info artpl
DESCRIPTION
aTRANSCRIPT
Cap. 7. Sisteme de bare articulate
7.A. Sisteme plane de bare articulate
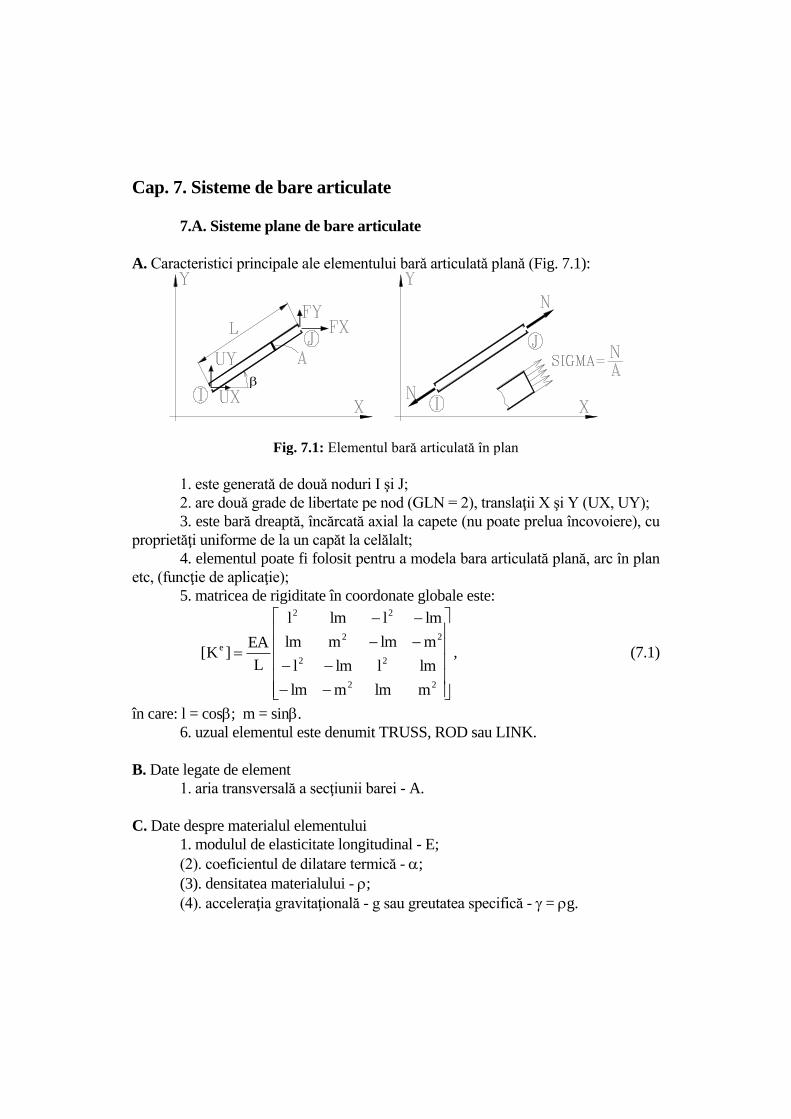
A. Caracteristici principale ale elementului barǎ articulatǎ planǎ (Fig. 7.1):
Fig. 7.1: Elementul bară articulată în plan
1. este generatǎ de douǎ noduri I şi J;
2. are douǎ grade de libertate pe nod (GLN = 2), translaţii X şi Y (UX, UY);
3. este bară dreaptă, încărcată axial la capete (nu poate prelua încovoiere), cu
proprietăţi uniforme de la un capăt la celălalt;
4. elementul poate fi folosit pentru a modela bara articulată plană, arc în plan
etc, (funcţie de aplicaţie);
5. matricea de rigiditate în coordonate globale este:
22
22
22
22
e
mlmmlm
lmllml
mlmmlm
lmllml
L
EA]K[ , (7.1)
în care: l = cos; m = sin.
6. uzual elementul este denumit TRUSS, ROD sau LINK.
B. Date legate de element
1. aria transversală a secţiunii barei - A.
C. Date despre materialul elementului
1. modulul de elasticitate longitudinal - E;
(2). coeficientul de dilatare termică - ;
(3). densitatea materialului - ;
(4). acceleraţia gravitaţională - g sau greutatea specifică - = g.
7. Sisteme de bare articulate
57
D. Date despre încărcări
1. blocaje în direcţia X-BX şi în direcţia Y-BY;
2. forţe la noduri în direcţia X-FX şi Y-FY;
(3). deplasări impuse pe orice direcţie;
(4). temperaturi în noduri sau în elemente;
(5). forţe de inerţie generate de câmpul gravitaţional (pentru care sunt
necesare ca date de intrare , g direcţia şi sensul gravitaţiei), sau generată de
mişcarea de rotaţie uniformă (pentru care trebuie precizate axa de rotaţie şi viteza
unghiulară ).
E. Rezultatele rezolvării
1. deplasările nodale - UX, UY;
2. eforturile şi tensiunile în bare: N, SIGMA;
(3). reacţiunile din legăturile cu exteriorul.
F. Structura fişierului cu date de intrare
1. Date generale
NN NE
2. Date despre noduri
NI BX BY X Y
...
3. Date despre elemente
EI I J A E
...
4. Date despre încărcări cu forţe
NF
NIF FX FY
...
G. Programul de lucru
ARTPLw_ref.EXE
Acest program a fost conceput astfel încât lucrează cu noţiunile (datele) de la
punctele B-E care nu sunt incluse între paranteze. Programul este de fapt
implementarea metodei deplasărilor (metoda de calcul exactă) pentru sisteme de bare
articulate în plan.
H. Schema logică a programului se prezintă în Fig. 7.2. Sistemul de ecuaţii care se
rezolvă este stocat în memoria RAM a calculatorului sub formă de matrice bandă.
Dimensiunea maximă a problemelor ce pot fi rezolvate rezultă din numărul

7. Sisteme de bare articulate
58
necunoscutelor şi lăţimea de bandă. Pentru a rezolva probleme de dimensiuni mari se
impune reconsiderarea gestionării resurselor hard (memoria extinsă).
