reconstructiaatractoruluisursei de semnalandrei.clubcisco.ro/cursuri/f/f-sym/4ps/8...
TRANSCRIPT
Reconstructia atractorului sursei
de semnal
Procesarea Semnalelor – Curs 8
de semnal
De ce reconstructia atractorului?
• Primul pas pentru predictia neliniara a
semnalelor.
• Folosit in algoritmi de predictie de ultima
generatie (McNames (2002), Hanias & Karrasgeneratie (McNames (2002), Hanias & Karras
(2007))
• Utilizat si de alte metode: retele neuronale,
metode kernel, metode nonparametrice, etc.
Predictie in haos – model general
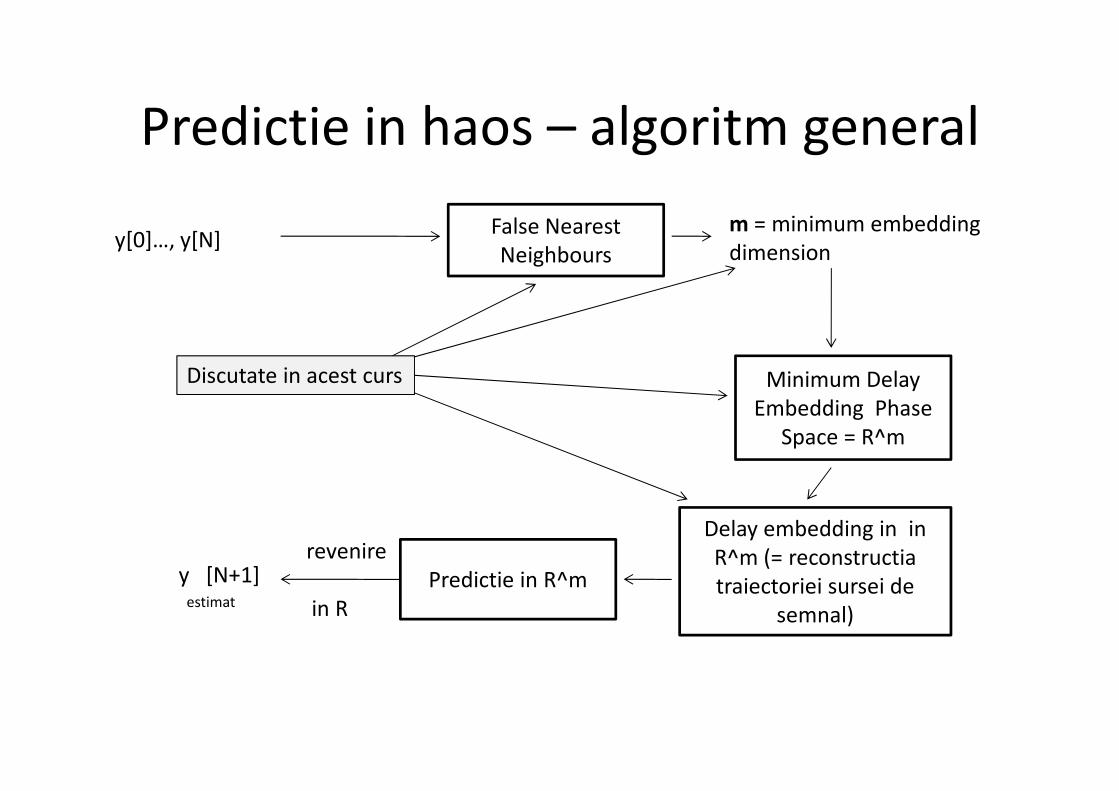
1) Determinam m - dimensiunea spatiului fazelor in
care se gaseste atractorul unui sistem haotic
determinist (sursa de semnal), plecand doar de la
esantioane ale unui semnal y[n].
Predictie in haos – model general
2) O data gasit acest spatiu (minimum embedding
phase space), se reconstruieste traiectoria sursei de
semnal pentru toate momentele de timp pentru care
avem esantioane y[n] (slide 7)
Predictie in haos – model general
3) Utilizand traiectoria reconstruita in acest spatiu,
pentru orice observatie noua facem extrapolari ale
urmatorului segment de traiectorie din phase space,
revenim in R si obtinem predictia semnalului cu un pas
inainte.
