teoria sistemelor Şi reglare automatĂ cap. 5-7 lectii curs cap 5_7... · unele forme canonice...
TRANSCRIPT
Constantin MARIN Dan POPESCU
TEORIA SISTEMELOR ŞI REGLARE AUTOMATĂ Cap. 5-7
LECTII CURS
CRAIOVA 2007

5. REALIZAREA SISTEMELOR PRIN ECUAÞII DE STARE
5.1. Formularea problemei
5.1.1. Realizári de stare echivalenteSe considerá un sistem monovariabil (SISO), p=1, r=1. Dacá un sistem
(5.1.1)S = SS(A, b, c, d, x)este dat prin ecuaþii de stare, atunci funcþia de transfer H(s) poate fi determinatáín mod unic prin
(5.1.2)H(s) = cT ⋅ Φ(s) ⋅ b + d =M(s)L(s)
, Φ(s) = (sI − A)−1
pe scurt, .S = FT(M, L)Cunoscänd funcþia de transfer a unui sistem, pot fi obþinute diverse forme
pentru ecuaþiile de stare, adicá avem mai multe realizári ale sistemului prinecuaþii de stare.
(5.1.3)S = FT(M, L) ⇒ S = SS(A, b, c, d, x)este o realizare de stare, dar
(5.1.4)S = FT(M, L) ⇒ S = SS(A, b, c, d, x)este o altá realizare de stare, cu aceeaßi funcþie de transfer,
(5.1.5)H(s) = cTΦ(s)b + d = H(s) , Φ(s) = (sI − A)−1
Cele douá realizári de stare sunt echivalente, adicá, ∃T, x = Tx, det T ≠ 0 (5.1.6)A = TAT−1, b = Tb, cT = c TT−1, d = d
Cele douá funcþii de transfer, ßi H(s) sunt identice,H(s)H(s) = cT(sI − A)−1b + d = cTT−1(sI − TAT−1 )−1Tb + d =
.= cTT−1T(Is − A)−1T−1Tb + d = H(s)Presupunem cá m=grad(M) ßi n=grad(L), . Deoarece L(s) are n+1m ≤ n
coeficienþi ßi M(s) are m+1 coeficienþi, H(s) are doar n+m+1 parametri liberidatoritá raportului. Realizárile de stare au
n2 (din A) + n (din b) + n (din c) +1 (din d) =n2+2n+1parametri, astfel íncät
n2 + 2n + 1 > n + m + 1ceea ce conduce la un sistem nedeterminat de n+m+1 ecuaþii cu n2+2n+1variabile necunoscute.
Aceasta explicá de ce existá mai multe (o infinitate) de realizári de starepentru o aceeaßi funcþie de transfer.
Existá mai multe metode pentru determinarea ecuaþiilor de stare pornind dela funcþia de transfer. Pentru sistemele multivariabile acest proces este maicomplicat, dar este posibil.
Unele din realizárile de stare au anumite forme particulare, cu numárminim de parametri liberi. Ele sunt numite forme canonice (forme economice).
5. REALIZAREA SISTEMELOR 5.1. Formularea problemei PRIN ECUAÞII DE STARE
131
Unele forme canonice sunt importante deoarece ele pun ín evidenþáanumite proprietáþi ale sistemului precum controlabilitatea ßi observabilitatea.
Existá douá structuri fundamentale pentru formele canonice: - Structuri controlabile (I-D : structuri integrator-derivator) ßi - Structuri observabile (D-I : structuri derivator-integrator).
Reamintim criteriile de controlabilitate ßi observabilitate pentru sisteme LIT:
5.1.2. Criterii de controlabilitate ßi observabilitate
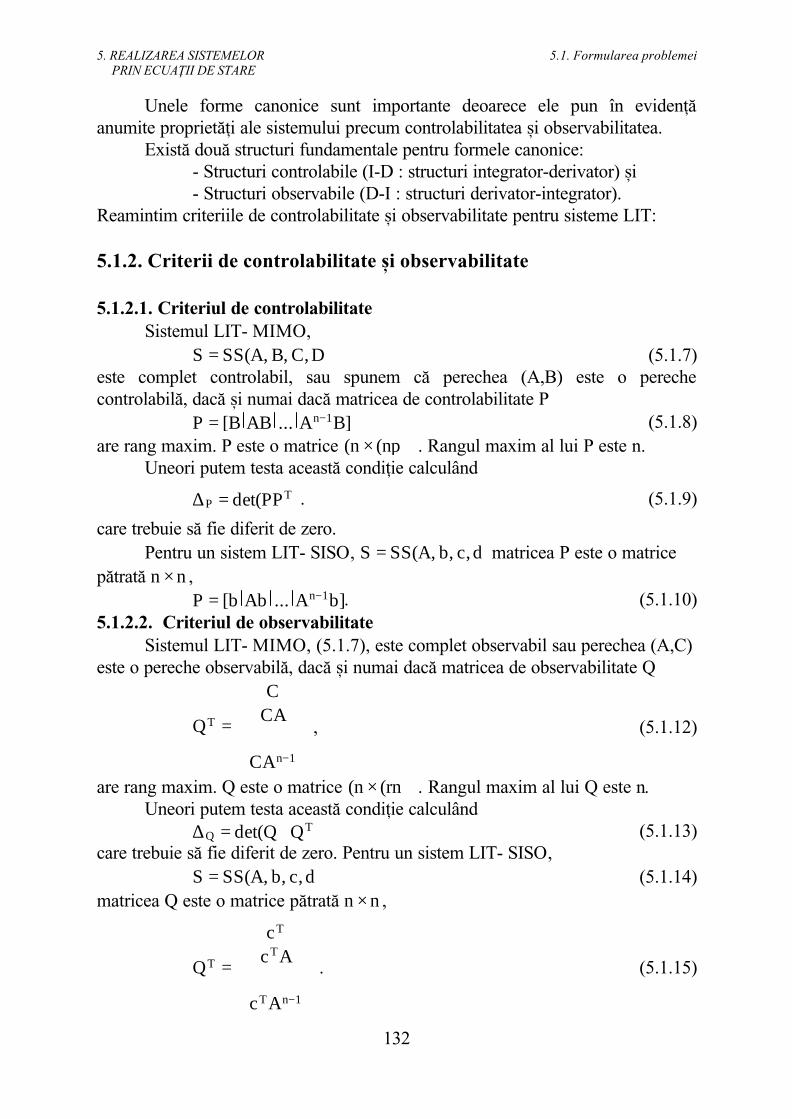
5.1.2.1. Criteriul de controlabilitateSistemul LIT- MIMO,
(5.1.7)S = SS(A, B, C, D)este complet controlabil, sau spunem cá perechea (A,B) este o perechecontrolabilá, dacá ßi numai dacá matricea de controlabilitate P
(5.1.8)P = [B AB ... An−1B]are rang maxim. P este o matrice . Rangul maxim al lui P este n. (n × (np))
Uneori putem testa aceastá condiþie calculänd
. (5.1.9)∆P = det(PPT )
care trebuie sá fie diferit de zero.Pentru un sistem LIT- SISO, matricea P este o matriceS = SS(A, b, c, d)
pátratá ,n × n. (5.1.10)P = [b Ab ... An−1b]
5.1.2.2. Criteriul de observabilitateSistemul LIT- MIMO, (5.1.7), este complet observabil sau perechea (A,C)
este o pereche observabilá, dacá ßi numai dacá matricea de observabilitate Q
, (5.1.12)QT =
CCA⋅⋅⋅
CAn−1
are rang maxim. Q este o matrice . Rangul maxim al lui Q este n. (n × (rn))Uneori putem testa aceastá condiþie calculänd
(5.1.13)∆Q = det(Q ⋅ QT)care trebuie sá fie diferit de zero. Pentru un sistem LIT- SISO,
(5.1.14)S = SS(A, b, c, d)matricea Q este o matrice pátratá ,n × n
. (5.1.15)QT =
cT
cTA⋅⋅⋅
cTAn−1
5. REALIZAREA SISTEMELOR 5.1. Formularea problemei PRIN ECUAÞII DE STARE
132
5.2. Prima formá canonicá structurá I-D
5.2.1. Deducerea ecuaþiilor de stare prin programare directá Fie H(s) o funcþie de transfer de forma
(5.2.1)H(s) =M(s)L(s)
= bnsn + ... + b0
ansn + ... + a0=
Y(s)U(s)
, an ≠ 0
Realizarea de stare a acestei funcþii de transfer, ca prima formá canonicáI-D, poate fi obþinutá prin metoda programárii directe, corespunzátor urmátoruluialgoritm:
1. Se ímparte numárátorul ßi numitorul funcþiei de transfer prin sn
(5.2.2)H(s) = bn + bn−1s−1 + ... + b1s −(n−1) + b0s−n
an + an−1s−1 + ... + a1s −(n−1) + a0s−n= Y(s)
U(s), an ≠ 0
ßi se exprimá ießirea astfel
(5.2.3)Y(s) =ca operator D
M(s) ⋅
W(s)
ca operator I
1L(s)
⋅U(s)
(5.2.4)Y(s) = (bn + bn−1s−1 + ... + b0s−n)
W(s)
⋅U(s)
an + an−1s−1 + ... + a1s−(n−1) + a0s−n
2. Se noteazá
(5.2.5)W(s) =U(s)
an + an−1s−1 + ... + a1s −(n−1) + a0s−n
ßi se exprimá W(s) ca o funcþie de U(s) ßi de produsele ( ) [s−kW(s)] , k = 1 : n
an[W(s)] + an−1[s−1W(s)]+ ... + a1[s−(n−1)W(s)] + a0[s −nW(s)] = U(s)
. (5.2.6)W(s) = −an−1an
xn(s)
s −1W(s) −an−2an
xn−1 (s)
s−2W(s) −... − a0an
x1 (s)
s−nW(s) + 1an
U(s)
3. Se noteazá produsele ca n noi variabile[s−kW(s)] , k = 1 : n
(5.2.7)Xk(s) = [s−(n−k+1) W(s)] , k = 1 : n
X1(s) = s−(n) W(s)X2(s) = s−(n−1) W(s).......Xn(s) = s−(1) W(s)
astfel íncät expresia lui W(s) din (5.2.6) devine, (5.2.8)W(s) = −an−1
anXn(s) − an−2
anXn−1 (s) − ... − a0
anX1(s) + 1
anU(s)
5. REALIZAREA SISTEMELOR 5.2. Prima formá canonicá structurá I-D PRIN ECUAÞII DE STARE
133

4. Se exprimá ießirea Y(s) din (5.2.3) ßi (5.2.4) sub forma
(5.2.9)Y(s) = bnW(s) + bn−1[s−1W(s)] + ... + b0[s−nW(s)]
unde W(s) este ínlocuit din (5.2.6)
Y(s) = (
cn
bn−1 − bnan−1an
)[s−1 W(s)] + (
cn−1
bn−2 − bnan−2an
)[s−2 W(s)] + ..+
c 1
(b0 − bna0an
)[s−n W(s)]+
d
bnan
U(s
(5.2.10)sau din (5.2.8),
Y(s) = (
cn
bn−1 − bnan−1an
)Xn(s) + (
cn−1
bn−2 − bnan−2an
)Xn−1(s) + ...+
c1
(b0 − bna0an
)X1(s)+
d
bnan
U(s)
(5.2.11)5. Se noteazá
c1 = b0 − bna0an
c2 = b1 − bna1an
..... (5.2.12)ck = bk−1 − bn
ak−1an
, k = 1 : n.....cn = bn−1 − bn
an−1an
ßi se exprimá ießirea Y(s) din (5.2.10) sub forma
Y(s) = cn ⋅ [s−1W(s)] + cn−1 ⋅ [s−2W(s)] + ... + c1 ⋅ [s−nW(s)]+ b nan
⋅ U(s)
(5.2.13)sau din (5.2.11),
. (5.2.14)Y(s) = c1 ⋅ X1(s) + c2 ⋅ X2(s) + ... + cn ⋅ Xn(s) + bnan
⋅ U(s)
6. Se deseneazá, ca schemá bloc sau graf de fluenþá, o conexiune serie de nintegratoare ßi se transpun ín aceastá reprezentare graficá relaþiile (5.2.6) sau(5.2.8) ßi relaþiile ießirii (5.2.13) sau (5.2.14).
Integratoarele pot fi reprezentate fárá condiþii iniþiale sau cu condiþiile loriniþiale dacá ulterior se doreßte sá se obþiná ráspunsul liber din aceastá diagramá.
7. Se noteazá de la dreapta la stänga ießirile integratoarelor cu anumitevariabile , ca ín (5.2.7) atät ín domeniul complex cät ßi ínX1, X2 , .. , Xn
domeniul timp.
5. REALIZAREA SISTEMELOR 5.2. Prima formá canonicá structurá I-D PRIN ECUAÞII DE STARE
134
+
+
+
+
+
+
+
+
+
+
U(s)
W(s)
Y(s)
W(s)s-(n-1)W(s)s-1 W(s)s-2 W(s)s-n
X (s)1 x (t)1
X (s)2 x (t)2
X (s)n-1 x (t)n-1
X (s)n x (t)n
a1an
++
a n-1
an
++
++
aan
n-2 a0an
s-1 s-1s-1 s-1
c2c n-1cn c1
an
1
bnan
x (t)n.
x (t)n-1.
x (t)2.
x (t)1.
= = ==
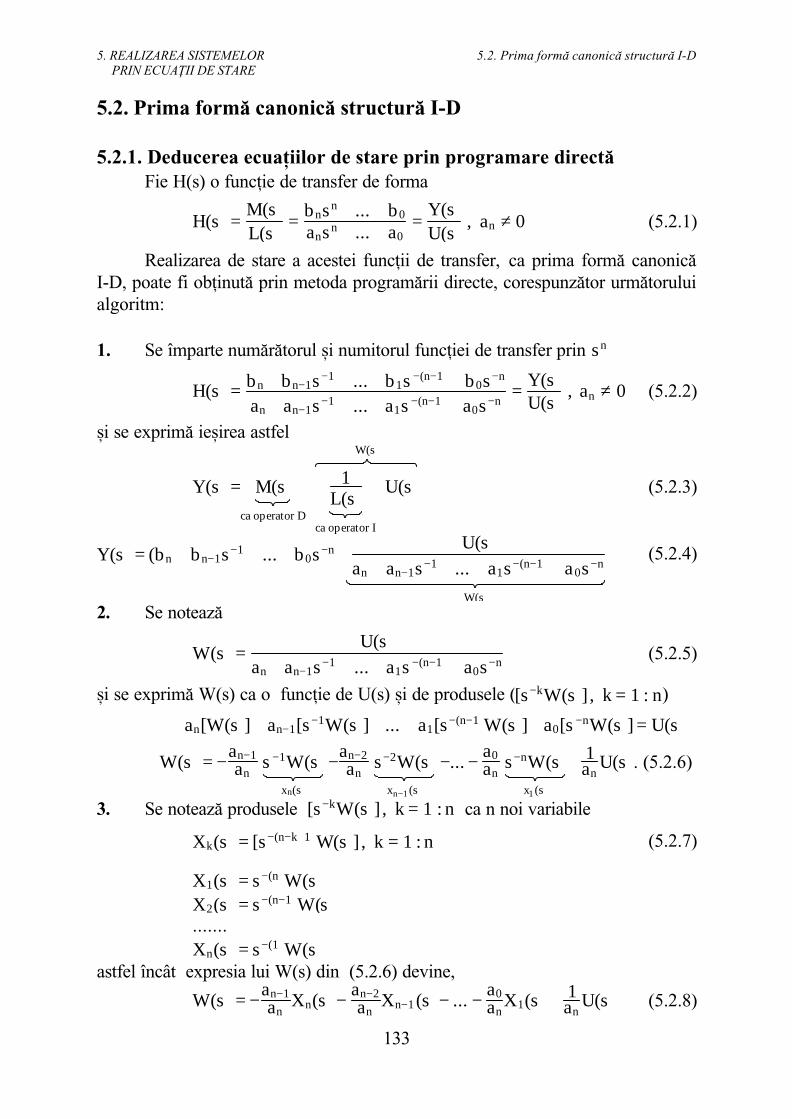
Figura nr.5.2.1.8. Se interpreteazá diagrama ín domeniul timp ßi se scriu relaþiile íntrevariabile ín domeniul timp,
x.
1 = x2
x.
2 = x3
........ (5.2.15)x.
n−1 = xn
x. n = −a0an
x1 − a1an
x2 − ... − an−2an
xn−1 − an−1an
xn + 1an
u (5.2.16)y = c1 ⋅ x1 + c 2 ⋅ x2 + ... + cn−1 ⋅ xn−1 + cn ⋅ xn + d ⋅ u
unde am notat,
(5.2.17)d = bnan
, ck = bk−1 − bnak−1an
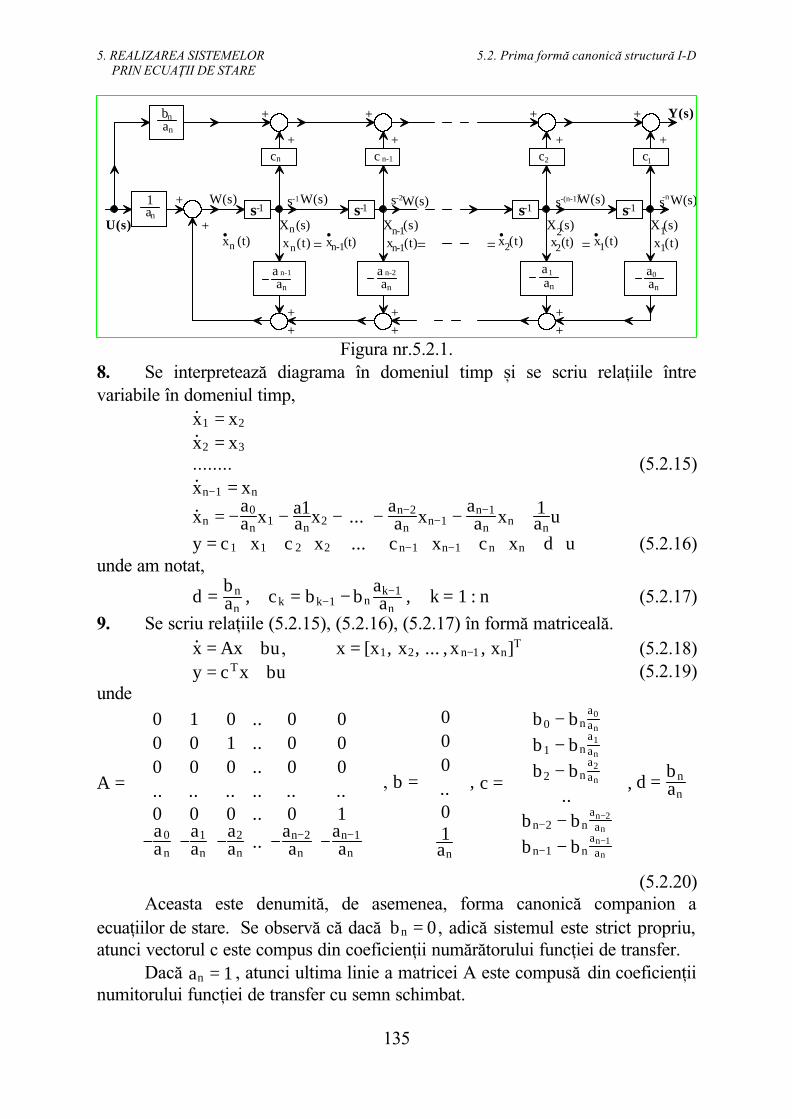
, k = 1 : n9. Se scriu relaþiile (5.2.15), (5.2.16), (5.2.17) ín formá matricealá.
, (5.2.18)x.
= Ax + bu x = [x1, x2, ... , xn−1 , xn]T
(5.2.19)y = cTx + buunde
, A =
0 1 0 .. 0 00 0 1 .. 0 00 0 0 .. 0 0.. .. .. .. .. ..0 0 0 .. 0 1
−a0an
−a1an
−a2an
.. −an−2an
−an−1an
b =
000..01an
, c =
b0 − bna0an
b1 − bna1an
b2 − bna2an
..bn−2 − bn
an−2an
bn−1 − bnan−1an
, d = bn
an
(5.2.20)Aceasta este denumitá, de asemenea, forma canonicá companion a
ecuaþiilor de stare. Se observá cá dacá , adicá sistemul este strict propriu,bn = 0atunci vectorul c este compus din coeficienþii numárátorului funcþiei de transfer.
Dacá , atunci ultima linie a matricei A este compusá din coeficienþiian = 1numitorului funcþiei de transfer cu semn schimbat.
5. REALIZAREA SISTEMELOR 5.2. Prima formá canonicá structurá I-D PRIN ECUAÞII DE STARE
135
5.2.2. Exemplu de reprezentare a unui sistem de ordinul doi ín primaformá canonicá structura I-D
Fie sistemul descris prin ecuaþia diferenþialá de ordinul doi
. (5.2.21)y + 3y.
+ 2y = u + 5u.
+ 6u
Funcþia de transfer este
(5.2.22)H(s) =Y(s)U(s)
= s2 + 5s + 6s2 + 3s + 2
=(s + 2) ⋅ (s + 3)(s + 2) ⋅ (s + 1)
Y(s) = H(s) ⋅ U(s)
(5.2.23)Y(s) = s2 + 5s + 6s2 + 3s + 2
⋅ U(s)
Ín continuare se aplicá cei 9 paßi ai procedurii programare directá pentrudeducerea ecuaþiei de stare ín prima formá canonicá structura ID:
1. Se ímpart cu numárátorul ßi numitorul funcþiei de transfers2
(5.2.24)H(s) = 1 + 5s−1 + 6s−2
1 + 3s−1 + 2s−2
Y(s) = (1 + 5s−1 + 6s−2) ⋅U(s)
1 + 3s−1 + 2s−2
2. Se noteazæ
(5.2.25)W(s) =U(s)
1 + 3s−1 + 2s−2
ßi se exprimá ín funcþie de W(s) U(s), [s−1W(s)], [s−2W(s)]
W(s) + 3 ⋅ [s−1W(s)] + 2 ⋅ [s−2W(s)] = U(s)
(5.2.26)W(s) = −3 ⋅ [s−1W(s)] − 2 ⋅ [s−2W(s)] + U(s)
3. Se noteazæ
; (5.2.27)X1(s) = s−1 W(s) X2(s) = s−2W(s)
ßi se exprimá ín funcþie de W(s) U(s), X1(s), X2(s)
. (5.2.28)W(s) = −3 ⋅ X1(s) − 2 ⋅ X2(s) + U(s)
4. & 5. Se exprimá ießirea ín funcþie de Y(s) U(s), [s −1W(s)], [s−2W(s)]
Y(s) = (1 + 5s−1 + 6s−2) ⋅ W(s)
Y(s) = 1 ⋅ W(s) + 5 ⋅ [s−1W(s)]+ 6 ⋅ [s−2W(s)] =
= 1 ⋅ −3 ⋅ [s−1W(s)]− 2 ⋅ [s−2W(s)]+ U(s) + 5 ⋅ [s−1W(s)] + 6[s−2W(s)]
Y(s) = (5 − 3) ⋅ [s−1W(s)] + (6 − 2) ⋅ [s−2W(s)]+ U(s)
(5.2.29)Y(s) = 2 ⋅ [s−1W(s)] + 4 ⋅ [s−2W(s)] + U(s)
5. REALIZAREA SISTEMELOR 5.2. Prima formá canonicá structurá I-D PRIN ECUAÞII DE STARE
136
ßi ín funcþie de U(s), X1(s), X2(s)
. (5.2.30)Y(s) = 2 ⋅ X1(s) + 4 ⋅ X2(s) + U(s)
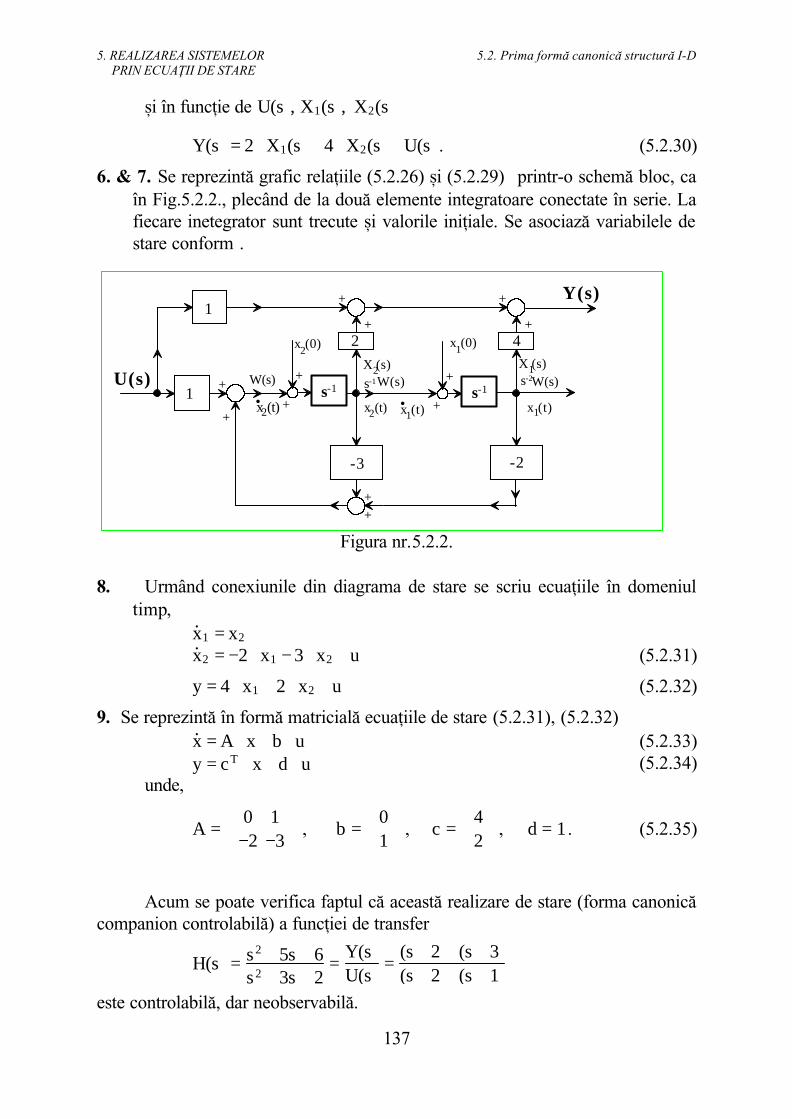
6. & 7. Se reprezintá grafic relaþiile (5.2.26) ßi (5.2.29) printr-o schemá bloc, caín Fig.5.2.2., plecänd de la douá elemente integratoare conectate ín serie. Lafiecare inetegrator sunt trecute ßi valorile iniþiale. Se asociazá variabilele destare conform .
+
++ +
+ +
+
+
+
+
U(s) W(s)
Y(s)
W(s)s-1 W(s)s-2
X (s)1
x (t)1
X (s)2
x (t)2
x (0)2 x (0)1
++
s-1 s-1
x (t)2.
x (t)1.1
-3 -2
42
1
Figura nr.5.2.2.
8. Urmänd conexiunile din diagrama de stare se scriu ecuaþiile ín domeniultimp,
x.
1 = x2
(5.2.31)x.
2 = −2 ⋅ x1 − 3 ⋅ x2 + u
(5.2.32)y = 4 ⋅ x1 + 2 ⋅ x2 + u
9. Se reprezintá ín formá matricialá ecuaþiile de stare (5.2.31), (5.2.32)(5.2.33)x
.= A ⋅ x + b ⋅ u
(5.2.34)y = cT ⋅ x + d ⋅ uunde,
, , , . (5.2.35)A =
0 1−2 −3
b =
01
c =
42
d = 1
Acum se poate verifica faptul cá aceastá realizare de stare (forma canonicácompanion controlabilá) a funcþiei de transfer
H(s) = s2 + 5s + 6s2 + 3s + 2
=Y(s)U(s)
=(s + 2) ⋅ (s + 3)(s + 2) ⋅ (s + 1)
este controlabilá, dar neobservabilá.
5. REALIZAREA SISTEMELOR 5.2. Prima formá canonicá structurá I-D PRIN ECUAÞII DE STARE
137
Aßa cum se poate vedea funcþia de transfer are factori comuni la numárátorßi numitor, ßi una din cele douá proprietáþi, controlabilitatea sau observabilitatea,este pierdutá. Ín cazul de faþá nu trebuie sá fie pierdutá controlabilitatea.
, (5.2.36)P = [b Ab]
,b =
01
Ab =
0 1−2 −3
⋅
01
=
1−3
⇒
, . (5.2.37)P =
0 11 −3
det(P) = −1 ≠ 0
Sistemul este controlabil.
(5.2.38)Q =
cT
cTA
,cT = 4 2 cTA = 4 2 ⋅
0 1−2 −3
= −4 −2
, . (5.2.39)Q =
4 2−4 −2
det(Q) = −8 + 8 = 0
Sistemul nu este observabil.Prelucränd aceastá schemá bloc, care este o diagramá de stare (DS), se pot
calcula matricea de tranziþie Φ (s)
(5.2.40)Φ (s) = (sI − A)−1 = Φ i,j i,j=1:2
ßi ráspunsurile libere ßi forþate ín raport cu starea ßi ießirea,
, (5.2.41)X(s) = Φ (s) ⋅ x(0) + Φ (s) ⋅ b ⋅ U(s) = Xl(s) + Xf(s)
Y(s) = cT ⋅ Φ (s) ⋅ x(0) + [cT ⋅ Φ (s) ⋅ b + d] ⋅ U(s) = Yl(s) + Yf(s)(5.2.42)
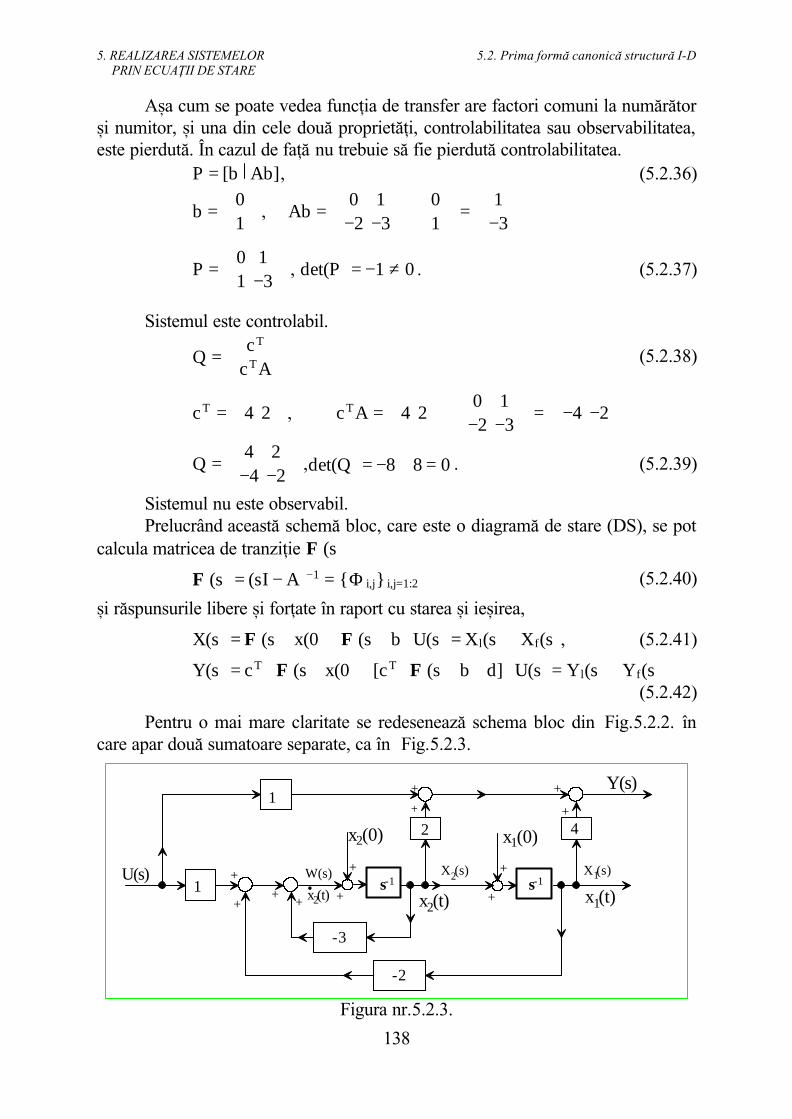
Pentru o mai mare claritate se redeseneazá schema bloc din Fig.5.2.2. íncare apar douá sumatoare separate, ca ín Fig.5.2.3.
