analiza eficientei energetice a utilizarii …mutuala, fluxul de magnetizare) și constantele...
TRANSCRIPT
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
R A P O R T Ş T I I N Ţ I F I C Ş I T E H N I C
ETAPA II – 2015
Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
1
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
1.Rezumatul etapei 1.1. Planul de realizare a etapei a prevăzut următoarele:
Activitatea II.1 Elaborare variantă preliminară documentație de execuție a circuitului intermediar de curent continuu. Activitatea II.2 Elaborare variantă preliminară documentație de execuție bloc module invertoare de ieșire și invertor recuperare. Activitatea II.3 Elaborare variantă preliminară documentație de execuție pentru unitatea de comandă și control.
1.2. Rezultatele așteptate ale etapei sunt cele prevăzute prin planul de realizare, și anume un un Proiect variantă preliminară model funcțional pentru subansamble ale sistemului de acționare multimotor cu noua arhitectură de comandă, proiect realizat prin colaborarea dintre CO – ICMET Craiova și partenerul P1 – SC CESI Automation SRL Craiova. Rezultatele acestei etape au avut ca punct de plecare concluziile din Studiu privind tehnicile moderne de comandă și control pentru invertoarele de putere și aplicații la sistemele de acționare multimotor, studiu realizat de către ICMET Craiova în etapa 1, la care se adaugă și experiența acumulată de membrii echipei proiectului în aplicații cu acționări multimotor, aplicații care au fost descrise sintetic în studiul amintit mai sus. Intr-o descriere centrată pe problemă, putem spune că s-a sintetizat din contextul tehnologic actual privind acționările electrice multimotor o arhitectură de control multimotor, de la care s-a pornit în realizarea proiectului amintit mai sus. La acestea putem adăuga faptul că soluția adoptată este optimală dar flexibilă cu aplicabilitate clară, identificată împreună cu partenerul industrial la momentul detalierii propunerii de proiect și structurării planului de realizare, și anume aplicații în industria mineritului de suprafață. Practic CO și P1 au structurat și elaborat proiectul general de acționare multimotor în 3 proiecte conform rezultatelor așteptate prin planul de realizare: - Proiect variantă preliminară model funcţional al circuitului intermediar de curent continuu - Proiect variantă preliminară model funcţional pentru bloc module invertoare de ieșire și invertor
recuperare - Proiect variantă preliminară model funcţional pentru unitatea de comandă și control Această structurare este naturală atât din prisma componenței sistemului global de acționare multimotor: blocuri de forță, blocuri de comandă, control și comunicație, dar și d.p.d.v. al soluției globale aleasă (ne referim de exemplu, la faptul că circuitul intermediar de c.c. este comun). In cadrul fiecărui proiect, din cele trei, s-a pornit de la tema de proiectare globală particularizată în cadrul proiectului, s-au prezentat dimensionarea principalelor componente și funcționalitatea lor, lista de materiale cât și simulări numerice pornind de la modelele matematice implementate în Simulink pentru principalele blocuri funcționale. Iterații de tipul trial and error sunt necesare pentru a evita greșelile grosiere de proiectare, dar și pentru a surprinde o serie de efecte și fenomene complexe, chiar dacă in mediu simulat, care să conveargă către o finalitate pozitivă a întregului proiect. Simulările au urmat linia de la simplu la complex pentru a pune în evidență atât elemente calitative cât și cantitative cu privire la dimensionarea blocurilor componente, dar și a întregului ansamblu de acționare. Schemele de simulare și rezultatele obținute în MATLAB/Simulink, pentru cele 3 proiecte sunt prezentate în 107 figuri, iar un număr relativ mare de simulări cu valori ale componentelor din listele de materiale stabilite prin proiectare, au condus la ideea că dimensionările elementelor de forță dar și a strategiei de conducere împreună cu buclele de reglare și estimatoarele care se vor implementa în DSP (urmând aproape aceeași structură ca cele implementate în Simulink) sunt corecte, astfel că în etapa 3 se poate realiza execuția propriu-zisă a sistemului de acționare multimotor propus în tema generală de proiectare. Schemele, cablajele și simularea blocurilor din unitatea de comandă și control, s-au făcut în mediul de proiectare Altium Designer, iar programarea parțială a DSP-ului Microchip în mediul de dezvoltare MPLAB. Datorită restructurării în 2015 a planului de realizare, proiectele din această etapă sunt variante preliminare, urmând ca în etapa 3, să realizăm forma definitivă împreună cu achiziția completă de echipamente, realizare model funcțional și testările corespunzăroare.
2
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
In etapa 3 principalele elmente care vor fi adăugate pentru definitivarea proiectului de acționare multimotor, se referă la organizarea și implementarea algoritmilor de control în rețea, comunicației aferente, iar d.p.d.v. al simulărilor numerice vor fi studiate modele pentru cuplarea multimotor rigidă sau elastică, deci sisteme care vor trebui să asigure aceeași turație sau același cuplu pentru fiecare motor (conform aplicațiilor identificate cu partenerul industrial P1, aplicații pe care le solicită piața internă, dar chiar și cea externă limitrofă). 2.Descrierea ştiinţifică şi tehnică a cercetărilor etapei analizate
2.1. Proiect variantă preliminară model funcțional pentru subansamble ale sistemului de acționare multimotor cu noua arhitectură de comandă
Datele tehnice ale Sistemului de acționare multimotor care conține Convertizoare statice de frecvență proiectate cu caracteristici tehnice superioare ce asigură reglarea turației unor motoare asincrone cu rotorul in scurtcircuit intre zero și valoarea nominală utilizând algoritmi de control în rețea sunt: Tensiunea de alimentare: 3 x 400Vac / 50Hz; Puterea nominala: 2 x 55KW; Puterea maxima: 1,5 x PN / 2 minute; Temperatura de functionare: -25°C – 45°C. Structura echipamentului de acționare multimotor: Redresor trifazat unic și filtru intermediar – 1 bucată; Convertizoare de frecvență 55KW – 2 bucăți; Invertor de recuperare in rețeaua industrială a energiei de frânare – 1 bucată.
Convertizorul static de frecvență cuprinde urmatoarele subansamble pe circuitul de forță: punte redresoare; filtru pentru circuitul intermediar; punte invertoare; traductoare marimi electrice.
Convertizorul static de frecventa este protejat la aparitia accidentala a urmatoarelor situatii: scurtcircuit; supratensiune in circuitul intermediar; supratemperatura; blocare motor.
Interfața minimală a convertizorului de frecvență conține: a) Semnalizări pe unitatea de comandă electronică: START, STOP, INTERBLOCARE, DESATURARE, Uintermediar, AVARIE. b) Semnalizări pe display-ul cu cristale lichide de pe panoul frontal al convertizorului Display-ul poate fi configurat să afișeze: starea convertizorului, frecvența de ieșire/frecvența prescrisă, curentul prin motor, tipul avariei, etc. c) Semnalizări la distanță: semnalizare funcționare invertor "Start";semnalizare nefunctionare invertor "Stop"; semnalizare defect invertor "Avarie". d) Comenzi de la distanță: pornire/oprire invertor; schimbarea sensului de rotire; cresterea/scaderea turației motorului de acționare.
Carcteristicile generale ale unui convertizor de frecvență sunt prezentate in tabelul de mai jos. Marimi de intrare Tensiunea de alimentare 3 x 400 V c.a. (+15%; -20%) Frecventa tensiunii de alimentare 50 Hz + 2% Marimi de iesire Puterea nominala de iesire 55 KW Capacitate de suprasarcina 1,5 Pn / 30 sec. Curentul nominal de iesire 86 A c.a. Tensiunea de iesire reglabila 3 x (0...400 V c.a) Domeniul de variatie a frecventei 1,5 Hz... 50 Hz (100 Hz) Componente electronice de putere tranzistoare IGBT Timp de accelerare si decelerare 5...180 sec, ajustabil;
rampa de accelerare/frânare=150rpm Marimi de reactie 0...10 V sau 4... 20 mA Sistem de racire ventilatie fortata Conditii de mediu Zona climatica climat normal (N) Altitudinea maxima 1000 m Temperatura mediului ambiant -10°C ÷ +40°C Umiditate relativa la 25°C max.80% fara condensare
Schema generală a sistemului de acționare multimotor cu noua arhitectură de comandă este prezentată în Fig. 1. și 2.
3
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
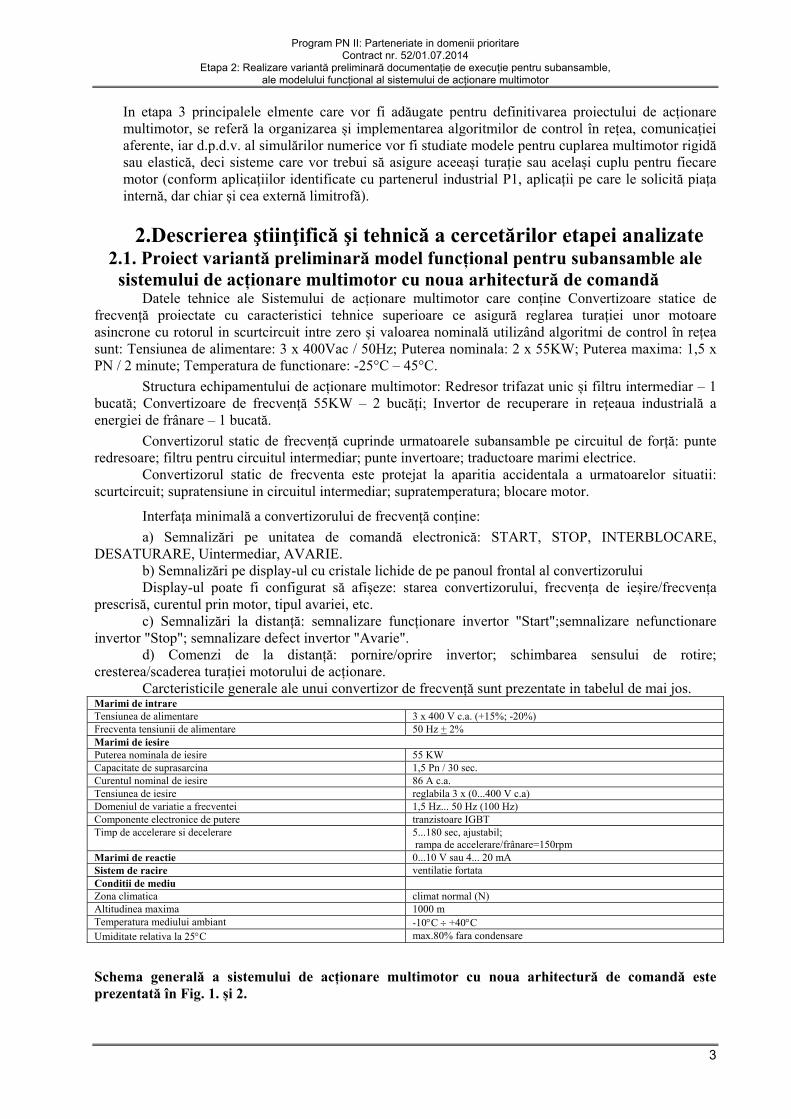
Fig. 1 Schema generală sistem de acționare multimotor: blocuri invertoare, redresor și filtre rețea
F iltru in tra re
F iltru E M I
380
Vac
+/-
10%
TSR
F iltru ie s ire
S
R
R
R
TS
S
T
T
r
ts
D C +
U
(+ )
(+ )
(+ )
(+ )
( -) (- )
(- )( - )
D C - In v e r to r 5 5 k W
In v e r to r 5 5 k W
W
V
V
U
W
F A 1
In v e rto r re c u p e ra re 1 1 0 k W
R e d re s o r 1 3 2 k W
W 1
V 1U 1
W 2
V 2U 2
P E
B lo c e le c tro n ic d e c o m a n d a s i re g la re
M
M
N iv e l ie ra rh ic s u p e rio r(d is p e c e r lo c a l)
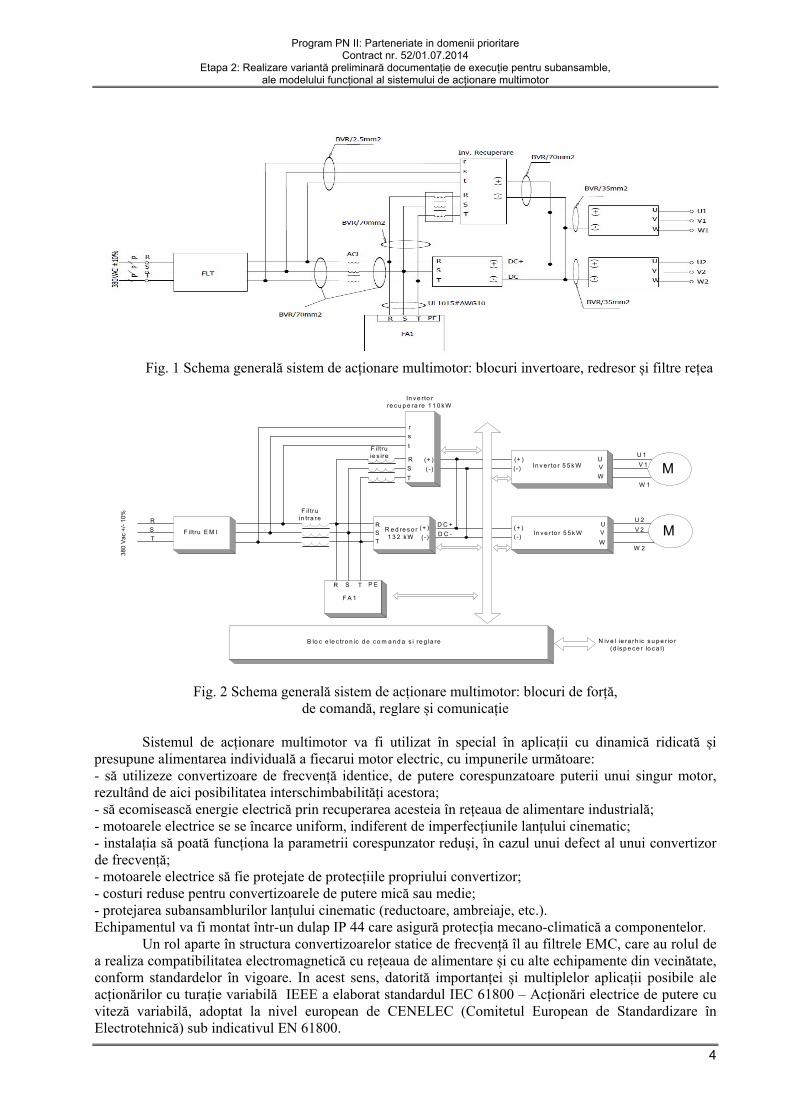
Fig. 2 Schema generală sistem de acționare multimotor: blocuri de forță, de comandă, reglare și comunicație
Sistemul de acționare multimotor va fi utilizat în special în aplicații cu dinamică ridicată și
presupune alimentarea individuală a fiecarui motor electric, cu impunerile următoare: - să utilizeze convertizoare de frecvență identice, de putere corespunzatoare puterii unui singur motor, rezultând de aici posibilitatea interschimbabilități acestora; - să ecomisească energie electrică prin recuperarea acesteia în rețeaua de alimentare industrială; - motoarele electrice se se încarce uniform, indiferent de imperfecțiunile lanțului cinematic; - instalația să poată funcționa la parametrii corespunzator reduși, în cazul unui defect al unui convertizor de frecvență; - motoarele electrice să fie protejate de protecțiile propriului convertizor; - costuri reduse pentru convertizoarele de putere mică sau medie; - protejarea subansamblurilor lanțului cinematic (reductoare, ambreiaje, etc.). Echipamentul va fi montat într-un dulap IP 44 care asigură protecția mecano-climatică a componentelor.
