeaza:
(a) Daca f (c1) · f (c2) < 0, exista o unica radacina a lui f (·) în (c1, c2);
(b) Daca f (c1) · f (c2) ≥ 0, nu exista nici—o radacina a lui f (·) în (c1, c2) [iar f (·) are semn
constant pe (c1, c2)].
Demonstratie. 1. Deoarece f (x1) = f (x2) = 0, se aplica 11.3.12 pentru a se obtine concluzia.
2. Daca functia f (·) ar avea doua radacini distincte în (c1, c2), atunci cu 1. ar exista între ele o
radacina a derivatei, ceea ce ar contrazice consecutivitatea lui c1 si c2 ca radacini ale derivatei.
Daca f (c1) · f (c2) < 0, cu proprietatea Darboux exista o radacina, care este unica.
Daca f (c1) · f (c2) = 0, una dintre valori este nula, dar nu ambele:
nu se poate întâmpla f (c1) = f (c2) = 0 [pentru ca ar mai exista înca un c ∈ (c1, c2) cu f ′ (c) = 0,
contradictie cu consecutivitatea];
nu se poate întâmpla nici ca f (·) sa se anuleze pe (c1, c2) si nici sa aiba semne diferite [din aceleasi
motive]
Daca f (c1) · f (c2) > 0, similar

221
11.3.14. Teorema (J. L. Lagrange). [teorema cresterilor finite] Fie f (·) : [a, b]→ R o functie cu propri-
etatile:
(1) f (·) continua pe [a, b];
(2) f (·) derivabila pe (a, b);
Atunci ∃c ∈ (a, b), astfel încât: f(b)− f(a) = (b− a) · f ′(c).
Demonstratie. Fie functia:
g (x) = f (x)− f (b)− f (a)
b− a · x, ∀x ∈ [a, b].
Atunci:
g (a) = f (a)− f (b)− f (a)
b− a · a,
g (b) = f (b)− f (b)− f (a)
b− a · b,
asa ca g (a) = g (b) ⇐⇒ f (a) − f (b)− f (a)
b− a · a = f (b) − f (b)− f (a)
b− a · b ⇐⇒ f (a) − f (b) =
−f (b)− f (a)
b− a · (b− a) adevarat.
Din Teorema Rolle se obtine ca exista c ∈ (a, b) astfel încât g′ (c) = 0 ⇐⇒ f ′ (c) =f (b)− f (a)
b− a .
11.3.15. Observatie. Fie f (·) : [a, b] → R si x0 ∈ [a, b] astfel încât f (·) continua pe [a, b] si derivabila
pe [a, b] \ x0. Atunci:
(1) Daca exista limita limxx0
f ′ (x) în R, exista si limita limxx0
f (x)− f (x0)
x− x0
, iar cele doua limite sunt
egale.
[Pentru fiecare x < x0, pe [x, x0] se aplica Teorema Lagrange: ∃cx ∈ (x, x0), f ′ (cx) =
f (x)− f (x0)
x− x0
.
Cum x < cx < x0, pentru x x0 are loc si cx → x0 si atunci ∃ limxx0
f ′ (cx) = limxx0
f ′ (x).
Se obtine, cu x x0, existenta limitei limxx0
f (x)− f (x0)
x− x0
= limxx0
f ′ (x)]
(2) Daca exista limita limxx0
f ′ (x) în R, exista si limita limxx0
f (x)− f (x0)
x− x0
, iar cele doua limite sunt
egale.
[Similar cu 1.]

222
(3) Daca x0 ∈ (a, b) iar limitele limxx0
f ′ (x) si limxx0
f ′ (x) exista si sunt egale în R, atunci exista si
limita f ′ (x0) [f (·) are derivata în x0], egala cu cele doua limite laterale.
[consecinta din 1. si 2.]
11.3.16. Observatie. Fie f (·) : [a, b]→ R o functie continua pe [a, b] si derivabila pe (a, b). Atunci f (·)
este constanta ⇐⇒ f ′ (x) = 0, ∀x ∈ (a, b).
[Daca f (·) este constanta, s—a vazut deja ca derivata ei este nula]
[Reciproc: daca f ′ (x) = 0, ∀x ∈ (a, b), fie x0 ∈ (a, b) fixat si fie x ∈ (a, b), x0 < x. Se aplica T.
Lagrange pe [x0, x] si se obtine cx ∈ (x0, x) astfel încât 0 = f ′ (cx) =f (x0)− f (x)
x0 − x⇒ f (x) = f (x0). Se
obtine ca functia este constanta pe (a, b) si, prin continuitate, pe [a, b]]
11.3.17. Observatie. Doua functii continue pe [a, b] si derivabile pe (a, b) difera printr—o constanta daca
si numai daca derivatele lor pe (a, b) sunt identice.
[consecinta a observatiei anterioare]
11.3.18. Observatie. Fie f (·) : [a, b]→ R o functie continua pe [a, b] si derivabila pe (a, b). Atunci:
(1) f (·) este crescatoare ⇐⇒ ∀x ∈ (a, b), f ′ (x) ≥ 0;
[Daca f (·) este crescatoare, atunci pentru orice x0 ∈ (a, b) fixat are loc: x < x0 ⇒ f (x) ≤
f (x0) si deci raportulf (x)− f (x0)
x− x0
≥ 0.
Cum limita dupa x → x0 exista, prin trecere la limita inegalitatea se pastreaza si se obtine
f ′ (x) ≥ 0]
[Reciproc, daca ∀x ∈ (a, b), f ′ (x) ≥ 0, atunci pentru x1 < x2 ∈ [a, b], ∃c ∈ (x1, x2) astfel încât
0 ≤ f ′ (c) =f (x1)− f (x2)
x1 − x2
⇒ f (x1) ≤ f (x2)]
(2) f (·) este strict crescatoare ⇐⇒ ∀x ∈ (a, b), f ′ (x) > 0;
[similar cu 1. si în plus se observa ca daca x1 < x2 cu f (x1) = f (x2), atunci ∃c ∈ (x1, x2),
f ′ (c) = 0]
(3) f (·) este descrescatoare ⇐⇒ ∀x ∈ (a, b), f ′ (x) ≤ 0;
[similar cu 1.]
(4) f (·) este strict descrescatoare ⇐⇒ ∀x ∈ (a, b), f ′ (x) < 0.

223
[similar cu 2.]
11.3.19. Teorema (Cauchy). [A doua Teorema a cresterilor finite] Fie f (·), g (·) : [a, b]→ R doua functii
continue pe [a, b] si derivabile pe (a, b), astfel încât ∀x ∈ (a, b), g′ (x) 6= 0.
Atunci exista c ∈ (a, b), astfel încâtf ′ (c)
g′ (c)=f (b)− f (a)
g (b)− g (a).
Demonstratie. Se considera functia:
h (x) = f (x)− f (b)− f (a)
g (b)− g (a)· g (x).
h (a) = f (a)− f (b)− f (a)
g (b)− g (a)· g (a),
h (b) = f (b)− f (b)− f (a)
g (b)− g (a)· g (b),
h (a) = h (b) ⇐⇒ f (a)− f (b)− f (a)
g (b)− g (a)· g (a) = f (b)− f (b)− f (a)
g (b)− g (a)· g (b) ⇐⇒
⇐⇒ f (a)− f (b) =f (b)− f (a)
g (b)− g (a)· (g (a)− g (b)) adevarat.
Se aplica T. Rolle functiei h (·) si se obtine ∃c ∈ (a, b), h′ (c) = 0 ⇐⇒ f ′ (c)
g′ (c)=f (b)− f (a)
g (b)− g (a).
11.3.20. Teorema (G. Darboux). Daca f (·) : [a, b]→ R este derivabila pe (a, b), atunci derivata f ′ (·) :
(a, b)→ R are proprietatea Darboux pe (a, b).
11.3.3. Diferentiala.
11.3.21. Definitie. Functia f (·) : D ⊆ R→ R se numeste diferentiabila în x0 ∈ int (D) daca exista o
functie A (x0; ·) : R→ R, liniara [operator liniar A (x0; ·) ∈ L (R,R), în sensul cursului de Algebra Liniara],
astfel încât urmatoarea limita sa existe si sa fie nula:
∃ limh→0
f (x0 + h)− f (x0)− A (x0;h)
h= 0.
Functia A (x0; ·) se numeste diferentiala în x0 a functiei f (·). Se foloseste notatia traditionala:
A (x0; ·) = df (x0) (·), df (x0) (·) : R→ R, df (x0) (h) = A (x0;h). Alta notatie este df (x0; ·).
11.3.22. Observatie. Desi se poate considera ca limita din definitie are sens si pentru puncte x0 care nu
sunt interioare, daca [de exemplu] D = [a, b] iar discutia se poarta în punctul b, limita poate fi considerata

224
limita laterala dar diferentiala nu va putea fi definita pentru h > 0 deoarece ∀h > 0, b+ h /∈ [a, b], asa ca
diferentiala nu poate avea domeniul de definitie R. Pentru a evita/amâna asemenea complicatii, se alege
conditia mai restrictiva x0 ∈ int (D), aceasta alegere reprezentând abordarea "clasica"; alte situatii sunt
rezervate pentru extensii care fac parte din abordarea "nonsmooth".
11.3.23. Observatie. Functia liniara din definitia diferentialei, daca exista, este unica.
Demonstratie. Presupunem ca doua functii liniare A1 (x0; ·), A2 (x0; ·) : R→ R satisfac definitia
diferentialei:
limh→0
f (x0 + h)− f (x0)− A1 (x0;h)
h= 0 si
limh→0
f (x0 + h)− f (x0)− A2 (x0;h)
h= 0.
Atunci functia h 7→ A1 (x0;h)−A2 (x0;h) = a1h− a2h = (a1 − a2)h, h ∈ R, este tot liniara, si are loc:
|A1 (x0;h)− A2 (x0;h)| = |A1 (x0;h)− [f (x0 + h)− f (x0)] + [f (x0 + h)− f (x0)]− A2 (x0;h)| ≤
≤ |f (x0 + h)− f (x0)− A1 (x0;h)|+ |f (x0 + h)− f (x0)− A2 (x0;h)| ⇒
⇒ |A1 (x0;h)− A2 (x0;h)||h| ≤ |f (x0 + h)− f (x0)− A1 (x0;h)|
|h| +|f (x0 + h)− f (x0)− A2 (x0;h)|
|h| .
Cum ambele fractii din membrul drept tind la zero pentru h → 0, rezulta ca si membrul stâng tinde
la zero:
∃ limh→0
|A1 (x0;h)− A2 (x0;h)||h| = lim
h→0
|(a1 − a2)h||h| = |a1 − a2| = 0 ⇒ a1 = a2 ⇒ A1 (x0; ·) = A2 (x0; ·).
11.3.24. Observatie. Functiile liniare A (·) : R→ R sunt (numai) functiile de forma A (x) = a · x, a ∈ R
[constanta].
11.3.25. Observatie. Modul ales de a introduce notiunea de diferentiala este cel care a fost considerat
ca fiind cel mai apropiat de notiunea de diferentiala pentru functii de mai multe variabile cu valori multi-
dimensionale. O consultare a cartilor din domeniu releva ca fiecare autor rezolva aceasta situatie în felul
lui. Desi pâna la urma rezultatele conduc în aceleasi locuri, cititorul neavizat poate fi bulversat de aceste
variatiuni.
11.3.26. Observatie. Definitia diferentialei lui f (·) : D ⊆ R→ R în x0 ∈ int (D) este echivalenta cu
urmatoarea formulare:

225
Exista functia liniara df (x0) (·) : R→ R, si
Exista ε > 0, si
Exista functia Ox0 (·) : (−ε, ε)→ R [care este numita infinit mic de ordin I],
astfel încât:
Exista si este nula limita: limh→0
Ox0 (h)
h= 0, si
∀h ∈ (−ε, ε), f (x0 + h) = f (x0) + df (x0) (h) +Ox0 (h).
11.3.27. Teorema. Functia f (·) : D ⊆ R→ R este diferentiabila în x0 ∈ int (D) daca si numai daca este
derivabila în x0. În aceasta situatie, diferentiala si derivata sunt legate prin relatia: df(x0)(h) = f ′(x0) ·h,
∀h ∈ R.
Demonstratie. Functia f (·) este diferentiabila în x0 iar df(x0) este diferentiala ei în x0 ⇒
⇒ ∃ limh→0
f (x0 + h)− f (x0)− df (x0) (h)
h= 0 si df(x0) (·) liniara ⇒
⇒ ∃a ∈ R, limh→0
f (x0 + h)− f (x0)− a · hh
= 0 ⇒
⇒ limh→0
[f (x0 + h)− f (x0)
h− a]
= 0 ⇒ limh→0
f (x0 + h)− f (x0)
h= a ⇒ f (·) este derivabila în x0, iar
derivata este f ′ (x0) = a.
Reciproc, daca f (·) este derivabila în x0 cu f ′(x0) ∈ R, atunci ∃ limh→0
f (x0 + h)− f (x0)
h= f ′ (x0) ⇒
⇒ ∃ limh→0
f (x0 + h)− f (x0)− f ′ (x0) · hh
= 0, asa ca exista functia liniara h 7→ f ′ (x0) · h, ∀h ∈ R, care
satisface definitia diferentialei. Cum aceasta, daca exista, este unica, rezulta ca este chiar diferentiala
functiei în punct.
11.3.28. Exemplu. Diferentialele unor functii uzuale sunt:
f (·) : R→ R, f (x) = αx ⇒ df (x0) (·) : R→ R, df (x0) (h) = αh.
f (·) : R→ R, f (x) = αx+ β ⇒ df (x0) (·) : R→ R, df (x0) (h) = αh.
f (·) : R→ R, f (x) = ax2 + bx+ c ⇒ df (x0) (·) : R→ R, df (x0) (h) = (2ax0 + b)h.
11.3.29. Observatie. Din regulile de derivare se obtin reguli de diferentiere:
(1) d(f + g) (x0) = df (x0) + dg (x0);
(2) d(c · f) (x0) = c · df (x0);

226
(3) d(f · g) (x0) = g (x0) · df (x0) + f (x0) · dg (x0);
(4) d(f
g) (x0) =
g (x0) · df (x0)− f (x0) · dg (x0)
g2 (x0);
(5) d(g f) (x0) = g′(f (x0)) · df (x0).
11.3.4. Derivate de ordin superior. Denumirea de derivate de ordin superior se refera la faptul
ca operatia de derivare poate fi repetata, adica derivata functiei poate fiderivata în continuare —se obtine
un proces iterativ, în care derivata de ordin k se obtine prin derivarea derivatei de ordin k − 1.
11.3.30. Definitie. Fie functia f (·) : D ⊆ R→ R si x0 ∈ int (D), pentru care:
1. Exista ε > 0 astfel încât (x0 − ε, x0 + ε) ⊆ D si ∀x ∈ (x0 − ε, x0 + ε), exista f ′ (x).
2. Exista si este finita limita limx→x0
f ′ (x)− f ′ (x0)
x− x0
.
Atunci functia f (·) este numita de doua ori derivabila în x0 iar limita limx→x0
f ′ (x)− f ′ (x0)
x− x0
este
notata f ′′ (x0) si este numita derivata de ordin 2 a functiei f (·) în punctul x0.
Functia f (·) este numita derivabila de ordin n ≥ 2 în x0 daca exista ε > 0 astfel încât f (·) sa fie
derivabila de ordin n−1 pe (x0 − ε, x0 + ε) si daca exista si este finita limita limx→x0
f (n−1) (x)− f (n−1) (x0)
x− x0
=
f (n) (x0) [f (n) (x) =(f (n−1)
)′(x)]
Functia f (·) este numita indefinit derivabila în x0 daca este derivabila de orice ordin în x0.
11.3.31. Observatie. Functiile uzuale sunt indefinit derivabile pe domeniul lor de derivabilitate.
11.4. Extreme
11.5. Metode elementare de integrare
11.5.1. Formule de integrare directa. Reguli de calcul :
1)∫
[Af (x) +Bg (x)] dx = A∫f(x)dx+B
∫g (x) dx,
2)∫ f ′(x)
f(x)dx = ln |f(x)|+ C, f(x) 6= 0,
3)∫fα(x)f ′(x)dx =
1
α + 1fα+1(x) + C, α ∈ R \ −1
Pentru functiile continue f(·) fiind valabila relatia F ′(x) = f(x), se poate obtine, din tabloul derivatelor
functiilor uzuale, tabloul de primitive:
227
1)∫
0dx = C,
2)∫xαdx =
xα+1
α + 1+ C, α ∈ R \ −1,
3)∫ 1
xdx = ln |x|+ C, x 6= 0,
4)∫
(ax+ b)α dx = 1a(α+1)
(ax+ b)α+1 + C, α ∈ R \ −1,
5)∫ dx
ax+ b= 1
aln |ax+ b|+ C, ax+ b 6= 0,
6)∫axdx = 1
ln aa2 + C, a > 0, a 6= 1,
7)∫exdx = ex + C,
8)∫
sinxdx = − cosx+ C,
9)∫
cosxdx = sinx+ C,
10)∫
tanxdx = − ln |cosx|+ C, cosx 6= 0,
11)∫
cothxdx = ln |sinx|+ C, sinx 6= 0,
12)∫
dxsinx
= ln∣∣tan x
2
∣∣+ C, sinx 6= 0,
13)∫
dxcosx
= ln∣∣tan
(x2
+ π4
)∣∣+ C, cosx 6= 0,
14)∫
dxcos2 x
= tanx+ C, cosx 6= 0,
15)∫
dxsin2 x
= − cothx+ C, sinx 6= 0,
16)∫chxdx = shx+ C,
17 )∫shxdx = chx+ C,
18)∫
1ch2x
dx = thx+ C,
19)∫
dxsh2x
= −cthx+ C, shx 6= 0,
20)∫
dxx2+a2
= 1a
arctan xa
+ C, a 6= 0,
21)∫
dxx2−a2 = 1
2aln∣∣x−ax+a
∣∣+ C, a 6= 0, |x| 6= a,
22)∫
dx√a2−x2 = arcsin x
a+ C, a 6= 0, x ∈ (−a, a),
23)∫
dx√x2+a2
= ln(x+√x2 + a2
)+ C,
24)∫
dx(ax+b)2+c2
= 1ac
arctan ax+bc
+ C,
Formulele sunt valabile pe un interval din domeniul de definitie al fiecarei functii în parte.
11.5.2. Integrarea prin parti.

228
11.5.1. Teorema. Daca u(x) si v(x) sunt doua functii care au derivate u′(·), v′(·) continue pe un interval
[a, b], atunci:
∫u(x)v′(x)dx = u(x)v(x)−
∫v(x)u′(x)dx.
Demonstratie. Functiile u (·) si v (·) sunt continue, fiind derivabile.
Derivatele u′ (·), v′ (·) fiind continue urmeaza ca functiile (u′v) (·) si (v′u) (·) sunt de asemenea continue,
deci admit primitive. Din formula de derivare a unui produs de functii (u (x) v (x))′ = u′ (x) v (x) +
v′ (x)u (x) se obtine, prin integrare:
u (x) v (x) =∫v (x)u′ (x) dx+
∫u (x) v′ (x) dx sau
∫u (x) v′ (x) dx = u (x) v (x)−
∫v (x)u′ (x) dx;
11.5.2. Observatie. (1) Deoarece v′dx = dv, u′dx = du, formula de integrare prin parti se mai scrie:∫udv = uv −
∫vdu.
(2) Metoda poate fi folosita cu succes daca integrala∫vdu poate fi calculata.
(3) Formula de integrare prin parti este adevarata si pentru integralele definite:
b∫a
u (x) v′ (x) dx =b∫a
u (x) v′ (x) dx+b∫a
v (x)u′ (x) dx de unde se obtine
b∫a
u (x) dv (x) = u (x) v (x)|x=bx=a −
b∫a
v (x) du (x).
11.5.3. Schimbarea variabilei de integrare in integrala definita. Teorema. Daca f(x)
este continua pe intervalul [a, b] , iar x = ϕ(t) este o functie strict monotona, cu derivata
continua pe [α, β], atunci∫ baf(x)dx =
∫ βαf [ϕ (t)]ϕ′ (t) dt,
unde α si β sunt solutiile ecuatiilor a = ϕ (α) , b = ϕ (β).
Demonstratie.Fie d o diviziune a intervalului [a, b]
a = x0 < x1 < x2 < ... < xn−1 < xn = b si
α = t0 < t1 < t2 < ... < tn−1 < tn = β,
diviziunea corespunzatoare d′ a intervalului [α, β] ce se obtine rezolvand ecuatiile xk = ϕ (tk), ecuatii
care au o singura solutie pentru fiecare k, deoarece ϕ este strict monotona.Avem de asemenea

229
xk+1 − xk = ϕ (tk+1)− ϕ (tk) = (tk+1 − tk)ϕ′ (τk) , τk ∈ (tk, tk+1).
Sa consideram o suma Riemann oarecare relativa la diviziunea d
σd(f) = f (ξ0) (x1 − x0) + f (ξ1) (x2 − x1) + ...+ f (ξn−1) (xn − xn−1)
si sa luam punctele ξk astfel incat ξk = ϕ (τk); in aceasta situatie suma σd devine
σd (f) = f [ϕ (τ0)]ϕ′ (τ0) (t1 − t0)+f [ϕ (τ1)]ϕ′ (τ1) (t2 − t1)+...+f [ϕ (τn−1)]ϕ′ (τn−1) (tn − tn−1).
Fie (dn) un sir de diviziuni ale intervalului [a, b] caruia ii corespunde sirul de diviziuni (d′n) ale inter-
valului [α, β];daca ν (dn)→ 0 atunci ν (dn)→ 0,deci la limita obtinem∫ baf(x)dx =
∫ αβf [ϕ (t)]ϕ′ (t) dt,
relatie care se numeste formula schimbarii de variabila in integrala definita.
Observatii.1)Formula stabilita mai sus permite si calculul de primitive;intr-adevar putem scrie∫ xα′ f(x)dx =
∫ tα′ f [ϕ (t)]ϕ′ (t) dt = F (t)− F (α′)
deci ∫f(x)dx = f (ϕ−1 (x)) + C,
unde am notat pe −F (α′) cu C (constanta arbitrara), deoarece consideram pe a′ oarecare (insa fix) in
[a, b].
2)Conditiile impuse functiei ϕ se cer numai in intervalul [α, β], transformatul inter-
valului [a, b]. Daca conditiile din enunt nu sunt indeplinite, se poate ajunge la rezultate false.
Exemplu.Sa se calculeze I(x) =∫
dx√a2+x2
Facem schimbarea de variabila x = a sht,dx = a cht dt,
J(t) =∫
a cht dt√a2+a2sh2t
=∫dt = t+ C,
deci
I(x) = arcshxa
+ C = ln(x+√a2 + x2
)+ C.


