universitatea din craiova - old.unitbv.roold.unitbv.ro/portals/31/sustineri de...
TRANSCRIPT

1
MINISTERUL EDUCAŢIEI NAȚIONALE ȘI CERCETĂRII ȘTIINȚIFICE
UNIVERSITATEA TRANSILVANIA DIN BRAŞOV BRAŞOV, EROILOR NR. 29, 500036, TEL. 0040-268-413000, FAX 0040-268-410525
Universitatea Transilvania din Brasov
Scoala Doctorala Interdisciplinara
Facultatea: Inginerie Mecanică
Ing. Țolea Bogdan Adrian
Cercetări privind impactul dintre autovehicul și
pieton
Research regarding vehicle-pedestrian impact
Conducător ştiinţific
Prof.dr.ing. Csaba ANTONYA
BRASOV, 2017
MINISTERUL EDUCAŢIEI NAȚIONALE ȘI CERCETĂRII ȘTIINȚIFICE

2
UNIVERSITATEA “TRANSILVANIA” DIN BRAŞOV
BRAŞOV, B-DUL EROILOR NR. 29, 500036, TEL. 0040-268-413000, FAX 0040-268-410525
RECTORAT
D-lui (D-nei) ..............................................................................................................
COMPONENŢA
Comisiei de doctorat
Numită prin ordinul Rectorului Universităţii Transilvania din Braşov
Nr. 8532 din 27.03.2017
PREŞEDINTE: Prof. Dr. Ing. Nicolae ISPAS
Universitatea Transilvania din Brașov
Director Departament de Autovehicule și Transporturi
CONDUCĂTOR ŞTIINŢIFIC: Prof. Dr. Ing. Csaba ANTONYA
Universitatea Transilvania din Brașov
REFERENŢI:
Prof. Dr. Ing. Nicolae FILIP
Universitatea Tehnică din Cluj Napoca
Prof. Dr. Ing. Anghel CHIRU
Universitatea Transilvania din Brașov
Conf. Dr. Ing. Adrian SACHELARIE
Universitatea Tehnica Gheorghe Asachi din Iasi
Data, ora şi locul susţinerii publice a tezei de doctorat: 19.05.2017, ora 11,
sala NP7 (sala INA).
Eventualele aprecieri sau observaţii asupra conţinutului lucrării vă rugăm să
le transmiteţi în timp util, pe adresa [email protected]
Totodată vă invităm să luaţi parte la şedinţa publică de susţinere a tezei de
doctorat.
Vă mulţumim.

3
CUPRINS (lb. romana)
Pg.
teza
Pg.
rezumat
INTRODUCERE 11 9
1. Stadiul actual al cercetărilor privind impacturile dintre autovehicule și pietoni 13 11
1.1. Impactul autovehicul-pieton- descriere generală 13 11
1.1.1 Definirea accidentelor de tip autovehicul-pieton 13 11
1.1.2 Clasificarea accidentelor de tip autovehicul-pieton 13 11
1.2. Statistica accidentelor în care sunt implicați pietoni 14 11
1.3. Criterii privind estimarea gradului de vătămare al pietonilor 17 13
1.3.1 Scara de evaluare AIS 17 13
1.3.2 Estimarea nivelului de vătămare la nivelul capului 19 13
1.4. Elemente de siguranță pasivă în contextul siguranței pietonilor 27 17
1.4.1 Teste experimentale privind evaluarea siguranței pietonilor 27 17
1.4.2 Sistem de siguranță pasivă – Capota activă 31 18
1.4.3 Sistem de siguranță pasivă – Airbag-ul destinat pietonilor 33 19
1.5. Elemente de siguranță activă în contextul siguranței pietonilor 34 20
1.5.1 Sistemul bazat pe frânarea de urgență automată 34 20
1.5.2 Sistemul Matrix LED 37 21
1.6. Parametrii geometrici ai profilului frontal care influențează siguranța
pietonilor
37 21
1.7. Concluzii 40 23
1.8. Obiectivele tezei 40 24
2.Studiul teoretic al coliziunilor de tip autovehicul-pieton 42 25
2.1. Considerații privind coliziunea de tip autovehicul-pieton 42 25
2.1.1. Cinematica pietonului în timpul coliziunii 42 25
2.2. Determinarea distanțelor de proiectare a pietonului 47 25
2.2.1. Evoluția modelelor privind determinarea distanței de proiectare a
pietonului
47 25
2.2.2. Metoda de determinare a distanțelor de proiectare a pietonului
analizată pe sub-faze ale impactului – Coliziune cu frânare a
autovehiculului în momentu coliziunii
49 27
2.2.3. Metoda de determinare a distanțelor de proiectare a pietonului în
urma coliziunii cu autovehiculul – Coliziune fără frânare a
autovehiculului în momentul colizunii
53 29
2.3. Metode de determinare a vizibilității pietonului în condiții nocturne 57 32
2.4. Concluzii 60 32
3. Determinarea distanțelor de vizibilitate a pietonului în condiții nocturne prin
teste experimentale
61 33

4
3.1. Metodologia încercărilor experimentale pentru scenariul de testare 1 61 33
3.1.1. Obiectivele testului experimental 61 33
3.1.2. Desfășurarea experimentului 61 33
3.1.3. Analiza și procesarea datelor 62 33
3.2. Metodologia încercărilor experimentale pentru scenariul de testare 2 67 36
3.2.1. Obiectivele testului experimental 67 36
3.2.2. Desfășurarea experimentului 67 36
3.2.3. Analiza și procesarea datelor 68 37
3.2.4. Determinarea vitezelor de evitare a coliziunii în funcție de
distanțele de vizibilitate obținute
73 39
3.3. Concluzii 77 41
4. Modelarea matematică a colizinii autovehicul-pieton 78 43
4.1. Principiile mecanicii Lagrangiene 78 43
4.2. Obiectivele modelării matematice 78 43
4.3. Modelarea matematică a sistemului proiectat 78 43
4.4. Datele de intrare ale modelului teoretic. Limitările modelului 82 44
5. Metodica cercetării experimentale 84 46
5.1. Stabilirea obiectivelor testelor experimentale 84 46
5.2. Stabilirea desfășurării testelor experimentale 84 46
5.2.1. Fixarea programului de încercări experimentale 84 46
5.2.2. Descrierea scenariilor de coliziune 85 46
5.3. Pregătirea testelor experimentale 97 46
5.3.1. Pregătirea dispozitivului antropomorfic de testare 87 46
5.3.2. Pregătirea aparaturii necesară achiziționării datelor 87 47
5.3.3. Pregătirea poligonului de încercări 91 48
5.4. Desfășurarea testelor experimentale 95 48
5.4.1. Desfășurarea testului experimental 1 97 48
5.4.2. Desfășurarea testului experimental 2 100 49
5.4.3. Desfășurarea testului experimental 3 102 50
5.4.4. Desfășurarea testului experimental 4 105 51
5.4.5. Desfășurarea testului experimental 5 107 52
6. Achiziția, prelucrarea și analiza datelor experimentale 111 54
6.1. Achiziția datelor experimentale 111 54
6.1.1. Achiziția și prelucrarea datelor din testul experimental 1 111 54
6.1.2. Achiziția și prelucrarea datelor din testul experimental 2 113 55
6.1.3. Achiziția și prelucrarea datelor din testul experimental 3 116 56
6.1.4. Achiziția și prelucrarea datelor din testul experimental 4 118 58
6.1.5. Achiziția și prelucrarea datelor din testul experimental 5 121 59
6.2. Determinarea parametrilor necunoscuți pe baza datelor extrase 125 60
5
6.2.1. Determinarea distanțelor de proiectare a pietonului în urma
coliziunii
125 60
6.2.2. Determinarea gradului de vătămare al pietonului prin prisma
criteriului de vătămare HIC
129 63
6.3. Analiza comparativă a datelor obținute cu ajutorul modelării matematice 135 65
7. Determinarea parametrilor geometrici ai profilului frontal ai autovehiculului
care influențează accelerația la nivelul capului în cazul accidentelor
138 66
7.1. Dezvoltarea unui pieton virtual similar cu cel utilizat în experimente 138 66
7.2. Simularea testelor experimentale utilizând sistemul multi-corp dezvoltat 139 66
7.2.1. Simularea testului experimental 2 140 66
7.2.1. Simularea testului experimental 3 141 66
7.3. Validarea sistemului multi-corp virtual 142 67
7.4. Aspecte privind proiectare și importarea profilurilor frontale utilizate în
cadrul studiului
146 67
7.5. Determinarea parametrilor care influențează accelerațiile la nivelul capului
pietonului
149 68
7.6. Analiza comparativă a datelor obținute 160 72
7.7. Determinarea gradului de vătămare la nivelul capului pe baza accelerațiilor
obținute
161 72
7.8. Concluzii 163 73
8. Concluzii generale, contribuții originale și direcții de aprofundare viitoare
ale cercetărilor
164 74
BIBLIOGRAFIE 170 78
ANEXE 178 -
Anexa 1 - Caracteristicile tehnice ale autovehiculelor utilizate în cadrul
testelor experimentale
178 -
Anexa 2 - Fișa tehnică pentru aparatul de achiziție date Pic DAQ5 179 -
Anexa 3 - Datele tehnice ale camerei de mare viteză Hi-Spec 5 180 -
Anexa 4 - Datele tehnice ale aparatului Casio Exilim 181 -
Anexa 5 - Specificațiile tehnice a Dronei DJI Phantom 182 -
Anexa 6 - Fișa tehnică a aparatului Fujifilm X-T1 183 -
Anexa 7 - Diagramele obținute prin simulările din capitolul 7 184 -
Scurt Rezumat (romana/engleza) 221 -
CV 222 -
6
CUPRINS (lb. engleza)
Pg.
teza
Pg.
rezumat
INTRODUCTION 11 9
1. The state of the art regarding car-to-pedestrian accidents 13 11
1.1. Car-to-pedestrian collision – general description 13 11
1.1.1 The definition of car-to-pedestrian accidents 13 11
1.1.2 Car-to-pedestrian accident classification 13 11
1.2. Accident statistics where pedestrians are involved 14 11
1.3. Criteria regarding pedestrian injury assesment 17 13
1.3.1 AIS scale 17 13
1.3.2 Assessment of the head injury risk 19 13
1.4. Passive safety systems in pedestrian protection 27 17
1.4.1 Experimental tests for pedestrian safety 27 17
1.4.2 Passive safety system – active bonnet 31 18
1.4.3 Passive safety system – pedestrians airbag 33 19
1.5. Active safety systems in pedestrian protection 34 20
1.5.1 Autonomous Emergency Braking System 34 20
1.5.2 Matrix LED System 37 21
1.6. The geometric parameters of the vehicle’s frontal profile design that affect
pedestrian safety
37 21
1.7. Conclusions 40 23
1.8. Objectives 40 24
2. The theoretical study of car-to-pedestrian collisions 42 25
2.1. Considerations on car-to-pedestrian collisions 42 25
2.1.1. Pedestrian kinematics during collision 42 25
2.2. Determination of the pedestran throwing distance 47 25
2.2.1. Historical overview regarding the mathematical models of the
pedestrians throwing distance
47 25
2.2.2. The determination method of pedestrian throwing distance
analyzed on impact sub-phases – The vehicle is considered to be
braked during collision
49 27
2.2.3. The determination method of pedestrian throwing distance –
The vehicle is not braked when the impact occurs
53 29
2.3. Methods to determine the pedestrian visibility during night-time 57 32
2.4. Conclusions 60 32
3. The determination of the pedestrian’s visibility distance during night-time by
experimental means
61 33
3.1. The first experimental test methodology 61 33
7
3.1.1. Objectives 61 33
3.1.2. Conducting the experiment 61 33
3.1.3. Analysis and data processing 62 33
3.2. The second experimental test methodology 67 36
3.2.1. Objectives 67 36
3.2.2. Conducting the experiment 67 36
3.2.3. Analysis and data processing 68 37
3.2.4. Determination of the avoidance velocities using the determined
distances
73 39
3.3. Conclusions 77 41
4. Mathematical modelling of the car-to-pedestrian collsion 78 43
4.1. Lagrange principles 78 43
4.2. Obiectives of the mathematical modelling 78 43
4.3. Mathematical modelling of the given system 78 43
4.4. Input data. Limitations 82 44
5. Experimental research methodology 84 46
5.1. Establishing the objectives of the experimental research 84 46
5.2. Establishing the course of te experimental tests 84 46
5.2.1. Testing schedule 84 46
5.2.2. Testing scenarios 85 46
5.3. Experimental tests preparation 87 46
5.3.1. Preparation of DAT 87 46
5.3.2. Data aquisition device preparation 91 47
5.3.3. Testing track preparation 95 48
5.4. Experimental tests preparation 97 48
5.4.1. Conducting the experimental test 1 97 48
5.4.2. Conducting the experimental test 2 100 49
5.4.3. Conducting the experimental test 3 102 50
5.4.4. Conducting the experimental test 4 105 51
5.4.5. Conducting the experimental test 5 107 52
6. Aquisition, processing and analysis of the experimental data 111 54
6.1. Data aquisition 111 54
6.1.1. Data aquisition and processing of the experimenta test 1 111 54
6.1.2. Data aquisition and processing of the experimenta test 2 113 55
6.1.3. Data aquisition and processing of the experimenta test 3 116 56
6.1.4. Data aquisition and processing of the experimenta test 4 118 58
6.1.5. Data aquisition and processing of the experimenta test 5 121 59
6.2. Determination of unknown parameters based on the extracted data 125 60
6.2.1. Determination of the pedestrian throwing distance for each 125 60

8
experimental test
6.2.2. Injury assessment in terms of head injury criteria HIC 129 63
6.3. Comparative analysis of data obtained through mathematical modelling 135 65
7. Determination of the geometric parameters of the vehicle’s frontal profile
design which influence the head accelerations in case of accidents
138 66
7.1. Development of a virtual pedestrian similar with the one used in the crash-
tests
138 66
7.2. Simulation of the crash-tests using the developed virtual multi-body system 139 66
7.2.1. Simulation of the test 2 140 66
7.2.1. Simulation of the test 3 141 66
7.3. Validation of the virtual multi-body system 142 67
7.4. Aspects regarding designing and importing of the vehicle’s frontal profile
used within the study
146 67
7.5. Determination of the geometric parameters that influence pedestrian’s head
acceleration
149 68
7.6. Comparative analysis of the obtained data 160 72
7.7. Head injury assessment based on the obtained accelerations 161 72
7.8. Conclusions 163 73
8. General conclusions, personal contributions and future research 164 74
REFERENCE 170 78
Appendix 178 -
Appendix 1 – Technical specification of the used vehicles within the crash-
tests
178 -
Appendix 2 – Technical specification of the data aquisition device Pic DAQ5 179 -
Appendix 3 – Technical specification of the high-speed video recording
camera HiSpec
180 -
Appendix 4 – Technical specification of the camera Casio Exilim 181 -
Appendix 5 - Technical speicificatio nfo the drone DJI Phantom 182 -
Appendix 6 - Technical speicification of the cammera Fujifilm X-T1 183 -
Appendix 7 – Diagrams obtained through simulation obtaiened from chapter
7
184 -
Abstract (romana/engleza) 221 -
CV 222 -

9
Introducere
În zonele urbane pietonii reprezintă participanții la trafic cu cea mai ridicată pondere, și
totodată sunt cei mai expuși riscului de accidente rutiere, prin faptul că aceștia nu sunt protejați
în cazul unei coliziuni cu un autovehicul de niciun dispozitiv de protecție.
Scopul acestei lucrări este de a determina parametrii geometrici ai profilului frontal ai
autovehiculului care influențează gradul de vătămare al pietonilor în urma coliziunilor cu
autovehiculele, precum și evidențierea posibilităților de reducere a vătămărilor grave prin
mijloace de siguranță pasivă. Siguranța pasivă privind coliziunea autovehiculelor cu pietonii este
limitată, unul din cele mai importante aspecte ale acesteia fiind reprezentat de designul/forma
caroseriei autovehiculelor.
Siguranța pietonilor reprezintă un aspect important la nivel național prin prisma faptului
că România este țara cu cei mai mulți pietoni decedați în urma accidentelor rutiere per milion de
locuitori, din Uniunea Europeană (European-Comission 2015).
Astfel, tema aleasă reprezintă un aspect de importanță majoră privind siguranța circulației
pe drumurile publice.
Principalele obiective ale tezei de doctorat sunt următoarele:
Dezvoltarea unui mers de calcul în vederea determinării distanțelor de proiectare a
pietonului în funcție de viteza de coliziune, în cazul în care coliziunea are loc în
timpul de reacție a conducătorului auto, iar frânarea autovehiculului se face cu
întârzierea aferentă acestui timp de reacție. Acest tip de coliziune are loc de obicei
în condiții de vizibilitate reduse, când pietonul este vizualizat de conducătorul
auto prea târziu. Acest mers de calcul s-a realizat pe un interval de viteze
cuprinse între 30 și 55 km/h.
Determinarea vizibilității pietonilor pe timp de noapte, respectiv a vitezelor de
evitare a acestora în aceste condiții. Vizibilitatea reprezintă distanța până la care
un obiect poate fii reperat (DEX 2016) . Această analiză este necesară deoarece în
România, datorită infrastructurii defectuoase, există drumuri neiluminate sau în
care iluminatul stradal nu funcționează, iar pietonii circulă pe carosabil fără să fie
conștienți de riscul la care se expun.
Determinarea cinematicii impactului autovehicul-pieton și a parametrilor viteză și
accelerație la nivelul centrului de greutate al capului, respectiv al toracelui
pietonului.
Evaluarea gradului de vătămare al pietonului în timpul coliziunii, prin prisma
criteriilor de vătămare
Dezvoltarea, elaborarea și validarea unui model matematic operativ, capabil să
determine parametrii viteză și deplasare a autovehiculului, respectiv a pietonului
în timpul coliziunii
Determinarea parametrilor geometrici ai profilului frontal ai autoturismului care
influențează accelerațiile apărute la nivelul capului pietonului în timpul coliziunii,
și totodată proiectarea unor profiluri frontale ”prietenoase” pe baza acestor
parametrii, pe clase de autovehicule.
Pentru a atinge obiectivele trasate, structura tezei este următoarea:
În primul capitol este prezentat stadiul actual al cercetărilor privind impacturile
dintre autovehicule și pietoni.
În cel de-al doilea capitol s-a prezentat studiul teoretic privind coliziunea dintre
autovehicule și pieton, aspect ce cuprinde cinematica pietonului în timpul
coliziunii, determinarea distanțelor de proiectare a pietonului în urma coliziunii cu
10
frânare, dezvoltarea principiului de calcul privind proiectarea pietonului în cazul
coliziunilor fără frânare, precum și determinarea distanțelor de vizibilitate a
pietonilor în condiții nocturne.
Capitolul trei cuprinde un studiu experimental realizat în vederea determinării
vizibilității pietonilor în funcție de culoarea articolelor vestimentare, în condiții
nocturne.
În cadrul capitolului patru este prezentat modelul teoretic dezvoltat pentru analiza
fazei de impact dintre autovehicule și pietoni.
În capitolul cinci sunt prezentate principalele etape parcurse în cadrul cercetării
experimentale.
Capitolul șase cuprinde modul de achiziție, prelucrare și analiză a datelor
experimentale obținute, precum și analiza comparativă a modelului teoretic cu
datele experimentale.
În capitolul șapte este prezentată metodologia de determinare a parametrilor
geometrici determinanți ai profilului frontal ai autovehiculului care influențează
accelerațiile la nivelul capului pietonului. Totodată, pe baza acestor parametri, s-a
realizat proiectarea și testarea unor profiluri frontale ”prietenoase” pietonilor,
pentru fiecare clasă de autovehicule.
Ultimul capitol cuprinde concluziile trase în urma realizării lucrării, evidențierea
contribuțiilor personale și trasarea direcțiilor viitoare de cercetare.

11
1. Stadiul actual al cercetărilor privind impacturile dintre
autovehicule și pietoni
1.1. Impactul autovehicul – pieton – descriere generală Accidentul rutier reprezintă un incident care constă în coliziunea a cel puțin două
vehicule, sau a unui vehicul cu un pieton, biciclist, ori alte obstrucții staționare (ex: copac, stâlp
etc.), din care rezultă rănirea, moartea unor persoane, sau producerea unor pagube materiale
(NSC 1996).
Conform OUG nr 195/2002 actualizată prin OUG 63/2006 accidentul rutier întrunește
simultan următoarele aspecte (Codul-Rutier 2002):
Implicarea a cel puțin unui vehicul aflat în mișcare.
Producerea lui a avut loc datorită încălcării unei reguli de circulație.
Conduce la vătămări corporale sau produce pagube materiale.
Are loc pe un drum public.
1.1.1. Definirea accidentelor de tip autovehicul-pieton
Pietonii pot suferi accidente în moduri foarte diferite spre deosebire de autovehicule,
fiind capabili să se accidenteze fără implicarea celorlalți participanți la trafic. Aceștia pot, de
exemplu, să se împiedice de o denivelare sau să se lovească de diferite obstacole.
Cu toate acestea, cele mai comune accidente în care sunt implicați pietonii sunt acelea cu
autovehicule.
Așadar se poate defini accidentul de tip autovehicul-pieton ca orice contact fizic ce apare
între un pieton si un autovehicul aflat în mișcare sau în repaus (Burg 2013).
1.1.2. Clasificarea accidentelor de tip autovehicul-pieton
Ravani (1981) și Brooks (1987) clasifică accidentele de tip autovehicul pieton, în funcție
de cinematica pietonului din timpul coliziunii, în 5 categorii (Brooks 1987, Ravani 1981, Simms
2009):
A. Coliziune prin ”înfășurare”
B. Coliziune în care pietonul este proiectat în fața autovehiculului
C. Coliziune în care pietonul cade în lateralul autovehiculului
D. Coliziune în urma căreia pietonul se lovește de plafonul autovehiculului
ajungând în poziție finală în spatele acestuia
E. Coliziune în urma căreia pietonul ajunge în spatele autovehiculului fără a
intra în contact cu plafonul acestuia.
1.2. Statistica accidentelor în care sunt implicați pietoni Comisia Europeana a adoptat un program ambițios de siguranță rutieră, care are scopul
de a reduce decesele rutiere în Europa între 2011 și 2020. Programul stabilește o combinație de
inițiative, la nivel european și național, cu accent pe îmbunătățirea siguranței vehiculelor,
siguranța infrastructurii rutiere și comportamentul conducătorilor auto.
În anul 2013, pietonii uciși în timpul accidentelor rutiere au avut o pondere de circa 22%.
Numărul pietonilor uciși în cadrul UE a scăzut cu doar 11% în comparație cu descreșterea
mortalității de 18% din 2010 până în 2013.
Cea mai mare pondere a deceselor provenite din accidentele de tip autovehicul pieton
sunt în țari emergente, precum România, Letonia, Polonia respectiv Lituania, unde mai mult de
1/3 din totalitatea deceselor provenite din accidentele rutiere sunt pietoni(European-Comission
2015).
Conform statisticilor furnizate de Comisia Europeană, evoluția deceselor pietonilor
implicați în accidente rutiere în România în comparație cu media UE este prezentată în Fig. 1.1.
12
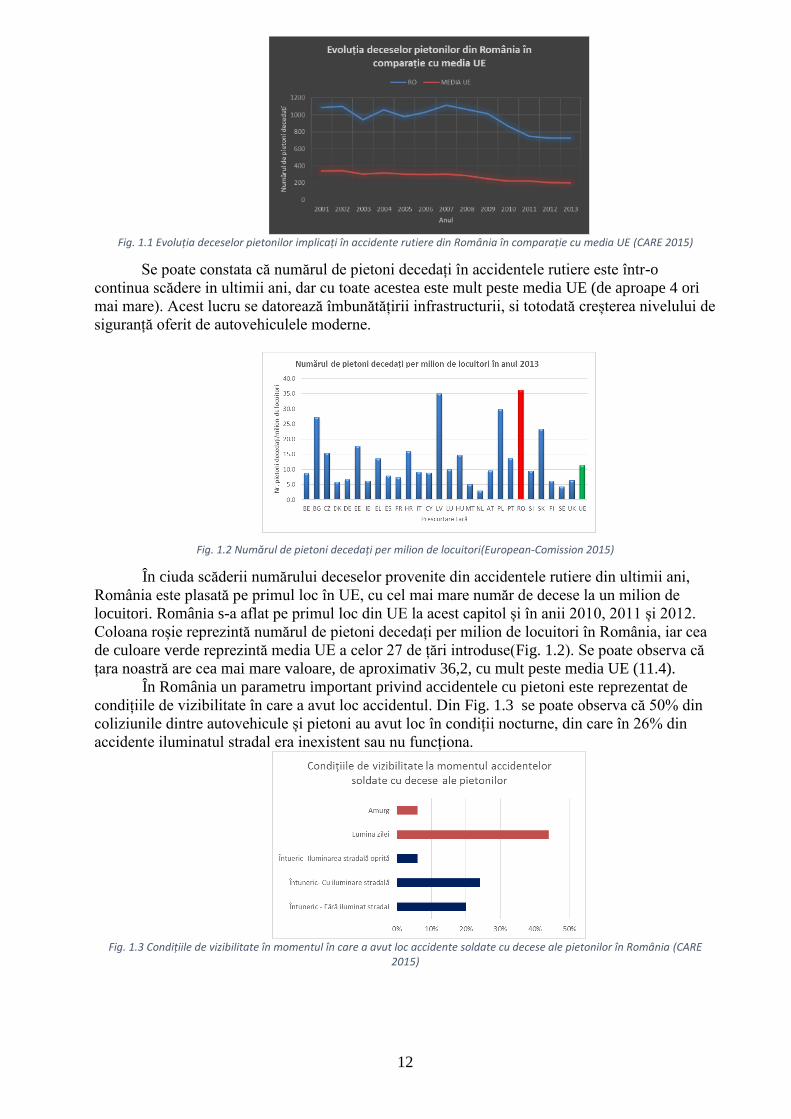
Fig. 1.1 Evoluția deceselor pietonilor implicați în accidente rutiere din România în comparație cu media UE (CARE 2015)
Se poate constata că numărul de pietoni decedați în accidentele rutiere este într-o
continua scădere in ultimii ani, dar cu toate acestea este mult peste media UE (de aproape 4 ori
mai mare). Acest lucru se datorează îmbunătățirii infrastructurii, si totodată creșterea nivelului de
siguranță oferit de autovehiculele moderne.
Fig. 1.2 Numărul de pietoni decedați per milion de locuitori(European-Comission 2015)
În ciuda scăderii numărului deceselor provenite din accidentele rutiere din ultimii ani,
România este plasată pe primul loc în UE, cu cel mai mare număr de decese la un milion de
locuitori. România s-a aflat pe primul loc din UE la acest capitol și în anii 2010, 2011 și 2012.
Coloana roșie reprezintă numărul de pietoni decedați per milion de locuitori în România, iar cea
de culoare verde reprezintă media UE a celor 27 de țări introduse(Fig. 1.2). Se poate observa că
țara noastră are cea mai mare valoare, de aproximativ 36,2, cu mult peste media UE (11.4).
În România un parametru important privind accidentele cu pietoni este reprezentat de
condițiile de vizibilitate în care a avut loc accidentul. Din Fig. 1.3 se poate observa că 50% din
coliziunile dintre autovehicule și pietoni au avut loc în condiții nocturne, din care în 26% din
accidente iluminatul stradal era inexistent sau nu funcționa.
Fig. 1.3 Condițiile de vizibilitate în momentul în care a avut loc accidente soldate cu decese ale pietonilor în România (CARE
2015)

13
1.3. Criterii privind estimarea gradului de vătămare al pietonilor Este cunoscut faptul că pietonii sunt cei mai expuși participanți la trafic, iar riscul
acestora de a fi răniți sau chiar uciși în cazul unei coliziuni cu un autovehicul este mult mai mare
în comparație cu cel al conducătorilor auto.
Pentru a se putea estima gradul de vătămare al corpului uman, s-au introdus diferite scări
de evaluare a gradului de vătămare pe diferite zone ale corpului.
1.3.1. Scara de evaluare AIS1
Această scara de măsurare a nivelului de vătămare datează din 1971, fiind introdusă de
către AAAM2. Intenția inițială a fost aceea de a asocia diferite vătămări în funcție de diferiți
parametri (disiparea energiei, periclitarea vieții, paralizie, tratament periodic, etc.). După 5 ani
apare primul catalog bazat pe codificarea gradului de vătămare, care conținea aproximativ 500
de tipuri de vătămări cu severități diferite, codate de la 1 la 6, unde 1 reprezenta o vătămare
ușoară, în timp ce 6 avea o semnificație de vătămare foarte severă. De-a lungul timpului, acest
catalog a fost revizuit de 5 ori (1980, 1985, 1990, 2005 și 2008) (Davison, Munro, and Straub
2004, Stevenson 2001).
Faptul că victimele accidentelor mor ca urmare a mai multor leziuni, deși leziunile
individuale nu ar fi fost fatale, a fost introdus scorul maxim AIS (MAIS3) și ISS4. MAIS indică
valoarea maximă AIS din multitudinea valorilor aferente leziunilor individuale, în timp ce ISS
este definită ca suma pătratelor celor mai mari valori AIS pentru fiecare din cele trei regiuni cu
răni mai severe ale corpului (Burg 2013).
Pentru o codificare completă utilizând scara AIS, s-a dezvoltat un cod din 7 cifre
prezentat în Tabelul 1.1(AAAM) : Tabelul 1.1 Codificarea completă cu ajutorul scării AIS
A B CD EF G
1- Cap 1 - Toată zona 02 - Abraziunea pielii 0 - Fără leziuni
2- Față 2- Vase 04 - Contuzie 1 - Minor
3- Gat 3- Nervi 06 - Plagă 2- Moderat
4- Torace 4- Organe interne 08 - Ruptură 3- Serios
5-Abdomen 5- Schelet 10 - Amputare 4- Sever
6- Coloană 6- Inconștiență 20 - Arsură 5- Critic
8- Extremitățile inferioare 50 - Fără specificații 6 - Fatal
7- Extremitățile superioare 60 - Penetrare 9 - Fără informații
Numărul aferent
gradului de vătămare
Vătămările sunt
descrise printr-un
cod format din
doua cifre, începând
cu 02
Regiunea corpuluiTipul de structura
anatomică
Structura anatomică
specifică - de
exemplu pe tot
corpul
Gradul de
vătămare pe o
anumită zona din
corp și structura
anatomică
În situația în care 3 din zonele evaluate au valoarea AIS 6, atunci valoarea totală ISS ia
valoarea de 75, fiind valoarea maximă de pe această scară.
NISS5 reprezintă o versiune modificată a scării ISS, în care se însumează pătratele celor
mai mari 3 valori AIS, indiferent de regiunea corpului. La fel ca în cazul ISS, dacă 3 din valorile
AIS au valoarea 6, atunci NISS ia valoarea maximă de 75.
ISS este mult mai utilizat pentru evaluarea severității leziunilor, în timp ce NISS s-a
dovedit a fi superior în predicția vătămărilor care pot apărea în urma accidentelor, precum și
durata de spitalizare(Narayan 2015).
1.3.2. Estimarea nivelului de vătămare la nivelul capului
1.3.2.1 Criteriul HIC6
Leziunile la nivelul capului reprezintă o cauză majoră a deceselor pietonilor (Haibo
2013). Pentru a cuantifica leziunile care pot apărea la nivelul creierului, s-au propus diferite
1 AIS – Abbreviated Injury Scale 2 AAAM - Association for the Advancement of Automotive Medicine 3 MAIS – Maximum Abbreviated Injury Scale 4 ISS - Injury Severity Score 5 NISS - New Injury Severity Score 6 HIC – Head Injury Criteria
14
metode menite să măsoare parametrii cinematici, respectiv dinamici. Una din cele mai populare
metode menite să determine nivelul de toleranță a capului la impact este HIC. Acest criteriu de
vătămare a fost utilizat de mai bine de 20 de ani în America de Nord ca o metodă de predicție a
nivelului de vătămare ce apare la nivelul capului în timpul unei coliziuni. Valoarea HIC este
calculată cu ajutorul accelerației liniare a centrului de masă a capului unui Dispozitiv
Antropometric de Testare (DAT)7(Hutchinson 1998, Gabauer 2008, Trusca 2015).
Prasad și Mertz au dezvoltat ulterior HIRC8 utilizând date obținute în urma testelor
efectuate pe cadavre(Prasad 1985).
Cu ajutorul HIRC, s-a constatat că o valoare a nivelului HIC de 1400 este asociată cu un
procentaj de 50% a unei leziuni care apare la nivelul creierului ce periclitează viața, în timp ce
valoarea de 1000 conduce la un procentaj de 18% pentru același tip de leziune. Aceste valori
sunt valabile doar în condițiile în care timpul pe care se efectuează calculul HIC nu depășește
intervalul de 15 ms(Hutchinson 1998).
Valoarea HIC se determină prin integrarea accelerației rezultante determinată în g, unde g
reprezintă accelerația gravitațională (9.81 m/s2), în funcție de intervalul de timp stabilit. Astfel
formula de calcul pentru HIC este:
))(])(1
([2,1max)( 12
5.2
2
112
max ttdttatt
tttHIC
t
t
res
,
1.1
222
resa zyx aaa , 1.2
unde avem:
[t1, t2]– intervalul de timp pe care se face analiza. Acesta poate sa fie 15 ms sau 36 ms,
ares – accelerația rezultantă [g],
ax, ay, az – componentele accelerațiilor pe fiecare axă [g].
Valorile componentelor accelerațiilor (ax, ay, az) sunt filtrate în concordanță cu filtrele
CFC9 1000. Pentru a specifica valorile de intrare în concordanță cu ECE-R80, valorile măsurate
la nivelul capului (ax, ay, az) sunt filtrate cu ajutorul filtrelor CFC 600(WGDPVS 2008).
În cercetarea experimentală, pentru a analiza cât mai precis nivelul de vătămare care
apare la nivelul capului, trebuie luați în considerare diferiți factori care pot influența acest
parametru cum ar fi: similitudinea dintre dispozitivul antropometric de testare și corpul uman,
structura craniului acestor dispozitive în comparație cu craniul uman, precum și dimensiunile
craniului.
Formula factorului de scalare este următoarea:
,)(
)(5.1
2
L
EHIC
1.3
unde:
λE – factorul de scalare al materialului,
λL – factorul de scalare al lungimii capului.
Cu toate că bazele de date privind rigiditatea scheletului capului sunt limitate, s-a constat
că odată cu micșorarea dimensiunilor ocupantului, scalarea geometrică va avea o prognoză cu o
toleranță mai ridicată, în timp ce scalarea materialului va avea o prognoză cu o toleranță mai
scăzută.
Acest criteriu de evaluare are anumite limitări privind nivelul de vătămare ce apare la
nivelul capului datorită faptului că accelerația unghiulară a capului este neglijată (Ilie 2015).
1.3.2.2. Criteriul de performanță HIC(d)
Un alt criteriu de evaluare a leziunilor apărute la nivelul capului care derivă din HIC este
HIC(d), numit si criteriul de performanță al capului. Acesta reprezintă ponderea standardizată a
integralei corespondente accelerației la nivelul capului determinată cu ajutorul valorii HIC pe
intervalul de 36 ms. Astfel s-a obținut formula HIC(d) după cum urmează (Kleinberger 1998):
7 DAT- Dispozitiv Antropomorfic de Testare 8 HIRC- Head Injury Risk Curve 9 CFC – Channel Frequency Class