Fig. 7.2: Schema logică a programului ARTPL.EXE
Aplicaţii
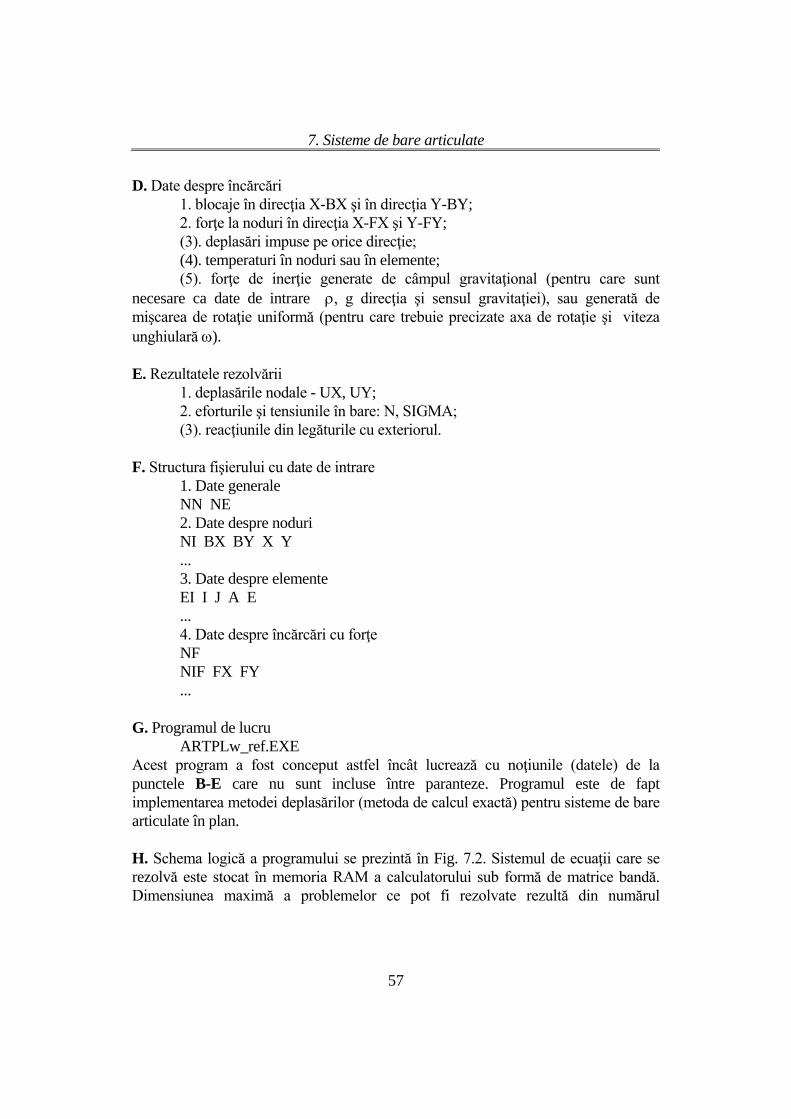
ARTP1. Un sistem de susţinere (vezi Fig. 7.3) este format dintr-o sârmă de
oţel de diametru 6 şi o baretă de plastic de secţiune dreptunghiulară 2015 [mm]
7. Sisteme de bare articulate
59
articulată în punctul A. Ştiind că sistemul susţine o forţă verticală de 1 kN, modulul
de elasticitate al oţelului este EOL=2.105 MPa iar al plasticului Eplastic=1.10
4 MPa, se
cere deplasarea punctului B şi tensiunile din materiale.
Rezolvare
Deoarece legăturile din B şi C pot
fi considerate articulaţii (sârma nu preia
încovoiere decât dacă este foarte groasă)
putem încadra problema în categoria
barelor articulate plane.
Se alege sistemul global de axe cu
originea în punctul A, unităţile de măsură
folosite se aleg [mm] pentru dimensiuni;
[N] pentru forţe şi rezultă [mm2] pentru
arie, [MPa] pentru tensiuni.
Fişierul cu date de intrare artp1
construit interactiv este:
3 2
1 1 1 0.0000000000E+00 0.0000000000E+00
2 1 1 0.0000000000E+00 3.5000000000E+02
3 0 0 5.0000000000E+02 3.5000000000E+02
1 2 3 2.8260000000E+01 2.0000000000E+05
2 1 3 3.0000000000E+02 1.0000000000E+04
1
3 0.0000000000E+00 -1.0000000000E+03
Atenţie! Fişierul nu trebuie să conţină linii goale nici la începutul fişierului nici între
datele intermediare. Pentru separarea datelor în cadrul liniei se foloseşte cel puţin un
spaţiu (blanc).
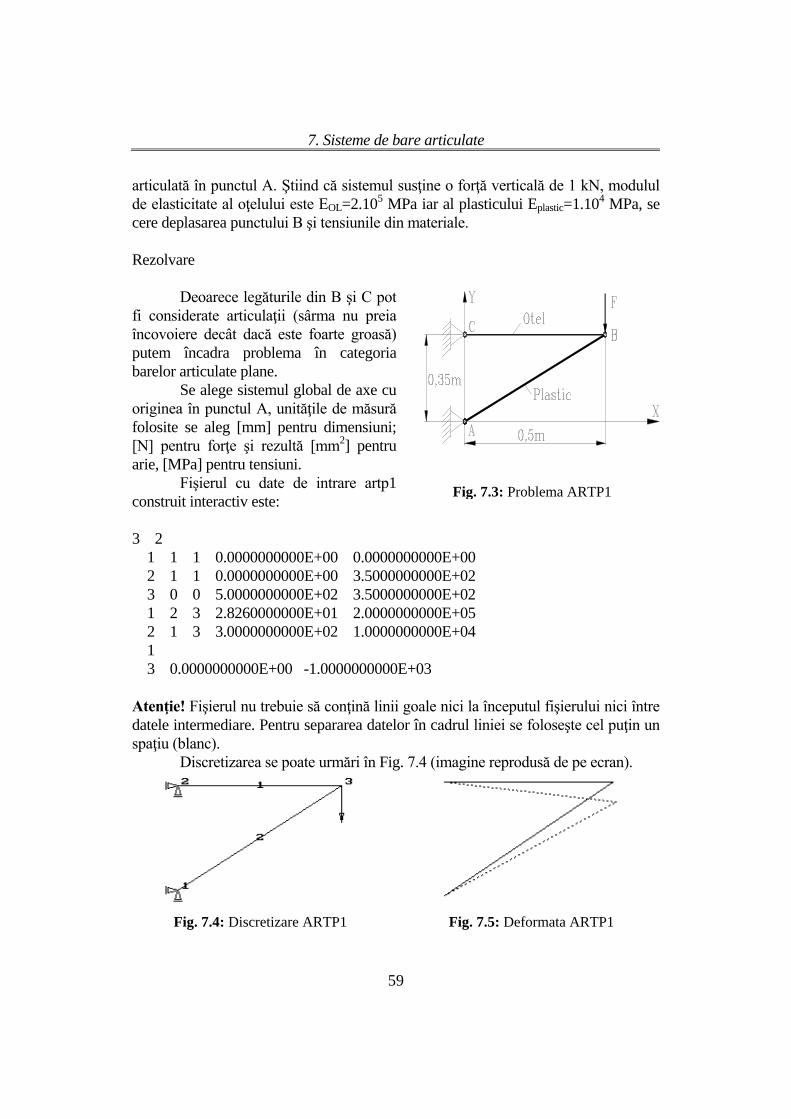
Discretizarea se poate urmări în Fig. 7.4 (imagine reprodusă de pe ecran).
