standdidacticpentrumonitorizarea...
TRANSCRIPT

U P BF A C
D A I S
L
Stand didactic pentru monitorizareacondiției mașinilor prin analiză de vibrații
AbsolventGeorge STERPU
CoordonatorȘl. Dr. Ing. Grigore STAMATESCU
București, 2013

Lucrare dedicată părinților mei,pentru susținerea neîntreruptă a
educației mele,fratelui meu, pentru numeroaseleture pe munte făcute împreună înperioada licenței, ce mi-au oferit
liniștea necesară redactăriiacesteia,
coordonatorului meu, alături defirma ASTI, pentru suportulmaterial acordat și deosebita
inspirație transmisă,precum și filmului Big Fish.
2
Cuprins
1. Introducere 81.1. Motivație . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2. Obiective . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3. Structura lucrării . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.4. Contribuții . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2. Standul didactic 112.1. Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1.1. Accelerometre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.1.2. Senzor optic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.1.3. Convertizorul de frecvență . . . . . . . . . . . . . . . . . . . . . . . . 162.1.4. Motorul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.1.5. Sistemul de achiziție al datelor . . . . . . . . . . . . . . . . . . . . . . 182.1.6. Rulmenții . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2. Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.2.1. Aplicație de monitorizare - ELEOS . . . . . . . . . . . . . . . . . . . 20
3. Revizuirea procedurii de diagnoza 223.1. Despre defecte, modele și tehnici de analiza . . . . . . . . . . . . . . . . . . . 223.2. Analiza de ordin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3. Predicția liniară . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.4. Deconvoluția de entropie minima . . . . . . . . . . . . . . . . . . . . . . . . . 253.5. Kurtosis Spectral și Kurtograma . . . . . . . . . . . . . . . . . . . . . . . . . 283.6. Analiza Anvelopei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.6.1. Transformarea Hilbert . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4. Rezultate 35
5. Concluzii 43
6. Direcții de continuare 456.1. Detecția defectelor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 456.2. Prognoza defectelor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.3. Metode inteligente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Anexe 48
A. MED Filter 49
B. Activități de laborator 55
Bibliografie 57
3

Listă de figuri
2.1. Convertizorul și placa de achiziții . . . . . . . . . . . . . . . . . . . . . . . . . 122.2. Structura mecanica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.3. Sistem IEPE tipic - imagine [Wilson,2005] . . . . . . . . . . . . . . . . . . . 142.4. Structura sandwich accelerometru - imagine [Wilson,2005] . . . . . . . . . . . 152.5. Senzor optic difuz - Siemens . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.6. Convertizor de frecventa - schema de principiu . . . . . . . . . . . . . . . . . 162.7. Sinamics G110 - Siemens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.8. SIEMENS 1LA9060-2KA60 . . . . . . . . . . . . . . . . . . . . . . . . . . 182.9. NSK 6004 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.10. Interfață aplicație - ELEOS . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1. Modelul semnalului analizat - imagine [Sawalhi,2007] . . . . . . . . . . . . . 233.2. Deplasarea liniei spectrale fără reeșantionare angulara . . . . . . . . . . . . . . 243.3. Dispersie spectrala - foto [NI Webcast OA] sus - domeniul timp; jos - domeniul
frecventa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.4. Calculul excesului spectral - foto [Randall,2011]
(a) semnalul în domeniul timpului, peste care se aplica fereastra scurta. (b) Di-agrama timp-frecventa. (c) Reprezentarea exces-frecventa. . . . . . . . . . . . 29
3.5. Divizarea frecventelor în Kurtograma . . . . . . . . . . . . . . . . . . . . . . . 293.6. Avantajele studierii pătratului anvelopei - imagine [Randall,2011] . . . . . . . 313.7. Procedura de implementare a anveloparii - imagine [Randall,2011] . . . . . . . 323.8. Avantajele semnalelor analitice. Foto [Randall,2011] . . . . . . . . . . . . . . 34
4.1. Semnal neprelucrat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.2. Semnal tahometru . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.3. Semnal reeșantionat angular . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.4. Profilul de viteză . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.5. Semnal predictat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.6. Eroarea de predicție . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.7. Coeficienții filtrului AR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.8. Semnal util după aplicarea MED . . . . . . . . . . . . . . . . . . . . . . . . . 384.9. Kurtosis Spectral - banda lata . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.10. Kurtosis Spectral - banda optima . . . . . . . . . . . . . . . . . . . . . . . . . 394.11. Anvelopă Semnal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.12. Spectrul anvelopei semnalului . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.13. Semnal filtrat MED - rulment uzat . . . . . . . . . . . . . . . . . . . . . . . . 404.14. Kurtosis Spectral - rulment uzat . . . . . . . . . . . . . . . . . . . . . . . . . 404.15. Transformata Fourier Scurtă - Grafic Tri-dimensional . . . . . . . . . . . . . . 414.16. Anvelopa semnalului de la rulmentul uzat, în comparație cu cea a rulmentului bun 414.17. Spectrul anvelopei - rulmentul uzat . . . . . . . . . . . . . . . . . . . . . . . . 42
4
Listă de tabele
2.1. Caracteristicile accelerometrelor tipice . . . . . . . . . . . . . . . . . . . . . . 132.2. Caracteristici VIB-Sensor S01 . . . . . . . . . . . . . . . . . . . . . . . . . . 142.3. Parametri importanți ai convertizorului . . . . . . . . . . . . . . . . . . . . . . 17
6.1. Limite recomandate de variații ale vibrațiilor din cadrul mașinilor rotative, co-respunzătoare ISO-10816-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5
Listă de Abrevieri
AIC Akaike Information Criterion
AR Auto Regresiv
FIR Finite Impulse Response
IIR Infinite Impulse Response
MED Minimum Entropy Deconvolution
PWM Pulse Width Modulation
SK Spectral Kurtosis
STFT Short-Time Fourier Transform
6

Rezumat
Acestă lucrare prezintă o metodă de analiză predictivă a defectelor rulmenților. Metodaeste testată pe un stand didactic realizat de ASTI Automation, pentru care a fost dezvoltată oaplicație software ce vizează deprinderea cunoștințelor teoretice în domeniul prelucrării semna-lelor, oferind un grad ridicat de configurabilitate.
Abstract
is paper presents a predictive maintenance, or condition-based method for analysingbearing defects. e procedure is tested on a didactic test rig produced by ASTI Automation,for which it was developed a software application aiming to secure theoretical knowledge însignal processing domain, offering a high degree of configurability.
7
1.
Introducere
Să facem un exercițiu de imaginație: vă propuneți o excursie pe munte. Vă pregătiți atentfiecare detaliu al traseului, vă echipați corespunzător și aduceți toate proviziile necesare. Vă aflațila baza muntelui. Călătoria decurge excelent, vremea de afară este splendidă, iar cea din interiore chiar mai bună de atât. Foarte aproape de vârf întâlniți o porțiune periculoasă, acoperită cuzăpadă, parcurgerea acesteia necesitând acceptarea unor riscuri vitale. Sau poate începe ploaia,fiind nevoiți să vă catarăți pe stâncă umedă. Ați accepta acest risc ? Dacă da, ați putea rămânecu o mană în gips timp de câteva luni, sau ați putea pierde orice șansă de a mai urca vreodată pemunte. Dacă vă întoarceți, veți rămâne cu un gust amar pană la următoarea revenire. Se spuneca viața este o călătorie, nu o destinație. Atunci de ce rămânem dezamăgiți dacă nu ajungem ladestinație ? În ce măsura modul în care facem aceste alegeri determină transformarea călătorieiîntr-o expediție? Vă provoc sa descoperiți răspunsul ascuns în această lucrare.
Actuala introducere
Datorită dezvoltării tehnicilor de prelucrare a semnalelor, în ultimii 15 ani mentenanțapredictivă a devenit cea mai bună metodă de monitorizare a condiției mașinilor. Strategia estejustificată de costurile reduse ale mentenanței aplicațiilor critice, în care defectarea mașinăriei însine, împreuna cu o perioadă neprevazută de inactivitate, conduc la pierderi economice substan-țiale.
Mentenanța predictivă se compune din trei etape, anume
• Detecție
• Diagnoză
• Prognoză
iar în această lucrare ne vom concentra pe diagnoză, spectaculoasă prin prisma rezultatelor, utilăpentru deprinderea unor competente în domeniul prelucrării de semnal și totodată matură înceea ce privește cercetările realizate până în prezent. Prin diagnoză vom putea extrage informațialegată de natura și locația unui defect din semnalul măsurat, iar prognoza va oferi o estimare atimpului util rămas până la înlocuirea rulmentului.
O procedură consacrată în domeniul diagnozei este analiza anvelopei, sau anveloparea,fiind descrisă în capitolul 3, iar rezultatele acesteia fiind prezentate în capitolul 4.
8

CAPITOLUL 1. INTRODUCERE
1.1. Motivație
Tema mi-a fost propusă la finalul stagiului de practica efectuat în 2012 la ASTI Auto-mation, firma contribuind cu întreaga baza materiala: senzori, placa de achiziții și structuramecanica.
Am remarcat atunci oportunitatea de a lucra într-un domeniu diferit de cele studiate în fa-cultate, specific ingineriei mecanice, neavând încă maturitatea automatizărilor industriale. Ast-fel, documentarea a fost realizata mai mult din articolele științifice decât din cărți, cele din urmafiind la rândul lor un mozaic al citărilor și referințelor. Totodată, lucrarea mai presupunea șicunoștințe bune în domeniul prelucrării de semnale, iar aceasta abordare practica facilita înțele-gerea uneltelor disponibile.
Dacă domnul profesor Dan Ștefănoiu, ale cărui explicații m-au ajutat masiv sa continuiatunci când spectacolul părea încheiat, citește aceste rânduri, atunci i-as putea propune include-rea unei abordări practice similare în cadrul cursului de Prelucrarea Semnalelor. Aproape fiecarecapitol din cuprinsul cursului poate fi exemplificat printr-o lucrare de laborator în analiza devibrații.
Atingând și acest aspect, am fost atras și de posibilitatea realizării unei aplicații didacticepentru diagnoza defectelor, întrucât cine ii învață pe ceilalți mai întâi se învață pe sine.
1.2. Obiective
Obiectivul principal al lucrării este reprezentat de diagnoza defectelor ce pot apărea încazul rulmenților. În aceasta lucrare este prezentată o metodă clasică, des utilizată în industriedatorită acurateții rezultatelor.
Lucrarea își mai propune și realizarea unei aplicații didactice implementate pe un standdemonstrativ, care sa permită ajustarea cat mai multor elemente ale metodei de analiză. Ast-fel, acest ansamblu ar putea fi utilizat cu succes pentru pregătirea studenților și inginerilor îndomeniul monitorizării condiției mașinilor.
1.3. Structura lucrării
În primul capitol este realizata introducerea în domeniul monitorizării condiției mașinilor;în plus, sunt prezentate obiectivele lucrării și motivația alegerii temei.
Capitolul doi se ocupă de descrierea bazei materiale disponibile, anume standul didacticprodus de firma ASTI, fiind prezentate componentele hardware și uneltele software utilizate.
Capitolul trei pune la dispoziție baza teoretica a diagnozei defectelor rulmenților. Esteanalizata metoda anvelopării, dar sunt schițați și pașii pentru pre-condiționarea semnalului.
Capitolele patru și cinci reprezintă rezultatele și concluziile lucrării, combinând cercetareacu abordarea didactică.
Ultimul capitol este destinat aspectelor netratate în cadrul tezei, fie din lipsa aprofundărilordin domeniu, în cazul detecției și prognozei, fie din rațiuni de menținere a lucrării concise șicompacte, în cazul metodelor inteligente de monitorizare. Aceste aspecte rămân deschise îneventualitatea aprofundării temei în cadrul unei teze de dizertație sau doctorat.
9

