1. spectrul semnalelor...semnale armonice în timp continuu şi în timp discret conceptul de...
TRANSCRIPT
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I, - 2014/2015 25
§.1.3. Spectrele semnalelor. Semnale armonice. Efecte ale eşantionării şi teorema Nyquist - Shannon.
1. Spectrul semnalelor Din punctul de vedere al periodicităţii în raport cu timpul, distingem semnale periodi-ce şi semnale neperiodice. Pentru a estima efectele semnalelor asupra sistemelor, se folosesc pe larg, alternativ modelelor de semnale în domeniul timp, spectrele semnalelor şi caracteristicile de pulsaţie ale sistemelor. În consecință, caracterizarea semnalelor prin spectre reprezintă un alt mijloc de descriere a semnalelor.
În cazul semnalelor periodice, spectrul este discret. În cazul semnalelor neperiodice, spectrul este continuu.
Baza matematică pentru abordarea acestei probleme o reprezintă seria Fourier, respectiv transformata Fourier. În sinteză, sunt de reținut următoarele aspecte:
Fie x(t) un semnal periodic de perioadă T0, deci de frecvenţă 0T1f şi pulsaţie
00 T
12 . El poate fi descompus în serie Fourier, sub forma:
n
n
tnjn 0ec)t(x . (1.26).
Coeficienţii nc , numiți coeficienţii seriei Fourier, sunt numere complexe. Dacă funcţia x(t) este absolut integrabilă (integrala modulului e finită), coeficienţii pot fi calculaţi cu formula
20T
0
0
2T
tnj
0n dte)t(x
T1c .
În cazuri simple ei pot fi determinaţi prin aducerea expresiei lui x(t) prin operaţii trigonometrice la forma (1.26).1)
În reprezentare polară coeficienţii se scriu sub forma ncargj
nn ecc .
Se numeşte spectru de amplitudine al semnalului x(t), mulţimea Znnc , iar spectru
de fază mulţimea Znncarg . Cele două spectre se reprezintă de regulă în funcţie de
1) Această cale este folosită în exemplele 1 şi 2 de mai jos

26 Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I - 2012/2013
0n , reprezentarea apărând ca o mulţime de puncte discrete
Zn
n0 cnω
),(n
,
respectiv
Zn
n0 cnω
)arg,(n
. De regulă punctele se unesc prin segmente cu abscisa
rezultând așa-numitele spectre de linii.
Exemplul 1: Să se determine spectrele de amplitudine şi fază ale semnalului x(t)=sin2t.
Soluţie: Folosind formula lui Euler jj eej2
1sin , expresia lui x(t) devine
tjtjtjtj ee)ee( 22222j1
2j1
2j1
x(t)
tj
c
jtj
c