+
+ + +
+ +
++
+
+
U(s) W(s)
Y(s)
X (s)1
x (t)1 x (t)2
X (s)2
+ +s-1 s-1
x (t)2.1
-3
-2
42
1
x (0)1 x (0)2
Figura nr.5.2.3.
5. REALIZAREA SISTEMELOR 5.2. Prima formá canonicá structurá I-D PRIN ECUAÞII DE STARE
138
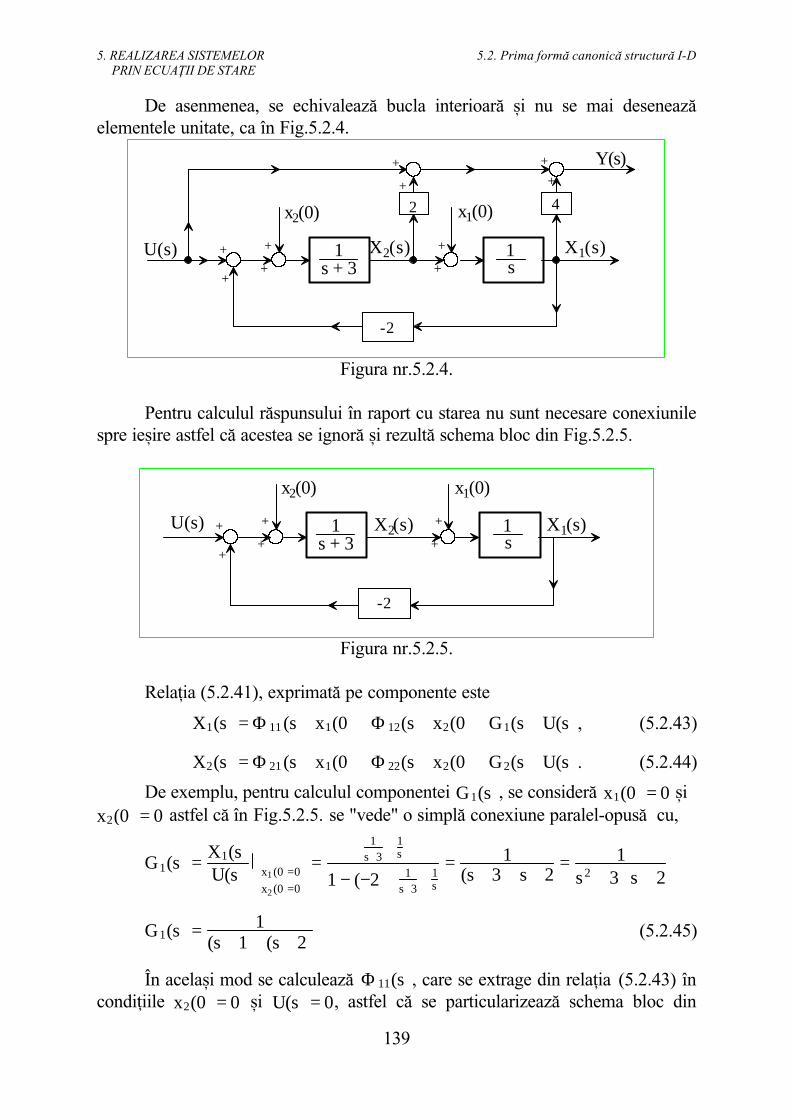
De asenmenea, se echivaleazá bucla interioará ßi nu se mai deseneazáelementele unitate, ca ín Fig.5.2.4.
+
+
+
+
++
U(s)
Y(s)
X (s)1X (s)2
x (0)1 x (0)2
+ +
+ +
-2
42
1s
1s + 3
Figura nr.5.2.4.
Pentru calculul ráspunsului ín raport cu starea nu sunt necesare conexiunilespre ießire astfel cá acestea se ignorá ßi rezultá schema bloc din Fig.5.2.5.
+
+
U(s) X (s)1X (s)2
x (0)1 x (0)2
+ +
+ +
-2
1s
1s + 3
Figura nr.5.2.5.
Relaþia (5.2.41), exprimatá pe componente este
, (5.2.43)X1(s) = Φ 11 (s) ⋅ x1(0) + Φ 12(s) ⋅ x2(0) + G1(s) ⋅ U(s)
. (5.2.44)X2(s) = Φ 21 (s) ⋅ x1(0) + Φ 22(s) ⋅ x2(0) + G2(s) ⋅ U(s)
De exemplu, pentru calculul componentei , se considerá ßiG1(s) x1(0) = 0 astfel cá ín Fig.5.2.5. se "vede" o simplá conexiune paralel-opusá cu,x2(0) = 0
G1(s) = X1(s)U(s) x1 (0)=0
x2 (0)=0
=1
s+3⋅ 1
s
1 − (−2) ⋅ 1s+3 ⋅ 1
s
= 1(s + 3) ⋅ s + 2
= 1s2 + 3 ⋅ s + 2
(5.2.45)G1(s) = 1(s + 1) ⋅ (s + 2)
Ín acelaßi mod se calculeazá , care se extrage din relaþia (5.2.43) ínΦ 11(s)condiþiile ßi , astfel cá se particularizeazá schema bloc dinx2(0) = 0 U(s) = 0
5. REALIZAREA SISTEMELOR 5.2. Prima formá canonicá structurá I-D PRIN ECUAÞII DE STARE
139
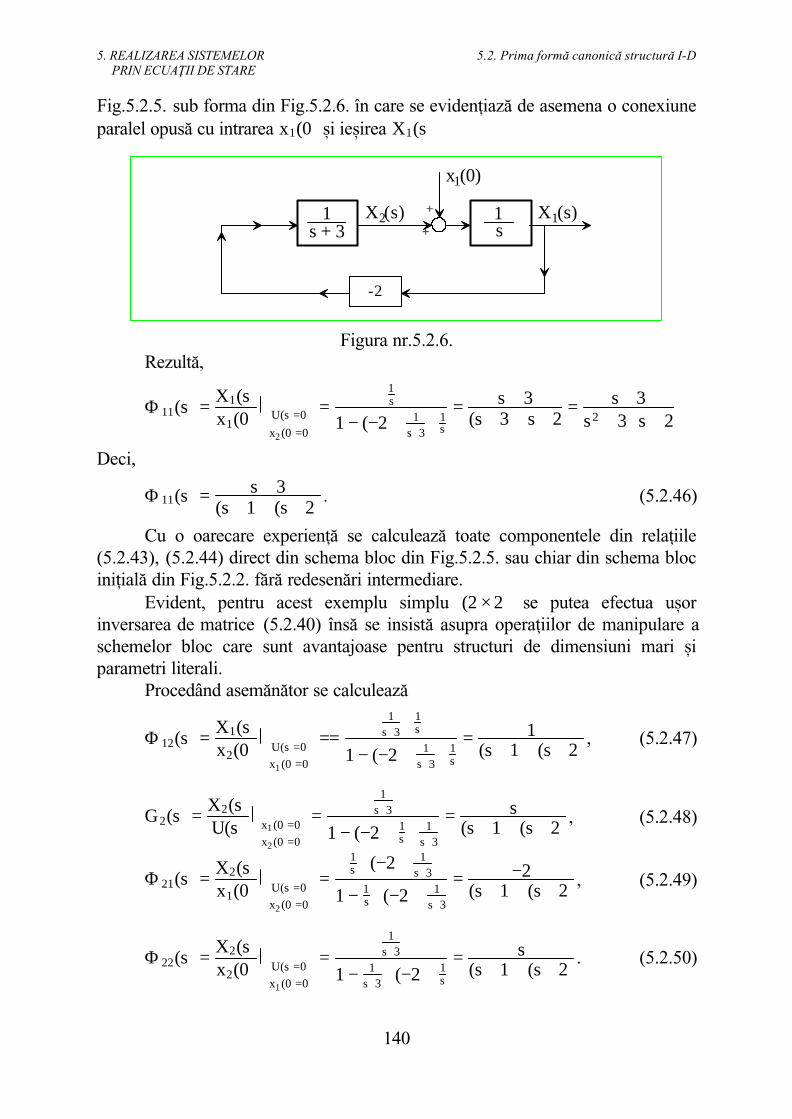
Fig.5.2.5. sub forma din Fig.5.2.6. ín care se evidenþiazá de asemena o conexiuneparalel opusá cu intrarea ßi ießirea x1(0) X1(s)
X (s)1X (s)2
x (0)1
+
+
-2
1s
1s + 3
Figura nr.5.2.6.Rezultá,
Φ 11(s) = X1(s)x1(0) U(s)=0
x2 (0)=0
=1s
1 − (−2) ⋅ 1s+3
⋅ 1s
= s + 3(s + 3) ⋅ s + 2
= s + 3s2 + 3 ⋅ s + 2
Deci,
. (5.2.46)Φ 11(s) = s + 3(s + 1) ⋅ (s + 2)
Cu o oarecare experienþá se calculeazá toate componentele din relaþiile(5.2.43), (5.2.44) direct din schema bloc din Fig.5.2.5. sau chiar din schema blociniþialá din Fig.5.2.2. fárá redesenári intermediare.
Evident, pentru acest exemplu simplu se putea efectua ußor(2 × 2)inversarea de matrice (5.2.40) ínsá se insistá asupra operaþiilor de manipulare aschemelor bloc care sunt avantajoase pentru structuri de dimensiuni mari ßiparametri literali.
Procedänd asemánátor se calculeazá
, (5.2.47)Φ 12(s) = X1(s)x2(0) U(s)=0
x1 (0)=0
==1
s+3⋅ 1
s
1 − (−2) ⋅ 1s+3 ⋅ 1
s
= 1(s + 1) ⋅ (s + 2)
, (5.2.48)G2(s) = X2(s)U(s) x1 (0)=0
x2 (0)=0
=1
s+3
1 − (−2) ⋅ 1s ⋅ 1
s+3
= s(s + 1) ⋅ (s + 2)
, (5.2.49)Φ 21(s) = X2(s)x1(0) U(s)=0
x2 (0)=0
=1s ⋅ (−2) ⋅ 1
s+3
1 − 1s ⋅ (−2) ⋅ 1
s+3
= −2(s + 1) ⋅ (s + 2)
. (5.2.50)Φ 22(s) = X2(s)x2(0) U(s)=0
x1 (0)=0
=1
s+3
1 − 1s+3 ⋅ (−2) ⋅ 1
s
= s(s + 1) ⋅ (s + 2)
5. REALIZAREA SISTEMELOR 5.2. Prima formá canonicá structurá I-D PRIN ECUAÞII DE STARE
140

5.3. A doua formá canonicá structurá D-I
5.3.1. Deducerea ecuaþiilor de stare prin programare buclatá Aceastá realizare de stare este denumitá, de asemenea, forma canonicá
companion observabilá: canonicá deoarece are un numár minim de elementene-standard (diferite de 0 sau 1) ßi observabilá deoarece aceasta asiguráobservabilitatea vectorului sáu de stare.
Aceasta este denumitá realizare D-I (derivator-integrator) deoareceinterpreteazá procesarea intrárii mai intäi ca derivare, iar rezultatul acesteia esteapoi integrat.
Putem ilustra aceastá procesare D-I consideränd proprietatea deasociativitate
. (5.3.1)Y(s) = H(s) ⋅ U(s) = 1L(s)
⋅ [M(s)U(s)]
O metodá de obþinere a acestei forme canonice, denumitá programareabuclatá, porneßte de la ecuaþia diferenþialá a sistemului,
any(n) + an−1y(n−1) + ... + a1y(1) + a0y(0) = bnu(n) + bn−1u(n−1) + ... + b1u(1) + b0u(0)
unde s-au notat (5.3.2)
(5.3.3)y(k) =dky(t)
dtk= Dky(t) = Dky = DDk−1y
. (5.3.4)u(k) = dku(t)dtk
= Dku(t) = Dku = DDk−1u
Utilizänd operatorul simbolic de derivare
, (5.3.5)D•def= d
dt•
ecuaþia (5.3.2) poate fi scrisá astfel,
anDny + an−1Dn−1y + .. + a1Dy + a0 y = bnDnu + bn−1Dn−1u + .. + b1Du + b0u
sau aranjatá sub forma unei egalitáþi faþá de zero,
Dn[any − bnu] + Dn−1[an−1y − bn−1u] + .. + D[a1y − b1u]+ [a0y − b0u] = 0
Se realizeazá factorizarea buclatá de mai jos, prin care care operatorul dederivare este echivalat cu aplicarea succesivá de i ori a operatorului simplu Di D
x2
, (5.3.6)a0y − b0u+x.
n
→D[a1y − b1u +D[.. + D[an−1y − bn−1u+
x.
1
Dx1
[any − bnu]]..]] = 0
5. REALIZAREA SISTEMELOR 5.3. A doua formá canonicá structurá D-I PRIN ECUAÞII DE STARE
141

Aßa cum se poate observa din (5.3.6), notám,
(5.3.7)x1 = an y − bnu
de unde,
y = 1an
x1 + bnan
u
x2 = an−1 y − bn−1u + x. 1 ⇒ x. 1 = −an−1an
x1 + x2 + (bn−1 − bnan−1an
)u
x3 = an−2 y − bn−2u + x. 2 ⇒ x. 2 = −an−2an
x1 + x3 + (bn−2 − bnan−2an
)u.......... (5.3.8)xn = a1 y − b1u + x. n−1 ⇒ x. n−1 = −a1
anx1 + xn + (b1 − bn
a1an
)u
0 = a0y − b0u + x.
n ⇒ x.
n = −a0an
x1 + (b0 − bna0an
)u
Din (5.3.7) ßi (5.3.8) putem scrie ecuaþiile de stare ín forma matricealá,
, (5.3.9)x.
= Ax + bu (5.3.10)y = cTx + bu
unde, (5.3.11)x = [x1, x2, ... , xn−1, xn]T
, A =
−an−1an
1 0 .. 0 0
−an−2an
0 1 .. 0 0
−an−3an
0 0 .. 0 0
.. .. .. .. .. ..−a1
an0 0 .. 0 1
−a0an
0 0 .. 0 0
b =
bn−1 − bnan−1an
bn−2 − bnan−2an
bn−3 − bnan−3an
..b 1 − bn
a1an
b 0 − bna0an
, c =
1an
00..00
, d = bn
an
(5.3.12)
5. REALIZAREA SISTEMELOR 5.3. A doua formá canonicá structurá D-I PRIN ECUAÞII DE STARE
142
5.3.2. Exemplu de reprezentare a unui sistem de ordinul doi ín primaformá canonicá structurá D-I
Reluám exemplul anterior cu sistemul desris prin ecuaþia diferenþialá(5.3.13)y + 3y
.+ 2y = u + 5u
.+ 6u
pentru care forma operatorilá este(5.3.14)D2y + 3 ⋅ Dy + 2 ⋅ y = D2u + 5 ⋅ Du + 6 ⋅ u
care se exprimá prin egalitate faþá de zero(5.3.15)D2(y − u) + D(3y − 5u) + (2y − 6u) = 0
Factorizarea buclatá este
, (5.3.16)(2y − 6u) + D[(3y − 5u) + D[(y − u)]] = 0
pe care se fac substituþiile (5.3.17)y − u = x1 ⇒ y = x1 + u
D(y − u) = x.
1
(3y − 5u) + x.
1 = x2 ⇒ x.
1 = x2 − 3y + 5u ⇔ x.
1 = x2 − 3(x1 + u) + 5u(5.3.18)x
.1 = −3x1 + x2 + 2u
(2y − 6u) + D[x2] = 0 ⇒ x.
2 = −2y + 6u ⇒ x.
2 = −2(x1 + u) + 6u(5.3.19)x
.2 = −2x1 + 4u
Relaþiile (5.3.18), (5.3.19) determiná ecuaþiile de stare propriu-zise iarrelaþia (5.3.17) constituie relaþia de ießire deci,
x.
1 = −3x1 + x2 + 2u(5.3.20)x
.2 = −2x1 + 4u
y = x1 + ucare se scriu sub formá matricialá,
(5.3.21)x.
= Ax + buy = cTx + bu
unde,
, , , , (5.3.22)A =
−3 1−2 0
b =
24
c =
10
d = 1
Acum putem verifica proprietáþile de controlabilitate ßi observabilitate.
. (5.3.23)P =
2 −24 −4
⇒ det(P) = 0
Aceastá realizare a aceleiaßi funcþii de transfer din exemplul de mai sus nueste controlabilá, dar
(5.3.24)Q =
1 0−3 1
⇒ det(Q) = 1 ≠ 0
ceea ce confirmá cá aceastá formá canonicá este una observabilá.Ecuaþiile de stare (5.3.19) se pot obþine ßi direct, prin ínlocuirea ín relaþiile
(5.3.12) a parametrilor ecuaþiei difereþiale (5.3.13),. (5.3.25)n = 2, b2 = 1, b1 = 5, b0 = 6, a2=1, a1 = 3, a0 = 2
5. REALIZAREA SISTEMELOR 5.3. A doua formá canonicá structurá D-I PRIN ECUAÞII DE STARE
143
5.4. Forma canonicá Jordan
5.4.1. Definiþia formei canonicá Jordan
O ecuaþie de stare se spune cá este ín forma canonicá Jordan dacá matriceasistemului este o matrice de tip Jordan.
O matrice patratá este de tip Jordan dacá este o matrice diagonalá, avändpe diagonalá valorile sale proprii, dacá acestea sunt distincte, sau are pe diagonaláo serie de blocuri, dacá existá valori proprii multiple, ín care caz este o formábloc-diagonalá.
Fiecare bloc de pe diagonalá este asociat unei singure valori proprii,dimensiunea blocului fiind egalá cu ordinul de multiplicitate al valorii propriirespectivá.
Forma unui astfel de bloc depinde de structura vectorilor proprii generaþi deacea valoare proprie multiplá.
Ín algebrá existá multe rezultate privind descompunerea unei matricipatrate ín produse de matrici, denumite factorizári matriciale, astfel íncät factorulmedian sá aibá diferite forme diagonale ín particular o matrice Jordan.
Realizarea unei funcþii de transfer printr-o ecuaþie de stare ín formacanonicá Jordan se poate efectua prin descompunerea acelei funcþii de transfer ínsumá de fracþii simple ßi exprimarea ráspunsului conform acestei descompuneri.
Pe aceastá structurá se ataßeazá variabile de stare ßi se scriu ecuaþiile destare ín domeniul timp.
Desigur, pentru aceasta trebuie cunoscute rádácinile numitorului ceea ceeste un dezavantaj.
Ín continuare se prezintá metoda de realizare a unei funcþii de transfer prinecuaþie de stare ín forma canonicá Jordan pe baza unui exemplu.
Prin extensie se poate aplica la orice funcþie de transfer pentru care esteposibilá descompunerea ín sumá de fracþii simple cu coeficienþi reali.
5. REALIZAREA SISTEMELOR 5.4. Forma canonicá Jordan PRIN ECUAÞII DE STARE
144
5.4.2. Exemplu de determinare a formei canonicá Jordan prindescompunere ín sumá de fracþii simple
Se considerá un sistem cu funcþia de transfer de ordinul 5 ín care seevidenþiazá un pol simplu, un pol dublu ßi doi poli complex conjugaþi,
, (5.4.1)H(s) = Y(s)U(s)
= b4 ⋅ s4 + ... + b1 ⋅ s1 + b0
(s − λ1) ⋅ (s − λ2)2 ⋅ [(s − α)2 + β2]care se descompune ín sumá de fracþii simple cu coeficienþi reali,
(5.4.2)H(s) = c0 + c11
s − λ1+ c21
s − λ2+ c22
(s − λ2)2 + c31 ⋅ s + c32
(s − α)2 + β 2
ín care coeficienþii se obþin eventual prin identificare.c0 , c ij
Pentru comoditatea scrierilor urmátoare se noteazá fracþia cu poli complexcojnjugaþi,
. (5.4.3)H3(s) = c31⋅s + c32
(s − α)2 + β2
Acest sistem realizeazá relaþia intrare-ießire ín condiþii iniþiale nule,
, (5.4.4)Y(s) = H(s) ⋅ U(s)
care se mai scrie, avänd ín vedere descompunerea ín sumá de fracþii simple,. Y(s) = c0 ⋅ U(s) + c11
s − λ1⋅ U(s) + [ c21
s − λ2+ c22
(s − λ2)2] ⋅ U(s) + H3(s) ⋅ U(s)
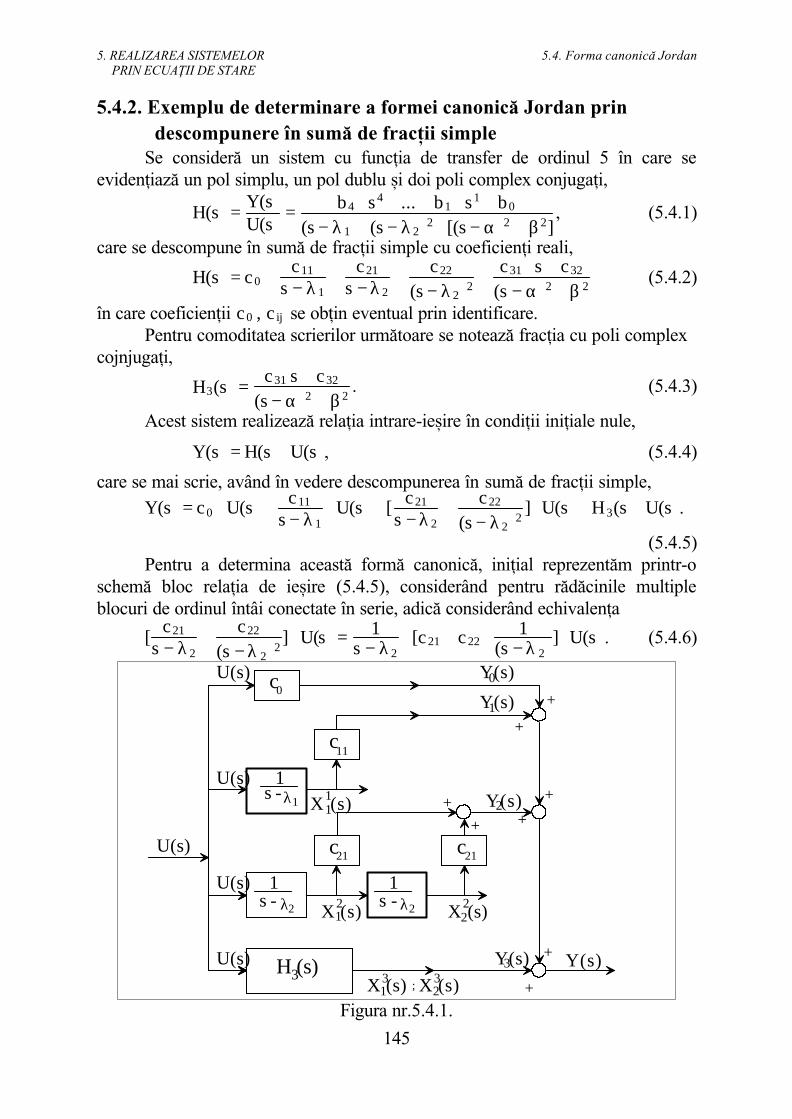
(5.4.5)Pentru a determina aceastá formá canonicá, iniþial reprezentám printr-o
schemá bloc relaþia de ießire (5.4.5), consideränd pentru rádácinile multipleblocuri de ordinul íntäi conectate ín serie, adicá consideränd echivalenþa
. (5.4.6)[ c21
s − λ2+ c22
(s − λ 2)2] ⋅ U(s) = 1
s − λ2⋅ [c21 + c22 ⋅ 1
(s − λ 2)] ⋅ U(s)
+
+
+
+
+
+
++
U(s)
U(s)
U(s)
U(s)
U(s)
X (s)11
X (s)22X (s)2
1
Y(s)
Y(s)0
Y(s)1
Y(s)2
Y(s)3
X (s)32X (s)3
1
c0
c11
c21 c21
1s - λ2
1s - λ2
1s -λ1
H (s)3;
Figura nr.5.4.1.
5. REALIZAREA SISTEMELOR 5.4. Forma canonicá Jordan PRIN ECUAÞII DE STARE
145
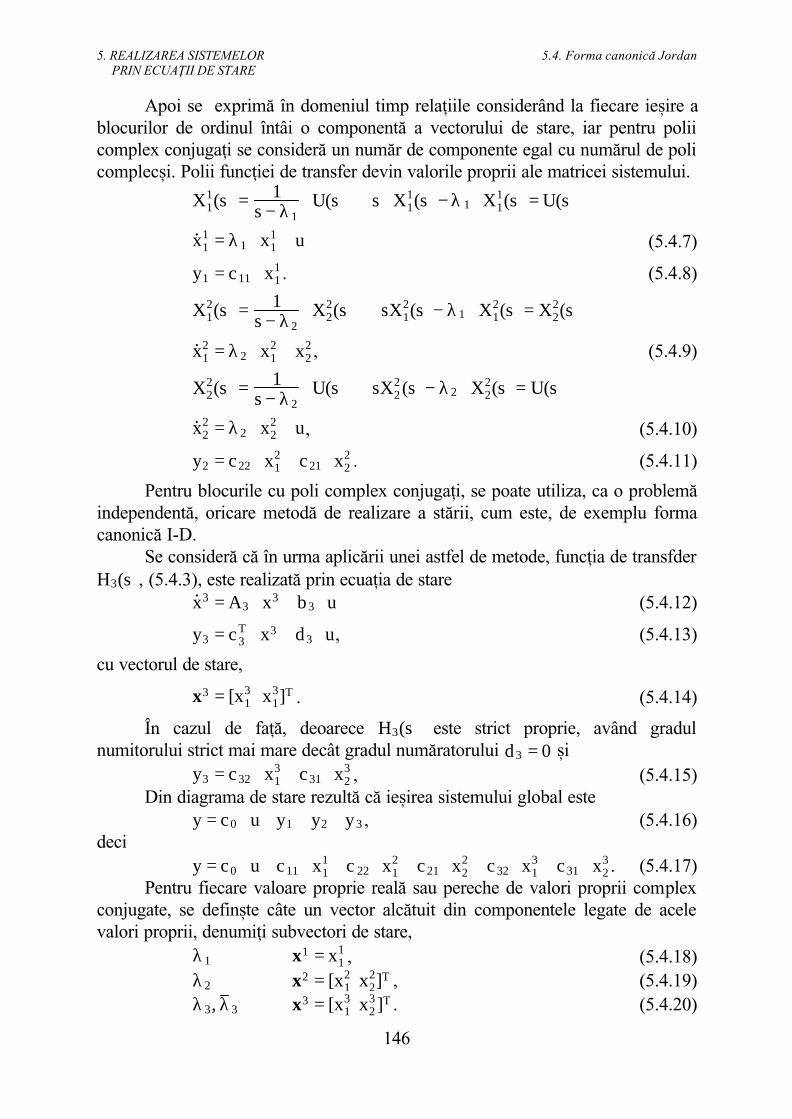
Apoi se exprimá ín domeniul timp relaþiile consideränd la fiecare ießire ablocurilor de ordinul íntäi o componentá a vectorului de stare, iar pentru poliicomplex conjugaþi se considerá un numár de componente egal cu numárul de policomplecßi. Polii funcþiei de transfer devin valorile proprii ale matricei sistemului.
X11(s) = 1
s − λ1⋅ U(s) ⇒ s ⋅ X1
1(s) − λ 1 ⋅ X11(s) = U(s) ⇒
(5.4.7)x. 11 = λ1 ⋅ x1
1 + u
. (5.4.8)y1 = c11 ⋅ x11
X12(s) = 1
s − λ2⋅ X2
2(s) ⇒ sX12(s) − λ1 ⋅ X1
2(s) = X22(s) ⇒
, (5.4.9)x. 12 = λ2 ⋅ x1
2 + x22
X22(s) = 1
s − λ2⋅ U(s) ⇒ sX2
2 (s) − λ2 ⋅ X22(s) = U(s) ⇒
, (5.4.10)x. 22 = λ2 ⋅ x2
2 + u
. (5.4.11)y2 = c22 ⋅ x12 + c21 ⋅ x2
2
Pentru blocurile cu poli complex conjugaþi, se poate utiliza, ca o problemáindependentá, oricare metodá de realizare a stárii, cum este, de exemplu formacanonicá I-D.
Se considerá cá ín urma aplicárii unei astfel de metode, funcþia de transfder, (5.4.3), este realizatá prin ecuaþia de stareH3(s)
(5.4.12)x. 3 = A3 ⋅ x3 + b3 ⋅ u
, (5.4.13)y3 = c3T ⋅ x3 + d3 ⋅ u
cu vectorul de stare,
. (5.4.14)x3 = [x13 x1
3]T
Ín cazul de faþá, deoarece este strict proprie, avänd gradulH3(s)numitorului strict mai mare decät gradul numáratorului ßi d3 = 0
, (5.4.15)y3 = c32 ⋅ x13 + c31 ⋅ x2
3
Din diagrama de stare rezultá cá ießirea sistemului global este, (5.4.16)y = c0 ⋅ u + y1 + y2 + y3
deci. (5.4.17)y = c0 ⋅ u + c11 ⋅ x1
1 + c 22 ⋅ x12 + c21 ⋅ x2
2 + c32 ⋅ x13 + c31 ⋅ x2
3
Pentru fiecare valoare proprie realá sau pereche de valori proprii complexconjugate, se definßte cäte un vector alcátuit din componentele legate de acelevalori proprii, denumiþi subvectori de stare,
, (5.4.18)λ1 ⇒ x1 = x11
, (5.4.19)λ2 ⇒ x2 = [x12 x2
2]T
. (5.4.20)λ3, λ3 ⇒ x3 = [x13 x2
3 ]T
5. REALIZAREA SISTEMELOR 5.4. Forma canonicá Jordan PRIN ECUAÞII DE STARE
146
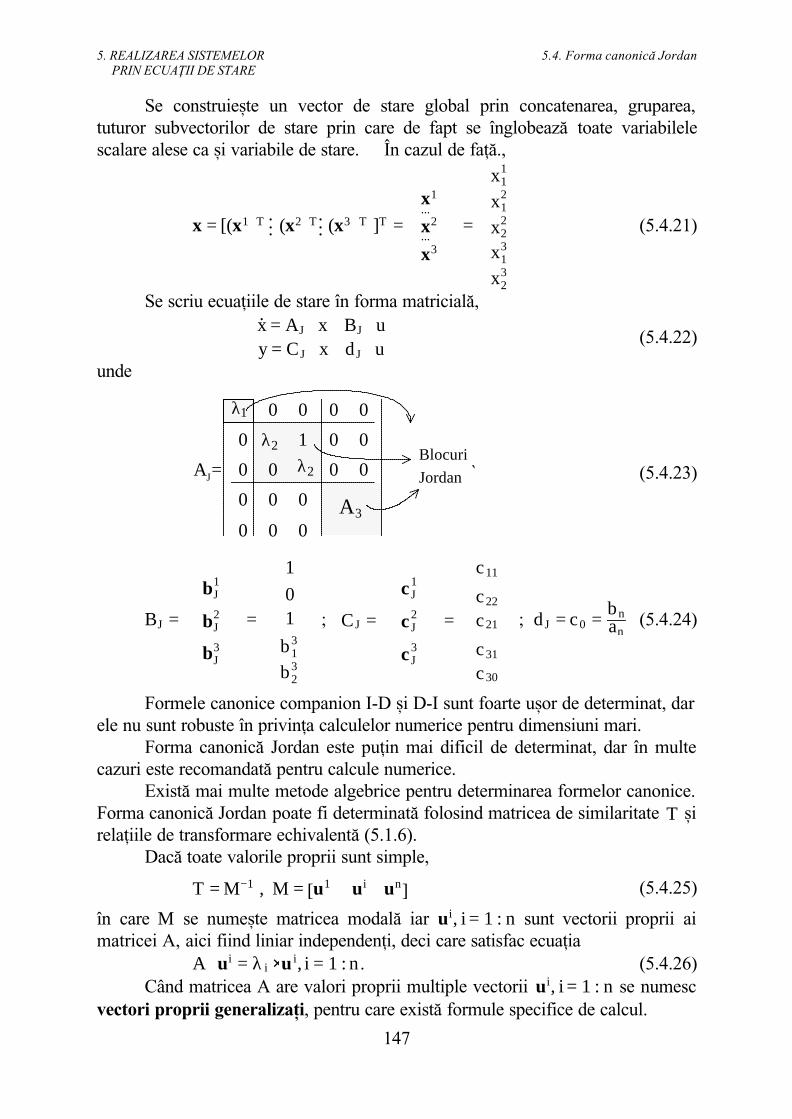
Se construießte un vector de stare global prin concatenarea, gruparea,tuturor subvectorilor de stare prin care de fapt se ínglobeazá toate variabilelescalare alese ca ßi variabile de stare. Ín cazul de faþá.,
(5.4.21)x = [(x1)T ... (x2)T .