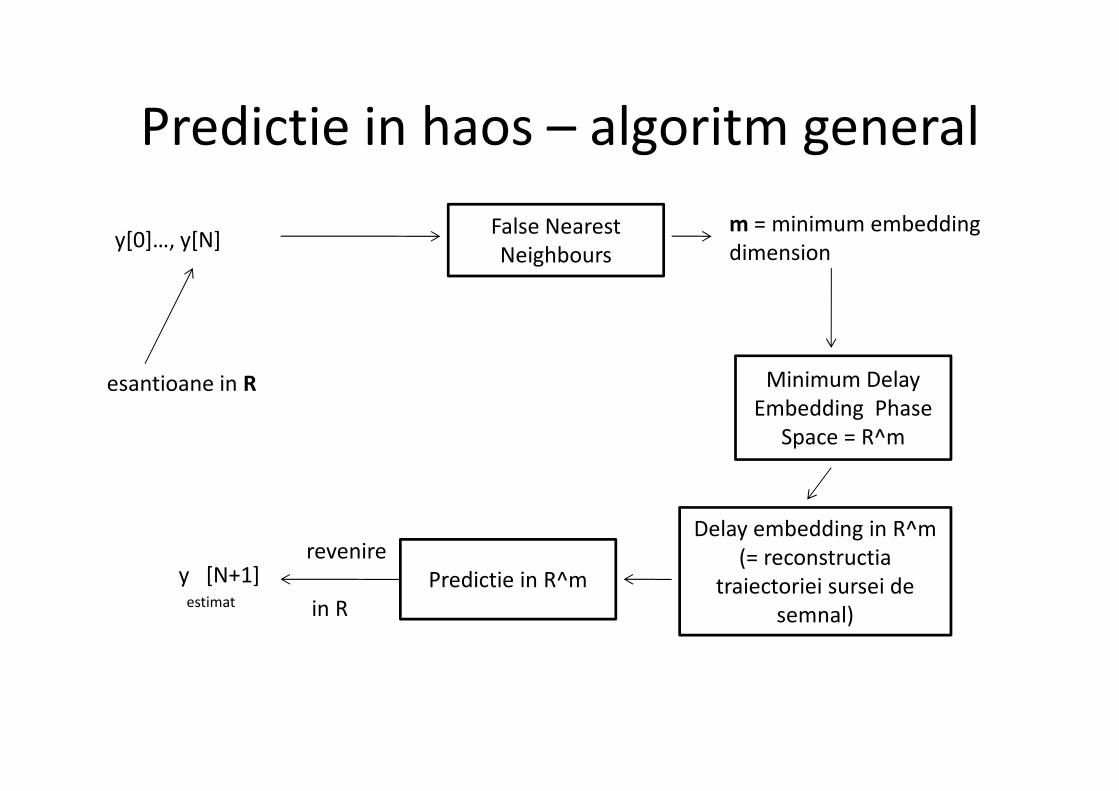
Predictie in haos – algoritm general
y[0]…, y[N]
esantioane in R
False Nearest
Neighbours
m = minimum embedding
dimension
Minimum Delay
Embedding Phase esantioane in R
Embedding Phase
Space = R^m
Predictie in R^m
Delay embedding in R^m
(= reconstructia
traiectoriei sursei de
semnal)
y [N+1]estimat
revenire
in R
Elemente introductive
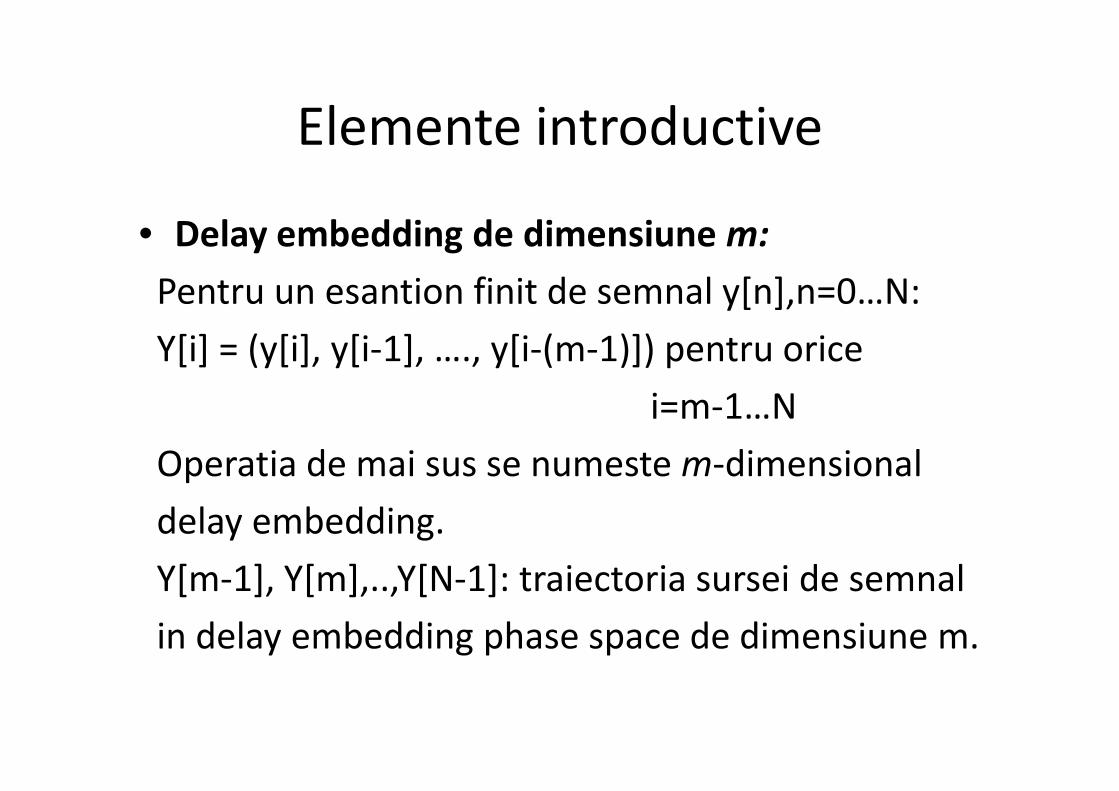
• Delay embedding de dimensiune m:
Pentru un esantion finit de semnal y[n],n=0…N:
Y[i] = (y[i], y[i-1], …., y[i-(m-1)]) pentru orice
i=m-1…Ni=m-1…N
Operatia de mai sus se numeste m-dimensional
delay embedding.
Y[m-1], Y[m],..,Y[N-1]: traiectoria sursei de semnal
in delay embedding phase space de dimensiune m.
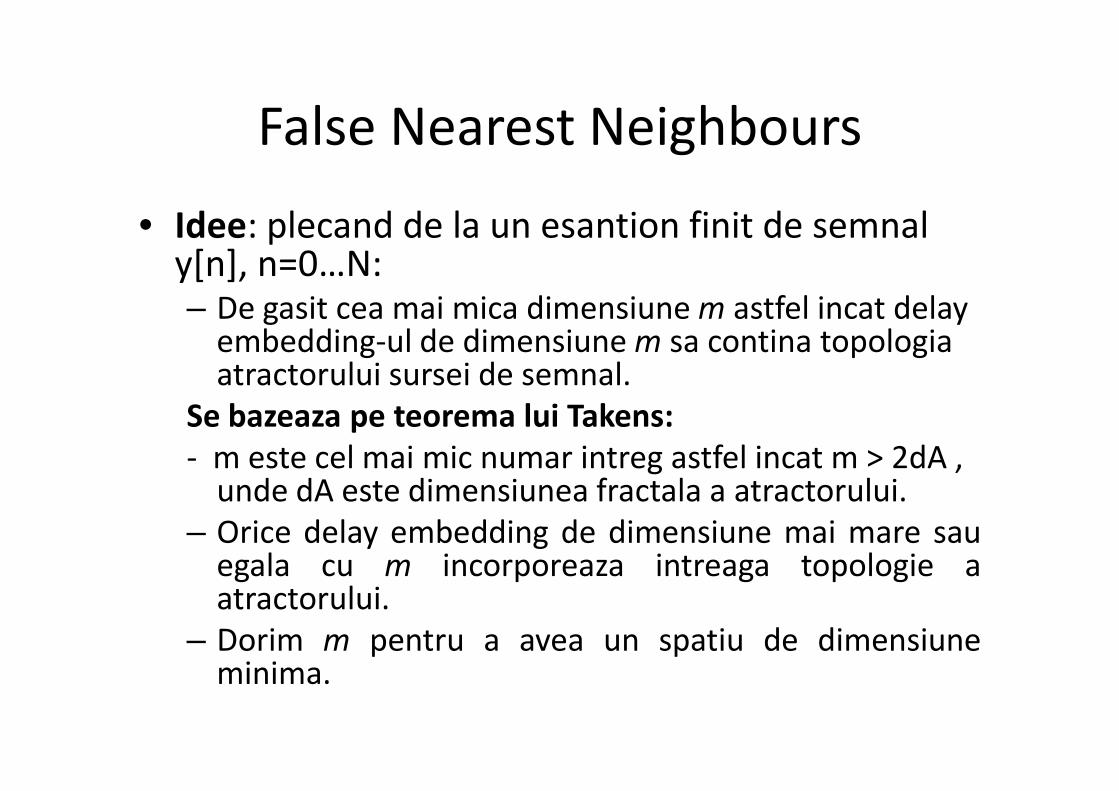
False Nearest Neighbours
• Idee: plecand de la un esantion finit de semnaly[n], n=0…N:– De gasit cea mai mica dimensiune m astfel incat delay
