generalitĂŢi - resist.pub.ro · modul în care sarcinile sunt transmise şi distribuite pe...
TRANSCRIPT
1
GENERALITĂŢI
Proprietăţile mecanice ale materiei au constituit obiect de studiu
încă din timpurile de început ale civilizaţiei umane. În particular,
materialele, cele din care omul îşi confecţiona diferite bunuri, au
început să fie dezvoltate din vremuri imemoriale, prin olărit, ţesături
şi mai apoi, prin prelucrarea metalelor neferoase, în epoca bronzului.
Se poate spune că istoria descoperirilor prin care diferitele “materii
prime” au fost transformate în “materiale” utile omului, este însăşi
istoria civilizaţiei.
Prin acest efort s-a căutat izolarea acelor proprietăţi ale
diferitelor materiale, care se dovedeau cele mai utile. Mai târziu,
obiectivul a fost optimizarea materialelor, adică modificarea
structurii lor cu scopul de a le îmbunătăţi una sau alta dintre
proprietăţi. De exemplu, vânătoarea a devenit mai eficace atunci
când vârfurile de săgeţi au fost făcute din silex, o piatră care putea fi
spartă în aşa fel încât să formeze muchii şi vârfuri ascuţite. Nu orice
piatră însă putea fi prelucrată astfel (prin mijloacele din acea vreme).
Neîndoielnic, întrebarea “de ce numai anumite pietre au această
proprietate” a apărut în mintea omului primitiv, dar răspunsul avea să
se lase aşteptat câteva milenii.
Un alt exemplu interesant din perspectivă istorică este inventarea
şi perfecţionarea oţelurilor. Aceasta s-a desfăşurat pe parcursul a
câtorva milenii, cea mai rapidă evoluţie înregistrându-se, desigur, în
ultimii aproximativ 150 de ani. De-a lungul acestei istorii, efortul
principal a fost îndreptat spre îmbunătăţirea rezistenţei materialului la
diverse solicitări; oţelurile trebuiau să susţină sarcini din ce în ce mai
mari înainte de rupere. Cu timpul, din întâmplare sau prin diverse
încercări empirice, s-au obţinut oţeluri pentru care, pe măsură ce
rezistenţa se îmbunătăţea, deformaţiile erau mai mici. În limbajul de
astăzi am spune că, între ductilitate şi rezistenţa la rupere există o
relaţie inversă. Mai târziu s-a observat că această situaţie nu este
specifică oţelurilor, ci este o caracteristică a majorităţii materialelor
inginereşti.
În prezent, structuri foarte complicate sunt construite din
materialele cele mai diverse. Multe dintre acestea sunt supuse la
2
încărcări mecanice semnificative şi deci proprietăţile mecanice ale
ansamblului sunt de maximă importanţă pentru buna lui funcţionare.
În acest sens se pot da multe exemple clasice, unele evidente: poduri,
supuse la propria greutate, la greutatea vehiculelor care le traversează
dar şi la solicitări produse de vânt şi de cutremure; structurile de
rezistenţă ale construcţiilor, care sunt supuse, în linii mari, la aceleaşi
tipuri de solicitări statice şi dinamice (variabile în timp), structuri
industriale de mari dimensiuni, cum ar fi cuptoarele de topire a
metalelor, care sunt supuse atât la solicitări mecanice prin greutatea
proprie, cât şi la solicitări termice, prin cicluri de încălzire – răcire.
Alte exemple, mai puţin discutate, de structuri intens solicitate
mecanic, sunt sistemele micro – electro – mecanice (micro –
electromechanical systems, MEMS) şi sistemul osos al omului şi
animalelor. MEMS – urile sunt sisteme mecanice formate din bare şi
membrane care sunt construite (“gravate”) pe un cip de siliciu, în
timp ce partea electronică de comandă şi control este integrată pe
acelaşi cip. Ele sunt folosite în special ca senzori de presiune şi
acceleraţie, dar pot fi folosite şi în alte scopuri, de exemplu, ca
actuatori microscopici. Aceste structuri sunt intens solicitate
mecanic, adeseori până aproape de rupere, în condiţii dinamice
dificile (la rezonanţă). Ele sunt însă deosebit de rezistente deoarece
materialul din care sunt realizate este un mono – cristal. O situaţie
similară există la sistemul osos. Acesta este structurat la multiple
scări şi s-a dezvoltat astfel încât să preia sarcinile cu maximă
eficienţă şi consum minim de material.
Practica inginerească impune, în general, două tipuri de restricţii
asupra comportării mecanice a structurilor. Pe de o parte, ele nu
trebuie să cedeze sub sarcinile normale de lucru (sau chiar sub sarcini
mai mari, aplicate accidental), iar pe de altă parte nu trebuie să se
deformeze excesiv. Prima condiţie este evidentă şi se aplică în
majoritatea cazurilor. A doua este necesară numai în unele cazuri. Un
astfel de exemplu îl constituie paletele rotoarelor turbinelor de abur
sau ale motoarelor de avion (turbine cu gaz). Acestea sunt supuse la
încovoiere de fluidul în mişcare, dar şi la întindere, de o importantă
forţă centrifugă datorată vitezelor unghiulare foarte mari cu care se
învârt rotoarele. În plus, ansamblul lucrează la temperaturi ridicate.
Condiţia de rezistenţă la rupere pentru aceste structuri este evident

3
necesară. În plus, este necesar ca paletele să nu se deformeze (să-şi
mărească lungimea) în timpul funcţionării mai mult decât distanţa
dintre vârful lor şi carcasă, pentru a evita ruperea paletelor şi / sau a
carcasei. Această toleranţă este însă mică, deoarece un spaţiu mare
între palete şi carcasă duce la pierderi inadmisibile ale fluidului de
lucru.
Aceste două condiţii, cea de rezistenţă şi cea de deformaţie, fac
obiectul studiilor mecanicii materialelor şi structurilor, cunoscută şi
ca rezistenţa materialelor sau ca mecanica solidului deformabil.
Este necesar să se sublinieze distincţia făcută mai sus între
comportarea materialelor şi cea a structurilor. Desigur, a doua o
include pe prima. În plus, răspunsul structurilor, compuse din multe
elemente (componente, piese, organe) încărcate complex, depinde de
modul în care sarcinile sunt transmise şi distribuite pe fiecare
element, de geometria structurii, a încărcării şi a modului în care
structura este susţinută (rezemată). Ruperea este, în esenţă, un proces
microscopic, local, adică ea este produsă de sarcini şi solicitări
locale, care depind de întreaga structură şi de încărcarea ei globală.
Există astfel o ierarhie de scări spaţiale la care studiul unei structuri
trebuie să se efectueze: de la scara globală, de exemplu, a unui întreg
pod, până la scara fiecărui element, de exemplu, cea a fiecărui nit al
podului respectiv. Această ierarhie poate fi extinsă spre scările mai
mici, spre microstructură, mergând în intimitatea materialului din
care sunt construite elementele cele mai solicitate. Sarcina
inginerului este aceea de a identifica această ierarhie şi de a elabora
modelul de calcul corespunzător. Obiectivul principal al disciplinei
rezistenţa materialelor este de a prezenta conceptele şi metodologiile
de bază în acest proces.
Tipuri de comportări mecanice ale materialelor
În acest paragraf se va defini răspunsul generic al unui material la
solicitări externe. Aceasta este o restrângere a discuţiei de la
răspunsul unei întregi structuri, la cel al materialului din care ea este
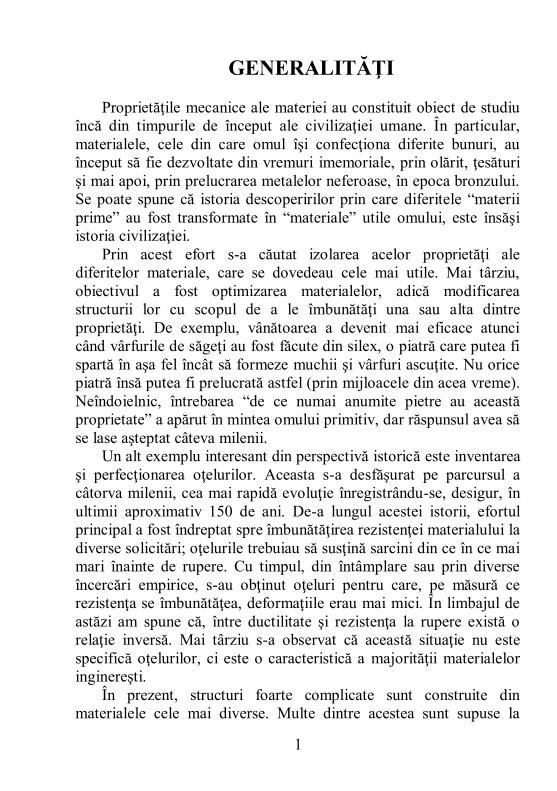
realizată. Este ca şi cum s-ar porni de la scara unei structuri încărcată
cu sarcini complexe (fig. 1.a),
4
s-ar face un “zoom-
in” la scara uneia
dintre componentele
sale (fig. 1.b) şi apoi
un alt “zoom-in” prin
care se izolează un
mic volum de
material din acea
componentă (fig.
1.c). Se presupune că
acest volum de
material, de exemplu
un cub, este încărcat cu tensiuni constante pe toate feţele sale, adică
este suficient de mic încât gradienţii (variaţiile tensiunii de la un
punct la altul) sunt neglijabili. Acest volum de material reprezintă un
“punct material” la scara elementului de structură din figura 1.b.
Răspunsul materialului la solicitarea din figura 1.c se poate
determina experimental. Pentru aceasta se folosesc epruvete cu
secţiuni circulare sau dreptunghiulare, care sunt solicitate la întindere
sau la compresiune. Una dintre condiţiile de bază ale unui astfel de
test este ca tensiunile să fie constante în întregul volum de material
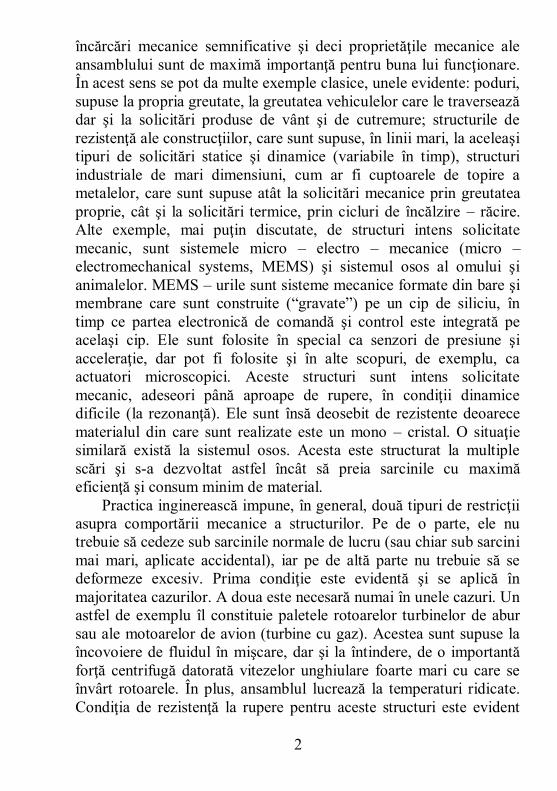
testat. O epruvetă cilindrică tipică este reprezentată schematic în
figura 2. Ea are trei zone: două capete de prindere şi o zonă
centrală. Cele două capete au secţiune mai mare decât zona centrală,
astfel încât
Figura 2
tensiunile aici să aibă valori mai reduse. La capete se prinde epruveta
în maşina de încercat. Zona centrală a epruvetei este cea în care se
face măsurarea. Ea este de obicei prelucrată foarte fin (la rugozităţi
mici) şi are diametrul constant d0 (dacă secţiunea este circulară), pe o
Figura 1
5
lungime Lc, ceea ce asigură uniformitatea tensiunilor în întregul
volum de material.