jtjtj eeeeejej 222222
11
21
21
21
21
În consecinţă, atât spectrul de amplitudine cât şi cel de frecvenţă vor fi formate din câte două valori, cărora le corespund grafic două puncte:
2
1211 ,c, şi
21212 ,c, ,
respectiv
,carg, 11
22, şi
2
212 ,,carg, .
Ele sunt reprezentate în Fig. 23 sub formă de spectre de linii. Exemplul 2: Să se determine spectrele de amplitudine şi de fază ale semnalului
tf4sinbtf2sina2)t(x 2 , cu b,a > 0 parametri reali.
Soluţie: Supunem expresia lui x(t), semnal periodic de pulsaţie f40 , unor transformări trigonometrice succesive, după cum urmează:
tf4sinb)tf4cos1(a)t(x
tf4jtf4jtf4jtf4j eej2
bee21aa)t(x
tf4jtf4j ebj1a
21aeb
j1a
21)t(x
tf4j0jtf4j e)bja(21aee)jba(
21x(t)
Fig. 23. Spectrul de amplitudine și spectrul de fază ale semnalului x(t)=sin2t
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I, - 2014/2015 27
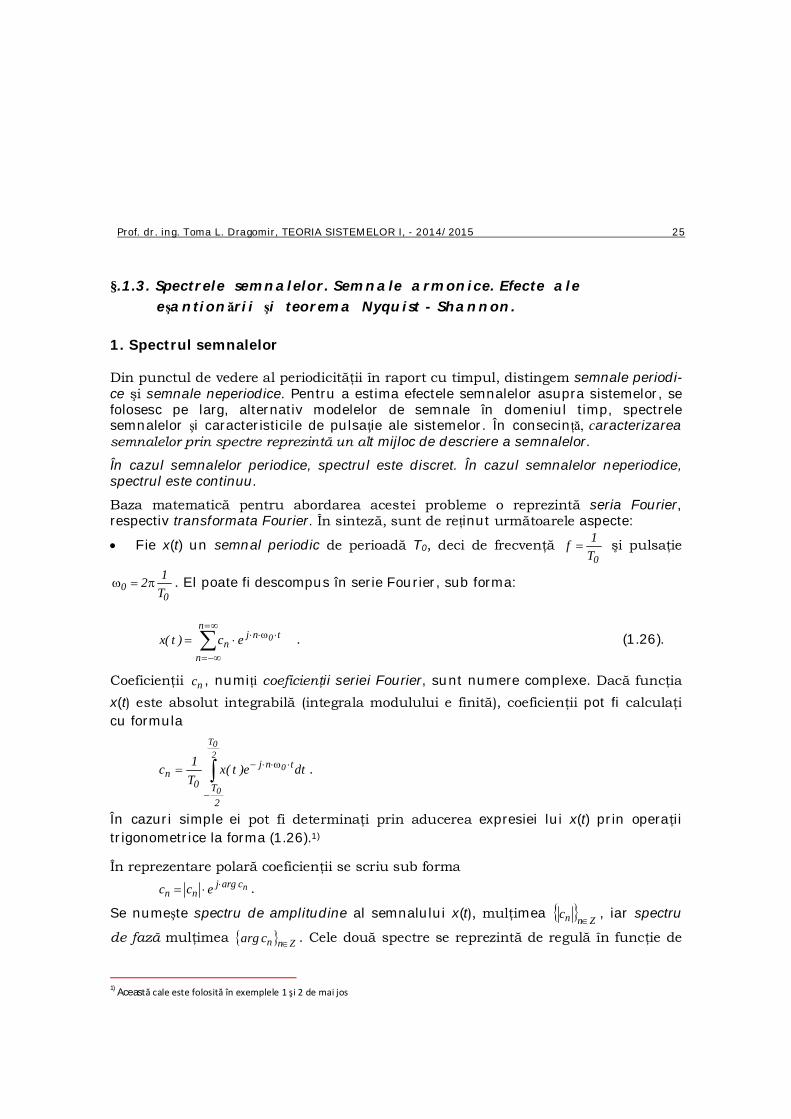
tf4j
1c
abarctgj22
0j
0c
tf4j
1c
abarctgj22
ee2
baeaee2
ba)t(x
De data aceasta spectrul de amplitudine şi cel de fază sunt formate din câte trei valori. Ele sunt re-prezentate în Fig. 24 sub formă de spectre de linii. Pentru spectrul de ampli-tudine s-au folosit punc-tele:
2
22
011ba,c, ,
a,c, 000 şi
2
22
011ba,c, ,
iar pentru spectrul de fază punctele
a
barctg,carg, 011 , 0,0carg, 00 ,
abarctg,carg, 011 .
În cazul când )t(x nu este un semnal periodic problema poate fi intuită calitativ ca o extensie a cazului anterior considerând semnalul neperiodic ca un semnal periodic de perioadă 0T , respectiv de pulsaţie 00 . În consecință, în acest caz rezultă un spectru continuu.
Problema spectrului semnalelor neperiodice se tratează folosind transfor-mata Fourier (bilaterală)
dte)t(x)(x tj . (1.27)
Modulul acestei expresii ne dă spectrul de amplitudine iar argumentul ei ne dă spectrul de fază. Domeniul de pulsaţii pe care 0)(x se numeşte bandă de pulsaţii.
O notăm cu ][ BB , . Frecvența
2f BB se numeşte frecvenţă de bandă, iar dublul
ei, Bs f2f , rată Nyquist.
Fig. 24. Spectrul de amplitudine și spectrul de fază ale
semnalului tf4sinbtf2sina2)t(x 2
28 Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I - 2012/2013
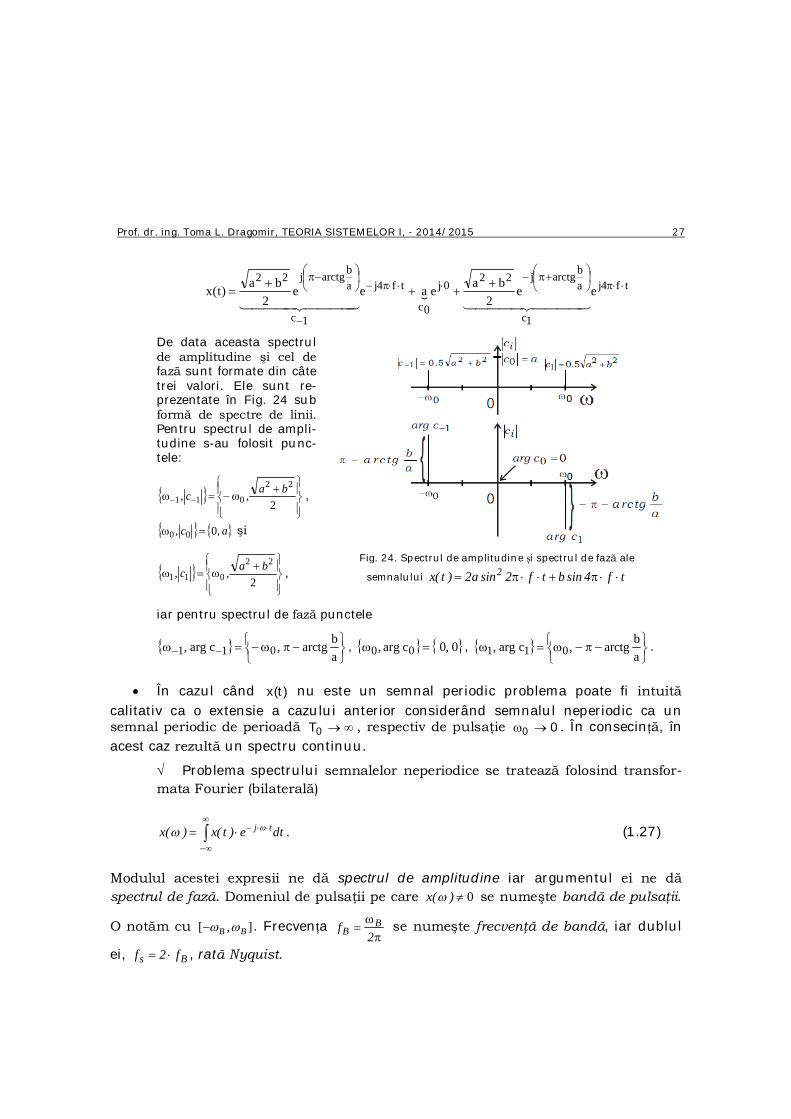
Exemplul 3. Să se determine spectrul de amplitudine şi spectrul de fază ale impulsului ][ 00 )tt()tt(a)t(x , 0t0 .