15
166.4,HIC360.75446HIC(d) 1.4
unde:
HIC36 -valoarea HIC pe intervalul de 36 ms.
1.3.2.3. Criteriul de evaluare al duratei de contact al capului (HCD10)(WGDPVS 2008)
Pentru a determina valoarea forței rezultante la contact, este necesară determinarea
intervalelor de timp în care are loc contactul. Astfel formula forței rezultante este: ,)()()( 222
zzyyxx FamFamFamF 1.5
având:
m – masa capului [kg],
ai - accelerația la nivelul capului [m/s2],
Fi – Forța la nivelul superior al gâtului în direcția i [N].
1.3.2.4. Criteriul de vătămare la nivelul Tibiei (TI11)
Acest criteriu de vătămare a fost introdus de către Mertz în 1984 și reprezintă o funcție care
depinde de sarcina de încovoiere, respectiv de sarcina axială care acționează asupra centrului
tibiei în momentul coliziunii(Wellbourne 1998, Mo 2012). ,
cc M
M
F
FTI 1.6
unde:
F- forța axială de comprimare [kN],
M- momentul rezultant de încovoiere [Nm],
Fc- forța axială de comprimare critică[kN],
Mc- momentul de încovoiere critic[Nm].
Studiul realizat de Welbourne (Wellbourne 1998) a concluzionat că acest criteriu este în
mare măsură ineficient ca evaluare a riscului de rănire a membrelor inferioare, în special la
nivelul gleznei. Valoarea acestui criteriu de vătămare este de cele mai multe ori mai mare decât
valoarea normală, datorită geometriei neobișnuite a tibiei, care induce un moment în jurul axei
Y, proporțional cu forța axială ce apare la nivelul tibiei.
Ulterior s-a introdus o revizuire a TI (RTI12), bazată pe aceeași ecuație, dar cu valorile
critice revizuite ale momentului de încovoiere, respectiv al forței axiale. Aceste valori modificate
au la bază teste experimentale din care s-au putut extrage date concludente privind valorile
critice ale momentelor și forțelor. Astfel Kuppa, utilizând datele experimentale ale altor autori, a
concluzionat că valorile critice pentru forța axială este de 12kN în timp ce pentru momentul
critic de încovoiere valoarea este de 240 Nm (TG25 2007).
Determinarea momentului rezultant de încovoiere este o sarcină dificilă, astfel s-a realizat
un model cu ajutorul Simulink, un modul al programului Matlab. Sistemul multi-corp dezvoltat
este compus din patru elemente reprezentând șoldul, femurul, tibia și piciorul, inter-conectate cu
3 cuple de rotație. Acest model este prezentat în Fig. 1.4.
10 HCD – Head Contact Duration 11 TI- Tibia Index 12 RTI – Revised Tibia Index

16
Fig. 1.4. Schema modelului dezvoltat în Simulink (Tolea 2015a)
Modelul are un comportament similar cu membrul inferior al sistemului multi-corp din
programul de specialitate PC-Crash. O analiză comparativă între modelul realizat în Simulink și
membrul inferior al sistemului multi-corp din PC-Crash este prezentată în Fig. 1.5.
Fig. 1.5 Comportamentul similar între modelul realizat în Simulink și modelul disponibil din PC-Crash(Tolea 2015a)
Introducând ca date de intrare forța de contact la diferite intervale de timp care acționează
în centrul de masă al tibiei, s-a putut obține valoarea momentului maxim de încovoiere ce apare
la nivelul tibiei printr-o diagramă reprezentată în Fig. 1.6.
Fig. 1.6 Diagrama momentului încovoietor
Astfel, cu ajutorul acestui model, se poate determina momentul de încovoiere al tibiei,
reprezentând un parametru esențial în vederea calculului RTI(Tolea 2015a).
17
1.4. Elemente de siguranță pasivă în contextul securității
pietonilor
1.4.1. Teste experimentale privind evaluarea siguranței pietonilor
Pentru evaluarea siguranței circulației, la începutul anilor ’70 s-a înființat EEVC
(European Experimental Vehicles Comittee), pentru ca ulterior să își schimbe denumirea în
European Enhanced Vehicle-safety Comittee (în 1997).
Acest comitet își desfășoară activitatea pe grupe de lucru, iar cele mai importante grupe
privind siguranța pietonilor sunt(Toganel 2008):
WG13 01 – Date privind accidentele rutiere.
WG 03 – Nivelul de toleranță al corpului uman.
WG 04 – Biomecanica corpului uman.
WG 10 – Protecția pietonilor.
WG 17 – Siguranța pietonilor.
În urma cercetărilor realizate de grupurile 10 respectiv 17, s-au stabilit câteva teste
experimentale pentru a evalua siguranța pietonilor. Astfel, până la momentul actual, testele
privind siguranța pietonilor sunt așa numitele teste ale componentelor și nu teste la scară 1:1.
Aceste teste privind siguranța pietonilor sunt (EEVCWG17 2003, Kalliske 2001) :
Testul cu un impactor de tip cap (copil și adult),
Testul cu un impactor de tip șold,
Testul cu un impactor de tip picior.
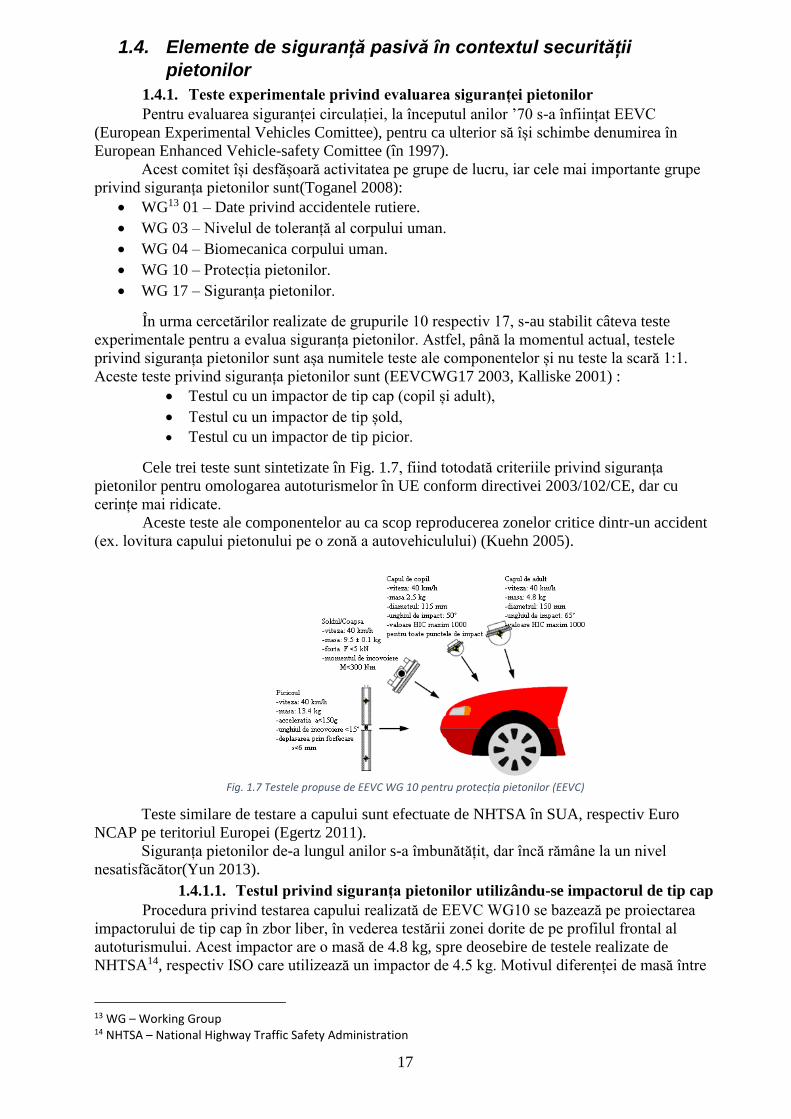
Cele trei teste sunt sintetizate în Fig. 1.7, fiind totodată criteriile privind siguranța
pietonilor pentru omologarea autoturismelor în UE conform directivei 2003/102/CE, dar cu
cerințe mai ridicate.
Aceste teste ale componentelor au ca scop reproducerea zonelor critice dintr-un accident
(ex. lovitura capului pietonului pe o zonă a autovehiculului) (Kuehn 2005).
Fig. 1.7 Testele propuse de EEVC WG 10 pentru protecția pietonilor (EEVC)
Teste similare de testare a capului sunt efectuate de NHTSA în SUA, respectiv Euro
NCAP pe teritoriul Europei (Egertz 2011).
Siguranța pietonilor de-a lungul anilor s-a îmbunătățit, dar încă rămâne la un nivel
nesatisfăcător(Yun 2013).
1.4.1.1. Testul privind siguranța pietonilor utilizându-se impactorul de tip cap
Procedura privind testarea capului realizată de EEVC WG10 se bazează pe proiectarea
impactorului de tip cap în zbor liber, în vederea testării zonei dorite de pe profilul frontal al
autoturismului. Acest impactor are o masă de 4.8 kg, spre deosebire de testele realizate de
NHTSA14, respectiv ISO care utilizează un impactor de 4.5 kg. Motivul diferenței de masă între
13 WG – Working Group 14 NHTSA – National Highway Traffic Safety Administration
18
aceste impactoare este faptul că EEVC consideră masa gâtului inclusă în impactor. Impactorul
utilizat pentru capul de copil are o masă de 2.5 kg.
Impactoarele de tip cap utilizate în teste sunt din aluminiu, fiind acoperite de un strat cu o
grosime de 12.5 mm de cauciuc menit să simuleze pielea. Diametrul impactorului trebuie să aibă
o valoare de 165 mm. În aceste impactoare sunt montate accelerometre tri-axiale necesare pentru
determinarea accelerației rezultante la nivelul capului, fiind singura metodă de evaluare a
severității leziunii în cazul impactului, prin utilizarea criteriului de vătămare HIC, dependent de
accelerație.
Nivelul de accelerație rezultantă acceptată pentru acest tip de test se află cuprinsă în
intervalul 225-275 g. Viteza cu care este proiectat impactorul este de 40 km/h la o înclinație de
65 de grade pentru capul de adult, în timp ce pentru capul de copil, unghiul de impact este de 50
de grade.
Atât pentru capul de copil cât și pentru capul de adult, nivelul criteriului HIC acceptat
este de 1000 (Stammen 2001) .
1.4.1.2. Testul privind siguranța pietonilor în cazul testului cu impactorul de
tip șold
Acest test reprezintă cel mai ”controversat” test din cadrul testelor realizate de EEVC
WG17. Reprezentanții din Italia și Franța sunt de părere ca acest test nu reflectă realitatea și nu îl
consideră necesar, iar reprezentanții germani îl privesc cu scepticism, deoarece în acest test static
nu apare frecarea între autovehicul și impactor(Lawrence 1998).
Acest test se desfășoară la o viteză cuprinsă între 20-40 km/h, iar parametrii măsurați
pentru estimarea riscului de vătămare sunt forța, care are o valoare acceptată de 5 kN, respectiv
momentul de încovoiere, cu o valoare maxima acceptată de 300 Nm(EEVCWG17 2003, GRSP
2007).
1.4.1.3. Testul privind siguranța pietonilor utilizând impactorul de tip picior
Pentru acest test, EEVC utilizează un impactor format din 2 părți menite sa simuleze
femurul și tibia, cu o masa de 9 kg, care este proiectat cu viteza de 7.5 m/s spre profilul frontal al
autovehiculului. Limita acceptată de EEVC privind deplasarea axială este de 6 mm, în timp ce
accelerația tibiei nu trebuie să depășească valoarea de 150 g. Totodată, unghiul de încovoiere
creat la nivelul genunchiului nu trebuie sa depășească valoarea de 15 de grade(EEVCWG17
2003).
Pentru aceste teste de coliziune se utilizează aceeași viteză de impact, cu toate că aceasta
influențează direct gradul de vătămare al membrelor inferioare (Matsui 2005).
O problemă care s-a pus este aceea de a înlocui tipul de impactor utilizat de EEVC cu
unul mai flexibil, deja existent pe piață care se numește Flex PLI
În urma analizei comparative a celor două tipuri de impactoare s-a ajuns la concluzia că
EEVC LFI evaluează individual încovoierea genunchiului și forța axială la care este supus, în
timp ce impactorul Flex PLI este capabil să evalueze direct elongația ligamentelor genunchiului.
De asemenea răspunsul componentelor impactorului Flex PLI corespund cu realitatea într-o
măsură mult mai mare decât impactorul utilizat de EEVC, acesta dovedindu-se a fi prea rigid în
timpul coliziunii cu autovehiculul (GTR9-1-05r1 2011, GTR9-5-13 2012).
Flex PLI a fost introdus de Euro NCAP din anul 2014, la un an mai târziu decât
JNCAP15, KNCAP16 respectiv ANCAP17 (Ariffin 2013).
Având în vedere că testele experimentale sunt costisitoare, A. KOPCZYNSKI a ajuns la
concluzia că utilizând simularea cu metoda elementului finit se poate ajunge la rezultate
satisfăcătoare privind testarea siguranței pietonilor, și totodată cu costuri mai reduse
(Kopczyński 2011).
1.4.2. Sistem de siguranță pasivă - Capota activă Capota activă reprezintă următorul pas făcut de industria auto privind siguranța
pietonilor. Acest pas a fost făcut in anul 2005, când Citroen, cu modelul C5, au introdus acest
15 JNCAP – Japan NCAP 16 KNCAP – Korea NCAP 17 ANCAP – Australian NCAP
19
element de siguranță pasivă pe autoturisme. În același an, a fost primul autoturism din istoria
Euro NCAP cu 4 stele la categoria siguranța pietonilor, reprezentând un nou început al evaluării
siguranței pasive a pietonilor (van Ratingen 2016).
Capota activă este compusă din două părți esențiale: partea compusă din senzori meniți să
detecteze când un impact va avea loc; cea de a doua componentă este compusă din dispozitive de
acționare a capotei astfel încât partea finală (cea de lângă parbriz) să se ridice în momentul
impactului. Această ridicare dezvoltă un spațiu între capotă și motor astfel încât la momentul
impactului capota să fie capabilă să absoarbă cât mai multă energie reducând riscul de vătămare
substanțial. Spațiul de ridicare a capotei variază între 70-100 mm (Fredriksson 2001, Takahashi
2013, Inomata 2009).
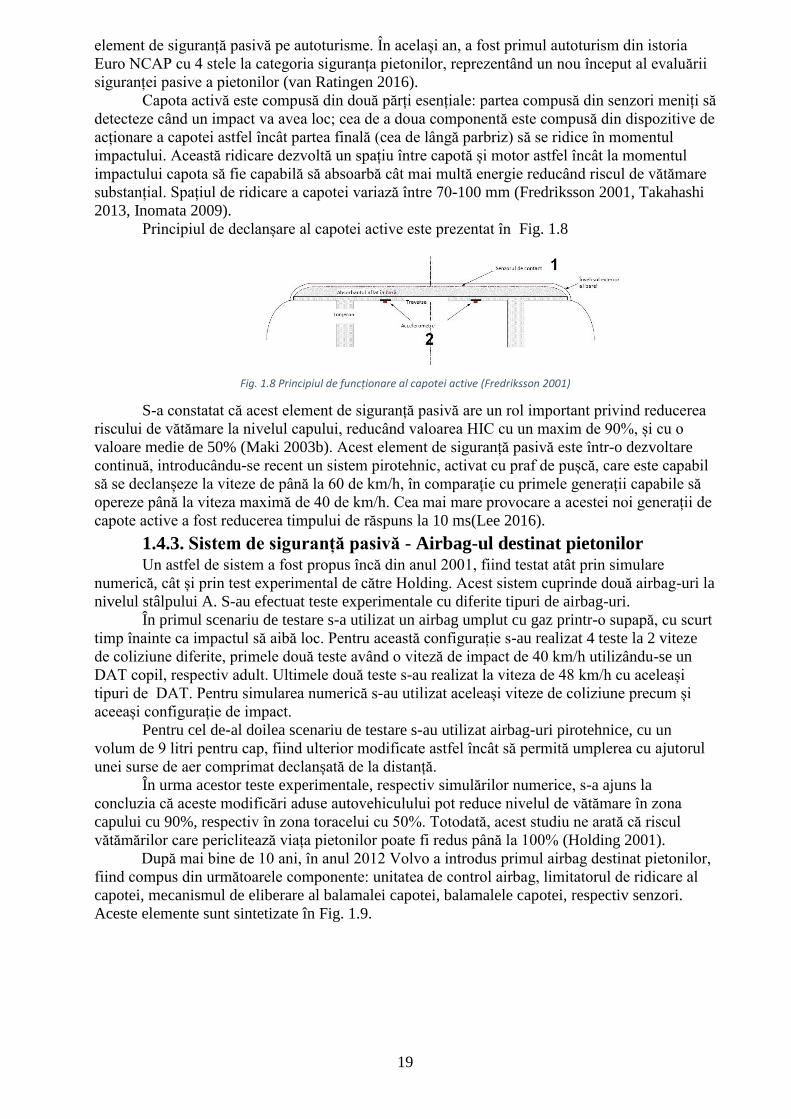
Principiul de declanșare al capotei active este prezentat în Fig. 1.8
Fig. 1.8 Principiul de funcționare al capotei active (Fredriksson 2001)
S-a constatat că acest element de siguranță pasivă are un rol important privind reducerea
riscului de vătămare la nivelul capului, reducând valoarea HIC cu un maxim de 90%, și cu o
valoare medie de 50% (Maki 2003b). Acest element de siguranță pasivă este într-o dezvoltare
continuă, introducându-se recent un sistem pirotehnic, activat cu praf de pușcă, care este capabil
să se declanșeze la viteze de până la 60 de km/h, în comparație cu primele generații capabile să
opereze până la viteza maximă de 40 de km/h. Cea mai mare provocare a acestei noi generații de
capote active a fost reducerea timpului de răspuns la 10 ms(Lee 2016).
1.4.3. Sistem de siguranță pasivă - Airbag-ul destinat pietonilor Un astfel de sistem a fost propus încă din anul 2001, fiind testat atât prin simulare
numerică, cât și prin test experimental de către Holding. Acest sistem cuprinde două airbag-uri la
nivelul stâlpului A. S-au efectuat teste experimentale cu diferite tipuri de airbag-uri.
În primul scenariu de testare s-a utilizat un airbag umplut cu gaz printr-o supapă, cu scurt
timp înainte ca impactul să aibă loc. Pentru această configurație s-au realizat 4 teste la 2 viteze
de coliziune diferite, primele două teste având o viteză de impact de 40 km/h utilizându-se un
DAT copil, respectiv adult. Ultimele două teste s-au realizat la viteza de 48 km/h cu aceleași
tipuri de DAT. Pentru simularea numerică s-au utilizat aceleași viteze de coliziune precum și
aceeași configurație de impact.
Pentru cel de-al doilea scenariu de testare s-au utilizat airbag-uri pirotehnice, cu un
volum de 9 litri pentru cap, fiind ulterior modificate astfel încât să permită umplerea cu ajutorul
unei surse de aer comprimat declanșată de la distanță.
În urma acestor teste experimentale, respectiv simulărilor numerice, s-a ajuns la
concluzia că aceste modificări aduse autovehiculului pot reduce nivelul de vătămare în zona
capului cu 90%, respectiv în zona toracelui cu 50%. Totodată, acest studiu ne arată că riscul
vătămărilor care periclitează viața pietonilor poate fi redus până la 100% (Holding 2001).
După mai bine de 10 ani, în anul 2012 Volvo a introdus primul airbag destinat pietonilor,
fiind compus din următoarele componente: unitatea de control airbag, limitatorul de ridicare al
capotei, mecanismul de eliberare al balamalei capotei, balamalele capotei, respectiv senzori.
Aceste elemente sunt sintetizate în Fig. 1.9.

20
Fig. 1.9 Tehnologia airbag-ului destinat pietonilor(Jakobsson 2013)
Viteza necesară activării acestui sistem este cuprinsă între 20 și 50 km/h. Senzorii
poziționați în bara autoturismului transmit semnale către unitatea de control a airbag-ului, astfel
că atunci când autoturismul intră în contact cu un obiect, semnalul se schimbă. În momentul în
care acest semnal se schimbă, unitatea de control evaluează tipul de semnal, iar daca acest tip de
semnal este interpretat ca fiind obținut de la un piciorul uman, atunci airbag-ul este declanșat
(Jakobsson 2013).
În urma testelor realizate de Euro NCAP, după cum era de așteptat, Volvo a obținut
punctajul maxim în cazul testelor cu impactorul de tip cap, devenind astfel una din cele mai
”prietenoase” autovehicule în coliziunile cu pietonii.
1.5. Elemente privind siguranța activă în contextul siguranței
pietonilor
1.5.1. Sistemul bazat pe frânarea de urgență automată
Un element esențial privind siguranța activă introdus de fabricile de autovehicule este
sistemul AEB18. Acest sistem este capabil să detecteze pericolul iminent de accident, iar în
situația în care conducătorul auto nu ia măsuri de evitare a accidentului, frânează automat
autovehiculul. Această tehnologie face parte din sistemele care încearcă să evite coliziunea
(PCS19), și se întâlnește sub diferite denumiri în funcție de marca autovehiculului : City Brake
Control (Fiat), Active City Stop (Ford), City Emergency Brake (VW), City Safety (Volvo),
Brake Assistance (Mercedes) . Aceste sisteme funcționează în general la viteze sub 30 km/h și
sunt eficiente pe distanțe scurte. Dacă frâna este acționată de către conducătorul auto în timpul
frânării sau se încearcă o manevră de evitare, sistemul se dezactivează (Fildes 2015, Radu 2015,
Yuasa 2013, Schittenhelm 2013, Keller 2011).
O schemă cu elementele componente ale sistemului este prezentată în Fig. 1.10(Hayashi
2013)
Fig. 1.10 Elementele componente ale sistemului(Hayashi 2013)
18 AEB – Autonomous Emergency Braking 19 PCS- Pre Collision System

21
Un studiu realizat de Peter Vertal în care a testat sistemul AEB al unui autovehicul Volvo
V40 produs în anul 2014, a condus la concluzii privind modul de funcționare al sistemului în
privința pietonilor. Câteva dintre limitările acestui sistem sunt (Vertal 2015) :
nu reacționează dacă înălțimea pietonului este mai mică de 80 cm sau pietonul se
află întins pe șosea
intră în funcțiune doar dacă condițiile de luminozitate sunt bune
sistemul reacționează la un pieton aflat în mișcare cu o viteză maximă de 7.5 km/h
timpul de intrare în funcțiune a sistemului de frânare este mai mare decât cel
normal (0.5 secunde)
pietonul este detectat doar la un unghi maxim de 45 de grade față de direcția de
deplasare a autoturismului
sistemul nu reacționează când autovehiculul virează la stânga/dreapta, iar pietonul
se mișcă tot din aceeași parte
Cu toate acestea, în condiții de luminozitate bună, sistemul detectează pietonii indiferent
de culoarea articolelor vestimentare, și are o eficacitate de oprire de 100% până la viteze de 30
de km/h, în cazul în care deplasarea pietonului este previzibilă. În cazul în care autovehiculul
circulă cu viteză mai mare de 30 de km/h, s-a constat că acest sistem este capabil să reducă
viteza până la maximum 30 de km/h până la impact.
Majoritatea studiilor ridică problema vizibilității pietonilor pentru aceste sisteme, motiv
pentru care industria auto face eforturi mari pentru ca aceste sisteme să fie capabile să detecteze
pietonul în toate condițiile. Astfel au apărut diferite tipuri de sisteme de detecție a pietonului care
declanșează sistemul AEB.
Pentru a detecta diferite zone ale corpului Bo Wu a introdus caracteristica ”edgelet”(Wu
2005). O a doua opțiune folosită în detecția pietonilor este folosirea sistemelor cu infraroșu
(Krotosky 2007).
1.5.2. Sistemul Matrix LED
După cum s-a discutat și în subcapitolul anterior (1.3.1), detecția și vizibilitatea
pietonului joacă un rol determinant în evitarea unui accident. Astfel, Audi a introdus un sistem
de iluminare inteligent, capabil să detecteze pietonul în întuneric, și să avertizeze prin semnale
luminoase atât conducătorul auto cât și pietonul.
Astfel, acest sistem de iluminare numit Matrix LED, poate fi încadrat ca un mijloc de
siguranță activă montat pe autovehicul, prin prisma faptului că autovehiculul ia măsuri pentru
evitarea unui potențial accident cu pietonul.
În Eroare! Fără sursă de referință. este prezentat sistemul Matrix LED, disponibil pe
autovehiculele Audi, și aplicația acestuia pentru detecția pietonului(MatrixLED 2016).
1.6. Parametrii geometrici ai profilului frontal care influențează
siguranța pietonilor Cercetătorii au ajuns la concluzia de-a lungul anilor, că profilul frontal al autovehiculului
are un rol determinant privind siguranța pietonilor. De aceea, de-a lungul anilor fabricile de
autoturisme au modificat design-ul profilului frontal al autoturismului, la cererea legilor din
vigoare de la vremea respectivă. Influența profilului frontal asupra vătămării capului pietonului a
fost demonstrată atât prin studii experimentale cât și prin studii teoretice, astfel încât în aceeași
configurație de impact cu două autoturisme cu profil frontal diferit, au oferit accelerații diferite la
nivelul capului pietonului, conducând la valori diferite ale criteriului de vătămare HIC(Tolea
2015b, Soica 2009, Toganel 2009, Soica 2007).
Parametrii determinanți privind geometria profilului frontal sunt următorii:
A. Design-ul barei față a autoturismului
B. Înălțimea muchiei anterioare capotei (BLE20)
20 BLE – Bonnet Leading Edge

22
A. Design-ul barei de protecție (bara parașoc)
Un prim pas privind modificarea profilului frontal a fost făcut în anul 1985, când s-a dorit
introducerea unui plan de 45º între profilul drept al barei față a autoturismului si colțul
autoturismului, pentru a se realiza procedura de testare a piciorului pietonului. După 6 ani, acest
unghi a fost modificat la 60 de grade, unghi care s-a păstrat până în prezent.
Geometria mai multor autovehicule de pe piața Europeană, care au fost primele ca număr
de vânzări, a fost evaluată privind modul în care s-au adaptat la schimbarea unghiului creat
dintre profilul drept al barei de protecție față și colțul barei. Pentru a realiza această evaluare s-au
utilizat planurile tehnice ale acestor vehicule, și s-a urmărit ca unghiul creat de colțul barei de
protecție să fie în relație cu lățimea completă a autoturismului. De asemenea s-au comparat
modurile în care design-ul versiunilor mai vechi de autoturisme afectează colțurile laterale ale
barei și cum este afectată zona de testare cu impactorul de tip picior. Un exemplu privind
evoluția barei frontale a autoturismelor de-a lungul anilor este prezentată în Fig. 1.11(Carroll
2014).
Fig. 1.11 Evoluția profilului frontal a autoturismelor(A Carroll 2014)
Înălțimea barei de protecție influențează leziunile ce apar la nivelul membrelor inferioare,
producând fracturi la nivelul tibiei sau genunchiului. Creșterea înălțimii acesteia poate duce la
fracturi și la nivelul femurului. De obicei la viteze mai mici(20-30 km/h) apar leziuni la nivelul
genunchiului, în timp ce la viteze de peste 40 de km/h apar fracturile. Cu toate acestea, înălțimea
barei față nu influențează într-un mod determinant gravitatea leziunilor, ci suprafața de contact a
acesteia cu piciorul. Cu toate acestea, design-urile moderne tind să minimizeze proeminența
barei de protecție, astfel că a fost necesară adăugarea unor constrângeri privind adâncimea barei.
Totodată prin ”rotunjirea” profilului frontal al autoturismului, suprafața de contact cu piciorul se
diminuează reducând nivelul de vătămare. Exemplu privind design-ul barei față a autoturismelor
de-a lungul anilor, este prezentată în Fig. 1.12(JINGWEN HU 2012).
Fig. 1.12 Evoluția barei față de-a lungul anilor(JINGWEN HU 2012)
Matsui a demonstrat că bara umplută cu materiale similare buretelui are un efect
semnificativ privind reducerea riscului de fractură a tibiei atunci când piciorul pietonului este

23
lovit cu partea centrală a barei, dar în cazul coliziunilor cu extremitățile barei, efectul este mult
mai mic(Matsui 2011).
Așadar acest element al autovehiculului reprezintă un element de importanță majoră în
construcția autovehiculelor, fiind proiectate astfel încât acestea să absoarbă cât mai multă energie
în momentul impactului (Reid 2000, Cheon 1995).
B. Muchia anterioară capotei (BLE)
Studiile recente bazate pe modele umane virtuale, respectiv pe DAT, au arătat că o
înălțime redusă a BLE (<750 mm), o rază mare a BLE (>250 mm), și o înălțime suficientă a
barei față (>490 mm) ar elimina fracturile de pelvis, respectiv femur, în timpul coliziunii unui
autovehicul cu un DAT bărbat la viteze mai mici de 40 de km/h (Snedeker 2003, 2005, Matsui
1999).
Gradul de ”rotunjire” a BLE are o influență semnificativă la autovehiculele cu o înălțime
cuprinsă în intervalul 750-850 mm a BLE, în timp ce o înălțime a acestui element de peste 850
mm, ar rezulta un contact direct cu toracele pietonului.
1.7. Concluzii În urma analizei literaturii de specialitate privind stadiul actual al cercetărilor privind
siguranța pietonilor și modul în care aceasta se desfășoară s-a ajuns la următoarele concluzii:
Cu toate că în țările Europene bine dezvoltate numărul de decese provenit din
coliziunile dintre autovehicule și pietoni este în scădere, România este una din
țările care se află departe de media europeană. Principalele motive ale acestei
statistici îngrijorătoare sunt nerespectarea regulilor de circulație, atât din partea
pietonilor cât și din partea conducătorilor auto, dar și o infrastructură
defectuoasă.
Siguranța pasivă a pietonilor este strâns legată de biomecanica corpului uman.
Astfel cercetătorii au ajuns la corelații biomecanice privind nivelul de vătămare
al pietonilor în diferite tipuri de impacturi. Modul de testare a siguranței
pietonilor atât la nivel european cât și la nivel mondial, este reglementat de
anumiți parametri biomecanici, respectiv anumite criterii de vătămare.
Evoluția în timp ale sistemelor de siguranță pasivă a fost anevoioasă, astfel că
după mai bine de 10 ani de la prima propunere a sistemelor airbag pentru pietoni
acestea au fost introduse. Cu toate acestea este necesară continuarea cercetărilor
în domeniul siguranței, prin implementarea și testarea de noi metode și
dispozitive de reducere a riscurilor de vătămare a pietonilor.
În privința elementelor de siguranță activă, cel mai important element introdus a
fost sistemul de frânare automată a autoturismului la detecția pietonului,
reprezentând totodată vârful tehnologiei actuale privind siguranța circulației. Cu
toate acestea, nu este optimizat perfect, iar o caracteristică adițională ce îi poate fi
adusă este avertizarea prin semnale sonore și vizuale a pietonului ce se află în
pericol, astfel încât acesta să încerce să ia măsuri de prevenire.
Cu toate că încă nu s-a ajuns la un design al profilului frontal al autovehiculului
foarte ”prietenos” pentru pietoni, s-a constatat că nu s-au realizat foarte multe
studii privind parametrii geometrici ce influențează nivelul de vătămare al
pietonilor. Într-o mare parte a publicațiilor în care s-au analizat influența
anumitor parametrii geometrici ai profilului frontal ai autoturismului în
coliziunea cu pietonul, analiza asupra pietonului s-a făcut la nivelul membrelor
inferioare, respectiv toracelui, și nicidecum asupra capului care reprezintă o zonă
foarte expusă în timpul coliziunii. Astfel se cere o analiză aprofundată asupra
acestui aspect.
Pentru crearea și implementarea a noi sisteme de siguranță a pietonilor, este
necesară dezvoltarea de noi teste experimentale de tip autovehicul-pieton, în

24
condiții controlate, la scară 1:1, monitorizarea acestora și achiziționarea de date
necesare dezvoltării analitice a modelelor de impact pentru înțelegerea cât mai
profundă a fenomenelor dinamice.
1.8. Obiectivele tezei În vederea identificării parametrilor determinanți în timpul coliziunii de tip autovehicul-
pieton, precum și analiza gradului de vătămare al pietonului s-au formulat următoarele obiective
ale tezei de doctorat:
Analizând modelele matematice existente privind distanțele de aruncare a
pietonului, s-a ajuns la concluzia că în literatura de specialitate s-a abordat în cele
mai multe cazuri coliziunea în care autovehiculul este frânat la impactul cu
pietonul. Astfel se dorește dezvoltarea unui mers de calcul în vederea determinării
distanțelor de proiectare al pietonului în cazul în care autovehiculul nu este frânat
în momentul coliziunii. Acest tip de coliziune are loc de obicei în condiții de
vizibilitate reduse, când conducătorul auto nu are posibilitatea să vadă pietonul,
iar acesta este lovit în timpul de reacție al conducătorului auto.
Determinarea distanțelor de vizibilitate a pietonilor pe timp de noapte, respectiv a
vitezelor de evitare a acestora în aceste condiții. Această analiză este necesară
deoarece în România, datorită infrastructurii defectuoase, există drumuri
neiluminate sau în care iluminatul stradal nu funcționează, iar pietonii circulă pe
carosabil fără să fie conștienți de riscul la care se expun.
Determinarea cinematicii impactului autovehicul-pieton și a parametrilor viteză și
accelerație la nivelul centrului de greutate al capului, respectiv al toracelui
pietonului.
Analiza comportării pietonului în timpul coliziunii prin prisma criteriilor de
vătămare.
Dezvoltarea, elaborarea și validarea unui model matematic operativ, capabil să
determine parametrii cinematici determinanți în contextul siguranței pietonilor.
Determinarea parametrilor geometrici ai profilului frontal ai autoturismului care
influențează accelerațiile apărute la nivelul capului pietonului în timpul coliziunii,
și totodată proiectarea unor profiluri frontale ”prietenoase” pe baza acestor
parametrii, pe clase de autovehicule.
25
2. Studiul teoretic al coliziunilor de tip autovehicul-pieton
2.1. Considerații privind coliziunea de tip autovehicul-pieton. În analiza accidentelor de tip autovehicul-pieton, abordarea este puțin diferită față de
accidentele în care sunt implicate doar autovehicule. Acest fapt se datorează fazei de pre-impact
a pietonului, care adeseori este considerată mai puțin importantă datorită diferenței relativ mari
de viteză între pieton și autovehicul. Un alt aspect este raportul maselor dintre pieton și
automobil, conducând astfel la ideea că pietonul, în momentul coliziunii, se va deplasa pe
aceeași direcție de deplasare ca şi autoturismul.
De obicei, în cadrul reconstrucției accidentelor rutiere în care sunt implicați pietoni,
partea de coliziune, respectiv faza ulterioară coliziunii se tratează ca un întreg, cu anumite date
deja cunoscute (pozițiile finale, urmele materializate, etc.). Faza premergătoare coliziunii conține
aspecte de cele mai multe ori necunoscute și este influențată de diferiți factori. Câțiva factori
care pot conduce la un accident rutier sunt: condițiile de vizibilitate (noapte, ceață etc.), neatenția
conducătorului auto (de cele mai multe ori nu poate fi dovedită), respectiv viteza și direcția de
deplasare a pietonului (Brach 2005).
Din punct de vedere biomecanic, cinematica mișcării determină părțile corpului care sunt
vătămate pe durata coliziunii și proveniența acestora. Cinematica mișcării pietonilor pe durata
impactului este foarte complexă, iar în general sunt insuficiente dovezi disponibile în urma
accidentelor rutiere pentru a determina mișcarea pietonului. Astfel, pentru a se studia această
cinematică s-au introdus testele de coliziune, unde se utilizează DAT sau cadavre, lovite de un
autovehicul, iar mișcarea acestora este înregistrată cu ajutorul camerelor de mare (Simms 2009).
2.1.1. Cinematica pietonului în timpul coliziunii
În ceea ce privește cinematica pietonului în timpul coliziunii, cercetătorii o împart în trei
faze esențiale(Tomasch 2004, Șerbu 2015, Dima 2007):
Faza de contact,
o Faza de transport,
Faza de zbor,
Faza de alunecare (contactul cu solul).
2.2.Determinarea distanțelor de proiectare a pietonului
2.2.1. Evoluția modelelor privind determinarea distanței de proiectare a pietonului
Majoritatea modelelor teoretice de proiectare a pietonului în urma coliziunilor consideră
pietonul ca un punct material. Astfel distanța totală de aruncare S este obținută ca o funcție
dependentă de următorii parametrii: viteza inițială V0 dependentă de unghiul de proiectare al
pietonului Θ, înălțimea inițială de la care are loc aruncarea pietonului H, coeficientul de frecare
cu solul µ, respectiv unghiul de înclinare a rampei α. O altă funcție ce se poate obține este a
vitezei inițiale în funcție de distanța totală de aruncare S.
Distanța totală de proiectare (aruncare) a pietonului este definită ca distanța parcursă de
pieton din momentul impactului primar până la ajungerea acestuia în poziția finală post-impact.
Unul din modelele de calcul privind distanța de aruncare disponibile a fost realizat de
Collins care a ajuns la următoarea ecuație privind distanța totală de aruncare S (Collins 1979):
,2
22
00
g
V
g
HVS
2.1
unde g = 9.81 m/s2 este accelerația gravitațională. Dacă valoarea S este cunoscută,
formula se poate scrie sub forma:
.2)(20 gHSHgV 2.2
Acest model privind proiectarea pietonului are un dezavantaj, și anume neglijarea
unghiului de proiectare al pietonului, respectiv a rampei drumului.

