universitatea ,,alexandru ioan cuza” din ... - phys.uaic.ro · 2 universitatea „alexandru ioan...
TRANSCRIPT

UNIVERSITATEA ,,ALEXANDRU IOAN CUZA” din IAȘI
FACULTATEA DE FIZICĂ
REZUMAT
TEZĂ DE DOCTORAT
UTILIZAREA DINAMICII NELINIARE ÎN STUDIUL UNOR FENOMENE LA
SCARĂ MICRO ȘI MACROSCOPICĂ
Doctorand, COORDONATOR
ȘTIINȚIFIC:
Mihăileanu Doina PROF. UNIV. DR. AGOP MARICEL
Iași 2015

2
Universitatea „Alexandru Ioan Cuza” din Iași
RECTORAT
Vă facem cunoscut că în data de 10 octombrie 2015, ora 1130, în sala L1, doamna Doina Mihăileanu (căs. Amarandi) va susține, în ședință publică, teza de doctorat cu titlul:
„UTILIZAREA DINAMICII NELINIARE ÎN STUDIUL UNOR FENOMENE LA
SCARĂ MICRO ȘI MACROSCOPICĂ”
în vederea obținerii titlului științific de doctor în domeniul fundamental Științe Exacte, domeniul
FIZICĂ.
Comisia de doctorat are următoarea componență:
Preşedinte: Prof. Univ. Dr. Diana Mardare, Director Școala Doctorală,
Universitatea „Alexandru Ioan Cuza” din Iaşi
Conducător ştiinţific: Prof. Univ. Dr. Maricel AGOP, Facultatea de Fizică,
Universitatea „Alexandru Ioan Cuza” din Iaşi
Referent: Prof. Univ. Dr. Dumitru Vulcanov, Facultatea de Fizică,
Universitatea de Vest Timișoara
Referent: Prof. Univ. Dr. Puiu Viorel Păun, Facultatea de Științe Aplicate,
Universitatea Politehnică București
Referent: Conf. Dr. Silviu Octavian Gurlui, Facultatea de Fizică,
Universitatea „Alexandru Ioan Cuza” din Iaşi

3
CUPRINS
INTRODUCERE …………………………………………………………………..…………..5
Cap.1. Forme geometrice ale structurilor materiale cerești. De la diferențiabilitate la
fractalitate…………………………………………………………………………..……….….6
1.1Introducere ...………………………………………………………………………..……….6
1.2 Abordarea clasică …………………………………………………………………..……….9
1.3 O abordare fizică ce necesită condiții inițiale……………………………………..………..11
1.4 Forțe centrale și direcții asimptotice ……………………………………………..………...15
1.5 Relație materie – spațiu…………………………………………………………...………...20
1.6 Deformația și reperul vectorial …………………………………………………..….……...21
1.7 Gaz Ideal clasic: Dinamica forțelor de lungă distanță……………………………………….30
1.8 Perspective ……………………………………………………………………….….……..37
Bibliografie…………………………………………………………………………..………....40
Cap.2 Aproximaţia disipativ – dispersivă a mişcării în teoriile de scală pe varietăţi
tridimensionale …………………………………………………………….…………………43
2.1 Scop ………………………………………………………………………….…………….43
2.2 Varietăţi fractale …………………………………………………………….……………..43
2.3 Variabile fractale ……………………………………………………………….………….45
2.4 Transformări fractale …………………………………………………………..…………..45
2.5 Principii de invarianță ………………………………………………………….…….…....47
2.6 Implicații ale nediferețiabilității pe o varietate spațială tridimensională ……….…………48
2.7 Derivata covariantă …………………………………………………………….….……....52
2.8 Ecuațiile geodezicelor ………………………………………………………….…….……55
2.9 Ecuația geodezicelor în formalismul funcției de undă …………………………..…….…..57
2.10 Varianta hidrodinamică a ecuațiilor geodezice …………………………………...……...58
2.11 Perspective………………………………………………………………………..………59
Bibliografie……………………………………………………………………………..……...60
Cap.3 Aproximația disipativă a mișcării pe varietăți tridimensionale în teorii de scală.
Aplicații ……………………………………………………………………..…..…………….64
3.1 Scop ……………………………………………………………………….…..…………..64
3.2 Ecuațiile hidrodinamicii fractale în aproximația disipativă a mișcării …….……..………..64
3.3 Problema Kepler la diverse scale de rezoluție ………………………………….…….…….65
3.4 Relații de incertitudine în varianta hidrodinamică. Implicații ………………..…………..…71
3.5 Legi constitutive de material pentru sisteme complexe ……………………………..….......74
3.6 Efecte de tip histerezis în sisteme complexe ………………………………….………….…77
3.7 Dinamici bosonice în spații fractale………………………………….…………….……….88
3.8 Perspective………………………………………………………………..………………...93
Bibliografie………………………………………………………………………..……………94
Cap.4. Efectele dispersive în plasmele de ablație laser ……………………..……….……...97
4.1 Scop …………………………………………………………….…………….……………97
4.2 Introducere ………………………………………………………….………….…………..97
4.3 Instalația experimentală ………………………………………………...….……………....98
4.4 Rezultate experimentale …………………………………………………...……………...100
4.5 Modelul teoretic ………………………………………………………………...….….….102
4.6 Perspective ……………………………………...…………………………….………..…111
4
Bibliografie…………………………………………………………………...…….………...112
Concluzii generale…………………………………………………………………..………..115
Bibliografie………………………………………………………………………..…..……...117
Lucrări publicate………………………………………………………………...…..………..127
5
Introducere
“Pseudo – inteligența” materiei se manifestă în general printr-o dinamică a limitei sale
de separare în raport cu spațiul, și implicit printr-o dinamică a limitei de separare a spațiului în
raport cu materia. Capitolul I este așadar pregătitor pentru o asemenea descriere a materiei
“pseudo - inteligente”: o teorie care matematic se bucură fie de continuitate spațiala însa nu
materială, fie de continuitate materială dar nu spațială. Cel mai bun candidat pare a fi o teorie
fractală, în care continuitatea nu este neapărat însoțită de diferențiabilitate, ci de
nediferențiabilitate. De aceea în capitolul II s-a construit o teorie a relativității de scală în
dimensiune fractală arbitrar constantă pe o varietate tridimensională, în care sunt luate în
considerare și derivatele de ordin trei în dezvoltarea Taylor a parametrilor de mișcare.
Ca urmare ecuația geodezicelor pentru un câmp complex de viteze este formată de o
ecuație generalizată de tip Boussinesq- Korteweg de Vries , în reprezentare prin funcție de undă,
o ecuație generalizată de tip Schrödinger, în timp ce în reprezentarea lui Madelung o
hidrodinamică fractală generalizată. Capitolul III este destinat tratării unor dinamici ale
sistemelor complexe în aproximația disipativă a mișcării (problema Kepler la diverse scale de
rezoluție, relațiile de incertitudine hidrodinamică particularizate la problema Kepler, legi
constitutive de material, efecte histeretice pentru fluide fractale și dinamici bosonice în câmp
combinat).
Aproximația dispersivă a mișcării este utilizată în capitolul IV pentru studiul unor
dinamici ale plasmelor de ablație. Validarea modelului teoretic a fost realizată pe baza unor
experimente bazate pe metoda sondei Langmuir.
Cap.1.Forme geometrice ale structurilor materiale cerești. De la diferențiabilitate la
fractalitate
Structurile materiale cu forme geometrice complicate populează spectacolul cosmic
observațional. Multe dintre acestea sunt plate sau cel puțin exprimă o tendință de a deveni plate.
Cronologic vorbind, descrierea geometrică a acestor structuri pornește de la cercuri, trece prin
secțiuni conice și sfârșește prin spirale. Structurile plate de materie, atât statice cât și în mișcare,
ne-au ajutat în dezvoltarea teoriei moderne a gravitației. De fapt, ele ne și ajută să decidem asupra
imaginii moderne a lumii, incluzând și viața. Sunt acestea cumva legate ca o familie? Da.
Prezentul capitol descrie geometria acestei conexiuni, pornind de la raționamente intuitive
fundamentale: nu le putem vedea decât în proiecțiile lor bidimensionale. Acestea furnizează o
descriere logica a materiei în mișcare, conducând la o geometrie metrică. Consecințele teoretice
sunt ilustrate prin intermediul concluziilor.
Rezultatele originale din acest capitol au fost publicate în referințele [1-3,32]. Am
insistat însă mai mult pe forme geometrice ale structurilor materiale cerești [1,3] și nu pe un
mesaj Newtonian pentru cuantificare [2] întrucât acestea ne vor permite tranziția de la
diferențiabilitate la fractalitate pe o cale total diferită de cea prezentată în [2].Totuși am menționat
referința [2] în măsura în care am utilizat formalismul matematic atât al algebrei cât și al
geometriei diferențiale asociate matricilor 2x2.
1.1 Introducere
Întâi de toate dorim să vedem care este numitorul comun geometric printre formațiunile
plane ale materiei cerești, ale caror forme sunt obținute din datele astronomice. Acestea au fost
de fapt și punctul de pornire a lui Newton, pentru a introduce forța în explicarea structurii fizice
a sistemului solar. Și întradevăr există un asemenea numitor: orbitele Kepler și brațele spirale ale
galaxiilor, fac parte din aceeași familie geometrică a curbelor anarmonice plane. În descrierea

6
acestora vom urma aici lucrarea lui Nicolae Mihăileanu [4]. Acest autor ne prezintă curbele
anarmonice plane ca orbite definite de o relație omografică între panta tangentei și panta secantei
ce trece printr-o poziție fixă, în oricare dintre punctele orbitei. Poziția fixă este polul curbei
anarmonice. Această definiție dă și proprietatea proiectivă interesană, care este esențială în
construcțiile bazate pe date astrometrice: ele oferă de fapt numai proiecții.
Presupunând, atât pentru simplitate, cât și pentru a oferi o idee cât mai clară, că luăm polul ca
origine, într-un sistem de coordonate (u, v), condiția din definiția unei curbe anarmonice revine
la ecuația diferențiala:
v'(u)=av+bu
cv+du (1.1)
în care a, b, c, d sunt coeficienți reali, iar accentul înseamnă derivata în raport cu variabila u.
Caracteristicile matricei reale 2x2
𝒂 ≡ (𝑎 𝑏𝑐 𝑑
) (1.2)
în mod specific, punctele fixe ale acțiunii sale omografice și valorile proprii ale acțiunii sale
liniare decid forma curbei descrisă de ecuația (1.1). Pentru a descoperi acea formă va trebui,
evident, să integrăm ecuația (1.1) pe care este convenabil să o scriem sub forma
−1
v
dv
dμ=
aμ+b
cμ(μ − μ1)(μ − μ
2)
; μ≡v
u (1.3)
Aici μ1,2 sunt puncte fixe ale acțiunii omografice a matricii a din (1.2), adică rădăcinile ecuației
cμ2 + (d − a)μ − b = 0 (1.4) Ele sunt, din punct de vedere geometric, pantele dreptelor asimptote curbei descrise de ecuația
(1.1) în planul (u, v). Pentru a arăta aceasta, să ne reamintim definiția asimptotei: tangenta la
curba în punctul de la infinit. În condițiile noastre, definiția implică:
limu→∞
v'(u)= limu→∞
μ(u) (1.5)
Având în vedere ecuația (1.1) aceasta condiție revine la ecuația (1.4).
Așadar, o curbă anarmonică plană are totdeauna două direcții asimptotice care trec prin
polul curbei, cu pantele date de ecuația (1.4). Natura algebrica a celor două rădăcini ale ecuației
(1.4) decide forma curbei anarmonice descrisă de ecuația (1.1). Normal, valorile proprii ale
matricii (1.2) reproduc natura algebrică a punctelor fixe: un raționament simplu ne arată că
punctele fixe ale acțiunii omografice a matricii (1.2) sunt rapoartele componentelor vectorilor
proprii. Acest fapt poate fi însă verificat și direct, deoarece un calcul simplu arată că, dacă λ1,2
sunt valorile proprii ale matricii (1.2), atunci există urmatoarele relații între ele și punctele fixe
ale matricii (1.3):
λkμk = aμk + b; λk = cμk + d; k = 1,2 (1.6)
Se vede lesne deci că, elementele matricei (1.2) sunt reale, punctele ei fixe și valorile ei proprii
trebuie să fie de aceeași natura algebrică. Relațiile (1.6) pot fi folosite în continuare pentru a
integra ecuația (1.3).
Presupunând că matricea (1.2) are valori proprii distincte, ecuația (1.3) dă soluția
|v − μ
2u|
λ2
|v − μ2u|λ1=K (1.7)

7
unde K este o constantă de integrare. În consecință, curba este o parabola reală de gradul λ1/λ2,
dacă valorile proprii sunt reale. În cazul în care valorile proprii sunt complexe, putem scrie
λ1,2=α±iβ (1.8)
iar curba armonică este o spirală logaritmică:
ρ=Ke-mψ (1.9)
unde K este, din nou, o constantă reală și am notat
ρ2=(βu)2 +(v − αu)2
β; tgψ=
βu
v − αu ; m=
d+αc
βc (1.10)
Mai există încă un caz, cel al valorilor proprii identice. Fie λ0 valoarea lor comună.Curba
anarmonică are în acest caz o singură direcție asimptotica prin origine, de pantă sa zicem μ0.
Ecuația (1.3) poate fi scrisă ca
−1
v
dv
dμ=
aμ+b
cμ(μ − μ0)
2 (1.11)
și poate fi integrată, cu rezultatul
ln|v − μ0u|+
λ0
c
|u|
|v − μ0
u|=K (1.12)
unde K este o constantă reală. Această curbă este o proiecție a funcției exponențiale obișnuite.
Am obținut astfel ceva mai mult decat am dorit inițial: curbele anarmonice conțin nu
numai spiralele logaritmice și secțiunile conice, ce se obțin aici pentru cazul m=0 în ecuația
(1.10), ci de asemenea și alte forme ce nu par să aibă corespondențe nici în ,,ceruri” nici în lumea
microscopica. Să vedem totuși unde ne duce algebra în continuare[2].
1.2 Abordarea clasică
Pentru a fixa ideile, să presupunem în continuare că parametrul v și elementele
matricii a de care vorbim în această secțiune sunt constante. Se poate înlocui atunci ecuația (1.1)
prin sistemul liniar:
|u⟩=va ∙ | u⟩ ; |u⟩≡ (u
v) (1.13)
Pentru a face legătură cu dinamica clasică , avem evident nevoie de derivatele
secundare ale lui u și v în raport cu timpul. În condițiile noastre acestea sunt:
|u⟩=(λa)2 |u⟩≡b |u⟩ (1.14)
Pentru ca rata ariei măturate de vectorul de poziție în raport cu polul curbei să fie constantă, este
necesar ca
vu- uv=0
iar această condiție revine la
b12v2+(b11 − b22)uv − b21u2=0 (1.15)
indiferent de u și v. Deci matricea b trebuie să fie matricea unitate 2×2, până la un factor arbitrar.
Alegând adecvat factorul v, putem ajusta elementele matricii a astfel încât pătratul ei să fie
matricea unitate:

8
a2= e
Asta înseamnă că matricea a trebuie să aibă urma nulă și determinant unitate, evident până la un
semn. Într-o notație adecvată, ea poate fi scrisă sub forma
a= (−a12 −a22
a11 a12) ≡ (
0 −1
1 0) (
a11 a12
a12 a22)
Așadar, eliminând parametrul timp din ecuația (1.13), o putem scrie sub forma pur diferențială
(a11u+a12v)du+(a12u+a22v)dv=0 (1.16)
așa încât ea poate fi integrată imediat, dând ecuația implicită a unei secțiuni conice:
a11u2+2a12uv+a22v2=K (1.17)
unde K este o constantă arbitrară. În acest caz, mișcarea descrisă de ecuația diferențială (1.16)
este hamiltoniană, iar forma pătratică (1.17) este chiar hamiltoniana care o generează, și care
reprezintă chiar și o lege de conservare.
Avem astfel rezultatul important că, pentru ca legea ariilor în forma sa diferențială să
fie satisfăcută, curba anarmonică trebuie să fie o secțiune conică. Aceasta ne spune mai departe
că mișcările reprezentate de curbele anarmonice plane sunt o clasă mult mai generală decât
mișcările Kepler, prin aceea că ele pot să nu respecte legea diferențiala a ariilor în raport cu polul.
O primă concluzie ar fi aceea că mișcările interne ale unei nebuloase spirale nu trebuie judecate
prin standardul reprezentat de mișcările Kepler. În particular, dacă profilul vitezelor interne nu
reproduce standardul newtonian, asta nu înseamnă neapărat că lipsește masa, sau există undeva
masa pe care n-o putem percepe cumva.
1.3.O abordare fizică ce necesită condiții inițiale
În descrierea anterioară, o matrice 2× 2 cu elemente reale este esențială: ea generează
o mișcare ce descrie cinematic o formă geometrică. Cum am vazut, prototipul istoric al acestei
reprezentări este dat de tratarea dinamică a mișcării Kepler clasice. Asa, de exemplu, elementele
matricii formei pătratice din ecuația (1.17), trebuie să depindă de parametrii fizici ai materiei ce
se presupune că generează câmpul – masa, sarcina, etc – și de condițiile inițiale ale mișcării. În
mulțimea acestor parametrii trebuie să avem anumite constrângeri limitative. Exemplul clasic cel
mai cunoscut se referă la faptul că dacă vitezele inițiale ale mișcării Kepler nu au o limită
superioară în mărime, determinată de parametrii fizici ai materiei ce genereaza câmpul, atunci
mișcarea nu este eliptică .
Acceptând, pentru orientarea raționamentului, cazul clasic, considerăm că are sens să
presupunem că materia, în general, poate fi structural descrisă dinamic,în manieră clasică, dar că
această descriere trebuie bazată pe matrici 2×2 cu elemente reale. Aparent, o asemenea concluzie
lasă în urmă ideea de forță, dar vom arăta că nu este cazul să tragem o asemenea concluzie. Pentru
a găsi forțele responsabile pentru mișcarea descrisă de curbele anarmonice, trebuie totuși să
procedăm cu ceva mai multă grijă, în sensul că va fi necesar să găsim relații între matricile 2× 2
ce caracterizează mișcările diferitelor puncte materiale din constituția unui corp fizic de exemplu.
Aceasta revine la a porni filozofia naturală de la ipoteza realistă că un corp fizic nu-i niciodată
un punct material în sens clasic, ci eventual o colecție de puncte materiale.Numai în condiții
extreme putem să luăm un anumit corp ca punct material, iar aceste condiții depind de scara
spațială a universului pe care-l putem explora. De exemplu, o stea ca Soarele nostru nu este un
punct material decât cu o mare aproximație, care s-a dovedit uneori chiar nerealistă în istoria
științei. Proxima Centauri sau Vega, pot fi considerate, mult mai realist, puncte materiale. La fel
galaxiile depărtate: suntem conștienți că ele au o structură internă complicată, dar în calcule
putem să le considerăm drept puncte materiale cu o destul de bună aproximație.

