raportare ŞtiinŢificĂ ştiinţific şi tehnic în extenso...
TRANSCRIPT
RAPORTARE ŞTIINŢIFICĂ
RST - Raport ştiinţific şi tehnic în extenso
Titlu proiect:
TEHNOLOGIE DE IRIGARE INDIVIDUALĂ CU COLECTOARE PLUVIALE A VIŢELOR DE VIE ÎN PRIMII ANI
DE VEGETAŢIE
Coordonator proiect:
INSTITUTUL NAŢIONAL DE CERCETARE DEZVOLTARE PENTRU MECATRONICĂ ŞI TEHNICA
MĂSURĂRII – INCDMTM Bucureşti
CUPRINS
1. Obiective etapa a 2-a.
2. Rezumatul etapei a 2-a.
3. Descrierea ştiinţifică şi tehnică, cu punerea în evidenţă a rezultatelor etapei a 2-a şi a gradului
de realizare a obiectivelor.
4. Anexe.
5. Concluzii.
1. OBIECTIVE ETAPA a 2-a
Activităţile aferente etapei a 2-a au fost desfăşurate în anul 2015 şi au urmărit realizarea următoarelor
obiective:
Testarea în condiţii de laborator a modelelor funcţionale de senzor de prag de umiditate sol.
Stabilirea datelor de intrare şi de ieşire ale algoritmului pentru controlul şi conducerea procesului
de udare realizat cu tehnologia de irigare propusă (sistem automatizat de irigare punctiformă cu
colectoare pluviale integrate) şi a momentelor de declanşare şi oprire a irigării.
Elaborarea algoritmului pentru conducerea procesului de udare.
Elaborarea documentaţiei de execuţie a modelului funcţional de colector pluvial.
Amenajarea parţială a parcelei experimentale în care va fi implementat sistemul automatizat de
irigare punctiformă cu colectoare pluviale.
Diseminarea rezultatelor etapelor parcurse.
2. REZUMATUL ETAPEI A 2-A
INCDMTM Bucureşti a efectuat experimentări de laborator care au permis stabilirea cantităţilor de apă
absorbite în condiţii specifice de montaj, la diferite valori ale umidităţii solului, de hidrogelul utilizat ca element
sensibil al senzorului. Concomitent, au fost determinate perioadele de timp necesare atingerii echilibrului hidric
de către acesta. Rezultatele obţinute sunt evidenţiate în tabelul şi graficul din Anexa 1. A fost testată în condiţii
de laborator funcţionalitatea primului model de senzor de prag de umiditate sol. Rezultatele obţinute nu au
satisfăcut şi ca urmare au urmat reproiectarea şi execuţia elementului sensibil senzor var. 1, cod CEFIN. 358 -
1.1.0, în trei variante suplimentare ale căror documentaţii sunt prezentate în Anexa 2. Testele ulterioare
efectuate au determinat alegerea ca variantă funcţională viabilă a elementului sensibil senzor var. 4, care a fost
multiplicat în zece exemplare. Cele zece modele funcţionale de senzor de prag de umiditate sol, dotate cu
elementul sensibil senzor var. 4, urmează să fie testate în condiţii reale de funcţionare în cadrul parcelei
experimentale.
Coordonatorul proiectului, INCDMTM Bucureşti împreună cu partenerii din consorţiu ICDVV Valea
Călugărească, INOE - IHP Bucureşti şi SC ELECTROZEP EXIM SRL Popeşti-Leordeni, au stabilit datele de
intrare şi de ieşire ale algoritmului pentru controlul şi conducerea procesului de udare realizat cu sistemul
automatizat de irigare punctiformă cu colectoare pluviale integrate. S-a convenit asupra metodei care urmează
să fie folosită pentru monitorizarea stărilor contactelor electrice ale modelelor funcţionale de senzor de prag de
umiditate sol şi asupra indicatorilor care descriu calitativ procesul de udare. A fost stabilit modul de
supraveghere a valorilor respectivilor indicatori în vederea semnalizării în timp real a disfuncţionalităţilor apărute.
În final a fost conceput algoritmul pentru conducerea procesului de udare, descris în următorul capitol al
prezentului raport şi prezentat grafic în schema logică din Anexa 3.
Elaborarea documentaţiei de execuţie a modelului funcţional de colector pluvial a avut la bază Brevetul de
Invenţie nr. RO 123469 B1/30.08.2012 cu titlul „Colector pluvial pentru irigarea individuală a plantelor în câmp şi
în seră”. INCDMTM Bucureşti şi SC ELECTROZEP EXIM SRL Popeşti - Leordeni au stabilit două soluţii
constructive de colector pluvial. Prima este dedicată unei posibile producţii viitoare de serie mare sau de masă a
colectorului pluvial şi care presupune realizarea acestuia prin utilizarea tehnologiei de injecţie mase plastice, iar
cea de a doua este dedicată realizării fizice a 24 modele funcţionale de colector pluvial în atelierul de execuţie
modele şi produse unicat din cadrul INCDMTM Bucureşti. Au rezultat două documentaţii de execuţie pentru cele
două variante de colector pluvial, în Anexa 4 fiind prezentat desenul de ansamblu al variantei care urmează să
fie realizată în atelierul INCDMTM Bucureşti.
Activităţile aferente amenajării parţiale a parcelei experimentale au implicat participarea tuturor membrilor
consorţiului. ICDVV Valea Călugărească a stabilit ca loc de amplasare a parcelei experimentale o plantaţie de
viţă de vie în anul III de vegetaţie aflată la o distanţă de cca. 1 km de sediul administrativ al institutului. În cadrul
plantaţiei, în conformitate cu schema prezentată în Anexa 5, a fost delimitată o suprafaţă de cca 320 m2, care a
fost împărţită în două părţi egale. Prima dintre cele două zone urmează să fie irigată punctiform în regim
automatizat şi să fie dotată cu colectoare pluviale, iar cea de a doua urmează să fie irigată punctiform în regim
neautomatizat. În imediata vecinătate a fost amenajată o platformă pe care ICDVV Valea Călugărească
urmează să construiască/amplaseze o cameră tehnică şi un rezervor de apă. INCDMTM Bucureşti, INOE - IHP
Bucureşti şi SC ELECTROZEP EXIM SRL Popeşti-Leordeni au efectuat măsurători convenind asupra traseelor
hidraulice şi electrice şi, împreună cu ICDVV Valea Călugărească, au stabilit modul de amplasare a senzorilor
de umiditate sol şi a colectoarelor pluviale.
INCDMTM Bucureşti a desfăşurat următoarele activităţi pentru diseminarea modelelor funcţionale de
senzor de prag de umiditate sol şi de colector pluvial:
Publicarea articolului „Senzor de prag de umiditate sol cu contact electric” în catalogul celei de a
7-a Conferinţe internaţionale „Recent Trends and Challenges in Mecatronic, Mechanical
Engineering and New High-Tech Products Development MECAHITECH’15”, (10-11 Septembrie
2015, Bucureşti, Romania) şi în nr. din decembrie 2015 al „Revistei Române de Mecanică Fină,
Optică & Mecatronică”.
Participarea cu posterul „Individual irrigation technology with pluvial collectors of the grape vine
in the first years of vegetation” la Salonul Cercetării Româneşti 2015, 14-17 octombrie 2015 din
cadrul TIB.
Participarea cu posterul „Higrostat mecanic cu contact electric lamelar”, cerere de brevet de
invenţie nr. A/00480/27.06.2013, la cea de-a 64-a ediţie a Concursului internaţional EUREKA
dedicat inventicii, organizat în cadrul Salonului INNOVA (19-21 Noiembrie 2015, Bruxelles,
BELGIA), pentru care au fost obţinute medalia de aur şi premiul special pentru „Energie şi
mediu” secţia „Agricultură şi industrie alimentară”.
