curs fizicĂ farmaceuticĂ - 4 · momentul forţei ... se adună vectorial – moment rezultant...
TRANSCRIPT
CURS FIZICĂ CURS FIZICĂ FARMACEUTICĂ – 4/2008FARMACEUTICĂ – 4/2008
CONF.DR. DOINA DRĂGĂNESCUCONF.DR. DOINA DRĂGĂNESCU
Agenda cursAgenda curs
Momentul forţeiMomentul forţei Moment cineticMoment cinetic Mişcarea de rotaţie corpului solid rigid Mişcarea de rotaţie corpului solid rigid Forţa centripetă; forţa centrifugăForţa centripetă; forţa centrifugă
MOMENTUL UNEI FORŢE MOMENTUL UNEI FORŢE FAŢĂ DE UN PUNCT FIXFAŢĂ DE UN PUNCT FIX (M (Mf))
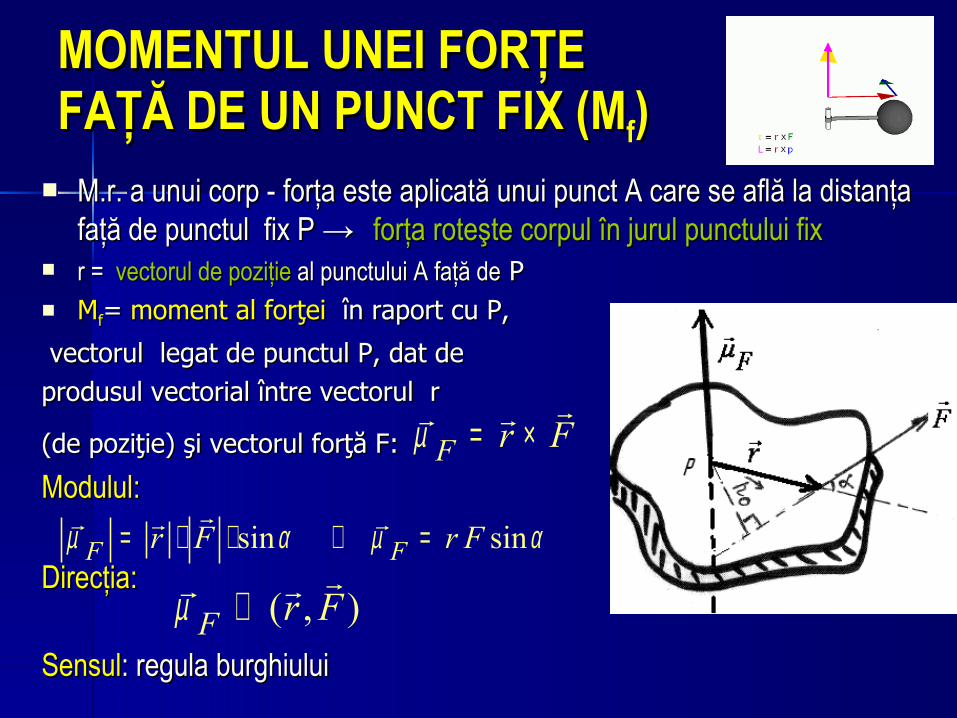
M.r. a unui corp - M.r. a unui corp - forţa este aplicată unui punct A care se află la distanţa forţa este aplicată unui punct A care se află la distanţa faţă de punctul fix Pfaţă de punctul fix P →→ forţa roteşte corpul în jurul punctului fixforţa roteşte corpul în jurul punctului fix
r =r = vectorul vectorul de poziţiede poziţie al punctului A faţă de al punctului A faţă de P P MMff= = moment al forţeimoment al forţei în raport cu P, în raport cu P,
vectorul legat de punctul P, dat de vectorul legat de punctul P, dat de produsul vectorial între vectorul produsul vectorial între vectorul rr
(de poziţie) (de poziţie) şşi vectorul forţă i vectorul forţă FF:: Modulul:Modulul:
Direcţia:Direcţia:
SensulSensul: regula burghiului: regula burghiului
F r Fµ = ×rr r
sin sinF Fr F r Fµ α µ α= ⋅ ⋅ ⇒ =rr r r
( , )F r Fµ ⊥rr r
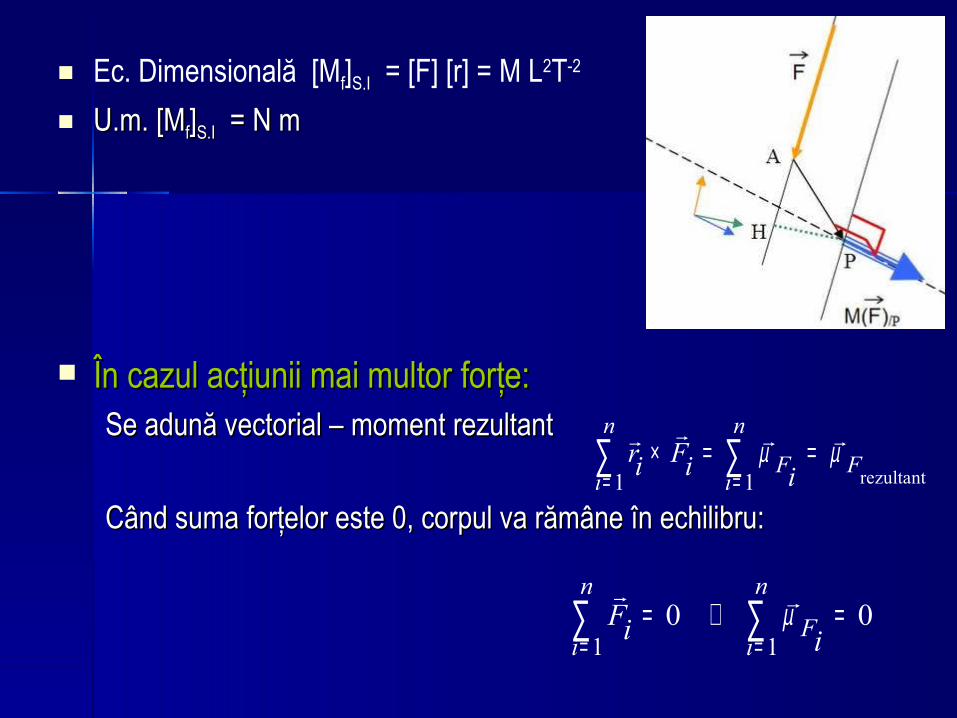
Ec. Dimensională [Mf]S.I = [F] [r] = M L2T-2
U.m. U.m. [[MMff]]S.IS.I = = N mN m