1.4. CONTRIBUȚII
1.4. Contribuții
Dacă algoritmii și modelele din aceasta lucrare au fost urmărite aproape biblic din surselecitate, contribuțiile personale se reflecta pe următoarele niveluri:
• Realizarea unei aplicații software pentru diagnoza defectelor rulmenților, compactândîntr-o singura procedura o serie de algoritmi și tehnici pentru separarea componentelordin semnalul măsurat și identificarea eventualelor defecte
• Schițarea unui posibil îndrumar de laborator, conținând aplicații didactice efectuate șidescrise în capitolul destinat rezultatelor
10
2.
Standul didactic
Standul propus spre studiere este compus dintr-o structură mecanică în care un motorcu turație variabila/convertizor acționează, printr-un cuplaj mecanic, un ax cu o volanta. Axuleste fixat la capete în doua lagăre cu rulmenți. Pe volanta sunt prevazute orificii pentru montareaunormase de dezechilibrare. Un prim scop al acestora este simularea unei sarcini, situația ceamaiplauzibila întâlnita într-o mașinărie.Totodată, vibrațiile introduse în sistem prin dezechilibrareavolantei rotative provoacă componente de accelerație nedorite în rulmenți.
Echipamentul are rolul de a pune în evidenta diferitele defecte ce pot apărea la rulmenți șide a permite o mentenanță predictiva a unor astfel de componente mecanice. Pe baza ampren-telor de vibrații, prin prelucrarea și analiza de semnal se ajunge la o caracterizare a defectelor șila dezvoltarea de sisteme inteligente de asistare a deciziilor de mentenanță.
Standul este compus din:
• Motor acționat de convertizor
• Cuplaj elastic, ax
• Volanta și sistem pentru dezechilibrare
• Lagăre cu rulmenți
• Senzori de vibrații
• Senzor optic difuz
• Sistem pentru achiziții de date
11
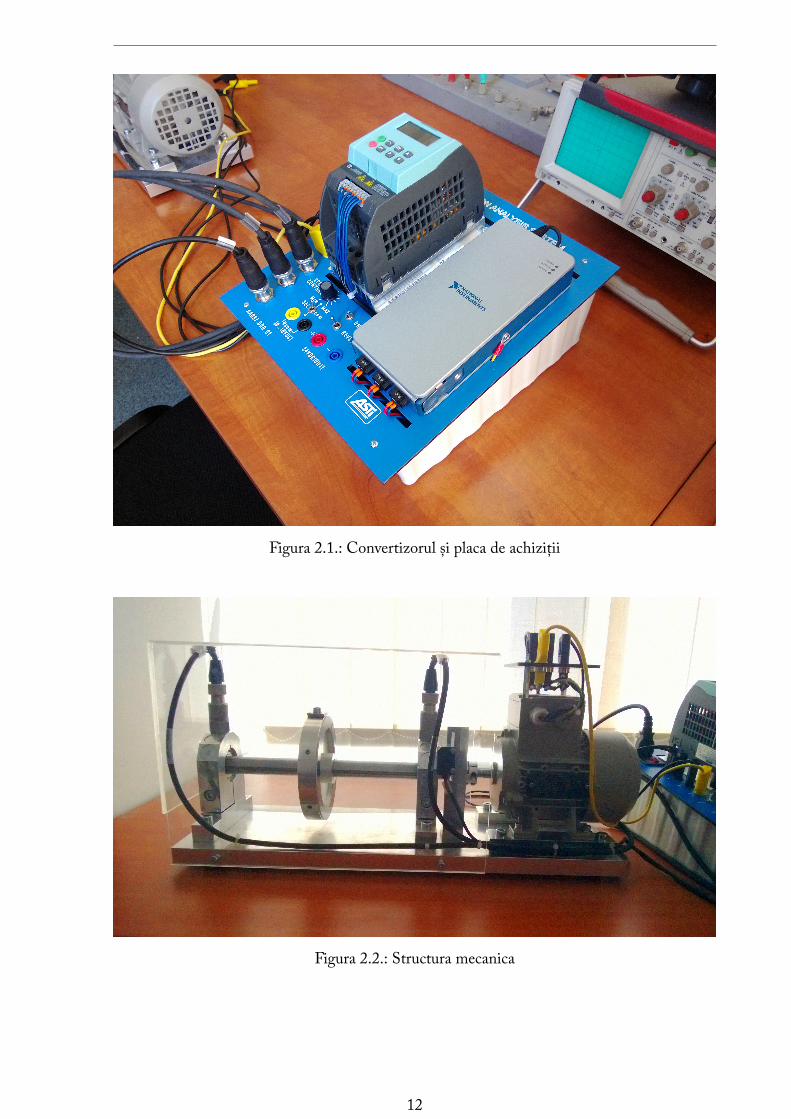
Figura 2.1.: Convertizorul și placa de achiziții
Figura 2.2.: Structura mecanica
12
CAPITOLUL 2. STANDUL DIDACTIC
2.1. Hardware
2.1.1. Accelerometre
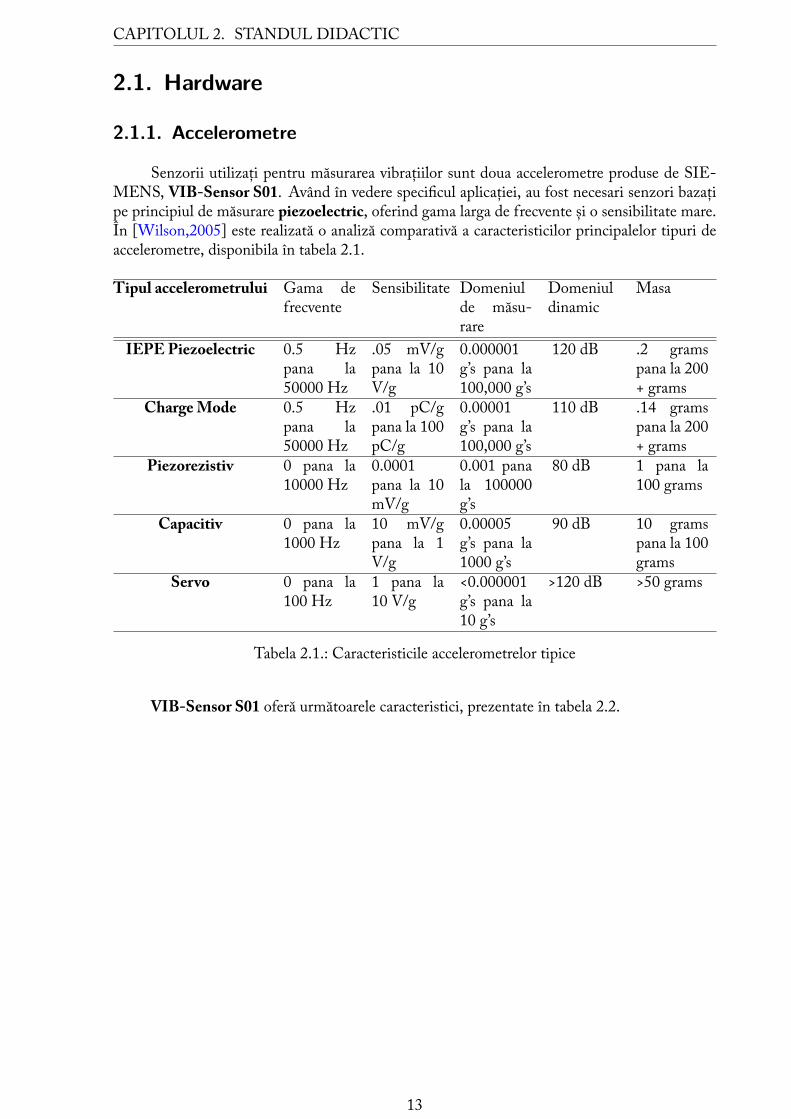
Senzorii utilizați pentru măsurarea vibrațiilor sunt doua accelerometre produse de SIE-MENS, VIB-Sensor S01. Având în vedere specificul aplicației, au fost necesari senzori bazațipe principiul de măsurare piezoelectric, oferind gama larga de frecvente și o sensibilitate mare.În [Wilson,2005] este realizată o analiză comparativă a caracteristicilor principalelor tipuri deaccelerometre, disponibila în tabela 2.1.
Tipul accelerometrului Gama defrecvente
Sensibilitate Domeniulde măsu-rare
Domeniuldinamic
Masa
IEPE Piezoelectric 0.5 Hzpana la50000 Hz
.05 mV/gpana la 10V/g
0.000001g’s pana la100,000 g’s
120 dB .2 gramspana la 200+ grams
ChargeMode 0.5 Hzpana la50000 Hz
.01 pC/gpana la 100pC/g
0.00001g’s pana la100,000 g’s
110 dB .14 gramspana la 200+ grams
Piezorezistiv 0 pana la10000 Hz
0.0001pana la 10mV/g
0.001 panala 100000g’s
80 dB 1 pana la100 grams
Capacitiv 0 pana la1000 Hz
10 mV/gpana la 1V/g
0.00005g’s pana la1000 g’s
90 dB 10 gramspana la 100grams
Servo 0 pana la100 Hz
1 pana la10 V/g
<0.000001g’s pana la10 g’s
>120 dB >50 grams
Tabela 2.1.: Caracteristicile accelerometrelor tipice
VIB-Sensor S01 oferă următoarele caracteristici, prezentate în tabela 2.2.
13
2.1. HARDWARE
Date generalePrincipiul de măsurare Cuart piezoelectric + IEPE
Domeniul de frecvente (+-3db) 0.5 pana la 15000HzSensibilitate 100mV/g (+-10%)Rezoluție 0.002g
Domeniul maxim de măsurare 50gFrecventa de rezonanta 23kHz
Semnalul de ieșire Tensiune BIAS 10 pana la 14V DCSursa de putere IEPE 2 pana la 10 mA
Tehnologia de conectare MIL-C5015Condiții ambientale / de mediu
Temperatura ambientala (de operare) -50g....+120gCGrad de protecție IP65
ProiectareMaterial otel inoxidabil
Tip montaj șuruburi de montaj UNF 1/4-28 pe M8
Tabela 2.2.: Caracteristici VIB-Sensor S01
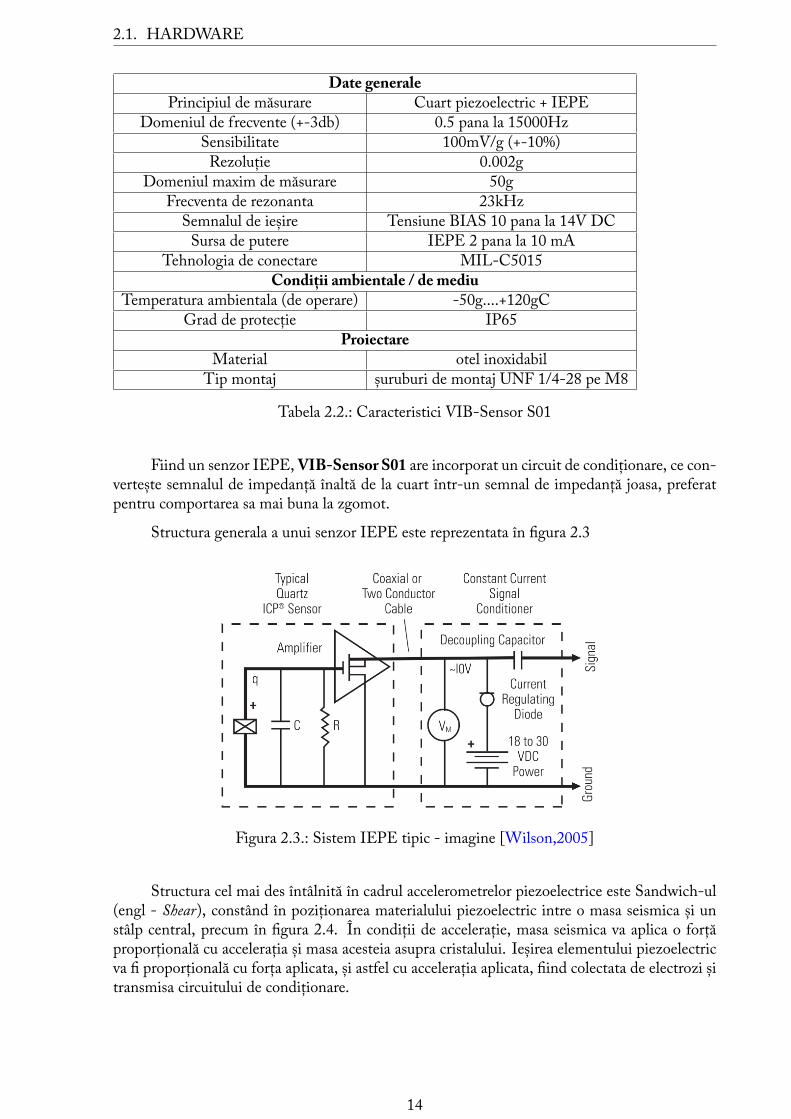
Fiind un senzor IEPE, VIB-Sensor S01 are incorporat un circuit de condiționare, ce con-vertește semnalul de impedanță înaltă de la cuart într-un semnal de impedanță joasa, preferatpentru comportarea sa mai buna la zgomot.
Structura generala a unui senzor IEPE este reprezentata în figura 2.3
Figura 2.3.: Sistem IEPE tipic - imagine [Wilson,2005]
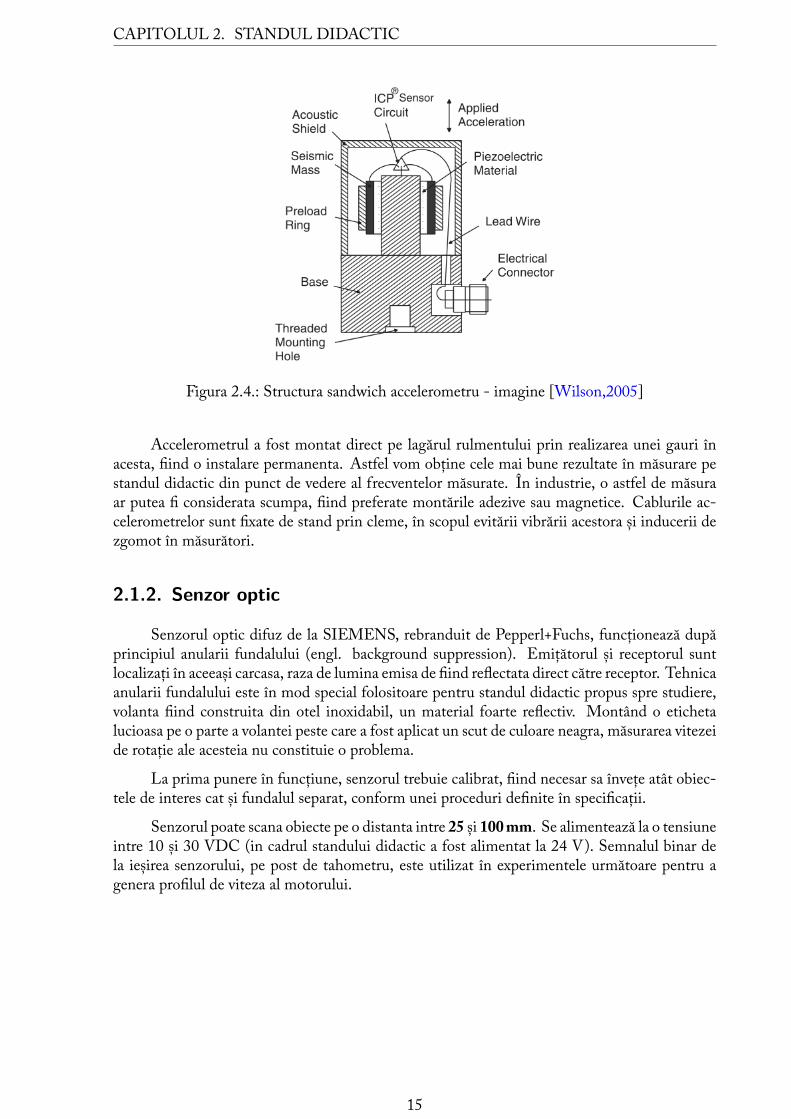
Structura cel mai des întâlnită în cadrul accelerometrelor piezoelectrice este Sandwich-ul(engl - Shear), constând în poziționarea materialului piezoelectric intre o masa seismica și unstâlp central, precum în figura 2.4. În condiții de accelerație, masa seismica va aplica o forțăproporțională cu accelerația și masa acesteia asupra cristalului. Ieșirea elementului piezoelectricva fi proporțională cu forța aplicata, și astfel cu accelerația aplicata, fiind colectata de electrozi șitransmisa circuitului de condiționare.
14
CAPITOLUL 2. STANDUL DIDACTIC
Figura 2.4.: Structura sandwich accelerometru - imagine [Wilson,2005]
Accelerometrul a fost montat direct pe lagărul rulmentului prin realizarea unei gauri înacesta, fiind o instalare permanenta. Astfel vom obține cele mai bune rezultate în măsurare pestandul didactic din punct de vedere al frecventelor măsurate. În industrie, o astfel de măsuraar putea fi considerata scumpa, fiind preferate montările adezive sau magnetice. Cablurile ac-celerometrelor sunt fixate de stand prin cleme, în scopul evitării vibrării acestora și inducerii dezgomot în măsurători.
2.1.2. Senzor optic
Senzorul optic difuz de la SIEMENS, rebranduit de Pepperl+Fuchs, funcționează dupăprincipiul anularii fundalului (engl. background suppression). Emițătorul și receptorul suntlocalizați în aceeași carcasa, raza de lumina emisa de fiind reflectata direct către receptor. Tehnicaanularii fundalului este în mod special folositoare pentru standul didactic propus spre studiere,volanta fiind construita din otel inoxidabil, un material foarte reflectiv. Montând o etichetalucioasa pe o parte a volantei peste care a fost aplicat un scut de culoare neagra, măsurarea vitezeide rotație ale acesteia nu constituie o problema.
La prima punere în funcțiune, senzorul trebuie calibrat, fiind necesar sa învețe atât obiec-tele de interes cat și fundalul separat, conform unei proceduri definite în specificații.
Senzorul poate scana obiecte pe o distanta intre 25 și 100mm. Se alimentează la o tensiuneintre 10 și 30 VDC (in cadrul standului didactic a fost alimentat la 24 V). Semnalul binar dela ieșirea senzorului, pe post de tahometru, este utilizat în experimentele următoare pentru agenera profilul de viteza al motorului.
15
2.1. HARDWARE
Figura 2.5.: Senzor optic difuz - Siemens
2.1.3. Convertizorul de frecvență
Convertizorul de frecventa, numit și variator de turație, este un dispozitiv electronic ca-pabil sa varieze turația unui motor electric, menținând raportul U/f constant. În plus, acestapoate oferi protecții suplimentare la suprasarcina, scurtcircuit, supra/subtensiune sau protecțietermica, diminuând și șocurile mecanice și de curent la pornirea motorului prin configurareatimpilor de accelerare și decelerare.
Cele trei componente principale ale unui convertizor sunt:
• redresor
• filtru
• invertor
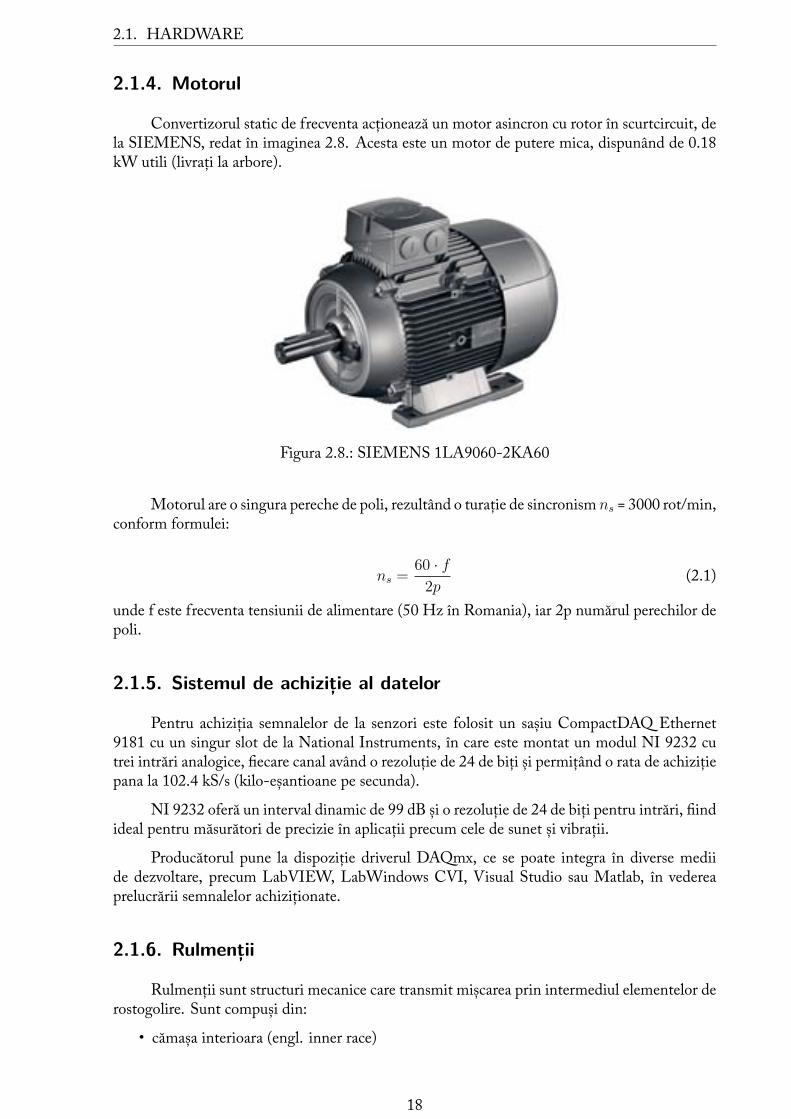
Schema de principiu este redata în figura 2.6
Figura 2.6.: Convertizor de frecventa - schema de principiu
Tranzistoarele sunt controlate de un microcontroller, ce folosește tehnica modularii în lă-țime a impulsurilor (PWM).
16