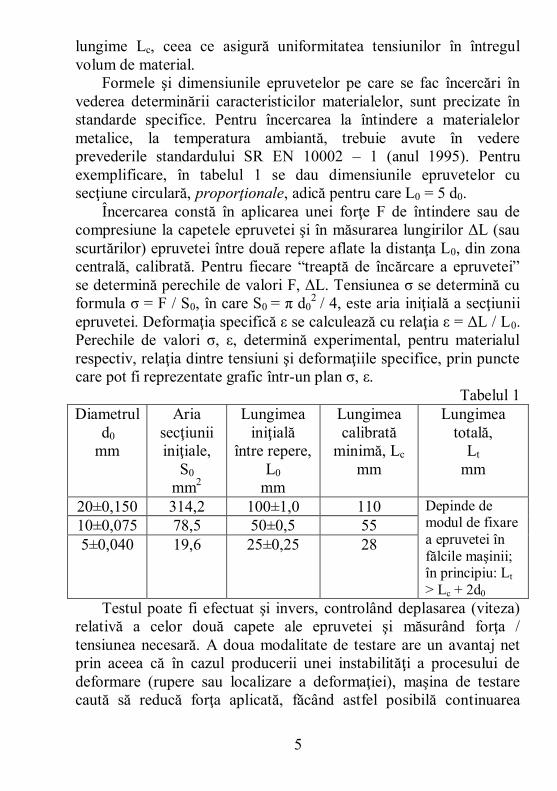
Formele şi dimensiunile epruvetelor pe care se fac încercări în
vederea determinării caracteristicilor materialelor, sunt precizate în
standarde specifice. Pentru încercarea la întindere a materialelor
metalice, la temperatura ambiantă, trebuie avute în vedere
prevederile standardului SR EN 10002 – 1 (anul 1995). Pentru
exemplificare, în tabelul 1 se dau dimensiunile epruvetelor cu
secţiune circulară, proporţionale, adică pentru care L0 = 5 d0.
Încercarea constă în aplicarea unei forţe F de întindere sau de
compresiune la capetele epruvetei şi în măsurarea lungirilor ΔL (sau
scurtărilor) epruvetei între două repere aflate la distanţa L0, din zona
centrală, calibrată. Pentru fiecare “treaptă de încărcare a epruvetei”
se determină perechile de valori F, ΔL. Tensiunea σ se determină cu
formula σ = F / S0, în care S0 = π d02
/ 4, este aria iniţială a secţiunii
epruvetei. Deformaţia specifică ε se calculează cu relaţia ε = ΔL / L0.
Perechile de valori σ, ε, determină experimental, pentru materialul
respectiv, relaţia dintre tensiuni şi deformaţiile specifice, prin puncte
care pot fi reprezentate grafic într-un plan σ, ε.
Tabelul 1
Diametrul
d0
mm
Aria
secţiunii
iniţiale,
S0
mm2
Lungimea
iniţială
între repere,
L0
mm
Lungimea
calibrată
minimă, Lc
mm
Lungimea
totală,
Lt
mm
20±0,150 314,2 100±1,0 110 Depinde de modul de fixare
a epruvetei în
fălcile maşinii; în principiu: Lt
> Lc + 2d0
10±0,075 78,5 50±0,5 55
5±0,040 19,6 25±0,25 28
Testul poate fi efectuat şi invers, controlând deplasarea (viteza)
relativă a celor două capete ale epruvetei şi măsurând forţa /
tensiunea necesară. A doua modalitate de testare are un avantaj net
prin aceea că în cazul producerii unei instabilităţi a procesului de
deformare (rupere sau localizare a deformaţiei), maşina de testare
caută să reducă forţa aplicată, făcând astfel posibilă continuarea
6
testului şi în regimul post-critic. În cazul celuilalt tip de test, maşina
caută să menţină forţa constantă, epruveta fiind distrusă catastrofic
(ruptă) în momentul atingerii punctului critic.
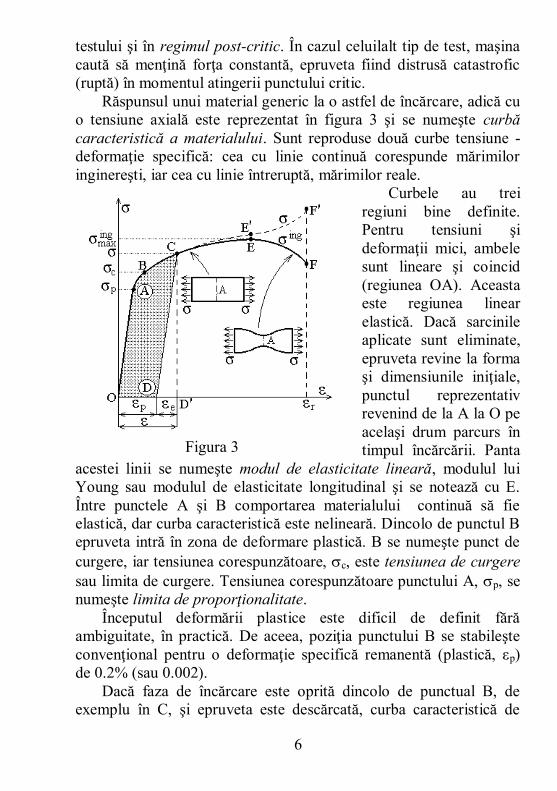
Răspunsul unui material generic la o astfel de încărcare, adică cu
o tensiune axială este reprezentat în figura 3 şi se numeşte curbă
caracteristică a materialului. Sunt reproduse două curbe tensiune -
deformaţie specifică: cea cu linie continuă corespunde mărimilor
inginereşti, iar cea cu linie întreruptă, mărimilor reale.
Curbele au trei
regiuni bine definite.
Pentru tensiuni şi
deformaţii mici, ambele
sunt lineare şi coincid
(regiunea OA). Aceasta
este regiunea linear
elastică. Dacă sarcinile
aplicate sunt eliminate,
epruveta revine la forma
şi dimensiunile iniţiale,
punctul reprezentativ
revenind de la A la O pe
acelaşi drum parcurs în
timpul încărcării. Panta
acestei linii se numeşte modul de elasticitate lineară, modulul lui
Young sau modulul de elasticitate longitudinal şi se notează cu E.
Între punctele A şi B comportarea materialului continuă să fie
elastică, dar curba caracteristică este nelineară. Dincolo de punctul B
epruveta intră în zona de deformare plastică. B se numeşte punct de
curgere, iar tensiunea corespunzătoare, c, este tensiunea de curgere
sau limita de curgere. Tensiunea corespunzătoare punctului A, p, se
numeşte limita de proporţionalitate.
Începutul deformării plastice este dificil de definit fără
ambiguitate, în practică. De aceea, poziţia punctului B se stabileşte
convenţional pentru o deformaţie specifică remanentă (plastică, εp)
de 0.2% (sau 0.002).
Dacă faza de încărcare este oprită dincolo de punctual B, de
exemplu în C, şi epruveta este descărcată, curba caracteristică de
Figura 3
7
descărcare parcurge linia CD. Aceasta este paralelă cu OA şi deci are
panta E. Descărcarea este elastică. Deformaţia specifică totală în C,
, este compusă dintr-o componentă elastică, e, şi una plastică, p.
După descărcare, deformaţia remanentă a epruvetei are valoarea p.
Această comportare a materialului subliniază cele prezentate
anterior, referitor la faptul că deformaţia elastică şi cea plastică se
produc în paralel. Materialul continuă să se deformeze elastic chiar şi
atunci când punctul caracteristic este dincolo de B. Tensiunea în
punctul curent este σ = Ee. Această observaţie este însă de puţin
ajutor în practică pentru că ceea ce se măsoară este deformaţia
specifică totală, , şi nu componentele ei.
Dacă epruveta este reîncărcată din punctul D, curba urmează
linia DC, iar punctul de curgere se mută în C. Tensiunea de curgere,
c a crescut după deformarea plastică. Se spune că materialul s-a
ecruisat. Acest efect poate fi folosit pentru creşterea durităţii
(hardness) şi a rezistenţei (strength) materialelor inginereşti metalice.
În continuare, punctul caracteristic urmează curba CE, ca şi cum
deformarea epruvetei nu ar fi fost întreruptă.
Deformaţia plastică este uniformă în întregul volum al zonei
centrale a epruvetei, iar aria secţiunii transversale scade continuu, pe
măsură ce lungimea epruvetei creşte. Se constată că variaţia de
volum corespunzătoare deformaţiei plastice este nulă. Acest mod de
deformaţie este reprezentat schematic în figura 3. La un moment dat
însă, deformaţia se localizează într-o gâtuire a epruvetei. În această
zonă aria secţiunii transversale scade dramatic, în timp ce forţa care
se aplică epruvetei este aproximativ constantă. În consecinţă,
tensiunile reale în zona respectivă cresc rapid, iar în afara zonei de
localizare rămân aproximativ constante. Aceasta corespunde
“ridicării” rapide a curbei trasată cu linie întreruptă, între punctele E
şi F, ajungând respectiv în E' şi F'. Valorile mari ale tensiunilor din
zona de localizare (gâtuire) duc, în final, la ruperea epruvetei. Pentru
un material ductil, procesul are loc prin “cavitaţie,” adică prin
nucleerea unui gol pe axa epruvetei, gol care creşte pe măsură ce
deformaţia continuă de la E la F. În punctul F, “ligamentele” de
material delimitate de acest gol axial şi suprafaţa externă a epruvetei
cedează prin forfecare.
8
Curba notată σing
, care reprezintă mărimile inginereşti, coboară
dincolo de punctul E. Această comportare este posibilă numai în
cazul în care viteza de deplasare relativă a celor două capete ale
epruvetei este controlată în timpul testului (nu forţa aplicată). Când
deformaţia se localizează, deplasarea creşte brusc, iar maşina reduce
forţa aplicată.
O altă observaţie importantă cu privire la curbele din figura 3
este legată de energia de deformaţie. Energia de deformaţie este
echivalentă cu aria de sub curba caracteristică. În cazul de faţă se
reduce la un singur termen pentru că sunt aplicate numai tensiuni
normale, pe o singură direcţie şi xxdW . Energia totală stocată
şi disipată în timpul încărcării (în punctul C), este aria de sub curba
OABC (haşurată în fig. 3). Această energie este generată de maşina
de încercare, sub formă de lucru mecanic. După descărcare (linia
CD), aria triunghiului CDD' reprezintă energia elastică care este
“recuperată.” Aceasta este energia de deformaţie care a fost stocată
în interiorul materialului în timpul încărcării. Aria OABCD
reprezintă energia disipată în procesul de deformare plastică. Cea mai
mare parte (~ 98 %) din această energie este transferată mediului sub
formă de căldură. Este important de notat că pe măsură ce punctul C
se apropie de E, cea mai mare parte din lucrul mecanic efectuat de
sistemul de încărcare este disipată în procesul de deformare plastică.
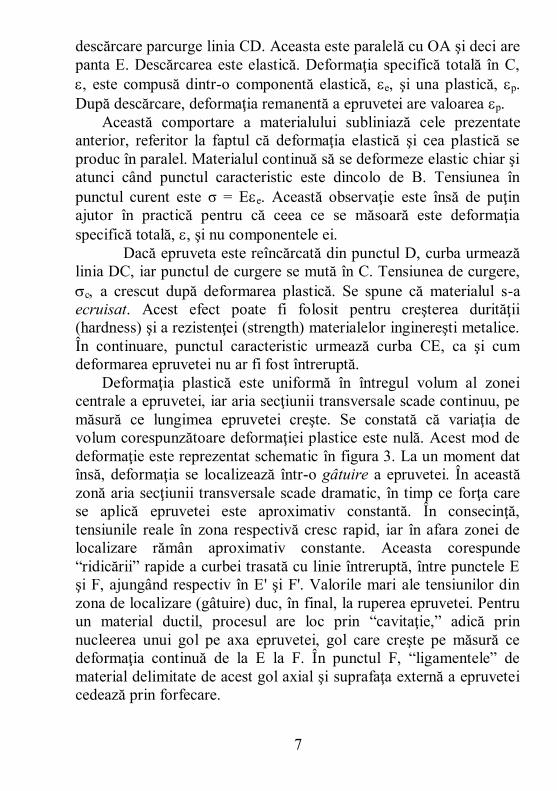
Figura 4
Nu toate materialele răspund identic la solicitările mecanice. De
fapt, există o foarte mare variabilitate în acest sens. Un exemplu este
reprezentat în figura 4, care conţine două curbe caracteristice: pentru

9
un oţel carbon şi pentru aluminiu pur (policristalin). Curba
corespunzătoare oţelului carbon prezintă câteva particularităţi în
vecinătatea punctului de curgere. Imediat după începutul curgerii
(deformării plastice) tensiunea scade brusc, astfel încât se pot defini
două puncte (limite) de curgere: unul superior şi unul inferior.