.. (x3)T ]T =
...x1
...x2
x3
=
x11
x12
x22
x13
x23
Se scriu ecuaþiile de stare ín forma matricialá,
(5.4.22)
x. = AJ ⋅ x + BJ ⋅ uy = C J ⋅ x + d J ⋅ u
unde
` (5.4.23)A =J
0000
0010
0
0
0
0
0
0
0000
A3
JordanBlocuri
λ1
λ2
λ2
; ; (5.4.24)BJ =
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅bJ
1
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅bJ
2
bJ3
=
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅10
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅1
b13
b23
C J =
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅c J
1
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅c J
2
c J3
=
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅c11
c22
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅c21
c31
c30
d J = c0 = bnan
Formele canonice companion I-D ßi D-I sunt foarte ußor de determinat, darele nu sunt robuste ín privinþa calculelor numerice pentru dimensiuni mari.
Forma canonicá Jordan este puþin mai dificil de determinat, dar ín multecazuri este recomandatá pentru calcule numerice.
Existá mai multe metode algebrice pentru determinarea formelor canonice.Forma canonicá Jordan poate fi determinatá folosind matricea de similaritate ßiTrelaþiile de transformare echivalentá (5.1.6).
Dacá toate valorile proprii sunt simple,
(5.4.25)T = M−1 , M = [u1 ⋅ ⋅ui ⋅ ⋅un]ín care se numeßte matricea modalá iar sunt vectorii proprii aiM ui, i = 1 : nmatricei A, aici fiind liniar independenþi, deci care satisfac ecuaþia
. (5.4.26)A ⋅ ui = λ i ⋅ u i, i = 1 : nCänd matricea A are valori proprii multiple vectorii se numescui, i = 1 : n
vectori proprii generalizaþi, pentru care existá formule specifice de calcul.
5. REALIZAREA SISTEMELOR 5.4. Forma canonicá Jordan PRIN ECUAÞII DE STARE
147
5.5. Deducerea ecuaþiilor de stare pornind de la schema bloc
5.5.1. Algoritmul de deducere a ecuaþiilor de stare
Dacá sistemul este reprezentat printr-o schemá bloc ín care blocurile au osemnificaþie fizicá, se poate obþine o realizare de stare utilá, astfel íncät dintrevariabilele de stare cät mai multe sá aibá o semnificaþie fizicá.
Evident matricile obþinute nu sunt íntr-o formá "economicá", dar auavantajul robusteþii pentru calculul numeric (sunt matrici "pline").
Se poate aplica urmátorul algoritm:
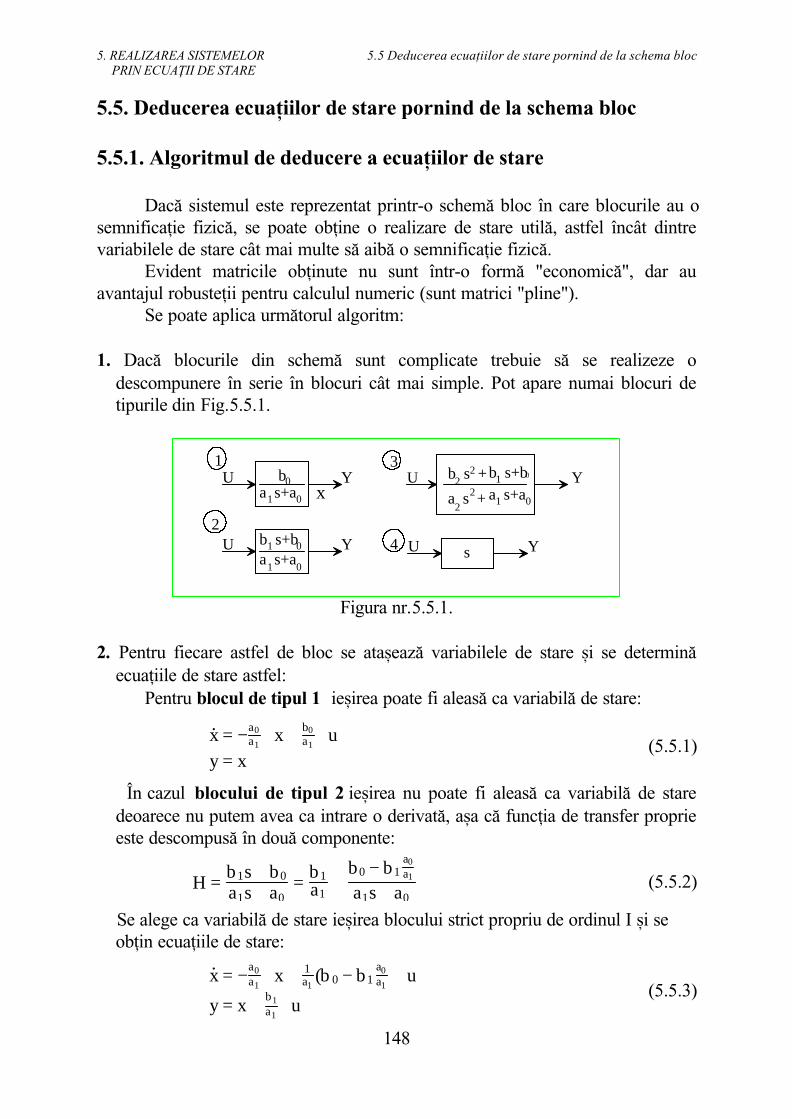
1. Dacá blocurile din schemá sunt complicate trebuie sá se realizeze odescompunere ín serie ín blocuri cät mai simple. Pot apare numai blocuri detipurile din Fig.5.5.1.
0ba s+a01
a s+a01
b s+b01 sU Y
a s+a01a s +2
b s+b01b s +22
2U YU Y
U Y
1
2
3
4
x
Figura nr.5.5.1.
2. Pentru fiecare astfel de bloc se ataßeazá variabilele de stare ßi se determináecuaþiile de stare astfel:
Pentru blocul de tipul 1 ießirea poate fi aleasá ca variabilá de stare:
(5.5.1)
x. = −a0a1
⋅ x + b0a1
⋅ uy = x
Ín cazul blocului de tipul 2 ießirea nu poate fi aleasá ca variabilá de staredeoarece nu putem avea ca intrare o derivatá, aßa cá funcþia de transfer proprieeste descompusá ín douá componente:
(5.5.2)H = b1s + b0
a1s + a0= b1
a1+
b0 − b1a0a1
a1s + a0
Se alege ca variabilá de stare ießirea blocului strict propriu de ordinul I ßi seobþin ecuaþiile de stare:
(5.5.3)
x.
= −a0a1
⋅ x + 1a1
(b 0 − b1a0a1
) ⋅ u
y = x + b1a1
⋅ u
5. REALIZAREA SISTEMELOR 5.5 Deducerea ecuaþiilor de stare pornind de la schema bloc PRIN ECUAÞII DE STARE
148

ba
b -b0 11
0aa
1a s+a1 0
U
X
Y
Figura nr.5.5.2.
Pentru blocul de tipul 3 se poate utiliza orice metodá de obþinere a uneirealizári de stare (forme canonice sau forma Jordan þinänd cont de parteaimaginará sau realá a polilor):
(5.5.4)
x. 1 = x2
x.
2 = − a0a2
⋅ x1 − a1a2
⋅ x2 + 1a2
⋅ u
y = (b0 − b2a0a2
) ⋅ x1 + (b1 − b2a1a2
) ⋅ x2 + b2a2
⋅ u
Pentru blocul de tipul 4 se poate alege ießirea ca fiind x. Íntr-un astfel de cazacest x va dispare dacá dorim sá obþinem realizarea minimalá (un numárminim de variabile de stare).
u=x y x=y.s
Figura nr.5.5.3.
3. Se noteazá intrárile ßi ießirile blocurilor cu variabile ßi se scriu relaþiilealgebrice dintre ele.
Folosind ecuaþiile de stare obþinute ca mai sus ßi relaþiile (ecuaþiile)algebrice se eliminá toate variabilele intermediare ßi se scriu ecuaþiile de stare ínforma matricialá, consideränd ca vector de stare vectorul alcátuit din toatevariabilele de stare ataßate ín schema bloc.
5. REALIZAREA SISTEMELOR 5.5 Deducerea ecuaþiilor de stare pornind de la schema bloc PRIN ECUAÞII DE STARE
149
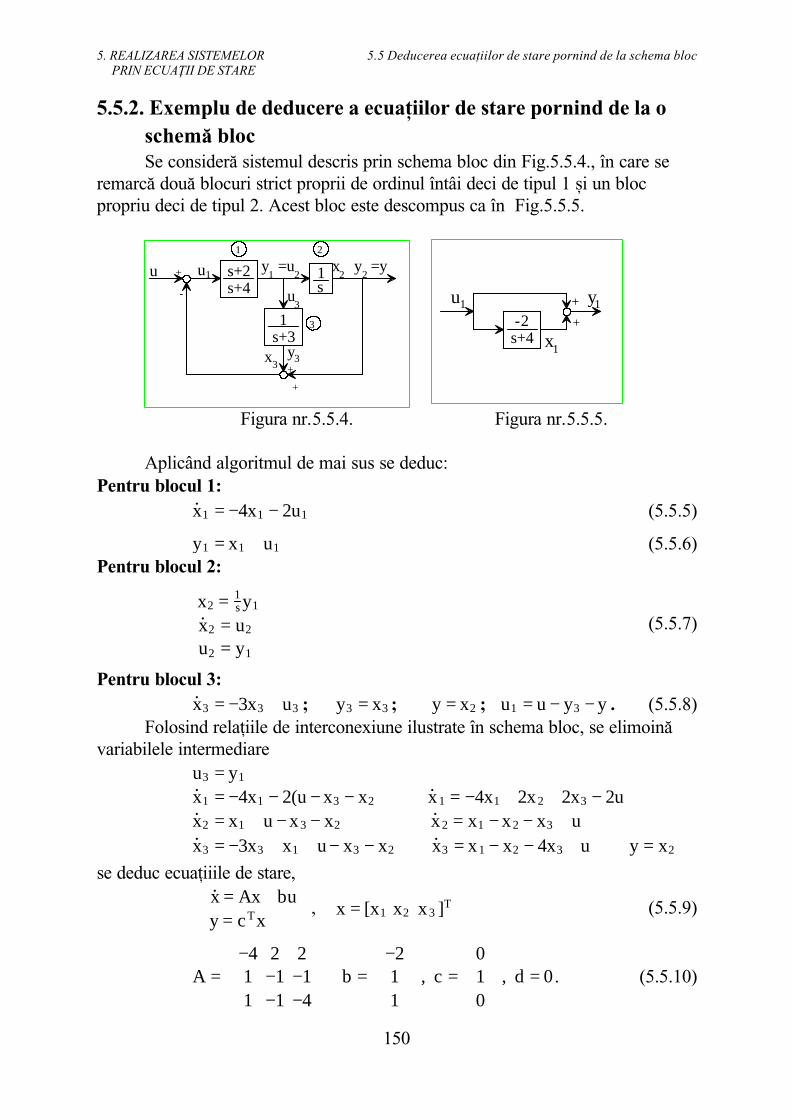
5.5.2. Exemplu de deducere a ecuaþiilor de stare pornind de la oschemá blocSe considerá sistemul descris prin schema bloc din Fig.5.5.4., ín care se
remarcá douá blocuri strict proprii de ordinul íntäi deci de tipul 1 ßi un blocpropriu deci de tipul 2. Acest bloc este descompus ca ín Fig.5.5.5.
s+2s+4
1s
1s+3
u u y =u
u
x
x y =y1 1 2
3
3y3
2 2
1 2
3
+
+
+
-
-2s+4
+
+1u 1y
1x
Figura nr.5.5.4. Figura nr.5.5.5.
Aplicänd algoritmul de mai sus se deduc:Pentru blocul 1:
(5.5.5)x.
1 = −4x1 − 2u1
(5.5.6)y1 = x1 + u1
Pentru blocul 2:
(5.5.7)x2 = 1
s y1
x.
2 = u2
u2 = y1
Pentru blocul 3:; ; ; . (5.5.8)x
.3 = −3x3 + u3 y3 = x3 y = x2 u1 = u − y3 − y
Folosind relaþiile de interconexiune ilustrate ín schema bloc, se elimoinávariabilele intermediare
u3 = y1 ⇒x.
1 = −4x1 − 2(u − x3 − x2) ⇒ x.
1 = −4x1 + 2x2 + 2x3 − 2ux.
2 = x1 + u − x3 − x2 ⇒ x.
2 = x1 − x2 − x3 + u x
.3 = −3x3 + x1 + u − x3 − x2 ⇒ x
.3 = x1 − x2 − 4x3 + u ⇒ y = x2
se deduc ecuaþiiile de stare,
, (5.5.9)
x. = Ax + buy = cTx
x = [x1 x2 x3 ]T
. (5.5.10)A =
−4 2 21 −1 −11 −1 −4
b =
−211
, c =
010
, d = 0
5. REALIZAREA SISTEMELOR 5.5 Deducerea ecuaþiilor de stare pornind de la schema bloc PRIN ECUAÞII DE STARE
150
6. ANALIZA SISTEMELOR ÍN DOMENIUL FRECVENÞÁAnaliza sistemelor ín domeniul frecvenþá (ín domeniul complex) constá ín
douá abordári principale:1. Caracteristici experimentale de frecvenþá,2. Descrierea funcþiilor de transfer ín domeniul complex.
6.1. Caracteristici experimentale de frecvenþáÍn practica inginereascá sunt des utilizate aßa-numitele caracteristici
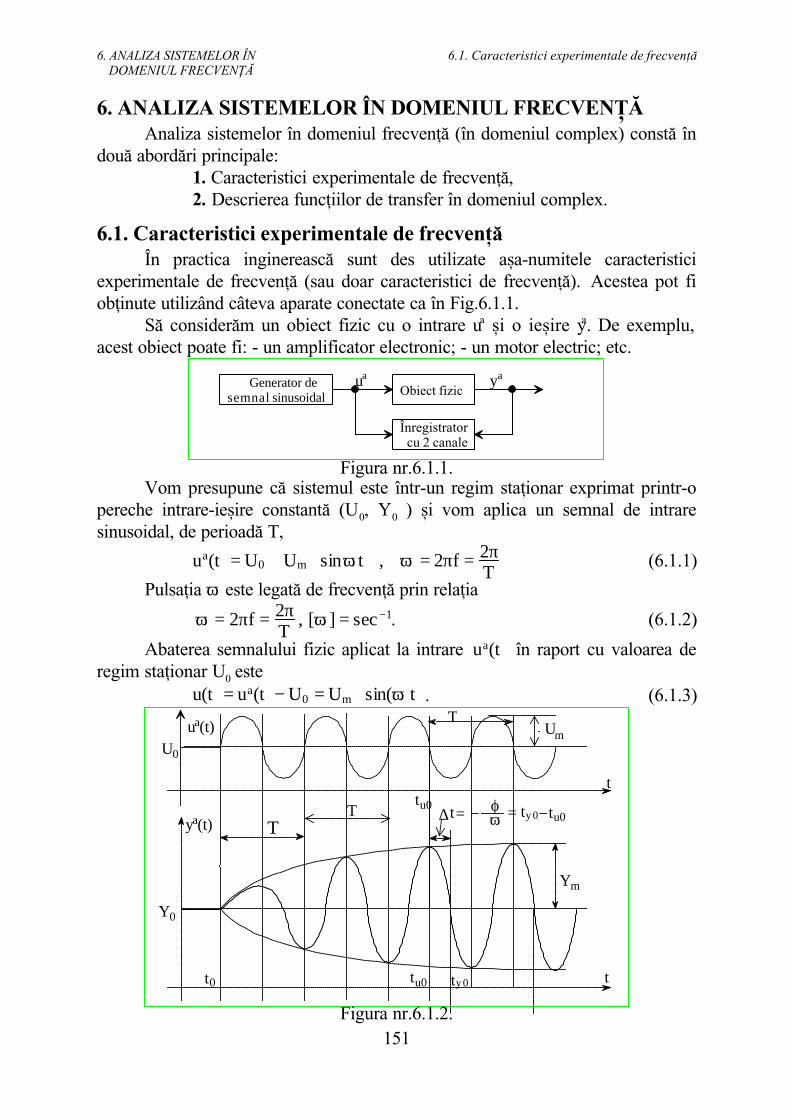
experimentale de frecvenþá (sau doar caracteristici de frecvenþá). Acestea pot fiobþinute utilizänd cäteva aparate conectate ca ín Fig.6.1.1.
Sá considerám un obiect fizic cu o intrare ua ßi o ießire ya. De exemplu,acest obiect poate fi: - un amplificator electronic; - un motor electric; etc.
Generator desemnal sinusoidal
ayauObiect fizic
cu 2 canaleÍnregistrator
Figura nr.6.1.1.Vom presupune cá sistemul este íntr-un regim staþionar exprimat printr-o
pereche intrare-ießire constantá (U0, Y0 ) ßi vom aplica un semnal de intraresinusoidal, de perioadá T,
(6.1.1)ua(t) = U0 + Um ⋅ sinω t , ω = 2πf = 2πT
Pulsaþia este legatá de frecvenþá prin relaþia ω
. (6.1.2)ω = 2πf = 2πT
, [ω] = sec−1
Abaterea semnalului fizic aplicat la intrare ín raport cu valoarea deua(t)regim staþionar U0 este
. (6.1.3)u(t) = ua(t) − U0 = Um ⋅ sin(ω t)
T
T
T
Um
Ym
Y0
U0
t
tt0
y (t)a
u (t)a
tu0
tu0
y 0t
ϕω= −∆t tu0y 0t= −
Figura nr.6.1.2.
6. ANALIZA SISTEMELOR ÍN 6.1. Caracteristici experimentale de frecvenþá DOMENIUL FRECVENÞÁ
151
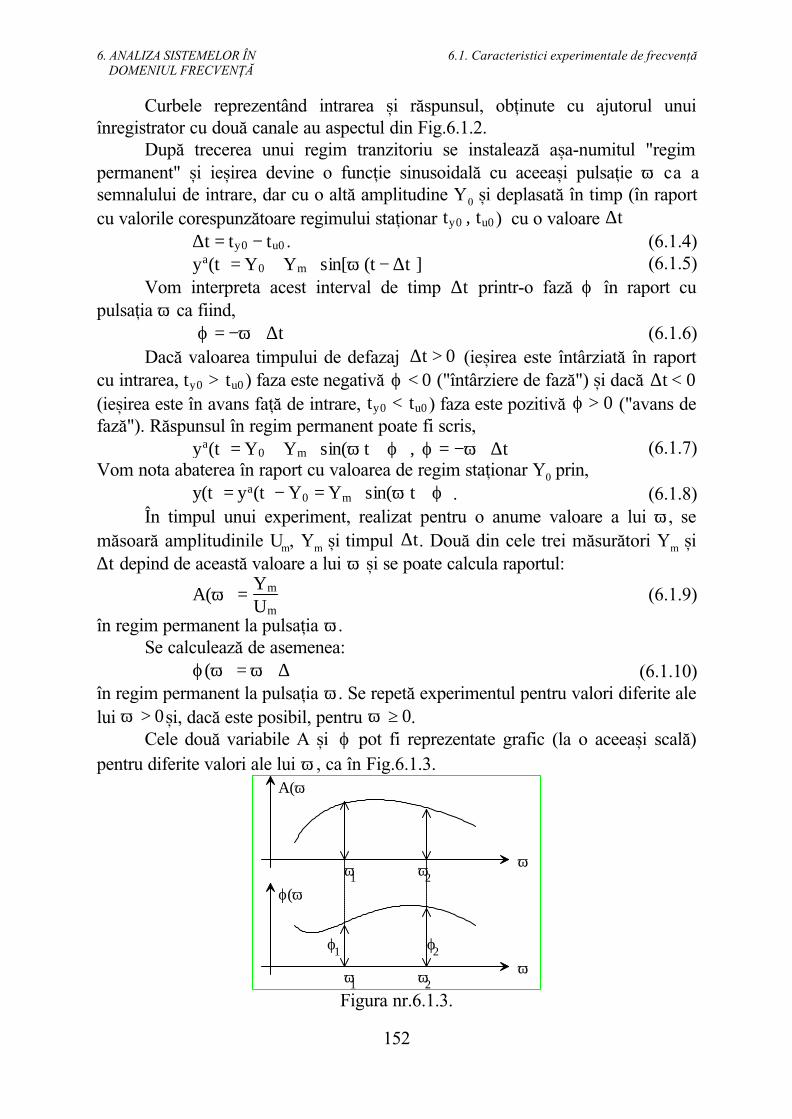
Curbele reprezentänd intrarea ßi ráspunsul, obþinute cu ajutorul unuiínregistrator cu douá canale au aspectul din Fig.6.1.2.
Dupá trecerea unui regim tranzitoriu se instaleazá aßa-numitul "regimpermanent" ßi ießirea devine o funcþie sinusoidalá cu aceeaßi pulsaþie ca aωsemnalului de intrare, dar cu o altá amplitudine Y0 ßi deplasatá ín timp (ín raportcu valorile corespunzátoare regimului staþionar ) cu o valoare ty0 , tu0 ∆t
. (6.1.4)∆t = ty0 − tu0
(6.1.5)ya(t) = Y0 + Ym ⋅ sin[ω (t − ∆t)]Vom interpreta acest interval de timp printr-o fazá ín raport cu∆t ϕ
pulsaþia ca fiind,ω (6.1.6)ϕ = −ω ⋅ ∆t
Dacá valoarea timpului de defazaj (ießirea este íntärziatá ín raport∆t > 0cu intrarea, ) faza este negativá ("íntärziere de fazá") ßi dacá ty0 > tu0 ϕ < 0 ∆t < 0(ießirea este ín avans faþá de intrare, ) faza este pozitivá ("avans dety0 < tu0 ϕ > 0fazá"). Ráspunsul ín regim permanent poate fi scris,
(6.1.7)ya(t) = Y0 + Ym ⋅ sin(ω t + ϕ) , ϕ = −ω ⋅ ∆tVom nota abaterea ín raport cu valoarea de regim staþionar Y0 prin,
. (6.1.8)y(t) = ya(t) − Y0 = Ym ⋅ sin(ω t + ϕ)Ín timpul unui experiment, realizat pentru o anume valoare a lui , seω
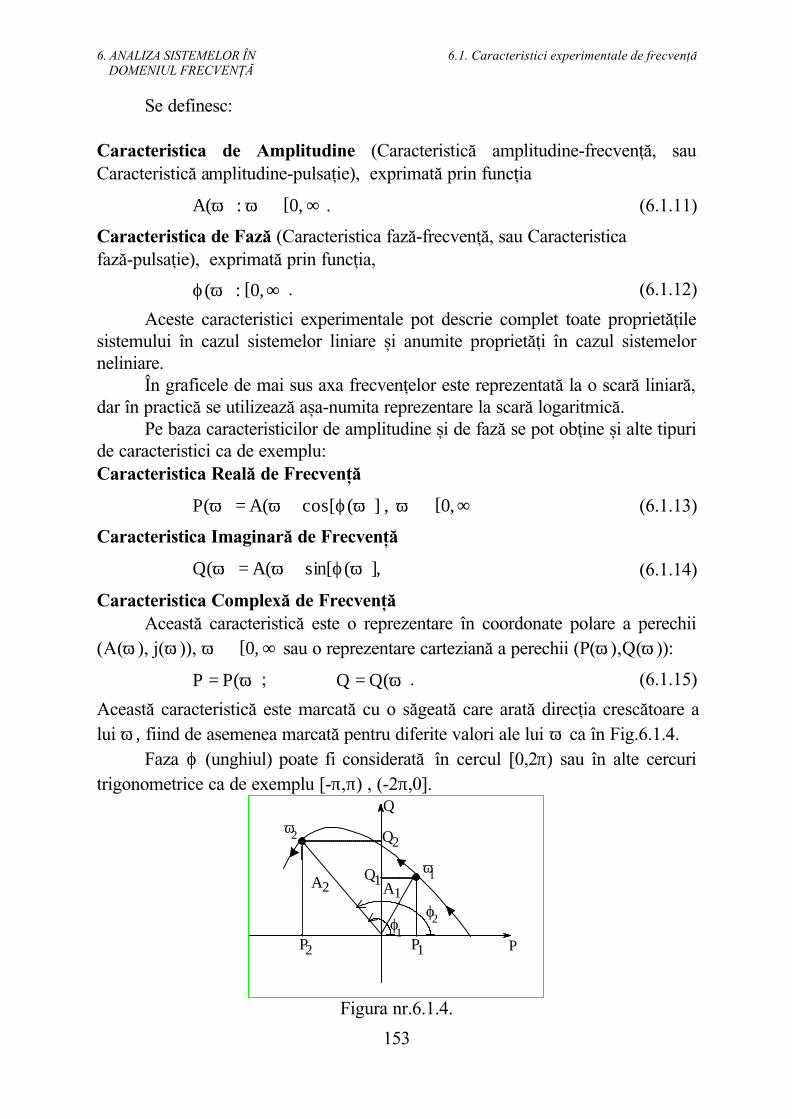
másoará amplitudinile Um, Ym ßi timpul . Douá din cele trei másurátori Ym ßi∆t depind de aceastá valoare a lui ßi se poate calcula raportul:∆t ω
(6.1.9)A(ω) = Ym
Umín regim permanent la pulsaþia . ω
Se calculeazá de asemenea: (6.1.10)ϕ(ω) = ω ⋅ ∆
ín regim permanent la pulsaþia . Se repetá experimentul pentru valori diferite aleωlui ßi, dacá este posibil, pentru . ω > 0 ω ≥ 0
Cele douá variabile A ßi pot fi reprezentate grafic (la o aceeaßi scalá)ϕpentru diferite valori ale lui ω , ca ín Fig.6.1.3.
ϕ2
ω2
ω2
ϕ1
ω1
ω1
A 2A 1
ω
ω
Α(ω)
ϕ(ω)
Figura nr.6.1.3.
6. ANALIZA SISTEMELOR ÍN 6.1. Caracteristici experimentale de frecvenþá DOMENIUL FRECVENÞÁ
152
Se definesc:
Caracteristica de Amplitudine (Caracteristicá amplitudine-frecvenþá, sauCaracteristicá amplitudine-pulsaþie), exprimatá prin funcþia
. (6.1.11)A(ω) : ω ∈ [0, ∞)
Caracteristica de Fazá (Caracteristica fazá-frecvenþá, sau Caracteristicafazá-pulsaþie), exprimatá prin funcþia,
. (6.1.12)ϕ(ω) : [0, ∞)
Aceste caracteristici experimentale pot descrie complet toate proprietáþilesistemului ín cazul sistemelor liniare ßi anumite proprietáþi ín cazul sistemelorneliniare.
Ín graficele de mai sus axa frecvenþelor este reprezentatá la o scará liniará,dar ín practicá se utilizeazá aßa-numita reprezentare la scará logaritmicá.
Pe baza caracteristicilor de amplitudine ßi de fazá se pot obþine ßi alte tipuride caracteristici ca de exemplu:Caracteristica Realá de Frecvenþá
(6.1.13)P(ω) = A(ω) ⋅ cos[ϕ(ω)] , ω ∈ [0, ∞)
Caracteristica Imaginará de Frecvenþá
(6.1.14)Q(ω) = A(ω) ⋅ sin[ϕ(ω)],
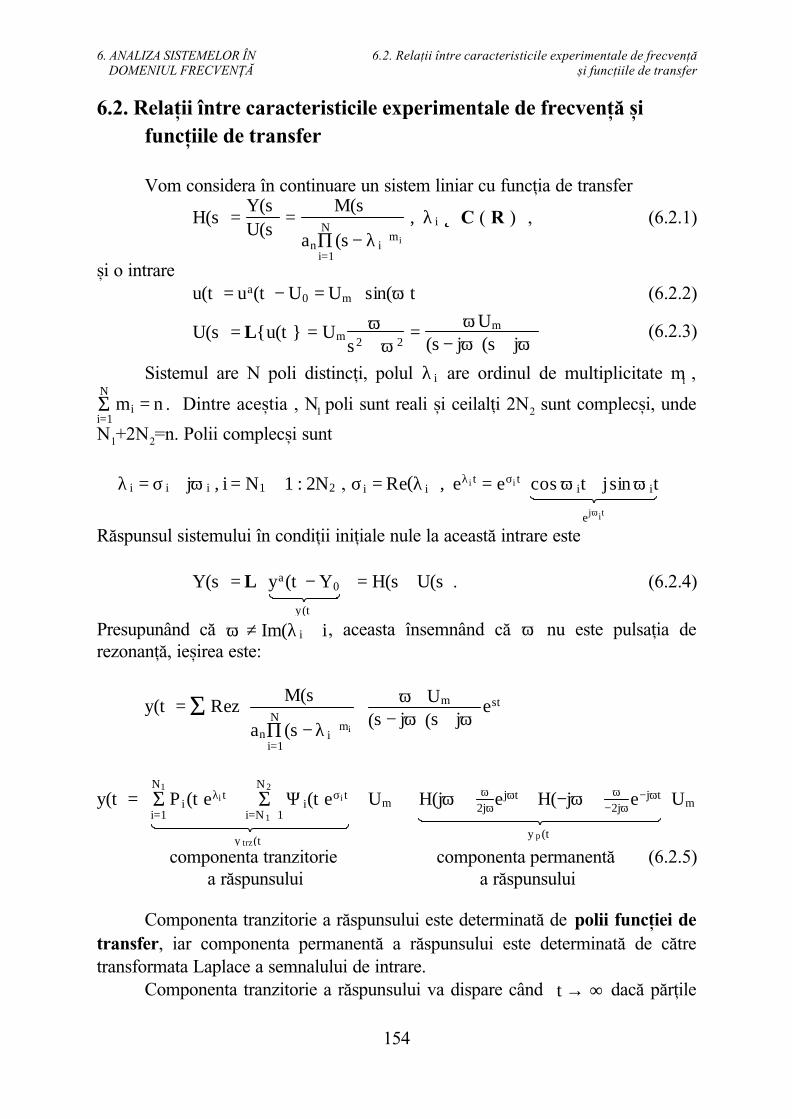
Caracteristica Complexá de Frecvenþá Aceastá caracteristicá este o reprezentare ín coordonate polare a perechii
(A(ω ), j(ω )), sau o reprezentare cartezianá a perechii (P(ω ),Q(ω )):ω ∈ [0, ∞)
; . (6.1.15)P = P(ω) Q = Q(ω)
Aceastá caracteristicá este marcatá cu o ságeatá care aratá direcþia crescátoare alui ω, fiind de asemenea marcatá pentru diferite valori ale lui ω ca ín Fig.6.1.4.
Faza ϕ (unghiul) poate fi consideratá ín cercul [0,2π) sau ín alte cercuritrigonometrice ca de exemplu [-π,π) , (-2π,0].
Q2
Q
P
ϕ2
ω2
ϕ1
ω1A1
A2
P2 P1
Q1
Figura nr.6.1.4.
