1 - introducerurmaţi tot setul de instrucţiuni ce este livrat cu convertizorul. • citiţi setul...
TRANSCRIPT
Introducere
1
Introducere Privire generală asupra capitolului Capitolul include o descriere a conţinutului intregului
Manual. În completare, mai conţine informaţii despre compatibilitate, siguranţă şi publicaţii adiacente.
Compatibilitatea Manualul e compatibil cu ACS800 Standard Aplication Program 7.x. Instrucţiuni de funcţionare în siguranţă Urmaţi tot setul de instrucţiuni ce este livrat cu convertizorul.
• Citiţi setul compet de instrucţiuni de funcţionare în siguranţă înainte de instalare sau folosirea convertizorului. Setul complet de instrucţiuni se găseşte la începutul Manualului Hardware.
• Citiţi documentaţia cu privire la setările soft înainte de a modifica setările de bază ale funcţiilor. Pentru fiecare funcţie, avertizările şi remarcile sun date în acest manual în subcapitole ce descriu setarea paremetrilor de către utilizator.
Pentru cititor Cititorul manualului trebuie să cunoască practicile standard în
domeniul electric, componentele electronice, şi simbolurile folosite în schemele electrice.
Cuprins Manualul conţine următoarele capitole:
• Pornirea; şi controlul prin intermediul modulului I/O - în vederea setării programului aplicaţie, cum să porneşti, să opreşti şi să reglezi turaţia motorului.
• Panoul de control - oferă informaţii despre folosirea lui. • Caracteristicile de program - conţine descrierile caracteristicilor şi ale listelor de referinţă ale
setărilor făcute de utilizator precum şi semnalele de test. • Aplicaţiile cu macrouri - conţine o scurtă descriere a fiecărui macrou împreună cu o diagramă
de conexiuni. • Parametrii şi semnale actuale - descreie parametrii şi semnalele actuale ale convertizorului. • Punctarea defectelor - sunt listate mesajele de avertizare şi de defect împreună cu cauzele
posibile şi modul de remediere. • Controlul prin magistrală - comunicarea prin porturi seriale • Modulul de extensie analog – descreie comunicarea între convertizor şi extensiile analogice
I/O(opţional). • Date aditionale: parametrii şi semnalele actuale conţin mai multe informaţii despre semnalele
şi parametrii actuali.
Pornirea şi controlul prin I/O
3
Pornirea şi controlul prin intermediul modulului I/O Privire generală asupra capitolului Instrucţiunile din acest capitol se referă la:
• Pornire • Pornire, oprire, schimbarea sensului de rotaţie şi reglarea turaţiei motorului
prin modulul I/O. • Efectuarea unui test de pornire.
Pornirea convertizorului Există două metode de pornire dintre care utilizatorul trebuie să
aleagă: rularea asistentului de pornire sau efectuarea unei porniri limitate. Asistentul ghidează utilizatorul prin toate setările esenţiale pentru a fi făcute. În cazul pornirii limitate convertizorul nu oferă ghidare. Utilizatorul trece prin setările cele mai de bază urmând instrucţiunile din manual.
• Daca vreţi rularea Asistentului, urmaţi instrucţiunile din subsecţiunea Cum să efectuezi pornirea asistată(acoperă toate setările esenţiale)
• Dacă vreţi să faceţi o pornire limitată, urmaţi instrucţiunile date în subsecţiunea Cum să efectuezi pornirea limitată(acoperă setările de bază).
Cum să efectuezi pornirea asistată(acoperă toate setările esenţiale) Înainte de a începe asiguraţi-vă că aveţi datele despre motorul în
cauză
Măsuri de Siguranţă Pornirea poate fi făcută doar de un electrician calificat. Instrucţiunile de siguranţă trebuie urmate în timpul procedurii de pornire. Consultă manualul Hardware pentru acestea.
Verifică instalaţia
Verifică pornirea motorului astfel încât să nu creeze accidente. Decuplează maşina electrică dacă: - există pericolul de accidente în cazul unei direcţii incorecte a sensului de rotaţie - un test ”standard” trebuie să fie rulat în timpul pornirii.
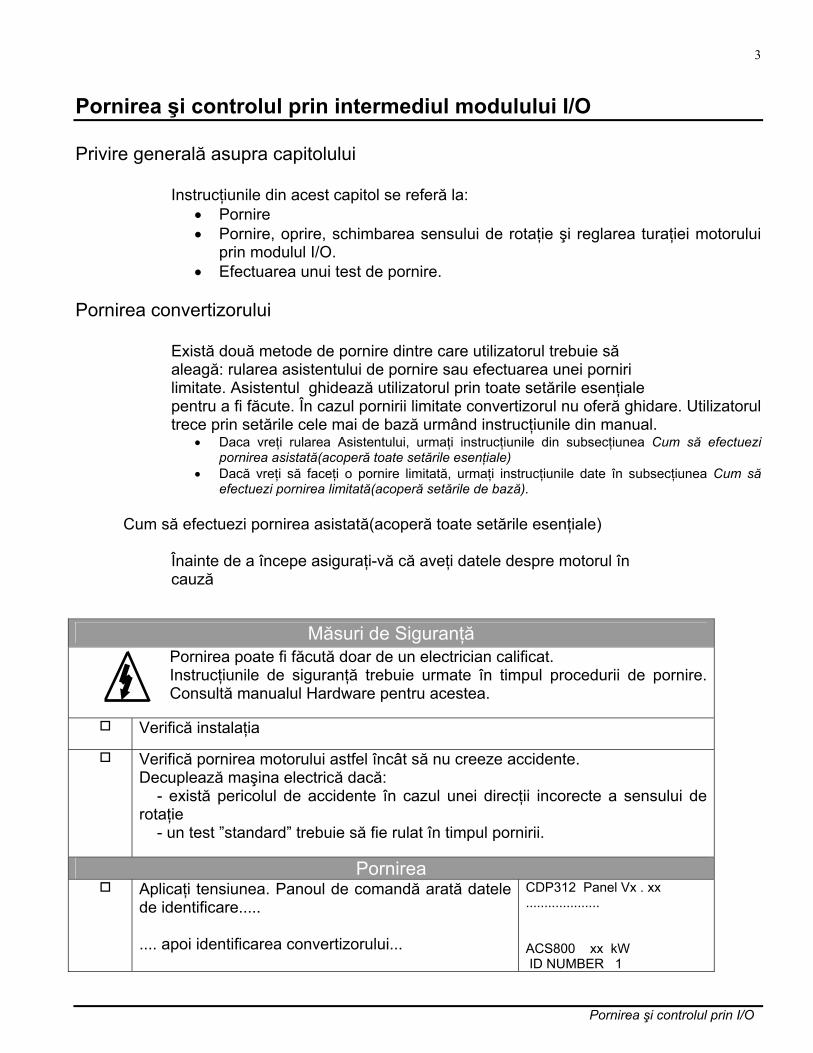
Pornirea Aplicaţi tensiunea. Panoul de comandă arată datele
de identificare..... .... apoi identificarea convertizorului...
CDP312 Panel Vx . xx .................... ACS800 xx kW ID NUMBER 1
Pornirea şi controlul prin I/O
4
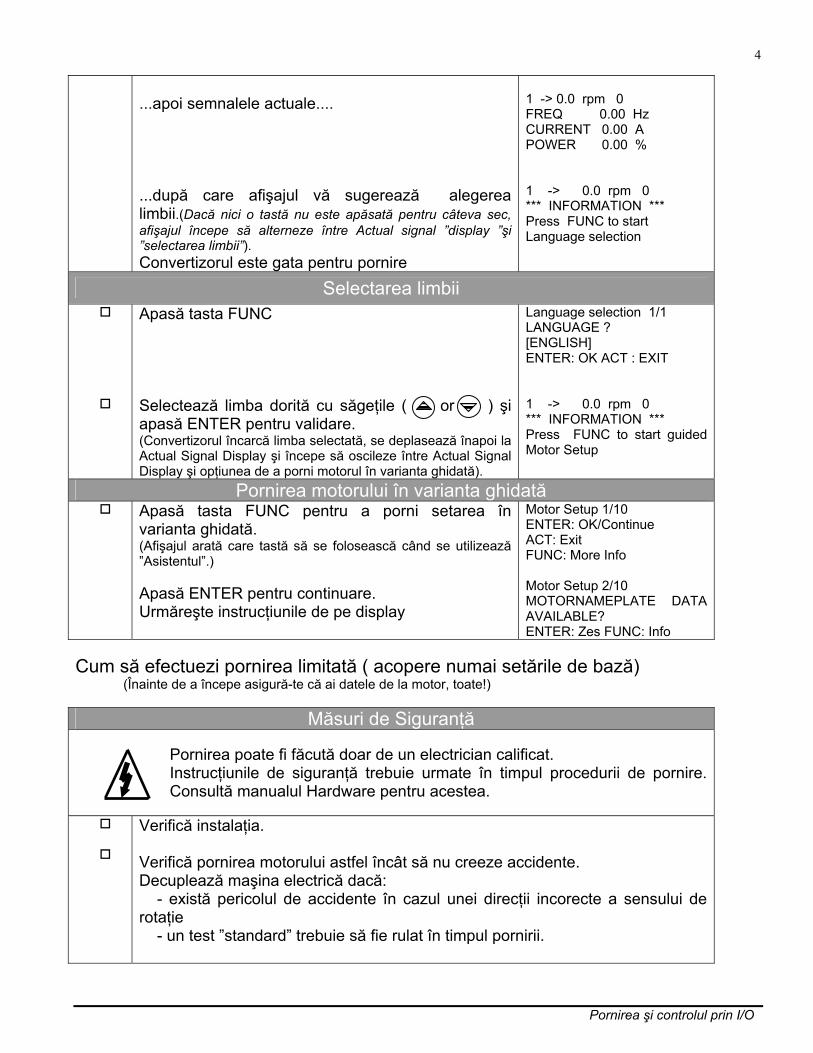
...apoi semnalele actuale.... ...după care afişajul vă sugerează alegerea limbii.(Dacă nici o tastă nu este apăsată pentru câteva sec, afişajul începe să alterneze între Actual signal ”display ”şi ”selectarea limbii”). Convertizorul este gata pentru pornire
1 -> 0.0 rpm 0 FREQ 0.00 Hz CURRENT 0.00 A POWER 0.00 % 1 -> 0.0 rpm 0 *** INFORMATION *** Press FUNC to start Language selection
Selectarea limbii
Apasă tasta FUNC Selectează limba dorită cu săgeţile ( or ) şi apasă ENTER pentru validare. (Convertizorul încarcă limba selectată, se deplasează înapoi la Actual Signal Display şi începe să oscileze între Actual Signal Display şi opţiunea de a porni motorul în varianta ghidată).
Language selection 1/1 LANGUAGE ? [ENGLISH] ENTER: OK ACT : EXIT 1 -> 0.0 rpm 0 *** INFORMATION *** Press FUNC to start guided Motor Setup
Pornirea motorului în varianta ghidată Apasă tasta FUNC pentru a porni setarea în
varianta ghidată. (Afişajul arată care tastă să se folosească când se utilizează ”Asistentul”.) Apasă ENTER pentru continuare. Urmăreşte instrucţiunile de pe display
Motor Setup 1/10 ENTER: OK/Continue ACT: Exit FUNC: More Info Motor Setup 2/10 MOTORNAMEPLATE DATA AVAILABLE? ENTER: Zes FUNC: Info
Cum să efectuezi pornirea limitată ( acopere numai setările de bază) (Înainte de a începe asigură-te că ai datele de la motor, toate!)
Măsuri de Siguranţă
Pornirea poate fi făcută doar de un electrician calificat. Instrucţiunile de siguranţă trebuie urmate în timpul procedurii de pornire. Consultă manualul Hardware pentru acestea.
Verifică instalaţia. Verifică pornirea motorului astfel încât să nu creeze accidente. Decuplează maşina electrică dacă: - există pericolul de accidente în cazul unei direcţii incorecte a sensului de rotaţie - un test ”standard” trebuie să fie rulat în timpul pornirii.
Pornirea şi controlul prin I/O
5
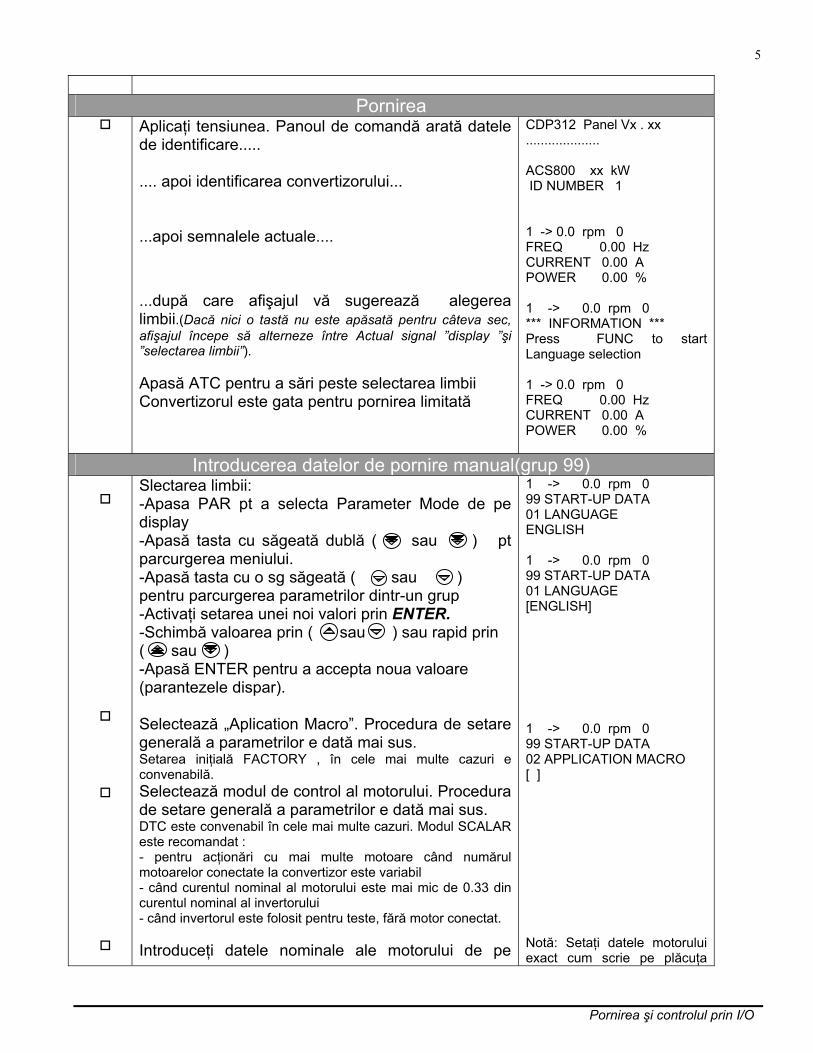
Pornirea
Aplicaţi tensiunea. Panoul de comandă arată datele de identificare..... .... apoi identificarea convertizorului... ...apoi semnalele actuale.... ...după care afişajul vă sugerează alegerea limbii.(Dacă nici o tastă nu este apăsată pentru câteva sec, afişajul începe să alterneze între Actual signal ”display ”şi ”selectarea limbii”). Apasă ATC pentru a sări peste selectarea limbii Convertizorul este gata pentru pornirea limitată
CDP312 Panel Vx . xx .................... ACS800 xx kW ID NUMBER 1 1 -> 0.0 rpm 0 FREQ 0.00 Hz CURRENT 0.00 A POWER 0.00 % 1 -> 0.0 rpm 0 *** INFORMATION *** Press FUNC to start Language selection 1 -> 0.0 rpm 0 FREQ 0.00 Hz CURRENT 0.00 A POWER 0.00 %
Introducerea datelor de pornire manual(grup 99)
Slectarea limbii: -Apasa PAR pt a selecta Parameter Mode de pe display -Apasă tasta cu săgeată dublă ( sau ) pt parcurgerea meniului. -Apasă tasta cu o sg săgeată ( sau ) pentru parcurgerea parametrilor dintr-un grup -Activaţi setarea unei noi valori prin ENTER. -Schimbă valoarea prin ( sau ) sau rapid prin ( sau ) -Apasă ENTER pentru a accepta noua valoare (parantezele dispar). Selectează „Aplication Macro”. Procedura de setare generală a parametrilor e dată mai sus. Setarea iniţială FACTORY , în cele mai multe cazuri e convenabilă. Selectează modul de control al motorului. Procedura de setare generală a parametrilor e dată mai sus. DTC este convenabil în cele mai multe cazuri. Modul SCALAR este recomandat : - pentru acţionări cu mai multe motoare când numărul motoarelor conectate la convertizor este variabil - când curentul nominal al motorului este mai mic de 0.33 din curentul nominal al invertorului - când invertorul este folosit pentru teste, fără motor conectat. Introduceţi datele nominale ale motorului de pe
1 -> 0.0 rpm 0 99 START-UP DATA 01 LANGUAGE ENGLISH 1 -> 0.0 rpm 0 99 START-UP DATA 01 LANGUAGE [ENGLISH] 1 -> 0.0 rpm 0 99 START-UP DATA 02 APPLICATION MACRO [ ] Notă: Setaţi datele motorului exact cum scrie pe plăcuţa
Pornirea şi controlul prin I/O
6
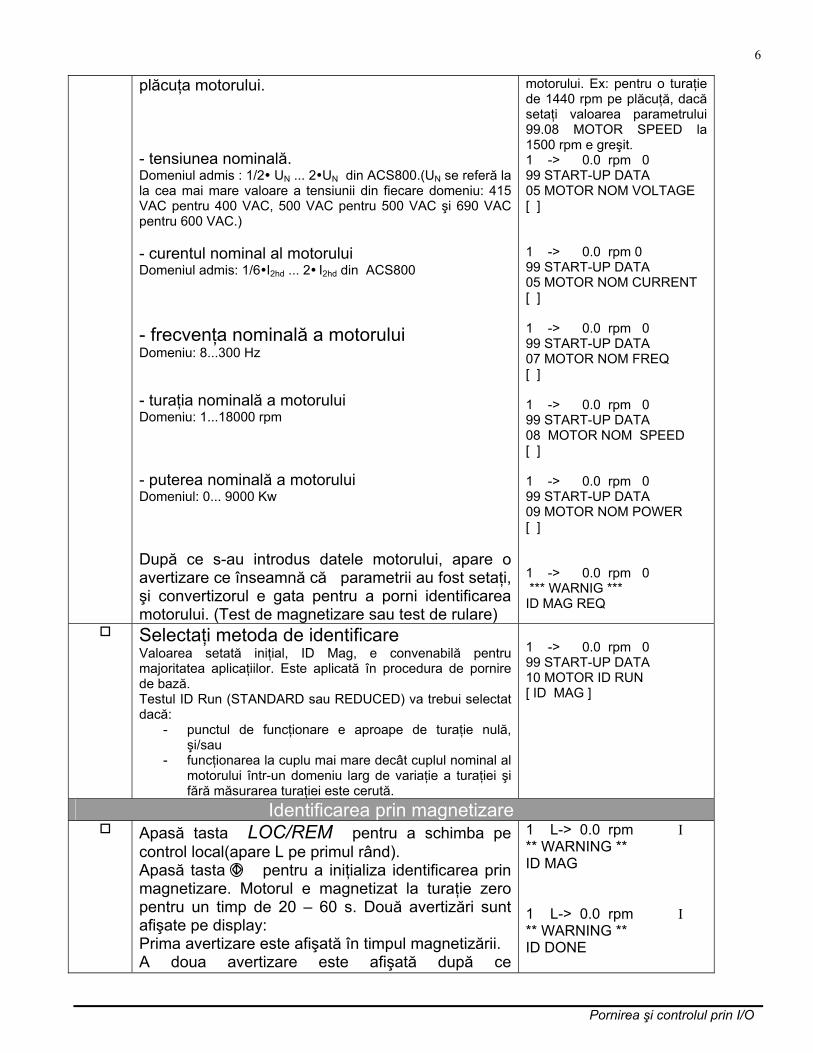
plăcuţa motorului. - tensiunea nominală. Domeniul admis : 1/2 UN ... 2 UN din ACS800.(UN se referă la la cea mai mare valoare a tensiunii din fiecare domeniu: 415 VAC pentru 400 VAC, 500 VAC pentru 500 VAC şi 690 VAC pentru 600 VAC.) - curentul nominal al motorului Domeniul admis: 1/6 I2hd ... 2 I2hd din ACS800 - frecvenţa nominală a motorului Domeniu: 8...300 Hz - turaţia nominală a motorului Domeniu: 1...18000 rpm - puterea nominală a motorului Domeniul: 0... 9000 Kw După ce s-au introdus datele motorului, apare o avertizare ce înseamnă că parametrii au fost setaţi, şi convertizorul e gata pentru a porni identificarea motorului. (Test de magnetizare sau test de rulare)
motorului. Ex: pentru o turaţie de 1440 rpm pe plăcuţă, dacă setaţi valoarea parametrului 99.08 MOTOR SPEED la 1500 rpm e greşit. 1 -> 0.0 rpm 0 99 START-UP DATA 05 MOTOR NOM VOLTAGE [ ] 1 -> 0.0 rpm 0 99 START-UP DATA 05 MOTOR NOM CURRENT [ ] 1 -> 0.0 rpm 0 99 START-UP DATA 07 MOTOR NOM FREQ [ ] 1 -> 0.0 rpm 0 99 START-UP DATA 08 MOTOR NOM SPEED [ ] 1 -> 0.0 rpm 0 99 START-UP DATA 09 MOTOR NOM POWER [ ] 1 -> 0.0 rpm 0 *** WARNIG *** ID MAG REQ
Selectaţi metoda de identificare Valoarea setată iniţial, ID Mag, e convenabilă pentru majoritatea aplicaţiilor. Este aplicată în procedura de pornire de bază. Testul ID Run (STANDARD sau REDUCED) va trebui selectat dacă:
- punctul de funcţionare e aproape de turaţie nulă, şi/sau
- funcţionarea la cuplu mai mare decât cuplul nominal al motorului într-un domeniu larg de variaţie a turaţiei şi fără măsurarea turaţiei este cerută.
1 -> 0.0 rpm 0 99 START-UP DATA 10 MOTOR ID RUN [ ID MAG ]
Identificarea prin magnetizare Apasă tasta LOC/REM pentru a schimba pe
control local(apare L pe primul rând). Apasă tasta pentru a iniţializa identificarea prin magnetizare. Motorul e magnetizat la turaţie zero pentru un timp de 20 – 60 s. Două avertizări sunt afişate pe display: Prima avertizare este afişată în timpul magnetizării. A doua avertizare este afişată după ce
1 L-> 0.0 rpm I ** WARNING ** ID MAG 1 L-> 0.0 rpm I ** WARNING ** ID DONE
Pornirea şi controlul prin I/O
7
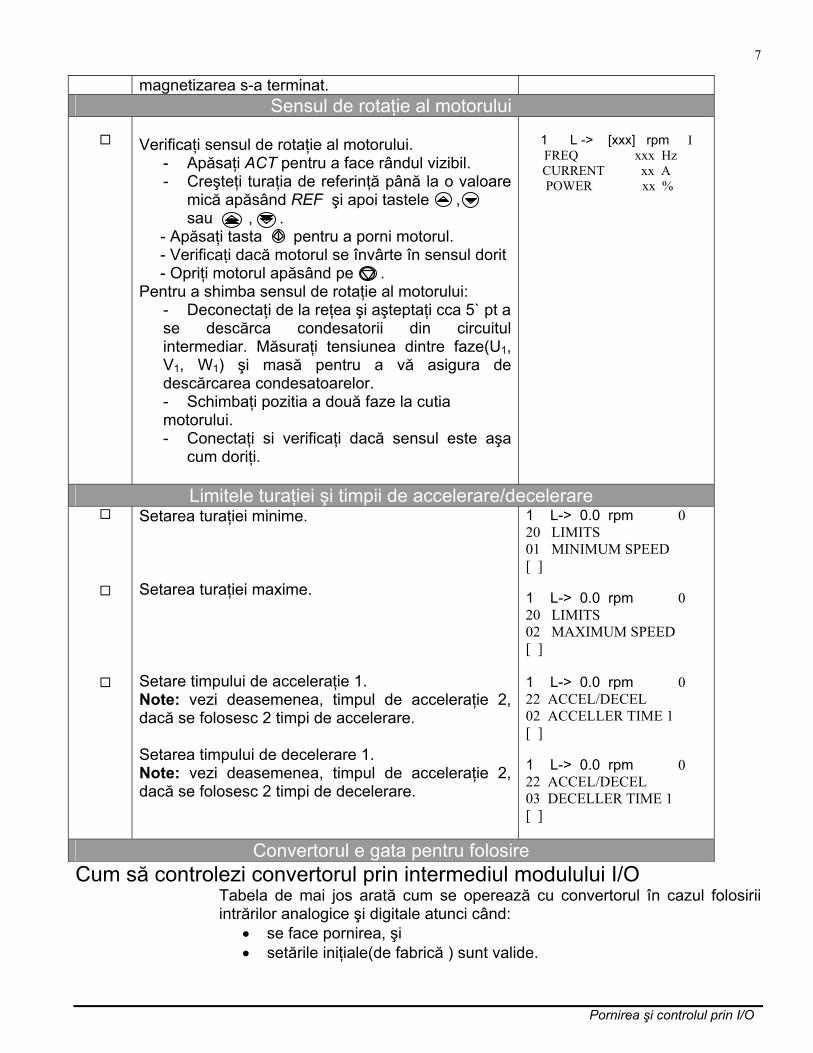
magnetizarea s-a terminat. Sensul de rotaţie al motorului
Verificaţi sensul de rotaţie al motorului.
- Apăsaţi ACT pentru a face rândul vizibil. - Creşteţi turaţia de referinţă până la o valoare
mică apăsând REF şi apoi tastele , sau , .
- Apăsaţi tasta pentru a porni motorul. - Verificaţi dacă motorul se învârte în sensul dorit - Opriţi motorul apăsând pe .
Pentru a shimba sensul de rotaţie al motorului: - Deconectaţi de la reţea şi aşteptaţi cca 5` pt a se descărca condesatorii din circuitul intermediar. Măsuraţi tensiunea dintre faze(U1, V1, W1) şi masă pentru a vă asigura de descărcarea condesatoarelor. - Schimbaţi pozitia a două faze la cutia motorului. - Conectaţi si verificaţi dacă sensul este aşa
cum doriţi.
1 L -> [xxx] rpm I FREQ xxx Hz CURRENT xx A POWER xx %
Limitele turaţiei şi timpii de accelerare/decelerare
Setarea turaţiei minime. Setarea turaţiei maxime. Setare timpului de acceleraţie 1. Note: vezi deasemenea, timpul de acceleraţie 2, dacă se folosesc 2 timpi de accelerare. Setarea timpului de decelerare 1. Note: vezi deasemenea, timpul de acceleraţie 2, dacă se folosesc 2 timpi de decelerare.
1 L-> 0.0 rpm 0 20 LIMITS 01 MINIMUM SPEED [ ] 1 L-> 0.0 rpm 0 20 LIMITS 02 MAXIMUM SPEED [ ] 1 L-> 0.0 rpm 0 22 ACCEL/DECEL 02 ACCELLER TIME 1 [ ] 1 L-> 0.0 rpm 0 22 ACCEL/DECEL 03 DECELLER TIME 1 [ ]
Convertorul e gata pentru folosire Cum să controlezi convertorul prin intermediul modulului I/O
Tabela de mai jos arată cum se operează cu convertorul în cazul folosirii intrărilor analogice şi digitale atunci când:
• se face pornirea, şi • setările iniţiale(de fabrică ) sunt valide.
Pornirea şi controlul prin I/O
8
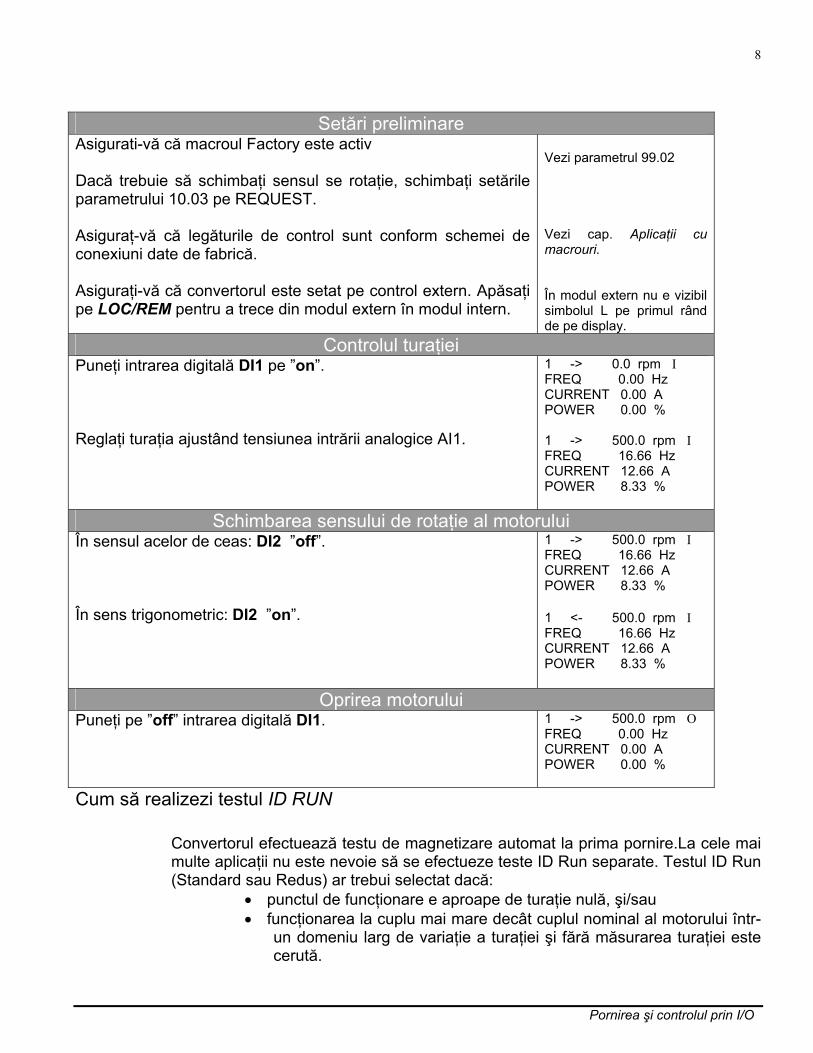
Setări preliminare Asigurati-vă că macroul Factory este activ Dacă trebuie să schimbaţi sensul se rotaţie, schimbaţi setările parametrului 10.03 pe REQUEST. Asiguraţ-vă că legăturile de control sunt conform schemei de conexiuni date de fabrică. Asiguraţi-vă că convertorul este setat pe control extern. Apăsaţi pe LOC/REM pentru a trece din modul extern în modul intern.
Vezi parametrul 99.02 Vezi cap. Aplicaţii cu macrouri. În modul extern nu e vizibil simbolul L pe primul rând de pe display.
Controlul turaţiei Puneţi intrarea digitală DI1 pe ”on”. Reglaţi turaţia ajustând tensiunea intrării analogice AI1.
1 -> 0.0 rpm I FREQ 0.00 Hz CURRENT 0.00 A POWER 0.00 % 1 -> 500.0 rpm I FREQ 16.66 Hz CURRENT 12.66 A POWER 8.33 %
Schimbarea sensului de rotaţie al motorului În sensul acelor de ceas: DI2 ”off”. În sens trigonometric: DI2 ”on”.
1 -> 500.0 rpm I FREQ 16.66 Hz CURRENT 12.66 A POWER 8.33 % 1 <- 500.0 rpm I FREQ 16.66 Hz CURRENT 12.66 A POWER 8.33 %
Oprirea motorului Puneţi pe ”off” intrarea digitală DI1. 1 -> 500.0 rpm O
FREQ 0.00 Hz CURRENT 0.00 A POWER 0.00 %
Cum să realizezi testul ID RUN
Convertorul efectuează testu de magnetizare automat la prima pornire.La cele mai multe aplicaţii nu este nevoie să se efectueze teste ID Run separate. Testul ID Run (Standard sau Redus) ar trebui selectat dacă:
• punctul de funcţionare e aproape de turaţie nulă, şi/sau • funcţionarea la cuplu mai mare decât cuplul nominal al motorului într-
un domeniu larg de variaţie a turaţiei şi fără măsurarea turaţiei este cerută.
Pornirea şi controlul prin I/O
9
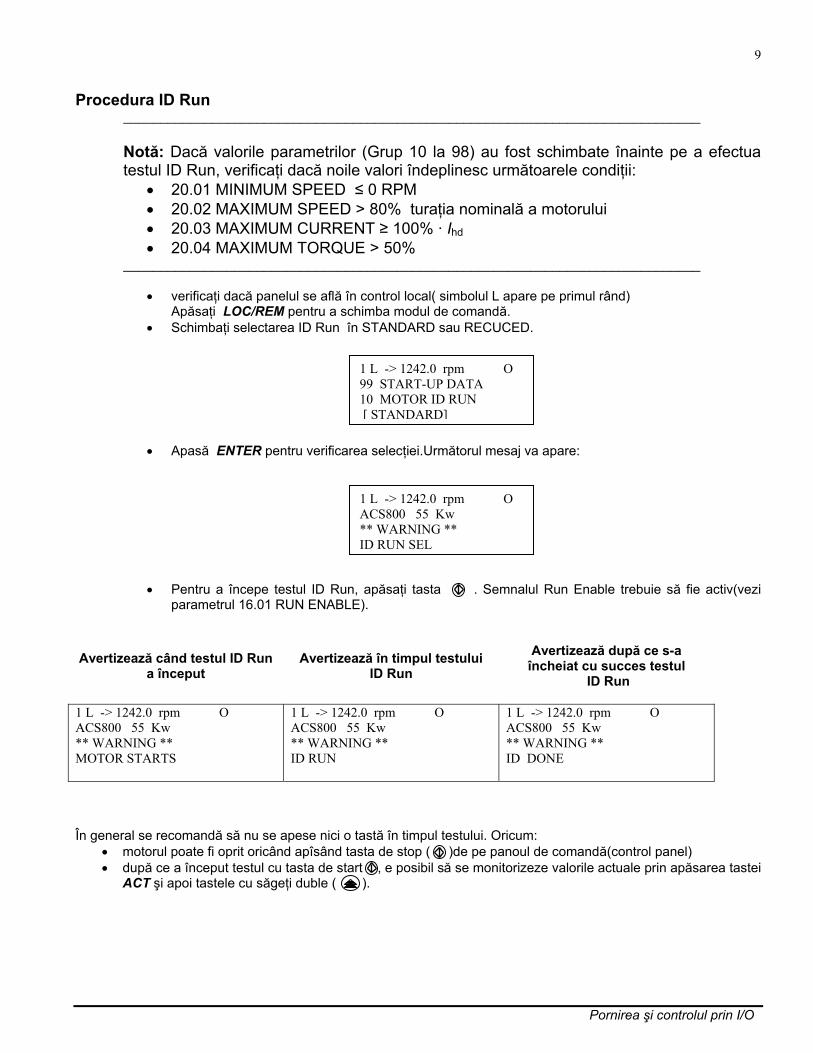
Procedura ID Run ______________________________________________________________________________
Notă: Dacă valorile parametrilor (Grup 10 la 98) au fost schimbate înainte pe a efectua testul ID Run, verificaţi dacă noile valori îndeplinesc următoarele condiţii:
• 20.01 MINIMUM SPEED ≤ 0 RPM • 20.02 MAXIMUM SPEED > 80% turaţia nominală a motorului • 20.03 MAXIMUM CURRENT ≥ 100% · Ihd • 20.04 MAXIMUM TORQUE > 50%
______________________________________________________________________________
• verificaţi dacă panelul se află în control local( simbolul L apare pe primul rând) Apăsaţi LOC/REM pentru a schimba modul de comandă.
• Schimbaţi selectarea ID Run în STANDARD sau RECUCED.
• Apasă ENTER pentru verificarea selecţiei.Următorul mesaj va apare:
• Pentru a începe testul ID Run, apăsaţi tasta . Semnalul Run Enable trebuie să fie activ(vezi parametrul 16.01 RUN ENABLE).
Avertizează când testul ID Run a început
Avertizează în timpul testului ID Run
Avertizează după ce s-a încheiat cu succes testul
ID Run 1 L -> 1242.0 rpm O ACS800 55 Kw ** WARNING ** MOTOR STARTS
1 L -> 1242.0 rpm O ACS800 55 Kw ** WARNING ** ID RUN
1 L -> 1242.0 rpm O ACS800 55 Kw ** WARNING ** ID DONE
În general se recomandă să nu se apese nici o tastă în timpul testului. Oricum:
• motorul poate fi oprit oricând apîsând tasta de stop ( )de pe panoul de comandă(control panel) • după ce a început testul cu tasta de start , e posibil să se monitorizeze valorile actuale prin apăsarea tastei
ACT şi apoi tastele cu săgeţi duble ( ).
1 L -> 1242.0 rpm O 99 START-UP DATA 10 MOTOR ID RUN [ STANDARD]
1 L -> 1242.0 rpm O ACS800 55 Kw ** WARNING ** ID RUN SEL

Panoul de comandă
10
Panoul de comandă Privire generală asupra întregului capitol Capitolul descrie cum să folosiţi panoul de comandă CDP 312 sau CDP 312R. Vedere asupra panoului
Afişajul tip LCD are 4 linii a câte 20 de caractere. Limba este selectată la pornire (parametrul 99.01) Panoul de control are 4 moduri de operare:
- Afişarea semnalelor actuale ( tasta ACT )
- Paramerii (tasta PAR ) - Modul aplicaţie (tasta FUNC ) - Selectarea tipului de convertor
(tasta DRIVE) Folosirea tastelor cu o sg. săgeată, săgeată dublă şi a lui ENTER depinde de modul de operare selectat. Tastel de control: Nr. Funcţia 1. Start 2. Stop 3. Activarea setării de referinţă 4. Sensul acelor de ceas 5. Sens trigonometric 6. Resetare 7. Control local / telecomandă
(extern)
ENTER
ACT PAR FUNC DRIVE
REF
REM
LOC RESET
0 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
1
25
6 3
4
7
Panoul de comandă
11
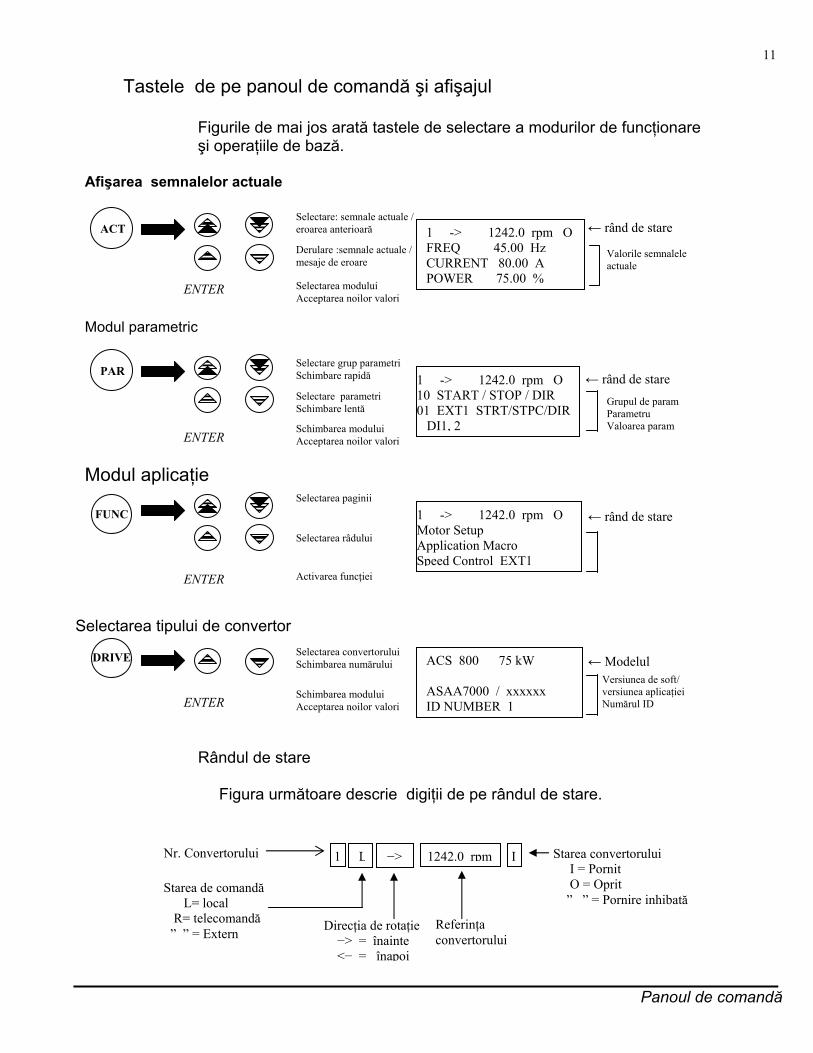
Tastele de pe panoul de comandă şi afişajul
Figurile de mai jos arată tastele de selectare a modurilor de funcţionare şi operaţiile de bază.
Afişarea semnalelor actuale Modul parametric Modul aplicaţie
Selectarea tipului de convertor
Rândul de stare Figura următoare descrie digiţii de pe rândul de stare.
ACT
ENTER
Selectare: semnale actuale / eroarea anterioară
Derulare :semnale actuale / mesaje de eroare
Selectarea modului Acceptarea noilor valori
PAR
ENTER
Selectare grup parametri Schimbare rapidă
Selectare parametri Schimbare lentă
Schimbarea modului Acceptarea noilor valori
FUNC
ENTER
Selectarea paginii
Selectarea râdului
Activarea funcţiei
DRIVE Selectarea convertorului Schimbarea numărului
Schimbarea modului Acceptarea noilor valori ENTER
1 -> 1242.0 rpm O Motor Setup Application Macro Speed Control EXT1
← rând de stare
1 -> 1242.0 rpm O FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
← rând de stare
Valorile semnalele actuale
1 -> 1242.0 rpm O 10 START / STOP / DIR 01 EXT1 STRT/STPC/DIR DI1, 2
← rând de stare Grupul de param Parametru Valoarea param
ACS 800 75 kW ASAA7000 / xxxxxx ID NUMBER 1
← Modelul Versiunea de soft/ versiunea aplicaţiei Numărul ID
1 L −> 1242.0 rpm INr. Convertorului
Starea de comandă L= local R= telecomandă ” ” = Extern Direcţia de rotaţie
−> = înainte <− = înapoi
Referinţa convertorului
Starea convertorului I = Pornit O = Oprit ” ” = Pornire inhibată
Panoul de comandă
12
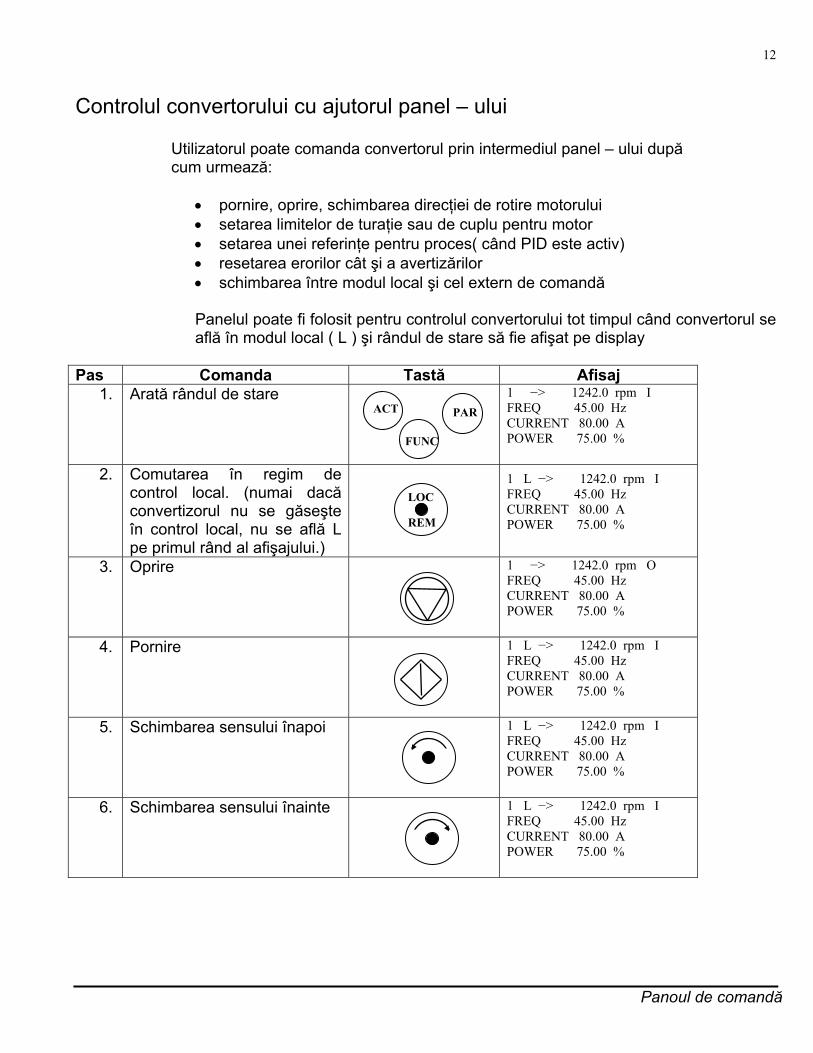
Controlul convertorului cu ajutorul panel – ului Utilizatorul poate comanda convertorul prin intermediul panel – ului după
cum urmează:
• pornire, oprire, schimbarea direcţiei de rotire motorului • setarea limitelor de turaţie sau de cuplu pentru motor • setarea unei referinţe pentru proces( când PID este activ) • resetarea erorilor cât şi a avertizărilor • schimbarea între modul local şi cel extern de comandă Panelul poate fi folosit pentru controlul convertorului tot timpul când convertorul se află în modul local ( L ) şi rândul de stare să fie afişat pe display
Pas Comanda Tastă Afisaj 1. Arată rândul de stare
1 −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
2. Comutarea în regim de control local. (numai dacă convertizorul nu se găseşte în control local, nu se află L pe primul rând al afişajului.)
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
3. Oprire
1 −> 1242.0 rpm O FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
4. Pornire
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
5. Schimbarea sensului înapoi
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
6. Schimbarea sensului înainte
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
ACT PAR
FUNC
REM
LOC
Panoul de comandă
13
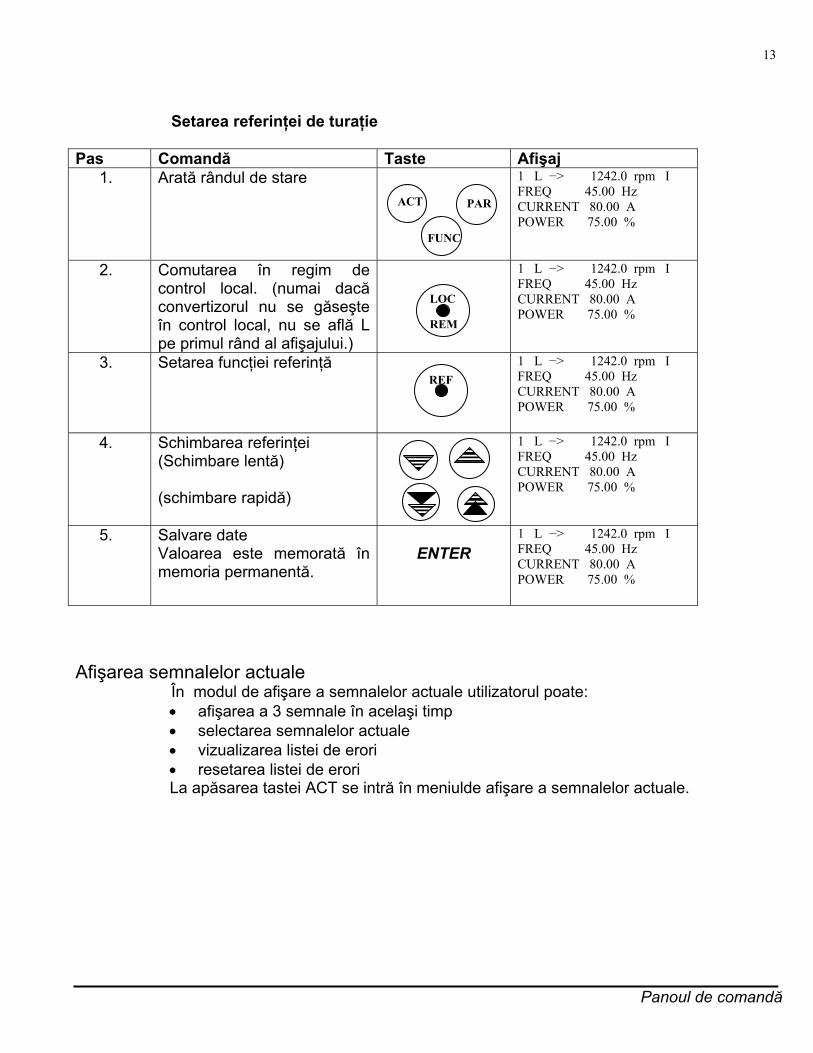
Setarea referinţei de turaţie Pas Comandă Taste Afişaj
1. Arată rândul de stare
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
2. Comutarea în regim de control local. (numai dacă convertizorul nu se găseşte în control local, nu se află L pe primul rând al afişajului.)
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
3. Setarea funcţiei referinţă
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
4. Schimbarea referinţei (Schimbare lentă) (schimbare rapidă)
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
5. Salvare date Valoarea este memorată în memoria permanentă.
ENTER
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
Afişarea semnalelor actuale În modul de afişare a semnalelor actuale utilizatorul poate:
• afişarea a 3 semnale în acelaşi timp • selectarea semnalelor actuale • vizualizarea listei de erori • resetarea listei de erori La apăsarea tastei ACT se intră în meniulde afişare a semnalelor actuale.
REM
LOC
ACT PAR
FUNC
REF
Panoul de comandă
14
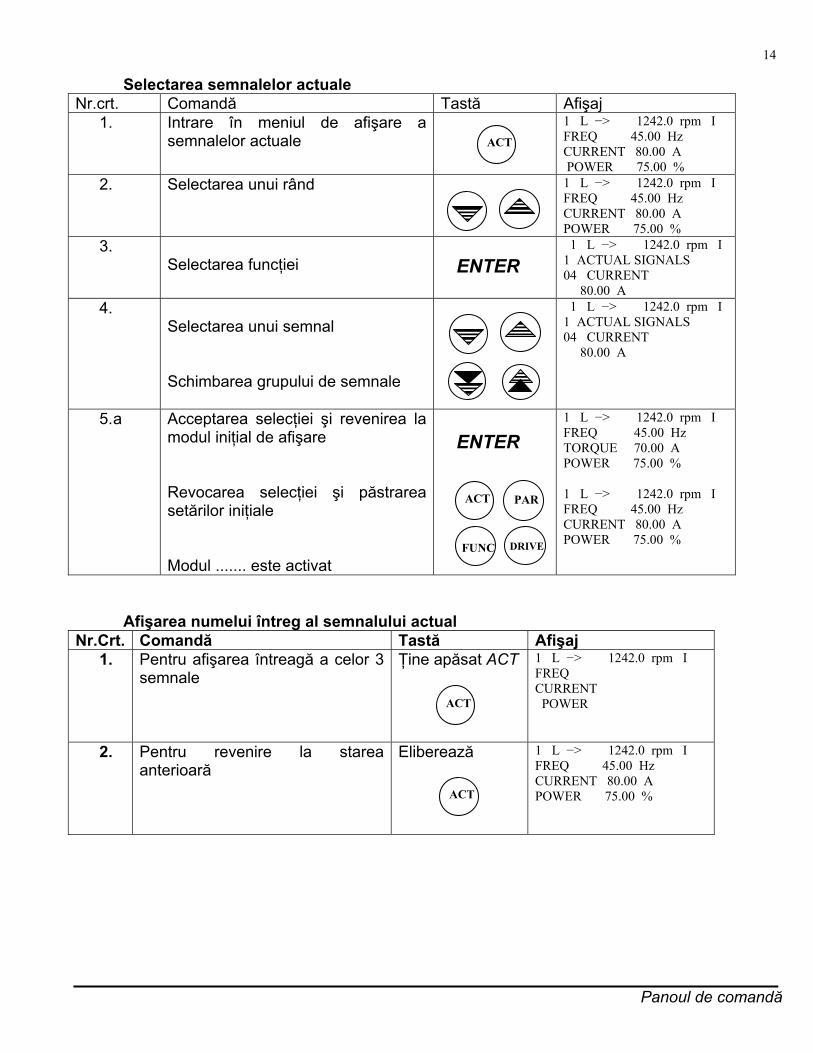
Selectarea semnalelor actuale Nr.crt. Comandă Tastă Afişaj
1. Intrare în meniul de afişare a semnalelor actuale
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
2. Selectarea unui rând 1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
3. Selectarea funcţiei
ENTER
1 L −> 1242.0 rpm I 1 ACTUAL SIGNALS 04 CURRENT 80.00 A
4. Selectarea unui semnal Schimbarea grupului de semnale
1 L −> 1242.0 rpm I 1 ACTUAL SIGNALS 04 CURRENT 80.00 A
5. a Acceptarea selecţiei şi revenirea la modul iniţial de afişare Revocarea selecţiei şi păstrarea setărilor iniţiale Modul ....... este activat
ENTER
1 L −> 1242.0 rpm I FREQ 45.00 Hz TORQUE 70.00 A POWER 75.00 % 1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
Afişarea numelui întreg al semnalului actual Nr.Crt. Comandă Tastă Afişaj
1. Pentru afişarea întreagă a celor 3 semnale
Ţine apăsat ACT
1 L −> 1242.0 rpm I FREQ CURRENT POWER
2. Pentru revenire la starea anterioară
Eliberează
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
ACT
ACT PAR
FUNC DRIVE
ACT
ACT
Panoul de comandă
15
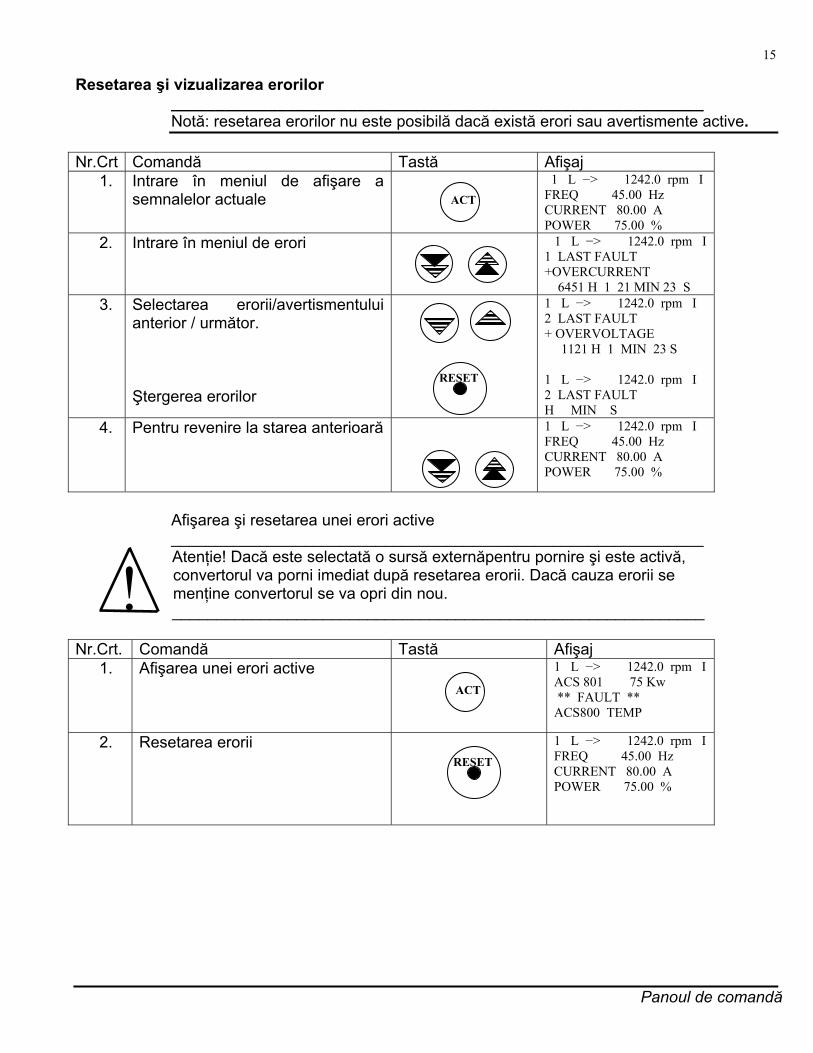
Resetarea şi vizualizarea erorilor ____________________________________________________________
Notă: resetarea erorilor nu este posibilă dacă există erori sau avertismente active. Nr.Crt Comandă Tastă Afişaj
1. Intrare în meniul de afişare a semnalelor actuale
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
2. Intrare în meniul de erori
1 L −> 1242.0 rpm I 1 LAST FAULT +OVERCURRENT 6451 H 1 21 MIN 23 S
3. Selectarea erorii/avertismentului anterior / următor. Ştergerea erorilor
1 L −> 1242.0 rpm I 2 LAST FAULT + OVERVOLTAGE 1121 H 1 MIN 23 S 1 L −> 1242.0 rpm I 2 LAST FAULT H MIN S
4. Pentru revenire la starea anterioară
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
Afişarea şi resetarea unei erori active ____________________________________________________________ Atenţie! Dacă este selectată o sursă externăpentru pornire şi este activă, convertorul va porni imediat după resetarea erorii. Dacă cauza erorii se menţine convertorul se va opri din nou. ____________________________________________________________ Nr.Crt. Comandă Tastă Afişaj
1. Afişarea unei erori active
1 L −> 1242.0 rpm I ACS 801 75 Kw ** FAULT ** ACS800 TEMP
2. Resetarea erorii
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
ACT
RESET
ACT
RESET
!
Panoul de comandă
16
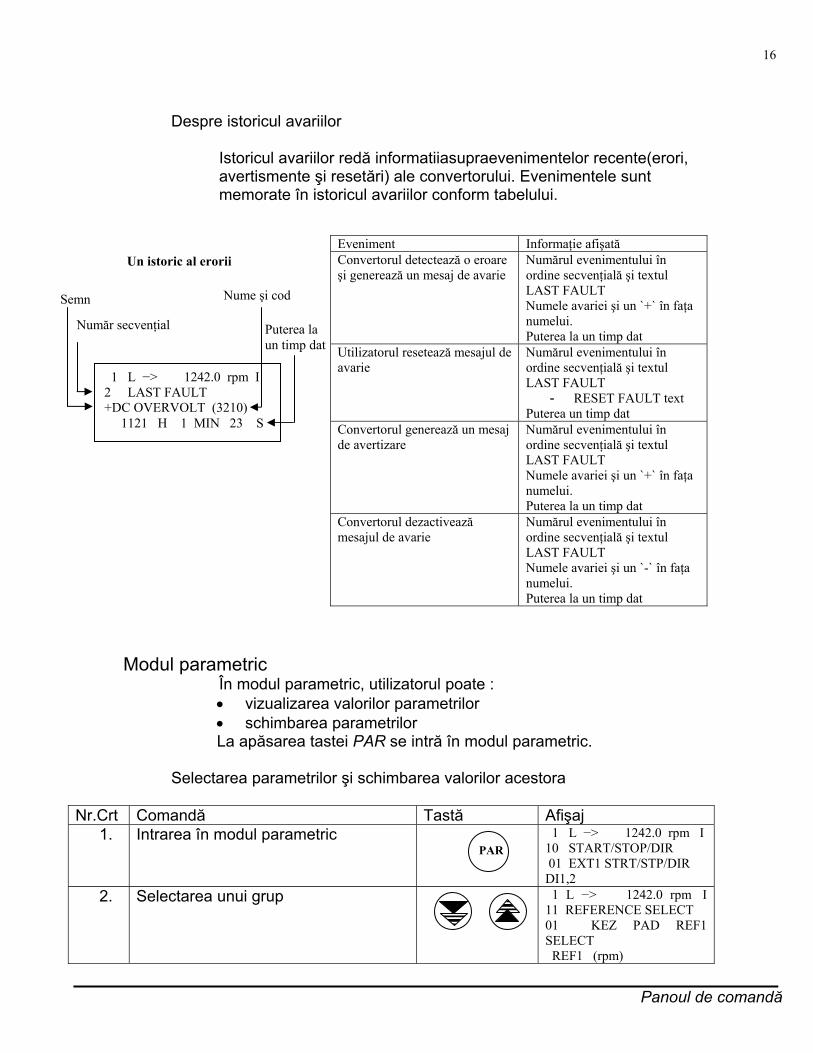
Despre istoricul avariilor Istoricul avariilor redă informatiiasupraevenimentelor recente(erori,
avertismente şi resetări) ale convertorului. Evenimentele sunt memorate în istoricul avariilor conform tabelului.
Modul parametric În modul parametric, utilizatorul poate :
• vizualizarea valorilor parametrilor • schimbarea parametrilor La apăsarea tastei PAR se intră în modul parametric.
Selectarea parametrilor şi schimbarea valorilor acestora Nr.Crt Comandă Tastă Afişaj
1. Intrarea în modul parametric
1 L −> 1242.0 rpm I 10 START/STOP/DIR 01 EXT1 STRT/STP/DIR DI1,2
2. Selectarea unui grup
1 L −> 1242.0 rpm I 11 REFERENCE SELECT 01 KEZ PAD REF1 SELECT REF1 (rpm)
Eveniment Informaţie afişată Convertorul detectează o eroare şi generează un mesaj de avarie
Numărul evenimentului în ordine secvenţială şi textul LAST FAULT Numele avariei şi un `+` în faţa numelui. Puterea la un timp dat
Utilizatorul resetează mesajul de avarie
Numărul evenimentului în ordine secvenţială şi textul LAST FAULT
- RESET FAULT text Puterea un timp dat
Convertorul generează un mesaj de avertizare
Numărul evenimentului în ordine secvenţială şi textul LAST FAULT Numele avariei şi un `+` în faţa numelui. Puterea la un timp dat
Convertorul dezactivează mesajul de avarie
Numărul evenimentului în ordine secvenţială şi textul LAST FAULT Numele avariei şi un `-` în faţa numelui. Puterea la un timp dat
1 L −> 1242.0 rpm I 2 LAST FAULT +DC OVERVOLT (3210) 1121 H 1 MIN 23 S
Un istoric al erorii
Număr secvenţial
Semn Nume şi cod
Puterea la un timp dat
PAR
Panoul de comandă
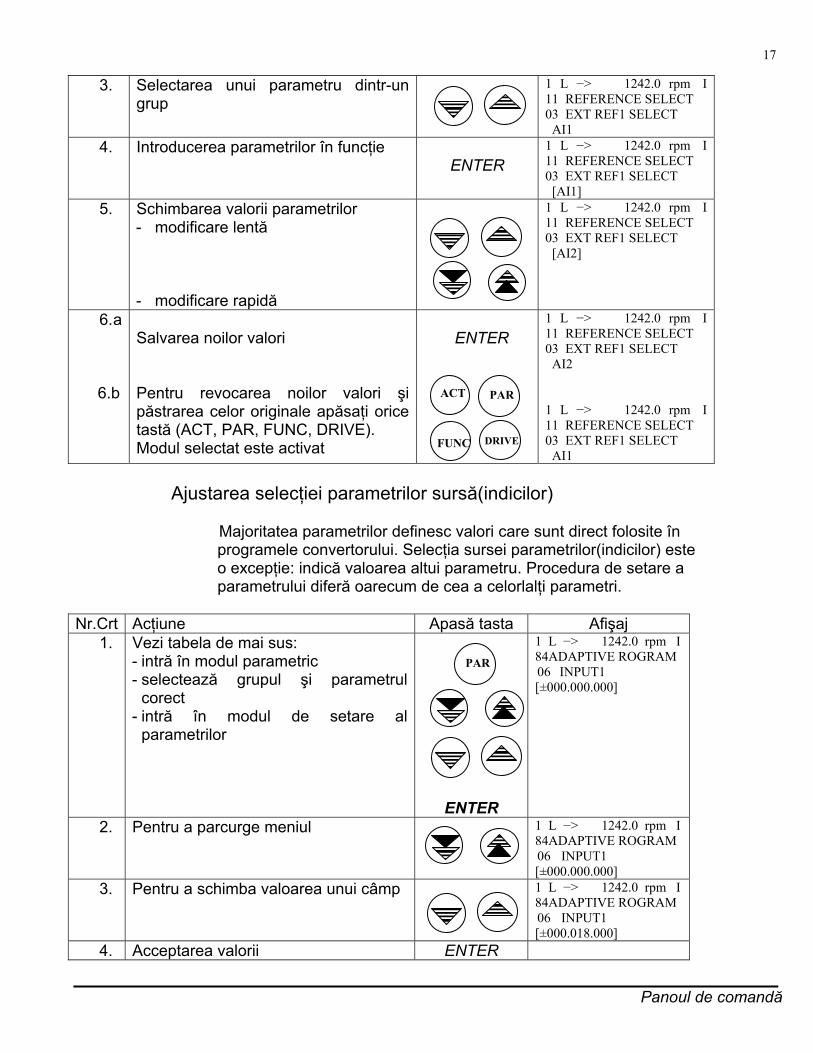
17
3. Selectarea unui parametru dintr-un grup
1 L −> 1242.0 rpm I 11 REFERENCE SELECT 03 EXT REF1 SELECT AI1
4. Introducerea parametrilor în funcţie ENTER
1 L −> 1242.0 rpm I 11 REFERENCE SELECT 03 EXT REF1 SELECT [AI1]
5. Schimbarea valorii parametrilor - modificare lentă - modificare rapidă
1 L −> 1242.0 rpm I 11 REFERENCE SELECT 03 EXT REF1 SELECT [AI2]
6. a 6.b
Salvarea noilor valori Pentru revocarea noilor valori şi păstrarea celor originale apăsaţi orice tastă (ACT, PAR, FUNC, DRIVE). Modul selectat este activat
ENTER
1 L −> 1242.0 rpm I 11 REFERENCE SELECT 03 EXT REF1 SELECT AI2 1 L −> 1242.0 rpm I 11 REFERENCE SELECT 03 EXT REF1 SELECT AI1
Ajustarea selecţiei parametrilor sursă(indicilor) Majoritatea parametrilor definesc valori care sunt direct folosite în programele convertorului. Selecţia sursei parametrilor(indicilor) este o excepţie: indică valoarea altui parametru. Procedura de setare a parametrului diferă oarecum de cea a celorlalţi parametri. Nr.Crt Acţiune Apasă tasta Afişaj
1. Vezi tabela de mai sus: - intră în modul parametric - selectează grupul şi parametrul
corect - intră în modul de setare al
parametrilor
ENTER
1 L −> 1242.0 rpm I 84ADAPTIVE ROGRAM 06 INPUT1 [±000.000.000]
2. Pentru a parcurge meniul
1 L −> 1242.0 rpm I 84ADAPTIVE ROGRAM 06 INPUT1 [±000.000.000]
3. Pentru a schimba valoarea unui câmp
1 L −> 1242.0 rpm I 84ADAPTIVE ROGRAM 06 INPUT1 [±000.018.000]
4. Acceptarea valorii ENTER
ACT PAR
FUNC DRIVE
PAR
Panoul de comandă
18
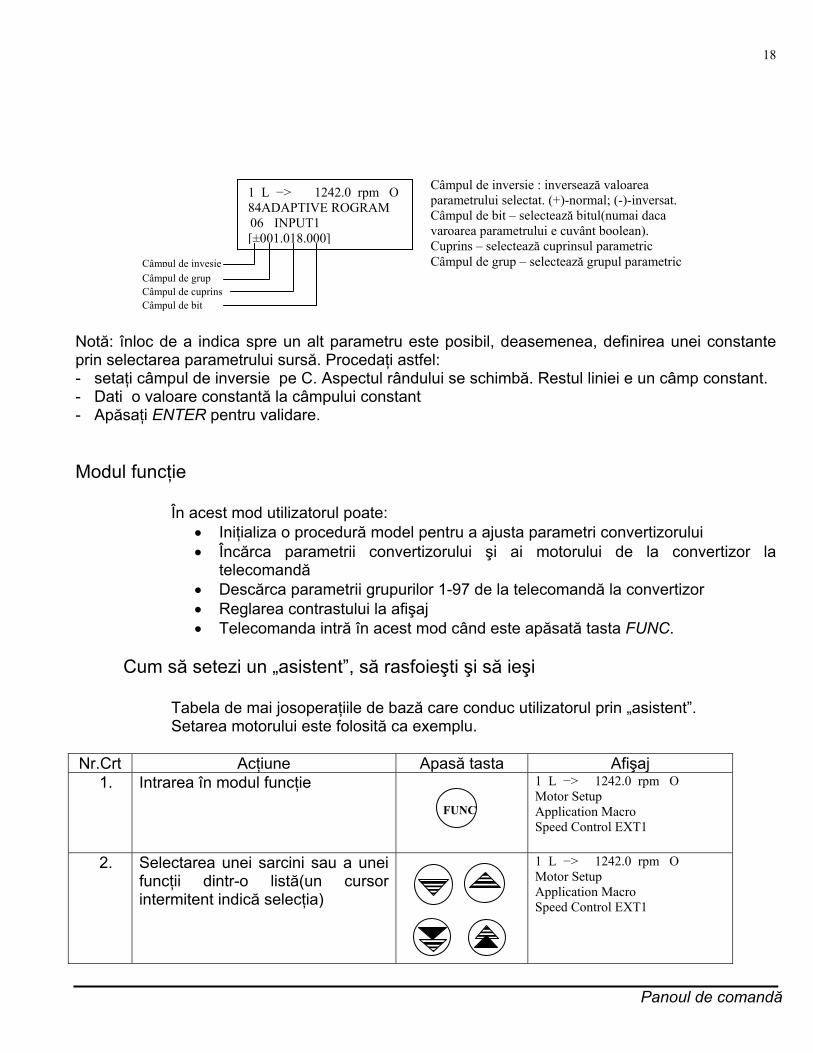
Notă: înloc de a indica spre un alt parametru este posibil, deasemenea, definirea unei constante prin selectarea parametrului sursă. Procedaţi astfel: - setaţi câmpul de inversie pe C. Aspectul rândului se schimbă. Restul liniei e un câmp constant. - Dati o valoare constantă la câmpului constant - Apăsaţi ENTER pentru validare. Modul funcţie În acest mod utilizatorul poate:
• Iniţializa o procedură model pentru a ajusta parametri convertizorului • Încărca parametrii convertizorului şi ai motorului de la convertizor la
telecomandă • Descărca parametrii grupurilor 1-97 de la telecomandă la convertizor • Reglarea contrastului la afişaj • Telecomanda intră în acest mod când este apăsată tasta FUNC.
Cum să setezi un „asistent”, să rasfoieşti şi să ieşi
Tabela de mai josoperaţiile de bază care conduc utilizatorul prin „asistent”.
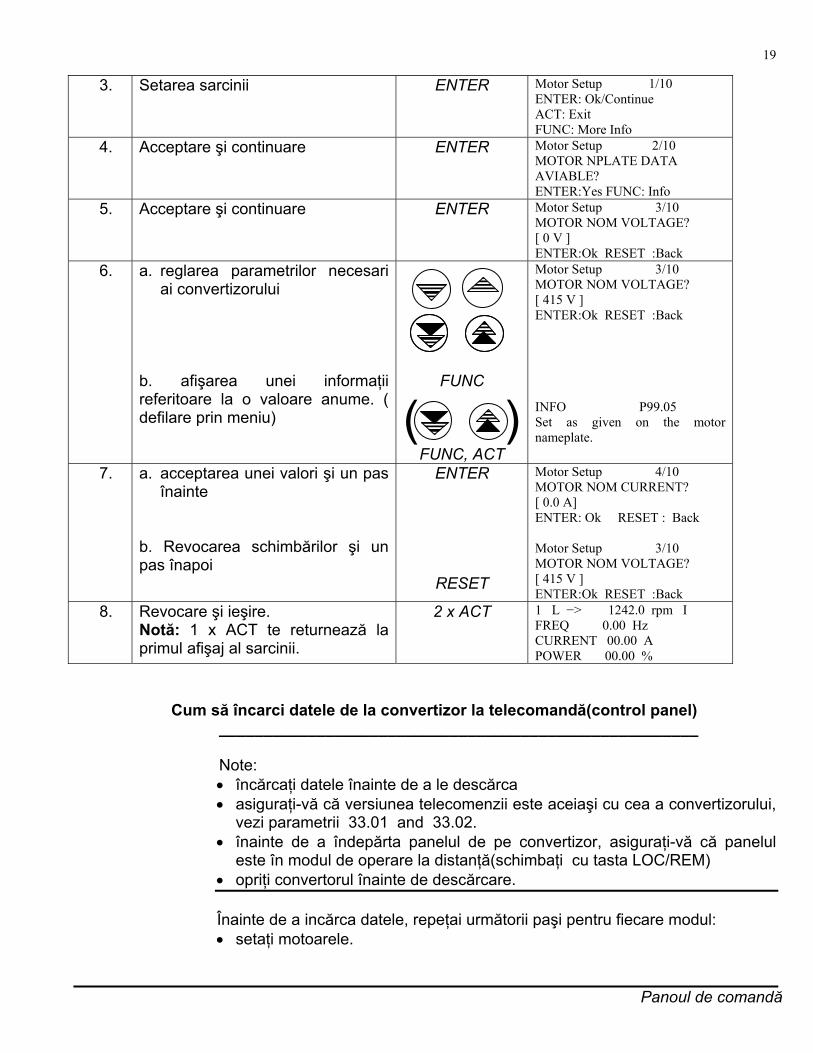
Setarea motorului este folosită ca exemplu. Nr.Crt Acţiune Apasă tasta Afişaj
1. Intrarea în modul funcţie
1 L −> 1242.0 rpm O Motor Setup Application Macro Speed Control EXT1
2. Selectarea unei sarcini sau a unei funcţii dintr-o listă(un cursor intermitent indică selecţia)
1 L −> 1242.0 rpm O Motor Setup Application Macro Speed Control EXT1
Câmpul de inversie : inversează valoarea parametrului selectat. (+)-normal; (-)-inversat. Câmpul de bit – selectează bitul(numai daca varoarea parametrului e cuvânt boolean). Cuprins – selectează cuprinsul parametric Câmpul de grup – selectează grupul parametric
1 L −> 1242.0 rpm O 84ADAPTIVE ROGRAM 06 INPUT1 [±001.018.000]
Câmpul de invesie Câmpul de grup Câmpul de cuprins Câmpul de bit
FUNC
Panoul de comandă
19
3. Setarea sarcinii ENTER Motor Setup 1/10 ENTER: Ok/Continue ACT: Exit FUNC: More Info
4. Acceptare şi continuare ENTER Motor Setup 2/10 MOTOR NPLATE DATA AVIABLE? ENTER:Yes FUNC: Info
5. Acceptare şi continuare ENTER Motor Setup 3/10 MOTOR NOM VOLTAGE? [ 0 V ] ENTER:Ok RESET :Back
6. a. reglarea parametrilor necesari ai convertizorului
b. afişarea unei informaţii referitoare la o valoare anume. ( defilare prin meniu)
FUNC
( )
FUNC, ACT
Motor Setup 3/10 MOTOR NOM VOLTAGE? [ 415 V ] ENTER:Ok RESET :Back INFO P99.05 Set as given on the motor nameplate.
7. a. acceptarea unei valori şi un pas înainte
b. Revocarea schimbărilor şi un pas înapoi
ENTER
RESET
Motor Setup 4/10 MOTOR NOM CURRENT? [ 0.0 A] ENTER: Ok RESET : Back Motor Setup 3/10 MOTOR NOM VOLTAGE? [ 415 V ] ENTER:Ok RESET :Back
8. Revocare şi ieşire. Notă: 1 x ACT te returnează la primul afişaj al sarcinii.
2 x ACT 1 L −> 1242.0 rpm I FREQ 0.00 Hz CURRENT 00.00 A POWER 00.00 %
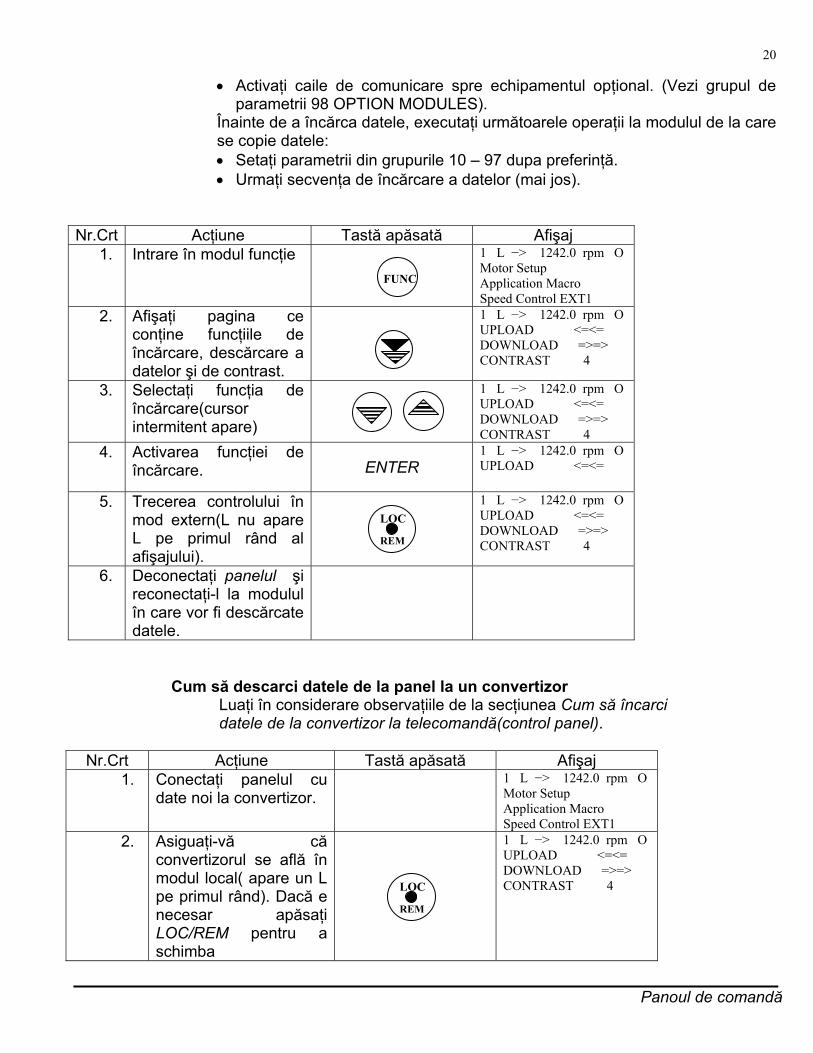
Cum să încarci datele de la convertizor la telecomandă(control panel) ______________________________________________________ Note:
• încărcaţi datele înainte de a le descărca • asiguraţi-vă că versiunea telecomenzii este aceiaşi cu cea a convertizorului,
vezi parametrii 33.01 and 33.02. • înainte de a îndepărta panelul de pe convertizor, asiguraţi-vă că panelul
este în modul de operare la distanţă(schimbaţi cu tasta LOC/REM) • opriţi convertorul înainte de descărcare. Înainte de a incărca datele, repeţai următorii paşi pentru fiecare modul: • setaţi motoarele.
Panoul de comandă
20
• Activaţi caile de comunicare spre echipamentul opţional. (Vezi grupul de parametrii 98 OPTION MODULES).
Înainte de a încărca datele, executaţi următoarele operaţii la modulul de la care se copie datele: • Setaţi parametrii din grupurile 10 – 97 dupa preferinţă. • Urmaţi secvenţa de încărcare a datelor (mai jos).
Nr.Crt Acţiune Tastă apăsată Afişaj
1. Intrare în modul funcţie 1 L −> 1242.0 rpm O Motor Setup Application Macro Speed Control EXT1
2. Afişaţi pagina ce conţine funcţiile de încărcare, descărcare a datelor şi de contrast.
1 L −> 1242.0 rpm O UPLOAD <=<= DOWNLOAD =>=> CONTRAST 4
3. Selectaţi funcţia de încărcare(cursor intermitent apare)
1 L −> 1242.0 rpm O UPLOAD <=<= DOWNLOAD =>=> CONTRAST 4
4. Activarea funcţiei de încărcare. ENTER
1 L −> 1242.0 rpm O UPLOAD <=<=
5. Trecerea controlului în mod extern(L nu apare L pe primul rând al afişajului).
1 L −> 1242.0 rpm O UPLOAD <=<= DOWNLOAD =>=> CONTRAST 4
6. Deconectaţi panelul şi reconectaţi-l la modulul în care vor fi descărcate datele.
Cum să descarci datele de la panel la un convertizor Luaţi în considerare observaţiile de la secţiunea Cum să încarci
datele de la convertizor la telecomandă(control panel).
Nr.Crt Acţiune Tastă apăsată Afişaj 1. Conectaţi panelul cu
date noi la convertizor. 1 L −> 1242.0 rpm O
Motor Setup Application Macro Speed Control EXT1
2. Asiguaţi-vă că convertizorul se află în modul local( apare un L pe primul rând). Dacă e necesar apăsaţi LOC/REM pentru a schimba
1 L −> 1242.0 rpm O UPLOAD <=<= DOWNLOAD =>=> CONTRAST 4
FUNC
REM
LOC
REM
LOC
Panoul de comandă
21
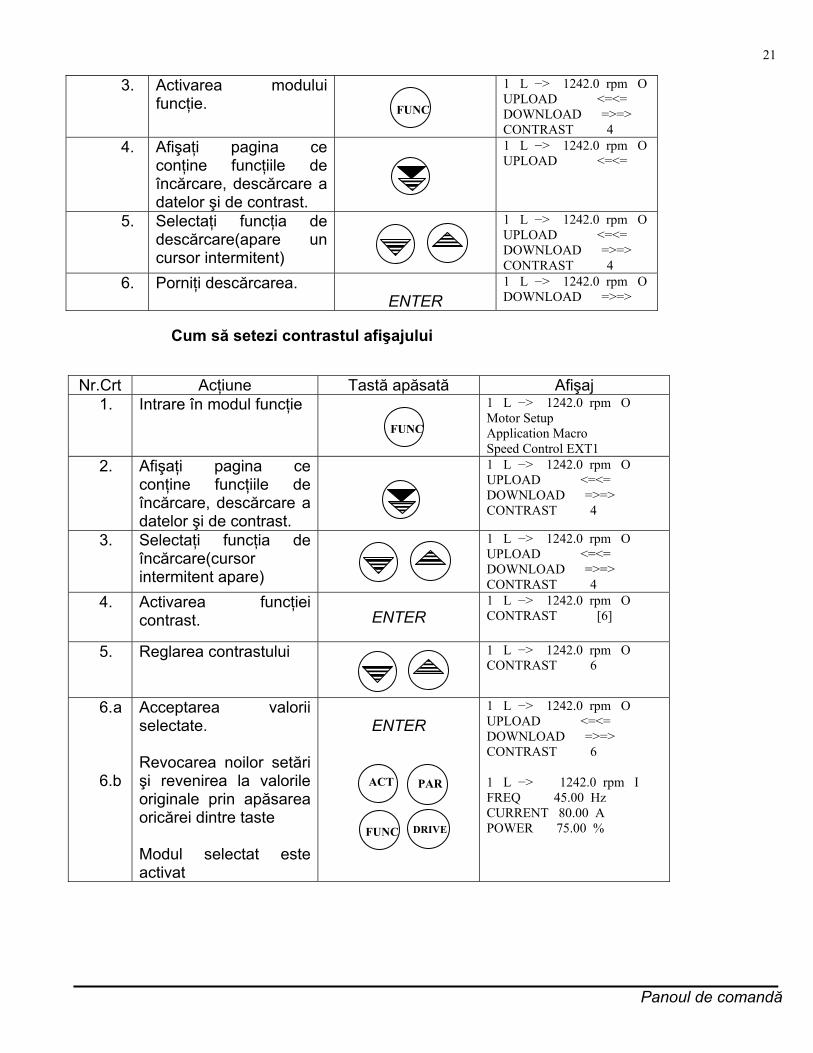
3. Activarea modului funcţie.
1 L −> 1242.0 rpm O UPLOAD <=<= DOWNLOAD =>=> CONTRAST 4
4. Afişaţi pagina ce conţine funcţiile de încărcare, descărcare a datelor şi de contrast.
1 L −> 1242.0 rpm O UPLOAD <=<=
5. Selectaţi funcţia de descărcare(apare un cursor intermitent)
1 L −> 1242.0 rpm O UPLOAD <=<= DOWNLOAD =>=> CONTRAST 4
6. Porniţi descărcarea. ENTER
1 L −> 1242.0 rpm O DOWNLOAD =>=>
Cum să setezi contrastul afişajului Nr.Crt Acţiune Tastă apăsată Afişaj
1. Intrare în modul funcţie 1 L −> 1242.0 rpm O Motor Setup Application Macro Speed Control EXT1
2. Afişaţi pagina ce conţine funcţiile de încărcare, descărcare a datelor şi de contrast.
1 L −> 1242.0 rpm O UPLOAD <=<= DOWNLOAD =>=> CONTRAST 4
3. Selectaţi funcţia de încărcare(cursor intermitent apare)
1 L −> 1242.0 rpm O UPLOAD <=<= DOWNLOAD =>=> CONTRAST 4
4. Activarea funcţiei contrast. ENTER
1 L −> 1242.0 rpm O CONTRAST [6]
5. Reglarea contrastului
1 L −> 1242.0 rpm O CONTRAST 6
6. a 6.b
Acceptarea valorii selectate. Revocarea noilor setări şi revenirea la valorile originale prin apăsarea oricărei dintre taste Modul selectat este activat
ENTER
1 L −> 1242.0 rpm O UPLOAD <=<= DOWNLOAD =>=> CONTRAST 6 1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
FUNC
FUNC
ACT PAR
FUNC DRIVE

Panoul de comandă
22
Selectarea tipului de convertor În mod normal caracteristicile disponibile la acest mod nu sunt
necesare; ele sunt rezervate pentru aplicaţiile unde există mai multe convertoare conectate la un panel de legătură. În acest mod utilizatorul poate: • selectaţi convertorul cu care comunică panelul prin panelul de legătură. • Schimbaţi numărul de identificare al convertorului conectat la panelul de
legătură • Vedeţi starea convertorului conectat la panelul de legătură. Panelul intră în modul de selecţie al convertorului când se apasă tasta DRIVE. Fiecare convertor activ trebuie să aibă un număr de identificare individual(ID). Iniţial numărul de identificare al convertorului este 1. _______________________________________________________ Notă: Numărul iniţial al convertorului nu ar trebui schimbat dacă convertorul nu va fi conectat cu altele la panoul de legătură.
Cum să selectezi un convertor şi să-i schimbi numărul de identificare. Nr.Crt Acţiune Tastă apăsată Afişaj
1. Activarea modului de selecţie al convertorului
ACS800 75Kw ASAAA5000 xxxxxx ID NUMBER 1
2. Selectarea convertorului ID –staţiei este schimbat prin apăsarea lui ENTER (apar paranteze rotunde), numărul de identificare se setează cu ajutorul săgeţilor simple. Acceptarea noii valori se face cu ENTER . Convertorul trebuie deconectat de la reţea pentru validarea noii valori. Afişajul arată starea tuturor convertoarelor conectate la panelul de legătură după setarea ultimei staţii. Dacă nu intră pe ecran toate staţiile apăsaţi tasta cu săgeţi duble în sus pentru a vedea restul.
ACS800 75Kw ASAAA5000 xxxxxx ID NUMBER 1 1 = convertizor oprit, direcţie înainte =convertizor pornit, direcţie inversă. F= Convertizor agăţat într-o eroare
3. Pentru a conecta ultimul convertor şi a schimba modul apăsaţi una dintre taste. Modul selectat este activat.
1 L −> 1242.0 rpm I FREQ 45.00 Hz CURRENT 80.00 A POWER 75.00 %
DRIVE
ACT PAR
FUNC
Panoul de comandă
23
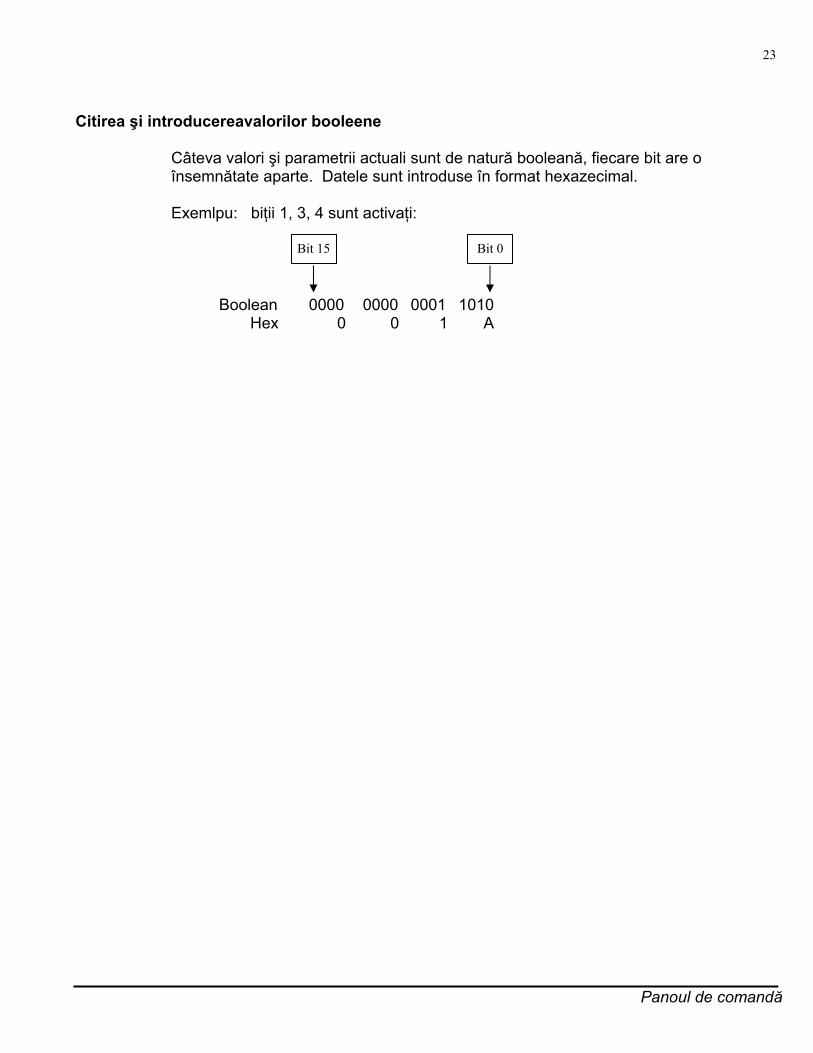
Citirea şi introducereavalorilor booleene Câteva valori şi parametrii actuali sunt de natură booleană, fiecare bit are o
însemnătate aparte. Datele sunt introduse în format hexazecimal. Exemlpu: biţii 1, 3, 4 sunt activaţi: Boolean 0000 0000 0001 1010 Hex 0 0 1 A
Bit 15 Bit 0
Facilităţile programului
25
Facilităţile programului _______________________________________________
Sumar
Acert capitol descrie particularităţile programului. Pentru fiecare caracteristică există o listă cu setări de utilizator, de semnale active şi de erori şi mesaje de avertizare.
Modelul de pornire „Asistentul” Introducere
„Asistentul” conduce utilizatorul prin procedura de pornire, ajutându-l să introducă datele necesare în convertor. Deasemenea, „asistentul” verifică dacă valorile introduse sunt valide şi se încadrează în domeniu admis. La prima pornire, convertorul sugerează „asistentului” să aleagă limba. „Asistentul de pornire se împarte în două secvenţe de instrucţiuni. Utilizatorul le poate activa una după alta, după cum îi sugerează „asistentul”, sau independent. Utilizatorul poate seta parametii convertorului şi fără „asistent”. Vezi capitolul Panoul de comandă pentru a porni „asistentul”.
Ordinea iniţială a sarcinilor
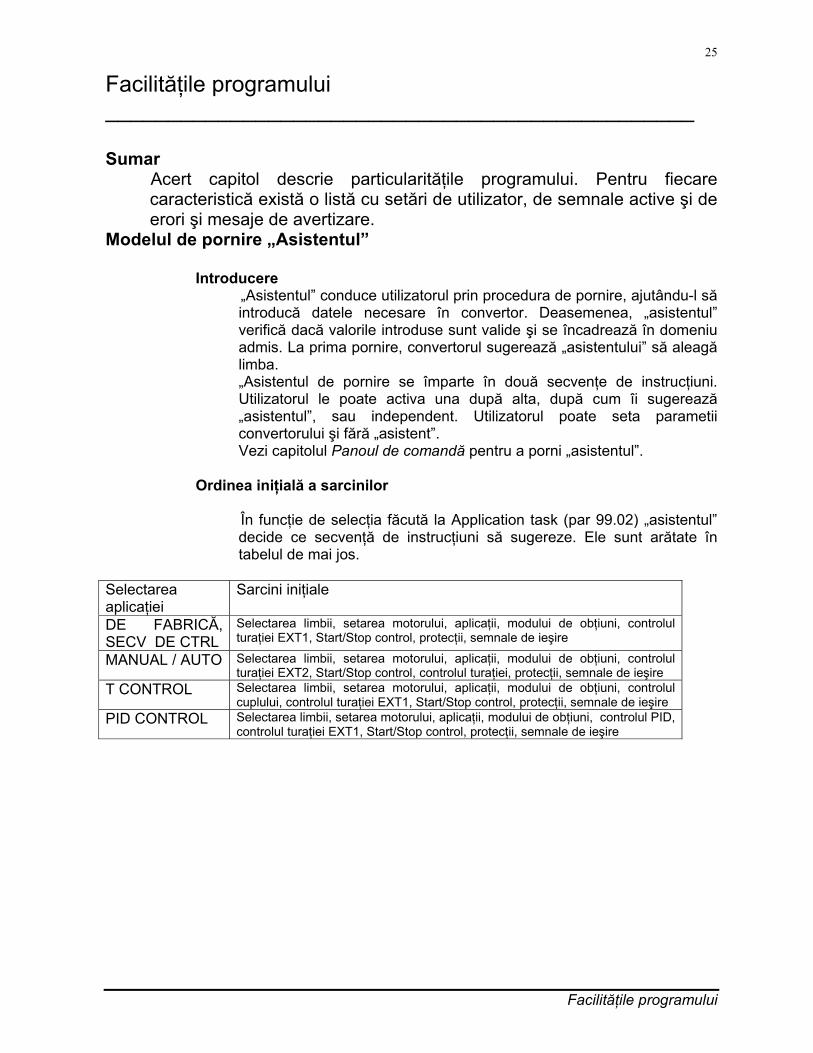
În funcţie de selecţia făcută la Application task (par 99.02) „asistentul” decide ce secvenţă de instrucţiuni să sugereze. Ele sunt arătate în tabelul de mai jos.
Selectarea aplicaţiei
Sarcini iniţiale
DE FABRICĂ, SECV DE CTRL
Selectarea limbii, setarea motorului, aplicaţii, modului de obţiuni, controlul turaţiei EXT1, Start/Stop control, protecţii, semnale de ieşire
MANUAL / AUTO Selectarea limbii, setarea motorului, aplicaţii, modului de obţiuni, controlul turaţiei EXT2, Start/Stop control, controlul turaţiei, protecţii, semnale de ieşire
T CONTROL Selectarea limbii, setarea motorului, aplicaţii, modului de obţiuni, controlul cuplului, controlul turaţiei EXT1, Start/Stop control, protecţii, semnale de ieşire
PID CONTROL Selectarea limbii, setarea motorului, aplicaţii, modului de obţiuni, controlul PID, controlul turaţiei EXT1, Start/Stop control, protecţii, semnale de ieşire