CAPITOLUL 2. STANDUL DIDACTIC
Convertizorul de frecventa din cadrul standului didactic face parte din seria SinamicsG110 de la Siemens, fiind destinat acționării elementelor de putere redusa, precum pompe,ventilatoare, benzi transportoare etc.
Figura 2.7.: Sinamics G110 - Siemens
Principalele comenzi (pornire / oprire, inversare sens, variere turație) pot fi efectuate atât depe panoul didactic realizat de ASTI Automation, cat și de pe panoul operator al convertizorului.
Pentru ca protecția la suprasarcina oferita de convertizor sa funcționeze corect, este ne-cesara o configurare adecvata a parametrilor, în concordanta cu specificațiile motorului. Astfel,avem în vedere următorii parametri:
P0304 tensiunea nominalaP0305 curentul nominalP0307 puterea nominalaP0308 factorul de putereP0310 frecventa nominala a motoruluiP0311 viteza nominalaP0640 factorul de suprasarcinaP1080 frecventa minimaP1082 frecventa maximaP1120 timpul de accelerareP1121 timpul de decelerare
Tabela 2.3.: Parametri importanți ai convertizorului
Parametrii respectivi, având prefixul 'P', pot fi configurați de la panoul operator, denumitBOP (Basic Operator Panel), alături de alți parametri opționali ce specifica modalitatea de ale-gere a referinței, nivelul de acces sau sensul de rotație. În cadrul panoului operator mai întâlnimși elemente prefixate cu 'r', semnificând atribute a căror valoare poate fi doar citita (read-only),și de obicei acestea reprezinta măsurători instantanee sau indicatori de stare.
17
2.1. HARDWARE
2.1.4. Motorul
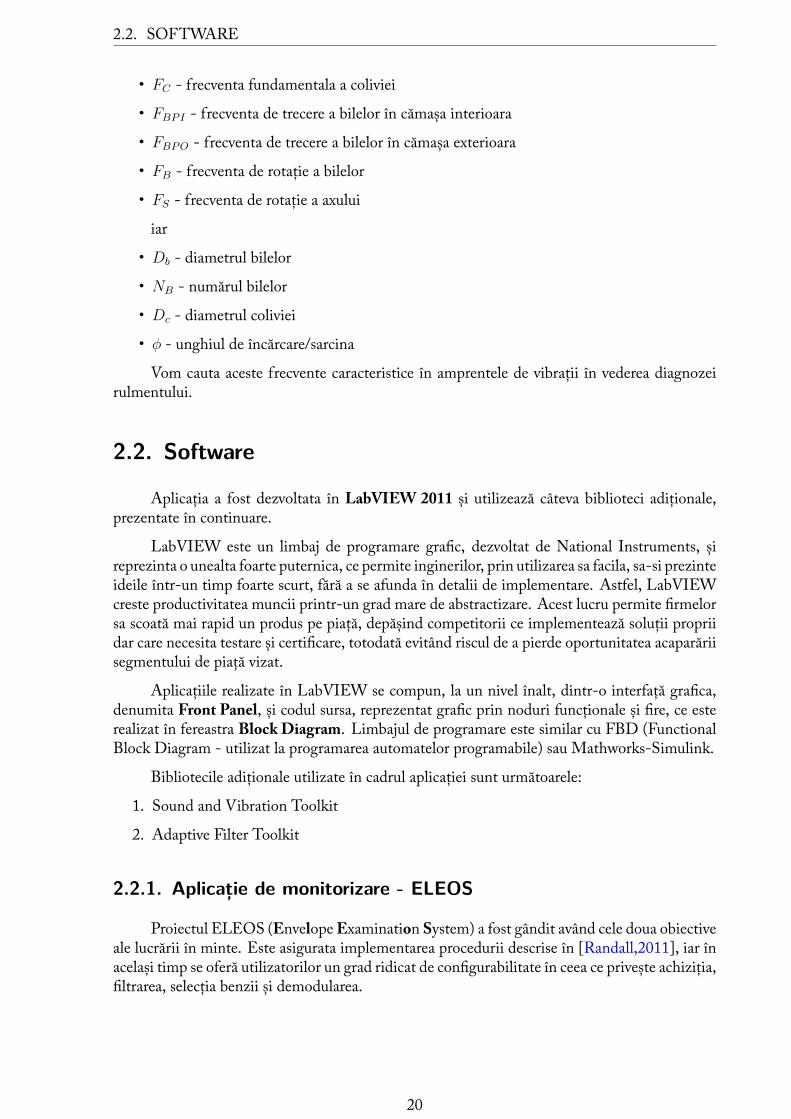
Convertizorul static de frecventa acționează un motor asincron cu rotor în scurtcircuit, dela SIEMENS, redat în imaginea 2.8. Acesta este un motor de putere mica, dispunând de 0.18kW utili (livrați la arbore).
Figura 2.8.: SIEMENS 1LA9060-2KA60
Motorul are o singura pereche de poli, rezultând o turație de sincronism ns = 3000 rot/min,conform formulei:
ns =60 · f2p
(2.1)
unde f este frecventa tensiunii de alimentare (50 Hz în Romania), iar 2p numărul perechilor depoli.
2.1.5. Sistemul de achiziție al datelor
Pentru achiziția semnalelor de la senzori este folosit un sașiu CompactDAQ Ethernet9181 cu un singur slot de la National Instruments, în care este montat un modul NI 9232 cutrei intrări analogice, fiecare canal având o rezoluție de 24 de biți și permițând o rata de achizițiepana la 102.4 kS/s (kilo-eșantioane pe secunda).
NI 9232 oferă un interval dinamic de 99 dB și o rezoluție de 24 de biți pentru intrări, fiindideal pentru măsurători de precizie în aplicații precum cele de sunet și vibrații.
Producătorul pune la dispoziție driverul DAQmx, ce se poate integra în diverse mediide dezvoltare, precum LabVIEW, LabWindows CVI, Visual Studio sau Matlab, în vedereaprelucrării semnalelor achiziționate.
2.1.6. Rulmenții
Rulmenții sunt structuri mecanice care transmit mișcarea prin intermediul elementelor derostogolire. Sunt compuși din:
• cămașa interioara (engl. inner race)
18

CAPITOLUL 2. STANDUL DIDACTIC
• cămașa exterioara (engl. outer race)
• colivie (engl. cage)
• elemente de rostogolire / bile
În datele de catalog ale rulmenților întâlnim adesea următorii parametri:
• d - diametrul interior
• D - diametrul exterior
• w - lățime
Figura 2.9.: NSK 6004
Cele mai întâlnite defecte ale rulmenți-lor, prezentate în [Stefanoiu,2002], sunt ur-mătoarele:
• defect asupra cămășii exterioare
• defect de lubrifiere
• defect asupra cămășii interioare
• defecte asupra bilelor / elementelor derostogolire
acestea fiind cauzate adesea de
• iregularități ale inelelor
• frecarea excesiva
• șocuri și rupturi ale stratului lubrifiant
• variații ale durității
• oscilații rezultate în urma imbalansului
Seturile de rulmenți utilizate de noi, de la NSK și CMB, sunt de tip radial cu bile (engl.deep groove ball bearings), având dimensiuni specifice modelelor 6004: D = 42 cm, d = 20 cm,w = 12 cm.
Putem defini patru frecvente caracteristice pentru care pot avea loc defecte în cadrul rul-menților. Acestea depind de geometria rulmentului, precum numărul de bile, diametrele colivieiși bilelor, dar și de frecventa de rotație a axului. Ecuațiile 2.2 - 2.5 descriu aceste frecvente ca-racteristice.
FC =1
2FS
(1− Dbcos(ϕ)
Dc
)(2.2)
FBPI =NB
2FS
(1 +
Dbcos(ϕ)
Dc
)(2.3)
FBPO =NB
2FS
(1− Dbcos(ϕ)
Dc
)(2.4)
FB =Dc
2Db
FS
(1− D2
bcos2(ϕ)
D2c
)(2.5)
unde:
19
2.2. SOFTWARE
• FC - frecventa fundamentala a coliviei
• FBPI - frecventa de trecere a bilelor în cămașa interioara
• FBPO - frecventa de trecere a bilelor în cămașa exterioara
• FB - frecventa de rotație a bilelor
• FS - frecventa de rotație a axului
iar
• Db - diametrul bilelor
• NB - numărul bilelor
• Dc - diametrul coliviei
• ϕ - unghiul de încărcare/sarcina
Vom cauta aceste frecvente caracteristice în amprentele de vibrații în vederea diagnozeirulmentului.
2.2. Software
Aplicația a fost dezvoltata în LabVIEW 2011 și utilizează câteva biblioteci adiționale,prezentate în continuare.
LabVIEW este un limbaj de programare grafic, dezvoltat de National Instruments, șireprezinta o unealta foarte puternica, ce permite inginerilor, prin utilizarea sa facila, sa-si prezinteideile într-un timp foarte scurt, fără a se afunda în detalii de implementare. Astfel, LabVIEWcreste productivitatea muncii printr-un grad mare de abstractizare. Acest lucru permite firmelorsa scoată mai rapid un produs pe piață, depășind competitorii ce implementează soluții propriidar care necesita testare și certificare, totodată evitând riscul de a pierde oportunitatea acaparăriisegmentului de piață vizat.
Aplicațiile realizate în LabVIEW se compun, la un nivel înalt, dintr-o interfață grafica,denumita Front Panel, și codul sursa, reprezentat grafic prin noduri funcționale și fire, ce esterealizat în fereastra Block Diagram. Limbajul de programare este similar cu FBD (FunctionalBlock Diagram - utilizat la programarea automatelor programabile) sau Mathworks-Simulink.
Bibliotecile adiționale utilizate în cadrul aplicației sunt următoarele:
1. Sound and Vibration Toolkit
2. Adaptive Filter Toolkit
2.2.1. Aplicație de monitorizare - ELEOS
Proiectul ELEOS (EnvelopeExamination System) a fost gândit având cele doua obiectiveale lucrării în minte. Este asigurata implementarea procedurii descrise în [Randall,2011], iar înacelași timp se oferă utilizatorilor un grad ridicat de configurabilitate în ceea ce privește achiziția,filtrarea, selecția benzii și demodularea.
20

CAPITOLUL 2. STANDUL DIDACTIC
Figura 2.10.: Interfață aplicație - ELEOS
În figura 2.10 este redata interfața aplicației, distingându-se zona din stânga, unde suntafișate frecventele caracteristice ale defectelor rulmentului în funcție de geometria acestuia și deviteza de rotație, precum și zona centrala, alcătuită din următoarele ferestre dispuse pe un controlde tip tab:
• Data Acquisition
• Order Analysis
• Linear Prediction
• MED
• SK
• Envelope Analysis
Aplicația este construita pe o arhitectura de tip Automat de stări și coada de așteptare(engl. Queued State Machine), prezentata în [Sterpu,2012].
Doua bucle de tip while rulează în paralel, prima ocupându-se de captarea evenimentelorde pe panoul frontal, iar cea de-a doua ocupându-se de executarea acțiunilor din stările indicatede prima bucla. Comunicația este asigurata prin intermediul unei cozi de așteptare, astfel caniciun eveniment nu este pierdut în caz de conflict, iar procesorul nu lucrează decât în timpulexecuției stărilor, eliminându-se neajunsul buclelor infinite.
Stările sunt reținute într-o structura de tip typedef enum pentru asigurarea scalabilitățiiaplicației. Astfel, funcționalitatea ELEOS poate fi extinsa cu ușurință în viitor în cazul în carese dorește acest lucru.
21

3.
Revizuirea procedurii de diagnoza
Analiza anvelopei este principala tehnica utilizata pentru identificarea defectelor posibileîn rulmenți, dar pentru a o putea aplica, trebuie realizata apriori o serie de pași.
Lucrarea se bazează pe procedura semi-automata pentru diagnoza rulmenților, descrisa deSawalhi și Randall în [Randall,2011]
Primii trei pași sunt asociați condiționării semnalului, propunându-și sa reducă zgomotulde măsura, componentele periodice, întinderea (engl. smearing) și deformarea, în timp ce alpatrulea furnizează o banda optima pentru filtrare și demodulare.
Pe scurt, procedura consta în următorii pași:
1. Analiza de ordin, utilizata pentru a reduce întinderile (engl. smearings) cauzate de fluc-tuațiile vitezei axului
2. Predicția Liniara, utilizata pentru a filtra frecventele deterministe
3. Deconvoluția de entropie minima, utilizata pentru a ascuți funcțiile de răspuns la impulscauzate de un posibil defect
4. Kurtosis Spectral (SK) și Kurtograma Rapida, ce furnizează o banda optima pentru filtrareși demodulare
5. Analiza de anvelopa, ce identifica frecventele caracteristice ale defectelor
3.1. Despre defecte, modele și tehnici de analiza
În secțiunea 2.1.6 au fost enumerate câteva defecte comune ale rulmenților. Acestea con-duc în cele din urma la exfolieri sau crăpături asupra ambelor inele sau a elementelor de rosto-golire, luând naștere semnale nestaționare, de tip ciclo-staționar.
Un defect al rulmentului este caracterizat de impacturile ce se produc în interiorul aces-tuia. Datorita rezonantelor, impacturile excita mai multe benzi de frecventa, astfel ca informațiautila poate fi extrasa din oricare aceste benzi. În zona frecventelor joase, în schimb, exista per-turbații semnificative cauzate de alte elemente ale structurii mecanice aflate în mișcare, precumrotile dințate, sau de nealinierea axului și imbalans. Ideal, ar trebui sa selectam o banda în jurulfrecventei de rezonanta a rulmentului, dar acest lucru poate fi dificil, nefiind cunoscut apriori.Informația de diagnoză este conținută în frecvența de repetiție a acestor impacturi.
Din cauza imperfecțiunilor de fabricație (exemplu - bile neidentice), a tolerantelor colivieisau a fluctuației unghiului de sarcina pe fiecare bila, va exista o alunecare (engl. slip), astfel încâtdurata dintre doua impulsuri variază în limite mici, uzual pana în 1-2% ([Sawalhi,2007]).
22
CAPITOLUL 3. REVIZUIREA PROCEDURII DE DIAGNOZA
În cazul unui defect pe suprafața cămășii interioare, presupusamobila, semnalulmăsurat deaccelerometrul situat pe carcasa lagărului va fi modulat în amplitudine, în concordanta cu variațiasarcinii. Astfel, amplitudinea maxima a impulsului va fi măsurata pentru impactul generat intrebila și aschietura atunci când aceasta se afla în punctul cel mai apropiat de accelerometru, urmândsa scadă pe măsură ce cămașa se depărtează.
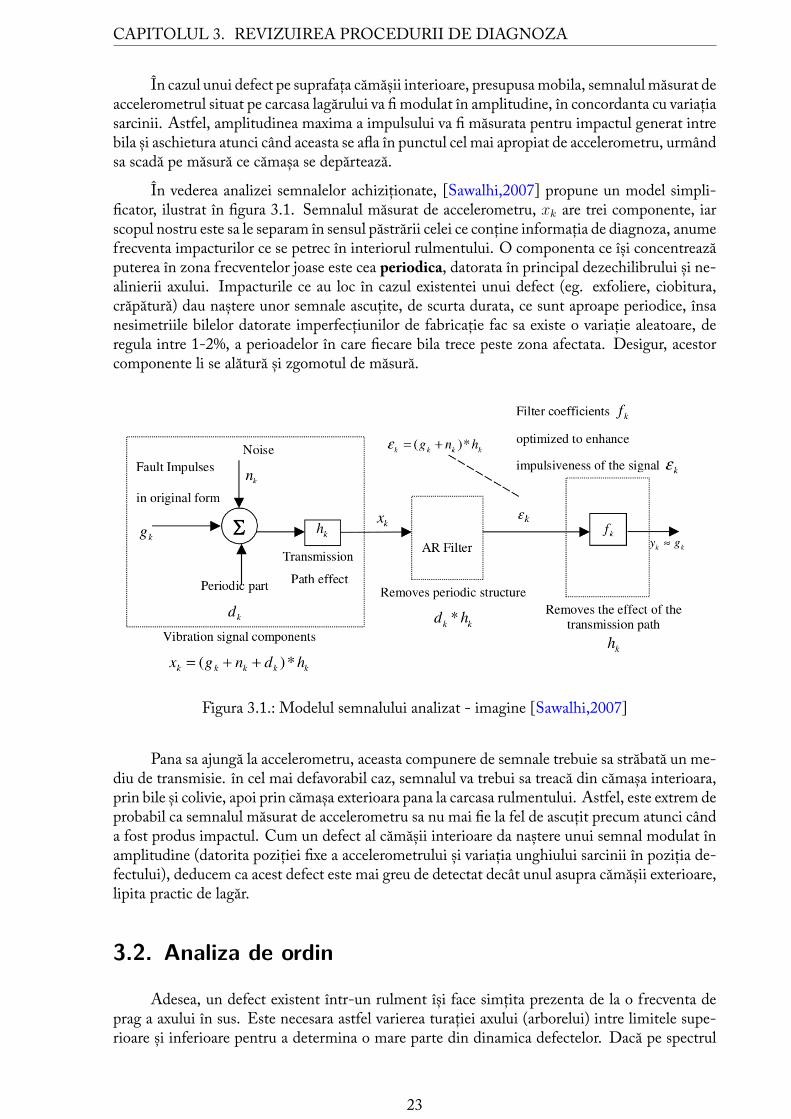
În vederea analizei semnalelor achiziționate, [Sawalhi,2007] propune un model simpli-ficator, ilustrat în figura 3.1. Semnalul măsurat de accelerometru, xk are trei componente, iarscopul nostru este sa le separam în sensul păstrării celei ce conține informația de diagnoza, anumefrecventa impacturilor ce se petrec în interiorul rulmentului. O componenta ce își concentreazăputerea în zona frecventelor joase este cea periodica, datorata în principal dezechilibrului și ne-alinierii axului. Impacturile ce au loc în cazul existentei unui defect (eg. exfoliere, ciobitura,crăpătură) dau naștere unor semnale ascuțite, de scurta durata, ce sunt aproape periodice, însanesimetriile bilelor datorate imperfecțiunilor de fabricație fac sa existe o variație aleatoare, deregula intre 1-2%, a perioadelor în care fiecare bila trece peste zona afectata. Desigur, acestorcomponente li se alătură și zgomotul de măsură.
Figura 3.1.: Modelul semnalului analizat - imagine [Sawalhi,2007]
Pana sa ajungă la accelerometru, aceasta compunere de semnale trebuie sa străbată un me-diu de transmisie. în cel mai defavorabil caz, semnalul va trebui sa treacă din cămașa interioara,prin bile și colivie, apoi prin cămașa exterioara pana la carcasa rulmentului. Astfel, este extrem deprobabil ca semnalul măsurat de accelerometru sa nu mai fie la fel de ascuțit precum atunci cânda fost produs impactul. Cum un defect al cămășii interioare da naștere unui semnal modulat înamplitudine (datorita poziției fixe a accelerometrului și variația unghiului sarcinii în poziția de-fectului), deducem ca acest defect este mai greu de detectat decât unul asupra cămășii exterioare,lipita practic de lagăr.
3.2. Analiza de ordin
Adesea, un defect existent într-un rulment își face simțita prezenta de la o frecventa deprag a axului în sus. Este necesara astfel varierea turației axului (arborelui) intre limitele supe-rioare și inferioare pentru a determina o mare parte din dinamica defectelor. Dacă pe spectrul
23
3.2. ANALIZA DE ORDIN
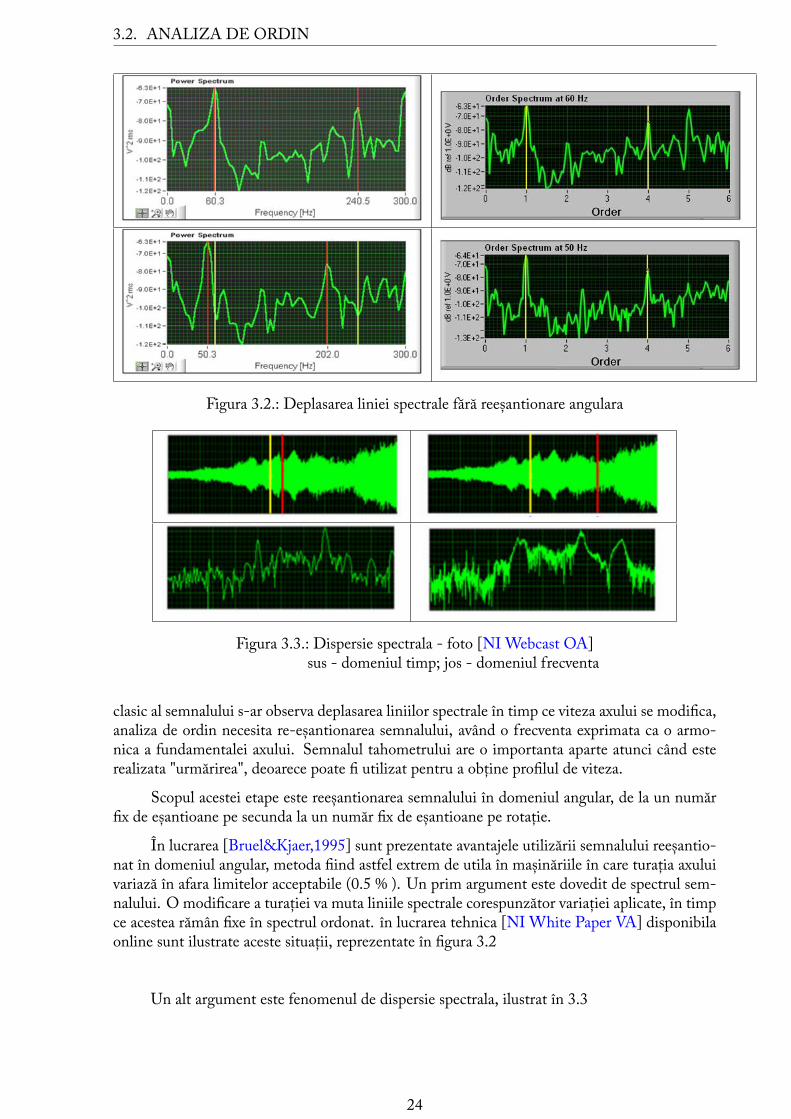
Figura 3.2.: Deplasarea liniei spectrale fără reeșantionare angulara
Figura 3.3.: Dispersie spectrala - foto [NI Webcast OA]sus - domeniul timp; jos - domeniul frecventa
clasic al semnalului s-ar observa deplasarea liniilor spectrale în timp ce viteza axului se modifica,analiza de ordin necesita re-eșantionarea semnalului, având o frecventa exprimata ca o armo-nica a fundamentalei axului. Semnalul tahometrului are o importanta aparte atunci când esterealizata "urmărirea", deoarece poate fi utilizat pentru a obține profilul de viteza.
Scopul acestei etape este reeșantionarea semnalului în domeniul angular, de la un numărfix de eșantioane pe secunda la un număr fix de eșantioane pe rotație.
În lucrarea [Bruel&Kjaer,1995] sunt prezentate avantajele utilizării semnalului reeșantio-nat în domeniul angular, metoda fiind astfel extrem de utila în mașinăriile în care turația axuluivariază în afara limitelor acceptabile (0.5 % ). Un prim argument este dovedit de spectrul sem-nalului. O modificare a turației va muta liniile spectrale corespunzător variației aplicate, în timpce acestea rămân fixe în spectrul ordonat. în lucrarea tehnica [NI White Paper VA] disponibilaonline sunt ilustrate aceste situații, reprezentate în figura 3.2
Un alt argument este fenomenul de dispersie spectrala, ilustrat în 3.3
24

