probleme de algebră, geometrie și ecuații diferențiale
TRANSCRIPT

MINISTERUL EDUCAŢIEI ŞI ÎNVATAMÎNTULUI
Constantin Udrişte Constantin Radu Constantina Dicti Odetta Mălăncioiu
PROBLEME DE
ALGEBRĂ, GEOMETRIE
kjJL JZ/V- LJ i \ J. A A
DIFERENŢIALE
\&t P/V
EDITURA DIDACTICĂ ŞI PEDAGOGICĂ BUCUREŞTI 1981

Referent ştiinţific: Prof: dr. doc. Radu Miron
Redactor: Iliescu Gabriela Tehnoredactor: Veîcovici Constantina

PREFAŢĂ >
Această carte se adresează studenţilor de la institutele de învătămînt superior tehnic, în special celor de la profilul mecanic, şi cadrelor didactice de specialitate. De asemenea ea mai poate fi folosită şi de către studenţii şi cadrele didactice de la alte forme de învătămînt superior, materialul conţinînd următoarele capitole de matematici: algebră liniară şi geometrie analitică, geometrie analitică în spaţiul cu trei dimensiuni, geometrie diferenţială şi ecuaţii diferenţiale.
Lucrarea are la bază cărţile [63], [58], [59], [51] pe care le completează substanţial prin idei noi sugerate de întreaga bibliografie şi de problemele lucrate cu studenţii.
Faţă de culegerile de probleme de profil apropiat, prezenta se deosebeşte prin probleme originale elaborate de autori în cadrul activităţii din Institutul politehnic Bucureşti, prin modul de îmbinare a noţiunilor de algebră, geometrie şi analiză potrivit actualei programe analitice precum şi prin finalizarea soluţiilor unor probleme numerice cu scheme logice şi programe FORTRAN. Testele făcute cu studenţii din Institutul politehnic BucureŞti şi discuţiile metodice purtate în cadrul colectivului Catedrei matematici I au arătat că această manieră de prezentare este impusă de nevoile actuale şi de perspectivă ale învăţămîntului superior tehnic.
Mulţumim profesorului dr. docent Radu Miron de la Universitatea din Iaşi şi profesorului dr. Valter Olariu de la Institutul politehnic Bucureşti pentru observaţiile deosebit de utile făcute asupra manuscrisului.
august 1981 Autorii

CUPRINS
Capitolul I. Algebră liniară şi geometrie analitică ',' § 1. Matrice şi determinanţi 7 § 2. Spaţii vectoriale 25 § 3. Transformări liniare 52 § 4. Valori şj vectori proprii 72 § 5. Forme biliniare şi pătratice 98 § 6. Spaţii punctuale euclidiene 112
Capitolul 2. Geometrie analitică în E3 , 122 § 1. Vectori liberi 122 § 2. Dreapta şi planul 130' § 3. Schimbări de repere carteziene HO § 4. Conice 146 § 5. Cuadrice 155 § 6. Coordonate polare şi semipolare 164
Capitolul 3. Geometrie diferenţială 1 6S § 1. Funcţii diferenţiabile 168 § 2. Curbe 177
i. Curbe în R" 177 ii. Curbe în plan 183 iii. Curbe plane în coordonate polare 193 iv. Curbe în J î 3 200
§ 3. Suprafeţe 207 § 4. Subvarietăţi ale lui Ra 229" § 5. Algebră şi analiză tensorială 238 § 6. Forme diferenţiale şi formule integrale 248-
Capitolul 4. Ecuaţii diferenţiale . 257 § 1. Ecuaţii diferenţiale de ordinul întîi 257 § 2. Ecuaţii diferenţiale liniare de ordin superior 267 § 3. Sisteme diferenţiale liniare de ordinul întîi 280 § 4. Linii de cîmp şi sisteme simetrice 299* § 5. Hipersuprafeţe de cîmp şi ecuaţii liniare cu derivate parţiale 304 § 6. Hipersuprafeţe ortogonale liniilor de cîmp şi ecuaţii Pfaff 316
Bibliografie 326-

CAPITOLUL 1
ALGEBRĂ LINIARĂ SI GEOMETRIE ANALITICĂ
§ 1. MATRICE ŞI DETERMINANŢI
1.1. Fie I m > a = {{i, j)\ i — 1,2, ..., m; j = 1, 2, ..., n). Orice funcţie A definită pe Im> n se numeşte matrice de tip mX n. Valorile A(i,j) = at} se numesc elementele matricei şi ele sînt dispuse într-un tabel dreptunghiular cu m linii şi n coloane
« i i a21
12 ^22
O matrice de tipul m X n se mai numeşte şi matrice dreptunghiulară şi prescurtat se notează prin A = [atj].
O matrice de tipul m X 1 se numeşte matrice (vector) coloană, iar o matrice de tipul 1X n se numeşte matrice (vector) linie. Dacă ?ra = w, atunci matricea A se numeşte matrice pătratică, iar n se numeşte ordinul matricei.
1.2. Matricea care se obţine din A prin schimbarea liniilor în coloane (sau a coloanelor în linii) se numeşte matricea transpusă a lui A şi se notează cu 'A.
1.3. Fie K unul dintre cîmpurileR sauC, iar §\lmxn(K) mulţimea matricelor de tipul mx n cu elemente din K. Adunarea matricelor şi respectiv înmulţirea cu scalari se definesc astfel: dacă A = [ai}] şi B = [btj] aparţin dui aRCmxn(K), atunci A + B = \at} + btj] şi respectiv kA = [kai}], keK.
Adunarea matricelor are proprietăţile A + B = B + A (A + B) + C = A + (B + C) A + 0 = A A + ( - A ) = O,
unde O este matricea zero, iar ,, — A" este matricea opusă lui A. Produsul dintre un scalar şi o matrice are proprietăţile
1A = A (kl)A = k(lA)
(k + l)A = kA + lA k(A + B) = kA + kB
Precizare. în cele ce urmează matricele au elemente din K.
7

1.4. Dacă A = [ai}] este o matrice de tipul mx n, iar B = [bjk] este o matrice de tipul nx p, atunci prin produsul celor două matrice se înţelege matricea
AB = E de tipul m> înmulţirea matricelor are proprietăţile
(AB) C = A(BC) A(B + C) = AB + AC (B + C) D = BD + CD
Matricele X şi Y cu proprietatea XY = YX vor fi numite matrice comu-tabile.
1.5. O matrice pătratică A pentru care A = eA(A = — *Â) se numeşte simetrică (antisimetricăj. Orice matrice pătratică poate fi scrisă în mod unic ca suma dintre o matrice simetrică şi o matrice antisimetrică.
1.6. O matrice pătratică A = [ai}] care are proprietăţile ai} = 0, i # j şi 3/ aşa ca an # 0 se numeşte matrice diagonală. O matrice diagonală în care au = 1, / = 1, 2, ..., n, se numeşte matrice unitate şi se notează cu I, Avem IA = AI = A.
1.7. O matrice pătratică care satisface condiţia 'AA = I se numeşte matrice ortogonală.
1.8. Dacă A este o matrice pătratică, atunci puterile naturale ale lui A se definesc inductiv:
A° = I, A" = AA"-1 pentru » = 1, 2, ...
1.9. Fie mulţimea / „ = {a1; a2, ..., aB}. O aplicaţie bijectivă a:Jn-*Jn se numeşte permutare a mulţimii /„ şi se notează prin
«î a (ce
a2 ... cf.n \ i) a(a2) ... cr(aB)J
S} =
Signatura unei permutări a se defineşte prin
1, dacă a este o permutare pară 1, dacă cr este o permutare impară.
1.10. Simbolul lui Kronecker, 1, dacă i = j 0, dacă i =£ _;'.
1.11. Presupunem, că indicii i^ i2, ..., i„ şi j\,j2, •••,jn iau valori din mulţimea {1, 2, ..., m, unde w > n). Definim simbolul lui Kronecker generalizat:
' 0, dacă întregii (ilt i2, ..., in) sau (jx, j 2 , ...,jn) nu sînt distincţi, 0, dacă întregii (ii,H,...,in) şi (?\ , /2 , . . . ,y j sînt distincţi dar
mulţimile {ilt i2, ..., in} şi {ji, jz, ...,jn} nu sînt egale %?h'---Tn={ sCT, dacă întregii (iu i2, ..., in)_ şi (juj2, ...,jn) sînt distincţi, iar
mulţimile {iy i2, ..., in} şi {ji,j2, •••,j^ sînt egale, unde
vii i2...yj
8
1.12. Cu ajutorul simbolului lui Kronecker generalizat se defineşt simbolul e:
. ; , ) , . . . < , şilH—in _ ţsl2...«
£ 1 - Ol 2 ...« , Zhh-hl — °hh-in> şi se constată că
~!lio.. .!« - »«l»2—'u
1.13. Fie A = [ai}] o matrice patratică cu elemente din cîmpul K (numere reale sau complexe). Elementul din K definit prin
d e t A = V ; shh-hava2h ... anln
se numeşte determinantul matricei A şi tradiţional se notează prin | ai} | sau
an a12... aln\
&zi fl-zz... a.in
i an\ anZ ••• ann
Vectorii [atv aa, ..., ain], i = 1, 2, ..., n, poartă numele de liniile determinantului, iar vectorii %av, aVl, ..., anj] j = 1, 2, ..., n, poartă numele de coloanele determinantului.
Numărul n se numeşte ordinul determinantului. 1.14. Dacă A este o matrice pătratică şi 'A este transpusa sa, atunci
det A = det 'A. De aceea orice proprietate referitoare la liniile unui determinant este adevărată şi pentru coloane.
1.15. (1) Dacă elementele unei linii (coloane) sînt respectiv sume de cîte doi termeni, atunci determinantul se descompune într-o sumă de doi determinanţi.
(2) Dacă elementele unei linii (coloane) se multiplică cu te.K, atunci determinantul se multiplică cu t. în general det f A) = tn det A, unde n este ordinul lui A şi te,K.
(3) Dacă într-un determinant se schimbă două linii (coloane) între ele, atunci se schimbă şi semnul determinantului.
Consecinţe: (i) Un determinant este nul dacă: are două linii (coloane) egale sau are două linii (coloane) proporţionale sau una din linii (coloane) este o combinaţie liniară de alte linii (coloane), (ii) Valoarea unui determinant nu se schimbă dacă: schimbăm liniile în coloane de acelaşi ordin sau la elementele unei linii (coloane) adăugăm combinaţii liniare formate cu elementele din celelalte linii (coloane).
1.16. (Dezvoltările lui Laplace). Fie determinantul \ai}\ de ordinul n ataşat matricei A = [ai}].
Determinantul de ordinul n — 1 care se obţine suprimînd linia i şi coloana / din | atj | se numeşte minorul elementului at] şi se notează cu minor atj. Numărul cof % = {—\)i+i minor ai} se numeşte complementul algebric sau cofactorul elementului a{}.
Avem n n
J2 api cofau = S Î « d e t A - 5 3 akP cofakq = Bpq det A.
( = 1 A = l
1.17. Matricele pătratice A pentru care det A ^ 0 (det A , = 0) se numesc matrici nesingulare (singulare).
9

1.18. Fie A o matrice pătratică. Matricea A - 1 care satisface condiţiile AA - 1 = A - 1 A = I se numeşte matrice inversă lui A.
O matrice pătratică A posedă o inversă dacă şi numai dacă det A ^ ()• Această matrice inversă se poate determina astfel: se calculează det A ^ 0; se face matricea transpusă, 'A, şi matricea reciprocă A+ ( = matricea ale
cărei elemente sînt cofactorii elementelor lui 'A) ; A - 1 = A+. det A
Matricea inversă unei matrice are proprietăţile:
('A)"1 = '(A-1), (A"1)-1 = A,
(kA)-1 = 1 Ar1, unde ke K - {0},
(AB)-1 = B-^A"1.
Cu ajutorul matricei inverse se definesc puterile întregi, negative, ale unei matrice nesingulare:
A-n = (A-1)'8, n = 1, 2, ...
1.19. Fie A = [aiS] o matrice de tipul « x n şi p un număr natural < m i n { w , n}. Prin suprimarea în matricea A a (m — p) linii şi (n — p) coloane, se obţine o matrice pătratică de ordinul p al cărui determinant se numeşte minor de ordinul p al matricei A.
Dacă matricea A posedă un minor nenul de ordinul p, iar toţi minorii de ordinul p + 1 sînt nuli sau nu există, atunci numărul p se numeşte rangul matricei A. Rezultă
rang A = rang 'A,
rang AB < min (rang A, rang B),
iar dacă B este o matrice pătratică nesingulară, atunci
rang AB = rang BA = rang A.
1.20. Fie A = [ay] o matrice de tipul « X n. Următoarele operaţii se numesc transformări elementare.
(1) Schimbarea a două linii (coloane) între ele. (2) înmulţirea elementelor unei linii (coloane) cu un număr nenul. (3) Adunarea la elementele unei linii (coloane) a elementelor corespondente
din altă linie (coloană) înmulţite cu acelaşi număr nenul. Matricele obţinute din matricea A prin transformări elementare au acelaşi
rang ca şi matricea A. Mai mult, în cazul în care A este o matrice pătratică nesingulară, matricea inversă A""1 poate fi obţinută cu ajutorul transformărilor elementare.
1.21. Fie A = [ai3] o matrice de numere reale sau complexe, de tipul mx n, şi b-i, b2, ..., bm nişte numere reale sau complexe date. O mulţime de ecuaţii de forma
se numeşte sistem de m ecuaţii liniare cu n necunoscute x}. Printr-o soluţie a sistemului se înţelege orice n — uplu (xx, x2, ..., xn) care verifică toate ecuaţiile sistemului. Matricea A se numeşte matricea coeficienţilor sistemului.
10
Fie B = *[&1( b2, ..., bm] şi X = t[x1, xs, ..., xn]. Sistemul (*) este echivalent cu ecuaţia matriceală (**) AX = B. Matricea [A/B] se numeşte matricea extinsă a sistemului.
1.22. Sistemul (*) este compatibil dacă si numai dacă rang A = rang [A/B].
Dacă A este o matrice pătratică nesingulară, atunci (**) are soluţia X = A-XB.
Exerciţii şi probleme
1. Fie mul ţ imeaj^ j 0 < pk < 1, E A = l | şi matricea complexă A=[« t J ] ,
pătratică de ordinul n, ale cărei elemente au modulul cel mult egal n n
cu unu. Să se arate că 7 ^ ^ fi*Pi\aki\z == * dacă şi numai dacă \akl\ = 1 , k=i i=i
k, l = 1, 2, ..., n, unde \au\ înseamnă modulul numărului aa. n n n n r «
Soluţie. Fie \au | = 1. Rezultă £ ] £ AAI««I2 = E E PtPi = E #
Fie 0<pt<l, ^ A = 1 .
*=I J=I *=i ;=i L*=I « K
= 1.
I<1. E E A A I « « I ' = 1 - Rezultă s=î 7=1
H ) A = E E A A = ! Ş1 P r i n diferenţă găsim J2 J^PtPii1 — k=l J A = l 1=1 k=l 1=1
= 0. Deoarece toţi termenii sumei din stînga sînt pozitivi, ultima egalitate implică p&Piiî- — |% | 2 ) = 0. Deci \a VA, le{l, 2,...,n}.
2. Fie matricele
= 1, adică
%! 2 )=
= i,
o
0 I„-2 I»-2 0
0
0 k 0
— bcX caX
— k 0 0 akX bkX
0
0 0 0
— b\i a\i
bcX —akX
bţi 0 c
— caX — bkX —a\i — c
0
= I2„+i, unde >. =
Să se arate că:
l = '[o, ..., (a2 + b2) X, 0, -cfx, a, 6],
-/] = [0, ..., (a2 + b2) X, 0, — cy., ai, bd]
A2
Ua? + b2' k , k = 4 a2 + b2 + c2.
<D2 = - I + ?vi, -/£ = 1, ®5 = 0, 7/5 = 0, S = g$, 'OgO = g - ' - „ •
Ansamblul (O, 5. ''3, g) se numeşte structură metrică aproape cocomplexă pe fl2"+1.
l i

3. Fie (x, y, z, w) coordonatele unui punct din R4 şi matricele
o =
0 0 1 0
0 1 0 0
y
- 1 0" 0 0 0 0 0 0 .
= %0, 0 0,
£ = o
2],
1 4
'Q
"1 + 0 0
. 0
= 0,
y2
o,
0 1 + 2
0 0
2_
0 2 0
i + y 2
0
0 0 0 1
Sa se verifice relaţi i le
cp2 = I — £T), 7)5 = 1, tp£ = 0, 7)Cp = 0, *V) = g£, *9gcp = g — 'TJYJ..
Ansamblul (cp, \, y\, g) se numeşte structură metrică coprodus pe R9.
cu elemente dira 4. Fie matricele
cîmpul K.
A = "«n « 2 1
« ! 2
«22. şi B = "&11 0 l 2
.021 022
1) Să se determine o condiţie necesară şi suficientă pentru ca A şi B să fie comutabile, adică AB = BA.
2) Folosind rezultatul de la punctul 1) să se exprime A2 în funcţie d e matricele A şi I.
Aceeaşi problemă pentru matricea A -1, în cazul cînd A - 1 există. r2 11 Aplicaţie la matricea A =
1 1J R: 1) a\ + 6B = ci..
5. 1) Să se dea exemple de mulţimi înzestrate cu operaţii de „înmulţire"* şi „adunare" pentru care sînt adevărate identităţile (x -\- y)2 = x2 -\- 2xy + y2,, (x + y) (x — y) = x2 — yz.
2) Să se arate că relaţiile din 1) nu sînt satisfăcute de matricele A =
^ Ce modificări trebuie să facem pentru a obţine-, B 1 0' 1 2
relaţii adevărate pentru mulţimea matricelor pătratice de ordinul ni R: 1) R, C, mulţimea matricelor pătratice (de ordinul n) comutabile etc.
(x + y)2 = x2 + xy + yx + y2, (x + y) v = x xy+yx — y2.,
6. Se consideră matricea A = "l 1
.1
0 1 1
0" 0 1.
. Să se verifice că A2 =
şi să se determine A3, A4 şi apoi An, neN. 1 0 0" n 1 0
!^±1 „ i
1 2 _3
0 1 2
0' 0 1J
R: AB =
7. Să se arate că dacă A2 = A, atunci (A + I)K = I + (2n — 1) A, neN.. Soluţie. Utilizăm metoda inducţiei complete. Evaluăm (A + I)2, ţinînd seama de egalitatea din ipoteză şi de faptul că.
matricea I este comutabilă cu orice matrice. Obţinem (A + I)2 = I + 3A = = I + (22 - 1)A.
12

Presupunem adevărată egalitatea (A + I)" = I + (2" — 1) A, Să arătăm că ea este adevărată si pentru n + 1. într-adevăr (A + I)B+1 =
= (A + I) (A + I)- = (A + I) [I + ' ( 2 - - 1) A], (A -f- I)re+1 = I + (2"+1 — 1) A. De aceea egalitatea propusă are loc pentru orice număr natural n.
3. O matrice pătratică se numeşte stochastică, dacă elementele ei sînt nenegative şi suma elementelor de pe fiecare linie este egală cu unitatea.
Să se arate ca * 1) Produsul a două matrice stochastice de ordinul n este tot o matrice
stochastică de ordinul n. 2) Puterile naturale ale unei matrice stochastice de ordinul n sînt matrice
•stochastice de ordinul n. 3) Dacă liniile unei matrice stochastice sînt egale între ele, atunci toate
puterile naturale ale matricei sînt egale cu matricea iniţială. 9. O matrice P = [pt]}, i, j = 1, 2,...,n, care are proprietăţile pa>0,
n n
/,i>ti = 1, y^.j),, = 1 se numeşte matrice dublu stochastică.
1) Să se arate că produsul a două matrice dublu stochastice este o matrice dublu stochastică.
2) Să se probeze că orice matrice dublu stochastică, care nu are toate •elementele egale, conţine o submatrice
&1 d
astfel încît min (a, d) > max (b, c) sau max (a, d) < min (b, c). 3) Să se găsească forma unei matrice dublu stochastice care comută cu
toate matricele dublu stochastice. 4) Să se arate că produsul tuturor elementelor dintr-o matrice dublu
stochastică de tipul n X n este cel mult ]/nn\ Cînd este atinsă această valoare? 10. Fie A = [«yj o matrice pătratică ale cărei elemente a{} sînt funcţii
reale diferenţiabile pe o mulţime deschisă din ROT şi fie d operatorul de diferenţiere.
1) Definim dk = [dat]]. Să se verifice relaţiile
d(A + B) = dk + dB, d(AB) == (iA) B + AdB.
2) Fie ă = det A. Să se arate că dA = V^ Ai}datj, unde A y este cofac-i, )=!•
torul elementului ai}, iar n este ordinul matricei A. 11. Considerăm funcţiile reale ult u2, ..., un definite pe (a, b) pe care le
presupunem derivabile de n ori. Determinantul W(x) = det [M (/_1)(A')] se numeşte wronskianul funcţiilor %, u2, ..., un. Să se arate că W'(#) este determinantul matricei obţinută din [«|i_1>(^)] prin derivarea ultimei linii.
12. Să se determine matricea inversă pentru fiecare dintre matricele următoare:
A 1
— 1
2"
4. ; 2) B =
'2 0 .1
— 1 2
— 2
' 3 -
O
0 0.
; 3) c = "3 1 2 0 1 0
.0 0
2 5
—2 0
0 1 6 1
13

13. Se dă matricea complexă
Să se arate că
—a --b -— x -
X
ca
\ - ! =
-b -c -y —
y
C
m b
m
— u
~u
X
y -d 0
— X
y 0 d_
b m a
m
— v
-v
ac —
îi
V
1 , d
w
6V0,
u
V
w
1 , — + w c
d^Q.
unde u = (cx — by)\md, v = (ay — bx)\md, w = {ay1 — 2bxy + cx%)\md2, m = ac — b2.
14. Fie §TL2X2(R) inelul matricelor reale de ordinul doi şi $11 submultimea
cu «, o e « .
1) Să se arate că $11 este un cîmp (corp comutativ). 2) Fie C cîmpul numerelor complexe. Să se arate că funcţia f: C —> $H
matricelor A =
definită prin i(a + ib) = este un izomorfism.
3) Să calculeze
a
V3 J_
Soluţie. 1) Fie matricele A, A'e$ll . Rezultă
A + A' a b — b a +
a' b' -V a'
a + a' b -(6 + 6') a
e$li
AA' = a b' — b a
a' b' ~b' a'
Evident matricele —A si O =
aa — 66 ab + ba — (ab' + ba') aa' — 66'
0 0'
e$H
0 0 aparţin lui $11, iar adunarea de
termină pe $11 o structură de grup comutativ. înmulţirea determină pe $H —- {0} o structură de grup comutativ. într-
adevăr ea este comutativă, asociativă ; matricea unitate de ordinul doi aparţme lui DTl — {0} şi orice matrice A / 0 este inversabilă, iar A_ 1e$ll — {O}.
14

Să justificăm ultima afirmaţie: pentru A ^ O avem det A = a2 -f- b2 ^ 0 şi prin metoda Gauss, de exemplu, obţinem
A:
a b b2 .
0 a
+ V
0
1
o
o + ab
b2
a" -ab a2 + b2 a'
b a
2 + b2
1
a — o a2 -f- b2 a2 + b2
b a
A~
a2 + b2 a2+ b2
2) Funcţia f: C-* 8M, este Lijectivă. într-adevăr, ax -\- ii1! # a2 + i62
implică f(a1 + i&2) =
i6e C astfel încît f(« + ii) = A =
# « 3 &2_
— 6o «2
= A = a 6"
, — & a
f(a2 + ib2) şi VA e DTl, 3a +
. în plus se constată că
f(*a + *3) = ffa) + i(z.2) şi î(Zlz2) = ffo) i(z2), Vzu z2eC. 3) Se observă că
1 r
3 T
V3 2 1
cos — 3
—sin — L 3
sin — 3
cos — 3
f cos —?+ i sm —
şi
V3
V3 1 2 J
= f60| cos 1- i sm 3 ' 3
f| cos 60 • -f -+- i i sin 60 • — I 3j
f(cos 20TL + i sin 20;r) == f(l + i 0) = 1 0 O 1
15. Fie matricea reală A ale cărei elemente sînt al} = Btj + p{ft}, i,j = 1, 2, ..., n.
n
1) Să se arate că det A = 1 + T^Pt
2) Să se determine A -1.
15

Soluţie. 1) Mai întîi se foloseşte descompunerea unui determinant într-o suma de doi determinanţi şi apoi proprietăţi ale determinanţilor
8« + M I = l + # o + Pd>» o +p±pn
+ pi o . PzPi ! •
A^i o .
. 0
. 0
. 1
+
0 + Pzpi 1 + Pi
0 + PnPl 0 + P„P2
i M . . . o| o ti...ol ,
j - r
o pnp2... i |
o + &£, A2
1
0
0
0 .
1.
0 .
. 0
. 0
. 1
+
| i 0...AA . J0 l...pzpn
jo o... ^ = i+£#
2) Deoarece det A ^ 0, matricea A"1 există. Căutăm pe A ' = [bjk\ cu elemente de forma bj!e = x$n + ypjpk- Observăm că 8it. = #Srt + ^^^« +
+ yPiPk + J 'AA y ^ Pi dacă şi numai dacă x = 1 şi ^
btt = S l t ; -piPf
det A Deci
'jjs. JjK det A
16. Fie A o matrice simetrică nesingulară, A x inversa ei şi B o matrice pătratică de acelaşi ordin cu matricea A. Să se determine inversa matricei
G = A + 'BA^B
-A-*B
R: A 1 este o matrice simetrică si G
-'(A^B)-
[A"1 '(BA-1) BA-1 A + BA-1SB
17. Fie G o matrice pătratică simetrică nesingulară de ordinul n şi X, Y două matrice de tipul 1 X n astfel încît XG"14Y = 0, XG"1£X = YG 1 SY = = — 1 . Să se găsească determinantul si, cînd este posibil, inversa matricei H = G + a 'XX + b fYY.
R: det H = — (1 —- a) (1 — b) şi deci H este nesingulară <*• a ^ 1, b # 1;
H-1 = G~ 1
(XG-1) (XG-1) 1
'(YG-1) (YG-1).
18. Matricea A ale cărei elemente sînt ai} = se numeşte matrice
Cauchy. 1) Să se verifice că
det A = n (xj - xt) {y, - yt)j R (*, + yt)
2) în ipoteza det A =/= 0, să se arate că K = ( n (x, + yt) (xk + yi))l(*} + yt) ( n (x, - xk)) n (yt - yk).
sînt elementele lui A -1. 3) Care este suma celor n2 elemente ale lui A -1? R: 3) (Xl + ... + xn) + (>•! + ... + yn).
16

19. Matricea H ale cărei elemente sînt h, 1 se numeşte ma-
i +j — 1 irice Hilbert.
1) Să se arate că orice matrice Hilbert este un caz particular de matrice Cauchy.
2) Să se găsească H_1. Să se arate că fiecare element al inversei este un număr întreg, iar suma tuturor elementelor inversei este n2.
20. Fie A = [a(j] o matrice pătratică. Numărul S a ^ permanentul matricei A. Care este permanentul matricei
*y» se numeşte
l x l 1X2 ... I X » 2 x 1 2 x 2 ... 2 x » ?
»X 1 « X 2 ... nxn_
R: (n !)3. Există n ! termeni. Fiecare termen are cîte un factor din fiecare linie şi fiecare coloană, adică are valoarea (n !)2.
21. Se consideră matricea Vandermonde
Ur1 xt1... *.. 1) Să se arate că det V = ŢI (xj ~ xi)-
2) în ipoteza det V ^ 0, să se găsească V -1. 3) Care este suma celor n2 elemente ale lui V - 1 ? 22. Se consideră matricea combinalorială
vn-\
Vx + y y
y -x + v ...
L y y •••
1) Să se arate că det C = xn~1(x + ny). 2) în ipoteza det C # 0, să se verifice că
bn = (~y + 8<*(* + ny))
y y
x 4- v_
xix ny) sînt elementele lui C-1.
3) Care este suma celor nz elemente ale lui C_1 ?
R: 3) x + ny
23. Program de inversare a unei matrice prin metoda Gauss-Jordan. Fie A = [ai}]eSZnxn o matrice pătratică de ordinul n nesingulară. Se
construieşte matricea extinsă C cu n linii şi 2w coloane, primele n coloane
2 — Probleme de algebră — c. 264 17

conţinînd matricea de inversat A, iar ultimele n coloane matricea unitate I de ordinul n. în urma transformărilor elementare
c» = au — aikakJ,
j = 2n, k
3 2n, k: i = 1, n k = \,n
se aduce matricea unitate I în primele n coloane şi în următoarele n coloane se obţine matricea inversă A-1.
ICI
ICI
[C|
Programul şi subprogramele necesare sînt (Fig. A.l)
SUBPROGRAM DE CITIRE ÎN MEMORIE A UNEI MATRICE A(NXN) SUBR0UTINE CITIRE (N, A) DIMENSI0N A(N, N) READ (105,1) ((A(I, J), J = 1, N, I = 1, N) F0RMAT (10F6.2) RETURN END
SUBPROGRAM DE SCRIERE A UNEI MA TRICE A (NXN) SUBR0UTINE SCRIERE (N, A) DIMENSI0X A(N, N) D0 1 1 = 1 , N) PRINŢ 2, (A(I, J), J = 1, N) F0RMAT (11X, 10E12.2) RETURN END
SUBPROGRAM DE ÎN MUL TIRE A 2 MA TRICE C (MXL) = = A(MXN) x B(NXL) SUBR0UTINE PR0DUS (C, A, B, M, N, L) DIMENSI0N A(M, N), B(N, L), C(M, L) D 0 1 1 = 1, M D 0 1 J = 1, L C(I, J) = O D 0 1 K = 1, N C(I, J) = C(I, J) RETURN END
A(I, K) * B(K, J)
SUBPROGRAM DE COPIERE A UNEI MATRICE ÎN MEMORIE SUBR0UTINE C0PIA (N, A, B) DIMENSION A(N, M), B(N, N) D0 1 I = 1, N D 0 1 J = 1, N B(I, J) = A(I, J) RETURN END
18
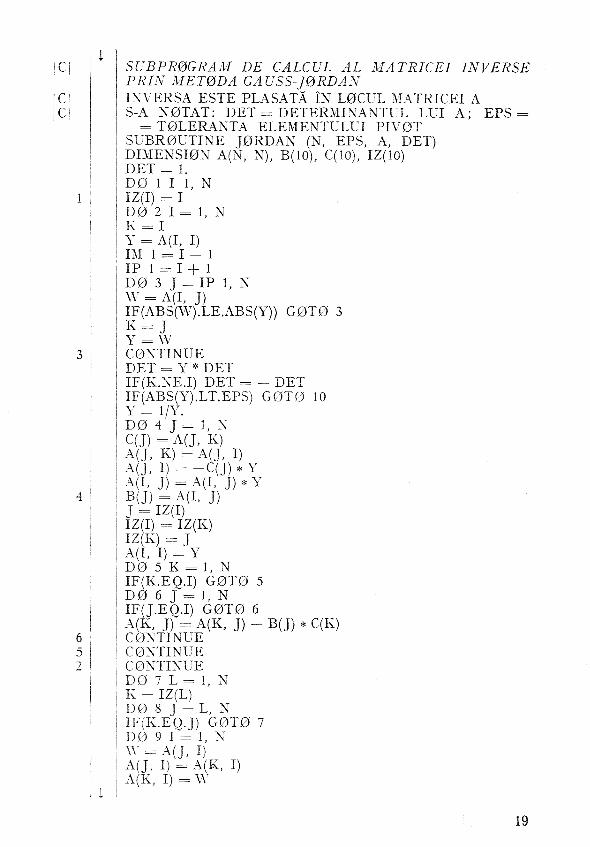
SUBPR0GRAM DE CALCUL AL MATRICEI INVERSE PRIN MET0DA GAUSS-J0RDAN INVERSA ESTE PLASATĂ ÎN L0CUL MATRICEI A S-A N0TAT: DET = DETERMINANTUL LUI A; EPS =
= T0LERANTA ELEMENTULUI PIV0T SUBR0UTINE J0RDAN (N, EPS, A, DET) DIMENSI0N A(N, N), B(10), C(10), IZ(10) DET = 1. D 0 1 I 1, N IZ(I) = I D 0 2 I = 1, N K = I Y = A(I, I) IM 1 = 1 - 1 IP 1 = 1 + 1 D'0 3 J = IP 1, N W = A(I, J) IF(ABS(W).LE.ABS(Y)) G 0 T 0 3 K = J Y = W C0NTINUE DET = Y * DET IF(K.NE.I) DET = - DET IF(ABS(Y).LT.EPS) G 0 T 0 10 Y = l/Y. D 0 4 J = 1, N C(J) = A(J, K) A(J, K) = A(J, I) A(J, I) = -C(J ) * Y A(I, J) = A(I, J) * Y B(J) = A(I, J) J = IZ(I) IZ(I) = IZ(K) IZ(K) = J A(I, I) = Y D 0 5 K = 1, N IF(K.EQ.I) G 0 T 0 5 D 0 6 J = 1, N IF(J.EQ.I) G 0 T 0 6 A(K, J) = A(K, J) - B(J) * C(K) C0NTINUE C0NTINUE C0NTINUE D 0 7 L = 1, N K = IZ(L) D 0 8 J = L, N IFi'K.EQ.J) G 0 T 0 7 D 0 9 1 = 1, N W = A(J, I) A(J, I) = A(K, I) A(K, I) = W
19
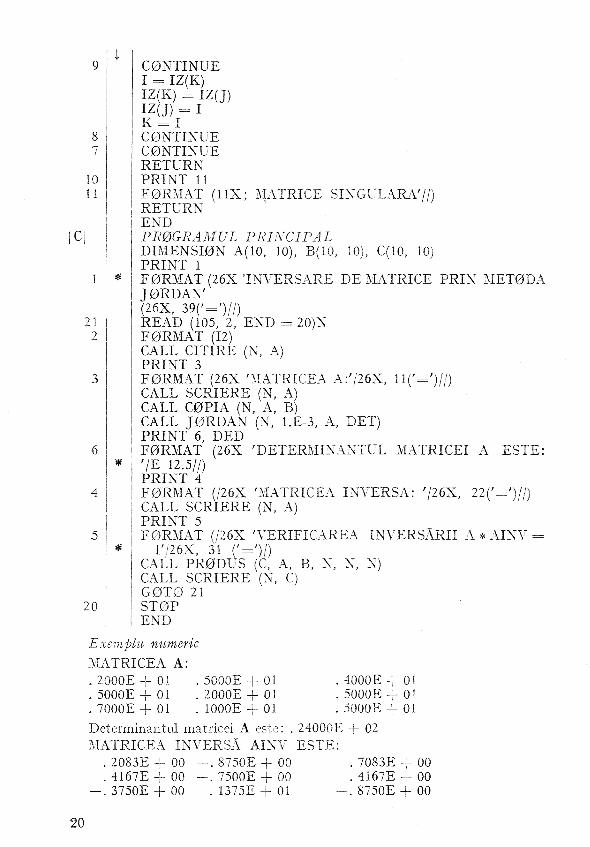
C0NTINUE I = IZ(K) IZ(K) = IZ(J) IZ(J) = I K = I C0NTINUE C0NTINUE RETURN PRINŢ 11 F 0 R M A T (11X; MATRICE SINGULARA'//) RETURN END PR0GRAMUL PRINCIPAL DIMENSI0N AUO, 10), B(10, 10), C(10, 10) PRINŢ 1 F 0 R M A T (26X ' INVERSARE DE MATRICE PRIN MET0DA J 0 R D A N ' (26X, 39( '=')/ /) READ (105, 2, END = 20)N F 0 R M A T (12) CALL CITIRE (N, A) PRINŢ 3 F 0 R M A T (26X 'MATRICEA A:'/26X, H( '= ' ) / / ) CALL SCRIERE (N, A) CALL C0PIA (N, A, B) CALL J 0 R D A N (N, l.E-3, A, DET) PRINŢ 6, DED F0RMAT (26X 'DETERMINANTUL MATRICEI A ESTE: ' /E 12.5//) PRINŢ 4 F 0 R M A T (/26X 'MATRICEA INVERSA: '/26X, 22( '= ') / /) CALL SCRIERE (N, A) PRINŢ 5 F 0 R M A T (/26X 'VERIFICAREA INVERSĂRII A * AINV =
F/26X, 31 (' = ')/) CALL P R 0 D U S (C, A, B, X, X, N) CALL SCRIERE (N, C) G 0 T 0 21 S T 0 P END
Exemplu numeric MATRICEA A: . 2000E + 01 . 5000E + 01 . 4000E + 01 .5000E + 01 .2000E + 01 . 5000E + 01 . 7000E + 01 . 1000E + 01 . 5000E + 01 Determinantul matricei A este: . 24000E -j- 02 MATRICEA INVERSĂ AINV ESTE:
. 2083E + 00 —. 8750E-j-00 . 7083E + 00
. 4167E + 00 —. 7500E + 00 . 4167E + 00 —. 3750E + 00 . 1375E + 01 —. 8750E + 00

Verificarea inversării A * AINV = I (matricea unitate)
. 1000E + 01 . 1490E - 05 . 1907E - 05
. 1907E — 05 .1000E + 01 . 9537E — 06 - . 2 8 6 1 E - 0 5 - . 1371E — 05 . 1000E + 01
Fig. A.l .
24. Fie Ii un corp comutativ şi A = [au] i = 1, 2, ..., m, j = 1, 2, .., n, o matrice de tipul mx n cu elemente din K. Să se arate că rang A = 1 dacă. şi numai dacă există u{, v}e,K (nu toate nule) astfel încît ai} = utvs.
Soluţie. Dacă ai} = utv}, atunci rang A = 1, deoarece liniile matricei A sînt proporţionale.
Presupunem rang A = 1. Aceasta înseamnă că nu toţi vectorii linie sînt nuli şi că dacă ah = (ahV ah2, ..., « f t n)#0, h = fix, atunci oricare alt vector linie at = (aa, ai2, ..., a(n) este de forma ai = ytah, adică afJ = YJ«B^. Punînd Yt = u0 aM = V], se obţine af} = utv}.
25. Se consideră circuitul din figura 1.1 în care E == 60 V şi conductorii au rezistenţele 2 0 . Să se determine intensităţile curenţilor care circulă prin conductori.
Indicaţie. Folosind legile lui Kirchhoff obţinem sistemul:
Ix — ii — I2 — 0, (nodul A)
h — H — h = 0, (nodul D)
Iz — H — 1-4 = 0 (nodul C)
I-i - ii - h = 0 (nodul B)
Iir + ix>' — iif = E (circuitul AFB)
I2r -f i-i? — iii' = 0 (circuitul ADF)
i2r — isr — ixr = 0 (circuitul DCF)
h>' — Ui' — Hi = 0 (circuitul CFB) 26. Se consideră (vectorii) matricele
~x{
.*..
, Y = "yî
-}'n.
cu ajutorul cărora definim matricea A = I + X'Y. 1) Să se arate că există un polinom de gradul doi cu coeficienţi reali,
P(x) = y.x2 + 3.T + v, astfel încît
P(A) = ocA2 + pA + Y1 = O.
2) în ipoteza *XY = O, să se cerceteze existenţa lui A -1.
3) Să se rezolve sistemul BX = Y, unde B = [b(j] este dată prin
P. * #y. x, i = j
21

Soluţie. 1) Fie matricea P(A) = aA2 + |3A + yl = (a + 6 + y) I + + (2a + P) X'Y + a (X'Y) (X(Y) = (a + (3 + y) I + (2a + j3 + p) X'Y. Condiţiile a + (3 + y = 0, 2a + Ş + p = 0 determină coeficienţii polinomului P(x), fiind evident compatibile.
2) Se observă că
A = I + X'Y =
1 + xiyi
x„\
xiy-i 1 + %23'2 -
Xi V U n
%r,
» > i 1 + *„>'»-şi det A = 1 + x1v1 + ... + :vBvs = 1 + 'XY. De aceea *XY = 0 implică
A = 1 şi d< 3) Matricea
det A = 1 şi deci A nesingulară
B
L P p p este matrice nesingulară dacă şi numai dacă a acest caz
P, a # P(l — n) şi în
B" (a -p) [« + p ( » - l ) ]
a - P
-p a
• ? > •
"P
-P - p . . .
•P -P
a J
In ipoteza a ^ p, a / p(l - »), sistemul BX = Y are soluţia unică X = B_1Y. Dacă a = p # 0, atunci sistemul BX = Y se scrie explicit sub forma a(% + ••• + %n) = }'i> •••» <*-{x\ + ••• + x
n) = }'n Şi admite soluţii numai dacă Vi = ... = vn; pentru a = P(l — n) # 0 sistemul se transcrie (1 — n)
x1 -f ... + xn = — , ..., % + ••• + (1 — n) %n = — şi admite soluţii numai P P
dacă y± + ... + >'» = 0; cazul a = p = 0 este banal. Explicitatea soluţiilor este evidentă.
27. Programul F 0 R T R A X pentru metoda lui Gauss de rezolvare a unui sistem liniar (Fig. A.2).
1 S U B R 0 U T I X E GAUSS 1 (N, A, B, X, DET, KAR, T 0 L )
C KAR AM X 0 T A T RANGUL MATRICEI C T 0 L ESTE T0LERANTA
D I M E N S I 0 N A(6,6), B(6), X(6) INTEGER 0RD(6) KS = 1 D 0 1 I = 1,X 0 R D ( I ) = I N 1 = N - 1 D 0 2 K = l , XI AM=ABS(A(K,K)) I M = K
22

i JM=K D 0 3 I=K,N D 0 3 J=K,N IF(AM.GE.ABS(A(IJ))) G 0 T 0 3 AM=ABS(A(IJ)) IM=I
i J M = j j C0NTINUE
IF(AM.GT.T0L) G 0 T 0 11 ! K A R = K
RETURN T=B(IM) B(IM)=B(I) B(K)=T ' D 0 4 J=K,N T=A(IMJ) A(IMJ)=A(KJ) A ( K J ) = T D 0 5 1=1,N T=A(IJM) A(IJM)=A(I,K) A(I;K)=T
j M=0RD(JM) 0RD(JM) = 0RD(K) 0RD(K)=M
j K 1 = K + 1 D 0 6 I=K1,N C=-A(I,K)/A(K,K) B(I)=B(I)+C*B(K) D 0 6 J=K,N
| A(IJ )=A(IJ)+C*A(KJ) C0NTINUE
REZOLVAREA SISTEMULUI TRIUNGHIULAR
X(N)=B(N)/A(N,N) D 0 20 K=1,N1 S = 0 NK=N—K N K 1 = N - K + 1 D 0 21 L=NK1,N
l S=S+A(NK,L)*X(L) ; X(NK) = (B(NK)-S)/A(NK,NK)
D 0 7 I=1,N1 D 0 8 J=1,N IF(0RD(J).EQ.I) G 0 T 0 9 C0NTINUE M=0RD(I) 0RD(I) = 0RD(J) 0RD(J)=M T=X(I) X(I)=X(J) X(J )=T
23

C0NTINUE D E T = 1 D 0 10 I = 1 , N D E T 1 = D E T DET=DET*A(I , I ) IF(DETl*DET.LT.O) K S = C0NTINUE K A R = N RETURN END
PROGRAMUL PRINCIPAL
DIMENSI0N A(6,6), B{6), X(6), AS(6,6), BS(6) E P S = 1 . E — 3 READ(105,1)N FORMAT (12) READ (105,2) ( (A(IJ) , J = 1 , N ) , I=1 ,N) F 0 R M A T (10F8.2) W R I T E (108,3) F 0 R M A T (20X, 'MATRICEA SISTEMULUI ESTE'/20X, 26( '=') / /) D 0 31 1=1,N WRITE (108,4) (A(IJ ) , 1=1,N) F 0 R M A T (11X, 10E12.4) D 0 7 1=1,N BS(I)=B(I) D 0 33 1=1,N D 0 33 J = 1 , N AS(IJ)=A(IJ) CALL GAUSS 1(N,A,B,X,DET,KAR,EPS) WRITE (108,6) F0RMAT (10X, 'MET0DA LUI GAUSS CU PIV0T MAXIM NE FURNIZEAZĂ S0LUTIILE"/ / ) D 0 9 I = 1,N W R I T E (108,10) I, X(I) F 0 R M A T (10X, 'X(',12,') = ' , E12.5) W R I T E (108,15) F 0 R M A T (11X, TN CALCULE S-A F 0 L 0 S I T T0LERANTA', E12.5) W R I T E (108,8) KAR, DER F0RMAT (11X 'RANGUL MATRICEI A ESTE: ' , I 2/1 IX'/ DETERMINANTUL MATRICEI A ESTE: ' , E12.5) . WRITE (108,14) F 0 R M A T (11X 'VERIFICAREA S0LUTIEI 0BTINUTE7) D 0 34 1=1,N B(I) = O. D 0 34 J = 1 , N B ( I ) = B ( I ) + A S ( I J ) * X ( J ) D 0 11 1 = 1 , N B ( I ) = B S ( I ) - B ( I ) WRITE (108,40) I, B(I)

40 F0RMAT (11X 'DELTAB(',12,') G 0 T 0 19 S T 0 P END
E12.5)
Exemplu numeric S-a rulat sistemul
1,5 xx — 3,2 %2 + 6 x3 + 4,5 %i + xh
— 3,6 xx + 2,5 *2 — 1,8 .v3 — 0,6 .r4
3 %x — 5 %2 + 0,7 ,r3 — 1,4 *4 — 4,2 xb
xx — 2 x2 + 3 A'3 — 1,8 Xi + 11 %5
+ 0,3 % = 0,82 + 2 x6 = 0,59
= — 3,92 = 1,91
- 3,2 xx + 0,5 x% + 2,5 xs
— 5 xx + x2 + 0 , 5 .Y3
S-a obţinut soluţia
1,1 Xi + 3,8 x5 + 4,6 x8 = 1,89 3 AfB 4 x„ = — 0,24
X(l) = .26064E + 00 Ar (2) = .75560E + 00 Z(3) = .2906 IE + 00 X(4) = .14330E + 00 X(5) = .23970E + 00
. Ar(6) = .13292E + 00
In calcule s-a folosit toleranţa: . 10000E—02. Rangul matricei sistemului este: 6. Determinantul matricei sistemului este: .30111E+05
VERIFICAREA SOLUŢIEI OBŢINUTE DELTA 5(1) = DELTA 73(2) = DELTA 5(3) = DELTA B(4) = DELTA 75(5) = DELTA 73(6) =
.19073E-05
.95367E-06
.95367E-06
.10000E—07
.95367E—06'
.19073E-05
A.2.
§ 2. SPAŢII VECTORIALE
2.1. O mulţime K împreună cu două aplicaţii ale lui KxK în K, numite respectiv adunare şi înmulţire, care satisfac condiţiile:
(1) adunarea determină pe K o structură de grup comutativ, 1 (2) înmulţirea determină pe K — {0} o structură de grup,
(3) înmulţirea este distributivă faţă de adunare, se numeşte corp. Un corp în care înmulţirea este comutativă se numeşte cîmp (corp comutativ).
Precizare. Noi vom folosi în special cîmpul numerelor reale Jî şi cîmpul numerelor complexe C.
25

2.2. O mulţime V se numeşte spaţiu vectorial peste cîmpul K dacă admite (1) o structură de grup comutativ, notată aditiv,
('6>, w) —»• v + w;
(2) o funcţie f : K x V —> V, notată prin (k, v)-* kv, astfel încît Vk, leK, Vi1, ze'eV să avem
1 v = v
k (Iv) = (kl) v
(k -f l) v = kv + fo
k (v + w) = kv -f fee». Elementele lui V se numesc vectori, elementele lui K se numesc scalari,
iar aplicaţia / se numeşte înmulţirea cu scalari. Un spaţiu vectorial peste R se numeşte spaţiu vectorial real. Un spaţiu
vectorial peste C se numeşte spaţiu vectorial complex. 2.3. Fie V un, spaţiu vectorial peste cîmpul K. O submulţime nevidă W
a lui V se numeşte subspatiu vectorial al lui V dacă
(1) VM, veW, u+ veW,
(2) \JkeK, V«eW, feeW.
sau echivalent
Wu, ve W, VĂ, ZeK, ÂM + foe W.
2.4. Fie V un spaţiu vectorial peste cîmpul K şi S o submulţime neviciâ a lui V. Un vector veV de forma
p v = y^, &,:«,-, unde « f eS, k(eK,
»=i
se numeşte combinaţie liniară finită de elemente din S. Mulţimea tuturor combinaţiilor liniare finite de elemente din S este un
subspatiu vectorial al lui V. Acest subspatiu se numeşte subspaţiul generat de submulţimea S sau acoperirea liniară a lui S şi se notează cu L(S).
2.5. Dacă W± şi W2 sînt două subspaţii ale spaţiului vectorial V, atunci (1) mulţimea
Wi + W2 = {v = v1 + vz\ vxe Wi, vze W2},
numită suma dintre Wi şi W2, este un subspatiu vectorial al lui V; (2) intersecţia Wx fi W2 este un subspatiu vectorial al lui V; (3) reuniunea Wi (J W2 nu este un subspatiu vectorial al lui V. Se
observă însă că Wi + W2 = L(WX U W2). 2.6. Fie Wi şi W2 două subspaţii vectoriale şi ve Wi + W2. Descompune
rea v = Vi + vz, Vie Wi, v%e W2, este unică dacă si numai dacă Wi n nw2 = {o}.
Dacă Wi fi W2 = {0}, atunci suma Wj + W2 se numeşte sumă directă şi se notează cu Wx © W2. în plus, dacă Wi © W2 = V, atunci Wx şi W2 se numesc subspaţii suplimentare.
2.7. Fie V un spaţiu vectorial peste cîmpul K. O mulţime S de elemente din V este numită liniar dependentă dacă există o mulţime finită de elemente
26
distincte din S, să zicem vx, ..., vp, şi scalarii kx, ..., kP, cel puţin unul dintre p
scalari fiind diferit de zero, astfel încît ^ kivi = 0. Mulţimea S se zice liniar ; = 1
independentă dacă nu este liniar dependentă; cu alte cuvinte pentru orice p
alegere a elementelor vte S şi a scalarilor kt, relaţia y ^ ktv, — 0 implică t = i
kx = ... = kp = 0. Uneori în loc de mulţime liniar dependentă respectiv liniar independentă
se zice direct vectori liniar dependenţi respectiv liniar independenţi. 2.8. Fie S — {vx, ..., vP} o mulţime liniar independentă şi L(S) acoperirea
liniară a lui S. Orice mulţime de p -f- 1 elemente din L(S) este liniar dependentă.
2.9. Fie V un spaţiu vectorial peste cîmpul K. O mulţime B de elemente din V este numită bază pentru V dacă B este liniar independentă şi generează pe V. Spaţiul V se numeşte finit dimensional dacă posedă o bază finită sau dacă V = {0}. în caz contrar V se numeşte infinit dimensional.
^.10. Dacă V este un spaţiu finit dimensional, atunci orice două baze ale lui V au acelaşi număr de elemente.
Dacă V are o bază formată din n elemente, atunci numărul n se numeşte dimensiunea lui V. Se scrie dim V = n sau V„.
2.11. Orice mulţime de vectori liniar independenţi din VM este o submulţime a unei baze. Orice mulţime formată din n elemente liniar independente din V„ este o bază a lui V„.
2.12. Fie B = {e1, e2, ..., en} o bază a spaţiului vectorial VB. Orice vector ne V se exprimă unic în forma
n
i = l
Numerele xt se numesc coordonatele lui v în raport cu baza B, iar bijecţia f:V—> K" definită prin v —> (%, x2r ..., xu) se numeşte sistem de coordonate pe V.
2.13. Dacă în V„ este fixată o bază B, atunci se preferă identificarea v = (xi, x-2, ..., xn). în acest caz kv = (kx1, kx2, ..., kxn) şi dacă w = {yx, _y2, ..., yn), atunci v + w = (xx + yx, x% + y2, ..., xn + y„).
2.14. Fie V„ un spaţiu vectorial peste cîmpul K, A = [ai}] o matrice patratică cu elemente din K şi B = {elt e2, ..., ere} o bază a lui V„. Mulţimea
B' =Wi =Z—/aaei> i•== ^> ^> •••• n\ es^-e ° bază a lui V„ dacă şi numai dacă det A # 0.
Dacă B = {<?!, e2, ..., en} şi B' = {e[, e'%, ..., e$ sînt baze ale lui V„, iar xi respectiv x\ sînt coordonatele unui vector v în raport cu B şi B',
avem scrierea matriceală X = AX'.
atunci xt = Â 3
Notînd X =
V^a = i
x2
•%n-
„%',, i = 1, 2, ..., n.
, A = [ % ] , X' =
-x[-x2
-Xn_
27

2.15. Fie V şi W două spaţii vectoriale peste cîmpul K. O aplicaţie eT:V —> W care satisface
&(u + v) = ST(u) + &(v)
&(ku) = k&(u), Vu.veY, WkeK,
se numeşte transformare liniară. O transformare liniară bijectivă se numeşte izomorfism.
Două spaţii vectoriale V şi W peste cîmpul K, de dimensiuni finite, sînt. izomorfe dacă şi numai dacă au aceeaşi dimensiune.
2.16. Fie V un spaţiu vectorial real. Pe V x V definim operaţiile
(u, v) + (x, y) = (u + x, v + y),
[a -f- i&) (w, D) = (au — 2w, &« + av),
unde a + ibeC. Se arată că V x V este un spaţiu vectorial peste C. Spaţiul vectorial complex V X V se numeşte complexificatul spaţiului V
şi se notează cu CV. Se observă că (0, v) = i (v, 0) şi dacă admitem identificarea (u, 0) = «,
atunci (u, v) = (u, 0) + (0, v) = u + iv. Deci CV = V © (iV), unde iV = = {(0,i;) |weV).
în particular, c'jRre = Cn. 2.17. Fie V un spaţiu vectorial complex. Spaţiul vectorial real E V care
coincide cu V ca grup şi în care înmulţirea cu un număr real se face ca în V se numeşte trecerea în real a lui V. în particular, RCn = R2n.
2.18. Fie V un spaţiu vectorial complex. O aplicaţie (v, w) definită pe V X V şi cu valori în C care are proprietăţile
(v, w) = (w, v)
(ii, V + W) = (U, V) + (U, W),
k(v, w) = (kv, w), \'keC,
(y, v)7*0; (v, v) = 0 •«• v = 0,
se numeşte produs scalar pe V.
Axiomele precedente au următoarele consecinţe
(v, kw) = k(v, w),
(u + v, w) = (ii, w) + (v, w),
inegalitatea lui Schwarz \(v, w)\2 < (v, v)(w, w). Dacă V este un spaţiu vectorial real, atunci în definiţia precedentă C se
înlocuieşte cu R, axioma (v, w) = (w,v) se înlocuieşte cu (v, w) = (w, v), iar consecinţa (v, kw) = k(v, w) devine (v, kw) = k(v, w).
2.19. Un spaţiu vectorial (real sau complex) pe care s-a definit un produs scalar se numeşte spaţiu euclidian (real sau complex).
2.20. Fie V un spaţiu euclidian. Funcţia 11 11 : V —» JR+ definită prin ijî,'jj = v(y, v) este o normă. Cu această noţiune inegalitatea lui Schwarz. se transcrie \(v, w)\ < !juj| \\w\\.
28

2.21. Proprietăţile normei care nu depind de alegerea produsului scalar pe V sînt următoarele
\\v\\ > 0 pentru v # 0, [|0|| = 0,
\\kv\\ = \k\ \\v\\, k = scalar,
||» + w\\ < \\v\\ + \\w\\ (inegalitatea triunghiului).
2.22. Un spaţiu vectorial dotat cu o normă se numeşte spaţiu vectorial normat. Un spaţiu vectorial normat în care norma provine dintr-un produs scalar se numeşte spaţiu prehilbertian.
Un spaţiu prehilbertian complet (în sensul că orice şir Cauchyde elemente din spaţiu este un şir convergent) se numeşte spaţiu Hilbert.
2.23. Fie V un spaţiu vectorial normat. Funcţia definită prin d(u, v) = = |JM — v\\ este o distanţă pe V, adică satisface relaţiile:
d(u, v) > 0; d(u, v) = 0 <=*• u = v ;
d(u, v) = d(v, u)
d(u, v) < d(u, w) + d(w, v), Wu, v, we V.
Astfel orice spaţiu vectorial normat este un spaţiu metric. 2.24. Fie V un spaţiu euclidian real şi v, w doi vectori nenuli din V. Prin
unghiul dintre v şi w înţelegem numărul 6 e [0, u] definit de egalitatea
(v, w) cos 6
\H \H\ 2.25. Fie v un vector nenul din spaţiul euclidian V. Vectorul
se numeşte versorul lui V. Evident |je
în particular
NI2=ElMi2-2.30. Orice spaţiu euclidian finit dimensional are o bază ortonormată.
Demonstraţia acestei teoreme se reduce la procedeul de ortogonalizare Gram-Schmidt.
2.31. Fie V un spaţiu euclidian şi S o submulţime a sa. Un vector din V se zice ortogonal lui S dacă el este ortogonal pe orice vector din S. Mulţimea tuturor vectorilor ortogonali lui S se notează cu S x .
S-1- este un subspaţiu vectorial al lui V. în cazul că şi S este un subspaţiu, atunci S-1- se numeşte complementul ortogonal al lui S.
2.32. Fie V un spaţiu euclidian şi W un subspaţiu finit dimensional al lui V. Avem V — W @ W-1, adică orice element ve V se poate exprima unic în forma v = w + ^'x , unde we W şi K ^ e W 1 . în plus |pj|2 = ||îe>||2 + jj -Mi2-
Fie B = {elt e2, ..., enj o bază ortonormată a lui W şi v un vector din V. n
Vectorul w = y ^ (v> e^ e. s e numeşte proiecţia lui v pe subspaţiul W. i = i
Exerciţii şi probleme
1. (Spaţiul vectorial aritmetic). Fie K un cîmp oarecare cu ajutorul căruia construim mulţimea Kn = K X K X ... X K — {{klt k-2, ..., kn)\ kteK). y% = (xlt xz, ..., x,x), y = (ylt y2, ..., yn)eKn definim
x + y = {xx + yx, x2 + y2, ..., xn + y„)
kx = (kxlt kx2, ..., kxn), VkeK.
Să se arate că mulţimea Kn este un spaţiu vectorial peste K. 2. Fie cîmpul K(2) ale cărui elemente sînt 0 şi 1, iar operaţiile de adunare
şi înmulţire sînt definite după cum urmează
+ 0 1
o | i S 0 I ' 1 i 0
i '
o j î
0
0 0
i ! i
0 1
1) Să se organizeze JK22) = K{2) X K(2) ca spaţiu vectorial peste K(2).
2) Cîte elemente conţine acest spaţiu? 3) Să se arate că oricare ar fi we K2
2) avem w + w = (0, 0). 3. Să se arate că mulţimea SM,mx„(K) a matricelor de tipul mxn cu ele
mente din cîmpul Ii este un spaţiu vectorial peste K în raport cu adunarea matricelor şi înmulţirea dintre un scalar şi o matrice.
4. Să se arate că mulţimea K [X] a polinoamelor în nedeterminata X cu coeficienţi din cîmpul K este un spaţiu vectorial peste cîmpul K în raport cu adunarea polinoamelor şi cu înmulţirea dintre un polinom şi un element din K.
Soluţie. Fie i, g, 'heK [X], f = a0 + axX + ... + amXm, g = b0 + + b1X+— + bnXu, h = c0 + cxX + ... + cpXp cu am, b„, cv ^ 0. Fără a scădea generalitatea putem presupune m^n^p.
30

Să arătăm că perechea (K[X], + ) este un grup aditiv comutativ. f + g = g + f :î + g = fa + a1X+... + amXm) + fa + b,X + ... + bnX") =
= (definiţie), fa + b0) + fa + h) X + ... + fa + bm) X™ + bm+1 Z-+ 1 + + ... + bnXn = (comutativitatea adunării pe K), (b0 + «o) + (<?i + ®i)X + + ... + (bm + am)Xm + bm+1X™^ + ... + bnX» = (definiţie) g + i;
(f +g) + h = f + (g + h) : (f + g) + h = [a0 + b0 + fa + b,) X + ... + + fa + bm) Xm + bm^X^x + ... + bnXn] + fa + ClX + ... + cpXp) = (definiţie), [fa + b0) + c0] + [fa + h) + c{\ X + ... + [fa + bm) + cm] Xm + + (*Wi + om+1) X^1 + ... + fa + cn) Xn + cn+1X^ + ... + cpX* = (asociativitatea adunării din K), fa + fa -f c0)] + [<% + (&i + Ci)]X + . . . + \am + + (&„ + cm)]Xm + (bm+1 + c m + 1 )Z^ 1 + ... + fa + cn)Xn + c'n+l X™ + ... + + c ^ = (definiţie), f + ( g + h ) ;
Elementul neutru este f = 0, iar opusul lui f este —f. Să verificăm proprietăţile aplicaţiei kî. lf = f : lf = (definiţie), (1 • a0) + (1 • ax) X + ... + (1 • am) Xm = (pro
prietăţile înmulţirii din K), a0 + axX + ... + &mXm = f; (kl)i = k(li), k, leK: {kl)i = (definiţie), (kl)a0 + (kl)a1X+...^r(kl)amX™ =
= (proprietăţile înmulţirii din K), k(la0) -f- kfax) X + ... + k(lam) Xm = = (definiţie),' k{lî);
(&+ l)i = M + li: (k + l)î = (definiţie), (k + l) a0 + (k + l) axX + ... -f + (k+l) amXm = (proprietăţile înmulţirii din K), {{ka0) + (la0)] + [(£%) + + {fa)]X + ... + i(kam) + (lam)]Xm = (definiţie), kî + li;
k{i+g) = kt + kg: k(i+g) = (definiţie), kfa+bQ) + kfa + bx)X + ... + k(am + bm)Xm + ... = (proprietăţileînmulţirii din K), [(ka0) + (kb0)] + [(ka±) + + (kbflX + ... + t(kam) + (kbm)]Xm + ..: = (definiţie), kî + kg.
5. Fie K [X] spaţiul vectorial peste cîmpul K al polinoamelor în nedeterminata X cu coeficienţi din K. Să se stabilească care dintre următoarele sub-mulţimi este un spaţiu vectorial peste cîmpul K.
1) mulţimea Kn[X] a polinoamelor de grad cel mult n, 2) mulţimea polinoamelor de grad cel puţin n. R: 1) Da, 2) Nu. 6. Fie V un spaţiu vectorial peste cîmpul K si S o mulţime nevidă. Definim
F = {f | f: S -> V}, (f + g) (*) = i(x) + g(x),' Vf, ge F, (kt) (x) = ki(x), Vk<=K. Să se arate că F este un spaţiu vectorial peste K.
7. Să se arate că următoarele mulţimi sînt respectiv spaţii vectoriale reale în raport cu adunarea funcţiilor şi cu înmulţirea dintre o funcţie şi un număr real.
1) { f | f : I - » J R , I = interval din R, f este derivabilă} 2) {f [ f: I ~» R, I = interval din R, f admite primitive} 3) {f | f: [a, b] ~» R, f este integrabilă}. 8. Să se arate că mulţimea soluţiilor unei ecuaţii diferenţiale ordinare,
liniară şi omogenă, este un spaţiu vectorial real în raport cu adunarea funcţiilor şi înmulţirea dintre un număr real şi o funcţie.
Indicaţie. O ecuaţie diferenţială ordinară, liniară şi omogenă, are forma a0(x) ym + a±(x) y(n~1:> + ••• + an-i(x) y(1) + an(%) V = °< u n d e x -> at(x) sînt funcţii reale continui.
31

9. Să se stabilească care dintre următoarele perechi de operaţii definesc pe R2 o structură de spaţiu vectorial si.care nu,
i) [x-i, xt) + (>-!, y2) = (*i + }>!, 0); k{Xl, x2) = (£*lf A*a), £eJR
2) (*i, xz) + (yi, y2) = [%x + ylt y2); &(#i, #2) == (&%, £#2), keR
3) (A-,, X2) + (>'i. >'2) = (% + y\, x2 + yz): k(xlt x2) = (0, kx2), keR
4) [x-i, xz) + (Vi, v2) = (%i + y-L, x2 + yz); k(xh x2) = (a + i|3)(%i, *2) =
= (K.I'X — B%2, ZX1 -\- axz)', ke C, a, 3 e U
i?: 1) Nu admite element neutru faţă de adunare; 2) Adunarea nu este comutativă; 3) Nu este îndeplinită axioma lv = u; 4) Da.
10. Fie V3 spaţiul vectorial real al segmentelor orientate cu originea comună în care considerăm următoarele submulţimi de vectori.
1) mulţimea U a vectorilor care formează cu un vector nenul dat v un unghi ?e[0,71];
2) mulţimea Ox a vectorilor ale căror extremităţi se află în primul octant; 3) mulţimea W a vectorilor ale căror extremităţi aparţin unui plan dat TC. Să se precizeze care dintre mulţimile U, Ox, W sînt subspaţii vectoriale. 11. Dîndu-se spaţiul vectorial Pn al funcţiilor polinomiale reale care au
cel mult gradul n, să se cerceteze care din următoarele submulţimi sînt subspaţii, vectoriale
î) A = {p(x)| p(0) = h, keR}, 2) B = {p(x)| 3p{0) - 2p( 1) = 0}
i)C = {p(x)\p(l)+p(Z) + ...+p(k) = 0} 12. Fie subspatiile vectoriale W si U generate respectiv de vectorii w% =
= (1, 1, l),wa = (0, 3, 1) w8 = (2, - l , 1); « x = ( 1 , - 2 , 4), M2 = ( - 2 , 4 , - 8 ) . 1) Să se verifice dacă sînt subspaţii suplimentare. 2) Să se găsească descompunerea vectorului v = (5, —7, 13) pe aceste
subspaţii. Soluţie. Va trebui să arătăm că W f l U = {0} şi W ® U = R3. Subspaţiul
vectorial W fi U conţine acei vectori pentru care
cciWx + <x2»'2 + K3-1C3 = (JjWi + 32«2.
Folosind operaţiile cu vectori, această egalitate vectorială se transcrie în forma
' ax + 0 • a2 + 2a3 == 3, - 2B2
• «i + 3a2 - «s = - 2Si + 432
*i + «2 + «3 = 43x — 8,32 Privim acest ansamblu de egalităţi ca fiind un sistem liniar în necunoscutele '•f-i, «a, «3 cu parametrii 3^ B2. Rangul matricei sistemului este doi şi deci, conform teoremei Rouche, compatibilitatea este asigurată de anularea determinantului caracteristic,
Pi - 232 = 0.
Obţinem soluţia Sj = 2k, S2 = k, keR pentru care 3X% + şzu2 = 2kul -4-+ Ăw2 = (0, 0, 0). Cu 3 i ; j = 1, 2, astfel găsiţi deducem
f ai + 3a2 — a3 = 0 1 «i + «2 + a3 = 0,
32

de unde aj. = — 2h, a2 = h, a3 = h, heR. Se verifică a i^i + «2^2 + a3z#3 = = (O, O, 0) şi deci singurul vector comun subspaţiilor W şi U este vectorul zero.
Se ştie că suma a două subspaţii vectoriale coincide cu acoperirea liniară a reuniunii subspaţiilor respective. Deci W + U = \-{{wx, w2, w3, ux, u2}). Un vector v<= (W -f U) este de /orma v = kxwx + ^2^2 + A3ze'3 + <W% + khu% şi deci aparţine lui R3. Rezultă W + V^R3. Să arătăm că R3^W -f- U. într-adevăr, pentru fiecare a = (i^, y2, ^3) există numerele reale kx, k2, Ă3>
h , k5 astfel încît
k1W1 + ^2^2 + htt'3 + &4% + «5M2 = fl
deoarece această relaţie este echivalentă cu sistemul liniar
(*) ki + 2ks + ki — 2k-0 = vx
h + 3£2 — k3 — 2k± + ika = v2
ki + h -f £3 + 4&4 — 8Ă5 = v3, »3 care este compatibil nedeterminat. Prin urmare W © U = fi
2) înlocuirea lui v = (5, —7,13) în (*) conduce la sistemul liniar
kx + 2&3 + ki ~ 2k5 = 5 h + 3^2 — As — 2ki + 4Â3 = - 7
. ki + k2+ ks + Aki — 8k5 = 13
a cărui soluţie este (—2X, A, 1 + X, 3 + 2 u, u ) ; X, u e U . Vectorul w se descompune unic v = #+_}' = [(—2X) wx + Xze>2 + (1 + X)i£'3]4-
+ [(3 + 2 a) Ui + auz], X, ueR. Găsim v = (2, — 1, 1) + (3, - 6 , 12).
13. (Subspaţiul funcţiilor reale pare). Să se arate că mulţimea funcţiilor i:\-a, a) —»• R care satisfac condiţia i(—x) = t(x), Vxe(—a, a) este un subspaţiu vectorial al spaţiului tuturor funcţiilor reale definite pe (—a, a).
(Subspaţiul funcţiilor reale impare). Să se arate că mulţimea funcţiilor f: (—a,a)—>R care satisface condiţia f(—x) — —f(x), Vxe (—a, a), este un subspaţiu al spaţiului tuturor funcţiilor reale definite pe (—a, a).
Observaţie. Subspaţiile vectoriale ale funcţiilor pare şi respectiv impare sînt suplimentare în spaţiul vectorial F al tuturor funcţiilor reale întrucît intersecţia lor este funcţia zero şi
f(x) = — {f(x) + f(--v)} + —'{f{x) - f(—*)}, Vxe. (-a, a); VfeF,
adică orice funcţie este suma dintre o funcţie pară şi una impară. 14. Fie numerele reale distincte ax, a2, ..., an şi funcţiile exponenţiale
fi, f2, ..., in definite respectiv prin ît(x) = ea'x, i = 1, 2, ..., n. Să se arate că {fx, f2, ..., fK} este o mulţime liniar independentă în spaţiul vectorial real al tuturor funcţiilor reale definite pe R.
Soluţie. Utilizăm inducţia. Oricare dintre funcţiile ft(x) — e"'* este liniar independentă deoarece este diferită de zero. Presupunem că n— 1 dintre aceste funcţii sînt liniar independente. Să arătăm că cele n funcţii sînt liniar
3 — Probleme de algebră — c. 264 33

independente. Pentru aceasta fie klt hZ) ..., kn numerele reale cu proprietatea n
k1f1+k2U + ... + kJn = 0sa.n echivalent X ) ^ e % * = 0 , V*ei?. Notînd a = m a x a rezul tă £,g!ai-ami2_]_ 4- k ,e{-c'm-^~am^x -4- k -4- k ,,e("m+i~am'lx-4
+ ... -f /^g!0»-"'»)^ = 0. Trecînd la limită pentru x —* oo găsim -%m = 0 şi rămîne Ă^x + ... + ^m_iim-i + £m+ifm+i + ... + kjn = 0. Pe de altă parte, prin ipoteză, {f1( f2, ..., f.,,} — {im, m = fixat} este o mulţime liniar independentă. Deci kx = k2 = ... = kn = 0.
15. Fie D un domeniu din Rn şi C°(D) mulţimea funcţiilor reale continui definite pe D.
1) Să se arate că C°(D) este un spaţiu vectorial real. 2) Să se demonstreze că dacă f # const, atunci {1, f, f2, ..., în, ...} este o
mulţime liniar independentă în C°(D). 16. 1) (Spaţiul vectorial aritmetic cu n dimensiuni). Fie spaţiul vectorial
aritmetic Kn. Să se arate că vectorii
e± = (1, 0, ..., 0), e2 = (0, 1, ..., 0), ..., e„= (0, 0, ..., 1)
constituie o bază a lui Kn şi deci dim Kn = n. Mulţimea {elt e2, ..., en} se numeşte baza canonică a lui Kn. 2) Fie SHlmxn(K) spaţiul vectorial al matriceîor de tipul mxn. Să se arate
că matricole
f O . . . 0 . . . 0" EJ ; = ...
i 0 . . . 1 ... 0
0... 0... 0.
j constituie o bază a lui SZmxn(K) şi deci dim 3TLmxn(K) = mn.
Mulţimea {Etj; i = 1, 2, ..., m; j = 1, 2, ..., n) se numeşte Saza canonică a lui S!croxre(K).
3) Fie K„[X] spaţiul vectorial al polinoamelor de grad cel mult n, în nedeterminata X. Să se arate că polinoamele
1, X, X2, ..., A7""
constituie o bază a lui Kn\_X] şi deci dim Kn[X] = n+1. • Mulţimea {1, X, X2, ..., Xn} poartă numele "de baza canonică a lui Kn[X}. 4) Fie K[X] spaţiul vectorial al tuturor polinoamelor în nedeterminata X.
Să se arate că polinoamele 1, X, X2, ..., Xn, ...
constituie o bază a lui K[X] şi deci dim K[X] = oo. . Mulţimea {l,X, X2, ..., Xn, ...} poartă numele de bază canonică a lui
K[X]. Soluţie. 1) Relaţia kxer + k2e2 + ••• + knen = 0 implică (k1, k2, ..., kn) =
= (0, 0, ..., 0) şi deci kx = k2 = ... = kn = 0. Astfel vectorii ex, e2, ..., en sînt liniar independenţi.
Orice element % = (xx, x2, ..., xn) din K" se poate scrie în forma x = = %\ex + ^2
g2 + ... + x„en şi deci {%, <%, ..., en} generează pe K".
34

în concluzie {ex, e2, ..., en) este o bază a lui Kn. 2) Fie A = [a(1] o matrice de tipul mxn cu elemente din K. Aplicaţia 3":
®lmxn{K) -> Kmn definită p r in
[%] ~* (*n- •••> am> a2i, •••, a2n< •••, aml, ..., amr)
este un izomorfism. De aceea {Efl; i = 1, 2, ..., m; j = 1, 2, ..., »} este o bază a lui S|llmXfî(JK') şi dim S\lmxn(K) = mn.
3) Fie p = fl0 -f aiA" + ... + fl„Z° un polinom de gradul cel mult n cu coeficienţi din K. Aplicaţia ST: K„[Z] —» iîw + 1 definită prin
^ "* («o. « i , - , «»)
este un izomorfism. De aceea {1,X, X2, ..., Xn} este o bază a lui KJX1 şi dim K„[Z] = = » + ! .
4) Reamintim că o mulţime infinită de vectori dintr-un spaţiu vectorial se numeşte liniar independentă dacă orice submulţime finită a sa este liniar independentă.
Presupunem k^X'i + kisX'2 + ••• + kipX'" = 0, ix < i2 ... < iv. Rezultă ki± = k,2 = ... = kip = 0 şi deci submulţimea {X^, X1"-, ..., A>} este liniar independentă. Deoarece succesiunea i± < i2 < ... < iv este arbitrară rezultă că ii, X, X2, ..., Xn, ...} este o mulţime independentă.
Pe de altă parte, orice polinom se poate scrie ca o combinaţie liniară finită de elemente din {1, X, X2, ..., Xn, . . .} . Cu alte cuvinte L({1, X,X2, ..., Xn, ...}) = K[Xl
Astfel {1, A", X2, ..., Xn, ...} este o bază a lui I I [X] şi deci dim IÎ[A] = co. 17. Considerăm funcţiile reale continui x —-> fl^a;), i = 0, 1, ..., n, şi ecuaţia
diferenţială ordinară, liniară şi omogenă,
a0(x) y») + ai(*) y - » + ... + «_i(«) 3!<1) + «„(«b' = 0, a0(x) j= 0, V*e I
Să se arate că dimensiunea spaţiului vectorial real al tuturor soluţiilor acestei ecuaţii este n.
Soluţie. Fie Y spaţiul vectorial real al soluţiilor ecuaţiei date. Oricărei funcţii v e Y îi putem ataşa ansamblul (y(0), ya}(0), ..., y(n~1}(0)). Obţinem aplicaţia S r : Y - ^ I T , &(y) = (y(0), >'(1)(0), . . . ^ " " ( O ) ) . Această aplicaţie este liniară şi are ca imagine întreg spaţiul Rn. într-adevăr, teorema de existenţă precizează că pentru orice condiţii iniţiale (>'(0), >,(1)(0), ..., yn_1)(0)) există o soluţie v e ¥ .
Pe de altă parte, teorema de unicitate asigură că oT este injectivă. In concluzie oT este un izomorfism şi deci dim Y = n. 18. Fiind dat un polinom nenul p al spaţiului vectorial Rn[X], să se arate
că p şi primele sale n derivate formează o mulţime liniar independentă. 19. Să se arate că polinoamele 1, A"—a, (X—a)2, ..., [X—a)n, aeR for
mează o bază a spaţiului Rn[X]. Să se expliciteze coordonatele unui polinom peR„[X~\ î n această bază.
20. Să se precizeze care dintre următoarele submulţimi din R3 sînt subspaţii vectoriale şi în caz afirmativ să se stabilească dimensiunea subspaţiului
A: xx — x2 + 5x3 = 0, B: x1 — x2 + 5xz = 4, C: tg xx = ± 1,
D: tg xz = 0, E: x\ + x\ + x\ = 25, F : xx = x2 = xs,
G: xx = x3 = 0, H : 2** -f 7*3 = 15.
35

Soluţie. Submulţimea A se mai poate scrie
A = {(%, x2, x3)\ xteR, %i — x2 + 5x3 = 0} sau A = {(x2 — 5x3, x2,
x3)\ xz, x3eR} Această mulţime este subspaţiu deoarece
x + y = (ff2 — 5x3, x2, x3) + (y2 — 5y3, y2, y3) = [x2 + y2 — 5(x3 + y3),
x2 + y2, xs -\- y3]e A
\x = X(x2 — 5^3, #2, ,-r3) = [X(xa — 5^3), X%, >.x3]e A; XeU.
B nu este subspaţiu vectorial deoarece adunarea şi înmulţirea cu scalari (X 7 1) nu sînt definite (vezi şi problema 10.3).
C = ix\ x = tk — , x2, x3\, keZ, x2,x3eRS nu este subspaţiu vectorial.
D = {x\ x = (xlt kn, x3), keZ, xXt x3eR} nu este subspaţiu vectorial
E şi H nu sînt subspaţii vectoriale. Submulţimea E este echivalentă cu submulţimea vectorilor de poziţie ale căror extremităţi se află pe sfera x\ + + x\ -\- x% = 25, submuiţime care nu este subspaţiu.
F este subspaţiu vectorial deoarece F este izomorfă cu subspaţiul vectorilor ale căror extremităţi se află pe bisectoarea triedrului (O; xx, x2, x3); dim F = 1.
G este subspaţiu vectorial deoarece G este izomorfă cu subspaţiul vectorilor cu originea în O, ale căror extremităţi se află pe axa ordonatelor Ox2; dim G = i,
21. Să se arate că mulţimile U = {ux = (1, 5, 3), u2 = (2, 0, 6)}, W = = {w1 = (— 1, 7, — 3), w2 = (4, 5, 12)} generează acelaşi subspaţiu în R3.
Soluţie. Acoperirea liniară a lui U este de forma L(U) = [kxux + k2u2, kx, k2eR} = {(kx + 2k2, 5kx, 2>kx + 6k2), kx, k2ţ.R)
Analog L(W) = {h l W l + h2w2, hx, h2eR} = ţ(-hx + 4h3, lhx+5h2, -2,hx + + 12h2), hx,h2eR}.
Se constată că vectorii din L(U) se află în planul 2>x — z = 0, deoarece 3x — z = 3(kx + 2k2) — (3&i + 6k2) = 0; L(W) generează acelaşi subspaţiu.
22. Fie C°(R) spaţiul vectorial real al funcţiilor reale şi continue; să se stabilească care dintre următoarele submulţimi ale lui C°(JB) sînt liniar dependente respectiv liniar independente. Să se stabilească dimensiunile subspaţiilor generate
1) {eax, xtax, x%ax} 2) {e*, e~x, eh x} 3) {1, cos 2x, sin2 x) R: 1) kxeax + k2xeax + k3x2eax = 0, Vx<=R; deoarece eax ¥= 0, rezultă
h + k2x +k3x2 = 0, VxeR => h = k2 = k3 = 0; dim L{eax, xeax, x2eax} = 3.
2) eh x = e - " t J L ^ ; dim L{ex, e~x, eh x) = 2 ;
3) dim L{1, cos 2x, sin2 x] = 2. 23. Fie S o submuiţime din Cs formată din vectorii
1) vx = (—i, 1+i , 3—2ij, vz = (1 — i, 0, i), v3 = (1, — 1 + i, 2 + 3i), w4 = (—2 + 2i, 0, — 2i).
2) Vl = (5—2i, 0, 1—i), «a = (—1—i, 2 + i , i), w3 = (3—4i, 4 + 2i, 1+i) .
36
Să se stabilească dimensiunea subspaţiului generat şi să se specifice care vectori din submulţime pot constitui o bază.
Soluţie. Dacă vectorii sînt exprimaţi în baza canonică, atunci dimensiunea subspaţiului generat coincide cu rangul matricei ale cărei coloane sînt coordonatele fiecărui vector. în cazul nostru
rang —i 1 — i 1 — 2 + 2i"
1 + i 0 —1 + i 0 3 — 2i i 2 + 3i —2i
2) v3 = «2 + 2v2; dim L(S) = 2.
dim L(5)
24. în C7 să se expliciteze subspaţiul vectorilor u = (u±, u%, ..., u7) ale căror coordonate satisfac sistemul
«1 + «2 + «3 + % + «5 + «6 + U7
ul — UZ '— UZ — % — U5 — Ui
0
Ui + W2 — U3 — Ui
u7 = 0
0. Să se stabilească dimensiunea subspaţiului şi să se dea exemplu de o bază. Soluţie. Din teoria sistemelor liniare şi omogene deducem că acest sistem
admite şi soluţii distincte de cea banală (m=2>, n=l, r=2>); există oo4 soluţii. Considerăm determinantul principal
\ = 1
- l — 1
1 1 •1 1 1 1
şi obţinem soluţia w4 = %—u z , u6 = —ux — u2 — u5, M7 = —ux. Subspaţiul U al soluţiilor sistemului este
U = {u\u = (%, u2, uz, % — u3, u5, — % — u2 — u5, —M 2 )} .
Evident dim U = 4. Un vector din subspaţiul U este de forma
« = ux{\, 0, 0, 1, 0, — 1, — 1) + «a(0, 1,0, 0,0, —1,0) + u3(0, 0, 1, — 1 ,
0, 0, 0) + «5(0, 0, 0, 0, 1, —1,0).
O bază a acestui subspaţiu este
B = = { e 1 = ( l , 0 ,0 , 1,0, — 1 , - 1 ) , e 2 = ( 0 , 1, 0, 0, 0 , - 1 , 0 ) , e3 = ( 0 , 0 , 1 ,
— 1, 0, 0, 0), «4 = (0, 0, 0, 0, 1, — 1 , 0)}.
25. Fie [fl 4M = _
0 0 af jy 0 0 .« 2 0.
, x = y + z; x, y, z, ueR
Să se arate că 1) mulţimea a este un subspaţiu vectorial al lui SKL3x3(R);
37

2) maţricele M, N, P constituie o bază a subspaţiului ă, unde
N M = "0 0 1" 1 0 0
.3 0 0_ ; P =
o o — î 0
3 0
3) constituie aceste matrice o bază pentru spaţiul vectorial (ă, Z{2)), unde Z(2) reprezintă clasele de resturi modulo doi?
Soluţie. 1) Oricare ar fi maţricele A., Beă şi oricare ar fi scalarii reali k, l, rezultă (kA + 13) e Si. Această apartenenţă decurge din operaţiile de înmulţire a unei matrice cu un scalar, de adunare a matricelor şi din operaţiile cu numere reale.
2) Conform definiţiei bazei, mulţimea {M, N, P} este liniar independentă. Condiţia ktM + £2N + Â3P = 0 conduce la un sistem liniar şi omogen
— 3&i + k2 — k3 = 0, — 2k± + k2 — k3 = 0,
h -T- 3/J2 + 7>k3 = 0, —kx = 0,
care admite numai soluţia banală k± = k2 = k3 = 0. Orice vector Aeă se scrie ca o combinaţie liniară de vectorii N, P,
- A = axM + a2N + a3P,
unde ai, a2, a3 reprezintă coordonatele matricei  în baza {M, N, P}. Găsim
A = - zM + — (3 v 6
52 + u) N 1 (Iz — 3_y + u) P.
Observaţie. Se ştie că dim S)\l3x3(R) = 3 x 3 = 9. Deoarece maţricele din submuiţimea ă se bucură de şase condiţii suplimentare an = a12 = a22 = = aZ3 = a33 = 0, «13 = fl2i + a32, urmează că dim ă = 3.
3) Maţricele M, N, P nu constituie o bază pentru (â, Z(2)) deoarece ele sînt liniar dependente (N = P modulo 2).
26. Să se găsească o bază a sumei şi intersecţiei subspaţiilor vectoriale W şi U generate respectiv de vectorii
Wl = (2, 1, 0, 1),
« ! = ( 1 , 1 , 2 , - 1 ) ,
W-2 ( - 2 . • 1 , - 1 ) ,
«2 = ( 0 , - 1 , - 1 , 2 ) ,
z»3 = (3, 0, 2, 3);
«8 = ( - 1 , 2 , 1 , - 5 )
Soluţie. Subspaţiul W + U este generat de WU U; prin urmare vectorii mulţimii W + U sînt vectori ai acoperirii liniare a ^ i + a.2w2 + a.3w3 + + Pi% + P2M2 + ^3^3- în particular din sumă fac parte şi vectorii wi(i= 1,2,3), u}(j = 1,2, 3).
Pentru a găsi o bază lui W + U vom căuta mai întîi o bază formată din vectorii wf, ut. Vectorii wx, w2, w3 sînt liniar independenţi şi ne propunem să stabilim dacă mulţimea.{w.x, w2, w3, «1} este in dependentă şi poate constitui
38

o bază. Din relaţia k1w1 + k2w2 + k&wz + £4^1 = O obţinem un sistem liniar şi omogen al cărui determinant este
2
1
0
1
— 2
— 1
— 1 1 1
3
0
2
3
1
1
2
— 1
0.
Deci sistemul admite numai soluţia banală kx = k2 = ka = £4 = 0. Am găsit în subspaţiul W + U patru vectori liniar independenţi şi, evi
dent, oricare cinci vectori sînt dependenţi, deci dini (W + U) = 4. Se ştie că W f]V == {v\v<~W şi s e U } ; orice vector veW se scrie ca o
combinaţie liniară v = otize>i + a2ze'2 + «3^3, respectiv v<= U, v = $xux + + ^2% + ,83%; prin urmare subspaţiul W fi U va conţine acei vectori pentru care
Se obţine sistemul
2cci — 2a2
ai — a2
— a o -4- 2 r,
a36t!3 = pi«i + J32M2 + Î33«3
3a3 = Pi - p3
= Pi - 23 + 2p3
23i— p2 + P3 ^a3
« i a2 i a 3 = Pi 2f32 -•'iz
2
1
0
1
— 2
— 1
— 1
— 1
3
0
2
3
0 Kl
P l -2 Si —
- P i +
- Ps Q ! ? Q P2 "T Zp3
p 2 + p3
2,S2 - 5p3
în t rucî t rangul matricei sistemului este trei, compatibilitatea este asigurată dacă determinantul caracteristic este nul.
= 0; p x - B2 + 2p3
Deci orice vector ve W (1 U este de forma
w = (Pi - p3, Pi - P2 + 2p3, 2pi - p2 + p8, - p i + 232 - 5p3) =
= (p! - p3, 0, Pi - p3, Pi - p3) = (Pi - ps) (1, 0, 1, 1).
Prin urmare am găsit în subspaţiul W fi U o bază formată dintr-un singur vector v = (1, 0, 1, 1); dim (Wfl U) = 1.
27. Fie V5 spaţiul vectorial real al polinoamelor în cos x care au cel mult gradul 4. Să se scrie transformarea de coordonate care permite trecerea de la baza B = {1, cos x, cos2x, cos3:r, COS4:K} la baza B' = {1, cos:*:, cos2^, cos3x, cos Ax] şi să se găsească inversa acestei transformări.
39

Soluţie. Matricea de trecere de la B la B' se obţine din
1 = 1 • 1 + 0 • cos x + 0 • cos2 x -f 0 • cos3 x -4- 0 • cos4 x
cos x = 0 • 1 + 1 - cos # + 0 • cos2 x + 0 • cos3 # + 0 • cos4 x
cos 2# = •— 1 • 1 + 0 • cos .v + 2 • cos2 % + 0 • cos3 x -j- 0 • cos4 ;r
cos 3# — 0 • 1 — 3 • cos .v + 0 • cos2 x + 4 • cos3 # -f- 0 • cos4 #
cos 4x 1 • 1 + 0 • cos % — 8 • cos2 x + 0 • cos3 % cos #.
Deci
A =
"i o
o î
o o o o o o
- l 0
0 - 3
2 0
0 4
0 0
Dacă a0, ax, a2, as, «4 sînt coordonatele unui vector din V în raport cu baza B şi b0, bi, b2, b3, 64 sînt coordonatele aceluiaşi vector în raport cu baza B', atunci \a0, alt a2, a3, a4] = A • '[&0, hlt b2, b3, 54j adică, explicit, a0 = b0 — — &2 + bî, oti = bi — 3bs, a2 = 2b2 — 8b3, a3 = 4b3, #4 = 864. Inversa acestei
1 1 3 1 transformări este b0 = a0 + — a2 + «3 — — at, bt = ax + — «3, &2 = — «2 +
1 1 3 • — ^2 + «3 — — «4, &i = % + — «3, h
2 8 4 2 , 1 , 1 4r a3, 63 = — «3, 64 = —
4 8 28. Să se stabilească formulele de transformare ale coordonatelor cînd
se trece de la baza e = {eit e2, e3, e4} la baza e' = {e[, e'2, e's, e4}.
^ = ( 1 , 2 , - 1 , 0 ) , e2= ( 1 , - 1 , 1,1), es = ( - l , 2 , 1, 1),
«4 = (—1, - 1 , 0 , 1)
^ = (2, 1, 0, 1), 4 = (0, 1,2, 2), 4 = (—2, 1, 1,2), < = (1, 3, 1, 2).
R: #i = x2 — .T3 -4- #4, x2 = —% + #2, x'z = xi>
x'i = xx — x2 + x3 — xt.
29. Fie V un spaţiu vectorial real w-dimensional. 1) Să se demonstreze că orice două baze e = {e^ ..., ere} e' = {e[, ..., e^}
din V sînt legate prin e] =Yianei> hj~ 1, 2, ..., n, unde A = [%] este o i
matrice nesingulară. 2) Să se arate că e ~ e ' •«• det A > 0 este o relaţie de echivalenţă. Această relaţie împarte mulţimea bazelor lui V în două clase de echivalenţă
numite orientări ale lui V.
40

30. Fie V un spaţiu vectorial real şi CV complexificatul său. Să se arate că
1) dacă S este o mulţime liniar independentă din V, atunci S X { 0} este o mulţime liniar independentă în CV.
2) dacă { e-i, ..., en} este o bază a lui V, atunci {(e1, 0), ..., (en, 0)} este o bază a lui CV. Consecinţă, dim c c V = dim RV.
Soluţie. 1) Prin ipoteză, pentru orice alegere a elementelor vx, ..., vP din 5 şi a scalarilor kx, ..., kp din R, relaţia kxvx + ... -f- kvvv = 0 implică h = ... =kP = 0.
Presupunem (kx + i/J (vx, 0) + ... + {kp + ilp) (vp, 0) = (0, 0), adică (kxvx + ... + kpvp, lxvx + ... + lpvP) = (0, 0) sau kxvx + ... + kpvp=0, lxvx +... ... 4- lpvp = 0. Acestea implică kx = ... — kp = 0 respectiv lx = ...== lp = 0 şi deci S x (0} este liniar independentă.
2) Dică {ex, ..., <?.„} este o mulţime liniar independentă în V, atunci mulţimea {(ex, 0), ..., (e,„, 0)} este liniar independentă în CV.
Presupunem că {ex, ..., en} generează pe V. Atunci Vu, veV putem scrie u = uxex -\- ... -f nn
en> v = viei + ••• ~r vnen. Rezultă u -j- iv — (u, v) — {uxex + + ... + uneu, vxex + ••• + vnen) = (u1ex + ... + unen, 0) + (0, vxex + ... + vnea) = .-= (Mjgj + ... + u»en, 0) + i(vxex + ... + vnen, 0) = (ux + ivx) {ex, 0) + ... + + K + i«») ien. 0) Şi deci {(ex, 0) , ..., (e„, 0)} generează pe CV.
31. Fie V un spaţiu vectorial complex şi EV trecerea sa în real. Să se arate că dacă dim V = n, atunci dim KV = 2n.
Soluţie. Fie { ex, ..., en} o bază în V. Definim {fx, ...,f2n} prin fx = ei, ..., / • = «./ /»+i = (0, 1) • cx = ieXj ...,f2n = (0, 1) • en = ic». Pentru VWE V pu-
tem scrie i) = Y^ t!,.?,., t'j.eC sau dacă înlocuim vk = (Jle vt, J m wt), atunci
, = [ £ (âte y,) ^ , £ ( Jm r,) J = £ (sie i>t) e, + i £ ( J m Wfc) et = n
Pe de altă parte se poate verifica uşor că {fx, . . . ,/2„} este o mulţime liniar independentă în KV.
32. (Spaţii euclidiene canonice ) 1) Fie x = (% ,..., #„) şi 3/ = (J-'J, ..., y„) doi vectori oarecare din spaţiul vectorial aritmetic Rn. Să se arate că apli-
n caţia definită prin (x, y) = Y^ a'i3't e s t e u n produs scalar pe Rn.
1 = 1
2) Fie .%• = (.Vj, ..., x„) şi \' = (j'x, ..., yn) doi vectori oarecare din spaţiul vectorial aritmetic C". Să se arate că aplicaţia definită prin (x, y) =
n
= Y^ Xjijj este un produs scalar pe Cn.
3) Să se arate că spaţiul vectorial real al tuturor funcţiilor cu valori reale, continue pe un interval [a, b], este un spaţiu euclidian real în raport cu aplicaţia definită prin
(î,g)=^î(t)g(t)dt.
41

4) Să se arate că spaţiul vectorial complex al tuturor funcţiilor cu valori complexe, continue pe un interval [a, b], sste un spaţiu euclidian complex în raport cu aplicaţia definită prin
{i,g)=^î(t)W)dt,
Soluţie. 3) Problema revine la a arăta că (f, g) este un produs scalar. într-adevăr continuitatea asigură existenţa integralei şi dacă f, g, h sînt trei funcţii oarecare cu valori reale, continue pe [a, b] şi dacă r este un număr real, atunci
d g) = C i(i) g(0 dt = C g(t) i(t) dt = (g, f), Ja Ja
(f, g + h)=C m (g(t) + m dt=C m g(t) + i(t) Mt)) dt = Ja Ja
= (liniaritatea integralei), [ i(t) g(t) dt + [ i(t) h(t) di = (f, g) + (f, li), Ja Ja
r{f, S) = r(* i(t) g(t) dt = C (rf(«) (g(0 di = (fi, g), J« Ja
(f, f) = V i2(t) dt > 0 pentru f =£ 0. într-adevăr, prin ipoteză, există un
punct t0e(a,b) astfel încît f(£0) > 0. Prin continuitate, există un interval deschis I astfel încît t0eI cz [«, 6] şi f 2(i) > 0, V i e I . Fie [c, d ] c l , c < ^,
şi m = inf f2(i) = f2(^) > 0. Rezultă 0 < m[d - c) < C f2(i) d i < C f2(i) di.
33. Fie V spaţiul vectorial real al şirurilor reale { xn} pentru care seria SA-2 este convergentă. Fie x = {xn}, y = {_y„} două elemente din V.
1) Să se arate că seria Sxm^w este absolut convergentă. 2) Să se verifice că aplicaţia definită prin {%, y) = ~Lxnyn este un produs
scalar pe V.
3) Să se calculeze (x, y) pentru xn = — , yn = . Apoi să se de-n " n + 1
termine x — y\\ stima ca !• — = — • ti y II > o r
Soluţie. 1) Ţinînd seama că pentru orice două numere reale a şi & avem rî2 h2 " 1 n 1 n 1 "'
[*V + T- r e z u l t ă EI^I<TEW + =TE^.2 + T E ^ î n
2 2 ţ?i 2 f=i 2 fr{ 2 f-{ baza unei teoreme de la serii cu termeni pozitivi, seria 2 [ xtyt | este convergentă şi deci seria ~Lxtyt este absolut convergentă.
2) Să verificăm numai faptul că forma pătratică ataşată este pozitiv definită. Deoarece (x, x) = 2%f^0, VxeV este suficient să arătăm (x, x) = = 0 =* x — 0. într-adevăr, relaţiile 0< x\^ x\ + # i ^ ... < #f + » | + ••• + » 2< ... < £x 2 = 0 implică 0 = xx = %% = ... = xn = ... (s-a ţinut seama şi de faptul că limita unui şir crescător convergent este supremumul mulţimii valorilor şirului).
42

1 1 1 1 3) (x, y) = S — — — — = 1 deoarece — — — - = — — , x1y1 + .
n\n + 1) »(» + 1 ) n » + 1 - + W » = 1 ; Şi Hm ( ^ ^ + ... + xnyn) = 1.
11 -\- \ »-»•<»
Avem II — jyll = V(* — % # — _y) __ , _ 2 „
. , , . . 1 / 1 1 I2 1 1 „ f 1 1 identitatea
Tinînd seama de
n2(n + 1) v » » + 1 f i — L _ ] ' = l + _ i 2 fi—1-1 ^ » n+l) n2 (n + l)2 \ « n+1)
se deduce II # — y || = "
34. Fie P spaţiul vectorial real al tuturor funcţiilor polinomiale reale definite pe [—1, 1].
1) Să se arate că 1, x, ..., xn, ... formează o bază în P. 2) Să se demonstreze că P este un spaţiu euclidian în raport cu aplicaţia
definită prin
(p, q) = \ p{x) q{x) ăx.
3) Polinoamele obţinute din 1, x, ..., xn, ... prin procedeul de ortogonali-zare se numesc polinoame- Legendre. Să se scrie primele 5 polinoame Legendre.
Soluţie.'3) Mai întîi notăm p,(#) = x\ ieN. Fie q0[x) = Po(#) = 1. Deoa
rece (q0, p0) = V dx — 2 şi (px, q0) = v xdx = 0 găsim
q i M = Pi(*) - ^ 5 ) q0(*) = Vl{x) = x . (qo. q0)
Analog, relaţiile (p.>, q0) = \ :t2 d# = — , (p2, qi) = \ #3 d# = 0, J- i 3 .)_!
f1 2 l'qi' qO = \ %2 &x — — implică
qaW == p,(*) - ^ 1 %(*) - - ^ f qiW = *" " 4 ' (qo, qo) (qi, qi) 3
La fel se găsesc
•q3(x) = x3 x, qJx) = xi • x2 + — , q5(#) = x5 • x3 + — #. 5 7 35 9 21
Prin inducţie se poate dovedi că
(2w) ! d.tB
43

35. Fie x = [xv x%, ..., xn) şi 3/ = (_y1( y2, ..., yn) doi vectori oarecare din spaţiul vectorial real V„. Să se cerceteze care dintre expresiile
i) (*,y) = J2 Hyt\. 2) (x,y) = J21xtyt 1,
( « \î/2 n « «
definesc produse scalare pe V„.
R: 1) Nu; (#, y 4- z) # (#, 3;) + (*, 2), deoarece | y t 4- zi| < [yi\ 4- j ^ | ; 2) Nu; (#, 31 + 2)54 (x, 3/) 4- (#, 2); | c\(x, y) = (cx, 3/); 3) Nu, idem ca 2) ; 4) Da ; (x, y) = 2{x1y1 4- x2y2 4- ... 4- xnyn).
36. Pe spaţiul vectorial C° ([1, e]) al funcţiilor reale continue pe intervalul [1, e] definim produsul scalar
( f , g ) = [ e ( l n . T ) f ( . v ) g ^ ) d ; Ji
1) Să se calculeze j|f|| pentru x—*f(x)=Jx. 2) Să se găsească o funcţie afină x —* g(x) = a 4- bx care este orto
gonală funcţiei constante î(x) = 1.
i 1 x In x dx = — v'e2 4- 1; 2
R: 1) ||f|| =V(f,f) =
fe ez 4 2) (f, g) = 0 =s> V (a 4- 6%) In x dx = 0 ==> a + & — -
Ji 4
e 2 4- 1
s{x)=bL-£±A\ beR. 37. Fie P,j spaţiul vectorial real al funcţiilor polinomiale reale de grad
mai mic sau egal n. 1) Să se arate că aplicaţiile (,): P„x Pm —> R definite prin formulele
(*) (p. q) = £ " A (**) (P- q) = E tf!)2 «A
n n
unde p(x) = S~) djX*, q(x) = Y^ b}x} sînt respectiv produse scalare.
2) Să se stabilească mărimea unghiurilor <£ (p, q) şi <£ (p, r), unde p(x) = = 12x2 — 4% + 3, q(x) = 2x2 4-, 2>x — 4, r(x) = 3*2 4- 12% — 4 utilizînd produsul scalar (*).
x2
3) Să se arate că funcţiile polinomiale definite respectiv prin 1, x, >
x3 xn , .... formează o bază ortonormată fată de produsul scalar (**).
3! »!
44