Facilităţile programului
26
Lista de sarcini şi parametrii relevanţi
Nume Descriere Setul de parametrii Selectarea limbii Selectarea limbii 99.01 Setarea motorului Introducerrea datelor de pe motor
Identificarea motorului.(dacă limitele turaţiei nu corespund)
99.05, 99.06, 99.09, 99.07, 99.08, 99.04 99.10 (20.8, 20.07)
Aplicaţie Selectarea macroului 99.02 parametrii asociaţi macroului Modul cu obţiuni Activarea modulului cu opţiuni Grupul 98, 35, 52 Controlul turaţiei EXT1
Selectarea sursei pentru referinţa de turaţie (Dacă AI1 este folosită: a se seta limitele, scala, inversarea) Setarea limitelor de referinţă Setarea limitelor de turaţie(frecvenţă) Setarea timpilor de accelerare/decelerare (Setarea frânei chopper-ului dacă este activat parametrul 27.01) (Dacă 99.02 nu este SEQ CTRL: Setarea turaţiilor constante)
11.03 (13.01, 13.02, 13.03, 13.04, 13.05, 13.01) 11.04, 11.05 20.02, 20.01, (20.08, 20.07) 22.02, 22.03 (Grupul 27,20.05,14.01) (Grupul 12)
Controlul turaţiei EXT2
Setarea sursei pt referinţa de turaţie (Dacă AI1 este folosită: a se seta limitele, scala, inversarea) Setarea limitelor de referinţă
11.06 (13.01, 13.02, 13.03, 13.04, 13.05, 30.01) 11.08, 11.07
Controlul cuplului Selectarea sursei pentru referinţa de cuplu (Dacă AI1 este folosită: a se seta limitele, scala, inversarea) Setarea limitelor de referinţă Setarea timpilor de creştere/descreştere ai cuplului
11.06 (13.01, 13.02, 13.03, 13.04, 13.05, 30.01) 11.08, 11.07 24.01, 24,02
Controlul PID Selectarea sursei pt referinţa de proces (Dacă AI1 este folosită: a se seta limitele, scala, inversarea) Setarea limitelor de referinţă Setarea limitelor de turaţie(referinţă) Setarea limitelor şi surselor pentru procesarea valorilor actuale
11.06 (13.01, 13.02, 13.03, 13.04, 13.05, 13.01) 11.04, 11.05 20.02, 20.01, (20.08, 20.07) 40.07, 40.09, 40.10
Start/Stop control Selectarea sursei pentru semnalele de pornire şi oprire ale locaţiilor externe de control EXT1 şi EXT2 Selectarea între EXT1 şi EXT2 Definirea controlului direcţiei Definirea modului de start şi stop Selectarea folosirii semnalului de Run Enable Setarea timpului rampă pentru funcţia Run Enable
10.01, 10.02 11.02 10.03 21.01, 21.02, 21.03 16.01, 21.07 22.07
Protecţii Setarea limitelor de curent şi cuplu 20.03, 20.04 Semnale de ieşire Selectarea semnalelor indicate prin releele de
ieşire RO1,RO2, RO3 şi cel opţional RO`s(dacă este instalat) Selectarea semnalelor indicate prin releele analogice AO1, AO2 şi cel opţional dacă este instalat. Setarea pragurilor de minim, maxim, scalare şi reversare de sens.
Grupul 14 15.01, 15.02,15.03, 15.04, 15.05 (Grup 96)
Facilităţile programului
27
Conţinutul afişajului „asistent”
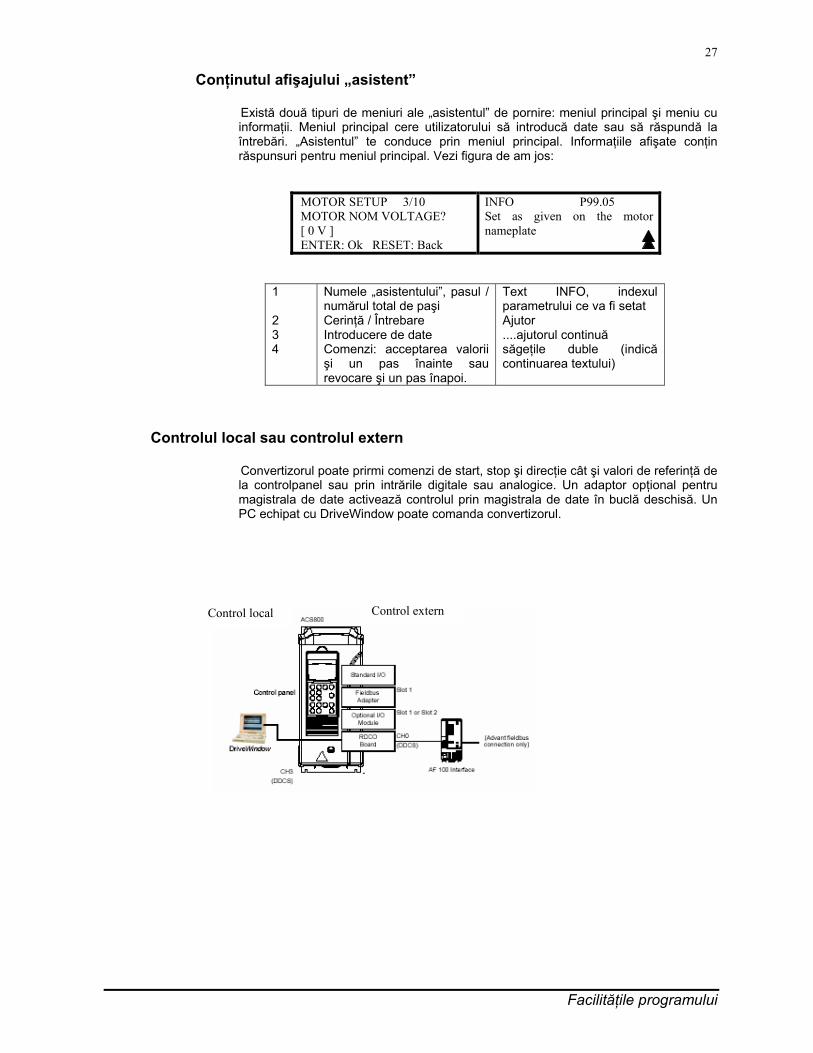
Există două tipuri de meniuri ale „asistentul” de pornire: meniul principal şi meniu cu informaţii. Meniul principal cere utilizatorului să introducă date sau să răspundă la întrebări. „Asistentul” te conduce prin meniul principal. Informaţiile afişate conţin răspunsuri pentru meniul principal. Vezi figura de am jos:
MOTOR SETUP 3/10 MOTOR NOM VOLTAGE? [ 0 V ] ENTER: Ok RESET: Back
INFO P99.05 Set as given on the motor nameplate
1 2 3 4
Numele „asistentului”, pasul / numărul total de paşi Cerinţă / Întrebare Introducere de date Comenzi: acceptarea valorii şi un pas înainte sau revocare şi un pas înapoi.
Text INFO, indexul parametrului ce va fi setat Ajutor ....ajutorul continuă săgeţile duble (indică continuarea textului)
Controlul local sau controlul extern
Convertizorul poate prirmi comenzi de start, stop şi direcţie cât şi valori de referinţă de la controlpanel sau prin intrările digitale sau analogice. Un adaptor opţional pentru magistrala de date activează controlul prin magistrala de date în buclă deschisă. Un PC echipat cu DriveWindow poate comanda convertizorul.
Control extern Control local
Facilităţile programului
28
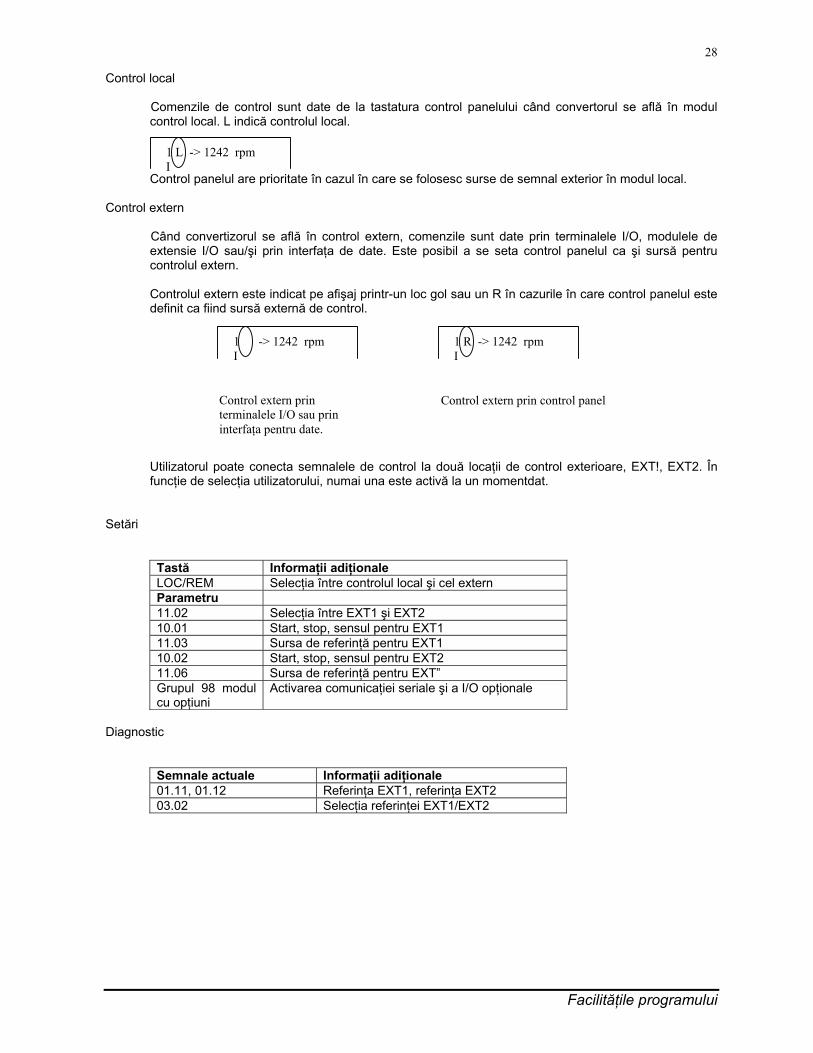
Control local Comenzile de control sunt date de la tastatura control panelului când convertorul se află în modul control local. L indică controlul local. Control panelul are prioritate în cazul în care se folosesc surse de semnal exterior în modul local.
Control extern
Când convertizorul se află în control extern, comenzile sunt date prin terminalele I/O, modulele de extensie I/O sau/şi prin interfaţa de date. Este posibil a se seta control panelul ca şi sursă pentru controlul extern. Controlul extern este indicat pe afişaj printr-un loc gol sau un R în cazurile în care control panelul este definit ca fiind sursă externă de control. Utilizatorul poate conecta semnalele de control la două locaţii de control exterioare, EXT!, EXT2. În funcţie de selecţia utilizatorului, numai una este activă la un momentdat.
Setări
Tastă Informaţii adiţionale LOC/REM Selecţia între controlul local şi cel extern Parametru 11.02 Selecţia între EXT1 şi EXT2 10.01 Start, stop, sensul pentru EXT1 11.03 Sursa de referinţă pentru EXT1 10.02 Start, stop, sensul pentru EXT2 11.06 Sursa de referinţă pentru EXT” Grupul 98 modul cu opţiuni
Activarea comunicaţiei seriale şi a I/O opţionale
Diagnostic
Semnale actuale Informaţii adiţionale 01.11, 01.12 Referinţa EXT1, referinţa EXT2 03.02 Selecţia referinţei EXT1/EXT2
1 L -> 1242 rpm I
1 -> 1242 rpm I
1 R -> 1242 rpm I
Control extern prin terminalele I/O sau prin interfaţa pentru date.
Control extern prin control panel

Facilităţile programului
29
DI1 / Sdt IO
DI6 / Sdt IO
DI1 /DIO ext 1 DI2 /DIO ext 1
DI1 /DIO ext 2 DI2 /DIO ext 2
Adaptor magistrală în slotul 1 Placă CH0 / RDCO BOARD Legătura standard ModBus Control panel DI1 / Std IO = intrare digitală DI1 la blocul terminal DI1 / DIO ext 1=intrare digitalăDI1 pe modului de extensie 1
Diagrama bloc: start, stop, sens pentru EXT1 Figura de mai jos arată parametri ce selectează interfaţa pentru start, stop, şi senspentru locaţia
externă EXT1.
Diagrama bloc: referinţa pentru EXT1 Figura următoare arată parametrii care sunt selectaţi la interfaţă pentru referinţa
de turaţie a locaţiei externe de control EXT1.
AI1 / Std IO = Intrare analogică pe terminalul standard I/O AI1 / AIO ext = intrare analogică pe modulul de extensie analog I/O
AI1 / Std IO AI2 / Std IO AI3 / Std IO DI3 / Std IO DI4 / Std IO AI1 / AIO ext AI2 / AIO ext DI1 / DIO ext 3 DI2 / DIO ext 3 Adaptor magistrală în slotul 1 Placă CH0 / RDCO BOARD Legătura standard ModBus Control panel
I/O extensii Vezi grup 98 Modulul opţiuni
Selecţie magistrală Vezi capitolul Selecţia magistralei
Select 10.01
EXT1 Start/stop/direcţie
DI1 DI6
DI7....DI9
COMM. CW
TASTATURĂ
I/O Extensii Grup de parametrii 98 Modul opţiuni
Selecţie magistrală Vezi capitolul Selecţia magistralei
Select 10.01
AI1, AI2, AI3, DI3, DI4
AI5, AI6, DI11, DI12
COMM. REF
TASTATURĂ
Facilităţile programului
30
Referinţe şi procesare Convertizorul poate accepta o varietate de referinţe pe lângă intrările
analogice şi semnalele control panel – ului. • Referinţa convertizorului poate fi dată cu două intrări digitale: o intrare
măreşte turaţia, iar cealaltă o reduce. • Convertizorul acceptă o referinţă analog – bipolară de turaţie. Această
caracteristică permite controlul turaţiei şi al sensului de rotire folosind o singură intrare analogică. Semnal minim este la turaţie maximă şi sensul înapoi, iar la semnal maxim avem turaţie maximă cu sensul înainte.
• Convertizorul poate da o referinţă pentru două semnale analogice de intrare folosind funcţii matematice: adunare, scădere, înmulţire, intersecţie, reuniune.
• Convertizorul poate genera o referinţă pentru un semnal analog de intrare cât şi pentru un semnal primit printr-o interfaţă serială folosind funcţii matematice: adunare şi înmulţire.
Este posibil săse scaleze referinţa externă astfel încât valorile minime şi cele maxime să corespundă unei alte turaţii decât turaţiei limită maximă şi minimă.
Setări
Parametru Informaţii adiţionale Grup 11 REFERENCE SELECT Referinţă externă Grup 20 LIMITS Limite de operare Grup 22 ACCEL/DECEL Referinţă de turaţie ale rampei de accel şi
decel Grup 24 TORQUE CTRL Timpii rampei de cuplu Grup 32 SUPERVISION Referinţa de control
Diagnostic
Semnal actual Informaţii adiţionale 01.11, 01.12 Valori ale referinţei externe Grup 02 ACTUAL SIGNALS Valorile referinţelor în diferite etape Parametru Grup 14 RELAY OUTPUTS Referinţe active / lipsa de referinţe la
releul de ieşire Grup 15 ANALOG OUTPUTS Valori de referinţă
Facilităţile programului
31
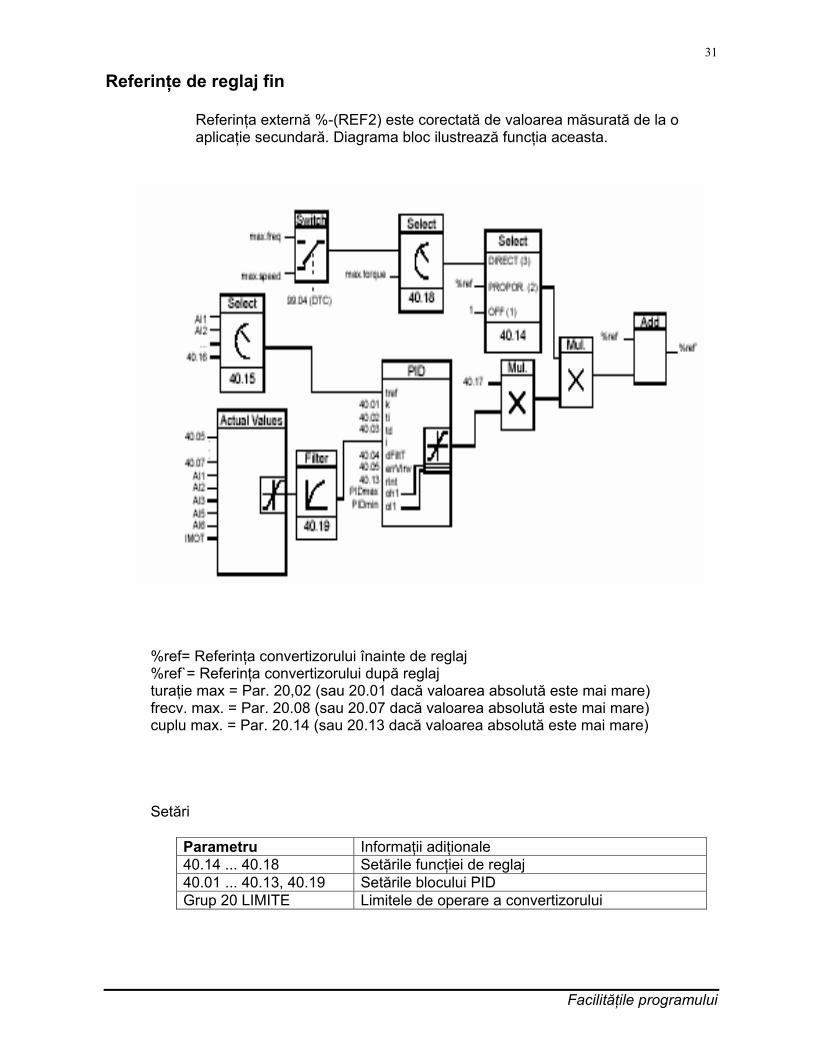
Referinţe de reglaj fin Referinţa externă %-(REF2) este corectată de valoarea măsurată de la o
aplicaţie secundară. Diagrama bloc ilustrează funcţia aceasta.
%ref= Referinţa convertizorului înainte de reglaj %ref`= Referinţa convertizorului după reglaj
turaţie max = Par. 20,02 (sau 20.01 dacă valoarea absolută este mai mare) frecv. max. = Par. 20.08 (sau 20.07 dacă valoarea absolută este mai mare) cuplu max. = Par. 20.14 (sau 20.13 dacă valoarea absolută este mai mare) Setări
Parametru Informaţii adiţionale 40.14 ... 40.18 Setările funcţiei de reglaj 40.01 ... 40.13, 40.19 Setările blocului PID Grup 20 LIMITE Limitele de operare a convertizorului
Facilităţile programului
32
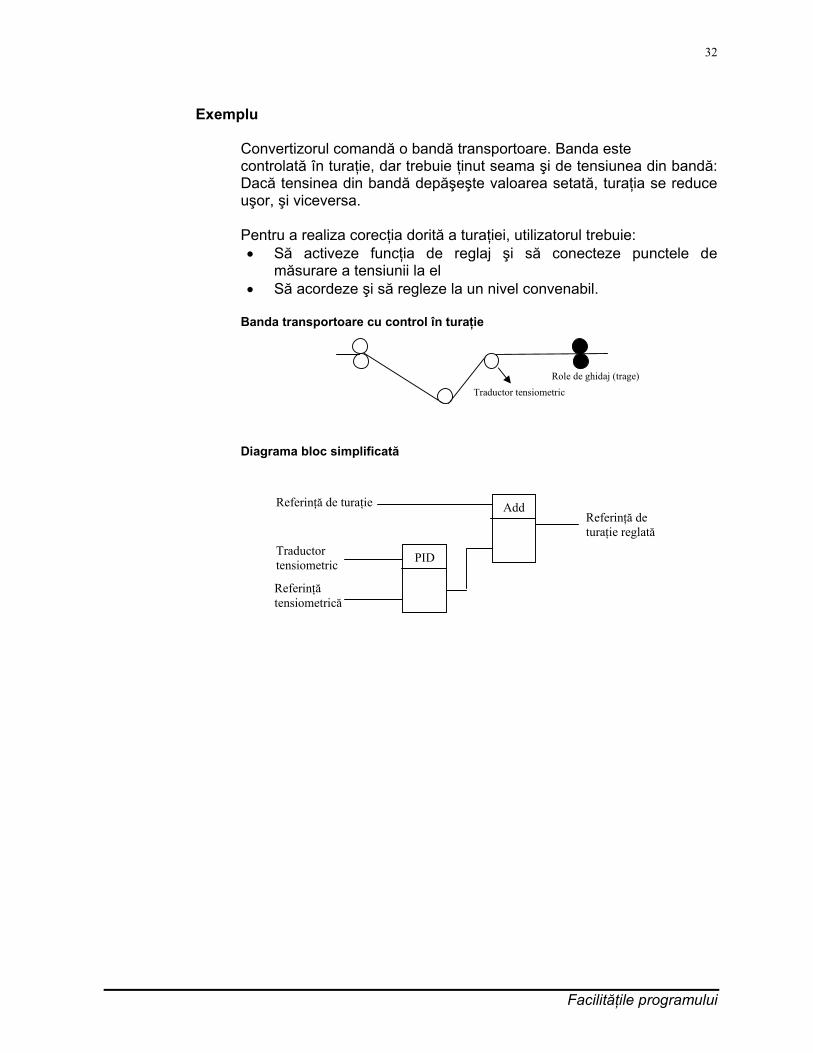
Exemplu Convertizorul comandă o bandă transportoare. Banda este
controlată în turaţie, dar trebuie ţinut seama şi de tensiunea din bandă: Dacă tensinea din bandă depăşeşte valoarea setată, turaţia se reduce uşor, şi viceversa. Pentru a realiza corecţia dorită a turaţiei, utilizatorul trebuie: • Să activeze funcţia de reglaj şi să conecteze punctele de
măsurare a tensiunii la el • Să acordeze şi să regleze la un nivel convenabil.
Banda transportoare cu control în turaţie Diagrama bloc simplificată
Role de ghidaj (trage) Traductor tensiometric
Add Referinţă de turaţie
Traductor tensiometric
Referinţă tensiometrică
PID
Referinţă de turaţie reglată
Facilităţile programului
33
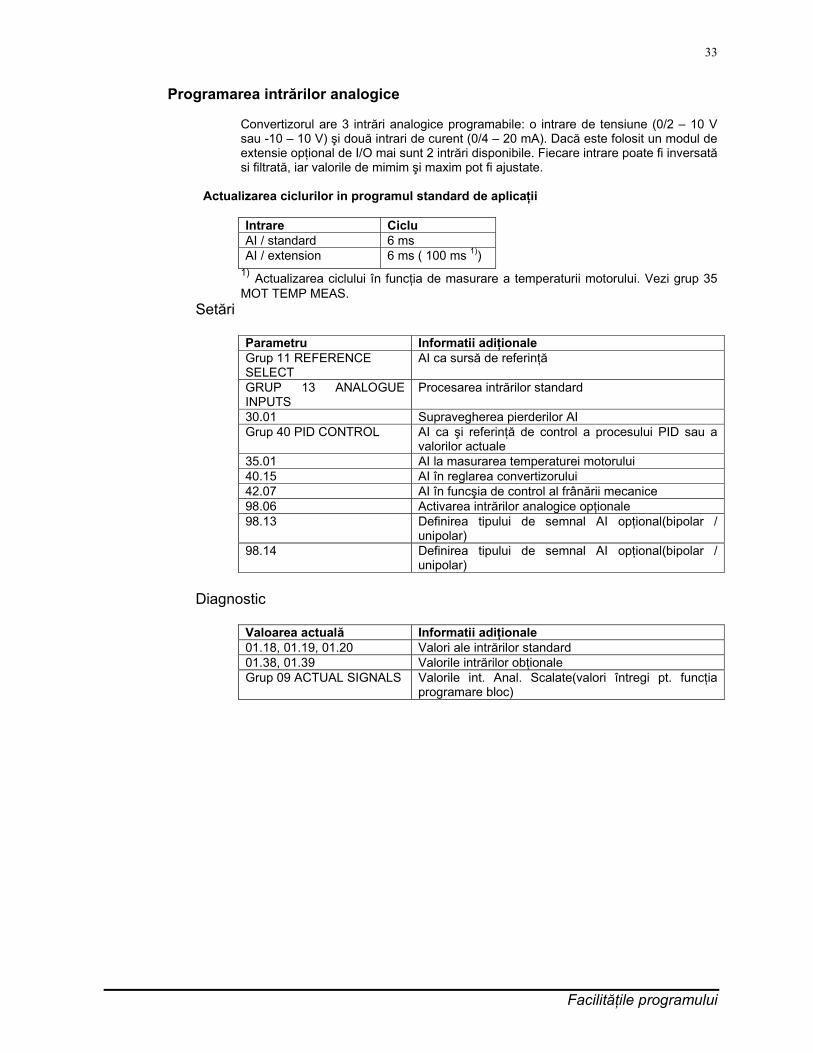
Programarea intrărilor analogice
Convertizorul are 3 intrări analogice programabile: o intrare de tensiune (0/2 – 10 V sau -10 – 10 V) şi două intrari de curent (0/4 – 20 mA). Dacă este folosit un modul de extensie opţional de I/O mai sunt 2 intrări disponibile. Fiecare intrare poate fi inversată si filtrată, iar valorile de mimim şi maxim pot fi ajustate.
Actualizarea ciclurilor in programul standard de aplicaţii
Intrare Ciclu AI / standard 6 ms AI / extension 6 ms ( 100 ms 1))
1) Actualizarea ciclului în funcţia de masurare a temperaturii motorului. Vezi grup 35 MOT TEMP MEAS.
Setări
Parametru Informatii adiţionale Grup 11 REFERENCE SELECT
AI ca sursă de referinţă
GRUP 13 ANALOGUE INPUTS
Procesarea intrărilor standard
30.01 Supravegherea pierderilor AI Grup 40 PID CONTROL AI ca şi referinţă de control a procesului PID sau a
valorilor actuale 35.01 AI la masurarea temperaturei motorului 40.15 AI în reglarea convertizorului 42.07 AI în funcşia de control al frânării mecanice 98.06 Activarea intrărilor analogice opţionale 98.13 Definirea tipului de semnal AI opţional(bipolar /
unipolar) 98.14 Definirea tipului de semnal AI opţional(bipolar /
unipolar) Diagnostic
Valoarea actuală Informatii adiţionale 01.18, 01.19, 01.20 Valori ale intrărilor standard 01.38, 01.39 Valorile intrărilor obţionale Grup 09 ACTUAL SIGNALS Valorile int. Anal. Scalate(valori întregi pt. funcţia
programare bloc)

Facilităţile programului
34
Programarea ieşirilor analogice
Două ieşiri de curent sunt diponibile în mod standard, şi pot fi adăugate încă două ieşiri folosind un modul opţional de exensie I/O.Semnalele de ieşire pot fi inversate şi filtrate.
Semnalele analogice de ieşire pot fi proporţionale cu turaţia motorului, viteza procesului( turaţia motorului scalată), frecvenţă de ieşire, curent de ieşire, cuplul motorului, puterea motorului, etc.
Este posibil prescrierea unei valori pe ieşirea analogică printr-o legătură serială.
Actualizarea ciclurilor in programul standard de aplicaţii
Intrare Ciclu AI / standard 6 ms AI / extension 6 ms ( 100 ms 1))
1) Actualizarea ciclului în funcţia de masurare a temperaturii motorului. Vezi grup 35 MOT TEMP MEAS.
Setări
Parametru Informaţii adiţionale Grup 10 START/STOP/DIR DI ca şi start, stop, direcţe GRUP 11 REFERENCE SELECT
DI în selectarea referinţei, sau sursa de referinţă
Grup 12 constant speeds DI în selectarea turaţiei constante Grup 16 SYSTEM CTRL INPUTS
DI ca şi Run Enable, resetarea erorii
21.01 DI la selectarea semnalului de accelerare/decelerare de tip rampă
30.03 DI ca şi sursă de eroare externă 30.05 DI la controlul funcţiei de supratemperatură 30.22 Controlul folosirii modulului opţional I/O 40.20 DI ca şi funcţie de sleep la semnalele de activare( la
procesele cu control PID) 42.02 DI ca şi semnal de sesizare a frânei mecanice 98.03 ... 96.05 Activarea modulelor opţionale externe digitale 98.09 ... 98.11 Numirea intrărilor digitale opţionale în programul de
aplicaţii Diagnostic
Valori actuale Informaţii adiţionale 01.17 Valori ale intrărilor digitale standard 01.40 Valorile intrărilor digitale obţionale Avertizare IO CONFIG Utilizare improprie a I/O opţionale Eroare I/O COMM ERR (7000) Pierderea comunicaţiilor spre I/O
Facilităţile programului
35
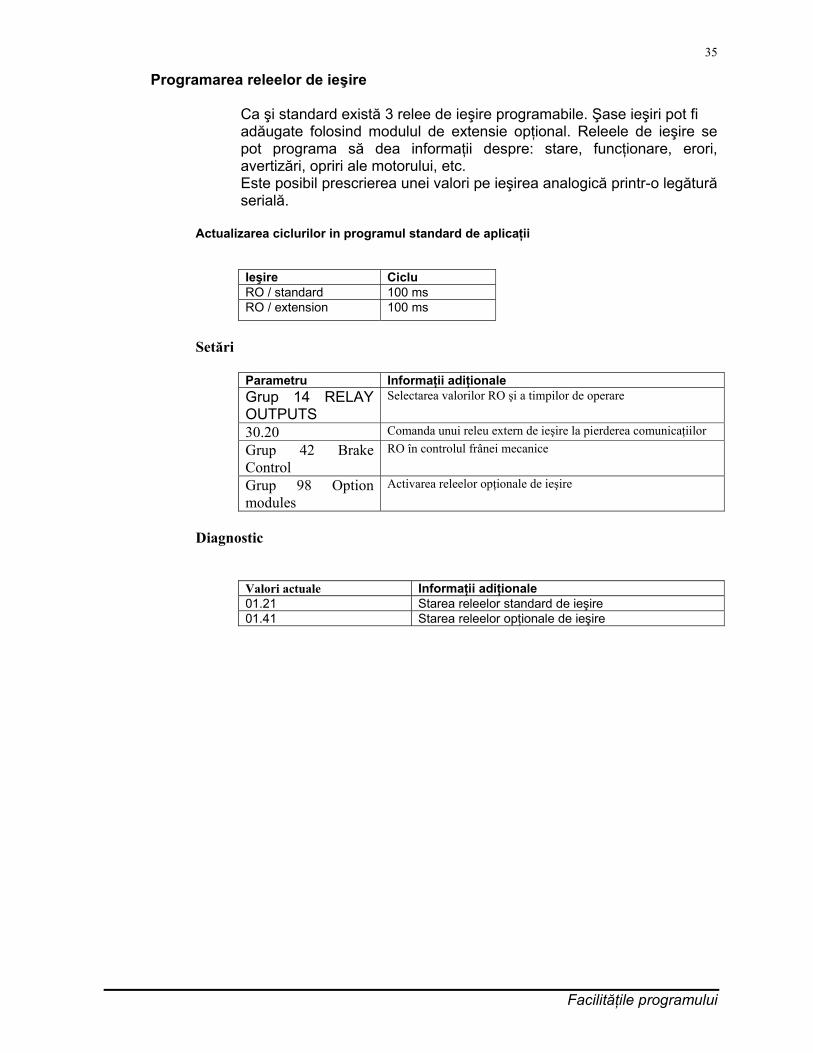
Programarea releelor de ieşire Ca şi standard există 3 relee de ieşire programabile. Şase ieşiri pot fi
adăugate folosind modulul de extensie opţional. Releele de ieşire se pot programa să dea informaţii despre: stare, funcţionare, erori, avertizări, opriri ale motorului, etc. Este posibil prescrierea unei valori pe ieşirea analogică printr-o legătură serială.
Actualizarea ciclurilor in programul standard de aplicaţii
Ieşire Ciclu RO / standard 100 ms RO / extension 100 ms
Setări
Parametru Informaţii adiţionale Grup 14 RELAY OUTPUTS
Selectarea valorilor RO şi a timpilor de operare
30.20 Comanda unui releu extern de ieşire la pierderea comunicaţiilor Grup 42 Brake Control
RO în controlul frânei mecanice
Grup 98 Option modules
Activarea releelor opţionale de ieşire
Diagnostic
Valori actuale Informaţii adiţionale 01.21 Starea releelor standard de ieşire 01.41 Starea releelor opţionale de ieşire
Facilităţile programului
36
Semnale actuale Semnale actuale disponibile:
• Frecvenţa de ieşire a convertizorului, curentul, tensiunea şi puterea
• Turaţia şi cuplul motorului • Tensiunea principală şi cea din circuitul intermediar(Vcc) • Controlul locaţiilor (Local, EXT1sau EXT2) • Valori de referinţă • Temperatura convertizorului • Contor operaţional (h), contor pt. kWh • Stări analogice şi digitale ale I/O • Valori ale PID (dacă e selectat macroul PID control) Trei semnale pot fi arătate simultan pe display. Valorile se pot citi şi printr-o legătură serială sau prin ieşirile analogice.
Setări
Parametru Informaţii adiţionale Grup 15 ANALOG INPUTS
Trimiterea unui semnal actual la ieşirea analogică
Ggrup 92 D SET TR ADDR
Trimiterea unui semnal actual la o bază de date printr-o legătură serială
Diagnostic
Valoarea actuală Informaţii adiţionale Grup 01 ACTUAL SIGNALS ... 09 ACTUAL SIGNALS
Listarea semnalelor actuale
Facilităţile programului
37
Identificarea motorului
Performanţele DTC – ului sunt bazate pe un model bine determinat în timpul pornirii motorului. În mod automat este făcută o identificare a motorului prin metoda magnetizării la prima pornire. În timpul primei porniri motorul este magnetizat la turaţie 0 pentru câteva secunde permiţând creearea motorului model. Această metodă de identificare este convenabilă pt. majoritatea aplicaţiilor. Pentru anumite aplicaţii se poate face un test de identificare separat, „Identification Run”.
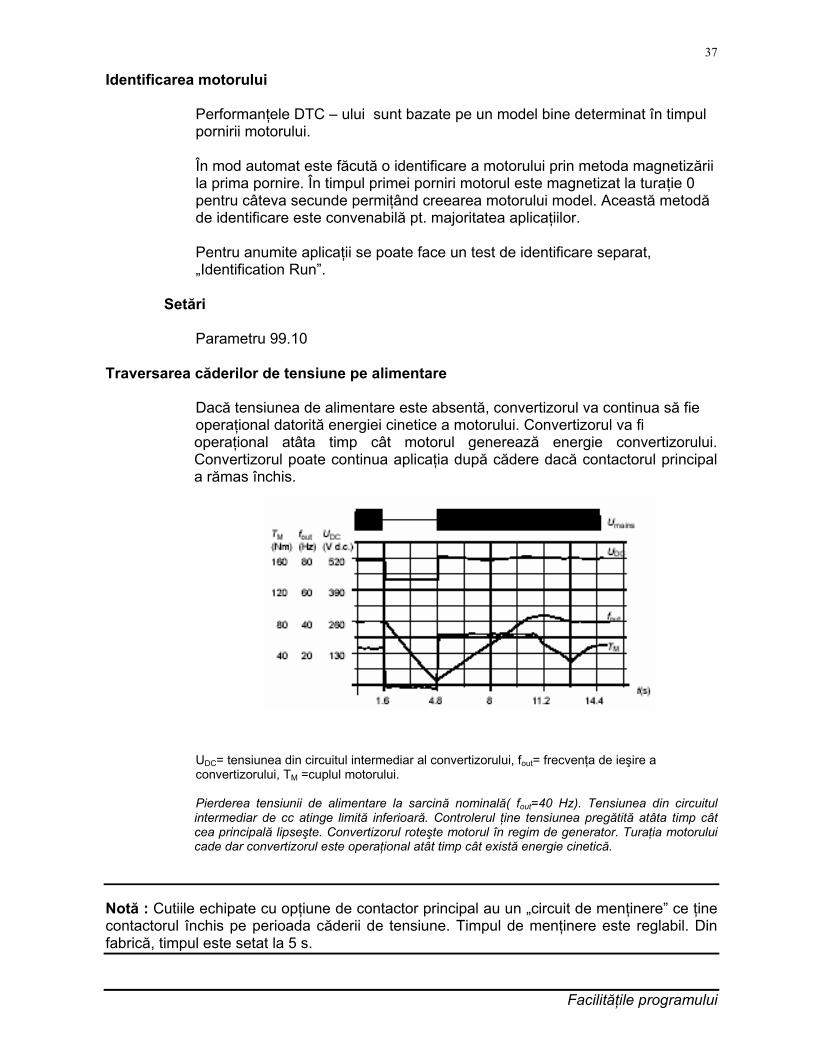
Setări Parametru 99.10 Traversarea căderilor de tensiune pe alimentare Dacă tensiunea de alimentare este absentă, convertizorul va continua să fie
operaţional datorită energiei cinetice a motorului. Convertizorul va fi operaţional atâta timp cât motorul generează energie convertizorului. Convertizorul poate continua aplicaţia după cădere dacă contactorul principal a rămas închis.
UDC= tensiunea din circuitul intermediar al convertizorului, fout= frecvenţa de ieşire a convertizorului, TM =cuplul motorului. Pierderea tensiunii de alimentare la sarcină nominală( fout=40 Hz). Tensiunea din circuitul intermediar de cc atinge limită inferioară. Controlerul ţine tensiunea pregătită atâta timp cât cea principală lipseşte. Convertizorul roteşte motorul în regim de generator. Turaţia motorului cade dar convertizorul este operaţional atât timp cât există energie cinetică.
Notă : Cutiile echipate cu opţiune de contactor principal au un „circuit de menţinere” ce ţine contactorul închis pe perioada căderii de tensiune. Timpul de menţinere este reglabil. Din fabrică, timpul este setat la 5 s.

Facilităţile programului
38
Pornire automată Deoarece convertizorul poate detecta starea motorului în câteva
milisecunde, pornirea este imediată cu toate condiţiile. Nu există repornire întârziată. Ex: pornirea pompelor sau a ventilatoarelor morilor.
Setări Parametru 21.01 Magnetizare în curent continuu Când magnetizarea în c.c. este activată, convertizorul magnetizează motorul
înainte de pornire. Această caracteristică garantează cel mai mare cuplu de pornire, până la 200% din cuplu nominal al motorului. Ajustând timpii de premagnetizare este posbil sincronizarea pornirii cu eliberarea frânei mecanice. Pornirea automată şi magnetizarea în cc nu pot fi activate în acelaşi timp.
Setări Parametrii 21.01 şi 21.02 Frânarea Setări Parametrii 21.04, 21.05, şi 21.06.
Activând caracteristica de frânare este posibil să se blocheze rotorul la turaţie zero. Când referinţa de turaţie şi turaţia motorului cad sub referinţa de frânare în turaţie, convertizorul opreşte motorul şi începe să injecteze curent continuu în motor. Când referinţa de turaţie depăşeşte turaţia de frânare, instricţiunile convertizorului sunt reluate.
Referinţa de turaţie
Turaţia motorul
Frână
Frână Frânare în turaţie
t
t
Facilităţile programului
39
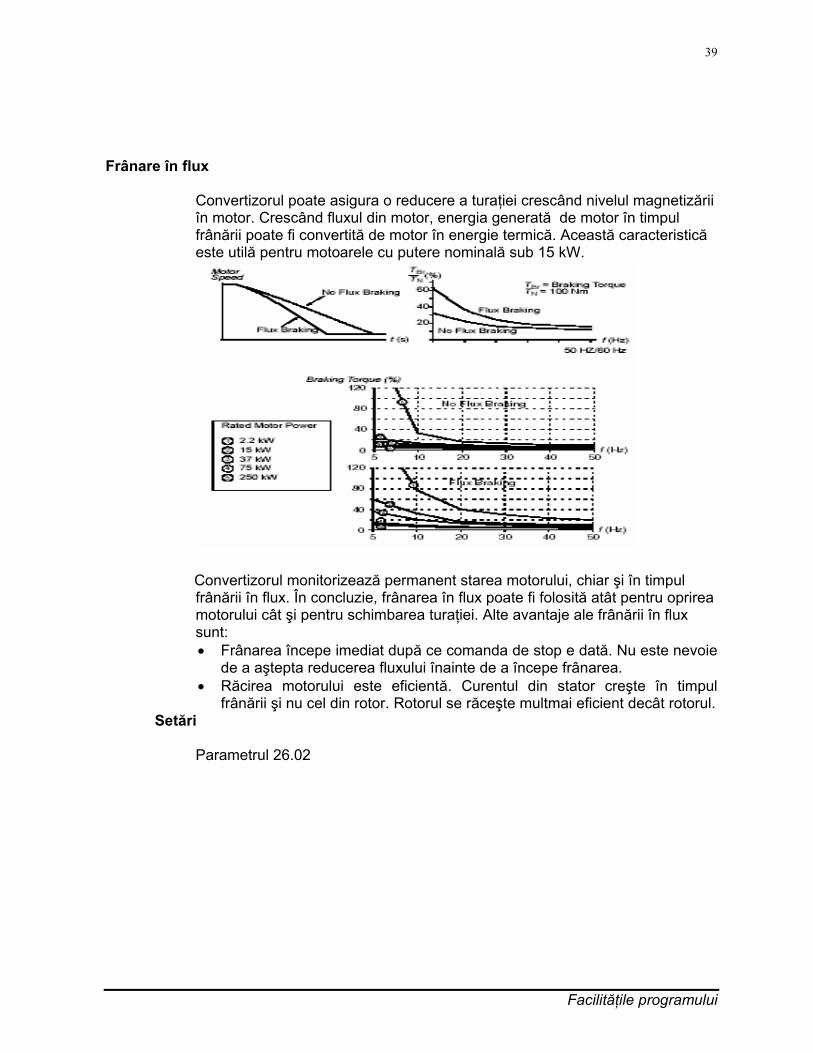
Frânare în flux Convertizorul poate asigura o reducere a turaţiei crescând nivelul magnetizării
în motor. Crescând fluxul din motor, energia generată de motor în timpul frânării poate fi convertită de motor în energie termică. Această caracteristică este utilă pentru motoarele cu putere nominală sub 15 kW.
Convertizorul monitorizează permanent starea motorului, chiar şi în timpul frânării în flux. În concluzie, frânarea în flux poate fi folosită atât pentru oprirea motorului cât şi pentru schimbarea turaţiei. Alte avantaje ale frânării în flux sunt: • Frânarea începe imediat după ce comanda de stop e dată. Nu este nevoie
de a aştepta reducerea fluxului înainte de a începe frânarea. • Răcirea motorului este eficientă. Curentul din stator creşte în timpul
frânării şi nu cel din rotor. Rotorul se răceşte multmai eficient decât rotorul. Setări Parametrul 26.02
Facilităţile programului
40
Optimizarea fluxului Optimizarea fluxului reduce consumul total de energie cât şi nivelu de
zgomot al motorului când convertizorul nu lucrează la sarcină nominală. Randamentul total poate fi îmbunătăţit cu până 10%, depinzând de cuplul şi turaţie.
Setări Parametrul 26.01
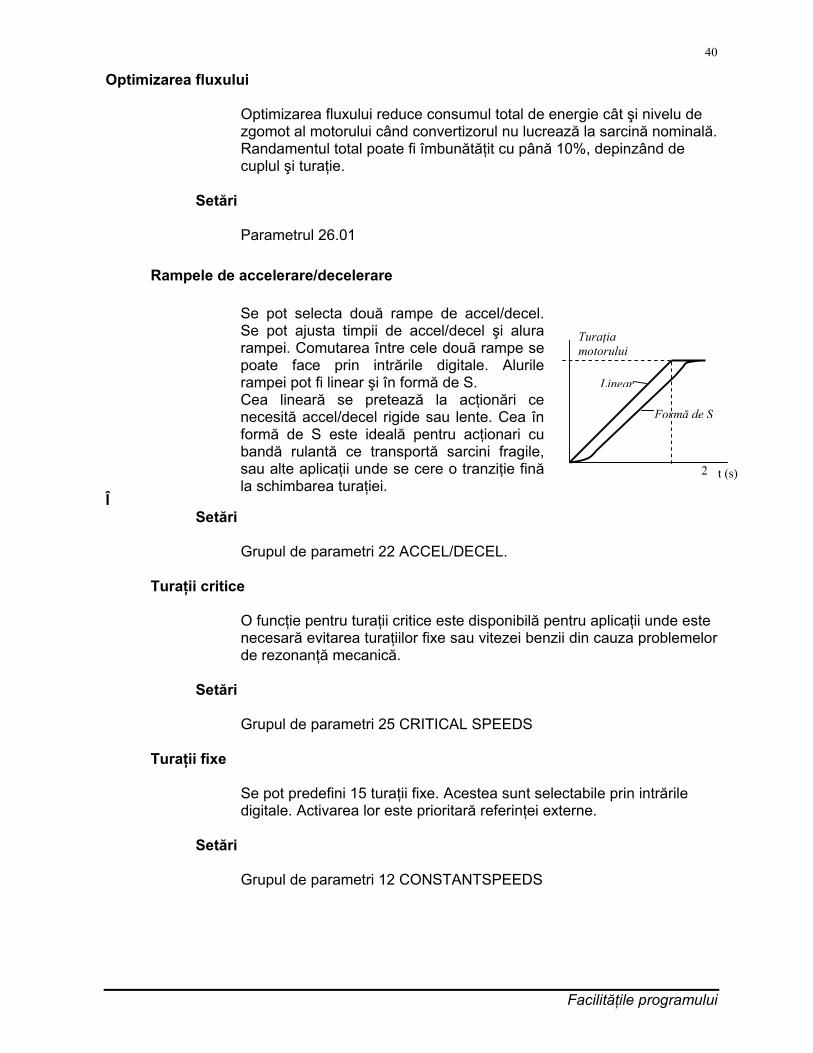
Rampele de accelerare/decelerare
Î Setări Grupul de parametri 22 ACCEL/DECEL. Turaţii critice O funcţie pentru turaţii critice este disponibilă pentru aplicaţii unde este
necesară evitarea turaţiilor fixe sau vitezei benzii din cauza problemelor de rezonanţă mecanică.
Setări Grupul de parametri 25 CRITICAL SPEEDS Turaţii fixe Se pot predefini 15 turaţii fixe. Acestea sunt selectabile prin intrările
digitale. Activarea lor este prioritară referinţei externe. Setări Grupul de parametri 12 CONSTANTSPEEDS
Se pot selecta două rampe de accel/decel. Se pot ajusta timpii de accel/decel şi alura rampei. Comutarea între cele două rampe se poate face prin intrările digitale. Alurile rampei pot fi linear şi în formă de S. Cea lineară se pretează la acţionări ce necesită accel/decel rigide sau lente. Cea în formă de S este ideală pentru acţionari cu bandă rulantă ce transportă sarcini fragile, sau alte aplicaţii unde se cere o tranziţie fină la schimbarea turaţiei.
Turaţia motorului
Linear
Formă de S
2 t (s)
Facilităţile programului
41
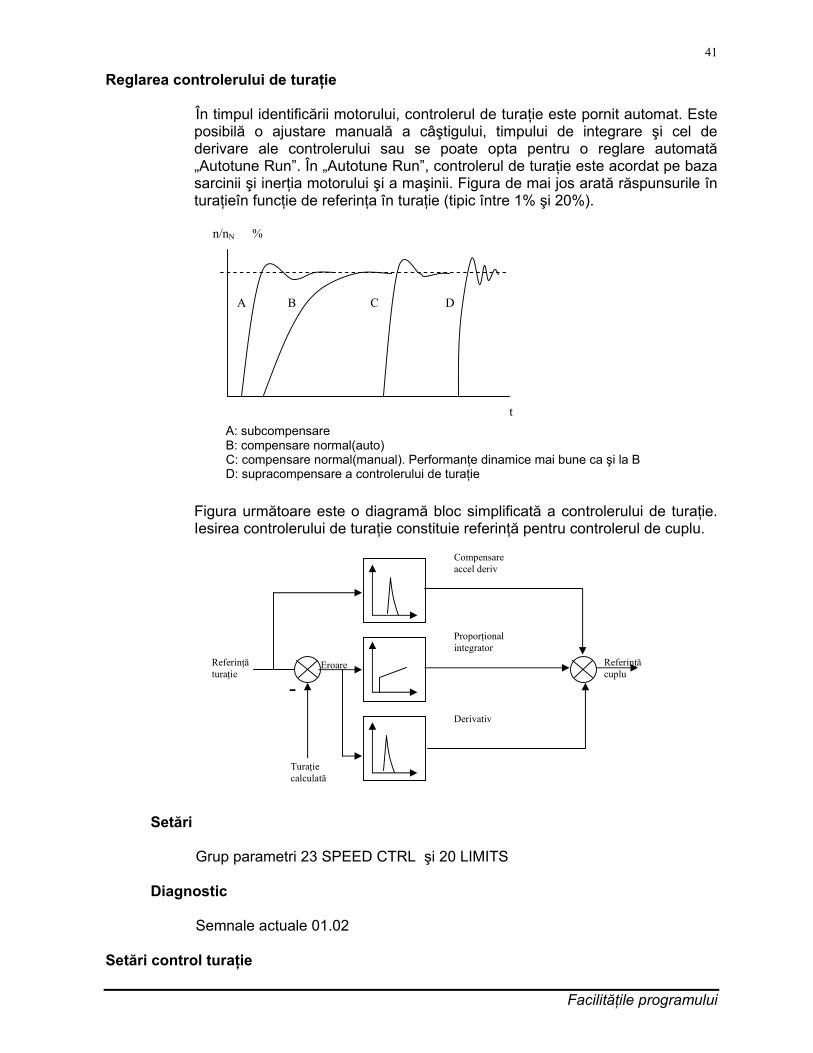
Reglarea controlerului de turaţie
În timpul identificării motorului, controlerul de turaţie este pornit automat. Este posibilă o ajustare manuală a câştigului, timpului de integrare şi cel de derivare ale controlerului sau se poate opta pentru o reglare automată „Autotune Run”. În „Autotune Run”, controlerul de turaţie este acordat pe baza sarcinii şi inerţia motorului şi a maşinii. Figura de mai jos arată răspunsurile în turaţieîn funcţie de referinţa în turaţie (tipic între 1% şi 20%).
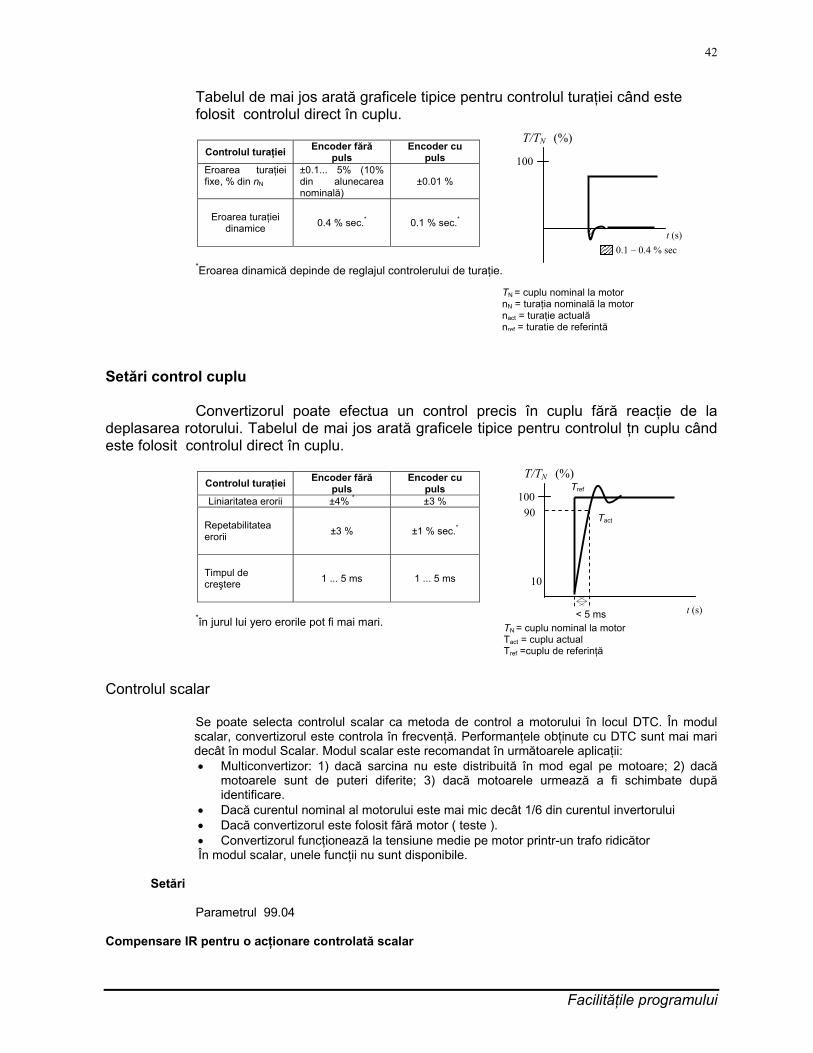
Figura următoare este o diagramă bloc simplificată a controlerului de turaţie. Iesirea controlerului de turaţie constituie referinţă pentru controlerul de cuplu.
Setări
Grup parametri 23 SPEED CTRL şi 20 LIMITS
Diagnostic Semnale actuale 01.02 Setări control turaţie
t
n/nN %
DCB A
A: subcompensare B: compensare normal(auto) C: compensare normal(manual). Performanţe dinamice mai bune ca şi la B D: supracompensare a controlerului de turaţie
Eroare
Turaţie calculată
Referinţă turaţie
Proporţional integrator
Derivativ
Compensare accel deriv
- Referinţă cuplu
Facilităţile programului
42
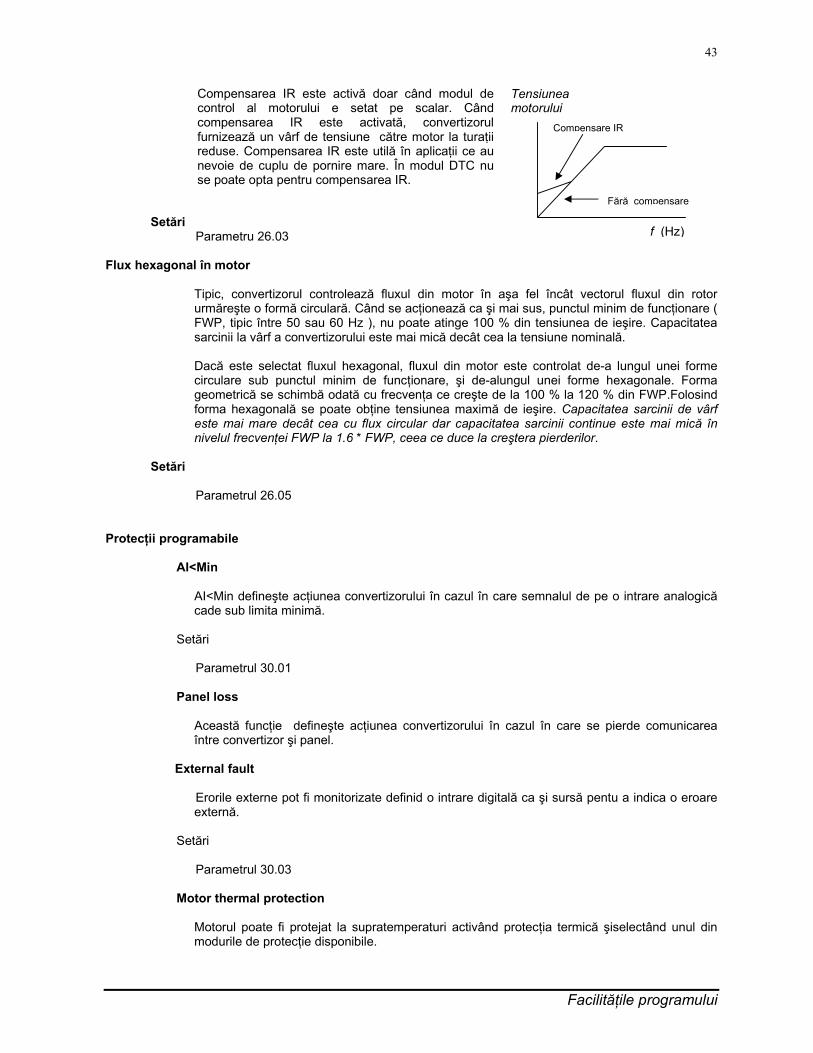
Tabelul de mai jos arată graficele tipice pentru controlul turaţiei când este
folosit controlul direct în cuplu.
Controlul turaţiei Encoder fără puls
Encoder cu puls
Eroarea turaţiei fixe, % din nN
±0.1... 5% (10% din alunecarea nominală)
±0.01 %
Eroarea turaţiei dinamice 0.4 % sec.* 0.1 % sec.*
*Eroarea dinamică depinde de reglajul controlerului de turaţie.
Setări control cuplu Convertizorul poate efectua un control precis în cuplu fără reacţie de la deplasarea rotorului. Tabelul de mai jos arată graficele tipice pentru controlul ţn cuplu când este folosit controlul direct în cuplu.
Controlul turaţiei Encoder fără puls
Encoder cu puls
Liniaritatea erorii ±4% * ±3 %
Repetabilitatea erorii ±3 % ±1 % sec.*
Timpul de creştere 1 ... 5 ms 1 ... 5 ms
*în jurul lui yero erorile pot fi mai mari. Controlul scalar
Se poate selecta controlul scalar ca metoda de control a motorului în locul DTC. În modul scalar, convertizorul este controla în frecvenţă. Performanţele obţinute cu DTC sunt mai mari decât în modul Scalar. Modul scalar este recomandat în următoarele aplicaţii: • Multiconvertizor: 1) dacă sarcina nu este distribuită în mod egal pe motoare; 2) dacă
motoarele sunt de puteri diferite; 3) dacă motoarele urmează a fi schimbate după identificare.
• Dacă curentul nominal al motorului este mai mic decât 1/6 din curentul invertorului • Dacă convertizorul este folosit fără motor ( teste ). • Convertizorul funcţionează la tensiune medie pe motor printr-un trafo ridicător În modul scalar, unele funcţii nu sunt disponibile.
Setări Parametrul 99.04 Compensare IR pentru o acţionare controlată scalar
0.1 – 0.4 % sect (s)
T/TN (%)
100
TN = cuplu nominal la motor nN = turaţia nominală la motor nact = turaţie actuală nref = turaţie de referinţă
t (s)
T/TN (%)
100
TN = cuplu nominal la motor Tact = cuplu actual Tref =cuplu de referinţă
90
10
< 5 ms
Tref
Tact
Facilităţile programului
43
Setări Parametru 26.03 Flux hexagonal în motor
Tipic, convertizorul controlează fluxul din motor în aşa fel încât vectorul fluxul din rotor urmăreşte o formă circulară. Când se acţionează ca şi mai sus, punctul minim de funcţionare ( FWP, tipic între 50 sau 60 Hz ), nu poate atinge 100 % din tensiunea de ieşire. Capacitatea sarcinii la vârf a convertizorului este mai mică decât cea la tensiune nominală. Dacă este selectat fluxul hexagonal, fluxul din motor este controlat de-a lungul unei forme circulare sub punctul minim de funcţionare, şi de-alungul unei forme hexagonale. Forma geometrică se schimbă odată cu frecvenţa ce creşte de la 100 % la 120 % din FWP.Folosind forma hexagonală se poate obţine tensiunea maximă de ieşire. Capacitatea sarcinii de vârf este mai mare decât cea cu flux circular dar capacitatea sarcinii continue este mai mică în nivelul frecvenţei FWP la 1.6 * FWP, ceea ce duce la creştera pierderilor.
Setări Parametrul 26.05 Protecţii programabile
AI<Min
AI<Min defineşte acţiunea convertizorului în cazul în care semnalul de pe o intrare analogică cade sub limita minimă.
Setări Parametrul 30.01 Panel loss
Această funcţie defineşte acţiunea convertizorului în cazul în care se pierde comunicarea între convertizor şi panel.
External fault
Erorile externe pot fi monitorizate definid o intrare digitală ca şi sursă pentu a indica o eroare externă.
Setări Parametrul 30.03 Motor thermal protection
Motorul poate fi protejat la supratemperaturi activând protecţia termică şiselectând unul din modurile de protecţie disponibile.
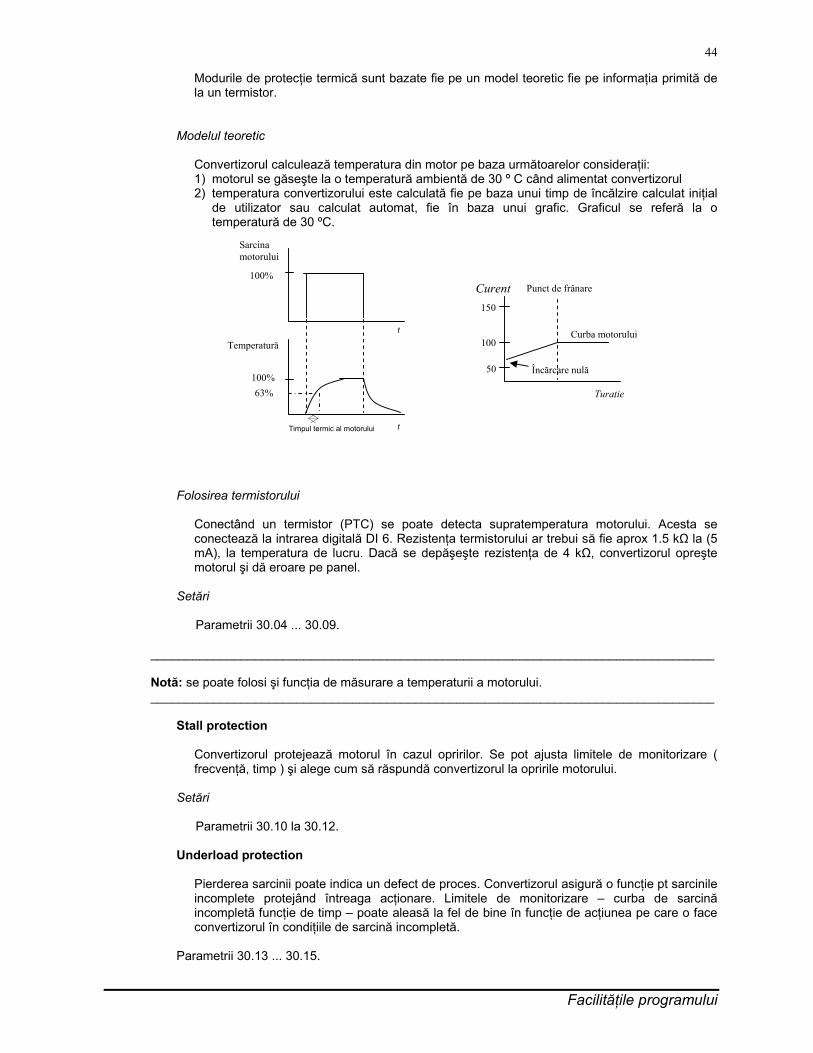
Compensarea IR este activă doar când modul de control al motorului e setat pe scalar. Când compensarea IR este activată, convertizorul furnizează un vârf de tensiune către motor la turaţii reduse. Compensarea IR este utilă în aplicaţii ce au nevoie de cuplu de pornire mare. În modul DTC nu se poate opta pentru compensarea IR.
f (Hz)
Tensiunea motorului
Compensare IR
Fără compensare
Facilităţile programului
44
Modurile de protecţie termică sunt bazate fie pe un model teoretic fie pe informaţia primită de la un termistor.
Modelul teoretic
Convertizorul calculează temperatura din motor pe baza următoarelor consideraţii: 1) motorul se găseşte la o temperatură ambientă de 30 º C când alimentat convertizorul 2) temperatura convertizorului este calculată fie pe baza unui timp de încălzire calculat iniţial
de utilizator sau calculat automat, fie în baza unui grafic. Graficul se referă la o temperatură de 30 ºC.
Folosirea termistorului Conectând un termistor (PTC) se poate detecta supratemperatura motorului. Acesta se conectează la intrarea digitală DI 6. Rezistenţa termistorului ar trebui să fie aprox 1.5 kΩ la (5 mA), la temperatura de lucru. Dacă se depăşeşte rezistenţa de 4 kΩ, convertizorul opreşte motorul şi dă eroare pe panel.
Setări Parametrii 30.04 ... 30.09.
_________________________________________________________________________________ Notă: se poate folosi şi funcţia de măsurare a temperaturii a motorului. _________________________________________________________________________________
Stall protection
Convertizorul protejează motorul în cazul opririlor. Se pot ajusta limitele de monitorizare ( frecvenţă, timp ) şi alege cum să răspundă convertizorul la opririle motorului.
Setări
Parametrii 30.10 la 30.12. Underload protection
Pierderea sarcinii poate indica un defect de proces. Convertizorul asigură o funcţie pt sarcinile incomplete protejând întreaga acţionare. Limitele de monitorizare – curba de sarcină incompletă funcţie de timp – poate aleasă la fel de bine în funcţie de acţiunea pe care o face convertizorul în condiţiile de sarcină incompletă.
Parametrii 30.13 ... 30.15.
Sarcina motorului
Temperatură
100%
100% 63%
Timpul termic al motorului
150
100
50 Încărcare nulă
Curba motorului
Punct de frânare Curent
Turaţie
t
t
Facilităţile programului
45
Motor phase loss Funcţia de Lipsă fază monitorizează starea conectării motorului la sursa de alimentare. Setări Parametrul 30.16 Earth fault protection Funcţia detectează erorile de punere la pământ la motor sau la cablul motorului.
Aceasta este bazată pe scurgerea la pământ a unor curenţi totalizaţi de la transformatoarele de curent la ieşirea convertizorului. • O eroare de pământare în circuitul principal nu declanşează protecţia. • La o punere accidentală la pământ protecţia se activează în 200 microsecunde. • La o încărcare principală, capacitatea principală ar trebui să fie un microfarad sau mai
mare. • Curenţii capacitivi din cablurile ecranate ale motorului de până la 300 m nu activează
protecţia.din cablurile ecranate ale motorului de până la 300 m nu activează protecţia.
Setări Parametrul 30.17
Communication fault
Funcţia de eroare comunicare monitorizează comunicaţiile între convertizor şi un modul extern de control( adaptor de magistrală).
Setări Parametrii 30.18 ... 30.21. Supervision of optional IO
Funcţia monitorizează utilizarea intrărilor şi ieşirilor analogice şi digitaleîn programul aplicaţie, şi avertizează dacă nu este operaţională comunicarea la intrări/ieşiri.
Setări
Parametrul 30.22
Erori preprogramate Supracurent
Limitarea la supracurent pentru convertizor este de 3.5 · I2nd ( curentul nominal de ieşire, în condiţii grele de lucru când foloseşte valoarea nominală).
Tensiuni maxime continue
Limita ls supratensiune continuă este de 1,3 ·U1max, unde U1max este valoarea maximă tensiunii de alimentare.
Tensiuni minime continue
Limita ls supratensiune continuă este de 0,65 ·U1min, unde U1min este valoarea minimă a tensiunii de alimentare.
Facilităţile programului
46
Temperatua convertizorului Convertizorul monitorizează modulul de temperatură. Dacă modulul de temperatură depăşeşte 115 ºC, este dată o avertizare. Limita maximă este 125 ºC.
Scurt – Circuit
Există protecţii separate ce monitorizează cablul până la motor scurt – circuiturile ce pot apare la invertor. Dacă apare un scurt – circuit, convertizorul nu va mai porni şi va afişa un mesaj de eroare.
Lipsa unei faze la intrare
Circuitele de protecţie la lipsa unei faze pe intrare monitorizează starea legăturii cablului principal detectând pulsaţia din circuit. Dacă lipseşte o fază, pulsaţia din circuit creşte. Dacă pulsaţia depăşeşte 13%, convertizorul se opreşte şi afişează un mesaj de eroare.
Temperatura mediului ambient
Dacă temperatura mediului ambient este sub -5 ... 0 ºC sau mai mare de 73 ... 82 ºC, convertizorul nu va porni.
Depăşirea frecvenţei
Dacă frecvenţa de ieşire a convertizorului depăşeşte limitele presetate, convertizorul se va opri şi va afişa un mesaj de eroare. Limita presetată este de 50 Hz peste limita maximă a turaţiei la DTC, sau a frecvenţei la Controlul Scalar.
Erori interne
Dacă este detectată o eroare internă , convertizorul se va opri şi va da un mesaj de eroare.
Limite de operare
ACS800 are limire reglabile pentru turaţie, curent (max), culpu (max) şi Vcc.
Setări
Grupul de parametrii 20 LIMITS
Puterea
Puterea maximă ce poate fi instalată pe motor este de 1,5 · Phd. Dacă se depăşeşte limita, culpul motorului este limitat. Funcţia protejează puntea de intrare a convertizorului la suprasarcini.
Resetări automate
Grupul de parametrii 31 AUTOMATIC RESETS.
Facilităţile programului
47
Monitorizare
Convertizorul monitorizează dacă variabilele selectate de utilizator se încadrează în limitele admise. Se pot seta limite pentru turaţie, curent, etc.
Setări
Grupul de parametrii 32 SUPERVISION.
Diagnostic
Semnale actuale Informaţii adiţionale 03.02 Monitorizare printr-un cuvânt boolean 03.14 Monitorizare printr-un cuvânt boolean Grupul 14 RELAY OUTPUTS Monitorizare printr-un releu de ieşire
Blocarea parametrilor
Se potate bloca modificarea parametrilor activând funcţia de blocare a parametrilor.
Setări Parametrii 16.02 şi 16.03
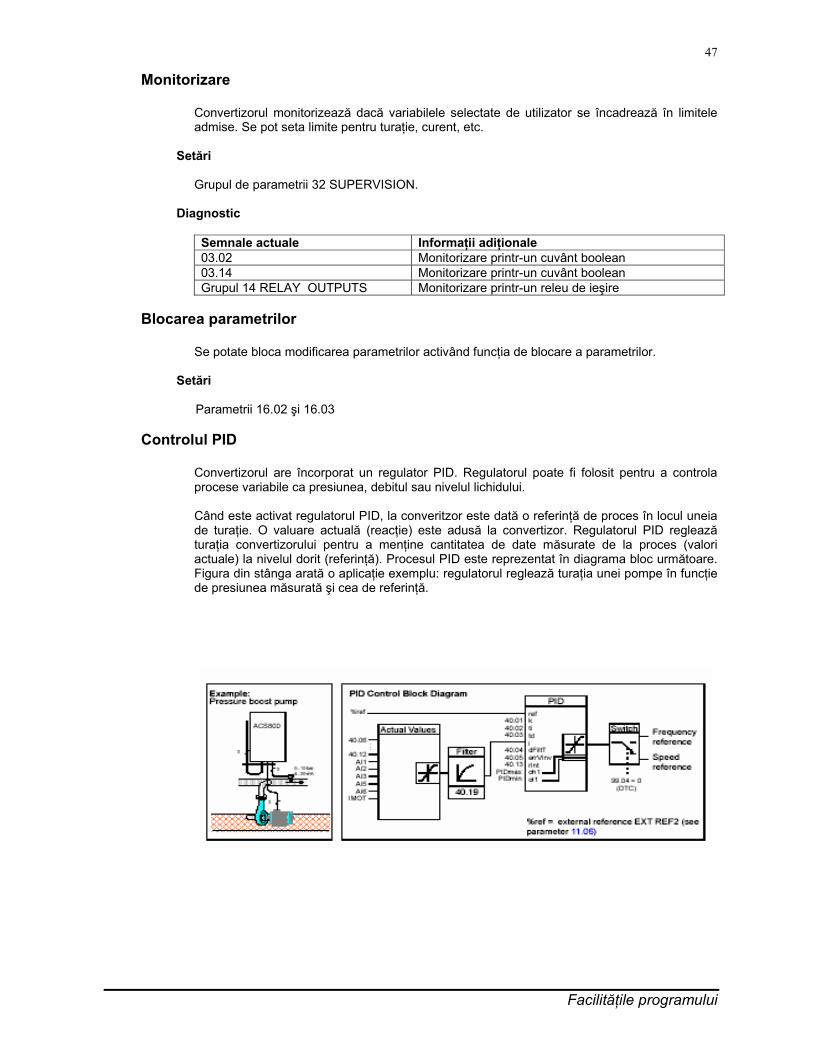
Controlul PID
Convertizorul are încorporat un regulator PID. Regulatorul poate fi folosit pentru a controla procese variabile ca presiunea, debitul sau nivelul lichidului. Când este activat regulatorul PID, la converitzor este dată o referinţă de proces în locul uneia de turaţie. O valuare actuală (reacţie) este adusă la convertizor. Regulatorul PID reglează turaţia convertizorului pentru a menţine cantitatea de date măsurate de la proces (valori actuale) la nivelul dorit (referinţă). Procesul PID este reprezentat în diagrama bloc următoare. Figura din stânga arată o aplicaţie exemplu: regulatorul reglează turaţia unei pompe în funcţie de presiunea măsurată şi cea de referinţă.
Facilităţile programului
48
Setări
Parametru Scop 99.02 Activare PID 40.01 – 40.13, 40.19 40.25 – 40.27
Setarea regulatorului PID
32.13 la 32.18 Limitele de monitorizare pentru referinţa de proces REF2 şi variabilele ACT1 şi ACT2
Diagnostic
Semnale actuale Scop 01.12, 01.24, 01.25, 01.26 şi 01.34
Grup 14 RELAY OUTPUT Grup 15 ANALOG OUTPUTS Grup 96 EXTERNAL AO
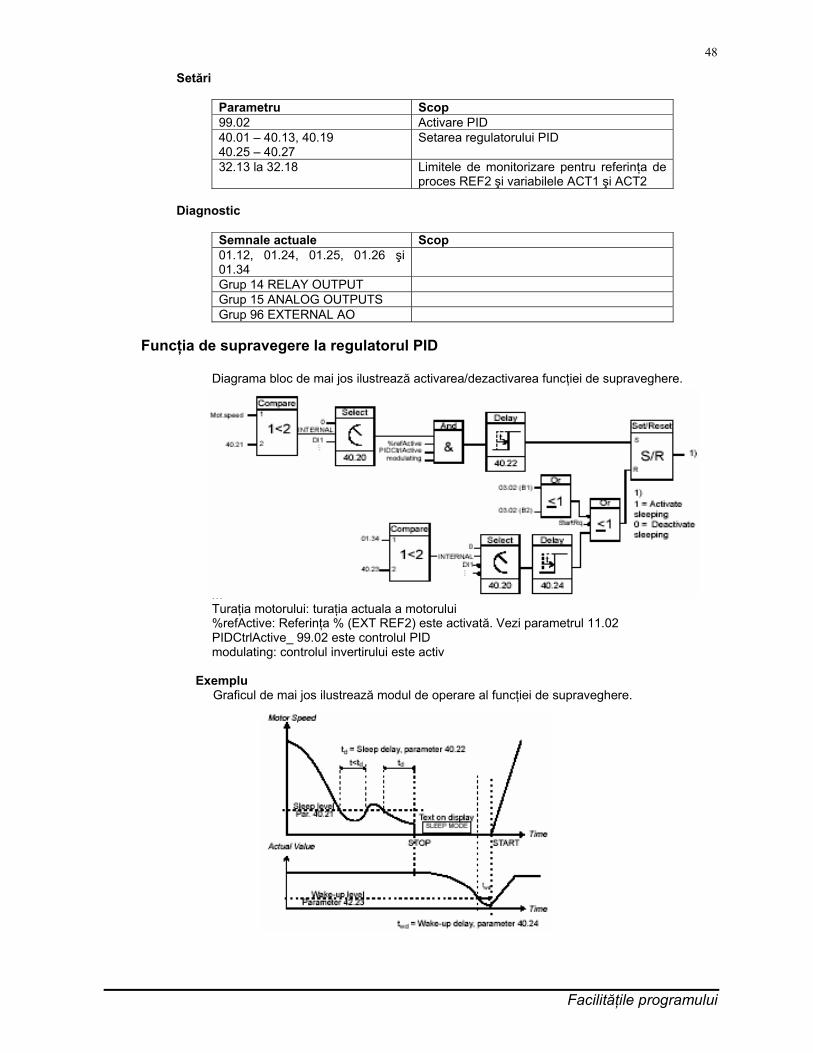
Funcţia de supravegere la regulatorul PID
Diagrama bloc de mai jos ilustrează activarea/dezactivarea funcţiei de supraveghere. Turaţia mTuraţia motorului: turaţia actuala a motorului %refActive: Referinţa % (EXT REF2) este activată. Vezi parametrul 11.02 PIDCtrlActive_ 99.02 este controlul PID modulating: controlul invertirului este activ
Exemplu Graficul de mai jos ilustrează modul de operare al funcţiei de supraveghere.

Facilităţile programului
49
Explicatie: Presupunem că noaptea consumul de apa scade. Ca o consecintă, regulatorul PID reduce turaţia motorului. Totuşi datorită pierderilor naturale din conducte şi a randamentului redus al pompei centrifuge la turaţie mică, motorul nu se va opri ci va continua să se rotească. Funcţia de supraveghere sesizează turaţia mică şi opreşte pomparea inutilă după ce a s-a trecut de temporizarea funcţiei de supraveghere. Convertizorul trece în modul de supraveghere, monitorizând presiunea. Pomparea se reia atunci când presiunea scade sub nivelul minim admis şi temporizarea de „trezire” a trecut.
Setări
Parametru Informaţii adiţionale 99.02 Activarea procesului de control al PID 40.20-40.24 Setări ale funcţiei de supraveghere
Diagnostic Avertizarea pe display la intrarea in Sleep Mode. Măsurarea temperaturii motorului prin interfaţa standard I/O
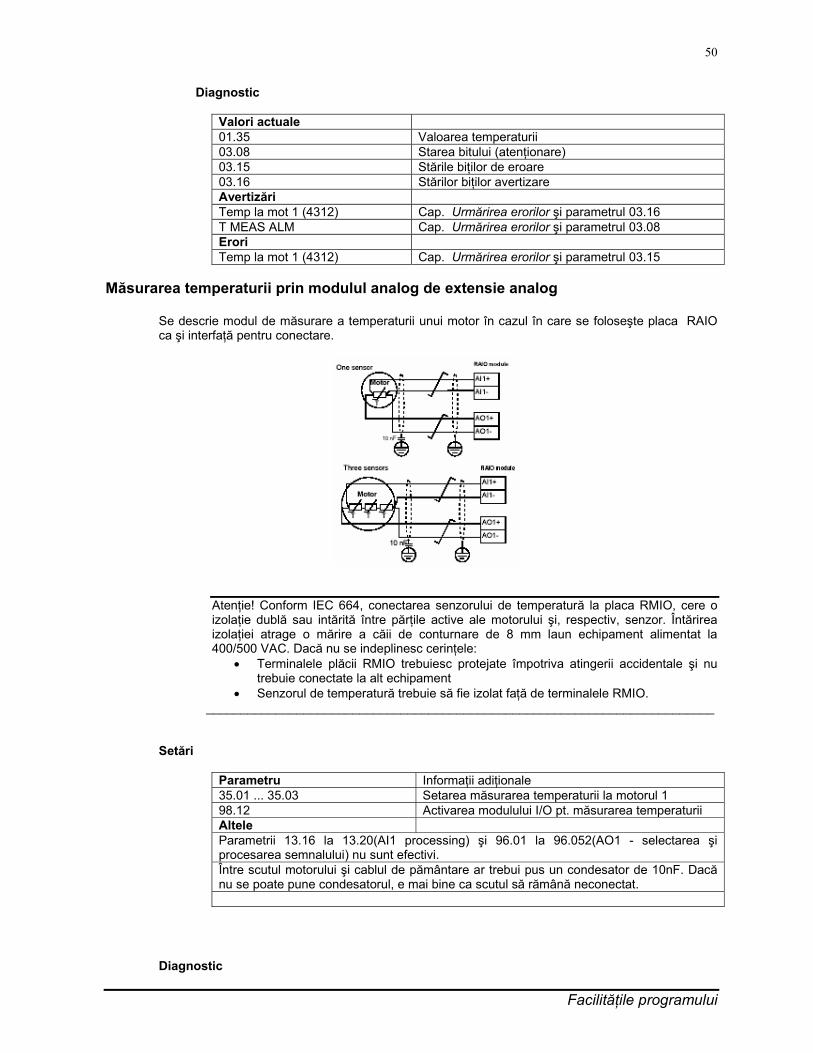
Se descrie modul de măsurare a temperaturii unui motor în cazul în care se foloseşte placa RMIO ca şi interfaţă pentru conectare.
Atenţie! Conform IEC 664, conectarea senzorului de temperatură la placa RMIO, cere o izolaţie dublă sau intărită între părţile active ale motorului şi, respectiv, senzor. Întărirea izolaţiei atrage o mărire a căii de conturnare de 8 mm laun echipament alimentat la 400/500 VAC. Dacă nu se indeplinesc cerinţele:
• Terminalele plăcii RMIO trebuiesc protejate împotriva atingerii accidentale şi nu trebuie conectate la alt echipament
• Senzorul de temperatură trebuie să fie izolat faţă de terminalele RMIO. ______________________________________________________________________________________
Setări
Parametru Informaţii adiţionale 15.01 Măsurarea temperaturii la motor 1 prin ieşirea
analogică. 35.01 ... 35.03 Setarea măsurarea temperaturii la motorul 1 Altele Parametrii 13.01 la 13.05(AI1 processing) şi 15.05(AO1 processing) nu sunt efectivi. Între scutul motorului şi cablul de pământare ar trebui pus un condesator de 10nF. Dacă nu se poate pune condesatorul, e mai bine ca scutul să rămână neconectat.
Facilităţile programului
50
Diagnostic
Valori actuale 01.35 Valoarea temperaturii 03.08 Starea bitului (atenţionare) 03.15 Stările biţilor de eroare 03.16 Stărilor biţilor avertizare Avertizări Temp la mot 1 (4312) Cap. Urmărirea erorilor şi parametrul 03.16 T MEAS ALM Cap. Urmărirea erorilor şi parametrul 03.08 Erori Temp la mot 1 (4312) Cap. Urmărirea erorilor şi parametrul 03.15
Măsurarea temperaturii prin modulul analog de extensie analog
Se descrie modul de măsurare a temperaturii unui motor în cazul în care se foloseşte placa RAIO ca şi interfaţă pentru conectare.
Atenţie! Conform IEC 664, conectarea senzorului de temperatură la placa RMIO, cere o izolaţie dublă sau intărită între părţile active ale motorului şi, respectiv, senzor. Întărirea izolaţiei atrage o mărire a căii de conturnare de 8 mm laun echipament alimentat la 400/500 VAC. Dacă nu se indeplinesc cerinţele:
• Terminalele plăcii RMIO trebuiesc protejate împotriva atingerii accidentale şi nu trebuie conectate la alt echipament
• Senzorul de temperatură trebuie să fie izolat faţă de terminalele RMIO. _________________________________________________________________________ Setări
Parametru Informaţii adiţionale 35.01 ... 35.03 Setarea măsurarea temperaturii la motorul 1 98.12 Activarea modulului I/O pt. măsurarea temperaturii Altele Parametrii 13.16 la 13.20(AI1 processing) şi 96.01 la 96.052(AO1 - selectarea şi procesarea semnalului) nu sunt efectivi. Între scutul motorului şi cablul de pământare ar trebui pus un condesator de 10nF. Dacă nu se poate pune condesatorul, e mai bine ca scutul să rămână neconectat.
Diagnostic
Facilităţile programului
51
Valori actuale 01.35 Valoarea temperaturii 03.08 Starea bitului (atenţionare) ca şi val. booleana 03.15 Stările biţilor de eroare ca şi val. booleana 03.16 Stările biţilor de avertizare ca şi val. booleana Avertizări Temp la mot 1 (4312) Cap. Urmărirea erorilor şi parametrul 03.16 T MEAS ALM Cap. Urmărirea erorilor şi parametrul 03.08 Erori Temp la mot 1 (4312) Cap. Urmărirea erorilor şi parametrul 03.15
Programare adaptivă folosind funcţiile bloc
În mod convenţional, utilizatorul poate controla acţiunile convertizorului prin intermediul parametrilor. Fiecare parametru are un set de opţiuni. Parmetrii fac programarea mai uşoară, dar variantele sunt limitate. Utilizatorul nu poate personaliza setările peste un anumit nivel. Programarea adaptivă poate face acest lucru fără mai fi nevoie de accesorii în plus.
• Programul este clădit pe funcţii bloc standard incluse în softul convertizorului. • Panelul de control este unealta de programare. • Utilizatorul poate salva programul desenându-l prin diagrame bloc pe o foaie
model. Numărul maxim de funcţii bloc este de 15. Programul mai constă în câteva funcţii adiţionale.
Controlul frânării mecanice
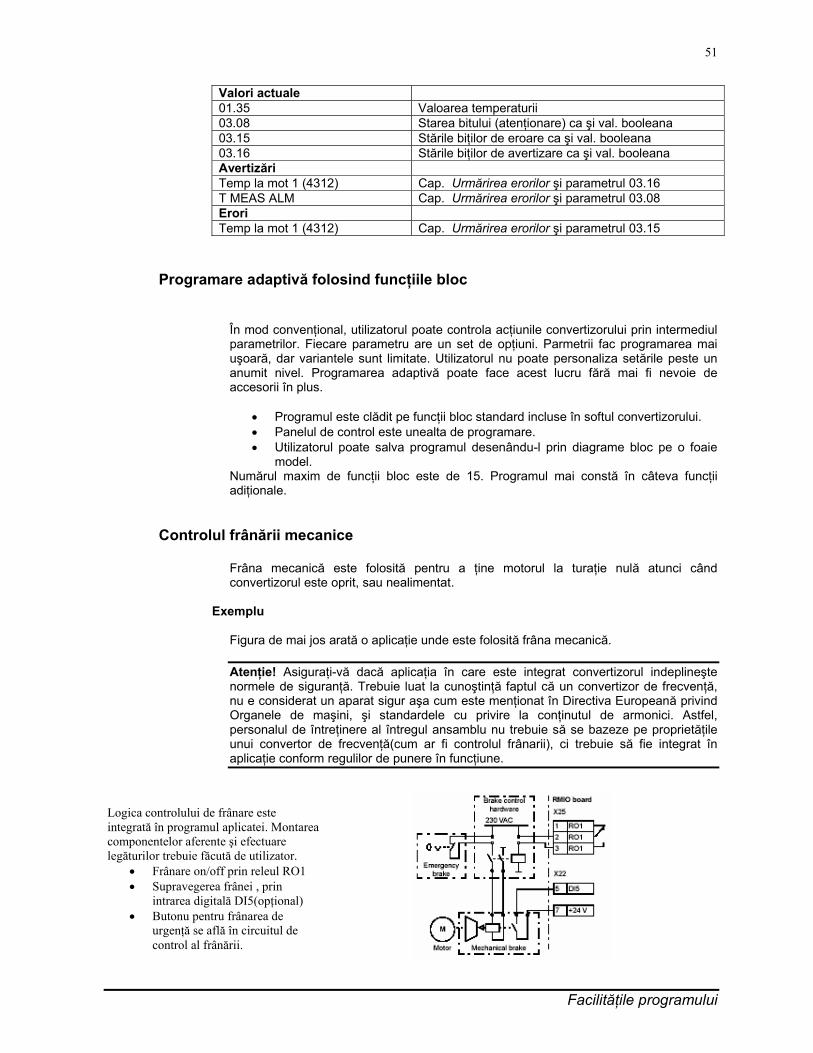
Frâna mecanică este folosită pentru a ţine motorul la turaţie nulă atunci când convertizorul este oprit, sau nealimentat.
Exemplu Figura de mai jos arată o aplicaţie unde este folosită frâna mecanică. Atenţie! Asiguraţi-vă dacă aplicaţia în care este integrat convertizorul indeplineşte normele de siguranţă. Trebuie luat la cunoştinţă faptul că un convertizor de frecvenţă, nu e considerat un aparat sigur aşa cum este menţionat în Directiva Europeană privind Organele de maşini, şi standardele cu privire la conţinutul de armonici. Astfel, personalul de întreţinere al întregul ansamblu nu trebuie să se bazeze pe proprietăţile unui convertor de frecvenţă(cum ar fi controlul frânarii), ci trebuie să fie integrat în aplicaţie conform regulilor de punere în funcţiune.
Logica controlului de frânare este integrată în programul aplicatei. Montarea componentelor aferente şi efectuare legăturilor trebuie făcută de utilizator.
• Frânare on/off prin releul RO1 • Supravegerea frânei , prin
intrarea digitală DI5(opţional) • Butonu pentru frânarea de
urgenţă se află în circuitul de control al frânării.
Facilităţile programului
52
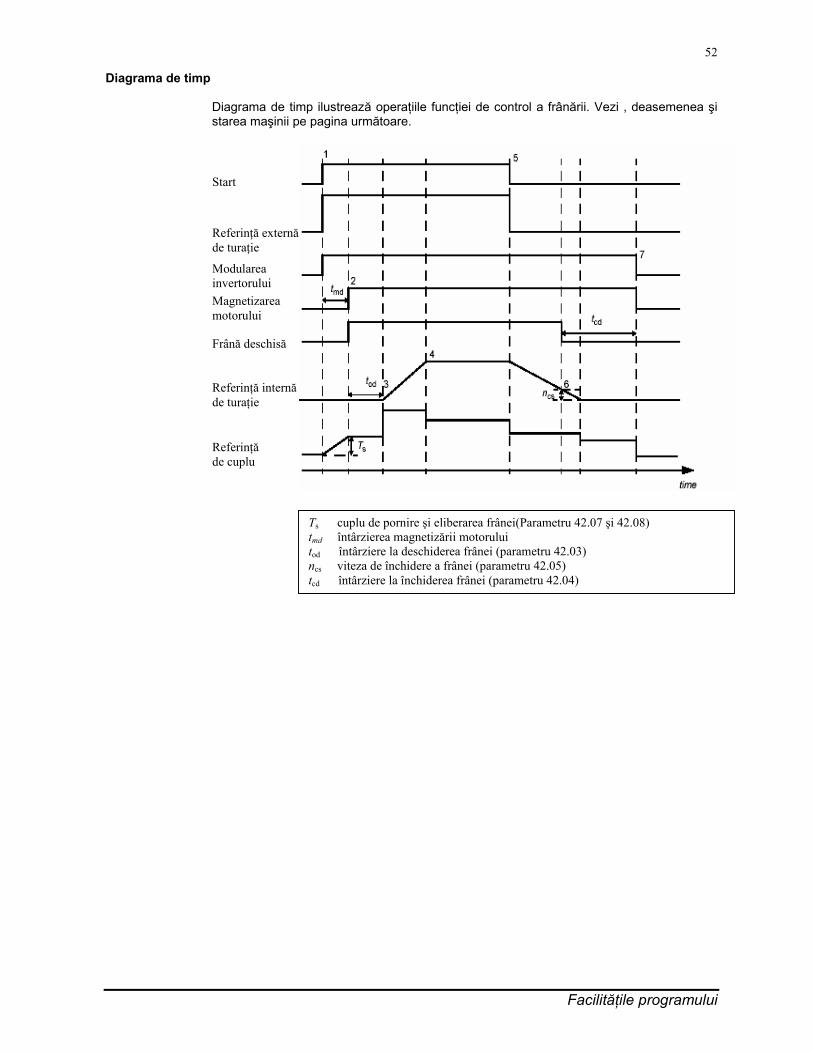
Diagrama de timp Diagrama de timp ilustrează operaţiile funcţiei de control a frânării. Vezi , deasemenea şi starea maşinii pe pagina următoare.
Start
Referinţă externă de turaţie
Modularea invertorului
Frână deschisă
Referinţă internă de turaţie
Magnetizarea motorului
Referinţă de cuplu
Ts cuplu de pornire şi eliberarea frânei(Parametru 42.07 şi 42.08) tmd întârzierea magnetizării motorului tod întârziere la deschiderea frânei (parametru 42.03) ncs viteza de închidere a frânei (parametru 42.05) tcd întârziere la închiderea frânei (parametru 42.04)
Facilităţile programului
53
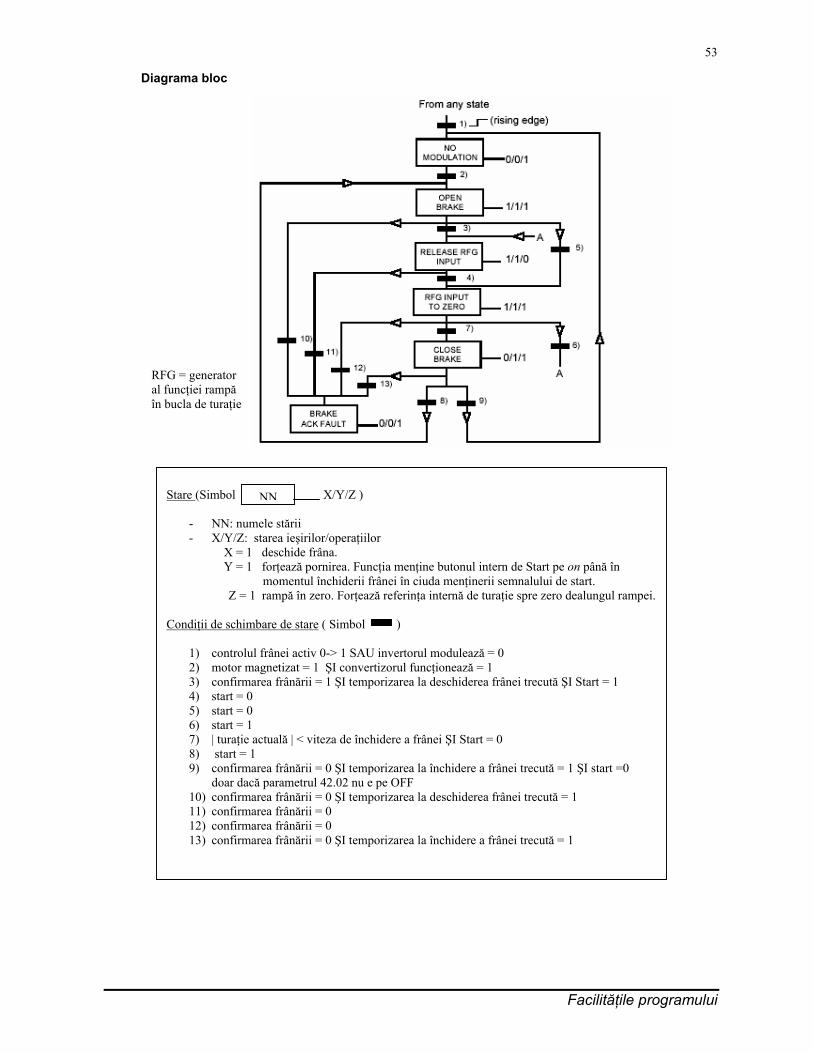
Diagrama bloc
Stare (Simbol X/Y/Z )
- NN: numele stării - X/Y/Z: starea ieşirilor/operaţiilor
X = 1 deschide frâna. Y = 1 forţează pornirea. Funcţia menţine butonul intern de Start pe on până în
momentul închiderii frânei în ciuda menţinerii semnalului de start. Z = 1 rampă în zero. Forţează referinţa internă de turaţie spre zero dealungul rampei.
Condiţii de schimbare de stare ( Simbol )
1) controlul frânei activ 0-> 1 SAU invertorul modulează = 0 2) motor magnetizat = 1 ŞI convertizorul funcţionează = 1 3) confirmarea frânării = 1 ŞI temporizarea la deschiderea frânei trecută ŞI Start = 1 4) start = 0 5) start = 0 6) start = 1 7) | turaţie actuală | < viteza de închidere a frânei ŞI Start = 0 8) start = 1 9) confirmarea frânării = 0 ŞI temporizarea la închidere a frânei trecută = 1 ŞI start =0
doar dacă parametrul 42.02 nu e pe OFF 10) confirmarea frânării = 0 ŞI temporizarea la deschiderea frânei trecută = 1 11) confirmarea frânării = 0 12) confirmarea frânării = 0 13) confirmarea frânării = 0 ŞI temporizarea la închidere a frânei trecută = 1
NN
RFG = generator al funcţiei rampă în bucla de turaţie
Facilităţile programului
54
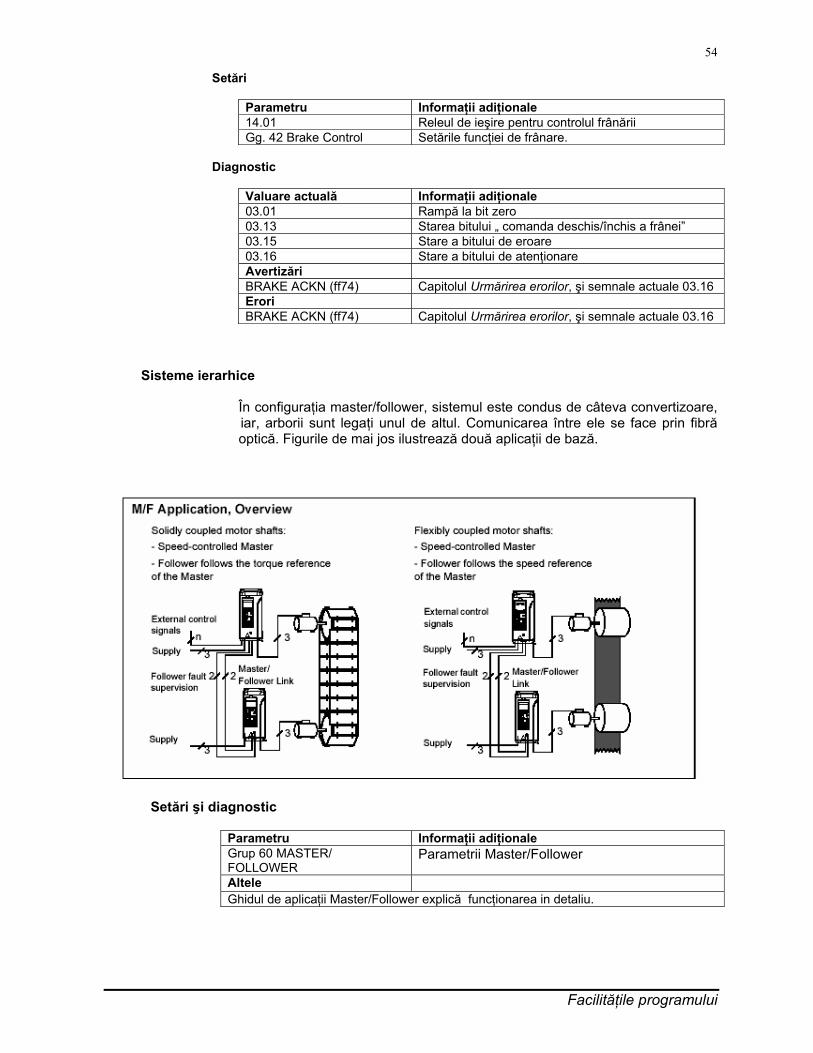
Setări
Parametru Informaţii adiţionale 14.01 Releul de ieşire pentru controlul frânării Gg. 42 Brake Control Setările funcţiei de frânare.
Diagnostic
Valuare actuală Informaţii adiţionale 03.01 Rampă la bit zero 03.13 Starea bitului „ comanda deschis/închis a frânei” 03.15 Stare a bitului de eroare 03.16 Stare a bitului de atenţionare Avertizări BRAKE ACKN (ff74) Capitolul Urmărirea erorilor, şi semnale actuale 03.16 Erori BRAKE ACKN (ff74) Capitolul Urmărirea erorilor, şi semnale actuale 03.16
Sisteme ierarhice
În configuraţia master/follower, sistemul este condus de câteva convertizoare, iar, arborii sunt legaţi unul de altul. Comunicarea între ele se face prin fibră optică. Figurile de mai jos ilustrează două aplicaţii de bază.
Setări şi diagnostic
Parametru Informaţii adiţionale Grup 60 MASTER/ FOLLOWER
Parametrii Master/Follower
Altele Ghidul de aplicaţii Master/Follower explică funcţionarea in detaliu.
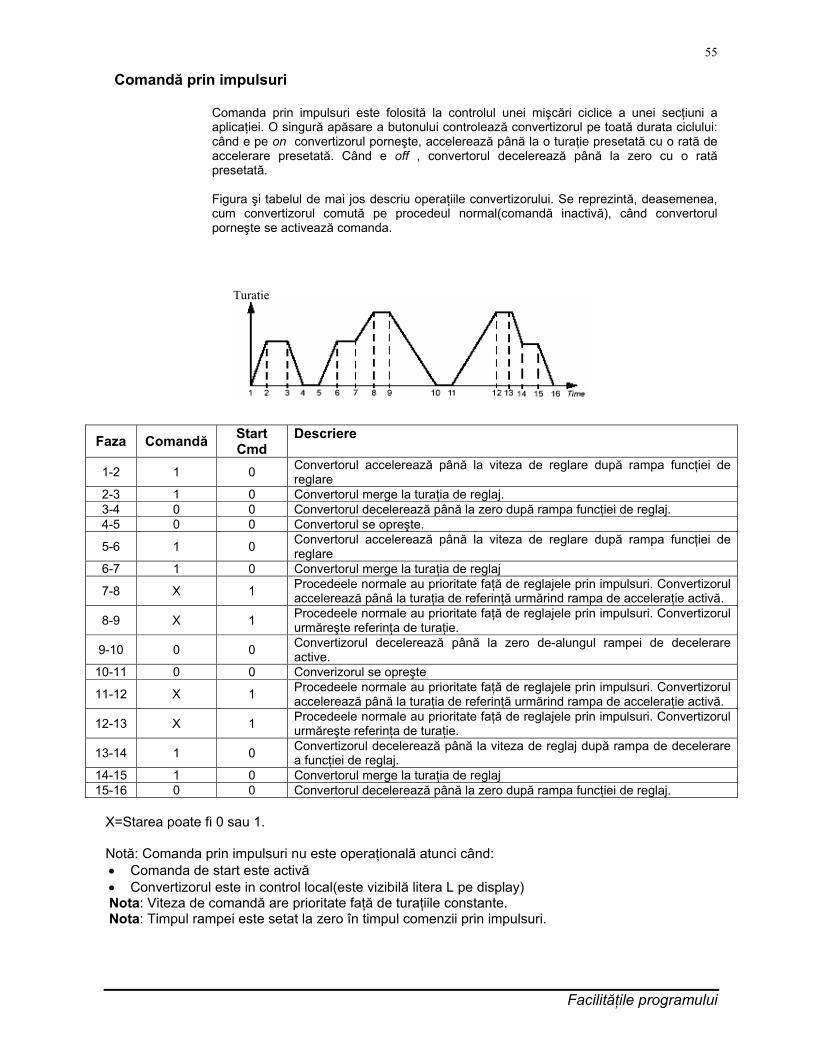
Facilităţile programului
55
Comandă prin impulsuri
Comanda prin impulsuri este folosită la controlul unei mişcări ciclice a unei secţiuni a aplicaţiei. O singură apăsare a butonului controlează convertizorul pe toată durata ciclului: când e pe on convertizorul porneşte, accelerează până la o turaţie presetată cu o rată de accelerare presetată. Când e off , convertorul decelerează până la zero cu o rată presetată. Figura şi tabelul de mai jos descriu operaţiile convertizorului. Se reprezintă, deasemenea, cum convertizorul comută pe procedeul normal(comandă inactivă), când convertorul porneşte se activează comanda.
Faza Comandă Start Cmd
Descriere
1-2 1 0 Convertorul accelerează până la viteza de reglare după rampa funcţiei de reglare
2-3 1 0 Convertorul merge la turaţia de reglaj. 3-4 0 0 Convertorul decelerează până la zero după rampa funcţiei de reglaj. 4-5 0 0 Convertorul se opreşte.
5-6 1 0 Convertorul accelerează până la viteza de reglare după rampa funcţiei de reglare
6-7 1 0 Convertorul merge la turaţia de reglaj
7-8 X 1 Procedeele normale au prioritate faţă de reglajele prin impulsuri. Convertizorul accelerează până la turaţia de referinţă urmărind rampa de acceleraţie activă.
8-9 X 1 Procedeele normale au prioritate faţă de reglajele prin impulsuri. Convertizorul urmăreşte referinţa de turaţie.
9-10 0 0 Convertizorul decelerează până la zero de-alungul rampei de decelerare active.
10-11 0 0 Converizorul se opreşte
11-12 X 1 Procedeele normale au prioritate faţă de reglajele prin impulsuri. Convertizorul accelerează până la turaţia de referinţă urmărind rampa de acceleraţie activă.
12-13 X 1 Procedeele normale au prioritate faţă de reglajele prin impulsuri. Convertizorul urmăreşte referinţa de turaţie.
13-14 1 0 Convertizorul decelerează până la viteza de reglaj după rampa de decelerare a funcţiei de reglaj.
14-15 1 0 Convertorul merge la turaţia de reglaj 15-16 0 0 Convertorul decelerează până la zero după rampa funcţiei de reglaj.
X=Starea poate fi 0 sau 1. Notă: Comanda prin impulsuri nu este operaţională atunci când: • Comanda de start este activă • Convertizorul este in control local(este vizibilă litera L pe display) Nota: Viteza de comandă are prioritate faţă de turaţiile constante. Nota: Timpul rampei este setat la zero în timpul comenzii prin impulsuri.
Turaţie
Facilităţile programului
56
Setări Parametru Informaţii adiţionale
10.06 Intrări pentru controlul on/off al comenyii prin impulsuri 12.15 Turaţia setată prin comanda prin impulsuri 21.10 Întârzierea comenyzii pentru stingerea ventilelor. 22.04, 22.05 Timpi de accelerare şi decelare folosiţi în timpul comenzii 22.06 Timpul de accelerare şi decelerare al rampei este setat pe
zero in timpul comenzii

Macrourile
57
Macrourile Privire generală asupra capitolului
Acest capitol descrie modul de utilizare, operaţiile şi controlul conexiunilor ale aplicaţiilor macro standard. Deasemenea arată modul în care se salvează un macro creat de utilizator, şi cum se apelează.
Privire generală asupra macrourilor
Aplicaţiile macro sunt seturi de parametrii presetaţi. În timp ce se porneşte convertizorul, utilizatorul poate selecta unul dintre macrouri prin parametrii 99.02. Există 5 macrouri standard şi 2 macrouri ce pot fi definite de utilizator. Tabelul de mai jos conţine un rezumat al macrourilor şi descrie aplicaţiile tipice. Macro Aplicaţii tipice Factory Turaţie normală la aplicaţiile de control atunci unde
0, 1, 2, 3 turaţii constante sunt folosite: − Benzi rulante; − Controlul turaţiei la pompe şi ventilatoare; − Teste cu turaţii prestabilite
Manual/Auto Aplicaţii pentru controlul turaţiei. Este posibil comutarea între două unităţi de control externe.
PID Control Aplicaţiide control al proceselor, diferite sisteme în buclă închisă ca: controlul presiunii, controlul nivelului, controlul debitului. Exemple:
− Amplificarea presiunii pe coloana de alimentare cu apă a oraşului.
− Controlul nivelului apei din rezervoarele de apă.
− Amplificarea presiunii pe instalaţiile de încălzire ale oraşului.
− Debitul de material de pe o bandă rulantă. Este posibil, deasemenea, comutarea între controlul procesului şi controlul turaţiei.
Torque control Aplicaţii de control în cuplu.Este posibil comutarea între controlul în cuplu şi cel în turaţie.
Sequential control Aplicaţii de control în turaţie în care referinţele de turaţie, 7 turaţii constante şi 2 rampe deacceleraţie şi deceleraţie pot fi folosite.
User Utilizatorul poate salva setările făcute, incluzând paraetrii 99 şi rezultatele identificării motorului în memoria permanentă, cu posibilitatea de a fi rechemate mai târziu. Două aplicaţii de tip utilizator sunt esenţiale când se comută între două motoare.
Macrourile
58
Macroul Factory
Toate comenzile convertorului şi setările de referinţă pot fi date de la control panel sau de la o locaţie externă de control.Locaţia activă este selectată cu tasta LOC/REM de pe panel. În control extern, locaţia de control este EXT1. Referinţa de semnal este conectată la intrarea analogică şi semnalele de start/stop şi sens sunt conectate la intrările AI1 şi AI2. în mod normal sensul de rotaţie este setat spre Înainte (parametru 10.03). Intrarea DI2 nu poate controla sensul numai dacă parametrul 10.03 este pus pe Request. Prin intrările digitale DI5 şi DI6 se pot selecta 3 turaţii constante. Două rampe de acceleraţie şi deceleraţie sunt presetate. Rampele de acceleraţie şi deceleraţie sunt folosite conform stării intrării DI4. Două semnale analogice (turaţie şi curent) şi trei semnale de ieşire de releu (pregătit, funcţionează, şi inverter fault) sunt disponibile. Semnalele care sunt afişate pe afişajul control panelului sunt: FRECVENŢA, CURENT ŞI PUTERE.