CAPITOLUL 3. REVIZUIREA PROCEDURII DE DIAGNOZA
3.3. Predicția liniară
Semnalele măsurate de accelerometre au atât componente staționare, cat și componentenestaționare. Cum informația de diagnoza se regăsește doar în semnalele produse în urma im-pacturilor, de tip ciclostationar, este utila eliminarea componentelor periodice sau cvasi-periodicedatorate celorlalte elemente ale structurii mecanice. Exemple de semnale periodice pot fi celerezultate în urma unor probleme ale axului (nealiniere, îndoire, dezechilibru) sau a impacturilordin rotile dințate (care, de aceasta data, nu mai manifesta alunecarea aleatorie specifica rulmen-ților, deci produc semnale deterministe).
Predicția liniara poate fi realizata cu ajutorul unui filtru AR, a cărui funcție de transferconține doar poli, fiind de tip IIR (cu răspuns infinit la impuls) și necesitând o lungime mairedusa decât a filtrelor FIR în cazul semnalelor ascuțite. Un experiment interesant este alegereaordinului filtrului, unde poate fi utilizat, de exemplu, criteriul informațional Akaike (AIC).
Un proces AR este definit prin ecuația 3.1, unde x̂(n) este eșantionul predictat de filtrupentru semnalul măsurat x, iar a(k) sunt coeficienții filtrului.
x̂(n) =L∑
k=1
a(k)x(n− k) (3.1)
Estimarea parametrilor AR poate fi realizata rezolvând ecuațiile Yule-Walker:
rxx[k] +
p∑l=1
a[l]rxx[k − l] = |b[0]2|δ[k], k ≥ 0 (3.2)
unde b[0]2 este varianta zgomotului alb.
rxx[0] rxx[−1] · · · rxx[p− 1]rxx[1] rxx[0] · · · rxx[−p+ 2]
... ... . . . ...rxx[p− 1] rxx[p− 2] · · · rxx[0]
·
a[1]a[2]...
a[p]
=
rxx[1]rxx[2]
...rxx[p]
(3.3)
r̂xx[k] =1
N
N−1∑n=0
x[n]x[n− k] (3.4)
Ometoda uzuala pentru rezolvarea acestor ecuații este algoritmul recursiv Levinson-Durbin,ce sta la baza funcției aryule din Matlab.
Deoarece acest filtru poate fi utilizat pentru predicția părții deterministe ale semnalului,aceasta poate fi substrasa din măsurătoare, separând-o astfel de impulsurile cauzate de posibileledefecte și de zgomot.
3.4. Deconvoluția de entropie minima
Vrem sa pregătim terenul pentru următorul pas, astfel ca, înainte de aplicarea TFS (Trans-formarea Fourier Scurta - engl STFT), vom dori ca orice funcție de răspuns la impuls cauzatade un defect sa fie cat mai ascuțită posibil.
25

3.4. DECONVOLUȚIA DE ENTROPIE MINIMA
Putem asuma faptul ca semnalul original a fost într-adevăr impulsiv, iar mediul de trans-misie a cauzat lățirea acestuia. Astfel, este necesara o metoda pentru a anula efectul caii detransmise. Impacturile inițiale din cămașa interioara, de exemplu, au cauzat răspunsuri ascuțite,dar semnalul a călătorit pana la accelerometru prin bile, colivie, cămașa exterioara și lagăr, astfelca a ajuns distorsionat.
MED a fost introdusa pentru prima data de Ralph Wiggins pentru extragerea detaliata ainformației de reflectivitate din măsurătorile seismice, utilizata la localizarea straturilor de mi-nerale subterane [Wiggins,1978].
Scopul deconvolutiei de entropie minima este determinarea adaptiva a unui filtru care sainverseze efectul caii de transmisie, minimizând entropia semnalului de la ieșirea sa (de undeși numele metodei). Entropia mare este asociata unui grad ridicat de dezordin al semnalului,adică de exces scăzut (aproape de cel gaussian), deci condiția este echivalenta cu maximizareaexcesului ieșirii, semnalul fiind mai structurat (impulsiv).
În [Endo,Randall,2006] este prezentat algoritmul care sta la baza deconvolutiei de entropieminima, împreuna cu rezultatele aplicării acestuia pentru detecția exfolierilor și a crăpăturilor dinrotile dințate.
Criteriul ce trebuie maximizat este excesul ieșirii filtrului:
J(f [l]) =
∑Nn=1 y
4[n][∑Nn=1 y
2[n]]2 (3.5)
Reprezentând ieșirea ca o convoluție intre semnalul filtrat la pasul anterior, notat e1 șicoeficienții filtrului MED, obținem:
y[n] =L∑l=0
f [l]e1[n− l] (3.6)
Filtrul MED ideal este cel pentru care derivata criteriului selectat se anulează (criteriul numai variază cu coeficienții filtrului), adică:
∂J(f [l])
∂f [l]= 0 (3.7)
Din ecuația 3.6 rezulta ca
∂y[n]
∂f [n]= e1[n− l] (3.8)
Introducând în ecuația 3.7 relațiile 3.8 și 3.6, rezulta
4N∑
n=1
y3[n] · ∂y[n]∂f [n]
·
(N∑
n=1
y2[n]
)2
−N∑
n=1
y4[n] · 2N∑
n=1
y2[n] · 2N∑
n=1
y[n]∂y[n]
∂f [n]= 0 (3.9)
26