Soluţie: Transformata Fourier a lui x(t) este:
0
0
t
t
tjtj dteadte)t(x)(x .
Dezvoltând, obţinem:
020
0tsina)tcosjt(sina)(x
t
t
.
Rezultatul din acest caz particular este o funcție reală căreia îi corespund spectrele de amplitudine şi spectrul de fază:
)t(Sitatsina)(x 000 22
,
12222120 0
restîn,}Zk))k(,k{[}Zk))k(,)k{[(t,)(xarg
.
Transformata Fourier, spectrul de amplitudine și spectrul de fază sunt reprezentate în Fig. 25.
-20 -15 -10 -5 0 5 10 15 20-0.5
0
0.5
1
1.5
2
omega [sec*(-1)]
x
Transformata Fourier a semnalului din exemplul 3
-20 -15 -10 -5 0 5 10 15 200
0.5
1
1.5
2
omega [sec*(-1)]
mod
ul (x
(om
ega)
)
Spectrul de amplitudine al semnalului din exemplul 3
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I, - 2014/2015 29
-20 -15 -10 -5 0 5 10 15 200
1
2
3
4Spectrul de fazã al semnalului din exemplul 3
omega [sec*(-1)]
arg(
x(om
ega)
[rad
]
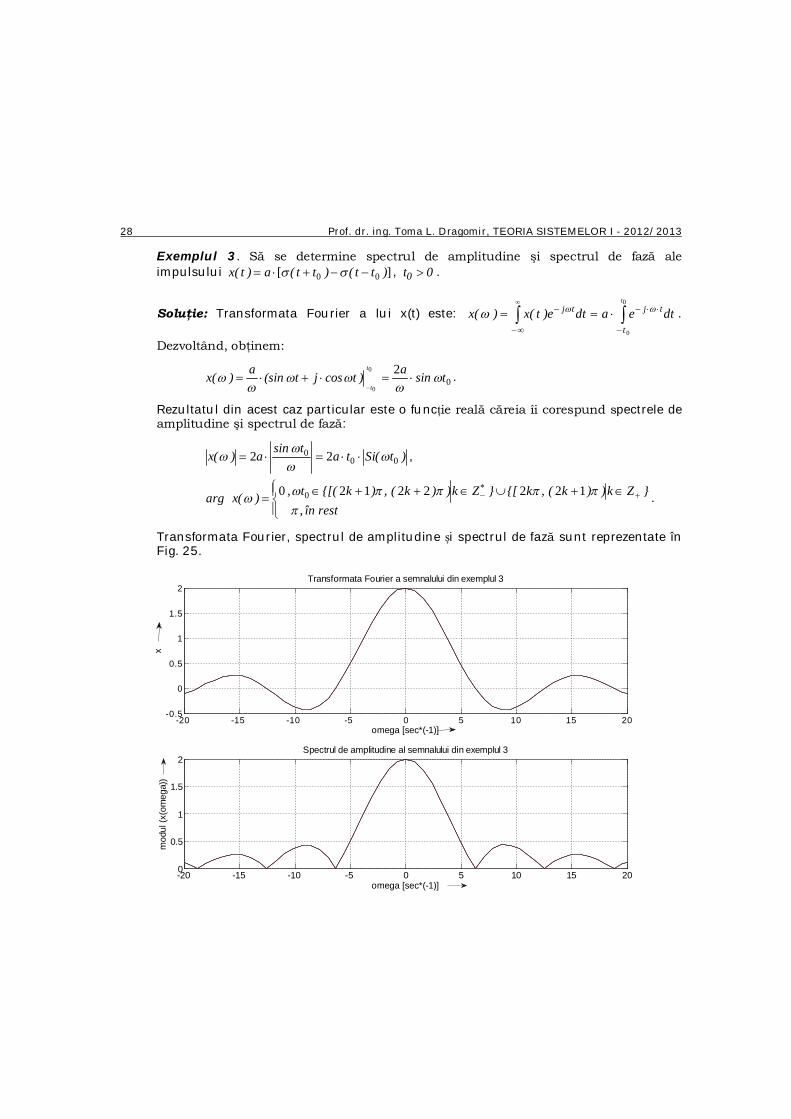
Exemplul 4. Să se determine spectrul de amplitudine şi spectrul de fază ale impulsului ]2[ 0 )tt()t(a)t(x , 0t0 .2)
Soluţie: Transformata Fourier a lui x(t) este:
02
0
t
dteadte)t(x)(x tjtj .
