laborator microunde
TRANSCRIPT
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 1/46
LABORATORUL DE MICROUNDE
Tehnica microundelor, ca subdomeniu al electronicii, prezintă particularităţiatât în ceea ce priveşte metodele teoretice, cât şi în aparatura şi procedeeleexperimentale utilizate. Din această cauză într-un laborator de microunde se află, pelângă aparate electronice de uz general, şi aparate şi dispozitive cu caracter specific,necesare pentru măsurarea semnalelor si reţelelor de microunde.
În cele ce urmează vor fi prezentate, pe scurt, câteva dintre caracteristicileaparaturii specifice de microunde. Se presupune că cititorul posedă cunoştinţe de
bază referitoare la propagarea undelor electromagnetice prin ghiduri de undă uniforme.
1. Linia de măsură
Linia de măsur ă este un dispozitiv utilizat frecvent în microunde, atât lamăsurarea semnalelor (ex.: lungime de undă) cât şi la măsurarea reţelelor (coeficientde reflexie, etc.).
Din punct de vedere constructiv, linia de măsur ă este o por ţiune de ghiduniform prevăzut cu o fanta longitudinală în care se introduce o sondă.
Sonda este în majoritatea cazurilor o simplă tijă metalică introdusă par ţial în
ghid, perpendicular pe direcţia de propagare. În acest tip de sondă se induce otensiune propor ţională cu intensitatea câmpului electric transversal din loculrespectiv (sonda “E”). Constanta de propor ţionalitate poate fi modificată prinschimbarea adâncimii de pătrundere (de intrare) a sondei în ghid.
T E
Cuplajul sondei cu linia de măsur ă trebuie să fie cât mai slab cu putinţă, astfelîncât prezenţa sondei să nu influenţeze fenomenele din ghid. Sensibilitatea liniei esteînsă limitată de sensibilitatea aparatului indicator sau de nivelul zgomotului.Existenţa unui anumit zgomot, inerent în orice instalaţie de măsur ă poate să conducă la erori de măsur ă importante dacă nivelul semnalului util este insuficient. În
consecinţă, cuplajul se va regla experimental, în funcţie de sensibilitatea detectoruluişi a aparatelor de măsur ă.
Semnalul de frecvenţă foarte înaltă cules de sondă este aplicat unei diodedetectoare direct sau prin intermediul unui rezonator de cuplaj.
Sonda, sistemul de cuplaj şi detectorul sunt amplasate împreună pe undispozitiv mobil, ale cărui deplasări în lungul liniei pot fi urmărite cu un vernier.
Linia de măsur ă prezintă, ca orice linie de transmisiune reală, o anumită constantă de atenuare, nenulă. Pierderile liniei sunt determinate de pierderile în
pereţii metalici imperfect conductori ca şi de radiaţia liniei prin fanta de măsur ă (care
nu poate avea lăţime zero). Totuşi, deoarece lungimea liniei de măsur ă este mică,aceste pierderi pot fi neglijate de regulă; în consecinţă, linia de măsur ă poate ficonsiderată o linie f ăr ă pierderi.
1

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 2/46
Figura 1. Simboluri utilizate pentru ansamblul linie de măsur ă – detectora) cuplaj direct cu detectorul;
b) cuplaj cu detectorul prin rezonator;c) simbol simplificat.
2. Detectorul liniei de măsură
Diodele semiconductoare folosite pentru detecţie sunt de diverse tipuri: cucontact punctiform, diode Schottky, diode “inverse”. Aceste diode, special realizate(şi încapsulate) pentru microunde, au elemente parazite reduse la minimum astfelîncât frecvenţa lor limită de detecţie este foarte ridicată.
Ca urmare a detecţiei se obţine o tensiune continuă, dependentă deamplitudinea semnalului cules de sondă şi de caracteristica diodei. Această tensiune –
eventual amplificată – este măsurată, obţinându-se astfel o indicaţie corelată cuintensitatea câmpului electric din ghid.
Deoarece relaţia dintre amplitudinea semnalului aplicat şi tensiunea continuă obţinută depinde de caracteristica neliniar ă a diodei folosite (şi de rezistenţa dedetecţie), pentru interpretarea corectă a indicaţiilor aparatului de măsur ă este necesar ă cunoaşterea caracteristicii de detecţie, ( )d U f U = . Această caracteristică poate fi
determinată experimental sau poate fi calculată pe baza unor consideraţii teoretice.Astfel, se ştie că la semnale aplicate mari (>1V), caracteristica neliniar ă a oricăreidiode poate fi aproximată prin două semidrepte şi în acest caz detecţia este liniar ă:
d U k U = ⋅ . Pentru semnale aplicate foarte mici (milivolţi sau chiar mai mici) rezultă
o detecţie pătratică:2
d U k U = ⋅ . În aceste situaţii extreme, forma caracteristicii de
detecţie este cunoscută şi nu depinde de dioda folosită (cazul liniilor de măsur ă, undesemnalul cules de sondă este de regulă foarte slab).
În concluzie, indicaţia aparatului de măsur ă conectat la detectorul liniei poate ficonsiderată propor ţională cu pătratul intensităţii câmpului electric din ghid, cucondiţia ca semnalul cules de sondă să fie suficient de mic. În situaţiile rare cândaceastă condiţie nu poate fi satisf ăcută, trebuie ridicată o curbă de etalonare a
detectorului.
2

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 3/46
În general, când se lucrează cu linia de măsur ă, se prefer ă să se utilizezemicrounde modulate în amplitudine cu un semnal oarecare de joasă frecvenţă (cca. 1KHz) şi grad de modulaţie constant.
Procedând astfel, după detecţie se obţine şi o componenta alternativă de joasă frecvenţă, mai uşor de amplificat şi de măsurat decât componenta continuă. Prezenţa
spectrului de modulaţie nu afectează practic fenomenul de propagare pe liniedeoarece raportul f 0 mod f este foarte mare (benzile laterale sunt extrem de apropiatede frecvenţa purtătoare).
3. Generatorul de microunde
Linia de măsur ă este excitată cu un semnal de foarte înaltă frecvenţă. Nivelul puterii generatorului poate varia între limite foarte largi, fiind, de obicei, de ordinulmiliwaţilor.
Generatoarele de microunde sunt realizate într-o gamă variată de tipuri. Uneledintre ele sunt compuse dintr-un simplu oscilator de microunde cuplat la linia demăsur ă. Alte generatoare – mai complexe – permit aplicarea unui semnal de nivelcalibrat şi reglabil, de frecvenţă variabilă, eventual baleiată (sweeper). Uneorigeneratoarele permit opţiunea între câteva tipuri de modulaţie (MA, MF).
Oscilatorul de microunde – componenta esenţială a acestor generatoare – poate fi realizat cu tuburi sau tranzistoare de frecvenţă foarte înaltă, ori cu uneledispozitive active speciale: clistron reflex, diodă Gunn, diodă IMPATT. Acestedispozitive oscilează pe o frecvenţă foarte înaltă, determinată de un rezonator
(acordabil mecanic). Modulaţia în amplitudine poate fi obţinută fie direct, prinmodificarea alimentării fie prin folosirea unui atenuator variabil, comandat electric(atenuator cu diode PIN), intercalat între generator şi linie.
Alimentarea oscilatoarelor cu diodă Gunn se face de la un generator detensiune constantă. Tensiunea aplicata este de 6 ÷ 10 V, curentul absorbit fiind deordinul sutelor de miliamperi.
Alimentarea oscilatoarelor cu diodă IMPATT se face de la un generator decurent constant. Curentul injectat este de câteva zeci de miliamperi, producând otensiune la borne de 70 ÷ 100 V.
Pentru alimentarea clistronului reflex este necesar ă aplicarea unei tensiuni deaccelerare ( ), precum şi a unei tensiuni negative
pe electrodul numit reflector (0 200 400 VU = ÷ 0 10 30mA I = ÷
0 RU
= R I ). Pentru o tensiune de accelerare dată, putereagenerată de clistronul reflex depinde de tensiunea de reflector.
Generatorul de microunde funcţionează optim atunci când lucrează pe osarcină adaptată. Prezenţa undelor reflectate către generator poate să afecteze regimullui de funcţionare (să modifice frecvenţa sau amplitudinea oscilaţiilor, mergânduneori până la suprimarea lor). Efectul poate fi evitat dacă între generator şi linie seintercalează un izolator sau un atenuator.
3

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 4/46
4. Elemente de circuit şi dispozitive de microunde uzuale
Majoritatea măsur ărilor de microunde efectuate cu linia de măsur ă necesită folosirea unor dispozitive specifice cum ar fi: izolatorul, atenuatorul, sarcina adaptată,scurtcircuitul (fix sau mobil), cuplorul directiv, circulatorul, şurubul mobil pentru
adaptare, etc. Simbolurile folosite pentru reprezentarea acestor dispozitive sunt prezentate în figura 2.
1
231 2
3 4
Figura 2. Simbolurile dispozitivelor folosite uzual în microunde:
a) izolator; b) atenuator;c) sarcina adaptată d) scurtcircuit fix;
e) scurtcircuit mobil;f) cuplor directiv;g) circulator;h) şurub de adaptare.
Izolatorul este un diport nereciproc, prezentând o atenuare foarte mică într-unsens şi o atenuare mare în sens contrar. Este realizat cu materiale anizotrope (feritamagnetizată). Se foloseşte la eliminarea influenţei undei reflectate.
Atenuatorul variabil este un diport care produce o aceeaşi atenuare (reglabilă)în ambele sensuri ale propagării. Este realizat de obicei sub forma unei plăci de oformă alungită, acoperită cu un material absorbant. Variaţia atenuării se obţine prinmodificarea poziţiei plăcii în interiorul ghidului.
Sarcina adaptată este o terminaţie (uniport) al cărei coeficient de reflexie esteteoretic nul. Se realizează tot cu ajutorul unor materiale absorbante depuse pe pereţiighidului sau pe o placă din interior.
Scurtcircuitul fix este o simplă placă metalică de scurtcircuitare a capătuluiliniei.
Scurtcircuitul mobil este o terminaţie de ghid care produce reflexie totală, cuo fază variabilă. Se prezintă sub forma unui piston deplasabil în interiorul ghidului.Deplasările pot fi controlate cu un vernier.
Cuplorul directiv este un dispozitiv cu 4 por ţi, alcătuit dintr-un ghid principal(por ţile 1-2) şi un ghid secundar (por ţile 3-4). La aceste două por ţi ale ghidului
4

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 5/46
5
secundar apar semnale propor ţionale cu unda directă din ghidul principal (poarta 3)respectiv cu unda inversă (poarta 4). Cuplorul directiv poate fi folosit la măsurareaseparată a undelor directă şi inversă.
Circulatorul este un dispozitiv nereciproc cu trei por ţi, prezentând un anumitsens de circulaţie. În sensul de circulaţie (de exemplu 1→2→3→1) atenuarea este
foarte mică. În sens contrar circulaţiei (1→3→2→1) atenuarea este mare.Funcţionarea circulatorului se bazează pe propagarea câmpului electromagnetic prinferita magnetizată.
Şurubul mobil este un diport cu ajutorul căruia o sarcină poate fi adaptată laghidul de acces. Se prezintă sub forma unui şurub care pătrunde printr-o fantă longitudinală practicată în peretele lat al ghidului. Este reglabil atât pe verticală (reglajul adâncimii de pătrundere în ghid) cât şi pe orizontală (deplasare în lungulghidului).
Referinţe bibliografice:
[1] G. Lojewski, Dispozitive şi circuite de microunde, Ed. Tehnică, Bucureşti,2005
[2] G. Lojewski, N. Militaru, Microunde – Culegere de probleme, Ed. Electronica2000, Bucureşti, 2006

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 6/46
Lucrarea nr.1
STUDIUL DISTRIBUŢIEI AMPLITUDINIISEMNALELOR ÎN LUNGUL UNEI LINII
1. Noţiuni teoretice
1.1 Propagarea undelor electromagnetice în ghidurile uniforme
În ghidurile metalice uniforme transmiterea energiei poate avea loc numai dacă frecvenţa depăşeşte o anumită valoare numită frecvenţă critică sau de tăiere.Frecvenţa critică depinde de forma şi dimensiunile secţiunii transversale a ghidului.
Într-un ghid dat se pot propaga mai multe structuri ale câmpuluielectromagnetic (moduri), care difer ă între ele atât prin configuraţia liniilor de câmpcât şi prin frecvenţa critică, viteza de propagare, etc. Diversele moduri se pot propagasimultan prin acelaşi ghid uniform, f ăr ă a se influenţa între ele.
Modul care are cea mai joasă frecvenţă critică se numeşte mod fundamental sau mod dominant în ghidul respectiv. Celelalte moduri se numesc moduri
superioare.În cazul unei frecvenţe de lucru situată între frecvenţa critică a moduluifundamental şi frecvenţa critică a primului mod superior, propagarea pe ghid esteunimodală (există numai modul fundamental). Aceasta este situaţia curentă dinreţelele de ghiduri.
Lungimea de undă în ghid, gλ , difer ă de lungimea de undă în spaţiul liber, 0λ .
Lungimea de undă în ghid este determinată de frecvenţa de lucru şi de frecvenţacritică, prin urmare depinde şi de ghid:
( ) ( )22
0
11
/1 f f f c
f f cc
g
−
=
−
= λ λ (1)
Pentru ghidurile cu aer, lungimea de undă în ghid este întotdeauna mai maredecât lungimea de undă a undei plane în aer: 0 0g c f λ λ > = .
În cazul ghidurilor cu secţiunea dreptunghiular ă, modurile posibile de propagare pot fi împăr ţite în moduri de tip transversal electric, notate (sau
undă ) şi moduri de tip transversal magnetic, notate (sau undă ).
Dintre toate aceste moduri, modul (sau ) are cea mai joasă frecvenţă critică.
,TEm n
E,Hm n ,TMm n ,m n
1,0TE 1,0H
6