Soluţie. 3) Baza B = {eh e2, ..., en} este ortonormată dacă
f i pentru j = k \ 0 pentru j # k.
Calculăm produsele scalare
[fi1 ^ ) = ^!)2(7i-°) + ^ ! ) 2 ( 0 ^) -°P e n t r ^- = Â;
deci vectorii — si — sînt ortogonali.
x " ' " , l 9 J ' " ' 1; j= 1,2 *,
deci norma fiecărui vector din bază este unu, prin urmare baza este ortonormată.
38. Fie R2 [X] spaţiul vectorial real al polinoamelor care au cel mult 2 2
gradul doi şi (p, q) = y ^ a}bj un produs scalar pe RZ[X], u n d e p = J~) a}X}, 1=o j=o
2
q = T^ bjX1. Considerăm polinoamele i=o
P l = 3A2 + IX + 1, p2 = - A"2 + 2X + 1, p 3 = 3A2 + IX + 5,
p 4 = 3 A'2 + 5X + 2.
1) Să se găsească un polinom p0 de grad cel mult doi care este echidistant polinoamelor px, p2 , p3, p 4 ; 2) să se calculeze această distanţă.
Soluţie. 1) Fie p0 = «2A2 + axX + a0.
Pi — p0 = (3 — «2) A2 + (2 — 0X) A + (1 — aQ) etc...
Trebuie să impunem
llPi —Poli = l|pa — p 0 | | = llps —poli = H P J —po l i ; se obţine
a0 = 3 , «! = 3, «2 = 1, deci p0 = A2 + 3A + 3.
2) Distanţa este 3.
39. Fie V spaţiul vectorial real al tuturor funcţiilor continui f: [0, oo) -^R
pentru care i e~xi2(x) ăx este convergentă. -o
f* CC
1) Să se arate că \ e~a:f(.v) g(.v) ăx, Vf, g e V , este absolut convergentă. . 0
2) Să se verifice că (f, g) = \ e~xf(x) g(x) dx este un produs scalar pe V. Jo
3) Se dă f(.v) = e~x'2+x şi gn(x) = xn. Să se determine lim 6„, unde 6„
este unghiul dintre f şi gn.
45

Soluţie. 1) Deoarece | fg | <—(f 2 + g2) şi V e~xi2(x) dx, \ e~xg2(x) dxs în t 2 Jo ' Jo
/•co convergente rezultă că \ e_a;| f(#) g(#) [ dx este convergentă şi deci
Jo V e-:sf(%).g(%) dx este absolut convergentă. Jo
3) Evident (f, g„) = \ e~*2 x" dx = j facem x2 = t şi deci * d% = — d^j >
4frt¥«.ir(4i). Calculăm pătratul normei lui f:
||f||2 = \ e~2*2+*dx = e*\ e~2v ~ T ' d x = { punem V2 I» — 4- ) = *,
dx = =44 ^r V2 j V2J- Fi
e~ţ2dt = -r=-1 \ e~l" cî -f- V e - '2 dt\ = I în prima
4 V 4
integrală schimbăm pe t în —t, iar în a doua punem
f = u, dt = 1 n
'tr1'2 du 2uU* ) 41 V Jo 2 J0
Analog | | g n | | 2 = T <rxx2» dx = T(2« +^1) =[(2») !. Jo
Rezultă
2 lr(n~ 1>
cos o_ = ei/» VTT H4)-V , 0„e[O,7r]
((2«) !W2
şi ţinînd seama că.V[p+-^\——-—""" lf - \l~, p = 1,2, ..., găsim 2P
lim 0„ = —
40. Fie otlBx»(jB) spaţiul vectorial real al matricelor pătratice. Produsul scalar standard pe SHBXn(JB) este definit prin
(A, B) = tr (A* B) = £ «„&„, A = [«„], B = [ y .
46

Care dintre următoarele submultimi din S!\l3X3(R) este ortogonală?
f 1 2 3 0 1 2 0 0 1.
1 2 3^ 0 2 3 0 0 3 ,
5
1 0 0 - 2
Lo o
* " - 3 0
0 0 . 0 0
0" 0 3
1 ,
on
0 1
J
2 0
_0
1 1 0
3 4 - 1 1
0 - 1
o oT - 2 0
1 1
41. Care dintre următoarele mulţimi sînt baze ortonormate în C3?
{(i, 0, 0), (0, i, 0), (0, 0, i)}
{(1,0 ,0) , (0,i, 0), (0,0, 1)}
1 '1 + i , 1 - i , 0), - L ( 0 , 1, 1), (0,0,1) V2
{ ( l , i , 0), ( - l , i , 0), (0,0, 1)}.
42. Fie H 4 spaţiul euclidian canonic cu 4 dimensiuni. Să se găsească o bază ortonormată pentru subspaţiul generat de vectorii
1) Xl = (0, 1, 1, 0), A-, = (0, 4, 0, 1), x3 = (1, - l , 1, 0), x4 = (1, 3, 0, 1).
2) xx = (1, - l , 1, - 1 ) , *2 = (5, 1, 1, 1), % = ( - 3 , - 3 , 1, - 3 ) .
Soluţie. Utilizînd procedeul Gram-Schmidt construim o mulţime ortogonală {yi, y<i, y%, y±} formată din vectori nenuli,
>'i = xlt yr+1 = xr+1 •
Obţinem
J'i = *i = (0, 1, 1, 0),
p l f r + l i ^ f ) ^ ^ pentru r = 1, 2, 3. <=* [yt.yt)
y%==z %2 (%*. yx) xs — lyx = (0, 2, —2, 1),
,, _ „ (xs, 3'i) >3 = ^3 '
(yi, >'i)
[ 9 9 9J
i*8' yi y* = x 3 - o - y i + ^-y2 (}'2, yz) 9
(xi. yi) ., (xt, ya) „ (*4, ys) „, (yi.yi) ' (ya,y*) "' (ys,ys) '
fi, 1, - l , -A). ^11 22 22 l l j
3 7 10 ^ - - y i - j y ^ - y *

împărţ im fiecare vector din baza ortogonală prin norma sa şi obţinem o bază ortonormată
v-, U ' i l
\\ya\
1 1 \ Vo V2 V2 J j | r 2 j |
3 1 1 Vlî ' 3VH ' 3v'TT
722 V22 V22 11 22 22
- ( , . 1 . .
, 4 ) 3VllJ
2 v 2 2 \ 11 j
2 3
li 3;4 II
2) yi = (1, - l , 1, - 1 ) , y2 = (4, 2, 0, 2), y3 = (0, 0, 0, 0).
Deoarece y3 este vectorul nul, înseamnă că vectorii xx, x2, x3 sînt liniar dependenţi. întrucît vectorii ylt y% sînt nenuli, vectorii xl şi x2 sînt liniar independenţi. Prin urmare dim L ({x1, x2, x3}) = 2. Atunci mulţimea {y\, y2} este o bază ortogonală a acestui subspaţiu.
Baza ortonormată conţine tot doi vectori
Ih'ill 2 II-V2H v6
43. Să se scrie programul FORTRAN ataşat procedeului de ortogonali-zare Gram-Schmidt.
Aplicaţie: e± = (3, - 1 , - 1 , - 2 ) , e2 = (1, 1, - l , - 1 ) , e3 = (1, 0, 0, - 1 ) , «4 = ( 0 , - 1 , 1 , 1).
Soluţie. Fig. A.3 DIMENSI0N A(20, 20), U(20), V(20), 0(19) READ (105, 1) N
1 FORMAT (12) DO 10 I = 1, N
10 READ (105, 2) (A(I, J) , J = 1, N) 2 FORMAT (4F4.2)
W R I T E (108,17) 17 FORMAT (' ' . ' VECTORII DIN BAZA SÎNT:' / /)
DO 11 I = 1, N 11 W R I T E (108,3) I, (A(I, J) , J = 1, N) 3 FORMAT (".' E ('.12.') = (\4(F6.2,3X).')')
DO 4 K = 2, N DO 5 I = 1, N
5 U(I) = A(K, I) L = K - 1 DO 6 I = 1, L DO 7 J = 1, N
7 V ( J ) = A ( I , J ) P = PSCAL (U, V, N) R = PSCAL(V, V, N)
48

6 0(1) = P/R D 0 8 J = 1, N D 0 8 I = 1, L
8 A(K.J) = A ( K J ) - Q(I)*A(IJ) 4 C0NTINUE
W R I T E (108,19) 19 F0RMAT ("///' VECT0RII 0 R T 0 G 0 N A L I SINT:'//)
D 0 12 I = l.N 12 W R I T E (108,15) I,(A(I,J),J = 1,N) 15 F0RMAT (". 'F( ' . I2. ' ) = ('.4(F9.4,3X).')')
S T 0 P END
FUNCTI0N PSCAL (A, B, M) DIMENSI0N A(M), B(M) PSCAL = 0. D 0 1 K = 1, M
1 PSCAL = PSCAL + A(K)*B(K) RETURN END
VECTORII DIN BAZA SÎNT: E(l) = (3.00 —1.00 —1.00 —2.00) E(2) = (1.00 1.00 —1.00 —1.00) E(3) = (1.00 .00 .00 —1.00) E(4) = ( .00 —1.00 1.00 1.00)
VECTORII ORTOGONALI SÎNT: F(l) = (3.0000 -1.0000 -1.0000 -2.0000) F(2) = ( .0000 1.3333 - .6667 - .3333) F(3) = ( .0000 .1429 .4286 -.2857) F(4) = ( .4000 .2000 .2000 .4000) *STOP*
Fig. A.3 44. Fie R spaţiul euclidian canonic cu o dimensiune. 1) Să se complexifice spaţiul R. 2) Să se demonstreze că spaţiul complexificat CR devine un spaţiu eucli
dian dacă se introduce produsul scalar prin următorul procedeu
(*) (Zl) z2) = (v1 + iw\ v2 + iw2) = (vh2 + iv1™2) + i(w*v2 - vl- w2).
3) Dacă {elt e2, ..., en] este o bază ortonormată în Rn, să se arate că («i + iO, e2 + iO, ..., en -1- i0} este o bază ortonormată în CR".
Soluţie. 1) Vectorii spaţiului CR sînt perechile (v, w) = v + iw, unde v, weR. Introducem operaţiile de adunare şi înmulţire cu scalari astfel
(1) (v\ w1) + {v2, w2) = (v1 + v2) + {{w1 + iu2)
(2) k(v, w) = (a + iŞ) (v + iw) = (a.v — $w) + i(j3y + OLW)
4 — Probleme de algebră — c. 264 49

Se verifică fără dificultate toate axiomele spaţiului vectorial, prin urmare mulţimea CR este un spaţiu vectorial complex.
2) (zlt z2) = ( » V + whv2) + i(wh2 - wV) =
= i 'V + utw1 + i{(v2 w1) - (w2 v1)) = (*a,*;)
(*i, (Z2 + z3)) = (y1 + iz^1) [(i>2 + »8) + i(z£>2 + w3)] =
= [w^w8 + v3) + w1 {w2 + ze/3)] + i i » 8 + w3) ^ f > 2 + ™s)] =
= [(wV) + (ze^2)] + i[(®V) - (y1^2)] + (a1»8) +
+ (wV) + i ^ V ) - (v1™3)] = («i, *a) + (zi, z3)
{kzlt z2) = ([(a + ip) (w1 + i^1)], (wa + i^2)) =
= [(a-y1 - pze*1) + i(pw1 + aze*1)]^2 + iz»2) [(afl1 - pze*1)- »2] +
-f [(p»1 + ai^)ie>2] + iflXp»1 + az»>2] - (au1 - p ^ V 2 ] } =
= a[('i>V) 4- (wV)] - p[(z»V) - (vhv2)] + i{p[(wV) + {wxw2)} +
+ a[(ze»V) - {vlw2)}} = (a + ip) {[(»V) + {^w2) + i[(a/V) -
_ (Wi. a,«)]| = £ ( ^ 2 )
(z, z) = ((u + ize)(D + izp)) = [ (^ ) + (z£>ze>)] + i[(zro) — (î>ze>)] =
= (OT) + (ie/ie') > 0, deoarece (vv) > 0, (ww) > 0.
c) ((e,c + iQ)/fe + i0)) = M + (0,0),+ i(0,e,) - (et,0) = (et,et) = 8W.
45. Fie V un spaţiu vectorial complex înzestrat cu produsul scalar (,). Notînd cu E V trecerea în real a lui V, să se arate că funcţia definită prin <v, w> = §le(v, w) este un produs scalar pe BV.
î) Fie i ' sV. Să se verifice că v şi iv sînt ortogonali în BV. 2) Să se arate că dacă {elt ..., ere} este o mulţime ortogonală din V, atunci
{e1,ie1, ..., en,ien} este o mulţime ortogonală în EV.
46. în spaţiul euclidian canonic Ri, fie vectorul v = (14, —3 , —6, — 7) şi submulţimea S = {«j, a2, a3}, unde ax = (— 3, 0, 7, 6), a2 = (1, 4, 3, 2), a3 = (2, 2, —2, —2). Să se găsească proiecţia ortogonală w a lui v pe L(5) şi vectorul w~.
Soluţie. Acoperirea liniară a vectorilor alt az, a3 notată cu L(S) nu este o mulţime liniar independentă. Vectorul proiecţie îl notăm cu w şi acesta poate fi reprezentat ca o combinaţie liniară w = k^ + k2a2 + k3a3.
Notăm cu w1- „perpendiculara" coborîtă din v pe L(S). Deoarece (w-1, a{) = = 0, i = 1, 2, 3, putem determina scalarii klt k2, k3 ca soluţie a sistemului liniar
(«x, « i ) /?! + (a2 , « i ) ^2 + («3, « i ) ^3 = (z>> « i )
(%, aa) Ă: + (<z2, a2) kz + ' (a3, a2) k3 = (u, az)
(«!, a3) Â2 + («2, a3) A2 + («3, «3) £3 = (a, a3)
Vectorul wL se obţine ca diferenţă w-1 = v — w.
5Q

Pe cazul concret efectuînd produsele scalare obţinem sistemul liniar neomogen
47&a + 15&2 — I6Ă3 = — 63
h+ h = — 1 —2kx + k3 = 3,
1 1 care admite o infinitate simplă de soluţii kx= — (a — 3), k% = — (1 — a),
k3 = a; a e K . Găsim w = (5, 2, — 9, — 8); w*- = v — w = (9, — 5, 3, 1).
47. în spaţiul euclidian canonic Ri, fie submulţimea
S = {«!, a2, «s},
unde «! = (1, 3, 0, 2), a2 = (3, 7, - l , 2), a3 = (2, 4, — 1, 0).
1) Să se găsească sistemul de ecuaţii liniare care descriu complementul ortogonal LX(S) al acoperirii liniare a lui L(S).
2) Să se găsească o bază a complementului ortogonal L±(S).
Soluţie. 1) întrucît a2 = «1 + «3, urmează că dim L(S) = 2, deci dim L±(5) = = 2. Fie un vector veL-l(S); u = (x1, x2, x3, %4). Ecuaţiile care descriu LX(S) pot fi
%i + 3^2 + 2^4 = 0 _ % + 3^2 + 2^4 = 0 Sd. l l
2xx + 4x2 — x3 = 0 3% + 7*2 — *3 + 2xţ = 0.
2) Folosind sistemele de ecuaţii de mai sus, găsim soluţiile j — o ,
1 \ ( 3 1 ax — 2a2, ai, a2 , ai, a2e.R, respectiv — Pi + 4p2, — — 3i — 2p2, Pi,
h J V
pA pi, p2eiS.
Vectorii (—3, — 1, —2, 0), (1, — 1, —2, 1) determină o bază a lui L-'-(S).
48. Fie F spaţiul vectorial euclidian canonic al funcţiilor reale continue definite pe [0, 2iz\.
1) Să se verifice că mulţimea {f0, fi, f2, . . .} , unde î0(x) = 1, i2M_i(#) = = cos nx, îin{%) = sin nx, B E N " , este liniar independentă şi să se ortonor-meze.
2) Notam cu W subspaţiul de dimensiune In + 1 generat de —== f0, V2TÎ
1 1 - p f i , . . . , -=f2„ (spaţiul vectorial al -polinoamelor trigonometrice). Să se ex--V7T V TC pliciteze proiecţia lui f e F pe W. Aplicaţie: f(x) = x.
51

f Soluţie, 1) In F avem produsul scalar (f, g) = V î(x) g(x) dx. Prin cal-•o
cui direct, pentru m ^ n, se găseşte
\ fn(x) îm(x) dx = 0, Jo
adică {f0, fx] f2, ...} este o mulţime ortogonală. Acest rezultat împreună cu faptul că nici una dintre funcţiile f0 ,f2„_i f-z,,, »eA7*, nu este funcţia zero arată că {f0, i1, f2, ...} este o mulţime independentă.
Deoarece
(f0, f0) = ^ d.V = 27T, ( / 2 B _ 1 ( f2n_X) = ţ . ' 0 ••<
{Un, hn) = \ Sin' - ' A
- T C
= \ cos2 nx dx = -,
nx dx = - ,
rezultă ||f0|| = V2-, ||f2B-il| = HWl = v~. De aceea mulţimea ortonormată ataşată este
[_Lf i f J_f weN.l '. ~ ^ = I 0» ,— T 2 « - l ' / — X 2 B > î î - c i i > 1
2) Fie f G F şi fn proiecţia lui f pe W. Se ştie că (vezi 2.32)
f « = E (^ f*) f*<u n d e ^ ^ = r *<*> f *w d-v-' ?=o .'o
Numerele (f, f/) se numesc coeficienţii Fourier ataşaţi lui f. Pentru f(.t) = .v găsim
(f, f0) = [ * * cî.v = 2-2 , (f, f ^ ) = V * *• cos nx dx = 0, • o Jo
(f, f2„) = \ x sin «A- d.v = •'0
2rc II
§ 3. TRANSFORMĂRI LINIARE
3.1. Fie V şi W două spaţii vectoriale peste cîmpul K. O funcţie oT: V—> W cu proprietăţile
sr(x + y) = W{x) + &{y), V.r, v e V,
&{kx) = kS-(x), VkeK, VxeY,
se numeşte transformare liniară (operator liniar sau lioniomorfism de spaţii vectoriale ) .
Precizare: uneori in loc de S'(x) se scrie Wx. O transformare liniară £: V —>• K (cîmpul K este considerat ca spaţiu vecto
rial aritmetic cu o dimensiune peste K) se numeşte formă liniară.
52

3.2. Funcţia cT: V —> W este o transformare liniară dacă şi numai dacă
ST(kx + ly) = kST(x) + l${y), \jk, leK, V.r, : yeV.
3.3. Fie GT: V —> W o transformare liniară. (i) a-(o) = o. (2) Dacă U este un subspaţiu vectorial al lui V, atunci oT(U) este un sub
spaţiu vectorial al lui W. (3) Dacă vectorii xx, x2, ..., \ e V sînt liniar dependenţi, atunci şi vec
torii OT(A'I), S'(XZ), ..-, Sr(xn)e W sînt liniar dependenţi.
3.4. Fie S": V —* W o transformare liniară. Mulţimea
Ker(âr) = {x\xeV, &(x) = 0},
numită nucleul lui ST, este un subspaţiu vectorial al lui V. Mulţimea Im(cT) = SF(\), numită imaginea lui V prin &, este un subspa
ţiu vectorial al lui W (fig. 1.2). Dacă V este finit dimensional, atunci şi spaţiul vectorial Im (S") este finit
dimensional şi dim Ker(IT) -j- dim Im(oT) = dim V.
Dimensiunea nucleului lui oT se numeşte defectul lui GT, iar dimensiunea imaginii lui V prin oT se numeşte rangul lui W.
3.5. Fie £(V, W) mulţimea tuturor transformărilor liniare definite pe V şi cu valori în W. Adunarea transformărilor liniare şi înmulţirea cu scalari se definesc ca la funcţii; dacă S>, oTe£(V, W), atunci
(S + §•) (x) = $(x) + ST(x), Vi-eV,
(M) (x) = kB(x), VkeK, VxeV.
în raport cu aceste operaţii mulţimea £(V, W) este un spaţiu vectorial peste cîmpul K.
Elementele lui £(V, V) se numesc endomorfisme ale lui V. Spaţiul vectorial £(V, K) al tuturor formelor liniare definite pe V şi cu
valori în K se numeşte dualul lui V. Dualul lui £(V„, îi) se dientifică cu V„.
3.6. Compunerea a două transformări liniare, definită ca la funcţii, este numită înmulţire (produs) şi are ca rezultat tot o transformare liniară. Evident compunerea nu este comutativă dar este asociativă.
Compunerea poate fi combinată cu operaţiile algebrice de adunare şi înmulţire cu scalari:
(1) dacă ă, o&, <2 sînt transformări liniare pentru care au sens <3 + Sb, de şi $<£, atunci Vk,leK,
(kă + l®>) e = M<2 + 1&& (2) dacă ă, &>, <B sînt transformări
liniare pentru care au sens ă -f- 8>, ea şi (2I& .atunci, Vk,leK,
e(kă + is>) = kea + ies>.
53

Fie ST un endomorfism al lui V. Puterile naturale ale lui ST se definesc inductiv :
§-° = j , 5T" = irsr«-i, » = 1, 2, ... unde J este transformarea identitate.
3.7. Fie GT: U - > V O transformare liniară bijectivă (inversabilă). Inversa QT-1: V —> U este tot o transformare liniară. în plus dacă 3": U —• V şi S:V—>-W sînt transformări liniare bijective, atunci 8° ST : U —» W este o transformare liniară bijectivă şi (B o ST)-1 = âT-1 o ir1.
O transformare liniară bijectivă se numeşte izomorfism de spaţii vectoriale.
3.8. Dacă cT:V —> W este o transformare liniară, atunci următoarele afirmaţii sînt echivalente.
(1) W este injectivă. (2) 8T : V —• GT(V) este inversabilă. (3) Ker (ST) = {0}. 3.9. Presupunem că W: V —> W este o transformare liniară, iar dim V = n.
Atunci următoarele afirmaţii sînt echivalente. (1) & este injectivă. (2) Dacă vx, ...,vpeV sînt vectori liniar independenţi, atunci şi aT(vi), ...
..., &(vp) GGT(V) C W sînt vectori liniar independenţi. (3) dim kr(V) = n. (4) Dacă {elt e2, ..., en} este o bază pentru V, atunci {Sr(«i), ST(e2), ..., ST(eB)}
este o bază pentru oT(V).
3.10. Fie VM şi W două spaţii vectoriale peste cîmpulK. Dacăjej , e2, ••-, £M} este o bază a lui V„, iar wx, w2, ..., wn sînt n vectori arbitrari din W, atunci există o transformare liniară unică ST: V„ ~* W cu proprietatea QT(^) = w{, i = 1,2, ..., w.
3.11. Fie Vn şi Wm două spaţii vectoriale finit dimensionale peste cîmpulK. Dacă {e-L, e2, ..... en} este o bază a lui V„, iar {ze , ze<2, •••, ^m} e s i e o bază a iui Wm, atunci există o matrice şi numai una T == [£„•] de tipul m X n astfel
m ^ n
încît oT(gj) = Y) ti}wt. în plus, dacă x =J~) x}e} are imaginea iF(x) =
™ r* r % ~\ r v = ^3/.ze,'., atunci yt = V ^ , i = 1, 2, ..., w. Notîncl X = 'i1 , Y = V
obţinem scrierea matriceală Y = TX a lui ef. r se numeşte matricea asociată transformării liniare S". Vom scrie T =
= m(ST). Fie £(VB, Wm) mulţimea tuturor transformărilor liniare de la \ n la Wm
şi S\lmXn(K) mulţimea tuturor matricelor de tipul M x « c u elemente din K. Funcţia m: £(V?, Wm) —> #Hm><n(jK) definită prin S" —> T este un izomorfism de spaţii vectoriale. De aceea £(V„, Wm) are dimensiunea m«.
Izomorfismul m are proprietăţile: (1) m(SoT) = m(S) m(S"), dacă SâT" are sens; (2) dacă §: V„ —> V„ este inversabilă, atunci si m(§) este inversabilă si
m(S-1) = (m(S))-1. 3.12. Fie £(V„,K) dualul lui V„. Baza {e1, £?2, ..., eK} a lui £(V„, K) defi
nită prin e'(^) = 8*, i,j = 1, 2, ..., «, se numeşte bază duală.
.54

Dacă V,, este un spaţiu vectorial euclidian, atunci V„ se poate identifica cu £(VB,K).
3.13. Fie \ n un spaţiu vectorial finit dimensional peste cîmpul K şi ST: Vre —> VK o transformare liniară. Fixînd baze diferite în V„, lui S" i se asociază matrice pătratice diferite.
Matricele A şi B, pătratice de ordinul n, cu elemente din K, reprezintă aceeaşi transformare liniară ST: Vn —> V„ dacă şi numai dacă există o matrice nesingulară C astfel încît B = C"1 AC. în acest caz matricele A şi B se numesc asemenea, iar C este de fapt matricea de trecere de la baza veche la baza nouă.
3.14. Fie V un spaţiu vectorial peste cîmpul K. Endomorfismul W: V —> V se numeşte:
(1) automorfism dacă este bijectiv; (2) •proiecţie dacă SF2 = GF ; (3) involuţie sau structură produs dacă IF2 = J, unde 3 este identitatea; (4) structură complexă dacă <F2 = — <5", unde tJ este identitatea; (5) endormorfism nilpotent de indice n dacă gFM = (9, unde n = 2, 3, ...,
iar t9 este transformarea zero. Un endomorfism nilpotent de indice doi şi de rang maxim posibil se mai numeşte şi structură tangentă.
3.15. Submulţimea lui £(V, V) ale cărei elemente sînt automorfisme ale lui V este un grup în raport cu compunerea automorfismelor. Acesta poartă numele de grupul liniar general şi se notează cu <Ş£(V).
3.16. Dacă S4:V—>V, i=l,2,...,p, sînt proiecţii cu proprietăţile p
SjS, = 6 pentru i ^ j şi Yj)% = 3 (identitatea), atunci
V = ImfSi) © Ln(Sa) © ... © Im(2„). 3.17. Presupunem că V şi W sînt două spaţii vectoriale complexe şi
euclidiene. Fie oT: V —> W o transformare liniară. Transformarea liniară f : W —* V,
definită prin (x,8Ty) = (ir*x,y), V A ' S W , VyeV, se numeşte adjuncta lui ST.
Un endomorfism oTe£(V, V) se numeşte: (1) hermitian dacă S" = âT*; (2) antihermiiian dacă ST = — GT*. O transformare liniară ofeS.(V, W) se numeşte unitară dacă păstrează
produsul scalar, adică (oT" , oPy) = (x, y), Vx,ye\T. Echivalent, ăT este unitar dacă şi numai dacă ijcT%[| = \\x\\, WxeV.
Orice transformare unitară este injectivă. Presupunem că V şi W sînt finit dimensionale şi că în fiecare este fixată
o bază. Transformării W: V - ^ W i se ataşează matricea T. Matricea T* = = 'T ataşată lui ST* se numeşte adjuncta matricei T.
Dacă T = ST, atunci matricea pătratică T se numeşte hermitică, iar dacă T = — tT, atunci matricea pătratică T se numeşte antihermitică.
O matrice pătratică T cu proprietatea TT* = I, unde I este matricea unitate, se numeşte matrice unitară.
3.18. Presupunem că V şi W sînt două spaţii vectoriale reale şi euclidiene. Fie oT: V —> W o transformare liniară. Transformarea liniară ST*: W —> V
definită prin (x, 8Ty) = (S~*x, y), VxeW, VyeV, se numeşte transpusa lui S\
55-
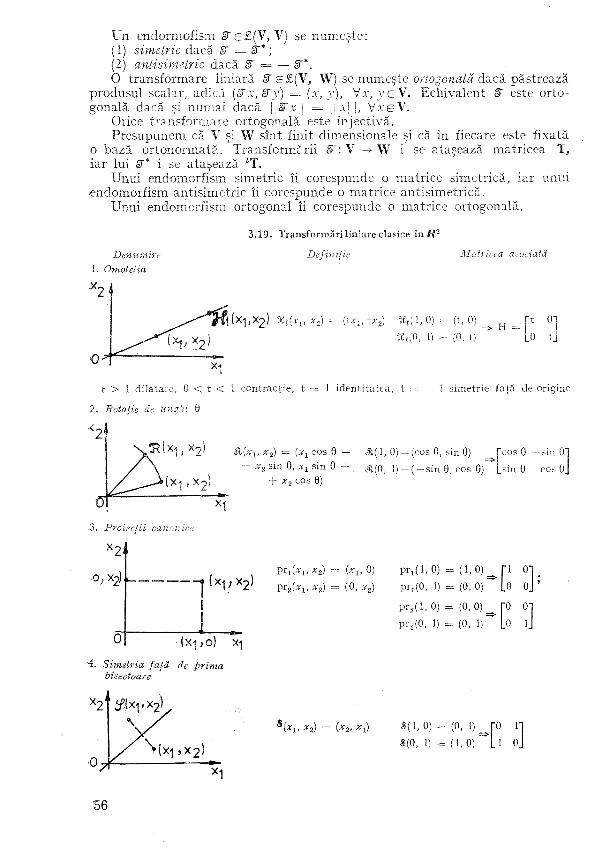
Un endormofism S"e£(V, V) se numeşte: (1) simetric dacă & — W*; (2) antisimetric dacă cT = — gr*. O transformare liniară cT e £(V, W) se numeşte ortogonală dacă păstrează
produsul scalar, adică (STx,S'y) = (x, y), V.v, yeV . Echivalent ST este ortogonală dacă şi numai dacă IJSTA'JI = ||A'| |, V.teV.
Orice transformare ortogonală este injectivă. Presupunem că V şi W sînt finit dimensionale şi că în fiecare este fixată
o bază ortonormată. Transformării GT:V—• W i se ataşează matricea T, iar lui gr* i se ataşează fT.
Unui endomorfism simetric îi corespunde o matrice simetrică, iar unui endomorfism antisimetric îi corespunde o matrice antisimetrică.
Unui endomorfism ortogonal îi corespunde o matrice ortogonală.
Denumire 1. Omoteîia X.
3.19. Transformări liniare clasice î n H 3
Definiţie Matricea asociată
}(X-|,X2) %t{xv x2) = {U1,tx2) %t{l,0) = (t, 0) 5t((0, 1) = (0, t)
H = t 0' 0 t
t > 1 dilatare, 0 < t < 1 contracţie, t = 1 identitatea, t
2. Rotaţie de unelti 6
1 simetrie faţă de origine
2
0
VRfx1(x2) / \
/ ^ ^ > ( X 1 ! X 2 )
r X1
3{,(xx, x2) = {xx cos ' — x2 sin 9, xx sin (
&(1, 0) = (cos 0, sinO) 51(0, 1) = ( — sin 0, cos
cos
sin
-sin 0' cos 0
o. Proiectil canonice l2>
0;X2)j . | ( X 1 ; X 2
I 1
J -ÎX-j,0) X-j
'•4. Simetria faţă de prima bisectoare
Pi"i(*r. #2) = pr2{xv x2) =
= (*i, 0)
= (0, .r2) pri(i,o) = ( i , o ) ^ n o-i p r i ( 0 , 1) = (0, 0) L0 0.
pr 2 ( l , 0) = (0,0) TO 0"
pr2(0, 1) = (0, 1) L0 1.
\X1* X2f — \x2* xl) (1,0) = (0, 1) => (0, 1) = (1,0)
ro î u o

Exerciţii şi probleme
1. Fie trei vectori x, y şi z şi trei l-forme u, v, w care satisfac
•u(x) = 1 — p2 - y2, u(y) = — a(3, u(z) = — ay
w(*) = - a p , »Cy) = 1 ~ a2 - Y2 *>(*) = PY,
Z0 Y) - ay, w >} Pr. >•(,) = î P2
+ Să se arate că x, y, z (sau u, v, w) sînt liniar deoendenti •**• a2 + p2 +
•2 = 1 .
Soluţie. Relaţia ax + &_>' + cz = 0 implică
(1 — p2 — y2) a — Kp6 — ayc = 0 —aP« + (1 — a2 — -f)b + Pyc = 0 - a y a + py& + (1 — a2 - p2) c = 0.
Acest sistem omogen admite soluţii nebanale dacă şi numai dacă determinantul
1 - P2 - Y2 - «P - ap 1 - a 2
ay Py
— ay PY = ( i - a 2 - p 2 - T
2 ) 2
l - a 2 - p 2
este nul.
2. Se consideră funcţiile 8T:R3--*R3 definite respectiv prin 1) 8F(x) = a, cu a un vector fixat din R3
2) S'(x) = x + a 3) &(x) = AX, cu X eR 4) G T ( Y ) = (xlt X-2, xf), CU Y = (Y'x, Y2 , Y : 3 ) e . J S 3
5) QT(Y) = ( Y 3 , Y 1 ( Y 2 )
6) S'(x) = (Y3, Y1; X-2 + k), cu A eR, k i= 0 7) oT(Y) = (YX -f- 2*2 — 3Y3, 3YX — Y2 + 3Y3( 2% + 3Y2 + 2Y3)
Să se cerceteze care dintre aceste funcţii sînt transformări liniare.
Soluţie. 1) Dacă a = s 0 rezultă S"(0) ^ 0, deci transformarea ST nu este aditivă; âT nu este liniară.
Dacă a = 0 transformarea JT este liniară. 2) Dacă a ^ 0rezultă oT(0) ^ 0 şi deci ST nu este liniară; dacă a = 0,
atunci 3"(Y) = Y, CT(V) = y şi pentru a, p e / J găsim
ff(a.x + $y) = a.x + p>' = aâr(Y) -f- $&(y), adică f este liniară.
3) Asemănător,
&r(aY + Sv) = X(aY + $y) = <X(XY) + P(\v) = <&{x) + $Sr(y),
VY, > 'eU 3 şi a, p e i î ; rezultă f liniară.
57

4) Fie şi y = (ylt y2, y3) eR3 şi a, ,3 eR. Avem ax + B_y = ( a% + B Vi, aA'2 + (3y2. ccxs -\- fiys) şi atunci
&{ax + Bv), = conform definiţiei, [(<xx1 + p ^ , K;r2 A By2, (a% + pv3)2l # ^ (<*%, <xx2, a*2) + (8>'i, B_>'2, P J | ) = air(x) -f 3ir(v); J nu este liniară.
5) ST este liniară. 6) Deoarece ST(0) = (0, 0, k) ^ (0, 0, 0) = 0, rezultă că ST nu este liniară. 7) Fie şi y = (ylt y2, ys) eRz şi a, ŞeR. Deoarece avem ax + S v =
= (a%! A Bj!, a%2 + Bv2, oe#3 A 3v3) rezultă,
Sf(ax + $y), = conform definiţiei, (a.x1 A 3 Vi A 2<x*2 A 2p v2 — 3ax3 — 33y3t
J>ax1 + 333;, - ax2 - B_>'2 + 3oc*8 + 3Ş3'3, 2a% A 2SV l + 3a*3 + 3Sv2 +
+ 2a.Y3 + 23v3) = [a(«! + 2*2 - 3%) + p ( ^ + 2><2 - 3v3), a ( 3 ^ - v2 A
+ 3x3) + B(3Vl - y2 A 3j/3), «(2% + 3*g + 2*s) A B(23/1 + 3y2 + 2v3)] =
= a(% + 2%2 — 3*3, 3% — ;v2 + 3%, 2*x A 3%2 A 2xs) A B(vi A 2v2 — 3r3,
3 j i — y2 + 2>y3, 2y1 + 3v2 + 2.v3) = a$"(x) A $&(}') şi deci 3" este liniară.
Aici s-au folosit axiomele operaţiilor introduse în spaţiul aritmetic R3. 3. Fie JR„[X] spaţiul vectorial real al polinoamelor de grad cel mult n.
Să se arate că funcţia I": Rn[X] —> B„[X] definită prin STp(x) = p(x A 2) — • — (A), V i e f i , este o transformare liniară.
Soluţie. Fie ^ şi g două polinoame oarecare din U„[X] şi k,leR. Găsim Sr(kp(x) + ^?(*)) = ST[(^ + <?) (#)], = conform definiţiei, (kp A /§•) (# A 2) — — {kp + Iq) (x) = kp(x + 2) + lq{x + 2) - A*(A) — /?(x) = £[£(* + 2) -— >(*)] A l[q(x + 2) — ?(#)] = M^(*) + /âT?(A), V.-veU. Deci W este o transformare liniară.
4. Să se cerceteze care din funcţiile definite mai jos sînt transformări liniare.
1) 3-(p(x))=p{~x), peR^, VxeR 2) sr(p(x)) =p{x+ 1), peR-JX], VxeR 3) 8T(p(x)) = p(x + l)-p(x), peRn[X], VxeR 4) 8-{p{x)) =P(x2), peRJX], VxeR 5) &(x) = (x\, x\, xţ), x = (%, %2, % ) e V 3
6) S"(x) = (e*>, e^), x = (%, *2) e V2
7) «•(*) = {Xl + l,X2+ 1, X3 - 1), X = (v., r2 , X3)GV3
8) gT(%) = (*! + X2, 0, % + Xo + ;V3), ;t == (xlt X2, X3) G V3
9) #•(%) = (*!, ^ + *2, %i + a-2 + xs, x-L + x-2 + x3 + %4), â; == (*!, «2, x3, .r4) G V4
R: 1), 2), 3), 4), 8), 9) liniară ; 5), 6), 7) neliniară. 5. Să se determine rangul şi defectul transformării liniare ST: R3 —> J?3
definită prin
#•(#) = ( ^ + x2 + *3, *i + #2 + x3, *! + x2 A *3) , * = (xi, x2, x3)
explicitînd cîte o bază în Ker ST şi Im &.
58

Soluţie. Conform definiţiei Ker ST este mulţimea vectorilor x = (xx, x2, x3) pentru care 8T(x) = 0, deci pentru care
(xx+ x2 + x3, xx + x2 + x3, xx + xz + A-3) == (0, 0, 0).
Obţinem sistemul xx + #2 + #3 = 0. xx + x2 -\- x3 = 0, xx + #2 + x3 = 0 care se reduce la ecuaţia % + x2 -j- x3 = 0, ceea ce arată că sistemul este dublu nedeterminat şi are soluţia (xx, x2, x3 = — xx — ^2) .
în concluzie orice vector x e Ker S" are forma
X = (#!, #2, — Xx — X2) = Xj (1, 0, — 1) -f- XZ\0, 1, — 1).
Vectorii ex = (1, 0, —1) şi e2 = (0, 1, —1) sînt liniar independenţi. De aceea {ex, e2} este o bază în Ker f şi deci n = dim(Ker 3") = 2. Avînd în vedere definiţia subspaţiului Im ST şi definiţia lui ST conchidem că orice vector din Im ST are toate coordonatele egale. Rezultă că oricare doi vectori din această mulţime sînt liniar dependenţi. Mai mult, orice vector din Im ST se poate exprima funcţie de vectorul f = (1, 1, 1); rezultă că o bază în Im f este formată din acest vector şi atunci r = dim(Im oT) = 1.
6. Să se cerceteze care dintre funcţiile definite mai jos sînt transformări liniare şi în acest caz să se determine defectul şi rangul lor.
i) S'(x) = [In | a rc tg(% + x2 + x3)\, xx, e*i+**+*>], x = (xx, x2, x3)eRa
2) 8~(x) = (xx, xx + x2, 0), x = (xx, x2, x3) eR3
3) ST(x) — (xx + x2, 0, x2 + x3, 0, xx + %), A; = (xx, x2, x3) eR3
4) &(x) = A- + (0, 3, 0) x= (xx, x2, x3) eRs
5) ST(x) = (xx — x2, xx + x2, 2>xx, xx, x2), x = (xx, x2)eR2
6) W{x) = (x2, xx, x2 + x3), x = (xx, x2, x3)eR3
7) gr(x) — (%i + %3, 0, xx + x2), x = (#1( x2, «3) e l ? 3
R: 1) Neliniară. 2) Liniară; dim Ker ir = 1; dim Im ST = 2. 3) Liniară; dim Ker ar — 0; dim Im ST = 3, 4) Neliniară. 5) Liniară; dim Ker 3" = 0, dim Im ST = 2, 6) Liniară; dim Ker ST = 0; dim Im 5" = 3. 7) Liniară; dim Ker & = 1; dim Im 5" = 2.
7. (Derivata). Fie spaţiile vectoriale reale V = {f: (a, b) —• U | f deriva-bi lă j , W = {g: (a, b) —»jR}. Să se arate că funcţia D: V —> W definită prin g = D(f) = f este o transformare liniară. Să se determine Ker D.
R: Ker D ={i:{a, b)-+R\f(x) = c, Vxe(a, b)}.
8. (Integrala definită). Fie spaţiul vectorial real V = {f: [a, b] —> R | f integrabilă în sens Riemann}. Să se arate că funcţia I : V —»iî definită prin
I(f) = ^ f(x) dx este liniară.
9. (Integrala nedefinită sau primitiva). Fie spaţiul vectorial real V = = {f: [a, b] -*• R\ f continuă}. Să se arate că funcţia P : V -> V, g = P(f),
S\x) = \ i(t) dt pentru a^x^b, este liniară şi să se determine Ker P.
R: Ker P = {funcţia zero}.
59

10. Fie V spaţiul vectorial real al tuturor funcţiilor reale continue pe
[a, b], Să se verifice că funcţia GT: V —> V, g = ST(f), g(x) = \ f(2) cos(^ — t) dt
pentru a^x^b, este o transformare liniară. Să se expliciteze Ker W. Soluţie. GT este bine definită deoarece g este o funcţie continuă. într-adevăr,
g(x + h) = [ i(t) cos(# + h — t) dt şi | g{x + h) — g(x) | < ( | i(t) (cos(x + h — Ja Ja
— /;) — cos(% — t))\ dt < (se utilizează uniform continuitatea funcţiei cosinus pe [a, b]), e pentru h dintr-o vecinătate a lui zero, adică lim g(x - j - h) = g(x).
ftn-O "6
Fie r, seR şi f1; f a eV. Rezultă ST (vii + sf2) =V ( r f ^ ) + sf2(*)) cos (* — Ja
rb rb — t) dt = y\ fi (0 cos (# — 2) di! + sV fa(f) cos (x — t) dt = rS ({{) + sâr (f2),
Ja Ja adică ST este liniară.
Condiţia V f(*S) cos (x — i) d^ = 0, \fxe[a, b], este echivalentă cu
J\ i(t) cos 2 dt\ cos # + j \ f(<) sin t dns in x = 0, V#e[a, &]. De aceea K e r f rb rb
conţine acele funcţii f pentru care V f(z!)cos ^ d^ == 0, \ i(t) sin t dt = 0, adică Ja Ja
funcţiile ortogonale funcţiilor cosinus şi sinus. 11. Fie D un domeniu din Rn şi C'X(D) spaţiul vectorial real al funcţiilor
de clasă O pe D. Fie dk: C°°(D) -* C°°(D) operatorul de diferenţiere de ordinul A. Să se găsească Ker d2.
12. Fie &:R3~>R2 o transformare liniară dată prin imaginile oT^) = = (2, 1), cT(e2) = (0, 1), Sr(e3) = (1, 1), unde ex = (1, 0, 0), e2 = (0, 1, 0), «3 = (0, 0, 1).
1) Să se determine imaginea unui vector oarecare din R3. 2) Să se determine imaginea vectorului f = (2, 3, —1) prin ST. R: 1) Dacă x = (xx, x2, x3) eR3, atunci &(x) = (2% + x3, xx -\- x2 + %).
2) ff(f) = (3, 4). 13. Pe spaţiul vectorial real al funcţiilor polinomiale de grad cel mult n,
notat cu Pn, se definesc funcţiile p{x) -*• 9x{p{x)) = xp{x),
p(x) -> ST2(j)(x)) = xi tp(t) dt, MxeR.
1) Să se arate că Wx şi cT2 sînt transformări liniare. 2) Să se verifice că &x este injectiva, dar nu este surjectivă. 3) Să se determine Ker W2 şi Im cT2. Soluţie. 1) VĂ, / G J B şi \/p,qeP„, găsim
oT2((^ + lq) (x))=x\ t{kp{t) + lq{t)) dt = xi ktp(t) dt + Jo Jo
+ * \ ltq(t)dt= k&2(p{x)) + l&'2(q(x)) şi deci âT2 este liniară. Jo
60

Pentru f 1 se procedează analog. 2) Deoarece &x(p{x)) = xp(x) = 0, \/XGR, implică p(x) = 0, VxeR,
adică p(x) = 0, transformarea liniară SV PM —• P n + 1 este injectivă. Ea nu este surjectiva întrucît nu orice polinom real de gradul n 4- 1 este divizibil cu x.
n 3) Fie p(x) =y)aiX\ Punem condiţia cT2 (p(x)) = 0, VxeR, adică
•;=o
f * £ « / dt = [ J^ aitt+1 ât = ° s a u ] C -r^— = 0. Deci Ker S"2 = I ^>(#) |
i=o i=o * - r ^ J
Notăm §•(%) = &#. Ipoteza q(x) = x\ tp(t) dt, VxeR, conduce la condiţia Jo
" ci- " ci-bx = x y ^ — , adică b = YN — . Astfel este determinată si Im ST;,c: Px.
Ui+2 Ui+2 14. Fie ST e £(V, V) un endomorfism pentru care GT2 — S" 4- J = 6 (6 este
transformarea nulă, J este transformarea identică). Să se arate că ST este inversabil.
Soluţie. 1) Să dovedim că GT este injectiv. Fie xlt x2eV pentru care £T(xx) = â r ^ ) şi deci oT2( -1) = âT2(#2). Egalitatea dată în enunţul problemei conduce la ST2(%1) — g-(%1) + % = 0, ăT2fe) — #"(#2) + *a = 0. '
Prin scădere găsim % = %2. adică ST este injectiv. 2) Dovedim că S" este surjectiv. Notînd # = _y — Wy, rezultă ST(x) —
= gT(y) — ST2(y). Pe de altă parte, din enunţ avem J = ST — GT2 de unde J(y) = (ST — IT2) (V) sau 3/ = S"(_y) — S"2(_y). Aceste egalităţi implică v = = cT(x), ceea ce arată că ST este surjectiv. în concluzie ST fiind bijectiv este inversabil.
Observaţie. în cazul dim V = n era suficient s î arătăm că GT este injectiv. 15. 1) O funcţie î.R-^R se numeşte funcţie original dacă are următoa
rele proprietăţi: (i) i(t) = 0, pentru t < 0;
(ii) f este derivabilă pe porţiuni; (iii) 3M > 0 şi s > 0 astfel încît | t(t) ' < Mest, W > 0 . Numărul s se nu
meşte indice de creştere. Să se verifice că mulţimea tuturor funcţiilor original este un spaţiu
vectorial real. 2) Fie Q.(a) subspaţiul funcţiilor original care au indicele de creştere cel
mult a şi Cm{a, 00) spaţiul vectorial real al funcţiilor de clasă Cx pe (a, 00).
Să se arate că funcţia £: Q(a) -* C°°(«, ce), £(f) == F, F(p) = y°f(*)e-p' da! • '0
este o transformare liniară injectivă (transformarea Laplace). 16. Dacă &x, £T2 e £ (a 3 , R3) sînt date prin matricele
3 1 0 2
. 1 2
O"1
1 •5
i
, T2 = " —1 4
0 4 0 0
2] 1 5 _
în raport cu baza canonică a lui Rz, atunci
61

1) să se determine imaginea lui x — (O, 1, — 1) prin &1, Wf1, ST2, S'î1 '> 2) să se determine imaginea lui y = (1, 3, —2) prin S^ -j- âTa si (cT 1 -f
+ ^r2)-1;
3) să se determine imaginea lui 2 = (1, 2, 0) prin S'1 GT2 şi ^ 2 ^ 1 -
R: 1) S-i(*) = (l , 1 , - 1 ) , ffa(*) = (2, 3, - 5 ) , Sr^(x)=( 4 1 2 ^
WzHx) = 4 3 5 ' 10
30 36 27 4 3 ' 43* 86
• 1 | . 2)(ir1 2) (.v)
13 13 13j
13, 14, -9) , (a-1 + ffa)-1(>0 =
1 3) (STiS-s)(z) = (29, 16, 23), (ffa»"i)(«) = (21, 21, 25).
17. Fie spaţiul vectorial al matricelor pătratice de ordin doi $\l2y.2{C) în care considerăm matricele
Ax = [ 0 1 [l 0
A2 = ro i
A, = A, = i 0" 0 i
1) Să se determme o formă liniară [: 3TL2x2(G) —> C astfel încît /(Ax) = = - 4 i , /(Aa) = 6, /(As) = 2, /(A4) = 4i.
2) Să se determine o bază a subspaţiului format din matricele A pentru care /(A) = 4.
Soluţie. 1) Fie matricea A eSKl2X2(C), A =
Ux 1
0
0"
0. , «2 =
0
1
1"
0. , «3 ==
"0 0
1 0 Ui =
«•12
^ 2 1 ^ 2 2
0 0
si baza canonica
0 1 a acestui spaţiu. Co
eficienţii formei liniare sînt L{u3) = txs, j= 1 ,2 ,3 ,4 ; a , -eC Deci /(A) = = ai«n + a2«i2 + <xs«2i + «4*22- Spunem că am determinat această formă dacă cunoaştem coeficienţii săi; pentru aceasta ne folosim de datele din enunţ /(Ai) = a2 -4- a3 = —4i ş.a.m.d. Sîntem conduşi la sistemul liniar neomogen aa + aa = —4i, —iaa + ia3 = 6, ai — a4 = 2, iai + ia4 = 4i a cărui soluţie este unică ai = 3, a2 = i, a3 = —5i, a4 = 1. Deci /(A) = 3 a n -4--4- ia1 2 — 5i«2i + ^22-
2) Fie subspaţiul S2 cz Sfl2x2(C), S2 = {A] /(A) = 4}. Elementele matricelor din Sa se află în relaţia
3«n + ia12 — 5ia21 + «2a = 4.
dim S2 = 3. O bază din acest subspaţiu poate fi
1 5' 1 1
Bţ> = 51
, B3 = 1 0"
.0 1. -3il
3 1 18. Fie gr1,gr2ie£,(R3[X},R3[X]) două endomorfisme definite astfel
s"i(«o + %X + aaX2 -4- a3X3) = a0 + <%X -4- «2X2,
X + X3, §T2(X + X3) = 1 + X3, S"2(l + X3) = 1 + X
+ X2 + X3, sra(i + x + x2 + x3) = 0. ira(X2 + x: Y 3 \
Să se determine matricele transformărilor S"1oTa şi respectiv S"2S"i în raport cu baza canonică a lui U3LX].
62

Soluţie. No t înd e1 = 1, e2 = X, e3 = X2, <?4 = X 3 şi ţ in înd seama că #"2
este o t r ans fo rmare l in iară , găs im
^"2(^3) + ^"2(^4) = « ! T '"i şi deci $"2( 1) = — s3 — — g4
Sr2(<?2) + S-a(e4) = ex + £4 1 1 ^2(^2) = — «2 — — «3 — — ^
^2(^1) + ^2(^4) = « I T « 2 T e3 + e4 ^ a (e 3 ) = — ^ 1 1
e3 — —-ei
2 2
$~2(ei) + ST2(e2) + ^2(^3) + Pafa) = 0 ffa) = ex + e2 + 1 , 3
2 2
Rezul tă
i 1 1 \ 1 1ST2(e1) = ST± — e3 — — e41 = —- i>3
S"1f2(e2) *"i ( -1 ! ^
•e;2 — — e 3 — — g 4
2 2 y
1
7*3
S-L&iU-,) = s1\—c1 — ~ e3 — — e4j = -e4 — — e3
^ â u / ^ i = STi! t-'i + ^2 H e3 -f — e4J = gj. + e2 + — e3.
De aici găs im
r12 = o o o - 1
- l 1 o 1
1 1/2 —1/2 —1/2 1/2 [ o 0 o o
Definiţia lui &x impl ică f i(e4) = e±, S"i(e2) = cz, ^1(^3) — H, $"1( 4) = 0. De aceea
ăT25T1(g1) == S"2(e1), S"2 ^1(^2) = ^2(^2), ^2 ST1(03) = ^2(^3), ^2^1(^4) = 0, si deci
0 0 — 1 0 0 — 1 0 0 1/2 - 1 / 2 - 1 / 2 0
— 1/2 —1/2 —1/2 0
63

19. Să se dovedească care dintre funcţiile definite mai jos sînt transformări liniare şi în toate cazurile de liniaritate să se determine matricea asociată transformării în raport cu baza canonică a spaţiului.
(i.Tj, ix2, xs), x = (xlt x2, x3)eR3, Sf : Rs
x;i + %i, 0, ÎXi), • C 4
1) Sf(x
2) &(x) = sin x, xeC, S": C - • C
3) aF(x) = (ix1 -4- ix2 + x3, xx -f- x2
x = (xx, x2, x3, Xi) eCi, 3": C4
4) S-(A) = 'A, AeSJ\lZx3{K), ST : 8VLM(E) - • Sfl3x3{K)
5) ST(x) = xx + 2x2 + 3.T3, x = (%, %2, x3)sR3, ST: R3
6) 3"(*) = xx + i%a — ix3, x = (%, «2, %)eR 3 , &: R3 *•
l) s(x) = (*, —i*, 0), *eH, sr-.R^C3
X IX
C3.
B
sr (x) = -IX
R: 1) Liniară, T =
xeC, ^ :C-+SHo x 2 (C) .
2) Neliniară. 1 0 0 i 0 0
3) Liniară, T =
l i 1 0 " 1 1 1 1 0 0 0 0 0 0 0 i .
4) Liniară, T =
5) Liniară, T = [1, 2, 3].
T = [1, —i, 0]. 8) Liniară, T
6) Liniară, ' 1 i '
1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0
,0 0 0 0 0 0 0 0 1_
T = [1, i, —i]. 7) Liniară,
20. în spaţiul vectorial real al tuturor funcţiilor reale fiecare dintre mulţimile
{sin x, cos x], {e2x sin 3x, e2x cos 2>x], {1,1 — x, 1 — x — es}
este liniară independentă şi generează un subspaţiu V finit dimensional. Utilizînd mulţimile date ca baze pentru V, să se găsească matricea ataşată operatorului de derivare D : V —> V.
21. Fie £T:V3—> V3 funcţia definită prin egalitatea aT(v) =~vXa, a fixat.
1) Să se arate că 3" este o transformare liniară. 2) Să se calculeze Ker 3" şi Im 3" şi să se arate că
Ker 8 ® Im 3" = V3.
64

3) Să se determine o bază în V3 faţă de care matricea lui 3" să fie de forma
0 0 a
0 1
\2 o 4) Să se determine subspaţiile invariante ale lui ST. Soluţie. 1) Fie ~Vx, v2eV3 şi X, JJLe R; rezultă: 3"(tâi + y.v2) = (X^i + JJU>2) X H = X(?i X a) + (JI(»2 X « ) = XoT(v1) +
+ j iaT^) şi deci ST este liniară.
2) Ker S" = {v G V31 &(v) = 0}. Insă, 5T(w) = 0 implică v X a = 0, adică v = ka, keR şi deci Ker 3" = {&« | £ e JB} este mulţimea vectorilor coli-niari cu a.
I m f = {S"(v) | v e V8} = (w = » X a | w J_ w, z? J_ «}, adică este mulţimea vectorilor din V3 ortogonali pe a. Rezultă KerSTlImS" = {0}. Pe de altă parte orice vector nenul » e V 3 poate fi descompus unic ca suma a doi vectori, v = Wi + vs, cu vx coliniar cu a, iar v2 ortogonal cu a, adică j ^ e K e r S " ş i ? 2 e l m 3 " , d e unde V3 = Ker gr ® Im &.
3)Considerăm baza formată din vectorii ~ex = a, ^ 2 G l m 3", ~e3 = <s2 X a-Renumerotînd, obţinem baza / j = ~ex, f2 = î 3 , f3 = 72 în care
grQx) = ST (ei) = «i X a =a x 2 = 0 = 0 - / , + 0-_/2 + 0- / 3
S"(/2) = 3" («a) = « 3 X « = ( « 2 X f l ) X « = «fa, ^2) — î 2 ( « , «) =
= _ ( 2 , 2) ? g = - || « | |«/3 = 0 • / i + 0 •% - || a | |2-/3,
deoarece ^ e l m f implică (2, e2) = 0 .
S-(/3) = f ( e 2 ) = g2 x a = e3 = / 2 = 0-/i + 1-/2 + 0-/3 .
Rezultă că matricea lui 3" în raport cu baza {/i,/2,/3} are forma
T = 0 0
4) Subspaţiile invariante ale transformării 3~ sînt: {0}, V3, Ker 3" şi Im S deoarece
g-(O) = 0 X « = 0 = > S-(O) e{0}
l ( » ) = 9 X « 6 V 3 l Vt;GV3=>S"(j;)eV3.
Dacă y e Ker 3" =s> y = &2 şi atunci,
&(v) = y x 2 = (Aa) X 2 = 0, ff(») G Ker 3".
Dacă y e Im 3" =j> (», 2) = 0 => v _L 2. Atunci,
3"(i>) — » X 2 =* ff(v) J_ ă => &(v) s Im 3".
5 — Probleme de algebră — c. 264 65

3 2 0" 1 0 0 0 0 0_
2) T2 = - 1 2 —2 2
. - 2 2
- 3 " — 6 — 6
3) T3 = "1 3
.2
— 1 2" - 3 6 — 2 4
22. Să se determine matricele transformărilor liniare STj: R3-+R3, j= 1,2,3, în raport cu baza formată din vectorii fx = (1, 2, 3), f2 = (2, 1, 3), f3 = (1, 1, 1) cunoscînd că
1) Tx
sînt matricele transformărilor respective în raport cu baza canonică a lui R3. Indicaţie. Se aplică formula B = C_1 AC, în care C este matricea de
trecere. 23. Fie transformarea liniară ST: V3 —> V3 definită ca proiecţia ortogonală
a vectorilor din V3 pe planul P: x — 3y + 2z = 0. Să se determine matricea transformării în raport cu baza canonică a lui V3.
Indicaţie. Determinăm o bază convenabilă. Anume alegem vx = (1, 1, 1) conţinut în planul P şi determinăm un vector v2 = («. P, y) care să aparţină planului şi să fie perpendicular pe v±. Din aceste condiţii rezultă ~v2 = (—5, 1,4). Completăm baza cu vectorul v3 = (1, —3, 2) normal la plan. Deoarece
&{vi) = Vi, Sr(v2) = v2, 3"(»3)]= 0 rezultă că
T = "1 0
.0
0 1 0
0 0 0_
este matricea transformării în baza {v1,v2,vs}.
Notăm prin U matricea transformării în baza canonică [i, j , k) şi aplicăm formula U = C_1 TC, unde C este matricea de trecere de la baza canonică la baza {vlt v2, v3}.
24. Fie &i, Wz 6 £(V, V) două proiecţii. Să se arate că 1) $x + SF2 este tot o proiecţie -**> § v SF2 = gf2- &1 = 6 : 2) Im(^ x + gF2) = Im S?! © Im &z; 3) Ker (ffx + gF2) = Ker Wx n Ker ff2. Soluţie. 1) fFx şi SF2 sînt proiecţii, adică SF| = SFx şi gF| = §F2. Admitem că
SFJfz = > # ! = £).' Aceasta implică (ffx + SF2)2 = Sf + ff^g + S ^ + gf = = S=i + 3 2 c e e a ce arată că şi transformarea sumă SFX + ^2 este o proiecţie. Reciproc, dacă admitem că âFx + 0F2 este o proiecţie, obţinem eF28Fx + ^ # 2 = 0.
Compunînd la stînga, respectiv la dreapta cu âFx găsim
c Fx = a sau
j9t = <9 _
Prin scădere se obţine SFgSFj, ~~ ^ # 2 = <9- Prin urmare âFjSFa = S ^ i = <9. 2) Incluziunea Im(Srx + S o c r i m c F x 0 Im 5F2 este evidentă. Fie xe
6 Im oFx © Im âF2, ceea ce înseamnă x = Xi -{- x2 cu %xe Im âFx şi x2e Im âF2. Găsim (SFX + SF2) (x) = (ff i + 92) (%) + (^1 + 9a)(xz) = (S=i + ffa) *i(*i) + + (SFX + âF2) GF2(2;2) = ^1(^1) + ^2(^2) = % + ^2 = x; aceasta arată că xelm (&:
l + 82), adică Im § 4 ® Im âF2 c Im (SFX -f- S=2). 3) Deoarece Ker {§:
1+S=2)^={xeV \ (S;1+SF3)(a;)= 0}, iar Eer fr
1fl Ker ^3 = = ( I G V ! BX[X) = 0 şi Sr
2(«) = 0} se găseşte Ker ŞFx.O Ker f:2czKer(âFi + S=2).
66

Fie x E Ker (Sfx + SF2), atunci (§FX + 82)(x) = O sau Wx{x) = — &2{x).. De aici rezultă că §x{x) = O implică 8;
2{x) = O şi reciproc. Deci ^ E K e r S ^ n fi Ker &2, adică Ker (§x + 3=2) <= Ker S^ n Ker ^ 2 .
25. Fie S"g£(V, V) un endomorfism nilpotent de indice p^2. 1) Să se arate că endomorfismul 5 — ST este inversabil şi că (5 — &)~x =
= J + sr + s-2 + ...gp-1. 2) Să se verifice că dacă x este un vector astfel încît 3~p~1(x)Jf 0, atunci
#, #"(#), ... S"îl_1(^) sînt vectori liniar independenţi. Soluţie. 1) oT este nilpotent de indice p dacă ar* = &, 0 fiind transformare
nulă. Rezultă
(J - ir) ( j + a- + a-2 + ... + sr*-1) = ( j + a- + S"2 + ... + + ir*-1) (J - sr) = J - sv = J.
De aceea endomorfismul W este inversabil şi («7 — oT)"1 = .7 + 3 + 3"2 + + ... + Sp~x.
2) Fie scalarii kx, ..., kp_x pentru care k0x + kx&(x) + ... + kp_i^p~1{x) = 6. Aplicînd succesiv pe & şi ţinînd seama că Sfp = 6 rezultă
k0®(x) + kxS\x) + ... + kp_xS)p-l(x) = 0
k0$p-*{x) + kxsrp-\x) = o k0srp-\x) = o.
Deoarece Wp~1(x)^=0 rezultă. k0 = AX = ... = kp_x = 0 şi deci afirmaţia este adevărată.
26. Să se determine transformarea liniară 3: i i 4 —> U 4 cu proprietatea că Ker 3" = Im ST = ~L(ex, e2) unde e4 = (1,0, 1,0), e2 = (0,0, 1,1) şi apoi să se găsească matricea lui ST în raport cu o bază a lui R4, care conţine vectorii ex, e2.
Indicaţie. Fie es = (0,0, 0,1) şi e4 = (0,1, 0,0) aşa încît {ex, e2, e3, e4} este o bază a lui B 4 . Punem 8r(ex) = 0, S"(e2) = 0, &{es) = ex, 8T(et) = e2.
Atunci ^(ajCi + y.2e2 + as^s + a4e4) = 0 implică a3ei -f- oc4e2 = 0, adică a3 = a4 = 0 (deoarece ex şi e2 sînt liniar independenţi) şi de aici rezultă Ker oT = L(ex, e2). Egalităţile eT(e3) = ex, âr(e4) = e2 implică Im S" 2 L(ex, e2) şi deci Im ST = L(ex, e2). Matricea este
"0 0 1 0~ T = 0 0 0 1
0 0 0 0 .0 0 0 0_
27. Fie V2 spaţiul vectorial al segmentelor orientate cu originea O identificat cu mulţimea punctelor din plan şi fie t i : V2 —>• V2 transformarea liniară definită prin ă(a) = b, ă(b) = c, unde A(a) şi B(b) sînt două puncte fixe necoliniare cu 0(3), iar C(c) un punct din plan. Să se determine C(c) astfel încît
1) 61 să fie o proiecţie. 2) ă să fie o involuţie. R: 1) C=B, 2) C=A.
67

28. O transformare liniară S: V —> V se numeşte ciclică dacă există un vector ve V astfel încît {«, S"(a), oT2(y), ...} să genereze pe V. Să se verifice că QT:R3->R3, &(x, y, z) = {x+y, y+z, x) este o transformare liniară ciclică.
Indicaţie. Se caută un vector v astfel încît {v, ST(v), S"2(u)} să fie o mulţime liniar independentă.
29. Fie V un spaţiu vectorial real de dimensiune n. O transformare liniară "J: V —*• V care satisface relaţia } 2 = — J se numeşte structură complexă pe V [58].
1) Să se arate că V admite o structură complexă dacă şi numai dacă n = 2m.
2) Să se demonstreze că un spaţiu vectorial real V care posedă o structură complexă "J devine un spaţiu vectorial complex de dimensiune m dacă înmulţirea cu numere complexe se defineşte prin
{a + ib) x = ax + V)(x), xe V, a, be R. 3) Invers, fiind dat un spaţiu vectorial complex V de dimensiune m,
definim *J: V —> V prin °\x = ix, xe V. Să se arate că dacă V este considerat ca un spaţiu vectorial real de dimensiune 2m, atunci "J este o structură complexă pe V.
30. Considerăm transformările liniare D, $: JJ„[X] -> Rn[X] definite respectiv prin Dp=p', 3{p{x) = p(x + 1) — p(x)), peR„[X], VxeR.
1) Să se arate că D este un endomorfism nilpotent si să se scrie matricea , • n » + v f, X X 2 X" lui D m raport cu baza ii, — > , ... ,
1 1! 2! ni 2) Să se arate că
1! 2! R : 1) Dn+1 = 0,
D2 + ... +
0 1
1
D
0 0 0 0
(n — 1)!
0 ... 0~ 1 . . .0 o. . . o
D' -1 -l D". n!
h
0 0 0 ... 1 .0 0 0 ... 0_
2) p(x+h)=p(x) + -p'(x)+... -\ 1! (n — 1)1
P<^\x) -\ -fin\x) n\
Deci
P(x + 1) = p(x) +±p'(x) + ... + ~p™(x). 1! ni
x)) = p(x + 1) - £(*) = - l D(p(x)) + 1 B2(P(x)) + ... +
+ ±-V«(p(x)) =(± D + ^ - D 2 + ... + - i - D - ) ( # * ) ) , «! V 1! 2! n!
V/>eJR„[X], VxeJR de unde
1 D + - l D2 + ... + - l DB
1! 2! »!
68

31. Fie V un spaţiu unitar şi S": V —* V o transformare liniară pentru care ||Sr(#)|| ==||f*(%)||, V#eV, unde 8* este adjuncta lui 8. Să se arate că 88' = 8*8.
Soluţie. Relaţia ||S"(x)|| = \\8*(x)\\ implică (8x, 8x) — (8'x, 8*x). Pe de altă parte, definiţia adjunctei (x, S'x) = (8'x, x) conduce la (8x, 8'x) =
•c, x) = (x, 8*(8x)) şi (8*x, 8*x) * * ) ) •
Avînd în vedere aceste egalităţi, găsim (x, 88*x) = (x, 8*8x) sau [x, (88' — 8'8)x] = 0, V*e V.
Prin urmare 88* = 8*8. 32. Fie 8 :V —»• V un endomorfism dat prin matricea
3 + 2i 2 — 2i] _ 1 — i 3 + 4iJ'
în raport cu o bază a spaţiului euclidian complex V. Să se determine două transformări hermitiene 8± şi 82 astfel ca 8 = S"x -f \82 şi apoi să se determine matricele transformărilor 8X şi 82.
Soluţie. Fie 8* adjuncta lui 8. Transformările liniare 8X şi 82 sînt
8+8' şi 82 = • 8 — 8*
2i
Acestea sînt hermitiene deoarece
şa
*î=(- 2i sr -
2(-.i) 2i
Dacă T = [i!y] este matricea transformării $" atunci T* = *[?y] este-matricea transformării adjuncte 8*. Avem
r 2i 1 + i ' 2i 3 — 4i
Şi
Ti = T + T* 3 ±_.
2
2 2
r 2i _2+_L
2 2
3 _ i
A
unde Tx şi T2 sînt matricele transformărilor 8X şi82. 33. Să se arate că transformarea liniară 8:SK.BxS(R) —> §fliSxS(R) definită.
de egalitatea 8(A) = ' A , AecJH3x3(IÎ), este o involuţie simetrică. 34. Fie C°(a, b) spaţiul euclidian canonic al funcţiilor reale continui pe
{a, b]. 1) Fie V subspaţiul funcţiilor f de clasă C1 pe [a, b] pentru care i(a) =
= i(b). Să se arate că operatorul de derivare D: V—> C°(a, b), D({) = f este antisimetric.
69

2) Fie V subspaţiul funcţiilor f de clasă C2 pe [a, b] pentru care p(a) t(a) = 0, p(b) t(b) = 0, unde p este o funcţie fixată, de clasă C1. Notăm cu } o funcţie fixată din C° (a, b). Să se arate că operatorul lui Sturm-Liouville S :V-> C°(a, b), §(f) = (pi')' + qi este simetric.
Indicaţie. Produsul scalar pe C°(a, b) este definit prin (u, v) — \ u(x)v(x)dx.
35. în spaţiul complex C 3 definim produsul scalar
(x, y) = XxŞx + ixxg2 — \x2yx + ix2y2 + x3y3,
unde x — xxex + x2e2 + x3e3, y = y\ex -4- y2e2 + y3es iar ex = (1, 0, 0), e3 = (0, 1, 0), e3 = (0, 0, 1) este baza canonică a lui C3. Fie ST: C'3 —> C 3 transformarea liniară ataşată matricei
T = 1 i 0
0 i" 1 2X 3 i .
XeC.
1) Să se determine matricea adjunctei lui SF. 2) Să se determine X astfel încît T să fie inversabilă.
R: 1) 3 3
T* = 1 . 4 . . , 2) X*— + — i. 2 6
1 J 1 . — 1 3 2iX
2 T 4 .
— 1 3
8X— 1
36. Fie : R 1 —> R 4 transformarea liniară definită prin
1 , 1 , 1 , 1 1 5 , 1 — xx + — x2 + — x3 + — %i, — xx — — x2 + — x3 2 2 2 2 2 6 6
— Xi, o
1 , 1 Xi -f- — %2 —
2 6
5 , 1 1 , 1 , 1 5 \ 6 6 2 6 6 6 j
1) Să se arate că S" este ortogonală. 2) Să se determine ST-1.
\. 3) Să se scrie matricele lui f şi S"_1 în raport cu baza canonică a lui R4 . Indicaţie. 1) Se arată că |jS"(^)]| = [] x\\ pentru orice %eR4. 2) Se
rezolvă sistemul y = 8T(x), y = (ylr yz, y3, 3/4) în raport cu xx, #2> #3> ^4 Şi se obţine ST-1.
37. Fie V un spaţiu vectorial real, °V complexificatul său şi â": V—> V o transformare liniară. Funcţia CS": CV —• CV definită prin cST(u, v) = (&u, STv), sau altfel scris c&(u 4- iiy) = S"M 4- itSFv, se numeşte complexificata lui âr.
1) Să se arate că CS" este o transformare liniară care are proprietăţile c{kST) = kc8T, keR
c« c(8 + ®)
(ca-)-1 = c(g--i) dacă oT este inversabilă.
70

2) Fie {elt ..., en} o bază a lui Vn şi {{elt 0), .,., (en, 0)} baza corespunzătoare din CV. Să se verifice că matricea CT ataşată lui CST este egală cu matricea T ataşată lui S".
38. Fie &e£.(Cn,Cm) o transformare liniară. Se numeşte reprezentare reală a transformării ST, transformarea liniară reală Kf: BCn —> RCm care coincide punctual cu âr, unde BCn, RCm sînt trecerile în real ale spaţiilor C şi Cm. Ştiind că ST: C3 —> C3 este transformarea liniară definită prin
§r(x) = (%x + ix^Xi + x3,ix3), x = (xlt x2, x3)e.C3,
să se determine matricea reprezentării reale a lui & în baza {fXj f2, f3} unde fx = (0, i, 1), f2 = (0, 0, i), f8 = (i, - l , 2).
Soluţie. Mai întîi determinăm matricea transformării W în baza "dată. Fie ex = (1, 0, 0), e2 = (0, 1, 0), e3 = (0, 0, 1) vectorii bazei canonice şi
f S-fa) = (1, 1, 0) = (1, 0/0) + (0, 1, 0) = ; ex + e2 + 0- e3
( S"(e2) = (i, 0, 0) = i- ex + 0- ez + 0- es
! «"(es) = (0, 1, i) = (0, 1, 0) + i (0, 0, 1) = 0- ex + e2 + ie3.
Matricea lui W în această bază este
"1 1
Lo
i 0 0
0" 1 i _
Deoarece îx = \e% + es, f% = ie3, f3 = — \ex — 2e% + 2e3 rezultă că matricea de trecere de la baza {elt e2l e3} la baza {f1( f2, f3} este
0 i 1
0 0 i
—î —2
2
Folosind 3.13 obţinem matricea transformării S" în baza {f1; f2, f3} şi anume
U T C
Dar
U = 3 4 0
0 0 0
—2 7 3
+ i
- i - i
0 -l - l
—î 2i 0
- l 2 0
—2 —5i 7+5i 3
= A + iB
asa încît matricea trecerii în real a lui ff este
RT = [A LK
- B "
A —
- 3 4 0 0
— 1 — 1
0 0 0
- 1 2 0
— 2] 7! 3 |
— 5: 5j 0!
0 1 1
-3 4 0
1 — 2
0 0 0 o
5" — 5
0 —2
7 3
71

39. O rotaţie a lui B " este o transformare liniară ortogonală cu determinantul + 1.
1) Să se arate că o transformare liniară Jt: R2 -* fi2 este o rotaţie dacă şi numai dacă există un număr real 6 astfel încît matricea lui JL în raport •cu baza canonică a lui R2 să fie
cos 9 —sin 6' sin 8 cos 0
2) Să se arate că orice rotaţie a lui R 3 lasă fixă o direcţie (admite un versor propriu în raport cu valoarea proprie 1).
3) Să se arate că dacă ăl este o rotaţie a lui Rs, ex este un versor pentru care o*L(<?i) = ? i şi ~ei este un versor perpendicular pe ~îx, atunci matricea a taşată lui SI în raport cu baza ortonormată {e1, ~e2, ~ex x 7Z} este
1 0 0 0 cos 8 —sin 6
.0 sin 8 cos 6 QeR.
40. Fie V un spaţiu vectorial normat şi complet şi ® = {aQ, a1: ..., a„} o diviziune a intervalului [a, b]czR. O funcţie f: [a, b] —> V se numeşte funcţie în scară în raport cu diviziunea ® dacă există elementele Vi, v%, ..., vne V
« •astfel încît f(2) = vt, a{_1< t< at,i = l, 2, ..., n. Valoarea I(i) = 2 3 {at~ at-i) vt este independentă de © şi se numeşte integrala lui f.
Să se arate că mulţimea 5c ([a, b], V) a funcţiilor în scară definite pe '[a, b] şi cu valori în V este un subspaţiu vectorial al spaţiului funcţiilor mărginite definite pe [a, b] şi cu valori în V, iar I: Se ([a, b], V) —> V este o aplicaţie liniară care satisface || I(i) || < (b — a) || f ||0, unde || f ||0 este norma supremum.
§ 4. VALORI ŞI VECTORI PROPRII
4.1. Fie V un spaţiu vectorial peste cîmpul K(R sau C), fie ă: V —»• V ?un endomorfism şi xe\ — {0}. Dacă există XeK astfel încît ăx = Xx, atunci x se numeşte vector propriu, iar X se numeşte valoare proprie pentru transformarea liniară ă.
Mulţimea valorilor proprii ale lui ă poartă denumirea de spectrul lui ă. La un vector propriu al lui ă corespunde o singură valoare proprie.
Vectorii proprii ai lui ă care corespund la valori proprii distincte sînt liniar independenţi.
4.2. Mulţimea S(X) = {xjxe V, 6Lx = Xx, X = valoare proprie} este un ^subspaţiu vectorial al lui V invariant faţă de ă, adică â(S) £ S. Acest sub-.spaţiu poate fi finit sau infinit dimensional şi se numeşte subspaţiu propriu corespunzător lui X.
4.3. Fie A = [a(j] o matrice pătratică de ordinul n şi X = [xs] o matrice nenulă de tipul n x 1 cu elemente din cîmpul K(R sau C). Dacă există XeK •astfel încît AX = XX, atunci X se numeşte vector propriu, iar X se numeşte •valoare proprie pentru matricea A.
72

Ecuaţia matriceală (A — XI) X = O este echivalentă cu sistemul liniar şi omogen
(«11 — X) % + a12x2 + ... + alttxn = O
«21 «1 + («23 — ?0 *2 + ... + «2»*n 0
anlxx + an2x2 + ... + (ann — X) x„ = 0,
care are soluţii nebanale dacă si numai dacă
P(X) = det (A - XI)
Ct\\—X ®<\z «21 «22 — X
« a l « » 2
"In
«2a
«„„ —
= 0.
Polinomul P(X) = det (A — XI) se numeşte fiolinomul caracteristic al •matricei A, iar ecuaţia P(X) = det (A — XI) = 0, Xe K, se numeşte ecuaţia caracteristică a matricei A.
4.4. Fie A o matrice pătratică reală de ordinul n şi P(X) = det (A — XI) = 0 ecuaţia ei caracteristică. Deoarece nu orice ecuaţie admite soluţii în R, dar admite în C, uneori valorile proprii ale lui A se definesc ca fiind elemente din C. în acest caz vectorii proprii corespunzători aparţin complexificatului lui Rn.
Fie X1( X2..., Xn valorile proprii ale lui A în C, fiecare valoare proprie ;fiind scrisă de atîtea ori cît este multiplicitatea sa. Avem X2 X2 ... XB = det A, AL + ^2 + ... + X„ = t r A.
Matricele asemenea au acelaşi polinom caracteristic şi deci aceleaşi valori jDr oprii.
4.5. Fie \ n un spaţiu vectorial w-dimensional peste cîmpul K(R sau C), ,fie ă: V„ —> VB un endomorfism şi A matricea ataşată lui ă în raport cu o bază fixată în V„. Mulţimea valorilor proprii ale lui ă constă din rădăcinile
jlui P(X) = det (A — XI) care fac parte din K. Vectorii proprii ai lui ă sînt .soluţiile ecuaţiei matriceale (A — XI) X = 0.
i/olinomul P(X) = det (A — XI) este invariant faţă de o schimbare a bazei din Yn, adică coeficienţii lui P(X) depind de endomorfismul ă şi nu de
:• reprezentarea matriceală particulară A. De aceea P(X) = det (A — XI) este ^numit poiinomul caracteristic al lui ă, det A este numit determinantul lui ă, -/tr A este numită urma lui ă etc.
Endomorfismul ă: V„ —> Vre are cel mult n valori proprii distincte. Dacă ă ;are exact n valori proprii distincte, atunci vectorii proprii corespunzători determină o bază a lui V„ şi matricea A ataşată lui ă în raport cu această
~;bază este o matrice diagonală avînd drept elemente pe diagonală valorile proprii ale lui ă.
4.6. Fie y„ un spaţiu vectorial real de dimensiune n şi £t:V„—>Vn un ..endomorfism. Notăm cu c\n complexificatul lui V„ şi cu că complexificata lui Şi. Deoarece ă şi CSL au aceeaşi reprezentare matriceală, valorile proprii ale lui c $ şînt valorile proprii în C ale matricei reale asociată lui ă. Avînd :în vedere acest lucru, uneori că se identifică cu ă, căutîndu-se valorile proprii ale unui endomorfism real direct în C şi bineînţeles vectorii proprii
jîn complexificatul spaţiului vectorial real.
73

4.7. Fie endomorfismul ă: Vn —> Vn şi A matricea asociată lui ă în raport cu o bază fixată în V„. Endomorfismul ă se numeşte diagonalizabil dacă există o bază a lui V„ faţă de care matricea D asociată lui ă să fie o matrice diagonală; corespunzător matricea A se numeşte diagonalizabilă dacă există o matrice nesingulară T astfel încît D = T_1AT să fie o matrice diagonală.
Endomorfismul &:V r a-»Vw este diagonalizabil dacă şi numai dacă (1) posedă n vectori proprii independenţi sau dacă şi numai dacă (2) polinomuî caracteristic are toate rădăcinile în cîmpul peste care este luat Vn şi oricare ar fi valoarea proprie X, dimensiunea subspaţiului propriu S(X) este egală cu ordinul de multiplicitate al lui X.
4.8. Matricele de tipul [X], _X 1"
.0 X >
"X 1 0" 0 X 1
.0 0 X , ... se numesc celule Jordan
ataşate lui X. Fie endomorfismul ă:Vn-±Yn. Dacă toate valorile proprii ale lui ă
aparţin lui K, atunci există o bază a lui V„ faţă de care ă este reprezentată printr-o matrice de tipul
"Ji 0 ... 0 " o j2 . . .o A =
.0 0 Jfc
unde J4 sînt celule Jordan ataşate respectiv valorilor proprii \ . O celulă Jordan de ordinul p ataşată unei valori proprii X multiplă de ordinul q^fi corespunde vectorilor liniar independenţi ex> e2< •••, e
p astfel încît ă{e-^) = \e1, ă(e2) = Xe2 + &\, ••-, &{ep) = ^e
P + eP-i- Vectorul ex este propriu, iar vectorii
&2, ep se numesc vectori principali. 4.9. Fie V un spaţiu euclidian peste cîmpul K(R sau C), ă:V-+V un
endomorfism, X o valoare proprie a lui ă şi x un vector propriu ataşat lui X. în aceste condiţii
X = (ăx, x) (x, x)
4.10. în cazul spaţiilor euclidiene complexe, valorile proprii ale unui endomorfism hermitian sînt reale, iar valorile proprii ale unui endomorfism antihermitian sînt pur imaginare.
Fie ă un endomorfism hermitian sau antihermitian. Vectorii proprii ai lui ă corespunzători la valori proprii distincte sînt ortogonali.
Presupunem că V„ este un spaţiu euclidian complex «-dimensional. Dacă ă: Vn —>• V„ este hermitian sau antihermitian, atunci ă posedă n vectori proprii care constituie o bază ortogonală a lui V„.
4.11. Pe spaţiile euclidiene reale, valorile proprii ale unui endomorfism simetric sînt reale, iar valorile proprii ale unui endomorfism antisimetric sînt nule.
Dacă Vn este un spaţiu euclidian real w-dimensional, iar ă: V„ -* VM este simetric, atunci ă posedă n vectori proprii care constituie o bază ortonormată a lui V„. Această proprietate nu este adevărată pentru un endomorfism, antisimetric.
74

4.12. Fie V un spaţiu euclidian complex (real) şi â :V—>V un endomorfism unitar (ortogonal).
(1) Dacă există, valorile proprii ale lui ă au modulul egal cu unu. (2) Vectorii proprii ai lui ă corespunzători unor valori proprii distincte
sînt ortogonali. (3) Dacă V este complex şi -ra-dimensional, atunci ă posedă n vectori
proprii care constituie o bază ortonormată a lui V. 4.13. Fie Vn un spaţiu vectorial w-dimensional peste cîmpul K şi
ă: V„ —> Vre un endomorfism căruia, în raport cu o bază a lui V„, i se ataşează matricea A.
Oricărui polinoin P(t) = a0tm + a\tm~x + ... + am_1tJram cu coeficienţi din
cîmpul K i se poate ataşa polinomul P(ă) = a0ăm + a^"1 + ... + #m_i<2 + + am3 sau polinomul P(A) = a0Amj
ra1Am^1 + ••• + * m - iA+a m I . Polinoamele P(d) se numesc 'polinoame de endomorfisme, iar polinoamele P(A) se numesc polinoame de matrice.
Teorema Cayley-Hamilfon: dacă P(X) este polinomul caracteristic al matricei A, atunci P(A) = 6. Ca urmare a acestei teoreme, orice polinom în A de grad > n, unde n este ordinul matricei A, poate fi exprimat printr-un polinom de gradul n — 1.
Oricărei serii de puteri î{t) = Y>amtm, cu coeficienţi din K, i se poate ataşa seria f(ă) = 2aro<3™ sau seria f(A) = T,amAm. Seriile Hamăm se numesc serii de endomorfisme, iar seriile SaOTAm se numesc serii de matrice. Teorema Cayley-Hamilton asigură că 2amAw se reduce la un polinom de gradul n — 1, unde n este ordinul matricei A.
Exerciţii şi probleme
1. Fie V spaţiul vectorial real al funcţiilor continue pe [a, b] şi fie transformarea liniară ă definită pe acest spaţiu prin âx(t) = tx(t), VA'G V, V/e [a, b],
Să se arate că transformarea liniară ă nu are nici o valoare proprie. Soluţie. Pentru ca xeV — {0} să fie vector propriu trebuie să existe
XeR astfel încît ăx(t) = \x{t), \/te [a, b] adică tx(t) = \x{t), Vte [a, b]. Se observă însă că nu există nici o constantă X care să verifice ultima relaţie. 2. Fie V spaţiul funcţiilor reale continue pe [a, b]. Să se arate că opera
torul de integrare W: V —> V definit prin g = oT(f), g(x) = \ î(t) dt, xe [a, b] Ja
nu admite valori proprii şi deci nici vectori proprii. 3. Fie V spaţiul funcţiilor reale continue f: (— oo, oo) —>i£ cu proprietatea
că \ î(t)ăt există V^e (—co, oo). Să se găsească valorile proprii şi vectorii J — CO
proprii ai operatorului de integrare ST: V —> V definit prin g = oT(f), g(x) =
= \ f(^)d^, xe (— oo, oo). J—OJ —-
R: Fiecare X< 0 este o valoare proprie şi i(x) = e este vectorul propriu corespunzător.
4. Fie V spaţiul vectorial al funcţiilor reale de clasă COT pe (0,1). Să se găsească valorile proprii şi vectorii proprii ai transformării liniare cT: V —* V definită prin g = ăT(f), g[x) = xt'(x), Vxe(0, 1).
R: Fiecare Xe R este o valoare proprie şi i{x) = xx este vectorul propriu corespunzător.
75

5. Fie V spaţiul vectorial real al funcţiilor reale continue pe [0, 2ri\. Fie f27I
oT: V -s- V transformarea liniară definită prin g = f(f), g(x) = \ ( l+sin(#—
— t))i(t)dt, xe[0,2iz]. 1) Să se arate că Im S" este un subspaţiu finit dimensional şi să se găsească
o bază pentru acest subspaţiu. 2) Să se determine Ker oT. 3) Să se găsească valorile proprii şi vectorii proprii ai lui 3".
Soluţie. 1) Deoarece g(x) — V (1 + sin x cos t — sin t cos #) f(2) d£ = X
= \ f ( i ! ) d i + | \ f(t) cos£ dns in x — j \ f(2) sin t dt\ cos #, imaginea lui 3"
este subspaţiul tridimensional generat de baza {1, cos x, sin x}.
2) Condiţia g(x) = @, V%e [0, 2-] implică V " f(f) d* = oA-™ f(/) cos i d / = 0 Jo Je
şi V i(t) sint dt = 0. Acestea sînt de fapt condiţiile care fixează pe Ker 3". Jo
Se observă că dim Ker gr = co deoarece mulţimea independentă {cos kx, sin kx, k = 2, 3, ...} este inclusă în Ker 3".
p2rt
3) Relaţia f (f) = Xf, fe V — {0} este echivalentă cu Xf(x) = \ f(*) di! -f Jo
+ ([ * i(t) cos t dt\ sin * — 1 \ ty) sin 2 dt j cos x, Vxe [0, 2 ^ , fe V— {0}. înţes (•2jt (»2Tt
grînd în ambii membrii de la 0 la 2TC rezultă XV i(x)dx = 27iV t(t) dt şi Jo Jo
f2n astfel, dacă \ i(x)dx^0, atunci X = 2TT.
Jo Orice vector nenul din Ker 3" este un vector propriu al lui 3" în raport
cu valoarea proprie zero. Fie X = 27T. Rezultă f e Im 3" şi deci i(x) = a + b cos x-\- c sin x. Relaţia
oT(f) = 27cf implică a^0, b = c = 0. Deci i(x) = 1 este un vector propriu ataşat valorii proprii 2n.
6. Fie V spaţiul funcţiilor f: [0,it]~*-R de clasă C2, care satisfac condiţiile f(0) = i(n) = 0. Să se găsească valorile proprii şi vectorii proprii pentru. transformarea liniară 3": V—*• V definită prin 3"(f) = f".
R: Valorile proprii sînt — l2, — 22, ..., — n2, ... Acestora le corespund respectiv vectorii proprii i(x) = cn sin nx cu c„^0 .
7. Fie V spaţiul funcţiilor f de clasă COT pe [— 1, 1]. Să se arate că operatorul Sturm-Liouville *: V - * V, *(f(*)) = ({x2 — 1) f'(x))', V*ef—1, 1], admite valorile proprii X„ = n(n + 1), neN, şi corespunzător vectorii proprii
1 d* x —y Pn[x)\= (x2 — 1)", neN (polinoamele Legendre).
Indicaţie. Se porneşte de la relaţia evidentă (x2 — 1) î'n(x) = 2nx in(x)K unde în(x) = (xz — l)n, şi se derivează de n + 1 ori în ambii membri utili-. zînd formula Leibniz. Rezultă (x2 — 1) fin+2)(*) + 2x(n + 1) fin+1> (x) + + n(n+l) f$p(x) = 2nxt%+1\x) + 2n(n + 1) f${x) şi deci ({x2 - 1) P;(*)]'=* = *(» + 1) P„(«).
76

8. Fie V2 spaţiul vectorial al segmentelor orientate cu originea 0 identificat cu mulţimea tuturor punctelor din plan. Fie A (a) şi B(b) două puncte neco-liniare cu 0(o) şi fie ă: V2 —> V2 transformarea liniară definită prin ă(a) = b, ă(b) = c', unde ~c este vectorul de poziţie al unui punct oarecare C din plan.
1) Presupunmd A şi B fixe, să se afle locul geometric al punctului C(c) astfel ca transformarea ă să aibă un punct fix coliniar cu A şi B.
2) în condiţiile din 1), să se determine direcţiile invariante ale lui ă. 3) Considerînd A(l, 0) şi B(0, 1) în raport cu un sistem de axe rectangulare
xOy, să se expliciteze mulţimea punctelor C(x, y) pentru care £1 admite două direcţii invariante.
4) Să se determine locul punctelor C(x, y) pentru care direcţiile invariante corespunzătoare sînt ortogonale.
Soluţie. 1) Deoarece [a, b} este o bază în V2 rezultă <? = xa + yb, x, y&R. Relaţiile ă(a) = 0 • a + 1 • b, ă(b) = ~c = xa + yb arată că matricea lui ă în raport cu baza {a, b) este
Ecuaţia caracteristică a lui A are forma PIX) = X2 — vX — x — 0. Ea trebuie să admită soluţia X = 1 căci, prin ipoteză, ă(d) = d, unde D(d) ^ ^0(o). Astfel x + y •= 1 şi vectorul propriu corespunzător este d = , «+&• Deoarece dreapta ^4B are vectorul director b — a rezultă că dreapta care trece prin O şi are direcţia lui d intersectează pe AB dacă şi numai dacă xj=~— 1. în concluzie locul geometric al lui C este dreapta AB din care se exclude punctul ce corespunde lui x = — 1 (deci y = 1 — # = 2), adică punctul C*(c* = - a + 2b); (fig. 1.3).
2) Dacă % -4- y — 1 atunci ecuaţia caracteristică a lui ă admite şi soluţia X2 = — x şi cum x = — 1, rezultă X2 = 1 aşa încît, în adevăr <3 admite încă o direcţie invariantă dată de vectorul propriu corespunzător lui X2 = — x. Acest vector propriu este u = a — b.
_ r - » -» -> -» -* 3) Deoarece a = i şi b = _/, rezultă ? = OT + jy_/. Pentru ca â să admită
două direcţii invariante este necesar si suficient ca discriminantul ecuaţiei X2 - y\ 0 să fie strict pozitiv şi mai mult ca rădăcinile să fie nenule, adică %#0 şi y% + 4x > 0. în concluzie mulţimea punctelor C(x, y) cu proprietatea cerută este domeniul exterior parabolei y2 + Ax — 0 din care scoatem axa Oy: x = 0 (fig. 1.4).
Fig. 1.3. Fig. 1.4.