În cazul acţiunii mai multor forţeÎn cazul acţiunii mai multor forţe:: Se adună vectorial – moment rezultantSe adună vectorial – moment rezultant
Când suma forţelor este 0, corpul va rămâne în echilibru:Când suma forţelor este 0, corpul va rămâne în echilibru: rezultant1 1
n n
F Fi ir Fi i i
µ µ= =
× = =∑ ∑rr r r
1 10 0
n n
Fi iFi i
µ= =
= ⇒ =∑ ∑r r
Cuplu de forţe. Momentul cupluluiCuplu de forţe. Momentul cuplului (μc)
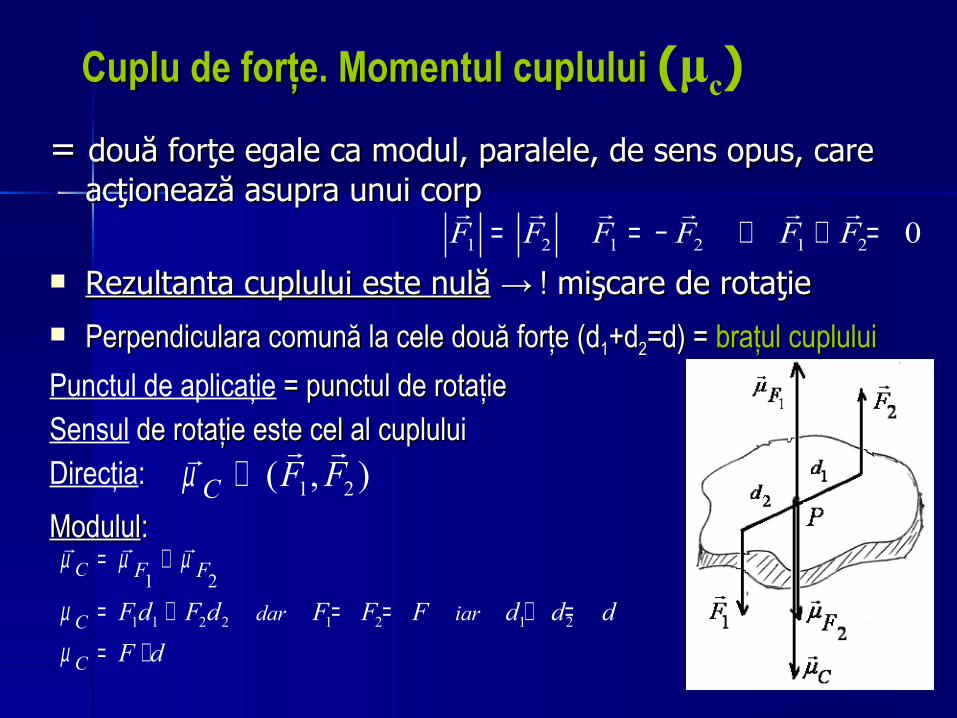
= = două forţe egale ca modul, paralele, de sens opus, care două forţe egale ca modul, paralele, de sens opus, care acţionează asupra unui corpacţionează asupra unui corp
Rezultanta cuplului este nulăRezultanta cuplului este nulă → !→ ! mişcare de rotaţie mişcare de rotaţie Perpendiculara comună la cele două forţe Perpendiculara comună la cele două forţe (d(d11+d+d22=d) ==d) = braţulbraţul cupluluicuplului Punctul de aplicaţie == punctul de rotaţie punctul de rotaţieSensul de rotaţie este cel al cuplului de rotaţie este cel al cupluluiDirecţia: : ModululModulul::
1 2 1 2 1 2 0F F F F F F= = − ⇒ + =r r r r r r
1 2( , )C F Fµ ⊥r rr
1 1 2 2 1 2 1 2
1 2C
C
C
F F
dar iarFd F d F F F d d dF d
µ µ µ
µµ
= +
= + = = + == ⋅
r r r

Momentului cuplului Momentului cuplului μc = 0 0
când d = 0 când d = 0
EEfectul de rotaţie al unui cuplu de forţe fectul de rotaţie al unui cuplu de forţe va fi cu atât mai mare cu cât forţele va fi cu atât mai mare cu cât forţele sunt mai mari şi cu cât braţul cuplului sunt mai mari şi cu cât braţul cuplului este mai mare.este mai mare.