26
Ulterior, Searle a luat în considerare unghiul de proiectare a pietonului de pe capotă,
ajungând la următoarea relație (Searle 1993):
.2
)sin(cos 22
0 Hg
VS
2.3
Rezolvând ecuația, pentru V0 rezultă următoarea expresie:
.sincos
)(20
HSgV 2.4
Datorită faptului că valoarea unghiului de proiectare a pietonului de pe capotă de cele
mai multe ori nu este disponibil, Searle a obținut o expresie pentru viteza minimă pe care o putea
avea inițial pietonul considerând 00
V , ajungând la următoarea ecuație:
.
1
)(220
HSgV
2.5
Nici acest model nu ia în considerare o eventuală elevație a drumului, respectiv unghiul
aferent acesteia.
Han ș.a. a împărțit în cadrului studiului lor mișcarea pietonul în trei faze importante.
Astfel ecuația generală a spațiului este după cum urmează(Han 2001): ,sRxS L 2.6
unde:
Lx - distanța pe care pietonul o parcurge în timpul contactului cu autoturismul,
R- distanța parcursă de pieton în faza de zbor,
s- distanța dintre locul unde are loc impactul cu solul și poziția de oprire a pietonului.
Distanța R poate fi scrisă sub forma:
.sin
2
1cos 2
0 RR gttVR 2.7
Iar durata fazei de zbor a pietonului din momentul proiectării acestuia până la contactul
cu solul Rt are relația:
.
cos
cos2sin
cos
sin22
00
g
gHV
g
VtR
2.8
Astfel distanța ecuația distanței totale S ia forma:
.)sincos(2
)( 2
g
VVS YX
2.9
Componentele vitezei pe axele X și Y, Vx respectiv Vy sunt scrise sub forma: ,sincos0 Rx gtVV 2.10
,cossin0 Ry gtVV 2.11
Neglijând înclinația drumului (α=0), expresia vitezei inițiale poate fi scrisă după cum
urmează:
.)cossin(
))((220
HxSgV
L 2.12
Datorită faptului că viteza autovehiculului Vc0’ diferă de viteza inițială a pietonului V0 la
momentul proiectării pietonului, Han et. al. au adoptat coeficientul η pentru a le corela: .'
00 cVV 2.13
Din Legea conservării momentului cinetic se poate determina viteza inițială a
autovehiculului Vc0 în momentul impactului ca fiind:
,'
00 c
c
pc
c Vm
mmV
2.14
unde mc este masa autoturismului, respectiv mp este masa pietonului

27
2.2.2. Metoda de determinare a distanțelor de proiectare a pietonilor analizată pe
sub-faze ale impactului – Coliziune cu frânare a autovehiculului în momentul
coliziunii
Cercetările privind distanța de proiectare a pietonului au continuat și în ultimii ani, iar o
cercetare recentă privind distanța de proiectare a pietonului în urma coliziunii cu autoturismul a
fost publicată în anul 2016 de către Șoica. Spre deosebire de modelul publicat de Han, acest
model ia în considerare două sub faze care apar în timpul coliziunii. Prima sub fază este cuprinsă
între primul moment în care pietonul intra în contact cu autoturismul și momentul când are loc
cea de a doua coliziune dintre autovehicul și pieton. A doua sub fază reprezintă timpul scurs
dintre momentul în care pietonul începe să fie purtat pe capota autoturismului și momentul în
care acesta se desprinde de pe capotă. Acest model de calcul este prezentat în cele ce urmează
(Soica 2016).
O schemă reprezentativă a fazelor ce sunt analizate în cadrul acestui model, respectiv
parametrii ce influențează cinematica pietonului în urma coliziunii sunt prezentați în Fig. 2.1.
Calculul se realizează sub următoarele ipoteze:
Vitezele autovehiculului înainte de contactul cu pietonul este V0’
Durata primei sub-faze (t0-t1) este cunoscut
Decelerația medie de frânare ”a” este cunoscută și este considerată constantă pe
toată durata sub-fazelor 1 respectiv 2
Fig. 2.1 Schema modelului de calcul (Soica 2016)
Spațiul total de proiectare a pietonului poate fi scris sub forma: ,32
'
11 xxxxD 2.15
unde:
1x - spațiul parcurs de ansamblul vehicul-pieton în prima sub-fază [m], '
1x - spațiul parcurs de ansamblul vehicul-pieton în cea de a doua sub-fază [m],
2x - spațiul parcurs de ansamblul vehicul-pieton în faza de zbor [m],
3x - spațiul parcurs de ansamblul vehicul-pieton în faza de alunecare pe sol până la oprire [m].
Calculul se realizează pentru fiecare fază în parte, astfel prima faza a analizei cuprinde
primul impact dintre autovehicul și pieton, cel de-al doilea impact dintre autovehicul și pieton,
respectiv faza de deplasare a vehiculului împreună cu pietonul poziționate pe capota acestuia.
Considerând impactul dintre autovehicul și pieton ca un impact plastic, viteza post impact
”V0” a ansamblului vehicul-pieton după primul impact este:
,
1
'
00
v
p
m
m
VV
2.16
V0’ – viteza vehiculului la momentul primului contact cu pietonul,
V0 – viteza ansamblului vehicul-pieton imediat după ce primul contact are loc,
mp,v – masele pietonului respectiv vehiculului.
După impactul dintre vehicul și pieton, se consideră ca ansamblul autovehicul-pieton se
află în frânare cu decelerația ”a”. Astfel se poate obține viteza ansamblului V la timpul t1,
reprezentând timpul la care pietonul se lovește de parbriz/capotă. ,10 atVV 2.17
.1
2
0
2 axVV 2.18

28
Pentru sub-faza 1, spațiul parcurs de ansamblul autovehicul-pieton rezultă din ecuația
2.18 rezultând:
.2
2
0
2
1a
VVx
2.19
Combinând ecuațiile (2.16)(2.18) și (2.19) se obține distanța parcursă de autovehicul in
sub-faza 1 astfel:
.2
11
2
'
0
2
1
'
0
1a
m
m
Vat
m
m
V
xv
p
v
p
2.20
Viteza pietonului este considerată în același mod în care a fost considerată de Han ș.a.,
astfel relația este: ,VVp
2.21
Din ecuațiile (2.17)și (2.21), rezultă viteza pietonului ca:
.
1
1
'
0
at
m
m
VV
v
pp
2.22
Ansamblul vehicul pieton se află în mișcare de frânare, iar pietonul este lansat de pe autovehicul
la timpul ”t1’ ”, după ce parcurge spațiul x1+x1’ .
Înlocuind ecuația (2.21) în ecuația (2.18)se obține spațiul parcurs în sub-faza 1 (x1’):
.2
)1( 22'
1a
Vx
2.23
Totodată înlocuind viteza ”V” în ecuațiile (2.16) și (2.17):
.2
)1(
1
2
2
1
'
0
1a
at
m
m
V
xv
p
2.24
Astfel spațiul parcurs de pieton în contact cu autovehiculul este compus din: .'11 xxSaut 2.25
În timpul sub-fazelor 1 respectiv 2 putem discuta de două decelerații aferente fiecărei
faze (a1 respectiv a2). Daca pe parcursul sub-fazei 1, viteza autovehiculului se consideră
constantă, rezultă că viteza ansamblului vehicul-pieton la momentul t1 poate fi considerată
V=V0.
Calculul pentru faza de zbor a pietonului (faza 2) se face după axa X, respectiv Y, prin
descompunerea vectorului ”Vp” la desprinderea pietonului de pe capota autoturismului. Astfel
accelerațiile pe X, respectiv Y ale pietonului la desprinderea de pe autoturism sunt :
,singapx 2.26
.cosgapy 2.27
Se notează Y0 = h înălțimea maximă de la care pietonul cade și lovește asfaltul. Astfel la
momentul proiectării pietonului de pe autovehicul avem componentele vitezelor pe X respectiv
pe Y în funcție de unghiul sub care pietonul pleacă de pe autoturism (α):

29
,cos)0( ppx VV 2.28
,sin)0( ppy VV 2.29
Ecuațiile la timpul t2 (timpul la care pietonul intră in coliziune cu solul) ,sincos)0( 22 tgtVV ppx 2.30
.cossin 22 tgtVV ppy 2.31
Astfel ecuațiile de mișcare pentru fiecare axă de coordonată vor fi:
,2
sin)cos(
2
222
tgtVx p
2.32
.
2
cos)sin(
2
22
tgtVhy p
2.33
Din ecuația de mișcare obținute după axa Y s-a determinat timpul aferent fazei de zbor al
pietonului.
.cos
cos2sinsin 22
2
g
ghVVt
pp 2.34
Soluția generală a traiectoriei este dată prin înlocuirea ecuațiilor (2.34) în (2.33).
Calculul pentru ultima fază a proiectării pietonului în urma coliziunii este aceea în care
pietonul alunecă pe sol până la oprire (Faza 3). Distanța alunecării pe sol este definită după cum
urmează:
.)sincos(2
))(( 2
2
3g
tVx
p
2.35
Un studiu realizat de Wood arată că valoarea coeficientului de frecare(µ) a pietonului cu
solul are valoarea cuprinsă între 0.3 și 0.93 (Wood 2001)
În timp ce viteza pietonului are relația: ),()()( 222 tVtVtV Pypxp 2.36
,sincos)( 22 tgVtV ppx 2.37
,cossin)( 22 tgVtV ppy 2.38
.
cos
cos2sinsin( 22
2
g
ghVVt
pp 2.39
Înlocuind ecuațiile (2.22) (2.38) (2.36)(2.37) în (2.15) rezultă formula spațiului parcurs
de pieton în ultima fază a coliziunii.
Astfel fiecare distanță calculată va fi înlocuită în ecuația (2.15) și se obține spațiul total
de proiectare al pietonului.
2.2.3. Metoda de determinare a distanțelor de proiectare a pietonului în urma
coliziunii cu autovehiculului – Coliziune fără frânare a autovehiculului în
momentul coliziunii
Acest tip de coliziuni au loc în condiții de vizibilitate redusă, când conducătorul auto nu
are posibilitatea de a vizualiza pietonul la timp, iar coliziunea are loc în timpul de reacție al
conducătorului auto. La viteze cuprinse în intervalul 30-55 km/h, pietonul se află în contact cu
autovehiculul, până în momentul începerii frânării acestuia, iar de obicei, poziția finală a
pietonului se află în spatele autoturismului (Burg 2013).
Schema privind fazele pe care le parcurge pietonul în timpul acestui tip de coliziune sunt
prezentate în Fig. 2.2.
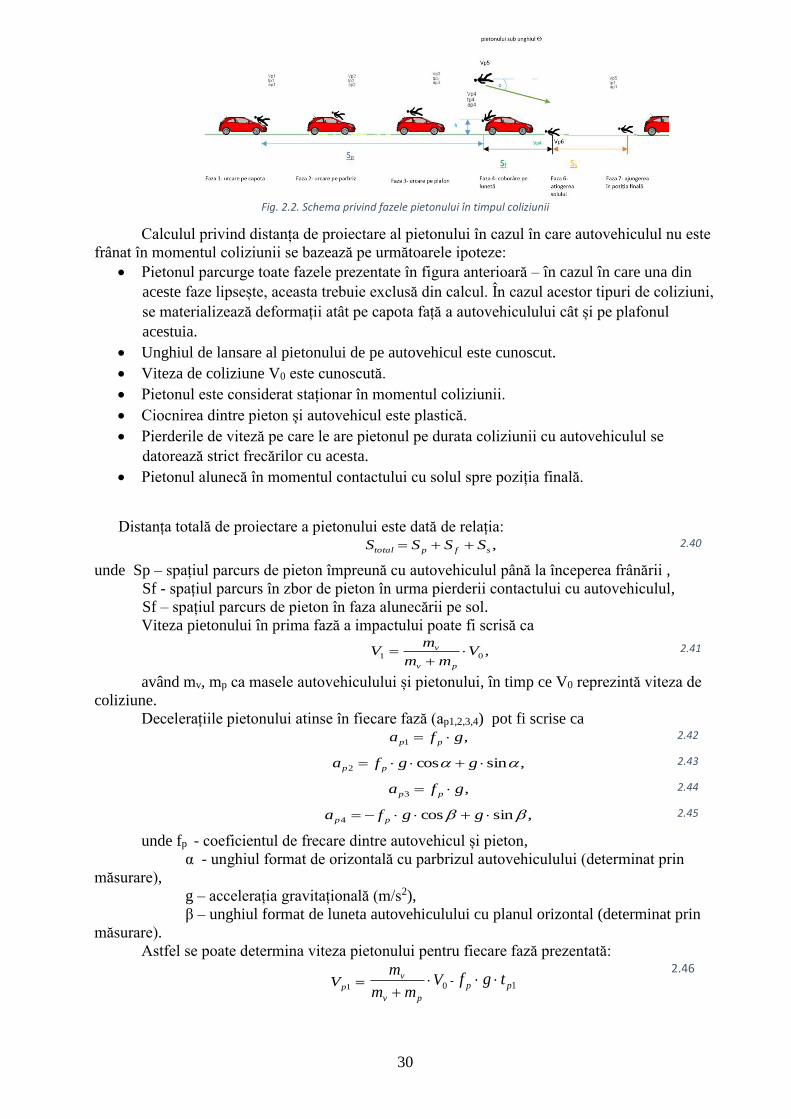
30
Fig. 2.2. Schema privind fazele pietonului în timpul coliziunii
Calculul privind distanța de proiectare al pietonului în cazul în care autovehiculul nu este
frânat în momentul coliziunii se bazează pe următoarele ipoteze:
Pietonul parcurge toate fazele prezentate în figura anterioară – în cazul în care una din
aceste faze lipsește, aceasta trebuie exclusă din calcul. În cazul acestor tipuri de coliziuni,
se materializează deformații atât pe capota față a autovehiculului cât și pe plafonul
acestuia.
Unghiul de lansare al pietonului de pe autovehicul este cunoscut.
Viteza de coliziune V0 este cunoscută.
Pietonul este considerat staționar în momentul coliziunii.
Ciocnirea dintre pieton și autovehicul este plastică.
Pierderile de viteză pe care le are pietonul pe durata coliziunii cu autovehiculul se
datorează strict frecărilor cu acesta.
Pietonul alunecă în momentul contactului cu solul spre poziția finală.
Distanța totală de proiectare a pietonului este dată de relația: ,sfptotal SSSS 2.40
unde Sp – spațiul parcurs de pieton împreună cu autovehiculul până la începerea frânării ,
Sf - spațiul parcurs în zbor de pieton în urma pierderii contactului cu autovehiculul,
Sf – spațiul parcurs de pieton în faza alunecării pe sol.
Viteza pietonului în prima fază a impactului poate fi scrisă ca
,01 Vmm
mV
pv
v
2.41
având mv, mp ca masele autovehiculului și pietonului, în timp ce V0 reprezintă viteza de
coliziune.
Decelerațiile pietonului atinse în fiecare fază (ap1,2,3,4) pot fi scrise ca ,1 gfa pp 2.42
,sincos2 ggfa pp 2.43
,3 gfa pp 2.44
,sincos4 ggfa pp 2.45
unde fp - coeficientul de frecare dintre autovehicul și pieton,
α - unghiul format de orizontală cu parbrizul autovehiculului (determinat prin
măsurare),
g – accelerația gravitațională (m/s2),
β – unghiul format de luneta autovehiculului cu planul orizontal (determinat prin
măsurare).
Astfel se poate determina viteza pietonului pentru fiecare fază prezentată:
1pV 0Vmm
m
pv
v
- 1pp tgf 2.46

31
2pV
0Vmm
m
pv
v
-21 )sincos( ppp tfpgtgf
2.47
3pV
0Vmm
m
pv
v
-321 )sincos( ppppp tgftfpgtgf
2.48
4pV0V
mm
m
pv
v
321 )sincos( ppppp tgftfpgtgf 4)cossin( pp tgfg 2.49
Considerându-se ca valori cunoscute timpii tp1,2,3,4 aferenți fiecărei faze, respectiv
adoptându-se un coeficient de frecare tipic între autovehicul și pieton, se pot determina vitezele
pe care le-a avut pietonul în fiecare fază a coliziunii.
Spațiul parcurs de autovehicul va fi scris ca: rvehicul tVS 1
2.50
Spațiul parcurs de pieton în fazele 1-4 este egală cu : CsSS vehiculp 2.51
unde Svehicul este spațiul parcurs de autovehicul în timpul de reacție,
Cs – distanța de la centrul de greutate al autovehiculului până în cel mai îndepărtat
reper poziționat în spatele acestuia (determinată prin măsurare),
tr – timpul de reacție al conducătorului auto.
Viteza pietonului în momentul desprinderii acestuia de pe autovehicul poate fi scrisă ca: .cos45 pp VV 2.52
Odată desprins de pe caroseria autovehiculului, pietonul se află în faza de zbor,
îndreptându-se spre sol. Considerând frecările cu aerul neglijabile, din Principiul Conservării
Energiei se deduce formula vitezei pietonului la contactul cu solul, ca fiind: .sin2
2
56 hgVV pp 2.53
Spațiul parcurs de pieton în faza de zbor se poate determina geometric, cunoscând
înălțimea de la care pietonul alunecă de pe autovehicul spre sol (h), și are relația:
.1
htg
S f
2.54
În momentul în care pietonul se lovește de sol, acesta alunecă spre poziția finală cu
decelerația: gap 5 ,
2.55
cunoscând µ ca fiind coeficientul de frecare dintre sol și pieton.
Spațiul parcurs de pieton în faza de alunecare pe sol are relația:
g
VS
p
s
2
2
6
.
2.56
Astfel spațiul total parcurs de pieton poate fi scris ca :
CstVhtgg
VS r
p
total
1
2
6 1
2 .
2.57
Acest model de calcul a fost introdus în programul de operații matematice Mathcad, cu
ajutorul căruia s-a realizat calculul distanțelor de proiectare a pietonului în funcție de viteza de
coliziune a pietonului pentru fiecare viteză din intervalul 30-55 km/h.
De asemenea, utilizând PC-Crash 10.2, s-au realizat simulările coliziunilor pe același
interval, obținându-se valori ale distanțelor de proiectare a pietonului. Cu ajutorul acestor date,
s-a realizat diagrama din Fig. 2.3.

32
Fig. 2.3. Distanțele de proiectare a pietonului în funcție de viteza de coliziune
Așadar, această diagramă(Fig. 2.3) poate fi utilizată în cazul reconstrucției
accidentelor în care sunt implicați pietoni, pentru o determinare a vitezei de coliziune cu ajutorul
distanței de proiectare măsurate, în situația în care în faza de pre-impact nu s-au materializat
urme de frânare sau derapare.
2.3. Metode de determinare a vizibilității pietonului în condiții nocturne
Faza anterioară coliziunii reprezintă faza în care apar cele mai multe necunoscute privind
reconstrucția accidentelor în care sunt implicați pietoni, și nu numai. Această fază de cele mai
multe ori se bazează pe anumite presupuneri sau, în cazul în care există, testimoniile martorilor
sau ale conducătorului auto. Astfel, vizibilitatea nocturnă reprezintă un factor esențial cu privire
la analiza fazei premergătoare coliziunii și totodată cu ajutorul căruia se pot stabili eventualele
posibilități de evitare a accidentului.
În calculul de determinare a vizibilității se iau în considerare parametrul contrastului,
respectiv reflexia obiectului(Hankey 2005).
Cei mai importanți parametri care influențează vizibilitatea nocturnă sunt prezentați în
studiul lui Hankey din 2005 ca fiind reflexia obiectului, contrastul respectiv distanța de
vizibilitate (Hankey 2005)
2.4. Concluzii Analizând aspectele privind cinematica pietonului pe parcursul coliziunii, modul de
determinare a distanțelor de proiectare a pietonului precum și vizibilitatea acestuia în diferite
condiții se pot formula următoarele concluzii:
Studiul privind determinarea distanțelor de proiectare a pietonului a început încă
de la sfârșitul anilor ’70, pentru ca ulterior pe baza acestor determinări, calculul să
devină tot mai complex, ținând cont de tot mai mulți parametri. Cu toate acestea,
acest calcul este dificil și se bazează pe parametri estimativi privind unghiul sub
care pietonul este aruncat de pe capota autovehiculului. Acest parametru este
dificil de estimat având în vedere că cinematica pietonului este foarte complexă,
de aceea o metodă mai bună de determinare a distanței de proiectare a pietonului
este prin simulare pe calculator, cu ajutorul programelor disponibile pe piață,
programe care permit vizualizarea 3D a pietonului pe parcursul desfășurării
simulării.
Metodele de determinare a vizibilității pietonului se bazează pe metoda lui Adrian
Werner, fiind cea mai precisă. Vizibilitatea pietonului depinde de mai mulți
parametrii: culoarea articolelor vestimentare, condițiile meteo, contrast, etc.
Analizând literatura de specialitate, s-a constat că nu s-au realizat foarte multe
studii privind vizibilitatea pietonului în funcție de culoarea articolelor
vestimentare, iar un studiu elaborat privind acest aspect ar fi necesar.
33
3. Determinarea distanțelor de vizibilitate a pietonului în
condiții nocturne prin teste experimentale
Pentru determinarea distanțelor de vizibilitate a pietonului s-au efectuat două tipuri de
teste experimentale, în diferite condiții de testare. În primele teste s-a dorit determinarea
distanțelor de vizibilitate a pietonului în condiții nocturne în funcție de culoarea articolelor
vestimentare, astfel încât vizibilitatea acestuia să fie completă. Pentru acesta, zona pe care s-au
efectuat măsurătorile a fost în zona toracelui, respectiv a umerilor.
A doua serie de teste experimentale, a avut ca scop determinarea distanțelor maxime de
vizibilitate a pietonului în condiții nocturne, în funcție de culoarea articolelor vestimentare.
Pentru a atinge acest obiectiv, a fost necesară efectuarea măsurătorilor pe zona membrelor
inferioare a pietonului (gamba).
3.1. Metodologia încercărilor experimentale pentru scenariul de
testare 1 (Tolea 2016b)
3.1.1. Obiectivele testului experimental
Primul studiu experimental a avut ca scop atingerea următoarelor obiective:
Determinarea contrastului, respectiv a vizibilității pietonilor în funcție de culoarea
tricoului, aflați pe partea carosabilă a unui drum public neiluminat,
Determinarea vizibilității unui pieton aflat pe un drum în aliniament,
Determinarea importanței vestei reflectorizante pe timp de noapte.
3.1.2. Desfășurarea experimentului
Pentru a atinge obiectivele trasate s-a utilizat un autovehicul echipat cu faruri de tip
Halogen, fiind poziționat la diferite distanțe de pieton. Acest scenariu de testare a cuprins două
tipuri de teste:
Autovehiculul a folosit luminile de întâlnire,
Autovehiculul a folosit luminile de drum.
Primul pas al testului experimental a fost acela de a poziționa pietonului îmbrăcat în
diferite culori la o distanța de 0.5 metri de acostamentul din partea dreaptă a drumului, în timp ce
vehiculul a fost poziționat la intervale succesive de 10 metri față de pieton, până la atingerea
distanței de 100 de metri față de acesta. Culorile utilizate în cadrul acestui experiment au fost :
galben, albastru, roșu, respectiv vestă reflectorizantă.
Din autovehicul s-au făcut fotografii cu două camere calibrate, astfel încât acestea să
poată să fie procesate cu un program specializat în rectificarea fotografiilor, conducând la
concluzii privind vizibilitatea pietonului. Această rectificare permite utilizatorului să determine
gradul de vizibilitate a pietonului prin măsurarea valorii luminanței pe zone determinate de către
utilizator.
3.1.3. Analiza și procesarea datelor
Pentru procesarea datelor s-a utilizat programul PC-Rect 4.2, un software dezvoltat de
DSD Austria, specializat pe fotogrammetrie. Introducând fotografiile în acest program s-a
determinat gradul de vizibilitate al pietonului cu ajutorul metodei Adrian Werner.
Următorul pas a fost centralizarea datelor obținute din procesarea fotografiilor ale
parametrului ∆Lu în vederea obținerii unor diagrame reprezentative ale distanțelor de vizibilitate.
Tabelele centralizate în formatul Microsoft Excel cuprind următorii parametrii:
Distanța – Distanța dintre autovehiculul din care s-au efectuat fotografiile și
pieton [m],
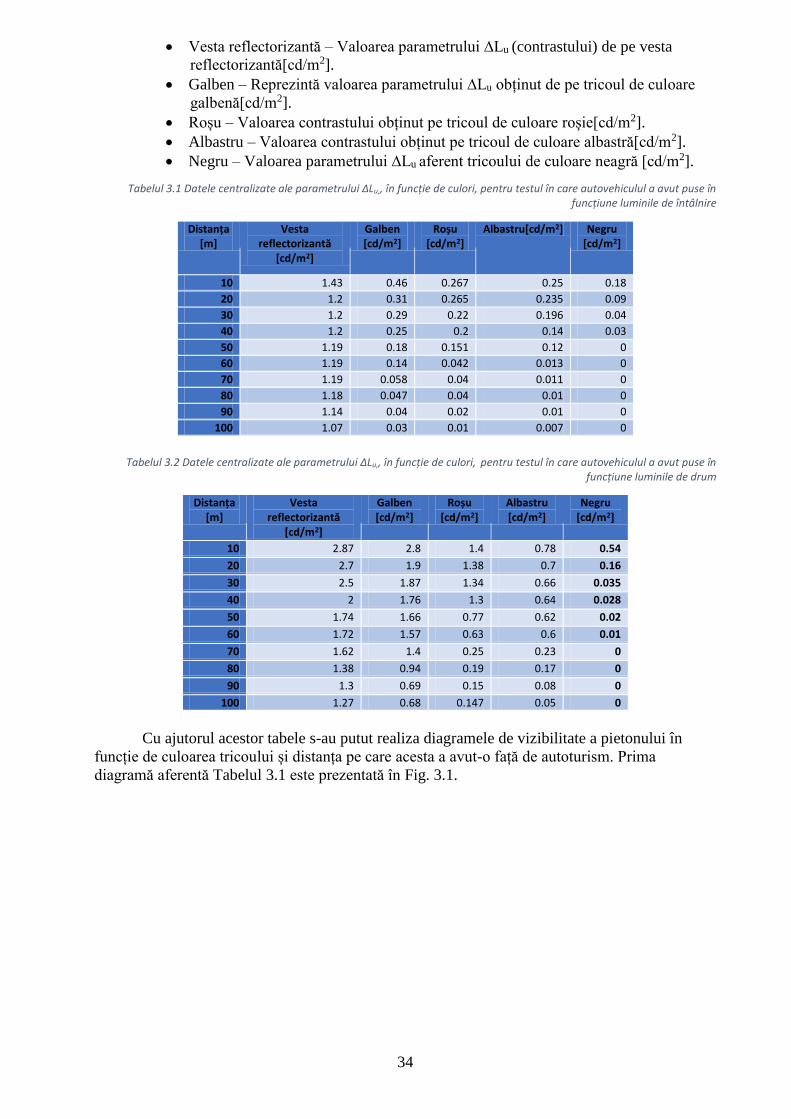
34
Vesta reflectorizantă – Valoarea parametrului ∆Lu (contrastului) de pe vesta
reflectorizantă[cd/m2].
Galben – Reprezintă valoarea parametrului ∆Lu obținut de pe tricoul de culoare
galbenă[cd/m2].
Roșu – Valoarea contrastului obținut pe tricoul de culoare roșie[cd/m2].
Albastru – Valoarea contrastului obținut pe tricoul de culoare albastră[cd/m2].
Negru – Valoarea parametrului ∆Lu aferent tricoului de culoare neagră [cd/m2].
Tabelul 3.1 Datele centralizate ale parametrului ∆Lu,, în funcție de culori, pentru testul în care autovehiculul a avut puse în funcțiune luminile de întâlnire
Distanța [m]
Vesta reflectorizantă
[cd/m2]
Galben [cd/m2]
Roșu [cd/m2]
Albastru[cd/m2] Negru [cd/m2]
10 1.43 0.46 0.267 0.25 0.18
20 1.2 0.31 0.265 0.235 0.09
30 1.2 0.29 0.22 0.196 0.04
40 1.2 0.25 0.2 0.14 0.03
50 1.19 0.18 0.151 0.12 0
60 1.19 0.14 0.042 0.013 0
70 1.19 0.058 0.04 0.011 0
80 1.18 0.047 0.04 0.01 0
90 1.14 0.04 0.02 0.01 0
100 1.07 0.03 0.01 0.007 0
Tabelul 3.2 Datele centralizate ale parametrului ∆Lu,, în funcție de culori, pentru testul în care autovehiculul a avut puse în
funcțiune luminile de drum
Distanța [m]
Vesta reflectorizantă
[cd/m2]
Galben [cd/m2]
Roșu [cd/m2]
Albastru [cd/m2]
Negru [cd/m2]
10 2.87 2.8 1.4 0.78 0.54
20 2.7 1.9 1.38 0.7 0.16
30 2.5 1.87 1.34 0.66 0.035
40 2 1.76 1.3 0.64 0.028
50 1.74 1.66 0.77 0.62 0.02
60 1.72 1.57 0.63 0.6 0.01
70 1.62 1.4 0.25 0.23 0
80 1.38 0.94 0.19 0.17 0
90 1.3 0.69 0.15 0.08 0
100 1.27 0.68 0.147 0.05 0
Cu ajutorul acestor tabele s-au putut realiza diagramele de vizibilitate a pietonului în
funcție de culoarea tricoului și distanța pe care acesta a avut-o față de autoturism. Prima
diagramă aferentă Tabelul 3.1 este prezentată în Fig. 3.1.