Un rol aparte în structura convertizoarelor statice de frecvență îl au filtrele EMC, care au rolul de a realiza compatibilitatea electromagnetică cu rețeaua de alimentare și cu alte echipamente din vecinătate, conform standardelor în vigoare. In acest sens, datorită importanței și multiplelor aplicații posibile ale acționărilor cu turație variabilă IEEE a elaborat standardul IEC 61800 – Acționări electrice de putere cu viteză variabilă, adoptat la nivel european de CENELEC (Comitetul European de Standardizare în Electrotehnică) sub indicativul EN 61800.
4
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
În cadrul multiplelor secțiuni ale acestuia se realizează o prezentare completă a cerințelor pe care trebuie să le îndeplinească sistemele de acționare cu motoare electrice alimentate prin convertizoare de frecvență și probelor la care trebuie supuse acestea. Sistemul de acționare multimotor din acest proiect va respecta aceste standarde.
Cele 2 invertoare principale de acționare și invertorul de recuperare energie, vor fi controlate de câte un DSP. Fiecare dintre aceste DSP-uri va programat și montat pe câte o placă de comandă.
Unitatea de comandă și control a fiecărui invertor trebuie să aibă implementat un algoritm de reglare vectorială, să fie prevăzută cu un microprocesor de semnal cu capacități de memorare și viteză de calcul foarte mari, ceea ce face posibilă rezolvarea, practic în timp real, a modelului matematic al mașinii electrice.
Unitatea de comandă și control permite stabilirea corespondenței dintre parametrii modelului matematic și parametrii modelului real al motoarelor, printr-un program automat de identificare a parametrilor motorului electric a cărui turație trebuie reglată. Programul test al unității de comandă asigură și stabilirea constantelor acționării (constantele regulatoarelor). Parametri motorului electric folosiți în algoritmul de reglare vectorială (rezistența statorică, inductivitatea statorică, inductivitatea mutuala, fluxul de magnetizare) și constantele regulatoarelor sunt vizulalizați pe monitorul unui PC sau Laptop, pentru o identificare corectă, cât mai apropiată de valoarea lor din modelul matematic. La alegerea componentelor necesare pentru implementarea tehnicilor numerice şi hibride in conducerea convertizoarelor statice trebuie prevăzute urmatoarele aspecte:
- puterea de procesare necesară calculelor matematice complexe; - existența unui numar suficient de convertoare analog-digitale și digital-analogice pentru a
putea prelua informațiile de la sistem; - existența unui numar suficient de mare de ieșiri digitale; - spațiul de memorie pentru program să poata cuprinde software-ul atât in forma inițială cât și
eventualele imbunatățiri ulterioare; - memoria RAM sa permită folosirea tuturor variabilelor și mărimilor de proces; - memoria EEPROM să fie suficient de mare pentru a permite salvarea marimilor de control pe
perioada când lipsește tensiunea de alimentare; - mediul de dezvoltare trebuie să fie un limbaj de nivel inalt care să permită dezvoltarea
corecta a software-ului, cât și dezvoltarea ulterioară a eventualelor upgrade-uri. Electronica de comandă asigură interfața dintre DSP și echipamentele de forță, și descrie
semnalele I/O și de comunicație: Impulsurile PWM; Intrari numerice; Iesiri numerice; Intrari analogice; Comunicația intre invertoare pe protocol CANOpen.
Comunicația intre invertoare In aplicațiile multi-motor este necesară sincronizarea invertoarelor in funcție de tipul sarcinii și a interacțiunii dintre motoare astfel: - In cazul cuplarii rigide a 2 sau mai multe motoare, toate motoarele trebuie sa aibă aceeași
viteză. In caz contrar vor apărea oscilații ale sistemului datorate faptului că nu toate motoarele dezvoltă cuplu util: unul sau mai multe motoare pot fi antrenate, ceea ce duce la transformarea acestora în generatoare. Acestea nu mai dezvoltă cuplu util ci cuplu rezistiv. Aplicatiile in care se folosește acest tip de sistem sunt: macarale de mare capacitate, lifturi, rotirea suprastructurilor, etc.
- In cazul cuplarii elastice a 2 sau mai multe motoare, toate motoarele trebuie să dezvolte același cuplu. Aplicații: benzi transportoare, deplasarea utilajelor cu șenile, etc. Avand in vedere ca motoarele sunt cuplate cu elemente elastice (benzi de cauciuc, etc.) sau funcționează independent dar acționează asupra aceleiași sarcini, sistemul trebuie să echilibreze cuplul dezvoltat de fiecare motor. Dezechilibrul poate fi generat de următorii factori: uzura neuniformă a elementelor de cuplare, virajul utilajelor care presupune distante diferite pentru fiecare șenila, etc. In acest caz viteza motoarelor nu este importantă, ci cuplul dezvoltat de fiecare motor.
- Sisteme complexe, cu minim 3 motoare, 2 fiind cuplate rigid intre ele și următoarele cuplate flexibil cu primele. Aceste sisteme impun folosirea ambelor metode de sincronizare: in cuplu și in viteza. Aplicații: benzi transportoare cu stații de acționare distribuite, etc.
Pentru a asigura viteza de comunicație necesară acestor sisteme și siguranța datelor vehiculate, se va implementa protocolul de comunicație CanOpen.
5
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
Pentru comunicația cu sistemele de comandă și control (PC, SCADA, etc.) se va implementa protocolul de comunicație Ethernet.
Procesorul de semnal pentru controlul in timp real trebuie să asigure: Arhitectură Harvard; Execută 8 operații in fiecare ciclu; Acumulatori pe 40 de biți pentru calcule de mare precizie; Viteza de procesare de până la 70 de MIPS; Modul hardware PWM pentru controlul motoarelor; Convertoare analog – digital cu precizia de 12 biți; 9 numaratoare pe 16 biți; 4 numaratoare pe 32 de biți; Interfață USB; Interfață UART; Interfață SPI; Interfață I2C; Interfață ECAN; DMA cu 15 canale.
Software-ul de commandă și control pentru sistemul general de acționare multimotor trebuie să fie dezvoltat într-un mediu de dezvoltare integrat (IDE) care să cuprindă o suită de instrumente folosite pentru a dezvolta aplicații, plus debugger încorporat. Acesta trebuie să includă optimizare C / C ++, editor pentru codul sursa, manager de proiecte, debugger, profiler, precum și multe alte caracteristici.
Software-ul dezvoltat pentru aplicația multimotor trebuie să aibă urmatoarele caracteristici: • Control vectorial al motoarelor asincrone cu rotorul in scurt-circuit fără senzor de turație
(sensorless); • Identificarea automată a parametrilor electrici ai motorului (Rs, Rr, Ls, Lr, flux, curent de
magnetizare) folosind doar parametrii nominali ai motorului (curent nominal, tensiune nominală, turație nominală);
• Stabilitate și răspuns rapid la schimbarea sarcinii motorului; • Modulatie PWM folosind metoda Space Vector pentru limitarea distorsiunilor armonice și
folosirea optimă a energiei din circuitul intermediar de curent continuu; • Implementarea regulatoarelor PI pentru controlul vitezei și a curentului; • Implementarea unui modul software de comunicație serială pentru comunicarea cu software-ul
PC. Fiecare convertizor de frecvență va alimenta un motor de 45kW, cu caracteristicile: putere activă: 45KW; frecvență: 50Hz; turație nominală: 1470rpm; tensiune: 400V; curent: 84A; factor de putere: 0.88; rezistență stator: 0.041Ω; rezistență rotor: 0.050Ω; inductanță stator/rotor: 0.8 mH; inductanță mutuală: 20.7 mH.
Practic, subanasmblele din Fig. 1 și 2 împreună cu cerințele impuse mai sus prin tema generală de proiectare a sistemului de acționare multimotor vor fi abordate în trei proiecte separate descrise mai jos:
2.2. Proiect variantă preliminară model funcțional al circuitului intermediar
de curent continuu
Puntea redresoare transformă tensiunea alternativă trifazata in tensiune continuă pentru circuitul intermediar. Elementele componente alese pentru proiect din gama ofertelor existente pe piață, indeplinesc urmatoarele condiții:
• Transfer de caldură prin placa de baza metalică izolată; • Lipituri sigure pentru o fiabilitate ridicată; • Conexiuni tip jumatate de punte (half bridge). Filtrul pentru circuitul intermediar
Este dimensionat sa corespundă frecvenței de comutație din invertor și asigură un factor de pulsație impus al tensiunii și curentului.
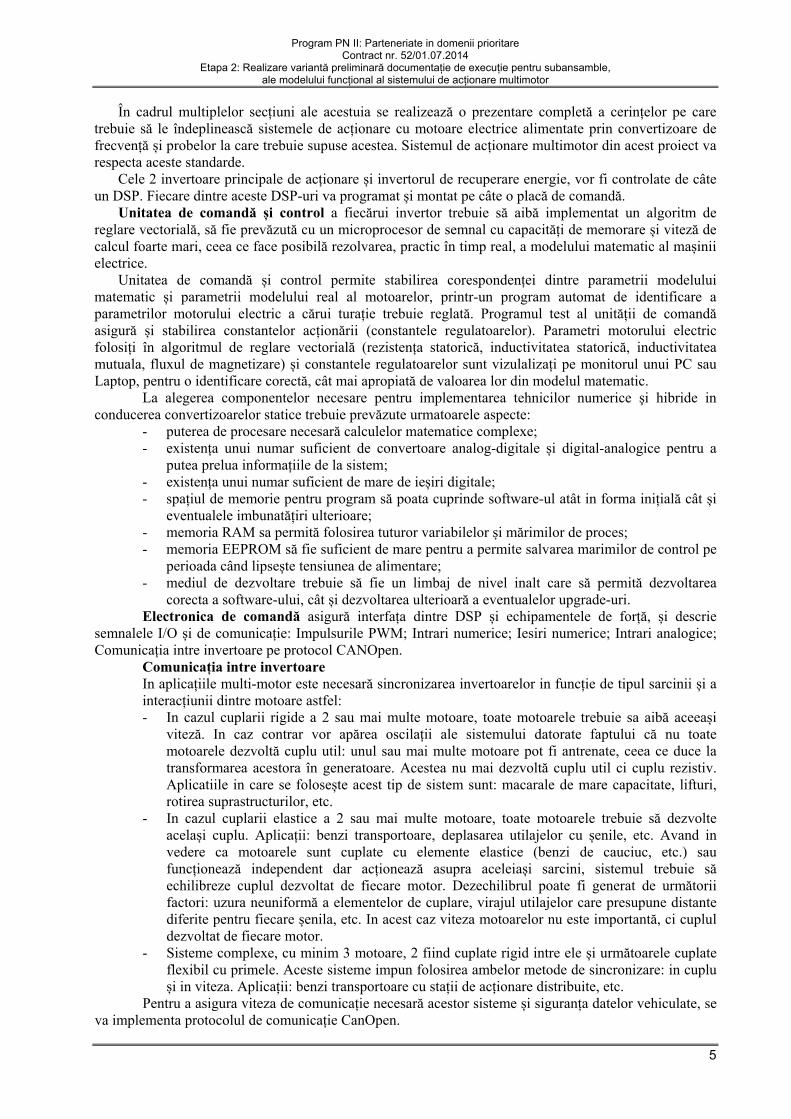
In Fig. 3 este prezentată schema elctrică a redresorului și a filtrului pentru circuitul intermediar de current continuu.
Condensatorul de filtrare C7 se incarca prin rezistenta de incarcare R7, iar cand tensiunea masurata de traductorul de tensiune T2 depaseste 80% din valoarea tensiunii nominale de iesire U2, se cupleaza contactorul de scurtcircuitare K. Contactul auxiliar al acestuia, prelucrat in circuitele de comanda , este conditie de validare “ START” pentru convertizoarele de frecventa. In regimul de franare, energia electrica rezultată, incarca filtrul C7 peste valoarea nominala, iar la depasirea pragului de 1,2*U2N, porneste automat invertorul de recuperare spre rețeaua industriala. In oricare din regimurile de lucru, curentul este tinut sub control de unitatea de comanda care primeste informatii de la traductorul de curent T1.
6
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
Fig.3 Schema elctrică a redresorului și a filtrului pentru circuitul intermediary
Ventilația: ventilație forțată cu aer asigurată de 3 ventilatoare de 250m3/h. Toate componentele electronice de putere se montează pe radiator de aluminiu și se construiește un canal special de ventilație pentru optimizarea fluxului de aer.
Proiectul conține Desenul de gabarit al dulapului in care va fi amplasat redresorul ca parte a convertizorului static de frecventa cu puterea de 55 kW, iar Lista de materiale pentru realizarea redresorului și filtrului din circuitul intermediar este prezentată in Anexa 1.
Pentru a studia comportamentul unui redresor și al filtrului intermediar inainte de construirea lor propriu-zisă s-au efctuat o serie de simulări numerice folosind mediul MATLAB/Simulink.
Construcția unor astfel de echipamente de forță este costisitoare și se impune un studiu in mediu simulat pentru cazul componentelor dimensionate anterior.
Simulările au urmat linia de la simplu la complex pentru a pune în evidență atât elemente calitative cât și cantitative cu privire la dimensionarea redresorului și a filtrului intermediar.
Simulările conțin scheme care pornesc de la faptul că înglobează sau nu condensator de filtrare și se evidențiază ondulațiile inacceptabile ale tensiunii redresate în cazul lipsei condensatorului. Sarcinile sunt de diverse tipuri și valori, iar snubberele au valori uzuale pentru gama de puteri studiată în acest proiect. Deoarece redresorul proiectat face parte dintr-un ansamblu mai complex, s-au efectuat și simulări în care au fost înglobate un invertor, un motor de 45kW și unitate de conducere de tip FOC.
Simulările numerice efectuate au pornit de la scheme implementate în Simulink, adaptate obiectivelor acestui proiect, iar parametrizarea elmentelor din schemele simulate au ca bază de referință Lista de materiale din Anexa 1.
Un număr relativ mare simulări cu valori în jurul celor din Anexa 1 au condus la ideea că dimensionarea redresorului și a filtrului din circuitul intermediar este corectă, astfel că în etapa 3 se poate realiza execuția propriu-zisă ca subansamblu din sistemul de acționare multimotor propus în tema generală de proiectare.