C F dµ = ⋅
MOMENTUL CINETICMOMENTUL CINETIC
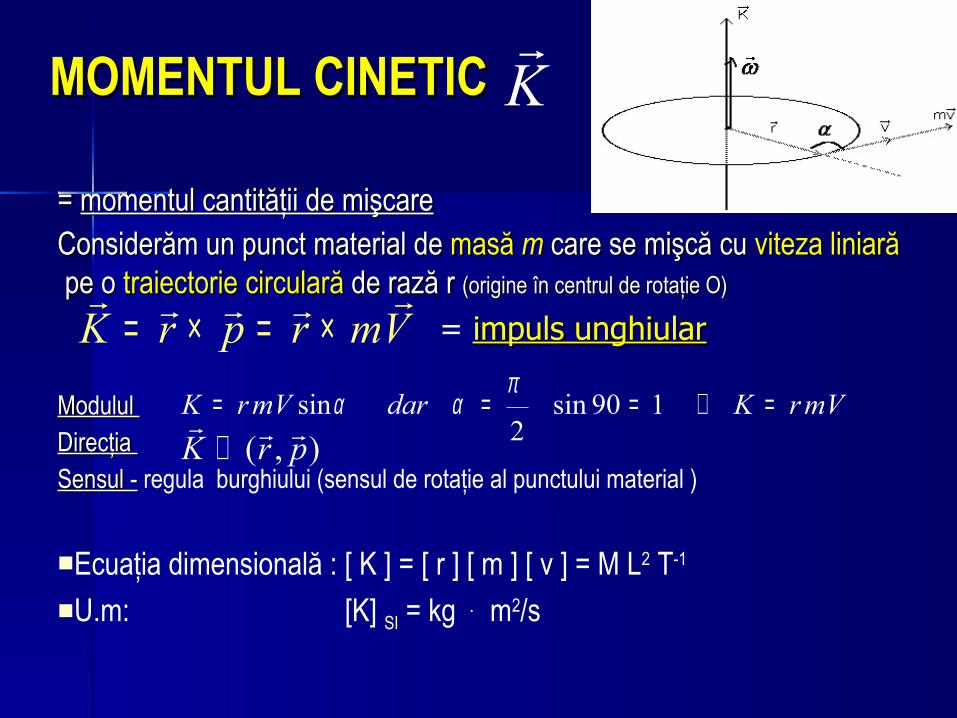
= = momentul cantităţii de mişcaremomentul cantităţii de mişcare Considerăm un punct material de Considerăm un punct material de masă masă mm care se mişcă cu care se mişcă cu viteza liniarăviteza liniară pe o pe o traiectorie circularătraiectorie circulară de rază de rază r r ((origine în centrul de rotaţie Oorigine în centrul de rotaţie O)) = impuls unghiularimpuls unghiular
Modulul Modulul Direcţia Direcţia Sensul -Sensul - regula burghiului (sensul de rotaţie al punctului material )
Ecuaţia dimensională : [ K ] = [ r ] [ m ] [ v ] = M L2 T-1
U.m: [K] SI = kg ּ m2/s
Kr
K r p r mV= × = ×r rr r r
sin sin 90 12
K rmV dar K rmVπ
α α= = = ⇒ =( , )K r p⊥
r r r
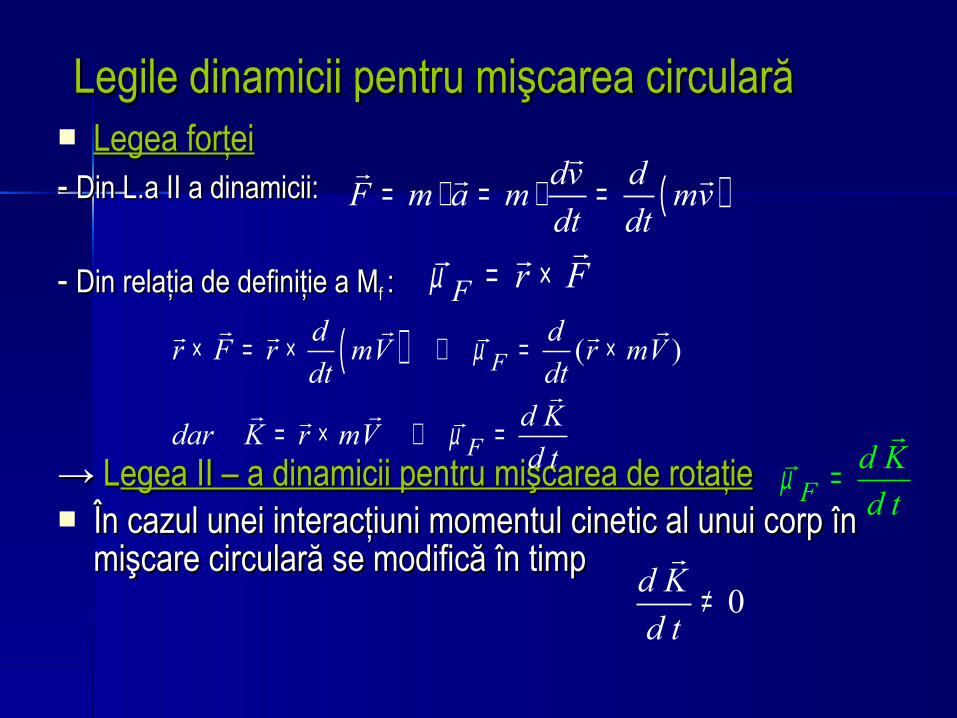
Legile dinamicii pentru mişcarea circularăLegile dinamicii pentru mişcarea circulară Legea forţeiLegea forţei - - Din L.a II a dinamicii:Din L.a II a dinamicii:
- - Din relaţia de definiţie a Din relaţia de definiţie a MMf f ::
→ → LLegea II – a dinamicii pentru mişcarea de rotaţieegea II – a dinamicii pentru mişcarea de rotaţie În cazul unei interacţiuni momentul cinetic al unui corp în În cazul unei interacţiuni momentul cinetic al unui corp în
mişcare circulară se modifică în timpmişcare circulară se modifică în timp
( )dv dF m a m mvdt dt
= ⋅ = ⋅ =rr r r
F r Fµ = ×rr r
( ) ( )F
F
d dr F r mV r mVdt dt
d Kdar K r mVd t
µ
µ
× = × ⇒ = ×
= × ⇒ =
r r rr r r r
rr rr r
Fd Kd t
µ =r
r
0d Kd t
≠r
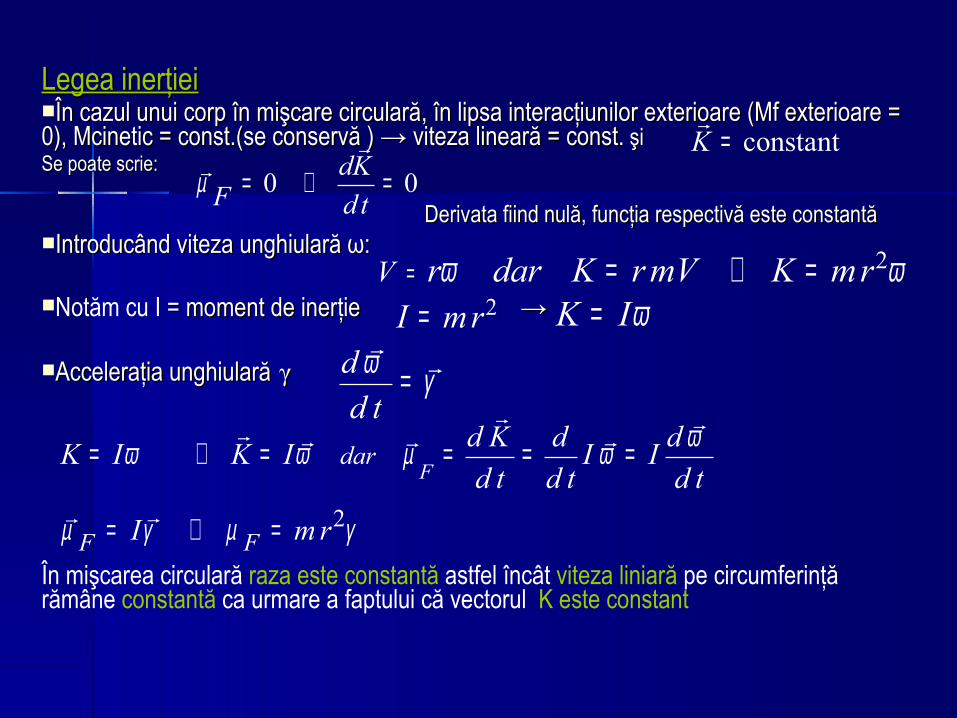
Legea inerţieiLegea inerţiei În cazul unui corp în mişcare circulară, în lipsa interacţiunilor exterioare (În cazul unui corp în mişcare circulară, în lipsa interacţiunilor exterioare (MfMf exterioare exterioare == 0),0), Mcinetic = const. Mcinetic = const.(se conservă )(se conservă ) → viteza lineară = const. → viteza lineară = const. şişiSe poate scrie:Se poate scrie:
Derivata fiind nulă, funcţia respectivă este constantăDerivata fiind nulă, funcţia respectivă este constantă IntroducândIntroducând vitez vitezaa unghiular unghiularăă ω ω::
Notăm cu I == moment de inerţie moment de inerţie →→