35
Fig. 3.1 Diagrama de vizibilitate a pietonului în funcție de culoarea tricoului pentru testul în care autovehiculul a avut puse în
funcțiune luminile de întâlnire
Se poate constata că vesta reflectorizantă oferă cea mai bună vizibilitate în comparație cu
celelalte culori, fiind vizibilă pe toate distanțele de testare cu o valoare a parametrului ∆Lu peste
valoarea de 1, reprezentând o vizibilitate sporită.
Vesta reflectorizantă este urmată de culoarea galbenă în ierarhia culorilor analizate, fiind
vizibilă pe intervalul 10-60 de m, ca după această distanță să își piardă vizibilitatea. Culorile roșu
respectiv albastru au un comportament asemănător, pierzându-și vizibilitatea după pragul de 50
de metri, în timp ce culoarea neagră reprezintă culoarea cu o vizibilitate extrem de scăzută, fiind
vizibilă doar în primii 20 de metri.
Cu ajutorul datelor centralizate în Tabelul 3.2, s-a realizat diagrama privind distanțele
vizibilitate a pietonilor în funcție de culoarea tricoului pentru testul în care autovehiculul a avut
pusă în funcțiune lumina de drum. Această diagramă este prezentată în Fig. 3.2.
Fig. 3.2 Diagrama de vizibilitate a pietonului în funcție de culoarea tricoului pentru testul în care autovehiculul a avut puse în
funcțiune luminile de drum
În urma acestui test se contată că vesta reflectorizantă rămâne cel mai vizibil element,
fiind vizibilă pe toate distanțele analizate, urmată de culoarea galbenă, care de asemenea este
vizibilă pe toate intervalele. După cum era de așteptat, se poate observa o creștere substanțială a
valorii luminanței, datorită intensității luminoase mult mai mari oferită de luminile de drum ale
autovehiculului.
Având în vedere că aceste teste au ca scop vizibilitatea completă a pietonului, se poate
discuta despre faptul că în timpul circulației pe timp de noapte, conul de lumină produs de
farurile autovehiculelor, luminează sub un anumit unghi. Acest unghi descoperă în prima fază
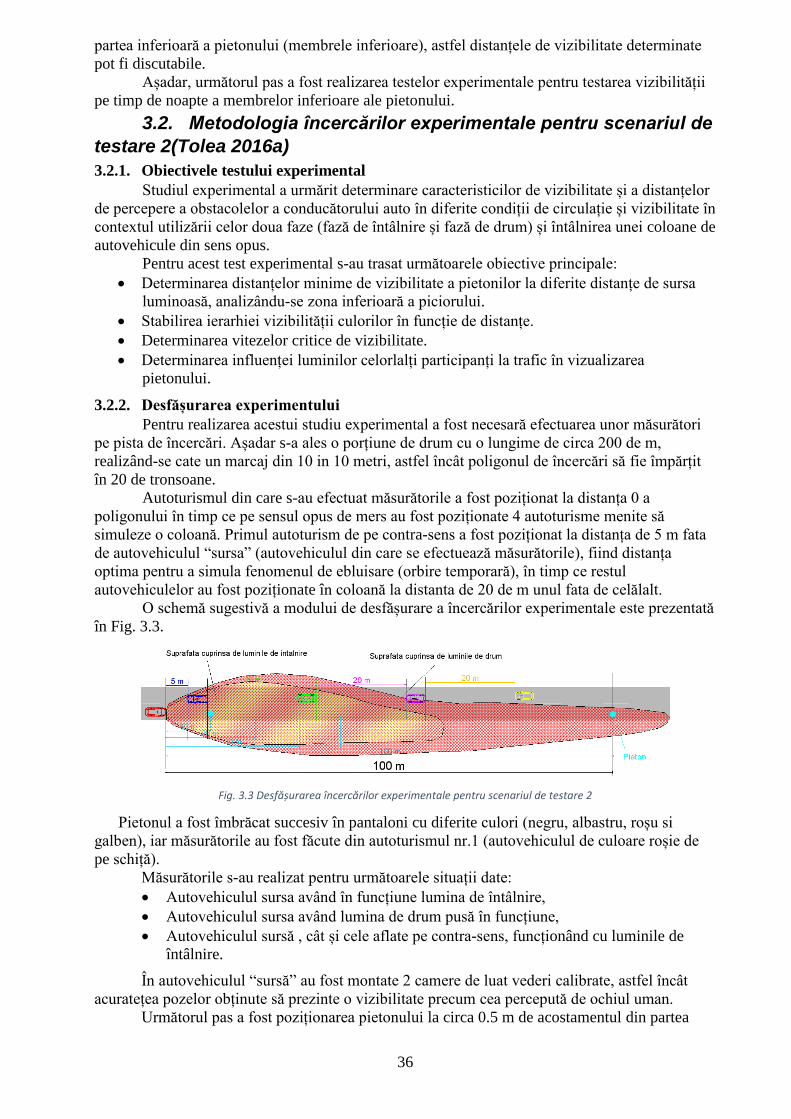
36
partea inferioară a pietonului (membrele inferioare), astfel distanțele de vizibilitate determinate
pot fi discutabile.
Așadar, următorul pas a fost realizarea testelor experimentale pentru testarea vizibilității
pe timp de noapte a membrelor inferioare ale pietonului.
3.2. Metodologia încercărilor experimentale pentru scenariul de
testare 2(Tolea 2016a)
3.2.1. Obiectivele testului experimental
Studiul experimental a urmărit determinare caracteristicilor de vizibilitate și a distanțelor
de percepere a obstacolelor a conducătorului auto în diferite condiții de circulație și vizibilitate în
contextul utilizării celor doua faze (fază de întâlnire și fază de drum) și întâlnirea unei coloane de
autovehicule din sens opus.
Pentru acest test experimental s-au trasat următoarele obiective principale:
Determinarea distanțelor minime de vizibilitate a pietonilor la diferite distanțe de sursa
luminoasă, analizându-se zona inferioară a piciorului.
Stabilirea ierarhiei vizibilității culorilor în funcție de distanțe.
Determinarea vitezelor critice de vizibilitate.
Determinarea influenței luminilor celorlalți participanți la trafic în vizualizarea
pietonului.
3.2.2. Desfășurarea experimentului
Pentru realizarea acestui studiu experimental a fost necesară efectuarea unor măsurători
pe pista de încercări. Așadar s-a ales o porțiune de drum cu o lungime de circa 200 de m,
realizând-se cate un marcaj din 10 in 10 metri, astfel încât poligonul de încercări să fie împărțit
în 20 de tronsoane.
Autoturismul din care s-au efectuat măsurătorile a fost poziționat la distanța 0 a
poligonului în timp ce pe sensul opus de mers au fost poziționate 4 autoturisme menite să
simuleze o coloană. Primul autoturism de pe contra-sens a fost poziționat la distanța de 5 m fata
de autovehiculul “sursa” (autovehiculul din care se efectuează măsurătorile), fiind distanța
optima pentru a simula fenomenul de ebluisare (orbire temporară), în timp ce restul
autovehiculelor au fost poziționate în coloană la distanta de 20 de m unul fata de celălalt.
O schemă sugestivă a modului de desfășurare a încercărilor experimentale este prezentată
în Fig. 3.3.
Fig. 3.3 Desfășurarea încercărilor experimentale pentru scenariul de testare 2
Pietonul a fost îmbrăcat succesiv în pantaloni cu diferite culori (negru, albastru, roșu si
galben), iar măsurătorile au fost făcute din autoturismul nr.1 (autovehiculul de culoare roșie de
pe schiță).
Măsurătorile s-au realizat pentru următoarele situații date:
Autovehiculul sursa având în funcțiune lumina de întâlnire,
Autovehiculul sursa având lumina de drum pusă în funcțiune,
Autovehiculul sursă , cât și cele aflate pe contra-sens, funcționând cu luminile de
întâlnire.
În autovehiculul “sursă” au fost montate 2 camere de luat vederi calibrate, astfel încât
acuratețea pozelor obținute să prezinte o vizibilitate precum cea percepută de ochiul uman.
Următorul pas a fost poziționarea pietonului la circa 0.5 m de acostamentul din partea

37
dreaptă a drumului. Pietonul s-a deplasat din 10 în 10 metri până la distanța de 100 de m de
autovehiculul “sursă” pentru a se efectua măsurători. La fiecare deplasare s-au utilizat diferite
culori de pantaloni pentru a se studia vizibilitatea acestora.
3.2.3. Analiza și procesarea datelor
Datele au fost procesate utilizând aceeași metodologie prezentată anterior, obținându-se
următoarele tabele. Tabelul 3.3 Valorile ΔLu obținute pentru cazul în care autovehiculul sursă avea lumina de întâlnire pusă în funcțiune
Distanța [m]
Negru [cd/m2]
Albastru [cd/m2]
Roșu [cd/m2]
Galben [cd/m2]
10 0.25 1.25 2.56 7.3
20 0.09 0.65 1.19 4.57
30 0.04 0.17 0.5 3.56
40 0.03 0.12 0.29 1.67
50 0 0.12 0.18 0.58
60 0 0.05 0.1 0.54
70 0 0 0.08 0.46
80 0 0 0.02 0.37
90 0 0 0 0.16
100 0 0 0 0.1
Tabelul 3.4. Valorile ΔLu obținute pentru cazul în care autovehiculul sursă avea lumina de drum pusă în funcțiune
Distanța [m]
Negru [cd/m2]
Albastru [cd/m2]
Roșu [cd/m2]
Galben [cd/m2]
10 0.74 2.19 4.57 5.36
20 0.2 1.82 2.98 5.36
30 0.04 0.66 1.27 4.53
40 0.03 0.56 1.06 4.37
50 0.02 0.39 0.69 3.1
60 0.01 0.31 0.46 3.1
70 0 0.13 0.38 1.69
80 0 0 0.26 1.41
90 0 0 0.25 1.34
100 0 0 0.14 0.91
Tabelul 3.5 Valorile ΔLu obținute în cazul în care autovehiculul avea lumina de întâlnire pusă în funcțiune iar de pe contra-sens
existau luminile de întâlnire ale autovehiculelor aflate in coloana
Distanța [m] Negru [cd/m2]
Albastru [cd/m2]
Roșu [cd/m2]
Galben [cd/m2]
10 0.36 0.86 2.16 6.6
20 0.14 0.46 1.08 6.58
30 0.13 0.07 0.41 3.57
40 0.03 0.06 0.21 1.76
50 0 0 0.17 0.95
60 0 0 0.15 0.76
70 0 0 0.07 0.48
80 0 0 0.04 0.17
90 0 0 0 0.16
100 0 0 0 0.1
A. Distanțele de vizibilitate pentru testul în care autovehiculul sursă utiliza luminile
de întâlnire-Test 1
Cu ajutorul acestor tabele s-au putut realiza diagramele privind vizibilitatea pietonului în
diferite condiții nocturne, astfel încât din Tabelul 3.3 a rezultat diagrama de vizibilitate a
pietonului în funcție de culoarea pantalonilor, pentru cazul în care singura sursă de lumina
existentă erau luminile de întâlnire a autovehiculului sursă. Diagrama rezultată din Tabelul 3.3
este prezentată în Fig. 3.4
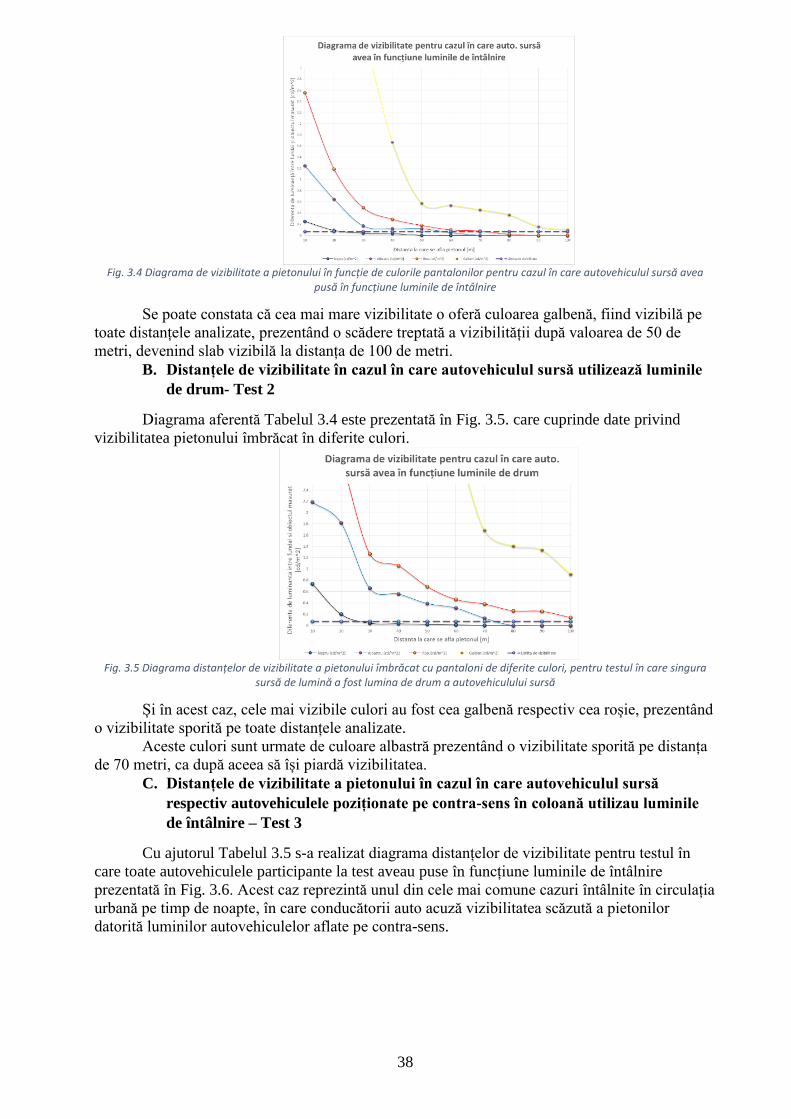
38
Fig. 3.4 Diagrama de vizibilitate a pietonului în funcție de culorile pantalonilor pentru cazul în care autovehiculul sursă avea
pusă în funcțiune luminile de întâlnire
Se poate constata că cea mai mare vizibilitate o oferă culoarea galbenă, fiind vizibilă pe
toate distanțele analizate, prezentând o scădere treptată a vizibilității după valoarea de 50 de
metri, devenind slab vizibilă la distanța de 100 de metri.
B. Distanțele de vizibilitate în cazul în care autovehiculul sursă utilizează luminile
de drum- Test 2
Diagrama aferentă Tabelul 3.4 este prezentată în Fig. 3.5. care cuprinde date privind
vizibilitatea pietonului îmbrăcat în diferite culori.
Fig. 3.5 Diagrama distanțelor de vizibilitate a pietonului îmbrăcat cu pantaloni de diferite culori, pentru testul în care singura
sursă de lumină a fost lumina de drum a autovehiculului sursă
Și în acest caz, cele mai vizibile culori au fost cea galbenă respectiv cea roșie, prezentând
o vizibilitate sporită pe toate distanțele analizate.
Aceste culori sunt urmate de culoare albastră prezentând o vizibilitate sporită pe distanța
de 70 metri, ca după aceea să își piardă vizibilitatea.
C. Distanțele de vizibilitate a pietonului în cazul în care autovehiculul sursă
respectiv autovehiculele poziționate pe contra-sens în coloană utilizau luminile
de întâlnire – Test 3
Cu ajutorul Tabelul 3.5 s-a realizat diagrama distanțelor de vizibilitate pentru testul în
care toate autovehiculele participante la test aveau puse în funcțiune luminile de întâlnire
prezentată în Fig. 3.6. Acest caz reprezintă unul din cele mai comune cazuri întâlnite în circulația
urbană pe timp de noapte, în care conducătorii auto acuză vizibilitatea scăzută a pietonilor
datorită luminilor autovehiculelor aflate pe contra-sens.
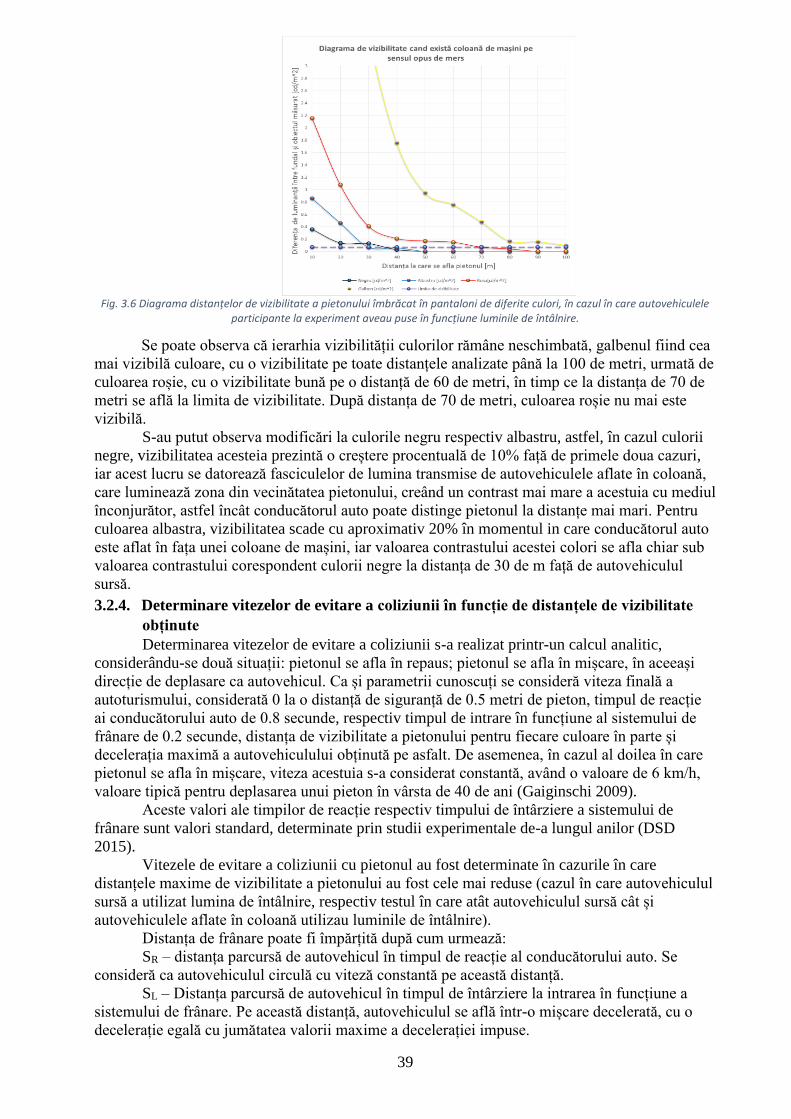
39
Fig. 3.6 Diagrama distanțelor de vizibilitate a pietonului îmbrăcat în pantaloni de diferite culori, în cazul în care autovehiculele
participante la experiment aveau puse în funcțiune luminile de întâlnire.
Se poate observa că ierarhia vizibilității culorilor rămâne neschimbată, galbenul fiind cea
mai vizibilă culoare, cu o vizibilitate pe toate distanțele analizate până la 100 de metri, urmată de
culoarea roșie, cu o vizibilitate bună pe o distanță de 60 de metri, în timp ce la distanța de 70 de
metri se află la limita de vizibilitate. După distanța de 70 de metri, culoarea roșie nu mai este
vizibilă.
S-au putut observa modificări la culorile negru respectiv albastru, astfel, în cazul culorii
negre, vizibilitatea acesteia prezintă o creștere procentuală de 10% față de primele doua cazuri,
iar acest lucru se datorează fasciculelor de lumina transmise de autovehiculele aflate în coloană,
care luminează zona din vecinătatea pietonului, creând un contrast mai mare a acestuia cu mediul
înconjurător, astfel încât conducătorul auto poate distinge pietonul la distanțe mai mari. Pentru
culoarea albastra, vizibilitatea scade cu aproximativ 20% în momentul in care conducătorul auto
este aflat în fața unei coloane de mașini, iar valoarea contrastului acestei colori se afla chiar sub
valoarea contrastului corespondent culorii negre la distanța de 30 de m față de autovehiculul
sursă.
3.2.4. Determinare vitezelor de evitare a coliziunii în funcție de distanțele de vizibilitate
obținute
Determinarea vitezelor de evitare a coliziunii s-a realizat printr-un calcul analitic,
considerându-se două situații: pietonul se afla în repaus; pietonul se afla în mișcare, în aceeași
direcție de deplasare ca autovehicul. Ca și parametrii cunoscuți se consideră viteza finală a
autoturismului, considerată 0 la o distanță de siguranță de 0.5 metri de pieton, timpul de reacție
ai conducătorului auto de 0.8 secunde, respectiv timpul de intrare în funcțiune al sistemului de
frânare de 0.2 secunde, distanța de vizibilitate a pietonului pentru fiecare culoare în parte și
decelerația maximă a autovehiculului obținută pe asfalt. De asemenea, în cazul al doilea în care
pietonul se afla în mișcare, viteza acestuia s-a considerat constantă, având o valoare de 6 km/h,
valoare tipică pentru deplasarea unui pieton în vârsta de 40 de ani (Gaiginschi 2009).
Aceste valori ale timpilor de reacție respectiv timpului de întârziere a sistemului de
frânare sunt valori standard, determinate prin studii experimentale de-a lungul anilor (DSD
2015).
Vitezele de evitare a coliziunii cu pietonul au fost determinate în cazurile în care
distanțele maxime de vizibilitate a pietonului au fost cele mai reduse (cazul în care autovehiculul
sursă a utilizat lumina de întâlnire, respectiv testul în care atât autovehiculul sursă cât și
autovehiculele aflate în coloană utilizau luminile de întâlnire).
Distanța de frânare poate fi împărțită după cum urmează:
SR – distanța parcursă de autovehicul în timpul de reacție al conducătorului auto. Se
consideră ca autovehiculul circulă cu viteză constantă pe această distanță.
SL – Distanța parcursă de autovehicul în timpul de întârziere la intrarea în funcțiune a
sistemului de frânare. Pe această distanță, autovehiculul se află într-o mișcare decelerată, cu o
decelerație egală cu jumătatea valorii maxime a decelerației impuse.

40
Sb – Distanța parcursă de autovehicul în frânare efectivă cu decelerația maximă.
Distanța totală de frânare are expresia: .bLRt SSSS 3.1
Valoarea decelerației maxime obținută de un autoturism în timpul frânării este dată de
expresia (Jazar 2013): .gab 3.2
Unde µ reprezintă coeficientul de frecare al anvelopei cu solul, având o valoare de 0.8
pentru asfalt nou uscat iar g=9.81 m/2 reprezentând valoarea accelerației gravitaționale.
Parametrii cinematici care influențează cele trei faze ale frânării sunt sintetizați într-o
schemă sugestivă prezentată în Fig. 3.7.
Fig. 3.7 Parametrii cinematici determinanți în stabilirea spațiului de frânare a autoturismului
unde:
Vav- Viteza de evitare,
VR – Viteza autovehiculului în urma timpului de reacție (se consideră egală cu viteza de evitare
datorită mișcării uniforme a autovehiculului în timpul de reacție al conducătorului auto),
Vl – Viteza la sfârșitul fazei de întârziere mecanică a sistemului de frânare.
Pentru acest calcul valoarea St este considerată distanța de vizibilitate determinată pe
cale experimentală, în cadrul celor de-al doilea set de teste, în care analiza s-a făcut pe membrele
inferioare ale pietonului.
Distanța totală de frânare St în funcție de viteza de evitare are următoarea relație
(Gaiginschi 2009):
g
gtV
g
gtVVtVS lavlavav
ravt
2
)5.0()5.0( 222
3.3
Astfel, cunoscându-se distanța totală ca fiind distanța de vizibilitate pentru fiecare culoare
în parte, s-a rezolvat ecuația de gradul doi. Acest calcul s-a realizat cu ajutorul programului
Mathcad, iar exemplul de rezolvare ce urmează a fi prezentat are ca parametrul de intrare
distanța de vizibilitate a pietonului îmbrăcat în culoarea neagră (St = 19.5 m).
hkmsmVav /43/93.11 3.4
Cunoscând faptul că autovehiculul se deplasează cu viteza constantă în secvența aferentă
timpului de reacție, viteza Vr = 11.93 m/s. Următorul pas a fost determinarea distanțelor de
frânare pentru fiecare secvență în parte :
,544.9 mtVS rrr 3.5
,464.2
2
2
mt
atVS lllrl
3.6
.492.7 mSSSS rltb 3.7
Timpul de frânare efectivă, tb poate fi scris sub forma:
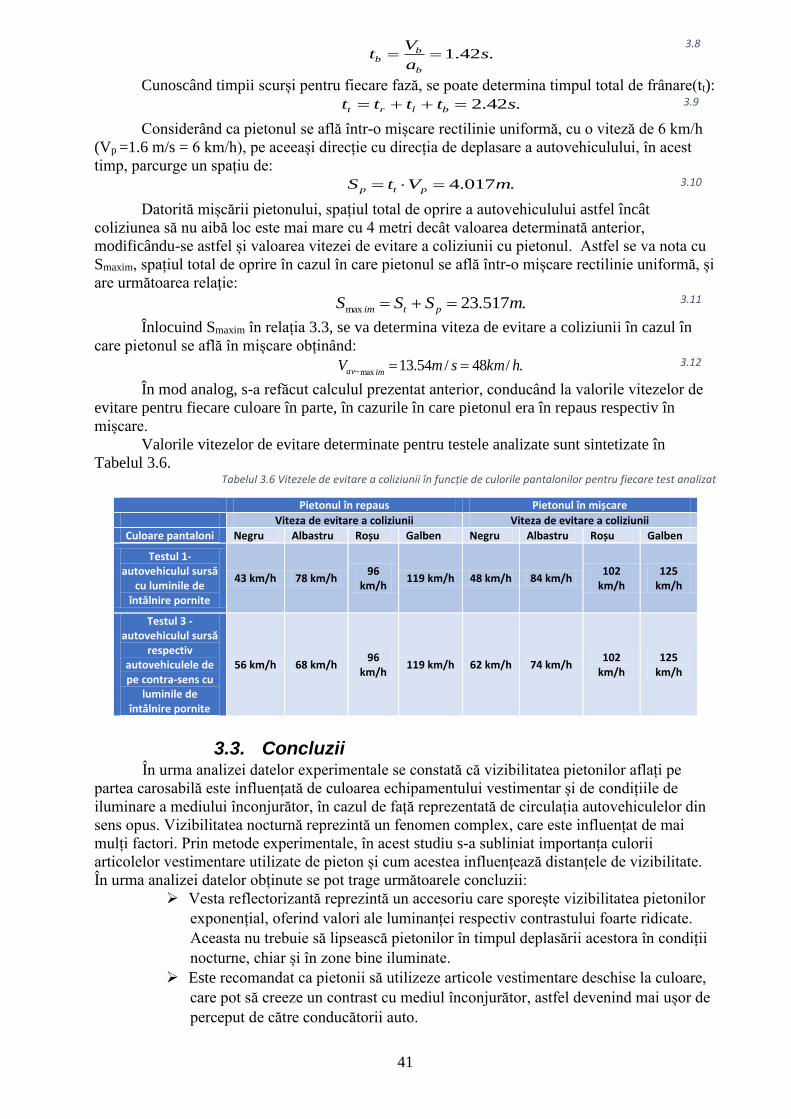
41
.42.1 s
a
Vt
b
bb
3.8
Cunoscând timpii scurși pentru fiecare fază, se poate determina timpul total de frânare(tt): .42.2 stttt blrt 3.9
Considerând ca pietonul se află într-o mișcare rectilinie uniformă, cu o viteză de 6 km/h
(Vp =1.6 m/s = 6 km/h), pe aceeași direcție cu direcția de deplasare a autovehiculului, în acest
timp, parcurge un spațiu de: .017.4 mVtS ptp 3.10
Datorită mișcării pietonului, spațiul total de oprire a autovehiculului astfel încât
coliziunea să nu aibă loc este mai mare cu 4 metri decât valoarea determinată anterior,
modificându-se astfel și valoarea vitezei de evitare a coliziunii cu pietonul. Astfel se va nota cu
Smaxim, spațiul total de oprire în cazul în care pietonul se află într-o mișcare rectilinie uniformă, și
are următoarea relație: .517.23max mSSS ptim 3.11
Înlocuind Smaxim în relația 3.3, se va determina viteza de evitare a coliziunii în cazul în
care pietonul se află în mișcare obținând: ./48/54.13
maxhkmsmV
imav 3.12
În mod analog, s-a refăcut calculul prezentat anterior, conducând la valorile vitezelor de
evitare pentru fiecare culoare în parte, în cazurile în care pietonul era în repaus respectiv în
mișcare.
Valorile vitezelor de evitare determinate pentru testele analizate sunt sintetizate în
Tabelul 3.6. Tabelul 3.6 Vitezele de evitare a coliziunii în funcție de culorile pantalonilor pentru fiecare test analizat
Pietonul în repaus Pietonul în mișcare
Viteza de evitare a coliziunii Viteza de evitare a coliziunii
Culoare pantaloni Negru Albastru Roșu Galben Negru Albastru Roșu Galben
Testul 1- autovehiculul sursă
cu luminile de întâlnire pornite
43 km/h 78 km/h 96
km/h 119 km/h 48 km/h 84 km/h
102 km/h
125 km/h
Testul 3 - autovehiculul sursă
respectiv autovehiculele de pe contra-sens cu
luminile de întâlnire pornite
56 km/h 68 km/h 96
km/h 119 km/h 62 km/h 74 km/h
102 km/h
125 km/h
3.3. Concluzii În urma analizei datelor experimentale se constată că vizibilitatea pietonilor aflați pe
partea carosabilă este influențată de culoarea echipamentului vestimentar și de condițiile de
iluminare a mediului înconjurător, în cazul de față reprezentată de circulația autovehiculelor din
sens opus. Vizibilitatea nocturnă reprezintă un fenomen complex, care este influențat de mai
mulți factori. Prin metode experimentale, în acest studiu s-a subliniat importanța culorii
articolelor vestimentare utilizate de pieton și cum acestea influențează distanțele de vizibilitate.
În urma analizei datelor obținute se pot trage următoarele concluzii:
Vesta reflectorizantă reprezintă un accesoriu care sporește vizibilitatea pietonilor
exponențial, oferind valori ale luminanței respectiv contrastului foarte ridicate.
Aceasta nu trebuie să lipsească pietonilor în timpul deplasării acestora în condiții
nocturne, chiar și în zone bine iluminate.
Este recomandat ca pietonii să utilizeze articole vestimentare deschise la culoare,
care pot să creeze un contrast cu mediul înconjurător, astfel devenind mai ușor de
perceput de către conducătorii auto.

42
În urma analizei comparative a valorilor contrastului obținut între scenariul de
testare 1 cu scenariul de testare 2, s-a constatat că valoarea contrastului este
simțitor mai mare la nivelul membrelor inferioare decât în zona superioară a
toracelui.
Distanțele de vizibilitate cresc procentual cu o valoare de 30% pentru culoarea
galbenă, în cazul în care analiza vizibilității se face la nivelul membrelor
inferioare, iar autovehiculul circulă cu luminile de întâlnire.
Pietonii îmbrăcați în culoarea neagră pe timpul nopții reprezintă un pericol pentru
conducătorii auto, aceștia fiind vizibili la distanțe foarte mici.
Conform vitezelor de evitare determinate în Tabelul 3.6, pietonii care se află în
stare de repaus pe carosabil, îmbrăcați în culoarea neagră nu pot fi evitați de către
un conducător auto, care circulă cu viteză legală prin localitate, datorită
vizibilității reduse a acestora.
Distanțele de vizibilitate a pietonului în condițiile date, pe un tronson de drum în
aliniament, fără iluminare stradală, cu carosabil de culoare închisă, în funcție de culoarea
articolelor vestimentare sunt sintetizate în Fig. 3.8.
Fig. 3.8 Distanțele maxime de vizibilitate a pietonului în diferite condiții de testare

43
4. Modelarea matematică a coliziunii autovehicul-pieton
4.1. Principiile mecanicii Lagrangiene Acest principiu se bazează pe energiile cinetice și potențiale ale sistemelor, care trebuie
exprimate în coordonate generalizate. Ca orice sistem, sistemul multi-corp al pietonului,
respectiv sistemul autovehiculului este guvernat de aceste energii în momentul deplasării,
respectiv al coliziunii. Astfel ecuația generală a lui Lagrange poate fi scrisă în funcție de aceste
energii după cum urmează(Nicoara 2003, Luca 2007):
knc
kkk
V
q
T
q
T
dt
d
4.1
unde:
T- Energia cinetică a sistemului,
V- Energia potențială a sistemului,
Qknc – Forțele exterioare neconservatoare care acționează asupra sistemului,
q – coordonatele generalizate.
4.2. Obiectivele modelării matematice Pentru a determina gradul de vătămare al pietonului la nivelul capului strict în momentul
coliziunii acestuia cu autovehiculul s-au trasat următoarele obiective ale modelării matematice:
Determinarea parametrilor vitezei, respectiv deplasării capului pietonului
în momentul coliziunii cu autovehiculul,
Determinarea variației vitezei autovehiculului în momentul coliziunii cu
pietonul,
Determinarea spațiului parcurs de autovehicul în momentul coliziunii.
Astfel, pentru a atinge aceste obiective trasate s-a realizat proiectarea unui sistem
simplificat din două corpuri, care este menit să simuleze mișcarea pietonului, respectiv un sistem
monocorp, care reprezintă autovehiculul. Pentru validarea acestui model s-au utilizat datele unui
test din cadrul cercetării experimentale.
4.3. Modelarea matematică a sistemului proiectat Pentru modelarea matematică s-au utilizat sistemul simplificat din următoarea figură,
fiind format din trei corpuri rigide care intră în coliziune. Primul corp de masă m1 reprezintă
autovehiculul, corpul de masă m2 reprezintă capul pietonului, în timp ce corpul de masă m3
reprezintă toracele acestuia. Corpurile 2 și 3 sunt legate printr-o cuplă de rotație.
Fig. 4.1 Schema modelului matematic
Acest sistem proiectat se bazează pe următoarele ipoteze:
Masele corpurilor 1 și 3 sunt concentrate în centrele de greutate.
Analiza se face strict în momentul în care pietonul ajunge în poziția de impact.
Arcul corespondent corpurilor 1-2 acționează strict pe direcția X, în timp ce arcul dintre
corpul 1 și corpul 3 acționează strict pe direcția Z.

44
Centrul de coordonate al sistemului XOZ este poziționat în centrul de masă al
autovehiculului (m1).
Autovehiculul este decelerat în momentul coliziunii.
Notațiile utilizate sunt următoarele:
x – deplsările corpurilor de-a lungul axei X
z – deplasările corupurilor de-a lungul axei Z
V – vitezele autovehiculelor
d – înălțimea profilului frontal al autovehiculului
Ff1 – Forța de frânare a autovehiculului
Ff2 – Forța de frecare dintre autovehicul și pieton
k1,2 – coeficienți de rigiditate între corupurile 1, respectiv 2
k23 – coeficientul de rigiditate descris de articulația de rotație utilizată între corpul 2 și 3
Θ – unghiul descris de mișcarea relativă a corpului 2 față de corpul 3
l2 – lungimea corpului 2
m1, m2, m3 – masele corpurilor 1, 2 și 3
Energia cinetică a sistemului poate fi scrisă sub forma:
).(2
3
4)sincos([
2
1
2
2
3
2
3
22
22222
2
2
2
22
2
11
zxmlm
xzlzxmxm
T
4.2
Iar energia potențială a sistemelor are următoarea relație
.)(2
1
2
1)(
2
132sin
2
2
33
2
23
2
1223222 dzkkxxkgzmgzmglm
V 4.3
Coordonatele generalizate ale ecuației lui Lagrange în cazul de față sunt:
q = x1, x2, y2, y3, Θ.
Prin aplicarea ecuației lui Lagrange (4.1)în funcție de aceste coordonate se vor obține 5
ecuații generale de mișcare ale corpurilor:
,
)1(
)()(
11
211221
1
xm
xxxkFFx
ff
4.4
,
)1)(sin2(2
1
)(
222
12221
2
xlm
xxxkFx
f
4.5
,
)1)(cos2(2
1
2
222
22
zlm
zgmz
4.6
,
)1(
)]([
33
33333
zm
dzkgmzz
4.7
.
)62
cossin()6
1(2
)sincos(
cos
222222
2
2
22222
2322
llxzlm
mlxzlm
kglm
4.8
Acest sistem de 5 ecuații diferențiale de ordinul 2 se poate rezolva prin metoda Runge-
Kutta, obținând un sistem de 10 ecuații diferențiale de ordinul 1.
Rezolvarea sistemului s-a realizat în programul Matlab 2014, cu ajutorul funcției
ODE4521 (Mathworks , Breaz 2013).
4.4. Datele de intrare ale modelului teoretic. Limitările modelului Parametrii de intrare ai sistemului sunt reprezentanți de constantele acestuia care au fost
definite ca variabile globale în cadrul programului Matlab, respectiv condițiile inițiale. Aceste
date de intrare sunt prezentate în tabelul următor.
21 ODE – Ordinary Differential Equations

45
Tabelul 4.1 Parametrii sistemului
Constantele sistemului Simbol Unitatea de măsură
Masa autovehiculului m1 kg
Masele corpurilor care definesc pietonul m2,m3 kg
Constantele de rigiditate care definesc contactul dintre autovehicul și pieton k1,k2,k23 N/m
Forțele ce acționează asupra autovehiculului respectiv pietonului Ff1,Ff2 N
Înălțimea profilului frontal al autovehiculului d m
Lungimea corpului 2 (capului) l2 m
Condițiile inițiale ale sistemului
deplasarea autovehiculului x1 inițial m
Viteza autovehiculului inițial m/s
Deplasarea capului pietonului pe direcția X x2 inițial m
Viteza capului pietonului pe direcția X inițial m/s
Deplasarea capului pietonului pe direcția Z z2 inițial m
Viteza capului pietonului pe direcția Z inițial m/s
Deplasarea toracelui pietonului pe direcția X x3 inițial m
Viteza capului pietonului pe direcția X inițial m/s
Deplasarea toracelui pietonului pe direcția Z z3 inițial m
Viteza capului pietonului pe direcția Z inițial m/s
Unghiul descris de mișcarea capului în raport cu toracele Θ inițial rad
Viteza unghiulară a capului inițial
rad/s
În urma rezolvării sistemului se vor obține următoarele valori:
Tabelul 4.2 Rezultatele obținute în urma modelării matematice
Rezultatele modelului teoretic Simbol Unitatea de măsură
Deplasarea autovehiculului x1= f(t) m
Viteza autovehiculului = f(t) m/s
Deplasările capului pietonului x2,y2= f(t) m
Vitezele capului pietonului , , = f(t) m/s
Deplasările toracelui pietonului x3,y3 = f(t) m
Vitezele toracelui pietonului , = f(t) m/s
Unghiul relativ? descris de cap și torace Θ = f(t) rad
Viteza unghiulară a capului = f(t)
rad/s
În urma rezolvării sistemului de ecuații prin metoda Runge Kutta, se vor putea obține
valorile descrise în tabelul anterior, iar pentru a determina valoarea vitezei rezultante de la
nivelul capului pietonului se va aplica următoarea formulă:
.2
2
2
22
yxV rez 4.9
Limitările modelului:
O limitare importantă a acestui model este aceea că este un model bidimensional, care nu
ia în considerare mișcările care pot apărea de-a lungul axei Y,
Modelul poate determina parametrii vitezelor, respectiv deplasărilor ce apar strict în
momentul coliziunii,
Nu ia în considerarea eventuala mișcare a membrelor inferioare sau superioare, astfel că
cinematica mișcării nu poate fi influențată de acestea,
Resorturile acționează doar pe direcția impusă (X pentru cap Z pentru torace),
Oscilațiile care pot apărea datorită mișcării de tangaj a autovehiculului sunt ignorate,
Eventualele mișcări ale corpului de-a lungul axei Y nu sunt luate în considerare.