2.3. Proiect variantă preliminară model funcțional pentru bloc module invertoare de ieșire și invertor de recuperare
Puntea invertor
Transformă tensiunea continuă din circuitul intermediar in tensiune alternativă trifazată de amplitudine și frecvență reglabile. Modulele cu tranzistoare IGBT din componența invertorului sunt comandate de amplificatoare de impuls separate de partea de comandă prin optocuploare. Fiecare amplificator de impuls are sursă proprie de alimentare. Modulele cu tranzistoare IGBT, alese pentru proiect din gama ofertelor existente pe piata, indeplinesc urmatoarele conditii:
• Produse de ultimă generație robuste și sigure in funcționare; • Placa de baza din cupru izolată utilizand tehnologia DBC (Direct Bonded Copper) ; • Capacitate crescută de cicluri de putere; • Cu rezistor de poartă integrat.
7

Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
Circuitele driver pentru modulele cu tranzistoare IGBT, alese pentru proiect din gama ofertelor existente pe piață, indeplinesc urmatoarele condiții:
• Pentru module IGBT avand tensiunea CE (cu poarta emitor scurtcircuitat) de pana la 1200 V; • Functioneaza ca un circuit dublu de drivere pentru IGBT si deasemenea ca doua drivere
independente; • Buffere de intrare compatibile CMOS/TTL (HCMOS); • Protecție la scurtcircuit prin monitorizarea tensiunii CE; • Oprire ușoară in caz de scurtcircuit; • Izolare datorata transformatoarelor; • Monitorizarea subtensiunii de alimentare (< 13 V); • Semnal de ieșire logic pentru eroare de memorie.
Schema de forță invertoare primcipale (de acționare motoare) Comanda tranzistoarelor de putere din structura invertoarelor (Fig. 4), este realizată cu ajutorul unor
module specializate numite drivere. Acestea primesc semnale logice de putere mică de la modulele de comandă cu ieşire PWM, şi realizează izolarea galvanică precum şi adaptarea în putere a acestor comenzi necesare comutaţiei tranzistoarelor de putere.
Deoarece tranzistoarele IGBT sunt de putere mare, între ieşirea integratului driver-ului şi grila MOS a semiconductorului se foloseşte un etaj de amplificare care poate susţine impulsuri de curent importante pentru încărcarea şi descărcarea rapidă a capacităţii grilei. Etajul este realizat cu o pereche de tranzistoare bipolare complementare care pot prelua curenţi de colector de până la 15 A. Tranzistorul bipolar se deschide atunci când la ieşirea integratului specializat apare un potenţial ridicat. În acest fel va lua naştere un puls de curent a cărui amplitudine este limitată de o rezistenţă. Sarcinile electrice transportate de acest curent vor încărca rapid capacitatea de grilă a IGBT-ului cu o tensiune pozitivă şi îl va deschide. Cu cât amplitudinea pulsului de curent va fi mai mare cu atât timpul de intrare în conducţie a IGBT-ului va fi mai scurt. Blocarea IGBT-ului este iniţiată atunci când semnalul de ieşire coboară spre valori negative. Astfel, este adus în conducţie tranzistorul bipolar complementar care va descărca rapid sarcinile acumulate în capacitatea de grilă, blocând IGBT-ul. Pentru siguranţa funcţionării invertorului se foloseşte un bloc specializat de protecţie şi de tratare a defectului. Acest bloc are rolul de a monitoriza curentul din circuitul intermediar de c.c., de a activa pe cale optică protecţia dacă valoarea curentului depăşeşte un anumit prag (protecţia la supracurent), de a prelua şi memora situaţiile de defect, precum şi de a bloca semnalele de comandă a IGBT-urilor atât timp cât circuitul de memorare reţine defectul. Când este detectat un supracurent prin IGBT se declanşează o secvenţă de avarie prin care tranzistorul de putere este blocat mai lent pentru a se evita supratensiuni mari de comutaţie. Simultan va fi transmis un semnal de defect către un integrat specializat şi în acelaşi timp va fi alertată structura ierarhic superioară de existenţa unui defect printr-un semnal logic FAULT. De asemenea există un circuit de supraveghere watch dog privind scăderea tensiunii de alimentare. Pe durata blocării voite a IGBT-ului, circuitul de detecţie al defectului este dezactivat pentru a preveni detecţia unor false situaţii de avarie.
Fig.4 Schemă de forță invertor principal
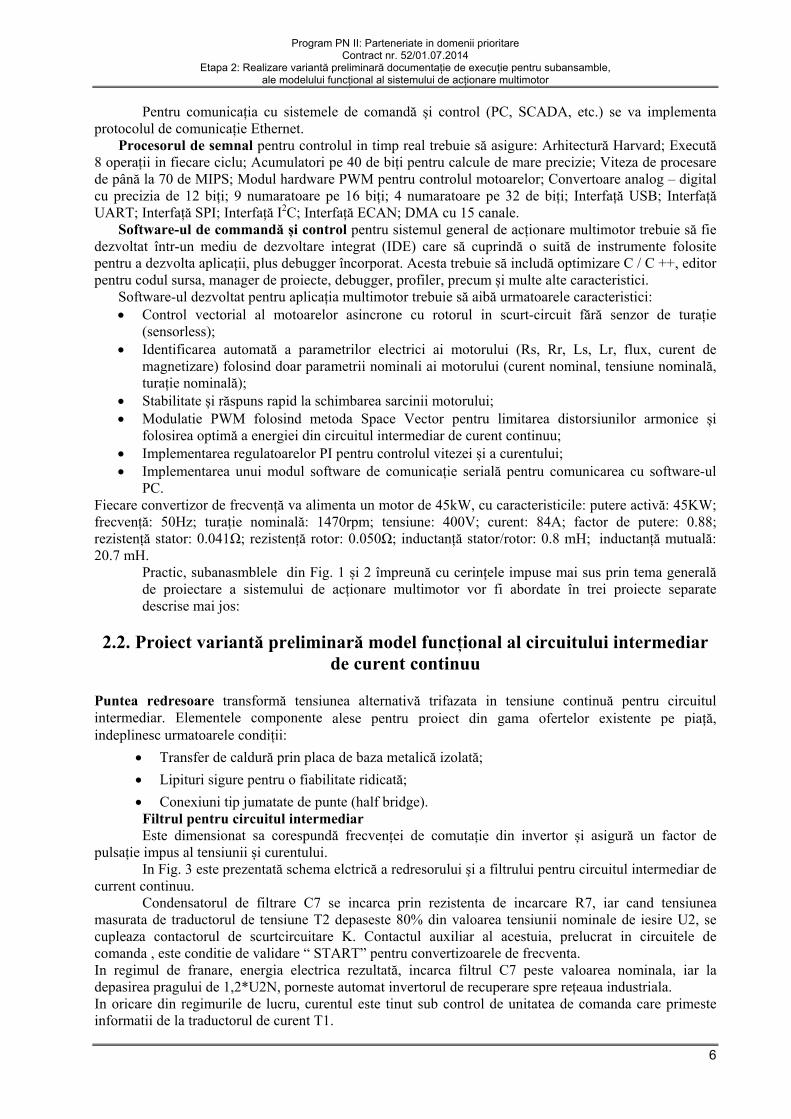
Schema de forță invertor de recuperare Invertorul de franare regenerativă (Fig. 5) asigură preluarea surplusului de energie din circuitul
intermediar al convertizoarelor, pe perioada in care motoarele sunt frânate, și injectarea acesteia in rețeaua de alimentare de joasă tensiune in fază cu aceasta.
8
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
Fig. 5 Schemă de forță invertor de recuperare
Energia injectata este disponibila pentru alimentarea altor consumatori cuplați la aceeași rețea. Prin utilizarea acestei metode se elimină chopperele de frânare și rezistențele adiacente utilizate in acționările clasice cu convertizor de frecvență. Se elimină astfel un element care produce pierderi de energie prin disiparea acesteaia pe rezistențele de frânare și inconvenientele legate de aceata (incălziri excesive ale rezistențelor, posibilitatea distrugerii chopperului de frânare in cazul intreruperii unei rezistențe sau a cablului de legătură, etc.).
Ventilația: ventilație forțată cu aer asigurată de 2 ventilatoare de de 250m3/h pentru fiecare din invertoarele principale și de 3 ventilatoare de 250m3/h pentru invertorul recuperare. Toate componentele electronice de putere se montează pe radiator de aluminiu și se construiește un canal special de ventilație pentru optimizarea fluxului de aer.
Proiectul conține Desenul de gabarit al dulapurilor in care vor fi amplasate invertoarele principale și de recuperare iar Lista de materiale pentru realizarea invertoarelor principale și de recuperare este prezentată in Anexa 2.
Simulările numerice efectuate au pornit de la scheme implementate în Simulink, adaptate obiectivelor acestui proiect, iar parametrizarea elmentelor din schemele simulate au ca bază de referință Lista de materiale din Anexa 2.
Este prezentată o schemă de bază implementată in Simulink pentru studiul IGBT-urilor, precum și parametrizarea caracteristicilor de funcționare pentru un IGBT folosind mediul MATLAB. Caracteristicile de funcționare la 25°C și 125°C pentru diverse valori alte tensiunii de grilă-emitor pentru IGBT-urile din invertoarele de acționare sunt prezentate, folosind Simulink-ul, împreună cu rezultatele simulării pentru IGBT-urile din invertorul de recuperare. Se poate constata o bună concordanță între caracteristicile obținute prin simulare și cele date în catalogul firmei producătoare Infineon, fapt ce validează într-o prima aproximație simulările ulterioare care se bazează pe modelul IGBT din Simulink.
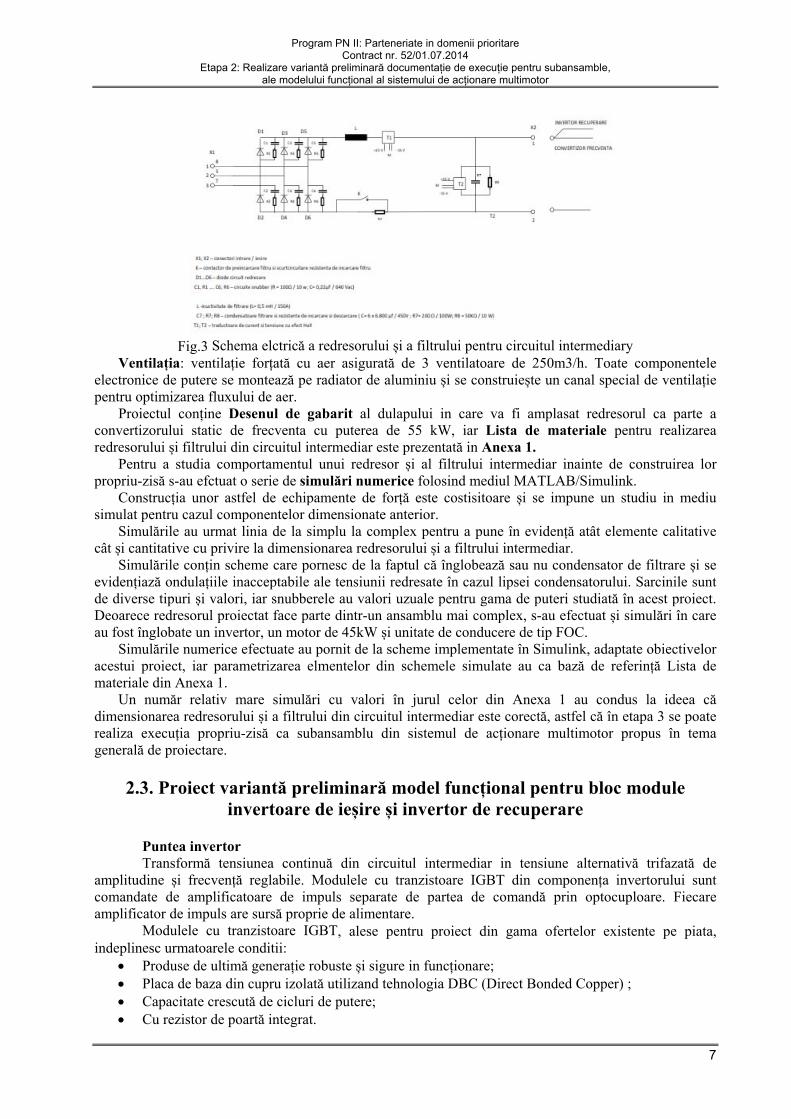
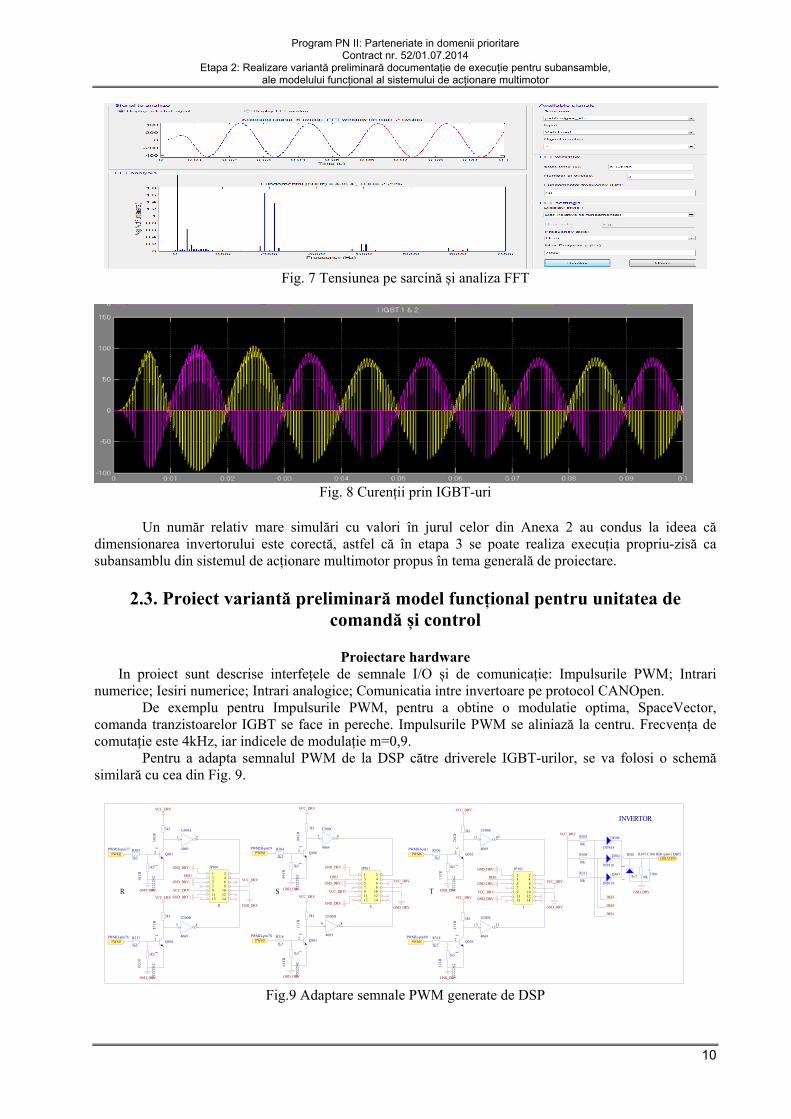
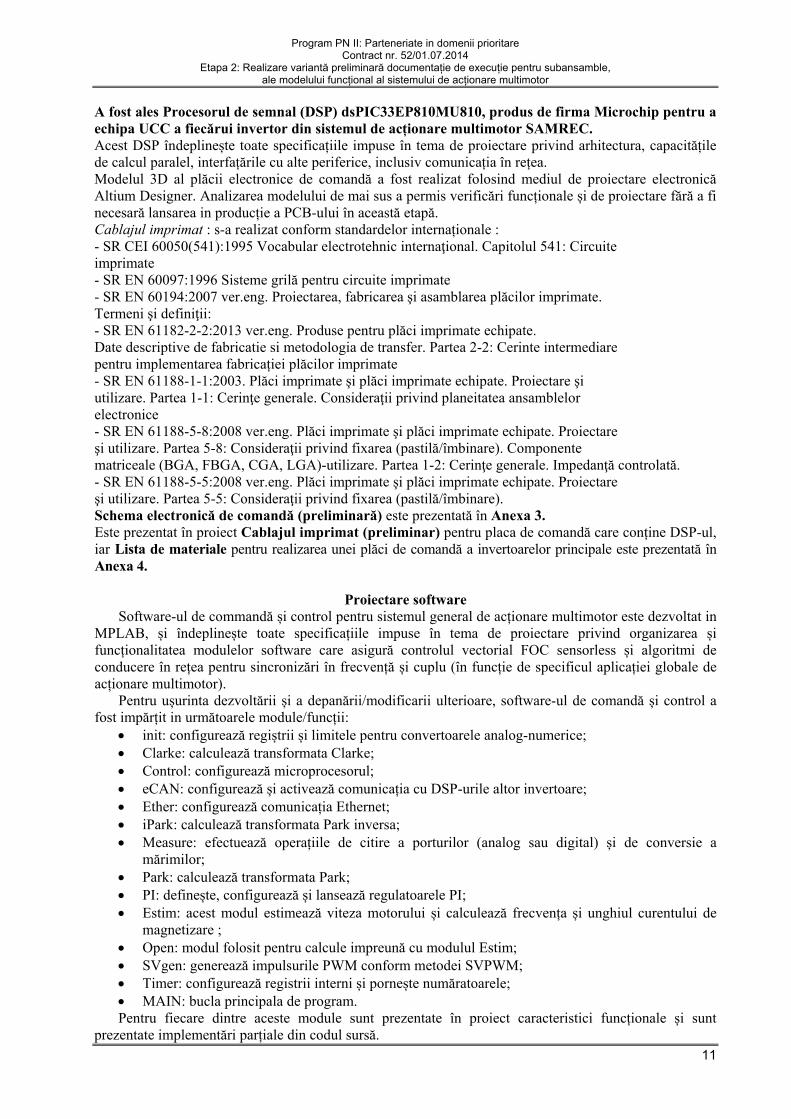
Se prezintă un model Simulink care urmărește evoluția pe 200ms a tensiunii redresate, a tensiunii între fazele invertorului și a tensiunii filtrate (Fig .6) dar și a curenților prin diode (Fig. 8), în cazul în care in schemă este prezent redresor și un invertor care alimentează o sarcină de 45kW. In fig. 7 este prezentată o analiză FFT a tensiunii pe sarcină, din care se remarcă o filtrare bună, în care THD = 2,29%.