Dezvoltând, obţinem:
002
0
000
2122 tje
tsina)t(cosjtsina)tcosjt(sina)(x
t
.
Rezultatul este de data aceasta o funcție complexă căreia îi corespund spectrele de amplitudine şi de fază:
)t(Sitatsina)(x 000 22
,
}))12(2{[})22()12{[(
0
00
restîn,tZkk,kZk)k,kt,t)(xarg
.
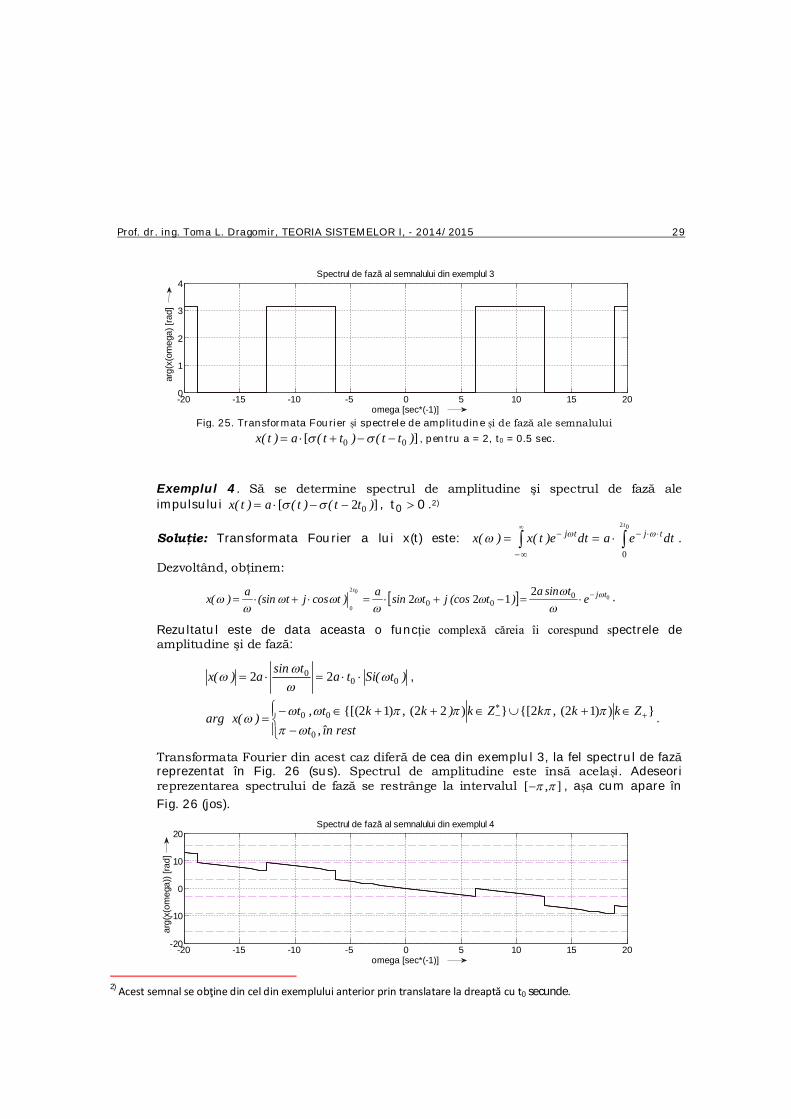
Transformata Fourier din acest caz diferă de cea din exemplul 3, la fel spectrul de fază reprezentat în Fig. 26 (sus). Spectrul de amplitudine este însă același. Adeseori reprezentarea spectrului de fază se restrânge la intervalul ][ , , așa cum apare în Fig. 26 (jos).
-20 -15 -10 -5 0 5 10 15 20-20
-10
0
10
20Spectrul de fazã al semnalului din exemplul 4
omega [sec*(-1)]
arg(
x(om
ega)
) [ra
d]
2) Acest semnal se obţine din cel din exemplului anterior prin translatare la dreaptă cu t0 secunde.
Fig. 25. Transformata Fourier și spectrele de amplitudine și de fază ale semnalului ][ 00 )tt()tt(a)t(x , pentru a = 2, t0 = 0.5 sec.

30 Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I - 2012/2013
Fig. 26. Spectrul de fază al semnalului ]2[ 00 )tt()t(a)t(x , pentru a = 2, t0 = 0.5 sec.
2. Semnale armonice. Efecte ale eşantionării. Teorema Nyquist-Shannon Semnale armonice în timp continuu şi în timp discret Conceptul de frecvenţă este legat de procese periodice explicite sau implicite care se derulează în timp. Considerând semnalul sinusoidal bilateral
R t,)tsin(x)t(x 0 , (1.28.1)
sunt valabile următoarele relaţii de legătură
2
f , f1T , în care f reprezintă
frecvenţa, pulsaţia iar T perioada fundamentală a semnalului.3)
Alternativ formei (1.28.1) se foloseşte şi forma
R t,)tcos(x)t(x 0 (1.28.2)
(v. Fig.27).