embedding-ul de dimensiune m sa contina topologiaatractorului sursei de semnal.
Se bazeaza pe teorema lui Takens:Se bazeaza pe teorema lui Takens:
- m este cel mai mic numar intreg astfel incat m > 2dA , unde dA este dimensiunea fractala a atractorului.
– Orice delay embedding de dimensiune mai mare sauegala cu m incorporeaza intreaga topologie aatractorului.
– Dorim m pentru a avea un spatiu de dimensiuneminima.
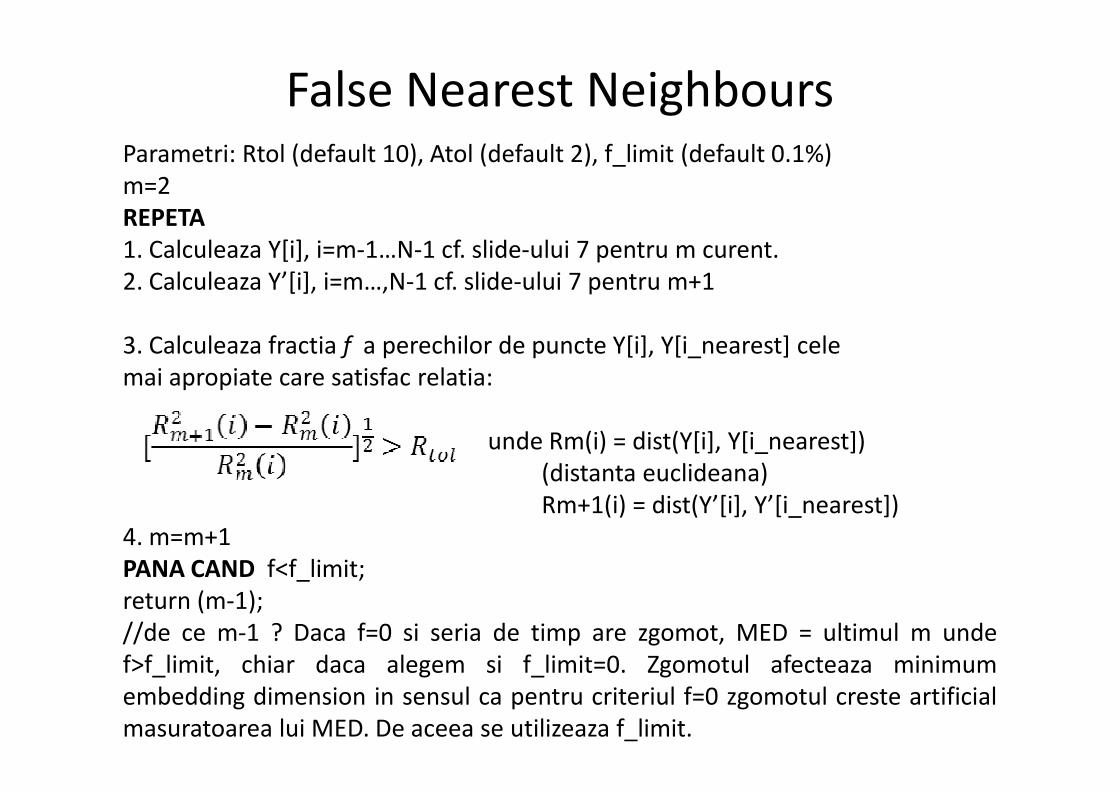
False Nearest NeighboursParametri: Rtol (default 10), Atol (default 2), f_limit (default 0.1%)
m=2
REPETA
1. Calculeaza Y[i], i=m-1…N-1 cf. slide-ului 7 pentru m curent.
2. Calculeaza Y’[i], i=m…,N-1 cf. slide-ului 7 pentru m+1
3. Calculeaza fractia f a perechilor de puncte Y[i], Y[i_nearest] cele
mai apropiate care satisfac relatia:
unde Rm(i) = dist(Y[i], Y[i_nearest])
(distanta euclideana)
Rm+1(i) = dist(Y’[i], Y’[i_nearest])
4. m=m+1
PANA CAND f<f_limit;
return (m-1);
