l1-2013
DESCRIPTION
mefTRANSCRIPT
1. INTRODUCERE – PREZENTARE GENERALA
Reprezentarea “lumii reale” prin modele virtuale utilizand aplicatiile pe calculator
se regaseste in orice domeniu al ingineriei si proiectarii.
Avantajele procedeului:
• modelele virtuale, bazate pe platforme de calcul comerciale, sunt mai ieftine
decat modelele fizice (la scara) analoage;
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
• modelele virtuale permit analize de tip “feed back” (revenire si
adaptare/corectare), conducand in final la optimizarea sistemelor ce depind de un
numar mare de parametri.
Comportarea oricarui sistem fizic poate fi descrisa analitic prin intermediul unor
relatii matematice, precum ecuatiile cu derivate partiale sau sistemele de ecuatii
diferentiale.
Din pacate, pentru problemele practice complexe nu pot fi gasite solutii analitice,
fiind disponibile numai cateva solutii clasice ale problemelor particulare, simple,
valabile in contextul unor ipoteze simplificatoare.1
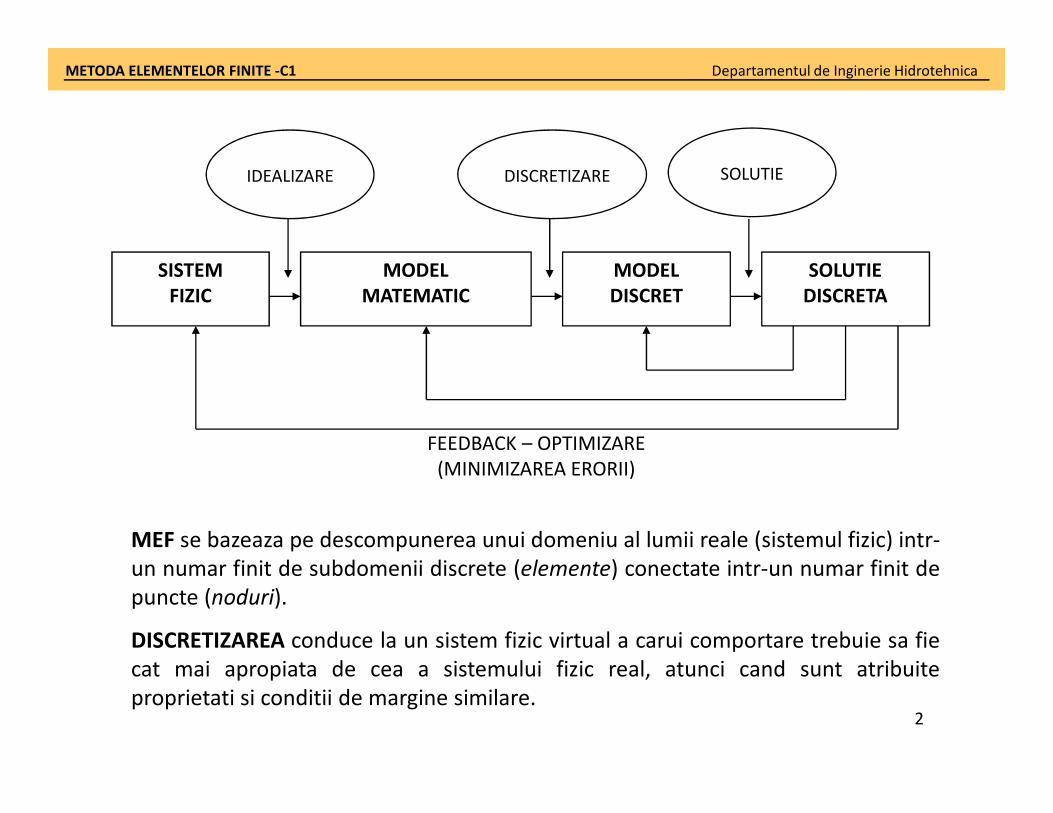
SISTEM
FIZIC
MODEL
MATEMATIC
MODEL
DISCRET
SOLUTIE
DISCRETA
IDEALIZARE DISCRETIZARE SOLUTIE
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
FEEDBACK – OPTIMIZARE
(MINIMIZAREA ERORII)
MEF se bazeaza pe descompunerea unui domeniu al lumii reale (sistemul fizic) intr-
un numar finit de subdomenii discrete (elemente) conectate intr-un numar finit de
puncte (noduri).
DISCRETIZAREA conduce la un sistem fizic virtual a carui comportare trebuie sa fie
cat mai apropiata de cea a sistemului fizic real, atunci cand sunt atribuite
proprietati si conditii de margine similare.2
x
y (D )
(De )
A(u) = 0B(u) = 0
(Γ )
(Γe)
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
x
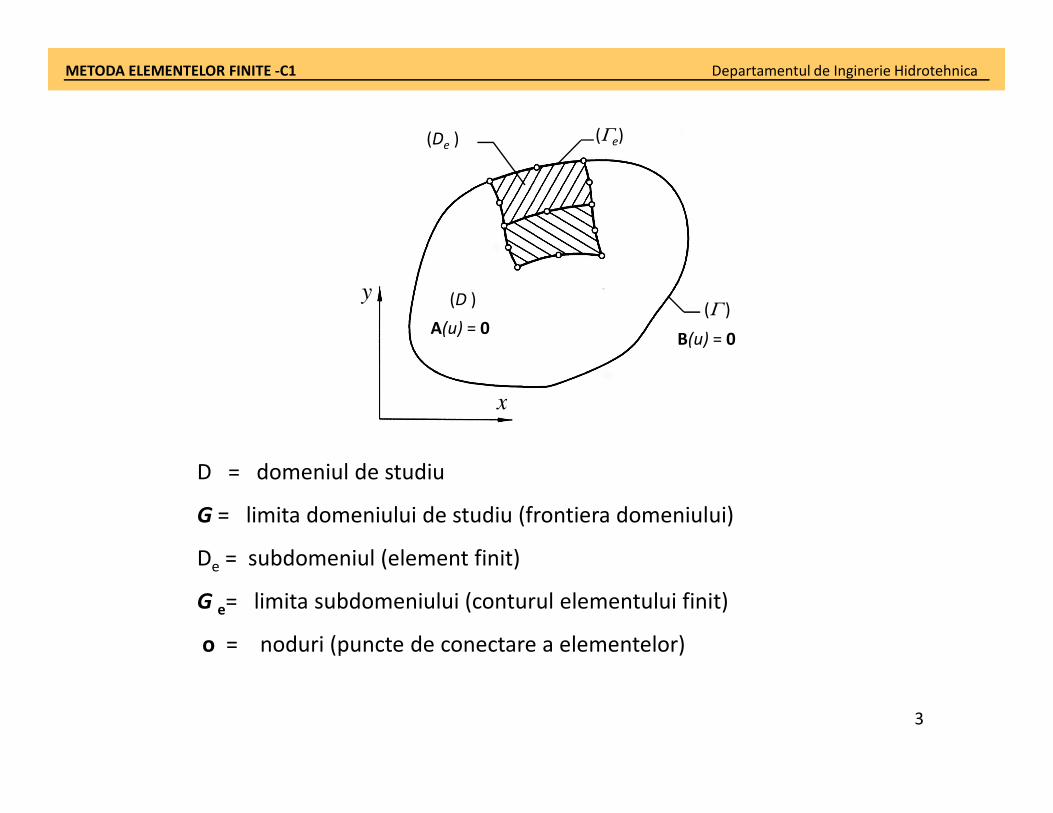
D = domeniul de studiu
G = limita domeniului de studiu (frontiera domeniului)
De = subdomeniul (element finit)
G e= limita subdomeniului (conturul elementului finit)
o = noduri (puncte de conectare a elementelor)
3
“Ingredientele” produsului comercial MEF:
• inginerie - pentru exprimarea sistemelor de ecuatii cu derivate partiale in
concordanta cu fenomenul fizic;
• metode numerice - pentru construirea si rezolvarea sistemelor de ecuatii
algebrice;
• limbaje de programare si IT - pentru implementarea celor de mai sus
intr-o platforma comerciala, cu interfata prietenoasa.
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Tipuri de variabile implicate
– variabile spatiale 1D - unidimensionale (axa orientata)
2D - doua dimensiuni (plan/suprafata)
3D - trei dimensiuni (volum)
- variabile nespatiale temperatura, potential hidraulic, timp
4

Principalele domenii ale ingineriei civile in care se aplica MEF:
• Proiectarea si verificarea structurilor – evaluarea starii de deformatie si eforturi
prin analize statice si/sau dinamice; optimizarea componentelor structurale;
evaluarea sensibilitatii structurilor la diversi parametri (temperatura, proprietatile
materialelor, conditii de margine, etc);
• Mecanica rocilor si geotehnica, interactiunea structurilor cu masivul de fundare;
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
• Mecanica rocilor si geotehnica, interactiunea structurilor cu masivul de fundare;
• Evaluarea fenomenelor de infiltratie; fenomene termice la structuri masive;
• Probleme de mecanica a fluidelor si interactiunea intre fluidul in miscare si
structura.
5
2. RADACINILE SI EVOLUTIA MEF
Fundamentul matematic – Mecanica elementelor structurale discrete – in
deceniul 6 al sec. XIX-lea, odata cu dezvoltatea calculului matriceal in Germania si
Marea Britanie.
Inainte de cel de-al doilea razboi mondial – tehnologia aeronautica si primele
masini de calcul mecanice – au dat principalul impuls al utiizarii algebrei
matriceale in secvente de calcul complexe.
Formularile fundamentale ale Analizei structurale bazate pe calcul matriceal, in
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Formularile fundamentale ale Analizei structurale bazate pe calcul matriceal, in
functie de necunoscutele primare:
- Metoda deplasarilor;
- Metoda fortelor.
1959 – Metoda Directa a Rigiditatii (Direct Stiffness Method) – Turner, o metoda
generala si eficienta de analiza ce permitea implementarea in algoritmi de calcul
automat; premergatoarea MEF.
6
Utilizarea elementelor finite de suprafata – aplicata pentru prima oara de Turner,
Clough, Martin si Topp. Criterii riguroase de compatibilitate si completitudine au
fost formulate de Melosh si Irons (1955 – 1959).
Intre 1950 – 1960 – tot industria aeronautica a fost cea care a impulsionat
dezvoltarea MEF.
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Analize structurale aprofundate pentru optimizarea aerodinamica si necesitatea
unor raspunsuri privind fenomenele de flambaj si oboseala au avut un rol
important in dezvoltarea metodei.
MEF a fost reformulata utilizand principii energetice si variationale – aplicarea
teoriei minimizarii reziduurilor ponderate.
7
Progresele tehnologice ale calculatoarelor
• 1951 – primul calculator comercial Univac I;
• 1952 Univac 1103, primul calculator cu mediu de stocare sub forma de disc
rotativ;
• 1953 primul calculator IBM, modelul 701
Desi abordarea digitala a crescut viteza si performantele de calcul, capacitatea de
stocare era foarte redusa.
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Dezvoltarea limbajelor de programere
In stadiul initial al calculului digital, programarea se facea in “cod masina”, nefiind,
in principiu, accesibila inginerilor.
Dupa 1957 – a devenit disponibil primul limbaj prietenos dedicat aplicatiilor:
limbajul de programare FORTRAN pe calculatorul IBM 704.
8

Dupa 1965 MEF a fost acceptata ca metoda generala pentru rezolvarea
problemelor descrise de sisteme de ecuatii diferentiale, fiind extinsa la probleme
neliniare si nestationare (dependente de timp): analize structurale, mecanica
fluidelor, probleme de camp termic, etc.
Atingerea nivelului actual de dezvoltare a MEF (complexitate, acuratete,
minimizarea erorii) se bazeaza pe evolutia simultana a urmatoarelor conditii:
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
• imbunatatirii suportului matematic, prin dezvoltarea elementelor finite de inalta
precizie si a elementelor finite specializate;
• cresterea puterii de calcul prin dezvoltarea spectaculoasa a calculatoarelor
(viteza de operare si cantitatea de informatii stocate) ceea ce permite alcatuirea
unor modele de calcul din ce in ce mai complexe.
9
“Clasici” ai MEF:
M.J. Turner
R.W. Clough
H.C. Martin
L.J. Topp
J.H. Argyris
C.A. Felippa
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
C.A. Felippa
R.H. Gallagher
K.J. Bathé
C. Taylor
C. O. Zienkiewikz
10
Programe de calcul specializate:
NASTRAN
SAP
ANSYS
ADINA
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
ADINA
ABAQUS
MARC
TITUS
11
Interpretarea si verificarea rezultatelor sunt de maxima importanta.
Principalul risc pentru un utilizator neexperimentat: validarea rezultatelor fara
verificarea acestora, numai pe baza faptului ca au fost obtinute utilizand un program de
calcul consacrat.
Utilizatorul MEF trebuie sa gaseasca intotdeauna mijloacele specifice de verificare a
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Utilizatorul MEF trebuie sa gaseasca intotdeauna mijloacele specifice de verificare a
rezultatelor. Rezultatele eronate sau problemele de calcul se datoreaza intotdeauna
datelor de intrare gresite, a ipotezelor de calcul eronate sau utilizarii
necorespunzatoare a comenzilor.
Calculatorul nu greseste niciodata !!!
12
3. NOTATII UZUALE (in ordine alfabetica)
[B], B matricea derivatelor functiilor de aproximare
[C], C matricea de amortizare
[D], D matricea conductivitatii
[E], E matricea de elasticitate
{ε}, εεεεvectorul deformatiilor specifice
{u}, u
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
{u}, u
{δ}, δδδδ vectorii deplasarilor/grade de libertate
{d}, d
{F}, F vectorul fortelor
{H}, H vectorul potentialului hidraulic
[I], I matricea unitate
13
[K], K matricea de rigiditate
[M], M matricea maselor
[N], N matricea functiilor de aproximare
[0], 0 matricea nula
{R}, R vectorul incarcarilor
{σ}, σσσσ vectorul eforturilor unitatre
{T}, T vectorul temperaturilor nodale
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
{T}, T vectorul temperaturilor nodale
{v}, v vectorul vitezei de infiltratie
u, v, w componentele deplasarii
δU lucru mecanic virtual al fortelor interioare
δW lucru mecanic virtual al fortelor exterioare
x, y, z coordonatele sistemului de referinta global
r, s, tcoordonate normalizate
14
4. SOLUTII DISCRETE – EXEMPLE SIMPLE
MEF este un procedeu de obtinere a unei solutii numerice (aproximare
numerica), inlocuind “solutia exacta” a unei probleme exprimate pe un
domeniu D.
Domeniul D este inlocuit cu reuniunea unor subdomenii distincte si adiacente
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Domeniul D este inlocuit cu reuniunea unor subdomenii distincte si adiacente
De (elemente); geometria domeniului D este aproximata de reuniunea
subdomeniilor individuale.
Functia necunoscuta este aproximata local pe fiecare element, pe baza unei
formule de interpolare, exprimata in functie de valorile nodale ale functiei (si,
eventual, ale derivatelor sale) – in puncte amplasate pe conturul elementului
(noduri).
15
α
d
ln
1
2
3
4
5
6
7
8
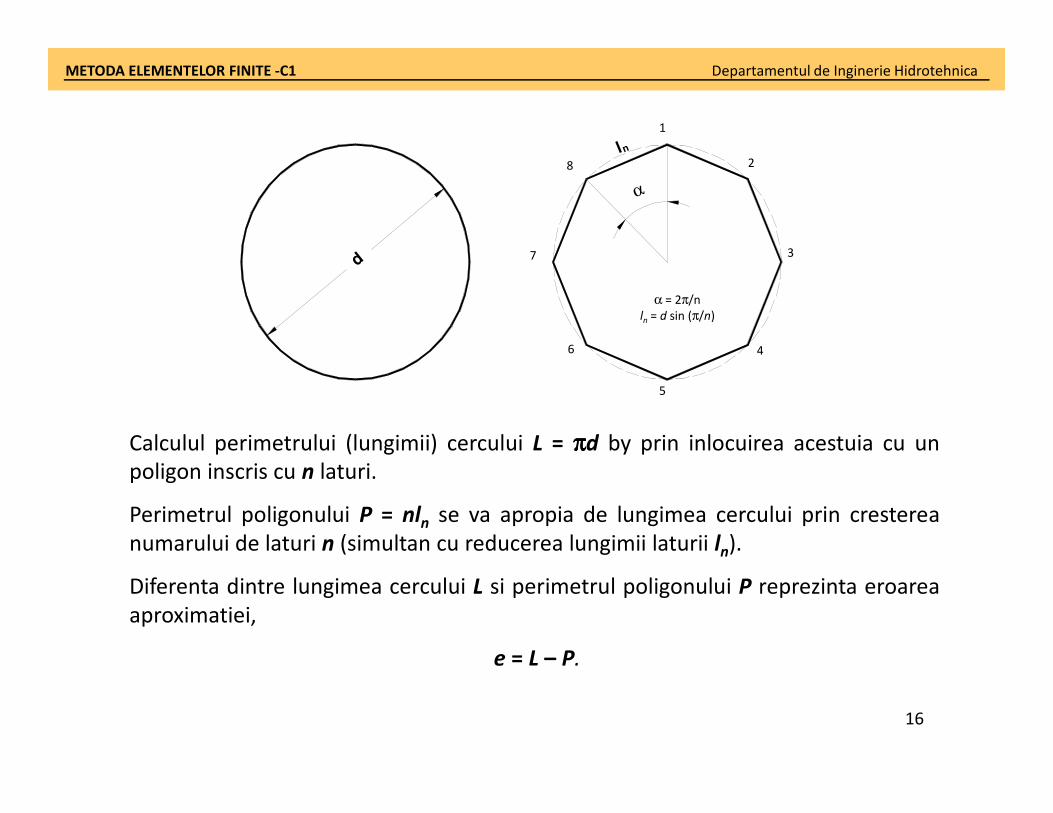
α = 2π/n
ln = d sin (π/n)
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Calculul perimetrului (lungimii) cercului L = ππππd by prin inlocuirea acestuia cu un
poligon inscris cu n laturi.
Perimetrul poligonului P = nln se va apropia de lungimea cercului prin cresterea
numarului de laturi n (simultan cu reducerea lungimii laturii ln).
Diferenta dintre lungimea cercului L si perimetrul poligonului P reprezinta eroarea
aproximatiei,
e = L – P.