Macrourile
59
Conexiuni iniţiale Figura de mai jos arată conexiunile exterioare pentru macroul Factory.
1 VREF 2 GND
Referinţa de tensiune -10V 1 kohm ≤ RL ≤ 10 kohm
X21 1 VREF 2 GND
Referinţa de tensiune -10V 1 kohm ≤ RL ≤ 10 kohm
3 AI1+ 4 AI1-
Referinţă de turaţie 0(2) ... 10 V, Rin>200 kohm
5 AI2+ 6 AI2-
Iniţial, nesetat. 0(4) ... 20 mA, Rin>100 ohm
7 AI3+ 8 AI3-
Iniţial, nesetat. 0(4) ... 20 mA, Rin>100 ohm
9 AO1+ 10 AO1-
Turaţia motorului 0(4) ... 20 mA ≡ 0 turaţia nominală a motorului RL≤700 ohmi
11 AO2+ 12 AO2-
Curent de ieşire 0(4) ... 20 mA ≡ 0 curentul nominal al motorului, RL≤700 ohmi
X22 1 DI1 Stop/Start2)
2 DI2 Înainte/Înapoi 1, 2)
3 DI3 Iniţial nu este setat. 2)
4 DI4 Accelerare/decelare 3)
5 DI5 Selectare turaţie constantă 4)
6 DI6 Error! Not a valid link. 7 +24V 8 +24V
+24 VDC, max. 100 mA
9 DGND1 Masă digitală 10 DGND2 Error! Not a valid link. 11 DI IL Începerea interblocajului (0=stop) 5)
X23 1 +24 V 2 GND
Ieşire auxiliară de tensiune, neizolată, 24 VDC, 250 mA.
X25 1 RO11 2 RO12 3 RO13
Ieşire releu 1 Pregătit
X26 1 RO21 2 RO22 3 RO23
Ieşire releu 2 Pregătit
X27 1 RO31 2 RO32 3 RO33
Ieşire releu 3 Pregătit
1) Efectiv doar dacă parametrul 10.03 este pus pe REQUEST de cărtre utilizator.
2) Setările de utilizator diferă dupa cum urmează (valid dacă codul digital pentru aplicaţie are valoarea B):
DI1 Start (Pulse:0->1) DI2 Stop (Pulse:0->1) DI3 Înainte/Înapoi
3) 0=timpii de rampă conf. par 22.02 şi 22.03. 1= timpii de rampă conf. par 22.04 şi 22.05
4) Vezi grupul de parametrii 12 TURAŢIE CONSTANTĂ:
DI5 DI6 Operaţie 0 0 Setarea turaţiei prin AI1 1 0 Turaţie 1 0 1 Turaţie 2 1 1 Turaţie 3
5) Vezi parametrul 21.09

Macrourile
60
Macroul Auto/Manual
Comenzile de start, stop şi sens cât şi setările de referinţă pot fi date de la una sau două locaţii de comandă externă, EXT1 (Manual) sau EXT2 (Auto). Comenzile de start, stop şi sens aleEXT1 (Manual) sunt conectate la intrările digitale DI1 şi DI2, iar semnalul de referinţă este conectat la intrarea analogică AI1. Comenzile de start, stop şi sens ale EXT2 (Auto) sunt conectate la intrările digitale DI5 şi DI6, iar semnalul de referinţă este conectat la intrarea analogică AI2. Selecţia între EXT1 şi EXT2 depinde de starea intrării DI3. Convertorul este controlat în turaţie. Comenzile de start, stop şi sens pot fi date şi de la tastatura control panel – ului. O turaţie constantă poate fi selectată prin DI4. Referinta de turaţie în modul auto (EXT2) este dat ca şi procent din turaţia maximă a convertorului. Două semnale analogice şi trei relee sunt disponibile la blocurile terminale. Semnalele uzuale de pe display – ul control panel – ului sunt FRECVENŢA, CURENTUL şi CTRL LOC.
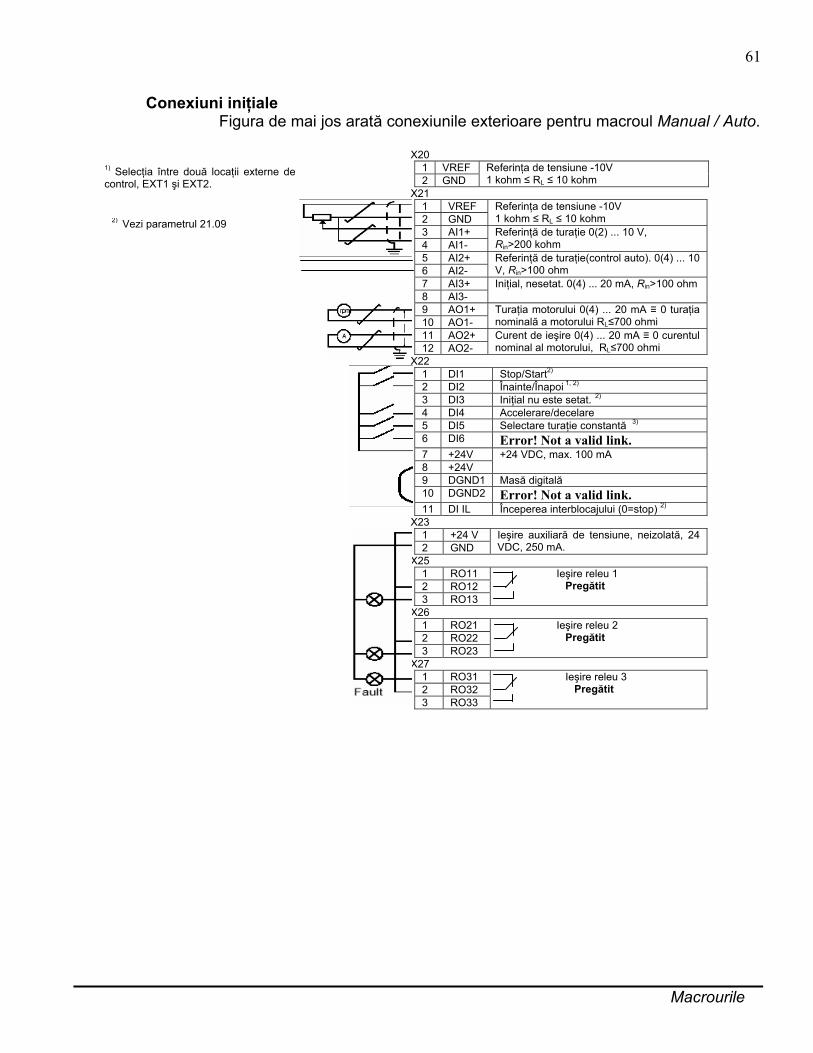
Macrourile
61
Conexiuni iniţiale Figura de mai jos arată conexiunile exterioare pentru macroul Manual / Auto. X20
1 VREF 2 GND
Referinţa de tensiune -10V 1 kohm ≤ RL ≤ 10 kohm
X21 1 VREF 2 GND
Referinţa de tensiune -10V 1 kohm ≤ RL ≤ 10 kohm
3 AI1+ 4 AI1-
Referinţă de turaţie 0(2) ... 10 V, Rin>200 kohm
5 AI2+ 6 AI2-
Referinţă de turaţie(control auto). 0(4) ... 10 V, Rin>100 ohm
7 AI3+ 8 AI3-
Iniţial, nesetat. 0(4) ... 20 mA, Rin>100 ohm
9 AO1+ 10 AO1-
Turaţia motorului 0(4) ... 20 mA ≡ 0 turaţia nominală a motorului RL≤700 ohmi
11 AO2+ 12 AO2-
Curent de ieşire 0(4) ... 20 mA ≡ 0 curentul nominal al motorului, RL≤700 ohmi
X22 1 DI1 Stop/Start2)
2 DI2 Înainte/Înapoi 1, 2)
3 DI3 Iniţial nu este setat. 2)
4 DI4 Accelerare/decelare 5 DI5 Selectare turaţie constantă 3)
6 DI6 Error! Not a valid link. 7 +24V 8 +24V
+24 VDC, max. 100 mA
9 DGND1 Masă digitală 10 DGND2 Error! Not a valid link. 11 DI IL Începerea interblocajului (0=stop) 2)
X23 1 +24 V 2 GND
Ieşire auxiliară de tensiune, neizolată, 24 VDC, 250 mA.
X25 1 RO11 2 RO12 3 RO13
Ieşire releu 1 Pregătit
X26 1 RO21 2 RO22 3 RO23
Ieşire releu 2 Pregătit
X27 1 RO31 2 RO32 3 RO33
Ieşire releu 3 Pregătit
1) Selecţia între două locaţii externe de control, EXT1 şi EXT2.
2) Vezi parametrul 21.09
Macrourile
62
Macroul PID Control
Acest macrou este folosit pentru controlul unei variabile de proces, de exemplu presiunea sau debitul, controlând turaţia motorului. Referinţa semnalulului de referinţă este conectată la intrarea analogică AI1, iar semnalul de reacţie la intrarea analogică AI2. Alternativ, o referinţă directă de turaţie poate fi dată convertorului prin intrarea analogică AI1. Apoi regulatorul PID este ocolit , iar convertorul nu mai controlează variabila de proces. Selecţia între controlul în turaţie şi controlul variabilei de proces este realizat prin intrarea digitală DI3. Două semnale analogice şi trei relee sunt disponibile la blocurile terminale. Semnalele uzuale de pe display – ul control panel – ului sunt TURAŢIA, VALUAREA ACTUALĂ1 şi ABATEREA ÎN CONTROL.
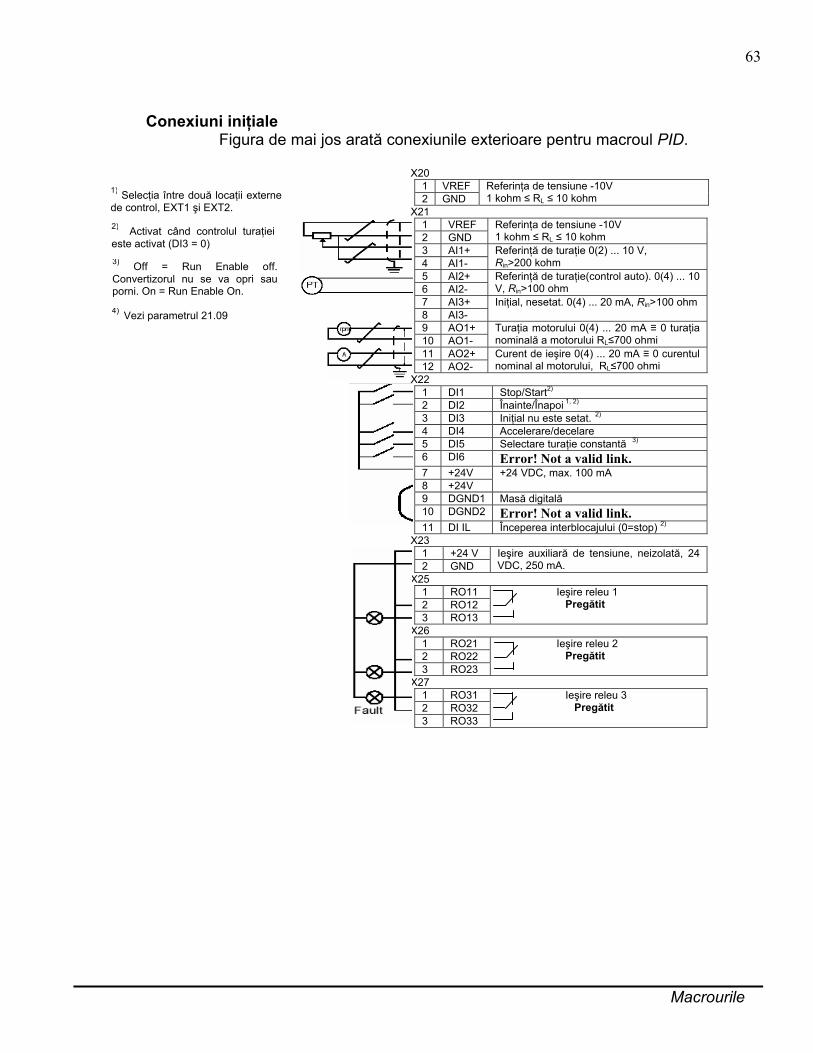
Macrourile
63
Conexiuni iniţiale Figura de mai jos arată conexiunile exterioare pentru macroul PID.
X20
1 VREF 2 GND
Referinţa de tensiune -10V 1 kohm ≤ RL ≤ 10 kohm
X21 1 VREF 2 GND
Referinţa de tensiune -10V 1 kohm ≤ RL ≤ 10 kohm
3 AI1+ 4 AI1-
Referinţă de turaţie 0(2) ... 10 V, Rin>200 kohm
5 AI2+ 6 AI2-
Referinţă de turaţie(control auto). 0(4) ... 10 V, Rin>100 ohm
7 AI3+ 8 AI3-
Iniţial, nesetat. 0(4) ... 20 mA, Rin>100 ohm
9 AO1+ 10 AO1-
Turaţia motorului 0(4) ... 20 mA ≡ 0 turaţia nominală a motorului RL≤700 ohmi
11 AO2+ 12 AO2-
Curent de ieşire 0(4) ... 20 mA ≡ 0 curentul nominal al motorului, RL≤700 ohmi
X22 1 DI1 Stop/Start2)
2 DI2 Înainte/Înapoi 1, 2)
3 DI3 Iniţial nu este setat. 2)
4 DI4 Accelerare/decelare 5 DI5 Selectare turaţie constantă 3)
6 DI6 Error! Not a valid link. 7 +24V 8 +24V
+24 VDC, max. 100 mA
9 DGND1 Masă digitală 10 DGND2 Error! Not a valid link. 11 DI IL Începerea interblocajului (0=stop) 2)
X23 1 +24 V 2 GND
Ieşire auxiliară de tensiune, neizolată, 24 VDC, 250 mA.
X25 1 RO11 2 RO12 3 RO13
Ieşire releu 1 Pregătit
X26 1 RO21 2 RO22 3 RO23
Ieşire releu 2 Pregătit
X27 1 RO31 2 RO32 3 RO33
Ieşire releu 3 Pregătit
2) Activat când controlul turaţiei este activat (DI3 = 0)
1) Selecţia între două locaţii externe de control, EXT1 şi EXT2.
4) Vezi parametrul 21.09
3) Off = Run Enable off. Convertizorul nu se va opri sau porni. On = Run Enable On.
Macrourile
64
Macroul Torque Control.
Acest macrou este folosit la aplicaţii care necesită control în cuplu. Referinţa de cuplu este dată prin intermediul intrării analogice AI2 ca şi semnal de curent. Iniţial, 0 mA corespund la 0%, iar 20 mA la 100% din cuplul nominal al motorului. Comenzile de Start/Stop/Senssunt date prin intrările digitale DI1 şi DI2. Semnalul de Run Enable este conectat la DI6. Prin intrarea DI3 este posibilă selectarea controlului în turaţie în schimbulcontrolului în cuplu. Deasemenea, este posibilă schimbarea locaţiei de control externă cu cea locală apăsând tasta LOC/REM. Prin comanda de la panel se comandă turaţia în modul iniţial. Dacă se cere control în cuplu de la panel, valoarea parametrului 11.01 ar trebui schimbată pe REF2 (%). Două semnale analogice şi trei relee sunt disponibile la blocurile terminale. Semnalele uzuale de pe display – ul control panel – ului sunt TURAŢIA, CUPLUL şi CTRL LOC.
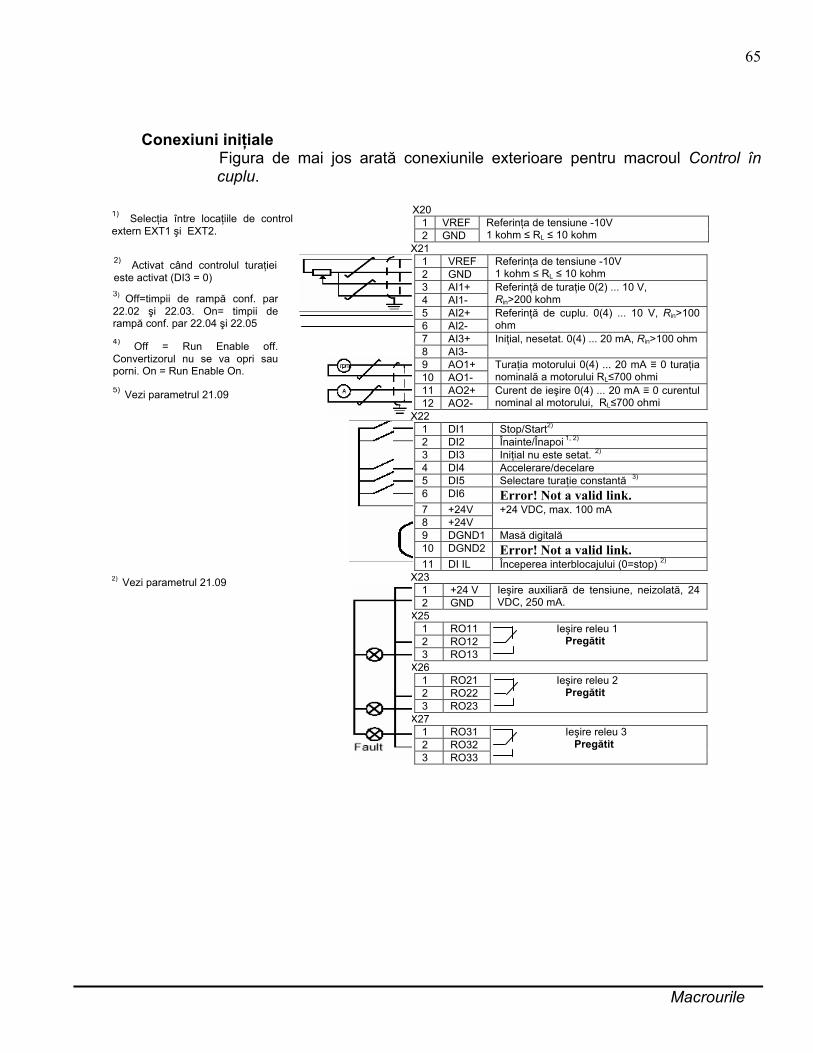
Macrourile
65
Conexiuni iniţiale Figura de mai jos arată conexiunile exterioare pentru macroul Control în cuplu.
X20
1 VREF 2 GND
Referinţa de tensiune -10V 1 kohm ≤ RL ≤ 10 kohm
X21 1 VREF 2 GND
Referinţa de tensiune -10V 1 kohm ≤ RL ≤ 10 kohm
3 AI1+ 4 AI1-
Referinţă de turaţie 0(2) ... 10 V, Rin>200 kohm
5 AI2+ 6 AI2-
Referinţă de cuplu. 0(4) ... 10 V, Rin>100 ohm
7 AI3+ 8 AI3-
Iniţial, nesetat. 0(4) ... 20 mA, Rin>100 ohm
9 AO1+ 10 AO1-
Turaţia motorului 0(4) ... 20 mA ≡ 0 turaţia nominală a motorului RL≤700 ohmi
11 AO2+ 12 AO2-
Curent de ieşire 0(4) ... 20 mA ≡ 0 curentul nominal al motorului, RL≤700 ohmi
X22 1 DI1 Stop/Start2)
2 DI2 Înainte/Înapoi 1, 2)
3 DI3 Iniţial nu este setat. 2)
4 DI4 Accelerare/decelare 5 DI5 Selectare turaţie constantă 3)
6 DI6 Error! Not a valid link. 7 +24V 8 +24V
+24 VDC, max. 100 mA
9 DGND1 Masă digitală 10 DGND2 Error! Not a valid link. 11 DI IL Începerea interblocajului (0=stop) 2)
X23 1 +24 V 2 GND
Ieşire auxiliară de tensiune, neizolată, 24 VDC, 250 mA.
X25 1 RO11 2 RO12 3 RO13
Ieşire releu 1 Pregătit
X26 1 RO21 2 RO22 3 RO23
Ieşire releu 2 Pregătit
X27 1 RO31 2 RO32 3 RO33
Ieşire releu 3 Pregătit
1) Selecţia între locaţiile de control extern EXT1 şi EXT2.
2) Vezi parametrul 21.09
2) Activat când controlul turaţiei este activat (DI3 = 0)
5) Vezi parametrul 21.09
4) Off = Run Enable off. Convertizorul nu se va opri sau porni. On = Run Enable On.
3) Off=timpii de rampă conf. par 22.02 şi 22.03. On= timpii de rampă conf. par 22.04 şi 22.05
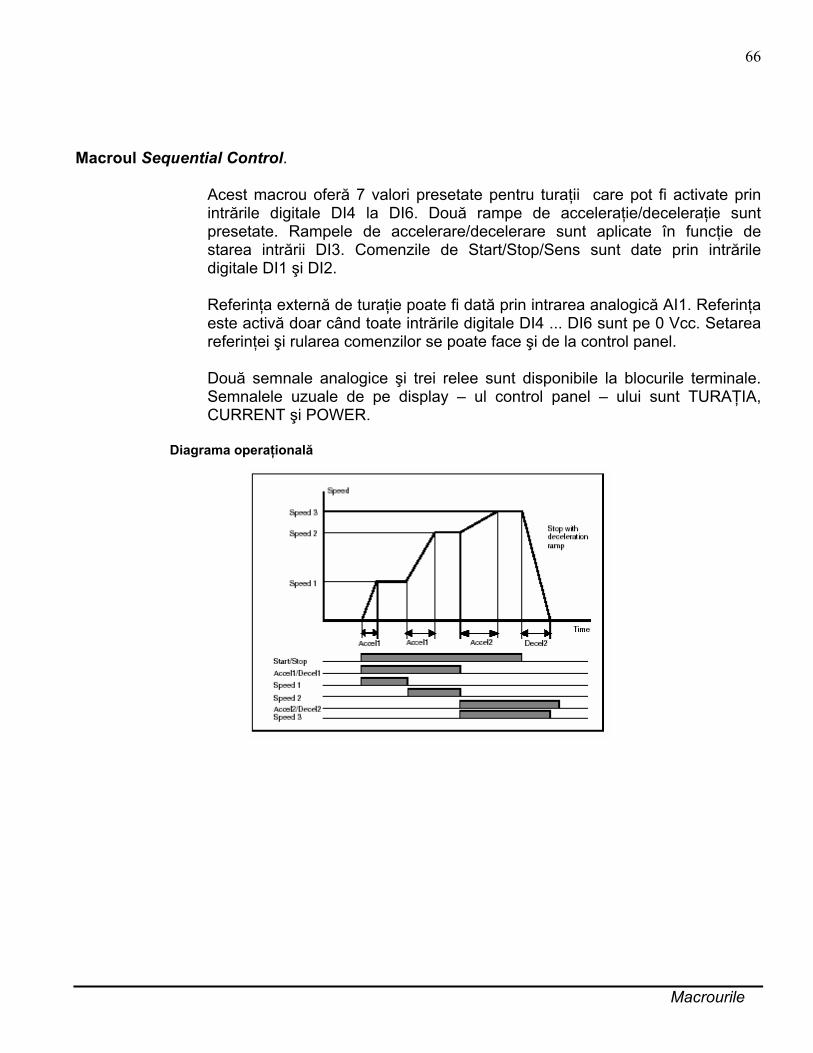
Macrourile
66
Macroul Sequential Control.
Acest macrou oferă 7 valori presetate pentru turaţii care pot fi activate prin intrările digitale DI4 la DI6. Două rampe de acceleraţie/deceleraţie sunt presetate. Rampele de accelerare/decelerare sunt aplicate în funcţie de starea intrării DI3. Comenzile de Start/Stop/Sens sunt date prin intrările digitale DI1 şi DI2. Referinţa externă de turaţie poate fi dată prin intrarea analogică AI1. Referinţa este activă doar când toate intrările digitale DI4 ... DI6 sunt pe 0 Vcc. Setarea referinţei şi rularea comenzilor se poate face şi de la control panel. Două semnale analogice şi trei relee sunt disponibile la blocurile terminale. Semnalele uzuale de pe display – ul control panel – ului sunt TURAŢIA, CURRENT şi POWER.
Diagrama operaţională
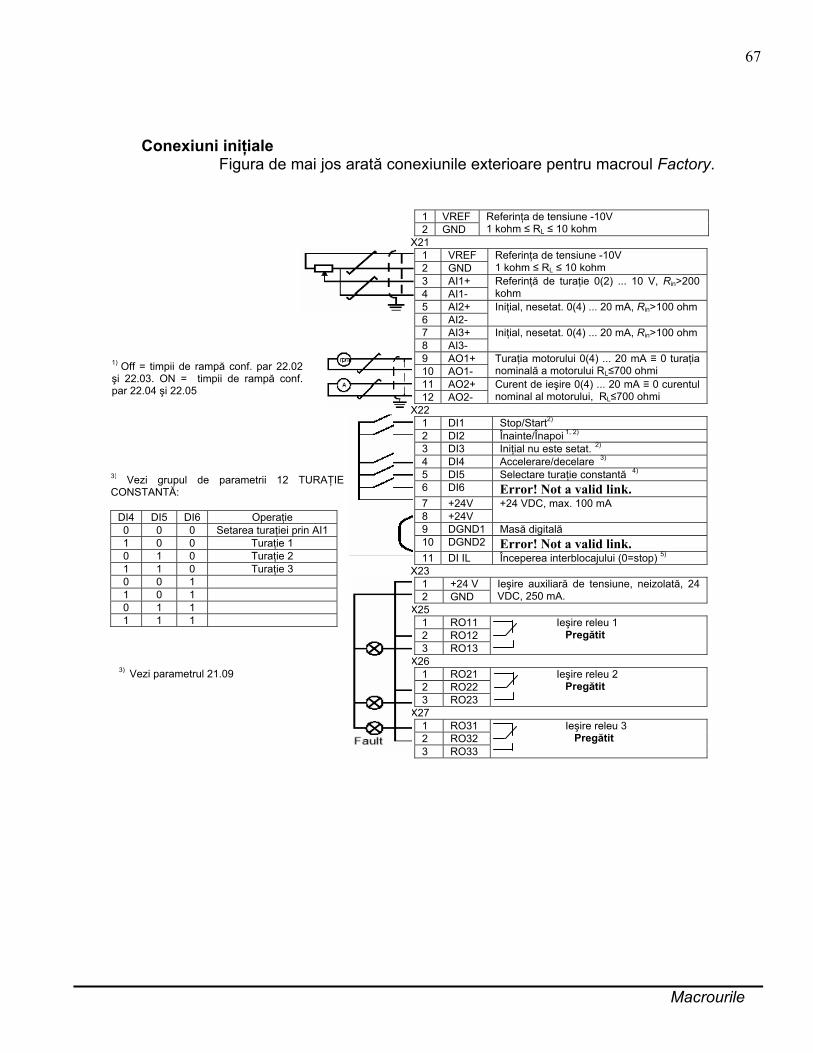
Macrourile
67
Conexiuni iniţiale Figura de mai jos arată conexiunile exterioare pentru macroul Factory.
1 VREF 2 GND
Referinţa de tensiune -10V 1 kohm ≤ RL ≤ 10 kohm
X21 1 VREF 2 GND
Referinţa de tensiune -10V 1 kohm ≤ RL ≤ 10 kohm
3 AI1+ 4 AI1-
Referinţă de turaţie 0(2) ... 10 V, Rin>200 kohm
5 AI2+ 6 AI2-
Iniţial, nesetat. 0(4) ... 20 mA, Rin>100 ohm
7 AI3+ 8 AI3-
Iniţial, nesetat. 0(4) ... 20 mA, Rin>100 ohm
9 AO1+ 10 AO1-
Turaţia motorului 0(4) ... 20 mA ≡ 0 turaţia nominală a motorului RL≤700 ohmi
11 AO2+ 12 AO2-
Curent de ieşire 0(4) ... 20 mA ≡ 0 curentul nominal al motorului, RL≤700 ohmi
X22 1 DI1 Stop/Start2)
2 DI2 Înainte/Înapoi 1, 2)
3 DI3 Iniţial nu este setat. 2)
4 DI4 Accelerare/decelare 3)
5 DI5 Selectare turaţie constantă 4)
6 DI6 Error! Not a valid link. 7 +24V 8 +24V
+24 VDC, max. 100 mA
9 DGND1 Masă digitală 10 DGND2 Error! Not a valid link. 11 DI IL Începerea interblocajului (0=stop) 5)
X23 1 +24 V 2 GND
Ieşire auxiliară de tensiune, neizolată, 24 VDC, 250 mA.
X25 1 RO11 2 RO12 3 RO13
Ieşire releu 1 Pregătit
X26 1 RO21 2 RO22 3 RO23
Ieşire releu 2 Pregătit
X27 1 RO31 2 RO32 3 RO33
Ieşire releu 3 Pregătit
1) Off = timpii de rampă conf. par 22.02 şi 22.03. ON = timpii de rampă conf. par 22.04 şi 22.05
3) Vezi grupul de parametrii 12 TURAŢIE CONSTANTĂ:
DI4 DI5 DI6 Operaţie 0 0 0 Setarea turaţiei prin AI1 1 0 0 Turaţie 1 0 1 0 Turaţie 2 1 1 0 Turaţie 3 0 0 1 1 0 1 0 1 1 1 1 1
3) Vezi parametrul 21.09
Macrourile
68
Macroul User Ca o completare la macrourile standard este posibilă creearea a doua macrouri de tip utilizator. Macroul utilizatorului permite utilizatorului să salveze setările parametrilor inclusiv grupul 99, şi rezultatele identificării motoruluiîn memoria permanentă cu posibilitatea de a le rechema. Creearea macroului utilizator 1:
− Ajustarea parametrilor. Identificarea motorului dacă nu s-a făcut încă; − Salvarea parametrilor setaţi şi a rezultatelor în urma identificării motorului
schimbând parametrul 99.02 pe utilizator(user) 1 SAVE (apasă ENTER). Memorarea poater dura între 20 s ... 1 min.
Pentru a rechema macroul:
− Schimbaţi parametrul 99.02 pe USER 1 LOAD − Apăsaţi Enter pentru încărcare.
Macroul poate fi schimbat prin intrările digitale (vezi parametrul 16.05). Notă: Încărcarea macroului utilizator restaurează şi setările motorului în grupul 99 START-UP DATA şi rezultatele identificării motorului. A se verifica dacă setările corespund cu cele de la motorul în uz.

Semnale actuale şi parametrii
69
Semnale actuale şi parametrii Privire generală asupra capitolului
Capitolul descrie semnalele actuale şi parametrii şi dă valorile echivalente pentru magistrala de date pentru fiecare parametru/semnal.
Termeni şi abrevieri
Termen Definiţie Frecvenţa
Maximă Absolută Valoarea lui 20.08, sau 20.07 dacă valoarea absolută a limitei
minime este mai mare decât limita maximă. Turaţia Maximă
Absolută Valoarea lui 20.08, sau 20.07 dacă valoarea absolută a limitei
minime este mai mare decât limita maximă.
Semnal Actual Semnal măsurat sau calculat de convertor. Poate fi monitorizat de utilizator. Nu sunt posibile setări ale utilizatorului.
FbEq Echivalentul magistralei de date: scalarea între valorile arătate pe panel şi cea de întreg.folosită în comunicaţia serială.
Parametru Operaţie de ajustare de către utilizator a acţiunii convertorului.
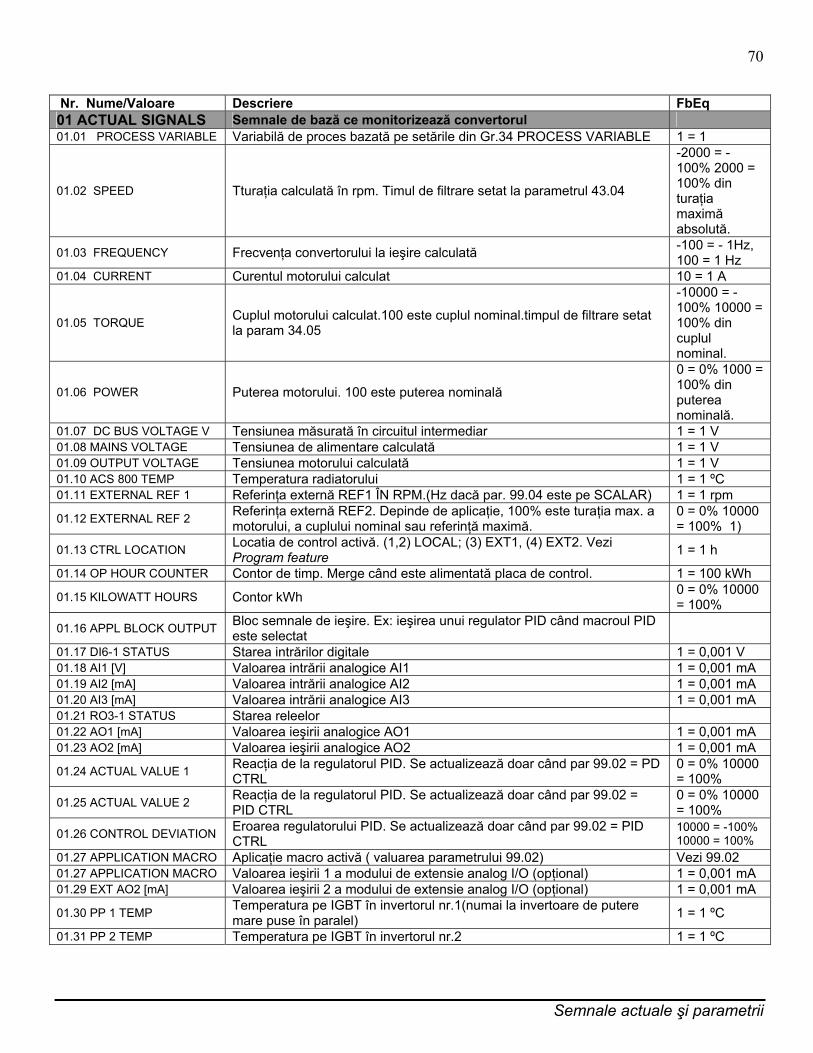
Semnale actuale şi parametrii
70
Nr. Nume/Valoare Descriere FbEq 01 ACTUAL SIGNALS Semnale de bază ce monitorizează convertorul 01.01 PROCESS VARIABLE Variabilă de proces bazată pe setările din Gr.34 PROCESS VARIABLE 1 = 1
01.02 SPEED Tturaţia calculată în rpm. Timul de filtrare setat la parametrul 43.04
-2000 = -100% 2000 = 100% din turaţia maximă absolută.
01.03 FREQUENCY Frecvenţa convertorului la ieşire calculată -100 = - 1Hz, 100 = 1 Hz
01.04 CURRENT Curentul motorului calculat 10 = 1 A
01.05 TORQUE Cuplul motorului calculat.100 este cuplul nominal.timpul de filtrare setat la param 34.05
-10000 = -100% 10000 = 100% din cuplul nominal.
01.06 POWER Puterea motorului. 100 este puterea nominală
0 = 0% 1000 = 100% din puterea nominală.
01.07 DC BUS VOLTAGE V Tensiunea măsurată în circuitul intermediar 1 = 1 V 01.08 MAINS VOLTAGE Tensiunea de alimentare calculată 1 = 1 V 01.09 OUTPUT VOLTAGE Tensiunea motorului calculată 1 = 1 V 01.10 ACS 800 TEMP Temperatura radiatorului 1 = 1 ºC 01.11 EXTERNAL REF 1 Referinţa externă REF1 ÎN RPM.(Hz dacă par. 99.04 este pe SCALAR) 1 = 1 rpm
01.12 EXTERNAL REF 2 Referinţa externă REF2. Depinde de aplicaţie, 100% este turaţia max. a motorului, a cuplului nominal sau referinţă maximă.
0 = 0% 10000 = 100% 1)
01.13 CTRL LOCATION Locatia de control activă. (1,2) LOCAL; (3) EXT1, (4) EXT2. Vezi Program feature 1 = 1 h
01.14 OP HOUR COUNTER Contor de timp. Merge când este alimentată placa de control. 1 = 100 kWh
01.15 KILOWATT HOURS Contor kWh 0 = 0% 10000 = 100%
01.16 APPL BLOCK OUTPUT Bloc semnale de ieşire. Ex: ieşirea unui regulator PID când macroul PID este selectat
01.17 DI6-1 STATUS Starea intrărilor digitale 1 = 0,001 V 01.18 AI1 [V] Valoarea intrării analogice AI1 1 = 0,001 mA 01.19 AI2 [mA] Valoarea intrării analogice AI2 1 = 0,001 mA 01.20 AI3 [mA] Valoarea intrării analogice AI3 1 = 0,001 mA 01.21 RO3-1 STATUS Starea releelor 01.22 AO1 [mA] Valoarea ieşirii analogice AO1 1 = 0,001 mA 01.23 AO2 [mA] Valoarea ieşirii analogice AO2 1 = 0,001 mA
01.24 ACTUAL VALUE 1 Reacţia de la regulatorul PID. Se actualizează doar când par 99.02 = PD CTRL
0 = 0% 10000 = 100%
01.25 ACTUAL VALUE 2 Reacţia de la regulatorul PID. Se actualizează doar când par 99.02 = PID CTRL
0 = 0% 10000 = 100%
01.26 CONTROL DEVIATION Eroarea regulatorului PID. Se actualizează doar când par 99.02 = PID CTRL
10000 = -100% 10000 = 100%
01.27 APPLICATION MACRO Aplicaţie macro activă ( valuarea parametrului 99.02) Vezi 99.02 01.27 APPLICATION MACRO Valoarea ieşirii 1 a modului de extensie analog I/O (opţional) 1 = 0,001 mA 01.29 EXT AO2 [mA] Valoarea ieşirii 2 a modului de extensie analog I/O (opţional) 1 = 0,001 mA
01.30 PP 1 TEMP Temperatura pe IGBT în invertorul nr.1(numai la invertoare de putere mare puse în paralel) 1 = 1 ºC
01.31 PP 2 TEMP Temperatura pe IGBT în invertorul nr.2 1 = 1 ºC
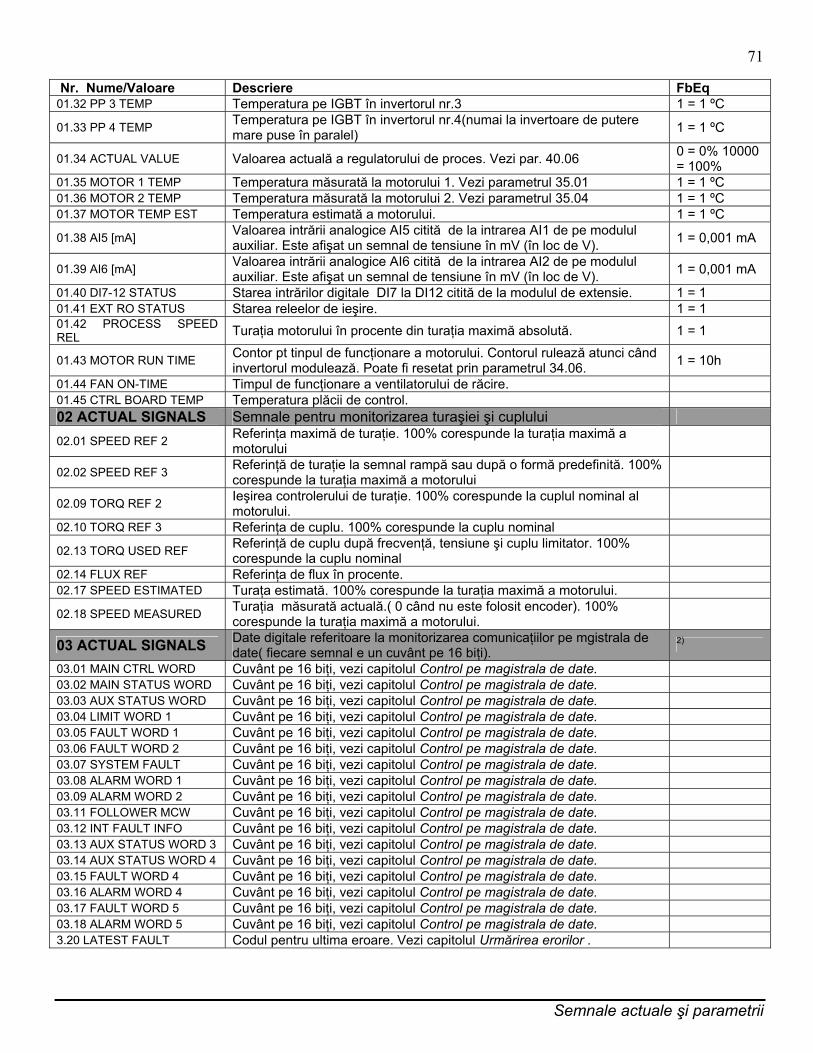
Semnale actuale şi parametrii
71
Nr. Nume/Valoare Descriere FbEq 01.32 PP 3 TEMP Temperatura pe IGBT în invertorul nr.3 1 = 1 ºC
01.33 PP 4 TEMP Temperatura pe IGBT în invertorul nr.4(numai la invertoare de putere mare puse în paralel) 1 = 1 ºC
01.34 ACTUAL VALUE Valoarea actuală a regulatorului de proces. Vezi par. 40.06 0 = 0% 10000 = 100%
01.35 MOTOR 1 TEMP Temperatura măsurată la motorului 1. Vezi parametrul 35.01 1 = 1 ºC 01.36 MOTOR 2 TEMP Temperatura măsurată la motorului 2. Vezi parametrul 35.04 1 = 1 ºC 01.37 MOTOR TEMP EST Temperatura estimată a motorului. 1 = 1 ºC
01.38 AI5 [mA] Valoarea intrării analogice AI5 citită de la intrarea AI1 de pe modulul auxiliar. Este afişat un semnal de tensiune în mV (în loc de V). 1 = 0,001 mA
01.39 AI6 [mA] Valoarea intrării analogice AI6 citită de la intrarea AI2 de pe modulul auxiliar. Este afişat un semnal de tensiune în mV (în loc de V). 1 = 0,001 mA
01.40 DI7-12 STATUS Starea intrărilor digitale DI7 la DI12 citită de la modulul de extensie. 1 = 1 01.41 EXT RO STATUS Starea releelor de ieşire. 1 = 1 01.42 PROCESS SPEED REL Turaţia motorului în procente din turaţia maximă absolută. 1 = 1
01.43 MOTOR RUN TIME Contor pt tinpul de funcţionare a motorului. Contorul rulează atunci când invertorul modulează. Poate fi resetat prin parametrul 34.06. 1 = 10h
01.44 FAN ON-TIME Timpul de funcţionare a ventilatorului de răcire. 01.45 CTRL BOARD TEMP Temperatura plăcii de control. 02 ACTUAL SIGNALS Semnale pentru monitorizarea turaşiei şi cuplului
02.01 SPEED REF 2 Referinţa maximă de turaţie. 100% corespunde la turaţia maximă a motorului
02.02 SPEED REF 3 Referinţă de turaţie la semnal rampă sau după o formă predefinită. 100% corespunde la turaţia maximă a motorului
02.09 TORQ REF 2 Ieşirea controlerului de turaţie. 100% corespunde la cuplul nominal al motorului.
02.10 TORQ REF 3 Referinţa de cuplu. 100% corespunde la cuplu nominal
02.13 TORQ USED REF Referinţă de cuplu după frecvenţă, tensiune şi cuplu limitator. 100% corespunde la cuplu nominal
02.14 FLUX REF Referinţa de flux în procente. 02.17 SPEED ESTIMATED Turaţa estimată. 100% corespunde la turaţia maximă a motorului.
02.18 SPEED MEASURED Turaţia măsurată actuală.( 0 când nu este folosit encoder). 100% corespunde la turaţia maximă a motorului.
03 ACTUAL SIGNALS Date digitale referitoare la monitorizarea comunicaţiilor pe mgistrala de date( fiecare semnal e un cuvânt pe 16 biţi).
2)
03.01 MAIN CTRL WORD Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.02 MAIN STATUS WORD Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.03 AUX STATUS WORD Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.04 LIMIT WORD 1 Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.05 FAULT WORD 1 Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.06 FAULT WORD 2 Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.07 SYSTEM FAULT Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.08 ALARM WORD 1 Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.09 ALARM WORD 2 Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.11 FOLLOWER MCW Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.12 INT FAULT INFO Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.13 AUX STATUS WORD 3 Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.14 AUX STATUS WORD 4 Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.15 FAULT WORD 4 Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.16 ALARM WORD 4 Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.17 FAULT WORD 5 Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 03.18 ALARM WORD 5 Cuvânt pe 16 biţi, vezi capitolul Control pe magistrala de date. 3.20 LATEST FAULT Codul pentru ultima eroare. Vezi capitolul Urmărirea erorilor .
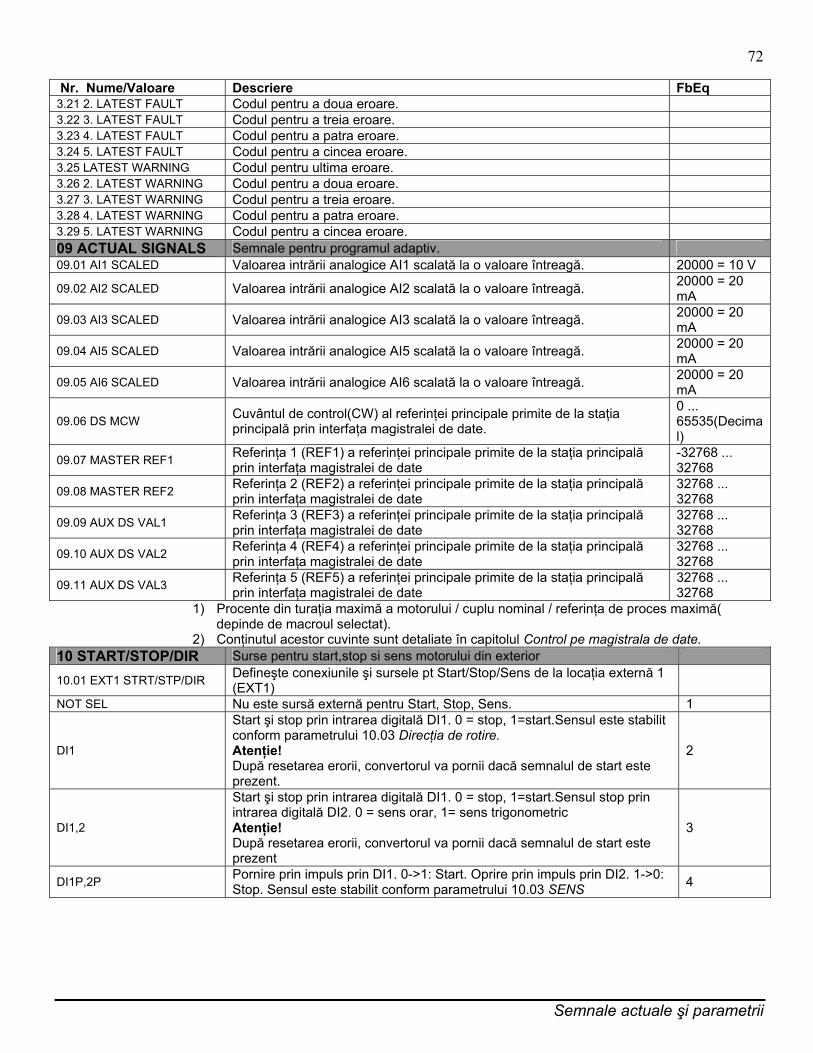
Semnale actuale şi parametrii
72
Nr. Nume/Valoare Descriere FbEq 3.21 2. LATEST FAULT Codul pentru a doua eroare. 3.22 3. LATEST FAULT Codul pentru a treia eroare. 3.23 4. LATEST FAULT Codul pentru a patra eroare. 3.24 5. LATEST FAULT Codul pentru a cincea eroare. 3.25 LATEST WARNING Codul pentru ultima eroare. 3.26 2. LATEST WARNING Codul pentru a doua eroare. 3.27 3. LATEST WARNING Codul pentru a treia eroare. 3.28 4. LATEST WARNING Codul pentru a patra eroare. 3.29 5. LATEST WARNING Codul pentru a cincea eroare. 09 ACTUAL SIGNALS Semnale pentru programul adaptiv. 09.01 AI1 SCALED Valoarea intrării analogice AI1 scalată la o valoare întreagă. 20000 = 10 V
09.02 AI2 SCALED Valoarea intrării analogice AI2 scalată la o valoare întreagă. 20000 = 20 mA
09.03 AI3 SCALED Valoarea intrării analogice AI3 scalată la o valoare întreagă. 20000 = 20 mA
09.04 AI5 SCALED Valoarea intrării analogice AI5 scalată la o valoare întreagă. 20000 = 20 mA
09.05 AI6 SCALED Valoarea intrării analogice AI6 scalată la o valoare întreagă. 20000 = 20 mA
09.06 DS MCW Cuvântul de control(CW) al referinţei principale primite de la staţia principală prin interfaţa magistralei de date.
0 ... 65535(Decimal)
09.07 MASTER REF1 Referinţa 1 (REF1) a referinţei principale primite de la staţia principală prin interfaţa magistralei de date
-32768 ... 32768
09.08 MASTER REF2 Referinţa 2 (REF2) a referinţei principale primite de la staţia principală prin interfaţa magistralei de date
32768 ... 32768
09.09 AUX DS VAL1 Referinţa 3 (REF3) a referinţei principale primite de la staţia principală prin interfaţa magistralei de date
32768 ... 32768
09.10 AUX DS VAL2 Referinţa 4 (REF4) a referinţei principale primite de la staţia principală prin interfaţa magistralei de date
32768 ... 32768
09.11 AUX DS VAL3 Referinţa 5 (REF5) a referinţei principale primite de la staţia principală prin interfaţa magistralei de date
32768 ... 32768
1) Procente din turaţia maximă a motorului / cuplu nominal / referinţa de proces maximă( depinde de macroul selectat).
2) Conţinutul acestor cuvinte sunt detaliate în capitolul Control pe magistrala de date. 10 START/STOP/DIR Surse pentru start,stop si sens motorului din exterior
10.01 EXT1 STRT/STP/DIR Defineşte conexiunile şi sursele pt Start/Stop/Sens de la locaţia externă 1 (EXT1)
NOT SEL Nu este sursă externă pentru Start, Stop, Sens. 1
DI1
Start şi stop prin intrarea digitală DI1. 0 = stop, 1=start.Sensul este stabilit conform parametrului 10.03 Direcţia de rotire. Atenţie! După resetarea erorii, convertorul va pornii dacă semnalul de start este prezent.
2
DI1,2
Start şi stop prin intrarea digitală DI1. 0 = stop, 1=start.Sensul stop prin intrarea digitală DI2. 0 = sens orar, 1= sens trigonometric Atenţie! După resetarea erorii, convertorul va pornii dacă semnalul de start este prezent
3
DI1P,2P Pornire prin impuls prin DI1. 0->1: Start. Oprire prin impuls prin DI2. 1->0: Stop. Sensul este stabilit conform parametrului 10.03 SENS 4
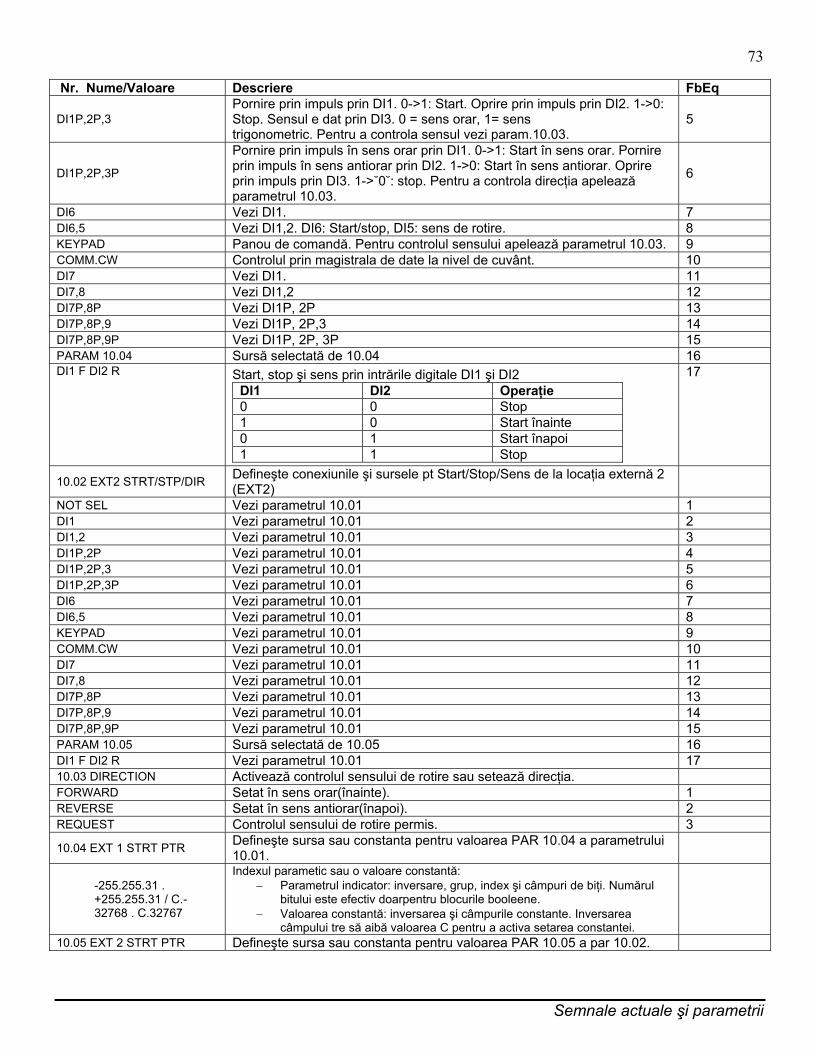
Semnale actuale şi parametrii
73
Nr. Nume/Valoare Descriere FbEq
DI1P,2P,3 Pornire prin impuls prin DI1. 0->1: Start. Oprire prin impuls prin DI2. 1->0: Stop. Sensul e dat prin DI3. 0 = sens orar, 1= sens trigonometric. Pentru a controla sensul vezi param.10.03.
5
DI1P,2P,3P
Pornire prin impuls în sens orar prin DI1. 0->1: Start în sens orar. Pornire prin impuls în sens antiorar prin DI2. 1->0: Start în sens antiorar. Oprire prin impuls prin DI3. 1->˘0˘: stop. Pentru a controla direcţia apelează parametrul 10.03.
6
DI6 Vezi DI1. 7 DI6,5 Vezi DI1,2. DI6: Start/stop, DI5: sens de rotire. 8 KEYPAD Panou de comandă. Pentru controlul sensului apelează parametrul 10.03. 9 COMM.CW Controlul prin magistrala de date la nivel de cuvânt. 10 DI7 Vezi DI1. 11 DI7,8 Vezi DI1,2 12 DI7P,8P Vezi DI1P, 2P 13 DI7P,8P,9 Vezi DI1P, 2P,3 14 DI7P,8P,9P Vezi DI1P, 2P, 3P 15 PARAM 10.04 Sursă selectată de 10.04 16 DI1 F DI2 R Start, stop şi sens prin intrările digitale DI1 şi DI2
DI1 DI2 Operaţie 0 0 Stop 1 0 Start înainte 0 1 Start înapoi 1 1 Stop
17
10.02 EXT2 STRT/STP/DIR Defineşte conexiunile şi sursele pt Start/Stop/Sens de la locaţia externă 2 (EXT2)
NOT SEL Vezi parametrul 10.01 1 DI1 Vezi parametrul 10.01 2 DI1,2 Vezi parametrul 10.01 3 DI1P,2P Vezi parametrul 10.01 4 DI1P,2P,3 Vezi parametrul 10.01 5 DI1P,2P,3P Vezi parametrul 10.01 6 DI6 Vezi parametrul 10.01 7 DI6,5 Vezi parametrul 10.01 8 KEYPAD Vezi parametrul 10.01 9 COMM.CW Vezi parametrul 10.01 10 DI7 Vezi parametrul 10.01 11 DI7,8 Vezi parametrul 10.01 12 DI7P,8P Vezi parametrul 10.01 13 DI7P,8P,9 Vezi parametrul 10.01 14 DI7P,8P,9P Vezi parametrul 10.01 15 PARAM 10.05 Sursă selectată de 10.05 16 DI1 F DI2 R Vezi parametrul 10.01 17 10.03 DIRECTION Activează controlul sensului de rotire sau setează direcţia. FORWARD Setat în sens orar(înainte). 1 REVERSE Setat în sens antiorar(înapoi). 2 REQUEST Controlul sensului de rotire permis. 3
10.04 EXT 1 STRT PTR Defineşte sursa sau constanta pentru valoarea PAR 10.04 a parametrului 10.01.
-255.255.31 . +255.255.31 / C.- 32768 . C.32767
Indexul parametic sau o valoare constantă: − Parametrul indicator: inversare, grup, index şi câmpuri de biţi. Numărul
bitului este efectiv doarpentru blocurile booleene. − Valoarea constantă: inversarea şi câmpurile constante. Inversarea
câmpului tre să aibă valoarea C pentru a activa setarea constantei.
10.05 EXT 2 STRT PTR Defineşte sursa sau constanta pentru valoarea PAR 10.05 a par 10.02.
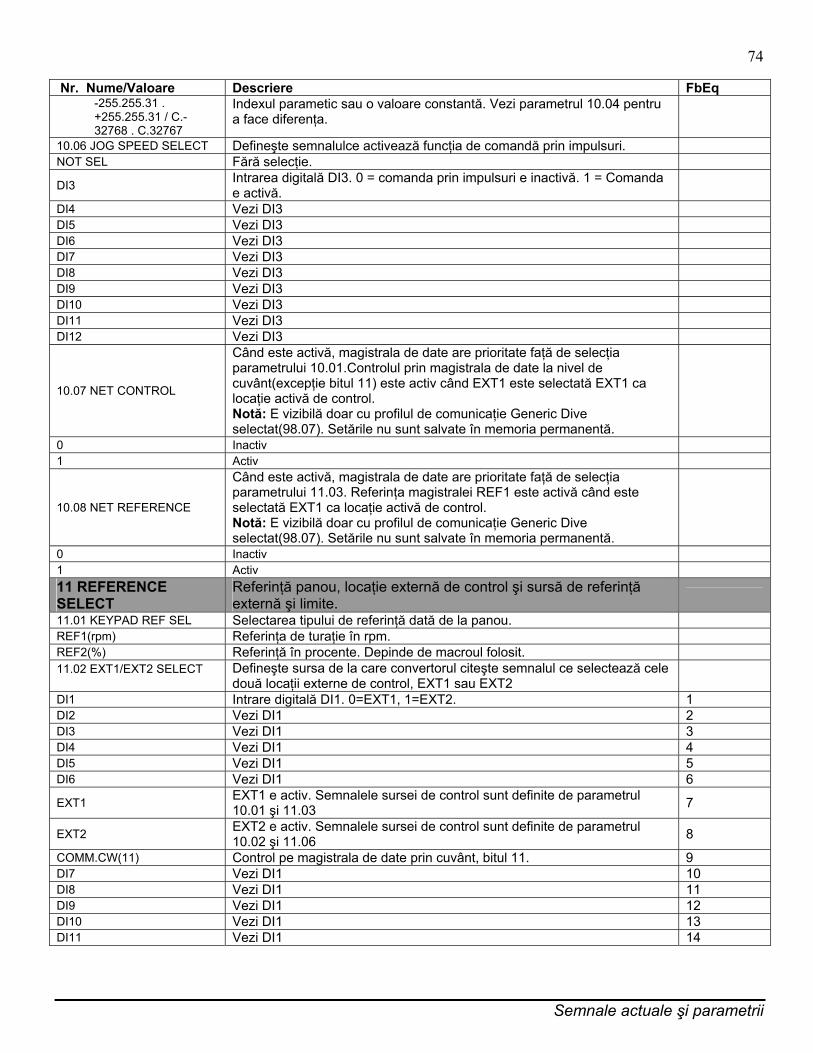
Semnale actuale şi parametrii
74
Nr. Nume/Valoare Descriere FbEq -255.255.31 . +255.255.31 / C.- 32768 . C.32767
Indexul parametic sau o valoare constantă. Vezi parametrul 10.04 pentru a face diferenţa.
10.06 JOG SPEED SELECT Defineşte semnalulce activează funcţia de comandă prin impulsuri. NOT SEL Fără selecţie.
DI3 Intrarea digitală DI3. 0 = comanda prin impulsuri e inactivă. 1 = Comanda e activă.
DI4 Vezi DI3 DI5 Vezi DI3 DI6 Vezi DI3 DI7 Vezi DI3 DI8 Vezi DI3 DI9 Vezi DI3 DI10 Vezi DI3 DI11 Vezi DI3 DI12 Vezi DI3
10.07 NET CONTROL
Când este activă, magistrala de date are prioritate faţă de selecţia parametrului 10.01.Controlul prin magistrala de date la nivel de cuvânt(excepţie bitul 11) este activ când EXT1 este selectată EXT1 ca locaţie activă de control. Notă: E vizibilă doar cu profilul de comunicaţie Generic Dive selectat(98.07). Setările nu sunt salvate în memoria permanentă.
0 Inactiv 1 Activ
10.08 NET REFERENCE
Când este activă, magistrala de date are prioritate faţă de selecţia parametrului 11.03. Referinţa magistralei REF1 este activă când este selectată EXT1 ca locaţie activă de control. Notă: E vizibilă doar cu profilul de comunicaţie Generic Dive selectat(98.07). Setările nu sunt salvate în memoria permanentă.
0 Inactiv 1 Activ 11 REFERENCE SELECT
Referinţă panou, locaţie externă de control şi sursă de referinţă externă şi limite.
11.01 KEYPAD REF SEL Selectarea tipului de referinţă dată de la panou. REF1(rpm) Referinţa de turaţie în rpm. REF2(%) Referinţă în procente. Depinde de macroul folosit. 11.02 EXT1/EXT2 SELECT
Defineşte sursa de la care convertorul citeşte semnalul ce selectează cele două locaţii externe de control, EXT1 sau EXT2
DI1 Intrare digitală DI1. 0=EXT1, 1=EXT2. 1 DI2 Vezi DI1 2 DI3 Vezi DI1 3 DI4 Vezi DI1 4 DI5 Vezi DI1 5 DI6 Vezi DI1 6
EXT1 EXT1 e activ. Semnalele sursei de control sunt definite de parametrul 10.01 şi 11.03 7
EXT2 EXT2 e activ. Semnalele sursei de control sunt definite de parametrul 10.02 şi 11.06 8
COMM.CW(11) Control pe magistrala de date prin cuvânt, bitul 11. 9 DI7 Vezi DI1 10 DI8 Vezi DI1 11 DI9 Vezi DI1 12 DI10 Vezi DI1 13 DI11 Vezi DI1 14
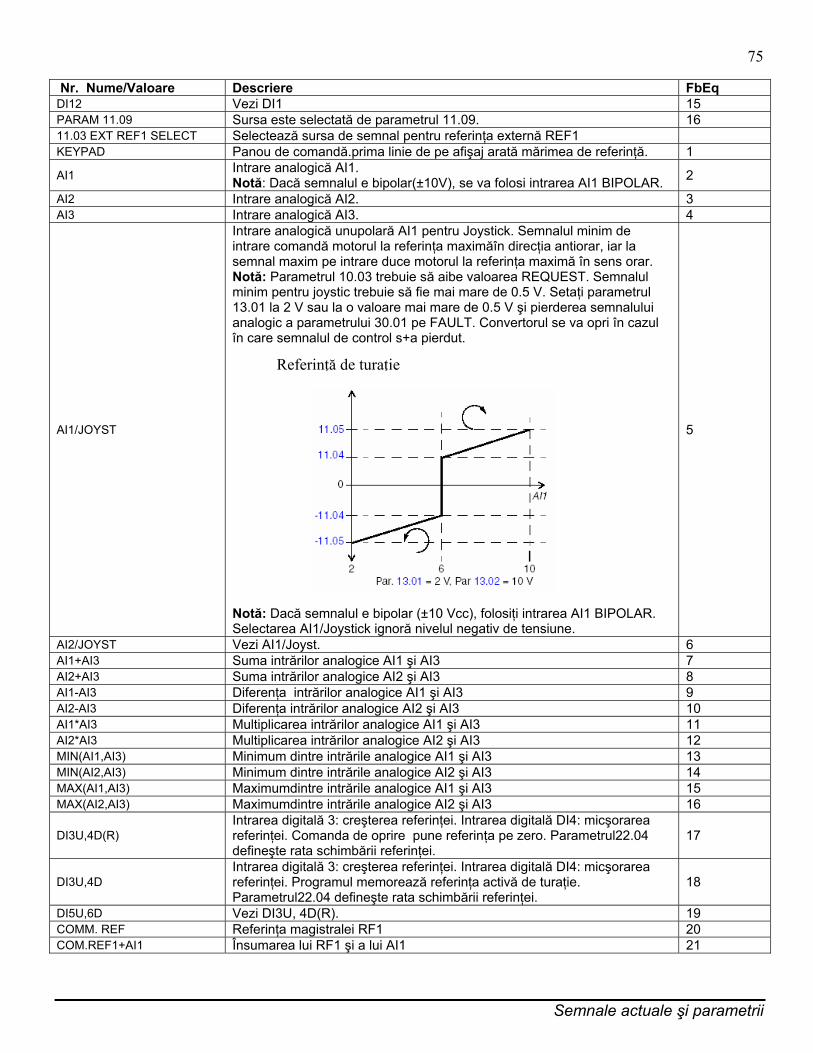
Semnale actuale şi parametrii
75
Nr. Nume/Valoare Descriere FbEq DI12 Vezi DI1 15 PARAM 11.09 Sursa este selectată de parametrul 11.09. 16 11.03 EXT REF1 SELECT Selectează sursa de semnal pentru referinţa externă REF1 KEYPAD Panou de comandă.prima linie de pe afişaj arată mărimea de referinţă. 1
AI1 Intrare analogică AI1. Notă: Dacă semnalul e bipolar(±10V), se va folosi intrarea AI1 BIPOLAR. 2
AI2 Intrare analogică AI2. 3 AI3 Intrare analogică AI3. 4
AI1/JOYST
Intrare analogică unupolară AI1 pentru Joystick. Semnalul minim de intrare comandă motorul la referinţa maximăîn direcţia antiorar, iar la semnal maxim pe intrare duce motorul la referinţa maximă în sens orar. Notă: Parametrul 10.03 trebuie să aibe valoarea REQUEST. Semnalul minim pentru joystic trebuie să fie mai mare de 0.5 V. Setaţi parametrul 13.01 la 2 V sau la o valoare mai mare de 0.5 V şi pierderea semnalului analogic a parametrului 30.01 pe FAULT. Convertorul se va opri în cazul în care semnalul de control s+a pierdut.
Notă: Dacă semnalul e bipolar (±10 Vcc), folosiţi intrarea AI1 BIPOLAR. Selectarea AI1/Joystick ignoră nivelul negativ de tensiune.
5
AI2/JOYST Vezi AI1/Joyst. 6 AI1+AI3 Suma intrărilor analogice AI1 şi AI3 7 AI2+AI3 Suma intrărilor analogice AI2 şi AI3 8 AI1-AI3 Diferenţa intrărilor analogice AI1 şi AI3 9 AI2-AI3 Diferenţa intrărilor analogice AI2 şi AI3 10 AI1*AI3 Multiplicarea intrărilor analogice AI1 şi AI3 11 AI2*AI3 Multiplicarea intrărilor analogice AI2 şi AI3 12 MIN(AI1,AI3) Minimum dintre intrările analogice AI1 şi AI3 13 MIN(AI2,AI3) Minimum dintre intrările analogice AI2 şi AI3 14 MAX(AI1,AI3) Maximumdintre intrările analogice AI1 şi AI3 15 MAX(AI2,AI3) Maximumdintre intrările analogice AI2 şi AI3 16
DI3U,4D(R) Intrarea digitală 3: creşterea referinţei. Intrarea digitală DI4: micşorarea referinţei. Comanda de oprire pune referinţa pe zero. Parametrul22.04 defineşte rata schimbării referinţei.
17
DI3U,4D Intrarea digitală 3: creşterea referinţei. Intrarea digitală DI4: micşorarea referinţei. Programul memorează referinţa activă de turaţie. Parametrul22.04 defineşte rata schimbării referinţei.
18
DI5U,6D Vezi DI3U, 4D(R). 19 COMM. REF Referinţa magistralei RF1 20 COM.REF1+AI1 Însumarea lui RF1 şi a lui AI1 21
Referinţă de turaţie

Semnale actuale şi parametrii
76
Nr. Nume/Valoare Descriere FbEq COM.REF1*AI1 Multiplicarea lui RF1 şi a lui AI1 22
FAST COMM
La fel cu selecţia lui COMM.REF, exceptând următoarele: − Timpi de comunicaţie mai mici pentru transferul referinţei la
programul convertizorului.(6 ms->2ms) − Sensul nu poarte fi controlat prin interfeţele definite prin parametrii
10.01 sau 10.02, nici de la panoul de comandă. − Grupul parametric 25 TURAŢII CRITICE nu e eficace.
Notă: Dacă una dintre următoarele este adevărată, selectarea nu e eficace. În schimb, operaţiile se referă la COMM.REF.
− Parametrul 99.02 este PID − Parametrul 99.04 sete scalar. − Parametrul 44.14 are valoarea Proporţional sau Direct
23
COM.REF1+AI5 Vezi COM.REF1+AI1(AI5 este folosit în locul lui AI1) 24 COM.REF1*AI5 Vezi COM.REF1*AI1(AI5 este folosit în locul lui AI1) 25 AI5 Intrare analogică AI5 26 AI6 Intrare analogică AI6 27 AI5/JOYST Vezi AI1JOYST 28 AI6/JOYST Vezi AI1JOYST 29 AI5+AI6 Însumarea intrărilor analogice AI5 şi AI6 30 AI5-AI6 Diferenţa intrărilor analogice AI5 şi AI6 31 AI5*AI6 Multiplicarea intrărilor analogice AI5 şi AI6 32 MIN(AI5,6) Minimumdintre AI5 şi AI6 33 MAX(AI5,6) Maximum dintre AI5 şi AI6 34 DI11U,12D(R) Vezi DI3U,4D(R) 35 DI11U,12D Vezi DI3U,4D 36 PARAM 11.10 Sursă selectată de 11.10 37
AI1 BIPOLAR
Intrarea analogică bipolară AI1 (-10V... 10V). Figura de mai jos ilusterază utilizarea intrării ca referinţă de turaţie. minAI1 = 13.01 MINIMUM AI1 maxAI1 = 13.02 MAXIMUM AI1 maxREF1 scalată = 13.03 SCALEAZĂ AI1 x 11.05 EXT REF1 MAXIMUM minREF1 = 11.04 EXT REF1 MINIMUM
38
11.04 EXT REF1 MINIMUM Defineşte valoarea minimă pentru referinţa externă REF1. 0 . 18000 rpm Setarea nivelului în rpm.(Hz dacă parametrul 99.04 este scalar).
Exemplu: intrarea analogică AI1 este selectată ca şi sursă de referinţă. 1 ...18000
Domeniu de operare
minAI1 minAI1 -minAI1 -minAI1
-scaled maxREF1
-minREF1
minREF1
scaled maxREF1
Intrări analogice de semnal
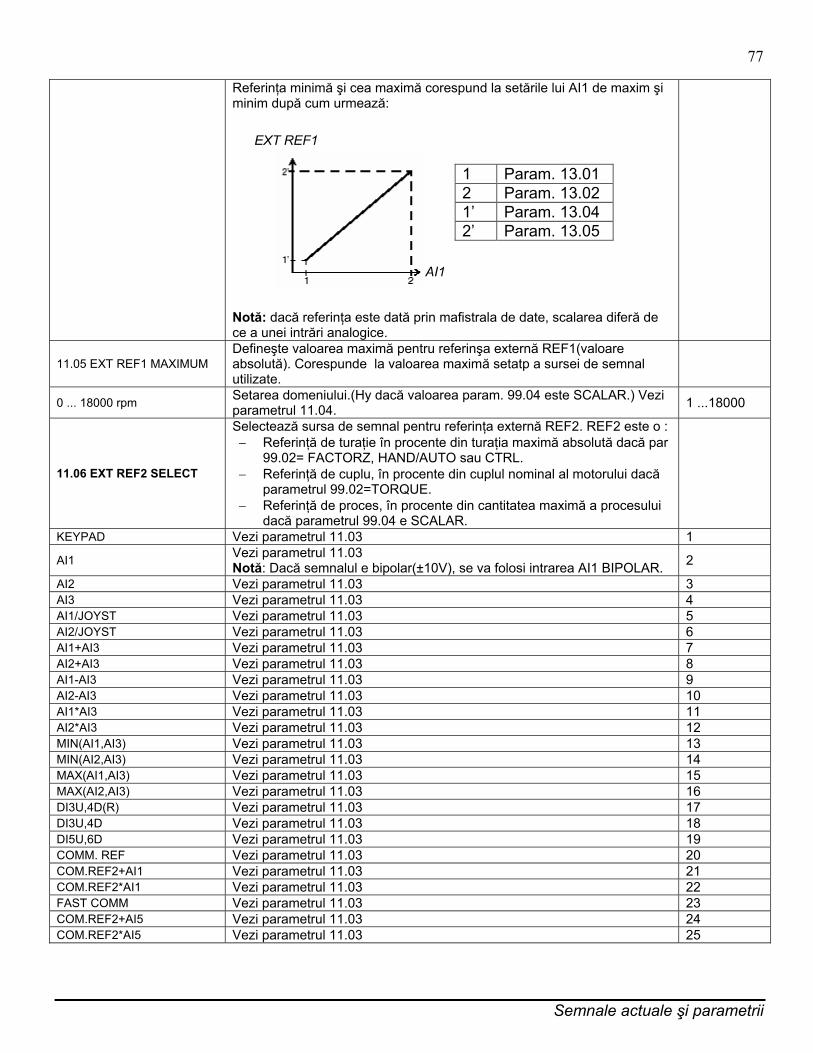
Semnale actuale şi parametrii
77
Referinţa minimă şi cea maximă corespund la setările lui AI1 de maxim şi minim după cum urmează: Notă: dacă referinţa este dată prin mafistrala de date, scalarea diferă de ce a unei intrări analogice.
11.05 EXT REF1 MAXIMUM Defineşte valoarea maximă pentru referinşa externă REF1(valoare absolută). Corespunde la valoarea maximă setatp a sursei de semnal utilizate.
0 ... 18000 rpm Setarea domeniului.(Hy dacă valoarea param. 99.04 este SCALAR.) Vezi parametrul 11.04. 1 ...18000
11.06 EXT REF2 SELECT
Selectează sursa de semnal pentru referinţa externă REF2. REF2 este o : − Referinţă de turaţie în procente din turaţia maximă absolută dacă par
99.02= FACTORZ, HAND/AUTO sau CTRL. − Referinţă de cuplu, în procente din cuplul nominal al motorului dacă
parametrul 99.02=TORQUE. − Referinţă de proces, în procente din cantitatea maximă a procesului
dacă parametrul 99.04 e SCALAR.
KEYPAD Vezi parametrul 11.03 1
AI1 Vezi parametrul 11.03 Notă: Dacă semnalul e bipolar(±10V), se va folosi intrarea AI1 BIPOLAR. 2
AI2 Vezi parametrul 11.03 3 AI3 Vezi parametrul 11.03 4 AI1/JOYST Vezi parametrul 11.03 5 AI2/JOYST Vezi parametrul 11.03 6 AI1+AI3 Vezi parametrul 11.03 7 AI2+AI3 Vezi parametrul 11.03 8 AI1-AI3 Vezi parametrul 11.03 9 AI2-AI3 Vezi parametrul 11.03 10 AI1*AI3 Vezi parametrul 11.03 11 AI2*AI3 Vezi parametrul 11.03 12 MIN(AI1,AI3) Vezi parametrul 11.03 13 MIN(AI2,AI3) Vezi parametrul 11.03 14 MAX(AI1,AI3) Vezi parametrul 11.03 15 MAX(AI2,AI3) Vezi parametrul 11.03 16 DI3U,4D(R) Vezi parametrul 11.03 17 DI3U,4D Vezi parametrul 11.03 18 DI5U,6D Vezi parametrul 11.03 19 COMM. REF Vezi parametrul 11.03 20 COM.REF2+AI1 Vezi parametrul 11.03 21 COM.REF2*AI1 Vezi parametrul 11.03 22 FAST COMM Vezi parametrul 11.03 23 COM.REF2+AI5 Vezi parametrul 11.03 24 COM.REF2*AI5 Vezi parametrul 11.03 25
EXT REF1
AI1
1 Param. 13.01 2 Param. 13.02 1’ Param. 13.04 2’ Param. 13.05
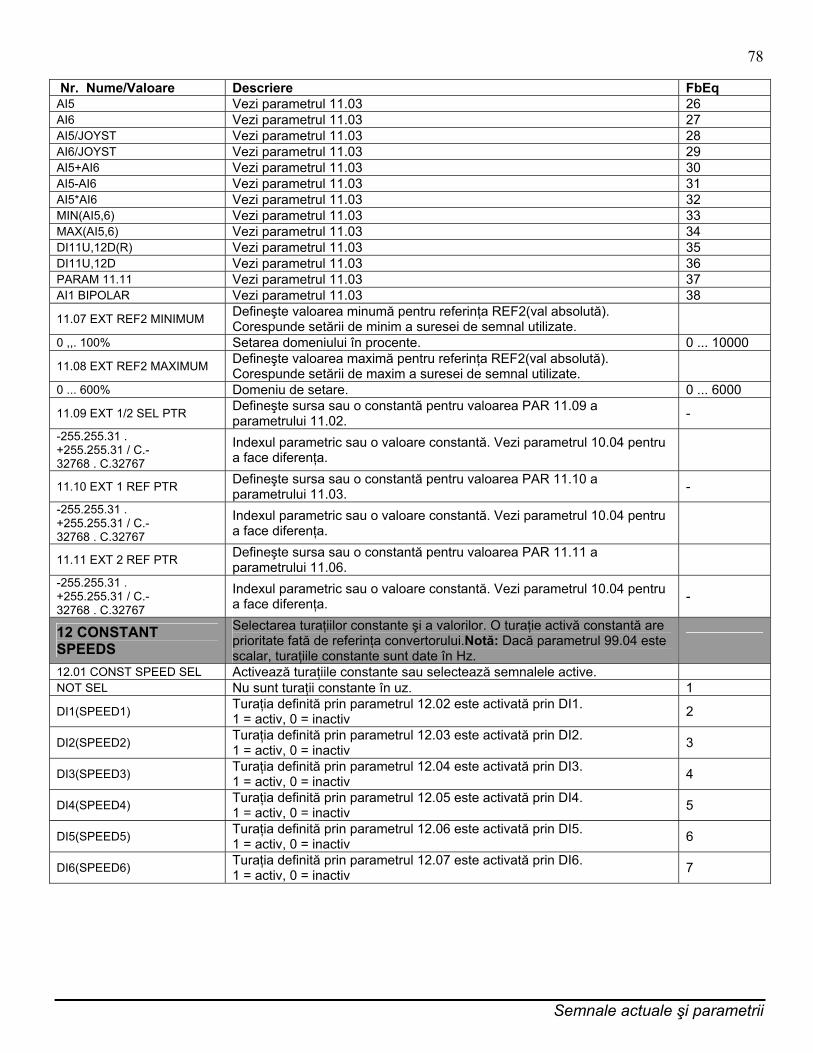
Semnale actuale şi parametrii
78
Nr. Nume/Valoare Descriere FbEq AI5 Vezi parametrul 11.03 26 AI6 Vezi parametrul 11.03 27 AI5/JOYST Vezi parametrul 11.03 28 AI6/JOYST Vezi parametrul 11.03 29 AI5+AI6 Vezi parametrul 11.03 30 AI5-AI6 Vezi parametrul 11.03 31 AI5*AI6 Vezi parametrul 11.03 32 MIN(AI5,6) Vezi parametrul 11.03 33 MAX(AI5,6) Vezi parametrul 11.03 34 DI11U,12D(R) Vezi parametrul 11.03 35 DI11U,12D Vezi parametrul 11.03 36 PARAM 11.11 Vezi parametrul 11.03 37 AI1 BIPOLAR Vezi parametrul 11.03 38
11.07 EXT REF2 MINIMUM Defineşte valoarea minumă pentru referinţa REF2(val absolută). Corespunde setării de minim a suresei de semnal utilizate.
0 ,,. 100% Setarea domeniului în procente. 0 ... 10000
11.08 EXT REF2 MAXIMUM Defineşte valoarea maximă pentru referinţa REF2(val absolută). Corespunde setării de maxim a suresei de semnal utilizate.
0 ... 600% Domeniu de setare. 0 ... 6000
11.09 EXT 1/2 SEL PTR Defineşte sursa sau o constantă pentru valoarea PAR 11.09 a parametrului 11.02. -
-255.255.31 . +255.255.31 / C.- 32768 . C.32767
Indexul parametric sau o valoare constantă. Vezi parametrul 10.04 pentru a face diferenţa.
11.10 EXT 1 REF PTR Defineşte sursa sau o constantă pentru valoarea PAR 11.10 a parametrului 11.03. -
-255.255.31 . +255.255.31 / C.- 32768 . C.32767
Indexul parametric sau o valoare constantă. Vezi parametrul 10.04 pentru a face diferenţa.
11.11 EXT 2 REF PTR Defineşte sursa sau o constantă pentru valoarea PAR 11.11 a parametrului 11.06.
-255.255.31 . +255.255.31 / C.- 32768 . C.32767
Indexul parametric sau o valoare constantă. Vezi parametrul 10.04 pentru a face diferenţa. -
12 CONSTANT SPEEDS
Selectarea turaţiilor constante şi a valorilor. O turaţie activă constantă are prioritate fată de referinţa convertorului.Notă: Dacă parametrul 99.04 este scalar, turaţiile constante sunt date în Hz.
12.01 CONST SPEED SEL Activează turaţiile constante sau selectează semnalele active. NOT SEL Nu sunt turaţii constante în uz. 1
DI1(SPEED1) Turaţia definită prin parametrul 12.02 este activată prin DI1. 1 = activ, 0 = inactiv 2
DI2(SPEED2) Turaţia definită prin parametrul 12.03 este activată prin DI2. 1 = activ, 0 = inactiv 3
DI3(SPEED3) Turaţia definită prin parametrul 12.04 este activată prin DI3. 1 = activ, 0 = inactiv 4
DI4(SPEED4) Turaţia definită prin parametrul 12.05 este activată prin DI4. 1 = activ, 0 = inactiv 5
DI5(SPEED5) Turaţia definită prin parametrul 12.06 este activată prin DI5. 1 = activ, 0 = inactiv 6
DI6(SPEED6) Turaţia definită prin parametrul 12.07 este activată prin DI6. 1 = activ, 0 = inactiv 7
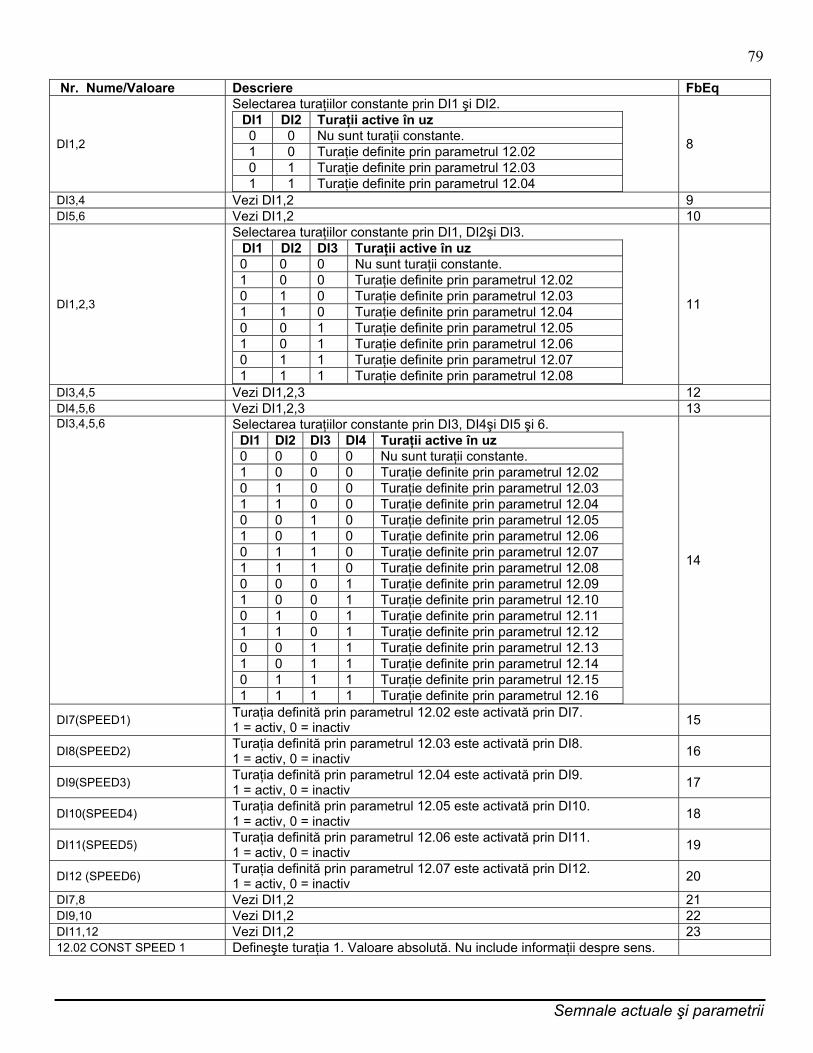
Semnale actuale şi parametrii
79
Nr. Nume/Valoare Descriere FbEq
DI1,2
Selectarea turaţiilor constante prin DI1 şi DI2. DI1 DI2 Turaţii active în uz 0 0 Nu sunt turaţii constante. 1 0 Turaţie definite prin parametrul 12.02 0 1 Turaţie definite prin parametrul 12.03 1 1 Turaţie definite prin parametrul 12.04
8
DI3,4 Vezi DI1,2 9 DI5,6 Vezi DI1,2 10
DI1,2,3
Selectarea turaţiilor constante prin DI1, DI2şi DI3. DI1 DI2 DI3 Turaţii active în uz 0 0 0 Nu sunt turaţii constante. 1 0 0 Turaţie definite prin parametrul 12.02 0 1 0 Turaţie definite prin parametrul 12.03 1 1 0 Turaţie definite prin parametrul 12.04 0 0 1 Turaţie definite prin parametrul 12.05 1 0 1 Turaţie definite prin parametrul 12.06 0 1 1 Turaţie definite prin parametrul 12.07 1 1 1 Turaţie definite prin parametrul 12.08
11
DI3,4,5 Vezi DI1,2,3 12 DI4,5,6 Vezi DI1,2,3 13 DI3,4,5,6 Selectarea turaţiilor constante prin DI3, DI4şi DI5 şi 6.
DI1 DI2 DI3 DI4 Turaţii active în uz 0 0 0 0 Nu sunt turaţii constante. 1 0 0 0 Turaţie definite prin parametrul 12.02 0 1 0 0 Turaţie definite prin parametrul 12.03 1 1 0 0 Turaţie definite prin parametrul 12.04 0 0 1 0 Turaţie definite prin parametrul 12.05 1 0 1 0 Turaţie definite prin parametrul 12.06 0 1 1 0 Turaţie definite prin parametrul 12.07 1 1 1 0 Turaţie definite prin parametrul 12.08 0 0 0 1 Turaţie definite prin parametrul 12.09 1 0 0 1 Turaţie definite prin parametrul 12.10 0 1 0 1 Turaţie definite prin parametrul 12.11 1 1 0 1 Turaţie definite prin parametrul 12.12 0 0 1 1 Turaţie definite prin parametrul 12.13 1 0 1 1 Turaţie definite prin parametrul 12.14 0 1 1 1 Turaţie definite prin parametrul 12.15 1 1 1 1 Turaţie definite prin parametrul 12.16
14
DI7(SPEED1) Turaţia definită prin parametrul 12.02 este activată prin DI7. 1 = activ, 0 = inactiv 15
DI8(SPEED2) Turaţia definită prin parametrul 12.03 este activată prin DI8. 1 = activ, 0 = inactiv 16
DI9(SPEED3) Turaţia definită prin parametrul 12.04 este activată prin DI9. 1 = activ, 0 = inactiv 17
DI10(SPEED4) Turaţia definită prin parametrul 12.05 este activată prin DI10. 1 = activ, 0 = inactiv 18
DI11(SPEED5) Turaţia definită prin parametrul 12.06 este activată prin DI11. 1 = activ, 0 = inactiv 19
DI12 (SPEED6) Turaţia definită prin parametrul 12.07 este activată prin DI12. 1 = activ, 0 = inactiv 20
DI7,8 Vezi DI1,2 21 DI9,10 Vezi DI1,2 22 DI11,12 Vezi DI1,2 23 12.02 CONST SPEED 1 Defineşte turaţia 1. Valoare absolută. Nu include informaţii despre sens.