La adresa web http://incdmtm.ro/proiecte.php?proiectID=67, pot fi consultate în timp real toate informaţiile
necesare cu privire la activităţile desfăşurate şi la rezultatele obţinute în cadrul proiectului.
3. DESCRIEREA ŞTIINŢIFICĂ ŞI TEHNICĂ, CU PUNEREA ÎN EVIDENŢA A REZULTATELOR ETAPEI A 2-A
ŞI GRADUL DE REALIZARE A OBIECTIVELOR
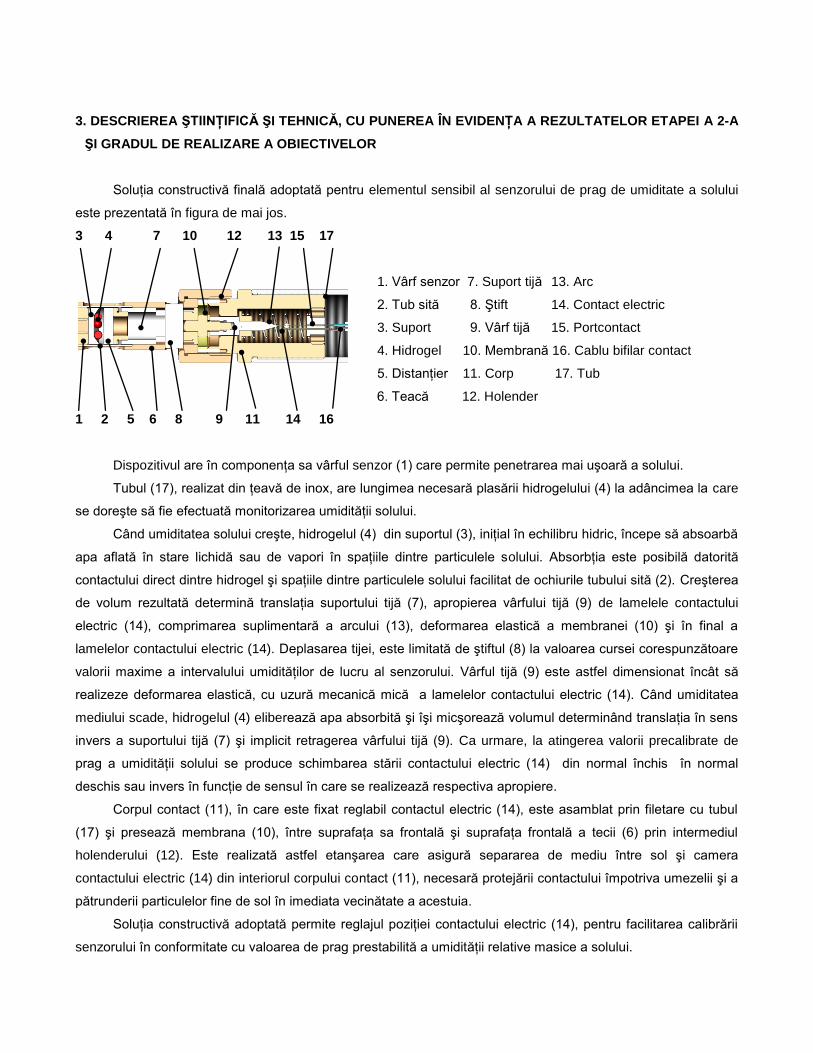
Soluţia constructivă finală adoptată pentru elementul sensibil al senzorului de prag de umiditate a solului
este prezentată în figura de mai jos.
3 4 7 10 12 13 15 17
1. Vârf senzor 7. Suport tijă 13. Arc
2. Tub sită 8. Ştift 14. Contact electric
3. Suport 9. Vârf tijă 15. Portcontact
4. Hidrogel 10. Membrană 16. Cablu bifilar contact
5. Distanţier 11. Corp 17. Tub
6. Teacă 12. Holender
1 2 5 6 8 9 11 14 16
Dispozitivul are în componenţa sa vârful senzor (1) care permite penetrarea mai uşoară a solului.
Tubul (17), realizat din ţeavă de inox, are lungimea necesară plasării hidrogelului (4) la adâncimea la care
se doreşte să fie efectuată monitorizarea umidităţii solului.
Când umiditatea solului creşte, hidrogelul (4) din suportul (3), iniţial în echilibru hidric, începe să absoarbă
apa aflată în stare lichidă sau de vapori în spaţiile dintre particulele solului. Absorbţia este posibilă datorită
contactului direct dintre hidrogel şi spaţiile dintre particulele solului facilitat de ochiurile tubului sită (2). Creşterea
de volum rezultată determină translaţia suportului tijă (7), apropierea vârfului tijă (9) de lamelele contactului
electric (14), comprimarea suplimentară a arcului (13), deformarea elastică a membranei (10) şi în final a
lamelelor contactului electric (14). Deplasarea tijei, este limitată de ştiftul (8) la valoarea cursei corespunzătoare
valorii maxime a intervalului umidităţilor de lucru al senzorului. Vârful tijă (9) este astfel dimensionat încât să
realizeze deformarea elastică, cu uzură mecanică mică a lamelelor contactului electric (14). Când umiditatea
mediului scade, hidrogelul (4) eliberează apa absorbită şi îşi micşorează volumul determinând translaţia în sens
invers a suportului tijă (7) şi implicit retragerea vârfului tijă (9). Ca urmare, la atingerea valorii precalibrate de
prag a umidităţii solului se produce schimbarea stării contactului electric (14) din normal închis în normal
deschis sau invers în funcţie de sensul în care se realizează respectiva apropiere.
Corpul contact (11), în care este fixat reglabil contactul electric (14), este asamblat prin filetare cu tubul
(17) şi presează membrana (10), între suprafaţa sa frontală şi suprafaţa frontală a tecii (6) prin intermediul
holenderului (12). Este realizată astfel etanşarea care asigură separarea de mediu între sol şi camera
contactului electric (14) din interiorul corpului contact (11), necesară protejării contactului împotriva umezelii şi a
pătrunderii particulelor fine de sol în imediata vecinătate a acestuia.
Soluţia constructivă adoptată permite reglajul poziţiei contactului electric (14), pentru facilitarea calibrării
senzorului în conformitate cu valoarea de prag prestabilită a umidităţii relative masice a solului.
În acest scop, se înşurubează/deşurubează portcontactul (15), modificându-se, cu 0,5 mm la o rotaţie
completă, poziţia lamelelor în raport cu vârful tijei (9), în interiorul corpului contact (11).
Au fost efectuate experimentări de laborator care au urmărit determinarea cantităţilor de apă absorbite de
hidrogelul utilizat ca element sensibil al senzorului, în condiţii specifice de montaj, la diferite valori ale umidităţii
solului. În acest scop în patru recipiente au fost preparate probe de sol cu umidităţi de 15%, 20%, 25% şi 30%,
(în procente masice).
A fost introdus ulterior în fiecare dintre recipiente câte un element sensibil var. 4 şi au fost apoi etanşate
recipientele de mediul exterior pentru conservarea valorilor de umiditate realizate.
Zilnic au fost cântărite elementele sensibile ale celor patru senzori în scopul evidenţierii momentului în
care acestea ajung la echilibru hidric şi ca urmare nu mai sunt evidenţiate câştiguri în greutate ale hidrogelului.
Pe baza rezultatelor obţinute a putut fi ridicat graficul prezentat în Anexa 1.
De asemenea au fost determinate masele de apă absorbite, ma, de elementul sensibil al senzorului până
la atingerea echilibrului hidric corespunzător celor patru valori prestabilite ale umidităţii solului (cuantificarea
acestora a fost făcută în raport cu masa elementului sensibil, mes). Datele obţinute sunt prezentate în tabelul din
Anexa 1.