Fig. 7.4: Discretizare ARTP1 Fig. 7.5: Deformata ARTP1
Fig. 7.3: Problema ARTP1

7. Sisteme de bare articulate
60
Rulând programul se obţine listingul:
NOD BX BY X Y
1 1 1 0.0000000000E+00 0.0000000000E+00
2 1 1 0.0000000000E+00 3.5000000000E+02
3 0 0 5.0000000000E+02 3.5000000000E+02
ELEM I J A E
1 2 3 2.8260000000E+01 2.0000000000E+05
2 1 3 3.0000000000E+02 1.0000000000E+04
NOD FX FY
1 0.0000000000E+00 0.0000000000E+00
2 0.0000000000E+00 0.0000000000E+00
3 0.0000000000E+00 -1.0000000000E+03
NUMAR DE ECUATII NEC= 2
SEMIBANDA MATRICII DE RIGIDITATE LB= 2
DEPLASARI NODALE
NOD UX UY
1 0.0000000000E+00 0.0000000000E+00
2 0.0000000000E+00 0.0000000000E+00
3 1.2637751491E -01 -7.9917086714E -01
EFORTURI SI TENSIUNI IN ELEMENTE
ELEM N SIGMA
1 1.4285714286E+03 5.0551005965E+01
2 -1.7437936594E+03 -5.8126455313E+00
Interpretarea rezultatelor

7. Sisteme de bare articulate
61
Rezultatele se pot citi din listă, nodul B este nodul numărul 3, deci deplasarea
lui este 0,126 mm pe orizontală spre dreapta şi 0,799 mm pe verticală în sus (invers
sensului axei Y întrucât valoarea este negativă). Tensiunea din bara de oţel,
(elementul numărul 1) este întindere de valoare 50,55 MPa iar în bara de plastic
(elementul numarul 2) este de compresiune cu 5,81 MPa. Valorile obţinute pentru
deplasare sunt foarte mici, ceea ce justifică calculul liniar. Tensiunile obţinute sunt
acceptabile. Deformata structurii se prezintă în Fig. 7.5.
Faza de interpretare a rezultatelor este importantă pentru o primă confirmare
a rezultatelor. Pentru aplicaţiile care urmează această fază cade în grija celui care
rezolvă problemele.
ARTP2. Pentru sistemul de bare articulate din Fig. 7.6 se cere să se
determine forţa capabilă Fcap şi deplasarea ei ştiind că barele sunt din oţel cu
E=2,1.105 MPa; A=100 mm
2; a=0,1 m; a = 150 MPa (tensiunea admisibilă).
Fig. 7.6: Problema ARTP2 Fig. 7.7: Discretizare ARTP2
Rezolvare
Se observă ca problema prezintă simetrie geometrică şi de încărcare (întrucât
reacţiunile verticale din C şi D sunt egale iar reacţiunea orizontală din reazemul C
este nulă), deci putem adopta rezolvarea unui model pe jumătate din structură. Forţa
F se împarte egal pe cele două jumătăţi, ca şi aria barei din axa de simetrie. Stiind că
relaţia dintre tensiune şi efort este liniară (A
Nσ ), şi eforturile din bare sunt funcţie
de F, se adoptă iniţial o valoare oarecare pentru F (spre exemplu F=1 N) şi din
tensiunile maxime corespunzătoare acestei forţe se poate determina forţa capabilă
funcţie de tensiunea admisibilă.
Discretizarea cu condiţiile la limită se poate urmări în Fig. 7.7 (sau pe ecranul
monitorului dacă se ruleaza fişierul artp2).
Fişierul cu datele de intrare este:
3 3
1 1 0 0.00 100
7. Sisteme de bare articulate
62
2 1 0 0.00 200
3 0 1 200 0.00
1 1 2 100 2.1E5
2 2 3 100 2.1E5
3 1 3 100 2.1E5
1
1 0.00 -0.50
Rezultatele rulării sunt:
DEPLASARI NODALE
NOD UX UY
1 0.0000000000E+00 -9.0018468776E-05
2 0.0000000000E+00 -8.5256564014E-05
3 5.8319162825E -05 0.0000000000E+00
EFORTURI şi TENSIUNI IN ELEMENTE
ELEM N SIGMA
1 1.0000000000E+00 1.0000000000E-02
2 -1.4142135624E+00 -1.4142135624E-02
3 1.1180339888E+00 1.1180339888E-02
Tensiunea maximă (în valoare absolută) se atinge în bara 2 şi este 2
1F|max 104142,1σ
MPa. Dacă forţa creşte tensiunea maximă în această bară
poate atinge a, deci forţa capabilă poate creşte de 1F|max
a
σ
σ
ori, deci
Fcap= 2104142,1
150
=10607 N.
Deplasarea pe verticală a nodului 1 este -9,001846.10-5
pentru F=1, pentru
Fcap deplasarea va fi UY(1)Fcap= -0,954 mm pe verticală şi UX(3)Fcap= 0,618 mm pe
orizontală.
TEMĂ: Trataţi problema fără a ţine seama de simetrie pentru a verifica rezultatele
de mai sus.

7. Sisteme de bare articulate
63
ARTP3. Un cadru dreptunghiular cu
diagonale format din bare articulate este
solicitat ca în figura 7.8. Ştiind că barele sunt
din oţel cu E=2,1.105 MPa, şi toate au arie
A=200 mm2; a=0,5 m; a=100 MPa şi F=13
kN, se cere să se facă verificarea solicitării în
bare şi să se determine deplasarea relativă
între punctele A şi C.