9
De astfel,mecanica are un moment al istoriei dezvoltării ei, în care definiția punctului
material a fost adaptată pentru a lua în considerare faptele reale menționate[5]. Conform acestei
descrieri, numai particula materială nu are extensie spațială și ca atare poate constitui punct de
aplicație al unei forțe materiale. Punctului material i se poate recunoaște extensia spațială, el
fiind, în sensul lui Hertz, un ansamblu de particule materiale. Conform acestei filozofii, o matrice
reală 2×2 reprezintă atunci o particulă materială,și ca atare trebuie să conțină informații asupra
forțelor ce acționeaza asupra ei, ceea ce, după cum vom arăta, este într-adevăr cazul.
Să admitem, așadar, că matricea 2×2 generică este
𝛂 ≡ (𝛼 𝛽𝛾 𝛿
) (1.18)
Elementele sale conțin, într-o manieră încă nespecificată, atât parametrii fizici ai particulei
implicate în mișcare, cît și condițiile inițiale posibile. Mulțimea acestor matrici, obținută atunci
când fiecare dintre elementele ei parcurge numerele reale formează un set de spinori
fundamentali ce descriu materia prin mișcarea ei. Această descriere este analoagă cu cea a
skyrmionilor prin asa-numita “ipoteză a ariciului”[6], ce oferă de fapt o familie de matrici ce
depind de cei doi parametri ai sferei unitate.
În cazul nostru, o astfel de ipoteză (ansatz, dupa nomenclatura curentă în fizica
teoretică) ne-ar spune că o familie de matrici(1.18) descrie o formă materială prin ecuația
diferențială:
v'(u)=αv+βu
γv+δu (1.19)
Putem aranja această ecuație în forma cu diferențiale totale
(δ+α)(vdu − udv)=d{γv2+(δ − α)uv − βu2} (1.20)
pe care citim două concluzii importante.
Mai întâi, dacă mișcarea satisface o lege a ariilor ce definește un parametru timp,
atunci avem
vdu – udv = ��dt (1.21)
unde “ ��” este viteza cu care vectorul de poziție față de polul curbei anarmonice mătură aria unui
sector al traiectoriei. Se poate astfel integra ecuația (1.20), în raport cu timpul astfel definit, în
modul obișnuit, cu rezultatul
γv2+(δ − α)uv − βu2=(δ+α)At+B (1.22)
unde B este o constanta de integrare. Așadar, în cazul când matricea reprezentativă este de urmă
nulă, avem rezultatul anterior, referitor la faptul că mișcarea anarmonică descrie o secțiune
conică. Altfel, dacă matricea reprezentativă nu este de urmă nulă, însă legea ariilor este încă
satisfacută, avem de-a face cu o secțiune conică cu parametrii ce variază liniar în timpul
problemei – o secțiune conică într-un fel de expansiune, am putea spune. Aceasta trebuie să fie,
de exemplu, cazul inelelor planetei Saturn, sau a centurii de asteroizi a sistemului solar. În măsura
în care sistemul solar este în expansiune ca un tot, acesta trebuie să fie cazul oricărei structuri
ajustabile din univers.
La modul general, acesta este chiar cazul unei secțiuni a unui corp în revoluție,
deoarece constituienții săi fizici sunt fiecare în revoluție în jurul aceluiași centru de forță, a priori
în elipse kepleriene echidistante. Se impune atunci de la sine o concluzie generală: cum
descoperirea legii ariilor s-a facut prin observații asupra corpurilor extinse spațial, ea trebuie sa
fie un soi de lege de medie, ca să zicem așa. Într-adevar, ea este verificată exact pentru un punct
material din structura unui corp cosmic, și în medie pentru ansamblul punctelor materiale din
structura sa. Așadar, conexiunile structurale ce caracterizează un corp cosmic,și deci un corp în
general, trebuie să ia în considerare această importantă concluzie cosmologică. Ea este astăzi
reflectată numai în speculații asupra masei inerțiale și a sarcinilor corpurilor. Să menționăm că,
citind ecuația (1.22) concluzia generală este aceea că avem de-a face cu o mișcare kepleriana în
10
cazul în care constanta ariilor este nulă, indiferent de natura matricii a, sau în cazul în care aceasta
matrice este de urmă nulă. Primul caz reprezintă totuși numai mișcare radială în raport cu polul.
Numai al doilea caz reprezintă o mișcare Kepler propriu-zisă. Deci mișcarea Kepler, chiar dacă
variabilă, este indicație clară a faptului că legea ariilor este respectată în raport cu polul curbei.
În al doilea rând, legea ariilor poate totuși să nu fie respectata în general. Într-un astfel
de caz, avem de integrat ecuația (1.20) ca atare, fără beneficiul unei variabile temporale, numai
raportând-o pur și simplu la caracteristicile matricii (1.18). Fie 𝑚1,2 punctele fixe ale acțiunii
omografice a acelei matrici și l1,2 valorile proprii ale acțiunii sale liniare. În notația
U=v − m1u; V= v − m2u (1.23)
ecuația (1.20) poate fi redusă la forma simplă în diferențiale exacte:
l2dV
V− l1
dU
U=0 (1.24)
ce se poate integra imediat, cu rezultatul deja anunțat anterior:
Vl2
Ul1=K (1.25)
unde K este o constantă de integrare. În cazul în care matricea (1.18) are două valori proprii
identice, ‘l’ să zicem, putem să punem ecuația (1.20) în forma
(δ+α)(vdu − udv)= γd(v − mu)2 (1.26)
unde “m” este unicul punct fix al acțiunii omografice a matricei. Folosind transformarea liniară
U=u; V=v − mu (1.27)
ecuația (1.26) devine o ecuație în diferențiale totale 1
γd
U
V=
dV
V
din care putem recupera direct rezultatul anunțat deja mai înainte:
1
γ
U
V=ln
V
K (1.28)
cu K o altă constantă de integrare.
Încurajați de ideea că materia inelară cunoscută este naturală printre formele
anarmonice ale materiei, ne hazardăm în a indica un caz în care forma exponențiala ar putea fi
cu siguranță găsită. Acesta este cazul materiei angrenate gravitațional, de exemplu cel al cozii
cometelor. Un alt caz în care forma exponențiala a materiei cerești își poate dovedi importanța
sa teoretică este cel al acrețiunii materiei în general. Ea poate folosi așadar nu numai în descrierea
materiei antrenate, ci și în probleme de cosmogonie de asemeni. O asemenea formă a fost gândită
chiar de Newton, dupa cum ne dovedesc scrisorile către Episcopul Bentley, sau schimburile sale
de idei cu Hooke. Un punct material ce cade către o masă atractivă ilustrează după Newton, fără
îndoială, acest caz: la distanțe mari față de centrul de atracție, el cade direct față de acest centru,
apoi la apropiere de masa atractivă, urmează o curbă ,,de ocolire”, ca să zicem așa, a centrului de
atracție, curba ce are direcția inițială de mișcare ca asimptotă. Fără îndoială, acrețiunea este mult
mai bine ilustrată în microcosmos, prin fenomenul Auger sau prin radiațiile alfa și beta, emise
de nucleul atomic.
Așadar, putem să admitem matricile 2×2 ca relevante problemelor de fizică, în mod
concret prin reprezentarea materiei conform calității sale esențiale - mișcarea – de exemplu, în
maniera în care spinorii sunt considerați fundamentali pentru structura spațiului. Ansatz-ul
conform căruia trebuie luate în considerare aceste matrici este cel dat prin ecuația (1.20), ce leagă
forma diferențială a ariei elementare de diferențiala formei pătratice care reprezintă doi spinori
fundamentali. Indiferent dacă legea ariilor este satisfacută sau nu, forma mișcării este dictată de
11
caracteristicile algebrice ale matricei ce o generează conform ansatz-ului. Astfel toate formele
plane ale materiei cerești apar în mod unitar, în forma familiilor de curbe anarmonice. Acestea
sunt curbe Kepler numai dacă, independent de matricea generatoare a formei geometrice, legea
ariilor este respectată. În cazul în care matricea este o involuție – adică are urma nulă – mișcarea
este hamiltoniană, iar planul mișcării poate fi chiar privit ca un plan al fazelor sau ca spațiu al
fazelor la modul mai general. În cazul în care legea ariilor nu este respectată, măsura timpului
trebuie căutată în cu totul alta parte, și anume în relația diferențiala între matrici. În măsura în
care acestea reprezintă particule în sensul lui Hertz, putem spune că timpul este dictat de forțele
interne ale materiei. Să vedem deci cum putem să găsim acea relație diferențială.
1.4 Forțe centrale și direcții asimptotice
Când vorbim aici de “spinori fundamentali”, ceea ce avem în vedere este caracterizarea
geometrică inițiala a lui Cartan pentru aceste ființe geometrice [7]. În cazul nostru ei sunt
reprezentați, de exemplu, de zerourile formei pătratice din partea dreaptă a ecuației (1.20), adică
de direcțiile asimptotice ale traiectoriei astfel descrisă de matricea (1.18). Din punct de vedere
clasic, aceste cantități au o legătură destul de originală cu forțele care eventual generează
mișcarea, legătură ce face obiectul secțiunii de față.
Orice matrice 2×2 – subliniem încă odată: nu folosim decât matrici cu elemente reale
– poate fi scrisă ca o combinație liniară cu coeficienți reali ce implică două matrici speciale,
anume matricea unitate și o matrice de urmă nulă (involuție):
𝛂=λ1+μi (1.29)
Involuția i are proprietățile ca (a) pătratul său este multiplu de matricea unitate 1, și (b)punctele
sale fixe sunt cele ale matricii α. În ecuația (1.29) avem libertatea de a alege, ca mai înainte, o
parametrizare în care patratul lui i să fie chiar matricea unitate până la un semn. În acest caz,
putem exprima elementele lui i prin doi parametri ce reprezintă direcțiile asimptotice ale matricii
α. Dacă acești parametri sunt complecși, atunci formele anarmonice generate de α conform
prescripției din ecuația (1.19) sunt spirale logaritmice, în timp ce acelea generate de involuția i
sunt elipse. În acest caz, suntem îndreptățiți să discutăm forțele newtoniene în legătură cu formele
materiei astfel descrise geometric. Procedura este următoarea.
În cazul direcțiilor asimptotice complexe – asupra căruia ne concentram acum atenția
din motive istorice evidente – reprezentarea matricii i prin direcțiile asimptotice este un soi de
“reprezentare sferică”, dacă putem spune așa. Ea este complet analogă reprezentării sferice a
vectorilor din cazul euclidian. Diferența stă numai în faptul că rolul jucat de mărimea vectorului
este acum preluat de determinantul matricii. Dacă direcțiile asimptotice sunt să zicem (u±iv),
atunci reprezentarea sferică ce satisface condițiilor (a) și (b) de mai sus este
i =1
v(−u −u2 − v2
1 u) ; i 2= − 1 (1.30)
În cazul clasic al problemei Kepler, u și v se pot exprima în raport cu viteza inițială a mișcării.
Mișcările dintre care se aleg aceste condiții inițiale, trebuie să fie, în mod corespunzător, de
aceeași natură cu mișcarea curentă pe care ele o caracterizează cu ajutorul ecuațiilor dinamicii
clasice. Practic însă, lucrurile se complică, întrucât rareori suntem în posesia vitezelor inițiale
ale unei mișcări, iar datele inițiale trebuie de fapt exprimate în raport cu mărimi contemporane.
De exemplu, în problema Kepler clasica mărimile contemporane se referă, în principal, la
centricitatea orbitei și la direcția relativă a axei ei mari.
Putem generaliza această procedură practică, prin implicarea directă a forțelor în
descrierea direcțiilor asimptotice, atât timp cât aceste forțe sunt centrale[8]. Astfel, parametrii u
și v pot fi luați drept coordonate plane ale unei mișcări clasice ce se face sub acțiunea unei forțe
centrale. În acest caz, ecuațiile de mișcare sunt

12
d
2u
dτ2= F
u
ρ;
d2
v
dτ2= F
v
ρ ; ρ2= u2+v2; (1.31)
Aici F este mărimea forței. Astfel putem da o explicație dinamică a elementelor matricii (1.30):
ele reprezintă expresii algebrice legate de mișcări în câmp de forțe centrale, exact ca în cazul
newtonian.
Cu ecuațiile (1.31) putem totuși merge ceva mai departe. Mai întâi construim
constanta ariilor din ecuația (1.21) ca o integrală a ecuațiilor (1.31) în timpul problemei. Să notăm
apoi că elementele matricii (1.30) pot fi exprimate numai în funcție de mărimi obținute din u și
v prin transformarea rațională:
r = u
v, z =
1
v (1.32)
În aceste noi coordonate ecuațiile de mișcare sunt
d
2r
dτ2=0;
d2
z
dτ2=Z; dτ=
dt
v2; Z= − F
v3
ρ (1.33)
Deci dacă punctul (u,v) descrie o conică, punctul (r,z) descrie de asemenea o conică,
transformată celei dintâi prin omografia (1.32). Notația este aleasă special pentru a face evidentă
o analogie, pe care numai am amintit-o anterior: conica în coordonatele (r,z) este similară unei
parabole, descrisă de un proiectil aruncat oblic în câmp gravitațional. În acel caz, coordonata r
reprezintă mișcarea uniformă “orizontală” în timpul “căderii libere” reprezentate de coordonata
“verticală”z. Forța Z acționează de-a lungul direcției verticale, și este analogă gravitației terestre
aproape de suprafața Pământului: este o forță “paralelă”, cum o numește Appell. Putem vedea
astfel transformarea (1.32) ca o “conversie” a experienței zilnice, referitoare la mișcarea locală
în câmp gravitațional, în mecanica cerească a mișcărilor kepleriene, sau reciproc. Această
conversie este exact ceea ce a realizat Newton, însă numai în mod speculativ.
Conversia din ecuația (1.32) de mai sus are o importanță specială în problema găsirii
forțelor centrale pornind de la principiile dinamicii clasice, a cărei soluție datorată lui Appell o
prezentăm pe scurt în continuare. Prin ecuația (1.33), problema se reduce la găsirea acelor forțe
paralele de mărime Z, al căror punct de aplicație descrie o conică. Ea poate fi redusă în continuare
la o soluție a ecuației diferențiale a lui Halphen ce descrie conicele [9]. Într-adevăr, ținând cont
de legătura dintre parametrii t și 𝜏 reprezentată diferențial în ecuația (1.31), ecuațiile de mișcare
(1.33) devin
dr
dt=a ∴
d2
z
dr2=
1
a2Z (1.34)
Acum este clar ca ecuația diferențială de ordinul al treilea a lui Halphen ce descrie
conicele, devine o ecuație diferențială de ordinul al treilea pentru forța paralelă Z:
{(𝑧)−2 3⁄ }′′′
= 0 ↔ (𝑍−2 3⁄ )′′′ = 0 (1.35)
unde accentul înseamnă derivata în raport cu r. Așadar forța paralelă este dată de :
Z=μϕ−3 2⁄
unde ϕ'''
=0 (1.36)
cu 𝜇 – o constanta. În acest mod, Appell găsește două expresii posibile ale forței paralele, valabile
indiferent de condițiile inițiale ale mișcării:
Z=μc3 2⁄
(br+cz+e)3
, Z=μ
(ar2+2d⋅z+f)3 2⁄
(1.37)
Folosind aici din nou ecuațiile (1.32) și (1.33), găsim mărimea a doua forțe ce satisfac
primelor două legi ale lui Kepler, în coordonatele (u,v):