CAPITOLUL 12
Clase speciale de functii de o singura variabila
12.1. Functii semicontinue
12.2. Functii monotone
Def: O functie f (·) : D ⊆ R→ R se numeste:
crescatoare, daca ∀x1, x2 ∈ D, x1 < x2 ⇒ f (x1) ≤ f (x2)
strict crescatoare, daca ∀x1, x2 ∈ D, x1 < x2 ⇒ f (x1) < f (x2)
descrescatoare, daca ∀x1, x2 ∈ D, x1 < x2 ⇒ f (x1) ≥ f (x2)
strict descrescatoare, daca ∀x1, x2 ∈ D, x1 < x2 ⇒ f (x1) > f (x2)
monotona, daca este crescatoare sau descrescatoare
strict monotona, daca este strict crescatoare sau strict descrescatoare
Prop: [vezi si [12], IV.2.6., Th. 5, pag. TG.IV.9] Orice functie f (·) : I → R care este continua si
injectiva pe un interval I este strict monotona [este chiar homeomorfism de la I la f (I)].
Dem:
Fie x1, x2 ∈ I, x1 < x2
Daca f (x1) < f (x2), atunci ∀x ∈ (x1, x2) are loc f (x1) < f (x) < f (x2), deoarece:
x1 < x < x2, iar din continuitatea functiei f (·) imaginile prin f (·) ale intervalelor [x1, x] si [x, x2] sunt
intervale, asa ca prin reducere la absurd, daca pozitia celor trei valori ar fi alta, de exemplu, f (x1) <
f (x2) < f (x), atunci f ([x1, x]) ∩ f ([x, x2]) 6= ∅, adica f (·) nu ar fi injectiva.
De completat
Demonstram mai întâi un rezultat „auxiliar”privitor la limitele laterale ale unei functii monotone:
231

232
Lema 3.4.1 (existenta limitelor laterale). Daca f : E → R este monotona pe intervalul I ⊆ E atunci
f este functie riglata pe I în sensul ca are limite laterale în fiecare punct adica:
∃ f(x0+) := limxx0
f(x), f(x0−) := limxx0
f(x) ∀ x ∈ I.
Mai mult, daca f este crescatoare pe I atunci limitele laterale au urmatoarele proprietati:
f(x1−) ≤ f(x1) ≤ f(x1+) ≤ f(x2−) ∀ x1 < x2, x1, x2 ∈ I
iar daca f este descrescatoare atunci:
f(x1−) ≥ f(x1) ≥ f(x1+) ≥ f(x2−) ∀ x1 < x2, x1, x2 ∈ I.
Demonstratie. Pentru a face o alegere, presupunem ca f este crescatoare (pe intervalul I); mai departe,
consideram x0 ∈ I si multimea
A = f(x); x > x0, x ∈ I (evident, în cazul în care x0 nu este capatul din dreapta al intervalului I). si
observam ca A este minorata (marginita inferior) de f(x0) deci, conform Axiomei lui Cantor (vezi Cap.1),
exista inf A = L ∈ R.Mai departe, din T.1.2.? privind caracterizarea marginii inferioare rezulta ca pentru
orice ε > 0 exista yε = f(xε) ∈ A (deci xε > x0) astfel încât f(x0) ≤ L ≤ f(xε) < L+ ε.
În continuare, daca notam δε = xε − x0 > 0 atunci din faptul ca f este crescatoare rezulta ca daca
x ∈ (x0, x0 + δ) = (x0, xε) atunci L ≤ f(x) ≤ f(xε) < L+ ε ceea ce, în baza definitiei din Cap.2 a limitei
la dreapta, înseamna ca L = f(x0+) ≥ f(x0).
In cazul limitei la stânga se procedeaza la fel, considerând multimea B = f(x); x < x0, x ∈ I si
marginea superioara, supB pentru a obtine faptul ca ∃ f(x0−) ≤ f(x0).
In sfârsit, daca x1 < x2 si xn x1, yn x2 sunt doua siruri convergente atunci, din afirmatia
anterioara rezulta:
f(xn) f(x1+), f(yn) f(x2−)
iar pe de alta parte, din definitia limitei rezulta ca deoarece x1 < x2, exista n0 ∈ N astfel încât:
x1 < xn <x1 + x2
2< yn < x2 ∀ n ≥ n0

233
deci f(xn) ≤ f(yn) ∀ n ≥ n0 si prin urmare f(x1+) ≤ f(x2−) ≤ f(x2) si teorema este demonstrata în
cazul în care f este crescatoare; în cazul în care f este descrescatoare afirmatiile simetrice corespunzatoare
se demonstreaza în acelasi mod (exercitiu !).
12.3. Functii absolut continue
12.4. Functii convexe
Def: O functie f (·) : I → R se numeste convexa daca ∀x1, x2 ∈ I, ∀t ∈ [0, 1], f (tx1 + (1− t)x2) ≤
tf (x1) + (1− t) f (x2). Functia f (·) se numeste concava daca functia (−f) (·) este convexa.
Prop: Daca f1 (·), f2 (·) : I → R sunt functii convexe, atunci functia—suma (f1 + f2) (·) : I → R este
tot convexa.
T: Fie I ⊆ R interval si f (·) : I → R. Atunci afirmatiile sunt echivalente:
1. f (·) este convexa
2. ∀n ∈ N \ 0, 1, ∀xk ∈ I, ∀λk ∈ [0, 1], k = 1, n, cun∑k=1
λk = 1, are loc:
f
(n∑k=1
λkxk
)≤
n∑k=1
λkf (xk) .
Dem:
2⇒ 1
Daca 2. are loc, atunci pentru n = 2, λ1 = t ∈ [0, 1] si λ2 = 1 − t ∈ [0, 1] se obtine definitia functiei
convexe.
1⇒ 2
Daca functia f (·) este convexa, 2 se demonstreaza prin inductie dupa n:
pentru n = 2, ∀x1, x2 ∈ I, ∀λ1, λ2 ∈ [0, 1] cu λ1 + λ2 = 1, are loc f (λ1x1 + λ2x2) ≤ λ1f (x1) + λ2f (x2)
din definitia convexitatii.
Presupunem ca inegalitatea este verificata pentru ∀p ≤ n ∈ N \ 0, 1 fixat si aratam ca este verificata
si pentru n+ 1:
Fie xk ∈ I, λk ∈ [0, 1], k = 1, n+ 1, cun+1∑k=1
λk = 1.

234
Daca macar o valoare λk este nula, atunci inegalitatea este verificata din cauza aplicarii ipotezei de
inductie pentru p ≤ n.
Daca toate valorile λk sunt nenule:
toate valorile sunt diferite de 1 (pentru ca daca una ar fi 1, atunci suma celorlalte ar fi 0, ceea ce
înseamna ca toate celelalte ar fi nule):n+1∑k=1
λk = 1 ⇒n∑k=1
λk + λn+1 = 1 ⇒n∑k=1
λk = 1 − λn+1 ∈ (0, 1) ⇒ ∀k = 1, n, 0 < λk < 1 − λn+1, adica
0 <λk
1− λn+1
< 1, iarn∑k=1
λk1− λn+1
= 1.
Din ipoteza de inductie se obtine:
f
(n∑k=1
λk1− λn+1
xk
)≤
n∑k=1
λk1− λn+1
f (xk) .
Atunci:n∑k=1
λk1− λn+1
xk ∈ I si
f
(n+1∑k=1
λkxk
)= f
(n∑k=1
λkxk + λn+1xn+1
)= f
((1− λn+1)
n∑k=1
λk1− λn+1
xk + λn+1xn+1
)≤ (1− λn+1) f
(n∑k=1
λk1− λn+1
xk
)+
λn+1f (xn+1) ≤
≤ (1− λn+1)n∑k=1
λk1− λn+1
f (xk) + λn+1f (xn+1) =n+1∑k=1
λkf (xk).
Prop: Fie f (·) : I → R convexa. Atunci ∀a ∈ I, functia ga (·) : I \ a → R definita prin ga (x) =
f (x)− f (a)
x− a este crescatoare.
Dem:
Fie x1 < x2 ∈ I \ a. Sunt posibile mai multe situatii:
x1 < x2 < a ⇒ ∃t ∈ (0, 1) astfel încât x2 = tx1 + (1− t) a[⇒ x2 = t (x1 − a) + a⇒ t =
x2 − ax1 − a
=a− x2
a− x1
∈ (0, 1)
][x1 < x2 < a ⇒ x1 − a < x2 − a < 0 ⇒ a− x1 > a− x2 > 0 ⇒ 1 >
a− x2
a− x1
> 0]
⇒ f (x2) = f
(a− x2
a− x1
x1 +
(1− a− x2
a− x1
)a
)≤ a− x2
a− x1
f (x1) +
(1− a− x2
a− x1
)f (a)⇒
⇒ f (x2) − f (a) ≤ a− x2
a− x1
(f (x1)− f (a)) ⇒ f (x2)− f (a)
a− x2
≤ f (x1)− f (a)
a− x1
⇒ f (x2)− f (a)
x2 − a≥
f (x1)− f (a)
x1 − a⇒ ga (x1) ≤ ga (x2).
[se foloseste si ca a− x1 si a− x2 sunt ambele pozitive]
Cazurile:
x1 < a < x2

235
a < x1 < x2
se trateaza analog.
Prop: Fie f (·) : I → R de clasa C2. Atunci f ′′ (·) ≥ 0 ⇐⇒ f (·) convexa pe I.
Dem:
⇒
Fie x1, x2 ∈ I, x1 < x2 si t ∈ (0, 1).
Fie x3 = tx1 + (1− t)x2 ∈ (x1, x2).
Se aplica Teorema Lagrange pe fiecare dintre intervalele [x1, x3] si [x3, x2]:
∃c1 ∈ (x1, x3), f ′ (c1) =f (x3)− f (x1)
x3 − x1
∃c2 ∈ (x3, x2), f ′ (c2) =f (x2)− f (x3)
x2 − x3
Din f ′′ (·) ≥ 0 se obtine ca f ′ (·) este crescatoare, si cum c1 < c2, se obtinef (x3)− f (x1)
x3 − x1
= f ′ (c1) ≤ f ′ (c2) =f (x2)− f (x3)
x2 − x3
⇒ f (x3)− f (x1)
x3 − x1
≤ f (x2)− f (x3)
x2 − x3
⇒
⇒ (x2 − x3) (f (x3)− f (x1)) ≤ (x3 − x1) (f (x2)− f (x3))⇒
⇒ (x2 − x3) f (x3)− (x2 − x3) f (x1) ≤ (x3 − x1) f (x2)− (x3 − x1) f (x3)⇒
⇒ (x2 − x1) f (x3) ≤ (x2 − x3) f (x1) + (x3 − x1) f (x2) ⇒ f (x3) ≤ x2 − x3
x2 − x1
f (x1) +x3 − x1
x2 − x1
f (x2) =
tf (x1) + (1− t) f (x2)
x2 − x3
x2 − x1
=x2 − tx1 − (1− t)x2
x2 − x1
=x2 − tx1 − x2 + tx2
x2 − x1
=−tx1 + tx2
x2 − x1
= t
x3 − x1
x2 − x1
=tx1 + (1− t)x2 − x1
x2 − x1
=(1− t)x2 + (t− 1)x1
x2 − x1
= 1− t
În final se obtine:
f (tx1 + (1− t)x2) ≤ tf (x1) + (1− t) f (x2), adica functia este convexa.
⇐
Daca f (·) este convexa, atunci pentru orice a ∈ I functia ga (x) =f (x)− f (a)
x− a din propozitia ante-
rioara este crescatoare.
Functia f ′ (·) este crescatoare:
Fie x1 < x2 fixate, si x, y ∈ (x1, x2), x < y.
gx1 (x) ≤ gx1 (y) = gy (x1) ≤ gy (x2) = gx2 (y), adicaf (x)− f (x1)
x− x1
≤ f (y)− f (x2)
y − x2
, pentru x > x1 si y < x2

236
Deoarece limitele exista iar inegalitatea se pastreaza prin trecere la limita, prin trecere la limita în
fiecare termen pentru x x1 si y x2 se obtine:
f ′ (x1) ≤ f ′ (x2), adica functia f ′ (·) este crescatoare. Cum f ′ (·) este derivabila, se obtine ca f ′′ (·) ≥ 0.