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 7/46
Frecvenţa critică a acestui mod fundamental este determinată numai de dimensiuneamare a secţiunii dreptunghiulare prin ghid:
1,0
0
2 2c
r
c c f
a a ε = = (2)
unde sm103 80 ⋅=c r este viteza luminii în vid, ε este permitivitatea electrică relativă a
dielectricului din ghid, iar este dimensiunea (interioar ă) a ghidului (figura 1).a
Fig. 1. Structura câmpului electromagnetic pentrumodul ( ) în ghidul dreptunghiular1,0H 1,0TE
/ 2g
1.2 Unde staţionare
În general, într-un ghid există simultan o undă directă (care se propagă de lagenerator către sarcină) şi o undă inversă (sau reflectată de sarcină). În ghidurileideale alcătuite din metal perfect conductor şi dielectric ideal, aceste unde se propagă f ăr ă atenuare.
Compunerea undei directe cu unda inversă conduce la apariţia în ghid afenomenului de undă staţionară. În această situaţie amplitudinea oscilaţiei rezultante
difer ă de la un punct la altul în lungul ghidului, deoarece rezultatul însumării depindede defazaj. Valoarea maximă a oscilaţiei se produce în planele în care cele două undese întâlnesc în fază, iar valoarea minimă în planele în care ele sosesc în antifază (figura 2 exemplifică o astfel de distribuţie). Distanţa între două maxime sau minimeconsecutive ale distribuţiei amplitudinilor este egală cu λ .
Dacă linia este f ăr ă pierderi, distribuţia este periodică; în acest caz, atâtmaximele cât minimele sunt egale între ele.
Aspectul distribuţiei amplitudinii de oscilaţie în lungul ghidului depinde deraportul dintre amplitudinea undei inverse şi amplitudinea undei directe. Acest raport
este determinat de sarcina care se află la capătul ghidului. Din acest punct de vedere,orice sarcină poate fi caracterizată printr-un coeficient de reflexie, .Γ
Linii câmp H
Linii câmp E b
a
7

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 8/46
O z invT dir T T E E E −=min
invT dir T T E E E +=
max
invT E
dir T E
4
gλ 2gλ
invT E
invT E
T E
dir T E
Fig. 2. Distribuţia componentei în lungul ghidului, caET
rezultat al suprapunerii undei directe cu unda inversă
( ) ( )
0
0
E
E
inv
dirv
T
T
Γ =
( )0
Edir T ( )
0E
invT
(3)
unde şi sunt amplitudinile complexe ale undei directe, respectiv
inverse, la sarcină.Cu această notaţie, valorile maxime şi minime ale distribuţiei devin
( )
( )
max
min
E E 1
E E 1
dir
dir
T T
T T
= + Γ
(4)= − Γ
iar raportul lor se numeşte raport de undă staţionară, σ :
max
min
E 1
E 1T
T
σ + Γ
= = (5)− Γ
Raportul de undă staţionar ă caracterizează aspectul distribuţiei (gradul de
ondulaţie) şi este determinat de măsura în care sarcina absoarbe puterea undeiincidente.
1.3 Rezonatoare electromagnetice
În domeniul microundelor, în locul obişnuitelor circuite rezonante se folosescrezonatoarele de volum (cavităţi rezonante).
O cavitate rezonantă ideală este un domeniu din spaţiu, având de obicei oformă geometrică simplă, închis de pereţi metalici perfect conductori. Într-o cavitateideală câmpul electromagnetic nu poate exista decât la anumite frecvenţe discrete
8

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 9/46
numite frecvenţe de rezonanţă ale diferitelor moduri de oscilaţie posibile. Acestefrecvenţe depind de dimensiunile cavităţii.
În cavităţile reale, în locul frecvenţelor discrete de rezonanţă apar curbe derezonanţă, cu atât mai aplatizate cu cât factorul de calitate al rezonatorului este maimic.
2. Desf ăşurarea lucrării
2.1 Se desenează schema instalaţiei de măsur ă.
2.2 Se măsoar ă distribuţia amplitudinii oscilaţiei în lungul ghidului, pentru diversesituaţii: ghid terminat în scurtcircuit, ghid terminat pe sarcina adaptată, ghid lăsatîn gol. Pentru aceasta se deplasează sonda în lungul ghidului, notându-seindicaţiile aparatului de măsur ă. Se repetă procedura pentru fiecare terminaţiespecificată mai sus, menţinând aceeaşi putere la intrare (aceeaşi atenuare). Sondava parcurge un spaţiu de câteva perioade ale distribuţiei. Rezultatele obţinute setrec în Tabelul T1.
Tabelul T1
Poziţia sondei [mm]Scurtcircuit
Indicaţia mV-metrului
[mV]
Gol
Sarcină adaptată
2.3 Se reprezintă cele trei curbe obţinute pe o singur ă diagramă în vedereacompar ării lor. Poziţia sondei va corespunde abscisei iar indicaţia milivoltmetruluiordonatei diagramei.
3. Întrebări
3.1 De ce minimele distribuţiei măsurate atunci când linia este terminată în
scurtcircuit nu sunt chiar nule ? 3.2 Cum poate fi explicat faptul că la linia terminată adaptat distribuţia măsurată nu
este perfect constantă ? 3.3 De ce în cazul liniei lăsate în gol distribuţia măsurată difer ă semnificativ de
distribuţia teoretică existentă la o linie f ăr ă pierderi terminată în gol [1, 2] ?
3.4 Cum poate fi pus în evidenţă zgomotul inerent oricărei instalaţii de măsur ă ?
3.5 Cum ar putea fi verificat faptul că pierderile liniei de măsur ă suntnesemnificative ?
9

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 10/46
Lucrarea nr.2
MĂSURAREA LUNGIMII DE UNDĂ ŞI A FRECVENŢEI
1. Noţiuni teoretice
1.1 Propagarea undelor electromagnetice în ghidurile uniforme
În ghidurile metalice uniforme transmiterea energiei poate avea loc numaidacă frecvenţa depăşeşte o anumită valoare numită frecvenţă critică sau detăiere. Frecvenţa critică depinde de forma şi dimensiunile secţiunii transversale aghidului.
Într-un ghid dat se pot propaga mai multe structuri ale câmpuluielectromagnetic (moduri), care difer ă între ele atât prin configuraţia liniilor decâmp cât şi prin frecvenţa critică, viteza de propagare, etc.. Diversele moduri se
pot propaga simultan prin acelaşi ghid uniform, f ăr ă a se influenţa între ele.Modul care are cea mai joasă frecvenţă critică se numeşte mod
fundamental sau mod dominant în ghidul respectiv. Celelalte moduri senumesc moduri superioare.
În cazul unei frecvenţe de lucru situată între frecvenţa critică a moduluifundamental şi frecvenţa critică a primului mod superior, propagarea pe ghideste unimodală (există numai modul fundamental). Aceasta este situaţia curentă din reţelele de ghiduri.
Lungimea de undă în ghid, gλ , difer ă de lungimea de undă în spaţiul
liber, 0λ . Lungimea de undă în ghid este determinată de frecvenţa de lucru şi defrecvenţa critică, prin urmare depinde şi de ghid:
( ) ( )22
0
1
1
/1 f f f
c
f f cc
g
−=
−=
λ λ (1)
Pentru ghidurile cu aer, lungimea de undă în ghid este întotdeauna maimare decât lungimea de undă a undei plane în aer: 0 0g c f λ λ > = .
În cazul ghidurilor cu secţiune dreptunghiular ă, modurile posibile de propagare pot fi împăr ţite în moduri de tip transversal electric, notate (sau
) şi moduri de tip transversal magnetic, notate (sau ). Dintre
,TEm n
,m n,Hm n ,TMm n E
7

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 11/46
toate aceste moduri, modul (sau1,0TE 1,0 H ) are cea mai joasă frecvenţă critică.
Frecvenţa critică a acestui mod fundamental este determinată numai dedimensiunea mare a secţiunii dreptunghiulare prin ghid:
0
0
2r
c
a2ca1,c f (2)
ε = =
r
unde este viteza luminii în vid,0c ε este permitivitatea electrică relativă adielectricului din ghid, iar este dimensiunea (interioar ă) a ghidului (figura 1).a
Figura 1. Structura câmpului electromagnetic pentru modul 1,0H
( ) în ghidul dreptunghiular1,0TE
1.2 Unde staţionare
În general, într-un ghid există simultan o undă directă (care se propagă dela generator către sarcină) şi o undă inversă (sau reflectată de sarcină). Înghidurile ideale alcătuite din metal perfect conductor şi dielectric ideal, aceste
unde se propagă f ăr ă atenuare.Însumarea undei directe cu unda inversă conduce la apariţia în ghid afenomenului de undă staţionar ă. În această situaţie amplitudinea oscilaţieirezultante difer ă de la un punct la altul în lungul ghidului, deoarece rezultatulînsumării depinde de defazaj. Valoarea maximă a oscilaţiei se produce în planeleîn care cele două unde se întâlnesc în fază, iar valoarea minimă în planele în careele sosesc în antifază (figura 2 exemplifică o astfel de distribuţie). Distanţa întredouă maxime sau minime consecutive ale distribuţiei amplitudinilor este egală cu /2gλ .
Dacă linia este f ăr ă pierderi, distribuţia este periodică; în acest caz, atâtmaximele cât minimele sunt egale între ele.
Linii câmp H
Linii câmp E b
a
8