Fig. 6 Tensiunea din circuitul intermediar de cc, tensiunea intre 2 faze ale invertorului si tensiunea pe
sarcină - pentru C=8400 uF
9
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
Fig. 7 Tensiunea pe sarcină și analiza FFT
Fig. 8 Curenții prin IGBT-uri
Un număr relativ mare simulări cu valori în jurul celor din Anexa 2 au condus la ideea că
dimensionarea invertorului este corectă, astfel că în etapa 3 se poate realiza execuția propriu-zisă ca subansamblu din sistemul de acționare multimotor propus în tema generală de proiectare.
2.3. Proiect variantă preliminară model funcțional pentru unitatea de
comandă și control
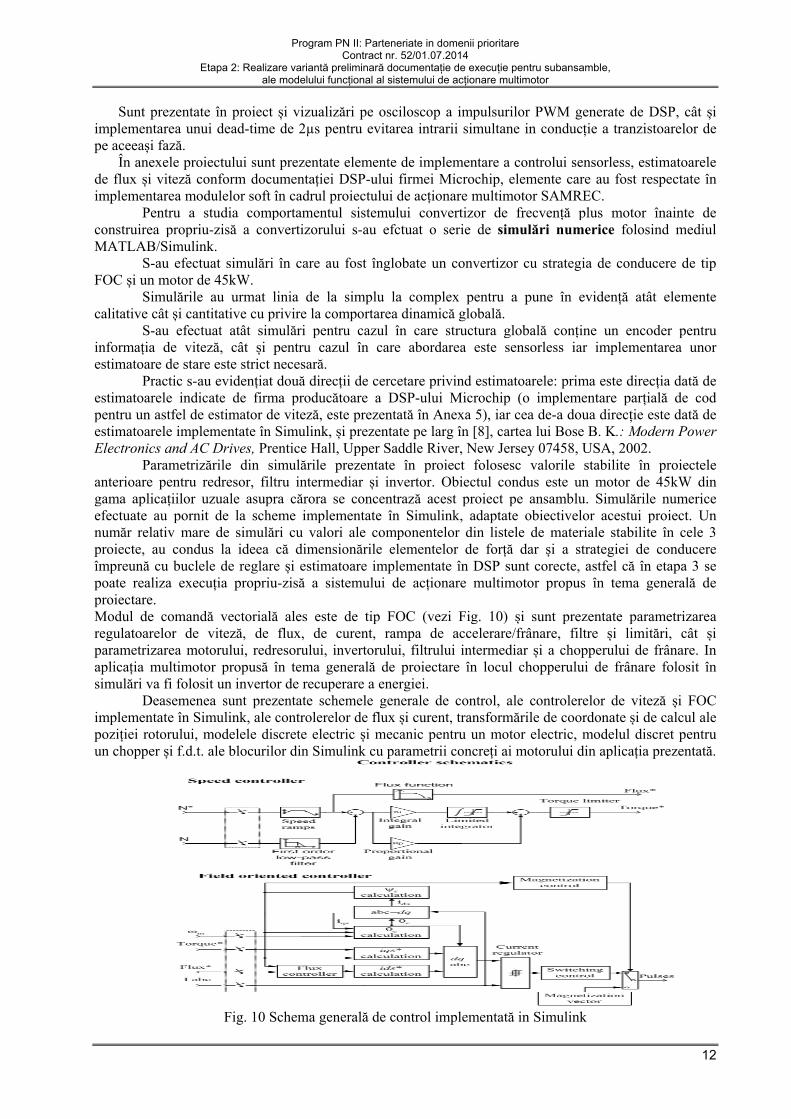
Proiectare hardware In proiect sunt descrise interfețele de semnale I/O și de comunicație: Impulsurile PWM; Intrari
numerice; Iesiri numerice; Intrari analogice; Comunicatia intre invertoare pe protocol CANOpen. De exemplu pentru Impulsurile PWM, pentru a obtine o modulatie optima, SpaceVector,
comanda tranzistoarelor IGBT se face in pereche. Impulsurile PWM se aliniază la centru. Frecvența de comutație este 4kHz, iar indicele de modulație m=0,9.
Pentru a adapta semnalul PWM de la DSP către driverele IGBT-urilor, se va folosi o schemă similară cu cea din Fig. 9.
D303
1N5818
D302
1N5818
D300
1N5818
DESATINVRD1-pin61 DSP2
1 23 45 67 89 1011 1213 14
JP302
T
PWM2R305
2k2
R301
5k1
PWM1
PWM1H-pin77
PWM1L-pin76
R310
1k5
3
2
1
Q301
2N2222A
R317
2k2
R314
5k1
R320
1k5
3
2
1
Q304
2N2222A
PWM4R304
2k2
R300
5k1
PWM3
PWM2H-pin79
PWM2L-pin78
R309
1k5
3
2
1
Q300
2N2222A
R316
2k2
R313
5k1
R319
1k5
3
2
1
Q303
2N2222A
PWM6R306
2k2
R302
5k1
PWM5
PWM3H-pin1
PWM3L-pin80
R311
1k5
3
2
1
Q302
2N2222A
R318
2k2
R315
5k1
R321
1k5
3
2
1
Q305
2N2222A
VCC_DRV VCC_DRV
VCC_DRV VCC_DRV VCC_DRV
VCC_DRV
GND_DRV GND_DRV GND_DRV
GND_DRV GND_DRV GND_DRV
R303
10k
R308
10k
R312
10k
DES1
DES2
DES3
VCC_DRV
R307
10k100n
C300
12
D301
4v7
GND_DRVR S TVCC_DRV
VCC_DRV
GND_DRV
GND_DRV
GND_DRV
DES3
GND_DRV
1 23 45 67 89 1011 1213 14
JP301
S
VCC_DRV
VCC_DRV
GND_DRVGND_DRV
GND_DRV
DES2
GND_DRV
1 23 45 67 89 1011 1213 14
JP300
R
VCC_DRV
VCC_DRV
GND_DRV
GND_DRV
GND_DRV
DES1
GND_DRV
INVERTOR
1 2
U300A
4069
3 4
U300B
4069
5 6
U300C
4069
9 8
U300D
4069
11
U300E
4069
10
13
U300F
4069
12
Fig.9 Adaptare semnale PWM generate de DSP
10
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
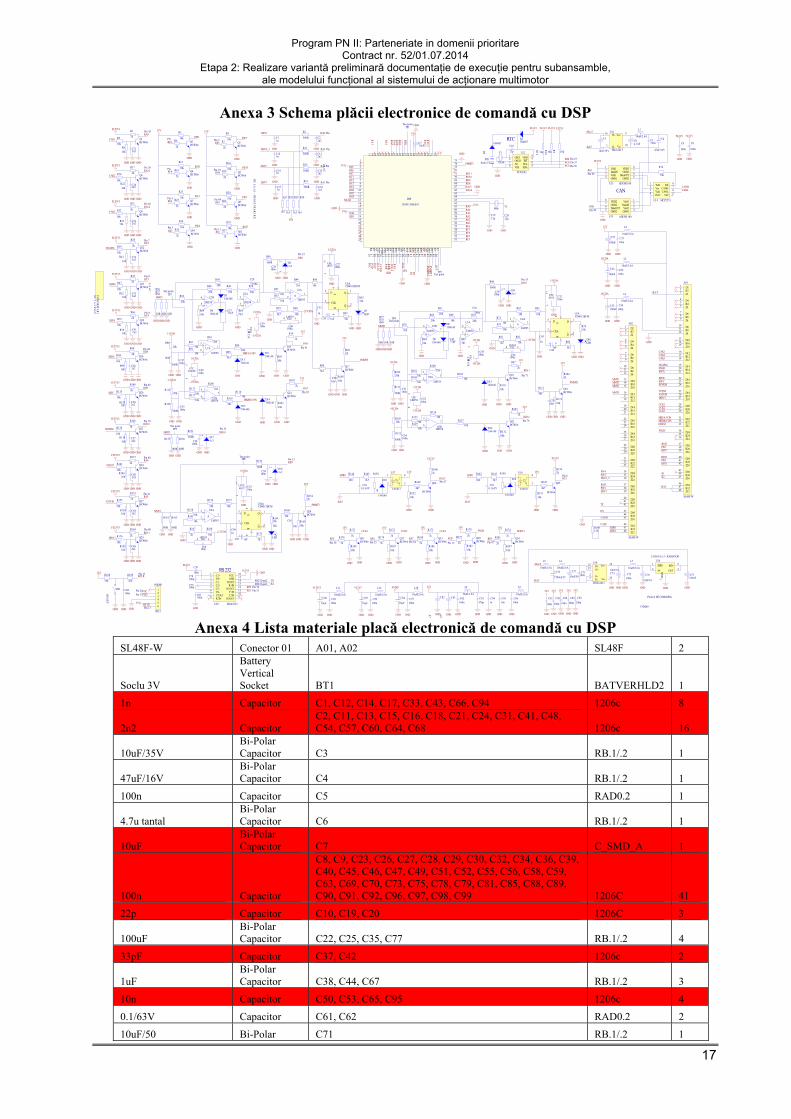
A fost ales Procesorul de semnal (DSP) dsPIC33EP810MU810, produs de firma Microchip pentru a echipa UCC a fiecărui invertor din sistemul de acționare multimotor SAMREC. Acest DSP îndeplinește toate specificațiile impuse în tema de proiectare privind arhitectura, capacitățile de calcul paralel, interfațările cu alte periferice, inclusiv comunicația în rețea. Modelul 3D al plăcii electronice de comandă a fost realizat folosind mediul de proiectare electronică Altium Designer. Analizarea modelului de mai sus a permis verificări funcționale și de proiectare fără a fi necesară lansarea in producție a PCB-ului în această etapă. Cablajul imprimat : s-a realizat conform standardelor internaționale : - SR CEI 60050(541):1995 Vocabular electrotehnic internaţional. Capitolul 541: Circuite imprimate - SR EN 60097:1996 Sisteme grilă pentru circuite imprimate - SR EN 60194:2007 ver.eng. Proiectarea, fabricarea şi asamblarea plăcilor imprimate. Termeni şi definiţii: - SR EN 61182-2-2:2013 ver.eng. Produse pentru plăci imprimate echipate. Date descriptive de fabricatie si metodologia de transfer. Partea 2-2: Cerinte intermediare pentru implementarea fabricației plăcilor imprimate - SR EN 61188-1-1:2003. Plăci imprimate şi plăci imprimate echipate. Proiectare şi utilizare. Partea 1-1: Cerinţe generale. Consideraţii privind planeitatea ansamblelor electronice - SR EN 61188-5-8:2008 ver.eng. Plăci imprimate şi plăci imprimate echipate. Proiectare şi utilizare. Partea 5-8: Consideraţii privind fixarea (pastilă/îmbinare). Componente matriceale (BGA, FBGA, CGA, LGA)-utilizare. Partea 1-2: Cerinţe generale. Impedanţă controlată. - SR EN 61188-5-5:2008 ver.eng. Plăci imprimate şi plăci imprimate echipate. Proiectare şi utilizare. Partea 5-5: Consideraţii privind fixarea (pastilă/îmbinare). Schema electronică de comandă (preliminară) este prezentată în Anexa 3. Este prezentat în proiect Cablajul imprimat (preliminar) pentru placa de comandă care conține DSP-ul, iar Lista de materiale pentru realizarea unei plăci de comandă a invertoarelor principale este prezentată în Anexa 4.