13
F=μRc3 2⁄
(bu+ev+c)3
, F=μR
(au2+2d⋅uv+fv2 )3 2⁄
(1.38)
Acestea sunt de fapt rezultate obținute și de Gaston Darboux, și chiar de Halphen
însuși, însă din alte considerente [10,11].
Ideea esențială este deci aceea că elementele matricilor reale 2×2 ce reprezintă – prin
ansatz-ul din ecuația (1.20) – formațiuni materiale plane în mișcare, sunt însele reprezentabile
prin coordonate ale mișcărilor clasice specifice componentelor materiei ce suportă forțele
(particulele lui Hertz). Așadar, diferența dintre acestă reprezentare și reprezentarea spinorială
obișnuită a vectorilor în spațiu, este aceea că aici elementele spinorilor au semnificație fizică dată
de problema dinamică referitoare la mișcarea materiei sub acțiunea forțelor centrale – ele nu sunt
simple noțiuni geometrice. Pe de altă parte, o atare reprezentare a materiei are un avantaj în sine
atunci când vine vorba de fizică: ea permite o descriere explicită a materiei printr-o geometrie
metrică, exact ca descrierea metrică a spațiului. Într-adevar, reprezentarea materiei în mișcare
prin matrici 2×2 conduce la o metrică naturală a spațiului matricilor: metrica Killing-Cartan a
algebrei acestor matrici [12]. Convectorii de bază ai acestei geometrii sunt, în cazul general al
unei matrici (1.18), dați de formele diferențiale
ω1=αdγ − γdα
αδβγ, ω2=
αdδ − δdα+βdγ − γdβ
αδ − βγ, ω3=
βdδ − δdβ
αδ − βγ (1.39)
În parametrizarea dată de ecuațiile (1.29) și (1.30),acestea sunt
ω1=1
vdϕ+sin
2ϕ
du
v2− sinϕcosϕ
dv
v2;
ω2=2u
vdϕ+2sin2ϕ
udu+vdv
v2+2sinϕcosϕ
vdu − udv
v2; (1.40)
ω3=u2+v2
vdϕ+sin2ϕ
(u2 − v2)du+2uvdv
v2 +sinϕcosϕ2uvdu − (u2 − v2)dv
v2 ;
unde tgϕ ≡ μ/λ. În raport cu acești vectori metrica este dată de forma pătratică
ω1ω3 − (ω2/2)
2 =dϕ
2 − sin2ϕ
du2 +dv2
v2 (1.41)
Se poate deci conchide că, atât timp cât materia este reprezentată prin proprietatea sa esențială,
anume mișcarea, modul ei de descriere este o geometrie metrică referitoare la particulele
constitutive ale materiei care suportă forța ca atare. O asemenea metrică este dată de ecuația
(1.41) unde 𝜙 este un unghi de fază arbitrar, iar u și v sunt coordonate ce se obțin din dinamica
materiei în modul descris mai sus.
1.5. Relație materie – spațiu
Două concluzii importante se impun din nou acum, aproape de la sine am zice, în ceea
ce privește relația dintre materie și spațiu. Mai întâi, atunci când o descriem formal, teoretic,
această descriere implică relația dintre două metrici – metrica spațiului și cea a materiei. Prin
urmare, o asemenea relație poate fi cu siguranță delegată aplicațiilor armonice [13], atât de la
materie la spațiu căt și de la spațiu la materie. Îndată ce am rezolvat în această manieră modul de
aplicare a materiei pe spațiu, mărimile 𝜙, u și v – și deci elementele familiei de matrici ce
reprezintă materia – se obțin ca funcții de poziție, ceea ce face posibilă definirea corectă a unei

14
densităti a materiei, a spațiului, a existenței spațiului- timp, etc. Am arătat, într-adevăr, cât de
arbitrară este definiția densității newtoniene, datorită necunoașterii distribuției materiei în spațiu
[12]. În descrierea metrică precedentă este însă posibil să se defineasca în mod local o densitate
ca relație între volumele elementare reprezentate de metricile materiei și spațiului.
Pentru a ilustra procedura, să luăm cazul metricii (1.41) pentru materie, admițând, pentru fixarea
ideilor, o metrică euclidiană pentru spațiu, în coordonatele x1 ,x2, x3 să zicem. Principiul aplicației
armonice, ne permite să sperăm că putem găsi totdeauna coordonatele materiale 𝜙, u,v ca funcții
de poziție, arătând cum materia în mișcare este distribuită în spațiu. Elementul de volum al
metricii (1.41) este 3-forma diferențială
dM≡sin
2ϕ
v2 dϕ∧du ∧ dv (1.42)
în timp ce elementul de volum al spațiului este 3-forma dV ≡ dx1 ∧ dx2 ∧ dx3. Notația vrea să
sugereze că avem aici de-a face cu un element de materie, sau o masă, întrucât coordonatele
materiale reflectă o problemă dinamică, așa cum am arătat mai înainte. Îndată ce avem aceste
coordonate ca funcții de poziție, este lesne să calculăm o densitate newtoniană, ca raport dintre
elementul de volum al materiei și elementul de volum al spațiului. Formal, avem deci pentru
densitatea materiei în spațiu relația:
ρ≡dM
dV=
sin2ϕ
v2J(ϕ,u,v;x) (1.43)
unde J(ϕ, u, v; x) reprezintă jacobianul transformării (x1,x2,x3)→(ϕ,u,v) pe care eventual am
descoperit-o prin principiul aplicației armonice.
A doua concluzie de notat aici ridică o problema importantă de interpretare. Deoarece
descrierile formale ale spațiului și materiei sunt astfel identice din punct de vedere geometric –
ambele sunt descrieri metrice – se poate pune la fel de bine problema găsirii “ densității spațiului”
în materie. Această problemă nu-i prin nimic ciudată, și este ilustrată în fizică prin multe
exemple. Un asemenea exemplu este așa numitul volum specific – inversul unei densităti
newtoniene – ce se folosește în mod curent în descrierea speciilor de materie, ca și cum acestea
ar umple tot spațiul, fără nici o lacună. Dar cel mai firesc exemplu este acela legat de faptul că
în mod obișnuit coordonatele spațiale se referă totdeauna la repere materiale, iar acestea nu pot
fi totdeauna definite geometric a priori, ci numai în condițiile fizice precise. Să oferim acum un
exemplu care să clarifice chestiunea.
1.6. Deformația și reperul vectorial
Materia în mișcare nu înseamnă numai deplasare a componentelor sale structurale: ea
se și deformează. În cadrul filozofiei naturale a lui Hertz, deformabilitatea materiei revine la
compunerea a două fenomene fundamentale. Mai întâi avem fenomenul de deformație a
punctelor materiale constituiente ale structurii sale. În al doilea rând avem fenomenul de
deplasare a punctelor materiale constituiente în această structură. În măsura în care se implică
structura materiei, deformația este actualmente descrisă de regulă numai prin deplasare [14]: se
consideră că punctele materile ale structurii materiei astfel descrise nu au extindere spațială, iar
deplasările lor oferă, printr-o anumită rețetă de calcul, componentele matricii ce reprezintă
deformarea.
Această rețetă poate fi universalizată, printr-o generalizare adecvată a procedeului pe
baza rezultatelor anterioare. Într-adevar, într-o filozofie naturală hertziană, materia în mișcare
trebuie descrisă printr-o “suprapunere” a celor două fenomene – deformare și deplasare – întrucât
punctele materiale admit extindere spațială. Acest fenomen de suprapunere între deplasare și
deformare poate fi teoretic descris într-un mod unitar, numai dacă deformarea poate fi descrisă

15
în același mod în care descriem mișcarea în general. Așadar trebuie să ne concentram în a descrie
procesul de deformare a unui punct material printr-o familie de matrici 2×2 cu elemente reale.
Punctele materiale ale unei structuri fizice sunt elementele ultime ale unei asemenea
structuri, atomii ei ca să zicem așa. La fel ca și în cazul atomilor istorici, nu înseamnă însă că
aceste elemente ultime ale unei structuri fizice nu admit ele însele mai departe structura fizică,
ci numai că ele sunt suficiente ca atare pentru descrierea manifestării structurii fizice din care ele
fac parte în mod curent. Pentru a le evidenția o eventuala structură, va fi necesară plasarea lor în
alte condiții de mediu, ceea ce constituie practica obișnuită curentă în fizică experimentală. Este
aici o contradicție aparentă între multiplu și individual, dar care poate fi ușor înțeleasă la o
reflecție ceva mai adâncă: numai ca individual punctul material este multiplu.
Acum, un punct material se manifestă în exteriorul său, deci structurii fizice din care
face parte, prin intermediul suprafeței care îl delimitează spațial ca atare, tot așa cum acest
exterior se manifestă interiorului unui punct material tot prin intermediul unei atare suprafețe. În
principiu, această suprafață poate chiar să nu fie aceeași în cele două cazuri, chiar dacă vorbim
de unul și același punct material. Faptul poate fi făcut inteligibil imediat, prin aceea că suprafața
unui corp oarecare al experienței noastre zilnice nu este aceeași privită din exterior sau din
interior, cel puțin din punctul de vedere al curburii sale. Dacă punctul material se deformează,
atunci suprafața se deformează. În condițiile de continuitate adecvate, această deformație se poate
descrie local în planul tangent al suprafeței, prin evoluția unui reper dat de doi vectori liniar
independenți, iar aici se ivește într-adevăr oportunitatea de a descrie deformația printr-o matrice
2×2 cu elemente reale, după cum urmează.
Poziția generică a doi vectori liniar independenți, să zicem e1 și e2, într-un plan nu este
în general o poziție standard a unui reper rigid. Și chiar dacă ea este rigidă, asemenea condiție
este numai momentană: datorită deformației nu poate dăinui. Dacă reperul este fizic, obținut, de
exemplu, printr-o anumită etalonare în plan, acești vectori de bază sunt în general descriși de
ecuațiile
e1∙e2=λμcosθ; e12=λ
2; e2
2=μ2; (1.44)
unde admitem λ, μ, θ cunoscute. Totuși, când discutăm situația geometric, avem obiceiul de a
reduce la poziție euclidiană standard, reprezentată de un reper ortonormal (𝑖1, 𝑖2), caracterizat
prin:
i1∙i2=0; i12=1; i2
2=1; (1.45)
Din punct de vedere algebric o asemenea reducere se face practic printr-o matrice nesingulară, a
să zicem:
|e⟩ = a ⋅ |i ⟩ (1.46)
Acum , dacă a, b, c, d sunt elementele matricii a, ele trebuie să satisfacă relațiilor ce se obțin din
(1.44) și (1.45)
ac+bd=λμcosθ; a2+b2=λ
2; c2+d
2=μ2 (1.47)
Aceste relații determină matricea a numai până la o fază arbitrară. Într-adevăr, putem alege
a=a1cosθ1; b=a1sinθ1; c=a2cosθ2; d=a2sinθ2 (1.48)
așa încât aria paralelogramului determinat de vectorii 𝐞𝟏 și 𝐞𝟐 este
|e1×e2| =a1a2sinθ ↔ ad – bc= a1a2sin( θ1 − θ2) (1.49)
Așadar , dacă alegem în continuare θ2=θ+ϕ, θ1= ϕ vom avea
𝐚 ≡ (a1cosϕ a1sinϕ
a2cos(θ + ϕ) a2sin(θ + ϕ)) (1.50)

16
Aceasta este o reprezentare Iwasawa a matricii a. Într-adevăr, ea are forma tipică pentru o
descompunere Iwasawa a unei matrici 2× 2:
a≡A ∙N ∙ K (1.51)
unde cele trei matrici ale produsului sunt date de
A≡ (a1/(a2sinθ) 0
0 (a2sinθ)/a1); K≡ (
cosϕ sinϕ−sinϕ cosϕ
)
(1.52)
N≡ (1 0
(a1cosθ)/(a2sin2θ) 1)
Deci o deformație a reperului în plan este de fapt reprezentată printr-o matrice 2× 2, a cărei
descompunere Iwasawa oferă o parametrizare a variabilității, necesară, de exemplu, într-o
descriere stocastică a procesului de deformație [15].
Ne-a fost foarte greu să găsim o referință adecvată pentru caracterizarea
descompunerii Iwasawa așa cum o dorim noi aici, și evidențierea necesității ei din punct de
vedere geometric. Cititorul va trebui să se orienteze el însuși în caz că dorește să se familiarizeze
cu subiectul, plecând eventual de la lucrarea lui Sergio Albeverio și Mariei Gordina citată
anterior. Există totuși introduceri adecvate, referitoare exact la ceea ce ne interesează aici, deși
nu publicate formal în paginile vreunui jurnal științific sau ale unei cărți. Una dintre aceste
introduceri se găsește în pagina personală a profesorului Keith Conrad de la Departamentul de
Matematică al Universității din Connecticut, Statele Unite. Ea este intitulată sugestiv
Decomposing SL2 (R), și este adresată explicit ideii că, printr-o descompunere, un grup de matrici
2× 2 se poate vizualiza printr-o imagine concretă, exact așa cum un grup de vectori, de exemplu,
se poate vizualiza prin mărimea și orientarea lor. Simplă în prezentare și ușor de înțeles din
considerente de algebră, chiar elementară, această lucrare este recomandată cu căldură cititorului
interesat, cu atât mai mult cu cât se gasește “la liber”, să zicem așa. De aici se poate porni în
înțelegerea teoriei diferențiale prezentate de Albeverio și Gordina pentru necesități de calcul
stocastic. Pentru alte prezentări mai generale, se pot consulta lucrări ceva mai puțin accesibile în
general. De exemplu [16], prezintă descompunerea Iwasawa, din nou foarte sugestiv, în legătură
cu procedeul Gram – Schmidt de ortogonalizare, de la care noi am pornit în mod explicit aici. De
asemeni [17] prezintă descompunerea multiplicativă a grupului SL(2,R) în legătură strânsă cu
descompunerea Iwasawa aditivă a algebrei Lie sl(2,R). Dar, să continuăm cu subiectul pe care
tocmai l-am deschis.
Cea mai importantă observație ce se cuvine făcută aici este totuși cea referitoare la
natura unui proces stockastic de genul celor analizate de Albeverio și Gordina: el este un proces
tridimensional de tip Levy [18], cu varianta determinată de metrica Barbilian [19]. Aceasta se
poate arata cel mai lesne făcând următoarele notații convenabile :
α≡a1cosϕ; β≡a1sinϕ; u≡a2
a1
cosθ; v≡a2
a1
sinθ (1.53)
în care caz matricea a din ecuația (1.50) se va scrie ca
a ≡ (α β
αu − βv αv + βu) (1.54)
Acum metrica Killing – Cartan a acestei familii de matrici este
(dv
v)
2
− (dϕ)2+2(dϕ) (du
v) ≡ (
dv
v)
2
+ (du
v)
2
− (dϕ −du
v)
2
(1.55)

17
adică, până la un semn, chiar metrica Barbilian a spațiului riemannian al formelor cubice binare
[12], în care unghiul ϕ apare cu un semn schimbat.
Avem așadar în ecuația (1.54) o familie de matrici ce reprezintă “materie în
deformare”, și ne punem problema reprezentării spațiului în raport cu această materie. Admitem
că spațiul este tridimensional euclidian, și căutăm, conform rețetei anterioare, o aplicație
armonică de la coordonatele ϕ, u, v caracterizate de metrica euclidiană. Rețeta generală de
construcție a aplicațiilor armonice este oferită de principiul de extremum pentru funcționala [13]
I≡1
2∭ √|g| d
3ξgμv(ξ)
∂xi
∂ξμ
∂xj
∂ξv hij(x) (1.56)
Corespondenta este aici înțeleasă așa cum am anunțat-o: de la spațiul 𝜉 la spațiul x, adică de la
materie la spațiu. Indicii 𝜇, v ca și i, j parcurg valorile 1, 2, 3, și se folosește aici regula de sumare
dupa indici muți. Tensorul g este tensorul metric pentru spațiul 𝜉, în timp ce h este tensorul
metric pentru spațiul x. În mod specific 𝜉 este transpusul vectorului linie (ϕ, u, v), în timp ce x
este vectorul de poziție în spațiul euclidian obișnuit. Prin urmare h este matricea unitate, în timp
ce din (1.55) citim metrica g a spațiului matricilor (1.50) din care putem calcula imediat inversa
ei, ce dă tensorul metric covariant:
g ≡ (
-1 1 v⁄ 0
1 v⁄ 0 0
0 0 1 v2⁄) ; g-1= (
0 v 0
v v2 0
0 0 v2
) (1.57)
Prin urmare, avem
√|g|g-1= (0 1 v⁄ 0
1 v⁄ 1 0
0 0 1
) (1.58)
Așa încât integrandul din ecuatia (1.56) se scrie
√|g|gμv(ξ)∂xi
∂ξμ
∂xi
∂ξv hij(x)=
2
v
∂x
∂ϕ⋅∂x
∂u+ (
∂x
∂u)
2
+ (∂x
∂v)
2
(1.59)
Ecuațiile Euler pentru funcționala (1.56) sunt în acest caz
∂
∂ϕ(1
v
∂x
∂u) =0;
∂
∂u(1
v
∂x
∂ϕ+
∂x
∂u) =0;
∂
∂v
∂x
∂v=0 (1.60)
Soluția acestui sistem de ecuații este un vector de forma
x(ϕ,u,v)=auv+bu+c(ϕ)v+d(ϕ) (1.61)
unde a și b sunt vectori constanți iar c(ϕ) și d(ϕ) sunt funcții vectoriale arbitrare de argumentul
lor.
Se impune imediat una dintre cele mai interesante concluzii: coordonatele carteziene
au aici sens numai odată cu reperul care le oferă semnificație ca lungimi. Fizic vorbind, un
asemenea reper trebuie sa fie totdeauna material. Fapt este însa că practica geometrică în fizica
teoretică dă totdeauna reperul a priori, ca și cum el ar fi la îndemâna noastră oricând, așa cum îl
vrem noi, și nu altfel. Această practică este un reflex al faptului că fizica nu are actualmente o
reprezentare adecvată pentru materia în mișcare, și cu atât mai mult pentru materia în deformare.
Dacă materia în deformare este reprezentată prin familii de matrici parametrizate ca în ecuația
(1.54), atunci ecuația (1.61) ne dă o reprezentare adecvată a reperului, mai întâi prin originea sa.
Această origine este aici dată prin ecuațiile x (ϕ, u, v) = 0, adică prin trei omografii distincte
între parametrii u și v, cu doi dintre coeficienți depinzând de unghiul ϕ.