Rezolvare
Aşa cum este dată problema deşi în echilibru, structura are “mişcare de solid
rigid” şi nu poate fi rezovată decât dacă se impun deplasări (de obicei blocaje) unor
noduri ale modelului. În plan numărul gradelor de libertate mecanică sunt trei (două
translaţii şi o rotaţie), prin urmare se impune blocarea a minim trei grade de libertate
din model astfel încât să nu se modifice problema iniţială. Unele modele pot arăta ca
în Fig. 7.9.
Fig. 7.9: Modele pentru problema ARTP3
Modelele a, b, c introduc trei blocaje care asigură înlăturarea mişcării de solid
rigid, modificarea aparentă a încărcărilor b, c nu modifică problema întrucât
calculând reacţiunile din reazeme, acestea sunt egale cu forţele din încărcare.
Modelul d, deşi are trei blocaje conduce la matrice de rigiditate singulară întrucât
poate avea mişcare de rotaţie în jurul punctului D (vezi Fig. 7.8). Modelul e modifică
problema întrucât impiedică deplasarea relativă între A şi C. Modelul f modifică
problema prin introducerea de elemente suplimentare, dar dacă rigidităţile acestor
elemente, sunt neglijabile faţă de cele ale barelor reale atunci se poate obţine un
Fig. 7.8: Problema ARTP3

7. Sisteme de bare articulate
64
rezultat foarte aproape de cel real. Aceasta metodă (“a rigidităţilor adiţionale”) poate
fi folosită şi pentru înlăturarea mişcării de mecanism. Pentru problema de mai sus
sunt suficiente trei sau chiar două bare în locul celor patru din colţuri. Uneori
modificarea rigidităţilor poate duce la obţinerea de rezultate false, deoarece matricea
de rigiditate rezultă slab condiţionată.
E posibil ca programul să ruleze şi fără condiţii la limită în deplasări şi uneori
se pot obţine rezultate acceptabile datorită faptului ca procedura de rezolvare folosită
în program (Gauss), nu face toate verificările necesare rezolvării corecte a unui
sistem de ecuaţii.
Dacă se adoptă pentru rezolvare modelul din Fig. 7.9.f, alegând pentru
modulul de elasticitate al elementelor suplimentare valoarea E = 1 MPa, iar pentru
arie se păstrează A=200 mm2 (se pot modifica E şi A în sensul scăderii valorilor şi L
în sensul creşterii), cu discretizarea din Fig. 7.10 fişierul datelor de intrare este:
8 10
1 0 0 0.00E+00 0.00E+00
2 0 0 1.00E+03 0.00E+00
3 0 0 1.00E+03 5.00E+02
4 0 0 0.00E+00 5.00E+02
5 1 1 -2.50E+02 -2.50E+02
6 1 1 1.25E+03 -2.50E+02
7 1 1 1.25E+03 7.50E+02
8 1 1 -2.50E+02 7.50E+02
1 1 2 2.00E+02 2.10E+05
2 2 3 2.00E+02 2.10E+05
3 3 4 2.00E+02 2.10E+05
4 4 1 2.00E+02 2.10E+05
5 1 3 2.00E+02 2.10E+05
6 2 4 2.00E+02 2.10E+05
7 5 1 2.00E+02 1.00E+00
8 6 2 2.00E+02 1.00E+00
9 7 3 2.00E+02 1.00E+00
10 8 4 2.00E+02 1.00E+00
4
1 0.00E+00 1.30E+04
2 2.60E+04 0.00E+00
3 0.00E+00 -1.30E+04
4 -2.60E+04 0.00E+00
Rezultatele rulării sunt:
Fig. 7.10: Discretizare ARTP3

7. Sisteme de bare articulate
65
DEPLASARI NODALE
NOD UX UY
1 3.314931E -01 -3.80460E -01
2 5.336515E -01 4.84683E -01
3 -3.314931E -01 3.80460E -01
4 -5.336515E -01 -4.84683E -01
5 0.000000E+00 0.00000E+00
6 0.000000E+00 0.00000E+00
7 0.000000E+00 0.00000E+00
8 0.000000E+00 0.00000E+00
EFORTURI SI TENSIUNI IN ELEMENTE
ELEM N SIGMA
1 8.490E+03 4.245E+01
2 -8.754E+03 - 4.377E+01
3 8.490E+03 4.245E+01
4 -8.754E+03 -4.377E+01
5 -9.492E+03 -4.746E+01
6 1.957E+04 9.788E+01
7 -1.958E -02 -9.793E -05
8 -1.958E -02 -9.793E -05
9 -1.958E -02 -9.793E -05
10 -1.958E -02 -9.793E -05
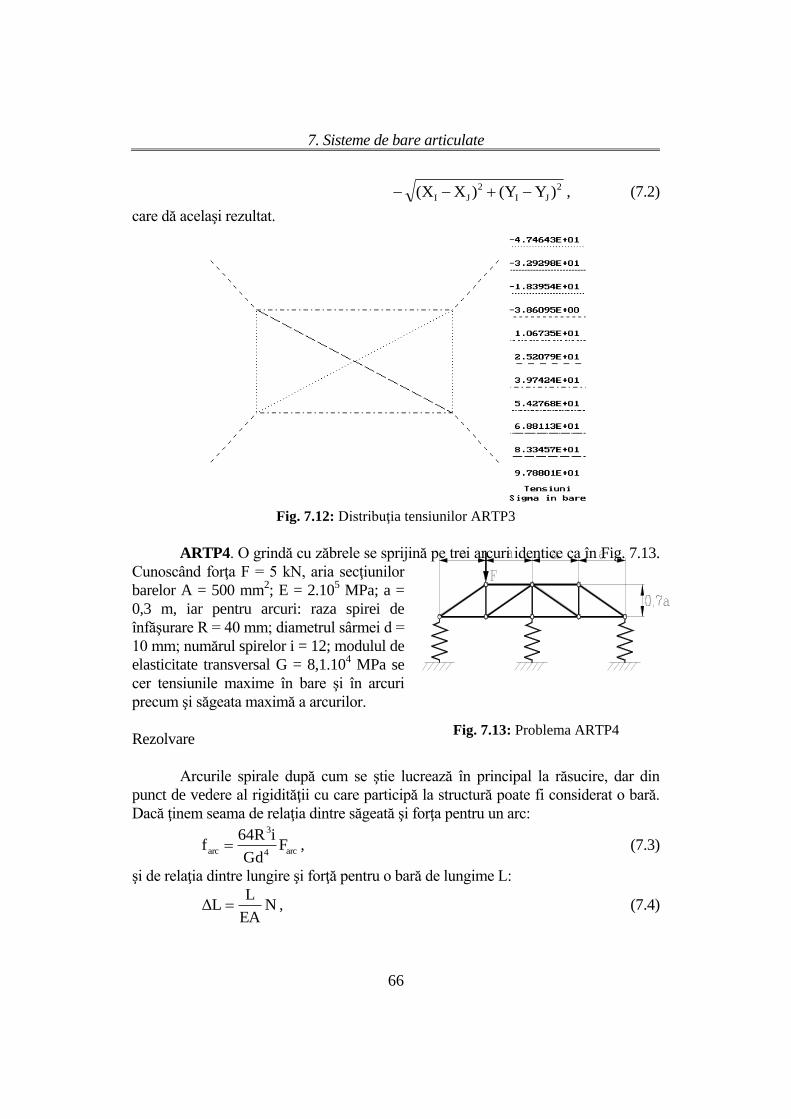
Deformata structurii se poate urmări în Fig. 7.11, iar reprezentarea tensiunilor
pe elemente în Fig. 7.12. Un anumit tip de linie precizează tensiune între valoarea
imediat superioară şi inferioară din legenda tensiunilor, spre exemplu bara 3 se
încadrează între tensiuni cuprinse între 39,74 şi 54,45 MPa, adică mai precis (din lista
tensiunilor) 42,45 MPa. Cea mai mare tensiune în valoare absolută este în bară
numărul 6 şi are valoare 97,88 MPa inferioară tensiunii admisibile.