Proiectare software
Software-ul de commandă și control pentru sistemul general de acționare multimotor este dezvoltat in MPLAB, și îndeplinește toate specificațiile impuse în tema de proiectare privind organizarea și funcționalitatea modulelor software care asigură controlul vectorial FOC sensorless și algoritmi de conducere în rețea pentru sincronizări în frecvență și cuplu (în funcție de specificul aplicației globale de acționare multimotor).
Pentru ușurinta dezvoltării și a depanării/modificarii ulterioare, software-ul de comandă și control a fost impărțit in următoarele module/funcții:
• init: configurează regiștrii și limitele pentru convertoarele analog-numerice; • Clarke: calculează transformata Clarke; • Control: configurează microprocesorul; • eCAN: configurează și activează comunicația cu DSP-urile altor invertoare; • Ether: configurează comunicația Ethernet; • iPark: calculează transformata Park inversa; • Measure: efectuează operațiile de citire a porturilor (analog sau digital) și de conversie a
mărimilor; • Park: calculează transformata Park; • PI: definește, configurează și lansează regulatoarele PI; • Estim: acest modul estimează viteza motorului și calculează frecvența și unghiul curentului de
magnetizare ; • Open: modul folosit pentru calcule impreună cu modulul Estim; • SVgen: generează impulsurile PWM conform metodei SVPWM; • Timer: configurează registrii interni și pornește număratoarele; • MAIN: bucla principala de program. Pentru fiecare dintre aceste module sunt prezentate în proiect caracteristici funcționale și sunt
prezentate implementări parțiale din codul sursă. 11
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
Sunt prezentate în proiect și vizualizări pe osciloscop a impulsurilor PWM generate de DSP, cât și implementarea unui dead-time de 2µs pentru evitarea intrarii simultane in conducție a tranzistoarelor de pe aceeași fază.
În anexele proiectului sunt prezentate elemente de implementare a controlui sensorless, estimatoarele de flux și viteză conform documentației DSP-ului firmei Microchip, elemente care au fost respectate în implementarea modulelor soft în cadrul proiectului de acționare multimotor SAMREC.
Pentru a studia comportamentul sistemului convertizor de frecvență plus motor înainte de construirea propriu-zisă a convertizorului s-au efctuat o serie de simulări numerice folosind mediul MATLAB/Simulink.
S-au efectuat simulări în care au fost înglobate un convertizor cu strategia de conducere de tip FOC și un motor de 45kW.
Simulările au urmat linia de la simplu la complex pentru a pune în evidență atât elemente calitative cât și cantitative cu privire la comportarea dinamică globală.
S-au efectuat atât simulări pentru cazul în care structura globală conține un encoder pentru informația de viteză, cât și pentru cazul în care abordarea este sensorless iar implementarea unor estimatoare de stare este strict necesară.
Practic s-au evidențiat două direcții de cercetare privind estimatoarele: prima este direcția dată de estimatoarele indicate de firma producătoare a DSP-ului Microchip (o implementare parțială de cod pentru un astfel de estimator de viteză, este prezentată în Anexa 5), iar cea de-a doua direcție este dată de estimatoarele implementate în Simulink, și prezentate pe larg în [8], cartea lui Bose B. K.: Modern Power Electronics and AC Drives, Prentice Hall, Upper Saddle River, New Jersey 07458, USA, 2002.
Parametrizările din simulările prezentate în proiect folosesc valorile stabilite în proiectele anterioare pentru redresor, filtru intermediar și invertor. Obiectul condus este un motor de 45kW din gama aplicațiilor uzuale asupra cărora se concentrază acest proiect pe ansamblu. Simulările numerice efectuate au pornit de la scheme implementate în Simulink, adaptate obiectivelor acestui proiect. Un număr relativ mare de simulări cu valori ale componentelor din listele de materiale stabilite în cele 3 proiecte, au condus la ideea că dimensionările elementelor de forță dar și a strategiei de conducere împreună cu buclele de reglare și estimatoare implementate în DSP sunt corecte, astfel că în etapa 3 se poate realiza execuția propriu-zisă a sistemului de acționare multimotor propus în tema generală de proiectare. Modul de comandă vectorială ales este de tip FOC (vezi Fig. 10) și sunt prezentate parametrizarea regulatoarelor de viteză, de flux, de curent, rampa de accelerare/frânare, filtre și limitări, cât și parametrizarea motorului, redresorului, invertorului, filtrului intermediar și a chopperului de frânare. In aplicația multimotor propusă în tema generală de proiectare în locul chopperului de frânare folosit în simulări va fi folosit un invertor de recuperare a energiei.
Deasemenea sunt prezentate schemele generale de control, ale controlerelor de viteză și FOC implementate în Simulink, ale controlerelor de flux și curent, transformările de coordonate și de calcul ale poziției rotorului, modelele discrete electric și mecanic pentru un motor electric, modelul discret pentru un chopper și f.d.t. ale blocurilor din Simulink cu parametrii concreți ai motorului din aplicația prezentată.
Fig. 10 Schema generală de control implementată in Simulink
12

Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
In simulările prezentate, în varianta cu encoder, se va urmări comportamentul ansamblului convertizor plus motor prin mărimile: curent stator, viteza rotorului, cuplu și tensiunea din circuitul intermediar. Parametrii care au fost variați au fost: pentru regulatorul de viteză Kp și Ki, pentru regulatorul de flux Kp și Ki, rampa de accelerare/frânare și banda de histerezis pentru regulatorul de curent. Acordările regulatoarelor de tip PI s-au făcut pornind de la parametrii și modelele discrete prezentate mai sus. Este evident că acordarea regulatoarelor din DSP va fi puțin diferită de cea obținută prin simulare, datorită faptului că simulările nu pot surprinde absolut toate modurile și dinamicile din realitate, dar tabloul calitativ se păstrează cu siguranță, iar rezultatele bune obținute în simulări și implementarea unor algoritmi în DSP care urmează linia celor din Simulink constituie garanția că și modelul real care se va construi în etapa 3 va funcționa cu rezultate bune. Parametrii reali ai motorului pot varia în timp față de cei nominali (în special datorită temperaturii), astfel că prin simulare, se constată că regulatoarele au o acordare bună chiar pentru o variație substanțială a acestora în jurul valorilor nominale. Se obține acordarea optimă a regulatoarelor și se prezintă simulările pentru referințe variabile de cuplu și viteză (vezi Fig. 11-12).
In Fig. 11 referința variabilă de viteză este dată de secvența: [0 0.5 2 4 7 8 9]s [0 150 300 500 350 450 700]rpm. Pe langă performanțele dinamice bune obținute datorită acordării corecte a regulatoarelor (eroare
staționară, timp de răspuns, timp de creștere, suprareglaj și indice de oscilație), se constată că la secunda 7 când referința de viteză scade de la 500rpm la 350rpm, apare fenomenul de frânare recuperativă și tensiunea în circuitul intermediar crește. In Simulink pentru a surprinde acest fenomen am setat chopperul de frânare între limitele 750V (Activation Voltage) și 650V (Shutdown Voltage). In implementarea reală în locul chopperului de frânare se va utiliza un invertor de recuperare a energiei.
Fig. 11 Rezultate simulare model in care pentru regulatorul de viteză Kp=300, Ki=2000, pentru
regulatorul de flux Kp=100, Ki=30, Banda hysterezis regulator curent= 10A, acc=150rpm și cu impunerea referinței de viteză [0 0.5 2 4 7 8 9]s [0 150 300 500 350 450 700]rpm
Fig. 12 Rezultate simulare model in care pentru regulatorul de viteză Kp=300, Ki=2000, pentru
regulatorul de flux Kp=100, Ki=30, Banda hysterezis regulator curent= 10A, acc=150rpm și cu impunerea referinței de viteză [0 7]s [800 300]rpm și cuplu [0 3 6 9 10]s [10 100 200 300 100]Nm
In varianta sensorless a modelului convertizor plus motor se constată prezența suplimentară, față de modelul anterior, a unui bloc estimator. Tipul de estimator al vitezei unghiulare este MRAS – Model
13
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
Referencing Adaptive System. Se renunță astfel la encoder, iar viteza unghiulară este estimată din măsurile de curenți și tensiuni. Se prezintă Estimatorul de viteză MRAS implementat in Simulink și descris pe larg in [8].
Folosind criteriul de hiperstabilitate Popov, pentru a se obține stabilitatea asimptotică globală se obține un estimator de forma[8]:
⎟⎠
⎞⎜⎝
⎛ +=s
KK i
pr ξω , unde . sqr
sdr
sqr
sdr ΨΨ−ΨΨ= ˆˆξ
Schema bloc a estimatorului MRAS – Model Referencing Adaptive System este prezentată in figura 13.
Fig. 13 Schema bloc a estimatorului MRAS
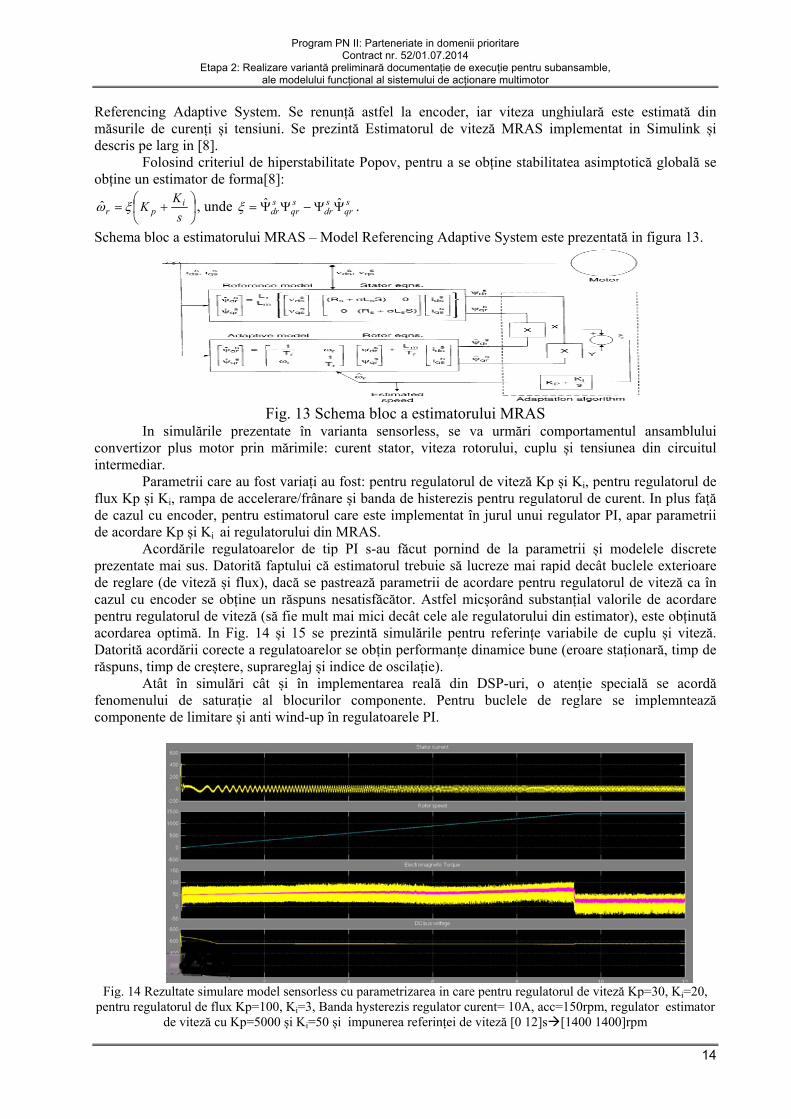
In simulările prezentate în varianta sensorless, se va urmări comportamentul ansamblului convertizor plus motor prin mărimile: curent stator, viteza rotorului, cuplu și tensiunea din circuitul intermediar. Parametrii care au fost variați au fost: pentru regulatorul de viteză Kp și Ki, pentru regulatorul de flux Kp și Ki, rampa de accelerare/frânare și banda de histerezis pentru regulatorul de curent. In plus față de cazul cu encoder, pentru estimatorul care este implementat în jurul unui regulator PI, apar parametrii de acordare Kp și Ki ai regulatorului din MRAS. Acordările regulatoarelor de tip PI s-au făcut pornind de la parametrii și modelele discrete prezentate mai sus. Datorită faptului că estimatorul trebuie să lucreze mai rapid decât buclele exterioare de reglare (de viteză și flux), dacă se pastrează parametrii de acordare pentru regulatorul de viteză ca în cazul cu encoder se obține un răspuns nesatisfăcător. Astfel micșorând substanțial valorile de acordare pentru regulatorul de viteză (să fie mult mai mici decât cele ale regulatorului din estimator), este obținută acordarea optimă. In Fig. 14 și 15 se prezintă simulările pentru referințe variabile de cuplu și viteză. Datorită acordării corecte a regulatoarelor se obțin performanțe dinamice bune (eroare staționară, timp de răspuns, timp de creștere, suprareglaj și indice de oscilație).
Atât în simulări cât și în implementarea reală din DSP-uri, o atenție specială se acordă fenomenului de saturație al blocurilor componente. Pentru buclele de reglare se implemntează componente de limitare și anti wind-up în regulatoarele PI.