18
Problema reprezentării materiei în această schemă se rezolvă acum prin aplicația
armonica inversă , de la spațiu la materie: 𝒙 ⟶ 𝝃. În locul funcționalei (1.56) trebuie să
considerăm atunci funcționala
I≡1
2∭(d
3x)√|h| h
ij(x)∂ξ
u
∂xi
∂ξv
∂xjg
μν(ξ) (1.62)
Având în vedere faptul că spațiul este euclidian și folosind ecuația (1.57) pentru tensorul metric
în materie, în locul integrandului din ecuația (1.28) va trebui să avem
√|h|hij
(x)∂ξ
u
∂xi
∂ξv
∂xjg
μν(ξ)≡ (
∇u
v)
2
+ (∇v
v)
2
− (∇ϕ+∇u
v)
2
(1.63)
unde folosim notația obișnuită pentru gradientul în coordonate carteziene, și am schimbat semnul
unghiului ϕ. Ecuațiile Euler corespunzătoare funcționalei (1.62) sunt
∇ (∇ϕ+∇u
v)
2
=0; ∇ (∇ϕ
v) =0; ∇ (
∇ϕ
v2) +
(∇v)2
v3+
∇ϕ⋅∇u
v2=0 (1.64)
Avem aici un sistem de ecuatți neliniare, care admite în principiu soluții, însă acestea sunt greu
de găsit în general. Putem totuși proceda intuitiv, având în vedere că este vorba de materie în
spațiu. Dacă această materie este descrisă structural în maniera lui Hertz, atunci putem presupune
că mișcarea reprezentată prin parametrizarea matricii (1.54) este formată din “curenți” de
particule materiale, ce se mișcă într-un anume timp. Cea mai naturală alegere pentru acest timp
este evident cea dată de parametrul afin al geodezicelor metricii din ecuația (1.55). De-a lungul
acestor geodezice, parametrii ϕ, u și v sunt funcții numai de timp, și deci nu depind de
coordonatele spațiale decât prin intermediul timpului. Dacă această dependență este de așa natură
ca timpul geodezicelor este o solutie a ecuației lui Laplace în spațiu, atunci sistemul (1.64) este
satisfăcut. Într-adevăr, fie 𝜏 timpul geodezicelor, funcție de locația spațială dată de punctele
materiale în curenții de puncte reprezentând materia în mișcare. Ecuațiile (1.64) devin atunci
(∇2τ) (ϕ+u
v) +(∇τ)2
d
dτ(ϕ+
u
v) =0;
(∇2τ) (ϕ
v) +(∇τ)2
d
dτ(ϕ
v) =0; (1.65)
(∇2τ) (v
v2) +(∇τ)2 {
d
dτ(
v
v2) +
(v)2
v3+
ϕu
v2} =0;
Daca 𝜏 este soluție a ecuației Laplace, iar gradientul său este nenul, atunci ramânem doar cu
ecuațiile
d
dτ(ϕ+
u
v) =0;
d
dτ(
ϕ
v) =0;
d
dτ (
v
v2) +
(v)2
v3+
ϕu
v2= 0; (1.66)
care sunt identic satisfăcute de-a lungul geodezicelor metricii (1.55).
Să vedem pe scurt care sunt aceste geodezici. A doua ecuație (1.66) ne oferă integrala
primă
ϕ
v=C (1.67)
Folosind această integrală pentru a obține u și v ca funcții de ϕ din celelalte două ecuații (1.66),
care astfel se reduc la sistemul diferențial liniar de ordinul al doilea
u''+v'=0; v'' − u'=0 (1.68)
independent de constanta de integrare din ecuația (1.67), cu condiția ca ea să nu fie totuși nulă.
Accentul notează derivata în raport cu ϕ. Soluția generală a acestui sistem depinde de patru
parametri arbitrari, și se poate scrie sub forma
19
u=u0+α sin ϕ+β cos ϕ; v=v0+α cos ϕ − β sin ϕ (1.69)
Avem aici un cerc din planul (u, v) cu centrul în punctul (uo,vo) și de raza √(𝛼2 + 𝛽2); ϕ este
unghiul la centru în acest cerc. Ecuația (1.67) care ne dă a treia coordonată în funcție de timp,
reflectă diversele parametrizări ale acestui cerc în raport cu timpul geodezicelor, dictate de
valorile razei în raport cu ordonata vo a centrului. Avem în general
Cdτ=dϕ
v0+R cos(ϕ+ω); R2=α2+β
2; tan ω =
β
α (1.70)
Această ecuație poate fi integrată în doua situații diferite, după poziția centrului față de axa
absciselor.
Presupunem, mai întâi, centrul departe de axa absciselor, de așa manieră că, fie v0 >R,fie v0 < −R. În acest caz putem scrie
√v0 − R
v0+Rtg
ϕ+ω
2= tg
ψ
2; ψ≡
Cv0(τ − τ0)
ch Q; th Q ≡
R
v0
(1.71)
unde 𝜏0 este o nouă constantă de integrare. Soluțiile (1.69) ale geodezicelor sunt atunci
u=u0+v0
ch Q⋅
sh Q sin Ψ
ch Q − sh Q cos ψ; v=
v0
ch Q⋅
1
ch Q − sh Q cos ψ (1.72)
Dacă acum centrul se află într-o bandă centrată pe axa absciselor, de lățime 2R, atunci
există două cazuri. Mai întâi, dacă are sens relația
√R − v0
R+v0
tgϕ+ω
2= th
ψ
2; ψ≡
CR(τ − τ0)
ch Q'; th Q' ≡
v0
R (1.73)
atunci ecuațiile parametrice ale geodezicelor sunt
u=u0+v0
sh Q'⋅
ch Q' sh ψ
ch Q' ch ψ − sh Q'; v=
v0
sh Q'⋅
1
ch Q' ch ψ − sh Q' (1.74)
În cazul în care prima condiție (1.44) nu are sens, atunci, în aceleași notații, putem scrie
√R-v0
R+v0
tgϕ+ω
2= ch
ψ
2 (1.75)
iar ecuațiile parametrice ale geodezicelor sunt
u=u0+v0
sh Q'⋅
ch Q' sh ψ
ch Q' ch ψ + sh Q'; v= −
v0
sh Q'⋅
1
ch Q' ch ψ + sh Q' (1.76)
Relatiile (1.72), (1.74), (1.76) sunt specifice planului fazelor oscilatorului armonic perturbat [12],
în diversele regimuri de funcționare, însă descrierea geodezicelor Barbilian înseamnă mai mult
din punct de vedere dinamic. Ea ne duce la descoperirea unei relații subtile între forța și statistica,
ce stă la baza descrierii materiei dintr-un punct de vedere modern: formalismul coordonatelor
colective.
1.8 Perspective
Capitolul porneşte de la o semnificaţie aparte a legilor lui Kepler: ele reprezintă materia în
mişcare. Ca atare mecanica clasică însăşi descrie materia în mişcare – concluzie care nu-i prin
20
nimic o noutate. Problema pe care ne-o punem noi acum este însă aceea a celei mai generale
reprezentări a materiei în mişcare, aşa cum o percepem astăzi, ajutaţi de progresele tehnologice
ce facilitează observaţiile şi măsurătorile, şi cum o descriem, ajutaţi de progresele fizicii pe tărâm
teoretic. Obţinem aici o reprezentare parametrică a materiei în mişcare, pe care am numi-o
spinorială, întrucât are toate atributele celebrei reprezentări teoretice a spaţiului-timp. Mişcarea
kepleriană este doar un caz particular al acestei reprezentări. Capitolul se desfăşoară după cum
urmează:
Se iau ca bază observaţiile astrometrice ale materiei, care o relevă prin proiecţii pe
bolta cerească. Arătăm astfel că toate formele plane ale materiei cereşti pot fi reprezentate prin
familii de curbe anarmonice. Acestea sunt redate în mod concret prin acţiunea omografică a
matricilor 2×2 cu elemente reale. Urmând firul logic al unei asemenea reprezentări, ajungem la
concluzia că o particulă materială în mişcare – în viziune modernă, componentă fundamentală a
structurii materiei – este bine reprezentată printr-o matrice reală 2×2. Ca atare, forţele interne ale
materiei, considerate, ca de obicei, forţe între particulele în mişcare ce o compun, se pot descrie
matematic prin relaţii algebrice între matricile reprezentative ale particulelor. Prin aceasta,
dinamica forţelor interne ale materiei este delegată unei geometrii metrice diferenţiale: geometria
spaţiului hiperbolic ce are ca absolut hiperboloidul cu o pânză.
De aici decurg următoarele concluzii importante: dacă admitem şi pentru spaţiu o
geometrie metrică, atunci materia în spaţiu poate fi descrisă matematic prin corespondenţe între
metrica materiei şi metrica spaţiului, prin urmare, cel puţin în cazuri particulare, prin aplicaţii
armonice. Aceasta facilitează o caracterizare neambiguă a materiei în spaţiu printr-o densitate
newtoniană, fără a face apel la estimări colaterale şi la ipoteze asupra substructurilor materiei şi
extinderii spaţiului. Pe de altă parte se poate admite şi o descriere matematică a spaţiului în
materie. Prototipul unui asemenea concept este cavitatea clasică Lummer-Wien, care a ajutat la
descrierea experimentală a radiaţiei termice, şi deci implicit la apariţia mecanicii cuantice.
Capitolul mai conţine şi o descriere, în formalismul teoretic astfel stabilit, a forţelor
clasice, cu concluzia că ele sunt legate de o caracterizare a punctelor fixe ale acţiunii omografice
a matricilor reprezentative ale particulelor materiale în mişcare. Se arată astfel că această
reprezentare pentru forţe este singura care poate descrie formal trecerea newtoniană de la
observaţiile curente asupra gravitaţiei terestre la ideea forţelor centrale. După cum se ştie, această
idee a fost numai intuitiv justificată de Newton prin imaginea tunului de pe un munte înalt, ce
lansează obuze cu diverse viteze iniţiale. Începând de la o anumită viteză de lansare, parabola
aruncării oblice trece în orbita circumterestră a mişcării kepleriene, ceea ce ar trebui să ne arate
că forţa de gravitaţie zilnică este una şi aceeaşi cu forţa care, prin principiile mecanicii clasice,
determină mişcarea de revoluţie. Este uşor de văzut că această ultimă concluzie este formal
nedemonstrabilă, aşa încât lucrarea de faţă arată că demonstraţia se poate face în cadrul
formalismului propus.
Se poate spera astfel, ca transcendenţa spaţio-temporală naturală a descrierii clasice a
mişcării, să aibă un revers fractal în aşa-numita transformare de scară din relativitate [31]. Vedem
în aceasta acea ordine în haos, responsabilă pentru trecerea gradată a materiei cereşti neplanare
la formele ei plane, dar şi reciproc: haotizarea formelor materiale plane, şi trecerea lor în forme
materiale spaţiale. Ideea generală ce s-ar desprinde în final de aici, este aceea că, din punct de
vedere structural, universul ar evolua într-un proces cvasi-periodic.

21
Cap.2 Aproximaţia disipativ – dispersivă a mişcării în teoriile de scală pe varietăţi
tridimensionale
2.1 Scop
Scopul prezentului capitol este de a construi o teorie a mişcării dependentă de rezoluţia
de scală într-o aproximaţie total diferită de cea a lui L Nottale din referinţele [33-48]. Am avut
în vedere termeni ai ecuației de mișcare ce conţin pe lângă derivatele de ordin unu şi doi ai
dezvoltării Taylor, aşa cum au fost utilizaţi în teoria standard a relativităţii de scală [33,34], şi
derivatele de ordin trei. Mai mult, nu am impus, aşa cum face Nottale în teoria sa [33-48],
dimensiunea fractală DF≡ 2 ci am considerat o dimensiune fractală arbitrar constantă, ceea ce va
face ca rezultatele obţinute de noi să fie de maximă generalitate.
Întrucât derivatele de ordin doi în coordonatele spaţiale specifică efecte de disipaţii, iar
cele de ordin trei efecte de dispersie, în cele ce urmează vom defini această tratare aproximaţia
disipativ – dispersivă a relativităţii de scală.
Rezultatele originale din acest capitol au fost publicate în referinţele [49-50]. Aceste
rezultate, de altfel de maximă generalitate, devin similare cu cele din referințele [51-60] numai
în condițiile explicitării fractalizării sub forma stocasticizării.
2.2 Ecuațiile geodezicelor
Putem implementa un principiu al covarianței de scală postulând că tranziția de la
mecanica clasică,(cea care operează cu mișcări pe curbe continue și diferențiabile), la mecanica
fractală, (cea care operează cu mișcări pe curbe continue și nediferențiabile), adică cea pe care o
considerăm aici, se realizează prin substituirea operatorului standard d dt⁄ cu cel fractal d dt⁄ .
Vom numi acest operator derivata covariantă. Astfel, aplicând derivata covariantă definită în (2.1) câmpului complex de viteze se obține ecuația geodezicelor sub forma :
dVi
dt = ∂tV
i+ V
l∂l V
i+
1
4(dt)
(2DF
⁄ ) – 1 Dlk∂l∂k V
i+
1
6(dt)
(3DF
⁄ ) – 1 Dlkj∂l∂k∂j V
i = 0 (2.1)
Mărimile ce intervin sunt definite în lucrarea extinsă.
Așadar accelerația locală, ∂t Vi, convecția, V
l∂l V
i, disipația 4−1 (dt)
(2DF
⁄ ) – 1 Dlk∂l∂k V
i și
dispersia, 6−1 (dt)(3
DF⁄ ) – 1
Dlkj∂l∂k∂j Vi, își fac echilibrul în orice punct al traiectoriei de
mișcare. Prezența accelerațiilor complexe ��Vi 𝑑𝑡⁄ , ∂t V
i, a vitezei complexe V
i și a
coeficientului de tip vâscozitate complexă 4−1 (dt)(2
DF⁄ ) – 1
Dlk specifică faptul că fluidul fractal are proprietăți reologice și deci memorie.
Din (2.1) prin separarea mișcărilor pe scale de rezoluție se găsește
dVi
dt = ∂t V
i + Vl∂l Vi – Ul∂l U
i + 1
4 (dt)
(2DF
⁄ ) – 1 dlk∂l∂k Vi –
1
4 (dt)
(2DF
⁄ ) – 1 dlk∂l∂k Vi
+ 1
6 (dt)
(3DF
⁄ ) – 1 Dklj∂k∂l∂j V
i = 0 (2.2)
pentru scala diferențială și