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 12/46
Aspectul distribuţiei amplitudinii de oscilaţie în lungul ghidului depindede raportul dintre amplitudinea undei inverse şi amplitudinea undei directe.Acest raport este determinat de sarcina care se află la capătul ghidului. Din acest
punct de vedere, orice sarcină poate fi caracterizată printr-un coeficient de
reflexie, .Γ
Figura 2. Distribuţia componentei în lungul ghidului, caET
rezultat al suprapunerii undei directe cu unda inversă
( )( )
0
0
E
E
inv
dirv
T
T
Γ = (3)
unde şi ( sunt amplitudinile complexe ale undei directe, respectiv
inverse, la sarcină.
(0
Edir T ) )
0E
invT
Cu această notaţie, valorile maxime şi minime ale distribuţiei devin
( )
( )
max
min
E E 1
E E 1
dir
dir
T T
T T
= + Γ
= − Γ (4)
iar raportul lor se numeşte raport de undă staţionar ă, σ :
max
min
E 1
E 1T
T
σ + Γ
= =− Γ
(5)
Raportul de undă staţionar ă caracterizează aspectul distribuţiei (gradul deondulaţie) şi este determinat de măsura în care sarcina absoarbe puterea undeiincidente.
O z invT dir T T
E E E −=min
invT dir T T E E E +=
max
invT E
dir T E
4gλ 2gλ
invT E
invT E
T E
dir T E
9
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 13/46
1.3 Rezonatoare electromagnetice
În domeniul microundelor, în locul obişnuitelor circuite rezonante sefolosesc rezonatoarele de volum (cavităţi rezonante).
O cavitate rezonantă ideală este un domeniu din spaţiu, având de obicei oformă geometrică simplă, închis de pereţi metalici perfect conductori. Într-ocavitate ideală câmpul electromagnetic nu poate exista decât la anumitefrecvenţe discrete numite frecvenţe de rezonanţă ale diferitelor moduri deoscilaţie posibile. Aceste frecvenţe depind de dimensiunile cavităţii.
În cavităţile reale, în locul frecvenţelor discrete de rezonanţă apar curbede rezonanţă, cu atât mai aplatizate cu cât factorul de calitate al rezonatoruluieste mai mic.
2. Metode de măsură
2.1 Măsurarea lungimii de undă
Măsurarea lungimii de undă în ghid se bazează pe proprietăţile undeistaţionare şi anume pe faptul că distanţa dintre două minime (sau maxime)consecutive este / 2gλ . Pentru o precizie de măsurare bună trebuie ca ondulaţia
distribuţiei să fie cât mai pronunţată. Situaţia optimă ( ),σ → ∞ Γ =1 apare încazul unei sarcini care produce reflexie totală, de exemplu scurtcircuitul.
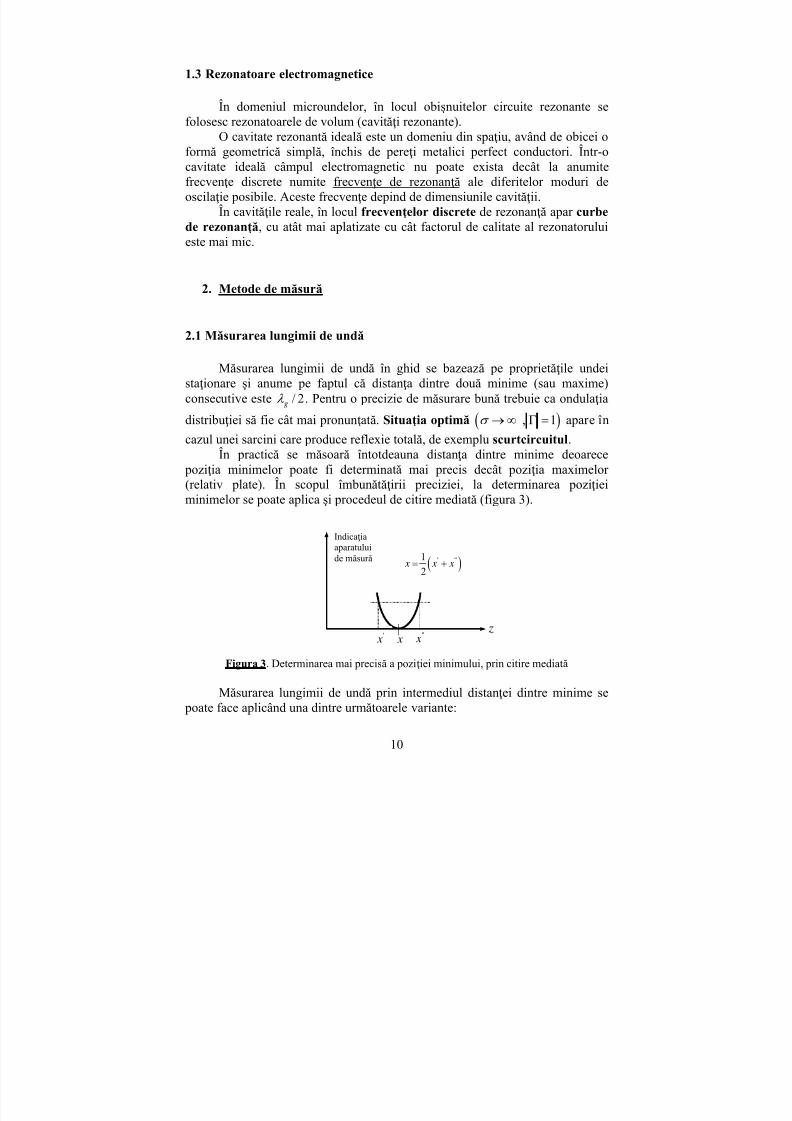
În practică se măsoar ă întotdeauna distanţa dintre minime deoarece poziţia minimelor poate fi determinată mai precis decât poziţia maximelor(relativ plate). În scopul îmbunătăţirii preciziei, la determinarea poziţieiminimelor se poate aplica şi procedeul de citire mediată (figura 3).
Indicaţiaaparatuluide măsur ă
z x
' x"
x
( )' "12
x x x= +
Figura 3. Determinarea mai precisă a poziţiei minimului, prin citire mediată
Măsurarea lungimii de undă prin intermediul distanţei dintre minime se poate face aplicând una dintre următoarele variante:
10
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 14/46
2.1.1 Metoda deplasării sondei
Se montează la capătul liniei de măsur ă un scurtcircuit fix. Se deplasează sonda în lungul liniei şi se notează poziţiile minimelor (de valoare nulă). Secalculează distanţa dintre două minime consecutive, distanţa din care se obţine
gλ .2.1.2 Metoda deplasării scurtcircuitului
Se montează la capătul liniei de măsur ă un scurtcircuit mobil. Sedeplasează scurtcircuitul şi se notează poziţiile pentru care apar minime alesemnalului, cu sonda fixată într-o poziţie oarecare. Se calculează distanţa dintredouă minime consecutive, din care rezultă gλ .
Cele două variante, în aparenţă echivalente, se deosebesc totuşi prin faptulcă metoda deplasării scurtcircuitului evită o anumită eroare sistematică existentă
în metoda deplasării sondei. Eroarea provine din modificarea lungimii de undă în por ţiunea de ghid cu fantă, cauzată de prezenţa fantei de măsur ă. Prin metodadeplasării sondei se măsoar ă, de fapt, lungimea de undă în ghidul cu fantă, care poate diferi (foarte puţin) de lungimea de undă gλ în ghidul închis.
2.2 Măsurarea frecvenţei
2.2.1 Determinarea frecvenţei prin intermediul lungimii de undă
Dacă s-a măsurat lungimea de undă gλ şi se cunoaşte frecvenţa critică ,
frecvenţa de lucru poate fi calculată cu relaţia:c f
2
1 g
g c
c f
λ
λ λ
⎛ ⎞= + ⎜ ⎟
⎝ ⎠ (6)
în care cλ este lungimea de undă critică (corespunzătoare frecvenţei critice, în
spaţiul liber). Pentru modul 1,0 H în ghid dreptunghiular, lungimea de undă
critică este determinată de dimensiunea mare a secţiunii interioare a ghidului:
( )1,0
2c H aλ = (7)
2.2.2 Măsurarea directă a frecvenţei cu frecvenţmetre numerice
Frecvenţmetrele numerice de microunde sunt aparate mai complexe decâtfrecvenţmetrele de joasă frecvenţă, deoarece număr ătoarele obişnuite nu potfuncţiona la o viteză atât de mare. În frecvenţmetrele de microunde se face o
translaţie a frecvenţei, urmată de măsurarea frecvenţei (mai joase) astfel
11

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 15/46
obţinute. Cunoscând translaţia, rezultatul măsur ării poate fi interpretat în modcorespunzător, iar aparatul afişează direct frecvenţa semnalului de la intrare.
2.2.3 Măsurarea frecvenţei cu ajutorul frecvenţmetrelor (undametrelor) de
rezonanţă Pentru a măsura frecvenţa se utilizează în mod curent cavităţi ale căror
dimensiuni pot fi modificate prin acţionarea unui mecanism de reglaj. Acestreglaj este acţionat până se constată rezonanţa cavităţii. Din dimensiunilecavităţii aduse la rezonanţă se poate determina frecvenţa de lucru folosindu-se înacest scop relaţii de calcul, tabele sau curbe de etalonare.
După modul cum este cuplat rezonatorul cu sursa de semnal şi după cumse constată rezonanţa, undametrele sunt de mai multe tipuri: cu transmisie, cureflexie, cu absorbţie (figura 4).
U.R
G b)a)
U.T.
G
a) undametru cu transmisie; b) undametru cu reflexie;c)
undametru cu absorbţie
U.A
Gc)
Figura 4. Măsurarea frecvenţei cu undametre de rezonanţă
Undametrul cu transmisie este un rezonator cu două por ţi de acces(cuplaje). Printr-un cuplaj se introduce semnal de la generator iar prin celalalt seextrage semnal pentru detector . În momentul rezonanţei semnalul detectat este
maxim.Undametrul cu reflexie este un rezonator cu un singur cuplaj, conectat ca
sarcină la capătul unui ghid. În afara rezonanţei, această sarcină reflectă toată puterea incidentă ( )1Γ = . La rezonanţă, datorită intensităţii foarte mari a
câmpului electromagnetic, o parte din puterea incidentă se pierde în pereţiiimperfect conductori ai rezonatorului. Acordul unui astfel de undametrucorespunde unui minim al puterii reflectate, minim care poate fi sesizat folosindun cuplor directiv şi un detector.
Undametrul cu absorbţie este un rezonator cu un singur cuplaj, conectat paralel la ghidul care transmite putere de la generator spre sarcină. La rezonanţă,
12

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 16/46
undametrul absoarbe o parte din puterea din ghid. Acordul acestui tip deundametru se constată prin scăderea puterii în sarcină (absorbţie de putere).Pentru ca minimul de putere în sarcină sa coincidă perfect cu rezonanţaundametrului trebuie ca sarcina să aibă un coeficient de reflexie cât mai redus
(sarcină adaptată). Acest tip de undametru este cel mai des întâlnit, datorită simplităţii montajului.
3. Desf ăşurarea lucrării
3.1 Se desenează schema instalaţiei de măsur ă.
3.2 Se măsoar ă lungimea de undă în ghid prin mai multe metode. Se compar ă rezultatele, calculându-se eroarea relativă cu formula
( ) ( )( )
calculat măsurat
calculat
e[%] 100g g
g
λ λ
λ
−= ⋅ (8)
unde ( )calculatgλ se determină cu relaţia (1).
3.3 Se măsoar ă frecvenţa de lucru prin mai multe metode. Se compar ă rezultatele, calculându-se eroarea relativă cu formula
măsurate[%] 100 f f
f
−= ⋅ (9)
unde f reprezintă frecvenţa de lucru iar frecvenţa măsurată cu metodade măsur ă folosită.
măsurat f
4. Întrebări
4.1 Poate fi măsurată lungimea de undă în ghid folosind o terminaţie adaptată conectată la capătul liniei de măsur ă? Justificaţi r ăspunsul.
4.2 Nivelul semnalului furnizat de generator afectează măsurarea lungimii deundă în ghid ? Dar sarcina de la capătul liniei ?
4.3 Ce rol are atenuatorul conectat între generator şi linia de măsur ă ?
4.4 Care este banda unimod a ghidului dreptunghiular din care este realizată linia de măsur ă ?
13

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 17/46
Lucrarea nr.3
MĂSURAREA RAPORTULUI DE UNDĂ STAŢIONAR Ă
1. Noţiuni teoretice
Raportul de undă staţionară se defineşte ca raport între valorile maximeşi minime ale distribuţiei amplitudinii de oscilaţie în lungul ghidului:
maxmin
T
T σ =
E
E , [ ]∞∈ ,1σ (1)
El este folosit pentru caracterizarea aspectului distribuţiei (mărimea ondulaţiilor)şi poate lua valori cuprinse între 1 şi infinit.
Valoarea 1 corespunde situaţiei în care în ghid nu există decât undă directă, astfel încât distribuţia amplitudinii de oscilaţie în lungul ghidului esteconstantă. Este cazul ghidului terminat adaptat.
Valoarea infinit se obţine în situaţiile în care ghidul este terminat pe oreactanţă pur ă (inclusiv de valoare zero sau infinit). În aceste cazuri,
amplitudinea undei inverse este egală cu amplitudinea undei directe, astfel încâtminimele distribuţiei sunt nule, iar maximele sunt egale cu dublul amplitudiniiundei directe.
Pentru o impedanţă de sarcină oarecare (diferită de cele de mai sus), undainversă este mai mică decât unda directă deoarece o fracţiune din putereatransportată de unda directă se consumă în partea rezistivă a impedanţei desarcină. În acest caz, distribuţia în lungul ghidului nu mai are minime nule( )σ ≠ ∞ şi poate fi privită ca o distribuţie mixtă, rezultată prin suprapunerea
unei unde staţionare peste o undă progresivă. Distribuţia este periodică, distanţa
între două minime (maxime) succesive fiind de / 2gλ (figura 1).
T E
Figura 1. Distribuţia amplitudinii componentei T E în lungul ghidului pentru o sarcină oarecare
maxT E
minT E
z 4
gλ 2gλ
15