6. ANALIZA SISTEMELOR ÍN 6.1. Caracteristici experimentale de frecvenþá DOMENIUL FRECVENÞÁ
153
6.2. Relaþii íntre caracteristicile experimentale de frecvenþá ßifuncþiile de transfer
Vom considera ín continuare un sistem liniar cu funcþia de transfer
C ( R ) , (6.2.1)H(s) =Y(s)U(s)
=M(s)
anΠi=1
N(s − λ i)mi
, λ i ∈
ßi o intrare (6.2.2)u(t) = ua(t) − U0 = Um ⋅ sin(ω t) ⇒
(6.2.3)U(s) = Lu(t) = Umω
s2 + ω 2= ωUm
(s − jω)(s + jω)
Sistemul are N poli distincþi, polul are ordinul de multiplicitate mi ,λ i
. Dintre aceßtia , N1 poli sunt reali ßi ceilalþi 2N2 sunt complecßi, undeΣi=1
Nmi = n
N1+2N2=n. Polii complecßi sunt
, λ i = σ i + jω i , i = N1 + 1 : 2N2 σi = Re(λ i) , eλi t = eσi t
ejωit
cos ω it + jsin ω it
Ráspunsul sistemului ín condiþii iniþiale nule la aceastá intrare este
. (6.2.4)Y(s) = L
y(t)
ya(t) − Y0
= H(s) ⋅ U(s)
Presupunänd cá , aceasta ínsemnänd cá ω nu este pulsaþia deω ≠ Im(λ i)∀irezonanþá, ießirea este:
y(t) = Σ Rez
M(s)
anΠi=1
N(s − λ i)mi
⋅ ω ⋅ Um
(s − jω)(s + jω)est
y(t) =
y trz(t)
Σi=1
N1
P i(t)eλi t + Σi=N 1+1
N 2
Ψ i(t)eσi t
Um +
y p (t)
H(jω) ⋅ ω2jωejωt + H(−jω) ⋅ ω
−2jωe−jωt
Um
componenta tranzitorie componenta permanentá (6.2.5) a ráspunsului a ráspunsului
Componenta tranzitorie a ráspunsului este determinatá de polii funcþiei detransfer, iar componenta permanentá a ráspunsului este determinatá de cátretransformata Laplace a semnalului de intrare.
Componenta tranzitorie a ráspunsului va dispare cänd dacá párþilet → ∞
6. ANALIZA SISTEMELOR ÍN 6.2. Relaþii íntre caracteristicile experimentale de frecvenþá DOMENIUL FRECVENÞÁ ßi funcþiile de transfer
154
reale ale tuturor polilor funcþiei de transfer sunt negative , .Re(λ i) < 0Acest lucru ínseamná cá párþile reale ale tuturor polilor sunt plasate ín
partea stängá a planului complex. Acesta este de fapt cel mai important criteriude stabilitate pentru sistemele liniare.
Expresia este un numár complex pentru care putem defini,H(jω)
H(jω) = Aω) ⋅ ejϕ(ω)
A(ω) = H(jω)
(6.2.6)ϕ(ω) = arg(H(jω))
H(jω) = A(ω)ejϕ(ω)
H(−jω) = A(ω)e−jϕ(ω)
Astfel vom avea:
yp (t) = H(jω) ω
2jωejωt + H(−jω) ω
−2jωe−jωt
Um
yp (t) = Um ⋅ A(ω) ⋅ ej(ωt+ϕ) − e−j(ωt+ϕ)
2j
(6.2.7)yp (t) =Ym
A(ω)Um sin(ω t+−ω∆t , ∆t=∆t(ω)
ϕ(ω) )
Se poate observa cá ráspunsul permanent este tot un semnal sinusoidal, cuaceeaßi pulsaþie cu intrarea, dar defazat faþá de aceasta,
(6.2.8)
A exp (ω)
Ym
Um= A(ω) = H(jω)
ceea ce ínseamná cá raportul dintre amplitudinile experimentale, aßa cum a fostdefinit ín (6.1.9), este chiar modulul expresiei complexe obþinutá prinH(jω)ínlocuirea lui s cu . Faza experimentalá, datá de relaþia (6.1.10), este de faptjωargumentul aceleiaßi expresii complexe ,H(jω)
(6.2.9)−ω∆t exp
ϕ(ω) = arg(H(jω))
Existá o legáturá puternicá íntre caracteristicile experimentale de frecvenþáßi modulul ßi argumentul funcþiei de transfer.
Prelucränd aceste caracteristici ale funcþiei de transfer se poate determina,ín sens invers, care este forma unor caracteristici experimentale.
Dacá avem funcþia de transfer H(s) se poate determina descrierea sa índomeniul frecvenþá (reprezentarea ín domeniul complex) doar prin substituirea(dacá este posibil) a variabilei s cu jω .
(6.2.10)H(jω) = H(s)s→jω
6. ANALIZA SISTEMELOR ÍN 6.2. Relaþii íntre caracteristicile experimentale de frecvenþá DOMENIUL FRECVENÞÁ ßi funcþiile de transfer
155
Din aceastá expresie teoreticá se obþin, Caracteristica Amplitudine - Frecvenþá
A(ω )=|H(jω )| (6.2.11)
Caracteristica Fazá - Frecvenþá
ϕ(ω )=arg(H(jω )) (6.2.12)
Caracteristica Realá de Frecvenþá
P(ω )=Re(H(jω )) (6.2.13)
Caracteristica Imaginará de Frecvenþá
Q(ω )=Im(H(jω )) (6.2.14)Reamintim cá,
(6.2.15)H(jω) = A(ω) ⋅ ejϕ(ω) = P(ω) + jQ(ω)
(6.2.16)A(ω) = P2(ω) + Q 2(ω)
, ϕ (6.2.17)ϕ(ω) =
arctgQ(ω)P(ω) , P(ω) > 0
arctgQ(ω)P(ω) + π , P(ω) < 0
π2
, P(ω) = 0, Q(ω) > 0−π
2, P(ω) = 0, Q(ω) < 0
∈ (−π, π]
Caracteristica complexá de frecvenþá este o reprezentare graficá ín coordonate polare a perechii (A(ω ),ϕ(ω )) sau o reprezentare cartezianá a perechii (P(ω ),Q(ω )).
6. ANALIZA SISTEMELOR ÍN 6.2. Relaþii íntre caracteristicile experimentale de frecvenþá DOMENIUL FRECVENÞÁ ßi funcþiile de transfer
156
6.3. Caracteristici logaritmice de frecvenþá
6.3.1. Definirea caracteristicilor logaritmicePentru a scoate mai bine ín evidenþá proprietáþile unui sistem,
caracteristicile de frecvenþá sunt trasate la o aßa-numitá scará logaritmicá, ínraport cu frecvenþa (pulsaþia) ßi cu amplitudinea.
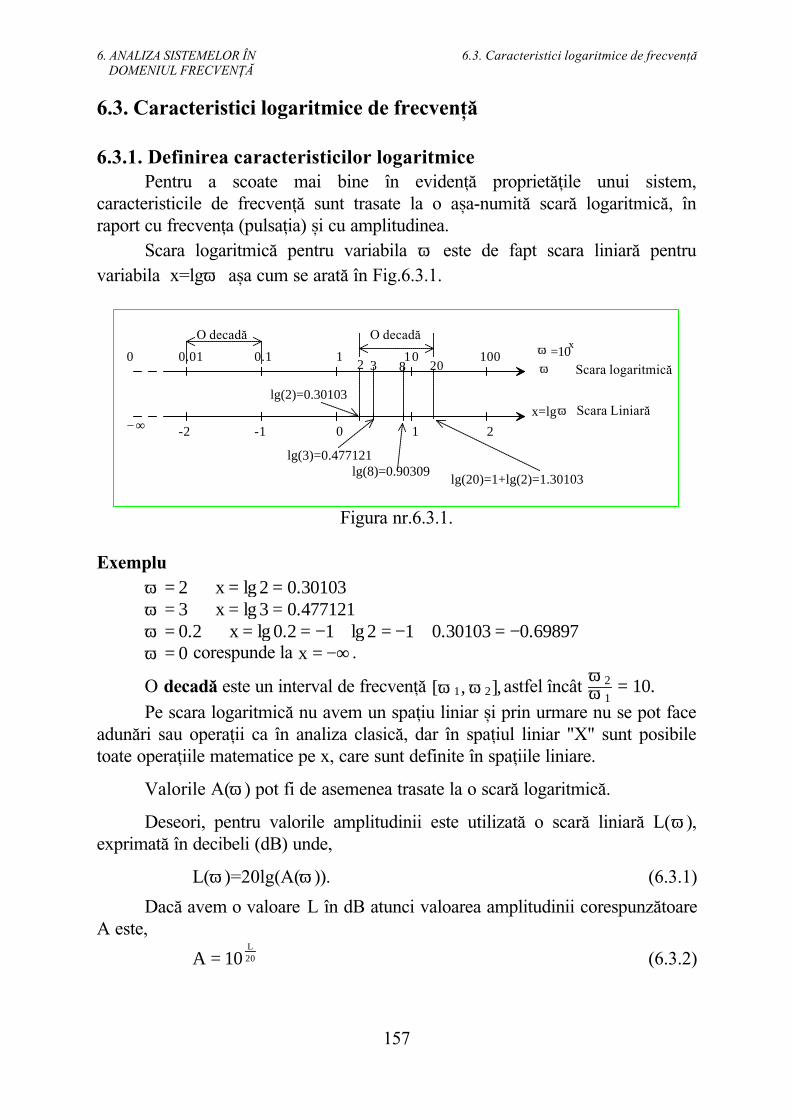
Scara logaritmicá pentru variabila ω este de fapt scara liniará pentruvariabila x=lgω aßa cum se aratá ín Fig.6.3.1.
0.1 1 10 100
-1 0 1 2
2 ω
x=lgω
0
−∞
0.01
-2
lg(2)=0.30103
lg(20)=1+lg(2)=1.30103
lg(3)=0.477121lg(8)=0.90309
3 8
Scara Liniará
Scara logaritmicá20
O decadá O decadáω =10x
Figura nr.6.3.1.
Exempluω = 2 ⇒ x = lg 2 = 0.30103ω = 3 ⇒ x = lg 3 = 0.477121ω = 0.2 ⇒ x = lg 0.2 = −1 + lg 2 = −1 + 0.30103 = −0.69897
corespunde la .ω = 0 x = −∞
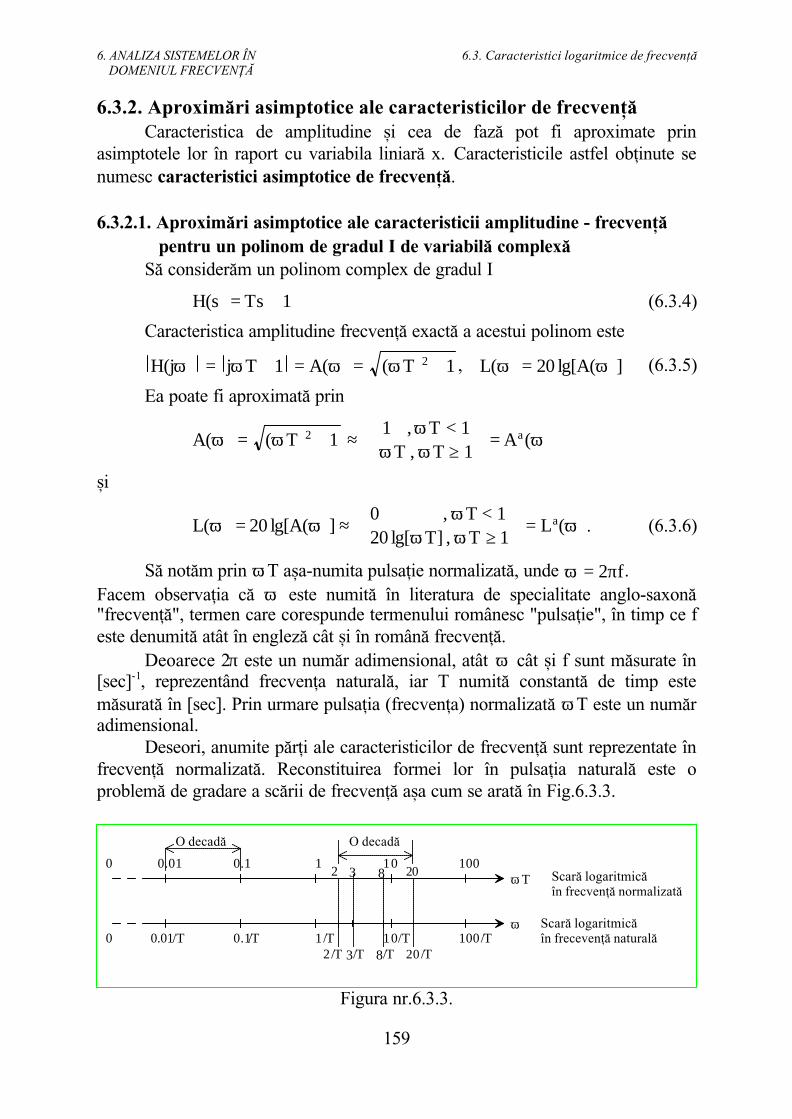
O decadá este un interval de frecvenþá astfel íncät [ω 1, ω 2],ω 2ω 1
= 10.Pe scara logaritmicá nu avem un spaþiu liniar ßi prin urmare nu se pot face
adunári sau operaþii ca ín analiza clasicá, dar ín spaþiul liniar "X" sunt posibiletoate operaþiile matematice pe x, care sunt definite ín spaþiile liniare.
Valorile A(ω ) pot fi de asemenea trasate la o scará logaritmicá.
Deseori, pentru valorile amplitudinii este utilizatá o scará liniará L(ω ),exprimatá ín decibeli (dB) unde,
L(ω )=20lg(A(ω )). (6.3.1)Dacá avem o valoare L ín dB atunci valoarea amplitudinii corespunzátoare
A este, (6.3.2)A = 10
L20
6. ANALIZA SISTEMELOR ÍN 6.3. Caracteristici logaritmice de frecvenþá DOMENIUL FRECVENÞÁ
157
Unitáþile "decibeli" sunt utilizate de exemplu pentru másurarea intensitáþiisunetului,
(6.3.3)Is = 20 lg
PP0
Is - intensitatea sunetului exprimatá ín dBP - presiunea pe urecheP0 - presiunea minimá care produce senzaþia de sunet.
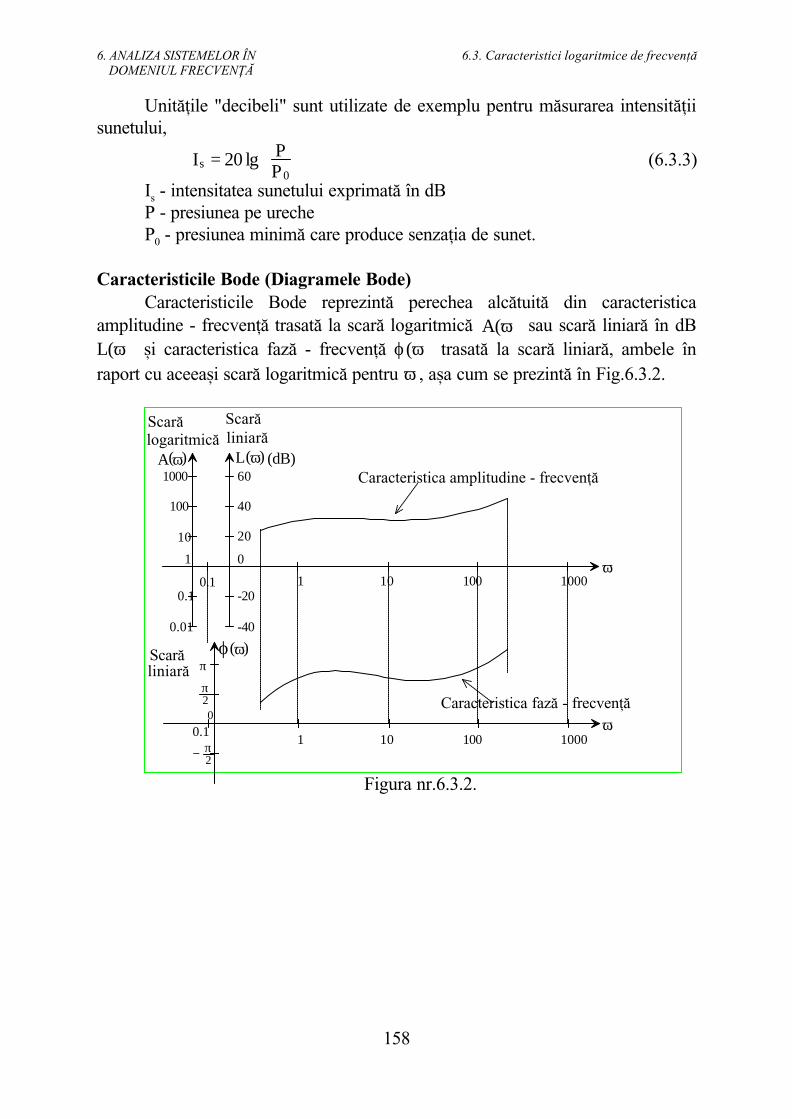
Caracteristicile Bode (Diagramele Bode)Caracteristicile Bode reprezintá perechea alcátuitá din caracteristica
amplitudine - frecvenþá trasatá la scará logaritmicá sau scará liniará ín dBA(ω) ßi caracteristica fazá - frecvenþá trasatá la scará liniará, ambele ínL(ω) ϕ(ω)
raport cu aceeaßi scará logaritmicá pentru ω , aßa cum se prezintá ín Fig.6.3.2.
A ( )ω L ( )ω
ϕ ( )ω
02π
π
−π2π−
(dB)
0
20
40
60
-20
-40
1
10
100
1000
0.1
0.01
0.1
0.1
1
1
10
10
100
100
1000
1000
ω
ω
Scará logaritmicá
Caracteristica amplitudine - frecvenþá
Caracteristica fazá - frecvenþá
Scaráliniará
Scaráliniará
Figura nr.6.3.2.
6. ANALIZA SISTEMELOR ÍN 6.3. Caracteristici logaritmice de frecvenþá DOMENIUL FRECVENÞÁ
158
6.3.2. Aproximári asimptotice ale caracteristicilor de frecvenþáCaracteristica de amplitudine ßi cea de fazá pot fi aproximate prin
asimptotele lor ín raport cu variabila liniará x. Caracteristicile astfel obþinute senumesc caracteristici asimptotice de frecvenþá.
6.3.2.1. Aproximári asimptotice ale caracteristicii amplitudine - frecvenþápentru un polinom de gradul I de variabilá complexá
Sá considerám un polinom complex de gradul I
(6.3.4)H(s) = Ts + 1
Caracteristica amplitudine frecvenþá exactá a acestui polinom este
, (6.3.5)H(jω) = jωT + 1 = A(ω) = (ωT)2 + 1 L(ω) = 20 lg[A(ω)]
Ea poate fi aproximatá prin
A(ω) = (ωT)2 + 1 ≈
1 , ωT < 1ωT , ωT ≥ 1
= Aa(ω)
ßi
. (6.3.6)L(ω) = 20 lg[A(ω)] ≈
0 , ωT < 120 lg[ωT] , ωT ≥ 1
= La(ω)
Sá notám prin ωT aßa-numita pulsaþie normalizatá, unde .ω = 2πfFacem observaþia cá ω este numitá ín literatura de specialitate anglo-saxoná"frecvenþá", termen care corespunde termenului romänesc "pulsaþie", ín timp ce feste denumitá atät ín englezá cät ßi ín romäná frecvenþá.
Deoarece 2π este un numár adimensional, atät ω cät ßi f sunt másurate ín[sec]-1, reprezentänd frecvenþa naturalá, iar T numitá constantá de timp estemásuratá ín [sec]. Prin urmare pulsaþia (frecvenþa) normalizatá ωT este un numáradimensional.
Deseori, anumite párþi ale caracteristicilor de frecvenþá sunt reprezentate ínfrecvenþá normalizatá. Reconstituirea formei lor ín pulsaþia naturalá este oproblemá de gradare a scárii de frecvenþá aßa cum se aratá ín Fig.6.3.3.
0.1
0.1
1
1
10
10
100
100
2
2
ω Τ
ω
0
0
0.01
0.01
3
3
8
8
Scará logaritmicá
Scará logaritmicá
20
20
O decadá O decadá
ín frecvenþá normalizatá
ín frecevenþá naturalá/T/T/T/T
/T /T /T /T /T
Figura nr.6.3.3.
6. ANALIZA SISTEMELOR ÍN 6.3. Caracteristici logaritmice de frecvenþá DOMENIUL FRECVENÞÁ
159
Cele douá aproximári ale lui (6.3.4) sunt asimptota orizontalá, respectivcea oblicá ale funcþiei corespunzátoare lui ín variabila x ín spaþiul liniar X,L(ω)
(6.3.7)F(x) = L(ω) ωT→10x = 20 lg( 102x + 1 )
, (6.3.8)lg ωT = x ⇒ ωT = 10x
Asimptota orizontalá este,
(6.3.9)y = limx→−∞
[F(x)] = 0
Asimptota oblicá este,
y=mx+n, , (6.3.10)m = limx→∞
F(x)x = 20 n = lim
x→∞[F(x) − mx]
Astfel, cele douá asimptote ín spaþiul liniar sunt
(6.3.11)y = 20x, pentru x → ∞
. (6.3.12)y = 0, pentru x → −∞
Pantele asimptotelor pot fi exprimate la scará logaritmicá ca un numár dedecibeli supra o decadá dB/dec.
Atunci cänd variabila liniará x creßte cu o unitate ín spaþiul liniar X=Rvariabila ωT sau ω la scará logaritmicá creßte de 10 ori (acoperá o decadá).
x=lg(ωT): x2-x1=1 ⇒ lg(ω 2T)-lg(ω 1T)=1 ⇒ ω 2Tω 1T
= 10 ⇒ ω 2ω 1
= 10
Panta ín spaþiul liniar este
m =y2 − y1x2 − x1
care poate fi interpretatá ca variaþia
m = y2 − y1 daca x2 − x1 = 1 ⇔ ω 2 Tω 1 T
= 10 ⇔ o decada
Dar
y2 = 20 lg(A(ω 2)) = L(ω 2)y1 = 20 lg(A(ω 1)) = L(ω 1)
astfel cá panta la scará logaritmicá pentru caracteristica amplitudine - frecvenþáeste exprimatá ca fiind,
m = y2 − y1 = 20 lg(A(ω 2)) − 20 lg(A(ω 1)) = L(ω 2) − L(ω 1) dB
daca ω 2ω 1
= 10 ⇔ o decada
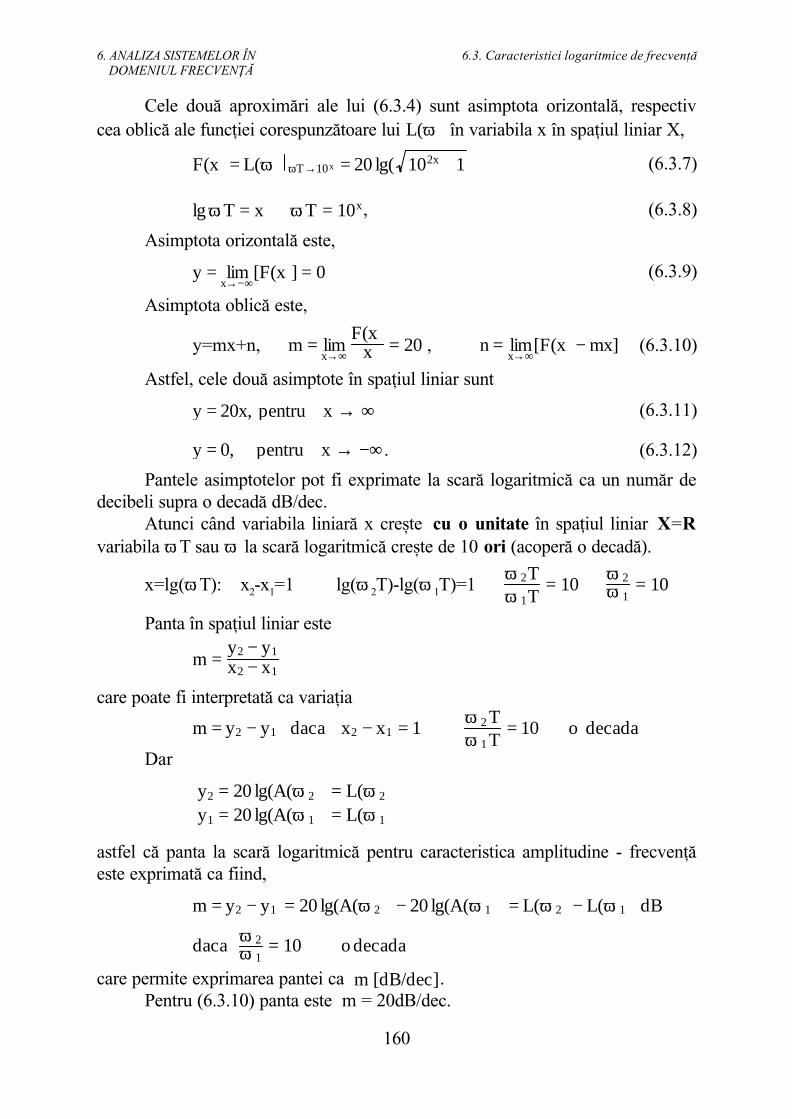
care permite exprimarea pantei ca . m [dB/dec]Pentru (6.3.10) panta este m = 20dB/dec.
6. ANALIZA SISTEMELOR ÍN 6.3. Caracteristici logaritmice de frecvenþá DOMENIUL FRECVENÞÁ
160
Caracteristicile exacte ßi asimptotice de frecvenþá (6.3.5), (6.3.6) suntprezentate ín Fig.6.3.4.
A( ) L( )
-1 0 1 2−∞ -2x Scara liniará
Scara logaritmicáωT=10x
x=lg( )ωT0.1 1 10 1000 0.01 ωT
40
30
20
10
0
-10
-20
1
10
100
0.1
ωω dB
x1 x2x1x2- =1
ω2Tω1T
ω2T
ω1T
=10
O decadá
Asimptota Oblicáy=mx+n
Asimptota orizontaláy=0
20 dBPanta m=20 dB/dec
Panta m=0 dB/dec
Eroarea max.3dB
Caracteristica ExactáAmplitud.-frecv.
Figura nr.6.3.4.
6.3.2.2. Aproximári asimptotice ale caracteristicii fazá - frecvenþá pentru unpolinom de gradul I de variabilá complexá
Sá considerám ín continuare un polinom complex de gradul I
(6.3.13)H(s) = Ts + 1
Caracteristica fazá frecvenþá exactá a acestui polinom este
(6.3.14)ϕ(ω) = arg(jωT + 1) = arctg(ωT)
Aceastá caracteristicá poate fi aproximatá prin
, ϕ(ω) = arctg(ωT) ≈
0 , ωT < 0.2ln 10
2 lg(ωT) + π4 , ωT ∈ [0.2, 5]
π2 , ωT > 5
= ϕ a(ω) ω ∈ [0, ∞)
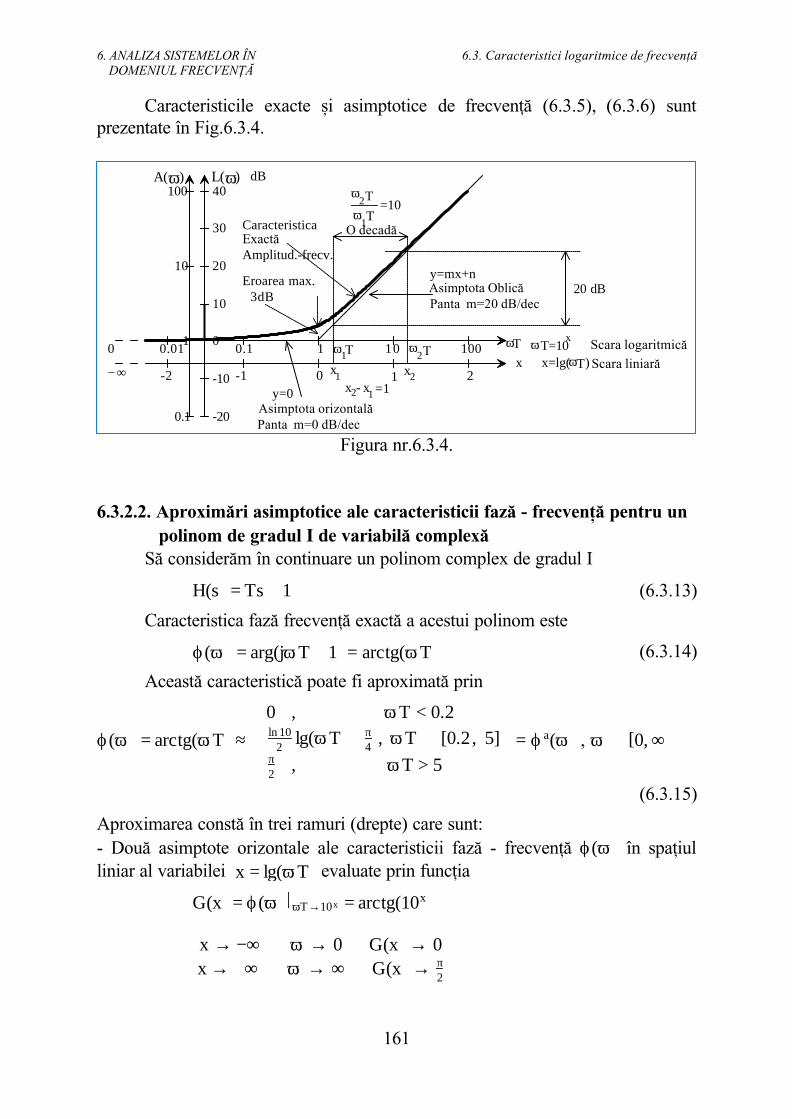
(6.3.15)Aproximarea constá ín trei ramuri (drepte) care sunt:- Douá asimptote orizontale ale caracteristicii fazá - frecvenþá ín spaþiulϕ(ω)liniar al variabilei evaluate prin funcþiax = lg(ωT)
G(x) = ϕ(ω) ωT→10x = arctg(10x)
x → −∞ ⇔ ω → 0 ⇒ G(x) → 0x → +∞ ⇔ ω → ∞ ⇒ G(x) → π
2
6. ANALIZA SISTEMELOR ÍN 6.3. Caracteristici logaritmice de frecvenþá DOMENIUL FRECVENÞÁ
161
- O dreaptá care are panta lui ín punctul particular ϕ(ω)
ωT = 1 ⇔ x = 0
pantá care este evaluatá pentru funcþia prin derivataG(x)
.G (x) = 10xln 10102x + 1
⇒ G (0) = ln 102
Ambele caracteristici - caracteristica exactá ßi - caracteristicaϕ(ω) ϕ a(ω)asimptoticá sunt reprezentate ín Fig.6.3.5.
-1 0 1 2− ∞ -2x Scará liniará
Scará logaritmicáωT=10x
x=lg( )ωT0.1 1 10 1000 0.01 ωT
180
135
90
45
0
-45
-90
0
−π/4
−π/2
π/4
π/2
3π/4
π
ϕ( )ωϕ( )ω
x1x2 - 0 = 0 -
Asimptotá orizontalá
Asimptotá orizontalá
Eroare max.6 grade
Caracteristica exactá fazá - frecvenþá
ϕ ( )ωaϕ ( )ωa
grade rad
ω1T=0.2 ω2T=5x2 = 0.69897x1 = - 0.69897
50.2...
.
ω2T
=1 ω1T
1
Asimptotá oblicáy = (ln10/2)x + π/4
Figura nr.6.3.5.
Alte aproximári asimptotice vor fi prezentate ulterior, atunci cänd se vordiscuta caracteristicile de frecvenþá elementare.
6. ANALIZA SISTEMELOR ÍN 6.3. Caracteristici logaritmice de frecvenþá DOMENIUL FRECVENÞÁ
162
6.4. Caracteristici elementare de frecvenþá
Caracteristicile elementare de frecvenþá sunt utilizate pentru trasareacaracteristicilor de frecvenþá pentru orice funcþie de transfer. Existá ßase astfel decaracteristici de frecvenþá elementare, obþinute plecänd de la factorizareapolinoamelor de la numitorul ßi numárátorul funcþiilor de transfer.
Aceste caracteristici se mai numesc caracteristici ale funcþiilor de transfertip sau ale elementelor tip.
Ín continuare, pentru fiecare element sunt evaluate ßiA(ω), ϕ(ω), L(ω)sunt deduse corespondentele lor asimptotice, fiind trasate caracteristicile Bode.