Fig. 14 Rezultate simulare model sensorless cu parametrizarea in care pentru regulatorul de viteză Kp=30, Ki=20,
pentru regulatorul de flux Kp=100, Ki=3, Banda hysterezis regulator curent= 10A, acc=150rpm, regulator estimator de viteză cu Kp=5000 și Ki=50 și impunerea referinței de viteză [0 12]s [1400 1400]rpm
14
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
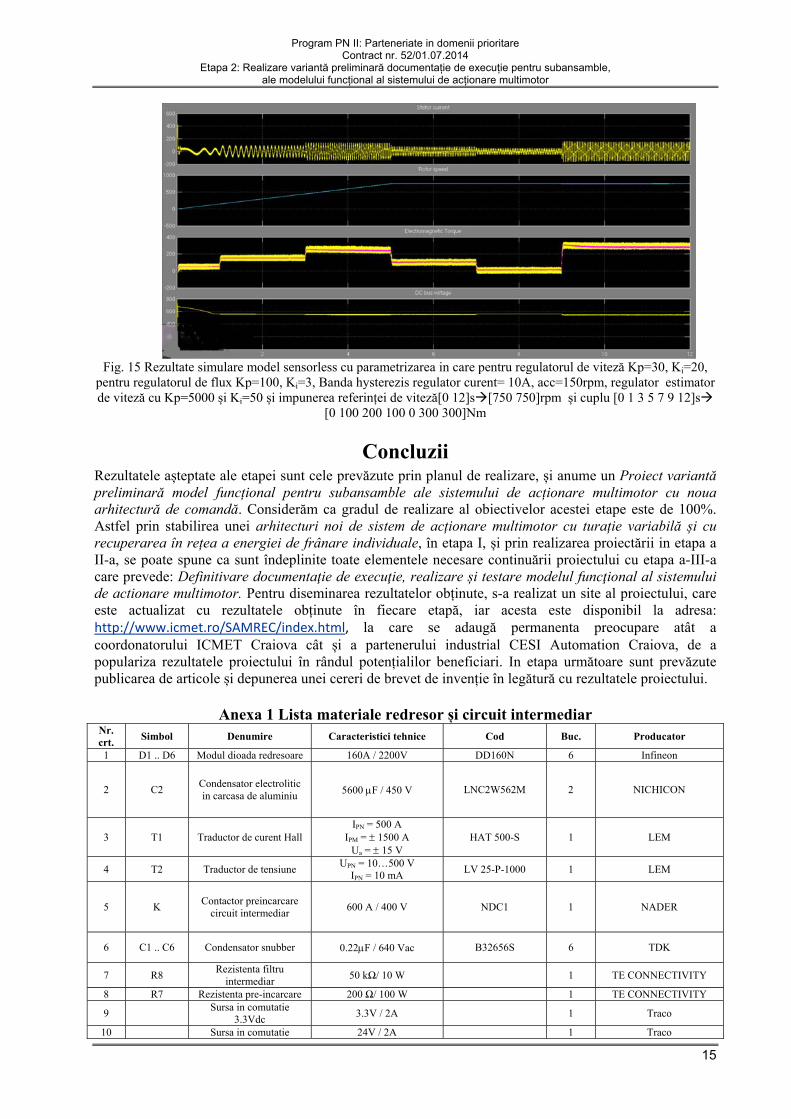
Fig. 15 Rezultate simulare model sensorless cu parametrizarea in care pentru regulatorul de viteză Kp=30, Ki=20,
pentru regulatorul de flux Kp=100, Ki=3, Banda hysterezis regulator curent= 10A, acc=150rpm, regulator estimator de viteză cu Kp=5000 și Ki=50 și impunerea referinței de viteză[0 12]s [750 750]rpm și cuplu [0 1 3 5 7 9 12]s
[0 100 200 100 0 300 300]Nm
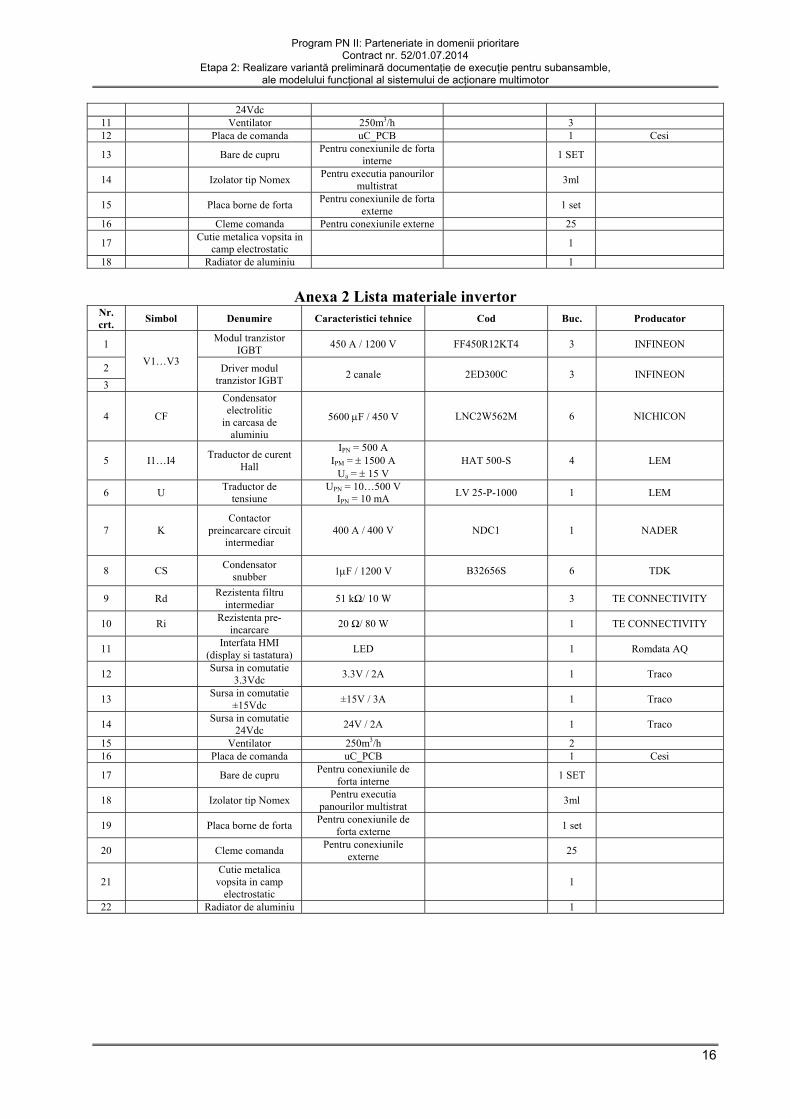
Concluzii Rezultatele așteptate ale etapei sunt cele prevăzute prin planul de realizare, și anume un Proiect variantă preliminară model funcțional pentru subansamble ale sistemului de acționare multimotor cu noua arhitectură de comandă. Considerăm ca gradul de realizare al obiectivelor acestei etape este de 100%. Astfel prin stabilirea unei arhitecturi noi de sistem de acționare multimotor cu turație variabilă și cu recuperarea în rețea a energiei de frânare individuale, în etapa I, și prin realizarea proiectării in etapa a II-a, se poate spune ca sunt îndeplinite toate elementele necesare continuării proiectului cu etapa a-III-a care prevede: Definitivare documentaţie de execuţie, realizare și testare modelul funcţional al sistemului de actionare multimotor. Pentru diseminarea rezultatelor obținute, s-a realizat un site al proiectului, care este actualizat cu rezultatele obținute în fiecare etapă, iar acesta este disponibil la adresa: http://www.icmet.ro/SAMREC/index.html, la care se adaugă permanenta preocupare atât a coordonatorului ICMET Craiova cât și a partenerului industrial CESI Automation Craiova, de a populariza rezultatele proiectului în rândul potențialilor beneficiari. In etapa următoare sunt prevăzute publicarea de articole și depunerea unei cereri de brevet de invenție în legătură cu rezultatele proiectului.
Anexa 1 Lista materiale redresor și circuit intermediar Nr. crt. Simbol Denumire Caracteristici tehnice Cod Buc. Producator
1 D1 .. D6 Modul dioada redresoare 160A / 2200V DD160N 6 Infineon
2 C2 Condensator electrolitic in carcasa de aluminiu 5600 μF / 450 V LNC2W562M 2 NICHICON
3 T1 Traductor de curent Hall IPN = 500 A
IPM = ± 1500 A Ua = ± 15 V
HAT 500-S 1 LEM
4 T2 Traductor de tensiune UPN = 10…500 V IPN = 10 mA LV 25-P-1000 1 LEM
5 K Contactor preincarcare circuit intermediar 600 A / 400 V NDC1 1 NADER
6 C1 .. C6 Condensator snubber 0.22μF / 640 Vac B32656S 6 TDK
7 R8 Rezistenta filtru intermediar 50 kΩ/ 10 W 1 TE CONNECTIVITY
8 R7 Rezistenta pre-incarcare 200 Ω/ 100 W 1 TE CONNECTIVITY
9 Sursa in comutatie 3.3Vdc 3.3V / 2A 1 Traco
10 Sursa in comutatie 24V / 2A 1 Traco
15
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
24Vdc 11 Ventilator 250m3/h 3 12 Placa de comanda uC_PCB 1 Cesi
13 Bare de cupru Pentru conexiunile de forta interne 1 SET
14 Izolator tip Nomex Pentru executia panourilor multistrat 3ml
15 Placa borne de forta Pentru conexiunile de forta externe 1 set
16 Cleme comanda Pentru conexiunile externe 25
17 Cutie metalica vopsita in camp electrostatic 1
18 Radiator de aluminiu 1
Anexa 2 Lista materiale invertor
Nr. crt. Simbol Denumire Caracteristici tehnice Cod Buc. Producator
1 V1…V3
Modul tranzistor IGBT 450 A / 1200 V FF450R12KT4 3 INFINEON
2 Driver modul tranzistor IGBT 2 canale 2ED300C 3 INFINEON
3
4 CF
Condensator electrolitic
in carcasa de aluminiu
5600 μF / 450 V LNC2W562M 6 NICHICON
5 I1…I4 Traductor de curent Hall
IPN = 500 A IPM = ± 1500 A
Ua = ± 15 V HAT 500-S 4 LEM
6 U Traductor de tensiune
UPN = 10…500 V IPN = 10 mA LV 25-P-1000 1 LEM
7 K Contactor
preincarcare circuit intermediar
400 A / 400 V NDC1 1 NADER
8 CS Condensator snubber 1μF / 1200 V B32656S 6 TDK
9 Rd Rezistenta filtru intermediar 51 kΩ/ 10 W 3 TE CONNECTIVITY
10 Ri Rezistenta pre-incarcare 20 Ω/ 80 W 1 TE CONNECTIVITY
11 Interfata HMI (display si tastatura) LED 1 Romdata AQ
12 Sursa in comutatie 3.3Vdc 3.3V / 2A 1 Traco
13 Sursa in comutatie ±15Vdc ±15V / 3A 1 Traco
14 Sursa in comutatie 24Vdc 24V / 2A 1 Traco
15 Ventilator 250m3/h 2 16 Placa de comanda uC_PCB 1 Cesi
17 Bare de cupru Pentru conexiunile de forta interne 1 SET
18 Izolator tip Nomex Pentru executia panourilor multistrat 3ml
19 Placa borne de forta Pentru conexiunile de forta externe 1 set
20 Cleme comanda Pentru conexiunile externe 25
21 Cutie metalica
vopsita in camp electrostatic
1
22 Radiator de aluminiu 1
16
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
17
Anexa 3 Schema plăcii electronice de comandă cu DSP
PLACA DE COMANDA
CSMA0
RG151
VDD2
RE53
RE64
RE75
RC16
RC27
RC38
RC49
RG610
RG711
RG812
MCLR13
RG914
VSS15
VDD16
RA017
RA1218
RA1319
RB520RB421
RB322
RB223
RB124RB025
RB
626
RB
727
RA
928
RA
1029
AV
DD
30A
VSS
31R
B8
32R
B9
33R
B10
34R
B11
35V
SS36
VD
D37
RA
138
RF13
39R
F1240
RB
1241
RB
1342
RB
1443
RB
1544
VSS
45V
DD
46R
D14
47R
D15
48R
F449
RF5
50
RF3 51RF2 52RF8 53RF7 54RF6 55RG3 56RG2 57RA2 58RA3 59RA4 60RA5 61VDD 62OSC1 63OSC2 64VSS 65RA14 66RA15 67RD8 68RD9 69RD10 70RD11 71RD0 72RC13 73RC14 74VSS 75
RD
176
RD
277
RD
378
RD
1279
RD
1380
RD
481
RD
582
RD
683
RD
784
VD
DC
OR
E85
VD
D86
RF0
87R
F188
RG
189
RG
090
RA
691
RA
792
RE
093
RE
194
RG
1495
RG
1296
RG
1397
RE
298
RE
399
RE
4100
DSP
33EP512MU810
3V3
3V3 3V3
3V3
3V3
3V3
GND
Y2MHz
C2022p
C1922p
GNDGND
GND
AV
DD
L9
10uH/2.6AC96
100n
GND
3V3
C91
100n
3V3
GND
C88
100n
3V3
GND
C90
100n
3V3
GND
C85100n
3V3
GND
C89100n
3V3
GND
C9510n
GND
C941n
GND
C93470p
GND
L8
10uH/2.6AC92
100n
GNDGND
C83
470
Vi-2
Vi-3
Vi+22
Vi+23Vo+ 14
Vo- 16
U19
TEN8-2411
C73100n
C71
10uF/50
GND
C75100n
GNDAVDD L10
10uH/2.6AC97
100n
GNDGND
C84
10uF
SDN1
IN2
GN
D3
OUT 4SEN 5
U18LT1963A-3.3 - RADIATOR
C76
10uF/16
GND GND
C77100uF
GND
OSCI1
OSCO2
A03
VSS4 SDA 5SCL 6INT 7VDD 8U12
PCF8583
10k
R12 10k
R10 10k
R9Y1
32kHz
C10
22pD2
1N4007RTC
Vdd11
DataIN2
Vdd13
GND14 DataOUT 6GND2 7VDD2 8
GND2 5
U13 ADUM1100
Vdd1 1
DataIN 2
Vdd1 3
GND1 4DataOUT6 GND27 VDD28
GND25
U15 ADUM1100
TxD1
Vss2
Vdd3
RxD4 Vref 5CANL 6CANH 7RS 8
U14 MCP2551
10k
R16
CAN
C3
10uF/35V
4.7uFC6
100nC5
BT1Soclu 3V
C4
47uF/16V
GND
GND
D11N4007
Vi-1
Vi+16 Vo+ 9
Vo- 10
U11
TEL2-2411
L1
10uH/2.6A
FL3V3 L12
10uH/2.6AC99
100n
GNDGND
C87
10uF
FL3V3 FL3V3 FL3V3 FL3V3
FL3V3
C141n
C152n2
R15
560R
R27
1k5
R28
1k5
R29
1k5
R30
1k5
GND
C171n
C182n2
R21
560R
GND
C121n
C132n2
R11
560R
GND
C11n
C22n2
R2
560R
GNDGND
GND
GND
GND
RA0
RA3
RA
RA1DSV7
DSV5
DSV4_3
DSV1
2
Q1BCW66
R1
2kR5
10kR810k
C112n2
FLT3V3
GND GNDGND
CAK1
Q6BCW66
R17
2kR20
10kR2210k
C162n2
FLT3V3
GND GNDGND
CAK2
RA9
RA10
Q9BCW66
R31
2kR32
10kR3310k
C212n2
FLT3V3
GND GNDGND
CAK3
RA14
Q12BCW66
R38
2kR39
10kR41
10kC242n2
FLT3V3
GND GNDGND
NOASM
Q13BCW66
R42
2kR47
10kR52
10kC312n2
FLT3V3
GND GNDGND
SSMA
RC2
RC3
Q14BCW66
R66
2kR72
10k
R7610k
C412n2
FLT3V3
GND GNDGND
SSFA
RC4
Q16BCW66
R90
2kR94
10kR9910k
C482n2
FLT3V3
GND GNDGND
SFDU
Q20BCW66
R109
2kR115
10k
R12010k
C542n2
FLT3V3
GND GNDGND
RD8
RD9
Q23BCW66
R128
2kR130
10kR134
10kC572n2
FLT3V3
GND GNDGND
RD10
Q24BCW66
R137
2kR141
10kR146
10kC602n2
FLT3V3
GND GNDGND
Q27BCW66
R153
2kR155
10kR15910k
C642n2
FLT3V3
GND GNDGND
RA4
RA5
Q29BCW66
R169
2kR176
10kR183
10kC682n2
FLT3V3
GND GNDGND
DIRV1
RD13D
E L
A A
1 - DE
SAT
UR
AR
I RX
LA
uC
LA
uC
DE
LA
CSM
A2
FLT3V3 L11
10uH/2.6AC98
100n
GNDGND
C86
10uF
CO
NFIR
MA
RI
Z3248 B3247 D3246
Z3045 B3044 D3043
Z2842 B2841 D2840
Z2639 B2638 D2637
Z2436 B2435 D2434
Z2233 B2232 D2231
Z2030 B2029 D2028
Z1827 B1826 D1825
Z1624 B1623 D1622
Z1421 B1420 D1419
Z1218 B1217 D1216
Z1015 B1014 D1013
Z812 B811 D810
Z69 B68 D67
Z46 B45 D44
Z23 B22 D21A01
SL48F-W
Z3248 B3247 D3246Z3045 B3044 D3043Z2842 B2841 D2840Z2639 B2638 D2637Z2436 B2435 D2434
Z2233 B2232 D2231
Z2030 B2029 D2028
Z1827 B1826 D1825
Z1624 B1623 D1622
Z1421 B1420 D1419
Z1218 B1217 D1216
Z1015 B1014 D1013
Z812 B811 D810
Z69 B68 D67
Z46 B45 D44
Z23 B22 D21A02
SL48F-W
120R166
Q2BCW66
R6
2k
15V
GND
RE1
PW1R3
10k
Q4BCW66
R18
2k
GND
RF8
RST1R13
10k
Q7BCW66
R25
2k
GND
RE6
PW3R23
10k
Q10BCW66
R36
2k
GND
RE7
PW4R34
10k
Q3BCW66
R7
2k
GND
RE5
PW5R4
10k
Q5BCW66
R19
2k
GND
RG6
RST5R14
10k
Q8BCW66
R26
2k
GND
RE3
PW7R24
10k
Q11BCW66
R37
2k
GND
RG7
RST7R35
10k
-15CDA L4
10uH/2.6AC34
100n
GNDGND
15CDA L3
10uH/2.6AC26