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 18/46
În practică, raportul de undă staţionar ă este folosit ca o măsur ă adezadaptării care apare la capătul dinspre sarcină al unui ghid. Cunoscândraportul de undă staţionar ă se poate calcula fracţiunea din puterea incidentă careeste reflectată de sarcină:
21
1r
i
P
P
σ
σ
−⎛ ⎞= ⎜ ⎟+⎝ ⎠ (2)
2. Metode de măsură
Metoda directă
Metoda directă pentru măsurarea raportului de undă staţionar ă se bazează pe folosirea relaţiei de definiţie (1). Valorile amplitudinii câmpuluielectromagnetic (componenta ) în punctele de maxim şi minim aledistribuţiei se determină cu ajutorul unei linii de măsur ă.
T E
În mod frecvent semnalul cules de sonda liniei de măsur ă este mic, astfelîncât indicaţiile maxα si minα ale aparatului conectat la detector sunt
propor ţionale cu pătratul amplitudinii câmpului electric în ghid în punctele
corespunzătoare. În aceste condiţii, raportul de undă staţionar ă se determină curelaţia:
max
mina
α σ
α = (3)
Dacă semnalul cules de sondă nu este suficient de mic poate fi depăşită zona pătratică de detecţie situaţie în care folosirea relaţiei (3) conduce la erori îndeterminarea lui σ .
2.2 Metoda pentru măsurarea raportului de undă staţionară de valoaremare
În cazul raportului de undă staţionar ă mare valorile minimelor sunt mici,astfel încât pentru măsurarea sa este necesar ă fie creşterea puterii aplicate laintrarea liniei, fie mărimea cuplajului sondei cu linia. În aceste condiţii este
posibil ca valorile maximelor să depăşească zona pătratică a caracteristicii de
detecţie a diodei, caz în care folosirea relaţiei (3) conduce la erori importante)( realmas σ σ < . Pentru a evita apariţia acestor erori, se poate recurge la o metodă
16
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 19/46
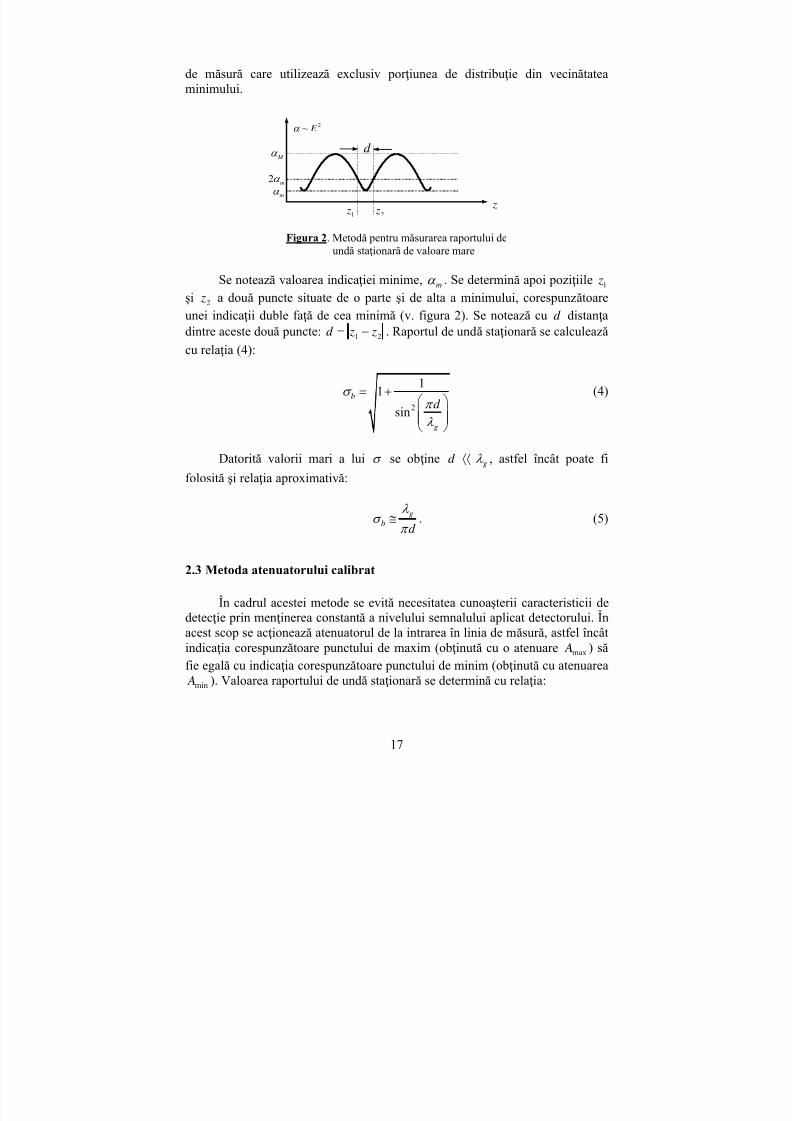
de măsur ă care utilizează exclusiv por ţiunea de distribuţie din vecinătateaminimului.
2 E ~α
d
Figura 2. Metodă pentru măsurarea raportului deundă staţionar ă de valoare mare
Se notează valoarea indicaţiei minime, mα . Se determină apoi poziţiileşi a două puncte situate de o parte şi de alta a minimului, corespunzătoareunei indicaţii duble faţă de cea minimă (v. figura 2). Se notează cu distanţadintre aceste două puncte:
1 z
2 z
d
21 z zd −= . Raportul de undă staţionar ă se calculează
cu relaţia (4):
2
11
sin
b
g
d σ
π
λ
= +⎛ ⎞
⎜ ⎟⎜ ⎟⎝ ⎠
(4)
Datorită valorii mari a lui σ se obţine gd λ ⟨⟨ , astfel încât poate fi
folosită şi relaţia aproximativă:
g
bd
λ σ
π ≅ . (5)
2.3 Metoda atenuatorului calibrat
În cadrul acestei metode se evită necesitatea cunoaşterii caracteristicii dedetecţie prin menţinerea constantă a nivelului semnalului aplicat detectorului. Înacest scop se acţionează atenuatorul de la intrarea în linia de măsur ă, astfel încâtindicaţia corespunzătoare punctului de maxim (obţinută cu o atenuare max A ) să fie egală cu indicaţia corespunzătoare punctului de minim (obţinută cu atenuarea
min A ). Valoarea raportului de undă staţionar ă se determină cu relaţia:
2 z1 z
mα
mα 2
M α
z
17

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 20/46
[ ] [ ]( )max min
1dB dB
2010 A A
cσ −
= (6)
Aplicarea acestui procedeu necesită atenuatoare cu calibrare precisă la
frecvenţa de lucru.Metoda se utilizează în special la măsurarea raportului de undă staţionar ă de valoare mare, deoarece în acest caz erorile de calibrare ale atenuatorului suntmai puţin supăr ătoare.
Indiferent de metoda folosită, măsurarea raportului de undă staţionar ă se poate face corect numai dacă amplitudinea minimă a semnalului depăşeştesensibil nivelul zgomotului instalaţiei de măsur ă.
În vederea reducerii nivelului de zgomot se prefer ă folosirea ca aparateindicatoare a milivoltmetrelor de bandă îngustă, acordate pe frecvenţa demodulaţie a generatorului. Unele dintre aceste aparate, special concepute înacest scop, sunt etalonate direct în valori ale raportului de undă staţionar ă (sigmametre).
3. Desf ăşurarea lucrării
3.1 Se desenează schema instalaţiei de măsur ă.
3.2 Se reglează generatorul şi linia de măsur ă pe frecvenţa dorită urmând
recomandările de la lucrarea nr.1, punctele 3.2 ÷ 3.4.
3.3 Se conectează la capătul liniei de măsur ă o sarcină compusă dintr-un şurubmobil şi o terminaţie adaptată SAU o sarcină compusă dintr-un atenuatorvariabil şi un piston cu scurtcircuit deplasabil.
3.4 Se măsoar ă raportul de undă staţionar ă pentru diverse înălţimi h aleşurubului (la o poziţie fixă a acestuia pe linie) SAU pentru diverse valori aleatenuării A (la o poziţie fixă a pistonului de scurtcircuit).
3.5
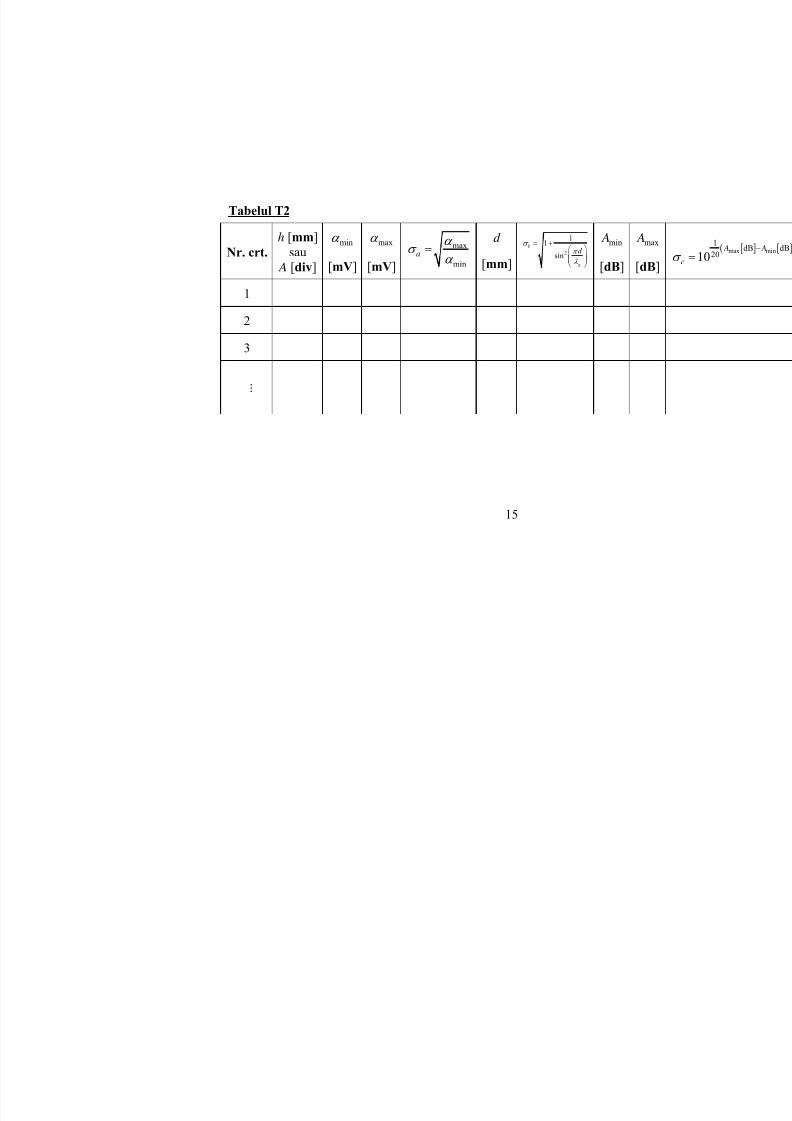
Determinarea lui σ se face prin metoda directă (2.1), iar pentru valori mariale lui σ se folosesc şi metodele (2.2) şi/sau (2.3). Rezultatele se trec înTabelul T2. Se prezintă grafic σ în funcţie de h sau A .
4. Întrebări
4.1 În cazul şurubului de reglaj, curba de variaţie a raportului de undă staţionar ă în funcţie de înălţimea h poate să fie nemonotonă (să prezinte un maxim).Cum se explică acest fapt ?
4.2 Depinde raportul de undă staţionar ă de nivelul semnalului dat de generator?
18
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 21/46
19
4.3 În cazul sarcinii compuse din atenuator şi scurtcircuit deplasabil, ce relaţieexistă între raportul de undă staţionar ă pe linia de măsur ă şi atenuareaatenuatorului?
4.4 Demonstraţi relaţia (2).
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 22/46
Tabelul T2
Nr. crt.h [mm]
sau A [div]
minα
[mV]
maxα
[mV]
max
mina
α σ
α =
d
[mm]2
11
sinb
g
d σ
π
λ
= +⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
min A max A
[dB]σ
[dB]
1
2
3
.
.
.
15

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 23/46

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 24/46

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 25/46

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 26/46

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 27/46
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 28/46