16
Daca sistemul fizic poate fi descris analitic printr-un model matematic sub forma unei
variable sau functii exacte u(x), aceasta poate fi inlocuita pe domeniul de studiu cu o
functie aproximativa ua(x), astfel incat diferenta (eroarea)
e(x) = ua(x) - u(x)
sa fie suficient de mica pentru scopul propus.
Etape pentru definirea functie de aproximare ua(x) :
• alegerea unei functii convenabile care depinde de un numar de n parametri a ,
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
• alegerea unei functii convenabile care depinde de un numar de n parametri ai,
u(x, a1, a2, …, an)
• gasirea parametrilor ai astfel incat conditia anterioara sa fie satisfacuta (prin atribuirea
unei valori nule erorii in n puncte diferite ale domeniului).
Functia de aproximare u(x, a1, a2, …, an) este aleasa in mod obisnuit astfel incat sa
permita operatii de diferentiere si integrare simple, deobicei sub forma polinomiala.
17
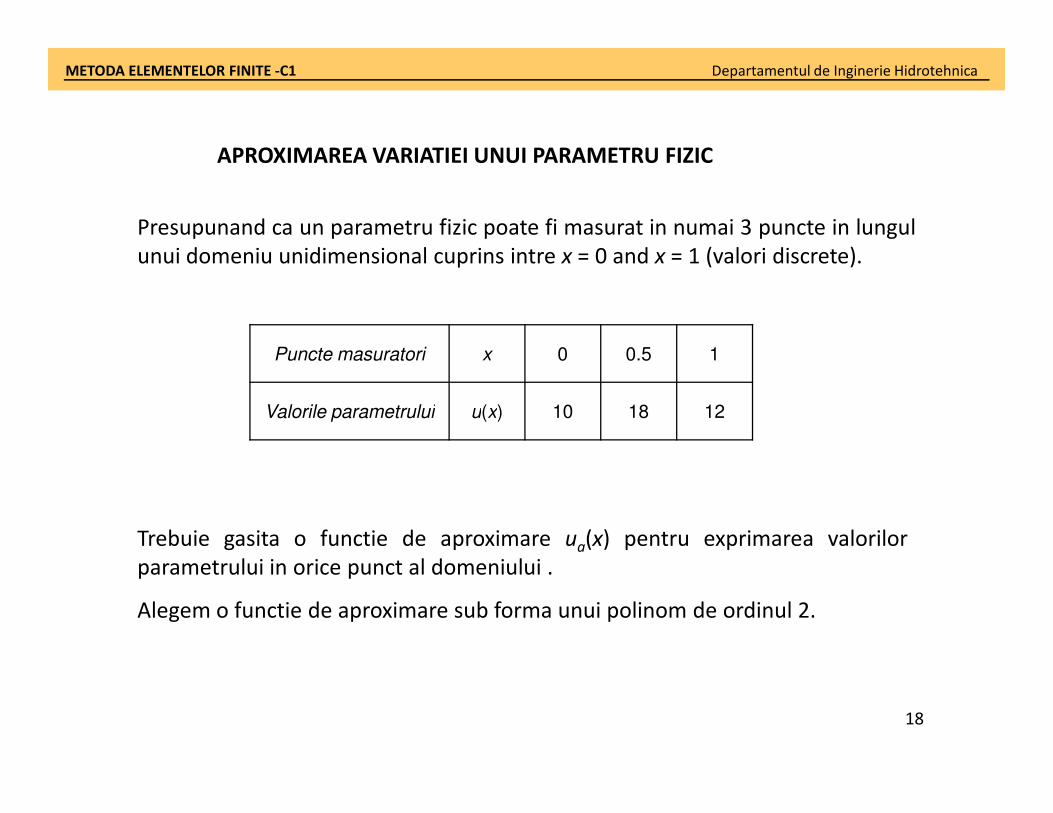
APROXIMAREA VARIATIEI UNUI PARAMETRU FIZIC
Presupunand ca un parametru fizic poate fi masurat in numai 3 puncte in lungul
unui domeniu unidimensional cuprins intre x = 0 and x = 1 (valori discrete).
Puncte masuratori x 0 0.5 1
Valorile parametrului u(x) 10 18 12
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Valorile parametrului u(x) 10 18 12
Trebuie gasita o functie de aproximare ua(x) pentru exprimarea valorilor
parametrului in orice punct al domeniului .
Alegem o functie de aproximare sub forma unui polinom de ordinul 2.
18
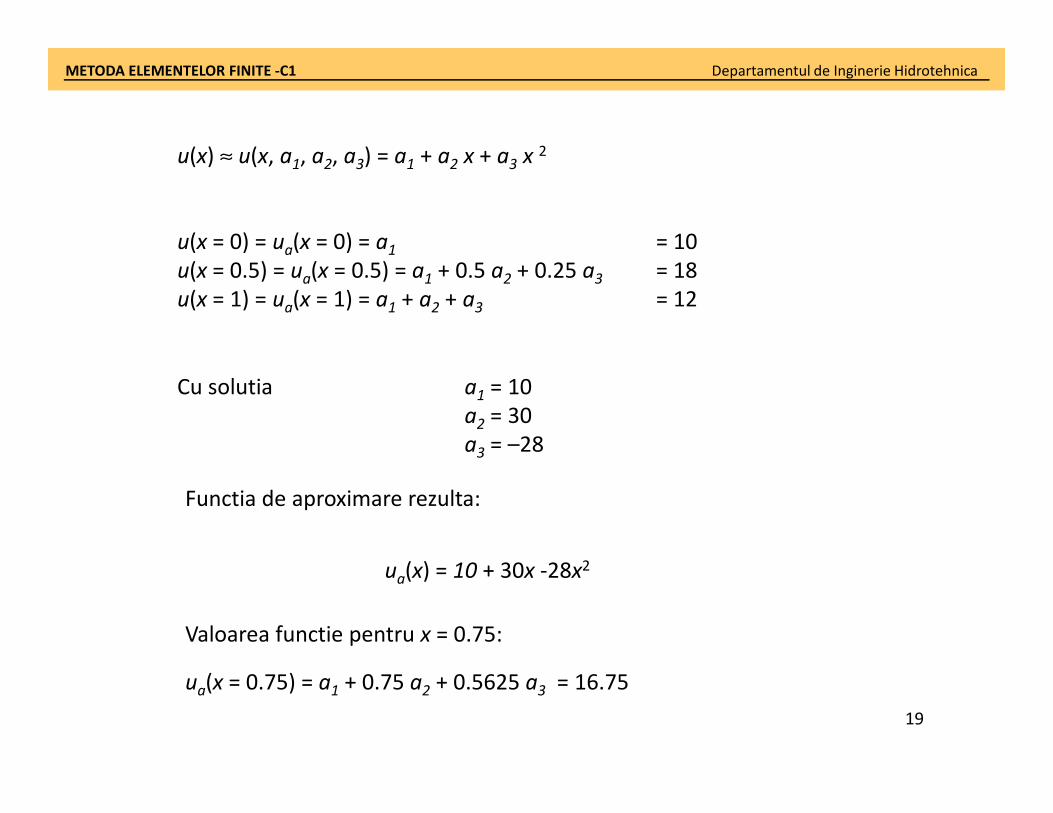
u(x) ≈ u(x, a1, a2, a3) = a1 + a2 x + a3 x 2
u(x = 0) = ua(x = 0) = a1 = 10
u(x = 0.5) = ua(x = 0.5) = a1 + 0.5 a2 + 0.25 a3 = 18
u(x = 1) = ua(x = 1) = a1 + a2 + a3 = 12
Cu solutia a1 = 10
a = 30
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
a2 = 30
a3 = –28
ua(x = 0.75) = a1 + 0.75 a2 + 0.5625 a3 = 16.75
Functia de aproximare rezulta:
ua(x) = 10 + 30x -28x2
Valoarea functie pentru x = 0.75:
19
xx1 x2 x3 x4
u1
u2
u3
u4
u
ua
u(x)
uai(x)
1 2 3 4
D1 D2 D3
D
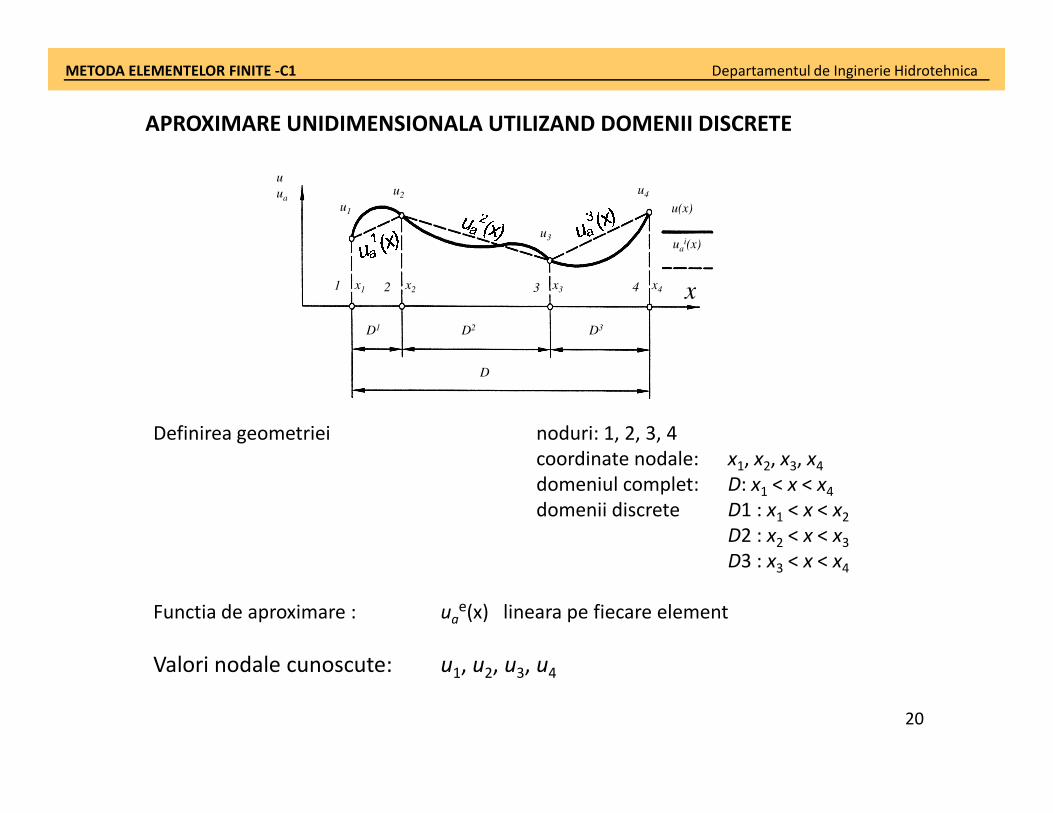
APROXIMARE UNIDIMENSIONALA UTILIZAND DOMENII DISCRETE
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Definirea geometriei noduri: 1, 2, 3, 4
coordinate nodale: x1, x2, x3, x4
domeniul complet: D: x1 < x < x4
domenii discrete D1 : x1 < x < x2
D2 : x2 < x < x3
D3 : x3 < x < x4
Functia de aproximare : uae(x) lineara pe fiecare element
Valori nodale cunoscute: u1, u2, u3, u4
20

Etape:
1 – identificarea subdomeniilor (elementelor) De ∈ D, ∑De ≈ D;
2 – definirea unei functii de aproximare ua(x)e pe fiecare element, prin aplicarea
metodei aproximarii nodale
Caracteristici ale metodei de aproximare:
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
1 – fiecare functie ua(x)e este definita utilizand numai variabilele nodale atasate
elementului De;
2 – functia de aproximare ua(x)e trebuie sa fie continua pe sub-domeniul De;
3 - functia de aproximare ua(x)e trebuie sa satisfaca anumite conditii de continuitate la
granita intre sub-domenii (elemente)
21
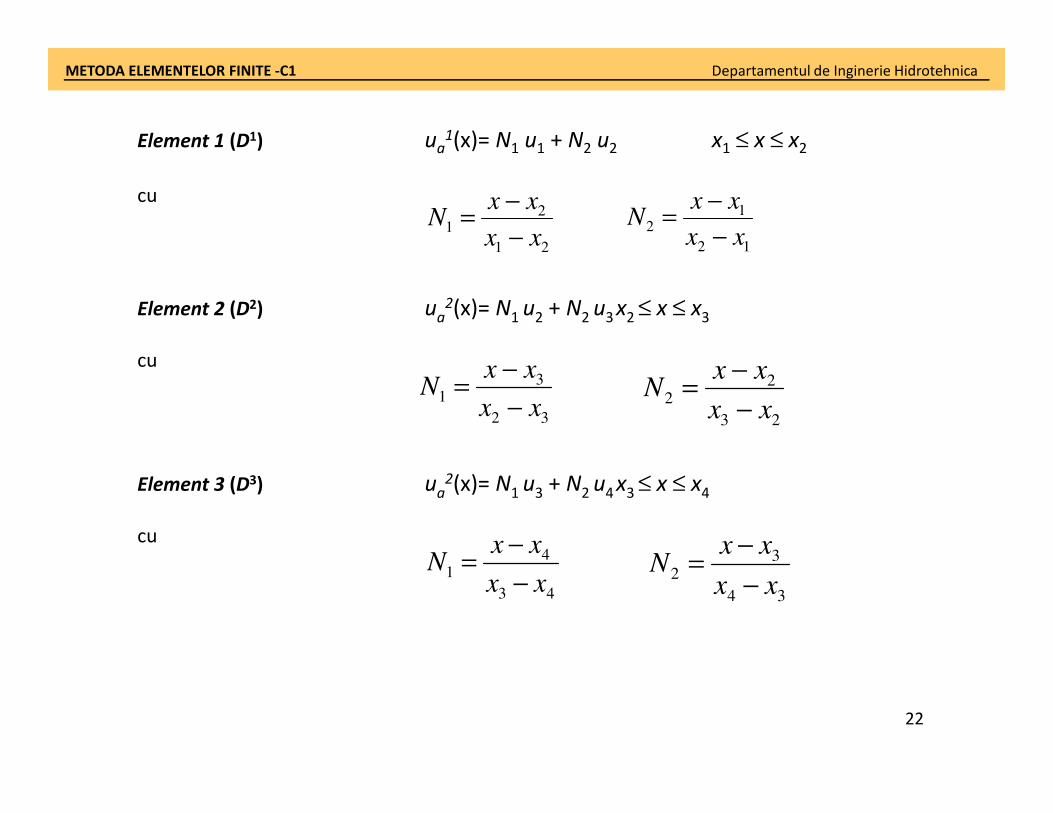
Element 1 (D1) ua1(x)= N1 u1 + N2 u2 x1 ≤ x ≤ x2
cu
21
21
xx
xxN
−
−=
12
12
xx
xxN
−
−=
31
xx
xxN
−
−= 2
2xx
xxN
−
−=
Element 2 (D2) ua2(x)= N1 u2 + N2 u3 x2 ≤ x ≤ x3
cu
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
32 xx −23
2xx −
43
4
1xx
xxN
−
−=
34
3
2xx
xxN
−
−=
Element 3 (D3) ua2(x)= N1 u3 + N2 u4 x3 ≤ x ≤ x4
cu
22

Functiile de aproximare uae(x) si functiile Ni(x) au exprimari similare dar sunt
diferite pe fiecare element De datorita valorilor coeficientilor polinomiali.
Suma functiilor ua1(x), ua
2(x), ua3(x) formeaza functia de aproximare pe domeniul
complet D.
Observatii:
1. Desi continuitatea functiilor de aproximare uai(x) este asigurata in punctele
nodale xi (functiile adiacente au aceeasi valoare), pantele graficelor difera
(derivatele au valori diferite);
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
(derivatele au valori diferite);
2. Functia de aproximare poate fi cautata pe domeniul D si sub forma unui
polinom de ordinul 3 de forma:
u(x) ≈ u(x, a1, a2, a3, a4) = a1 + a2 x + a3 x2 + a4 x3
Conform valorilor nodale cunoscute ale functiei, se determina cei 4 parametrii
ai (coeficientii polinomiali).
O aceeasi problema de aproximare poate fi rezolvata fie utilizant functii
lineare simple pe domenii discrete, fie prin functii de aproximare de ordin
superior pe intregul domeniu.