Fig. 27. Semnalul armonic (1.28.2)
Semnalele x(t) de expresii (1.28.1) şi (1.28.2) se numesc „semnale sau oscilaţii armonice reale”. Parametrul x0 reprezintă amplitudinea semnalelor.
3) Unităţile de măsură ale mărimilor care intervin în argumentul funcţiei sinusoidale sunt: radianul (notat în mod curent „rad”) pentru cantitatea t numită fază şi cantitatea numită fază iniţială –, secunda (notaţii alternative „s” sau „sec”) pentru perioada fundamentală T, „secunda-1”, denumită în mod uzual Hertz (notaţii alternative „Hz”, „s-1” sau „sec-1”) pentru frecvenţă, respectiv „secunda-1”, (notaţii alternative „rad/secundă” etc.) pentru pulsaţie. De la caz la caz, în funcţie de unitatea de exprimare a timpului, se utilizează şi alte unităţi de măsură.

Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I, - 2014/2015 31
Cu privire la semnalele armonice sunt importante următoarele proprietăţi utilizate în aplicaţiile practice:
Semnalele armonice de perioade diferite sunt funcții liniar independente.
Dacă frecvenţa tinde spre valoarea f = 0, atunci se obţine o perioadă funda-mentală de oscilaţie infinită T .
Alături de semnalele armonice reale se foloseşte şi semnalul armonic complex:
R t,)sin(ωx)cos(ωxex(t)x 00)j(ω
0a tjtt . (1.29)
Semnalele armonice reale pot fi rescrise cu ajutorul formulei lui Euler, sinjcose j , sub forma:
R t,ej2
xej2
x}ex{m)tsin(x)t(x )t(j0)t(j0)t(j00 (1.30.1)
R t,e2
xe2
x}ex{e)tcos(x)t(x )t(j0)t(j0)t(j00 (1.30.2)
Reprezentările grafice ale celor doi termeni din expresiile de mai sus se numesc fazori. Considerând sensul trigonometric ca sens pozitiv, rezultă că fazorul de viteză unghiulară se roteşte în sens trigonometric, iar cel de viteză unghiulară în sens orar. În consecință, un semnal armonic real se obţine din doi fazori de
amplitudine 2
x0 care se rotesc în opoziţie, cu viteză unghiulară absolută , plecând
din poziţii iniţiale bine precizate.
Din punct de vedere matematic putem considera că f şi pot lua orice valori pe axa reală, atât negative cât şi pozitive.
Semnalele armonice (1.28) pot fi rescrise și sub forma
R
t),tT2sin(x)ft2sin(x)tsin(x)t(x 000 , (1.28.1')
R
t),tT2cos(x)ft2cos(x)tcos(x)t(x 000 . (1.28.2')
Prin cuantizarea timpului cu pasul constant h la momentele
Z k,hktk , (1.31)
din expresiile celor două semnale rezultă formulele
R
t),hkT2sin(x)fhk2sin(x)hksin(x)kh(x 000 (1.32.1)
R
t),hkT2cos(x)fhk2cos(x)hkcos(x)kh(x 000 (1.32.2)
Notând

32 Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I - 2012/2013
,fh2
~f~,h
T2h~
şi N k],k[x)kh(x , (1.33)
relaţiile (1.32) iau forma: N k,)kf~2sin(x)k~sin(x]k[x 00 (1.34.1)
N k,)kf~2cos(x)k~cos(x]k[x 00 (1.34.2)
Semnalele (1.34) se numesc semnale armonice digitale. Cantitatea ~ , adimensională, se măsoară în radiani (rad sau rad/eşantion) şi reprezintă „pulsaţia discretă” sau, prin acelaşi abuz de limbaj, „frecvenţa discretă”. În figura 28 este reprezentat grafic
un semnal de forma (1.34.2), de pulsaţie esantion/rad6
~ , adică cu frecvenţa
discretă 121f~ , şi cu un defazaj
6
.
Fig. 28. Exemplu de semnal armonic digital
660 kcosxkx ][
Efectul de aliasing Fie pasul de eşantionare h şi semnalele în timp continuu
)tsin(x)t(x 01 şi )tthnsin(x)t(x 202 cu Rt şi Zn .
Ele au aceeași amplitudine x0, iar frecvenţele lor diferă cu un multiplu al frecvenţei de eşantionare 4)
hfs
1 , (1.35)
Prin eşantionarea semnalelor x1(t) și x2(t) la momentele tk = kh, Zk , potrivit rel. (1.32) rezultă:
4) Semnalul x1 are frecvenţa f iar semnalul x2 are frecvenţa f+nfs.

Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I, - 2014/2015 33
][)()()(][
)(][
kxkhsinxkhnksinxkhnkhh
sinxkx
khsinxkx
10002
01
22
(1.36)
Se observă că secvenţele Zkkx ][1 şi Zkkx ][2 sunt identice. Fiind identice, rezultă că pe baza lor nu se poate preciza în mod ferm semnalul în timp continuu din care provin. Fenomenul este denumit efect de aliasing 5),6).