CAPITOLUL 13
Câteva inegalitati importante
13.0.1. Exercitiu. Daca a1, · · · ,an ∈ R∗+ sin∏k=1
ak = 1, atuncin∑k=1
ak ≥ n.
13.0.2. Solutie. Prin inductie:
n = 2:
a1 > 0, a2 > 0, a1 · a2 = 1⇒ a2 =1
a1
⇒ a1 + a2 = a1 +1
a1
= f (a1)
f ′ (a1) = 1− 1
a21
=
(1− 1
a1
)(1 +
1
a1
),
f ′′ (a1) =2
a31
> 0
f ′ (a1) = 0⇒ a1 = 1
⇒ a1 = 1 este minim global pe (0,∞) ⇒ f (a1) ≥ f (1) = 2
P (n)→ P (n+ 1)
Fie a1, · · · ,an, an+1 ∈ R∗+ sin+1∏k=1
ak = 1.
Printre numerele a1, · · · ,an, an+1 exista macar un numar mai mare sau egal cu 1 (pentru ca daca toate
ar fi strict mai mici ca 1 atunci si produsul lor ar fi strict mai mic ca 1).
Printr—o renumerotare, putem presupune ca numarul mai mare sau egal cu 1 este ultimul: presupunem
ca an+1 ≥ 1.n+1∏k=1
ak = 1⇒n∏k=1
(ak
n√an+1
)= 1 si din ipoteza de inductie se obtine
n∑k=1
(ak
n√an+1
)≥ n⇒
⇒n∑k=1
ak ≥ n n√an+1 ⇒
n+1∑k=1
ak ≥ n n√an+1 + an+1 ≥ n+ 1 deoarece an+1 ≥ 1.
13.0.3. Solutie. Cu metoda multiplicatorilor Lagrange:
Fie functia f (·) : Rn++ → R+, definita prin f (x) =n∑k=1
xk.
Inegalitatea poate fi privita ca o problema de extrem conditionat:
min f (x) cu restrictian∏k=1
xk = 1.
237

238
L (x;λ) =n∑k=1
xk + λ
(n∏k=1
xk − 1
)L′xi (x;λ) = 1 + λ
n∏k=1,k 6=i
xk
Sistemul (CFOC):
1 + λ
n∏k=1,k 6=i
xk = 0, i = 1, n
n∏k=1
xk = 1
⇒
∀i = 1, n, xi 6= 0,n∏
k=1,k 6=i
xk =1
xi,
1 +λ
xi= 0⇒ xi = −λ
⇒
xi = λ, i = 1, n
(−λ)n = 1
⇒ λ = −1 pentru n impar, λ = ±1, pentru n par.
pentru n impar, sistemul are o solutie: (1, · · · , 1;−1)
pentru n par, sistemul are doua solutii (1, · · · , 1;−1) si (−1, · · · ,−1; 1) a doua fiind falsa, deoarece nu
este din domeniul functiei.
Deci în ambele cazuri exista o singura solutie (1, · · · , 1;−1).
Conditiile de ordin II:
L′′xixj (x;−1) = −n∏
k=1,k 6=i,j
xk, pentru i 6= j,
L′′x2i
(x;−1) = 0
⇒ diferentiala de ordin II a functiei x 7→ L (x; 1) în x0 = (1, · · · , 1)este
d2L (x0;−1) = −2∑
i,j=1,ni<j
dxidxj
diferentiala legaturii este:n∑k=1
n∏l=1l 6=k
xl
dxk = 0⇒n∑k=1
dxk = 0⇒ dxn = −n−1∑k=1
dxk
⇒ d2L (x0;−1)|dxn=−
n−1∑k=1
dxk= −2
∑i,j=1,n−1
i<j
dxidxj − (dx1 + · · · dxn−1)
(−
n−1∑k=1
dxk
)=
= −2∑
i,j=1,n−1i<j
dxidxj + (dx1 + · · · dxn−1)2 =n−1∑i=1
dx2i
În punctul critic conditionat (1, · · · , 1;−1), functionala patratica atasata este:
(x1, · · · , xn−1) 7→n−1∑k=1
(dxk)2, care este strict pozitiv definita, deci punctul critic conditionat (1, · · · , 1;−1)
este minim local conditionat.

239
Cum domeniul (0,∞)n este deschis, valoarea f (1, · · · , 1) = n este valoare minima conditionata globala
pe (0,∞)n.
13.0.4. Exercitiu (Inegalitatea mediilor). Fie a1, · · · ,an ∈ R∗+ si fie:
A =1
n
n∑k=1
ak [media aritmetica a numerelor]
G = n
√n∏k=1
ak [media geometrica a numerelor]
H =n
n∑k=1
1
ak
[media armonica a numerelor]
Atunci au loc inegalitatile:
H ≤ G ≤ A.


ANEXA A
Aplicatii în Economie
A.1. O problema de încalzire
Aceasta problema mi—a fost trimisa prin email [asa ca nu stiu de unde este extrasa] si mi s—a spus ca
este la nivel de clasa a III—a ... ma îndoiesc, dar fie ... :)
A.1.1. Exercitiu. Trei studenti solicita o camera la un hotel, unde camera costa 30 lei. Plateste fiecare
10 lei si se cazeaza. Receptionerul constata ca trebuia sa le aplice o reducere, asa ca trimite portarul sa le
înapoieze 5 lei. Portarul, pentru ca nu primise bacsis, îsi opreste 2 lei si le înapoiaza 3 lei. Fiecare student
ia înapoi 1 leu, asa ca fiecare a platit 9 lei. Socoteala în final arata asa: fiecare a platit 9 lei, si cu 2 lei
primiti de portar, un total de 29 lei. Unde este 1 leu?
A.2. O lista scurta de trucuri si erori retorice
Retorica se refera la orice tentativa [scrisa sau verbala] de persuasiune/influentare a unei persoane
[cu scopul de a crede, a dori sau a face/actiona] fara a oferi motivatii rationale, ci numai prin forta
cuvintelor/expresiilor folosite.
Trucurile/manevrele retorice [mai pot fi numite "trucuri ieftine" sau "manevre murdare" :—) ] sunt
argumente/metode de persuasiune care constau în utilizarea potentialului de influenta a unor cuvinte—
cheie sau fraze pentru a sugera credinte, dorinte sau actiuni fara a oferi motivatii rationale [preluate si
adaptate din [8]].
Nu neaparat sugestiile promovate sunt false sau gresite, ci numai motivatiile sunt gresit directionate.
• Trucuri/manevre retorice:
—Apel la noutate:
∗ "Noul model de televizor"[Se sugereaza: Acest televizor este bun pentru ca e nou]
∗ "Ultimul tip de procesor" [Se sugereaza: Acest procesor este bun pentru ca e ultimul]241

242
∗ "Partidul Noua Dreapta", "Partidul Noua Stânga", "Ultimul Partid de Centru" ... :—)
[fara legaturi sau aluzii la partide existente cu denumiri similare] [Se sugereaza: Acest
partid este bun pentru ca este "cel nou"]
—Apel la popularitate:
∗ "Detergentul X: gospodinele îl adora!"
∗ "Biscuitii X: copiii nu se mai satura!"
—Apel la compasiune, mila:
∗ "Cumpera X ca sa ajuti copiii din orfelinate!"
—Apel la vinovatie, frica:
∗ "Taxa antipoluare"
—Apel vizual la dragalasenie, senzualitate: Persoana care face reclama produsului este fie
un copil dragalas, fie o persoana atragatoare si îmbracata sumar/provocator, fie un actor
recunoscut ca fiind considerat atragator.
—Apel la bogatie, statut, putere: "Oamenii responsabili cumpara X!"
—Hard sell and buzzwords:
∗ "Cumpara!"; "Voteaza—ma pe mine!"
∗ Utilizare de cuvinte—cheie: "birocrati" versus "angajati la stat"; "piata libera"; "liber—
schimb"
—Scare quotes
—Ambiguity or vagueness
—Implicatii gresite:
∗ "Pret: doar 6.99 RON" sau "Pret: 6.99 RON" [ar trebui dedus ca aceste produse
trebuie cumparate...]
—Schimbarea subiectului
• Notiuni sau opinii gresite/incorecte provenite din rationamente invalide sau date eronate
—Formale:
∗ p→ q ”⇒ ” q → p [barbatii sunt oameni, asa ca oamenii sunt barbati]

243
∗ (p→ q) ∧ p ”⇒ ” q [barbatii sunt oameni iar X nu e barbat, asa ca nu e om]
∗ O concluzie concreta este dedusa dintr—o descriere care nu are legatura cu concluzia
[Pilotul conduce un avion mare si frumos, deci are 36 de ani]
∗ Aplicarea trunchiata si partinitoare a informatiei disponibile [Candidatul X va fi ales
primar de Bucuresti pentru ca e favorit în sectorul lui]
—Substantive
∗ Credinte majoritare
∗ Practici comune
∗ Ad hominem, si subspecii
· Ad hominem circumstantiale
· Tu quoque
∗ Apel la autoritate
∗ Neacceptare bazata pe incompletitudine
∗ Amestecarea/confundarea moralitatii cu legalitatea
∗ Analogii slabe
—Cauzale
∗ Post hoc ergo propter hoc (prioritatea temporala este considerata suficienta pentru o
relatie cauzala)
∗ Confuzia dintre corelatie si cauzalitate
∗ Inversiunea dintre cauza si efect
—Epistemice
∗ Apel la ignoranta
∗ Exceptions to Lebnitz’s Law (if one thing is identical with another one, then what is
true of one must be true of the other)
—Further
∗ Equivocation
∗ Red herring