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 29/46
1
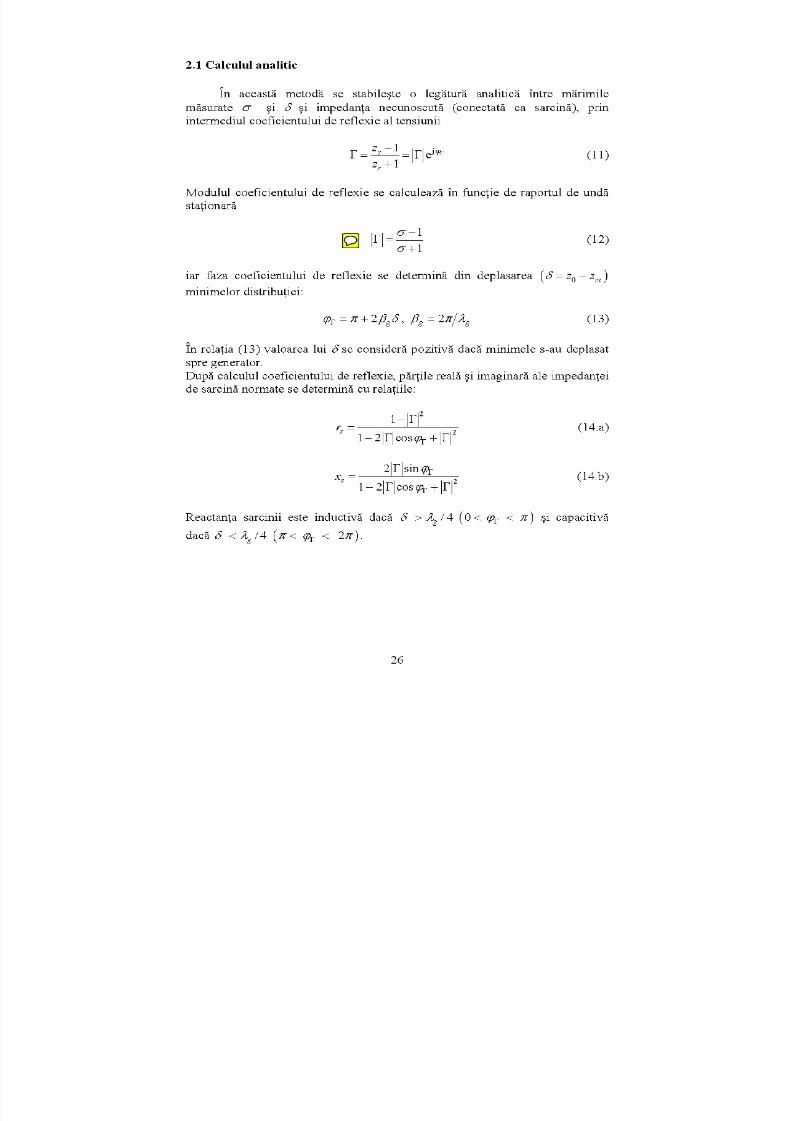
2.2.Metoda grafic
În metoda grafic, rezistenţa şi reactanţa normate ale sarcinii necunoscutese deduc direct din diagrama circular, cu ajutorul parametrilor msuraţi σ şi δ.Concomitent se determin amplitudinea şi faza coeficientului de reflexie.
Pe diagrama circular punctele de minim ale impedanţei (corespunztoarepunctelor de minim ale distribuţiei) sunt situate pe semidiametrul real negativ(φw = φΓ + 2 βzm = π) , la intersecţia acestuia cu cercul corespunztor valoriimsurate a lui σ. Prin deplasarea în lungul cercului de σ constant se poatedetermina impedanţa în orice punct de msur , deci şi la captul ei.
Practic , pentru reprezentarea pe diagram a punctului figurativ al sarciniinecunoscute , se determin întâi poziţia razei prin rotire faţ de semiaxa real negativ cu numrul de diviziuni δ / λ g corespunztor. Se intersecteaz apoiaceast raz cu cercul σ constant respectiv. Punctul astfel obţinut permitedeterminarea impedanţei normate sau a coeficientului de reflexie.Valorilenormate ale rezistenţei şi reactanţei sunt citite pe cercurile de rezistenţ constant , respectiv de reactanţ constant , care trec prin acest punct.Coeficientul de reflexie , în modul şi faz ,este determinat de distanţa punctuluila origine şi de unghiul msurat faţ de originea de faz a diagramei (semiaxareal pozitiv). Se consider raza cercului exterior al digramei circulare devaloare unitar.
Pe diagramele circulare folosite la msurarea impedanţelor sunt notatedirect sensurile în care trebuie f cut rotaţia , în funcţie de sensul deplasriiminimelor pe linia de msur faţ de planul de referinţ echivalent (în senstrigonometric , dac deplasarea este ctre generator)
3.Desf şurarea lucrrii
3.1.Se deseneaz schema instalaţiei de msur.
3.2.Se regleaz frecvenţa generatorului la valoarea f=8.88GHz. Se msoar lungimea de und în ghid . Valoarea necesar este λ g=50 ±1 mm. Se determin poziţia unui plan de referinţ echivalent planului de referinţ al sarcinii (planulde contact între linia de msur şi sarcin).Se ţine cont de distanţa între planulde referinţ şi planul plcii de scurtcircuitare.
3.3.Se calculeaz, urmând indicaţiile din Anexa 1, impedanţa sarcinii reglabileformate din dispozitivul de adaptare cu trei şuruburi şi terminaţia adaptat ,pentru câteva seturi de valori ale înlţimii şuruburilor , alese din tabelului T1.
3.4.Se msoar , cu ajutorul liniei de msur, impedanţa aceleiaşi sarcini ,pentru fiecare set de valori ale înlţimilor şuruburilor. Rezultatele experimentalese trec în tabelul T2.
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 30/46
2
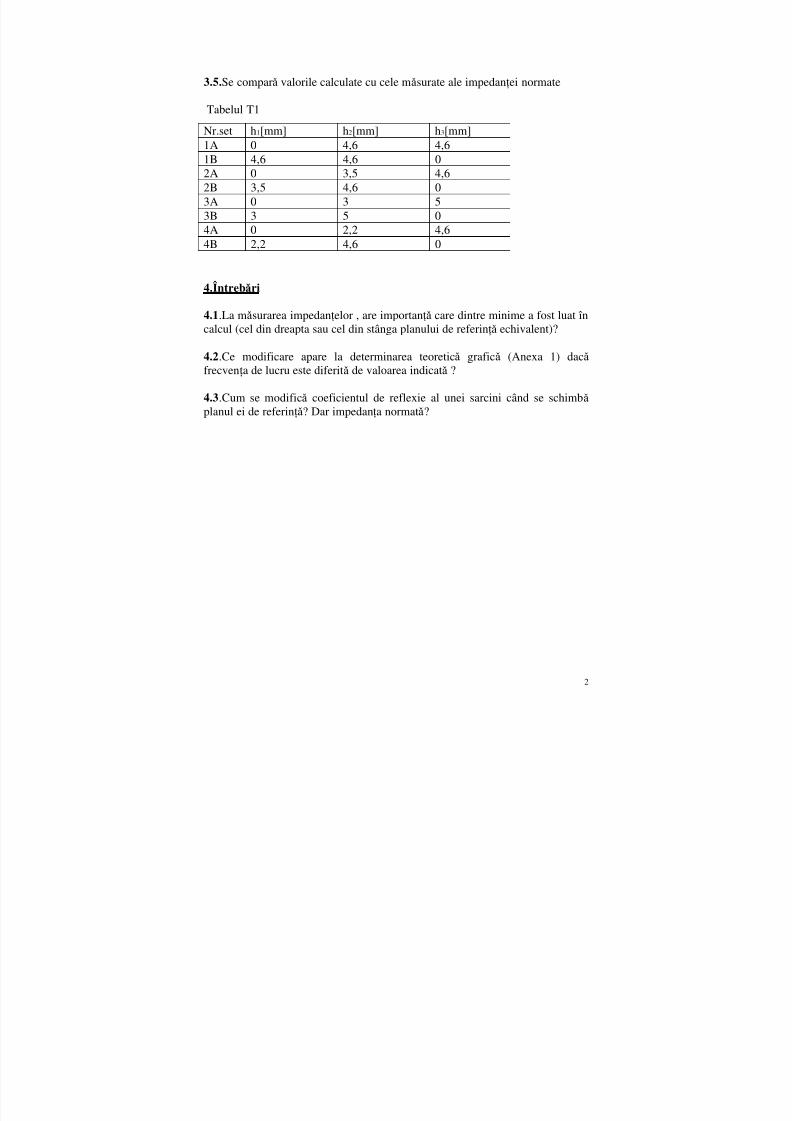
3.5.Se compar valorile calculate cu cele msurate ale impedanţei normate
Tabelul T1
4.Întrebri
4.1.La msurarea impedanţelor , are importanţ care dintre minime a fost luat încalcul (cel din dreapta sau cel din stânga planului de referinţ echivalent)?
4.2.Ce modificare apare la determinarea teoretic grafic (Anexa 1) dac frecvenţa de lucru este diferit de valoarea indicat ?
4.3.Cum se modific coeficientul de reflexie al unei sarcini când se schimb
planul ei de referinţ? Dar impedanţa normat?
Nr.set h1[mm] h2[mm] h3[mm]1A 0 4,6 4,61B 4,6 4,6 02A 0 3,5 4,62B 3,5 4,6 03A 0 3 53B 3 5 04A 0 2,2 4,64B 2,2 4,6 0
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 31/46
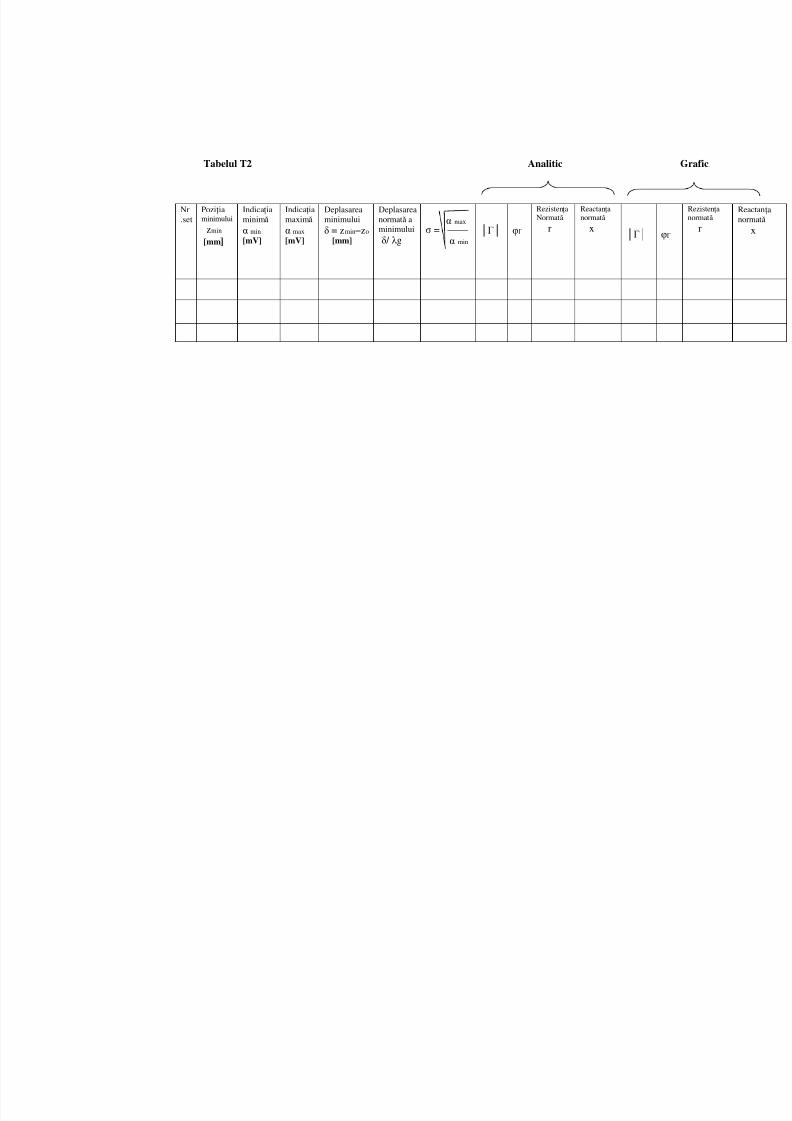
Tabelul T2 Analitic
Nr
.set
Poziţiaminimului
zmin
[mm]
Indicaţiaminim α min [mV]
Indicaţiamaxim α max [mV]
Deplasarea
minimului
δ = zmin−zo [mm]
Deplasarea
normat aminimului
δ / λg
α max σ = ——
α min Γ φΓ
RezistenţaNormat
r
Reactanţanormat
x Γ φΓ