Valorile obţinute ale ma au permis dimensionarea corespunzătoare a volumului delimitat de suprafaţa
interioară a tubului sită (2) şi de suprafeţele frontale ale suportului (3) şi distanţierului (5), raportată la masa
hidrogelului utilizat ca element sensibil al senzorului.
Totodată respectivele valori au stat la baza dimensionării arcului (13) care, pe de o parte trebuie
pretensionat pentru a asigura revenirea fermă a tijei de acţionare a lamelelor contactului electric (14) în poziţia
iniţială şi, pe de altă parte, trebuie să permită efectuarea cursei maxime a tijei fără ca forţa elastică
corespunzătoare dezvoltată de el să cauzeze deteriorarea sau tensionarea excesivă a hidrogelului.
Pentru realizarea unui program practic de irigare cu senzori de umiditate ai solului trebuie să înţelegem că
atât limita de non stres cat şi cea de stres variază cu tipul de sol, distribuţia rădăcinilor şi climatul.
Umiditatea solului variază adesea între măsurători. Variaţiile în umiditatea solului atât sub o singură viţă,
cat şi de-a lungul unei parcele de irigare poate fi mare. Modelul de umezire, în special în cazul irigării prin
picurare, se poate abate de la senzorul de umiditate a solului. Distribuţia şi densitatea rădăcinilor şi adâncimea
profilului de sol pot varia între amplasamente. În mod similar, textura solului şi structura acestuia se pot schimba
chiar în cadrul unor distanţe mici. O viţă individuală poate detecta toate aceste variaţii în timp ce un senzor de
umiditate sol măsoară numai o mică parte din zona totală a rădăcinilor. Cea mai bună metodă pentru a fi siguri
că un senzor reflectă condiţiile de umiditate a solului este de a sapa sau a sfredeli cu un burghiu melc în
apropierea senzorului cu atenţie pentru a-l nu vătăma şi a vedea cat de umed sau uscat este solul.
În cazul utilizării umidităţii solului ca unic ghid pentru irigare este necesar să determinăm şi performanţa
viţei (producţie, creştere vegetativă) şi a recoltei (calitatea) pentru o armonizare fină a tensiunii apei din sol.
Monitorizarea umidităţii solului reprezintă o componentă esenţială a irigării.
Monitorizarea umidităţii solului va îmbunătăţii orice plan de irigare deoarece ne ajută să estimăm volumul
de sol udat, nivelul stresului hidric al plantei, norma de utilizare a apei de către viţa de vie şi contribuţia
precipitaţiilor la umiditatea disponibilă din sol. Ea va permite o estimare iniţială a cat de mult şi unde trebuie să
irigăm să fie ajustate pentru a potrivi cu un anume sistem de irigare şi tipul de sol. Sunt necesare cel puţin două
puncte (locaţii) de monitorizare a umidităţii solului. Ele trebuie să fie reprezentativă pentru întreaga parcelă de
irigat. Este bine să fie alese viţe care sunt tipice în privinţa creşterii şi producţiei pentru întreaga parcelă.
Scopul senzorului amplasat în mijlocul zonei radiculare este de a ne furniza indicaţii privind nivelul
stresului hidric la nivelul viţei şi astfel să putem prognoza când irigăm. Solul trebuie să devină umed la nivelul
senzorului în timpul sau imediat după irigare. Cea mai bună zonă de plasare a senzorul este la 10÷20 cm de viţă
în cazul irigării prin picurare. Adâncimea medie a zonei de răspândire a rădăcinilor variază între plantaţii, dar în
general se situează între 20÷50 cm.
Scopul amplasării senzorului în partea de jos a adâncimii de udare este de a determina adâncimea de
irigare. Dacă senzorul, de exemplu, devine umed atunci timpul de irigare a fost prea lung. Solul poate deveni
umed dar scopul nostru este de a evita ca apa de irigare să ude înainte de a atinge această adâncime. De
obicei, adâncimea de udare este în partea de jos a zonei rădăcinilor cu toate că în cazul viţelor înrădăcinate
adânc acest lucru poate fi imposibil, aşa că senzorul se plasează la o adâncime mai mică.
În anumite situaţii, în special în cazul solurilor adânci, poate fi avantajos să includem mai mult de două
adâncimi de monitorizare. În solurile adânci umiditatea ce poate fi extrasă la nivelul rădăcinilor sub adâncimea
de udare în urma irigării, umiditate care poate fi folositoare la pornirea viţei de vie în vegetaţie.
Având în vedere că dispozitivul experimental este amplasat într-o plantaţie tânără de viţă de vie (anul III)
cu un sistem radicular puţin dezvoltat în adâncime, care va fi irigată prin picurare, senzorii de umiditate vor fi
amplasaţi în două locaţii: la o distanţă de 20 cm de butucul de viţă de vie şi la adâncimile de 20 şi 40 cm.
Dacă senzorul din zona rădăcinilor rămâne uscat imediat după irigare atunci volumul de apă pe viţă
trebuie crescut, sau poate fi o problemă legată de infiltrarea apei în sol, în timp ce, dacă senzorul plasat în
partea de jos a adâncimii udate devine umed atunci volumul de apă per viţă trebuie redus.
Există două motive pentru care irigările nu pot uda solul pană la adâncimea potrivită.
Primul ar fi că volumul de apă la irigare a fost incorect calculat datorită unei erori în estimarea umidităţii
disponibile a solului, iar cel de al doilea îl reprezintă configurarea incorectă a modelului de umectare estimat
datorită vitezei diferite de infiltrare a apei în funcţie de natura solului.
Infiltrarea cu viteză scăzută este caracteristică solurilor slab structurate şi poate cauza pierderi de apă prin
scurgerea sau băltirea apei la suprafaţă. Această problemă poate fi rezolvată prin îmbunătăţirea structurii solului
şi nu prin mărirea normei de irigare.
Infiltrarea cu viteză mare a apei în sol este prezentă în cazul solurilor uşoare, aşa cum sunt solurile
nisipoase. Aceasta poate cauza pierderi considerabile de apă prin levigare, în afara zonei de distribuţie a
sistemului radicular. În acest caz este necesară reducerea normei de irigare şi utilizarea unor sisteme de irigare
cu o distribuţie lentă a apei (picurare, microjeturi).
După aplicarea irigării umiditatea solului trebuie determinată la intervale regulate de timp pentru a stabili
când trebuie irigat din nou.
S-a convenit asupra următoarelor date de intrare ale algoritmului pentru controlul şi conducerea
procesului de udare:
constanta configurabilă de utilizator, care reprezintă valoarea prestabilită a volumului de apă
utilizat la o irigare, VPI.
constanta configurabilă de utilizator, care reprezintă valoarea prestabilită a volumului de apă
utilizat suplimentar după o irigare, VPSI.
constanta configurabilă de utilizator, care reprezintă valoarea histerezisului senzorilor analogici
umiditate sol, h.
constanta configurabilă de utilizator, care reprezintă valoarea perioadei de timp în care sunt
efectuate irigări în regim automatizat, TPUSIA.
constanta configurabilă de utilizator, care reprezintă timpul de răspuns al senzorilor analogici
umiditate sol, PAUZĂ1.
variabila care reprezintă timpul dintre două schimbări consecutive ale stărilor contactelor
electrice ale senzorilor de prag de umiditate sol, PAUZĂ2.
constanta configurabilă de utilizator, care reprezintă perioadele la care sunt citite valorile totale
ale volumelor de apă utilizate pentru irigarea celor două parcele învecinate, PAUZĂ3.
Elementele de execuţie din componenţa sistemului de automatizare a procesului de irigare sunt
electrovalvă magistrală, EM şi patru electrovalve linie picurare, ELP1÷4.