4) Fie D: y2 + 4.x > O, x^= O şi fie CeD. Valorile proprii "kx şi X2 ale lui ă
sînt distincte şi nenule. Vectorii proprii corespunzători sînt e'1 = | l , — j
şi ~ez = I 1, — | . Din condiţia de ortogonalitate rezultă 1 -\—- •.— = 0 sau \ X ) ' XX
XX 1 1 —- = 0. Deoarece XXX2 = — x obţinem 1 — — = 0, de unde % = 1,
x2 x Locul geometric căutat este dreapta x = 1.
9. Fie V un spaţiu vectorial real, CV complexificatul său şi oT:V—>-V o transformare liniară şi coT:cV—» °V complexificata lui f. Presupunem că CGT admite valoarea proprie X = a -f- i|3.
1) Să se arate că ST admite un subspaţiu invariant de dimensiune 1 sau 2. 2) Să se demonstreze că dacă X este reală, atunci X este o valoare proprie
a lui GT. Soluţie. 1) Presupunem cST(u, a) = (oc + *(3) (w,a), (w, a ) ^ ( 0 , 0), adică
(fw, f a ) = (OM — pa, p« + aa). Echivalent STu = v.u — $v, f a = (3« + oca şi deci acoperirea liniară a lui {#, a} este invariantă prin f.
2) Fie p = 0 şi (u, «)# (0, 0). Rezultă f w = a#, f a = oca şi deci « sau a (acela care este nenul) este vectorul propriu al lui f în raport cu valoarea proprie a.
10. Fie V un spaţiu vectorial real de dimensiune n. Un ansamblu (S\ \, i\), unde cF este un endomorfism al lui V, £ este un vector din V şi YJ este o formă. liniară pe V, care satisfac condiţiile
IF2 = - 3 + l- 7), 7,(5) = 1
se numeşte structură cocomplexă pe V[58]. Evident <7 este identitatea [pe V, iar £• 7) este endomorfismul definit prin (E,- yj) (#) = T](X) \, xeV.
1) Să se arate că relaţiile de definiţie implică
SF£ = 0, 7]»I = 0, ranglF = n — 1, rang (3= + £YJ) = «•.
2) Să se afle valorile proprii ale lui CGF: CV —> CV şi să se arate că n = 2m -f- 1.
Reciproc, să se demonstreze că dacă n = 2m + 1, atunci pe V există o structură cocomplexă.
11. Fie Vn un spaţiu vectorial real. Un endomorfism &• al lui V„ cu proprietatea IF3 + SF = O se numeşte 8 — structură pe V„.
1) Să se găsească valorile proprii ale lui câF: cYn —>• cVn. 2) Să se arate că dacă \ n este un spaţiu euclidian şi dacă admite o SF — struc
tură de rang r[^n — 2), atunci V„ admite şi o SF — structură de rang r + 2. Soluţie. 1) Presupunem rang §F = n. Rezultă SF(Sr2 + id) = O si deci
^ 2 = — i i . Fie c!Fa = Xa, a ^ 0 . Din (CIF)2 = — id găsim X2 + 1 = 0 'şi deci valorile proprii ale lui e§F sînt —i şi -f- i- Deoarece SF este real, fiecare dintre aceste valori proprii este multiplu de ordinul m şi deci n == 2m.
Presupunem rang SF < n şi cSFa — Xa, a ^ 0 . Relaţia (cSr)3 -f CW = O implică X(X2 -+- 1) = 0 şi deci valorile proprii ale lui CSF sînt 0, —i şi + i . Rezultă că rang W este un număr impar.
2) Fie rang UF = r < w — 2. Fie W0 = Ker SF ; avem dim PF0 = n — r. Pentru cVn rezultă descompunerea c\n = CW0 ® W ( 0 W_s unde Jfr4 este subspaţiul propriu ataşat valorii proprii i.
78

Fie Vi, v% doi vectori independenţi din W0 şi U2 subspaţiul generat de ei. Definim f : U% —>• Uz prin îvx = — v2, iv% = vx. Rezultă î2x = — x, Vxe U%. Punînd iz = îx, \fz = y+ % + w, xe, U2, ye W( (J W_(, wţ W0 (] Ut, obţinem o extensie a lui f la V„. Transformarea liniară § = i -\- & satisface Ş3z — — Şz şi deci rang § = r -\- 2.
Observaţie. Cele mai cunoscute SF — structuri sînt structura complexă (vezi problema 29 §3) şi structura cocomplexă (vezi problema 10).
12. Fie V un spaţiu vectorial real de dimensiune n şi un ansamblu (SF, \a> Tia)> a = 1. 2, ...,p, unde !F este o transformare liniară a lui V, ţa sînt vectori din V şi rla sînt forme liniare pe V, care satisfac relaţiile
^ 2 = - J + E ^ - ^ *}.&)=..*.». a,b= 1,2 p.
1) Să se demonstreze că
*la = 0 , rla o , 0, rang § = n — p este par.
2) Să se verifice că transformarea liniară § + ]Ţ) £a • rla este nesingulară. 0=1
Indicaţie. 1) Pentru ultima parte se poate folosi observaţia că SF este o p ' P
— structură pe V. 2) Inversa lui <F + ^ ţa • ~r\a este — W + ^ \a' "V a=X a = l
13. Fie ă: U4 —» i i 4 endomorfismul dat prin matricea
A
1) S i se determine valorile şi vectorii proprii. 2) Dacă notăm E = {ex, e2j es, ex} baza canonică din fi1, să se arate că
subspaţiul generat de vectorii vx = ex ~j- 2e2 şi i>2 = £2 + £3 + 2e4 este invariant în raport cu endomorfismul ă.
Soluţie. 1) P(X) = (X — l)4 aşa încît X! = X2 = X3 = X4 = 1 este valoare proprie multiplă de ordinul patru. Din Ax = 1 • x unde x = \xx, %z, x3, ,v4] obţinem sistemul 2xs — x4 = 0, 2xx — x% — x3 + xt = 0 cu soluţia
1 0 2 2
0 1
- 1 - 1
2 4 0
— 1
— 1 —2
1 2
X2 = 2% + %3
Not înd Xi Xi = 2.T3.
= a şi x3 = b rezultă
X = =
a 2«+5
-26
= a " r
2 0
_ 0.
+ i ' 0"
1 1
_ 2 .
şi deci lui X = 1 îi corespund doi vectori proprii % = ' [12 0 01, v2 = '[0 1 1 2] în scriere matriceală, sau vx = (1, 2, 0, 0), v2 = (0, 1, 1, 2) în scriere vectorială.
2) Din forma vectorilor proprii se vede că subspaţiul generat de vectorii Vi = ei + 2ea, z/2 == g2 4- e3 + 2e4 este invariant în raport cu ă deoarece vx şi vz sînt tocmai vectorii proprii ai endomorfismului.
79

14. Să se determine valorile proprii şi vectorii proprii pentru endomorfismul â:R3—> R3 dat prin matricea A.
0 1 1 1 0 1
- 3 2 1
0 1 0.
- 7 4 2
, 2) A =
- 5 " 3 2
•
4 0
_0
0 0" 0 1
— 1 2. , 3) A =
7 4
.—4
4 7
— 4
— 1' — 1
4 1) A =
4) A
R: 1) X1 = 0 , X a = - l , X B = 2 f « 1 = ( l , 0 , 1), «„ = ( 1 , - 1 , 1 ) , <?, = (1,2,1) r 2) Xt = 4, X2 = X3 = 1, «i = (1, 0, 0), e2 = (0, 1, 1); 3) Xx = X2 = 3, X3 = 12, ex = (5, - 4 , 4), e2 = ( - 4 , 5, 4), ez = ( - 1 , - l , 1); 4) Xx = X2 = X3 = 1 şi vectorul propriu ex = (—3, 1, 1).
15. Fie P = [^w] o matrice stochastică. Să se arate că X = 1 este valoare proprie pentru P şi că v — (1, 1, ..., 1) este vectorul propriu corespunzător.
io o r 16. Să se cerceteze dacă matricea A =
0 1 0 o
poate fi dia-
gonalizată. în caz afirmativ să se determine matricea diagonalizatoare T. Soluţie. P(X) = det (A — XI) = X(l — X)2 (X — 6). Rezultă valorile proprii
X1 = 0 , ' X 2 = X 3 = 1, X 4 = 6. Deoarece rang (A — XXI) = 3 obţinem vectorul propriu ex = '[—1 0 2 1]. Analog rang (A — X2I) = 2 şi deci la valoarea proprie dublă X2 = X3 = 1
vor corespunde doi vectori proprii. Se obţin e2 = ' [ 0 1 0 0 ] , e3 = l[2 0 1 0 ] . Rang (A — X4I) = 3 şi deci et = \\ 0 — 2 5] este vectorul propriu cores
punzător valorii proprii X4 = 6. Prin urmare matricea A este diagonalizabilă. Matricea diagonalizatoare
\exe%eze^ =
- 1 0 2 0 1 0 2 0 1 1 0 0
1 0
- 2 5
Se obţine
D = T^AT =
17. Să se determine valorile proprii, vectorii proprii şi să se diagonalizeze matricele A,
0 0 0 0
0 1 0 0
0 0 1 0
0" 0 0 6.
1) - 1 0
3 2 - 3 0
- 3 3
— 1 2)
0 1 1" 1 0 1
.1 1 0 3)
4 —3 - 3
6 0 - 5 0 —6 1
so

4)
1 7 2 7 2 7
R: 1) >.! = 4, X2 = X3 = 2, e1 ==4[ l - l 1], e2 = { [ 1 0 - l ] , e 3 = '[l 1 - 1 ] .
D = T^AT = 1 1
- l O 1 —1
4 0 0
0 2 0
0 0 2
2) X1 = X2 = - l , X3 '[1 1 1].
— 1 1 0
- 1 0 1
1 1 1
3) Xa
T =
e1 = * [ - l 1 0], e 2 = = ( [ - l O 1], e3
"—1 D = T J A T = O
. O
1, X3 = 2 ; ej. = ' [ - 2 11] e2 = '[2 - 1 2] e3 = '[O O 1].
D = I - 'AT =
0 1 0
0' 0 2
2 1 1
2 0" - 1 0
2 1.
1 0 0
0 0] - 1 0
0 2
4) X1 = l , X2 . V3 1 . V3
e-, = e<>
X,3 = "= 1
. 1 - i iA 2 2
__L+i i i 2 2
= X2 )
«3 = C 2 .
Determinăm vectorii u şi v astfel ca e2 = u + w, g3 = M — i». Se obţin
« = '[1 - 1 / 2 - 1 / 2 ] , » = *[0 - V I / 2 V3/2],
1
1
1
1
- 1 / 2
- 1 / 2
0
-v'I/2 V3/2_
D = T-^AT =
1
0
„ 0
0
1/2
-V3/2
0
V3/2
1/2.
18. Fie ST: R3 -^> R3 endomorfismul definit prin 3"(#) == (xx + 2*2 — 4#3, 2%! — 2#2 — 2#3, —4% — 2^2 + x3), x = (xu x2, x3)eR3. Să se determine o bază ortonormată în JB3 faţă de care matricea endomorfismului să fie diagonală.
6 — Probleme de algebră c. 264 ii

0 1 1 0
.1 1
1] 1 0.
19. Fie matricea A
1) Să se determine valorile proprii şi vectorii proprii. 2) Folosind forma diagonală a matricei A să se determine A*, keN şi să
se scrie sub forma A* = akA + bkI, unde I este matricea unitate de ordinul trei.
R: 1) X 1=X a=— 1, X3=2. Vectorii proprii e1 = t[— 1 1 0], e%=\— 1 0 1], e3 - ([1 11] .
2) D = T^AT =
' ( - 1 ) *
- l 0 0
0 1 0
0" 0 2_
1 1 0
— 1 0 1
1" 1 1_
D7- (-0
_1)* 0
0" 0
2*J
unde T
= akB + &SI. Se obţine 6& — ak = (— 1)*,
2a„ bk = 2*. Rezultă
A* = T D * ! 1
2 * - ( - ! ) * _ 2[2*~1 + (— 1)*]
•1)» A | 2 [2^ +(-!)*] ^
şi
A =
20. Fie spaţiul euclidian canonic Ri şi ă : Ri —* U 4 endomorfismul dat prin matricea
0 0 — 1 0 " 1/2 0 0 - V 3 / 2 0 1 0 0
_V3/2 0 0 1/2. 1) Să se arate că ă este ortogonal. 2) Să se verifice că toate valorile proprii ale lui că: cRi-*cRi au modulul
egal cu unitatea, iar vectorii proprii corespunzători sînt ortogonali. 3) Să se scrie matricea ataşată lui ă în raport cu baza (reală) ortonormată
asociată canonic vectorilor proprii ai lui ă. Soluţie. 1) Deoarece A- 'A = I, matricea A este ortogonală. Deci şi endo
morfismul ă este ortogonal
2) P(X) = det (A - XI) =
— A
1
0
2
Obţinem ?.x = — 1, X2 = i,
evident, | Xx j = | X2; = 1 şi | X3
x3
1 =
0 - 1
-X 0
1 - X
0 0
1 . • ^ = 4 + 1
= |A-ll = /
0 "
V3 2
0
1 — - X
= (X»- l ) (x»-
'15 , 1 . VT5 "4 • *« = 4 » 4
1 + 1 5 ^ i 16 f 16
. Atunci,
82

3) Vectorii proprii corespunzători sînt respectiv e1= (—-v/3, \ 3, — v3,l), e2 = {-l, 1, 1, - V i ) , e8 = ( - l / 4 , 1/4, 1, V3/2) + i (VB/4, VB/4, 0, 0),
e4 = g3. Acestor vectori proprii li se ataşează vectorii reali u = I > — > \ 4 4
1. vy Şl Vl5 V15 , 0, 0 astfel încît e3 = u + iv şi e* = u- IV.
4 4 Se verifică imediat că (elt e2) = 0, {e1, u) = 0, (e1; t>) = 0 (e2, u) = 0
(«2, w) = 0. 4) Normăm vectorii (e^ e2, M> P)» adică punem ux = —
« i M 2 = •
e2
e-2\
Ut> = , Ud = . I! I! li II
II «3 ii ip|i Coordonatele acestora formează matricea
1 V~6 1
\ '6
1 v'6
V~3
V3 Vio
Vio n Vio VI
î V30
1 Vio 2 VI VI5 2
1
i
V2 1
V2
0
0 V Vio V5
Atunci în baza {ult i-h, w4}, avem
0
D = T-aAT =
0 1
0 0 —
o o
1
4~
V Î 5 Jl
0 '
0
VB 4
1 T
21. Fie ci : i i 4 —> U4 endomorfismul definit prin matricea
A =
1 2 0 0
— 1 3 0 0
0 - 1
1 2
în raport cu baza canonică a lui Rl. Să se determine matricea Jordan pentru că: CR4 —> cRi şi să se scrie matricea corespunzătoare pentru ă: Ri —• U4 .
Soluţie. Polinomul caracteristic P(X)
are rădăcinile /;1 = ale lui că.
•- det (A - XI) = [X - (2 + i)]2 [X —[_(2 - i)]2
X2 = 2-j-i, X3 = X4 = 2—i. Acestea sînt valorile proprii
83

Fie x = (%, x%, xs, xt) un vector propriu asociat lui Âj = 2 + i , adică
- 1 - i - l 2 1- i 0 0 0 0
0 -l - 1 - i 2
0" 0
— 1 1—i.
" x{ x2
#4-
=
" 0" 0 0
. o. Se obţine sistemul (—1—i) xx—x2 = 0, 2xx + (1— i) x2—xs = 0, (—1—i) xs— — Xi = 0, 2^3 + (1—i)Xi = Ocu soluţia xx = 1, x2 = — 1—i, x3 = 0, ,r4 = 0. Astfel lui X = 2 + i îi corespunde un singur vector propriu independent; de exemplu x = (1, —1—i, 0, 0).
Analog, pentru X3 = 2—i, găsim W = (1, — 1 + i , 0, 0). Din Ay = X^+x rezultă y = (0, — 1, 2i, 2 —2i), iar din Ay = X3^+ic
deducem ^ = (0, — 1 , — 2i, 2+2i) . Matricea ataşată lui că în raport cu baza {x, y, x, y} este
2 + i 1 0 0 " 0 2 + i 0 0 0 0 2—i 1 0 0 0 2—i.
Fie x = a+ib, y = c-\-id, x = a—ib, Ş—c—id. Bazei {x,y, x,ş} din cRi i se ataşează baza {a = (1, — 1 , 0, 0), b = (0, 1, 0, 0), c = (0, — 1, 0, 2), d = (0, 0, 2, —2)} din JB4. Matricea de trecere de la baza canonică a lui R* la baza {a, b, c, d} este
0 - 1 / 2
1/2 0
B = T-XAT
T =
Se obţine
1 — 1
0 . 0
0 1 0 0
0 — 1
0 2
0 0 2
—2_
, T-x =
1 1 0 0
0 — 1
0 0
0 - 1 / 2
1/2 1/2
- 2 1 — 1 2
0 0 0 0
0 0" 0 0 2 1
- 1 2 22. Să se determine bazele faţă de care următoarele endomorfisme au
respectiv formele canonice Jordan.
1) ă:R3-+R3, A
3) ă:R3->R3, A
4) a-.Ri->Ri, A =
6 6 - 1 5 1 5 —5 1 2 —2
2) a:R3-^R3, A = 0 0 2
1 0" 0 1
- 5 4_
0 1 2
2 1 0
-1
0 0
— 3
0 3 0
— 1
—
0 1 0 0
o 1
— 1 2
84

Indicaţii. 1) Xx = X2 = X3 = 3. Pentru X = 3 rezultă vectorul x = = (5b—2a, a, b) cu proprietatea ă(x) = 3* şi deci există o familie liberă care conţine doi vectori proprii independenţi. în concluzie matricea Jordan a endomorfismului conţine două celule Jordan, iar baza faţă de care A admite această formă conţine doi vectori proprii şi un vector principal.
Construim vectorul e3 — (xx> *2, xs) astfel încît Aes — 2>es -f- x (deoarece nu ştim căruia dintre vectorii proprii posibili îi corespunde vectorul principal). Obţinem sistemul
|
3*x + 6x2 — 15*3 = 5b—2a x1 + 2*2 — 5*3 = a *x -j- 2*2 — 2*3 = b.
Din condiţia de compatibilitate rezultă a = b. Soluţia generală a sistemului este *2 = c, *3 = d, x% = 5d — 2c -f- a şi deci e3 = (5d — 2c + a, c, d).
Deoarece familia de vectori proprii este liniar independentă pentru a = b, numai un vector propriu din această familie aparţine bazei căutate şi acestui vector propriu îi va corespunde vectorul principal. Alegem de exemplu a=b= 1 şi obţinem e% = (3, 1, 1). Atunci e3 = (5d—2c+l, c, d) cu c şi d nesupuşi la restricţii. Alegem de exemplu c=d = 0 şi obţinem e3 = (1, 0, 0). Pentru a determina cel de-al doilea vector propriu ex trebuie să alegem a şi b astfel ca ex, e2 să fie liniar independenţi. Luăm de exemplu a — 1, b — 0 astfel încît ex = (—2, 1, 0). Atunci în baza {ex, e2, e3) obţinem
T^AT '3 0
.0
0 3 0
0' 1 3.
unde T —2
1 0
3 1 1
1 0 0.
2) Xx = X2 = 1, X3 = 2. Pentru Xi = X2 = 1 se obţine vectorul propriu e-i = (1, 1, 1); completăm cu vectorul principal e2 = (%. #2* xz) determinat de ă(e2) = e2 + ex. Se obţine ez = (0, 1,2). Pentru X = 2 rezultă vectorul proprim e3 = (1, 2, 4). în baza {elt e2, e3} avem
J = T-XAT
3) Xx- X3 = 0, X3= - 1 . La e± = (0, 1, —3), ca vector propriu pentru X = 0, adăugăm vectorul
principal e2 = (— 1, 1, 2) determinat de &(e2) = 0-e2 + «j. Pentru X = — 1 se obţine e3 = (0, 0, 1). în baza { x, e2, e3] găsim
1 0
.0
1 1 0
0" 0 2_
cu T = 1 1
.1
0 1 2
1 2 4
"0 0
.0
1 0 0
0" 0
—1_ cu T =
0 1
. - 3
- 1 1 2
0" 0 1.
J == T^AT
4) Xx = X3 = X3 = X4 = 2 căreia îi corespunde vectorul propriu * = = (a, —a, —b, b). Aceasta arată că există doi vectori proprii liniar independenţi; va trebui să completăm baza cu doi vectori principali. Obţinem
85

ex = (1, — 1, 0, 0), e2 = (0, 0, — 1, 1), ca vectori proprii şi ea = (0, — 1, 1, 0), e4 = (0, 0,—1,0) ca vectori principali. Fa ţă de baza {ex, e2, e3, e^ găsim
T - i A T
2 0 0 0
0 2 0 0
0 1 2 0
0" 0 1 2^
cu T =
1 - l
0 0
o o
-l 1
o -l 1 o
23. Să se aducă la forma Jordan endomorfismul ST: jR4
canonică a lui JJ4 are matricea • B 4 care în baza
1) A =
3) A =
1 0 0 0
2 1 0 0
3 2 1 0
4' 3 2 1.
2) A =
3 - 4
7 -17
0 0 2
— 1
0" 0 1 0.
0 2 0 1 0 0 0 1 0 0 0 1
— 1 0 o 0.
Soluţie. 1) P(X) = det(A—XI) = 0 conduce la (1— X)4 = 0 şi deci Xx = = X2 = X3 = X4 = 1 este valoarea proprie multiplă de ordinul patru. Numărul celulelor Jordan din forma canonică va fi egal cu dimensiunea subspaţiului propriu corespunzător lui X = 1,
dim 5x=i = 4 — rang (A — 1 • I) = 4 — 3 = 1.
Deci avem, pentru X = 1, un singur vector propriu şi o celulă Jordan de ordinul 4.
Atunci din #"(%) = 1 • %, $"(%) = 1 • «2 + «1, ^(%) = 1 • «3 + «2, #"(«4) = = 1 • Ui -4- us obţinem patru sisteme algebrice, unul omogen şi celelalte trei neomogene, în care ux este vectorul propriu iar u%, u3, w4 sînt vectorii principali. Se obţine ux = ' [ 8 0 0 0], u2 = '[12 4 0 0], u3 = '[4 3 2 0], % = '[0 0 0 1]. Matricea de trecere T are forma
T =
8 0 0 0
12 4 0 0
4 3 2 0
0" 0 0 1_
aşa încît 1 0 0 0
1 0 1 1 0 1 0 0
0" 0 1 1.
D = T^AT
2) P(X) = det (A — XI) = 0 *> (1 — X)4 = 0 <*> Xx = X2 = X3 = X4 = 1. în acest caz însă dim 5x=i = 4 — rang (A — 1 • I) = 4 — 2 = 2 şi jdeci numărul celulelor Jordan corespunzătoare lui X = 1 este egal cu 2.
Deoarece (A — 1 • I)2 = O (matricea nulă) rezultă că indicele de nilpotenţă al restricţiei lui ST la subspatiul propriu este doi şi deci vom avea două celule Jordan de ordinul 2 (acelaşi rezultat l-am fi obţinut folosind sistemele algebrice obţinute pentru determinarea vectorilor proprii şi a vectorilor principali).
86

Aşadar #"(%) = !• %, eT(w2) = ! •%+%, - f (%) = !•%, GT(M4) = 1-^4 + %. Se obţine ul = %2 —4 7 17] = '[0 i 0 0]. Deci
D
u2 '[1 O O 0], us = %l -2 1 - 6 ] , ^ =
r l 1 0 1 0 0
„0 0
0 01 0 0 1 1 0 lj
3) P(X) = d e t ( A - X l ) = 0-**(X-l)2(X+l)2 = 0 ^ X 1 = X 2 = l , X3 = X4 = - l . dim Sx = 1 = 4 - rang (A — M ) = 4 — 3 = 1; dim 5 x = _ i = 4 - rang (A+1 • I) = = 4—3= 1 şi deci avem doi vectori proprii. Deoarece atît X = 1 cît şi X = — 1 sînt duble rezultă că avem tot două celule Jordan de ordinul 2 (dacă s-ar admite o celulă de ordinul 1, ar însemna că cealaltă este de ordinul 3, ceea ce ar rezulta că valoarea proprie corespunzătoare primei celule este simplă şi cealaltă triplă). """Ob ţinem % = '[3 2 1 0], % = '[1 = '[—1 1 1 "
ux = '[3 1], iar
1 1 11. = '[3 —2 1 0], ^ =
1 1 0 1 0 0 0 0
0 0
— 1 0
0 0 1
— 1
D =
24. Fie V un spaţiu vectorial real euclidian finit dimensional, cT: V —> V o transformare liniară simetrică şi S •= {x\xeV, \\x\\ = 1} sfera unitate. Definim f: S—> R, f (x) = (ST(x), x) şi notăm cu ve S vectorul pentru care f(v) este valoarea minimă a lui f, iar cu ye S un vector fixat ortogonal lui v.
1) Să se arate c ă — ' • te R, are lungimea unu. Definim g:/J—>U,
g(0 = f (— IVI
+ ty <Jl + t2
+ t2
2) Să se verifice că g (0) 3) Să se arate că
dg
f (v) este minimul lui g.
It (t) =
dt (l + t2)2 (&-(v + ty), v + ty).
4) Să se verifice că ST(v) este perpendicular pe y, iar v este un vector propriu al lui ST.
25. Pe o bară de masă neglijabilă şi de rigiditate constantă la încovoiere sînt fixate patru mase m1 = m,mz = im, mz = 2m, mu = Am. Să se determine pulsaţiile proprii ale vibraţiilor transversale şi modurile proprii de vibraţie-ştiind că matricea dinamică a sistemului este
A =
Soluţie, Trebuie să determinăm valorile şi vectorii proprii pentru matricea A.
1 0 0 1
0 1 0 0
0 0 1
—2
1 0
— 2 5
87

Ecuaţia caracteristică det (A — XI) — O conduce la ecuaţia X(l — X)2(X — 6) = 0 cu soluţiile Xx = 0, X2 = X2 = 1 şi X4 = 6. Pentru Xx = 0 obţinem vectorul propriu ax = ' [—1, 0, 2, 1], iar lui X = î
îi corespund vectorii proprii a2 = %0, 1, 0,0], a3 = '[2, 0, 1, 0]. în sfîrşit, lui X = 6 îi corespunde vectorul propriu «4 = '[1, 0, —2, 5].
26. Să se determine direcţiile invariante în studiul vibraţiilor libere ale unui sistem constînd din trei mase (figura 1.5).
Soluţie. Notăm prin co frecvenţa, x vectorul
deplasare de coordonate u, v, w, şi k = • l
undea este tensiunea, iar Al este lungimea barei.
(2k — 2m<x>2) u — kv = 0
Fig. 1.5. Ecuaţiile de mişcare sînt
- ku + (2 — 4WÎ(I)2) v — kw = 0
— kv + (2 — 6moi2) ze> = 0, sau,
2k- -2nu-y -k
0 2k-
-k -Anus? -k
0 -k
- 6 w ( o 2 .
u V
_w _ = 0.
Notînd prin X = m<s?\k această ecuaţie se transcrie
2 -l 0
0" 1 2_
M
î)
ze;_ = X
'2 0
_0
0 4 0
ol 0 6
u V
_w _
sau 2(1 — X)u— v = 0
- « + 2 (1 — 2X) Î; — ze> — y -h 2( 1 — 3X)w
0 0 proprii soluţiile ecuaţiei cu valorile
12X3 — 22X2 + 10X — 1 = 0 . Vectorii proprii corespunzători dau direcţiile invariante în sistemul vibraţiilor libere.
27. Să se detennine valoarea polinomului matriceal P(A) în fiecare din cazurile
24A2 - 32A + 161, P(A) = A4 8A3
pentru A =
0 1
— 1 2
I este matricea unitate de ordinul patru
P(A) = A4 - 4A3 + 6A2 - 4A
pentru A = —2 3 —1 4 —4 5 — 2 7 —3 3 — 2 5 _ ? ? —? •ţ
I este matricea unitate de ordinul patru

3) P(A) = A3 - (a2 + 2a) A2 + (a2 + 2a3) A - a%
'a 1 O" pentru A = O a2 1 , 1 este matricea unitate
U O a\ d e ordinul trei
Indicaţie. Se determină polinoamele caracteristice pentru fiecare matrice şi apoi se aplică teorema lui Cayley-Hamilton. în toate cazurile se obţine P(A) = O, unde O este matricea nulă de ordinul respectiv.
28. Folosind teorema lui Cayley-Hamilton să se calculeze A - 1 şi A", pentru
1) A
4) A =
1 1
0 0 0
0 1
1 1 0
'
r i 0
2) A =
5) A =
1 0" 0 1
'2 ( 0
.0
, 3) A =
) 0" t 0 1 1.
•
"1 0 1" 0 2 0 0 0 3.
R: 1) P(A) = A2 - 2A + I = O, A(2I - A) = I. Deci A"1 = 21 - A, A2 = 2A — I, A3 = 2A2 - A = 3A - 21, prin inducţie A" = nk - (»— 1)1.
2) P(A) = A2 - I = O, A- A = î. Deci A"1 = A, A2 = I, A3 = A şi
prin inducţie An = ^ I + ^ - ^ A .
3) P(A) = A3 - 6A2 + 11A - 61 = O, A(A2 - 6A + 1II) = 61. Rezultă
A-1 = — (A2 - 6A + 1II), A" 6
"1 0 3(3« 2 -12w+13)- | - f 0 2" 0
_0 0 3" n>2
4) P(A) = A3 - A2 = O, A3 == A8 = A şi deci An = A pentru » > 1. A 2 nu există deoarece A este singulară.
5) P(A) = A3 - 4A2 + 5A - 21 = O, A"1 = — (A2 - 4A + I).
'2n 0 0 A" = 0 1 0 •
.0 n 1
29. Fie ă:Rn~»Rn o transformare liniară. Transformarea liniară ea: Rn —* Rn definită de egalitatea
J + ^a + ^ă* i ™ i
ni t^o ni numeşte exponenţiala transformării ă.
CC j
1) Să se arate că pentru orice ă, seria 2^—r- ăn este convergentă şi »=o n\
convergenţa este uniformă pe fiecare mulţime X = {<3| | ] â | | < k, keR}, unde II dl II este norma transformării.
89

2) Să se calculeze e a , ştiind că ă este dată prin matricea ei în raport cu. baza canonică a spaţiului R3, în fiecare din cazurile de mai jos:
(a) A =
(b) A =
2 1 1
0 1 0
—2 1 3
1 0" 1 1 1 0,
3 1
- 1 (c) A =
(d) A =
7 4 4
1 0 2
4 7
- 4
0 0 0
1 Soluţie. 1) Admitem că [|<2[|<&. Atunci seria ^2—rll^ll" poate fi ni
1 majorată de seria numerică / , •—r kn care converge către ek. Conform crite-
riului lui Weierstrass, seria e a converge uniform pentru ||<3||<k. 2) (a) Valorile proprii ale lui ă sînt Xx = 1, X2 = —2, X3 = 3. Corespun
zător găsim vectorii proprii fx = (—1, 1, 1), / 2 = (11, 1, —14), f3 = (1, 1, 1). Notînd vectorii bazei canonice cu e1 = (1, 0, 0), e2 = (0, 1, 0), e3 =
= (0, 0, 1), putem scrie (*) / i = — h + «2 + e3, f2 — \\e1 + e2. — 14s3, / 8 = et + e2 + e3. în ra
port cu baza {/i,/2 , /3}, numită şi bază proprie, transformarea ă are forma diagonală
"1 0 0" D = 0 - 2 0 •
_0 0 3. Pe baza teoremelor lui Dirac, rezultă că în raport cu baza proprie matricea
transformării ea este
M =
Pentru a găsi matricea lui ea în baza iniţială aplicăm formula (3.13). Anume, din relaţiile (*) oţinem matricea de trecere
e 0 0 e~2
0 0
0 0 e3
j a s i
A __
c =
11
CMC"1
- 1 1 1 i
1
11 1 1 1
— 14 1.
15e+ — 15e+
.— 15e +
, cu inversa
275<T2-10es
25<T2-10e3
350e~2-10e3
L 30
2 2 e - 2 - ; 2 e - 2 - :
—28e" 2 -
— 15 0 15" 25 2 3
. - 1 0 —2 12
le3 —15e+2,2,e~ le3 15e+ 3e-le3 I5e—A2e~
2+12e3" 2+12e 3
2+12e 3
(b) Valorile proprii sînt Xj — 0, X2 = — 1 , X3 = 2, iar vectorii proprii,. fx = (1, o, —1), / 2 = (1, — î, 1), fz = (1, 2, 1). în raport cu baza proprie,,. ă are forma diagonală dată de matricea
D 0 0 0
0 0 - 1 0
0 2
90 i î

iar matricea lui e®, în aceeaşi bază, este
M =
Matricea de trecere are forma
1 0 0 e'1
0 0
0" 0 A
Obţinem
1 0 1
c-1
1 - 1
1" 2
1 1.
1 ~~6~
"3
şi inversa C 1 =
(1 + e2) 2(1—e-3
-6e2 2(e-x+2 -3( l + e2) 2(—1 —
1/2 0
L-1/2
+ e2)
1/3 1/6" - 1 / 3 1/3
1/3 1/6. .
1 + 2 ^ + e 2 " 2(e2-e~1) - 1 + 2 ^ + e 2 .
(c) şi (d), se procedează asemănător.
30. Polinomul
= ^ (A - XJ) (A - X2I) ... (A - X,_J) (A - XJ+1I) ... (A - XJ) ( ) £ f (X, - Xt) (X, - X2) ... (X, - V O (X, - X,+1) ... (X, - X„) Kl
se numeşte polinomul Lagrange de interpolare pentru funcţia de matrice A—*i{A) în cazul cînd matricea A are valori proprii distincte.
Folosind acest polinom să se calculeze eKi în cazul matricelor
1) A 3 1 1
— 1 5
— 1
1" — 1
3 , 2) A =
0 1 1 0 1 1
1] 1 0
Soluţie. 1) P(X) = det (A — XI) = — (X - 2) (X — 3) (X - 6) aşa încît valorile proprii sînt Xx = 2, X2 = 3, X3 = 6. Atunci polinomul Lagrange de interpolare se scrie
( * - 3 ) ( X - 6) _ (X - 2) (X - 6) . , (X - 2) (X - 3) L(X) = -^ = i - ^ i i - e* + (2 - 3) (2 - 6) (3 - 2) (3 - 6)
e3 + (6 - 2) (6 - 3) e~ =
= l ( X - 3 ) ( X - 6 ) e 2 - i ( X - 2 ) ( X - 6 ) e3 + 1 L - ( X - 2 ) ( X - 3 ) e 8 ,
şi dacă ţinem seama de {(%) = etx, găsim
«A< = L(At) = (A - 31) (A - 61) - (A - 21) (A - 6 1 ) — + (A - 21) X
x (A - 31)-— = — [ 3 ^ _ 4g3i + jm. A2 + _ L r 2 7g2 i + 32e3< - 5em] X 12 12 12
XA + - [ 9 e 2 + / " ] • ! .
91

Deoarece
se deduce
ckt =
~ 1 1 1 2 3 6
1 e3t-~ eet
3 3
-1 e2t+ - e3t+ -2 3 6
A2
eu
e6t
= 1 1 - 9 1
- 9 27 - 9 . 7 — 9 11.
3 3 27 55 2\ - e
2'+ e3i — 2 3 6
- e3t+ i e6t
3 3
eet
1 1 1 ~" 2 3 6
1 1 3 3
1 1 1 2 3 6
2) P(X) = det (A — XI) = - ( X + l ) 2 ( X - 2 ) iar polinomul minimal P*(X) = = (X+1)(X—2). Sîntem în cazul cînd valorile proprii sînt multiple, dar polinomul minimal al matricei are rădăcini simple. Polinomul de interpolare Lagrange are tot forma (*) dar gradul egal cu m — 1, unde m = grad P*(X), iar Xlf ..., Xm sînt zerourile polinomului minimal. Deci
L(X) = X X + 1 2 + 1
( X + l ) _ , - i ( X - 2 ) ,
iar
= L ( A ( ) - ( 4 - « - ) , + ( ^ + 2,.)l =
— + 2«~' 3
3 „2J
— e \- 2e~l
3 3 „2* „2t
+ 2e~
31. în cazul cînd matricea A = [ai}] admite valori proprii multiple adică. P(X) = (X — X!)mi ... (X — \)m", atunci funcţia de matrice este
i=l\j=0 Jl J
unde E4 (i = 1, .... k) sînt matrice date de egalităţile
E{ = a((X) (A - X J ) - ... (A - h-J)""" (A - XmI)""+.
( » = 1 , -,k)
iar «t(X) se calculează din descompunerea
1 %(X) , , at(X)
(A - XtI)«*.
P(X) (X - Xx)-! + - . + • (X - X4)«*
92

Folosind descompunerea precedentă să se calculeze eAt în cazurile
1) A =
3) A =
3 2 1 2 1 2
0" — 1
2_ 2) A =
— 1 — 4 - 3 — 2
0 1 3 2
0 0 1
— 2
0" 0 0 1.
0 0 1 0 2 - 3
A =
"1 0 0 0
0 0
- 1 ,
-
J
1 —1 1 —1 0 1 0 0
2 — 1 — 1
2
Soluţie. 1) P(X) = (X - 2)2(X - 3). 1 a\-\-b. c
rezultă a P(X) ^ X - 2 ) 2 X—3
ax(X) = — X -j- 1, a2(X) = 1 şi atunci
\t c = 1, aşa încît
Ej = « i ( A ) (A-31) = ( I - A ) (A-31) = - A 2 - 2 A - 3 I 2 0 3
2 1 7
2' 0 3
E2 = a2(A)- ( A - 2 I ) 2 = A 2 - 4 A + 41 3 2 0 0 3 7
Deci f(A) = f(X0 Ex + Î'(h) (A - XjJEi + f(Xz) E2
şi dacă ţinem cont că i(x) = etx, avem
dew
e/A _ e V E r dX
(A-X 3 I ) Ei + cVEg =-• e*Ei+fc*(A - 2 1 ) E j + ^ ' E
= — 2 —2<! —2 2 + 2 /
* 1 —* .— 3—2^ —2 3 + 2 /
2) Asemănător, P(X) — X2(X + 1);
a = — 1, 6 = 1 şi c = 1. Deci a^X) =
e2t +
1 P(X) t — X, a
-5
0 1
2 —2 0 0 2 —2_
«X + b X2
2(X) = 1 aşa
Ex = fll(A) (A + I) = (I - A) (I + A) = ]
E2 = a,{A) • A2 = I- A2 = A2 == 0 0 0 0 0 0 5 3 î
Rezultă f(A) = f(0) Ex + f(0) AEX +
şi de aici
e'A = EX + zîAEj + <r'E2 = 1
—t ,5-11 4-5e-e 3
[ - A2 =
e3t.
c X + l încît 1 0 0 1
.5 3
f ( - l ) E 2
0 1
—6t+3e~ 1 -
c i H p a i r*i o i U.C ctlWl
0" 0 1.
Î
0 0 t+e -t
•
93

3) P(X) = ( X + 1 ) 2 ( X - 1 ) 2 ,
1 aX+b cX + d . , . . 1 , ; 1 1 , 1 -—— = + — şi de aici a = —, o = —. c = — —, d = — P(X) (X + l)2 (X - l)2 * 4 2 4 2
astfel încît
Rezultă
1 1 1 1 ax(k) = — X + — , a2(X) == — _ X + — •
4 2 4 2
E,_(iA + ^l)(A-D.-i 3 1 A3 - — A + - I =
4 4 2
E2 =[-- A + - îl (A + I)2 = - - A3+ - A+ 1 1 : " \ 4 2 / 4 4 2
1 0 0 0 2 1 0 0
9/2 —3/2 0 0 23/2 —5/2 0 0.
0 0 0 0 —2 0 0 0 - 9 / 2 3/2 1] 1
-23 /2 —1/2 0 1. si deci
g - % + te-*(A + I) Ei + e'E2 + te*{A — I) E2 =
(2 + 4*:) £-* + ( -« -2) e*
jf+18^+(,-f),
3 t , 3 ,
0 0' 0 0
e< O
A ^ - ( 1 + 3 ^ - 'Hc i
4) Se procedează analog. 32. Fie A = [afj] o matrice pătratică de ordinul n cu elemente reale sau
complexe. 1) Să se arate că dacă T este o matrice pătratică nesingulară de
acelaşi ordin cu A, atunci T-1eA/T — eT~1AT. 2} Dacă Xj, X2, ..., X„ sînt valori proprii distincte ale matricei A, atunci
eA(i-/0) s e r e c l u c e } a forma diagonală
reXi(*-<ol 0 ... 0
eB(t-t0) _
0 ... e-An(2— *o)
unae D = T^AT = Xx 0 ... 0 0 X2 ... 0
.0 0 ... X j iar T este matricea formată cu vectorii : proprii corespunzători. Această afirmaţie este adevărată pentru orice matrice diagonalizabilă A.
94

3) Presupunem că matricea A are valorile proprii X1( X2, ..., Xt multiple, respectiv de ordinul %, n%, .... nk, (% + % + - . . . % — ri), şi că ea a fost redusă la forma canonică Jordan
J i 0 ...0
X L A T o j3 . . .o
.0 0 . . .J s
Fie Jp, p = 1, ..., k o celulă Jordan^de ordinul np,
\ 1 0 ... 0 0 \ 1 ... 0
0 0 0 ... 1 0 0 0 ... X,
Să se arate că
eJv(t-t0) — e*v{t-h)
= M P + E J » EÎ> =
^ - ^ 0 ( * -* 0 ) 2
1! 2!
j ^ - ^ 0
1!
0 0
0 0
0 0 ... 0
_0
.. 1
.. 0
1 0 ... 0 0 1 ... 0
0 0 ... 1 0 0 . 4 0
nv
(t - t0y*-'-K - l ) ! (t - to)n»-2
K - 2 ) !
t-t0
1! 1
t nn
Soluţie. 1) Prin inducţie se arată că T ^ A T = (T^AT)", weN. Folosind această egalitate şi definiţia lui eA('-'o) avem
. T - L A ^ J T = £ (T^AT)" (j - fr)" _ ^ T i A"T(; - fr)» _
»! K = 0 n\
-_ T-ify- —{t — t0)n) T == T-1 eA('-(»'T.
Ifco n\ ) 2) Dacă 4 are valori proprii distincte atunci ea poate fi redusă la forma
diagonală
D = T^AT =
deci
ePit-h) _ eT-lA(t-*c)T = X-lgA(<-<o)T —
0 0 . x2 .
0 0 .
0
. 0
.. 0 '
.. 0
•• V
>
'<>) 0 g\z [t-
0
«o) 0. 0.
0.
. 0
. 0
_eMt-h)
95
3) Orice celulă Jordan JP se poate scrie sub forma Jp = \lp + Ep , Ij, este matricea unitate de ordinul np, iar Ev are forma
E
ilpote
F2 —
p
0 1 0 ... 0 0 0 l ... 0
0 0 0 ... 1 _0 0 0 ... 0 _
ntă de ordinul np, iar
"o 0 1 o . . . o o ~ 0 0 0 1 ... 0 0
0 0 0 0 . . . 0 1 0 0 0 0 . . . 0 0 0 0 0 0 . . . 0 0
Deoarece Ip şi Ep sînt comutabile avem glp(t—10) __ ghplt — to)Ip g(t—to)Ep —
t—t — $>p[t~-H) iv + -°E„ (t - to)
— g*j>(<—'o)
2! 2! " K - 1 ) ! *
1!
1
2!
1!
( * -
K
/o )"" - 1 "
- 1 ) ! «o)"»"2
- 2 ) !
1 _0 0 0
33. Să se calculeze e^ în fiecare din cazurile de mai jos
1) A
4) A
R: 1) cK>
J 4
1 0 0 0
—2 — 1 •
1 0 2 1 0 3 0 0
\~&t
[ 2 e*
2) A==
0" 0
0 4_
1 0
.0
, 5) A =
-2e3t e< -— le1 le'
C 2 1 3 0 1.
-
"0 - 1 1 0
.0 1
-e3t 1 — e3t_
3) A =
6 1 0.
•
3 2
.1
— 1 1 0 1
- 1 2
2) eA< = — [<22 - 2 / + 2) I + (-2i2 + 2t) A + /2A2] .
3) c** = (4e< - 3 . 5 » + 2fe») I + (4e2( - 3 ^ 2 i - 4 e ( ) A + (e* -e* +te
96
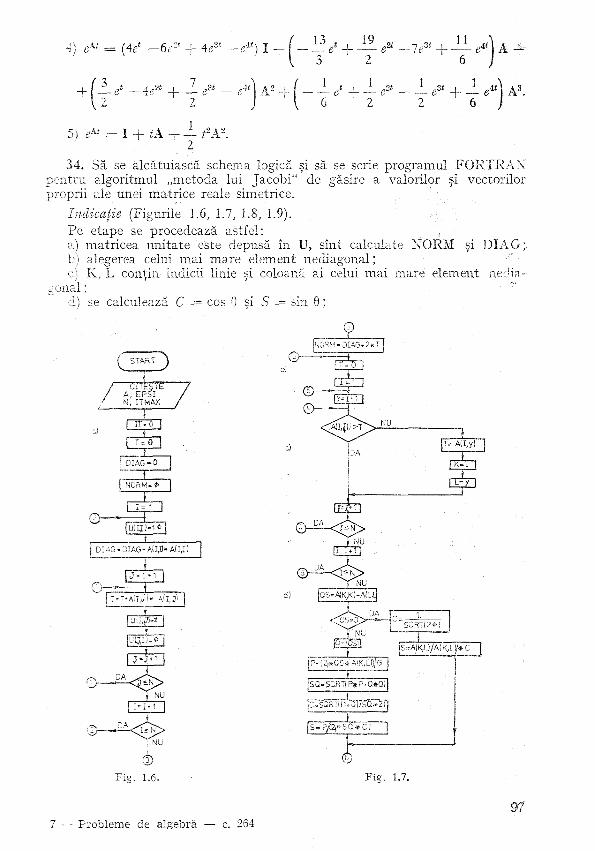
4) eX! = (4e8 —6e2t + Ae
+
^l + \-llet + 2 6
/ 1 e * A2 + - _ eJ + - i e2S - - est +
\ 6 2 2 A3,
J / e- = I + tA + — /2A2.
34. Să se alcătuiască schema logică şi să se scrie programul FORTRAN pentru algoritmul „metoda lui Jacobi" de găsire a valorilor şi vectorilor proprii ale unei matrice reale simetrice.
Indicaţie (Figurile 1.6, 1.7, 1.8, 1.9). Pe etape se procedează astfel: ,, a) matricea unitate este depusă în U, sînt calculate NORM şi DIAG; b) alegerea celui mai mare element nediagonal; c) K, L conţin indicii linie şi coloană ai celui mai mare element nedia
gonal; ci) se calculează C = cos 0 si S = sin 6;
( START j
/ CITEŞTE / A, EPSÎ
N, ITMAX
i T-O !
I DIAG-0 i ZZ3 j NQRMT» I
©-i
DIAG-DIAG*A!LI)*A(I^I
-L
| T-TM(y")» A(l,3l I
©- CA
DA
aşn [ N U
FnVn -<i£N~>
Fig. 1.7.
7 — Probleme de algebră — c. 264 m

<D-
0-
£
©-
luW)-Ci.T.'5>lITXT1
DA
rr^r NU
|AHKI-C»T«S»AlI,ll|
|AII,U.C«A(I,U-S»T
1 ÎDIĂG'OI AG* 2 •> A(K,1! *A(K,U]
I T-AIK,K)
|AIK,K)-C.C-T*2«-C»S.A(K,U«S»S"«.Ăi"ULn
[AlL, [>OOAl L,LKS»S»T- 2«C>S- AIK,LI
©-
l T ; Al KIII |AIK,;)-C»Ţ*S»A(LJ) I
Y |A(LJ) = C«-A|L,I]-S»T DA * '
Fig. 1.8.
Ileraiiiledepa sesc ITMAX
(STOP y—<gi
Fig. 1.9.
e) matricele U şi A sînt necalculate. Deoarece M, = {UAU este totdeauna simetrică, vom lucra tot timpul numai în partea superioară triunghiulară a lui A;
f) testăm dacă numărul de iteraţii depăşeşte IT MAX şi dacă este satisfăcut testul referitor la suma de pătrate a elementelor de pe diagonală.
§ 5. FORME BILINIARE ŞI PÂTRATICE
5.1. Fie V un spaţiu vectorial peste un cîmp K. O funcţie ă: V X V —>K, (x, y) —> ă(x, y), care este liniară în -raport cu fiecare argument se numeşte formă (funcţională) biliniară sau tensor covariant de ordinul doi pe V.
O formă biliniară ă se numeşte simetrică dacă ă(x, y) =ă(y, x), V;v, yeV. 5.2. Fie Yn un spaţiu vectorial w-dimensional peste cîmpul K. Fixăm o
bază în V~ si notăm cu xu x2, ..., x„ coordonatele vectorului x si Vi, v2, ..., v. coordonatele vectorului y. Vectorului x i se ataşează matricea coloană X = \_Xj~], vectorului y i se ataşează matricea coloană Y = [yj\, iar formei bili-n ia re i se ataşează matricea pătratică A=[a u ] astfel încît expresiile explicită,
n n
respectiv matriceală, ale lui ă(x, y) sînt ă(x, y) = ^ y z2iau x% 3V> respectiv
m

ă(x, y) — 'XAY. Dacă matricea A este nesingulară (singulară), atunci â se numeşte nedegenerată (degenerată). în general, rangul matricei A se numeşte rangul formei biliniare ă. Forma biliniară ă este simetrică dacă şi numai dacă matricea asociată A este simetrică.
Fie A matricea ataşată formei biliniare ă în raport cu o bază a lui VB şi fie S matricea de trecere de la vechea bază la o nouă bază. Matricea ataşată lui ă în raport cu noua bază a lui V„ este B = 'SAS.
5.3. O aplicaţie <ă: V—>K cu proprietatea că există o formă biliniară ş> simetrică ă pe V astfel încît &(%) = ă(x, x) se numeşte formă (funcţională) pătratică pe V; forma biliniară ă care intervine în această definiţie se mai numeşte şi forma polară sau forma dedublată a lui &.
5.4. O formă pătratică <ă se numeşte pozitiv semidefinită (negativ semidefinită) dacă (2(#)>0 (respectiv <0) , Vx. O formă pătratică (2 se numeşte pozitiv definită (negativ definită) dacă &(x) > 0 (respectiv <0) , Vx^O.
O formă biliniară simetrică ă se numeşte pozitiv definită (negativ definită, pozitiv semidefinită, negativ semidefinită) dacă forma pătratică asociată ă are această proprietate. • O formă biliniară simetrică şi pozitiv definită este un produs scalar şi
uneori se numeşte tensor metric sau metrică riemanniană. 5.5. Fixăm o bază în V„. Matricea simetrică A = [ai}] ataşată formei
biliniare simetrice ă se numeşte matricea asociată formei pătratice x —»• ă(x) =» = ă(x, x). Expresiile explicită şi matriceală ale lui &{x) sînt respectiv
<2(*) = £ £ % W. &(x) = fXAX. t = l 3 = 1
5.6. Forme pătratice pe spaţii vectoriale reale Vffl. 1) Se spune că forma pătratică <S: VK —>U a/os/ redusă la forma canonică
dacă s-a ales o bază în VM astfel încît matricea simetrică A ataşată lui <ă să fie o matrice diagonală. Pentru reducerea efectivă a unei forme pătratice la forma canonică se cunosc mai multe metode:
(i) Metoda lui Gauss. Presupunînd că &(x) posedă un termen în x\, «-l / «-i a \2
putem scrie &(x) = annx\ + 2 J2 <*inxixn+ £ at}xlxj=am \xn + J2 ~ xi 1 + f' = l i<n V i-1 ann ]
j <n
-rZ—/a'iixixj- ^n I o r m a pătratică / , a'uxtXi nu figurează decît coordonate de ! < M ! < « ;?<n i < «
indice inferior lui »—1 şi de aceea ea poate fi privită ca o formă pe V ^ c V , , Dacă <2 nu conţine pătrate, atunci în mod necesar trebuie să conţină cel
puţin un termen nenul alixixi, i^j. Schimbarea -V- = ' ' } , %\ = — ! dă aa(xl — x\ ) . Avînd un termen
pătratic, putem aplica raţionamentul de mai sus. (ii) Metoda valorilor proprii. Deoarece orice matrice simetrică reală are
valori proprii reale, rezultă că expresia ă(x) a oricărei forme pătratice
&: V„ —> i î poate fi redusă prin X = SX', la forma canonică 2 J \ x l , unde
Ai, 'ho, ..., hn sînt valorile proprii ale matricei asociate A (fiecare valoare proprie fiind scrisă de atîtea ori cît este multiplicitatea sa), iar S este matricea vectorilor proprii (coloane) ortonormaţi.
99

(iii) Metoda lui Jacobi. Fie A = [%] matricea simetrică ataşată lui (2 ăreia îi ataşăm determinanţii
A o - 1 , A1 = «11, A2 = an
a21
Cti2
^22 . A0 =
a n «12 «13
^21 ^22 ^23 ^
«31 a32 «331
A,, %%. Dacă \ ^ 0 , i= 1,2, ..., atunci <2(#) = 2 ^ ~ r = L ^ 2 , unde ^ = •*,+ JD
» = i A 4 " j = » + i *' = 1,2, ..., n — 1 şi ^re = xn. Numerele % sînt funcţii raţionale de ai}.
2) Expresia unei forme pătratice de rang r poate fi adusă printr-o schimbare a bazei la tipul canonic
<2(*)= K)2 + ... + K)2 - « + 1 ) 2 . . . - (*;)2. în această expresie numărul termenilor pozitivi (negativi) nu depinde de alegerea bazei.
Perechea (p, r—p) se numeşte signatura formei pătratice <S. 3) Fie A = [<%] matricea simetrică ataşată lui €k; Forma patratică
&: Vn -* R este pozitiv definită dacă şi numai dacă una dintre următoarele .condiţii este îndeplinită:
(i) are signatura (n, 0); (ii) determinanţii
*iil an a\2 ®-21 ^22
«11 «12 «33 \
«21 ^22 «23 | , e t C
| «31 fl32 #33 I •sînt strict pozitivi;
(iii) valorile proprii ale matricei A sînt strict pozitive.
Exerciţii şi probleme
1. Fie P spaţiul vectorial al funcţiilor polinomiale reale care au cel mult gradul trei şi fie &: P x P—> i? funcţia definită prin ă(x, v) =
= \ \ %{S) y(s)ât ds-Jo Jo
1) Să se arate că ă este o formă biliniară. 2) Să se determine matricea ei în baza canonică a spaţiului şi apoi
matricea în baza {t2 — 1, t2 — t, f, t2 — f}. Soluţie. 1) ă este liniară în ambele argumente. într-adevăr folosind
proprietăţile integralelor duble avem
a(X%! + p.x2, y) = V \ [X%(/) + \J.x2{t)} y(s) dt ds = Jo «-o
ş= X V V x1(t)y(s) dt ds + uf f x2(t) y(s) dt ds =\ă(xl:'y) + u.ă(x-2, y); Jo Jo Jo Jo
X, [ A E J R .
Analog ă(x, c/.y± + j3_y2) = aâ(x J 3^) + (3&(x, _y2), a, (3 e f i .
100

2) Elementele matricei A, ataşată formei biliniare în baza canonică {i.t.f.f}, sînt
* i i = <3(1, 1) = ( [ dtds = [ dti ds = t\ls\l = 1, Jo Jo Jo ~o ,'•! f i f i f i }
alz = <2(l,s) = V V l - s d ^ d s = = \ d a s d s = — , Jo .'o Jo Jo fi fi fi fi 1
a 1 3 = a ( l ; s 2 ) = \ V l - s 2 d M s = V di\ s 2 d s = —, Jo Jo Jo Jo •* fi fi fi fi 1
au = <9;(l,s3) = \ \ l-ssdlds = \ dt\ s3ds = —, JoJo Jo Jo 4
a23 == d(i, s) = \ \ i- s cli! ds = \ i d n s ds = Jo Jo Jo KO fi fi fi fi fi
«23 = <3(^ s2) = Y V fc2 d^ ds = V if d A s2 ds = — Jo Jo Jo Jo ^
Datorită faptului că forma biliniară este simetrică, matricea sa este"
1 1/2 1/3 1/4 1/2 1/4 1/6 1/8 1/3 1/6 1/9 1/12 1/4 1/8 1/12 1/16.
(2
2
2
1 s2 I1 1
o H ~ ^ ' :l S 3 | l J 1 —! = — etc Io 3 !0 6
A
Notăm cu B matricea formei în noua bază. Avem B = fSAS, unde*
~ - 1 0 0 0 ] O — l O O' 1 1 1 1 O O O - i i
este matricea de trecere. Efectuăm calculele şi obţinem
4 1 - 2 —1/2 1 1 4 - 1 / 2 —1/8
- 2 —1/2 1 1/4 - 1 / 2 —1/8 1/4 1/16J
2. Se dă forma biliniară a[x, y) = x1 y2 — A'2Vi + *'i>3 — - 3>'i + %iy4 — %>'i + x2ys —
— A'3 V2 + A'2>4 — ^4>'2 + «8>'4 ~ *4^3-
Să se scrie matriceal şi să se găsească matricea corespunzătoare formei* biliniare în raport cu baza fx = (1, 1, 0, 0), f2 = (0, 1, 1, 0), /3 = (0, 1, 0, 1)~ / j = (1 ,0 ,0 , 1).
B
R:
B
0 3 3 1 - 3 0 1 0 — 3 - i 0 - î - l 0 1 0
101-

3. Să se precizeze care din următoarele funcţii sînt forme biliniare şi în caz afirmativ să se găsească spaţiul nul relativ la al doilea argument.
1) &:PnxVn-
2) â i B ' X f l 3 '
R, ă(x,y)
%xy% R, ă[x, y) keR - { 0 } .
i) &: RixRi — R, ă{x, y) = 2xxyx
T #4^1 ~T xi}'i-
4) ăi RixRi ~* R, ă(x, y) = 4xxyx
+ x3ys — 2x4yx + x4v2.
[ x{t)[y{t) + k]ăt, keR - { 0 } .
%%yi + xxy3 — x3yx + k,
x%yx + x-2yz 4- 3x3ys
2xxy2 X2\ J'3 I 2*3 Vi +
Soluţie. 1) Funcţia este liniară numai în primul argument; 2) Nu; 3) Da. Fie forma biliniară ă: U X V —»• K. Mulţimea vectorilor y e V pentru care £L(x, y) — 0, V x e U formează un subspaţiu liniar al lui V pe care-1 notăm W şi se numeşte spaţiul nul al lui ă relativ la al doilea argument. în cazul
4 4 4
nostru Y^ ] C aijxi-vJ = ° v-v«< * = l> 2> 3< 4> d e c i 12 anyi = ° s a u
2 l 0 1
0 0 0 1 0 0 0 3 0 0 0 b
• ' y\ V-2
>'3
-3'l-
=
"0^ 0 0
_0_
23'i J'i +3 ;2
3
>'l
= 0 = 0
3j '3 == 0 + 3'4 = 0
Am obţinut un sistem liniar şi omogen care admite numai soluţia banală. Prin urmare W = {0} ; acest rezultat este evident deoarece forma biliniară este nedegenerată; rang [%] = 4.
4) Da ; matricea formei biliniare este
4 0 2 2
- 2 0 0 1
0 1 1 0
0 1 0 0
Sistemul liniar şi omogen Av = 0 este 4yx — 2y2 = 0, y3 + yt = 0, 2yx + 4- y3 = 0, —2^! -j- V2 == 0. Vectorul soluţie este v = (a/2, a, —a, a), aeR; prin urmare spaţiul nul relativ la al doilea argument este un subspaţiu vectorial unidimensional.
4. Fie V un spaţiu vectorial şi ă o formă biliniară simetrică pe V, iar U c V un subspaţiu în V. Să se arate că
1) mulţimea, V-1 = {ye V | ă(x, y) = 0, xe\J} este un subspaţiu al lui V (complementul ortogonal al lui U în V faţă de ă) ;
2) dacă \eXl e2, ..., es}cz\J este o bază în U, atunci xeV-<$>ă(ex, x) = = ... =ă(et, x) = 0 ;
3) dacă V este finit dimensional, atunci dim V < dim U + dim U x . Soluţie. 1) Fie yx, y2 G V aşa încît ă[x, yx) = ă{x, y2) — 0 şi ai, a 2 e X .
Deoarece a^yi +- a2_y2 e V şi ă este biliniară, rezultă ă(x, <xxyx + a2>'2) == = a ^ a ; , ^i) -f- a2<3(x, 3'2) = 0. Deci aij'i + o ^ e U - 1 .
102

2) Dacă .veU", rezultă ă(x, y) — 0, V_yeU şi deci în particular ă(x, e.) = = O, j = 1, ..., s. Reciproc din ă(elt y) = ă(e2, >') = ... = ă(ea, y) = 0, re-
zultă ă(x, y) = 0, V,teU, deoarece putem scrie -1-'= X ) a*A-> a * G j K şi deci * = i
s <fl(#, 3') = y ^ a;-'S(g;,, y) = 0. Prin urmare ^ e U 1 .
A = l 3) Fie dim V = n şi {%, ..., un} o bază a spaţiului V. Notînd cu ylt ..., y„
coordonatele vectorului y faţă de această bază, sistemul de ecuaţii ă(e-L, y) = ... = d(es, y) = 0 devine
<3(ei. ui) Vi + - + &(ei, un) }'n = °
&{es. %) >'l + - + t1;(eS, un) }'« = 0.
Rangul acestui sistem este cel mult s, iar spaţiul soluţiilor' sale este VL şi deci dim U-1 ^ n — s = dim V — dim U.
5. Fie V un spaţiu vectorial real «-dimensional, ă o formă biliniară sime~-trică şi nedegenerată pe V şi W c V un subspatiu vectorial Ă-dimensionaL Definim W x = {ve V| ă(v, w) = 0, WweV}. Să se arate că
1) W~ este un subspatiu (n — k) -dimensional, 2) W x - = W, 3 ) V = W 0 W ± ,
dacă şi numai dacă restricţia <2|w este nedegenerată. 6. Fie V un spaţiu euclidian complex şi 3": V —> V un endomorfism,
Definim forma pătratică x-+&(x) = (${%), x), xeV.
1) Să se arate că dacă 3 este hermitian, atunci &(x)eR, VxeY, iar dacă GT este antihermitian, atunci ă(x) este pur imaginar, VxeV.
2) Să se verifice relaţiile &(tx) =fta(x), VtsC, &{x + y) = &(x) + &{y) + (*-(*), v) + (^(>')> *), Vx,yeV,
şi să se scrie formula corespunzătoare pentru <â(# -\- ty). 3) Să se verifice implicaţia &(x) = 0, V*eV =*• ST(x) = 0, VXGV. 4) Să se arate că dacă &(x) este real VxeV, atunci & este hermitian, 7. Se dă forma pătratică x —> &(x) = 2%x2 — 6%%3 — 6x2#3. 1) Să se scrie matriceal şi să se determine rangul formei. 2) Să se găsească expresia canonică prin metoda Gauss şi să se stabi
lească matricea de trecere. Soluţie
o i —3] r xx 1 0 —3 xz
-3 —3 0J [xs
1) a(x) = [*! A-2 X3] rang fi = 3.
2) întrucît toţi coeficienţii au = 0, i = 1, 2, 3, vom face schimbarea %i = y'i — yz, x-2 = >'i + J'2, *3 = >'3- Obţinem <S,(x) = 2yf — 2v| — Hy^, Grupăm termenii care conţin pe yx, &{x) = .— (2yx — 6j'3)2 — 2jf — 18y§,
103

Prin schimbarea zx = 2yx — 6 v3, z2 = y>s, zs = y>3, obţinem forma canonică /€) i , . \ ~2 9 ~2 IO ~2 a\Xi — ,7 ^1 ~~ ZZ2 — lb"S-
S-au efectuat următoarele transformări liniare % —»• _y —» z sau matriceal Z = T2 Tx X, unde S_1 = T2 Xi, S fiind matricea de trecere.
s - x =
2 0
0 1
0 0
0
1 1
'Zi'
Z-2
-Zs.
=
- 0 2 2
o 0 1 .
1 1 1 1
o o
1 1 - 6
1 1 0 2 2
0 0 1_
~ x l ~
x%
si deci
•Găsim
— 1 3
0 0 1
Se ştie că matricea ataşată lui & în raport cu noua bază este B = jSAS. Deci
JSAS =
1 2
1
3
1 2
1
3
0
0
1_
=
1 2 0 0
0
1
__ — 3
0
2 0
1 _ -3
0 - 3
- 3 0_
0
0 —18.
1 1
2
1 2
0
—1
1
0
3
3
i_
Am obţinut matricea diagonală ataşată formei canonice z —> &{x) =
= — z\ — 24'— I82Î.
8. Se dă forma pătratică x —> <2.(.r) = 5.T? + 6*1 + 4x| — 4#1#2 — 4#i*3. Utilizînd metoda lui Gauss, metoda lui Jacobi şi respectiv metoda valorilor proprii, să se aducă &(x) la expresia canonică şi să se verifice teorema de inerţie.
104

Soluţie, Metoda lui Gauss, Grupăm termenii care conţin pe X\\&{x) —
= (5*f — \xxx2 — ixxxz) 4- 6x1 + 4*1 = — (5xv — 2x2 — 2x3)2 H x\ 4-
i %| — — x2x3. racem transformarea Vj = 0% — 2%2 — 2%3, jy2 = A;2, 5 5
26 „ . 16 „ y% = x3. Obţinem £L(x) = vr v.-3
- > 3 y^ys- Grupăm terme
nii care conţin pe y2, apoi facem transformarea zt = ylt zz = y« — — ys, 5 " 5
•23 =• y3. Obţinem expresia canonică ă(x) = —z\ 2 6 4
îormarea z1 = 5#i — 2x, — 2x3, z, = x2 — — x3, z3 5 5
1 - • A 4 + i ° 2 | c u trans. 26 " 13
1 ~ ~ -A2 — z--v3> *% = '1'2 — - -3) ^3 === #3«
Metoda lui Jacohi. Matricea simetrică ataşată lui ă este
A =
vlmorii principali sînt
A 0 = 1, Ai = 5, A, = ' : 1
5 --2 - 2 6
. - 2 0
5 —2 2 6 =
—2' 0 4.
•
26,: A3 = 5
—2 —2
2 6 0
— 2 0 4
toţi nenuli şi pozitivi. 1 5 13
Forma canonică este &(x) = — y? -\ ys -4- — 5 26 ' " 40'
coordonatele vectorului în noua bază {e[, e!2, e'3~j. Relaţiile de legătură între vectorii bazei noi si celei vechi sînt
\, unde (ylt y2, y3) sînt
1 , 1 , 5 ei = — et, e.2 = — ex + —- e2, e%
5 - 13 26
3 1 . 13 ei 4 e2 4- e3-20 20 40
Elementele c0 ale matricei de trecere le găsim din modul cum se construieşte noua bază; anume e[ = c^e^ e2 = c2Xex A- c22ez, e's = c3xex -4- c32e2 + -~ c33e3. Impunem condiţiile ă(e'k, et) = 0, i ^ Ă ; ă(e'k,ek) = l, ştiind că ă{ek, ef) = «M sînt elementele matricei A ataşată formei pătratice ă.
Metoda valorilor proprii. Matricea reală A ataşată formei pătratice & -este o matrice simetrică şi deci are valori proprii reale. Aceste valori proprii vor constitui coeficienţii formei canonice. Ne propunem să determinăm valorile proprii şi vectorii proprii corespunzători transformării a cărei matrice •este A.
' 5 - X —2 —2 -2 6 —X 0 = 0 . -2 0 4—X
Obţinem valorile proprii distincte Xx = 2, X2 = 5, X3 = 8 şi deci vectorii proprii corespunzători vor fi ortogonali.
105

Pentru Xx = 2 coordonatele vectorului propriu corespunzător e[ vor fi date de sistemul 3e n — 2e21 — 2e31 = 0, —2en + 4<?21 = 0, —2eu + 2g31 = 0.
( 2 1 2 \
3 3 3 / (1 2 2\
Analog pentru X2 = 5, obţinem — — = 1 — 5 — > — — j • ' \ 3 3 3 )
e2\\ Coordonatele vectorului e'a se obţin fie ca soluţie a sistemului —3e31 —
2<339 — 2es3 = 0, —2e31 — 2e32 = 0, ~-2e31 — 4e33 = 0, fie din condiţiile de
.. «41| U ' 3 ' _ Transformarea ortogonală care ne conduce la forma canonică este
ortogonalitate (e's, e[) = 0 şi {e's, e's) = 0, găsim ! ) -
î x» x%
1 x, + —
2 2 , 3 2 3 3 XS= — X-, x„ —
x'o. Prin această transformare forma pătratica devine 3
&{x) = 2*J* + 5%22 + 8.v3
2. Mai facem observaţia că forma canonică de mai sus s-a obţinut cu
ajutorul unei baze ortonormate. Observaţii. Am redus ă la forma canonică prin trei metode diferite şi am
obţinut o sumă de trei pă t ra te ; formele canonice au aceeaşi signatură (3, 0), prin urmare se verifică teorema de inerţie.
Forma pătratica este pozitiv definită, deoarece se verifică oricare din condiţiile (i) signatura este (3, 0) sau (ii) Ax = 5, A2 = 26, A3 = 80, toţi determinanţii fiind strict pozitivi sau (iii) valorile proprii ale matricei A sînt strict pozitive, Xx = 2, X2 = 5, X3 = 8.
n n *
9. Să se arate că forma pătratica x —* &(x) = / ) / , —.—:—r—. =-r • xixi
este pozitiv definită. Soluţie. Considerăm funcţiile t-*b(j(t) = 2l*--H cu ajutorul cărora fixăm
matricea B = [bi}(t)~]. Minorii principali ai acestei matrice sînt
A1 = 1, A2 = 1 t = 1 t\ A 3 = t l t - 0 l-t2 t~-ls
0 l-t3 t-t* = (1 — t2)2. Prin inducţie se poate arăta că minorul de ordin h este
1 t 1 t t 1
1 t
th~i
1 t ... t ... I ft-2
= n-t2) 4 - 1
th-2 th-Z _ _ j
Toţi minorii Ah(h = 1, 2, ..., n) sînt strict pozitivi pentru le (0, 1); prin n n
urmare forma pătratica Ţ^ y^,itt(t) x,x, este pozitiv definită, Vie (0, 1). S e i = i j = i
constată că
C bn(t) dt = [ 1 • d* = 1 = an, [ b12(t) At = C »'o »'o Jo »'o
1 , 1 t ât = — =
2
f 1 2 -
106

în general
^ btt(t) dt = ^ t\i~J\dt = fi + \i-i]
1 * = at i — i\
p u t e m scrie
adică forma pătratică (2 este pozitiv definită. 10. Să se reducă la forma canonică
n
•î) aw = E ^ + E « ' * = (*i,.... *.)eJT. » = 1 : < i
i<]
.3) &{x) = E *? - T E xtxt, x = (Xl, .... A-J e f l \ iii Z s<j
Soluţie. 1) în raport cu baza canonică, ă(x) = E *« + ~ ' E -^V a r e
piatricea 1 1/2 ... 1/2" 1/2 1 ... 1/2
jEcuatia caracteristică
se mai scrie
(1/2 - X)
n 4- 1
1/2 1/2 ... 1
1 — X 1/2 ... 1/2 1/2 l - X ... 1/2
1/2 1/2 ... l - X
— Xl = 0 şi are rădăcinile ~p±!-x) Ai = X3 = X3 = ... = X„ = 1/2. în concluzie, expresia canonică este
*;* + ... + x£). a(x) = 4- 1 1
11. Dîndu-se următoarele forme pătratice, să se găsească pentru fiecare £> bază ortonormată faţă de care forma pătratică să aibă o expresie canonică.
1) &: Ri -^ R, &(x) = 2xxxz — 6xxxa — 6x2x4 + 2x3Xi 2) ă:R3-*R, <$.{%) = 3*f + 6*1 + 3*1 — 4*1*-2 — 8 % ^ — 4*2*3
.3) (2: jR3 ->• R, ă(x) = —x\ + x\ — 5x\ + 6%% + 4*2*3.
w n , n i i n , /1 i i n , n 1 U 2 2 2) \2 2 2 2) \2 2
1 n ' ' ^ ' T ' - f - T V " < 2 ( * ) = - 4 * f - 2 ^ 2 + 2 * s2 + 4<2;
107

a(x)
,, Ni 2 4i 1 ~ I T ' T HT « 9
3) e{ =
V14
1 V V21 V21
4
2 V2
1
~4%
e., = V2 2
T 6 j
2 V6
î
V~6 ) ' 4
-7%:
12. Fie Fe§tlnXB(.R) şi I matricea unitate din SHlnxn(R). 1) Să se verifice că forma pătratică ataşată matricei G = I -f 'FF este
pozitiv definită. 2) Să se arate că dacă F2 = — I, atunci n este par şi det F = 1. Soluţie. 1) Evident 'G = ' I+ ' ( 'FF) = G , adică G este o matrice simetrică.
Se observă că 'XGX = 'XX + 'X('FF)X = 'XX + '(FX) (FX) > 0, VX=*0. 2) Deoarece det F2 = (det F)2 = (—1)" det I = (— \y, iar F este reală,
rezultă n = par. Din (det F)2 = 1 deducem că det F este sau —1 sau + 1 . Pe de altă parte, 'FG + GF = ' F + ' F f F F ) + F + (*FF)F = ' F + ' ( F 2 ) F +
+ F + *FF2 = 0, adică matricea GF este antisimetrică. Ţinînd seama de relaţiile (det G) (det F) == det(GF), det G > 0, şi de faptul că determinantul unei matrice antisimetrice de ordin par este strict pozitiv, rezultă det F = 1.
13. Fie V2n un spaţiu vectorial euclidian raportat la o bază oarecare, fie G matricea ataşată produsului scalar şi J matricea ataşată unei structuri tangente pe V, adică J2 = 0 şi rang J = n. Să se arate că forma pătrat ică ataşată matricei H = GJ + ' JG are signatura (n, n).
Soluţie. Matricea H este simetrică, 'H = '(GJ + 'JG) = '(GJ) + S('JG) = = ' J 'G + 'GJ = ' J G + GJ = H. Alegem baza {vu ..., v2n} a lui V2„ astfel încît Jva = va+n, a = 1,2, ..., n. în raport cu această bază avem
T _ r ° ° k o
pozitiv definite.
Rezultă H = GJ
si G = r A 'B
Bl
cj unde A si C sînt în mod necesar matrice
MG = B + ' B
C si deci H este nedegenerată.
Alegem baza \u1: ..., uZn} a lui V2„ astfel încît ]ua = ua+n, G(ua 1, 2, In raport cu această bază găsim
J =
H =
"0
In
GJ
0"
o. , G =
+ <JG =
A 01
0 C 0 C C 0.
unde A şi C sînt matrice pozitiv definite. Deci
Pe de altă parte, 'EHE = ['X, *Y] "0 CI "X' c oj [Y
= 2'XCY. Făcînd schimbarea X = Xj + Y2, Y = X3 — Yi, găsim 'XCY = = tX1CX1 — 'YiCYj. Ţinînd seama că C este o matrice pozitiv definită, rezultă că forma pătratică ataşată lui H are signatura (n, ti).
14. Fie V un spaţiu vectorial real euclidian 2«-dimensional înzestrat cui o structură complexă IF. Să se arate că V admite o metrică g astfel încît
g(&x, &y) = g(x, y), Vx, y e V.
108

Ansamblul (SF, g) se numeşte structură, metrică hermitiană pe V.
R: g(x, y) = — {h(x, y) 4- h[§x, Wy)}, Vx,yeV, unde h este produsul
scalar dat prin definiţia lui V ca spaţiu euclidian [58]. 15. Fie V un spaţiu vectorial real euclidian (2»+1) -dimensional înzestrat cu
o structură cocomplexă (W,£,•»)). Să se arate că V admite o metrică g astfel încît rt{x) = g[l, x), g{Wx, 9y) = g(x, y) - r,{x) Y)(J/), Wx, v e V.
Ansamblul {W, H,, TJ, g) se numeşte structură metrică cocomplexă pe V. 1
R. g(,Y, T) = — (Â(# , v) hiWx.Wy) -f- v](^) v)(>•)}, unde h(x, y) = f(x —
'l{j')5) + 'l(A') "l(>')' ' a r / es^s metrica dată iniţial pe V [58], — r,{x) l, y 16. Fie V un spaţiu vectorial real de dimensiune n. Un ansamblu (SF, £,, TQ),
unde F este o transformare liniară a lui V, ? e V şi 73 este o formă liniară pe V, care satisfac condiţiile
SF 2 = i i — E, • 7), T)( ) == 1 se numeşte structură coprodus pe V. Evident 5' "1 e s te endomorfismul definit prin (>;• YJ) (#) = 7}(#) 5, %eV.
1) Să se arate că dacă (SF, £, TJ) este o structură coprodus, atunci |Fc = 0, Y) o F = 0, rang SF = » — 1, rang (SF — £• TJ) = «.
2) Să se afle valorile proprii ale lui W. 3) Să se arate că V admite o metrică g astfel încît
•n{x) = g & *), g(ff*, Şy) = g(z, .y) - rt(x) rty), Vx,yeV. Ansamblul (SF, £, vj, g) se numeşte structură metrică coprodus pe V. R. 1) (SF — \-rtf = \d. 2) Valorile proprii ale lui SF sînt — 1 , 0, + 1 . 17. Fie V un corp acţionat de sarcini de suprafaţă T e C ^ c B 3 ) şi de
forţe masice F pe unitatea de volum. Să se arate că energia de deformaţie a corpului, pe unitatea de volum, exprimată în deformaţii specifice (sau tensiuni; este o formă pătratică pozitiv definită.
Soluţie. Se ştie că X + 2^
V0 4) + xfc xx^yy 1
icestei forme pătratice, X 2
X+2u
A
2
X
2
>.
0
0
0
2
X
L
0 o o
X
2
X
~i X+2fi
2 0 0 o
o
o
r) + M
o o
o o
s;»j.
0 0 0
2fJL
0 0
0 2;a 0
0 o 2w
are toţi minorii principali strict pozitivi. Deci forma pătratică U0 este pozitiv definită.
109

în tensiuni avem
Uo = ~=r OL + <?h + CTfs — 2y{vuy°zz -r azzaxx + axxavy) + ih,
+ 2(1 + y ) ( 4 + af, + a%,) cu - î < y < 1/2.
18. Să se scrie programul FORTRAN al algoritmului lui Jacobî de determinare a semnului unei forme pătratice. Aplicaţie:
ă(x) = x\ -f 7x§ -f- 2xJ + 3%f + 5x\ + 4x2:1-2 -4- Zx-jXj + 4.v2x4 + 2x3Xj„
Soluţie (Fig. A.4). DEVIENSI0N B(5.5).DELTA(5) READ(105,1)N
1 F0RMAT(I2) D 0 2 1= 1,N
2 READ( 105,3) (B(I, J), J = 1 , N ) 3 F0RMAT(5F4.2)
WRITE( 108,30) 30 F0RMAT( ' ', 'MATRICEA F 0 R M E I PĂTRATICE ESTE: ' / / )
D 0 40 1 = 1, N 40 \VRITE( 108,45) (B(I, J), J = 1,X) 45 FORMATC ', 5(F9.3,3X))
IF(X.EQ.l) G 0 T 0 11 DELTA(l) = B( l , l ) DO 4 I = 2,X CALL DETER(B,I ,DET)
4 DELTA(I) = DET \VRITE( 108,25) (DELTA(I) , I= 1,X)
25 F0RMAT( ' ' / / ' D E L T A : ',5(F8.3,3X)/) D 0 5 I = 1 , X IF(DEI.TA(I).LE.O) G 0 T 0 6
5 C 0 X T I N U E
14 WRITE(108,10) 10 F0RMAT( ' ', ' F 0 R M A PATRATICA ESTE P 0 Z I T I V DEFINITA')
G 0 T 0 20 6 D 0 7 I = 1 , X , 2
IF(I.LT.X) G 0 T 0 15 IF(DELTA(I).LT.O) G 0 T 0 12 G 0 T 0 13
15 IF(DELTA(I) .LT.O.AXD.DELTA(I- l).GT.O) G 0 T 0 7 13 \VRITE( 108,8)
S F0RMAT( ' ', ' F 0 R M A PATRATICA XU ESTE XICI POZITIV X1CI NEGATIV DEFINITA') G 0 T 0 20
7 CONTINUE 12 \VRITE( 108,9) 9 F0RMAT( ' ', ' F 0 R M A PATRATICA ESTE NEGATIV DEFINITA')
G 0 T 0 20
110
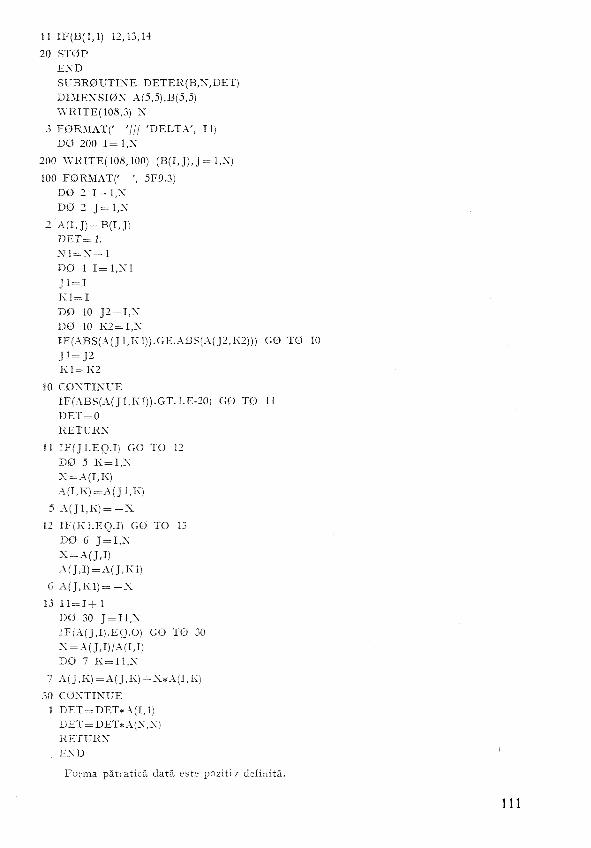
t i IF(B(1,1) 12,13,14
20 S T 0 P END S U B R 0 U T I X E DETER(B,N,DET) DIMENSI0X A(5,5),B(5,5) WRITEţ 108,3) N
3 F0RMAT( ' '/// 'DELTA', II) D 0 200 1 = 1,X
200 WRITEţ 108,100) (B ( I , J ) , J= 1,X) Î00 F0RMAT( ' ', 5F9.3)
D 0 2 1 = 1,X D 0 2 J = 1 , X
2 A(I,J) = B(I,J) DET = 1. N1 = X - 1 D 0 1 1 = 1,X1 j l = I K1 = I D 0 10 J 2 = I , X DO 10 K2 = I,X IF(ABS(A(J1,KT)).GE.ABS(A(J2,K2))) G 0 T 0 10 J 1 = J 2 K 1 = K 2
Î0 C 0 X T I X U E IF(ABS(A(Jl ,Kl)) .GT.l .E-20) G 0 T 0 11 DET = 0 RETUR X
11 IF( J l .EQ. I ) G 0 TO 12 DO 5 K = I,X X = A(I,K) A(I,K)==A(J1,K)
5 A(J1,K) = - X 12 IF(Kl .EO. I ) GO TO 13
DO 6 J = I,X X = A(J,I) A(J , I )=A(J ,K1)
6 A ( J , K 1 ) = - X 13 11 = 1 + 1
DO 30 J = I1,X IF(A(J,I) .EO.O) GO TO 30 X = A(J,I)/A(I,I) DO 7 K = I1,X
7 A(J,K) = A(J ,K)~X*A(I ,K)
30 C 0 X T I N U E 1 DET = DET*A(1,1)
DET = DET*A(X,X) RETURX EXD '
Forma pătraticâ data est? pozitiv definită.
111

§ 6. SPAŢII PUNCTUALE EUCLIDIENE
6.1. Fie V = {a, b, Z, ...} un spaţiu vectorial euclidian. O mulţime E = {A, B, C, ...} se numeşte spaţiu punctual euclidian dacă există o funcţie i-.ExE^-V astfel încît
(i) i{A,B) +f(B,C) = î{A,C), A.B.CeE, (ii) funcţiile parţiale îA:E~*\ definite prin îA(B) = i(A, B)t sînt bi-
jective. V se numeşte spaţiu director; elementele lui V se numesc vectori directori;
elementele lui E se numesc puncte; f se numeşte funcţie de structură afină.
Spaţiul punctul euclidian E se numeşte real (complex) dacă V este un spaţiu vectorial real(complex). Dimensiunea lui E se defineşte ca fiind dimensiunea lui V. Un spaţiu punctul euclidian de dimensiune n va fi notat cu En.
6.2. Pentru orice punct AeE şi orice vector v e V există un singur punct BeE astfel încît v={(A,B).
6.3. Există spaţii punctuale euclidiene care nu sînt spatii vectoriale. Orice spaţiu vectorial euclidian V este un spaţiu punctual euclidian deoarece funcţia f : V x V - + V definită prin i(u, v) = v — u satisface (i) şi (ii).
6.4. Fie E un spaţiu punctual euclidian, V spaţiul vectorial euclidian asociat şi f funcţia de structură afină. O pereche ordonată (.4, B) de puncte din E se numeşte vector tangent la E în punctul A (segment orientat, vector legat). Punctul A se numeşte originea sau punctul de aplicaţie al vectorului tangent, iar B se numeşte extremitatea sa. Dacă A este originea lui E, atunci (A, B) se numeşte vectorul de poziţie al punctului B.
Mulţimea tuturor vectorilor tangenţi la E în punctul A se numeşte spaţiul tangent la E în punctul A şi se notează cu TAE. Această mulţime este un spaţiu vectorial euclidian izomorf cu V.
Doi vectori tangenţi (A, B) şi (C, D) se numesc egali dacă au aceeaşi parte vectorială l(A, B) = f (C, D) şi acelaşi punct de aplicaţie, A = C. Doi vectori (A, B) şi (C,D) care au aceeaşi parte vectorială, f (A, B) = f (C,D), clar care au puncte de aplicaţie diferite, A ^ C, se numesc paraleli.
Mulţimea tuturor vectorilor tangenţi la E paraleli cu un vector tangent dat se numeşte vector liber si se identifică cu un vector director (element ai lui V).
6.5. Un vector legat (A, B) se notează cu AB sau cu v dacă f(A, B) = ~v; un vector liber se notează fie prin AB, dacă AB este un segment orientat din mulţimea numită vector liber, fie prin v dacă i(A, B) = v.
6.6. Fie E un spaţiu punctual euclidian. Funcţia d: ExE —>R+ definită
prin ă(A, B) = || Ă~B\\ =f(A~B, iB) este o distanţă pe E. 6.7. Fie 2 o mulţime închisă din En, fie A un punct oarecare din EK şi B
un punct oarecare din 2 . Marginea inferioară
d = ă{A, S) = i n f â{A, B)
se numeşte distanta de la A la 2 . Aceasta este de fapt minimul funcţiei B-+d(A,B).
112

Fie Sj şi S 2 două mulţimi închise din En, fie A un punct oarecare din Ei şi B un punct oarecare din S2. Marginea inferioară
d = d(Z 1 , 22) = inf d ( J , i ? )
se numeşte distanţa de la Sx la S2 . Dacă S2 este compactă şi dacă Ex f) 2 2 = 0 , atunci d = d ( 2 1 , 22) este minimul funcţiei (A, B) -* d(A, B).
6.8. Fie ~e\, ..., ~en o bază ortonormată a spaţiului director V şi 0 originea spaţiului punctual euclidian En. Ansamblul âl = {0; ~£i, •••, ~en} se numeşte reper cartezian în Ei.
Coordonatele (xlr ..., xn) ale vectorului de poziţie OM = x{ex -j- ... -j- xJ?u se numesc coordonatele carteziene ale punctului M în raport cu SI.
Fie A(xl, ..., xn) şi B(yu .... yn). Rezultă AB = [yx — xx) 71 + ... + (y„ — — x„) ln, d(A, B) = \'(y± — *±)2 + ... + {y„ — xnf.
6.9. Distanţa de la un punct M0(x10, ..., xn0) la un hiperplan P:cţiX1 + ... ... + amx„ + b = 0. W »
d(M0; P) = «1%j0 + - + a„xn{> + b\ •Ja\
6.10. Unghiul dintre două drepte orientate de vectori directori a respectiv ^
cos o = — J ^— , cp e [0, T:].
II «II II'* II 6.11. Unghiul dintre două hiperplane orientate cu vectorii normali Kj
respectiv n2, (n-t, îîo)
c o s ? = -.. ^ ~ , J— ? e [ 0 , - ] . li ^ î l l II ^ 2 I I
6.12. Unghiul dintre dreapta orientată de direcţie a şi hiperplanul orientat de normala n,
tn, a) sm o = —3 '— , o e ll»H II «II ' 2 2
6.1.3 Măsura ^-paralelipipedului (0; u1,uz,\\.,uf
V = Vdet [(«,, Uj)]. 6.14. Izometrii. Fie E n un spaţiu punctual euclidian «-dimensional. 1) O aplicaţie a lui En în el însuşi care păstrează distanţa se numeşte
izometrie. 2) Orice izometrie este de forma i = t°0, unde t este o translaţie, iar O
este o transformare ortogonală. Fiind date două repere Si = {0; 1X,...., ~en] şi $L' = {0'; ?£, ..., ~e'n} există
o singură izometrie i = toO:E„^-En astfel încît 0(e1)=7i. 3) Fie i = | o O o izometrie. Dacă d e t O = + l , atunci * se numeşte
deplasare (izometrie pozitivă), iar dacă det O = — 1, atunci i se numeşte antideplasare (izometrie negativă).
113 8 — Probleme de algebră — c. 264

6.15. Hipercuadrice. Fie En un spaţiu punctual euclidian real n-dimensional raportat la un reper
cartezian. 1) Mulţimea
H=\x\x = (Xl xn) eRn, V atjxtx, + 2 £ btxt + c = 0
se numeşte hipercuadrică sau suprafaţă algebrică de ordinul al doilea. Dacă utilizăm matricele A = [%], B = [61( .... &„], X = ' [%, ..., x„], atunci
ecuaţia hipercuadricei H se transcrie 'XAX -j- BX -j- c = 0. 2) Hiperplanul tangent la o hipercuadrică H într-un punct x0 = (x10, ..., x„0)
în care cel puţin unul dintre n u m e r e l e ^ a,-,xm + b este diferit de zero, are j
ecuaţia matriceală (obţinută prin dedublare)
<X(AX0 + fB) + BX0 + c = 0,
Iar normala la H în x0 are ecuaţia
X == X0 + s(AX0 + eB), seR.
3) Cuadrica H are un centru de simetrie dacă şi numai dacă rang A = rang [A, *B].
Ecuaţia unei hipercuadrice cu centru poate fi redusă, printr-o izometrie, la forma canonică
a.1%1 + ... -f xrx; + y = 0.
Ecuaţia unei hipercuadrice fără centru poate fi redusă, printr-o izometrie, la forma canonică
a.ix\ + ... + a.rx; = 2xr+1.
Exerciţii şi probleme
1. Fie E un spaţiu punctual euclidian real şi d:ExE -+R+ distanţa pe E. 1) Pentru orice M,, ..., MBsE(n > 1) există relaţia
M$U + MSU + - -r M^M, + M~M1 = 0V,
numită relaţia lui Chasles. (0V este vectorul nul din spaţiul director V). 2) Să se arate ca punctul G este centrul de greutate al sistemului de
puncte {Mi, ..., Mn}czE cu ponderile jx1; ..., •xHeK, y^ + ••• + V-a — ^ dacă şi numai dacă
lifiMx + \J.2GM^ -f-... -l- \inGMn = 0V. >• •
3) Dacă (MiMz, M2M3) = 0, să se dovedească egalitatea d2(ilf!, M3) = d2(M!, M3) + d2(Ma, M3).
4) Dacă MeE, să se scrie expresia
f(M) = ( i i , M , ) + ( M 2 l MM3) + {MM3, MMt)
114

funcţie de d (M1, Mt), d (Ma, Ma), d (M3, Mt) şi d (M, G), unde
G = — Mx + — M2 + — M3 este centrul de greutate al sistemului {Mlr 3 3 3 M2, M3).
5) Să se expliciteze locul geometric al punctelor M eE pentru care i(M) = 0. >
Soluţie. 1) Demonstrăm prin inducţie. Pentru n = 2 avem M1M2 + >' > -^
+ M2MY = Mxilfi = 0V, deci relaţia este adevărată. Admitem că relaţia este adevărată pentru n — 1 puncte Mlr ..., Mn__}l
şi o vom demonstra pentru « puncte Mx, ..., Mn. în adevăr,
M1MZ + M2M3 + ... + Mn_,Mn-i + (Mn^Mn + MnMJ == MXM2
+ AfgAfg + ... + il4_2M„_1 + Mn_1M1 = 0V. (conform ipotezei).
2) Dacă pr GMi + n2GM2 + - + ^n^Mn = Ov, ,u-i + H-a + ... + ^ = 1, pentru un punct fixat OeE, obţinem succesiv
u^GO + OMT) + [i2(GO + OM2) + ... + u„(GO + OMn) = 0V,
(a,+ ^ + ... + [O GO + (fi lări + ... + H.OÎfî.) = 0V,
"OG = fXiOMx + ... -f u;i0MM şi deci
G = u.xMi + y.2M2 + ... + 'J-nMn. Reciproc, dacă G este centrul de greutate al sistemului {M1( ..., Mn}, adică, egalitatea precedentă este adevărată, atunci
n
0V = GG = ^2 V-fiMi-i = 1
-> 3) Pe baza relaţiei lui Chasles, MXM3 = MXM2 + M2MS avem
&(Mlt M3) = || MrM3\^ = (AfiMa + Af2iW3)2 = || MJt2f
+ 2(Af1Afa, M2M3) 4- ;| M2M3 jj = d2(Mi, M2) + d2(M2, M3). =o
4) în baza egalităţii GM± + G¥ 2 + GM3 = 0V şi a relaţiei lui Chasles obţinem
f (M) = (Â/G + GM!, MG + GM,) + (MG + Glîţ, MG + GM3) +
+ (JÎG + GM3, ~MG + 7ÎMJ = 3d2(M, G) + 2 (MG, G ^ + GJtf8+GĂ?â)+-= ov
+ (GAfi, GM,) + (GÎf2, GMS) + (GM3, GMX) = 3d2(M, G) + (GM^ GM2) +
+ (GÎ?2, GM3) + (GMo, GMX).
115

însă
(GM, GM2) = (1 (MtMi + M3M{j, - (M1M2 + MSM2)\ =
= - L &(M Mg) - 1 (M^Mt, MZ~M3), 9 v 9
(GM2, GM3) = - — d2(M2, M3) - - l {MM-z, M3M1), 9 9,
(GM3, GMO = - - d2(M3, Mx) - - ( M M 3 , M^I2). 9 9
Deci
f(lQ = 3d2(M G) - — [d2(M1; M2) -f d2(ilf2, M3) + d2(M3, Mx)l -
1 r(M!M2 -f M2M3 + M ^ ) 2 - 1! M±M2 \f - jj M2M3 p2 - || M3Mj j|2l = 18 s y '
= dv
= 3d2(M, G) - - l [d2(M1; M2) + d2(M2, M3) + G12(M3, Mi)]. 6
5) f(Af) = O implică d2(M, G) = — [d2(M1; M, )+d 2 (M 2 , M 3 )+d 2 (M 3 , MYj] 18
şi deci locul geometric căutat este mulţimea
\MGE\ â2(M, G) = — rda(Mlt Mo) + d2(Mo, Ma) + d*(Ma,Mi)\ \ 18 ' J
şi reprezintă o hipersferă cu centrul în G şi d
R î = Vd«(M!, M8) + d2(M2, M3) + d2(Af3, M ^ . 3V2
2. Fie L3 mulţimea dreptelor din U 3 care intersectează planul P: %3 = 0, iar DeL3 o dreaptă de ecuaţii xt = ax3 -f- c, ,ra' = 0,t3 + d, (a, b, c, i ) e B 4 .
Fie f : L3 —* JJ4 funcţia care asociază dreptei DeL3 punctul (a, b, c, ci) eRl. 1) Să se arate că mulţimile
S1 = {i{D)\DeL3, MeD}, S2 = {i(D)\ DEL3, DCQ}
sînt subspatii afine în B'1 de dimensiune doi ştiind că M este un punct din Rs, iar Q un plan din R3 secant cu planul P.
2) Să se demonstreze că o condiţie suficientă pentru ca un subspatiu afin al lui U4 să fie St sau S2 este ca el să aibă drept subspatiu director un subspatiu vectorial de dimensiune doi conţinut în mulţimea
S = {(*!, x2, xo, %i) eRi\ xxXi — x2x3}.
Soluţie. 1) Dacă M = («1( a2, % ) e f i 3 , atunci Sx = {(%, #2, x3, %i) eRi\ cii = %% + •%> a2 = *'2«3 + ^4}. adică Sx este
mulţimea punctelor din Ri ale căror coordonate xlt x2, x3, x± verifică sistemul de ecuaţii liniare a3xx 4- x3 — ax — 0, a3x2 -)- #4 — «2 = 0.
116

Deoarece
rang ct3 0 0 = 2 rezultă că Sx este un subspatiu afin din U4 de 0 a4 0 1_'
dimensiune doi. Sistemul liniar omogen asociat caracterizează subspatiul vectorial asociat lui Si, faţă de baza canonică din R4. Rezultă că, pentru «3 = 0, direcţia lui Sx este subspatiul {(xx, x2, x3, x4) e B 4 ] x% = 0, x3 = 0}s iar pentru a3 = 0, direcţia lui S1 este subspatiul vectorial
\xx, X-2, Xs, Xi) E f i j Xx = 1
x2, x3 «3 j
Dacă Q:axxx -j- a2x2 -j- a3xs + a4 = 0, unde % ^ 0 sau a 2 # 0 , atunci
S2 = {(.Ti, «2j %3, ;c4) eJR4j %a-i + «2% + % = 0, « ^ + a2^4 + #4 = 0}.
Deoarece a\ + a | ^ 0 , rezultă
"«! a2 0 0 rang 0 0
= 2 şi deci
\Xi}, XeR}
= U..V4}, mei?}
S2 este un subspatiu afin din jR4 de dimensiune doi. 2) Un subspatiu vectorial de dimensiune doi poate fi reprezentat printr-una
din mulţimile
U(X) = {(xx, x2, x3, Xi) GR4\ XX = Xx2, x3 =
V(u.) = {(xx, x2, x3, xi) eR4\ xx = u.t;
U ( X') = {(Xx, X2, X3, Xi) t j R 4 j Xo = 0 , #4 = 0 } , :•
V(oo) = {(xx, x%, x3, Xi) eRi]x3 = 0, x^ = 0}.
Subspaţiile U(X) şi V(X) împreună cu U(co) şi V(oo), generează mulţimea
2 = {(xx, x2, x3, Xi) sR4] xxXi = x2^s}c:B4.
Fie S un subspatiu afin al lui i£4 astfel încît subspatiul său director să fie U(X), XeR. In raport cu reperul canonic al lui R4, sistemul ecuaţiilor liniare ale lui S va fi de forma
xx — Xx2 + a = 0 x3 — XXi + (3 = 0, unde a, J3e2J.
Dacă considerăm planul (?: xx — Xx2 + a i 3 + |3 •= 0, atunci (2 este secant planului P şi din definiţia lui S2 urmează în mod necesar S = S2. Dacă Sr
este un subspatiu afin al lui R4 astfel încît subspatiul său director este U(oo), atunci sistemul ecuaţiilor liniare ale lui S' în raport cu reperul canonic din R4
va fi de forma
f x2 -\- a = 0 1 *4 + b = 0, cu a, beR.
Luînd Q: x2 + OLX3 -f o = 0, rezultă că Q este secant cu P şi deci S' = S2 . Pentru Si se face o discuţie analogă.
117

X2, XS 3. în R", să se afle distanta dintre S:.v„ = — + — si P:xx— xz — 2x„ -— 4.
12 4 " Soluţie. Distanţa cerută este distanţa dintre hiperplanul P şi hiperplanul
tangent la cuadrica S paralel cu hiperplanul P. Fie x1 — x2 — 2xn = X ecuaţia fasciculului de hiperplane paralele cu P.
Determinăm pe X astfel încît hiperplanul corespunzător să fie tangent la 5, adică eliminînd pe x„ din sistemul xn = — + — , xx — x2 — 2xn = X impunem
12 4 ca ecuaţia obţinută (xx — 3)2 + 2>{x2 + l)2 = 12 — 6X să reprezinte un punct în hiperplanul xxOx2. Găsim X = 2, iar xx = 3, x2 = — 1, #„ = 1 este varietatea liniară de tangenţă. Distanţa de la punctul (3, — 1, x3, x4, ..., 1) la hiper-
planul P este distanţa căutată, d = —— •
4. Fie hiperplanul P: xx + 3.T2 + 5x3 + ... + (2n — 1) ,T„ —1/4 = 0 şi punctul M(\, 1, ..., 1). Se cer
1) distanţa de la punctul M la planul P, 2) coordonatele simetricului punctului M faţă de planul P.
1 + 3 + 5 + ... + (2n —1—1/4 | __ [» 2 — 1/4 ; Soluţie. 1) d =
VI + 32 + 52 + ... + (2» - l)2 l /»(4»2—1) F' 2) Ecuaţiile parametrice ale dreptei D, care trece prin M şi este ortogonală
hiperplanului P, sînt
xi = 1 + t, xz = 1 + 3*, *3 = 1 + 5;, ..., #„ = 1 + (2n— 1) *, *!eJR.
Intersectăm dreapta Z) cu hiperplanul P şi găsim coordonatele punctului proiecţie M'0,
Mi[\- — n, 1-3—», 1-5 — » l - ( 2 » - l ) . l » V l 4 4 4 4 j
#< + A'" Ştiind că x' = — -i = \,2, ...,n, coordonatele punctului simetric
2 Ml{x\, x'i ..., x"n) vor fi
M'Al-—n, 1-3—», 1-5-1»,..., l - (2»- l ) — »V 1 2 2 2 V ; 2 J
5. Să se calculeze unghiul dintre hiperplanele
P1: Xx + 2,r2 + 3,v3 + ... + nxn — 1 = 0 ,
P2: 2xx + 3x2 + ... + (« + 1) xn — 1 = 0.
R: cos ş = 2(« + 2)
118
w + 1 ' (2w + 1) (2w + 9w + 13)

6. Să se arate că distanţa de la 0(0, O, ..., 0) la hiperplanul P:x1
x<> x —j=r -j- ... 4 — — + 1 = 0 satisface relaţia V 2 v n
1 +n\ 1 fn)
;d (0 ; P) <: n(fn + 1—1)
Indicaţie. n(fn + 1 — 1) < 1 -f 1- ... H < 1 + « ( 1 — -^=-j VweN—{0}. 2 « V fn)
7. Se dă familia de hiperplane P:#1#1+... + anxn — 0. Ştiind că toate hiperplanele trec prin punctul (1, 1, ..., 1) şi că există un punct Jf0(A-10, #20, •••, #„o) c ^ proprietatea
d (M0; P) = — | « ^ K , «2A'2o + ... + <V«,o|, & ¥= cons t=0,
să se arate că
k3< £«? « •
v«(» — 1) v»(« — 1)
8. în spaţiul cu patru dimensiuni considerăm două plane A şi B generate de vectorii alta2, şi &i, &2 respectiv
1) 2 1 = ( 1 ,0 ,0 ,0 ) , a 3 = (0, 1 ,0 ,0) ; bi= (1, 1, 1, 1), &a=(—1', — 1 , 1, 1).
2) Sj = (1 ,0 ,0 ,0 ) , a 2 = (0, 1 ,0 ,0) ; 6, = (1, 1, 1, 1), £ 2 = ( 1 , 1 , - 1 , - 1 ) .
Să se găsească unghiul o dintre planul A şi un vector oarecare din planul B. Apoi să se verifice că funcţia cp: B —> [0, - ] , care asociază fiecărui vector din B unghiul pe care-1 face cu planul A, este surjectivă.
Soluţie. 1) Un vector oarecare din planul B se exprimă în forma t$i + tzbz = (h — h, h — h, h + h, h + h). Proiecţia sa pe planul A are coordonatele (ti — t2, ti — tz, 0, 0). Notînd cu cp unghiul dintre vectorul nenul txb x + t2b 2 şi planul A, trebuie să avem
COS" O : (h — U, h— h, 0, 0) ||2
(h - h, h - u, h h, U 1 t\ — Itit;
~1 t\A-t\
ti 1 1) h
Funcţia X •
2 7:
1
~2
( X - l ) 2
1 X = — pentru t2^0
h
0. pentru t%
admite un minim egal ci: 0 pentru X = 1 şi un X2 + 1 b l
maxim egal cu 1 pentru X = — 1. De aceea 0<]coscpj<l sau 0 < c p < - , adică o este surjectivă.
2) Analog.
119

9. în R2n considerăm un paralelipiped (0; ult u2, ..., u2n), astfel încît
S4(S, - 1) . • . pentru i = J,
• pentru % ^ j Xl*i
unde Si + ••• — S2„ < 1 şi St > 0. Să se determine volumul acestui paralelipiped.
^M'-Mâfir)'
0 0
r 0
sau P o 0 a
10. Să se determine transformarea afină a planului care nu posedă puncte fixe şi nici drepte invariante,
Soluţie. O transformare afină ST a planului este definită prin 8T(x) = = Ax + b, unde AeSI\l2x2(R), beS)l2>(1(R), x = ' [%, x2).
Fie {u, v) o bază a planului şi b un vector care nu aparţine dreptei generate de u. Funcţia cu + ăv —s- (c + d) u -\- dv-\- b are proprietăţile dorite. într-adevăr, pentru orice vector w, vectorii ST(w) — w şi S"2(z&) — ze> sînt independenţi.
Să arătăm că funcţia precedentă este singura care satisface datele problemei. Fie W{x) = Ax +• b o transformare afină oarecare. Ipoteza că % = = Ax + b nu are nici o soluţie implică faptul că matricea A — I este singulară ; ipoteza că dreapta generată de b nu este invariantă prin ST implică A # I . Rezultă rang (A — I) = i şi forma Jordan a lui A,
a=£Q.
Fie {u, v} baza Jordan corespunzătoare. în primul caz S" se confundă cu transformarea de mai sus şi b nu aparţine dreptei generată de u deoarece această dreaptă nu este invariantă prin S". Al doilea caz este imposibil deoarece
b = ru + sv implica faptul că dreapta t —>• tu — — v este invariantă prin ST. a
11. Fie En un spaţiu punctual euclidian real şi i:En'~*En o izometrie. 1) Să se arate că imaginea prin i a unei hipersfere este tot o hipersferă. 2) Fie n = 2. Să se demonstreze că dacă i este o deplasare care are cel
puţin două puncte fixe, atunci i este identitatea pe E2. Rămîne valabilă această proprietate şi în cazul antideplasării ?
Soluţie. 1) Fie S sfera de centru O şi rază r şi M un punct al lui S. Relaţia d(0, M) = r implică d(i(0), i(M)) = r şi deci i(M) aparţine sferei i(Y) cu centrul în i(0) şi de rază r.
2) Fie J , BeE2, A^B,şi i:E2->E2 o deplasare pentru care i(A) = /! şi i(B) = JB. Fie V2 spaţiul vectorial ataşat lui E2 şi j : V2 —> V2 transformarea liniară indusă de i. Rezultă j{AB) — j(A) j{B) =AB, iar aceasta implică
s- > coincidenţa lui j cu identitatea pe V2. Deoarece ^4i(M) = i'( 4) Î ' (M) = = j(AM) = ^lilf, adică i(M) = M, izometria este identitatea pe E2.
Antideplasările nu au proprietatea precedentă.
120