CAPITOLUL 3. REVIZUIREA PROCEDURII DE DIAGNOZA
(am ignorat scrierea numitorului, deoarece acesta este finit). Atunci:
4
(N∑
n=1
y2[n]
)2
·N∑
n=1
y3[n] · e1[n− l] = 4N∑
n=1
y4[n] ·N∑
n=1
y2[n] ·N∑
n=1
y[n] · e1[n− l] (3.10)
(∑Nn=1 y
2[n])2
∑Nn=1 y
4[n] ·∑N
n=1 y2[n]
·N∑
n=1
y3[n] · e1[n− l] =N∑
n=1
y[n] · e1[n− l] (3.11)
∑Nn=1 y
2[n]∑Nn=1 y
4[n]·
N∑n=1
y3[n] · e1[n− l] =N∑
n=1
e1[n− l] ·L∑
p=1
f [p] · e1[n− p] (3.12)
=L∑
p=1
f [p] ·N∑
n=1
e1[n− l]e1[n− p] (3.13)
[∑Nn=1 y
2[n]∑Nn=1 y
4[n]
]N∑
n=1
y3[n]e1[n− l]︸ ︷︷ ︸b
=L∑
p=1
f [p]︸ ︷︷ ︸f
N∑n=1
e1[n− l]e1[n− p]︸ ︷︷ ︸A
(3.14)
Putem rescrie aceasta ecuație sub forma matriceala:
b = Af (3.15)
de unde vor rezulta coeficienții filtrului:
f = A−1 · b (3.16)
Kurtosis
Kurtosis, sau indicele de aplatizare / boltire, reprezinta un parametru statistic, definit pebaza momentului al patrulea al unui semnal (prin moment înțelegând media statistica a sem-nalului, ridicat la puterea specificata de ordin). Ridicând la puterea a patra fiecare eșantion,remarcam faptul ca acest parametru ponderează mai mult eșantioanele de valori mari, fiind ast-fel un indicator al ascuțimii semnalului. Momentul al patrulea este normat, prin împărțire lapătratul momentului al doilea, numit și varianță, și sustragere a unei constante (de obicei 2 sau3), pentru a obține o valoare nula în cadrul semnalelor gaussiene, considerate de dezordin mare.
Prin definiție, excesul unui semnal y[n] este dat de:
K(y) =E{y4[n]}E{y2[n]}2
(3.17)
unde E{·} este operatorul de mediere.
În forma explicita,
27
3.5. KURTOSIS SPECTRAL ȘI KURTOGRAMA
K(y) =(1/N)
∑Ni=1 (y(i)− y)4(
(1/N)∑N
i=1 (y(i)− y)2)2 (3.18)
iar
y = (1/N)N∑i=1
y(i) (3.19)
3.5. Kurtosis Spectral și Kurtograma
Analiza anvelopei este o metoda performanta pentru diagnoza defectelor rulmenților, alcărei succes depinde în schimb de o buna condiționare a semnalului.
Deoarece impulsurile cauzate de defecte excita frecventele de rezonanta ale rulmentului,este preferata analiza anvelopei semnalului doar pentru unele benzi, în care partea impulsiva estedominanta, iar perturbațiile cauzate de ansamblul mecanic, de obicei concentrate în zona defrecvente joase, sunt atenuate.
Pentru a avea un indiciu asupra benzii de impulsivitate maxima din semnal, care ar oferiinformații mai relevante despre frecventele caracteristice ale defectelor, vom aplica proceduraSK (Spectral Kurtosis). La baza acesteia sta Transformarea Fourier Scurta (engl. STFT - ShortTime Fourier Transform), reprezentând Transformarea Fourier Discreta aplicata unor segmentedin semnal, obținute prin multiplicarea acestuia cu o fereastra scurta. Spectrele obținute suntintroduse într-o diagrama timp-frecventa, iar pentru fiecare linie spectrala se construiește sem-nalul de-a lungul axei timpului, pentru care se calculează excesul acestuia. Reprezentarea graficaexces - frecventa poarta astfel numele de exces spectral. În principiu, excesul spectral este zeroîn benzile de frecventa în care este prezent doar zgomotul gaussian, și are valori mari în benzileîn care își fac apariția impulsurile defectelor.
Fereastra aplicata trebuie sa fie suficient de lata pentru a cuprinde impulsurile căutate,dar mai scurta decât distanta dintre doua impulsuri succesive. în [Sawalhi,2004], procedura delucru pentru determinarea lungimii ferestrei optime este una experimentala, fiind realizate maimulte alegeri și analize comparative. Se constata ca dimensiuni mari ale ferestrei duc la scădereaexcesului spectral, în timp ce dimensiunile mici nu oferă o rezoluție suficienta.
Același lucru este susținut și în [Antoni,Randall,2006]. în plus, sunt realizate câteva co-mentarii referitor la variațiile excesului:
• SK scade odată cu creșterea vitezei de rotație
• SK creste odată cu frecventa de eșantionare
• SK scade odată cu lungimea ferestrei
• SK creste odată cu intensitatea fluctuațiilor din amplitudinea impulsurilor
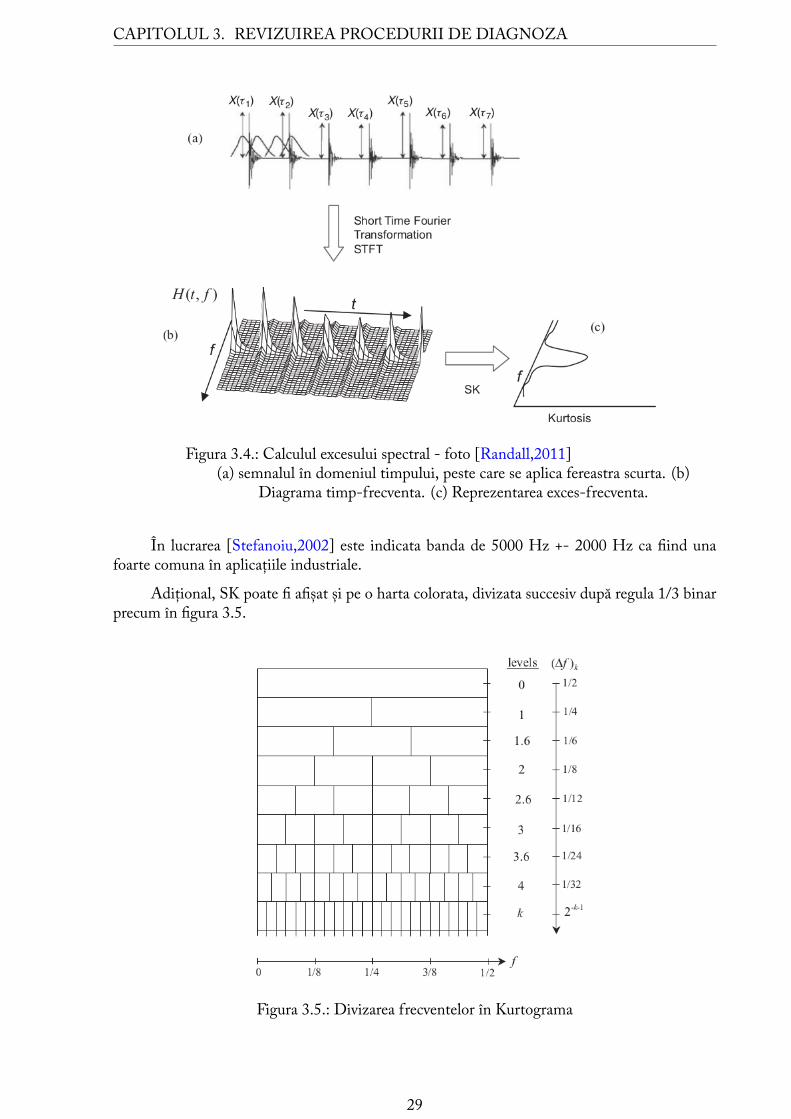
În figura 3.4 este ilustrata procedura de calcul a excesului spectral.
28
CAPITOLUL 3. REVIZUIREA PROCEDURII DE DIAGNOZA
Figura 3.4.: Calculul excesului spectral - foto [Randall,2011](a) semnalul în domeniul timpului, peste care se aplica fereastra scurta. (b)
Diagrama timp-frecventa. (c) Reprezentarea exces-frecventa.
În lucrarea [Stefanoiu,2002] este indicata banda de 5000 Hz +- 2000 Hz ca fiind unafoarte comuna în aplicațiile industriale.
Adițional, SK poate fi afișat și pe o harta colorata, divizata succesiv după regula 1/3 binarprecum în figura 3.5.
Figura 3.5.: Divizarea frecventelor în Kurtograma
29
3.6. ANALIZA ANVELOPEI
3.6. Analiza Anvelopei
Ajungând la ultimul pas al procedurii, utilizam banda aleasa anterior, iar în urma demo-dulării și filtrării determinam anvelopa semnalului, în spectrul căreia ar trebui sa se regăseascăinformații despre frecventele discrete căutate inițial. Dacă le vom identifica, atunci le vom pu-tea compara cu frecventele caracteristice ale rulmentului pentru a trage o concluzie referitoarela defectul singular sau multiplu pe care rulmentul l-ar putea avea. Amplitudinea acestor liniispectrale reprezinta un indicator cheie pentru predictarea timpului rămas pana la următoareamentenanță.
Analiza anvelopei, sau anveloparea, profita de natura impulsiva a semnalului cauzat dedefect, acesta având energia distribuita pe o gama larga de frecvente datorita rezonantelor rul-mentului. Celelalte elemente din semnalul măsurat se situează în zona de frecvente joase, fiindastfel avantajoasa diminuarea efectului acestora prin alegerea corespunzătoare a unui filtru trece-banda centrat pe zona impulsiva.
Succesul acestei metode depinde în mod evident de banda aleasa, specificata prin frecventacentrala, fc și lățimea benzii, fbw.
În [BeMeKi,2011], analiza anvelopei este prezentata ca o metoda de demodulare a rezo-nantelor de la frecventele înalte, asociate impacturilor din rulmenți. Indiferent de modelul deanaliza folosit, principiul este același: când bilele din rulment lovesc un defect (ciobitura, cră-pătură, așchiere etc.), se produc impacturi, care modulează semnalul determinist la frecventelecaracteristice ale rulmentului, amintite în ecuațiile 2.5, rezultând astfel o modulare în amplitu-dine a frecventei rezonante.
Deoarece la frecvente joase este foarte probabil sa întâlnim interferente cauzate de alteelemente din ansamblul mecanic, preferam sa realizam analiza la frecvente înalte, ideal în jurulcelei de rezonanta a rulmentului. în [Yugoslavs,2012], dezechilibrul și nealinierea axului suntasociate defectelor de joasa frecventa, ce ar putea masca un defect real al rulmentului dacă acestearămân nefiltrate.
Scopul analizei anvelopei este identificarea frecventelor caracteristice din ecuațiile 2.5 alerulmentului pe spectrul anvelopei semnalului măsurat și filtrat, conducând astfel la diagnozadefectelor acestuia. Având la dispoziție rata de repetiție a unui defect, putem conclude asupralocalizării acestuia (de exemplu în cămașa interioara, în cea exterioara, sau în bile).
Tradițional, anveloparea consta doar în filtrarea în banda aleasa, unde impulsurile sunt am-plificate de rezonantele structurale, și demodularea semnalului rezultat (prin rectificare), pentrua obține anvelopa acestuia, al cărei spectru conține informația de diagnoza căutata.
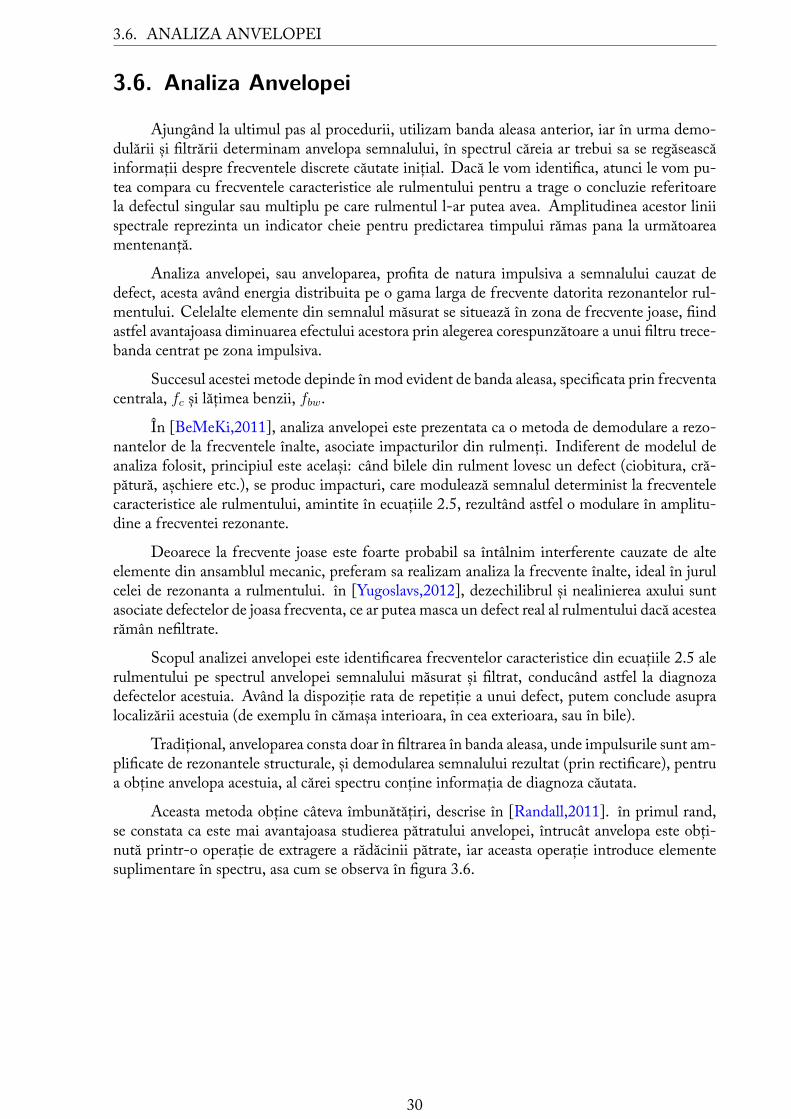
Aceasta metoda obține câteva îmbunătățiri, descrise în [Randall,2011]. în primul rand,se constata ca este mai avantajoasa studierea pătratului anvelopei, întrucât anvelopa este obți-nută printr-o operație de extragere a rădăcinii pătrate, iar aceasta operație introduce elementesuplimentare în spectru, asa cum se observa în figura 3.6.
30
CAPITOLUL 3. REVIZUIREA PROCEDURII DE DIAGNOZA
Figura 3.6.: Avantajele studierii pătratului anvelopei - imagine [Randall,2011]
În al doilea rand, este propusa studierea anvelopei semnalului analitic, obținut prin com-punerea părții reale ale sale cu cea imaginara, aceasta din urma fiind determinata cu ajutorulTransformării Hilbert. Semnalul analitic are un spectru unilateral, iar avantajele acestei propri-etăți în calculul spectrului pătratului anvelopei au fost discutate în secțiunea 3.6.1.
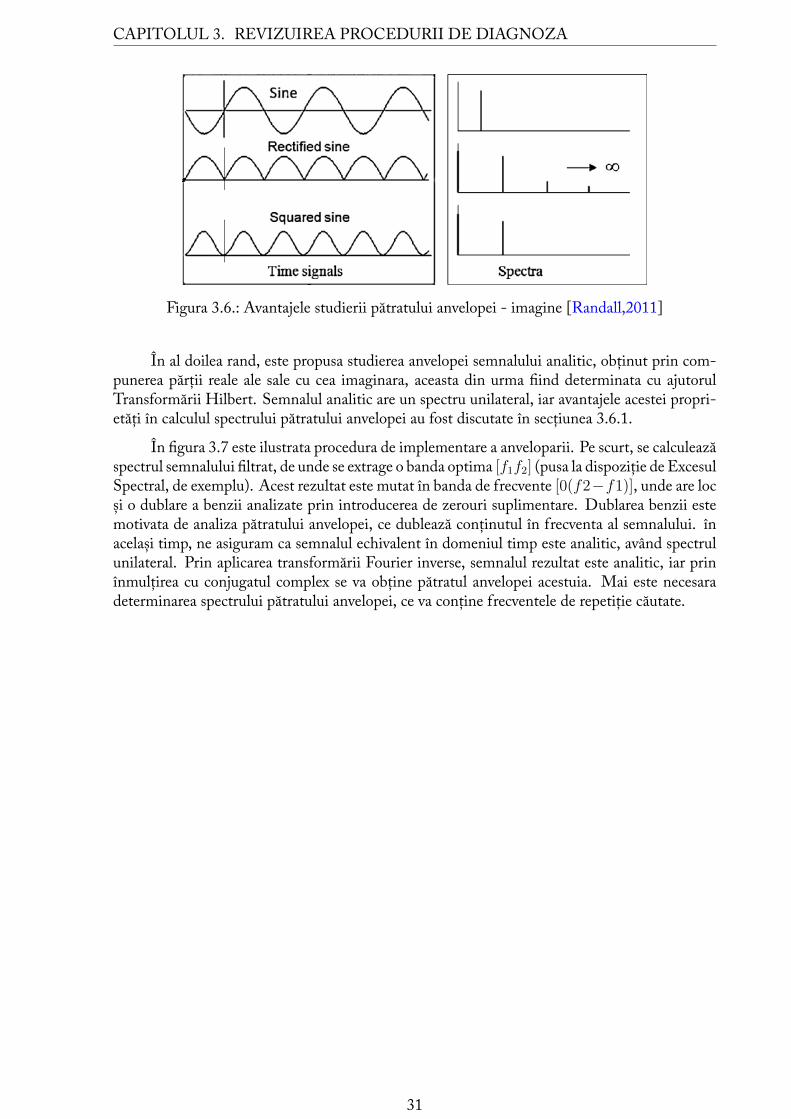
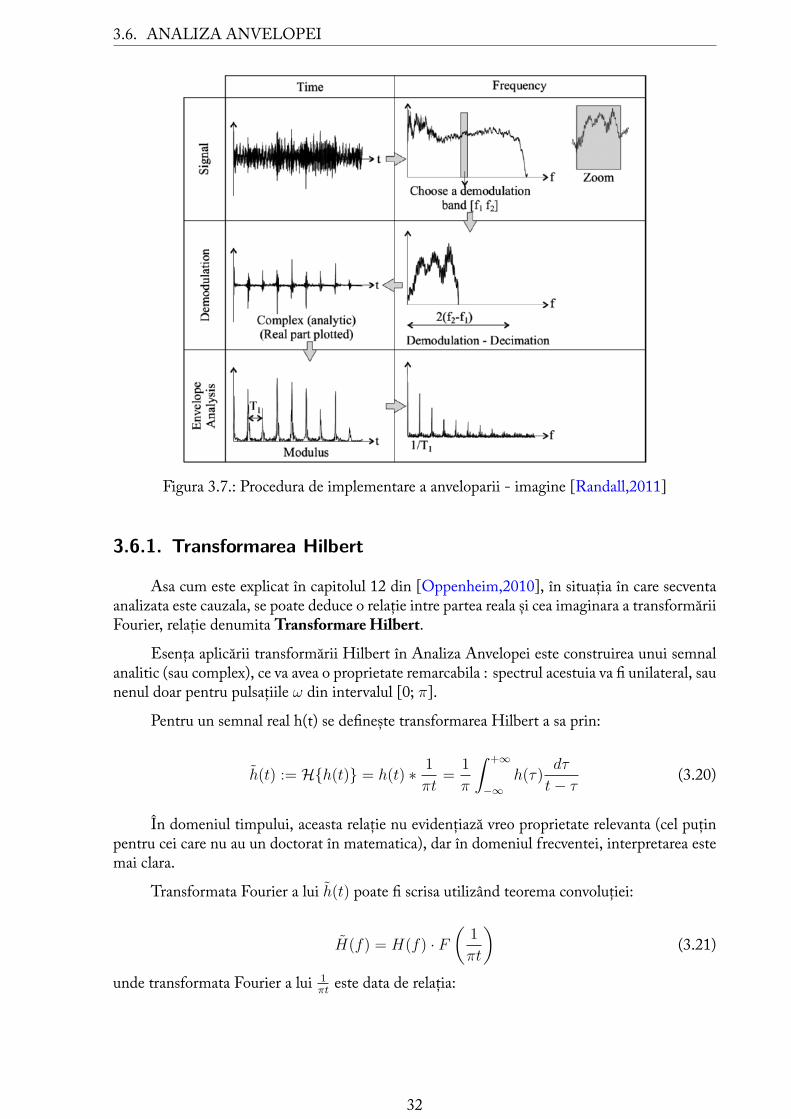
În figura 3.7 este ilustrata procedura de implementare a anveloparii. Pe scurt, se calculeazăspectrul semnalului filtrat, de unde se extrage o banda optima [f1f2] (pusa la dispoziție de ExcesulSpectral, de exemplu). Acest rezultat este mutat în banda de frecvente [0(f2−f1)], unde are locși o dublare a benzii analizate prin introducerea de zerouri suplimentare. Dublarea benzii estemotivata de analiza pătratului anvelopei, ce dublează conținutul în frecventa al semnalului. înacelași timp, ne asiguram ca semnalul echivalent în domeniul timp este analitic, având spectrulunilateral. Prin aplicarea transformării Fourier inverse, semnalul rezultat este analitic, iar prinînmulțirea cu conjugatul complex se va obține pătratul anvelopei acestuia. Mai este necesaradeterminarea spectrului pătratului anvelopei, ce va conține frecventele de repetiție căutate.
31
3.6. ANALIZA ANVELOPEI
Figura 3.7.: Procedura de implementare a anveloparii - imagine [Randall,2011]
3.6.1. Transformarea Hilbert
Asa cum este explicat în capitolul 12 din [Oppenheim,2010], în situația în care secventaanalizata este cauzala, se poate deduce o relație intre partea reala și cea imaginara a transformăriiFourier, relație denumita Transformare Hilbert.
Esența aplicării transformării Hilbert în Analiza Anvelopei este construirea unui semnalanalitic (sau complex), ce va avea o proprietate remarcabila : spectrul acestuia va fi unilateral, saunenul doar pentru pulsațiile ω din intervalul [0; π].
Pentru un semnal real h(t) se definește transformarea Hilbert a sa prin:
h̃(t) := H{h(t)} = h(t) ∗ 1
πt=
1
π
∫ +∞
−∞h(τ)
dτ
t− τ(3.20)
În domeniul timpului, aceasta relație nu evidențiază vreo proprietate relevanta (cel puținpentru cei care nu au un doctorat în matematica), dar în domeniul frecventei, interpretarea estemai clara.
Transformata Fourier a lui h̃(t) poate fi scrisa utilizând teorema convoluției:
H̃(f) = H(f) · F(
1
πt
)(3.21)
unde transformata Fourier a lui 1πt
este data de relația:
32
CAPITOLUL 3. REVIZUIREA PROCEDURII DE DIAGNOZA
F
(1
πt
)= −j · sign(f) =
−j f > 0
0 f = 0
j f < 0
(3.22)
iar H(f ) reprezinta transformata Fourier a lui h(t).
Astfel, transformarea Hilbert poate fi privita în domeniul frecventei ca un filtru ce păs-trează amplitudinea semnalului intacta, dar modifica faza cu ±90◦ , în funcție de semnul luif.
Spectrul semnalului analitic se va scrie astfel:
F (hc(t)) = H(f) + j · H̃(f) = H(f) + j ·H(f) · F(
1
πt
)(3.23)
=
2H(f) f > 0
H(f) f = 0
0 f < 0
(3.24)
Trebuie remarcat faptul ca spectrul semnalului analitic este 0 pentru frecvente negative.Mai jos vor fi ilustrate avantajele utilizării unui astfel de semnal cu spectru unilateral.
Semnalul analitic (complex) rezultat va fi scris sub forma:
hc(t) = h(t) + j · h̃(t) (3.25)
sau, în coordonate polare:
hc(t) = A(t) · ejϕ(t) (3.26)