23
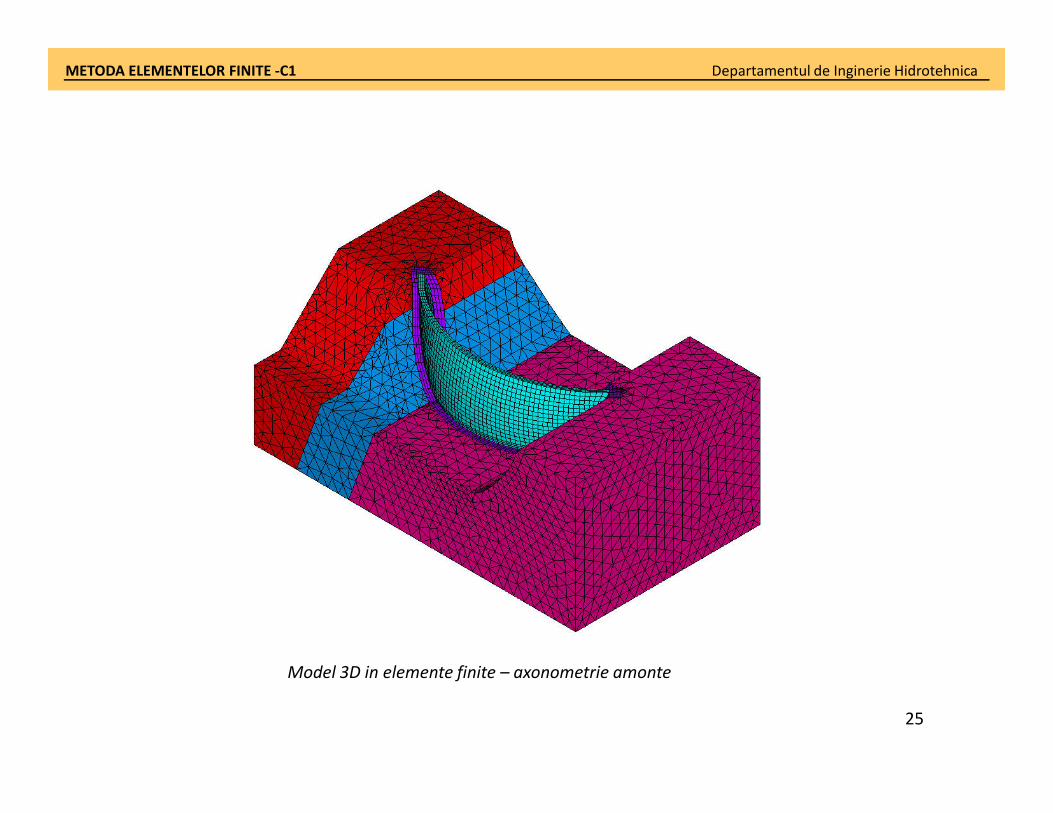
BARAJ BRADISOR – ANALIZA STRUCTURALA
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
24
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Model 3D in elemente finite – axonometrie amonte
25

METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Model 3D in elemente finite – axonometrie aval
26
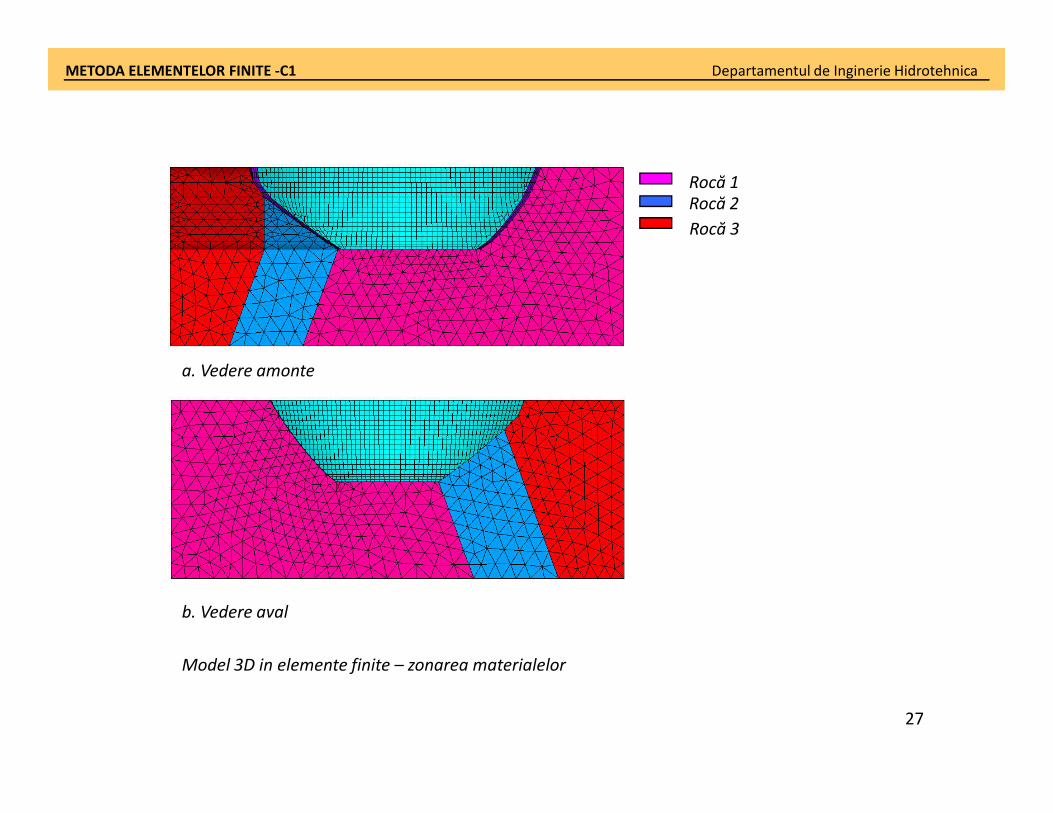
Rocă 1
Rocă 2
Rocă 3
a. Vedere amonte
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
b. Vedere aval
Model 3D in elemente finite – zonarea materialelor
27
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
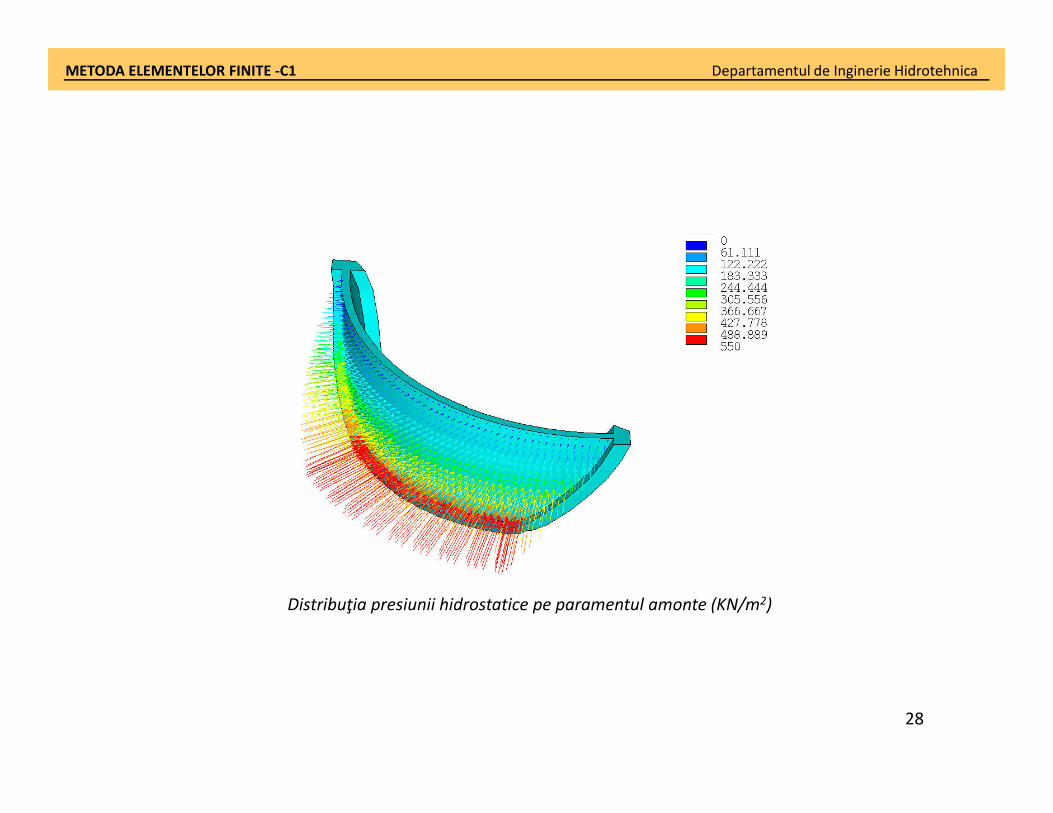
Distribuţia presiunii hidrostatice pe paramentul amonte (KN/m2)
28
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
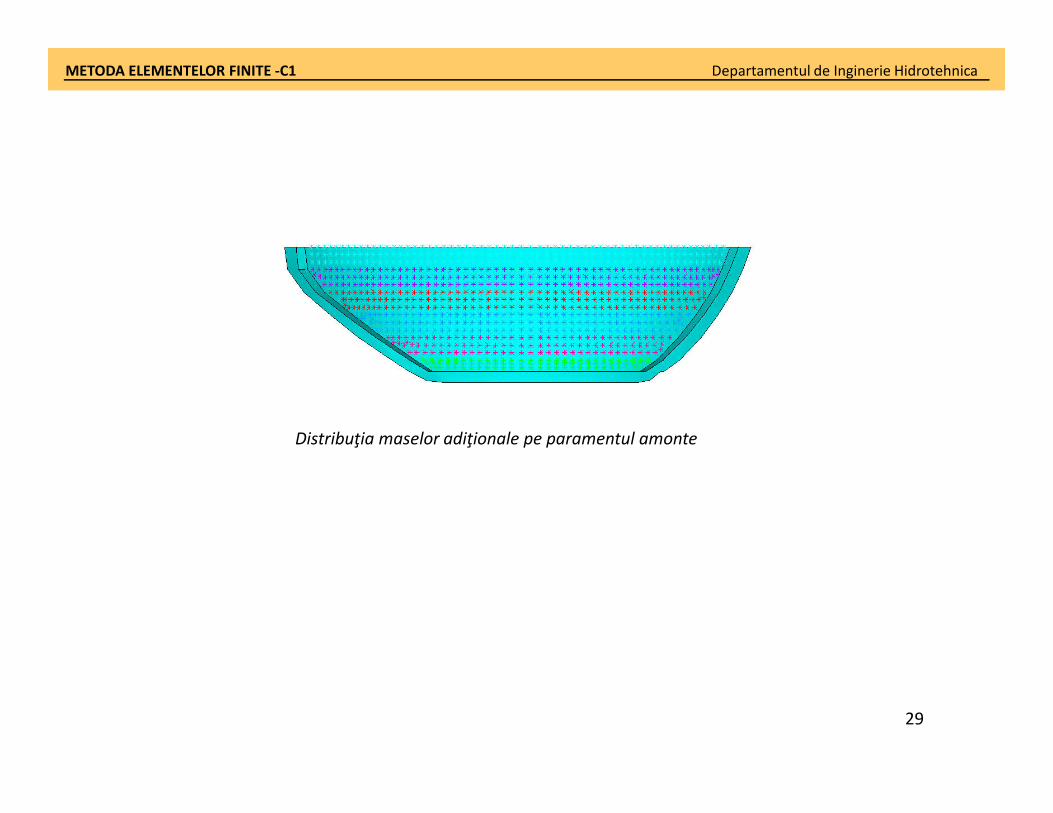
Distribuţia maselor adiţionale pe paramentul amonte
29
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
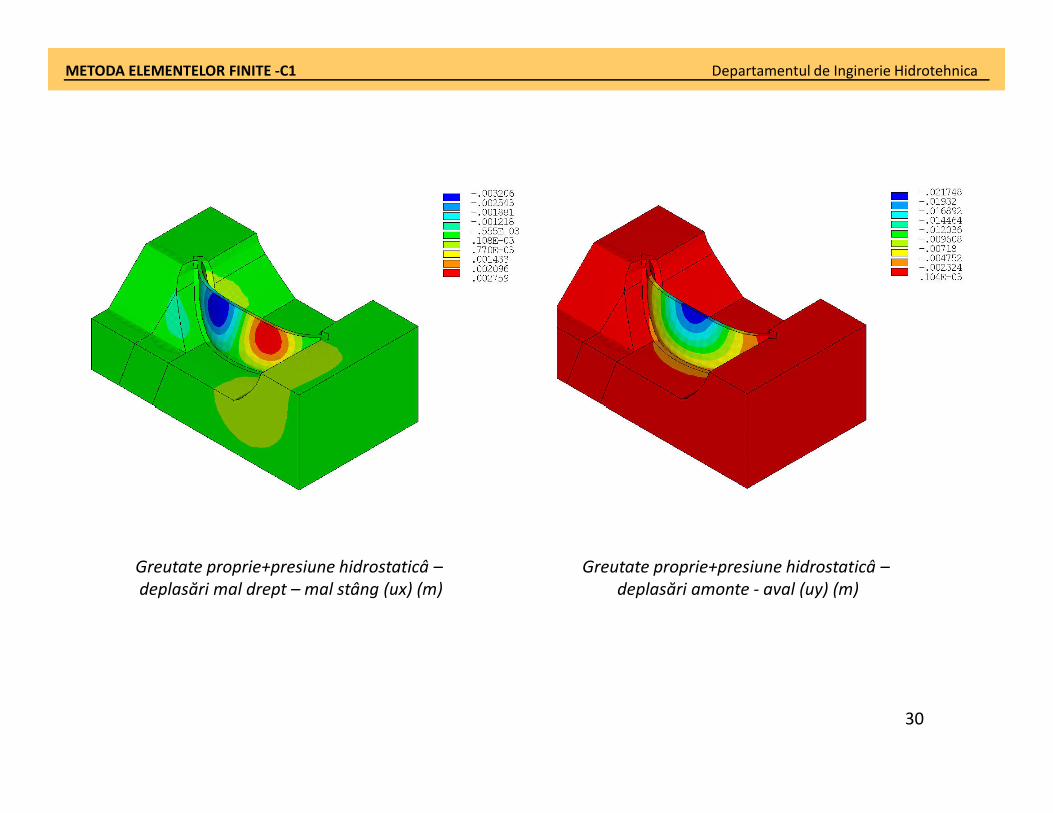
Greutate proprie+presiune hidrostaticâ –
deplasări amonte - aval (uy) (m)
Greutate proprie+presiune hidrostaticâ –
deplasări mal drept – mal stâng (ux) (m)
30
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
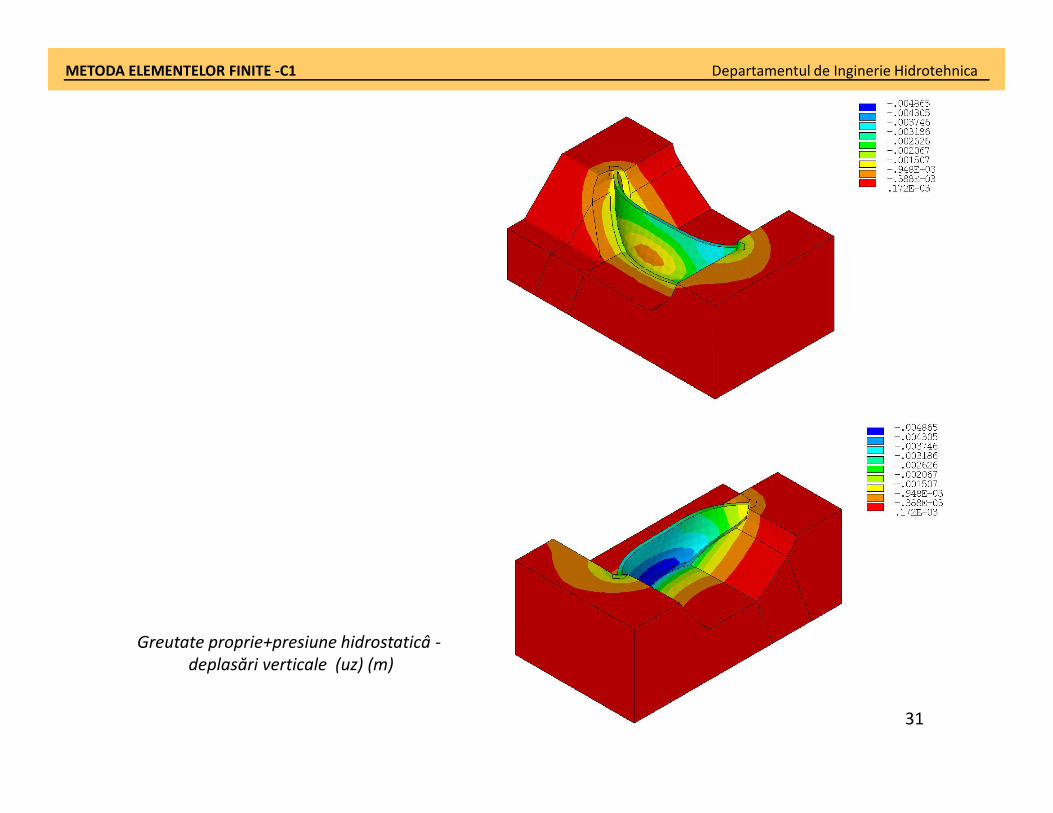
Greutate proprie+presiune hidrostaticâ -
deplasări verticale (uz) (m)
31
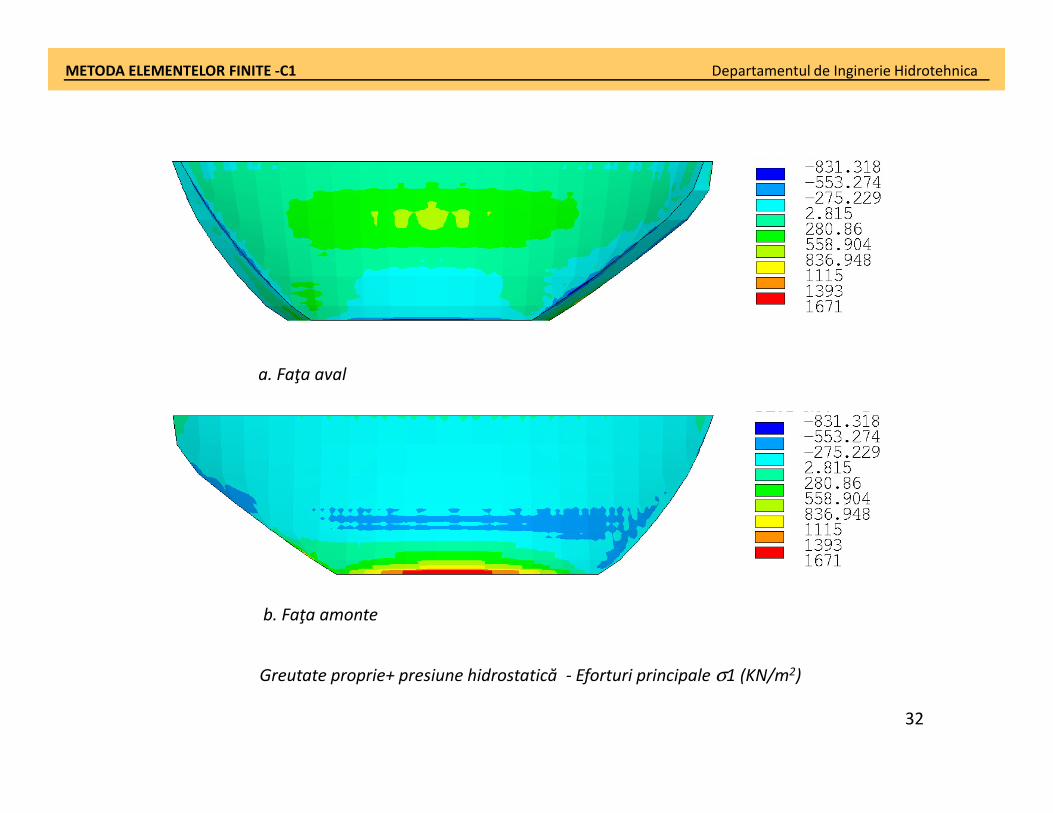
a. Faţa aval
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Greutate proprie+ presiune hidrostatică - Eforturi principale σ1 (KN/m2)
b. Faţa amonte
32
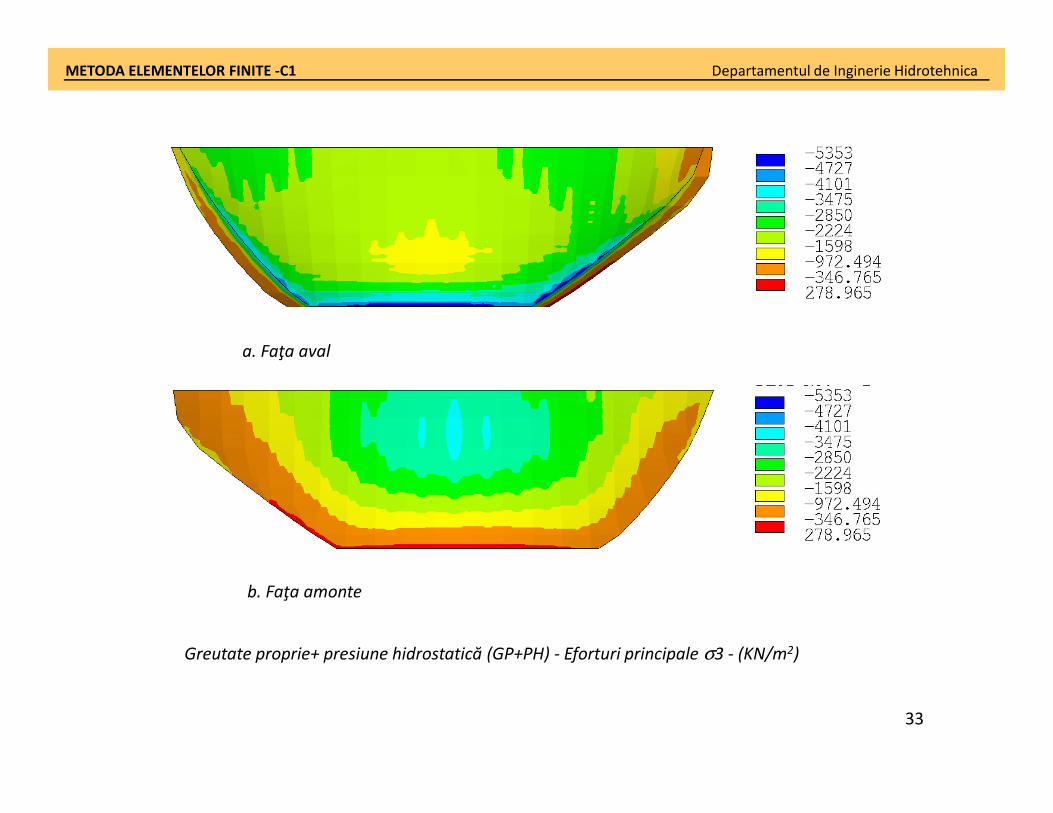
a. Faţa aval
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Greutate proprie+ presiune hidrostatică (GP+PH) - Eforturi principale σ3 - (KN/m2)
b. Faţa amonte
33
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
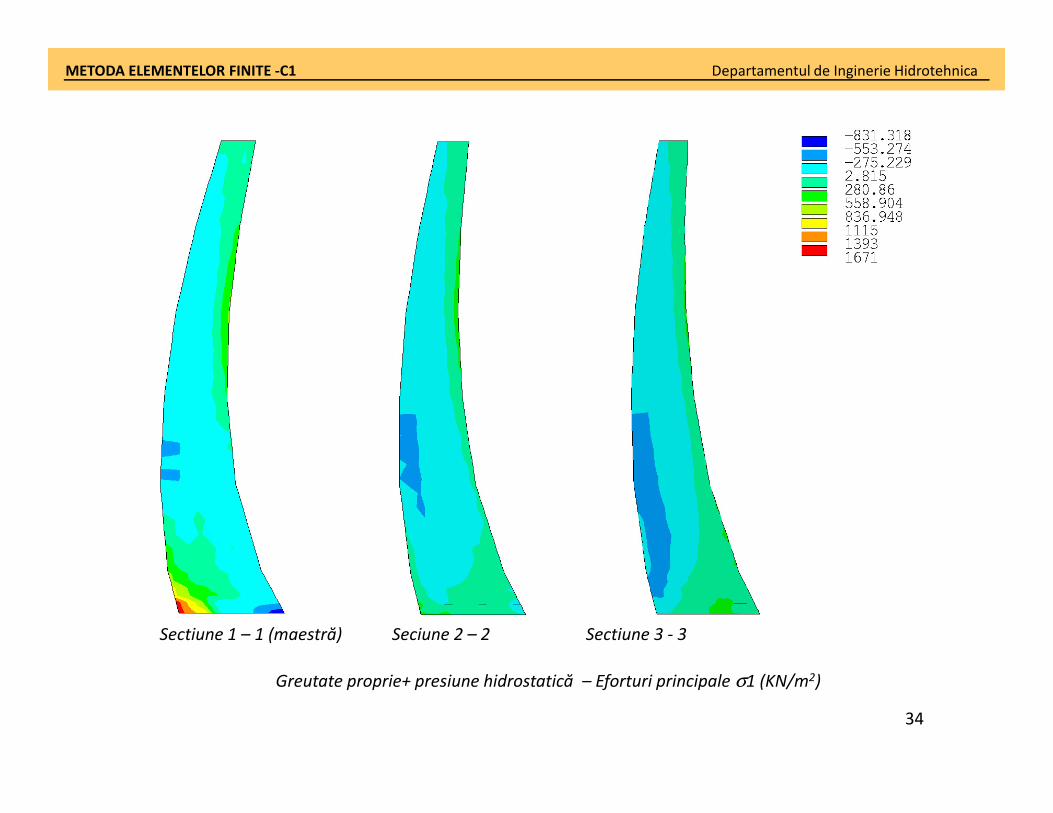
Greutate proprie+ presiune hidrostatică – Eforturi principale σ1 (KN/m2)
Sectiune 1 – 1 (maestră) Seciune 2 – 2 Sectiune 3 - 3
34
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
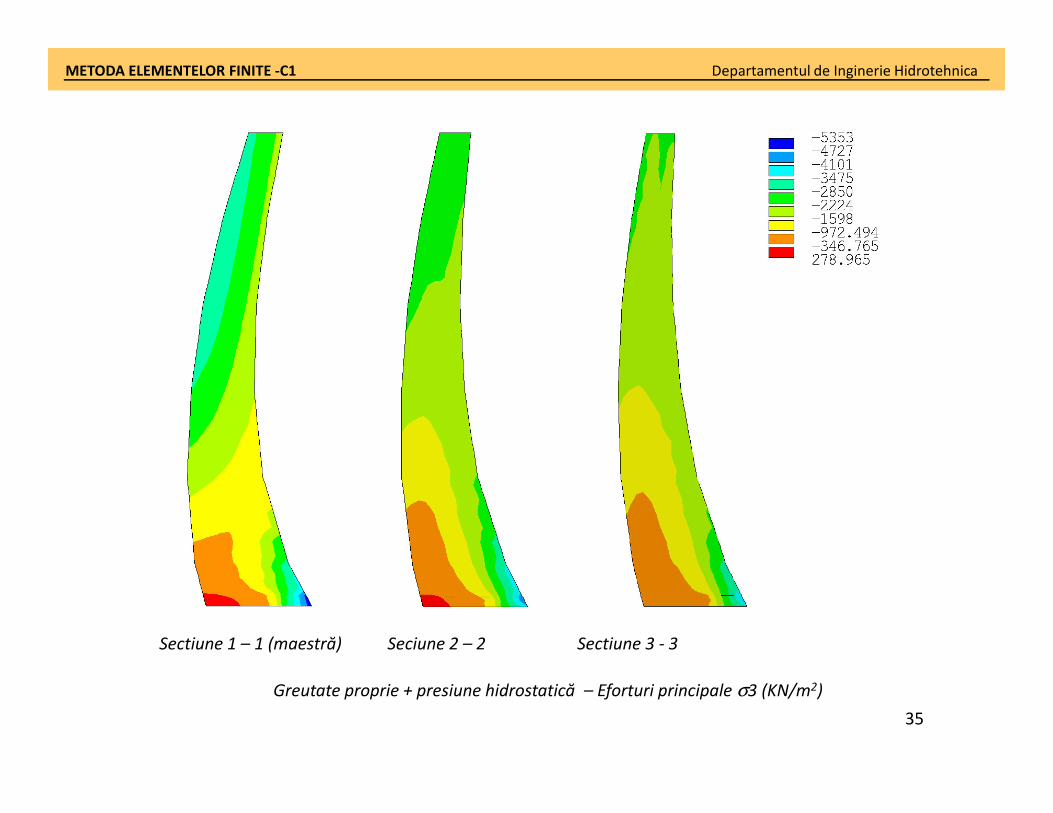
Greutate proprie + presiune hidrostatică – Eforturi principale σ3 (KN/m2)
