l2 aeh arispa
DESCRIPTION
aehTRANSCRIPT
1
Sistemul de propulsie electric cuprinde : masina electrica, variatorul de turatie –control electronic,
sursa mobila de energie.
Elementele auxiliare ale sistemului de propulsie sunt : elemente de control si comutatie,
servopompa pentru alimentare, power steering, power braking....
Sistemul de propulsie pe tensiune foarte mare trebuie protejat.
Motoare (masini) electrice de tractiune
Toate motoarele sunt reversibile. Acestea se impart in doua mari categorii?
1. DE CURENT CONTINUU (CC)
1.1. Cu magneti permanenti (MP)
1.2. Cu infasurare de excitatie: serie/ paralel/ mixt
2. DE CURENT ALTERNATIV
2.1. SINCRONE: curenti sinusoidali/ curenti dreptunhiulari/ curenti pas cu pas
2.2. ASINCRONE
MASINA (MOTOR) DE CURENT CONTINUU (CC)
Principiul de functionare
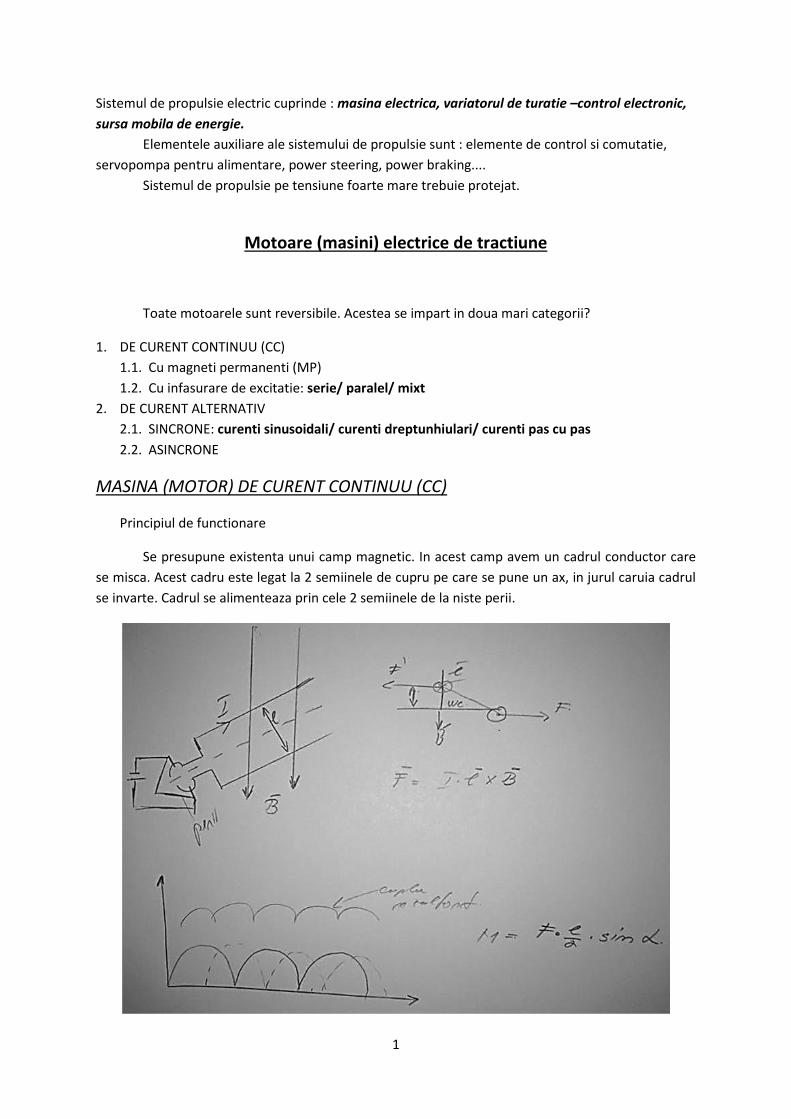
Se presupune existenta unui camp magnetic. In acest camp avem un cadrul conductor care
se misca. Acest cadru este legat la 2 semiinele de cupru pe care se pune un ax, in jurul caruia cadrul
se invarte. Cadrul se alimenteaza prin cele 2 semiinele de la niste perii.