Acceleraţia unghiularăAcceleraţia unghiulară γγ
În mişcarea circulară raza este constantă astfel încât viteza liniară pe circumferinţă rămâne constantă ca urmare a faptului că vectorul K este constant
0 0dKF dt
µ = ⇒ =r
rconstantK =
r
2V r dar K rmV K mrω ω= = ⇒ =2I mr= K Iω=
Fdar
d K d dK I K I I Id t d t d t
ωω ω µ ω= ⇒ = = = =r rr r rr
dd t
ω γ=r
r
2F FI m rµ γ µ γ= ⇒ =rr
Legea conservării momentului cineticLegea conservării momentului cinetic
Fie două corpuri în mişcare circulară având momentele cinetice Fie două corpuri în mişcare circulară având momentele cinetice KK1 şi şi respectiv respectiv KK22; în urma interacţiunii lor (ciocnir; în urma interacţiunii lor (ciocniree) cele două corpuri îşi vor ) cele două corpuri îşi vor modifica momentele cinetice în modifica momentele cinetice în K’K’11 şi respectiv şi respectiv K’K’22..
Conform legii conservării momentului cinetic:Conform legii conservării momentului cinetic:
SSuma momentelor cinetice înainte de interacţiune este egală cu suma momentelor cinetice după de interacţiune
2 21 1K K K K′ ′+ = +r r r r
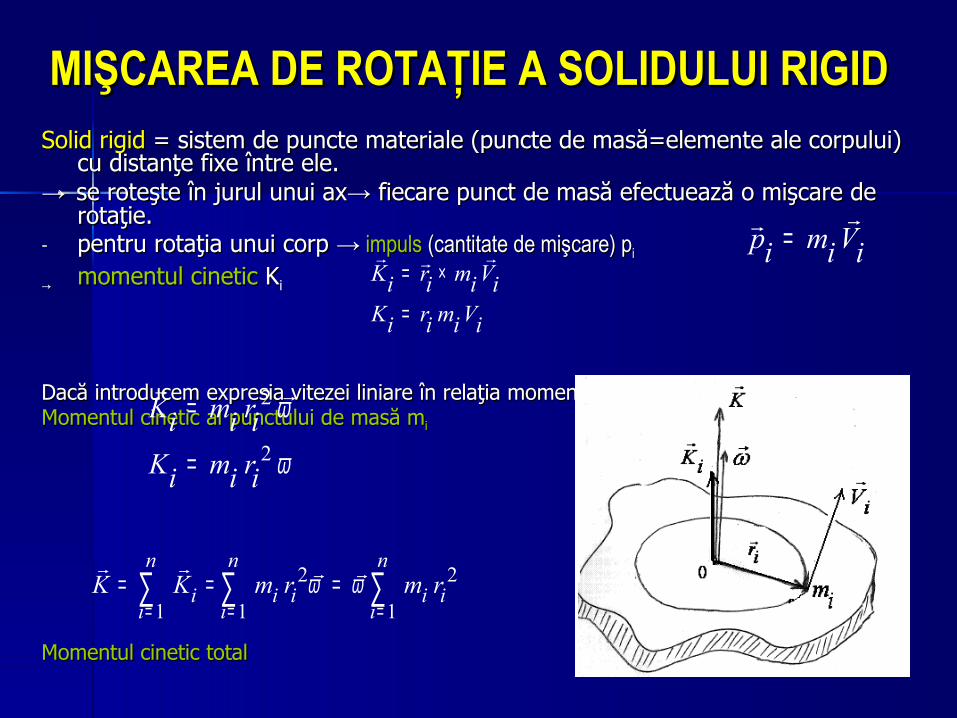
MIŞCAREA DE ROTAŢIE A SOLIDULUI RIGIDMIŞCAREA DE ROTAŢIE A SOLIDULUI RIGIDSSolid rigidolid rigid == sistem de puncte materiale sistem de puncte materiale ((puncte de masăpuncte de masă==elemente ale corpului) elemente ale corpului)
cu distanţe fixe între ele.cu distanţe fixe între ele. → → se roteşte în jurul unui axse roteşte în jurul unui ax→→ ffiecare punct de masă efectuează o mişcare de iecare punct de masă efectuează o mişcare de
rotaţie.rotaţie.- pentru rotaţia unui corp pentru rotaţia unui corp →→ impuls impuls (cantitate de mişcare) p (cantitate de mişcare) pi i
→→ momentul cineticmomentul cinetic K Kii
Dacă introducem expresia vitezei liniare în relaţia momentului cinetic obţinemDacă introducem expresia vitezei liniare în relaţia momentului cinetic obţinem::Momentul cinetic al punctului de masă mMomentul cinetic al punctului de masă mii
Momentul cinetic totalMomentul cinetic total
p m Vi i i=rr
K r m Vi i i iK r m Vi i i i
= ×
=
r rr
2
2
K m ri i iK m ri i i
ω
ω
=
=
r r
2 2
1 1 1