244
∗ Sliperry slope (floodgates)
∗ Straw man (ignore the opponent’s real position and set up a weaker version of the
position, by missrepresenting it, exaggerating it distorting it or simplifying it)
∗ Begging the question (the validity of the conclusion is assumed by at least one of its
premises)
∗ False dilemma (pretending less options than there are in fact)
A.3. Exemplu în Microeconomie
A.3.1. Exemplu.
max r (kxαy1−α),
subject to:
px+ qy = B,
x ∈ [0, xmax] , y ∈ [0, ymax]
The problem has a (neo)classical interpretation in Microeconomics:
• (x, y) 7→ kxαy1−α [the function to be optimized] is a "Cobb—Douglas—type production function",
—x is "the labor input" [the quantity of labor per unit of time, for example measured in terms
of working hours or in terms of labor monetary value]; it may be assumed that x ∈ [0, xmax]
[x cannot be bigger than a certain given quantity denoted by xmax]
—y is "the capital input" [the quantity of investment per unit of time, measured in monetary
value]; it may be assumed that y ∈ [0, ymax] [y cannot be bigger than a certain given quantity
denoted by ymax]
—The values xmax and ymax are endogeneous, in that they may be given independently by
technological/market conditions. Since the production problem takes place in a given period
of time, it is only natural to accept that input quantities are limited.
—kxαy1−α is "the output" [the quantity of output per unit of time, measured for example in
monetary value]
—k > 0 represents "total factor productivity"
—r is an unitary price for the output!!!
—α ∈ (0, 1) represents "the output elasticity of labor" while 1 − α represents "the output
elasticity of capital"; since α + (1− α) = 1, the production has "constant returns to scale"

245
—It should be mentioned that this line of interpretation has been criticized
[e.g. http://mises.org/journals/qjae/pdf/qjae7_1_10.pdf]
• p > 0 and q > 0 are unit prices of the inputs, while B > 0 is the available budget.
• To summarize, all the parameters k, α, xmax, ymax, p, q, B are endogeneous.
We apply the procedure to find the maximum:
(1) The constraint has no critical point, so that NDCQ holds.
(2) Since k > 0, max (kxαy1−α) = kmax (xαy1−α)
(3) The Lagrange function is:
L (x, y;λ) = xαy1−α − λ (px+ qy −B) .
(4) We calculate the first—order partial derivatives of the Lagrangian:
L′x (x, y;λ) =∂
∂x(xαy1−α − λ (px+ qy −B)) = αxα−1y1−α − pλ,
L′y (x, y;λ) =∂
∂y(xαy1−α − λ (px+ qy −B)) = (1− α)xαy−α − qλ;
we observe that since the exponents α− 1 and −α are negative, the expressions are not valid
for x = 0 or y = 0.
(5) We consider the FOC system:αxα−1y1−α − pλ = 0
(1− α)xαy−α − qλ = 0
px+ qy −B = 0

246
for which we consider the solutions from (0, xmax)× (0, ymax). The solution is:
α
p
(x
y
)α−1
= λ =1− αq
(x
y
)α⇒ x =
αq
p (1− α)y
px+ qy −B = 0⇒ pαq
p (1− α)y + qy −B = 0⇒
⇒(
α
1− α + 1
)qy = B ⇒ y =
B (1− α)
q⇒
⇒ x =αq
p (1− α)· B (1− α)
q=Bα
p⇒
⇒ λ =α
p
(x
y
)α−1
=α
p
Bα
pB (1− α)
q
α−1
=α
p
(αq
p (1− α)
)α−1
⇒
⇒ λ =ααqα−1
pα (1− α)α−1 .
⇒ x =Bα
p, y =
B (1− α)
q, λ =
ααqα−1
pα (1− α)α−1 .
(6) When "the availability conditions" are satisfied [that is, the solution satisfies x < xmax and
y < ymax], we check the second—order conditions:
(a) we calculate the second—order partial derivatives for the function (x, y) 7→ L(x, y; λ
):
L′′x2(x, y; λ
)=
∂2
∂x2
(xαy1−α − λ (px+ qy −B)
)= xα−2y1−αα (α− 1),
L′′xy
(x, y; λ
)=
∂2
∂x∂y
(xαy1−α − λ (px+ qy −B)
)= −x
α−1
yαα (α− 1),
L′′yx
(x, y; λ
)=
∂2
∂y∂x
(xαy1−α − λ (px+ qy −B)
)= −x
α−1
yαα (α− 1),
L′′y2(x, y; λ
)=
∂2
∂y2
(xαy1−α − λ (px+ qy −B)
)=
xα
yα+1α (α− 1),
so that the Hessian of the function (x, y) 7→ L(x, y; λ
)is:
H(x, y; λ
)=
xα−2y1−αα (α− 1) −xα−1
yαα (α− 1)
−xα−1
yαα (α− 1)
xα
yα+1α (α− 1)
;(b) since the partial derivatives of the constraint are
∂
∂x(px+ qy −B) = p, and
∂
∂y(px+ qy −B) = q, the bordered Hessian is:

247∣∣∣∣∣∣∣∣∣∣∣
0 p q
p xα−2y1−αα (α− 1) −xα−1
yαα (α− 1)
q −xα−1
yαα (α− 1)
xα
yα+1α (α− 1)
∣∣∣∣∣∣∣∣∣∣∣=
= α (1− α) (p2xαy−1−α + q2xα−2y1−α + 2pqxα−1y−α) > 0; we conclude that the point (x, y)
is a constrained local maximum.
(c) we differentiate the constraint: pdx+ qdy = 0
(d) we find the nature of the quadratic form d2(x,y)L
(x, y; λ
)∣∣∣pdx+qdy=0
=
= −α (1− α)xα−2y1−αdx2 + 2α (1− α)xα−1y−αdxdy − α (1− α)xαy−α−1dy2|pdx+qdy=0
dy=−p
qdx
=
= −α (1− α)xα−2y1−αdx2+2α (1− α)xα−1y−αdx
(−pqdx
)−α (1− α)xαy−α−1
(−pqdx
)2
=
= −α (1− α)
[xα−2y1−α + 2
p
qxα−1y−α + xαy−α−1p
2
q2
]dx2 < 0 and we conclude that the point
(x, y) is a local constrained maximum.
(7) When "the availability conditions" are not satisfied [that is, x ≥ xmax or y ≥ ymax], the (FOC)
system doesn’t have any solution.
(8) The (FOC) system doesn’t cover the boundary points (just the interior points), so they should
be discussed separately; we discuss the boundary of the budget line intersected with the rectangle
[0, xmax]× [0, ymax].
• The budget line px + qy = B has the y—intercept at the point(
0,B
q
)and the x—intercept
at(B
p, 0
). We have several situations:

248
y—intercept x—intercept Boundary points
1)B
q< ymax
B
p< xmax
(0,B
q
),(B
p, 0
)2)
B
q< ymax
B
p= xmax
(0,B
q
),(B
p, 0
)= (xmax, 0)
3)B
q< ymax
B
p> xmax
(0,B
q
),(xmax,
B − pxmax
q
)4)
B
q= ymax
B
p< xmax
(0,B
q
)= (0, ymax),
(B
p, 0
)5)
B
q= ymax
B
p= xmax
(0,B
q
)= (0, ymax),
(B
p, 0
)= (xmax, 0)
6)B
q= ymax
B
p> xmax
(0,B
q
)= (0, ymax),
(xmax,
B − pxmax
q
)7)
B
q> ymax
B
p< xmax
(B − qmax
p, ymax
),(B
p, 0
)8)
B
q> ymax
B
p= xmax
(B − qmax
p, ymax
),(B
p, 0
)= (xmax, 0)
9)B
q> ymax
B
p> xmax
(B − qmax
p, ymax
),(xmax,
B − pxmax
q
)[if pxmax + qymax > B]
(9) Each situation from above may accept two subcases, depending on the (FOC) solution satisfying
"the availability conditions"; each case should be considered separately. Since we are only inter-
ested in finding constrained maximum, we observe that all boundary points with at least one null
component correspond to a null value of the production function. So we have just the cases 3),
6), 7), 8) and 9) to consider.
1)
(10) We gather all the possible candidates for a maximum:
• The solutions from the (FOC) system (if they exist), which are in the set (0, xmax)×(0, ymax)
x =Bα
p, y =
B (1− α)
q
A.4. Exemplu de utilizare a seriilor în Macroeconomie
Optional Macroeconomics Topic for Series: Chapter 3, Doepke, Lehnert, Sellgren MACROECO-
NOMICS, 1999.

249
A.4.1. Exemplu. Un model macroeconomic tipic, numit "problema de maximizare a gospodariei":
maxct∞t=1
∞∑t=1
βt−1u (ct) ,
cu restrictiile:∞∑t=1
P (yt − ct)(1 +R)t−1 = 0.
It is beyond the goal of the present text to study such models. Here we just mention the economical
interpretations expressed by means of series:
• t ∈ N∗ means "(discrete) time" ( 0 means "now", 1 means "a year from now" and so on); the
measurement unit for time may be "year" or a certain unspecified "period of time".
• the discussion is about a "household", and not an individual; one difference is that while an
individual lives a finite number of years, the household may be considered "to live forever" (an
indefinite number of years).
• the household uses a single commodity (say bananas) measured in quantities (kilos of bananas)
both for income and consumption;
—yt is "the household’s income for period t" (kilos of bananas) (exogeneous)
—ct is "the household’s consumption for the period t" (kilos of bananas)
—P is the price of one kilo of bananas (doesn’t change over time :) );
—the household has access to a "bananas market", where it may buy (at price P ), sell (at price
P ) and invest money to buy bonds on the bananas market, which bear interest R (1 USD
invested gives the next period (1 +R) USD);
—u (·) is an increasing function of consumption, called "the household’s consumption utility
function"
• β ∈ [0, 1] is "the household’s discount factor" and it is a way to express how much the household
cares for the current consumption as oposed to future consumption
—β = 0 means that the household only cares about current consumption;
—β = 1 means that the household cares equally about current indefinite future consumption;
—β = 0.95 (a typical value) should mean that the household cares a little more about the
present than the future consumption.
250
With the above conventions, the initial problem says: "find the maximum present utility and the
consumption strategy to attain this, while keeping equal the present values of all future income and all
future consumption".
A.5. Paradoxul lui Zenon: Achile si Broasca Testoasa
Achile (A) si Broasca Testoasa (B) se întrec. Se presupune ca viteza lui A este mult mai mare decât
viteza lui B, asa ca intuitia spune ca si daca A îi da un avans initial lui B, A tot va câstiga întrecerea.
Urmatorul rationament (varianta) este cunoscut din Grecia Antica sub numele de "Paradoxul lui
Zenon" [Achile nu întrece niciodata brasca testoasa]:
"Daca B porneste cu un avans initial, în timp ce A recupereza avansul, B obtine un nou avans (eventual
mai mic decât avansul anterior). Prin repetarea rationamentului, B va avea totdeauna un nou avans strict
pozitiv în fata lui A, asa ca A nu poate câstiga întrecerea."
Fie vA viteza lui A, iar vB viteza lui B (cu vA > vB), si fie S0 avansul initial. A începe cursa doar
când B este la distanta S0. A porneste si pâna parcurge si el distanta S0 B deja a parcurs alta distanta
notata S1. În timpul necesar pentru A pentru a parcurge distanta S1, B parcurge o noua distanta S2; se
obtine un sir de distante Sn. Intuitia spune ca distantele Sn desi sunt din ce în ce mai mici sunt totdeauna
strict pozitive, iar acest lucru este interpretat: "Ahile nu va depasi niciodata Broasca Testoasa, deoarece
Broasca Testoasa va avea totdeauna un avans strict pozitiv".
Avansul total al lui B este o serie geometrica:∞∑n=0
S0
(vBvA
)n= lim
n→∞S0
1−(vBvA
)n+1
1− vBvA
=S0vA
vA − vB[desi
avansul total al lui B este o suma infinita de distante strict pozitive, valoarea lor totala este finita]. Greseala
de rationament facuta în Grecia Antica a fost ca s—a acceptat ca "daca se aduna o infinitate de numere
strict pozitive, atunci suma lor este infinita".
Timpul de care are nevoie A pentru a parcurge distantaS0vA
vA − vBeste
S0
vA − vB, care este egal cu (seria
geometrica)∞∑n=0
S0
vA
(vBvA
)n.