2
Aceste perii alimenteaza in permanente semiinelele, chiar si atunci cand acestea se ivnart.
Atunci cand cadrul este alimentat apare un curent ce interactioneaza cu campul magnetic provocand
astfel o forta electromagnetica F=B*I*L (B-inductia, I-intensitarea, L-lungimea). Sub actiunea acestor
forta cadrul se invarte generand astfel cuplul M.
Cuplul invarte cadrul pana cand acesta ajunge intro pozitie orizontala. Acest cadru se
cheama sectie sau bobina si se pune in rorot.
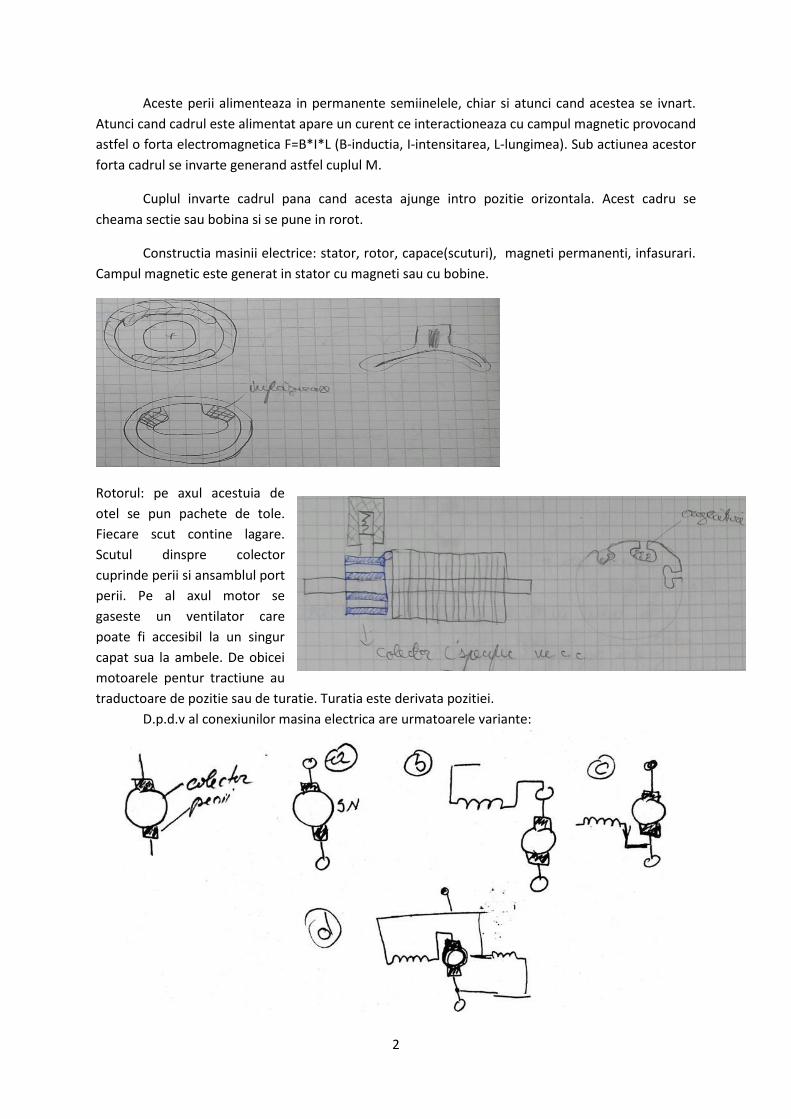
Constructia masinii electrice: stator, rotor, capace(scuturi), magneti permanenti, infasurari.