O primă impresie este aceea că familia de semnale {x2(t}| Zn }, este reprezentată în timp discret, în condiţiile de eşantionare precizate, tocmai de semnalul x1(t). Lucrurile
nu stau însă aşa întrucât pulsația nfs22 și frecvența 22 nff s ale
semnalului x2(t) pot lua valori absolute mai mici decât pulsația și frecvența 2
f
ale semnalului x1(t). Valoarea absolută cea mai mică a frecvenței 2f se obține
determinând pe n din condiția ss fff21
21
2 , adică dubla inegalitate:
sss ffnff21
21
. (1.37)
Fie na soluția obținută, iar fnff asa și asa nf2 valorile corespunzătoare ale frecvenței 2f și pulsației 2 . Semnalul )tsin(x)t(x aa 0 caracterizat de faptul că
][][ kxkxa 1 , (1.38)
este cazul particular de semnal x2 cu cea mai mică pulsaţie în valoare absolută capabil să furnizeze secvenţa Zkkx ][1 . În general, pe baza secvenţelor Zkkx ][1 = Zkkx ][2 Semnalele x1(t) şi x2(t) ale căror secvențe Zkkx ][1 = Zkkx ][2 se confundă cu secvența Zka kx ][ provenită din semnalul )tsin(x)t(x aa 0 se numesc semnale
alias ale semnalului xa(t), iar pulsaţiile Zn,nfsa 2 pulsaţii alias ale pulsaţiei ωa.
Efectul de aliasing este general valabil, iar faptul că prin aplicarea relaţiei (1.37) rezultă pentru a o valoare pozitivă sau negativă nu are relevanţă. În acest context semnalului xa(t) îi asociem frecvenţa 7):
5) În statistică şi tehnică termenul „aliasing” se referă la situaţiile în care apar efecte care nu permit ca semnalele în timp continuu care le-au cauzat să poată fi deosebite pe baza efectelor. În cazul de faţă modul în care s-a făcut eşantionarea nu permite ca pe baza secvenţelor Zkkx1 şi Zkkx2 să se facă distincţie între x1(t) şi x2(t). Totodată, în contextul
prezentării din text, reconstruind din secvenţele Zkkx1 şi Zkkx 2 semnale în timp continuu, în ipoteza că acest
lucru este posibil, va rezulta de fiecare dată semnalul xa(t) care poate să nu coincidă nici cu x1(t), nici cu x2(t). Termenul „aliasing” include şi acest aspect. 6) În limba română termenul alias, provenit din latină, se foloseşte la situaţia când ne referim la o persoană sub forma „A zis şi numit şi B”. 7) Afirmaţia se bazează pe faptul că orice funcţie armonică reală se poate exprima cu ajutorul unei cosinusoide, care este funcţie pară.

34 Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I - 2012/2013
fnfff~ saa , (1.39)
n fiind numărul întreg care satisface dubla inegalitate (1.37). Din (1.37) şi (1.39) rezultă că
20 s
aff~ . (1.40)
Pentru exemplificarea celor de mai sus se consideră 3 semnalele armonice: )tcos()t(x 21 , )tcos()t(x 222 , )tcos()t(x 183 . Frecvenţele lor sunt f1 = 1 Hz, f2 = 11 Hz şi f3 = 9 Hz.
Eșantionate cu pasul h = 0.1 sec., adică cu o frecvență de eşantionare fs = 10 Hz, pe o durată de o secundă, se obține situația din Fig. 29.
Fig. 29. Referitoare la efectul de aliasing
Pentru fiecare dintre cele trei semnale frecvenţa af~ se obţine determinând pe n din
dubla inegalitate (1.37), care devine 5fn105 , şi aplicând apoi (1.39):
Pentru x1(t): = 2, deci 51105 n n = 0, respectiv af~
1 = 1 =1 Hz = f1;
Pentru x2(t): = 22, deci 511105 n n = -1, respectiv af~
2 = 1 =1 Hz = f1;
Pentru x3(t): = 18, deci 59105 n n = -1, respectiv af~
3 = 1 = 1 Hz = f1.
Ca urmare semnalele x2(t) şi x3(t) sunt semnale alias ale lui x1(t) având f1 = fa = 1 Hz, iar valorile celor trei semnale coincid la momentele tk = kh = 0.1·k secunde, k Z.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
t [secunde]
x 1, x2, x
3
x 1
x 2
x 3

Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I, - 2014/2015 35
Efectul de folding şi teorema Nyquist-Shannon Presupunem că un semnal x(t) are mai multe componente armonice, de amplitudini diferite, toate componentele fiind semnale alias ale unui semnal de frecvenţă af
~ . În acest caz, secvenţa Zkkx ][ ale cărei valori rezultă prin însumarea componentelor semnalelor alias nu va permite distingerea componentelor semnalului x(t) şi refacerea lui. Acest efect, generat tot prin eşantionare, este denumit efect de folding.