100n
GNDGND
C25
100uF
C35100uF
GND
C8
100n
FL3V3
GND
C9
100n
FL3V3
GND
R188
10k
SW1
RE
SET
C80100n
123456
PGDSP
RJ12
3V3
GNDGND
PGDPGC
GNDMCLR
R189
100
PGC
PGD
MCLR
3V3
+BA-T
-BAT
+BA-T
-BAT
CAK1
RA
9
CAK2CAK3
RA
10
RA14
NOASM
RC2
SSMA
RC3
SSFA
RC4
SFDU
RD8
SSFC
SSFC
RD9
SSVKM
SSVKM
RD10
TVENT
TVENT
RA4
AVTEM
AVTEM
RA5
DIRV1
RE
1
PW1
RF8
RE6
PW3
RST1
PW4
RE7
RE5
PW5
RG6
RST5
RE
3
PW7RST7
RG7
RA0 RA3RA2
RA
1
15V L2
10uH/2.6AC23
100n
GNDGND
C22
100uF
6
57
U2B
LM358
2
31
U2A
LM358
48
U2CL
M358
R56
82R
R57
82R
R58
82R
R54
20k
GNDGND GND
R48
20k
R43
20k R49
10k
R50
20k
R655k1
R6410k
D51N4148
D61N4148
C29100n
C3733pF
GNDGNDC39100n
15CDA
-15CDA
R51
10k
R44
2M
R53
10k
R59
2k7
R60
10k15CDA
GND 4 8U1CLM393
C40100n
D5 Q 1
CLK3
Q 2
R4
S6
U6ACD4013BCM
R45
10k
C38 1uF
R67
5k1
GND
R5510k
D7LED
GND
R8820k
R96
500RC47100n
GND GND
R9110k
R8710k
R832M
2
31U7A
LM358
15CDA
R8910k
R93
5k1D121N4148
GND
D111N4148
GND
R9510k
Q15BCW66
R79
2k
3V3
GND GND
R11420k
R122
500RC55100n
GND GND
R117
10k
R113
10k
R108
2M
-15CDA
R11610kR118
5k1 D151N4148
GND
D141N4148
GND
R12110k
Q21BCW66
R107
2k
3V3
RA7
GND GND
TP3Test point
C49100n
15CDA
-15CDA
MMT5
6
57
U3B
LM358
2
31
U3A
LM358
48
U3CL
M358
R77
56R
R78
56R
R80
56R
R74
20k
GND GNDGND
R68
20k
R61
20k R69
10k
R70
20k
R855k1
R8410k
D81N4148
D91N4148
C36100n
C4233pF
GNDGNDC45
100n
15CDA
-15CDA
R71
10k
R62
2M
R73
10k
R81
2k7
R82
10k15CDA
GND 4 8U4CLM393
C46100n
D5 Q 1
CLK3
Q 2
R4
S
U5ACD4013BCM6
R63
10k
C441uF
R86
5k1
GND
R7510k
D10LED
GND
R10220k
R111
500RC51100n
GND GND
R10610k
R101
10k
R1002M
2
31U8A
LM358
15CDA
R10310k
D131N4148
GND
R11010k
Q18BCW66
R97
2k
3V3
RD11
GND GND
R12620k
R133
500RC56100n
GND GND
R12910k
R12510k
R1242M
-15CDA
R12710k
D161N4148
GND
R13210k
Q22BCW66
R123
2k
3V3
RD12
GND GND
TP4Test point
C52100n
15CDA
-15CDA
MMT2
C28100n
R40
560R
12
D33v3
GND GND
RB8
C30100n
R46
560R1
2D43v3
GND GND
RB11
C33
1n
GND
C43
1n
GND
R98
5k1
R10510k
Q17BCW66
R922k
GND GND
C5010n
GND
3V3
PMMT5
R112
5k1
R11910k
Q19BCW66
R1042k
GND GND
C5310n
GND
3V3
PMMT2
MMT5
RB
8
RA6
RA
7R
A6
ADR0ADR1
RA15
RC1
MMT2
RB
11
RD11
RD
12
C1+1
VS+2
C1-3
C2+4
C2-5
VS-6
T2OUT7
R2IN8 R2OUT 9T2IN 10T1IN 11R1OUT 12R1IN 13T1OUT 14GND 15VCC 16
U20 MAX3232
C78100n
C81100n
C79100n
RS 232
RS232-pin2RS232-pin3
GND
GND
FL3V3
FL3V3C70
100n
15V
C710uF
LRMC
L6
10uH/2.6A
L5
10uH/2.6AC72
2200uF/35
+BA-T
-BAT
C7410uF/16
GND
L7
10uH/2.6A
GND
C82
47
MKBR-CON
MKBR-CON
MKFA-CON
MKFA-CON
PMM
T5
PMM
T2
GND
RX
TX
RX
CANH
CANHCANL
CANL
RE8
RE8
RG2
RG2RG3
RG3
GND
R18410k
Q31BCW66
R171
2k
15V
GND GND
CCK1
RF5
R18510k
Q32BCW66
R172
2k
15V
GND GND
CCK2
RF6
R18610k
Q33BCW66
R173
2k
15V
GND GND
CCK3
RF7
R18210k
Q30BCW66
R170
2k
15V
GND GND
RG8
R18710k
Q34BCW66
R174
2k
15V
GND GND
CCK1CCK2CCK3
RF5
RF6RF7
FNCH
FNCH
RG8
GND
DORV1
DORV1
TP2st pointTe
TP1Test point
RG0
RG1
RG
0R
G1
RF0
RD
13
RF2RF3
TX
GNDGND
RF2RF3
R2
R1R2
R1
GND
PMMT3
DSV1
DSV4_3
DSV7
DSV5
MMT1
MMT3
C58100n
R131
560R
12
D173v3
GND GND
RB10
R135
300R
R136
300R
GND GND
MMT1TP5
Test point
R158
10k
R156
2M
R161
10k
R167
2k
R168
10k15CDA
GND 4 8U9CLM393
C69100n
R157
10k
C67 1uF
R175
5k1
GND
R16410kD21
LED
GND
C661n
GND
R160
10k
R16510k
Q28BCW66
R1542k
GND GND
C65
10n
GND
3V3
PMMT3
R162
300R
R163
300R
C59100n
R139
560R
12
D183v3
GND GND
RB9TP6
Test point
2
31A
U9A
LM393
2
31A
U1A
LM393
2
31
A
U4A
LM393
MMT3
GND GND
RB
9R
B10
P
P
PP
P
P
P
in
Pin
Pin
in
Pin 3
Pin 10
Pin 99
Pin 11Pin 5
Pin 4
Pin
Pin
Pin 32
Pin 35
Pin 34
Pin 33
in 52in 51Pin 26
Pin 27
Pin 13
in 13
Pin 80
Pin 61
Pin 60
in 70
Pin 69
Pin 68
Pin 9
Pin 8
Pin 7
Pin 66
Pin 29
Pin 28
Pin 50 Pin 55 Pin 54 Pin 12 Pin 87
Pin 71
Pin 79
Pin 91
Pin 92
Pin 18in 57
Pin 56
Pin 89
Pin 90
1
2 3
4U17
LTV817
R145
2k7
R150
1k
R144
100
C620.1/63V
-BAT
ADR015V
R15210k
Q26
BCW66
R1402k
FL3V3
RA15
GND GND
Pin 67
1
2 3
4U16
LTV817
R143
2k7
R148
1k
R142
100
C610.1/63V
-BAT
ADR115V
R15110k
Q25
BCW66
R1382k
FL3V3
RC1
GND GND
Pin 6D20
1N4148
D19
1N4148
R149
4k7
R147
4k7
R177
2k
R180
2k
R179
2k
R178
2k
R181
2kRF0
147
U6C4013
147
U5C4013 C32
100n
GND
15CDA
C27100n
15CDA
GND
C63100n
GND
15CDA
3V3
48
U8CLM358
6
57
U8BLM358
48
U7CLM358
6
57
U7BLM358
147
U10C4013
D5 Q 1
CLK3
Q 2
R4
S6
U10ACD4013BCM
Anexa 4 Lista materiale placă electronică de comandă cu DSP
SL48F-W Conector 01 A01, A02 SL48F 2
Soclu 3V
Battery Vertical Socket BT1 BATVERHLD2 1
1n Capacitor C1, C12, C14, C17, C33, C43, C66, C94 1206c 8
2n2 Capacitor C2, C11, C13, C15, C16, C18, C21, C24, C31, C41, C48, C54, C57, C60, C64, C68 1206c 16
10uF/35V Bi-Polar Capacitor C3 RB.1/.2 1
47uF/16V Bi-Polar Capacitor C4 RB.1/.2 1
100n Capacitor C5 RAD0.2 1
4.7u tantal Bi-Polar Capacitor C6 RB.1/.2 1
10uF Bi-Polar Capacitor C7 C_SMD_A 1
100n Capacitor
C8, C9, C23, C26, C27, C28, C29, C30, C32, C34, C36, C39, C40, C45, C46, C47, C49, C51, C52, C55, C56, C58, C59, C63, C69, C70, C73, C75, C78, C79, C81, C85, C88, C89, C90, C91, C92, C96, C97, C98, C99 1206C 41
22p Capacitor C10, C19, C20 1206C 3
100uF Bi-Polar Capacitor C22, C25, C35, C77 RB.1/.2 4
33pF Capacitor C37, C42 1206c 2
1uF Bi-Polar Capacitor C38, C44, C67 RB.1/.2 3
10n Capacitor C50, C53, C65, C95 1206c 4
0.1/63V Capacitor C61, C62 RAD0.2 2
10uF/50 Bi-Polar C71 RB.1/.2 1

Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
Capacitor
2200uF/35 Bi-Polar Capacitor C72 RB.3/.6 1
10uF/16 Bi-Polar Capacitor C74, C76 RB.1/.2 2
100n Capacitor C80 1206 1
4700uF/6.3 Bi-Polar Capacitor C82, C83 RB.2/.4 2
10uF Bi-Polar Capacitor C84, C86, C87 RB.1/.2 3
470p Capacitor C93 1206C 1
1N4007
High Conductance Fast Diode D1, D2 DO-41 2
3v3 Zener Diode D3, D4, D17, D18 SOD-323 4
1N4148
High Conductance Fast Diode D5, D6, D8, D9, D11, D12, D13, D14, D15, D16, D19, D20 SOD-80C 12
LED Typical LED Red D7, D10, D21 1206LED2 3
dsPIC33EP512MU810 DSP Microchip DSP
TQFP14X14-100N 1
10uH/2.6A Inductor L1, L2, L3, L4, L5, L6, L7, L8, L9, L10, L11, L12 PWRIND1 12
RJ12 Connector PGDSP BU_TEL6V 1
BCW66 NPN Bipolar Transistor
Q1, Q2, Q3, Q4, Q5, Q6, Q7, Q8, Q9, Q10, Q11, Q12, Q13, Q14, Q15, Q16, Q17, Q18, Q19, Q20, Q21, Q22, Q23, Q24, Q25, Q26, Q27, Q28, Q29, Q30, Q31, Q32, Q33, Q34 SOT-23 34
2k Resistor
R1, R6, R7, R17, R18, R19, R25, R26, R31, R36, R37, R38, R42, R66, R79, R90, R92, R97, R104, R107, R109, R123, R128, R137, R138, R140, R153, R154, R169, R170, R171, R172, R173, R174, R177, R178, R179, R180, R181 1206 39
560R Resistor R2, R11, R15, R21, R40, R46, R131, R139 1206 8
10k Resistor
R3, R4, R5, R8, R9, R10, R12, R13, R14, R16, R20, R22, R23, R24, R32, R33, R34, R35, R39, R41, R45, R47, R49, R51, R52, R53, R55, R63, R64, R69, R71, R72, R73, R75, R76, R84, R87, R89, R91, R94, R95, R99, R101, R103, R105, R106, R110, R113, R115, R116, R117, R119, R120, R121, R125, R127, R129, R130, R132, R134, R141, R146, R151, R152, R155, R157, R158, R159, R160, R161, R164, R165, R176, R182, R183, R184, R185, R186, R187, R188 1206 80
1k5 Resistor R27, R28, R29, R30 AXIAL0.3 4
20k Resistor R43, R48, R50, R54, R61, R68, R70, R74 1206 8
2M Resistor R44, R62, R83, R100, R108, R124, R156 1206 7
82R Resistor R56, R57, R58 AXIAL0.3 3
2k7 Resistor R59, R81 AXIAL0.3 2
10k Resistor R60, R82, R168 AXIAL0.3 3
5k1 Resistor R65, R67, R85, R86, R93, R98, R112, R118, R175 1206 9
56R Resistor R77, R78, R80 AXIAL0.3 3
20k Resistor R88, R102, R114, R126 AXIAL0.3 4
500R Resistor R96, R111, R122, R133 AXIAL0.3 4
300R Resistor R135, R136, R162, R163 AXIAL0.3 4
100 Resistor R142, R144, R189 1206 3
2k7 Resistor R143, R145 1206 2
4k7 Resistor R147, R149 1206 2
1k Resistor R148, R150 1206 2
120 Resistor R166 AXIAL0.3 1
2k Resistor R167 AXIAL0.3 1
RESET dip switch SW1 SW00 1
Test point Test point TP1, TP2, TP3, TP4, TP5, TP6 TERMINAL_B 6
LM393
Low-Power Dual Voltage Comparator U1, U4, U9 DIP-8 3
LM358 Low-Power Dual Voltage U2, U3, U7, U8 DIP-8 4
18
Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
Comparator
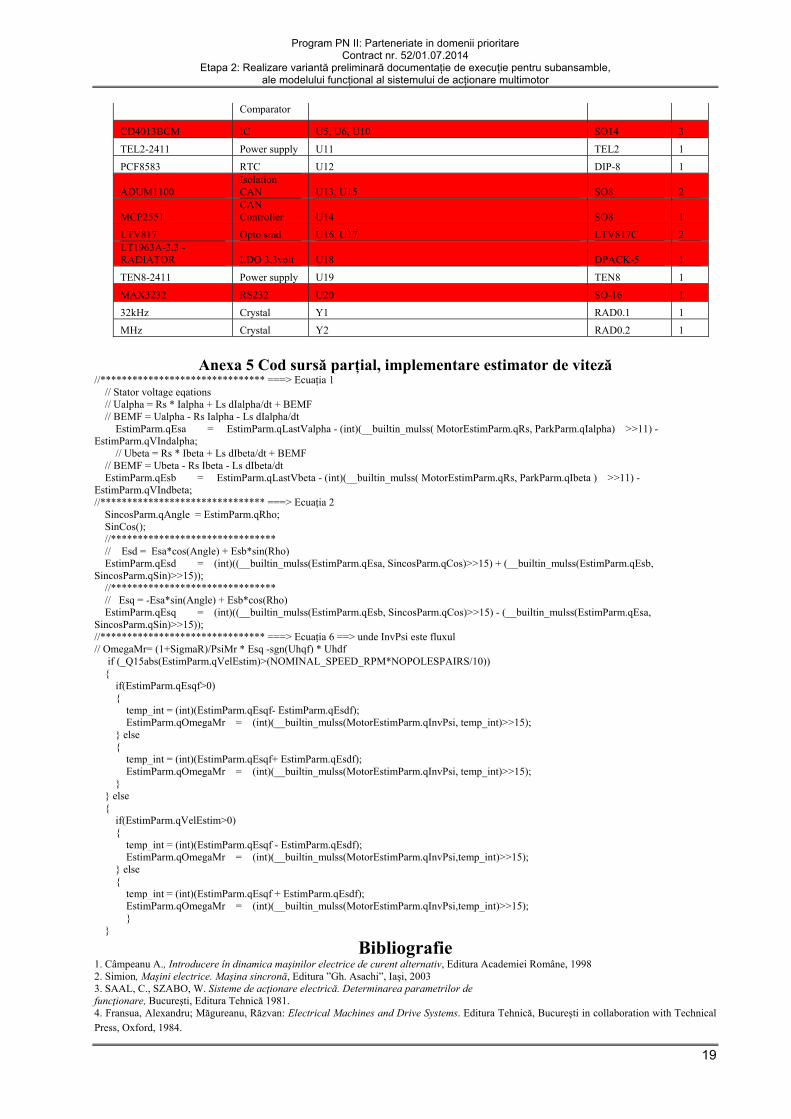
CD4013BCM IC U5, U6, U10 SO14 3
TEL2-2411 Power supply U11 TEL2 1
PCF8583 RTC U12 DIP-8 1
ADUM1100 Isolation CAN U13, U15 SO8 2
MCP2551 CAN Controller U14 SO8 1
LTV817 Opto smd U16, U17 LTV817C 2 LT1963A-3.3 - RADIATOR LDO 3.3volt U18 DPACK-5 1
TEN8-2411 Power supply U19 TEN8 1
MAX3232 RS232 U20 SO-16 1
32kHz Crystal Y1 RAD0.1 1
MHz Crystal Y2 RAD0.2 1
Anexa 5 Cod sursă parțial, implementare estimator de viteză