Vom numi A(t) anvelopa semnalului, iar aceasta poate fi extrasa calculând modulul sem-nalului complex hc(t). în [Randall,2011] se recomanda analiza pătratului anvelopei, deoareceoperația de extragere a rădăcinii pătrate introduce elemente suplimentare în spectrul acesteia.
Astfel, pătratul anvelopei semnalului analitic va fi produsul dintrehc(t) și complex-conjugatulsau:
A2(t) = hc(t) · h⋆c(t) (3.27)
iar în domeniul frecventei, conform teoremei convoluției:
F{A2(t)} = F{hc(t)} ⋆ F{h⋆c(t)} = Fhc(f) ⋆ F
⋆hc(−f) (3.28)
unde în ultima parte a relației a fost utilizata proprietatea de conjugare complexa a transformateiFourier.
Avantajele utilizării unui spectru unilateral sunt ilustrate în figura 3.8: în spectrul anvelopeisemnalului analitic (a) vor apărea doar frecventele diferență, ce conțin informația utila (decalajulbenzilor laterale).
33
3.6. ANALIZA ANVELOPEI
Figura 3.8.: Avantajele semnalelor analitice. Foto [Randall,2011]
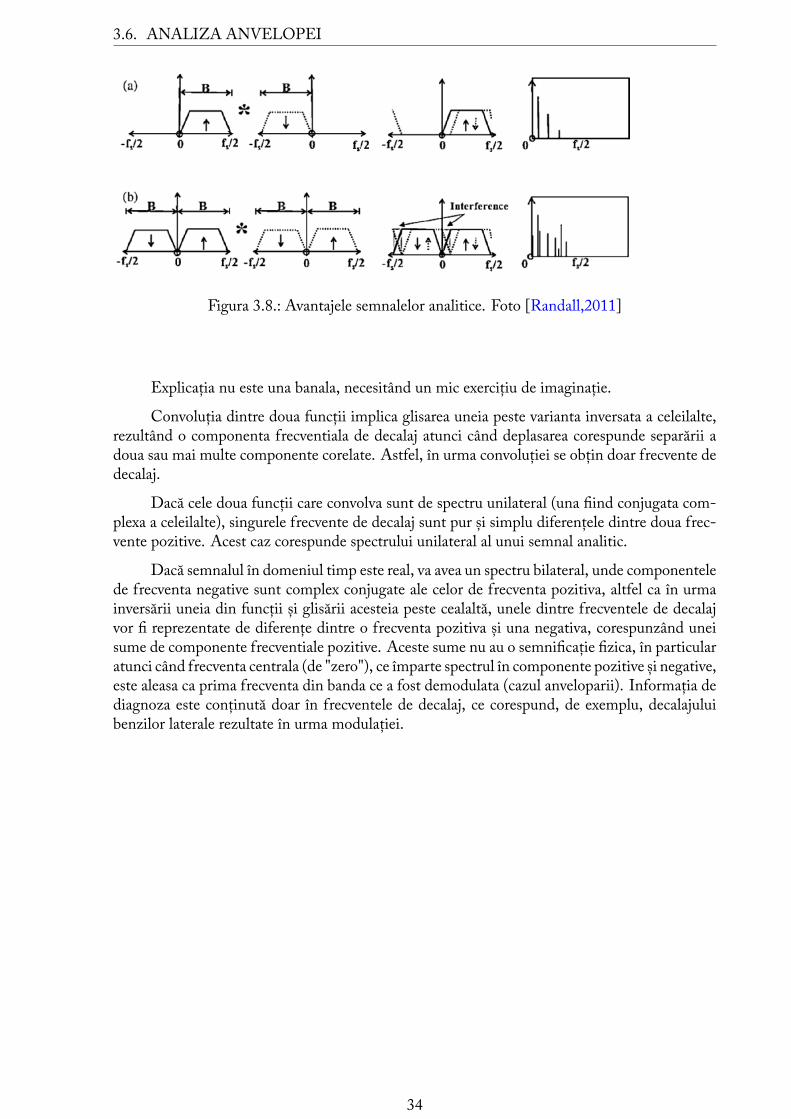
Explicația nu este una banala, necesitând un mic exercițiu de imaginație.
Convoluția dintre doua funcții implica glisarea uneia peste varianta inversata a celeilalte,rezultând o componenta frecventiala de decalaj atunci când deplasarea corespunde separării adoua sau mai multe componente corelate. Astfel, în urma convoluției se obțin doar frecvente dedecalaj.
Dacă cele doua funcții care convolva sunt de spectru unilateral (una fiind conjugata com-plexa a celeilalte), singurele frecvente de decalaj sunt pur și simplu diferențele dintre doua frec-vente pozitive. Acest caz corespunde spectrului unilateral al unui semnal analitic.
Dacă semnalul în domeniul timp este real, va avea un spectru bilateral, unde componentelede frecventa negative sunt complex conjugate ale celor de frecventa pozitiva, altfel ca în urmainversării uneia din funcții și glisării acesteia peste cealaltă, unele dintre frecventele de decalajvor fi reprezentate de diferențe dintre o frecventa pozitiva și una negativa, corespunzând uneisume de componente frecventiale pozitive. Aceste sume nu au o semnificație fizica, în particularatunci când frecventa centrala (de "zero"), ce împarte spectrul în componente pozitive și negative,este aleasa ca prima frecventa din banda ce a fost demodulata (cazul anveloparii). Informația dediagnoza este conținută doar în frecventele de decalaj, ce corespund, de exemplu, decalajuluibenzilor laterale rezultate în urma modulației.
34
4.
Rezultate
Achiziția datelor a fost realizată la frecvența de eșantionare de 25.6 KHz, așa cum estesugerat în [Stefanoiu,2002], banda [0-12.8 KHz] fiind suficientă pentru identificarea oricăruidefect posibil.
Măsurătorile au fost realizate în intervalul [10-26 Hz] (cu pas de incrementare de un Hz)corespunzând unor turații ale motorului în gama [600 - 1560 rpm]. Vom utiliza măsurătorilecorespunzătoare turației 1200 rpm (20 Hz) pentru a exemplifica procedura descrisă.
Pentru o mai bună analiză comparativă pe rezultatele anvelopării am utilizat doua seturide rulmenți, unul nou de la NSK și unul uzat, de la CMB. Cronologic au fost testați mai întâirulmenții buni, în continuare fiind prezentate rezultatele procedurii.
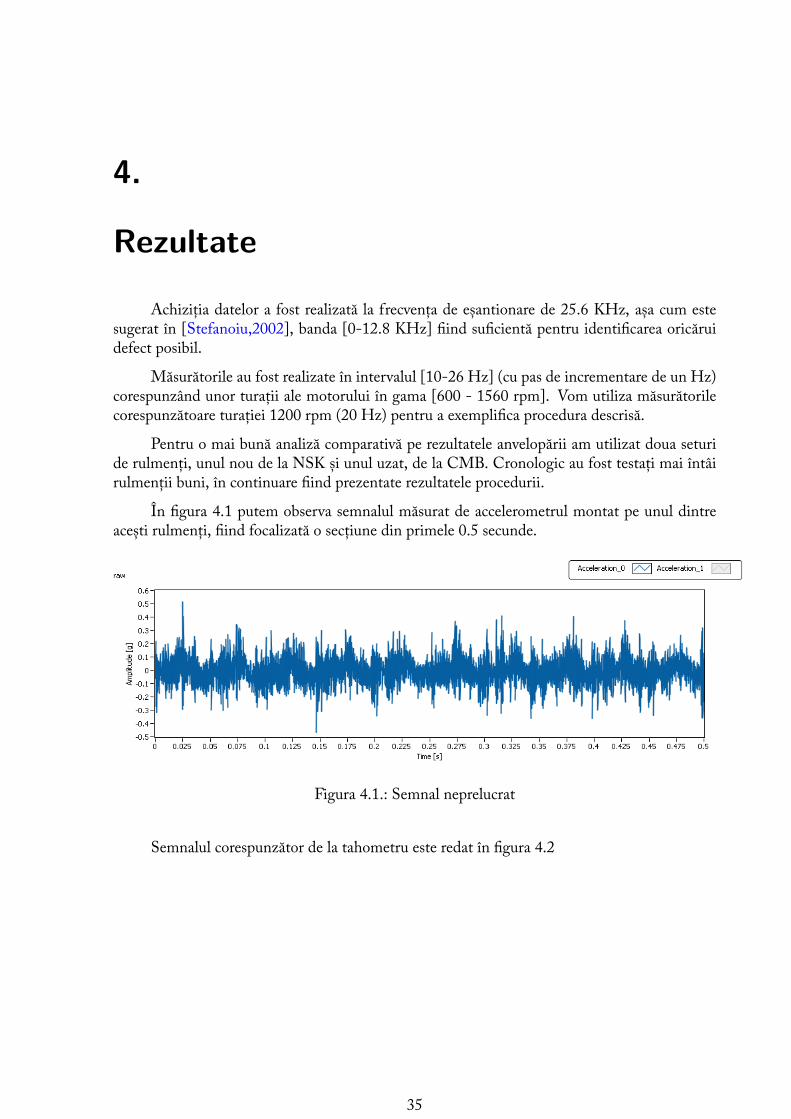
În figura 4.1 putem observa semnalul măsurat de accelerometrul montat pe unul dintreacești rulmenți, fiind focalizată o secțiune din primele 0.5 secunde.
Figura 4.1.: Semnal neprelucrat
Semnalul corespunzător de la tahometru este redat în figura 4.2
35
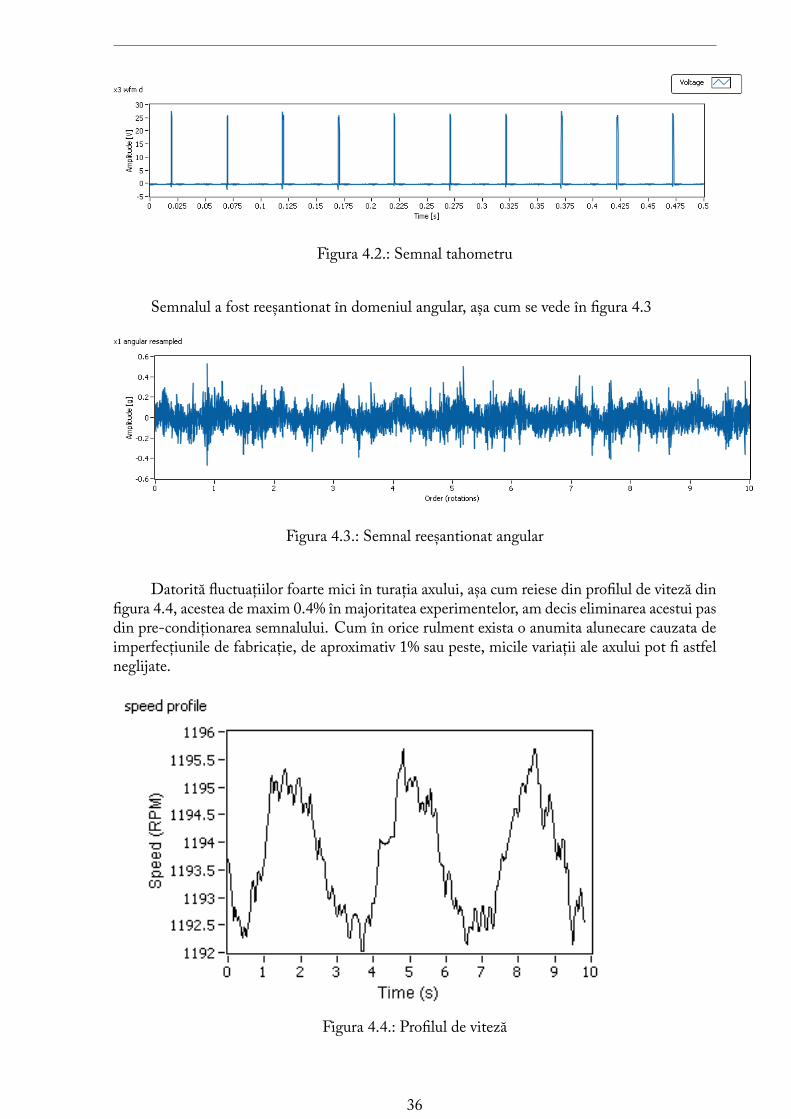
Figura 4.2.: Semnal tahometru
Semnalul a fost reeșantionat în domeniul angular, așa cum se vede în figura 4.3
Figura 4.3.: Semnal reeșantionat angular
Datorită fluctuațiilor foarte mici în turația axului, așa cum reiese din profilul de viteză dinfigura 4.4, acestea de maxim 0.4% în majoritatea experimentelor, am decis eliminarea acestui pasdin pre-condiționarea semnalului. Cum în orice rulment exista o anumita alunecare cauzata deimperfecțiunile de fabricație, de aproximativ 1% sau peste, micile variații ale axului pot fi astfelneglijate.
Figura 4.4.: Profilul de viteză
36
CAPITOLUL 4. REZULTATE
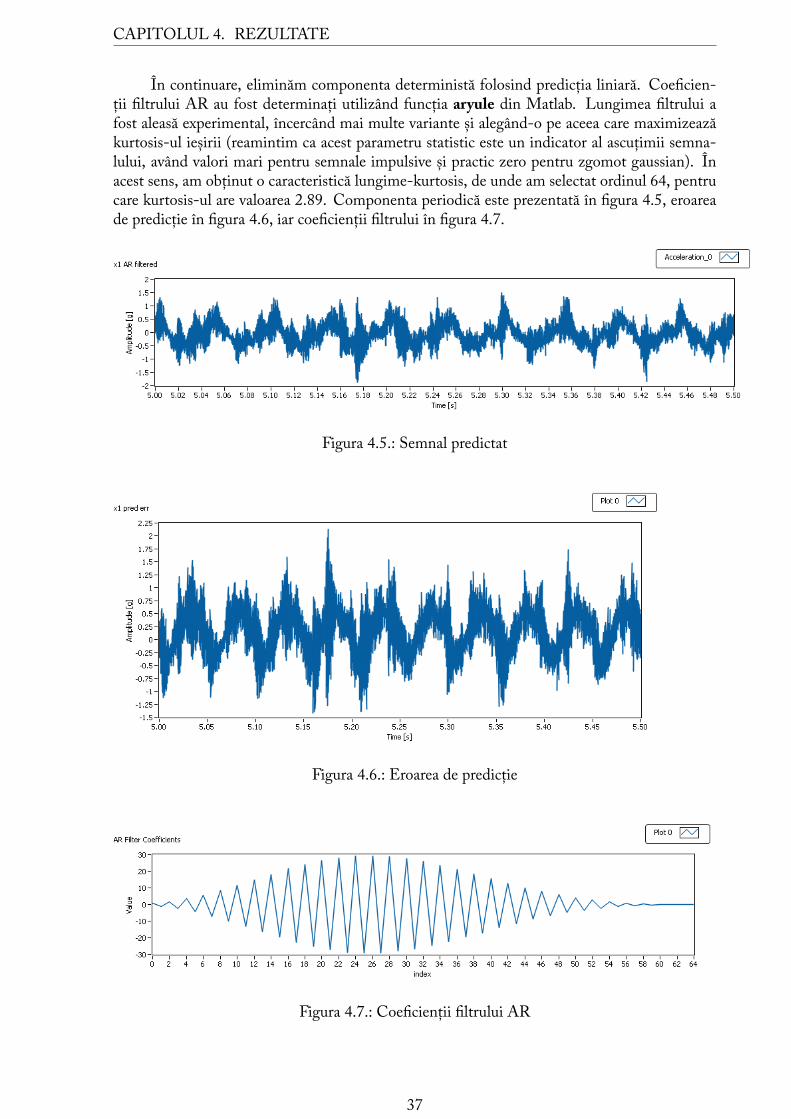
În continuare, eliminăm componenta deterministă folosind predicția liniară. Coeficien-ții filtrului AR au fost determinați utilizând funcția aryule din Matlab. Lungimea filtrului afost aleasă experimental, încercând mai multe variante și alegând-o pe aceea care maximizeazăkurtosis-ul ieșirii (reamintim ca acest parametru statistic este un indicator al ascuțimii semna-lului, având valori mari pentru semnale impulsive și practic zero pentru zgomot gaussian). Înacest sens, am obținut o caracteristică lungime-kurtosis, de unde am selectat ordinul 64, pentrucare kurtosis-ul are valoarea 2.89. Componenta periodică este prezentată în figura 4.5, eroareade predicție în figura 4.6, iar coeficienții filtrului în figura 4.7.
Figura 4.5.: Semnal predictat
Figura 4.6.: Eroarea de predicție
Figura 4.7.: Coeficienții filtrului AR
37
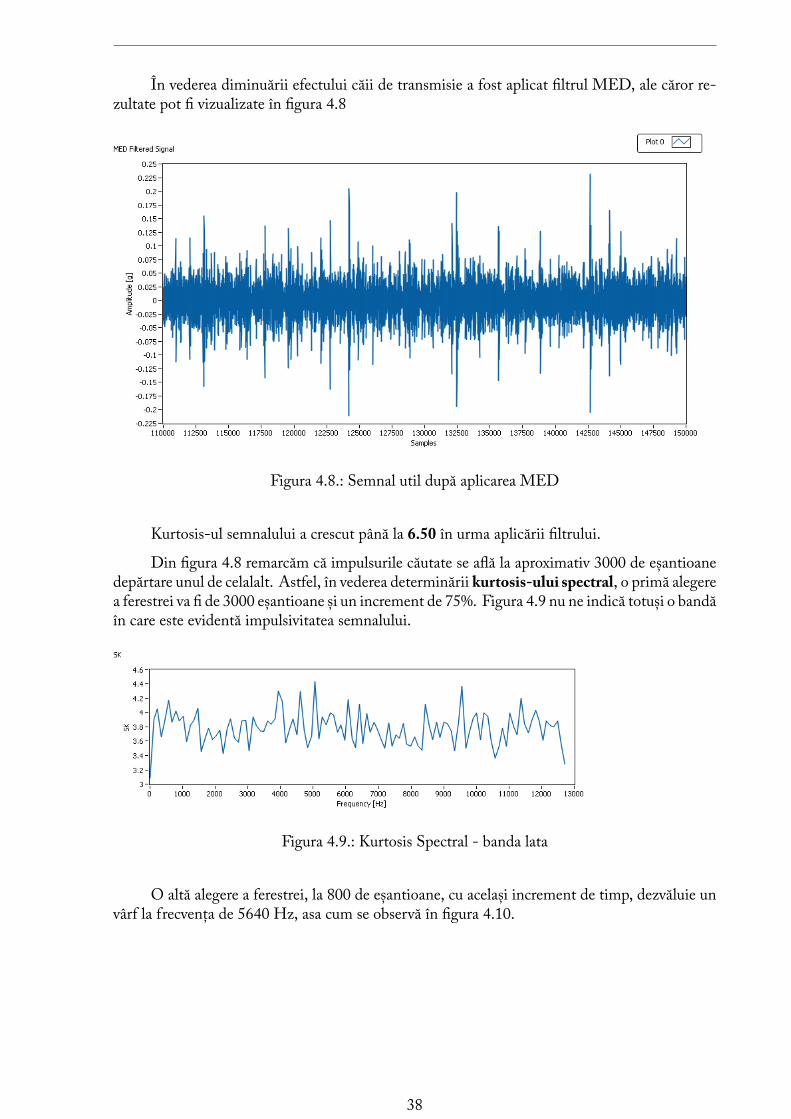
În vederea diminuării efectului căii de transmisie a fost aplicat filtrul MED, ale căror re-zultate pot fi vizualizate în figura 4.8
Figura 4.8.: Semnal util după aplicarea MED
Kurtosis-ul semnalului a crescut până la 6.50 în urma aplicării filtrului.
Din figura 4.8 remarcăm că impulsurile căutate se află la aproximativ 3000 de eșantioanedepărtare unul de celalalt. Astfel, în vederea determinării kurtosis-ului spectral, o primă alegerea ferestrei va fi de 3000 eșantioane și un increment de 75%. Figura 4.9 nu ne indică totuși o bandăîn care este evidentă impulsivitatea semnalului.
Figura 4.9.: Kurtosis Spectral - banda lata
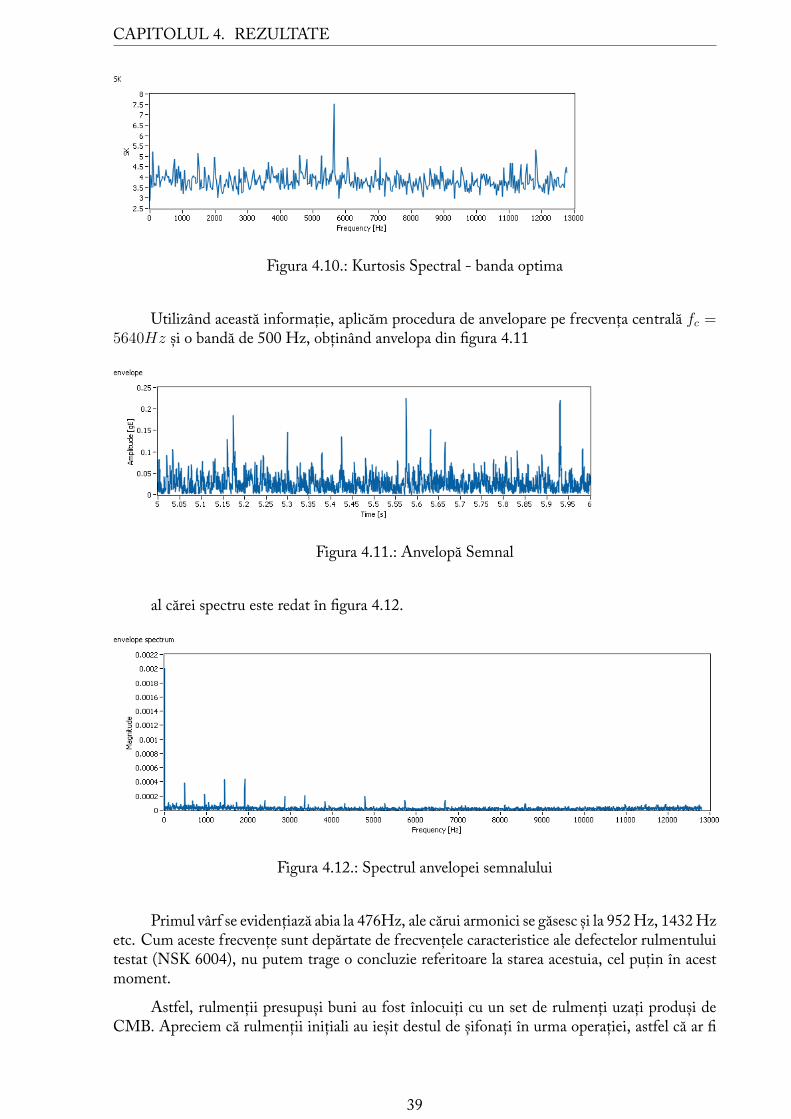
O altă alegere a ferestrei, la 800 de eșantioane, cu același increment de timp, dezvăluie unvârf la frecvența de 5640 Hz, asa cum se observă în figura 4.10.
38
CAPITOLUL 4. REZULTATE
Figura 4.10.: Kurtosis Spectral - banda optima
Utilizând această informație, aplicăm procedura de anvelopare pe frecvența centrală fc =5640Hz și o bandă de 500 Hz, obținând anvelopa din figura 4.11
Figura 4.11.: Anvelopă Semnal
al cărei spectru este redat în figura 4.12.
Figura 4.12.: Spectrul anvelopei semnalului
Primul vârf se evidențiază abia la 476Hz, ale cărui armonici se găsesc și la 952Hz, 1432Hzetc. Cum aceste frecvențe sunt depărtate de frecvențele caracteristice ale defectelor rulmentuluitestat (NSK 6004), nu putem trage o concluzie referitoare la starea acestuia, cel puțin în acestmoment.
Astfel, rulmenții presupuși buni au fost înlocuiți cu un set de rulmenți uzați produși deCMB. Apreciem că rulmenții inițiali au ieșit destul de șifonați în urma operației, astfel că ar fi
39
interesant de văzut, la un schimb ulterior, cum ar arăta noul spectru în comparație cu cel inițial,considerat drept referință.
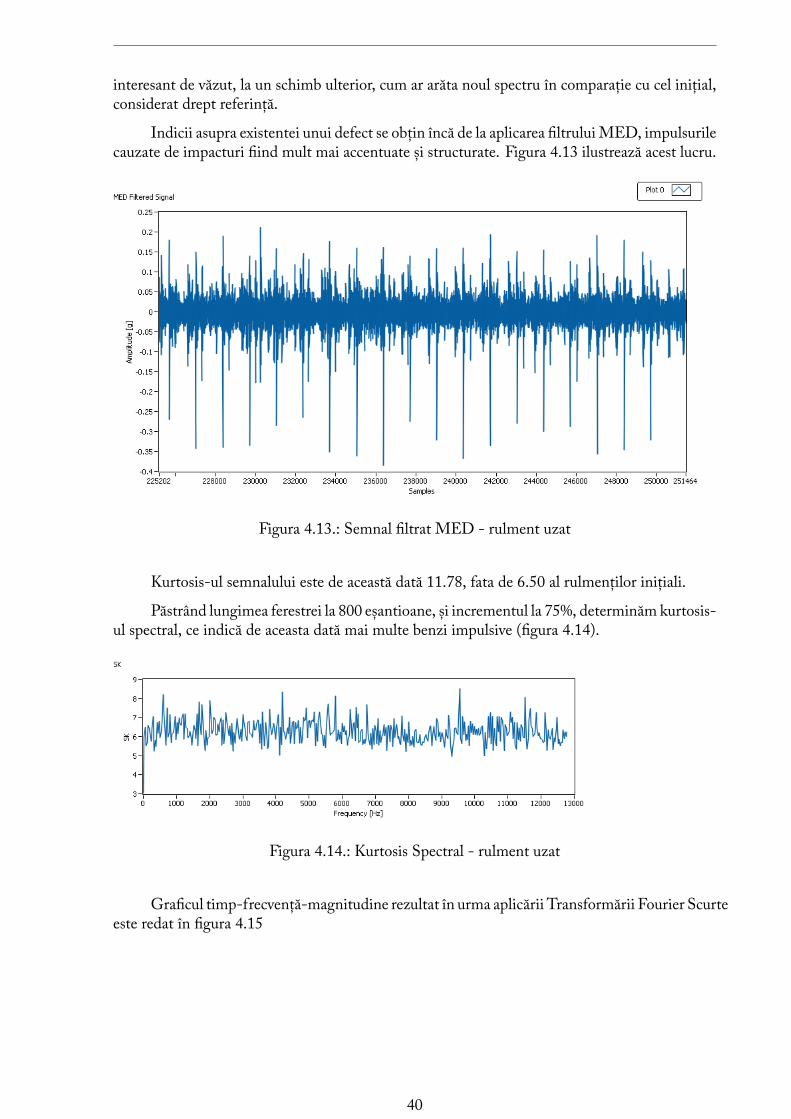
Indicii asupra existentei unui defect se obțin încă de la aplicarea filtrului MED, impulsurilecauzate de impacturi fiind mult mai accentuate și structurate. Figura 4.13 ilustrează acest lucru.
Figura 4.13.: Semnal filtrat MED - rulment uzat
Kurtosis-ul semnalului este de această dată 11.78, fata de 6.50 al rulmenților inițiali.
Păstrând lungimea ferestrei la 800 eșantioane, și incrementul la 75%, determinăm kurtosis-ul spectral, ce indică de aceasta dată mai multe benzi impulsive (figura 4.14).
Figura 4.14.: Kurtosis Spectral - rulment uzat
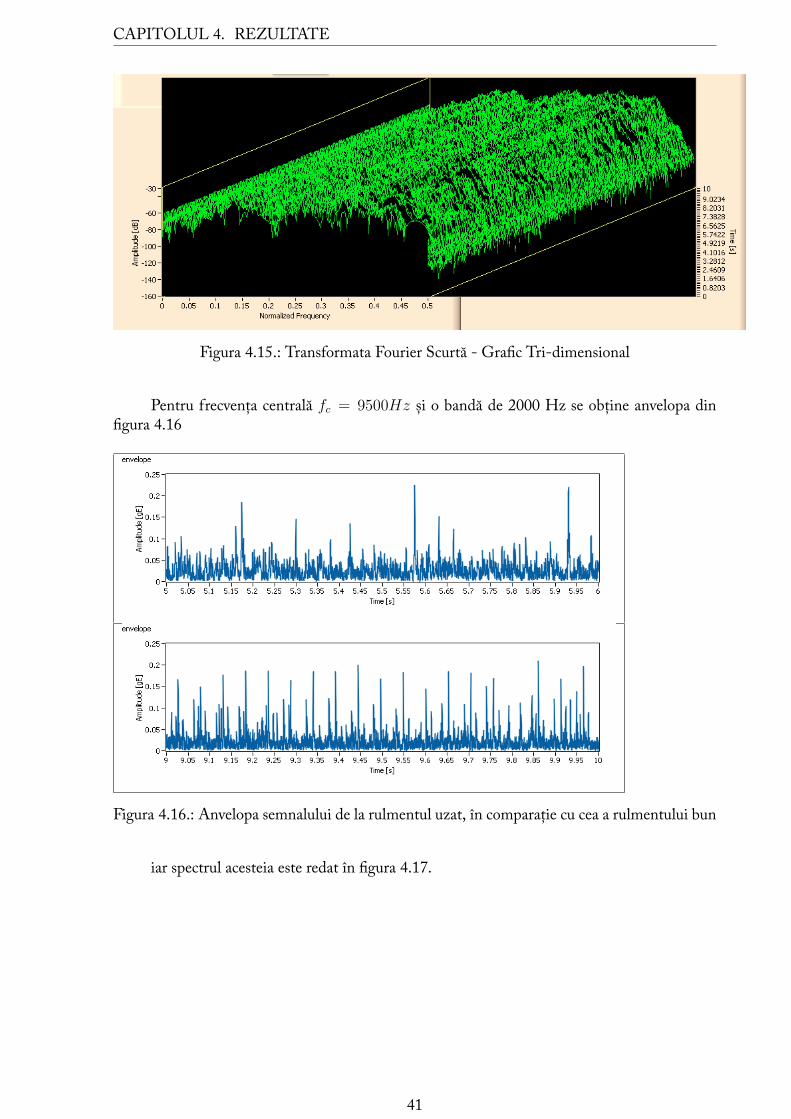
Graficul timp-frecvență-magnitudine rezultat în urma aplicării Transformării Fourier Scurteeste redat în figura 4.15
40
CAPITOLUL 4. REZULTATE
Figura 4.15.: Transformata Fourier Scurtă - Grafic Tri-dimensional
Pentru frecvența centrală fc = 9500Hz și o bandă de 2000 Hz se obține anvelopa dinfigura 4.16
Figura 4.16.: Anvelopa semnalului de la rulmentul uzat, în comparație cu cea a rulmentului bun
iar spectrul acesteia este redat în figura 4.17.
41
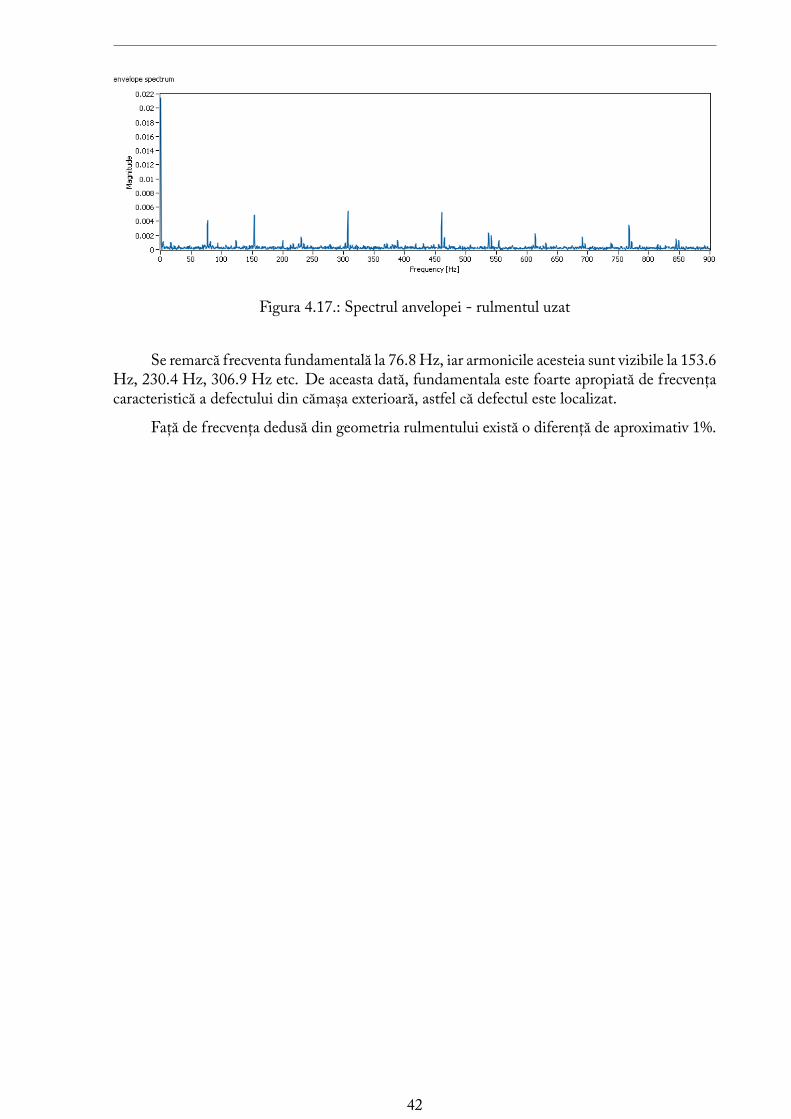
Figura 4.17.: Spectrul anvelopei - rulmentul uzat
Se remarcă frecventa fundamentală la 76.8 Hz, iar armonicile acesteia sunt vizibile la 153.6Hz, 230.4 Hz, 306.9 Hz etc. De aceasta dată, fundamentala este foarte apropiată de frecvențacaracteristică a defectului din cămașa exterioară, astfel că defectul este localizat.
Față de frecvența dedusă din geometria rulmentului există o diferență de aproximativ 1%.
42
5.
Concluzii
Procedura implementata înELEOS separa cu succes componentele din semnalul măsurat,și ii reface impulsivitatea după aplicarea filtrului MED.
Alegerea optima a lungimii ferestrei în urma Transformării Fourier Scurte scoate la ivealabenzile impulsive ale semnalului. Fata de distanta medie intre doua impulsuri observata în urmaaplicării filtrului MED, observam ca SK oferă rezultate bune atunci când fereastra este de celpuțin trei ori mai mica decât aceasta distanta, în condițiile în care incrementul ferestrei este de75%, adică vor fi cuprinse și ultimele 25% din ultimul set de eșantioane utilizate.
Spectrul anvelopei poate oferi informații înșelătoare, în special atunci când amplitudinilevibrațiilor sunt reduse (cazul rulmenților buni). Am fi tentați sa spunem ca am descoperit undefect asupra cămășii interioare, dar asa cum am insistat și în secțiunea 3.1, un astfel de defectnu este chiar ușor de detectat, iar în situația de fata este nevoie de o procedura îmbunătățita deseparare a zgomotului de impulsuri, acestea având amplitudini comparabile, deci filtrul MEDnu ar putea realiza o distincție precisa. În literatura se recomanda filtrajul adaptat pentru aceastasituație ([Randall,2011]).
Pentru validarea rezultatelor a fost folosita o soluție profesionista, FASTVIEW de la Di-gitline Automatizări. Spectrul semnalului în zona de joasa frecventa scoate la iveala un defectde dezechilibru al axului, observabil în prima armonica. Armonicile doi și trei au valori mari,indicând prezenta unui defect de nealiniere. După filtrare, în jurul frecventei de 7600 Hz găsimo banda impulsiva, iar în urma analizei acesteia se găsesc primele cinci ordine
În cadrul mașinilor industriale de mari dimensiuni, ce lucrează la ordinul zecilor de miide rotații pe minut, este necesara realizarea reeșantionării angulare, deoarece o perturbație re-lativ mica, sau o variație a sarcinii, pot conduce la întinderi ale spectrului semnalului măsurat,îngreunând astfel tehnica de diagnoza. *
Procedura descrisa în [Randall,2011] pare sa funcționeze pentru rulmenții uzați, din mo-ment ce obține un rezultat relevant experimentului desfășurat. Cu toate acestea, o serie de factoripot ridica diverse probleme care ar pune sub semnul întrebării rezultatele obținute:
1. Setul redus de eșantioane analizateDin aspecte practice, ce țin de timpii de procesare a datelor, a fost analizat un set de 256000 eșantioane, ceea ce ar corespunde la frecventa de rotație a axului de 20 Hz și cea deeșantionare de 25.6KHz unui număr de 200 rotații complete ale axului. În [Stefanoiu,2002]se sugerează studierea a cel puțin 2000 rotații complete pentru o acuratețe buna, fiindnecesar în acest caz o segmentare a setului de date și compunerea într-un mod optim arezultatelor fiecărui segment.
2. Defectele multipleÎn cazul în care acestea exista, procesul de diagnoza prin analiza anvelopei devine unul
43