46
5. Metodica cercetării experimentale Pentru validarea modelului matematic au fost necesare realizarea unor teste
experimentale, realizate la scară 1:1, astfel încât să se poată realiza o analiză comparativă între
datele teoretice și datele obținute pe cale experimentală.
5.1. Stabilirea obiectivelor testelor experimentale Cea mai bună cale de a studia cinematica pietonului în timpul coliziunii prin prisma
criteriilor de vătămare este pe cale experimentală. Cu toate că la nivel European evaluările
privind nivelele de vătămare se realizează prin așa numitele teste ale componentelor, în
experimentele necesare validării datelor teoretice s-au realizat testele la scară 1:1, utilizând un
DAT.
Obiectivele testelor experimentale sunt:
Achiziția datelor privind parametrii cinematici ai pietonului,
Achiziția datelor necesare validării modelului matematic realizat,
Stabilirea cinematicii pietonului din timpul coliziunii și încadrarea acesteia în
clasificarea accidentelor de tip autovehicul-pieton,
Determinarea distanțelor de aruncare (proiectare a pietonului),
Determinarea severității leziunilor ce pot apărea la nivelul capului în urma
coliziunii.
5.2. Stabilirea desfășurării testelor experimentale
5.2.1. Fixarea programului de încercări experimentale
Testele experimentale s-au desfășurat de-a lungul a 4 zile de testare, efectuându-se teste
cu diferite configurații. Pentru aceste teste s-au utilizat 3 autovehicule cu profiluri frontale
diferite, ce au avut ca scop determinarea influenței acestora asupra nivelului de vătămare ce
apare la nivelul capului pietonului.
În cadrul acestui sub-capitol este prezentat în detaliu programul testelor experimentale în
detaliu.
5.2.2. Descrierea scenariilor de coliziune
Configurațiile celor 5 teste au fost următoarele:
A. Testul 1 - Viteza de coliziune de 17 km/h.
B. Testul 2 – Viteza de coliziune de 29 km/h – condiții de testare identice cu testul 1
C. Testul 3 – Viteza de coliziune de 29 km/h – condiții de testare identice cu testul 1
și 2 dar cu vehiculul 2
D. Testul 4 – Viteza de coliziune de 37 km/h – Suprapunere de 50% între
autovehicul și pieton – s-a utilizat vehiculul 3
E. Testul 5 – Viteza de coliziune de 33 km/h – Vehiculul 3 a fost frânat cu întârziere
5.3. Pregătirea testelor experimentale
5.3.1. Pregătirea dispozitivului antropometric de testare
DAT-ul este unul din cele mai importante dispozitive pentru realizarea testelor
experimentale, datorită faptului că analiza ce urmează a fi făcută privind comportamentul
pietonilor în timpul coliziunii se va face pe acesta.
Astfel s-au efectuat următoarele operații în vederea efectuării testelor experimentale:
Cântărirea și etalonarea dispozitivului.
Montarea unui dispozitiv de achiziție a datelor în interiorul toracelui.
Montarea unui accelerometru tri-axial în centrul de greutate al capului
dispozitivului
Verificarea cablurilor aferente dispozitivelor de înregistrare a datelor

47
Introducerea unui sistem de prindere a capului de torace adițional, astfel încât în
momentul coliziunii să nu existe riscul ca toracele să se desprindă de cap, fapt ce
ar conduce la ruperea cablului dintre accelerometru și aparatul de achiziție a
datelor.
Amplasarea unor repere pe manechin astfel încât zonele de interes (capul,
toracele) să poată să fie monitorizate mai ușor în analiza video.
Construcția unui dispozitiv de susținere a DAT astfel încât acesta să rămână în
poziția verticală până în momentul impactului.
Aceste etape sunt descrise în detaliu în cadrul acestui sub-capitol în teză.
5.3.2. Pregătirea aparaturii necesară achiziționării datelor
A. GPS DS5 (Covaciu 2010, Popa 2013)
Acest dispozitiv a avut ca rol înregistrarea datelor privind evoluția vitezei autovehiculului
de-a lungul testelor experimentale și cu ajutorul căruia s-au stabilit vitezele de coliziune dintre
autovehicul și pieton.
GPS-ul DS5 este compus din două elemente importante: programul, respectiv
echipamentul fizic. Partea hardware conține un receptor GPS, un calculator de mici dimensiuni și
o interfață de conectare care poartă numele de RS232-USB. Achiziția și înregistrarea datelor se
stochează în fișiere .TXT.
Cu ajutorul acestui dispozitiv s-au putut extrage date privind timpul, viteza, și
coordonatele vehiculului.
B. Dispozitivul PIC DAQ5 (DSD)
Acest dispozitiv a fost dezvoltat de DSD Austria și are ca rol înregistrarea parametrilor
privind accelerația, viteza, viteza unghiulară și poziția. Dispozitivul suportă senzor tri-axial
extern, fiind capabil să înregistreze date externe privind accelerația. Acest senzor a fost montat în
centrul de greutate al capului DAT-ului, măsurând astfel parametrul accelerației capului pe
parcursul testelor experimentale.
Un mare avantaj oferit de acest dispozitiv este faptul că nu se bazează pe o sursă externă
de energie, ci funcționează cu ajutorul bateriilor, fiind astfel un dispozitiv mobil, foarte ușor de
utilizat.
Fișa tehnică a acestui dispozitiv este prezentată în Anexa 2.
C. Aparatura de înregistrare foto-video
C1. Camera de mare viteză Hi-Spec5 (FASTECIMAGING)
Acest dispozitiv este un dispozitiv de înregistrare video de mare viteză, fiind capabil să
înregistreze un video la peste 1400 de cadre pe secundă. Camera a fost necesară filmării
impactului, care are loc într-un interval de timp foarte scurt, timp în care ochiul uman nu este
capabil să perceapă în detaliu fenomenul de impact.
Pentru o stabilire cât mai corectă a cinematicii pietonului din timpul coliziunii, a fost
necesară utilizarea acestei camere, focusată pe zona de coliziune a autovehiculului cu pietonul.
Detalii suplimentare despre acest dispozitiv utilizat se găsesc în Anexa 3
C2. Casio Exilim EX-F1 (CASIO)
Această camera a fost utilizată ca și cameră secundară de mare viteză, fiind capabilă să
înregistreze până la 1200 de cadre pe secunde, dar cu o rezoluție mult mai redusă în comparație
cu Hi-Spec5. Spre deosebire de camera Hi-Spec, această cameră este capabilă să înregistreze și
imaginile foto, cu o rezoluție de 2816 x 2112 pixeli.
Acest dispozitiv a fost poziționat lângă camera primară Hi-Spec, înregistrând și partea de
mișcare din faza post impact.
Fișa tehnică a dispozitivului este prezentată în Anexa 4
C3. Drona DJI Phantom 3 (DJI)
Acest dispozitiv este capabil să realizeze fotografii și înregistrări video aeriene, fiind
utilizată în cadrul testelor de coliziune pentru a înregistra video coliziunea și pentru o
determinare mai ușoară a distanțelor de proiectare a pietonului prin prelucrare video.
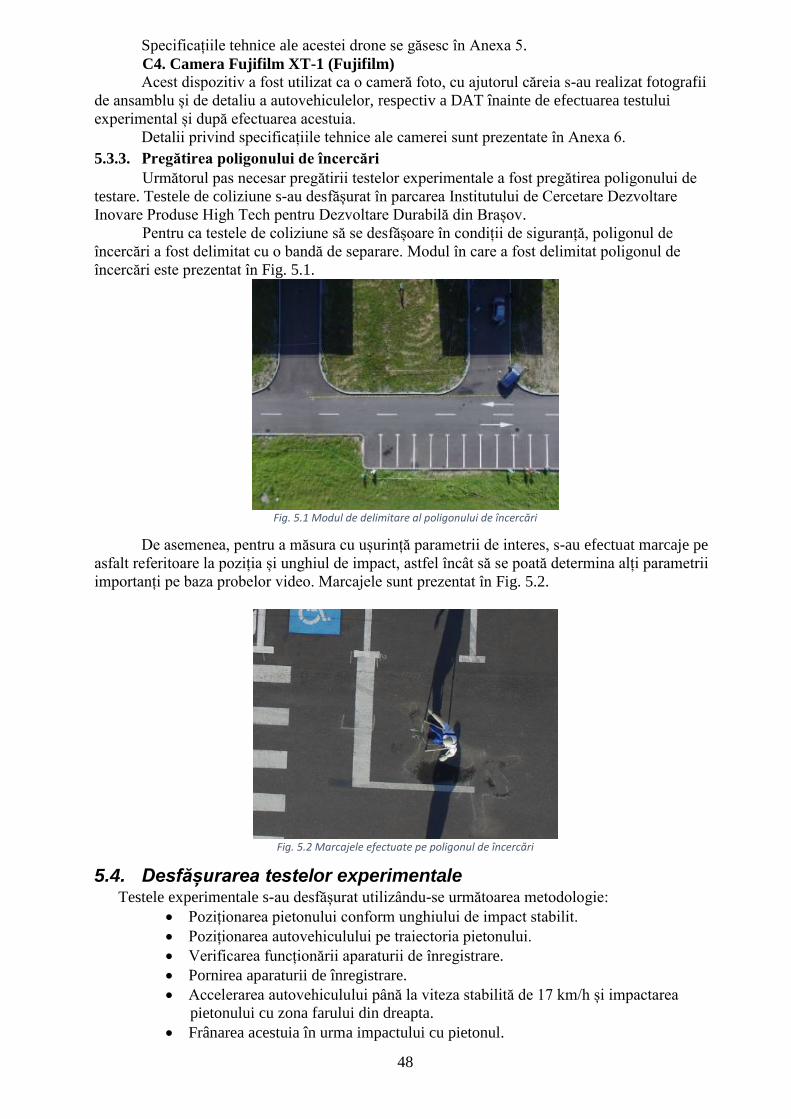
48
Specificațiile tehnice ale acestei drone se găsesc în Anexa 5.
C4. Camera Fujifilm XT-1 (Fujifilm)
Acest dispozitiv a fost utilizat ca o cameră foto, cu ajutorul căreia s-au realizat fotografii
de ansamblu și de detaliu a autovehiculelor, respectiv a DAT înainte de efectuarea testului
experimental și după efectuarea acestuia.
Detalii privind specificațiile tehnice ale camerei sunt prezentate în Anexa 6.
5.3.3. Pregătirea poligonului de încercări
Următorul pas necesar pregătirii testelor experimentale a fost pregătirea poligonului de
testare. Testele de coliziune s-au desfășurat în parcarea Institutului de Cercetare Dezvoltare
Inovare Produse High Tech pentru Dezvoltare Durabilă din Brașov.
Pentru ca testele de coliziune să se desfășoare în condiții de siguranță, poligonul de
încercări a fost delimitat cu o bandă de separare. Modul în care a fost delimitat poligonul de
încercări este prezentat în Fig. 5.1.
Fig. 5.1 Modul de delimitare al poligonului de încercări
De asemenea, pentru a măsura cu ușurință parametrii de interes, s-au efectuat marcaje pe
asfalt referitoare la poziția și unghiul de impact, astfel încât să se poată determina alți parametrii
importanți pe baza probelor video. Marcajele sunt prezentat în Fig. 5.2.
Fig. 5.2 Marcajele efectuate pe poligonul de încercări
5.4. Desfășurarea testelor experimentale Testele experimentale s-au desfășurat utilizându-se următoarea metodologie:
Poziționarea pietonului conform unghiului de impact stabilit.
Poziționarea autovehiculului pe traiectoria pietonului.
Verificarea funcționării aparaturii de înregistrare.
Pornirea aparaturii de înregistrare.
Accelerarea autovehiculului până la viteza stabilită de 17 km/h și impactarea
pietonului cu zona farului din dreapta.
Frânarea acestuia în urma impactului cu pietonul.

49
Efectuarea fotografiilor de ansamblu și de detaliu a autovehiculelor.
Marcarea pozițiilor finale ale autovehiculului, respectiv DAT-ului.
Debarasarea poligonului de încercări în vederea efectuării următoarelor teste.
Parametrii de interes au fost:
Accelerația/decelerația pietonului la nivelul capului.
Viteza pietonului la nivelul capului.
Distanța de proiectare a pietonului.
Deplasarea pietonului în timpul coliziunii
5.4.1. Desfășurarea testului experimental 1
Configurația testului este prezentată în Fig. 5.3.
Fig. 5.3 Descrierea testului 1
În urma desfășurării primului test experimental s-au distins următoarele faze privind
cinematica impactului:
Faza 1 : Contactul dintre bara față (bara parașoc) a autoturismului și membrul inferior
drept al pietonului.
Faza 2: Ridicarea pietonului pe capota autovehiculului – în urma contactului cu bara
autovehiculului sub centrul de masă al pietonului, se imprimă o mișcare de rotație
pietonului în jurul axei Y, ridicându-l pe capotă.
Faza 3: Intrarea în contact al toracelui și al capului cu capota autovehiculului.
Faza 4: Faza de aterizare a pietonului – faza în care acesta cade pe sol și ajunge în poziția
finală.
Fazele de coliziune sunt prezentate în Fig. 5.4. Se poate observa că tipul de impact este
prin ”înfășurare”, iar din fazele coliziunii lipsește faza de zbor. Această faza nu apare deoarece
frânarea autovehiculului nu este bruscă, iar viteza de coliziune este mică. Astfel, faza de zbor cu
faza de aterizare (contact cu solul) coincid în acest caz particular.
Fig. 5.4 Fazele coliziunii

50
5.4.2. Desfășurarea testului experimental 2
Schema privind configurația coliziunii dintre auto1 și pieton în scenariul de testare 2 este
prezentată în Fig. 5.5.
Fig. 5.5 Configurația de coliziune pentru scenariul de testare 2
În urma desfășurării testului numărul doi se disting următoarele faze ale cinematicii
pietonului din timpul coliziunii:
Faza 1 : Contactul dintre bara parașoc a autoturismului și membrul inferior drept
al pietonului.
Faza 2: Ridicarea pietonului pe capota autovehiculului – în urma contactului cu
bara autovehiculului sub centrul de masă al pietonului, se imprimă o mișcare de
rotație pietonului în jurul axei laterale, ridicându-l pe capotă.
Faza 3: Intrarea în contact al toracelui și al capului cu capota autovehiculului.
Faza 4: Faza de zbor a pietonului.
Faza 5: Faza de aterizare a pietonului – faza în care acesta cade pe sol și ajunge în
poziția finală.
Fazele impactului sunt prezentat în Fig. 5.6.Se poate observa că în acest caz apare o fază
suplimentară în comparație cu primul test, și anume faza de zbor al pietonului, care se datorează
vitezei de impact mai ridicate și totodată unei frânări mai violente din faza post-impact a
autovehiculului.
Fig. 5.6 Fazele coliziunii pentru scenariul de testare 2
Din punct de vedere al clasificării realizate în capitolul 1 și acest tip de impact poate fi
încadrat ca impact prin ”înfășurare”, în care pietonului i se imprimă o mișcare de rotație în jurul
axei laterale (Y), conducând la o înfășurare a acestuia pe capota autovehiculului
5.4.3. Desfășurarea testului experimental 3
Acest test a avut loc în ziua 2, în jurul orei 13:03, utilizându-se autovehiculul 2, cu scopul
de a determina influența profilului frontal în aceleași condiții de testare.
O schiță a configurației testului de coliziune numărul trei este prezentată în Fig. 5.7.
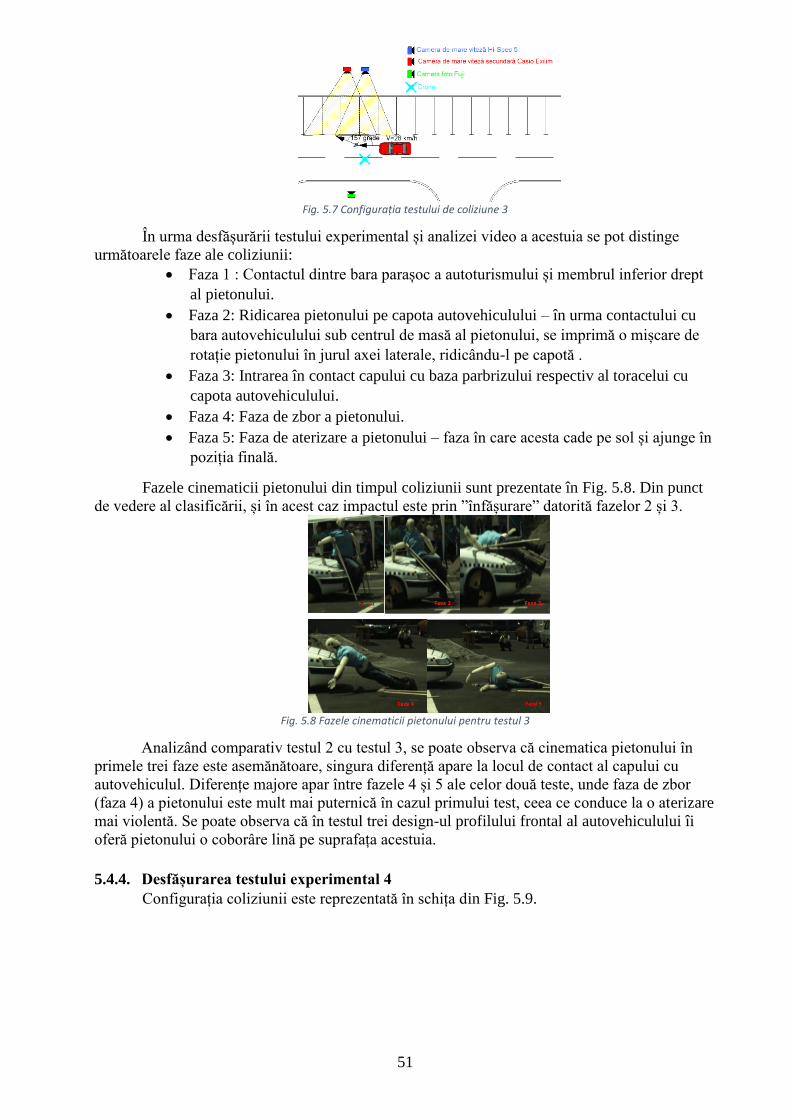
51
Fig. 5.7 Configurația testului de coliziune 3
În urma desfășurării testului experimental și analizei video a acestuia se pot distinge
următoarele faze ale coliziunii:
Faza 1 : Contactul dintre bara parașoc a autoturismului și membrul inferior drept
al pietonului.
Faza 2: Ridicarea pietonului pe capota autovehiculului – în urma contactului cu
bara autovehiculului sub centrul de masă al pietonului, se imprimă o mișcare de
rotație pietonului în jurul axei laterale, ridicându-l pe capotă .
Faza 3: Intrarea în contact capului cu baza parbrizului respectiv al toracelui cu
capota autovehiculului.
Faza 4: Faza de zbor a pietonului.
Faza 5: Faza de aterizare a pietonului – faza în care acesta cade pe sol și ajunge în
poziția finală.
Fazele cinematicii pietonului din timpul coliziunii sunt prezentate în Fig. 5.8. Din punct
de vedere al clasificării, și în acest caz impactul este prin ”înfășurare” datorită fazelor 2 și 3.
Fig. 5.8 Fazele cinematicii pietonului pentru testul 3
Analizând comparativ testul 2 cu testul 3, se poate observa că cinematica pietonului în
primele trei faze este asemănătoare, singura diferență apare la locul de contact al capului cu
autovehiculul. Diferențe majore apar între fazele 4 și 5 ale celor două teste, unde faza de zbor
(faza 4) a pietonului este mult mai puternică în cazul primului test, ceea ce conduce la o aterizare
mai violentă. Se poate observa că în testul trei design-ul profilului frontal al autovehiculului îi
oferă pietonului o coborâre lină pe suprafața acestuia.
5.4.4. Desfășurarea testului experimental 4
Configurația coliziunii este reprezentată în schița din Fig. 5.9.

52
Fig. 5.9 Configurația de impact al testului de coliziune 4
În urma analizei probelor video realizate în urma testului de coliziune s-au observat
următoarele faze privind cinematica pietonului în timpul coliziunii:
Faza 1: Contactul primar dintre bara parașoc și piciorul stâng al pietonului,
Faza 2: Ridicarea parțială a pietonului pe capota autovehiculului,
Faza 3: Imprimarea unei mișcări de rotație în jurul axei verticale a pietonului
datorat impactului excentric față de coordonatele centrului de masă al pietonului
pe axa Y a acestuia,
Faza 4: Zborul pietonului,
Faza 5: Aterizarea pe sol a pietonului.
Cinematica pietonului din timpul testului experimental este prezentată în Fig. 5.10.
Fig. 5.10 Fazele cinematicii pietonului pentru testul 4
Spre deosebire de celelalte cazuri, din punct de vedere al clasificării putem discuta de un
impact în care pietonul este aruncat în lateralul autovehiculului. De asemenea, un element
important ce distinge acest impact de celelalte este faza de zbor a pietonului (Faza 4), fază care
se poate observa cu ușurință în acest caz deoarece aceasta se întinde pe o durată mai mare de
timp. Totodată faza 5 corespondentă impactului cu solul este foarte violentă, pietonul aterizând
cu fața spre sol, ceea ce ar putea conduce la leziuni grave la nivelul capului.
5.4.5. Desfășurarea testului experimental 5
Ultimul test experimental s-a desfășurat în jurul orei 18:05, reprezentând un test similar
cu primele trei teste, care a avut ca scop influența profilului frontal al autovehiculului în
cinematica pietonului. Singurele modificări aduse față de primele trei teste au fost viteza de
coliziune, crescută peste pragul de 30 de km/h (33 km/h), și frânarea mult mai întârziată a
autovehiculului în urma coliziunii.
Schița privind configurația de impact al testului experimental numărul 5 este prezentată
în Fig. 5.11.

53
Fig. 5.11 Configurația de impact a scenariului de testare numărul 5
În ceea ce privește cinematica pietonului, datorită frânării întârziate a conducătorului
auto, aceasta suferă mici modificări, împărțindu-se în 6 faze:
Faza 1 : Contactul dintre bara parașoc a autoturismului și membrul inferior drept
al pietonului.
Faza 2: Ridicarea pietonului pe capota autovehiculului – în urma contactului cu
bara autovehiculului sub centrul de masă al pietonului, se imprimă o mișcare de
rotație pietonului în jurul axei laterale, ridicându-l pe capotă.
Faza 3: Intrarea în contact a toracelui și a capului cu capota autovehiculului.
Faza 4: Datorită lipsei decelerației pietonul se rostogolește printr-o mișcare
accelerată spre plafonul autovehiculului, intrând în contact cu acesta.
Faza 5: Alunecarea ușoară a pietonului de pe plafonul autovehiculului spre sol.
Faza 6: Faza de aterizare a pietonului – faza în care acesta cade pe sol și ajunge în
poziția finală.
Se poate observa că în acest caz faza de zbor lipsește, pietonul alunecând ușor de pe
plafonul autovehiculului spre sol, aterizând în prima fază în picioare.
Toate aceste 6 faze sunt sintetizate în următoarea figură (Fig. 5.12).
Fig. 5.12 Fazele cinematicii pietonului în timpul coliziunii 5

54
6. Achiziția, prelucrarea și analiza datelor experimentale
6.1. Achiziția datelor experimentale
6.1.1. Achiziția și prelucrarea datelor din testul experimentul 1
Datele extrase din aparatura autovehiculului (auto1)
Diagrama de viteză extrasă din GPS-ul montat pe autovehicul este prezentată în Fig. 6.1.
Fig. 6.1 Viteza auto1 în testul experimental 1
Pentru a obține diagrama de accelerație a autovehiculului, diagrama de viteză a
autovehiculului a fost transformată într-o diagramă de viteză cu unitatea de măsură în m/s (Fig.
6.1).
Se poate observa că, autovehiculul a avut o viteză maximă de 17 km/h în momentul
coliziunii.
Datele extrase din DAT
Parametrii de interes cu privire la pieton au fost accelerațiile la nivelul capului, respectiv
toracelui, care au fost extrase din programul dispozitivului de achiziție a datelor Pic DAQ.
Diagrama de accelerații la nivelul capului pietonului pentru testul 1 este prezentată în
Fig. 6.2. Analiza de detaliu asupra accelerației capului s-a făcut din momentul coliziunii până în
momentul de după impactul capului cu capota autoturismului.
Fig. 6.2 Diagrama de accelerații la nivelul capului pentru testul 1
Având în vedere că dispozitivul de înregistrare a datelor a fost setat la o frecvență de
achiziție de 10 kHZ, acestei diagrame i s-a aplicat un filtru CFC – 1000, conform SAE (Comm
2003).
Vârful de accelerație este obținut după 100 de milisecunde, având un vârf maxim de 55 g,
fiind produs de impactul capului cu capota autoturismului.
Diagrama de viteză la nivelul capului este expusă în Fig. 6.3.

55
Fig. 6.3 Viteza rezultantă la nivelul capului, testul 1
Viteza capului pietonului atinge valoarea maximă de 3.5 m/s după primele 100 de
milisecunde, vârf ce corespunde valorii maxime a accelerației obținute în diagrama anterioară
(Fig. 6.3). Se poate observa că valoarea vitezei nu scade brusc la fel ca cea a accelerației, iar
acest fapt se datorează mișcării ansamblului autovehicul-pieton.
Cu ajutorul dispozitivului amplasat în toracele dispozitivului antropometric de testare s-a
extras diagrama de accelerații pe cele trei axe a toracelui (Fig. 6.4).
Fig. 6.4 Diagrama de accelerații a toracelui, test 1
6.1.2. Achiziția și prelucrarea datelor din testul experimental 2
Date extrase din aparatura autovehiculului (auto1)
Cu ajutorul dispozitivului GPS montat pe autovehicul s-au extras datele privind variația
vitezei în funcție de timp a acestuia pe parcursul testul 2. Această diagramă este prezentată în
Fig. 6.5.
Fig. 6.5 Diagrama de viteză a autovehiculului
Viteza avută de autovehicul la impactul din testul 2 a fost de 28 km/h. Urmărind
diagrama, se constată o asemănare a acesteia cu testul 1, conducând la concluzia că nici în acest
caz conducătorul auto nu a frânat decât în faza de post-coliziune.
Datele extrase din DAT
În mod analog cu testul anterior, datele de interes ale accelerației capului sunt din
momentul impactului până după ce capul DAT-ului intră în contact cu capota autovehiculului.
Diagrama de accelerații este expusă în Fig. 6.6.

56
Fig. 6.6 Diagrama de accelerații pe cele 3 axe, la nivelul capului DAT-ului, Test 2.
Variația vitezei capului pietonului în timpul coliziunii dintre autovehicul și DAT a fost
extras cu ajutorul programului de analiză video Tracker și este prezentată în Fig. 6.7.
Fig. 6.7 Viteza capului DAT – Test 2
Cu ajutorul dispozitivului de achiziție a datelor montat în toracele DAT-ului s-a extras
diagrama de accelerații la nivelul toracelui (Fig. 6.8)
Fig. 6.8 Diagrama de accelerații la nivelul toracelui – Test 2
6.1.3. Achiziția și prelucrarea datelor din testul experimental 3
Datele achiziționate de pe autovehicul
Din dispozitivul GPS s-au extras datele cu ajutorul cărora s-a trasat diagrama de viteză a
autovehiculului, prezentată în Fig. 6.9.

57
Fig. 6.9 Diagrama de viteză a autovehiculului 2, măsurată în km/h – Test 3
Datele extrase din DAT În mod analog cu testele anterioare, s-a extras diagrama de accelerații la nivelul capului
DAT-ului, pe cele trei axe. Această diagramă este extrasă pe durata de timp cuprinsă între
contactul primar dintre autovehicul – pieton la nivelul membrelor inferioare și terminarea fazei
de contact dintre capul pietonului și autovehicul. Diagrama de accelerații este prezentată în Fig.
6.10.
Fig. 6.10 Diagrama de accelerații de la nivelul capului DAT – test 3
Un alt parametru de interes extras a fost evoluția vitezei capului în funcție de timpul scurs
de la începerea coliziunii până la terminarea acesteia. Diagrama vitezei capului este prezentată în
Fig. 6.11.
Fig. 6.11 Diagrama de viteză la nivelul capului DAT – Test 3
Ultimul parametru extras din aparatul de achiziție Pic DAQ a fost valoarea accelerațiilor
la nivelul toracelui (Fig. 6.12).
Fig. 6.12 Diagrama de accelerații de la nivelul toracelui – Test 3
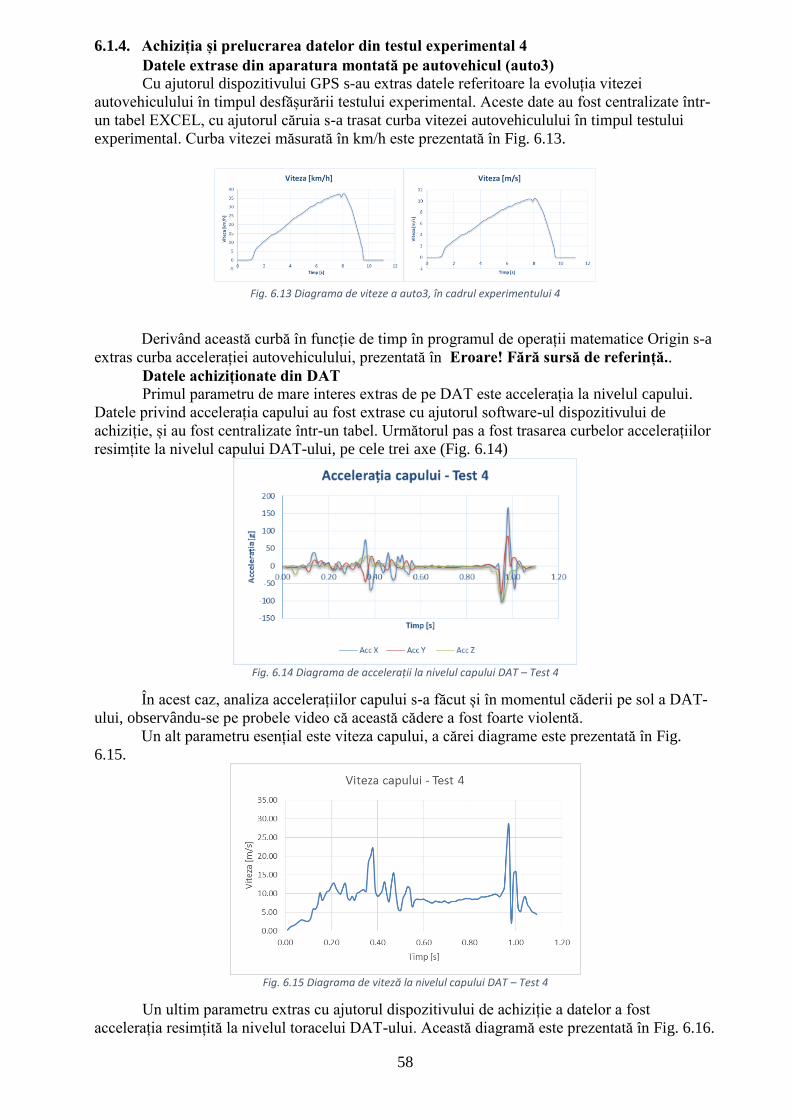
58
6.1.4. Achiziția și prelucrarea datelor din testul experimental 4
Datele extrase din aparatura montată pe autovehicul (auto3)
Cu ajutorul dispozitivului GPS s-au extras datele referitoare la evoluția vitezei
autovehiculului în timpul desfășurării testului experimental. Aceste date au fost centralizate într-
un tabel EXCEL, cu ajutorul căruia s-a trasat curba vitezei autovehiculului în timpul testului
experimental. Curba vitezei măsurată în km/h este prezentată în Fig. 6.13.
Fig. 6.13 Diagrama de viteze a auto3, în cadrul experimentului 4
Derivând această curbă în funcție de timp în programul de operații matematice Origin s-a
extras curba accelerației autovehiculului, prezentată în Eroare! Fără sursă de referință..
Datele achiziționate din DAT
Primul parametru de mare interes extras de pe DAT este accelerația la nivelul capului.
Datele privind accelerația capului au fost extrase cu ajutorul software-ul dispozitivului de
achiziție, și au fost centralizate într-un tabel. Următorul pas a fost trasarea curbelor accelerațiilor
resimțite la nivelul capului DAT-ului, pe cele trei axe (Fig. 6.14)
Fig. 6.14 Diagrama de accelerații la nivelul capului DAT – Test 4
În acest caz, analiza accelerațiilor capului s-a făcut și în momentul căderii pe sol a DAT-
ului, observându-se pe probele video că această cădere a fost foarte violentă.
Un alt parametru esențial este viteza capului, a cărei diagrame este prezentată în Fig.
6.15.
Fig. 6.15 Diagrama de viteză la nivelul capului DAT – Test 4
Un ultim parametru extras cu ajutorul dispozitivului de achiziție a datelor a fost
accelerația resimțită la nivelul toracelui DAT-ului. Această diagramă este prezentată în Fig. 6.16.