Sectiune 1 – 1 (maestră) Seciune 2 – 2 Sectiune 3 - 3
35
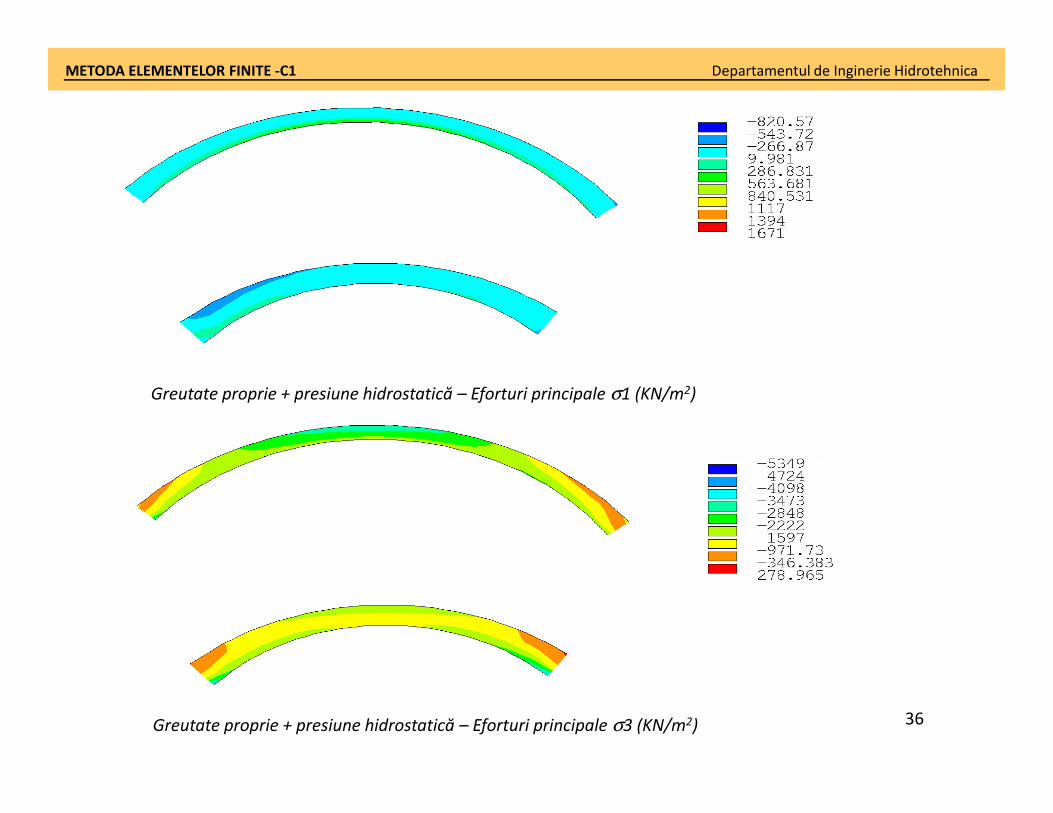
Greutate proprie + presiune hidrostatică – Eforturi principale σ1 (KN/m2)
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Greutate proprie + presiune hidrostatică – Eforturi principale σ3 (KN/m2) 36
Dinamic - Lac plin – modul 1 de vibraţie – T1 = 0.270 sec Dinamic - Lac plin – modul 2 de vibraţie – T2 = 0.252 sec
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
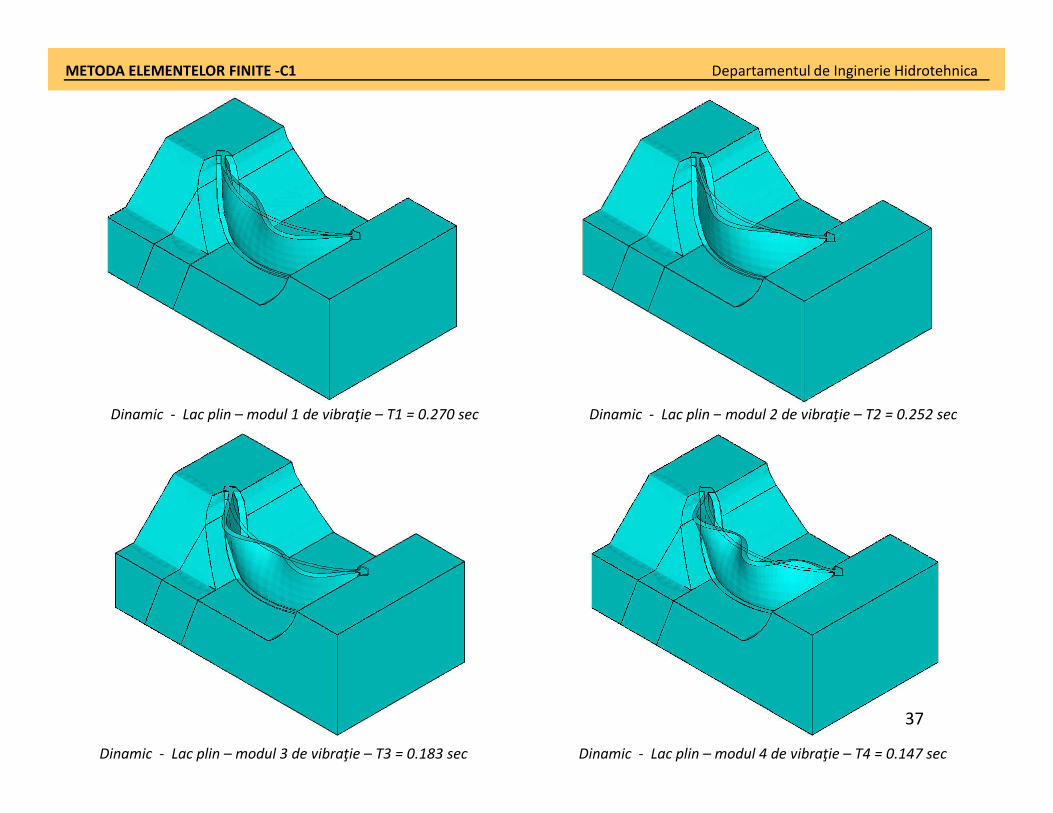
Dinamic - Lac plin – modul 1 de vibraţie – T1 = 0.270 sec Dinamic - Lac plin – modul 2 de vibraţie – T2 = 0.252 sec
Dinamic - Lac plin – modul 3 de vibraţie – T3 = 0.183 sec Dinamic - Lac plin – modul 4 de vibraţie – T4 = 0.147 sec
37
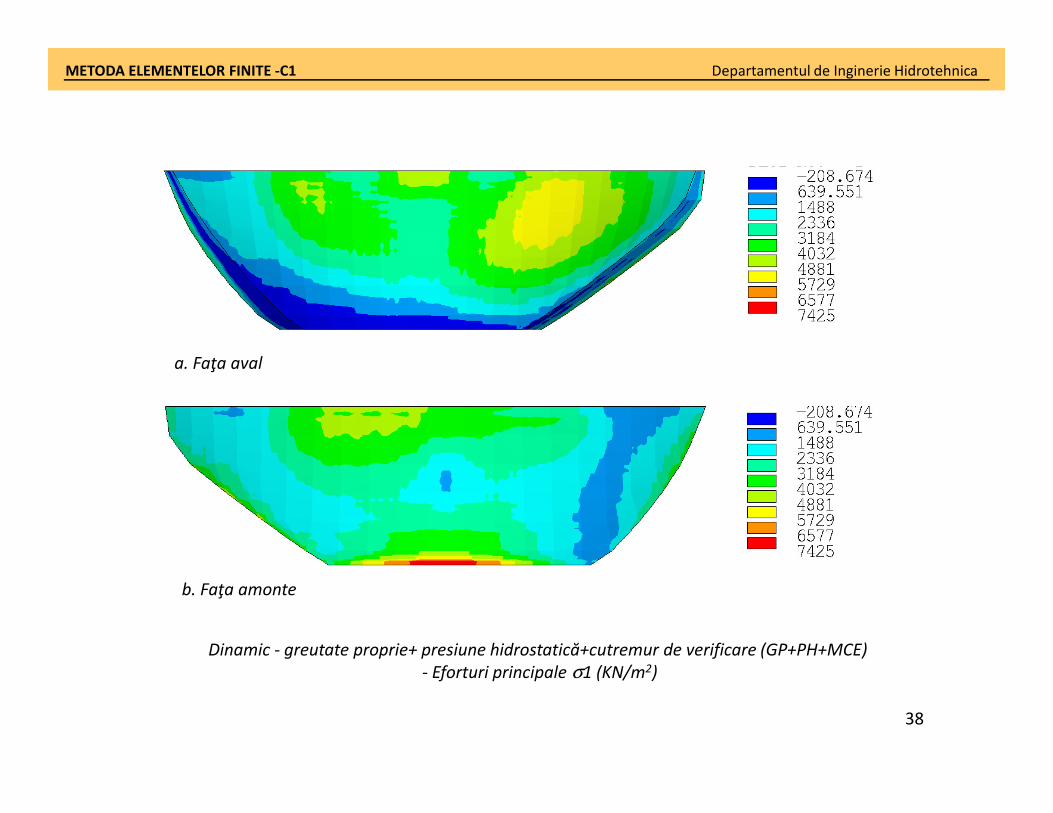
a. Faţa aval
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Dinamic - greutate proprie+ presiune hidrostatică+cutremur de verificare (GP+PH+MCE)
- Eforturi principale σ1 (KN/m2)
b. Faţa amonte
38

a. Faţa aval
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Dinamic - greutate proprie+ presiune hidrostatică+cutremur verificare (GP+PH+MCE)
- Eforturi principale σ3 (KN/m2)
b. Faţa amonte
39
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
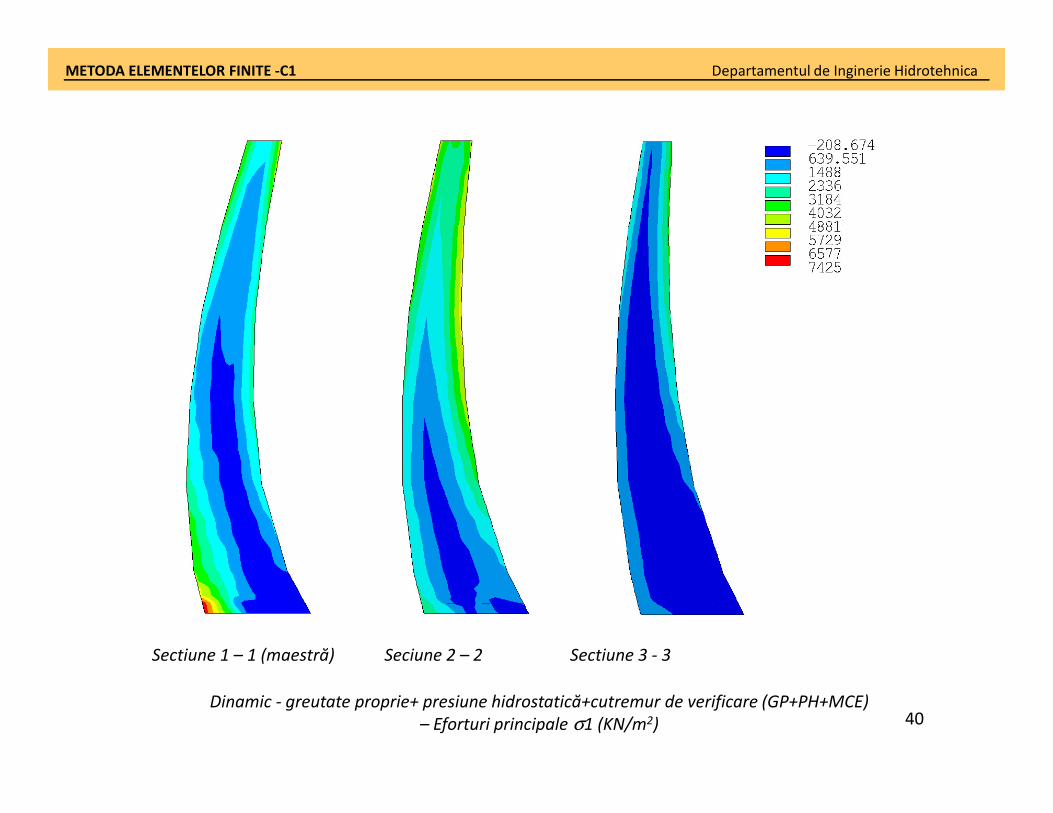
Dinamic - greutate proprie+ presiune hidrostatică+cutremur de verificare (GP+PH+MCE)
– Eforturi principale σ1 (KN/m2)
Sectiune 1 – 1 (maestră) Seciune 2 – 2 Sectiune 3 - 3
40
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
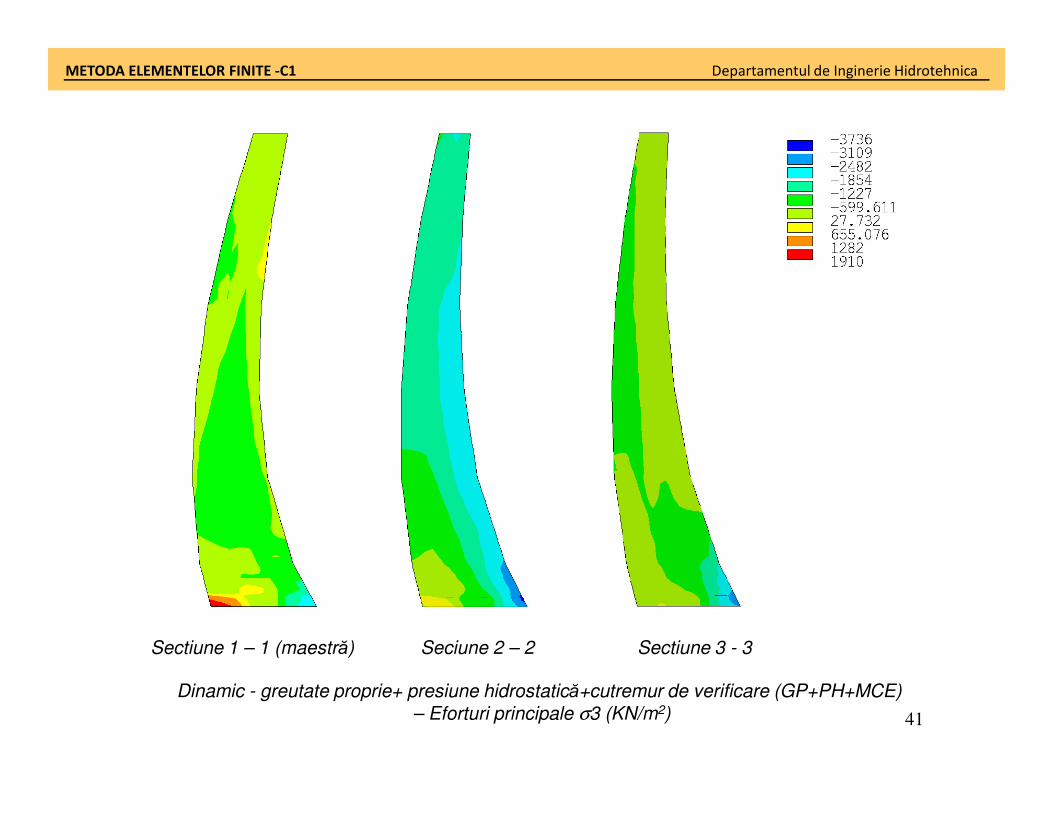
Sectiune 1 – 1 (maestră) Seciune 2 – 2 Sectiune 3 - 3
Dinamic - greutate proprie+ presiune hidrostatică+cutremur de verificare (GP+PH+MCE)
– Eforturi principale σ3 (KN/m2) 41
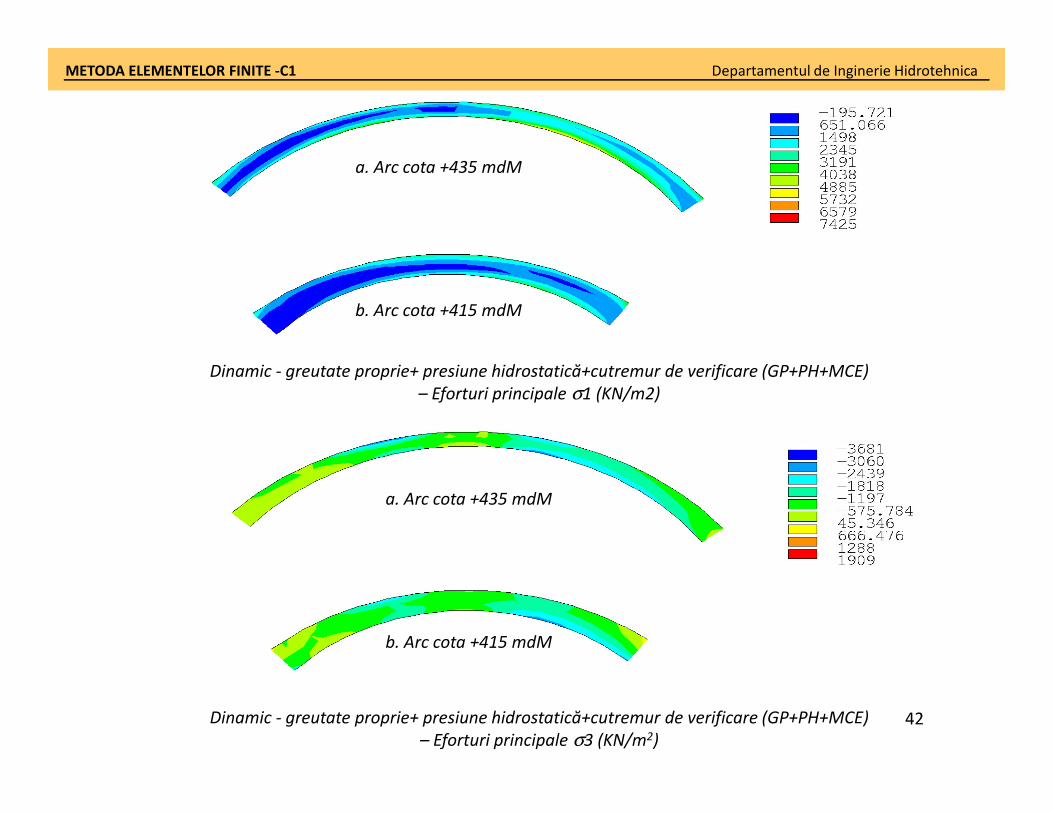
Dinamic - greutate proprie+ presiune hidrostatică+cutremur de verificare (GP+PH+MCE)
– Eforturi principale σ1 (KN/m2)
a. Arc cota +435 mdM
b. Arc cota +415 mdM
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
a. Arc cota +435 mdM
b. Arc cota +415 mdM
Dinamic - greutate proprie+ presiune hidrostatică+cutremur de verificare (GP+PH+MCE)