Semnale actuale şi parametrii
80
Nr. Nume/Valoare Descriere FbEq 0 . 18000 rpm Domeniu de setare. 0 ... 18000 12.03 CONST SPEED 2 Defineşte turaţia 2. Valoare absolută. Nu include informaţii despre sens. 0 . 18000 rp Domeniu de setare. 0 ... 18000 12.04 CONST SPEED 3 Defineşte turaţia 3. Valoare absolută. Nu include informaţii despre sens. 0 . 18000 rpm Domeniu de setare. 0 ... 18000 12.05 CONST SPEED 4 Defineşte turaţia 4. Valoare absolută. Nu include informaţii despre sens. 0 . 18000 rpm Domeniu de setare. 0 ... 18000 12.06 CONST SPEED 5 Defineşte turaţia 5. Valoare absolută. Nu include informaţii despre sens. 0 . 18000 rpm Domeniu de setare. 0 ... 18000 12.07 CONST SPEED 6 Defineşte turaţia 6. Valoare absolută. Nu include informaţii despre sens. 0 . 18000 rpm Domeniu de setare. 0 ... 18000 12.08 CONST SPEED 7 Defineşte turaţia 7. Valoare absolută. Nu include informaţii despre sens. 0 . 18000 rpm Domeniu de setare. 0 ... 18000 12.09 CONST SPEED 8 Defineşte turaţia 8. Valoare absolută. Nu include informaţii despre sens. 0 . 18000 rpm Domeniu de setare. 0 ... 18000 12.10 CONST SPEED 9 Defineşte turaţia 9. Valoare absolută. Nu include informaţii despre sens. 0 . 18000 rpm Domeniu de setare. 0 ... 18000 12.11 CONST SPEED 10 Defineşte turaţia 10. Valoare absolută. Nu include informaţii despre sens. 0 . 18000 rpm Domeniu de setare. 0 ... 18000 12.12 CONST SPEED 11 Defineşte turaţia 11. Valoare absolută. Nu include informaţii despre sens. 0 . 18000 rpm Domeniu de setare. 0 ... 18000
12.13 CONST SPEED 12
Defineşte turaţia 12. Valoare absolută. Nu include informaţii despre sens. Notă: Dacă comandã prin închideri succesive rapide este în uz, parametrul defineşte comanda prin închideri succesive rapide 1. semnul este ţinut minte. Vezi capitolul Controlul prin magistrala de date.
-18000 . 18000 rpm Domeniu de setare. -18000 ... 18000
12.14 CONST SPEED 13
Defineşte turaţia 13. Valoare absolută. Nu include informaţii despre sens. Notă: Dacă comandã prin închideri succesive rapide este în uz, parametrul defineşte comanda prin închideri succesive rapide 2. semnul este ţinut minte. Vezi capitolul Controlul prin magistrala de date.
-18000 . 18000 rpm Domeniu de setare. -18000 ... 18000
12.15 CONST SPEED 14
Defineşte turaţia 14. Valoare absolută. Nu include informaţii despre sens. Notă: Dacă comandã prin închideri succesive rapide este în uz, parametrul defineşte comanda prin închideri succesive rapide 3. semnul este ţinut minte. Vezi capitolul Controlul prin magistrala de date.
0 . 18000 rpm Domeniu de setare. 0 ... 18000
12.16 CONST SPEED 15
Defineşte turaţia 15. Valoare absolută. Nu include informaţii despre sens. Notă: Dacă comandã prin închideri succesive rapide este în uz, parametrul defineşte comandã prin închideri succesive rapide 4. semnul este ţinut minte. Vezi capitolul Controlul prin magistrala de date.
-18000 . 18000 rpm Domeniu de setare. -18000 ... 18000
13 ANALOGUE INPUTS
Procesarea semnalelor analogice.
13.01 MINIMUM AI1 Defineşte valoarea minimă pentru intrarea analogică AI1. când e folosită ca şi referinţă, valoarea corespunde valorii de referinţă minime.
0 V Zero volt. Notă: programul nu poate detecta pierderea semnalului de pe intrarea analogică. 1
2 V Doi Volt. 2 TUNED VALUE Valoarea măsurată de funcţia de reglaj. Vezi REGLAJ. 3
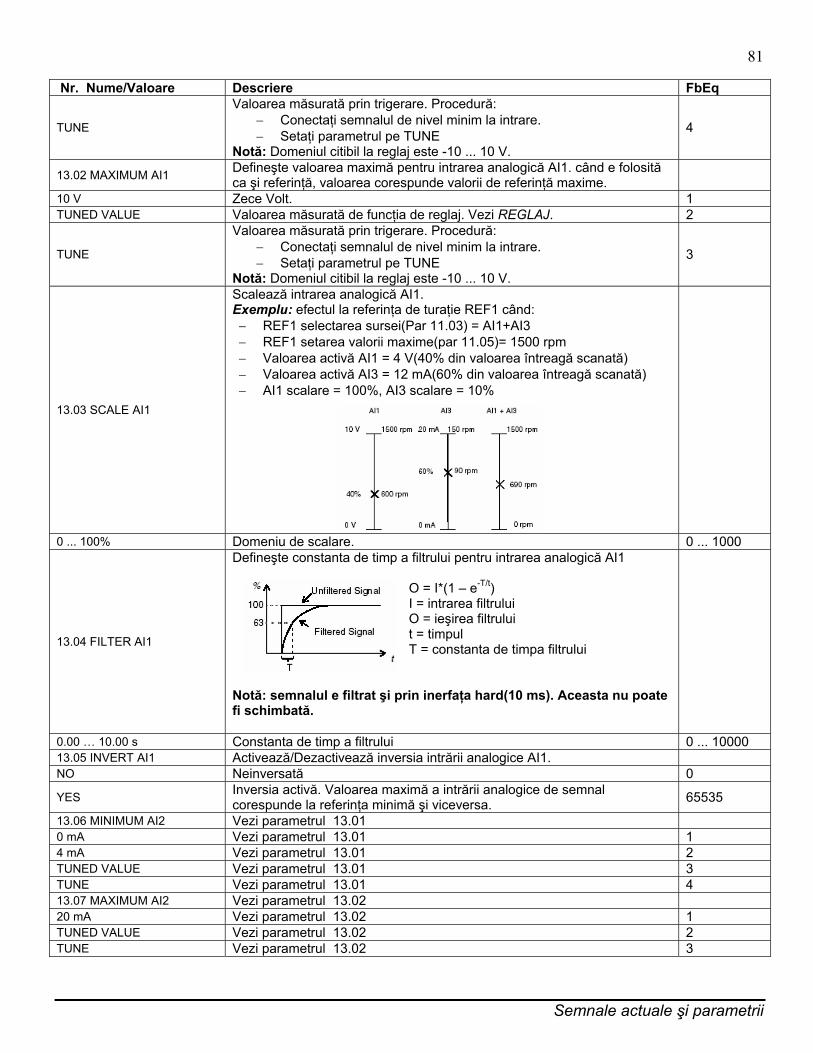
Semnale actuale şi parametrii
81
Nr. Nume/Valoare Descriere FbEq
TUNE
Valoarea măsurată prin trigerare. Procedură: − Conectaţi semnalul de nivel minim la intrare. − Setaţi parametrul pe TUNE
Notă: Domeniul citibil la reglaj este -10 ... 10 V.
4
13.02 MAXIMUM AI1 Defineşte valoarea maximă pentru intrarea analogică AI1. când e folosită ca şi referinţă, valoarea corespunde valorii de referinţă maxime.
10 V Zece Volt. 1 TUNED VALUE Valoarea măsurată de funcţia de reglaj. Vezi REGLAJ. 2
TUNE
Valoarea măsurată prin trigerare. Procedură: − Conectaţi semnalul de nivel minim la intrare. − Setaţi parametrul pe TUNE
Notă: Domeniul citibil la reglaj este -10 ... 10 V.
3
13.03 SCALE AI1
Scalează intrarea analogică AI1. Exemplu: efectul la referinţa de turaţie REF1 când: − REF1 selectarea sursei(Par 11.03) = AI1+AI3 − REF1 setarea valorii maxime(par 11.05)= 1500 rpm − Valoarea activă AI1 = 4 V(40% din valoarea întreagă scanată) − Valoarea activă AI3 = 12 mA(60% din valoarea întreagă scanată) − AI1 scalare = 100%, AI3 scalare = 10%
0 ... 100% Domeniu de scalare. 0 ... 1000
13.04 FILTER AI1
Defineşte constanta de timp a filtrului pentru intrarea analogică AI1 O = I*(1 – e-T/t) I = intrarea filtrului O = ieşirea filtrului t = timpul T = constanta de timpa filtrului
Notă: semnalul e filtrat şi prin inerfaţa hard(10 ms). Aceasta nu poate fi schimbată.
0.00 … 10.00 s Constanta de timp a filtrului 0 ... 10000 13.05 INVERT AI1 Activează/Dezactivează inversia intrării analogice AI1. NO Neinversată 0
YES Inversia activă. Valoarea maximă a intrării analogice de semnal corespunde la referinţa minimă şi viceversa. 65535
13.06 MINIMUM AI2 Vezi parametrul 13.01 0 mA Vezi parametrul 13.01 1 4 mA Vezi parametrul 13.01 2 TUNED VALUE Vezi parametrul 13.01 3 TUNE Vezi parametrul 13.01 4 13.07 MAXIMUM AI2 Vezi parametrul 13.02 20 mA Vezi parametrul 13.02 1 TUNED VALUE Vezi parametrul 13.02 2 TUNE Vezi parametrul 13.02 3
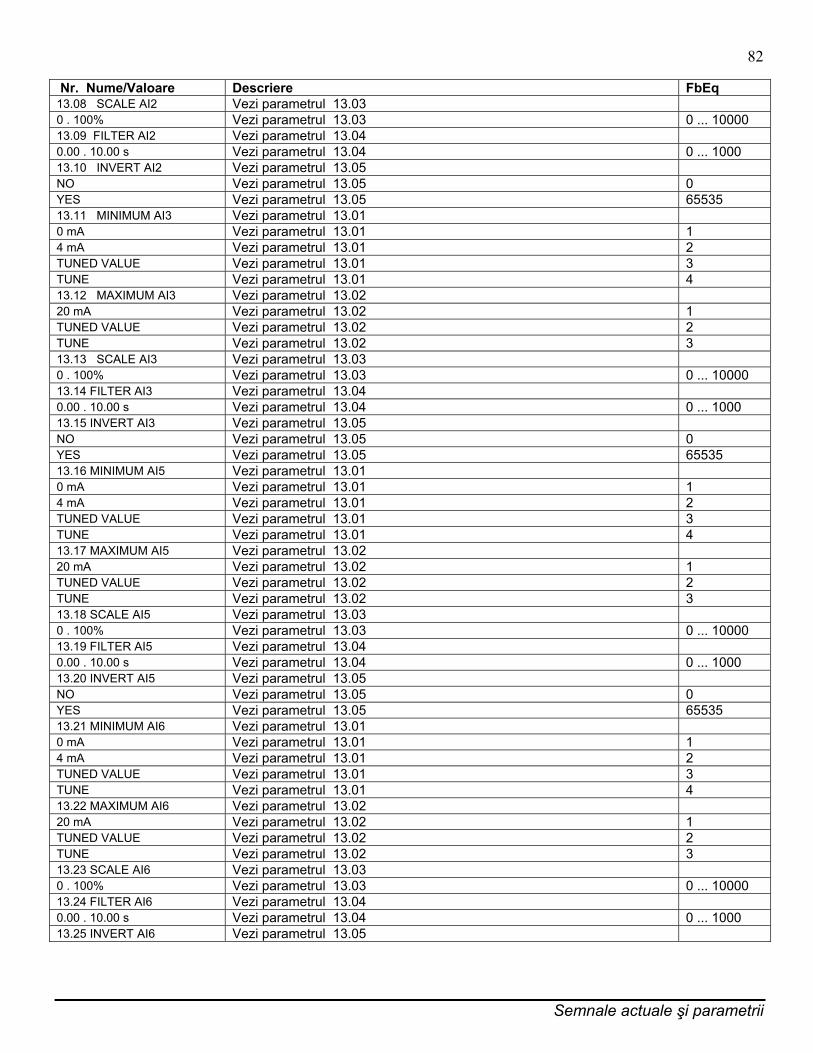
Semnale actuale şi parametrii
82
Nr. Nume/Valoare Descriere FbEq 13.08 SCALE AI2 Vezi parametrul 13.03 0 . 100% Vezi parametrul 13.03 0 ... 10000 13.09 FILTER AI2 Vezi parametrul 13.04 0.00 . 10.00 s Vezi parametrul 13.04 0 ... 1000 13.10 INVERT AI2 Vezi parametrul 13.05 NO Vezi parametrul 13.05 0 YES Vezi parametrul 13.05 65535 13.11 MINIMUM AI3 Vezi parametrul 13.01 0 mA Vezi parametrul 13.01 1 4 mA Vezi parametrul 13.01 2 TUNED VALUE Vezi parametrul 13.01 3 TUNE Vezi parametrul 13.01 4 13.12 MAXIMUM AI3 Vezi parametrul 13.02 20 mA Vezi parametrul 13.02 1 TUNED VALUE Vezi parametrul 13.02 2 TUNE Vezi parametrul 13.02 3 13.13 SCALE AI3 Vezi parametrul 13.03 0 . 100% Vezi parametrul 13.03 0 ... 10000 13.14 FILTER AI3 Vezi parametrul 13.04 0.00 . 10.00 s Vezi parametrul 13.04 0 ... 1000 13.15 INVERT AI3 Vezi parametrul 13.05 NO Vezi parametrul 13.05 0 YES Vezi parametrul 13.05 65535 13.16 MINIMUM AI5 Vezi parametrul 13.01 0 mA Vezi parametrul 13.01 1 4 mA Vezi parametrul 13.01 2 TUNED VALUE Vezi parametrul 13.01 3 TUNE Vezi parametrul 13.01 4 13.17 MAXIMUM AI5 Vezi parametrul 13.02 20 mA Vezi parametrul 13.02 1 TUNED VALUE Vezi parametrul 13.02 2 TUNE Vezi parametrul 13.02 3 13.18 SCALE AI5 Vezi parametrul 13.03 0 . 100% Vezi parametrul 13.03 0 ... 10000 13.19 FILTER AI5 Vezi parametrul 13.04 0.00 . 10.00 s Vezi parametrul 13.04 0 ... 1000 13.20 INVERT AI5 Vezi parametrul 13.05 NO Vezi parametrul 13.05 0 YES Vezi parametrul 13.05 65535 13.21 MINIMUM AI6 Vezi parametrul 13.01 0 mA Vezi parametrul 13.01 1 4 mA Vezi parametrul 13.01 2 TUNED VALUE Vezi parametrul 13.01 3 TUNE Vezi parametrul 13.01 4 13.22 MAXIMUM AI6 Vezi parametrul 13.02 20 mA Vezi parametrul 13.02 1 TUNED VALUE Vezi parametrul 13.02 2 TUNE Vezi parametrul 13.02 3 13.23 SCALE AI6 Vezi parametrul 13.03 0 . 100% Vezi parametrul 13.03 0 ... 10000 13.24 FILTER AI6 Vezi parametrul 13.04 0.00 . 10.00 s Vezi parametrul 13.04 0 ... 1000 13.25 INVERT AI6 Vezi parametrul 13.05
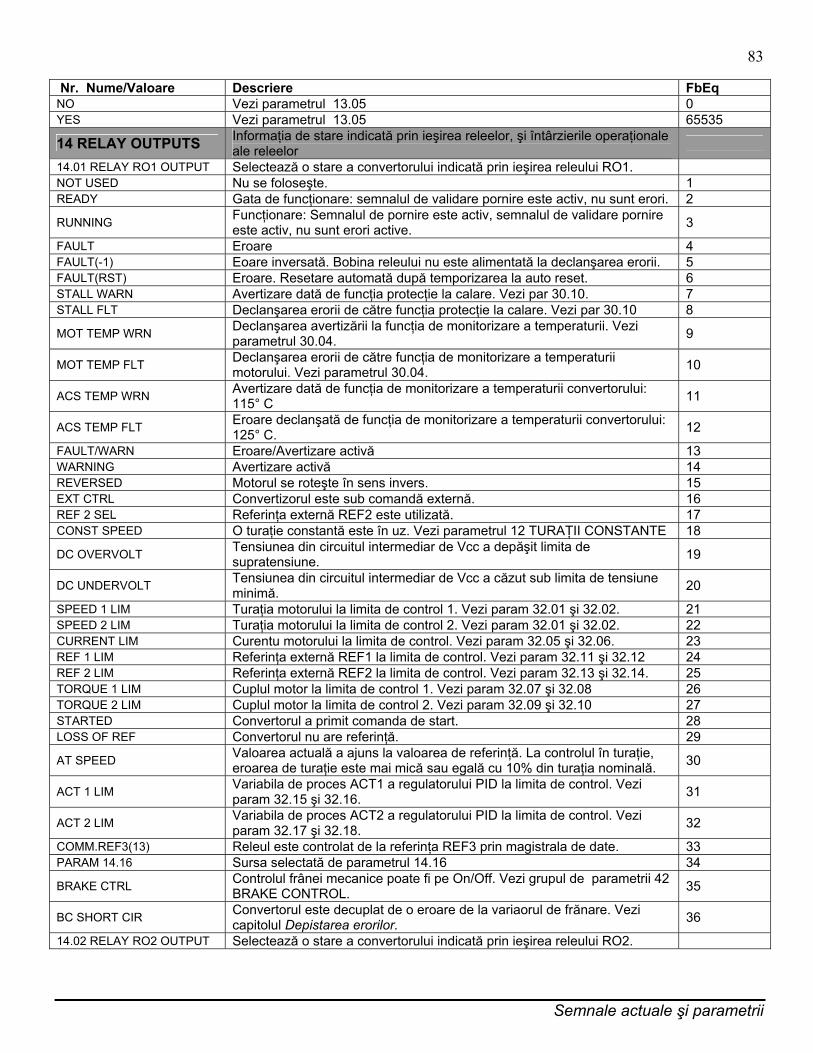
Semnale actuale şi parametrii
83
Nr. Nume/Valoare Descriere FbEq NO Vezi parametrul 13.05 0 YES Vezi parametrul 13.05 65535
14 RELAY OUTPUTS Informaţia de stare indicată prin ieşirea releelor, şi întârzierile operaţionale ale releelor
14.01 RELAY RO1 OUTPUT Selectează o stare a convertorului indicată prin ieşirea releului RO1. NOT USED Nu se foloseşte. 1 READY Gata de funcţionare: semnalul de validare pornire este activ, nu sunt erori. 2
RUNNING Funcţionare: Semnalul de pornire este activ, semnalul de validare pornire este activ, nu sunt erori active. 3
FAULT Eroare 4 FAULT(-1) Eoare inversată. Bobina releului nu este alimentată la declanşarea erorii. 5 FAULT(RST) Eroare. Resetare automată după temporizarea la auto reset. 6 STALL WARN Avertizare dată de funcţia protecţie la calare. Vezi par 30.10. 7 STALL FLT Declanşarea erorii de către funcţia protecţie la calare. Vezi par 30.10 8
MOT TEMP WRN Declanşarea avertizării la funcţia de monitorizare a temperaturii. Vezi parametrul 30.04. 9
MOT TEMP FLT Declanşarea erorii de către funcţia de monitorizare a temperaturii motorului. Vezi parametrul 30.04. 10
ACS TEMP WRN Avertizare dată de funcţia de monitorizare a temperaturii convertorului: 115° C 11
ACS TEMP FLT Eroare declanşată de funcţia de monitorizare a temperaturii convertorului: 125° C. 12
FAULT/WARN Eroare/Avertizare activă 13 WARNING Avertizare activă 14 REVERSED Motorul se roteşte în sens invers. 15 EXT CTRL Convertizorul este sub comandă externă. 16 REF 2 SEL Referinţa externă REF2 este utilizată. 17 CONST SPEED O turaţie constantă este în uz. Vezi parametrul 12 TURAŢII CONSTANTE 18
DC OVERVOLT Tensiunea din circuitul intermediar de Vcc a depăşit limita de supratensiune. 19
DC UNDERVOLT Tensiunea din circuitul intermediar de Vcc a căzut sub limita de tensiune minimă. 20
SPEED 1 LIM Turaţia motorului la limita de control 1. Vezi param 32.01 şi 32.02. 21 SPEED 2 LIM Turaţia motorului la limita de control 2. Vezi param 32.01 şi 32.02. 22 CURRENT LIM Curentu motorului la limita de control. Vezi param 32.05 şi 32.06. 23 REF 1 LIM Referinţa externă REF1 la limita de control. Vezi param 32.11 şi 32.12 24 REF 2 LIM Referinţa externă REF2 la limita de control. Vezi param 32.13 şi 32.14. 25 TORQUE 1 LIM Cuplul motor la limita de control 1. Vezi param 32.07 şi 32.08 26 TORQUE 2 LIM Cuplul motor la limita de control 2. Vezi param 32.09 şi 32.10 27 STARTED Convertorul a primit comanda de start. 28 LOSS OF REF Convertorul nu are referinţă. 29
AT SPEED Valoarea actuală a ajuns la valoarea de referinţă. La controlul în turaţie, eroarea de turaţie este mai mică sau egală cu 10% din turaţia nominală. 30
ACT 1 LIM Variabila de proces ACT1 a regulatorului PID la limita de control. Vezi param 32.15 şi 32.16. 31
ACT 2 LIM Variabila de proces ACT2 a regulatorului PID la limita de control. Vezi param 32.17 şi 32.18. 32
COMM.REF3(13) Releul este controlat de la referinţa REF3 prin magistrala de date. 33 PARAM 14.16 Sursa selectată de parametrul 14.16 34
BRAKE CTRL Controlul frânei mecanice poate fi pe On/Off. Vezi grupul de parametrii 42 BRAKE CONTROL. 35
BC SHORT CIR Convertorul este decuplat de o eroare de la variaorul de frănare. Vezi capitolul Depistarea erorilor. 36
14.02 RELAY RO2 OUTPUT Selectează o stare a convertorului indicată prin ieşirea releului RO2.

Semnale actuale şi parametrii
84
Nr. Nume/Valoare Descriere FbEq NOT USED Vezi parametrul 14.01 1 READY Vezi parametrul 14.01 2 RUNNING Vezi parametrul 14.01 3 FAULT Vezi parametrul 14.01 4 FAULT(-1) Vezi parametrul 14.01 5 FAULT(RST) Vezi parametrul 14.01 6 STALL WARN Vezi parametrul 14.01 7 STALL FLT Vezi parametrul 14.01 8 MOT TEMP WRN Vezi parametrul 14.01 9 MOT TEMP FLT Vezi parametrul 14.01 10 ACS TEMP WRN Vezi parametrul 14.01 11 ACS TEMP FLT Vezi parametrul 14.01 12 FAULT/WARN Vezi parametrul 14.01 13 WARNING Vezi parametrul 14.01 14 REVERSED Vezi parametrul 14.01 15 EXT CTRL Vezi parametrul 14.01 16 REF 2 SEL Vezi parametrul 14.01 17 CONST SPEED Vezi parametrul 14.01 18 DC OVERVOLT Vezi parametrul 14.01 19 DC UNDERVOLT Vezi parametrul 14.01 20 SPEED 1 LIM Vezi parametrul 14.01 21 SPEED 2 LIM Vezi parametrul 14.01 22 CURRENT LIM Vezi parametrul 14.01 23 REF 1 LIM Vezi parametrul 14.01 24 REF 2 LIM Vezi parametrul 14.01 25 TORQUE 1 LIM Vezi parametrul 14.01 26 TORQUE 2 LIM Vezi parametrul 14.01 27 STARTED Vezi parametrul 14.01 28 LOSS OF REF Vezi parametrul 14.01 29 AT SPEED Vezi parametrul 14.01 30 ACT 1 LIM Vezi parametrul 14.01 31 ACT 2 LIM Vezi parametrul 14.01 32 COMM. REF3(14) Vezi parametrul 14.01 33 PARAM 14.17 Sursa selectată prin parametrul 14.17. 34 BRAKE CTRL Vezi parametrul 14.01 35 BC SHORT CIR Vezi parametrul 14.01 36 14.03 RELAY RO3 OUTPUT Selectează o stare a convertorului indicată prin ieşirea releului RO3 NOT USED Vezi parametrul 14.01 1 READY Vezi parametrul 14.01 2 RUNNING Vezi parametrul 14.01 3 FAULT Vezi parametrul 14.01 4 FAULT(-1) Vezi parametrul 14.01 5 FAULT(RST) Vezi parametrul 14.01 6 STALL WARN Vezi parametrul 14.01 7 STALL FLT Vezi parametrul 14.01 8 MOT TEMP WRN Vezi parametrul 14.01 9 MOT TEMP FLT Vezi parametrul 14.01 10 ACS TEMP WRN Vezi parametrul 14.01 11 ACS TEMP FLT Vezi parametrul 14.01 12 FAULT/WARN Vezi parametrul 14.01 13 WARNING Vezi parametrul 14.01 14 REVERSED Vezi parametrul 14.01 15 EXT CTRL Vezi parametrul 14.01 16
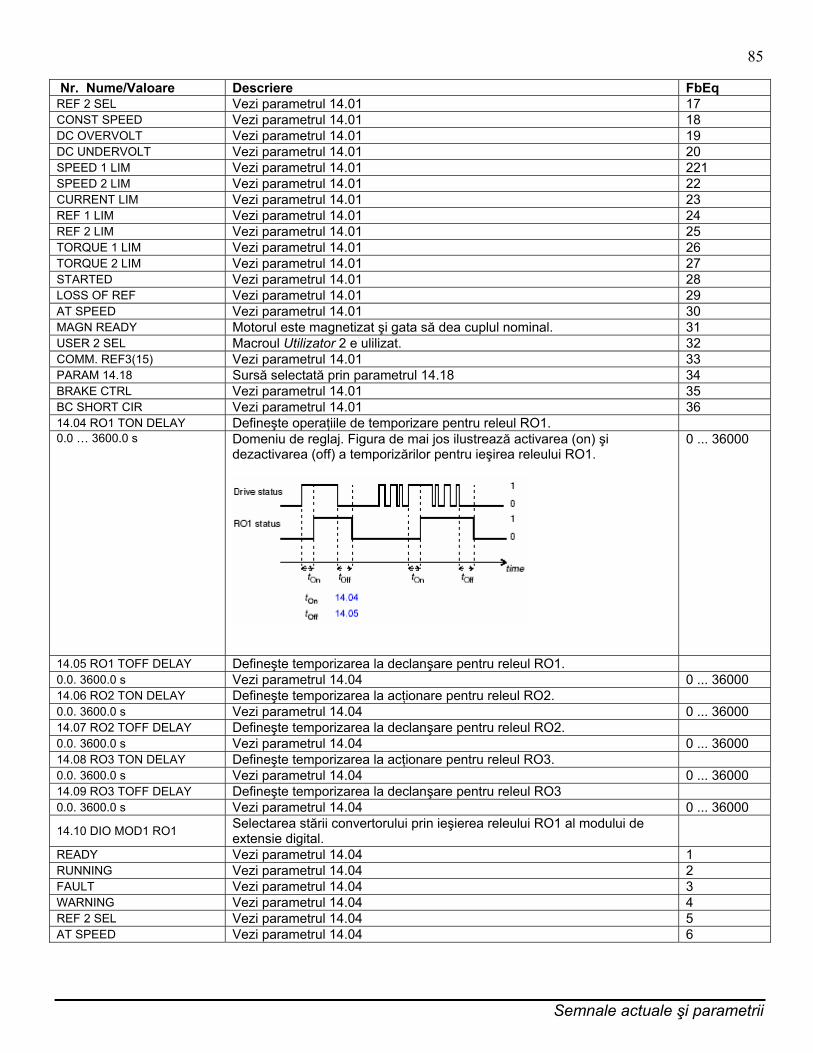
Semnale actuale şi parametrii
85
Nr. Nume/Valoare Descriere FbEq REF 2 SEL Vezi parametrul 14.01 17 CONST SPEED Vezi parametrul 14.01 18 DC OVERVOLT Vezi parametrul 14.01 19 DC UNDERVOLT Vezi parametrul 14.01 20 SPEED 1 LIM Vezi parametrul 14.01 221 SPEED 2 LIM Vezi parametrul 14.01 22 CURRENT LIM Vezi parametrul 14.01 23 REF 1 LIM Vezi parametrul 14.01 24 REF 2 LIM Vezi parametrul 14.01 25 TORQUE 1 LIM Vezi parametrul 14.01 26 TORQUE 2 LIM Vezi parametrul 14.01 27 STARTED Vezi parametrul 14.01 28 LOSS OF REF Vezi parametrul 14.01 29 AT SPEED Vezi parametrul 14.01 30 MAGN READY Motorul este magnetizat şi gata să dea cuplul nominal. 31 USER 2 SEL Macroul Utilizator 2 e ulilizat. 32 COMM. REF3(15) Vezi parametrul 14.01 33 PARAM 14.18 Sursă selectată prin parametrul 14.18 34 BRAKE CTRL Vezi parametrul 14.01 35 BC SHORT CIR Vezi parametrul 14.01 36 14.04 RO1 TON DELAY Defineşte operaţiile de temporizare pentru releul RO1. 0.0 … 3600.0 s Domeniu de reglaj. Figura de mai jos ilustrează activarea (on) şi
dezactivarea (off) a temporizărilor pentru ieşirea releului RO1.
0 ... 36000
14.05 RO1 TOFF DELAY Defineşte temporizarea la declanşare pentru releul RO1. 0.0. 3600.0 s Vezi parametrul 14.04 0 ... 36000 14.06 RO2 TON DELAY Defineşte temporizarea la acţionare pentru releul RO2. 0.0. 3600.0 s Vezi parametrul 14.04 0 ... 36000 14.07 RO2 TOFF DELAY Defineşte temporizarea la declanşare pentru releul RO2. 0.0. 3600.0 s Vezi parametrul 14.04 0 ... 36000 14.08 RO3 TON DELAY Defineşte temporizarea la acţionare pentru releul RO3. 0.0. 3600.0 s Vezi parametrul 14.04 0 ... 36000 14.09 RO3 TOFF DELAY Defineşte temporizarea la declanşare pentru releul RO3 0.0. 3600.0 s Vezi parametrul 14.04 0 ... 36000
14.10 DIO MOD1 RO1 Selectarea stării convertorului prin ieşierea releului RO1 al modului de extensie digital.
READY Vezi parametrul 14.04 1 RUNNING Vezi parametrul 14.04 2 FAULT Vezi parametrul 14.04 3 WARNING Vezi parametrul 14.04 4 REF 2 SEL Vezi parametrul 14.04 5 AT SPEED Vezi parametrul 14.04 6
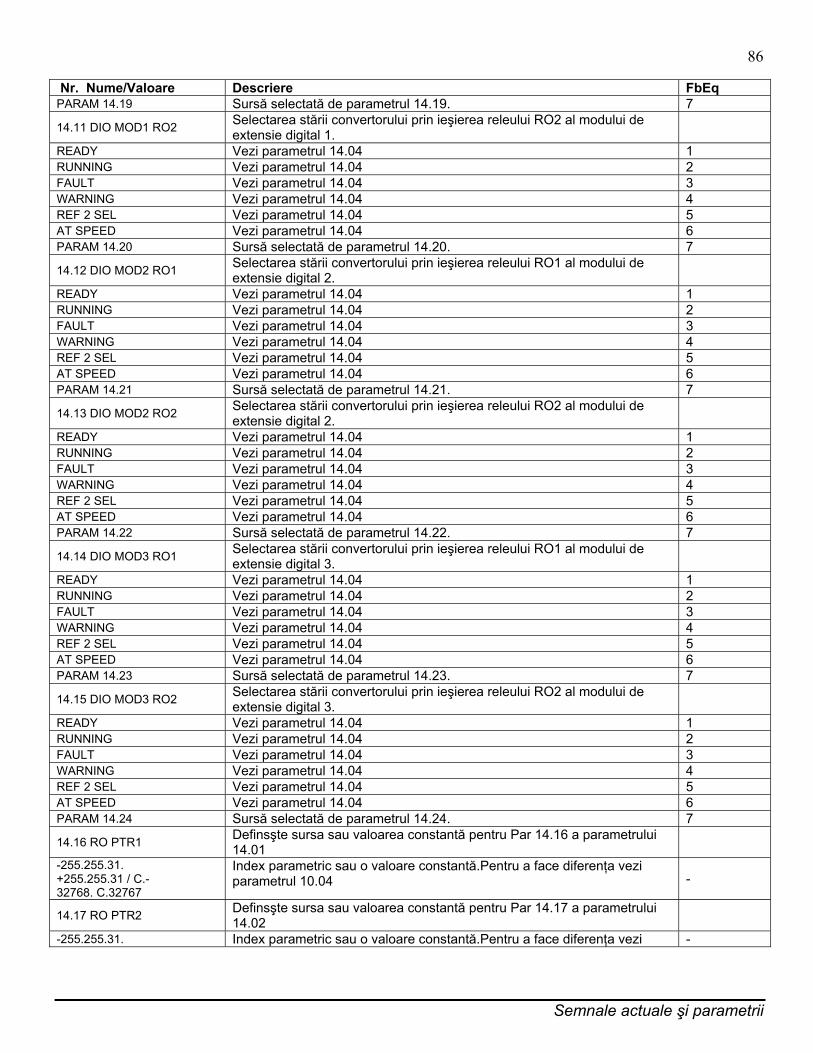
Semnale actuale şi parametrii
86
Nr. Nume/Valoare Descriere FbEq PARAM 14.19 Sursă selectată de parametrul 14.19. 7
14.11 DIO MOD1 RO2 Selectarea stării convertorului prin ieşierea releului RO2 al modului de extensie digital 1.
READY Vezi parametrul 14.04 1 RUNNING Vezi parametrul 14.04 2 FAULT Vezi parametrul 14.04 3 WARNING Vezi parametrul 14.04 4 REF 2 SEL Vezi parametrul 14.04 5 AT SPEED Vezi parametrul 14.04 6 PARAM 14.20 Sursă selectată de parametrul 14.20. 7
14.12 DIO MOD2 RO1 Selectarea stării convertorului prin ieşierea releului RO1 al modului de extensie digital 2.
READY Vezi parametrul 14.04 1 RUNNING Vezi parametrul 14.04 2 FAULT Vezi parametrul 14.04 3 WARNING Vezi parametrul 14.04 4 REF 2 SEL Vezi parametrul 14.04 5 AT SPEED Vezi parametrul 14.04 6 PARAM 14.21 Sursă selectată de parametrul 14.21. 7
14.13 DIO MOD2 RO2 Selectarea stării convertorului prin ieşierea releului RO2 al modului de extensie digital 2.
READY Vezi parametrul 14.04 1 RUNNING Vezi parametrul 14.04 2 FAULT Vezi parametrul 14.04 3 WARNING Vezi parametrul 14.04 4 REF 2 SEL Vezi parametrul 14.04 5 AT SPEED Vezi parametrul 14.04 6 PARAM 14.22 Sursă selectată de parametrul 14.22. 7
14.14 DIO MOD3 RO1 Selectarea stării convertorului prin ieşierea releului RO1 al modului de extensie digital 3.
READY Vezi parametrul 14.04 1 RUNNING Vezi parametrul 14.04 2 FAULT Vezi parametrul 14.04 3 WARNING Vezi parametrul 14.04 4 REF 2 SEL Vezi parametrul 14.04 5 AT SPEED Vezi parametrul 14.04 6 PARAM 14.23 Sursă selectată de parametrul 14.23. 7
14.15 DIO MOD3 RO2 Selectarea stării convertorului prin ieşierea releului RO2 al modului de extensie digital 3.
READY Vezi parametrul 14.04 1 RUNNING Vezi parametrul 14.04 2 FAULT Vezi parametrul 14.04 3 WARNING Vezi parametrul 14.04 4 REF 2 SEL Vezi parametrul 14.04 5 AT SPEED Vezi parametrul 14.04 6 PARAM 14.24 Sursă selectată de parametrul 14.24. 7
14.16 RO PTR1 Definsşte sursa sau valoarea constantă pentru Par 14.16 a parametrului 14.01
-255.255.31. +255.255.31 / C.- 32768. C.32767
Index parametric sau o valoare constantă.Pentru a face diferenţa vezi parametrul 10.04 -
14.17 RO PTR2 Definsşte sursa sau valoarea constantă pentru Par 14.17 a parametrului 14.02
-255.255.31. Index parametric sau o valoare constantă.Pentru a face diferenţa vezi -

Semnale actuale şi parametrii
87
+255.255.31 / C.- 32768. C.32767
parametrul 10.04
14.18 RO PTR3 Definsşte sursa sau valoarea constantă pentru Par 14.18 a parametrului 14.03
-255.255.31. +255.255.31 / C.- 32768. C.32767
Index parametric sau o valoare constantă.Pentru a face diferenţa vezi parametrul 10.04 -
14.19 RO PTR4 Definsşte sursa sau valoarea constantă pentru Par 14.19 a parametrului 14.04
-255.255.31 +255.255.31 / C.- 32768. C.32767
Index parametric sau o valoare constantă.Pentru a face diferenţa vezi parametrul 10.04 -
14.20 RO PTR5 Definsşte sursa sau valoarea constantă pentru Par 14.20 a parametrului 14.05
-255.255.31. +255.255.31 / C.- 32768. C.32767
Index parametric sau o valoare constantă.Pentru a face diferenţa vezi parametrul 10.04 -
14.21 RO PTR6 Definsşte sursa sau valoarea constantă pentru Par 14.21 a parametrului 14.06
255.255.31. +255.255.31 / C.- 32768. C.32767
Index parametric sau o valoare constantă.Pentru a face diferenţa vezi parametrul 10.04 -
14.22 RO PTR7 Definsşte sursa sau valoarea constantă pentru Par 14.22 a parametrului 14.07
255.255.31. +255.255.31 / C.- 32768. C.32767
Index parametric sau o valoare constantă.Pentru a face diferenţa vezi parametrul 10.04 -
14.23 RO PTR8 Definsşte sursa sau valoarea constantă pentru Par 14.23 a parametrului 14.08
255.255.31. +255.255.31 / C.- 32768. C.32767
Index parametric sau o valoare constantă.Pentru a face diferenţa vezi parametrul 10.04 -
14.24 RO PTR9 Definsşte sursa sau valoarea constantă pentru Par 14.24 a param 14.09 255.255.31. +255.255.31 / C.- 32768. C.32767
Index parametric sau o valoare constantă.Pentru a face diferenţa vezi parametrul 10.04 -
15 ANALOGUE OUTPUTS
Selecţia semnalelor analogice actuale ce vor fi indicate prin ieşirile analogice.procesarea semnalelor de intrare.
15.01 ANALOGUE OUTPUT1 Conectează un semnal al convertizorului la ieşirea analogică AI1.
NOT USED Nu este în uz. 1
P SPEED Valoare unui proces-utilizator derivată ddin turaţia motorului. Vezi grupul de parametrii 34 PROCESS VARIABLE. 2
SPEED Turaţia motorului. 20 mA = turaţia nominală al motorului. 3 FREQUENCY Frecvenţa de ieşire. 20 mA = frecvenţa nominală a motorului. 4 CURRENT Curentul de ieşire. 20 mA = curentul nominal al motorului. 5 TORQUE Cuplul motorului. 20 mA =100% din cuplul nominal al motorului. 6 POWER Puterea motorului. 20 mA =100% din puterea nominală a motorului. 7
DC BUS VOLT
Tensiunea pe DC Bus. 20 mA = 100% din valoarea de referinţă. Valoarea de referinţă este 540 Vcc.(1.35* 400 V) pentru 380 – 415 Vac tensiune de alimentare şi 675 Vcc (1.35 * 500) pentru 380 ... 500 Vac tensiune de alimentare.
8
OUTPUT VOLT Tensiunea motorului. 20 mA =tensiunea nominală a motorului. 9
APPL OUTPUT Referinţa care e dată ca şi ieşire de la application. De ex: dacă macroul Control PID este în uz, aceasta este ieşirea procesului cu regulator PID. 10
REFERENCE Referinţa activă pe acre o urmăreşte convertorul. 20 mA = 100% din referinţa activă. 11

Semnale actuale şi parametrii
88
Nr. Nume/Valoare Descriere FbEq
CONTROL DEV Diferenţa dintre referinţă şi valuarea actuală a procesului cu regulator PID. 0/4 mA = -100%, 10/12 mA = 0%, 20 mA = 100%. 12
ACTUAL 1 Valoarea variabilei ACT1 folosită în proces. 20 mA valoarea parametrului 40.10. 13
ACTUAL 2 Valoarea variabilei ACT2 folosită în proces. 20 mA valoarea parametrului 40.12. 14
COMM.REF4 Valoarea este citită de la referinţa REF4. 15
M1 TEMP MEAS Ieşirea analogică este sursă de curent în circuitul de măsurare al temperaturii. Depinzînd de tipul de senzor, ieşirea este 9.1 mA (Pt 100) sau 1.6 mA (PTC). Vezi parametrul 35.01.
16
PARAM 15.11 Sursă selectată de 15.11 17
15.02 INVERT AO1 Inversează ieşirile analogice la AO1. semnalul analogic e la nivel minim atunci când semnalul indicat de convertor e la nivel maxim şi viceversa.
NO Inversie inactivă 0 YES Inversie activă 65535 15.03 MINIMUM AO1 Se defineşte valoarea minimă a semnalului analogic de ieşire AO1 0 mA Zero mA 1 4 mA Patru mA 2 15.04 FILTER AO1 Defineşte constanta de timp pentru iesirea analogică AO1.
0.00 … 10.00 s
Constanta de timp a filtrului
O = I*(1 – e-T/t) I = intrarea filtrului O = ieşirea filtrului t = timpul T = constanta de timpa filtrului
Notă: chiar dacă se selectează un timp de 0 s ca valoare minimă, semnalul este încă filtrat cu o constantă de timp de 10 ms.
0 ... 1000
15.05 SCALE AO1 Scalează semnalul de pe ieşirea analogică AO1
10 … 1000%
Factor de scalare. Dacă valoarea este 100%, referinţa convertoruluicorespunde la 20 mA. Exemplu: curentul nominal al unui motor este 7.5 A şi curentul măsurat la sarcină maximă este de 5A. Curentul motorului de la 0 la 5 A e nevoie să fie citit ca şi de la 0 la 20 mA, semnal analog prin AO1. Setările cerut sunt: 1. AO1 e setat pe CURRENT din parametrul 15.01. 2. AO1 minimum este setat la 0 mA din parametrul 15.03. 3. curentul maxim măsurat al motorului este scalat corespunzător cu 20 mA ieşire de semnal analogicăsetând factorul de scalare (k) la 150%. Valuarea e definită după cum urmează: valoarea de referinţă a semnalului de ieşire CURRENT estecurentul nominal al motorului(ex.7,5 A). Pentru a face măsurători asupra curentului maxim corespunzător la 20 mA, semnalul ar trebui scalat în raport egal cu valoarea de referinţă înainte de a fi convertit în semnal analogic de ieşire. k * 5 A = 7,5 A => k = 1,5 = 150%
100 ... 10000
15.06 ANALOGUE OUTPUT2 Vezi parametrul 15.01. NOT USED Vezi parametrul 15.01. 1 P SPEED Vezi parametrul 15.01. 2 SPEED Vezi parametrul 15.01. 3 FREQUENCY Vezi parametrul 15.01. 4 CURRENT Vezi parametrul 15.01. 5 TORQUE Vezi parametrul 15.01. 6

Semnale actuale şi parametrii
89
Nr. Nume/Valoare Descriere FbEq POWER Vezi parametrul 15.01. 7 DC BUS VOLT Vezi parametrul 15.01. 8 OUTPUT VOLT Vezi parametrul 15.01. 9 APPL OUTPUT Vezi parametrul 15.01. 10 REFERENCE Vezi parametrul 15.01. 11 CONTROL DEV Vezi parametrul 15.01. 12 ACTUAL 1 Vezi parametrul 15.01. 13 ACTUAL 2 Vezi parametrul 15.01. 14 COMM.REF5 Valoarea este citită de la REF5 prin magistrala de date. 15 PARAM 15.12 Sursă selectată de 15.12 16 15.07 INVERT AO2 Vezi parametrul 15.02. NO Vezi parametrul 15.02. 0 YES Vezi parametrul 15.02. 65535 15.08 MINIMUM AO2 Vezi parametrul 15.03. 0 mA Vezi parametrul 15.03. 1 4 mA Vezi parametrul 15.03. 2 15.09 FILTER AO2 Vezi parametrul 15.04. 0.00 … 10.00 s Vezi parametrul 15.04. 0 ... 1000 15.10 SCALE AO2 Vezi parametrul 15.05.
10. 1000% Vezi parametrul 15.05. 100 ... 10000
15.11 AO1 PTR Defineşte sursa sau constanta pentru valoarea PAR 15.11 al param 15.01. 1000 = 1mA -255.255.31. +255.255.31 / C.- 32768. C.32767
Index parametric sau o valoare constantă. Vezi parametrul 10.04 pentru a putea face diferenţa. -
15.12 AO2 PTR Defineşte sursa sau constanta pentru valoarea PAR 15.12 al param 15.06. 1000 = 1 mA -255.255.31. +255.255.31 / C.- 32768. C.32767
Index parametric sau o valoare constantă. Vezi parametrul 10.04 pentru a putea face diferenţa. -
16 SYSTEM CTRL INPUTS
Validare pornire, blocarea parametrilor, etc.
16.01 RUN ENABLE
Setează semnalul de validare a porniri pe on sau selectează o sursă semnalul extern de validare. Dacă semnalul de validare e oprit, convertorul nu va porni sau opri dacă merge încă. Modul de oprire este setat prin parametrul 21.07.
YES Semnal de validare pornire e on. 1 DI1 Se cere un semnal extern prin DI1.1 = Validare pornire(Run Enable) 2 DI2 Vezi selecţia DI1 3 DI3 Vezi selecţia DI1 4 DI4 Vezi selecţia DI1 5 DI5 Vezi selecţia DI1 6 DI6 Vezi selecţia DI1 7 COMM.CW(3) Se cere un semnal extern prin magistrala de date prin cuvânt(bit 3). 8 DI7 Vezi selecţia DI1 9 DI8 Vezi selecţia DI1 10 DI9 Vezi selecţia DI1 11 DI10 Vezi selecţia DI1 12 DI11 Vezi selecţia DI1 13 DI12 Vezi selecţia DI1 14 PARAM 16.08 Sursă selectată prin parametrul 16.08. 15
16.02 PARAMETER LOCK Selectează starea blocării parametrilor. Blocarea previne schimbarea parametrilor.
OPEN Blocarea nu este activă. Parametrii pot fi schimbaţi. 0
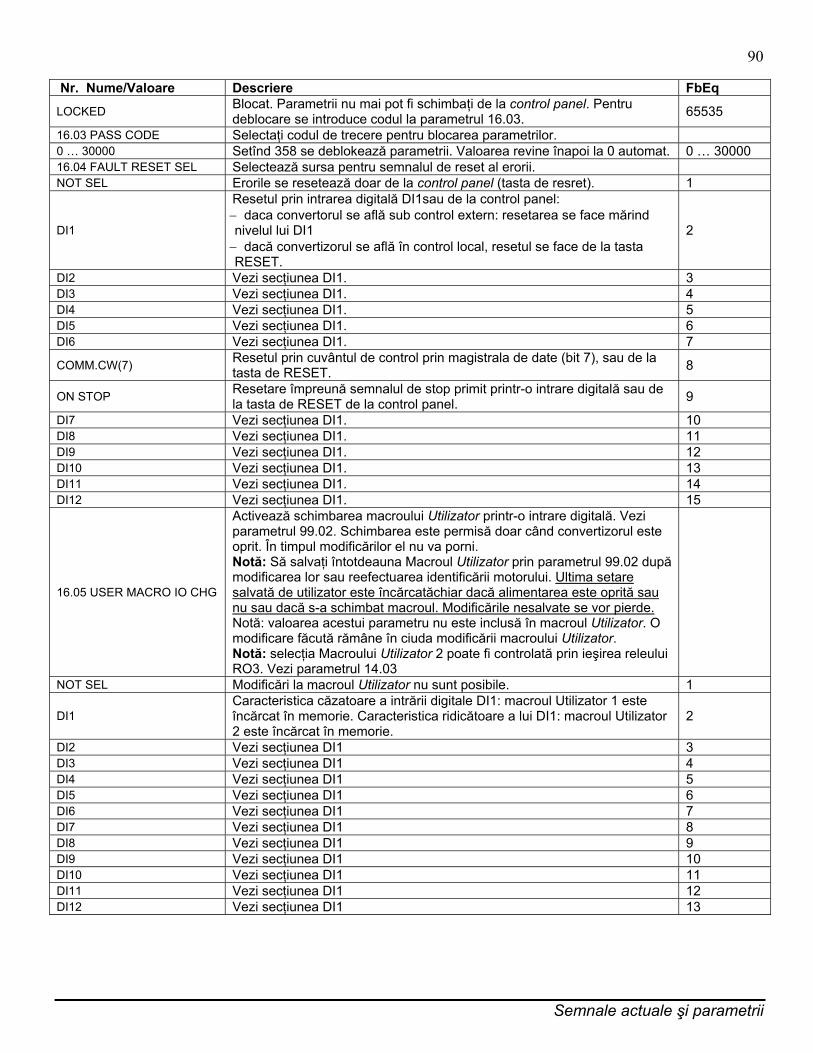
Semnale actuale şi parametrii
90
Nr. Nume/Valoare Descriere FbEq
LOCKED Blocat. Parametrii nu mai pot fi schimbaţi de la control panel. Pentru deblocare se introduce codul la parametrul 16.03. 65535
16.03 PASS CODE Selectaţi codul de trecere pentru blocarea parametrilor. 0 … 30000 Setînd 358 se deblokează parametrii. Valoarea revine înapoi la 0 automat. 0 … 30000 16.04 FAULT RESET SEL Selectează sursa pentru semnalul de reset al erorii. NOT SEL Erorile se resetează doar de la control panel (tasta de resret). 1
DI1
Resetul prin intrarea digitală DI1sau de la control panel: − daca convertorul se află sub control extern: resetarea se face mărind nivelul lui DI1 − dacă convertizorul se află în control local, resetul se face de la tasta RESET.
2
DI2 Vezi secţiunea DI1. 3 DI3 Vezi secţiunea DI1. 4 DI4 Vezi secţiunea DI1. 5 DI5 Vezi secţiunea DI1. 6 DI6 Vezi secţiunea DI1. 7
COMM.CW(7) Resetul prin cuvântul de control prin magistrala de date (bit 7), sau de la tasta de RESET. 8
ON STOP Resetare împreună semnalul de stop primit printr-o intrare digitală sau de la tasta de RESET de la control panel. 9
DI7 Vezi secţiunea DI1. 10 DI8 Vezi secţiunea DI1. 11 DI9 Vezi secţiunea DI1. 12 DI10 Vezi secţiunea DI1. 13 DI11 Vezi secţiunea DI1. 14 DI12 Vezi secţiunea DI1. 15
16.05 USER MACRO IO CHG
Activează schimbarea macroului Utilizator printr-o intrare digitală. Vezi parametrul 99.02. Schimbarea este permisă doar când convertizorul este oprit. În timpul modificărilor el nu va porni. Notă: Să salvaţi întotdeauna Macroul Utilizator prin parametrul 99.02 după modificarea lor sau reefectuarea identificării motorului. Ultima setare salvată de utilizator este încărcatăchiar dacă alimentarea este oprită sau nu sau dacă s-a schimbat macroul. Modificările nesalvate se vor pierde. Notă: valoarea acestui parametru nu este inclusă în macroul Utilizator. O modificare făcută rămâne în ciuda modificării macroului Utilizator. Notă: selecţia Macroului Utilizator 2 poate fi controlată prin ieşirea releului RO3. Vezi parametrul 14.03
NOT SEL Modificări la macroul Utilizator nu sunt posibile. 1
DI1 Caracteristica căzatoare a intrării digitale DI1: macroul Utilizator 1 este încărcat în memorie. Caracteristica ridicătoare a lui DI1: macroul Utilizator 2 este încărcat în memorie.
2
DI2 Vezi secţiunea DI1 3 DI3 Vezi secţiunea DI1 4 DI4 Vezi secţiunea DI1 5 DI5 Vezi secţiunea DI1 6 DI6 Vezi secţiunea DI1 7 DI7 Vezi secţiunea DI1 8 DI8 Vezi secţiunea DI1 9 DI9 Vezi secţiunea DI1 10 DI10 Vezi secţiunea DI1 11 DI11 Vezi secţiunea DI1 12 DI12 Vezi secţiunea DI1 13
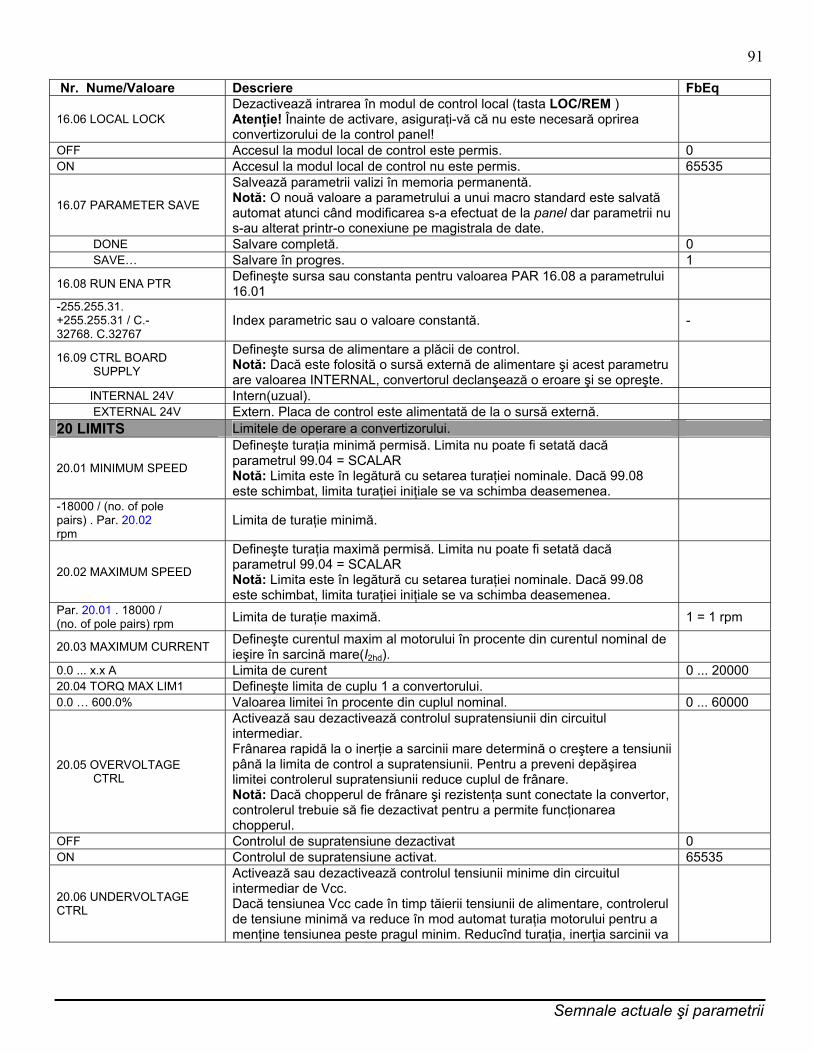
Semnale actuale şi parametrii
91
Nr. Nume/Valoare Descriere FbEq
16.06 LOCAL LOCK Dezactivează intrarea în modul de control local (tasta LOC/REM ) Atenţie! Înainte de activare, asiguraţi-vă că nu este necesară oprirea convertizorului de la control panel!
OFF Accesul la modul local de control este permis. 0 ON Accesul la modul local de control nu este permis. 65535
16.07 PARAMETER SAVE
Salvează parametrii valizi în memoria permanentă. Notă: O nouă valoare a parametrului a unui macro standard este salvată automat atunci când modificarea s-a efectuat de la panel dar parametrii nu s-au alterat printr-o conexiune pe magistrala de date.
DONE Salvare completă. 0 SAVE… Salvare în progres. 1
16.08 RUN ENA PTR Defineşte sursa sau constanta pentru valoarea PAR 16.08 a parametrului 16.01
-255.255.31. +255.255.31 / C.- 32768. C.32767
Index parametric sau o valoare constantă. -
16.09 CTRL BOARD SUPPLY
Defineşte sursa de alimentare a plăcii de control. Notă: Dacă este folosită o sursă externă de alimentare şi acest parametru are valoarea INTERNAL, convertorul declanşează o eroare şi se opreşte.
INTERNAL 24V Intern(uzual). EXTERNAL 24V Extern. Placa de control este alimentată de la o sursă externă. 20 LIMITS Limitele de operare a convertizorului.
20.01 MINIMUM SPEED
Defineşte turaţia minimă permisă. Limita nu poate fi setată dacă parametrul 99.04 = SCALAR Notă: Limita este în legătură cu setarea turaţiei nominale. Dacă 99.08 este schimbat, limita turaţiei iniţiale se va schimba deasemenea.
-18000 / (no. of pole pairs) . Par. 20.02 rpm
Limita de turaţie minimă.
20.02 MAXIMUM SPEED
Defineşte turaţia maximă permisă. Limita nu poate fi setată dacă parametrul 99.04 = SCALAR Notă: Limita este în legătură cu setarea turaţiei nominale. Dacă 99.08 este schimbat, limita turaţiei iniţiale se va schimba deasemenea.
Par. 20.01 . 18000 / (no. of pole pairs) rpm Limita de turaţie maximă. 1 = 1 rpm
20.03 MAXIMUM CURRENT Defineşte curentul maxim al motorului în procente din curentul nominal de ieşire în sarcină mare(I2hd).
0.0 ... x.x A Limita de curent 0 ... 20000 20.04 TORQ MAX LIM1 Defineşte limita de cuplu 1 a convertorului. 0.0 … 600.0% Valoarea limitei în procente din cuplul nominal. 0 ... 60000
20.05 OVERVOLTAGE CTRL
Activează sau dezactivează controlul supratensiunii din circuitul intermediar. Frânarea rapidă la o inerţie a sarcinii mare determină o creştere a tensiunii până la limita de control a supratensiunii. Pentru a preveni depăşirea limitei controlerul supratensiunii reduce cuplul de frânare. Notă: Dacă chopperul de frânare şi rezistenţa sunt conectate la convertor, controlerul trebuie să fie dezactivat pentru a permite funcţionarea chopperul.
OFF Controlul de supratensiune dezactivat 0 ON Controlul de supratensiune activat. 65535
20.06 UNDERVOLTAGE CTRL
Activează sau dezactivează controlul tensiunii minime din circuitul intermediar de Vcc. Dacă tensiunea Vcc cade în timp tăierii tensiunii de alimentare, controlerul de tensiune minimă va reduce în mod automat turaţia motorului pentru a menţine tensiunea peste pragul minim. Reducînd turaţia, inerţia sarcinii va
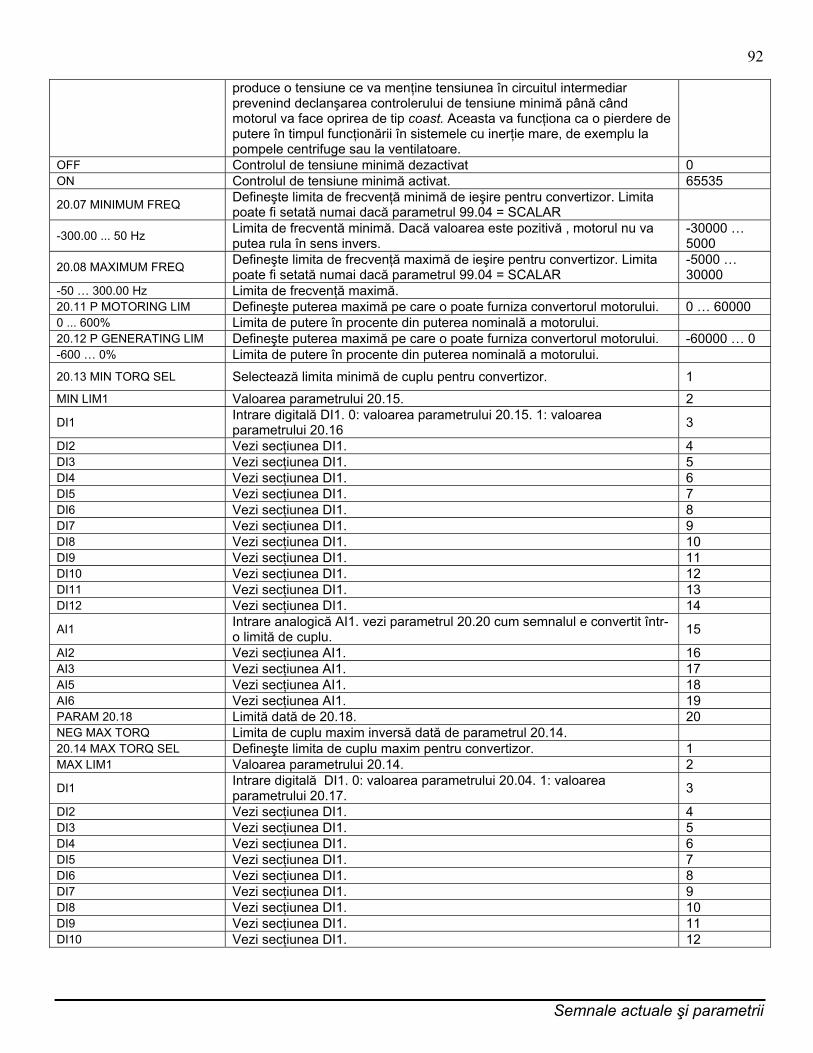
Semnale actuale şi parametrii
92
produce o tensiune ce va menţine tensiunea în circuitul intermediar prevenind declanşarea controlerului de tensiune minimă până când motorul va face oprirea de tip coast. Aceasta va funcţiona ca o pierdere de putere în timpul funcţionării în sistemele cu inerţie mare, de exemplu la pompele centrifuge sau la ventilatoare.
OFF Controlul de tensiune minimă dezactivat 0 ON Controlul de tensiune minimă activat. 65535
20.07 MINIMUM FREQ Defineşte limita de frecvenţă minimă de ieşire pentru convertizor. Limita poate fi setată numai dacă parametrul 99.04 = SCALAR
-300.00 ... 50 Hz Limita de frecventă minimă. Dacă valoarea este pozitivă , motorul nu va putea rula în sens invers.
-30000 … 5000
20.08 MAXIMUM FREQ Defineşte limita de frecvenţă maximă de ieşire pentru convertizor. Limita poate fi setată numai dacă parametrul 99.04 = SCALAR
-5000 … 30000
-50 … 300.00 Hz Limita de frecvenţă maximă. 20.11 P MOTORING LIM Defineşte puterea maximă pe care o poate furniza convertorul motorului. 0 … 60000 0 ... 600% Limita de putere în procente din puterea nominală a motorului. 20.12 P GENERATING LIM Defineşte puterea maximă pe care o poate furniza convertorul motorului. -60000 … 0 -600 … 0% Limita de putere în procente din puterea nominală a motorului. 20.13 MIN TORQ SEL Selectează limita minimă de cuplu pentru convertizor. 1 MIN LIM1 Valoarea parametrului 20.15. 2
DI1 Intrare digitală DI1. 0: valoarea parametrului 20.15. 1: valoarea parametrului 20.16 3
DI2 Vezi secţiunea DI1. 4 DI3 Vezi secţiunea DI1. 5 DI4 Vezi secţiunea DI1. 6 DI5 Vezi secţiunea DI1. 7 DI6 Vezi secţiunea DI1. 8 DI7 Vezi secţiunea DI1. 9 DI8 Vezi secţiunea DI1. 10 DI9 Vezi secţiunea DI1. 11 DI10 Vezi secţiunea DI1. 12 DI11 Vezi secţiunea DI1. 13 DI12 Vezi secţiunea DI1. 14
AI1 Intrare analogică AI1. vezi parametrul 20.20 cum semnalul e convertit într-o limită de cuplu. 15
AI2 Vezi secţiunea AI1. 16 AI3 Vezi secţiunea AI1. 17 AI5 Vezi secţiunea AI1. 18 AI6 Vezi secţiunea AI1. 19 PARAM 20.18 Limită dată de 20.18. 20 NEG MAX TORQ Limita de cuplu maxim inversă dată de parametrul 20.14. 20.14 MAX TORQ SEL Defineşte limita de cuplu maxim pentru convertizor. 1 MAX LIM1 Valoarea parametrului 20.14. 2
DI1 Intrare digitală DI1. 0: valoarea parametrului 20.04. 1: valoarea parametrului 20.17. 3
DI2 Vezi secţiunea DI1. 4 DI3 Vezi secţiunea DI1. 5 DI4 Vezi secţiunea DI1. 6 DI5 Vezi secţiunea DI1. 7 DI6 Vezi secţiunea DI1. 8 DI7 Vezi secţiunea DI1. 9 DI8 Vezi secţiunea DI1. 10 DI9 Vezi secţiunea DI1. 11 DI10 Vezi secţiunea DI1. 12
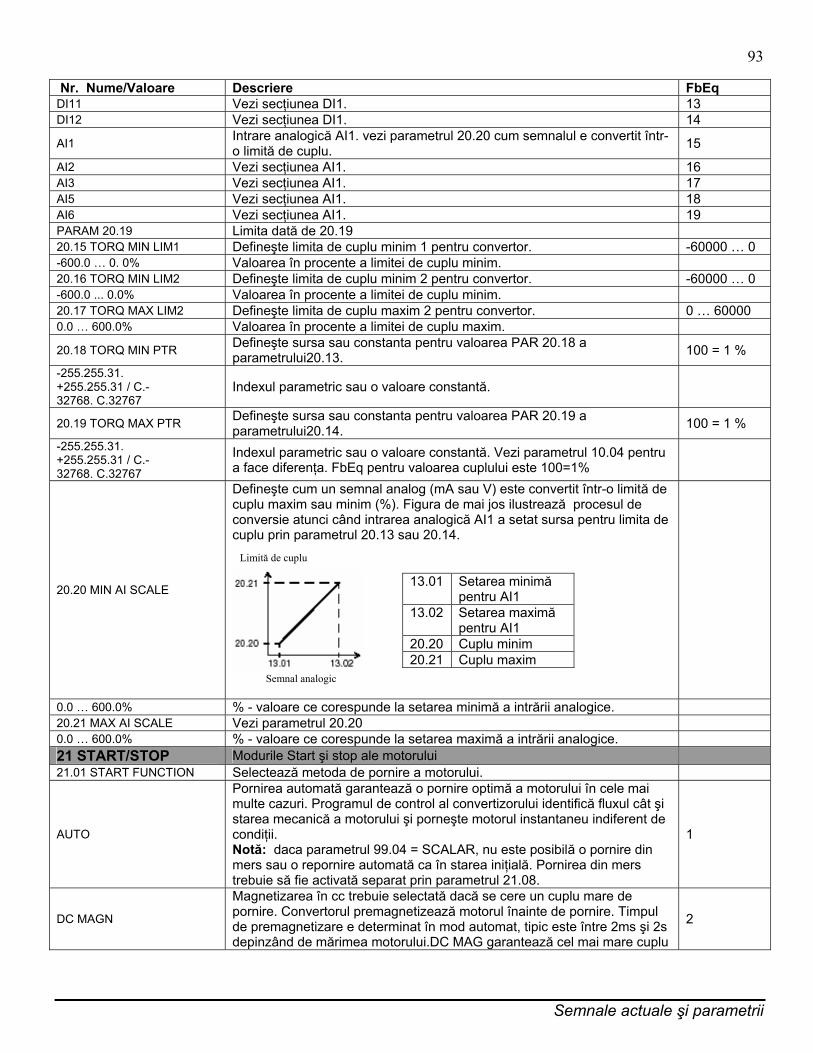
Semnale actuale şi parametrii
93
Nr. Nume/Valoare Descriere FbEq DI11 Vezi secţiunea DI1. 13 DI12 Vezi secţiunea DI1. 14
AI1 Intrare analogică AI1. vezi parametrul 20.20 cum semnalul e convertit într-o limită de cuplu. 15
AI2 Vezi secţiunea AI1. 16 AI3 Vezi secţiunea AI1. 17 AI5 Vezi secţiunea AI1. 18 AI6 Vezi secţiunea AI1. 19 PARAM 20.19 Limita dată de 20.19 20.15 TORQ MIN LIM1 Defineşte limita de cuplu minim 1 pentru convertor. -60000 … 0 -600.0 … 0. 0% Valoarea în procente a limitei de cuplu minim. 20.16 TORQ MIN LIM2 Defineşte limita de cuplu minim 2 pentru convertor. -60000 … 0 -600.0 ... 0.0% Valoarea în procente a limitei de cuplu minim. 20.17 TORQ MAX LIM2 Defineşte limita de cuplu maxim 2 pentru convertor. 0 … 60000 0.0 … 600.0% Valoarea în procente a limitei de cuplu maxim.
20.18 TORQ MIN PTR Defineşte sursa sau constanta pentru valoarea PAR 20.18 a parametrului20.13. 100 = 1 %
-255.255.31. +255.255.31 / C.- 32768. C.32767
Indexul parametric sau o valoare constantă.
20.19 TORQ MAX PTR Defineşte sursa sau constanta pentru valoarea PAR 20.19 a parametrului20.14. 100 = 1 %
-255.255.31. +255.255.31 / C.- 32768. C.32767
Indexul parametric sau o valoare constantă. Vezi parametrul 10.04 pentru a face diferenţa. FbEq pentru valoarea cuplului este 100=1%
20.20 MIN AI SCALE
Defineşte cum un semnal analog (mA sau V) este convertit într-o limită de cuplu maxim sau minim (%). Figura de mai jos ilustrează procesul de conversie atunci când intrarea analogică AI1 a setat sursa pentru limita de cuplu prin parametrul 20.13 sau 20.14.
13.01 Setarea minimă pentru AI1
13.02 Setarea maximă pentru AI1
20.20 Cuplu minim 20.21 Cuplu maxim
0.0 … 600.0% % - valoare ce corespunde la setarea minimă a intrării analogice. 20.21 MAX AI SCALE Vezi parametrul 20.20 0.0 … 600.0% % - valoare ce corespunde la setarea maximă a intrării analogice. 21 START/STOP Modurile Start şi stop ale motorului 21.01 START FUNCTION Selectează metoda de pornire a motorului.
AUTO
Pornirea automată garantează o pornire optimă a motorului în cele mai multe cazuri. Programul de control al convertizorului identifică fluxul cât şi starea mecanică a motorului şi porneşte motorul instantaneu indiferent de condiţii. Notă: daca parametrul 99.04 = SCALAR, nu este posibilă o pornire din mers sau o repornire automată ca în starea iniţială. Pornirea din mers trebuie să fie activată separat prin parametrul 21.08.
1
DC MAGN
Magnetizarea în cc trebuie selectată dacă se cere un cuplu mare de pornire. Convertorul premagnetizează motorul înainte de pornire. Timpul de premagnetizare e determinat în mod automat, tipic este între 2ms şi 2s depinzând de mărimea motorului.DC MAG garantează cel mai mare cuplu
2
Limită de cuplu
Semnal analogic
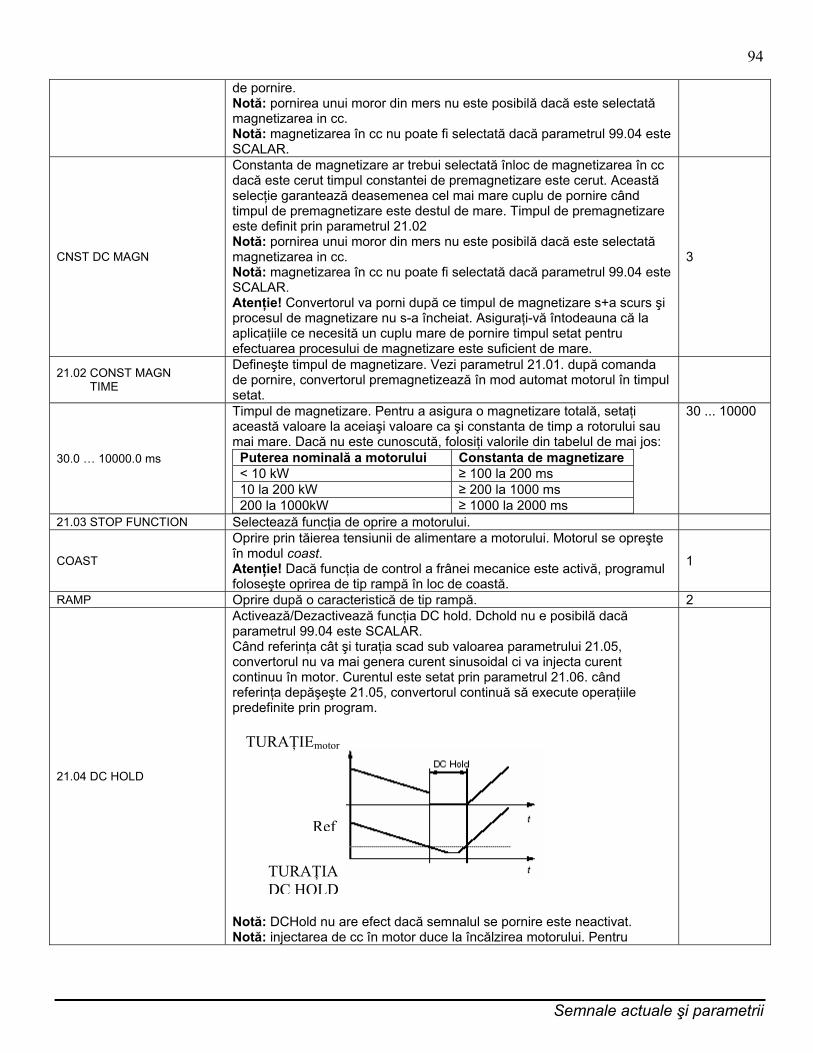
Semnale actuale şi parametrii
94
de pornire. Notă: pornirea unui moror din mers nu este posibilă dacă este selectată magnetizarea in cc. Notă: magnetizarea în cc nu poate fi selectată dacă parametrul 99.04 este SCALAR.
CNST DC MAGN
Constanta de magnetizare ar trebui selectată înloc de magnetizarea în cc dacă este cerut timpul constantei de premagnetizare este cerut. Această selecţie garantează deasemenea cel mai mare cuplu de pornire când timpul de premagnetizare este destul de mare. Timpul de premagnetizare este definit prin parametrul 21.02 Notă: pornirea unui moror din mers nu este posibilă dacă este selectată magnetizarea in cc. Notă: magnetizarea în cc nu poate fi selectată dacă parametrul 99.04 este SCALAR. Atenţie! Convertorul va porni după ce timpul de magnetizare s+a scurs şi procesul de magnetizare nu s-a încheiat. Asiguraţi-vă întodeauna că la aplicaţiile ce necesită un cuplu mare de pornire timpul setat pentru efectuarea procesului de magnetizare este suficient de mare.
3
21.02 CONST MAGN TIME
Defineşte timpul de magnetizare. Vezi parametrul 21.01. după comanda de pornire, convertorul premagnetizează în mod automat motorul în timpul setat.
30.0 … 10000.0 ms
Timpul de magnetizare. Pentru a asigura o magnetizare totală, setaţi această valoare la aceiaşi valoare ca şi constanta de timp a rotorului sau mai mare. Dacă nu este cunoscută, folosiţi valorile din tabelul de mai jos:
Puterea nominală a motorului Constanta de magnetizare < 10 kW ≥ 100 la 200 ms 10 la 200 kW ≥ 200 la 1000 ms 200 la 1000kW ≥ 1000 la 2000 ms
30 ... 10000
21.03 STOP FUNCTION Selectează funcţia de oprire a motorului.
COAST
Oprire prin tăierea tensiunii de alimentare a motorului. Motorul se opreşte în modul coast. Atenţie! Dacă funcţia de control a frânei mecanice este activă, programul foloseşte oprirea de tip rampă în loc de coastă.
1
RAMP Oprire după o caracteristică de tip rampă. 2
21.04 DC HOLD
Activează/Dezactivează funcţia DC hold. Dchold nu e posibilă dacă parametrul 99.04 este SCALAR. Când referinţa cât şi turaţia scad sub valoarea parametrului 21.05, convertorul nu va mai genera curent sinusoidal ci va injecta curent continuu în motor. Curentul este setat prin parametrul 21.06. când referinţa depăşeşte 21.05, convertorul continuă să execute operaţiile predefinite prin program. Notă: DCHold nu are efect dacă semnalul se pornire este neactivat. Notă: injectarea de cc în motor duce la încălzirea motorului. Pentru
TURAŢIEmotor
Ref
TURAŢIA DC HOLD
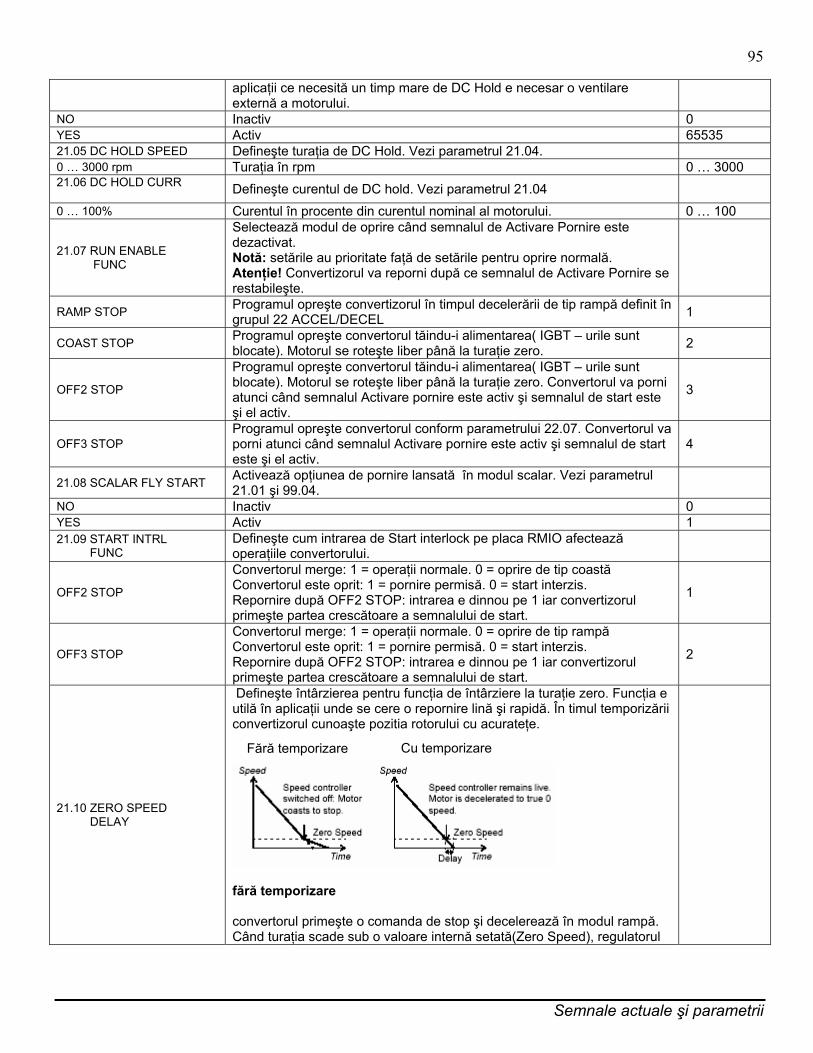
Semnale actuale şi parametrii
95
aplicaţii ce necesită un timp mare de DC Hold e necesar o ventilare externă a motorului.
NO Inactiv 0 YES Activ 65535 21.05 DC HOLD SPEED Defineşte turaţia de DC Hold. Vezi parametrul 21.04. 0 … 3000 rpm Turaţia în rpm 0 … 3000 21.06 DC HOLD CURR Defineşte curentul de DC hold. Vezi parametrul 21.04 0 … 100% Curentul în procente din curentul nominal al motorului. 0 … 100
21.07 RUN ENABLE FUNC
Selectează modul de oprire când semnalul de Activare Pornire este dezactivat. Notă: setările au prioritate faţă de setările pentru oprire normală. Atenţie! Convertizorul va reporni după ce semnalul de Activare Pornire se restabileşte.
RAMP STOP Programul opreşte convertizorul în timpul decelerării de tip rampă definit în grupul 22 ACCEL/DECEL 1
COAST STOP Programul opreşte convertorul tăindu-i alimentarea( IGBT – urile sunt blocate). Motorul se roteşte liber până la turaţie zero. 2
OFF2 STOP
Programul opreşte convertorul tăindu-i alimentarea( IGBT – urile sunt blocate). Motorul se roteşte liber până la turaţie zero. Convertorul va porni atunci când semnalul Activare pornire este activ şi semnalul de start este şi el activ.
3
OFF3 STOP Programul opreşte convertorul conform parametrului 22.07. Convertorul va porni atunci când semnalul Activare pornire este activ şi semnalul de start este şi el activ.
4
21.08 SCALAR FLY START Activează opţiunea de pornire lansată în modul scalar. Vezi parametrul 21.01 şi 99.04.
NO Inactiv 0 YES Activ 1 21.09 START INTRL FUNC
Defineşte cum intrarea de Start interlock pe placa RMIO afectează operaţiile convertorului.
OFF2 STOP
Convertorul merge: 1 = operaţii normale. 0 = oprire de tip coastă Convertorul este oprit: 1 = pornire permisă. 0 = start interzis. Repornire după OFF2 STOP: intrarea e dinnou pe 1 iar convertizorul primeşte partea crescătoare a semnalului de start.
1
OFF3 STOP
Convertorul merge: 1 = operaţii normale. 0 = oprire de tip rampă Convertorul este oprit: 1 = pornire permisă. 0 = start interzis. Repornire după OFF2 STOP: intrarea e dinnou pe 1 iar convertizorul primeşte partea crescătoare a semnalului de start.
2
21.10 ZERO SPEED DELAY
Defineşte întârzierea pentru funcţia de întârziere la turaţie zero. Funcţia e utilă în aplicaţii unde se cere o repornire lină şi rapidă. În timul temporizării convertizorul cunoaşte pozitia rotorului cu acurateţe.
fără temporizare convertorul primeşte o comanda de stop şi decelerează în modul rampă. Când turaţia scade sub o valoare internă setată(Zero Speed), regulatorul
Fără temporizare Cu temporizare
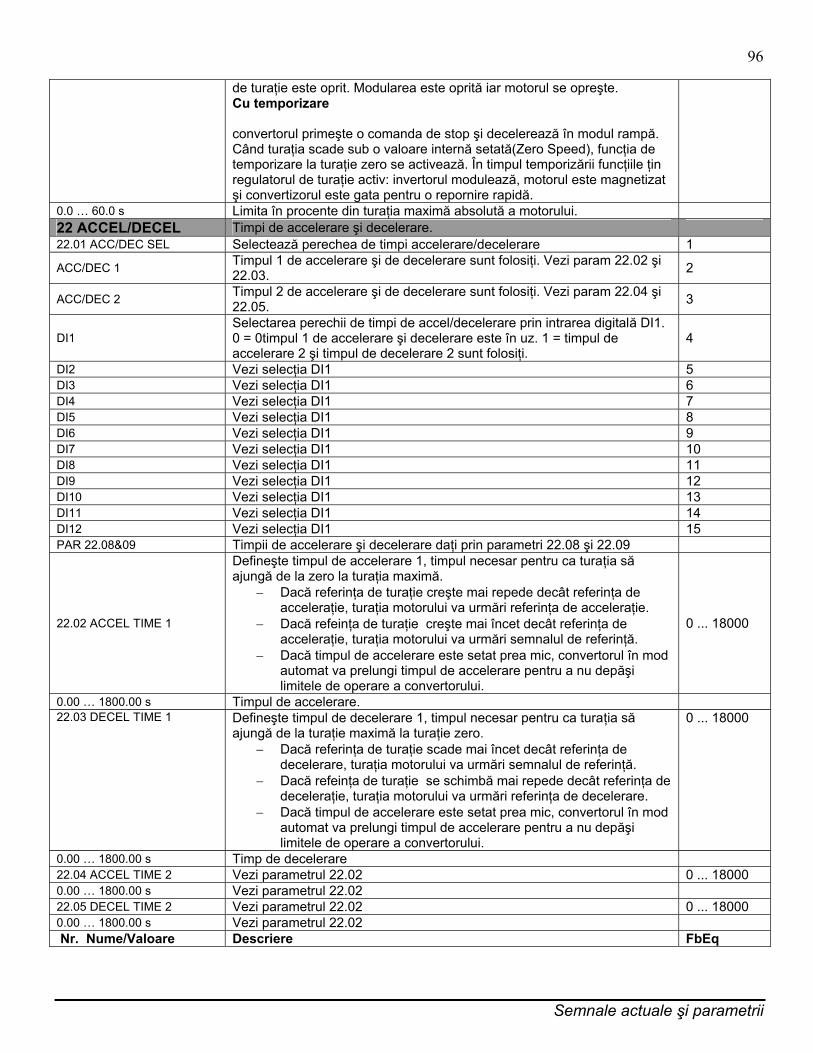
Semnale actuale şi parametrii
96
de turaţie este oprit. Modularea este oprită iar motorul se opreşte. Cu temporizare convertorul primeşte o comanda de stop şi decelerează în modul rampă. Când turaţia scade sub o valoare internă setată(Zero Speed), funcţia de temporizare la turaţie zero se activează. În timpul temporizării funcţiile ţin regulatorul de turaţie activ: invertorul modulează, motorul este magnetizat şi convertizorul este gata pentru o repornire rapidă.
0.0 … 60.0 s Limita în procente din turaţia maximă absolută a motorului. 22 ACCEL/DECEL Timpi de accelerare şi decelerare. 22.01 ACC/DEC SEL Selectează perechea de timpi accelerare/decelerare 1
ACC/DEC 1 Timpul 1 de accelerare şi de decelerare sunt folosiţi. Vezi param 22.02 şi 22.03. 2
ACC/DEC 2 Timpul 2 de accelerare şi de decelerare sunt folosiţi. Vezi param 22.04 şi 22.05. 3
DI1 Selectarea perechii de timpi de accel/decelerare prin intrarea digitală DI1. 0 = 0timpul 1 de accelerare şi decelerare este în uz. 1 = timpul de accelerare 2 şi timpul de decelerare 2 sunt folosiţi.
4
DI2 Vezi selecţia DI1 5 DI3 Vezi selecţia DI1 6 DI4 Vezi selecţia DI1 7 DI5 Vezi selecţia DI1 8 DI6 Vezi selecţia DI1 9 DI7 Vezi selecţia DI1 10 DI8 Vezi selecţia DI1 11 DI9 Vezi selecţia DI1 12 DI10 Vezi selecţia DI1 13 DI11 Vezi selecţia DI1 14 DI12 Vezi selecţia DI1 15 PAR 22.08&09 Timpii de accelerare şi decelerare daţi prin parametri 22.08 şi 22.09
22.02 ACCEL TIME 1
Defineşte timpul de accelerare 1, timpul necesar pentru ca turaţia să ajungă de la zero la turaţia maximă.
− Dacă referinţa de turaţie creşte mai repede decât referinţa de acceleraţie, turaţia motorului va urmări referinţa de acceleraţie.
− Dacă refeinţa de turaţie creşte mai încet decât referinţa de acceleraţie, turaţia motorului va urmări semnalul de referinţă.
− Dacă timpul de accelerare este setat prea mic, convertorul în mod automat va prelungi timpul de accelerare pentru a nu depăşi limitele de operare a convertorului.
0 ... 18000
0.00 … 1800.00 s Timpul de accelerare. 22.03 DECEL TIME 1 Defineşte timpul de decelerare 1, timpul necesar pentru ca turaţia să
ajungă de la turaţie maximă la turaţie zero. − Dacă referinţa de turaţie scade mai încet decât referinţa de
decelerare, turaţia motorului va urmări semnalul de referinţă. − Dacă refeinţa de turaţie se schimbă mai repede decât referinţa de
deceleraţie, turaţia motorului va urmări referinţa de decelerare. − Dacă timpul de accelerare este setat prea mic, convertorul în mod
automat va prelungi timpul de accelerare pentru a nu depăşi limitele de operare a convertorului.
0 ... 18000
0.00 … 1800.00 s Timp de decelerare 22.04 ACCEL TIME 2 Vezi parametrul 22.02 0 ... 18000 0.00 … 1800.00 s Vezi parametrul 22.02 22.05 DECEL TIME 2 Vezi parametrul 22.02 0 ... 18000 0.00 … 1800.00 s Vezi parametrul 22.02 Nr. Nume/Valoare Descriere FbEq
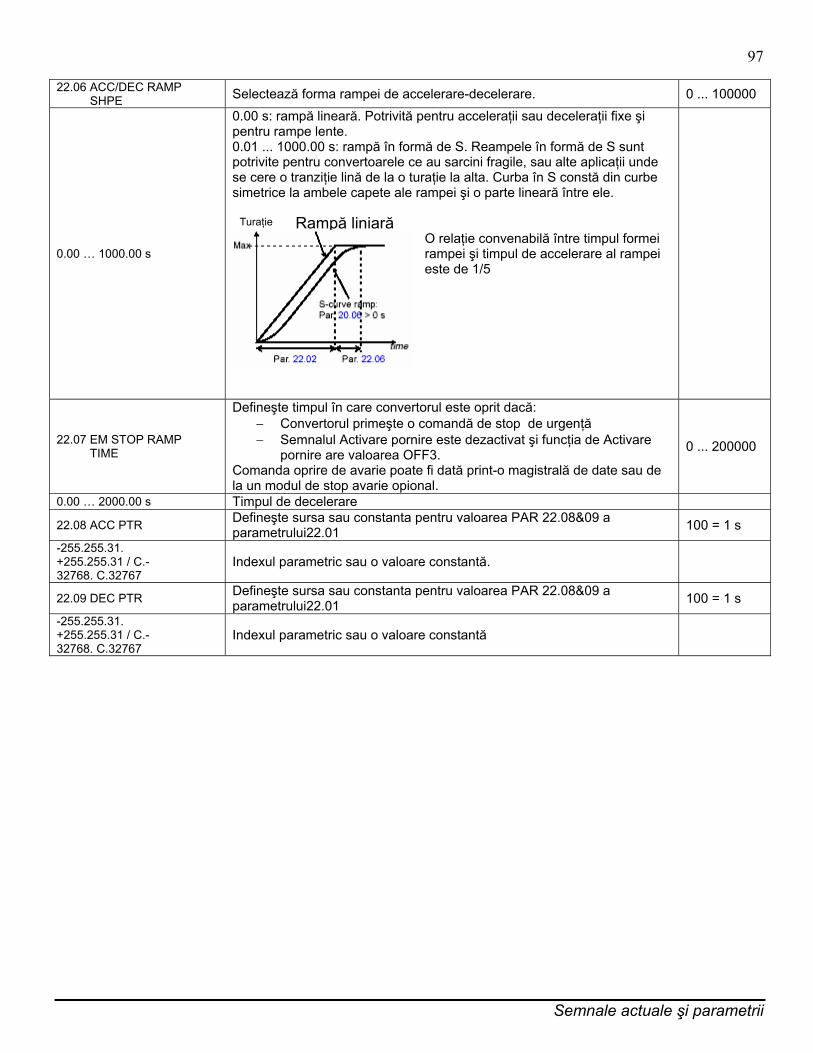
Semnale actuale şi parametrii
97
22.06 ACC/DEC RAMP SHPE Selectează forma rampei de accelerare-decelerare. 0 ... 100000
0.00 … 1000.00 s
0.00 s: rampă lineară. Potrivită pentru acceleraţii sau deceleraţii fixe şi pentru rampe lente. 0.01 ... 1000.00 s: rampă în formă de S. Reampele în formă de S sunt potrivite pentru convertoarele ce au sarcini fragile, sau alte aplicaţii unde se cere o tranziţie lină de la o turaţie la alta. Curba în S constă din curbe simetrice la ambele capete ale rampei şi o parte lineară între ele.
O relaţie convenabilă între timpul formei rampei şi timpul de accelerare al rampei este de 1/5
22.07 EM STOP RAMP TIME
Defineşte timpul în care convertorul este oprit dacă: − Convertorul primeşte o comandă de stop de urgenţă − Semnalul Activare pornire este dezactivat şi funcţia de Activare
pornire are valoarea OFF3. Comanda oprire de avarie poate fi dată print-o magistrală de date sau de la un modul de stop avarie opional.
0 ... 200000
0.00 … 2000.00 s Timpul de decelerare
22.08 ACC PTR Defineşte sursa sau constanta pentru valoarea PAR 22.08&09 a parametrului22.01 100 = 1 s
-255.255.31. +255.255.31 / C.- 32768. C.32767
Indexul parametric sau o valoare constantă.
22.09 DEC PTR Defineşte sursa sau constanta pentru valoarea PAR 22.08&09 a parametrului22.01 100 = 1 s
-255.255.31. +255.255.31 / C.- 32768. C.32767
Indexul parametric sau o valoare constantă
Turaţie Rampă liniară
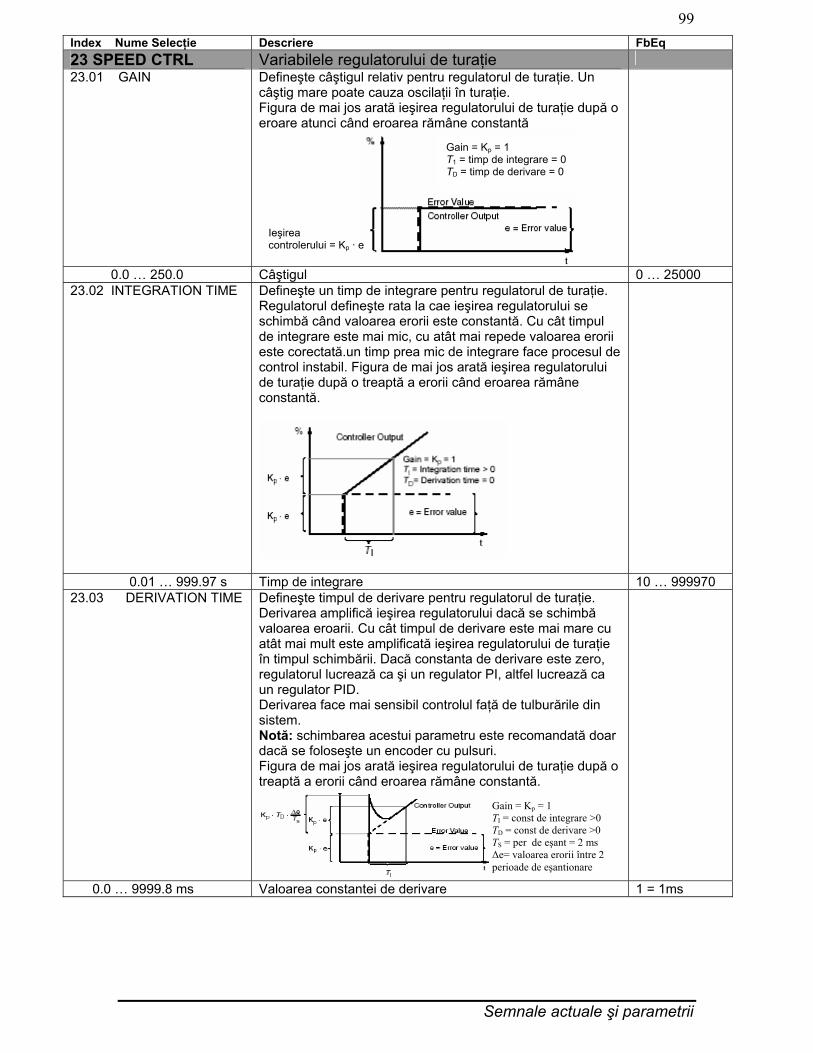
Semnale actuale şi parametrii
99Index Nume Selecţie Descriere FbEq 23 SPEED CTRL Variabilele regulatorului de turaţie 23.01 GAIN Defineşte câştigul relativ pentru regulatorul de turaţie. Un
câştig mare poate cauza oscilaţii în turaţie. Figura de mai jos arată ieşirea regulatorului de turaţie după o eroare atunci când eroarea rămâne constantă
0.0 … 250.0 Câştigul 0 … 25000 23.02 INTEGRATION TIME Defineşte un timp de integrare pentru regulatorul de turaţie.
Regulatorul defineşte rata la cae ieşirea regulatorului se schimbă când valoarea erorii este constantă. Cu cât timpul de integrare este mai mic, cu atât mai repede valoarea erorii este corectată.un timp prea mic de integrare face procesul de control instabil. Figura de mai jos arată ieşirea regulatorului de turaţie după o treaptă a erorii când eroarea rămâne constantă.
0.01 … 999.97 s Timp de integrare 10 … 999970 23.03 DERIVATION TIME Defineşte timpul de derivare pentru regulatorul de turaţie.
Derivarea amplifică ieşirea regulatorului dacă se schimbă valoarea eroarii. Cu cât timpul de derivare este mai mare cu atât mai mult este amplificată ieşirea regulatorului de turaţie în timpul schimbării. Dacă constanta de derivare este zero, regulatorul lucrează ca şi un regulator PI, altfel lucrează ca un regulator PID. Derivarea face mai sensibil controlul faţă de tulburările din sistem. Notă: schimbarea acestui parametru este recomandată doar dacă se foloseşte un encoder cu pulsuri. Figura de mai jos arată ieşirea regulatorului de turaţie după o treaptă a erorii când eroarea rămâne constantă.
0.0 … 9999.8 ms Valoarea constantei de derivare 1 = 1ms
Gain = Kp = 1 T1 = timp de integrare = 0 TD = timp de derivare = 0
Ieşirea controlerului = Kp · e
Gain = Kp = 1 TI = const de integrare >0 TD = const de derivare >0 TS = per de eşant = 2 ms ∆e= valoarea erorii între 2 perioade de eşantionare
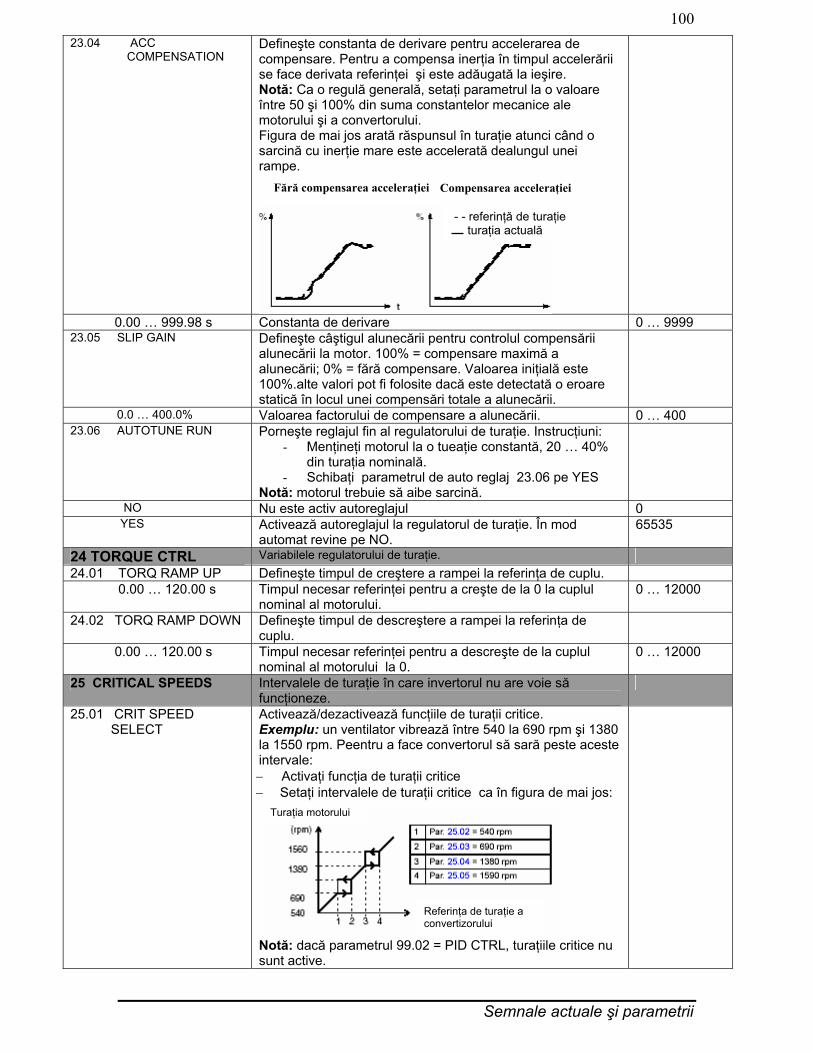
Semnale actuale şi parametrii
10023.04 ACC COMPENSATION
Defineşte constanta de derivare pentru accelerarea de compensare. Pentru a compensa inerţia în timpul accelerării se face derivata referinţei şi este adăugată la ieşire. Notă: Ca o regulă generală, setaţi parametrul la o valoare între 50 şi 100% din suma constantelor mecanice ale motorului şi a convertorului. Figura de mai jos arată răspunsul în turaţie atunci când o sarcină cu inerţie mare este accelerată dealungul unei rampe.
0.00 … 999.98 s Constanta de derivare 0 … 9999 23.05 SLIP GAIN Defineşte câştigul alunecării pentru controlul compensării
alunecării la motor. 100% = compensare maximă a alunecării; 0% = fără compensare. Valoarea iniţială este 100%.alte valori pot fi folosite dacă este detectată o eroare statică în locul unei compensări totale a alunecării.
0.0 … 400.0% Valoarea factorului de compensare a alunecării. 0 … 400 23.06 AUTOTUNE RUN Porneşte reglajul fin al regulatorului de turaţie. Instrucţiuni:
- Menţineţi motorul la o tueaţie constantă, 20 … 40% din turaţia nominală.
- Schibaţi parametrul de auto reglaj 23.06 pe YES Notă: motorul trebuie să aibe sarcină.
NO Nu este activ autoreglajul 0 YES Activează autoreglajul la regulatorul de turaţie. În mod
automat revine pe NO. 65535
24 TORQUE CTRL Variabilele regulatorului de turaţie. 24.01 TORQ RAMP UP Defineşte timpul de creştere a rampei la referinţa de cuplu. 0.00 … 120.00 s Timpul necesar referinţei pentru a creşte de la 0 la cuplul
nominal al motorului. 0 … 12000
24.02 TORQ RAMP DOWN Defineşte timpul de descreştere a rampei la referinţa de cuplu.
0.00 … 120.00 s Timpul necesar referinţei pentru a descreşte de la cuplul nominal al motorului la 0.
0 … 12000
25 CRITICAL SPEEDS Intervalele de turaţie în care invertorul nu are voie să funcţioneze.
25.01 CRIT SPEED SELECT
Activează/dezactivează funcţiile de turaţii critice. Exemplu: un ventilator vibrează între 540 la 690 rpm şi 1380 la 1550 rpm. Peentru a face convertorul să sară peste aceste intervale: − Activaţi funcţia de turaţii critice − Setaţi intervalele de turaţii critice ca în figura de mai jos:
Notă: dacă parametrul 99.02 = PID CTRL, turaţiile critice nu sunt active.
Fără compensarea acceleraţiei Compensarea acceleraţiei
- - referinţă de turaţie turaţia actuală
Referinţa de turaţie a convertizorului
Turaţia motorului
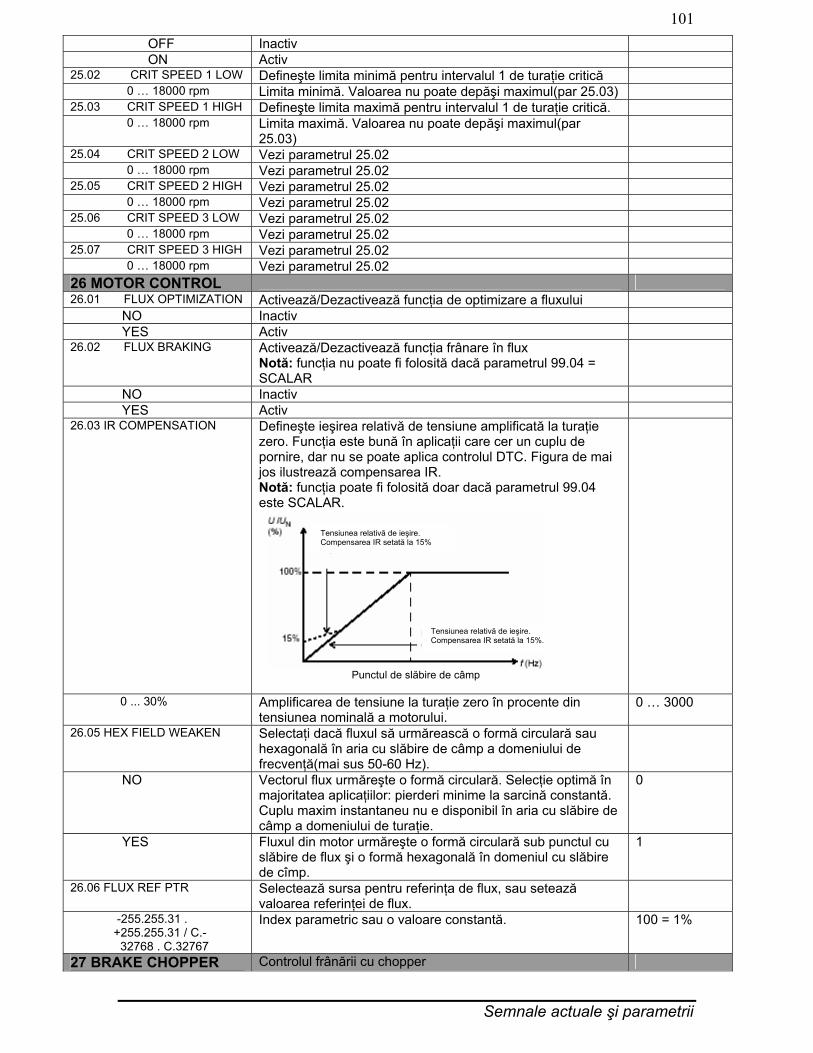
Semnale actuale şi parametrii
101 OFF Inactiv ON Activ 25.02 CRIT SPEED 1 LOW Defineşte limita minimă pentru intervalul 1 de turaţie critică 0 … 18000 rpm Limita minimă. Valoarea nu poate depăşi maximul(par 25.03) 25.03 CRIT SPEED 1 HIGH Defineşte limita maximă pentru intervalul 1 de turaţie critică. 0 … 18000 rpm Limita maximă. Valoarea nu poate depăşi maximul(par
25.03)
25.04 CRIT SPEED 2 LOW Vezi parametrul 25.02 0 … 18000 rpm Vezi parametrul 25.02 25.05 CRIT SPEED 2 HIGH Vezi parametrul 25.02 0 … 18000 rpm Vezi parametrul 25.02 25.06 CRIT SPEED 3 LOW Vezi parametrul 25.02 0 … 18000 rpm Vezi parametrul 25.02 25.07 CRIT SPEED 3 HIGH Vezi parametrul 25.02 0 … 18000 rpm Vezi parametrul 25.02 26 MOTOR CONTROL 26.01 FLUX OPTIMIZATION Activează/Dezactivează funcţia de optimizare a fluxului NO Inactiv YES Activ 26.02 FLUX BRAKING Activează/Dezactivează funcţia frânare în flux
Notă: funcţia nu poate fi folosită dacă parametrul 99.04 = SCALAR
NO Inactiv YES Activ 26.03 IR COMPENSATION Defineşte ieşirea relativă de tensiune amplificată la turaţie
zero. Funcţia este bună în aplicaţii care cer un cuplu de pornire, dar nu se poate aplica controlul DTC. Figura de mai jos ilustrează compensarea IR. Notă: funcţia poate fi folosită doar dacă parametrul 99.04 este SCALAR.
0 ... 30% Amplificarea de tensiune la turaţie zero în procente din tensiunea nominală a motorului.
0 … 3000
26.05 HEX FIELD WEAKEN Selectaţi dacă fluxul să urmărească o formă circulară sau hexagonală în aria cu slăbire de câmp a domeniului de frecvenţă(mai sus 50-60 Hz).
NO Vectorul flux urmăreşte o formă circulară. Selecţie optimă în majoritatea aplicaţiilor: pierderi minime la sarcină constantă. Cuplu maxim instantaneu nu e disponibil în aria cu slăbire de câmp a domeniului de turaţie.
0
YES Fluxul din motor urmăreşte o formă circulară sub punctul cu slăbire de flux şi o formă hexagonală în domeniul cu slăbire de cîmp.
1
26.06 FLUX REF PTR Selectează sursa pentru referinţa de flux, sau setează valoarea referinţei de flux.
-255.255.31 . +255.255.31 / C.- 32768 . C.32767
Index parametric sau o valoare constantă. 100 = 1%
27 BRAKE CHOPPER Controlul frânării cu chopper
Punctul de slăbire de câmp
Tensiunea relativă de ieşire. Compensarea IR setată la 15%
Tensiunea relativă de ieşire. Compensarea IR setată la 15%.