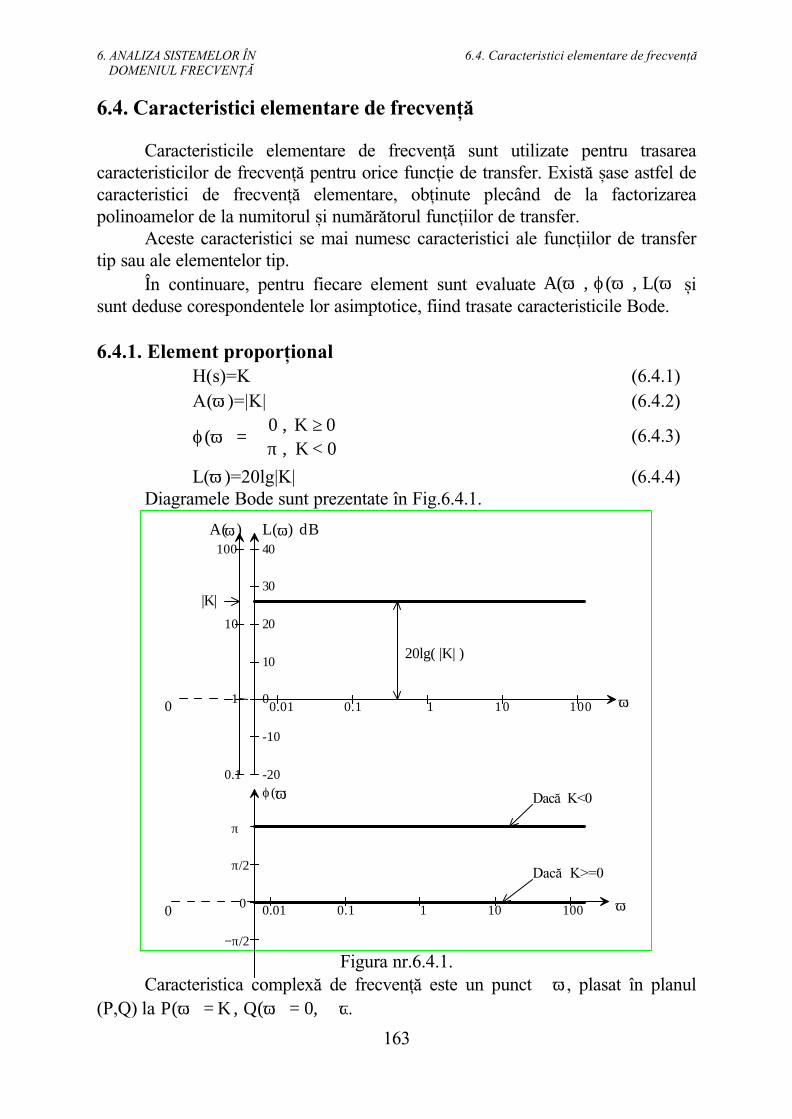
6.4.1. Element proporþionalH(s)=K (6.4.1)A(ω )=|K| (6.4.2)
(6.4.3)ϕ(ω) =
0 , K ≥ 0π , K < 0
L(ω )=20lg|K| (6.4.4)Diagramele Bode sunt prezentate ín Fig.6.4.1.
ω
ϕ( )ω
0 0.1 1 10 1000.010
−π/2
π/2
π
Dacá K<0
Dacá K>=0
0.1 1 10 1000 0.01 ω
40
30
20
10
0
-10
-20
1
10
100
0.1
L( )ωA( )ω dB
20lg( |K| )
|K|
Figura nr.6.4.1.Caracteristica complexá de frecvenþá este un punct , plasat ín planul∀ω
(P,Q) la .P(ω) = K , Q(ω) = 0, ∀ω
6. ANALIZA SISTEMELOR ÍN 6.4. Caracteristici elementare de frecvenþá DOMENIUL FRECVENÞÁ
163
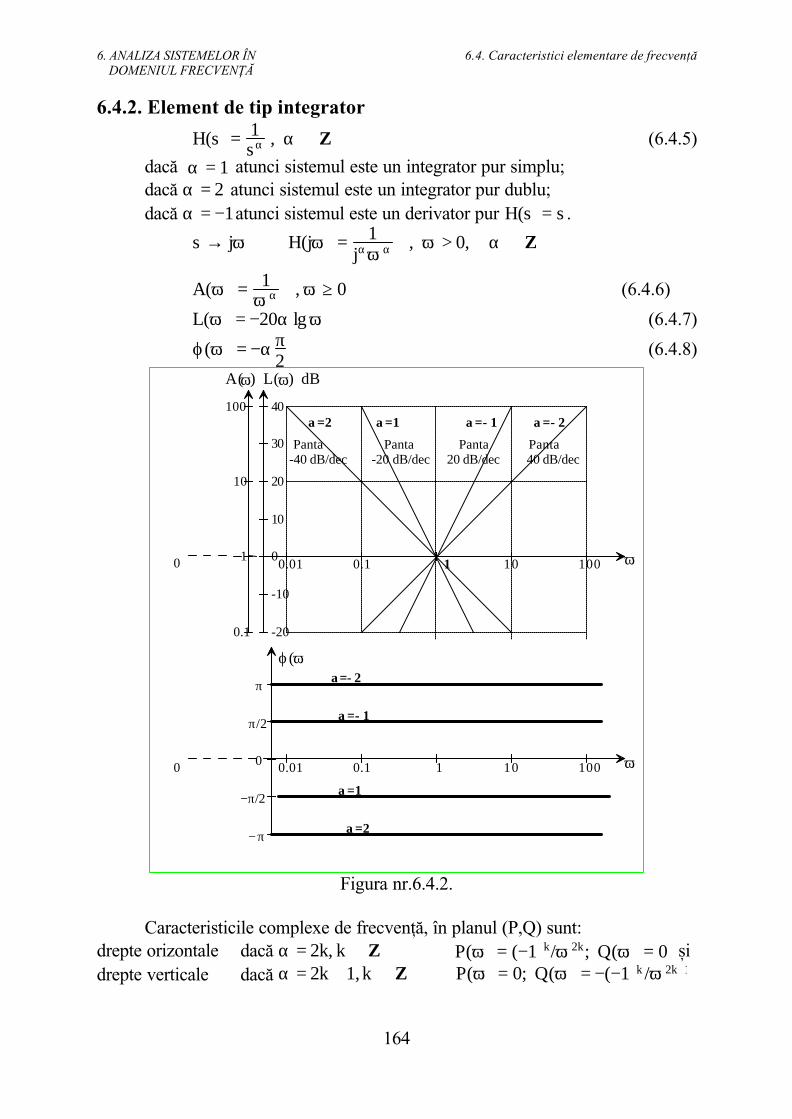
6.4.2. Element de tip integrator (6.4.5)H(s) = 1
sα , α ∈ Zdacá atunci sistemul este un integrator pur simplu;α = 1dacá atunci sistemul este un integrator pur dublu;α = 2dacá atunci sistemul este un derivator pur .α = −1 H(s) = s
s → jω ⇒ H(jω) = 1jαω α , ω > 0, α ∈ Z
(6.4.6)A(ω) = 1ω α , ω ≥ 0
(6.4.7)L(ω) = −20α lg ω
(6.4.8)ϕ(ω) = −α π2
0 0.1 1 10 1000.01 ω0
−π/2
π/2
π
− π
ϕ( )ω
α=1
α=2
α=−1
α=−2
0.1 1 10 1000 0.01 ω
40
30
20
10
0
-10
-20
1
10
100
0.1
A( )ω L( )ω dB
α=1α=2 α=−1 α=−2
20 dB/dec 40 dB/dec -20 dB/dec -40 dB/dec PantaPanta Panta Panta
Figura nr.6.4.2.
Caracteristicile complexe de frecvenþá, ín planul (P,Q) sunt: drepte orizontale dacá ßiα = 2k, k ∈ Z ⇒ P(ω) = (−1)k/ω 2k; Q(ω) = 0drepte verticale dacá α = 2k + 1, k ∈ Z ⇒ P(ω) = 0; Q(ω) = −(−1)k /ω 2k+1
6. ANALIZA SISTEMELOR ÍN 6.4. Caracteristici elementare de frecvenþá DOMENIUL FRECVENÞÁ
164
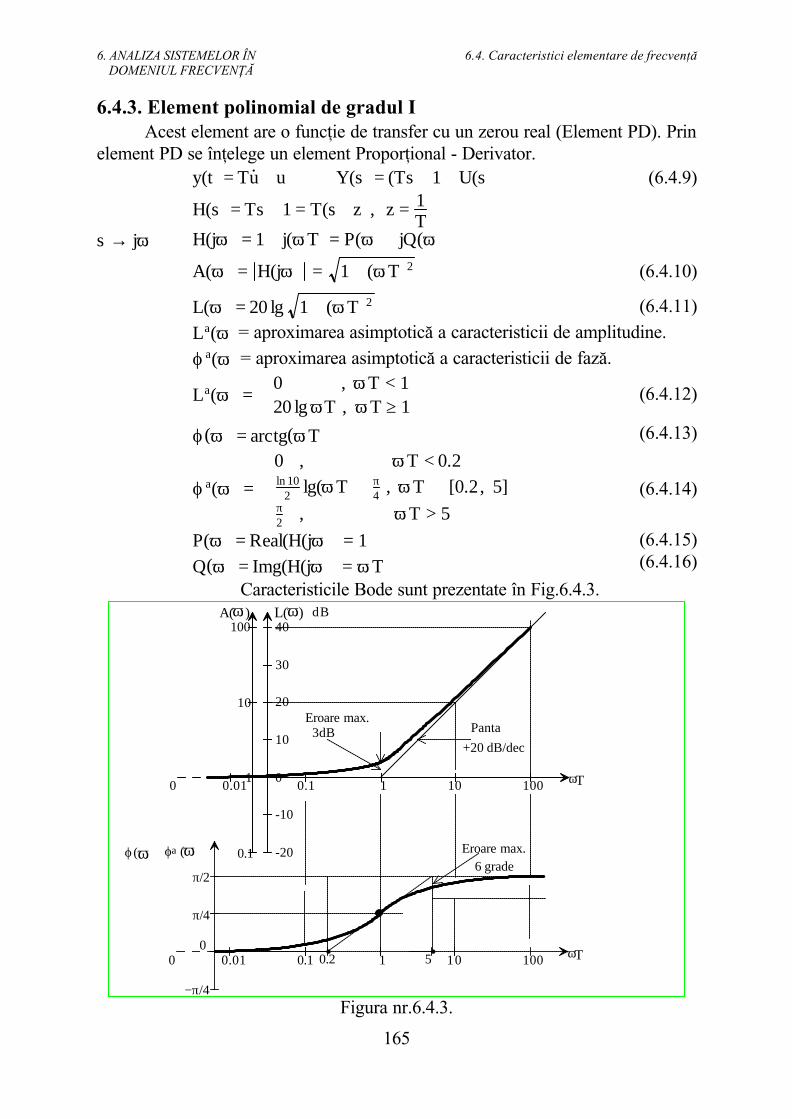
6.4.3. Element polinomial de gradul IAcest element are o funcþie de transfer cu un zerou real (Element PD). Prin
element PD se ínþelege un element Proporþional - Derivator. (6.4.9)y(t) = Tu
.+ u Y(s) = (Ts + 1) ⋅ U(s)
H(s) = Ts + 1 = T(s + z) , z = 1T
s → jω ⇒ H(jω) = 1 + j(ωT) = P(ω) + jQ(ω)
(6.4.10)A(ω) = H(jω) = 1 + (ωT)2
(6.4.11)L(ω) = 20 lg 1 + (ωT)2
= aproximarea asimptoticá a caracteristicii de amplitudine.La(ω)= aproximarea asimptoticá a caracteristicii de fazá.ϕ a(ω)
(6.4.12)La(ω) =
0 , ωT < 120 lg ωT , ωT ≥ 1
(6.4.13)ϕ(ω) = arctg(ωT)
(6.4.14)ϕ a(ω) =
0 , ωT < 0.2ln 10
2 lg(ωT) + π4 , ωT ∈ [0.2, 5]
π2 , ωT > 5
(6.4.15)P(ω) = Real(H(jω)) = 1 (6.4.16)Q(ω) = Img(H(jω)) = ωT
Caracteristicile Bode sunt prezentate ín Fig.6.4.3.L( )
0.1 1 10 1000 0.01 ωT
40
30
20
10
0
-10
-20
1
10
100
0.1
ωA( )ω dB
Panta+20 dB/dec
Eroare max.3dB
0.1 1 10 1000 0.01 ωT0
−π/4
π/4
π/2
ϕ( )ω Eroare max.6 grade
ϕ ( )ωa
50.2..
Figura nr.6.4.3.
6. ANALIZA SISTEMELOR ÍN 6.4. Caracteristici elementare de frecvenþá DOMENIUL FRECVENÞÁ
165
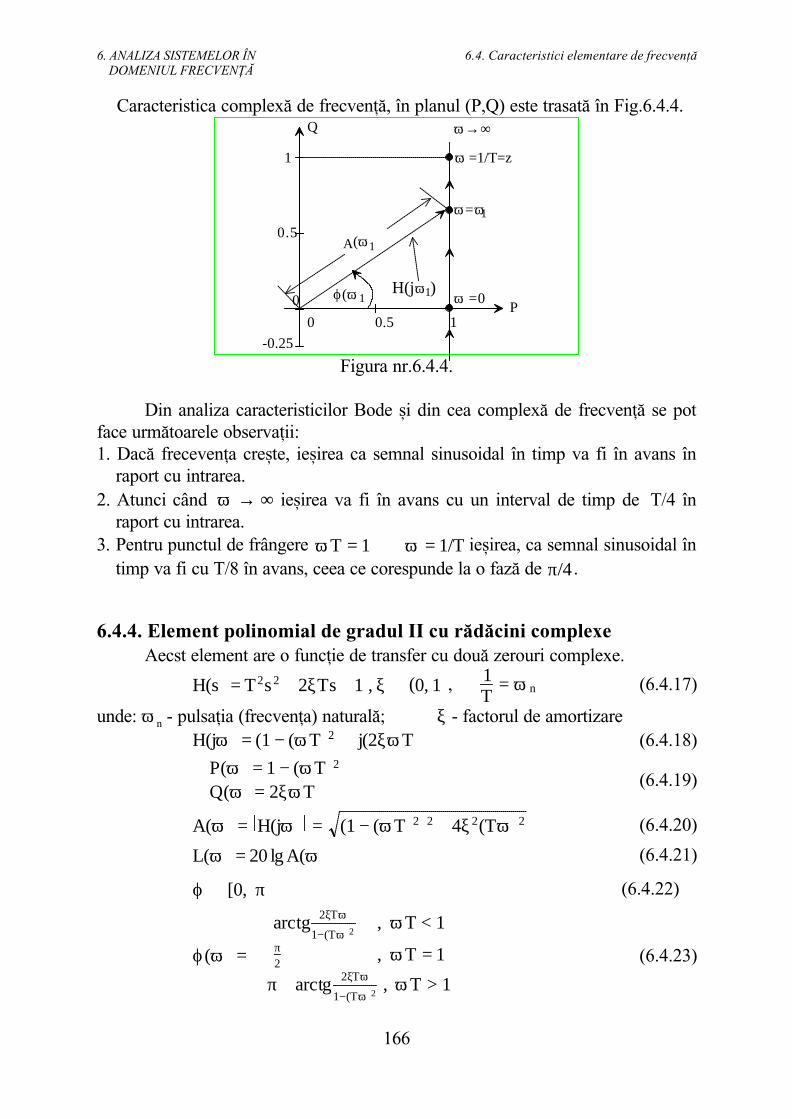
Caracteristica complexá de frecvenþá, ín planul (P,Q) este trasatá ín Fig.6.4.4.
P
Q
0.5 1
0.5
1
00
-0.25
1ω=ω
1ϕ(ω ) =0ω
=1/T=zω
ω→∞
1(ω )Α
1ωH(j )
Figura nr.6.4.4.
Din analiza caracteristicilor Bode ßi din cea complexá de frecvenþá se potface urmátoarele observaþii:1. Dacá frecevenþa creßte, ießirea ca semnal sinusoidal ín timp va fi ín avans ín
raport cu intrarea. 2. Atunci cänd ießirea va fi ín avans cu un interval de timp de T/4 ínω → ∞
raport cu intrarea.3. Pentru punctul de frängere ießirea, ca semnal sinusoidal ínωT = 1 ⇔ ω = 1/T
timp va fi cu T/8 ín avans, ceea ce corespunde la o fazá de .π/4
6.4.4. Element polinomial de gradul II cu rádácini complexeAecst element are o funcþie de transfer cu douá zerouri complexe.
, (6.4.17)H(s) = T2s2 + 2ξTs + 1 , ξ ∈ (0, 1) 1T
= ω n
unde: ω n - pulsaþia (frecvenþa) naturalá; ξ - factorul de amortizare (6.4.18)H(jω) = (1 − (ωT)2) + j(2ξωT)
(6.4.19)
P(ω) = 1 − (ωT)2
Q(ω) = 2ξωT
(6.4.20)A(ω) = H(jω) = (1 − (ωT)2)2 + 4ξ2(Tω)2
(6.4.21)L(ω) = 20 lg A(ω)
(6.4.22)ϕ ∈ [0, π)
(6.4.23)ϕ(ω) =
arctg 2ξTω
1−(Tω)2, ωT < 1
π2 , ωT = 1
π + arctg 2ξTω
1−(Tω)2, ωT > 1
6. ANALIZA SISTEMELOR ÍN 6.4. Caracteristici elementare de frecvenþá DOMENIUL FRECVENÞÁ
166
a. Caracteristica asimptoticá amplitudine - frecvenþáAproximárile asimptotice sunt:
(6.4.24)L(ω) = 20 lg
1 − (ωT)2
2+ 4ξ2(ωT)2
(6.4.25)x = lg (ωT) ⇒ ωT = 10x
(6.4.26)F(x) = L(ω) ωT=10x = 20 lg (1 − 102x)2 + 4ξ2102x
Atunci cänd avem o asimptotá orizontalá.x → −∞ (ω → 0) ⇒ F(−∞) = 0Atunci cänd ,x → +∞
m = limx→∞
F(x)x = 40
n = limx→∞
[F(x) − mx] = 0existá o asimptoticá oblicá,
y = 40x
(6.4.27)La(ω) =
0 , ωT < 140 lg (ωT) , ωT ≥ 1
(6.4.28)A(ω) ≈ Aa(ω) =
1 , ωT < 1(ωT)2 , ωT ≥ 1
La = 20 lg[Aa(ω)]Caracteristicile de frecvenþá exacte depind de factorul de amortizare ξ, aßa
cá avem o familie de caracteristici.
(6.4.29)A(ω) = 1 − (ωT)2
2
+ 4ξ2(ωT)2 = 1 −
ωω n
2
2
+ 4ξ 2
ωω n
2
Putem gási pulsaþia de rezonanþá anuländ derivata lui A ín raport cu ω , A'(ω )dA(ω)
dω= 0 ⇒
(6.4.30)ω rez = 1T
1 − 2ξ2
Se poate obþine o pulsaþie de rezonanþá dacá 0 < ξ <2
2 .Amplitudinea de rezonanþá, Am=Arez este
(6.4.31)Am = 2ξ 1 − ξ2 = A(ω rez)
unde este pulsaþia de rezonanþá.ω rez
(6.4.32)A(ω n) = A(1/T) = 2ξ. (6.4.33)L(1/T) = L(ω n) = 20lg (2ξ)
Dacá .ξ = 0.5 ⇒ L(1/T) = 0, A(ω) = 1 ⇒ ω = ω t
unde este pulsaþia de táiereω t
(6.4.34)ω t = 2 ω rez
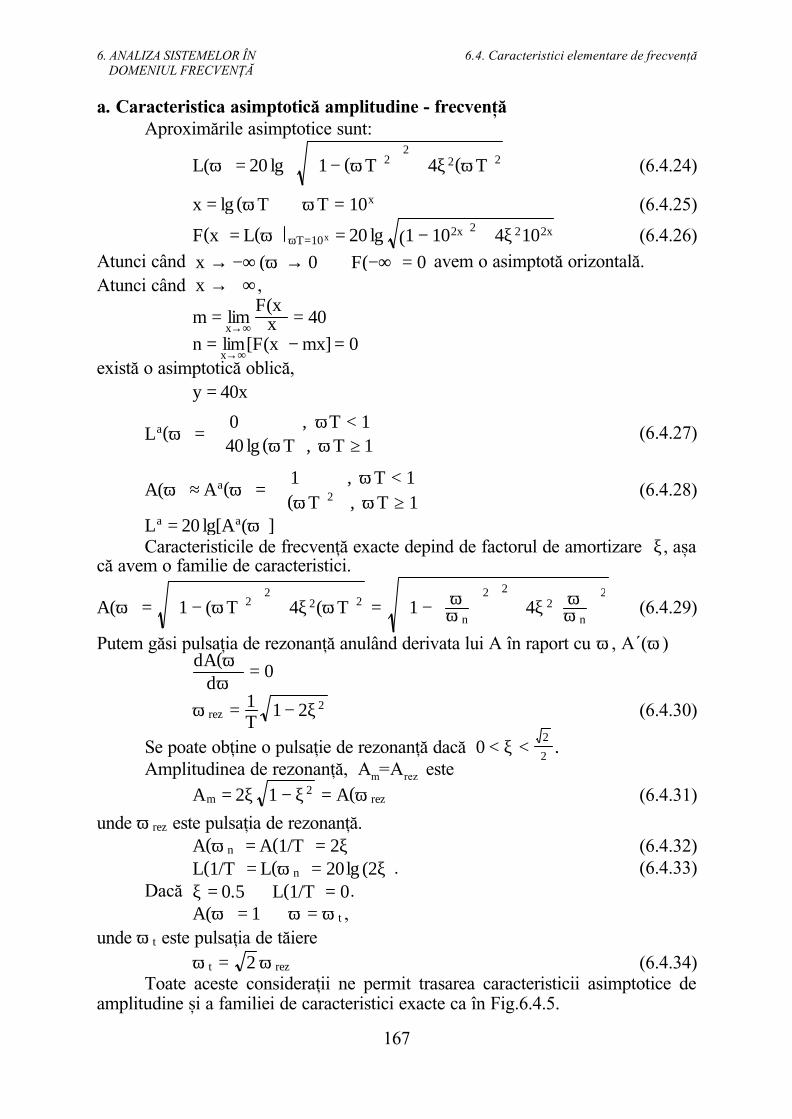
Toate aceste consideraþii ne permit trasarea caracteristicii asimptotice deamplitudine ßi a familiei de caracteristici exacte ca ín Fig.6.4.5.
6. ANALIZA SISTEMELOR ÍN 6.4. Caracteristici elementare de frecvenþá DOMENIUL FRECVENÞÁ
167
0.1 1 100.01ωT
40
20
0
-20
1
10
100
0.1
A( )ω L( )ω dB
Panta+40 dB/dec
-400.01
A( )ωn Am
ωrezT
ξ=0ξ=0
0<ξ<1/2
1/2<ξ<√2/2
ξ>√2/2
ξ=√2/2
ξ=1/2
Tω t
Figura nr.6.4.5.
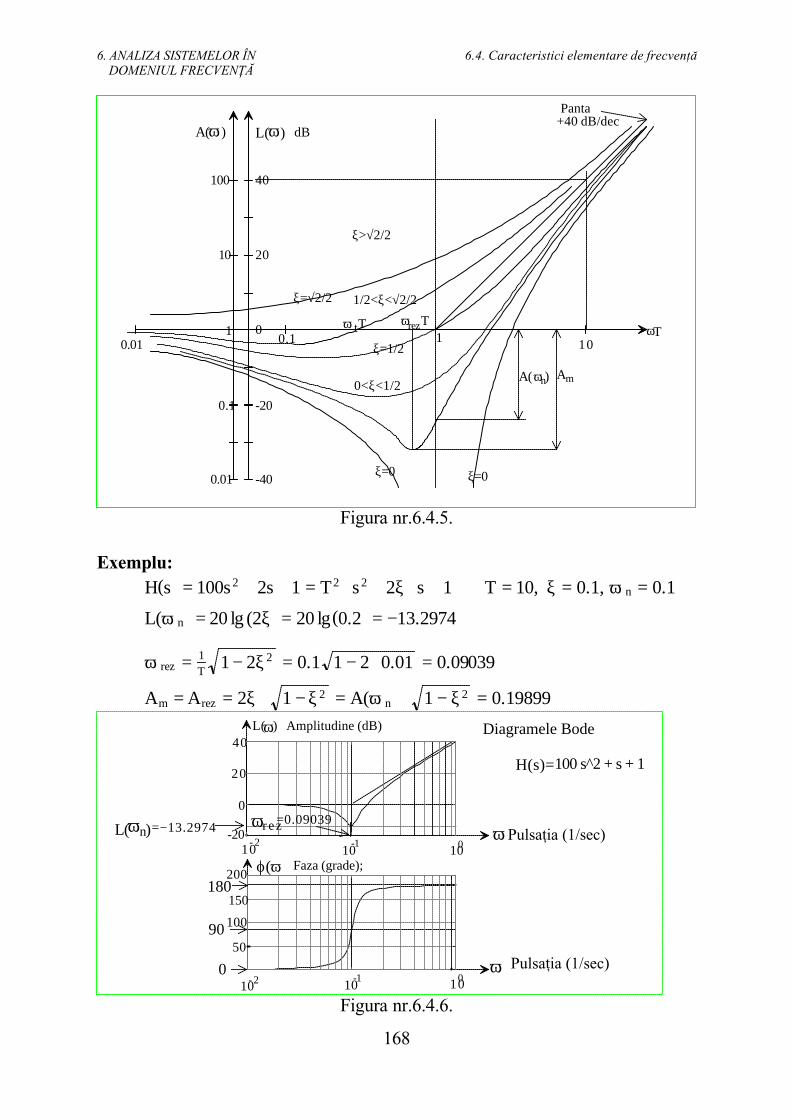
Exemplu:H(s) = 100s2 + 2s + 1 = T2 ⋅ s2 + 2ξ ⋅ s + 1 ⇒ T = 10, ξ = 0.1, ω n = 0.1
L(ω n) = 20 lg (2ξ) = 20 lg(0.2) = −13.2974
ω rez = 1T 1 − 2ξ2 = 0.1 1 − 2 ⋅ 0.01 = 0.09039
Am = Arez = 2ξ ⋅ 1 − ξ2 = A(ω n) ⋅ 1 − ξ2 = 0.19899
Pulsaþia (1/sec)
Amplitudine (dB) Diagramele Bode
-20
0
20
40
10- 210-1 100
L( ) ω
ω
100 s^2 + s + 1H(s)=
ωr ez=0.09039L( ) ωn =−13.2974
Faza (grade);
10- 2 10-1 100
50
100
150
200
ω
ϕ(ω)
0
90
180
Pulsaþia (1/sec)
Figura nr.6.4.6.
6. ANALIZA SISTEMELOR ÍN 6.4. Caracteristici elementare de frecvenþá DOMENIUL FRECVENÞÁ
168
Pulsaþia (frecvenþa) de táiere se obþine prin rezolvarea ecuaþiei
A = 1 − (ωT)2
2
+ 4ξ 2(ωT)2 = 1
Se noteazá
y = (ωT2) ⇒ (1 − y)2 + 4ξ2 y = 1 ⇒
y = 0y = 2(1 − 2ξ2)
(ωT)2 = 2(1 − 2ξ2) ⇒ ω t = ω c = 1T
2 1 − 2ξ2
b. Caracteristica asimptoticá fazá - frecvenþáAfirmám cá:
(6.4.35)ϕ(ω) =
arctg 2ξωT
1−(ωT)2, ωT < 1
π2 , ωT = 1
π + arctg 2ξωT
1−(ωT)2 , ωT > 1
Dacá notám,
(6.4.36)g(x) = arctg2ξωT
1 − (ωT)2 ωT=10x = arctg2ξ10x
1 − 102x
vom avea
G(x) = ϕ(ω) ωT→10x
ca o funcþie de x ín spaþiul liniar X cu trei ramuri,
(6.4.37)G(x) =
arctg 2ξ10x
1−102x, x < 0
π2 , x = 0
π + arctg 2ξ10x
1−102x , x > 0
ßi atunci poate fi aproximatá prin trei drepte, din care douá asimptote orizontale ßio asimptotá oblicá. Asimptotele orizontale,
x → −∞ ⇒ G(x) → 0x → +∞ ⇒ G(x) → π
Asimptota oblicáy = G (0) ⋅ x + π/2
Faza asimptoticá ϕa va fi aproximatá íntre douá puncte printr-o dreaptácare trece prin x=0, ϕ=π/2
y = ln10ξ
x + π2
= 0 ⇒ x1 = −π2
ξln10
⇒ ω 1T = 10x1
y = ln103
x + π2
= π2
⇒ x2 =π2
1 − ln 103
⇒ ω 2T = 10x2
6. ANALIZA SISTEMELOR ÍN 6.4. Caracteristici elementare de frecvenþá DOMENIUL FRECVENÞÁ
169
(6.4.38)ϕ a(ω) =
0 , ωT < ω 1Tπ2
+ ln(10)ξ lg(ωT) , ωT ∈ [ω 1T, ω 2T]
π , ωT > ω 2T
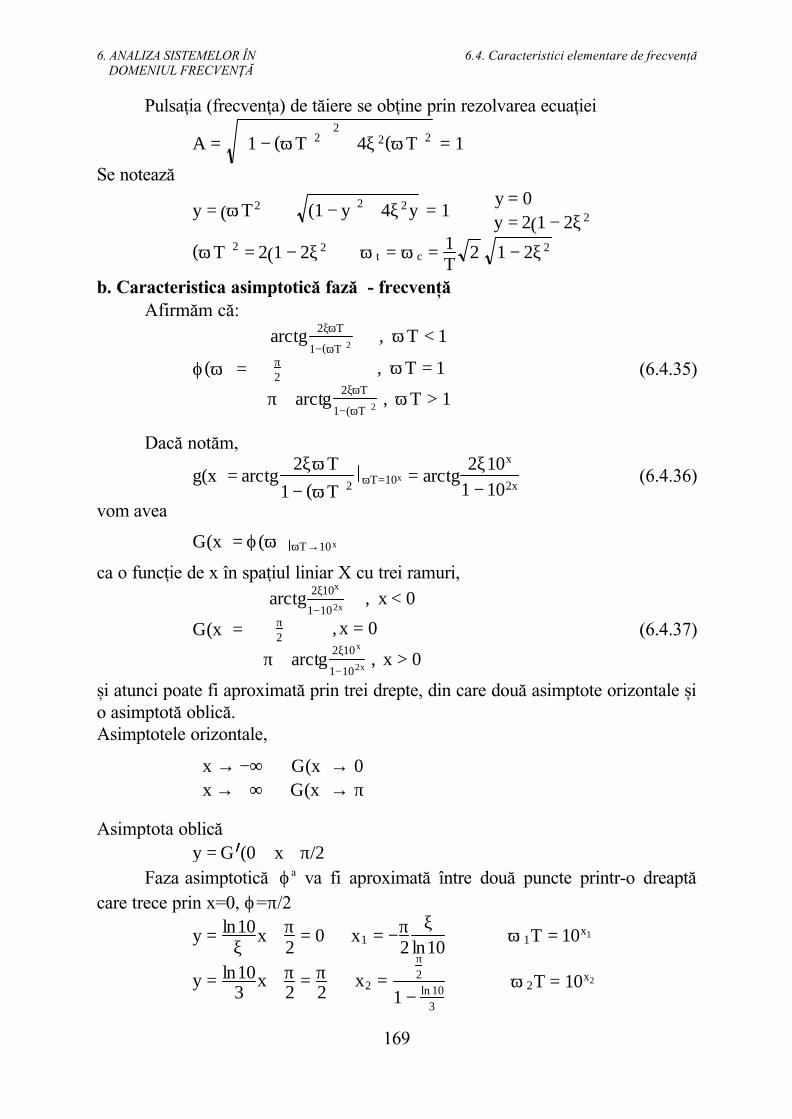
0.1 1 10 1000 0.01 ωT0
−π/2
π/2
π
ϕ( )ω ϕ ( )ωa
.