n n ni i i i i
i i iK K m r m rω ω
= = == = =∑ ∑ ∑
r r r r
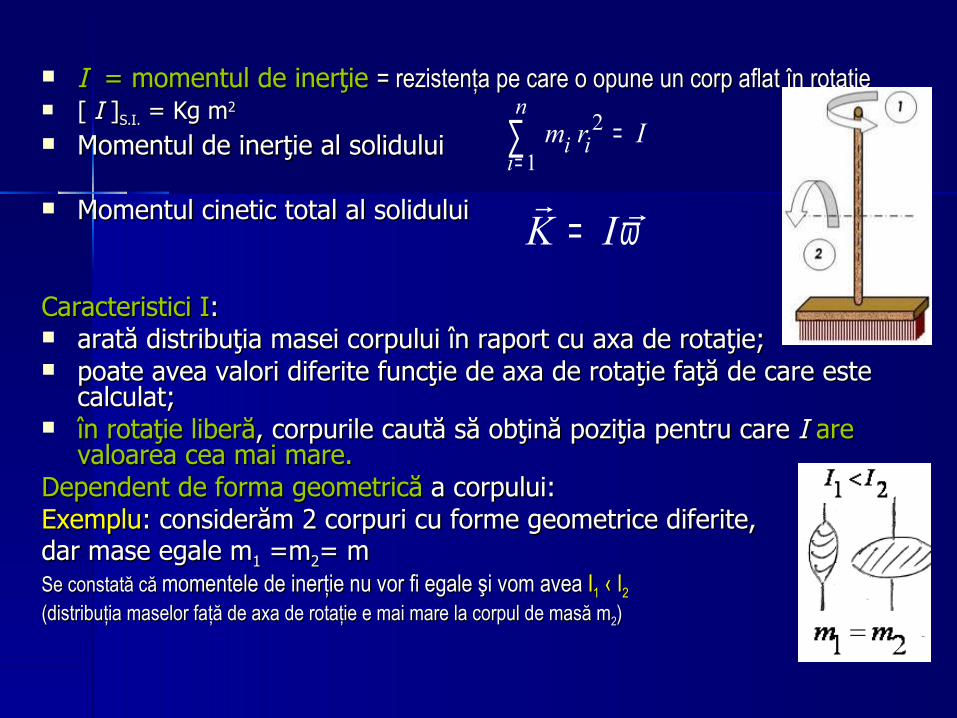
I I = = momentul de inerţiemomentul de inerţie = rezistenţa pe care o opune un corp aflat în rotaţie= rezistenţa pe care o opune un corp aflat în rotaţie [ [ II ] ]S.I.S.I. = Kg m = Kg m22 Momentul de inerţie al solidului Momentul de inerţie al solidului
Momentul cinetic total al soliduluiMomentul cinetic total al solidului
Caracteristici ICaracteristici I:: arată distribuţia masei corpului în raport cu axa de rotaţie;arată distribuţia masei corpului în raport cu axa de rotaţie; poate avea valori diferite funcţie de axa de rotaţie faţă de care este poate avea valori diferite funcţie de axa de rotaţie faţă de care este
calculat;calculat; în rotaţie liberăîn rotaţie liberă, corpurile caută să obţină poziţia pentru care , corpurile caută să obţină poziţia pentru care II are are
valoarea cea mai mare.valoarea cea mai mare.DDependent de forma geometricăependent de forma geometrică a corpului a corpului: : ExempluExemplu: : considerăm 2 corpuri cu forme geometrice diferiteconsiderăm 2 corpuri cu forme geometrice diferite,, dar mase egale dar mase egale mm11 =m =m22= m= mSe constată că Se constată că momentele de inerţie nu vor fi egale şi vom avea momentele de inerţie nu vor fi egale şi vom avea II11 ‹ I ‹ I22((distribuţia maselor faţă de axa de rotaţie e mai mare la corpul de masă distribuţia maselor faţă de axa de rotaţie e mai mare la corpul de masă mm22))
2
1
ni i
im r I
==∑
K Iω=r r
Exemplu:
Un patinator care se roteşte pe loc are un Un patinator care se roteşte pe loc are un moment de inerţie de moment de inerţie de 5 kg-m5 kg-m22 când are când are mâinile întinse în laterale şi de mâinile întinse în laterale şi de 1 kg-m1 kg-m22 când mâinile sunt aşezate pe lângă corp. când mâinile sunt aşezate pe lângă corp.
Dacă începe să se învârtească cu o viteză Dacă începe să se învârtească cu o viteză de de 3 rot/s3 rot/s când mâinile sunt întinse şi apoi când mâinile sunt întinse şi apoi aşează mâinile pe lângă corp, aşează mâinile pe lângă corp,
ce ce viteză unghiularăviteză unghiulară finală are? finală are?