22
dUi
dt=∂t U
i+Vl∂l Ui+Ul∂l V
i+1
4(dt)
(2DF
⁄ ) – 1dkl∂l∂kUi+
1
4(dt)
(2DF
⁄ ) – 1dkl∂l∂kVi = 0 (2.3)
pentru scala fractală unde 𝑑𝑘𝑙ș𝑖 dkl sunt definite în lucrarea extinsă.
Dacă fractalitatea se realizează prin procese de tip Markov ecuația geodezicelor ia forma
dVi
dt = ∂t V
i + Vl∂l Vi – i λ (dt)
(2DF
⁄ ) – 1∂l∂k Vi + λ
(3DF
⁄ ) – 1∂l∂l∂lV
i = 0 (2.4)
sau încă prin separarea scalelor de rezoluție
dVi
dt = ∂t V
i + Vl∂l Vi – [Ul – λ (dt)
(2DF
⁄ ) – 1 ∂l] ∂l U
i + λ (dt) (3
DF⁄ ) – 1
∂l∂l∂lVi = 0 (2.5)
dUi
dt = ∂t U
i + Vl∂l Ui + [Ul – λ (dt)
(2DF
⁄ ) – 1 ∂l] ∂l V
i + λ(dt) (3
DF⁄ ) – 1
∂l∂l∂lUi = 0 (2.6)
De aici, pentru mișcări pe curbe Peano , DF=2, ecuația geodezicelor ia forma și mai simplă
dVi
dt = ∂t V
i + Vl∂l Vi – i λ ∂l∂lV
i + λ(dt)1
2⁄ ∂l∂l∂lVi = 0 (2.7)
sau prin separarea scalelor de interacții
dVi
dt = ∂t V
i + (Vl∂l) Vi – [Ul – λ 𝜕𝑙] ∂l Ui + λ (dt)1
2⁄ ∂l∂l∂lVi = 0 (2.8)
dUi
dt = ∂t U
i + (Vl∂l) Ui + [Ul – λ𝜕𝑙 ] ∂l Vi + λ (dt)1
2⁄ ∂l∂l∂lVi = 0 (2.9)
unde în ∂i∂l∂k sau ∂l∂l∂l se înțelege însumarea după indicii muți.
2.3 Ecuația geodezicelor în formalismul funcției de undă
Dacă câmpul complex de viteze este irotațional atunci acesta poate fi generat cu
ajutorul unei funcții scalare complexe numite potențialul vitezelor
Vi = i λ (dt)(2
DF⁄ ) – 1
∂i lnψ (2.10)
Pe baza relației (2.10) ecuația geodezicelor (2.1) se scrie sub forma
dVi
dt = i λ (dt)
(2DF
⁄ ) – 1 ∂t∂i lnψ + [i λ (dt)
(2DF
⁄ ) – 1 ∂l lnψ – i
λ
2 (dt)
(2DF
⁄ ) – 1 ∂l] i λ
(dt)(2
DF⁄ ) – 1
∂l∂i lnψ + i λ λ (dt)(5
DF⁄ ) – 2
∂l∂l∂l∂i lnψ = 0 (2.11)
Utilizând identitățile
∂i(∂l lnψ∂l lnψ) = 2∂l lnψ ∂i∂l lnψ (2.12)
∂i∂l∂l lnψ = ∂l∂l∂i lnψ (2.13)

23
∂i (∂l lnψ ∂l lnψ + ∂l∂l lnψ) = ∂i (
∂l∂l ψ
ψ) (2.14)
ecuația (2.11) ia forma
i λ (dt)(2
DF⁄ ) – 1
∂t∂i lnψ + λ2(dt)(4
DF⁄ ) – 2
∂i (∂l∂
l ψ
ψ)
+ i λ λ (dt)(5
DF⁄ ) – 2
∂i∂l∂l∂l lnψ = 0 (2.15)
Integrând ecuația (2.15), abstracție făcând de un factor de fază nul printr-o alegere
convenabilă a fazei lui ψ, obținem ecuația
λ2(dt)(4
DF⁄ ) – 1
∂l∂l ψ + i λ (dt)
(2DF
⁄ ) – 1 ∂tψ + i λ λ (dt)
(5DF
⁄ ) – 2 (∂l∂l∂l lnψ) ψ = 0 (2.16)
sau încă
λ2(dt)(4
DF⁄ ) – 2
∆ψ + i λ (dt)(2
DF⁄ ) – 1
∂tψ + i λ λ (dt)(5
DF⁄ ) – 2
(∇3 lnψ) ψ = 0 (2.17)
Acest rezultat generalizează ecuația de tip Schrödinger.
2.4 Varianta hidrodinamică a ecuațiilor geodezice
Pentru ψ=√𝜌 exp (iS) cu √𝜌 o amplitudine și S o fază, (2.10) permite definirea vitezei
la scală diferențiabilă
Vi = λ (d t)(2
DF⁄ ) – 1
∂iS (2.18)
și a celei la scală fractală
Ui = − λ (dt)(2
DF⁄ ) – 1
∂i ln√ρ (2.19)
Întrucât identitățile (2.12) – (2.14) funcționează și în variabila ln√ρ vom avea:
[Ul – λ
2 (dt)
(2DF
⁄ ) – 1 ∂l] ∂lU
i = λ2
2 (dt)
(4DF
⁄ ) – 2 ∂i (
∂l∂l√ρ
√ρ) (2.20)
ceea ce implică potențialul fractal specific
Q = − λ2
2 (dt)
(4DF
⁄ ) – 2 (
∂l𝜕𝑙√ρ
√ρ) = [Ul – 𝜆 (dt)
(2DF
⁄ ) – 1 ∂l] Ui (2.21)
respectiv forța fractală specifică
Fi = λ2
2 (dt)
(4DF
⁄ ) – 2 ∂i (
∂l𝜕𝑙√ρ
√ρ) = [Ul –
λ
2 (dt)
(2DF
⁄ ) – 1 ∂l] ∂lU
i (2.22)
În aceste condiții legea de conservare a impulsului specific la scala diferențiabilă,
ecuația (2.5), devine
24
∂tVi + Vl∂l V
i + λ (dt) (3
DF⁄ ) – 1
∂l∂l∂lVi = Fi = − ∂iQ (2.23)
Legea de conservare a impulsului specific la scala fractală, ecuația (2.6), ținând seama de (2.19) se scrie sub forma :
∂i [ ∂t lnρ + Vl∂l lnρ + ∂lVl + λλ− 1 (dt)
1D𝐹
⁄ ∂l∂l∂l lnρ] = 0 (2.24)
Integrând această relație, abstracție făcând de o constanta ce o putem lua zero printr-o alegere
convenabilă a fazei lui ψ, se obține legea de conservare a densității de stare
∂tρ + ∂l (ρVl) + λλ− 1 (dt)1
D𝐹⁄ ρ ∂l∂l∂l lnρ = 0 (2.25)
Ecuațiile (2.23) și (2.25) cu potențialul fractal definit prin relația (2.46) constituie setul
de ecuații al hidrodinamicii fractale în dimensiune fractală arbitrară constantă în aproximația
disipativ- dispersivă a mișcării.
2.5 Perspective
Luarea în considerare a termenului dispersiv pe lângă cel convectiv și disipativ
generalizează rezultatele lui Nottale [33-48]. Practic se obține o nouă derivată covariantă pentru
o dimensiune fractală constantă arbitrară și de aici, ecuațiile geodezice în viteză complexă. În
particular, pentru mișcări irotaționale ale unităților structurale ale unui sistem complex se obține
varianta de tip Schrödinger generalizată și cea de tip hidrodinamic generalizată.
Se “dotează ” în acest fel teoria relativității de scală cu un instrument matematic ce
poate descrie mai fidel fenomenele fizice dependente de scală
Cap.3 Aproximația disipativă a mișcării pe varietăți tridimensionale în teorii de scală.
Aplicații
3.1 Scop
Scopul prezentului capitol este de a aplica aproximația disipativă a mișcării a teoriilor de
scală pe varietăți tridimensionale în teorii de scală în analiza unei dinamici specifice: problema
Kepler la diverse scale de rezoluție (scala Planck, scala atomică și scala cosmologică), relațiile
de incertitudine și corespondența lor cu problema Kepler, legi constitutive de materie pentru
sisteme complexe, efecte de memorizare ale unui sistem complex prin analiza de tip fuzzy,
bozoni relativiști în câmpuri statice generalizate (câmp electromagnetic și câmp
gravitomagnetic), etc.
Rezultatele originale din acest capitol au fost publicate în referințele [61-65].
3.2 Problema Kepler la diverse scale de rezoluție
Să aplicăm ecuațiiale hidrodinamice fractale în aproximația disipativă a mișcării în
studiul dinamicii unor sisteme complexe la diverse scale de rezoluții, mai precis problema Kepler
la scala Planck, la scala atomică respectiv la scala cosmologică. Scalele de interacții vor fi
specificate printr-o alegere convenabilă atât a constantelor de structură cât și a dimensiunilor
fractale ale curbelor de mișcare.
Fie deci o particulă test în câmpul scalar U și în câmpul colectiv al unui ansamblu de
particule. Presupunem de asemenea că sistemul astfel definit este unul cu comportament de tip

25
haotic. Conjunctura noastră implică faptul că haosul, fie la scale de timp mici (scală temporală
Planck sau scală temporală atomică), fie la scale de timp mari (scală temporală infragalactică sau
scară temporală extragalactică) poate fi concretizat prin mișcări de tip Brownian sau mai general
de tip Levi [66-71], cu un coeficient 𝜆 al tranziției fractal – nefractal (efectul haotic indus de
toate celelalte particule ale ansamblului asupra particulei test are ca finalitate mișcări pe curbe
nediferențiabile cu dimensiune fractală arbitrar constantă).
O particularizare a ecuațiilor hidrodinamicii fractale în cazul mișcărilor staționare în
câmpul scalar
U =Ⓗi
r⁄ implică:
∂l∂l√ρ = -
1
λ2
2 (dt)
(4DF
⁄ )-2 (E –
1
2 ViV
i + Ⓗi
r) √ρ (3.1)
𝜕𝑖ρVi = 0 (3.2)
0 < r <∞, 0 ≤ δ ≤ π , 0 ≤ φ ≤ 2π (3.3)
ρ (r→∞, δ,φ) = 0, ρ(r, δ, φ )δ≤π2⁄ = ρ (r, δ +
π
2, φ)
unde E este constanta energiei iar Ⓗ𝑖 este o constantă impusă prin tipul de interacții (electrica, gravitaționala, etc.).
Soluția generală a ecuației (3.1) este de forma
ρnlm = Cnlm (2r
na)
2l
exp (– 2r
na) [L n+l
2l+1 ( 2r
na) Pl
m (cos δ)]2
(3.4)
Cnml = (2
na)
3 (n – l − 1)!
2n [(n + l)! ]3 2l + 1 (l − |m|)!
4π (l + |m|)! (3.5)
În relațiile anterioare L n+l2l+1 sunt polinoamele Laguerre asociate, Pl
m sunt polinoamele Legendre
asociate, n este echivalentul numărului cuantic principal, l este echivalentul numărului cuantic
orbital iar m este echivalentul numărului cuantic magnetic. Pentru ca variabilele de câmp să aibă
semnificații fizice numai următoarele combinații între numerele cuantice echivalente sunt
acceptabile
0 ≤ l ≤ n – 1, − l ≤ m ≤ + l (3.6)
Relațiile (3.4) și (3.5) reprezintă o soluție completă (ρ, vi)nlm a hidrodinamicii fractale în
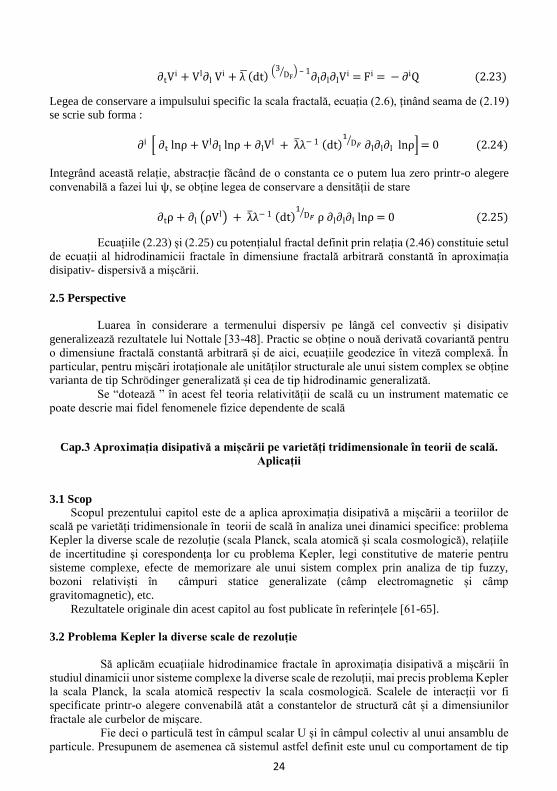
problema unui singur corp. Prezentăm în Figura 3.1 dependența tridimensională și curbele de
contur a densității de stări 𝜌 311
26
Figura 3.1
Dependența tridimensională și de contur a densității de stări 𝜌 311.
3.3 Perspective
Utilizând aproximația disipativă a mișcării sunt studiate diverse dinamici la diverse
scale de rezoluție (problema unui singur corp la diverse scări, relații de incertitudine, bosoni
relativiști în câmpuri compozite etc). Se statuează astfel universalitatea fractalității în dinamica
sistemelor fizice la orice scală de rezoluție.
4. Efectele dispersive în plasmele de ablație laser
4.1. Scop
Prezentul capitol are ca scop investigarea prin metoda sondei Langmuir a unei plasme
de ablație laser. Au fost efectuate măsurători sistematice pentru diagnoza unei plasme produse
prin iradierea unei ținte de cupru cu radiații produse de un laser de tipul Nd:YAG ce funcționează
în regim de pulsație. Analiza evoluției temporale a curentului ionic pentru diferite valori ale
energiei pulsului laser a specificat prezența unor oscilații periodice. Pentru explicarea acestui
fenomen a fost utilizat un model teoretic fractal ce presupune nediferențiabilitatea curbelor de
mișcare ale particulelor încărcate din plasma de ablație. Modelul teoretic surprinde corect
fenomenele și dependențele observate experimental. Rezultatele originale din acest capitol au
fost publicate în referințele [123,124].
4.2.Introducere
Interacțiunile între radiația laser în regim pulsat și o țintă implică procese fizice
complexe[1,2]. Proprietățile plasmei tranziente ce rezultă în urma interacțiunii dintre radiația
laser și țintă, depinde foarte mult de proprietățile țintei [73-80]. Deși radiația laser de mare
energie, în regim pulsat, a fost utilizată deseori pentru studii fundamentale [81,82], multe dintre
procesele de bază nu sunt înțelese complet. Formarea și expansiunea plasmei de ablație laser
este punctul de pornire al multor tipuri de studii precum dinamica plasmelor transiente [83-87],
depunere de straturi subțiri [88-91] microanaliză [92], etc.
Construirea unui model teoretic unitar este destul de complicată. Cu ani în urmă grupul
nostru a propus o descriere fractală a fenomenelor din plasmă [93,94]. Modele teoretice recente
27
acceptă paradigma prezentată de noi și anume prezența comportamentelor haotice și a self-
similarității la toate scalele de interacțiune [95-98]. Traiectoriile particulelor ablate sunt înlocuite
cu o colecție de curbe asociate traiectoriilor potențiale iar conceptul de poziție definită este
înlocuit cu acela de densitate de probabilitate dacă scalele de timp sunt mari raportate la inversul
celui mai mare exponent Lyapunov. Un bun exemplu este oferit de mișcările de tip Levy [95,99]:
între două ciocniri succesive traiectoria particulei este o dreaptă, ea devenind nediferențiabilă în
punctul de impact. Luând în considerare atât ciocnirile elastice cât și cele neelastice rezultă că
traiectoriile devin fractale. În acest caz mișcarea Browniană devine un caz particular al mișcării
de tip Levy[100]. Procesele elementare implicate în interacțiunea radiației electromagnetice cu
o țintă implică diferite scale de rezoluție spațiale și temporale, iar evoluțiile acestora impun
diferite grade de libertate [101].
În acest capitol prezentăm diagnoza electrică a unei plasme de ablație laser produsă de
un laser Nd: YAG în regim de nanosecundă pe o ținta de cupru. Este propus un model teoretic
fractal pentru descrierea fenomenelor observate experimental, model ce ia în considerare și efectele dispersive.
4.3 Instalația experimentală
Măsurătorile experimentale au fost efectuate utilizând o instalație prezentată detaliat
în referințele [102,103]. Pe scurt, a doua armonică a radiației produsă de un laser (λ = 532 nm)
Nd:YAG ce funcționeaza în regim pulsat, cu durata pulsului de 10 ns a fost focalizată de o lentilă
având distanța focală f = 250 mm (dimensiunea fasciculului laser a fost de 300μm) pe o țintă
de cupru aflată într-o incintă vidată (p < 10-7 Torr). Energia pulsului laser a fost varianta între
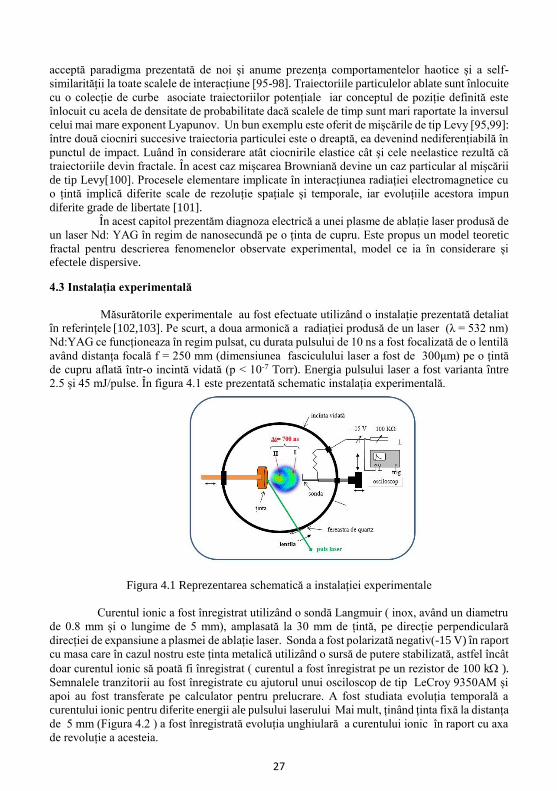
2.5 și 45 mJ/pulse. În figura 4.1 este prezentată schematic instalația experimentală.
Figura 4.1 Reprezentarea schematică a instalației experimentale
Curentul ionic a fost înregistrat utilizând o sondă Langmuir ( inox, având un diametru
de 0.8 mm și o lungime de 5 mm), amplasată la 30 mm de țintă, pe direcție perpendiculară
direcției de expansiune a plasmei de ablație laser. Sonda a fost polarizată negativ(-15 V) în raport
cu masa care în cazul nostru este ținta metalică utilizând o sursă de putere stabilizată, astfel încât
doar curentul ionic să poată fi înregistrat ( curentul a fost înregistrat pe un rezistor de 100 k ).
Semnalele tranzitorii au fost înregistrate cu ajutorul unui osciloscop de tip LeCroy 9350AM și
apoi au fost transferate pe calculator pentru prelucrare. A fost studiata evoluția temporală a
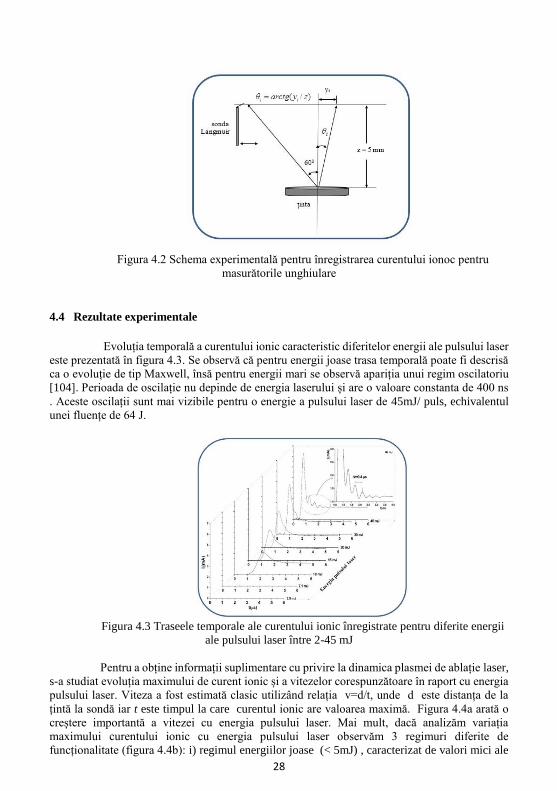
curentului ionic pentru diferite energii ale pulsului laserului Mai mult, ținând ținta fixă la distanța
de 5 mm (Figura 4.2 ) a fost înregistrată evoluția unghiulară a curentului ionic în raport cu axa
de revoluție a acesteia.
28
Figura 4.2 Schema experimentală pentru înregistrarea curentului ionoc pentru
masurătorile unghiulare
4.4 Rezultate experimentale
Evoluția temporală a curentului ionic caracteristic diferitelor energii ale pulsului laser
este prezentată în figura 4.3. Se observă că pentru energii joase trasa temporală poate fi descrisă
ca o evoluție de tip Maxwell, însă pentru energii mari se observă apariția unui regim oscilatoriu
[104]. Perioada de oscilație nu depinde de energia laserului și are o valoare constanta de 400 ns
. Aceste oscilații sunt mai vizibile pentru o energie a pulsului laser de 45mJ/ puls, echivalentul
unei fluențe de 64 J.
Figura 4.3 Traseele temporale ale curentului ionic înregistrate pentru diferite energii
ale pulsului laser între 2-45 mJ
Pentru a obține informații suplimentare cu privire la dinamica plasmei de ablație laser,
s-a studiat evoluția maximului de curent ionic și a vitezelor corespunzătoare în raport cu energia
pulsului laser. Viteza a fost estimată clasic utilizând relația v=d/t, unde d este distanța de la
țintă la sondă iar t este timpul la care curentul ionic are valoarea maximă. Figura 4.4a arată o
creștere importantă a vitezei cu energia pulsului laser. Mai mult, dacă analizăm variația
maximului curentului ionic cu energia pulsului laser observăm 3 regimuri diferite de
funcționalitate (figura 4.4b): i) regimul energiilor joase (< 5mJ) , caracterizat de valori mici ale
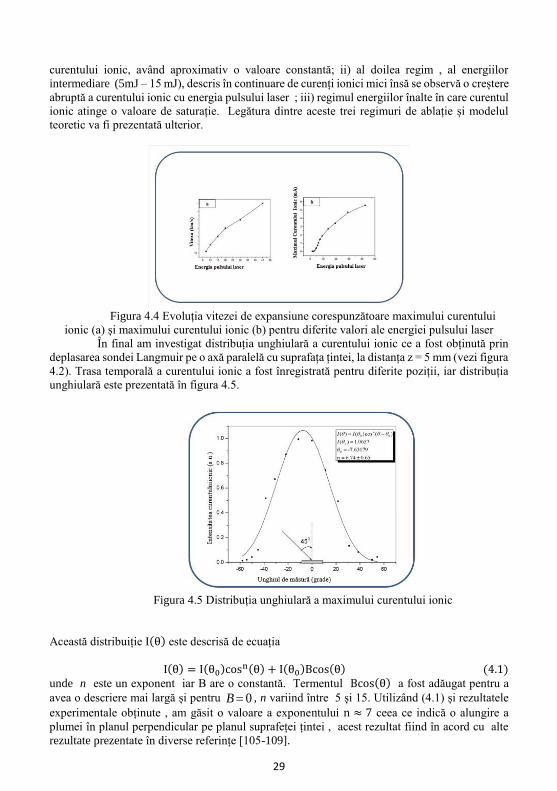
29
curentului ionic, având aproximativ o valoare constantă; ii) al doilea regim , al energiilor
intermediare (5mJ – 15 mJ), descris în continuare de curenți ionici mici însă se observă o creștere
abruptă a curentului ionic cu energia pulsului laser ; iii) regimul energiilor înalte în care curentul
ionic atinge o valoare de saturație. Legătura dintre aceste trei regimuri de ablație și modelul
teoretic va fi prezentată ulterior.
Figura 4.4 Evoluția vitezei de expansiune corespunzătoare maximului curentului
ionic (a) și maximului curentului ionic (b) pentru diferite valori ale energiei pulsului laser
În final am investigat distribuția unghiulară a curentului ionic ce a fost obținută prin
deplasarea sondei Langmuir pe o axă paralelă cu suprafața țintei, la distanța z = 5 mm (vezi figura
4.2). Trasa temporală a curentului ionic a fost înregistrată pentru diferite poziții, iar distribuția
unghiulară este prezentată în figura 4.5.
Figura 4.5 Distribuția unghiulară a maximului curentului ionic
Această distribuiție I(θ) este descrisă de ecuația
I(θ) = I(θ0)cosn(θ) + I(θ0)Bcos(θ) (4.1)
unde n este un exponent iar B are o constantă. Termentul Bcos(θ) a fost adăugat pentru a
avea o descriere mai largă și pentru 0B , n variind între 5 și 15. Utilizând (4.1) și rezultatele
experimentale obținute , am găsit o valoare a exponentului n ≈ 7 ceea ce indică o alungire a
plumei în planul perpendicular pe planul suprafeței țintei , acest rezultat fiind în acord cu alte
rezultate prezentate în diverse referințe [105-109].