Semnale actuale şi parametrii
10227.01 BRAKE CHOPPER Activează controlul frânrii cu chopper OFF Inactiv 0 ON Activ.Notă: Asiguraţi-vă că rezistorul şi chopperul sunt
instalate şi controlul supratensiunii este dezactivat. 65535
27.02 BR OVERLOAD FUNC
Activează protecţia la suprasarcină a rezistorului de frânare. Variabilele ce se pot ajusta sunt parametrii 27.03, 27.04 şi 27.05
NO Inactiv 0 WARNING Activ. La detectarea unei suprasarcini se generează o
avertizare. 1
FAULT Activ. La detectarea unei suprasarcini se declanşează o eroare.
2
27.03 BR RESISTANCE Defineşte valoarea rezistenţei de frânare. Valoarea e folosită la protecţia la suprasarcină.
0.01 … 100.00 ohm Valoarea rezistenţei. 0 …100 27.04 BR THERM TCONST Defineşte constanta termică a rezistorului. 0.001 … 10000.000 s Constanta de timp. 27.05 MAX CONT BR POWER
Defineşte puterea maximă continuă de frânare care va determina creşterea temperaturii rezistorului la valoarea maxim admisă. Valoarea e folosită la protecţia la suprasarcină.
0.01 … 10000 kW Puterea 30 FAULT FUNCTIONS Funcţii de protecţie programabile. 30.01 AI<MIN FUNCTION Selectează cum va reacţiona convertizorul când un semnal
analogic de intrare coboară sub limita minimă admisă. Setarea minimă analogică este de 0.5V (1 mA).
1
FAULT Convertotul declanşează o eroare, iar motorul face o oprire de tip coastă.
2
NO Inactiv 3 CONST SP 15 Convertorul generează o avertizare AI < MIN FUNC ) 8110 şi
setează turaţia la valoarea definită de parametrul 12.16. Atenţie!!! Asiguraţi-vă că este prudent să continuaţi operaţiile dacă semnalul analogic este pierdut.
4
LAST SPEED Convertorul generează o avertizare AI < MIN FUNC ) 8110 şi “îngheaţă” turaţia la nivelul la care opera convertorul. Turaţia este determinată de turaţia medie pe ultimile 10 s. Atenţie!!! Asiguraţi-vă că este prudent să continuaţi operaţiile dacă semnalul analogic este pierdut.
30.02 PANEL LOSS Selectează cum reacţionează convertorul la căderea comunicării cu panoul de comandă.
1
FAULT Convertorul declanşează o eroare şi motorul se opreşte asa cum e definit prin parametrul 21.03.
2
CONST SP 15 LAST SPEED
Convertorul generează o avertizare şi setează turaţia la cea setată prin parametrul 12.16. Atenţie!!! Asiguraţi-vă că este prudent să continuaţi operaţiile dacă comunicaţia cu panoul de comandă s-a întrerupt.
3
30.03 EXTERNAL FAULT Selectează o interfaţă pentru un semnal de eroare din exterior.
NOT SEL Inactiv 1 DI1 Eroare externă este indicată prin intrarea digitală DI1. 0:
declanşează eroare. Motorul face o oprire de tip coastă. 1: nu sunt erori externe.
2
DI2 Vezi selecţia DI1 3 DI3 Vezi selecţia DI1 4 DI4 Vezi selecţia DI1 5 DI5 Vezi selecţia DI1 6 DI6 Vezi selecţia DI1 7 DI7 Vezi selecţia DI1 8 DI8 Vezi selecţia DI1 9
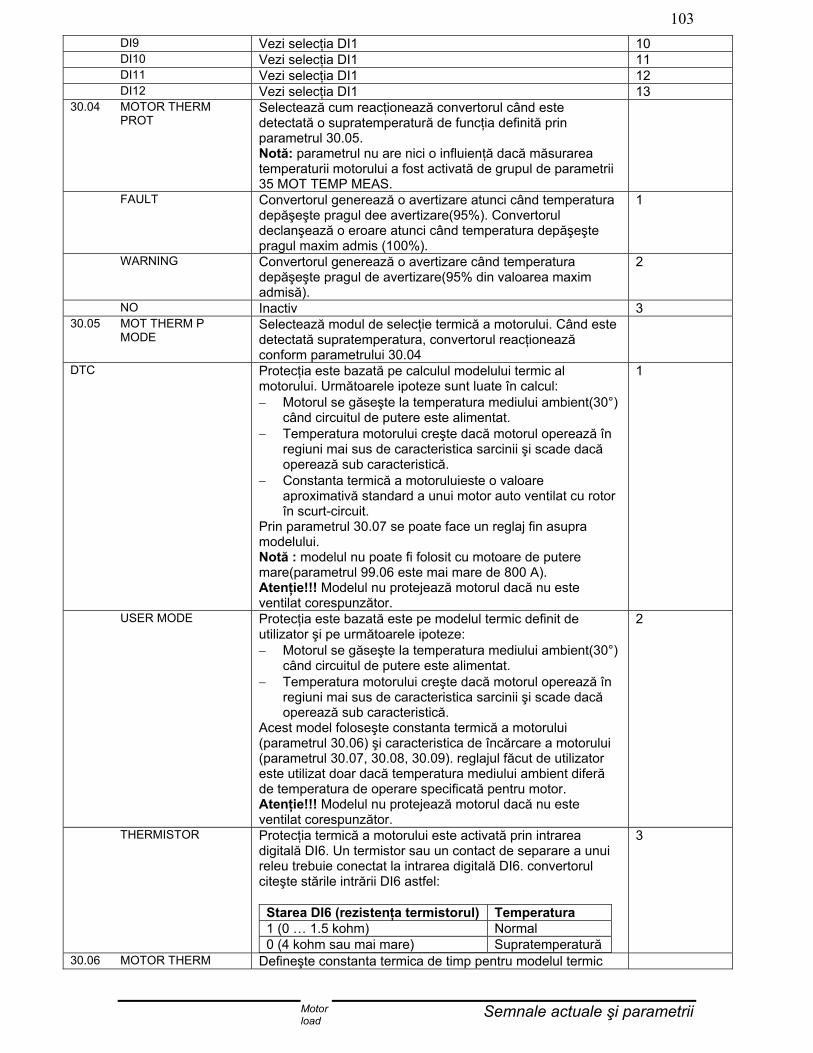
Semnale actuale şi parametrii
103 DI9 Vezi selecţia DI1 10 DI10 Vezi selecţia DI1 11 DI11 Vezi selecţia DI1 12 DI12 Vezi selecţia DI1 13 30.04 MOTOR THERM PROT
Selectează cum reacţionează convertorul când este detectată o supratemperatură de funcţia definită prin parametrul 30.05. Notă: parametrul nu are nici o influienţă dacă măsurarea temperaturii motorului a fost activată de grupul de parametrii 35 MOT TEMP MEAS.
FAULT Convertorul generează o avertizare atunci când temperatura depăşeşte pragul dee avertizare(95%). Convertorul declanşează o eroare atunci când temperatura depăşeşte pragul maxim admis (100%).
1
WARNING Convertorul generează o avertizare când temperatura depăşeşte pragul de avertizare(95% din valoarea maxim admisă).
2
NO Inactiv 3 30.05 MOT THERM P MODE
Selectează modul de selecţie termică a motorului. Când este detectată supratemperatura, convertorul reacţionează conform parametrului 30.04
DTC Protecţia este bazată pe calculul modelului termic al motorului. Următoarele ipoteze sunt luate în calcul: − Motorul se găseşte la temperatura mediului ambient(30°)
când circuitul de putere este alimentat. − Temperatura motorului creşte dacă motorul operează în
regiuni mai sus de caracteristica sarcinii şi scade dacă operează sub caracteristică.
− Constanta termică a motoruluieste o valoare aproximativă standard a unui motor auto ventilat cu rotor în scurt-circuit.
Prin parametrul 30.07 se poate face un reglaj fin asupra modelului. Notă : modelul nu poate fi folosit cu motoare de putere mare(parametrul 99.06 este mai mare de 800 A). Atenţie!!! Modelul nu protejează motorul dacă nu este ventilat corespunzător.
1
USER MODE Protecţia este bazată este pe modelul termic definit de utilizator şi pe următoarele ipoteze: − Motorul se găseşte la temperatura mediului ambient(30°)
când circuitul de putere este alimentat. − Temperatura motorului creşte dacă motorul operează în
regiuni mai sus de caracteristica sarcinii şi scade dacă operează sub caracteristică.
Acest model foloseşte constanta termică a motorului (parametrul 30.06) şi caracteristica de încărcare a motorului (parametrul 30.07, 30.08, 30.09). reglajul făcut de utilizator este utilizat doar dacă temperatura mediului ambient diferă de temperatura de operare specificată pentru motor. Atenţie!!! Modelul nu protejează motorul dacă nu este ventilat corespunzător.
2
THERMISTOR Protecţia termică a motorului este activată prin intrarea digitală DI6. Un termistor sau un contact de separare a unui releu trebuie conectat la intrarea digitală DI6. convertorul citeşte stările intrării DI6 astfel:
Starea DI6 (rezistenţa termistorul) Temperatura 1 (0 … 1.5 kohm) Normal 0 (4 kohm sau mai mare) Supratemperatură
3
30.06 MOTOR THERM Defineşte constanta termica de timp pentru modelul termic
Motor load
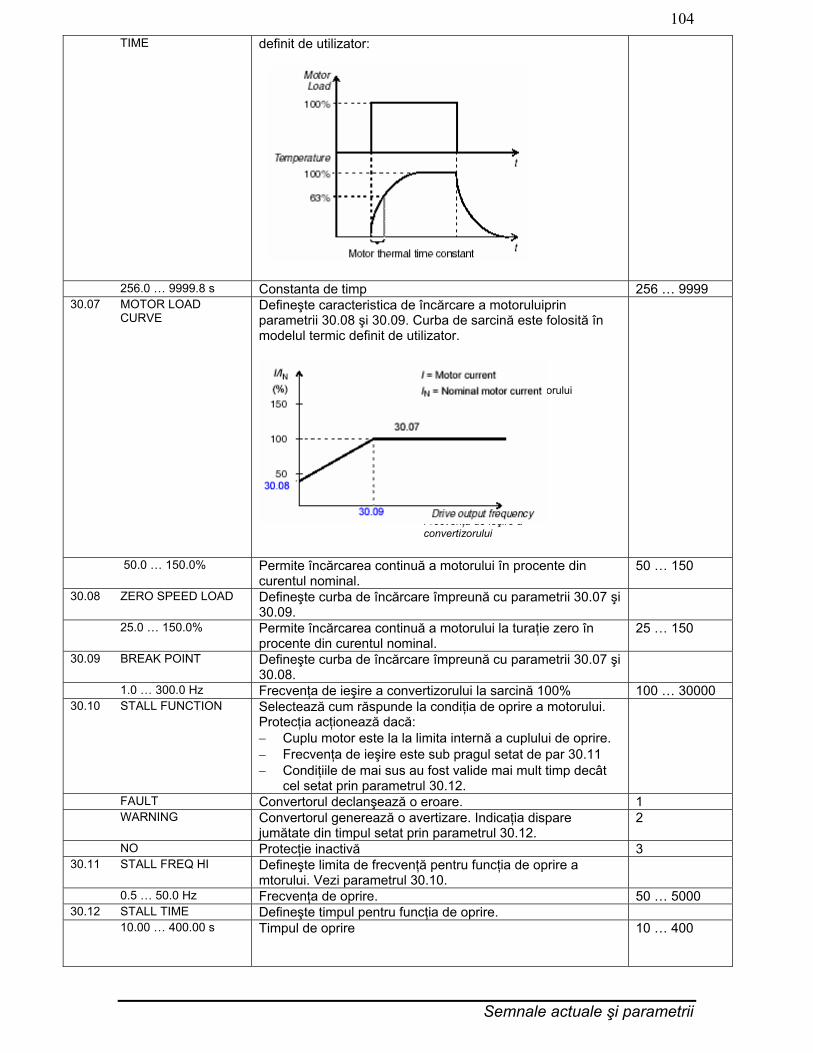
Semnale actuale şi parametrii
104 TIME definit de utilizator:
256.0 … 9999.8 s Constanta de timp 256 … 9999 30.07 MOTOR LOAD CURVE
Defineşte caracteristica de încărcare a motoruluiprin parametrii 30.08 şi 30.09. Curba de sarcină este folosită în modelul termic definit de utilizator.
50.0 … 150.0% Permite încărcarea continuă a motorului în procente din curentul nominal.
50 … 150
30.08 ZERO SPEED LOAD Defineşte curba de încărcare împreună cu parametrii 30.07 şi 30.09.
25.0 … 150.0% Permite încărcarea continuă a motorului la turaţie zero în procente din curentul nominal.
25 … 150
30.09 BREAK POINT Defineşte curba de încărcare împreună cu parametrii 30.07 şi 30.08.
1.0 … 300.0 Hz Frecvenţa de ieşire a convertizorului la sarcină 100% 100 … 30000 30.10 STALL FUNCTION Selectează cum răspunde la condiţia de oprire a motorului.
Protecţia acţionează dacă: − Cuplu motor este la la limita internă a cuplului de oprire. − Frecvenţa de ieşire este sub pragul setat de par 30.11 − Condiţiile de mai sus au fost valide mai mult timp decât
cel setat prin parametrul 30.12.
FAULT Convertorul declanşează o eroare. 1 WARNING Convertorul generează o avertizare. Indicaţia dispare
jumătate din timpul setat prin parametrul 30.12. 2
NO Protecţie inactivă 3 30.11 STALL FREQ HI Defineşte limita de frecvenţă pentru funcţia de oprire a
mtorului. Vezi parametrul 30.10.
0.5 … 50.0 Hz Frecvenţa de oprire. 50 … 5000 30.12 STALL TIME Defineşte timpul pentru funcţia de oprire. 10.00 … 400.00 s Timpul de oprire
10 … 400
I = Curentul motorului IN = curentul nominal al motorului
Frecvenţa de ieşire a convertizorului
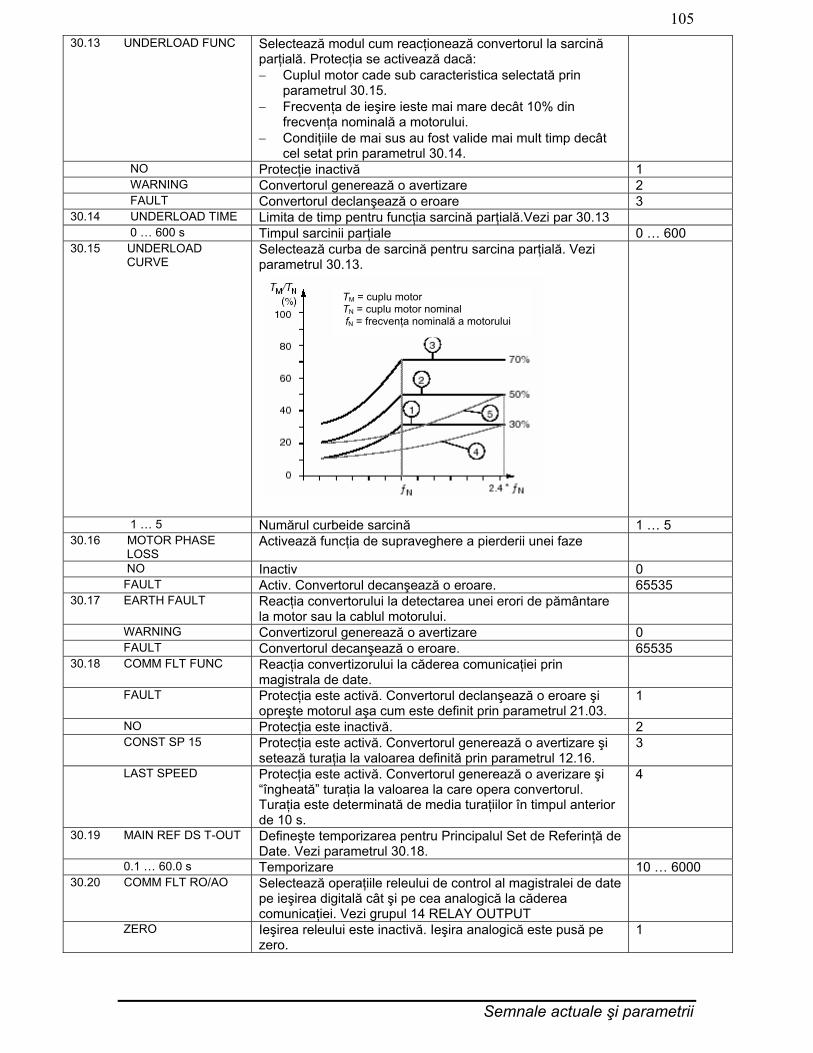
Semnale actuale şi parametrii
10530.13 UNDERLOAD FUNC Selectează modul cum reacţionează convertorul la sarcină
parţială. Protecţia se activează dacă: − Cuplul motor cade sub caracteristica selectată prin
parametrul 30.15. − Frecvenţa de ieşire ieste mai mare decât 10% din
frecvenţa nominală a motorului. − Condiţiile de mai sus au fost valide mai mult timp decât
cel setat prin parametrul 30.14.
NO Protecţie inactivă 1 WARNING Convertorul generează o avertizare 2 FAULT Convertorul declanşează o eroare 3 30.14 UNDERLOAD TIME Limita de timp pentru funcţia sarcină parţială.Vezi par 30.13 0 … 600 s Timpul sarcinii parţiale 0 … 600 30.15 UNDERLOAD CURVE
Selectează curba de sarcină pentru sarcina parţială. Vezi parametrul 30.13.
1 … 5 Numărul curbeide sarcină 1 … 5 30.16 MOTOR PHASE LOSS
Activează funcţia de supraveghere a pierderii unei faze
NO Inactiv 0 FAULT Activ. Convertorul decanşează o eroare. 65535 30.17 EARTH FAULT Reacţia convertorului la detectarea unei erori de pământare
la motor sau la cablul motorului.
WARNING Convertizorul generează o avertizare 0 FAULT Convertorul decanşează o eroare. 65535 30.18 COMM FLT FUNC Reacţia convertizorului la căderea comunicaţiei prin
magistrala de date.
FAULT Protecţia este activă. Convertorul declanşează o eroare şi opreşte motorul aşa cum este definit prin parametrul 21.03.
1
NO Protecţia este inactivă. 2 CONST SP 15 Protecţia este activă. Convertorul generează o avertizare şi
setează turaţia la valoarea definită prin parametrul 12.16. 3
LAST SPEED Protecţia este activă. Convertorul generează o averizare şi “îngheată” turaţia la valoarea la care opera convertorul. Turaţia este determinată de media turaţiilor în timpul anterior de 10 s.
4
30.19 MAIN REF DS T-OUT Defineşte temporizarea pentru Principalul Set de Referinţă de Date. Vezi parametrul 30.18.
0.1 … 60.0 s Temporizare 10 … 6000 30.20 COMM FLT RO/AO Selectează operaţiile releului de control al magistralei de date
pe ieşirea digitală cât şi pe cea analogică la căderea comunicaţiei. Vezi grupul 14 RELAY OUTPUT
ZERO Ieşirea releului este inactivă. Ieşira analogică este pusă pe zero.
1
TM = cuplu motor TN = cuplu motor nominal fN = frecvenţa nominală a motorului
Semnale actuale şi parametrii
106 LAST VALUE Ieşirea releului menţine ultima stare cunoscută înainte de
căderea comunicaţiei. Ieşirea analogică dă ultima stare ştiută înainte de pierderea comunicaţiei.
65535
30.21 AUX DS T-OUT Defineşte tempotizarea pentru Setul auxiliar de referinţă pentru supraveghere. Vezi parametrul 30.18. Convertorul activează automat supravegherea la 60 s după pornire dacă valoarea este diferită de 0. Notă: temporizarea se aplică şi pentru funcţia definită prin parametrul 30.20
0.0 … 60.0 s Temporizarea. 0.0 s = funcţia este inactivă. 0 …6000 30.22 IO CONFIG FUNC Răspunsul convertorului în cazul în care un canal de
ieşiresau intrare a fost eslectat ca şi interfaţă de semnal, dar comunicaţia cu un modul de extensie analogic/digital nu a fost făcută conform grupului e parametrii 98 OPŢION MODULES.
NO Inactiv 1 WARNING Activ. Convertorul generează o avertizare. 2 31 AUTOMATIC RESET Resetarea automată a erorii. Resetările automate sunt
posibile doar pentru anumite tipri de erori şi când este activată funcţia de reset pentru acel tip de eroare. Funcţia de reset automat nu este disponibilă dacă convertorul se află în modul de control local.
31.01 NUMBER OF TRIALS Defineşte numărul de resetări automate ale erorii pe care îl poate face convertizorul în timpul stabilit prin parametrul 31.02.
0 … 5 Numărul de reseturi automate. 0 31.02 TRIAL TIME Defineşte timpul pentru funcţia de reset a erorii. Vezi
parametrul 31.01
1.0 … 180.0 s Timpul permis de reset. 100 … 18000 31.03 DELAY TIME Defineşte cât timp va aştepta convertorul după apariţia unei
erori, înainte ca acesta să o reseteze automat.
0.0 … 3.0 s Temporizarea de reset. 0 … 300 31.04 OVERCURRENT Activează/dezactivează resetul automat la eroarea de
supracurent.
NO Inactiv 0 YES Activ 65535 31.05 OVERVOLTAGE Activează/dezactivează resetul automat la eroarea de
supratensiune
NO Inactiv 0 YES Activ 65535 31.06 UNDERVOLTAGE Activează/dezactivează resetul automat la eroarea de
tensiune minimă
NO Inactiv 0 YES Activ 65535 31.07 AI SIGNAL<MIN Activează/dezactivează resetul automat pentru eroarea AI
SIGNAL<MIN (semnalul analogic de intrare este sub nivelul minim admis)
NO Inactiv 0 YES Activ 65535 32 SUPERVISION Limite de supraveghere. Ieşirea unui releu poate fi folosită
pentru a indica când o valoare este peste/sub limită.
32.01 SPEED1 FUNCTION Activează/dezactivează funcţia de supraveghere a turaţiei şi selectează tipul limitei de supraveghere.
NO Supravegherea nu este folosită 1 LOW LIMIT Supravegherea “trezeşte” convertorul dacă valoarea este sub
limită. 2
1HIGH LIMIT Supravegherea “trezeşte” convertorul dacă valoarea este peste limită.
3
Semnale actuale şi parametrii
107 ABS LOW LIMIT Supravegherea “trezeşte” convertorul dacă valoarea este sub
limită. Limita este supravegheată în ambele sensuri de rotaţie. Figura de mai jos ilustrează principiu.
4
32.02 SPEED1 LIMIT Defineşte limita de supraveghere. Vezi parametrul 32.01. - 18000 ... 18000 rpm Valoarea limite -18000 …
18000 32.03 SPEED2 FUNCTION Vezi parametrul 32.01. NO Vezi parametrul 32.01. 1 LOW LIMIT Vezi parametrul 32.01. 2 HIGH LIMIT Vezi parametrul 32.01. 3 ABS LOW LIMIT Vezi parametrul 32.01. 4 32.04 SPEED2 LIMIT Vezi parametrul 32.01. - 18000 … 18000 rpm Vezi parametrul 32.01. -18000 …
18000 32.05 CURRENT FUNCTION
Activează/dezactivează funcţia de supraveghere a curentului din motor, şi selectează tipul limitei.
NO Vezi parametrul 32.01. 1 LOW LIMIT Vezi parametrul 32.01. 2 HIGH LIMIT Vezi parametrul 32.01. 3 32.06 CURRENT LIMIT Defineşte limita pentru supravegherea curentului din motor
(vezi parametrul 32.05)
0 … 1000 A Valoarea limitei 0 … 1000 32.07 TORQUE 1 FUNCTION
Activează/dezactivează funcţia de supraveghere a cuplului motor şi selectează tipul limitei.
NO Vezi parametrul 32.01. 1 LOW LIMIT Vezi parametrul 32.01. 2 HIGH LIMIT Vezi parametrul 32.01. 3 32.08 TORQUE 1 LIMIT Defineşte limita pentru supravegherea cuplului motor. Vezi
parametrul 32.07.
-600 … 600% Valoarea limitei în procente din cuplul nominal al motorului. -6000 … 6000 32.09 TORQUE 2 FUNCTION
Activează/dezactivează funcţia de supraveghere a cuplului motor şi selectează tipul limitei.
NO Vezi parametrul 32.01. 1 LOW LIMIT Vezi parametrul 32.01. 2 HIGH LIMIT Vezi parametrul 32.01. 3 32.10 TORQUE 2 LIMIT Defineşte limita pentru supravegherea cuplului motor. Vezi
parametrul 32.07.
-600 … 600% Valoarea limitei în procente din cuplul nominal al motorului. -6000 … 6000 32.11 REF1 FUNCTION Activează/dezactivează funcţia de referinţă externă REF1 şi
selectează tipul limitei.
NO Vezi parametrul 32.01. 1 LOW LIMIT Vezi parametrul 32.01. 2 HIGH LIMIT Vezi parametrul 32.01. 3 32.12 REF1 LIMIT Defineşte limita pentru REF1. 0 … 18000 rpm Valoarea limitei 0 … 18000 32.13 REF2 FUNCTION Activează/dezactivează funcţia de referinţă externă REF2 şi
selectează tipul limitei.
NO Vezi parametrul 32.01. 1 LOW LIMIT Vezi parametrul 32.01. 2 HIGH LIMIT Vezi parametrul 32.01. 3 32.14 REF2 LIMIT Defineşte limita pentru REF2. 0 … 600% Valoarea limitei 0 … 6000
Turaţii/rpm Limita min abs
-Limita min abs
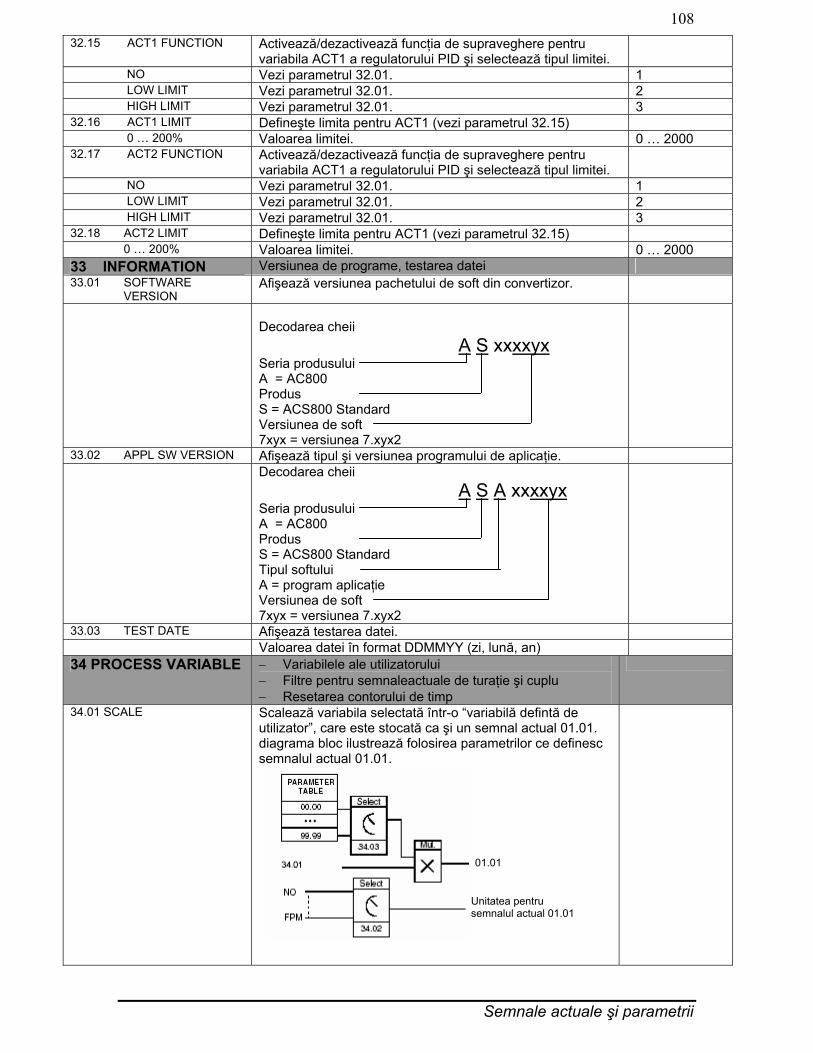
Semnale actuale şi parametrii
10832.15 ACT1 FUNCTION Activează/dezactivează funcţia de supraveghere pentru
variabila ACT1 a regulatorului PID şi selectează tipul limitei.
NO Vezi parametrul 32.01. 1 LOW LIMIT Vezi parametrul 32.01. 2 HIGH LIMIT Vezi parametrul 32.01. 3 32.16 ACT1 LIMIT Defineşte limita pentru ACT1 (vezi parametrul 32.15) 0 … 200% Valoarea limitei. 0 … 2000 32.17 ACT2 FUNCTION Activează/dezactivează funcţia de supraveghere pentru
variabila ACT1 a regulatorului PID şi selectează tipul limitei.
NO Vezi parametrul 32.01. 1 LOW LIMIT Vezi parametrul 32.01. 2 HIGH LIMIT Vezi parametrul 32.01. 3 32.18 ACT2 LIMIT Defineşte limita pentru ACT1 (vezi parametrul 32.15) 0 … 200% Valoarea limitei. 0 … 2000 33 INFORMATION Versiunea de programe, testarea datei 33.01 SOFTWARE VERSION
Afişează versiunea pachetului de soft din convertizor.
Decodarea cheii A S xxxxyx Seria produsului A = AC800 Produs S = ACS800 Standard Versiunea de soft 7xyx = versiunea 7.xyx2
33.02 APPL SW VERSION Afişează tipul şi versiunea programului de aplicaţie. Decodarea cheii
A S A xxxxyx Seria produsului A = AC800 Produs S = ACS800 Standard Tipul softului A = program aplicaţie Versiunea de soft 7xyx = versiunea 7.xyx2
33.03 TEST DATE Afişează testarea datei. Valoarea datei în format DDMMYY (zi, lună, an) 34 PROCESS VARIABLE − Variabilele ale utilizatorului
− Filtre pentru semnaleactuale de turaţie şi cuplu − Resetarea contorului de timp
34.01 SCALE
Scalează variabila selectată într-o “variabilă defintă de utilizator”, care este stocată ca şi un semnal actual 01.01. diagrama bloc ilustrează folosirea parametrilor ce definesc semnalul actual 01.01.
01.01
Unitatea pentru semnalul actual 01.01

Semnale actuale şi parametrii
1090.00 . 100000.00
Factor de scalare 0 … 100000
34.02 P VAR UNIT Selectează unitatea pentru variabila de proces.(34.01) NO Nici o unitate nu este selectată 1 Rpm Rotaţii pe minut 2 % Procente 3 m/s Metri/secundă 4 A Amper 5 V Volt 6 Hz Hertz 7 S Secundă 8 H Ora 9 Kh Kilooră 10 C Celsius 11 Lft Labels per foot 12 mA Miliamper 13 mV Milivolt 14 kW Kilowatt 15 W Watt 16 kWh Kilowatt ora 17 F Farenheit 18 Hp Cal putere 19 MWh Megawat ora 20 m3h Metricubi pe oră 21 l/s Litrii pe secundă 22 Bar Bar 23 kPa Kilopascal 24 GPM Galoane pe minut 25 PSI Punds pe inch patrat 26 CFM Cubic feet pe minut 27 Ft Foot (picior) 28 MGD Milioane de galoane pe zi 29 iHg Inches de mercur 30 FPM Feet pe minut 31 34.03 SELECT P VAR
Selectează variabila scalată într-o variabilă de proces dorită. Vezi parametrul 34.01
0 … 9999 Index parametric 0 … 9999 34.04 MOTOR SP FILT TIM
Defineşte constanta de timp pentru semnalul actual turaţie (01.02), valoarea turaţie folosită la supraveghere(param 32.01 şi 32.03) şi valoarea turaţiei citită de la o ieşire analogică.
0 … 20000 ms
Constanta de timp a filtrului
0 … 20000
34.05 TORQ ACT FILT TIM Defineşte constanta de timp pentru semnalul actual de cuplu (01.05), valoarea turaţie folosită la supraveghere(param 32.07 şi 32.09) şi valoarea turaţiei citită de la o ieşire analogică.
O = I · (1 – e-t/T) I = intrarea filtrului O = ieşire t = timp t = constanta de timp
Semnal nefitrat
Semnal fitrat

Semnale actuale şi parametrii
110 0 … 20000 ms
0 … 20000
34.06 RESET RUN TIME Resetează contorul motorului ( semnal actual 01.43). NO Neresetat 0 YES Resetat. Contorul pleacă de la zero. 65535 35 MOT TEMP MEAS Măsurarea temperaturii motorului. 35.01 MOT 1 TEMP AI1 SEL
Activează funcţia de măsurare a temperaturii (1) şi selectează tipul de senzor.
NOT IN USE Funcţia este inactivă. 1 1xPT100 Funcţia activă. Temperatura este măsurată cu un senzor Pt
100. 2
2XPT100
Funcţia activă. Temperatura este măsurată cu doi senzori Pt 100.
3
3XPT100
Funcţia activă. Temperatura este măsurată cu trei senzori Pt 100.
4
1..3 PTC
Funcţia activă. Temperatura este măsurată cu 1 … 3 senzori PTC
5
35.02 MOT 1 TEMP ALM L
Defineşte limita de alarmă pentru măsurarea temperaturii la motorul 1. când este depăşită temperatura indicele de alarmă este afişat.
-10 … 5000 ohm/°C (PTC/Pt100)
Limita în °C sau ohmi. Parametrul 35.01 este 1xPT100, 2xPT100, 3xPT100. ohm: parametrul 35.01 este 1 … 3PTC
-10 … 5000
35.03 MOT 1 TEMP FLT L
Defineşte limita de declanşare a erori pentru măsurarea temperaturii la motorul 1. Eroarea apare când limita este depăşită.
-10 … 5000 ohm/°C (PTC/Pt100)
Limita în °C sau ohmi. Parametrul 35.01 este 1xPT100, 2xPT100, 3xPT100. ohm: parametrul 35.01 este 1 … 3PTC
-10 … 5000
35.04 MOT 2 TEMP AI2 SEL
Activează funcţia de măsurare a temperaturii la motorul 2 şi selectează tipul de senzor. Două motoare pot fi protejate folosind doar un modul de extensie analog extern. Parametrul 98.12 trebuie să fie activat.
NOT IN USE Vezi 35.01 1 1xPT100 Vezi 35.01 2 2XPT100 Vezi 35.01 3 3XPT100 Vezi 35.01 4 1… 3 PTC Vezi 35.01 5 35.05 MOT 2 TEMP ALM L
Defineşte limita de alarmă pentru măsurarea temperaturii la motorul 2. Când este depăşită temperatura indicele de alarmă este afişat
-10 … 5000 ohm/°C Vezi 35.02 -10 … 5000
Semnal nefitrat
Semnal fitrat
O = I · (1 – e-t/T) I = intrarea filtrului O = ieşire t = timp t = constanta de timp
Temperatură Rezistenţă
Normal 0 …1,5 kohm excesiv ≥ 4 kohm
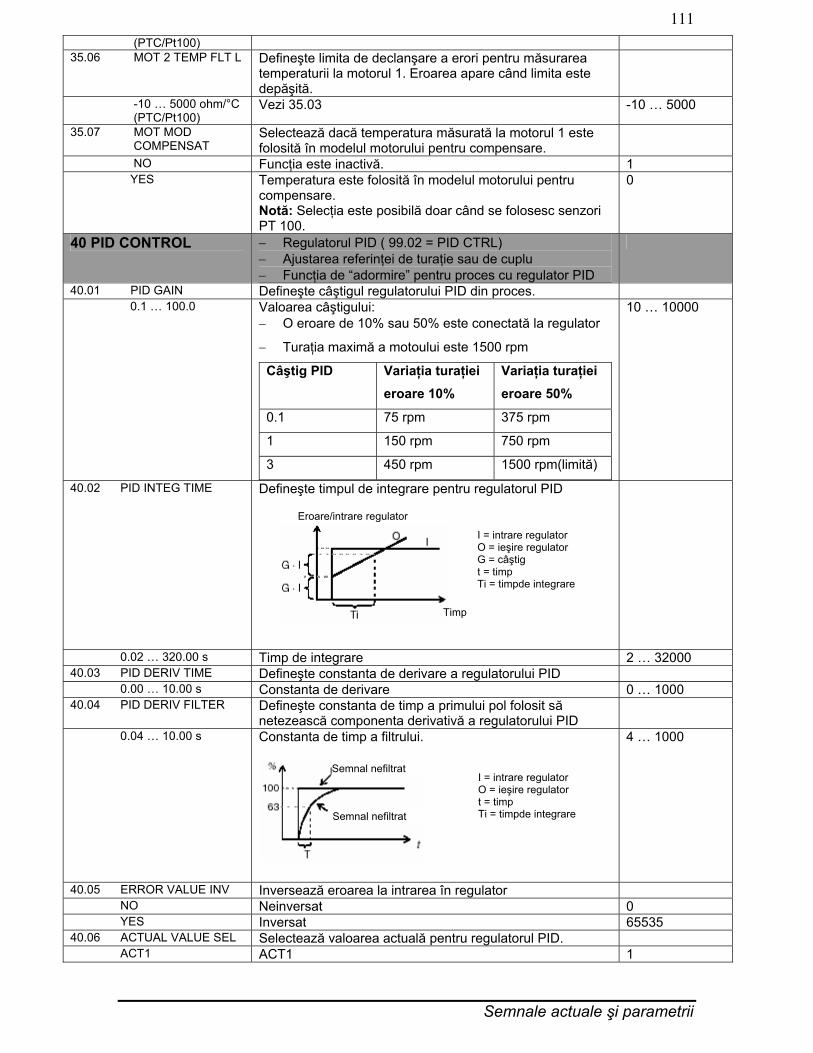
Semnale actuale şi parametrii
111 (PTC/Pt100) 35.06 MOT 2 TEMP FLT L
Defineşte limita de declanşare a erori pentru măsurarea temperaturii la motorul 1. Eroarea apare când limita este depăşită.
-10 … 5000 ohm/°C (PTC/Pt100)
Vezi 35.03 -10 … 5000
35.07 MOT MOD COMPENSAT
Selectează dacă temperatura măsurată la motorul 1 este folosită în modelul motorului pentru compensare.
NO Funcţia este inactivă. 1 YES
Temperatura este folosită în modelul motorului pentru compensare. Notă: Selecţia este posibilă doar când se folosesc senzori PT 100.
0
40 PID CONTROL − Regulatorul PID ( 99.02 = PID CTRL) − Ajustarea referinţei de turaţie sau de cuplu − Funcţia de “adormire” pentru proces cu regulator PID
40.01 PID GAIN Defineşte câştigul regulatorului PID din proces. 0.1 … 100.0 Valoarea câştigului:
− O eroare de 10% sau 50% este conectată la regulator
− Turaţia maximă a motoului este 1500 rpm
Câştig PID Variaţia turaţiei eroare 10%
Variaţia turaţiei eroare 50%
0.1 75 rpm 375 rpm
1 150 rpm 750 rpm
3 450 rpm 1500 rpm(limită)
10 … 10000
40.02 PID INTEG TIME Defineşte timpul de integrare pentru regulatorul PID
0.02 … 320.00 s Timp de integrare 2 … 32000 40.03 PID DERIV TIME Defineşte constanta de derivare a regulatorului PID 0.00 … 10.00 s Constanta de derivare 0 … 1000 40.04 PID DERIV FILTER Defineşte constanta de timp a primului pol folosit să
netezească componenta derivativă a regulatorului PID
0.04 … 10.00 s Constanta de timp a filtrului.
4 … 1000
40.05 ERROR VALUE INV Inversează eroarea la intrarea în regulator NO Neinversat 0 YES Inversat 65535 40.06 ACTUAL VALUE SEL Selectează valoarea actuală pentru regulatorul PID. ACT1 ACT1 1
Eroare/intrare regulator
Timp
I = intrare regulator O = ieşire regulator G = câştig t = timp Ti = timpde integrare
I = intrare regulator O = ieşire regulator t = timp Ti = timpde integrare
Semnal nefiltrat
Semnal nefiltrat
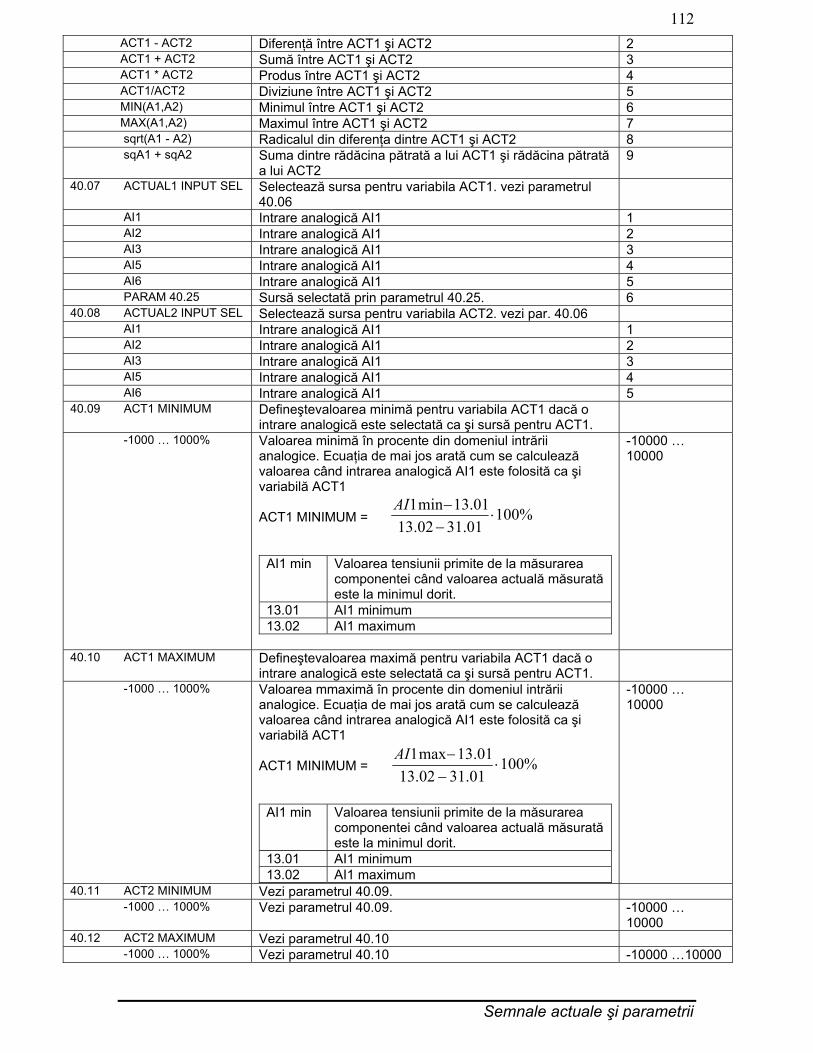
Semnale actuale şi parametrii
112 ACT1 - ACT2 Diferenţă între ACT1 şi ACT2 2 ACT1 + ACT2 Sumă între ACT1 şi ACT2 3 ACT1 * ACT2 Produs între ACT1 şi ACT2 4 ACT1/ACT2 Diviziune între ACT1 şi ACT2 5 MIN(A1,A2) Minimul între ACT1 şi ACT2 6 MAX(A1,A2) Maximul între ACT1 şi ACT2 7 sqrt(A1 - A2) Radicalul din diferenţa dintre ACT1 şi ACT2 8 sqA1 + sqA2 Suma dintre rădăcina pătrată a lui ACT1 şi rădăcina pătrată
a lui ACT2 9
40.07 ACTUAL1 INPUT SEL Selectează sursa pentru variabila ACT1. vezi parametrul 40.06
AI1 Intrare analogică AI1 1 AI2 Intrare analogică AI1 2 AI3 Intrare analogică AI1 3 AI5 Intrare analogică AI1 4 AI6 Intrare analogică AI1 5 PARAM 40.25 Sursă selectată prin parametrul 40.25. 6 40.08 ACTUAL2 INPUT SEL Selectează sursa pentru variabila ACT2. vezi par. 40.06 AI1 Intrare analogică AI1 1 AI2 Intrare analogică AI1 2 AI3 Intrare analogică AI1 3 AI5 Intrare analogică AI1 4 AI6 Intrare analogică AI1 5 40.09 ACT1 MINIMUM Defineştevaloarea minimă pentru variabila ACT1 dacă o
intrare analogică este selectată ca şi sursă pentru ACT1.
-1000 … 1000% Valoarea minimă în procente din domeniul intrării analogice. Ecuaţia de mai jos arată cum se calculează valoarea când intrarea analogică AI1 este folosită ca şi variabilă ACT1 ACT1 MINIMUM =
AI1 min Valoarea tensiunii primite de la măsurarea componentei când valoarea actuală măsurată este la minimul dorit.
13.01 AI1 minimum 13.02 AI1 maximum
-10000 … 10000
40.10 ACT1 MAXIMUM Defineştevaloarea maximă pentru variabila ACT1 dacă o intrare analogică este selectată ca şi sursă pentru ACT1.
-1000 … 1000% Valoarea mmaximă în procente din domeniul intrării analogice. Ecuaţia de mai jos arată cum se calculează valoarea când intrarea analogică AI1 este folosită ca şi variabilă ACT1 ACT1 MINIMUM =
AI1 min Valoarea tensiunii primite de la măsurarea componentei când valoarea actuală măsurată este la minimul dorit.
13.01 AI1 minimum 13.02 AI1 maximum
-10000 … 10000
40.11 ACT2 MINIMUM Vezi parametrul 40.09. -1000 … 1000% Vezi parametrul 40.09. -10000 …
10000 40.12 ACT2 MAXIMUM Vezi parametrul 40.10 -1000 … 1000% Vezi parametrul 40.10 -10000 …10000
%10001.3102.1301.13min1
⋅−−AI
%10001.3102.1301.13max1
⋅−−AI
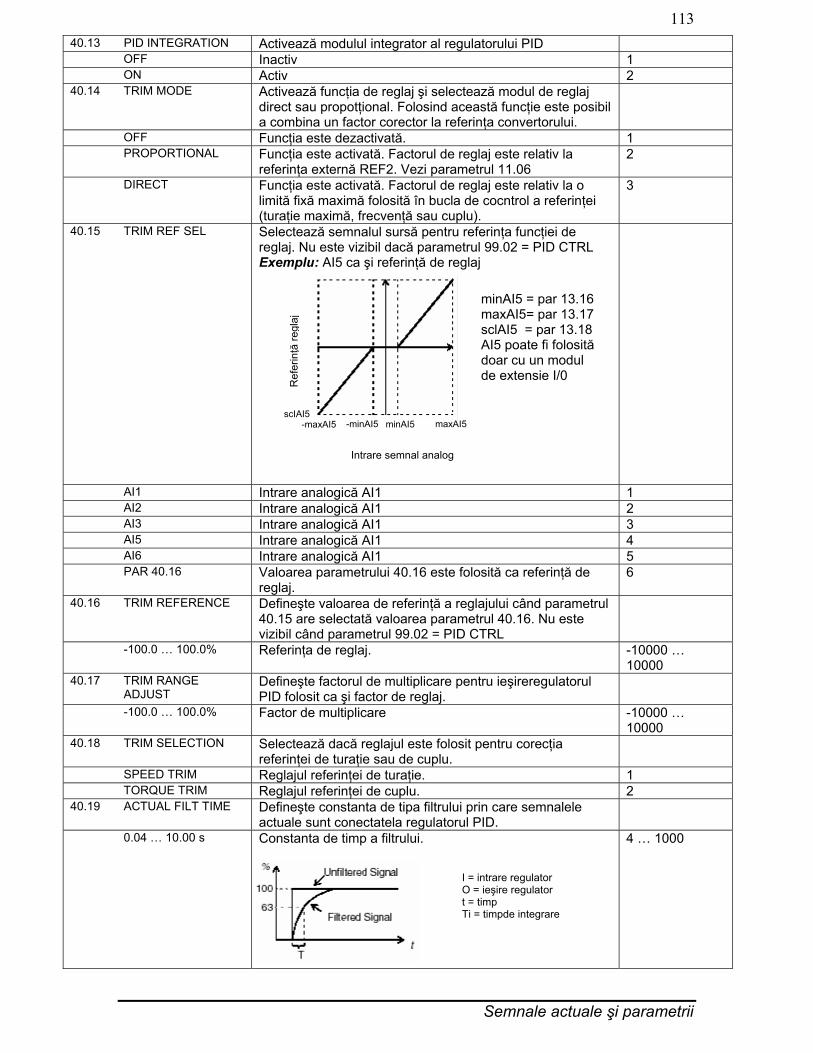
Semnale actuale şi parametrii
11340.13 PID INTEGRATION Activează modulul integrator al regulatorului PID OFF Inactiv 1 ON Activ 2 40.14 TRIM MODE Activează funcţia de reglaj şi selectează modul de reglaj
direct sau propotţional. Folosind această funcţie este posibil a combina un factor corector la referinţa convertorului.
OFF Funcţia este dezactivată. 1 PROPORTIONAL Funcţia este activată. Factorul de reglaj este relativ la
referinţa externă REF2. Vezi parametrul 11.06 2
DIRECT Funcţia este activată. Factorul de reglaj este relativ la o limită fixă maximă folosită în bucla de cocntrol a referinţei (turaţie maximă, frecvenţă sau cuplu).
3
40.15 TRIM REF SEL Selectează semnalul sursă pentru referinţa funcţiei de reglaj. Nu este vizibil dacă parametrul 99.02 = PID CTRL Exemplu: AI5 ca şi referinţă de reglaj
AI1 Intrare analogică AI1 1 AI2 Intrare analogică AI1 2 AI3 Intrare analogică AI1 3 AI5 Intrare analogică AI1 4 AI6 Intrare analogică AI1 5 PAR 40.16 Valoarea parametrului 40.16 este folosită ca referinţă de
reglaj. 6
40.16 TRIM REFERENCE Defineşte valoarea de referinţă a reglajului când parametrul 40.15 are selectată valoarea parametrul 40.16. Nu este vizibil când parametrul 99.02 = PID CTRL
-100.0 … 100.0% Referinţa de reglaj. -10000 … 10000
40.17 TRIM RANGE ADJUST
Defineşte factorul de multiplicare pentru ieşireregulatorul PID folosit ca şi factor de reglaj.
-100.0 … 100.0% Factor de multiplicare -10000 … 10000
40.18 TRIM SELECTION Selectează dacă reglajul este folosit pentru corecţia referinţei de turaţie sau de cuplu.
SPEED TRIM Reglajul referinţei de turaţie. 1 TORQUE TRIM Reglajul referinţei de cuplu. 2 40.19 ACTUAL FILT TIME Defineşte constanta de tipa filtrului prin care semnalele
actuale sunt conectatela regulatorul PID.
0.04 … 10.00 s Constanta de timp a filtrului.
4 … 1000
Ref
erinţă
regl
aj
Intrare semnal analog
scIAI5 -maxAI5 -minAI5 minAI5 maxAI5
minAI5 = par 13.16 maxAI5= par 13.17 sclAI5 = par 13.18 AI5 poate fi folosită doar cu un modul de extensie I/0
I = intrare regulator O = ieşire regulator t = timp Ti = timpde integrare
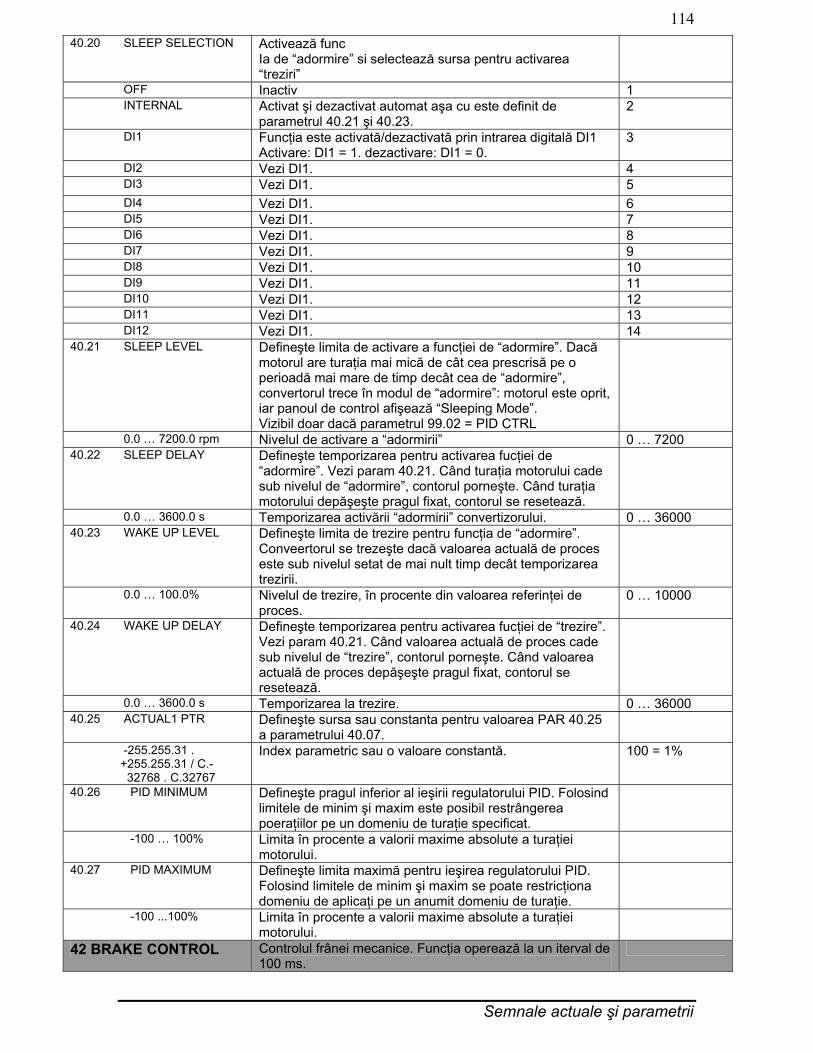
Semnale actuale şi parametrii
11440.20 SLEEP SELECTION Activează func
Ia de “adormire” si selectează sursa pentru activarea “treziri”
OFF Inactiv 1 INTERNAL Activat şi dezactivat automat aşa cu este definit de
parametrul 40.21 şi 40.23. 2
DI1 Funcţia este activată/dezactivată prin intrarea digitală DI1 Activare: DI1 = 1. dezactivare: DI1 = 0.
3
DI2 Vezi DI1. 4 DI3 Vezi DI1. 5 DI4 Vezi DI1. 6 DI5 Vezi DI1. 7 DI6 Vezi DI1. 8 DI7 Vezi DI1. 9 DI8 Vezi DI1. 10 DI9 Vezi DI1. 11 DI10 Vezi DI1. 12 DI11 Vezi DI1. 13 DI12 Vezi DI1. 14 40.21 SLEEP LEVEL Defineşte limita de activare a funcţiei de “adormire”. Dacă
motorul are turaţia mai mică de cât cea prescrisă pe o perioadă mai mare de timp decât cea de “adormire”, convertorul trece în modul de “adormire”: motorul este oprit, iar panoul de control afişează “Sleeping Mode”. Vizibil doar dacă parametrul 99.02 = PID CTRL
0.0 … 7200.0 rpm Nivelul de activare a “adormirii” 0 … 7200 40.22 SLEEP DELAY Defineşte temporizarea pentru activarea fucţiei de
“adormire”. Vezi param 40.21. Când turaţia motorului cade sub nivelul de “adormire”, contorul porneşte. Când turaţia motorului depăşeşte pragul fixat, contorul se resetează.
0.0 … 3600.0 s Temporizarea activării “adormirii” convertizorului. 0 … 36000 40.23 WAKE UP LEVEL Defineşte limita de trezire pentru funcţia de “adormire”.
Conveertorul se trezeşte dacă valoarea actuală de proces este sub nivelul setat de mai nult timp decât temporizarea trezirii.
0.0 … 100.0% Nivelul de trezire, în procente din valoarea referinţei de proces.
0 … 10000
40.24 WAKE UP DELAY Defineşte temporizarea pentru activarea fucţiei de “trezire”. Vezi param 40.21. Când valoarea actuală de proces cade sub nivelul de “trezire”, contorul porneşte. Când valoarea actuală de proces depăşeşte pragul fixat, contorul se resetează.
0.0 … 3600.0 s Temporizarea la trezire. 0 … 36000 40.25 ACTUAL1 PTR Defineşte sursa sau constanta pentru valoarea PAR 40.25
a parametrului 40.07.
-255.255.31 . +255.255.31 / C.- 32768 . C.32767
Index parametric sau o valoare constantă. 100 = 1%
40.26 PID MINIMUM Defineşte pragul inferior al ieşirii regulatorului PID. Folosind limitele de minim şi maxim este posibil restrângerea poeraţiilor pe un domeniu de turaţie specificat.
-100 … 100% Limita în procente a valorii maxime absolute a turaţiei motorului.
40.27 PID MAXIMUM Defineşte limita maximă pentru ieşirea regulatorului PID. Folosind limitele de minim şi maxim se poate restricţiona domeniu de aplicaţi pe un anumit domeniu de turaţie.
-100 ...100% Limita în procente a valorii maxime absolute a turaţiei motorului.
42 BRAKE CONTROL Controlul frânei mecanice. Funcţia operează la un iterval de 100 ms.
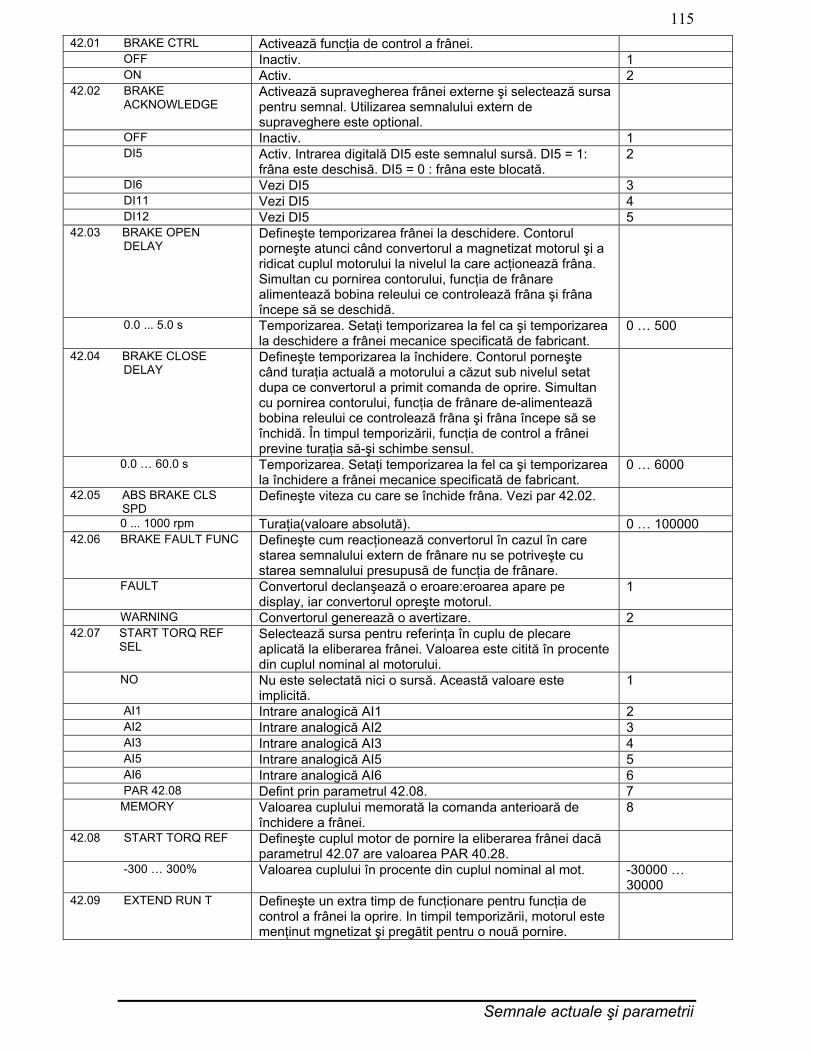
Semnale actuale şi parametrii
11542.01 BRAKE CTRL Activează funcţia de control a frânei. OFF Inactiv. 1 ON Activ. 2 42.02 BRAKE ACKNOWLEDGE
Activează supravegherea frânei externe şi selectează sursa pentru semnal. Utilizarea semnalului extern de supraveghere este optional.
OFF Inactiv. 1 DI5
Activ. Intrarea digitală DI5 este semnalul sursă. DI5 = 1: frâna este deschisă. DI5 = 0 : frâna este blocată.
2
DI6 Vezi DI5 3 DI11 Vezi DI5 4 DI12 Vezi DI5 5 42.03 BRAKE OPEN DELAY
Defineşte temporizarea frânei la deschidere. Contorul porneşte atunci când convertorul a magnetizat motorul şi a ridicat cuplul motorului la nivelul la care acţionează frâna. Simultan cu pornirea contorului, funcţia de frânare alimentează bobina releului ce controlează frâna şi frâna începe să se deschidă.
0.0 ... 5.0 s Temporizarea. Setaţi temporizarea la fel ca şi temporizarea la deschidere a frânei mecanice specificată de fabricant.
0 … 500
42.04 BRAKE CLOSE DELAY
Defineşte temporizarea la închidere. Contorul porneşte când turaţia actuală a motorului a căzut sub nivelul setat dupa ce convertorul a primit comanda de oprire. Simultan cu pornirea contorului, funcţia de frânare de-alimentează bobina releului ce controlează frâna şi frâna începe să se închidă. În timpul temporizării, funcţia de control a frânei previne turaţia să-şi schimbe sensul.
0.0 … 60.0 s Temporizarea. Setaţi temporizarea la fel ca şi temporizarea la închidere a frânei mecanice specificată de fabricant.
0 … 6000
42.05 ABS BRAKE CLS SPD
Defineşte viteza cu care se închide frâna. Vezi par 42.02.
0 ... 1000 rpm Turaţia(valoare absolută). 0 … 100000 42.06 BRAKE FAULT FUNC
Defineşte cum reacţionează convertorul în cazul în care starea semnalului extern de frânare nu se potriveşte cu starea semnalului presupusă de funcţia de frânare.
FAULT
Convertorul declanşează o eroare:eroarea apare pe display, iar convertorul opreşte motorul.
1
WARNING Convertorul generează o avertizare. 2 42.07 START TORQ REF
SEL
Selectează sursa pentru referinţa în cuplu de plecare aplicată la eliberarea frânei. Valoarea este citită în procente din cuplul nominal al motorului.
NO Nu este selectată nici o sursă. Această valoare este implicită.
1
AI1 Intrare analogică AI1 2 AI2 Intrare analogică AI2 3 AI3 Intrare analogică AI3 4 AI5 Intrare analogică AI5 5 AI6 Intrare analogică AI6 6 PAR 42.08 Defint prin parametrul 42.08. 7 MEMORY Valoarea cuplului memorată la comanda anterioară de
închidere a frânei. 8
42.08 START TORQ REF Defineşte cuplul motor de pornire la eliberarea frânei dacă parametrul 42.07 are valoarea PAR 40.28.
-300 … 300% Valoarea cuplului în procente din cuplul nominal al mot. -30000 … 30000
42.09 EXTEND RUN T Defineşte un extra timp de funcţionare pentru funcţia de control a frânei la oprire. In timpil temporizării, motorul este menţinut mgnetizat şi pregătit pentru o nouă pornire.

Semnale actuale şi parametrii
116 0.0 … 60.0 s 0.0 s = rutina normală de oprire a funcţiei de control a
frânei: magnetizarea motorului este oprită după ce temporizarea la închidere a frânei a trecut. 0.1 … 60.0 s = rutina extinsă de oprire a funcţiei de control a frânei: magnetizarea motorului este oprită după ce temporizarea la închidere a frânei şi timpul de funcţionare prelungită a trecut. În timpul acesta prelungit, este aplicată o referinţă de cuplu nul, iar motorul este pregătit pentru un nou restart.
42.10 LOW REF BRK HOLD Activează funcţia de reţinere a frânei şi defineşte perioada de temporizare pentru ea. Funcţia stabileşte operaţiile controlului frânei când motorul operează aproape de zero şi nu există reacţie de turaţie disponibilă.
0.0 … 60.0 s 0.0 s = Inactiv 0.1 … 60.0 s = activ. Când valoarea absolută a referinţei de
turaţie a motorului cade sub turaţia de inchidere a frânei:
− contorul de temporizare a menţinerii frânei porneşte − frâna este închisă conform rutinei normale de oprire a
funcţiei de control a frînei. În timpul temporizării, funcţia menţine frâna închisăîn ciuda valorii de referinţă şi a comenzii de pornire. După ce atrecut temporizarea, operaţiile normale reîncep.
50 ENCODER MODULE Conexiunea encodreului. Vizibilă doar când un encoder este instalatşi activatde către parametrul 98.01 Setările rămân aceleaşi chiar dacă seschimbă macroul.
50.01 PULSE NR Stabileşte numărul de pulsuri pe revoluţie. 0 … 29999 ppr Numărul pulsului în pulsuri pe rotaţie.(ppr) 0 … 29999 50.02 SPEED MEAS MODE Defineşte cum sunt calculate pulsurile A -_ B DIR Canal A: limite pozitive calculate pentru turaţie. Canal B:
direcţie 1
A_-_ Canal A: limite pozitive şi negative calculate pentru turaţie. Canal B: nu este folosit.
2
A _-_ B DIR Canal A: limite pozitive şi negative calculate pentru turaţie. Canal B: direcţia.
3
A _-_ B_-_ Toate limitele semnalelor sunt calculate. 4 50.03 ENCODER FAULT Defineşte operaţiile convertorului dacă o întrerupere în
funcţionare este detectată în comunicaţia dintre encoder şi placa encoderului, sau dintremodul şi convertor. Funcţia de supraveghere a encoderului se activează dacăuna din condiţiile de mai jos sunt valide: − există o diferenţăde 20 % între turaţia estimată şi cea
măsurată cu encoderul. − Nu se primesc de la encoder nici un puls în timpul
definit prin param 50.04 şi cuplu motorului este la valoarea maximă admisă.
WARNING Convertorul generează o avertizare. 1
Motor magnetizat
1 = viteza de închidere a frânei 2 = tempoizareaînchiderii frânei 3 = timpulprelungit de funcţionare
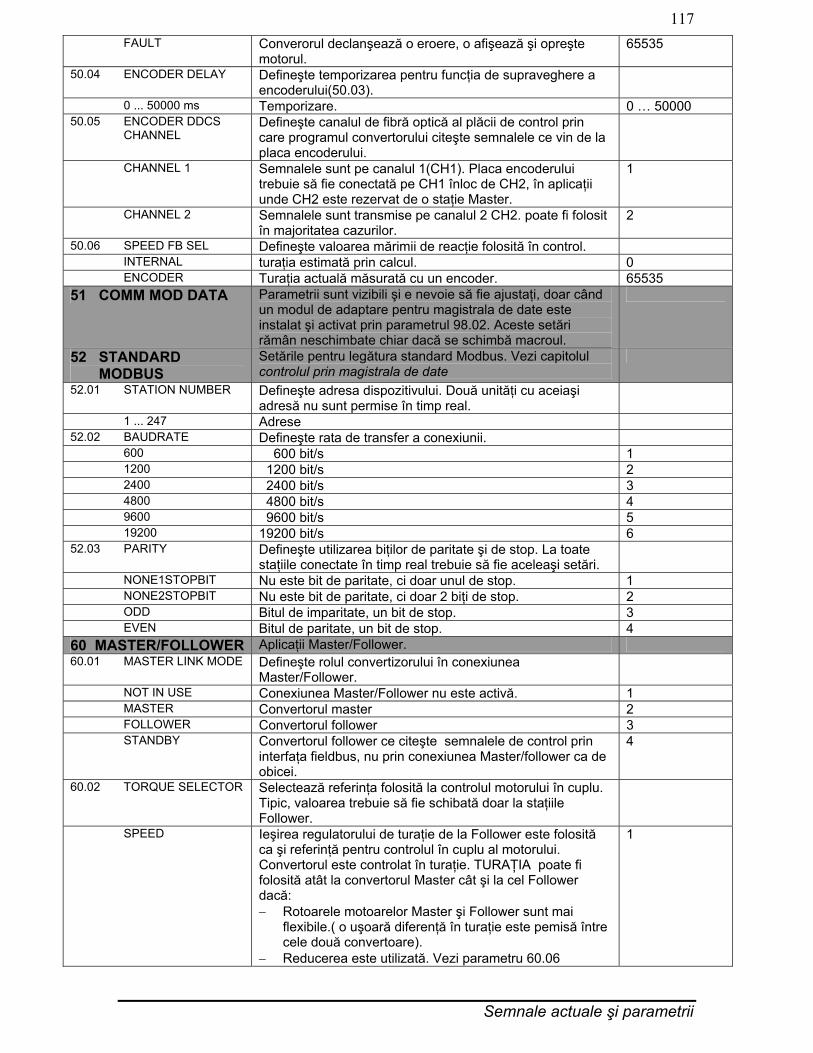
Semnale actuale şi parametrii
117 FAULT Converorul declanşează o eroere, o afişează şi opreşte
motorul. 65535
50.04 ENCODER DELAY Defineşte temporizarea pentru funcţia de supraveghere a encoderului(50.03).
0 ... 50000 ms Temporizare. 0 … 50000 50.05 ENCODER DDCS CHANNEL
Defineşte canalul de fibră optică al plăcii de control prin care programul convertorului citeşte semnalele ce vin de la placa encoderului.
CHANNEL 1 Semnalele sunt pe canalul 1(CH1). Placa encoderului trebuie să fie conectată pe CH1 înloc de CH2, în aplicaţii unde CH2 este rezervat de o staţie Master.
1
CHANNEL 2 Semnalele sunt transmise pe canalul 2 CH2. poate fi folosit în majoritatea cazurilor.
2
50.06 SPEED FB SEL Defineşte valoarea mărimii de reacţie folosită în control. INTERNAL turaţia estimată prin calcul. 0 ENCODER Turaţia actuală măsurată cu un encoder. 65535 51 COMM MOD DATA Parametrii sunt vizibili şi e nevoie să fie ajustaţi, doar când
un modul de adaptare pentru magistrala de date este instalat şi activat prin parametrul 98.02. Aceste setări rămân neschimbate chiar dacă se schimbă macroul.
52 STANDARD MODBUS
Setările pentru legătura standard Modbus. Vezi capitolul controlul prin magistrala de date
52.01 STATION NUMBER Defineşte adresa dispozitivului. Două unităţi cu aceiaşi adresă nu sunt permise în timp real.
1 ... 247 Adrese 52.02 BAUDRATE Defineşte rata de transfer a conexiunii. 600 600 bit/s 1 1200 1200 bit/s 2 2400 2400 bit/s 3 4800 4800 bit/s 4 9600 9600 bit/s 5 19200 19200 bit/s 6 52.03 PARITY Defineşte utilizarea biţilor de paritate şi de stop. La toate
staţiile conectate în timp real trebuie să fie aceleaşi setări.
NONE1STOPBIT Nu este bit de paritate, ci doar unul de stop. 1 NONE2STOPBIT Nu este bit de paritate, ci doar 2 biţi de stop. 2 ODD Bitul de imparitate, un bit de stop. 3 EVEN Bitul de paritate, un bit de stop. 4 60 MASTER/FOLLOWER Aplicaţii Master/Follower. 60.01 MASTER LINK MODE Defineşte rolul convertizorului în conexiunea
Master/Follower.
NOT IN USE Conexiunea Master/Follower nu este activă. 1 MASTER Convertorul master 2 FOLLOWER Convertorul follower 3 STANDBY Convertorul follower ce citeşte semnalele de control prin
interfaţa fieldbus, nu prin conexiunea Master/follower ca de obicei.
4
60.02 TORQUE SELECTOR Selectează referinţa folosită la controlul motorului în cuplu. Tipic, valoarea trebuie să fie schibată doar la staţiile Follower.
SPEED Ieşirea regulatorului de turaţie de la Follower este folosită ca şi referinţă pentru controlul în cuplu al motorului. Convertorul este controlat în turaţie. TURAŢIA poate fi folosită atât la convertorul Master cât şi la cel Follower dacă: − Rotoarele motoarelor Master şi Follower sunt mai
flexibile.( o uşoară diferenţă în turaţie este pemisă între cele două convertoare).
− Reducerea este utilizată. Vezi parametru 60.06
1
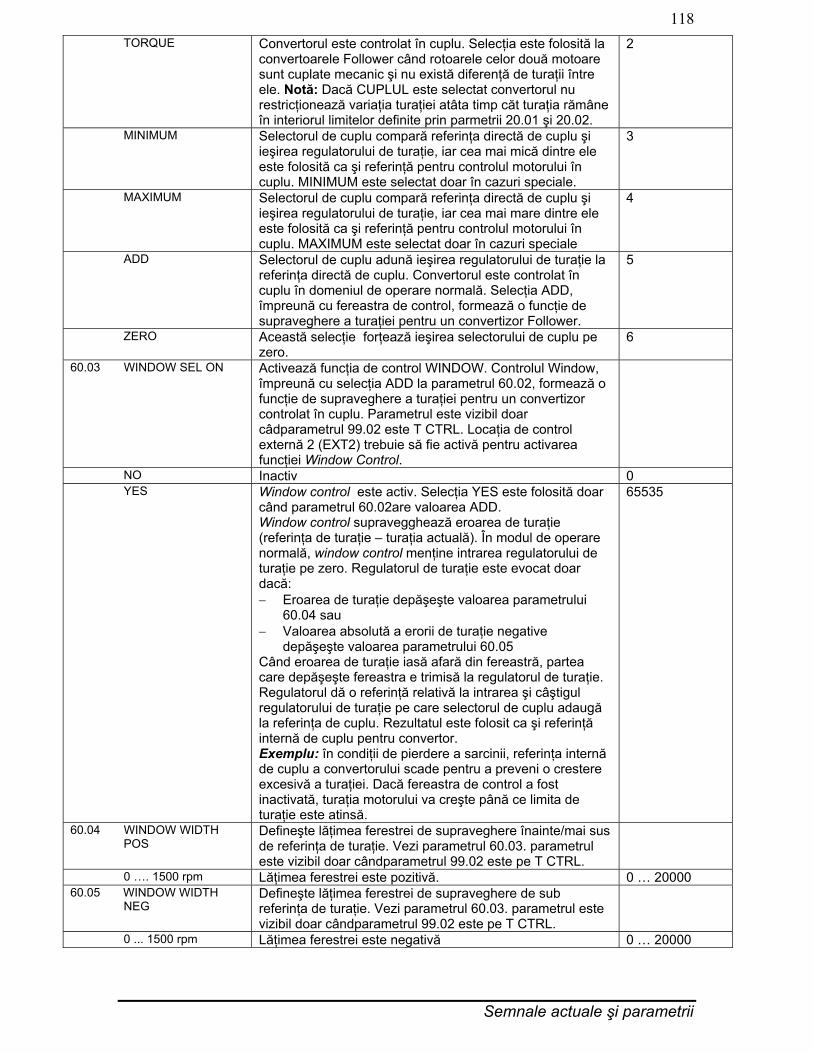
Semnale actuale şi parametrii
118 TORQUE Convertorul este controlat în cuplu. Selecţia este folosită la
convertoarele Follower când rotoarele celor două motoare sunt cuplate mecanic şi nu există diferenţă de turaţii între ele. Notă: Dacă CUPLUL este selectat convertorul nu restricţionează variaţia turaţiei atâta timp căt turaţia rămâne în interiorul limitelor definite prin parmetrii 20.01 şi 20.02.
2
MINIMUM Selectorul de cuplu compară referinţa directă de cuplu şi ieşirea regulatorului de turaţie, iar cea mai mică dintre ele este folosită ca şi referinţă pentru controlul motorului în cuplu. MINIMUM este selectat doar în cazuri speciale.
3
MAXIMUM Selectorul de cuplu compară referinţa directă de cuplu şi ieşirea regulatorului de turaţie, iar cea mai mare dintre ele este folosită ca şi referinţă pentru controlul motorului în cuplu. MAXIMUM este selectat doar în cazuri speciale
4
ADD Selectorul de cuplu adună ieşirea regulatorului de turaţie la referinţa directă de cuplu. Convertorul este controlat în cuplu în domeniul de operare normală. Selecţia ADD, împreună cu fereastra de control, formează o funcţie de supraveghere a turaţiei pentru un convertizor Follower.
5
ZERO Această selecţie forţează ieşirea selectorului de cuplu pe zero.
6
60.03 WINDOW SEL ON Activează funcţia de control WINDOW. Controlul Window, împreună cu selecţia ADD la parametrul 60.02, formează o funcţie de supraveghere a turaţiei pentru un convertizor controlat în cuplu. Parametrul este vizibil doar câdparametrul 99.02 este T CTRL. Locaţia de control externă 2 (EXT2) trebuie să fie activă pentru activarea funcţiei Window Control.
NO Inactiv 0 YES Window control este activ. Selecţia YES este folosită doar
când parametrul 60.02are valoarea ADD. Window control supravegghează eroarea de turaţie (referinţa de turaţie – turaţia actuală). În modul de operare normală, window control menţine intrarea regulatorului de turaţie pe zero. Regulatorul de turaţie este evocat doar dacă: − Eroarea de turaţie depăşeşte valoarea parametrului
60.04 sau − Valoarea absolută a erorii de turaţie negative
depăşeşte valoarea parametrului 60.05 Când eroarea de turaţie iasă afară din fereastră, partea care depăşeşte fereastra e trimisă la regulatorul de turaţie. Regulatorul dă o referinţă relativă la intrarea şi câştigul regulatorului de turaţie pe care selectorul de cuplu adaugă la referinţa de cuplu. Rezultatul este folosit ca şi referinţă internă de cuplu pentru convertor. Exemplu: în condiţii de pierdere a sarcinii, referinţa internă de cuplu a convertorului scade pentru a preveni o crestere excesivă a turaţiei. Dacă fereastra de control a fost inactivată, turaţia motorului va creşte până ce limita de turaţie este atinsă.
65535
60.04 WINDOW WIDTH POS
Defineşte lăţimea ferestrei de supraveghere înainte/mai sus de referinţa de turaţie. Vezi parametrul 60.03. parametrul este vizibil doar cândparametrul 99.02 este pe T CTRL.
0 …. 1500 rpm Lăţimea ferestrei este pozitivă. 0 … 20000 60.05 WINDOW WIDTH NEG
Defineşte lăţimea ferestrei de supraveghere de sub referinţa de turaţie. Vezi parametrul 60.03. parametrul este vizibil doar cândparametrul 99.02 este pe T CTRL.
0 ... 1500 rpm Lăţimea ferestrei este negativă 0 … 20000