foarte dificil.
3. Intervalul dinamic (Dynamic Range) al accelerometrelorConform specificațiilor instrumentului folosit, măsurătorile încep sa fie distorsionate dela 99 dB.
4. Poziția accelerometrelorAcestea au fost montate pe carcasele rulmenților în poziție verticala, fiind posibila detecțiaa 30% a defectelor posibile, conform [Stefanoiu,2002].
5. Rulmenții disponibiliConsideram extrem de utila analiza efectuata pe un set de rulmenți ale căror defecte lecunoaștem apriori, deoarece vom avea o idee asupra spectrului unui semnal modulat șivom căpăta o reala experienta în diagnoza seturilor ulterioare.
6. Dezechilibrul introdus de volantaCu toate ca nu este deloc ieșit din comun un dezechilibru al axului, apropierea volantei derulment poate simula un defect, fapt pentru care ar trebui realizate măsurători și în condițiide echilibru.
44

6.
Direcții de continuare
În primul rand, deoarece rezultatele din aceasta lucrare nu au o fundație solida, trebuiesa fie considerate multiple configurații de măsurare, atât cu rulmenți defecți, cat și cu rulmențiideali, precum și în condiții de echilibru al axului sau cu doua accelerometre montate în pozițiiverticale respectiv orizontale.
Procedura de diagnoza implementata în ELEOS, deși nevalidata, oferă rezultate destulde apropiate fata de cele așteptate, dar succesul acestora este deocamdată limitat la mediul delaborator în care a fost desfășurat experimentul. Consideram necesare dezvoltarea proceduriloractuale, sau înlocuirea acestora cu metode des întâlnite în articole, precum SANC (Self Adap-tive Noise Cancellation), DRS (Discrete - Random Separation), filtrare adaptata sau wavelets,în vederea unei mai bune separări a componentelor semnalului înregistrat. Mașinile industriale,ce au viteze de rotație de ordinul zecilor de mii, necesita astfel proceduri performante, precumcele amintite, iar reeșantionarea angulara devine obligatorie, deoarece la aceste viteze orice per-turbație relativ mica devine semnificativa.
Odată localizat defectul, etapa de diagnoza se încheie, dar echipamentul trebuie sa rămânăsub monitorizare, atât din punct de vedere al detecției ulterioarelor defecte, cat și a prognozeitimpului util rămas al rulmentului căruia i s-a detectat un defect incipient.
6.1. Detecția defectelor
Detecția defectelor reprezinta o etapa preliminara în monitorizarea condiției mașinilor.Modul în care se iau deciziile în cazul detecției unei modificări ai unui parametru monitorizatinfluențează situația economica a proprietarului. În cadrul acestei etape, precizia trebuie sa fiela fel de buna precum în cadrul diagnozei, dar se poate decide o investigare amănunțită atuncicând se observa un comportament anormal în vibrațiile măsurate.
Un indicator simplu al stadiului defectului este exemplificat în [Stefanoiu,2002], dar pre-supune deasemenea determinarea spectrului anvelopei semnalului, de unde poate fi obținută șiinformația pentru diagnoza. Dacă exista un defect, pe spectrul anvelopei ar trebui sa apară vâr-furi deasupra mediei spectrale. Vârfurile de peste 10% deasupra mediei indica un defect sever,cele de peste 5% indica un defect ajuns la maturitate, iar cele peste 1% semnalează un defectincipient.
În [Randall,2011] sunt indicate doua modalități prin care se poate realiza detecția defecte-lor. Prima metoda are la baza criteriile Rathbone și Yates, aflate și în specificațiile ISO 10816-1,unde sunt oferite recomandări ale limitelor nivelului de vibrații pentru diferite clase de mașinării.
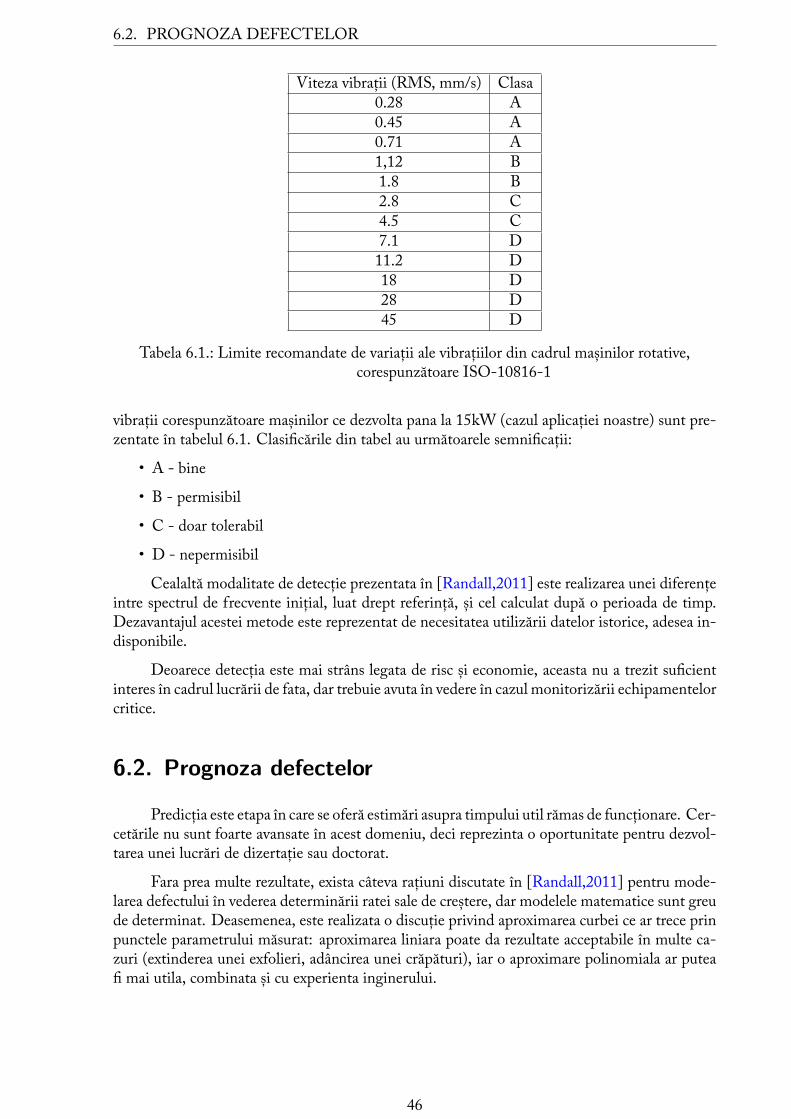
Conform clasificărilor ISO 10816-1, limitele recomandate pentru variații ale nivelului de
45
6.2. PROGNOZA DEFECTELOR
Viteza vibrații (RMS, mm/s) Clasa0.28 A0.45 A0.71 A1,12 B1.8 B2.8 C4.5 C7.1 D11.2 D18 D28 D45 D
Tabela 6.1.: Limite recomandate de variații ale vibrațiilor din cadrul mașinilor rotative,corespunzătoare ISO-10816-1
vibrații corespunzătoare mașinilor ce dezvolta pana la 15kW (cazul aplicației noastre) sunt pre-zentate în tabelul 6.1. Clasificările din tabel au următoarele semnificații:
• A - bine
• B - permisibil
• C - doar tolerabil
• D - nepermisibil
Cealaltă modalitate de detecție prezentata în [Randall,2011] este realizarea unei diferențeintre spectrul de frecvente inițial, luat drept referință, și cel calculat după o perioada de timp.Dezavantajul acestei metode este reprezentat de necesitatea utilizării datelor istorice, adesea in-disponibile.
Deoarece detecția este mai strâns legata de risc și economie, aceasta nu a trezit suficientinteres în cadrul lucrării de fata, dar trebuie avuta în vedere în cazul monitorizării echipamentelorcritice.
6.2. Prognoza defectelor
Predicția este etapa în care se oferă estimări asupra timpului util rămas de funcționare. Cer-cetările nu sunt foarte avansate în acest domeniu, deci reprezinta o oportunitate pentru dezvol-tarea unei lucrări de dizertație sau doctorat.
Fara prea multe rezultate, exista câteva rațiuni discutate în [Randall,2011] pentru mode-larea defectului în vederea determinării ratei sale de creștere, dar modelele matematice sunt greude determinat. Deasemenea, este realizata o discuție privind aproximarea curbei ce ar trece prinpunctele parametrului măsurat: aproximarea liniara poate da rezultate acceptabile în multe ca-zuri (extinderea unei exfolieri, adâncirea unei crăpături), iar o aproximare polinomiala ar puteafi mai utila, combinata și cu experienta inginerului.
46