.
.
.
.
A
C
B
D
1ω T 2ω T
ln(10)/ ξ
Figura nr.6.4.7.Algoritmul pentru trasarea caracteristicii asimptotice de fazá:- se marcheazá punctul A [(ωT)=1; ϕ=π/2]- se marcheazá punctul C [(ωT)=10; ϕ= ]π
2+ ln 10
ξ- se unesc punctele A ßi C pentru a determina ω 1T ßi ω 2T la intersecþia cu
ϕ=0 (punctul B) ßi respectiv ϕ=π (punctul D).Astfel, caracteristica de fazá exactá va avea ca semitangente segmentele
AB ßi AD.
Exemplu: , .T = 10 , ξ = 0.1 ln 10ξ
= 2.30260.1
= 23.026 rad = 7.33π
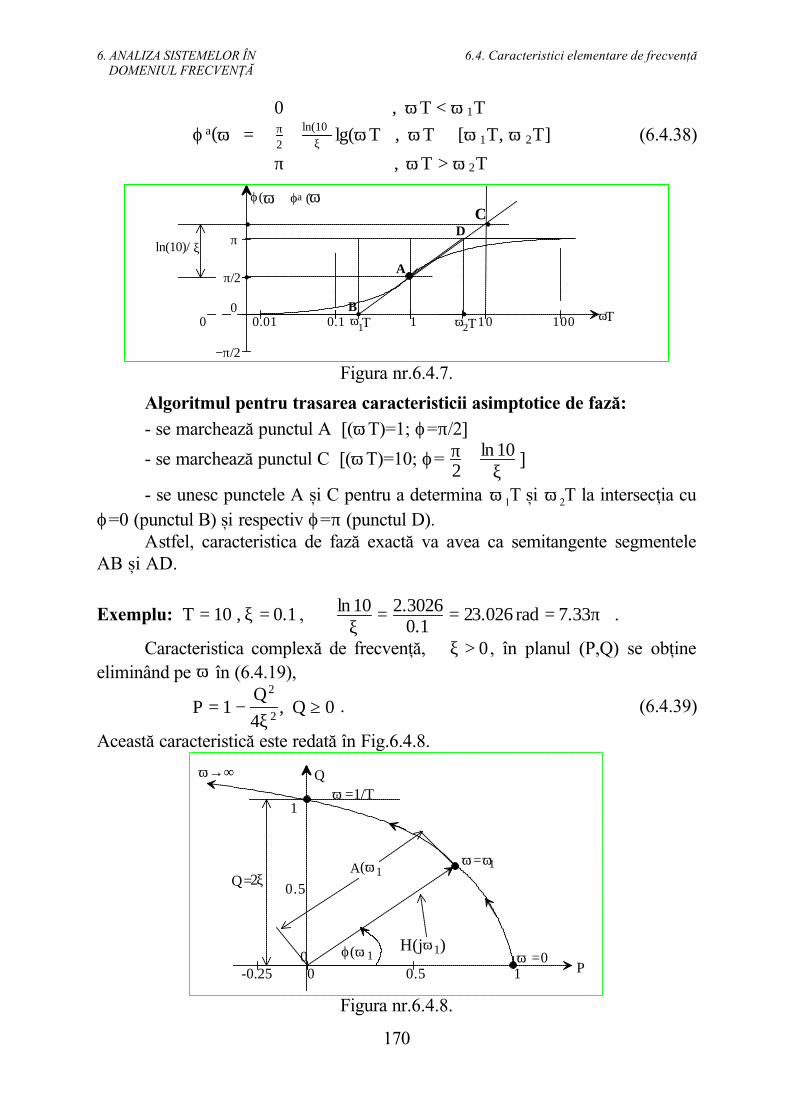
Caracteristica complexá de frecvenþá, , ín planul (P,Q) se obþine∀ξ > 0eliminänd pe ín (6.4.19),ω
. (6.4.39)P = 1 −Q2
4ξ2 , Q ≥ 0
Aceastá caracteristicá este redatá ín Fig.6.4.8.
P
Q
0.5 1
0.5
1
00-0.25
1ω=ω
1ϕ(ω ) =0ω
=1/Tωω→∞
1(ω )Α
1ωH(j )
Q=2ξ
Figura nr.6.4.8.
6. ANALIZA SISTEMELOR ÍN 6.4. Caracteristici elementare de frecvenþá DOMENIUL FRECVENÞÁ
170
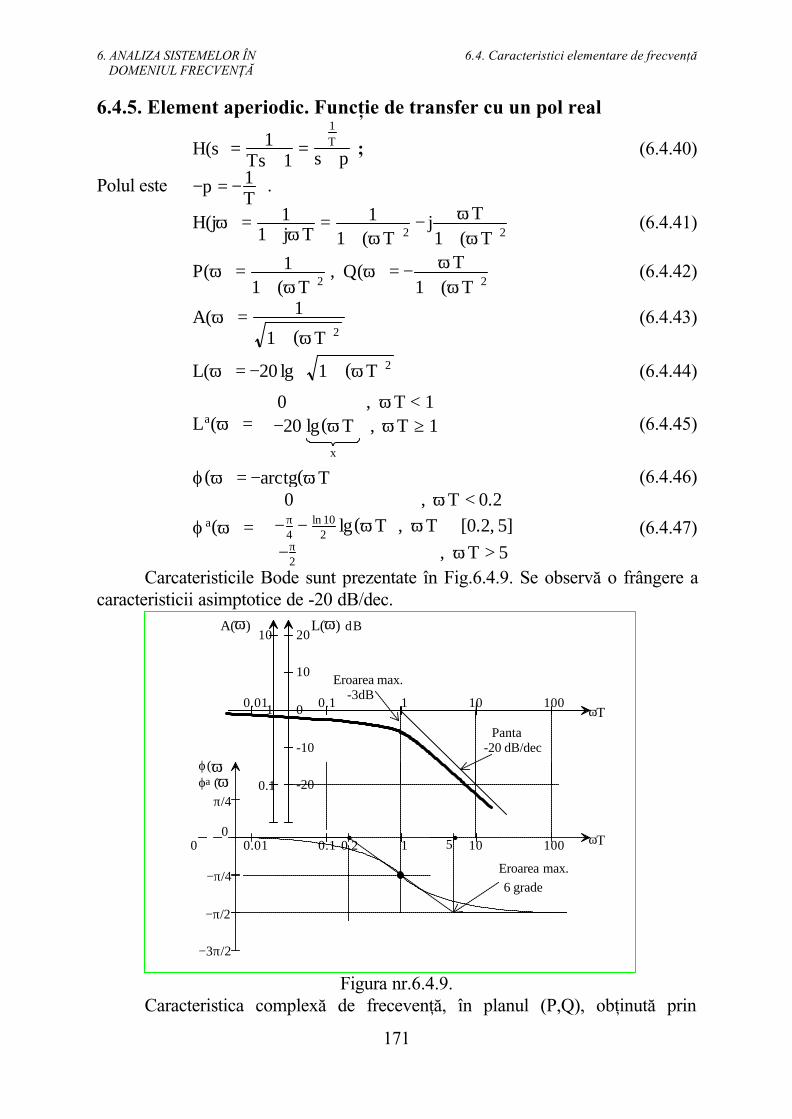
6.4.5. Element aperiodic. Funcþie de transfer cu un pol real
; (6.4.40)H(s) = 1Ts + 1
=1T
s + pPolul este .−p = − 1
T (6.4.41)H(jω) = 1
1 + jωT= 1
1 + (ωT)2− j ωT
1 + (ωT)2
(6.4.42)P(ω) = 11 + (ωT)2
, Q(ω) = − ωT1 + (ωT)2
(6.4.43)A(ω) = 1
1 + (ωT)2
(6.4.44)L(ω) = −20 lg 1 + (ωT)2
(6.4.45)La(ω) =
0 , ωT < 1−20
x
lg(ωT) , ωT ≥ 1
(6.4.46)ϕ(ω) = −arctg(ωT)
(6.4.47)ϕ a(ω) =
0 , ωT < 0.2−π
4 − ln 102 lg(ωT) , ωT ∈ [0.2, 5]
−π2 , ωT > 5
Carcateristicile Bode sunt prezentate ín Fig.6.4.9. Se observá o frängere acaracteristicii asimptotice de -20 dB/dec.
Eroarea max.-3dB0.1 1 10 1000.01
ωT
20
10
0
-10
-20
1
10
0.1
A( )ω L( )ω dB
Panta-20 dB/dec
−π/2
0.1 1 10 1000 0.01 ωT0
−π/4
π/4
ϕ( )ω
Eroarea max.6 grade
ϕ ( )ωa
50.2..
−3π/2
Figura nr.6.4.9.Caracteristica complexá de frecevenþá, ín planul (P,Q), obþinutá prin
6. ANALIZA SISTEMELOR ÍN 6.4. Caracteristici elementare de frecvenþá DOMENIUL FRECVENÞÁ
171
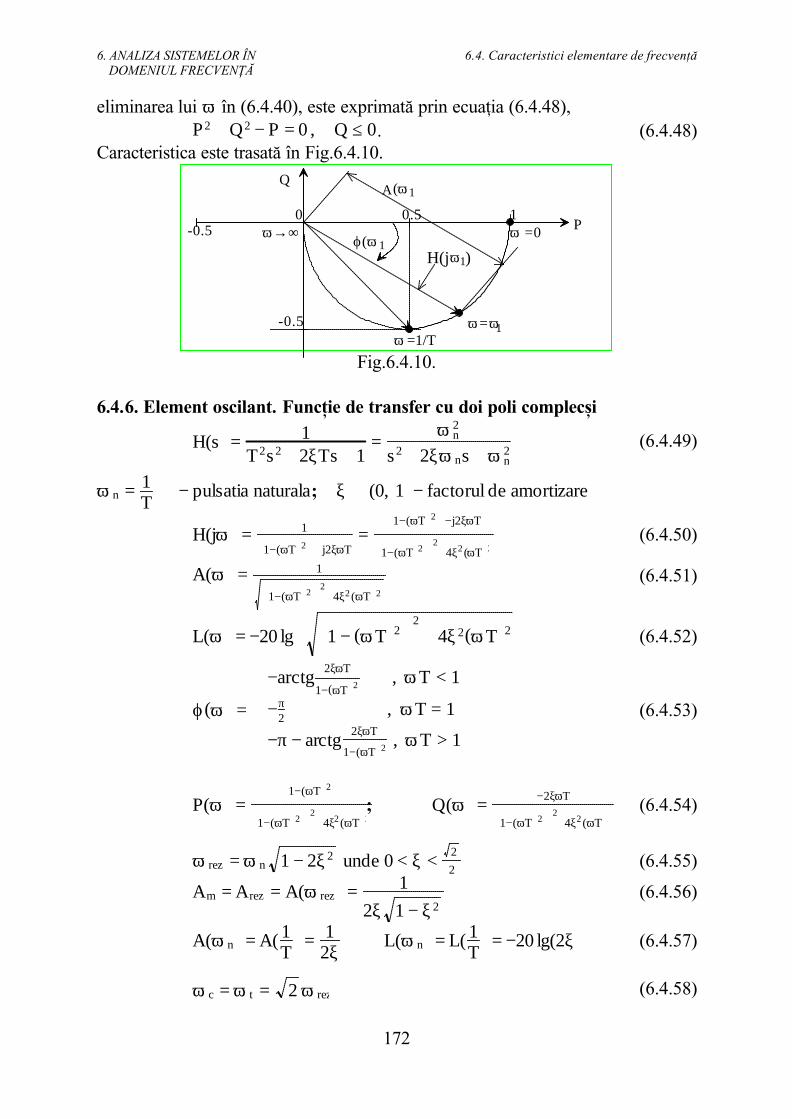
eliminarea lui ín (6.4.40), este exprimatá prin ecuaþia (6.4.48),ω. (6.4.48)P2 + Q2 − P = 0 , Q ≤ 0
Caracteristica este trasatá ín Fig.6.4.10.
P
Q
0.5 1
-0.5
-0.50
1ω=ω
1ϕ(ω )=0ω
=1/Tω
ω→∞
1(ω )Α
1ωH(j )
Fig.6.4.10.
6.4.6. Element oscilant. Funcþie de transfer cu doi poli complecßi
(6.4.49)H(s) = 1T2s2 + 2ξTs + 1
=ω n
2
s2 + 2ξω ns + ω n2
; ω n = 1T
− pulsatia naturala ξ ∈ (0, 1) − factorul de amortizare
(6.4.50)H(jω) = 11−(ωT)2
+j2ξωT=
1−(ωT)2
−j2ξωT
1−(ωT)2
2
+4ξ2 (ωT)2
(6.4.51)A(ω) = 1
1−(ωT)2
2
+4ξ2 (ωT)2
(6.4.52)L(ω) = −20 lg
1 − (ωT)2
2+ 4ξ2(ωT)2
(6.4.53)ϕ(ω) =
−arctg 2ξωT
1−(ωT)2 , ωT < 1
−π2 , ωT = 1
−π − arctg 2ξωT
1−(ωT)2 , ωT > 1
; (6.4.54)P(ω) =1−(ωT)2
1−(ωT)2
2
+4ξ2 (ωT)2Q(ω) = −2ξωT
1−(ωT)2
2+4ξ2 (ωT)2
(6.4.55)ω rez = ω n 1 − 2ξ2 unde 0 < ξ < 22
(6.4.56)Am = Arez = A(ω rez) = 12ξ 1 − ξ2
(6.4.57)A(ω n) = A( 1T
) = 12ξ
L(ω n) = L( 1T
) = −20 lg(2ξ)
(6.4.58)ω c = ω t = 2 ω rez
6. ANALIZA SISTEMELOR ÍN 6.4. Caracteristici elementare de frecvenþá DOMENIUL FRECVENÞÁ
172
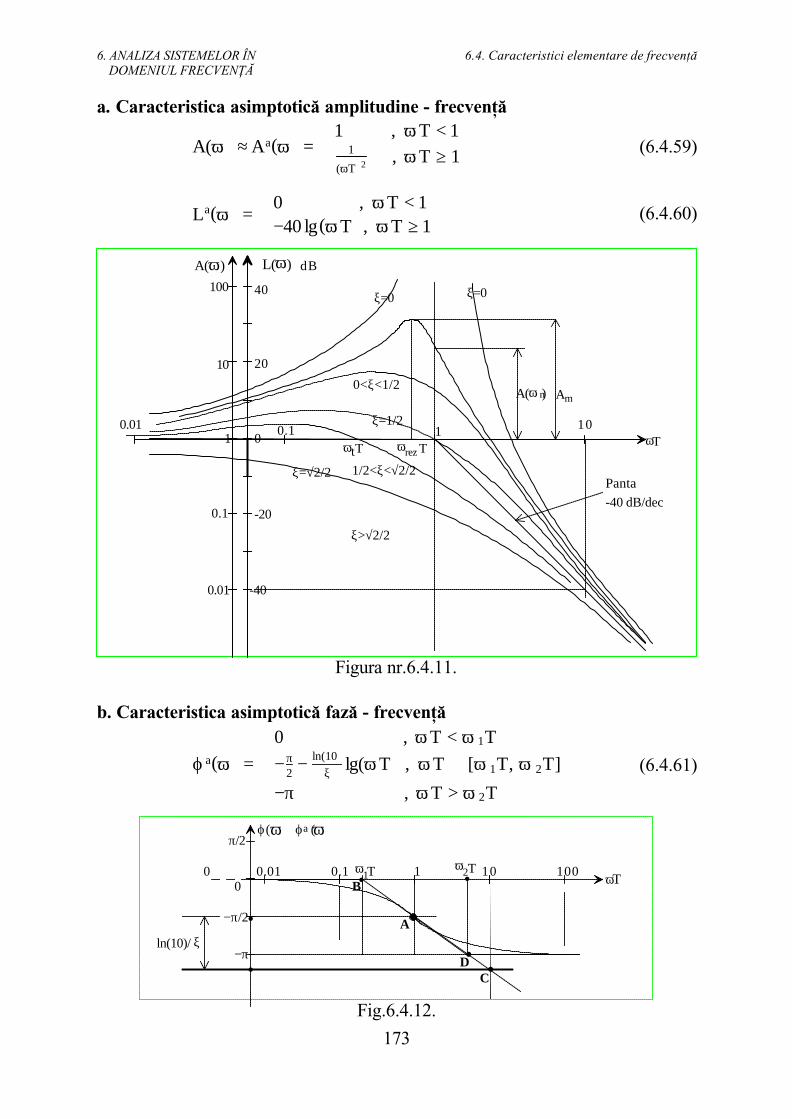
a. Caracteristica asimptoticá amplitudine - frecvenþá
(6.4.59)A(ω) ≈ Aa(ω) =
1 , ωT < 11
(ωT)2 , ωT ≥ 1
(6.4.60)La(ω) =
0 , ωT < 1−40 lg(ωT) , ωT ≥ 1
0.1 1 100.01ωT
-40
-20
0
20
1
10
100
0.1
A( )ω L( )ω dB
Panta-40 dB/dec
40
0.01
A( )ω n Am
ωrez T
ξ=0ξ=0
0<ξ<1/2
1/2<ξ<√2/2
ξ>√2/2
ξ=√2/2
ξ=1/2
Tωt
Figura nr.6.4.11.
b. Caracteristica asimptoticá fazá - frecvenþá
(6.4.61)ϕ a(ω) =
0 , ωT < ω 1T−π
2 − ln(10)ξ lg(ωT) , ωT ∈ [ω 1T, ω 2T]
−π , ωT > ω 2T
0.1 1 10 1000 0.01 ωT0
−π/2
π/2
−π
ϕ( )ω ϕ ( )ωa
.
.
.
..
.
A
C
B
D
1ω T 2ω T
ln(10)/ ξ
Fig.6.4.12.
6. ANALIZA SISTEMELOR ÍN 6.4. Caracteristici elementare de frecvenþá DOMENIUL FRECVENÞÁ
173
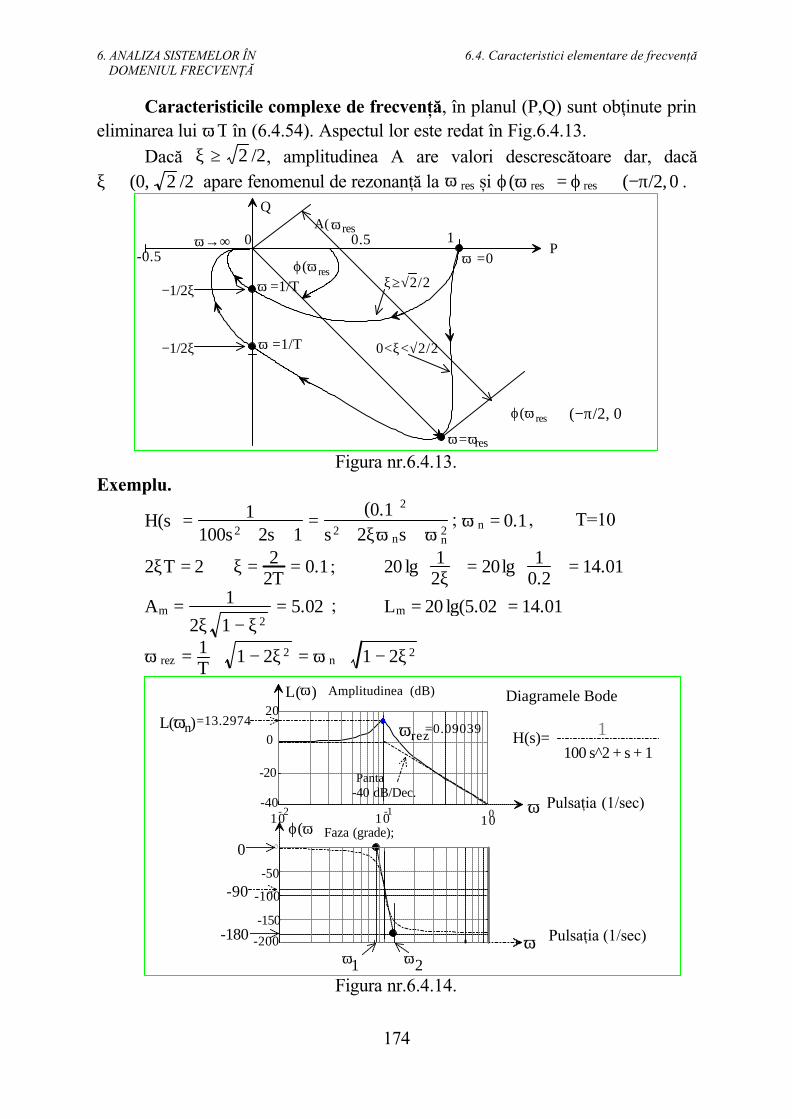
Caracteristicile complexe de frecvenþá, ín planul (P,Q) sunt obþinute prineliminarea lui ín (6.4.54). Aspectul lor este redat ín Fig.6.4.13. ωT
Dacá , amplitudinea A are valori descrescátoare dar, dacáξ ≥ 2 /2 apare fenomenul de rezonanþá la ßi .ξ ∈ (0, 2 /2) ω res ϕ(ω res) = ϕ res ∈ (−π/2, 0)
P
Q
0.5 1-0.5
0
resω=ω
=0ω
=1/Tω
=1/Tω
ω→∞res ωΑ( )
ϕ(ω )res
0<ξ<√2/2
ξ≥√2/2−1/2ξ
−1/2ξ
ϕ(ω )res ∈(−π/2, 0)
Figura nr.6.4.13.Exemplu.
; , T=10H(s) = 1100s2 + 2s + 1
=(0.1)2
s2 + 2ξω ns + ω n2
ω n = 0.1
;2ξT = 2 ⇔ ξ = 22T
= 0.1 20 lg
12ξ
= 20lg
1
0.2 = 14.01
;Am = 12ξ 1 − ξ2
= 5.02 Lm = 20 lg(5.02) = 14.01
ω rez = 1T
⋅ 1 − 2ξ2 = ω n ⋅ 1 − 2ξ2
Amplitudinea (dB) Diagramele Bode
Panta-40 dB/Dec.
100 s^2 + s + 1H(s)= 1
Pulsaþia (1/sec)
-20
-40
0
20
10- 2 10-1 100
L( ) ω
ω
ωrez=0.09039L( ) ωn =13.2974
ω
0
Faza (grade);ϕ(ω)
ω1 ω2
-50
-100
-150
-200
0
-90
-180 Pulsaþia (1/sec)
Figura nr.6.4.14.
6. ANALIZA SISTEMELOR ÍN 6.4. Caracteristici elementare de frecvenþá DOMENIUL FRECVENÞÁ
174
6.5. Caracteristici de frecvenþá pentru conexiunea serie asistemelor
6.5.1. Consideraþii generaleVom presupune cá un sistem este exprimat printr-o conexiune serie a q
funcþii de transfer,
(6.5.1)H(s) = H1(s) ⋅ H2(s) ⋅ ⋅⋅Hq (s)
ale cáror caracteristici de frecvenþá sunt cunoscute,
(6.5.2)Ak(ω) = Hk(jω) k = 1 : q
. (6.5.3)ϕk(ω) = arg (Hk(jω)) k = 1 : q
Caracteristica de amplitudine a sistemelor interconectate ín serie esteprodusul amplitudinilor elementelor componente
, (6.5.4)A(ω) = Πk=1
qAk(ω)
ín timp ce caracteristicile logaritmice de amplitudine ßi de fazá ale sistemuluiinterconectat ín serie sunt sumele caracteristicilor elementelor componente,
(6.5.5)L(ω) = Σk=1
qLk(ω)
(6.5.6)ϕ(ω) = Σk=1
qϕk(ω)
De asemenea, caracteristicile asimptotice logaritmice de amplitudine ßi defazá ale sistemului interconectat ín serie sunt date de sumele caracteristicilorasimptotice ale elementelor componente,
(6.5.7)La(ω) = Σk=1
qLk
a (ω)
(6.5.8)ϕ a(ω) = Σk=1
qϕk
a (ω)Aceste relaþii pot fi utilizate pentru trasarea caracteristicilor de frecvenþá
pentru orice funcþie de transfer. O funcþie de transfer poate fi decompusá (factorizatá) la numárátor ßi la
numitor folosind constantele de timp ca ín relaþia (6.5.9), ín care termenul liber ínoricare polinom din factorizare este egal cu 1,
(6.5.9)H(s) =K ⋅ Π
i=1
m1
(θ i ⋅ s + 1) Πi=m1 +1
m1 +m2 θ i
2s2 + 2ζ iθ is + 1
sαΠi=1
n1
(T is + 1) Πi=n1 +1
n1 +n2 T i
2s2 + 2ξ iT is + 1
unde, , Z.n1 + n2 = n m1 + m2 = m , α ∈
6. ANALIZA SISTEMELOR ÍN 6.5. Caracteristici de frecvenþá pentru DOMENIUL FRECVENÞÁ conexiunea serie a sistemelor
175
Pe baza unei astfel de factorizári, orice funcþie de transfer, oricät decomplicatá, poate fi interpretatá ca o conexiune serie de funcþii de transferelementare dintre cele 6 tipuri prezentate anterior,
, (6.5.10)H(s) = Πk=1
p
Hi(s) = Πk=1
p
Hik i (s), ki ∈ [1, 6]
unde este una dintre funcþiile de transfer elementare studiate dejaHi(s) = Hik i (s)
indicate, dacá este necesar, prin supraindicele ki.Factorizarea sub forma constantelor de timp pune ín evidenþá un factor K
care este denumit "factorul general de amplificare" al unei funcþii de transfer. Factorul general de amplificare poate fi calculat ínainte de factorizarea
propriu-zisá, utilizänd formula,
, (6.5.11)K = lims→0
sαH(s)
unde indicá numárul polilor funcþiei de transfer H(s) situaþi ín origineaα ∈ Zplanului s dacá , sau numárul zerourilor lui H(s) situate ín originea planuluiα > 0s dacá . Pentru valori particulare ale lui , K are urmátoarele denumiri:α < 0 α
, K=Kp - factorul de amplificare de poziþie;α = 0
, K=Kv - factorul de amplificare de vitezá; (6.5.12)α = 1
, K=Ka - factorul de amplificare de acceleraþie.α = 2
Factorii generali de amplificare exprimá raportul íntre valorile de regimstaþionar ale: ießirii (Kp),derivatei de ordinul I a ießirii (K v), derivateiy(∞) y. (∞)de ordinul II a ießirii (Ka), ßi valorile de regim staþionar ale intrárii .y(∞) u(∞)
(6.5.13)Kp = lims→0
H(s) =t→∞lim
y(t)u(t) =
y(∞)u(∞)
(6.5.14)Kv = lims→0
sH(s) =t→∞lim
y. (t)u(t) =
y. (∞)u(∞)
. (6.5.15)Ka = lims→0
s2H(s) =t→∞lim
y(t)u(t) =
y(∞)u(∞)
6. ANALIZA SISTEMELOR ÍN 6.5. Caracteristici de frecvenþá pentru DOMENIUL FRECVENÞÁ conexiunea serie a sistemelor
176
6.5.2. Tipuri de factorizáriDacá funcþia de transfer este descompusá sub forma poli-zerouri, atunci
factorizarea care se obþine este de forma (6.5.16), ín care coeficientul termenilorprincipali din fiecare polinom este egal cu 1,
(6.5.16)H(s) =B ⋅ Π
i=1
m1
(s + zi) ⋅ Πi=m1 +1
m1 +m2 s2 + 2ζ iΩ is + Ω i
2
sα ⋅ Πi=1
n1
(s + p i) ⋅ Πi=n1 +1
n1 +n2 s2 + 2ξ iω is + ω i
2
unde sunt zerouri reale; (6.5.17)zi = 1
θ i⇒ ζ i = −zi
sunt poli reali. (6.5.18)p i = 1T i
⇒ λ i = −p i
Uneori, numim pe pi, zi ca fiind "pol", respectiv "zerou".Factorizarea poli-zerouri a unei funcþii de transfer se mai numeßte
factorizare "z-p-k". Ín aceastá factorizare, B este doar un coeficient, care nu arelegáturá cu amplificarea sistemului.
Pentru trasarea rapidá a caracteristicilor Bode este util sá considerámfactorizarea dupá constantele de timp (6.5.9) descompusá ín 2 factori principali,
(6.5.19)H(s) = R(s) ⋅ G(s)
unde, (6.5.20)R(s) = K
sα
íncorporeazá comportarea esenþialá pentru frecvenþe joase, ín special pentru. Definim,ω → 0
(6.5.21)AR(ω) = R(jω) = K ⋅ ω −α
(6.5.22)LR(ω) = 20 lg(AR(ω)) = 20 lg( K ) − α ⋅ 20 lg(ω)
(6.5.23)ϕR(ω) = arg(R(jω)) =
−α ⋅ π/2 if K ≥ 0−α ⋅ π/2 − π if K < 0
Al doilea factor G(s),
(6.5.24)G(s) =Πi=1
m1
(θ i ⋅ s + 1) ⋅ Πi=m1 +1
m1 +m2 θ i
2s2 + 2ζ iθ is + 1
Πi=1
n1
(T is + 1) ⋅ Πi=n1+1
n1 +n2 T i
2s2 + 2ξ iT is + 1
nu are efect asupra caracteristicilor de frecvenþá ale conexiunii serie atunci cänd. ω → 0Íntr-adevár,
G(0)=1 , . (6.5.25)limω→0
G(jω) = 1 limω→0
arg(G(jω)) = 0
6. ANALIZA SISTEMELOR ÍN 6.5. Caracteristici de frecvenþá pentru DOMENIUL FRECVENÞÁ conexiunea serie a sistemelor
177
6.5.3. Exemple de factorizári Fie funcþia de transfer, (6.5.26)
. (6.5.26)H(s) = 10(s + 10) ⋅ (20s + 1)s ⋅ (5s + 1) ⋅ (s + 2)
Chiar dacá aceastá funcþie este factorizatá, nu corespunde nici-uneia dinfactorizárile prezentate. Factorul 10 din faþa fracþiei nu ne spune nimic.
Se pot determina cu ußurinþá, direct din H(s), cele douá elemente ale luiR(s), se observá la o simplá inspectare a funcþiei, iar se poateα = 1 K = Kv
evalua folosind (6.5.14),
K = Kv = lims→0
sH(s) = 10 ⋅(0 + 10) ⋅ (0 + 1)(0 + 1) ⋅ (0 + 2)
= 50[y]
sec⋅[u]
Pentru funcþia de transfer consideratá factorul R(s) este,
. (6.5.27)R(s) = Ksα = 50
sceea ce determiná,
(6.5.28)LR(ω) = 20 lg( K ) − α ⋅ 20 lg(ω) = 20 lg(50) − 20 lg(ω)
. (6.5.29)ϕR(ω) = arg(R(jω)) = −π/2Este important de remarcat faptul cá H(s) are,pe längá polul s=0, íncá doi
poli reali simpli ßi douá zerouri reale simple, notate utilizänd (6.5.17), (6.5.18): p0=0; p1=0.2; p2=2; z1=0.05; z2=10; (6.5.30)Putem scrie expresia lui G(s) astfel:
(6.5.31)G(s) =(0.1s + 1)(20s + 1)(5s + 1)(0.5s + 1)
condiþia G(0)=1 fiind índeplinitá.Vom utiliza aceste rezultate ín paragraful urmátor la trasarea
caracteristicilor Bode. Pentru acelaßi sistem din exemplu, .Kp = ∞, Ka = 0
Cele douá tipuri de factorizári pentru H(s) sunt:- factorizarea dupá constantele de timp
,H(s) = 50 ⋅(0.1s + 1) ⋅ (20s + 1)
s ⋅ (5s + 1) ⋅ (0.5s + 1)- factorizarea "z-p-k"
.H(s) = 40 ⋅(s + 10) ⋅ (s + 0.05)s ⋅ (s + 0.2) ⋅ (s + 2)
Ca raport a douá polinoame, fárá de folos ínsá ín obþinerea caracteristicilorde frecvenþá, funcþia de transfer este,
.H(s) = 200s2 + 2010s + 1005s3 + 11s2 + 2s + 0
6. ANALIZA SISTEMELOR ÍN 6.5. Caracteristici de frecvenþá pentru DOMENIUL FRECVENÞÁ conexiunea serie a sistemelor
178

6.5.4. Metode de trasare a caracteristicilor Bode Diagramele Bode, pentru funcþii de transfer complicate, pot fi trasate cu
relativá ußurinþá prin utilizarea a douá metode: 1. Trasarea Caracteristicilor Bode pe componente.2. Trasarea directá a Caracteristicilor Bode.