– Eforturi principale σ3 (KN/m2)
42

CLADIRI – ANALIZA STRUCTURALA
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Structura cladire 2S+P+5E 43

METODA DIRECTA A RIGIDITATII (DSM)
Cel mai simplu element structural este bara dublu articulata (pendulul), capabila
sa preia numai forta axiala (forta taietoare si momentul incovoietor sunt zero).
2 Fx=10210
)2()1( == LL
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
1 3
(1) (2)
(3)
Fy = -20
Nivelul efortului unitar in fiecare componenta structurala se considera suficient de
redus astfel incat materialul sa se gaseasca in domeniul linear-elastic de
comportare si este exclusa pierderea stabilitatii (flambajul).
2100)2()1( == EAEA
100)3( =EA
20)3( =L
44
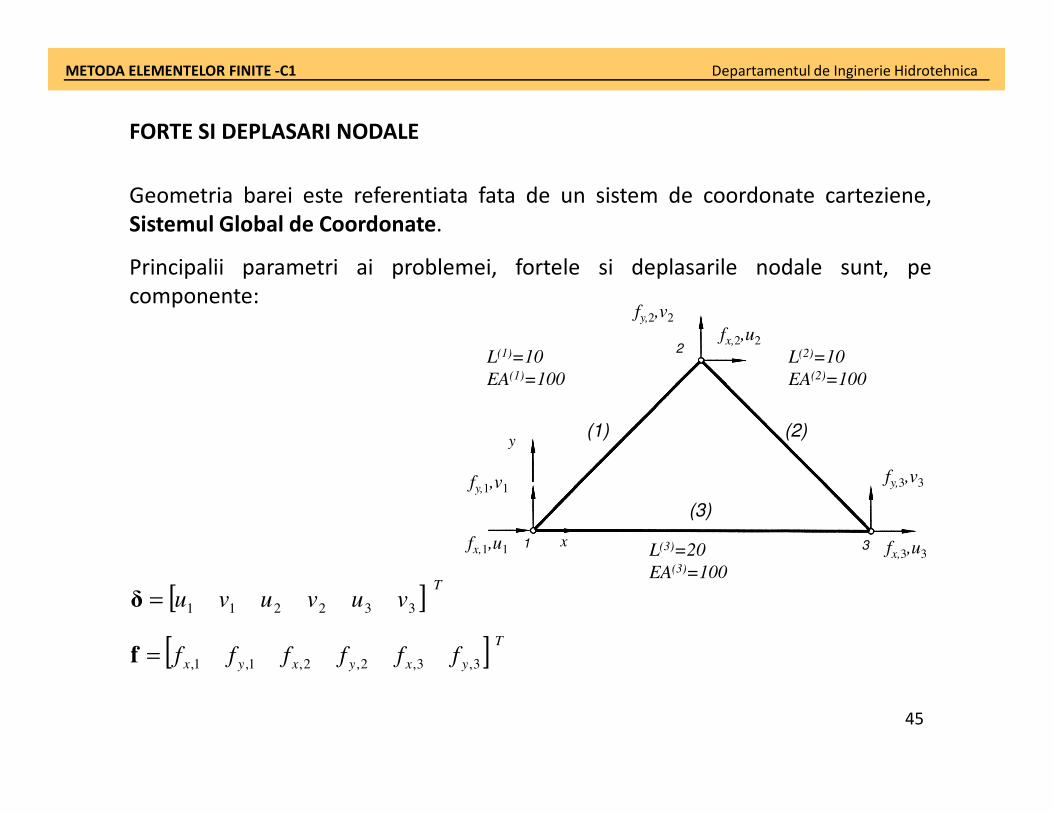
FORTE SI DEPLASARI NODALE
Geometria barei este referentiata fata de un sistem de coordonate carteziene,
Sistemul Global de Coordonate.
Principalii parametri ai problemei, fortele si deplasarile nodale sunt, pe
componente:
2fx,2,u2
fy,2,v2
L(2)=10
EA(2)=100
L(1)=10
EA(1)=100
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
L(3)=20
EA(3)=100
1 3
(1) (2)
(3)
fx,3,u3fx,1,u1
fy,3,v3fy,1,v1
x
y
[ ] T
yxyxyx ffffff3,3,2,2,1,1,
=f
[ ]T
vuvuvu 332211=δ
45
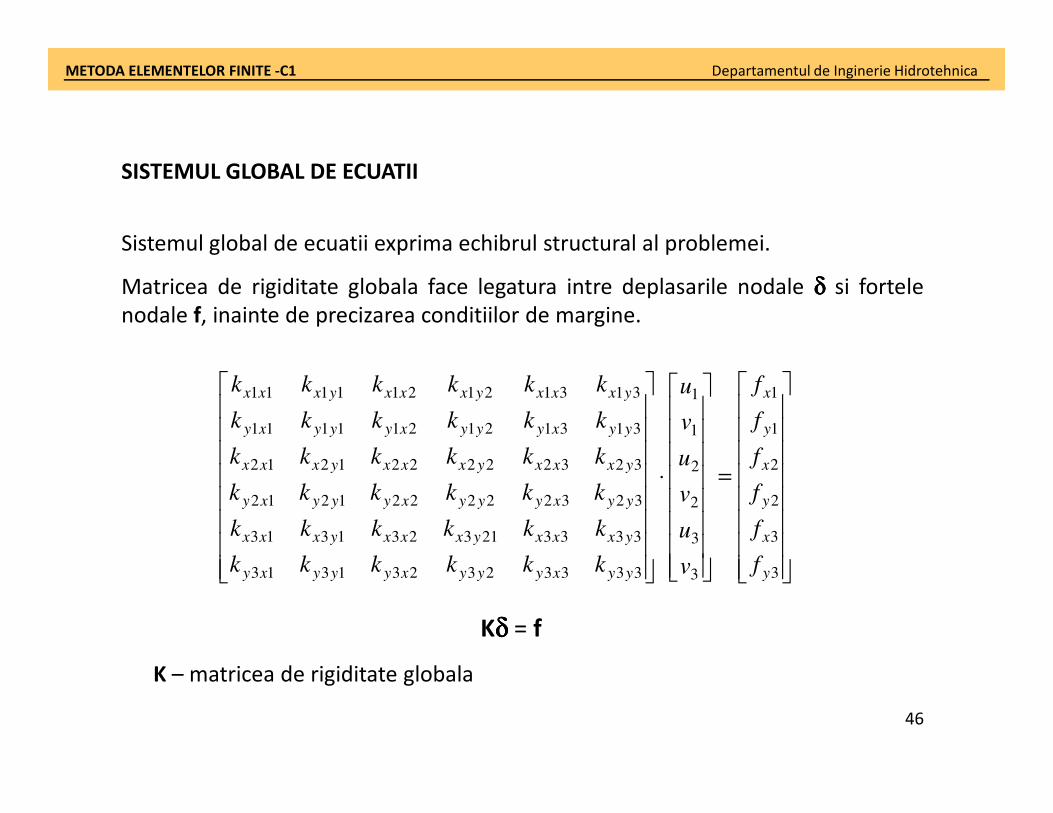
SISTEMUL GLOBAL DE ECUATII
Sistemul global de ecuatii exprima echibrul structural al problemei.
Matricea de rigiditate globala face legatura intre deplasarile nodale δδδδ si fortele
nodale f, inainte de precizarea conditiilor de margine.
11313121211111 xyxxxyxxxyxxx
f
fu
kkkkkk
kkkkkk
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
=
⋅
3
3
2
2
1
3
3
2
2
1
333323231313
3333213231313
323222221212
323222221212
313121211111
y
x
y
x
y
yyxyyyxyyyxy
yxxxyxxxyxxx
yyxyyyxyyyxy
yxxxyxxxyxxx
yyxyyyxyyyxy
f
f
f
f
f
v
u
v
u
v
kkkkkk
kkkkkk
kkkkkk
kkkkkk
kkkkkk
Kδδδδ = f
K – matricea de rigiditate globala
46

Termenii matricii de rigiditate pot fi interpretati prin alegerea unui vector al
deplasarii δδδδ astfel incat toate componentele sale sa fie 0 cu exceptia componentei
“i”, care este 1.
Coloana “i” a matricii de rigiditate devine astfel vectorul fortelor f.