Urmează un scurt platou şi o zonă de ecruisare. Curba
corespunzătoare aluminiului nu are particularităţi deosebite, fiind
similară cu cea generică, prezentată în figura 3.
Încercările de laborator prin care au fost obţinute curbele din
figura 4, au fost făcute în mediul ambiant şi la temperatura camerei.
Este important de observat că, dat fiind că temperatura de topire
a diferitelor materiale este diferită, nu ne putem aştepta ca răspunsul
măsurat la o temperatura dată să fie similar. Pentru a aduce discuţia
la un numitor comun, adică pentru a putea compara diferite
materiale, se foloseşte aşa numita “homologous temperature” Th
definită ca raportul dintre temperatura curentă T şi temperatura de
topire a materialului respectiv Tt (pentru polimeri se foloseşte
temperatura de tranziţie “glass transition temperature” – de
vitrificare) Th = T/Tt. Pentru cele două materiale în discuţie,
temperaturile Tt sunt: 1538o
C pentru oţelul carbon şi 660o
C pentru
Al. Deci la temperatura camerei (200 C), temperaturile “omoloage”
Th sunt 0.013 şi respectiv 0.03. Trebuie menţionat că totuşi, chiar
dacă încercările ar fi fost făcute la aceeaşi valoare a homologous
temperature Th , curbele caracteristice ar fi fost diferite. Aceasta se
datorează faptului că microstructurile şi mecanismele de deformare
sunt diferite de la material la material.
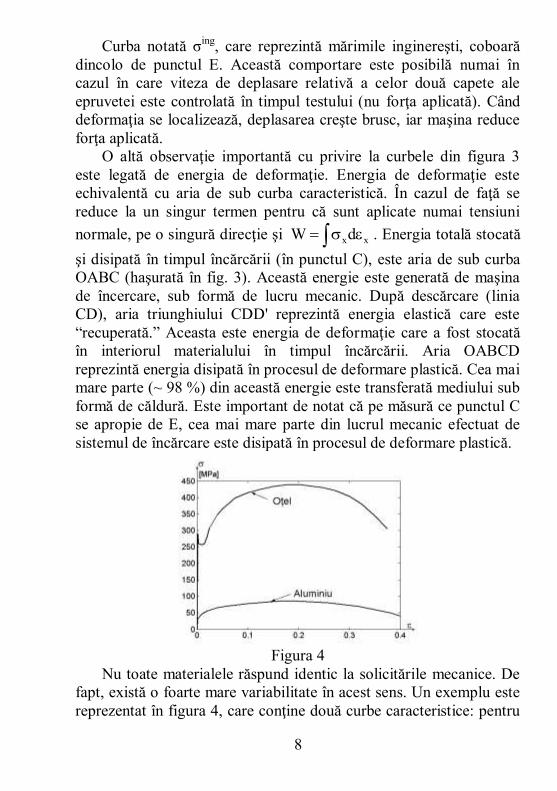
Efectul temperaturii asupra comportării mecanice a unui material
dat este reprezentat calitativ în figura 5. Creşterea temperaturii are
următoarele consecinţe: modulul de elasticitate scade uşor (panta
curbei caracteristice în zona elastică este mai redusă), punctul de
curgere se mută la tensiuni mai mici şi deformaţia la rupere creşte
simţitor. Pe acest efect se bazează prelucrarea la cald a materialelor.
Prin încălzire la o temperatură apropiată de temperatura de topire,
materialul devine mult mai ductil şi curge la tensiuni mult mai mici
decât la temperaturi coborâte.
10
Figura 5
Problema poate fi pusă şi invers: o structură construită dintr-un
material care este ductil la temperaturi de lucru normale poate deveni
fragilă dacă temperatura coboară accidental sub ceea ce este
considerat normal la proiectare. Un exemplu proeminent în acest sens
este cel al unei serii de accidente petrecute în timpul celui de-al
doilea război mondial, în care nave de război s-au rupt pur şi simplu
în două, aparent fără o cauză bine determinată, atunci când intrau în
zona arctică a oceanului Atlantic. Cauza a fost elucidată mai târziu,
când s-a descoperit că oţelul din care erau construite navele trecea
printr-o tranziţie de fragilizare la temperaturi în jurul celei de –10 oC.
Acest şir de evenimente tragice a constituit în mare măsură factorul
declanşator pentru iniţierea studiilor care au dus la naşterea
disciplinei Mecanica Ruperii.
Alte utilizări practice ale efectului de fragilizare a materialelor,
asociat cu scăderea temperaturii, sunt în biologie şi în producţia de
micro şi nano-pulberi. În biologie, ţesuturile care trebuie studiate la
microscop se îngheaţă pentru a putea fi tăiate (microtome) în felii
subţiri şi pregătite pentru observaţie. La fel, una dintre metodele de
producţie a pulberilor este cea criogenică: materialul respectiv se
răceşte la temperaturi sub –100 oC după care este supus unei
operaţiuni de aglomerare (ball milling). Aceste pulberi (ceramice sau
metalice) pot fi apoi folosite pentru a produce aliaje (prin sinterizare)
sau materiale compozite (prin compactare).
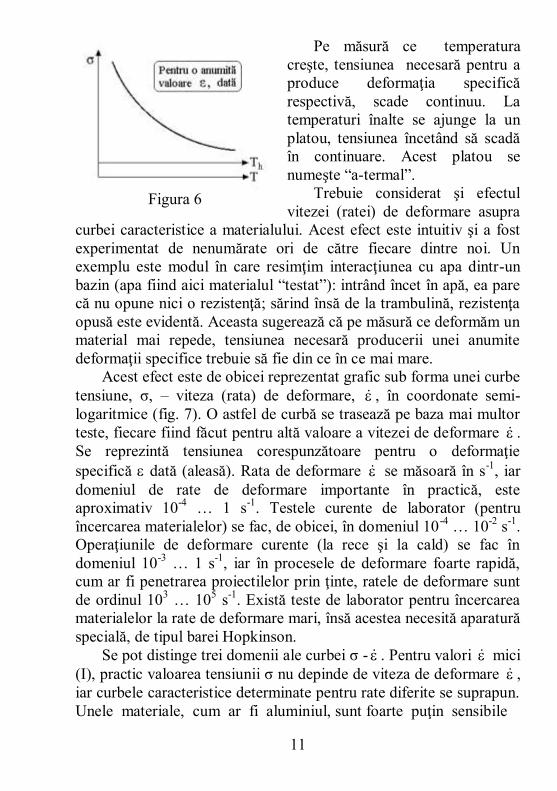
Modalitatea standard de reprezentare grafică a efectului
temperaturii asupra curgerii materialelor este curba, σ –T, tensiune –
temperatură (sau temperatura Th), pentru o deformaţie specifică ε
dată. Un exemplu generic este prezentat în figura 6.
11
Pe măsură ce temperatura
creşte, tensiunea necesară pentru a
produce deformaţia specifică
respectivă, scade continuu. La
temperaturi înalte se ajunge la un
platou, tensiunea încetând să scadă
în continuare. Acest platou se
numeşte “a-termal”.
Trebuie considerat şi efectul
vitezei (ratei) de deformare asupra
curbei caracteristice a materialului. Acest efect este intuitiv şi a fost
experimentat de nenumărate ori de către fiecare dintre noi. Un
exemplu este modul în care resimţim interacţiunea cu apa dintr-un
bazin (apa fiind aici materialul “testat”): intrând încet în apă, ea pare
că nu opune nici o rezistenţă; sărind însă de la trambulină, rezistenţa
opusă este evidentă. Aceasta sugerează că pe măsură ce deformăm un
material mai repede, tensiunea necesară producerii unei anumite
deformaţii specifice trebuie să fie din ce în ce mai mare.
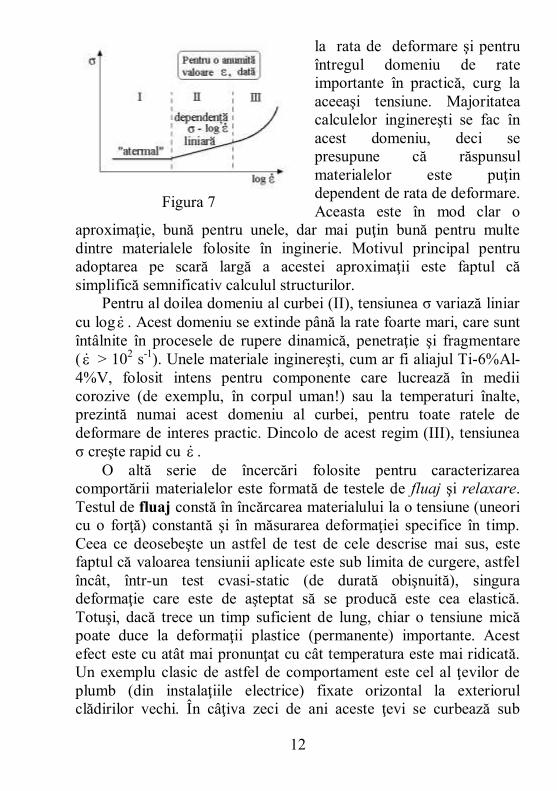
Acest efect este de obicei reprezentat grafic sub forma unei curbe
tensiune, σ, – viteza (rata) de deformare, , în coordonate semi-
logaritmice (fig. 7). O astfel de curbă se trasează pe baza mai multor
teste, fiecare fiind făcut pentru altă valoare a vitezei de deformare .
Se reprezintă tensiunea corespunzătoare pentru o deformaţie
specifică dată (aleasă). Rata de deformare se măsoară în s-1
, iar
domeniul de rate de deformare importante în practică, este
aproximativ 10-4
… 1 s-1
. Testele curente de laborator (pentru
încercarea materialelor) se fac, de obicei, în domeniul 10-4
… 10-2
s-1
.
Operaţiunile de deformare curente (la rece şi la cald) se fac în
domeniul 10-3
… 1 s-1
, iar în procesele de deformare foarte rapidă,
cum ar fi penetrarea proiectilelor prin ţinte, ratele de deformare sunt
de ordinul 103 … 10
5 s
-1. Există teste de laborator pentru încercarea
materialelor la rate de deformare mari, însă acestea necesită aparatură
specială, de tipul barei Hopkinson.
Se pot distinge trei domenii ale curbei σ - . Pentru valori mici
(I), practic valoarea tensiunii σ nu depinde de viteza de deformare ,
iar curbele caracteristice determinate pentru rate diferite se suprapun.
Unele materiale, cum ar fi aluminiul, sunt foarte puţin sensibile
Figura 6
12
la rata de deformare şi pentru
întregul domeniu de rate
importante în practică, curg la
aceeaşi tensiune. Majoritatea
calculelor inginereşti se fac în
acest domeniu, deci se
presupune că răspunsul
materialelor este puţin
dependent de rata de deformare.
Aceasta este în mod clar o
aproximaţie, bună pentru unele, dar mai puţin bună pentru multe
dintre materialele folosite în inginerie. Motivul principal pentru
adoptarea pe scară largă a acestei aproximaţii este faptul că
simplifică semnificativ calculul structurilor.
Pentru al doilea domeniu al curbei (II), tensiunea σ variază liniar
cu log . Acest domeniu se extinde până la rate foarte mari, care sunt
întâlnite în procesele de rupere dinamică, penetraţie şi fragmentare
( > 102 s
-1). Unele materiale inginereşti, cum ar fi aliajul Ti-6%Al-
4%V, folosit intens pentru componente care lucrează în medii
corozive (de exemplu, în corpul uman!) sau la temperaturi înalte,
prezintă numai acest domeniu al curbei, pentru toate ratele de
deformare de interes practic. Dincolo de acest regim (III), tensiunea
σ creşte rapid cu .