//de ce m-1 ? Daca f=0 si seria de timp are zgomot, MED = ultimul m unde
f>f_limit, chiar daca alegem si f_limit=0. Zgomotul afecteaza minimum
embedding dimension in sensul ca pentru criteriul f=0 zgomotul creste artificial
masuratoarea lui MED. De aceea se utilizeaza f_limit.
Care este ideea ?
• 2 vecini apropiati intr-o proiectie nu mai sunt
apropiati daca se mareste cu 1 numarul de
dimensiuni.
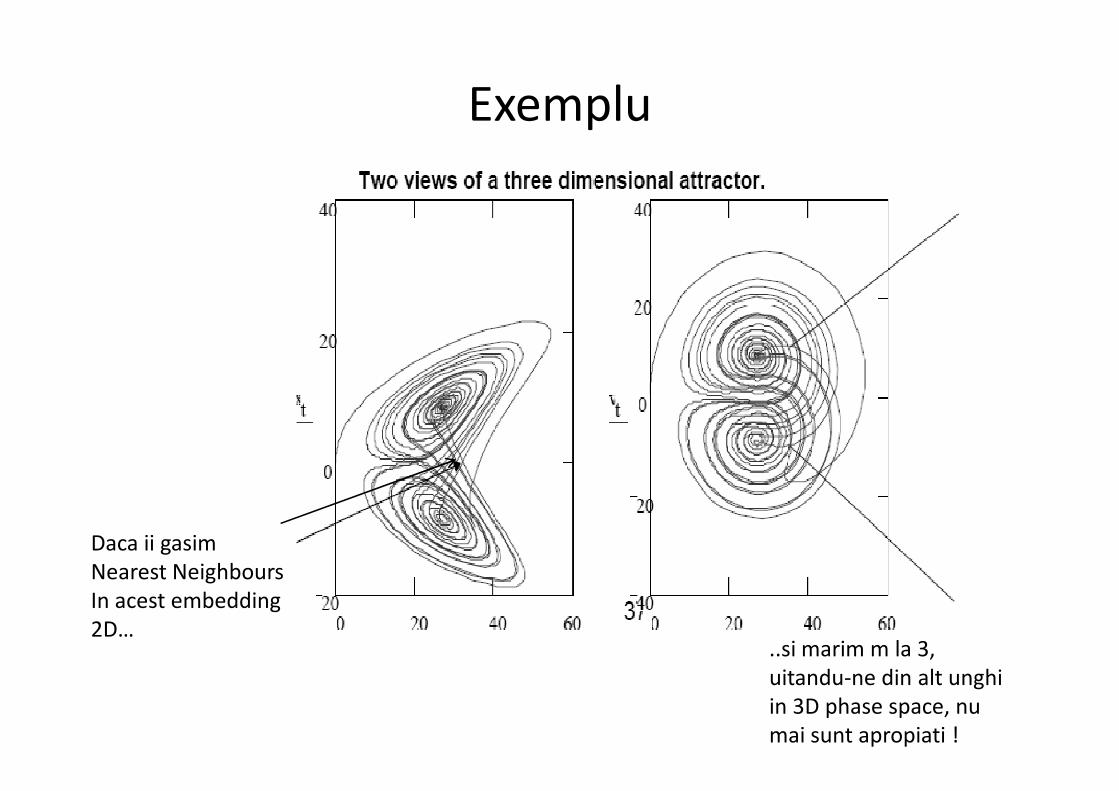
Exemplu
Daca ii gasim
Nearest Neighbours
In acest embedding
2D…..si marim m la 3,
uitandu-ne din alt unghi
in 3D phase space, nu
mai sunt apropiati !
Ideea False Nearest Neighbours
• La un moment dat numarul de perechi care se
‘desfac’ prin acest procedeu scade sub un
prag.
• Cand algoritmul se opreste, inseamna ca am‘desfacut’ suficient spatiul prin delayembedding incat cuprinde intreg atractorul.
• Efectul este ca traiectoriile nu se mai auto-intersecteaza (nu exista ‘noduri’ in haos).intersecteaza (nu exista ‘noduri’ in haos).