251
A.6. Realitatea si conditiile de separabilitate
Desi pot parea foarte abstract de imaginat situatii comune în care conditia de separabilitate 2.2.19 nu
este satisfacuta, asemenea situatii se întâlnesc la tot pasul. De obicei sunt o consecinta ale unor confuzii
pe care le fac persoanele despre ele însele sau despre alte persoane. O situatie tipica ar arata astfel:
Se considera o multime M de indivizi. Se stabileste o lista de n caracteristici individuale iar pentru
fiecare individ se masoara aceste caracteristici. Se obtine o noua multimeM0 ⊆ Rn care contine rezultatele
masuratorilor. În acest context este posibil (si frecvent) ca între doua persoane sa nu se poata distinge pe
baza masuratorilor, desi modelatorul stie ca cele doua persoane sunt distincte. Aceasta situatie este posibila
de exemplu pentru ca multimeaM (a persoanelor reale) este mult mai bogata si mult mai complexa decât
multimea M0 (a masurarilor persoanelor reale) si atunci este posibil ca doua persoane distincte sa aiba
aceleasi masurari (este ca si cum doi vectori distincti ar avea aceeasi proiectie). Câteva situatii concrete:
A.6.1. Observatie. • Doi pacienti cu acelasi diagnostic (sau cu acelasi set de analize; daca ar fi
modificata lista de analize necesare, s—ar putea sa nu se mai obtina rezultate identice);
• Doua persoane cu acelasi job / cu acelasi venit / cu aceaasi vârsta / cu acelasi gen / cu acelasi
numar de copii etc;
• Doua persoane care au aceleasi raspunsuri la un sondaj de opinie (desi sunt persoane distincte,
au aceleasi pareri; daca ar fi schimbate întrebarile, s—ar putea sa nu mai coincida)
A.7. Functii de productie
O interpretare economica uzuala, ca functie de productie, a functiilor scalare de variabila vectoriala,
este:
n este numarul de tipuri de materie prima (input) folosite.
Rn este multimea tuturor cantitatilor posibile de materie prima.
D este multimea cantitatilor admise de materie prima.
x ∈ D ⊆ Rn este o cantitate (vectoriala) de materie prima.
m este numarul de tipuri posibile de produse finite.
Rm este multimea tuturor cantitatilor posibile de produse finite.
252
f (x) ∈ Rm este cantitatea (vectoriala) de produs finit obtinuta din cantitatea (vectoriala) de materie
prima x.
Common usage in Economics:
A distinction should be made between the name of the good and the quantity of the good. I will
distinguish between them by denoting X (capital letter) the name and by x (small letter) the quantity of
X.
Observe that I use the word "quantities" and not the word "units" for measurements. This is because
while the word "units" may sound better than "quantities", it is also misleading from the point of view
of Analysis and what is meant by "appropriate masurement units". Analysis refers to "infinitesimal
modifications" and not integers and moreover an appropriate measurement unit should be "indefinitely
decomposable" in the sense that we should be able to refer to amounts as small as possible.
Since x, y and f (x, y) are quantities, some measurement units should be chosen for each of them.
Some usual choices will be used for exemplification purposes.
X is money (capital) with measurement unit € (so that x is the quantity of €)
Y is labor with measurement unit wh (working hours) (so that y is the quantity of working hours)
Z is nails (the production process uses capital and money to produce nails) with measurement unit kg
(of nails) (so that z is the quantity of kg of nails)
It should always be clear in what measurement units are we measuring different quantities.
A.7.1. Examples of usual production functions (from Economics):

253
Cobb—Douglas type: f (·) : Rn+ → R+,
f (x1, x2, · · · , xn) = axα11 xα22 · · · xαnn
CES [constant elasticity of substitution] type: f (·) : Rn+ → R+,
f (x1, x2, · · · , xn) = a
(n∑i=1
cixρi
) bρ
, 0 6= ρ < 1
(for ρ = 0, u (x1, x2, · · · , xn) = an∑i=1
ci lnxi)
Perfect substitutes [linear] type: f (·) : Rn+ → R+,
f (x1, x2, · · · , xn) =n∑i=1
aixi
Perfect complement type (Leontieff): f (·) : Rn+ → R+,
f (x1, x2, · · · , xn) = minaixi; i = 1, n
If f (·, ·) is a production function (so that x and y are quantities of raw materials X and Y used to
obtain the quantity f (x, y) of finite product Z).
Then:
The partial derivative∂f
∂x(x0, y0) is measured in (kg of nails)/€ and it may be interpreted as the speed
of change in nails when money changes, around (x0, y0). The usual naming convention in Economics is
"marginal product of X at (x0, y0)" and actually it expresses literally the following approximation:
f (x, y0) ' f (x0, y0) +∂f
∂x(x0, y0) (x− x0)
Note that from the perspective concerning the measurement units, the (usual) interpretation of∂f
∂x(x0, y0)
as an estimator of "the change in output due to a one unit increase in capital" is misleading because the
measurement units are different: while "the change in output" is f (x, y0)− f (x0, y0) and is measured in
(kg of nails), the quantity∂f
∂x(x0, y0) is measured in (kg of nails)/€.
Of course the confusion comes from identifying the distinct objects
∂f
∂x(x0, y0)
(kg of nails)/€
and∂f
∂x(x0, y0)
(kg of nails)/€
· 1€
and it may be addressed by accepting a convention to make a distinction when appropriate, but still the
situation leads to significant ambiguities.

254
In a similar manner,
f (x0, y) ' f (x0, y0) +∂f
∂y(x0, y0) (y − y0)
f (x, y) ' f (x0, y0) +∂f
∂x(x0, y0) (x− x0) +
∂f
∂y(x0, y0) (y − y0)
The confusion may be further increased by the following facts:
• the approximations are valid only inside the convergence domains for the attached Taylor expan-
sions
• the "quality of approximation" decreases with future operations applied (the more the operations
applied, the worse the quality of approximation)
• The need to think dx [= x− x0] in integer terms contradicts its significance as "small", "infinitez-
imal", "local".
A.7.1. Definitie. A function u (·) : Rn → R is called an utility function if it represents a preference
relation, in the sense that x % y ⇐⇒ u (x) ≥ u (y)
A.8. Elasticitati
A.8.1. Elasticity for single—variable functions.
A.8.1. Definitie. Percentage change of a function f (·) at x2 compared to the base from x1:f (x2)− f (x1)
f (x1)[The difference between the two states as a fraction of the initial state x1] [it is a dimensionless value].
A.8.2. Definitie. Mean value of a function at x:f (x)
x[the average] [it is measured in (kg of nails)/€].
A.8.3. Definitie. Derivative of a function at x (when exist): f ′ (x0) = limx→x0
f (x)− f (x0)
x− x0
. [Speed at x0]
[also measured in (kg of nails)/€]
A.8.4. Definitie. El (f (·) , x) =xf ′ (x)
f (x)=
x
f (x)· df (x)
dx=
d (ln f (x))
dx[Possible interpretation: the
elasticity of f (·) with respect to x (at a certain fixed value for x) is the percentage change in f (·)
corresponding to a one per cent increase in x] [the ratio between the speed and the average] [dimensionless
value ].

255
A.8.5. Observatie. General Economical terminology:
|El (f (·) , x)| > 1 (f (·) is elastic)
|El (f (·) , x)| = 1 (f (·) is unitary elastic)
|El (f (·) , x)| < 1 (f (·) is inelastic)
|El (f (·) , x)| = 0 (f (·) is completely inelastic)
A.8.6. Observatie. Calculation Rules:
El ((f · g) (·) , x) = El (f (·) , x) + El (g (·) , x)
El
((f
g
)(·) , x
)= El (f (·) , x)− El (g (·) , x)
El ((f ± g) (·) , x) =f (x)El (f (·) , x)± g (x)El (g (·) , x)
f (x)± g (x)El ((f g) (·) , x) = El (f (·) , g (x)) · El (g (·) , x)
El (f−1 (·) , f (x0)) =1
El (f (·) , x0)[if f (·) is invertible]
El (A, x) = 0 [A is a constant]
El (xα, x) = α [α is a constant]
El (sinx, x) = x cotx
El (cosx, x) = −x tanx
El (tanx, x) =x
sinx cosxEl (cotx, x) = − x
sinx cosx
El (lnx, x) =1
lnx
El (loga x, x) =1
lnx
A.8.7. Exercitiu. Prove the statements from the above remark.
A.8.2. Elasticity for many—variables functions.
A.8.8. Definitie. Mean value with respect to the ith variable at x:f (x)
xi[measured in (kg of nails)/(unit
of Xi)]

256
A.8.9. Definitie. El ixi
(f(x1· , · · · , xn·
), x)
=xi ·
∂f
∂xi(x)
f (x)[the partial elasticity of the function f (·) at x
with respect to the ith variable] [the ratio between the speed with respect to i and the average with respect
to i]
El jtj
(F(f1
(t1· , · · · , tm·
), · · · , fn
(t1· , · · · , tm·
)), t)
=n∑i=1
El ixi
(F(x1· , · · · , xn·
), x)·El j
tj
(fi
(t1· , · · · , tm·
), t)
A.9. Functii liniare în Economics
A.9.1. Linear functions.
A.9.1.1. Linear production function. Consider the following conventions:
• The set of all possible quantities is denoted by [0, qmax] ⊆ [0,∞)1. An element q ∈ [0, qmax] repre-
sents a possible quantity of output (measured appropriately) (let’s assume kilos as measurement
unit). Please observe the inclusion of the null quantity (0 kilos) —that is, we may produce nothing,
and of a maximal quantity (qmax kilos) —that is, we can’t produce indefinitely, and specifically we
can’t produce more than qmax.
• The set of all possible total manufacturing costs is denoted by [cmin, cmax] ⊆ [0,∞)2. An element
c ∈ [cmin,cmax ] represents a possible total cost of manufacturing some output quantity (measured
appropriately) (let’s assume USD as measurement unit).
Observe that the total cost should depend on the quantity in the sense that manufacturing more output
should usually cost more.
• We are interested in a rule to connect the output quantity with the total cost. Such a rule may be
very complicated (maybe it is even not a function); we will ignore this complexity by assuming that
the establishing mechanism for the total cost is a function of the quantity produced and moreover
it is a linear function f (·) : [0, qmax]→ [cmin, cmax], given by f (q) = aq + b. We may also assume
that a > 0 and b > 0; moreover, given a value qmax, we should have [b, aqmax + b] ⊆ [cmin, cmax]
because otherwise some possible quantities will not have possible total costs (and the model will
be incoherent) and this implies cmin ≤ b and aqmax + b ≤ cmax.
1This implies qmax > 0.2This implies c1 > 0, c2 > 0 and c1 ≤ c2.