Campul magnetic este generat in stator cu magneti sau cu bobine.
Rotorul: pe axul acestuia de
otel se pun pachete de tole.
Fiecare scut contine lagare.
Scutul dinspre colector
cuprinde perii si ansamblul port
perii. Pe al axul motor se
gaseste un ventilator care
poate fi accesibil la un singur
capat sua la ambele. De obicei
motoarele pentur tractiune au
traductoare de pozitie sau de turatie. Turatia este derivata pozitiei.
D.p.d.v al conexiunilor masina electrica are urmatoarele variante:

3
a) Masina electrica de curent continuu cu magneti permanenti
b) Masina electrica de curent continuu cu excitatie serie
c) Masina electrica de curent continuu cu excitatie derivatie
d) Masina electrica de curent continuu cu excitatie mixta
Dpdv al unui motor, principala sursa de informatie este caracteristica de cuplu. Daca
tensiunea de alimentare este constanta atunci caracteristica de cuplu este de forma :
Curba a este pentru motoare electrice de curent continuu cu excitatie serie, iar curba b este
pentru cele cu magneti permanenti si excitatie paralel. MCC (masina curent continuu) in serie se
utilizeaza pentru tractiunea electrica alimentata de reostate la automobile. In cazul curbei b pentru
MCC cu MP(magneti permanenti) si ptr MCC paralele, cuplul scade putin odata cu turatia. O astfel de
curba o intalnim la stergatoarele de parbriz.
Motoarele de curent continuu au fost primele motoare electrice utilizate, comanda lor fiind
relativ simpla. Pentru a face reglajul de turatie se utilizeaza un reostat in serie cu rotorul.
1. UA=RA*IA+EA (EA=tensiune indusa electromotoare)
2. EA=k*φex*r
3. r=2*pi*n/60
4. φex=kex*Iex (φex=flux electromagnetic/ kex=constanta de excitatie)
5. Iex=Uex/Rex
6. M=k*IA* φex (IA curent prin rotor)
La motoarlee de tractiune, cand tesniunea de alimentare este constanta reglajul se face prin-
trun reostat exterior de reglaj. Aceasta regleaza curentul si tensiunea care cade pe motor. Pe masura
ce turatia motorului creste, rezistenta reostatului scade pana la turatia dorita. De obicei la motoarele
puternice rezistenta lui este foarte mica, astfel incat randamentul sa fie mare.
Pentru reglajul unui MCC cu MP reglajul se face cu 1, 2 si 6.

4
CONCLUZII!!!!
1. In regim stabilizat cuplul dezvoltat de motor este proportional cu, curentul absorbit.
Ft-R=n*a. S
2. La un motor de putere mare, rezistenta rotorului este mica.
3. Turatia este proportionala cu tensiunea de alimentare
VARIATORUL DE TURATIE (controleaza curentul utilizand un modul electronic): realizeaza un
reglaj ( potentiometru), controleaza regim de functionare, controleaza acceleratia motorului, la
pornire/accelerare poate oferi un cuplu, curentul este diminuat cand se incalzeste motorul ( starea
motorului monitorizata cu un termistor).
MASINA (MOTOR) DE CURENT ALTERNATIV
A. MASINI SINCRONE
Masina sincrona este alcatuita din stator (parte de Fier sub forma de teava cu poli aparenti
sau poli inecati/ ++ o parte din Cupru), rotor, scuturi(capace). Capacele tin lagarele rotoului. Statorul
poate fi din cupru sau din fier sub forma de teava cu poli aparenti sau inecati. ROtorul poate fi cu
magneti permanenti sau cu infasurare( cu perii si inele/ sist de transmitere fara contact).
La motoarele sincrone se folosesc rotoare cu magneti permanenti.

5
Excitatia se gaseste in rotor. In stator exista u sistem de 3 infasurari ce sunt plasate
echidistant pe periferia statorului. Aceste 3 infasurari pot fi alimentate fie cu curenti dreptunhiulari
fie cu curenti sinusoidal. Interactiunea produce cuplu electromagnetic care invarte rotorul.