Semnale actuale şi parametrii
11960.06 DROOP RATE Defineşte abaterea proporţională a regulatorului. Valoarea
parametrului trebuie schimbată doar dacă convertoarele Master/follower sunt controlate în turaţie. − Locaţia externă de control 1 (EXT1) este selectată (vezi
parametrul 11.02 sau − Locaţia externă de control 2 (EXT2) este selectată (vezi
parametrul 11.02) şi parametrul 60.02 este setat pe SPEED.
Abaterea proporţională a regulatorului trebuie să fie setată la ambele convertoare atât Master cât şi Follower. Abaterea optimă trebuie găsită prin încercări repetate în practică. Abaterea previne un conflict între convertorul Master şi Follower permiţînd o diferenţă uşoară de turaţie între ele. Abaterea regulatorului scade uşor turaţia convertorului pe măsură ce creşte sarcina. Turaţia actuală scade până la un punct de funcţionare sigur depinzînd de rata abaterii regulatorului şi de încărcarea convertizorului ( = referinţă de cuplu / ieşirea regulatorului de turaţie). La 100% ieşirea controlerului de turaţie, abaterea este la valoarea ei nominală, egalăcu valoarea parametrului DROOP RATE. Efectul de abatere scade liniar spre zero odată cu micşorarea sarcinii.
0 … 100% Abaterea în procente din turaţia nominală a motorului. 0 … 1000 60.07 MASTER SIGNAL 2 Selecteză semnalul care este trimis de convertorul Master
către cel Follower ca şi Referenc 1 ( referinţă de turaţie)
0000 ... 9999 Index parametric 0000 ... 9999 60.08 MASTER SIGNAL 3 Selecteză semnalul care este trimis de convertorul Master
către cel Follower ca şi Referenc 1 ( referinţă de turaţie)
0000 ... 9999 Index parametric 0000 ... 9999 70 DDCS CONTROL Setări pentru canalele 1, 2 şi 3, pe fibră optică. 70.01 CHANNEL 0 ADDR Defineşte adresa nodului pentru canalul 0. Două canale
active nu pot avea aceiaşi adresă. Setările rebuiesc schimbate când o staţie master este conectată la canalul 0 şi nu schimbă automat adresa staţiei slave.
1 ... 125 Adresa. 1 … 125 70.02 CHANNEL 3 ADDR Adresa nodului pentru canalul 3. Două canale active nu pot
avea aceiaşi adresă. Setările rebuiesc schimbate când convertorul se află într-o reţea de tip inel ce constă din câteva convertoare şi un PC cu programul DriveWindow® .
1 ... 254 Adresa. 1 … 254 70.03 CH1 BAUDRATE Viteza de comunicaţie pe canalul 1. Tipic setările trebuie să
fie schimbate doar dacă placa encoderului e conectată pe canalul 1 înloc de canalul 2. Viteza trebuie schimbată la 4Mbiţi. Vezi parametrul 50.05.0
0
8 Mbits 8 megabiţi pe secundă. 1 4 Mbits 4 megabiţi pe secundă. 2 1 Mbits 1 megabit pe secundă. 3 70.04 CH0 DDCS HW Selectează topologia conexiunii pentru canalul 0.
Reducerea turaţiei = Ieşirea Controlerului de Turaţie · Abaterea · Turaţia
maximă Exemplu: Ieşirea Regulatorului de turaţie este 50%, Abaterea este 1%, turaţia maximă este 1500 rpm. Reducerea turaţiei = 0,50 · 0,01 · 1500 rpm = 7,5 rpm
Ieşirea reg / Sarcină Turaţie / %
Turaţia motorului %
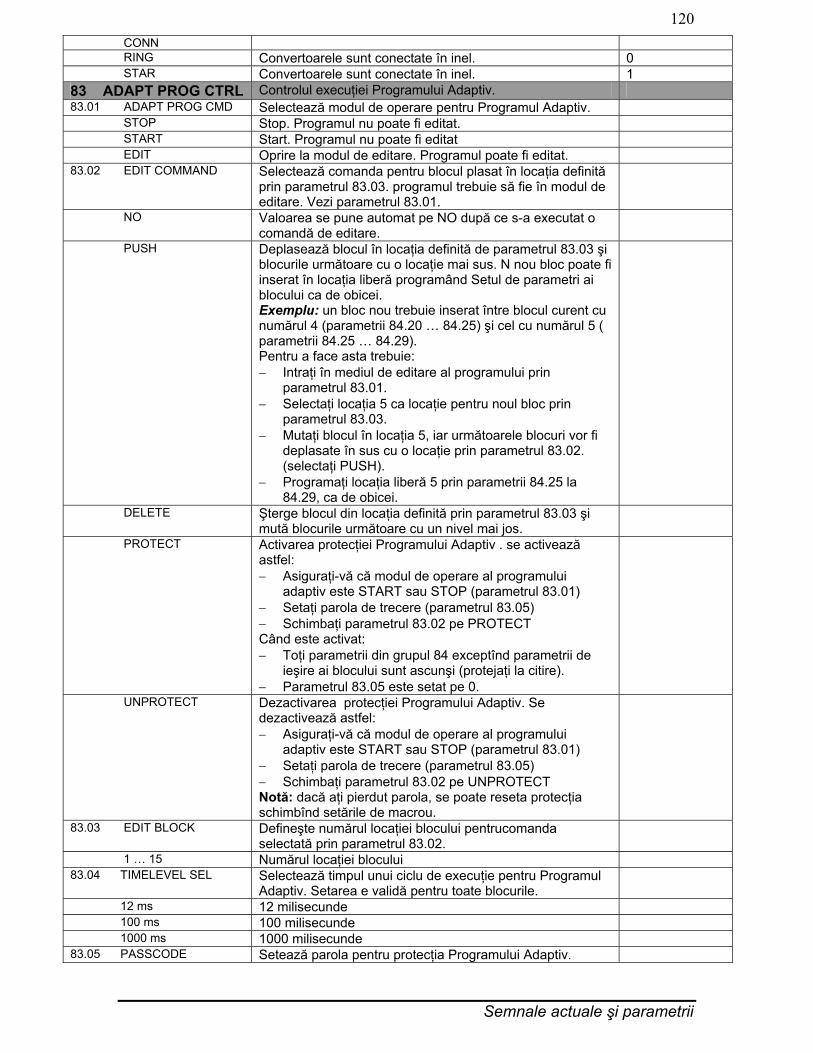
Semnale actuale şi parametrii
120 CONN RING Convertoarele sunt conectate în inel. 0 STAR Convertoarele sunt conectate în inel. 1 83 ADAPT PROG CTRL Controlul execuţiei Programului Adaptiv. 83.01 ADAPT PROG CMD Selectează modul de operare pentru Programul Adaptiv. STOP Stop. Programul nu poate fi editat. START Start. Programul nu poate fi editat EDIT Oprire la modul de editare. Programul poate fi editat. 83.02 EDIT COMMAND Selectează comanda pentru blocul plasat în locaţia definită
prin parametrul 83.03. programul trebuie să fie în modul de editare. Vezi parametrul 83.01.
NO Valoarea se pune automat pe NO după ce s-a executat o comandă de editare.
PUSH Deplasează blocul în locaţia definită de parametrul 83.03 şi blocurile următoare cu o locaţie mai sus. N nou bloc poate fi inserat în locaţia liberă programând Setul de parametri ai blocului ca de obicei. Exemplu: un bloc nou trebuie inserat între blocul curent cu numărul 4 (parametrii 84.20 … 84.25) şi cel cu numărul 5 ( parametrii 84.25 … 84.29). Pentru a face asta trebuie: − Intraţi în mediul de editare al programului prin
parametrul 83.01. − Selectaţi locaţia 5 ca locaţie pentru noul bloc prin
parametrul 83.03. − Mutaţi blocul în locaţia 5, iar următoarele blocuri vor fi
deplasate în sus cu o locaţie prin parametrul 83.02. (selectaţi PUSH).
− Programaţi locaţia liberă 5 prin parametrii 84.25 la 84.29, ca de obicei.
DELETE Şterge blocul din locaţia definită prin parametrul 83.03 şi mută blocurile următoare cu un nivel mai jos.
PROTECT Activarea protecţiei Programului Adaptiv . se activează astfel: − Asiguraţi-vă că modul de operare al programului
adaptiv este START sau STOP (parametrul 83.01) − Setaţi parola de trecere (parametrul 83.05) − Schimbaţi parametrul 83.02 pe PROTECT Când este activat: − Toţi parametrii din grupul 84 exceptînd parametrii de
ieşire ai blocului sunt ascunşi (protejaţi la citire). − Parametrul 83.05 este setat pe 0.
UNPROTECT Dezactivarea protecţiei Programului Adaptiv. Se dezactivează astfel: − Asiguraţi-vă că modul de operare al programului
adaptiv este START sau STOP (parametrul 83.01) − Setaţi parola de trecere (parametrul 83.05) − Schimbaţi parametrul 83.02 pe UNPROTECT Notă: dacă aţi pierdut parola, se poate reseta protecţia schimbînd setările de macrou.
83.03 EDIT BLOCK Defineşte numărul locaţiei blocului pentrucomanda selectată prin parametrul 83.02.
1 … 15 Numărul locaţiei blocului 83.04 TIMELEVEL SEL Selectează timpul unui ciclu de execuţie pentru Programul
Adaptiv. Setarea e validă pentru toate blocurile.
12 ms 12 milisecunde 100 ms 100 milisecunde 1000 ms 1000 milisecunde 83.05 PASSCODE Setează parola pentru protecţia Programului Adaptiv.
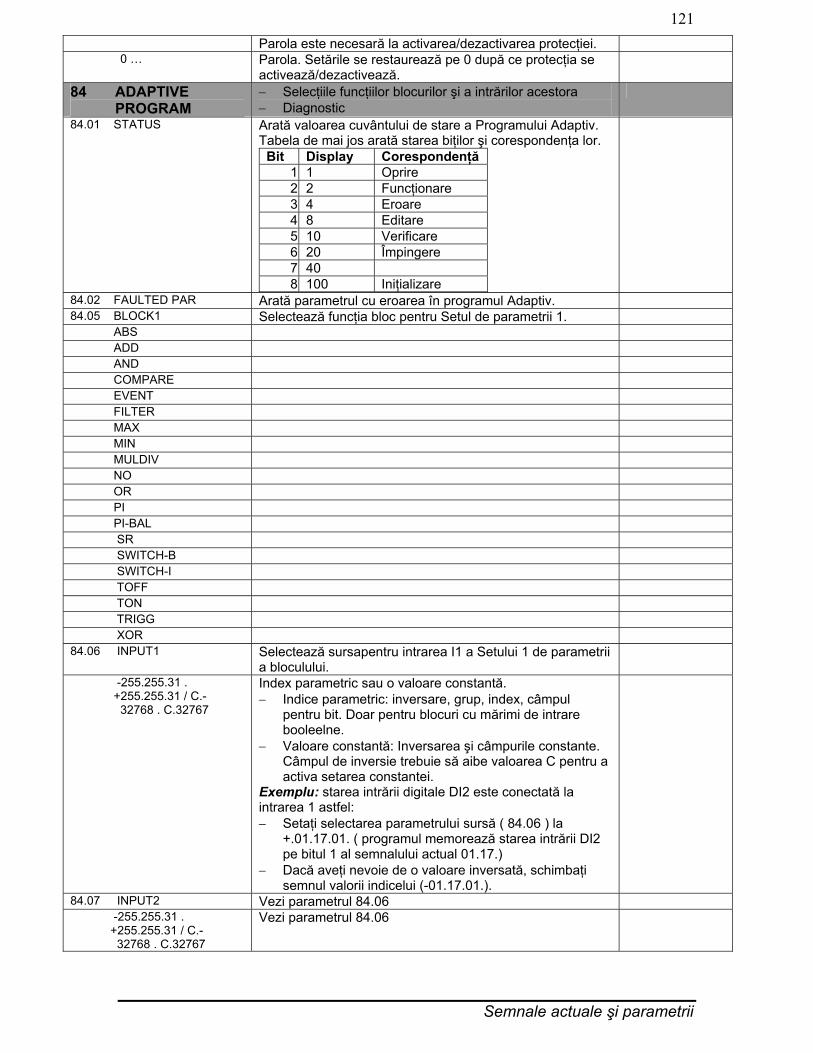
Semnale actuale şi parametrii
121Parola este necesară la activarea/dezactivarea protecţiei.
0 … Parola. Setările se restaurează pe 0 după ce protecţia se activează/dezactivează.
84 ADAPTIVE PROGRAM
− Selecţiile funcţiilor blocurilor şi a intrărilor acestora − Diagnostic
84.01 STATUS Arată valoarea cuvântului de stare a Programului Adaptiv. Tabela de mai jos arată starea biţilor şi corespondenţa lor.
Bit Display Corespondenţă 1 1 Oprire 2 2 Funcţionare 3 4 Eroare 4 8 Editare 5 10 Verificare 6 20 Împingere 7 40 8 100 Iniţializare
84.02 FAULTED PAR Arată parametrul cu eroarea în programul Adaptiv. 84.05 BLOCK1 Selectează funcţia bloc pentru Setul de parametrii 1. ABS ADD AND COMPARE EVENT FILTER MAX MIN MULDIV NO OR PI PI-BAL SR SWITCH-B SWITCH-I TOFF TON TRIGG XOR 84.06 INPUT1 Selectează sursapentru intrarea I1 a Setului 1 de parametrii
a bloculului.
-255.255.31 . +255.255.31 / C.- 32768 . C.32767
Index parametric sau o valoare constantă. − Indice parametric: inversare, grup, index, câmpul
pentru bit. Doar pentru blocuri cu mărimi de intrare booleelne.
− Valoare constantă: Inversarea şi câmpurile constante. Câmpul de inversie trebuie să aibe valoarea C pentru a activa setarea constantei.
Exemplu: starea intrării digitale DI2 este conectată la intrarea 1 astfel: − Setaţi selectarea parametrului sursă ( 84.06 ) la
+.01.17.01. ( programul memorează starea intrării DI2 pe bitul 1 al semnalului actual 01.17.)
− Dacă aveţi nevoie de o valoare inversată, schimbaţi semnul valorii indicelui (-01.17.01.).
84.07 INPUT2 Vezi parametrul 84.06 -255.255.31 . +255.255.31 / C.- 32768 . C.32767
Vezi parametrul 84.06
Semnale actuale şi parametrii
12284.08 INPUT3 Vezi parametrul 84.06 -255.255.31 . +255.255.31 / C.- 32768 . C.32767
Vezi parametrul 84.06
84.09 OUTPUT Memorează şi afişează ieşirea setului 1 de parametrii ai blocului.
… … 84.79 OUTPUT Memorează ieşirea setului 15 de parametrii ai blocului. 85 USER CONSTANTS Memorarea constantelor Programului Adaptiv şi a
mesajelor
85.01 CONSTANT1 Setarea unei constante pentru Programul Adaptiv. -8388608 to 8388607 Valoare întreagă. 85.02 CONSTANT2 Setarea unei constante pentru Programul Adaptiv. -8388608 to 8388607 Valoare întreagă. 85.03 CONSTANT3 Setarea unei constante pentru Programul Adaptiv. -8388608 to 8388607 Valoare întreagă. 85.04 CONSTANT4 Setarea unei constante pentru Programul Adaptiv. -8388608 to 8388607 Valoare întreagă. 85.05 CONSTANT5 Setarea unei constante pentru Programul Adaptiv. -8388608 to 8388607 Valoare întreagă. 85.06 CONSTANT6 Setarea unei constante pentru Programul Adaptiv. -8388608 to 8388607 Valoare întreagă. 85.07 CONSTANT7 Setarea unei constante pentru Programul Adaptiv. -8388608 to 8388607 Valoare întreagă. 85.08 CONSTANT8 Setarea unei constante pentru Programul Adaptiv. -8388608 to 8388607 Valoare întreagă. 85.09 CONSTANT9 Setarea unei constante pentru Programul Adaptiv. -8388608 to 8388607 Valoare întreagă. 85.10 CONSTANT10 Setarea unei constante pentru Programul Adaptiv. -8388608 to 8388607 Valoare întreagă. 85.11 STRING1 Setarea unei constante pentru Programul Adaptiv.(EVENT
block)
MESSAGE1 Mesaj 85.12 STRING2 Setarea unei constante pentru Programul Adaptiv.(EVENT
block)
MESSAGE2 Mesaj 85.13 STRING3 Setarea unei constante pentru Programul Adaptiv.(EVENT
block)
MESSAGE3 Mesaj 85.14 STRING4 Setarea unei constante pentru Programul Adaptiv.(EVENT
block)
MESSAGE4 Mesaj 85.15 STRING5 Setarea unei constante pentru Programul Adaptiv.(EVENT
block)
MESSAGE5 Mesaj 90 D SET REC ADDR − Adresele unde sunt scrise seturile de date primite prin
magistrala de date − Numerele seturilor de date principale şi auxiliare
90.01 AUX DS REF3 Selectează adresele în care valoarea referinţei REF3 este scrisă.
0 … 8999 Index parametric 90.02 AUX DS REF4 Selectează adresele în care valoarea referinţei REF4 este
scrisă.
0 … 8999 Index parametric 90.03 AUX DS REF5 Selectează adresele în care valoarea referinţei REF5 este
scrisă.
0 … 8999 Index parametric
Semnale actuale şi parametrii
12390.04 MAIN DS SOURCE Defineşte setul de date din care citeşte convertorul Cuvântul de
Control, Referinţa REF1 şi Referinţa REF2.
1 ... 255 Numărul setului de date. 90.05 AUX DS SOURCE Defineşte setul de date din care convertorul citeşte REF3, REF4
şi REF5.
1 ... 255 Numărul setului de date. 92 D SET TR ADDR Setul de date principal şi auxiliar pe care le trimite convertorul la
staţia master prin magistrala de date.
92.01 MAIN DS STATUS WORD
Memorează adresele de la care cuvântul principal de stare este citit. Valoare fixă, invizibilă.
302 (fixed) Index parametric. 92.02 MAIN DS ACT1 Selectează adresele de la care este citit Semnalil actual 1
pentru Setul Principal de Date.
0 … 9999 Index parametric 92.03 MAIN DS ACT2 Selectează adresele de la care este citit Semnalil actual 2
pentru Setul Principal de Date.
0 … 9999 Index parametric 92.04 AUX DS ACT3 Selectează adresele de la care este citit Semnalil actual 3
pentru Setul Principal de Date.
0 … 9999 Index parametric 92.05 AUX DS ACT4 Selectează adresele de la care este citit Semnalil actual 4
pentru Setul Principal de Date.
0 … 9999 Index parametric 92.06 AUX DS ACT5 Selectează adresele de la care este citit Semnalil actual 5
pentru Setul Principal de Date.
0 … 9999 Index parametric 96 EXTERNAL AO Selectarea şi procesarea semnalului de ieşire pentru modulul de
extensie analogic. Parametrii sunt vizibili doar când modulul este instalat şi activat prin parametrul 98.06.
96.01 EXT AO1 Selectează semnalul conectat la ieşirea analogică AO1 a modulului de extensie.
NOT USED Vezi parametru 15.01. 1 P SPEED Vezi parametru 15.01. 2 SPEED Vezi parametru 15.01. 3 FREQUENCY Vezi parametru 15.01. 4 CURRENT Vezi parametru 15.01. 5 TORQUE Vezi parametru 15.01. 6 POWER Vezi parametru 15.01. 7 DC BUS VOLT Vezi parametru 15.01. 8 OUTPUT VOLT Vezi parametru 15.01. 9 APPL OUTPUT Vezi parametru 15.01. 10 REFERENCE Vezi parametru 15.01. 11 CONTROL DEV Vezi parametru 15.01. 12 ACTUAL 1 Vezi parametru 15.01. 13 ACTUAL 2 Vezi parametru 15.01. 14 COM.REF4 Vezi parametru 15.01. 15 PARAM 96.11 Sursa selectată de parametrul 96.11 16 96.02 INVERT EXT AO1 Activează inversia ieşirii analogice AO1 a modului de extensie. NO Inactiv 0 YES Activ. Semnalul analogic este la nivel minimum când semnalul
convertizorului este la maxim şi viceversa. 65535
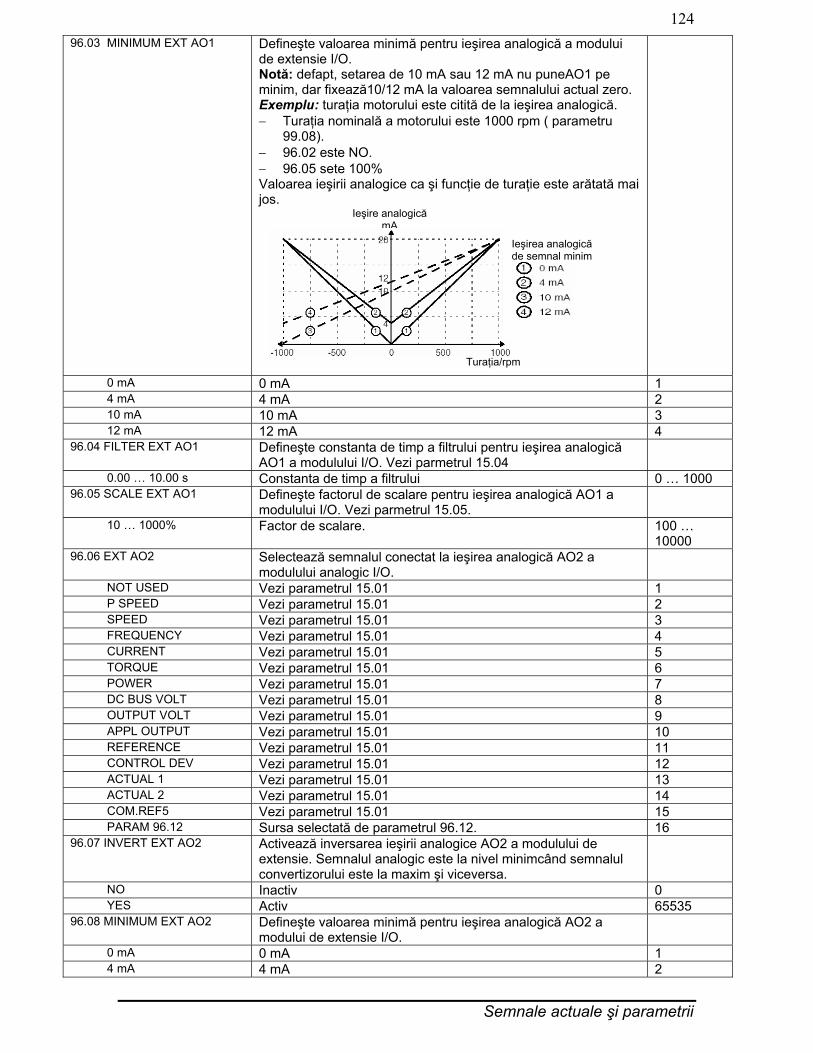
Semnale actuale şi parametrii
12496.03 MINIMUM EXT AO1 Defineşte valoarea minimă pentru ieşirea analogică a modului
de extensie I/O. Notă: defapt, setarea de 10 mA sau 12 mA nu puneAO1 pe minim, dar fixează10/12 mA la valoarea semnalului actual zero. Exemplu: turaţia motorului este citită de la ieşirea analogică. − Turaţia nominală a motorului este 1000 rpm ( parametru
99.08). − 96.02 este NO. − 96.05 sete 100% Valoarea ieşirii analogice ca şi funcţie de turaţie este arătată mai jos.
0 mA 0 mA 1 4 mA 4 mA 2 10 mA 10 mA 3 12 mA 12 mA 4 96.04 FILTER EXT AO1 Defineşte constanta de timp a filtrului pentru ieşirea analogică
AO1 a modulului I/O. Vezi parmetrul 15.04
0.00 … 10.00 s Constanta de timp a filtrului 0 … 1000 96.05 SCALE EXT AO1 Defineşte factorul de scalare pentru ieşirea analogică AO1 a
modulului I/O. Vezi parmetrul 15.05.
10 … 1000% Factor de scalare. 100 … 10000
96.06 EXT AO2 Selectează semnalul conectat la ieşirea analogică AO2 a modulului analogic I/O.
NOT USED Vezi parametrul 15.01 1 P SPEED Vezi parametrul 15.01 2 SPEED Vezi parametrul 15.01 3 FREQUENCY Vezi parametrul 15.01 4 CURRENT Vezi parametrul 15.01 5 TORQUE Vezi parametrul 15.01 6 POWER Vezi parametrul 15.01 7 DC BUS VOLT Vezi parametrul 15.01 8 OUTPUT VOLT Vezi parametrul 15.01 9 APPL OUTPUT Vezi parametrul 15.01 10 REFERENCE Vezi parametrul 15.01 11 CONTROL DEV Vezi parametrul 15.01 12 ACTUAL 1 Vezi parametrul 15.01 13 ACTUAL 2 Vezi parametrul 15.01 14 COM.REF5 Vezi parametrul 15.01 15 PARAM 96.12 Sursa selectată de parametrul 96.12. 16 96.07 INVERT EXT AO2 Activează inversarea ieşirii analogice AO2 a modulului de
extensie. Semnalul analogic este la nivel minimcând semnalul convertizorului este la maxim şi viceversa.
NO Inactiv 0 YES Activ 65535 96.08 MINIMUM EXT AO2 Defineşte valoarea minimă pentru ieşirea analogică AO2 a
modului de extensie I/O.
0 mA 0 mA 1 4 mA 4 mA 2
Ieşirea analogică de semnal minim
Turaţia/rpm
Ieşire analogică mA
Semnale actuale şi parametrii
125 10 mA 10 mA 3 12 mA 12 mA 4 FILTER EXT AO2 Defineşte constanta de timp a filtrului pentru ieşirea analogică
AO2 a modulului I/O. Vezi parmetrul 15.04
0.00 … 10.00 s Constanta de timp a filtrului 0 … 1000 96.10 SCALE EXT AO2 Defineşte factorul de scalare pentru ieşirea analogică AO2 a
modulului I/O. Vezi parmetrul 15.05.
10 … 1000% Factor de scalare. 100 … 10000
96.11 EXT AO1 PTR Defineşte sursa sau constanta pentru valoarea PAR 96.11 a parametrului 96.01.
1000 = 1 mA
-255.255.31 . +255.255.31 / C.- 32768 . C.32767
Index parametric sau o valoare constantă. -
96.12 EXT AO2 PTR Defineşte sursa sau constanta pentru valoarea PAR 96.12 a parametrului 96.06.
1000 = 1 mA
-255.255.31 . +255.255.31 / C.- 32768 . C.32767
Index parametric sau o valoare constantă. -
98 OPTION MODULES Activarea modului cu opţiuni. Setările parametrilor rămân neschimbate chiar şi la chimbarea macroului (parametrul 99.02).
98.01 ENCODER MODULE Activează comunicarea cu placa encoderului. NTAC Comunicaţia este activă. Tipul modulului: modul NTAC. Interfaţa:
conexiune DDCS pe fibră optică. Notă: numărul nodului de la modul trebuie să fie setat pe 16. pentru detalii vezi Installaţion and Start-up Guide for NTAC-0x/NDIO-0x/NAIO-0x Modules (Code: 3AFY 58919730 [English]).
0
NO Inactiv 1 RTAC-SLOT1
Comunicaţie activă. Tipul modulului: RTAC. Intrefaţare: la alegere slotul 1 al convertizorului.
2
RTAC-SLOT2
Comunicaţie activă. Tipul modulului: RTAC. Intrefaţare: la alegere slotul 2 al convertizorului
3
RTAC-DDCS Comunicaţie activă. Tipul modulului: RTAC. Intrefaţare: modulul opţional I/O (AIMA) care comunică cu convertizorul prin conexiune DDCS prin fibră optică. Notă: numărul nodului de la modul trebuie să fie setat pe 16. pentru detalii vezi Use`s Manual for RDIO Module.
4
98.02 COMM. MODULE LINK
Activează comunicaţia serială externă şi selectează interfaţa.
NO Nu există comunicaţie. 1 FIELDBUS Convertorul comunică printr-un modul adaptor la magistrala de
date în slotul 1 al convertorului, sau via CH0 la plăcii RDCO. 2
ADVANT
convertorul comunică cu un sistem ABB OCS via CH0 de pe placa RDCO.
3
STD MODBUS Convertorul comunică cu un controler Modbus via modulul Modbus (RMBA) din slotul 1 al convertorului.
4
CUSTOMISED Convertorul comunică printr – o conexiune specificată de utilizator. Sursele pentru control sunt definite prin parametrii 90.04 şi 90.05.
5
98.03 DI/O EXT MODULE 1 Activează comunicaţia cu modulul I/O digital 1 şi defineşte tipul şi interfaţarea modulului. Intrările modulului: vezi parametrul 98.09 pentru utilizarea intrărilor în programul de aplicaţii al convertizorului. Ieşirile modulului: vezi parametrul 14.10 şi 14.11 pentru a selecta stările convertorului ce sunt indicate prin ieşirile releului.
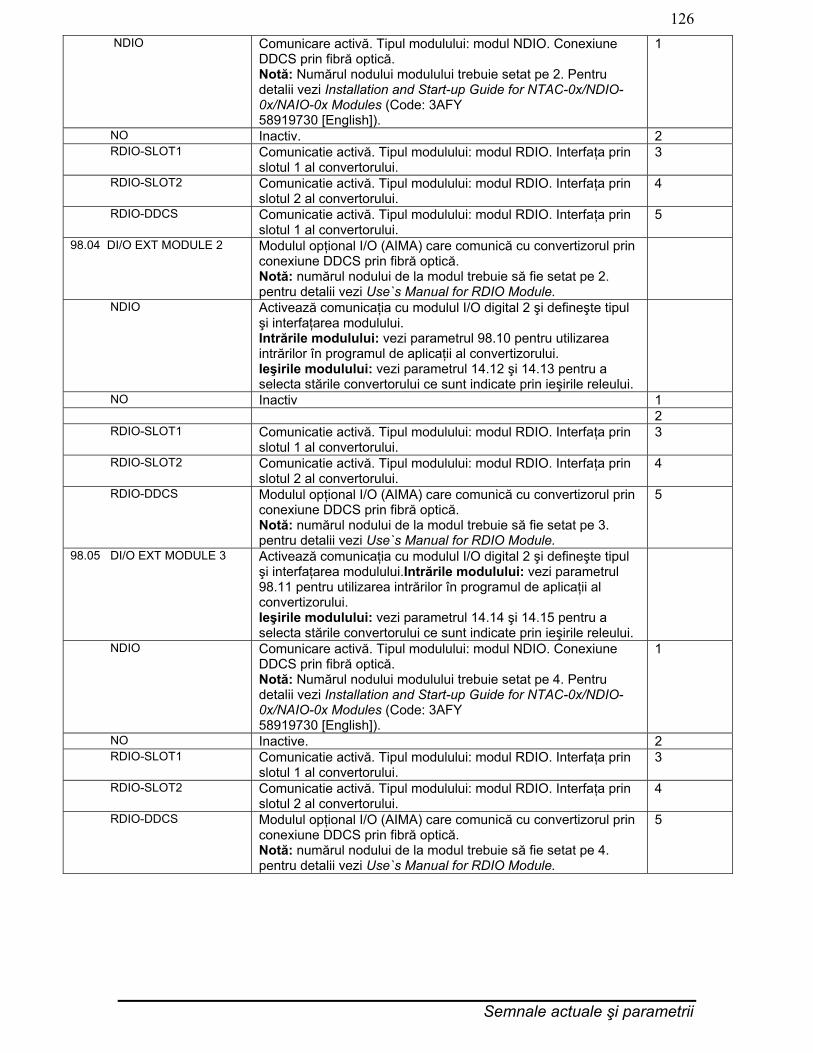
Semnale actuale şi parametrii
126 NDIO Comunicare activă. Tipul modulului: modul NDIO. Conexiune
DDCS prin fibră optică. Notă: Numărul nodului modulului trebuie setat pe 2. Pentru detalii vezi Installation and Start-up Guide for NTAC-0x/NDIO-0x/NAIO-0x Modules (Code: 3AFY 58919730 [English]).
1
NO Inactiv. 2 RDIO-SLOT1 Comunicatie activă. Tipul modulului: modul RDIO. Interfaţa prin
slotul 1 al convertorului. 3
RDIO-SLOT2 Comunicatie activă. Tipul modulului: modul RDIO. Interfaţa prin slotul 2 al convertorului.
4
RDIO-DDCS Comunicatie activă. Tipul modulului: modul RDIO. Interfaţa prin slotul 1 al convertorului.
5
98.04 DI/O EXT MODULE 2 Modulul opţional I/O (AIMA) care comunică cu convertizorul prin conexiune DDCS prin fibră optică. Notă: numărul nodului de la modul trebuie să fie setat pe 2. pentru detalii vezi Use`s Manual for RDIO Module.
NDIO Activează comunicaţia cu modulul I/O digital 2 şi defineşte tipul şi interfaţarea modulului. Intrările modulului: vezi parametrul 98.10 pentru utilizarea intrărilor în programul de aplicaţii al convertizorului. Ieşirile modulului: vezi parametrul 14.12 şi 14.13 pentru a selecta stările convertorului ce sunt indicate prin ieşirile releului.
NO Inactiv 1 2 RDIO-SLOT1 Comunicatie activă. Tipul modulului: modul RDIO. Interfaţa prin
slotul 1 al convertorului. 3
RDIO-SLOT2 Comunicatie activă. Tipul modulului: modul RDIO. Interfaţa prin slotul 2 al convertorului.
4
RDIO-DDCS Modulul opţional I/O (AIMA) care comunică cu convertizorul prin conexiune DDCS prin fibră optică. Notă: numărul nodului de la modul trebuie să fie setat pe 3. pentru detalii vezi Use`s Manual for RDIO Module.
5
98.05 DI/O EXT MODULE 3
Activează comunicaţia cu modulul I/O digital 2 şi defineşte tipul şi interfaţarea modulului.Intrările modulului: vezi parametrul 98.11 pentru utilizarea intrărilor în programul de aplicaţii al convertizorului. Ieşirile modulului: vezi parametrul 14.14 şi 14.15 pentru a selecta stările convertorului ce sunt indicate prin ieşirile releului.
NDIO Comunicare activă. Tipul modulului: modul NDIO. Conexiune DDCS prin fibră optică. Notă: Numărul nodului modulului trebuie setat pe 4. Pentru detalii vezi Installation and Start-up Guide for NTAC-0x/NDIO-0x/NAIO-0x Modules (Code: 3AFY 58919730 [English]).
1
NO Inactive. 2 RDIO-SLOT1 Comunicatie activă. Tipul modulului: modul RDIO. Interfaţa prin
slotul 1 al convertorului. 3
RDIO-SLOT2 Comunicatie activă. Tipul modulului: modul RDIO. Interfaţa prin slotul 2 al convertorului.
4
RDIO-DDCS Modulul opţional I/O (AIMA) care comunică cu convertizorul prin conexiune DDCS prin fibră optică. Notă: numărul nodului de la modul trebuie să fie setat pe 4. pentru detalii vezi Use`s Manual for RDIO Module.
5
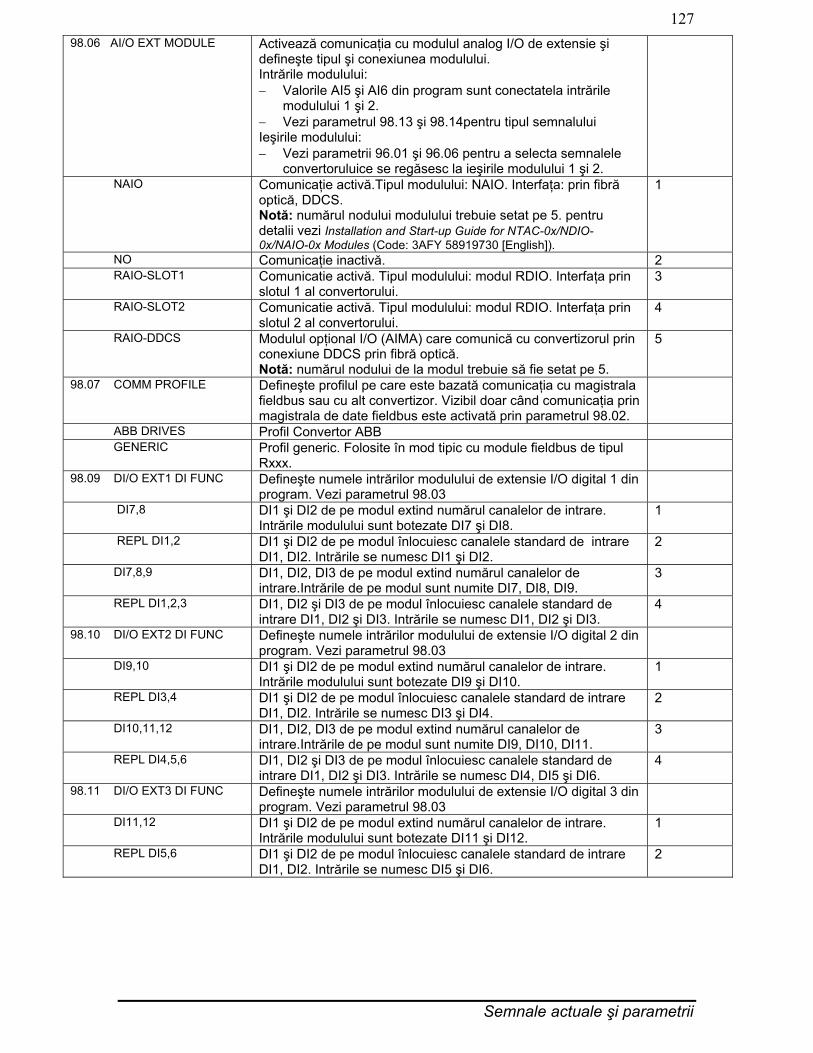
Semnale actuale şi parametrii
12798.06 AI/O EXT MODULE Activează comunicaţia cu modulul analog I/O de extensie şi
defineşte tipul şi conexiunea modulului. Intrările modulului: − Valorile AI5 şi AI6 din program sunt conectatela intrările
modulului 1 şi 2. − Vezi parametrul 98.13 şi 98.14pentru tipul semnalului Ieşirile modulului: − Vezi parametrii 96.01 şi 96.06 pentru a selecta semnalele
convertoruluice se regăsesc la ieşirile modulului 1 şi 2.
NAIO Comunicaţie activă.Tipul modulului: NAIO. Interfaţa: prin fibră optică, DDCS. Notă: numărul nodului modulului trebuie setat pe 5. pentru detalii vezi Installation and Start-up Guide for NTAC-0x/NDIO-0x/NAIO-0x Modules (Code: 3AFY 58919730 [English]).
1
NO Comunicaţie inactivă. 2 RAIO-SLOT1 Comunicatie activă. Tipul modulului: modul RDIO. Interfaţa prin
slotul 1 al convertorului. 3
RAIO-SLOT2 Comunicatie activă. Tipul modulului: modul RDIO. Interfaţa prin slotul 2 al convertorului.
4
RAIO-DDCS Modulul opţional I/O (AIMA) care comunică cu convertizorul prin conexiune DDCS prin fibră optică. Notă: numărul nodului de la modul trebuie să fie setat pe 5.
5
98.07 COMM PROFILE Defineşte profilul pe care este bazată comunicaţia cu magistrala fieldbus sau cu alt convertizor. Vizibil doar când comunicaţia prin magistrala de date fieldbus este activată prin parametrul 98.02.
ABB DRIVES Profil Convertor ABB GENERIC Profil generic. Folosite în mod tipic cu module fieldbus de tipul
Rxxx.
98.09 DI/O EXT1 DI FUNC Defineşte numele intrărilor modulului de extensie I/O digital 1 din program. Vezi parametrul 98.03
DI7,8 DI1 şi DI2 de pe modul extind numărul canalelor de intrare. Intrările modulului sunt botezate DI7 şi DI8.
1
REPL DI1,2 DI1 şi DI2 de pe modul înlocuiesc canalele standard de intrare DI1, DI2. Intrările se numesc DI1 şi DI2.
2
DI7,8,9 DI1, DI2, DI3 de pe modul extind numărul canalelor de intrare.Intrările de pe modul sunt numite DI7, DI8, DI9.
3
REPL DI1,2,3 DI1, DI2 şi DI3 de pe modul înlocuiesc canalele standard de intrare DI1, DI2 şi DI3. Intrările se numesc DI1, DI2 şi DI3.
4
98.10 DI/O EXT2 DI FUNC Defineşte numele intrărilor modulului de extensie I/O digital 2 din program. Vezi parametrul 98.03
DI9,10 DI1 şi DI2 de pe modul extind numărul canalelor de intrare. Intrările modulului sunt botezate DI9 şi DI10.
1
REPL DI3,4 DI1 şi DI2 de pe modul înlocuiesc canalele standard de intrare DI1, DI2. Intrările se numesc DI3 şi DI4.
2
DI10,11,12 DI1, DI2, DI3 de pe modul extind numărul canalelor de intrare.Intrările de pe modul sunt numite DI9, DI10, DI11.
3
REPL DI4,5,6 DI1, DI2 şi DI3 de pe modul înlocuiesc canalele standard de intrare DI1, DI2 şi DI3. Intrările se numesc DI4, DI5 şi DI6.
4
98.11 DI/O EXT3 DI FUNC Defineşte numele intrărilor modulului de extensie I/O digital 3 din program. Vezi parametrul 98.03
DI11,12 DI1 şi DI2 de pe modul extind numărul canalelor de intrare. Intrările modulului sunt botezate DI11 şi DI12.
1
REPL DI5,6 DI1 şi DI2 de pe modul înlocuiesc canalele standard de intrare DI1, DI2. Intrările se numesc DI5 şi DI6.
2
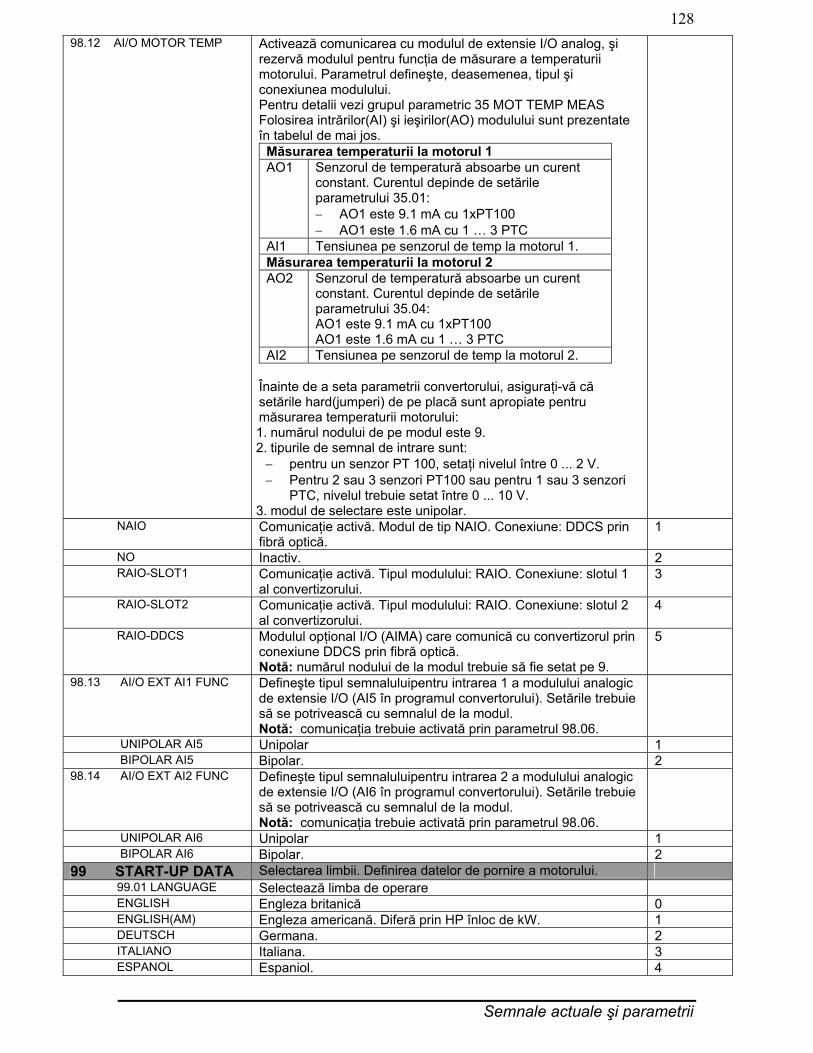
Semnale actuale şi parametrii
12898.12 AI/O MOTOR TEMP Activează comunicarea cu modulul de extensie I/O analog, şi
rezervă modulul pentru funcţia de măsurare a temperaturii motorului. Parametrul defineşte, deasemenea, tipul şi conexiunea modulului. Pentru detalii vezi grupul parametric 35 MOT TEMP MEAS Folosirea intrărilor(AI) şi ieşirilor(AO) modulului sunt prezentate în tabelul de mai jos.
Măsurarea temperaturii la motorul 1 AO1 Senzorul de temperatură absoarbe un curent
constant. Curentul depinde de setările parametrului 35.01: − AO1 este 9.1 mA cu 1xPT100 − AO1 este 1.6 mA cu 1 … 3 PTC
AI1 Tensiunea pe senzorul de temp la motorul 1. Măsurarea temperaturii la motorul 2 AO2 Senzorul de temperatură absoarbe un curent
constant. Curentul depinde de setările parametrului 35.04: AO1 este 9.1 mA cu 1xPT100 AO1 este 1.6 mA cu 1 … 3 PTC
AI2 Tensiunea pe senzorul de temp la motorul 2. Înainte de a seta parametrii convertorului, asiguraţi-vă că setările hard(jumperi) de pe placă sunt apropiate pentru măsurarea temperaturii motorului: 1. numărul nodului de pe modul este 9. 2. tipurile de semnal de intrare sunt: − pentru un senzor PT 100, setaţi nivelul între 0 ... 2 V. − Pentru 2 sau 3 senzori PT100 sau pentru 1 sau 3 senzori
PTC, nivelul trebuie setat între 0 ... 10 V. 3. modul de selectare este unipolar.
NAIO Comunicaţie activă. Modul de tip NAIO. Conexiune: DDCS prin fibră optică.
1
NO Inactiv. 2 RAIO-SLOT1 Comunicaţie activă. Tipul modulului: RAIO. Conexiune: slotul 1
al convertizorului. 3
RAIO-SLOT2 Comunicaţie activă. Tipul modulului: RAIO. Conexiune: slotul 2 al convertizorului.
4
RAIO-DDCS Modulul opţional I/O (AIMA) care comunică cu convertizorul prin conexiune DDCS prin fibră optică. Notă: numărul nodului de la modul trebuie să fie setat pe 9.
5
98.13 AI/O EXT AI1 FUNC Defineşte tipul semnaluluipentru intrarea 1 a modulului analogic de extensie I/O (AI5 în programul convertorului). Setările trebuie să se potrivească cu semnalul de la modul. Notă: comunicaţia trebuie activată prin parametrul 98.06.
UNIPOLAR AI5 Unipolar 1 BIPOLAR AI5 Bipolar. 2 98.14 AI/O EXT AI2 FUNC Defineşte tipul semnaluluipentru intrarea 2 a modulului analogic
de extensie I/O (AI6 în programul convertorului). Setările trebuie să se potrivească cu semnalul de la modul. Notă: comunicaţia trebuie activată prin parametrul 98.06.
UNIPOLAR AI6 Unipolar 1 BIPOLAR AI6 Bipolar. 2 99 START-UP DATA Selectarea limbii. Definirea datelor de pornire a motorului. 99.01 LANGUAGE Selectează limba de operare ENGLISH Engleza britanică 0 ENGLISH(AM) Engleza americană. Diferă prin HP înloc de kW. 1 DEUTSCH Germana. 2 ITALIANO Italiana. 3 ESPANOL Espaniol. 4
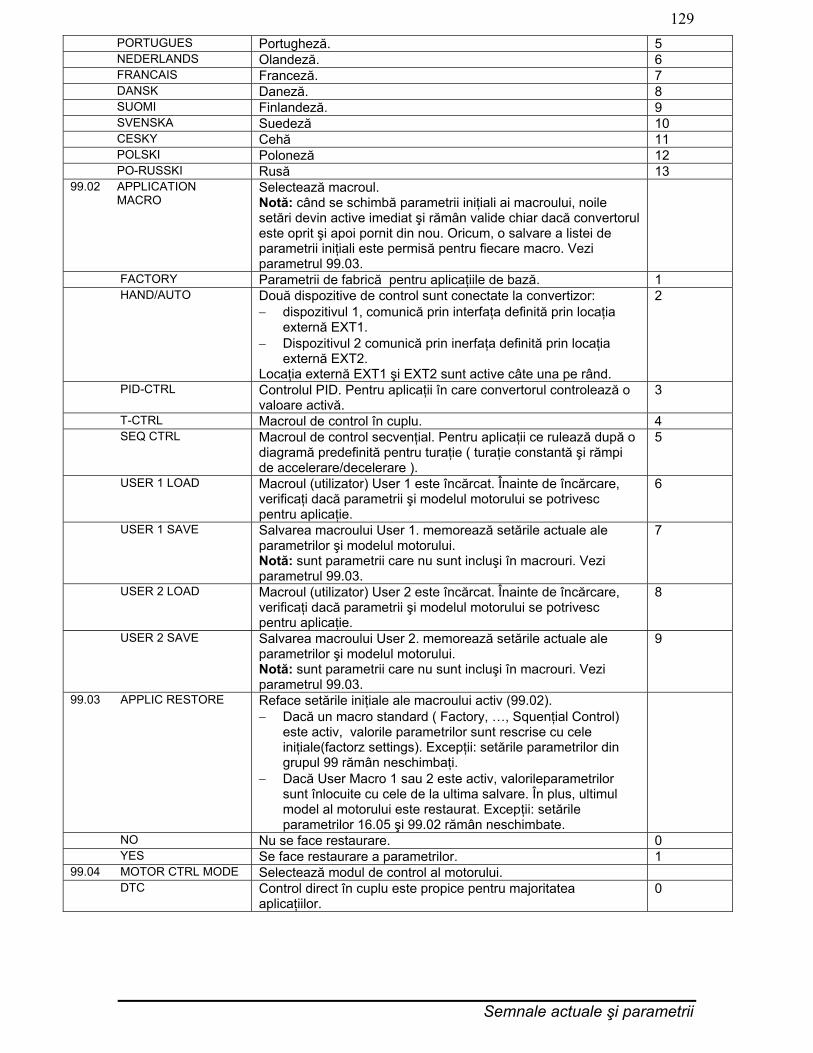
Semnale actuale şi parametrii
129 PORTUGUES Portugheză. 5 NEDERLANDS Olandeză. 6 FRANCAIS Franceză. 7 DANSK Daneză. 8 SUOMI Finlandeză. 9 SVENSKA Suedeză 10 CESKY Cehă 11 POLSKI Poloneză 12 PO-RUSSKI Rusă 13 99.02 APPLICATION MACRO
Selectează macroul. Notă: când se schimbă parametrii iniţiali ai macroului, noile setări devin active imediat şi rămân valide chiar dacă convertorul este oprit şi apoi pornit din nou. Oricum, o salvare a listei de parametrii iniţiali este permisă pentru fiecare macro. Vezi parametrul 99.03.
FACTORY Parametrii de fabrică pentru aplicaţiile de bază. 1 HAND/AUTO Două dispozitive de control sunt conectate la convertizor:
− dispozitivul 1, comunică prin interfaţa definită prin locaţia externă EXT1.
− Dispozitivul 2 comunică prin inerfaţa definită prin locaţia externă EXT2.
Locaţia externă EXT1 şi EXT2 sunt active câte una pe rând.
2
PID-CTRL Controlul PID. Pentru aplicaţii în care convertorul controlează o valoare activă.
3
T-CTRL Macroul de control în cuplu. 4 SEQ CTRL Macroul de control secvenţial. Pentru aplicaţii ce rulează după o
diagramă predefinită pentru turaţie ( turaţie constantă şi rămpi de accelerare/decelerare ).
5
USER 1 LOAD Macroul (utilizator) User 1 este încărcat. Înainte de încărcare, verificaţi dacă parametrii şi modelul motorului se potrivesc pentru aplicaţie.
6
USER 1 SAVE Salvarea macroului User 1. memorează setările actuale ale parametrilor şi modelul motorului. Notă: sunt parametrii care nu sunt incluşi în macrouri. Vezi parametrul 99.03.
7
USER 2 LOAD Macroul (utilizator) User 2 este încărcat. Înainte de încărcare, verificaţi dacă parametrii şi modelul motorului se potrivesc pentru aplicaţie.
8
USER 2 SAVE Salvarea macroului User 2. memorează setările actuale ale parametrilor şi modelul motorului. Notă: sunt parametrii care nu sunt incluşi în macrouri. Vezi parametrul 99.03.
9
99.03 APPLIC RESTORE Reface setările iniţiale ale macroului activ (99.02). − Dacă un macro standard ( Factory, …, Squenţial Control)
este activ, valorile parametrilor sunt rescrise cu cele iniţiale(factorz settings). Excepţii: setările parametrilor din grupul 99 rămân neschimbaţi.
− Dacă User Macro 1 sau 2 este activ, valorileparametrilor sunt înlocuite cu cele de la ultima salvare. În plus, ultimul model al motorului este restaurat. Excepţii: setările parametrilor 16.05 şi 99.02 rămân neschimbate.
NO Nu se face restaurare. 0 YES Se face restaurare a parametrilor. 1 99.04 MOTOR CTRL MODE Selectează modul de control al motorului. DTC Control direct în cuplu este propice pentru majoritatea
aplicaţiilor. 0
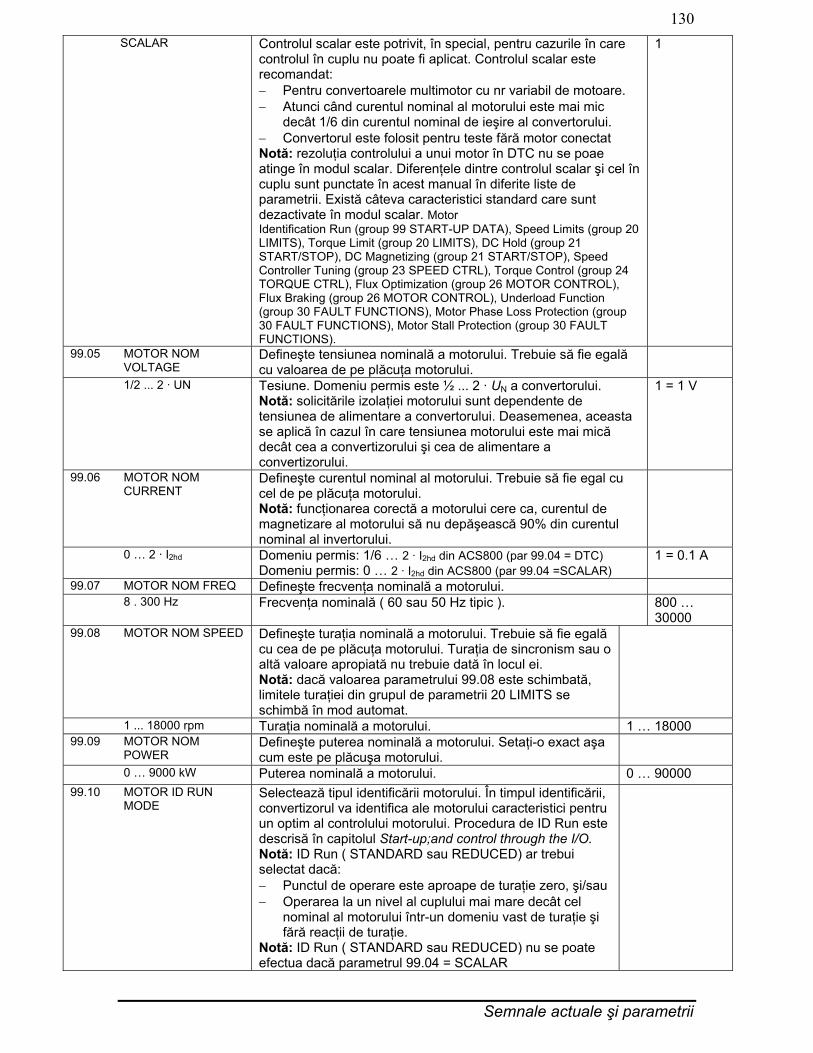
Semnale actuale şi parametrii
130 SCALAR Controlul scalar este potrivit, în special, pentru cazurile în care
controlul în cuplu nu poate fi aplicat. Controlul scalar este recomandat: − Pentru convertoarele multimotor cu nr variabil de motoare. − Atunci când curentul nominal al motorului este mai mic
decât 1/6 din curentul nominal de ieşire al convertorului. − Convertorul este folosit pentru teste fără motor conectat Notă: rezoluţia controlului a unui motor în DTC nu se poae atinge în modul scalar. Diferenţele dintre controlul scalar şi cel în cuplu sunt punctate în acest manual în diferite liste de parametrii. Există câteva caracteristici standard care sunt dezactivate în modul scalar. Motor Identification Run (group 99 START-UP DATA), Speed Limits (group 20 LIMITS), Torque Limit (group 20 LIMITS), DC Hold (group 21 START/STOP), DC Magnetizing (group 21 START/STOP), Speed Controller Tuning (group 23 SPEED CTRL), Torque Control (group 24 TORQUE CTRL), Flux Optimization (group 26 MOTOR CONTROL), Flux Braking (group 26 MOTOR CONTROL), Underload Function (group 30 FAULT FUNCTIONS), Motor Phase Loss Protection (group 30 FAULT FUNCTIONS), Motor Stall Protection (group 30 FAULT FUNCTIONS).
1
99.05 MOTOR NOM VOLTAGE
Defineşte tensiunea nominală a motorului. Trebuie să fie egală cu valoarea de pe plăcuţa motorului.
1/2 ... 2 · UN Tesiune. Domeniu permis este ½ ... 2 · UN a convertorului. Notă: solicitările izolaţiei motorului sunt dependente de tensiunea de alimentare a convertorului. Deasemenea, aceasta se aplică în cazul în care tensiunea motorului este mai mică decât cea a convertizorului şi cea de alimentare a convertizorului.
1 = 1 V
99.06 MOTOR NOM CURRENT
Defineşte curentul nominal al motorului. Trebuie să fie egal cu cel de pe plăcuţa motorului. Notă: funcţionarea corectă a motorului cere ca, curentul de magnetizare al motorului să nu depăşească 90% din curentul nominal al invertorului.
0 … 2 · I2hd Domeniu permis: 1/6 … 2 · I2hd din ACS800 (par 99.04 = DTC) Domeniu permis: 0 … 2 · I2hd din ACS800 (par 99.04 =SCALAR)
1 = 0.1 A
99.07 MOTOR NOM FREQ Defineşte frecvenţa nominală a motorului. 8 . 300 Hz Frecvenţa nominală ( 60 sau 50 Hz tipic ). 800 …
30000 99.08 MOTOR NOM SPEED Defineşte turaţia nominală a motorului. Trebuie să fie egală
cu cea de pe plăcuţa motorului. Turaţia de sincronism sau o altă valoare apropiată nu trebuie dată în locul ei. Notă: dacă valoarea parametrului 99.08 este schimbată, limitele turaţiei din grupul de parametrii 20 LIMITS se schimbă în mod automat.
1 ... 18000 rpm Turaţia nominală a motorului. 1 … 18000 99.09 MOTOR NOM POWER
Defineşte puterea nominală a motorului. Setaţi-o exact aşa cum este pe plăcuşa motorului.
0 … 9000 kW Puterea nominală a motorului. 0 … 90000 99.10 MOTOR ID RUN MODE
Selectează tipul identificării motorului. În timpul identificării, convertizorul va identifica ale motorului caracteristici pentru un optim al controlului motorului. Procedura de ID Run este descrisă în capitolul Start-up;and control through the I/O. Notă: ID Run ( STANDARD sau REDUCED) ar trebui selectat dacă: − Punctul de operare este aproape de turaţie zero, şi/sau − Operarea la un nivel al cuplului mai mare decât cel
nominal al motorului într-un domeniu vast de turaţie şi fără reacţii de turaţie.
Notă: ID Run ( STANDARD sau REDUCED) nu se poate efectua dacă parametrul 99.04 = SCALAR
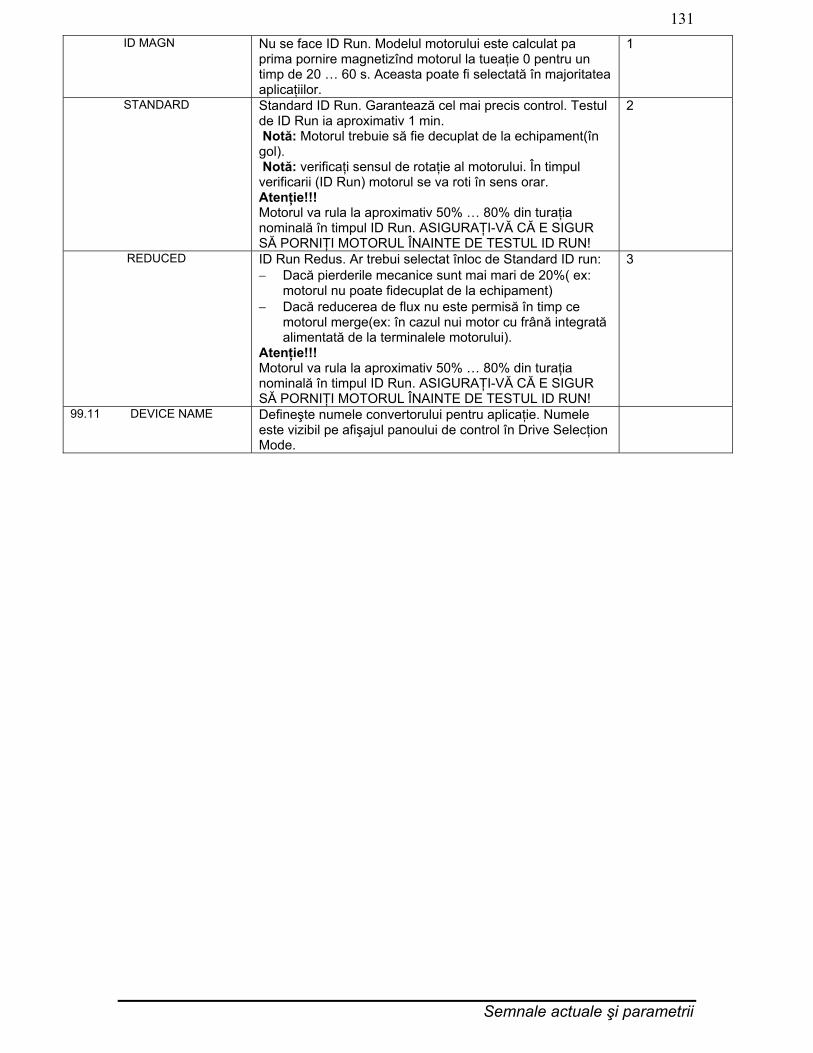
Semnale actuale şi parametrii
131 ID MAGN Nu se face ID Run. Modelul motorului este calculat pa
prima pornire magnetizînd motorul la tueaţie 0 pentru un timp de 20 … 60 s. Aceasta poate fi selectată în majoritatea aplicaţiilor.
1
STANDARD Standard ID Run. Garantează cel mai precis control. Testul de ID Run ia aproximativ 1 min. Notă: Motorul trebuie să fie decuplat de la echipament(în gol). Notă: verificaţi sensul de rotaţie al motorului. În timpul verificarii (ID Run) motorul se va roti în sens orar. Atenţie!!! Motorul va rula la aproximativ 50% … 80% din turaţia nominală în timpul ID Run. ASIGURAŢI-VĂ CĂ E SIGUR SĂ PORNIŢI MOTORUL ÎNAINTE DE TESTUL ID RUN!
2
REDUCED ID Run Redus. Ar trebui selectat înloc de Standard ID run: − Dacă pierderile mecanice sunt mai mari de 20%( ex:
motorul nu poate fidecuplat de la echipament) − Dacă reducerea de flux nu este permisă în timp ce
motorul merge(ex: în cazul nui motor cu frână integrată alimentată de la terminalele motorului).
Atenţie!!! Motorul va rula la aproximativ 50% … 80% din turaţia nominală în timpul ID Run. ASIGURAŢI-VĂ CĂ E SIGUR SĂ PORNIŢI MOTORUL ÎNAINTE DE TESTUL ID RUN!
3
99.11 DEVICE NAME Defineşte numele convertorului pentru aplicaţie. Numele este vizibil pe afişajul panoului de control în Drive Selecţion Mode.

Identificarea Erorilor
133
Identificarea Erorilor Privire generală
În acest capitol sunt listate avertizările şi mesajele de eroare incluzând şi cauza posibilă cât şi acţiunile corective.
Siguranţă în funcţionare
__________________________________________________________________ ATENŢIE! Numai personalul calificat are voie să verifice convertorul. Instrucţiunile de funcţionare în siguranţă de pe primele pagini ale manualului de utilizare al dispozitivului în cauză trebuie citit înainte de a începe să operaţi cu convertorul.
Indicaţii ale erorilor şi avertizărilor
Un mesaj de avertizare sau de eroare pe afişajul control panelului indică o stare anormală a convertorului. Majoritatea cauzelor pot fi identificate şi corectate folosind informaţia din acest capitol. Dacă convertorul funcţionează cu control panelul detaşat, ledul roşu de pe carcasa convertorului va indica o eroare. Codul din 4 biţi, din paranteze, de după mesajul de eroare este pentru comunicarea în mod fieldbus.
RESETAREA Convertorul poate fi resetat fie prin apăsarea tastei RESET, printr-o intrare digitală sau fieldbus, fie deconectînd tensiunea de la covertor pentru scurt timp. După ce eroarea a fost înlăturată, motorul poate fi repornit.
ISTORICUL ERORILOR
Când o eroare a fost detectată, ea este memorată în Istoricul Erorilor. Erorile şi avertizările recente sunt memorate împreună cu data şi ora la care s-au întâmplat.

Identificarea Erorilor
134
Mesaje de eroare generate de convertor AVERTIZARE CAUZĂ REMEDIU ACS 800 TEMP (4210)
Temperatura convertorului este excesivă. O avertizare este dată dacă temperatura modulul invertor depăşeşte 115 ºC
Verificaţi condiţiile de mediu ambient. Verificaţi debitul de aer cât şi funcţionarea ventilatorului Comparaţi putera motorului cu cea a convertizorului.
AI < (8110) MIN FUNC (programmable Fault Function 30.01)
Un semnal de control analogic este sub pragul permis. Acest lucru poate fi cauzat de un nivel al semnalului incorect sau o cădere în controlul conexiunilor.
Verificaţi dacă nivelul semnalului analogic este bun. Verificaţi conexiunile
BACKUP USED Un fişier de rezervă cu parametrii este descărcat în fişier.
Aşteptaţi până se termină descărcarea.
BRAKE ACKN (ff74)
O stare neprevăzută a semnalului de frână. Vezi grupul de parametrii 42 BRAKE CONTROL. Verifică conexiunea semnalului de frânare.
BR OVERHEAT (7112)
Rezistorul de frânare este supra încărcat. Opriţi convertorul. Aşteptaţi să se răcească rezistorul. Verificaţi setările parametrilor funcţiei de protecţie a rezistorului la supra încărcare (vezi grupul de parametrii 27 BRAKE CHOPPER). Verificaţi dacă ciclul de frânare se încadrează în limitele permise.
CALIBRA REQ Calibrarea transformatoarelor de curent de pe ieşire este cerută. Mesajul este afişat la pornirea convertorului dacă convertorul se găseşte în modul de control scalar ( par 99.04), iar caracteristica de pornire din mers în mod scalar este activată (param 21.08).
Calibrarea începe în mod automat. Aşteptaţi.
CALIBRA DONE Calibrarea transformatoarelor de curent de pe ieşire este completă.
Operaţiile normale sunt reluate.
CHOKE OTEMP (ff82)
Temperatura filtrului de ieşire a convertorului este excesiv de mare. Supravegherea este activă pe partea de de convertor ridicător.
Opriţi convertorul. Aşteptaţi să se răcească. Verificaţi temperatura mediului ambient. Verificaţi dacă ventilatorul se roteşte corect.
COMM MODULE (7510) (programmable Fault Function)
Comunocaţia ciclică dintre convertor şi cel master s-a pierdut.
Verificaţi starea comunicaţiei prin fieldbus. Consultă capitolul Controlul prin fieldbus, sau apropiaţi adaptorul manual. Verificaţi parametrii: − Grupul 51 (pentru adaptorul fieldbus) − Grupul 52 (pentru conexiunea Standard
Modbus) Verificaţi legăturile. Verificaţi dacă magistrala principală este configurată, şi dacă trimite/primeşte mesaje.
DC OVERVOLTAGE (3210)
Tensiune în circuitul intermediar de tensiune continuă. Limita de declanşare la supratensiune este de 1.3 · U1max unde U1max, este valoara maximă a tensiunii pe convertizor. Pentru 400 V, U1max este 415V. Pentru 500 V, U1max este 500V. Tensiunea actuală din circuitul intermediar corespunzătoare nivelului de declanşare pentru tensiunea principală este de 728 VDC pentru 400 V şi 877 VDC pentru 500 V.
Verificaţi dacă controlerul de supratensiune este activ( param 20.05). Verificaţi părţile principale să nu fie sub tensiune statică sau tranzitorie. Verificaţi chopperul de frânare şi rezistorul (dacă sunt folosite). Verificaţi timpul de decelerare. Folosiţi rampă de tip coast pentru oprire dacă se poate aplica. Reajustaţi frecvenţa convertorului cu un chopper de frânare şi un rezistor de frânare.
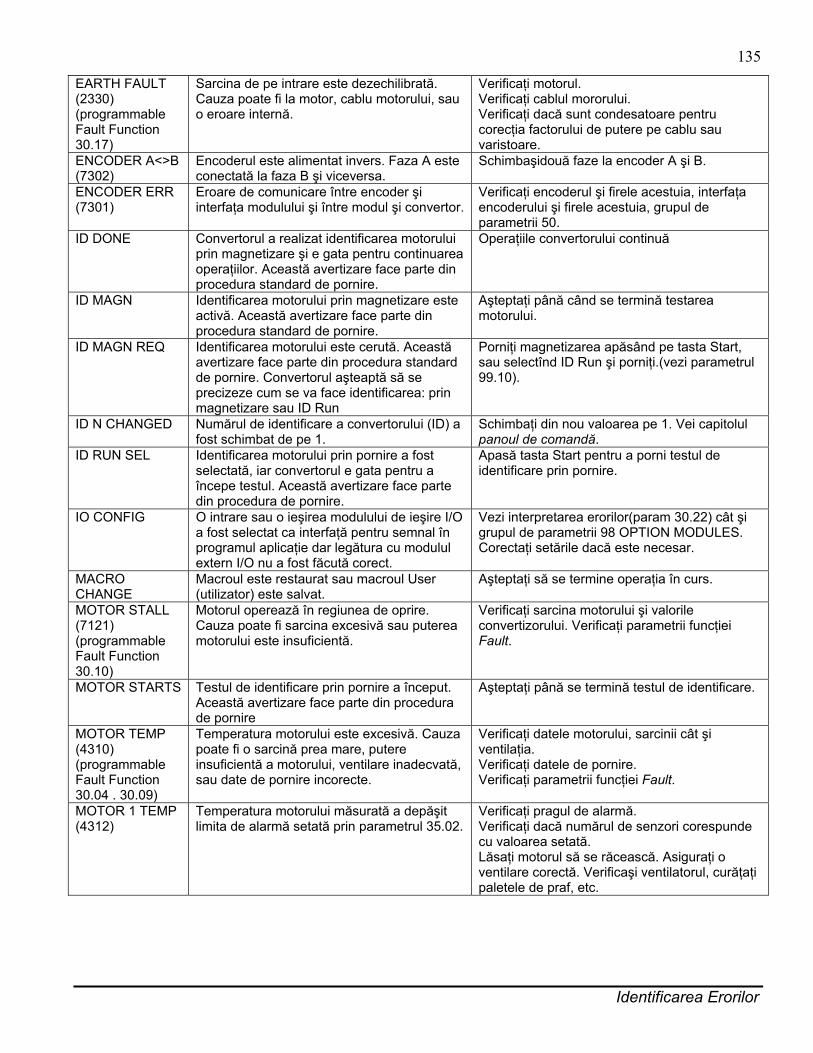
Identificarea Erorilor
135
EARTH FAULT (2330) (programmable Fault Function 30.17)
Sarcina de pe intrare este dezechilibrată. Cauza poate fi la motor, cablu motorului, sau o eroare internă.
Verificaţi motorul. Verificaţi cablul mororului. Verificaţi dacă sunt condesatoare pentru corecţia factorului de putere pe cablu sau varistoare.
ENCODER A<>B (7302)
Encoderul este alimentat invers. Faza A este conectată la faza B şi viceversa.
Schimbaşidouă faze la encoder A şi B.
ENCODER ERR (7301)
Eroare de comunicare între encoder şi interfaţa modulului şi între modul şi convertor.
Verificaţi encoderul şi firele acestuia, interfaţa encoderului şi firele acestuia, grupul de parametrii 50.
ID DONE Convertorul a realizat identificarea motorului prin magnetizare şi e gata pentru continuarea operaţiilor. Această avertizare face parte din procedura standard de pornire.
Operaţiile convertorului continuă
ID MAGN Identificarea motorului prin magnetizare este activă. Această avertizare face parte din procedura standard de pornire.
Aşteptaţi până când se termină testarea motorului.
ID MAGN REQ Identificarea motorului este cerută. Această avertizare face parte din procedura standard de pornire. Convertorul aşteaptă să se precizeze cum se va face identificarea: prin magnetizare sau ID Run
Porniţi magnetizarea apăsând pe tasta Start, sau selectînd ID Run şi porniţi.(vezi parametrul 99.10).
ID N CHANGED Numărul de identificare a convertorului (ID) a fost schimbat de pe 1.
Schimbaţi din nou valoarea pe 1. Vei capitolul panoul de comandă.
ID RUN SEL Identificarea motorului prin pornire a fost selectată, iar convertorul e gata pentru a începe testul. Această avertizare face parte din procedura de pornire.
Apasă tasta Start pentru a porni testul de identificare prin pornire.
IO CONFIG O intrare sau o ieşirea modulului de ieşire I/O a fost selectat ca interfaţă pentru semnal în programul aplicaţie dar legătura cu modulul extern I/O nu a fost făcută corect.
Vezi interpretarea erorilor(param 30.22) cât şi grupul de parametrii 98 OPTION MODULES. Corectaţi setările dacă este necesar.
MACRO CHANGE
Macroul este restaurat sau macroul User (utilizator) este salvat.
Aşteptaţi să se termine operaţia în curs.
MOTOR STALL (7121) (programmable Fault Function 30.10)
Motorul operează în regiunea de oprire. Cauza poate fi sarcina excesivă sau puterea motorului este insuficientă.
Verificaţi sarcina motorului şi valorile convertizorului. Verificaţi parametrii funcţiei Fault.
MOTOR STARTS Testul de identificare prin pornire a început. Această avertizare face parte din procedura de pornire
Aşteptaţi până se termină testul de identificare.
MOTOR TEMP (4310) (programmable Fault Function 30.04 . 30.09)
Temperatura motorului este excesivă. Cauza poate fi o sarcină prea mare, putere insuficientă a motorului, ventilare inadecvată, sau date de pornire incorecte.
Verificaţi datele motorului, sarcinii cât şi ventilaţia. Verificaţi datele de pornire. Verificaţi parametrii funcţiei Fault.
MOTOR 1 TEMP (4312)
Temperatura motorului măsurată a depăşit limita de alarmă setată prin parametrul 35.02.
Verificaţi pragul de alarmă. Verificaţi dacă numărul de senzori corespunde cu valoarea setată. Lăsaţi motorul să se răcească. Asiguraţi o ventilare corectă. Verificaşi ventilatorul, curăţaţi paletele de praf, etc.
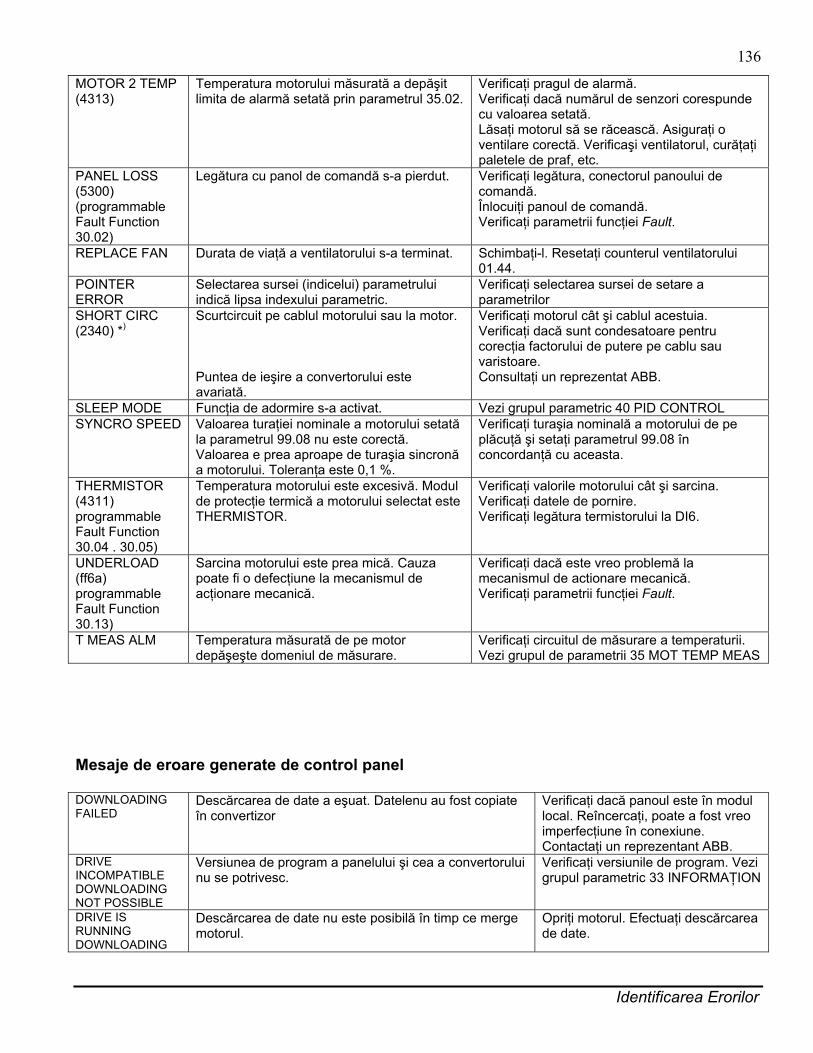
Identificarea Erorilor
136
MOTOR 2 TEMP (4313)
Temperatura motorului măsurată a depăşit limita de alarmă setată prin parametrul 35.02.
Verificaţi pragul de alarmă. Verificaţi dacă numărul de senzori corespunde cu valoarea setată. Lăsaţi motorul să se răcească. Asiguraţi o ventilare corectă. Verificaşi ventilatorul, curăţaţi paletele de praf, etc.
PANEL LOSS (5300) (programmable Fault Function 30.02)
Legătura cu panol de comandă s-a pierdut. Verificaţi legătura, conectorul panoului de comandă. Înlocuiţi panoul de comandă. Verificaţi parametrii funcţiei Fault.
REPLACE FAN Durata de viaţă a ventilatorului s-a terminat. Schimbaţi-l. Resetaţi counterul ventilatorului 01.44.
POINTER ERROR
Selectarea sursei (indicelui) parametrului indică lipsa indexului parametric.
Verificaţi selectarea sursei de setare a parametrilor
SHORT CIRC (2340) *)
Scurtcircuit pe cablul motorului sau la motor. Puntea de ieşire a convertorului este avariată.
Verificaţi motorul cât şi cablul acestuia. Verificaţi dacă sunt condesatoare pentru corecţia factorului de putere pe cablu sau varistoare. Consultaţi un reprezentat ABB.
SLEEP MODE Funcţia de adormire s-a activat. Vezi grupul parametric 40 PID CONTROL SYNCRO SPEED Valoarea turaţiei nominale a motorului setată
la parametrul 99.08 nu este corectă. Valoarea e prea aproape de turaşia sincronă a motorului. Toleranţa este 0,1 %.
Verificaţi turaşia nominală a motorului de pe plăcuţă şi setaţi parametrul 99.08 în concordanţă cu aceasta.
THERMISTOR (4311) programmable Fault Function 30.04 . 30.05)
Temperatura motorului este excesivă. Modul de protecţie termică a motorului selectat este THERMISTOR.
Verificaţi valorile motorului cât şi sarcina. Verificaţi datele de pornire. Verificaţi legătura termistorului la DI6.
UNDERLOAD (ff6a) programmable Fault Function 30.13)
Sarcina motorului este prea mică. Cauza poate fi o defecţiune la mecanismul de acţionare mecanică.
Verificaţi dacă este vreo problemă la mecanismul de actionare mecanică. Verificaţi parametrii funcţiei Fault.
T MEAS ALM Temperatura măsurată de pe motor depăşeşte domeniul de măsurare.
Verificaţi circuitul de măsurare a temperaturii. Vezi grupul de parametrii 35 MOT TEMP MEAS
Mesaje de eroare generate de control panel DOWNLOADING FAILED
Descărcarea de date a eşuat. Datelenu au fost copiate în convertizor
Verificaţi dacă panoul este în modul local. Reîncercaţi, poate a fost vreo imperfecţiune în conexiune. Contactaţi un reprezentant ABB.
DRIVE INCOMPATIBLE DOWNLOADING NOT POSSIBLE
Versiunea de program a panelului şi cea a convertorului nu se potrivesc.
Verificaţi versiunile de program. Vezi grupul parametric 33 INFORMAŢION
DRIVE IS RUNNING DOWNLOADING
Descărcarea de date nu este posibilă în timp ce merge motorul.
Opriţi motorul. Efectuaţi descărcarea de date.
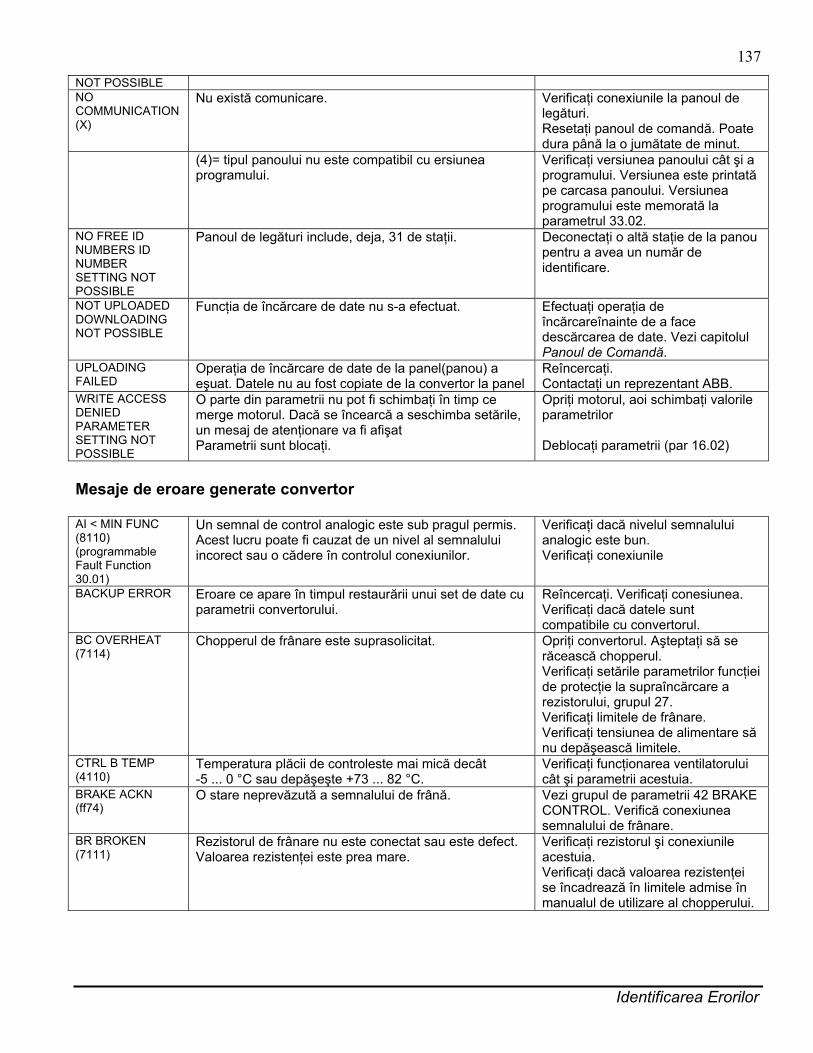
Identificarea Erorilor
137NOT POSSIBLE NO COMMUNICATION (X)
Nu există comunicare. Verificaţi conexiunile la panoul de legături. Resetaţi panoul de comandă. Poate dura până la o jumătate de minut.
(4)= tipul panoului nu este compatibil cu ersiunea programului.
Verificaţi versiunea panoului cât şi a programului. Versiunea este printată pe carcasa panoului. Versiunea programului este memorată la parametrul 33.02.
NO FREE ID NUMBERS ID NUMBER SETTING NOT POSSIBLE
Panoul de legături include, deja, 31 de staţii. Deconectaţi o altă staţie de la panou pentru a avea un număr de identificare.
NOT UPLOADED DOWNLOADING NOT POSSIBLE
Funcţia de încărcare de date nu s-a efectuat. Efectuaţi operaţia de încărcareînainte de a face descărcarea de date. Vezi capitolul Panoul de Comandă.
UPLOADING FAILED
Operaţia de încărcare de date de la panel(panou) a eşuat. Datele nu au fost copiate de la convertor la panel
Reîncercaţi. Contactaţi un reprezentant ABB.
WRITE ACCESS DENIED PARAMETER SETTING NOT POSSIBLE
O parte din parametrii nu pot fi schimbaţi în timp ce merge motorul. Dacă se încearcă a seschimba setările, un mesaj de atenţionare va fi afişat Parametrii sunt blocaţi.
Opriţi motorul, aoi schimbaţi valorile parametrilor Deblocaţi parametrii (par 16.02)
Mesaje de eroare generate convertor AI < MIN FUNC (8110) (programmable Fault Function 30.01)
Un semnal de control analogic este sub pragul permis. Acest lucru poate fi cauzat de un nivel al semnalului incorect sau o cădere în controlul conexiunilor.
Verificaţi dacă nivelul semnalului analogic este bun. Verificaţi conexiunile
BACKUP ERROR Eroare ce apare în timpul restaurării unui set de date cu parametrii convertorului.
Reîncercaţi. Verificaţi conesiunea. Verificaţi dacă datele sunt compatibile cu convertorul.
BC OVERHEAT (7114)
Chopperul de frânare este suprasolicitat. Opriţi convertorul. Aşteptaţi să se răcească chopperul. Verificaţi setările parametrilor funcţiei de protecţie la supraîncărcare a rezistorului, grupul 27. Verificaţi limitele de frânare. Verificaţi tensiunea de alimentare să nu depăşească limitele.
CTRL B TEMP (4110)
Temperatura plăcii de controleste mai mică decât -5 ... 0 °C sau depăşeşte +73 ... 82 °C.
Verificaţi funcţionarea ventilatorului cât şi parametrii acestuia.
BRAKE ACKN (ff74)
O stare neprevăzută a semnalului de frână. Vezi grupul de parametrii 42 BRAKE CONTROL. Verifică conexiunea semnalului de frânare.
BR BROKEN (7111)
Rezistorul de frânare nu este conectat sau este defect. Valoarea rezistenţei este prea mare.
Verificaţi rezistorul şi conexiunile acestuia. Verificaţi dacă valoarea rezistenţei se încadrează în limitele admise în manualul de utilizare al chopperului.
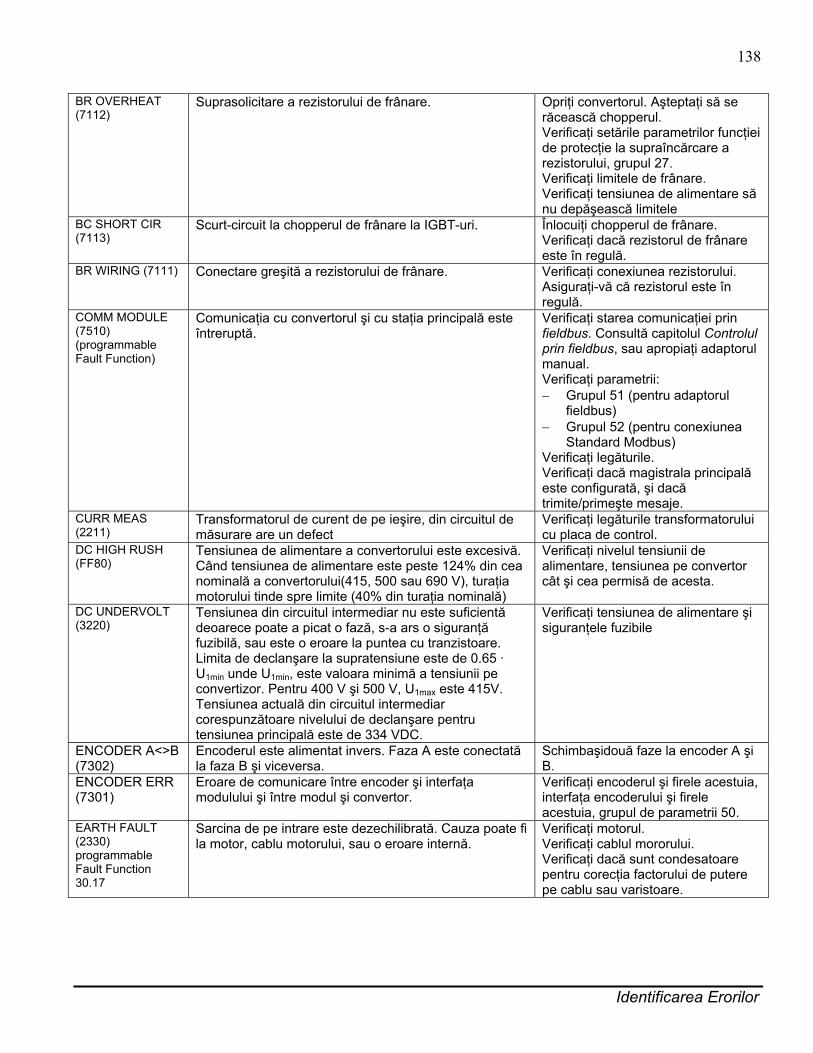
Identificarea Erorilor
138
BR OVERHEAT (7112)
Suprasolicitare a rezistorului de frânare. Opriţi convertorul. Aşteptaţi să se răcească chopperul. Verificaţi setările parametrilor funcţiei de protecţie la supraîncărcare a rezistorului, grupul 27. Verificaţi limitele de frânare. Verificaţi tensiunea de alimentare să nu depăşească limitele
BC SHORT CIR (7113)
Scurt-circuit la chopperul de frânare la IGBT-uri. Înlocuiţi chopperul de frânare. Verificaţi dacă rezistorul de frânare este în regulă.
BR WIRING (7111) Conectare greşită a rezistorului de frânare. Verificaţi conexiunea rezistorului. Asiguraţi-vă că rezistorul este în regulă.
COMM MODULE (7510) (programmable Fault Function)
Comunicaţia cu convertorul şi cu staţia principală este întreruptă.
Verificaţi starea comunicaţiei prin fieldbus. Consultă capitolul Controlul prin fieldbus, sau apropiaţi adaptorul manual. Verificaţi parametrii: − Grupul 51 (pentru adaptorul
fieldbus) − Grupul 52 (pentru conexiunea
Standard Modbus) Verificaţi legăturile. Verificaţi dacă magistrala principală este configurată, şi dacă trimite/primeşte mesaje.
CURR MEAS (2211)
Transformatorul de curent de pe ieşire, din circuitul de măsurare are un defect
Verificaţi legăturile transformatorului cu placa de control.
DC HIGH RUSH (FF80)
Tensiunea de alimentare a convertorului este excesivă. Când tensiunea de alimentare este peste 124% din cea nominală a convertorului(415, 500 sau 690 V), turaţia motorului tinde spre limite (40% din turaţia nominală)
Verificaţi nivelul tensiunii de alimentare, tensiunea pe convertor cât şi cea permisă de acesta.
DC UNDERVOLT (3220)
Tensiunea din circuitul intermediar nu este suficientă deoarece poate a picat o fază, s-a ars o siguranţă fuzibilă, sau este o eroare la puntea cu tranzistoare. Limita de declanşare la supratensiune este de 0.65 · U1min unde U1min, este valoara minimă a tensiunii pe convertizor. Pentru 400 V şi 500 V, U1max este 415V. Tensiunea actuală din circuitul intermediar corespunzătoare nivelului de declanşare pentru tensiunea principală este de 334 VDC.
Verificaţi tensiunea de alimentare şi siguranţele fuzibile
ENCODER A<>B (7302)
Encoderul este alimentat invers. Faza A este conectată la faza B şi viceversa.
Schimbaşidouă faze la encoder A şi B.
ENCODER ERR (7301)
Eroare de comunicare între encoder şi interfaţa modulului şi între modul şi convertor.
Verificaţi encoderul şi firele acestuia, interfaţa encoderului şi firele acestuia, grupul de parametrii 50.
EARTH FAULT (2330) programmable Fault Function 30.17
Sarcina de pe intrare este dezechilibrată. Cauza poate fi la motor, cablu motorului, sau o eroare internă.
Verificaţi motorul. Verificaţi cablul mororului. Verificaţi dacă sunt condesatoare pentru corecţia factorului de putere pe cablu sau varistoare.
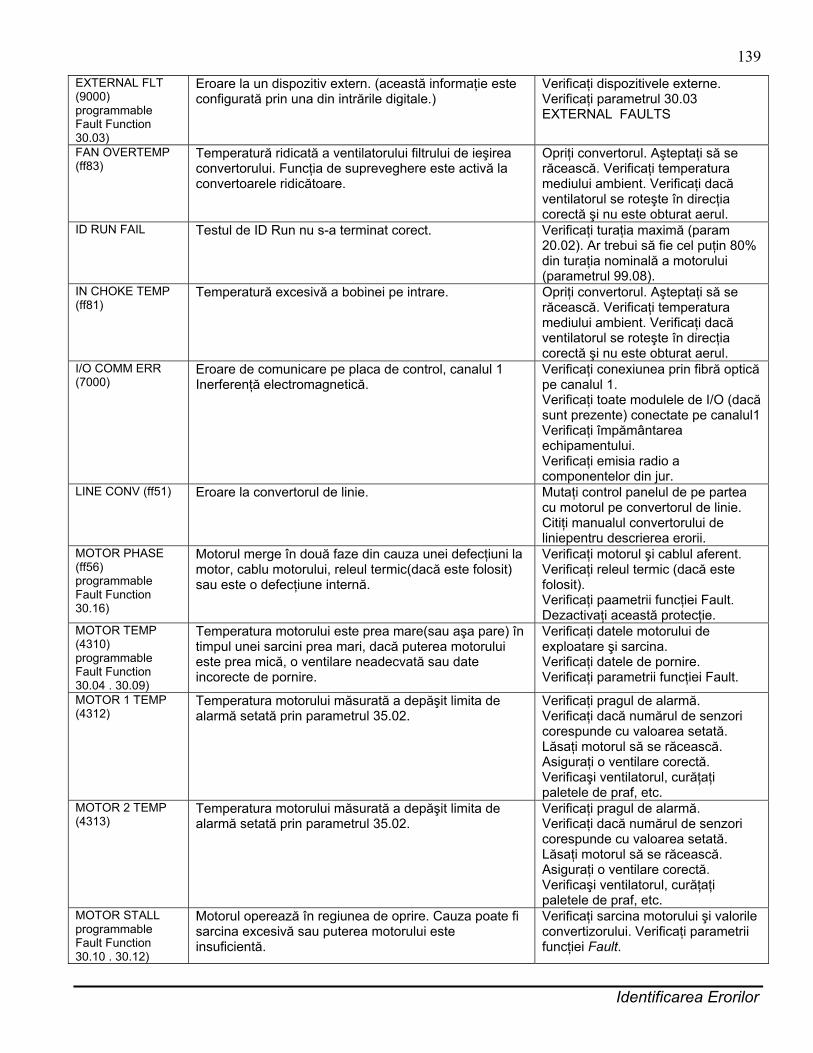
Identificarea Erorilor
139EXTERNAL FLT (9000) programmable Fault Function 30.03)
Eroare la un dispozitiv extern. (această informaţie este configurată prin una din intrările digitale.)
Verificaţi dispozitivele externe. Verificaţi parametrul 30.03 EXTERNAL FAULTS
FAN OVERTEMP (ff83)
Temperatură ridicată a ventilatorului filtrului de ieşirea convertorului. Funcţia de supreveghere este activă la convertoarele ridicătoare.
Opriţi convertorul. Aşteptaţi să se răcească. Verificaţi temperatura mediului ambient. Verificaţi dacă ventilatorul se roteşte în direcţia corectă şi nu este obturat aerul.
ID RUN FAIL Testul de ID Run nu s-a terminat corect. Verificaţi turaţia maximă (param 20.02). Ar trebui să fie cel puţin 80% din turaţia nominală a motorului (parametrul 99.08).
IN CHOKE TEMP (ff81)
Temperatură excesivă a bobinei pe intrare. Opriţi convertorul. Aşteptaţi să se răcească. Verificaţi temperatura mediului ambient. Verificaţi dacă ventilatorul se roteşte în direcţia corectă şi nu este obturat aerul.
I/O COMM ERR (7000)
Eroare de comunicare pe placa de control, canalul 1 Inerferenţă electromagnetică.
Verificaţi conexiunea prin fibră optică pe canalul 1. Verificaţi toate modulele de I/O (dacă sunt prezente) conectate pe canalul1 Verificaţi împământarea echipamentului. Verificaţi emisia radio a componentelor din jur.
LINE CONV (ff51) Eroare la convertorul de linie. Mutaţi control panelul de pe partea cu motorul pe convertorul de linie. Citiţi manualul convertorului de liniepentru descrierea erorii.
MOTOR PHASE (ff56) programmable Fault Function 30.16)
Motorul merge în două faze din cauza unei defecţiuni la motor, cablu motorului, releul termic(dacă este folosit) sau este o defecţiune internă.
Verificaţi motorul şi cablul aferent. Verificaţi releul termic (dacă este folosit). Verificaţi paametrii funcţiei Fault. Dezactivaţi această protecţie.
MOTOR TEMP (4310) programmable Fault Function 30.04 . 30.09)
Temperatura motorului este prea mare(sau aşa pare) în timpul unei sarcini prea mari, dacă puterea motorului este prea mică, o ventilare neadecvată sau date incorecte de pornire.
Verificaţi datele motorului de exploatare şi sarcina. Verificaţi datele de pornire. Verificaţi parametrii funcţiei Fault.
MOTOR 1 TEMP (4312)
Temperatura motorului măsurată a depăşit limita de alarmă setată prin parametrul 35.02.
Verificaţi pragul de alarmă. Verificaţi dacă numărul de senzori corespunde cu valoarea setată. Lăsaţi motorul să se răcească. Asiguraţi o ventilare corectă. Verificaşi ventilatorul, curăţaţi paletele de praf, etc.
MOTOR 2 TEMP (4313)
Temperatura motorului măsurată a depăşit limita de alarmă setată prin parametrul 35.02.
Verificaţi pragul de alarmă. Verificaţi dacă numărul de senzori corespunde cu valoarea setată. Lăsaţi motorul să se răcească. Asiguraţi o ventilare corectă. Verificaşi ventilatorul, curăţaţi paletele de praf, etc.
MOTOR STALL programmable Fault Function 30.10 . 30.12)
Motorul operează în regiunea de oprire. Cauza poate fi sarcina excesivă sau puterea motorului este insuficientă.
Verificaţi sarcina motorului şi valorile convertizorului. Verificaţi parametrii funcţiei Fault.
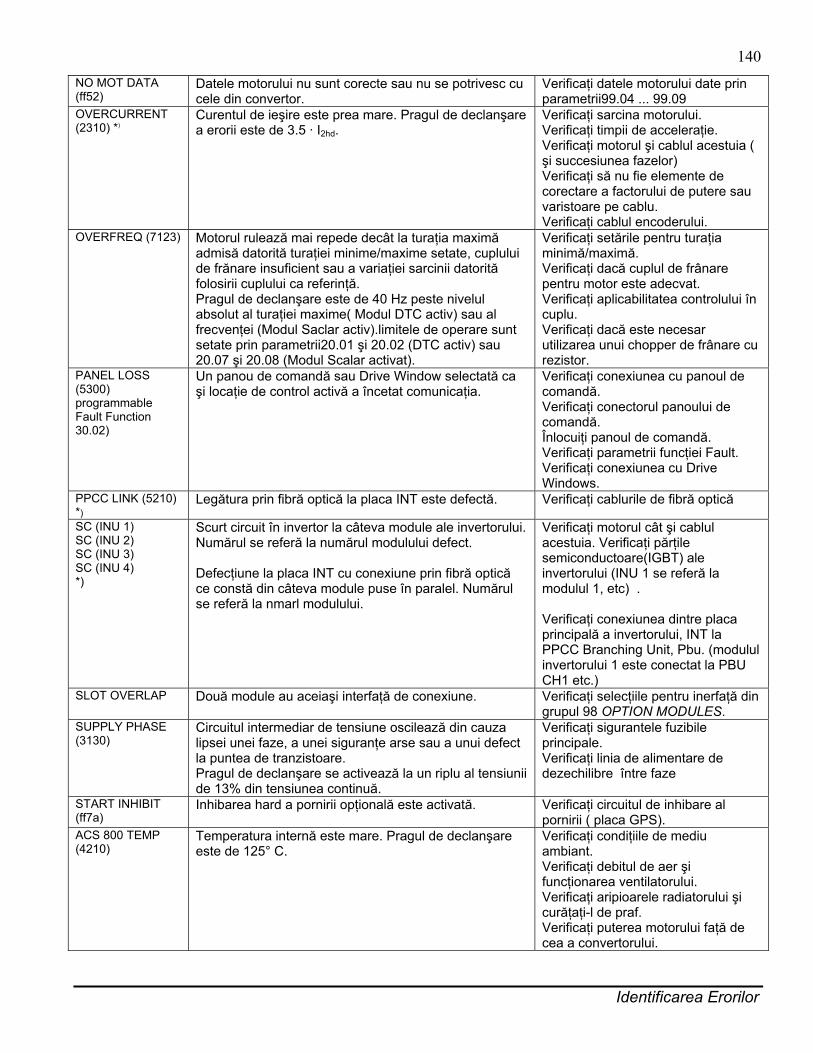
Identificarea Erorilor
140NO MOT DATA (ff52)
Datele motorului nu sunt corecte sau nu se potrivesc cu cele din convertor.
Verificaţi datele motorului date prin parametrii99.04 ... 99.09
OVERCURRENT (2310) *)
Curentul de ieşire este prea mare. Pragul de declanşare a erorii este de 3.5 · I2hd.
Verificaţi sarcina motorului. Verificaţi timpii de acceleraţie. Verificaţi motorul şi cablul acestuia ( şi succesiunea fazelor) Verificaţi să nu fie elemente de corectare a factorului de putere sau varistoare pe cablu. Verificaţi cablul encoderului.
OVERFREQ (7123) Motorul rulează mai repede decât la turaţia maximă admisă datorită turaţiei minime/maxime setate, cuplului de frănare insuficient sau a variaţiei sarcinii datorită folosirii cuplului ca referinţă. Pragul de declanşare este de 40 Hz peste nivelul absolut al turaţiei maxime( Modul DTC activ) sau al frecvenţei (Modul Saclar activ).limitele de operare sunt setate prin parametrii20.01 şi 20.02 (DTC activ) sau 20.07 şi 20.08 (Modul Scalar activat).
Verificaţi setările pentru turaţia minimă/maximă. Verificaţi dacă cuplul de frânare pentru motor este adecvat. Verificaţi aplicabilitatea controlului în cuplu. Verificaţi dacă este necesar utilizarea unui chopper de frânare cu rezistor.
PANEL LOSS (5300) programmable Fault Function 30.02)
Un panou de comandă sau Drive Window selectată ca şi locaţie de control activă a încetat comunicaţia.
Verificaţi conexiunea cu panoul de comandă. Verificaţi conectorul panoului de comandă. Înlocuiţi panoul de comandă. Verificaţi parametrii funcţiei Fault. Verificaţi conexiunea cu Drive Windows.
PPCC LINK (5210) *)
Legătura prin fibră optică la placa INT este defectă. Verificaţi cablurile de fibră optică
SC (INU 1) SC (INU 2) SC (INU 3) SC (INU 4) *)
Scurt circuit în invertor la câteva module ale invertorului. Numărul se referă la numărul modulului defect. Defecţiune la placa INT cu conexiune prin fibră optică ce constă din câteva module puse în paralel. Numărul se referă la nmarl modulului.
Verificaţi motorul cât şi cablul acestuia. Verificaţi părţile semiconductoare(IGBT) ale invertorului (INU 1 se referă la modulul 1, etc) . Verificaţi conexiunea dintre placa principală a invertorului, INT la PPCC Branching Unit, Pbu. (modulul invertorului 1 este conectat la PBU CH1 etc.)
SLOT OVERLAP Două module au aceiaşi interfaţă de conexiune. Verificaţi selecţiile pentru inerfaţă din grupul 98 OPTION MODULES.
SUPPLY PHASE (3130)
Circuitul intermediar de tensiune oscilează din cauza lipsei unei faze, a unei siguranţe arse sau a unui defect la puntea de tranzistoare. Pragul de declanşare se activează la un riplu al tensiunii de 13% din tensiunea continuă.
Verificaţi sigurantele fuzibile principale. Verificaţi linia de alimentare de dezechilibre între faze
START INHIBIT (ff7a)
Inhibarea hard a pornirii opţională este activată. Verificaţi circuitul de inhibare al pornirii ( placa GPS).
ACS 800 TEMP (4210)
Temperatura internă este mare. Pragul de declanşare este de 125° C.
Verificaţi condiţiile de mediu ambiant. Verificaţi debitul de aer şi funcţionarea ventilatorului. Verificaţi aripioarele radiatorului şi curăţaţi-l de praf. Verificaţi puterea motorului faţă de cea a convertorului.
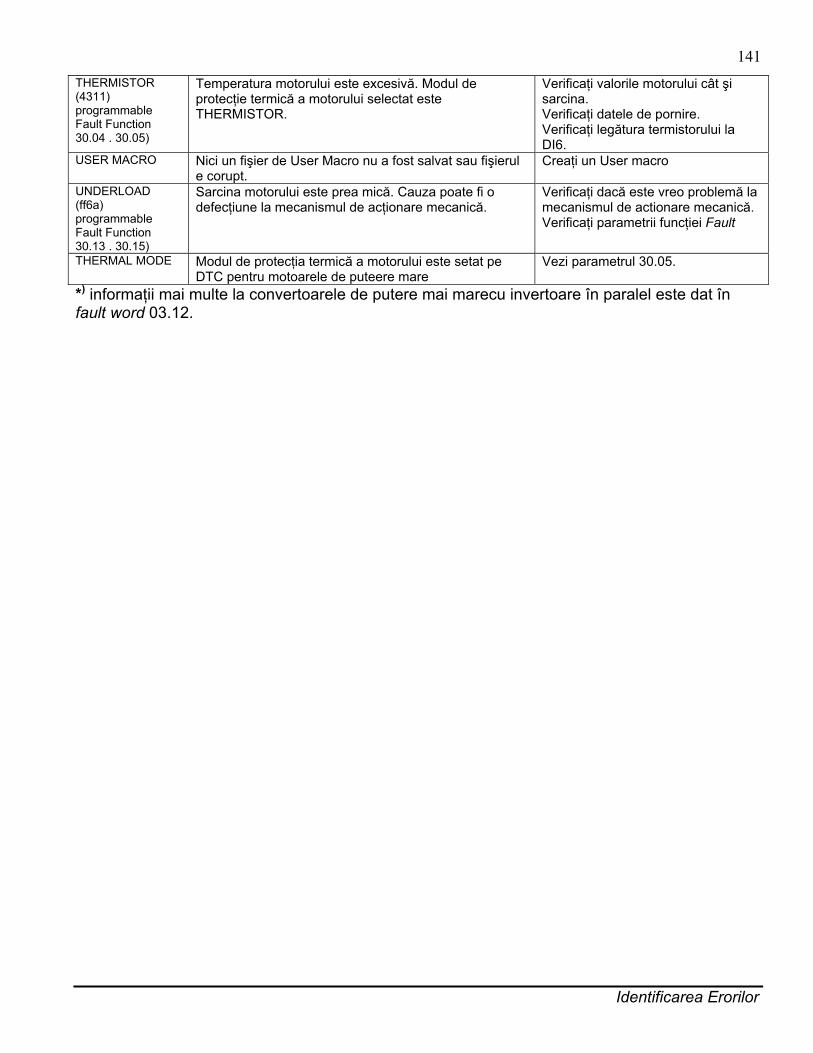
Identificarea Erorilor
141THERMISTOR (4311) programmable Fault Function 30.04 . 30.05)
Temperatura motorului este excesivă. Modul de protecţie termică a motorului selectat este THERMISTOR.
Verificaţi valorile motorului cât şi sarcina. Verificaţi datele de pornire. Verificaţi legătura termistorului la DI6.
USER MACRO Nici un fişier de User Macro nu a fost salvat sau fişierul e corupt.
Creaţi un User macro
UNDERLOAD (ff6a) programmable Fault Function 30.13 . 30.15)
Sarcina motorului este prea mică. Cauza poate fi o defecţiune la mecanismul de acţionare mecanică.
Verificaţi dacă este vreo problemă la mecanismul de actionare mecanică. Verificaţi parametrii funcţiei Fault
THERMAL MODE Modul de protecţia termică a motorului este setat pe DTC pentru motoarele de puteere mare
Vezi parametrul 30.05.
*) informaţii mai multe la convertoarele de putere mai marecu invertoare în paralel este dat în fault word 03.12.