O altă serie de încercări folosite pentru caracterizarea
comportării materialelor este formată de testele de fluaj şi relaxare.
Testul de fluaj constă în încărcarea materialului la o tensiune (uneori
cu o forţă) constantă şi în măsurarea deformaţiei specifice în timp.
Ceea ce deosebeşte un astfel de test de cele descrise mai sus, este
faptul că valoarea tensiunii aplicate este sub limita de curgere, astfel
încât, într-un test cvasi-static (de durată obişnuită), singura
deformaţie care este de aşteptat să se producă este cea elastică.
Totuşi, dacă trece un timp suficient de lung, chiar o tensiune mică
poate duce la deformaţii plastice (permanente) importante. Acest
efect este cu atât mai pronunţat cu cât temperatura este mai ridicată.
Un exemplu clasic de astfel de comportament este cel al ţevilor de
plumb (din instalaţiile electrice) fixate orizontal la exteriorul
clădirilor vechi. În câţiva zeci de ani aceste ţevi se curbează sub
Figura 7
13
propria greutate: materialul curge. Un fenomen similar este observat
şi la alte materiale, “mai dure”, cum ar fi oţelurile, dar devine
măsurabil numai la temperaturi relativ ridicate (Th ~ 0.8).
Testul de relaxare a tensiunilor este oarecum opus celui de fluaj.
La acest test materialul este încărcat la o tensiune, după care
deformaţia specifică este menţinută constantă. Cel mai simplu
exemplu este cel al strângerii cu şuruburi a două flanşe ale unei
conducte. În condiţii normale (discutate mai sus), forţa (tensiunea)
din şuruburi nu variază. Pentru multe materiale, însă, se constată că
tensiunea scade în timp, iar îmbinarea luată ca exemplu se slăbeşte.
Ca şi în cazul fluajului, relaxarea este mai pronunţată pe măsură ce
temperatura creşte.
Originile fizice ale comportării mecanice a materialelor
Aşa cum s-a menţionat mai sus, comportarea mecanică a
materialelor este extrem de variată. În aceleaşi condiţii de mediu şi
încărcare, materiale diferite se comportă diferit. Este important a se
înţelege ce anume determină acest fapt. Unul dintre factori a fost deja
discutat: raportul dintre temperatura la care se face testul şi cea de
topire, deci cât de aproape este materialul respectiv de punctul la care
încetează să mai fie un corp solid. Cei mai importanţi factori, însă,
sunt legaţi de structura internă a materialului.
Această legătură între microstructura şi comportarea mecanică a
materialelor a fost un obiectiv pentru câteva generaţii de cercetători
în domeniu. Ea formează obiectul de studiu al metalurgiei fizice. Mai
recent, s-a demonstrat faptul că fenomenologia observată la scară
macroscopică este determinată nu numai de ce se întâmplă la scară
microscopică (de ordinul a 1-10 m, de exemplu), ci de întreaga
ierarhie de scări spaţiale, de la cea atomică până la cea macroscopică.
A devenit evident că o înţelegere reală şi un control efectiv asupra
comportării materialelor (din punct de vedere mecanic, termic,
electronic, magnetic etc) este posibil numai înţelegându-l în
integralitatea lui. Astfel, ştiinţa materialelor a trecut din sfera
metalurgiei fizice în cea a fizicii corpului solid şi chiar a fizicii
cuantice şi a mecanicii statistice. În ziua de astăzi, bazele teoretice
ale dezvoltării materialelor noi fac parte mai mult din fizică decât din
inginerie.
14
În cele ce urmează se vor prezenta numai câteva aspecte,
esenţiale, pe baza cărora să se poată înţelege de ce materialele se
comportă elastic şi plastic şi ce fenomene fizice controlează această
comportare. Pentru aceasta este necesar să coborâm până la scara
atomică sau moleculară şi să renunţăm la descrierea de mediu
continuu a corpului solid, cu care suntem obişnuiţi. La acest nivel,
corpurile trebuie privite ca fiind medii discrete, compuse din atomi
şi/sau molecule, care interacţionează unele cu altele, prin câmpuri.
Pentru simplitatea discuţiei, se va considera un material mono-
atomic, aşa cum sunt toate metalele.
La scara atomică astfel de materiale (metale, ceramici) au
aspectul unei reţele cristaline. Atomii sunt aşezaţi în poziţii specifice
în reţea, de exemplu, în nodurile acesteia. Reţelele cristaline sunt
clasificate în 6 tipuri sau singonii (cubic, hexagonal, tetragonal,
ortorombic, monoclinic şi romboedric). Cele mai multe materiale
inginereşti au reţele fie cubice, fie hexagonale. Singonia cubică are
patru clase: cubic simplu, care nu se întâlneşte în natură în condiţii
normale, cubic cu feţe centrate (de exemplu Al, Ni), cubic cu volum
centrat (de exemplu Fe, V) şi cubic de tip diamant (de exemplu Si,
Ge). Dintre materialele cu reţele hexagonale se pot menţiona Zn şi
Mg. Detalii cu privire la aceste aspecte se pot găsi în tratatele de
cristalografie.
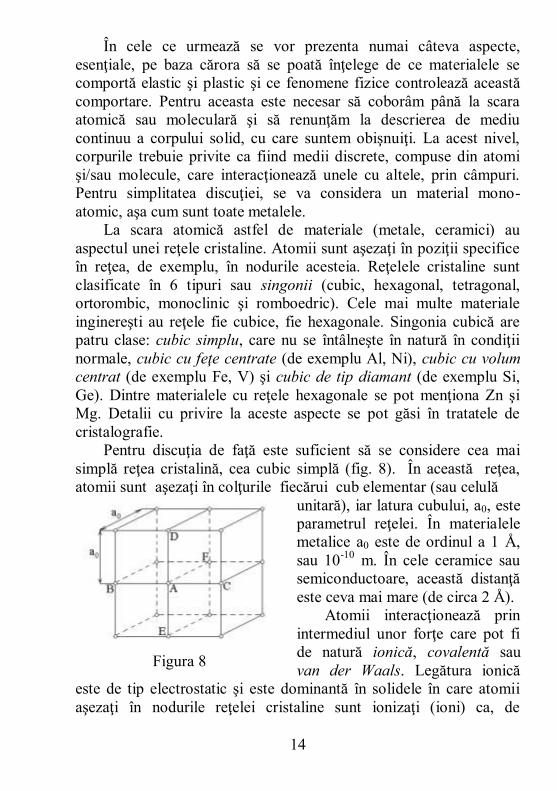
Pentru discuţia de faţă este suficient să se considere cea mai
simplă reţea cristalină, cea cubic simplă (fig. 8). În această reţea,
atomii sunt aşezaţi în colţurile fiecărui cub elementar (sau celulă
unitară), iar latura cubului, a0, este
parametrul reţelei. În materialele
metalice a0 este de ordinul a 1 Å,
sau 10-10
m. În cele ceramice sau
semiconductoare, această distanţă
este ceva mai mare (de circa 2 Å).
Atomii interacţionează prin
intermediul unor forţe care pot fi
de natură ionică, covalentă sau
van der Waals. Legătura ionică
este de tip electrostatic şi este dominantă în solidele în care atomii
aşezaţi în nodurile reţelei cristaline sunt ionizaţi (ioni) ca, de
Figura 8
15
exemplu, la sarea de bucătărie (NaCl). Aceasta este o legătură
puternică, care se exercită la distanţă mare. Legătura covalentă se
datorează faptului că electroni ai unui atom sunt în comun cu unul
sau mai mulţi vecini ai lui, atunci când aceştia sunt suficient de
aproape pentru ca orbitele lor să se suprapună. Legătura covalentă
este tot o legătură puternică, dar care are o rază de acţiune mai
redusă. În metale, o parte dintre electronii de valenţă sunt puşi în
comun şi, efectiv, atomii devin ioni pozitivi. Fiind însă “cufundaţi”
în această “mare electronică” de sarcină negativă, ei sunt ecranaţi şi
deci nu interacţionează electrostatic (adică între ei nu apar forţe de
respingere). Electronii liberi formează o bandă de conducţie la scara
întregii reţele cristaline şi asigură o bună conductivitate electrică şi
termică a majorităţii metalelor. Trebuie menţionat că unele metale de
tranziţie au o componentă covalentă semnificativă în legăturile lor
atomice. În sfârşit, interacţiunea de tip van der Waals se datorează
dipolilor induşi şi este tipul dominant de interacţiuni interatomice în
solidele formate de gazele nobile (He, Ar, Xe, Ne) la temperaturi
scăzute şi în polimeri. Gazele nobile au nivelele electronice complete
şi deci nu pun electroni în comun cu atomii vecini. Totuşi, sarcina
electrică a unui atom dat fluctuează spaţial, deşi rămâne constantă ca
medie pe întregul atom. Aceste fluctuaţii (pentru un atom dat) duc la
formarea unui dipol de sarcină a cărui mărime şi orientare în spaţiu
fluctuează. Atunci când doi astfel de atomi sunt suficient de apropiaţi
unul de celălalt, fluctuaţiile unuia induc dipoli în cel vecin. Aceşti
dipoli induşi au viaţa extrem de scurtă, însă suficientă pentru a
genera forţe de natură electrostatică între atomii vecini aflaţi în
interacţiune.
Forţele interatomice sunt definite de o mărime numită potenţial
interatomic. Aceasta este, în esenţă, o lege constitutivă la scară
atomică, care poate fi stabilită prin calcule de fizică cuantică. O
formă funcţională generică, pentru astfel de interacţiuni (una dintre
cele mai simple), este potenţialul Lennard-Jones:
612
r
a
r
ae4)r(u , (1)
16
care este expresia energiei de interacţiune a doi atomi aflaţi la
distanta r. În relaţia (1), e este unitatea de energie, iar a este cea de
distanţă. Forţa de interacţiune dintre cei doi atomi este:
f(r) = - du / dr. (2)
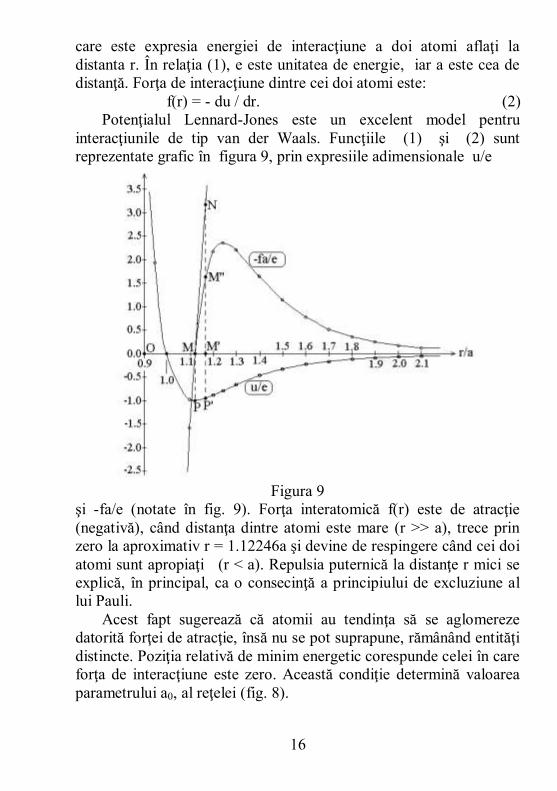
Potenţialul Lennard-Jones este un excelent model pentru
interacţiunile de tip van der Waals. Funcţiile (1) şi (2) sunt
reprezentate grafic în figura 9, prin expresiile adimensionale u/e
Figura 9
şi -fa/e (notate în fig. 9). Forţa interatomică f(r) este de atracţie
(negativă), când distanţa dintre atomi este mare (r >> a), trece prin
zero la aproximativ r = 1.12246a şi devine de respingere când cei doi
atomi sunt apropiaţi (r < a). Repulsia puternică la distanţe r mici se
explică, în principal, ca o consecinţă a principiului de excluziune al
lui Pauli.