257
• Under the above conditions the value q is measured in kilos, f (q) is measured in USD, b is
measured in USD and it may be interpreted as the fixed cost (paid even if nothing is produced)
while a is measured in USD/kilos and it may be interpreted as the unit cost (sincef (q)− b
q= a,
that is, after removing the fixed cost, a is the cost of producing one unit of output).
• The term "unit cost" is defined [[43], page 425] as "the cost of producing one unit" of output, and
further on is suggested a procedure to calculate it as an "average cost", supposedly between "the
total output quantity" [How much output quantity have you obtained?] and "the total production
cost" [How much have you spent on producing what you obtained?]. The point here is that in the
real—world the unit cost should not be considered fixed, but dependent on several other objects,
like "total production cost", "fixed cost",
• If [cmin, cmax] \ [b, aqmax + b] 6= ∅ there are among the possible total costs some values which are
unattainable. If not, cmin = b, cmax = aqmax + b and the function f (·) is surjective; since f (·) is
also injective, there is f−1 (·) : [b, aqmax + b] → [0, qmax], given by f−1 (c) =c− ba. The function
f−1 (·) may be interpreted as the quantity obtainable given the total cost c.
• Since the function f (·) is defined on compact intervals —f (·) : [0, qmax] → [cmin, cmax] —and the
definition of a linear function [See, for example, 8.9.5, 170] involves entire spaces, the function
f (·) is not a linear function; instead, it is a piecewise linear function [8.9.3, page 170], [8.9.6, page
171].
• We could extend the function f (·) at entire spaces for both the domain and the codomain, but
by doing this we may lose other characteristics, like being invertible or the interpretations. Please
observe that when you change any of the above conventions and assumptions you should also
reevaluate the interpretations.
A.9.1.2. Linear demand function. The first example from [[46], page 14] involve a linear demand
function. The text says:
"If P is price, the demand for widgets in each period, D, is given by the linear demand
function
D (P ) =P − Pb
,

258
whose corresponding inverse demand function is
P (D) = P − bD,
so that the revenue function can be written
Φ (D) ≡ P (D)D = PD − bD2.
In the above formulation, b and P are positive constants and P ≤ P."
We deduce the following setup:
Constants: D > 0, P > 0
D (·) :[0, P
]→[0, D
], D (P ) = D − D
PP ,
P (·) :[0, D
]→[0, P
], P (D) = P − P
DD,
with the interpretations:
P > 0 is a given price [measured in some currency, e.g. USD]
P is the price of widgets in USD, which is between 0 [we don’t accept negative prices] and P [we don’t
accept prices higher than P ]
D > 0 is a given demand [measured in some measurement unit, denoted by µ]
D is the demand of widgets in µ, which is between 0 [we don’t accept negative demand] and D [we
don’t accept demand higher than D]P
D[b in the original setup] is "the diminishing rate of price with respect to demand", measured in
USD/µ.D
P[1
bin the original setup] is "the diminishing rate of demand with respect to price", measured in
µ/USD.
A.9.1.3. Linear cost of purchasing of a commodity.
A.9.1.4. Linear amount of commodity consumed at fixed price.
A.9.1.5. Linear total national consumption at fixed national income.
A.9.1.6. Linear total national savings at fixed national income. A note about exactity:
259
A.10. Applications for Series (and finite difference equations)
A.11. Applications for functions of several variables
A.12. Applications for EODE
A.13. Applications for integrals
A.14. A note about economic terminology [Some stupid questions for Economics :)]
Ideally, we should be able to define each word used in an economic model. Mathematics had a similar
problem and addressed it starting with the nineteenth century while it reached a conclusion in the first
half of twentieth century.
I will mainly use a list of dictionaries of economic terms [[4], [9], [35], [43]] and, when necesary, a
general dictionary as [14] as well as Internet resources like [38].
A.14.1. Quantity. Quantity is a word extensively used in Economics texts; still, no economic defin-
ition may be found in the dictionaries. I’ve reproduced in [section E.1, page 269] the explanations found
at [38].
It seems that when we say "quantity" we operate in two steps:
the first step [a qualitative step] is to assume or to prove that something is measurable (or countable, or
comparable, or weighable, or quantifiable) or at least it has a property (which we refer to) that is
measurable / countable / comparable / weighable / quantifiable;
the second step is to measure [a quantitative step], in order to obtain "the quantity".
Let’s have a look at a concept from "Chapter 1, Series"; in this setup, the sum of the series is "the
quantity" and the fact that the series converges or diverges translates as the quality of a series of being
measurable. A series may be:
• measurable with a finite measure, when the sequence of the partial sums converges to a finite
limit, which is the measure of the series;
• measurable with an infinite measure, when the sequence of the partial sums converges to an infinite
limit, and the measure is +∞ or −∞;

260
• nonmeasurable, when the sequence of the partial sums diverges.
The example from [1, page 6] shows what may happen when you blindly measure a nonmeasurable
object.
A.14.2. Output. From [[4], page 145]: "the amount which a company or a person or a machine
produces".
Since "amount" is similar with "quantity", we deduce that "output" is a special quantity: a quantity
which is "produced". We also find that the activity of the person/company which produces, is "to produce".
A.14.3. Producer. From the same dictionary [[4], page 158] we find that a "producer" [also called
"supplier"] means "a person or company which supplies or sells goods or services". We also deduce that
when reffering to a production, we have a "producing entity" like a person [in an economical sense, an
economic person] or a company [I will call all of them "agents"]. We also find that the agent’s activity is
to "supply" or to "sell", which is in conflict with the conclusion from the previous definition, which was
"to produce" —since "to supply/sell" is not similar with "to produce" and the quantities involved by each
activity may be different.
A.14.4. Cost. The dictionary [43] doesn’t have a definition of "cost".
From [[4], page 40]
Cost [as a noun]: "the value of the inputs (i.e. the amount of money) which are used to produce a
good or service"
Cost [as a verb]: "to have a particular monetary value"
Note: we also find a new word: "value"
A.14.5. Value. From [[43], page 608]
Value: "Intrinsic worth or price of a good or service. Earlier economic writers from ARISTOTLE
made the distinction between VALUE IN USE and VALUE IN EXCHANGE (prices) with, in many cases,
the objective use value being measured by the cost of production of that article. CANTILLON, SMITH,
RICARDO and John Stuart MILL agonized over the determinants and measure of different types of value,
often using the so-called ‘water and diamonds paradox’: the PARADOX OF VALUE. Apart from Marx

261
and his disciples, interest in the concept of INTRINSIC VALUE waned and attention was concentrated
on prices, except inasmuch as intrinsic value can be equated with longterm equilibrium prices."
From [[4], page 202]
Value [as a noun]: "the amount of money which something is worth"
Value [as a verb]: "to assess the amount of money which something is worth"
Note: we also find a new word: "worth"
A.14.6. Worth. Neither [43] nor [4] have a definition for "worth".
I’ve reproduced in [section E.2, page 271] the explanations found at [47]. Basically, we find that the
most common sense is "value"... So, at least for "value", everything is clear: value is value... :). This is
also valid for worth: worth is worth...
A.14.7. Total Costs. From [[43], page 586]
Total costs: "All the costs of producing a good or service. In the short run the total is divisible into
fixed and variable costs, but in the long run all costs are variable."
From [[4], page 202]
Total cost: "all the cost of producing a certain amount of production, including fixed costs and variable
costs"
Notes:
• In [43] there are no definitions for "long run" or "short run".
• Since in both definitions we have a common part "all the cost[s] of producing" [widgets], and since
"producing" refers to a certain amount/quantity of widgets [and not to some indefinite quantity
of widgets or to the quality of being a widget], we deduce that "total cost" measures a certain
specific produced quantity. Presumably, this measure named "total cost" is a monetary measure,
but this is just simplistic view, since we would also like to include some other forms of costs,
"nonmonetary costs" []. Note that the first definition doesn’t refer explicitly to the amount of
good/service.
A.14.8. Long Run. [[4], page 158]

262
A.14.9. Short Run. [[4], page 158]
A.14.10. Alternatives. Each individual decision problem should have possible and mutually exclu-
sive alternatives from which the decision—maker should choose. We consider them as elementary objects
[an "elementary alternative" is any alternative which cannot be decomposed further into component alter-
natives3] and we gather them in a set X [we may call it the set of all possible elementary alternatives]. The
important point here is that, regarding a fixed "individual decision problem", X gathers all the possible
elementary alternatives —no possible alternative lays outside X. We should ask, then, "How many elements
has X?". In other words, how many elementary alternatives for a given individual decision problem should
we consider?.
3I borrow here, of course, from a notion which I consider similar, that is, "elementary event" from Probabilities.
ANEXA B
Aplicatii în Computer Science
B.1. Database applications for Logic, Sets, Relations and functions
It is more convenient to apply all of these topics (namely Logic, Sets, Relations and Functions) without
distinguishing which part is applied in a certain topic, because this approach gives an overall view for
databases. The software applications to have in mind are two: Oracle and CRAN—R —an open source
software product for Statistics that uses built—in database operations.
B.1.1. Definitie. A table is a set of functions with the same domain. The empty set is a table over any
set (as domain). The common domain of the functions is "the heading of the table". In common language,
the heading stands for "column names" and the functions stands for rows.
With two or more "compatible" tables (they have the same heading) set operations can be performed,
like: union, intersection, difference.
B.1.2. Definitie. Projection is the operation of restricting the common domain of a table (the heading)
to a subset (a subheading).
B.1.3. Definitie. Table restriction is the operation of selecting a subset of functions from the initial
functions which belong to the table.
B.1.4. Definitie. Join is the operation of "prolongation"/"gluing" the functions which composes two
tables, as long as they are "compatible" in the sense that on the intersection of the two common domains
(the common part of the headings) the functions coincide. A particular join operation is the extension
operation, which extends the heading of the table and the corresponding functions of the table.
263

264
B.1.5. Definitie. Database or table queries are predicates built over the queried objects. They are used
with several purposes, like gathering specific information from the object or verify certain integrity issues
for the queried object.
B.1.6. Observatie. The type of logic used in databases is more than binary. Readers interested in
an applicable introduction should also consult [21] (especially for applications in databases) for more
information about ternary logic and application in Oracle.
Ternary logic in CRAN—R statistical software:
AND table TRUE FALSE NA
TRUE TRUE FALSE NA
FALSE FALSE FALSE FALSE
NA NA FALSE NA
OR table TRUE FALSE NA
TRUE TRUE TRUE TRUE
FALSE TRUE FALSE NA
NA TRUE NA NA

ANEXA C
Informatii educationale
C.1. Materiale si locatii disponibile legal
http://www.trillia.com/zakon1.html
http://www.trillia.com/zakon-analysisI.html
http://www.trillia.com/zakon-analysisII.html
265