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 32/46
1
ANEXA 1
Dispozitivul de adaptare a impedanţei cu şuruburi
Acest dispozitiv este un tronson de ghid prevzut cu trei şuruburi reglabile (figura 1). Elpoate transforma orice impedanţ complex conectat la ieşire într-o impedanţ
real,egal cu impedanţa de und a ghidului . Reciproc , dac la ieşire este conectat oterminaţie adaptat, impedanţa ei poate fi transformat într-o impedanţ complex arbitrar.
1 32
h1
h2
h3
Linia de Terminaţiemsur adaptat
L L L L
T T1 T2 T3 L=12,5mm
Fig.1.Dispozitiv de adaptare a impedanţelor.
Determinarea teoretic a impedanţei normate (pentru seturile cu h1=0)
Tabelul 1 h1[mm] = 0 h2[mm]= h3[mm]=σ1= 1 σ2= σ3 =b1= 0 b2= b3 =
1.Se compleaz , pentru fiecare şurub , valoarea raportului de und staţionar σ cores-punztor înlţimii h (se utilizeaz graficul obţinut la lucrarea precedent).Valoarea σ afost msurat pentru admitanţa format de terminaţia adaptat , în paralel cu susceptanţacapacitiv a şurubului, y=1+jb .Pe diagrama Smith , se poate determina pe cale grafic valoarea lui b , astfel: se ia cu ajutorul compasului distanţa dintre centrul O şi punctul depe diametrul orizontal g = σ , se roteşte şi se intersecteaz cercul unitar în punctul M , de
coordonate g = 1 şi b.Se completeaz în tabel valorile susceptanţelor b astfel determinate.Precizm c susceptanţa şurubului este capacitiv (b > 0) dac 0 < h < λ 0 /4 [1]
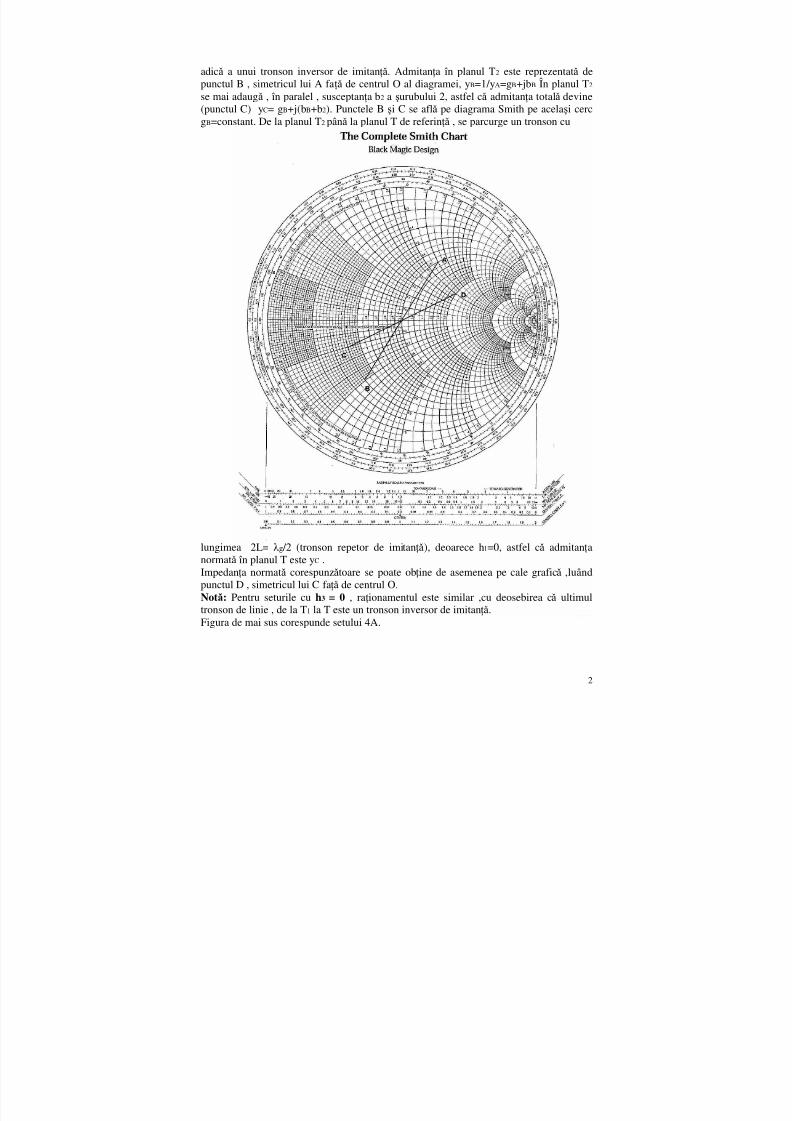
2.Se determin pe cale grafic impedanţa normat în planul de referinţ (planul T) - fig.1Pe diagrama Smith pentru admitanţe se reprezint , pe cercul unitar , punctul A decoordonate g = 1 , b = b3. Acesta reprezint admitanţa normat în planul T3 : yA=1+jb3
Deplasarea pân în planul T2 înseamn parcurgerea unui tronson de lungime L= λ g /4,
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 33/46
2
adic a unui tronson inversor de imitanţ. Admitanţa în planul T2 este reprezentat depunctul B , simetricul lui A faţ de centrul O al diagramei, yB=1/yA=gB+jbB În planul T2 se mai adaug , în paralel , susceptanţa b2 a şurubului 2, astfel c admitanţa total devine(punctul C) yC= gB+j(bB+b2). Punctele B şi C se afl pe diagrama Smith pe acelaşi cercgB=constant. De la planul T2 pân la planul T de referinţ , se parcurge un tronson cu
lungimea 2L= λ g /2 (tronson repetor de imitanţ), deoarece h1=0, astfel c admitanţanormat în planul T este yC .Impedanţa normat corespunztoare se poate obţine de asemenea pe cale grafic ,luândpunctul D , simetricul lui C faţ de centrul O.Not: Pentru seturile cu h3 = 0 , raţionamentul este similar ,cu deosebirea c ultimultronson de linie , de la T1 la T este un tronson inversor de imitanţ.Figura de mai sus corespunde setului 4A.

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 34/46
Lucrarea nr.5
CIRCUITE SIMPLE DE ADAPTARE
1. Noţiuni teoretice
În funcţie de modul în care se pune problema adaptării şi anume la osingur ă frecvenţă sau într-o bandă de frecvenţe, circuitele de adaptare pot ficlasificate în circuite de bandă îngustă, respectiv circuite de adaptare de bandă
largă.
1.1 Adaptarea de bandă îngustă
Unul dintre cele mai simple şi totodată cele mai utilizate circuite deadaptare este tronsonul de linie de lungime 4λ , care are proprietatea deinversare a impedanţei. Această proprietate permite transformarea uneiimpedanţe de sarcină reale S S Z R= într-o altă impedanţă, de asemenea reală dar
de o altă valoare, 2i i C S Z R Z R= = .
Figura 1. Circuit de adaptare cu un tronson inversor.
Circuite de acest tip sunt utilizate în adaptarea unei sarcini rezistive la olinie de acces sau pentru adaptarea unei rezistenţe de sarcină la un generator cuimpedanţă internă reală. În ambele cazuri, impedanţa caracteristică a tronsonuluide linie se determină cu relaţia:
c i S Z R R= ⋅ (1)
1

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 35/46
Este evident că linia în 4λ realizează adaptarea perfectă la o singur ă frecvenţă, aceea la care lungimea liniei satisface condiţia 4l λ = . Se poateconsidera însă că adaptarea se menţine – cu aproximaţie – şi într-o bandă îngustă în jurul frecvenţei nominale. În aceste condiţii, lărgimea de bandă a circuitului
este direct legată de compromisul acceptat în ceea ce priveşte calitatea adaptării.Stabilind o valoare maxim admisibilă pentru modulul coeficientului de
reflexie,max
Γ rezultă banda:
( )
max0
max
8
1 S i
i S
f R R
R Rπ
Γ= ⋅
⎛ ⎞− Γ −⎜ ⎟⎜ ⎟
⎝ ⎠
S
B (2)
În general banda oferită de acest tip de circuite este îngustă şi depinde, aşacum reiese şi din relaţia precedentă, de raportul care există între R şi i R .Atunci când se doreşte obţinerea unei adaptări într-o bandă mai largă estenecesar ă utilizarea unor circuite mai complexe.
1.2 Adaptarea de bandă largă
Performanţele circuitelor de adaptare de bandă largă sunt supuse unor
limitări rezultate din teoria reţelelor electrice.
Figura 2. Diport nedisipativ utilizat la adaptarea unei
impedanţe de sarcină complexe.
De exemplu, pentru un circuit de adaptare nedisipativ având drept sarcină o rezistenţă în paralel cu un condensator (figura 2), se poate ar ăta că erorile deadaptare – reprezentate prin modulul coeficientului de reflexie – satisfac relaţia:
0
1ln d
S S
π
R C ω
∞
=Γ∫
1 2
(3)
De obicei se urmăreşte obţinerea unei adaptări cât mai bune într-oanumită bandă de frecvenţe ω ω ω < , ceea ce corespunde unui coeficient de<
2
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 36/46
reflexie cât mai mic în domeniul de frecvenţă respectiv. Întrucât integrala din (3)este egală cu o constantă, rezultatul optim se obţine atunci când Γ este maxim
în afara benzii de adaptare (la limită 1Γ = ). Adaptarea optimă corespunde unei
pante cât mai abrupte a caracteristicii filtrului la trecerea din banda de trecere în banda de oprire.
Corelând aceste cerinţe se observă că circuitul de adaptare considerat secomportă de fapt ca un filtru trece-bandă. Întrucât şi pentru alte structuri aleimpedanţei de sarcină se pot stabili relaţii similare cu (3), proiectarea circuitelorde adaptare de bandă largă se face într-un mod asemănător cu a filtrelor trece-
bandă.Proiectarea poate avea în vedere obţinerea unui coeficient de reflexie al
cărui modul să varieze cu frecvenţa conform unei curbe de tip Butterworth (cu“maximum de liniaritate a amplitudinii”), de tip Cebîşev (cu riplu egal în
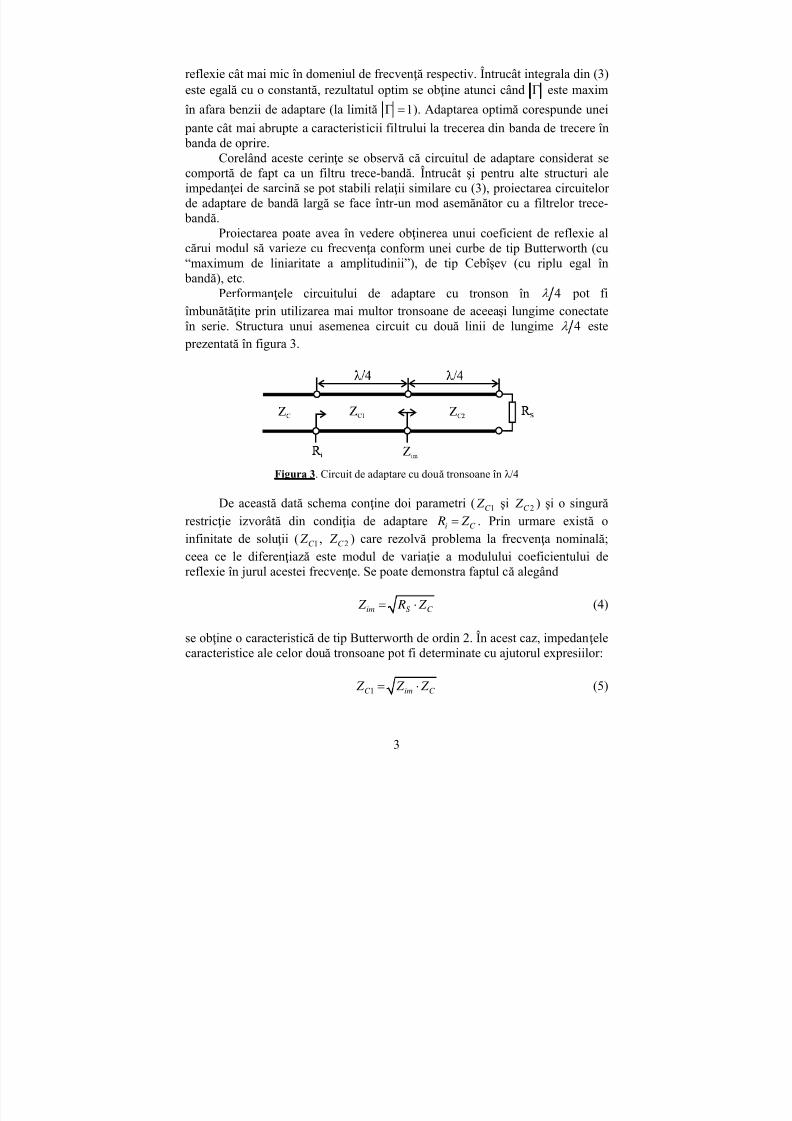
bandă), etc.Performanţele circuitului de adaptare cu tronson în 4λ pot fi
îmbunătăţite prin utilizarea mai multor tronsoane de aceeaşi lungime conectateîn serie. Structura unui asemenea circuit cu două linii de lungime 4λ este
prezentată în figura 3.
Figura 3. Circuit de adaptare cu două tronsoane în λ /4
De această dată schema conţine doi parametri ( 1C Z şi 2C Z ) şi o singur ă
restricţie izvorâtă din condiţia de adaptare i C R Z = . Prin urmare există oinfinitate de soluţii ( 1C Z , 2C Z ) care rezolvă problema la frecvenţa nominală;
ceea ce le diferenţiază este modul de variaţie a modulului coeficientului dereflexie în jurul acestei frecvenţe. Se poate demonstra faptul că alegând
im S C Z R Z = ⋅ (4)
se obţine o caracteristică de tip Butterworth de ordin 2. În acest caz, impedanţelecaracteristice ale celor două tronsoane pot fi determinate cu ajutorul expresiilor:
1C im C Z Z Z = ⋅ (5)
3

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 37/46
2C S im Z R Z = ⋅ (6)
În figura 4 este prezentată varianta cu trei tronsoane în λ /4.
Figura 4. Circuit de adaptare cu trei tronsoane în 4λ
Şi în acest caz la frecvenţa nominală, există o singur ă condiţie de proiectare, i C R Z = , fiind deci necesar ă alegerea a două impedanţe intermediare
1im Z şi 2im Z , în vederea determinării impedanţelor caracteristice ale celor treitronsoane.
781C C S Z Z R= ⋅ (7)
2C C S Z Z R= ⋅ (8)
783C C S Z Z R= ⋅ (9)
2. Desf ăşurarea lucrării
2.1 Studiul unui circuit de adaptare cu un tronson în 4λ
2.1.1 Se deschide programul ANSOFT DESIGNER SV.
2.1.2 Se calculează lungimea electrică a tronsonului inversor de impedanţă, precum şi impedanţa caracteristică a acestuia, Z C , cu relaţia (1), astfel încâtcircuitul cu schema din Fig. 1 să realizeze la frecvenţa f = 1 GHz adaptarea uneisarcini având impedanţa ZS1 = 50Ω la o linie de acces cu impedanţacaracteristică ZC = 100Ω.
2.1.3 Se editează schema de principiu din Fig. 1. În acest scop se deschide un proiect, apoi se alege din bara de meniu “Project ” opțiunea „ Insert Circuit
Design”; se va selecta ca tehnologie de realizare a substratului „PCB-Double
Sided ”.
4