Elementele de comandă din componenţa sistemului de automatizare a procesului de irigare sunt:
Debitmetrul, D1, cu ieşire 4÷20 mA, care monitorizează volumul parţial, VPD1 şi volumul total,
VTD1, de apă de irigare, livrate în regim automatizat în parcela experimentală cu colectoare
pluviale.
Debitmetrul, D2, cu ieşire 4÷20 mA, care monitorizează volumul total de apă de irigare, VTD2,
livrat în regim neautomatizat în cadrul unei parcele fără colectoare pluviale, cu suprafaţa egală
cu cea a parcelei experimentale şi aflată în imediata vecinătate a acesteia.
Doi senzori analogici umiditate sol achiziţionaţi cu ieşire 4÷20 mA, care monitorizează
umiditatea relativă masică a solului, URM1, URM2.
Zece modele funcţionale de senzor prag de umiditate sol cu contact electric proiectate şi
executate de INCDMTM Bucureşti, care monitorizează o valoare de prag a umidităţii relative
masice a solului, VPURM.
De comun acord au fost stabilite şi datele de ieşire ale algoritmului pentru controlul şi conducerea
procesului de udare:
stările contactelor electrice, SCE1÷10, ale modelelor funcţionale ale senzorilor prag de umiditate
sol împreună cu valorile corespunzătoare indicate de senzorii analogici de umiditate sol, URM1,
URM2, la fiecare modificare de stare survenită (la intervale de timp variabile;
valorile debitului de apă indicate de debitmetrele D1 şi D2;
valorile indicate de debitmetrele D1 şi D2 ale volumelor totale de apă consumate până la
momentul citirii, VTD1, VTD2.
În limbaj natural algoritmul pentru controlul şi conducerea procesului de udare poate fi descris ca
succesiunea următorilor zece paşi:
1. De la consolă sunt încărcate de utilizator în memoria PLC-ului din componenţa dulapului de
automatizare datele de intrare anterior stabilite:
constanta configurabilă de utilizator, care reprezintă valoarea prestabilită a volumului de apă
utilizat la o irigare, VPI.
constanta configurabilă de utilizator, care reprezintă valoarea prestabilită a volumului de apă
utilizat suplimentar după o irigare, VPSI.
constanta configurabilă de utilizator, care reprezintă valoarea histerezisului senzorilor analogici
umiditate sol, h.
constanta configurabilă de utilizator, care reprezintă valoarea perioadei de timp în care sunt
efectuate irigări în regim automatizat, TPUSIA.
constanta configurabilă de utilizator, care reprezintă timpul de răspuns al senzorilor analogici
umiditate sol, PAUZĂ1.
variabila care reprezintă timpul dintre două schimbări consecutive ale stărilor contactelor
electrice ale senzorilor de prag de umiditate sol, PAUZĂ2.
constanta configurabilă de utilizator, care reprezintă perioadele la care sunt citite valorile totale
ale volumelor de apă utilizate pentru irigarea celor două parcele învecinate, PAUZĂ3.
2. Sunt citite valorile indicate de senzorii analogici a umidităţii relative masice a solului, URM1, URM2.
3. Când umiditatea relativă masică a solului, monitorizată prin intermediul senzorilor de umiditate
analogici, atinge descrescător valoarea VPURM este comandată prin intermediul unui bloc de relee
alimentarea electrovalvei magistrală, EM şi a electrovalvelor linie de picurare, ELP1÷4.
Comentariu: Pot exista două variante în care este efectuată respectiva comandă:
varianta A: URM1 ≤ VPURM şi URM2 ≤ VPURM;
varianta B: URM1 ≤ VPURM sau URM2 ≤ VPURM.
4. Sunt citite valorile integrate ale debitului, indicate de debitmetrul VPD1, pentru a fi asigurată livrarea
volumului de apă prestabilit pentru o irigare, VPI.
5. Când VPD1 ≥ VPI, este comandată închiderea electrovalvei magistrală EM şi a electrovalvelor linie de
picurare ELP1÷4.
6. Este realizată întârzierea PAUZĂ1, pentru aşteptarea răspunsului senzorilor/senzorului
analogici/analogic de umiditate sol (în funcţie de varianta aleasă).
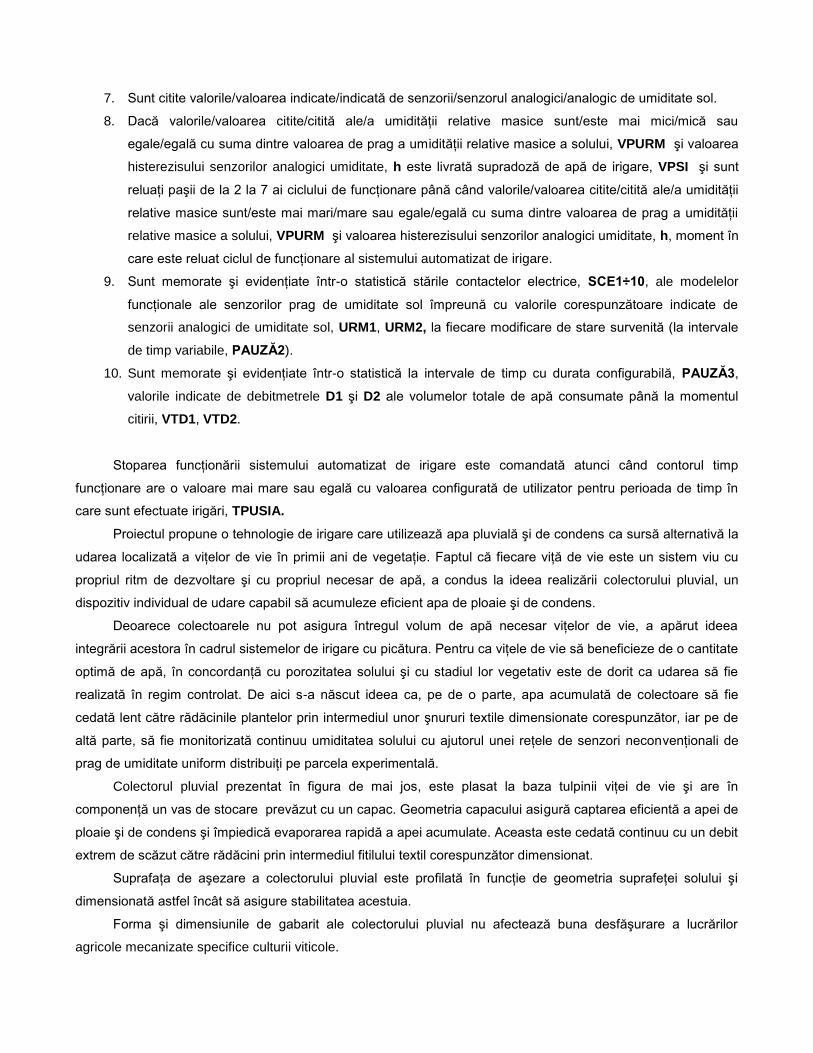
7. Sunt citite valorile/valoarea indicate/indicată de senzorii/senzorul analogici/analogic de umiditate sol.
8. Dacă valorile/valoarea citite/citită ale/a umidităţii relative masice sunt/este mai mici/mică sau
egale/egală cu suma dintre valoarea de prag a umidităţii relative masice a solului, VPURM şi valoarea
histerezisului senzorilor analogici umiditate, h este livrată supradoză de apă de irigare, VPSI şi sunt
reluaţi paşii de la 2 la 7 ai ciclului de funcţionare până când valorile/valoarea citite/citită ale/a umidităţii
relative masice sunt/este mai mari/mare sau egale/egală cu suma dintre valoarea de prag a umidităţii
relative masice a solului, VPURM şi valoarea histerezisului senzorilor analogici umiditate, h, moment în
care este reluat ciclul de funcţionare al sistemului automatizat de irigare.