30
4.5 Modelul teoretic
Dacă admitem că nediferențiabilitatea este o proprietate specifică a plasmei de ablație este
necesar să construim un model nediferențiabil specific fizicii plasmei [93,94,97]. Aceste
interacțiuni complexe sunt înlocuite de nediferențiabilitate, în conluzie nu mai este necesar să
utilizăm întregul arsenal de mărimi fizice din descrierile standard ale dinamicii plasmei (drum
liber mediu, secțiune eficace de ciocnire, etc) [110].
Această temă a fost dezvoltată utilizând Teoria Relativității de Scală (SRT) [111-116].
Această teorie presupune că particulele încărcate se deplasează pe curbe continue și
nediferențiabile (curbe fractale), astfel încât fenomenele nu depind doar de coordonatele spațiale
și temporale cât și de scalele de rezoluție spațio-temporale. De asemenea mărimile fizice ce
descriu plasma de ablație pot fi considerate funcții fractale [93,94,102] așa încât particulele pot
fi reduse și indentificate cu propriile traiectorii, astfel încât plasma de ablație se comportă ca un
fluid lipsit de interacțiuni într-un spațiu fractal, (fluid fractal).
Utilizând aceasta abordare, se pot determina simultan proprietățile globale (viteza de
expansiune, timpul de viață, forma și simetria plasmei), cât și proprietățile intrinseci (ratele de
ionizare și recombinare, efecte dispersive, regimuri oscilatorii).
În abordarea clasică utilizarea unui singur model pentru descrierea tuturor scalelor de
interacțiune nu este posibilă, fiecare scală de rezoluție fiind compatibilă cu un model diferențiabil
diferit.
Dinamica plasmei de ablație laser poate fi simplificată dacă presupunem că electronii, ionii
și atomii din plasmă se deplaseaza pe curbe continue dar nediferențiabile (curbe fractale- de
exemplu curbe Koch, Peano, Weierstrass, etc) [96].
Odată acceptată o asemenea supoziție dinamica particulelor este descrisă complet de operatorul
complex [117]:
d
dt=
∂
∂t+ �� ∙ ∇ − i
λ2
τ(
dt
τ)
(2DF
⁄ ) – 1
∆ +√2
3
λ3
τ(
dt
τ)
(3DF
⁄ ) – 1
∇3 (4.2)
unde
�� = 𝐕D − i𝐕F (4.3) este viteza complexă, 𝑽𝑫 este viteza diferențiabilă și independentă de scala de rezoluție, 𝑽𝐹
viteza nediferențiabilă și dependentă de scala de rezoluție, �� ∙ ∇ este termenul convectiv,
(λ2 τ⁄ )(dtτ⁄ )
(2DF
⁄ )−1Δ = (λ2 τ⁄ )(dt
τ⁄ )(2
DF⁄ )−1
[(∂2/ ∂x2) + (∂2/ ∂y2) + (∂2/ ∂z2)]
este termenul disipativ,
(λ3 τ⁄ )(dtτ⁄ )
(3DF
⁄ )−1∇3= (λ3 τ⁄ )(dt
τ⁄ )(3
DF⁄ )−1
[(∂3/ ∂x3) + (∂3/ ∂y3) + (∂3/ ∂z3)]
este termenul dispersiv, DF este dimensiunea fractală a curbelor de mișcare, λ lungimea de
referință a scalei, τ este timpul de referință al scalei și λ2 τ⁄ ≡ D este coeficientul lui Nottale
specific tranziției fractali-ne-fractali [111-113]. Pentru dimensiunea fractala 𝐷𝐹 poate fi utilizată
orice definiție (dimensiunea fractală Hausdorff – Besikovici, dimensiunea fractală Kolmogorov
[96]), însă odata aleasă această definiție, ea trebuie să fie constantă pe întreaga analiză a dinamicii
plasmei de ablație.
Aplicând operatorul (4.2) câmpului de curenți I, legea de conservare a curentului poate fi
scrisă sub forma
dI
dt=
∂I
∂t+ (�� ∙ ∇) − i
λ2
τ(
dt
τ)
(2DF
⁄ ) – 1
∆I +√2
3
λ3
τ(
dt
τ)
(3DF
⁄ ) – 1
∇3I = 0 (4.4)

31
Ecuația (4.4) a curentului arată faptul că în orice punct al traiectoriei fractale , dependența locală
de timp a curentului, convecția, efectele disipative și dispersive sunt în echilibru.
În aproximația dispersivă a mișcării (se neglijează termenul disipativ) ecuația (4.4) devine
dI
dt=
∂I
∂t+ (�� ∙ ∇) +
√2
3
λ3
τ(
dt
τ)
(3DF
⁄ ) – 1
∇3I = 0 (4.5)
Separând în (4.4) partea reală de cea imaginară se obține :
dI
dt=
∂I
∂t+ (𝑽D ∙ ∇) +
√2
3
λ2
τ(
dt
τ)
(3DF
⁄ ) – 1
∇3I = 0 (4.6)
la rezoluție de scală diferențiabilă :
(𝐕F ∙ ∇)I = −λ2
τ(
dt
τ)
(2DF
⁄ ) – 1
∆ (4.7)
la rezoluție de scală fractală. Așadar în timp ce la scala de rezoluție diferențială dependență
locală de timp a curentului, convecția și dispersia acestuia își fac echilibru, la scala de rezoluție
fractală curentul de convecție este anulat de disipația acestuia.
O formă explicită a soluției ecuației (4.6) se obține în cazul unidimensional în variabilele
adimensionale :
ωt = τ, k𝓍 = ξ, θ = ξ − Mτ, I
I0= Θ (4.8𝑎 − 𝑑)
Soluția ecuației (4.6) este de forma [47]
Θ = 2a [E(s)
K(s)− 1] + 2acn2[θ ; s ] (4.9)
În relațiile (4.8a-d) și (4.9) 𝜔 este frecvența plasmei, k este inversul lungimii Debye,
c = k ω⁄ viteza iono-acustică, M numarul lui Mach , I0 este valoarea medie a curentului, a este
amplitudinea, K(s) și E(s) sunt integralele eliptice complete de speța I și II de modul s și cn este
funcția eliptică cnoidală a lui Jacobi de modul s [119] și argument θ = √a (θ − θ0) s⁄ cu θ0 =
constant. Modulul s este parametrul de control al neliniarității, depinzând de proprietățile
intrinseci ale plasmelor de ablație și de regimurile dinamice. Mai multe detalii despre parametri
a și s pot fi gasite în [118]. Așadar dinamica plasmei de ablație este descrisă prin moduri de
oscilații cnoidale cu dependență spațio-temporală a curentului ionic. În abordarea noastră
parametrul s este corelat cu energia pulsului laser presupunând o relație funcțională între acest
parametru teoretic și cel experimental. Figurile 4.6 prezintă modurile de oscilație cnoidale are
curentului normalizat în funcție de coordonatele spațio temporale 𝜃 și paramentru de control
s. Curbele de contur pentru diverse grade de neliniaritate asociate acestui tip de dependență sunt
prezentate în figura 4.7.
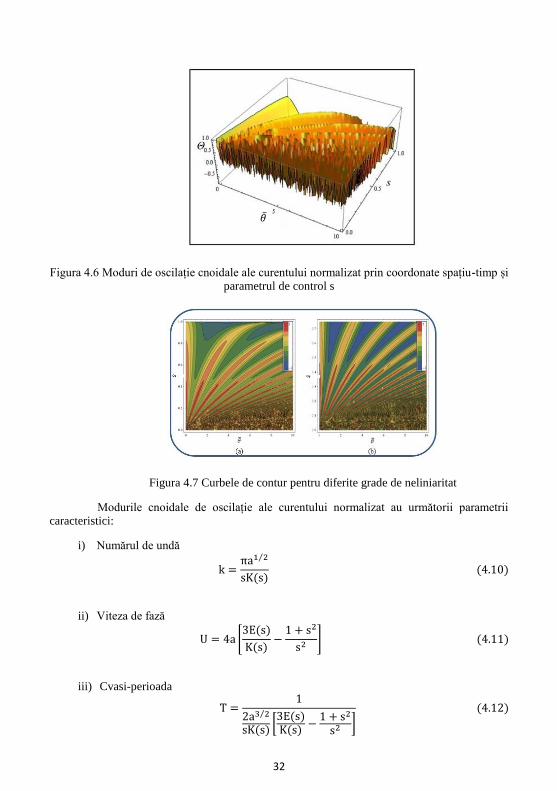
32
Figura 4.6 Moduri de oscilație cnoidale ale curentului normalizat prin coordonate spațiu-timp și parametrul de control s
Figura 4.7 Curbele de contur pentru diferite grade de neliniaritat
Modurile cnoidale de oscilație ale curentului normalizat au următorii parametrii caracteristici:
i) Numărul de undă
k =πa1 2⁄
sK(s) (4.10)
ii) Viteza de fază
U = 4a [3E(s)
K(s)−
1 + s2
s2 ] (4.11)
iii) Cvasi-perioada
T =1
2a3 2⁄
sK(s)[3E(s)K(s)
−1 + s2
s2 ]
(4.12)

33
Structura modurilor cnoidale de oscilații ale curentului normalizat sunt obținute explicit
urmărind degenerearea funcțiilor eliptice cn în raport cu modulul s [119]. Astfel:
i) Pentru s → 0, ecuația (4.9) se reduce la un pachet de unde armonice de tipul
Θ → 𝑎 + 𝑎𝑐𝑜𝑠(𝑘��) (4.13)
caracterizat prin numărul de undă
k =2a1 2⁄
s (4.14)
viteza de fază
U ≈ 8a − k2 (4.15)
și cvasi-perioada
T = 2π (8ak − k3)⁄ (4.16)
ii) Pentru s → 1, ecuația (4.9) se reduce la pachetul de solitoni
Θ → a1sch2 [(a1
6)
1 2⁄
(θ − θ0)] (4.17)
caracterizat prin numărul de undă
Λ =(2a1)1 2⁄
4k1, a1 = 2a, k1 =
k
2π (4.18)
viteza de fază
U ≈ 2a1 − 12k1(a1)1 2⁄ (4.19)
și cvasi-perioada
T = 1 [2a1k1 − 12k12(a1)1 2⁄ ]⁄ (4.20)
Pentru s = 0, ecuația (4.9) poate fi redusă la oscilații armonice, în timp ce pentru s = 1 se reduce
la soliton . Detalii privind degenerările funcției eliptice cn pot fi găsite în lucrarea lui Armitage
[119] în timp ce detalii privind soluțiile neliniare de tip soliton sau pachet de solitoni pot fi gasite
în referințele [120,121].
Eliminând amplitudinea a între ecuațiile (4.10) și (4.11), se obține următoarea expresie :
Uλ2 = 16A(s), k =2π
λ (4.21)
unde
A(s) = 3s2K(s)E(s) − (1 + s2)K2(s) (4.22)
Parametru nelinear s generează trei regimuri dinamice distincte de funcționalitate ale plasmei
de ablație: regimul necvasi-autonom (prin secvențe de tipul oscilațiilor armonice, secvențe de
tip pachet de oscilații), regimul intermediar și regimul cvasi-autonom (prin secvențe de tip soliton
sau pachete de solitoni) (vezi figura 4.8). Din punct de vedere calitativ regimul cvasi-autonom
corespunde regimului energiilor înalte, regimul intermediar regimului energiilor intermediare iar cel necvasi –autonom, regimului energiilor joase, prezentate în figura 4.8b.
Prin calcularea valorii medii a curentului potrivit ecuației (4.9), se obține :