0
0
31yx
k
k
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
=
1
0
0
0
0
δ
=
33
33
32
32
31
yy
yx
yy
yx
yy
k
k
k
k
k
fSpre exemplu,
dacavectorul fortelor devine
47
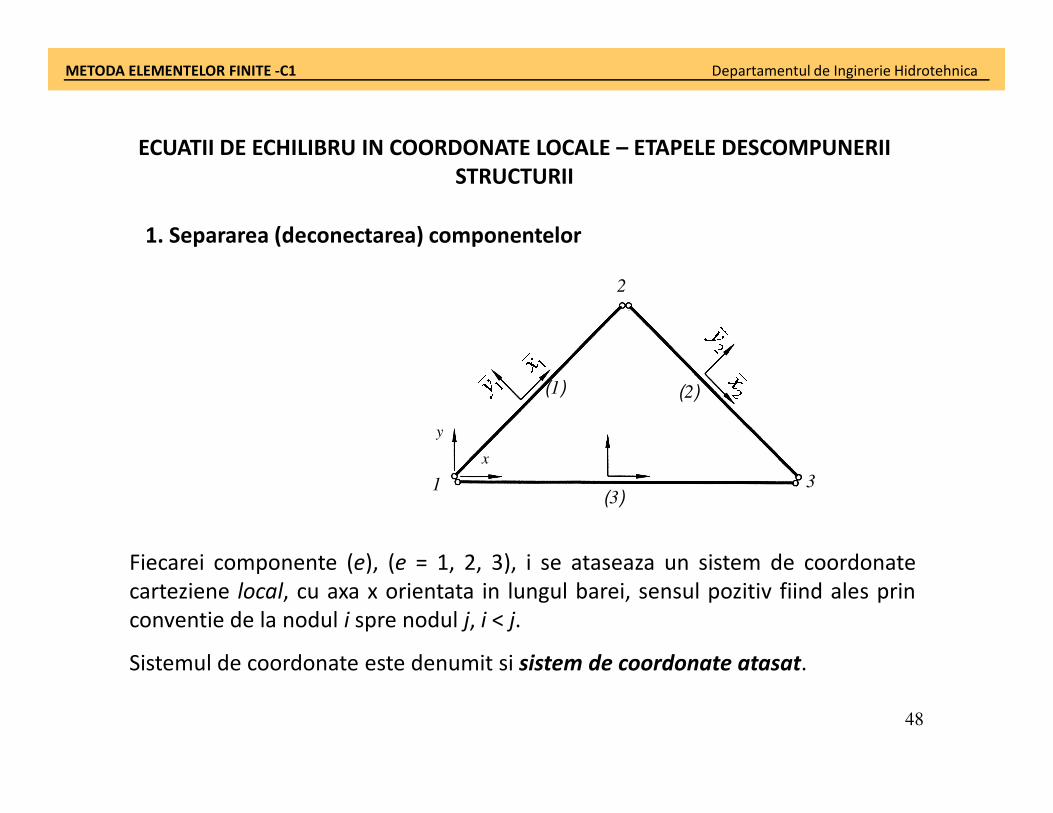
ECUATII DE ECHILIBRU IN COORDONATE LOCALE – ETAPELE DESCOMPUNERII
STRUCTURII
1. Separarea (deconectarea) componentelor
2
(1) (2)
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
1 3(3)
x
y
Fiecarei componente (e), (e = 1, 2, 3), i se ataseaza un sistem de coordonate
carteziene local, cu axa x orientata in lungul barei, sensul pozitiv fiind ales prin
conventie de la nodul i spre nodul j, i < j.
Sistemul de coordonate este denumit si sistem de coordonate atasat.
48
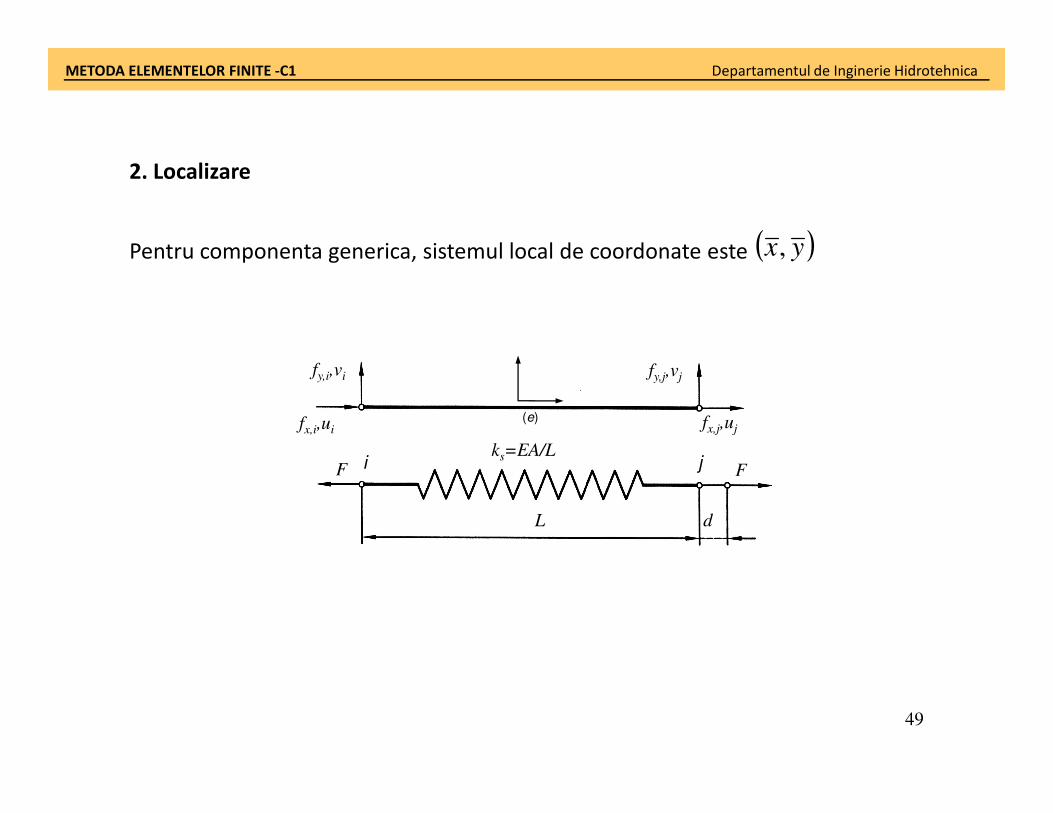
2. Localizare
Pentru componenta generica, sistemul local de coordonate este ( )yx,
fy,i,vi fy,j,vj
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
i j
(e)fx,i,ui fx,j,uj
L d
ks=EA/LF F
49
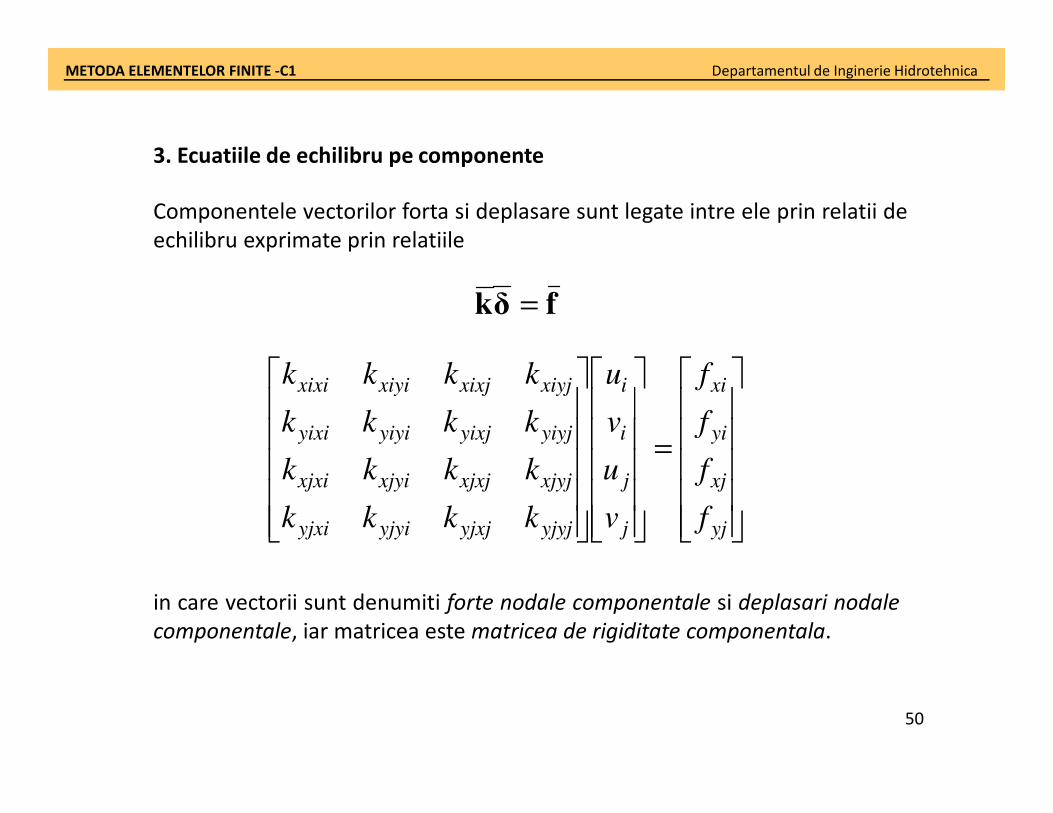
3. Ecuatiile de echilibru pe componente
Componentele vectorilor forta si deplasare sunt legate intre ele prin relatii de
echilibru exprimate prin relatiile
fδk =
xiixiyjxixjxiyixixi
f
f
v
u
kkkk
kkkk
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
=
yj
xj
yi
j
j
i
yjyjyjxjyjyiyjxi
xjyjxjxjxjyixjxi
yiyjyixjyiyiyixi
f
f
f
v
u
v
kkkk
kkkk
kkkk
in care vectorii sunt denumiti forte nodale componentale si deplasari nodale
componentale, iar matricea este matricea de rigiditate componentala.
50
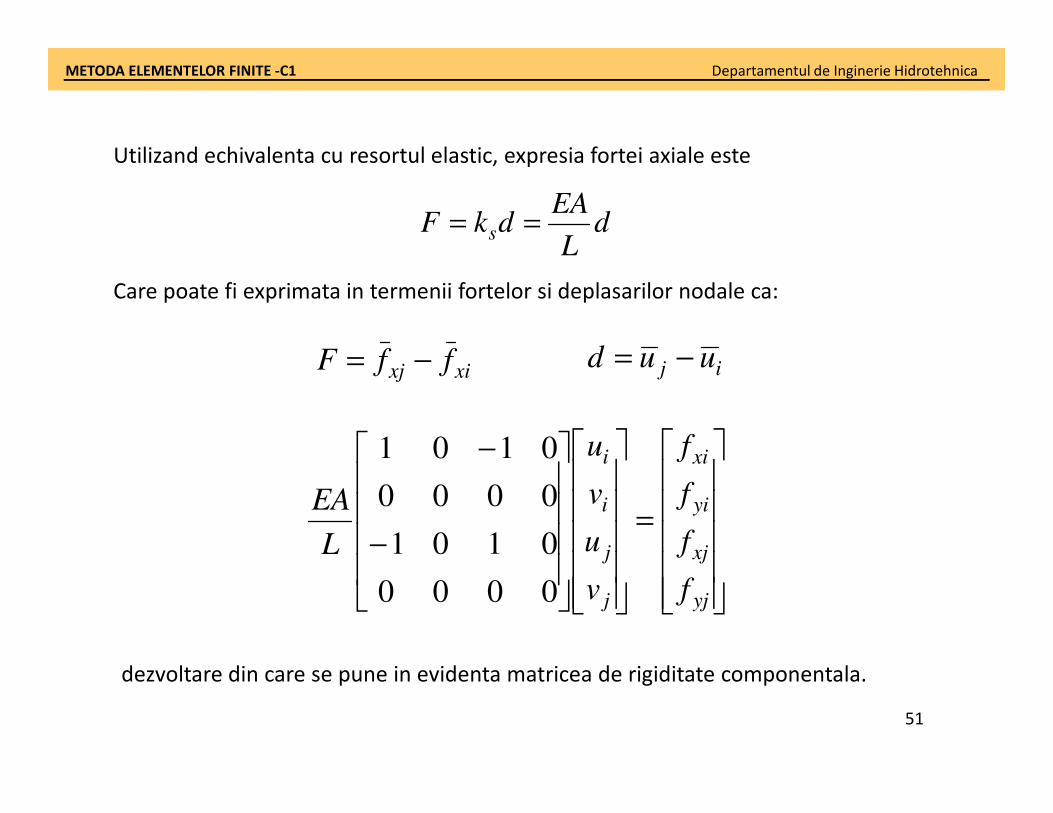
Utilizand echivalenta cu resortul elastic, expresia fortei axiale este
dL
EAdkF s ==
Care poate fi exprimata in termenii fortelor si deplasarilor nodale ca:
xixj ffF −= ij uud −=
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
=
−
−
yj
xj
yi
xi
j
j
i
i
f
f
f
f
v
u
v
u
L
EA
0000
0101
0000
0101
dezvoltare din care se pune in evidenta matricea de rigiditate componentala.
51

PROCESUL DE ASAMBLARE
Asamblarea presupune doua etape: transformarea inversa a fiecarei
componente in sistemul de coordonate global si sumarea ecuatiilor pentru
formarea sistemului global de ecuatii.
1. Transformarea coordonatelor
Aceata etapa defineste relatia matriceala de transformare a fortelor si
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Aceata etapa defineste relatia matriceala de transformare a fortelor si
deplasarilor nodale dintr-un sistem de coordonate in altul (local si global).
i
j
(e)
xy
ϕ
iu
iuiv
iv
jv
jv
ju
ju
svcuu iii += cvsuv iii +−=
svcuu jjj += cvsuv jjj +−=
52
−
−=
j
j
i
i
j
j
i
i
v
u
v
u
cs
sc
cs
sc
v
u
v
u
00
00
00
00
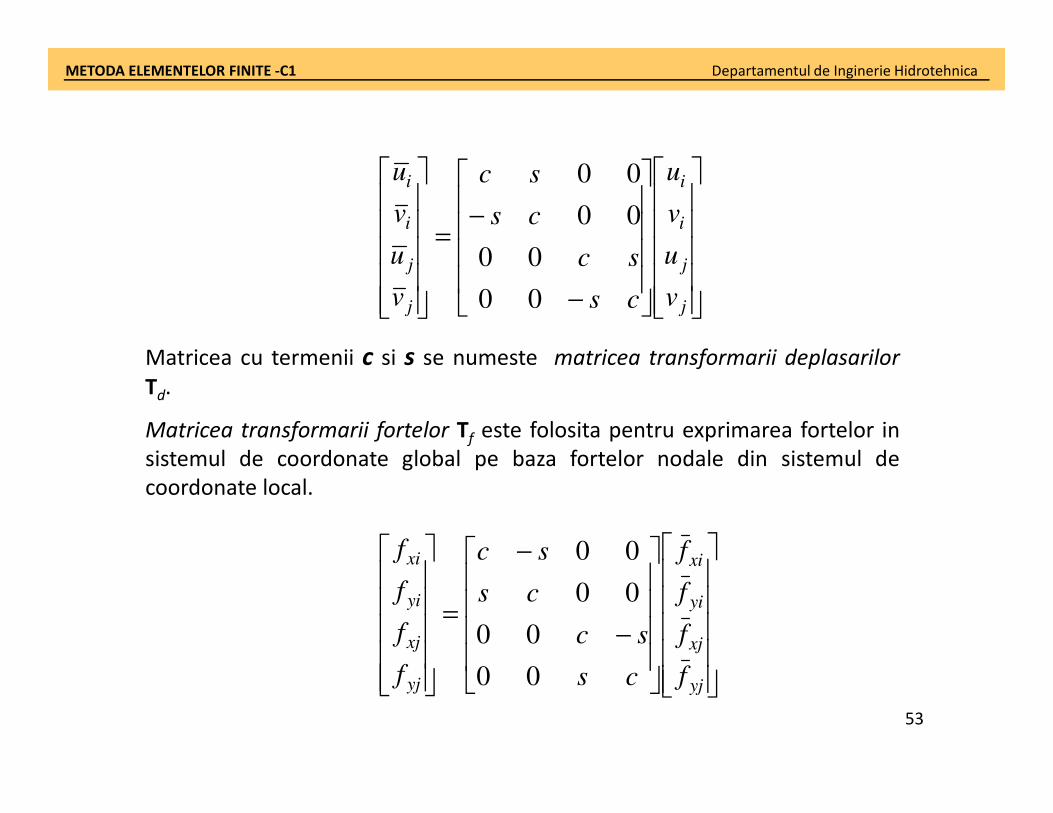
Matricea cu termenii c si s se numeste matricea transformarii deplasarilor
Td.
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Matricea transformarii fortelor Tf este folosita pentru exprimarea fortelor in
sistemul de coordonate global pe baza fortelor nodale din sistemul de
coordonate local.