9. Sunt memorate şi evidenţiate într-o statistică stările contactelor electrice, SCE1÷10, ale modelelor
funcţionale ale senzorilor prag de umiditate sol împreună cu valorile corespunzătoare indicate de
senzorii analogici de umiditate sol, URM1, URM2, la fiecare modificare de stare survenită (la intervale
de timp variabile, PAUZĂ2).
10. Sunt memorate şi evidenţiate într-o statistică la intervale de timp cu durata configurabilă, PAUZĂ3,
valorile indicate de debitmetrele D1 şi D2 ale volumelor totale de apă consumate până la momentul
citirii, VTD1, VTD2.
Stoparea funcţionării sistemului automatizat de irigare este comandată atunci când contorul timp
funcţionare are o valoare mai mare sau egală cu valoarea configurată de utilizator pentru perioada de timp în
care sunt efectuate irigări, TPUSIA.
Proiectul propune o tehnologie de irigare care utilizează apa pluvială şi de condens ca sursă alternativă la
udarea localizată a viţelor de vie în primii ani de vegetaţie. Faptul că fiecare viţă de vie este un sistem viu cu
propriul ritm de dezvoltare şi cu propriul necesar de apă, a condus la ideea realizării colectorului pluvial, un
dispozitiv individual de udare capabil să acumuleze eficient apa de ploaie şi de condens.
Deoarece colectoarele nu pot asigura întregul volum de apă necesar viţelor de vie, a apărut ideea
integrării acestora în cadrul sistemelor de irigare cu picătura. Pentru ca viţele de vie să beneficieze de o cantitate
optimă de apă, în concordanţă cu porozitatea solului şi cu stadiul lor vegetativ este de dorit ca udarea să fie
realizată în regim controlat. De aici s-a născut ideea ca, pe de o parte, apa acumulată de colectoare să fie
cedată lent către rădăcinile plantelor prin intermediul unor şnururi textile dimensionate corespunzător, iar pe de
altă parte, să fie monitorizată continuu umiditatea solului cu ajutorul unei reţele de senzori neconvenţionali de
prag de umiditate uniform distribuiţi pe parcela experimentală.
Colectorul pluvial prezentat în figura de mai jos, este plasat la baza tulpinii viţei de vie şi are în
componenţă un vas de stocare prevăzut cu un capac. Geometria capacului asigură captarea eficientă a apei de
ploaie şi de condens şi împiedică evaporarea rapidă a apei acumulate. Aceasta este cedată continuu cu un debit
extrem de scăzut către rădăcini prin intermediul fitilului textil corespunzător dimensionat.
Suprafaţa de aşezare a colectorului pluvial este profilată în funcţie de geometria suprafeţei solului şi
dimensionată astfel încât să asigure stabilitatea acestuia.
Forma şi dimensiunile de gabarit ale colectorului pluvial nu afectează buna desfăşurare a lucrărilor
agricole mecanizate specifice culturii viticole.
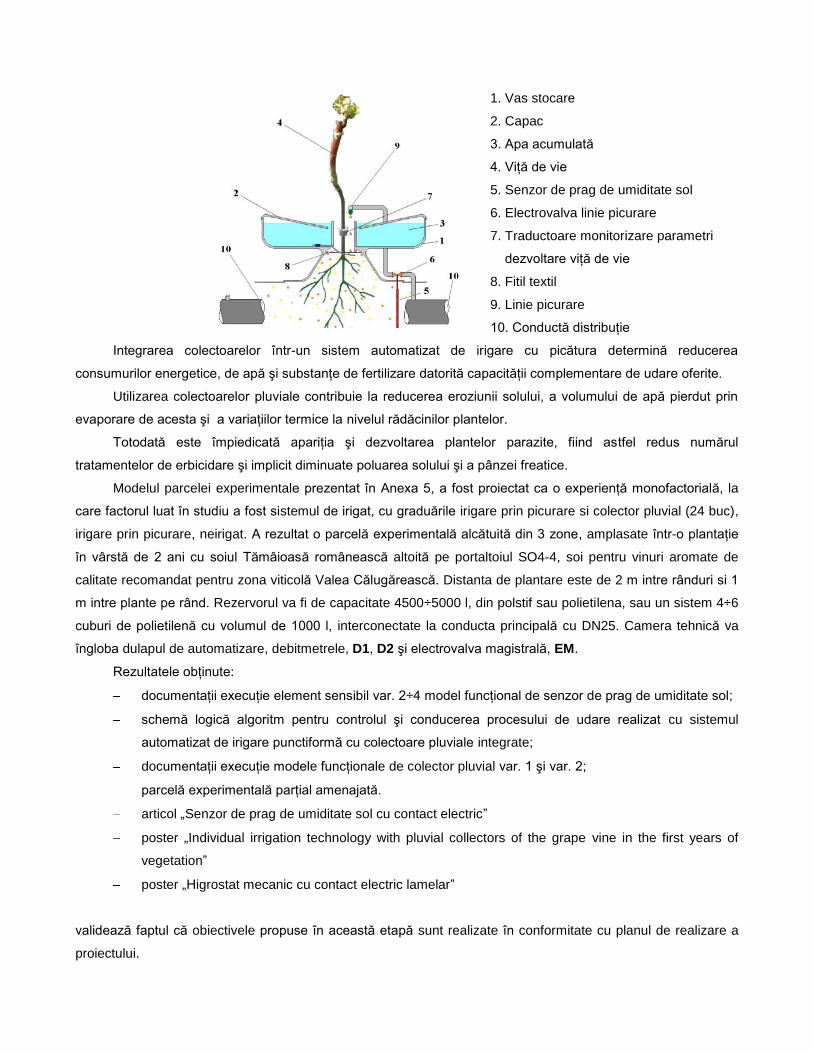
1. Vas stocare
2. Capac
3. Apa acumulată
4. Viţă de vie
5. Senzor de prag de umiditate sol
6. Electrovalva linie picurare
7. Traductoare monitorizare parametri
dezvoltare viţă de vie
8. Fitil textil
9. Linie picurare
10. Conductă distribuţie
Integrarea colectoarelor într-un sistem automatizat de irigare cu picătura determină reducerea
consumurilor energetice, de apă şi substanţe de fertilizare datorită capacităţii complementare de udare oferite.
Utilizarea colectoarelor pluviale contribuie la reducerea eroziunii solului, a volumului de apă pierdut prin
evaporare de acesta şi a variaţiilor termice la nivelul rădăcinilor plantelor.
Totodată este împiedicată apariţia şi dezvoltarea plantelor parazite, fiind astfel redus numărul
tratamentelor de erbicidare şi implicit diminuate poluarea solului şi a pânzei freatice.
Modelul parcelei experimentale prezentat în Anexa 5, a fost proiectat ca o experienţă monofactorială, la
care factorul luat în studiu a fost sistemul de irigat, cu graduările irigare prin picurare si colector pluvial (24 buc),
irigare prin picurare, neirigat. A rezultat o parcelă experimentală alcătuită din 3 zone, amplasate într-o plantaţie
în vârstă de 2 ani cu soiul Tămâioasă românească altoită pe portaltoiul SO4-4, soi pentru vinuri aromate de
calitate recomandat pentru zona viticolă Valea Călugărească. Distanta de plantare este de 2 m intre rânduri si 1
m intre plante pe rând. Rezervorul va fi de capacitate 4500÷5000 l, din polstif sau polietilena, sau un sistem 4÷6
cuburi de polietilenă cu volumul de 1000 l, interconectate la conducta principală cu DN25. Camera tehnică va
îngloba dulapul de automatizare, debitmetrele, D1, D2 şi electrovalva magistrală, EM.