59
Fig. 6.16 Diagrama de accelerații de la nivelul toracelui – Test 4
6.1.5. Achiziția și prelucrarea datelor din testul experimental 5
Datele achiziționate din aparatura montată pe autovehicul (auto3)
Cu ajutorul aparaturii GPS s-a extras variația vitezei autovehiculului în funcție de timp,
măsurată în km/h. Dispozitivul GPS permite importarea datelor dintr-un fișier TXT în Excel, de
unde s-au putut centraliza într-un tabel, cu ajutorul căruia s-a trasat diagrama de viteză,
prezentată în Fig. 6.17.
Fig. 6.17 Variația vitezei în funcție de timp – Test 5 (auto 3)
Datele achiziționate din DAT
Primul parametru de mare interes extras de pe dispozitivul de achiziție este accelerația la
nivelul capului. Diagrama accelerației la nivelul capului este prezentată în Fig. 6.18.
Fig. 6.18 Diagrama de accelerații la nivelul capului – Test 5
De această dată, timpul de analiză al acestei diagrame a fost mai mare ca de obicei, iar
acest lucru se datorează duratei de impact mai îndelungată în comparație cu celelalte teste,
datorită frânării foarte târzii a conducătorului auto.
Un alt parametru de interes îl reprezintă viteza capului, iar diagrama variației vitezei la
nivelul capului în funcție de timp pe parcursul coliziunii este prezentată în Fig. 6.19.
Fig. 6.19 Diagrama vitezei capului – Test 5
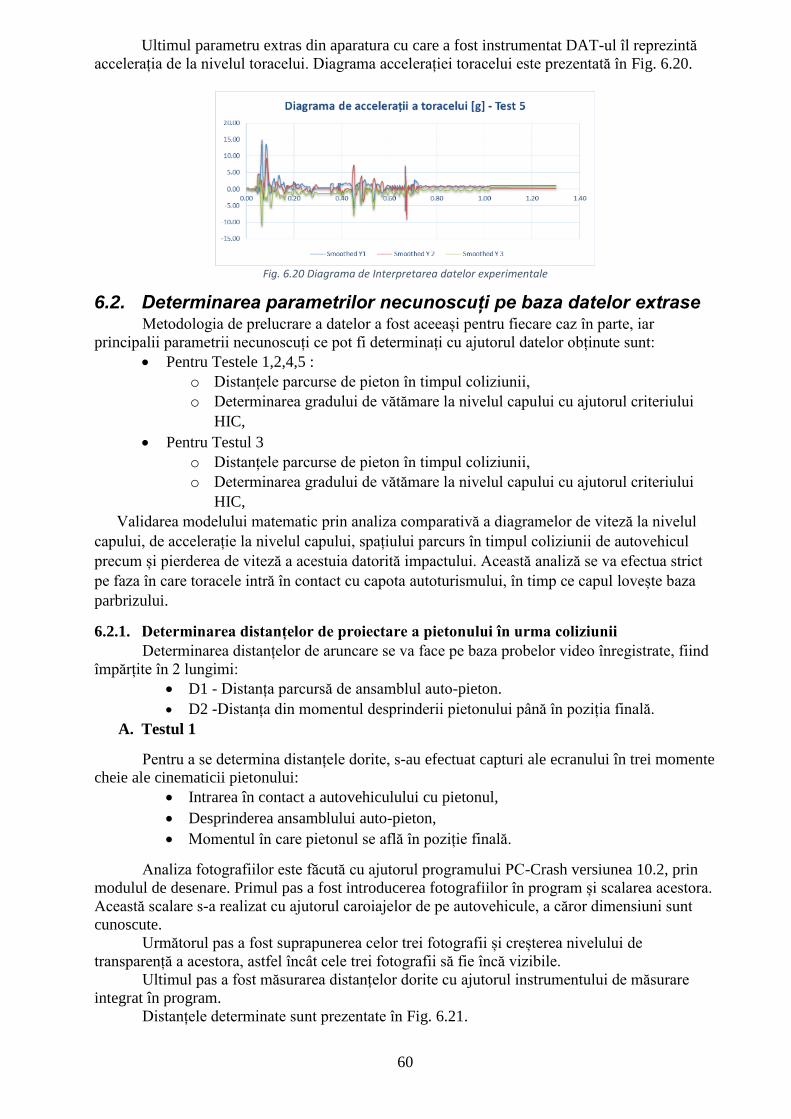
60
Ultimul parametru extras din aparatura cu care a fost instrumentat DAT-ul îl reprezintă
accelerația de la nivelul toracelui. Diagrama accelerației toracelui este prezentată în Fig. 6.20.
Fig. 6.20 Diagrama de Interpretarea datelor experimentale
6.2. Determinarea parametrilor necunoscuți pe baza datelor extrase Metodologia de prelucrare a datelor a fost aceeași pentru fiecare caz în parte, iar
principalii parametrii necunoscuți ce pot fi determinați cu ajutorul datelor obținute sunt:
Pentru Testele 1,2,4,5 :
o Distanțele parcurse de pieton în timpul coliziunii,
o Determinarea gradului de vătămare la nivelul capului cu ajutorul criteriului
HIC,
Pentru Testul 3
o Distanțele parcurse de pieton în timpul coliziunii,
o Determinarea gradului de vătămare la nivelul capului cu ajutorul criteriului
HIC,
Validarea modelului matematic prin analiza comparativă a diagramelor de viteză la nivelul
capului, de accelerație la nivelul capului, spațiului parcurs în timpul coliziunii de autovehicul
precum și pierderea de viteză a acestuia datorită impactului. Această analiză se va efectua strict
pe faza în care toracele intră în contact cu capota autoturismului, în timp ce capul lovește baza
parbrizului.
6.2.1. Determinarea distanțelor de proiectare a pietonului în urma coliziunii
Determinarea distanțelor de aruncare se va face pe baza probelor video înregistrate, fiind
împărțite în 2 lungimi:
D1 - Distanța parcursă de ansamblul auto-pieton.
D2 -Distanța din momentul desprinderii pietonului până în poziția finală.
A. Testul 1
Pentru a se determina distanțele dorite, s-au efectuat capturi ale ecranului în trei momente
cheie ale cinematicii pietonului:
Intrarea în contact a autovehiculului cu pietonul,
Desprinderea ansamblului auto-pieton,
Momentul în care pietonul se află în poziție finală.
Analiza fotografiilor este făcută cu ajutorul programului PC-Crash versiunea 10.2, prin
modulul de desenare. Primul pas a fost introducerea fotografiilor în program și scalarea acestora.
Această scalare s-a realizat cu ajutorul caroiajelor de pe autovehicule, a căror dimensiuni sunt
cunoscute.
Următorul pas a fost suprapunerea celor trei fotografii și creșterea nivelului de
transparență a acestora, astfel încât cele trei fotografii să fie încă vizibile.
Ultimul pas a fost măsurarea distanțelor dorite cu ajutorul instrumentului de măsurare
integrat în program.
Distanțele determinate sunt prezentate în Fig. 6.21.

61
Fig. 6.21 Determinarea distanței de aruncare pentru testul 1
Distanța totală de aruncare se determină prin însumarea celor două lungimi, iar în acest
caz este 2.58 m.
B. Testul 2
Metodologia de determinare a distanțelor de aruncare a pietonului este aceeași,
obținându-se în final fotografia prezentată în Fig. 6.22.
Fig. 6.22 Distanța de aruncare a pietonului în testul 2
Distanța totală de proiectare a pietonului obținută prin metodologia expusă este de 5.94
m.
C. Testul 3
Distanțele de interes au fost determinate prin aceeași metodă și sunt prezentate în Fig.
6.23.
Fig. 6.23 Distanța de aruncare a pietonului în testul 3
Însumând valorile celor două distanțe obținem o valoarea totală a distanței de aruncare a
pietonului de 5,16 m.
D. Testul 4
Distanța de aruncare a pietonului au fost determinate în mod analog cu celelalte teste, iar
fotografiile procesate sunt prezentate în Fig. 6.24.
Fig. 6.24 Distanța totală de aruncare pentru testul 4
Dacă în celelalte cazuri se poate observa că distanța parcursă de ansamblul auto-pieton
este semnificativ mai mare decât distanța parcursă de pieton după desprinderea de autovehicul,
în acest caz este viceversa. Acest fenomen se explică prin faptul că pietonul primește un moment

62
de rotație în jurul axei Z, datorită punctului de impact excentric față de centrul de masă al
pietonului (impactul primar are loc în piciorul stâng), iar desprinderea lui de autovehicul se face
mult mai repede.
În acest caz distanța totală de proiectare a pietonului este de 8.042 m.
E. Testul 5
I. Metodologia 1
În ultimul caz analizat, metodologia este aceeași cu testele anterioare, singura diferență
este reprezentată de unghiul de filmare. Datorită faptului că autovehiculul a frânat cu întârziere,
pietonul a ieșit din cadrul de filmare al camerei de mare viteză, astfel că nu se poate stabili cu
exactitate locul în care a căzut pietonul după impact.
Așadar, pentru analiza distanței de aruncare, în acest caz s-a utilizat filmarea din dronă.
Fotografia procesată a distanței de proiectare este prezentată în Fig. 6.25.
Fig. 6.25 Distanța de proiectare a pietonului pentru testul 5
Astfel distanța totală de aruncare a pietonului este de 16.234 m.
II. Metodologia 2
În acest caz, având o frânare întârziată a conducătorului auto, se poate aplica o a doua
metodă de determinare a distanțelor de proiectare a pietonului în funcție de viteza de coliziune.
Această metodă este prezentată în sub-capitolul 2.2.3. Aplicând metoda analitică prin eliminării
fazei a 4-a, datorită faptului că pietonul se desprinde de autovehicul de pe plafonul acestuia și nu
de pe lunetă, s-au considerat următorii parametrii de intrare:
V0 = 33 km/h – viteză extrasă de pe GPS-ul montat pe autovehicul
µ = 0.7 – valoare tipică pentru asfalt uscat (Sullenberger 2014, Stevenson 2006)
g= 9.81 m/s2
tp1 = 0.15 s –valoare extrasă de pe înregistrarea video
tp2 = 0.45 s – valoare extrasă de pe înregistrarea video
tp3 = 0.5 s – valoare extrasă de pe înregistrarea video
fp = 0.6 - valoare tipică utilizată în lucrarea (Zou 2016)
h = 1.5 – valoare măsurată cu ajutorul filmelor de mare viteză
Θ= 11◦ - valoare măsurată cu ajutorul filmelor de mare viteză înregistrate
α= 45◦ - valoare măsurată
β = 40◦ - valoare măsurată
tr = 1 s – valoare tipică pentru un timp de reacție normal (Gaiginschi 2009)
mv = 1050 kg – valoare măsurată
mp = 87 kg – valoare măsurată
Cs = 1.2 m – valoare măsurată
Obținând distanța totală de aruncare a pietonului Stotal = 16 m, având o eroare de 0.234 m
față de cea determinată prin prima metodă prezentată anterior.
Astfel validarea modelului analitic de aruncare a pietonului a fost validat atât prin
simulare, cât și prin testare experimentală.
Pentru a sintetiza distanțele de aruncare a pietonului în funcție de timpul determinat din
probele video s-a realizat o diagramă care este prezentată în Fig. 6.26
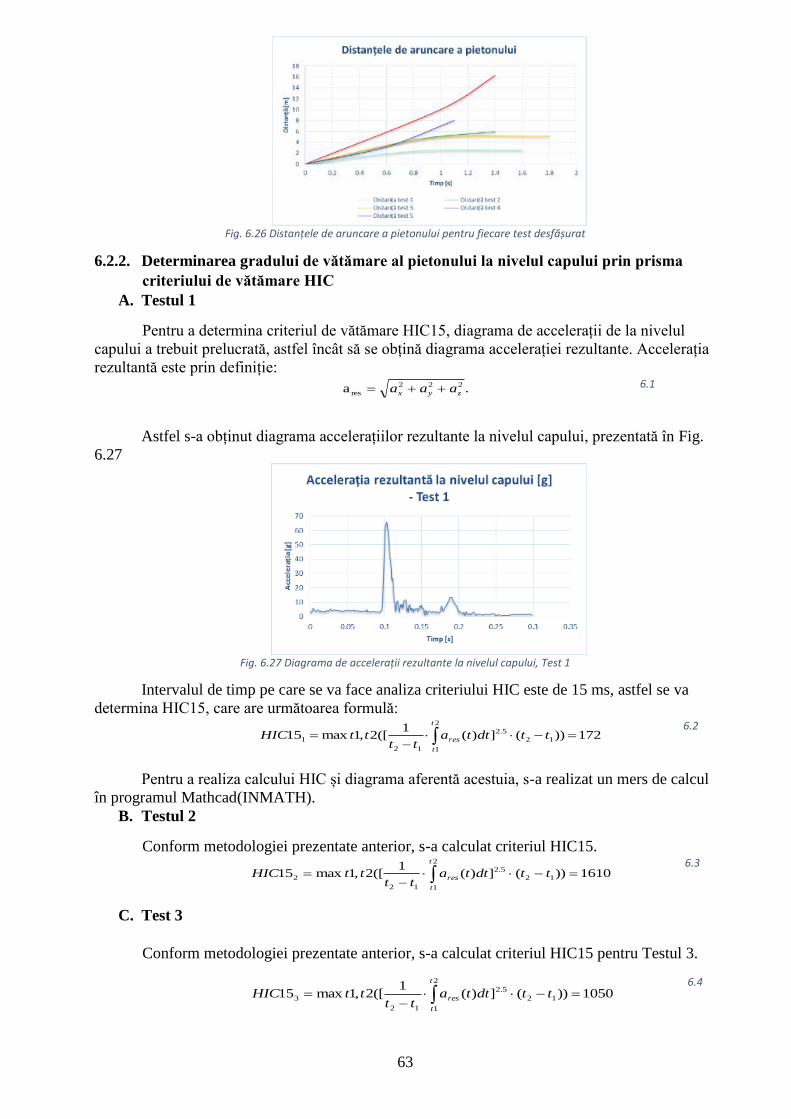
63
Fig. 6.26 Distanțele de aruncare a pietonului pentru fiecare test desfășurat
6.2.2. Determinarea gradului de vătămare al pietonului la nivelul capului prin prisma
criteriului de vătămare HIC
A. Testul 1
Pentru a determina criteriul de vătămare HIC15, diagrama de accelerații de la nivelul
capului a trebuit prelucrată, astfel încât să se obțină diagrama accelerației rezultante. Accelerația
rezultantă este prin definiție: .a 222
res zyx aaa 6.1
Astfel s-a obținut diagrama accelerațiilor rezultante la nivelul capului, prezentată în Fig.
6.27
Fig. 6.27 Diagrama de accelerații rezultante la nivelul capului, Test 1
Intervalul de timp pe care se va face analiza criteriului HIC este de 15 ms, astfel se va
determina HIC15, care are următoarea formulă:
172))(])(1
([2,1max15 12
5.2
2
112
1
ttdttatt
ttHIC
t
t
res
6.2
Pentru a realiza calcului HIC și diagrama aferentă acestuia, s-a realizat un mers de calcul
în programul Mathcad(INMATH).
B. Testul 2
Conform metodologiei prezentate anterior, s-a calculat criteriul HIC15.
1610))(])(1
([2,1max15 12
5.2
2
112
2
ttdttatt
ttHIC
t
t
res
6.3
C. Test 3
Conform metodologiei prezentate anterior, s-a calculat criteriul HIC15 pentru Testul 3.
1050))(])(
1([2,1max15 12
5.2
2
112
3
ttdttatt
ttHIC
t
t
res 6.4
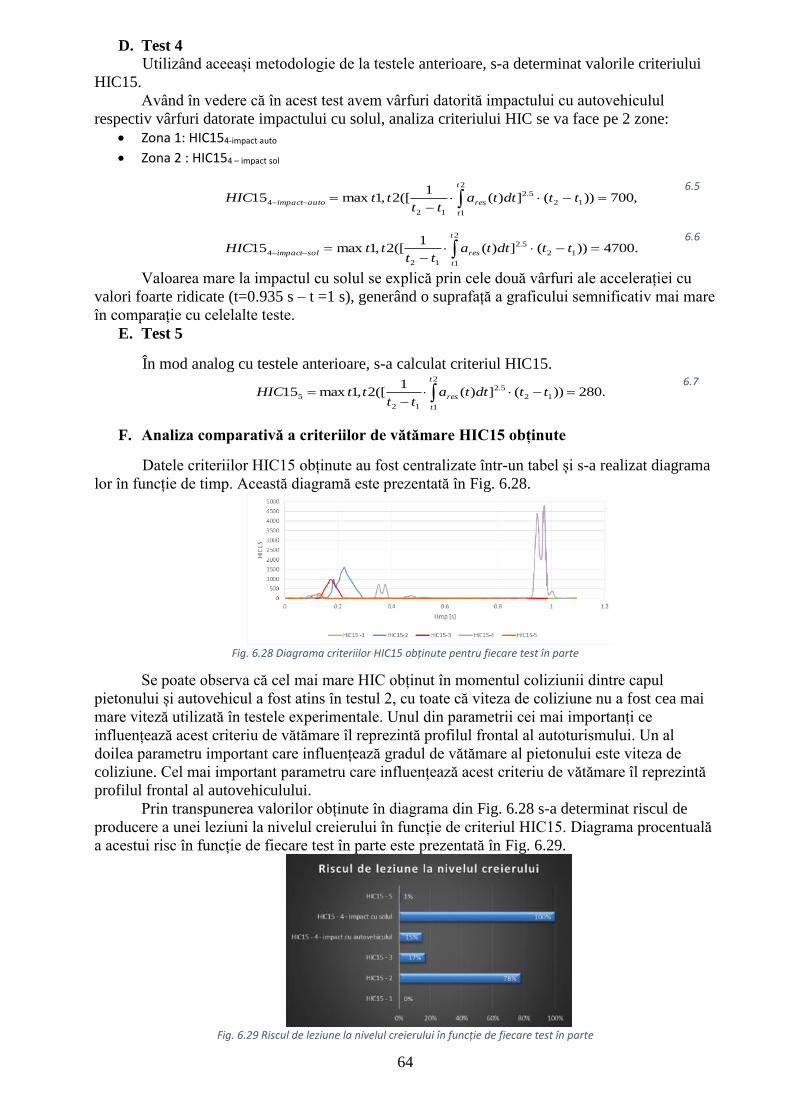
64
D. Test 4
Utilizând aceeași metodologie de la testele anterioare, s-a determinat valorile criteriului
HIC15.
Având în vedere că în acest test avem vârfuri datorită impactului cu autovehiculul
respectiv vârfuri datorate impactului cu solul, analiza criteriului HIC se va face pe 2 zone:
Zona 1: HIC154-impact auto
Zona 2 : HIC154 – impact sol
,700))(])(
1([2,1max15 12
5.2
2
112
4
ttdttatt
ttHIC
t
t
resautoimpact
6.5
.4700))(])(
1([2,1max15 12
5.2
2
112
4
ttdttatt
ttHIC
t
t
ressolimpact 6.6
Valoarea mare la impactul cu solul se explică prin cele două vârfuri ale accelerației cu
valori foarte ridicate (t=0.935 s – t =1 s), generând o suprafață a graficului semnificativ mai mare
în comparație cu celelalte teste.
E. Test 5
În mod analog cu testele anterioare, s-a calculat criteriul HIC15.
.280))(])(1
([2,1max15 12
5.2
2
112
5
ttdttatt
ttHIC
t
t
res 6.7
F. Analiza comparativă a criteriilor de vătămare HIC15 obținute
Datele criteriilor HIC15 obținute au fost centralizate într-un tabel și s-a realizat diagrama
lor în funcție de timp. Această diagramă este prezentată în Fig. 6.28.
Fig. 6.28 Diagrama criteriilor HIC15 obținute pentru fiecare test în parte
Se poate observa că cel mai mare HIC obținut în momentul coliziunii dintre capul
pietonului și autovehicul a fost atins în testul 2, cu toate că viteza de coliziune nu a fost cea mai
mare viteză utilizată în testele experimentale. Unul din parametrii cei mai importanți ce
influențează acest criteriu de vătămare îl reprezintă profilul frontal al autoturismului. Un al
doilea parametru important care influențează gradul de vătămare al pietonului este viteza de
coliziune. Cel mai important parametru care influențează acest criteriu de vătămare îl reprezintă
profilul frontal al autovehiculului.
Prin transpunerea valorilor obținute în diagrama din Fig. 6.28 s-a determinat riscul de
producere a unei leziuni la nivelul creierului în funcție de criteriul HIC15. Diagrama procentuală
a acestui risc în funcție de fiecare test în parte este prezentată în Fig. 6.29.
Fig. 6.29 Riscul de leziune la nivelul creierului în funcție de fiecare test în parte

65
6.3. Analiza comparativă a datelor obținute experimental cu datele
obținute cu ajutorul modelării matematice Modelul matematic dezvoltat reprezintă un model simplificat al fenomenului de coliziune
dintre un autovehicul și pieton, fiind capabil să determine anumiți parametrii ai coliziunii. Pentru
a efectua o analiză comparativă între datele obținute experimental și modelul matematic, a fost
necesară rezolvarea numerică a modelului.
Așadar s-au utilizat următorii parametrii de intrare necesari rezolvării modelului:
Parametrii extrași din fișa tehnică a autovehiculelor respectiv din etalonarea DAT
m1 = 1200 kg; m2 = 6.1 kg; m3 = 80 kg; l2 = 0.2 m; d = 0.84 m
Parametrii determinați/adoptați
Coeficienții de rigiditate au fost adoptați conform lucrărilor realizate de Mizuno și Du
Bois care au testat comportamentul capului pietonului la interacțiunea cu diferite
materiale(Mizuno 2001, Du Bois 2006).
k2 = 2000 N/m; k23 = 0.5 N/m; k3 = 32000 N/m; NamFf 6000112 6.8
Unde a1 – decelerația autovehiculului extrasă din testul experimental 3 NNF toracecaroserief 2651 6.9
µcaroserie = 0.6 – valoare extrasă din manualul PC-Crash NgmNtorace 4413 6.10
Condițiile inițiale
Pentru a rezolva ecuațiile diferențiale s-au impus condițiile determinate pe baza testelor
experimentale. Astfel s-a ales pentru validare testul experimental 3, iar condițiile inițiale sunt
după cum urmează.
- Distanța de la COG a sistemului până la locația de impact de pe parbriz
- Viteza autovehiculului în momentul coliziunii
– Distanța la care se află capul față de centrul sistemului de coordonate
– Viteza capului pe axa X
– Poziția capului pe axa Y în momentul coliziunii
- Viteza capului pe axa Y în momentul coliziunii
- Poziția toracelui pe axa Y în momentul coliziunii
–Viteza toracelui pe axa Y în momentul coliziunii
– Unghiul dintre cap si torace
rad/s – Viteza unghiulară
Intervalul de timp pe care s-a făcut analiza a fost de 0.2 secunde
Diagramele obținute în urma rezolvării sistemului de ecuații diferențiale de ordinul 2 cu
ajutorul Matlab în comparație cu datele extrase pe cale experimentală sunt prezentate în figura
următoare (Fig. 6.30):
Fig. 6.30. Analiza comparativă a diagramelor obținute din modelarea matematică cu experiment
Se poate observa un grad ridicat de similitudine între curbele obținute în urma rezolvării
modelului teoretic și cele obținute pe cale experimentală. Diagrama corespondentă curbelor
obținute pe cale experimentală a fost extrasă strict pe intervalul în care toracele pietonului a
intrat în contact cu capota autovehiculului, iar capul pietonului intra în contact cu parbrizul
acestuia.

66
7. Determinarea parametrilor geometrici ai profilului frontal ai
autovehiculului care influențează accelerația la nivelul
capului în cazul accidentelor Este cunoscut faptul că zona capului pietonului reprezintă zona cea mai vulnerabilă a
acestuia, iar în cazul unui impact puternic cu autovehiculul, vătămarea acestei zone este foarte
probabilă (Longhitano 2005, Maki 2003a, Zhang 2008, Badea-Romero 2013).
În continuare se dorește să se determine cei mai importanți parametrii geometrici ce
influențează gradul de vătămare al capului în urma coliziunii cu pietonul, iar pe baza acestor
parametrii să se dezvolte un profil frontal ”prietenos” în cazul coliziunii.
7.1. Dezvoltarea unui pieton virtual similar cu cel utilizat în
experimente Dezvoltarea acestui model s-a făcut în programul PC-Crash, versiunea 11, prin
asamblarea unui sistem multi-corp având caracteristici constructive asemănătoare cu DAT-ul
utilizat în cadrul testelor experimentale. Acest software permite utilizatorului să simuleze diferite
tipuri de coliziuni, inclusiv impactul dintre un autovehicul și un sistem multi-corp virtual al
pietomului, calculând parametrii cinematici ai acestuia. Totodată, programul permite
utilizatorului să modifice diferiți parametri cum ar fi masa, forma vehiculelor și sistemelor multi-
corp. dar și parametrii de rigiditate ai acestora (DSD 2016) .
Primul pas în dezvoltarea acestui model a fost crearea corpurilor cu caracteristici
asemănătoare DAT-ului utilizat în testele experimentale. Aceste date au fost prezentate în partea
de Etalonare a DAT-ului în vederea testelor experimentale . Astfel s-au creat 20 de părți
componente ale sistemului multi-corp, inter-conectate cu diferite tipuri de articulații, conform
celor prezente în DAT. Numărul total de articulații este de 19, acestea fiind capabile să descrie
mișcarea corpului uman.
7.2. Simularea testelor experimentale utilizând sistemul multi-corp
dezvoltat Pentru a verifica validitatea acestui sistem, s-au realizat simulările testelor experimentale
2 și 3. Aceste teste experimentale prezintă caractere similare în ceea ce privește gradul de
suprapunere a pietonului asupra autovehiculului, unghiul de coliziune, viteza de coliziune și
caracteristicile de frânare a autovehiculului în urma coliziunii. În ambele teste autovehiculul a
fost frânat imediat după ce impactul a avut loc, în timp ce în ultimele două teste, frânarea
autovehiculului nu respectă același șablon de testare. De asemenea, datorită faptului că diferența
de viteză între primul test experimental și restul testelor este mare, nu se va realiza simularea
acestuia. Astfel, pentru a trage concluzii legate de geometria profilului frontal al autovehiculelor,
sunt necesare condiții de testare similare.
7.2.1. Simularea testului experimental 2
Pentru ca autovehiculul să aibă profilul frontal similar cu cel utilizat în test, s-a introdus
un fișier de tip „mesh” (reţea de triughiuri), disponibil în PC-Crash cu profilul frontal al
autovehiculului.
În urma simulării testului experimental s-a constatat că cinematica pietonului este
similară cu cinematica mișcării DAT-ului utilizat în cadrul testului experimental.
7.2.2. Simularea testului experimental 3
Pentru efectuarea simulării testului experimental 3, ca parametrii de intrare s-au introdus
valorile utilizate în cadrul testelor experimentale.
În mod analog cu prima simulare realizată, s-a importat un profil a autovehiculului de tip
mesh, astfel încât acesta să ofere o suprafață de contact dintre autovehicul și pieton asemănătoare
cu cea utilizată în testul experimental.
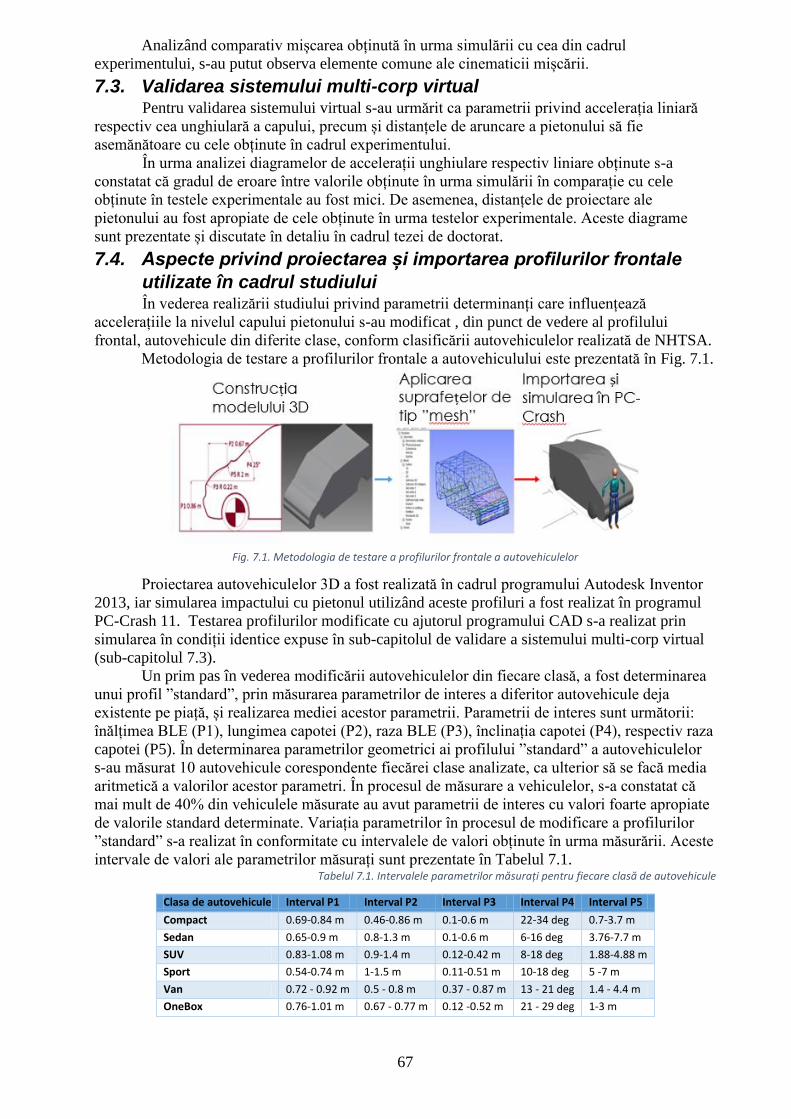
67
Analizând comparativ mișcarea obținută în urma simulării cu cea din cadrul
experimentului, s-au putut observa elemente comune ale cinematicii mișcării.
7.3. Validarea sistemului multi-corp virtual Pentru validarea sistemului virtual s-au urmărit ca parametrii privind accelerația liniară
respectiv cea unghiulară a capului, precum și distanțele de aruncare a pietonului să fie
asemănătoare cu cele obținute în cadrul experimentului.
În urma analizei diagramelor de accelerații unghiulare respectiv liniare obținute s-a
constatat că gradul de eroare între valorile obținute în urma simulării în comparație cu cele
obținute în testele experimentale au fost mici. De asemenea, distanțele de proiectare ale
pietonului au fost apropiate de cele obținute în urma testelor experimentale. Aceste diagrame
sunt prezentate și discutate în detaliu în cadrul tezei de doctorat.
7.4. Aspecte privind proiectarea și importarea profilurilor frontale
utilizate în cadrul studiului În vederea realizării studiului privind parametrii determinanți care influențează
accelerațiile la nivelul capului pietonului s-au modificat , din punct de vedere al profilului
frontal, autovehicule din diferite clase, conform clasificării autovehiculelor realizată de NHTSA.
Metodologia de testare a profilurilor frontale a autovehiculului este prezentată în Fig. 7.1.
Fig. 7.1. Metodologia de testare a profilurilor frontale a autovehiculelor
Proiectarea autovehiculelor 3D a fost realizată în cadrul programului Autodesk Inventor
2013, iar simularea impactului cu pietonul utilizând aceste profiluri a fost realizat în programul
PC-Crash 11. Testarea profilurilor modificate cu ajutorul programului CAD s-a realizat prin
simularea în condiții identice expuse în sub-capitolul de validare a sistemului multi-corp virtual
(sub-capitolul 7.3).
Un prim pas în vederea modificării autovehiculelor din fiecare clasă, a fost determinarea
unui profil ”standard”, prin măsurarea parametrilor de interes a diferitor autovehicule deja
existente pe piață, și realizarea mediei acestor parametrii. Parametrii de interes sunt următorii:
înălțimea BLE (P1), lungimea capotei (P2), raza BLE (P3), înclinația capotei (P4), respectiv raza
capotei (P5). În determinarea parametrilor geometrici ai profilului ”standard” a autovehiculelor
s-au măsurat 10 autovehicule corespondente fiecărei clase analizate, ca ulterior să se facă media
aritmetică a valorilor acestor parametri. În procesul de măsurare a vehiculelor, s-a constatat că
mai mult de 40% din vehiculele măsurate au avut parametrii de interes cu valori foarte apropiate
de valorile standard determinate. Variația parametrilor în procesul de modificare a profilurilor
”standard” s-a realizat în conformitate cu intervalele de valori obținute în urma măsurării. Aceste
intervale de valori ale parametrilor măsurați sunt prezentate în Tabelul 7.1. Tabelul 7.1. Intervalele parametrilor măsurați pentru fiecare clasă de autovehicule
Clasa de autovehicule Interval P1 Interval P2 Interval P3 Interval P4 Interval P5
Compact 0.69-0.84 m 0.46-0.86 m 0.1-0.6 m 22-34 deg 0.7-3.7 m
Sedan 0.65-0.9 m 0.8-1.3 m 0.1-0.6 m 6-16 deg 3.76-7.7 m
SUV 0.83-1.08 m 0.9-1.4 m 0.12-0.42 m 8-18 deg 1.88-4.88 m
Sport 0.54-0.74 m 1-1.5 m 0.11-0.51 m 10-18 deg 5 -7 m
Van 0.72 - 0.92 m 0.5 - 0.8 m 0.37 - 0.87 m 13 - 21 deg 1.4 - 4.4 m
OneBox 0.76-1.01 m 0.67 - 0.77 m 0.12 -0.52 m 21 - 29 deg 1-3 m

68
Astfel, realizând media celor 10 vehicule măsurate corespondente fiecărei clase analizate,
s-au obținut următoarele valori privind profilurile ”standard” ale vehiculelor.
În urma determinării cotelor profilurilor frontale ”standard” s-a realizat modificarea
acestora.
7.5. Determinarea parametrilor care influențează accelerațiile la
nivelul capului pietonului Determinarea parametrilor geometrici care influențează atât accelerațiile unghiulare cât și
cele liniare de la nivelul capului pietonului, s-a realizat prin varierea parametrilor P1, P2, P3, P4
și P5 pentru fiecare autovehicul în parte, obținând diferite valori ale accelerațiilor. Fiecare
variație a acestor parametrii s-a realizat în programul Inventor, astfel, pentru fiecare profil frontal
obținut s-a realizat metodologia de importare prezentată în subcapitolul 7.4, conducând la
proiectarea a peste 130 de profiluri de autovehicule. Diagramele de accelerații obținute în urma
simulărilor sunt prezentate în Anexa 7. Aceste valori ale accelerațiilor s-au obținut prin
simularea impactului dintre autovehiculele modificate cu sistemul multi-corp virtual dezvoltat în
condițiile de testare prezentate în sub-capitolul 7.3. Așadar datele obținute sunt valide doar în
condiții de testare identice. A. Optimizarea profilului autovehiculului din clasa Compact
Analizând datele obținute în urma simulărilor, s-a putut observa ca prin variația oricărui
parametru, atât accelerația unghiulară cât și cea liniara măsurată la nivelul capului a avut o
tendință de creștere semnificativă. Astfel, vom considera profilul ”standard” ca fiind ideal, având
dimensiunile prezentate în Fig. 7.2.
Fig. 7.2. Profilul autovehiculului compact precum și accelerațiile obținute în urma simulării
A. Optimizarea profilului autovehiculului din clasa Sedan
Pentru autovehiculul de tip Sedan, s-a observat că la variația anumitor parametrii, atât
accelerația unghiulară cât și cea liniară a prezentat o anumită scădere. Astfel analizând datele
obținute, s-a constatat că cel mai important parametru care influențează accelerațiile la nivelul
capului este reprezentat de raza capotei. Astfel, accelerațiile de la nivelul capului pietonului scad
odată cu creșterea razei capotei autovehiculului.
De asemenea, s-a constatat că o capotă cu o lungime de 1.3 m (P2), conduce la cea mai
mică accelerație unghiulară obținută prin variația parametrilor. Astfel, proiectarea profilului ideal
propus pentru autovehiculele sedan s-a făcut prin combinarea parametrilor P5 și P2, pe lungimile
în care s-a obținut o descreștere semnificativă a accelerațiilor unghiulare și liniare. Așadar la o
rază a capotei de 7.7 m s-a obținut o descreștere a accelerației unghiulare și liniare, în timp ce la
o lungime de capotă de 1.3 m accelerația unghiulară descrește cu 547 rad/s2, iar accelerația
liniară a prezentat o creștere de 8 g. Prin combinarea acestor parametrii s-a obținut următorul
profil frontal pentru autovehiculul de tip Sedan, prezentat în Fig. 7.3.