Controlul prin Fieldbus
143
Controlul prin fieldbus Privire generală a capitolului
În acest capitol se descrie modul cum un convertizor poate fi controlat de la dispozitive externe printr-o reţea.
Privire generală a sistemului Convertorul poate fi conectat la o sursă de control extern – uzual un controler fieldbus – via un modul de adaptare montat în slotul 1 de extensie al convertorului.
Convertorul poare fi setat să primească toate informaţiile necesare prin intrefaţa fieldbus, sau controlul poate fi distribuit între ineerfaţa fieldbus şi alte surse de control disponibile, ex. Intrările digitale şi analogice.
Setarea comunicaţiei printrul modul de adaptare fieldbus. Înainte de a configura convertorul pentru controlul prin fieldbus, modulul de adaptare trebuie să fie atât mecanic cât şi electric instalat conform instrucţiunilor date în manualul de instalare ( Hardware manual) al concertorului, şi cel al modulului. Comunicaţia între convertor şi modulul de adaptare se activează prin parametrul 98.02. după ce sa iniţializat comunicaţia, parametrii de configurare ai modulului devin accesibili la convertor la grupul de parametrii 51.
Fig1. Control Fieldbus

Controlul prin Fieldbus
144
Tabelul 1 setarea parametrilor pentru modulul de adaptare la fieldbus. Parametru Setări alternative Setarea pentru
controlul prin fieldbusFuncţionare/informaţii
INSTALAREA COMUNICAŢIEI 98.02 NO; FIELDBUS;
ADVANT; STD MODBUS; CUSTOMISED
FIELDBUS Iniţializează comunicaţia între convertor şi modulul de adaptare. Activează parametrii de setare ai modulului (Grup 51).
ABB DRIVES; GENERIC; CSA 2.8/3.0
ABB DRIVES, GENERIC or CSA 2.8/3.0
Selectează profilul de comunicare folosit de convertor. Vezi secţiunea Profile de comunicare de mai jos.
CONFIGURAREA MODULULUI 51.01 MODULE TYPE - - Afişează tipul modulului 51.02 (FIELDBUS PARAMETER 2) . . . 51.26 (FIELDBUS PARAMETER 26)
Aceşti parametrii sunt specifici modulului de adaptare. Pentru informaţii mai multe, vezi manualul modulului. Observaţie: nu toţi parametrii sunt vizibili.
51.27 FBA PAR REFRESH*
(0) DONE; (1) REFRESHING.
- Validează orice parametru schimbat. După rescalare, valoarea revine automat pe DONE.
51.28 FBA CPI FW REV*
xyz (binary coded decimal)
- Afişează revizia CPI a modulului de adaptare. x = nr reviziei majore; y = nr reviziei minore; z = nr corecţiei. Ex: 107 = revizia 1.07
51.29 FBA CONFIG ID*
xyz (binary coded decimal)
- Afişează fişierul de configurare -identificare al modulului de adaptare dim memoria lui ACS800. această informaţie este folosită de programul de aplicaţie. x = nr reviziei majore; y = nr reviziei minore; z = nr corecţiei. Ex: 101 = revizia 1.01
51.30 FBA CONFIG REV*
xyz (binary coded decimal)
- Afişează fişierul de configurare -revizie al modulului de adaptare dim memoria lui ACS800. y = nr reviziei minore; z = nr corecţiei. Ex: 1 = revizia 0.01
51.31 FBA STATUS
(0) IDLE; (1) EXEC. INIT; (2) TIME OUT; (3) CONFIG ERROR; (4) OFF-LINE; (5) ON-LINE; (6) RESET
- Afişează starea modulului. Notă: Cu modulu de tipul Nxxx valoarea este întodeauna inactivă. IDLE = adaptorul nu este configurat EXEC.INT = Iniţializarea modulului TIME OUT = O pauză a intervenit în comunicaţia dintre convertor şi modul. CONFIG ERROR = eroare de configurare a adaptorului. Codul de revizie major sau minor al CPI memorat în modul este diferit de cel din fişierul de configurare din memoria convertorului. OFF-LINE = adaptor deconectat ON -LINE = adaptor conectat RESET = resetare
*Parametrii 51.27 ... 51.30 sunt vizibili doar cu module de tipul Rxxx.
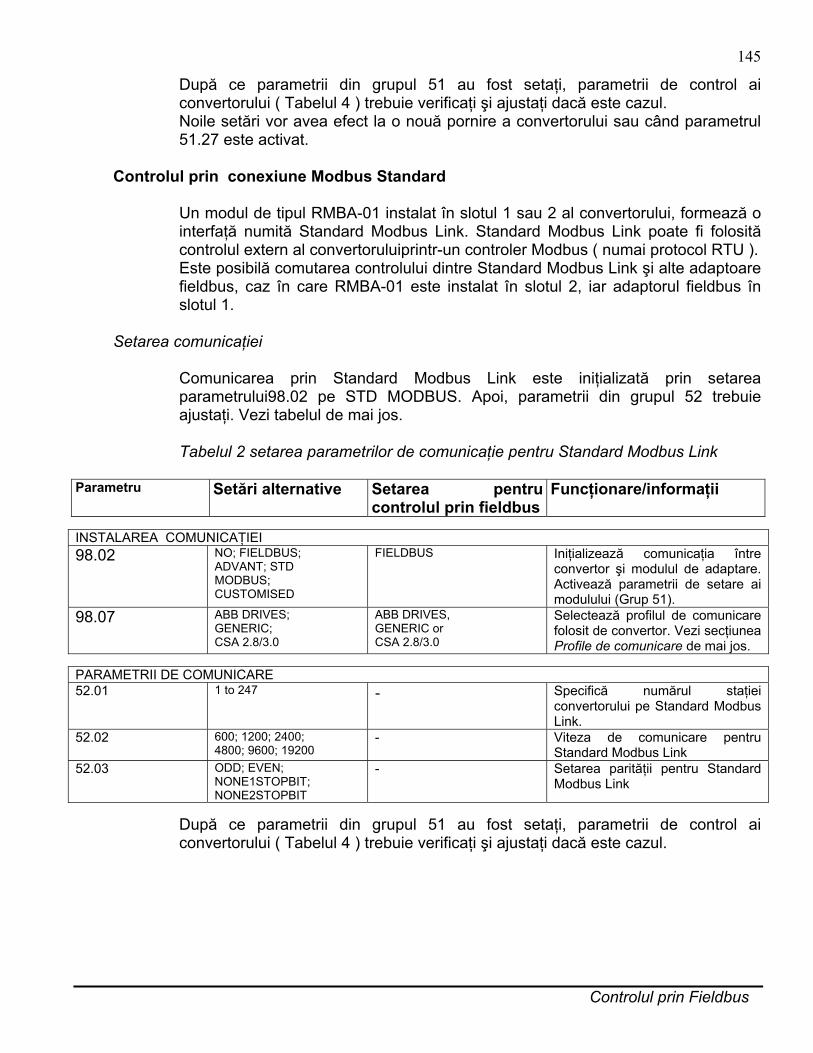
Controlul prin Fieldbus
145
După ce parametrii din grupul 51 au fost setaţi, parametrii de control ai convertorului ( Tabelul 4 ) trebuie verificaţi şi ajustaţi dacă este cazul. Noile setări vor avea efect la o nouă pornire a convertorului sau când parametrul 51.27 este activat.
Controlul prin conexiune Modbus Standard
Un modul de tipul RMBA-01 instalat în slotul 1 sau 2 al convertorului, formează o interfaţă numită Standard Modbus Link. Standard Modbus Link poate fi folosită controlul extern al convertoruluiprintr-un controler Modbus ( numai protocol RTU ). Este posibilă comutarea controlului dintre Standard Modbus Link şi alte adaptoare fieldbus, caz în care RMBA-01 este instalat în slotul 2, iar adaptorul fieldbus în slotul 1.
Setarea comunicaţiei
Comunicarea prin Standard Modbus Link este iniţializată prin setarea parametrului98.02 pe STD MODBUS. Apoi, parametrii din grupul 52 trebuie ajustaţi. Vezi tabelul de mai jos. Tabelul 2 setarea parametrilor de comunicaţie pentru Standard Modbus Link
Parametru Setări alternative Setarea pentru controlul prin fieldbus
Funcţionare/informaţii
INSTALAREA COMUNICAŢIEI 98.02 NO; FIELDBUS;
ADVANT; STD MODBUS; CUSTOMISED
FIELDBUS Iniţializează comunicaţia între convertor şi modulul de adaptare. Activează parametrii de setare ai modulului (Grup 51).
98.07 ABB DRIVES; GENERIC; CSA 2.8/3.0
ABB DRIVES, GENERIC or CSA 2.8/3.0
Selectează profilul de comunicare folosit de convertor. Vezi secţiunea Profile de comunicare de mai jos.
PARAMETRII DE COMUNICARE 52.01 1 to 247 - Specifică numărul staţiei
convertorului pe Standard Modbus Link.
52.02 600; 1200; 2400; 4800; 9600; 19200
- Viteza de comunicare pentru Standard Modbus Link
52.03 ODD; EVEN; NONE1STOPBIT; NONE2STOPBIT
- Setarea parităţii pentru Standard Modbus Link
După ce parametrii din grupul 51 au fost setaţi, parametrii de control ai convertorului ( Tabelul 4 ) trebuie verificaţi şi ajustaţi dacă este cazul.
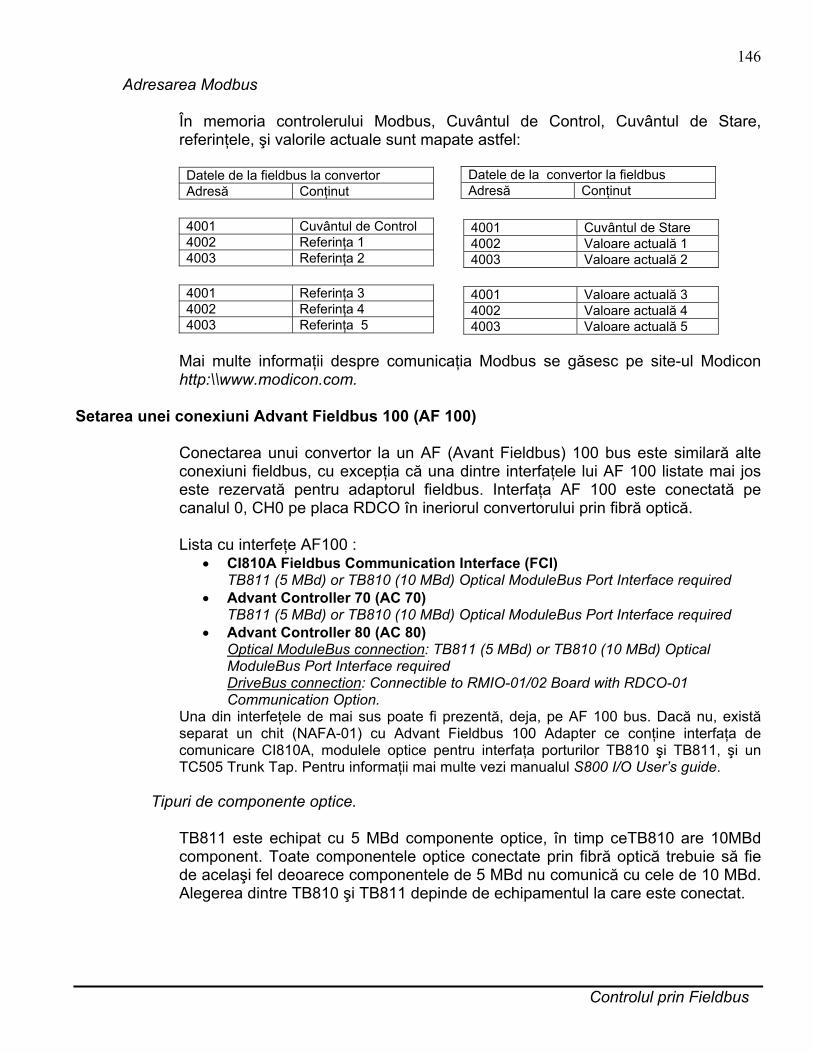
Controlul prin Fieldbus
146
Adresarea Modbus
În memoria controlerului Modbus, Cuvântul de Control, Cuvântul de Stare, referinţele, şi valorile actuale sunt mapate astfel:
Datele de la fieldbus la convertor Adresă Conţinut
4001 Cuvântul de Control 4002 Referinţa 1 4003 Referinţa 2
4001 Referinţa 3 4002 Referinţa 4 4003 Referinţa 5
Mai multe informaţii despre comunicaţia Modbus se găsesc pe site-ul Modicon http:\\www.modicon.com.
Setarea unei conexiuni Advant Fieldbus 100 (AF 100)
Conectarea unui convertor la un AF (Avant Fieldbus) 100 bus este similară alte conexiuni fieldbus, cu excepţia că una dintre interfaţele lui AF 100 listate mai jos este rezervată pentru adaptorul fieldbus. Interfaţa AF 100 este conectată pe canalul 0, CH0 pe placa RDCO în ineriorul convertorului prin fibră optică. Lista cu interfeţe AF100 :
• CI810A Fieldbus Communication Interface (FCI) TB811 (5 MBd) or TB810 (10 MBd) Optical ModuleBus Port Interface required
• Advant Controller 70 (AC 70) TB811 (5 MBd) or TB810 (10 MBd) Optical ModuleBus Port Interface required
• Advant Controller 80 (AC 80) Optical ModuleBus connection: TB811 (5 MBd) or TB810 (10 MBd) Optical ModuleBus Port Interface required DriveBus connection: Connectible to RMIO-01/02 Board with RDCO-01 Communication Option.
Una din interfeţele de mai sus poate fi prezentă, deja, pe AF 100 bus. Dacă nu, există separat un chit (NAFA-01) cu Advant Fieldbus 100 Adapter ce conţine interfaţa de comunicare CI810A, modulele optice pentru interfaţa porturilor TB810 şi TB811, şi un TC505 Trunk Tap. Pentru informaţii mai multe vezi manualul S800 I/O User’s guide.
Tipuri de componente optice.
TB811 este echipat cu 5 MBd componente optice, în timp ceTB810 are 10MBd component. Toate componentele optice conectate prin fibră optică trebuie să fie de acelaşi fel deoarece componentele de 5 MBd nu comunică cu cele de 10 MBd. Alegerea dintre TB810 şi TB811 depinde de echipamentul la care este conectat.
Datele de la convertor la fieldbus Adresă Conţinut
4001 Cuvântul de Stare 4002 Valoare actuală 1 4003 Valoare actuală 2
4001 Valoare actuală 3 4002 Valoare actuală 4 4003 Valoare actuală 5
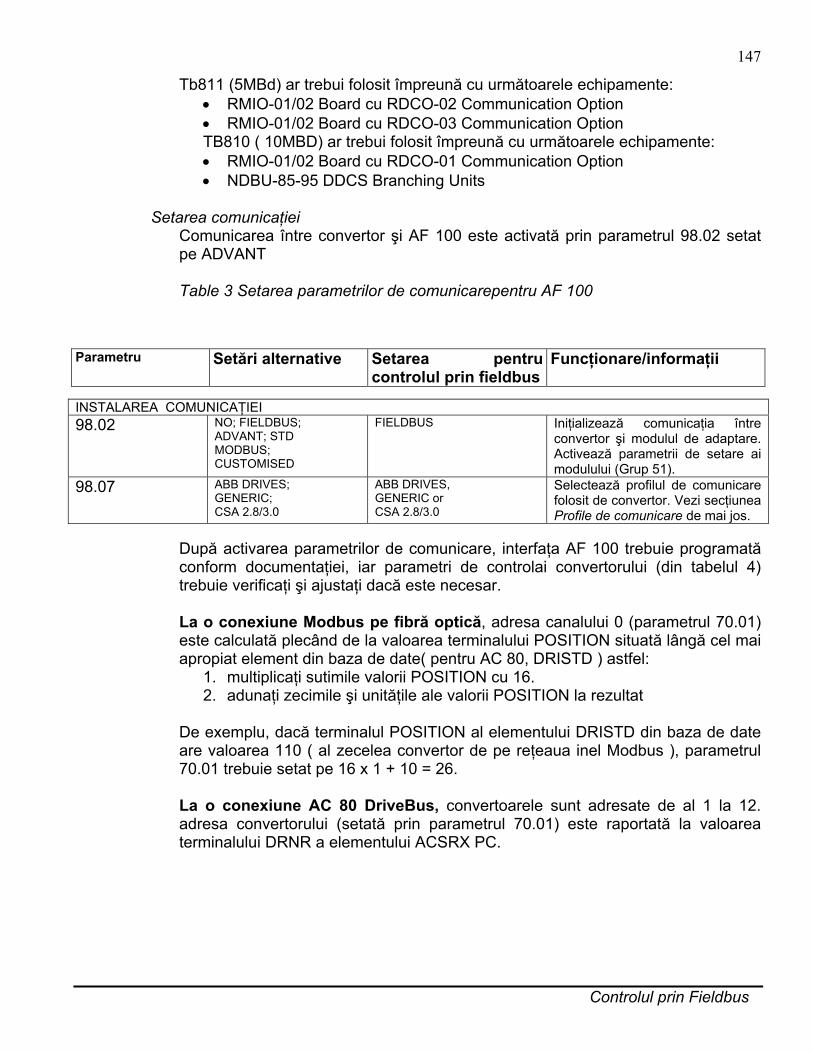
Controlul prin Fieldbus
147
Tb811 (5MBd) ar trebui folosit împreună cu următoarele echipamente: • RMIO-01/02 Board cu RDCO-02 Communication Option • RMIO-01/02 Board cu RDCO-03 Communication Option TB810 ( 10MBD) ar trebui folosit împreună cu următoarele echipamente: • RMIO-01/02 Board cu RDCO-01 Communication Option • NDBU-85-95 DDCS Branching Units
Setarea comunicaţiei
Comunicarea între convertor şi AF 100 este activată prin parametrul 98.02 setat pe ADVANT Table 3 Setarea parametrilor de comunicarepentru AF 100
Parametru Setări alternative Setarea pentru
controlul prin fieldbusFuncţionare/informaţii
INSTALAREA COMUNICAŢIEI 98.02 NO; FIELDBUS;
ADVANT; STD MODBUS; CUSTOMISED
FIELDBUS Iniţializează comunicaţia între convertor şi modulul de adaptare. Activează parametrii de setare ai modulului (Grup 51).
98.07 ABB DRIVES; GENERIC; CSA 2.8/3.0
ABB DRIVES, GENERIC or CSA 2.8/3.0
Selectează profilul de comunicare folosit de convertor. Vezi secţiunea Profile de comunicare de mai jos.
După activarea parametrilor de comunicare, interfaţa AF 100 trebuie programată conform documentaţiei, iar parametri de controlai convertorului (din tabelul 4) trebuie verificaţi şi ajustaţi dacă este necesar. La o conexiune Modbus pe fibră optică, adresa canalului 0 (parametrul 70.01) este calculată plecând de la valoarea terminalului POSITION situată lângă cel mai apropiat element din baza de date( pentru AC 80, DRISTD ) astfel:
1. multiplicaţi sutimile valorii POSITION cu 16. 2. adunaţi zecimile şi unităţile ale valorii POSITION la rezultat
De exemplu, dacă terminalul POSITION al elementului DRISTD din baza de date are valoarea 110 ( al zecelea convertor de pe reţeaua inel Modbus ), parametrul 70.01 trebuie setat pe 16 x 1 + 10 = 26. La o conexiune AC 80 DriveBus, convertoarele sunt adresate de al 1 la 12. adresa convertorului (setată prin parametrul 70.01) este raportată la valoarea terminalului DRNR a elementului ACSRX PC.
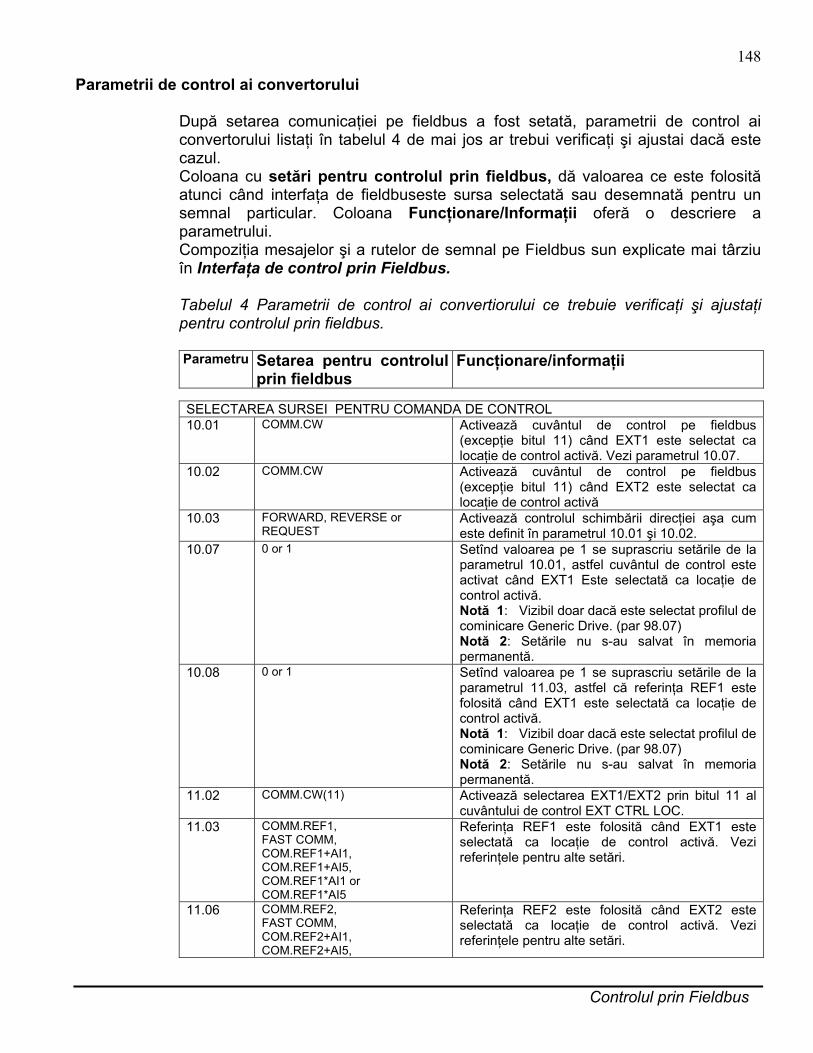
Controlul prin Fieldbus
148
Parametrii de control ai convertorului
După setarea comunicaţiei pe fieldbus a fost setată, parametrii de control ai convertorului listaţi în tabelul 4 de mai jos ar trebui verificaţi şi ajustai dacă este cazul. Coloana cu setări pentru controlul prin fieldbus, dă valoarea ce este folosită atunci când interfaţa de fieldbuseste sursa selectată sau desemnată pentru un semnal particular. Coloana Funcţionare/Informaţii oferă o descriere a parametrului. Compoziţia mesajelor şi a rutelor de semnal pe Fieldbus sun explicate mai târziu în Interfaţa de control prin Fieldbus. Tabelul 4 Parametrii de control ai convertiorului ce trebuie verificaţi şi ajustaţi pentru controlul prin fieldbus. Parametru Setarea pentru controlul
prin fieldbus Funcţionare/informaţii
SELECTAREA SURSEI PENTRU COMANDA DE CONTROL 10.01 COMM.CW Activează cuvântul de control pe fieldbus
(excepţie bitul 11) când EXT1 este selectat ca locaţie de control activă. Vezi parametrul 10.07.
10.02 COMM.CW Activează cuvântul de control pe fieldbus (excepţie bitul 11) când EXT2 este selectat ca locaţie de control activă
10.03 FORWARD, REVERSE or REQUEST
Activează controlul schimbării direcţiei aşa cum este definit în parametrul 10.01 şi 10.02.
10.07 0 or 1 Setînd valoarea pe 1 se suprascriu setările de la parametrul 10.01, astfel cuvântul de control este activat când EXT1 Este selectată ca locaţie de control activă. Notă 1: Vizibil doar dacă este selectat profilul de cominicare Generic Drive. (par 98.07) Notă 2: Setările nu s-au salvat în memoria permanentă.
10.08 0 or 1 Setînd valoarea pe 1 se suprascriu setările de la parametrul 11.03, astfel că referinţa REF1 este folosită când EXT1 este selectată ca locaţie de control activă. Notă 1: Vizibil doar dacă este selectat profilul de cominicare Generic Drive. (par 98.07) Notă 2: Setările nu s-au salvat în memoria permanentă.
11.02 COMM.CW(11) Activează selectarea EXT1/EXT2 prin bitul 11 al cuvântului de control EXT CTRL LOC.
11.03 COMM.REF1, FAST COMM, COM.REF1+AI1, COM.REF1+AI5, COM.REF1*AI1 or COM.REF1*AI5
Referinţa REF1 este folosită când EXT1 este selectată ca locaţie de control activă. Vezi referinţele pentru alte setări.
11.06 COMM.REF2, FAST COMM, COM.REF2+AI1, COM.REF2+AI5,
Referinţa REF2 este folosită când EXT2 este selectată ca locaţie de control activă. Vezi referinţele pentru alte setări.

Controlul prin Fieldbus
149COM.REF2*AI1 or COM.REF2*AI5
SELECTAREA SURSEI DE SEMNAL EXTERNE 14.01 COM.REF3(13) Activează controlul releului RO1 prin referinţa
REF3, bitul 13. 14.02 COM.REF3(14) Activează controlul releului RO2 prin referinţa
REF3, bitul 14. 14.03 COM.REF3(15) Activează controlul releului RO3 prin referinţa
REF3, bitul 15. 15.01 COMM.REF4 Direcţionează conţinutul referinţei REF4 spre
ieşirea analogică AO1. Scalare: 20000 = 20 mA 15.06 COMM.REF5 Direcţionează conţinutul referinţei REF5 spre
ieşirea analogică AO2. Scalare: 20000 = 20 mA
INTRĂRILE DE CONTROL ALE SISTEMULUI 16.01 COMM.CW(3)
Activează controlul semnalului Run Enable prin bitul 3 al Cuvântului de control.
16.04 COMM.CW(7)
Activează resetarea erorilor prin bitul 7 al Cuvântului de control. Notă: Trebuie setat pe ZES cândeste selectat profilul de comunicaţie Generic Drive (par. 98.07).
16.07 DONE; SAVE
Salvează valorile schimbate ale parametrilor ( şi cele făcute prin fieldbus) în memoria permanentă.
FUNCŢII ALE ERORILOR DE COMUNICAŢIE 30.18 NO FAULT
LAST SPEED Determină acţiunile convertorului în cazul întreruperii comunicaţiei prin fieldbus. Notă: Detectarea întreruperii este bazată pe monitorizarea primirii seturilor de date Principale şi Auxiliare ( a căror surse sunt selectate cu parametrii 90.04 şi 90.05 ).
30.19 0.1 . 60.0 s Defineşte timpul detectarea pierderii setului de date Principale de referinţă şi acţiunea selectată cu parametrul 30.18.
30.20 ZERO; LAST VALUE Determină starea în care ieşirea releeulor RO1 la RO3 şi ieşirile analogice AO1 şi AO2 sunt ”părăsite” după pierderea setului de dateAuxiliar de Referinţă .
30.21 0.0 … 60.0 s Defineşte timpul detectarea pierderii setului de date Auxiliare de referinţă şi acţiunea selectată cu parametrul 30.18. Notă: această funcţie de supraveghere este dezactivată dacă parametrul/parametrii 90.01, 90.02 şi 90.03 sunt pe 0.
Selecţia referinţeisemnalului prin fieldbus 90.01 0 ... 8999 Defineşte parametrul convertorului în care
valoarea referinţei REF3 prin fieldbus. Format: xxyy, unde xx = grup parametric (10-89), yy = index parametric (3001 = parametrul 30.01.
90.02 0 ... 8999 Defineşte parametrul convertorului în care valoarea referinţei REF4 prin fieldbus. Format: vezi parametrul 90.01
90.03 0 ... 8999 Defineşte parametrul convertorului în care valoarea referinţei REF5 prin fieldbus. Format: vezi parametrul 90.01
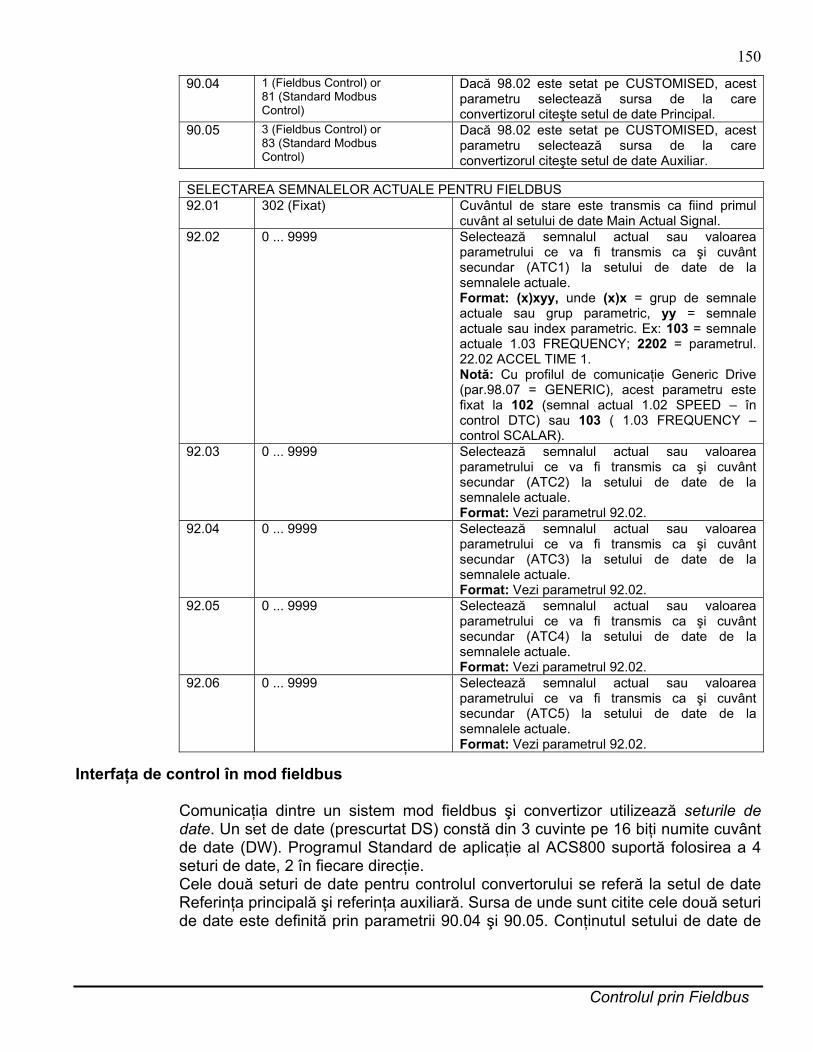
Controlul prin Fieldbus
150
90.04 1 (Fieldbus Control) or 81 (Standard Modbus Control)
Dacă 98.02 este setat pe CUSTOMISED, acest parametru selectează sursa de la care convertizorul citeşte setul de date Principal.
90.05 3 (Fieldbus Control) or 83 (Standard Modbus Control)
Dacă 98.02 este setat pe CUSTOMISED, acest parametru selectează sursa de la care convertizorul citeşte setul de date Auxiliar.
SELECTAREA SEMNALELOR ACTUALE PENTRU FIELDBUS 92.01 302 (Fixat) Cuvântul de stare este transmis ca fiind primul
cuvânt al setului de date Main Actual Signal. 92.02 0 ... 9999 Selectează semnalul actual sau valoarea
parametrului ce va fi transmis ca şi cuvânt secundar (ATC1) la setului de date de la semnalele actuale. Format: (x)xyy, unde (x)x = grup de semnale actuale sau grup parametric, yy = semnale actuale sau index parametric. Ex: 103 = semnale actuale 1.03 FREQUENCY; 2202 = parametrul. 22.02 ACCEL TIME 1. Notă: Cu profilul de comunicaţie Generic Drive (par.98.07 = GENERIC), acest parametru este fixat la 102 (semnal actual 1.02 SPEED – în control DTC) sau 103 ( 1.03 FREQUENCY – control SCALAR).
92.03 0 ... 9999 Selectează semnalul actual sau valoarea parametrului ce va fi transmis ca şi cuvânt secundar (ATC2) la setului de date de la semnalele actuale. Format: Vezi parametrul 92.02.
92.04 0 ... 9999 Selectează semnalul actual sau valoarea parametrului ce va fi transmis ca şi cuvânt secundar (ATC3) la setului de date de la semnalele actuale. Format: Vezi parametrul 92.02.
92.05 0 ... 9999 Selectează semnalul actual sau valoarea parametrului ce va fi transmis ca şi cuvânt secundar (ATC4) la setului de date de la semnalele actuale. Format: Vezi parametrul 92.02.
92.06 0 ... 9999 Selectează semnalul actual sau valoarea parametrului ce va fi transmis ca şi cuvânt secundar (ATC5) la setului de date de la semnalele actuale. Format: Vezi parametrul 92.02.
Interfaţa de control în mod fieldbus
Comunicaţia dintre un sistem mod fieldbus şi convertizor utilizează seturile de date. Un set de date (prescurtat DS) constă din 3 cuvinte pe 16 biţi numite cuvânt de date (DW). Programul Standard de aplicaţie al ACS800 suportă folosirea a 4 seturi de date, 2 în fiecare direcţie. Cele două seturi de date pentru controlul convertorului se referă la setul de date Referinţa principală şi referinţa auxiliară. Sursa de unde sunt citite cele două seturi de date este definită prin parametrii 90.04 şi 90.05. Conţinutul setului de date de
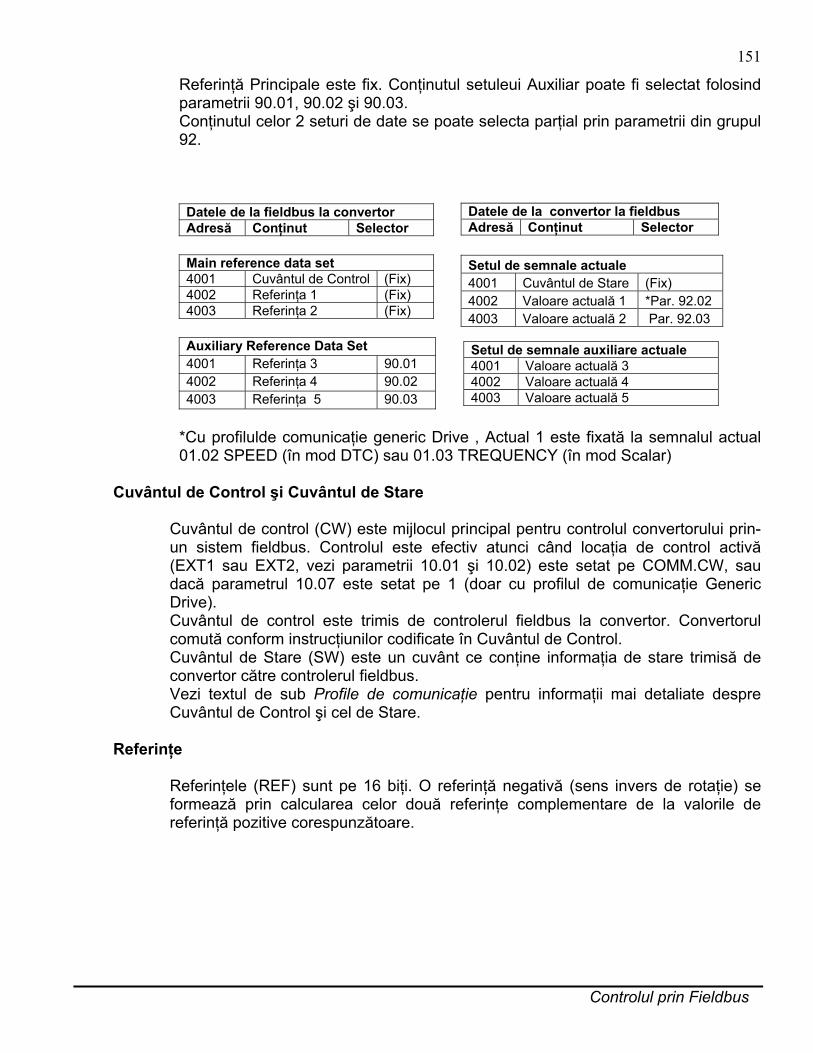
Controlul prin Fieldbus
151
Referinţă Principale este fix. Conţinutul setuleui Auxiliar poate fi selectat folosind parametrii 90.01, 90.02 şi 90.03. Conţinutul celor 2 seturi de date se poate selecta parţial prin parametrii din grupul 92. Datele de la fieldbus la convertor Adresă Conţinut Selector
Main reference data set 4001 Cuvântul de Control (Fix) 4002 Referinţa 1 (Fix) 4003 Referinţa 2 (Fix)
Auxiliary Reference Data Set 4001 Referinţa 3 90.01 4002 Referinţa 4 90.02 4003 Referinţa 5 90.03
*Cu profilulde comunicaţie generic Drive , Actual 1 este fixată la semnalul actual 01.02 SPEED (în mod DTC) sau 01.03 TREQUENCY (în mod Scalar)
Cuvântul de Control şi Cuvântul de Stare
Cuvântul de control (CW) este mijlocul principal pentru controlul convertorului prin-un sistem fieldbus. Controlul este efectiv atunci când locaţia de control activă (EXT1 sau EXT2, vezi parametrii 10.01 şi 10.02) este setat pe COMM.CW, sau dacă parametrul 10.07 este setat pe 1 (doar cu profilul de comunicaţie Generic Drive). Cuvântul de control este trimis de controlerul fieldbus la convertor. Convertorul comută conform instrucţiunilor codificate în Cuvântul de Control. Cuvântul de Stare (SW) este un cuvânt ce conţine informaţia de stare trimisă de convertor către controlerul fieldbus. Vezi textul de sub Profile de comunicaţie pentru informaţii mai detaliate despre Cuvântul de Control şi cel de Stare.
Referinţe
Referinţele (REF) sunt pe 16 biţi. O referinţă negativă (sens invers de rotaţie) se formează prin calcularea celor două referinţe complementare de la valorile de referinţă pozitive corespunzătoare.
Datele de la convertor la fieldbus Adresă Conţinut Selector
Setul de semnale actuale 4001 Cuvântul de Stare (Fix) 4002 Valoare actuală 1 *Par. 92.02 4003 Valoare actuală 2 Par. 92.03
Setul de semnale auxiliare actuale 4001 Valoare actuală 3 4002 Valoare actuală 4 4003 Valoare actuală 5
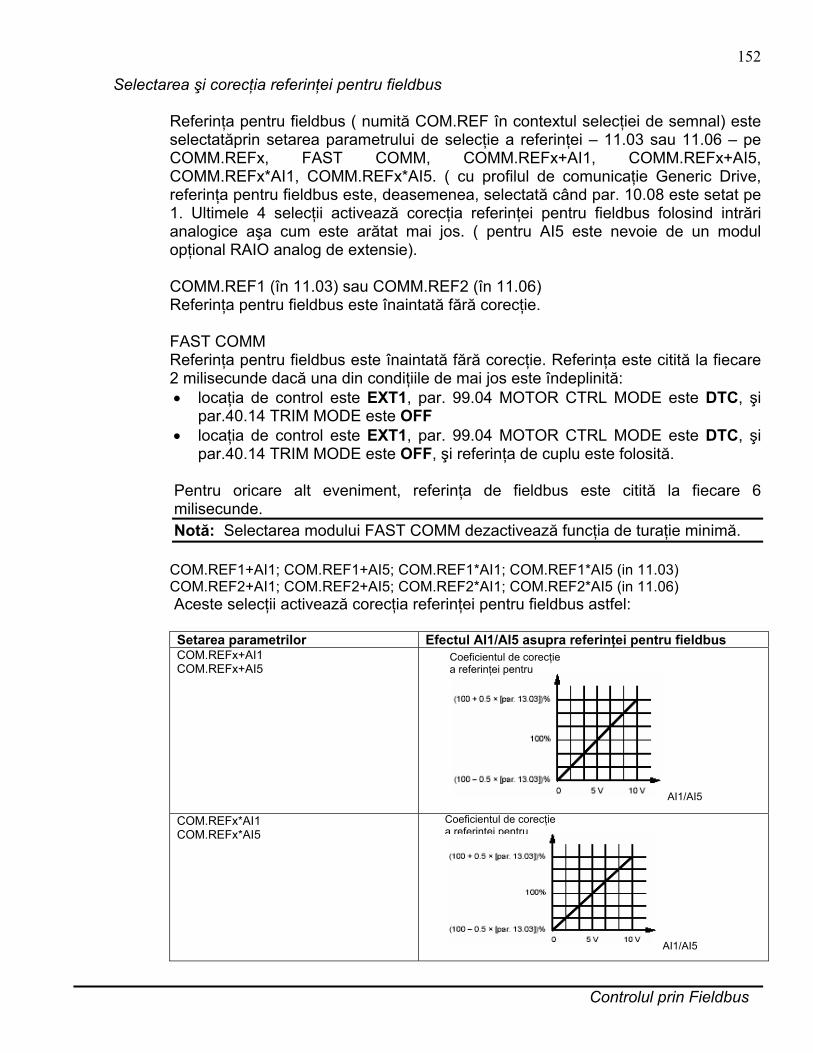
Controlul prin Fieldbus
152
Selectarea şi corecţia referinţei pentru fieldbus
Referinţa pentru fieldbus ( numită COM.REF în contextul selecţiei de semnal) este selectatăprin setarea parametrului de selecţie a referinţei – 11.03 sau 11.06 – pe COMM.REFx, FAST COMM, COMM.REFx+AI1, COMM.REFx+AI5, COMM.REFx*AI1, COMM.REFx*AI5. ( cu profilul de comunicaţie Generic Drive, referinţa pentru fieldbus este, deasemenea, selectată când par. 10.08 este setat pe 1. Ultimele 4 selecţii activează corecţia referinţei pentru fieldbus folosind intrări analogice aşa cum este arătat mai jos. ( pentru AI5 este nevoie de un modul opţional RAIO analog de extensie). COMM.REF1 (în 11.03) sau COMM.REF2 (în 11.06) Referinţa pentru fieldbus este înaintată fără corecţie. FAST COMM Referinţa pentru fieldbus este înaintată fără corecţie. Referinţa este citită la fiecare 2 milisecunde dacă una din condiţiile de mai jos este îndeplinită: • locaţia de control este EXT1, par. 99.04 MOTOR CTRL MODE este DTC, şi
par.40.14 TRIM MODE este OFF • locaţia de control este EXT1, par. 99.04 MOTOR CTRL MODE este DTC, şi
par.40.14 TRIM MODE este OFF, şi referinţa de cuplu este folosită. Pentru oricare alt eveniment, referinţa de fieldbus este citită la fiecare 6 milisecunde. Notă: Selectarea modului FAST COMM dezactivează funcţia de turaţie minimă.
COM.REF1+AI1; COM.REF1+AI5; COM.REF1*AI1; COM.REF1*AI5 (in 11.03) COM.REF2+AI1; COM.REF2+AI5; COM.REF2*AI1; COM.REF2*AI5 (in 11.06) Aceste selecţii activează corecţia referinţei pentru fieldbus astfel: Setarea parametrilor Efectul AI1/AI5 asupra referinţei pentru fieldbus COM.REFx+AI1 COM.REFx+AI5
COM.REFx*AI1 COM.REFx*AI5
Coeficientul de corecţie a referinţei pentru
AI1/AI5
Coeficientul de corecţie a referinţei pentru
AI1/AI5

Controlul prin Fieldbus
153
Manipularea referinţelor Controlul sensului de rotaţie este configurat pentru fiecare locaţie de control (EXT1 şi EXT2) folosind parametrii din grupul 10. Referinţele pentru fieldbus sunt bipolare, pot fi negative sau pozitive. Diagramele următoare ilustrează cum interacţionează parametrii din grupul 10 cu semnul referinţei pentru fieldbus pentru a rezulta referinţa REF1/REF2. Notă 2: Cu profilul de comunicaţie ABB Drives, limita “Max.Ref.” este definită de parametrii 11.05 (REF1) şi 11.08 (REF2). Cu profilul de comunicaţie ABB Drives, limita “Max.Ref.” este definită de parametrii 99.08 (în mod DTC) şi 99.07 (în mod Scalar). Notă 3: parametrii de scalare a referinţa externe 11.04 şi 11.07 sunt deasemenea în acţiune. Notă 4: Folosirea lui REF 2 nu este suportată de profilul de comunicaţie Generic Drive.
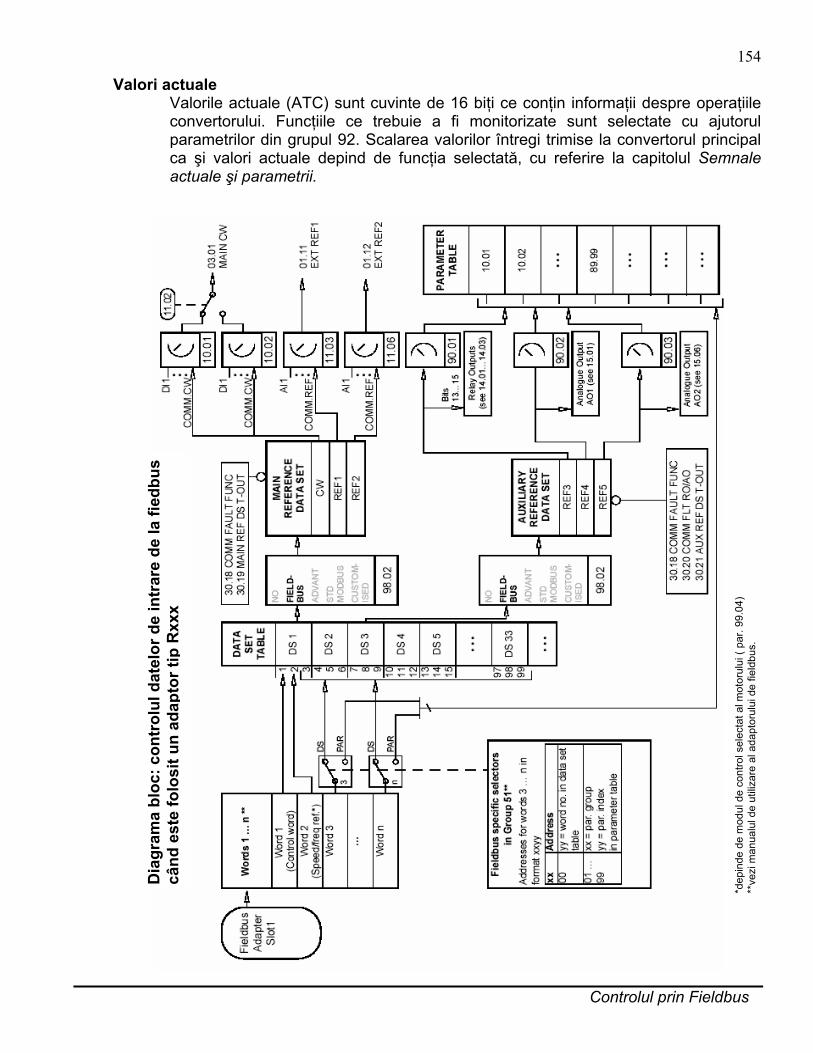
Controlul prin Fieldbus
154
Valori actuale Valorile actuale (ATC) sunt cuvinte de 16 biţi ce conţin informaţii despre operaţiile convertorului. Funcţiile ce trebuie a fi monitorizate sunt selectate cu ajutorul parametrilor din grupul 92. Scalarea valorilor întregi trimise la convertorul principal ca şi valori actuale depind de funcţia selectată, cu referire la capitolul Semnale actuale şi parametrii.
Dia
gram
a bl
oc: c
ontr
olul
dat
elor
de
intr
are
de la
fied
bus
când
est
e fo
losi
t un
adap
tor t
ip R
xxx
*dep
inde
de
mod
ul d
e co
ntro
l sel
ecta
t al m
otor
ului
( pa
r. 99
.04)
**
vezi
man
ualu
l de
utili
zare
al a
dapt
orul
ui d
e fie
ldbu
s.
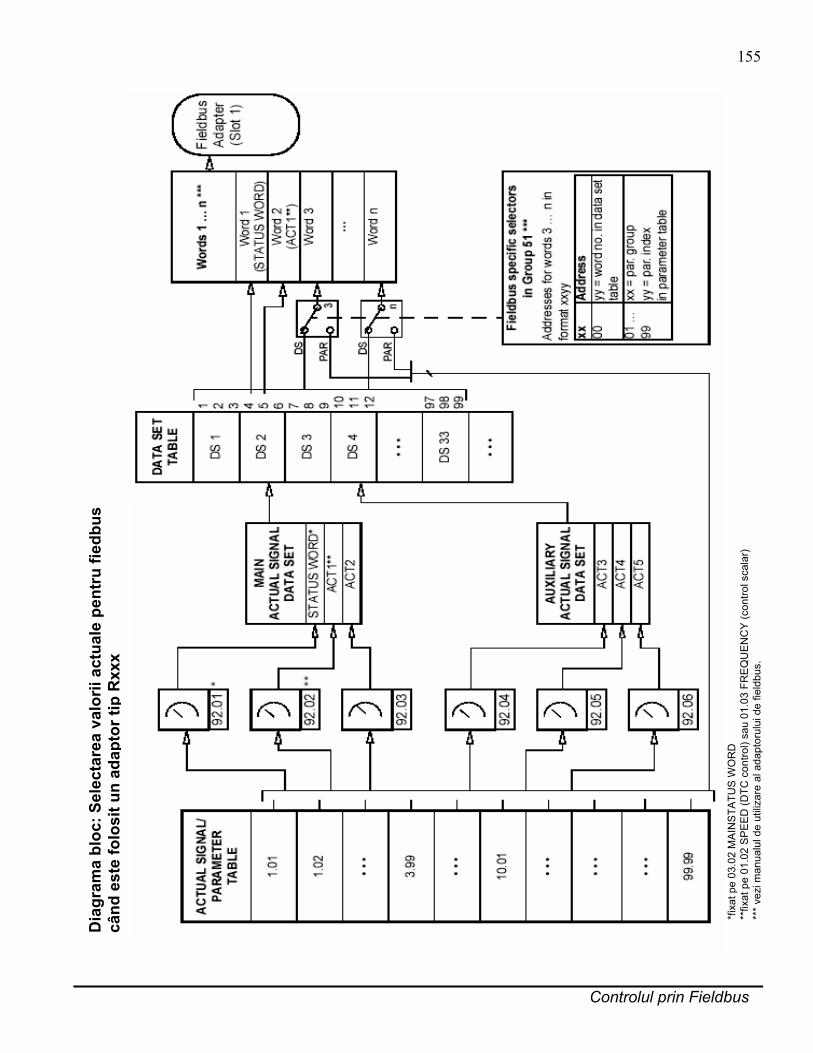
Controlul prin Fieldbus
155
Dia
gram
a bl
oc: S
elec
tare
a va
lorii
act
uale
pen
tru
fiedb
us
când
est
e fo
losi
t un
ada p
tor t
ip R
xxx
*fix
at p
e 03
.02
MA
INS
TATU
S W
OR
D
**fix
at p
e 01
.02
SP
EE
D (D
TC c
ontro
l) sa
u 01
.03
FRE
QU
EN
CY
(con
trol s
cala
r)
***
vezi
man
ualu
l de
utili
zare
al a
dapt
orul
ui d
e fie
ldbu
s.
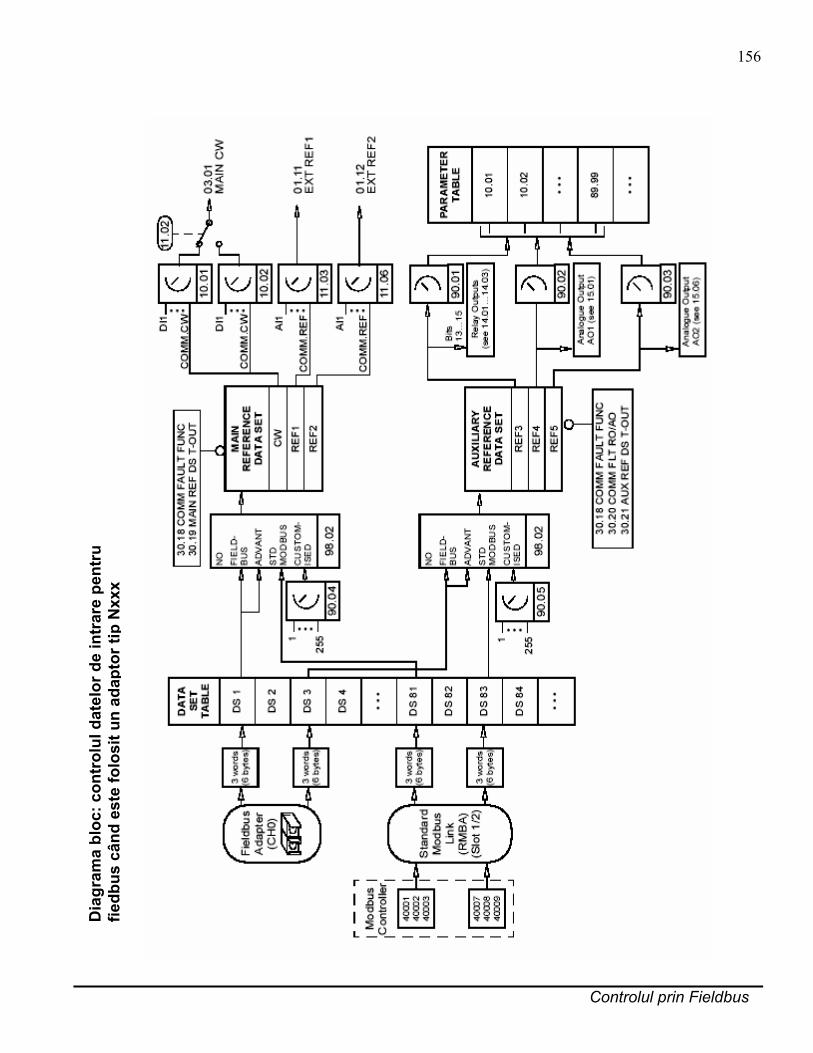
Controlul prin Fieldbus
156
Dia
gram
a bl
oc: c
ontr
olul
dat
elor
de
intr
are
pent
ru
fiedb
us c
ând
este
folo
sit u
n ad
a pto
r tip
Nxx
x
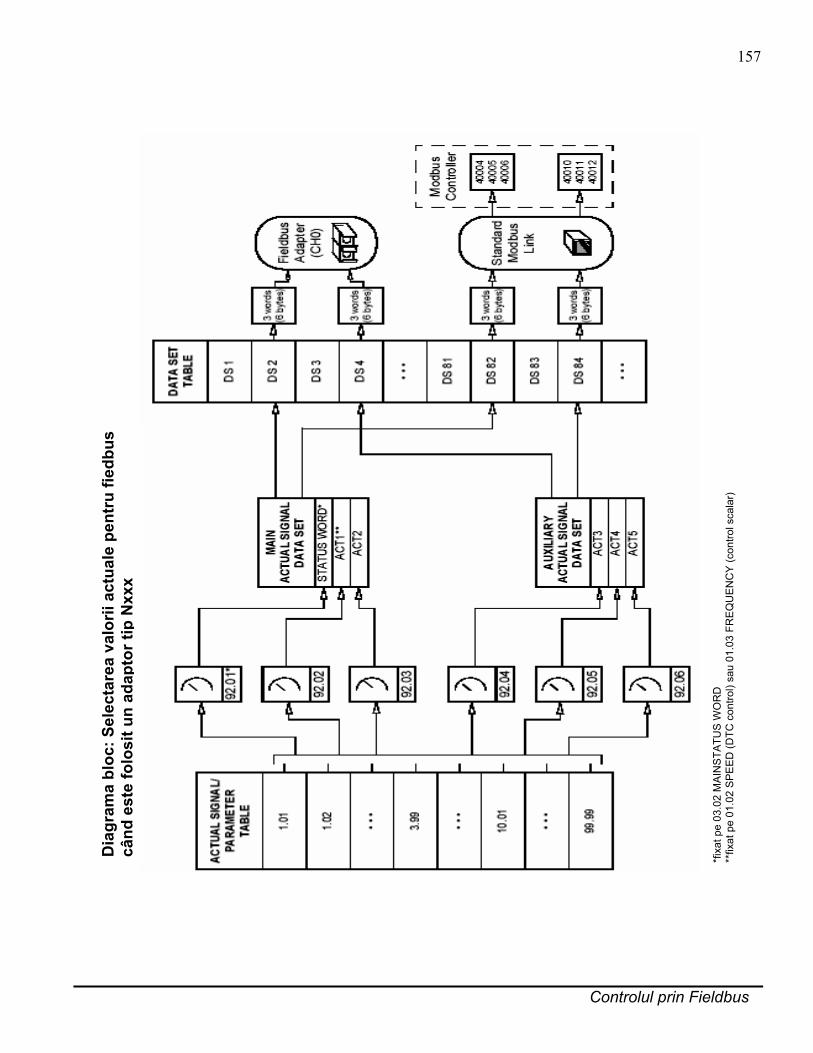
Controlul prin Fieldbus
157
*fix
at p
e 03
.02
MA
INS
TATU
S W
OR
D
**fix
at p
e 01
.02
SP
EE
D (D
TC c
ontro
l) sa
u 01
.03
FRE
QU
EN
CY
(con
trol s
cala
r)
Dia
gram
a bl
oc: S
elec
tare
a va
lorii
act
uale
pen
tru
fiedb
us
când
est
e fo
losi
t un
adap
tor t
ip N
xxx
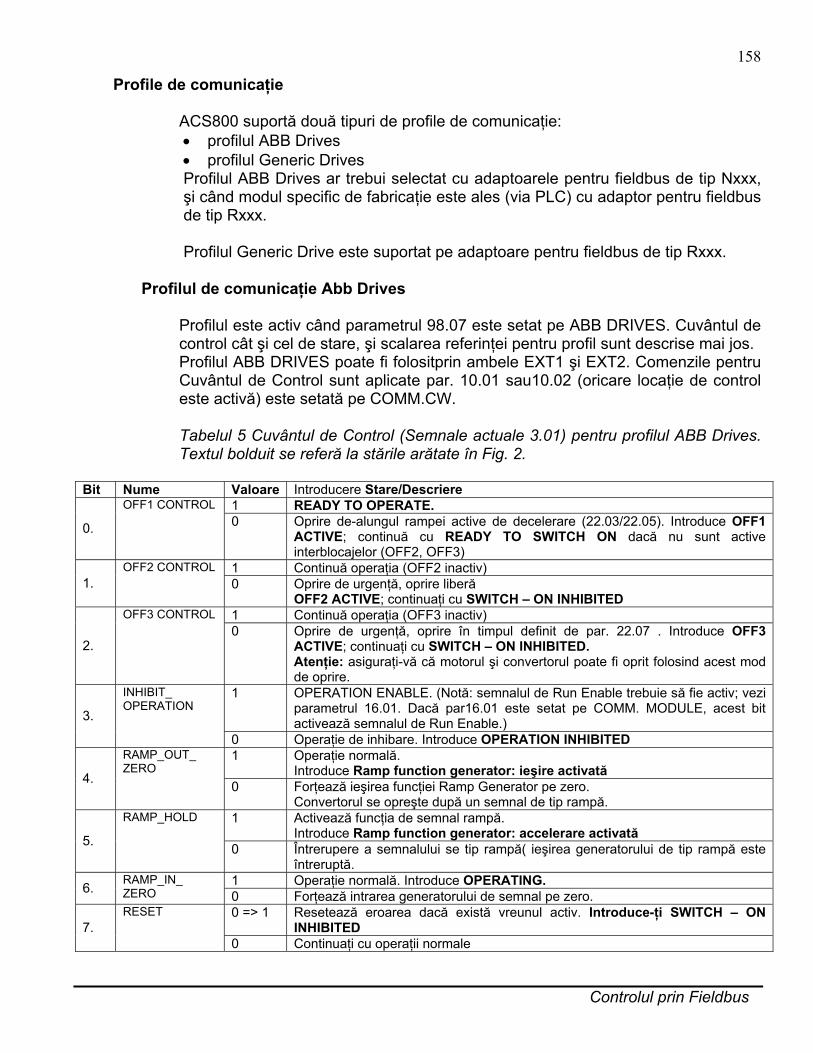
Controlul prin Fieldbus
158
Profile de comunicaţie ACS800 suportă două tipuri de profile de comunicaţie: • profilul ABB Drives • profilul Generic Drives Profilul ABB Drives ar trebui selectat cu adaptoarele pentru fieldbus de tip Nxxx, şi când modul specific de fabricaţie este ales (via PLC) cu adaptor pentru fieldbus de tip Rxxx. Profilul Generic Drive este suportat pe adaptoare pentru fieldbus de tip Rxxx.
Profilul de comunicaţie Abb Drives Profilul este activ când parametrul 98.07 este setat pe ABB DRIVES. Cuvântul de control cât şi cel de stare, şi scalarea referinţei pentru profil sunt descrise mai jos. Profilul ABB DRIVES poate fi folositprin ambele EXT1 şi EXT2. Comenzile pentru Cuvântul de Control sunt aplicate par. 10.01 sau10.02 (oricare locaţie de control este activă) este setată pe COMM.CW. Tabelul 5 Cuvântul de Control (Semnale actuale 3.01) pentru profilul ABB Drives. Textul bolduit se referă la stările arătate în Fig. 2.
Bit Nume Valoare Introducere Stare/Descriere 1 READY TO OPERATE.
0.
OFF1 CONTROL 0 Oprire de-alungul rampei active de decelerare (22.03/22.05). Introduce OFF1
ACTIVE; continuă cu READY TO SWITCH ON dacă nu sunt active interblocajelor (OFF2, OFF3)
1 Continuă operaţia (OFF2 inactiv) 1.
OFF2 CONTROL 0 Oprire de urgenţă, oprire liberă
OFF2 ACTIVE; continuaţi cu SWITCH – ON INHIBITED 1 Continuă operaţia (OFF3 inactiv)
2.
OFF3 CONTROL 0 Oprire de urgenţă, oprire în timpul definit de par. 22.07 . Introduce OFF3
ACTIVE; continuaţi cu SWITCH – ON INHIBITED. Atenţie: asiguraţi-vă că motorul şi convertorul poate fi oprit folosind acest mod de oprire.
1 OPERATION ENABLE. (Notă: semnalul de Run Enable trebuie să fie activ; vezi parametrul 16.01. Dacă par16.01 este setat pe COMM. MODULE, acest bit activează semnalul de Run Enable.) 3.
INHIBIT_ OPERATION
0 Operaţie de inhibare. Introduce OPERATION INHIBITED 1 Operaţie normală.
Introduce Ramp function generator: ieşire activată 4.
RAMP_OUT_ ZERO
0 Forţează ieşirea funcţiei Ramp Generator pe zero. Convertorul se opreşte după un semnal de tip rampă.
1 Activează funcţia de semnal rampă. Introduce Ramp function generator: accelerare activată 5.
RAMP_HOLD
0 Întrerupere a semnalului se tip rampă( ieşirea generatorului de tip rampă este întreruptă.
1 Operaţie normală. Introduce OPERATING. 6. RAMP_IN_ ZERO 0 Forţează intrarea generatorului de semnal pe zero.
0 => 1 Resetează eroarea dacă există vreunul activ. Introduce-ţi SWITCH – ON INHIBITED 7.
RESET
0 Continuaţi cu operaţii normale

Controlul prin Fieldbus
159
Bit Nume Valoare Introducere Stare/Descriere 1 Nu este folosit. 8. INCHING_1
1 => 0 Nu este folosit. 1 Nu este folosit. 9. INCHING_2
1 => 0 Nu este folosit. 1 Controlul prin fieldbus este activat.
10.
REMOTE_CMD 0 Cuvântul de control <> 0 sau Referinţa <> 0: reţine ultimul Cuvânt de Control şi
Referinţa Cuvântul de control = 0 şi Referinţa = 0: fieldbus este activat. Referinţa şi rampa de deceleraţie/acceleraţie sunt blocate.
1 Selectaţi locaţia de Control Externă EXT2. Este efectvă dacă par. 11.02 este setat pe COMM.CW(11) 11.
EXT CTRL LOC
0 Selectaţi locaţia de Control Externă EXT1. Este efectvă dacă par. 11.02 este setat pe COMM.CW(11)
12... 15
Reserved
Tabelul 6 cuvântul de stare pentru profilu de comunicaţii ABB Drives Textul bolduit se referă la stările arătate în Fig. 2
Bit Nume Valoare Introducere Stare/Descriere 1 READY TO SWITCH ON.
0. RDY_ON 0 NOT READY TO SWITCH ON.
1 READY TO OPERATE. 1.
RDY_RUN 0 OFF1 ACTIVE.
1 OPERATION ENABLED. 2. RDY_REF 0 OPERATION INHIBITED.
1 FAULT. 3. TRIPPED 0 No fault.
1 OFF2 inactive. 4. OFF_2_STA 0 OFF2 ACTIVE.
1 OFF3 inactive. 5. OFF_3_STA 0 OFF3 ACTIVE.
1 SWITCH-ON INHIBITED. 6. SWC_ON_INHIB 0
1 Avertizare/Alarmă 7. ALARM 0 Fără Avertizare/Alarmă
1 OPERATING. Valoarea actuală este egală cu valoarea de referinţă (= este în limitele de toleranţă).
8. AT_SETPOINT
0 Valoarea actuală diferă de valoarea de refrinţă.(= este înafara limitelor de toleranţă).
1 Locaţia de control a convertorului: REMOTE (EXT1 sau EXT2). 9. REMOTE 0 Locaţia de control a convertorului: LOCAL.
1 Valoarea actuală a frecvenţei sau turaţiei este egală sau mai mare decât limita de supraveghere (par. 32.02). Observaţia cu privire la valoarea par. 32.02 este validă pentru ambele direcţii de rotaţie.
10. ABOVE_LIMIT
0 Valoarea actuală a frecvenţei sau a turaţiei se află între limite. 1 Locaţia de control externă EXT2 este selectată 11. EXT CTRL LOC
0 Locaţia de control externă EXT2 este selectată 1 Semnalul de Run Enable extern este primit. 12. EXT RUN
ENABLE 0 Nici un semnal de Run Enable nu este primit 13, 14 Reserved
1 Este detectată o eroare în comunicaţie de adaptorul pentru fieldbus ( pe fibră optică pe canalul CH0).
15.
0 Comunicaţia cu adaptorul pentru fieldbus(CH0) este OK

Controlul prin Fieldbus
160
Figura 2 Starea convertoruluipentru profilul de comunicaţie ABB Drives
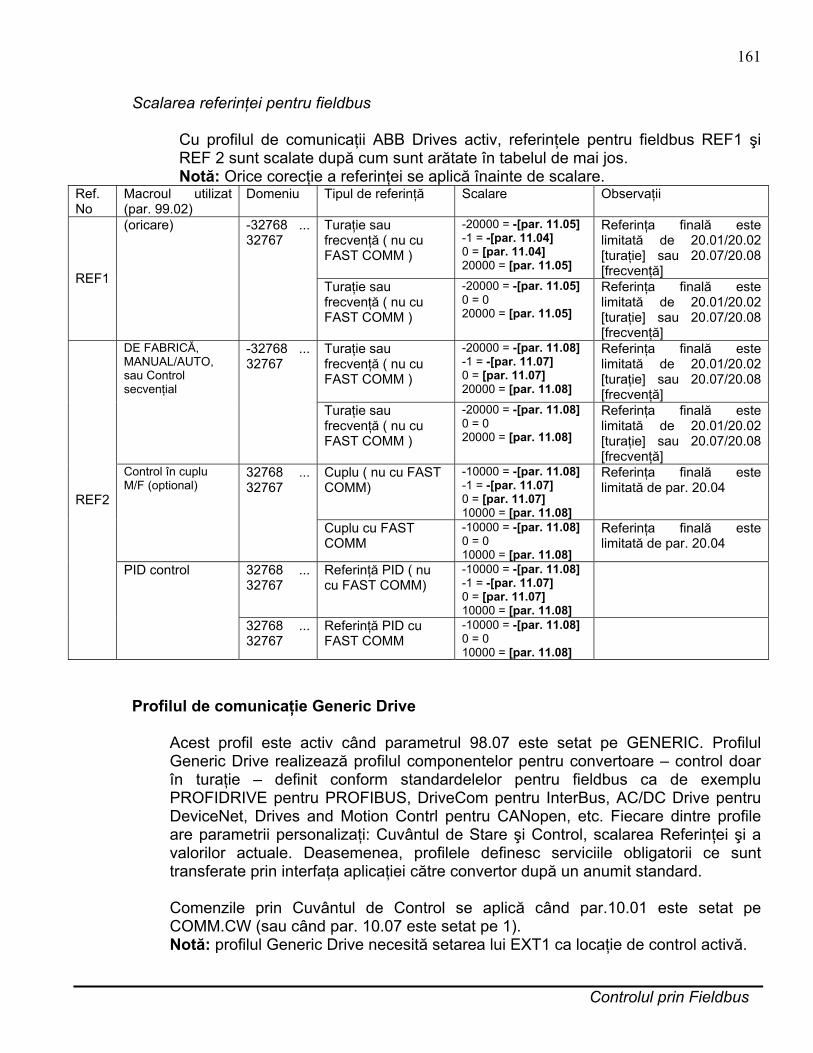
Controlul prin Fieldbus
161
Scalarea referinţei pentru fieldbus
Cu profilul de comunicaţii ABB Drives activ, referinţele pentru fieldbus REF1 şi REF 2 sunt scalate după cum sunt arătate în tabelul de mai jos. Notă: Orice corecţie a referinţei se aplică înainte de scalare.
Ref. No
Macroul utilizat (par. 99.02)
Domeniu Tipul de referinţă Scalare Observaţii
Turaţie sau frecvenţă ( nu cu FAST COMM )
-20000 = -[par. 11.05] -1 = -[par. 11.04] 0 = [par. 11.04] 20000 = [par. 11.05]
Referinţa finală este limitată de 20.01/20.02 [turaţie] sau 20.07/20.08 [frecvenţă] REF1
(oricare) -32768 ... 32767
Turaţie sau frecvenţă ( nu cu FAST COMM )
-20000 = -[par. 11.05] 0 = 0 20000 = [par. 11.05]
Referinţa finală este limitată de 20.01/20.02 [turaţie] sau 20.07/20.08 [frecvenţă]
Turaţie sau frecvenţă ( nu cu FAST COMM )
-20000 = -[par. 11.08] -1 = -[par. 11.07] 0 = [par. 11.07] 20000 = [par. 11.08]
Referinţa finală este limitată de 20.01/20.02 [turaţie] sau 20.07/20.08 [frecvenţă]
DE FABRICĂ, MANUAL/AUTO, sau Control secvenţial
-32768 ... 32767
Turaţie sau frecvenţă ( nu cu FAST COMM )
-20000 = -[par. 11.08] 0 = 0 20000 = [par. 11.08]
Referinţa finală este limitată de 20.01/20.02 [turaţie] sau 20.07/20.08 [frecvenţă]
Cuplu ( nu cu FAST COMM)
-10000 = -[par. 11.08] -1 = -[par. 11.07] 0 = [par. 11.07] 10000 = [par. 11.08]
Referinţa finală este limitată de par. 20.04
Control în cuplu M/F (optional)
32768 ... 32767
Cuplu cu FAST COMM
-10000 = -[par. 11.08] 0 = 0 10000 = [par. 11.08]
Referinţa finală este limitată de par. 20.04
32768 ... 32767
Referinţă PID ( nu cu FAST COMM)
-10000 = -[par. 11.08] -1 = -[par. 11.07] 0 = [par. 11.07] 10000 = [par. 11.08]
REF2
PID control
32768 ... 32767
Referinţă PID cu FAST COMM
-10000 = -[par. 11.08] 0 = 0 10000 = [par. 11.08]
Profilul de comunicaţie Generic Drive
Acest profil este activ când parametrul 98.07 este setat pe GENERIC. Profilul Generic Drive realizează profilul componentelor pentru convertoare – control doar în turaţie – definit conform standardelelor pentru fieldbus ca de exemplu PROFIDRIVE pentru PROFIBUS, DriveCom pentru InterBus, AC/DC Drive pentru DeviceNet, Drives and Motion Contrl pentru CANopen, etc. Fiecare dintre profile are parametrii personalizaţi: Cuvântul de Stare şi Control, scalarea Referinţei şi a valorilor actuale. Deasemenea, profilele definesc serviciile obligatorii ce sunt transferate prin interfaţa aplicaţiei către convertor după un anumit standard. Comenzile prin Cuvântul de Control se aplică când par.10.01 este setat pe COMM.CW (sau când par. 10.07 este setat pe 1). Notă: profilul Generic Drive necesită setarea lui EXT1 ca locaţie de control activă.
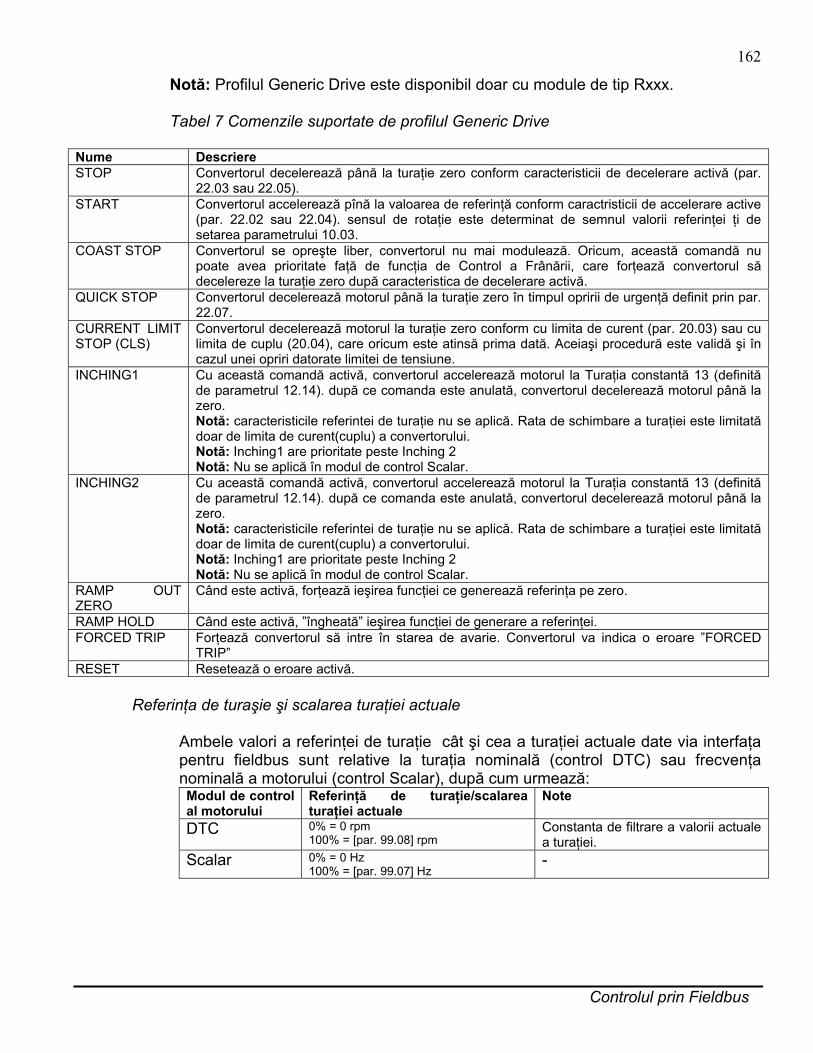
Controlul prin Fieldbus
162
Notă: Profilul Generic Drive este disponibil doar cu module de tip Rxxx. Tabel 7 Comenzile suportate de profilul Generic Drive
Nume Descriere STOP Convertorul decelerează până la turaţie zero conform caracteristicii de decelerare activă (par.
22.03 sau 22.05). START Convertorul accelerează pînă la valoarea de referinţă conform caractristicii de accelerare active
(par. 22.02 sau 22.04). sensul de rotaţie este determinat de semnul valorii referinţei ţi de setarea parametrului 10.03.
COAST STOP Convertorul se opreşte liber, convertorul nu mai modulează. Oricum, această comandă nu poate avea prioritate faţă de funcţia de Control a Frânării, care forţează convertorul să decelereze la turaţie zero după caracteristica de decelerare activă.
QUICK STOP Convertorul decelerează motorul până la turaţie zero în timpul opririi de urgenţă definit prin par. 22.07.
CURRENT LIMIT STOP (CLS)
Convertorul decelerează motorul la turaţie zero conform cu limita de curent (par. 20.03) sau cu limita de cuplu (20.04), care oricum este atinsă prima dată. Aceiaşi procedură este validă şi în cazul unei opriri datorate limitei de tensiune.
INCHING1 Cu această comandă activă, convertorul accelerează motorul la Turaţia constantă 13 (definită de parametrul 12.14). după ce comanda este anulată, convertorul decelerează motorul până la zero. Notă: caracteristicile referintei de turaţie nu se aplică. Rata de schimbare a turaţiei este limitată doar de limita de curent(cuplu) a convertorului. Notă: Inching1 are prioritate peste Inching 2 Notă: Nu se aplică în modul de control Scalar.
INCHING2 Cu această comandă activă, convertorul accelerează motorul la Turaţia constantă 13 (definită de parametrul 12.14). după ce comanda este anulată, convertorul decelerează motorul până la zero. Notă: caracteristicile referintei de turaţie nu se aplică. Rata de schimbare a turaţiei este limitată doar de limita de curent(cuplu) a convertorului. Notă: Inching1 are prioritate peste Inching 2 Notă: Nu se aplică în modul de control Scalar.
RAMP OUT ZERO
Când este activă, forţează ieşirea funcţiei ce generează referinţa pe zero.
RAMP HOLD Când este activă, ”îngheată” ieşirea funcţiei de generare a referinţei. FORCED TRIP Forţează convertorul să intre în starea de avarie. Convertorul va indica o eroare ”FORCED
TRIP” RESET Resetează o eroare activă.
Referinţa de turaşie şi scalarea turaţiei actuale
Ambele valori a referinţei de turaţie cât şi cea a turaţiei actuale date via interfaţa pentru fieldbus sunt relative la turaţia nominală (control DTC) sau frecvenţa nominală a motorului (control Scalar), după cum urmează: Modul de control al motorului
Referinţă de turaţie/scalarea turaţiei actuale
Note
DTC 0% = 0 rpm 100% = [par. 99.08] rpm
Constanta de filtrare a valorii actuale a turaţiei.
Scalar 0% = 0 Hz 100% = [par. 99.07] Hz
-
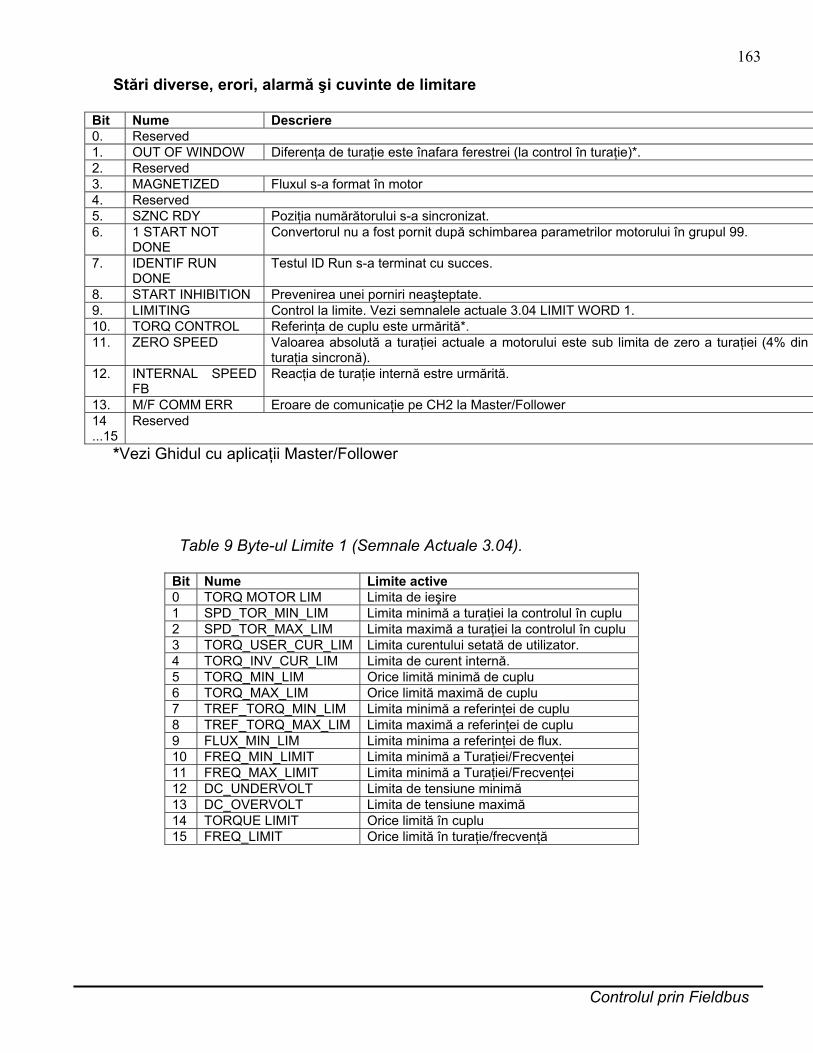
Controlul prin Fieldbus
163
Stări diverse, erori, alarmă şi cuvinte de limitare
Bit Nume Descriere 0. Reserved 1. OUT OF WINDOW Diferenţa de turaţie este înafara ferestrei (la control în turaţie)*. 2. Reserved 3. MAGNETIZED Fluxul s-a format în motor 4. Reserved 5. SZNC RDY Poziţia numărătorului s-a sincronizat. 6. 1 START NOT
DONE Convertorul nu a fost pornit după schimbarea parametrilor motorului în grupul 99.
7. IDENTIF RUN DONE
Testul ID Run s-a terminat cu succes.
8. START INHIBITION Prevenirea unei porniri neaşteptate. 9. LIMITING Control la limite. Vezi semnalele actuale 3.04 LIMIT WORD 1. 10. TORQ CONTROL Referinţa de cuplu este urmărită*. 11. ZERO SPEED Valoarea absolută a turaţiei actuale a motorului este sub limita de zero a turaţiei (4% din
turaţia sincronă). 12. INTERNAL SPEED
FB Reacţia de turaţie internă estre urmărită.
13. M/F COMM ERR Eroare de comunicaţie pe CH2 la Master/Follower 14 ...15
Reserved
*Vezi Ghidul cu aplicaţii Master/Follower Table 9 Byte-ul Limite 1 (Semnale Actuale 3.04).
Bit Nume Limite active 0 TORQ MOTOR LIM Limita de ieşire 1 SPD_TOR_MIN_LIM Limita minimă a turaţiei la controlul în cuplu 2 SPD_TOR_MAX_LIM Limita maximă a turaţiei la controlul în cuplu 3 TORQ_USER_CUR_LIM Limita curentului setată de utilizator. 4 TORQ_INV_CUR_LIM Limita de curent internă. 5 TORQ_MIN_LIM Orice limită minimă de cuplu 6 TORQ_MAX_LIM Orice limită maximă de cuplu 7 TREF_TORQ_MIN_LIM Limita minimă a referinţei de cuplu 8 TREF_TORQ_MAX_LIM Limita maximă a referinţei de cuplu 9 FLUX_MIN_LIM Limita minima a referinţei de flux. 10 FREQ_MIN_LIMIT Limita minimă a Turaţiei/Frecvenţei 11 FREQ_MAX_LIMIT Limita minimă a Turaţiei/Frecvenţei 12 DC_UNDERVOLT Limita de tensiune minimă 13 DC_OVERVOLT Limita de tensiune maximă 14 TORQUE LIMIT Orice limită în cuplu 15 FREQ_LIMIT Orice limită în turaţie/frecvenţă
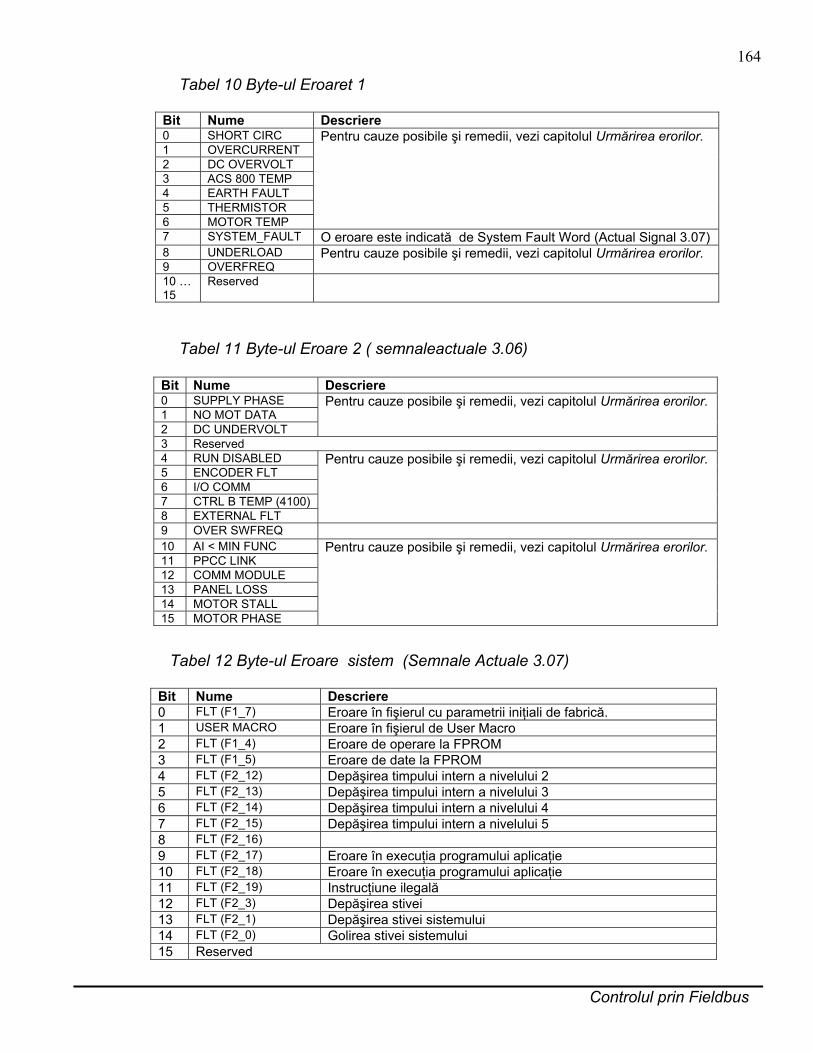
Controlul prin Fieldbus
164
Tabel 10 Byte-ul Eroaret 1
Bit Nume Descriere 0 SHORT CIRC 1 OVERCURRENT 2 DC OVERVOLT 3 ACS 800 TEMP 4 EARTH FAULT 5 THERMISTOR 6 MOTOR TEMP
Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor.
7 SYSTEM_FAULT O eroare este indicată de System Fault Word (Actual Signal 3.07) 8 UNDERLOAD 9 OVERFREQ
Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor.
10 … 15
Reserved
Tabel 11 Byte-ul Eroare 2 ( semnaleactuale 3.06)
Tabel 12 Byte-ul Eroare sistem (Semnale Actuale 3.07)
Bit Nume Descriere 0 FLT (F1_7) Eroare în fişierul cu parametrii iniţiali de fabrică. 1 USER MACRO Eroare în fişierul de User Macro 2 FLT (F1_4) Eroare de operare la FPROM 3 FLT (F1_5) Eroare de date la FPROM 4 FLT (F2_12) Depăşirea timpului intern a nivelului 2 5 FLT (F2_13) Depăşirea timpului intern a nivelului 3 6 FLT (F2_14) Depăşirea timpului intern a nivelului 4 7 FLT (F2_15) Depăşirea timpului intern a nivelului 5 8 FLT (F2_16) 9 FLT (F2_17) Eroare în execuţia programului aplicaţie 10 FLT (F2_18) Eroare în execuţia programului aplicaţie 11 FLT (F2_19) Instrucţiune ilegală 12 FLT (F2_3) Depăşirea stivei 13 FLT (F2_1) Depăşirea stivei sistemului 14 FLT (F2_0) Golirea stivei sistemului 15 Reserved
Bit Nume Descriere 0 SUPPLY PHASE 1 NO MOT DATA 2 DC UNDERVOLT
Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor.
3 Reserved 4 RUN DISABLED 5 ENCODER FLT 6 I/O COMM 7 CTRL B TEMP (4100) 8 EXTERNAL FLT
Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor.
9 OVER SWFREQ 10 AI < MIN FUNC 11 PPCC LINK 12 COMM MODULE 13 PANEL LOSS 14 MOTOR STALL 15 MOTOR PHASE
Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor.
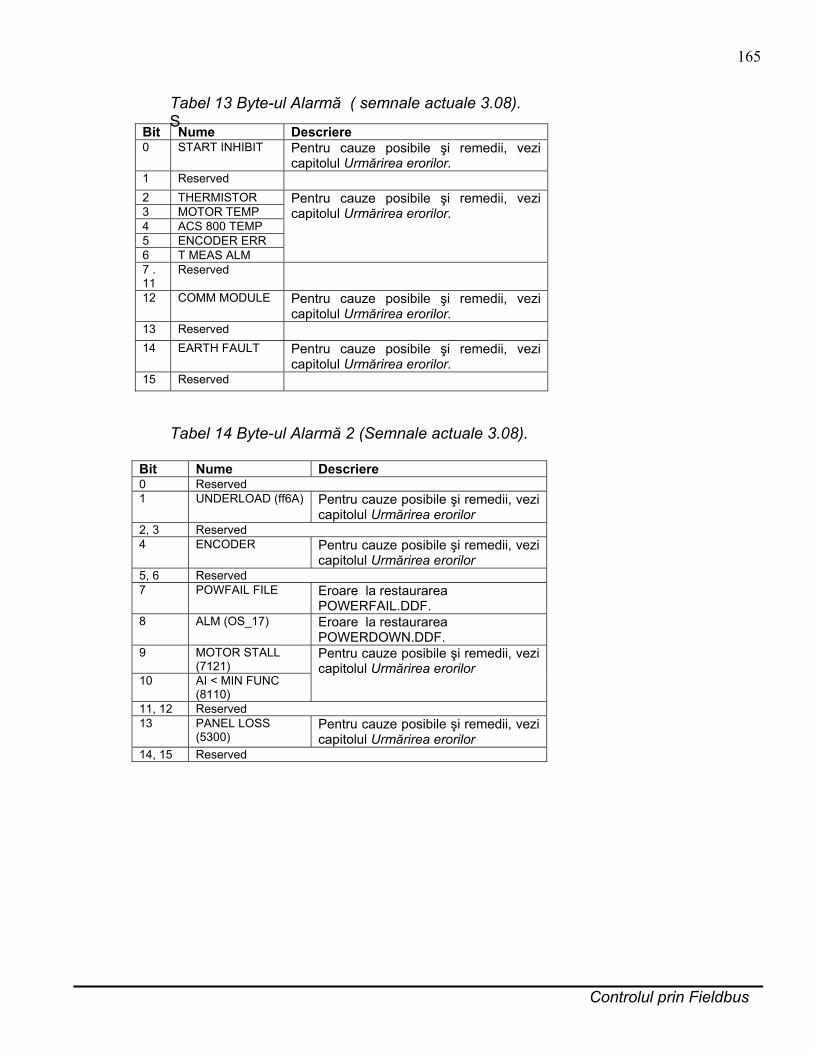
Controlul prin Fieldbus
165
Tabel 13 Byte-ul Alarmă ( semnale actuale 3.08). S Tabel 14 Byte-ul Alarmă 2 (Semnale actuale 3.08).
Bit Nume Descriere 0 Reserved 1 UNDERLOAD (ff6A) Pentru cauze posibile şi remedii, vezi
capitolul Urmărirea erorilor 2, 3 Reserved 4 ENCODER Pentru cauze posibile şi remedii, vezi
capitolul Urmărirea erorilor 5, 6 Reserved 7 POWFAIL FILE Eroare la restaurarea
POWERFAIL.DDF. 8 ALM (OS_17) Eroare la restaurarea
POWERDOWN.DDF. 9 MOTOR STALL
(7121) 10 AI < MIN FUNC
(8110)
Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor
11, 12 Reserved 13 PANEL LOSS
(5300) Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor
14, 15 Reserved
Bit Nume Descriere 0 START INHIBIT Pentru cauze posibile şi remedii, vezi
capitolul Urmărirea erorilor. 1 Reserved 2 THERMISTOR 3 MOTOR TEMP 4 ACS 800 TEMP 5 ENCODER ERR 6 T MEAS ALM
Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor.
7 . 11
Reserved 12 COMM MODULE Pentru cauze posibile şi remedii, vezi
capitolul Urmărirea erorilor. 13 Reserved 14 EARTH FAULT Pentru cauze posibile şi remedii, vezi
capitolul Urmărirea erorilor. 15 Reserved
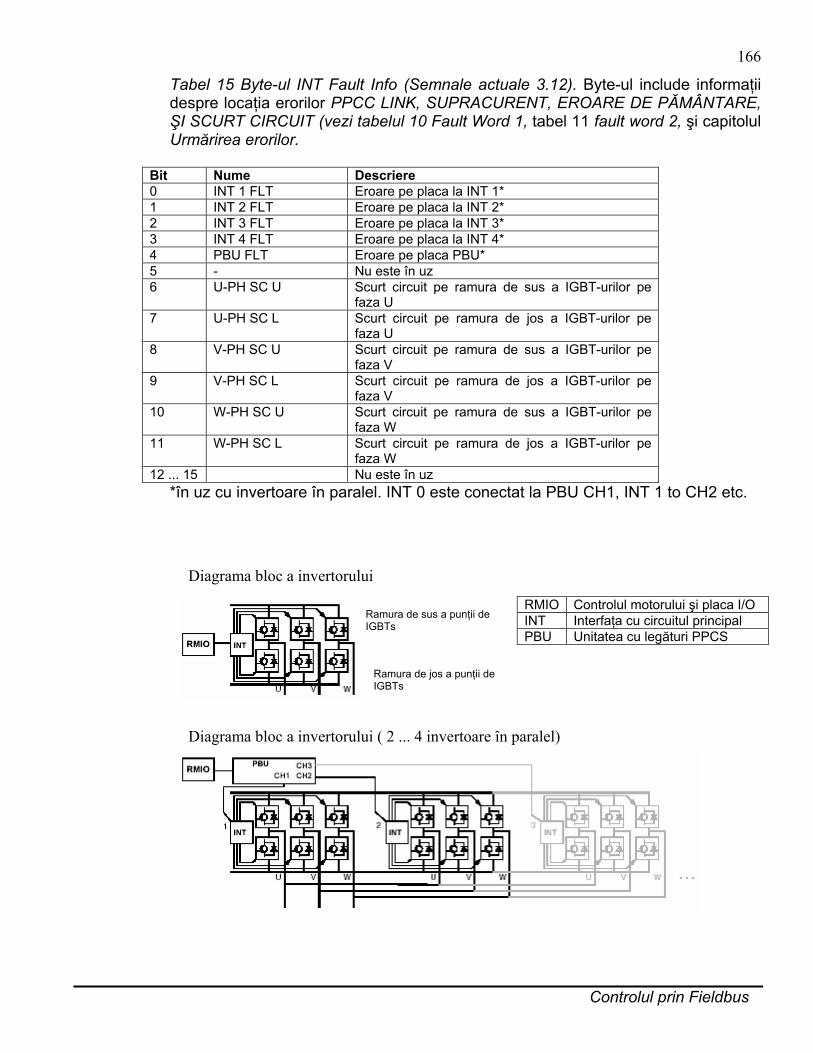
Controlul prin Fieldbus
166
Tabel 15 Byte-ul INT Fault Info (Semnale actuale 3.12). Byte-ul include informaţii despre locaţia erorilor PPCC LINK, SUPRACURENT, EROARE DE PĂMÂNTARE, ŞI SCURT CIRCUIT (vezi tabelul 10 Fault Word 1, tabel 11 fault word 2, şi capitolul Urmărirea erorilor.
Bit Nume Descriere 0 INT 1 FLT Eroare pe placa la INT 1* 1 INT 2 FLT Eroare pe placa la INT 2* 2 INT 3 FLT Eroare pe placa la INT 3* 3 INT 4 FLT Eroare pe placa la INT 4* 4 PBU FLT Eroare pe placa PBU* 5 - Nu este în uz 6 U-PH SC U Scurt circuit pe ramura de sus a IGBT-urilor pe
faza U 7 U-PH SC L Scurt circuit pe ramura de jos a IGBT-urilor pe
faza U 8 V-PH SC U Scurt circuit pe ramura de sus a IGBT-urilor pe
faza V 9 V-PH SC L Scurt circuit pe ramura de jos a IGBT-urilor pe
faza V 10 W-PH SC U Scurt circuit pe ramura de sus a IGBT-urilor pe
faza W 11 W-PH SC L Scurt circuit pe ramura de jos a IGBT-urilor pe
faza W 12 ... 15 Nu este în uz
*în uz cu invertoare în paralel. INT 0 este conectat la PBU CH1, INT 1 to CH2 etc.
RMIO Controlul motorului şi placa I/O INT Interfaţa cu circuitul principal PBU Unitatea cu legături PPCS
Diagrama bloc a invertorului
Ramura de sus a punţii de IGBTs
Ramura de jos a punţii de IGBTs
Diagrama bloc a invertorului ( 2 ... 4 invertoare în paralel)