Acest fapt sugerează că atomii au tendinţa să se aglomereze
datorită forţei de atracţie, însă nu se pot suprapune, rămânând entităţi
distincte. Poziţia relativă de minim energetic corespunde celei în care
forţa de interacţiune este zero. Această condiţie determină valoarea
parametrului a0, al reţelei (fig. 8).
17
Originea elasticităţii materialelor
Pentru a descrie originea fizică a elasticităţii materialelor
cristaline, de tip metalic şi ceramic (comportarea elastică a
materialelor polimerice şi a cauciucurilor este de natură diferită şi nu
se discută aici), se vor face referiri la reţeaua cristalină din figura 8 şi
anume la răspunsul ei la deformarea după una din direcţiile aliniate
cu axele principale (muchiile cubului reprezentativ). Pentru
simplitate, se va considera că un atom interacţionează, prin
potenţialul Lennard-Jones, numai cu vecinii lui cei mai apropiaţi. De
exemplu, atomul A interacţionează numai cu cei 6 vecini ai săi aflaţi
la distanţa a0: atomii B, C, D, E, F şi G (fig. 8). În acest caz,
parametrul reţelei, a0, este determinat de valoarea minimă a
potenţialului: a0 = 1.12246a.
În configuraţia nedeformată, valoarea forţei care acţionează
asupra fiecărui atom este nulă, atât pentru că forţa f = 0 în punctul M
(fig. 9), cât şi datorită simetriei reţelei. Se presupune, apoi, că reţeaua
este deformată, prin întindere uniaxială, în direcţia orizontală din
figura 8. Distanţa dintre atomii A, B şi C creşte, în timp ce cea dintre
A şi D, E, F şi G rămâne aproximativ constantă (creşte mult mai
puţin decât cea în direcţia deformării; această variaţie se neglijează).
Având în vedere curbele din figura 9, distanţa între A, B şi C creşte
corespunzător creşterii distanţei OM la OM’, iar energia unui atom
creşte de la cea corespunzătoare punctului P la cea corespunzătoare
lui P’. Această creştere de energie este energia de deformare stocată
în material în timpul deformării. Aşa cum s-a discutat în paragrafele
precedente, energia de deformare este asociată cu deformaţia elastică.
În elasticitate se presupune, de cele mai multe ori, că ecuaţia
constitutivă este lineară, deci tensiunile sunt proporţionale cu
deformaţiile specifice. În limbajul curent, aceasta însemnă că forţa
dintre doi atomi este proporţională cu deplasarea în raport de poziţia
de echilibru. Aceasta este tot o consecinţă a formei funcţionale a
potenţialului interatomic. Dacă punctul de echilibru este în M
(energie minimă şi forţă rezultantă zero), deformaţia duce la mutarea
punctului curent pe curba -fa/e din figura 9 în M” (nivel de energie
mai ridicat şi forţă nenulă între doi atomi. Trebuie notat că deşi forţa
dintre doi atomi nu este zero, datorită simetriei reţelei forţa rezultantă
18
(totală) rămâne nulă, deci atomul este în echilibru). Aceasta poate fi
aproximată cu o mutare a punctului curent, nu pe curba reală (curba -
fa/e) din M în M”, ci pe tangenta la curba reală, dusă în punctul M,
adică din M în N. În aceste condiţii, forţa este proporţională cu
deplasarea dintre doi atomi şi materialul este linear elastic.
Este necesar să fie re-subliniat că aceasta este numai o
aproximaţie, care este cu atât mai bună cu cât deplasările
(deformaţiile specifice) sunt mai mici. De fapt, reţeaua cristalină se
comportă elastic nelinear.
Aproximarea curbei reale -fa/e cu tangenta în punctul M, este
echivalentă cu aproximarea curbei energiei (u/e) cu o parabolă având
vârful în punctul P. Curbura parabolei, ca şi panta tangentei,
corespund modulului de elasticitate, E.
Efectul temperaturii asupra modului de elasticitate este bine
cunoscut: când temperatura creşte, E scade uşor. Acest efect poate fi
explicat tot cu ajutorul curbelor din figura 9. În fizica corpului solid,
temperatura este asociată cu mişcarea de vibraţie a atomilor în jurul
poziţiilor lor de echilibru. Cu cât temperatura creşte, cu atât
amplitudinea vibraţiilor (energia cinetică) creşte. Temperatura zero
absolut corespunde cu încetarea totală a mişcării atomice şi de aceea
nu poate fi atinsă. Dacă potenţialul interatomic ar avea variaţia într-
adevăr parabolică (şi legea constitutivă ar fi linear elastică), atomii ar
vibra, la orice temperatură, în jurul aceleiaşi poziţii de echilibru,
căreia îi corespunde punctul P, pe curba u/e din figura 9. Cum nu
aceasta este realitatea, potenţialul fiind “mai abrupt” spre r mic şi
“mai puţin abrupt” spre r mare, mărirea temperaturii are ca efect
mutarea punctului în jurul căruia vibrează atomii spre dreapta, adică
spre P’. Aparent, parametrul reţelei, a0, creşte cu temperatura, ceea ce
este cunoscut la scară macroscopică ca dilatare termică. În acelaşi
timp, pe măsură ce reţeaua se dilată, curbura potenţialului scade, ceea
ce este echivalent cu reducerea valorii modulului de elasticitate, E.
Desigur, această prezentare este simplificată. Reţelele cristaline
reale sunt mai complexe, iar interacţiunile interatomice sunt şi ele
mai complexe şi cu raza de acţiune mai mare decât s-a considerat
aici. Toate acestea aduc în discuţie particularităţile materialului.
Totuşi, comportamentul general este acelaşi, iar acest exemplu
simplu este suficient pentru a oferi o imagine completă asupra
19
fenomenelor fizice relevante din mecanica solidului deformabil şi
rezistenţa materialelor.
Originea plasticităţii materialelor
În prezentarea precedentă s-au considerat numai deformaţii
elastice; atunci când încărcarea este eliminată, interacţiunile
interatomice aduc reţeaua la configuraţia de echilibru. În acest
proces, forţele interatomice execută lucru mecanic împotriva
mecanismului de încărcare, eliberând energia elastică stocată. Acum
trebuie înţeles cum o astfel de reţea se deformează plastic
(permanent).
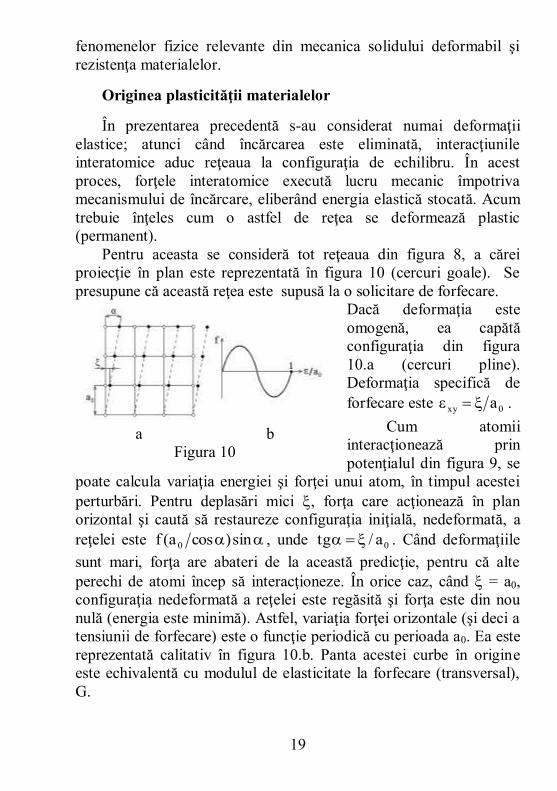
Pentru aceasta se consideră tot reţeaua din figura 8, a cărei
proiecţie în plan este reprezentată în figura 10 (cercuri goale). Se
presupune că această reţea este supusă la o solicitare de forfecare.
Dacă deformaţia este
omogenă, ea capătă
configuraţia din figura
10.a (cercuri pline).
Deformaţia specifică de
forfecare este 0xy a .
Cum atomii
interacţionează prin
potenţialul din figura 9, se
poate calcula variaţia energiei şi forţei unui atom, în timpul acestei
perturbări. Pentru deplasări mici , forţa care acţionează în plan
orizontal şi caută să restaureze configuraţia iniţială, nedeformată, a
reţelei este sin)cosa(f 0 , unde 0a/tg . Când deformaţiile
sunt mari, forţa are abateri de la această predicţie, pentru că alte
perechi de atomi încep să interacţioneze. În orice caz, când = a0,
configuraţia nedeformată a reţelei este regăsită şi forţa este din nou
nulă (energia este minimă). Astfel, variaţia forţei orizontale (şi deci a
tensiunii de forfecare) este o funcţie periodică cu perioada a0. Ea este
reprezentată calitativ în figura 10.b. Panta acestei curbe în origine
este echivalentă cu modulul de elasticitate la forfecare (transversal),
G.
a b
Figura 10
20
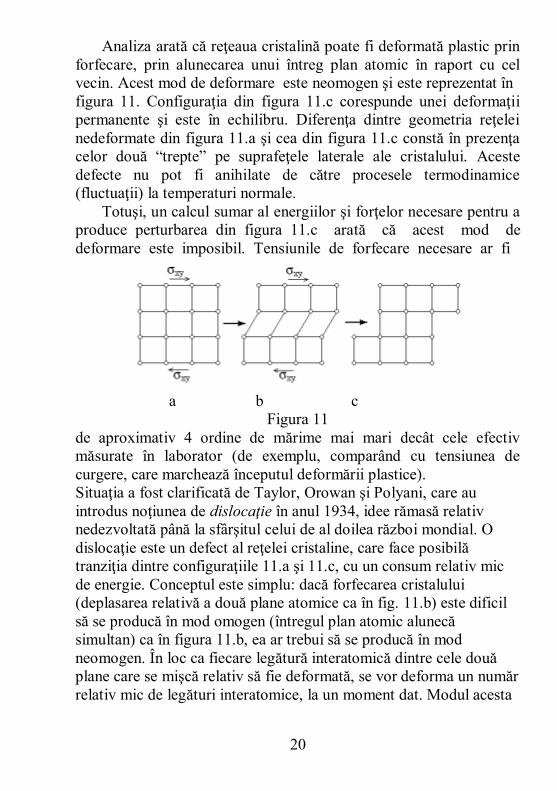
Analiza arată că reţeaua cristalină poate fi deformată plastic prin
forfecare, prin alunecarea unui întreg plan atomic în raport cu cel
vecin. Acest mod de deformare este neomogen şi este reprezentat în
figura 11. Configuraţia din figura 11.c corespunde unei deformaţii
permanente şi este în echilibru. Diferenţa dintre geometria reţelei
nedeformate din figura 11.a şi cea din figura 11.c constă în prezenţa
celor două “trepte” pe suprafeţele laterale ale cristalului. Aceste
defecte nu pot fi anihilate de către procesele termodinamice
(fluctuaţii) la temperaturi normale.
Totuşi, un calcul sumar al energiilor şi forţelor necesare pentru a
produce perturbarea din figura 11.c arată că acest mod de
deformare este imposibil. Tensiunile de forfecare necesare ar fi
a b c
Figura 11
de aproximativ 4 ordine de mărime mai mari decât cele efectiv
măsurate în laborator (de exemplu, comparând cu tensiunea de
curgere, care marchează începutul deformării plastice).