69
Fig. 7.3. Analiza comparativă a profilului standard cu cel ideal determinat precum și valorile accelerațiilor obținute în cele două
cazuri
În urma analizei diagramei prezentate în figura anterioară se poate constata că prin
optimizarea profilului standard, s-a obținut o reducere a accelerației unghiulare de 438 rad/s2, în
timp ce reducerea accelerației liniare a fost mai mică, de circa 4 g.
A. Optimizarea profilului autovehiculului din clasa SUV
În urma analizei datelor obținute, s-a observat că cel mai important parametru care
influențează variația accelerațiilor capului sistemului multi-corp virtual este lungimea capotei
(P2).
Din diagrama anterioară, se poate observa că prin creșterea parametrului P2, accelerația
liniară a capului descrește împreună cu accelerația unghiulară a acestuia. Prin descreșterea
aceluiași parametru, accelerația unghiulară prezintă o scădere, în timp ce accelerația liniară
crește. Dorința generală pentru o optimizare cât mai bună a profilului frontal este de a reduce
ambele accelerații, astfel, vom considera un profil frontal cu o lungime a capotei în care
accelerațiile au prezentat valorile cele mai mici (1.4 m).
În urma proiectării și testării profilurilor cu o lungime a capotei mai mari, s-au obținut
cele mai favorabile rezultate pentru profilul frontal prezentat în figura următoare.
Fig. 7.4. Analiza comparativă a profilului standard cu cel ideal determinat precum și valorile accelerațiilor obținute în cele două
cazuri
Analizând diagrama din Fig. 7.4, se poate observa că descreșterea accelerației unghiulare
este semnificativă, prezentând o reducere de 1067 rad/s2, în timp ce accelerația liniară măsurată
la nivelul capului sistemului multi-corp virtual, prezintă o scădere de circa 14 g.
B. Optimizarea profilului autovehiculului din clasa Sport
Observând valorile obținute în urma simulărilor efectuate pentru autovehiculul din clasa
sport s-a observat că parametrul care joacă un rol determinant în siguranța pietonilor este
înălțimea BLE.
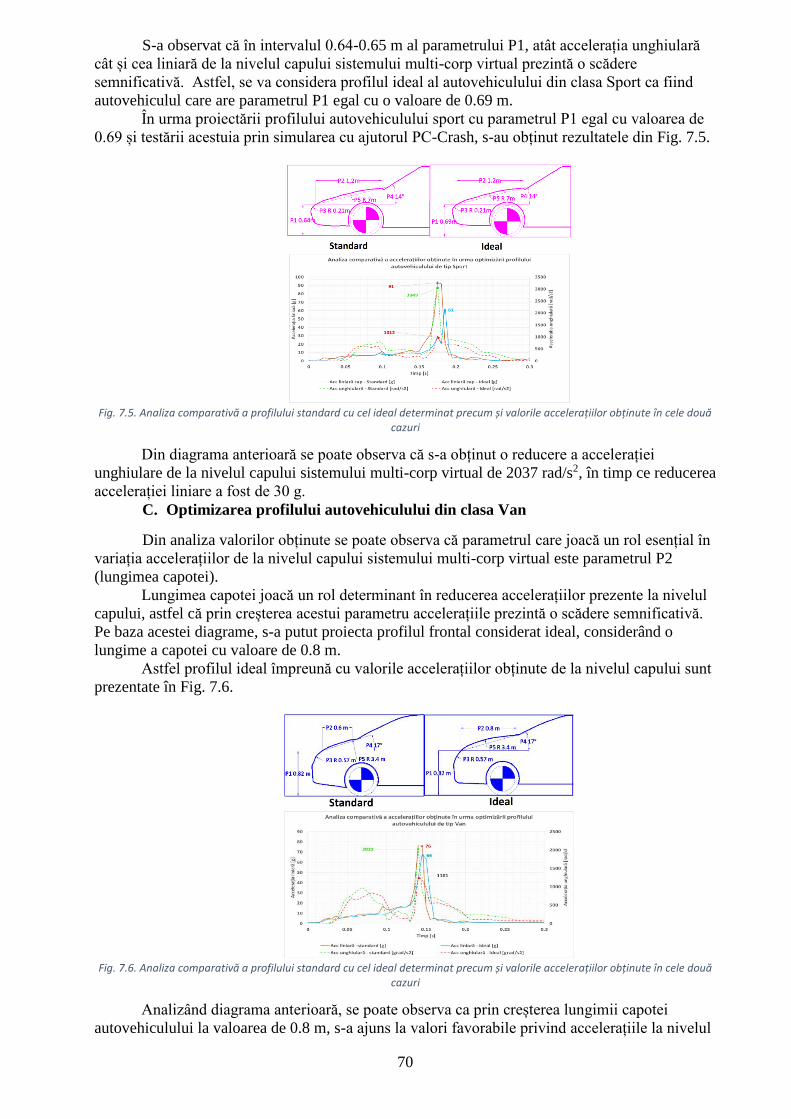
70
S-a observat că în intervalul 0.64-0.65 m al parametrului P1, atât accelerația unghiulară
cât și cea liniară de la nivelul capului sistemului multi-corp virtual prezintă o scădere
semnificativă. Astfel, se va considera profilul ideal al autovehiculului din clasa Sport ca fiind
autovehiculul care are parametrul P1 egal cu o valoare de 0.69 m.
În urma proiectării profilului autovehiculului sport cu parametrul P1 egal cu valoarea de
0.69 și testării acestuia prin simularea cu ajutorul PC-Crash, s-au obținut rezultatele din Fig. 7.5.
Fig. 7.5. Analiza comparativă a profilului standard cu cel ideal determinat precum și valorile accelerațiilor obținute în cele două
cazuri
Din diagrama anterioară se poate observa că s-a obținut o reducere a accelerației
unghiulare de la nivelul capului sistemului multi-corp virtual de 2037 rad/s2, în timp ce reducerea
accelerației liniare a fost de 30 g.
C. Optimizarea profilului autovehiculului din clasa Van
Din analiza valorilor obținute se poate observa că parametrul care joacă un rol esențial în
variația accelerațiilor de la nivelul capului sistemului multi-corp virtual este parametrul P2
(lungimea capotei).
Lungimea capotei joacă un rol determinant în reducerea accelerațiilor prezente la nivelul
capului, astfel că prin creșterea acestui parametru accelerațiile prezintă o scădere semnificativă.
Pe baza acestei diagrame, s-a putut proiecta profilul frontal considerat ideal, considerând o
lungime a capotei cu valoare de 0.8 m.
Astfel profilul ideal împreună cu valorile accelerațiilor obținute de la nivelul capului sunt
prezentate în Fig. 7.6.
Fig. 7.6. Analiza comparativă a profilului standard cu cel ideal determinat precum și valorile accelerațiilor obținute în cele două
cazuri
Analizând diagrama anterioară, se poate observa ca prin creșterea lungimii capotei
autovehiculului la valoarea de 0.8 m, s-a ajuns la valori favorabile privind accelerațiile la nivelul
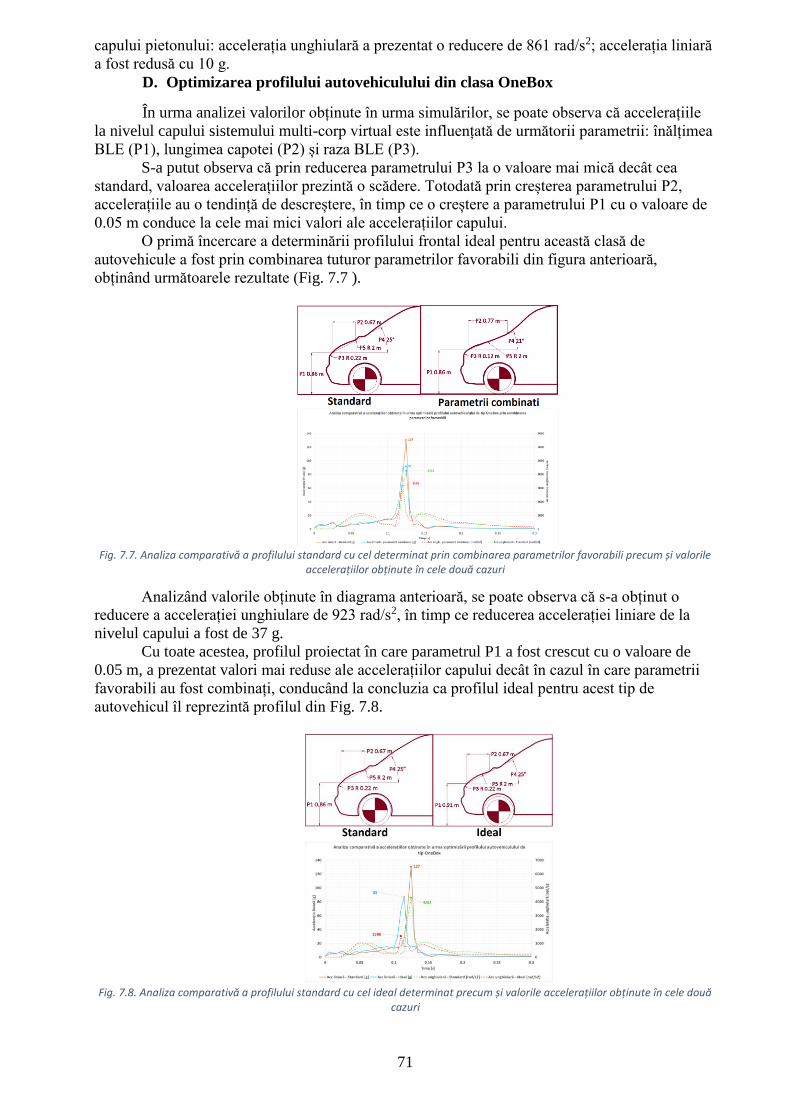
71
capului pietonului: accelerația unghiulară a prezentat o reducere de 861 rad/s2; accelerația liniară
a fost redusă cu 10 g.
D. Optimizarea profilului autovehiculului din clasa OneBox
În urma analizei valorilor obținute în urma simulărilor, se poate observa că accelerațiile
la nivelul capului sistemului multi-corp virtual este influențată de următorii parametrii: înălțimea
BLE (P1), lungimea capotei (P2) și raza BLE (P3).
S-a putut observa că prin reducerea parametrului P3 la o valoare mai mică decât cea
standard, valoarea accelerațiilor prezintă o scădere. Totodată prin creșterea parametrului P2,
accelerațiile au o tendință de descreștere, în timp ce o creștere a parametrului P1 cu o valoare de
0.05 m conduce la cele mai mici valori ale accelerațiilor capului.
O primă încercare a determinării profilului frontal ideal pentru această clasă de
autovehicule a fost prin combinarea tuturor parametrilor favorabili din figura anterioară,
obținând următoarele rezultate (Fig. 7.7 ).
Fig. 7.7. Analiza comparativă a profilului standard cu cel determinat prin combinarea parametrilor favorabili precum și valorile
accelerațiilor obținute în cele două cazuri
Analizând valorile obținute în diagrama anterioară, se poate observa că s-a obținut o
reducere a accelerației unghiulare de 923 rad/s2, în timp ce reducerea accelerației liniare de la
nivelul capului a fost de 37 g.
Cu toate acestea, profilul proiectat în care parametrul P1 a fost crescut cu o valoare de
0.05 m, a prezentat valori mai reduse ale accelerațiilor capului decât în cazul în care parametrii
favorabili au fost combinați, conducând la concluzia ca profilul ideal pentru acest tip de
autovehicul îl reprezintă profilul din Fig. 7.8.
Fig. 7.8. Analiza comparativă a profilului standard cu cel ideal determinat precum și valorile accelerațiilor obținute în cele două
cazuri

72
Analizând figura anterioară, se poate observa că reducerea accelerației liniare de la
nivelul capului a fost de 44 g, în timp ce valoarea accelerației unghiulare a fost redusă cu 2754
rad/s2.
Așadar, putem afirma că cel mai important parametru geometric al autovehiculului
privind accelerațiile apărute la nivelul capului pietonului îl reprezintă parametrul P1 (înălțimea
BLE).
7.6. Analiza comparativă a datelor obținute Analizând valorile accelerațiilor obținute în urma modificării profilurilor frontale ale
autovehiculelor, s-au putut determina reducerile procentuale privind nivelul accelerațiilor liniare
respectiv unghiulare de la nivelul capului pietonului. Aceste reduceri sunt prezentate în Fig. 7.9.
Fig. 7.9. Reducerea procentuală a accelerațiilor de la nivelul capului
Din diagrama anterioară se poate observa că cea mai bună optimizare din punct de vedere
a accelerațiilor unghiulare s-a realizat la autovehiculul din clasa SUV, prezentând o reducere a
acestui parametru de 79%, în timp ce pentru accelerația liniară, reducerea maximă s-a realizat la
autovehiculul de tip OneBox.
7.7. Determinarea gradului de vătămare la nivelul capului pe baza
accelerațiilor obținute Pe baza accelerațiilor liniare obținute în urma simulărilor s-a putut determina criteriul
HIC15 al autovehiculelor ”standard” respectiv ”ideale”. Astfel, cu ajutorul acestor valori s-a
putut determina gradul de vătămare al capului pietonului în funcție de scara de vătămare AIS,
utilizând curba lui Mertz. Datele obținute sunt prezentate în Fig. 7.10.
Fig. 7.10. Riscul de vătămare al capului în funcție de criteriul HIC
Se poate observa că în urma optimizării profilurilor frontale ale fiecărei clase de
autovehicule s-au obținut diferite reduceri pe scara AIS.
Riscul de vătămare al capului în funcție de accelerațiile unghiulare determinate pentru
profilurile ”standard” respectiv ”ideale” în funcție de clasa de autovehicule este prezentat în Fig.
7.11.

73
Fig. 7.11. Probabilitatea de 50% de a obține o leziune cotată pe scara AIS la nivelul capului datorită accelerațiilor unghiulare
Precum în cazul accelerațiilor liniare, optimizarea profilurilor frontale ale unor
autovehicule au condus la o reducere a criteriului AIS.
7.8. Concluzii În urma analizei datelor extrase în acest capitol se pot formula următoarele concluzii:
Design-ul profilului frontal are un rol semnificativ în siguranța pietonilor.
Geometria profilului frontal afectează nivelul accelerațiilor capului, care pot
conduce la vătămări grave.
În ceea ce privește parametrii geometrici determinanți în siguranța pietonilor
aceștia variază în funcție de clasa autovehiculelor. Astfel în urma studiului
realizat, putem afirma că lungimea capotei joacă un rol de importanță majoră în
cazul autovehiculelor din clasele SUV și Van. Astfel, concluzia este că o capotă
mai lungă conduce la accelerații mai mici resimțite la nivelul capului. Un alt
parametru geometric important ce influențează accelerațiile capului pietonului îl
reprezintă înălțimea BLE, pentru autovehiculele din clasele Sport și OneBox.
Astfel, ridicând valoarea acestui parametru la valoarea de 0.69 m pentru
autovehiculul din clasa Sport, respectiv la valoarea de 0.91 m pentru
autovehiculul din clasa OneBox, am obținut reduceri semnificative privind
parametrii cinematici ai capului sistemului multi-corp virtual. Un ultim parametru
care a influențat accelerațiile la nivelul capului pietonului pentru autovehiculul
din clasa Sedan îl reprezintă raza capotei. Astfel s-a determinat o valoare optimă
egală cu 7.7 m a acestui parametru, conducând la o reducere de 25% a accelerației
unghiulare respectiv de 3% a accelerației liniare. Aceste valori determinate sunt
valide doar în condițiile de testare expuse în cadrul acestui capitol.
Analizând rezultatele obținute prin prisma criteriilor biomecanice, se poate
observa că prin optimizarea profilurilor frontale ale autovehiculelor, s-a redus
vătămarea la nivelul capului până la nivelul cotat pe scara AIS cu valoarea 1,
reprezentând răni minore.
Acest studiu, prezintă o metodologie nouă de testare a profilurilor frontale a
autovehiculelor prin modificarea geometriei autovehiculelor prin prisma re-
proiectării acestora într-un program de tip CAD, și aplicarea de suprafețe asupra
zonelor de interes în cazul impacturilor cu pietoni.
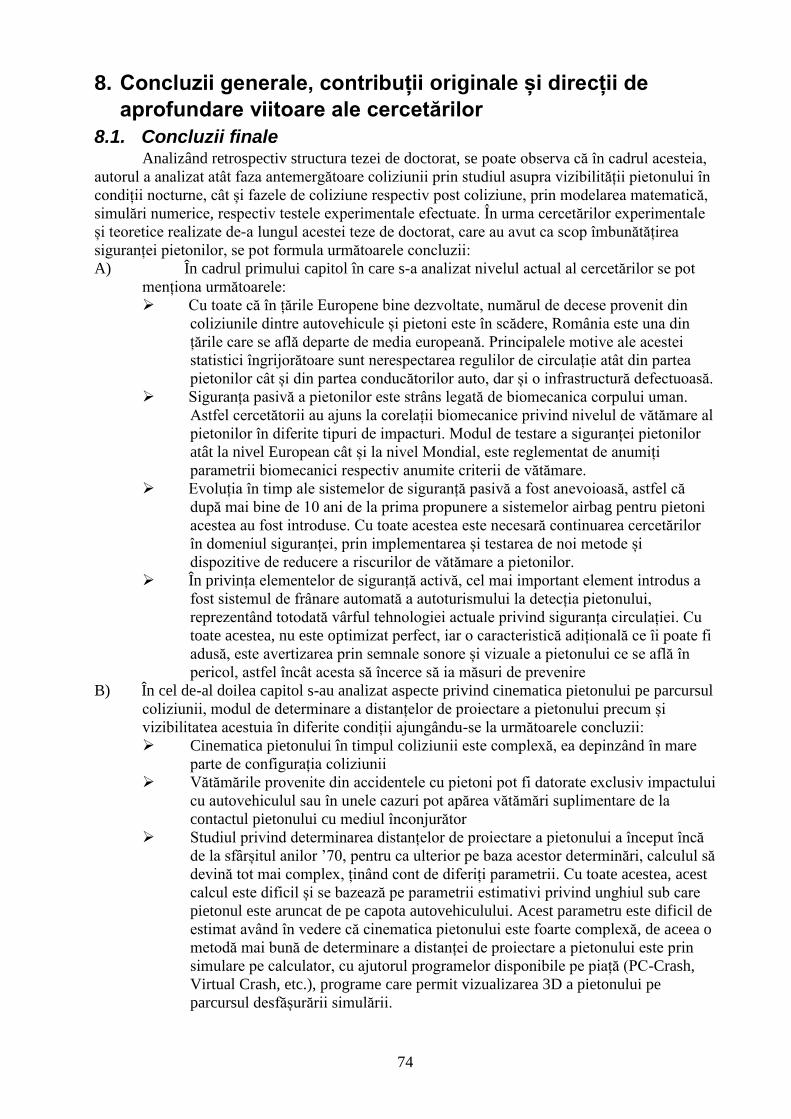
74
8. Concluzii generale, contribuții originale și direcții de
aprofundare viitoare ale cercetărilor
8.1. Concluzii finale Analizând retrospectiv structura tezei de doctorat, se poate observa că în cadrul acesteia,
autorul a analizat atât faza antemergătoare coliziunii prin studiul asupra vizibilității pietonului în
condiții nocturne, cât și fazele de coliziune respectiv post coliziune, prin modelarea matematică,
simulări numerice, respectiv testele experimentale efectuate. În urma cercetărilor experimentale
și teoretice realizate de-a lungul acestei teze de doctorat, care au avut ca scop îmbunătățirea
siguranței pietonilor, se pot formula următoarele concluzii:
A) În cadrul primului capitol în care s-a analizat nivelul actual al cercetărilor se pot
menționa următoarele:
Cu toate că în țările Europene bine dezvoltate, numărul de decese provenit din
coliziunile dintre autovehicule și pietoni este în scădere, România este una din
țările care se află departe de media europeană. Principalele motive ale acestei
statistici îngrijorătoare sunt nerespectarea regulilor de circulație atât din partea
pietonilor cât și din partea conducătorilor auto, dar și o infrastructură defectuoasă.
Siguranța pasivă a pietonilor este strâns legată de biomecanica corpului uman.
Astfel cercetătorii au ajuns la corelații biomecanice privind nivelul de vătămare al
pietonilor în diferite tipuri de impacturi. Modul de testare a siguranței pietonilor
atât la nivel European cât și la nivel Mondial, este reglementat de anumiți
parametrii biomecanici respectiv anumite criterii de vătămare.
Evoluția în timp ale sistemelor de siguranță pasivă a fost anevoioasă, astfel că
după mai bine de 10 ani de la prima propunere a sistemelor airbag pentru pietoni
acestea au fost introduse. Cu toate acestea este necesară continuarea cercetărilor
în domeniul siguranței, prin implementarea și testarea de noi metode și
dispozitive de reducere a riscurilor de vătămare a pietonilor.
În privința elementelor de siguranță activă, cel mai important element introdus a
fost sistemul de frânare automată a autoturismului la detecția pietonului,
reprezentând totodată vârful tehnologiei actuale privind siguranța circulației. Cu
toate acestea, nu este optimizat perfect, iar o caracteristică adițională ce îi poate fi
adusă, este avertizarea prin semnale sonore și vizuale a pietonului ce se află în
pericol, astfel încât acesta să încerce să ia măsuri de prevenire
B) În cel de-al doilea capitol s-au analizat aspecte privind cinematica pietonului pe parcursul
coliziunii, modul de determinare a distanțelor de proiectare a pietonului precum și
vizibilitatea acestuia în diferite condiții ajungându-se la următoarele concluzii:
Cinematica pietonului în timpul coliziunii este complexă, ea depinzând în mare
parte de configurația coliziunii
Vătămările provenite din accidentele cu pietoni pot fi datorate exclusiv impactului
cu autovehiculul sau în unele cazuri pot apărea vătămări suplimentare de la
contactul pietonului cu mediul înconjurător
Studiul privind determinarea distanțelor de proiectare a pietonului a început încă
de la sfârșitul anilor ’70, pentru ca ulterior pe baza acestor determinări, calculul să
devină tot mai complex, ținând cont de diferiți parametrii. Cu toate acestea, acest
calcul este dificil și se bazează pe parametrii estimativi privind unghiul sub care
pietonul este aruncat de pe capota autovehiculului. Acest parametru este dificil de
estimat având în vedere că cinematica pietonului este foarte complexă, de aceea o
metodă mai bună de determinare a distanței de proiectare a pietonului este prin
simulare pe calculator, cu ajutorul programelor disponibile pe piață (PC-Crash,
Virtual Crash, etc.), programe care permit vizualizarea 3D a pietonului pe
parcursul desfășurării simulării.

75
Metodele de determinare a vizibilității pietonului se bazează pe metoda lui Adrian
Werner, fiind cea mai precisă. Vizibilitatea pietonului depinde de mai mulți
parametrii: culoarea articolelor vestimentare, condițiile meteo, contrast, etc.
Analizând literatura de specialitate, s-a constat că nu s-au realizat foarte multe
studii privind vizibilitatea pietonului în funcție de culoarea articolelor
vestimentare, iar un studiu elaborat privind acest aspect a fost necesar.
C) În capitolul trei s-a realizat un studiu experimental care a avut ca scop determinarea
distanțelor de vizibilitate a pietonului în funcție de culoarea articolelor vestimentare, în
condiții nocturne, și viteza de evitare a coliziunii dintre autovehicul și pieton pe baza
acestor măsurători, ajungându-se la următoarele concluzii:
Vesta reflectorizantă reprezintă un accesoriu care sporește vizibilitatea pietonilor
exponențial oferind valori ale luminanței foarte ridicate. Aceasta nu trebuie să
lipsească pietonilor în timpul deplasării acestora în condiții nocturne, chiar și în
zone bine iluminate
Este indicat ca pietonii să utilizeze articole vestimentare deschise la culoare, care
pot să creeze un contrast pozitiv cu mediul înconjurător, astfel devenind mai ușor
de perceput de către conducătorii auto
În urma analizei comparative a valorilor contrastului obținut între scenariul de
testare 1 cu scenariul de testare 2, s-a constatat că valoarea contrastului este
simțitor mai mare la nivelul membrelor inferioare decât în zona superioară a
toracelui.
Distanțele de vizibilitate cresc procentual cu o valoare de 30% pentru culoarea
galbenă, în cazul în care analiza vizibilității se face la nivelul membrelor
inferioare iar autovehiculul circulă cu luminile de întâlnire.
Pietonii îmbrăcați în culoarea neagră pe timpul nopții reprezintă un pericol pentru
conducătorii auto, aceștia fiind vizibili la distanțe foarte mici.
Conform vitezelor de evitare determinate, pietonii îmbrăcați în culoarea neagră nu
pot fi evitați de către un conducător auto care circulă cu viteză legală prin
localitate datorită vizibilității reduse a acestora.
D) În capitolul 4 este prezentat modelul teoretic dezvoltat, precum și limitările acestuia.
Acest model permite determinarea vârfurile de accelerații respectiv viteze la nivelul
capului, atât de necesari în domeniul siguranței pietonilor.
E) Partea cercetării experimentale a tezei este cuprinsă în capitolele 5 respectiv 6, în
urma căreia s-a ajuns la următoarele concluzii:
Analizând comparativ riscul de vătămare al capului între testele experimentale 2 și
3, care au o configurație de impact aproape identică, dar autovehiculele utilizate
au avut un profil frontal diferit, se constată că riscul de leziune la nivelul
creierului este mai mare în cazul testului 2 cu o valoare procentuală de 61%,
conducând la concluzia că designul profilului frontal autovehiculului utilizat in
acest test, conduce la valori ale accelerațiilor semnificativ mai mari. Astfel, putem
afirma că designul profilului frontal joacă un rol determinant în siguranța
pietonilor.
Un alt parametru important în cazul coliziunii dintre un autovehicul și un pieton îl
reprezintă gradul de suprapunere al pietonului asupra autoturismului. S-a putut
observa că în testul experimental 4, în care gradul de suprapunere a fost de 50%,
comportamentul pietonului din timpul coliziunii a suferit modificări față de
celelalte teste experimentale, conducând la o cădere violentă a acestuia pe sol. Tot
în cadrul acestui test experimental, s-a determinat că riscul de leziune al creierului
la impactul cu solul este foarte probabil.
Acționarea pedalei de frână cu întârziere precum în cazul testului experimental 5,
nu influențează nivelul de vătămare al capului pietonului în cazul coliziunii cu
autovehiculul (impactul primar), dar influențează distanța de proiectare a acestuia.

76
Prin creșterea distanței de proiectare a pietonului, pot apărea impacturi secundare
ale pietonului cu mediul înconjurător, care pot conduce la vătămări grave.
F) Capitolul 7 cuprinde cercetarea teoretică privind parametrii geometrici ai profilului
frontal ai autovehiculului ce influențează accelerațiile la nivelul capului pietonilor,
bazându-se pe testele experimentale realizate. Astfel în acest capitol s-a dezvoltat un
sistem multi-corp virtual cu ajutorul programului PC-Crash, care a fost validat prin
simularea testelor experimentale care au avut un caracter repetitiv, obținând nu doar o
cinematică similară a pietonului dar și valori foarte apropiate privind accelerațiile capului
respectiv distanțele de aruncare a pietonului. Pe baza acestui sistem multi-corp virtual, s-
au realizat simulări cu diferite tipuri de profiluri frontale de autovehicule, conducând la
concluzii privind parametrii geometrici ai profilului frontal care influențează accelerațiile
la nivelul capului. Astfel concluziile desprinse din acest capitol sunt:
Profilul frontal are un rol semnificativ în siguranța pietonilor.
Geometria profilului frontal afectează nivelul accelerațiilor capului, care pot
conduce la vătămări grave.
În ceea ce privește parametrii geometrici determinanți în siguranța pietonilor
aceștia variază în funcție de clasa autovehiculelor. Astfel în urma studiului
realizat, putem afirma că lungimea capotei joacă un rol de importanță majoră în
cazul autovehiculelor din clasele SUV și Van. Astfel, concluzia este că o capotă
mai lungă conduce la accelerații mai mici resimțite la nivelul capului. Un alt
parametru geometric important ce influențează accelerațiile capului pietonului îl
reprezintă înălțimea BLE, pentru autovehiculele din clasele Sport și OneBox.
Astfel, ridicând valoarea acestui parametru la valoarea de 0.69 m pentru
autovehiculul din clasa Sport, respectiv la valoarea de 0.91 m pentru
autovehiculul din clasa OneBox, am obținut reduceri semnificative privind
parametrii cinematici ai capului sistemului multi-corp virtual. Un ultim parametru
care a influențat accelerațiile la nivelul capului pietonului pentru autovehiculul
din clasa Sedan îl reprezintă raza capotei. Astfel s-a determinat o valoare optimă
egală cu 7.7 m a acestui parametru, conducând la o reducere de 25% a accelerației
unghiulare respectiv de 3% a accelerației liniare. Aceste valori determinate sunt
valide doar în condițiile de testare menționate în cadrul capitolului 7.
Analizând rezultatele obținute prin prisma criteriilor biomecanice, se poate
observa că prin optimizarea profilurilor frontale ale autovehiculelor, s-a redus
vătămarea la nivelul capului până la nivelul cotat pe scara AIS cu valoarea 1,
reprezentând răni minore.
Acest studiu, prezintă o metodologie nouă de testare a profilurilor frontale a
autovehiculelor prin modificarea geometriei autovehiculelor prin prisma re-
proiectării acestora într-un program de tip CAD, și aplicarea de suprafețe asupra
zonelor de interes în cazul impacturilor cu pietoni.
8.2. Contribuții originale 1. Realizarea unui model de picior în Simulink, extensia programului Matlab, capabil să
determine momentul de încovoiere a tibiei, cu ajutorul căruia se poate determina gradul
de vătămare al pietonului.
2. Determinarea distanțelor de vizibilitate a pietonului în funcție de culoarea articolelor
vestimentare, în condiții nocturne, pe baza procesării fotografiilor, și determinarea
vitezelor de evitare a pietonului în diferite condiții.
3. Dezvoltarea și validarea unui model teoretic capabil să determine distanțele de aruncare a
pietonului în urma coliziunii cu un autovehicul, în cazul în care autoturismul nu este
frânat.
4. Dezvoltarea unui model teoretic capabil să determine parametrii cinematici ce
influențează nivelul de vătămare al capului pietonului în cazul coliziunii cu
autovehiculul. Acest model a fost abordat utilizând mecanica Lagrangeană, fiind aplicabil
strict în momentul coliziunii.