Pentru a afla deplasarea relativă A - C se calculează lungirea barei 5 adică:
AC = 252,0200101,2
500100085,9492
AE
LN5
22
55
mm sau se poate folosi relaţia de
calcul a deplasării între două noduri:
2
JJII
2
JJIIIJ )UYYUYY()UXXUXX(δ
Fig. 7.11: Deformata ARTP3
7. Sisteme de bare articulate
66
2
JI
2
JI )YY()XX( , (7.2)
care dă acelaşi rezultat.
Fig. 7.12: Distribuţia tensiunilor ARTP3
ARTP4. O grindă cu zăbrele se sprijină pe trei arcuri identice ca în Fig. 7.13.
Cunoscând forţa F = 5 kN, aria secţiunilor
barelor A = 500 mm2; E = 2.10
5 MPa; a =
0,3 m, iar pentru arcuri: raza spirei de
înfăşurare R = 40 mm; diametrul sârmei d =
10 mm; numărul spirelor i = 12; modulul de
elasticitate transversal G = 8,1.104 MPa se
cer tensiunile maxime în bare şi în arcuri
precum şi săgeata maximă a arcurilor.
Rezolvare
Arcurile spirale după cum se ştie lucrează în principal la răsucire, dar din
punct de vedere al rigidităţii cu care participă la structură poate fi considerat o bară.
Dacă ţinem seama de relaţia dintre săgeată şi forţa pentru un arc:
arc4
3
arc FGd
iR64f , (7.3)
şi de relaţia dintre lungire şi forţă pentru o bară de lungime L:
NEA
LLΔ , (7.4)
Fig. 7.13: Problema ARTP4

7. Sisteme de bare articulate
67
rezultă că între rigidităţile unui arc şi ale unei bare există relaţia:
iR64
Gd
L
EA3
4
. (7.5)
Dacă alegem pentru bara echivalentă arcului E=2.105 MPa şi L = a = 300 mm
rezultă pentru secţiunea barei care modelează arcul (din relaţia 7.5) aria:
2
35
44
3
4
1047192,2124010264
30010101,8
iER64
LGdA
mm
2 .
Discretizarea se prezintă în
Fig. 7.14. Blocajul nodului 2
pe orizontală se introduce
pentru înlăturarea posibilităţii
de pendulare a cadrului
(mişcare de mecanism).
Fişierul cu date de intrare
artp4 este:
11 16
1 1 1 0.0000000000E+00 0.0000000000E+00
2 1 0 0.0000000000E+00 3.0000000000E+02
3 0 0 3.0000000000E+02 3.0000000000E+02
4 0 0 3.0000000000E+02 5.1000000000E+02
5 1 1 6.0000000000E+02 0.0000000000E+00
6 0 0 6.0000000000E+02 3.0000000000E+02
7 0 0 6.0000000000E+02 5.1000000000E+02
8 0 0 9.0000000000E+02 3.0000000000E+02
9 0 0 9.0000000000E+02 5.1000000000E+02
10 1 1 1.2000000000E+03 0.0000000000E+00
11 0 0 1.2000000000E+03 3.0000000000E+02
1 2 3 5.0000000000E+02 2.0000000000E+05
2 2 4 5.0000000000E+02 2.0000000000E+05
3 3 4 5.0000000000E+02 2.0000000000E+05
4 3 6 5.0000000000E+02 2.0000000000E+05
5 3 7 5.0000000000E+02 2.0000000000E+05
6 4 7 5.0000000000E+02 2.0000000000E+05
7 6 7 5.0000000000E+02 2.0000000000E+05
8 6 8 5.0000000000E+02 2.0000000000E+05
9 7 8 5.0000000000E+02 2.0000000000E+05
10 7 9 5.0000000000E+02 2.0000000000E+05
11 8 9 5.0000000000E+02 2.0000000000E+05
Fig. 7.14: Discretizare - ARTP4
7. Sisteme de bare articulate
68
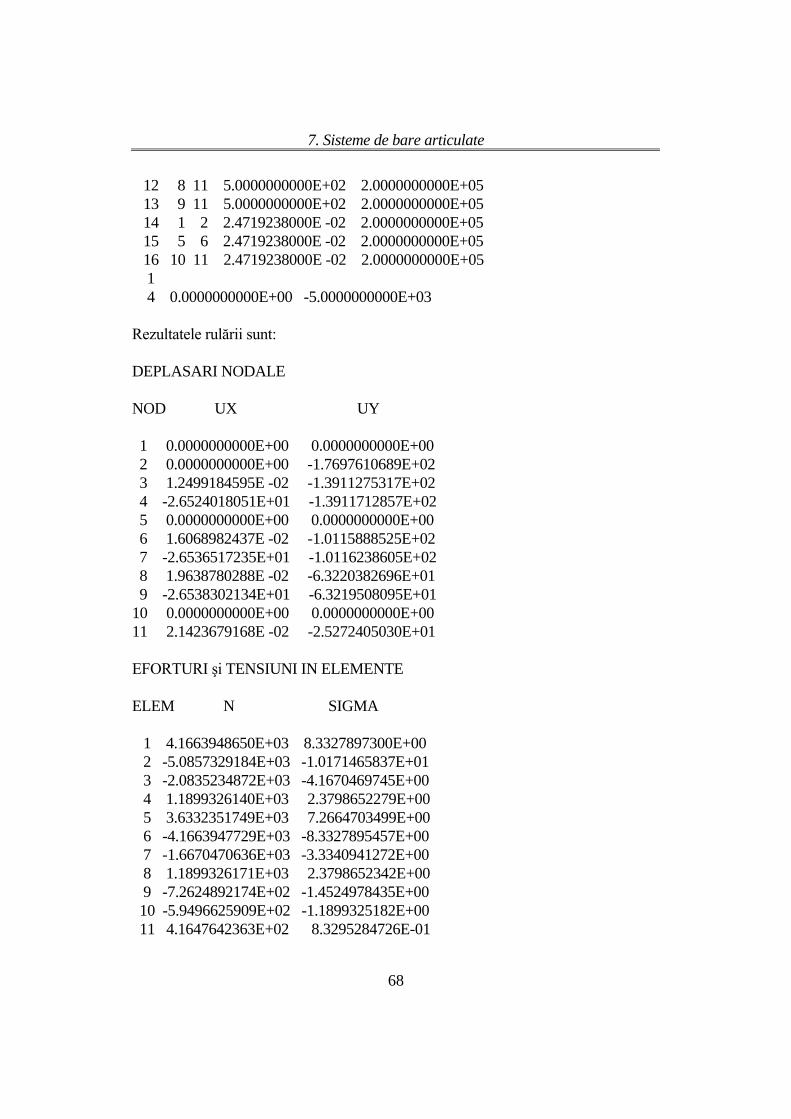
12 8 11 5.0000000000E+02 2.0000000000E+05
13 9 11 5.0000000000E+02 2.0000000000E+05
14 1 2 2.4719238000E -02 2.0000000000E+05
15 5 6 2.4719238000E -02 2.0000000000E+05