Situaţia a fost clarificată de Taylor, Orowan şi Polyani, care au
introdus noţiunea de dislocaţie în anul 1934, idee rămasă relativ
nedezvoltată până la sfârşitul celui de al doilea război mondial. O
dislocaţie este un defect al reţelei cristaline, care face posibilă
tranziţia dintre configuraţiile 11.a şi 11.c, cu un consum relativ mic
de energie. Conceptul este simplu: dacă forfecarea cristalului
(deplasarea relativă a două plane atomice ca în fig. 11.b) este dificil
să se producă în mod omogen (întregul plan atomic alunecă
simultan) ca în figura 11.b, ea ar trebui să se producă în mod
neomogen. În loc ca fiecare legătură interatomică dintre cele două
plane care se mişcă relativ să fie deformată, se vor deforma un număr
relativ mic de legături interatomice, la un moment dat. Modul acesta
21
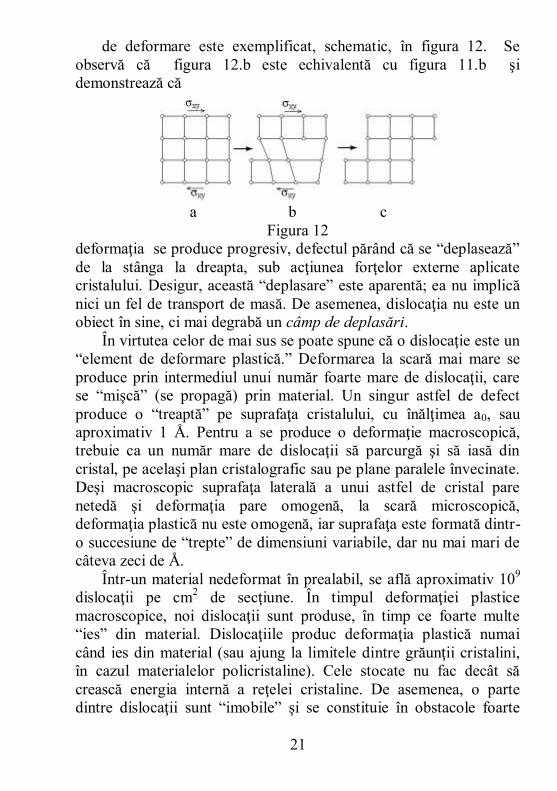
de deformare este exemplificat, schematic, în figura 12. Se
observă că figura 12.b este echivalentă cu figura 11.b şi
demonstrează că
a b c
Figura 12
deformaţia se produce progresiv, defectul părând că se “deplasează”
de la stânga la dreapta, sub acţiunea forţelor externe aplicate
cristalului. Desigur, această “deplasare” este aparentă; ea nu implică
nici un fel de transport de masă. De asemenea, dislocaţia nu este un
obiect în sine, ci mai degrabă un câmp de deplasări.
În virtutea celor de mai sus se poate spune că o dislocaţie este un
“element de deformare plastică.” Deformarea la scară mai mare se
produce prin intermediul unui număr foarte mare de dislocaţii, care
se “mişcă” (se propagă) prin material. Un singur astfel de defect
produce o “treaptă” pe suprafaţa cristalului, cu înălţimea a0, sau
aproximativ 1 Å. Pentru a se produce o deformaţie macroscopică,
trebuie ca un număr mare de dislocaţii să parcurgă şi să iasă din
cristal, pe acelaşi plan cristalografic sau pe plane paralele învecinate.
Deşi macroscopic suprafaţa laterală a unui astfel de cristal pare
netedă şi deformaţia pare omogenă, la scară microscopică,
deformaţia plastică nu este omogenă, iar suprafaţa este formată dintr-
o succesiune de “trepte” de dimensiuni variabile, dar nu mai mari de
câteva zeci de Å.
Într-un material nedeformat în prealabil, se află aproximativ 109
dislocaţii pe cm2 de secţiune. În timpul deformaţiei plastice
macroscopice, noi dislocaţii sunt produse, în timp ce foarte multe
“ies” din material. Dislocaţiile produc deformaţia plastică numai
când ies din material (sau ajung la limitele dintre grăunţii cristalini,
în cazul materialelor policristaline). Cele stocate nu fac decât să
crească energia internă a reţelei cristaline. De asemenea, o parte
dintre dislocaţii sunt “imobile” şi se constituie în obstacole foarte
22
puternice pentru cele mobile. Acesta este mecanismul ecruisării
materialelor, prin care tensiunea necesară continuării curgerii plastice
creşte, pe măsură ce materialul se deformează (şi densitatea
dislocaţiilor imobile creşte).
Energia consumată în timpul deformaţiei plastice şi care nu este
stocată în deformaţia legăturilor interatomice (energie de
deformaţie), este, de fapt, lucrul mecanic necesar mişcării
dislocaţiilor prin material, care se transformă în căldură. Mecanismul
de conversie al lucrului mecanic în căldură este, de asemenea, asociat
cu mişcarea dislocaţiilor; mişcarea acestor defecte produce vibraţii
ale reţelei cristaline sau fononi. Fononul este o construcţie
conceptuală (particulă fictivă), analoagă celei de foton al energiei
electromagnetice şi reprezintă o cuantă de energie sonoră sau de
vibraţii elastice, care se propagă prin corpuri cristaline, cu frecvenţe
comparabile cu cele ale sunetelor.
Mecanica dislocaţiilor, interacţiunile lor şi implicaţiile acestora
în deformaţia macroscopică a corpurilor solide cristaline, a fost
intens studiată în ultimii 50 de ani şi este un domeniu relativ bine
înţeles. Numeroase tratate au fost scrise pe această temă. Sinteza şi analiza structurilor mecanice. Locul calculului de
rezistenţă în inginerie
Proiectarea este o activitate de creaţie, cu implicaţii
multidisciplinare. Pentru rezolvarea unei probleme, proiectantul
trebuie să primească informaţii care să-i permită să formuleze
problema dată în termeni numerici. Dacă tema pe care a primit-o
conţine condiţii calitative, la care nu s-au asociat şi termeni
cantitativi, este de aşteptat ca soluţia să fie nesatisfăcătoare, cel puţin
din unele puncte de vedere.
Scopul primordial al proiectării este de a obţine cel mai bun
sistem posibil pentru un ansamblu de cerinţe impuse. Pentru aceasta
se concepe un sistem candidat şi se studiază cum se comportă acesta.
În inginerie în general, precum şi în construcţia unei maşini, a unui
utilaj sau a unei instalaţii, o componentă de bază este structura de
rezistenţă, care reprezintă un ansamblu mecanic cu o funcţionalitate
riguros definită, ca de exemplu: preluarea diverselor sarcini,
23
asigurarea unei anumite poziţii relative între subansamble,
posibilitatea efectuării unor mişcări relative între unele componente,
asigurarea unei stabilităţi statice şi dinamice, garantarea unei
rigidităţi impuse etc. În limbajul ingineresc obişnuit structura de
rezistenţă se numeşte mai simplu structură.
Calculele de rezistenţă, de stabilitate, de durabilitate, dinamice
etc au în vedere structura de rezistenţă în ansamblu, componentele
acesteia, precum şi alte elemente, componente sau subansamble ale
maşinii, utilajului sau instalaţiei care se proiectează. Aceste calcule
constituie o componentă importantă a proiectării dar ele pot fi duse
la bun sfârşit numai după ce alte aspecte, de principiu sau de detaliu,
au fost clarificate. Este cazul cerinţelor beneficiarului, a costurilor
impuse, a termenelor acordate, a materialelor disponibile, a
tehnologiilor accesibile, a volumului producţiei, a durabilităţii cerute
produsului, a exigenţelor ecologice etc.
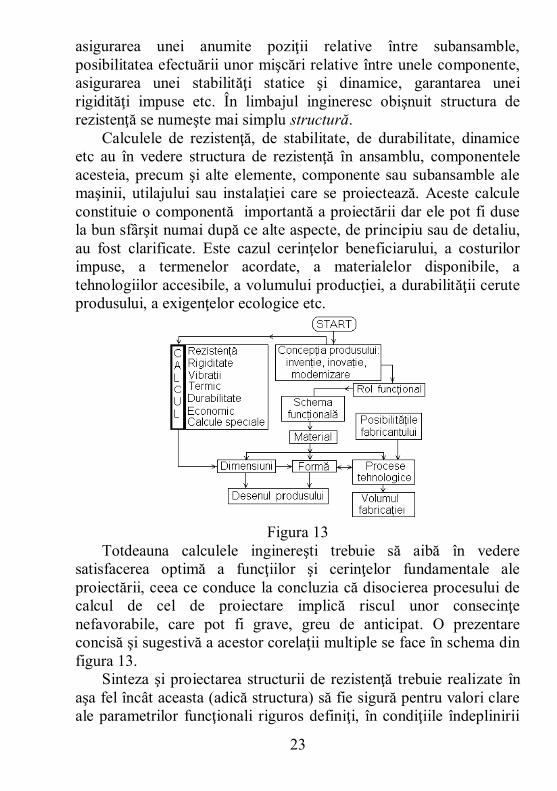
Figura 13
Totdeauna calculele inginereşti trebuie să aibă în vedere
satisfacerea optimă a funcţiilor şi cerinţelor fundamentale ale
proiectării, ceea ce conduce la concluzia că disocierea procesului de
calcul de cel de proiectare implică riscul unor consecinţe
nefavorabile, care pot fi grave, greu de anticipat. O prezentare
concisă şi sugestivă a acestor corelaţii multiple se face în schema din
figura 13.
Sinteza şi proiectarea structurii de rezistenţă trebuie realizate în
aşa fel încât aceasta (adică structura) să fie sigură pentru valori clare
ale parametrilor funcţionali riguros definiţi, în condiţiile îndeplinirii

24
unor cerinţe severe şi adesea contradictorii privind costurile,
termenele de execuţie, dimensiunile de gabarit, greutatea, fiabilitatea,
aspectul estetic etc. Îndeplinirea acestor cerinţe duce la considerarea
unor restricţii pe care trebuie să le satisfacă calculele, cele mai des
întâlnite fiind: valorile maxime ale tensiunilor, deplasărilor şi/sau
deformaţiilor, coeficientul de siguranţă la flambaj, la rupere sau la
oboseală, minimum de sensibilitate la imperfecţiuni de execuţie, de
montaj sau de exploatare, frecvenţele modurilor fundamentale de
vibraţii, viteza de deformare în curgerea plastică staţionară, durata de
viaţă, greutatea, volumul, rigiditatea la diverse solicitări, momentele
de inerţie ale secţiunilor barelor, stabilitatea statică şi dinamică,
comportarea la solicitări dinamice etc. Mai pot fi avute în vedere
diferitele moduri de rupere, suprasarcinile la transport, la montaj sau
în exploatare, precum şi prevederile diverselor legi, standarde, norme
etc
Figura 14
În prezent, marea majoritate a calculelor inginereşti cerute pentru
sinteza, proiectarea şi analiza unui produs se fac cu metoda
elementelor finite (MEF). În condiţiile proiectării asistate de
calculator (CAD) şi a fabricaţiei asistate de calculator (CAM),
analiza prin calcul devine o componentă a unui proces unitar –
integrat, aşa cum se poate vedea în figura 14.
Trebuie remarcat faptul că în succesiunea CAD – CALCUL –
CAM există un proces iterativ de proiectare – calcul – execuţie. În
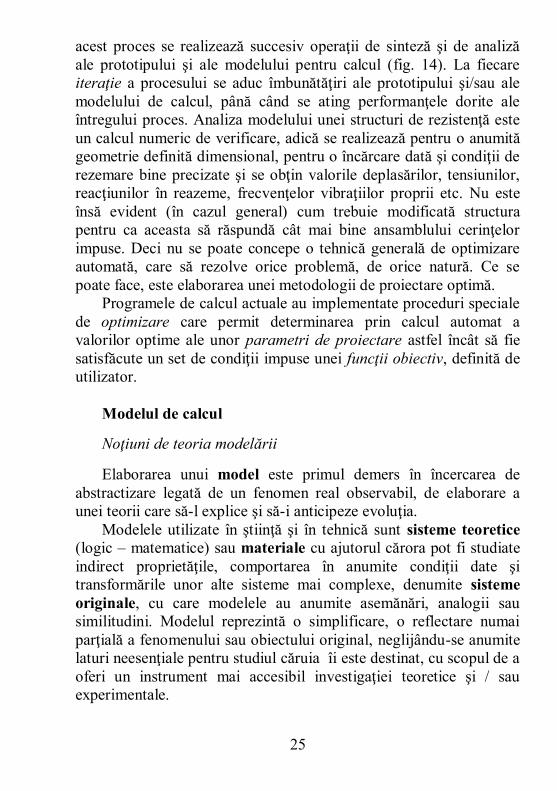
25
acest proces se realizează succesiv operaţii de sinteză şi de analiză
ale prototipului şi ale modelului pentru calcul (fig. 14). La fiecare
iteraţie a procesului se aduc îmbunătăţiri ale prototipului şi/sau ale
modelului de calcul, până când se ating performanţele dorite ale
întregului proces. Analiza modelului unei structuri de rezistenţă este
un calcul numeric de verificare, adică se realizează pentru o anumită
geometrie definită dimensional, pentru o încărcare dată şi condiţii de
rezemare bine precizate şi se obţin valorile deplasărilor, tensiunilor,
reacţiunilor în reazeme, frecvenţelor vibraţiilor proprii etc. Nu este
însă evident (în cazul general) cum trebuie modificată structura
pentru ca aceasta să răspundă cât mai bine ansamblului cerinţelor
impuse. Deci nu se poate concepe o tehnică generală de optimizare
automată, care să rezolve orice problemă, de orice natură. Ce se
poate face, este elaborarea unei metodologii de proiectare optimă.