12. 1) Să se arate că operaţia de compunere defineşte pe mulţimea izometriilor lui En o structură de grup (grupul izometric).
2) Să se demonstreze că operaţia de compunere defineşte pe mulţimea deplasărilor lui E.a o structură de grup (grupul deplasărilor = subgrup al grupului izometric). Acest grup admite subgnipurile: grupul rotaţiilor de acelaşi centru (deplasări cu punct fix) şi grupul translaţiilor.
13. Se dă hipercuadrica H: x5 = 2xxx.2 + 2xzxx. 1) Să se găsească ecuaţia canonică. 2) Să se găsească ecuaţia hiperplanuiui P tangent la H în A = (1, 1, 1, 1, 4).
Să se scrie ecuaţiile normalei la H în A. 3) Să se determine punctele din H în care normalele sînt paralele cu dreapta
_ xx + 2 _ xo -f 1 _ x3 — 1 _ x4 _ *5
— 2 1 —1 4) Să se verifice că imaginea funcţiei f:H—*R5, f (xv x2, xs, xA) = 2x2 2xx 2Xi 2xfl - 1 ^ p = j î + 4{xl + Â + x î + x l ) > este
V P P semihipersfera 5 : x\ + x\ A- x\ + x\ 4- x\— \, xh < 0.
R: 1) x3 = x'i + *
, V2 , VI + — - X i , x% = — xx
, 2) P:x5 + 4 = 2(x Xs= 1 — 2/, x4 = 1 — 24 ;V5 = /, 2 e R .
3) Direcţia normalei la H este dată de vectorul (2x2,2x1,,2xi,2xs, — 1). Acest vector trebuie să fie paralel cu dreapta D, adică
2;t2 2 v t 2xţ 2x$ —1
,2 ,2 ,2 , , \ 2 , V2 , :2 — %3 — *4 , unde xx = — % + - y *2, *2 =
VI , VI VI 2 Xîl %i ~ 2 *3 _ 2 *4 '
1 + 3-2 + #3 + ^4); Normala: % = 1 — 2t, x2
VI , " T %3'
= 1 - 2t,
3 — 2 — 2 1 - l 3 1
Din % = — 1, #2 = — , x3 = — , -v4 = — 1, •% = 2#1*2 + 2%A'4 găsim punctul
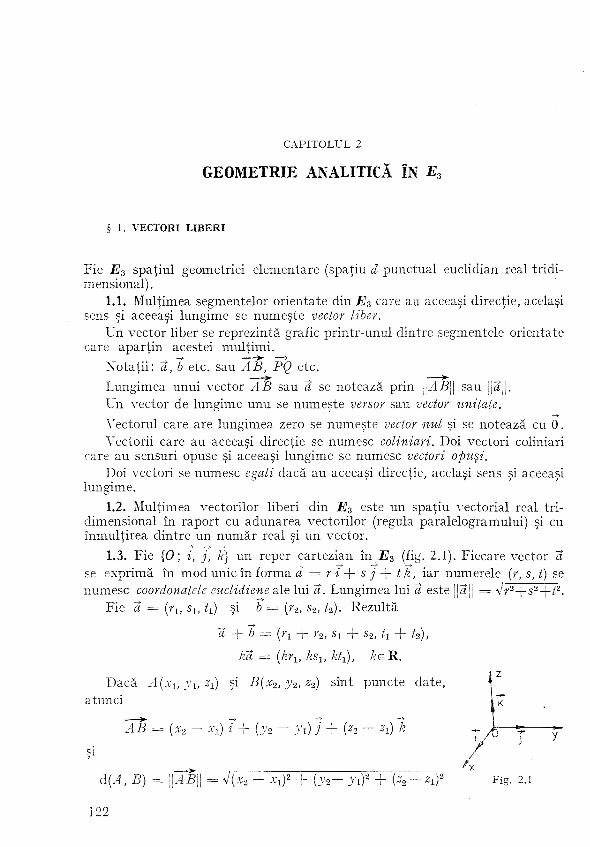
CAPITOLUL 2
GEOMETRIE ANALITICĂ ÎN E3
§ 1. VECTORI LIBERI
Fie E3 spaţiul geometriei elementare (spaţiu d punctual euclidian real tridimensional) .
1.1. Mulţimea segmentelor orientate din E3 care au aceeaşi direcţie, acelaşi sens şi aceeaşi lungime se numeşte vector liber.
Un vector liber se reprezintă grafic printr-unul dintre segmentele orientate care aparţin acestei mulţimi.
Notaţii: a, b etc. sau AB, PQ etc. Lungimea unui vector AB sau a se notează prin \\AB\\ sau ||«||. Un vector de lungime unu se numeşte versor sau vector unitate. Vectorul care are lungimea zero se numeşte vector nul şi se notează cu 0. Vectorii care au aceeaşi direcţie se numesc coliniari. Doi vectori coliniari
care au sensuri opuse şi aceeaşi lungime se numesc vectori opuşi. Doi vectori se numesc egali dacă au aceeaşi direcţie, acelaşi sens şi aceeaşi
lungime. 1.2. Mulţimea vectorilor liberi din E3 este un spaţiu vectorial real tri
dimensional în raport cu adunarea vectorilor (regula paralelogramului) şi cu înmulţirea dintre un număr real şi un vector.
1.3. Fie {0; i, j , k} un reper cartezian în E3 (fig. 2.1). Fiecare vector a se exprimă în mod unic în forma a = r i -\- s j -\- tk, iar numerele (r, s, t) se numesc coordonatele euclidiene ale lui a. Lungimea lui a este ||a|| == •Jr2J
rs~Jrl2.
Fie a = (r1, s1, ti) şi b = (r2, s2, h). Rezultă
a + b — (/, + r2, sx + s2, h -f- h),
ka = (kfi, ksx, kti), ke R.
Dacă A(%i, y'i, zx) şi B(x2, y2, z2) sînt puncte date, atunci
AB = (x2 — xt) i -f (v2 — >-i);' + (z2 — zt) k
si > / x
d{A, B) = \\AB\\ = V(*2 - xif + ( v 2 - yif + (z2 - zxf Fig. 2.1
i - — » - Î>-
122
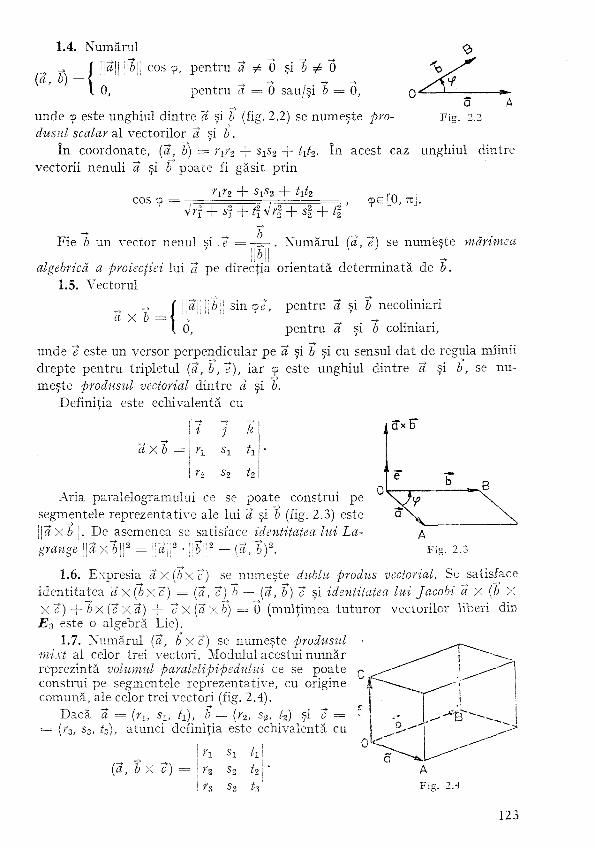
(a, b)
1.4. Numărul """ lfb\; cos 9, pentru a # 0 şi & # 0
pentru « = 0 sau/şi b = f PI
2>
o, o ^
f
5 Fig. 2.2 unde 9 este unghiul dintre a şi b (fig. 2.2) se numeşte pro
dusul scalar al vectorilor a şi b. în coordonate, (a, b) = rLr2 + SjSa + txh. în acest caz unghiul dintre
vectorii nenuli a şi b poate fi găsit prin
cos cp nr2 + S!S2 + hh
vVf +sf + tt 47\ + 4 + ti <pe[0,7t].
se numeşte mărimea
a X b ={
Fie 6 un vector nenul si ,? = - ^ - . Numărul («, ? Pi!
algebrică a proiecţiei lui a pe direcţia orientată determinată de b. 1.5. Vectorul
ijj&jl sin (ţie, pentru a şi b necoliniari
( 0, pentru a şi 6 coliniari, unde ~î este un versor perpendicular pe a şi b şi cu sensul dat de regula mîinii drepte pentru tripletul (a, b, 7), iar cp este unghiul dintre a şi b, se numeşte produsul vectorial dintre a şi b.
Definiţia este echivalentă cu i r± r2
3 Sl
s2
k h h
aXb =
Aria paralelogramului ce se poate construi pe segmentele reprezentative ale lui a şi b (fig. 2.3) este | |«X6| | . De asemenea se satisface identitatea lui La-eranse !|<f x~Sj|2 = Ijail2 • 1'b'i2 — (a, ~b)2.
S"x b
* f __B
FiR. 2.3
1.6. Expresia ax(bxc") se numeşte dublu produs vectorial. Se satisface identitatea a X(bx,~c) = (a, c) b — (a, b) c şi identitatea lui Jacobi ă X (b X X ~c) + T> X Ce X a) -+- c x ( f l X Î ) = 0 (mulţimea tuturor vectorilor liberi din E3 este o algebră Lie).
1.7. Numărul (a, b X~c) se numeşte produsul mixt al celor trei vectori. Modulul acestui număr reprezintă volumul paralelipipedului ce se poate r construi pe segmentele reprezentative, cu origine comună, ale celor trei vectori (fig. 2.4).
Dacă a = (r±, slt ti), b = (r2, s2, t2) şi ~c = :
= (r3, Ss, h), atunci definiţia este echivalentă cu
{a, b X c) = r2 s2 /a ^3 S3 £j
123
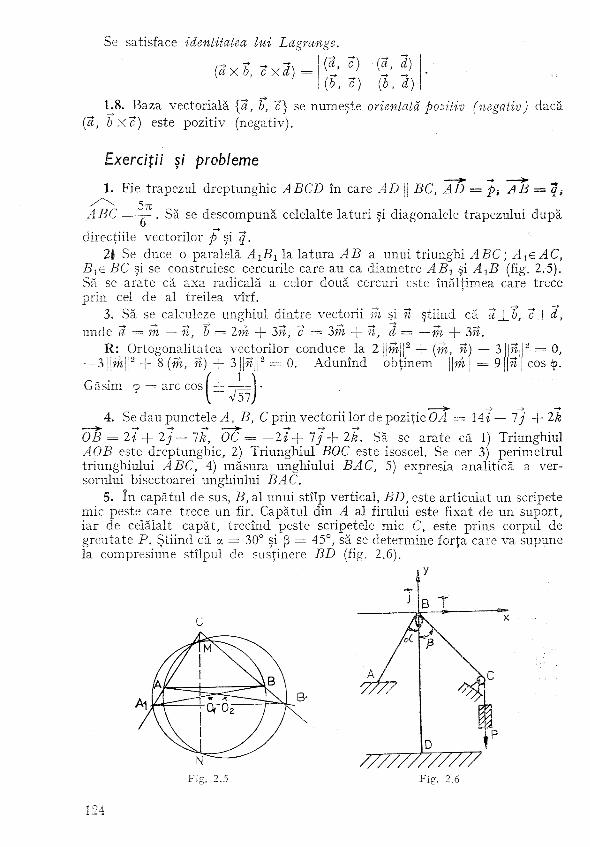
Se satisface identitatea lui Lagrange. (a., c)
(axb, ~cxd) {a, d) (b, c) (b, d)
1.8. Baza vectorială {a, b, c} se numeşte orientată pozitiv (negativ) dacă (a, b X~c) este pozitiv (negativ).
Exerciţii şi probleme
1. Fie trapezul dreptunghic ABCD în care AD |[ BC, AD =^>; AB = q}
ABC =—— . Să se descompună celelalte laturi şi diagonalele trapezului după
direcţiile vectorilor p şi q. 2 | Se duce o paralelă A±BX la latura AB a unui triunghi ABC; AieAC,
Bxe BC şi se construiesc cercurile care au ca diametre AB1 şi ATJB (fig. 2.5). Să se arate că axa radicală a celor două cercuri este înălţimea care trece prin cel de al treilea vîrf.
3. Să se calculeze unghiul dintre vectorii m şi n ştiind că aj_b, c_\_d, unde a = m — n, b = 2m + 3», ~c = 7>m -\-n,d— —m + 3w.
(m, n) — obţinem IIOTII =
R: Ortogonalitatea vectorilor conduce la 2||OT[|2
J « Î I (m, n) + 3| 0. Adunînd
Găsim co = arc cosi ± 1
j | 2 = 0, || cos cp.
V57 4. Se dau punctele A, B, C prin vectorii lor de poziţie O A = \Ai— Ij + 2k
OB = 2i + 2_/'— lk, OC = — 2iA- 1j + 2k. Să se arate că 1) Triunghiul AOB este dreptunghic, 2) Triunghiul BOC este isoscel. Se cer 3) perimetrul triunghiului ABC, 4) măsura unghiului BAC, 5) expresia analitică a versorului bisectoarei unghiului BAC.
5. în capătul de sus, B, al unui stîlp vertical, BD, este articulat un scripete mic peste care trece un fir. Capătul din A al firului este fixat de un suport, iar de celălalt capăt, trecînd peste scripetele mic C, este prins corpul de greutate P. Ştiind că a = 30° şi fâ == 45°, să se determine forţa care va supune la compresiune stupul de susţinere BD (fig. 2.6).
y
Fig. 2.6
124
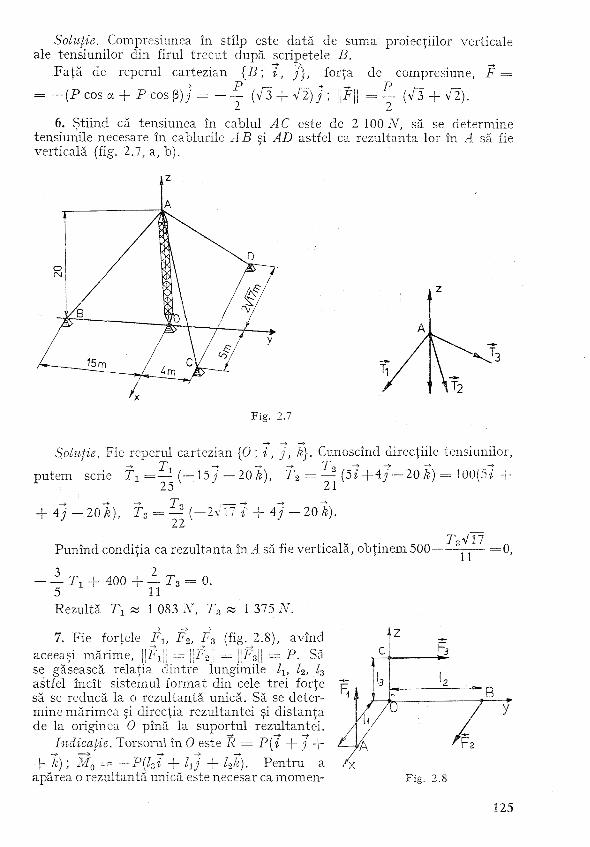
Soluţie. Compresiunea în stîlp este dată de suma proiecţiilor verticale ale tensiunilor din firul trecut după scripetele B.
Faţă de reperul cartezian {B; i, j), forţa de compresiune, F =
= ~{P cos a + P cos ,8); =—— (V~3 + V I ) ; ', \\F\\ = — (V 3 + VI). 2 2
6. Ştiind că tensiunea în cablul AC este de 2 100 iV, să se determine tensiunile necesare în cablurile AB şi AD astfel ca rezultanta lor în A să fie verticală (fig. 2.7, a, b).
Fie. 2.7
Soluţie. Fie reperul cartezian {O; i , ;', &}. Cunoscînd direcţiile tensiunilor,
putem scrie T x = — ( - 1 5 / - 2 0 A), fa = — ( 5 i + 4 / - 2 0 A) = 100(5i + 25 21
+ Aj - 20%), fs = — ( - 2 / Î 7 ? + 4 / - 20 £).
Punînd condiţia ca rezultanta în .4 să fie verticală, obţinem 500- r,vn 11
= 0,
Tx + 400 + — T3 = 0.
Rezultă 7 \ 11 1 083 X, J 3 a 1 375 N:
7. Fie forţele F x , Fz, F3 (fig. 2.8), avînd aceeaşi mărime, jJFjjj = |jF2j| == ||Fa|[ = P. Să se găsească relaţia dintre lungimile llt l2, l3 astfel încît sistemul format din cele trei forţe să se reducă la o rezultantă unică. Să se determine mărimea şi direcţia rezultantei şi distanţa de la originea O pînă la suportul rezultantei.
Indicaţie. Torsorul în O este R = P(i -j- ;' -J-+ 1); M0 = — P{lJ + Za; + IJk). Pentru a apărea o rezultantă unică este necesar ca momen-
R n
c 1 '•3
Z
-
p 12
"*]B
.4 A
TT
Fig
125

tul minim, m = M -=r- să fie nul, adică L + L 4- L = 0. Mărimea rezultanţ i i
tei, ||i?|| = V3 P, direcţia sa fiind definită de cos a = cos 3 = cos y = - = •
' ' \ '3
— 8 •
? + 2X; - (X - 1)1, I = (3 - X)? +]+ ik. 8. Se dau vectorii a
Se cere 1) valoarea lui X pentru care a şi b sînt ortogonali. 2) mărimea algebrică a proiecţiei vectorului a pe vectorul 3 -f- b pentru
a±b, 3) expresia analitică a versorului perpendicular simultan pe a şi b. 9. Fie vectorii ~OA =~j — 3/e, T e = 4? + ? / , ~BC = Ai + 8; — 8k. Se
cere 1) vectorul de poziţie al punctului B, respectiv C, 2) lungimea înălţimii triunghiului 4 5 C coborîtă din A, 3) expresia analitică a unui vector v din planul yOz astfel ca v ±_BC şi
| | w | | = | | 5 C | | . 10. Se consideră triunghiul ABC pentru care vectorii de poziţie sînt
~OA = li + b] + ik, OB=—2>i—2j, 0^=1 + 1+2%. Se cer 1) măsura unghiului ABC, 2) perimetrul triunghiului ABC, 3) aria triunghiului ABC, 4) lungimea înălţimii BB'.
R: 1) cos (BA, BC)
+ V29 + V5T, 3) aria (ABC)
58 Vl3S-29 '
1
\AB \BC\\ + \\CA\\ = V 138 +
? ltABxAQ = — V638, 4) ||.B5'|| = 11. Fie un solid rigid care se roteşte în jurul drep-
% V Z tei D : — = —— = — cu viteza unghiulară w. Să se
2 - 1 2 determine vectorul viteză al punctului M0 (3, 1 , - 5 ) din solid (fig. 2.9).
Soluţie. Vectorul viteză al punctului M0 este v = w X r0 . unde rQ este vectorul de poziţie al punctului M0, iar S = ± w « , M fiind versorul direcţiei dreptei D.
li —'] +lk 2 -t Fig. 2.'
a |l«|| _ V22 + (—1)2 + 22 _ 3 ij + i*.
» = ± y (3* + l6J + 5k)> ll»l.
/ 2 -, 1 > — î — —
v 3 3
V290
126

12. în vîrfurile A. B, D, E, H, ale unei plăci hexagonale acţionează forţe perpendiculare pe placă cu sensurile din figura 2.10. Se cunosc modulele forţelor FB = IN, FH == 2N. Ştiind că latura hexagonului regulat este 1 = 2, să se determine forţele aplicate în vîrfurile A, D, E astfel încît placa să rămînă în echilibru.
Soluţie. Se ataşează plăcii sistemul de axe Oxyz faţă de care vîrfurile hexagonului au coordonatele A( — i, —Vi, 0), J5(—2, 0, 0), D(l, — VI, 0) E(0, —2V2, 0), H(—2, —2V2, 0). Pentru ca placa să stea în echilibru sînt necesare următoarele condiţii: forţa rezultantă a sistemului să fie zero şi momentul rezultant al sistemului de forte să fie zero.
,
/
2.
c
-F 3 ^-^ /
Fi
^ - ^ 3
_ z f l _ ^r ' -F2
Fig. 2.11
Prin urmare F 4 + F B + FD + FE + FH = 0 şi O A X FA + OB x F B + + OD x f j - [ - 0 £ x F j + Off X FH = 0. Aceste relaţii sînt echivalente cu (F^ + F f l -4- F£) A = — k, respectiv
1
-o
0
-VI o
k
o + * 3 2 0
0 0 + -VI
k
o FD
+
+ -2 VI o
k
o F P
+ 1 3 _
-2 — 2V2
0 0
0
FH
== 0.
Rezultă sistemul FA + FD -\- FE = — 1, — F 4 — FD — 2FE = 4, 3F^ — — Fj, = — 2 a cărui soluţie este F^ = 0, FD = 2, F £ = — 3, sau F 4 = 0, FD = (2N)k,FE=(-3N)'k.
13. Trei cupluri acţionează asupra unui paralelipiped avînd muchiile
OA=OC = a, OB = 3a (fig. 2.11). Ştiind că ||Fi|| = 2F, ||F2|| = —,
||F3jj = 3F, să se determine mărimea şi direcţia momentului cuplului rezultant. Soluţie. Expresiile analitice ale forţelor care formează cuplurile sînt
F± = 2Fj, F 2 F - -» - k , F3 2
9F '10 y +
3F VIO
A.
127

Momentele celor trei cupluri sînt Mx = DC X F± = —2aFk, Mz = BH X ^ aF •? -ri T7*: s. 3«F -t 9aF -»
2 VlO VIO — J . 3
Cuplul rezultant are momentul M =J~^Mf=aF
- 2)%, cu ||M|| = flF
fcHM; Vio
cos a = 0, cos Ş> —
53 39 == si direcţia definită de cosinusurile directoare
3 Vio / 53 / 4
1 2
39
Vio
COS Y =
9 Vio
fi-— 2
39 Vîo
14. Să se calculeze aria paralelogramului construit pe segmentele repre zentative, cu origine comună ale vectorilor .
1) r 1 = - s i n v sm u% -j- sin w cos «_? ;
y 2 = c °s i' cos « j + cos y sin M/ + • cos'
sm
2) / ! 1 4- cos v -» , sin M sin p -» .7 H ; « '•
cos2 M cos2 » -» -? ' . ' ' -* , COS W -r r2 = —sm în — sm a tg 2*7 4 A,
C O S M • ' '
folosind identitatea lui Lagrange.
15. Se dau vectorii a = p — ăq 4- 37, b = ap — q + r, c = 2>p + q~r, unde >, <f, r sînt versori reciproc ortogonali.
1) Să se găsească valoarea lui a astfel încît vectorii a, b, Z, să fie co-planari.
2) Pentru a = 2, să se afle înălţimea paralelipipedului construit pe segmentele reprezentative ale vectorilor a, b, ~c, înălţime corespunzătoare bazei formate de vectorii a şi b.
16. Să se calculeze lungimile diagonalelor şi aria paralelogramului construit pe segmentele reprezentative, cu origine comună, ale vectorilor a, b, unde
. * - > - * ., / \ ' _ a = 5 > - 3?, & = £ + 2?, l^ll = 3, \\q\\ = 2 , # , ?) = ~ -
o
R: dx = « + 6 = 6^ — y ; p ^ J 2 = ( i 1 ( J x ) , | | i t | | = 1/328 — 36V3";
3 2 = « — b, \\d2\\ = 1' 244— 120 V I ; axb = \2>{pXq); |Jax&j| =
= 1 3 | $ | | | ? | | s i n - J = 39. o
128

17. Să se determine volumul paralelipipedului construit pe segmentele reprezentative ale vectorilor a, b, ~c,
1) a = m — 2n + fi, b = 3m + 5w — 2fi, 2 = 2m + In — 2>p
2) a = m — 2n + fi, b = "hm + 5n — Afi, ~c = 2m + In — 2>fi
ştiind că ||m|| = 3, ||w|| = 42, \\p\\ — 1, (w, p) = — , iar unghiul format 6
de vectorul w si planul determinat de vectorii n si fi are măsura I 4
R: 1) (a, 5, ~c) = 0, prin urmare vectorii a, b, ~c sînt coplanari, 2) (a, &, c) = 22(w, n, fi) = 22][m|| ||»X^>|| cos— = 33^2 ||»|| || >|| sin (n,
?) = 33. 18. Fie triedrul (O; 3 , 6, c"). Vectorii reciproci vectorilor a, b, ~c se defi
nesc prin -», 6 X c 7, c X a - , a x J « = • , b = , c' ==
(a, 6 x c ) (a, &xc) (a, &Xc)
Triedrul (O; a', o , c') se numeşte triedrul reciproc. Să se arate că
1) următoarele relaţii caracterizează complet vectorii reciproci
(a, a') = 1 (a, b') = 0 (a, c') = 0
(b, a') = 0 (6, b') = \ (6, c') = 0
(c, «') = 0 (c, 6') = 0 (c, c') = 1,
2) ({a'xP), [(b'xc')x(c'x«')])= (a, 6 x c ) 2
3) (*'' ? x c ) + (a, 5 ' X c) + (a, ? X c ' ) _ a'2 + 5 ' 2 + c ' 2 ^ £ x ? ) 2
(a*, l ' x c ' ) + (S, ? X « ' ) + (c, a'x"S') a2+b*+c* " '
4) Să se verifice aceste relaţii pentru cazul numeric a = —2i-\-j -\-2k, b = 5t — 3>~] + 9~k, c = 9? + i] + 2%.
19. Se dau vectorii a = li + j — k,b = 3i + 2j + k,~c = —j+ 2k. Se cere
1) volumul paralelipipedului construit pe segmentele reprezentative, cu origine comună, ale vectorilor a, b, ~c;
2) expresia analitică a vectorilor reciproci a', b', ~c'; 3) volumul paralelipipedului construit pe segmentele reprezentative ale
vectorilor reciproci a', b', ~c'; 4) să se arate că a X (b X c) # (a x o) X c" pentru vectorii daţi mai sus.
R: 1) (2, 6, £) = 7 ; 2) a' = — (5? - 67 - 3?), & ' = i - ( - ? + 4 ; +
+ 2A), c ' = - l (3? - 57 + £ ) ; 3) (a', &', c')= — -
9 — Probleme de algebră — c. 264 129
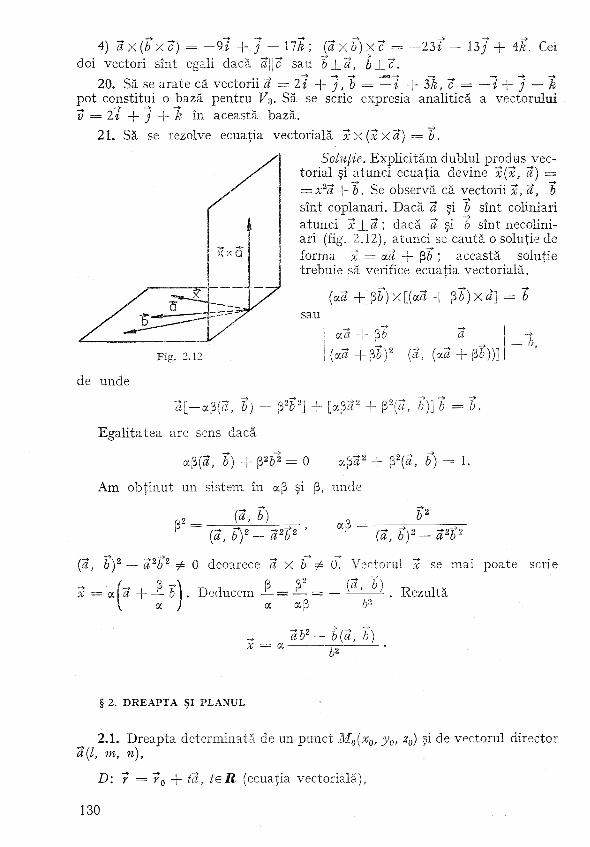
4) l x ( i x c ) = —9.» + j - \lk; (axb)Xc = - 2 3 j - 13; + 4k. Cei doi vectori sînt egali dacă a\\~c sau b\Ja, b_L~c.
20. Să se arate că vectorii a = 2i -f- ;', b = —» + 3&, ? = — j + ;' — & pot constitui o bază pentru V3. Să se scrie expresia analitică a vectorului » = 2» + ;' + & în această bază.
21. Să se rezolve ecuaţia vectorială xX(xX'd) = b.
Soluţie. Explicităm dublul produs vectorial şi atunci ecuaţia devine x(x, a) = = x2a-\- b. Se observă că vectorii x, a, b sînt coplanari. Dacă a şi b sînt coliniari atunci xj_a; dacă a şi & sînt necolini-ari (fig. 2.12), atunci se caută o soluţie de forma x = aia + 36 ; această soluţie trebuie să verifice ecuaţia vectorială,
sau
Fig. 2.12
(OM + 8&)x[(aa + 36) X 2] = 6
aa + 36 a | _ -t (o2 + S&)2 (a, (aa + Ş>b))} 1 ~~ "'
de unde
3[-a3(5, &) ~ M + L«?«2 + P2(«, &)1 & = &-Egalitatea are sens dacă
aS(2, 6) + B 2 ^ = 0 a3«2 + 82(«, &j = 1.
Am obţinut un sistem în oc8 şi 8, unde
(a, 6) „ P P2 =
(2, 5 ) 2 - a2b Zt2 ' a3 = (a, b)2-a2b'<
(a, b)2 — a2b2 j= 0 deoarece a X b ^ 0. Vectorul x se mai poate scrie
x = a (* + ±î) 5 j . Deducem — = — = x J a aS
x = a-
(a, 6)
62
. Rezultă
§ 2. DREAPTA ŞI PLANUL
2.1. Dreapta determinată de un punct M0(x0, y0, z0) şi de vectorul director a(l, m, n),
D: r = r0 + £«, £eU (ecuaţia vectorială),
130

D: x = x0 + lt, y = v0 + m^> z = o + ^< ^ -K (ecuaţii parametrice),
— *o ^ - >'o ^ — o D / «î
Convenţie: dacă un numitor este zero, atunci numărătorul corespunzător trebuie egalat cu zero.
2.2. Dreapta determinată de două puncte Mt(xi, yt, zt), i =1,2,
D: X — X\ y — y\ Zl
%2 — xi y% — yi z-2 Z\
2.3. Unghiul dintre ciouă drepte orientate Dlt D2, de vectori directori a —*
respectiv b,
cos o (a, b) \mw\bw ?e[0 , TU].
2.4. Planul determinat de un punct M0(x0, y0, z0) şi de un vector normal l{a, b, c).
P: a(x - x0) + b(y — y0) + c(z - z0). = 0
2.5. Ecuaţia generală a unui plan,
ax + by + cz + d = 0, a2 + b2 + c2 ^ 0.
2.6. Planul determinat de trei puncte necoliniare Mi(xi, yt, zt), i = 1, 2, 3,
P: x y z J xi }'i zi 1 x2 y2 z2 1 x3 y-3 zs l
= o
2.7. Planul determinat de un punct M0(x0, y0, z0), şi de doi vectori ne-coliniari u{lx, mx, »i) şi v(l2, m2, n2),
P: 7 = 70 + ru + sv (ecuaţia vectorială)
[ x = x0 + y/x + sh y = y0 + f » ! + s« 2 , y, ş e f i (ecuaţii parametrice), 2 = O + r W l + SW2
Zi ?% nx
l2 m2 n2
0.
2.8. Unghiul dintre două piane orientate Plt P 2 cu vectorii normali % respectiv w2,
(«!, ns) cos o
| |»l | | |p2| | oe[0, TU].
131

2.9. Dreapta ca intersecţie de plane,
f a,x + biv 4- c,z + d, = O \ax b-, cx rang
r«i *i L«2 a [ a2x + b2y + c2z + d2 = O |_a2 *a c2.
Vectorul («xr + bxj + c^) X (a2i -4- &2.7 + c2A) dă direcţia dreptei. Dacă r, seR, r2 -\- s2 =£ O, atunci
r{axx + hxy 4- c^ + ^1) + s(a2# + £>2v + c2z + rf2) = O
este ecuaţia fasciculului de plane care trec prin dreapta considerată. 2.10. Distanţa de la un punct A la o dreaptă D ce trece prin M0 şi are
direcţia a,
2.11. Distanţa de la un punct M0(x0, y0, z0) la planul P: ax + by + + cz + d = 0,
d(M • P) = 'a*° + &3'° + czo + ^i . Va2 + 62 + c2
2.12. Unghiul dintre o dreaptă orientată de direcţie a şi un plan orientat de normală n,
(a, n) sin o I I I l | - * M '
|a|| ||w|| 2.13. Pentru a determina ecuaţiile perpendicularei comune a două drepte
Dx şi D2 de vectori directori ax respectiv a2 se poate proceda astfel: — se găseşte direcţia perpendicularei comune, w = a 1 x a 2 , — se scrie ecuaţia unui plan P± ce trece prin Dx şi conţine pe n, — se scrie ecuaţia unui plan P 2 ce trece prin D2 şi conţine pe n. PXC\ P a
este perpendiculara comună căutată.^ Distanţa dintre dreptele Dx şi D2 este
| ?2 — ri, « i X a 2 | d(D l l D2)=-« i X n 2
Exerciţii şi probleme
1. Se dau punctele A{i, — 1, 3), 5 (5 , 1, —1), C(0, 4, —3). Se cer 1) ecuaţiile carteziene, parametrice şi ecuaţia vectorială ale dreptelor AB,
respectiv AC; 2) măsura unghiului dintre aceste drepte; 3) ecuaţia carteziană şi ecuaţia vectorială ale planului care conţine
punctul C şi este perpendicular pe dreapta A B; 4) locul geometric al punctelor egal depărtate de punctele A şi B; 5) distanţa dintre planele obţinute la 3) şi 4).
132

v \ y I 1 v 3 Soluţie. 1) Conform cu § 2.2 obţinem AB: = =—•— = ,
_ _ - ' 2 2 - 4 unde putem considera a = i + j — 2k. Ecuaţiile parametrice sînt x = i-\-t, v = — 1 + t, z = 3 — 2t, teR. Ecuaţia vectorială a dreptei AB este r = 7A + ta, unde 7A este vectorul de poziţie al punctului A ; o altă formă pentru ecuaţia vectorială a unei drepte este r X a = b, unde b = 7A X 3 ;
deci . 4 5 : r x ( i * + ; - 2 l ) = - l + 9 ; + 4^. Analog ^ C ; ^ ^ = ^ t i =
z — 3 _ » - » - » • = 3 — 3s, v = — 1 + 5s, 2 = 3 — 6s, se R; r X (—3i -\- 5j — - 6
_ 6%) = - 9 1 + 9 / + \2%. 2) Notăm a = ţ + y — 2Ă, 6 = — 2>i + 5_;' — 6k. Conform cu § 2.3
-u l.(-3)+ 1-5+ (-2). (-6) cos qj = , .
Vi2 + l2 + ( - 2 ) 2 V ( - 3 ) 2 + 52 + (—6)»
. , . ]H şi aeci 9 = arc cos / -r= •
3) Vectorul director al dreptei AB este un vector coliniar cu normala planului căutat P. Conform cu 2.4 ecuaţia planului P este: \{x — 0) + + l(y — 4) + (—2) (z + 3) = 0 sau x + y — 2z — 10 = 0. Ecuaţia vectorială este P: (r, (i + / — 2%)) = 10.
4) Locul geometric este planul mediator Q al segmentului AB; Q; x -\- y — 2z — 2 = 0.
5) P \\Q; fie M0 un punct cunoscut al planului Q, M0(l, 1 ,0 ) ; d(P, 0 = ă(M0, P). Conform cu 2.11,
d(M0, P) = i i l l ± ^ - 1 + ( - 2 ) - Q - 1 0 l = 1 V6. Vi2 + l2 + ( - 2 ) 2 3
2. Se consideră punctele A(l, 3, 0), 5 (3 , —2, 1), C(a, 1, - 3 ) , D{1, —2, 3). Să se determine a astfel încît punctele să fie coplanare; să se scrie ecuaţia carteziană a planului determinat de ele. Ce se poate spune despre acest plan?
3. Să se scrie ecuaţia planului care trece prin punctul M0(2, —1, 1) şi este perpendicular pe dreapta definită de planele P x : x + 2y 4- 2z + 2 = 0, P 2 : x + y + z + 1 = 0.
R: Direcţia normalei la plan coincide cu direcţia dreptei D, unde
D_ [ * + 2v + 2.sr + 2 = 0 x + y + z+l = 0.
Vectorul director al dreptei D este a = ni X n2 = j — k.
P: y — z + 2 = 0. Planul obţinut este paralel cu Ox.
4. Să se scrie ecuaţia planului care trece prin M0 (1, — 1 , 3) şi este paralel cu dreptele
p + v - 2 * + 1 2 = 0 ) , x + y - z = 0 \ x — 3 = 0 \ 2 * - 5 v + 3 2 - - l = 0.
133
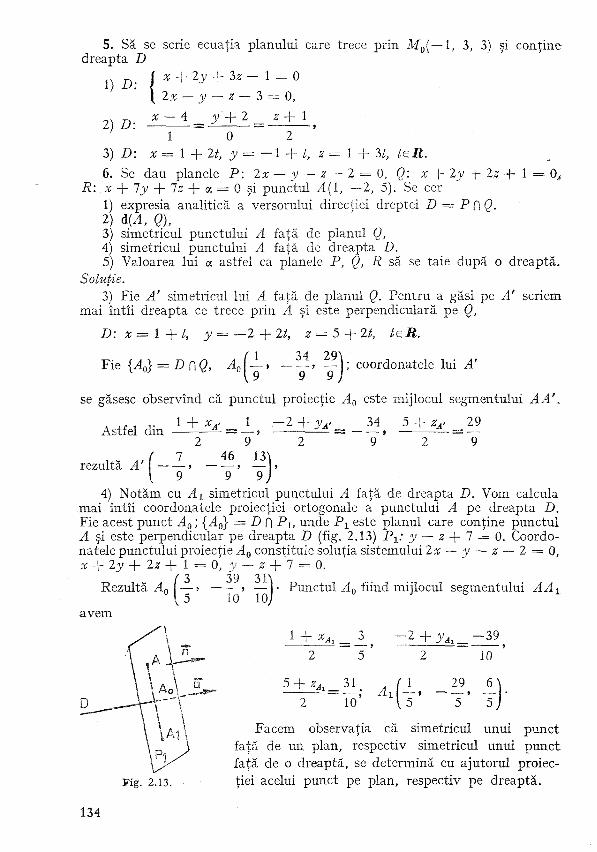
5. Să se scrie ecuaţia planului care trece prin M0(—l, 3, 3) şi conţine dreapta D
lx + 2y+iz-l=0
2) D :
2^ — y — z — 3 = 0, x — 4 y + 2 _ 2 + 1
1 0 2 3) D : % = 1 + 2t, y = — 1 + t, z = 1 + 3/, tefi. 6. Se dau planele P : 2% — y — z — 2 = 0, (?: % + 2v + 2z + 1 = 0,,
R: x + ly + Iz + a = 0 şi punctul A{\, —2, 5). Se cer 1) expresia analitică a versorului direcţiei dreptei D = P (] Q. 2) â(A, Q), 3) simetricul punctului A faţă de planul Q, 4) simetricul punctului J. faţă de dreapta D. 5) Valoarea lui a astfel ca planele P , Q, R să se taie după o dreaptă.
Soluţie. 3) Fie A' simetricul lui A faţă de planul Q. Pentru a găsi pe A' scriem
mai întîi dreapta ce trece prin A şi este perpendiculară pe Q,
D:x=l+t, y=—2 + 2t, z = 5 + It, teR.
( 1 34 29\ _ , , __ ; coordonatele lui A'
se găsesc observînd că punctul proiecţie A0 este mijlocul segmentului AA',
1 + xA. _ 1 ? ~2 + yA,__ 34 ^ 5 + y = 29 2 ~ 9 ' ~ 2 9 ' 2 9
Astfel din
i*- *>( 7 4 6 1 3 \
rezulta /4 > — — > — \> { 9 9 9 j 4) Notăm cu A± simetricul punctului A faţă de dreapta D. Vom calcula
mai întîi coordonatele proiecţiei ortogonale a punctului A pe dreapta D. Fie acest punct A0; { .0} = D f\ Plt unde P± este planul care conţine punctul A şi este perpendicular pe dreapta D (fig. 2.13) Px: y — z + 7 = 0. Coordonatele punctului proiecţie /1 0 constituie soluţia sistemului 2x — y — z — 2 = 0, A- + 2j> + 2z + 1 = 0 y — z + 7 = 0.
— » — — > — • Punctul _4n fiind mijlocul segmentului A A-, 5 10 ÎOJ
3 - 2 + 3 V avem
M i -39 5
& -H 2
' 1 29
10
1 ) Facem observaţia că simetricul unui punct
faţă de un plan, respectiv simetricul unui punct faţă de o dreaptă, se determină cu ajutorul proiecţiei acelui punct pe plan, respectiv pe dreaptă.
134

7. Asupra unui cub avînd latura l — 5, acţionează un sistem alcătuit din forţele Flt F2, F&> Fi Şi cuplul C%, ca în figura 2.14. Ştiind că \\Pj\\ = \\F2\\ = 120 N, \\F9\\ = \\Fi\\ = 120V2"iV şi HCJII = 600 N, se cere:
1) să se reducă sistemul dat în punctul A, 2) să se arate cu ce este echivalent sistemul, 3) să se scrie ecuaţiile axei centrale. Soluţie. 1) Faţă de reperul cartezian {0: i,
j , k}, cele patru forţe au expresiile analitice, Fi = 120 £, Fz= 120 k, Fs = 120? + 120/, Fi = 120? — 120;. Vectorul rezultant, R = 240(? + %).
Aplicînd relaţia de rVfmiţie a momentului forţei faţă de punct, pentru fiecare din cele patru fcrţe se obţine,
2.14.
MAl = Q; MA AGxF2
i j -5 5 0 0
k 0
120 600(i + j)
MA AOxFo, -600 k; MAl = AExF4 = 600(i + j).
Momentul cuplului fiind MCi = —600 j , prin însumare se obţine momentul rezultant MA = 600(2? + ; — %).
2) Deoarece momentul rezultant MA nu este perpendicular pe rezultanta R, sistemul se reduce la un tcrsor veritabil.
3) Se face trecerea în originea O. Se aplică relaţia M0 = MA -4- O A X — • - * - » - . 15 5
xR = 600(2i — j — k). Ecuaţiile axei centrale sînt y = — > x — z = ' 4 2
Ea este situată în planul y = — şi înclinată cu 45° faţă de planul xOy.
8. Se dau dreapta D: x + 2 y 1 z+ 1
2 1 şi planul P : 2A; — _y -4- 2z + 3 = 0. Se cer
1) mărimea unghiului dintre dreaptă şi plan, 2) ecuaţia planului Q care e perpendicular pe dreapta D şi care conţine
punctul D h Q, 3) punctele dreptei D care se află la distanţa de două unităţi faţă de
planul P. 9. în spaţiul fizic tridimensional considerăm o sursă de lumină şi o oglindă
plană. Modelăm acest spaţiu prin spaţiul punctual euclidian real R3. Presu-punînd că, faţă de reperul canonic din R3 , planul oglinzii este P: x + y-\- z = 1, iar direcţia unei raze de lumină ce cade pe P este dată de vectorul a(l, — 1, 1), să se afle:
î) punctul de incidenţă dintre raza de lumină şi oglindă, 2) unghiul de incidenţă,
135

3) ecuaţiile dreptei ce reprezintă raza reflectată, 4) punctul în care raza reflectată întîlneşte un ecran situat în planul ce
trece prin O şi este paralel cu axele Ox şi Oy.
10. Se dau dreptele D1:fX~y + z ~ 3 = 0
z + 1 = —-— Şi punctul M0(—3, 4, 0). Se cer
2x + y — 2z+ 5 = 0 D« l _ y + l __
—5
1) ecuaţia planului P determinat de M0 şi DSl 2) distanţa de la M0 la Z)2, 3) unghiul dintre dreptele Dx şi D2, 4) ecuaţiile dreptei D care trece prin M0 şi se sprijină pe Dx şi D%. 11. Să se scrie ecuaţia planului determinat de dreptele
!) p . f 9* — 2 y + 3 s — 16 = 0 c . n . x—l_y+l z—5 \ 5x —
2) I»!
2.y + 3z — 16 = 0 ly + z — 6 = O
4 _y z + 3 -l
şi D2:
şi Z)2:
2 3 + 2
—4
3 - l z
~2
Să se calculeze distanţa dintre dreptele Dx şi D2. Soluţie. 1) StabiHm expresia analitică a vectorului director « j al dreptei Du
« 1 = K X X W 2 = 9 — 2 3 5 - 2 1
= Ai + 6] — 8k.
Se constată că ax = 2a2, deci dreptele L>! şi D2 sînt paralele (fig. 2.15). Vectorul normal la planul P determi
nat de aceste drepte este n — a2xM2Mlt
unde Afxe Di, Afifo, —— , 5 ] ; iW3e Da ,
-^2(1, — 1, 5). Găsim » = 2 (7+ Ij + 2k). Ecuaţia carteziană implicită a planului P este x + 2y + 2z — 9 = 0.
Fig. 2.15.
2) Di || Di, «iHSa = 3»1*- J + [2£, P : * - 17^ - 10* - 34 = 0,
12. Se dau dreptele
x — 2_y-{-l_ z 1) D i :
2) Dx:
— 1
x - 1
3
y+ 1
Z).
Z),
* + 1 _ y — 8 _z— 3
7 - 3 1
g — 2 _ _y __z + 1
2 ~ T r~' Să se calculeze mărimea unghiului celor două drepte şi să se stabilească
poziţia relativă a dreptelor. Să se scrie ecuaţiile perpendicularei comune celor două drepte.
136

Soluţie. 1) Elemente cunoscute M1(r1)eD1, Mx(2, — 1 , 0), ax = (—1, 3, 1),
M2(r2)eD2, M2(-l, 8, 3), «8 = (7, - 3 , 1); cos 9 = - - ^ . V649
Pentru a decide poziţia relativă calculăm distanta dintre drepte, conform cu 2.13,
ă(D1, D2)
- 3 9 3 - l 3 1
| (72 — f 1( « iXa 2 ) | j 7 —3 1 = 0
| |«lX«2 | | V63+ 8 2 + ( - 1 8 ) 2
Deoarece d = 0, rezultă că dreptele sînt concurente. 2) Af1(l, - 1 , 0 ) , « ! = (2,3, 1); Af2(2, 0, - 1 ) ; « 2 = ( 2 , 2, 1).
3 -» -» -d = - = sau («i, &2) + («2, 6i) = —3 =£ 0. Deci dreptele sînt oarecare. Con-
v5 form cu 2.13 ecuaţiile perpendicularei comune sînt date de intersecţia planelor P i şi P 2 ,
(MXM, axxn) = 0
{M2M, a2xn) = 0;
MXM =r—?1, = (x— \)i + (y + 1) j+zk, n = ^ X a j ==*'— 2A etc. Obţinem
f 6AT —;5v + 3^ — 11 == 0 \ Ax — 5y + Iz — 6 = 0.
•v — \ >\) 1 2 7
13. Fie punctul A0 (—2, 0, 1), dreapta Dx: = - = 1 3 4 2
planul P: 11 x + 6y — z + 2 = 0. Să se scrie ecuaţiile dreptei D2 care trece prin AQ, intersectează dreapta Dx şi este paralelă cu planul P.
14. Să se scrie ecuaţia carteziană a planului care trece prin dreapta D: l si este echidistant fată de punctele A(i, —5, 4),
\ x + y — 3 z + l = 0 ' B{—5, 1, 0).
R: Af0(—1, - 2 , 2), i l f 0 eP , P : 15A;—9v+l 1^—25=0. •v 2 v -!— 1 £ 1
15. Fie dreapta D: = — = şi punctul A(— 1, — 1 , 2). Se cer
1) ecuaţia carteziană şi vectorială a planului determinat de D şi A; 2) distanţa de la punctul A la dreapta D; 3) coordonatele simetricului punctului A faţă de dreapta D. R: 1) P:x - 5y + 3z - 10 = 0, (r, (1 - 5 ; + 3^)) = 10, 2) d = VîoT
.3) A'(5, - 1 , 0 ) . 16. Să se studieze poziţia relativă a planelor P: x + y — 2z = 3, Q: x —
— y — z = — 1, R: 2>x + 3v — 6z = 5. R: Studiul poziţiei celor trei plane revine la studiul sistemului format de
ecuaţiile celor trei plane; rangul matricei sistemului este doi şi determinantul .caracteristic corespunzător este nenul. Conform teoremei lui Rouche' sistemul
137

este incompatibil, deci cele trei plane nu au nici un punct în comun. Se observă că planele P şi R sînt paralele; aceste plane determină pe Q două drepte paralele.
17. Fie planul P: 2>x + y — z — 9 = 0 şi punctul A(i, 7 , - 1 ) . Se cer 1) distanţa de la punctul A la planul P, 2) coordonatele simetricului punctului A faţă de plan. Să se stabilească coordonatele a două puncte din plan şi să se verifice
teorema celor trei perpendiculare sau o consecinţă a acesteia. R: 1) ă(A, P) = VTT; 2) A'{—2, 5, 1), 3) Fie Mx (3, 1, 1), Mz(0, 8, - 1 )
puncte ale planului P. Fie A0 proiecţia punctului A pe planul P, A0 (1, 6, 0). Va trebui să găsim coordonatele punctului 13 astfel ca A0B_j_M1M2 şi apoi să arătăm că AB \_MXM2. Ortogonalitatea dreptelor va fi dovedită prin ortogonalitatea vectorilor. Fie v = (l, m, n) vectorul director al dreptei A0B. Din condiţiile A0BeP, A0B±_MXM2 obţinem sistemul 3/ -+- m — n = 0,
3/ — Im + 2n = 0. Parametrii directori ai lui v vor fi — — — = — • Obti-5 9 24
„ / 5 7 363 —12 nem i> — >
162 62 31 18. Se dau punctele M0(l, 0, i), ,4(0, 2, 1), B( — 2, 0, 1) şi pianul P: x —
— v + 2z = 0. Se cere 1) proiecţia Mo a punctului M0 pe planul P; 2) proiecţia M0' a punctului M0 pe dreapta ,4JB, 3) să se verifice că dreapta MgM0 este perpendiculară pe dreapta y4S
şi să se determine poziţia dreptei AB faţă de planul P. 4) M(x, y, z) fiind un punct arbitrar în planul P, să se exprime distanţa
MQM şi să se afle coordonatele lui M, astfel ca această distanţa să fie minimă. R: 1) M 0 {— > i - ° ) ; 2) M j [ ——» —» l i ; 3) Dreapta AB este conţi-
-> nută în planul P ; 4) Notăm d = l|Af0Mjj2; d = {x — l)2 + y2 + {z — l)2.
Deoarece Me P , avem ă(x, y) = (x — l)2 -j- y2 + 1 — 11 . Din siste-PT-'-'J"-m u l — = 0, — = 0 ob ţ inem p u n c t u l critic x = y = — Deoarece (x, v)—>
c% rjy " 2
—*• ă(x, y) este convexă , p u n c t u l MU — > — > 0 este u n p u n c t de m i n i m
global. Deci d i s t an ţ a m i n i m ă este a t insă p e n t r u M = M'0. 19. Fie planele P x : x — 3y + z — 1 = 0 , P 2 : x + 2y — 2 = 0. Să se scrie
ecuaţia carteziană a simetricului lui P x faţă de P 2 . R: Planul căutat P 3 face parte din fasciculul determinat de P x si P 9 ;
P3:2>x + y + z — 2> = 0.
20. Se dau planul P: x — y+2z — 3 = 0, dreapta D: c -^— = —
şi punctul 0 ' (3, - 2 , 4). 1) Să se determine ecuaţia simetricului planului P în raport cu punctul O'. 2) Să se determine ecuaţiile simetricei drepte D în raport cu punctul O'..
x — 2 v + 2 -z — 8 R: 1) x - y + 2 * - 2 3 = 0 ; = } - = — •
3 - 2 1
138

21. Să se determine ecuaţiile simetricei drepte D în raport cu dreapta Dj j n x + 1 j ' 2—2 % v 2 + 1 X J . — = > x / i : — = —— = .
2 _ i • 4 1 —2 3 R 7 a : + 15 _ 7_y + 16 _ 72 + 4
2 ~ —25 ~ 20 x — 1
22. Se consideră planul P : 3x — 2y + z — 4 = 0 si dreapta Z>: = 2
v + 1 2 - 2 — = Se cer
3 5 1) ecuaţiile proiecţiei ortogonale a dreptei D pe planul P, 2) ecuaţiile dreptei simetrice dreptei D faţă de planul P. R: 1) DA 3% ~ 2y + Z ~ 4 = ° ; 2) Considerăm punctele AX{1, — 1, 2),
| # + jy — 2 + 2 = 0 ^ al 0, — — > — — situate pe dreapta D. Calculăm simetricele acestor puncte
/ 2 1 11\ f 3 33 fată de planul P; găsim A[ — — > ——> — . respectiv A'A > »
* b \ 1 1 1 jV V [ 14 14 4 \ ^ , „ , , „ , - , L.. Ix + 2 7y + 1 Iz — 11
—— • Dreapta căutata este A-, A« de ecuaţii — = 1) 1 - 3 1 —30
>Y 1 V 2 -j— 2 23. Se dau dreapta D-,; - = + = , planele P:2x— oy+32 —
4 1 - 1 — 7 = 0, <?:3.y—z + 1 = 0 şi punctul ikf0(2, 0, —3). Se cer
1) distanţa de la dreapta Dx la planul P, 2) planul care trece prin Dx şi este paralel cu Z)a = P f) Q, 3) dreapta care trece prin M0 şi se sprijină pe Dx şi D2-R: 1) (llt U) = 0=» D i | | P ; «1(1)!, P) = d(Mi, P) = - ? i = , 2) Dreapta Djse 38
-mai poate scrie D,:l . Planul cerut R face parte din fasci-4 y + z + 2 = 0
cuiul % + (—4 + X) j> + \z — 1 + X = 0; a2 = (—2, 1, 3) (»x, «,) = 0, X
= 2 , P : 2 , - 5 J + 32 + 4 = 0; 3) DA %~ ^ ~ l + ^ + * + 2 ) = 2 •" \ 2 ^ - 5 ^ + 3 2 - 7 + iL(Sy—z+l) =
A; + 2y — 2 = i = 0 0
24. Se dau planele P: 4x — y - 2z — 11 = 0, Q: x — ly + 32 — 8 = 0, P : x + 2j< + 2 - 2 = 0.
1) Să se calculeze unghiurile dintre plane. 2) Să se stabilească punctul comun al planelor. 3) Să se scrie ecuaţiile dreptei D de direcţie (— 1, 1,2) care se sprijină
pe dreptele Dx= Pf]Q, D2 = P fi R. R: 1) Planele KÎnt ortogonale, 2) M„(3, - l , 1), 3) £>:{ * ~~ y + Z ~ D = °
l 7#+5_y+2 — 17 = 0.
139

§ 3. SCHIMBĂRI ŞI REPERE CARTEZIENE
3.1. Izometriile de bază sînt: rotaţia, simetria în raport cu un plan, simetria în raport cu un punct şi translaţia.
Rotaţiile şi simetriile se mai numesc şi transformări ortogonale. Ele sînt aplicaţii liniare date prin matrici ortogonale.
Orice izometrie este de forma i = f»o, unde t este o translaţie iar o este o transformare ortogonală.
3.2. Fie i = t°o izometrie care mută reperul <& = {0; i, j , k} în reperul Si' = {O'; i',j',k'}. Izometria i se numeşte pozitivă (deplasare) dacă baza {i',j',k'\ este orientată pozitiv şi negativă (antideplasare) în caz contrar.
Principalele izometrii pozitive sînt rotaţiile şi translaţiile, iar principalele izometrii negative sînt simetria în raport cu un plan şi simetria în raport cu un punct.
3.3. Schimbarea reperului printr-o transformare ortogonală o (fig. 2.16), 0' =o(0) = 0, %' =o(i) = ani + a21j + a31k
]' =°{j) = fl12^ + a22J + «32& k —o{k) — a13i + a23j + a33k
unde
A «11
«21
_«31
a 12
«22
«32
«13
«23
«33_
este o matrice ortogonală, adică A*A = I. în coordonate,
X
y L*. = A
~ x'~ y'
[z'j 9
rx'\ y'
U'J = <A
X
y z _
Această izometrie este pozitivă dacă det A = + 1 (rotaţie) şi negativă dacă det A = — 1 (rotaţie şi simetrie).
3.4. Schimbarea reperului printr-o translaţie / (fig. 2.17) O' = t{0), V = — t(i) = i, j ' = t(j) — j , k' = t(k) = k sau în coordonate
x = x' -\- a, y = y' -\- b, z = z' -\- c, unde O' {a, b, c).
x, y, z. M (x',y',z'
Fig. 2.16.
140

3.5. Schimbarea generală i = t° o
O' = (t°o) (O) = t(0), T = f(o(i))=o(i), j'HAoU)) = o(7),
k' = t{o(k)) = o(k)
y sau în
x — a y - b
_z — c _
coordonate
= A \x'}
y' U'J
> ' xr
y' [z'\
= 'A x — a y—b
_z — c.
(x,y) Mlx'.yVx-
3.6. în particular putem vorbi despre izometrii în plan. Din acestea reţinem roto-translatiile care sînt caracterizate prin J | y (fig. 2.'18)
f ^ = x' cos 6 — y' sin 6 + * \ y = %' sin G + y' cos 8 + b Fig. 2.18.
Exerciţii şi probleme
1. Fie hexagonul regulat ABCDEF care raportat la sistemul #Cy are vîrfurile 5 şi E pe axa Cx, respectiv Cy (fig. 2.19). Se consideră un alt sistem x'Fy' orientat pozitiv, axa absciselor fiind FA.
1) Să se stabilească formulele de trecere de la xCy la x'Fy'. 2) Să se găsească coordonatele vîrfurilor C şi E faţă de x'Fy'. 3) Să se determine distanta de la punctul x = — 2, y = 1 la punctul
* ' = — 2, / = 1. Soluţie. 1) Izometria se compune dintr-o translaţie în -F(— 2, — 2V3)
2 şi o rotaţie de unghi 8 = — - ; conform cu 3.6 scriem
V3 7
V3 2 -
- 2 V 3 .
2) Coordonatele punctului C faţă de noul sistem sînt date de
0 1 , V3 , V3 , - T * ' - T j , - 2 , 0 = — x -
2 Obţinem C(2, — 2VI). Analog £(— 1, —VI). Fig. 2.19.
14!

3) Fie punctul Mx (— 2,1) raportat la sistemul xCy şi M2 (— 2,1) raportat la noul sistem x'Fy'. Vom stabili coordonatele lui M2 faţă de sistemul vechi.
*=-i(-2)-^ ( + 1 ) -L, y = ( - 2 ) (+1) - 2V3.
Obţinem M, — 1 f - 1 - ^ . --i-3v'3J;||ii^M2|| =1^31 + 87 3. V3
2. Fie sistemul de coordonate Oxyz şi un alt sistem O'x'y'z' situat faţă de cel iniţial ca în figura 2.20.
1) Să se determine transformarea care face trecerea de la sistemul Oxyz la sistemul O'x'y'z', ştiind că O' se depărtează de O de-a lungul lui Ox, rectiliniu şi uniform, cu viteza v.
2) Să se arate că ecuaţiile lui Newton privitoare la dinamica punctului d2x ' d2v ă2z
material, x = m -^-^> y = m^-^-> z = m^^- sînt invariante fată de trans-ăt2 ăi2 ăi2
formarea de mai sus. R. 1) %' = x — vt, y' = y, z' = z (grupul de transformări al lui Galilei
din cinematica clasică). Pentru stabilirea lor s-a lucrat cu sisteme inerţiale, adică cu sisteme care se mişcă rectiliniu şi uniform şi nu sînt acţionate de forte, sau sînt acţionate de forţe care sînt în echilibru.
Fig. 2.20.
3. Fie sistemul xOy şi fie punctele O, A (2, 0), B (2, 2), C (0, 2) vîrfurile unui pătrat . Fie izometria i cu proprietatea i (OABC) = O0A' B' C, unde coordonatele noii origini O0 sînt (3, — 1) şi noua axă a ordonatelor O0C
3 face cu vechea axă a absciselor un unghi ascuţit a pentru care tg a = —
(fig. 2.21). Se cer 1) coordonatele vîrfurilor pătratului O0A'B'C faţă de sistemul xOy, 2) să se determine punctul fix al izometriei.
Soluţie. 1) Unghiul de rotaţie este 8 = —• + a; sin 8 = —cos a = ——> 2 5
3 cos 8 = sin a = — Sistemul x'O0y' se obţine din sistemul xOy printr-o
rototranslatie caracterizată de formulele x = — x' 5
+ | y - i .
— y' + 3, y = -
142

Faţă de noul sistem x'O0y' vîrfurile O0, A', B', C au aceleaşi coordonate ca vîrfurile O, A, B, C fată de vechiul sistem xOy. Coordonatele punctului A'
3 4 4 fată de sistemul xOy le găsim din relaţiile x = — -2 -4- — • 0 + 3 , y = — —•
5 5 " 5 3 2 -f— • 0 5
'21 i ; A'\ — , 5 y). Analog , ( f , 4 ) , c, ( f, 1).
2) în formulele de transformare luăm x = #', v = y'. Obţinem punctul M0
1 7 ale cărui coordonate sînt x = — > y = — — fată de ambele sisteme. 2 2
4. în sistemul triortogonal 0#V2 fie cubul de latură unitate cu unul din vîrfuri în origine. Considerăm noua origine cu vîrful în B [0,1, 0), iar noua axă a absciselor are direcţia A'B (fig. 2.22). Axa ordonatelor By' aparţine planului xOy şi face un unghi obtuz cu Oy. Axa Bz' completează triedrul tri-dreptunghic orientat pozitiv.
1) Se cer formulele care caracterizează această izometrie.
2) Dîndu-se LMMi, MB, unde M± ( - 1, 1,3), M2 (— 3, 0, 1), M3 (0, 3, 1), să se calculeze coordonatele vîrfurilor triunghiului transformat M{M«Mj prin izometria de mai sus, precum şi lungimile laturilor şi măsura unghiurilor.
Soluţie. 1) ^4'i? = — i + j — k, i' = = i + - p j p k ; ; = oct + V3 V3 v3
1 1 + 3 / unde a2 + [32 = 1, — a + — (3 = 0 (deoarece (? ' , / ' ) = 0). Con-
V3 V3 V I -
diţiile din enunţ conduc la expresia analitică a versorului j7 = ~- * — 2
7- întrucît %' = 7 ' x 7 ' , Â' V2 - V2 -, , V 2 ? k. 2V"3' + 2 V 3 ; + V 3
Izometria se compune dintr-o translaţie şi o rotaţie ale cărei formule sînt
1 x = VI
VI 2
VI , 2V3
y = 1 VI
V2 , T3'
VI 1 — z', z = — —= ar
2V3 v'3 • 3 / ' VI ZI!
2) Ţinînd seama de corespondenţele M1-^M{, M2^^M^, Mo,<r+Mş şi de for-2 1 7
mulele de mai sus ?ăsim M\\ —. - => -7= 1 V3 V2 V6
1 4 4 \ W3 V2 V6j \ V 3
V 2, - I j . HM^all = \\M[M'2\\ = 3 etc ... <£ ik M^VIg = «£ i l ^ i k «
: — etc. 2
143

5. Fie sistemul triortogonal Oxyz faţă de care considerăm punctele . 4 ( 3 , 0 , 0 ) 5 ( 0 , 2 , 0 ) , C (0,0, 6). Construim sistemul rotit Ox'y'z' astfel: Oz' are direcţia şi sensul înălţimii 00' a tetraedrului O ABC; Oy' este paralelă cu O'A', unde A' este piciorul înălţimii dusă din A în triunghiul ABC, iar axa Ox' este astfel aleasă încît sistemul Ox'y'z' să fie orientat pozitiv.
1) Se cere matricea rotaţiei. 2) Să se determine direcţia invariantă (subspaţiul propriu real unidimen
sional) şi planul invariant faţă de această rotaţie. Soluţie: 1) Se ştie din geometria elementară că ortocentrul O' al feţei ABC
coincide cu proiecţia punctului O pe această fată a tetraedrului. Coordonatele ' 6 9 3
punctului i O' sînt (—
direcţiei O'A' va fi
5 -? , 3 ->
7,
iar
Versorul axei Oz' îl notăm cu k'', versorul
1 -> rxv; i'=w^ Vio
3 i, T^J
1 -* -» k; k' V35 ' V35 V35
Matricea de trecere este
A
2 •?
'Vii*
1 io 3
vio
V35 3
V35 1
V35
V l 4 ; Vl4
2 " Vii
3 Vii
1 Vii
k.
Noua bază {{', j ' , k'} fiind orientată pozitiv urmează că matricea A este ortogonală şi det A = + 1.
2) Formulele de transformare se scriu concis
X = AX' sau X' = A - % unde X = \x, y, z], X' = ' [ * ' , / , z'].
Fie X = X' şi deci X = AX, X = 'AX. Rezultă (A — «A) X = 0. Această relaţie matriceală conduce la sistemul liniar şi omogen
{ V35 VioJ IVH Vio;
Wio V35J \VH V35;
{ Vio VHJ IV35 VHJ- al cărui determinat este nul prin urmare sistemul admite şi soluţii diferite de cea banală.
Soluţia sistemului este x = t (2V35 — 1 5 / î i ) , y = / ( l o V l i + 2lVTo), z = 2; (7VIO + 10V35), teR.
Există deci o direcţie invariantă la rotaţia de axe de mai sus. Aceasta este axa de rotaţie ale cărei ecuaţii carteziene sînt
2V35 — I5VI4 IOVH + 21VT0 7VI~0+10V35
144

Planul invariant (real) este asociat valorilor proprii complexe conjugate ale complexificatei rotaţiei. Fiind complementul ortogonal al axei de rotaţie, acest plan are ecuaţia
(2V35 - 15VT4) * + (loVTi + 2lVT0) y + (7VT0 + 10^35) z=0. x 1
6. Se dau planul P: x + y + 2>z + 5 = 0 şi dreapta D: =
_ y +2 __ z
- 1 - 2 1) Să se determine ecuaţia planului Q, simetricul lui P faţă de dreapta D. 2) Să se expliciteze izometria i(P) = Q. Soluţie. Considerăm trei puncte cunoscute în planul P; fie Mi (— 5, 0, 0),
M2 (0, —5, 0), M3 (—1, — 1 , —1). Stabilim coordonatele simetricelor
acestor puncte faţă de dreapta D. Găsim M[ I —. . — 1, M'\ — > — > / Q Q C \
respectiv M'Jt—• > > — 1 . Aceste puncte determină unic planul Q, — 4
a cărui ecuaţie este 2>x — y — z — 9 = 0. 2) Conform cu 3.5 izometria este caracterizată de ecuaţiile
x — a + &ux' + «12^' + «132'
y = b + «21*' + a22y' + 0,23z'
z = c + a31x' + a32y' + a33z'
întrucît M[ este transformatul lui My prin izometria i, rezultă sistemul 13 an — 4 a12 + 16 a13 = — 15 — ia, 8an -f- #12 — 4 a13 = — 3 a, 8 a n —
— 8 «i2 + 5 flit = — 3 — 3 a, a cărui soluţie este I — • > > \ 3 9
0 — 7 \ , • • , , * - % , , , , , - & + 4 & — 3 • Analog, dm 1 (M2) = M2 obţmem a21 = » azz = »
& 4- 9 c c-f-4 c-4-1 a,3 = si din Î ( M 3 ) = M ' S obţinem « 3 1 = —— . a32 = , a33 = •
9 3 9 9 Din condiţia de ortogonalitate a matricei A deducem a = b + 4, c =
= 3 6 + 1 1 . 7. Fie reperul cartezian {O', i, j , k} care prin rotaţie r este transformat în
reperul cartezian {O; V', j ' , k'}. Se aleg ca parametri ce caracterizează această rotaţie unghiurile lui Euler <J>, 6, 9 din figura 2.23. Planele (O; i,j) şi (0;i',j') se intersectează după o dreaptă a cărei direcţie este dată de versorul său director u.
Fie următoarele rotaţii particulare: •i'i rotaţia de unghi ip în jurul axei de direcţie k, r^O; i, j , k) — (O; u, v, k); r3 rotaţia de unghi 0 în jurul axei de direcţie u, r2 (O; u, v, k) = (O; u, w, k') ; r3 rotaţia de unghi <p în jurul axei de direcţie k'', rs(0;'u,w,~k') = (b;l',]',k').
Să se scrie matricea Mt, i = 1,2, 3 ataşată respectiv rotaţia rt, i = 1, 2, 3 şi să se arate că rotaţia
10 — Probleme de algebră — c. 264 145
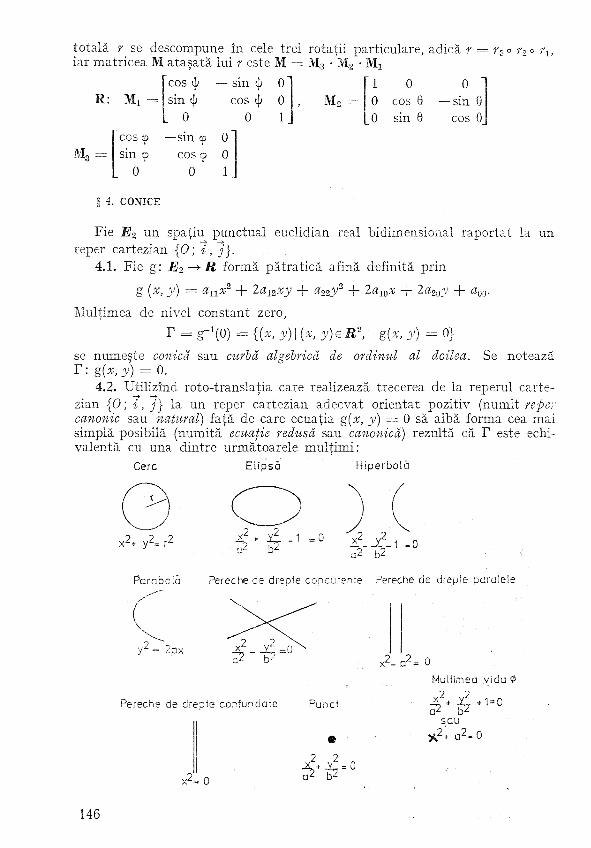
totală r se descompune în cele trei rotaţii particulare, adică r = rs o r2 o r1: iar matricea M ataşată lui r este M = M3 • M2 • Mi
1 0 0
M„
R:
=
§ 4
M1 =
cos 9 sin 9
0
CONICE
cos 9 sin <i . o' —sin o
cos 9 0
— sin 9 cos 9
0 0" 0 1.
0 0 1
M2 = 0 cos 0 0 s in 6
- s i n 8 cos 6
Fie Ez un spaţiu punctual euclidian real bidimensional raportat la un reper cartezian {O; i, j).
4.1. Fie g: E^-^-R formă pătratică afină definită prin
g (x, y) = aux2 + 2a12xy + «22.V2 + 2a10x + 2awy -f- am. Mulţimea de nivel constant zero,
r = g-i(0) = {(*, y) | (x, y) e R\ g(x, y) = 0} se numeşte conică sau cwr&ă algebrică de ordinul al doilea. Se notează r •" g(*. y) = o.
4.2. Utilizînd roto-translaţia care realizează trecerea de la reperul cartezian {0)i, j} la un reper cartezian adecvat orientat pozitiv (numit reper canonic sau natural) faţă de care ecuaţia g(x, y) = 0 să aibă forma cea mai simplă posibilă (numită ecuaţie redusă sau canonică) rezultă că F este echivalentă cu una dintre următoarele mulţimi:
Cerc Elipsă Hiperbolă
7 2 ? 2 ? 2 ^ . J T . 1 . o a2 b2
Parabolă Pereche de drepte concurente Pereche de drepte paralele
y2 = 2px a2 g2 x2- a2= 0 Mulţimea vida 4>
Pereche de drepte confundate Punct
x2= 0
2 2 „ x + v _ n
E2 b? sau
ytfi- a 2 -0
146

4.3. Faţă de roto-translaţii ecuaţia g (x, y) = 0 posedă următorii invarianţi
A = «11
«12
«12
«22
«11 «12
«12 «22
«10 «20
Cu ajutorul acestora se poate preciza curba Y.
«io «20
«00
«22-
A = 0 A # 0
Natura conicei S degenerată nedegenerată
8 < 0 8 = 0 S > 0
Genul conicei hiperbolic parabolic eliptic
4.4. Centrul unei conice:
1 — gxKx.y) anx + al2y + a10 = 0.
Sy(X- y) = «12* + «22>' + «20 = 0.
Determinantul acestui sistem liniar este 8. 4.5. Pentru stabilirea ecuaţiei canonice se poate proceda în modul următor. (i) Dacă a12 = 0, atunci se face o translaţie. (ii) Dacă ax% •=£ 0, atunci se face mai întîi o rotaţie. (varianta 1) Se face rotaţia x = x' cos 0 — y' sin 6, y = x' sin 6 -4-
v'cos 8, unde 6 este unghiul determinat de ecuaţia ( a u — a22) sin 20 = 2a12cos 20, 0e[O, TTJ. (varianta 2) Se determină valorile proprii \1: X2 şi proprii vectorii
ortonormaţi tx, ~î2 ai matricei simetrice
«11 «12
«12 «22-
ataşată formei pătratice anx2 + 2 a^xy + «22.y2- Se notează cu R matricea formată cu coordonatele vectorilor t l t ~e2 aşezate pe coloane; avînd în vedere posibilitatea înlocuirii unuia dintre versorii ? i , ~e2 prin opusul său sau posibilitatea renumerotării valorilor proprii, putem presupune det R Rotaţia
1.
= R y
reduce forma pătratică la forma diagonală XiX ,2+?^y2- Versorii proprii tx, ~e2 dau distanţele noilor axe.
După aceea, dacă este cazul, se face o translaţie. 4.6. Ecuaţia polarei lui M0 (x0, y0) în raport cu F este
anxx0 + a12(xy0 + x0y) + a22yy0 + aw(x + x0) + a20(y + y0) + a00 = 0.
în particular această ecuaţie dă tangenta într-un punct (x0, y0)eF. 4.7. Ecuaţia diametrului conjugat cu direcţia (l, m):
tg, (x> y) + »»&(*. y) = °-
147

4.8. Ecuaţia care determină direcţiile axelor,
(an — a22) Im + a12(m2 — l2) = 0.
4.9. Ecuaţia care determină direcţiile asimptotice este
ftiJ2 + 2a12lm -f- ai2m2 = 0,
iar ecuaţia unei asimptote este
lsAx> y) + msAx> y) = °-4.10. Cazul cînd T reprezintă un cerc («12 = 0, « u = «22 # 0) îl presu
punem cunoscut şi nu va mai fi discutat în cele ce urmează.
Exerciţii şi probleme
1. Se dă conica T: x2 — Axy -f- 4y2 — 6x -f- 2v + 1 = 0. 1) Să se determine natura şi genul. 2) Să se construiască conica. 3) Să se reducă la forma canonică.
Acelaşi enunţ pentru conicele r x : 16,r2 — 2Axy + 9v2 — 38% — 34v + + 1 1 = 6 şi r a : ' y2 — 2>x + ly + 7 = 0.
Soluţie. Calculăm invarianţii conicei
A = 1 2 3
—2 4 1
—3 1 1
25; 8 = 1
- 2
0, X(X — 5) = 0 are soluţiile
întrucît A =£ 0, 8 = 0 conica este o parabolă. Altă metodă. Matricea formei pătratice x2 — Axy + Ay2 este
" 1 —2" —2 A
Ecuaţia caracteristică a acestei matrice
l - X —2 - 2 4 - Â
Xx = 0, X2 = 5. întrucît produsul X ^ este nul, conica este de gen parabolic. 2) Pentru construcţie stabilim ecuaţia axei parabolei, coordonatele vîr
fului, ecuaţia tangentei în vîrf şi punctele de intersecţie ale parabolei cu axele de coordonate.
Se ştie că ecuaţia axei parabolei este « n gx(x, y) + «12 gy{x, y) = 0 (sau «12 gx(x, y) + «22 gy(x, y) = 0, adică (2x — Ay — 6) + (—2) (—Ax + + 8 v + 2) = 0; x — 23/ — 1 = 0.
Intersectăm parabola cu axa de simetrie si obţinem coordonatele vîrfului V (1/5, - 2 / 5 ) .
Tangenta în vîrf are ecuaţia 2x + y = 0.
148

Parabola nu taie axa Oy deoarece trino- , mul 4 v2 + 2y + 1 = 0 nu are rădăcini reale y
(fig. 2.24). Axa absciselor este secantă parabolei în punctele Ax (3 + l4l, 0) şi A2 (3 — — 2VI, 0).
Altă metodă. Ecuaţia parabolei se mai poate scrie
(x - 2v + X)2 + 2 x ( - 3 , - X ) + 2y(l +
+ 2X) + 1 — X2 = 0.
Ecuaţia axei şi aceea a tangentei în vîrf este x — 2v + X = 0, respectiv 2x(—3 — X) + 2y(l + 2X) + 1 — X2 = 0 pentru X astfel determinat încît cele două drepte să fie perpendiculare. Se obţine X = — 1. Apoi continuăm ca mai sus.
3) Varianta 1. Rotim sistemul xOy astfel încît noua axă a absciselor să aibă direcţia axei de simetrie a parabolei. La 2) am stabilit ecuaţia axei
Fig. 2.24
x — 2y — 1 = 0, de unde m 1
T întrucît 6 e 0, obţinem
sm 1
7!' cos 0 = - = • Prin urmare formulele de rotaţie vor fi x =
1 1 — -= (2x' — y'), y —-j=(x'+ 2y'). Introducem în ecuaţia generală a para-
V5 V5 bolei şi obţinem ecuaţia acesteia raportată la sistemul rotit x'Oy' ca fiind 5v'2 — x' + —y'-{-\= 0. Restrîngem pătratele şi obţinem Iy' -\ j —
\5 V5 \ 5 J V5 x' = 0. Efectuăm o translaţie a sistemului x'Oy' în vîrful parabolei
( ^5\ v J V 0, — I, x' = x", y' = y" —; obţinem ecuaţia canonică y'
2~x" 0 raportată la sistemul rototranslatat x"Vy".
Varianta 2. Coordonatele (u, v) ale vectorului propriu corespunzător valorii proprii X se obţin din ecuaţia matriceală
;][!]= -11 sau echivalent, coordonatele (u, v) sînt soluţii ale sistemului
f (1 - X) u - 2v = 0 \ —2u + (4 — X) v = 0.
Pentru Xx = 0 sistemul (1) are soluţia u = 2k, v = k, keR — {0}; pentru X2 = 5 obţinem soluţia (—k, 2k), keR — {0}.
Vectorii proprii ortonormaţi sînt ? x = j —= > - = J, respectiv
C2
149

întrucît
îfectuăm rotaţia
det R = det r2/V5 1/VI
- l / V 5' 2/V3.
= 1
" x~
.y.
1
"vî '2 1
— 1" 2_
V"
y. sau * VI (2*' - y)
y== {x> + 2/) . V5
Ecuaţia carteziană a parabolei raportată la sistemul rotit x'Oy' este 5y'2 — 24°bx' + 2V5_v' + 1 = 0 . Procedăm ca la varianta 1; completăm pătratele, efectuăm translaţia în vîrf si obţinem ecuaţia canonică -v"2 —
-2f*" = 0. I \ : ecuaţia axei de simetrie a parabolei este Ax — 2>y — 1 = 0, deci
4 1 1 t g 6 = —; formulele de rotaţie sînt x = — (3>x' — 43/'), y = — [Ax' + 3j/).
Fată de sistemul rotit x'Oy' ecuaţia parabolei este 25v'2 — 50%' + + 1 0 / + 11 = 0.
Efectuăm translaţia x' = x" > y' = y" — — si obţinem ecuaţia 5 5
canonică y"2 — 2x" = 0 faţă de sistemul rototranslatat x"Vy". T2 : întrucît «12 = 0 (vezi 4.5 (i)) reştrîngem pătratele (y + l)2 — 3(x—2) =
= 0 şi efectuăm o translaţie în vîrful parabolei dată de formulele x = x' + 2, y = y' — 1. Obţinem ecuaţia canonică y 2 — 3%' = 0 faţă de sistemul transiatat x'Vy'.
2. Se dau hiperbola T: 4xy + 3 y2 + \6x + 12_y — 36 == 0, dreapta D: x — y + 2 = 0 şi punctele A(0,2), B(—l,2). Se cer
1) centrul, axele şi asimptotele hiperbolei, 2) polara punctului B în raport cu conica, 3) tangenta în punctul A la conică, 4) tangentele la conică paralele cu dreapta D, 5) polul dreptei D în raport cu conica, 6) diametrul conjugat direcţiei lui D, 1) să se reducă hiperbola la forma canonică şi să se construiască. Soluţie. 1) Coordonatele centrului,
| 2 v + 8 = 0 | 2x + 3v + 6 = 0.
Obţinem C(3, —4). m Fie (l, m) o direcţie oarecare şi k = — panta ei; itunci ecuaţia (4.8)
se scrie («u — #22) & + %2(&2 — 1) = 0.
în cazul nostru, 2k2 — 3/% — 2 = 0 cu rădăcinile kx = 2, &a = 1 T
150

Pentru a scrie ecuaţiile axelor ţinem seama că sînt drepte care trec prin centrul C al conicei sau ţinem seama că axele sînt diametrii conjugaţi perpendiculari şi folosim (4.7). Obţinem x + 2y + 5 = 0, 2x — y — 10 = 0.
Pantele asimptotelor (vezi 4.9) sînt rădăcinile ecuaţiei a2Zk2 + 2a12k +
+ « u = 0 unde h = — • Obţinem y + 4 = 0, 4* + 3y = 0 (fig. 2.27). h
2) Ecuaţia polarei unui punct faţă de conică se scrie prin dedublare (vezi 4.6),
2 [(— 1) y + 2x] + 3v • 2 + 8 (* — 1) + 6 (y + 2) — 36 = 0 sau
6x + 5y — 16 = 0.
3) ^4eT; acelaşi procedeu ca la punctul precedent; obţinem ecuaţia x + y — 2 = 0.
4) Orice dreaptă paralelă cu dreapta D este de forma x — y -f- X = 0, XeJR. Intersectăm cu conica şi punem condiţia ca ecuaţia găsită pentru determinarea lui y să aibă rădăcină dublă
x — y + X = 0 4*y + 3y2 + 16# + 123; - 36 = 0
şi deci
7 / + 4y(7 — A) — 4(4X + 9) = 0.
Din (7 — X)2 + 7(4X + 9) = 0 deducem X1( X2e C, ceea ce înseamnă că nu există tangente la hiperbolă paralele cu dreapta D.
5) Fie M0 (x0, y0) polul dreptei D. Scriem ecuaţia polarei acestui punct prin dedublare şi punem condiţia ca această dreaptă să coincidă cu D. Obţinem sistemul
2y0 + 8 2x0 + 3y0 + 6 Sx0 + 6y0 — 36 1 —1 2
Rezultă iW0(8, — 6).
6) Direcţia dreptei D este — = 1 . Conform cu (4.7) obţinem ecuaţia
2x + 5y + 14 = 0. 7) Matricea formei pătratice 4xy + 3y2 este
"0 2" 2 3.
Ecuaţia caracteristică a acestei matrice
I —X 2 2 3 —X
= 0, X2 — 3X — 4 = 0, are soluţiile Xx = — 1,
Coordonatele (w, w) ale vectorului propriu corespunzător valorii proprii X sînt soluţiile sistemului
— Xw + 2v = 0 2M + (3 — X) y = 0.
151

Pentru Xx =—- 1 obţinem vectorul (—2k, k), keR~{0}, iar prin
normalizare versorul propriu ? i = | •=» - = | -l V5 V5J
Analog pentru X3 = 4 obţinem ^ 2 = | —> - p i - Deoarece \45 45j
det R = det
— 2 VI
i Vf
î •
VI 2
V5. = — 1 (rotaţie şi simetrie),
pentru a avea numai rotaţie putem folosi unul din următoarele procedee: a) renumerotăm Xi = X2, X2 = Xx de unde rezultă 7[ = ?2 , «2 = ^î-Rotaţia
1 '#"
^ .
- 1 — 2" VI VI 2 1
-VI Vf-«conduce la 4A;'2 — y'2 + S45 x î n x' şi jy',
sau x = ^={x' -2y')
y=~{2x' +y') 45
4V 5y' — 36 = 0. Completăm pătratele
i(x' + VI)2 - ( / + 2V5)2 - 36 = 0.
Efectuăm o translaţie a sistemului xOy în punctul C(—v5, —l45) dată de %' = x" — 45, y' = y — l4l. Obţinem ecuaţia canonică a hiperbolei
(a) v,»2 y — 1 0. 9 36
Pentru construcţie efectuăm o rotaţie a sistemului de axe xOy. Axele Ox\ Oy' au direcţiile versorilor ~e'u respectiv ~e'2 (fig. 2.25);
b) întrucît orice direcţie în plan este caracterizată de perechi de numere reale proporţionale, convenim să luăm versorii proprii ~î\ = — tx, ~î\ = t%. Rotaţia
' X'
.y.
- 2 1 -Vf Vf
- 1 2 - 41 41.
conduce la x\ — 4vf
LJ'J
A41x1 — 8V5_Vi + 36 = 0. Direcţiile pozitive ale axelor 0 % respectiv Oy! sînt determinate de versorii t\, ~e\. Sistemul rotit XiOyi este translatat în C (2v5, — v5) folosind formulele % = xa + 2VT •yx = _ya —^5. Obţinem forma canonică a hiperbolei.
%2 (b)
36 • ^ + 1 = 0
9 (cu vîrfurile pe axa ordonatelor Cy%) raportată la sistemul rototranslatat xzCy% (fig. 2.26).
152

Prin cele două procedee am obţinut ecuaţia redusă a hiperbolei sub forme diferite (a), respectiv (b), întrucît ecuaţia este raportată la sisteme diferite x"Cy", respectiv x2Cy-2', facem observaţia că în desen este vorba de una şi aceeaşi hiperbolă.
3. Să se stabilească natura conicelor şi să se construiască
1) 16*2 + Axy + 1 9 / + lOAx — 2l2y — 356 = 0,
2) 2>x2 — Axy — 2x + Ay — 3 = 0,
3) 9x2 + 2Axy + 1 6 / — 52* + 14v — 6 = 0,
4) 9x2 + 6xy + y2 — 5x — ly — 4 = 0,
5) x2 + Ixy + / - I x - ly + 6 = 0,
6) Ux2 — 2Axy + 4 / — 9Ax + ASy + 119 = 0,
7) Ax2 + 1 6 / + Ax — 80v + 85 = 0.
4. Să se scrie ecuaţia conicei care este tangentă axei Ox în punctul MQ( — 3, 0) şi pentru care cunoaştem două perechi de diametri conjugaţi x — — 3>y + 2 = 0 şi x + 5y — 6 = 0; x — 2y + 1 = 0 şi 2x + y — 3 = 0.
Să se stabilească natura conicei obţinute, să se reducă la forma canonică şi să se construiască.
5. Se dă conica V: x2 -\- 2xy + y2 + 3% — 2>y — 18 = 0. 1) Să se construiască conica. 2) Să se scrie ecuaţia fasciculului de conice bitangente parabolei în
punctele de intersecţie cu prima bisectoare a axelor de coordonate. Să se discute natura conicelor din fascicul.
3) Să se expliciteze ecuaţia dreptelor din fascicul. 4) Să se reducă la forma canonică şi să se construiască hiperbola echi
laterală din fascicul. R: 1) Parabola are vîrful V (3, —3); ecuaţia axei de simetrie a parabolei
•este x + y = 0. Parabola intersectează axa absciselor în J41(—6, 0), Az(3, 0). 2) g(x, y) + X(x - v)2 = 0, x2(l + X) + 2xy(l - X) + / ( l + X) + 2>x -— Zy — 18 = 0; A = —9(8X + 1 ) , S = 4X, I = 2(1 + X); elipse reale
pentru Xe (0, + oo), parabolă X = 0, hiperbole Xe (— oo, 0) — i — — | , drepte
reale concurente X = • 8
153

3) Pentru  = — 1/8 obţinem ecuaţia conicei degenerate Ix1 + l&xy -f--f 7v2 + 24A; — 24 j — 144 = 0. Aceasta este Dx\] D2, unde
Dt: Ix + y{9 + 4^2) + 12(1 + 2V2) = 0, D2: lx + y(9 - 4V2) + 12(1 - 2 VI) = 0. 4) A ^ 0, S < 0, 1 = 0; X = — 1; 4xy + 3x ~ 2>y — 1& = 0. Rotaţia
1 1 x = -j= (x' + 3''). 3; = ~T= (~ x' + J1') urmată de translaţia A-' = x" +
V2 ' " V2 /o" „."2 "2 + 3 — , y' = r" conduce la ecuaţia redusă -—.-— •—— + 1 = 0 . 4 J ' 63 63
"8" T 6. Se dă conica V: Axy — 3j'2 + Ax — 14y — 7 = 0. 1) Să se găsească ecuaţiile axelor de simetrie, asimptotelor şi ecuaţia
diametrului conjugat direcţiei k = 1. 2) Să se reducă la forma canonică şi să se construiască conica.
R: 1) 2x + y — 3 = 0, x — 2y — 4 = 0; 2) y + 1 = 0, 4,v — 3y — 11 = 0, 2x — y — 5 = 0; 2) Matricea rotaţiei este
A Zii" VI V~5
1 2 UI VJJ
6 32 Ecuaţia hiperbolei fată de sistemul x'Oy' este x'2 — 4v'2 — %' — y' —
' ' V5 V5 — 7 = 0.
/ 3 __4\ In urma translaţiei în punctul CI-7=» —T=-| obţinem sistemul x"Cy'"
W5 V 5 ; %"2 v"2
fată de care conica are ecuaţia canonică. - [-1 = 0. Vîrfurile hi— ' 4 1
perbolei conjugate se află pe axa Cy". 7. Pentru ce valori ale lui X şi \x conicele din fasciculul 2x2 + Xxy +^
+ 2 v2 — Ix + y.y + 3 = 0 sînt 1) conice cu centru? 2) conice nedegenerate fără centru? R: 8==i*LZ_A. , A = — (3X2-f 2 t x 2 + 7Xa + 50).
4 4 ' 1) x # ± 4; 2) X = ± 4, (x ^ =F 7. 8. Să se scrie ecuaţia fasciculului de conice circumscrise triunghiului de-
vîrfuri A(4, 0), B(0, 2), C(— 1,0) şi să se discute natura conicelor. R: 2x2 + 3>xy + (X — 2) y2 — 6x + 8y — 8 = 0;
Xej — 0 0 , — j — {0} hiperbole; pentru valoarea particulară X = 0 obţinem-,
drepte concurente perpendiculare, iar pentru X = — obţinem parabolăz
Xej — , + 00 j elipse. (2f 154

§ 5. CUADRICE
Fie Es un spaţiu punctual euclidian real tridimensional raportat la un •reper cartezian {0; i, j , k}.
5.1. Fie g: E3—*R forma pătratică afină definită prin g (x, y, z) = — axlx2 + a33yz -\- a3az2 + 2 a12xy + 2 alsxz + 2 a23_yz + 2 a10^ + 2 azoy + + 2 a30z -(- «00.
Mulţimea de nivel constant zero, L = g_1(0) = {{x, y, z) | (x, y, z)eR3, g (*, y, z) = 0},
:se numeşte cuadrică sau suprafaţă algebrică de ordinul al doilea. Se notează X : g (*,':y, z) = 0.
5.2. Prin trecerea de la reperul cartezian {O; i, j , k} la un reper cartezian adecvat orientat pozitiv (numit reper canonic sau natural) faţă de care ecuaţia ,g (x, y, z) = 0 să aibă forma cea mai simplă posibilă (numită ecuaţie redusă sau canonică) se dovedeşte că 2 e s t e echivalentă cu una dintre următoarele •mulţimi:
Hiperboloid cu .o pînza
sîera Elipsoid
• v 2+ Z ^ r 2
9 9 9
a2 b2 c2 a2 b2 c2
Hiperboloid cu doua pînze Paraboloid eliptic Paraboloid hiperbolic (sa!
0
Con de ordinul doi
*2 v2 , 2 _ n 2- S2 r.2
C:lrndru Darcbolic
x2 y2
Ciiindru eliptic Cilindru hiperbolic
\ j •2 , , 2
| -Ă l l=0 o ^ ' ^ - 1 - 0 5-2-P
Pereche de plane secante Pereche de plane paralele
x2- a2- 0
155

;recne de piere confundate Dreapta Punct
X2 V2 Z2 n
A o ^ ! - ° Mulţ imea vidă 0: 5 + ^ + J 2 + 1 " ^ ŞQU Q 2 + 52+ 1 *^ SQU >?+a«0
5.3. Faţă de roto-translaţii ecuaţia g (x, y, z) = 0 posedă următorii invarianţi:
A = det A, 8 = det A, J :
unde
«11 #12
#12 #22 + #11 #13
#13 #33 + «22 #23
«23 #33 I = tr A,
A =
«11 #12 #13 #10
«12 #22 #23 #20
#13 #23 #33 #30
-#10 #20 #30 #00-
«11
#12
#13
#12
«22
«23
#13
#23
#33_
Precizarea naturii cuadricei £ s e poate face cu ajutorul numerelor A, 8„ J Şi / .
A I Natura cuadricei A = 0 ! degenerată A # 0 | nedegenerată
Dintre cuadricele nevide, sferele, elipsoizii, hiperboloizii şi paraboloizii sînt cuadrice nedegenerate, iar restul sînt cuadrice degenerate.
5.4. Sferele sînt caracterizate prin aiz = a13 = «23 = 0 şi « u = azz =• = #33 # 0 .
5.5. Centrul unei cuadrice:
1 ~2 1
T î
{ T
gx(x, y, z) = aux + «i2j' + aisz+ #i0 = 0
gv(x, y, z) = a12x + a22y + «2 3z+ «20 = 0
gz{x, y, z) = a13x + a23y + a33z + a30 = 0.
Determinantul acestui sistem liniar este 8. 5.6. Pentru obţinerea ecuaţiei canonice se poate proceda astfel: (i) Dacă ai2 = «J3 = «23 = 0» se face o translaţie. (ii) Dacă cel puţin unul dintre numerele «12, «13, «23 este diferit de zero*,
atunci se face mai întîi o rotaţie.
156

Se determină valorile proprii Xx, X2, X3 şi vectorii proprii ortonormaţi *ii ^2. ^3 a i matricei simetrice A ataşată formei pătratice anx2 + a32y2 -j--f- aaaz2 + 2a12#y + 2a13xz -f- 2a23y2. Se notează cu R matricea formată cu coordonatele vectorilor <?1( ?2 , ^3 aşezate pe coloane; avînd în vedere posibilitatea înlocuirii unuia dintre versorii ?1 ( £2, ? 3 prin opusul său sau posibilitatea renumerotării valorilor proprii, putem presupune det R = + 1. Rotaţia
"1 X
y _ z _
= R f * ' l y
L*' reduce forma pătratică la forma diagonală Xx%'2 + X2y'2 + X3z'2. Versorii proprii tx, 1%, tz dau direcţiile noilor axe.
în final, dacă este cazul, se face o translaţie. 5.7. Planul tangent la o cuadrică într-un punct M0(x0, y0, z0)e £ în c a r e
•cel puţin unul dintre numerele g*r, gyo, gîo este diferit de zero, are ecuaţia
(x - xo) g . + (y - y0) gy. + (2 - *o) & = 0. Această ecuaţie se obţine prin dedublare.
Normala la cuadrică £ în punctul M0 are ecuaţiile
x x0 y y0 z z0
gy<,
Exerciţii şi probleme
1. Fie sfera £ : x2 + v2 -4- z2 + 2x - 6y + 4z - 15 = 0, planele P x : " ~ • " 39 - - - - -0 şi dreapta D : 8x
2 f lP i : .v2 + y2 + 22 + 2.v
4 # — v + 32 — 13 = 0, P 2 : 4* — y + 2>z — 1 ly + 82 — 30 = 0, * — y — 22 = 0.
1) Se cere centrul şi raza cercului T : — 6y + 4z — 15 = 0, Ax — y + 2>z — 13 = 0.
2) Să se scrie ecuaţia sferei simetrice sferei 2 faţă de planul P 2 . 3) Să se arate că prin dreapta D se pot duce două plane tangente sferei 2 . Soluţie. 1) Centrul sferei este C(— 1, 3, —2) şi raza sferei este
r = v ' ( - l ) 2 + 32-r- ( - 2 ) 2 - ( - 1 5 ) , r = JÎ9. Cercul T există dacă planul Px este secant sferei 2 ; într-adevăr d(C; Px) = V26<?\ Centrul Cx al cercului F (fig. 2.27) se află la intersecţia planului P x cu •dreapta care trece prin C şi are direcţia normalei »!.
Ci
4* — y + 32 — 13 = 0
# + 1 _ y — 3 _ 2 + 2 4 - l ~ 3
Obţinem Ci(3, 2, 1). Din triunghiul dreptun-ghic ACiC găsim raza rx a cercului T ; rx =
Fig. 2.27.
157

2) Fie 2 ' sfera simetrică sferei 2 faţă de planul P 2 . Centrul C al: sferei 2 ' este simetricul punctului C faţă de planul P 2 . Obţinem C (15, — 1, 10). Ţinînd sema că cele două sfere au aceeaşi rază, ecuaţia sferei 2 ' va fi
15)2 + (y + l)2 + (z - IO)2 29.
3) Prin dreapta D se pot duce două plane tangente sferei 2 dacă această 29VTÎ0 dreaptă este exterioară sferei; într-adevăr d(C; D) = —^r— > r. Planele
tangente fac parte din fasciculul de plane 8% — lly -f- 82 — 30 + X(x — — y — 2z) = 0, XeR.
Determinăm pe X din condiţia ca distanţa de la centrul C al sferei la plan. să fie egală cu raza r a sferei 2 ,
r - i ) (8 +J) + 3(—11 — X) + ( - 2 ) (8 - 2X) - 30 j V(8~
V29. X)2 + (—11 — X)2 + (8 — 2X)2
Obţinem trinomul X2 + X — 2 = 0 cu rădăcinile reale şi distincte Xx = = —2, X2 = 1. Cele două plane tangente sferei sînt 7^: 2x — 2>y + Az — 10 = 0, respectiv TC2 •' 3# — 4y + 2z — 10 = 0.
2. Să se reducă la forma canonică şi să se recunoască cuadricele 1) 36 x2 + y2 + 4 z2 + llx + 6y — 40z + 109 = 0 2) 5*2 - 8 / + 5z2 - 6xz + 8 = 0 3) x2 + 3y2 + 4yz — 6.r + 8y + 8 = 0 4) 2y2 + Axy — Sxz — iyz + 6x — 5 = 0.
Soluţie. 1) întrucît #12 = «13 = a23=0 (vezi 5.6 (i)), formăm pătrate perfecte. Obţinem 36 (x + + !)2 + (y + 3 ) 2 + Mz - 5)2 — 36 = 0 care reprezintă ecuaţia unui elipsoid. Efectuăm translaţia în centrul de simetrie al suprafeţei x= x' — 1, y = y' — 3, z = z' + 5 şi obţinem ecuaţia canonică x'2 v'2 z'2
— + ^ + — - 1 = 0 (fig. 2.28). Fig. 2.28. 1 36 9 V '
2) Efectuăm o rotaţie, axa Oy rămînînd neschimbată x = x' cos 0 — z'" sin. 0, y = y'; z = %' sin 6 + 2' cos 8. Unghiul de rotaţie 8 se alege astfel ca termenul x'z' să dispară din ecuaţia suprafeţei. înlocuind în ecuaţia suprafeţei obţinem x'\5 - 6 sin 8 cos 0) - 8v'2 + z'2 (5 + 6 sin 8 cos 6) — 6x'zf
(cos2 8 — sin2 6 )+ 8 = 0. Din condiţia cos2 6 — sin2 0 = 0 obţinem 0 = 4
A-'2
Rezultă ecuaţia canonică -— — y'2 4- z'2 + 1 = 0 si deci cuadrica este un 4
hiperboloid cu două pînze cu vîrfurile pe Oy'. 3) Se face o rotaţie, axa Ox rămînînd fixă. Se procedează ca în cazul pre
cedent si din ecuaţia 2 tg2 6 + 3 tg 6 — 2 = 0 obţinem unghiul de rotaţie ' 1 . , ' . , , . „ 1 „ 2 . . „ tg 9i = — Şi tg 32 = —2, de unde sin 8X = - =
v5 cos s şi sin
158

cos 82 1 în ambele cazuri obţinem un hiperboloid cu o
V5 ' """"* V5 pînză rotit şi translatat în centrul său de simetrie.
Altă metodă. Matricea formei pătratice x2 + 3jy2 + 4yz este
A =
Valorile proprii ale matricei sînt soluţiile ecuaţiei
= 0.
'1 0
.0
0 3 2
0" 2 0_
1 —X 0 0 3 — X 0 2
Obţinem AX = — 1, X2 — 1, X3 = 4. Coordonatele (u, v, w) ale vectorului propriu corespunzător valorii proprii X sînt soluţii ale sistemului
(1) (1 - X) u = 0
— X) v + lw = 0 2v + ( — X) ^ = 0.
Pentru Xx =
malizînd obţinem vectorul propriu unitar tx = j 0,
1 sistemul (1) are soluţia « = 0 , w = —k, w = 2Â sau nor-
VI V5 J Pentru X2 = 1 sistemul (1) are soluţia (&, 0, 0), iar ~e2 = (1, 0, 0); procedăm
( 2 1 analog pentru X3 = 4 şi obţinem e3 = 0, -=> - =
V V5 V5 Matricea ortogonală ale cărei coloane sînt versorii proprii,
0 1
V? 2
V?
1
0
0
0 ~ 2
TE 1
VI are determinantul 1. Prin rotaţia (vezi 5.6)
0 1 0 1
•-7= 0 V5 2
V5
2 VI
V5
sau v = VI
V5 V5 ecuaţia carteziană a cuadricei devine
-x'2 + y'2 + 4z'2 - ~ x' - 6 / V5
16 , V3
0.
159