34
I(t, s) =∫ Θ(τ; s)dτ
τ
0
∫ dττ
0
= (E(s)
k(s)−
2a
s) +
2√asE [am (√as
τ; s) ; s] [−1 +1s
cn2 (√as
τ; s)]
dn (√as
τ; s) √[1 − s sn2 (√as
τ; s)]
(4.23)
unde sn și dn sunt funcțiile eliptice ale lui Jacobi ale modului s și E[am] este deasemenea
funcție eliptică standard de modul s [119]. Comportamentul oscilatoriu este astfel obținut pentru diferite grade de neliniaritate (vezi figura 4. 9).
Figura 4.8 Trei regimuri distincte ale plasmei de ablație: regim ne-cvasi- autonom, regimul intermediar și regimul cvasi-autonom
Figura 4.9 Evoluția curentului normalizat pentru diferite valori ale parametrului neliniar s
Menționăm deasemenea faptul că acest model teoretic surprinde partea de final a regimului
oscilatoriu, dupa ce amplitudinea oscilațiilor a scăzut destul de mult. Modelul teoretic simulează
destul de bine curentul ionic al plasmei, după cum se poate vedea în figura 4.10. Valorii energiei
laserului de 45 mJ (pornind de la aproximativ 2.2 μs) îi corespunde unui parametru neliniar s
având valoarea 0.7. Ținând cont de modul de definire al paramentrului de control s , această
valoare corespunde unei soluții de tip pachet de solitoni. În general straturile duble sau multiple
sunt asociate fie cu o soluție de tip soliton sau pachet de solitoni [122]. Putem presupune, deci,
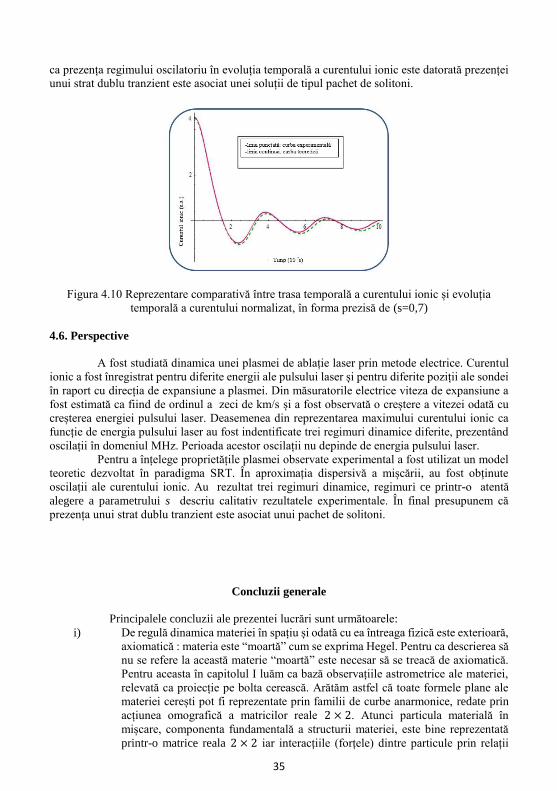
35
ca prezența regimului oscilatoriu în evoluția temporală a curentului ionic este datorată prezenței unui strat dublu tranzient este asociat unei soluții de tipul pachet de solitoni.
Figura 4.10 Reprezentare comparativă între trasa temporală a curentului ionic și evoluția
temporală a curentului normalizat, în forma prezisă de (s=0,7)
4.6. Perspective
A fost studiată dinamica unei plasmei de ablație laser prin metode electrice. Curentul
ionic a fost înregistrat pentru diferite energii ale pulsului laser și pentru diferite poziții ale sondei
în raport cu direcția de expansiune a plasmei. Din măsuratorile electrice viteza de expansiune a
fost estimată ca fiind de ordinul a zeci de km/s și a fost observată o creștere a vitezei odată cu
creșterea energiei pulsului laser. Deasemenea din reprezentarea maximului curentului ionic ca
funcție de energia pulsului laser au fost indentificate trei regimuri dinamice diferite, prezentând
oscilații în domeniul MHz. Perioada acestor oscilații nu depinde de energia pulsului laser.
Pentru a înțelege proprietățile plasmei observate experimental a fost utilizat un model
teoretic dezvoltat în paradigma SRT. În aproximația dispersivă a mișcării, au fost obținute
oscilații ale curentului ionic. Au rezultat trei regimuri dinamice, regimuri ce printr-o atentă
alegere a parametrului s descriu calitativ rezultatele experimentale. În final presupunem că
prezența unui strat dublu tranzient este asociat unui pachet de solitoni.
Concluzii generale
Principalele concluzii ale prezentei lucrări sunt următoarele:
i) De regulă dinamica materiei în spațiu și odată cu ea întreaga fizică este exterioară,
axiomatică : materia este “moartă” cum se exprima Hegel. Pentru ca descrierea să
nu se refere la această materie “moartă” este necesar să se treacă de axiomatică.
Pentru aceasta în capitolul I luăm ca bază observațiile astrometrice ale materiei,
relevată ca proiecție pe bolta cerească. Arătăm astfel că toate formele plane ale
materiei cerești pot fi reprezentate prin familii de curbe anarmonice, redate prin
acțiunea omografică a matricilor reale 2 × 2. Atunci particula materială în
mișcare, componenta fundamentală a structurii materiei, este bine reprezentată
printr-o matrice reala 2 × 2 iar interacțiile (forțele) dintre particule prin relații

36
algebrice între matricile reprezentative ale particulelor. Prin aceasta dinamica
materiei este delegata unei geometrii metrice diferențiale și anume geometria
spațiului hiperbolic ce are ca absolut hiperboloidul cu o pânză. De aici rezultă că
dacă admitem și pentru spațiu o geometrie metrică , atunci materia în spațiu poate
fi descrisă matematic prin corespondențe între metrica materiei și metrica
spațiului, adică prin aplicații armonice. În acest fel este fractală caracterizarea
neambiguă a materiei în spațiu printr-o densitate în sens clasic, fără estimări
colaterale și ipoteze asupra substructurilor materiei. Pe de altă parte se admite o
descriere matematică a spațiului în materie, prototipul unui asemenea concept
fiind cavitatea clasică Lummer- Wien, care a ajutat la descrierea experimentală a
radiației termice și deci implicit la apariția mecanicii cuantice. Astfel
transcendența spațio- temporală naturală a descrierii clasice a mișcării poate avea
un revers fractal în așa numita rezoluție de scală:
ii) În capitolul II construim o teorie a mișcării într-o dimensiune fractală arbitrară
constantă pe o varietate tridimensională în care sunt luate în considerare și
derivatele de ordin trei în dezvoltarea Taylor a parametrilor de mișcare. Altfel
spus, pe lângă efectele convective și disipative , sunt luate în considerare și
efectele dispersive. Într-un asemenea cadru se obține ecuația geodezicelor pentru
un câmp complex de viteze (ecuația generalizată de tip Boussinesq- Korteweg de
Vries). Această ecuație în reprezentarea prin funcții de undă se reduce la una
generalizată de tip Schröndinger, iar în reprezentarea lui Madelung la
hidrodinamica fractală generalizată structurată în legea de conservare a
impulsului și legea de conservare a densității de stare. De asemenea sunt tratate
probleme fundamentale ale teoriei relativității de scală precum varietăți fractale,
variabile fractale, transformări fractale, principii de invarianță,etc;
iii) Capitolul III este destinat tratării unor dinamici ale sistemelor complexe în
aproximația disipativă a mișcării în teorii de scală pe varietăți tridimensionale.
Astfel utilizând ecuațiile hidrodinamicii fractale este analizată problema Kepler a
mișcării la diverse scale de rezoluție (scala Planck – particula este și sursă și
particulă test, scală atomică – modelul fractal al atomului, scală infragalactică –
modelul planetar fractal și scală cosmologică – efectul Tifft), relațiile de
incertitudine hidrodinamice și particularizarea lor la problema Kepler, legi
constitutive de material pentru sisteme complexe și efecte de tip histerezis în
fluide complexe pe baza soluțiilor numerice ale ecuațiilor hidrodinamicii fractale
cuplate cu cea a energiei. În final utilizând o ecuație de tip Klein - Gordon într-un
câmp combinat (câmp electromagnetic și gravitoelectromagnetic) sunt analizate
dinamici bosonice în spații fractale.
iv) Scopul capitolului IV este de investigare a dinamicilor unei plasme de ablație prin
metoda sondei Langmuir. Analiza evoluției temporale a curentului ionic pentru
diverse valori ale energiei pulsului laser a specificat prezența unei oscilații în
domeniul MHz, perioada acestor oscilații fiind independentă de energia pulsului
laser. Pentru a interpreta proprietățile plasmei observate experimental a fost
utilizat un model teoretic al relativității de scală în aproximația dispersivă a
mișcării.