//******************************* ===> Ecuația 1 // Stator voltage eqations // Ualpha = Rs * Ialpha + Ls dIalpha/dt + BEMF // BEMF = Ualpha - Rs Ialpha - Ls dIalpha/dt EstimParm.qEsa = EstimParm.qLastValpha - (int)(__builtin_mulss( MotorEstimParm.qRs, ParkParm.qIalpha) >>11) - EstimParm.qVIndalpha; // Ubeta = Rs * Ibeta + Ls dIbeta/dt + BEMF // BEMF = Ubeta - Rs Ibeta - Ls dIbeta/dt EstimParm.qEsb = EstimParm.qLastVbeta - (int)(__builtin_mulss( MotorEstimParm.qRs, ParkParm.qIbeta ) >>11) - EstimParm.qVIndbeta; //******************************* ===> Ecuația 2 SincosParm.qAngle = EstimParm.qRho; SinCos(); //******************************* // Esd = Esa*cos(Angle) + Esb*sin(Rho) EstimParm.qEsd = (int)((__builtin_mulss(EstimParm.qEsa, SincosParm.qCos)>>15) + (__builtin_mulss(EstimParm.qEsb, SincosParm.qSin)>>15)); //******************************* // Esq = -Esa*sin(Angle) + Esb*cos(Rho) EstimParm.qEsq = (int)((__builtin_mulss(EstimParm.qEsb, SincosParm.qCos)>>15) - (__builtin_mulss(EstimParm.qEsa, SincosParm.qSin)>>15)); //******************************* ===> Ecuația 6 ==> unde InvPsi este fluxul // OmegaMr= (1+SigmaR)/PsiMr * Esq -sgn(Uhqf) * Uhdf if (_Q15abs(EstimParm.qVelEstim)>(NOMINAL_SPEED_RPM*NOPOLESPAIRS/10)) if(EstimParm.qEsqf>0) temp_int = (int)(EstimParm.qEsqf- EstimParm.qEsdf); EstimParm.qOmegaMr = (int)(__builtin_mulss(MotorEstimParm.qInvPsi, temp_int)>>15); else temp_int = (int)(EstimParm.qEsqf+ EstimParm.qEsdf); EstimParm.qOmegaMr = (int)(__builtin_mulss(MotorEstimParm.qInvPsi, temp_int)>>15); else if(EstimParm.qVelEstim>0) temp_int = (int)(EstimParm.qEsqf - EstimParm.qEsdf); EstimParm.qOmegaMr = (int)(__builtin_mulss(MotorEstimParm.qInvPsi,temp_int)>>15); else temp_int = (int)(EstimParm.qEsqf + EstimParm.qEsdf); EstimParm.qOmegaMr = (int)(__builtin_mulss(MotorEstimParm.qInvPsi,temp_int)>>15);
Bibliografie 1. Câmpeanu A., Introducere în dinamica maşinilor electrice de curent alternativ, Editura Academiei Române, 1998 2. Simion, Maşini electrice. Maşina sincronă, Editura ”Gh. Asachi”, Iaşi, 2003 3. SAAL, C., SZABO, W. Sisteme de acţionare electrică. Determinarea parametrilor de funcţionare, Bucureşti, Editura Tehnică 1981. 4. Fransua, Alexandru; Măgureanu, Răzvan: Electrical Machines and Drive Systems. Editura Tehnică, Bucureşti in collaboration with Technical Press, Oxford, 1984.
19

Program PN II: Parteneriate in domenii prioritare Contract nr. 52/01.07.2014
Etapa 2: Realizare variantă preliminară documentație de execuție pentru subansamble, ale modelului funcțional al sistemului de acționare multimotor
20
5. Austin Hughes Senior Fellow: : Electric Motors and Drives Fundamentals, Types and Applications, Third edition , School of Electronic and Electrical Engineering, University of Leeds 6. Muşuroi Sorin, Controlul acţionărilor electrice, documentaţie disponibilă pe internet 7. Akagi H: New trends in active filters for power conditioning, IEEE Transactions on Industry Applications, Vol. 32, No. 6, Nov/Dec 1996, pp. 1312-1322. 8. Bose B. K.: Modern Power Electronics and AC Drives, Prentice Hall, Upper Saddle River, New Jersey 07458, USA, 2002. 9. Ionescu, F., Six, J. P., Floricău D., Delarue Ph., Niţu Smaranda, Boguş C.: Electronică de putere – convertoare statice, Editura tehnică, Bucureşti, 1998, ISBN 973-31-1262-3. 10. Kelemen, Árpád, Imecs, Maria: Electronică de putere, Editura didactică şi pedagogică, Bucureşti, 1983. 11. Chiver Olivian, Traductoare, documentaţie disponibilă pe internet 12. Albu Mihai, Invertorul PWM trifazat de tensiune, documentaţie disponibilă pe internet 13. LEM, documentaţie de firmă 14. Richard Okrasa, Adjustable Speed Drive, Ontario Hydro 15. Texas Instruments, documentație de firmă 16. Microchip, documentație de firmă 17. Convertoare cc-ca. Invertoare – curs disponibil pe internet 18. Kelemen Árpád, Imecs Maria: Sisteme de reglare cu orientare după cîmp ale maşinilor de curent alternativ. Editura Academiei Române, Bucureşti, 1989 19. Kelemen Árpád, Imecs Maria: Vector Control of AC Drives. Volume 1: Vector Control of Induction Machine Drives. OMIKK Publisher, Budapest, 1991, ISBN 9635931409 20. Kelemen Árpád, Imecs Maria: Vector Control of AC Drives. Volume 2: Vector Control of Synchronous Machine Drives. Ecriture-Publisher, Budapest, Hungary, 1993, ISBN 9635931409 21. Archana S. Nanoty, and A. R. Chudasama : Vector Control of Multimotor Drive; World Academy of Science, Engineering and Technology , International Journal of Electrical, Robotics, Electronics and Communications Engineering Vol:2 No:9, 2008 22. D.O. Kisch, Reglarea vectorială a maşinilor de curent alternativ, Editura ICPE, 1997 23. BHAKTI M JOSHI and MUKUL C CHANDORKAR: Two-motor single-inverter field-oriented induction machine drive dynamic performance, Department of Electrical Engineering, Indian Institute of Technology Bombay, International Journal of Electronics Communications and Electrical Engineering ISSN : 2277-7040 Volume 3 Issue 7 (July 2013) 24. Amit Biswal1, Sai Ram Reddy Bhavanam1, Dr. Umashankar S1, Analysis of Common DC Link in VSI fed Multi-motor Drives, School of Electrical Engineering, VIT University, Vellore-632014, Tamil Nadu, India 25. WHITAKER, JERRY C, The Electronics Handbook, IEEE Press, 1996. 26. Controlul vectorial al acţionărilor electrice, curs, documentație disponibilă pe Internet 27. IVANOV S., GRENIER D., LABRIQUE F., RESENDE M., ROBYNS B. , Online Interactive Lessons on the Principle of the Direct Torque Control of the Induction Machine, WSEAS TRANSACTIONS on ADVANCES in ENGINEERING EDUCATION Issue 5, Volume 5, May 2008. 28. Estimarea parametrilor mașinii asincrone folosind filtrul Kalman extins, documentație disponibilă pe Internet 29. Compatibilitate electromagnetică (CEM). Partea 3: Limite. Secţiunea 2: Limite pentru emisiile de curent armonic (curent absorbit de aparat 16A pe fază). SR EN 61000-3-2+A12. 30. Electromagnetic compatibility (EMC). Part 2: Environment. Section 2: Compatibility levels for low-frequency conducted disturbances and signalling in public low-voltage power supply systems. IEC 61000-2-2. 31. General guide on harmonics and interharmonics measurements and instrumentation for power supply systems and equipment connected thereto. IEC 1000-4-7. 32. BABU C., „Control of Voltage Source Inverters using PWM/SVPWM for Adjustable SpeedDriveApplications”;http://ethesis.nitrkl.ac.in/1133/1/Control_of_Voltage_Source_Inverters_using_PWM.pdf 33. Chiasson, J., Tolbert, L. M.,McKenzie, K. and Du, Z., “Control of a multilevel converter using resultant theory,” in IEEE Transactions on Control System Technology, vol. 11, pp. 345–354, May 2003. 34. Malinowski, M. And Kazmierkowski, M. P., “Simple Direct Power Control of Three-Phase PWM Rectifier Using Space Vector Modulation – A Comparative Study”, in EPE Journal, Vol. 35. No. 2 pp. 28-34, 2003. 35. GYUGYI L., „Power Electronics in Electric Utilities: Static Var Compensator”; 36. Geyer,T., Becutti, A.,et. al, “Model Predictive Direct Torque Control of Permanent Magnet Synchronous Motors”, in ECCE Conference, 2010 37. FRONTIERS OF MODEL PREDICTIVE CONTROL, Edited by Tao Zheng, 2012, Interenet 38. Predictive Control of Inverter Supplied Electrical Drives, Ralph Kennel, Arne Linder 39. S. Seo et al, Hybrid Control System for Managing Voltage and Reactive Power in the JEJU Power System, Journal of Electrical Eng. and Technol. Vol. 4, no.4 pp. 429-437, 2009. 40. T. Geyer, G. Papafotiou, M. Morari, Model Predictive Direct Torque Control-Part I:Concept, Algorithm, and Analysis, IEEE Transactions on Industrial Electronics vol. 56, no.6, pp. 1894-1905, 2009. 41. Jose Rodriguez and Patricio Cortes, PREDICTIVE CONTROL OF POWER CONVERTERS AND ELECTRICAL DRIVES, John Wiley & Sons, Ltd., Publication, 2012 42. Jun Ren, Chun-Wen Li, De-Zong Zhao, CAN-based Synchronized Motion Control for Induction Motors, International Journal of Automation and Computing 06(1), February 2009 43. Vismay Chauhan, Prof. V.P. Patel, Multi-motor Synchronization Techniques, International Journal of Science, Engineering and Technology Research (IJSETR), Volume 3, Issue 2, February 2014 44. Nicola M., et al., SISTEM INTEGRAT DE AUTOMATIZARE A INSTALAŢIILOR DE ACŢIONARE ELECTRICĂ, HIDRAULICĂ ŞI DE ÎNCĂLZIRE A STAVILELOR CU CLAPETĂ DE PE BARAJELE DIN HIDROCENTRALE, Buletinul Tehnico-Ştiinţific al ICEMENERG, Editura ICEMENERG Bucureşti, pp. 52-59, ISSN 1584-0484, 2007 45. Nicola M., Velea F., AUTOMATIC CONTROL OF A HIDROPOWER DAM SPILLWAY, International Conference on Applied and Theoretical Electricity ICATE 2010 Craiova, 8-9 October, Annals of the University of Craiova no.34, pp. 279-282, ISSN : 1842-4805, 2010.