77
5. Realizarea unui program de rezolvare a ecuațiilor diferențiale de ordin 2 în Matlab,
necesar în rezolvarea numerică a ecuațiilor obținute în urma modelării matematice.
6. În vederea prelucrării datelor autorul a utilizat diferite programe de calculator: Pocket
DAQ, Tracker, PC-Crash 10.2, 11, Pachetul Microsoft Office, Matlab, Mathcad, Origin
8, Autocad, Engauge, Gmsh, Photoshop, Autodesk Inventor
7. Determinarea distanțelor de proiectare a pietonului s-a realizat printr-o metodă originală
de scalare și suprapunere a fotografiilor extrase din filmul de mare viteză realizat.
8. Determinarea parametrilor geometrici ai profilului frontal ai autovehiculului ce
influențează accelerațiile resimțite la nivelul capului pietonului, printr-o metodă
originală.
9. Conceperea, proiectarea și dezvoltarea unui profil frontal ”prietenos” în cazul coliziunii
cu pietonii, în funcție de clasa autovehiculelor.
10. Publicarea a 14 lucrări în cadrul unor conferințe naționale și internaționale, din care 5 ca
prim-autor. Lucrările sunt indexate în următoarele baze de date: isiwebofknoledge - 4
lucrări, respectiv Springer - 6 lucrări.
11. Scrierea a două lucrări, cotate ISI, cu factor de impact, acceptate la recenzie, în cadrul
unor jurnale internaționale.
12. Scrierea unei lucrări, cotată ISI, cu factor de impact de 0.821 și SRI de 0.641 , în curs de
publicare, în cadrul unui jurnal internațional.
8.3. Direcții de aprofundare viitoare ale cercetărilor o Concepția unui sistem de îmbunătățire a siguranței pasive a autovehiculelor în cazul
coliziunii cu pietonii
o Perfecționarea modelului matematic dezvoltat, prin analiza fazei ce are loc între contactul
primar dintre bara autovehiculului și membrele inferioare ale pietonului și faza deja
analizată.
o Determinarea distanțelor de vizibilitate în diferite condiții meteorologice (ploaie, ceață,
ninsoare, etc.).
o Determinarea distanțelor de vizibilitate utilizând diferite tipuri de faruri (xenon, led)

78
Bibliografie A Carroll, A Barrow, B J Hardy, B Robinson. 2014. Pedestrian legform test area assessment.
Transport Research Laboratory 2014.
AAAM. http://www.aaam.org/about-ais.html.
Adrian, Werner. 1989. "Visibility of targets: Model for calculation." Lighting Research and
Technology no. 21 (4):181-188.
Ariffin, Aqbal Hafeez, Azhar Hamzah, Noor Faradila Paiman, Mohd Khairudin Rahman, Mohd
Syazwan Solah, Mohd Hafzi Md Isa, Zulhaidi Mohd Jawi, and Khairil Anwar Abu
Kassim. . 2013. Pedestrian Protection Assessment in ASEAN NCAP: Future
Consideration. Paper read at Southeast Asia Safer Mobility Symposium, at Melaka,
Malaysia.
Bach, FH, Peter, Winfried Bindges, Hartmut Zoppke. 2006. "Sensorsystem für aktive
Motorhauben auf dem Prüfstand " ATZ nr.5/2006;.
Badea-Romero, Alexandro, and James Lenard. 2013. "Source of head injury for pedestrians and
pedal cyclists: Striking vehicle or road?" Accident Analysis & Prevention 50 pp: 1140-
1150.
Biswas, Gautam. 2012. Review of forensic medicine and toxicology: JP Medical Ltd.
Bogdanovic, L., M. Batista. 2004. "The Throw Model for Vehicle/Pedestrian Collisions
including Road Gradient." Proceedings of ICTS, 11, 12.
Brach, Raymond M. 2005. Vehicle accident analysis and reconstruction methods.
Breaz, Nicoleta, , Marian Crăciun, Păstorel Gaşpar, Maria Miroiu, Iuliana Paraschiv-Munteanu.
2013. "Modelarea matematica prin matlab." In, edited by Iasi.
Brooks, D., J. Wiechel, M. Sens, and Dennis A. Guenther. 1987. "A comprehensive review of
pedestrian impact reconstruction." SAE Technical Paper, No. 870605.
Budescu, Emil. 2013. Biomecanica Generala. Iasi.
Burg, Heinz, Moser, Andreas. 2009. Handbuch Verkehrsunfallrekonstruktion Unfallaufnahme.
Burg, Heinz, Moser, Andreas. 2013. Handbook of Accident Reconstruction
CARE. 2015. EUROSTAT for population data.
Carroll, J. A., Adam Barrow, Hardy, B.J. , Robinson, B. 2014. "Pedestrian legform test area
assessment.
CASIO. http://www.casio-intl.com.
Cheon, Seong Sik, and Jin Ho Choi. 1995. "Development of the composite bumper beam for
passenger cars." Composite structures 32, no. 1, pp.: 491-499.
Classifcation. 2016. https://en.wikipedia.org/wiki/Car_classification#Classification_methods
2016].
Codul-Rutier. 2002. Codul Rutier. OUG nr 195/2002.
Collins, James C. 1979. Accident Reconstruction.
Comm, Safety Test Instrumentation Stds. 2003. Instrumentation for impact test-part 1-electronic
instrumentation (j211/1). Technical report, SAE.
Cordos, Nicolae, Burnete, Nicolae, Todorut, Nicolae. 2003. Coliziunea automobilelor.
Covaciu, Dinu. 2010. Soluţii în studiul performanţelor dinamice şi în trafic ale autovehiculelor
prin integrarea aplicaţiilor cad/plm şi gps. Teza de doctorat, Universitatea Transilvania
Brasov.
Davison, Robert M., Malcolm Munro, and Detmar W. Straub. 2004. "Introduction to the AIS
Code of Research Conduct." Communications of the Association for Information Systems
no. 13 (1):1.
DEX. 2016. Available from https://dexonline.ro.
Dima, Dragos-Sorin, Rusitoru Florin, Soica Adrian, and Tarulescu Stelian. 2007.
EXPERIMENTAL STUDY OF THE VEHICLE-PEDESTRIAN COLLISIONS. In
International Congress" AMMA 2007-Automobile, Environment and Farm Machinery,
Cluj Napoca.
DJI. http://www.dji.com.
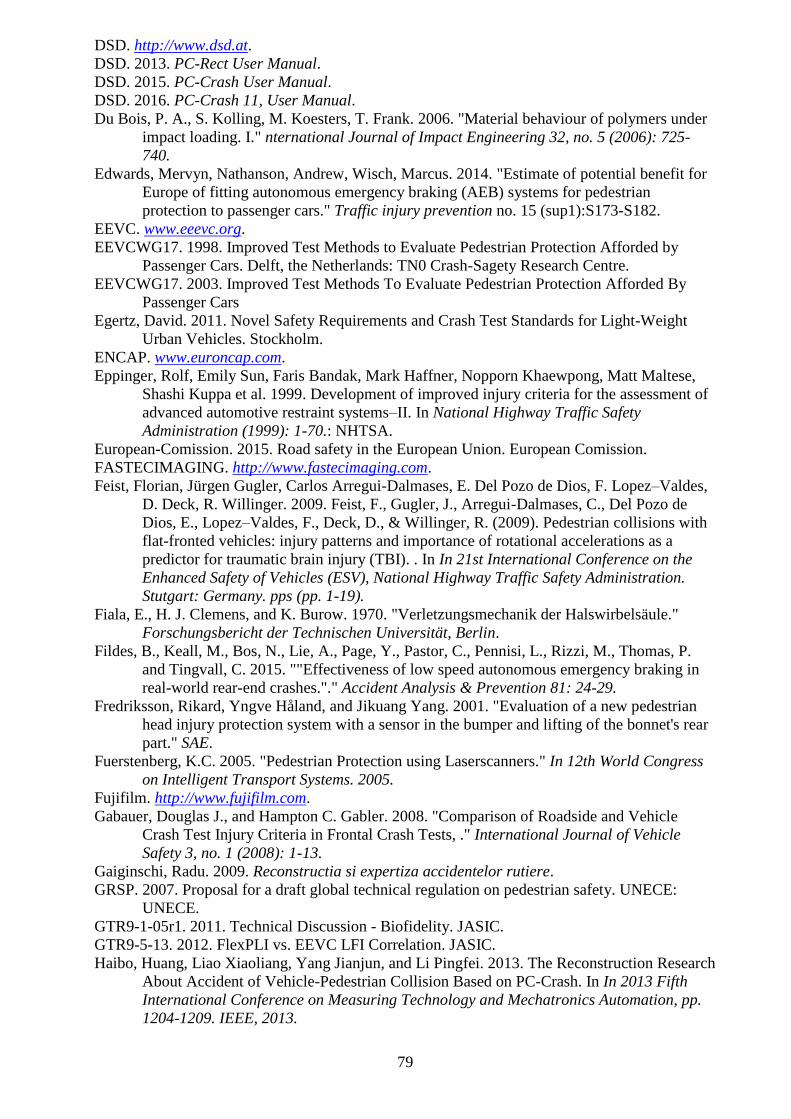
79
DSD. http://www.dsd.at.
DSD. 2013. PC-Rect User Manual.
DSD. 2015. PC-Crash User Manual.
DSD. 2016. PC-Crash 11, User Manual.
Du Bois, P. A., S. Kolling, M. Koesters, T. Frank. 2006. "Material behaviour of polymers under
impact loading. I." nternational Journal of Impact Engineering 32, no. 5 (2006): 725-
740.
Edwards, Mervyn, Nathanson, Andrew, Wisch, Marcus. 2014. "Estimate of potential benefit for
Europe of fitting autonomous emergency braking (AEB) systems for pedestrian
protection to passenger cars." Traffic injury prevention no. 15 (sup1):S173-S182.
EEVC. www.eeevc.org.
EEVCWG17. 1998. Improved Test Methods to Evaluate Pedestrian Protection Afforded by
Passenger Cars. Delft, the Netherlands: TN0 Crash-Sagety Research Centre.
EEVCWG17. 2003. Improved Test Methods To Evaluate Pedestrian Protection Afforded By
Passenger Cars
Egertz, David. 2011. Novel Safety Requirements and Crash Test Standards for Light-Weight
Urban Vehicles. Stockholm.
ENCAP. www.euroncap.com.
Eppinger, Rolf, Emily Sun, Faris Bandak, Mark Haffner, Nopporn Khaewpong, Matt Maltese,
Shashi Kuppa et al. 1999. Development of improved injury criteria for the assessment of
advanced automotive restraint systems–II. In National Highway Traffic Safety
Administration (1999): 1-70.: NHTSA.
European-Comission. 2015. Road safety in the European Union. European Comission.
FASTECIMAGING. http://www.fastecimaging.com.
Feist, Florian, Jürgen Gugler, Carlos Arregui-Dalmases, E. Del Pozo de Dios, F. Lopez–Valdes,
D. Deck, R. Willinger. 2009. Feist, F., Gugler, J., Arregui-Dalmases, C., Del Pozo de
Dios, E., Lopez–Valdes, F., Deck, D., & Willinger, R. (2009). Pedestrian collisions with
flat-fronted vehicles: injury patterns and importance of rotational accelerations as a
predictor for traumatic brain injury (TBI). . In In 21st International Conference on the
Enhanced Safety of Vehicles (ESV), National Highway Traffic Safety Administration.
Stutgart: Germany. pps (pp. 1-19).
Fiala, E., H. J. Clemens, and K. Burow. 1970. "Verletzungsmechanik der Halswirbelsäule."
Forschungsbericht der Technischen Universität, Berlin.
Fildes, B., Keall, M., Bos, N., Lie, A., Page, Y., Pastor, C., Pennisi, L., Rizzi, M., Thomas, P.
and Tingvall, C. 2015. ""Effectiveness of low speed autonomous emergency braking in
real-world rear-end crashes."." Accident Analysis & Prevention 81: 24-29.
Fredriksson, Rikard, Yngve Håland, and Jikuang Yang. 2001. "Evaluation of a new pedestrian
head injury protection system with a sensor in the bumper and lifting of the bonnet's rear
part." SAE.
Fuerstenberg, K.C. 2005. "Pedestrian Protection using Laserscanners." In 12th World Congress
on Intelligent Transport Systems. 2005.
Fujifilm. http://www.fujifilm.com.
Gabauer, Douglas J., and Hampton C. Gabler. 2008. "Comparison of Roadside and Vehicle
Crash Test Injury Criteria in Frontal Crash Tests, ." International Journal of Vehicle
Safety 3, no. 1 (2008): 1-13.
Gaiginschi, Radu. 2009. Reconstructia si expertiza accidentelor rutiere.
GRSP. 2007. Proposal for a draft global technical regulation on pedestrian safety. UNECE:
UNECE.
GTR9-1-05r1. 2011. Technical Discussion - Biofidelity. JASIC.
GTR9-5-13. 2012. FlexPLI vs. EEVC LFI Correlation. JASIC.
Haibo, Huang, Liao Xiaoliang, Yang Jianjun, and Li Pingfei. 2013. The Reconstruction Research
About Accident of Vehicle-Pedestrian Collision Based on PC-Crash. In In 2013 Fifth
International Conference on Measuring Technology and Mechatronics Automation, pp.
1204-1209. IEEE, 2013.

80
Han, Inhwan, and Raymond M. Brach. 2001. "Han, Inhwan, and Raymond M. Brach. Throw
model for frontal pedestrian collisions." SAE Technical Paper No. 2001-01-0898.
Hankey, Jonathan , Blanco, Myra, Gibbons, Ronald Bruce, McLaughlin, Shane B., Dingus,
Thomas A. 2005. "Enhanced Night Visibility Series, Volume I: Executive Summary."
Hayashi, Hideaki, Ryo Inomata, Ryo Fujishiro, Yusuke Ouchi, Koji Suzuki, and Takeshi
Nanami. 2013. Development of pre-crash safety system with pedestrian collision
avoidance assist. In In Proceedings of the 23rd International Conference on the
Enhanced Safety of Vehicles, Seoul, Republic of Korea (pp. 13-0271).
Hazlett, Richard D., Merrill J. Allen. 1968. "The ability to see a pedestrian at night: The effects
of clothing, reflectorization and driver intoxication." Optometry & Vision Science, 45(4),
246-258.
Holding, P. N, Chinn, B. P., Happian-Smith, Julian. 2001. Pedestrian Protection: An Evaluation
of an Airbag System Through Modelling and Testing: Society of Automotive Engineers.
Hutchinson, John, Mark, J. Kaiser, Hamid, M. Lankarani. 1998. "The Head Injury Criterion
(HIC) functional." Applied Mathematics and Computation 96 (1998) 1-16.
Ilie, Sorin. 2015. Modelarea fenomenelor de impact ale autovehiculelor.
INMATH. http://www.intmath.com/applications-integration/hic-part2.php.
Inomata, Yusuke, Nobuhiro Iwai, Yoshinori Maeda, Seiichi Kobayashi, Hiroyuki Okuyama, and
Nobuhiko Takahashi. 2009. Development of the pop-up engine hood for pedestrian head
protection. In In 21st International Technical Conference on the Enhanced Safety of
Vehicles (ESV), no. 09-0067.
Jakobsson, Lotta, Broberg, Thomas, Karlsson, Henrik,Fredriksson, Anders,Gråberg, Niklas,
Gullander, Christina, Lindman, Magdalena. 2013. Pedestrian Airbag Technology–A
Production System, 2013.
Jazar, Reza N. 2013. Vehicle dynamics: theory and application: Springer Science & Business
Media.
JINGWEN HU, KATHLEEN D. KLINICH. 2012. TOWARD DESIGNING PEDESTRIAN-
FRIENDLY VEHICLES. The University of Michigan.
Kalliske, Ingo, Flavio Friesen. 2001. Improvements to pedestrian protection as exemplified on a
standard-sized car. Paper read at Proceedings of the 17th international technical
conference on the Enhanced Safety of Vehicles, Amsterdam, The Netherlands, pp. 4-7.
Keller, Christoph G., Thao Dang, Hans Fritz, Armin Joos, Clemens Rabe, Dariu M. Gavrila.
2011. "Active pedestrian safety by automatic braking and evasive steering." IEEE
Transactions on Intelligent Transportation Systems, 12(4), 1292-1304.
Kleinberger, Michae, l , Sun, Emily, Eppinger, Rolf 1998. Development of Improved Injury
Criteria for the Assessment of Advanced Automotive Restraint Systems.
Kopczyński, A., Ptak, M., & Harnatkiewicz, P. 2011. "The influence of frontal protection system
design on pedestrian passive safety." Archives of Civil and Mechanical Engineering,
11(2), 345-364.
Krotosky, S.J. Trivedi, M.M. 2007. "On color-, infrared-, and multimodal-stereo approaches to
pedestrian detection." Intelligent Transportation Systems, no. IEEE Transactions
8(4):619-629.
Kuehn, Matthias, Robert Froeming, and Volker Schindler. 2005. Assessment of vehicle related
pedestrian safety. In In Experimental Safety Vehicles Conference, pp. 05-0044. 2005.
Kuppa, Shashi, Wang, Jing, Haffner, Mark, Eppinger, Rolf. 2001. Lower extremity injuries and
associated injury criteria, 2001.
Kwan, Irene, James, Mapstone. 2006. Interventions for increasing pedestrian and cyclist
visibility for the prevention of death and injuries. The Cochrane Library John Wiley &
Sons, Ltd.
Lawrence, Graham., Brian Hardy. 1998. Pedestrian safety testing using the EEVC pedestrian
impactors. In 16th ESV Conference.
Lee, Tae-Hoon, Gun-Ha Yoon, and Seung-Bok Choi. . 2016. "A Shock Mitigation of Pedestrian-
Vehicle Impact Using Active Hood Lift System: Deploying Time Investigation." Shock
and Vibration 2016.
81
Lemmon, D.R., Huston, R.L. 1994. Automobile hood/fender design optimization for improved
pedestrian head impact protection. In 20th Design Automation Conference Proceedings
69 (2), pp 569-577.
Lenard, James, Alexandro Badea-Romero, and Russell Danton. . 2014. "Typical pedestrian
accident scenarios for the development of autonomous emergency braking test
protocols." Accident Analysis & Prevention 73: 73-80.
Longhitano, Douglas, Basem Henary, Kavi Bhalla, Johan Ivarsson, and Jeff Crandall. 2005.
"Influence of vehicle body type on pedestrian injury distribution." SAE Technical Paper
No. 2005-01-1876.
Luca, D., Stan Cristina 2007. Mecanică clasică. Edited by Iasi.
Luoma, Juha, Josef Schumann, Eric C. Traube. 1996. "Effects of retroreflector positioning on
nighttime recognition of pedestrians." Accident Analysis & Prevention 28, no. 3, pp: 377-
383.
Maki, Tetsuo, Janusz Kajzer, Koji Mizuno, and Yasufumi Sekine. 2003a. "Comparative analysis
of vehicle–bicyclist and vehicle–pedestrian accidents in Japan." Accident Analysis &
Prevention 35, no. 6 pp: 927-940.
Maki, Tetsuo, Toshiyuki Asai, and Janusz Kajzer. 2003b. Development of future pedestrian
protection technologies. In In 18th International Technical Conference on the Enhanced
Safety of Vehicles (ESV), pp. 03-0165.
Mathworks. www.mathworks.com.
MatrixLED.
http://www.audi.com/com/brand/en/vorsprung_durch_technik/content/2013/10/audi-a8-
in-a-new-radiant-light.html 2016.
Matsui, Yasuhiro, Hirotoshi Ishikawa, Akira Sasaki. 1999. "Pedestrian injuries induced by the
bonnet leading edge in current car-pedestrian accidents." No. 1999-01-0713. SAE
Technical Paper.
Matsui, Yasuhiro, Yong Han, and Koji Mizuno. 2011. "Performance of collision damage
mitigation braking systems and their effects on human injury in the event of car-to-
pedestrian accidents." Stapp car crash journal, 55, 461.
Matsui, Yasuhiro. 2005. "Effects of vehicle bumper height and impact velocity on type of lower
extremity injury in vehicle–pedestrian accidents." Accident Analysis & Prevention 37.4
pp: 633-640.
McCarthy, Mike, and Ian Simmons. 2005. Active pedestrian protection. In In 19th International
Technical Conference on the Enhanced Safety of Vehicles (ESV).
Melvin, John W. 1995. Injury assessment reference values for the CRABI 6-month infant
dummy in a rear-facing infant restraint with airbag deployment. SAE Technical Paper.
Mertz, Harold J. 2002. "Injury risk assessments based on dummy responses." In Accidental
Injury, 89-102. Springer.
Mertz, Harold J., Prasad, Priya, Nusholtz, Guy. 1996. Head injury risk assessment for forehead
impacts. SAE Technical Paper.
Mizuno, Koji, Hideki Yonezawa, Janusz Kajzer. 2001. Pedestrian headform impact tests for
various vehicle locations. Paper read at Proceedings of the 17th Enhanced Safety of
Vehicles Conference.
Mo, Fuhao, Arnoux, Pierre Jean, Jure, Jean Jaques, Masson, Catherine. 2012. "Injury tolerance
of tibia for the car–pedestrian impact." Accident Analysis & Prevention no. 46:18-25.
Moser, Andreas, Heinz Hoschopf, Hermann Steffan, and Gustav Kasanicky. . 2000. "Validation
of the PC-Crash pedestrian model. No. 2000-01-0847. ." SAE Technical Paper,.
Moser, Andreas, Steffan Hermann, Kasanický Gustav. 1999. "The pedestrian model in PC-
Crash-the introduction of a multi body system and its validation " SAE Technical Paper
No. 1999-01-0445.
Narayan, Yoganandan, Alan, M. Nahum,John, W. Melvin. 2015. Accidental Injury: Springer.
Nicoara, D. Dumitru. 2003. Mecanica analitica. Edited by Editura Universității Transilvania din
Brasov.
82
NSC. 1996. American national standard manual on classification of motor vehicle traffic
accidents. edited by National Safety Council.
Oh, Cheol, Youn-soo Kang, and Wonkyu Kim. 2008. "Assessing the safety benefits of an
advanced vehicular technology for protecting pedestrians." Accident Analysis &
Prevention 40, no. 3 (2008): 935-942.
Ommaya, Ayub K. 1984. ""Biomechanics of head injury: experimental aspects." The
biomechanics of trauma 13 (1985): 245-269.
Popa, Virgil. 2013. Stabilirea dinamicii accidentelor rutiere în funcție de mărimea avariilor și
gravitatea leziunilor înregistrate la ocupanții autovehiculelor, Univeristy Transilvania of
Brasov.
Prasad, Priya, Harold J. Mertz. 1985. "The position of the United States delegation to the ISO
working group 6b on the use of HIC in the automotive environment." SAE Paper 821246,
.
Qiang, Chen, Zhao Hang, Yao Chun-de, Zou Tiefang, and Li Gen. 2013. Reconstruct side pole
impact accidents by computer simulation. In In Intelligent System Design and
Engineering Applications (ISDEA), Third International Conference, pp. 1092-1095.
IEEE.
Quintero, R., J. Almeida, David Fernández Llorca, and M. A. Sotelo. . 2014. "Pedestrian path
prediction using body language traits." 2014 IEEE Intelligent Vehicles Symposium
Proceedings, pp. 317-323.
Radu, Alexandru Ionuț, Cofaru, Corneliu. 2015. "Study of current state of crash testing." Bulletin
of the Transilvania University of Brasov. Engineering Sciences. Series I 8, no. 2, p. 31.
Ravani, Bahram, D. Brougham, and R. T. Mason. 1981. "Pedestrian post-impact kinematics and
injury patterns." SAE Technical paper., No. 811024.
Reid, Stephen Robert, and Gang Zhou. 2000. Impact behaviour of fibre-reinforced composite
materials and structures. Elsevier.
Rumar, Kare. 1990. "The basic driver error: late detection." Ergonomics 33, no. 10-11: 1281-
1290.
Schittenhelm, Helmut. 2013. Advanced Brake Assist–Real World effectiveness of current
implementations and next generation enlargements by Mercedes-Benz. Paper read at
Proceedings of the 23rd International Technical Conference on the Enhanced Safety of
Vehicles (ESV). Seoul, Korea.
Searle, John A. . 1993. "The physics of throw distance in accident reconstruction. No. 930659."
SAE Technical Paper No. 930659.
Șerbu, Călin Ioan. 2015. Cercetări privind evaluarea cauzelor de producere a accidentelor
rutiere cu pietoni folosind metode matematice de luare a deciziilor, Universitatea
Tehnica din Cluj-Napoca, Facultatea de Mecanica.
Simms, Ciaran, Wood, Denis. 2009. Pedestrian and cyclist impact: a biomechanical perspective.
Vol. 166: Springer Science & Business Media.
Snedeker, Jess G., Felix H. Walz, Markus H. Muser, Christian Lanz, and Günter Schroeder.
2005. Assessing femur and pelvis injury risk in car-pedestrian collisions: comparison of
full body PMTO impacts, and a human body finite element model. In The 19th
International Technical Conference on the Enhanced Safety of Vehicles. Washington,
D.C.
Snedeker, Jess G., Markus H. Muser, and Felix H. Walz. 2003. "Assessment of pelvis and upper
leg injury risk in car-pedestrian collisions: comparison of accident statistics, impactor
tests and a human body finite element model." Stapp Car Crash Journal, 55, 461.
Soica, Adrian, George Toganel, Daniel Trusca, Oana Falup-Pecurariu. 2007. Aspects regarding
the influence of the variation of front-end geometrical parameters over the degree of
injury for a child in a vehicle-pedestrian collision. In International Congress" AMMA
2007-Automobile, Environment and Farm Machinery, Cluj Napoca.
Soica, Adrian, Tarulescu, Stelian. 2016. "Impact phase in frontal vehicle-pedestrian collisions."
International Journal of Automotive Technology 17, no. 3, pp.387-397.

83
Soica, Adrian, Tarulescu, Stelian, Luca, Dana, Motoc. 2009. "Influence of bumper design on
pedestrian injuries." Annals of DAAAM & Proceedings, pp.145-147.
Stammen, Jason A., Roger A. Saul, Brian Ko. 2001. "Pedestrian head impact testing and PCDS
reconstructions." Amsterdam, Netherlands, June:1-9.
Steffan, Hermann, Andreas Moser. 1996. "The collision and trajectory models of PC-CRASH."
SAE Technical Paper, No. 960886. .
Steffan, Hermann, Andreas Moser, Bertram Christian Geigl, Yoshihiro 2000. "Validation of the
coupled PC-CRASH-MADYMO occupant simulation model." SAE Technical Paper No.
2000-01-0471.
Stevenson, M., Maria Segui-Gomez, I. Lescohier, C. Di Scala, G. McDonald-Smith. 2001. "An
overview of the injury severity score and the new injury severity score." Injury
Prevention no. 7 (1):10-13. doi: 10.1136/ip.7.1.10.
Stevenson, T. J. 2006. Simulation of Vehicle-Pedestrian Interaction.
, University of Canterbury., Canterbury, New Zealand.
Sullenberger, Greg. 2014. Pedestrian Impact on Low Friction Surface. edited by No. 2014-01-
0470. SAE Technical Paper.
Takahashi, H., Miyazaki, H., Narita, S., Shamoto, T. and Mase, Y. 2013. Development of Pop-
Up Hood System for Pedestrian Protection. . Paper read at Proceedings of the 23rd
International Technical Conference on the Enhanced Safety of Vehicles, paper (pp. 13-
0126).
TG25, HFM. 2007. Test Methodology for Protection of Vehicle Occupants against Anti-
Vehicular Landmine Effects.
Toganel, George. 2008. Cercetări privind influența designului caroseriei asupra siguranței
pasive a automobilelor.
Toganel, George, Adrian Soica, Dragos-Sorin Dima. 2009. Aspects regarding the analysis of the
car geometry. In 12th European Automotive Congress EAEC, Bratislava.
Tolea, Bogdan, Antonya, Csaba, Beles, Horia. 2015a. "Assesment of the injury severity of the
pedestrian lower limbs at the collision with a vehicle." ANNALS OF THE ORADEA
UNIVERSITY, Fascicle of Management and Technological Engineering
Tolea, Bogdan, Daniel Dragos Trusca, Csaba Antonya, Alexandru Ionut Radu, Dragos Sorin
DIMA. 2016a. Research Regarding Pedestrian Visibility During Night-Time Using Photo
Processing. In In International Congress of Automotive and Transport Engineering, pp.
881-888. Springer International Publishing.
Tolea, Bogdan, Daniel Trusca, Csaba Antonya, and Horia Beles. 2015b. "The influence of the
frontal profile design of a vehicle upon the pedestrian safety at low velocity." Annals of
DAAAM & Proceedings no. 26 (1).
Tolea, Bogdan, Trusca, Daniel, Antonya, Csaba. 2016b. Research Regarding Night-Time
Pedestrian Visibility. Paper read at Proceedings of the European Automotive Congress
EAEC-ESFA 2015 (pp. 749-755), 2016.
Tomasch, Ernst. 2004. PENDANT Deliverable D4 - Accident Reconstruction Guidelines. edited
by Graz: Eigenverlag.
Trusca, Daniel, Tolea, Bogdan, Radu, Ionut. 2015. "Research regarding the severity of the injury
of the pedestrian’s head with the vehicle’s bonnet " ANNALS OF THE ORADEA
UNIVERSITY, Fascicle of Management and Technological Engineering
van Ratingen, Michiel, Aled Williams, Anders Lie, Andre Seeck, Pierre Castaing, Reinhard
Kolke, Guido Adriaenssens, and Andrew Miller. 2016. ""The European New Car
Assessment Programme: a historical review." Chinese journal of traumatology, 19(2),
63-69.
Vertal, Peter, Kasanicky Gustav, Steffan Hermann. 2015. Implementation of an active safety
system for pedestrian detection in Volvo’s cars and the real benefits of the system based
on selected real-life fatal pedestrian accidents. In EVU Congress UK.
Wellbourne, E. R., Shewchenko, Nicholas. 1998. Improved measures of foot ankle injury risk
from the Hybrid III tibia, 1998.

84
WGDPVS. 2008. Crash Analysis Criteria Description. Workgroup Data Processing Vehicle
Safety.
Wood, D.P. Simms, C.K. 2001. ""Coefficient of friction in pedestrian throw."." Impact 9, no. 1
pp: 12-15.
Wood, Joanne M., Richard A. Tyrrell, Trent P. Carberry. 2005. "Limitations in drivers' ability to
recognize pedestrians at night." Human Factors: The Journal of the Human Factors and
Ergonomics Society 47, no. 3, pp: 644-653.
Wu, B. Nevatia. 2005. "Detection of multiple, partially occluded humans in a single image by
bayesian combination of edgelet part detectors. ." ICCV Tenth IEEE International
Conference on no. 1:90-97.
Xu, Dang, Zhu, Xichan,Miao, Qiang,Ma, Zhixiong, Wu, Bin. 2010. The research of reversible
pop-up Hood for pedestrian protection, 2010.
Xu, Hongguo, Yanhui Fan. 2007. Simulation research on form and kinematics law of contact
process for automobile-pedestrian collision based on the coupling of PC-Crash and
MADYMO Paper read at Proceedings of the First International Conference on
Transportation Engineering (ICTE). Chengdu, China.
Yuasa, Hitoshi, Masashi Nakanishi, Tsutomu Mochida, Naoyuki Yamada, and Makoto Nakai.
2013. "Research into evaluation method for pedestrian pre-collision system." In
Proceedings of the 23rd International Conference on the Enhanced Safety of Vehicles,
Seoul, p. 13Ā0110.
Yun, Yong-Won, Jae-Wan Lee, Gyu-Hyun Kim, and Park Gyung-Jin. 2013. Pedestrian
Protection Test and Results: Utilization for Regulations in Korea. In In 23rd
International Technical Conference on the Enhanced Safety of Vehicles (ESV), no. 13-
0357. 2013.
Zander, Oliver, Dirk-Uwe Gehring, Michiel van Ratingen. 2015. Beyond safety legislation:
Contribution of consumer information programmes to enhanced injury mitigation of
pedestrians during accidents with motor vehicles. Paper read at Proceedings of 24th
Enhanced Safety of Vehicles (ESV) conference.
Zhang, Guanjun, Libo Cao, Jingwen Hu, and King H. Yang. 2008. "A field data analysis of risk
factors affecting the injury risks in vehicle-to-pedestrian crashes." Annals of advances in
automotive medicine, 52, 199-214.
Zou, T., Zhang, Y. Yin, R. 2016. ""Two Simple Formulas for Evaluating the Lower Bound of
the Impact Velocity in Vehicle–pedestrian Accidents." ." Journal of Forensic Sciences

85
Rezumat
Scopul acestei teze de doctorat este de a determina parametrii geometrici ai profilului
frontal ai autovehiculului care influențează gradul de vătămare al pietonilor în urma coliziunilor
cu autovehiculele, precum și evidențierea posibilităților de reducere a vătămărilor grave prin
mijloace de siguranță pasivă. Siguranța pasivă privind coliziunea autovehiculelor cu pietonii este
limitată, unul din cele mai importante aspecte ale acesteia fiind reprezentat de designul/forma
caroseriei autovehiculelor. Parametrii geometrici ai profilului frontal ai autovehiculului care
influențează siguranța pietonilor au fost determinați printr-o abordare originală. Acești parametrii
au fost modificați într-un program de proiectare, iar cu autovehiculele noi obținute s-au realizat o
serie de simulări în vederea evaluării riscului de vătămare al pietonului la nivelul capului.
În cadrul tezei de doctorat s-a determinat gradul de vizibilitate al pietonului în condiții
nocturne în funcție de culoarea articolelor vestimentare, determinate pe baza testelor
experimentale. Totodată, pe baza acestor distanțe determinate s-a realizat un calcul privind viteza
de evitare a pietonului în condițiile date.
Un alt element de noutate adus îl reprezintă determinarea distanțelor de proiectare a
pietonului în urma coliziunii cu autovehicul, în cazul în care acesta este frânat cu întârziere.
Aceste distanțe de proiectare s-au determinat printr-un calcul analitic validat atât prin simulări
cât și prin teste experimentale.
De asemenea, s-a dezvoltat un model matematic capabil să determine parametrii viteză și
distanță a capului pietonului, respectiv ai autovehiculului în timpul coliziunii cu pietonul
Abstract The aim of the PhD. dissertation was to determine the geometric parameters of the
vehicle’s frontal profile which have a major influence upon the pedestrian injury risk in case of
car-to-pedestrian accidents, as well as highlighting the possibilities to reduce the serious injuries
by passive safety means. The passive safety regarding car-to-pedestrian accidents is limited, and
one of its most important aspects is the design of the vehicle’s car body. The geometric
parameters of the vehicle’s frontal profile were determined through an original approach. These
parameters were modified in a CAD software, and by using the re-designed vehicles a series of
simulations in order to assess the head injury risk were performed.
Within the PhD. thesis the pedestrian visibility during night-time in function of garment
color was determined, by experimental means. However, based on the determined distances, the
accident avoidance velocity was calculated in the given conditions.
Another novelty is the throwing distance calculation as a consequence of car-to-
pedestrian accidents, in the case where the vehicle braking is delayed. These throwing distances
were determined through a new calculation method, validated through simulations and
experimental means.
Furthermore, a mathematical model able to determine parameters such as velocity and
distance corresponding to the pedestrian head, respectively vehicle during collision, was
developed.

86
Informaţii
personale
Nume /
Prenume Țolea Bogdan Adrian
Adresă(e) Nr 67, Bd-ul Republicii, Cod 315700, Oras Sebis , Jud. Arad, Romania
Telefon(oane) Mobil:+0743422229
E-mail(uri) [email protected] ; [email protected]
Naţionalitate(-
tăţi)
Romana
Data naşterii 28.07.1989
Sex Masculin
Educaţie şi
formare
Universitatea Transilvania Brasov, Programul de studii doctorale, 2014-prezent
Universitatea Transilvania Brasov, Programul de master Securitate Rutieră, Transport
şi Interacţiunea cu Mediul 2012-2014
Universitatea Tehnica din Graz (TU Graz ) , Vehicle Safety Institute , Traffic Accident
Research Master Programme , in perioada 2012- 2015
Univeristatea Transilvania Brasov , Facultatea de Inginerie mecanica , Specializarea
Automotive Engineering (lb.engleza) , in perioada 2008-2012
Grup Scolar Industrial Sebis , in perioada 2004-2008
Experiență
profesională
Stagiar Inspector Daune Auto, Groupama Asigurări, în perioada Octombrie 2015 –
Iulie 2016
Aptitudini și
competențe
personale
Limbi străine cunoscute:
Engleză – avasați
Spaniolă - începători
Operare PC: Pachet Microsoft Office, Pc-Crash, Solidworks, Autodesk Inventor,
Mathcad, Matlab, Gmsh, Autocad, Tracker, Piocket DAQ, OriginPro
Activitate
științifică
14 articole publicate / 5 ca prim autor
Afiliere la
corpuri /
asociații
profesionale
SIAR

87
Personal
information
Name / Surname Țolea Bogdan Adrian
Adress Nr 67, Bd-ul Republicii, Cod 315700, Oras Sebis , Jud. Arad, Romania
Phone Mobile:+0743422229
E-mail(s) [email protected] ; [email protected]
Nationality Romanian
Birth date 28.07.1989
Sex Masculin
Formation and
education
Universitatea Transilvania Brasov, Programul de studii doctorale, 2014-prezent
Universitatea Transilvania Brasov, Programul de master Securitate Rutieră, Transport
şi Interacţiunea cu Mediul 2012-2014
Universitatea Tehnica din Graz (TU Graz ) , Vehicle Safety Institute , Traffic Accident
Research Master Programme , in perioada 2012- 2015
Univeristatea Transilvania Brasov , Facultatea de Inginerie mecanica , Specializarea
Automotive Engineering (lb.engleza) , in perioada 2008-2012
Grup Scolar Industrial Sebis , in perioada 2004-2008
Professional
experience
Stagiar Inspector Daune Auto, Groupama Asigurări, în perioada Octombrie 2015 –
Iulie 2016
Personal skills and
competences
Limbi străine cunoscute:
Engleză – avasați
Spaniolă - începători
PC operation: Microsoft Office, Pc-Crash, Solidworks, Autodesk Inventor, Mathcad,
Matlab, Gmsh, Autocad, Tracker, Piocket DAQ, OriginPro
Scientific work
14 papers / 5 as first author
Memberships/
Associations
SIAR