Notă: Pentru a realiza mai bine importanța problemei efectului de folding să considerăm următorul exemplu: Presupunem că semnalul care trebuie eșantionat, iar apoi prelucrat, conține o componentă utilă de joasă frecvență peste care se suprapune o componentă parazită de înaltă frecvență. Întrucât datorită fenomenului de aliasing în șirul eșantioanelor contribuția semnalului util se însumează la joasă frecvență cu cea a semnalului parazit, în semnalul eșantionat nu se mai poate distinge semnalul util de componenta parazită, semnalul eșantionat fiind privit ca provenind dintr-un semnal de joasă frecvență complet diferit de componenta utilă. Filtrarea suplimentului parazit din semnalul eșantionat nemaifiind posibilă, utilizarea semnalului eșantionat va avea cu totul alte efecte decât cele scontate.
Studiul efectului de folding, se poate face sistematic şi de o manieră generală pe baza spectrului semnalului x(t).
Fără a intra în detalii precizăm că, indiferent dacă spectrul unui semnal este continuu sau discret, abordarea spectrală se bazează în principiu pe teorema Nyquist-Shannon şi reţine următoarele aspecte:
Fie x(t), Rt , un semnal al cărui spectru se situează în intervalul simetric ][ BB f,f , frecvența fB reprezentând cea mai mare frecvenţă de energie nenulă din
semnal (semnal de bandă limitată ][][ BBBB f,f, 22 ). Frecvenţa
BN ff 2 (1.41)
se numeşte rată Nyquist asociată semnalului x(t).
Fie fs frecvenţa de eşantionare a semnalului x(t) (v. rel. (1.35)). În acest context este valabilă următorul rezultat cunoscut sub denumirea de teorema Nyquist-Shannon sau teorema eşantionării:
Semnalul x(t) cu frecvenţa de bandă fB poate fi reconstruit (teoretic) perfect din secvenţa Zkkx ][ obţinută prin eşantionare cu frecvenţa de eşantionare fs dacă
Ns ff folosind relaţia
khtSikxtxk
][ . (1.42)
Dacă Ns ff informaţia din semnalul x(t) nu mai poate fi reconstruită complet din secvenţa Zkkx ][ .

36 Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I - 2012/2013
În (1.42) tf
tfsintSiN
N
este aşa-numita funcţie de interpolare. Frecvenţa sf21 , care
apare şi în relaţia (1.37), se numeşte frecvenţă Nyquist. Ca urmare aplicarea formulei
(1.42) presupune că Bs ff 21 , adică o frecvență Nyquist mai mare decât frecvența de
bandă corespunzătoare semnalului eșantionat. Notă: Cu toate că prezentarea problemei refacerii semnalelor nu face obiectul lucrării de față, este necesar să atragem atenția că în practică refacerea unui semnal pe baza formulei (1.42) nu este posibilă. Pentru a ne da seama de acest lucru este suficient să observăm incompatibilitatea dintre numărul infinit de termeni ai sumei și cerința de prelucrare în timp real. Tehnicile de prelucrare folosite în practică au însă ca punct de plecare teorema Nyquist-Shannon și respectă condiția din teoremă.
Filtre anti-aliasing În cazul aplicaţiilor de control automat numeric (digital) conştientizarea efectelor eşantionării sub forma de efect de aliasing şi efect de folding este deosebit de importantă.
Aceasta se explică prin faptul că semnalele de ieşire ale proceselor conduse, y(t), care trebuie procesate digital de regulatoarele numerice, RN, pentru a genera mărimea de comandă c[k], sunt semnalele analogice ce conţin de regulă componente utile şi parazite (zgomote) cu spectre amplasate în benzi de frecvenţă disjuncte, unele cu rate Nyquist ce depăşesc frecvenţele Nyquist uzuale (zgomotele).
Pentru a nu permite semnalelor parazite să afecteze prin efectele de aliasing şi folding semnalele y[k], rezultate prin eşantionare, şi care trebuie prelucrate de regulatoarele numerice, se folosesc, în aval de convertoarele analog-numerice (CAN), filtre analogice de tip trece-jos (FTJ) denumite filtre anti-aliasing (v. exemplul din Fig. 30).
FTJ eşantionarew
CAN
RN
Regulator numeric reţinere
CNA
y(t) y[k] c[k] c(t)
Fig. 30. Referitoare la utilizarea unui filtru anti-aliasing în raport cu un regulator numeric.
Filtrele anti-aliasing rejectează sau atenuează considerabil componentele parazite, astfel încât semnalul de comandă analogic c(t), transmis procesului condus, să fie obținut numai din componenta utilă a lui y(t). Eşantionarea componentei utile trebuie să respecte condiţia din teorema Nyquist-Shannon. Pe această cale este eliminată posibilitatea producerii efectului de folding al componentelor parazite în raport cu componenta utilă.
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I, - 2014/2015 37
§.1.4. Sisteme – aspecte generale.
1. Tipuri de sisteme. Mărimi de stare. Modelele matematice ale sistemelor fizice şi modelele matematice ale semnalelor din sistemele fizice, denumite în continuare în mod simplu sisteme, respectiv semnale, reprezintă principalele instrumente de lucru ale teoriei sistemelor. Folosirea lor permite abordări cu caracter general, bazate pe distingerea de clase de sisteme şi pe identificarea, în scopuri aplicative, de izomorfisme care să permită diseminarea în practică a rezultatelor teoretice.