Rezultatele obţinute:
documentaţii execuţie element sensibil var. 2÷4 model funcţional de senzor de prag de umiditate sol;
schemă logică algoritm pentru controlul şi conducerea procesului de udare realizat cu sistemul
automatizat de irigare punctiformă cu colectoare pluviale integrate;
documentaţii execuţie modele funcţionale de colector pluvial var. 1 şi var. 2;
parcelă experimentală parţial amenajată.
articol „Senzor de prag de umiditate sol cu contact electric”
poster „Individual irrigation technology with pluvial collectors of the grape vine in the first years of
vegetation”
poster „Higrostat mecanic cu contact electric lamelar”
validează faptul că obiectivele propuse în această etapă sunt realizate în conformitate cu planul de realizare a
proiectului.

4. ANEXE
Anexa 1 Rezultate experimentări laborator.
Anexa 2 Desen subansamblu şi poză var. 4 element sensibil model funcţional senzor de prag de umiditate sol.
Anexa 3 Schemă logică algoritm pentru controlul şi conducerea procesului de udare realizat cu sistemul
automatizat de irigare punctiformă cu colectoare pluviale integrate.
Anexa 4 Desene variantă 1 model funcţional colector pluvial.
Anexa 5 Desen ansamblu variantă 2 model funcţional colector pluvial.
Anexa 6 Amplasare şi schemă parcelă experimentală şi platformă tehnică.
5. CONCLUZII
În cadrul etapei a 2-a consorţiul a realizat 12 modele funcţionale de senzor de prag de umiditate, dintre
care 10 (cele care înglobează var. 4 a elementului sensibil, CEFIN. 358 - 1.1.0, al modelului funcţional de senzor
de prag de umiditate sol) au trecut testele de laborator. Acestea urmează să fie testate în condiţii reale de
funcţionare în cadrul parcelei experimentale. În acest scop partenerul SC ELECTROZEP EXIM SRL Popeşti-
Leordeni a achiziţionat doi senzori analogici cu ieşire 4÷20 mA, care monitorizează umiditatea relativă masică a
solului şi care sunt utilizaţi ca etaloane de referinţă. Unul dintre ei va fi plasat la adâncimea de 20 cm împreună
cu 5 dintre cele 10 modele funcţionale de senzor de prag de umiditate realizate în atelierul de execuţie modele şi
produse unicat din cadrul INCDMTM Bucureşti, iar celălalt va fi plasat la adâncimea de 40 cm împreună cu
restul modelelor funcţionale de senzor de prag de umiditate.
Tot în această etapă a fost elaborat algoritmul pentru conducerea procesului de udare, pe baza căruia va
fi programul rulat de unitatea centrală de calcul a automatului programabil (PLC produs de Panasonic).
Au fost realizate de asemenea documentaţiile de execuţie pentru două variante de model funcţional de
colector pluvial. Prima dedicată unei posibile producţii viitoare de serie mare sau de masă, iar cea de a doua
realizării fizice a 24 modele funcţionale de colector pluvial în atelierul de execuţie modele şi produse unicat din
cadrul INCDMTM Bucureşti, care vor fi testate în etapa următoare.
În ceea ce priveşte continuarea amenajării parcelei experimentale, care a debutat în această etapă cu
activităţile prezentate anterior, urmează ca, în funcţie de finanţarea viitoare proiectului, precum şi de valoarea
investiţiilor pentru anul 2016, planificate de partenerul ICDVV Valea Călugărească, să fie stabilită modalitatea în
care vor fi soluţionate problemele alimentării cu apă şi energie electrică la nivelul parcelei experimentale.
Activităţile aferente diseminării rezultatelor proiectului vor continua conform planului de realizare al
acestuia.
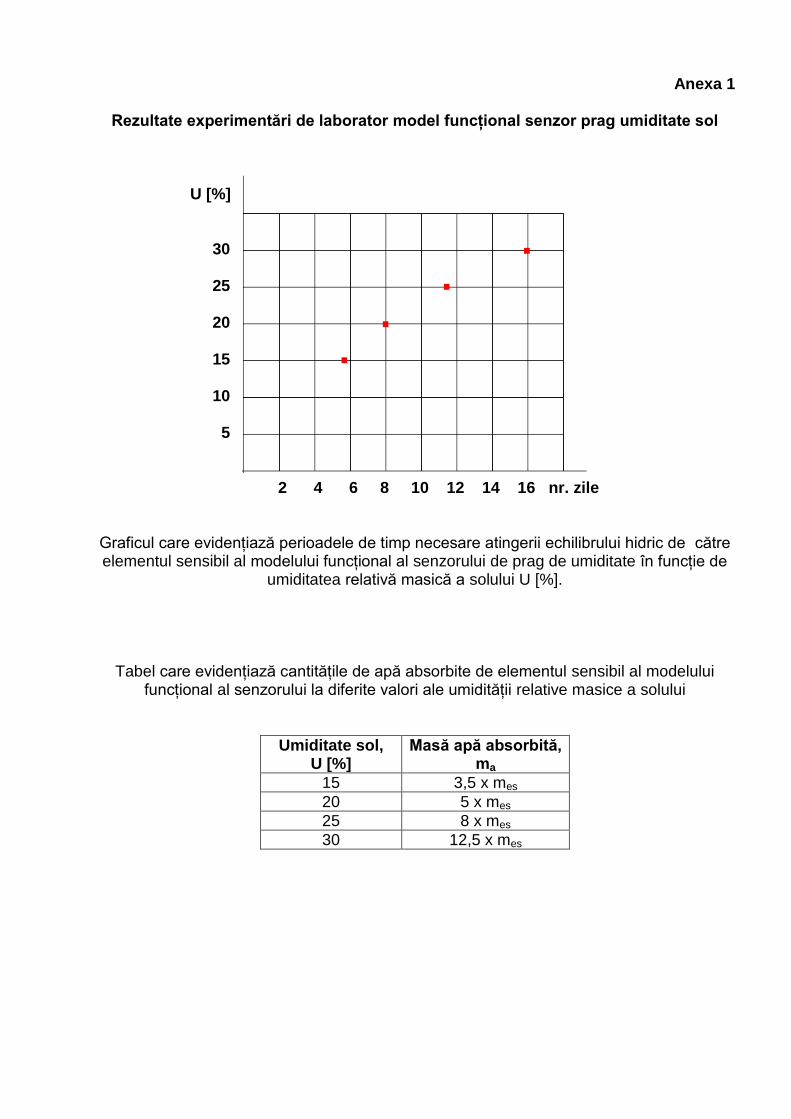
Anexa 1
Rezultate experimentări de laborator model funcţional senzor prag umiditate sol
U [%]
30
25
20
15
10
5
2 4 6 8 10 12 14 16 nr. zile Graficul care evidenţiază perioadele de timp necesare atingerii echilibrului hidric de către elementul sensibil al modelului funcţional al senzorului de prag de umiditate în funcţie de
umiditatea relativă masică a solului U [%].