37
Bibliografie selectivă
1. Mazilu, N., Agop, M., Axinte, C.I., Radu, E., Jarcău, M., Gârțu, M., Răuț, M., Pricop, M.,
Boicu, M., Mihăileanu, D., Vrăjitoriu, L., A Newtonian message for quantization, Physics Essays
27, 2, 2014, 204-214
2. Mazilu, N., Agop, M., Boicu, M., Mihăileanu, D., Pricop, M., Gatu, I., Iacob Dezideriu, D.,
Ghizdovăț, V., The geometry of heavently matter formations, Physics Essays, 28,1 (2015) 120-
127
3. Mihăileanu,D., Agop,M., Neliniaritate în sisteme fizice complexe, Ars Longa, Iași, 2015
4. Mihăileanu, N. (1972). Complemente de Geometrie Analitică Proiectivă şi Diferenţială.
Bucureşti: Editura Didactică şi Pedagogică.
5. Hertz, H. (2003). The Principles of Mechanics. New York: Dover Publications.
6. Manton, N. S., & Sutcliffe, P. M. (2004). Topological Solitons. Cambridge, UK: Cambrige
University Press.
7. Cartan, E. (1981). The Theory of Spinors. New York: Dover Publications, Inc.
8. Appell, P. (1891). Sur les Lois de Forces Centrales Faisant Decrire a Leur Point d’Application
une Conique Quelles Que Soient les Conditions Initiales. American Journal of Mathematics,
13(2), pp. 153 – 158.
9. Halphén, G. (1879). Sur l’Équation Différentielle des Coniques. Bulletin de la Societé
Mathématique de France, 7, pp. 83 – 85.
10. Darboux, G. (1877). Recherche de la Loi que Doit Suivre une Force Centrale pour que la
Trajectoire qu’elle Détermine Soit Toujours une Conique. Comptes Rendus de l’Académie des
Sciences Paris, 84, 760 – 762; 936 – 938.
11. Halphén, G. (1877). Sur les Lois de Kepler. Comptes Rendus de l’Académie des Sciences,
Paris, 84, pp. 939–941
12. Mazilu, N., & Agop, M. (2010). La Răscrucea Teoriilor: între Newton şi Einstein –
Universul Barbilian. Iaşi: Ars Longa.
13. Misner, C. W. (1978). Harmonic Maps as Models for Physical Theories. Physical Review D,
18(12), pp. 4510 – 4524.
14. Beju, I., Soós, E., & Teodorescu, P. P. (1977). Tehnici de Calcul Tensorial Euclidian cu
Aplicaţii. Bucureşti: Editura Tehnică.
15. Albeverio, S., & Gordina, M. (2007). Lévy Processes and Their Subordination in Matrix Lie
Groups. Bulletin des Sciences Mathématiques, 131(8), pp. 738 – 760.
16. Howe, R., & Tan, E. C. (1992). Non-Abelian Harmonic Analysis: Applications of SL(2, R) .
New York: Springer-Verlag.
17. Helgason, S. (1994). Geometric Analysis on Symmetric Spaces. Providence, Rhode Island,
USA: American Mathematical Society.
18. Lévy, P. (1965). Processus Stochastiques et Mouvement Brownien. Paris: Gauthier-Villars.
19. Barbilian, D. (1938). Riemannsche Raum Cubischer Binärformen. Comptes Rendus de
l’Académie Roumaine des Sciences, 2, p. 345.
20. Kerner, E. H. (1981). Clarification of the Great Ensemble. Physical Review A, 24(4), pp.
2244 – 2246.
21. Jeans, J. H. (1954). The Dynamical Theory of Gases. New York: Dover Publications.
22. Clausius, R. (1870). On a Mechanical Theorem Applicable to Heat. Philosophical Magazine,
40, pp. 122 – 127.
23. Maxwell, J. C. (1965). Scientific Papers. (W. D. Niven, Ed.) New York: Dover Publications.
24. Newton, I. (1995). The Principia. Amherst, New York: Prometheus Books.
25. Compton, A. H. (1915). The Variation of the Specific Heat of Solids with Temperature.
Physical Review, 6(5), pp. 377 – 389.
38
26. Boyer, T. H. (1969). Derivation of the Blackbody Radiation Spectrum without Quantum
Assumptions. Physical Review, 182(5), pp. 1374 – 1383.
27. Sciama, D. W. (1969). The Physical Foundations of General Relativity. New York:
Doubleday.
28. Govinder, K. S., Athorne, C., & Leach, P. G. (1993). The Algebraic Structure of Generalized
Ermakov Systems in Three Dimensions. , Journal of Physics A: Mathematical and General,
26(16), pp. 4035 – 4046.
29. Gradshteyn, I. S., & Ryzhik, I. M. (2007). Table of Integrals, Series and Products. (A. Jeffrey,
& D. Zwillinger, Eds.) Academic Press-Elsevier, Inc.
30. Reyes, E. G. (2003). On Generalized Bäcklund Transformation for Equations Describing
Pseudo-Spherical Surfaces. Journal of Geometry and Physics, 45(3–4), pp. 368 – 392.
31. Agop, M., Ciobanu, G., Ioannou, P. D., & Buzea, C. G. (2002). Cantorian ε() Space-Time in
Cartan, de Broglie and Field Theories. Chaos, Solitons and Fractals, 14(8), pp. 863 – 890
32. Agop, M., Gavriluț, A., Mihăileanu, D., Boicu, M., Some generelized physical models
through homographic group, Reports on Mathematical Physics (acceptat spre publicare)
33. Nottale, L., Fractal Space- Time and Microphysics: Towards a Theory of Scale Relativity,
World Scientific, Singapore
34. Nottale, L., Scale Relativity And Fractal Space-Time: A New Approach to Unifying
Relativity and Quantum Mechanics, Imperial College Press, London, 2011
35. Nottale, L., (1994) Chaos, Solitons and Fractals 4, 361. Reprinted in Quantum Mechanics,
diffusion and Chaotic Fractals, M.S.El Naschie, O.E.Rossler and I. Prigogine (Eds.), Pergamon
(1995), p.51.
36. Nottale, L., (1994) Relativity in General, (Spanish Relativity Meeting 1993), J.Diaz Alonso
and M. Lorente Paramo (Eds.), Editions Frontieres, Paris, p.121
37. Nottale, L., (1994) Chaos and diffusion in Hamiltonian systems”, Proceedings of the fourth
workshop in Astronomy and Astrophysics of Chamonix (France), 7-12 February 1994, Ed. D.
Benest et C. Froeschlé, (Eds.)Editions Frontières, p. 173
38. Nottale, L., (1995) From Quantum Mechanics to Chaotic Dynamics, Chaos, Solitons &
Fractals 6, 399
39. Nottale, L., (1996) Scale Relativity and Fractal Space-Time: Applications to Quantum
Physics, Cosmology and Chaotic Systems, Chaos, Solitons & Fractals 7, 877
40. Nottale, L., (1998) Scale Relativity and Quantization of Planet Obliquities, Chaos, Solitons
& Fractals 9, 1035
41. Nottale, L., (1998) Scale Relativity and Quantization of the Planetary System around the
Pulsar, Chaos, Solitons & Fractals 9, 1043
42. Nottale, L., (1998) Scale Relativity and Schrödinger’s Equation, Chaos, Solitons & Fractals
9, 1051
43. Nottale L. & Schumacher G., (1998) Fractals and beyond: Complexities in the Sciences,
World Scientific, (Ed.) M.M. Novak,Singapore, p. 149.
44. Nottale, L., (1999) Chaos, Solitons & Fractals 10, 459
45. Nottale L., (2001) Frontiers of Fundamental Physics, Proceedings of Birla Science Center
Fourth International Symposium, 11-13 dec. 2000, B.G. Sidharth and M.V. Altaisky, (Eds.),
Kluwer Academic, Kluwer Academic/Plenum Publishers, New York, p. 65
46. Nottale L., Célérier M.N. & Lehner T., 2006, J. Math. Phys. 47, 032303 (arXiv:hep-
th/0605280)
47. Nottale L. & Célérier M.N., 2007, J. Phys. A: Math. Theor. 40, 14471-
14498 (arXiv:0711.2418) [quant-ph]
48. Nottale L., 2009, J. Phys. A: Math. Theor. 42, 275306 (arXiv:0812.0941)
49. Mihăileanu, D., Ghizdovăț, V., The Scale Relativity Theory in the Schrödinger
39
Reprezentation, Buletinul Institutului Politehnic Iași, Seria Matematică, Mecanică și Fizică, 2015
(acceptată spre publicare)
50. Mihăileanu, D., Gațu, I., The Scale Relativity Theory in the hydrodinamic reprezentation,
Buletinul Institutului Politehnic, Iași, Seria Matematică, Mecanică și Fizică, 2015 (acceptată spre
publicare)
51.. Gottlieb I., Agop M., Ciobanu, G., Stroe, A., El Nasche’s E-infinity space-time and new
results in scale relativity theory, Chaos, Solitons and Fractals, 30: 380-398, 2006;
52. Stroe, A., Gottlieb, I., Agop, M., Scale relativity theory and massive gravitoelectromagnetic
field, Buletinul Institutului Politehnic , Iasi, Tomul LI(LV), Fasc. 1-2, Sectia Matematica,
Mecanica Teoretica, 81-88, 2005;
53. Agop, M., Jarcău, M., Fractalitate și gravitație, Ed. Ars Longa, Iași, 2006
54. Abăcioaie, S.D., Agop, M., Dinamica neliniară și gravitația, Ed. Ars Longa, Iași, 2009
55. Agop, M., Crăciun, P., Microfractalitatea, macrofractalitatea și gravitație, Ed.Ars Longa, Iași,
2008
56. Agop, M., Murguleț, C., El Naschie 𝑒(∞) space- time and scale relativity theory in the
topological dimension D=4, Chaos, Solitons and Fractals, 2006
57. Agop, M., Radu, C., Nica, P., Enache, V., Autoorganizarea interfeței solid-lichid și implicații,
Ed.Ars- Longa, Iași, 2007
58. Agop, M., Chicoș, L., Contribuții la studiul interacțiunii plasmei cu câmpurile fizice, Ed.Ars-
Longa, Iași, 2007
59. Agop, M., Băcăiță, S., Spațiu- timpul fractalic și straturi duble în plasme de descărcare, Ed.
Ars- Longa, Iași, 2007
60. Agop, M., Păun, V., Harabagiu, A., El Naschie 𝑒(∞) theory and effects of nanoparticle
dustising in the heat transport in nanofluids, Chaos, Solitons and Fractals,37,5,1269-1278, 2008
61. Vasincu, D., Mihăileanu D., Timofte D., Memorization type effect in biological fluids.
Numerical Simulations (II), Buletinul Institutului Politehnic din Iași, Secția Matematica,
Mecanică Teoretică, Fizică, Tom LX (LXIV), Fasc.3, 2014, 9-15.
62. Stoica C., Duceac L.D., Lupu D., Boicu M., Mihăileanu D., On the fractal bit in biological
systems, Buletinul Institului Politehnic Iași, Sectia Matematica, Mecanica Teoretica, Fizica, LXI
(LXV), Fasc.1, 2015, 1-15.
63. Mihăileanu D., Boicu M., The increase of the electrical conductance in nanostructures, A
theoretical approach, Simpozionul International Universul Stiintelor, Editia a Va , septembrie
2014
64. Mihăileanu D., Butuc, I., The one body problem at small and large scale, Buletinul Institutului
Politehnic Iași, Secția Matematică, Mecanică și Fizică,2015 (acceptată spre publicare)
65. Agop M., Botez C.I., Boicu M., Mihăileanu D., Dimensionality in Nanostructures by Means
of Non – differentiability, Journal of Computational and Theoretical Nanoscience, American
Scientific Pubishers, vol.12, Nr.12, 1-10,2015
66. Nottale L., Fractal Space – Times and Microphysics: Towards a Theory of Scale Relativity,
World Scientific Singapore, New Jersey, London, Hong Kong, 1993
67. Nottale L., Scale Relativity and Fractal Space - Time A New Approad to Unifying Relativity
and Quantum Mechanics, Imperial College Press, 2011
68. Mandelbrot, B., Les Objets Fractals, Flammarion, Paris, 1975
69. Mandelbrot, B., The Fractal Geometry of Nature, Freeman, San Francisco, 1982
70. Mandelbrot, B., Multifractals and 1/f Noise, Springer, 1999
71.Mandelbrot, B., Chronicle of books on fractal geometry,
http://www.math.yale.edu/mandelbrot/web_docs/chronicleFractals.doc.,2007
72. M. von Allmen and Andreas Blatter, Laser-Beam Interactions with Materials: Physical
Principles and Applications ~Springer, Berlin, 1995!.
40
73. Miller, J.C., and Haglund, R.F., in Laser Ablation and Desorption, Experimental Methods in
the Physical Sciences Vol. 30 (Academic Press, New York, 1998)
74. Brown, M., and Arnold, C. B., in Fundamentals of Laser-Material Interaction and
Application to ultiscale Surface Modification, in Laser Precision Fabrication, ed. K. Sugioka et
al. (Springer, Chapter 4, 91-121, 2010)
75. Noll, R., in Laser-Induced Breakdown Spectroscopy Fundamentals and Applications
(Springer, 2011)
76. Russo, R., Mao, X., Mao, S., Analitical Chemistry 74 (2002) 70 A
77. Amoruso, S., Bruzzese, R., Spinelli, N., Velotta, R., J. Phys. B 32 (1999) 13
78. Claeyssens, F., Henley, S.F., Ashfold, M.N.R., J. Appl. Phys. 94 (2003) 2203.
79. Conrad, J.R., Radtke, J. L., Dodd, R.A., Worzala, J., Tran, N. C., J. Appl. Phys. 62 (1987)
4591.
80. Doria, D., Lorusso, A., Belloni, F., Nassisi, V., Rev. Sci. Instrum. 75 (2004) 387.
81. Toftmann, B., Schou, J., Lunney, J. G., Phys.Rev. B 67 (2003) 104101
82. Velardia, L., Krásab, J., Velyhanb, A., Nassisia, V., Appl. Surf. Sci. 272 (2013) 65
83. Toftmann, B., Schou, J., Hansen, T. N., and Lunney, J. G., Phys.Rev. Lett. 84, (2000) 3998
84. Sibold, D., and Urbassek, H. M., Phys. Rev. A 43, (1991) 6722
85. Anisimov, S. I., and Luk’yanchuk, B. S., Phys. Usp. 45 (2002) 293
86. Phipps, C. R., and Dreyfus, R. W.,: in Laser Ionization Mass Analysis, edited by A. Vertes,
R. Gijbels, and F. Adams, Chemical Analysis Series No. 124 (Wiley, New York, 1993 p. 369)
87. Saenger, K. L.,: in Pulsed Laser Deposition of Thin Films, edited by D. B. Chrisey and G. B.
G. K. Hubler (Wiley, New Yourk 1994)
88. Lowndes,D. H., Geohegan, D. B., Puretzky,A. A., Norton, D. P., and Rouleau,C. M.,Science
273, (1996) 898
89. D. H. Lowndes,D. H., in Laser Ablation and Desorption, edited by J. C. Miller and R. F.
Haglund, Jr.(Academic, San Diego, 1998)
90. Willmott, P.R., and Huber, J. R., Rev. Mod. Phys. 72 (2000) 315
91. Bauerle, D., in Laser Processing and Chemistry, 3rd ed. (Springer, Berlin, 2000)
92. Russo, E., Mao, X., in Laser Ablation and Desorption, ed. By J. C. Miller, R. F. Haglund,
Exp. Meth. In Phys. Sci. 30, 375, (Academic Press, San Diego, 1998).
93. Nica, P., Agop, M., Gurlui, S., Bejinariu, C., and Focșa, C., Jpn. J. Appl. Phys. 51 (2012)
106102
94. Nica, P., Vizureanu, P., Agop, M., Gurlui, S., Focșa, C., Forna, N., Ioannou, P. D., and
Borsos, Z., Jpn. J. Appl. Phys. 48 (2009) 066001
95. Shlesinger, M. F., Klafter, J., and Zumofen, G., Am. J. Phys. 67 (12) (1999) 1253
96. Mandelbrot Benoit, B., The Fractal Geometry of Nature, updated and augmented, (New
York: W. H. Freeman, 1983)
97. Munceleanu, G. V., Paun, V. P., Casian-Botez, I., and Agop, M., Int. J. Bifurcat. Chaos 21
(2011) 603
98. Agop, M., Nica, P., Niculescu, O. and Dimitriu, D. G., J. Phys. Soc. Jpn. 81 (2012) 064502
99. Viswanathan, G. M., Bartumeus, F., Sergey, V. B., Catalan, J., Fulco, U. L., Havlin, S., M.
G. E. da Luz, Lyra, M. L., Raposo, E. P., and Stanley, H. E., Phy. A: 314 (2002) 208
100. Agop, M., Dimitriu, D. G., Niculescu, O., E. Poll and V. Radu, Phys. Scripta 87 (2013)
045501
101. Bulgakova, N. M., Bulgakov, A. V., and Bobrenok, O. F., Phys. Rev. E 62 (2000) 5624
102. Gurlui, S., Agop, M., Nica, P., Ziskind, M., and Focşa, C., Phys. Rev. E 78 (2008) 026405
103. Ursu, C., Pompilian, O. G., Gurlui, S., Nica, P., Agop, M., Dudeck, M., and Focşa, C., Appl.
Phys. A 101 (2010)
104. S. Gurlui, S., Sanduloviciu, M., Mihesan, C., Ziskind, M., and Focșa, C., AIP Conf. Proc. 8
(2006) 279
41
105. Lowndes, D. H., in: J. C. Miller, R. F. Haglund (Eds.), Laser Ablation and Desorption,
Experimental Methods in the Physical Sciences, vol. 30, (Academic Press, New York, 1998), p.
475
106. Hansen, T. N., Schou, J., Lunney, J. G., Europhys, Lett. 40 (1997) 441
107. Svendsen, W., Schou, J., Hansen, T. N., Ellegaard, O., Appl. Phys. A 66 (1998) 493
108. Weaver, I., Lewis, C. L. S., J. Appl. Phys. 79 (1996) 7216
109. Gurlui, S., Sanduloviciu, M., Strat, M., Strat, G., Mihesan, C., Ziskindb, M., Focșa, C.,
JOAM 8, (2006), 148
110. Nicholson, D: R., Introduction to Plasma Theory (New York: John Wiley & Sons 1983)
111. Nottale, L., Fractal Space-Time and Microphysics: Towards a Theory of Scale Relativity
(Singapore: World Scientific 1993)
112. Nottale, L., Scale Relativity and Fractal Space-Time – A new Approach to Unifying
Relativity and Quantum Mechanics (London: Imperial College Press 2011)
113. Nottale, L., Int. J. Mod. Phys. A, 4 (1989) 5047
114. El Naschie, M. S., Rossler, O. E., and I. Prigogine Quantum Mechanics: Diffusion and
Chaotic Fractals (Oxford: Elsevier, 1995)
115. Weibel, P., Ord, G., and Rosler, O. E., Space Time Physics and Fractility (New York:
Springer 2005)
116. Agop, M., Nica, P. E., Ioannou, P. D., Antici, A., and Păun, V. P.,: Eur. Phys. J. D 49 (2008)
239
117. Casian-Botez, I., Agop, M., Nica, P., Paun, V., Munceleanu, G. V., J. Comput. Theor.
Nanosci. 7 (2010) 2271
118. Agop, M., Păun, V., and Harabagiu, A., Chaos Soliton Fract 37 (2008) 1269
119. Armitage, J. V., and Eberlein, W. F., “Elliptic functions,” (Cambridge University Press,
2006)
120. Cristescu, C. P., Nonlinear Dynamics and Chaos in Science and Engineering, (Academy
Publishig House, Bucharest 2008)
121. Jackson, E. A., Perspectives in Nonlinear Dynamics, vol 1 (Cambridge: Cambridge
University Press 1991)
122. Goswami, K. S., Saharia, K., and Schamel, H., Phys. Plasmas 15 (2008) 062111
123. Irimiciuc, S. A., Agop, M., Nica, P., Gurlui, S., Mihăileanu, D., Toma, S., Focșa, C.,
Dispersive effects in laser ablation plasmas, Japanese Journal of Applice Physics 53, 116202,
2014
124. Irimiciuc, S. A., Mihăila, I., Mihăileanu, D., Agop, M., Langmuir probe investigations of a
laser produced plasma, 10th International Conference on Physics of Advanced Materials (ICPAM
– 10) Iasi 2014, 22.09 – 28.09, 2014/Topic 2-/ Langmuir probe investigations of a laser produced
plasma/pag.30/O3
Lista lucrărilor științifice publicate în reviste indexate ISI în domeniul tezei:
1. Agop, M., Botez, C.I., Boicu, M., Mihăileanu, D., Dimensionality in Nanostructures by Means
of Non – differentiability, Journal of Computational and Theoretical Nanoscience, American
Scientific Pubishers, vol.12, Nr.12, 1-10,2015
2. Vasilescu, D., Corabieru, P., Corabieru, A., Boicu, M., Mihăileanu, D., Agop, M., On a
constitutive material law at nanoscale,Journal of Computational and Theoretical Nanoscience
(acceptat spre publicare)
3. Irimiciuc, S. A., Agop, M., Nica, P., Gurlui, S., Mihăileanu, D., Toma, S., Focșa, C., Dispersive
effects in laser ablation plasmas, Japanese Journal of Applice Physics 53, 116202, 2014
42
Lista lucrărilor științifice publicate în reviste indexate BDI în domeniul tezei:
1. Mihăileanu, D., Scale Relativity Theory in the Schrödinger reprezentation, Buletinul
Institutului Politehnic Iași, Secția Matematică, Mecanică și Fizică, 2015(acceptată spre pubicare) 2. Mihăileanu, D., Scale Relativity Theory in the hydrodinamic reprezentation, Buletinul
Institutului Politehnic Iași, Secția Matematică, Mecanică și Fizică, 2015 (acceptată spre
publicare)
3. Vasincu, D., Mihăileanu D., Timofte D., Memorization type effect in biological fluids.
Numerical Simulations (II), Buletinul Institutului Politehnic din Iași, Secția Matematica,
Mecanică Teoretică, Fizică, Tom LX (LXIV), Fasc.3, 2014, 9-15.
4. Stoica C., Duceac L.D., Lupu D., Boicu M., Mihăileanu D., On the fractal bit in biological
systems, Buletinul Institului Politehnic Iași, Sectia Matematica, Mecanica Teoretica, Fizica, LXI
(LXV), Fasc.1, 2015, 1-15.
5. Mihăileanu, D., The one body problem at small and large scale, Buletinul Institutului
Politehnic Iasi, Secția Matematică, Mecanică și Fizică, 2015 (acceptată spre publicare)
Articole în reviste din străinătate indexate în bazele de date internaționale în domeniul
tezei:
1. Mazilu, N., Agop, M., Axinte, C.I., Radu, E., Jarcău, M., Gârțu, M., Răuț, M., Pricop, M.,
Boicu, M., Mihăileanu, D., Vrăjitoriu, L., A Newtonian message for quantization, Physics Essays
27,2, (2014), 204-214
2. Mazilu, N., Agop, M., Boicu, M., Mihăileanu, D., Pricop, M., Gațu, I., Iacob Dezideriu, D.,
Ghizdovăț, V., The geometry of heavently matter formations, Physics Essays, 28, 1 (2015) 120-
127
Participări la conferințe internaționale:
1. Mihăileanu, D., Boicu, M., The increase of the electrical conductance in nanostructures, A
theoretical approach, Simpozionul International Universul Științelor, Editia a V-a , septembrie
2014
2. Irimiciuc, S. A., Mihăila, I., Mihăileanu, D., Agop, M., Langmuir probe investigations of a
laser produced plasma, 10th International Conference on Physics of Advanced Materials (ICPAM
– 10) Iasi 2014, 22.09 – 28.09, 2014/Topic 2-/ Langmuir probe investigations of a laser produced
plasma/pag.30/O3
Cărți publicate:
1. Mihăileanu, D., Agop, M., Neliniaritate în sisteme fizice complexe, Ars Longa, Iași, 2015
Mulțumiri:
Această lucrare a fost finanțată din contractul POSDRU/159/1.5/S/137750, proiect strategic
,,Programe doctorale si postdoctorale – suport pentru creșterea competitivității cercetării in
domeniul Științelor exacte” cofinanțat din Fondul Social European, prin Programul Operațional
Sectorial pentru Dezvoltarea Resurselor Umane 2007 – 2013.