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 38/46
2.1.4 Pentru editarea liniei de transmisiune, din categoria “ Ideal Distributed ” seva selecta opţiunea „Transmission line-Electrical length” (TRLE). Pentruintroducerea impedanţei de sarcină în circuit se va alege un rezistor din categoriade componente “ Lumped ”. La intrarea în circuit se va folosi o poartă a cărei
impedanţă trebuie modificată la 100Ω, impedanţa caracteristică a liniei de acces.2.1.5 Se efectuează analiza circuitului într-un domeniu de frecvenţă convenabilales, centrat pe frecvența de 1GHz. Pentru aceasta se va selecta din bara demeniu “Circuit ” opțiunea “ Add Solution Setup” şi se va alege analiză liniar ă îndomeniul frecvenţă.
2.1.6 Se analizează circuitul („Circuit ”, opţiunea „ Analyze”) şi apoi se reprezintă grafic („Circuit ” , opţiunea „Create Report ”) variația modulului coeficientuluide reflexie la intrarea în circuit, mag(S 11), în raport cu frecvența. Din acest graficse determină lărgimea benzii de frecvenţe în care are loc adaptarea,
corespunzătoare unui modul al coeficientului de reflexie maxim admisibil de0,1.
2.1.7 Se modifică domeniul de frecvenţă într-unul mai larg, 0,1GHz - 10 GHz.Se repetă analiza şi se reprezintă grafic variaţia modulului coeficientului dereflexie în domeniul respectiv de frecvenţă.
2.1.8 Se calculează lungimea electrică a tronsonului inversor de impedanţă, precum şi impedanţa caracteristică a acestuia Z C cu relaţia (1), astfel încâtcircuitul cu schema din Fig. 1 să realizeze la frecvenţa f = 1 GHz adaptarea unei
sarcini având impedanţa Z
S2=
25Ω la o linie de acces cu impedanţacaracteristică ZC = 100Ω.
2.1.9 Urmând procedura descrisă anterior se va reprezenta grafic variațiamodulului coeficientului de reflexie la intrarea în circuit, mag(S 11), în funcție defrecvență. Din grafic se determină lărgimea benzii de frecvenţe în care are locadaptarea, corespunzătoare unui modul al coeficientului de reflexie maximadmisibil de 0,1.
2.1.10 Se calculează lungimea electrică a tronsonului inversor de impedanţă, precum şi impedanţa caracteristică a acestuia Z C cu relaţia (1), astfel încât
circuitul cu schema din Fig. 1 să realizeze la frecvenţa f = 1 GHz adaptarea uneisarcini având impedanţa ZS2 = 75Ω la o linie de acces cu impedanţacaracteristică ZC = 100Ω.
2.1.11 Urmând procedura descrisă anterior se reprezintă grafic variațiamodulului coeficientului de reflexie la intrarea în circuit în funcție de frecvență,mag(S 11). Din grafic se determină lărgimea benzii de frecvenţe în care are locadaptarea, corespunzătoare unui modul al coeficientului de reflexie maximadmisibil de 0,1.
2.1.12 Pentru a compara performantele acestor circuite de adaptare, se editează cele trei scheme pe aceeași foaie de lucru. Se vor reprezenta cele trei module ale
5
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 39/46
coeficienţilor de reflexie: mag(S 11), mag(S 22), mag(S 33), pe acelaşi grafic, încoordonate carteziene.
2.2 Studiul unui circuit de adaptare cu două tronsoane în 4λ
2.2.1 Se calculează Z im, Z C2 şi Z C3 cu ajutorul relaţiilor (4), (5) şi (6), în care sevor considera Z C=100 şi RS= RS1=50.
2.2.2 Se va edita schema circuitului din Fig. 3 după algoritmul prezentat lasubpunctele 2.1.3, 2.1.4, 2.1.5, 2.1.6.
2.2.3 Se reprezintă grafic variația modulului coeficientului de reflexie la intrareaîn circuit în funcție de frecvență, mag(S 11). Din grafic se determină lărgimea
benzii de frecvenţe în care are loc adaptarea, corespunzătoare unui modul alcoeficientului de reflexie maxim admisibil de 0,1.
2.3 Studiul unui circuit de adaptare cu trei tronsoane în 4λ
2.3.1 Se calculează Z C1, Z C2 şi Z C3 cu ajutorul relaţiilor (7), (8) şi (9), în care sevor considera Z C=100 şi RS= RS1=50.
2.3.2 Se va edita schema de principiu corespunzătoare Figurii 4 după algoritmul prezentat la subpunctele 2.1.3, 2.1.4, 2.1.5, 2.1.6.
2.3.3 Se reprezintă grafic variația modulului coeficientului de reflexie la intrareaîn circuit în funcție de frecvență, mag(S 11). Din grafic se determină lărgimea benzii de frecvenţe în care are loc adaptarea, corespunzătoare unui modul alcoeficientului de reflexie maxim admisibil de 0,1.
2.4 Comparaţie între performanţele circuitelor de adaptare ce utilizează unul, două sau trei tronsoane inversoare.
2.4.1 Pentru a compara performanțele acestor circuite de adaptare, se vor edita
cele trei scheme corespunzătoare circuitelor de adaptare cu unul, două și treitronsoane inversoare, studiate la punctele 2.1.2, 2.2.2 şi 2.3.2, pe aceeași foaiede lucru. Se reprezintă cele trei module ale coeficienţilor de reflexie pe acelaşigrafic, în coordonate carteziene: mag(S 11), mag(S 22), mag(S 33).
6

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 40/46
3. Întrebări
3.1 Explicaţi variaţia în funcţie de frecvenţă a modulului coeficientului dereflexie la intrarea în circuitul de la punctul 2.1.6.
3.2 Cum se explică dependenţa periodică a modulului coeficientului de reflexieîn funcţie de frecvenţă, obţinută la punctul 2.1.7?
3.3 Cum depinde banda de adaptare a unui circuit cu un tronson în 4λ deraportul dintre impedanţele între care este conectat?
7

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 41/46
1
Lucrarea nr.6
CIRCUITE DE ADAPTARE DE BANDĂ ÎNGUSTĂ
PENTRU SARCINI COMPLEXE
Noţiuni teoretice
O linie realizează transmiterea energiei în condiţii optime atunci când ea esteterminată pe impedanţa ei caracteristică. În plus, în această situaţie linia prezintă avantajul
unei impedanţe de intrare constante, de valoare reală, independentă de frecvenţă sau delungimea liniei. Dacă impedanţa de sarcină Z S este diferită de impedanţa caracteristică Z C a
liniei, atunci între linie şi sarcina propriu-zisă poate fi interconectat un circuit de adaptarespecial conceput, adică un diport nedisipativ astfel calculat încât impedanţa lui de intrare săfie Z C.
La frecvenţe înalte, circuitele de adaptare sunt realizate din tronsoane de linii. Liniile pot înlocui reactanţele de tip concentrat din circuitele de adaptare clasice, dar proprietăţileliniilor permit şi realizarea unor circuite de adaptare specifice.
Problema adaptării se poate pune la o singură frecvenţă sau într -o bandă mai largă defrecvenţe. Din acest punct de vedere circuitele de adaptare sunt clasificate în circuite deadaptare de bandă îngustă şi circuite de adaptare de bandă largă.
La toate tipurile de circuite de adaptare, atât banda cât şi randamentul depind deimpedanţa de sarcină. Cu cât dezadaptarea iniţială este mai mare, cu atât banda de frecvenţe şirandamentul circuitului de adaptare sunt mai reduse, adică adaptarea este mai "dificilă".
1.1 Adaptarea cu compensarea părţii reactive a sarcinii şi linie /4
În cazul unei sarcini complexe, linia /4 poate fi utilizată pentru adaptare dacă în prealabil partea reactivă a sarcinii a fost compensată. Această compensare poate fi obţinută,de pildă, prin conectarea în paralel cu sarcina a unei linii terminate în scurtcircuit, avândimpedanţa caracteristică egală cu cea a liniei de acces, ZC (Fig. 1).
l
Y = G + jBS S S
ZC
(Z )C (Z' )C
Bi
Fig. 1. Adaptarea cu compensarea sarcinii şi linie /4.
Lungimea tronsonului de linie în paralel cu sarcina se alege astfel încât susceptanţa lui deintrare să compenseze susceptanţa sarcinii:
ctg ,i C S B Y l B (1)
de unde
8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 42/46
2
arctg ,2 2
C
S
Y l k k Z
B
. (2)
Tronsonul în /4 serveşte la transformarea conductanţei de sarcină rămase după compensare,GS , în valoarea rezistivă necesară pentru adaptarea liniei de acces:
/ .C C S Z Z G (3)
În principiu, circuitul de adaptare din Fig. 1 poate fi folosit la adaptarea oricăreisarcini (cu excepţia evidentă a celor pur reactive). Practic, utilizarea circuitului de acest tipeste limitată de posibilitatea realizării unei linii având impedanţa caracteristică necesară Z ' C,
precum şi de banda de frecvenţe şi de randamentul lui.
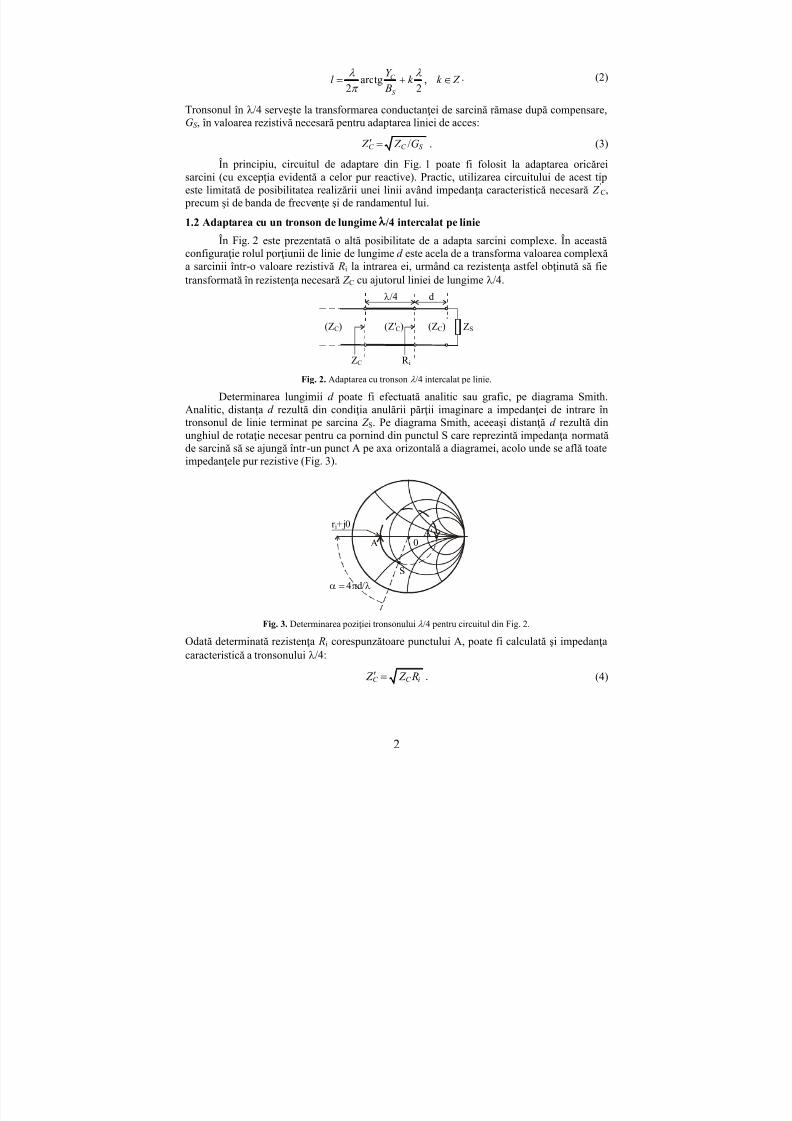
1.2 Adaptarea cu un tronson de lungime /4 intercalat pe linie
În Fig. 2 este prezentată o altă posibilitate de a adapta sarcini complexe. În aceastăconfiguraţie rolul porţiunii de linie de lungime d este acela de a transforma valoarea complexăa sarcinii într -o valoare rezistivă Ri la intrarea ei, urmând ca rezistenţa astfel obţinută să fie
transformată în rezistenţa necesară Z C cu ajutorul liniei de lungime /4.
ZS(Z )C
ZC
(Z )C(Z' )C
d
R i Fig. 2. Adaptarea cu tronson /4 intercalat pe linie.
Determinarea lungimii d poate fi efectuată analitic sau grafic, pe diagrama Smith.
Analitic, distanţa d rezultă din condiţia anulării părţii imaginare a impedanţei de intrare întronsonul de linie terminat pe sarcina Z S. Pe diagrama Smith, aceeaşi distanţă d rezultă dinunghiul de rotaţie necesar pentru ca pornind din punctul S care reprezintă impedanţa normată
de sarcină să se ajungă într -un punct A pe axa orizontală a diagramei, acolo unde se află toateimpedanţele pur rezistive (Fig. 3).
0
d
A
S
A'r +j0i
Fig. 3. Determinarea poziţiei tronsonului /4 pentru circuitul din Fig. 2.
Odată determinată rezistenţa Ri corespunzătoare punctului A, poate fi calculată şi impedanţacaracteristică a tronsonului /4:
.C C i Z Z R (4)