• f_tol = 0.1% sau mai jos pentru situatiile candin semnal exista zgomot si exista auto-intersectii artificiale ale orbitelor (false nearestneighbours).
Ce concluzii se desprind ?
• Gasind m cu False Nearest Neighbours, putem
rationa despre dimensiunea fractala a
atractorului dA.
• dA este in intervalul [(m-1)/2, m/2)• dA este in intervalul [(m-1)/2, m/2)
• Cu m determinat, calculam Y[i] cf. slide-ului 7
• Pentru i=m-1..N-2, fiecarei observatii
Y[i] = (y[i], y[i-1], …., y[i-(m-1)]) ii atasam
observatia (eticheta) yDesired = y[i+1]-y[i]
Algoritmul False Nearest Neighbours
• Utilizat de Pavdilis, Tasoulis (2003) ca prim pas in predictia
cursului valutar, utilizand template-ul din slide-ul 6.
� Pavdilis, Tasoulis - articol disponibil la:
http://neuron.ro/PS/Documentatie%20implementare%20proi
ecte/ReconstructiaAtractorului_MinimumEmbeddingDimensiecte/ReconstructiaAtractorului_MinimumEmbeddingDimensi
on.pdf
� Implementare pe platforma MetaTrader 4 la:
http://neuron.ro/PS/Documentatie%20implementare%20proi
ecte/FalseNearestNeighbours.mq4
Atentie: implementarea nu include si criteriul cu Atol
Abordarea experimentala
• m (minimum embedding dimension) se poatedetermina si experimental:– Crestem m de la 2 la M_MAX, astfel:
– La fiecare iteratie:• calculam toti Y[i] in m-dim delay embedding si atasam
fiecarui Y[i] label-ul y[i+1]-y[i]
• Generam seturi de date (Y[i], y[i+1]-y[i]) cu Y[i] intrari, y[i+1]-• Generam seturi de date (Y[i], y[i+1]-y[i]) cu Y[i] intrari, y[i+1]-y[i] iesiri dorite
• Folosim jumatate din ei sa antrenam o retea neuronala
• Masuram MSE (Mean Squared Error) – eroarea patraticamedie de predictie
- Alegem m pentru care eroarea este minima
- Abordarea este folosita in literatura de unii autori, insa nu esteriguroasa
- Tema de proiect propusa impune implementarea algoritmuluiFalse Nearest Neighbours