Completăm pătratele în x', y' şi z'. Obţinem
Efectuăm o translaţie a sistemului 0%' y' z* în punctul
C 4 2 —= , 3, pz | dată de %' = x" — \/5 V5j
Fisr. 2.29. • V T y y 3, 2' = 2" -VI
0 2 4
2 2
—2
—4 - 2
0
Obţinem ecuaţia canonică a hiperboloidului cu o pînză —x"2-\-y"2-\-.4- 42"2 — 1 = 0, ale cărui vîrfuri se află pe axele Cy" şi Cz" (fig. 2.29).
Observaţie. Coordonatele centrului conicei faţă de sistemul iniţial Oxyz se pot afla ca soluţie a sistemului gx(x, y, z) — 0, gy(x, y, z) = 0, gt(x, y, z) = 0 ;
(vezi 5.5); — (2x — 6) = 0, — (6 v + 42 + 8) = 0, — (Ay) = 0; coordonatele
centrului sînt x0 = 3, y0 = 0, 20 = —2. 4) Formei pătratice 2y2 + 4^3' — 8xz — Ayz i se ataşează matricea
A =
ale cărei valori proprii sînt Xa = —4, X2 = 0, X3 = 6. Coordonatele (u, v, w) ale vectorului propriu corespunzător valorii proprii X
sînt soluţii ale sistemului — \u + 2v — 4.w = 0
2M + (2 — X) v — 2w = 0
—4M — 2z; + (—X) w = 0.
Pentru X: = —4 sistemul admite ca soluţie vectorul (&, 0, &), ke R — {0}.
Prin normalizare obţinem versorul propriu ~î-> = -_r , 0, -==!• lV2 V2J
Analog, pentru X2 = 0, X3 = 6 obţinem vectorii proprii ortonormaţi e2 =
f 1 2 1 \ _, / 1 1 - 1 \ P=. -p=. -p= , respectiv e3 =[-==, -j=, —— •
\ V6 V6 76 j VV3 V3 V 3 j 76
întrucît
det R = det
"_L Zii _L" V2 V<5 VI
2 1 71 V3
1 î — î Vf V"6 V3"
o = — 1 (rotaţie şi simetrie),
160

pentru a avea numai rotaţie procedăm astfel: luăm
Si = -ei, e2 = e2,
unde evident e"î
~£* = ~£3 sau renumerotăm X*
», c , = 6 1 , e s = e.Q.
^2< ^2 = ^ 1 ) ^ 8 = = ^3<
în cele ce urmează folosim al doilea procedeu. Rotaţia
1 V6" 2
VâT 1
V6~
1
vf 0
1 Vf
1 ~ Vf
1
vf — 1 VT
%
. 2 '
conduce la ecuaţia —4v'2 + 6z'2 —
Completăm pătratele şi obţinem
3
sau
V6.
4 v' 4V2 ( ^ )
Efectuăm o translaţie în punctul P
, " 2
35
-T =
V
z
42'
- V 6 |
3 ;z= »
V6* + V 2 3 + V 3
V6 V3 1 1 1
V6 V2 V3
+ -7=2' - 5 = 0. V3
V + 3f_] - 0. 8V6J
~"T7=?I Şi găsim —4y"2
8V6 4V3 Z V J ; + 6z"z — Vâx" = 0, adică ecuaţia redusă a unui paraboloid hiperbolic.
Folosind formulele de transformare, coordonatele vîrfului paraboloidului 15 13 3
faţă de sistemul iniţial Oxyz sînt x = — , y 16 16 3. Fie paraboloidul hiperbolic —— — = z şi punctul M0 (0, 2, —1).
1) Să se scrie ecuaţiile generatoarelor rectilinii care trec prin M0. 2) Să se calculeze măsura unghiului dintre aceste generatoare. Soluţie. 1) Problema are sens deoarece punctul M0 aparţine cuadricei.
Cele două familii de generatoare rectilinii sînt
Dx
D„
2x + 3y — 6X2 = 0 \{2x — 3/v) —6 = 0
pentru z # 0, 2x — 3 v # 0 şi Da
2x — 3v — 6.112 = 0 1(2* + 3v) 0
pentru z^0,2x + 3y^0 şi £>„:
z = 0
2% — 3y = 0.
2 = 0
2* + 3 v = 0.
Determinăm parametrii X şi \x. impunînd condiţia ca generatoarele să treacă prin M0. Obţinem X = — 1, \i = 1. Ecuaţiile generatoarelor vor fi
Di-
D2:
2x+3v + 6z=0 2x — 3v + 6 = 0
% — 3v — 62 = 0 _. sau £>2 •
a: + 3v — 6 = 0
x
3
X
3
v - 2 2
y - 2 —2
_*+ ! —2
2 + 1 2
11 Probleme de algebră c. 264 161

-n 1
2) 9 == arc cos-p=:-v l7
4. Să se reducă la forma canonică şi să se recunoască cuadricele 1) x2 - 1 6 / — Az2 — 2>2y + 16z - 16 = 0 2) 2y2 — 722 + 112* — 16y — \Az — 87 = 0 3) #y + z2 — 2 = 0 4) %2 — j , ' 2 -4- z2 — 2*v — 2j>z — 2#,2 — 5# — 1 = 0
5) x2 + v2 + 5z2 — 6xy + 2xz — 2yz — Ax + Sv — 12z + 14 = 0
5. Să se stabilească natura cuadricelor de ecuaţie
9;K2(1 + X) — 16/(A — 3) + 36(X — 2)z2 — 18(1 + \)x — 64v(X — 3) —
— 5 5 X + 5 7 = 0, XeR. Soluţie. Grupăm termenii astfel încît să formăm pătrate perfect". Ecuaţia
familiei de cuadrice se poate scrie
9(1 + \){x- l)2 - 16(X-3) (y + 2)2 + 36(X - 2) z2 - 144 = 0.
Efectuăm translaţia x = x' + 1 , y = y' — 2, z = z \ Obţinem
l i ± ^ : i __ (>--3)y2 + (^-2)^2 _ ! = 0 16 9 ' 4
Se cercetează semnele expresiilor 1-f-A, X — 3, X — 2. Se găsesc: pentru Xe(—oo, —1) hiperboloizi cu două pînze, pentru Xe (—-l, 2) U (3, + oo) hiperboloizi cu o pînză, pentru Xe (2, 3) elipsoizi, pentru X = — 1 cilindru hiperbolic, pentru X = 2 cilindru eliptic, pentru X = 3 cilindru circular.
6. Să se precizeze curbele de secţiune ale cuadricelor
v2 z2
1) i - -—= -2x, 4 1
2) x2 - 1. + z2 + 1 = 0 4
cu planele y + mz — 3 = 0. R: 1) parabole pentru me.R — {—2, 2}, drepte pentru m = ± 2.
2) hiperbole pentru » e (— oo, —2) u (2, + oo), elipse pentru me (—2, + 2 ) . 7. Dreapta D se roteşte în jurul axei Oy. Să se stabilească pentru fiecare
caz ecuaţia suprafeţei obţinute
1) D: £n! = !y±? = fJZi, 2) D: L = Z ± i = _i_, 0 1 0 3 1—1
3) D : ^L = Z±i = ^zJ. 3 1 — 1
Soluţie. Pentru fiecare caz se obţine o suprafaţă de rotaţie generată de cercurile F: x% + >'2 + z2 = X, _y = ;x.
162

1) Dreapta D este paralelă cu Oy; obţinem un cilindru circular drept a cărui ecuaţie se găseşte astfel: cercurile T se sprijină pe dreapta D şi prin urmare sistemul, format din ecuaţiile cercurilor Y şi ecuaţiile dreptei D, trebuie să fie compatibil,
%2 + } ' 2 + 22 = X, y = \x, x — 1 = 0, 2 — 3 = 0.
Eliminăm pe x, y, z şi obţinem condiţia de compatibilitate tx2 — X -(- 10 = 0. Din sistemul (x2 — X + 10 = 0, x2 + .y2 + z2 = X, y = ţx eliminăm pe X şi [x şi găsim ecuaţia carteziană a cilindrului, A;2 + z2 — 10 = 0.
2) Dreapta Z) intersectează axa Oy în punctul F (0, —2, 0); obţinem un con circular
x2 —10 (y + 2)2 -f 22 = 0.
3) Dreapta D2 si axa Oy sînt disjuncte; obţinem hiperboloidul cu o pînză
V i o ; io 8. Să se determine ecuaţia suprafeţei generată prin mişcarea unei drepte,
ce se sprijină simultan pe trei drepte date, Di: x -\- 2z + 2 = 0, y + 2 = 0; D 2 : » + z — 1 = 0, y — 2 = 0; J)3 : x = y = 2.
Soluţie. O dreaptă variabilă A, ce se sprijină simultan pe Dx şi D2, se obţine la intersecţia unui plan variabil trecînd prin Dlt cu un plan variabil trecînd prin D2 adică
A: x + 2z + 2 = X(^ + z), x + z - 1 = y.{y - 2).
Punem condiţia ca A să se sprijine şi pe Ds, adică sistemul x + 2z -j- 2 = = X(y + •2:), x + 2 — 1 = jj.(y — 2), x = y = z, să fie compatibil. Găsim condiţia de compatibilitate 4Xu. — 2X — 8y. -\- 1 = 0. Eliminînd parametrii X şi tj. între această relaţie şi ecuaţiile dreptei A obţinem ecuaţia suprafeţei:
\x% + 7v2 — lOxv — 5yz + 4xz + 8x — lOy + 2z = 0.
9. Să se determine ecuaţia carteziană implicită a suprafeţei cilindrice a cărei generatoare este paralelă cu dreapta D: x = y = z şi se sprijină pe curba directoare C: x = y2, z = 0.
Soluţie. Orice dreaptă paralelă cu D are ecuaţiile x — 2 = X , y — z = fx. Punem condiţia ca această dreaptă să se sprijine pe C. Aceasta înseamnă că sistemul x — z = X, y — z = [x, z = 0, # = y2, trebuie să fie compatibil. Eliminînd pe x, y şi z găsim condiţia de compatibilitate, X = [x2. înlocuind pe X şi [x găsim ecuaţia carteziană implicită a suprafeţei, v2 — 2yz -j- z2 — — x + z = 0.
10. Să se determine ecuaţia conului care trece prin dreptele D1: y = x, 2 = 0; D2:.y = —x, 2 = 0, şi prin punctul (1, 2, 3), axa Oz fiind axă de simetrie. R: 2>x2 - iy2 + z2 = 0.
11. Să se determine ecuaţia conului ale cărui generatoare sînt Ox, Oy, Oz şi trece prin punctele P j ( l , 2, 1) şi P 2 (—2, 1, 2). R: 5xv — 3_>'2 — Axz = 0.
163

12. Să se reprezinte domeniul D, curba C, precum şi proiecţia lui C pe planul xOy în cazurile
1) D: x2 + y2 + z2^ 6, x2 + y2^z; C: x2 + y2 + z2 = 6, x2 + y2 = ar.
2) B : Ă2(%2 + v2) > r V , A-2 + v2< r2, 2> 0; C: Ă2(.T2 + y2) = rh2,
x2 -\- y2 = r2.
3) 1>: *2 + y2 + z2^r2, x2 + f — rx^O, x2 + y2 + rx^0] C: x2 + y2 + z2 = f2, *2 + y - r* = 0, *2 + y2 + rx = 0.
4) » : *2 + y < 2r«, (*2 + v2)2 - 2?%j;< 0; C: x2 + y2=2rz, {x2 + y2)2 - 2r2xy = 0, unde r, Ă > 0.
R: 1) figura 2.30, 2) figura 2.31. 3) figura 2.32, 4) figura 2.33.
Fig. 2.30 Fig. 2.31
Fig. 2.32
§ 6. COORDONATE POLARE ŞI SEMIPOLARE
6.1. Fie O originea (polul), Ox axa polară şi xOy reperul cartezian asociat reperului polar. între coordonatele polare (p, 6) şi coordonatele carteziene (x, y) ale punctului M (fig. 2.34) există relaţiile
x = p cos 6 y == p sin G.
164
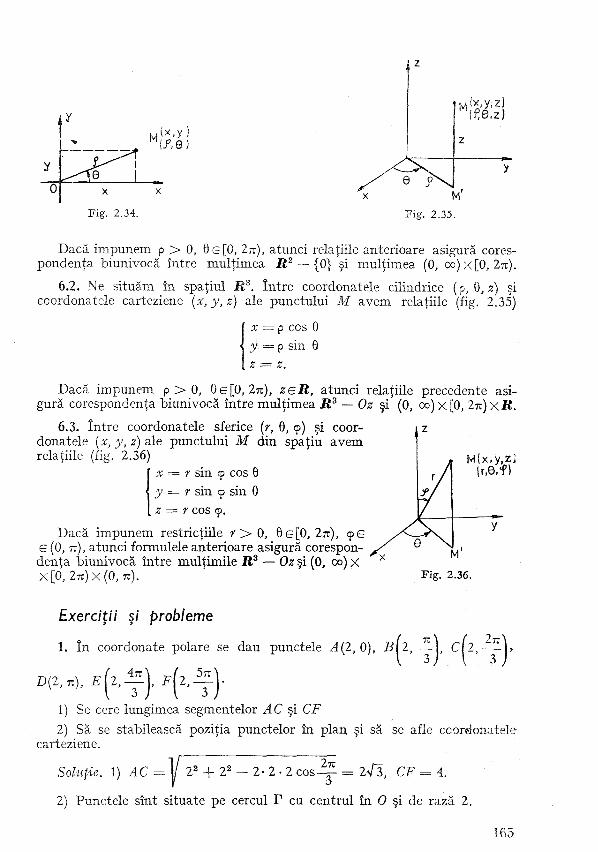
ix ,y ) f,Q)
Fig. 2.35.
Dacă impunem p > O, 0e[O, 2rc), atunci relaţiile anterioare asigură corespondenţa biunivocă între mulţimea R2 — {0} şi mulţimea (0, oo)x[0, 2n).
6.2. Ne situăm în spaţiul R3. în t re coordonatele cilindrice (p,Q,z) şi ccordonatele carteziene (x, y, z) ale punctului M avem relaţiile (fig. 2.35)
' x — p cos 8 1 y\ = p sin 6 ,z = z.
Dacă impunem p > 0, 6e [0 , 2-K), zeR, atunci relaţiile precedente asigură corespondenţa biunivocă între mulţimea R3 — Oz şi (0, oo)x[0, 2n)xR.
6.3. între coordonatele sferice (r, 0, cp) şi coordonatele (x, y, z) ale punctului M din spaţiu avem relaţiile (fig. 2.36)
" x = r sin cp cos 0 y = r sin cp sin 0 z = r cos <p.
Dacă impunem restricţiile r > 0, 0e[O, 27r), 9 6 e (0, iz), atunci formulele anterioare asigură corespondenţa biunivocă între mulţimile R3 — Oz şi (0, 00) x X[0, 2 T Î ) X ( 0 , TC). Fig. 2.36.
M!x,y,zi r,9,f)
Exerciţii şi probleme
1. în coordonate polare se dau punctele 4 ( 2 , 0 ) , B(I, —V cil,—),
1) Se cere lungimea segmentelor AC şi CF 2) Să se stabilească poziţia punctelor în plan şi să se afle coordonatele
carteziene.
Soluţie. 1) AC •V 22 + 22 - 2- 2 • 2 cos4^ = 2V3, CF 4.
2) Punctele sînt situate pe cercul T cu centrul în O şi de rază 2.
165

întrucît unghiul polar al fiecărui punct se obţine din precedentul adăugind
— , punctele sînt vîrfurile unui hexagon regulat înscris în cercul T; A[2, 0), S
£ ( 1 , VI), C(—1, VI), D(—2, 0), E{-\, - V I ) , F(l, - V I ) .
2. Se dau punctele A I—r—' —4—, — " T ' I T ' ? — '
( V6 V"6 ~ 1 \
C i - — — - , — ' ~~~~| raportate la reperul triortogomal 0 ^ 2 . Sase calcu
leze coordonatele sferice ale acestor puncte. Unde sînt ele situate? — 5 5V6 r , ( 5 V 6 f , ( 5V ~ 2 1
+ —5— + —r = 5 ; cost? 4 ; ' \ 4 / • \ 2) ' T > 5 2
2TT „ . „ \ 2 „ ~ , | , !i 2 ~ |
Soluţie. rA =
9 6(0, - ) deci cp = - ^ ; cos 0 = sin 0 = -2-^- , 0 = -£-; ^4 |5 , ' o Z 4 \ 4 o
-1 *-> / ~ î 1
rB = 6, cos cp = — —-, 9 6(0, - ) , cp = —^-, cos 0 — — ' sin 0 = —'
6 =——; B\6, > •—-L C i l , > ——I. Punctele i si C sînt situate 6 \ 6 3 J \ 4 3 )
într-un plan care trece prin Oz şi prin dreapta D'OD, astfel încît <£
<£ (Ox, D'OD) = — •
Punctele ^4, B, C se află pe un con cu vîrful în origine, ale cărui generatoare
fac un unghi de cu Oz.
3. Axa : polară a unui sistem de coordonate polare este paralelă cu axa absciselor a unui sistem cartezian rectangular si de acelaşi sens. Se dau coor-donatele carteziene ale polului 0'(2, —3) şi ale punctelor ^4(2, 0), B(0, —1), C(0, - 3 ) , D(2 + 2 VI, - 1 ) , £ ( 1 , - 3 + VI). Să se afle coordonatele polare ale acestor puncte.
R : ^ 3 , T j , B ( 2 V 2 , T j , C ( Z . , ) , ^ , - p | Z , T j .
4. Se dau curbele I \ : ;v4 + / + a{x2 + / ) = 0, T2 : x4 - yi = A;2 - 3 / . Să se transcrie ecuaţiile în coordonate polare şi să se stabilească simetriile fiecărei curbe
R : r i = P = ; - 4 - < ! T V î n t r U d t P ( ~ ° ) = P(Q) Vsin4 u -4- cos* O curba este simetrică faţă de axa polară; p(n — 0) = p(6) deci curba este simetrică faţă de o perpendiculară pe axa polară dusă prin pol; egalitatea P(TT + 6) =p(0) impUcă simetrie faţă de pol;
I V P = 1/ y s — ; aceleaşi simetrii ca la curba precedentă.
166

5. Presupunem că în spaţiu folosim coordonate sferice; care este locul O —i-
geometric al punctelor M (r,0, 9) pentru care 1) r = 2, 2) 9 = •—-, 3) 9 =— > 3 ' 3
4) r = 2 şi 0 = — , 5) r = 2 si 0 = — , 6 ) 0 = — si ® = —. 3 ' ' 3 3 ' ' 3
R: 1) Sfera S x cu centrul în O şi raza 2 ; 2) semiplanul P care trece prin 2n Oz şi prin OM0, OMQ e %0_y, <C xOikf0 = — ; 3) porţiunea de suprafaţă conică
S 2 cu vîrful cu O, ale cărei generatoare fac unghiuri de— cu semiaxa Oz;
4) semicercul T1 al sferei Sx din semiplanul P; 5) cercul Y al sferei S x din suprafaţa conică 2 2 ; 6) generatoarea suprafeţei conice S 2 aflată în semiplanul P.
6. Presupunînd că în spaţiu folosim coordonate cilindrice, care este locul
geometric al punctelor M{ p, 6, z) pentru care 1) p = 2, 2) 0 = — >
3) z = — 5, 4) p = 2 şi 0 = — , 5) p = 2 şi z = — 5, 6) 0 = — şi z = — 5.
R: 1) cilindrul circular drept 2 cu generatoarele paralele cu Oz, la distanţă doi de Oz; 2) semiplanul P care trece prin Oz şi prin OM0, OiW0 e xOy,
<£ #O.M0 = —; 3) planul Q paralel cu xOy la distanţă cinci sub xOy;
4) dreapta p = 2, 0 = —•; 5) cercul T din planul Q cu centrul în (0, 0, —5)
şi de rază doi; 6) semidreapta D = P f\ Q.

CAPITOLUL 3
GEOMETRIE DIFERENŢIALĂ
51. FUNCŢII DIFERENŢIABILE
1.1. în acest capitol, prin funcţie diferenţiabilă vom înţelege o funcţie de clasă C03. Clasa de indice minim impusă de context poate fi uşor recunoscută.
1.2. Considerăm o funcţie de tipul f: Rn~-*Rm. Funcţiile îi = yi°l: Rn —> R, unde yf sînt funcţiile coordonate ale lui Rm, se numesc coordonatele euclidiene ale lui f şi se scrie f = (f1( ..., fm).
Mulţimea G(i) = ţ(Xl,..., xn, h{xx, ..., xn), ..., im(Xl, ..., xn))\{xt, ..., *„)€«»} c J B » x « » s = Rn+m se numeşte graficul funcţiei f = (f1( ..., fm). Evident G(f) coincide cu mulţimea valorilor funcţiei
Funcţia f = (fi,
) -> (%, ..., xw, fx(%, ..., *„), ..., fm(»1( ..., *„)).
fm) este diferenţiabilă dacă şi numai dacă it sînt funcţii diferenţiabile. Unei funcţii diferenţiabile f i se asociază matricea jacohian
J(f) =
oh dxi
8im
oh cx2
0*m
oh oxn
Q*m
CX-i CX% cx„ Dacă n = m, atunci determinantul det J(f) se numeşte jacobianul lui f si se
A „ D(fx, ..., f„) notează cu •—— — . D(*i, ..., *,)
1.3. Funcţia f = (fx, ..., im) se numeşte: 1) injectivă dacă relaţiile VP,QeRn, i(P) = {(Q)eRm implică P = Q; 2) surjectivă dacă VQeRm, 3PeRn astfel încît f(P) = <?; 3) bijectivă dacă este injectivă şi surjectivă; 4) imersie dacă J(f) are rangul n, VP<~Rn(n^m); 5) submersie dacă J(f) are rangul w, VPeRn(m^n); 6) regulată dacă este imersie sau submersie; 7) difeomorfism dacă n = m, dacă este diferenţiabilă şi dacă posedă inversă
diferenţiabilă. 1.4. Dacă funcţia f = (fi, .... fm) nu este regulată într-un punct P, atunci P
se numeşte punct singular sau punct critic, iar f (P) se numeşte valoare singulară sau valoare critică.
168

1.5. Fie f : R" —> R o funcţie diferenţiabilă şi
d2f(P) (d;r) = £ —~- (P) dxt dXj i, j=\ C'XţOXj
hessiana sa (diferenţiala de ordinul doi). Fie P un punct critic al lui f. Dacă r sH
forma pătratică d2f(P) este nedegenerată, adică det (P) # 0, L dxţdxj J
atunci P se numeşte punct critic nedegenerat. în caz contrar P se numeşte punct critic degenerat.
Punctele critice nedegenerate ale unei funcţii diferenţabile f:Rn-+R sînt izolate.
1.6. Teorema funcţiei inverse. Fie f: Rn —> Rn o funcţie diferenţiabilă. Dacă PeRa este un punct în care det J(f) ^ 0, atunci există o vecinătate J} a lui P astfel încît restricţia lui f la D să fie un difeomorfism.
1.7. Teorema funcţiei implicite. Fie f = (fx, ..., fm): Rn+m—>Rm o funcţie dife
renţiabilă. Dacă în (A, B)eR**m avem î(A, B) = 0 si P ^ f l im) [A, B) ? 0, ' ^{yi,--,ym)
atunci există o vecinătate D a lui A si o funcţie diferenţiabilă (unică) g:D-+Rm astfel încît g(A) = B şi i(P, g(P)) = 0, V P s O .
1.8. Pentru definiţia diferenţiabilităţii nu este necesar ca domeniul de definiţie al funcţiei să fie toată mulţimea Rn, dar este necesar ca acest domeniu să fie o mulţime deschisă în Rn.
Fie S o mulţime oarecare din Rn. O funcţie f: S —> Rm se numeşte diferenţiabilă pe S dacă poate fi extinsă diferenţiabil la un interval deschis din Rn care conţine pe 5.
1.9. Fie I un interval din R şi f: I —* Rm. în acest caz noţiunea de derivată parţială se reduce la noţiunea de derivată de la funcţiile de o singură variabilă. De asemenea, au sens şi noţiunile de derivată la stînga şi derivată la dreapta.
1.10. Considerăm funcţia diferenţiabilă f: Rn -> R şi v un vector tangent la Rn în punctul P . Numărul
D7i(P)=±{(P + tV) at «
unde V este punctul ataşat lui v, se numeşte derivata lui f în raport cu v sau derivata lui f după direcţia lui v.
Dacă vP = (vi, ..., vn)p, atunci
D7f(P) = B l- |L (P) + ... + vnJL(P) = (v, Vf(P)), âx1 6xn
unde Vf este gradientul lui f.
1.11. Fie S o mulţime din R". O funcţie V care asociază fiecărui punct P e S un vector V(P) tangent la Rn în punctul P se numeşte cîmp vectorial pe S (fig. 3.1).. Dacă funcţia V este constantă, atunci cîmpul se numeşte paralel.
169

\
V-i / /
V= -yî+ xf V= x i + yj
Fig. 3.1
Algebra cîmpurilor vectoriale se construieşte pe baza următoarelor definiţii (V + W) (P) = V{P) + W(P), (iV) (P) = f(P) V[P), i:S^R.
Evident au sens şi noţiunile de dependenţă şi independenţă (punctual) liniară. Cîmpurile paralele Ult U2, ..., Un definite prin Ui(P) = (1, 0, ..., 0)P,
U2(P) = (0, 1, ..., 0)P, ..., U„(P) = (0, 0,..., 1)P se numesc cîmpuri fundamentale, iar ansamblul lor se numeşte cîmpul reperului natural. Orice cîmp V poate fi scris în forma
? (P) = fx(P) U^P) + U(P) U2(P) + ... + f„(P) U,(P), funcţiile P —> f,(P), i = 1, 2, ..., n, numindu-se coordonatele euclidiene ale lui V. Deci un cîmp vectorial este echivalent cu o funcţie de tipul f = (fi, h in):S^R\
Un cîmp vectorial se numeşte diferenţiabil dacă coordonatele sale sînt funcţii diferenţiabile.
Produsul scalar a două cîmpuri vectoriale, produsul vectorial a n—l cîmpuri vectoriale şi produsul mixt a n cîmpuri vectoriale se definesc punctual, adică prin intermediul operaţiilor corespunzătoare de la vectorii tangenţi.
—» 1.12. Fie V un cîmp vectorial pe Rn şi f: Rn -> jR o funcţie diferenţiabilă.
Funcţia D^ f definită prin P —» D« p. f se numeşte derivata lui f în raport cîmpul V. în particular găsim
% * = — , DffJ di 8x2
, . . . , D ^ f = oi Sxn
1.13. Fie W un cîmp vectorial pe Rnşive TpRn. Vectorul
V7W(P) =^-W(P + tV) dt t=0
tangent la Rn în punctul P se numeşte derivata covariantă a lui W în raport —> —» —> —»
cuv. Dacă W = WiUt -f- »>2$2 + ... + ^»Î7», atunci D?W = (D-Wi) ^ -f- ( D ^ 2 ) C7a + ... + (D-w.) tf„.
170

în particular, derivatele covariante ale cîmpurilor paralele sînt nule. — • — > _
Fie cîmpurile vectoriale diferentiabile Y, Z, fie v, we TpRn şi a, be R. Avem
D-(«Y + *Z) = « D - y + 5D-Z
D-( fy) = (D 7 f )y + f D - y
D7(Y, Z) = (D7Y,Z) + (Y,D7Z).
1.14. Fie cîmpurile vectoriale diferentiabile V şi W. Cîmpul vectorial T>pW definit prin (D^W) (P) = Dpp)W se numeşte derivata covariantă a
timpului IV în raport cu cîmpul V. Daca
W = te-'i^ -j- »'2LT2 + ... + <£'nL7„, atunci
D-.TT = (pfWl) L\ + (Dpwa) U2 + ... + (Dfwn)Un.
Exerciţii şi probleme
1. Să se arate c i pe Rn nu există nici o distanţă diferenţiabilă. Soluţie. Dacă d: Rn X Rn —• R este o distanţă diferenţiabilă pe Rn, atunci
f.RxR-^-R definită prin p(x, y) = ă((x, 0, ..., 0), (y, 0, ..., 0)) este o dist a n ţ ă diferenţiabilă pe R. De aceea este suficient să demonstrăm că pe R nu există nici o distanţă diferenţiabilă.
Fie o: Rx R —» R o metrică diferenţiabilă. Deoarece p(x, y) > p(x, x) = 0, adică (x, x) este un punct de minim global, în mod necesar avem
- ^ - [%, x) = 0, ht (X> x) = 0. cx 8y
Fie z > v. Din p(x, z)<p(#, y) + p[y, z) rezultă
p(x, z) - p(x, y) p(y, z) - p(y, y) z — y z — y
•şi deci
Hm P(*' z) ~ Pfe >') < u m P(^' z) - P(>'- y) . '\y z — y z\y z — y
Aceasta împreună cu diferenţiabilitatea implică
~ (X y) < - r 1 (y, y) = o. cy - cy
171

Analog, în ipoteza z < y, se arată că —— (x, y) ^ 0. oy
Cele două inegalităţi satisfăcute de—— implică —— {%, y)=0, V(#, y)eR2. cy 8y
Analog, _dp_ 8x
(x, y) = 0, V(x, y)eR2. Deci dp = 0, adică p(x, !jy) = const.
Dar p(x, x) — 0 implică p = 0. 2. Fie D o mulţime deschisă din Rn, fie I un interval din R şi f: D —> R
a: J —» D două funcţii diferentiabile. Să se arate că f o a este constantă dacă şi numai dacă <x_Lvf° a-
3. Fie funcţia f: Rn —• ÎS de clasă C1. Se presupune că ecuaţia f(%, #3, ..., ..., #a) = 0 defineşte pe xt, i = fixat, ca funcţie de clasă C1 de celelalte n—l variabile. Se construieşte matricea pătratică de ordinul n, A = [%], astfel
"*' pentru orice j ^ y, *, y = 1, 2, ..., n. Să se arate că ca au = 1 şi «„ <9#<
det A = — (» - 2) 2»-1.
Soluţie. Aplicăm operatorul de derivare totală. Obţinem Si 8x,
X ox,
dx, „ . , . , . „ d#4 X — L = 0, Î ,6 j , ad ică — -dXj
Notăm
Si
'j , deoarece prin ipoteză • (x) =£ 0.
Si
dx,-= U i = 1, 2,
det A =
1 _ l i _ h îs
Si
Sxt
., n. Atunci, ai} —
L
Sx,
pentru i =£ j .
f i
i - A u
-i± _ ^ i
f i
A f3
A 4 A f.
i
_ *i*2
fif2 - f,
1
— 1
— 1
- i
— 1
1
— 1
— 1
- 1
- 1
ţ
— 1
2) şi prima Adunăm toate liniile la prima, scoatem factor comun pe linie astfel obţinută, (cu toate elementele egale cu unitatea, o adunăm la toate celelalte. Determinantul devine
1 1 1
det A = — (n — 2) 0 2
0 Dezvoltînd cu regula lui Laplace după elementele primei coloane, găsim det A = — (n — 2) 2"-1.
172

4. Fie funcţia f: D —> R3 dată prin i(u, v) = (u2, uv, v2), D: u > O, v > 0 . 1) Să se arate că este injectivă şi imersie, dar nu este surjectivă. 2) Să se determine î(D) şi să se arate că f-1: f(C) —> D este continuă.
5. Fie funcţia f:R2-+R, definită prin i(x, y) = %4 — ax2y + &y3, a,b^0. Să se stabilească dacă este injectivă, surjectivă, submersie.
6. Fie f = (x, y): JR2 —> B 2 , # = p cos 6, y = p sin 8 şi restricţia sa g: (0, oo) X (0,2 TT) -> R2 — {(*, v) [ x> 0, v = 0}.
1) Să se cerceteze aplicabilitatea teoremei funcţiei inverse pentru f. 2) Să se arate că g este un difeomorfism global. Să se găsească g"1.
~D(x r) R: 1) —- = p ^ 0 <s- p ^ 0. 2) g este o bijecţie cu Jacobianul
nenul (fig. 3.2);
[x, y = 1
V xz -r v2, arc cos V*2 +
— A', 7t)
\ x2 + v2, - + arc cos / ^ T V% •JV
pentru y > 0
pentru jy = 0, # < 0
\ pentru y < 0
7. Se dă funcţia f = (x, y, z): Rs —> R3, x = p cos 6, _y = p sin 6, 2 = 2 si restricţia sa g: (0, 00) x (0,2^) X (— 00, 00) —> R3 — {(x, y, z) \ x > 0, ^ = 0}.^
1) Să se cerceteze aplicabilitatea teoremei funcţiei inverse pentru f. 2) Să se arate că g este un difeomorfism global. Să se găsească g_1.
Soluţie. Pentru funcţia diferentiabilă f obţinem
D(x, y, z) _ D(p, Q,z)~
cos 6 sin 6
0
— p sin 8 p cos 8
0
0 0 1
D(v v z) Deoarece ' -' •'- = p ^ 0 < s > p ^ 0 , rezultă că există mulţimi deschise
D(p, 6,2) din R3 pe care f este Cx — inversabilă. De exemplu, D = (0, 00) x (0, 2iz)x X(— 00, 00). Imaginea lui D prin f este mulţimea deschisă care se obţine
91
27
P Fig, 3.2
173

scoţînd din R3 semiplanul xOz,. x^O (fig. 3.3). închiderea lui D este_I)=[0, oo) x [0, 2n] x B , iar f(B) = R3.
2) Funcţia g este injectivă. y" într-adevăr, relaţia g(pi, 6i,
•zi)=g(Pa< ^2, Za), adică (piccs 6i, pi sin Qlt Zi) = (p2 cos 02, p2 sin 02, z2), implică (pi, 0X, z{) = = (P2. 02, 22). Funcţia g este şi surjectivă deoarece g ((0, oo) x
X (0, 2~) X (— oo, oo)) = R3 — {(#, y, 2) | . 0 0, v = 0}. g este un difeomor-fism global deoarece este o bijecţie cu Jacobianul nenul.
Rezolvînd sistemul
p cos 0 = x, p sin 0 = y, z = z, (x, y, z)sR3 — {(x, y, z)jx^O, y = 0},
Fig. 3.3
Vx y", arc cos V.r
-\y,x,z) =\ {-x.ii, z)
14x2 + y2, -K + arc cos V %- -f- y
»3
pentru v > 0
pentru v = 0, x < 0
pentru v < 0.
8. Considerăm funcţia f = (x, y, z): R3 —» l?3, „v = r sin cp ccs 6, v == r sin o sin 0, z = r cos 9 şi restricţia sa g : (0, oo) x (0, ~) X (0, 2-1 ~> R3 -{{x,'y,z)\x>0, y = 0).
1) Să se cerceteze aplicabilitatea teoremei funcţiei inverse pentru f. 2) Să se arate că g este un difeomorfism global. Să se găsească g~x.
R: i) J^ŞIILA = r2 sin 9 ± 0 o r ^ 0 si o # /CTT, Ăe Z. D ( r , 9 , 0) ' ' '
2) g este o bijecţie cu Jacobianul nenul (fig. 3.4). Restricţia lui g~ la x > 0, y > 0, z > 0 este
'x{x, y, z) = IV%2 + v2 + £2, arc cos V.x-2 + arc sm
Fig. 3.4
174

9. Se consideră funcţia t —> (a cos t, b sin t), teR. Să se stabilească dacă este injectivă, surjectivă, imersie.
10. Considerăm funcţia f: R—>R2,
f(0 =
1 1 1
(e ' , e ' sin e ' ) , i > 0
(0, 0) , t = 0 i î i_
(—e' , ez sin e *), £ < 0.
Să se arate că este diferentiabilă şi admite originea ca punct singular.
11. Fie f = («, v): J î 2 - {(0, 0 ) } ^ R 2 - {(0, 0)}, u = -^—t» v = - ^ - y
Să se arate că f este un difeomorfism. ku
R: f este bijecţie, F 1 = (x, y): R1 - {(0, 0)} -* R'2 - {(0, 0)}, x = —
y = — , este diferentiabilă, deci f este difeomorfism. i t —p- L
12. Se consideră funcţia f: Rn—> R definită prin
i(xi, x,, ..., xn) = (.Vi - A-,)2 x2 + (Xl - x2) xs + ^ ^+3 e-t*'-*»1,
pentru n ^ 4. Să se arate că rangul hessianei lui f, adică rangul matricei c<2f r g*f este cel mult 2.
Soluţie. Notăm
ci
P2
CX1
ci CXo
ci cx-z
n~3
£ • 3 = 1
2(A-X - x2) xz 4- * s + £ « a ea(-i-^),
*2)2 - x3 - g fl^+3 e^«.-^, — 2(.T! — ,V2) Xo + (A\ —
= Xi — -v2, Ai-3 = e"(*i-*=>, a = 1, 2, ..., w — 3.
Fie fa: B" —> R, a = 1, 2, ..., n — 2, funcţiile reale definite respectiv prin
fi(y) = >'i + 3'2 — yh U(y) = <?> — yA,
f3(v) = e2* - v 3 , ..., fM_3(v) = e(«"3)* - v,.
175

Notăm f = (f1( U, ..., fK_2), f: Rn -+ R"~2. Se găseşte
1 0 0
1 0 0
- 2 v 3
ey»
2e2^
0 — 1
0
0 0
— 1
0 ... 0 ... 0 ..
0 0 0
O O (n — 3)e<"-3>*
şi, evident, rang Jy(i) = n—2, VyeRn.
Se observă că fa(plt ••-,£„) = 0, a = 1, raport cu Af4, Î = 1,2, ..., n, obţinem
0 0
n—2, pe Rn. Derivînd în
n fii 8 b-
adică fiecare dintre vectorii
ternului omogen BL
dpi 3p. dx, fix,
poate fi privit ca o soluţie a sis-
Deoarece rang Jy(i) = rang
22f "
# „ = «
1.2,
2 în orice punct din R", rezultă
rang ldx{\ = rang < 2 pe Rn. în (1, 0, ..., 0) se găseşte rangul doi.
dxioxj
13. Fie funcţia diferenţiabilă f: R2 -> ft, dată prin f(.v, v) = j ' 2 — — (# — a)2 (a; — b). Să se determine punctele critice ale lui f şi să se precizeze natura lor.
Soluţie. Fie J(î) = [(x — a) ( — 3x + a + &), 2_v]. Minorii matricei /(f) se anulează simultan în P(a, 0), deci P este punct critic al lui f.
Ataşăm funcţiei f hessiana sa, d2i(x, v) (dx, dv) = ( — 6% -f- 4a+2i>) d*2 + + 2 dj/2. Pentru P(a, 0), df(P) (d,r, dy) = - 2(a — b) dx2 + 2dv2. Matricea ataşată formei d2f are determinantul
-2(a — b) 0
-4(« - b).
Pentru a =£ b, P(a, 0) este punct critic nedegenerat. Pentru a = b, P(a, 0) este punct critic degenerat.
14. Fie f: R4 —> R definită prin f(%, x2, x3, #4) = 2#f>-3 + x2x\ + *2%3 + + %%!, P ( l , 0, 2, — 1) şi v = (1, 1, 0, 1) un vector tangent la R1 în P . Să se calculeze D^i(P).
15. Fie V1 = —ai —bj -\- (a + b) k, V2 = — bi + (a + b) j — «£, F 3 =
= (a + &) » — aj — bk. Să se arate că F\, F2 , F 3 sînt liniar dependente. Să se exprime cîmpul F 3 ca o combinaţie liniară de V1 şi F2 .
R: ( F x x F2 , F3) = 0, F 3 = - Vx - V2.
176

16. Fie v = (1, 2, —5) şi P ( l , 3, —1). Să se găsească D^î(P) ştiind că : 1) f = x2y + z2, 2) f = %"' — y5z, f = arc tg (xy).
R: 1) 18; 2) 2032; 3) 1/2.
17. Fie W = x\x^Jx + XşxlUz + x1x2U3 -4- x\x\U^ un cîmp vectorial pe -R4, vectorul ? = (— 1, 1,0, 2) şi P ( l , 0, — 1, 0). Să se calculeze D^W(P).
18. Fie V = — 2 Î + 3'Ă şi TF = e* cos yi + ey sin #_/.
Să se determine:
1) D fTF, 2) D p F , 3) D f ( r f f ) , 4) D$(xV), 5ŢDf(DfW), 6) D ? ( * T F -
- yV).
R: 1) D ^ l F = - s e * cos vi -.-e2 ' cos yj, 2) D - F = -yi, 3) D^(*2TF) =
= A- e cos 3> (—2 — :v) i — .T0e1/(2 sin ,x + x cos _ | _/', 4)D!-*(»F) =
= — exz cos y î + (exy cos y + evx sin x) k, 5) D^(D^TF) = ( e V cos y — - » - ^ • — ± —* - *
— ea_y cos y) j + j 'e y cos yj, 6) ~Dş.(xW — yV) = [y"—]exz cos y (1 + #)]« —
— ztv (sin % + x cos A') y.
19. Cîmpul vectorial [V, W] =>= DrtTF — D ^ F se numeşte croşetul cîm-— • — y
purilor vectoriale F şi TF. Să se demonstreze relaţiile 1) % , ^ ] f = D f ( % f ) - % ( D F f ) '
2) [F, TF] = - [TF, F] ,
3) [£7, [F , TF]] + [W, [U, Vj] + [V, [W, U]] = 0,
4) [iV, gW] = f(Dfg) W-g (%f) V + fg[F, W].
§ 2. CURBE
i. Curbe în Rn
Fie Bra spaţiul eucHdian canonic cu n dimensiuni, TPRn spaţiul tangent în punctul P la Rn şi 3P: Rn —* TPJRK izomorfismul canonic. Notăm cu / un interval deschis (alteori interval închis, semiînchis sau reuniune de intervale) din R.
i.l. O funcţie diferenţiabilă a : / —> Rn se numeşte curbă şi se notează cu a. Fineori numai imaginea a.(I) este numită curbă. în acest caz a se numeşte
parametrizare, iar tel se numeşte •parametru. De asemenea, din definiţia lui tx(I) rezultă echivalenta Pe a(I) o 3tEI,
P = «(*).
12 — Probleme de algebră — c. 264 177

Deoarece lui a i se ataşează o funcţie şi numai una de tipul a = I0occ: 7 - ^ T0Rn, mulţimea <x(I) poate fi privită ca fiind descrisă de extremitatea vectorului variabil a. cu originea fixată în originea O a lui Rn (fig. 3.5).
Dacă raportăm pe Rn la baza canonică, atunci funcţiile a şi a sînt caracterizate prin coordonatele lor euclidiene
a(t) = {x1{t),...,xn{t))> tel
x{t) = Xl(t) lx + ... + *i(0 en, tel, într-un context în care numai imaginea oc(I) este numită curbă, relaţiile
xx = Xi(t), ..., xn = xn(t) se numesc ecuaţiile parametrice ale curbei, iar a = a(t) se numeşte ecuaţia vectorială a curbei.
i.2. Un punct Peoc(I) se numeşte simplu dacă există o singură valoare a lui te I astfel încît oc{t) = P. Dacă există mai multe valori distincte t astfel încît a(if) = -P, atunci P se numeşte punct multiplu (dublu, triplu e tc ) . în general, cardinalul mulţimii a_1(P) se numeşte multiplicitatea punctului P.
O funcţie diferenţiabilă şi injectivă a: I —> Rn se numeşte curbă simpla deoarece ipoteza de injectivitate asigură faptul că a(I) posedă numai puncte simple.
i.3. O curbă %: [a, b]~^R" pentru care «.(a) = a(6) se numeşte curbă închisă. Această definiţie nu are acelaşi conţinut cu definiţia topologică a unei
mulţimi închise. într-adevăr, pentru orice curbă a: [a, b] —> Rn, imaginea a([a, &]) este închisă în Rn în sens topologic, deoarece a este implicit o funcţie continuă, dar aceasta n-are nici o legătură cu condiţia <x(a) = a(6).
i.4. O curbă a: I —> Rn se numeşte periodică dacă există un număr T > 0 astfel încît t + P e / , a(£ + P) = a(^), V/e7 . Cel mai mic număr P > 0 care are această proprietate se numeşte perioada lui a.
Se poate demonstra că imaginea unei curbe închise admite o reprezentare parametrică periodică.
1.5. Fie a: I —> Rn o curbă. Arectorul a'{t) cu originea în a.(t) se numeşte vector viteză. Evident x'(t) e Ta{t)Rn.
Un punct a.[t) = P 6 a(I) corespunzător unei valori a lui t pentru care £'(t) ¥= 0 se numeşte punct regulat. Dacă a.'{t) nu se anulează pe I, atunci curba a se numeşte regulată. Dreapta determinată de punctul regulat P şi de vectorul a (t) se numeşte tangenta curbei în punctul considerat.
i.6. Un punct a.{t) = P e a(I) corespunzător unei valori a lui t pentru care a(t) = 0 se numeşte punct singular.
Dacă 3n > 1 astfel încît a'(t) = x"{t) = ... = a t - 1 ' ^ ) = 0, aW(0 # 0,
atunci P se numeşte punct singular de ordinul n. în acest caz punctul u.{t) = P şi vectorul a{n){t) definesc o dreaptă care se numeşte tangenta la curbă în punctul singular.
Fig. 3.5
178

i.7. O funcţie Y care asociază fiecărui iei un vector Y(t) tangent la Rn
în punctul a(t) se numeşte cîmp vectorial pe curba a:I—>.R". în particular a ' este numit cîmp viteză, iar a." este numit cîmp acceleraţie.
i.8. Fie ce o curbă pentru care imaginea <x(I) este conexă. Curba a împreună cu o alegere a unui sens de parcurs pe a(7) se numeşte curbă orientată.
Dacă a este o curbă regulată, atunci se consideră drept pozitiv acel sens de parcurs pe oc(T) care este coerent cu sensul lui a'(^), adică cu sensul pozitiv pe tangentă.
i.9. Dacă într-o extremitate t0a intervalului deschis J aveml im jja(i) | | = oc,
atunci spunem că « posedă o ramură infinită. Direcţia asimptotică corespunzătoare acestei ramuri infinite este dată de
w = lim — (daca exista !).
în ipoteza că ramura admite o direcţie asimptotică u, punctul P = cc(t) şi vectorul u determină o dreaptă Dp. Dacă DP are o limită D, pentru t —> tg, atunci dreapta D este asimptotă ramurii infinite.
i.10. Fie ty.-.I^-R11 o curbă şi t0 o extremitate a intervalului deschis I. Dacă lim <x.(t) = A, atunci A se numeşte punct asimptotic al curbei a.
t+t,
i. 11. în studiul proprietăţilor curbelor regulate a: I ->K n se utilizează următoarele elemente:
1) viteza, v(t) = \\a'(t)\\, 2) elementul de arc, ăs = v(t) dt,
3) lungimea unui arc de curbă, \ v(t) dt, a < b; a, bel,
A) abscisa curbilinie, s = \ v{t) dt, s:I-+J,
5) reprezentarea normală a lui a, (3 = a0s_1: J —>UB.
i. 12. Fie a1( a2 : I —> R" două curbe care au un punct regulat comun M0 = a.i(t0) = a3(^0). Dacă
a2(£) — ai(^) _ f 0 pentru i = 1, ..., 7î — 1, «
*-*'•> (t — toy 1 ^ 0 pentru i = n + 1
atunci se spune că ai(7) şi a2(I) au în ikf0 un contact de ordinul n.
Se observă că ai şi a3 au în punctul regulat comun M0 un contact de ordinul n dacă şi numai dacă MQ este un punct singular de ordinul n + 1 pentru curba a2 — ax sau dacă şi numai dacă au loc relaţiile
*{*>&) = *P(to), k = 0, 1, ..., » şi ai»+1)(/0) * 3£"+1>(*b).
179

Exerciţii şi probleme
1. Fie curba x: fi~*jR4, oc(t) = (sin t, 1 + cos t, sin t + cos2 /, sin2 /). Să se arate că :
1) a este periodică, 2) restricţia la [0, TC) este o curbă simplă, 3) curba trece prin punctele (1, 1, 1, 1) şi (0, 2, 1, 0),
( î 1 1 1 1 \
- ^ , 1 -4- ~T=' — + -7=' — I e s t e regulat, iar tangenta V2 V 2 2 V 2 2 /
Ia
curbă în acest punct este perpendiculară pe dreapta de direcţie d = (1, 1, - V I , - 2 , - 1 ) .
Soluţie. 1) Deoarece funcţiile sin iî şi cos t sînt periodice, de perioadă 2~, rezultă a(2 + 2TT) = cc( ), We'jR.
2) Restricţia a:[0, TL) ~-*U4 este injectivă. într-adevăr, din a(4) = o'-ih) rezultă sistemul sin tx = sin t2, 1 + cos t± = 1 + cos 4, sin ^ + cos2 ^ = = sin t2 + cos2 ^2, sin2 tt = sin2 /2, care are soluţia unică t± = t2.
3) (1, 1, 1, 1) = a [—V iar (0, 2, 1, 0) = <x(0).
4) Găsim oc'( ) = (cos t, — sin /, cos t — 2 cos f sin £, 2 sin t cos £), I — ,
V2 2 v2 2/ U i UJ W2 V2 V2 J Deci punctul considerat este un punct regulat al curbei.
Fie a j — I = i i . Rezultă ( i x , i ) = 0, adică dx_Ld. Deoarece d± este vecto
rul director al tangentei la curbă, afirmaţia din enunţ este demonstrată. 1 21 i2+ 1
i 2 - T ' t2~ î 2 2
2. Fie curba x.R - { - l , 1} -+ # 5 , a(j) = f—?—
t+ î i— 1 1) Să se determine tangenta la curba în punctul (— 1, 0, — 1 , 2, 0), 2) Să se cerceteze ramurile infinite ale curbei. Soluţie. 1) (— 1, 0, —1,2,0) = a(0). Vectorul director al tangentei la curbă
este -,,(A , • - 2 * 2 - 2 - 4 / - 2 - l ct{t) = a ' ^ - i ) 2 ( ^ 2 - i ) 2 ( i 2 - i ) 3 (t+i)2 (t-i)2)
a'(0) = (—1, —2, 0, —2, —1); Tangenta la curbă este dreapta
XŢ. + 1 __ -Ta _ A'3 + 1 _ Xj — 2 _ % — 1 " — 2 ~ 0 ~ — 2 ~~ — 1
2) Curba x ar putea avea ramuri infinite pentru £ = ± 0 0 sau t = ± 1 • Calculăm lim a(£) = (0, 0, 1, 0, 1). Punctul (0, 0, 1, 0, l ) e i l 3 este punct
asimptotic al curbei a.
180

Deoarece lim x2(t) = lim x3(t) = lim xt(t) = oo, avem lim |j a(OI| = oo, i-i.— 1 i->—1 ' <-> — 1 ' *-»—1
deci curba posedă o ramură infinită pentru t—> — 1.
11 (011 = V*î(*) + *§(*) + x\{t) + xt(t) +lxt(t) =
(* - 1) (* + 1)
t(f) _ (* + 1, 2/, ** + 1, 2(t - 1), *(* + 1)) ||ăe(0l| V2^ + 2 ^ + 12^2 — 6 ^ + 6
*--i | |a(0ll l ' V6 V6 V6 direcţia asimptotică corespunzătoare ramurii infinite obţinută pentru t—>— 1. Asimptotă nu există.
Deoarece lim %(£) = lim x2(0 = Hm #3(0 = lim x5(t) = oo, avemlim 11 «.(t) || = oo, *->l i-s-1 2->l i-9-1 *-»-l
deci curba posedă o ramură infinită pentru t—*l.
a{t) _(l 1 1 l im •
\2 2 2 2 J t*i | |a(01
direcţia asimptotică la această ramură. Asimptotă nu există.
3. Fie curba «: JB ->JR5, a(0 = N2, 2t, 1 — 2t, 2 + t, — ?
1) Să se arate că a este curbă simplă, regulată ce trece prin punctele
.4(0,0, 1,2,0) şi B(l, 2, — 1,3, l i ) -
2) Să se determine tangenta la curbă în punctul A, viteza de-a lungul curbei, lungimea arcului de curbă AB.
4. Fie curba a:[0, TU] -»• JR4, oc(*) = (sin t, cos2 *, 5 sin t, 1—3 cos2 t). 1) Să se arate că a este închisă, iar prelungirea a: R <-+R5 este periodică. 2) Să se determine punctele singulare ale curbei şi tangentele în aceste
puncte.
3) Să se găsească viteza şi acceleraţia pentru t0 = — • 6
Soluţie. 1) a(0) = (0, 1, 0, — 2) = OC(TC), deci curba este închisă. Deoarece a(0 = a(tf + 2TT), prelungirea este periodică, de perioadă 2iz.
2) Punctele singulare ale curbei corespund valorilor parametrului t pentru care a'(i) = 0.
x'(t) = (cos t, —sin 2/, 5 cos t, 3 sin 2j!);
t'H) = 0 =* t = — • w 2
18Î

2 cos 2t, —5 sini , 6 cos 2t). Deoarece
Punctul al —j = (1, 0, 5, 1) este punct singular \ 2 J
Determinăm a"(i) = (—sin t,
a " l — = ( — 1 , 2 , — 5 , - 6 ) ^ 0 , acesta este vectorul director al tangentei
la curbă în punctul singular.
Tangenta are ecuaţiile
%i — 1 x-2 x3 — 5 %z — 1 — 1
3) v(t) = \\*(t)\\; v\l
2
, * | f
— 5
Vi 08
a[t) = \\a."{t)\\ ; a, î\ 1 si 66.
5. Fie curbele
ax: [0, TT] -* R4, ai(i) = (cos i, sin3 /, 2 + sin t, 1 - cos t).
a2:[0,7t]->R*, «2( i)=| | -- i , ^ - | J + 1 , ^ - | j 2+ 3 , i ~ - | - ! - l j -
Să se arate că <xi([0, -]) şi a2[(0, TT]) au un punct regulat comun în care contactul este de ordinul unu.
Soluţie. Punctul comun M0(0, 1,3, 1) corespunde la t = — . S e găsesc
ai(2) = (—sin i, 3 sin21 cos /, cos t, sin i) =* a i | — j = (—1, 0, 0, 1),
2£(*) = ( - 1 , 3^ - | j 2 , 2^ - | -J , lj =» a ^ j = (-1,0,0, 1),
al(t) = (cos t, 6 sin i cos21 — 3 sin3 t, —sini, cos i) =>aî | — 1= (0, — 3, — 1, %),
3*ff) = (0, 6, (i - TI/2), 2, 0) => O5(TC/2) = (0, 0, 2, 0).
(f) Deoarece a i j -^ | = a 2 | — } = (0, 1, 3, 1), oi(7t/2) -*(f) ( - 1 , 0, 0, 1),
şi ^ = (TU/2) = (0, —3, — 1, 0) ^ a£(n/2) = (0, 0, 2, 0), contactul este de ordinul unu.
6. Să se arate că dacă a: I —»• i i " este o curbă cu viteză constantă, atunci a"(i) _L «'(/), Wei".
Soluţie. Fie P = cc(i), i e / , un punct arbitrar pe curba a. Vectorul viteză în P este a'(i). Dacă 11 a'(t)11 = const, rezultă (a'(i))2 = const. Prin derivare (a'(i), a"(i)) = 0 adică a'(i) J_ a"(i).
182
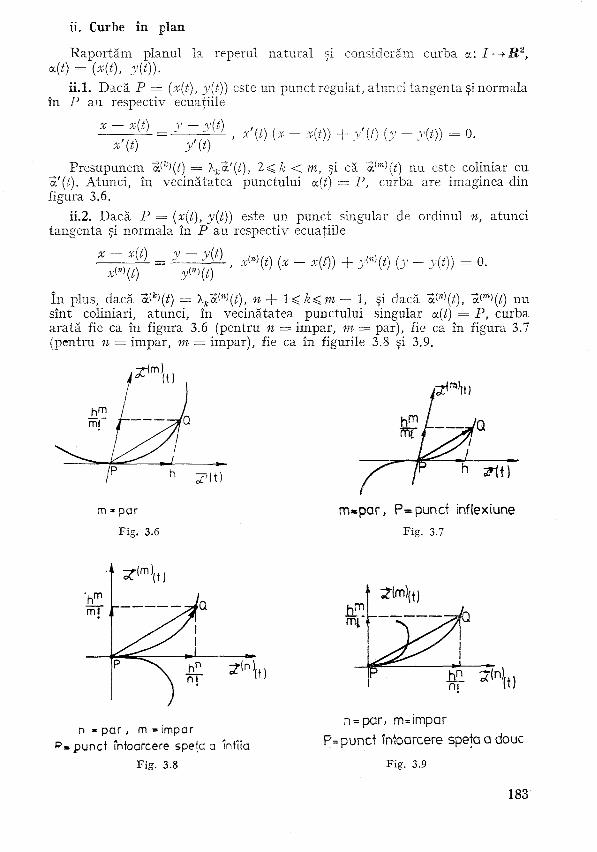
ii. Curbe în plan
Raportăm planul la reperul natural si considerăm curba a: 7—»H2, «(*) = (*(*), MO).
ii.l. Dacă P = (x(t), y(t)) este un punct regulat, atunci tangenta şi normala în P au respectiv ecuaţiile
x — x(t) v — v(/!) *'(0 (* - *(*)) + y (0 (v - y{t)) = 0. * ' (*) y'(t)
Presupunem a'1'^/) = ~kt.~x'(t), 2^k < m, şi că a(m'(£) nu este coliniar cu a'(2). Atunci, în vecinătatea punctului <x(t) = P, curba are imaginea din figura 3.6.
ii.2. Dacă P = (x(t), y(t)) este un punct singular de ordinul n, atunci tangenta şi normala în P au respectiv ecuaţiile
x — x(t) y — y(t) M (t) y»>00
, *<»>(*) (x - x{t)) + yW{t) (y - y(t)) = 0.
în plus, dacă t^(t) = \a.w{t), n + 1 < £ < O T — 1, şi dacă a^(t), a^(t) nu sînt coliniari, atunci, în vecinătatea punctului singular a(t) = P, curba arată fie ca în figura 3.6 (pentru n = impar, m = par), fie ca în figura 3.7 (pentru n = impar, m = impar), fie ca în figurile 3.8 şi 3.9.
^ f t ! l t )
TMt)
m » par Fig. 3.6
h ?1t)
m»par, P= punct inflexiune Fig. 3.7
n - p a r , m = impar p » punct întoarcere speţa a înfiia
Fig. 3.8
ţg- 2(n'(t)
n = par, m= impar P= punct întoarcere speţa a douc
Fig. 3.9
183

ii.3- Presupunem că a este o curbă regulată. Funcţia k: a(I) —> R definită prin
, :c y — x y k°x = — -i- : I —.> R
{x'2+ y'y* se numeşte curbura lui a, iar — (pentru k =£ 0) se numeşte raza ie curbură,
\k\ Semnul lui k precizează alura lui oc(I). Mai mult, funcţia de curbură determină o curbă clin plan pînă la o izometrie.
ii.4. Graficul unei funcţii diferenţiabile de tipul f: I —> R este o curbă plană simplă şi regulată. în acest caz y = î(x) se numeşte ecuaţia carteziană explicită a curbei.
ii.5. Curbe de nivel, Curbele plane mai pot fi introduse şi pornind de la o funcţie diferenţiabilă de tipul f: Rs ~> R. Mulţimea
C = i-\c) = {(x, y) | (x, v) eR2, i{x, y) = c, c = fixat}
se numeşte mulţime de nivel constant c sau mulţime de ecuaţia carteziană implicită i(x, y) = c. Pe scurt se scrie C: i(x, y) = c.
Dacă funcţia f este regulată în punctele Iui C, atunci C este o reuniune de arce simple şi regulate în sensul i.2 şi i.5. în această ipoteză, tangenta şi normala în (x0, y0) au respectiv ecuaţiile
(x-
( y —
c x
ci xo) — (xo,
cy
yo) + (y
3b) - (y
- >'o)
- J'o)
di ~7- (xo, }'o) cy
8i -7- (xo, yo) cx
= 0
= 0
şi Vf este un cîmp normal nenul pe C. De asemenea există o parametrizare globală a lui C dacă şi numai dacă C este conexă.
Fie (x0, Vo) e C un punct critic al lui f în care hessiana lui f nu este identic nulă. Dacă det d2f(^0, y0) > 0, atunci (xQ, y0) este un punct izolat al curbei C; dacă det d2i(x0, y0) < 0, atunci (x0, y0) este un punct dublu pentru C; dacă det d2f (xQ, y0) = 0, atunci (x0, y0) este un punct de întoarcere pentru C. într-un punct dublu sau de întoarcere, direcţiile (l, tn) ale tangentelor la C sînt date de
S2i 82i 82f P-7TT (;Vo> yo) + 2lm— (x0, y0) + m2 — - (x0, y0) = 0.
cx cxdy cy
Dacă f este un polinom de gradul n, atunci C se numeşte curbă algebrică de •ordinul n.
ii.6. Trasarea curbelor plane. -«, Fie <x= (x, y): I-^-R2, x = xlt), y = y(t) o curbă plană. Pentru a desena imaginea a(J) cr R2 în raport cu axele de coordonate este
necesar să se urmărească problemele următoare. 1) Stabilirea domeniului de definiţie I, precizarea punctelor de acumulare
ce nu aparţin lui I şi calculul limitelor lui t —> x{t), t —> y(t) în aceste puncte. Precizarea punctelor critice (dacă există !).
2) Intersecţii cu axele.
184

3) Se cercetează dacă a este o curbă periodică, adică 3T > 0, a(t~\- T) = = a(t) Vt. Dacă a este periodică, de perioadă T, atunci este suficient să considerăm restricţia a:[0, T] —> Rs.
Din faptul că a. este o curbă periodică rezultă că t —> x(t), t —» v(£) sînt periodice avînd eventual alte perioade decît a. Dacă t —+ #(f) este periodică şi are
perioada Tlt t—>y(t) este periodică si are perioada T2, iar — - = — e Q ,
atunci a este periodică şi are perioada T = #7^ = ^>T2. 4) Se cercetează simetriile lui a(I). Dacă Vtel, 3.1' e I astfel încît
(1) *(*') = *(*), _v(0 = - M * ) . (2) *(*') = - * ( * ) , MO =y(t), (3) * ( 0 = -*(*)> y(i') = — yiî), (4) .t(f) = y(t), y(f) = #(£) e t c , atunci curba este respectiv simetrică faţă de (1) axa Ox, (2) axa Oy, (3) origine, (4) prima bisectoare etc. Se observă că sistemele (1), (2) şi (3) conţin ca un caz particular studiul parităţii şi imparităţii funcţiilor t —> x(t), t—*y(t).
Dacă IreR astfel încît, Vtel, punctul oc(r — t) se deduce din «.{£) printr-o simetrie (în raport cu un punct sau o dreaptă), atunci rezultă f = r — t
t + t' r ceea ce este echivalent cu — • — = —. Astfel t si t' sînt simetrice în R faţă 2 2
de —. In acest caz trasăm porţiunea din cc(I) corespunzătoare lui I (] [r/2, co),
iar restul se completează prin simetrie.
Dacă a! — 1 se deduce din x(t) printr-o simetrie, atunci rezultă t' = — ui ^ * sau W = 1. In acest caz trasăm porţiunea din a(I) corespunzătoare lui Z n ([—1, 0) U (0, 1]), iar restul se completează prin simetrie.
5) Stabilirea punctelor regulate şi a semnului curburii în aceste puncte. Dintre punctele regulate trebuiesc precizate punctele de inflexiune şi punctele în care a(m), n = 2, 3, ... sînt coliniari cu a'.
Stabilirea punctelor singulare şi a tangentelor în aceste puncte (cînd există !). Dintre acestea trebuiesc precizate punctele de inflexiune, punctele de întoarcere, punctele singulare de ordinul n în care a!m), m = n + l,n + 2 , ... sînt coliniari cu a(K)^ 0 şi punctele singulare în care a(,i:) = 0 , k= 1,2,...
6) Determinarea punctelor multiple şi a tangentelor în aceste puncte. Dacă sistemul t± ^ t2, A'( L) = x(t2), y(ti) = y(t2) este compatibil (determinat sau nedeterminat), atunci soluţiile sale dau punctele multiple. Dacă sistemul este incompatibil, atunci curba are numai puncte simple.
7) Alcătuirea tabelului de variaţie pentru funcţiile t~^x(t), t—>-y(t). 8) Stabilirea ramurilor infinite şi a asimptotelor (dacă există !). Putem
întîlni situaţiile: 1°. lim x(t) = ± co, lim y(t) = b. în acest caz asimptota are ecuaţia y — b.
t->h * - » • < «
Pentru a decide poziţia ramurii faţă de asimptotă, din tabel, se citeşte semnul lui y{t) — b în vecinătatea lui t0.
2°. lim x{t) = a, lim. y(t) = ± co. în acest caz asimptota are ecuaţia t-*h t->ta
x = a. 3°. lim x(t) = ± oo, lim y(t) = + oo.
185

y(t) Dacă lini-t^h x(t)
= O, atunci (1,0) este direcţia asimptotică. Nu avem asimp
totă (ramură parabolică). x(t)
Dacă lim -t-*ta y(f)
0, atunci (0, 1) este direcţie asimptotică. Nu avem asimp
totă (ramură parabolică).
Dacă lim - = m, atunci (1, m) este direcţie asimptotică. Dacă lim(_y(/) — t-*h x(t) ' t-*t„
— mx(t)) = n, atunci avem asimptota y = mx + n. Dacă lim y(t) — mx{ujj =
= ± oo, atunci nu avem asimptotă (ramură parabolică). 9) Trasarea curbei.
Exerciţii şi probleme
7. Fie curba a = (x,y): R—*R2, x(t) = — (2 cos/ + cos 2t), y(t) =
= —• (2 sin t — sin 2t).
1) Să se arate că este a periodică. 2) Să se arate că <x([0, 2iz]) este închisă, simplă, dar nu este regulată. Curba a se numeşte hipocicloida lui Steiner, (fig. 3.10). 8. Fie C: î(x, y) = 0 o curbă plană orientată şi v un vector nenul tangent
la C în PEC. Să se arate că baza {v} a lui CP este coerentă cu orientarea
lui C, dacă şi numai dacă direcţia tangentă pozitivă în P este —— •
Soluţie. Fie 6 unghiul dintre 0 # şi direcţia orientată N(P), unde iV(P) este unitar. Atunci N(P) = (cos 6, sin 6),
ţ(P) = ||tT|| (cosi— - e] , - s i n f— - eYl = U» || (sin 0, - cos 6).
Dacă direcţia tangentă pozitivă în P este = sm -cos
atunci N(P) se obţine din aceasta printr-o rotaţie de unghi — în sens direct
trigonometric (fig. 3.11).
* IP)
Fig. 3.10 Fig. 3.11
186

9. în fiecare dintre cazurile următoare, să se determine o parametrizare a curbei C:f(x,y) = 0.
1) i(x, y) = xi + yi + 8x2y - 6y3, 2) f(x, y) = (y - l )3 + 21 (x - 2)\ 3) i(x, y) = xi - ax3 + a2y2. Soluţie. 1) Intersectăm curba (fig. 3.12) cu un fascicul de drepte cu vîrful
în origine. Pentru x = 0 rezultă y = 0 sau y = 6. Pentru 3/ = Lr, i e i i , obţi-
Fig. 3.12
nem.r4(l + f) = 6t3xs
Apoi găsim 2i(3i2 - 4)
x = — , v
8tx3. Mai întîi, x3 = 0 conduce la punctul triplu (0, 0).
2t2(Sl2 - A) , teR.
\+f - 1 + i 4
2) Intersectăm curba (fig. 3.13) cu un fascicul de drepte cu vîrful în (2.1). Pentru x = 2 rezultă 3/ = 1. Pentru y — 1 = t(x — 2), i e H , găsim
2) + 27) = 0. Dacă x = 2, atunci y = 1; punctul (2, 1) se 2 / j 3 / 2)2 (f regăseşte şi pentru t = 0. Pentru i # 0 si i3(% — 2) + 27 = 0 găsim % = = 2 — 27r 3 , a-' = 1 — 27r 2 .
3) Intersectăm curba (fig. 3.14) cu fasciculul de parabole de ecuaţie ay = 3%2, a, p e i i , a2 + (32 ^ 0. Pentru x2 = 0 găsim j ' 2 = 0, deci punctul dublu (0, 0). Pentru y = tx2, teR, obţinem x3(x + a2t2x — a) = 0. Cazul xs = 0 corespunde punctului de întoarcere (0, 0). Apoi, pentru teR, găsim
1 + a2t2 y =
a>o
Fig. 3.14 Fig. 3.15
10. Se dă curba a = (*, y):R - {1} ^ i l 2 , *(*) = *3 + 2-, j/(*) = • 3 -
<fig. 3.15).
187

1) Să se determine punctul de intersecţie al curbei cu axa Oy, tangenta şi normala la curbă în acest punct.
2) Să se determine asimptotele curbei.
Soluţie. 1) Curba se intersectează cu axa Oy în punctele pentru care x = 0, adică t3 + 2 = 0. Se obţine t0 = f—2 căruia îi corespunde punctul (0, f 2).
Vectorul director al tangentei la curbă are coordonatele
'/A ~9f 'IA ~6^-3 x (t) = , y (t) = — •
Pentru t0 — f — 2, se obţin %'(t0) = — f 4, y'(t)0 = 1. Se'găseşte tangenta. de ecuaţie # + f 4, 3/ — 2 = 0 şi normala de ecuaţie xf 4. — y + f 2 = 0.
2) Calculăm lim x(t) = lim • = 1, t-+±co t^±co t3 •— 1
3>t lim y(ţ) = lim — = 0. i->±co t->-±co t — 1
Deoarece, l im|#(£) | = 00, l i m | j ^ ) | = 00, pentru t /• 1, t \ 1, curba are
Am obţinut astfel punctul asimptotic al curbei A(l, 0). Deoarece, li
ramuri infinite.
Limita l i m - = lim = 1, arată că direcţia asimptotică este (1, 1). *-*i x(t) M t3 + 2
( 3 / 43 1 9 \ 1 = 0, rezultă că ramura
f — 1 r — 1) infinită a curbei, pentru tf —> 1, are asimptota y = x.
2 ' t2 t3
11. 1) Să se arate că x = — — — , v = , ZeR, este o curbă ; 1 + t2 - 1 + t*
simplă. 2) Să se determine punctele singulare ale curbei şi tangentele la curbă
y în aceste puncte. 3) Să se determine asimptotele curbei (fig. 3.16),
12. Fie curba x = 4.t — sin 4t, y = 8 sin4 tt t eR şi P un punct al arcului O A obţinut pentru
* 0 < £ < — . Să se calculeze lungimea arcului s = 2
= OP. Tangenta în punctul P la curbă, taie axa Ox în punctul T. Să se verifice că s =;
Fig> 3,ig = k- d(P, T) şi să se determine constanta k.
188

Soluţie. %' = 4(1 — cos Ai) = 8 sin2 2t = 32 sin21 cos2 t, 32 sin31 cos t. y
s C V*'2+v'2di = 32 T Jo •'o
32 sin2 i cos tdt = — sin.31
y J- , / 2 — d(P, J) = -^-V%'2 + .) >''
13. Să se calculeze abscisa curbilinie şi lungimea primei arcade pentru ci-cloida x = a(t — sin t), y = «(1 — cos t), teR (fig. 3.17).
Soluţie. %' = «(1—cos <0 = la sin2 — > 2
sin3 2; s = — ă(P, T). 3
y = a sin / _ . t t , 2a sm — cos — . ds =
2 2 = V*'2 + y'2 di = la sin — d/.
2
Fig. 3.17
Pentru arcada te\0,2iz\, se obţine
- S "* t 2a sin — di
2 4# c o s •—
2 4«| 1 — cos — l -
Lungimea primei arcade este l = 8a. 14. Fie C o curbă plană orientată, P un punct al său şi a: / —> C o para-
metrizare locală de viteză unu a lui C cu a(0) = P. Presupunem k(P) ^ 0. Pentru QeRs şi r > 0 definim i:I-+R prin f(i) t ( i ) - ? J | 2 - r 2
unde yQ este vectorul de poziţie al punctului Q. Să se arate că Q este centrul de curbură si r este raza de curbură a lui C
î n P « f(0) = f'(0) = f"(0) = 0.
15. Fie C o curbă plană orientată, P un punct al său şi N(P) versorul normal de orientare în P. Să se arate că dacă a: / —> C este o parametrizare
— > •
locală de viteză unu a lui C cu a(t0) = P şi h(t) = (a(/) — a(i0), N(t0)) (fig. 3.18), atunci A(jf0) = h'(t0) = 0 şi A"(i0) = &(P).
iP=^(i0 ) Fig. 3.18
0 Fig. 3.19
16. Un cablu omogen de lungime 21, avînd greutatea pe unitatea de lungime p, este suspendat cu cele două capete pe aceeaşi orizontală (fig. 3.19). Unghiul făcut de tangenta la cablu cu orizontala în punctele de suspensie este 0.
189

1) Să se determine punctul de pe cablu în care curbura este maximă. 2) Să se calculeze tensiunile maximă T, minimă T0 şi săgeata f a cablului. Soluţie. 1) Cablul suspendat ia forma lănţişorului. Ecuaţia carteziană a
curbei este y = a eh — , a > 0. Avem y' = sh — , y" = — eh — , k(x) =» a " a « a '
1 . % şi raza de curbură, r(x) = a eh2— . Punem condiţia ca x —> r(x) «eh2 —
IV d*2
— ^ h ^
d/ 2z să aibă un extrem, adică = 0. Rezultă sh — = 0, x = 0. Deoarece
dx a 2
— — > 0, punctul x = 0 este punctul de minim pen-tru raza de curbură, deci punctul de maxim pentru curbura lănţişorului. Astfel, vîrful lănţişorului (punctul de pe cablul suspendat în care curbura este maximă) este punctul (0, a).
2) Folosind ecuaţia lănţişorului se obţine panta tangentei la fir în punc
tul B,(^-\ = t g 6 , d e c i s h A = t: U*L b B a
Expresia lungimii de fir AB este l = a sh— = a tg 0, de unde rezultă a
a = l ctg 8. Tensiunea în punctul A, T0 = pa = fi ctg 0. Proiecţia tensiunii pe ori
zontală fiind constantă, rezultă
T — T T0
cos 6 sin 6
Se mai poate scrie
TB — pa 1(1 — cos TB = pyB = p(a + f) şi / =
p sin 8 17. Fie f :[0, 1] -> [0, 1] o funcţie de clasă C00 pentru care f(0) = 0 şi f(l) = 1
şi fie G(t) graficul său. Se poate ca lungimea arcului lui G(f) să depăşească lungimea arcului lui G(fof) ?
18. Fie a : [0, a] —>JR2 o curbă simplă, închisă, cu viteza unu, a cărei
curbură k nu se anulează în nici un punct, Fie r — — raza de curbură şi ă fZ
aria domeniului plan mărginit de a([0, a]). Să se arate că
a < — C" r(s) ds + —[" II r'(s) || ds. Pentru care curbe avem egalitate?
19. Să se construiască curbele de nivel f_1(—1), f_1(0), f_1(l), pentru f(x, y) = x2 — v2. în fiecare caz să se cerceteze în care puncte spaţiul tangent va fi [Vf(P)]-C
190

20. Să se găsească o parametrizare globală pentru fiecare dintre următoa-Vf rele curbe, orientate prin , unde f este funcţia definită de membrul
l |Vf j | stîng al fiecărei ecuaţii.
1) ax + by = c, b # 0.
2) T5 + — = 1, « ^ 0, 5 ^ 0 .
3) 3' — a ;2 = c, a =£ 0.
4) %2 —y 2 = 1, % > 0.
21. Fie curba C = f-1(0) unde î(x, y) = y2x + -f ay2 Ar x3 — ax2 (fig. 3.20). Să se arate că originea este punct dublu pentru curbă. Să se determine tangentele la curbă în acest punct.
Soluţie. Se determină punctele critice ale lui f din C care sînt date de soluţiile sistemului
xv" - ay2 A- ax2 = 0, 3%2 -f- y2 — 2ax = 0, 2xy Ar 2ay = 0.
Se găseşte (0, 0) singurul punct critic al lui C. Avem
Fig. 3.20
d2f(*, y) = (6x — 2a) dx2 + Ay ăx dy + {2x + 2a) dy2,
d2f{0, 0) = ( — 2a) dx2 + 2a dy2, det d2f(0, 0) = —4a2 < 0,
deci (0, 0) este punct dublu pentru curbă. Tangentele la curbă în acest punct au parametrii directori (l, m) daţi de
ecuaţia
sau
c2î cx2 (0, 0) + lim
m2
-2a A 2a l2
cH cxcy
= o,
(0,0) m d2i dy2-
(0, 0) = 0
Pantele tangentelor la curbă sînt
1 = 0.
1, deci tangentele la curbă în origine
1), teR. sînt bisectoarele axelor, x = y, x — — y.
22. Să se construiască curba x = t3(3t — 2), y = t(t Soluţie, lim x(t) = ce; lim y(t) = oo, Din x = 0 =*• t\ = 0, t2 = 2/3. Deci
curba taie axa Oy în punctele (0, 0) şi (0, —2/9). Din y = 0 => ti = 0, f2 = 1. Deci curba taie axa 0.v în punctele (0, 0)
şi (1,0). Curba nu are simetrii. Puncte regulate. Puncte singulare. Vectorul viteză, a.'(t) re coordonatele x'(t) = 6t2(2t — 1) şiy'(t) = 2t — 1.
Din x'(t) = 0, y'(t) = 0 => 2 = 1/2, punct singular. Deoarece a"(l/2) = (3, 2)
191

şi a'"(1/2) = (24, 0) nu sînt coliniari, deducem că punctul A(—1/16, —1/4) este punct de întoarcere de speţa întîi. Tangenta în acest punct are ecuaţia # - | - l / 1 6 v + 1 / 4 '
— = — . Printre punctele regulate (t^ 1/2) căutăm punctele
de inflexiune. Deoarece x'(0) = x"(0) = 0 rezultă că a"(0) este coliniar cu <x'(0). Deci originea este punct de inflexiune. Alte puncte de inflexiune nu mai există, deoarece ecuaţia a"(t) = Xa.'(t) nu are alte soluţii în afară de t = 0.
Puncte multiple nu există, deoarece sistemul t\{7>tx — 2) = tl(2>t2 — 2), h(h — 1) = h{h — 1), *a ^ 4 este incompatibil. Deci a este o curbă simplă.
Ramuri infinite. Asimptote. Pentru £—> +_ oo se obţin două ramuri infinite.
Deoarece lim ^ ' = 0, ambele ramuri admit direcţia asimptotică (1, 0). f~»±co x(t)
Nu există asimptote. Tabelul de variaţie pentru x şi y (fig. 3.21)
t
x'
X
y ^
— oo 0
— 0
oo \ 0
—
+ oo \ 0
—
Ni
^
1/2
0
- 1 / 1 6
0
- 1 / 4
/
/
1
+ 1
+ 0
/
/
00
CO
00
Fig. 3.21
23. Curba x = sin— , y = cos t, te[0A - ] , se numeşte curba Lissajous.
1) Să se construiască curba. 2) Să se determine ecuaţia carteziană a ei. Soluţie. 1) Intersecţii cu axele. Simetrii. Fie a = a(^) = x(t) i + y(t) j ecuaţia vectorială a curbei. Deoarece a(0) =
= a(47z) — (0 1), deducem că a este o curbă închisă. Din x = 0 rezultă te{0, 2n, 4ÎÎ}, deci curba taie axa Oy în punctul triplu (0, 1). Din y = 0
rezultă tel—i —-» —-» — - \ si astfel curb" taie axa Ox în punctele \_4 2 2 2 r '
duble ( -V2 /2 , 0) şi (V2/2, 0).
Deoarece sin {t + 2n) • sm — , cos (t 2
2TT) = cos t, rezultă că a este
simetrică în raport cu axa Oy. Este suficient să construim imaginea pentru te\0, 2TZ\, iar restul îl completăm prin simetrie.
Puncte regulate. Puncte singulare.
Se obţin punctele singulare (
1/2* cos— — j sin f, «•'(t) = 0 =*• tx = iz, t2 = 3TC.
•1) şi ( 1 , - 1 ) .
192

Deoarece a" (t) — i sin •— — j cos t, oi'"(t) 4 2
-* t 1 -» t -> j sin — , aIV(i) = — i sin — + 7 cos t, găsim
2 V 16 2 J
"•("•)— -~rl 1 ) > a ww 4
1 -* * , j. cos — 4-8 2
«'"(-) = 0; '(3*)
aIV(~) = — i — j , W 16 y aIV(37r) = 1 -? -i
— — 1 — 1. 16 J
Rezultă că punctele i — - şi t = 3TC sînt puncte singulare de întoarcere de speţa a doua. Tangentele în aceste puncte au ecuaţiile y = — Ax + 3 , y = = Ax + 3.
Nu există puncte de inflexiune.
Puncte multi-ble. Din sistemul s i n — = " s i n ~ , cos 2 " 2
t\ = cos t2, ^ # tz, de
ducem t1 = 2% — t2, 7z < Î2<2T:; t[ = 6-K — t'2, 2>TV < t^Arc. De aici rezultă că (—1, —1), (1, —1) sînt puncte simple; te(0, iz) (J (n, 2n) U (2TT, 3rt) IJ U (3- , An) sînt puncte duble; (0, 1) este punct triplu. Deoarece curba este simetrică faţă de Oy şi deoarece punctele corespunzătoare lui t G (TE, 2TC] se suprapun peste punctele te[0, ~) {punctele ^E(3TI, 4TC] se suprapun peste punctele te[2n, 3TC)} pentru desenarea curbei este suficient să trasăm porţiunea te[0, TT], iar restul să completăm prin dublare şi simetrie.
Tabelul de variaţie (fig. 3.22)
3 -, 2 2 -
5n 2
X-ITZ
2 1 -
. 2 sm —
2
^ 2 0 / x /
cos / li v* 0 \
1 ^ A 1 N y \ 0
— 1 /• 0 /». 1
\ t
Si 0 \
- 1 /
- î /
- y / 0
0 / 1
2) Se observă că:
te[n,3,7z] =* v = 1 - 2.v2, * e [ — 1 , 1], arc de parabolă;
/G[0, - ) U (3- , 4-) => 3' = 1 - 2x2,
xe(—l, 1) arc de parabolă;
t = ATZ =S- # = 1, v = 1, un punct.
t€[2T,3¥) \
teOlOl
te (o,f)
t£[i,zr:
Fijţ. 3.22
13 — Probleme de algebră — c. 264 193

Precizare. Extensia lui a la fi este o curbă periodică de perioadă T = 4TT. Toate punctele acestei curbe sînt multiple. în particular punctele (—1, —1) şi ( 1 , - 1 ) sînt şi puncte multiple şi puncte singulare de întoarcere de speţa a doua.
24. Să se determine înfăşurătoarea următoarelor familii de curbe:
1) {x- uf + v 2 - ^ = 0;
2) — + 2L — 1 = 0, cînd am + $m — am = 0 {a = const); a P
3» f + f - - . . < - i Hf)° — î = 0, at b constante.
R: l) y = ± x; 2) xm+1 + yw+i = am+i; 3) I
25. Să se determine evolutele pentru curbele:
ţnn m-f-n
mn m-ţ-n
= 1.
1) ^ . + ^ _ 1 = 0 .
2) x = «(£ — sin £), v = «(1 — cos 2).
R: 1) astroidă alungită (fig. 3.23); 2) cicloidă.
26. Se consideră curbele a.^. fi —> fi2, ax(f) =
= ( T 4 — ' eT 5* ^••R~*R2, z2(t)=(smt,
± /• + «+!). 1) Să se arate că Af(0, 1) este un punct
regulat comun celor două curbe. 2) Să se arate că în acest punct curbele
au un contact de ordinul doi. Soluţie. 1) M0(0, 1) se află pe ambele curbe
şi M0 = a i(0) = a2(0).
i + e'y. Rezultă
Fig. 3.23
Fie aiM =
a'(/) = — — 1 + e'J, | |ai(0) | | = \ 2 # 0 şi deci M0 este punct regulat
pentru ai. (t2 + l)2
Fie x2(t) = sin 2» + — t2 + t - ) ' •
Găsim.
^(t) = cos U + (t + 1) / , ||a£(0)!| = 4l # 0, deci M0 este punct regulat pentru a2.
194

2) Trebuie ară ta t că
lim M U m « » ( * ) - ai(fl f °. P e n t r u » = O, 1, 2 T O, pentru Î = 3.
<*»(*) -M+ 1 - e ( y ,
lim — — ii-i- = lim sin i i + 1*0 *° M [\ fi + l j
A M^ — «i(0 H m
— t2+t + 1 - e•) 7
\(^t 1 \?, f LI * ;2 + iJ T
Hm *«<'> - «l{t) - l im
+ (M + 1 e< \ VI
Y sin 2 LI *2
7? ,- S = 0, lim -
==o,
^ + ' + ~)?] 1 1? 1
^2 + 1)J * 2(0 - Si(0 _, s
/3 '
o,
deci M0 (0, 1) este punct de contact de ordinul doi.
iii. Curbe plane în coordonate polare
iii.l. Presupunem că planul xOy a fost raportat la un reper polar şi că punctului (x, y) îi corespunde punctul (p, 6). în această ipoteză, o curbă plană mai poate fi dată şi prin ecuaţia polară p — f(6).
iii.2. Fie (p, 6) un punct al unei curbe date, diferit de pol. Unghiul V dintre tangenta în acest punct şi raza vectoare corespunzătoare este dat de
tg V = — . Dacă considerăm un reper cartezian adecvat: OX este pe raza 9
vectoare corespunzătoare punctului (p, 6), iar OY este perpendiculară pe OX astfel încît XOY să fie un reper orientat pozitiv, atunci tangenta şi normala în (p, 6) au respectiv ecuaţiile (fig. 3.24).
Y ~(X i) şi JL Y + X - p = 0.
Mărimile algebrice OT = — si ON •• P
p Se
numesc subtangentă polară "şi respectiv sub-normală polară (fig. 3.24).
Dacă curba considerată trece prin pol, atunci tangenta în pol face cu Ox unghiul Qt care anulează pe p = f(6).
195

iii.3. Punctele multiple ale unei curbe dată prin p = f(0) se găsesc rezolvînd ecuaţiile
f(9i) = f(02 + Ikn), f(0i) = - f(02 + - + 2kn), keZ
iii.4. Forma curbei se stabileşte cu ajutorul semnului curburii
h _ p2 + 2p'2-pp»
(P2 + p'Y'* w . r ^ - î ^" Pentru k > 0 corespund puncte în vecină-
\ ^^~^2^^ tatea cărora curba se încovoaie în sens opus * —"•"" •** polului, pentru k < 0 corespund puncte în ve
cinătatea cărora curba se încovoaie către pol, iar pentru k — 0 obţinem de obicei puncte de inflexiune.
iii.5. Valorile lui 0 pentru care limita lui p = f(6) este infinită dau direcţiile asimptotice. Fie 0O o direcţie asimptotică. Notăm d = = lim p sin (0 — 60). Dacă d este finit, atunci
curba admite o asimptotă a cărei ordonată la origine este d (fig. 3.25). Dacă d=ca, atunci curba are o ramură parabolică.
Fig. 3.25
Exerciţii şi probleme
27. Fie curbele plane date prin următoarele ecuaţii polare
1) p = a sin 0 sin 20, 0 e — — > -
2) p = acos — , 0 e [ — 2 - , 2-1. 4
Să se cerceteze dacă sînt închise, simple, regulate.
R: 1) pi— — 1 = pj —1 = 0, deci curba este închisă.
Nu este simplă, deoarece p I — — j = p | — 1 = p(0) = 0, deci polul este •{ 2) \2)
punct triplu pentru curbă. p'(0) = 0, deci curba nu este regulată. Polul 0 este şi punct singular. 2) Curba e închisă, nu e simplă, nu e regulată.
28. Curba p = f(0) ± a, a > 0, se numeşte concoida curbei p = f(0). Să se determine 1) Concoida cercului (melcul lui Pascal). 2) Concoida unei drepte (concoida lui Nicomede). Soluţie. 1) Considerăm ecuaţia în coordonate polare a cercului de rază a,
ce trece prin pol şi are ca diametru prelungirea axei polare (fig. 3.26). Un punct M al acestui cerc are coordonatele polare OM = p şi <£ 0 = -^xOM. în AMOiV avem OM = ON cos Q1 = la cos 0! = la cos (180° — 0), OM = = —la cos 0.
196

Fig. 3.26 Fig. 3.27
Adăugăm razei vectoare mărimea constantă k = 2a şi obţinem o con-coidă, de ecuaţie p = 2a — 2a cos 0, sau p = 2a(l — cos 0) care este o cardioidă (vezi fig. 3.27) descrisă de punctul P.
2) Considerăm o dreaptă perpendiculară pe axa polară la distanţa d de
pol. Avem OM = p cos
Concoida va avea ecuaţia + a. cos 0
Dacă se schimbă a în —a se obţine ecuaţia cos 6
a, care reprezintă
aceeaşi curbă, căci se poate deduce din prima schimbînd pe 0 în n + 0 şi pe p în - p .
Deci, ecuaţia p = \- a reprezintă curba compusă din două arce cos 0
distincte obţinute respectiv prin mărirea şi micşorarea razei vectoare a unui punct curent M de pe dreapta considerată iniţial cu aceeaşi lungime a.
Considerăm ecuaţia p = a, unde a şi d sînt pozitivi. Schimbînd cos 9
pe 0 în —0, p nu se schimbă, deci curba este simetrică faţă de axa Ox. E
suficient să considerăm 6 6 (0, - ] — J —
?V co, lim p(9) sin — = l i m „ Tul COS 8 ->-r-V
d \i fix — a j(—cos 0)== 7 v ' ^ 2 " ' 2
= lim ( — d-\- a cos 8) = —d, rezultă că asimptota curbei este chiar dreapta
iniţială.
Poziţia curbei faţă de asimptotă este dată de diferenţa p sin I 0
7C — (—d) = a cos 0, pozitivă pentru 0 < — şi, negativă pentru 0 2 2
197

Vom considera trei cazuri. Cazul I: d > a (fig. 3.28)
/
J
1 \
y
/
A '
6
p
P
0
0
d- a
71
T
+
/
—
+
0
00
— 2
+
—
i
'30
0
4-
/
TT,
0
- (d + a)
Fig. 3.28
Caz«/ I I : i < a (fig. 3.29). O este punct dublu pentru curbă.
6
P
P
o 0
— (a -d)
i
/
a
0
2
+ + cc i
—
—
+ 0 T.
+ + o — (d + «)
00
]>'
Fig. 3.29 Fig. 3.30
Cazul III: d = a (fig. 3.30). O este punct de întoarcere de prima speţă.
8
P
P
0
0
0
+
/
2
+ +
0
+ oo | 1
2 +
oo
0
+
?
—
0
— 2a

29. Un punct M execută o mişcare plană astfel încît viteza lui areolară în raport cu un punct O este proporţională cu raza vectoare, Q = ^ p . Ştiind că în momentul iniţial p = p0 avem v^ = k2, să se studieze mişcarea punctului.
30. Să se determine elementul de arc, cosinusul şi sinusul unghiului 60 format de raza vectoare şi tangentă, pentru fiecare din următoarele curbe:
1) p = aQ (spirala lui Arhimeăe); 2) p = — (spirala hiperbolică) 3) p2 =
= a cos 2 8 (lemniscata).
dp 1 R: 1) ăs = V ps + p'2 d8 = a v 1 + 62 d 6 ; cos %
ăs
sin Un = „ _ d _ 6 _ P ăs ~ VT
0 i + e2
2) ds = — V î + 62 d0 ; cos ©o = - - = = , sin e„= ; 62 ° V i + 62 ° VI +
3) ăs-- d 6 ; cos 0O = — sin 26, sin 00 = cos 26.
31. Să se construiască curba p = cos° —
, 6 ^ ( 2 / 1 + l ) - — , keZ.
Curba este reprezentată în figura 3.31. 32. Să se determine asimptotele curbelor:
1) p = i££il^ . 2) P = a ( s e c 2 0 + t g 2 6 ) ; cos 6
3) cos 28
Soluţie. 1) Domeniul de definiţie,
R — ! ţ, n = impar. Inn)
\ 2j Fie. 3.31
60 = — dă o direcţie asimptotică a curbei.
Considerăm d = lim p sin (6 — 60) = lim —'• sin I 6 — — | = a. Atunci &->% „ n cos 0 { 2
2 asimptota curbei este dreapta de ecuaţie
sin (6 — 0O sau p = —
sin | 8 - — cos 8
2) Ecuaţia curbei se mai poate scrie
c = a i -l- t g 6 1 - tg 0 '
Domeniul de definiţie, R — \ k- + — , kr, {" 5~ 4
keZ.
199

Curba admite două direcţii asimptotice si anume 0o = — si Q1 = 4
Calculăm dn = lim p sin | 8 — — S = lim a — sin j 6 — — I = 4 , « l 4 j . « 1 - t g O { 4)
4
7t sin 6 .. cos 9 + sin 8 . (a TC \ i— \
a lim sin 8 — — = av 2 uni — „ n cos 8 — sin 0 1 4 1 . - n . e ^ T 9 H , T cos 8 — cos
U sini 8 —-"^ = a "4 2 lim
Z sm — sin 4
-\nalog, i i = lim o sin 8 1 = —a. 4
Cele două asimptote ale curbei au respectiv ecuaţiile:
şi p = — şi se află la distanta a de pol.
H^-°)'' sin(T-e) 3) Domeniul de definiţie, R — \ k~ + — , &- H —\, keZ.
1 4 4 '
Direcţii asimptotice, 80 = — si 8i = —- . i 0 = , ^i= — — 4 4 2 2
„ , , „ . , , a\2 . a/2 Cele doua asimptote, p = —• — şi i
sini— - 8 . tir. sini
33. 1) Să se stabilească coordonatele centrului cercului osculator într-un punct arbitrar al unei curbe plane dată în coordonate polare.
2) Să se determine desfăşurata spiralei logaritmice, p = e*9.
iv. Curbe în Rs
Raportăm spaţiul tridimensional la reperul natural şi considerăm curba
« = (x, y, z): I -> R3, x = x{t), y = y(t), z = z(t).
iv.l. Dacă Vtel, 3a, b, c, d astfel încît ax{t) + by(t) + cz(t) + d = 0, atunci a se numeşte curbă plană. în caz contrar se numeşte curbă strîmbă.
200

iv.2. Fie P = (x(t), y(t), z[t)) un punct regulat al lui a. Tangenta şi planul normal în acest punct au respectiv ecuaţiile
x-x(t)_y-y(t)_z-z(t) x'{t) y'{t) z'{t)
x'(t)(x - x(t)) + y'(t)(y - y(t)) + *'(*)(* - z(t)) = 0.
iv.3. Dacă P = (x(t), y(t), z(t)) este un punct singular de ordinul n, atunci tangenta şi planul normal în P au respectiv ecuaţiile
x — x(t) __y — y(t) _ z — z(t) *<»>(*) yW(t) z^(t)
xW(t) (x - x(t)) + yW{t) (y - y{t)) + *<">(*) (z - z{t)) = 0.
iv.4. Pentru^ studiul unei curbe regulate din spaţiu se folosesc elementele lui Frenet:
* Ti a' 1) cîmpul tangent, 1 = —-— >
2) cîmpul normal principal, N = B x T,
-> a ' X a" 3) cîmpul binormal, B = (ipoteză: k > 0),
II a'xa"|| ^ K fc l l« 'X«" | l 4) curbura, « = -^— -
5) torsiune, r=l*'X*''*"'l
Acestea intervin în primul rînd în relaţiile
—* = AwY, = — kvT + T U 5 , = —tvN, dt dt dt
care se numesc formulele lui Frenet.
iv.5. Muchiile şi feţele triedrului lui Frenet au următoarele denumiri: tangenta, normala principală, binormala, plan osculator, plan normal şi plan rectificării.
iv.6. Funcţia de curbură k > 0 şi funcţia de torsiune T determină o curbă din spaţiu abstracţie făcînd de o izometrie;
k = 0 <*=> a este o porţiune dintr-o dreaptă; t = 0 •**> a este un arc de curbă plană; £ — const. > 0, T = 0 **> a este un arc de cerc; k = const > 0,
T = const =£ 0 •*> a este un arc dintr-o elice circulară; — = const <£> « este k
un arc dintr-o elice cilindrică etc. iv.7. Curbele din Rs mai pot fi introduse şi pornind de la funcţii
diferenţiabile de tipul F = (f, g) : R3 -* R2. Mulţimea C = F" 1 (a, b) = = 4 {%, y. z) I (*> y. z)eR3, i(x, y, z) = a, g(x, y, z) = 6}, se numeşte mulţime
201

de ecuaţii carteziene implicite i(x, y, z) — a, g(x, y, z) = b. Dacă C este nevidă, iar Cfr este regulată în punctele lui C, atunci C este o curbă şi anume intersecţia a două suprafeţe (vezi § 3).
Dacă P(x0, y0, zQ) este un punct regulat al curbei C, atunci tangenta şi planul normal în acest punct au respectiv ecuaţiile
Jo W , g) D(/- g)
D(.Vo- z0)
(.T — %) D( Vo, *o)
P ( / . g) D(z0, A'0) D(%0J >'O)
D(/,g) 3'o)
D( {z — z0)
D(/ , , D(*0, Vo)
= 0.
Exerciţi» şi prob/eme
34. Fie a: [>, 2-] -»• R3, a:/) = [a sin2 /, —sin lt, c cos A şi (3: [—1, 1] -*
—»#3, $(u) =*(«(1 — z<2), bu^T^^i2, cu). Să se arate că a şi (3 au aceeaşi imagine.
Indicaţie. Fie h : [-, 2-] —* [— 1, 1], dată prin u = ccs t. Rezultă t = — \rx{u) = - -f arc cos ;?. 3 = ' « o I r 1 : [— 1, 1] —»• Ri, adică p este o repa-rametrizare a lui a prin h. Cele ccuă parsmetrizări reprezintă curba C =
= ((*,>>, z)eR3 |* + «il = o, 4 + 7 ^ - 4 = °V [ cz c4 cr c j 35. Fie curba x=l + f, y = i2 + t3, z = 5t3 + 2t2 + 2, teR. 1) Să se arate că este o curbă simplă, plană şi să se găsească planul curbei. 2) Să se determine punctul singular al curbei, tangenta şi planul normal
în acest punct.
genta
R: 1) T = 0, lx + 2v - z — 1 = 0; 2) Punct singular (1, 0, 2). Tan-x — \ _ y z — 2
o . Planul normal: y + 2z — 4 0.
36. Fie curba^;>; = a CGS2J, y = a\2sint cos t, z = a sin2i, teR. Sa se arate că se află pe un con (fig. 3.32). Să se găsească ecuaţiile
carteziene ale curbei. Să se determine planul ei . x A , . ( a a4l a'
osculator m punctul I — ' ——' -
37. Fie curba C: x2 + y2 + z2 - 16 = 0, y + z — 4 = 0.
Să se determine proiecţia curbei C pe planul xOy. Să se obţină o reprezentare parametrică pentru curbă. Să se determine elementele lui Frenet T, N, B, k, T pentru curba C în punctul (0, 4, 0).
Soluţie. Curba C este un cerc în spaţiu, care Fig. 5.32 se obţine intersectînd sfera cu centrul în ori-
202

gine şi raza 4, cu un plan paralel cu axa Ox (fig. 3.33). Proiecţia curbei pe planul xOy este o elipsă şi ecuaţiile sale se obţin eliminînd pe z între ecuaţiile sferei şi planului şi adăugînd ecuaţia z = 0, anume x2 + l(y — 2)2— 8 = 0, z = 0 sau
xs i v _ 2 ) 2
r — - 1 = 0, z = 0. Elipsa are 8 4 _
central co(0, 2, 0) şi semiaxele 2 \ 2 şi 2. Ecuaţiile parametrice ale ei sînt X = = 2 V 2 cos t, y = 2 -f- 2 sin t, z = 0, /s e [0,27t). înlocuind expresia lui v în ecuaţia planului y + z — 4 = 0 obţinem Fig. 3.33 £ = 2(1 — smj). _
Ecuaţiile parametrice ale cercului C sînt x = 2*v2 cos t, y — 2(1 + sin 2)( 2 = 2(1 — sin t), te[0, 2n).
Punctul (0, 4, 0) corespunde valorii parametrului t0 = — •
Rezultă £'(/) = (2V2 cos t, 2 + 2 sin t, 2 — 2 sin £),
S ' ( T ) = (~2 - °-0)' " " ( f ) = ( °'~2,2)' * ' " ( f ) = (2V1, °-0)' Folosind formulele care dau elementele lui Frenet ataşate curbei într-un
punct, obţinem
T(t0) = i - 2 V 2 , 0,0) = —]
B(t0) =
2V2
(0, 4V2, 4V2 8 vV V2
1 -» #(*>) - (0, - 1 / V 2 , l/V2) = - — J + — k,
k(t0) = 1 ; T ( % ) 0.
2V2 38. Se consideră curba x = e* cos f, j ' = e* sin t, z = es, i e B . Să se arate că a(B) e situată pe un con. Să se determine lungimea arcului
ourbei cuprins între punctele (1,0, 1) şi (0, e 2 , e-2). Soluţie. Eliminînd parametrul t între ecuaţiile curbei, se obţine ecuaţia
%- -f y2 = z2, care reprezintă un con cu vîrful în origine. Punctele date corespund respectiv valorilor parametrului t\ = 0 şi t% =
, _ n 2 _ ^_ 4x'2 + y'2 + z'2 ăt = V3V ee ăt = V3(e2 - 1).
0. Jo
203

39. Să se determine abscisa curbilinie a curbei 1) % = cos t, y = sin t, z = i2/2, tsR, 2) A; = a eh t, y = a sh t, z = at, teR, 3) x = t cos t, y = tsint, z = t2j2, tsR,
luînd ca origine punctul în care curba intersectează planul xOy. Să se găsească elementele lui Frenet T, N, B, k, i în punctul unde curba
intersectează planul xOy.
R: i) s = 1 [t-lT+l2 + In (t + VîTT2)]; T = J, N = - = i ? + - l %, 2 V2 V2
5 = -r= t + - = k ; A == 41, T = 0. V2 V2
2) s = a42shf, ~T = -^1 +~i=k, ~B = -= . ; - — £, ÎV = 1 ; £ = T = —• V2 V2 V2 V2 2«
3) s = (1/2V2) pV2(l + 212) + l n ( ^ 2 + V T T ^ ) ] ; r = i, B = ^ ; + V5
V5 V5 V5
40. Fie curba OL.R~>R3, a(t) = (2/ - M 3 , 1 - t2). 1) Să se determine curbura şi torsiunea curbei în punctul (—1,0, 1), ecua
ţiile muchiilor şi feţelor triedrului lui Frenet ataşat curbei în acest punct.. 2) Să se determine punctele curbei în care planul osculator este per
pendicular pe planul 1% — Yly + 5z — 6 = 0. 3
R: 1) k = 1/2, x = — ; tangenta: jy = 0, 2 — 1 = 0;
binormala: x -\- 1 = 0, z — 1 = 0; normala principală: y = 0, # + 1 = 0 ; planul normal: % + 1 = 0; planul osculator: y = 0; planul rectificant:
2 - 1 = 0 . 2) Pentru ^ = —2 se obţine punctul ( — 5, —8, —3), iar pentru t% = 4/7'
se obţine punctul (1/7,64/343, 33/49).
41. Se numeşte curbă Ţiţeica, curba pentru care — d2 = const., unde -r-
este torsiunea în punctul curent, iar d este distanţa de la un punct fix la. planul osculator al curbei.
Să se arate că C: xyz = 1 , y2 = x este o curbă Ţiţeica.
R: Luînd punctul fix (0, 0, 0), avem •— d2 = __• T 3
42. Fie / un interval, fie «.(t) vectorul de poziţie al unui punct în mişcare şi a'(tf) vectorul viteză. Să se determine:
1) Condiţia ca cei doi vectori să fie perpendiculari, 2) Condiţia ca cei doi vectori să fie coliniari.
204

Soluţie. 1) Se ştie că of(f) = x(t) î + y[t) J + z(t) k şi oi'(t) = x'(t) 7 + -\-y'(t)] + z'(t)k.
Condiţia de perpendicularitate a celor doi vectori,
(a, a') = 0, implică 1/2 — (a, a) = 0, adică 1/2 — {x2 + y2 + z2) = 0, dl dl deci x2 + y2 + z2 = k.
în acest caz, punctul se mişcă pe o sferă. -* x' y' z'
2) Coliniaritatea celor doi vectori, a ' = Xa conduce la — = — = — =* x y z
= X(t). Integrînd, se obţine — = -£- = — = e W d 2 , deci 'punctul se mişcă pe « P y
o dreaptă.
43. Să se arate că torsiunea şi curbura unei curbe în spaţiu sînt invariante faţă de o rototranslaţie.
Soluţie. Fie a = a(£) ecuaţia vectorială a curbei în reperul cartezian Oxyz şi a j = a ^ ) , ecuaţia ei în reperul OxX\y\Z±. Deoarece a = OOx + «i Şi OOi
este un vector constant care defineşte translaţia din O în Ou = —»
£ = 1, 2, 3, ... în expresia curburii şi torsiunii intră derivatele lui a pînă la ordinul trei inclusiv, deci curbura şi torsiunea rămîn invariante faţă de o rototranslaţie.
44. Să se determine funcţia t —> i(l) astfel încît curba 1) x = t2, y = —lat, z = i(t), t > 0; 2) x = a cos t, y = a sin , 2 = f(ţ), IeR, să fie plană. Să se determine
curbura curbei în punctul în care aceasta taie planul xOz. Indicaţie. Se pune condiţia T = 0. 1) f(t) = Cj2 + C2ln t + C3. Pentru y = 0 se obţine * = 1.
 ( 1 ) = 4(Cf + C| + 1)V» _ (5 + 4C? + CI + 4C1Ca)3/2
2) i(t) = Cx cos < + C2 sin i + C3. Pentru y = 0 se obţine t = 0.
a(Cf + CI + a2)1/2
k(0) = CI)3/2
, . „ . , . cos t sin z! , „ 4D. r i e curbele x = z = , y = , te.R, si x =
V1 + cos2 f " V1 + cos2 t — V— cos 2 8 , y = z = cos 8, 8e
— 3— 4 ' 4
Să se arate că: 1) sînt situate pe aceeaşi sferă; să se determine ecuaţiile carteziene, 2) se întîlnesc în două puncte.
205

R: 1) Ambele sînt situate pe sfera cu centrul în origine şi raza egală cu unitatea.
Cx = {{x, y, z) \ (x, y, z)eRs, x2 + y2 + z2 = 1, % - z = 0},
C2 = {(*, y, z) | (x, y, z)eRs, x2 + y2 + z2 = 1, y - z = 0},
2) x = y = z= ± — • -v J
46. O curbă C cu proprietatea că pe normala principală în punctul M S J găseşte un punct Mx, care descrie o curbă C\, a cărui normală principală este tot dreapta MMX se numeşte curbă Bertrand.
Să se arate că: 1) distanţa MM1 este constantă, 2) tangentele în M şi Mx la cele două arce fac un unghi const., 3) dacă între curba şi torsiunea unei curbe există o relaţie de forma
ak + br + c = 0, a,b, c constante, c # 0, curba este Bertrand.
47. Se consideră curba C = {(x, y, z) \ (x, y, z)eR3, î(x, y, z) ^j? +
( r V 2 rV 2 / V 21 —:r— ' —r— * — T - ) *
Să se determine tangenta, planul normal şi planul osculator al curbei, curbura şi torsiunea curbei în acest punct.
Indicaţie. Curba este intersecţia a doi cilindri. Punctul dat este un punct regulat al curbei, deoarece în acest punct, rangul matricei
ci ci ci T
cx cy iz
gg fg gg cx cy iz
este doi.
Tangenta, A: - — = - I y — - ^ - 1 /' v 2 / r V 2 i r V 2
y V 2 Planul normal, A — v -j- 2 —- = 0.
Considerăm pe v si z ca funcţii implicite de x, definite prin ecuaţiile x2 + v2 = r2, f + z2 = r2.
» 4 In punctul dat, x' = î, v' = — 1, z' = 1, A" = 0, y" = F , ::'' = 0.
r V2 Planul osculator este # — z = 0.
4 Ă = —p— , T = 0. In vecinătatea punctului dat curba se comportă
3v3(2 ca o curbă plană.
48. Fie C = f_1(c) fi g - V ) o curbă în U 3 şi A = Vf X Vg. Să se verifice - * • - - , . . .
că restricţia lui A la C este un cîmp vectorial tangent la C. In ce condiţii există o parametrizare globală a: I —> C?
206

§ 3. SUPRAFEŢE
3.1. Fie D o mulţime deschisă din R2. O funcţie diferenţiabilă regulată şi injectivâ r : D -*• R3 se numeşte hartă (de coordonate). Dacă r"1: r(D) -> D este continuă, atunci harta se numeşte proprie.
O hartă mai poate fi dată şi prin funcţia r = J0°r : D -» T0R3, J 0 este izomorfismul canonic dintre R3 şi T0R3.
3.2. O submulţime M a lui R3 se numeşte suprafaţă dacă pentru fiecare punct Pe M există o hartă proprie în M a cărei imagine să conţină o vecinătate a lui P din M.
D
(u,v
Fi? . 3.34
Imaginea r(D) a unei hărţi proprii se numeşte suprafaţă simplă (fig. 3.34). De asemenea suprafeţele date prin ecuaţia carteziană explicită z = f(#, >>), unde (.v, v) —> f(x, 3') este o funcţie diferenţiabilă, sînt simple deoarece pot fi reprezentate printr-o hartă Monge
r: D —> J$3, x(u, v) = (w, u, i(u, v)),
care este o hartă proprie. 3.3 Suprafeţele mai pot fi introduse şi pornind de la funcţii diferen-
tiabile de tipul f: Rz —• JB. în acest sens mulţimea .1 / = f-x(c) = {{x, y, z) | (*, y, z)eR3, i(x, y, z) = c, c = fixat}
-se numeşte mulţimea de nivel constant c sau mulţimea de ecuaţie carteziană •implicită i(x, y,z) = c. Pe scurt se scrie M: i(x, y, z) = c.
Dacă f este un polinom de gradul n, atunci M se numeşte mulţime algebrică, de ordinul n.
Dacă M este nevidă şi dacă funcţia f este regulată în punctele lui M, atunci M este o suprafaţă în sensul definiţiei 3.2.
3.4. O funcţie diferenţiabilă şi regulată r : D -> U 3 a cărei imagine se află într-o suprafaţă M se numeşte parametrizate a regiunii r (D) din M.
Fie parametrizarea r(u, v) = (x(u, v), y(u,v), z[u,v)), (u,v)eD, sau echivalent, r(u, v) = (x(u, v), y(u, v), z(u, v)), (u, v)eD. Variabilele u şi v se
, .. , r , .. \cr flcx ev cz\ d~r (cx by cz\ numesc parametru. Vectorii = , -^—, \, = » — -> j» \cu cu cu) ev \cv ev ev) cu
avînd prin convenţie originea în punctul r(«, v), se notează cu r t
numesc vitezele parţiale ale aplicaţiei r. Regularitatea lui r este echivalentă cu ru X r.v # 0.
şi se
207

3.5. Suprafaţa M se numeşte 1) riglată, dacă poate fi generată prin mişcarea unei drepte care se spri
jină pe o curbă (suprafeţe cilindrice, conice, conoide e tc ) . 2) de rotaţie, dacă poate fi generată prin rotaţia unei curbe în jurul
unei drepte fixe. 3.6. Fie M o suprafaţă şi f : M - * J R o funcţie reală. Dacă r:Z>—>M
este o hartă, atunci for: D —• R se numeşte expresia lui f în coordonate. Dacă for este diferenţiabilă în sens obişnuit, oricare ar fi r, atunci f se numeşte diferenţiabilă.
Fie F : Rn —* M, unde M este o suprafaţă. O hartă r în M dă o expresie în coordonate r-1o F pentru F. Dacă r -1oF este diferenţiabilă în sens obişnuit, oricare ar fi r, atunci F se numeşte diferenţiabilă. O funcţie diferenţiabilă. de tipul a: R —> M se numeşte curbă în M.
Fie M şi N două suprafeţe, r2 o hartă în M şi r2 o hartă în N. O funcţie F:M—*N se numeşte diferenţiabilă dacă funcţia compusă r^oFoii este diferenţiabilă în sens obişnuit, oricare ar fi v-y şi r2.
3.7. Fie M o suprafaţă şi P un punct oarecare din ea. Un vector tangent la R3 în P se numeşte tangent la M în P dacă este vectorul viteză al unei curbe oarecare din M ce trece prin P.
Mulţimea tuturor vectorilor tangenţi la M în punctul P se numeşte planul tangent al lui M în P şi se notează cu TPM. Direcţia normală la TPM este dată de Z(u0, v0) = rUoXrVo sau de (yf) (P), după cum este dată suprafaţa. Imaginea lui TPM în R3 are ecuaţia
(r — r(u0, v0), r„0X r„„) = 0, unde r = xî + yj + zk,
sau
(x — x0) •— (x0, y 0 , z0) + (y — y0) — (x0, y 0 , z0) + (z — z0) — (^0, y 0 l z0) = 0. L3A; cy cz
Dreapta ce trece prin P şi este perpendiculară pe planul tangent se numeşte normala suprafeţei.
3.8. Un cîmp vectorial euclidian Y definit pe suprafaţa M se numeşte —*
cîmp vectorial tangent la M dacă vectorul Y(P) este tangent la M pentru fiecare punct Pe M.
Un cîmp vectorial euclidian Z definit pe suprafaţa M se numeşte cîmp — •
normal pe M dacă fiecare vector Z(P), VPe M, este normal la M. 3.9. O suprafaţă M se numeşte conexă dacă, VP,Qe M, există un segment
de curbă «: [a, b] —» M, cel puţin continuă, astfel încît « (a) = P şi a (b) = Q, adică imaginea a ([a, bj) cz M uneşte punctele P şi Q.
Fie M şi IV două suprafeţe. Dacă M este conexă, iar F : M —>• N este o aplicaţie surjectivă şi diferenţiabilă, atunci N este conexă. în particular, dacă D este o mulţime deschisă şi conexă din plan, iar r: D —> M este o parametrizare, atunci r (D) cz M este conexă.
3.10. O suprafaţă M se numeşte simplu conexă dacă orice curbă închisă de pe M poate fi deformată prin continuitate (fără a ieşi din M) astfel încît să se reducă la un punct.
208

3.11. O suprafaţă M se numeşte compactă dacă poate fi acoperită prin imaginile unui număr finit de funcţii diferenţiale de tipul r : D0 —*• M, unde Z>0 este un dreptunghi închis. Fiind o submulţime a lui R3, o suprafaţă este compactă dacă şi numai dacă este închisă şi mărginită.
O suprafaţă de nivel M: î(x, y, z) = c este închisă deoarece M = f_1(c), mulţimea {c} este închisă în R, iar f este o funcţie continuă. Astfel o suprafaţă de nivel este compactă dacă şi numai dacă este mărginită în Rs.
3.12. O suprafaţă M se numeşte orientabilă dacă posedă un cîmp vectorial normal care nu se anulează în nici un punct al lui M.
Se ştie că: — suprafeţele simple sînt orientabile, — orice suprafaţă de nivel M = f-1(c) (nu posedă puncte critice ale lui f !)
este orientabilă, — orice suprafaţă conexă şi simplu conexă este orientabilă, — orice suprafaţă conexă şi compactă este orientabilă, — orice punct al unei suprafeţe neorientabile este cuprins într-o regiune
conexă şi orientabilă; etc. Un cîmp vectorial normal unitar pe suprafaţa orientabilă M se numeşte
orientare pe M. Orice suprafaţă conexă şi orientabilă admite exact două orientări. O suprafaţă orientabilă împreună cu o alegere a unei orientări se numeşte suprafaţă orientată.
3.13. Fie M o suprafaţă (sau o porţiune de suprafaţă) conexă şi v un vector tangent la M în P. Dacă U înseamnă cîmpul normal unitar într-o vecinătate a lui P, atunci funcţia liniară SP: TPM —> TPM definită prin
SP(v) = -DţU
se numeşte aplicaţia lui Weingarten a lui M în punctul P. Aplicaţia lui Weingarten este un operator simetric, adică (SP(v), w) =
= (v, SP(w)), Vv, we TPM.
3.14. Fie u un versor tangent la M în P. Numărul
k„(u) = (SP(u), u)
se numeşte curbura normală a lui M în direcţia ti. Funcţia u —> k„(u), | \u\\ = 1, este o formă patratică. A^alorile kx =
= max kn(u), k-2 = min kn(u) se numesc curburi principale, iar direcţiile u n
pe care se găsesc aceste valori extreme se numesc direcţii principale. Evident, curburile principale sînt valorile proprii ale lui SP, iar direcţiile principale sînt versorii proprii ai lui SP.
Punctele lui M în care k± = k2 se numesc puncte ombilicale. Cuadrica 2z = k^P) x2 + k2(P) y2 se numeşte aproximarea pătralică a
lui M în vecinătatea punctului P. 3.15. Funcţia K = det S: M —> R se numeşte curbura lui Gauss a lui M,
iar funcţia H = 1 /2 urma S: M —> R se numeşte curbura medie a lui M.
Avem K = hxkz, H = k l + k* sau khZ = H ± V H 2 - K.
14 — Probleme de algebră — c. 264 209 >.