ω 1 ω 2
( )( ) ( )
11 1 2 2 2 1
2
2rot rots s2
5 kg m3 15
1 kg m
II II
ω ω ω ω= → =
⋅= =
⋅
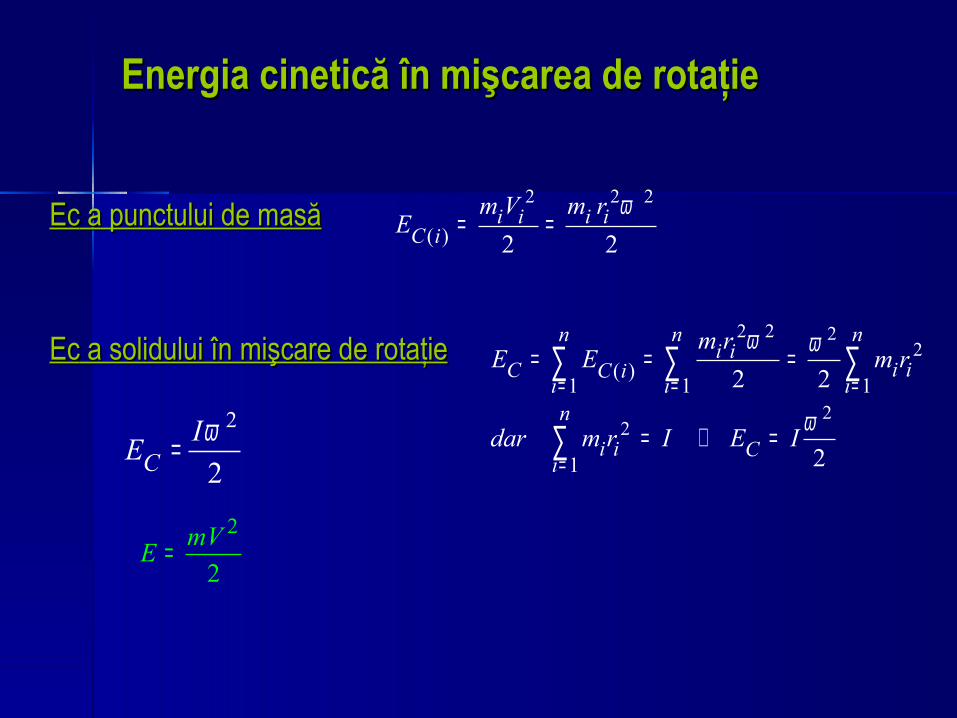
Energia cinetică în mişcarea de rotaţieEnergia cinetică în mişcarea de rotaţie
EcEc a punctului de masă a punctului de masă
EcEc a solidului în mişcare de rotaţie a solidului în mişcare de rotaţie
2 2 2
( ) 2 2i i i i
C im V m r
Eω
= =
2 2 22
22
( )1 1 1
1
2 2
2
n n ni i
i iC C ii i in
i i Ci
m rE E m r
dar m r I E I
ω ω
ω= = =
=
= = =
= ⇒ =
∑ ∑ ∑
∑2
2CIE ω=
2
2mVE =
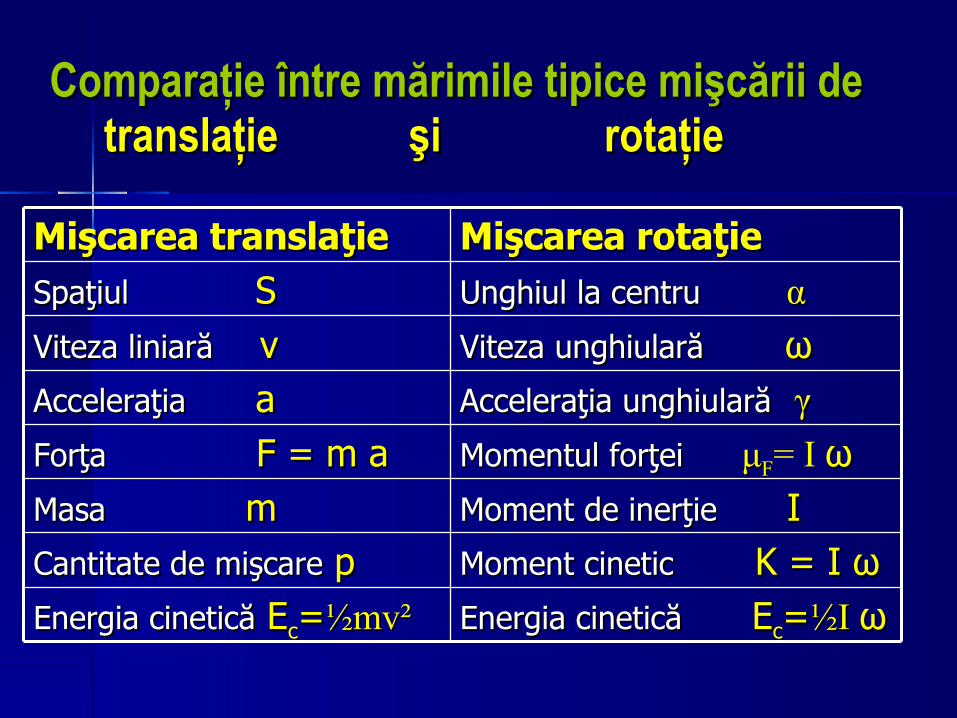
CComparaomparaţie întreţie între mărimile tipice mişcării de mărimile tipice mişcării de translaţie translaţie şi şi rotaţierotaţie
Mişcarea translaţieMişcarea translaţie Mişcarea rotaţieMişcarea rotaţie Spaţiul Spaţiul SS Unghiul la centruUnghiul la centru ααViteza liniarăViteza liniară vv Viteza unghiularăViteza unghiulară ωωAcceleraţiaAcceleraţia aa Acceleraţia unghiularăAcceleraţia unghiulară γγForţa Forţa F = m aF = m a Momentul forţeiMomentul forţei μμFF= I ωωMasaMasa mm Moment de inerţieMoment de inerţie II Cantitate de mişcareCantitate de mişcare pp Moment cineticMoment cinetic K = I K = I ωωEEnergia cineticănergia cinetică EEcc==½mv²½mv² EEnergia cineticănergia cinetică EEcc==½I ½I ωω
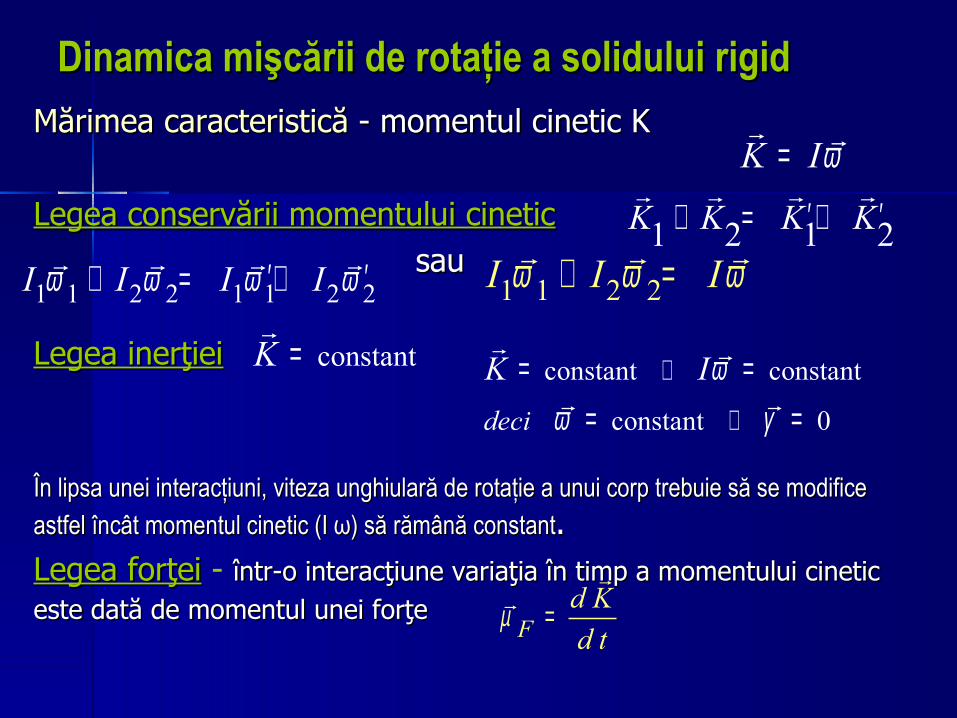
Dinamica mişcării de rotaţie a solidului rigidDinamica mişcării de rotaţie a solidului rigidMMărimea caracteristicăărimea caracteristică - - momentul cinetic momentul cinetic K K
Legea conservării momentului cineticLegea conservării momentului cinetic sausau
Legea inerţieiLegea inerţiei