16 10 11 2.4719238000E -02 2.0000000000E+05
1
4 0.0000000000E+00 -5.0000000000E+03
Rezultatele rulării sunt:
DEPLASARI NODALE
NOD UX UY
1 0.0000000000E+00 0.0000000000E+00
2 0.0000000000E+00 -1.7697610689E+02
3 1.2499184595E -02 -1.3911275317E+02
4 -2.6524018051E+01 -1.3911712857E+02
5 0.0000000000E+00 0.0000000000E+00
6 1.6068982437E -02 -1.0115888525E+02
7 -2.6536517235E+01 -1.0116238605E+02
8 1.9638780288E -02 -6.3220382696E+01
9 -2.6538302134E+01 -6.3219508095E+01
10 0.0000000000E+00 0.0000000000E+00
11 2.1423679168E -02 -2.5272405030E+01
EFORTURI şi TENSIUNI IN ELEMENTE
ELEM N SIGMA
1 4.1663948650E+03 8.3327897300E+00
2 -5.0857329184E+03 -1.0171465837E+01
3 -2.0835234872E+03 -4.1670469745E+00
4 1.1899326140E+03 2.3798652279E+00
5 3.6332351749E+03 7.2664703499E+00
6 -4.1663947729E+03 -8.3327895457E+00
7 -1.6670470636E+03 -3.3340941272E+00
8 1.1899326171E+03 2.3798652342E+00
9 -7.2624892174E+02 -1.4524978435E+00
10 -5.9496625909E+02 -1.1899325182E+00
11 4.1647642363E+02 8.3295284726E-01

7. Sisteme de bare articulate
69
12 5.9496629309E+02 1.1899325862E+00
13 -7.2624890507E+02 -1.4524978101E+00
14 -2.9164763376E+03 -1.1798407126E+05
15 -1.6670470402E+03 -6.7439256834E+04
16 -4.1647639651E+02 -1.6848270020E+04
Tensiunea maximă în bare este -10,17 MPa în bara 2. Săgeata maximă a arcului
corespunde cu deplasarea pe verticală a nodului 2 şi este 176,97 mm. Tensiunile din
barele care modelează arcurile sunt false, pentru a afla tensiunea din arcuri folosim
relaţia:
3
arcarc
dπ
RF16τ . (7.6)
Forţa din arcul 14 (modelat ca bară) este forţa maximă care încarcă un arc, deci
tensiunea maximă în acest arc este:
1,59410π
40291616τ
3arc
MPa.
ARTP5. Să se dimensioneze cu
secţiune circulară barele structurii din Fig.
7.15, ştiind că: a = 1 m; E = 7.104 MPa;
F=100 kN; a = 200 MPa, şi să se calculeze
deplasarea totală a punctului de aplicaţie al
forţei F.
Indicaţie. Se alege iniţial A=1 mm2, Anec
rezultă că trebuie să fie de a
1A|max
σ
σ ori mai
mare.
Raspuns: A=161,7 mm2, deci 14,38 şi 20,29. În practică se aleg valori rotunjite
superior. 588,5285,4586,3UYUXδ 2222
F mm.
ARTP6. Pentru grinda cu zăbrele (în consolă) din Fig.7.16 se cere distribuţia
tensiunilor în elementele structurii şi săgeata maximă a grinzii ştiind că: a = 0,4 m;
F=6 kN; toate barele sunt din oţel cu E=2.105 MPa şi au aceeaşi arie a secţiunii
Fig. 7.15: Problema ARTP5

7. Sisteme de bare articulate
70
A=400 mm2. Numerotaţi diferit nodurile şi constataţi care sunt modificările în rulare
şi rezultate.
Răspuns:
vmax = -5,069 mm.
Pentru distribuţie
vezi Fig.7.17.
Fig.7.16: Problema ARTP6
Fig.7.17: Distribuţia de tensiuni - ARTP6
ARTP7. Grinda cu zăbrele
din Fig.7.18 este formată din bare de
secţiune circulară 60. Se cunosc
E=2,1.105 MPa; a =250 mm şi a =
150 MPa. Pentru încărcarea din figură
se cere forţa maximă capabilă Fcap de
încărcare a grinzii, deplasarea pe
orizontală a reazemului din dreapta şi
bara cea mai solicitată.