Controlul prin Fieldbus
167
Tabel 16 Byte-ul de stare auxiliar
Bit Nume Descriere 0 REVERSED Motorul se roteşte în direcţia inversă. 1 EXT CTRL Este selectat controlul extern 2 REF 2 SEL Referinţa 2 este selectată 3 CONST SPEED Este selectată o turaţie constantă (1...15) 4 STARTED Convertorul a primit comanda de pornire. 5 USER 2 SEL Macroul User 2 este încărcat. 6 OPEN BRAKE Comanda Open Brake este activată. Veyi
grupul 42 BRAKE CONTROL 7 LOSS OF REF Referinţa s-a pierdut. 8 STOP DI STATUS Starea intrărilor interblocate pe placa
RMIO 9 . 15 REVERSED
Tabel 17 Byte-ul de stare auxiliar 4 (Ssemnale Actuale 3.13)
Bit Nume Descriere 0 SPEED 1 LIM Turaţia a depăşit sau a scăzut sub limita de
supraveghere 1. Vezi grup 32 SUPERVISION 1 SPEED 2 LIM Turaţia a depăşit sau a scăzut sub limita de
supraveghere 2. Vezi grup 32 SUPERVISION 2 CURRENT LIM Curentul a depăşit sau a scăzut sub limita de
supraveghere. Vezi grup 32 SUPERVISION 3 REF 1 LIM Refeinţa 1 a depăşit sau a scăzut sub limita de
supraveghere. Vezi grup 32 SUPERVISION 4 REF 2 LIM Referinţa 2 a depăşit sau a scăzut sub limita de
supraveghere. Vezi grup 32 SUPERVISION 5 TORQUE 1 LIM Cuplul motor a depăşit sau a scăzut sub limita
de supraveghere TORQUE1. Vezi grup 32 SUPERVISION
6 TORQUE 2 LIM Cuplul motor a depăşit sau a scăzut sub limita de supraveghere TORQUE2. Vezi grup 32 SUPERVISION
7 ACT 1 LIM Valoarea actuală 1 a regulatorului PID a depăşit sau a scăzut sub limita de supraveghere. Vezi grup 32 SUPERVISION
8 ACT 2 LIM Valoarea actuală 1 a regulatorului PID a depăşit sau a scăzut sub limita de supraveghere. Vezi grup 32 SUPERVISION
9 … 15 Reserved Tabel 18 Byte-ul Eroare (Semnale Actuale 3.15)
Bit Nume Descriere 0 Reserved 1 MOTOR 1 TEMP 2 MOTOR 2 TEMP 3 BRAKE ACKN
Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor
4 ... 15 Reserved
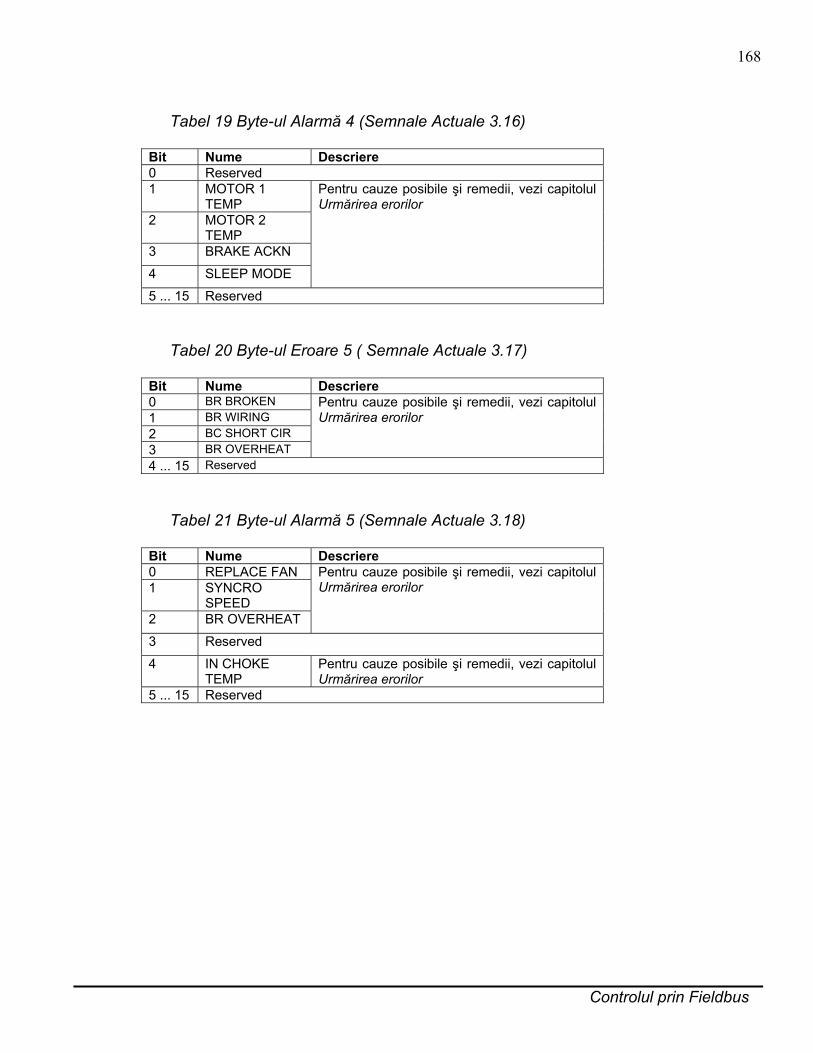
Controlul prin Fieldbus
168
Tabel 19 Byte-ul Alarmă 4 (Semnale Actuale 3.16)
Bit Nume Descriere 0 Reserved 1 MOTOR 1
TEMP 2 MOTOR 2
TEMP 3 BRAKE ACKN
4 SLEEP MODE
Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor
5 ... 15 Reserved Tabel 20 Byte-ul Eroare 5 ( Semnale Actuale 3.17)
Bit Nume Descriere 0 BR BROKEN 1 BR WIRING 2 BC SHORT CIR 3 BR OVERHEAT
Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor
4 ... 15 Reserved Tabel 21 Byte-ul Alarmă 5 (Semnale Actuale 3.18)
Bit Nume Descriere 0 REPLACE FAN 1 SYNCRO
SPEED 2 BR OVERHEAT
Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor
3 Reserved
4 IN CHOKE TEMP
Pentru cauze posibile şi remedii, vezi capitolul Urmărirea erorilor
5 ... 15 Reserved
Modulul de extensie analogic
169
Modulul de extensie analogic Vedere generală asupra capitolului
Capitolul descrie utilizarea modulului analogic de extensie RAIO ca şi interfaţă pentru referinţa de turaţie a lui ACS800 ce este echipat cu Programul de Aplicaţie Standard.
Controlul turaţiei prin modulul de extensie analogic
Două variante sunt descrise: • Intrare bipolară pentru controlulde bază al turaţiei • Intrare bipolară pentru Joystick Doar folosirea unei intrări bipolare (± semnal) este acoperit aici. Folosirea intrării unipolare corespunde standardului unipolar când: • Setările descrise mai jos sunt făcute • Comunicaţia dintre modul şi convertor este activată de parametrul 98.06.
Verificări de bază
Asiguraţi-vă că convertorul este: • Instalat şi pus în funcţiune • Semnalele externe de start şi stop sunt conectate Asiguraţi-vă că modulul de extensie: • Are setările făcute • Este instalat si referinţa este conectată la AI1. • Este conectat la convertor.
Setările modulului de extensie şi a convertorului
• Setaţi adresa nodului pe 5 (nu este necesar dacă este instalat în slotul opţional al convertorului). • Selectaţi tipul de semnal pentru intrarea de semnal A1 de pe modul • Selectaţi modul de operare (unipolar/bipolar) a intrării modulului. • Asiguraţi-vă că setările parametrilor corespund felului cum sunt configurate Intrările modulului (parametrii 98.13 şi 98.14). • Setaţi parametrii convertorului (vedeţi subsecţiunea apropiată pe paginile următoare.
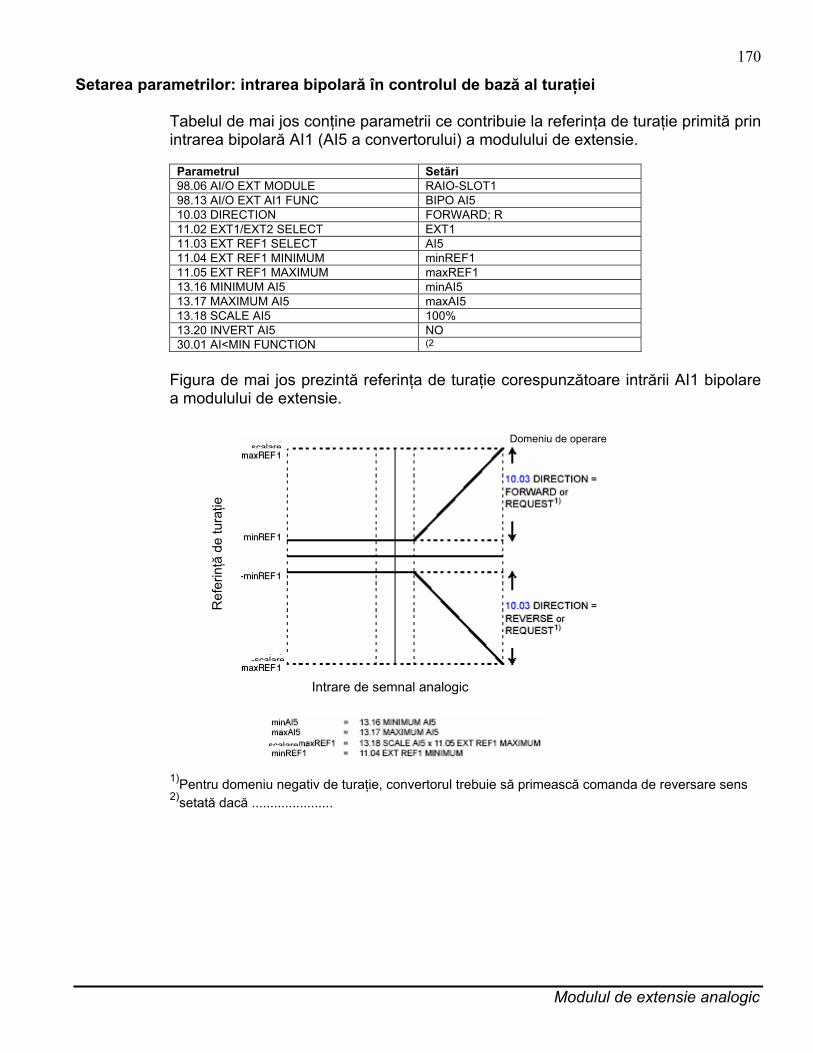
Modulul de extensie analogic
170
Setarea parametrilor: intrarea bipolară în controlul de bază al turaţiei Tabelul de mai jos conţine parametrii ce contribuie la referinţa de turaţie primită prin intrarea bipolară AI1 (AI5 a convertorului) a modulului de extensie.
Parametrul Setări 98.06 AI/O EXT MODULE RAIO-SLOT1 98.13 AI/O EXT AI1 FUNC BIPO AI5 10.03 DIRECTION FORWARD; R 11.02 EXT1/EXT2 SELECT EXT1 11.03 EXT REF1 SELECT AI5 11.04 EXT REF1 MINIMUM minREF1 11.05 EXT REF1 MAXIMUM maxREF1 13.16 MINIMUM AI5 minAI5 13.17 MAXIMUM AI5 maxAI5 13.18 SCALE AI5 100% 13.20 INVERT AI5 NO 30.01 AI<MIN FUNCTION (2
Figura de mai jos prezintă referinţa de turaţie corespunzătoare intrării AI1 bipolare a modulului de extensie. 1)Pentru domeniu negativ de turaţie, convertorul trebuie să primească comanda de reversare sens 2)setată dacă ......................
-scalare
scalareDomeniu de operare
Ref
erinţă
de
turaţie
Intrare de semnal analogic
scalare

Modulul de extensie analogic
171
Setarea parametrilor: intrarea bipolară în modul joystick. Tabelul de mai jos conţine parametrii ce contribuie la referinţa de turaţie primită prin intrarea bipolară AI1 (AI5 a convertorului) a modulului de extensie.
Parametrul Setări 98.06 AI/O EXT MODULE RAIO-SLOT1 98.13 AI/O EXT AI1 FUNC BIPO AI5 10.03 DIRECTION FORWARD; R 11.02 EXT1/EXT2 SELECT EXT1 11.03 EXT REF1 SELECT AI5 11.04 EXT REF1 MINIMUM minREF1 11.05 EXT REF1 MAXIMUM maxREF1 13.16 MINIMUM AI5 minAI5 13.17 MAXIMUM AI5 maxAI5 13.18 SCALE AI5 100% 13.20 INVERT AI5 NO 30.01 AI<MIN FUNCTION (2
Figura de mai jos prezintă referinţa de turaţie corespunzătoare intrării AI1 bipolare a modulului de extensie în modul joystick. 1) Activează folosirea abbelor domenii de turaţie negati şi pozitiv. 2) Este setat dacă ....................
-scalare
scalare
Ref
erinţă
de
turaţie
Intrare de semnal analogic
Date adiţionale: semnale actuale şi parametrii
173
Date adiţionale: semnale actuale şi parametrii Privire de ansamblu
Acest capitol enumerează listele cu semnale actuale şi parametrii cu câteva date adiţionale. Pentru date suplimentare consultă capitolul Semnale actuale şi parametrii.
Termeni şi abrevieri
Termen Definiţie PB Adresa parametrului pentru comunicarea prin fieldbus printr-o
legătură Profibus (Adaugă 4000 în modul FMS) FbEq Echivalent fieldbus: Scalarea între valoarea arătată pe panel şi cea
folosită în comunicaţia serială. Frecvenţa maximă absolută Valoarea lui 20.08, sau 20.07 dacă valoarea absolută a limitei
minime este mai mare decât limita maximă. Turaţie maximă absolută Valoarea lui 20.02, sau 20.01 dacă valoarea absolută a limitei
minime este mai mare decât limita maximă. Adrese pentru fieldbus
Profibus Vezi tabelele următoare
Adrese de Modbus şi Modbus Plus 4xxyy, unde xxyy = numărul parametrului convertorului
Adresă interbus-S xxyy · 100 + 12288 corvertit în hexazecimal xxyy = numărul parametrului convertorului Exemplu: Indexul parametrul 13.09 este 1309 + 12288 = 13597 = 351D.
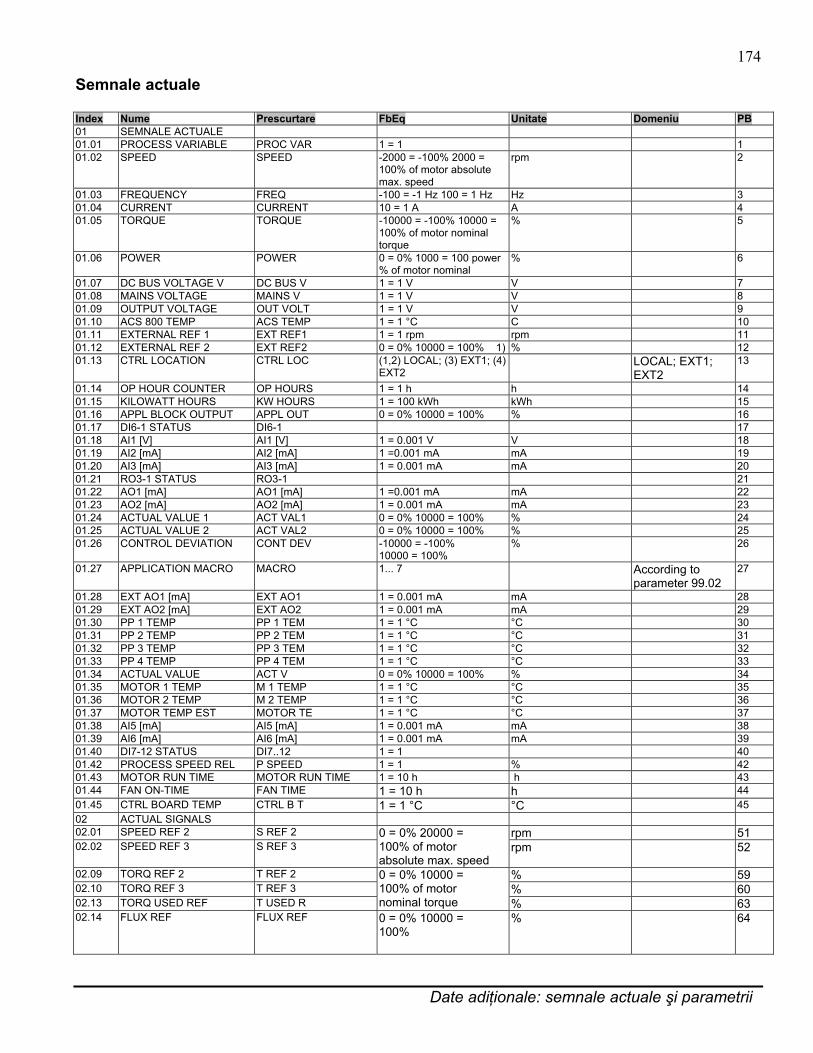
Date adiţionale: semnale actuale şi parametrii
174
Semnale actuale Index Nume Prescurtare FbEq Unitate Domeniu PB 01 SEMNALE ACTUALE 01.01 PROCESS VARIABLE PROC VAR 1 = 1 1 01.02 SPEED SPEED -2000 = -100% 2000 =
100% of motor absolute max. speed
rpm 2
01.03 FREQUENCY FREQ -100 = -1 Hz 100 = 1 Hz Hz 3 01.04 CURRENT CURRENT 10 = 1 A A 4 01.05 TORQUE TORQUE -10000 = -100% 10000 =
100% of motor nominal torque
% 5
01.06 POWER POWER 0 = 0% 1000 = 100 power % of motor nominal
% 6
01.07 DC BUS VOLTAGE V DC BUS V 1 = 1 V V 7 01.08 MAINS VOLTAGE MAINS V 1 = 1 V V 8 01.09 OUTPUT VOLTAGE OUT VOLT 1 = 1 V V 9 01.10 ACS 800 TEMP ACS TEMP 1 = 1 °C C 10 01.11 EXTERNAL REF 1 EXT REF1 1 = 1 rpm rpm 11 01.12 EXTERNAL REF 2 EXT REF2 0 = 0% 10000 = 100% 1) % 12 01.13 CTRL LOCATION CTRL LOC (1,2) LOCAL; (3) EXT1; (4)
EXT2 LOCAL; EXT1;
EXT2 13
01.14 OP HOUR COUNTER OP HOURS 1 = 1 h h 14 01.15 KILOWATT HOURS KW HOURS 1 = 100 kWh kWh 15 01.16 APPL BLOCK OUTPUT APPL OUT 0 = 0% 10000 = 100% % 16 01.17 DI6-1 STATUS DI6-1 17 01.18 AI1 [V] AI1 [V] 1 = 0.001 V V 18 01.19 AI2 [mA] AI2 [mA] 1 =0.001 mA mA 19 01.20 AI3 [mA] AI3 [mA] 1 = 0.001 mA mA 20 01.21 RO3-1 STATUS RO3-1 21 01.22 AO1 [mA] AO1 [mA] 1 =0.001 mA mA 22 01.23 AO2 [mA] AO2 [mA] 1 = 0.001 mA mA 23 01.24 ACTUAL VALUE 1 ACT VAL1 0 = 0% 10000 = 100% % 24 01.25 ACTUAL VALUE 2 ACT VAL2 0 = 0% 10000 = 100% % 25 01.26 CONTROL DEVIATION CONT DEV -10000 = -100%
10000 = 100% % 26
01.27 APPLICATION MACRO MACRO 1... 7 According to parameter 99.02
27
01.28 EXT AO1 [mA] EXT AO1 1 = 0.001 mA mA 28 01.29 EXT AO2 [mA] EXT AO2 1 = 0.001 mA mA 29 01.30 PP 1 TEMP PP 1 TEM 1 = 1 °C °C 30 01.31 PP 2 TEMP PP 2 TEM 1 = 1 °C °C 31 01.32 PP 3 TEMP PP 3 TEM 1 = 1 °C °C 32 01.33 PP 4 TEMP PP 4 TEM 1 = 1 °C °C 33 01.34 ACTUAL VALUE ACT V 0 = 0% 10000 = 100% % 34 01.35 MOTOR 1 TEMP M 1 TEMP 1 = 1 °C °C 35 01.36 MOTOR 2 TEMP M 2 TEMP 1 = 1 °C °C 36 01.37 MOTOR TEMP EST MOTOR TE 1 = 1 °C °C 37 01.38 AI5 [mA] AI5 [mA] 1 = 0.001 mA mA 38 01.39 AI6 [mA] AI6 [mA] 1 = 0.001 mA mA 39 01.40 DI7-12 STATUS DI7..12 1 = 1 40 01.42 PROCESS SPEED REL P SPEED 1 = 1 % 42 01.43 MOTOR RUN TIME MOTOR RUN TIME 1 = 10 h h 43 01.44 FAN ON-TIME FAN TIME 1 = 10 h h 44 01.45 CTRL BOARD TEMP CTRL B T 1 = 1 °C °C 45 02 ACTUAL SIGNALS 02.01 SPEED REF 2 S REF 2 rpm 51 02.02 SPEED REF 3 S REF 3
0 = 0% 20000 = 100% of motor absolute max. speed
rpm 52
02.09 TORQ REF 2 T REF 2 % 59 02.10 TORQ REF 3 T REF 3 % 60 02.13 TORQ USED REF T USED R
0 = 0% 10000 = 100% of motor nominal torque % 63
02.14 FLUX REF FLUX REF 0 = 0% 10000 = 100%
% 64
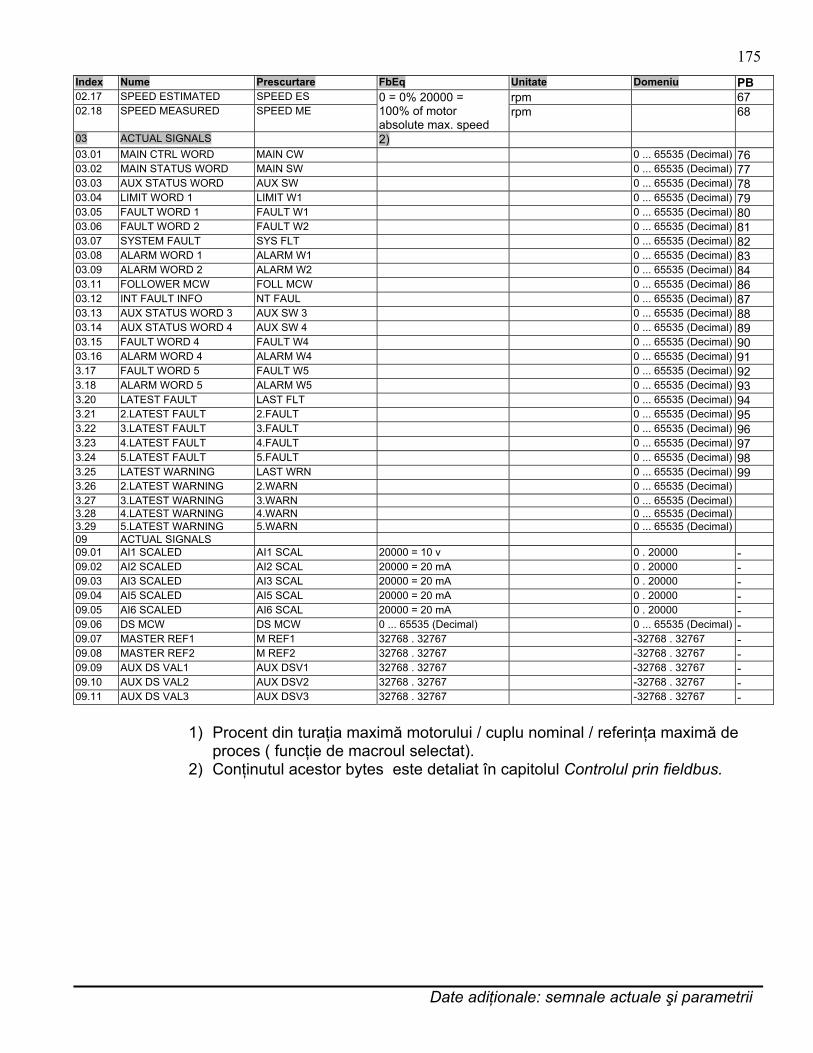
Date adiţionale: semnale actuale şi parametrii
175Index Nume Prescurtare FbEq Unitate Domeniu PB 02.17 SPEED ESTIMATED SPEED ES rpm 67 02.18 SPEED MEASURED SPEED ME
0 = 0% 20000 = 100% of motor absolute max. speed
rpm 68
03 ACTUAL SIGNALS 2) 03.01 MAIN CTRL WORD MAIN CW 0 ... 65535 (Decimal) 76 03.02 MAIN STATUS WORD MAIN SW 0 ... 65535 (Decimal) 77 03.03 AUX STATUS WORD AUX SW 0 ... 65535 (Decimal) 78 03.04 LIMIT WORD 1 LIMIT W1 0 ... 65535 (Decimal) 79 03.05 FAULT WORD 1 FAULT W1 0 ... 65535 (Decimal) 80 03.06 FAULT WORD 2 FAULT W2 0 ... 65535 (Decimal) 81 03.07 SYSTEM FAULT SYS FLT 0 ... 65535 (Decimal) 82 03.08 ALARM WORD 1 ALARM W1 0 ... 65535 (Decimal) 83 03.09 ALARM WORD 2 ALARM W2 0 ... 65535 (Decimal) 84 03.11 FOLLOWER MCW FOLL MCW 0 ... 65535 (Decimal) 86 03.12 INT FAULT INFO NT FAUL 0 ... 65535 (Decimal) 87 03.13 AUX STATUS WORD 3 AUX SW 3 0 ... 65535 (Decimal) 88 03.14 AUX STATUS WORD 4 AUX SW 4 0 ... 65535 (Decimal) 89 03.15 FAULT WORD 4 FAULT W4 0 ... 65535 (Decimal) 90 03.16 ALARM WORD 4 ALARM W4 0 ... 65535 (Decimal) 91 3.17 FAULT WORD 5 FAULT W5 0 ... 65535 (Decimal) 92 3.18 ALARM WORD 5 ALARM W5 0 ... 65535 (Decimal) 93 3.20 LATEST FAULT LAST FLT 0 ... 65535 (Decimal) 94 3.21 2.LATEST FAULT 2.FAULT 0 ... 65535 (Decimal) 95 3.22 3.LATEST FAULT 3.FAULT 0 ... 65535 (Decimal) 96 3.23 4.LATEST FAULT 4.FAULT 0 ... 65535 (Decimal) 97 3.24 5.LATEST FAULT 5.FAULT 0 ... 65535 (Decimal) 98 3.25 LATEST WARNING LAST WRN 0 ... 65535 (Decimal) 99 3.26 2.LATEST WARNING 2.WARN 0 ... 65535 (Decimal) 3.27 3.LATEST WARNING 3.WARN 0 ... 65535 (Decimal) 3.28 4.LATEST WARNING 4.WARN 0 ... 65535 (Decimal) 3.29 5.LATEST WARNING 5.WARN 0 ... 65535 (Decimal) 09 ACTUAL SIGNALS 09.01 AI1 SCALED AI1 SCAL 20000 = 10 v 0 . 20000 - 09.02 AI2 SCALED AI2 SCAL 20000 = 20 mA 0 . 20000 - 09.03 AI3 SCALED AI3 SCAL 20000 = 20 mA 0 . 20000 - 09.04 AI5 SCALED AI5 SCAL 20000 = 20 mA 0 . 20000 - 09.05 AI6 SCALED AI6 SCAL 20000 = 20 mA 0 . 20000 - 09.06 DS MCW DS MCW 0 ... 65535 (Decimal) 0 ... 65535 (Decimal) - 09.07 MASTER REF1 M REF1 32768 . 32767 -32768 . 32767 - 09.08 MASTER REF2 M REF2 32768 . 32767 -32768 . 32767 - 09.09 AUX DS VAL1 AUX DSV1 32768 . 32767 -32768 . 32767 - 09.10 AUX DS VAL2 AUX DSV2 32768 . 32767 -32768 . 32767 - 09.11 AUX DS VAL3 AUX DSV3 32768 . 32767 -32768 . 32767 -
1) Procent din turaţia maximă motorului / cuplu nominal / referinţa maximă de proces ( funcţie de macroul selectat).
2) Conţinutul acestor bytes este detaliat în capitolul Controlul prin fieldbus.
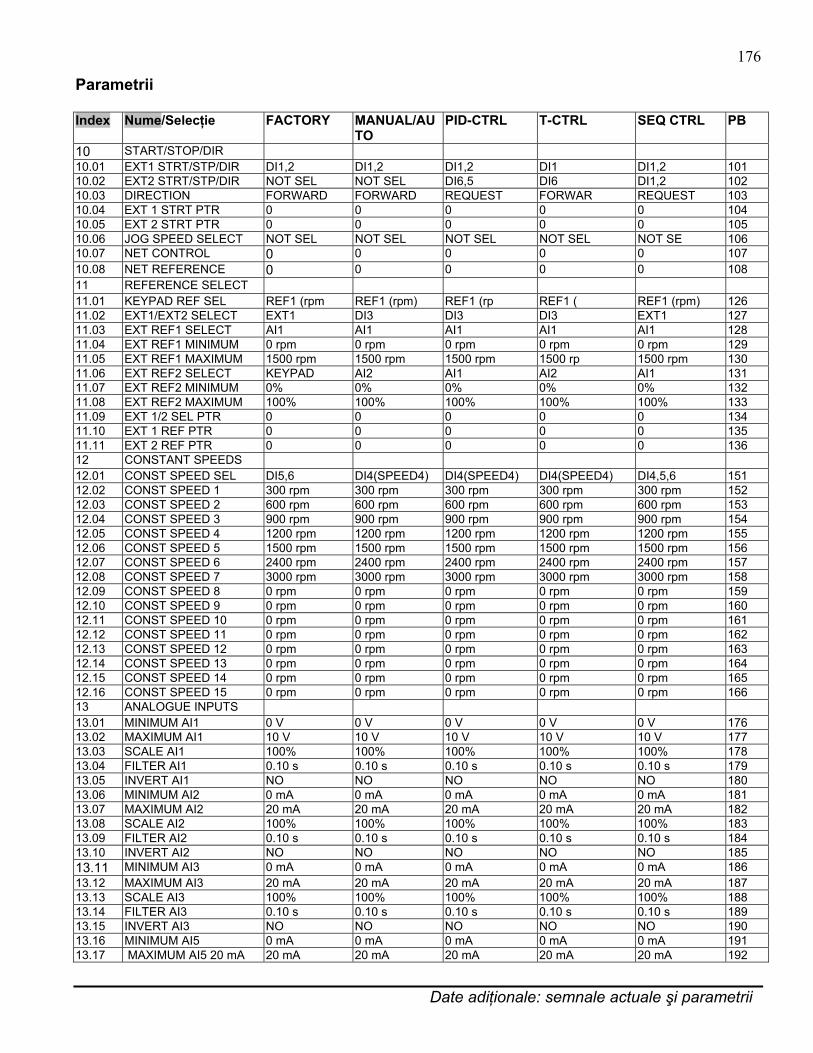
Date adiţionale: semnale actuale şi parametrii
176
Parametrii Index Nume/Selecţie FACTORY MANUAL/AU
TO PID-CTRL T-CTRL SEQ CTRL PB
10 START/STOP/DIR 10.01 EXT1 STRT/STP/DIR DI1,2 DI1,2 DI1,2 DI1 DI1,2 101 10.02 EXT2 STRT/STP/DIR NOT SEL NOT SEL DI6,5 DI6 DI1,2 102 10.03 DIRECTION FORWARD FORWARD REQUEST FORWAR REQUEST 103 10.04 EXT 1 STRT PTR 0 0 0 0 0 104 10.05 EXT 2 STRT PTR 0 0 0 0 0 105 10.06 JOG SPEED SELECT NOT SEL NOT SEL NOT SEL NOT SEL NOT SE 106 10.07 NET CONTROL 0 0 0 0 0 107 10.08 NET REFERENCE 0 0 0 0 0 108 11 REFERENCE SELECT 11.01 KEYPAD REF SEL REF1 (rpm REF1 (rpm) REF1 (rp REF1 ( REF1 (rpm) 126 11.02 EXT1/EXT2 SELECT EXT1 DI3 DI3 DI3 EXT1 127 11.03 EXT REF1 SELECT AI1 AI1 AI1 AI1 AI1 128 11.04 EXT REF1 MINIMUM 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 129 11.05 EXT REF1 MAXIMUM 1500 rpm 1500 rpm 1500 rpm 1500 rp 1500 rpm 130 11.06 EXT REF2 SELECT KEYPAD AI2 AI1 AI2 AI1 131 11.07 EXT REF2 MINIMUM 0% 0% 0% 0% 0% 132 11.08 EXT REF2 MAXIMUM 100% 100% 100% 100% 100% 133 11.09 EXT 1/2 SEL PTR 0 0 0 0 0 134 11.10 EXT 1 REF PTR 0 0 0 0 0 135 11.11 EXT 2 REF PTR 0 0 0 0 0 136 12 CONSTANT SPEEDS 12.01 CONST SPEED SEL DI5,6 DI4(SPEED4) DI4(SPEED4) DI4(SPEED4) DI4,5,6 151 12.02 CONST SPEED 1 300 rpm 300 rpm 300 rpm 300 rpm 300 rpm 152 12.03 CONST SPEED 2 600 rpm 600 rpm 600 rpm 600 rpm 600 rpm 153 12.04 CONST SPEED 3 900 rpm 900 rpm 900 rpm 900 rpm 900 rpm 154 12.05 CONST SPEED 4 1200 rpm 1200 rpm 1200 rpm 1200 rpm 1200 rpm 155 12.06 CONST SPEED 5 1500 rpm 1500 rpm 1500 rpm 1500 rpm 1500 rpm 156 12.07 CONST SPEED 6 2400 rpm 2400 rpm 2400 rpm 2400 rpm 2400 rpm 157 12.08 CONST SPEED 7 3000 rpm 3000 rpm 3000 rpm 3000 rpm 3000 rpm 158 12.09 CONST SPEED 8 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 159 12.10 CONST SPEED 9 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 160 12.11 CONST SPEED 10 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 161 12.12 CONST SPEED 11 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 162 12.13 CONST SPEED 12 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 163 12.14 CONST SPEED 13 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 164 12.15 CONST SPEED 14 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 165 12.16 CONST SPEED 15 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 166 13 ANALOGUE INPUTS 13.01 MINIMUM AI1 0 V 0 V 0 V 0 V 0 V 176 13.02 MAXIMUM AI1 10 V 10 V 10 V 10 V 10 V 177 13.03 SCALE AI1 100% 100% 100% 100% 100% 178 13.04 FILTER AI1 0.10 s 0.10 s 0.10 s 0.10 s 0.10 s 179 13.05 INVERT AI1 NO NO NO NO NO 180 13.06 MINIMUM AI2 0 mA 0 mA 0 mA 0 mA 0 mA 181 13.07 MAXIMUM AI2 20 mA 20 mA 20 mA 20 mA 20 mA 182 13.08 SCALE AI2 100% 100% 100% 100% 100% 183 13.09 FILTER AI2 0.10 s 0.10 s 0.10 s 0.10 s 0.10 s 184 13.10 INVERT AI2 NO NO NO NO NO 185 13.11 MINIMUM AI3 0 mA 0 mA 0 mA 0 mA 0 mA 186 13.12 MAXIMUM AI3 20 mA 20 mA 20 mA 20 mA 20 mA 187 13.13 SCALE AI3 100% 100% 100% 100% 100% 188 13.14 FILTER AI3 0.10 s 0.10 s 0.10 s 0.10 s 0.10 s 189 13.15 INVERT AI3 NO NO NO NO NO 190 13.16 MINIMUM AI5 0 mA 0 mA 0 mA 0 mA 0 mA 191 13.17 MAXIMUM AI5 20 mA 20 mA 20 mA 20 mA 20 mA 20 mA 192
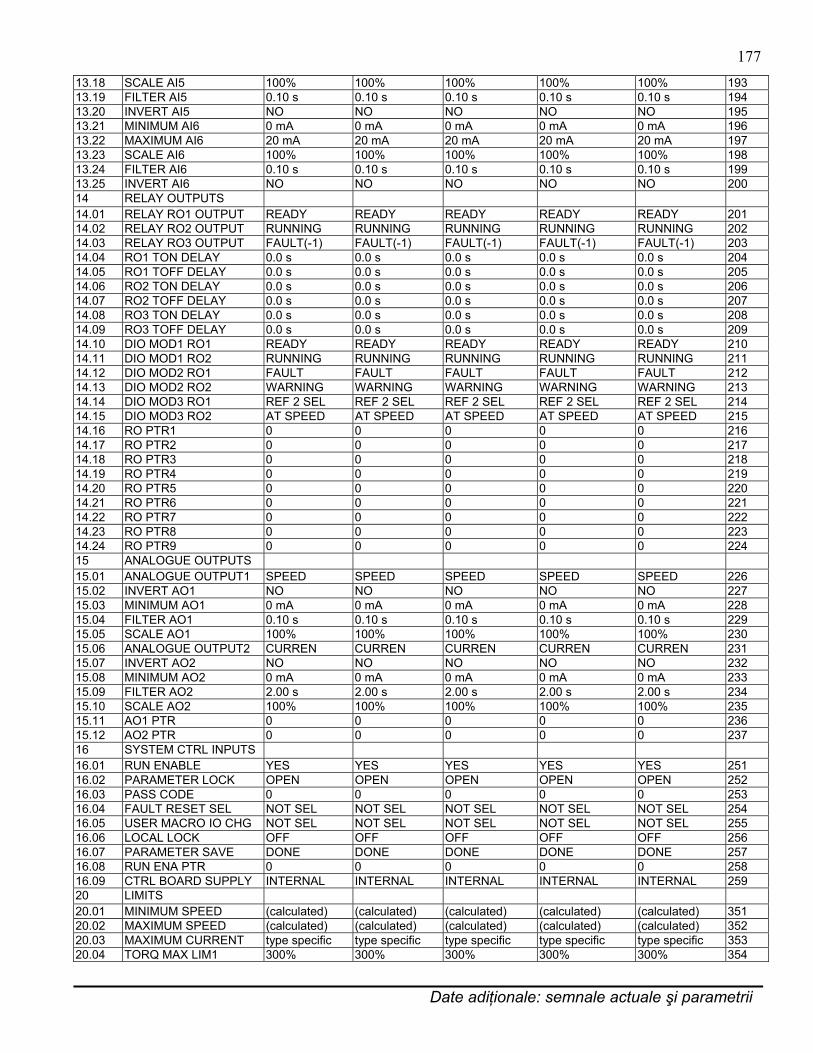
Date adiţionale: semnale actuale şi parametrii
17713.18 SCALE AI5 100% 100% 100% 100% 100% 193 13.19 FILTER AI5 0.10 s 0.10 s 0.10 s 0.10 s 0.10 s 194 13.20 INVERT AI5 NO NO NO NO NO 195 13.21 MINIMUM AI6 0 mA 0 mA 0 mA 0 mA 0 mA 196 13.22 MAXIMUM AI6 20 mA 20 mA 20 mA 20 mA 20 mA 197 13.23 SCALE AI6 100% 100% 100% 100% 100% 198 13.24 FILTER AI6 0.10 s 0.10 s 0.10 s 0.10 s 0.10 s 199 13.25 INVERT AI6 NO NO NO NO NO 200 14 RELAY OUTPUTS 14.01 RELAY RO1 OUTPUT READY READY READY READY READY 201 14.02 RELAY RO2 OUTPUT RUNNING RUNNING RUNNING RUNNING RUNNING 202 14.03 RELAY RO3 OUTPUT FAULT(-1) FAULT(-1) FAULT(-1) FAULT(-1) FAULT(-1) 203 14.04 RO1 TON DELAY 0.0 s 0.0 s 0.0 s 0.0 s 0.0 s 204 14.05 RO1 TOFF DELAY 0.0 s 0.0 s 0.0 s 0.0 s 0.0 s 205 14.06 RO2 TON DELAY 0.0 s 0.0 s 0.0 s 0.0 s 0.0 s 206 14.07 RO2 TOFF DELAY 0.0 s 0.0 s 0.0 s 0.0 s 0.0 s 207 14.08 RO3 TON DELAY 0.0 s 0.0 s 0.0 s 0.0 s 0.0 s 208 14.09 RO3 TOFF DELAY 0.0 s 0.0 s 0.0 s 0.0 s 0.0 s 209 14.10 DIO MOD1 RO1 READY READY READY READY READY 210 14.11 DIO MOD1 RO2 RUNNING RUNNING RUNNING RUNNING RUNNING 211 14.12 DIO MOD2 RO1 FAULT FAULT FAULT FAULT FAULT 212 14.13 DIO MOD2 RO2 WARNING WARNING WARNING WARNING WARNING 213 14.14 DIO MOD3 RO1 REF 2 SEL REF 2 SEL REF 2 SEL REF 2 SEL REF 2 SEL 214 14.15 DIO MOD3 RO2 AT SPEED AT SPEED AT SPEED AT SPEED AT SPEED 215 14.16 RO PTR1 0 0 0 0 0 216 14.17 RO PTR2 0 0 0 0 0 217 14.18 RO PTR3 0 0 0 0 0 218 14.19 RO PTR4 0 0 0 0 0 219 14.20 RO PTR5 0 0 0 0 0 220 14.21 RO PTR6 0 0 0 0 0 221 14.22 RO PTR7 0 0 0 0 0 222 14.23 RO PTR8 0 0 0 0 0 223 14.24 RO PTR9 0 0 0 0 0 224 15 ANALOGUE OUTPUTS 15.01 ANALOGUE OUTPUT1 SPEED SPEED SPEED SPEED SPEED 226 15.02 INVERT AO1 NO NO NO NO NO 227 15.03 MINIMUM AO1 0 mA 0 mA 0 mA 0 mA 0 mA 228 15.04 FILTER AO1 0.10 s 0.10 s 0.10 s 0.10 s 0.10 s 229 15.05 SCALE AO1 100% 100% 100% 100% 100% 230 15.06 ANALOGUE OUTPUT2 CURREN CURREN CURREN CURREN CURREN 231 15.07 INVERT AO2 NO NO NO NO NO 232 15.08 MINIMUM AO2 0 mA 0 mA 0 mA 0 mA 0 mA 233 15.09 FILTER AO2 2.00 s 2.00 s 2.00 s 2.00 s 2.00 s 234 15.10 SCALE AO2 100% 100% 100% 100% 100% 235 15.11 AO1 PTR 0 0 0 0 0 236 15.12 AO2 PTR 0 0 0 0 0 237 16 SYSTEM CTRL INPUTS 16.01 RUN ENABLE YES YES YES YES YES 251 16.02 PARAMETER LOCK OPEN OPEN OPEN OPEN OPEN 252 16.03 PASS CODE 0 0 0 0 0 253 16.04 FAULT RESET SEL NOT SEL NOT SEL NOT SEL NOT SEL NOT SEL 254 16.05 USER MACRO IO CHG NOT SEL NOT SEL NOT SEL NOT SEL NOT SEL 255 16.06 LOCAL LOCK OFF OFF OFF OFF OFF 256 16.07 PARAMETER SAVE DONE DONE DONE DONE DONE 257 16.08 RUN ENA PTR 0 0 0 0 0 258 16.09 CTRL BOARD SUPPLY INTERNAL INTERNAL INTERNAL INTERNAL INTERNAL 259 20 LIMITS 20.01 MINIMUM SPEED (calculated) (calculated) (calculated) (calculated) (calculated) 351 20.02 MAXIMUM SPEED (calculated) (calculated) (calculated) (calculated) (calculated) 352 20.03 MAXIMUM CURRENT type specific type specific type specific type specific type specific 353 20.04 TORQ MAX LIM1 300% 300% 300% 300% 300% 354
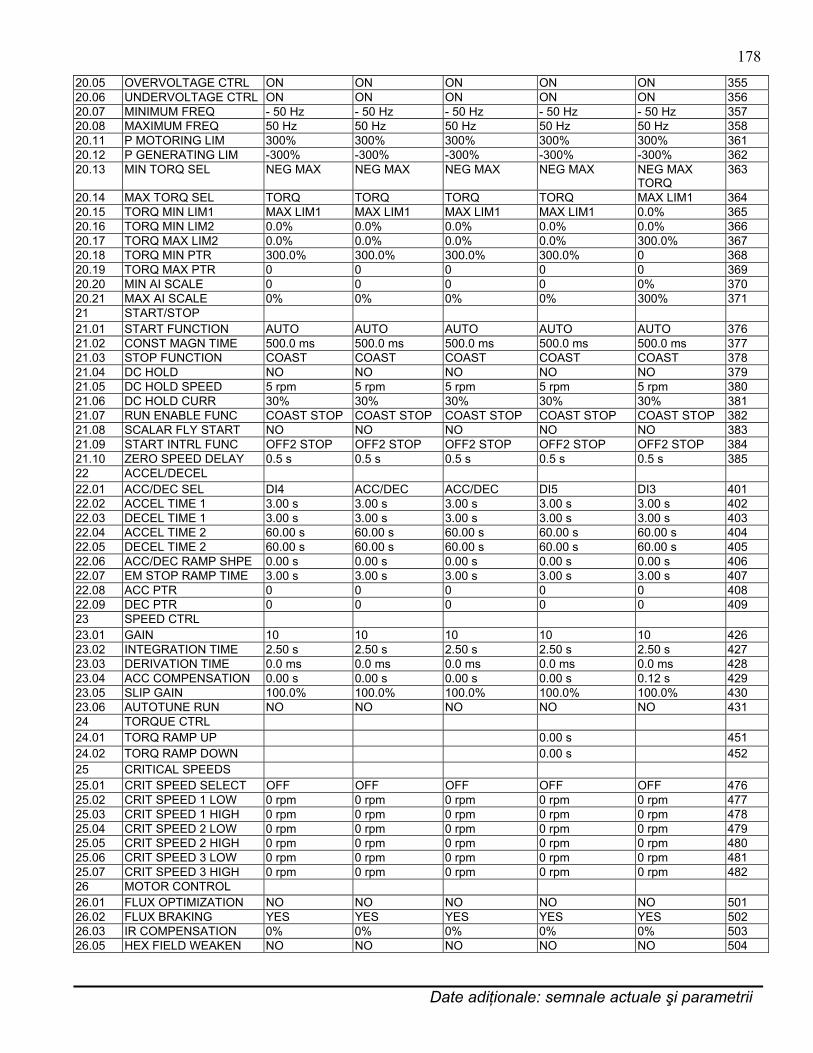
Date adiţionale: semnale actuale şi parametrii
17820.05 OVERVOLTAGE CTRL ON ON ON ON ON 355 20.06 UNDERVOLTAGE CTRL ON ON ON ON ON 356 20.07 MINIMUM FREQ - 50 Hz - 50 Hz - 50 Hz - 50 Hz - 50 Hz 357 20.08 MAXIMUM FREQ 50 Hz 50 Hz 50 Hz 50 Hz 50 Hz 358 20.11 P MOTORING LIM 300% 300% 300% 300% 300% 361 20.12 P GENERATING LIM -300% -300% -300% -300% -300% 362 20.13 MIN TORQ SEL NEG MAX NEG MAX NEG MAX NEG MAX NEG MAX
TORQ 363
20.14 MAX TORQ SEL TORQ TORQ TORQ TORQ MAX LIM1 364 20.15 TORQ MIN LIM1 MAX LIM1 MAX LIM1 MAX LIM1 MAX LIM1 0.0% 365 20.16 TORQ MIN LIM2 0.0% 0.0% 0.0% 0.0% 0.0% 366 20.17 TORQ MAX LIM2 0.0% 0.0% 0.0% 0.0% 300.0% 367 20.18 TORQ MIN PTR 300.0% 300.0% 300.0% 300.0% 0 368 20.19 TORQ MAX PTR 0 0 0 0 0 369 20.20 MIN AI SCALE 0 0 0 0 0% 370 20.21 MAX AI SCALE 0% 0% 0% 0% 300% 371 21 START/STOP 21.01 START FUNCTION AUTO AUTO AUTO AUTO AUTO 376 21.02 CONST MAGN TIME 500.0 ms 500.0 ms 500.0 ms 500.0 ms 500.0 ms 377 21.03 STOP FUNCTION COAST COAST COAST COAST COAST 378 21.04 DC HOLD NO NO NO NO NO 379 21.05 DC HOLD SPEED 5 rpm 5 rpm 5 rpm 5 rpm 5 rpm 380 21.06 DC HOLD CURR 30% 30% 30% 30% 30% 381 21.07 RUN ENABLE FUNC COAST STOP COAST STOP COAST STOP COAST STOP COAST STOP 382 21.08 SCALAR FLY START NO NO NO NO NO 383 21.09 START INTRL FUNC OFF2 STOP OFF2 STOP OFF2 STOP OFF2 STOP OFF2 STOP 384 21.10 ZERO SPEED DELAY 0.5 s 0.5 s 0.5 s 0.5 s 0.5 s 385 22 ACCEL/DECEL 22.01 ACC/DEC SEL DI4 ACC/DEC ACC/DEC DI5 DI3 401 22.02 ACCEL TIME 1 3.00 s 3.00 s 3.00 s 3.00 s 3.00 s 402 22.03 DECEL TIME 1 3.00 s 3.00 s 3.00 s 3.00 s 3.00 s 403 22.04 ACCEL TIME 2 60.00 s 60.00 s 60.00 s 60.00 s 60.00 s 404 22.05 DECEL TIME 2 60.00 s 60.00 s 60.00 s 60.00 s 60.00 s 405 22.06 ACC/DEC RAMP SHPE 0.00 s 0.00 s 0.00 s 0.00 s 0.00 s 406 22.07 EM STOP RAMP TIME 3.00 s 3.00 s 3.00 s 3.00 s 3.00 s 407 22.08 ACC PTR 0 0 0 0 0 408 22.09 DEC PTR 0 0 0 0 0 409 23 SPEED CTRL 23.01 GAIN 10 10 10 10 10 426 23.02 INTEGRATION TIME 2.50 s 2.50 s 2.50 s 2.50 s 2.50 s 427 23.03 DERIVATION TIME 0.0 ms 0.0 ms 0.0 ms 0.0 ms 0.0 ms 428 23.04 ACC COMPENSATION 0.00 s 0.00 s 0.00 s 0.00 s 0.12 s 429 23.05 SLIP GAIN 100.0% 100.0% 100.0% 100.0% 100.0% 430 23.06 AUTOTUNE RUN NO NO NO NO NO 431 24 TORQUE CTRL 24.01 TORQ RAMP UP 0.00 s 451 24.02 TORQ RAMP DOWN 0.00 s 452 25 CRITICAL SPEEDS 25.01 CRIT SPEED SELECT OFF OFF OFF OFF OFF 476 25.02 CRIT SPEED 1 LOW 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 477 25.03 CRIT SPEED 1 HIGH 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 478 25.04 CRIT SPEED 2 LOW 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 479 25.05 CRIT SPEED 2 HIGH 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 480 25.06 CRIT SPEED 3 LOW 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 481 25.07 CRIT SPEED 3 HIGH 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 482 26 MOTOR CONTROL 26.01 FLUX OPTIMIZATION NO NO NO NO NO 501 26.02 FLUX BRAKING YES YES YES YES YES 502 26.03 IR COMPENSATION 0% 0% 0% 0% 0% 503 26.05 HEX FIELD WEAKEN NO NO NO NO NO 504
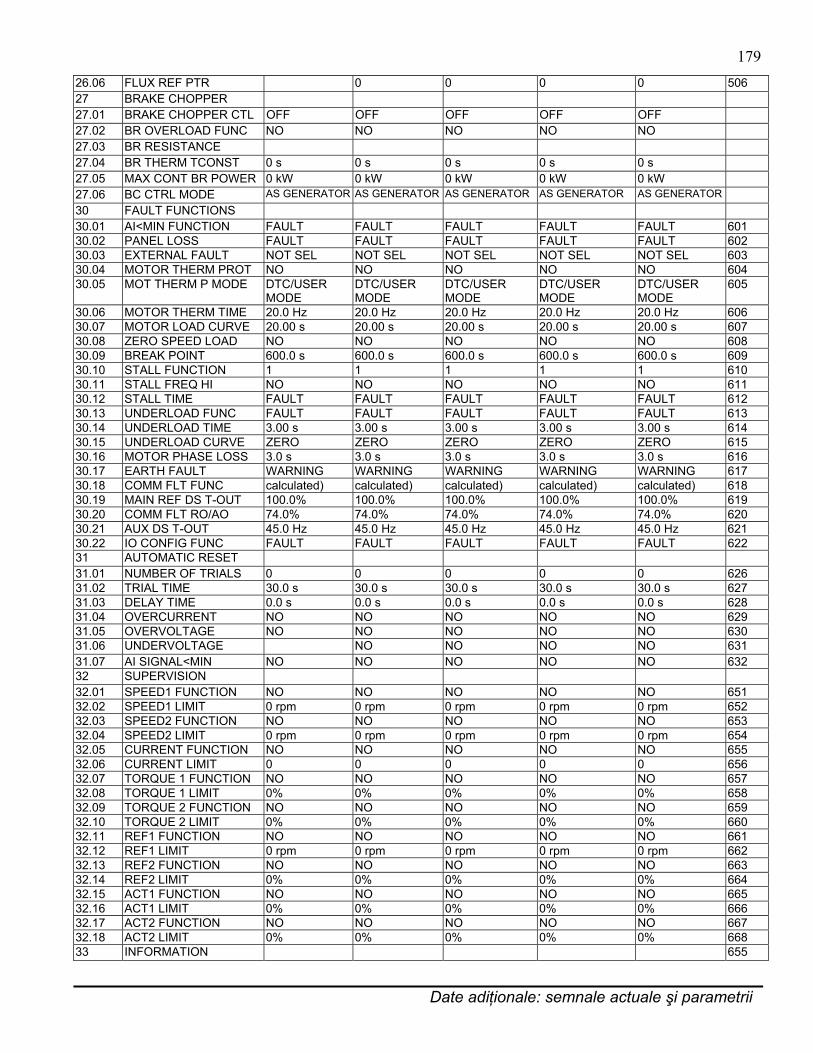
Date adiţionale: semnale actuale şi parametrii
17926.06 FLUX REF PTR 0 0 0 0 506 27 BRAKE CHOPPER 27.01 BRAKE CHOPPER CTL OFF OFF OFF OFF OFF 27.02 BR OVERLOAD FUNC NO NO NO NO NO 27.03 BR RESISTANCE 27.04 BR THERM TCONST 0 s 0 s 0 s 0 s 0 s 27.05 MAX CONT BR POWER 0 kW 0 kW 0 kW 0 kW 0 kW 27.06 BC CTRL MODE AS GENERATOR AS GENERATOR AS GENERATOR AS GENERATOR AS GENERATOR 30 FAULT FUNCTIONS 30.01 AI<MIN FUNCTION FAULT FAULT FAULT FAULT FAULT 601 30.02 PANEL LOSS FAULT FAULT FAULT FAULT FAULT 602 30.03 EXTERNAL FAULT NOT SEL NOT SEL NOT SEL NOT SEL NOT SEL 603 30.04 MOTOR THERM PROT NO NO NO NO NO 604 30.05 MOT THERM P MODE DTC/USER
MODE DTC/USER MODE
DTC/USER MODE
DTC/USER MODE
DTC/USER MODE
605
30.06 MOTOR THERM TIME 20.0 Hz 20.0 Hz 20.0 Hz 20.0 Hz 20.0 Hz 606 30.07 MOTOR LOAD CURVE 20.00 s 20.00 s 20.00 s 20.00 s 20.00 s 607 30.08 ZERO SPEED LOAD NO NO NO NO NO 608 30.09 BREAK POINT 600.0 s 600.0 s 600.0 s 600.0 s 600.0 s 609 30.10 STALL FUNCTION 1 1 1 1 1 610 30.11 STALL FREQ HI NO NO NO NO NO 611 30.12 STALL TIME FAULT FAULT FAULT FAULT FAULT 612 30.13 UNDERLOAD FUNC FAULT FAULT FAULT FAULT FAULT 613 30.14 UNDERLOAD TIME 3.00 s 3.00 s 3.00 s 3.00 s 3.00 s 614 30.15 UNDERLOAD CURVE ZERO ZERO ZERO ZERO ZERO 615 30.16 MOTOR PHASE LOSS 3.0 s 3.0 s 3.0 s 3.0 s 3.0 s 616 30.17 EARTH FAULT WARNING WARNING WARNING WARNING WARNING 617 30.18 COMM FLT FUNC calculated) calculated) calculated) calculated) calculated) 618 30.19 MAIN REF DS T-OUT 100.0% 100.0% 100.0% 100.0% 100.0% 619 30.20 COMM FLT RO/AO 74.0% 74.0% 74.0% 74.0% 74.0% 620 30.21 AUX DS T-OUT 45.0 Hz 45.0 Hz 45.0 Hz 45.0 Hz 45.0 Hz 621 30.22 IO CONFIG FUNC FAULT FAULT FAULT FAULT FAULT 622 31 AUTOMATIC RESET 31.01 NUMBER OF TRIALS 0 0 0 0 0 626 31.02 TRIAL TIME 30.0 s 30.0 s 30.0 s 30.0 s 30.0 s 627 31.03 DELAY TIME 0.0 s 0.0 s 0.0 s 0.0 s 0.0 s 628 31.04 OVERCURRENT NO NO NO NO NO 629 31.05 OVERVOLTAGE NO NO NO NO NO 630 31.06 UNDERVOLTAGE NO NO NO NO 631 31.07 AI SIGNAL<MIN NO NO NO NO NO 632 32 SUPERVISION 32.01 SPEED1 FUNCTION NO NO NO NO NO 651 32.02 SPEED1 LIMIT 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 652 32.03 SPEED2 FUNCTION NO NO NO NO NO 653 32.04 SPEED2 LIMIT 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 654 32.05 CURRENT FUNCTION NO NO NO NO NO 655 32.06 CURRENT LIMIT 0 0 0 0 0 656 32.07 TORQUE 1 FUNCTION NO NO NO NO NO 657 32.08 TORQUE 1 LIMIT 0% 0% 0% 0% 0% 658 32.09 TORQUE 2 FUNCTION NO NO NO NO NO 659 32.10 TORQUE 2 LIMIT 0% 0% 0% 0% 0% 660 32.11 REF1 FUNCTION NO NO NO NO NO 661 32.12 REF1 LIMIT 0 rpm 0 rpm 0 rpm 0 rpm 0 rpm 662 32.13 REF2 FUNCTION NO NO NO NO NO 663 32.14 REF2 LIMIT 0% 0% 0% 0% 0% 664 32.15 ACT1 FUNCTION NO NO NO NO NO 665 32.16 ACT1 LIMIT 0% 0% 0% 0% 0% 666 32.17 ACT2 FUNCTION NO NO NO NO NO 667 32.18 ACT2 LIMIT 0% 0% 0% 0% 0% 668 33 INFORMATION 655
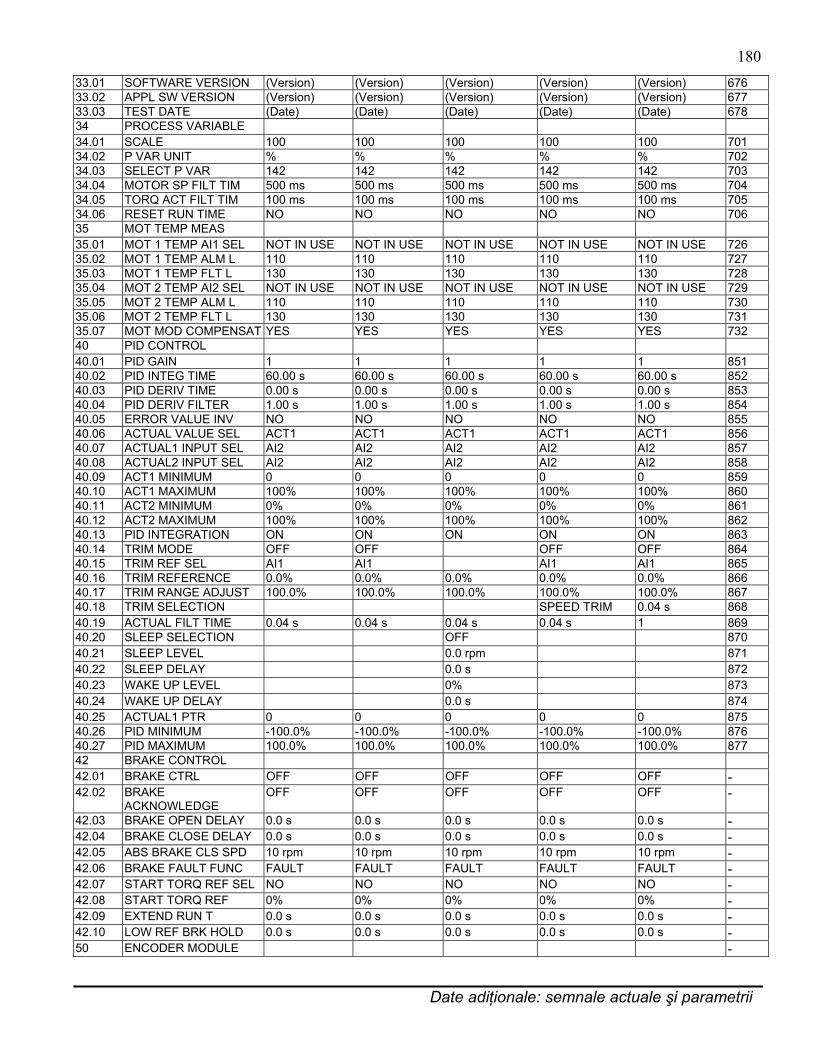
Date adiţionale: semnale actuale şi parametrii
18033.01 SOFTWARE VERSION (Version) (Version) (Version) (Version) (Version) 676 33.02 APPL SW VERSION (Version) (Version) (Version) (Version) (Version) 677 33.03 TEST DATE (Date) (Date) (Date) (Date) (Date) 678 34 PROCESS VARIABLE 34.01 SCALE 100 100 100 100 100 701 34.02 P VAR UNIT % % % % % 702 34.03 SELECT P VAR 142 142 142 142 142 703 34.04 MOTOR SP FILT TIM 500 ms 500 ms 500 ms 500 ms 500 ms 704 34.05 TORQ ACT FILT TIM 100 ms 100 ms 100 ms 100 ms 100 ms 705 34.06 RESET RUN TIME NO NO NO NO NO 706 35 MOT TEMP MEAS 35.01 MOT 1 TEMP AI1 SEL NOT IN USE NOT IN USE NOT IN USE NOT IN USE NOT IN USE 726 35.02 MOT 1 TEMP ALM L 110 110 110 110 110 727 35.03 MOT 1 TEMP FLT L 130 130 130 130 130 728 35.04 MOT 2 TEMP AI2 SEL NOT IN USE NOT IN USE NOT IN USE NOT IN USE NOT IN USE 729 35.05 MOT 2 TEMP ALM L 110 110 110 110 110 730 35.06 MOT 2 TEMP FLT L 130 130 130 130 130 731 35.07 MOT MOD COMPENSAT YES YES YES YES YES 732 40 PID CONTROL 40.01 PID GAIN 1 1 1 1 1 851 40.02 PID INTEG TIME 60.00 s 60.00 s 60.00 s 60.00 s 60.00 s 852 40.03 PID DERIV TIME 0.00 s 0.00 s 0.00 s 0.00 s 0.00 s 853 40.04 PID DERIV FILTER 1.00 s 1.00 s 1.00 s 1.00 s 1.00 s 854 40.05 ERROR VALUE INV NO NO NO NO NO 855 40.06 ACTUAL VALUE SEL ACT1 ACT1 ACT1 ACT1 ACT1 856 40.07 ACTUAL1 INPUT SEL AI2 AI2 AI2 AI2 AI2 857 40.08 ACTUAL2 INPUT SEL AI2 AI2 AI2 AI2 AI2 858 40.09 ACT1 MINIMUM 0 0 0 0 0 859 40.10 ACT1 MAXIMUM 100% 100% 100% 100% 100% 860 40.11 ACT2 MINIMUM 0% 0% 0% 0% 0% 861 40.12 ACT2 MAXIMUM 100% 100% 100% 100% 100% 862 40.13 PID INTEGRATION ON ON ON ON ON 863 40.14 TRIM MODE OFF OFF OFF OFF 864 40.15 TRIM REF SEL AI1 AI1 AI1 AI1 865 40.16 TRIM REFERENCE 0.0% 0.0% 0.0% 0.0% 0.0% 866 40.17 TRIM RANGE ADJUST 100.0% 100.0% 100.0% 100.0% 100.0% 867 40.18 TRIM SELECTION SPEED TRIM 0.04 s 868 40.19 ACTUAL FILT TIME 0.04 s 0.04 s 0.04 s 0.04 s 1 869 40.20 SLEEP SELECTION OFF 870 40.21 SLEEP LEVEL 0.0 rpm 871 40.22 SLEEP DELAY 0.0 s 872 40.23 WAKE UP LEVEL 0% 873 40.24 WAKE UP DELAY 0.0 s 874 40.25 ACTUAL1 PTR 0 0 0 0 0 875 40.26 PID MINIMUM -100.0% -100.0% -100.0% -100.0% -100.0% 876 40.27 PID MAXIMUM 100.0% 100.0% 100.0% 100.0% 100.0% 877 42 BRAKE CONTROL 42.01 BRAKE CTRL OFF OFF OFF OFF OFF - 42.02 BRAKE
ACKNOWLEDGE OFF OFF OFF OFF OFF -
42.03 BRAKE OPEN DELAY 0.0 s 0.0 s 0.0 s 0.0 s 0.0 s - 42.04 BRAKE CLOSE DELAY 0.0 s 0.0 s 0.0 s 0.0 s 0.0 s - 42.05 ABS BRAKE CLS SPD 10 rpm 10 rpm 10 rpm 10 rpm 10 rpm - 42.06 BRAKE FAULT FUNC FAULT FAULT FAULT FAULT FAULT - 42.07 START TORQ REF SEL NO NO NO NO NO - 42.08 START TORQ REF 0% 0% 0% 0% 0% - 42.09 EXTEND RUN T 0.0 s 0.0 s 0.0 s 0.0 s 0.0 s - 42.10 LOW REF BRK HOLD 0.0 s 0.0 s 0.0 s 0.0 s 0.0 s - 50 ENCODER MODULE -
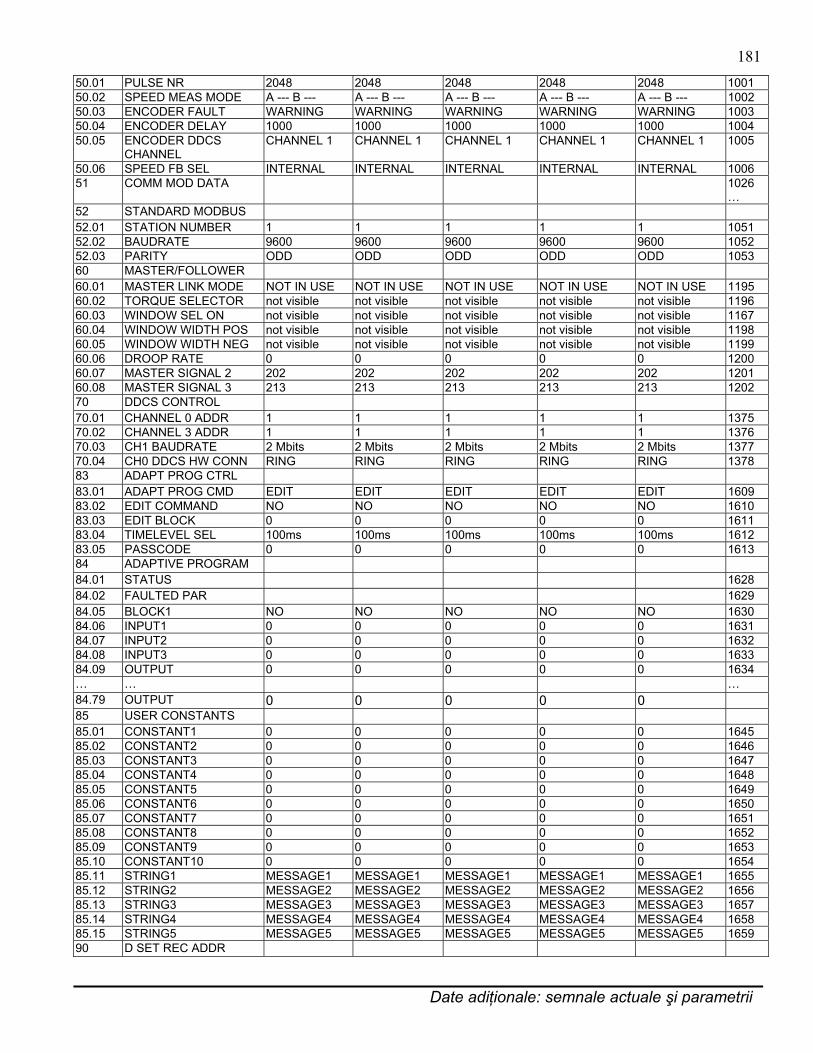
Date adiţionale: semnale actuale şi parametrii
18150.01 PULSE NR 2048 2048 2048 2048 2048 1001 50.02 SPEED MEAS MODE A --- B --- A --- B --- A --- B --- A --- B --- A --- B --- 1002 50.03 ENCODER FAULT WARNING WARNING WARNING WARNING WARNING 1003 50.04 ENCODER DELAY 1000 1000 1000 1000 1000 1004 50.05 ENCODER DDCS
CHANNEL CHANNEL 1 CHANNEL 1 CHANNEL 1 CHANNEL 1 CHANNEL 1 1005
50.06 SPEED FB SEL INTERNAL INTERNAL INTERNAL INTERNAL INTERNAL 1006 51 COMM MOD DATA 1026
… 52 STANDARD MODBUS 52.01 STATION NUMBER 1 1 1 1 1 1051 52.02 BAUDRATE 9600 9600 9600 9600 9600 1052 52.03 PARITY ODD ODD ODD ODD ODD 1053 60 MASTER/FOLLOWER 60.01 MASTER LINK MODE NOT IN USE NOT IN USE NOT IN USE NOT IN USE NOT IN USE 1195 60.02 TORQUE SELECTOR not visible not visible not visible not visible not visible 1196 60.03 WINDOW SEL ON not visible not visible not visible not visible not visible 1167 60.04 WINDOW WIDTH POS not visible not visible not visible not visible not visible 1198 60.05 WINDOW WIDTH NEG not visible not visible not visible not visible not visible 1199 60.06 DROOP RATE 0 0 0 0 0 1200 60.07 MASTER SIGNAL 2 202 202 202 202 202 1201 60.08 MASTER SIGNAL 3 213 213 213 213 213 1202 70 DDCS CONTROL 70.01 CHANNEL 0 ADDR 1 1 1 1 1 1375 70.02 CHANNEL 3 ADDR 1 1 1 1 1 1376 70.03 CH1 BAUDRATE 2 Mbits 2 Mbits 2 Mbits 2 Mbits 2 Mbits 1377 70.04 CH0 DDCS HW CONN RING RING RING RING RING 1378 83 ADAPT PROG CTRL 83.01 ADAPT PROG CMD EDIT EDIT EDIT EDIT EDIT 1609 83.02 EDIT COMMAND NO NO NO NO NO 1610 83.03 EDIT BLOCK 0 0 0 0 0 1611 83.04 TIMELEVEL SEL 100ms 100ms 100ms 100ms 100ms 1612 83.05 PASSCODE 0 0 0 0 0 1613 84 ADAPTIVE PROGRAM 84.01 STATUS 1628 84.02 FAULTED PAR 1629 84.05 BLOCK1 NO NO NO NO NO 1630 84.06 INPUT1 0 0 0 0 0 1631 84.07 INPUT2 0 0 0 0 0 1632 84.08 INPUT3 0 0 0 0 0 1633 84.09 OUTPUT 0 0 0 0 0 1634 … … … 84.79 OUTPUT 0 0 0 0 0 85 USER CONSTANTS 85.01 CONSTANT1 0 0 0 0 0 1645 85.02 CONSTANT2 0 0 0 0 0 1646 85.03 CONSTANT3 0 0 0 0 0 1647 85.04 CONSTANT4 0 0 0 0 0 1648 85.05 CONSTANT5 0 0 0 0 0 1649 85.06 CONSTANT6 0 0 0 0 0 1650 85.07 CONSTANT7 0 0 0 0 0 1651 85.08 CONSTANT8 0 0 0 0 0 1652 85.09 CONSTANT9 0 0 0 0 0 1653 85.10 CONSTANT10 0 0 0 0 0 1654 85.11 STRING1 MESSAGE1 MESSAGE1 MESSAGE1 MESSAGE1 MESSAGE1 1655 85.12 STRING2 MESSAGE2 MESSAGE2 MESSAGE2 MESSAGE2 MESSAGE2 1656 85.13 STRING3 MESSAGE3 MESSAGE3 MESSAGE3 MESSAGE3 MESSAGE3 1657 85.14 STRING4 MESSAGE4 MESSAGE4 MESSAGE4 MESSAGE4 MESSAGE4 1658 85.15 STRING5 MESSAGE5 MESSAGE5 MESSAGE5 MESSAGE5 MESSAGE5 1659 90 D SET REC ADDR
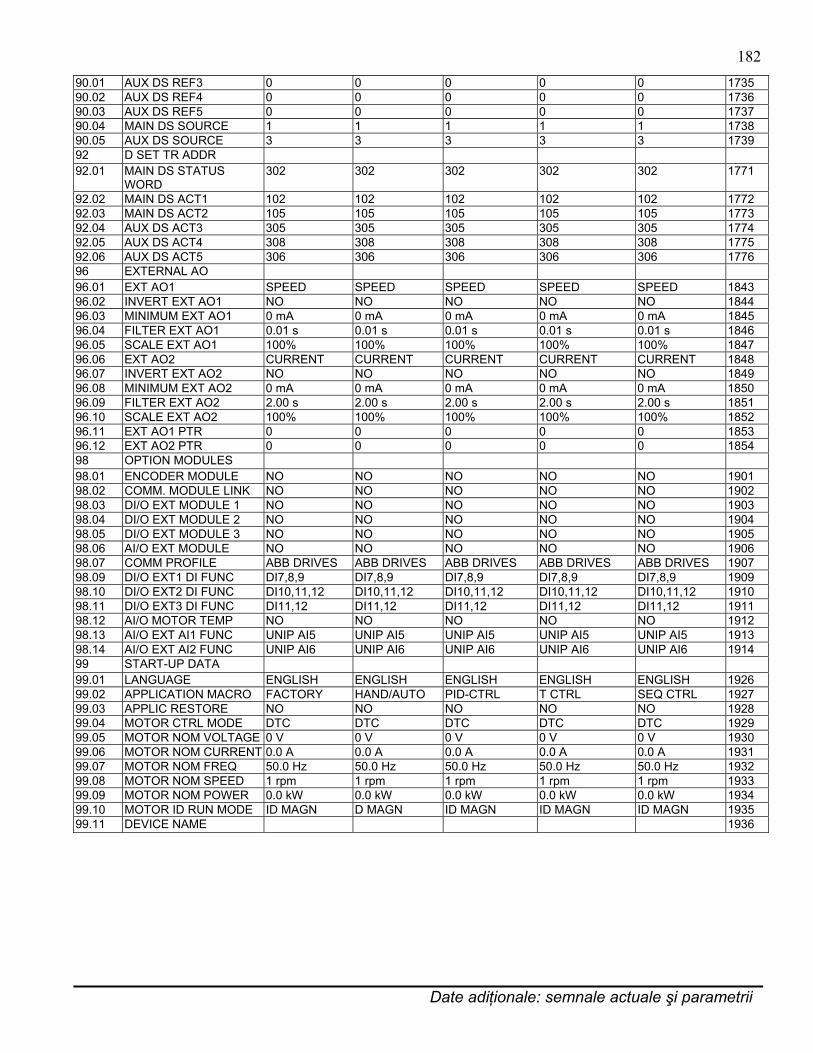
Date adiţionale: semnale actuale şi parametrii
18290.01 AUX DS REF3 0 0 0 0 0 1735 90.02 AUX DS REF4 0 0 0 0 0 1736 90.03 AUX DS REF5 0 0 0 0 0 1737 90.04 MAIN DS SOURCE 1 1 1 1 1 1738 90.05 AUX DS SOURCE 3 3 3 3 3 1739 92 D SET TR ADDR 92.01 MAIN DS STATUS
WORD 302 302 302 302 302 1771
92.02 MAIN DS ACT1 102 102 102 102 102 1772 92.03 MAIN DS ACT2 105 105 105 105 105 1773 92.04 AUX DS ACT3 305 305 305 305 305 1774 92.05 AUX DS ACT4 308 308 308 308 308 1775 92.06 AUX DS ACT5 306 306 306 306 306 1776 96 EXTERNAL AO 96.01 EXT AO1 SPEED SPEED SPEED SPEED SPEED 1843 96.02 INVERT EXT AO1 NO NO NO NO NO 1844 96.03 MINIMUM EXT AO1 0 mA 0 mA 0 mA 0 mA 0 mA 1845 96.04 FILTER EXT AO1 0.01 s 0.01 s 0.01 s 0.01 s 0.01 s 1846 96.05 SCALE EXT AO1 100% 100% 100% 100% 100% 1847 96.06 EXT AO2 CURRENT CURRENT CURRENT CURRENT CURRENT 1848 96.07 INVERT EXT AO2 NO NO NO NO NO 1849 96.08 MINIMUM EXT AO2 0 mA 0 mA 0 mA 0 mA 0 mA 1850 96.09 FILTER EXT AO2 2.00 s 2.00 s 2.00 s 2.00 s 2.00 s 1851 96.10 SCALE EXT AO2 100% 100% 100% 100% 100% 1852 96.11 EXT AO1 PTR 0 0 0 0 0 1853 96.12 EXT AO2 PTR 0 0 0 0 0 1854 98 OPTION MODULES 98.01 ENCODER MODULE NO NO NO NO NO 1901 98.02 COMM. MODULE LINK NO NO NO NO NO 1902 98.03 DI/O EXT MODULE 1 NO NO NO NO NO 1903 98.04 DI/O EXT MODULE 2 NO NO NO NO NO 1904 98.05 DI/O EXT MODULE 3 NO NO NO NO NO 1905 98.06 AI/O EXT MODULE NO NO NO NO NO 1906 98.07 COMM PROFILE ABB DRIVES ABB DRIVES ABB DRIVES ABB DRIVES ABB DRIVES 1907 98.09 DI/O EXT1 DI FUNC DI7,8,9 DI7,8,9 DI7,8,9 DI7,8,9 DI7,8,9 1909 98.10 DI/O EXT2 DI FUNC DI10,11,12 DI10,11,12 DI10,11,12 DI10,11,12 DI10,11,12 1910 98.11 DI/O EXT3 DI FUNC DI11,12 DI11,12 DI11,12 DI11,12 DI11,12 1911 98.12 AI/O MOTOR TEMP NO NO NO NO NO 1912 98.13 AI/O EXT AI1 FUNC UNIP AI5 UNIP AI5 UNIP AI5 UNIP AI5 UNIP AI5 1913 98.14 AI/O EXT AI2 FUNC UNIP AI6 UNIP AI6 UNIP AI6 UNIP AI6 UNIP AI6 1914 99 START-UP DATA 99.01 LANGUAGE ENGLISH ENGLISH ENGLISH ENGLISH ENGLISH 1926 99.02 APPLICATION MACRO FACTORY HAND/AUTO PID-CTRL T CTRL SEQ CTRL 1927 99.03 APPLIC RESTORE NO NO NO NO NO 1928 99.04 MOTOR CTRL MODE DTC DTC DTC DTC DTC 1929 99.05 MOTOR NOM VOLTAGE 0 V 0 V 0 V 0 V 0 V 1930 99.06 MOTOR NOM CURRENT 0.0 A 0.0 A 0.0 A 0.0 A 0.0 A 1931 99.07 MOTOR NOM FREQ 50.0 Hz 50.0 Hz 50.0 Hz 50.0 Hz 50.0 Hz 1932 99.08 MOTOR NOM SPEED 1 rpm 1 rpm 1 rpm 1 rpm 1 rpm 1933 99.09 MOTOR NOM POWER 0.0 kW 0.0 kW 0.0 kW 0.0 kW 0.0 kW 1934 99.10 MOTOR ID RUN MODE ID MAGN D MAGN ID MAGN ID MAGN ID MAGN 1935 99.11 DEVICE NAME 1936
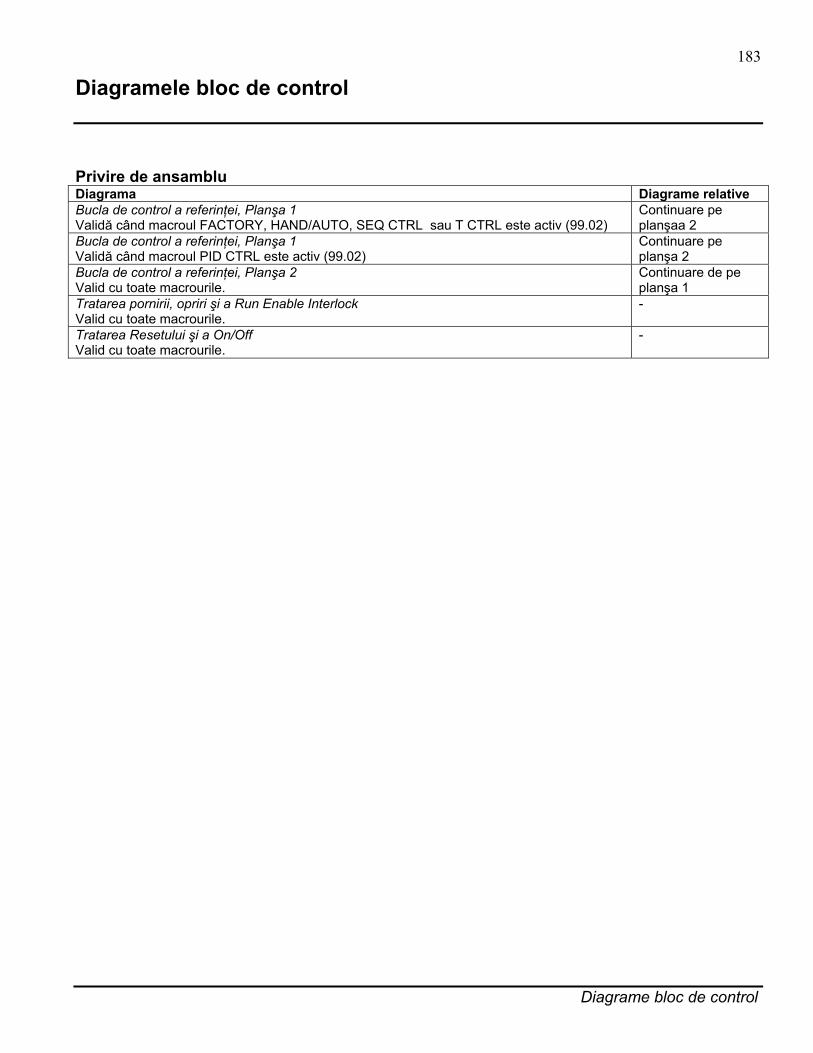
Diagrame bloc de control
183
Diagramele bloc de control Privire de ansamblu Diagrama Diagrame relative Bucla de control a referinţei, Planşa 1 Validă când macroul FACTORY, HAND/AUTO, SEQ CTRL sau T CTRL este activ (99.02)
Continuare pe planşaa 2
Bucla de control a referinţei, Planşa 1 Validă când macroul PID CTRL este activ (99.02)
Continuare pe planşa 2
Bucla de control a referinţei, Planşa 2 Valid cu toate macrourile.
Continuare de pe planşa 1
Tratarea pornirii, opriri şi a Run Enable Interlock Valid cu toate macrourile.
-
Tratarea Resetului şi a On/Off Valid cu toate macrourile.
-

Diagrame bloc de control
184
Bucla de control a referinţei, Planşa 1: macrourile FACTORZ, HAND/AUTO, SEQ CTRL şi T CTRL (continuare şi pe pagina următoare ... )
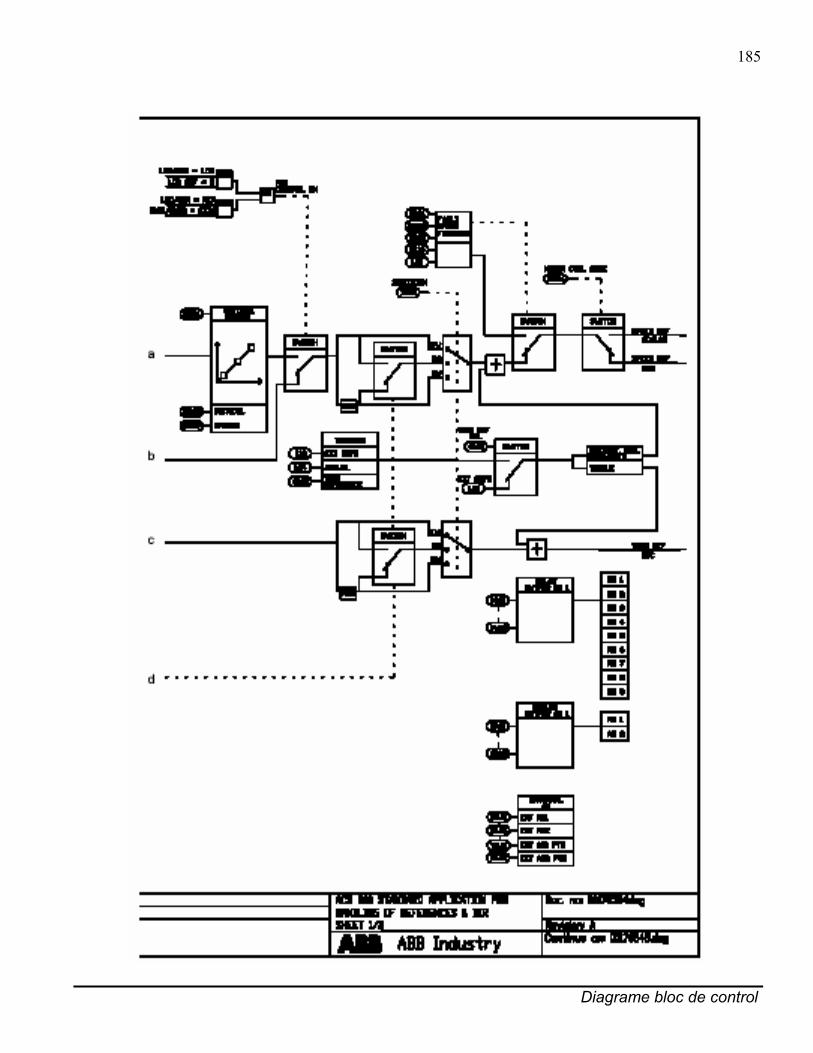
Diagrame bloc de control
185
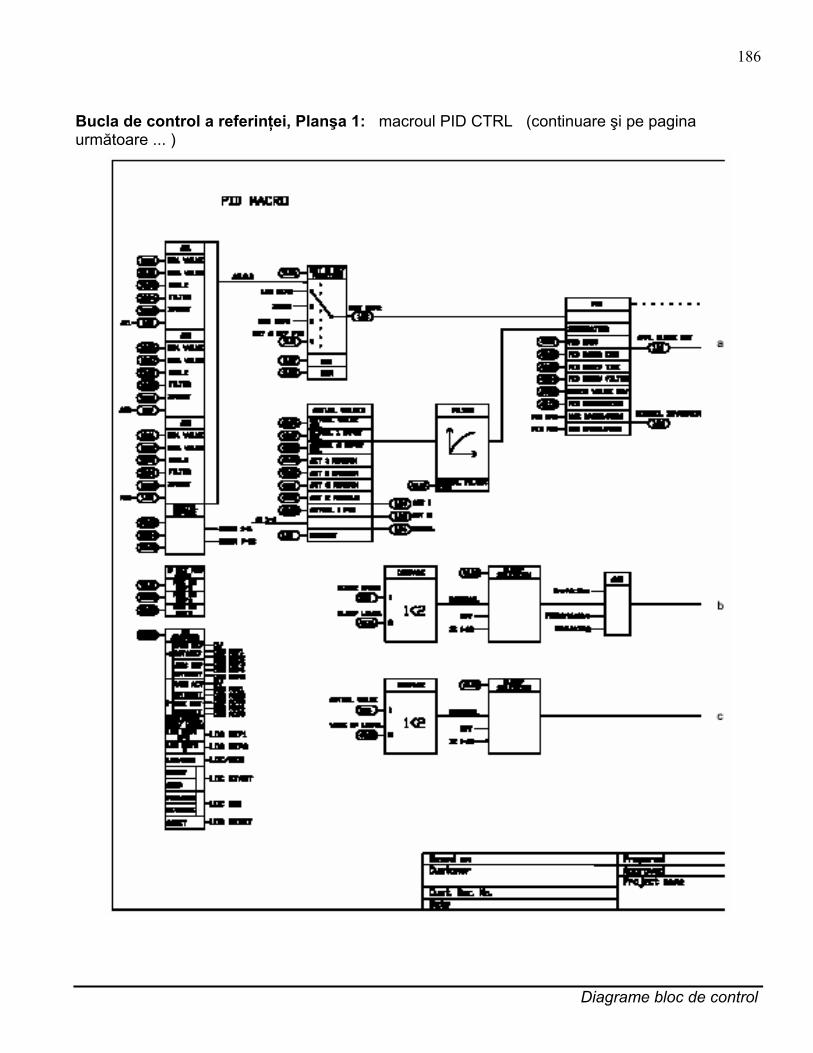
Diagrame bloc de control
186
Bucla de control a referinţei, Planşa 1: macroul PID CTRL (continuare şi pe pagina următoare ... )
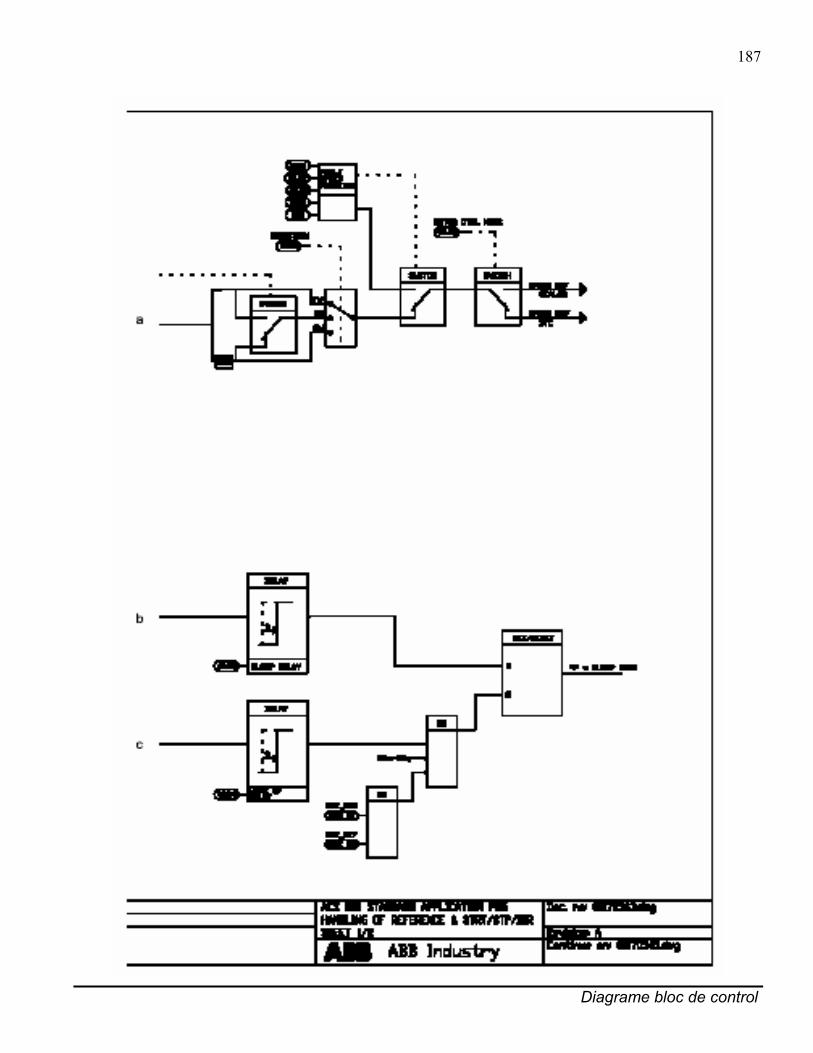
Diagrame bloc de control
187
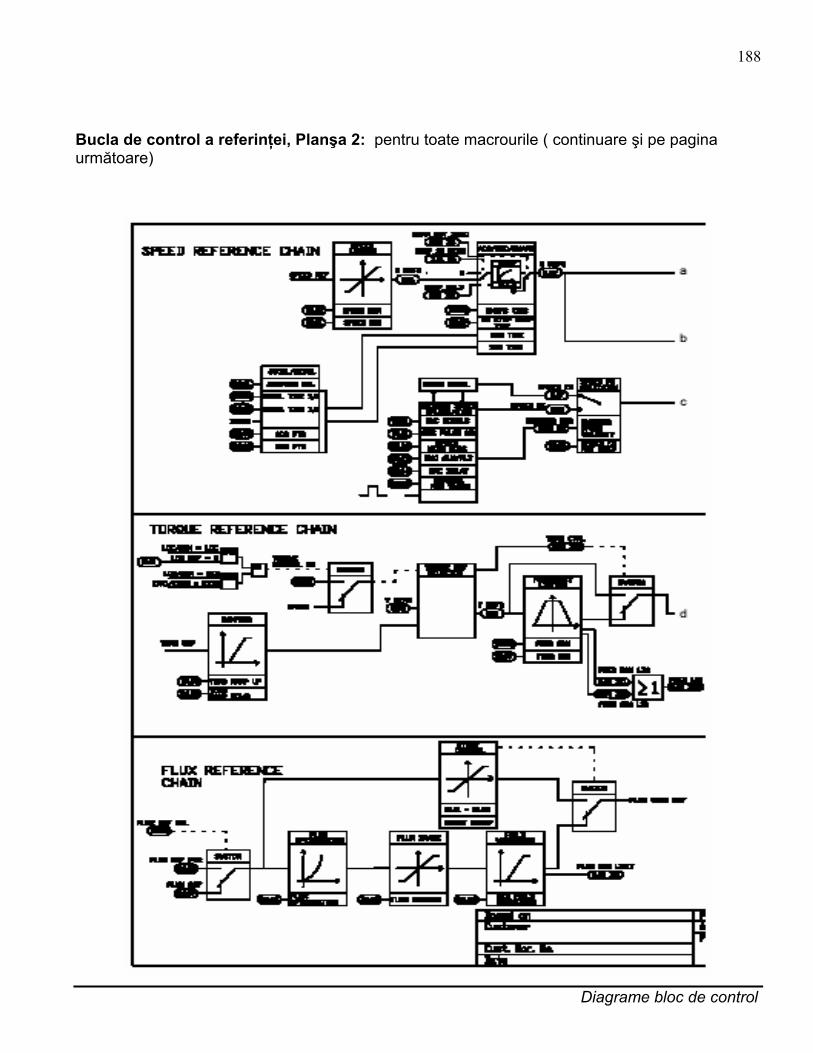
Diagrame bloc de control
188
Bucla de control a referinţei, Planşa 2: pentru toate macrourile ( continuare şi pe pagina următoare)
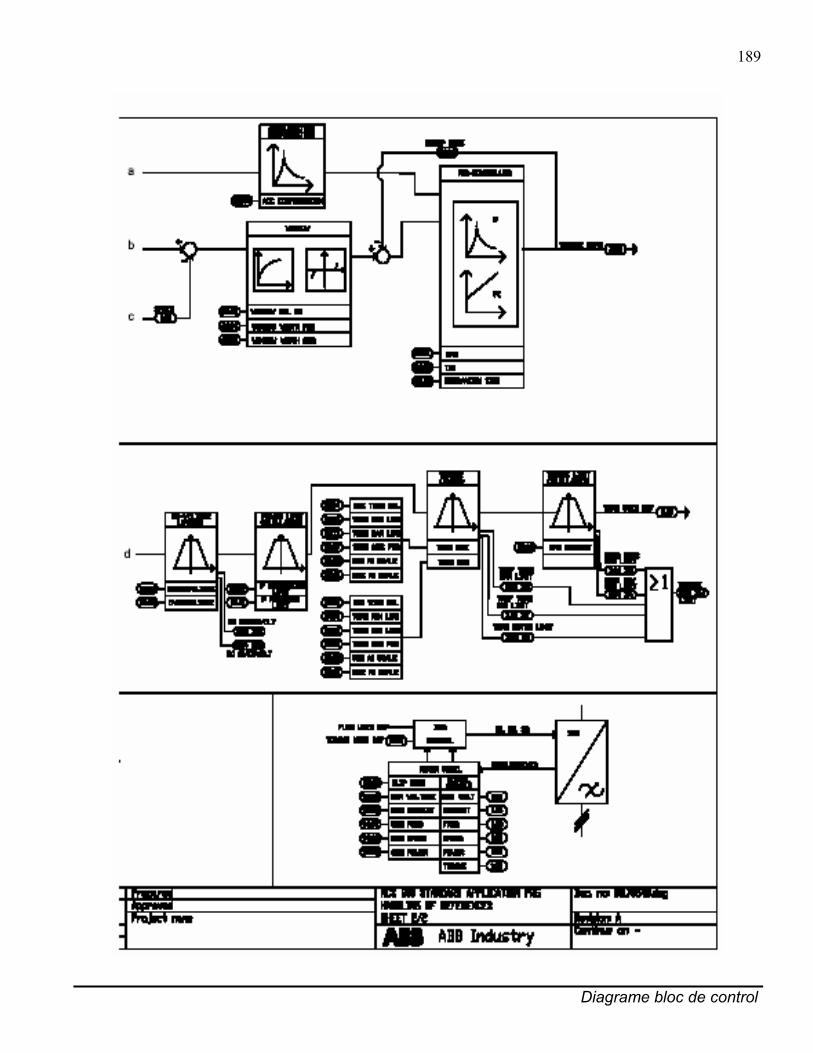
Diagrame bloc de control
189
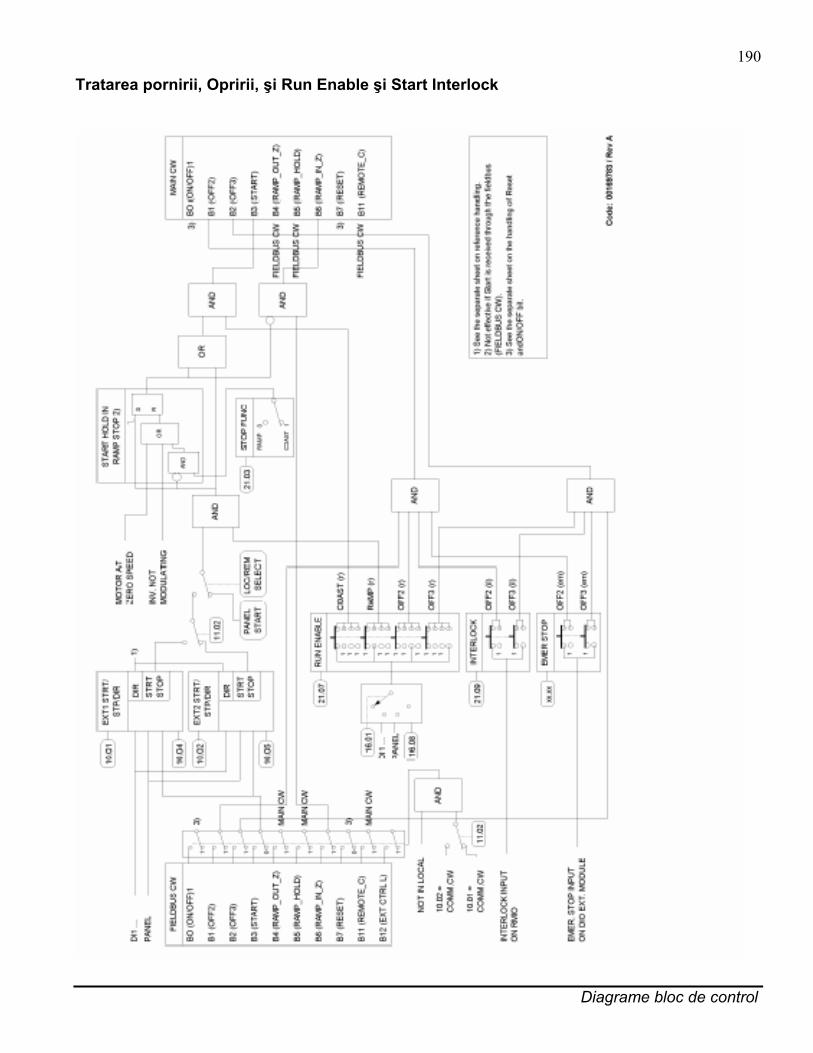
Diagrame bloc de control
190
Tratarea pornirii, Opririi, şi Run Enable şi Start Interlock
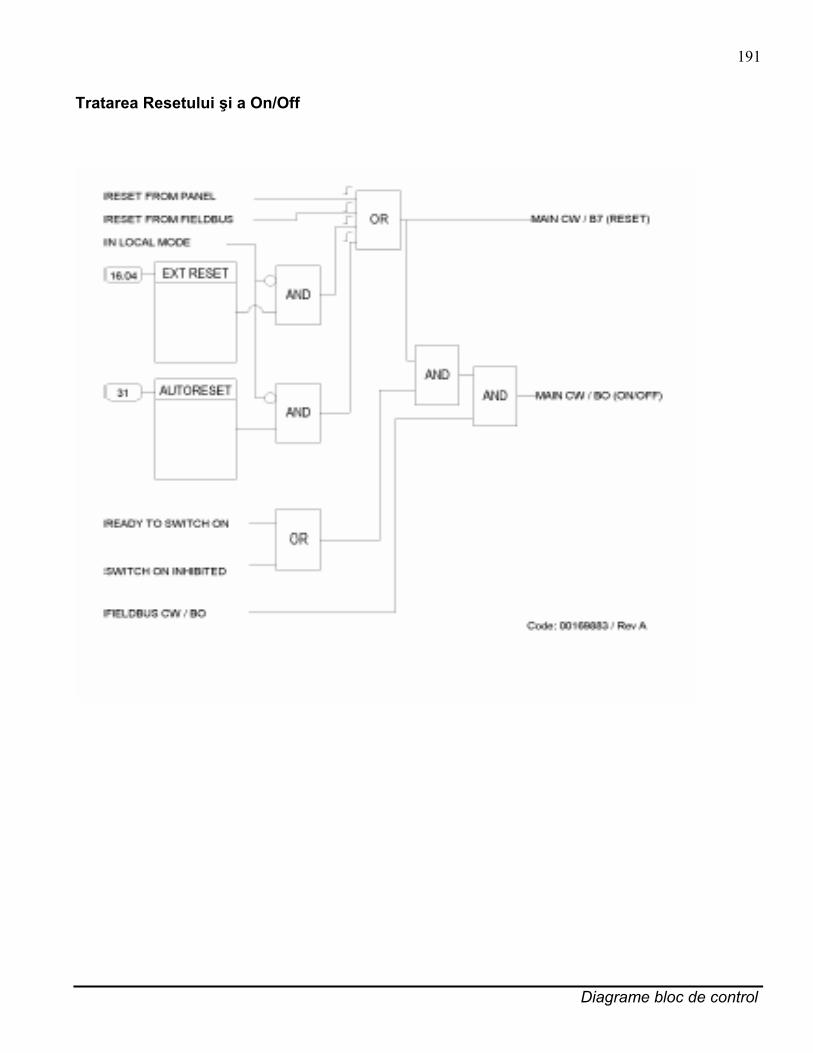
Diagrame bloc de control
191
Tratarea Resetului şi a On/Off