ÎÎn lipsa unei interacţiuni, viteza unghiulară n lipsa unei interacţiuni, viteza unghiulară dede rotaţie rotaţie a a unui corp unui corp trebuie trebuie să se modifice să se modifice astfel încât momentul cinetic astfel încât momentul cinetic (I (I ωω) ) să rămână constantsă rămână constant..Legea forţeiLegea forţei - într-o interacţiune variaţia în timp a momentului cinetic într-o interacţiune variaţia în timp a momentului cinetic este dată de momentul unei forţeeste dată de momentul unei forţe
1 2 1 2K K K K′ ′+ = +r r r r
1 1 2 2 1 1 2 2I I I Iω ω ω ω′ ′+ = +r r r r1 1 2 2I I Iω ω ω+ =r r r
constantK =r
constant constant
constant 0deci
K Iωω γ
⇒
⇒
= == =
r r
r r
K Iω=r r
Fd Kd t
µ =r
r
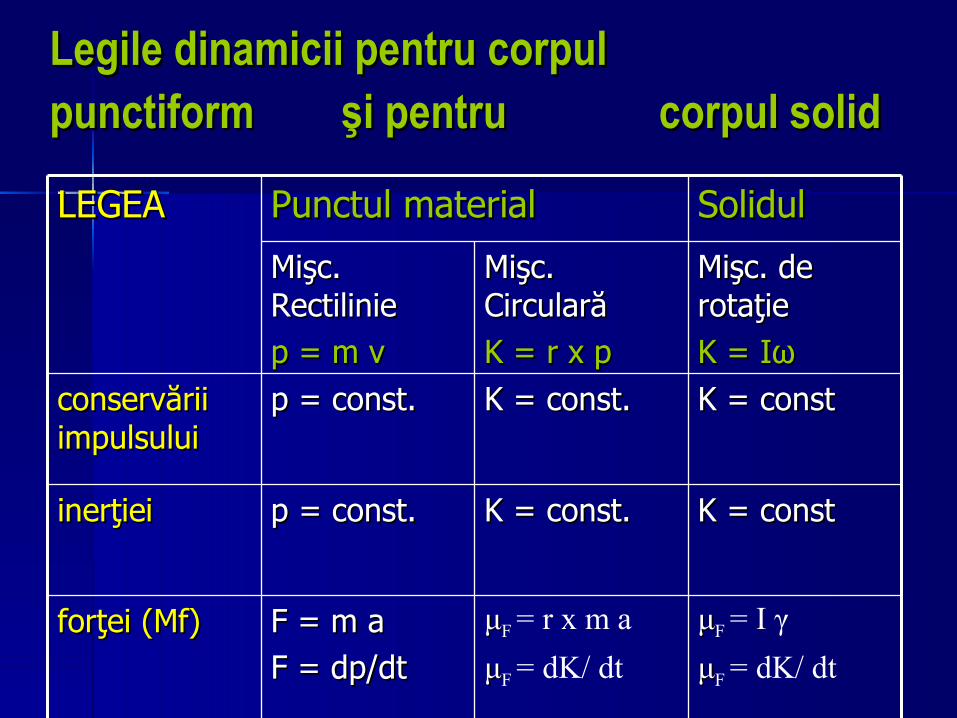
LLegiegilele dinamicii pentru corpul dinamicii pentru corpul punctiform punctiform şi pentru şi pentru corpul solidcorpul solid
LEGEALEGEA Punctul materialPunctul material SolidulSolidul
Mişc. Mişc. RectilinieRectiliniep = m vp = m v
Mişc. Mişc. CircularăCircularăK = r x pK = r x p
Mişc. de Mişc. de rotaţierotaţieK = IK = Iωω
conservării conservării impulsuluiimpulsului
p = const.p = const. K = const.K = const. K = constK = const
inerţieiinerţiei p = const.p = const. K = const.K = const. K = constK = const
forţei (forţei (MMf)f) F = m aF = m aF = dp/dtF = dp/dt
μμF = r x m a μμF = dK/ dt
μμF = I γμμF = dK/ dt
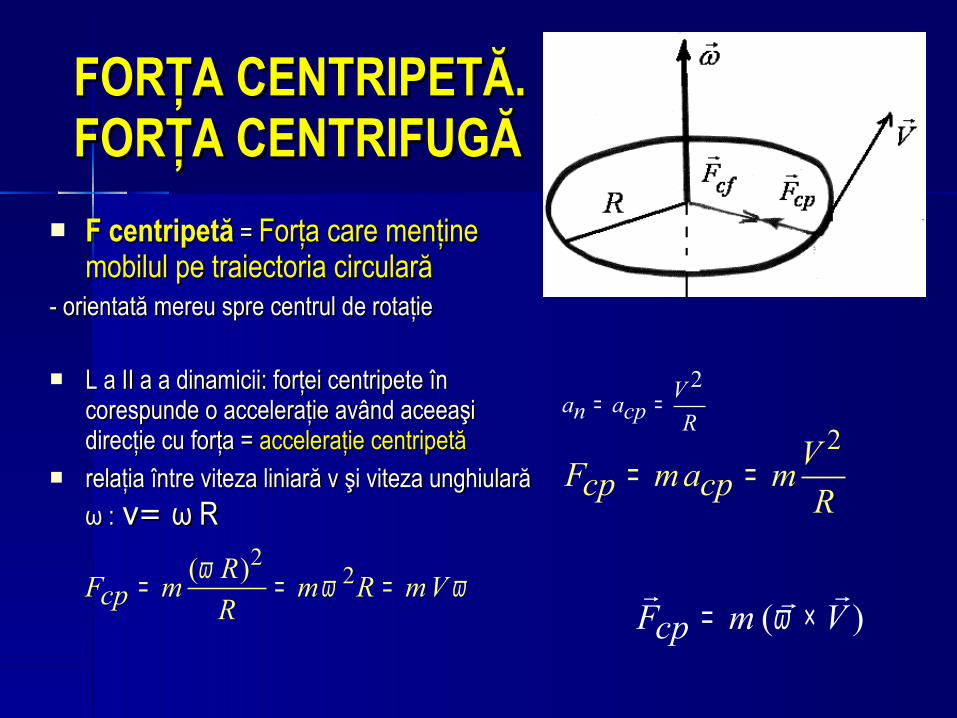
FORŢA CENTRIPETĂ. FORŢA CENTRIPETĂ. FORŢA CENTRIFUGĂFORŢA CENTRIFUGĂ
F centripetăF centripetă = = Forţa care menţine Forţa care menţine mobilul pe traiectoria circularămobilul pe traiectoria circulară
- - orientată mereu spre centrul de rotaţie orientată mereu spre centrul de rotaţie
L a II a a dinamicii: fL a II a a dinamicii: forţei centripete în orţei centripete în corespunde o acceleraţie având aceeaşi corespunde o acceleraţie având aceeaşi direcţie cu forţa direcţie cu forţa == acceleraţie centripetăacceleraţie centripetă