Cand statorul se alimenteaza cu 3 tesnsiuni sinusoidale decalate in timp cu 2pi/3 fazele
statorului fiind decalate in spatiu se produce camp magnetic invartitor care antrezeaza dupa el
rotorul.
Tensiunea sau curenti de alimentare trebuie sincronizati cu pozitia rotorului, de aceea se
utilizeaza un traductor de pozitie retorica cu o rezoluie mare. Motorul sincron alimentat cu curent
dreptunghiulari se numeste Brushless DC.

6
Avantaje motoare: Curentul principal trece prin stator
Statorul se raceste bine, la acelasi volum trce curent mai mare prin stator
Cuplu si putere specifica
Nu au contacte alunecatoare( perii) fapt ce rezulta o fiabiltiate mult mai buna, intretinere
aproape 0, nu produc scantei
Constructie mai complicata la cc (mai ales rotorul)
Pret mai mic la motorul de CA
Performante: turatia maxima este limitata la cc(max 6000rpm) la Ca turatia poate fi foarte
mare de aproximativ 30000rpm
Frecventa mare de 5kHz,
Dezavantaje: Comanda masinilor de CA este foarte complicata
Faza curentilor trebuie sincronizata cu cea a rotorului
Motoarele sunt mai robuste la CA
Motoarele cu CA sunt mai avantajoase deoarece s.au generalizat
Motoare cu CC se folosesc in aplicatii speciale: automobile
B. MASINI ASINCRONE
Dpdv constructiv acestea seamana cu cele sincrone, deoarece statorul este aproape la fel (
infasurare trifazata). Deosebirea se regaseste la nivelul constructiei rotorului.

7
In rotor exista un ax pe care se pune un pachet de tole, iar in tole se regasesc crestaturi In
aceste crestaturi se pun bare conductoare ce se scurtcircuiteza la capete cu niste inele.
Acest tip de rorot se cheama rorot in scurtcircuit. O alta deosebire intrele motorul sincron si
cel asincron este dimensiunea de gabarit, cel sincron fiind scurt, dar cu diametru mare.
Daca statorul este alimentat cu un sistem trifazat de U se obtine camp magnetic invartiro, ce
se roteste cu turatia n0=G0*f/P. Prin invartirea acestuia se induce in bare scurtcircuitate tensiune
electromotoare. Interactiunea cu camul magnetic invartitor se produce cuplu electromagnetic care
incepe sa deplaseze rotorul. Pe masura ce rotorul se accelereaza, viteza relativa dintre camp si rotor
cat si tensiunea indusa scad. Scazand curentii va scadea si cuplul electromagnetic.
Momentan motoarele de curent alternatic sincrone sau asincrone sunt controlate de
variatoare de turatie.
AVANTAJE:
Este robust, nu se sparge nu se rupe, nu se deformeaza.
Se incalzeste peste 120-150 grade celsius
Fucntionare timp de 1mil de km fara probleme
UTILIZARE: hibrid serie, vehicule comerciale grele, cale ferata.