O suprafaţă pentru care K = const. se numeşte suprafaţă cu curbură constantă. în particular suprafeţele pentru care K = 0 se mai numesc şi local euclidiene.
O suprafaţă pentru care H = 0 se numeşte suprafaţă minimală.
3.16. Dacă M este dată printr-o hartă r :D—>U 3 , r (u, v) = (x (u, v), y(u,v), z(u,v)), atunbi avem următoarele formule de calcul:
1) prima formă fundamentală (metrica)
ds2 = E du2 + 2F du dv + G dv2, E = (ru, ru), F = (ru, rv), G = (rv, rv) 2) a doua formă fundamentală
dcp2 = / du2 + 2 « Î du dv + n dv2
1 = (u> ?««). m = {U, r„), n = (U, r „ ) , 6" ' « X ''B
II r î t x ri> i
3) curbura lui Gauss K (r)
4) curbura medie H(r) =
EG-F2
Gl — 2Fm + En 1{EG - F2)
3.17. Curbe speciale pe o suprafaţă. 1) O curbă regulată a de pe suprafaţa M se numeşte curbă principală
sau linie de curbură dacă vite&a sa a ' determină în fiecare punct al curbei o direcţie principală.
— •
Fie a o curbă regulată din M şi U restricţia cîmpului normal unitar la a. Curba a este principală dacă şi numai dacă a' şi U' sînt coliniari în fiecare punct.
2) Direcţiile tangente la M pe care curbura normală este zero se numesc direcţii asimptotice. O curbă regulată a din M se numeşte curbă asimptotică dacă viteza sa a ' dă în fiecare punct o direcţie asimptotică.
Fie ce o curbă regulată din M şi U restricţia cîmpului normal unitar la x. Curba a este asimptotică dacă şi numai dacă a ' şi V sînt ortogonali sau dacă şi numai dacă a" este tangentă la M.
3) O curbă a. din M se numeşte geodezică a lui Af dacă acceleraţia sa «" este normală la M.
3.18. Fie cr o porţiune dintr-o suprafaţă M reprezentată de imaginea funcţiei r: D0 —> M, adică a = r (Do), unde D0 este un dreptunghi închis, iar r: int. D0 —• M este e hartă. Aria lui a este dată de
A =[{ da = R JEIT^F' du dv. JJa JJD,
Exerciţii şi probleme
1. Fie D : —TU < « < 7 c , 0 < y < l şi r: D —> U3 , funcţia definită prin x (M, V) = (sin M, sin 2u, v).
Să se arate că r este o hartă, dar M = r (D) nu este o suprafaţă în sensul •definiţiei 3.2.
210

Soluţie, r este diferenţiabilă* deoarece funcţiile sale coordonate sînt dife-renţiabile. Matricea Jacobian,
cos a 0 J (r) = 2 cos 2# 0
0 1
(u, v)eD, deci r este regulată.
Din r (ult vx) = r (w2, w2) avem
are rangul doi pentru orice
ian Ui, sin 2«, — (sin uz, sin 2%, £12), adică ut = «2j ^ = ii2, deci \ « i , («2. v-z}- Rezultă că r este injectivă.
Deoarece r este diferenţiabilă, regulată, injectivă, ea este o hartă. Pentru ca r (D) să fie suprafaţă este necesar ca harta r să fie proprie,
adică r"""1: r (D) ->j> să fie continuă.
Fie M = r (D). Domeniul plan D se poate scrie,
D = Dx U i>2 U Ds, unde j ^ = (—*, — —\ X (0, 1),
D, X (0,. 1) •*-(H X (0, 1) şi M = MX\J M2l) M3 2 2
unde M,. = r (Di), i = î, 2, 3.
Aplicaţia r este inversabilă şi,
| (—T. — arc sin ;r, z), (x, y, z)eM1
r_ (x, y, z) = I (arc s i n ^ ^ (^ y^ z^e M2
i (- — are sin x, z) (x, y, z)<= M3.
Deoarece prima funcţie coordonată nu este continuă, funcţia r - 1 nu este continuă şi deci r (D) nu este o suprafaţă (fig. 3.35).
2. Fie r: (0, 00) x R -* R2,. r (u, v) = («, » cos Î>, « sin w). Să se arate că r este regulată. Să se găsească o funcţie f: JR3 —> R astfel
încît imaginea r ((0, 00} X R) să fie suprafaţa ilf: f (x, y, z) = 0, * > 0. Indicaţie.
J(r) I
cos w sin D
0 w sin w w cos ZJ
; rang J(r) = 2.
f (.v, v, 2) = x2 — _v2 — z2 • ilf este un senii con.
Fig. 3.35
211.

3. Fie funcţia r : D —> R3, dată prin r (u, v) = (cos 2TM, sin 2TM, V). Să se arate că r este o hartă proprie şi că r (D) este suprafaţa M: x2 -\- y2 = 1, — l<x<l,y>0, z<=R.
4. Să se arate că cilindrul x2 + y2 = 1 în JR3, poate fi reprezentat ca o mulţime de nivel ataşată la oricare dintre funcţiile
1) f (x, y, z) = x2 + y2. 2) f (x, y, z) = — x2 — y2
3) f (x, y, z) = 2x2 + 2 / + sin {x2 + y2).
5. Fie sfera M : x2 + y2 -f- z2 = a2 şi harta în sferă
r (w; v) = (a cos w sin y, a sin « sin v, a cos y),
(u, v)e (0, 2TC) X (0,7i). Să se găsească expresiile în coordonate pentru următoarele funcţii definite pe M:
1) f (x, y, z) = x2 + z2; 2) f (*, y, z) = (y - zf + x2.
R: 1) f (r(«, w)) = a2 (cos2« sin2 v + cos2 y);
2) f (r («, v)) = a2(l — 2 sin u sin z> cos w).
6. Fie f: R —> R o funcţie diferenţiabilă care nu se reduce la o constantă, Să se determine f astfel încît toate planele tangente la suprafaţa M: z = = f (yjx), x ^ 0, să fie paralele cu cîmpul vectorial X = yi — xj.
Soluţie. Cîmpul vectorial normal la M are expresia Z = (f — ui') i -f- f j — * • — * unde u = jy/%. Ipoteza (Z, X) = 0 este echivalentă cu ecuaţia diferenţială
_y(f — wf) = f'x, adică wf = f (w + !)• Rezultă
i(u) = C V T + 1 ^ " şi deci f {yjx) = C V 1 + /
7. Fie suprafaţa M : z2 = a2 arc tg — + f (x,y), unde f este o funcţie x
diferenţiabilă. Fie P un punct arbitrar al lui M, fie A proiecţia lui P pe planul xOy, iar B punctul în care normala la M în P înţeapă planul xOy. Să se determine f astfel încît aria triunghiului OAB să fie constanta a2
— , oricare ar fi Pe M. 4
Soluţie. Fie P(x, y, z). Rezultă A(x, y, 0). Normala la M în P are ecuaţiile
X — x _ Y - y _Z_— z di a?y ci a2x ~2z ^ 2 i 2 r' 2 i 2 ox x* + j r cy x + y
Aceasta intersectează planul Z = 0 în punctul B de coordonate 2», ^ / flf 3f a2,y \
e* x2 + y2 ) X=X+1I2[^~^\, Y=v-M/2| — + f y | > 2 = 0.
212

Aria triunghiului O A B este valoarea absolută a expresiei
0 0
y
di . (8i a2y \ f di . a2x \ \8x x~ + y ) \cy x2 + y) ox x" -j- y
1/2 l/2|,--y-J + T c y
of 3f «* 3f 5f Dacă 1/2(^ — y-—-)+—- = — rezultă # - ^ - — _y-^- = 0. Ţinînd
seama de integralele" prime ale sistemului — _ = _ £ _ = — rezultă f (x, y) = —y x 0
= f (*2 + / ) • Dacă 1/2 J x 8i_
8y df 8i\ a2 a2
y — I + — = rezultă x — 8x) 2 2 8y
8i . . . y 1- 2a 8x
2 0.
Asociem sistemul simetric dx dv
Ci şi deci dy -y df
df — 2a
;. O integrală primă este x2-\-y 2
y c f -. Rezultă f (#, jy) = —2a2 arc sin
V^2 + j ' 2 + vof — y —2a-+ tp(«2 + yz), pentru x # 0, y # 0.
8. Se consideră funcţia r : fi2 —> i i 3 , r («, s>) = (1 + uv, u + w2y, w2 -f-+ «3»).
1) Să se arate că r (R2) este o „suprafaţă" conică. 2) Să se găsească ecuaţia carteziană a lui r (fi2).
Soluţie. 1) Ecuaţia vectorială a „suprafeţei" este r = (1 -{- uv) i - j -+ (« + «2w)y -f- (u2 + M3y) Â. Ea se poate scrie în forma r = (1 + «») (* + «y + M2&). De aceea r (fi)2 este o „suprafaţă" conică.
2) Eliminînd parametrii u şi v între cele trei ecuaţii date, se obţine ecuaţia carteziană y2 = xz.
9. Se consideră harta r definită prin x = a(u + l/z;), y = b(u — 1/fl),.
2 = 2 — , u<= fi, veR — {0}.
1) Să se arate că imaginea r (fi X (fi — {0})) este o suprafaţă dubla riglată.
2) Să se precizeze curbele coordonate ale suprafeţei şi ecuaţia carteziană implicită a suprafeţei.
R: 1) i(u, v) = I — > , Ol + u [a, b, —j = (au, bu, 0) + — (a, —b, \ V V } \ V ) V
2u)..
x2 y2
2) Curbele coordonate sînt drepte. Ecuaţia carteziană este —- — — = 2z.. a2 b2
213;

10. Fie suprafaţa descrisă de extremitatea vectorului r = (u2 + v + 1) î + -f {u2 — v + 1) / + («w + 2) £ («, a)g R2 — {(0, 0)} şi punctul M0(u0 = 1, •»o = —1) de pe ea.
Să se determine: 1) Tangentele şi planele normale în M0, la curbele coordonate ce trec prin acest punct.
2) Unghiul curbelor coordonate ce trec prin M0,
R: Pentru curba u0 = 1, tangenta = = , planul nor-1 — 1 1
mal , x — y + z -\- 1 = 0 .
Pentru curba v0 = — 1 , tangenta — - = - , planul normal, 2 2 — 1
2y + 1% — z — 7 = 0.
2) cos 6 = —=. •
11. Fie imersia r definită prin x = « cos ÎI, y = M sin i>, 2 = bv, [u, v)eR2
şi trei curbe trasate pe r(R2) reprezentate prin ecuaţiile Ci: v = 1, C2: w = = 1/2 «u2, C3: « = —1/2 a»2.
Să se determine lungimile laturilor si unghiurile triunghiului curbiliniu MtM2M3, unde Mx = C a n C3, i¥2 = C3n Cx, M3 = C an Ca.
R: J(Af[Ma) = (7/6) a, /(MgMs) = «, J(AfăĂfi) = (7/6) «;
9i = 0, 82 = arc cos (—2/3), 83 = arc cos (2/3).
12. Fie imersia r definită prin x = «cos », y = « sin v, z = a In (u — + V»2 — a2), a > 0, we[#, oo), veR. Să se determine curbele de pe suprafaţa r ([«, oo) X-B) care intersectează curbele D = v.0 sub un unghi constant.
Indicaţie. Fie curbele
a(2) = (u(t) cos «(£), «{<) sin v{t), a\n(u(i) + su2[t) — a2))
$(t) = (w(£) cos Î>9) «(2) sin »o, * In («(£) -f Ju2(t) — a2)).
Unghiul dintre ele este dat de relaţia
cos t) = (S'(*), p'(0) !! «*(0 IIII P'(') II
a'(i) =\u' cos y — «y* sin i>, «' sin a + nv' cos c, 1 \ \ « 2 — a2;
-*,, . / , . . ««' j3 ' (2)=l« cos % M sm % v'w2 — a'
u' 1 Se găseşte cos 8 = , — —•• . Putem scrie == 1 + Iu2 —
VM'2 + (M3 - a2) v'2 cos2 6 V
2. v'2 (vff tg2 9 . . . v' . t g 8 — an — , sau — J = — , adică — — ± • -, = . . Pentru 8 constant,
u'2 \u'J u2-a2 u' _4u2-a2
găsim soluţia generală v = _± tg 0 In c(« + 4u2 — a2), c = constant. 2-14

13. 1) Să se determine ecuaţia suprafeţei conice cu vîrful V(0, 1, 3) şi curba directoare C: x2 + y2 — 2x — 6y + 3 = 0, 2 = 0.
2) Să se determine ecuaţiile parametrice ale curbei obţinută intersec-tînd conul cu planul z = 2, ecuaţiile tangentei şi planului normal al curbei
m punctul A I »— , 2 •
Soluţie. 1) Generatoarea suprafeţei conice face parte din familia de drepte y — 1 = AX, z—3 = u-x. Punem condiţia ca aceste drepte să se sprijine pe C, adică sistemul y — 1 == Xx, z — 3 = \ix, z = 0, x2 -f y2 — 2x — 6y + 3 = 0 să fie compatibil. Eliminînd pe x, y, z găsim condiţia de compatibilitate 9Â2 — 2 ir2 + 12XJJL + 6 u. + 9 = 0.
înlocuind pe  şi \i găsim ecuaţia carteziană implicită a suprafeţei conice, 9x2 + 9y2 — 2z2 + 6xz + Ylyz — 18* — 5Ay + 27 = 0.
2) Intersecţia conului cu planul z — 2 are ecuaţiile carteziene: 9x2 + — 9y2 — 2z2 + 6xz + \2yz — 18* — 54y + 27 = 0, z = 2.
Proiecţia acestei curbe pe planul .*0j> este cercul j * — — I + | 3 ' — — j =
= — . Ecuaţiile parametrice ale acestui cerc sînt 9 "
1 41 5 V7 -. x x — — + — cos t, y =-^-+ — smt, tsR.
^ . „ 1 V7 5 / i . ' : , Deci C: % = — - + — cos t, y=— + -— smt, z = 2. Punctul .4 se obţine pentru z!0 = 0. Tangenta la curbă în punctul A are
1 -L -\f7 ecuaţiile * = ——— , 2 = 2. Planul normal are ecuaţia y = 5/3.
14. Să se arate că suprafaţa M: xy + jr2 + zx = 0 este un con de rotaţie şi să i se determine axa de rotaţie.
w « * > r v - ,v i ,~ (* + 3' + ^)2 - (x2 + y2 + z2) bolune. xv -+• zv — zx = • 2 Deoarece ecuaţia suprafeţei este de forma F(* + y -\- z, x2 + y2 + z2) =
= 0, suprafaţa este de rotaţie. Axa este o dreaptă perpendiculară pe planul de ecuaţie * + y + 2 = 0,
deci are parametrii directori (1 , 1, 1). Suprafaţa M este con, deoarece pentru z # 0, ecuaţia ei poate fi scrisă sub forma
0 ^^Z + JL + Z^t-tlL, Z). z z z z \z z)
Yîrful se confundă cu originea. Axa de rotaţie trece prin vîrful conului. Ea are ecuaţiile * = y = 2.
15. Suprafaţa generată prin rotirea unui cerc în jurul unei axe conţinută în planul cercului şi exterioară lui, se numeşte tor.
Să se determine ecuaţia cart eziană implicită a torului generat prin rotirea în jurul axei Oz a cercului din planul xOz, avînd centrul în (3, 0, 0) şi raza 1.
215
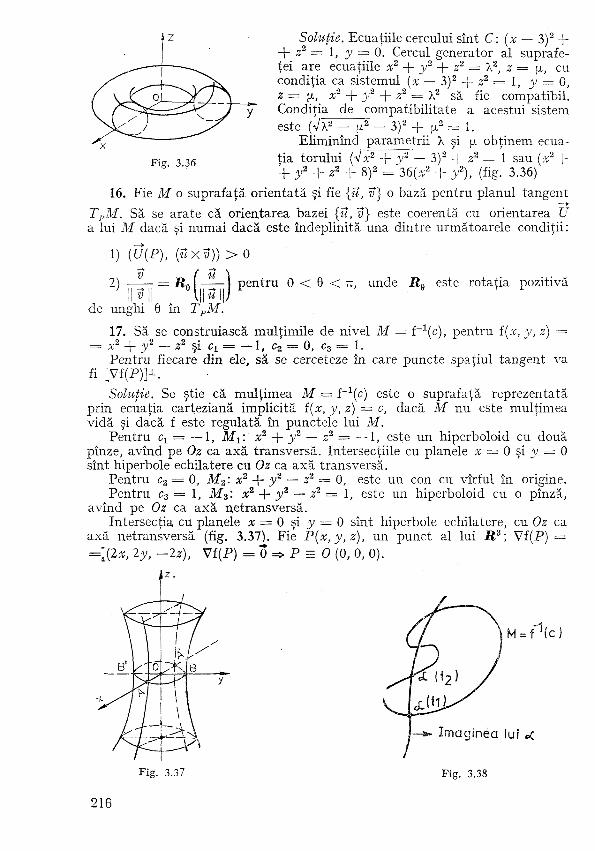
Soluţie. Ecuaţiile cercului sînt C: (x — 3)2 + + z2 = 1, y = 0. Cercul generator al suprafeţei are ecuaţiile x2 -\- y2 -\- z2 = X2, z — ji, cu condiţia ca sistemul \x — 3)2 + z2 = 1, v == 0, 2 = fi, #2 + y2 + z2 = X2 să fie compatibil. Condiţia de compatibilitate a acestui sistem este (Vx2 - j ? - 3)2 + fi2 = 1.
Eliminînd parametrii X şi fi obţinem ecuaţia torului (vV + y2 — 3)2 + z2 = 1 sau (^2 + + y2 + z2 + 8)2 = ^36(*2 + f), (fig. 3.36)
16. Fie M o suprafaţă orientată şi fie {u, v} o bază pentru planul tangent TPM. Să se arate că orientarea bazei {u, v} este coerentă cu orientarea U a lui M dacă şi numai dacă este îndeplinită una dintre următoarele condiţii:
Fig. 3.36
1) {U(P), (uXv)) > 0 —» * —> »
2) — = RB — 1 pentru 0 < 0 < n, II #11 v|| « I U
unde J?,fi este rotaţia pozitivă
pentru f(#, y, z) =
de unghi 8 în TPM. 17. Să se construiască mulţimile de nivel M = f""1(
= x2 + v2 — z2 şi cx = — 1, c2 = 0, c3 = 1. Pentru fiecare din ele, să se cerceteze în care puncte spaţiul tangent va
fi [Vf(P)>. Soluţie. Se ştie că mulţimea M = f_1(c) este o suprafaţă reprezentată
prin ecuaţia carteziană implicită i(x, y, z) = c, dacă M nu este mulţimea vidă şi dacă f este regulată în punctele lui M.
Pentru cx — — 1 , Mx: x2 + y2 — z2 = —-l, este un hiperboloid cu două pînze, avînd pe Oz ca axă transversă. Intersecţiile cu planele x = 0 şi y = 0 sînt hiperbole echilatere cu Oz ca axă transversă.
Pentru c3 = 0, Pentru c3 = 1
M2. M3:
-\- y — z~ = 0, este un con cu vîrful în origine. x> + y* = 1, este un hiperboloid cu o pînză,
avînd pe Oz ca axă netransversă. Intersecţia cu planele x = 0 şi y = 0 sînt hiperbole echilatere, cu Oz ca
axă netransversă (fig. 3.37). Fie P(x,y,z), un punct al lui R3; Vf(P) = =l{2%, ly, —2z), Vf(P) = 0 =* P = O (0, 0, 0).
M = f ' (ci
Fig. 3.37
Imaginea lui cţ
Fig. 3.38
216

Deoarece 0$MX şi 0$M3, rezultă că mulţimile caracterizate prin i(x, y, z) = cx şi respectiv i(x, y, z) = cs, sînt regulate în toate punctele lor, deci pentru ele, spaţiul vectorial tangent este [Vf(P)]->-.
Pentru conul i(x, y, z) = c2, originea este singurul punct neregulat, deci pentru această suprafaţă, spaţiul vectorial tangent este fVf(P)]-1-, pentru orice P # 0.
18. Fie M = f_1(c), unde f: R3 —> R este o funcţie regulată. Presupunem că a: R —> II 3 este o curbă care traversează pe M dar care nu este tangentă la JVlYadică (Vf(a'(i)), *'{t)) ¥= 0 pentru orice t, cu a(t)e M, (fig. 3.38).
1) Fie a(^i) şi a(i2), £i < 4, două puncte consecutive de intersecţie ale curbei a cu M. Să se arate că dacă <x(t)<£M pentru fa < t < h, atunci (Vf(a(tfi), oi'{h)) > 0, dacă şi numai dacă (Vi(a(t2), a.'{h)) < 0.
2) Dacă M este compactă şi lim | |a(£)|| = lim | |«(i) | | = oo, atunci a t^ — co t->oo
intersectează suprafaţa M într-un număr par de puncte.
19. (Modelul riglat al benzii Mobius) (fig. 3.39). iz
Fie I = { v | ve ( - — » — 1 1 , r : R X I -> H3 ,
r(«, i/) = 1 j 1 -4- y cos — icos a, 1 + v cos — 1 sin u,
v sin — . Să se arate că: 1) u —> r(u, v) sînt curbe 2 i Fig. 3.39
periodice cu perioada 2n pentru v = 0 şi 4TT pentru y # 0; 2) u —> r(«, v) sînt segmente de dreaptă cu mijlocul pe cercul uni-
t'h ta te din pianul xOy şi care fac unghiul — cu pianul xOy. Să se verifice că r
este o imersie, dar suprafaţa r(JR X I) nu este global orientabilă.
Soluţie. Pentru v = 0 găsim <x(u) = r(#, 0) = (cos u, sin w, 0) şi evident a.(u) = a(« 4- 27u), V«efi , Pentru w # 0 se constată că a(«) = r(w, w) = = a(« + 4TU) = r(« + 4r, i'), VueR.
Fixînd pe M obţinem ecuaţiile unui segment de dreaptă, x = cos u -4-u . "u . u { 1 1
•+• v cos u cos — , y = sin « + f sm « cos — , z = v sin — . we I — — > — 2 2 2 1 4 4
Mijlocul acestui segment are coordonatele (cos u, sin u, 0). Unghiul 0 dintre segment şi planul xOy este dat de
• A ( u -* u-* . u t t \ . u „ « sm 0 = cos w cos — Î + sm z« cos — n 4- sm — «. « = sin —, adică 0 = —
\ 2 2 y 2 J 2 2
Fie Z cîmpul vectorial local normal la r ( U x I ) , adică Z = ~rux7v. Deoa-
rece E = [| rj[2 = ~ + [ 1 + v cos - £ } ' , P = (?„, r„) = 0, G = 11 rv\\2 = 1
217

rezultă \\Z\\ = EG — F2 > O, adică r este o imersie. Pe de altă parte se observă că a(0, 0) = K ( 2 - , 0) = (1, 0,0) = r(0, 0) = T{2TZ, 0), dar
r.(0, 0) = / , r ,(0, 0) = ?, Z(0, 0) = - l ,
rB(27r, 0) = / , r , (2 - , 0) = - 7 , Z(2- , 0) = I ,
adică Z nu este un cîmp vectorial normal global bine definit pe r(RxI).
Banda lui Mobius nu este global orientabilă deoarece orice cîmp vectorial normal (diferenţiabil) definit pe ea trebuie să se anuleze într-un punct şi să-şi schimbe sensul la trecerea prin acest punct (consecinţă a „răsucirii"). Fiind conexă, această suprafaţă are în mod necesar o singură faţă.
x2 v" z2
20. Să se arate că hiperboloidul cu o pînză, \- — 1 = 0 este o a2 b2 c2
X V Z suprafaţă conexă, iar hiperboloidul cu două pînze, f- — j - 1 = 0 ,
a2 b2 c2
nu este conex. Indicaţie. Hiperboloidul cu o pînză este mulţimea valorilor funcţiei dife-
renţiabile x = a eh u cos v, y = b eh u sin v, z = c sh u, definită pe mulţimea conexă R2. Fiecare din pînzele hiperboloidului cu două pînze este suprafaţă conexă. Deoarece cele două pînze sînt mulţimi deschise şi disjuncte, rezultă că hiperboloidul cu două pînze nu este conex.
21. Fie flcB2o mulţime deschisă şi conexă, iar r: D —> R3 o parametri-zare. Să se arate că dacă normala la suprafaţa r(D) are direcţia fixă, atunci suprafaţa este o parte a unui plan.
Să se verifice acest rezultat pentru
1) r: R2 - {(0, 0)} ~> -B3, r(», v) = {ir + v2, uv, (u + v)2).
2) T:R2 — {(U, V) Iu > 0, v > 0, u — v > 0, u — 3v < 0} -> R3,
T(U, V) = I (u — v)2, u2 — iv2, — (îi — 2i
- > • _ - » _ > \ _
Indicaţie. U = const. =s> ăU = 0 . 1) U — —= (i -\- 2j — k), V6
2) U = ~ ( i - ' j + 4k). 3VZ
22. Se consideră suprafaţa AI: xyz — 1 = 0. 1) Să se arate că este o suprafaţă Ţiţeica. 2) Să se determine ecuaţiile carteziene ale curbelor coordonate ce trec
prin punctul P(u0 = 1 , v0 = 2) şi unghiul acestor curbe. 3) Să se arate că planul tangent la suprafaţă într-un punct arbitrar al
acesteia formează cu planele de coordonate un tetraedru de volum constant. 4) Să se arate că M nu este conexă. Soluţie. 1) O suprafaţă pentru care K / i 4 = const., unde K este curbura
lui Gauss pe suprafaţă, iar d este distanţa de la un punct fix la planul tangent într-un punct oarecare al suprafeţei, se numeşte suprafaţă Ţiţeica.
218

Reprezentăm suprafaţa M prin ecuaţia vectorială 7 = ui + vj + (\juv)k . Avem ru = C—{\\i?v)k, rv= j — {\\uv2)k, rUB = (2/w3y)1) ?B„ = {\jn2v2)k, r „ = (2/«t>3)Ă, rM X r„ = (llu2v)i + (lfuv*)j + k,
Ţr _ _ru XJŢv__ "? + uj + u2v2k ~ II rrxTplî _ « V ( l + 1/«V + 1/wV)1'2 '
' = ( ^ rm) = n" i m = {U, rUK) = irv(\ + I/M-JT -t- l/^rir)1/2
« V ( l + ! / » ¥ + 1 /MV) 1 / 2
2
OT3(1 + 1/wV-r- l/Va2)1/2 '
3
£ = 1 + 1/«V,
F = l / A 3 , G = 1 + 1/«V, K • u4v2(l + l/w4w2 + 1 / M V ) 2
Considerăm pe O (0, 0, 0) drept punct fix. Distanţa de la origine la planul tangent într-un punct arbitrar al suprafeţei este dată de,
d==l(7>Uy \(?,rux7v)]_ 3 \\ru X rv\\ \uv\(l+ l / u V + 1/^V)1/2 '
Găsim K/ i 4 = 1/27, deci suprafaţa este Ţiţeica.
2) Curbele w = u0 au ecuaţiile parametrice x = u0, y = v, z = l/#8i>. Eliminînd parametrul f între aceste ecuaţii, găsim ecuaţiile carteziene: x = u0, yz = \ju0, care reprezintă hiperbole echilatere. Curbele v = v0 au ecuaţiile parametrice x = M, y = v0, z = ljuv0 şi ecuaţiile carteziene y = v0, xz — l[v0> deci sînt tot hiperbole echilatere. Unghiul curbelor coordonate care trec prin P este 0 = arccos 1/V85.
3) Ecuaţia planului tangent la suprafaţă în punctul (x0, y0, z0) este xy0 • ~o+ yx0z0 + zx0y0 — 3 = 0.
Volumul tetraedrului cu vîrfurile în O, A(i[y^a0, 0, 0), B{0, 2>jx0z0, 0), C(0, 0, 2>\xay0) este 9/2.
(4) Mulţimea D : x y ^ O este deschisă în R2. Considerăm aplicaţia r(x, y, z)= =[x' y'T~) D~*R3
Se verifică uşor că r este o hartă în M astfel ca r(D) = M. Pe de altă parte se observă că D este reuniunea unor mulţimi deschise şi disjuncte. Imaginile prin r ale acestor mulţimi vor fi disjuncte şi deci M nu este conexă (reuniune de mulţimi disjuncte).
23. Fie paraboloidul hiperbolic M: z = xy. 1) Să se orienteze suprafaţa. 2) Să se calculeze curburile normale ale lui M în direcţiile axelor de coor
donate Ox, Oy şi în direcţiile bisectoarelor planului xOy.
219

3) Să se determine curburile principale şi să se exprime aceste curburi cu ajutorul coordonatelor cilindrice.
Soluţie. 1) Suprafaţa M este simplă ^_ (este dată prin ecuaţia carteziană explicită) y şi deci orientabilă. Alegem cîmpul normal
—yi — xj + k unitar U = > adică fata
Fig. 3.40 Vi + x2 + y2
superioară este cea pozitivă, iar faţa inferioară este faţa negativă (fig. 3.40).
2) Punctul 0(0, 0, 0) aparţine suprafeţei M şi axele de coordonate Ox şi Oy aparţin în întregime suprafeţei. Versorii i şi j sînt tangenţi la M în O.
Avem
+ Dr>
S0(l) = - DrU(0)
j + Dr Vi + %2+y
Dr
1
-y vr *2 + y2
vi + x2+y i + y .y + .
(i + ^ + 3 , , 2 ) 2 / 3
* » (1 + A-2 + y f / 2 (1 -f *2 + v2)3/2 Jo
deci S(i) = j . Analog, S(j) = — D-ţ U = i.
Rezultă kfi) = (S(î), ?) = 0, kjj) = (S(;), ; ) = 0 —* —* —* —>
Deducem S(ai + &/) = oi + «.;', Va, & constante. Fie 5 = —]=~(i + y) versorul director al primei bisectoare a planului
V2 1 xOy, care este tangent în 0 la Af. Avem k„(u) = (S(«*), «)
V2 {*+ J\
1 V2
>•+ ; ) ) = 1 > 0 .
Aceasta înseamnă că în direcţia lui u suprafaţa M se încovoaie în sensul lui U.
1 -* Fie ? = -p r (i — j) versorul director al bisectoarei a doua a planului
V2 ^Ojy care este tangent în O la M. Avem kn(v) = (S(w), v) = — 1 < 0, adică. în direcţia lui v suprafaţa se încovoaie în sens opus sensului lui U.
3) Suprafaţa M se poate reprezenta prin ecuaţia vectorială 7(u, v) = ui + + iTj + uvk. Găsim ru= (1, 0, v), ~rv= (0, 1, u), E = 1+^2 , F = MU, G = 1 +
+ ^ 2 , U = (—v, —u, 1) V1 + u2 + v2 = (0, 0, 0), 7U, = (0, 0, 1), rm = (0, 0, 0), l
n = 0, w = 4i + u2+v2
Deci K 1 M + M
2 + Î , 2 ) 2
H —uv ;i + »2 + ^2)3/2
220

Raportînd spaţiul la coordonatele cilindrice (p, 8, z) şi ţinînd seama că x = p cos 6, y = p sin 6, z = z şi z = %y, deducem
K = - 1 (1 + P2)2
H = —z (1 + P2)3'2 K H ± v'H2 K
kl, 2 = " — Z ± Vi P2 +
(1 + fi** 24. Suprafaţa generată prin mişcarea unei
drepte ce se sprijină pe o elice circulară, întîl-neşte axa Oz şi este paralelă cu planul xOy se numeşte elicoid cu plan director sau suprafaţă şurub.
1) Să se găsească ecuaţia carteziană implicită a suprafeţei.
2) Să se determine prima şi a doua formă fundamentală pe suprafaţă.
3) Să se determine curbura lui Gauss şi curbura medie.
Soluţie. Suprafaţa este un conoid. Planul director este z = 0 şi axa fixă, x = 0, y = 0. Ecuaţiile generatoarei sînt D: z = X, y = \xx. Fig. 3.41 Punem condiţia ca această dreaptă să se sprijine pe elicea circulară de ecuaţii: x = a cosu, y = a sin v, z = bv, adică sistemul z = X, y = \ix, x = a cos v, y = a sin v, z = &y, să fie compatibil.
Eliminînd pe x, y, z, v obţinem condiţia de compatibilitate, [x = tg —. Eli-b
minînd parametrii X şi u între această relaţie şi ecuaţiile lui D, găsim ecuaţia carteziană v xtg— = 0.
2) Avem z/b = v şi notăm y u. Astfel, suprafaţa şurub sm v cos v
(fig. 3.41) apare ca imaginea imersiei r : x = u cos v, y = u sin v, z = bv, b ^ 0. Reprezentăm suprafaţa prin ecuaţia vectorială y = #cos vi-\-u sin w_/-j-
+ bvk. Vitezele parţiale sînt ru = cos vi + sin w/, y« = — w sin w? + + u cos «y + bk, iar coeficienţii primei forme fundamentale, E = 1, F = = 0, G = M2 + 62. Deoarece ruXrv = (& sin », — b cos », «), | | ? „ X r B | | =
\-rr "Fi IW~, h 7^ ? , X r , (& sili ZJ, — & COS W, « ) = V£G — i7 2 == V62 + M2, L — " — --• -f » X r , | Vi2 +
Găsim de asemenea rua = 0, rBB = (—sin y, cos a, 0), rt.
-M sin v, 0), 1 = 0, m = , n « = 0.
- u cos y,
Prima formă fundamentală, ds2 = du2
fundamentală, do2 = -2b
V&2 u-3) Curbura lui Gauss K(r)
. du dv.
In- m
(«2 + 62) du2. A doua formă
-b2
EG-F2 (b2 + u2)2
221

Curbura medie, H(r) ==— = 0. 2(EG - F2)
Deci elicoidul este o suprafaţă minimală pentru care < K < 0.
25. Se consideră imersia r definită prin x = u cos v, y = u sin v, z = bv, M O , (u, v)<=R2.
1) Să se arate că r (R2) este o suprafaţă riglată. 2) Să se găsească curbura normală şi curburile principale. Soluţie. 1) Ecuaţia vectorială a suprafeţei este r = u cos vi 4 u sin vi 4
4 bvk. Ea se poate scrie în forma r = u(cos vi 4 sin vj) 4 bvk, adică suprafaţa este riglată. Dacă v este fix, atunci extremitatea lui r descrie gene-ratoarea suprafeţei. Dacă u este fix, atunci extremitatea lui r descrie o elice pe suprafaţă.
2) r = u cos vi 4 usinvj 4 &w&. Vectorii viteze parţiale sînt ~ru = = cos vi 4 sin vj, 7V = — w sin w i 4 u cos y y 4 bk- Deoarece (y„, ?„) = 0, adică y„ J_ ?«,, putem alege drept bază ortonormată a planului tangent în
punctul curent al suprafeţei baza formată din vectorii ~îx = - ru = II ' M II
-> . -* ^ 1 ~> —tt sin vi 4-ucosvj 4- bk „ . = cos t)« + s i m / ; , ea = *\, = , — . Orientam
| |r , | | V62 + w2
7» r B X r , &sin w -t b cos y - « -> suprafaţa alegind U = — = , t , j 4 ,. k .
* ' ° M - * . . - > 11 / 7 9 i 9 f 7 9 : 9 J / 7.9 i . 9
r „ X r J | VS2 + u2 4b2 4 w2 Vfr 2 M* „,.» , d 7ţ &M sin a -t bu cos w -» b2 ?
Avem i «i = u = Î 7 /? , V ' dM (62 4 u2)3'2 (b2 + u2)3'2 (b2 + u2)3'2
„..* . 1 d 7» — bcosv-* b sin v -» ; || ? . || dv b2 + u2 b2 + u2 J
Găsim Sn = (S(?i), ~e{) = 0, S22 = (S(72), ?a) = 0, S12 = (S(?i), «a) =
= («i,S(«B)) = - T - — r -Zr + ic
-» _ - _ & sin 2 8 Fie ? = cos 8 ? ! + sin 8 1%. Obţinem f (6) = kn(e(Q)) = — — - — - şi deci
b2 4 u"1
h -, b < kn(e(8)) < — — --, adică
&2 + M2 " ^ " b2 + M2
= ^«l-y («i — «a))1 2 4 &
V2, . , . a _ 6 2
^2 = * » | - 2 - ( e i + ea)
26. Se consideră suprafeţele 24(i = 1, 2, 3), date prin Tj (u, v) = (u + y, w2 4 i-'2, *«3 4 y3), (w, v)eR2; r2 («, y) = (w2, wy, aw 4 t'2), («, v)eR2;
n +U2 l + v 2 M 2 + B 2 - , r3 («, v) = > > > (M, y) e (R — { 0})
\ u v uv j Pentru fiecare din ele să se determine 1) Ecuaţia planului tangent şi ecuaţiile normalei în punctul P(u0= 1, vg=2).
222

2) Ecuaţia carteziană implicită. 3) Curbura lui Gauss şi curbura medie în P, Soluţie. 1) Pentru S1( avem x0 = 3, y0 = 5, z0 = 9.
Ecuaţia planului tangent este
x—3 v—5 £—9 1 2 3 1 4 12
= O, sau Ylx — 9 / + 2z — 9 = 0.
# — 3 _ 3 / — 5 _ z—9 Direcţia normalei (12, —9, 2). Ecuaţiile normalei:
12 - 9 2 Pentru S2, găsim a = 1, >•„ — 2, z0 = « + 4; #Bo = 2, jy„„ = 2, z„o = a;
%% = O, r»,, = 1, Zq, == 4. Ecuaţia planului tangent este (8 — a) # — 83; -j--\- 2z — a = 0. Direcţia normalei, (8 — a, — 8, 2). Ecuaţiile normalei: x — 1 v — 2 2 — a — 4 8 — «~ ' —8 2
Pentru S3, obţinem x0 = 2, y0 = z0 = 5/2; %Kci = 0, y„t = 0, zUa = —3/2 ; *«, = 0, y», = ZVII = 3/4.
Planul tangent: a; — 2 = 0. Normala: 2y — 5 = 0, 2z — 5 = 0. 2) Pentru a obţine ecuaţia carteziană implicită a suprafeţei, trebuie să
eliminăm parametrii u şi v între cele trei ecuaţii parametrice. Pentru 2X : ^3 = w3 -r/^3 + 3uv(tt -\- v), x2 — y = (u -\- v)2 — («a + sy2) =
= 2«i', wi1 = (*'2 — v)/2. înlocuind în prima relaţie obţinem x3 — 3xy-\-2z = 0. Pentru S 2 găsim (xz — y2)2 — a2x% = 0; analog 2 3 : #yz — ;v2 — v2 —
— z2 + 4 = 0. —62 —3- 147
3) Pentru Ex, K(P) = , H(P) = -• ' ; 2292 2293/2
Pentru S2, K(P) = = * ? , H(P) - , 2*° + 1 5 « ± 1 6 8 • (a2 - 16a + 132)2 (a2 - 16a + 132)3/2
Pentru S3, K(P) = 0, deci în vecinătatea lui P, suprafaţa se comportă 4 2
ca un plan; H(P) = •
27. Se consideră paraboloidul M:2z= [- — • a2 62
Să se arate că dacă 6 este unghiul pe care-1 face normala într-un punct al K
lui M cu axa Oz, atunci = const. cos4 6
* - £ - = - L -cos4 6 a2b2
28. Să se arate că imaginea imersiei (suprafaţa lui Enneper) r:R2—>- R3, / 7/3 ,.,3 \
rlu, v) = I u — — + uv2, v h u2v, u2 — v2I, este o suprafaţă minimală. { 3 3 J
29. Fie Af = f-1 (1), unde i(x, y, z) = — x2 + y2 + z2. Să se orienteze suprafaţa M. Să se determine curbura normală a suprafeţei în punctul P(0,0,1), în direcţia v, unde v este un vector unitar, v g PPAf. Cazuri particulare: .
1) J = 7 = (1, 0, 0) ; 2) ? = ? = (0, 1, 0); 3) » = (1/V2, 1/V2, 0). 223

Soluţie. Suprafaţa M este hiperboloidul cu o pînză, de ecuaţie carteziană implicită — x2 4- y2 + z2 = 1 •
Deoarece y f = (—2x, 1y, 2z) i= 0 pe M, suprafaţa este orientabilă. O orien-—> ry £ / — % V
tăm prin cîmpul normal unitar U = —-— = , > — » |yf jj \V-v2 -f- ^2 + z2 V*2 4- IV2 -r 2"
z vx-2 + y + 22;
Pentru P = (0, 0, 1), orice vector unitar ve TPM este de forma (vlt v2, 0), unde uf + z>| = 1-
SP(?) = -DjU(P) = K - W g , 0) si kn{v) = v\ - vi Cazuri particulare: 1) k„(i) = 1; 2) &„(;') = — 1; 3) &ffl(îî) = 0. Observaţie: k1(i) = l şik^j) =—1 sînt curburile principale ale lui M
în P , deci i şi y sînt direcţiile principale ale lui M în P . într-adevăr, considerînd S P : TPM —> PP-M", curburile principale ale lui ikf în P sînt valorile proprii ale acestei aplicaţii liniare. Matricea aplicaţiei lui Weingarten
si din ecuaţia caracteristică: este 0
l - X 0 0 —1 —X
0 rezultă Â = 4-1.
30. Fie <x(u) = (x(u), y(u))_, unde x(u) = v" V1 — e"2' dt, y(u) = e~u, u> 0
şi fie M suprafaţa de rotaţie obţinută prin rotirea lui a. în jurul axei Ox. Să se arate că:
1) a are viteză unu; 2) a are proprietatea ca pentru orice u > 0 segmentul dintre <x(u) şi axa
Ox al tangentei la a. în a.(u) are lungimea constantă 1; 3) M are curbura lui Gauss K = — 1 . Soluţie. 1) Fie o.(u) = x{u)i 4- y(u)j şi vectorul viteză de-a lungul.
curbei a, a » = f i - e~2,i? - e ~ M / , ( a » ) 2 = 1 =*|| a'(«) || = 1.
*—V Vl-e-2fd^ 2) Tangenta la curba a în punctul OC(M) are ecuaţia ; 0 — _ v - e - M . . ' V l - e ~ 2 M
= — . Punctul de intersecţie al tangentei cu axa Ox are coordonatele
jv Vi — e~2'd^ 4- Vi — e 2u, 0). Prin calcul direct se verifică că distanţa
dintre cele două puncte este 1.
3) Fie r(u, v)= V \ 1 — e~2 dt, e -" cos v, e~u sin v) parametrizarea lui M.
ţu = (Vi — e-2", — e~" cos », --e~M sin v) 7V = ( 0 , — e~" sin u, — e~a cos u)
7 ™ = \ j T ^ ^ ' e "" C O S Î ' ' e - "s inu j
224
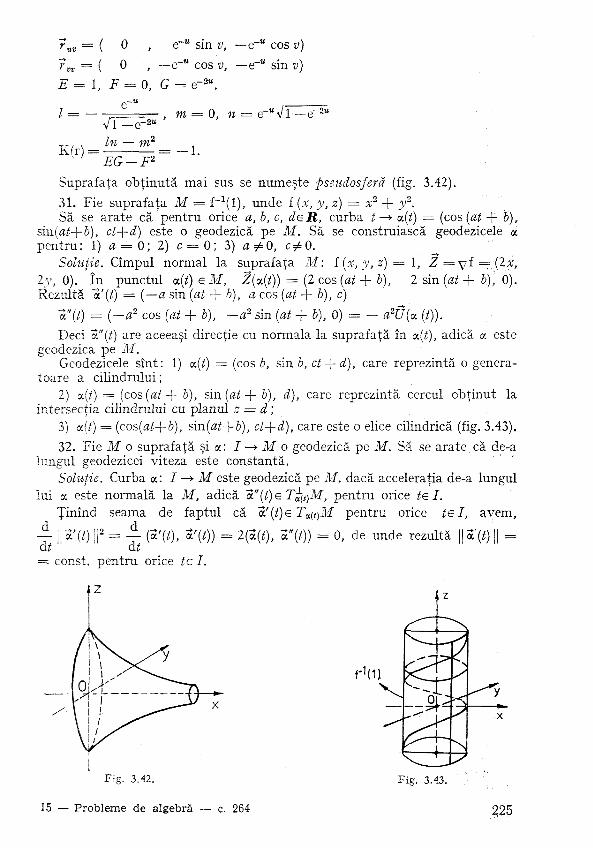
r~m = (
rn = ( E
O
O
1, F
K(r) = In
e~" sin v, —e~" cos w)
, —e"~u cos v, —e~a sin v)
0, G = e-2U. t
= - , m = 0, « = e_uVl—i -2«
wr • 1 . £ G - . F 2
Suprafaţa obţinută mai sus se numeşte ftseudosferă (fig. 3.42). 31. Fie suprafaţa M = f -1(l), unde f (x, y, z) = x2 -f- J'2-Să se arate că pentru orice a, b, c, deR, curba t —> <x(i) = (cos (ai -f- &),
sin(ai+&), ci-l-a") e s t e o geodezică pe Af. Să se construiască geodezicele a pentru: 1) a = 0; 2) c = 0; 3) a ^ O , c # 0 .
Soluţie. Cîmpul normal la suprafaţa M: i (x, y, z) — 1, Z = y f = (2i, 2v, 0). în punctul oe(i) e M, Z(oc(i)) = (2 cos (ai + 6 ) , ,2 sin (at + b), 0). Rezultă a'(i) = (—a sin (at + b), a cos (at -\-b), c)
t"(t) = ( - « 2 cos (at + b), ~a2 sin (at + b), 0) = - a2U(<z (/)). Deci a"(i) are aceeaşi direcţie cu normala la suprafaţă în a(i), adică a este
geodezica pe M. Geodezicele sînt: 1) <x(i) = (cos b, sin b, ct-\-d), care reprezintă o genera
toare a cilindrului; 2) a(i) = (cos (at + &), sin (ai + 6), i ) , care reprezintă cercul obţinut la
intersecţia cilindrului cu planul z = d; 3) a(i) = (cos(ai+&), sin(at+b), ct+d), care este o elice cilindrică (fig. 3.43). 32. Fie M o suprafaţă şi a: I —> ikf o geodezică pe ilf. Să se arate că de-a
lungul geodezicei viteza este constantă. Soluţie. Curba a.: I —> M este geodezică pe M. dacă acceleraţia de-a lungul
lui x este normală la M, adică a"(i)s T^t)M, pentru orice tel. Ţinînd seama de faptul că ~$.'(t)eTa[t)M pentru orice tel, avem,
- l |ja'(i)[j2 = — (S'(i), a'(i)) = 2(a(i), a"(i)) = 0, de unde rezultă | |a '(i) | | = di di = const. pentru orice tel.
r(U
Fig. 3.42.
15 — Probleme de algebră — c. 264
Fig. 3.43.
225

33. Fie a > b > O şi funcţia r:B2—>• R3 definită prin r(u, v) = ((a + -j- b cos v) cos u, (a + b cos t/) sin u, b sin t>).
1) Să se arate că r este o parametrizare a torului, dublu periodică. 2) Să se arate că torul este o suprafaţă conexă şi compactă. 3) Să se determine curburile principale, direcţiile principale, şi curbura
Iui Gauss. Soluţie. Aplicaţia este diferenţiabilă. Fie r = (a+ b cos v) cos ui + (a + b cos v) sin u j + b sin vk şi 7U =
= — (a+b cos v) sin ui + (a+b cos v) cos uj Jr 0&, r„ = — b sin t> cos u T —
—b sin v sin « j+b cos vk,7ux7v¥;0, deci r este o parametrizare. r este para
metrizarea suprafeţei de rotaţie care se obţine rotind cercul «.(v) — ( a + 6 cos y, 0, & sin v) în jurul axei Oz (fig. 3.36), adică r este parametrizarea unui tor.
Ecuaţia carteziană a torului este (Vx2 + y2 — a)2 + z2 = b2. Funcţia r este dublu periodică în sensul că r (u -\- Ikiz, v) — x(u, v + 2kn) = r (u, v), (u,v)eR2, keZ.
Deci, fiecare punct al imaginii lui r corespunde la un punct unic (u, v)eR2
cu 0 < u < 2K şi 0 < v < 2iz. 2) Deoarece aplicaţia r este definită pe mulţimea conexă R2, imaginea
acestei aplicaţii r (R2) este o suprafaţă conexă în H3 . Torul este o suprafaţă mărginită şi închisă, deci este compactă. Ea este
şi orientabilă. 3) Fie vi = 7a = (a + b cos v) (—sin u, cos u, 0),
vz = 7v = b(— sin v cos u, —sin v sin u, cos v). -> y X f -*
Orientăm suprafaţa prin U —~— , !7=(cos u, cos v, sin u cos v, sin v). j l î y « I! 11 ' « A J B 11
? 7" 7" Considerăm S(î>i) = — D-» 0" = r— = (— sin u cos v, cos w cos i> 0) =
cos w _ . c/_» _ r> <3?7 . . . Î>! şi S(v2) = — U •* U = — = —(cos u sin y, sm « sin i>, a - j - 6 cos v
-cos v) = — — v*. b
w, Din calcul rezultă că ru = Vi şi 7^ = 1)2 sînt vectorii proprii ai aplicaţiei
eingarten SP, adică sînt direcţiile principale în punctul P al suprafeţei.
Curburile principale sînt kx= , şi ks = . Curbura lui a -Ţ- b cos v b
Gauss, K = klt k2 = b(a + b cos v)
Observaţie. K > 0 pe regiunea „exterioară", J — — < v < — 1, K < 0 pe
regiunea „interioară", I— < v < —— j şi K = 0 pe partea superioară I v = — 1
şi pe partea inferioară, 1 v = — — J •
34. Fie mulţimea de nivel, M = f_1 (1), unde f (x, y, z) = x2 -f- y2 + z2
şi curba a: I -* ilf. Să se arate că pentru orice pereche de vectori unitari, ortogonali, {7lt 72} din R3, curba a, este o geodezică pe M, dacă şi numai dacă a(i) cos (ai) ~ex + sin (at) ?2 .
226

v" E l
-u'v' F m
u'2
G n
35. Să se determine liniile de curbură şi liniile asimptotice ale paraboloidului hiperbolic M:[z = xy.
Soluţie. Suprafaţa poate fi reprezentată prin harta Monge, x = u, y = v, z = uv, (u, v) eRz.
Avem E = 1 + v2, F = uv, G = 1 + a2, ' = n = 0, m = 1. Ecuaţia diferenţială a liniilor de curbură
= 0,
devine în acest caz u' Vi + v2 = ± v' Vi + u2. Aceasta este o ecuaţie diferenţială de ordinul întîi cu variabile separabile. Soluţia generală, u + \' \-\-u2 = = ± c(v -f- VT+ Î;2). Trecînd la coordonate carteziene găsim % + V l + * 2 = = ± c(VT+^ + y), z = xy.
Ecuaţia diferenţială a liniilor asimptotice, Iu'2 + Imu'v' + nv = 0, devine u'v' = 0, adică u = clt v = c2. Deci liniile asimptotice sînt x = clt z = cxy şi y = c2, 2 = c2#.
36. Să se determine liniile asimptotice ale suprafeţelor următoare: 1) x = cos In «, v = z> sin In u, z = u, u > 0, » 6 f i , 2) x = w, _y = uv, z = v + In u, u > 0, » e H , 3) A; = v, y = M, z = M2V, («, a) G J B 2 .
R : 1) w = c1( « = C2Î;2; 2) u = clt u = c^e2* ; 3) w = clt uv2 = c2.
37. Fie M imaginea aplicaţiei r definită prin x = u+v2, y = —2u2 -f- w, u — 1 2 = , (u, v)eRx(R — { — 1}) şi pe ea curba C: u = v, trecînd prin y + 1
punctul P0(u0 = 1, t'0 = 1). Să se determine: 1) planul tangent la M şi tangenta la C în P0 , 2) normala la Af şi planul normal la C în P0 , 3) direcţiile asimptotice ale lui M în P0 . R: 1) P0(2, — 1 , 0), planul tangent s — 2j> — 18z —4=0. Ecuaţiile curbei C
sînt: # = M2 -f u, y— —2u2 J- u, z = . Tangenta în P0 , = u -f- 1 6
__ 3' + 1 ^ ^6~ ~~ T '
x — 2 v "I- 1 ^ 2) Normala la suprafaţă, - — = — =
1 — 2 —18 Planul normal la curba C, 6x — 6y -(- z — 18 = 0. 3) Direcţiile asimptotice în P 0 sînt date de ecuaţia 8u'z + 9u'v' -f 2v'2 = 0
şi sînt ambele reale. 38. Se consideră imersia definită prin .ţ = C O S Î « C O S Î ) , y = cos u sin v,
z = sinu — In tgl — + — I, ue\0, — I, veR. V4 2J l 2j
1) Să se determine liniile de curbură si liniile asimptotice ale suprafeţei
227
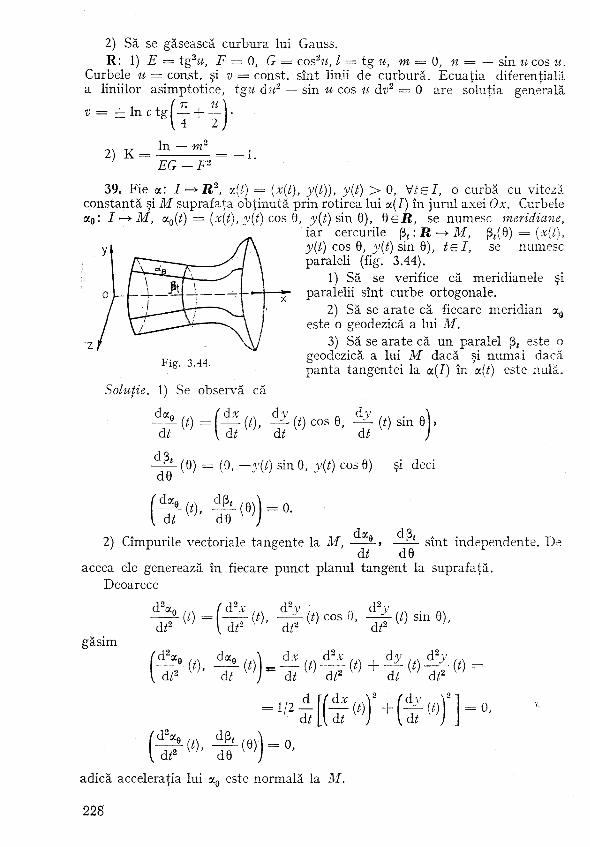
2) Să se găsească curbura lui Gauss. R: 1) E = tg2-w, F = O, G = COS2M, l — tgu, m = O, w = — sin îi cos w.
Curbele « = const. şi z; = const. sînt linii de curbură. Ecuaţia diferenţială a liniilor asimptotice, tgu du2 — sin u cos u dv2 = 0 are soluţia generală
v = ± In c tg | — + —
2) K = In W"
EG-F2 1.
39. Fie a: I—>R2, a(i) = (x(i), y(i)), -y(i) > 0, Viei, o curbă cu viteză constantă şi M suprafaţa obţinută prin rotirea lui a(7) în jurul axei Ox. Curbele a9: I —> M, <x0(£) = (#(i), v(i) cos 6, j»(£) sin 0), 6 G J R , se numesc meridiane,
iar cercurile (3,: jR -+ M, $t(Q) = (x(t), y(t) cos 0, ^(f) sin 6), tel, se numesc paraleli (fig. 3.44).
1) Să se verifice că meridianele şi paralelii sînt curbe ortogonale.
2) Să se arate că fiecare meridian aa este o geodezică a lui M.
3) Să se arate că un paralel (3, este o geodezică a lui M dacă şi numai dacă panta tangentei la a(I) în a.(t) este nulă.
Soluţie
dt
de f da9
{ di
dy ~(t), ^-(t)cosQ, ^ L ^ s i n e } , dt dt dt
9-(t) =
(0) = (o, —y(t) sin 0, y(t) cos 0) şi deci
(*). d0 (0) = 0 .
2) Cîmpurile vectoriale tangente la Af, di
dg. de
sînt independente. De
aceea ele generează în fiecare punct planul tangent la suprafaţă. Deoarece
găsim dt2
d2aa
• ( * )
£flW f ^ ( ; ) c o s 8 , -^(i)sin0), di2 V y di2 W di2 W '
di2
' d 2 ^
. d i 2
(0.
(0.
da9
di
d,B,
d0
(t)
(6) = 0,
d.r , ,
1 7 ( < )
1/2 1
$«>+£«>f«> [OH»1 = o,
adică acceleraţia lui aQ este normală la M.
228

3) Acceleraţia lui p, este - ^ % (6) = (O, —y(t) cos 0, ->•(£) sin 6). Con-d62
ditiile f ^ - ( 6 ) , ^ - ( 1 ) 1 = 0, ( - ^ - ( 6 ) , - ^ - (6)] = O sînt echivalente cu
{de2 w d WJ {de2 w de v 7 y'(l) = 0.
40. Fie M o suprafaţă conexă închisă. Să se arate că: 1) dacă H = const şi K = 0, atunci M este un plan sau un cilindru
circular drept, 2) dacă H = const, K = const şi M nu are puncte ombilicale, atunci M
este un cilindru circular drept, 3) prima formă fundamentală coincide cu a doua formă fundamentală
dacă şi numai dacă M este o sferă de rază unu. 41. Să se găsească o suprafaţă cu curbura constantă pozitivă care. nu este
o submulţime deschisă dintr-o sferă. 42. Fie D cz C o mulţime deschisă, fie f, g, h : D —• C trei funcţii monogene
şi F = (f, g, h): D -*. &. Notăm X = HeF, Y = J m F , w = u + iveJ). Să se arate că: ••
IBX dX\ • 1) dacă (F' , F') = 0 şi > > 0 pe D, atunci fiecare dintre funcţiile
V du du ) X: D -+ H3, Y: D —> R3 sînt imersii ale căror imagini sînt suprafeţe minimale;
2) dacă M este o suprafaţă minimală din R3 şi P este un punct al său, atunci există o mulţime deschisă D în C şi funcţiile monogene f, g, h : 2>—»• C astfel încît X(D) este o vecinătate a lui P în M. - ."•'<
43. Fie suprafaţa M: {x2 + y2 + 22)2 = a2(x2 + y2). ;_.'.".' _''[ ', 1) Să se arate că r: D —»• U3, Z) = (0, 2tr) X (0, TÎ), r («, u) = (a roş w cos2 v,
a sin « sin2 v, a sin w cos v), este o hartă şi că r (D) = M. 2) Să se calculeze aria suprafeţei M. • Indicaţie. 2) y (M, ZI) = a cos « cos2 t i j + a sin w sin2 v j_.-\~ a sin v cos ÎJ A.
Se calculează E = a2 cos 2v, F = 0, G = a2. ,, '
A = U V £G — F 2 du dv = U a2 cos2 v du dv = a2 \ dw V. cos i> d z j ^ k V . JJD JjD .'o X
44. Să se calculeze aria suprafeţei
~r(ii, v) = a v'cos 2« cos îi cos2 v i -\- a Vcos 2w sin w cos2 z> _/ +
+ a Vcos 2« sin z,1 cos z> A, («, z>) e (0, 2TC) X (0, n). O 9
7T # R: da = a2 cos2 z> dw dz>; 4 =
§ 4. SUBVARIETAŢI ALE LUI Kra
Fie Rn spaţiul euclidian canonic cu n dimensiuni. 4.1. Fie m^n două numere naturale. Incluziunea canonică Rm a::R"
este (xlt ..., *„) -* (%, ..., *„, 0, ..., 0). Uneori se scrie Rn = RmxRn~m.
229

O submulţime M a lui Rn se numeşte subvarietate de dimensiune m dacă satisface una dintre următoarele condiţii (echivalente):
1) pentru WXEM există o mulţime deschisă D din R" care conţine pe x şi un difeomorfism f: D *-+ t(D) c Rn astfel încît f (D f] M) = î'(D) [)Rm]
2) pentru VxeM există o mulţime deschisă I) din Rn care conţine pe x şi n—m funcţii diferenţiabile ft: D -> R, i = \, 2, ..., n — m, astfel încît vectorii grad it(x) să fie liniar independenţi şi
M n D = {x\ xe®, U(x) = 0,... , în_m(x) = 0};
3) pentru orice xeM există o mulţime deschisă D din Rn care conţine pe x şi o submersie i:D ~*Rn"n astfel încît M[)~D = [x\ xeD, i(x) =*0};
4) pentru orice xeM există o mulţime deschisă I> din ii™ care conţine pe x = (%, ..., #„), o mulţime deschisă E din Um care conţine pe (xls ..., xm) şi n — m funcţii diferenţiabile h4: E —>R, i = 1,2, ..., n — m, astfel încît, abstracţie facînd eventual de o permutare a coordonatelor, M()D să fie graficul aplicaţiei (hx, ..., hra_ro): E -^Rn~m;
5) pentru orice xeM există o mulţime deschisă D din Rn care conţine pe x, o mulţime deschisă E din Rm şi o imersie injectivă g:E~*Rn cu imaginea Mf]D şi cu inversa g - 1 : M fi 1> ~* -E continuă.
Dacă în fiecare dintre aceste definiţii utilizăm funcţii de clasă Cp, atunci M se numeşte subvarietate de clasă Cp.
Numărul natural n—m se numeşte codimensiunea lui M. 4.2. Subvarietăţile de dimensiune zero sînt mulţimile de puncte izolate
din JB". Subvarietăţile de dimensiune unu se numesc curbe, iar subvarietăţile de dimensiune doi se numesc suprafeţe.
Subvarietăţile de codimensiune zero sînt mulţimile deschise din R". Subvarietăţile de codimensiune unu se numesc Mpersuprafeţe.
4.3. Fie M o subvarietate a lui JR" de dimensiune m. O funcţie diferentiabilă h : D —> Rn cu proprietăţile:
1) D este o mulţime deschisă din Rm, 2) h(D) <= M, 3) h este o imersie injectivă,
se numeşte hartă în M. Dacă h este numai imersie, atunci h se numeşte parametrizare a regiunii
:h(D) din M. Conform lui 4.1.5 orice punct xeM admite hărţi h : D ~> M astfel încît xeh.(D).
4.4. Fie M o subvarietate a lui Rn. Un vector v din Rn se zice tangent în x la M dacă există o curbă din M (o aplicaţie diferentiabilă a: I —>• M, I = interval deschis din R) pentru care a(4) = x, a.'(t0) = v, t0el.
Mulţimea vectorilor din Rn tangenţi la M în x este un subspaţiu vectorial al lui Rn de dimensiune m, numit spaţiul tangent la M în x si notat cu TXM.
Mulţimea TM = \J TXM se numeşte fibrarea tangentă a lui M. Aceasta xeM
este o subvarietate a lui R2" de dimensiune Im. 4.5. Fie M o subvarietate a lui JB* şi a: / —> M o curbă din M. Restricţia
a: [a, b] —> M, [a, b] c I, se numeşte segment de curbă în M. O subvarietate M de clasă C21, ^>>1, se numeşte conexă dacă pentru
orice #, yeM există un segment de curbă în M care uneşte pe x cu y.
230
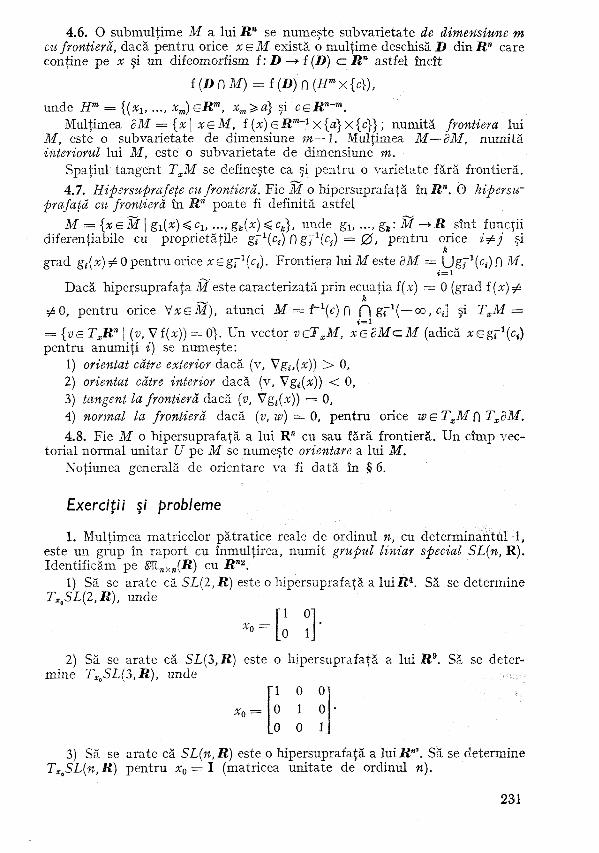
4.6. O submulţime M a lui Rn se numeşte subvarietate de dimensiune m cu frontieră, dacă pentru orice xeM există o mulţime deschisă D din Rn care conţine pe x şi un difeomorfism f: D —* f (D) ci Rn astfel încît
f(onM) = f(D)'n(fl"x{c», unde tfm = {(*!, ..., « J e l f , s;m^a} şi CGJB"-™.
Mulţimea BM — {x | xeM, i(x)eRm~1x{a}x{c}}; numită frontiera lui M, este o subvarietate de dimensiune m—l. Mulţimea M—BM, numită interiorul lui M, este o subvarietate de dimensiune m.
Spaţiul tangent TXM se defineşte ca şi pentru o varietate fără frontieră. 4.7. Hipersuprafeţe cu frontieră. Fie M o hipersuprafaţă înf l" . O hipersu
prafaţă cu frontieră în 1?" poate fi definită astfel M = {xeM\ gi(*)<c1 ( ..., gk{x)<ck}, unde g1( ..., g s : M -»• JB sînt funcţii
diferentiabile cu proprietăţile g,"1^) fi g j 1 ^ ) = 0 , pentru orice i^j şi
grad gi(x) =£ 0 pentru orice x e grx(ci)- Frontiera iui M este dM = UgJ"x(c*) 0 M.
Dacă hipersuprafaţă M este caracterizată prin ecuaţia i(x) = 0 (grad f (%) 76 _ &
560, pentru orice V * e M ) , atunci M = f"1(c) fi D g»rl(—°o, c4j şi TXM =• = {»e r j î " | (», Vf(*)) = 0}. Un vector ^eX^M, xedMcM (adică « e g r 1 ^ , ) pentru anumiţi i) se numeşte:
1) orientat către exterior dacă (v, Vg4,(*)) ^> 0, 2) orientat către interior dacă (v, Vgt(#)) < 0, 3) tangent la frontieră dacă (v, Vg,(#)) = 0, 4) normal la frontieră dacă (a, ze>) = 0, pentru orice w e Î ^ M fi TXBM. 4.8. Fie ilf o hipersuprafaţă a lui R" cu sau fără frontieră. Un cîmp vec
torial normal unitar U pe M se numeşte orientare a lui M. Noţiunea generală de orientare va fi dată în § 6.
Exerciţii şi probleme
1. Mulţimea matricelor patratice reale de ordinul n, cu determinantul 1, este un grup în raport cu înmulţirea, numit grupul liniar special SL(n, R). Identificăm pe afllnxn(R) cu R"2.
1) Să se arate că SL(2,R) este o hipersuprafaţă, a lui B 4 . Să se determine TXcSL{2,R), unde
1 01 xo 0 1
2) Să se arate că SL(i,R) este o hipersuprafaţă a lui fi9. Să se determine TXoSL(2>,R), unde
X(j =
"1 0
.0
0 1 0
0 0 1
3) Să se arate că SL(n,R) este o hipersuprafaţă a lui fi"'. Să se determine TXlSL(n,R) pentru x0 = l (matricea unitate de ordinul n).
231

Soluţie. 1) Fie (x±, x2, x3, #4) e R 4 şi
"4J e°^2x2(-K)
matricea asociată. Mulţimea SL(2,R) devine o submulţime din R4 caracterizată prin
SL(2,R): XiXi — x2x3 = 1.
Astfel SL(2,R) este mulţimea zerourilor funcţiei diferenţiabile definită prin f (XL X2, X3, Xi) = XiXi — x2x3 — 1. Deoarece grad f (x) = (#4) — x3, — #2, *i) este nenul pe SL(2,R), rezultă că SL(2,R) este o subvarietate de dimensiune 4 — 1 = 3 a lui R\
Fie ~xx(t) xz(t)~
t z(t) x3{t) xt(t)
o curbă în SL(2,R) care are proprietatea
"1 0" x(t0) =
0 1 Vectorul viteză în t0 este
«'(A)) = x[{t) x'2{t)
L<(t) X'M Condiţia (grad f (x0), x'(t0)) = 0 implică x[(t0) + x'^po) = 0, adică
TX,SL{2, R) a + d = 0
smne
2) —3) Analog. 2.1) Sase arate că grupul ortogonal0(n,R) este o subvarietate de dimen-
»(« — 1) a lui fl""
2) Să se expliciteze Txfl(n,R) pentru x0 = I (matricea unitate). Soluţie. 1) Grupul ortogonal 0(n,R) este mulţimea matricelor pătratice
reale A = [%] de ordinul n pentru care {AA = I. Privind pe A ca un element x = (xn, ..., xln, x2x, ..., x2n, ..., xnl, ..., xnn)
din R"' mulţimea 0(n, R) devine o submulţime din R"3 definită prin
0(», « ) :£**• vw $a-/yi('yi I 1 )
Astfel 0(n,R) este mulţimea zerourilor a —-———'- funcţii diferenţiabile 2
*"""*•*«(*) = 2 ^ xti' xu ~ <%, i <j- Deoarece grad i{j(x), i^j, sînt inde-k
pendenţi pe 0(n,R), rezultă că 0(n,R) este o subvarietate de dimensiune 2 n(n + 1) _ »(» — 1)
n a lui R"\ 2. 2
2) Spaţiul tangent la 0[n,R) într-un punct x este caracterizat prin 2 J **< d# w + 2 ^ (dxM) xiS = 0. înlocuind pe x(j cu Sw găsim d % -f- d % —
= 0. Astfel TXoO(n, R) este mulţimea tuturor matricelor antisimetrice.
232

3. Definim f: D -^Ri, unde D = {(«, v, w) j « e R , O < i> < r , O < z# < < iz}, prin f (w, v, w) = (sin « sin v sin ze», cos u sin » sin ze>, cos v sin ze», cos w).
1) Să se verifice că f(D) este o varietate cu trei dimensiuni în i i 4 . 2) Să se arate că i(D) este conţinută în sfera cu trei dimensiuni din Rl. 4. Fie M o hipersuprafaţă a lui i i " şi h : M —*R o funcţie diferenţiabilă.
Să se arate că h creşte cel mai repede de-a lungul liniilor cîmpului vectorial grad h. ,
Indicaţie. Fie ac: [a, b] —»• M o curbă integrală a lui grad h şi (3: [a, b) —> M o altă curbă astfel încît Ş,(a) = a(«) şi || Ş>'(t) \\ = || &'(£) ||, pentru orice \fte[a, b~\. Rezultă h(a(&))>h((3(&)) cu egalitate dacă şi numai dacă [3 = a.
5. (Fibrarea tangentă) Fie iW o hipersuprafară a lui Rn orientată prin U. Să se arate că
TM = {(x, v) | xeM, (v, U) = 0}
este o subvarietate de dimensiune In — 2 în R2n. 6. (Fibrarea sferică) Fie M o hipersuprafaţă a lui Rn — orientată prin U.
Să se arate că
TlM = {x,v)\ xeM, (v, U) = 0, (v, v) = 1}
este o varietate cu 2n — 3 dimensiuni în R2a. 7. Să se verifice că semisfera
S = {%, x-2, xs) | (xlt x2, x3) eR3, x\ + x\ + x\ = 1, % > 0 }
este o suprafaţă cu frontieră în R3.
Fie I——-» ——-, 01 un punct de pe frontieră. Să se scrie ecuaţia planului
tangent la S în acest punct şi apoi să se expliciteze un vector tangent la S orientat către exterior, unul orientat către interior, unul tangent şi unul normal la frontieră.
Soluţie. Să considerăm funcţia diferenţiabilă definită prin f (xlt xz, xs) = = x\ + x\ + %\ — 1 al cărui gradient (2xlt 2x2,2x3)) nu se anulează în nici un punct din 5. Apoi g(%, xz, x3).= — x3 este o funcţie diferenţiabilă astfel încît
s = f-1(o)ng-1 ((-c»,o]). Frontiera lui S este ecuatorul 8S = {(%, %2> x3)eS, x3 — 0}.
Ecuaţia planului tangent la S în |—p^> -7=-, \ v 2 V2
Un vector îî(vi, w2, %) s e v a afla în acest plan dacă şi numai dacă vx -f v2 = 0 (ortogonal vectorului normal al planului).
Se observă că grad g(%, x2, x3) = —k. De aceea {v\, —vlt v3), v3 < 0 , este un vector tangent la S orientat către exterior; (vx, —vlt v3), v3 > 0, este un vector tangent la S orientat către interior; (vlt — i>i, 0) este un vector tangent la S şi tangent la 8S; (0, 0, v3), v3^ 0, este un vector tangent la S şi normal la BS (fig. 3.45).
233

8. Fie î:D—*Rn astfel încît f (D) să fie o hipersuprafaţă fără frontieră în Rn. Fie x = (xx, ..., %n+1)eftB+1 cu x n + 1 #0 . Definim ? : f l x [ 0 , l ] -^Kn+1, prin <p(*lf ..., *B+1) = (1 — iB+1) * + W f ( * i ' ••, Q, 0). Să se arate că <p(D X [0, 1]) este o hipersuprafaţă cu frontieră în R"+1 (conul peste î(D) cu vîrful în x).
9. Fie M = f_1(c) o hipersuprafaţă fără frontieră a lui Rn. Să se verifice că cilindrul peste M,
Mxl = {(%, ..., *B+i) I (*i, •». xn+1)eRn+1, î(x1, ..., x„) = c, 0 < * n + i < 1}, este o hipersuprafaţă cu frontieră în B a + 1 .
10. Fie M o hipersuprafaţă în Rn cu sau fără frontieră. 1) Fie D ={xlt xz) eR21 x\ + # i < 1} şi o aplicaţie diferenţiabilă cp:Z>—s-M.
Mulţimea <p(D) se numeşte itsc în M. Să se expliciteze frontiera discului. 2) Fie U i = {(xx, xz) | (%, #2) eR2, #2< 0} şi o aplicaţie diferenţiabilă
f.D C\RL —> M. Mulţimea <p(Dn-Ri) se numeşte semidisc în M. Să se expliciteze frontiera semidiscului.
3) Fie A = {xu x2) | (%, x 8 ) eB 2 , % > 0 , %2>0, xx + x2< 1} şi o aplicaţie diferenţiabilă <p: A - * M. Mulţimea <p(A) se numeşte triunghi în M:< Să se expliciteze frontiera triunghiului.
R. 1) S<p = 9 ° a unde a: (0, 2TT] -> D, <x.(t) = (cos i, sin t). 2)3<p = q>°a unde «:-[0, 2 4 - 7 r ] - + D n B l ,
a W = ( ( 1 - ^ ° ) pentru i e [ 0 ,2 ]
\(cos (t — 2 + n), sin (t — 2 -j- TC)) pentru ie[2,-2 -f- iz],
3) dcp = cp o a unde a: [0, 3] ~> A,
' (i, 0) pentru 2e[0, 1] x(t) = • (2—*, *—1) pentru i e [ l , 2 ] .
[ (0, 3—0 pentru i e [2 , 3] 11. Fie hipersuprafeţele Ţiţeica S ^ definite în H", n = 2, 4, 8, prin
ecuaţii de forma % ^ ... x„ = 1. Să se arate că aceste varietăţi sînt paralelizabile. Soluţie. O varietate geometrică de dimensiune m se numeşte paraleliza-
bilă, dacă posedă m cîmpuri vectoriale (diferenţiabile) tangente independente. Pentru o hipersuprafaţă a lui R" care se poate reprezenta printr-o ecuaţie
implicită i(xlt x2, ..., xB) = 0, avem cîmpul vectorial normal Z = Vf şi orice cîmp vectorial tangent T este caracterizat prin ecuaţia (T, Z) = 0.
Fie 2 X : xxxz = 1. Aceasta este o hiperbolă echilateră, o varietate Ţiţeica cu o singură di-
k 1 mensiune. (Se poate demonstra că este satisfăcută condiţia — = — = const., K ' d3 4
unde k este curbura curbei, iar d este distanţa de la origine la tangenta într-un punct curent de pe curbă).
Construim cîmpul vectorial normal la 2 ^ Z = #2i + X\j- Cîmpul vectorial
tangent T(—xu x2) se obţine d inZ printr-o rotaţie de unghi —. Cîmpul T nu se
anulează în nici un punct de pe curba xxx2 = 1, deci este independent. Considerăm acum hipersuprafaţă Ţiţeica E3: x^x^Xi = 1.
234

Cîmpul vectorial normal este definit în toate punctele hipersuprafeţei
prin Z = 1—•> —> —> — I . Putem construi trei cîmpuri vectoriale tan-\XX X2 X3 Xil
gente, (Tt, Z) = 0, i = 1, 2, 3 şi anume: (*) Tx = I-" —1 1 - l 1 ^ 2 ^ 1 -^4 *^3 >
~ /-i i i -n _ t-\ - i i M ... w . i 2 = » —» —» , T3 = -> > -—> -— . be verifica prin
V x3 Xi xx x2 ) \ Xi %z x% xx) calcul direct că cele trei cîmpuri sînt reciproc ortogonale, adică \Tt, T}) = 0,; oricare ar fi i^j; i,j = 1, 2, 3. Deoarece sînt diferite de zero peste tot şi reciproc ortogonale, ele sînt liniar independente.
r i e ,L7: xxx2x3XiX6x6x7x8 = 1. In acest caz, Z = I — » — » •— > — > — » \ XX X% X3 Xi XS
— , — , — 1 Un cîmp vectorial tangent se poate obţine împărţind variabil e X7 X8 J
lele lui R8 în perechi, adică xx, x2,', xs, x±; ...; x7, x8 şi schimbînd rolul variabilelor unei perechi şi semnul unei variabile. Putem lua
„ t - \ 1 - 1 1 - 1 1 i - n 1 1 = i — > — > — > — > — > — > — » • — - 1 •
\ X% Xx X^ X3 Xg Xc, Xg X7 J
împărţim variabilele lui R8 în grupe de cîte patru şi după modelul (*) obţinem două cîmpuri vectoriale tangente,
T2 = (—l 1 1 - 1 - 1 - 1 1 1\ \ x3 xi xl x2 X7 x8 X5 xe J
_ (-1 -l 1 1 -l 1 -l 1\ 1 3 = I > > > » ) > » I •
\ Xi X3 X$ Xi Xg Xy XQ Xs,/
Alte patru cîmpuri vectoriale tangente se obţin schimbînd rolul celor patru variabile xx, x%, x3, Xi cu celelalte, x5, xe, x7, xs.
T,=
^ 6 =
r, =
t—i î î î î - i - i — n I , — , — , — 9 — , , , _ _ I, \ A 5 %Q Xn Xo XI X% X$ X^ J
X3 J
• 1 — 1 1 1 1 1 1 XQ X§ XQ XIJ X% X^ X/±
(—1 — 1 — 1 1 1 —1 1 1 \
V x7 xs x5 xs x3 xi xi xz)
- 1 1 — 1 — 1 1 1 — 1 1 Xn ivg X§ X^. XŞ XQ XJ_
Prin calcul se verifică (Tu Z) = 0, (Tf, T}) = 0, i¥*j, î,j = 1, 2 , ..., 7, deci S7 este paraielizabilă.
12. Fie î:RnxRm -^ R o funcţie diferenţiabilă. Numim pe Rn spaţiul stărilor şi pe Rm spaţiul de control. Mulţimea MczRnxRm a tuturor punctelor critice ale potenţialelor x-+ie(x), xeRn, CGR™ se numeşte varietatea catastrofă. Restricţia proiecţiei naturale iz: RnxRm —> Rm la M se notează cu y_ şi se numeşte aplicaţia catastrofă. Submulţimea SczM formată din punctele singulare (= critice) ale aplicaţiei catastrofă %: M —> Rm sau,
235

echivalent, formată din punctele critice degenerate ale potenţialelor x,—> ic(x), se numeşte mulţimea singularităţilor. Imaginea B = x ( S ) c R m se numeşte mulţimea bifurcaţie.
Cele şapte catastrofe elementare. Pentru fiecare dintre următoarele funcţii să se expliciteze M, y, S şi B. Să se arate că graficele funcţiilor date cît şi varietăţile catastrofă asociate sînt subvarietăţi riglate.
1) faldul
f (x, a) = — x3 + ax,
2) întoarcerea
i (x, a,b) = — A;4 A ax2 A- bx, 4 2
3) rîndunica
i(x, a, b, c) = — x5
5 — ax3 A- — bx2 A- cx, 3 2
4) fluturele 1 1 1 1
f (x, a, b, c, d) = — x6 A ax* Ar — bx3 A. cx2
V ' 6 4 3 2
dx,
2>xy2 + a(x2 + y2) Ar bx + cy,
f bx v-3 -i- y3 _|_ axy cy,
5) ombilicul eliptic f (x, y, a, b, c) = .t3
6} ombilicul hiperbolic f (%, v, «, b, c) = #s
7) ombilicul parabolic
f (#, v, a, b, c, d) = x2y + v4 + a#2 + 6_y2 + c* + dy.
Soluţie. 2) Considerăm funcţia f:RxR2^R de valori i(x,a,b) =
• — xi A ax2 Ar bx. 4 2 Graficul lui f este o hipersuprafaţă riglată în Ri fiind imaginea hărţii, 1 u, a = v, b — w, z = — w4 + — w 2 + you, {u, v, w) e ft;
4 2
Potenţialul este funcţia parţială x —> fa6(^
d
— % + — «x - j - »#. 4 2
Deoarece • dx
lab\ — r* x Ar ax + &, punctele critice ale lui f sînt soluţiile
ecuaţiei x3 Ar ax + b = 0. Se ştie însă că natura rădăcinilor unei asemenea ecuaţii este determinată de semnul discriminantului' D = Aa3 + 11b2: dacă D < 0 adică (a, b) aparţine regiunii / din figura 3.46, atunci există. trei rădăcini reale; pentru D = 0 dar a =fi 0 sati b^O, adică pentru (a,b)eT1\jF2, ecuaţia în x are trei rădăcini reale, una fiind dublă (corespunzător lui P i , cea dublă este cea mai mică; corespunzător lui r 2 , cea dublă este cea mai mare); dacă Z) = 0 şi a = b = 0, atunci x — 0 este o
Fig. 3.46 rădăcină reală triplă; pentru D > 0, adică pentru,
236

(a, V) apartinînd regiunii I I din figura 3.46 ecuaţia în x are o rădăcină reală d2
şi două rădăcini complex conjugate. Ţinînd seama de iab = 3A;2 -4- a dx2
constatăm că punctele critice sînt nedegenerate cu excepţia cazului a = b = 0 în care x = 0 este un punct critic degenerat.
De asemenea, dacă ţinem seama de semnele derivatelor de ordinul unu şi doi, respectiv, ajungem la următoarea concluzie: pentru (a, b) deci regiunea I, figura 3.46, funcţia f, are un maxim local printre două minime globale; pentru (a, b) e IY funcţia iab are un punct de inflexiune la stînga unui punct de minim global; pentru (a, b)eVz funcţia iab are un punct de inflexiune la dreapta unui punct de minim global; dacă a = b = 0, atunci x = 0 este un punct de minim global pentru f00; dacă (a, b) aparţine regiunii I I din figura 3.46, atunci iab are un minim global. Graficele corespunzătoare pentru x—>fab(x) sînt schiţate în figura 3.47.
Fig. 3.47
Varietatea catastrofă are ecuaţia —- i^{x) = 0, adică M: x3-\-ax-\-b = 0. dx
Ea nu este altceva decît imaginea hărţii r : x = u, a — v, b = — uz — vu, (ÎI, V)ER2. Astfel M este o suprafaţă riglată în R3 (fig. 3.48).
I Tj T2 o 3î Fig. 3.48
Expresia în coordonate a aplicaţiei catastrofă este /_or (u, v) = (v, —u3 — — vu). Ei i se ataşază matricea Jacobian
0 1" —3w2—v —u
237

Deoarece determinantul acestei matrice este 2>u2 -\- v, rezultă că punctele parabolei P : 2>u2 + v = 0 din planul uOv sînt punctele singulare ale lui %° r. Astfel, mulţimea singularităţilor S este caracterizată prin x = u, a = v, b = — u3 — vu, 2>u2 + v = 0, adică S este o cubică răsucită (curbă fald) de ecuaţii parametrice x = u, a = —?>u2, b — 2u3. Corespunzător, mulţimea bifurcaţie B are parametrizarea yju, —2>u2, 2us) = (— 3u2, 2w3). Cu alte cuvinte, B este parabola semicubică de ecuaţie carteziană implicită 4a3 + -f- 21b2 = 0 (fig. 3.46 şi 3.48). Pentru această curbă originea este un punct de întoarcere (punct singular) de speţa întîi.
Analog se rezolvă 1), 3), 4), 5), 6), 7).
§ 5. ALGEBRĂ ŞI ANALIZĂ TENSORIALĂ
5.1. Fie V un spaţiu vectorial real de dimensiune n şi V* dualul său. Un tensor de tipul (p, q) pe V, unde p, qeN, este o funcţie
riv'x-xV' x Vx...xv^fi, P factori q fact5ri
(ca1, ..., top, »i, ..., vg) -» T(eo1, ..., eap, vlr .... vq),
liniară în fiecare argument (multiliniară). Numărul p se numeşte ordin de coniravariantă, q se numeşte ordin de covarianţă, iar p -j- q se numeşte ordinul tensorului.
Mulţimea tuturor tensorilor de tipul (p, q) pe V se notează cu 3"£(F) şi este un spaţiu vectorial real de dimensiune M*"19. Evident, 8~°(V) —R, S'K'V) = = V, ffS(V) = V*.
5.2. Fie ff»(V), *l(\) şi a*ţ:(V). Funcţia
® :*?(V)x*î (V)- f fs+; (V) definită prin
S ® r(cox, ..., cop+r, v±, ..., vQ+s) = S(©\ ..., co*, vx, ..., vq) T{<*™ o>*+r, v9+1, ..., vî+s) este o aplicaţie biliniară şi asociativă numită produs tensorial. Această definiţie se extinde la un număr finit de factori.
5.3. Fie {ei, ..., en} o bază a lui V şi {e1, .., e") baza duală în V*. Mulţimea {eh ® ... (g> ei? (g> e'i ® ... ® e3«, ilt ..., ip,ji,...,jt = 1, ..., n} este o bază
a lui $"£(V) numită baza produs şi deci oricare ar fi TeSf^(\) putem scrie T = T)['",\eix ® ... ® eir ® e1* <g) ... ® e*« (convenţia Einstein de însumare),
unde Ttzt=T{* eh,e, «,,) .
sînt coordonatele tensorului T. Fie {ex, .., e„} şi ( e r , . . . , en-} două baze în V şi {e1, ..., en} respectiv
{e r , ...£*'} bazele duale corespunzătoare din V*. Schimbarea bazelor este descrisă de relaţiile
unde AiA^4, Ai-Ai = Sj.
238