relaţia între viteza liniară relaţia între viteza liniară vv şi viteza unghiulară şi viteza unghiulară ωω : : v= v= ωω R R
2Va an cp R= =
2VF ma mcp cp R= =
22( )RF m m R mVcp R
ω ω ω= = =( )F m Vcp ω= ×
r rr
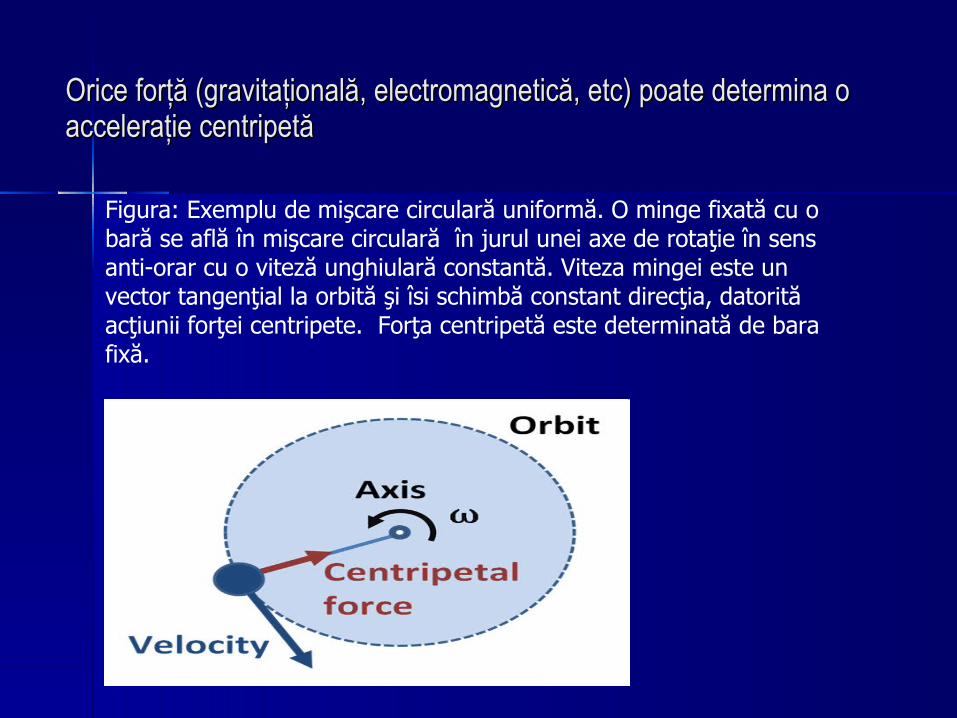
Orice forţă (gravitaţională, electromagnetică, etc) poate determina o Orice forţă (gravitaţională, electromagnetică, etc) poate determina o acceleraţie centripetăacceleraţie centripetă
Figura: Exemplu de mişcare circulară uniformă. O minge fixată cu o bară se află în mişcare circulară în jurul unei axe de rotaţie în sens anti-orar cu o viteză unghiulară constantă. Viteza mingei este un vector tangenţial la orbită şi îsi schimbă constant direcţia, datorită acţiunii forţei centripete. Forţa centripetă este determinată de bara fixă.
Conform principiului acţiunii şi reacţiunii forţei centripete Fc i se opune o forţă Conform principiului acţiunii şi reacţiunii forţei centripete Fc i se opune o forţă egală în valoare absolută dar de sens opus egală în valoare absolută dar de sens opus == forţa centrifugăforţa centrifugă ((FFcf )
Forţa centripetă acţionează asupra corpului în centrul său de greutate. Forţa centrifugă este aplicată centrului de rotaţie.
- pentru V şi R = const., FFcf ~ m;- pentru m şi R = const., FFcf ~ V 2;- pentru m şi ω = const., FFcf ~ R;- pentru m şi V = const. FFcf ~ 1/R.
Concluzii:Pentru corpurile cu aceeaşi masă şi aceeaşi viteză, forţa centrifugă este mai
mare pentru corpul aşezat mai aproape de centrul de rotaţie.Pentru corpurile cu mase şi viteze unghiulare egale, corpul mai apropiat de
centrul de rotaţie va fi supus unei forţe centrifuge mai mici.
2
0cp cpcf cf
cpcf
F F F F
F F ma m R m Vcp ω ω
⇒= − + =
= − = = =
r r r r
cfF mVω=

aplicaţiiaplicaţii
Centrifuga Centrifuga