Fig.7.18: Problema ARTP7
Răspuns: Fcap = 159,042 kN; u= -0,46875 mm.
7. Sisteme de bare articulate
71
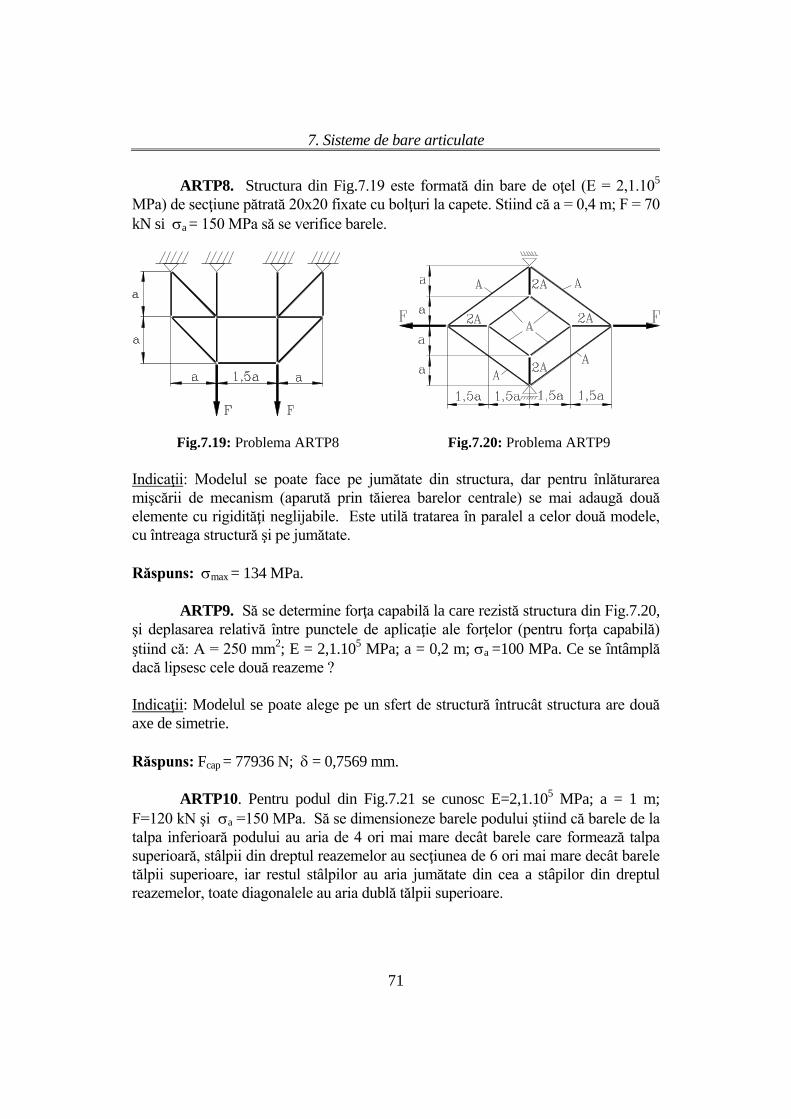
ARTP8. Structura din Fig.7.19 este formată din bare de oţel (E = 2,1.105
MPa) de secţiune pătrată 20x20 fixate cu bolţuri la capete. Stiind că a = 0,4 m; F = 70
kN si a = 150 MPa să se verifice barele.
Fig.7.19: Problema ARTP8
Fig.7.20: Problema ARTP9
Indicaţii: Modelul se poate face pe jumătate din structura, dar pentru înlăturarea
mişcării de mecanism (aparută prin tăierea barelor centrale) se mai adaugă două
elemente cu rigidităţi neglijabile. Este utilă tratarea în paralel a celor două modele,
cu întreaga structură şi pe jumătate.
Răspuns: max = 134 MPa.
ARTP9. Să se determine forţa capabilă la care rezistă structura din Fig.7.20,
şi deplasarea relativă între punctele de aplicaţie ale forţelor (pentru forţa capabilă)
ştiind că: A = 250 mm2; E = 2,1.10
5 MPa; a = 0,2 m; a =100 MPa. Ce se întâmplă
dacă lipsesc cele două reazeme ?
Indicaţii: Modelul se poate alege pe un sfert de structură întrucât structura are două
axe de simetrie.
Răspuns: Fcap = 77936 N; = 0,7569 mm.
ARTP10. Pentru podul din Fig.7.21 se cunosc E=2,1.105 MPa; a = 1 m;
F=120 kN şi a =150 MPa. Să se dimensioneze barele podului ştiind că barele de la
talpa inferioară podului au aria de 4 ori mai mare decât barele care formează talpa
superioară, stâlpii din dreptul reazemelor au secţiunea de 6 ori mai mare decât barele
tălpii superioare, iar restul stâlpilor au aria jumătate din cea a stâpilor din dreptul
reazemelor, toate diagonalele au aria dublă tălpii superioare.

7. Sisteme de bare articulate
72
Să se studieze distribuţia de tensiuni şi să se precizeze dacă se poate neglija
greutatea proprie ( = 7800 Kg/m3, g = 10 m/s
2). Care este săgeata podului sub
încărcarea dată ?
Fig.7.21: Problema ARTP10
Indicaţie: Se lucrează pe jumătate şi se alege iniţial un parametru A = 1 mm2 (aria
tălpii superioare).
Fig.7.22: Distribuţia de tensiuni - ARTP10
Răspuns: A=1600 mm2. Greutatea unei bare de secţiune 4A din talpa inferioară
este: 4,998107800121016004gρa2A4G 6 N. Comparativ cu forţa
F (de încărcare într-un nod), forţa rezultată din greutatea proprie reprezintă 0,83%.
Pentru estimarea corectă ar trebui determinată greutatea întregului pod raportată la
forţa totală de încărcare, sau determinarea tensiunii şi deformaţiilor cu considerarea
7. Sisteme de bare articulate
73
greutăţii proprii, oricum greutatea proprie se poate neglija. Distribuţia de tensiuni
este prezentată în Fig.7.22.