Tabel care evidenţiază cantităţile de apă absorbite de elementul sensibil al modelului funcţional al senzorului la diferite valori ale umidităţii relative masice a solului
Umiditate sol, U [%]
Masă apă absorbită, ma
15 3,5 x mes
20 5 x mes
25 8 x mes
30 12,5 x mes
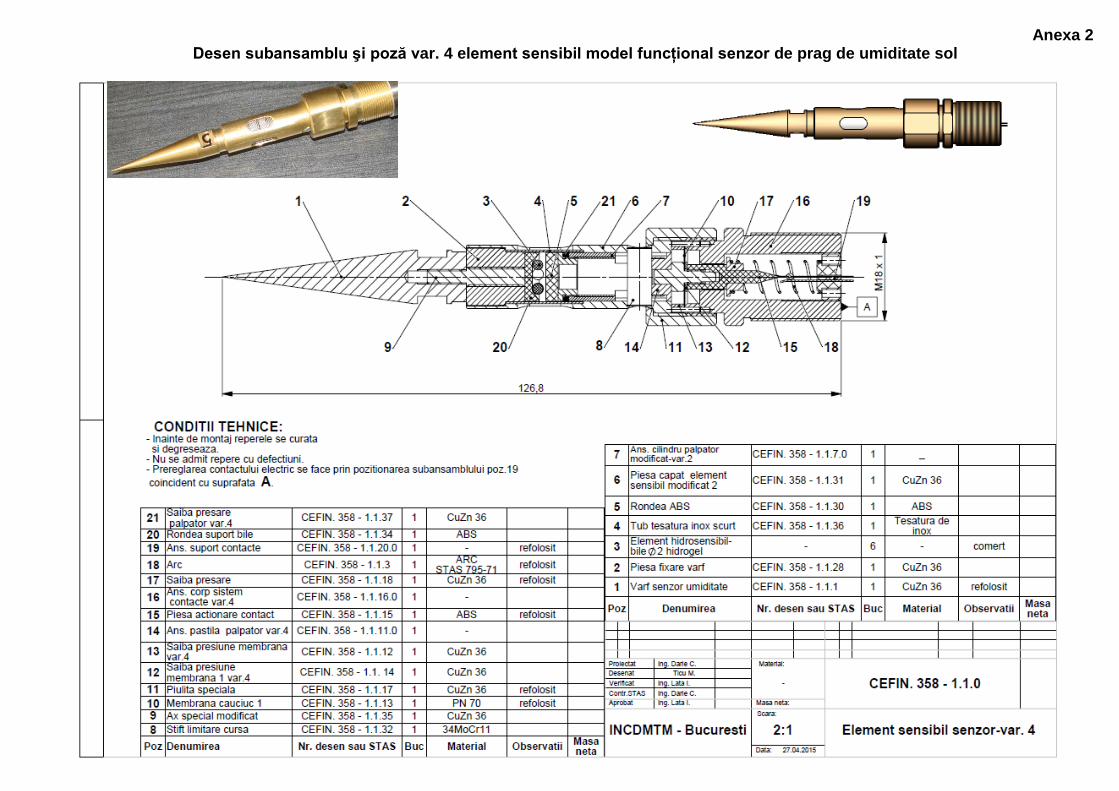
Anexa 2 Desen subansamblu şi poză var. 4 element sensibil model funcţional senzor de prag de umiditate sol
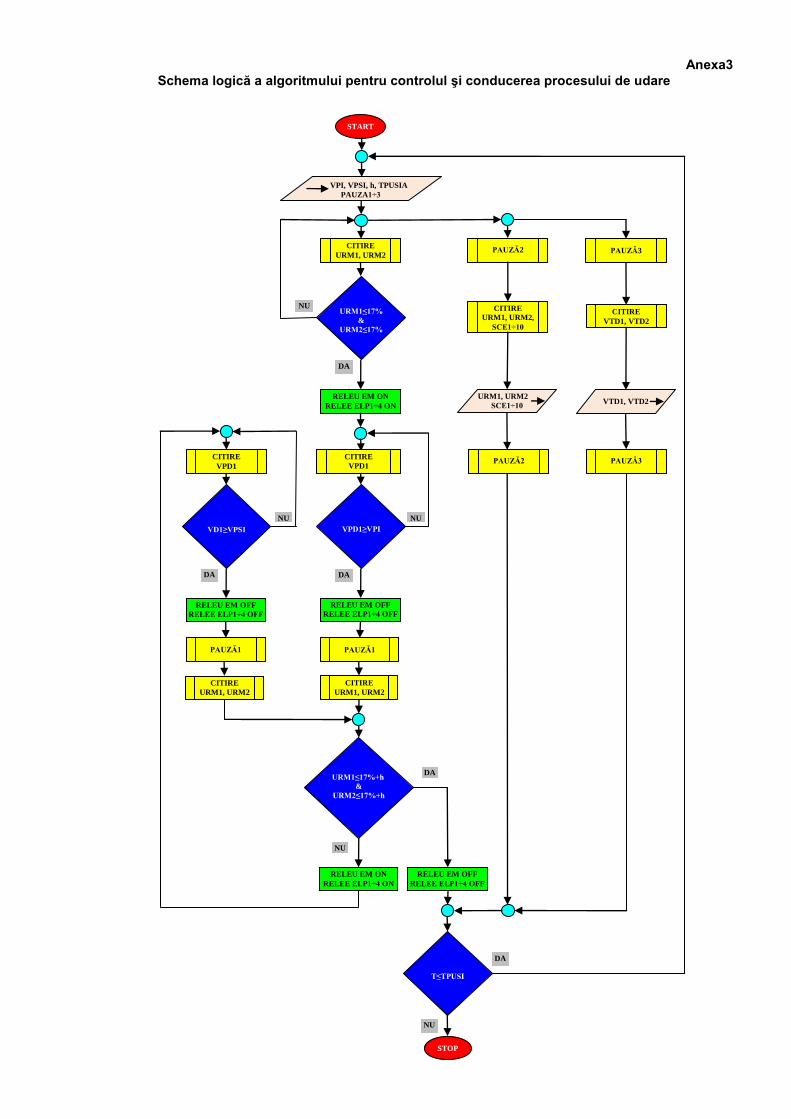
Anexa3
Schema logică a algoritmului pentru controlul şi conducerea procesului de udare
START
RELEU EM ON
RELEE ELP1÷4 ON
VPI, VPSI, h, TPUSIA
PAUZA1÷3
URM1≤17%
& URM2≤17%
NU
DA
PAUZĂ1
RELEU EM OFF
RELEE ELP1÷4 OFF
URM1≤17%+h
& URM2≤17%+h
NU
DA
VPD1≥VPI
DA
CITIRE
URM1, URM2
CITIRE
VPD1
NU
CITIRE
URM1, URM2
RELEU EM OFF