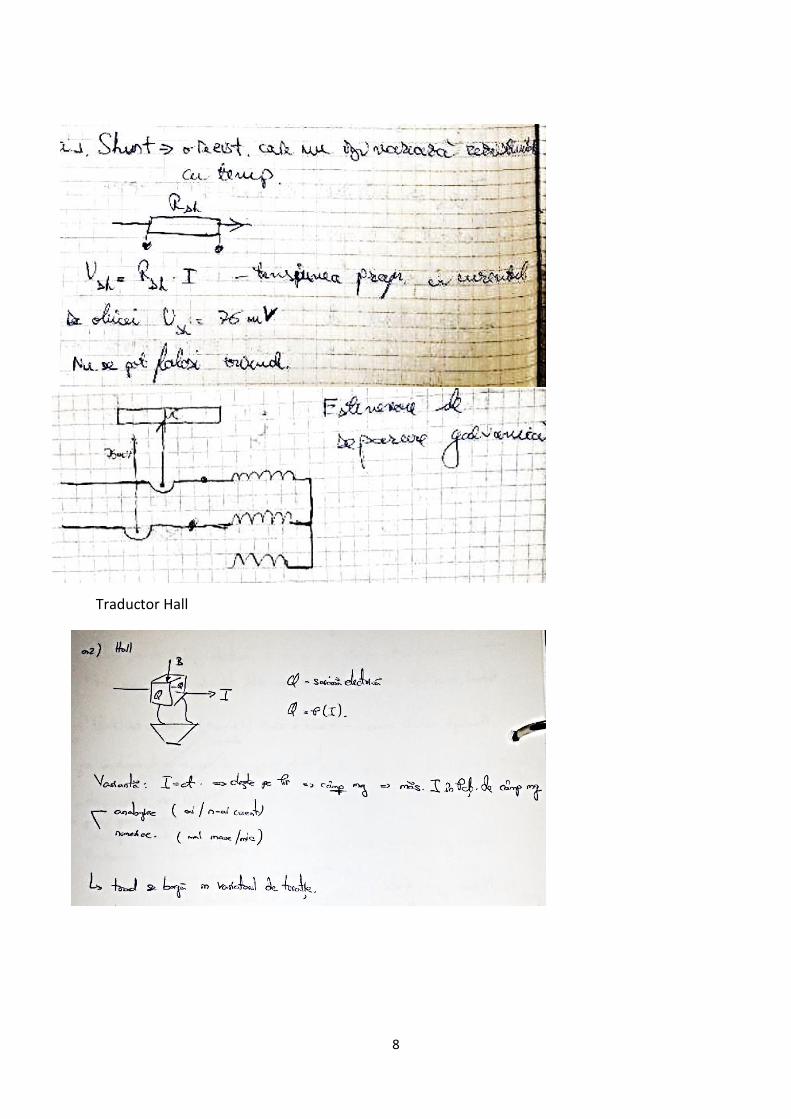
Traductoare=transforma o marime neelectrica intro marime electrica
Traductoarele pentru curent=transforma un curent intr-o tensiune
Tensiunea data de un traductor poate fi variabila de la caz la caz.
8
Traductor Hall

9
Traductoare de pozitie (HALL si inductiv)
**VLAD** Intensitatea campului magnetic este constanta. Inductia magnetica rezultanta
depinde de liniile de camp magnetic. Daca prin bobina apare un flux magnetic variabil,
atunci in bobina apare o tensiune electromotoare. Amplitudinea acestei tensiuni este
poportionala cu turatia. Se obtine un traductor de poztiei incremental.(se da un impuls cand
roata se roteste cu jumatate de dinte). Pentru calcularea pozitiei reale si pentru protecia la
zgomote de obicei traductoarele inductive utilizeaza un dinte lipsa si un numarator.
Motoarele de curent continuu au nevoie de determinarea pozitiei rotorului. Sunt
doua categorii de traductoare: liniare si rotative.
Traductaorele rotative pot fi incrementale sau absolute. Incrementale: genereaza un
impuls cand sau deplasat cu un anumit unghi, mai exact, cand rotorul se deplaseaza printrun
increment. Sunt simple, robuste dar trebuie sa aiba efect. Pot fi afectate de zgomot
electromagnetic. Ele sunt folosite la volant sau la arbore cotit. Principalul traductor
incremental este traductorul optic.
Acesta functioneaza astfel: avem un disc pe care sunt trasate linii opace si
transparente. Avem un led deasupra discului iar dedesubt un foto-tranzistor.