Corespunzător,
<V ® ... ® e< ® e'1 ® ••• ® elq = ^ i ; ••• -4Î-MJÎ ••• 4 » ^ ® ... ® eip ® eh ® ... ® eia
Şi Tî.î—4 = ^4*î... ^ A% ... A^T^-y
5.4. Fie oi: VX. . .XV —s-K, («i, ..., w?) —* 01( 1, ..., w3), un tensor de tipul (0, q). Acesta se numeşte
1) simetric dacă valoarea sa rămîne aceeaşi pentru toate permutările posibile ale argumentelor,
2) antisimetric dacă valoarea sa după orice permutare a argumentelor este produsul dintre valoarea înainte de permutare şi semnul permutării.
5.5. Fie p > 0, q > 0, s = 1, ...,p, t = 1, ..., q. Aplicaţia t r}: T»(\Ţ5. -> î l r î (V) , definită prin
(tr^r)(oi\ ..., oi*-1, F a F H ) = £ T(o>1,..., o/"1, e*. o/, . . . , o/"1, Vi,...,Vi. Ă = I
<?s, t)„ ..., vq_j) unde {fii, ..., en} este baza lui V, iar {e1, ..., en} este baza duală din V , se numeşte contracţie. Pe coordonate,
/ x _ i T \ h •••**-! V ^ •x '»j . . .»j_,*»i . . . i ]»_,
5.6. Presupunem că V este un spaţiu euclidian; produsul scalar sau metrica riemaniană (,) pe V nu este altceva decît un tensor covariant de ordinul doi (formă biliniară), simetric şi pozitiv definit. Metrica induce o aplicaţie liniară nesingulară G:V—> V*, G(u)(v) = (u, v), pentru orice veV. Fie G1 inversa lui G; dacă oieV*, atunci (G1(i>, v) = <i>(v).
Fie s = 1, ...,p; t = 1, ..., q şi T e ^ ( V ) . Definim <Ş„t: 8*{\) -* T£l{\), (Ş„tT) (oi1, ..., oi*-1, vx, .... vq+1) = T(<*\ .... oi8"1, G(vt), o/, ..., oi'"1, Vlt ...,»„ ..., .., »a+1), unde semnul „ A " înseamnă că argumentul respectiv lipseşte. Pe coordonate,
1(0 T \*> • • • ' P - i .'/"• T l i . . . *•—1«» • l"is, t-' W, -.i(-isi(+1...i9+a — Mst-LJi—Jt-Ji+i • U
Această operaţie se numeşte „cohorîrea" indicilor. Analog, utiiizînd pe G 1, se defineşte „ridicarea" indicilor.
5.7. Fie D o mulţime deschisă şi conexă din Rn şi aF(D) algebra reală a funcţiilor reale diferenţiabile, definite pe D. Un vector Xx tangent la D în punctul x = (x1, ..., xn) poate fi privit ca o funcţie XX:8(D) - ^ B cu proprietăţile
Xx{i + g) = Xx{i) + Xx(g), Xx{ai) = aXx(i), aeR, X,(fg) = (Xx{f))g{x) + t(x)X,(g).
In acest context baza canonică a spaţiului tangent TXD este d 8 )
Bx1 ' "" 8xn] Un cîmp vectorial X pe D este o funcţie X: D -» U TXD, X(x)e TXD.
Deci
X(*) = X<(*)-V dx
239

Cîmpul X se numeşte diferenţiabil dacă funcţiile coordonate x —* X*(#) sînt diferenţiabile. Adunarea dintre două cîmpuri vectoriale şi produsul dintre o funcţie reală şi un cîmp vectorial se definesc punctual.
Alternativ/cîmpul vectorial X poate fi privit ca fiind aplicaţia X: &(D) —> —> §(D) cu proprietăţile
X(f + g) = X(f) + X(g), X(flf) = aX(i), asR, X(fg) = (X(f))g + f(X(g).
Fie X si Y două cîmpuri vectoriale diferenţiabile pe D. Cîmpul vectorial [X, Y] definit prin f -»[X, Y] (f) = X(Y (f)) - Y(X(f)) se numeşte croşetul cîmpurilor X şi Y. Deoarece pentru orice trei cîmpuri vectoriale diferenţiabile X, Y, Z avem S[X, [Y, Z]] = 0, mulţimea ^(D) a tuturor cîmpurilor vectoriale diferenţiabile pe D este o algebră Lie peste cîmpul R.
5.8. Fie &(D) algebra funcţiilor reale diferenţiabile pe D şi %(D) algebra Lie a cîmpurilor vectoriale diferenţiabile pe D. O funcţie <x>: *%(D) -*-»• &(D), SF(D) — liniară, co(X) = diferenţiabilă oricare ar fi X, se numeşte l-formă diferenţială pe D. Adunarea a două l-forme diferenţiale şi produsul dintre o funcţie reală şi o l-formă diferenţială se definesc punctual.
Fie T*J) dualul spaţiului tangent TXD. Baza canonică în T*XD este {d*1, ....
...,dxn\, fiind duală bazei) , . . . , \ din TXD. De aceea expresia locală \ dx1 cxn J
a unei l-forme diferenţiale <•> este a>(x) = oif(x) dx1. Mulţimea tuturor 1-formelor diferenţiale pe D va fi notată cu %*(D). 5.9. Fie &\(TJD) mulţimea tuturor tensorilor de tipul (p, q) pe spaţiul
tangent TXD. O funcţie T.D - U *>Q(TJ>), T{x)e8*{TJ>),
xeD
se numeşte cîmp tensorial de tipul (p, q) pe D. Fie 8%{D) mulţimea tuturor cîmpurilor tensoriale pe D de tipul (p, q).
Adunarea a două elemente din această mulţime ca şi produsul dintre o funcţie reală şi un cîmp tensorial se definesc punctual.
Deoarece baza canonică în SF%(T„D) este 3
8 CX'i CX'P
expresia în coordonate a lui T este
® ... ® —— ® dx ' i® ... ® dx**},
.ip/\ C „ _ C T(x) = Tl\Z%{x) ® ... ® -±- ® dxh ® ... ® dxk. CX'i CX'r
Cîmpul T se numeşte diferenţiabil dacă funcţiile coordonate sînt diferenţiabile. Echivalent, un cîmp tensorial de tipul (p, q) este o funcţie
T: T(D) X ... X t(D) X 1(D) X... x « ( B ) -» 9(D), ^ ^ ' ' _ '
P factori q factori
(co1, ..., co3', X±, ..., Xq) —> r(c)1 , ..., cop, Xi, ..., Xq), &(D) — liniară în fiecare argument.
Definiţiile cîmpurilor tensoriale simetrice respectiv antisimetrice ca şi definiţiile produsului tensorial şi contracţiei pentru cîmpuri tensoriale sînt evidente.
240

5.10. Fie x un punct din D caracterizat pe de o parte prin coordonatele (x1, ..., xn) = (x*), iar pe de altă parte prin coordonatele (xv, ..., x"') = (x>'), schimbarea de coordonate fiind xv = xi'(xi) cu inversa xl = xl(xi'). Baza
se schimbă în J , ..., i cu legătura cxn L I e1*1 e# 2*'
= -{x1) — ; corespunzător baza duală {dx1, ..., dxn}x se schimbă în cxx cx1' \x
cxi
{dxr, ..., dx"'}x, dx1 \x = {rS) dxv \x. Evident, dx{
dx1 cx1' . , ' K.V 1/-V - j
= or, r = o,-. Corespunzător,
8 8 ' , ,• , ,-- c '> &«?* CA;^ ^ « ® ... ®—j7-® d ^ i ® ... ®d* ;« = — - r ... —— — — . . . — X cx'i Sx1* cxfi &*> cx^ cxJ"
8 ^ ^ 8 ® ... ® CX1' CX'*
X — - ® ••• ® —— ® d#jl ® ... ® dx}".
si „.< ,- cx*! 8x% 8xh 8xi« ^..^ T'i •••*.? = . . . p- . . . ^jl...jr
h-]i cx'1 8x'" cx'i 8x}" 5.11. O funcţie D : « ( D ) x * ( D ) - • « ( » ) , (X, Y) ~> £XY, cu proprietăţile Ac(Yx + Y2) = DxYi + DXY2, D x , + X Y = DXlY + D x Y, Dx(fY) = f£ x Y+X(f)Y, AxY = f£xY, oricare ar fi feăF(D), se numeşte
conexiune liniară sau derivare covariantă pe D. Fie D o conexiune liniară pe JD. Funcţiile T%: D —* R, i, j , k = l, ..,n,
definite prin
se numesc componentele conexiunii D. Conexiunea D se numeşte simetrică daca ±ij = 1 , j .
Curbele definite local prin sistemul d V , ri dx3 dx" . . • di2 di di
se numesc geodezicele conexiunii D. 5.12. Fie D o conexiune pe D şi /Ye f (D) . Conexiunea D induce derivarea
covariantă în raport cu X, notată Dx, care aplică pe S\(D) în el însuşi. Operatorul Dx se defineşte prin
Dzf = X(f), feff(D), DXY este dat de conexiunea pe D, (Dxu) (Y) = X(<o(Y)) - <o(Z>xY), W e*Î(D), ( £ > X 7 V , ..., ta", Fx Yq) = X ( 7 V , ..., co*, Y1( ..., Y8)) - r (D x <o\
co2,.., «?, Yx, ..., Yt) - ... - 2 V «*>, Yx, ..., DxYt), TeSr»(D).
16 — Probleme de algebră — c. 264 241

Se verifică relaţia DX{S ® T) = DXS ® T+.S ® £> xr , oricare ar fi S, T. Operatorul Dx induce un operator general de derivare covariantă care
aplică pe 8T*(D) în &*+1(D). 5.13. Un cîmp tensorial g de tipul (0,2) pe D cu proprietatea că g(x) este
o metrică riemaniană pe TXD se numeşte cîmp tensorial metric. Cîmpul tensorial metric induce operaţiile de „ridicare" şi „coborîre" a indicilor pe cîm-purile tensoriale (vezi 5.6).
5.14. în paragrafele 5.7—5.13 mulţimea D poate fi înlocuită cu orice subvarietate de dimensiune w > 1 cu sau fără frontieră, a lui Rn.
Exerciţii şi probleme
1. Să se verifice că (£,): *J(V) X ff;(V) - • R, (S, T) = SJ1Z% T^Zil este un produs scalar pe S"*(V).
2. Fie V un spaţiu euclidian cu metrica g == [gy], g_1 = [g*']. Să se verifice că următoarele funcţii sînt produse scalare
1) funcţia definită prin S- T = g*A ... g ^ ' S ; , . . . ^ , . . . ^ , S, r s # 8 ( V ) , 2) funcţia definită prin 4 - 5 = giih ... gîVV4'>-'*#-•••*»>, 4 , B e * * ( V ) . 3. Fie V un spaţiu euclidian real cu trei dimensiuni şi &: V —> V. Să se
verifice relaţia ($"(M), 3P( î)xf(a ' )) = (det) («, »xw) . în ipoteza că cT este nedegenerat, să se arate că W{v)Xef(w) — (detir) '(S"_1) vxw.
4. 1) Să se verifice că mulţimea tensorilor simetrici, covarianţi, de ordinul r, este un subspaţiu al lui 3"r(V).
2) FieSr:Srr(V)^8rr(V),Sr(A) (vu .... vr)= — E ^ ( ^ t t ) , - , »,<,)),?i,....tveV.
Să se arate că S r este o proiecţie a lui S"r(V) în subspatiul tensorilor simetrici de ordinul r. Să se găsească Ker Sr.
5. Utilizînd izomorfismul canonic dintre £(V, V) şi S"î(V) să se arate că endomorfismul &: V -> V şi dualul său &*: V* —> V* corespund aceluiaşi tensor Te*\(V).
6. Fie reă" 3 (V) şi [Tfi] matricea coordonatelor sale. Să se verifice că la o schimbare a bazei avem
d e t [ r i T ] = ( d e t [ ^ ] ) 2 de t [7 \ ; ] . 7. Fie tensorii { ^ ...»„«„,}, {Q,...»,}. Să se verifice că numerele B{k,l,m)
care satisfac relaţia ] C AH-hhimB(k, l, m) = Q,...»-,
k, l, m
sînt coordonatele unui tensor din $"3(V). 8. Pentru fiecare ^4eS'j,+î(V) definim rp î^4 eS"j,+s(V) prin TpiA(ux, ..., ut,
vlt..., vp) = /4(DI, ..., Î/,,, %, . . . , % ) , w1( % e V . Să se arate că Sfpq: STp+q(V) —* 8fP+q(V) este un automorfism (transpunerea
generalizată). Ce legături sînt între coordonatele lui A şi coordonatele lui T^Al
242

9. Fie x şi x' cele două hărţi din atlasul stereografic al sferei a.beR. Să se arate că expresiile locale
(ax1 — bx2) —-- + (bx1 -j- ax2) — r
S2 şi
dx*
(-ax^'-bx2')-^ + (bx1' ~ ax2') — dx1 dx2
definesc un cîmp vectorial pe S2. Soluţie. Fie N = (0, 0, 1) polul nord, fie
S = (0, 0, — 1) polul sud şi £3 = 0 planul ecuator identificat cu R2 (fig. 3.49). Fiecărui MeS2 — {N] i se ataşază P e R2, unde P = MN fi R2, stabilindu-se o corespondenţă / biunivocă între S2 — {N} şi R2. Explicit, t— dacă Mfe1, £2, £3) atunci
NM: — = — ^ = t; R2:1? = 0 ţ i ^ ^ 3 _ !
şi considerînd pe (x1, x2) drept coordonate în plan găsim x: S — {N}
* = - £ - . *2 = - ^ -1 _ £> 1—5»
cu inversa x - 1 : i t 2 —> S2 — {iV},
2%x
fi2,
£3 =
(A--1)2 + (*2)2 + 1
(x1)2 + (x2)2 - 1
F 2 2*2
(*X ^2\2 .
(^)2 + (*2)2 + 1 Analog procedăm pentru S2 — {S}. Găsim %': S2 — {S} —* R2,
cu inversa A; :R2^
x<- = •
l + £ 3
S2 - {S},
V Ix1
1 + (*!')« + («2')S
3 = i - (^r + (^r
— F 2 = . 2%2 '
1 + (*->')» + (A;2')2
1 + (x1')2 + (*2')2
Astfel schimbările de coordonate sînt date prin
x'o x x ' (x2) 2\2
, Xo(x')-1{ v2' ^
(X1)2 + (X2)2
Evident acestea sînt C00 pe R2 — {0}.
(x1')2 •2'\2 + (X2') v2'
XVf + (%2')2
243

Rezultă
dx1 jx2')2 - {xvf dx2
dx1' {{x1')2 + (x2')2)2 ~ dx2'
dx1 —2xvx2 ' dx2
dx2' ((x1')2 + (x2')2)2 dx1'
Fie X1 = ax1 — bx2, X2 = bx1 + ax2 şi X1' = —ax1' - bx2', X2' = bxv -— ax2'. Relaţiile
x i = ^_Xv + ^ ţ x 2 ' , X2=^-Xi' + — X2' dx1' dx2' dx1' dx2'
sînt identic verificate. 10. Pe R3 se consideră cîmpul vectorial
(x, y, z) —> V(x, y, z) = %% + yj + zk.
Să se determine funcţiile coordonate covariante respectiv contravariante ale lui V în coordonate sferice (locale).
Soluţie. în sistemul cartezian ortonormat coordonatele covariante se confundă cu cele contravariante. Deci
i'i = v1 = x, vz = v2 = y, v3 = v3 = z.
Facem transformarea de coordonate
x = r sin 9 cos 6, y = r sin 9 sin 0, z = r cos 9.
Notînd x1 = x, x2 — y, x3 = z şi respectiv xv = r, x2' = 9, xy = 0, din relaţiile
oxl
dx'' găsim
vy = (sin 9 cos 0) [r sin 9 cos 0) + (sin 9 sin 0) (r sin 9 sin 0) + cos 9 x (r cos 9) = r,
Vr = (r cos 9 cos 0) (r sin 9 cos 0) + (r cos 9 sin 0) (r sin 9 sin 0) — (r sin 9) x (r cos 9) = 0,
vy = (—r sin 9 sin 0) (r sin 9 cos 0) + (r sin 9 cos 0) (r sin 9 sin 6) + 0 = 0.
Analog, ţinînd seama de
z v x2 + y2 + z2, 9 = arc cos , , 0 = arctg —»
VA-2 + y2 + z2 x x, y, z > 0,
Î;1 = •W
rezultă i)i' = f, v
2' = o, Î)3' = 0.
244

11. Pe R3 se dau cîmpurile vectoriale definite respectiv prin
V(x, y, z) = x2i + xyj — yzk,
V(x, y, z) = r ! ( « x ? ) X / + (2, "r)r,a = vector constant,
r = xi + yj + zk, r — \\ r \\,
V (x, y, z) = (a x r ) <p(r) + î^{r).
1) Să se determine funcţiile coordonate covariante respectiv contravariante în coordonate cilindrice şi sferice. i
2) Să se calculeze rot V. Apoi să se găsească funcţiile coordonate covariante respectiv contravariante ale lui rot V în coordonate cilindrice şi sferice.
12. Fie X, Ye<%(M) şi i,geW(M). Să se verifice relaţiile
{fX, gY] = îg[X, Y] + î(X(g)) Y - g(Y(f)) A',
[A, Y] (*) = (A,(Y) - Y S ( X * ) ) - A -
13. 1) Să se determine liniile de cîmp pentru
A(%\ %2, x3) = % 2 - i - + *3 — + A - 1 - ^ -
2) Fie cîmpul vectorial definit pe U 3 prin
VI dx1 h 8x2 " 8x3J
Utilizînd notaţiile matriceale, să se arate că linia de cîmp care pleacă din punctul zeR3 este t —* a.(t) = etA z, unde A = [%].
14. Fie f,g,h.e&(R3) cu g # 0 şi V = f? + g / + tâ," X = —g? + fj, y = _ / ? J + Sk. Notăm 0, = {Z | Z e T^ 3 , (Z, % ) ) = 0}.
Să se arate că Qp este un spaţiu vectorial bidimensional, iar {X(p), Y(p)} este o bază a sa. Să se verifice că [A, Y] (p)eQp <*• (V(p), rot F(^>)) = 0. Să se probeze că dacă M = 9_1(c) este o suprafaţă de nivel pentru care TpM = Qp, atunci (V(p), rot V(p)) = 0.
15. Utilizînd schimbările de coordonate, să se arate că 1) orice cîmp tensorial antisimetric de tipul (0, 2) pe o sub varietate de
dimensiune trei este echivalent cu un cîmp pseudo-vectorial contravariant; 2) orice cîmp tensorial antisimetric de tipul (2,0) pe o subvarietate de di
mensiune trei este echivalent cu un cîmp pseudo-vectorial covariant. Soluţie. 1) Dacă T(j = — Tn sînt coodonatele locale ale cîmpului ten
sorial antisimetric T, atunci la o schimbare de coordonate găsim
_ 8xi 8x}
1 i'i' ~~ T~7 ~TT 1 a-cxl 8x3
245

Notînd X1 = T23, X2 = r31, Xs = Txz, putem reprezenta cîmpul tensorial antisimetric Tprin tripletul (X1, X2, X3). Să vedem cum se schimbă funcţiile X* la o schimbare de coordonate. Vom avea
™ „ 8x* 8x} _ / 8x2 8x3 8x3 8%2 \ _, , A1- = i 2-3' = ; — -*« = ; ; 7 J- 23+
8x2 S.r3 \ 8x2 8x3 8x2 8x3 ) ( 8xs 8xx 8xx 8x3 \ t 8xx 8x2 8x2 dx1 \ _ \8x2' 8xy 8x2' dxy) 31 \ox2' 8xy dx2' dxy) 1 3~
= (...) X1 + (...) X2 + (...) X3. D (x1 x2 x3) Ţinînd seama că — / - / — - = A=£Q, formulele fundamentale
explicit,
8xi
8x*'
dx1
8xr
8x2
8xr
8x3
D (xv,
8xv
cxi
8xv
Sx1
8xv
Sx1
8xv
, X2', Xy)
= * S .
Sx1
CX2
4~. O
dx~ + 1 2' '
0%
a*3
d*1 5%3' .
8xx 8xy 8xx
8x2' , 8x2 8xy
8xx 8xy 8xx
8x2' , 8x3 8xy
imphcă
8x
8xv
dx
v 8xx 8x2' 8xx 8xy 8xx
= 0
= 0
v _ 1 f 8x2 8x3 8x3 8x2 \ 1 ~~ A { 8x2' 8xy 8x2' 8xy ) '
Deci X1' = A — X* si analog X2' = A — X4, X3' = A - ^ - X J . 3*' 8x% 8x*
2) Analog. 16. Fie D+ o conexiune liniară cu tensorul de torsiune Tnenul şi cu compo
nentele locale T)h. 1) Să se arate că
DjtY = D£Y - T(X, Y) este o conexiune liniară cu tensorul de torsiune — T.
2) Să se arate că
DXY = Y (DJY + DiY)
1 este o conexiune liniară simetrică cu componentele — (T}h + T -).
17. Fie M o subvarietate, fie Xe%(M) şi {ex, ..., en} o bază în T^Af cu duala {e1, ..., e"}. Să se demonstreze că
(divX)(%)=f>W0-
246

18. Fie D o conexiune pe subvarietate M. Fie t —> x(t) o curbă integrală a lui Xe^(M), îie't-+{e1(t),...,en(t)} o bază formată din vectori paraleli de-a lungul lui a şi t —> Y(t) = ^ yt(t) et{t) un cîmp vectorial de clasă C°°
4
pe a. Să se arate că
19. Ştiind că
r 4 [ 1 pentru i = j = 1, k = 2 sau * = ,& ••=== 1, _/ = 2 ^ 0 in rest
sînt componentele unei conexiuni pe R2, să se găsească geodezicele,
20. Fie M o subvarietate şi D o conexiune pe M. 1) (Cîmpul tensorial de torsiune) Să se arate ca
T: *(M) X*(M) - • * (M) . ^ (X , Y) = D X Y - £>rX - [X, Y] este un ©împ tensorial TGS\(M).
2) (Cîmpul tensorial de curbură) Să se arate că
R:%(M)x*{M)X*(M) -*• «(M), i?(X, Y) Z = DX{DTZ) - DY{DXZ) -— DEx, y]Z este un cîmp tensorial ReS'l(M).
3) Să se verifice relaţia T(X, Y) = —T(Y, X). Apoi, în ipoteza T = 0, să se arate că R(X, Y) Z + R(Y,Z)X + R{Z, X) Y = 0 (identitatea lui Bienchi).
4) Fie T§ componentele conexiunii D. Să se verifice eă coordonatele locale ale lui T şi R sînt respectiv
^pA o r i
21. (Conexiunea riemanniană). Fie M o subvarietate înzestrată cu metrica g. Să se arate că pe M există o conexiune D cu proprietăţile
(i) T(X, Y) = 0,
(ii) Dxg(Y,Z) = g{DxY,Z) +g(Y,DxZ), oricare ar fi X, Y,Ze<Z{M).
Să se expliciteze componentele locale ale lui D.
Soluţie. Deoarece T(X, Y) = DXY - DyY - [X, Y] = 0, rezultă
(iii) g (DXY, Z) - g (DYX, Z) =*g ([X, Y]), Z).
Dar condiţiile (ii) şi (iii) sînt echivalente cu
(iv) 2g (DXY, Z) = X(g (Y, Z)) + Y(g (X, Z)) - Z(g (X, Y)) +
+ g ([Z, X] , Y) + g ([Z, Y], X) + g (pT. Y], Z).
Această relaţie implică unicitatea lui D. Pe de altă parte relaţia (iv) defineşte o coenxiune care verifică pe (i) şi (ii),
deoarece g este nedegenerată.
247

c c d Punînd X = , Y = r , Z = relaţia (iv) implică 8xl 8x3 dxk
dx CA;3 dar şi deci
rft = 1 g** f 8 g t f 1 8gik B g v ) "' 2 s 1 a*1 a** a;vs J
(simbolurile lui Christoffel).
§ 6. FORME DIFERENŢIALE ŞI FORMULE INTEGRALE
6.1. Fie V un spaţiu vectorial real de dimensiune n. O q—formă sau formă (alternată) de ordinul q pe V este o funcţie
M : Y X ... X V - » B , (t'i, ..., va) -> <*(vlt ...,vg), q factori
care satisface următoarele condiţii: 1) multiliniară: pentru fiecare ie{l,...,q} şi vx, ..., vt_x, v(+1,..., vteV,
funcţia raier* CO(Î>I, ..., w4_i, w, vi+1, ..., vq) este. liniară, 2) antisimetrică: pentru fiecare vx, ..., vqeV şi pentru fiecare permutare a
a mulţimii {1, ..., q} se satisface a>(va(1), ..., vaW) = (sign cr) <a(vlt ..., vt). o, Cu alte cuvinte, o ş'-formă pe V nu este altceva decît un tensor antisimetric de tipul (0, q) pe V.
Mulţimea tuturor ş'-formelor pe V se notează cu SFq(\) şi este un spaţiu vectorial real de dimensiune
dim 9q (V) = ' dacă 0 < q < n
ql(n-q)\ 0 dacă q~> n
Evident, f0(V) = R, f^V) = V*. 6.2. Fie §yV) , &S(V) şi §v ? (V) . Funcţia
definită prin
(w1 A w2) (»i, .... V ? ) = 7—;—77 S ( s i§nc7) Ml(»oa>» - . v<r(3») • »2(*Wu* •••> (£ + ?)!
..., VJH-»)) suma fiind luată după toate permutările G ale lui {l, ..., p + q}, se numeşte produs exterior (este o operaţie biliniară, asociativă). Această definiţie se extinde la un număr finit de factori.
Evident, o^Aw2 = (-l) î*W îAco1. 6.3. Fie {ex, .... e„) o bază a lui V şi {el, ..., en] baza duală în V*. Mul
ţimea {ei'/\.../\e'«, ix<i2< ... <iq} este o bază a lui' SF8(V) şi deci oricare ar fi ueSF4(V) putem scrie
o> = <Ai1..:iteii A ...f\e li (convenţia"^Einstein de însumare), unde w»,...t4 = ?! w(e,-1( ..., eiq), ix < ... < iq sînt coordonatele stricte ale q-formei.
248

6.4. Fie D o mulţime deschisă din Rn, fie TXD spaţiul tangent la D în punctul x şi Wq{TxD) mulţimea tuturor ^-formelor pe TXD. O funcţie
a:D-+\J*,{TJ>), « (*)e f f g ( r x D), xeD
se numeşte q-formă diferenţială sau formă diferenţială de ordinul q pe D. Cu alte cuvinte o ş-formă diferenţială este un cîmp tensorial antisimetric de tipul (0, q) pe D.
Fie IFg (D) mulţimea tuturor (/-formelor diferenţiale pe D. Adunarea a două elemente din această mulţime ca şi produsul dintre o funcţie reală şi o ^-formă se definesc punctual.
Fie T*XD dualul spaţiului tangent. Baza canonică în TXD este] , ..., J i [Bx1 Sxn]
iar duala sa, bază în T ' f l este {dx1, ..., dxn}. Baza indusă în Sr9(D) este {d#'»A ... Adx*", i1< i2 < . . . < it}. De aceea expresia în coordonate a lui « este
<a(x) = <*ii...it(x) d^ ' iA . . .Ad^« .
în continuare vom face ipoteza că funcţiile x—> to,-, ...;,(*) sînt de clasă C°° pe D.
Fie Sr(D) algebra funcţiilor reale şi 'K(D) algebra Lie a cîmpurilor vectoriale. O 17-formă diferenţială pe D poate fi privită ca fiind funcţia
*>:*(!>)X.. .X*(0) -^ *(D), (Xi, ..., Xq) -* co(Zx X,) Sr(D)-liniară în fiecare argument şi cu proprietatea a>(Xail), ..., XaW) =
= (sign a) <o(Xx, ..., Xq), unde <r este o permutare a mulţimii {1, ...,<?}. Definiţia produsului exterior pentru (/-forme diferenţiale este evidentă.
6.5. Fie Xe%(D) şi u e f j f f l ) . Prin contracţia dintre X şi « î n ţ e l e g e m (q— l)-formă diferenţială X_j(x> definită prin
(Xj<o) (Xlt ..., I H ) = <o(X, Z l f .... X M ) , Xj , ..., X ^ e ^ Z ) ) .
6.6. Fie ^«(D) şi SFÎ+1(D). Funcţia jR-liniară d:Sr4(D)->Sr
î+1(fl) cu proprietăţile
d2 = 0
d(w1Aw2) = du1 A o>2 + ( -WAdco 2 , X(d«) = d(X(6>)), l e f ( f l ) ,
X(o>) = Z j d U + d ( Z j ( o )
se numeşte diferenţială exterioară. Utilizînd derivata covariantă şi croşetul putem scrie,
dco(X1;..., Xl+1) = E ( - 1 ) * - 1 ^ » ^ ^ , ..., X^, Xt+1, ..., X1+1) +
+ E (-r«(K- *,]. *i *,-i, !xi+1 x}_lt xm,.... x1+l). Pe &(D) = Sr0(D) diferenţiala exterioară se reduce la diferenţiala obişnuită.
Mai mult, dco(x) = dco;i...t-s ( ^ A d ^ A - A d * ' ' * .
249
O { — formă diferenţială co cu proprietatea dco = 0 se numeşte formă închisă. O (<?+l)—formă diferenţială TJ CU proprietatea că există o q — formai co astfel încît v; = dco se numeşte formă exactă.
6.6. în paragrafele 6.4 şi 6.5 mulţimea D poate fi înlocuită cu orice sub-varietate de dimensiune w > 1, cu sau fără frontieră, a lui Rn.
6.7. Fie M o subvarietate a lui R", de dimensiune m, cu sau fără frontieră., O formă volum pe M este o w -formă diferenţială co pe M cu proprietatea w(fi, ..., wm) = ± 1 ori de cîte ori {Î^, ..., vra} este o bază ortonormată a l u i TXM. O alegere a unei forme volum co pe M se numeşte orientare a luiJfef;. despre Af se zice că este orientată. -:.:\.,;
Fie M o subvarietate de dimensiune w ^ 2, cu frontieră. O orientare pe, M induce o orientare pe dM.
6.8. Fie M o hipersuprafaţă a lui Jîn—cu sau fără frontieră. Un cîrnp vectorial normal unitar U pe M se numeşte orientare a lui Af. O orientare &' lui M" determină şi este determinată de o alegere a unei forme volum pe m, adică o (n—l) — formă diferenţială co pe M cu &(vi, .... vn_i) = + 1, ori de cîte ori {vi, ..., v„_i} este o bază ortonormată pentru TXM, anume ,
»(»!< •••, V i ) = d e t
'»1
V i
Fie Af o hipersuprafaţă cu frontieră a lui Rn. O orientare o:> pe M induce © orientare cosjf = F_!co pe varietatea cu »—2 dimensiuni dAf, unde F este cîmpul vectorial pe Af definit prin % —>• F(A-) == versorul din TXM orientat către exterior care este normal la frontieră.
6.9. Fie D o mulţime deschisă din Ra, fie a: [a, b] —*D o curbă orientată şi co o 1 -formă diferenţială (de clasă C°°) pe D. Numărul real
V c o = \ to(a'( (Odf
se numeşte integrală curbilinie de al doilea tip (circulaţie). 6.10. Fie M o suprafaţă din R3 şi co o 2 -formă diferenţială (de clasă C°")
pe M. Fie S0 un dreptunghi plan deschis cu închiderea S şi a imaginea funcţiei diferenţiabile r : S —»• M, unde r : SQ —»• M este o hartă. Numărul real
Ja JJS " fo . rv) d« dw
se numeşte integrală de suprafaţă de al doilea tip (flux). 6.11. Fie V o subvarietate orientată din Rs de dimensiune trei, compactă
(=* cu frontieră) şi (x, y, z) —>co(#, y,z) = f (%, y, z) dxf\dy ţ\dz o 3 -foiTnă diferenţială (de clasă C°°) pe V. Notăm
co = \ \ \ f (x, y, z) dx dv dz. Jv JJJv
250

6.12. (Formula Greeu). Dacă A este regiunea plană mărginită de curba închisă orientată C, iar co este o l-formă diferenţială (de clasă C°°) pe o mulţime deschisă ce conţine pe A \J C, atunci
1H co = \ do. JC JA
(Formula Stokes). (i) Fie a o suprafaţă orientată din JR3, cu frontieră şi 80 frontiera sa cu orientarea indusă. Dacă w este o l-formă diferenţială (de clasă Cm) pe a, atunci
\ d w = <t> <a
(ii) Fie c o suprafaţă orientată în H3, compactă şi fără frontieră. Dacă w este o l-formă diferenţială (de clasă C00) pe a, atunci
dw == 0.
6.13. (Formula Gatiss — Ostrogradski). Fie V o subvarietate orientată din Rz, de dimensiune trei, cu frontieră şi 3V frontiera sa cu orientarea indusă. Dacă w este o 2-formă diferenţială (de clasă C°°) pe V, atunci
V dco = ® 1 Jv ^av
6.14. Noţiunile din paragrafele 6.9—6.13 se pot extinde la subvarietăţi de dimensiune m din Rn.
6.15. în JB3, l-formele şi 2-formele pot fi convertite în cîmpuri vectoriale prin corespondenţele
2 ît âXi <£-> S itUt < ^ / i d.r2 A d^3 + f2 dx3 A d#x + f3 d% A dx2,
df <H-> grad f, ( l ) tT 1 (2> , T T
co«—> V=>da> <—> rot V,
7) «-^ VWdiQ —(divV) d%Ad^a Ad#3-
Exerciţii şi probleme
1. Să se arate că
« 1 A . . . A « Î = S f - ' - ' l ^ A - A ^ , unde §^".'1, este simbolul Kronecker generalizat.
2. Să se verifice relaţia C 0 1 ( D I ) . . . W^'t'g)
<a1/\.../\<£?(v1, ..., ve) a>«(Bl) ... «>«(»,)
251

3. Fie {e1, ..., en} şi {e1, ..., ea} două baze duale. Să se verifice relaţia
e'*A...AeH«fc,...,e*,) = $:::£. 4. Fie V un spaţiu euclidian cu metrica g = [giS], g - 1 = [g"J. 1) Săseverifice că *:S r
e(V)xS rî(V) —>JB, co * ~q = ^2 c0*'i-»'« ^H-H e s^ e
un produs scalar pe ^ ( V ) . Să se arate că dacă privim pe SFe(V) ca un subspaţiu al lui S"S(V), atunci
1 ( 0 * 7 ) = • £ 0 * 7 ) .
?! 2) Să se arate că
CO * 7] = ^
» , < . . . •
3) Să se verifice identitatea
gVi . . . phh
<*>H-~itrlh---h'
1. -«1 ^ 1 . -^e " • ' 1 . . CO • 7]
( c o 1 A - A ^ ) * ( - r i1 A . . . A r /
e ) = C O 9 , 7 ) 1 . . . CO 9 - 7 j 9
unde co1, ..., co9 şi TJ1, ..., v;9 sînt l-forme. 5. Fie X, Y două cîmpuri vectoriale din R3 şi cox, coY l-formele diferenţiale
duale. Să se verifice că
(COXAWY) (V,W) = ((XxY) (*), (»X»)), pentru orice xeR3, oricare ar fi v, w E TXR3. Indicaţie. Ţinînd seama de multiliniaritate, este suficient să dovedim
relaţia pentru v, we{i, j , k}.
6. Fie X un cîmp vectorial pe o sub varietate m-dimensională M şi fie cox l-forma duală lui X.
1) Să se arate că
dcox(t', w) = (DVX, w) — (DWX, v), oricare ar fi v, we TZM,
unde D este conexiunea riemanniană. 2) Presupunem M = Rs. Să se verifice relaţia
dcox(u, w) = (rot X, vxw).
7. Să se calculeze dco pentru fiecare dintre următoarele l-forme diferenţiale
co = x ăx + y ăz + z ăy, co = <fv Ax + z ăy -f (ln(xz)) ăz,
co = (cos x) ăy + dz, co = V xjy ăy + x dz.
8. Se dau formele diferenţiale
co = x2y ăy — xy2 ăx, co = f (x, y) ăx, TJ = &xv ăx/\ăz.
Să se calculeze diferenţialele exterioare.
252

9. Să se verifice că următoarele l-forme co sînt închise şi pentru fiecare caz să se expliciteze o soluţie f a ecuaţiei df = co.
(dx + dy -f- dz), x + y + z > 0, % -j- v -f- z
2 (* - yz)2
y
-yz dx + zx dy + *v dz), x — _y,z > 0,
co = e ' dx + 1 6 ' ( * + 1} + se*) ld3< +
y
e 2 ( * + 1) , ™ z
dz,
z> 0. R. f (*, y, *) = In (x + y + z) + C, f (*, y, z) = — — \-C, f(x, y, z) = y x — yz
= e* (x -f- 1) + eaz — e~* + C (ipotezele asigură faptul că domeniile de definiţie sînt deschise, conexe şi simplu conexe).
10. Să se verifice că următoarele 2-forme sînt închise 1
ri = "71 77—77"2 (* d ^ A d^ + y dz/\ dx + zdx/\ dy), x > 0, (x2 + y2 + z2p2
v > 0, z > 0, •q = (1 -j- 2xv22) dv /\dz — y2z2 dz[\ dx + xv2 d # / \ dv.
Pentru fiecare caz, să se expliciteze o soluţie co a ecuaţiei dco = yj. 11. Să se arate că dacă co! şi co2 sînt închise, atunci şi <*>i_/\ co3 este închisă.
v x 12. Fie l-forma diferenţială co = — dx-\ dv definită
x2 + y2 x2 + y2
x2 v2
pe R2 — {(0, 0)} şi C: -—V— = 1 orientată prin versorul normal unitar a2 b2
cu sensul spre interiorul elipsei. 1) Să se calculeze dco şi \ co. Este co o formă exactă?
2) Să se arate că restricţia lui co la R2 — Ox+ este exactă, găsindu-se soluţia f a ecuaţiei df = co.
Soluţie. 1) Fie a: [0, 2-] —> C, <x(t) = (a cost, bsint) a cărei restricţie la [0, 2TT) este o parametrizare a lui C. Rezultă
C co = [ co = r *>(«'(*)) d* = ^ \-f2-r (a(0 dx(<t'(t)) + x Ja Jo Jo L * + y
X (a(0) dv(a
*2 + v . .-o J Jo
—6 sin £
a2 cos2 i + &2 sin2 £
a cos £ „ .1 , C2n ab
—asin t) +
dt =
253

Deşi co este închisă, adică
d<x>(x, y) = —dl ^ 1 Adx + d | 1 Adv = 1 ; U2 + W U2 + W = (x2 + y2)dy~yd(x2 + y2) (x* + f) dx - xd (x2 + f) ,
(x2 + y2)2 (x2 + y2)2
_ (y2 - x2) dy + 2xy dx (y2 - x2) dx - 2xy dy =
(*2 + >-2)2 ' (*2 + v2)2
totuşi ea nu este exactă (consecinţă a faptului că v co = 2TC sau a faptului că
domeniul JB2 — {0) nu este simplu conex). 2) Mulţimea U 2 — Ox+ este simplu conexă şi dco = 0. De aceea există o
funcţie diferenţiabilă f: U 2 — Ox+-^R astfel încît df — co, adică co este exactă. Mai precis,
arctg — + Ci, pentru • # # 0 ffx> y) = C* ^_ d* + r Î 2 _ dv =
arcctg hC2, pentru j ' ^ 0 .
13. Să se calculeze următoarele integrale curbilinii
1) \ y dx — xdy unde a.(i) = (cos 2t, sin2i), 0<i<7i:. Ja r x v
2) ffi — >' d# + * djy unde elipsa C: • (- •=— = -l este orientată prin ver-J c " fl2 62 .
sorul normal cu sensul către interior. 3) V x1dx1 + ... + x„ dxn unde a: [0, 1] —>• JlM uneşte punctele a(0) =
= (0, ."." 0) şi a(l) = ( - l , - l , . . . i - l ) , Vf
14. Fie C = f_1(c) o curbă plană compactă orientată prin , fie U II Vf ||
Vf 7 T - '••' cîmpul vectorial unitate obţinut prin rotirea lui cu unghiul — — şi <a
' i ! v f l l 2
l-forma duală ataşată lui U. Să se arate că V co = l(C). )c
15. Fie cîmpul vectorial v = (i X j) X r + j X r + (A, ?) ? ,
unde r = #i -f j / _ ; + z&. 1) Să se scrie cîmpul în coordonate sferice şi cilindrice. 2) Să se calculeze circulaţia lui v pe curba C: x2 + J-'2 = 4, 2 = 2 prin
integrală curbilinie şi de suprafaţă. 3) Să se calculeze fluxul lui v prin suprafaţa închisă c.Q ce mărgineşte
corpul O: x2 + y2< z2, x2 + y2 + z2< i?2, z > 0, prin integrală de suprafaţă şi de volum. > 254

Să se reforrnuleze şi să se rezolve problema în limbajul 1 — formelor, ' 2— formelor îi 3 — formelor. "'; Soluţie. 1) în coordonate cilindrice (fig. 3.50) găsim r = pep + zet, k = tz
şi deci ( f x / ) X r = kx{pep + zez) = ? 2X(pe p + zet) = pe e , ' Jx? = ] X X (pe p + zet) = gra.d^yx{pep+zez)_= grad (p sin 6) x {pep + ze2) = sin 0?„+ + cos 0?e) X (p?8 + £<?2) = — z sin 0^6 — p cos §~ez-{-z cos 0?p (pentru calculul lui grad (p sin 0) s-au folosit coeficienţii Lame: H1 = 1, H a = p, ff3 == 1), (&, ?) = (ez, p^, + zî2) = z. în final
v(p, 0, z) = z{cos 0 -f p)?p + (p — z sin 0)^9 -j- {z2 — p cos 0)12 . în coordonate sferice (fig. 3.51) avem r = / e r , A = grad z = grad {r cos 9) =
= cos <p7r — sin oe^, j = grad _y — grad {r sin 9 cos 0) = sin 9 sin Q~er -\-+ cos 9 sin 8 ^ + c o s Q7S (coeficienţii Lame: Hi = 1 , H^ = r, Hs = r sin 9). De aceea, {i X j) X î = k X rîr = ?'(cos cp7r —sin afe,^) X ~er = r sin 9?8> j X~r = = r(—cos 9 sin 0?a + cos G?9), {k,7) = r cos 9 şi deci
v(r, 9, 0) = r2 cos 9? , + f cos 0^, + (r sin 9 — r cos 9 sin ~ep.
Fig. 3.50. Fig. 3.51.
2) în coordonate cilindrice putem scrie C: p = 2, z = 2. Apoi
d r = dplp + p d0<?e + dz ? z şi deci F = <V) (y, d?) =
= (V) z(cos 0 + p) dp + (p2 — pz sin 6) d0 + (z2 — p cos 0) dz =
- 2 T : C2r,
= 4 &> d0 — 4 \ sin 0 d0 = 871:, deoarece dp = 0, dz = 0 pe C. ^0 Jo
Fie discul S: p < 2 , z = 2. Formula Stokes arată că
iV) (y, d?) = U (îl, rot ?) dcr. Aici n = % şi
rot v = -1
H-LHZHZ
H{e-i Hzes H^e^ JL JL JL Cp 3% 02,
H1v1 H2v2 Hzvz
255

3) Se lucrează mai uşor în coordonate sferice. Se observă că dQ = Si(j 5 2 (curba de intersecţie dintre con şi sferă este o mulţime de arie nulă), unde S1:r = R, 9 e [0, 'TT/4], 0 e[0 , 2n]; S2:re[0, R], o = TI/4, 6 e[0 , 2n]. Deci
° = | Ş (v.n):do=& ( ? , H ) d a + K (» ,S )da .
Deoarece pe Sx avem de = r2 sin codcpd6, ?1 = ? r , iar pe S2 avem dz = = r sin cp dr d6, n = 7V, rezultă
U (v, îi) der = 2T.R^\ sin cp d (sin cp), U (?, w) dej = sin2— \ r drX
x ( " c o s 6d6 = 0. Jo
si deci r.R4
Aplicînd formula Gauss
O = Qî) (u, w) de = \U div y dQ 8"
şi ţinînd seama că dQ = r2 sin 9 dr dep d6,
d i v « ? = 1 (.^H'H»vr + JW^ + gCgjgge'. = 4 r c o s ?f K-JI-Jlz \ cr cep 8Q
se verifică rezultatul precedent. Reformularea în limbajul formelor diferenţiale are la bază regulile din
paragraful 6.15.

CAPITOLUL 4
ECUAŢII DIFERENŢIALE
§ 1. ECUAŢII DIFERENŢIALE DE ORDINUL ÎNTÎI
1.1. Ecuaţii cu variabile separ abile.
a-Sx) bi(y) âx — a2(x) b2(y) ăy = 0, unde alt a2e C°{I^), blt b2e C°(I2) şi az(x) ^ 0 oricare ar fi xellt bx(y) ^ 0 oricare ar fi ye I2.
Soluţia generală este definită de
['iMdx-rMyLiy + c k Hx) k Hy)
1.2. Ecuaţii omogene,
ăy dx
f ( ^ - ] , unde ieC°(I), x^O.
Schimbarea de funcţie y <H> t definită prin y=tx arată că o ecuaţie omogenă se reduce la o ecuaţie cu variabile separabile.
1.3. Ecuaţii liniare,
^ - = yi(x) + g(x), unde f, ge C°(7). dx
Soluţia generală este definită prin
- *• I r _!_ V ( i / < A o Jxo i{x) ăx .
eJ*° lc + \ p(x) e JX° dx) -IX-
1.4. Ecuaţii Bernoulli,
Ş^ = fi{x) + yS(x), re R - {0, 1}, f, ge C°(Z). ax
Mulţimea valorilor lui y este determinată ţinînd seama de valorile particulare ale lui r.
i
Schimbarea de funcţie y <-» z definită prin y = z ~r arată că p ecuaţie Bernoulli se reduce la o ecuaţie liniară.
17 — Probleme de algebră — c. 264 257

1.5. Ecuaţii Riccati,
yH(x) + yg(x) + h(x), unde f, g, he C°(I). d >' - ,,2f dx
Soluţia generală a unei asemenea ecuaţii nu se poate obţine decît în ipoteze suplimentare. De exemplu, dacă se cunoaşte o soluţie y1: atunci schimbarea de funcţie y *-* z definită prin y = y\ + l/z arată că ecuaţia Riccati se reduce la o ecuaţie liniară.
1.6. Ecuaţii exacte. Fie ecuaţia
P(x, y)dx + Q(x, y)dy = 0, unde P, Q sînt funcţii de clasă C1 pe DczR2.
1) Dacă D este un dreptunghi şi dacă = —— pe D, atunci funcţia 8y dx
rx ry (x, y) —>• i{x, y) = V ¥{x, y) dx + \ Q{x0, y) dy are proprietatea df = P dx-{-
Jx„ ^y„ + Q dy şi deci soluţia generală a ecuaţiei diferenţiale este definită prin
P(.v, y) dx + [" Q(xQ, y) dy = c. fx ry V P(.v, y) dx + \ i
Dacă D este o mulţime convexă şi dacă — = —— pe D, atunci func-dy Bx
ţia (x, y) -> i(x, y) = \ (P(x0 + t(x — x0), y0 + t(y — y0)) (x — x0)+ Q{xQ +
+ t(x — xQ), y0 + t(y — Vo)) (y — yo)) dt are proprietatea df = P dx + Q dv şi deci soluţia generală a ecuaţiei diferenţiale este definită prin
V (P(#0 + t(x — x0), y0 + t(y — Vo)) {x — x0) + Q(x0 + t(x — x0),
, yo + t(y — yo)) • (y — yo))dt = c
Ecuaţiile pentru care D este conex şi simplu conex, iar = —— dy dx
oricare ar fi (x,y)eD, se numesc ecuaţii diferenţiale exacte. 2) Fie D o mulţime conexă şi simplu conexă. Există o funcţie nenulă
(j.: D —>• R de clasă C1 astfel încît u(x, y) P(x, y) dx + [L(X, y) Q(x, y) dy = 0
xactă. Funcţia
d(aP) _ 3(ILQ)
să fie o ecuaţie diferenţială exactă. Funcţia u. se numeşte factor integrant şi satisfac ecuaţia
dy dx 1.7. Ecuaţia Clairaut,
y = xy! -j- <\>(y'), unde ty este o funcţie de clasă C1. .-.••
Punînd y' = p şi derivînd în raport cu x în ambii membri, rezultă soluţia
generală y = cx + fy{c) Şi soluţia singulară x = —, v = x^ + fy{p)-
258

1.8. Ecuaţia Lagrange,
y = xy(y') + <l>(y'), unde <p(y') y' şi <]> sînt funcţii de clasă C1.
Notînd y' = p, derivînd în raport cu x în ambii membri şi privind pe x ca funcţie de p, obţinem o ecuaţie liniară cu soluţia generală x = x(fi, c). Rezultă că soluţia generală a unei ecuaţii Lagrange este definită prin x = = x(P.c). .y = x(P.c) <?(P) + 4#)-
1.9. Teorema de existenţă şi unicitate a soluţiei problemei lui Cauchy.Fie sistemul de ecuaţii
—— = f,(*, ylt ..., yn), i = 1, ..., n. ax
Găsirea funcţiilor x —* y( = yt(x) care să verifice sistemul şi condiţiile iniţiale }'i(xo) = yto poartă numele de problema lui Cauchy.
Dacă funcţiile reale (x, y) ~*.ii(x, y), y = (ylt.,.., yn), sînt de clasă C° pe o mulţime deschisă şi conexă D din Rn+1, iar funcţiile parţiale y -* i^x, y) sînt de clasă C1 atunci oricare ar fi (x0,y0)eD există o soluţie unică x —» —> y(x) definită pe o vecinătate a lui x0 care verifică condiţiile y{(x0) = yi0, i = 1, ..., n.
1.10. Metode numerice.
Fie y' = i(x, y) o ecuaţie diferenţială de ordinul întîi cu condiţia iniţială y(x0) = y0. Metoda lui Runge — Kutta de ordinul patru aproximează soluţia prin yn+1 = yn + Ayn, unde
Ayn == — [k0 + lkx + lk% + k3], iar k0 = i(xn, yn),
kx = ilxn + hll, >'n + j), h = i{xn + hl2, % + y)>
k3 = i(xn + h, yn -\- k2), h = Ax este pasul diviziunii.
Metoda lui Euler are la bază formula de recurenţă
yn+i = }'n + hi(xn, yn) pentru soluţia aproximativă yn+1 — y(xn+1).
Exerciţii şi probleme 1. Se dă un corp de formă sferică constituit dintr-o substanţă care prin
expunere la o sursă de căldură trece din starea solidă în starea gazoasă, viteza de trecere fiind proporţională cu aria expusă. Să se studieze evoluţia razei sferei ştiind că valoarea sa la momentul iniţial este R0.
Soluţie. Fie R(t) raza sferei la momentul t, R(t0) = R0- Aria expusă este , p 2 . . . ' . . 47zRs(t) . .. , . , . . d (inRs(t) \ A-R^lt), volumul , iar viteza de descreştere este —— — •
3 dt[ 3 j Aşadar, rezultă ecuaţia diferenţială •!—-—— I = k47zR2(t), k > 0, sau
dt l 3 ) —R'(t) == k cu soluţia R(t) = — k(t — t0) + R0.
259

Condiţia R(t) > 0 impune 0 < t — t0 < — • Această soluţie permite să k
se determine k printr-un experiment în care se măsoară timpul pînă la care o sferă dată trece în întregime în starea gazoasă.
2. Se consideră familiile de curbe plane:
1) x2 + y2 lax — Iby = c; 2) y2 ± k2x2 = c; a, b, k
Să se determine ecuaţia diferenţială a fiecărei familii.
fixate, cq R.
Dacă A şi B sînt punctele în care normala în punctul M(x, y) la curbă
taie axele Ox, respectiv Oy, atunci 1) -7-7-+ 7777 = 1; 2) MA = MTB.
R: (3, OA OB
b) y' = a — x respectiv yy' = + &2#.
3. Să se arate că forma unei oglinzi, care reflectă paralel cu o direcţie dată toate razele ce pleacă dintr-o sursă luminoasă este parabolică.
2) Dacă M(x, y) este un punct de pe oglindă, cercul al cărui diametru este raza vectoare a punctului M, trece prin mijlocul segmentului normală MN.
Soluţie. 1) Alegem sistemul de axe în mod convenabil şi anume, originea în punctul în care se află sursa luminoasă şi direcţia axei absciselor paralelă cu direcţia dată prin ipoteză. Fie o rază care cade pe oglindă în punctul M(x, y). Considerăm secţiunea oglinzii prin planul determinat
~~ţ\~*Z de axa absciselor, punctul M şi tangenta în M la curba de secţiune. Aceasta taie axa absciselor în punctul P (fig. 4.1).
Deoarece unghiul de incidenţă al razei luminoase este egal cu unghiul de
reflexie, triunghiul MOP este isoscel. Avem tg G = y' =
0 Eig. 4.1.
Ecuaţia obţinută este omogenă şi se poate scrie
¥= (0, 0), sau d(V*ă
x dx + y dy + \x? + y2
= dx, (x, v)=£ V*2 + y2
yi) = dx. După integrare obţinem ecuaţia carteziană a curbelor integrale, v2 == 2cx + c2, care reprezintă o familie de parabole.
2) Cercul de diametru OM are ecuaţia carteziană I X — — I -f- J Y 2 %2 _|_ y2 l
= - — Normala în punctul M la curbă, Y — y = (X 2 ) 4 v' y
— x). Punctul ei de intersecţie cu axa absciselor este N(x + yy', 0). 4. Să se determine soluţia generală a ecuaţiei diferenţiale
1)
3)
d v _ dx
dy
\2x + 5y — 9 — 5x — ly + 3
x — ly + 5
2) dy x + v
dx -2x
dx 1 — x -j- y
şi curba integrală ce trece prin punctul (1,2).
260

Să se arate că pentru ecuaţiile 1) şi 2) curbele integrale sînt conice de gen. hiperbolic şi să se determine asimptotele lor.
R: 1) 6x2 + 5xy + y2 — 9x — 2>y = c; 2) x2+2xy — y2 - 6x -+•2y= c;
3) (* + 3,' + l)2 = c(* - y + 3). ,
Curbele integrale ale ecuaţiilor 1) şi 2) sînt conice cu § < 0, deci gen hiperbolic. Pentru 1) asimptotele sînt dreptele 2x + y — 3 = 0 şi 3x -\-:y = 0. Pentru 2) asimptotele sînt dreptele (1 + -v/2) x — 3.» — 1 — 2V2" = 0 şi (1 — — V2)# — y — 1 + 2V2~= 0. ! ' i :
5. 1) Să se determine soluţia generală a ecuaţiei diferenţiale y' - j -... 1 ~2x ' ' • . ' . - ,
2) Se consideră tangentele la curbele integrale într-un punct *0 # 0. Să se arate că aceste tangente trec printr-un punct fix şi să se determine coordonatele lui în funcţie de x0.
3) Să se determine curba integrală care trece prin (1,1). 6. Se consideră o sursă de curent alternativ a cărui tensiune variază după
le gea E = EQ sin t. Sursa alimentează un circuit compus dintr-o rezistenţă R şi o inductanţă L.
Să se determine intensitatea curentului din circuit dacă regimul de funcţionare este staţionar.
Soluţie. Conform legii lui Kirchoff putem scrie:
RI + L — E0smt. di
sau,
dl, R T E0 . • 1 I = — sini , dt L L
o ecuaţie diferenţială liniară neomogenă cu coeficienţi constanţi. în electrotehnică se preferă soluţia particulară I(t) = Asin (coi—cp). Pentru a determina pe A şi o calculăm derivata •— = G>A cos (coi — 9) ; înlocuim în ecuaţia
di diferenţială, apoi egalăm coeficienţii lui cos coi, respectiv sin coi şi obţine sistemul La> cos cp — R sin cp = 0, A (Lco sin 9 + R cos cp) — E0 = 0.
/ - - • 4. °>L . . E0 •• Găsim 9 = arc tg • şi A = R ' ~ Vi?2 + W2Z.2 7. Să se determine soluţiile generale ale ecuaţiilor
1) —— -j- 3>y = e2*; 2) —— = y + sin x; 3) —— cos x = 1 — y sin x; dx dx dx
4 ) i Z . * 2 _ _ * = <); 5) x ^ - y = x2-2x+3. dx x2 — 1 dx
R: 1) <y = ce~3Z + — e2*; 2) _y = ce* — — (cos x + sin x);
3) _y = c cos % + sin x; 4) v = cV%2 — 1; 5) _y = CA; + x2 — 2x In % — 3.
261

8. Să se determine soluţiile generale ale ecuaţiilor
dy _ y , x2 ^ dy _ 2 __ 2 1) ^ _ = ^L + _ . 2) - ^ = y2
dx 2A; 2y dx x2
3) * ^ - - y2 In * + y = 0; 4) i V - ^ + xzf = 0. dx dx x
Indicaţie. 1) Ecuaţie Bernoulli. Se face schimbarea z — y2. Se găseşte dz z x^
ecuaţia liniară = f- x2, cu soluţia generală, z = cxx 4 . Soluţia ge-dx x ' 2
x3
nerală a ecuaţiei Bernoulli, y2 = c,x + — • 3
9. Să se determine soluţiile generale ale următoarelor ecuaţii
1) lx2y' — Axy — y2 = 0; 2) y' + ly = Ixsy
3) 2xy' + y + 2xsys = 0; 4) y' + — y = — y 3 ;
2 5) y H y = — y2 In *; 6) y' + y tg x = y2.
A;
R : l ) 3 ' = ^ - ; 2) y = ( ce - + x - l ) 2 ; 3) y = î = = = N ;
4) — = c,r4 4- 4- —; 5) — = cx2 — x In x — x; y2 2 8 v
cos * 6) J = :
c — sm x 10. Să se integreze ecuaţia diferenţială y' — xy2 + 2x2y — x3 — 1 = 0. R: Este o ecuaţie Riccati. Se găseşte soluţia y0 = #. Soluţia generală
2 a ecuaţiei este y = x
x2 + c 11. Să se integreze ecuaţia diferenţială y' = y2 — xi — 2x2 4- 2x — 1,
ştiind că admite drept soluţie particulară un polinom. R: Se găseşte soluţia y0 = x2 + 1. Soluţia generală a ecuaţiei este,
2 2 — x'-2x( fx — x"-+2x
y = e c — \ e d#
12. Să se integreze ecuaţia diferenţială y' -f y2 = — , ştiind că ad-x x2
mite soluţia y0 = —
R: 3/ = 1 , x > 0. ^ A' In % + CA:
262

ve-
13. 1) Să se. arate că dacă (x, y) —>• P(x, y), (x, y) -*Q(x, y) sînt funcţii
omogene, de acelaşi grad de omogenitate m, atunci (x, y)—* xP(x,y) + yQ(x,y)
este un factor integrant al ecuaţiei diferenţiale P(x, y) dx + Q(x, y) dy = 0 (P, Q diferenţiabile şi xP(x, y) + v Q(x, y) nenul).
2) Să se aplice rezultatul de mai sus ecuaţiei (xy — x2) dy — y2 dx — 0. Soluţie. 1) Contextul impune ca domeniul de definiţie al funcţiilor P şi Q
să fie interiorul unui unghi în care xV(x, y) + yQ(%, >') # 0. 3P
Funcţiile P si Q fiind omogene de grad m, satisfac ecuaţia Euler, x \-
+ , « ' _ „P; .*+ y i a . „Q. s, ^ •«&*+!& JL. 8v cx ev xT? + ^yQ
rentiala unei funcţii, adică - l f 0 ) « ±[ P ) •
într-adevăr, PI x —— + y—— I ~ Ql # h v 1 = 0 este identic V cx 8y ) \ Bx dy)
rificată dacă ţinem seama de relaţiile lui Euler. 2) Ecuaţia dată se poate scrie — y2dx -f- (xy — x2) dy = 0 cu V(x, y) =
= — y2, Q(x, y) = xy — x2, omogene, de gradul doi şi admite factorul 1 1
integrant ţx(x, y) = — — — — r = -• xP(x,y) +yQ(x, y) xy
înmulţind ecuaţia diferenţială cu acest factor obţinem o ecuaţie exactă — dx H — dy = 0, cu soluţia generală In y — — y = c, pe x>0, y>0. x2 xy ' x
14. Să se arate că ecuaţia diferenţială de forma yî(xy) dx — xg(xy) dy = 0, cu f şi g funcţii de produsul xy, de clasă C1 pe D c B 2 , admite pe p.(x, y) = = •• ca factor integrant.
xy[i{xy) + g{xy)] Aplicaţie la ecuaţia (xy2 + y) dx — 2(x2y — x) dy = 0. R: (ixy - l)4 = cx3y6. 15. Să se determine soluţia generală a eeuaţiei (x + y + 1) d# +
+ (* — y2 + 3) dv = 0. Să se precizeze curba integrală care trece prin originea coordonatelor, tangenta şi normala la această curbă în origine.
Soluţie. Ecuaţie cu P(x, y) = x + "y + 1, Q(x, y) = x — y2 -\- 3. P şi Q sînt funcţii de clasă C™ pe D = R2.
8P 80 Deoarece D este o mulţime convexă si = —^- = 1 pe D soluţia generală
dy dx
a ecuaţiei este definită prin (x — x0)\ [x0 + t(x — x0) + y0 -f- t(y — y0) + + 1] di + (y — y0) \ {x0 -f- *(* — #0) — [y0 + t(y — v0)]2 + 3 } ăi = c (vezi pa-ragraful 1.6). Efectuînd calculele se obţine soluţia generală dată de 2>x2 + 6*^ + + I83/ — 2>-3 + 6x = cx.
263

•Pentru x = O, y = O se obţine cx = O, deci curba integrală cerută are ecuaţia carteziană implicită, 2>x2 + 6xy + 18v — 2y3 + 6# = 0. Tangenta la această curbă în origine are ecuaţia x -{- 2>y = 0, iar normala, y — 2>x = 0.
16. Să se integreze ecuaţiile diferenţiale:
1) {2x3 - 6x2y + 3xy2) dx + (3x2y — 2x3 - / ) dy = 6
2) y(exv — 4x) da: + x(fv — 2x) dy = 0.
R: 1) — - 2x3y + — % V - — = c; 2) e3* - 2x2v = c. 2 2 4
17. Să se integreze următoarele ecuaţii diferenţiale ştiind că admit un factor integrant care depinde numai de x.
1) (5x2 + Ylxy — 2,y2) dx + (2>x2 — 2xy) dy = 0.
2) (2x2y2 + y2) dx + 2xy dy = 0.
R. 1) [i = x2. Soluţia generală, x5 + Zxiy — x2y2 = c.
2) pi = e*\ Soluţia generală, xy2ex' = c.
18. Să se integreze ecuaţiile:
1) y'2 + (x + a)y' — y = 0, a e f i ; 2) v = # / + — ; 5'
3)7 = *y + 3/2; 4) y (* - -1) - 7 = 0. Soluţie. 1) Ecuaţia se poate scrie j ' = # y + y'(a + 3/'). Este ecuaţie
Clairaut cu ty(y') = y'(a + y ) . ^ este de clasă C00 pe i i . Notăm y = j!>. Ecuaţia devine v = %> + ^>(« + fi). Derivînd în raport
dj> dp di> cu x în ambii membri obţinem fi = fiJ
rx^- + {a-\- 2 fi) — , sau — (x-\-dx dx dx
+ 2fi + a) = 0. d/>
Pentru — = 0=s>^ = c ş i obţinem soluţia generală a ecuaţiei y — cx + dx
- f C(A + c). Pentru 2 > -f- # -f- a = 0 rezultă a; = —• 2_£ — a şi soluţia singulară a ecuaţiei
iniţiale este reprezentată parametric prin ecuaţiile x = — 2fi — a, y = — fi2. 19. Să se integreze ecuaţiile diferenţiale:
1) y + 2xy' + y'2 = 0, 2) xy'2 + (y - 3x) y' + y = 0, ( v' 4- l i 2
3) yy'2 — 2xy' + y = 0, 4) x + y = ' " ' ' . y - i j
5) y 2 - 2 * / + ^ = 0. Soluţie. 1) Ecuaţia se poate scrie: r = — 2 # y — y 2 . Este ecuaţie La-
grange cu y(y') = — 2 y şi ty(y') = — y'2, unde 9 şi <\> sînt funcţii de clasă C™ pe R. Notînd y' = >, ecuaţia devine y = — 2# > — >2. Derivînd în raport
264

dp cu x în ambii membri şi ţinînd seama că y' — p, obţinem p = —2p — 2x — — dx
dj) df> dfi — 2p — • Considerînd pe x ca funcţie de p şi împărţind prin — > — # 0, dx . . . ^ ^ dju obţinem ecuaţia 3* — = , , d*
2* sau, — = d^
3^ — care este ecuaţie 3
liniară. Soluţia ei generală este definită de x = cp 3 — —p. Soluţia generală
--î 2 *2 4-a ecuaţiei Lagrange este definită prin x = cp 3 ——p, y = — 2cp' •
împărţind prin — =£ 0, am pierdut soluţiile p = const., date de ecuaţia dx
p — o(p) = 0, adică 2>p = 0, deci p = 0. Ei îi corespunde soluţia singulară a ecuaţiei iniţiale, r = 0.
20. Să se găsească soluţia ecuaţiei y + ky = e-*, 0 < * < c o , y(0) = v0, ÂeJB şi să se studieze continuitatea ei în raport cu parametrul k.
R: Pentru k =£ 1 se obţine y(x; k) = ce-*"1 + , iar pentru k = 1 ,
J J ( ^ ; l) = ce-* + xe~x. Se verifică lim v(%; k) = y(#; 1).
21. Să se determine traiectoriile ortogonale ale familiei de parabole Ya: x = = ay2, aeR.
Soluţie. Traiectoriile ortogonale ale familiei Ta sînt liniile care taie curbele familiei sub unghiuri drepte. Pantele y[ şi y'.z ale tangentelor la curbele celor
două familii trebuie să satisfacă condiţia de ortogonalitate y'2 = •
Pentru familia Ya găsim y'
y
1 2 a v
adică
y = —, * # o. 2%
Ecuaţia diferenţială a traiectoriilor ortogonale căutate este y' — • sau yy'+2x = 0.
y Soluţia generală este definită de V 2:K d* =
= — V _y d v + c, sau x2 -f- — = c2, care re-•>y» Fig. 4.2
prezintă o familie de elipse (fig. 4.2). Observaţie. Punctul 0(0, 0) este punct singular pentru familia de para
bole iniţiale, numit punct singular de tip centru.
22. Să se alcătuiască schema logică pentru metoda Runge-Kutta dată în paragraful 1.10.
Soluţie (fig. 4.3).
265
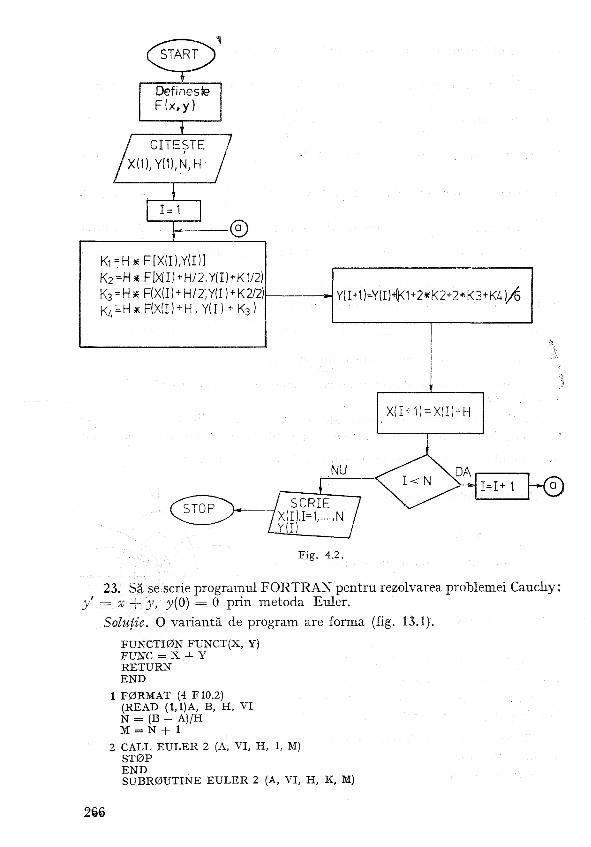
Defineşte F(x.y)
I CITEŞTE 'X(1),Y(1),N,H
1=1 v=^— ©
Ki = H * F[X(I),Y(D] K2=K*FMI)+H/2.Y(I)+KV2) K3 = H*F(X(I) + H/2,Y!D + K2/2) K4 = H*F(X[I) + H,Y(I / + K3
Y(I+l)-Y(I}-KKl+2*K2+2*K3+K4)/6
X(I+1) = X(I) + H
1=1+1 - * @
..:.;> Fig. 4.2.
23. Să sescrie programul FORTRAN pentru rezolvarea problemei Cauchy: y' = x +,y, y(0) = 0 prin metoda Euler.
Soluţie. O variantă de program are forma (fig. 13.1). FUNCTI0N FUNCT(X, Y) FUNC = X + Y RETURN END
1 F 0 R M A T (4 F10.2) (READ (1,1) A, B, H, VI N = (B - A)/H M = N + 1
2 CALL E U L E R 2 (A, VI, H, 1, M) S T 0 P END S U B R 0 U T I N E E U L E R 2 (A, VI, H, K, M)
2§€
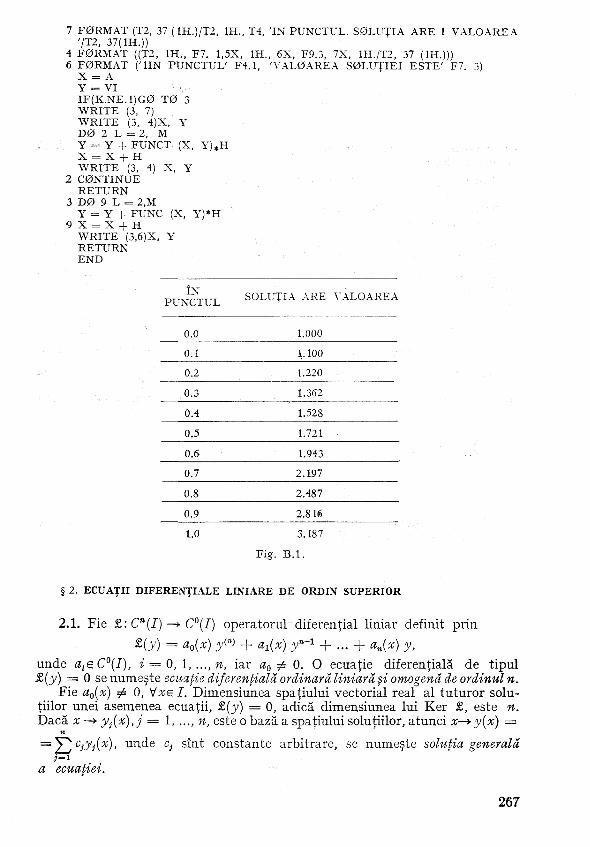
7 F0RMAT (T2, 37 (1H.)/T2, 1H., T4, 'IN PUNCTUL. S0LUŢIA ARE 1 VALOAREA '/T2, 37(1H.))
4 F0RMAT ((T2, 1H., F7. 1,5X, 1H., 6X, F9.3, 7X, 1H./T2, 37 (1H.))) 6 F0RMAT ('UN PUNCTUL' F4.1, 'VAL0AREA S0LUŢIEI ESTE' F7. 3) X = A Y = VI IF(K.NE.1)G0 T 0 3 W R I T E (3, 7) W R I T E (3, 4)X, Y D 0 2 L = 2, M Y = Y + FUNCT (X, Y)*H X = X + H W R I T E (3, 4) X, Y
2 C 0 N T I N U E RETURN
3 D 0 9 L = 2,M Y = Y + FUNC (X, Y)*H
9 X = X + H WRITE (3,6) X, Y RETURN END
ÎN PUNCTUL
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
SOLUŢI A ARE
1.000
1.100
1.220
1.362
1.528
1.721
1.943
2.197
2.487
2.816
VALOAREA
1.0 3.187
Fig. B . l .
§ 2. ECUAŢII DIFERENŢIALE LINIARE DE ORDIN SUPERIOR
2.1. Fie £:C"(7) • C°(I) operatorul diferenţial liniar definit prin M%) ym + *i(«) yT1- + - + «»(*) y,
unde ateC°(I), i = 0, 1, ..., n, iar a0 ^ 0. O ecuaţie diferenţială de tipul £(y) = 0 se numeşte ecuaţie diferenţială ordinară liniară şi omogenă de ordinul n.
Fie a0(x) # 0, Vxe I. Dimensiunea spaţiului vectorial real al tuturor soluţiilor unei asemenea ecuaţii, S,(y) = 0, adică dimensiunea lui Ker £, este n. Dacă x —» y,{x),j = 1, ..., n, este o bază a spaţiului soluţiilor, atunci x~*y(x) = = X~^c1yj(x), unde c} sînt constante arbitrare, se numeşte soluţia generală
, 7 = 1
a ecuaţiei.
267

2.2. Fie y}€ Cn(I), j = 1,2, ..., n. Determinantul
w(.r) =
yi{x) y2{x) y'i(x) yî{x)
y*{x) yn{x)
tf-»{X) $-»(X) ... y<:-1](x)
se numeşte wronskian. Funcţiile ylt y2, ..., yn sînt liniar independente dacă şi numai dacă w ^ 0.
Dacă yi, y2, ..., yn sînt soluţii ale ecuaţiei £(y) — 0, atunci w(x) =
= w(^0) e J*° "•(*' . De aceea, dacă w se anulează într-un punct din I, atunci w se anulează peste tot.
2.3. 0 ecuaţie diferenţială de tipul £(>') = i{x), ie C°{I) — {0}, se numeşte ecuaţie diferenţială ordinară liniară şi neomogenă.
Soluţia generală a ecuaţiei neomogene £(y) = î(x) este suma dintre o-soluţie particulară a ecuaţiei neomogene şi soluţia generală a ecuaţiei omogene £(y) = 0.
«
2.4. Metoda variaţiei constantelor (Metoda Lagrange). Dacă >'(*)= 2 J c ^ ( ^ )
este soluţia generală a ecuaţiei omogene £(y) = 0, atunci soluţia generală a n
ecuaţiei £(y) = i(x) poate fi găsită sub forma y{x) = / , c,(x) y,(x), unde funcţiile #—* c,'(#), de clasă C""1, se obţin ca soluţii ale sistemului de ecuaţii algebrice
E 4(*) y&) = o, E 4<*) -W = o,. . . ,E c;(x) ^-*>(*) = o. i= i j= i i=.i
" ao[x) 2.5. Dacă funcţiile f şi g sînt analitice într-o vecinătate a punctului %„
atunci orice soluţie a ecuaţiei
se poate scrie sub forma y" + y'i(x) + yg(x) = 0
Ax) = E «*(* - *o)fc-A = 0
Dacă funcţiile f2 şi f2 sînt analitice într-o vecinătate a punctului .y0, atunci. cel puţin una dintre soluţiile ecuaţiei
X XQ [X • Xn
se poate reprezenta în forma
y(x) = (x — x0)« E «*(* — *o)s
268

2.6. Fie D:C°°(I) -» C°°(J) operatorul de derivare şi £:C°°(I) -> C°°(7) un operator diferenţial liniar cu coeficienţi constanţi (reali) definit prin
£ = a0Dn + «iD"-! + ... + a„_xD + «,.
Mulţimea {£} este un spaţiu vectorial real. De asemenea, orice doi operatori diferenţiali liniari cu coeficienţi constanţi sînt comutabili.
Polinomul
L(r) = a0rn + a^-1 + ... + an_xr + an
se numeşte polinomul caracteristic ataşat lui £. Deoarece descompunerii lui L(r) în factori reali (comutabili) îi corespunde o descompunere a lui £ ca produs de operatori cu coeficienţi constanţi (comutabili), sa zicem £ = £ ^ 2 . . . S.t, rezultă Ker £s £ Ker £. Tipurile posibile de factori sînt
r — a—> D — a
(r - a)ro -> (D - a)m
r2 - 2ar + (a2 + <i2) - • D2 - 2aD + (a2 + fi2)
(r2 - 2ar + (a2 + p2))m -» (D2 - 2aD + (oc2 + [32))m.
Fie £(_)') = 0 o ecuaţie diferenţială liniară omogenă cu coeficienţi constanţi şi L(r) = 0 ecuaţia caracteristică asociată.
(1) La o soluţie ce, reală, simplă, a ecuaţiei caracteristice, îi corespunde o singură soluţie liniar independentă eax a ecuaţiei £,(y) = 0.
(2) La o soluţie a, reală, multiplă de ordinul m, a ecuaţiei caracteristice îi corespund m soluţii liniar independente
Q<ZX XQ'XX xm~^ e a *
ale ecuaţiei S.(y) = 0. (3) La o pereche de rădăcini complexe conjugate simple a + iŞ, a — ifi
ale ecuaţiei caracteristice îi corespunde o pereche de soluţii liniar independente ea* cos fix, e " sin fix ale ecuaţiei S.(y) = 0.
(4) La o pereche de rădăcini complexe conjugate a + i(3, a — ifi, multiple de ordinul m, îi corespund 2m soluţii liniar independente
eax cos fix, xeax cos fix, ..., xm~x eax cos fix
eax sin fix, xe" sin fix, ..., xm~1eaX cos fix
ale ecuaţiei £(y) = 0.
2.7. Metoda coeficienţilor nedeterminaţi pentru găsirea unei soluţii particulare yv a unei ecuaţii liniare neomogene cu coeficienţi constanţi &(y) = f(x), unde f este un cvasipolinom, constă în căutarea unor soluţii determinate de expresii de tipul i(x). Această tehnică se poate rezuma prin tabelele următoare.
2,69
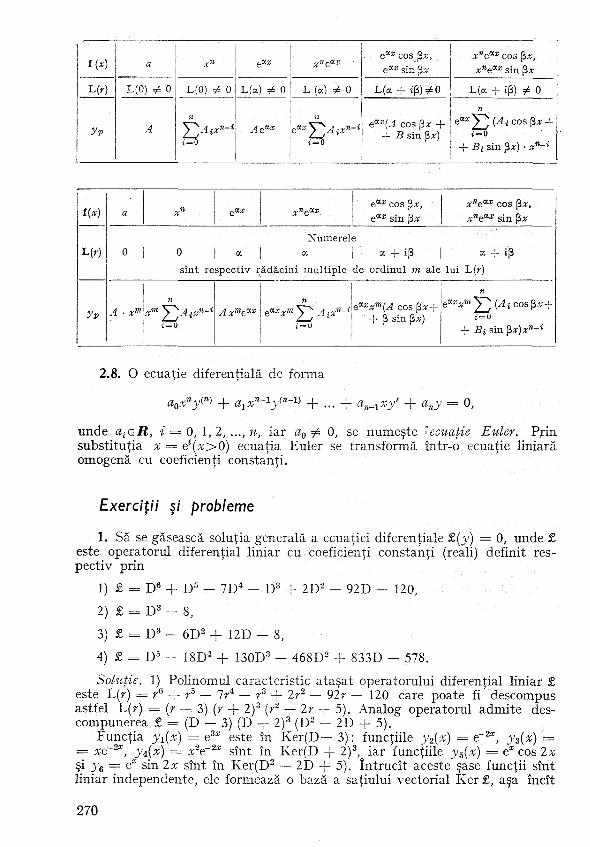
l(x)
L(r)
yp
a
L(0) # 0
*»
L(G) ^ 0
« = 0
e«»
L(«) * 0
Aea*
xtieax
L ( a ) 7^0
t = 0
. e"1 cos j3;t, eaa: sin |5A'
L ( a ' + # ) # < )
ea :c(^ cos 3A: -f -f B sin par)
«gOez c o s p ^
A-"ea:c sin p *
L(oc + iP) * 0
71
e « ^ ^ ( ^ i c o s p A r + i = 0
-f- B4 sin PAT) • Ar"-»'
((*)
L(r)
y»
a Ar" e"2 | Arnea:5 eax cos PAT, e a r sin PA;
A^e"* cos PAT, xneax sin PAT
Numerele 0 | 0 | a | a | • a + ip | a + ip
sînt respectiv rădăcini multiple de ordinul m ale lui L(J-)
^ • * m n
xm'^/Alxn-i
i = 0 ^Armeaj:
«=o
eaxxm(A cos PA;+ ' + P sin p»)
n ea-xxm^2/{Aicos^x+
j = 0 + Bj sin PAT) * » - '
2.8. O ecuaţie diferenţială de forma
a0xnym + a-tx^y^-u + ... + an_txy' + any = 0,
unde ateR, i = 0, 1,2, ...,n, iar a0 =£ 0, se numeşte -ecuaţie Euler. Prin substituţia x = e (%>0) ecuaţia Euler se transformă într-o ecuaţie liniară omogenă cu coeficienţi constanţi.
Exerciţii şi probleme
1. Să se găsească soluţia generală a ecuaţiei diferenţiale £(jy) = 0, unde £ este operatorul diferenţial liniar cu coeficienţi constanţi (reali) definit respectiv prin
1) £ = D6 + D5 — 7D4 - D3 + 2D2 — 92D — 120,
2) £ = D3 - 8,
3) £ = D3 - 6D2 + 12D - 8,
4) £ = D5 - 18D4 + 130D3 - 468D2 + 833D - 578.
Soluţie. 1) Polinomul caracteristic ataşat operatorului diferenţial liniar £ este L(y) = r6 + r5 — 7r4 — r3 + 2r2 — 92r — 120 care poate fi ' descompus astfel L(r) = (r — 3) (r + 2)3 (r2 — 2r + 5). Analog operatorul admite descompunerea £ = (D — 3) (D -f- 2)3 (D2 — 2D + 5).
Funcţia yx(x) = e t e este în Ker(D— 3): funcţiile y2(x) = e~2z, y3(x) = = xe~2x, yi(x) = x2e~2x sînt în Ker(D -f 2)3
V iar funcţiile yb(x) = <f cos 2% şi jy6 = ex sin 2x sînt în Ker(t)2 — 2D + 5). întrucît aceste şase funcţii sînt liniar independente, ele formează o bază a saţiului vectorial Ker £, aşa încît
270

soluţia generală a ecuaţiei diferenţiale g,(y) — 0 este acoperirea liniară y(x) = = Cxe3x + (Ca + C3x'+ CiX
2) e'2x + e2x(C5 cos 2x + C6 sin 2x). 2) y(x) = CIQ2X + e~'r(c2 cos TJ3X 4 c3 sin V3V), 3) y{x) = (&(ct + czx + c3x2),
4) y(x) = qe2* 4 e4'T[(c2 4 c3«) cos x 4 (4 4 c5%) sin #].
2. Fie operatorul ă, operatorul identic 3 şi operatorul de derivare D definiţi pe C°° (R) astfel:
ă{y(x)] = # •>'(*•) pentru orice i e S , tJ[v(^)] == y(x).
Să se calculeze
Da - <3D, D2a — aD2, D3a — ao3 , . . . , Dna — aD". Să se arate că operatorii obţinuţi sînt operatori diferenţiali liniari cu coeficienţi constanţi şi să se exprime în funcţie de D.
Soluţie. Bă = {Dă) [y(x)] = B(ă[y(x)]) = D(x • y(x)) = y(x) + xy'(x), ăD = (aD) [y(x)] = a(D[y(x)]) = ă[y'(x)] = * • y'(x). Rezultă D<3 — a D = J .
D 2a = D 2 [ a (y ] = D 2 (*y = D(j/ + xy') = 2v' + * / ' ; <aD2 = a[D2(;y)]= = xD2(y) = xy" ; Rezultă D2a - a D 2 = 2D. "
Analog D 3a — a D 3 = 3D2. Calculăm Draa folosind formula lui Leibnitz; Dnă = T>n[ă(y)] = Dn(x-y) =
= c r ^ i y " - " + c^vTO = «y»-" + ooym, apoi aDn = a{D™(y] = a(v<n>) = = *yra). Obţinem D % — a D " = nYf-1.
3. Să se integreze 1) y - 2>-IV + y'" - 2 / ' = Q 2) y - 3 / ' + 49v' + 53v = 0 3) y v — 2 9 / ' + 100 = 0 4) vIV 4 29 v" 4 100 = 0 5) y n - 20VI 4 130>|V - 500j'IV 4 6 2 5 j ' " = 0. 6) j ' " 4 \ y ' = 0, pentru X = 0, X = — a2, X = a2, a e i J . Soluţie. 1) Ecuaţia caracteristică rb — 2rx 4 f3 — 2r2 = 0 admite rădă
cina reală dublă rx = r2 = 0, rădăcina reală simplă r3 = 2 şi rădăcinile complex conjugate r4 = i, r5 = i.
Soluţia generală a ecuaţiei este
_v(;t) = cx -f- c2.t' + c3e2" 4 c4 cos # 4 c3 sin #;
2) y(x) = c e""* 4 eM(c2 cos Ix 4 c3 sin Ix); 3) <$,(*) = Cle-°x + c2e5* + c3 e~2X + c4 e2*; 4) y(x) = cx cos 5x 4 c2 sin 5% 4 c3 cos 2# 4 c4 sin 2%. 5) Ecuaţia caracteristică admite rădăcinile rx = r2 = r3 = 0, r3 = r4 =
= 5 + 2i, r5 = r6 = 5 — 2i, prin urmare y(x) = cx + C2,T + c3x2 + e3:!;[(c4+ -f- c5x) cos .Y + (c6 + c1x) sin .T].
6) y(x) = CXA-2 4- C2A- -f c3 pentru  = 0 ^i + k-2Qax + k3e~x pentru X = — a2
k± + Ă2 cos a;v 4- k3 sin AA; pentru X =
271

4. Fie operatorii diferenţiali liniari cu coeficienţi constanţi &x( v) — vIV + y", Hy) = y'" + ?-
1) Să se rezolve ecuaţiile £i(y) = 0, tz(y) = 0. 2) Să se găsească dimensiunea spaţiilor Ker £ : + Ker £3 şi Ker £ : fi Ker £2. Soluţie. 1) Polinomul caracteristic ataşat lui £i este Lx(r) = r4 + f2-
Rădăcinile ecuaţiei caracteristice sînt ri = rz = 0, r3 = i, r4 = — i. Soluţia generală a ecuaţiei £i(.y) = 0 este y(x) = cx + C2A' + c3 cos # + c4 sin %. Pentru ecuaţia £2(3') = 0, obţinem soluţia generală y(x) = kx + &2^ + ^ e - * .
2) Spaţiile vectoriale Ker £x şi Ker £2 sînt generate de mulţimile de vectori liniar independenţi ( 1 , x, cos x, sin x}, respectiv {1, x, erx). Elementele spaţiului Ker £x + Ker £2 sînt elementele acoperirii liniare cx -f- c2x + c3 cos x + + c4 sin % + kx + ^2^ + ^3e - a :- O bază în acest spaţiu poate fi considerată mulţimea {1, x, cos x, sin x, e~x) ; deci dim (Ker £x + Ker £2) = 5.
Orice vector din Ker £x, este soluţia generală a ecuaţiei S.x(y) = 0. Analog pentru Ker £2. Spaţiul Ker £x f\ Ker £2 va conţine acei vectori pentru care ci + c3x -j- c3 cos % + <^i sin # = kx + &2A- + Ase-15. Din egalitatea de mai sus obţinem cx — k, c2 = A, c3 = 0, c4 = 0, &3 = 0. Deci, dim (Ker £x fi Ker £2) = = 2. O bază în acest spaţiu este {1, x}.
5. Să se integreze ecuaţiile diferenţiale &i(y) — 0, £2(y) = 0 şi să se scrie matricea ataşată operatorului liniar
1) (D3 - 2D2) : Ker £2 — Ker tx
2) (D2 + 3D) : Ker £x -> Ker £2
unde Zx(y) = >'IV - 2 / " + y", Hy) = vv - 2 y v + y . Soluţie. Pentru ecuaţia diferenţială £i(v) = 0 soluţia generală este aco
perirea liniară y(x) = cx + c2x + Cae -f- c^'e* ; mulţimea liniar independentă {1, x, e", xex} a soluţiilor particulare ale ecuaţiei de mai sus constituie o bază în Ker S.x. Analog, considerăm o bază în Ker £2 ca fiind mulţimea soluţiilor particulare ale ecuaţiei &z{y) = 0, adică {1, x, x2, ex, xex}. Atunci,
(D3 - 2D2) (1) = D3(l) - 2D2(1) = 0 • 1 + 0 • x + 0 • ex + 0 • xex
(D3 - 2D2) (*) = D3(x) - 2D2(x) = 0 • 1 + 0 • x + 0 • ex + 0 • xe* (D3 - 2D2) {x2) = D3{x2) - 2D2(%2) = ( - 4 ) • 1 + 0 • x + 0 • ex + 0 • x<f (D3 - 2D2) (e*) = D3(ea:) - 2D2(e*) = 0 • 1 + 0 • x + ( - l ) e * + 0 • xex
( D 3 - 2 D 2 ) (xex) = D3(*e*) - 2D2(;re*) = 0 • 1 + 0 -x + ( - l ) e * + ( - l ) xex. Matricea ataşată acestui operator liniar este
"0 0 ~i 0 0 0 0 0 0 0 0 0 0 — 1 — 1
_0 0 0 0 — 1.
Analog calculăm imaginile vectorilor din baza aleasă în Ker £x prin operatorul diferenţial liniar (D2 + 3D). Matricea ataşată este
~0 3 0 O" 0 0 0 0 o o o o • 0 0 4 5 0 0 0 4
272

6. Să se integreze următoarele ecuaţii folosind metoda variaţiei constantelor
1) y" + y = 2 sec3 X 2) y" + 4y = sec 2x 3) y" + 4 v = 2 tg x 4) / " - 9_v' = cos x Soluţie. 1) Ecuaţia omogenă admite soluţia y = cx cos x + c2 sin #. Solu
ţia generală a ecuaţiei date este de forma y = c^x) cos x + c2(^) sin #, unde funcţiile necunoscute cx(^) şi c2(^) se obţin din sistemul c'^x) cos x+c a(*) sin # =
= 0, — ci(x) sin x+c'2(x) cos % = 2 sec3 x. Găsim cx(x) = —2 V sin x cos -3 xăx-\-
f d^' + Ai, Ci(x) = — cos"2 % + kx; c2(x) = 2\ = 2 tg x + k2. Soluţia gene-
J cos2% rală este
sau
y(x) = (—cos-2 x + ki) cos x + (2 tg x + &2) sin a;
cos 2# 7r V(.T) = Ai cos % + &3 sin x — , x # (2k + 1) — , &e Z.
cos A' 2 7. Să se găsească soluţiile generale ale următoarelor ecuaţii folosind metoda
coeficienţilor nedeterminaţi 1) y" + 2y' — 3y = 3e-3*, 2) >•" — 2jy' + 5y = 2 ^ + e* sin 2A;, 3) y — 9 / = cos x, 4) / " - 6v" + 1 2 / - 8v = 4^e^, 5) y'" - >'" — / + ;y = 3e* + 5x sin *. Soluţie. 1) Ecuaţiei omogene / ' +• 2y' — 3v = 0 i se ataşează ecuaţia
caracteristică r2 + 2r — 3 = 0 ale cărei rădăcini sînt rx = 1, f2 = — 3. Soluţia generală a ecuaţiei omogene este 3>0(#) = Cie* -4- cze~3x. Avînd în vedere expresia i(x), soluţia particulară ar trebui să fie de forma Ae~3x; întrucît r = — 3 este rădăcină simplă a ecuaţiei caracteristice vom lua yp = Axe~3x.. Derivăm şi înlocuim în ecuaţia neomogenă iniţial dată. Obţinem —4Ae~3x =
3 = 3e-3;r, de unde A = — — . Prin urmare soluţia generală căutată este defi-
4 3
nită prin y(x) = c-^ + cze~3x — — xe~3x. 4
2) Soluţia generală a ecuaţiei omogene este y0(x) = e^Ci cos 2x + c2 sin 2x). Pentru a determina o soluţie particulară a ecuaţiei propuse, considerăm ecuaţiile
u" — 2u' -f 5u = 2^6^ şi v" — 2u' + 5v = e* sin 2#.
Pentru prima ecuaţie, soluţia particulară este de forma up = (Ax + J3)e*. 1
Rezultă A = — , B = 0. Pentru a doua ecuaţie soluţia particulară este d e
forma vv = xex • (C cos 2x + D sin 2x), deoarece Re (1 ± 2i) = 1. Se obţine
18 — Probleme de algebră — c. 264 273

C = — — , D = 0. Prin urmare, soluţia generală a ecuaţiei date este definită 4
1 1 prin y(x) = ex(ci cos 2x -4- ca sin 2x) + — «e* = — .%'e* cos 2%.
2 4 3) v0(^) = c1 -f- ^e 3 * + C3e - a c; soluţia particulară se ia de forma yp(x) =
= A cos x -\- B sin #, se obţine A = 0, B — — — . Soluţia generală este
y(x) = c, + c2e3* + c3e_ar — — sin x. 10
4) y0(x) = cie2* + c^e2* + c3z2eM; ^ = x3(Ax + B) e2x, deoarece r = 2
este rădăcină triplă a ecuaţiei caracteristice. Soluţia generală este y = ^e 2" 4-+ c2%e2* + Cs*V* + — x*e**.
6 5) u = A x2ex deoarece r = 1 este rădăcină dublă a ecuaţiei caracteristice;
3 se găseşte 4 = —; vP = (Bx + C) cos x + (-D* + -E) - sin #, se găseşte 73 =
= D == _ , C = — , E = — — . Prin urmare y(%) = c ^ + caez + C g ^ - f 7 7 7
+ — i&V* + — l(x -4- 2) cos a; + (# — 1) sin #]. 4 7 8. Fie ecuaţia diferenţială / " + 3 / + 2 / = 4e~2*, *e[0, + co). 1) Să se găsească soluţia generală. 2) Să se determine curba integrală care trece prin punctul M0(l, 1), are
tangenta în M0 paralelă cu axa absciselor şi admite asimptota y = — 3. Soluţie. 1) Ecuaţia diferenţială omogenă y'" + 3v" + 2y' = 0 admite
soluţia generală y(x) = cx-\- cae_2j; -4- c3erx. Ţinînd seama de expresia i(x) = = ie*2* şi de faptul că r = — 2 este rădăcină simplă a ecuaţiei caracteristice, căutăm o soluţie particulară a ecuaţiei neomogene de forma y^x) = Axe~2x. Soluţia generală a ecuaţiei neomogene iniţial date este de forma
y(x) = cx + c2e-2* + c3e~x + 2xe~2x.
2) Datele problemei se scriu concis v(l) == 1, v'(l) = 0, lim y(x) = — 3. x->co
Acestea conduc la sistemul liniar c t + (c2 + 2) e~2 + c3e_1 = 1, —2c2e~" — 2
— c3e_1 = 2e~2; cx = — 3 . Găsim c% = — 4e2, c3 = — (4e2 — 1). e
Prin urmare ecuaţia curbei cerute este y(x) = — 3 — 4e2~2x _]_ 2(4e2 —
- l^"1"* + 2*e~2*. 9. Să se integreze ecuaţia diferenţială y" — -iy' — lOy = f(x), unde
r, . { 0 dacă xe (— 1, 01 î(x) — { [ sin x dacă xe (0, 1)
Soluţie. Pentru xe(—1,0) se obţine ecuaţia diferenţială omogenă y" —.2>y' — lOy = 0 c u soluţia generală y(x) — c^*2* + c2ehx.
274

Pentru xe (O, 1) se obţine ecuaţia diferenţială neomogenă y" — 3y' — 3
— lOv = sin x, cu soluţia generală y(x) = k^21 + k2e5:c -\ cos x — 130
11 . sm x. , .
130 Deci soluţia ecuaţiei diferenţiale propuse trebuie să aibă forma
Ci&~2x + c2e5*, % e ( - î , 0 ] y(x) = { ix hs _ 3 _ c Q s ^ _ _U_ ^ ^
130 130
Se impune condiţia de continuitate a lui y(x) în x = 0, şi condiţiile de existenţă a derivatelor y'(0), y"(0). Obţinem sistemul liniar cx + c2 — kj —
3 11 — k2 — , —2cj + 5c2 + 2&T — 5kz = — —— , Acx + 25c2 — 4&i — 25ft2 =
130 130 3 = care este compatibil dublu nedeterminat, prin urmare ecuaţia diferen-
130 ' tială dată iniţial admite soluţii pentru xG(—1,1); C\=— + ki, c2 =
35 = - — +h.
182 10. Să se determine soluţiile ecuaţiilor 1) xy" + 2 / — *y = 0,
2) * / + (3 + x3) y' + ?>x2y = 0,
3) y" + xy' + y = 0,
4) y" — xy' — 2y = 0,
cu ajutorul seriilor de puteri. Soluţie. 1) Se observă că x = 0 este un punct singular. De aceea căutăm
CO CO
soluţii de tipul y = xa 2 ^ an^" = 2 ^ fl»xaf*- P r m derivare deducem «=0 »=0
y' = ]C (* + w) ^*a+n-1> / = Z ) (« + ») (a + . « - 1) «„%a+n-2
şi deci . . CC CO CO
2 ^ (a + n) (a + * — 1) «„%a+K-1 + X} ?(« + ») a»* 0 1^ 1 - £ « n * a w l = 0, H = 0 M = 0 11 = 0
adică a0a(a + 1) x"'1 + «j(a + ! ) ( « + 2) z* +
_ C O
+ £ ((» + « + 2) (» + « + O <**+* + 2(« + a + 2) an+2 - «,) ***»+i = 0. n = 0
Prin identificare găsim
0ooc(« + 1) = 0, «i(a + 1) (a + 2) = 0, (« + n + 3) (a + n + 2) aB+2 = an.
275

Pentru <x = O rezultă ax = O şi «_.„ = . Deci a,v = ° — » (w + 2 ) ( n + 3 ) (2^+1) !
Îsli #
«o pt. # # 0 este o soluţie a O p t . , - 0 '
Fie a = — 1 . Găsim #aJ.9 = - si deci a, ° *»+2 — " " fi u c u W2p (» + 2 ) ( » + l ) ' (2/.)!
0 1 . Astfel ( 2 ^ + 1 ) !
oo %23> oo ^ 2 P + 1 c n x sh #
&(2p)l ^ o ( 2 ^ > + l ) ! * ' *
este soluţia generală a ecuaţiei propuse (liniar independenţa soluţiilor particulare este evidentă).
Cazul a = — 2 conduce tot la soluţia generală. 2) Găsim
>'i = *-2(i + £ ; V «=1
( !)m ^ s J i w! 3"
r,= l + p LiL^ , *#0. ^ i (3w + 2) (3w — 1) ... 11 • 8 • 5
3) fln42 = an pentru n^O. Seria y(x) = 2 an:V" ma-i poate fi n + 2
scrisă _y(#) = #0.yi(#) + <hy2,{%)> unde co / \\n _^_ co / 1\»
Vl(x) = 1 + V" i * x°-n = e 2 , va(*) = V x2"4"1
" hi 2.4.6 ... (2») ^ W & 1.3.5... ( 2 » + 1) şi « „ ^ ^ ( O ) , «i = y ( 0 ) .
Aceste serii sînt convergente pentru orice xsR, adică raza de convergenţă este infinită.
( m xzn \ co r2"+ 1
4) y= d l + F ^ + ^ p — : [ h i 1.3 ... (2» - 1) J ifcrf 2.4 ... (2»)
Raza de convergenţă este infinită. 11. Fie operatorul diferenţial liniar
i)^y) = y'—TJL-9y' + T^-1y, z-.c\i)^cv), i = (-M). 1 — x2 1 — x2
2) £(*) = y - - ]x v' - -z-^—.y, «= CV) - ev) 2(x2 — 1) 2(x2 — 1)
3) t(y) = y v + l y _ l y + 1 v> £ . C 4 ( / ) _ c o ( / ) < j = B
A'2 %3 iT
Să se determine Ker £ si să i se stabilească dimensiunea.
276