−
−
=
yj
xj
yi
xi
yj
xj
yi
xi
f
f
f
f
cs
sc
cs
sc
f
f
f
f
00
00
00
00
53
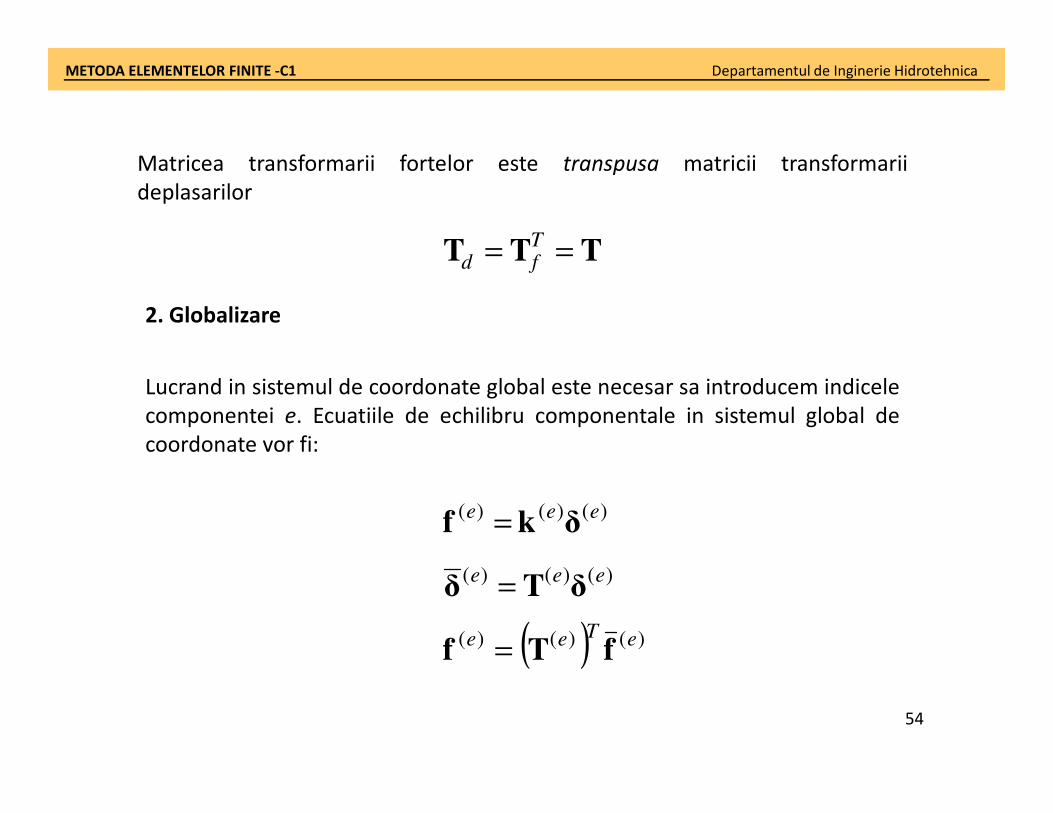
Matricea transformarii fortelor este transpusa matricii transformarii
deplasarilor
TTT == Tfd
2. Globalizare
Lucrand in sistemul de coordonate global este necesar sa introducem indicele
componentei e. Ecuatiile de echilibru componentale in sistemul global de
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
componentei e. Ecuatiile de echilibru componentale in sistemul global de
coordonate vor fi:
)()()( eeeδkf =
)()()( eeeδTδ =
( ) )()()( eTeefTf =
54
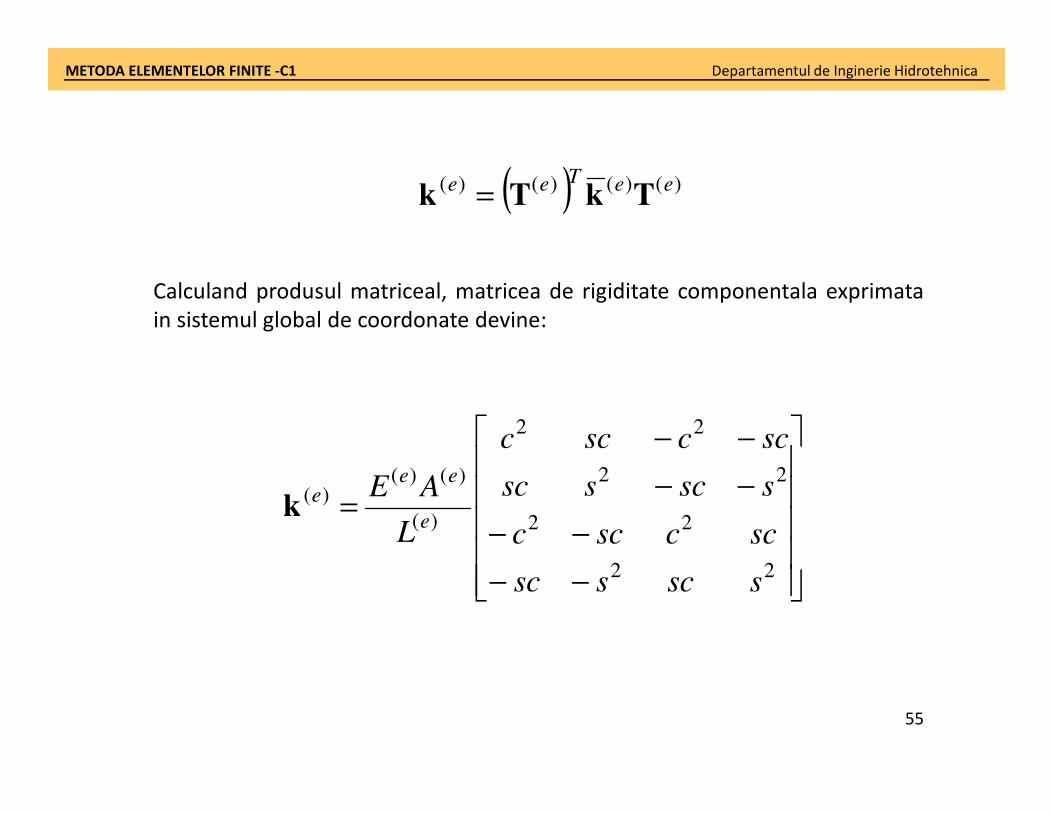
( ) )()()()( eeTeeTkTk =
Calculand produsul matriceal, matricea de rigiditate componentala exprimata
in sistemul global de coordonate devine:
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
−−
−−
−−
−−
=
22
22
22
22
)(
)()()(
sscssc
sccscc
sscssc
sccscc
L
AEe
eee
k
55
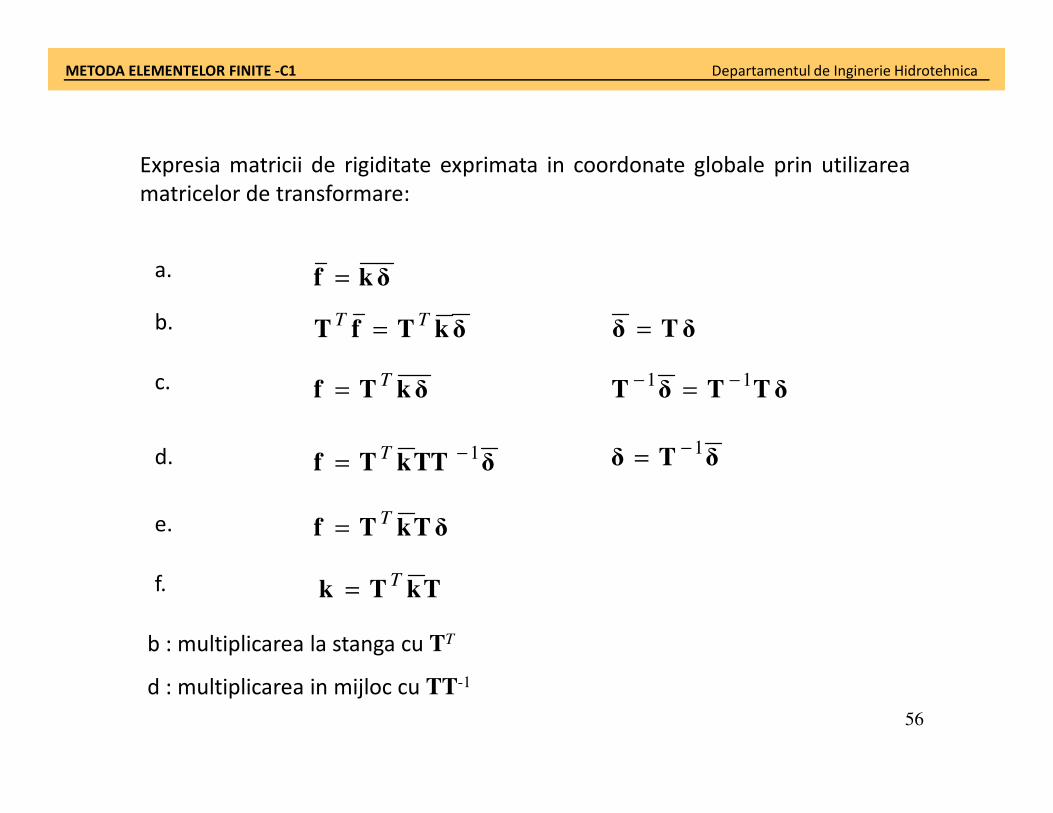
δkf =
δkTfTTT =
δkTfT=
T δδ =
TδTδT11 −− =
Expresia matricii de rigiditate exprimata in coordonate globale prin utilizarea
matricelor de transformare:
a.
b.
c.
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
56
δTδ1−=δTTkTf
1−= T
TδkTfT=
TkTkT=
b : multiplicarea la stanga cu TT
d : multiplicarea in mijloc cu TT-1
d.
e.
f.
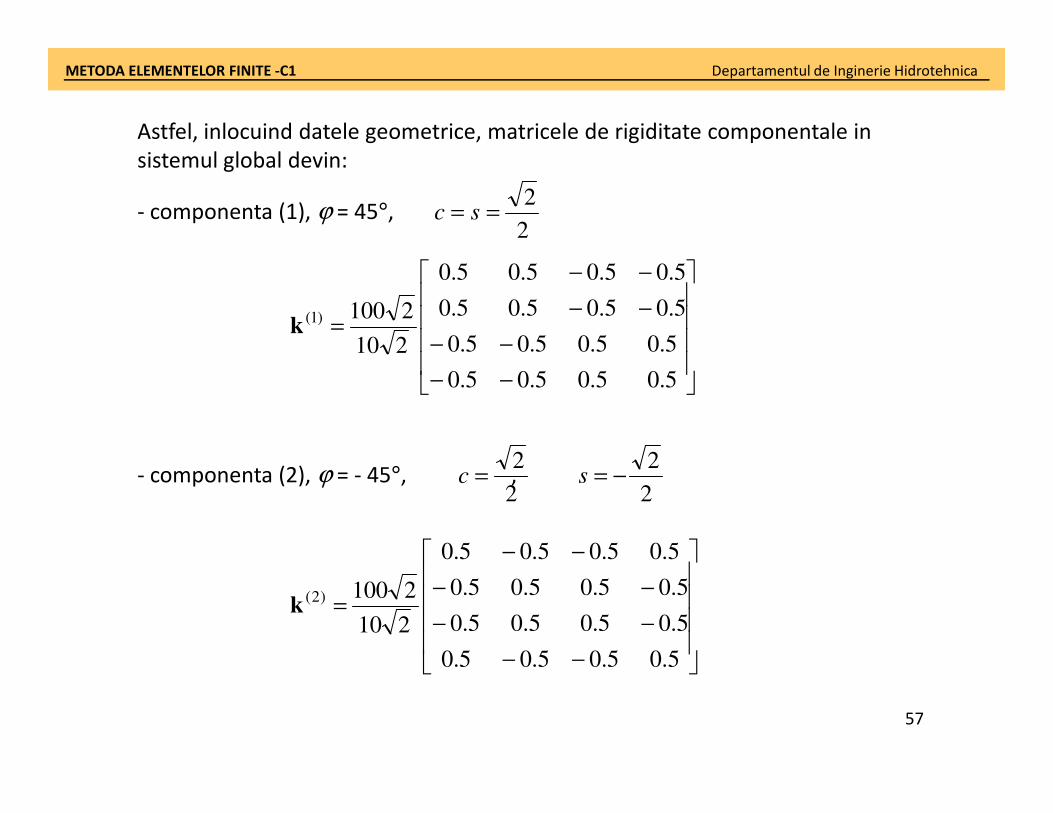
Astfel, inlocuind datele geometrice, matricele de rigiditate componentale in
sistemul global devin:
- componenta (1), ϕ = 45°, 2
2== sc
−−
−−
−−
−−
=
5.05.05.05.0
5.05.05.05.0
5.05.05.05.0
5.05.05.05.0
210
2100)1(k
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
- componenta (2), ϕ = - 45°, ,2
2=c
2
2−=s
−−
−−
−−
−−
=
5.05.05.05.0
5.05.05.05.0
5.05.05.05.0
5.05.05.05.0
210
2100)2(k
57
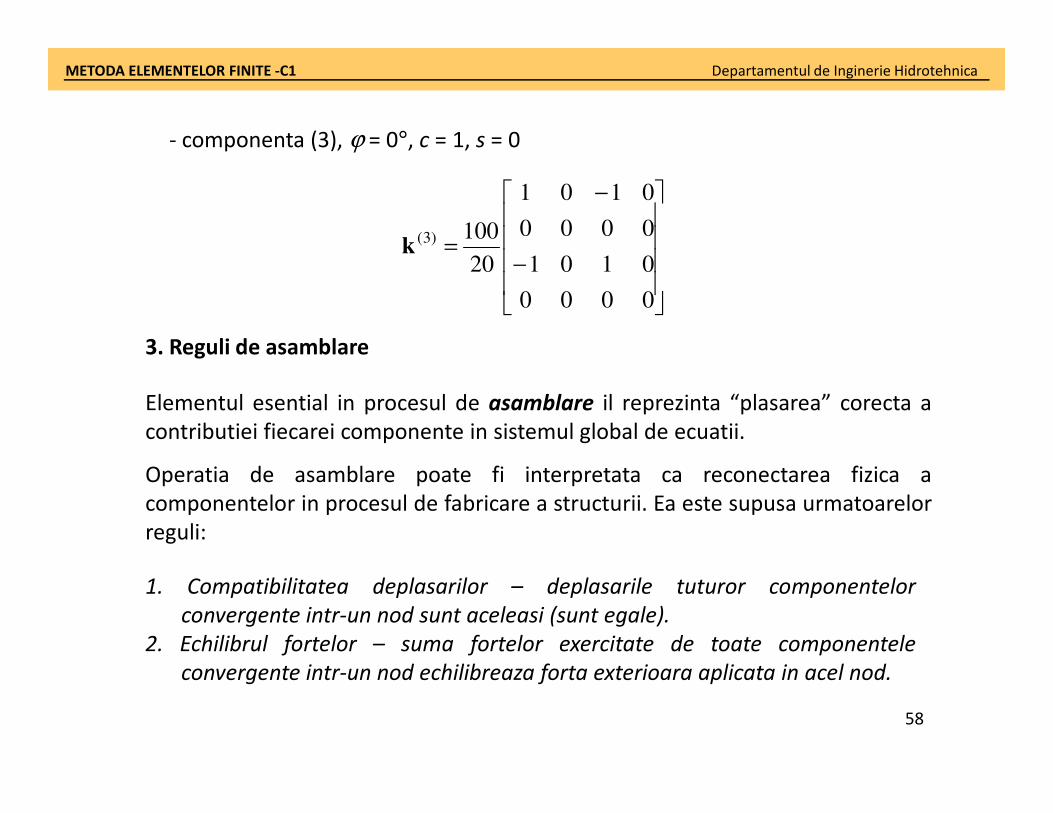
- componenta (3), ϕ = 0°, c = 1, s = 0
−
−
=
0000
0101
0000
0101
20
100)3(k
3. Reguli de asamblare
Elementul esential in procesul de asamblare il reprezinta “plasarea” corecta a
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Elementul esential in procesul de asamblare il reprezinta “plasarea” corecta a
contributiei fiecarei componente in sistemul global de ecuatii.
Operatia de asamblare poate fi interpretata ca reconectarea fizica a
componentelor in procesul de fabricare a structurii. Ea este supusa urmatoarelor
reguli:
1. Compatibilitatea deplasarilor – deplasarile tuturor componentelor
convergente intr-un nod sunt aceleasi (sunt egale).
2. Echilibrul fortelor – suma fortelor exercitate de toate componentele
convergente intr-un nod echilibreaza forta exterioara aplicata in acel nod.
58
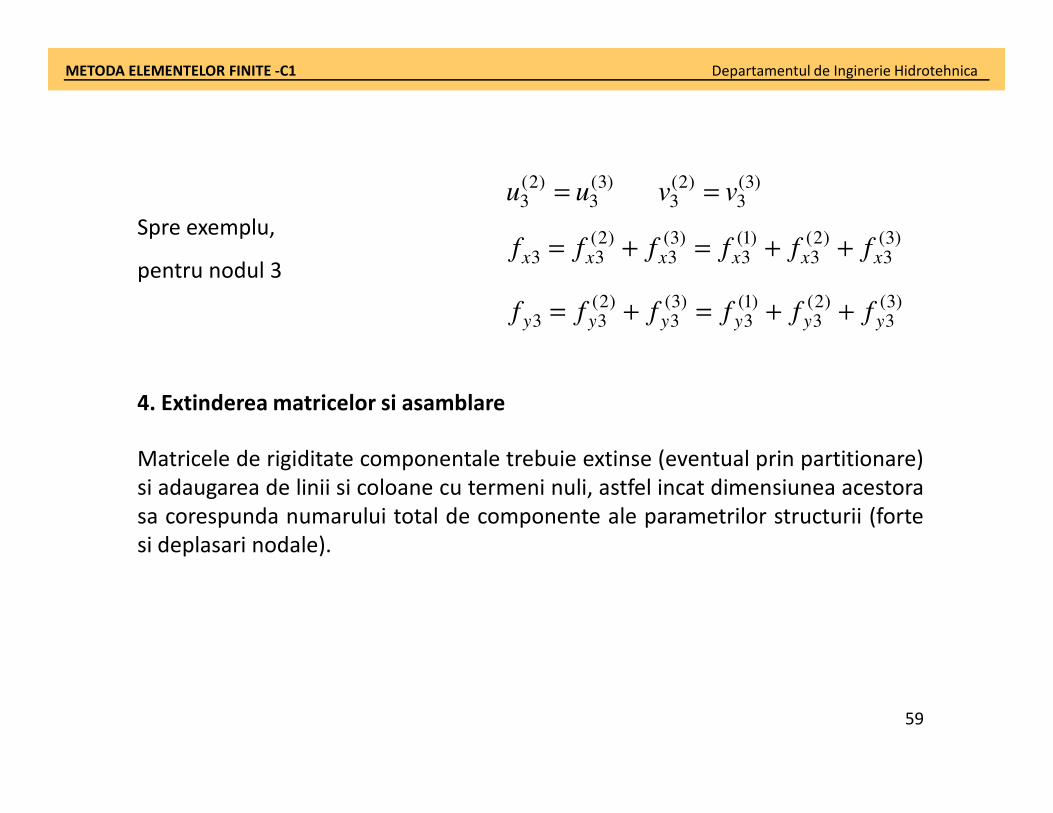
)3(3
)2(3 uu = )3(
3)2(
3 vv =
)3(3
)2(3
)1(3
)3(3
)2(33 xxxxxx ffffff ++=+=
)3(3
)2(3
)1(3
)3(3
)2(33 yyyyyy ffffff ++=+=
Spre exemplu,
pentru nodul 3
4. Extinderea matricelor si asamblare
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
4. Extinderea matricelor si asamblare
Matricele de rigiditate componentale trebuie extinse (eventual prin partitionare)
si adaugarea de linii si coloane cu termeni nuli, astfel incat dimensiunea acestora
sa corespunda numarului total de componente ale parametrilor structurii (forte
si deplasari nodale).