Traductaore absolute: optice sau
inductive. Acestea dau direct pozitia
rotorului. Resolver(figura alaturata) este
un traductor analogic inductiv si are in
stator 2 infasurari si in rotor o
infasurare. Un traductor absolut optic
digital seamana cu un encoder.
10
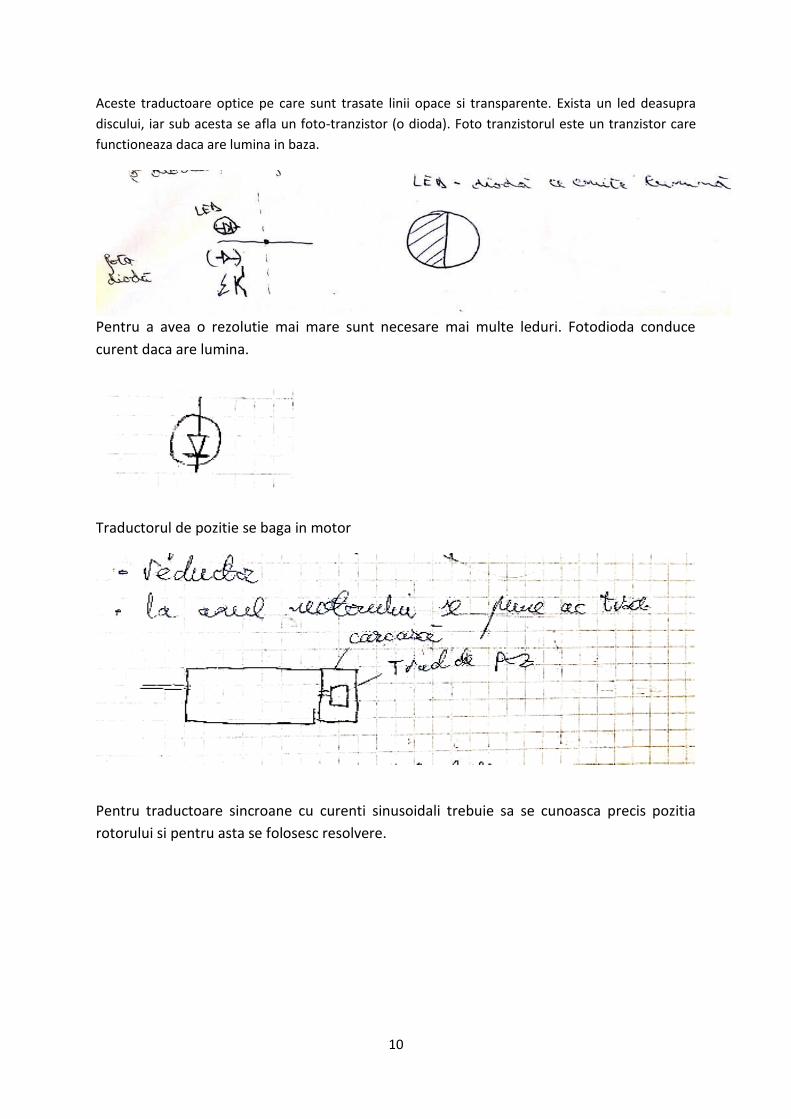
Aceste traductoare optice pe care sunt trasate linii opace si transparente. Exista un led deasupra
discului, iar sub acesta se afla un foto-tranzistor (o dioda). Foto tranzistorul este un tranzistor care
functioneaza daca are lumina in baza.
Pentru a avea o rezolutie mai mare sunt necesare mai multe leduri. Fotodioda conduce
curent daca are lumina.
Traductorul de pozitie se baga in motor
Pentru traductoare sincroane cu curenti sinusoidali trebuie sa se cunoasca precis pozitia
rotorului si pentru asta se folosesc resolvere.