ANEXA D
Simboluri
267

268
Symbol/Simbol Meaning/Semnificatie Common Usage/Utilizare comuna
N the set of natural numbers natural numbers numere naturale
Z the set of integers integers întregi
Q the set of rational numbers fractions fractii
R the set of real numbers reals numere reale
C the set of complex numbers complex numere complexe
R \Q the set of irrational numbers irrational numere irationale
∈ appartenence ...is an element of... apartenenta
/∈ nonappartenence ...is not an element of... nonapartenenta
⊆ nonstrict inclusion ...is a subset of ... incluziune nestricta
⊂ strict (proper) inclusion ...is a strict (proper) subset of ... incluziune stricta
∅ the empty set void/empty multimea vida
∩ intersection common elements; AND intersectie
∪ reunion OR reuniune
\ difference diferenta
× cross/cartesian productordered pair(s)/
[tuple=a set of ordered pairs]produs cartezian
P (·) powerset of the set of all subsets multimea partilor
e Negation NOT negatie
∨ Disjunction OR disjunctie
∧ Conjunction AND conjunctie
⇒ Implication If...then implicatie
⇐⇒ Equivalence If and only if echivalenta
∃ Existence quantifier There exists/There is cuantificatorul existential
∀ Universal quantifier For all cuantificatorul universal
ANEXA E
Note despre Teoria Economica
E.1. Quantity
Explanations [from [38]]:
• (1)
(a) "A specified or indefinite number or amount"
(b) "A considerable amount or number"
(c) "An exact amount or number"
(2) "The measurable, countable, or comparable property or aspect of a thing"
(3) "Mathematics Something that serves as the object of an operation"
(4)
(a) "Linguistics The relative amount of time needed to pronounce a vowel, consonant, or
syllable"
(b) "The duration of a syllable in quantitative verse"
(5) "Logic The exact character of a proposition in reference to its universality, singularity, or
particularity"
[The American Heritage R©Dictionary of the English Language, Fourth Edition copyright c©2000 by Houghton Miffl in Company.
Updated in 2009. Published by Houghton Miffl in Company. All rights reserved]
(1)
(a) "A specified or definite amount, weight, number, etc."
(b) "(as modifier) a quantity estimate"
(2) "the aspect or property of anything that can be measured, weighed, counted, etc."
(3) "a large or considerable amount"
269

270
(4) (Mathematics) Maths an entity having a magnitude that may be denoted by a numerical
expression
(5) "(Physics / General Physics) Physics a specified magnitude or amount; the product of a
number and a unit"
(6) "(Philosophy / Logic) Logic the characteristic of a proposition dependent on whether it is a
universal or particular statement, considering all or only part of a class"
(7) "(Literature / Poetry) Prosody the relative duration of a syllable or the vowel in it"
[Collins English Dictionary —Complete and Unabridged c© HarperCollins Publishers 1991, 1994, 1998, 2000, 2003]
"Something, such as a number or symbol that represents a number, on which a mathematical
operation is performed"
[The American Heritage R©Science Dictionary Copyright c© 2005 by Houghton Miffl in Company. Published by Houghton Miffl in
Company. All rights reserved]
"an amount or sum of people, things, or animals"
[Dictionary of Collective Nouns and Group Terms. Copyright 2008 The Gale Group, Inc. All rights reserved]
—Thesaurus:
"How much there is or how many there are of something that you can quantify"
"an adequate or large amount"
"the concept that something has a magnitude and can be represented in mathematical ex-
pressions by a constant or a variable"
[Based on WordNet 3.0, Farlex clipart collection. c© 2003-2008 Princeton University, Farlex Inc]
Words with similar meaning:
—Amount [used with nouns which normally have no plural];
—Ample [considered wrong a hundred years ago to represent indefinite quantity; presently
accepted]
—Bunch [when used with a plural noun, used to indicate a feature/features held in common;
may have slang/informal connotation]
—A deal [an undefined, but considerable or large quantity] [e.g. "a deal of trouble"]
271
Particular words:
—Ceiling quantity [an upper limit of quantity]
—Floor quantity [a lower limit of quantity]
—Considerable quantity [e.g. "a fair amount", "a fair quantity"]
—Deficient/insuffi cient quantity [present in less than the quantity needed]
—Less quantity [of uncountable or mass nouns, e.g. affection, power, misery]
—More quantity [of uncountable or mass nouns, e.g. affection, power, misery]
—Fraction [A numerical quantity which is not integer; usually a small/very small part/piece/amount]
—Function [a variable quantity]
—Quantum/Quanta [a quantity which may exist in a minimum [floor] quantity and in [integer]
multiples of the floor quantity]
—Quantum jump [an abrupt transition between one stationary state and another]
—Quantum leap [a sudden large increase]
—Quantitative/Quantitive
—"In quantity" [in considerable amount]
E.2. Worth
Explanations [from [47]]:
worth [as a noun]:
(1) The quality that renders something desirable, useful, or valuable;
(2) Material or market value;
(3) A quantity of something that may be purchased for a specified sum or by a specified means;
(4) Wealth; riches;
(5) Quality that commands esteem or respect; merit;
worth [as an adjective]:
(1) Equal in value to something specified;
(2) Deserving of; meriting;

272
(3) Having wealth or riches amounting to.
[The American Heritage R©Dictionary of the English Language, Fourth Edition copyright c©2000 by Houghton Miffl in Company. Updated in
2009. Published by Houghton Miffl in Company. All rights reserved]
worth [as an adjective]:
(1) worthy of; meriting or justifying;
(2) (Business / Commerce) having a value;
(3) for all one is worth to the utmost; to the full extent of one’s powers or ability;
(4) worth one’s weight in gold extremely helpful, kind, etc.
worth [as a noun]:
(1) high quality; excellence;
(2) (Business / Commerce) value, price;
(3) (Business / Commerce) the amount or quantity of something of a specified value.
[Collins English Dictionary —Complete and Unabridged c© HarperCollins Publishers 1991, 1994, 1998, 2000, 2003]

Bibliografie
[1] Aczel, J.: "Lectures on functional equations and their applications", Academic Press, 1966.
[2] Baz, Sorin; Iftimie, Bogdan; Manu—Iosifescu, Liana; Raischi, Constantin: "Analiza Matematica Culegere de probleme
pentru Anul I", Editura ASE, Bucuresti, 2000.
[3] Amihaesei, C.; Bîrsan, T; Costinescu, O.: "Topologie Generala —Probleme", Editura Didactica si Pedagogica, Bucuresti,
1974.
[4] Bateman, Heather; McAdam, Katy: "Dictionary of Economics", P. H. Collin, 2003.
[5] Berck, Peter; Strøm, Arne; Sydsæter, Knut: Economists’Mathematical Manual 4th ed. Springer, 2005.
[6] Blume, Lawrence; Simon, Carl, P.: Mathematics for Economists, W.W. Norton & Company, 1994.
[7] Birkhoff, Garrett: "METRIC FOUNDATIONS OF GEOMETRY. I", Trans. Amer. Math. Soc. 55 (1944), 465-492.
[8] Bowell, Tracy; Kemp, Gary: "Critical Thinking —A Concise Guide", second edition, Routledge, 2005.
[9] Brian, Nelson: "A Comprehensive Dictionary Of Economics", Abhishek Publications, 2005.
[10] Bonar D.D., Khoury M.J.: Real infinite series Math. Assoc. Am., 2006.
[11] Bourbaki, Nicolas: ÉLÉMENTS DE MATHÉMATIQUE, THÉORIE DES ENSEMBLES, N. Bourbaki et Springer—
Verlag, 2006.
[12] Bourbaki, Nicolas: Topologie Generale: Chapitres I A X, N. Bourbaki et Springer—Verlag, 1971 1981 2007
[13] Bourbaki, Nicolas: "Fonctions D’Une Variable Réelle: Théorie élémentaire", N. Bourbaki et Springer—Verlag, 1964,
1976, 1981, 2007
[14] Burchfield, R. W.; Fowler, Henry Watson: "The New Fowler’s Modern English Usage", Oxford University Press, 1998.
[15] Burago, Dmitri; Burago, Yuri, Dmitrievich; Ivanov, Sergei: "A Course in Metric Geometry", AMS, 2001.
[16] Castillo E.; Iglesias A.; Ruiz-Cobo R.: "Functional equations in applied sciences" Elsevier, 2004.
[17] Chiraleu, Mihai; Draghicescu, Inocentiu; Iambor, Ilie Petre; Mirica, Stefan: "Matematica (M1). manual pentru clasa a
XI—a", Editura Aramis Print, 2002.
[18] Chites, Costel; Petriceanu, Daniel: "Manual pentru clasa 11", Editura Teora, 2002.
[19] Colojoara, Ion: "Analiza Matematica", Editura Didactica si Pedagogica, Bucuresti, 1983.
[20] Craciun, Constantin, C.: "Exercitii si probleme de Analiza Matematica", Tipografia Universitatii Bucuresti, 1984.
[21] de Haan, Lex; Koppelaars, Toon: Applied Mathematics for Database Professionals, Apress, 2007.
273
274
[22] Demidovich B. (ed.) Problems in mathematical analysis, Mir Publishing House, 1970.
[23] Devlin, K.: The Joy of Sets —Fundamentals of Contemporary Set Theory, second edition, Springer, 1993.
[24] Dieudonné, Jean: "Treatise On Analysis", Vol. I—V, Academic Press, 1969, 1972, 1974, 1976, 1977.
[25] Doepke, Matthias; Lehnert, Andreas; Sellgren, Andrew W.: Macroeconomics, 1999.
[26] Ferrar W.L.:A textbook of convergence, Oxford University Press, 1938—1969, 1980.
[27] Green, Jerry, R.; Mas-Colell, Andreu; Whinston, Michael, D.: "Microeconomic_Theory", Oxford University Press,
1995.
[28] Hardy, Darel; Richman, Fred; Walker, Carol; Wisner, Robert: "Calculus: Understanding Its Concepts and Methods",
http://www.mackichan.com/products/calculusbook.html, last accessed on 13.02.2012.
[29] Hestenes M.R.: Optimization theory: the finite dimensional case, Wiley, 1975.
[30] Jehle, Geoffrey, A.; Reny, Philip, J.: "Advanced Microeconomic Theory", Second Edition, Copyright owned by the
authors, 2001.
[31] Karris, Steven, T.: Mathematics for Business, Science and Technology with MATLAB and Excel computations, 3rd
edition, Orchard Publications, 2007.
[32] Krantz, Steven, George; Parks, Harold, R.: The Implicit Function Theorem: History, Theory, and Applications,
Birkhäuser, 2002.
[33] Landau, Edmund: "Foundations of Analysis: The Arithmetic of Whole, Rational, Irrational, and Complex Numbers —
A Supplement to Text-Books on the Differential and Integral Calculus", 1929, Third Edition of English Translation by
F. Steinhardt —Columbia University, Chelsea Publishing Company, New—York, 1966.
[34] Ljungqvist L., Sargent T.: Recursive Macroeconomic Theory, MIT, Second Edition, 2000.
[35] Mascull, Bill: "Business Vocabulary in Use - Intermediate", Cambridge University Press, 2005.
[36] Muresan, Marian: "A Concrete Approach to Classical Analysis", Springer, 2009.
[37] Precupanu, Anca: Analiza Matematica —Functii reale, EDP, 1976.
[38] http://www.thefreedictionary.com/quantity, last accessed on 01.03.2011.
[39] Rudin, W.: Principles of Mathematical Analysis, McGraw—Hill, 1976.
[40] Safier, Fred: "Schaum’s Outline of PreCalculus", 2nd Ed., McGraw Hill Professional, 2008.
[41] Searcoid, M.: "Metric Spaces", Springer, 2007.
[42] Lucas, R., E.; Stokey, N.; with Prescott, E., C.: Recursive Methods in Economics Dynamics, Harvard University Press,
1989.
[43] Rutherford, Donald: "Routledge Dictionary of Economics", Routledge, 1995, 2002.
[44] Statt, David, A.: "Concise Dictionary of Business Management", Routledge, 1999.
[45] Varian, Hal: "Microeconomic Analysis", Third Edition, W. W. Norton & Company, Inc., 1992.

275
[46] Weitzman, Martín L.: "Income, Wealth, and the Maximum Principle", Harvard University Press, 2003.
[47] http://www.thefreedictionary.com/worth, last accessed on 08.03.2011.