Predictie in haos – algoritm general
y[0]…, y[N]False Nearest
Neighbours
m = minimum embedding
dimension
Minimum Delay
Embedding Phase
Discutate in acest curs
Embedding Phase
Space = R^m
Predictie in R^m
Delay embedding in in
R^m (= reconstructia
traiectoriei sursei de
semnal)
y [N+1]estimat
revenire
in R
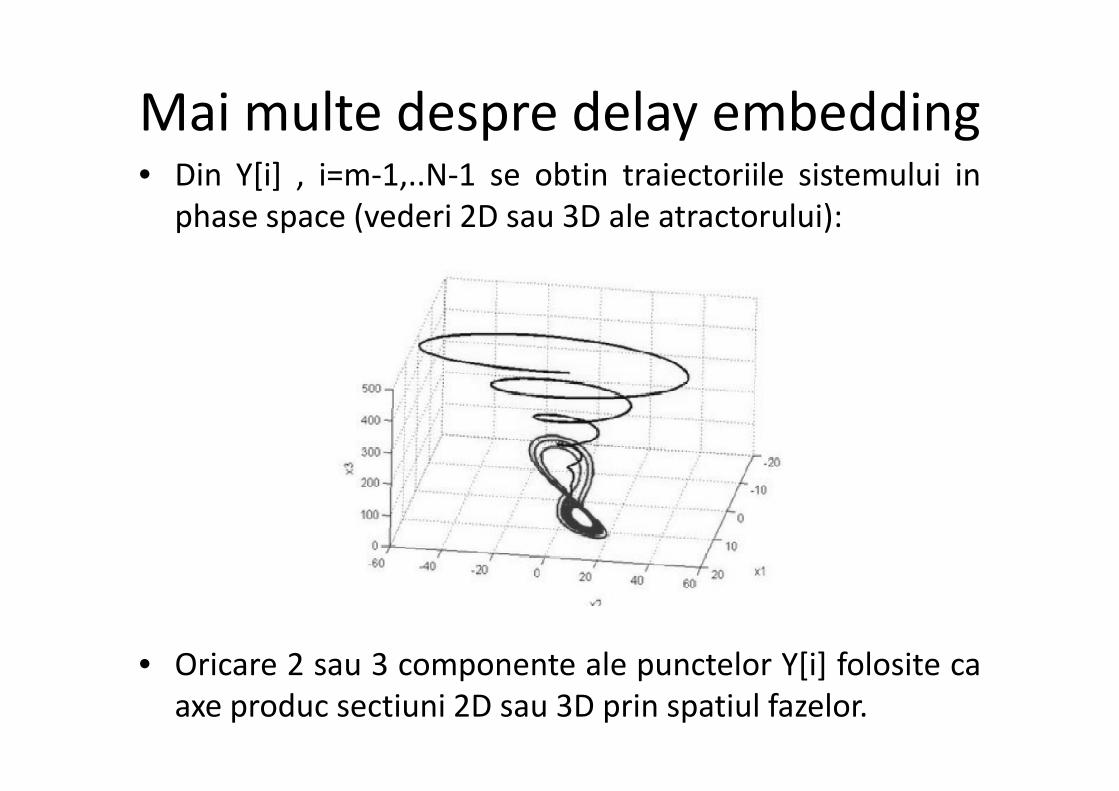
Mai multe despre delay embedding• Din Y[i] , i=m-1,..N-1 se obtin traiectoriile sistemului in
phase space (vederi 2D sau 3D ale atractorului):
• Oricare 2 sau 3 componente ale punctelor Y[i] folosite ca
axe produc sectiuni 2D sau 3D prin spatiul fazelor.
Sectiuni prin phase space
• Daca atractorul are dimensiunea fractala dA,
False Nearest Neighbours gaseste m astfel
incat m > 2dA
• Cu m determinat, avem:• Cu m determinat, avem:
in care stim ca observam un atractor cu
dimensiune fractala dA in intervalul
[ (m-1)/2, m/2)
In realitate…
• In realitate y[n] – semnalul analizat este alterat de
zgomot.