6.5.4.1. Trasarea caracteristicilor Bode pe componenteAceastá metodá se bazeazá pe utilizarea caracteristicilor de frecvenþá
elementare (caracteristici tip), prezentate ín Cap. 6.4., ca ßi componente alefuncþiei de transfer conform relaþiilor (6.5.1)... (6.5.8).
Se recomandá parcurgerea urmátoarelor etape:1. Se efectueazá factorizarea dupá constantele de timp.2. Se identificá funcþiile de transfer elementare (dintre cele 6 tipuri).3. Se traseazá caracteristicile asimptotice de amplitudine ßi de fazá pentru
elementele tip.4. Caracteristica asimptoticá pentru funcþia de transfer rezultá prin ínsumarea
graficá punct cu punct a caracteristicilor asimptotice ale componentelor.5. Pentru obþinerea caracteristicilor exacte trebuie efectuate corecþiile ín punctele
de frängere. Valorile amplitudinilor sunt adáugate pe o scará liniará exprimatá ín dB, L(ω)
chiar dacá ín final este utilizatá scara logaritmicá pentru marcarea lor.A(ω)Dacá un pol sau un zerou, real sau complex, are ordinul de multiplicitate mi,atunci el va fi considerat ca determinänd mi caracteristici elementare defrecvenþá, chiar dacá este vorba despre aceeaßi caracteristicá.
6.5.4.2. Exemple de trasare a diagramelor Bode pe componenteSá trasám caracteristica Bode pentru funcþia de transfer analizatá ín Ex.
6.5.1.1., funcþie de transfer datá de relaþia (6.5.26),
(6.5.26)H(s) = 10 ⋅(s + 10) ⋅ (20s + 1)s ⋅ (5s + 1) ⋅ (s + 2)
Factorizarea dupá constantele de timp este interpretatá ca o conexiune seriea 6 funcþii de transfer elementare,
H(s) = 50(0.1s + 1)(20s + 1)s(5s + 1)(0.5s + 1)
= H1(s) ⋅ H2(s) ⋅ H3(s) ⋅ H4(s) ⋅ H5(s) ⋅ H6(s)
unde ;H1(s) = H11 (s) = 50 H2(s) = H2
2(s) = 1s
;H3(s) = H35 (s) = 1
5s + 1H4(s) = H4
5(s) = 10.5s + 1
;H5(s) = H53 (s) = 0.1s + 1 H6(s) = H6
3(s) = 20s + 1
6. ANALIZA SISTEMELOR ÍN 6.5. Caracteristici de frecvenþá pentru DOMENIUL FRECVENÞÁ conexiunea serie a sistemelor
179
a3ϕ
-310 -210
-110 010 110 102
Faza (grade)
Amplitudine (dB)
-310 -210
-110 010 110 102
0
-60
-40
-20
20
40
60
80
100
-180
-135
-90
-45
0
45
90
ω=10ω=0.05 ω=0.2 ω=2
ω
ω
ϕ(ω)
(ω)L
0.05*50.05/5 2*52/5
L6L2a
L1a
L3a
L4a
L5a
a2ϕ
a4ϕ
a5ϕa
6ϕ
a
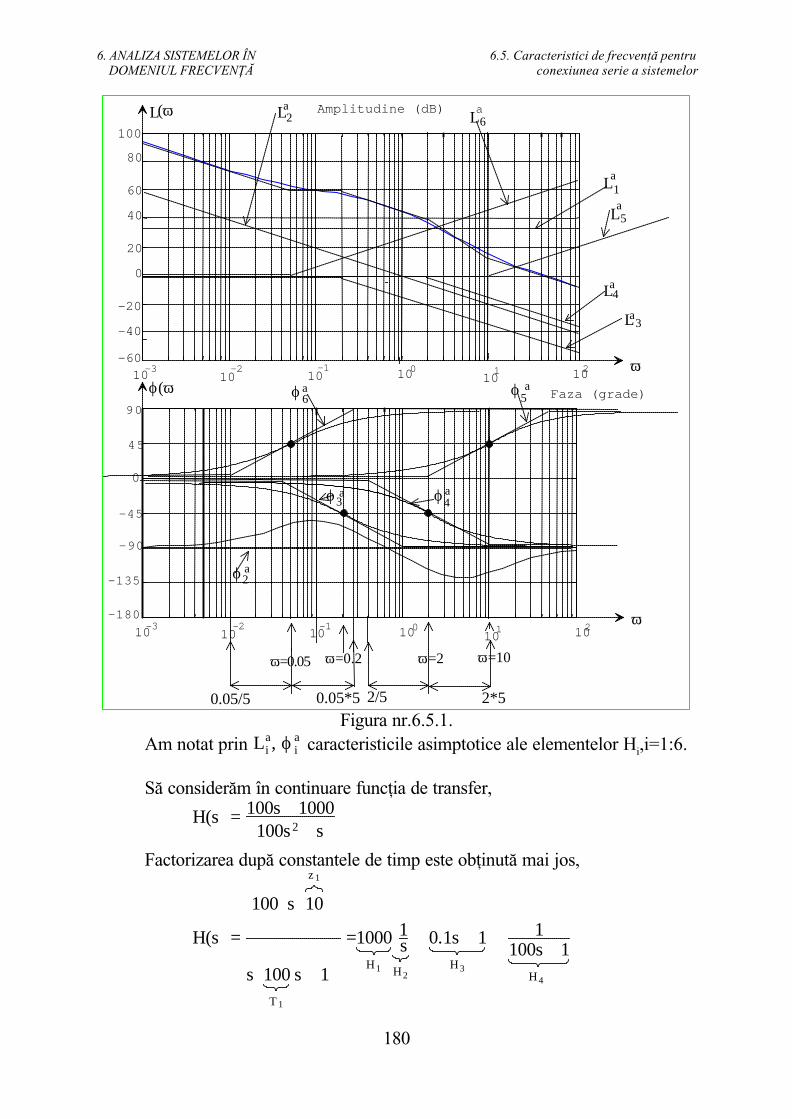
Figura nr.6.5.1.Am notat prin caracteristicile asimptotice ale elementelor Hi,i=1:6.Li
a, ϕ ia
Sá considerám ín continuare funcþia de transfer,H(s) = 100s + 1000
100s2 + s
Factorizarea dupá constantele de timp este obþinutá mai jos,
H(s) =
100
s+
z 1
10
s
T 1
100 s + 1
=H 1
1000
H 2
⋅1s ⋅
H 3
0.1s + 1
H 4
⋅ 1100s + 1
6. ANALIZA SISTEMELOR ÍN 6.5. Caracteristici de frecvenþá pentru DOMENIUL FRECVENÞÁ conexiunea serie a sistemelor
180
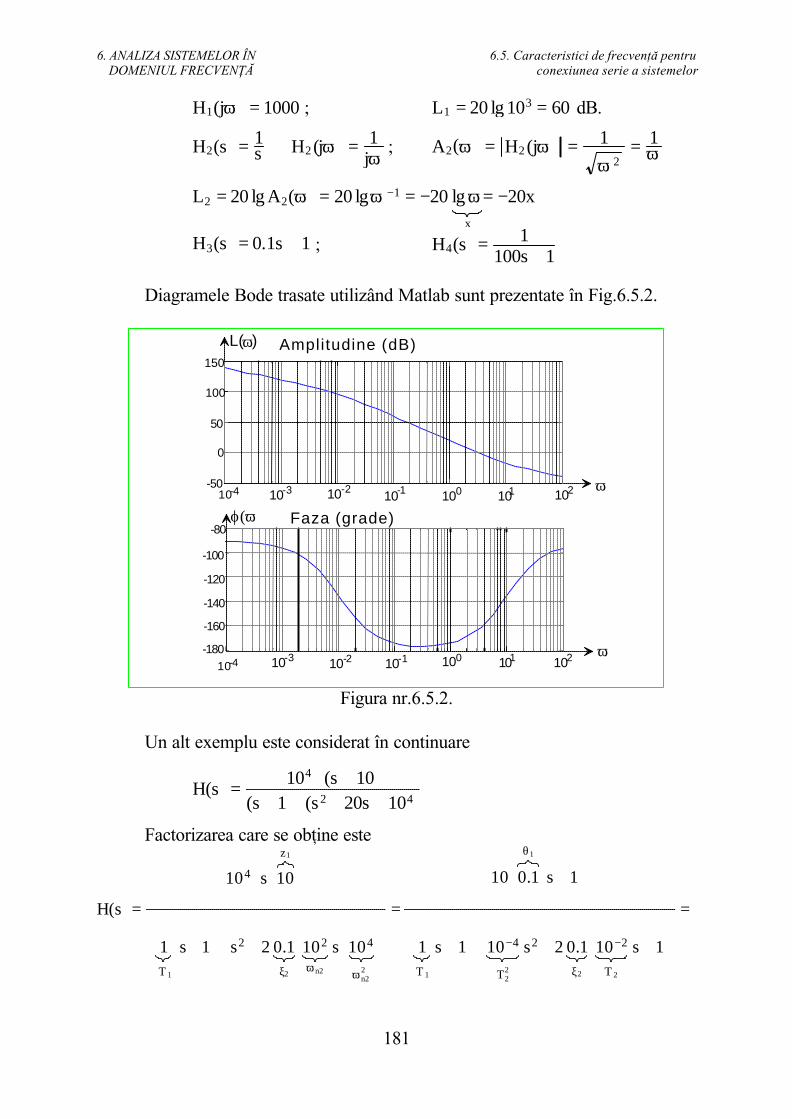
; dB.H1(jω) = 1000 L1 = 20 lg 103 = 60
;H2(s) = 1s ⇒ H2 (jω) = 1
jωA2(ω) = H2 (jω) = 1
ω 2= 1
ω
L2 = 20 lg A2(ω) = 20 lgω −1 = −20x
lg ω= −20x
;H3(s) = 0.1s + 1 H4(s) = 1100s + 1
Diagramele Bode trasate utilizänd Matlab sunt prezentate ín Fig.6.5.2.
-100
10-3
10-3
Faza (grade)
Amplitudine (dB)
-50
0
50
100
150
10-4
10-4
10-2
10-2
10-1
10-1
100
100
101
101
102
102
-180
-160
-140
-120
-80ϕ(ω)
L( )ω
ω
ω
Figura nr.6.5.2.
Un alt exemplu este considerat ín continuare
H(s) = 104 ⋅ (s + 10)(s + 1) ⋅ (s2 + 20s + 104)
Factorizarea care se obþine este
H(s) =
104
s+
z1
10
T 1
1 ⋅ s + 1
s2 + 2⋅
ξ2
0.1 ⋅ωn2
102 s+ωn2
2
104
=
10
θ1
0.1 ⋅s + 1
T 1
1 s + 1
T22
10−4 s2 + 2⋅ξ2
0.1 ⋅T 2
10−2 s + 1
=
6. ANALIZA SISTEMELOR ÍN 6.5. Caracteristici de frecvenþá pentru DOMENIUL FRECVENÞÁ conexiunea serie a sistemelor
181
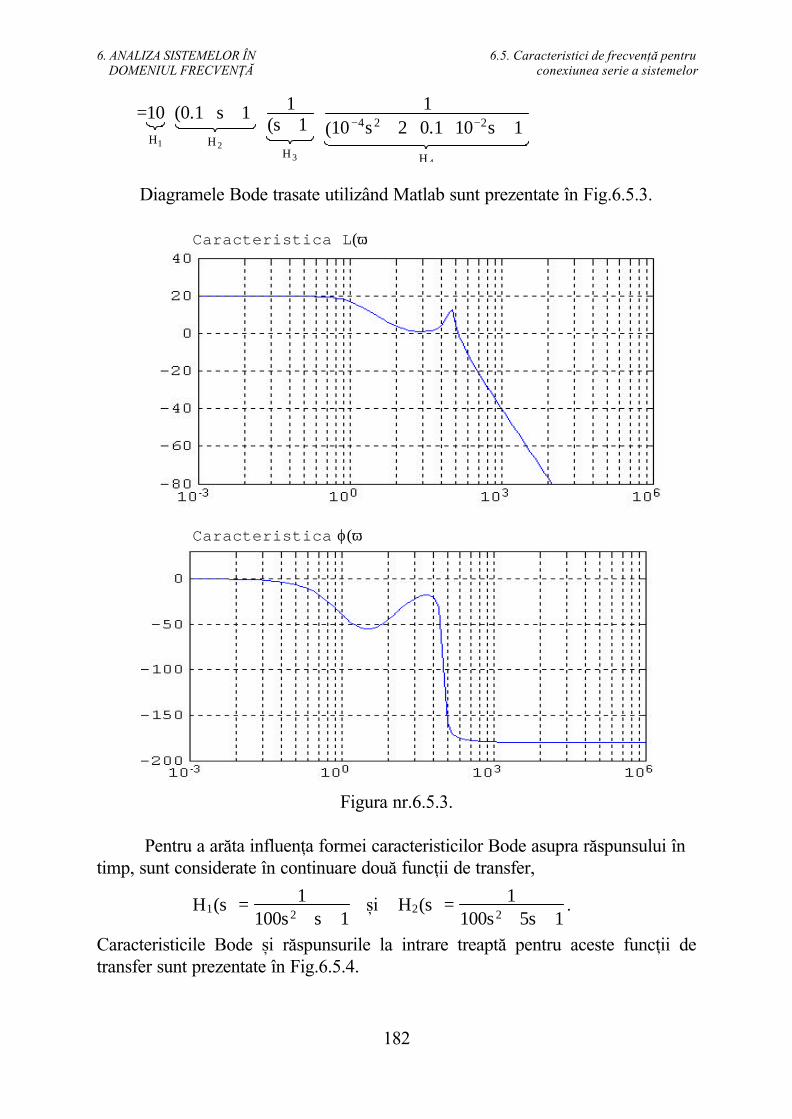
=H1
10 ⋅H 2
(0.1 ⋅ s + 1) ⋅
H 3
1(s + 1)
⋅
H 4
1(10−4s2 + 2 ⋅ 0.1 ⋅ 10−2s + 1)
Diagramele Bode trasate utilizänd Matlab sunt prezentate ín Fig.6.5.3.
Caracteristica L(ω)
Caracteristica ϕ(ω)
Figura nr.6.5.3.
Pentru a aráta influenþa formei caracteristicilor Bode asupra ráspunsului íntimp, sunt considerate ín continuare douá funcþii de transfer,
ßi .H1(s) = 1100s2 + s + 1
H2(s) = 1100s2 + 5s + 1
Caracteristicile Bode ßi ráspunsurile la intrare treaptá pentru aceste funcþii detransfer sunt prezentate ín Fig.6.5.4.
6. ANALIZA SISTEMELOR ÍN 6.5. Caracteristici de frecvenþá pentru DOMENIUL FRECVENÞÁ conexiunea serie a sistemelor
182
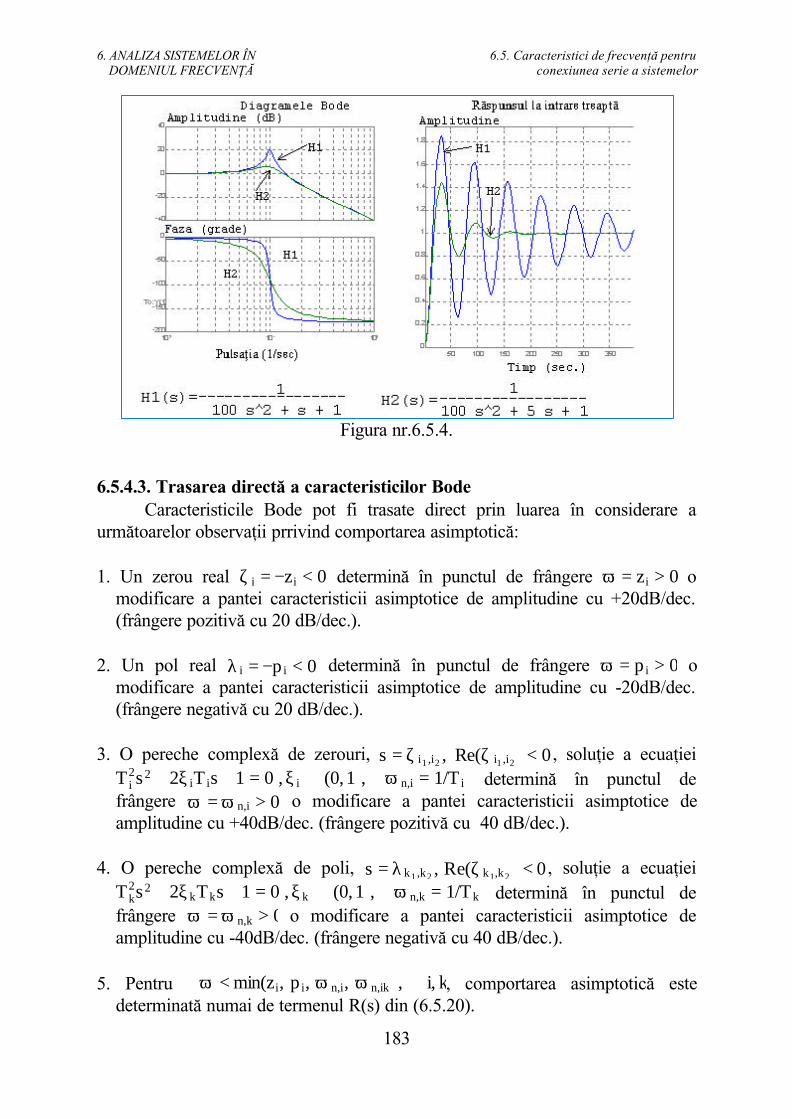
Figura nr.6.5.4.
6.5.4.3. Trasarea directá a caracteristicilor BodeCaracteristicile Bode pot fi trasate direct prin luarea ín considerare a
urmátoarelor observaþii prrivind comportarea asimptoticá:
1. Un zerou real determiná ín punctul de frängere oζ i = −zi < 0 ω = zi > 0modificare a pantei caracteristicii asimptotice de amplitudine cu +20dB/dec.(frängere pozitivá cu 20 dB/dec.).
2. Un pol real determiná ín punctul de frängere oλ i = −p i < 0 ω = p i > 0modificare a pantei caracteristicii asimptotice de amplitudine cu -20dB/dec.(frängere negativá cu 20 dB/dec.).
3. O pereche complexá de zerouri, , soluþie a ecuaþieis = ζ i1 ,i2 , Re(ζ i1 ,i2 ) < 0 determiná ín punctul deT i
2s2 + 2ξ iT is + 1 = 0 , ξ i ∈ (0, 1), ω n,i = 1/T i
frängere o modificare a pantei caracteristicii asimptotice deω = ω n,i > 0amplitudine cu +40dB/dec. (frängere pozitivá cu 40 dB/dec.).
4. O pereche complexá de poli, , soluþie a ecuaþieis = λk1 ,k2 , Re(ζ k1,k2 ) < 0 determiná ín punctul deTk
2s2 + 2ξkTks + 1 = 0 , ξk ∈ (0, 1), ω n,k = 1/Tk
frängere o modificare a pantei caracteristicii asimptotice deω = ω n,k > 0amplitudine cu -40dB/dec. (frängere negativá cu 40 dB/dec.).
5. Pentru , comportarea asimptoticá este∀ω < min(zi, p i, ω n,i, ω n,ik ), ∀i, kdeterminatá numai de termenul R(s) din (6.5.20).
6. ANALIZA SISTEMELOR ÍN 6.5. Caracteristici de frecvenþá pentru DOMENIUL FRECVENÞÁ conexiunea serie a sistemelor
183
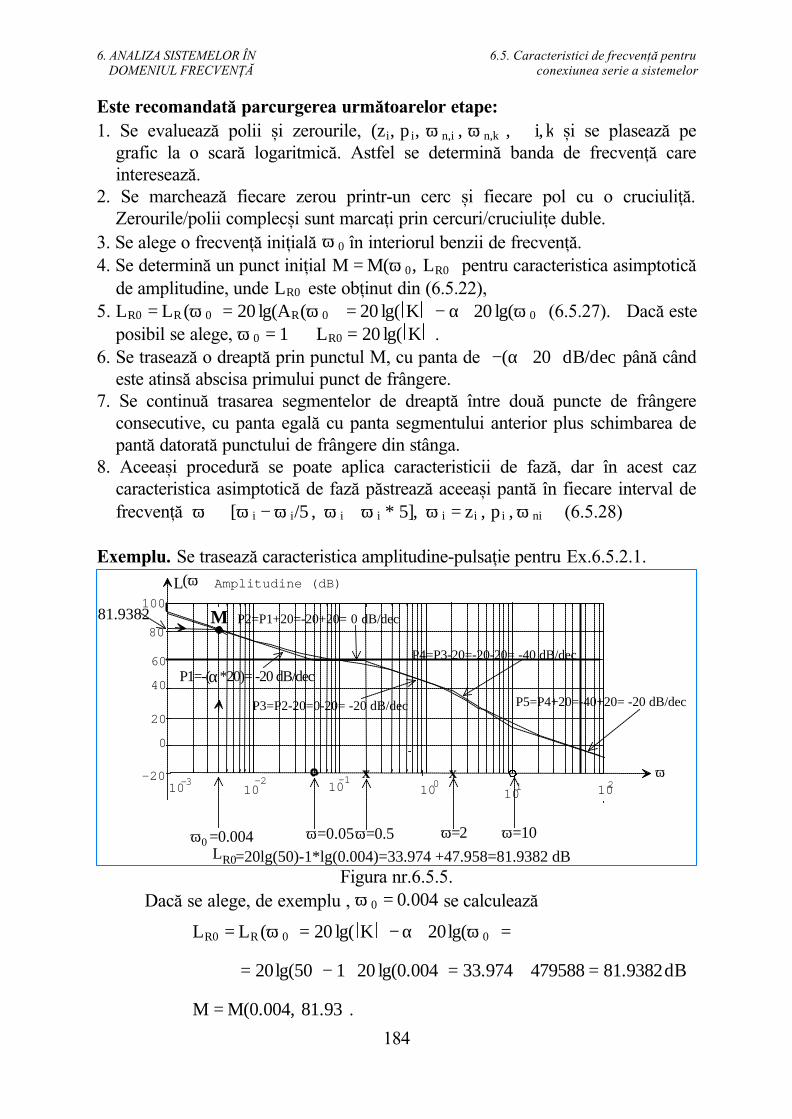
Este recomandatá parcurgerea urmátoarelor etape:1. Se evalueazá polii ßi zerourile, ßi se plaseazá pe(zi, p i, ω n,i , ω n,k), ∀i, k
grafic la o scará logaritmicá. Astfel se determiná banda de frecvenþá careintereseazá.
2. Se marcheazá fiecare zerou printr-un cerc ßi fiecare pol cu o cruciuliþá.Zerourile/polii complecßi sunt marcaþi prin cercuri/cruciuliþe duble.
3. Se alege o frecvenþá iniþialá ín interiorul benzii de frecvenþá.ω 0
4. Se determiná un punct iniþial pentru caracteristica asimptoticáM = M(ω 0, LR0)de amplitudine, unde este obþinut din (6.5.22),LR0
5. (6.5.27). Dacá esteLR0 = LR (ω 0) = 20 lg(AR(ω 0)) = 20 lg( K ) − α ⋅ 20 lg(ω 0)posibil se alege, .ω 0 = 1 ⇒ LR0 = 20 lg( K )
6. Se traseazá o dreaptá prin punctul M, cu panta de päná cänd−(α ⋅ 20) dB/deceste atinsá abscisa primului punct de frängere.
7. Se continuá trasarea segmentelor de dreaptá íntre douá puncte de frängereconsecutive, cu panta egalá cu panta segmentului anterior plus schimbarea depantá datoratá punctului de frängere din stänga.
8. Aceeaßi procedurá se poate aplica caracteristicii de fazá, dar ín acest cazcaracteristica asimptoticá de fazá pástreazá aceeaßi pantá ín fiecare interval defrecvenþá (6.5.28)ω ∈ [ω i − ω i/5 , ω i + ω i ∗ 5], ω i = zi , p i , ω ni
Exemplu. Se traseazá caracteristica amplitudine-pulsaþie pentru Ex.6.5.2.1.Amplitudine (dB)
-310 -210
-110 010 110 102
0
-20
20
40
60
80
100
ω
(ω)L
x x
P2=P1+20=-20+20= 0 dB/dec
P3=P2-20=0-20= -20 dB/dec
P4=P3-20=-20-20= -40 dB/dec
P5=P4+20=-40+20= -20 dB/dec
P1=-( *20)= -20 dB/dec α
ω=0.05ω=0.5 ω=2 ω=10ω =0.0040
M
LR0=20lg(50)-1*lg(0.004)=33.974 +47.958=81.9382 dB
81.9382
Figura nr.6.5.5.Dacá se alege, de exemplu , se calculeazá ω 0 = 0.004
LR0 = LR (ω 0) = 20 lg( K ) − α ⋅ 20lg(ω 0 ) =
= 20lg(50) − 1 ⋅ 20 lg(0.004) = 33.974 + 479588 = 81.9382dB
. M = M(0.004, 81.93)
6. ANALIZA SISTEMELOR ÍN 6.5. Caracteristici de frecvenþá pentru DOMENIUL FRECVENÞÁ conexiunea serie a sistemelor
184
7. STABILITATEA SISTEMELOR
7.1. Definirea problemeiStabilitatea este una dintre cele mai importante proprietáþi ale unui sistem.
Intuitiv, putem spune cá un sistem este stabil dacá stá ín repaus, ín afará de cazulín care perturbaþii externe íi afecteazá comportarea, ßi se íntoarce ín starea derepaus dacá acþiunea perturbaþiilor externe dispare. Existá mai multe definiþiipentru stabilitatea sistemelor.
Una dintre aceste definiþii se referá la aßa-numita stabilitate intraremárginitá - ießire márginitá - IMEM (ín englezá bounded input - boundedoutput - BIBO): dacá intrarea este márginitá atunci ßi ießirea rámäne márginitá.
Ín plus, un sistem este asimptotic stabil dacá este cu intrare márginitá -ießire márginitá ßi ießirea tinde cátre o stare staþionará.
Se poate spune cá sistemul este stabil dacá dispare componenta tranzitoriea ráspunsului ßi ín final se va instala doar regimul permanent. Acest tip destabilitate se numeßte stabilitate externá.
Existá de asemenea aßa-numita stabilitate interná care ia ín considerareráspunsul tranzitoriu ín raport cu componentele vectorului de stare. Studiulstabilitáþii interne necesitá descrierea prin ecuaþii de stare.
Foarte utilizatá, índeosebi pentru sistemele neliniare, este stabilitatea ínsens Liapunov, care este o condiþie de continuitate a traiectoriei de stare ín raportcu starea iniþialá. Existá o teorie amplá despre stabilitatea Liapunov.
Pentru sistemele liniare invariabile ín timp stabilitatea externá estedeterminatá de polii funcþiei de transfer
, (7.1.1)H(s) =M(s)L(s)
adicá de rádácinile numitorului: , (7.1.2)L(s) = 0 ⇒ s = λ i
care trebuie sá fie situaþi ín semiplanul stäng al planului complex .Re(λ i) < 0Stabilitatea interná a unui sistem, exprimat prin ecuaþiile de stare, este
determinatá de valorile proprii ale matricii sistemului A, adicá de rádácinilepolinomului caracteristic,
(7.1.3)∆(s) = det(sI − A) = 0 ⇒ s = λ i
Un sistem extern stabil poate sá nu fie intern stabil.Dacá sistemul este complet observabil ßi controlabil cele douá tipuri de
stabilitate sunt echivalente, astfel cá ín continuare vom discuta despre stabilitateasistemelor complet observabile ßi complet controlabile.
Polinomul de la numitorul funcþiei de transfer L(s)=ans
n+an-1sn-1+...+a1s+a0 (7.1.4)
poate fi considerat polinomul caracteristic∆(s)=ans
n+an-1sn-1+...+a1s+a0. (7.1.5)
7. STABILITATEA SISTEMELOR 7.1. Definirea problemei
185
7.2. Criterii algebrice de stabilitate
Pentru analiza stabilitáþii sistemelor sunt foarte utilizate aßa-numitelecriterii de stabilitate, care exprimá condiþiile necesare ßi suficiente de stabilitate.
Avänd un polinom L(s) (care poate fi ), spunem cá acesta este un∆(s)polinom stabil (sau polinom Hurwitz) dacá sistemul care are acest polinom canumitor al funcþiei de transfer (sau ca polinom caracteristic) este stabil.
Existá douá tipuri de criterii: - criterii algebrice, care lucreazá cu coeficienþii polinomului sau cu
rádácinile acestuia - criterii frecvenþiale de stabilitate care lucreazá cu caracteristicile de
frecvenþá ale sistemului.
7.2.1. Condiþia necesará de stabilitateO condiþie necesará de stabilitate a polinomului L(s) (sau ) este ca toþi∆(s)
coeficienþii polinomului sá aibá acelaßi semn ßi sá nu fie lipsá nici-un coeficient(toþi sá fie ).≠ 0Exemplu: este un polinom instabil.L(s) = s2 − 2s + 3
7.2.2. Criteriul fundamental de stabilitateUn sistem cu L(s) sau ca polinoame de stabilitate (numitorul funcþiei∆(s)
de transfer sau polinomul caracteristic) este stabil dacá ßi numai dacá toþi polii(toate valorile proprii) sunt plasaþi ín semiplanul stäng al planului complex, iardacá sunt poli (valori proprii) pe axa imaginará aceßtia sunt poli simpli (valoriproprii simple).
Aceasta ínseamná cá dacá λi este pol atunci Re(λi)<0 sau dacá Re(λi)=0atunci λi este un pol simplu (valoare proprie simplá). Un sistem este asimptoticstabil dacá toþi polii (valorile proprii) sunt situaþi ín semiplanul stäng al planuluicomplex s, adicá Re(λi)<0 .∀i
Dupá cum s-a vázut ín cadrul capitolului referitor la caracteristicileexperimentale de frecvenþá, componenta tranzitorie a ráspunsului era
(7.2.1)ytr(t) = Σi=1
Np i(t)e(Re(λi ))t
unde sunt valorile proprii ale matricii sistemului A.λ i
Dacá Re(λi)<0 atunci . (7.2.2)limt→∞
ytr(t) = 0Dintre criteriile algebrice de stabilitate, existá douá foarte importante:
Criteriul Hurwitz de stabilitate.Criteriul Routh de stabilitate.
7. STABILITATEA SISTEMELOR 7.2. Criterii algebrice de stabilitate
186

7.2.3. Criteriul de stabilitate HurwitzSá considerám polinomul,
(7.2.3)L(s) = ansn + an−1sn−1 + ... + a1s1 + a0 an ≠ 0Presupunem cá primul coeficient an este pozitiv, (an>0). Se construiesc
aßa-numiþii determinanþi Hurwitz ∆k unde ∆n este un determinant .n × n
(7.2.4)∆n =
n − coloane
an−1 an−3 an−5 an−7 ... 0an an−2 an−4 an−6 ... 00 an−1 an−3 an−5 ... 00 an an−2 an−4 ... 0... ... ... ... ... ...0 0 0 ... 0 a0
Pe diagonala principalá vom scrie coeficienþii . an−i , i = 1, .. , nSe descresc subindicii coeficienþilor cu cäte douá unitáþi ín partea dreaptá ßi
se cresc cu cäte douá unitáþi ín partea stängá. Dacá subindicii depáßesc pe n saudevin negativi elementele respective sunt considerate nule.
∆k este determinantul construit din ∆n folosind primele k - linii ßi primele k- coloane.