59
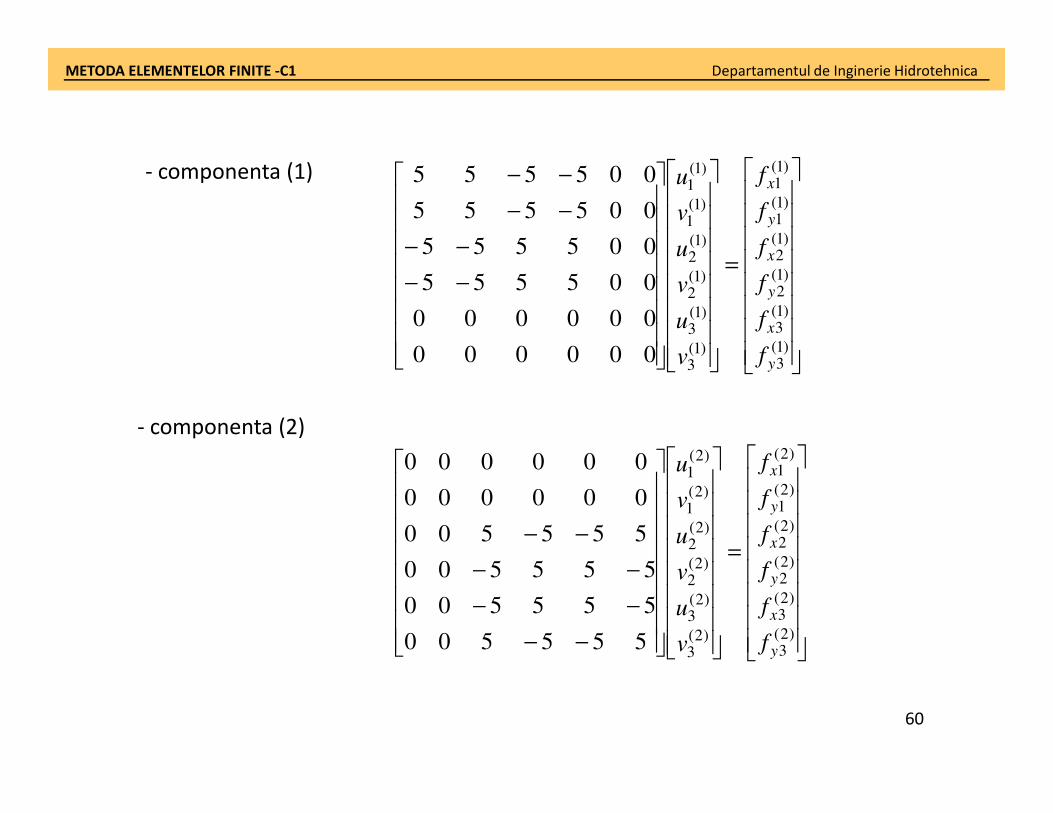
- componenta (1)
=
−−
−−
−−
−−
)1(3
)1(3
)1(2
)1(2
)1(1
)1(1
)1(3
)1(3
)1(2
)1(2
)1(1
)1(1
000000
000000
005555
005555
005555
005555
y
x
y
x
y
x
f
f
f
f
f
f
v
u
v
u
v
u
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
- componenta (2)
=
−−
−−
−−
−−
)2(3
)2(3
)2(2
)2(2
)2(1
)2(1
)2(3
)2(3
)2(2
)2(2
)2(1
)2(1
555500
555500
555500
555500
000000
000000
y
x
y
x
y
x
f
f
f
f
f
f
v
u
v
u
v
u
60
=
−
−
)3(3
)3(3
)3(2
)3(2
)3(1
)3(1
)3(3
)3(3
)3(2
)3(2
)3(1
)3(1
000000
050005
000000
000000
000000
050005
y
x
y
x
y
x
f
f
f
f
f
f
v
u
v
u
v
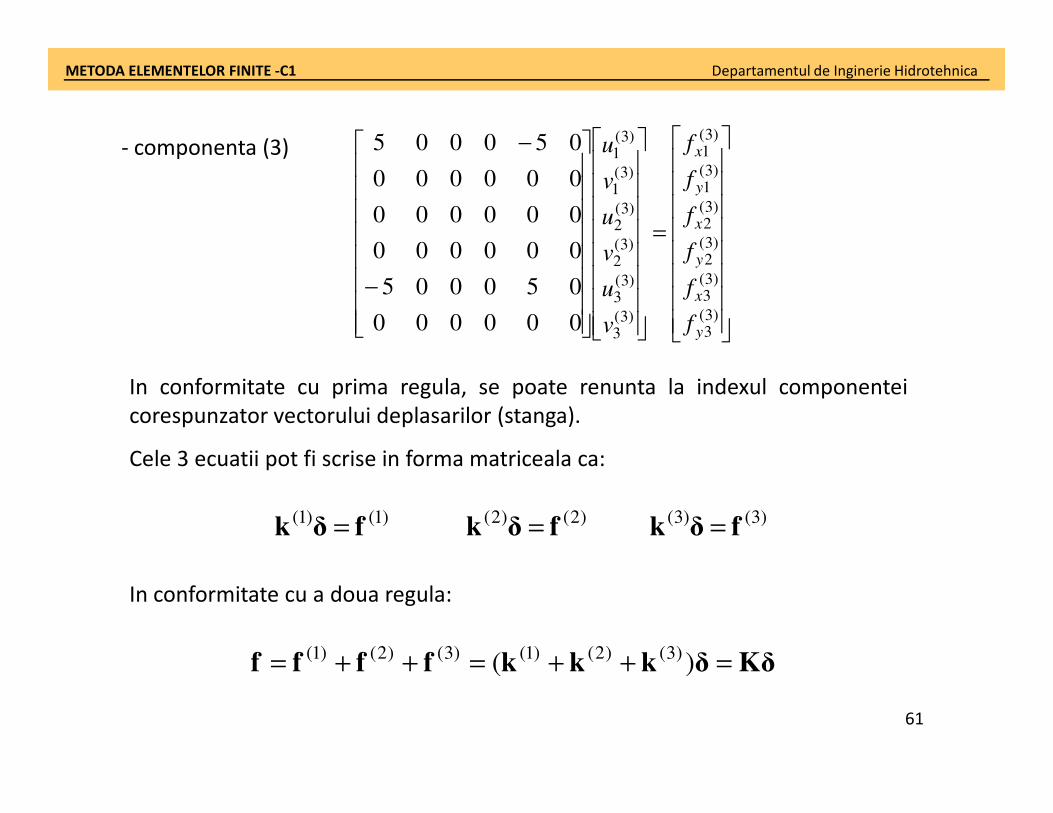
u- componenta (3)
In conformitate cu prima regula, se poate renunta la indexul componentei
corespunzator vectorului deplasarilor (stanga).
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
corespunzator vectorului deplasarilor (stanga).
Cele 3 ecuatii pot fi scrise in forma matriceala ca:
)1()1(fδk = )2()2(
fδk = )3()3(fδk =
In conformitate cu a doua regula:
Kδδkkkffff =++=++= )()3()2()1()3()2()1(
61

Operatia de asamblare devine o simpla sumare matriceala.
Eliminand indexul componentei, sistemul global de ecuatii devine
=
−−−
−−
−−−
2
1
1
2
1
1
5501055
005555
0555510
x
y
x
f
f
f
u
v
u
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
=
−−
−−−
−−−
3
3
2
2
3
3
2
2
555500
5105505
5510055
y
x
y
x
f
f
f
v
u
v
62
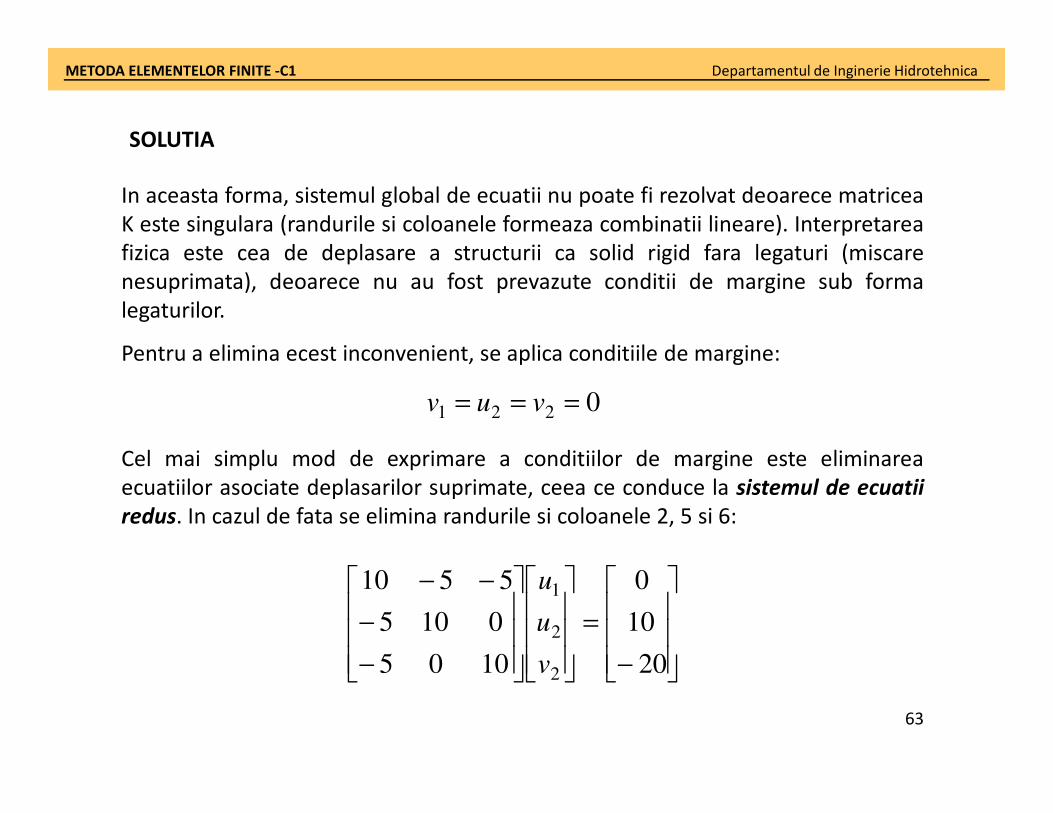
SOLUTIA
In aceasta forma, sistemul global de ecuatii nu poate fi rezolvat deoarece matricea
K este singulara (randurile si coloanele formeaza combinatii lineare). Interpretarea
fizica este cea de deplasare a structurii ca solid rigid fara legaturi (miscare
nesuprimata), deoarece nu au fost prevazute conditii de margine sub forma
legaturilor.
Pentru a elimina ecest inconvenient, se aplica conditiile de margine:
0221 === vuv
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
0221 === vuv
Cel mai simplu mod de exprimare a conditiilor de margine este eliminarea
ecuatiilor asociate deplasarilor suprimate, ceea ce conduce la sistemul de ecuatii
redus. In cazul de fata se elimina randurile si coloanele 2, 5 si 6:
−
=
−
−
−−
20
10
0
1005
0105
5510
2
2
1
v
u
u
63
Matricea coeficientilor nu mai este singulara si sistemul de ecuatii poate fi
rezolvat. Prin rezolvare, rezulta:
−
−
=
5.2
5.0
1
2
2
1
v
u
u
numita solutia redusa in deplasari.
Valorile deplasarilor sunt denumite necunoscutele primare ale problemei.
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
Solutia redusa se extinde la cele 6 componente, prin adaugarea termenilor
nuli:
−
−
=
=
0
0
5.2
5.0
0
1
3
3
2
2
1
1
v
u
v
u
v
u
δ
64
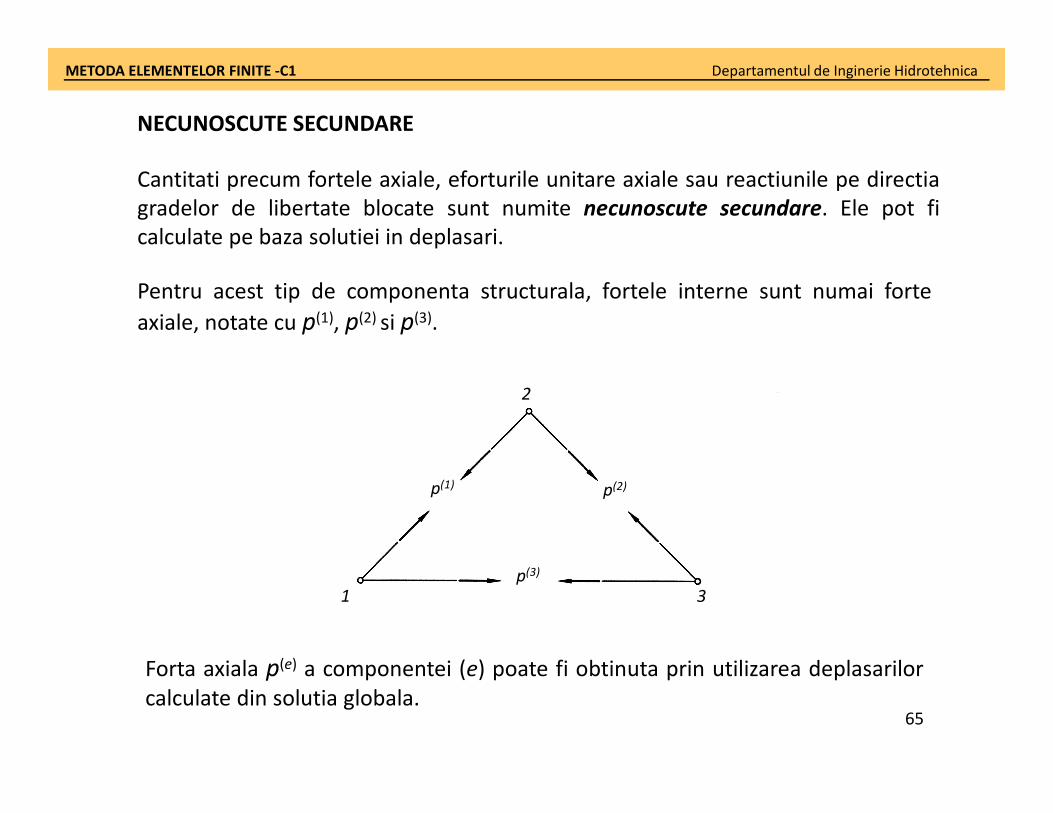
NECUNOSCUTE SECUNDARE
Cantitati precum fortele axiale, eforturile unitare axiale sau reactiunile pe directia
gradelor de libertate blocate sunt numite necunoscute secundare. Ele pot fi
calculate pe baza solutiei in deplasari.
Pentru acest tip de componenta structurala, fortele interne sunt numai forte
axiale, notate cu p(1), p(2) si p(3).
2
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
1 3
p(1) p(2)
p(3)
Forta axiala p(e) a componentei (e) poate fi obtinuta prin utilizarea deplasarilor
calculate din solutia globala.65
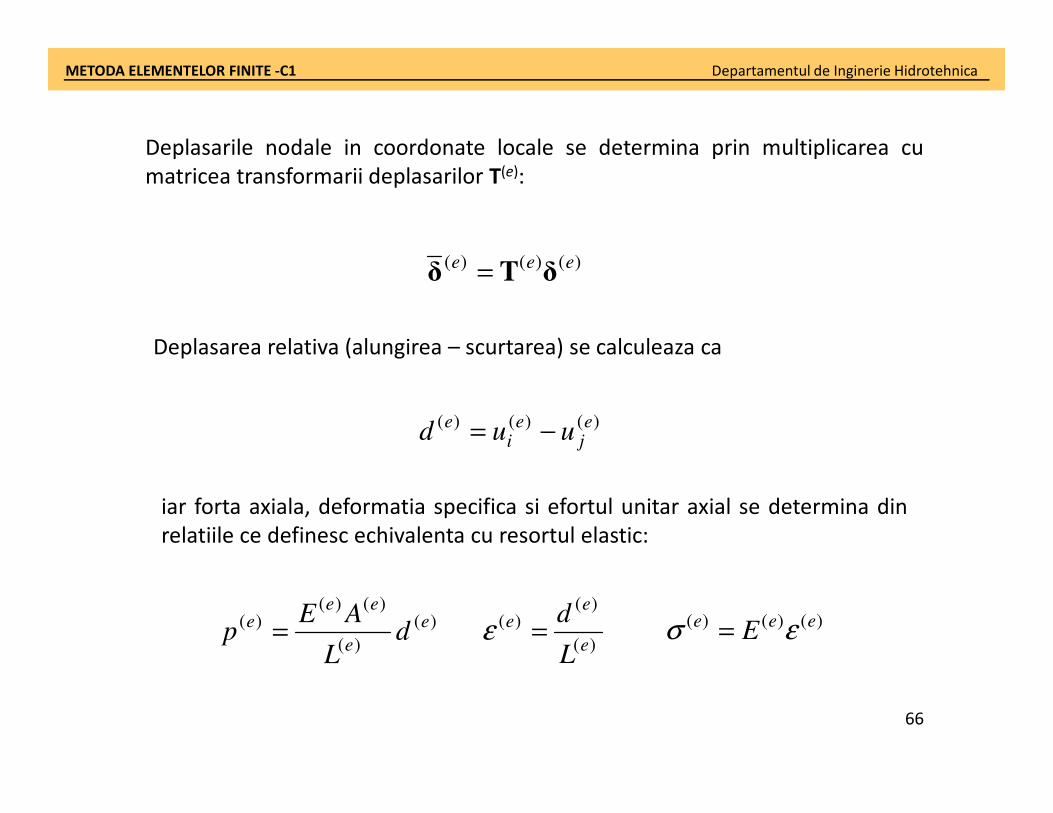
Deplasarea relativa (alungirea – scurtarea) se calculeaza ca
Deplasarile nodale in coordonate locale se determina prin multiplicarea cu
matricea transformarii deplasarilor T(e):
)()()( eeeδTδ =
METODA ELEMENTELOR FINITE -C1 Departamentul de Inginerie Hidrotehnica
)()()( ej
ei
e uud −=
iar forta axiala, deformatia specifica si efortul unitar axial se determina din
relatiile ce definesc echivalenta cu resortul elastic:
)(
)(
)()()( e
e
eee
dL
AEp =
)(
)()(
e
ee
L
d=ε )()()( eee
E εσ =
66