RELEE ELP1÷4 OFF
RELEU EM ON
RELEE ELP1÷4 ON
PAUZĂ1
RELEU EM OFF
RELEE ELP1÷4 OFF
VD1≥VPSI
DA
CITIRE
VPD1
CITIRE
URM1, URM2
NU
T≤TPUSI
DA
NU
STOP
PAUZĂ2
CITIRE
URM1, URM2,
SCE1÷10
PAUZĂ3
CITIRE
VTD1, VTD2
URM1, URM2
SCE1÷10
VTD1, VTD2
PAUZĂ2
PAUZĂ3
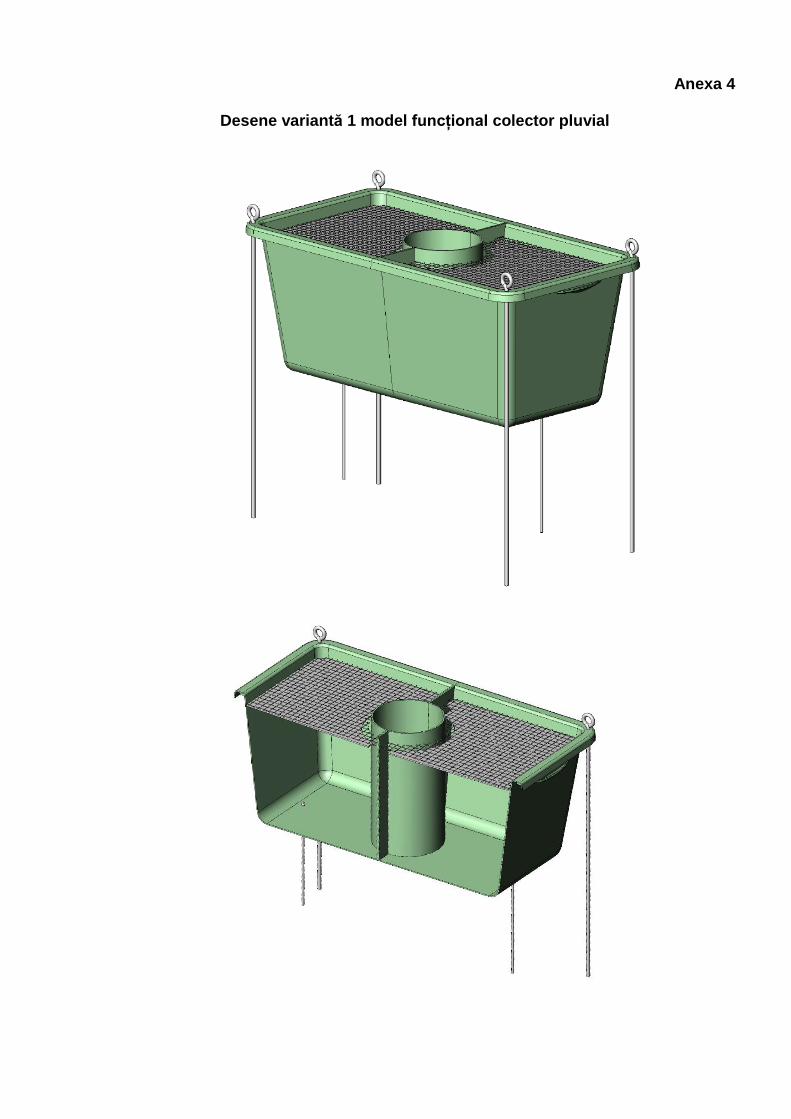
Anexa 4
Desene variantă 1 model funcţional colector pluvial
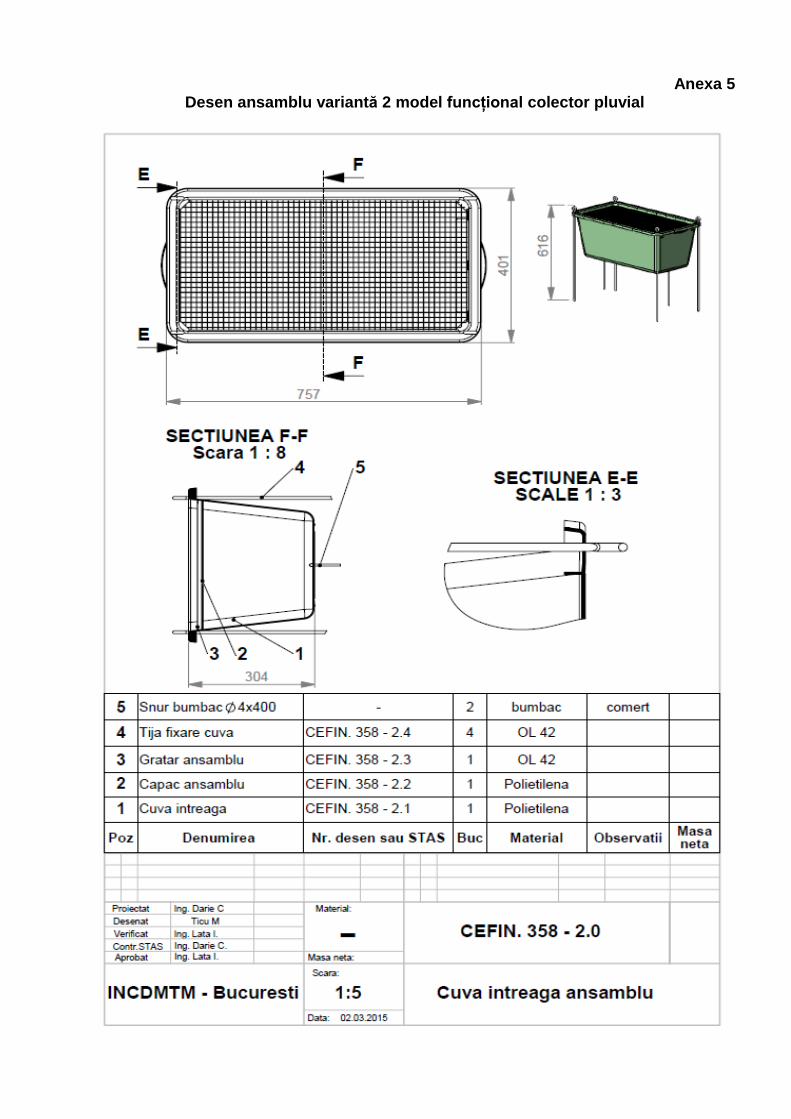
Anexa 5 Desen ansamblu variantă 2 model funcţional colector pluvial
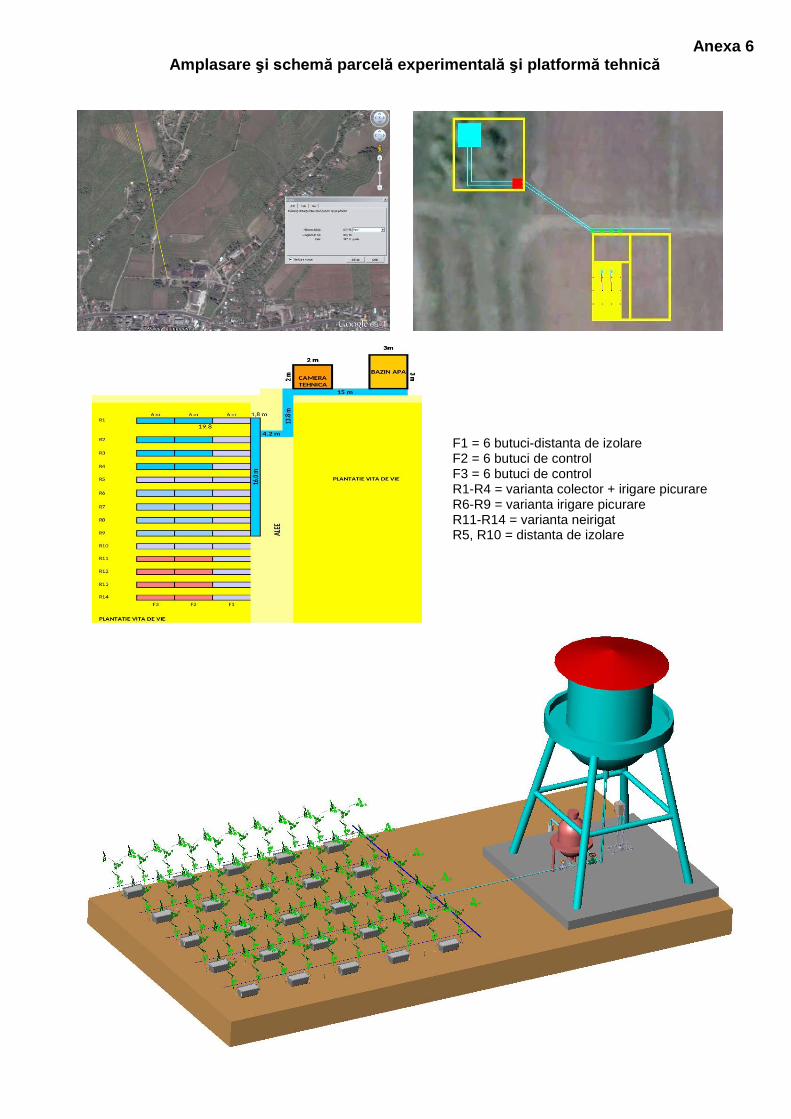
Anexa 6 Amplasare şi schemă parcelă experimentală şi platformă tehnică
F1 = 6 butuci-distanta de izolare F2 = 6 butuci de control F3 = 6 butuci de control R1-R4 = varianta colector + irigare picurare R6-R9 = varianta irigare picurare R11-R14 = varianta neirigat R5, R10 = distanta de izolare