Programele de calcul actuale au implementate proceduri speciale
de optimizare care permit determinarea prin calcul automat a
valorilor optime ale unor parametri de proiectare astfel încât să fie
satisfăcute un set de condiţii impuse unei funcţii obiectiv, definită de
utilizator.
Modelul de calcul
Noţiuni de teoria modelării
Elaborarea unui model este primul demers în încercarea de
abstractizare legată de un fenomen real observabil, de elaborare a
unei teorii care să-l explice şi să-i anticipeze evoluţia.
Modelele utilizate în ştiinţă şi în tehnică sunt sisteme teoretice
(logic – matematice) sau materiale cu ajutorul cărora pot fi studiate
indirect proprietăţile, comportarea în anumite condiţii date şi
transformările unor alte sisteme mai complexe, denumite sisteme
originale, cu care modelele au anumite asemănări, analogii sau
similitudini. Modelul reprezintă o simplificare, o reflectare numai
parţială a fenomenului sau obiectului original, neglijându-se anumite
laturi neesenţiale pentru studiul căruia îi este destinat, cu scopul de a
oferi un instrument mai accesibil investigaţiei teoretice şi / sau
experimentale.
26
Modelele pot fi teoretice (ideale) când sunt construcţii sau
reprezentări logic – matematice, ca de exemplu modelele atomului,
modelele cosmologice, modele de calcul etc, sau materiale, ca de
exemplu, macheta unei nave, un calculator analogic sau numeric etc.
Modelele teoretice sunt o verigă intermediară între experienţă şi
teoria propriu-zisă, cuprinzătoare şi exactă a sistemului studiat,
reprezentând un mijloc de verificare a ipotezelor enunţate la
elaborarea teoriei. Modelele teoretice sunt adesea ansambluri de
ipoteze formulate pe baza analogiei, presupuse, cu un sistem a cărui
teorie este, în esenţă, cunoscută; din aceste ipoteze pot fi deduse
consecinţe verificabile experimental. Adesea sunt utilizate modele
intuitive, care facilitează interpretarea teoriei şi raportarea ei la
obiectul real.
Modelele materiale permit abordarea pe cale experimentală a
unor probleme care nu pot fi rezolvate pe cale analitică, fie pentru că
nu există metode de calcul adecvate, fie că metodele existente sunt
prea laborioase şi costisitoare. Ele pot fi de aceeaşi natură fizică cu
sistemele originale – modele prin similitudine – fiind diferite de
acestea prin ordinul de mărime al dimensiunilor şi al valorilor
caracteristice (de exemplu, constantele fizice ale materialelor
folosite). Modelele pot fi şi de altă natură fizică decât sistemele
originale – modele prin analogie - caracterizate prin ecuaţii
matematice de aceeaşi formă cu cele ale sistemelor pe care le
modelează.
Utilizarea modelării în cele mai variate domenii ale ştiinţei şi
tehnicii s-a dovedit deosebit de fructuoasă şi eficientă, căpătând o
extindere spectaculoasă în ultimele decenii, ca urmare a aportului
adus de electronică în toate tipurile de procese de modelare. Mai mult
decât atât, apariţia şi dezvoltarea ciberneticii, informaticii şi
calculatoarelor electronice au dus la un proces de unificare a
modelării, analogiei, similitudinii şi simulării într-un sistem integrat,
cu performanţe remarcabile şi eficienţă ridicată.
Calculatoarele sunt de fapt modele: cele analogice sunt modele
ale unor relaţii matematice, iar cele numerice ale unor algoritmi. În
urmă cu câteva decenii, calculatoarele analogice şi cele numerice se
dezvoltau în paralel, oarecum independent. Modelarea pe
calculatoare analogice avea însă un neajuns: pentru fiecare tip de
27
problemă era necesară realizarea unui alt model. În prezent acest
neajuns s-a înlăturat ca urmare a utilizării unor algoritmi adecvaţi,
care permit simularea pe calculatorul numeric a modelelor
analogice, în acest fel calculatorul numeric devenind universal.
În numeroase domenii ale ştiinţei şi ingineriei se utilizează tot
mai mult sisteme complexe, interactive de modelare experimentală şi
prin calcul. De exemplu, un model (sau un ansamblu de mai multe
modele) al unei structuri este investigat prin una din metodele
cunoscute: tensometrie electrică rezistivă, fotoelasticitate,
interferometrie holografică. Informaţiile furnizate de determinările
experimentale sunt convertite – de către un convertor analog numeric
– în informaţii numerice, care se introduc într-un calculator, pe care,
simultan cu investigaţia experimentală, se execută calculele
corespunzătore unui model de calcul al aceleaşi structuri. Din
confruntarea informaţiilor obţinute prin cele două căi de investigare
se formulează decizii, care duc la perfecţionarea modelului
experimental, al celui de calcul şi al structurii care se studiază.
Procesul continuă până când se elaborează configuraţia optimă a
structurii respective.
Elaborarea unui model corect şi eficient al unui sistem original
reprezintă o sinteză a tot ceea ce se ştie despre acel sistem. Paradoxal
este faptul că, pentru a modela corect un fenomen, este necesară
cunoaşterea cât mai cuprinzătoare a sa, ceea ce este în opoziţie cu
nevoia de a-l cerceta. De asemenea modelul trebuie să fie adecvat
scopului urmărit. Un model excesiv de complicat – care îşi propune
să aibă în vedere toate aspectele şi detaliile posibile ale fenomenului
original – poate deveni costisitor, greoi sau chiar inoperant. Un
model simplist, prea sumar, poate fi incorect, ca urmare a neglijării
unor aspecte importante ale sistemului investigat.
În concluzie, un model M al unui sistem original S este un alt
sistem S’, care este echivalent cu S din anumite puncte de vedere şi
care poate fi studiat mai uşor ca S. Din determinarea pe S’ (adică pe
M) a unor informaţii se deduc informaţii corespunzătoare pentru S.
Echivalarea sau înlocuirea lui S’ cu S poate fi exactă sau
aproximativă. În domeniul teoriilor formale se pot construi sisteme
S’ care sunt riguros echivalente cu S, din anumite puncte de vedere,
ca, de exemplu, modelele din geometrie. În alte cazuri, modelul este
28
o construcţie teoretică care aproximează realitatea. Dacă această
construcţie teoretică este redată prin relaţii matematice, aceste relaţii
împreună cu interpretarea lor constituie modelul matematic al
sistemului care se studiază.
Modelele pentru calculele inginereşti, în general, sunt modele
matematice aproximative ale structurilor care se studiază.
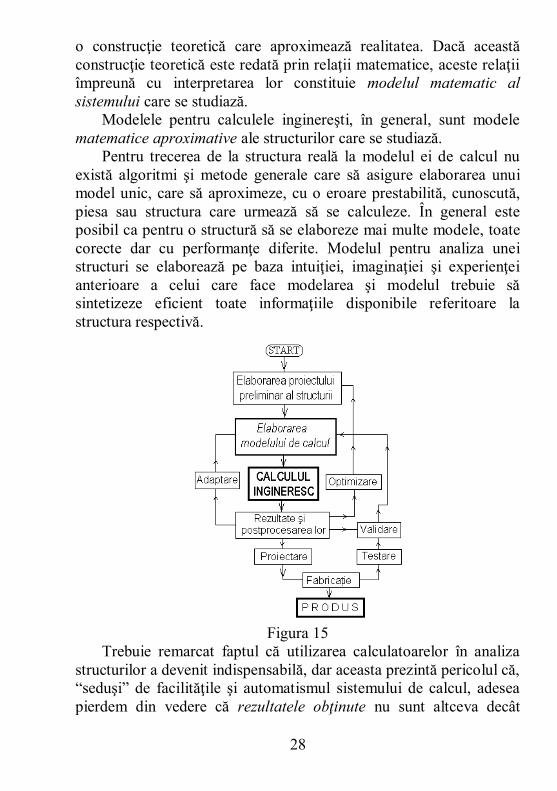
Pentru trecerea de la structura reală la modelul ei de calcul nu
există algoritmi şi metode generale care să asigure elaborarea unui
model unic, care să aproximeze, cu o eroare prestabilită, cunoscută,
piesa sau structura care urmează să se calculeze. În general este
posibil ca pentru o structură să se elaboreze mai multe modele, toate
corecte dar cu performanţe diferite. Modelul pentru analiza unei
structuri se elaborează pe baza intuiţiei, imaginaţiei şi experienţei
anterioare a celui care face modelarea şi modelul trebuie să
sintetizeze eficient toate informaţiile disponibile referitoare la
structura respectivă.
Figura 15
Trebuie remarcat faptul că utilizarea calculatoarelor în analiza
structurilor a devenit indispensabilă, dar aceasta prezintă pericolul că,
“seduşi” de facilităţile şi automatismul sistemului de calcul, adesea
pierdem din vedere că rezultatele obţinute nu sunt altceva decât
29
consecinţele ipotezelor care au stat la baza modelului de calcul, a
configuraţiei modelului şi a algoritmilor utilizaţi pentru analiza
respectivă. Din acest impas nu se poate ieşi decât pe seama intuiţiei,
imaginaţiei şi experienţei.
Având în vedere că toate calculele “le face calculatorul”, sarcina
care rămâne proiectantului este de elabora modele adecvate şi
performante, ceea ce dovedeşte importanţa acestora.
Elaborarea modelului de calcul şi analiza efectuată cu acesta sunt
etape componente ale unui proces relativ complex, de concepţie şi
fabricaţie şi trebuie să servească la realizarea, în condiţii riguros
definite, a unui anumit produs. În acest context, modelul de calcul nu
poate fi conceput decât după ce a fost proiectată într-o primă formă –
eventual, în cadrul unui proces preliminar CAD – piesa sau structura
care trebuie să fie calculată. Urmează ca în etape succesive, având în
vedere rezultatele obţinute, să se modifice – în vederea ameliorării
performanţelor realizate – atât proiectul produsului cât şi modelul de
calcul. În acest scop se efectuează numeroase testări, adaptări,
optimizări şi validări, aşa cum rezultă din schema din figura 15.