Polinomul L(s), cu coeficientul principal an pozitiv, este un polinomHurwitz sau un polinom stabil, adicá toate rádácinile sale sunt ín semiplanulstäng al planului s, dacá ßi numai dacá toþi determinanþii ∆k sunt pozitivi (∆k>0,
).∀k = 1, nDacá un polinom este stabil atunci
(7.2.5)L∗ (s) = a∼0 sn + a∼1sn−1 + ... + a∼n
este de asemenea stabil, unde .a∼k = an−k
Exemplu:L(s)=s3+3s2+2s+5; n=3;
∆3 =2 1 05 3 00 2 1
; ∆1 = 2 ; ∆2 = 1 ; ∆3 = 1
7. STABILITATEA SISTEMELOR 7.2. Criterii algebrice de stabilitate
187
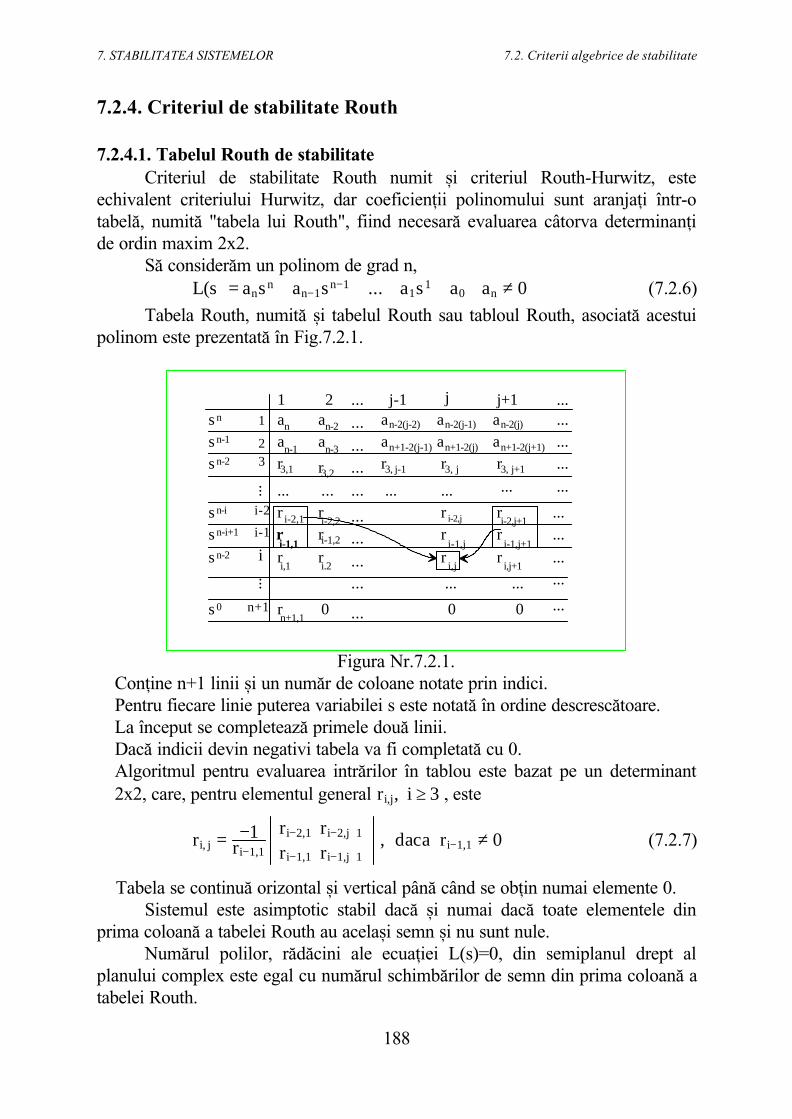
7.2.4. Criteriul de stabilitate Routh
7.2.4.1. Tabelul Routh de stabilitateCriteriul de stabilitate Routh numit ßi criteriul Routh-Hurwitz, este
echivalent criteriului Hurwitz, dar coeficienþii polinomului sunt aranjaþi íntr-otabelá, numitá "tabela lui Routh", fiind necesará evaluarea cätorva determinanþide ordin maxim 2x2.
Sá considerám un polinom de grad n, (7.2.6)L(s) = ansn + an−1sn−1 + ... + a1s1 + a0 an ≠ 0
Tabela Routh, numitá ßi tabelul Routh sau tabloul Routh, asociatá acestuipolinom este prezentatá ín Fig.7.2.1.
1s nj-1...
...
an
1 2an-2 an-2(j-1) an-2(j)
an+1-2(j) an+1-2(j+1)an+1-2(j-1)
an-2(j-2)
j j+1 ......
...
...
...
...
...
...
...
......
2s n-1 an-1 an-3 ...3s n-2 r3,1 r3,2
r3, j-1 r3, j+1r3, j...... ...... ... ... ...
i-2s n-i r i-2,1 ri-2,2
r i-2,j...i-1n-i+1 r
i-1,1ri-1,2 r
i-1,j...in-2 r
i,1ri.2
ri,j...
... ... ...
ss
ri-2,j+1r
i-1,j+1r
i,j+1...
n+10 rn+1,1
0 ...s 0 0
Figura Nr.7.2.1.Conþine n+1 linii ßi un numár de coloane notate prin indici. Pentru fiecare linie puterea variabilei s este notatá ín ordine descrescátoare.La ínceput se completeazá primele douá linii. Dacá indicii devin negativi tabela va fi completatá cu 0.Algoritmul pentru evaluarea intrárilor ín tablou este bazat pe un determinant2x2, care, pentru elementul general , este ri,j, i ≥ 3
(7.2.7)ri, j = −1ri−1,1
ri−2,1 ri−2,j+1
ri−1,1 ri−1,j+1, daca ri−1,1 ≠ 0
Tabela se continuá orizontal ßi vertical päná cänd se obþin numai elemente 0. Sistemul este asimptotic stabil dacá ßi numai dacá toate elementele din
prima coloaná a tabelei Routh au acelaßi semn ßi nu sunt nule.Numárul polilor, rádácini ale ecuaþiei L(s)=0, din semiplanul drept al
planului complex este egal cu numárul schimbárilor de semn din prima coloaná atabelei Routh.
7. STABILITATEA SISTEMELOR 7.2. Criterii algebrice de stabilitate
188

7.2.4.2. Cazuri speciale ín tabelul Routh
a. Un element din prima coloaná a tabelei Routh este zeroÍn acest caz calculul nu poate fi realizat.
Existá douá posibilitáþi pentru acest caz:a.1. Se ínlocuießte elementul nul printr-o literá, fie aceasta ε, consideränd cá
, ßi se continuá calculul celorlalte elemente ca funcþii de ε. ε > 0, ε → 0Pentru determinarea stabilitáþii sistemului (semnele elementelor din prima
coloaná) trebuie calculate limitele .limε→0ε>0
ri, 1(ε)
a.2. Dacá suntem la ínceputul completárii tabelei Routh, se ínlocuießte polinomulprin reciprocul acestuia ßi se construießte tabela Routh pentru polinomul reciproc.
Polinomul L(s)=ans
n+...+a1s+a0 este ínlocuit prin
, (7.2.8)L∼
(s) = a0sn + a1sn−1 + ... + an−1s + an
ßi se construießte tabela Routh pentru acest polinom reciproc.
b. Toate elementele unei linii sunt nulePresupunem cá
ri+1,k=0 , k=1,2,... (7.2.9)Atunci aceastá parte din tabelá aratá astfel,
(7.2.10)i− 1
sn−i+1 isn−i i+ 1
ri, 1 ri, 2 ri, 3 ...0 0 0 ...
Pentru a continua completarea tabelei, se construießte un polinom auxiliarprin utilizarea elementelor din liniile de deasupra nenule, cu gradul egal cu gradulcorespunzátor liniei nenule ataßate, ín cazul de mai sus gradul fiind n-i+1, graduldescrescänd din doi ín doi.
Polinomul auxiliar este: (7.2.11)U(s) = ri1sn−i+1 + ri2sn−i−1 + ri3sn−i−3 + ...
Se calculeazá derivata acestui polinom: (7.2.12)U (s) =
r∼ i1
(n − i + 1)ri1 sn−i+r∼ i2
(n − i − 1)ri2 sn−i−2+r∼ i3
(n − i − 3)ri3 sn−i−4 + ...
Se folosesc coeficienþii derivatei polinomului auxiliar ca elemente ale linieinule ßi se continuá calculul celorlalte elemente.
Rádácinile polinomului auxiliar sunt situate simetric ín planul s ín raport cuoriginea planului s.
Rádácinile polinomului auxiliar pot fi rádácini nule, rádácini imaginare
7. STABILITATEA SISTEMELOR 7.2. Criterii algebrice de stabilitate
189

pure, rádácini reale sau complexe.Dacá polinomul are coeficienþi reali, atunci are douá rádácini conjugate.Poate fi demonstrat cá un polinom cu o linie de elemente nule ín tabela
Routh are ca factor comun polinomul auxiliar:L(s)=L1(s)U(s) (7.2.13)
Criteriul Routh este util pentru cá lucreazá cu mai mulþi determinanþi deordinul doi, ín timp ce criteriul Hurwitz necesitá calculul unor determinanþi deordin superior.
Exemplu. Fie un polinom care conþine doi parametri reali, :p, ωL(s) = (s2 + ω 2)(s + p)L(s) = s3 + ps2 + ω 2 s + pω 2
Tabela Routh este,
1 2 3s 3
s 2
12
s1
s 0
3
4
1
0
ω2
ω2
0 0 0
4
0 0 00 00 0
2p 0 0 0
ω2
p
pp
; r31 = −1p
1 ω 2
p pω 2 = −1p(pω 2 − pω 2) = 0
r32 = −1p
1 0p 0
= 0
Se observá cá toate elementele din linia a treia, i=3, sunt zero. Polinomulataßat U(s) este,
U(s) = ps2 + pω 2s2−2 = p(s2 + ω 2)
L(s)=L1(s)U(s);
U'(s)=2ps+0
.r41 = −12p
p pω 2
2p 0= pω 2
Se poate determina L1(s) care este un factor fárá rádácini simetrice.
7. STABILITATEA SISTEMELOR 7.2. Criterii algebrice de stabilitate
190
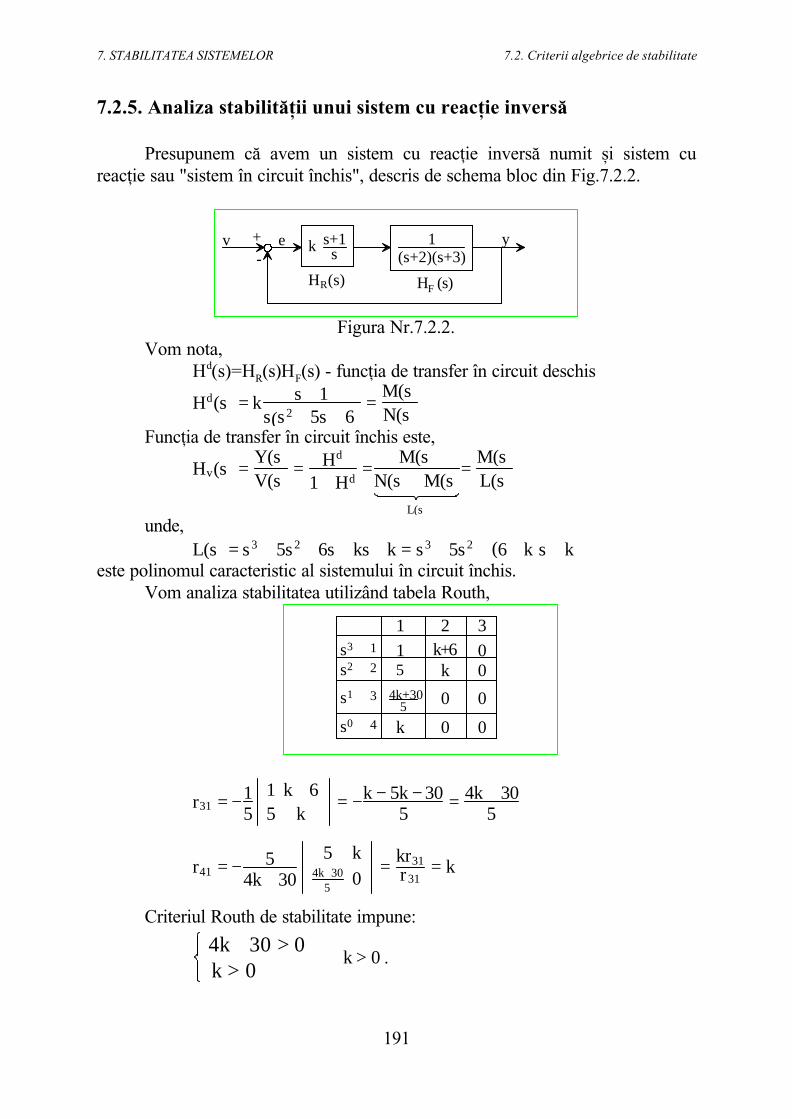
7.2.5. Analiza stabilitáþii unui sistem cu reacþie inversá
Presupunem cá avem un sistem cu reacþie inversá numit ßi sistem cureacþie sau "sistem ín circuit ínchis", descris de schema bloc din Fig.7.2.2.
k s+1s
1(s+2)(s+3)
yv e+-
H (s)R FH (s)
Figura Nr.7.2.2.Vom nota,
Hd(s)=HR(s)HF(s) - funcþia de transfer ín circuit deschis
Hd(s) = k s + 1s(s2 + 5s + 6)
=M(s)N(s)
Funcþia de transfer ín circuit ínchis este,
Hv(s) =Y(s)V(s)
= Hd
1 + Hd=
L(s)
M(s)N(s) + M(s)
=M(s)L(s)
unde,L(s) = s3 + 5s2 + 6s + ks + k = s3 + 5s2 + (6 + k)s + k
este polinomul caracteristic al sistemului ín circuit ínchis.Vom analiza stabilitatea utilizänd tabela Routh,
1 2 3s3
s2
12
s1
s0
3
4
15
k 0 0
0 0
00
kk+6
4k+305
r31 = −15
1 k + 65 k
= −k − 5k − 305
= 4k + 305
r41 = − 54k + 30
5 k4k+30
5 0= kr31
r31= k
Criteriul Routh de stabilitate impune:
.4k + 30 > 0k > 0
⇒ k > 0
7. STABILITATEA SISTEMELOR 7.2. Criterii algebrice de stabilitate
191
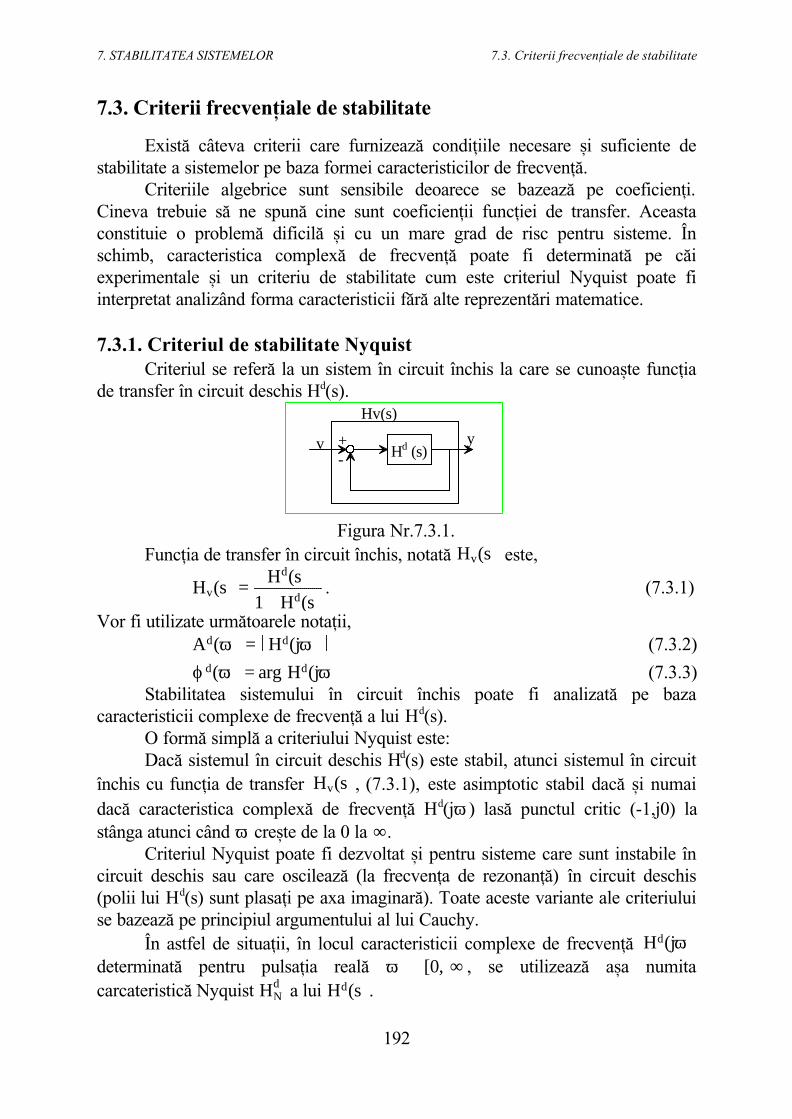
7.3. Criterii frecvenþiale de stabilitateExistá cäteva criterii care furnizeazá condiþiile necesare ßi suficiente de
stabilitate a sistemelor pe baza formei caracteristicilor de frecvenþá.Criteriile algebrice sunt sensibile deoarece se bazeazá pe coeficienþi.
Cineva trebuie sá ne spuná cine sunt coeficienþii funcþiei de transfer. Aceastaconstituie o problemá dificilá ßi cu un mare grad de risc pentru sisteme. Ínschimb, caracteristica complexá de frecvenþá poate fi determinatá pe cáiexperimentale ßi un criteriu de stabilitate cum este criteriul Nyquist poate fiinterpretat analizänd forma caracteristicii fárá alte reprezentári matematice.
7.3.1. Criteriul de stabilitate NyquistCriteriul se referá la un sistem ín circuit ínchis la care se cunoaßte funcþia
de transfer ín circuit deschis Hd(s).
dH (s)+-
yv
Hv(s)
Figura Nr.7.3.1.Funcþia de transfer ín circuit ínchis, notatá este, Hv(s)
. (7.3.1)Hv(s) = Hd(s)1 + Hd(s)
Vor fi utilizate urmátoarele notaþii, (7.3.2)Ad(ω) = Hd(jω) (7.3.3)ϕd(ω) = arg Hd(jω)
Stabilitatea sistemului ín circuit ínchis poate fi analizatá pe bazacaracteristicii complexe de frecvenþá a lui Hd(s).
O formá simplá a criteriului Nyquist este: Dacá sistemul ín circuit deschis Hd(s) este stabil, atunci sistemul ín circuit
ínchis cu funcþia de transfer , (7.3.1), este asimptotic stabil dacá ßi numaiHv(s)dacá caracteristica complexá de frecvenþá Hd(jω ) lasá punctul critic (-1,j0) lastänga atunci cänd creßte de la 0 la . ω ∞
Criteriul Nyquist poate fi dezvoltat ßi pentru sisteme care sunt instabile íncircuit deschis sau care oscileazá (la frecvenþa de rezonanþá) ín circuit deschis(polii lui Hd(s) sunt plasaþi pe axa imaginará). Toate aceste variante ale criteriuluise bazeazá pe principiul argumentului al lui Cauchy.
Ín astfel de situaþii, ín locul caracteristicii complexe de frecvenþá Hd(jω)determinatá pentru pulsaþia realá , se utilizeazá aßa numitaω ∈ [0, ∞)carcateristicá Nyquist a lui .HN
d Hd(s)
7. STABILITATEA SISTEMELOR 7.3. Criterii frecvenþiale de stabilitate
192
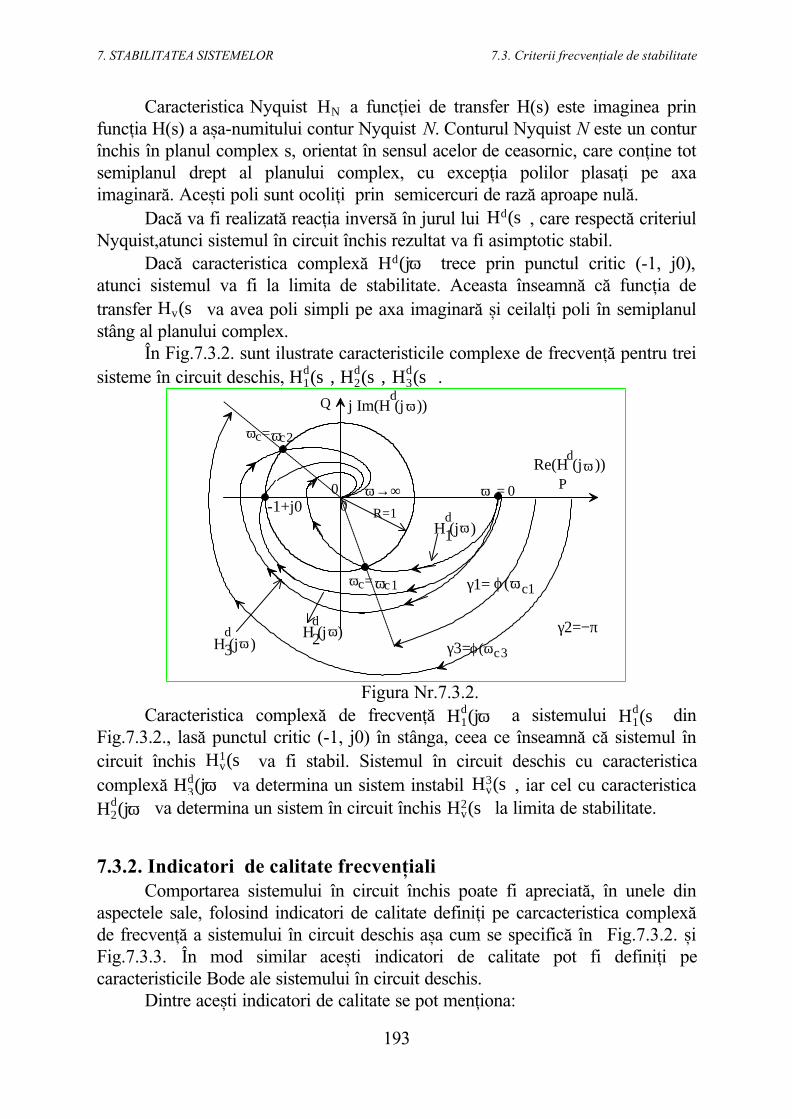
Caracteristica Nyquist a funcþiei de transfer H(s) este imaginea prinHN
funcþia H(s) a aßa-numitului contur Nyquist N. Conturul Nyquist N este un conturínchis ín planul complex s, orientat ín sensul acelor de ceasornic, care conþine totsemiplanul drept al planului complex, cu excepþia polilor plasaþi pe axaimaginará. Aceßti poli sunt ocoliþi prin semicercuri de razá aproape nulá.
Dacá va fi realizatá reacþia inversá ín jurul lui , care respectá criteriulHd(s)Nyquist,atunci sistemul ín circuit ínchis rezultat va fi asimptotic stabil.
Dacá caracteristica complexá trece prin punctul critic (-1, j0),Hd(jω)atunci sistemul va fi la limita de stabilitate. Aceasta ínseamná cá funcþia detransfer va avea poli simpli pe axa imaginará ßi ceilalþi poli ín semiplanulHv(s)stäng al planului complex.
Ín Fig.7.3.2. sunt ilustrate caracteristicile complexe de frecvenþá pentru treisisteme ín circuit deschis, .H1
d(s), H2d(s), H3
d(s)
P
Q
00 = 0ωω→∞
-1+j0
ωRe(H (j ))d
ωj Im(H (j ))d
R=1 H (j )ω
d1
H (j )ωd3
ω H (j )d2
ωc1ω =c
ωc2ω =c
ϕ(ω )c1γ1=
ϕ(ω )c3γ3=γ2=−π
Figura Nr.7.3.2.Caracteristica complexá de frecvenþá a sistemului dinH1
d(jω) H1d(s)
Fig.7.3.2., lasá punctul critic (-1, j0) ín stänga, ceea ce ínseamná cá sistemul íncircuit ínchis va fi stabil. Sistemul ín circuit deschis cu caracteristicaHv
1(s)complexá va determina un sistem instabil , iar cel cu caracteristicaH3
d(jω) Hv3(s)
va determina un sistem ín circuit ínchis la limita de stabilitate.H2d(jω) Hv
2(s)
7.3.2. Indicatori de calitate frecvenþialiComportarea sistemului ín circuit ínchis poate fi apreciatá, ín unele din
aspectele sale, folosind indicatori de calitate definiþi pe carcacteristica complexáde frecvenþá a sistemului ín circuit deschis aßa cum se specificá ín Fig.7.3.2. ßiFig.7.3.3. Ín mod similar aceßti indicatori de calitate pot fi definiþi pecaracteristicile Bode ale sistemului ín circuit deschis.
Dintre aceßti indicatori de calitate se pot menþiona:
7. STABILITATEA SISTEMELOR 7.3. Criterii frecvenþiale de stabilitate
193

a. Pulsaþia de táiere (de traversare) . Pulsaþia de táiere , notatá ßi prin ,ω t ω t ω c
reprezintá cea mai mare pulsaþie la care caracteristica complexá de frecvenþáHd(jω ) intersecteazá cercul de razá unitará.
γ
ω
ωt
ωπ
ϕd ωt( )Re( ωH j( )d )
ωH j( )djIm( )
ωH j( )dPlanul (-1,j0)
Adπ
ωt ωc=
Figura Nr.7.3.3.
Poate fi obþinutá din ecuaþia (7.3.2)
(7.3.4)ω c = ω t = max ω Ad(ω) = 1b. Marginea de fazá . Marginea de fazá reprezintá unghiul (ín sens orar)γ γdintre direcþia vectorului ßi axa realá negativá. Conform criteriuluiHd(jω t)Nyquist, exprimá rezerva de stabilitate a sistemului ín circuit ínchis.
Marginea de fazá este definitá prin relaþia, (7.3.5)γ = π + ϕd(ω t)
unde am considerat pe cercul Valoarea indicáϕd(ω t) = arg Hd(jω t) (−2π, 0]. γ = 0limita de stabilitate. Pentru a avea o stabilitate "buná" (o rezervá de stabilitatesuficient de mare), indicatorului de calitate i se impune urmátoarea condiþieγ(condiþie de performanþá)
(7.3.6)γ ≥ γ imp
c. Pulsaþia de táiere de fazá . ω π
Pulsaþia de táiere de fazá , reprezintá cea mai micá pulsaþie la careω π
caracteristica complexá de frecvenþá intersecteazá axa realá negativá. Hd(jω) (7.3.7)ω π = min ω ϕd(ω) = −π
d. Marginea de amplitudine . Aπd
Marginea de amplitudine este lungimea vectorului , adicá Aπd Hd(jω π)
(7.3.8)Aπd = Ad (ω π)
Dacá , atunci exprimá clar rezerva de stabilitate aAd(ω) < 1, ∀ω > ω π Aπd
sistemului ín circuit ínchis. Conform criteriului Nyquist, condiþia de performanþáeste exprimatá prin
. (7.3.9)Aπd ≤ Aπ imp.
d
7. STABILITATEA SISTEMELOR 7.3. Criterii frecvenþiale de stabilitate
194
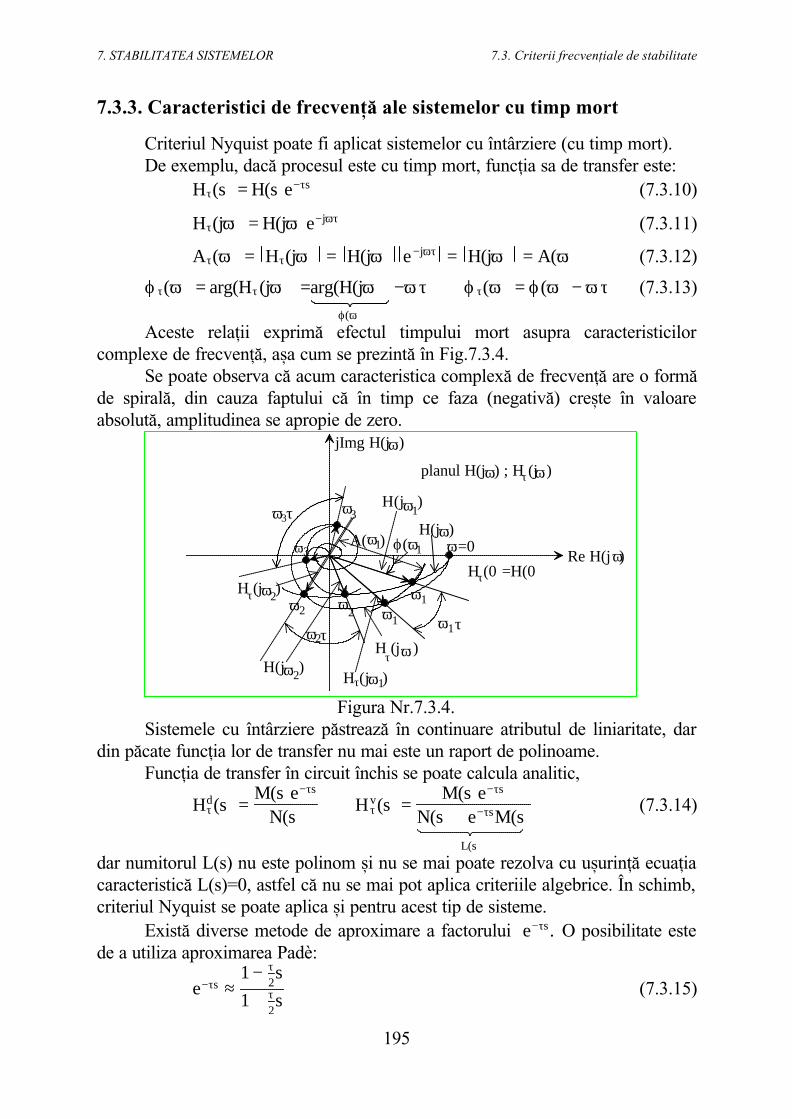
7.3.3. Caracteristici de frecvenþá ale sistemelor cu timp mort
Criteriul Nyquist poate fi aplicat sistemelor cu íntärziere (cu timp mort).De exemplu, dacá procesul este cu timp mort, funcþia sa de transfer este:
(7.3.10)Hτ(s) = H(s)e−τs
(7.3.11)Hτ(jω) = H(jω)e−jωτ
(7.3.12)Aτ(ω) = Hτ(jω) = H(jω) e−jωτ = H(jω) = A(ω)
(7.3.13)ϕ τ(ω) = arg(Hτ(jω)) =ϕ(ω)
arg(H(jω)) −ωτ ⇒ ϕ τ(ω) = ϕ(ω) − ωτ
Aceste relaþii exprimá efectul timpului mort asupra caracteristicilorcomplexe de frecvenþá, aßa cum se prezintá ín Fig.7.3.4.
Se poate observa cá acum caracteristica complexá de frecvenþá are o formáde spiralá, din cauza faptului cá ín timp ce faza (negativá) creßte ín valoareabsolutá, amplitudinea se apropie de zero.
Re H(j )ω
H(j )ω1
ω21ω
ω
ωτ
τ
H (j )
H(j )A( )ω1 ω=0
Η (0)=Η(0)
ω ωω
ω 1
122
ω3
ω3
jImg H(j )ω
planul H(j ) ; H (j )ωτω
ϕ(ω )1
H (j )τ ω1H(j )ω2
H (j )ω2τ
ττ
ω3τ
Figura Nr.7.3.4.Sistemele cu íntärziere pástreazá ín continuare atributul de liniaritate, dar
din pácate funcþia lor de transfer nu mai este un raport de polinoame.Funcþia de transfer ín circuit ínchis se poate calcula analitic,
(7.3.14)Hτd(s) =
M(s)e−τs
N(s)⇒ Hτ
v(s) =M(s)e−τs
L(s)
N(s) + e−τsM(s)
dar numitorul L(s) nu este polinom ßi nu se mai poate rezolva cu ußurinþá ecuaþiacaracteristicá L(s)=0, astfel cá nu se mai pot aplica criteriile algebrice. Ín schimb,criteriul Nyquist se poate aplica ßi pentru acest tip de sisteme.
Existá diverse metode de aproximare a factorului O posibilitate estee−τs.de a utiliza aproximarea Padé:
(7.3.15)e−τs ≈1 − τ
2s
1 + τ2s
7. STABILITATEA SISTEMELOR 7.3. Criterii frecvenþiale de stabilitate
195