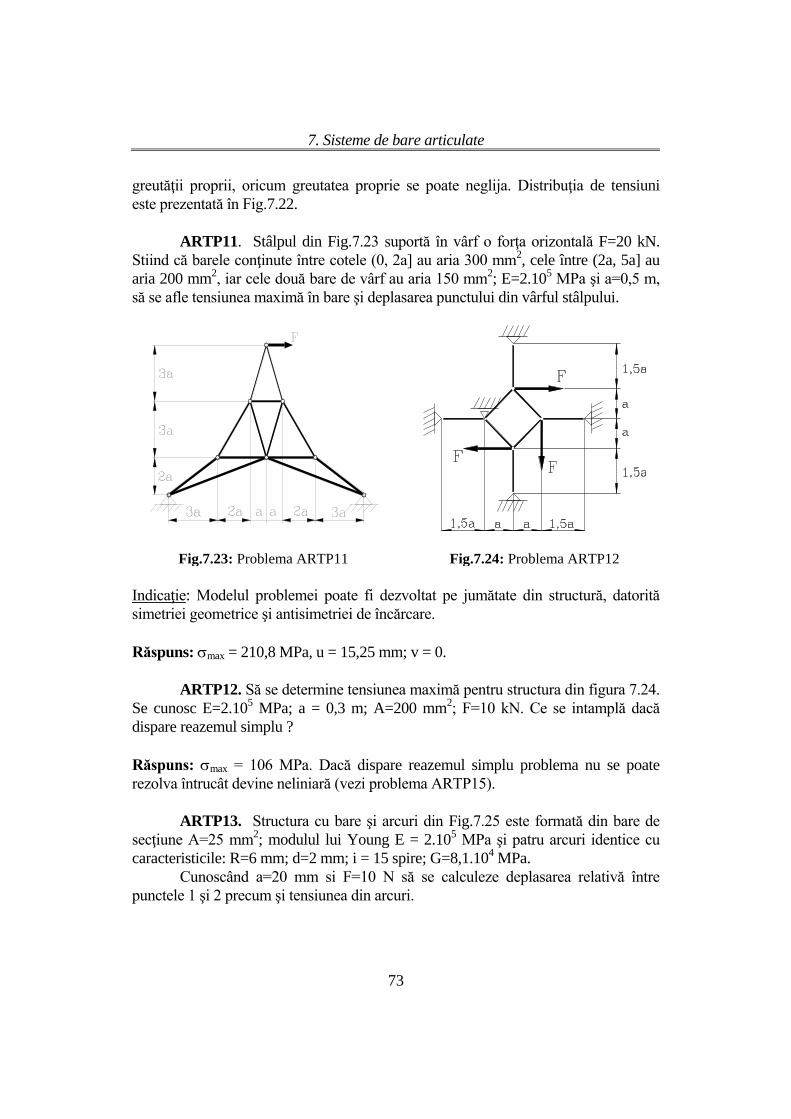
ARTP11. Stâlpul din Fig.7.23 suportă în vârf o forţa orizontală F=20 kN.
Stiind că barele conţinute între cotele (0, 2a] au aria 300 mm2, cele între (2a, 5a] au
aria 200 mm2, iar cele două bare de vârf au aria 150 mm
2; E=2.10
5 MPa şi a=0,5 m,
să se afle tensiunea maximă în bare şi deplasarea punctului din vârful stâlpului.
Fig.7.23: Problema ARTP11
Fig.7.24: Problema ARTP12
Indicaţie: Modelul problemei poate fi dezvoltat pe jumătate din structură, datorită
simetriei geometrice şi antisimetriei de încărcare.
Răspuns: max = 210,8 MPa, u = 15,25 mm; v = 0.
ARTP12. Să se determine tensiunea maximă pentru structura din figura 7.24.
Se cunosc E=2.105 MPa; a = 0,3 m; A=200 mm
2; F=10 kN. Ce se intamplă dacă
dispare reazemul simplu ?
Răspuns: max = 106 MPa. Dacă dispare reazemul simplu problema nu se poate
rezolva întrucât devine neliniară (vezi problema ARTP15).
ARTP13. Structura cu bare şi arcuri din Fig.7.25 este formată din bare de
secţiune A=25 mm2; modulul lui Young E = 2.10
5 MPa şi patru arcuri identice cu
caracteristicile: R=6 mm; d=2 mm; i = 15 spire; G=8,1.104 MPa.
Cunoscând a=20 mm si F=10 N să se calculeze deplasarea relativă între
punctele 1 şi 2 precum şi tensiunea din arcuri.
7. Sisteme de bare articulate
74
Indicaţie: Arcurile se modelează ca bare (vezi problema ARTP4). Structura fiind
repetitivă modelul se poate dezvolta pe o porţiune de bară şi o jumătate de arc (1/16
din structura) ca în Fig.7.26. Lungimea barei care modelează arcul este cunoscută 3a,
pentru modulul de elasicitate longitudinal se poate alege valoarea E=2.105 MPa şi
rezultă din relaţia (7.5) A=1,875.10-2
mm2.
Fig.7.25: Problema ARTP13 Fig.7.26: Model - ARTP13
Răspuns: 1-2 = 14,4 mm; arc = 57,3 MPa.
ARTP14. O structură tip macara ca în
Fig.7.27, formată din bare de oţel (E=2.105
MPa) de secţiuni egale A=4000 mm2, trebuie
să reziste la solicitarea unei forţe înclinate F.
Stiind că a = 1 m şi a = 150 MPa, să se afle
forţa capabilă de încărcare fără a de depăşi
tensiunea admisibilă şi să se calculeze
deplasarea totală a punctului unde este
aplicată forţa.
Răspuns: Fcap = 161 kN.
22 )78,59(52,36δ 70,05 mm.
ARTP15. Sistemul de două bare
articulate prezentat în Fig.7.28, încărcat cu
forţa F perpendiculară pe bare nu poate fi
rezolvat cu acest program. Să se explice de ce?
Dacă unghiul dintre cele două bare este foarte
mic (aproximativ un grad) problema se poate
rezolva ! Interpretaţi rezultatul.
Fig.7.28: Problema ARTP15
Fig.7.27: Problema ARTP14

7. Sisteme de bare articulate
75
Răspuns: Calculul fiind liniar echilibrul nodului central trebuie să poată fi scris în
poziţia iniţială (nedeformată) ceea ce este imposibil. Problema este neliniară. Deşi
pentru unghiuri mici programul poate fi rulat, rezultatele sunt false (deplasare
exagerată pentru forţă F mică).