Modelul matematic (MM) al unui sistem fizic exprimă dependenţa funcţională (corelaţia) dintre modelele matematice ale unor semnale din sistem. Printr-un MM nu se modelează întregul sistem fizic ci doar procesele din sistem care ne interesează (limite de interes), iar acestea doar în măsura în care le înțelegem (limitele de percepţie).
Modele matematice întrare-ieșire
Dacă sistemul redă numai dependenţa dintre semnalele de intrare şi cele de ieşire, prin care se exprimă rolul sistemului, spunem că modelul este de tip funcţional şi îl vom numi în mod curent model matematic intrare - ieşire (MM-II).
MM-II se folosesc în general pentru sisteme de tip SISO. În cazul timp continuu MM-II constă, în formă primară, dintr-o egalitate integro-diferenţială de tipul:
f( , u dt,u,u, , y dt,y,y, ) 0 . (1.43)
În cele mai multe cazuri drept MM-II se consideră egalitatea diferenţială obţinută din forma primară prin eliminarea integralelor, denumită forma generală implicită:
(1) (m) (1) (n)f(u,u , ,u ,y,y , ,y ) 0 . (1.44)
În mod obişnuit în (1.44) semnalul de intrare u(t) se cunoaşte, iar egalitatea, completată cu condiţiile iniţiale care se referă la valorile mărimii de ieşire şi la valorile derivatelor acesteia la un moment iniţial t0, este tratată ca ecuaţie diferenţială ordinară. Soluţionarea ei reprezintă o problemă de tip Cauchy. Dacă la momentul t0 semnalul de intrare prezintă salturi atunci, pentru rezolvarea ecuaţiei diferenţiale, se consideră atât pentru semnalul de intrare cât şi pentru semnalul de ieşire drept condiţii iniţiale fie numai valori la momentul t0_
t tt t
lim t
0
0
, fie numai valori la momentul t0+t tt t
lim t
0
0
.
Ordinul maxim de derivare n, al mărimii de ieşire din sistemul (1.44), se numeşte ordi-nul sistemului sau dimensiunea sistemului. Principiul non-anticipării se manifestă prin faptul că n m (sistem strict cauzal). Dacă n = m vom spune că sistemul este la limita de strictă cauzalitate.
Sistemele fizice sunt strict cauzale. Reciproc, pentru ca un MM-II să poată fi modelat fizic trebuie îndeplinită condiţia n m,numită, din această perspectivă, condiţie de realizabilitate fizică. În cazul n = m vorbim despre un model aflat la limita de

38 Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR I - 2012/2013
realizabilitate fizică. Dacă n m modelul nu este fizic realizabil, sistemul având un caracter pur anticipativ.
Pentru diverse tipuri de calcule este avantajoasă explicitarea lui y(n)(t) din (1.44) sub forma:
).y,...,y,y,u,...,u,u(f~~)t(y )1n()1()m()1()n( , (1.45)
denumită forma generală explicită a unui MM-II.
Exemplu: Ecuaţia 0)t(yk)t(y]1)t(y[c2)t(ym 2 reprezintă modelul unui sistem fizic numit oscilator Van der Pol. Este vorba despre un sistem autonom în cadrul căruia apar numai mărimea de ieşire y (poziţie) şi trei parametri : m, c, k. Modelul are ordinul n = 2 şi poate fi încadrat în formele (1.44) şi (1.45), observând că
yky]1y[c2ym)y,y,y(f~ 2 ,
respectiv
y
mky)1y(
mc2)y,y(f
~~ 2 .
Sistemul evoluează în timp ca efect al condiţiilor iniţiale (neevidențiate mai sus).
În cazul SISO, un MM-II în timp discret constă în formă primară dintr-o egalitate de forma:
0])t[y],1t[y],...,1nt[y],nt[y],t[u],1t[u],...,1mt[u],mt[u(f~ , (1.46)
sau
1])y[t,1],ny[tn],y[tu[t],1],u[t,1],mu[tm],(u[tfy[t] ~~ . (1.47)
De regulă, egalităţile se completează cu condiţiile iniţiale şi se tratează ca ecuaţii recursive.
În mod obişnuit condiţiile iniţiale se referă la ansamblul de valori necesare utilizării modelului începând cu un moment iniţial t0. Pentru (1.47) aceasta înseamnă cunoașterea valorilor: y[t0-1], ..., y[t0-n], u[t0-1], ..., u[t0-m] 8). Celor două ecuaţii recursive li se asociază mulţimi de timp de forma T = { t0, t1,..., tf } cu tf finit sau infinit, corespunzătoare momentelor pentru care modelul trebuie să furnizeze valorile lui y[t].
Ordinul de recursivitate al modelului este dat de diferenţa dintre cel mai mare şi cel mai mic argument al lui y din (1.46) sau (1.47). Ca urmare, ordinul de recursivitate al modelelor (1.46) și (1.47) este t – (t-n) = n. El reprezintă şi ordinul sistemului sau dimensiunea sistemului. Dacă în cele două modele nu apare u[t], atunci sistemul este strict cauzal și fizic realizabil întrucât y[t] se determină numai pe baza unor valori ale lui y şi u de la momente anterioare lui t0. 8) Acest lucru impune în cazurile practice monitorizarea sistemului la momentele t0-1, t0-2, ... , anteriore momentului iniţial.