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 43/46
3
Din Fig. 3 se observă că problema admite două soluţii distincte, corespunzătoare punctelor A şi A'. Cele două soluţii conduc la valori distincte ale Z' C, una dintre ele fiind
întotdeauna mai mare, iar cealaltă mai mică decât Z C.
În principiu şi acest tip de circuit de adaptare este universal, limitele practice ale
utilizării lui fiind determinate de bandă, randament, precum şi de posibilitatea obţinerii unei
linii cu impedanţa necesară Z' C.
1.3 Adaptarea cu tronsoane /4 şi /8
Uneori la adaptarea sarcinilor complexe se utilizează o combinaţie de două tronsoanede linie, unul cu lungimea /4 iar celălalt cu lungimea /8, conectate în cascadă, ca în Fig. 4.
ZS(Z )C
ZC
(Z" )C(Z' )C
R i
Fig. 4. Circuit de adaptare cu tronsoane /4 şi /8.
Acest circuit de adaptare se bazează pe faptul că o linie fără pierderi cu lungimea /8
are o impedanţă de intrare reală, atunci când impedanţa ei caracteristică are valoarea | Z S| [1]
Odată obţinută o impedanţă reală Ri la intrarea în tronsonul /8, transformarea acestei
rezistenţe Ri în valoarea necesară pentru adaptare, Z C, se obţine cu ajutorul liniei de lungime/4. Prin urmare, la circuitul din Fig. 4 impedanţele tronsoanelor trebuie să aibă valorile:
iC C
S C S
C S iS C R Z Z
X Z R
Z R R Z Z
,
2,
22
2
(5)
În principiu această variantă de circuit poate fi folosită la adaptarea oricărei sarcini
complexe. Practic, limitările sunt aici reprezentate de banda de frecvenţe, de randamentulcircuitului, dar în primul rând de posibilitatea realizării impedanţelor caracteristice Z' C şi Z" C.
1.4 Adaptarea cu un tronson de linie conectat în paralel
O sarcină complexă oarecare poate fi adaptată la o linie de acces folosind numai liniicu o aceeaşi impedanţă caracteristică Z C. Acest tip de circuit de adaptare constă într -un
tronson de linie terminat în scurtcircuit, conectat în paralel pe linie, la o anumită distanţă d
faţă de sarcină, ca în Fig. 5.
(Y )C
YC
Y1 ZS
Y2
d
l
Fig. 5. Adaptarea cu un tronson de linie terminat în scurtcircuit,
conectat în paralel la o anumită distanţă faţă de sarcină.
La acest circuit realizarea adaptării este condiţionată de alegerea lungimilor d şi l
astfel încât admitanţa care reprezintă sarcina totală a liniei de acces, compusă din sumaadmitanţelor de intrare în tronsonul terminal, Y 1, şi în tronsonul lateral, Y 2, să fie egală cu
admitanţa caracteristică Y C=1/ Z C a liniei de acces. Lungimile d şi l necesare pentru adaptareaunei sarcini date Z S pot fi determinate fie analitic, fie grafic, folosind diagrama Smith [2]. În

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 44/46
4
acest ultim caz, se începe prin reprezentarea pe diagramă, a punctului, notat cu S
corespunzător impedanţei normate de sarcină, CSS Z Z z . Datorită conexiunii paralel, se
preferă calculul cu admitanţe. Admitanţa normată de sarcină, SS 1 z y , este reprezentată de
punctul notat cu S' simetric cu S în raport cu centrul diagramei. Determinarea distanţei d
revine la determinarea unghiului de rotaţie în sens orar (spre generator), astfel încât admitanţanormată de sarcină, S', să se transforme într -o admitanţă având partea reală egală cu unitatea(deoarece adăugarea ulterioară a admitanţei de intrare a tronsonului lateral – pur reactiv – nu
va influenţa asupra părţii reale a admitanţei totale). Efectuând rotaţia din punctul S' până laintersectarea cercului 1 g , se obţine punctul A. Unghiul de rotaţie, determinat cu ajutorulgradaţiilor de pe periferia diagramei, corespunde unei distanţe normate la lungimea de undă
d , de unde rezultă, prin denormare, lungimea d .
0
AS
S’d /
-b
+b
B
D
l / A’
Fig. 6. Determinarea lungimilor d şi l pentru circuitul din Fig. 5.
În punctul A, partea imaginară a admitanţei (susceptanţa) tronsonului terminal, citită
pe diagramă, are valoarea normată b
; în consecinţă, lungimea tronsonului lateral trebuieastfel determinată încât susceptanţa lui de intrare să aibă valoarea normată +b, necesară pentrucompensare. Lungimea aceasta poate fi determinată tot pe diagramă, prin intermediulunghiului de rotaţie necesar pentru a transforma admitanţa terminală a tronsonului lateral,
y (reprezentată de punctul B), în susceptanţa necesară pentru adaptare (punctul D). Se
obţine astfel distanţa normată la lungimea de undă l , de unde rezultă, prin denormare,lungimea l .
Din Fig. 6 se observă că problema admite două soluţii distincte, corespunzătoare punctelor A şi A'. Cele două soluţii conduc la valori distincte ale perechilor de valori d şi l .
Adaptarea este şi aici exactă numai la frecvenţa nominală, frecvenţă la care au fostcalculate lungimile d şi l ale tronsoanelor.
Deşi acest tip de circuit de adaptare are o aplicabilitate generală (adică poate adaptaorice sarcină cu parte reală nenulă), folosirea lui este limitată în practică la adaptarea unorimpedanţe de valoare fixă, cunoscută, deoarece modificarea poziţiei punctului de ramificaţieîn raport cu sarcina este mai greu de realizat din punct de vedere tehnologic.
Desfăşurarea lucrării
2.1 Adaptarea cu compensarea părţii reactive a sarcinii şi linie /4
2.1.1. Se calculează lungimea l a tronsonului lateral şi impedanţa caracteristică a
tronsonului inversor de impedanţă,C
Z , cu ajutorul relaţiilor (2) şi (3), astfel încât circuitul
din Fig. 1 să realizeze adaptarea unei sarcini având impedanţa 10 j20S Z la o liniede acces cu impedanţa caracteristică 50C Z , la frecvenţa GHz1 f .

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 45/46
5
2.1.2. Se consideră o variantă a schemei de principiu din Fig. 1 alcătuită din elementeideale. Pentru aceasta se va deschide un proiect în programul ANSOFT DESIGNER SV,
selectând din bara de meniu “ Project ” opțiunea „ Insert Circuit Design”. Ca tehnologie de
realizare a substratului se alege „ PCB-Double Sided ”.
2.1.3. Pentru editarea liniilor de transmisiune, din categoria componente “ Ideal
Distributed ” se va selecta „Transmission lines, electrical length” (TRLE). Pentru sarcinăse vor alege din categoria “ Lumped ” un rezistor ideal, respectiv o bobină ideală sau uncondensator ideal în funcție de natura reactanței de sarcină. Impedanţa de sarcină va fi
conectată la masă, iar la intrarea circuitului se va folosi un generator ( poartă) având
impedanţa egală cu impedanţa caracteristică a liniei de acces.
2.1.4. Se efectuează analiza circuitului într -un domeniu de frecvenţă convenabil ales,centrat pe frecvența de 1 GHz. Pentru aceasta se va selecta din bara de meniu “Circuit ”opțiunea “ Add Solution Setup” şi se va alege analiză liniară în domeniul frecvenţă.
2.1.5 Se analizează circuitul (meniul „Circuit ”, opţiunea „ Analyze”) şi apoi se reprezintăgrafic (meniul „Circuit ” , opţiunea „Create Report ”) variația modulului coeficientului dereflexie la intrarea în cir cuit, mag(S 11), în raport cu frecvența. Din acest grafic sedetermină lărgimea benzii de frecvenţe în care are loc adaptarea, corespunzătoare unuimodul al coeficientului de reflexie maxim admisibil de 0,1.
2.2 Adaptarea cu un tronson de lungime /4 intercalat pe linie
2.2.1. Folosind diagrama circulară se determină lungimea d a tronsonului terminal,
precum şi impedanţa caracteristicăC
Z a tronsonului inversor cu relaţia (4), astfel încât
circuitul din Fig. 2 să realizeze adaptarea unei sarcini având impedanţa 10 j20S Z
la o linie de acces cu impedanţa caracteristică 50C Z , la frecvenţa GHz1 f .
2.2.2. Se consideră o variantă a schemei de principiu din Fig. 2 alcătuită din elementeideale. Pentru aceasta se va deschide un proiect în programul ANSOFT DESIGNER SV,
selectând din bara de meniu “ Project ” opțiunea „ Insert Circuit Design”. Ca tehnologie de
realizare a substratului se alege „ PCB-Double Sided ”.
2.2.3. Se analizează circuitul şi se reprezintă grafic, în coordonate carteziene, modululcoeficientului de reflexie la intrarea în circuit, corespunzător celor două soluţii obţinute la
punctul 2.2.1. Din acest grafic se determină lărgimea benzii de frecvenţe în care are loc
adaptarea, corespunzătoare unui modul al coeficientului de reflexie maxim admisibil
. Se identifică apoi soluţia care conduce la o bandă mai largă.
2.3 Adaptarea cu tronsoane /4 şi /8
2.3.1. Se determină impedanţele caracteristiceC
Z şiC
Z cu ajutorul relaţiilor (5), astfel
încât circuitul din Fig. 4 să realizeze adaptarea unei sarcini având impedanţa 10 j20S Z la o linie de acces cu impedanţa caracteristică 50C Z , la frecvenţa
GHz1 f .
2.3.2. Se consideră o variantă a schemei de principiu din Fig. 4 alcătuită din elementeideale. Pentru aceasta se va deschide un proiect în programul ANSOFT DESIGNER SV,
selectând din bara de meniu “ Project ” opțiunea „ Insert Circuit Design”. Ca tehnologie de
realizare a substratului se alege „ PCB-Double Sided ”.
2.3.3. Se analizează circuitul şi se reprezintă grafic, în coordonate carteziene, modululcoeficientului de reflexie la intrarea în circuit, corespunzător celor două soluţii obţinute la
punctul 2.2.1. Din acest grafic se determină lărgimea benzii de frecvenţe în care are loc

8/10/2019 Laborator Microunde
http://slidepdf.com/reader/full/laborator-microunde 46/46
adaptarea, corespunzătoare unui modul al coeficientului de reflexie maxim admisibil
.
Întrebări şi exerciţii
3.1. Adaptarea cu un tronson de linie conectat în paralel
3.1.1. Folosind diagrama circulară se determină lungimile d şi l astfel încât circuitul dinFig. 5 să realizeze adaptarea unei sarcini având impedanţa 10 j20S Z la o linie de
acces cu impedanţa caracteristică 50C Z , la frecvenţa GHz1 f .
3.1.2. Se consideră o variantă a schemei de principiu din Fig. 5 alcătuită din elementeideale. Pentru aceasta se va deschide un proiect în programul ANSOFT DESIGNER SV,
selectând din bara de meniu “ Project ” opțiunea „ Insert Circuit Design”. Ca tehnologie de
realizare a substratului se alege „ PCB-Double Sided ”.
3.1.3. Se analizează circuitul (meniul „Circuit ”, opţiunea „ Analyze”) şi apoi se reprezintăgrafic (meniul „Circuit ” , opţiunea „Create Report ”) variația modulului coeficientului dereflexie la intrarea în circuit, mag(S 11), în raport cu frecvența. Din acest grafic sedetermină lărgimea benzii de frecvenţe în care are loc adaptarea, corespunzătoare unuimodul al coeficientului de reflexie maxim admisibil de 0,1.
3.2. Pentru sarcina considerată, care dintre circuitele de adaptare analizate în lucrarea delaborator oferă cea mai largă bandă?
3.3. Tipurile de circuite de adaptare studiate pot fi folosite pentru adaptarea oricărei sarcinicomplexe? Justificaţi răspunsul.
3.4. Identificaţi posibile dificultăţi de realizare practică a circuitelor de adaptare calculate.