11
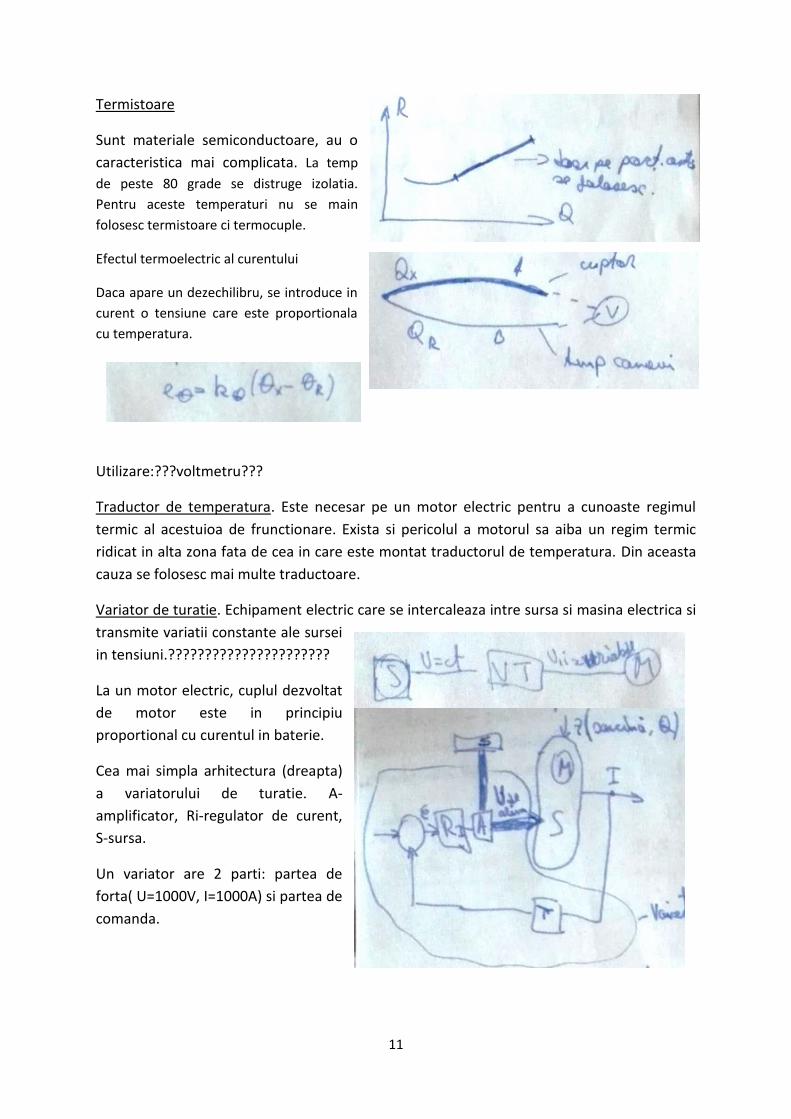
Termistoare
Sunt materiale semiconductoare, au o
caracteristica mai complicata. La temp
de peste 80 grade se distruge izolatia.
Pentru aceste temperaturi nu se main
folosesc termistoare ci termocuple.
Efectul termoelectric al curentului
Daca apare un dezechilibru, se introduce in
curent o tensiune care este proportionala
cu temperatura.
Utilizare:???voltmetru???
Traductor de temperatura. Este necesar pe un motor electric pentru a cunoaste regimul
termic al acestuioa de frunctionare. Exista si pericolul a motorul sa aiba un regim termic
ridicat in alta zona fata de cea in care este montat traductorul de temperatura. Din aceasta
cauza se folosesc mai multe traductoare.
Variator de turatie. Echipament electric care se intercaleaza intre sursa si masina electrica si
transmite variatii constante ale sursei
in tensiuni.??????????????????????
La un motor electric, cuplul dezvoltat
de motor este in principiu
proportional cu curentul in baterie.
Cea mai simpla arhitectura (dreapta)
a variatorului de turatie. A-
amplificator, Ri-regulator de curent,
S-sursa.
Un variator are 2 parti: partea de
forta( U=1000V, I=1000A) si partea de
comanda.