Modelul conceptual
Prima şi cea mai importantă etapă a elaborării unui model
performant este cea de realizare a modelului conceptual, primar sau
fundamental. Pornind de la desenul piesei sau structurii care
urmează să fie analizată şi având în vedere cerinţele impuse de
procesul de calcul, se fac următoarele “operaţii”:
- se decide care sunt elementele constructive ale structurii, care
vor deveni componente ale modelului de calcul;
- se stabilesc elementele structurii care nu vor fi avute în vedere
la elaborarea modelului, fiind apreciate ca accesorii sau detalii lipsite
de importanţă, din punctul de vedere al scopului calculului;
- se aleg formele geometrice pe care se vor defini componentele
modelului, adică: linii, suprafeţe sau volume, avându-se în vedere şi
tipurile de componente care se vor defini pe aceste elemente
geometrice: bare, plăci, corpuri masive;
- se hotărăsc modalităţile de aplicare a sarcinilor (forţe şi
momente concentrate şi/sau distribuite, acceleraţii, presiuni,
temperaturi etc) şi care sunt componentele modelului care le vor
30
prelua. Această operaţie implică şi determinarea riguroasă a valorilor,
direcţiilor şi coordonatelor punctelor de aplicaţie ale sarcinilor. Se
vor stabili cazurile de încărcare ale modelului;
- se identifică condiţiile de rezemare ale structurii şi se decide
modul în care aceste condiţii vor fi “modelate” şi anume: blocarea
deplasărilor, introducerea unor forţe de frecare etc. Dacă este cazul,
se vor stabili mai multe variante ale condiţiilor de rezemare;
- se decid condiţiile generale de elaborare şi utilizare ale
modelului: metodele şi algoritmii de calcul care se vor utiliza,
tipurile de materiale şi proprietăţile lor, zonele de interes deosebit (de
exemplu, unde se presupune că tensiunile au valori mari) şi
modalităţi de verificare ale modelului şi ale rezultatelor obţinute cu
el.
Modelul conceptual trebuie să aibă în vedere valorificarea tuturor
informaţiilor disponibile privind structura (condiţii şi regimuri de
funcţionare, de montaj, de avarie etc) şi modalităţile de utilizare ale
rezultatelor obţinute prin calcul. Modelul trebuie să asigure, de fapt,
o simulare satisfăcătoare – din anumite puncte de vedere, bine
precizate – a comportării structurii în exploatare.
Factori care determină elaborarea modelului de calcul
La elaborarea modelelor de calcul trebuie să se aibă în vedere o
multitudine de aspecte şi factori, dintre care cei mai importanţi se
prezintă în cele ce urmează.
Nivelul la care se face modelarea. Pentru o anumită fază a
procesului de proiectare şi în funcţie de scopul calculului, modelarea
se poate face la nivelul întregii structuri (maşina sau utilajul în
ansamblu), la nivelul substructurilor (subansamble ale maşinii) sau al
componentelor acestora (elemente sau organe ale maşinii). Utilizarea
calculatoarelor face posibilă modelarea şi analiza prin calcul a unui
utilaj, a unei instalaţii sau a unei maşini ca un tot unitar, aşa cum sunt
acestea în realitate, ca, de exemplu un autobuz, un pod rulant, un
recipient, o combină pentru recoltarea cerealelor, un avion, o
locomotivă, o maşină de frezat, o pompă etc. Pentru etape ulterioare,
se pot “extrage” din structura dată componente, al căror studiu să fie
detaliat.
31
Metoda de calcul. În general, mai întâi se alege metoda de
calcul, din diverse considerente obiective sau subiective, ca, de
exemplu: cunoaşterea metodei, existenţa programelor, cerinţele unor
norme, scopul calculului etc. Elaborarea modelului se face în
conformitate cu cerinţele metodei, care include ipoteze, simplificări,
aproximări, delimitări ale aplicabilităţii etc. De exemplu, pentru o
metodă analitică se vor face simplificările specifice, pentru metoda
elementelor finite se va face “discretizarea” modelului şi se vor
defini elementele finite adecvate, pentru metoda diferenţelor finite se
va face discretizarea şi definirea diferenţelor având în vedere
ecuaţiile diferenţiale ataşate problemei etc.
Elaborarea modelului de calcul trebuie corelată strict cu metoda
de calcul, deoarece un calcul foarte exact nu poate suplini sau
compensa o modelare deficitară, nerealistă, ineficientă. De asemenea,
un calcul efectuat cu o metodă foarte precisă, laborioasă şi
costisitoare, pe un model aproximativ, simplist, este o risipă,
deoarece rezultatele nu vor avea performanţe mai bune, fiind
determinate de calităţile modelului.
Trebuie menţionat faptul că în ingineria actuală se folosesc
numeroase şi variate metode de calcul, ceea ce arată că fiecare
metodă are avantajele, dezavantajele şi limitele sale. Se pare că în
viitor se vor promova proceduri, algoritmi şi programe mixte sau
hibride, care să reunească mai multe metode de calcul, în vederea
valorificării avantajelor fiecăreia.
Scopul calculului. Beneficiarii calculelor inginereşti pot solicita
informaţii diverse în legătură cu modul cum se va comporta structura
în anumite situaţii, adică rezultatele calculului trebuie să dea – pe cât
posibil – răspunsuri neechivoce la întrebări precis formulate (adesea
beneficiarii trebuie informaţi ce poate oferi calculul). Consecinţa
acestei situaţii este că trebuie efectuate, de regulă, mai multe tipuri de
analize, care să ofere informaţiile dorite. În principiu, este posibil ca
pe acelaşi model, să se efectueze mai multe tipuri de analize, ca, de
exemplu, analiză statică, de stabilitate, de vibraţii etc. Dar într-o
astfel de situaţie este foarte posibil ca performanţele modelului şi
calitatea informaţiilor obţinute să nu fie satisfăcătore pentru toate
variantele de analiză. Se ajunge astfel la cerinţa ca modelul să fie
elaborat având în vedere scopul calculului. În general, foarte rar este
32
necesar să se creeze un model complet nou pentru fiecare tip de
analiză. Adesea se foloseşte un model de bază, destinat uneia din
variantele de calcul şi acestuia i se aduc modificările cerute de
celelalte tipuri de analize.
Pentru clarificarea şi fixarea ideilor se dau, pe scurt, câteva
exemple:
- pentru determinarea valorilor maxime ale tensiunilor, trebuie
efectuate “analize locale”, specifice, în zonele cu concentratori;
- pentru analize dinamice, trebuie acordată cea mai mare atenţie
aspectelor modelării maselor şi amortizărilor;
- pentru calculele de oboseală sau durabilitate este importantă
cunoaşterea precisă a caracteristicilor mecanice ale materialelor la
solicitări variabile;
- pentru analizele termice trebuie definite foarte precis sursele de
căldură, inclusiv parametrii lor, şi valorile constantelor fizice ale
transmiterii căldurii prin conducţie, convecţie şi radiaţie;
- pentru structurile cu deplasări mari trebuie precizate variaţiile
mărimilor şi direcţiilor sarcinilor în timpul procesului de deformaţie.
Simplitatea modelului. Marea majoritate a structurilor
inginereşti sunt de o mare complexitate în ceea ce priveşte formele
geometrice, sarcinile, reazemele şi caracteristicile mecanice ale
materialelor din care sunt realizate. Este cazul carcaselor, batiurilor,
instalaţiilor, utilajelor de proces, maşinilor de toate tipurile etc.
Elaborarea unui model care să aibă în vedere cele mai mici detalii ale
structurii reale ar deveni foarte costisitor sau chiar imposibil de
realizat, în condiţii rezonabile, în ceea ce priveşte costul şi durata de
timp necesară. Se impune astfel considerarea unei structuri
“ipotetice” simplificate, adică a unui model de calcul raţional.
Trebuie analizat cu discernământ dacă, într-un anumit context,
elaborarea unui model mai complicat, care are costuri mai mari (în
timp şi bani), se justifică prin câştigul de informaţii suplimentare,
comparativ cu o variantă mai simplă.
Concepţia de calcul. Structura care se calculează trebuie să
corespundă unor cerinţe de funcţionalitate, siguranţă şi eficienţă
economică. Siguranţa exprimă proprietatea structurii ca într-un
interval de timp dat să satisfacă, la nivelul performanţelor sale,
condiţiile de exploatare, ţinând seama de destinaţia şi importanţa
33
ansamblului în care trebuie să se integreze (fiabilitatea). Concepţia
clasică de calcul este cea deterministă, care consideră o siguranţă
absolută, care acoperă toate incertitudinile printr-un coeficient de
siguranţă. Concepţia actuală este probabilistă, care ţine seama de
caracterul aleatoriu al parametrilor structurii şi al sarcinilor, siguranţa
structurii fiind evaluată prin probabilităţile diferitelor comportări
posibile pe durata exploatării structurii. Având în vedere că cerinţele
de economicitate şi siguranţă sunt contradictorii, o proiectare a unei
structuri optime se obţine numai printr-o evaluare corectă şi realistă a
siguranţei acesteia.
Rezultatele să fie acoperitoare. Modelul trebuie elaborat astfel
încât rezultatele calculului trebuie să fie într-o măsură raţională şi
rezonabilă acoperitoare, adică să ofere o marjă suplimentară de
siguranţă care să compenseze faptul că analiza este aproximativă. În
ceea ce priveşte procesele de calcul, utilizarea calculatoarelor oferă
garanţia unei fiabilităţi foarte mari a acestora şi a unui nivel de
încredere ridicat al rezultatelor.
Corelarea modelului cu condiţiile existente. Modelul este o
componentă a unui ansamblu complex, care include un mare număr
de condiţii şi restricţii, adesea contradictorii. Deci elaborarea
modelului se face totdeauna într-un anumit context, pentru un set de
condiţii impuse, riguros definite. Structura reală, realizată fizic, are
abateri efective în ceea ce priveşte dimensiunile, formele geometrice,
sarcinile efective (nominale, de calcul, maxime, accidentale, de
avarie, de montaj, de transport, de exploatare etc), condiţiile de
rezemare, caracteristicile fizice şi mecanice ale materialelor, faţă de
cele considerate în proiect şi deci şi la elaborarea modelului. Prin
urmare este neraţional să se elaboreze un model foarte performant,
costisitor şi laborios, dacă valorile numerice ale datelor “de intrare” –
pentru care se face calculul – sunt afectate de incertitudini sau de
erori relativ mari. Prin urmare, modelarea şi analiza trebuie făcute cu
o precizie limitată, raţională, bine definită, în cadrul acesteia
structura reală putând fi simplificată şi “idealizată” printr-un model
corespunzător.
De asemenea, pe parcursul diverselor faze ale elaborării unui
proiect, sau ale realizării unui produs, sunt necesare modele diferite,
determinate de informaţiile disponibile în etapa respectivă. Frecvent,

34
pentru calcule preliminare, se utilizează modele mult simplificate,
comparativ cu modelele destinate unor calcule de verificare, în faze
finale ale proiectării. De exemplu, pe modele simple se fac
dimensionări şi analize la solicitări statice, în fazele de proiect
preliminar şi apoi se au în vedere analize de stabilitate, dinamice, de
oboseală, de durabilitate etc, pe modele mai sofisticate, elaborate pe
baza formei finale a proiectului.
Pentru numeroase domenii inginereşti – ca, de exemplu, utilajele
energetice, vehiculele de toate categoriile, construcţiile civile şi
industriale etc – s-au elaborat diverse prescripţii, norme şi standarde
privind modelele de calcul, evaluarea sarcinilor, variantele analizelor
obligatorii etc. Aceste normative pot avea caracterul unor
recomandări sau pot fi obligatorii, ele putând fi aplicate unor ramuri
industriale, la nivel naţional sau pot fi internaţionale. În aceste
condiţii trebuie ca elaborarea modelului să fie astfel făcută încât el
să realizeze încadrarea corectă a situaţiei reale în ipotezele şi
prevederile de detaliu ale normelor respective. Unele programe de
calcul au implementate proceduri care conţin astfel de condiţii
speciale. În ultimii ani au apărut şi norme cu recomandări privind
modul cum să se elaboreze unele modele de calcul. De exemplu,
pentru industria de automobile se recomandă care să fie
caracteristicile de bază ale modelelor pentru diversele componente,
cum ar fi blocul motor, caroseria, cutia de viteze etc.
Bibliografie
1. Constantinescu, I.N., Picu, C., Hadăr, A., Gheorghiu, H.,
Rezistenţa materialelor pentru ingineria mecanică, Editura BREN,
Bucureşti, 2006.
2. Gheorghiu, H., Constantinescu, I.N., Hadăr, A., Petre, C.,
Methodes numeriques pour le calcul des structures de resistance,
Editura BREN, Bucureşti, 1999.
3. Hadăr, A., Constantinescu, I.N., Gheorghiu, H., Coteţ, C.E,
Modelare şi modele pentru calcule în ingineria mecanică, Editura
Printech, Bucureşti, 2007.