CAPITOLUL 6. DIRECȚII DE CONTINUARE
6.3. Metode inteligente
În [Marwala,2012] sunt tratate metode inteligente pentru monitorizarea condiției mași-nilor, precum:
• Rețele neurale
• Rețele Bayesiene
• Gaussian Mixture Models / Hidden Markov Models
• Sisteme Fuzzy
• Rough sets
• Algoritmi genetici
Toate aceste metode reprezinta o continuare naturala a cercetărilor din analiza clasica șirămân deschise celor care doresc sa aprofundeze cunoștințele din domeniul mentenanței predic-tive.
47
Anexe
48
A.
MED Filter
12 function [y_final f_final kurtIter] = med2d(x,filterSize ,
termIter ,termDelta ,plotMode)3 %2D MINIMUM ENTROPY DECONVOLUTION4 % code by Geoff McDonald ([email protected]), February
20115 % Used în my MSc research at the University of Alberta ,
Advanced6 % Control Systems Laboratory.7 %8 % sorry bro, I optimized it for 1D - George Sterpu9 %
10 % med2d(x,filterSize ,termIter ,termDelta ,plotMode)11 %12 % Algorithm Reference:13 % R.A. Wiggins , Minimum Entropy Deconvolution ,
Geoexploration , vol.14 % 16, Elsevier Scientific Publishing , Amsterdam , 1978.
pp. 21 �35 .15 %16 % Inputs:17 % x:18 % Signal to perform Minimum Entropy Deconvolution on.
If a single19 % column/row of data is specified , a 1d filter is
designed to20 % minimize the entropy of the resulting signale. If a
2d data21 % matrix is specified , a single 1d filter will be
designed to22 % minimize the averaged entropy of each column of the
filtered23 % data.24 %25 % filterSize:26 % This is the length of the finite inpulse filter
filter to27 % design. Using a value of around 30 is appropriate
depending on
49

28 % the data. Investigate the performance differenceusing
29 % different values.30 %31 % termIter: (OPTIONAL)32 % This is the termination number of iterations. If
the33 % the number of iterations exceeds this number , the
MED process34 % will complete. Specify [] to use default value of
30.35 %36 % termDelta: (OPTIONAL)37 % This is the termination condition. If the change în
kurtosis38 % between iterations is below this threshold , the
iterative39 % process will terminate. Specify [] to use the
default value40 % of 0.01. You can specify a value of 0 to only
terminate on41 % the termIter condition , ie. execute an exact number
of42 % iterations.43 %44 % plotMode:45 % If this value is > 0, plots will be generated of
the iterative46 % performance and of the resulting signal.47 %48 % Outputs:49 % y_final:50 % The input signal(s) x, filtered by the resulting
MED filter.51 % This is obtained simply as: y_final = filter(
f_final ,1,x);52 %53 % f_final:54 % The final 1d MED filter în finite impulse response
format.55 %56 % kurtIter:57 % Kurtosis according to MED iteration. kurtIter(end)
is the58 % final kurtosis , ie. the summed kurtosis of each
y_final59 % column of y_final. sum(kurtosis(each column of
y_final))60 %61 % Example:
50
ANEXA A. MED FILTER
62 % % This will mostly extract the impulse -like63 % % disturbances caused by 0.2*(mod(n,21)==0)64 % % and plot the result.65 % n = 0:999;66 % x = [sin(n/30) + 0.2*(mod(n,21)==0);67 % sin(n/13) + 0.2*(mod(n,21)==0)];68 % [y_final f_final kurt] = med2d(x',30,[],0.01,1);69 %70 %71 % Note:72 % The solution is not guaranteed to be the optimal
solution to the73 % entropy minimizataion problem , the solution is just a
local74 % minimum of the entropy and therefore a good pick.757677 % Assign default values for inputs78 if( isempty(filterSize) )79 filterSize = 30;80 end81 if( isempty(termIter) )82 termIter = 30;83 end84 if( isempty(termDelta) )85 termDelta = 0.01;86 end87 if( isempty(plotMode) )88 plotMode = 0;89 end9091 % Validate the inputs92 if( sum( size(x) > 1 ) > 2 )93 error('MED:InvalidInput', 'Input signal x must be of
either 2d or 1d.')94 elseif( sum(size(termDelta) > 1) ~= 0 || termDelta < 0 )95 error('MED:InvalidInput', 'Input argument termDelta
must be a positive scalar , or zero.')96 elseif( sum(size(termIter) > 1) ~= 0 || mod(termIter , 1) ~=
0 || termIter <= 0 )97 error('MED:InvalidInput', 'Input argument termIter must
be a positive integer scalar.')98 elseif( sum(size(plotMode) > 1) ~= 0 )99 error('MED:InvalidInput', 'Input argument plotMode must
be a scalar.')100 elseif( sum(size(filterSize) > 1) ~= 0 || filterSize <= 0
|| mod(filterSize , 1) ~= 0 )101 error('MED:InvalidInput', 'Input argument filterSize
must be a positive integer scalar.')102 end
51

103104 % If the data is 1d, lets make it a column vector105 if( sum(size(x)>1) == 1 )106 x = x(:); % A column vector107 end108 L = filterSize;109110 % Calculate the weighted toeplitz autocorrelation matrix111 % as the average autocorrelation matrix of the rows.112 autoCorr = zeros(1,L);113114 for k = 0:L-1115 % Create the shifted x116 x2 = zeros(size(x,1) ,1);117 x2(k+1:end) = x(1:end-k);118119 % Calculate the autocorrelation at this shift120 autoCorr(k+1) = sum(x.*x2);121 end122123 A = toeplitz(autoCorr);124 A_inv = inv(A);125126127 % Initialize matrix sizes128 f = zeros(L,1);129 y = zeros(size(x,1),size(x,2));130 b = zeros(L,1);131 kurtIter = [];132133 % Assume initial filter as a delayed impulse. This decision134 % was made by paper:135 % H. Endo and R. Randall , �Enhancement of autoregressive
model based136 % gear tooth fault detection technique by the use of
minimum entropy137 % deconvolution filter , � Mechanical Systems and Signal
Processing vol.21,138 % no.2, February 2007139 f(2) = 1;140141 % Iteratively adjust the filter to minimize entropy142 n = 1;143 while n == 1 || ( n < termIter && ( (kurt(filter(f,1,x)) -
kurtIter(n-1)) > termDelta ) )144145 % Compute output signal146 y = filter(f,1,x);147148 % Calculate the kurtosis
52
ANEXA A. MED FILTER
149 kurtIter(n) = kurt(y); %#ok<AGROW >150151 % Calculate the matrix g = weighted av{ crosscorr( y
.^3, x) }152 weightedCrossCorr = zeros(L,1);153154 for k = 0:L-1155 % Create the shifted x156 x2 = zeros(size(x,1) ,1);157 x2(k+1:end) = x(1:end-k);158159 % Calculate the crosscorrelation at this shift160 weightedCrossCorr(k+1) = sum((y.^3).*x2);161 end162163164 % Now we have new filter coefficients calculted as:165 % f = A^-1 * g166 f = A_inv*weightedCrossCorr;167 f = f/sqrt(sum(f.^2)); % Normalize the filter result168169 % Next iteration170 n = n + 1;171 end172173 % Update the final result174 f_final = f;175 y_final = filter(f_final ,1,x);176 kurtIter(n) = kurt(y_final);177178 % Plot the results179 if( plotMode > 0 )180181 figure;182 subplot(2,1,1)183 plot(x)184 title('Input Signal(s)')185 ylabel('Value')186 xlabel('Sample Number')187 axis tight188189 subplot(2,1,2)190 plot(y_final)191 title('Signal(s) Filtered by MED')192 ylabel('Value')193 xlabel('Sample Number')194 axis tight195196 figure;197 stem(f_final)
53
198 xlabel('Sample Number')199 ylabel('Value')200 title('Final Filter , Finite Impulse Response')201202 figure;203 plot(kurtIter);204 xlabel('MED Algorithm Iteration')205 ylabel('Sum of Kurtosis for Filtered Signal(s)')206207 if( n == termIter )208 display('Terminated for iteration condition.')209 else210 display('Terminated for minimum change în kurtosis
condition.')211 end212 end213 end214215 function [result] = kurt(x)216 % This function simply calculates the summed kurtosis of
the input217 % signal , x.218 result = mean( (sum((x-ones(size(x,1) ,1)*mean(x)).^4)/(size
(x,1) -2))./(std(x).^4) );219 end
54
B.
Activități de laborator
Achiziția datelor
1. Studiu asupra ratei optime de eșantionare; Efectul alierii în datele măsurate și diminuareaacestuia
2. Alegerea optima a numărului de eșantioane achiziționate, prin impunerea unui timp to-tal de achiziție; Determinarea numărului minim de rotații analizate pentru obținerea derezultate concludente
Analiza de ordin
3. Realizarea reeșantionării angulare și obținerea unui număr fix de eșantioane pe rotație -Script Matlab
4. Compararea spectrelor semnalelor achiziționate la doua viteze de rotație diferite, atât înversiunea temporala cat și în cea angulara
Predicția Liniară
5. Implementarea procedurii de predicție prin filtrarea AR - Script Matlab
6. Trasarea caracteristicii lungime filtru vs kurtosis
7. Implementarea Criteriului Informațional Akaike (AIK) pentru alegerea optima a lungimiifiltrului
8. Implementarea procedurilor avansate de separare - SANC, DRS
Deconvoluția de entropie minimă
9. Implementarea filtrului MED - Script Matlab
10. Comparație intre semnal filtrat AR vs AR+MED
11. Demonstrarea convergentei filtrului MED în funcție de lungimea - trasare caracteristica
12. Îmbunătățirea convergentei MED prin modificarea tolerantei și a numărului de iterații
55
Kurtosis Spectral
13. Implementarea procedurii STFT și trasarea graficului timp-frecventa
14. Alegerea optima a ferestrei. Testare pentru diferite tipuri, lungimi și incremente
15. Calculul kurtosis-ului spectral
16. Implementarea Kurtogramei (Rapide)
17. Comparație intre SK și PSD
18. Comparație intre SK și diferența în decibeli intre spectre utilizând o referință istorica
19. Implementare filtru Wiener
20. Implementare filtru Adaptat
Anveloparea
21. Implementarea procedurii de anvelopare - Script Matlab
22. Studiu asupra alegerii optime a benzii de filtrare și demodulare
23. Influenta filtrelor AR/MED asupra spectrului anvelopei
24. Ilustrarea avantajelor semnalelor analitice
25. Ilustrarea avantajelor studierii pătratului anvelopei
56
Bibliografie
[Randall,2011] Bond Robert Randall. (2011). Vibration-Based Condition Monitoring. Indus-trial, aerospace and automotive applications.
[Stefanoiu,2002] Ștefănoiu Dan, Ionescu Florin. Vibration Faults Classification by Fuzzy-Statistical Reasoning. Research Report AvH-FHKN-StIo0205, Alexander vonHumboldtFoundation & University of Applied Sciences in Konstanz, Germany, May 2002.
[Oppenheim,2010] Alan Oppenheim, Ronald Schafer . Discrete-Time Signal Processing(ird Edition). Pearson Higher Education, 2010.
[Sawalhi,2004] Nader Sawalhi, Robert Bond Randall. e Application of Spectral Kurtosis toBearing Diagnostics.School of Mechanical and Manufacturing Engineering, e Univer-sity of New South Wales, Sydney 2052, Australia. Proceedings of Acoustics 2004. 3-5November 2004, Gold Coast, Australia.
[Sawalhi,2007] Nader Sawalhi. Diagnostics, Prognostics and Fault Simulation For Rolling Ele-ment Bearings. PhD essis. April 2007, Australia
[McDonald,2010] Geoff McDonald. (2010). Minimum Entropy Deconvolution (MED 1Dand 2D) implementation in Matlab. http://www.mathworks.com/matlabcentral/fileexchange/29151-minimum-entropy-deconvolution-med-1d-and-2d
[Wiggins,1978] Ralph Wiggins, Minimum Entropy Deconvolution, Geoexploration, vol. 16,Elsevier Scientific Publishing, Amsterdam, 1978. pp. 21-35.
[Endo,Randall,2006] H. Endo, Robert Bond Randall. Enhancement of autoregressive modelbased gear tooth fault detection technique by the use of minimum entropy decnvolutionfilter. Mechanical Systems and Signal Processing 21, Elsevier, 2006, pp.906-919.
[Marwala,2012] Tshilidzi Marwala. Condition Monitoring Using Computational IntelligenceMethods. Applications in Mechanical and Electrical Systems. Springer-Verlag, 2012.
[Bruel&Kjaer,1995] Order Tracking Analysis. Technical Review. No.2 - 1995, Bruel & Kjaer.
[Wilson,2005] Jon Wilson. Sensor Technology Handbook. Newnes - Elsevier, 2005.
[Antoni,Randall,2006] Jerome Antoni, Robert Bond Randall. e spectral kurtosis: applica-tion to the vibratory surveillance and diagnostics of rotatingmachines.Mechanical Systemsand Signal Processing 20 (2006) p. 308-311. Elsevier Ltd.
[BeMeKi,2011] Eric Bechhoefer, Praneet Menon, Michael Kingsley. Bearing Envelope Ana-lysis Window Selection Using Spectral Kurtosis Techniques. Prognostics and Health Ma-nagement (PHM), 2011 IEEE Conference on. Montreal, QC, 20-23 June 2011
[Sterpu,2012] George Sterpu. ArhitecturaQueued StateMachine în LabVIEW. Studiu de caz:calculator de buzunar. Concursul National Studentesc National Instruments, Bucuresti,Iunie 2012.
57

Bibliografie
[Yugoslavs,2012] Janko Slavic, Aleksandar Brkovic, Miha Boltezar. Typical bearing-fault ra-ting using force measurements: application to real data. Journal of Vibration and Control,December 2011 vol. 17 no. 14 2164-2174.. DOI: 10.1177/1077546311399949
[NI Webcast OA] Heath Dwenger. Order Analysis Webcast. National Instruments 2003.http://www.ni.com/swf/presentation/us/orderanalysis/
[NI White Paper VA] Vibration Analysis and Signal Processing in LabVIEW. Mai 2012.http://www.ni.com/white-paper/9230/en/
58