12
Clasificare VT:
1. Fata de Uintrare/Uiesire
2. Dpdv al functionarii mecanice
Insiruire de chestii nonsens:
13
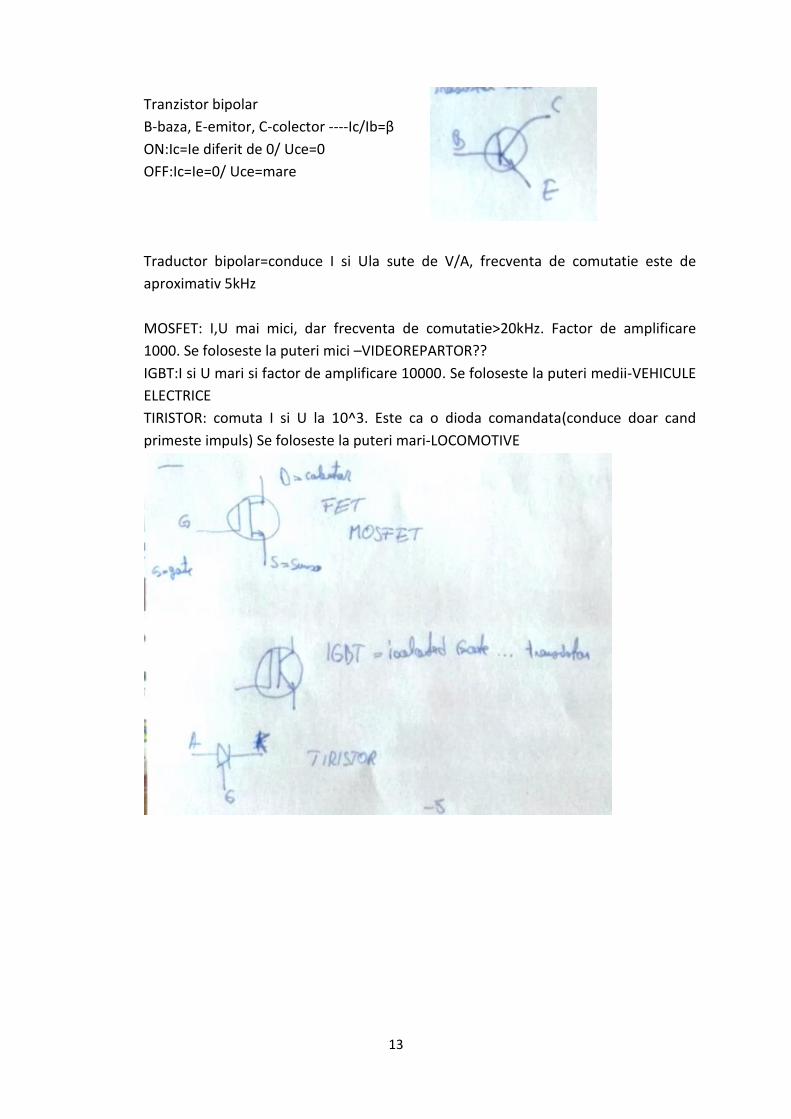
Tranzistor bipolar
B-baza, E-emitor, C-colector ----Ic/Ib=β
ON:Ic=Ie diferit de 0/ Uce=0
OFF:Ic=Ie=0/ Uce=mare
Traductor bipolar=conduce I si Ula sute de V/A, frecventa de comutatie este de
aproximativ 5kHz
MOSFET: I,U mai mici, dar frecventa de comutatie>20kHz. Factor de amplificare
1000. Se foloseste la puteri mici –VIDEOREPARTOR??
IGBT:I si U mari si factor de amplificare 10000. Se foloseste la puteri medii-VEHICULE
ELECTRICE
TIRISTOR: comuta I si U la 10^3. Este ca o dioda comandata(conduce doar cand
primeste impuls) Se foloseste la puteri mari-LOCOMOTIVE