• De aceea in realitate sursa de semnal este un sistem
haotic determinist cu zgomot:
Y[n+1] = f(Y[n]) + zgomot (medie 0, dev.std. σ)
(Y[n] – notatia din slide-ul 7)(Y[n] – notatia din slide-ul 7)
• Doar nivelul de zgomot impiedica in viata reala
predictiile ideale.
• Zgomot = variatie neexplicabila doar cu teoria haosului
pe baza observatiilor uni-variate y[n].
• Limiteaza performanta ORICARUI predictor (retele
neuronale, metode non-parametrice, alg. bazati pe teoria
haosului, etc.).
Signal-to-noise ratio (SNR)
• Marime care determina in ce masura
componenta determinista f(Y[n]) a unui
semnal ‘mascheaza’ componenta de zgomot:
SNR in haos
• Cum masuram SNR in haos ?
• Ideal, SNR = 20log10(RMS(f(Y[n])) / σ) , valori mediimasurate intr-o vecinatate B(Y[n],r) (bila de centru Y[n]si raza r) din phase space.
• Experimental, SNR = 20log10(RMS(prediction(Y[n])) /RMS(eroare absoluta)), pentru orice predictor cu functiede predictie prediction cu m intrari reale.
⇒SNR in decibeli, dependent de pozitia in phase space!
⇒Nivelul de zgomot poate varia in phase space
⇒Subiect de cercetare
Principii generale legate de predictie
• Predictia seriilor de timp are sens doar in
portiuni din phase space unde SNR este peste
o valoare de prag dependenta de criteriile
minime de precizie dorita
• Valabil indiferent de metoda de predictie:
– Retele neuronale
– Metode kernel
– Algoritmii pe care ii vom studia
– Regresie liniara, etc.
Principii generale legate de predictie
• Daca functia predictor nu tine cont de pozitia
curenta in phase space, performanta
predictorului poate fi sever afectata.
• Daca functia predictor nu tine cont de SNR• Daca functia predictor nu tine cont de SNR
local in jurul pozitiei curente din phase space,
performanta predictorului poate fi sever
afectata.
• Geometria campului vectorial depinde de
pozitia in phase space (divergenta, rotor).
Principii generale legate de predictie
• Urmand aceste principii intr-o forma sau alta,
se poate detecta haos determinist chiar si in
nivele foarte mari de zgomot, unde alte
metode esueaza.metode esueaza.
• Literatura de specialitate sugereaza acest
lucru.
Preliminarii pentru predictia neliniara
– Preprocesarea semnalelor nestationare:
• Inainte de predictie, semnalele nestationare sediferentiaza:
– z[n] = y[n]-y[n-1], n=0…N
– Se aplica False Nearest Neighbours pe z[n]Se aplica False Nearest Neighbours pe z[n]
– Se prezice z[n+1]-z[n]
– Alinierea traiectoriilor:
• 2 segmente de traiectorie (Y[i],Y[i+1]) si (Y[j],Y[j+1]) suntaliniate daca unghiul dintre cei 2 vectori este mai micde X grade (X se alege cel mult 90 grade). Se folosesteprodusul scalar in R^m.
• Un fascicul de traiectorii este aliniat daca oricare 2 cate2 sunt aliniate.
Preliminarii pentru predictia neliniara
• Campul vectorial se poate schimba in timp !
�Atractorul isi poate schimba forma si locatia.
�In aceasta situatie se foloseste predictieadaptiva (L.J. Cao, R. Tay, 2002)adaptiva (L.J. Cao, R. Tay, 2002)
http://portal.acm.org/citation.cfm?id=607854
Nota: acest slide informativ nu intra in materia
de examen
Anexa: Dimensiunea Fractala
• Exista mai multe masuri
• Cea mai des utilizata in teorie: Box-CountingDimension (Minkovski – Bouligand):
• Utilizata in R^n : la limita, log(numarul decuburi de latura ε necesare pentru a acoperimultimea S) (presupusa atractor) impartit lalog(1/ ε)