Soluţie. Variabila independentă x o înlocuim prin funcţia i —> q>(i) convenabil aleasă astfel încît să obţinem o ecuaţie diferenţială cu coeficienţi constanţi uşor de integrat.
1) x = sin i, tel - i — . Derivatele de ordinul întîi si doi ale func-l 2 2)
ţiei y vor fi , dy I ăx _ 1 :d_v,
d i / di cos i d i '
1 d / 1 dy\ 1 (d2y •. djy . \ _y = — = — — — - cos i H—- s m i •
cosi d i \ c o s i d i / c o s 3 i \ d i 2 di / înlocuim în £(v) = 0 si obţinem ecuaţia diferenţială liniară de ordinul doi d2v .—=- -f- 9_y = 0 ale cărei soluţii particulare sînt yx(t) = cos 3i, y2(t) = sin 3i. di2
Prin schimbarea de variabilă, operatorul diferenţial liniar £ devine operatorul diferenţial liniar cu coeficienţi constanţi £* = D2 + 9; mulţimea tuturor soluţiilor ecuaţiei diferenţiale S,*(y) = 0, adică Ker £* este un spaţiu vectorial real. Spaţiul vectorial Ker£* este generat de soluţiile particulare yi(x) = cos 3i, y2(t) = sin 3i ale ecuaţiei diferenţiale &*(y) — 0.
Fie S" transformarea liniară &: Ker £* —> R2 definită prin S~(yf) = — (^(^o)» JMi( o))> î = l » 2, unde i0 este un punct fixat dini > — I. Deoarece K-H} ^'(j'i) = 0 implică ^ ( i ) = 0 conform teoremei de existenţă şi unicitate a soluţiilor ecuaţiei diferenţiale, urmează că âT este injectivă; aceeaşi teoremă asigură şi surjectivitatea lui &. Deci & este un izomorfism şi dim Ker£* = = dim R2 = 2.
Perechea formată din soluţiile particulare yi(x) = cos 3 (arcsin x), y%{x) = = sin 3 (arcsin x) ale ecuaţiei diferenţiale S.(y) = 0 formează o bază a lui Ker £. Acoperirea liniară cxy(x) + c2y(x) constituie soluţia generală a ecuaţiei diferenţiale £(y) = 0.
2) Efectuăm schimbarea de variabilă # = c h i ; y' = -> y"— s h i di
— -— '-—--• obţinem ecuaţia diferenţială 2 — - — 9 — — 5 y = î sh 2 i di2 sh 3 i di ' ' di2 " di
— 0 ale cărei soluţii particulare sînt i
Vi(i) = e~T , y (i) = e5i; dim Ker £* = dim Ker £ = 2.
3) Efectuăm schimbarea de variabilă x = e '; în acest caz
J e< di ' J e2JU*2 d i j ' - e3iU^3 di* " dy\ dij
e«*\d^ di3 • di2 dy di
277-

Ecuaţia diferenţială ataşată operatorului diferenţial liniar £* este
di4 dt3 dt2 dt
ale cărei soluţii particulare sînt y^t) — e26, yz(t) = te2', y3(t) = ee cos t, y^t) = e' sin t;' dim Ker £* == dim Ker £ = 4. O bază în Ker £ poate fi considerată mulţimea {x2, # 2 ln \x\, x cos In \x\, x sin In \x\}. Acoperirea liniară a elementelor acestei mulţimi este soluţia generală a ecuaţiei diferenţiale £(v) = 0.
Observaţie. Ecuaţia diferenţială da tă în enunţ se mai poate scrie sub forma x*yiv + 3x2y" — Ixy' -f- 8^ = 0 qare este o ecuaţie diferenţială tip Euler. i '
12. Să se determine soluţiile generale ale următoarelor ecuaţii Euler
1) x3y'" + 3x2y" + xy' — y = 0 2) x3y'" + xy' — y = 0
3) x2y" + xxy' + py = 0, a, Ş,eZ
4) x2y"' + 5xy" + 4 / = In x
5) x2y" -6y = 5x3 + &x\
Soluţie. Ecuaţiile Euler se reduc la ecuaţii liniare cu coeficienţi constanţi i *•* *• ' «• r» • * d;y/dx. 1 <ty „ 1 d / 1 dy\
prin substituţia % = e \ Deci v = — / — = — — , v" = — — — — = F dt] dt ee di e( d*\e* d i j dy' di
d3v 1) înlocuim aceste derivate în ecuaţia dată si obţinem 1 = 0 a ' ' ' df
cărei ecuaţie caracteristică este. r3 — 1 = 0, avînd rădăcinile ri = 1; r2 = i VT I 4î
= — + i — , r3 = — Î ' - T - - Soluţia generală este definită prin
e2'\di2 dij e3 'Ul3 &2
--( V3" Vă
jy(i) = cxe + e 2 I c2 c o s — i + c3 s i n — ij •
înlocuim pe t = In x şi obţinem soluţia generală a ecuaţiei iniţiale y(x) C l * + - ^ [ j c o s ^ l n | * | j + c 3 f s i n ^ l n | ^ | j x^O.
13. Fie ecuaţia diferenţială î(x)y" + g(x)y' + h.(x)y = 0, cu i(x) > 0, i, g, heC°(I ) . Un punct x = 6 se numeşte conjugatul lui # = a dacă există o soluţie nenulă a ecuaţiei diferenţiale care se anulează în ambele puncte.
1) Fie u şi v două soluţii liniar independente. Să se arate că x = b este conjugat lui x = a dacă şi numai dacă
u(a) v(a) u(b) v(b)
0.
278
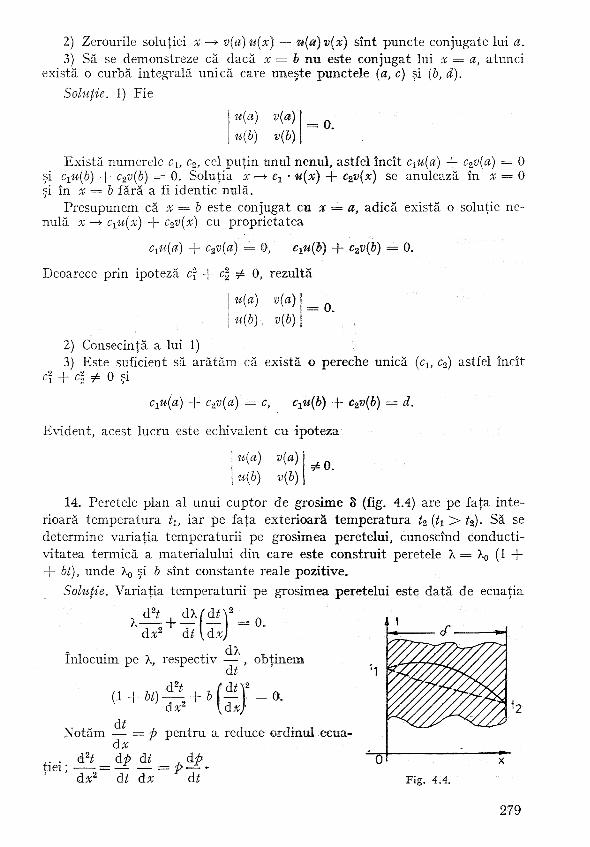
2) Zerourile soluţiei x —> v(a)u(x) — tt(a)v(x) sînt puncte conjugate lui a. 3) Să se demonstreze că dacă x = b nu este conjugat lui x = a, atunci
există o curbă integrală unică care uneşte punctele [a, c) şi (b, d). Soluţie. 1) Fie
I u(a) v(a) I u(b) v(b) 0.
Există numerele c t, c2, cel puţin unul nenuî, astfel încît cxu{a) + czv(a) = 0 şi cxu(b) + c2u(5) = 0. Soluţia x —• et • u(x) - j - czv(x) se anulează în # = 0 şi în x = b fără a fi identic nulă.
Presupunem că x = b este conjugat cu % = a, adică există o soluţie nenulă x —> cxu(x) + c2^(x) cu proprietatea
C!«(a) + c2w(«) = 0, c±u(b) -f- czv(b) = 0.
Deoarece prin ipoteză c\ + c§ # 0, rezultă
«(«) «(a) «(&)•, w(6)
2) Consecinţă a lui 1) 3) Este suficient să ară tăm că există o pereche unică (clt c2) astfel încît
c\ + c\ ± 0 şi
cxu(a) + c2w(«) = c, ^«(6) -f- c2t)(6)
Evident, acest lucru este echivalent cu ipoteza
I u(a) v(a)
d.
u(b) v(b) # 0 .
14. Peretele plan al unui cuptor de grosime 8 (fig. 4.4) are pe faţa interioară temperatura tx, iar pe faţa exterioară temperatura t2 (h > t2). Să se determine variaţia temperaturii pe grosimea peretelui, cunoscînd conductivitatea termică a materialului din care este construit peretele X = X0 (1 + -j- bt), unde X0 şi b sînt constante reale pozitive.
Soluţie. Variaţia temperaturii pe grosimea peretelui este dată de ecuaţia
x^+d_x/d!y = o_ " " dt\ dx)
dx dx2
înlocuim pe X, respectiv — ' , obţinem dt
[l + bt)
ât dx2 \dx}
Notăm •—• = p pentru a reduce ordinul ecua-
,. . d2t dp dt ^dp t i e i ; - — = —£• — = * . _ £ . .
dx2 dt dx dt Fig. 4.4.
279

Rezultă
(1 + U) ^p + bp2 = O dt
din care p = — = 0 nu prezintă interes tehnic şi (1 + bt) — + bp = 0. dx ' dt
Deci p{\ + bt) = c sau — (1 -j- bt) = c; printr-o nouă integrare obţinem dx
soluţia generală 2
b— + t = cx + k-2
Constantele se pot determina din condiţiile la limită t(0) = t± şi t(8) = t2.
ţinem k = b^ + h şi c = *3 - - fa + fe + 2). 2 28
Variaţia temperaturii pe grosimea peretelui este
t(x) = - \ ± o M-[(M-(M X
7
§ 3. SISTEME DIFERENŢIALE LINIARE DE ORDINUL ÎNTÎI
3.1. Un sistem diferenţial de forma
di p f
unde aweC°(/) se numeşte sistem liniar omogen. 3.2. Notînd Y = \yi, ,.;, % ] , A = [atj], sistemul omogen este echivalent
cu ecuaţia matriceală
dY (1') _ ^ L = AY. di
3.3. Spaţiul vectorial V al tuturor soluţiilor lui (1') are dimensiunea n. într-adevăr, oricărei soluţii Y e V îi putem ataşa vectorul Y(0)eRn. Obţinem aplicaţia liniară GT:V —>Rn, care se dovedeşte a fi un izomorfism (în baza teoremei de existenţă şi unicitate a soluţiei).
« Dacă t ~^-Yj(t),j = 1, ..., n, este o bază a lui V, atunci t —>Y(t) = ]>^ cjY}{t),
nnde cs sînt constante arbitrare, se numeşte soluţia generală a ecuaţiei (1') sau a sistemului (1). Notînd C = t[clr..., c„], TF = [Y1( ..., Y J , soluţia generală se scrie Y(t) = FF(i) C
3.4. Fie funcţiile (vectori coloană) Ylt ..., Yn pe care le presupunem cel puţin continui. Determinantul w(t) = det [Y^t), ..., Yn(t)] se numeşte determinant fundamental. Funcţiile Ylt ..., Yn sînt liniar independente dacă şi numai dacă w =£ 0.
280

Dacă Y\, ..., Yn sînt soluţii ale ecuaţiei (1'), atunci
S* (tr A) ăt
De aceea dacă w se anulează într-un punct t0, atunci el se anulează peste tot.
3.5. Un sistem diferenţial de tipul
(2) dy( 1, ...,n,
unde aip fteC°(I), se numeşte sistem liniar neomogen. Punînd F = t[fx, . . . , / J şi utilizînd notaţiile matriceale de mai înainte
sistemul neomogen este echivalent cu ecuaţia matriceală dY
(2') - i - = AY + F. dt
Soluţia generală a ecuaţiei (2') este suma dintre o soluţie particulară a ecuaţiei neomogene şi soluţia generală a ecuaţiei omogene.
3.6. (Metoda variaţiei constantelor.) Dacă Y(t) = W(t)C este soluţia generală a ecuaţiei omogene (1'), atunci soluţia generală a ecuaţiei neomogene (2')
poate fi găsită sub forma Y(t) = W(t) C(t), unde — = W~XF. dt
3.7. Fie y'j = aAyx + ... + ajnyn, j = 1, 2, ..., n, un sistem diferenţial de ordinul întîi omogen cu coeficienţi constanţi. Notînd Y =t[y1, ..., yn], A = = [atj]eS\ln'xn(R), avem . transcrierea matriceală Y' = AY. Soluţia care satisface condiţia iniţială Y(t0) = Y0 este Y(t) = e4''_'«'Y0.
Echivalent, (a) dacă A este diagonalizabilă, atunci
Y(t) =Te D ( ' -«T- 1 Y 0 ,
unde T este matricea vectorilor proprii, iar D este matricea diagonală ataşată lui A; ,
(b) dacă A are valori proprii multiple, şi se reduce la forma canonică jordan J , atunci
Y(t) = TeJi'-WT^Yo, unde T este matricea vectorilor proprii şi principali.
Exerciţii şi probleme
1. Se dă sistemul diferenţial liniar omogen Y' = AY, unde
"2 c t e i - 1 1 A = -2 tg tj
> Y = %yi, yz\
Să se arate că vectorii Yx = sin t, 2 sin t In \ tgj — — — | } + sin t Y2 cos i, 2 cos i In tg| — — — | j, + cos t + 2tgt . *(-fi)-w.
281

constituie o bază în spaţiul soluţiilor sistemului. Să se scrie soluţia generală a sistemului.
Soluţie. Se verifică imediat că funcţiile yn = sin t, y2i = 2 sin / In tg
+ sin t, componentele lui Y±, şi jVi2=cos t, y<z,%=2 cos ^ln HH; + -•- cos t + 2 tg t, componentele lui Y2, verifică ecuaţiile sistemului. Rămîne de arătat că vectorii Yx, Y2 formează o bază în spaţiul vectorial al soluţiilor sistemului. Pentru aceasta este necesar si suficient a dovedi că determinantul
W(t) = det [Y1; Y2] (0 = det
sin t
yn yn 3;2i y&.
cos t
(*) =
2 sin t In tg M + sin t , 2 cos t In «7 2 t \ + cos £ + 2 tg i
este nenul. în adevăr obţinem
sin21 W(t) = 2^^¥=0 pentru iei- — , — ] - {0}. cos 2 V 2 2 J
Soluţia generală este
Y(t) = W(t)C =
2 sin t In
sin i
M T 4 ) ]
•
cJ2sintfln W T -
cos i
+ sin t 2 c o s i l n t g l ——'—1 + cos £ + 2 tg £
LC2.
'
=
cx sin £ + c2 c o s ^
r l +s i im+C2J2cos 2 In MM)] +cos^+2tg/|
2. Să se rezolve sistemele
1) Y' = AY, A =
2) Y' = AY, A =
3) Y' = AY, A =
"— 1 2 2" 2 2 2
_ 3 _ 6 —6_
" 7 4 - 1 " 4 7 — 1
. - 4 —4 4.
"0 1 0" 0 0 1
.1 - 3 3
, Y ( 0 ) = Y 0 şi Y0 =
, Y ( 0 ) = Y 0 şi Y0 =
, Y(0) = Y 0 şi Y0 = "—2"
0 - 1.
"— 1 2
L 0
"o" 1
. 1 .
282

~—2 3 - 1 4" - 4 5 - 2 7
,—3 3 —2 5 _— 2 2 —2 3.
" 2 —1" J / 2 1.
, y(o) = y o Ş i
, y(o) == Y0 şi y0 =
y? =
i. •
î 2 1
.3
4) y = A y , A =
5) y = A y , A =
Soluţie. 1) det (A — XI) = O are soluţiile Xx = — 3, X3 = — 2, X3 = 0 care sînt valorile proprii ale matricei A. Vectorii proprii corespunzători sînt
g l = ' [ 1 , 0 , - 1 ] , «2 = ' [ 2 , - 1 , 0 ] , «« = ' [ 0 , 1 , - 1 ] .
Matricea vectorilor proprii
1 0
— 1
2 — 1
0
0 1
— 1
este matricea diagonalizatoare pentru A, adică
D = T-XAT 0
- 2 0
0~ 0 0_
Obţinem
Y{t) = TeD*T-1y(0) =
— 3 0 0
—e~3' + 2e~2' - e - 2 ' + 1
e~3' - 1
si e ,D! _
- 2 e - 3 ' -e-2' 4 2e-3'
- e - 2 ' + 2 2e~2' — 2e-3' + 2e"
P -2 * + 1 2e~3'
3e-3' - e - 2 ' 3e~3'
+ 2e-+ 3 — 3
- 2 f
adică yi(t) = - 3 e - 3 ' + 2e~2', ya(t) = 3 - e~2f, j/s(f) = 3e-3' - 3. 2) det(A — XI) = 0 are soluţiile Xx = X2 = 3, X3 = 12. Deoarece rang
(A — 31) = 1, rezultă că lui X = 3 îi corespund doi vectori proprii liniar independenţi. Fie V = \xi, x2, x3] un vector propriu. Din condiţia (31 — A) V = 0 obţinem sistemul
— 4% — 4*a + x3 = 0
—4% — 4x2 + x3 = 0
\xx + 4*2 — %3 = 0
care se reduce la ecuaţia 4% + 4*2 — #3 = 0 cu soluţia #3 = Ax1 + 4x2 sau X\ = a, x2 = b, x3 = 4(a + 6), aşa jîncît F = '[«, 6, 4(« + 6)] din care, considerînd a = 1, 6 = —1 şi respectiv « = 0, & = 1, obţinem doi vectori proprii liniar independenţi corespunzători lui X = 3: ex = *[1, — 1, 0], <fa = *[0, 1, 4]. Pentru X = 12 alegem e3 = '[1, 1, lj.
283

Deci
Şi
1 1 0
0 1 4
1 1 1.
, D =
e D/ ~e3t
0 0
T 1 • A T =
0 0 n
e3i 0 0 e12f
•
3 0 0
0 3 0
0 0
12
Atunci aplicăm tot relaţia (3.7)„ şi obţinem soluţia
Y(t) = T • e^T-1 • Y(0)
o3*
— e3t + 3 3 4 3
3 l e » 3
3) P(X) = det(A — XI) = 0 are soluţiile Xx = X2 = X3 = 1 şi deoarece rang (A— 1 • I) = 2 ^ » — r rezultă un vector propriu corespunzător la valoarea proprie triplă X = 1. Se găseşte e1 = '[1, 1, 1] vectorul propriu. Trebuie să completăm baza cu aşa-numiţii vectori principali e2l e3 care satisfac egalităţile Ae2 = 1 • e% + ex, Ae3 = 1 • es -\- ez. Dacă punem e2 = %xi, a.%, a3] şi ez — %$i, B2, 83] obţinem sistemele:
si
-ai + a2 = a -a2 -\- a3 = a ai — 3a2 + 2a3 = a
- P i + B2 = 5 - B 2 + 33 = « + &
Si - 3S2 + 263 = la + &
cu soluţia •
cu soluţia
ai = b a2 = a + b a3 = 2a ~f- b
Bi = C B2 = 6 + c S3 = a + b + c,
unde a, b, c e R sînt parametri reali arbitrari. Putem lua « = 1, 6 = . 0, c = 0 astfel încît rezultă
în concluzie
«2 = '[0, 1,2], e3 = '[0,0, 1].
T = "1 0 1 1
.1 2
0" 0 1
are forma Jordan corespunzătoare,
J = T J A T = "1 1 0 1
.0 0
0" 1 1
284

Avem
Y{t) = TeltT-1Y(0) = T-e* te* — e'
O ee
O O te'
T"1 • Y(O) = 1/2 e( -4 +4/ - /2 ] 2 / - / 2
2 - / 2
4) P(X) = det(A — XI) = (1 — X)4 şi deci Xx = X3 = X3 = X3 = 1 este valoarea proprie multiplă de ordinul patru. Deoarece rang ( l . I — A) = = 3 # n — k rezultă un singur vector propriu corespunzător e1 = '[16, 16, 0, Oj. Completăm baza în R4, cu vectorii principali e2, e3, et aşa încît
Ae2 = 1 • ez + elt Ae3 = 1 • e3 + e2, Ae4 = 1 • e4 +
Obţinem
e%
şi deci
T =
-8, 0, 8, 0], e3 = '[10, 0, —6, 4], eA = '[—13, 0, 5, - 6 ]
, J == TJAT 16 16 0 0
- 8 0 8 0
10 0
- 6 4
- 1 3 0 5
- 6
1 0 0 0
1 1 0 0
0 1 1 0
0' 0 1 1.
Y(t) = TeJ'-T-1F(0) = T
e' te'
0
0 0
ee
0 0
2
te'
e' 0
te'
T~i-Y(0),
Y(t)=e'
— t3-4t2-M+l — / 3 + 4 / 2 + 3 / 3 3
— / 3 - 4 / 2 - / ^.p + 6t2+4t 3 3
— / 3 - 6 / 2 - 4 / A / 3 + 6 / 2 + 4 / + l -lf-et2-2t —t3+8t2+lt 3 3 3 3
2/2 -It
- 3/ 2f~ + 3* 2
r — 2
i . 3 .
- 2 / 2 - 3 / t - 2 /
= es
~4/3 4- 18/2 + 14/" 4/3 + 24/2 + 23/ 6/2 + 1 5 / - 3
_ 6 / + 3
- 3 2/2 + 5/ 2t+ 1
5) P(X) = det(A — XI) = X2 — 3X + 5/2 = 0 are soluţiile Xi = 3/2 4- l/2i, X2 = 3/2 — 1/2 i ce reprezintă valorile proprii ale ma
tricei A în C
285
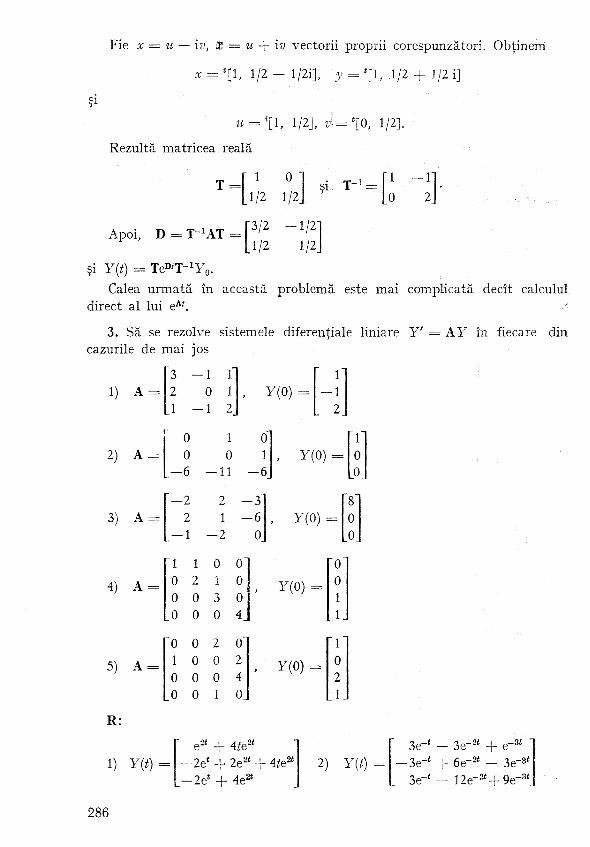
Fie x = u — iv, se = u + iw vectorii proprii corespunzători. Obţinem
x = '[1, 1/2 - l/2i], \\, .1/2 H- 1/2 i]
si
« = '[1, 1/2], t>!=<[0, 1/2].
Rezultă matricea reală
" 1 0 ' .1/2 1/2
"3/2 —1/2'
.1/2 1 /2j
şi. T~1 = "1 0
- 1 " 2.
Apoi, D = T X AT =
şi Y(t) = T e ^ ^ Y o . Calea urmată în această problemă este mai complicată decît calculul
direct al lui eA*.
3. Să se rezolve sistemele diferenţiale liniare Y' = AY în fiecare din cazurile de mai jos
1) A =
2) A==
3) A =
4) A =
5) A
R:
1) Y(t) =
3 2 1
— 1 1" 0 1
- 1 2. , Y(0) =
0 0
-6
1 0 1
o" 1
— 6_
2 2 1
2 1
- 2
- 3 " - 6
0.
1 0 0 0
1 2 0 0
0 1 3 0
0" 0 0 4.
0 1 0 0
0 2 0 0 0 0 0 1
0" 2 4 0_
Y(0)
. yw
Y(0) =
Y(0) =
e2{ + 4fc2S
- 2 e f + 2e a + 4fe2J
—2e* + 4c2* 2) Y(t) =
3e-' - 3e-2t + e"3{ " -3e-e + 6e-2 ' - 3e-3* 3e~' - 12e-2J+9e-3J.
286

3) Y(t)
5) Y(t) =
e 5<
2eE
- e 5 S
+ le~3t 1 t _ 2 e - 3 '
+ e"34 j 4) Y(*)
' - l / 2 e f + e2{
e2J
1
e3e
e4<
+ e3'
l/2e38 '
2e 2e2f
2S
— t 2e2t
e2<
1 2
4. Să se găsească soluţiile generale ale următoarelor sisteme
%' = 2x-\- y — z 1) = 5x — y
3y'
[ x' = —Ix + y i x' = 5x
2 = 3^—3_y — x
Soluţie. Folosim polinoamele de interpolare pentru calculul exponenţialei de matrice.
1) Scrisă matriceal soluţia sistemului este
Y(t) = eA-'C, unde Y(t) = '[*(*), y(t), z(t)], C = '[clf c2, c3].
Pentru sistemul (1) găsim
, P(X) = det(A - XI) = (X + 1) (X - 1) ( X - 3); Xi = — 1; X 2 = 1, X3 = 3.
2 1 - l " A = 1 2 - l
„3 - 3 - l
Dacă f(X) = ew, atunci f(—1) = er*. f(l) = e', f(3) = e3'. Folosind polinomul Lagrange, deducem
+ 1
f(A) = A2
3
f ( - l ) f(l) , f(3y + A
- f ( - l ) f(l) +
f ( - l ) + | f ( l ) - | f ( 3 )
2 2
înlocuind f(A) = ext şi f(X) = ew obţinem
. 4 8
2 7 —2 1 8 —2 0 0 1
+ (M) 2 1 1 2
.3 - 3 +
+ 1 - --* ' -£ 1 • e-
c + — ec e; ,3«
- -^-e- £ +^e s +-8 4 8
• e_£ + — e A 8 4 8
3e< __ 3 _f
2 2
1 0 0 0 1 0 0 0 1
- e ' + l e 3 ' —
— e~e e' + — e3i — 8 4 8 4 3 t , 3' ,
— e' + — e - '
4 e3'
4
287

Soluţia sistemului este Y(t) = eAt. C sau explicit,
3 - Î ! ) + J1 ^ 4/ U "
x(t) = e- s | — ^ Cl + ^ Ca + - 3 | + e ' l - Cl - - c J + e3Jl'-1 + - ca ~ 4 J
Ci Cg
adică
2) A = 1'
x- = Aje' + &2e~* + k3est
y = 1 / 5 V + kz€-f + A3e3i
x = 6/5^e ' + 4Ă2e-s
P(X) = det(A - XI) = (X + 6 + i) (X + 6 - i ) ; -2 — 5J
Xi = — 6 + i, X2 = —6—i. Pentru f(A) folosim
(*) f(A) = Z1f(X1) + ^af(X2). Zx, Z2eS)\l2x2(R),.
Particularizăm şi fie f(X) = X + 6 — i = X — Xx; rezultă f(A) = A + 4- (6 — i)I şi f(A) = Zx • 0 + Z2(—2i), deoarece f(X:) = 0, f(X3) = — li.
Deci, A + (6 - i) I = Z2(—2i) sau Z2 = — — [A + (6 — i) I] = 2i
1—i J_ • ~i~ T
. 1 + i Pentru a-1 determina pe Zx particularizăm pe f(X);
fie f(X) = X — X2 = X + 6 + i şi deci f(X1) = 2i, f(X2) = 0. Procedînd analog, f(A) = A + (6 + i)I = Zx • 2i + Z2 • 0, găsim
Zi = - [A + (6 + i) I] = 2i
1 + i i_ 2 2
1 —i
în concluzie
f(A)
1 + i __i_ 2 2
1 - i f ( -6+i) +
1 + i J 2 2 . ' 1 - i
f ( - 6 - i)
288

oricare ar fi funcţia f. în particular, luînd f(X) = e*', deducem
r 1 — i i 1+i _±\ 2 '2
1—i e'(-«+i)« -f 2
1+i . 2
e ( - 6 - i ) « =
= e' -6 ' "cos t — sin t sin t — 2 sin / sin t + cos £_
Din Y(i) = eA* • C, obţinem
{ x{t) = e_6![c1(cos i — sin /) + c2 sin 2] >'(i) = e-6'[—2cx sin i + c2(sin t+ cos <()]
sau
3) A =
x(ţ) = e~6 (ki cos £ + k2 sin 2),
>'(/) = e-6([(Ă1 + Ă2) cos t + (kz — kx) sin t]
P(X) = (X — 4)2, X = 4 rădăcină dublă. Aşadar f(A)
= Zjf(4) + Z,f'(4). Particularizînd, alegem f(X) = X — 4; atunci f(A) = A - 41 şi deci f(A) = A - 41 = Zx • 0 + Z2 • 1, deoarece f(4) = 0, f'(4)
1 —11 = 1. Rezultă Z2 = A — 41 = . Pentru a-1 determina pe Z1 alegem
1 —1 f(X) = X si deci f(A) = A = \ZX + Z2, deoarece f(4) = 4, f'(4) = 1.: Rezultă
"1 01 Z1 = ( 1 / 4 ) ( A - Z 2 ) = 0 1
f(A) = 1 0 0 1
în concluzie
f(4) + 1 — 1 1 - l
f'(4).
Pentru f(X) = ex', găsim
•1
L° 0"
ij e4t + "1
Li — 1"
— l J fe4' = 1 + t —t
t 1 — 1
Soluţia generală a sistemului este definită prin
Y(t) Q« 1 +t - t ' t i — t
C
sau * = kj.eu + k2teif
y = (kx - kz)" + £2fe4i
5. Să se rezolve sistemele
1) x = y / = * , 2) z' = x
x' + y — z = 0 / - * = 0 , 3)
. z' + x — z — 0
%' = y + 2 y ' = z + a; 2' = x+ y
19 Probleme de algebră — c. 264 289

\x' = 2x + y — z 4) 1 „ 1 7)
"1 „i
y' = x -\- 2y — z , z' = 3x ~ 3_y — z
x' = 3A — y + sin t y' = 7>y — Ax + cos 2;
A' = 2>x + _y y = —Ax — y z' = Ax — 8_y — 22
[y — z' + x = o 2' — A' + y = 0 , |A' — v' + ^ = 0
*' + y = y + e' [2.^' + / = — 2>' + cosi
8)
A' = Ax y = x — 2^ 2' = A — 4jy - f 2
[ ; j'(0) = - 1 ;
V == — 2x + y — 2>z y' — — 3 A — 2v + z, z' = x — 2>y — Iz
10) \y
12)
x'
y'
x' v' z'
~r
+
— = =
Ax + iy 2x -f- 5y
— x — y z — x — — 2x — 1
=
y
t e«
22
- 5;
13)
15)
îx' = 5A - 2y + 42 7) | v' = Ax — y + Az ,
[z' = 2% — 2>y — z
14)
= — v + t2 + 6/ + 1 = x — 3/2 + 2>t + 1
A' = A' COS 2
y = x e~sin t
z' + AA/3 = sin
x' + >'V3 = sin t,
y + W3 = sin /
I A' == v — A' -f ee
y' = z — x + cos t, .2' = —x
18)
19)
21)
(Ax' + 9>'' [ 3 A' + ly'
+ AAx + 49jy = t + 34A + 383; = e*
2A + y = e2i + f
#' = 7A + 3jy + 42 — 8w y = 6A + 4>' + 42 — 8M 2' = 6A + 3_y + 52 — 8u u' = 7A — l l j ; + 222 — lOu
20) P ' + ^ = 3/
\ A " + y - ly = e2t
L A' + y — a? + 3y 1.
R: Sistemul este echivalent cu ecuaţia %'" = x.
-— r V^3 Aceasta are soluţia x(t) = cx e* + e 2 c2 cos / + c3 sin -^- t ''['
_•_ V3 2 2
V3
Din
\' = A' deducem _y(tf) = c± e* — a/2e 2 ' I (c3 + V3 c2). sin - ^ - t — (^3 c3
2 *] Ş c2) cos ——n şi din 2 = y , rezultă z(i) = ^ e ' — 1/2e 2 ' (c2 +
+ V3 c3) cos f + + (c3 — V3 c2) sin d • 2 2 J
290

2) (I) Prin eliminare obţinem ecuaţia y" — y" + y' — y = 0 cu soluţia MO = c i e * + c2 cos f + c3 sin i. Apoi *(£) = (ca + c3) cos t + (cg — c2) • sin if, z(2) = cx e* — c2 sin J! + c3 cos £.
(II) Căutăm soluţii de forma % = aert, y = bert, z =cert. Ecuaţia caracteristică are rădăcinile ri = 1, f2 = i, f% = —i-
(III) Forma matriceală a sistemului este Y' = ÂY unde Y = \x, y, z],
A = 0 0
-l
1 0 0
r i i
î . Se obţine soluţia Y :MC.
3) Prin adunare deducem d(x + y + z)
dt 2(x + y + z), de unde x + y + z = kx e . Apoi,
d(y-z)_
— (v — z). Deci _y — z — &2 e~{. Analog, din —-—-—— = y
dt
x, obţi-
1 + c2 e2i, z = dt
nem y — x = £3 e*. Rezultă # = ^ e~* -f c2 e2', j> = c3 e = (c3 - d) e~* + c2 e2'.
4) Deoarece matricea sistemului are valorile proprii Xi = — 1, X2 = 1, X3 = 3 şi vectorii proprii ex = ' [1, 1, 4], £2=
(L5> *» 6 ] , ^ = ' [1, 1, 0] soluţia sistemului Y' = AY este Y(*) = eA< C = T eD< T 1 C, unde
D
iar
1 0 0
0 1 0
0 0 3
T = 1 1 4
5 1 6
r i 0
este matricea vectorilor proprii.
d*
5) Integrînd prima ecuaţie, se obţine x = c1 cil. Din a doua ecuaţie
-j- 2y = c te4e rezultă y --1 ait eM + c2 ( iar din a treia, z = — e4' +
9 + _ C 2e- 2 ' -j- c3es.
6) Considerăm mai întîi sistemul omogen
{ %' = 2>x — y
y ' = 2>y — Ax
care are soluţia x = cx e( + c2 eM, y = 2cx e* — 2c2e5i. O soluţie particulară a sistemului neomogen are forma
f xv = «! sin i + &j cos j {Vj, == a2 sin t + 3 cos t

Punînd condiţia ca aceste funcţii să verifice sistemul neomogen obţinem «1 = 361 — \ , «2 = 3&x — 4&! + 1, &! = — 3 % -f a2 — 1, b2 — —2>a2 + Aax
21 _ 1 _ _ _ 3 6 , _ _ 2 4 26"' * ~~ 26 ' *" ~~ _ ^ 6 ~ ' 2 ~ ~26
cu soluţia «! =
Soluţia generală a sistemului iniţial este
x = cx e* + ca e5' H (—21 sin £ + cos t) 26
3/ == 2cx e' — 2c2 e5e H (—18 sin 2 + 12 cos *)
, t eR.
13
25 Din condiţiile iniţiale rezultă cx = 0, c2 = — — , aşa încît soluţia problemei
este definită prin
x = e5t H (—21 sin t + 12 cos t) 26 26
y = - — e5f + — (—13 sin t + 12 cos t) 13 13
, * e R .
7) '#(*) = 3c2e* + 9c3^e* y(*) = 9c3(l - 2*) e* - 6C2e< , * e f t . *(*) = C l e- 2 t + 20c2e' + c3(60t — 16) e*
S)
X(t) = Cj =>-« I „-t
MO = % e~4J + e-f
z(t) = Ci e~4' + e~*
c2 sin 2V3 2 — =—- cos 2^/3 £ V3
c3 sin 2 V3 * + 2Ca + 2C2 cos 2V3 * V3
, teR.
(c2 + c3) sin 2 V3 £ + ——• cos 2y3 i
9) Implicit se presupune că %, _y, 2 sînt funcţii de clasă C°° pe un interval deschis din R. Adunînd ecuaţiile avem
(1) x + y + z = 0.
înmulţind prima ecuaţie cu x', a doua cu y' şi a treia cu z' şi adunînd, găsim xx' + yy' + zz' = 0, adică (2) ^2 + y2 -\- z2 = 2c2. Rezolvînd sistemul (1) şi (2), rezultă funcţiile continui
y -x+V4cf-3*2 — x—4Ac\-2>x2 _ l\cx\
—- % ^ —r-' 2 V3
292

A treia ecuaţie a sistemului dă 3x' = V4cf — 3x2. Făcînd calculele rezultă soluţia generală . : r
LC-\ . t C2 x = —=• s i n ==—
V3 V3
y r?, sin- V"3 C 2 / — • C 2
h cx cos 7=— V3
«elî.
Cx . t Co t — C9 Z = -=r SIIl j = Ci COS rrr
V3 V3 V3 10) Sistemul se reduce la ecuaţia x" + x = 3zl3 — t + 5, a cărei soluţie
generală este definită prin
% = d cos i = ca sin £ + 3/2 — 2 — 1, teR. Apoi
y = cx sin t — c2 cos 2 + t2 + 2, i e i { .
Pentru £ = 0, deducem cx = 2, c2 = 3.
11)
x(t) 17
sin tf 3
17 cos £ -4- c2 + 3cx e
4i
2 1 4 y(2) = — — e' sin t -\ cos t — 4c± eil,
3 17 17 teR.
12) Din a doua ecuaţie a sistemului, x = y' esin ' deducem %' = e s i nV' + + cos t es in ,v' = esiaty" + x cos £. Deoarece x' = x cos £ rezultă esin'_y" — = 0 sau y" = 0 şi deci 3/ = cx2 -4- ca, * = cx esin '.
13) *(*) = cx e~7t + c2 e-2' H f
14 e — •
v( ) = C le-7S- c2e
31 196 5
+ 1-\ e-, 98 17 24
' teR.
14) Funcţiile x, y, z sînt de clasă C°°. Prin adunarea ecuaţiilor rezultă x + y + z = V 3 sin £. Scăzînd ultimile două ecuaţii obţinem
V 2>x' -\- z — y = cos 2! (*)
Deci, ^ 2>x" = v' — z' — sin £ = — <J 3x sau %" + x = 0 cu soluţia generală x = cx cos t = c2 sin £. Din (*) rezultă 3/ — z = V 3%' — cos 2!, iar din x + 3' + 2 = "v3sinz! obţinem y -4- 2 = V 3 sin t — x'.
Atunci,
x = j — — — v3cxjsin t + (c2 — c3) cos tf
y -—=- — \ 3c2 j sin t -4- (c3 — cx) cos it j! e iJ.
z = j - p - — VJc3 J sin £ + (ci — ca) cos i, unde cx + ca + c3 = 0.
293

15) Căutăm soluţii de forma x = «e" , y = 6e r ( , z =-- ccrt. Din condiţia ca aceste funcţii să satisfacă ecuaţiile sistemului obţinem
' (r + 1) a + b + Ic = 0 a + {r + 1) b — c = 0
2a + b + (r + 1) c = 0.
Ecuaţia caracteristică (r — 1) (r + 1) (r -f- 3) = 0 are soluţiile r — 1, r — — 1, y = — 3 . Deoarece a — —2r — 3, & = r -f- 3, c = r2 -j- 2r, rezultă
«i = — 5, &i = 4, cx = 3 pentru r = 1.
aa = — 1, b2 = 2, c2 = — 1 pentru r = — 1.
« 3 = 1 , 53 = 0, c3 = 1 pentru r = —3. Deci
% = — 5cxe' — c2e~* + c3e~3i
jy = 4cx e* + 2c2 e~* 0 = 2>c1 es — c2 er* + c3 e~3t, 2 e 11.
16) Putem folosi metoda eliminării şi obţinem ecuaţia
z'" + z" + z' + z = —ec — cos t
cu soluţia generală 1 j • * 2 = cx e - i + c2 cos t + c3 sin t —- — e + — (cos £ — sin tf). 4 4
Din ,T = —z' şi r = x + #' — e( se obţin x şi jy, teii.
' x{t) = (^ + 2c2£ + c3i2) e*
17)
z(t) i ( C 2 - 2 C l - l C 3 ) e ^ ( C 2 - | ) *e* c3i2 e{
18) Matricea sistemului are valorile proprii Xx = X2 = 1 şi X3 = ?v4 = 2. Soluţia sistemului Y' = AY este
y = eA<C = Te^T-1C.
19)
19 56 29 , 4 /-l*" *(,!) = Cl e-6t + c2 e-s H t
7
Wrt = 4cx e6s - c2 e-« - — < + — + — e*. * e R. w 3 9 7
20) Folosim metoda eliminării. Din prima ecuaţie rezultă x" = —1 /2jy" —3. Din a doua găsim o ecuaţie de ordinul doi neomogenă
•v" - 2v' + 4y = —2e2 ' - 6.
294

21) Scăzînd ecuaţiile sistemului avem 7>x — 2y — ea e~f + t + 1 sau
y == — # — 1 /2 e2' -f- 1 /2 e* — \\2t — 1/2 şi înlocuind în prima obţinem o
5 3 1 ecuaţie numai în # cu soluţia generală %(0 = c,e -7J 4 e 2 ' + — t——•
' 14 7 49 Apoi se determină y.
6. Să se determine soluţia generală a sistemelor liniare şi neomogene
1) Y' = AY + F, A =
2) Y' = AY + F , A =
3) Y' = AY + F , A =
folosind metoda variaţiilor constantelor pentru determinarea soluţiei particulare a sistemelor neomogene.
Soluţie. 1) Soluţia generală a sistemului omogen Y' = AY este
1 1 0 - 1 0 1
.— 1 0 0
' — 5 T 1 - 6
Y =
Y =
' 4 - 1 8 9" - 1 5 - 2
_—3 14 — 6 , Y =
3'i 3;2
. ^ 3
' yi .yz.
yi y*-
.ys.
, F =
, F =
F =
ec
cost 0
e~2t_
4+m—9t2
2f— 5t 6t2- nt—s
y\ • cx e"' + c2 sin t — cs cos /, y° = c2 (sin / + cos /) -4-
c3(sin t — cos t), yl = Cj e~* + c2 cos t 4- c3 sin z!.
Pentru a determina soluţia particulară a sistemului Y' = AY + F folosim metoda variaţiei constantelor. Anume, căutăm soluţiile
Vip = ci{t) e - ' + cz(t) sin t — c3(0 cos t
y'2P = c2(0 (sin i + cos i) -j- C;i{t) (sin / — cos /)
y'av = ci{t) e~* + c2(/) cos ^ + c3(t) sin /
şi determinăm funcţiile ct: IczR —*• R, i = 1, 2, 3 din sistemul c'i(t) e~* + 4(t) sin * — cs(0 c o s t = ee
c2(z!) (sin t + cos £) 4- c's(t) (sin / — cos t) = cos i
c'i{t) e_l + 4 ( 0 cos 2 + c3(;!) sin / = 0.
Se obţine
c i(0 = —te< — c o s t], c's(t) = — (sin t — cos jţ) H (sin t + cos t)
cm cos £ 'sin t — cos 0 (sin t + cos 0
295

şi prin integrare avem
1 e' Cl(t) = — e2* — — (cos t + sin t), cM)
4 4
t sin 2t 8
e , 1 - 2 — cos t -\ sin t +
c 3 ( ^ sin21
4 sin 22 o'
8 sm t.
Aşadar soluţia particulară este
e cos t , t , . J'ip = — " + —- ( s m t + cos t)
e 2 — -f — cos 2 + 1/2 sin £ 2 2 e cos J tf ,
>'3„ = — h — (cos t — sm t)
aşa încît soluţia generală a sistemului va fi
Vi = }'î + }'iP = ci e~f + c2 sin t — c3 cos t + cos £
+ — (sin t + cos t).
y% = yl + ^23, = c2(sin 2 + cos t) + c3 (sin t — cost) — — +
+ — cos t + 1/2 sin t
ys = yî + y-3p = cx e~l + c2 cos 2 + c3 sin cos t
-\ (cos t — sin t), teR. V 4
^ = 2Cl e~*e + c2 e~7' -4 e* + — e"2*
2) Procedînd analog avem
40 5 ^ a = C le-4 £ - c2e"7t + (1/40) e< + (3/10) e~2t, * e B .
' yx = 3c2 e* + c3(2 + 6t) e' — 1 3) j 2 = - C l e f - c2(l + t) ef + c3(2i + i2) ef + t
. >-3 = - 2 C l e * - e2(3 + 2*) el - c3(6# + 2f2) es + £2, «gf i .
7. Fie un sistem cu „n" grade de libertate care vibrează liber neamortizat. Să se determine ecuaţiile de mişcare şi modurile proprii de vibraţie.
Aplicaţie: cazul a trei mase.
296
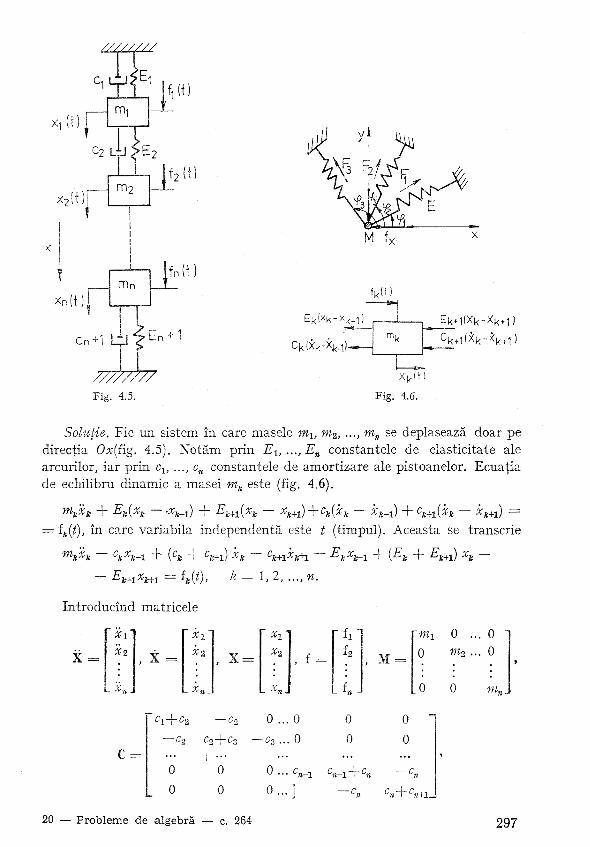
77777777 Fig. 4.5.
fkn: E k l x k - x ^ )
Ck(Xk-*l<-l)-
_|k_+l(Xk-Xk + l ) c k* i ( *k - * i<+ i>
Xk(t!
Fig. 4.6.
Soluţie. Fie un sistem în care masele mlt mz, ..., mn se deplasează doar pe direcţia Ox(iig. 4.5). Notăm prin Elt ..., En constantele de elasticitate ale arcurilor, iar prin clt ..., cn constantele de amortizare ale pistoanelor. Ecuaţia de echilibru dinamic a masei mk este (fig. 4.6).
mtxj. + Ek(xk — .xk_j) + Ek+1(xk — xk+1) + ck(kk — V i ) + ck+1{xk — xk+1) = — îk(t), în care variabila independentă este t (timpul). Aceasta se transcrie
«*** - cA-i + K- + c*+i) x* - c*+i*rt - E*x*-i + (Ek + Ek+1) xt -
^k+l-^k-H Ut), 1,2,
Introducînd matricele
X " * l l
X2
- Xr, -
, x = " i r
x%
i- x n -
, x = " * 1 ^
^ 2
- *»-
, f = rfri
f2
u f j
, M = % o 0 m2
o o
o o
c =
Ci + C2
— c2
0 0
— Ca
C2~T"C3
0 0
0 .
— c 3 .
0 . 0. .
. 0 . 0
•cn
i
0
o
—c
o o
20 Probleme de algebră — c. 264 297

E1+E2
-E2
0 0
-Ei E2+E3
0 0
0 . -E3.
0 . 0 .
0 0
• E«-i+E„ • - E .
0 " 0
-E« EB+En+t
E =
ecuaţia matriceală de echilibru dinamic pentru cele « mase este
MX + CX + EX = f.
în cazul cînd vibraţiile sistemului sînt libere neamortizate, ecuaţia se reduce la
MX + EX = 0,
deoarece în acest caz C = 0eSttinxn(R), iar f = QeSHmxl(R). Pentru ultima ecuaţie se caută soluţii de forma:
X = A sin (pt + 8) cu A * i
reprezentînd o mişcare armonică sincronă în toate coordonatele. în acest tip de vibraţie, configuraţia generală a mişcării nu se schimbă
cu excepţia alungirii care variază peste tot, armonic în t imp, astfel încît raportul dintre oricare două alungiri xt(t) şi x}(t), i^j, rămîne constant în timpul mişcării.
Prin înlocuire obţinem sistemul
(E - p2M) • A = 0, unde p% = X.
Pulsaţiile proprii sînt soluţiile ecuaţiei algebrice
det (E — XM) = 0
care are n soluţii (valori proprii, ale iui E) pozitive (consideraţiile fizice implică faptul că matricele M şi E sînt pozitive definite). Fiecărei pulsaţii \ îi corespunde un vector A(fc) cu coordonate reale A(*>, care este soluţia ecuaţiei matriceale
(E - XjM) A<*> = 0.
Vectorii proprii A(A,), denumiţi şi vectori modali, formează o bază . Aplicaţie. Fie un sistem compus din trei mase: 1 «Î 1 = «t, »Ja = Im, ms.=
= 2>m, E1 = 2a, E2 = ia; deplasarea orizontală a maselor se face fără frecare. Ecuaţiile de mişcare devin
m{x\ + EiXi — Ei%2 — 0 m2x2 — Ei%! + (Ei -\- E2) x2
m3x3 — E2x2 + E2x3 = 0 Esxs = O
sau m'x1 + 2ax1 — la x2 = 0 2m'x2 — 2ax\ + 6ax2 — iax3
3m'x3 — iax-2 + 4a3%3 = 0. == 0
298

Notfnd mf? , ecuaţia pulsaţiilor proprii
2—X —2 0 —2 6 - 2 X —4
0 —4 4—3X = 0,
sau
6XS 88X3 + 48X = 0, are soluţiile Xa = 0, X2 19 — V73 1,74,
Î 9 + V 7 3 . . X3 = i w4 '6-
Prima valoare fi0 = 0, corespunde mişcării de „corp rigid" a ansamblului celor trei mase, deoarece în acest caz, vectorul propriu corespunzător este \0.) _ t[Xi a> a j ^ adică cele trei mase se deplasează identic, arcurile nu se deformează şi poziţiile relative ale elementelor din sistem nu se modifică. Mişcarea corespunzătoare nu poate fi o oscilaţie, deoarece pentru %\ = x% = %z rezultă x1 = x% = x3 = 0 care caracterizează mişcarea uniformă. Din acest motiv, din punctul de vedere al vibraţiilor, sistemul are efectiv două grade de libertate şi anume cei doi vectori modali corespunzători la X2 şi X3. A'ectorii modali normalizaţi sînt
A«2> = *[1 0,13—0,427] şi A® = '[1 —1,3 0,5307].
§ 4. LINII DE CÎMP ŞI SISTEME SIMETRICE
4.1. Fie X = (Xlt.... Xn) un cîmp vectorial de clasă C1 pe o mulţime deschisă şi conexă D c i R " . O curbă <*.: I—* D de clasă C1 cu proprietatea a'(t) = X(a(t}), oricare ar fi tel, se numeşte linie de cîmp sau curbă integrală a cîmpului vectorial X (fig. 4.7).
Explicit, a = (xlr.... x„): I —> D, xx = = xx(t), ..., xn = xjfy şi deci
dXl (t) = Xfait) xn(t))
(t) = X.(Xl(t)),..., *,(*)).
, . ^
d#
d x , di
Fiind dat X, teorema de existenţă şi unicitate asigură existenţa locală a unei linii de cîmp, adică a unei soluţii a sistemului precedent.
cC i î )
Fig. 4.7.
Uneori se foloseşte scrierea d%
X^xx,..., xm) dx„
X„ •H, Xn) [=ăt),
cu convenţia că dacă un numitor este funcţia zero, atunci numărătorul respectiv trebuie egalat cu zero.
299

4.2. Fie X = (Xlt ..., Xn) un cîmp vectorial de clasă C1 pe D. Un sistem diferenţial de tipul
d*i = = dxn
Xi{xi, .... *,) ' " Xu(xu .... xn) se numeşte sistem simetric.
O funcţie f: D —> R de clasă C1 se numeşte integrală primă a sistemului simetric dacă Dxf = 0. Echivalent, f este constantă de-a lungul oricărei soluţii a.: I ~+ D a sistemului, adică f o a = const.
Dacă X este un cîmp de clasă C1 şi xeD este un punct în care X(x)j£0, atunci există o vecinătate U a lui* astfel încît sistemul simetric admite n—l integrale prime f1( ..., in_x funcţional independente pe U şi orice altă integrală primă este o funcţie de acestea. în aceste condiţii soluţia generală a sistemului poate fi scrisă sub forma
Uixx, .... xn) = cx, ..., f„_i(#i, ..., x„) = cn_x.
Dacă se cunosc n—2 integrale prime funcţional independente ale sistemului simetric, atunci găsirea soluţiei generale se reduce la aflarea soluţiei generale a unei ecuaţii diferenţiale de ordinul întîi.
4.3. Pentru determinarea soluţiei unor sisteme simetrice particulare se utilizează metoda combinaţiilor integrabile. în ipoteza că există funcţiile
\ : D r-+R, i=l, ..., n, de clasă C1, astfel încît 2 3 \ dxt = df şi 2 3 \Xt = G, i= i i = i
n
1 2 3 \ d%{ ,r din * * = £ * ! • „ *
Xt » 0 » = 1
rezultă df = 0 şi deci î(xv ..., x„) = c, adică f este o integrală primă a sistemului simetric. Expresia 2 3 \ dx(
= df, cu condiţia 2 3 ^ ^ = 0 » se numeşte combinaţie integrabilă.
4.4. în cazul spaţiului cu trei dimensiuni, se utilizează notaţiile v(x, y, z) = — Vx(x, y, z)i + v2(x, y, z)j -+- vs(x, y, z)k, r = xi + yj + zk, dr = dxi -f-•+ dyj + dzk. Sistemul simetric
dx ___ dv __ d2 »i(*, 3', 2) WzC*. .% 2) v3(#, y, z)
. > —> este echivalent cu ecuaţia vectorială » x d r = 0 .
Exerciţii şi probleme
1. Se dau cîmpurile vectoriale definite respectiv prin
1) v(x, y ,z) = xzî + z(2x — y)J — x2k, x=£ 0, £# 0,
2) v(x, y, z) = x2(y + z)î — y2(z + x)j + z2(y — x)k, xyz^ 0,
300
3) v(x, y, z) = y2z2i + xyz2j + xy2zk, xyz ^ O 4) v(x, y, z) = xzt + yzj — (x2 + y2)k, x > O, y > O, z > O, 5) v(x, y, z) = #(3; — z)i — y(x — z) j + ^(^ — jy) A, * > O, >' > O, z
Să se determine liniile de cîmp. Soluţie. 1) Sistemul
dx __ djy ___ dz xz z(2x — y) —x2
implică
# d# + z dz = O, —^ - = — • dx x
Deci x2 + z2 = ct \ x(x — v) | = cz pe ## O, z=£ 0. 2) Din
d;v _ d^ d^
~*\ deducem
x\y + z) —y2(z + x)
dx dy dx i
x y x x(x + ^) —-jy(z + #)
d# dy —dz x2 y2 z2
z2(y — x)
dy , dz
y z , 0
dx _j_ d_y ( dz 2 *"' 2 "*" 2 x y z*
x + z —z—x —y-\-x 0
1 1 1 Rezultă \xyz\ = clt 1 = cz, pentru xyz^O.
" x y z 3) Sistemul
dx dv dz y2z2 xyz2 xy2z
xyzj± 0,
xyz£ O,
conduce la dy dz dx dy z y y x
adică y2 — z2 = cn, x2 — y2 = c2, %j)'z 0. 4) Din
dx dy dz „ — = — = m a.» *>°< ^>o, *>o %z 3'z ~~ ( * + . / )
rezultă d% dv xdx_ydy_ zdz _ xdx -\- y dy + zdz x y x2z y2z —z(x2 + y2) 0
Deci x = c±y, x2 + y2 + z2 = c2, %, _y, ze (0, 00).

5) Deoarece dx
x(y — z) dx X
dy -y(x-dy y
dz z) z(x — y)
dz dx (
Z X
dx + dy + dz 0
dy dz y z .
y — z —(x — z) x — y 0 găsim x + y + z = cx, %wz = c2, #, v, ze (0, oo).
2. Să se afle liniile de cîmp ale cîmpurilor vectoriale 1) V(r) = axr, a = const ^ cf, r #Xa
2) F(#, 3', z) = grad f x grad g, f = —, g = || a x r ||2, 2 = const 56 0. r
R: 1) %2 + y + z2 = c1, (a,r) = c%, 2) x + y + z = c t, #* + _y2 + z2 = c3. 3. Să se determine un cîmp vectorial ale cărui linii de cîmp sînt
1) x2 — yz = c1( j ' 2 — z% = c2 v %
2) % + arc sin — = cx, y + arc sm — = c2. z " z
3) (a, 7) (b ,7) = clt r(a, 7) = c2, unde 7 — xi + yj + zk, r = || 7 |j, iar a şi b sînt vectori constanţi.
Indicaţie. Orice cîmp vectorial de tipul v = X grad f>Xgrad 4» are liniile de cîmp ®(x, y, z) = clt ty(x, y, z) = c2.
4. Mişcarea unei particule în Rs este guvernată de sistemul dx _ dy dz
~di ~ yZ' ~dt~Z%' ~dl ~~ Xy' Să se arate că: 1) dacă două dintre numerele x(0), y(0), z(0) sînt nule, atunci particula
nu se mişcă; 2) dacă x(0) = y(0) = 1, z(0) = 0, atunci traiectoria mişcării are ecuaţiile
parametrice
x = sec t, y = sec t, z = tg f, i # (2£ + 1) — s keZ; 2
3) dacă »(0) = jy(0) = 1, z(0) = — 1, atunci traiectoria mişcării are ecuaţiile parametrice
x = jy = , Z = , tj= — I J 1+.* l + < l + «
4) dacă cel puţin două dintre valorile x(0), y{0), z(Q) sînt diferite de zero, atunci sau particula se mişcă la infinit într-un timp finit (In viitor) sau vine de la infinit într-un timp finit (în trecut).
Indicaţii. 1) Dacă două dintre numerele x(0), y{0), s(0) se anulează, atunci #'(()) = 3/(0) = z'(0) = 0 şi teorema de unicitate arată că traiectoria se «educe la un punct,
302

2} — 3), Utiîîzînd combinaţiile integrabile se determină ecuaţiile carte ziene implicite ale familiei de traiectorii. Prin condiţiile iniţiale, se determină constantele şi apoi se verifică parametrizările propuse.
4) Din xx* = yy' = zz' = xyz rezultă x2 — cx = y2 — ca = z2 — c3. Presupunem c\ > %> e3 = 0. Deci z2 < y2 < x2 şi 22 = x2 — cx = y2 — c2, c1( c2 0,
= ±4{zs -f %) (z8 -f c2). Pentru simplitate presupunem z(0) > 0 şi = di " d£ = V(22' + %) (z2 + ca). Rezultă
du . . . [«• dw -i = r si lim t(z) = \ . •
:ţ0) V(«* + ^ (îi2 + Cg) *->» Jz(0) V(îi2 + C^ (#2 + Ca) = finită (deoarece integrala este convergentă).
5. Fie ¥ spaţiul vectorial real al funcţiilor reale de clasă O pe mulţimea deschisă şi conexă D c B * . Fie X un cîmp vectorial de clasă C1 pe D şi fie ir: V -*• V funcţia definită prin oT(f) = Dxf.
1) Să se ara te că S" este o transformare liniară. 2) Să se demonstreze că (i) f e V — {0} este un vector propriu al lui 8T
în raport cu valoarea proprie a dacă şi numai dacă (f°a) (t) = Aeat, A = i(a.(0)), pentru orice Enie de cîmp a a lui X; (ii) dacă fiecare linie de cîmp maximală a lui X este periodică, atunci fiecare valoare proprie a lui S" este zero. Aplicaţii pentru n = 2 : (i) X = xxi + xzj, (ii) X = xzi — xxj.
Soluţie. î) Consecinţă a proprietăţilor derivatei unei funcţii în raport cu un cîmp vectorial.
2) Dacă os este o Muie de cîmp a lui X pe D, iar f: D —> R este o funcţie
de clasă Cm, atunci (f o a) = (Dxf) o a. dî
(i) Fie Dsf = aî, a fiind un număr real dat. Ţinînd seama de observaţia
precedentă, rezultă — (f o a ) = a[i° a) şi deci (f o a)(t) = A eat, te I, unde d*
4 = f ( a ( 0 ) ) . Reciproc, dacă relaţia (f ° a) (t) = A e , pentru orice tel, are loc pentru
o curbă a: / —*• D, atunci Dxf == ai pe a(7). Dacă relaţia este adevărată pentru fiecare linie de cîmp, atunci Dxf = ai pe D şi deci a este o valoare proprie a lui ST, iar f este un vector propriu.
Aplicaţie. Liniile de cîmp ale lui X = x\i + x2j, {xu xz)eR2, sînt definite prin <x(t) = (^e*, c ae') , teR. Funcţia f # 0 este un vector propriu al lui ir corespunzător valorii proprii a dacă şi numai d a c ă f ^ e ' , cae{) = ea*f(cx, c2) pentru orice (clt cs)eRz, oricare ar fi teR, sau echivalent f(sc1)sc2) = = sai (clt cz), pentru orice (clt c3) e R2, Vs > 0. Deci f trebuie să fie o funcţie omogenă de grad de omogenitate a.
Să arătăm că pe R2 fiecare valoare proprie a lui GT este un număr natural n şi funcţia proprie corespunzătoare este un polinom omogen de gradul n.
Fie f un vector propriu corespunzător la valoarea proprie a. Deoarece f # 0 , 3x0eRs astfel încît î(xo)^0. Presupunem a < 0; atunci hm | i(sx0) [ =
s-»0 = co şi deci f r*u este continuă în origine; absurd. Rămîne a > 0.
Fie p > « uo număr natural . Fiecare derivată parţială de ordinul > a lui f trebuie să fie nulă deoarece ea este o funcţie omogenă pe R2 avînd gradul de om ogenitate ® — -p < 0. Ţinînd seama de acest lucru şi de formula Taylor
303
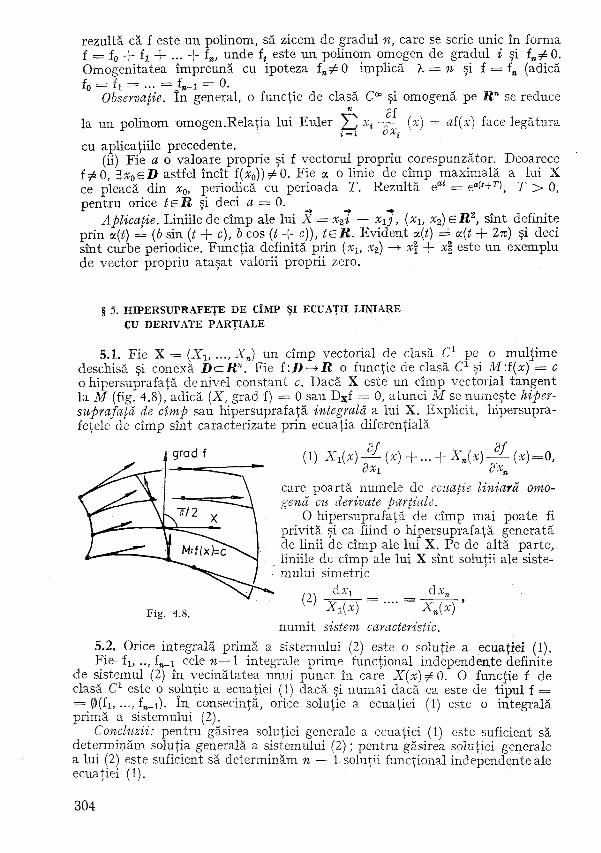
rezultă că f este un polinom, să zicem de gradul n, care se scrie unic în forma f = f0 + fi + ... + f»i unde f, este un polinom omogen de gradul i şi in^= 0. Omogenitatea împreună cu ipoteza f„ # 0 implică X = n şi f == fn (adică f0 = fi = ... = f„-i = 0.
Observaţie. în general, o funcţie de clasă C" şi omogenă pe Rn se reduce
la un polinom omogen.Relaţia lui Euler ]T) xi ~^r ix) = a^(x) ^ce legătura cx,
cu aplicaţiile precedente. (ii) Fie a o valoare proprie şi f vectorul propriu corespunzător. Deoarece
f # 0 , 3x0eD astfel încît î(x0))^0. Fie a o linie de cîmp maximală a lui X ce pleacă din x0, periodică cu perioada T. Rezultă eat = e"(t+T), T > 0, pentru orice teR şi deci a = 0.
Aplicaţie. Liniile de cîmp ale lui X = xzi — xxj, (xlt xz)eR2, sînt definite prin oc{t) = (b sin (£ + c), & cos (i + c)), teR. Evident <x.(t) = a.(t + In) şi deci sînt curbe periodice. Funcţia definită prin (xlt x2) -* x\ + x\ este un exemplu de vector propriu ataşat valorii proprii zero.
§ 5. HIPERSUPRAFEŢE DE CÎMP ŞI ECUAŢII LINIARE CU DERIVATE PARŢIALE
5.1. Fie X = (Xlt ..., Xn) un cîmp vectorial de clasă C1 pe o mulţime deschisă şi conexă DczRn. Fie i:D-*R o funcţie de clasă C1 şi M:i(x) = c o hipersuprafaţă de nivel constant c. Dacă X este un cîmp vectorial tangent la M (fig. 4.8),'adică (X, grad f) = 0 sau Dxf = 0, atunci M se numeşte hipersuprafaţă de cîmp sau hipersuprafaţă integrală a lui X. Explicit, hipersupra-feţele de cîmp sînt caracterizate prin ecuaţia diferenţială
grad f (l) Xl(x)-f(x)+. 8xx
xn{x)^L[xy =0,
Fig. 4.8.
care poartă numele de ecuaţie liniară omogenă cu derivate parţiale.
0 hipersuprafaţă de cîmp mai poate fi privită şi ca fiind o hipersuprafaţă generată de linii de cîmp ale lui X. Pe de altă parte, liniile de cîmp ale lui X sînt soluţii ale sistemului simetric
m dXl = - d%n • -1 > Xx{x) •- ~ Xn(x) '
numit sistem caracteristic. 5.2. Orice integrală primă a sistemului (2) este o soluţie a ecuaţiei (1). Fie fx, .., fn_1 cele n— 1 integrale prime funcţional independente definite
de sistemul (2) în vecinătatea unui punct în care X(x)^Q. O funcţie f de clasă C1 este o soluţie a ecuaţiei (1) dacă şi numai dacă ea este de tipul f = = 0(fi, ..., fre_i). în consecinţă, orice soluţie a ecuaţiei (1) este o integrală primă a sistemului (2).
Concluzii: pentru găsirea soluţiei generale a ecuaţiei (1) este suficient să determinăm soluţia generală a sistemului (2); pentru găsirea soluţiei generale a lui (2) este suficient să determinăm n — 1 soluţii funcţional independente ale ecuaţiei (1).
304

5.3. Fie f = 0(f1; .... f„_x) soluţia generală a ecuaţiei (1) şi Mc : 0(fi(#), ... •••, f»-i(^)) = c familia hipersuprafeţelor integrale.
Problema lui Cauchy pentru o ecuaţie de tipul (1) constă în determinarea hipersuprafeţei integrale care să conţină o varietate cu n — 2 dimensiuni F : g(*i, ..., x„) = 0, h(* l f ..., *„) = 0. '
î n anumite condiţii problema lui Cauchy admite soluţie unică. Pentru cazurile particulare se observă că bipersuprafaţa căutată poate fi privită ca fiind generată de curbele integrale ale sistemului (2), i^x) = clt ..., fK_i(#) == = cn-i, c a r e întîlnesc pe I \ Ecuaţiile îx(x) = clt ..., fn_1(%) = cn_x, g(x) — 0, h(x) = 0 formează un sistem algebric de n-\-1 ecuaţi cu n necunoscute xx, ..., xn. Eliminînd pe xx, ..., xn obţinem condiţia de compatibilitate 0(c1) ..., cn_x) — 0 şi apoi eliminînd parametrii cu ..., c„_j găsim hipersuprafata integrală M:0({1(x),...Jtt_1(x))=,O.
5.4. Ecuaţiile liniare neomogene cu derivate parţiale au forma
Xx{x, i)^-+ ... + Xn(x, f)JL = F(x, f),
unde f este funcţia necunoscută. în acest caz f se caută sub formă implicită 0(x,i) = 0, ecuaţia diferenţială reducîndu-se la o ecuaţie de tipul (1) căreia îi corespunde sistemul simetric
dxx dxn df X1(x, f) Xn(x, f) F(x, f)
Se află soluţia generală a acestui sistem, apoi soluţia generală 0 a ecuaţiei diferenţiale corespunzătoare şi din 0(x, f) = 0 rezultă f.
Exerciţii şi probleme
1. 1) Să se scrie ecuaţia carteziană implicită a suprafeţei cilindrice pentru care generatoarele sînt paralele cu dreapta x — y -\- iz — 1 = 0 , x + 2 v —
x v — z + 2 — 0, iar curba directoare este elipsa — -f — = 1. z — 2. 9 2
2) Să se scrie ecuaţia carteziană implicită a suprafeţei conice cu vîrful x^
în punctul F ( l , — 1, 1) şi avînd curba directoare — — y — 0, z = 4.
3) Să se determine ecuaţia carteziană implicită a suprafeţei obţinută prin rotaţia parabolei y2 = 4z, % = 0 în jurul axei 02.
Soluţie. 1) Ecuaţia cu derivate parţiale a suprafeţelor cilindrice din R3
este . CZ , C2 / j - m — — n,
8x dy unde l, m, n sînt parametrii directori ai generatoarei. în cazul nostru ecuaţia devine
dx dy
305

Sistemul caracteristic asociat,
dx _ dv _ dz —5~~A~~'Y'
admite soluţia Ax + 5y = clt 3* + 5z = c2. Condiţia de compatibilitate a sis
temului Ax + 5y = cx, Zx + 5z = cz, — + — = 1, z = 2 este 50(c2 — 10)2+ y /•
+ 9(3cx — 4c2 + 40)a — 450 = 0. Eliminînd pe clt c2 găsim 50(3* + 5z —10)2+ + 9(12* + 15y + 40)2 — 450 = 0.
2) Ecuaţia cu derivate parţiale a suprafeţei conice cu vîrful în V(a, b, c) este
, . dz , . ,. dz (x — a) }- (y — o) — = z — c.
dx 8y în cazul problemei aceasta se transcrie
(*_ l )J i + 0 , + l )Jf .«*_l . dx cy
Integralele prime funcţional independente ale sistemului simetric asociat sînt x \ ' v + 1
(x, v, z) ~» , (x, y, z) —>- . Condiţia de compatibilitate a sistemului 2 — 1 2 — 1
x— 1 y+i x2 A .
= <*. = ca, — - y = 0, 2 = 4. 2—1 z — 1 4
este (1 + ) 3 c 1 ) 2 - 12c2 + 4 = 0. Deci (3A; — 4)2 — 12(^ + 1) (2—1) + + 4(z — l)2 = 0 este ecuaţia căutată.
X V Z
3) Dacă axa de rotaţie are ecuaţiile — = — = —-, atunci ecuaţia cu I m n
derivate parţiale a suprafeţei de rotaţie este fîz c)z
(ny — mz) \- (Iz — nx) — = mx — ly. dx dy
î n cazul nostru, l = 0, m = 0, n = 1, găsim
, dz _ dz __ dx dy
Sistemul caracteristic asociat
dx dv _ d2 v — x 0
admite soluţia generală x2 + y2 = c1( z = ca. Rezolvînd problema Cauchy obţinem 4z = x2 + y2.
2. Fie V spaţiul vectorial real al funcţiilor reale de clasă C°° pe DcR3
şi fie S" :V —> V funcţia definită prin
*•(*) =-?-- (y + ^)^+ & + **)-%-• g* dy 22
306

î) Să se arate că ST este o transformare liniară. 2) Să se determine Ker S". 3) Să se rezolve ecuaţia âT(f) = f. Soluţie. 1) f, g e V şi a, $eR. Atunci
ff(af + pg) = i - (af + Şg) - (v + 2*) i - (af + Pg) + (3j/ + 4*) — (of + pg) -8x 8y 8z
= . f i ! - ( , + 2 , ) | ! + ( 3 v + 4 , ) f 1 + p [ ^ -(y+22)Ş+{3y+iz)Ş. lax 8y 8z\ \8x 8y 8z_
= aS"(f) + PoT(g) în baza liniarităţii operatorului de derivare parţială. 2) Ker ST = {f/#"(f) = 0}. Determinarea lui Ker âT revine la găsirea solu
ţiei generale a ecuaţiei cu derivate parţiale
T-- (y + lz)^-+ Py + 4 2 ) T = °-8x oy 8z
Sistemul caracteristic asociat, dx ăy dz 1 — (y + 2z) 2>y + 4z
implică dx=dy±dl> dx==Hdy + 2dz
2(y + z) 2>y + 2z şi deci admite soluţia generală e~2x(y + z) = clt e~x(2>y + 2z) = cz. Rezultă
Ker T = {f | î{x, y, z) = 0 (e~2*(y + z), <rx{?>y + 2z))}. 3) Ecuaţia cT(f) = f este liniară neomogenă. Sistemul caracteristic asociat
dx dv _ dz __ df 1 ~ _(_y + 2<r) ~ 3v + 4z~ f
admite integralele prime (x, y, z) -* e_2:t:(v + z), e~x(3>y + 2z), e~*{(x, y, z). Soluţia generală a ecuaţiei este definită prin
0 ( e - * ( y + z ) , e-*{3y + 2z), e~*î(x, y, z)) = 0. 3. Să se formuleze şi să se rezolve probleme de tipul precedent în cazurile
i) r(f) = xlL-ylL + {x* _ f) ă. 8x 8y cz
2 ) ' ( f ) = E ( * « - « i ) ^ -i—l CA-j
» 1 cî
R: 1) Ker ff = {f | f(*, v, *) = 0 (*y, x2 + y2 - Zz)}, 0 (xy, x2 + f - Iz, ' x% — «2 x„ — an\] A(x% — «2 erxi(x, y, z)) = 0. 2) Ker fr= {f | i(x) = 0 f-% — <%
f(*) - } = 0. 3) Ker ff = {f | f (*) = 0 (** #]_ Ct^ %\
%{%% - x\, ..., x% - *}, î(x) e x p f - ^ i j j = 0.
307

4. Fie cîmpul vectorial definit prin
V(x, y, z) = (x — 4x2 + y2 + z2)l + yj + zk.
Să se determine funcţiile diferenţiabile f: JR3 — {(0, 0, 0)} —> R cu proprietatea D-f = 0.
Soluţie. Ecuaţia D-f = {ft grad f) = 0 se transcrie
i l~2~,—2~~,—5\ <ti , di ei (x — Vx2 + y2 + z2) 1- y M — = 0.
dx By cz Sistemul caracteristic asociat
dx _ dy _ ăz x — 4x2 + y2 + z2 y z
conduce la dy dz xâx + ydy + zăz , — - = > = — dx. y z 4x2 + y2 + z2
Rezultă soluţia generală jy == C]Z, %+ "^X'Â + j ' 2 + z2 = c2. Deci
f(*. y, *) = o f—. %+ V*2 + y 2 +T 2 V
5. Problema precedentă pentru cîmpurile vectoriale definite prin
1) V(x, y, z) = (x + y — z)l + (x — y + z) f + ( — x + y + z)k
2) V{x, y, z) = x(y2 - z2)f- y(x2 + z 2 ) / + z{x2 + y2)k
3) V(x) = xxU1 + ... + xnUn.
R: 1) (x-y)d(x~y) = (y-z)d(y-z)1 d ( ^ z ) ~ ^
2v (x + z) —y 2) i(x, y,z)=0(^, x2 + v2 + z2) . 3) f(x) = 0 ^ , .... ^ - V
6.) Pentru fiecare dintre următoarele cîmpuri vectoriale să se determine-suprafaţa de cîmp ce trece prin curba specificată.
1) V{x, y, z) = xy2î + xzy~] + z(x2 + y2)k, (x, y, z)eRs - {(0, 0, 0)> C: x2 + y2 = 4, z= 1.
2) V(x, y, z) = x{\ - 2 / ) ? + y(l + lx2fj + 2z{x2 + y2fk, - ^ > 0, - > 0,.
C:%3' = a, z •= b.
3) ?(* , 3;, z) = x(*2 - y 2 ) f + y ( / - % 2 ) / + 2z(?;2 + v 2 ) | , ( x j , z ) e 8 3 -— {(0, 0, 0)} C: x2 + y2 + xy == 1, z = 2.
4) f (*, y, z) = 2xzî + 2yz; — {x2 + y2 — z2)£, {x, y, z) eR3 — {(0, 0, 0)}.,.
C: x2 + y2 + z2 = 1, z + 1 = 0.
5) F(#, y, z) = xl + y] + 4 — & , * # 0 , C: «3 — y = 2, z = 1. xz

6) V(x, y, z) = x(x2 + 2>y2)i + 2ysj + 2y2zk, y^O, z # 0 , C: x2 + y2 = = 9, 2 = 2.
7) V(x, y, z) = 2xii + 5xyj + 5xzk, x, y, z^O, C: x = O, 2y -4- z = 1.
8) V(x, y, z) = (xz — xy — y2 — z2)i + (#2 + :Ky — yz — z2)j + (y2 — %2—
— xz + yz)k, y2 — x2 — xz + yz ^ o, C: %2 -f y2 + 22 — 3% — y — — 2z = 0, y = %.
Soluţie. 1) Sistemul diferenţial al liniilor de cîmp,
dx _ dy __ dz xy2 x2y z(x2 + y2)
implică dx dy ă (xy) _ dz y x xy z
Obţinem liniile de cîmp x2 — y2 = clt xy = c2z. Se consideră sistemul algebric x2 — y2 = cu xy = c2z, x2 + y2 = 4, z = 1.
Eliminînd pe #, 3; şi 2 găsim condiţia de compatibilitate cf + 4ca = 16. Eliminînd pe cx şi ca rezultă
(A;2 — j»2) z — I62 + #3/ = 0.
_. dx dy dz 2) - •' -x(l - 2y2) -y(\ + 2x2) 2z(x2 + y2)
conduc la
— + 2*1 dx = — I — — 2y 1 dy, — dz = 2 (x dx — y dy) x ) \ y ) z
şi de aici găsim xyexl-y' = clt z €>'-'' = c2.
Suprafaţa de cîmp are ecuaţia carteziană implicită
^ dx dv d(.T2— y2) dz 2 2 i) = > —— — — . Rezulta xy = cu x — y" = c2z.
x y x- — v2 z
Ecuaţia carteziană implicită a suprafeţei de cîmp este
(1 — xv)2 = 4
|V2 __ 2\2
x2y2+-{X n
}}
dx dy d ( ; v 2 + y 2 + z2) dx , . ... „ .... 4) = > — - — . Liniile de cîmp au ecuaţiile x =
x y x + y' + 2 *' = c ^ , %2 + v2 + z2 = c2z. Suprafaţa de cîmp are ecuaţia 2>x2(x2 -f- y2 + -r- z2)2 - (x2 + / ) = 0. " '
309

5) V = d%3, zx2 — y2 = czx2. Suprafaţa de cîmp (y2 — zx2 + x2)\y — — xZŢ= 16%18.
6) , o ~„ o, = T 4 " = T 4 " - 0 b t i n e m ^fe d e cîmp z = dy, y(x2+y2)= x(xi+S>yi) 2y6 2y*z = c2x2. Punem condiţia ca sistemul z = dy, y(x2 + y2) — c%x2, xz + y2 — 9, 3 = 2 să fie compatibil. Rezultă relaţia 18^ = (9cf — 4) c2. Eliminînd pe d Şi c3 obţinem ecuaţia carteziană implicită a suprafeţei de cîmp, (*2 + y2) (922 - 4 / ) = I8x2z.
7) Liniile de cîmp, y = dz, 5x2 — zi = c2. Suprafaţa de cîmp, (5x2 - 24) (2y + zf + zi = 0.
8) Linii de cîmp, x2 + y2 + z2 = d, x + y + z = c2. Suprafaţa de cîmp, (* - l ) 2 + (y- l)2 + (z- 1)2 = 3.
7. Să se rezolve problema Cauchy
- • * ( * + y)— + y(x + y) — + (x - y) (2x + 2v + z) -f- = 0;
y = l, x + v + z = 3, # ^ 0 , x^—y, zeR.
Soluţie. Ecuaţia dată este liniară. Scriem sistemul caracteristic asociat
dx __ dv _ dz — x(x + y) y(x + y)] (x — y){2x + 2y + z)
şi determinăm două integrale prime funcţional independente ale acestuia. Anume Xx = y, X2 = x, X3 = 0 definesc o combinaţie nulă cu numitorii sistemului, iar ecuaţia Pfaff corespunzătoare yăx+xdy — 0 este complet integrabilă cu soluţia xy = d Şi deci (x, y, z) —> fi(#, y, z) = xy este o integrală primă. Analog, Xx = 2(x + y) + z, X2 = 2(x + y) + z, X3 = (x + y) definesc o combinaţie nulă cu numitorii sistemului, iar ecuaţia Pfaff corespunzătoare [2(x + y) + z] d(x + y) + (x + y) ăz = 0 este complet integrabilă şi se mai scrie
d (x + y) _ ăz x + y 2(x + y) + z
Soluţia ei (x+y) (x+y+z) = ca. Deci (x, y, z) —> i2(x, y, z) = (x+y)(x+y+z) este a doua integrală primă.
Cum oh Sii Sii' Sx Sy cz
ef2 3f2 Siş, cx dy cz _
rezultă că f1( fa sînt funcţional independente. Eliminînd x, y, z în sistemul v = l , x + y + z = 3, #y = «a, (# + y) (x + y + z) = ca, obţinem 3 (cx + 1) — c2 = 0 şi deci 3(#v + 1) — (x + y) (x + y + z) = 0 este soluţia problemei Cauchy.
310
rang = 2, oricare ar fi x=£Q, x^—y, zeR,

8. Să se determine soluţiile generale ale ecuaţiilor de mai jos şi acolo unde este indicat să se rezolve problema Cauchy corespunzătoare.
1) x— + yz~ = 0, x > 0, z^0, î(x, y, 1) = xv
dx 3z
2) x- r (v + Va2 — z2) -^- = 0, a — const. z<= î—a, a], x > 0 ' o% XJ • cy
cz , dz 3) x \- v -T— = V x2 -f v2 sin a, a e [0, 2TC)
dx dy ' ?i di di
4) (z-y)2 — + z ~ + y ~ = 0,i(0, y, z) = 2y(y - z) dx cy cz
5) (l + ^ ) 2 i l + 23,_£L = o,f(0^)=y 3^ dy
6) (%3 - ixy2) — + 2y8 — + 2y2z — = 0, x*0, y ^ 0 d# cy " dz
7) y(3*2 + y2 + z2) — - 2x{x2 + z2) — - Ixyz = 0, z ^ 0 3# dy
8) %y2 — + *2y — = z{x2 + v2), z^0 dx dy
9) x(l - 2y2) — - y{\ + lx2) — = 2z{x2 + y2), x* 0, y* 0 dx cy
10) bxy2 ax2y \~ z(bv2 — ax2) — = 0, a, b = const, xy^=0 cx ^ dy ' dz
11) 2z\x—+ y—) + x2 + y2 - z2 = 0, x*0 :\x !-J — l dx dy)
12) x(y2 - z 2 ) ~ - y{x2 + z2) — + z(x2 + y2) — = 0, x* 0 dx cy dz
13) x - ^ - y — +z— = f, * # 0 , f ( l , y , z ) = y + z 3% d y c=2
1 A\ ci di 14) y xz = 0
cx ey
15) — + yz = 0 dx
16) * - £ ! — £ i = 0 , ~ ^ 0
3% dy
di di 17) x ^ l - y-SL = 0, f (1, y) = y2
C,T CV
311

0% 18) x— = z, x^=0
dy io\ dz dz 19) x \- 3y =
dx cy 4. — , x^O
20) x(x2 + 3v2) — + 2ys~ - 2y2z = 0, x^O, y* 0, C: x2 + y2
dx cy z=b
21) xz— + yz h xy = 0, y^Q, C:xy = 9, z = 3 dx cy
22) x— y = x — v, z(«, y) = a2 -\- y2
dx dy
cz cz 23) y— x— x2 -\- y2 = 0, z(x, a) = x2 — a2
cx dy
cz cz 24) y — + x —- = x2 + v2, (ar, v) e R2 - {(0, 0)}, z(a, y) = 1 + ly + 3 y
25) (v2 * 2 ) ^ - 2xy — +2xz = 0, 2 ^ 0, C:y2 + z2 = 2, cx cy
Soluţie. 1) Sistemul caracteristic asociat
dx dy dz x 0 y — z
admite integralele prime (x, v, z) —* y, — • Să dovedim^că acestea sînt func-z
ţional independente. într-adevăr
ran;
0
Yv-i
1 0 -
xy In x xv = 2.
Soluţia generală a ecuaţiei este definită prin f (x, y, z) = O ly, — J • Dacă
xv 2 = 1 , atunci x=cu y = c2 astfel încît î(x, y, l) = xv=c{~. Deci i(x, y, z) =
dx dy dz 4a2 z-
+ 4a2 — z2 = cax. Deci O 2,
- = — admite soluţia generală 2 = cx, y +
v + a2 — 22
31 dx __ dy d% .? y» V^2 + J-'2 sin a
312

implică dx dv d(x2 + y2) dz
= — : ^ J ^\2 4x2 + y2 sin
Rezultă x = cxy şi *jx2 + ^ 2 = z + ca. Deci sin a
of-, V 2 + y - - i - ) = o . \ 3< sin a ;
. dx _ d_y dz (*-3<) 2 * 3;
este echivalent cu
j/d_y = zdz, (z — y) d(y — z) = dx.
Prin integrare găsim y2 — z2 = c1: (y — z)2 + 2x = c2. Soluţia generală a ecuaţiei este definită prin i(x, y, z) = 3>( y2 — z2, (3; — z)2 + 2%). Seluţia problemei Cauchy, f(x, y, z) = 23/(3/ — z) -f 2%.
5) = •——. Rezulta = — — cu soluţia y* = n+xnci. (1 + x2)2 xy (1 + x2)2 y
Soluţia generală a ecuaţiei este (x, y) —> i(x, y) = <I>| — — J, iar solu-\ 1 + x2
ţia problemei Cauchy este definită prin f(#, v) = • l + %2
*\ dx dy dz - , „ o) = —— = —> z = cx3', xiy + y = c2x .
A;3 — 3 xy2 2y3 2y2z Soluţia generală a ecuaţiei,
l z ys
(x, y, z) -» i(x, y, z) — <D — , y + — l 3' A'2
dx _ dy dz y(3x2 + _\|2 + z2) —2x(x2 + 22) 2xyz este echivalent cu
d(2%2+3-'2) dz d(x2 + / + z2) ăz 2x2+y2 = T ' *2 + 3<2 + z2 ~ z
2a;2 -f y2 ^2 4- v2 + Z2
şi deci admite integralele prime (x, y, z) —> » —
Soluţia generală a euaţiei este definită de ecuaţia v-2 _L A ,2
,v2 2 , 2 f 2«2 + y M / + *2 = *?[ ^ ~ J ' _d* dv
;2 %23' z(x-2 + / )
Din xdx = ydy, -—— = — rezultă combinaţiile integrabile şi integralele XV 2
313

prime (x, y, z) —» x2 — y2, ——. Soluţia generală este definită prin z = z
= xyo{x2 — y2), unde o este o funcţie de clasă C1.
9) (x, y, z) —> xy e*2->'3, z eyS--'t!! sînt două integrale prime funcţional inde
pendente. Soluţia generală a ecuaţiei este z = - • <p(xy ex'-yi). xy
H . dx dv dz 10) = = —•
bxy2 —ax2y z(by2 — ax2) admite integralele prime (x, v, z) —> ax2 + by2, — . Soluţia generală a ecuaţiei
xy este definită de î(x, y, z) =€>! ax2 -4- by2, )•
l xy) dx dv dz 11) — —L- = . . .
/ -i o 2 2 2
2xz Lyz x' — x — y Găsim liniile de cîmp y = cxx, x2 + y2 + z2 — czx şi soluţia generală a ecuaţiei este definită de ecuaţia x2 -j- y2 + z2 = <P <i)'
2o.v 1 vn^ d. % 12) xd;t -f- vdy + zdz, — sînt combinaţii integrabile. Solu-
zy • x ia generală a ecuaţiei are expresia
î(x, y, z) = ®(x + y + z, - ^ - j •
13) Soluţia generală este definită prin 0(xy, yz, yi(x, y, z)) = 0. Din # = 1, MX = .TV, M2 = J72* M3 — yf rezultă ux = y, « a = yz, w3 = yf şi deci
% = 1, y = ult z = —-, i = -l. Condiţia f(l, y, z) = y + z implică f = U\ U _ i
= **i + z r - Deci f(%, y, 2) = % -J = *y -\ • îi1 u-i ^ x
14) —— = — = — . Soluţia generală a ecuaţiei, (x,y,z) —>0(z, zx2-4-y2). y %z 0
15) —— = —— = . Soluţia generală a ecuaţiei este definită prin 1 0 — yz
z = er**<p{y). ,,. dx dv dz ( x 16) — —'— — . Se obţine <I> \z, \-y
2 — 1 0 ' \ z
17) —— = — implică xy = cx. Deci t(x, y) = O(xy). Condiţia x y
f(l, y) = O(y) = y2 implică f(#, y) = x2y2.
314

{IJC d v OiZ 18) — = . Soluţia generală a ecuaţiei este definită prin
0 x z L
z = e* y(x). dx dy dz . . dx dy -— = — - = —- implica combinaţiile integrabile —
x iy 4y2 ' x 3y 2y , 2y2
-dy H — dx. Soluţia generală a ecuaţiei este definită prin z = x2 x3
=4*, x2 • ( * ) •
dx dv dz 20) = — — = Găsim integralele prime funcţional inde-
x(x2 + 3y2) lyz 2y2z z v
pendente (x, y, z) -* — > — (x2 + y2)- Soluţia generală a ecuaţiei este definită y x2
de z = ycp X*
Condiţia de compatibilitate a sistemului z = cxy, y(x2 -\- y2) = czx2, z=b, x2 + y2 = a2 este ba2cx = («2cf — b2)c2. Eliminînd" pe clt cz rezultă suprafaţa căutată, (x2 + y2) [fl2z2 — b2y2) = a2bx2z.
«z 3^ —xy Rezultă
şi deci
dx dy „ , , , , , •— = —— > 2zdz + jydx + M v = 0
x y
(x, y, z) —> — > 22 4- xj.
sînt integrale prime.
x2y2 xv 22) Soluţia problemei Cauchy, z = — — + # + y + a2 — a.
a2 a 2 2 /
23) 0(xy, z - 1/2 (x + y)2) = 0 şi z = - ^ L + 1/2 (* + 3')2 - 1/2 [ ™ + a2 \ a 2
+ «1 — a2.
24) Soluţia problemei Cauchy, 2 = (x2 + J'2) arc sin _ + o(%2 + ><2).
25) Soluţia problemei Cauchy este definită prin 2 (x2 4- y2 + z2) — - 9 (*2 + z2) = 0.
315

9. Să se rezolve p rob l ema Cauchy
— + a — + b{z- <p(*)) = 0, 8% 8y
ze C1, cu z(x, 0) = 0, cp: [0, k] —»• R continuă, a > 0. Unde este definită soluţia problemei ?
10. Mişcarea unui punct material atras de un centru fix este caracterizată
prin ecuaţia Newton m = F, unde F = — km —?— • Să se arate că func-x > J J 2 ' |i -* | I3
II rl —* ci y > i / c l î ' i ci J* y tiile definite prin l = r X şi m = — r X IX i—— sînt integrale
dt . k \ dt) dt || 7H prime ale ecuaţiei.
Soluţie. Găsim
d l dr d r , _ d2r £r -»
-dF=^r x-ar + r x " d F = - y x IITF = °'
1 ( - dr\ x d2r 1 d r 1 dr_ dr~~ k \T /N"di"; di2 + 1 | r II di | | ; | | ' di!
1 (f^, d r \ J\ , 1 d r 1 d r
f U dt) j 1171! ^ ||?|| dt 11 m w u w ; uni u<- IIr
Integralele prime dau informaţii complete asupra traiectoriilor. într-adevăr, avem (l, ~ţ) = 0; deci dacă i ^ 0 mişcarea se efectuează într-un plan ortogonal pe vectorul l
Din ^ a r r X-—
dt
2 + lr,~\^\\rf 2 / -3 " ^ '
rezultă f T x — 1 r = - (U'||2 şi di
- > -» l / l l 2 - * ->• ., -> deci (w, r) = — -W—h ||r||. Deoarece 7=^; (m, r) este proiecţia vectorului r
« ' l|w|| ^ -» 1 -» 11 T!!2
pe axa de direcţie m, numărul —=»— (in, r) -j ^—^— reprezintă distan-| | m | | I N I I - A
ţa de la punctul de pe traictorie la o dreaptă d perpendiculară pe m dusă la 11 ~î\ 1 2
d i s t an ta—H^— de O; deoarece M^ll =OM, rezultă că M se mişcă pe o II w i l «
conică avînd focarul în O, directoarea d şi excentricitatea | |w| | .
§ 6. HIPERSUPRAFEŢE ORTOGONALE LINIILOR DE CÎMP ŞI ECUAŢII PFAFF
6.1. Fie X = (A'i, ..., Xn) un cîmp vectorial de clasă C1 pe o mulţime deschisă şi conexă DczR". Fie f:D—>• R o funcţie de clasă C2 ş iM:f(x) = c o hipersuprafaţă de nivel constant c. Dacă X este coliniar cu grad f, adică 3\:D—>R de clasă C1 astfel încît X = X grad f(fig. 4.9), atunci M se numeşte hipersuprafaţă ortogonală liniilor de cîmp ale lui X.
316

Deoarece (d#1( ..., dxn) este un vector din planul tangent la M în punctul x rezultă că o hipersuprafaţă ortogonală liniilor de cîmp ale lui X satisface ecuaţia
X±(x) d*i + .... + Xn(x) dx„ = 0.
6.2. Cîmpului vectorial X = (Xi, ..., Xn) de clasă C1 pe D îi ataşăm l-forma diferenţială w = Xx(x) dxx -f- ... + XB(x) dxn. Ecuaţia ea=0 se numeşte ecuaţie Pfaff.
(1) Dacă D este un interval w-dimensional şi dacă
~~ * (x) = (x), pentru orice xeD, 8x, 8x,
atunci funcţia
x—>f (x) •• Xx{xx, .... xn) dxx + \ X2(xw, xz, ..., xn) dx2 + ... +•
+ \ Xn(x10, ..., xn_10, x„) dx„
are proprietatea df = X\ dx1-\- ... -\- Xn dxn şi deci soluţia generală a ecuaţiei' Pfaff este definită prin f(x) = c.
Dacă D este o mulţime convexă şi dacă (x) = (x), pentru 8x} 8x(
orice V*eD, atunci funcţia x—>g(^)=\ (x(xo + t(x — x0)), (x — x0)) dt 5" are proprietatea dg = X± dxt + ... + Xn dxn şi deci soluţia generală a ecuaţiei Pfaff este definită prin g (x) = c.
Ecuaţiile Pfaff pentru care D este conex şi simplu conex, iar (x) =
8X}
8x,-
dXj
(x), pentru orice, xeD, adică X este un cîmp potenţial, se numesc
ecuaţii diferenţiale exacte. (2) Fie D o mulţime conexă şi simplu conexă. Uneori există o funcţie
nenulă fi.: D —> R de clasă C1 astfel încît
fi(#) Xx{x) dxx + ... + y.(x) Xn(x) dxn = 0
să fie o ecuaţie diferenţială exactă. Funcţia fx se numeşte factor integrant şi satisface sistemul cu derivate parţiale
d^hxrJ^^A(X). • . ' 8x} 8x(
Ecuaţiile diferenţiale exacte şi ecuaţiile Pfaff care admit un factor integrant se numesc ecuaţii complet integrabile. Soluţia unor asemenea ecuaţii depinde de o constantă arbitrară. Cu alte cuvinte cîmpurile vectoriale corespunzătoare
317-

unor ecuaţii complet integrabile admit o familie cu un parametru de hipersu-prafeţe ortogonale liniilor de cîmp.
O ecuaţie Pfaff în două variabile este complet integrabilă. în general, ecuaţia co = 0 este complet integrabilă dacă şi numai dacă co A dw = 0 (bineînţeles, se presupune că mulţimea pe care lucrăm este conexă şi simplu conexă).
(3) Presupunem că ecuaţia Pfaff nu este complet integrabilă, adică X nu posedă o familie cu un parametru de hipersuprafeţe ortogonale liniilor de cîmp. O asemenea ecuaţie Pfaff defineşte o infinitate de curbe integrale al căror ansamblu se numeşte hipersuprafaţă neolonomă.
6.3. Fie Xn=fiO. înlocuind pe xx, ..., xn_x cu ux, ..., V i Şi P e xn c u z
ecuaţia Pfaff se poate transcrie în forma
dz = îx(ux, ..., ua_x, z) d% + ... + fn_!(%, .... un_x, z) dun_x,
ft=^i-,i= 1, . . . , » - 1.
De aceea o ecuaţie Pfaff este echivalentă cu sistemul
Bz = ît{ux, ..., u„_x, z), i = 1, ..., n — 1. dut
Dacă mulţimea D este deschisă, conexă şi simplu conexă, atunci condiţiile de complet integrabilitate ale sistemului sînt
82z 82z dUţdU] 8Uj8ut
sau echivalent
di, , 8L Si, , 8î< , . . . — ! - + — } - i , = — î - H '-f,, t,j = 1, ...,n— 1. cut cz BUj cz
6.4. Un cîmp vectorial X se numeşte biscalar dacă există două cîmpuri scalare X şi f funcţional independente astfel încît X = X grad f. Dacă X şi f sînt funcţional dependente, atunci cîmpul X == X grad f este un cîmp potenţial.
Discuţia precedentă arată că X este un cîmp biscalar dacă şi numai dacă admite o familie cu un parametru de hipersuprafeţe ortogonale liniilor de cîmp.
6.5. Fie D o mulţime deschisă, conexă şi simplu conexă din Rs şi X = = (Xx, X2, X3) un cîmp vectorial pe D de clasă C1. O condiţie necesară şi suficientă ca X să fie biscalar, adică ecuaţia Pfaff Xx(x, y, z)dx + X%{%,y,z)dy\-+ X3(x, y, z) dz = 0 să fie complet integrabilă, este (X, rot X) = 0.
Relaţia (X, rot X) = 0 arată că suprafeţele ortogonale liniilor de cîmp ale lui X trebuie căutate printre suprfeţele integrale ale lui rot X (suprafeţe de vîrtej). Această observaţie a sugerat următoarea metodă pentru găsirea soluţiei unei ecuaţii Pfaff complet integrabile, în trei variabile: se determină liniile de cîmp ale lui rot X (linii de vîrtej), să zicem yx{x, y, z) = = cx, <pa(#, y, z)= c3; se scrie X = a grad cpx + (3 grad <p2, a2 + [32# 0, ceea ce
permite transcrierea ecuaţiei Pfaff sub forma ad <px + P d <p3 = 0, unde —• =
=-E(<Pi, «Pa), bineînţeles pentru (3#0; rezultă soluţia generală <&(<pi, <p2) = c,
318

aceasta nefiind altceva decît familia suprafeţelor ortogonale liniilor de cîmp ale lui X. Cînd este cazul, din identitatea X = X grad <E> se găseşte A.
Exerciţii şi probleme. 1. Să se găsească soluţiile generale ale următoarelor ecuaţii Pfaff
1) xx{x\ + x\ — ar) dxx + x2(x\ + x\ + ar) dxz = 0, (xx, x2)eR2
2) 12xxx2 + xfx2 -\- — j dx1 + i x\ + Xj>"! + — | d%a = 0, (xx, xz) GR2
3) (e*i*« + 1) d% + % * 2 — 1 e*>*. dx2 = 0, (x1( x2) GR2 — Ox2 v 2
4) (1 + sin Xi) dxx -j- (2 + sin xa) &xz + ••• + (« + s m #») dxH = 0,
(*i *.)e«"
5) 2%a%3%4(2%1 + xa + x3 + «4) dxx = 0, (x1( x2, X3, xl)sRi
6) xx(x2 —1) (x3 — 1) d*i + x2(x3 — 1) (% — 1) dx2 +
+ x3(xx — 1) (x2 — 1) dx3 = 0, x, > 1
7) (2#a — 3*2) d%i + (x3 — 2%) d%a + (3>xx — x2) dxs = 0, 2xx > x3
8) dx3 = ——— dxx -\——— dx2, « = const, xx > 0, x2 > 0, x3 + a > 0 xx x2
9) 2%!%3 dxx + 2xaX3 dx2 + {%% — x\— x\) dx3 = 0, x3 > 0
10) (x§ — x3 sin #2) cos % sin x2 dxx -f- (xf -f x3 sin x^ sin xx- cos x2 dx2 +
+ (sin % + sin x2) sin xx sin x2 dx3 = 0, xx, x 2 e (0, - ) , xs > 0. Soluţie. 1) Notăm X L ( # I , X2) = Xi(xf + x\ — a2), X2(xx, x2) = x2(xf -f-
-\- x\-\- a2). Deoarece 1 (x) = (x) = 2xxx2, pentru orice xeR,
8x2 dxx
există o funcţie f:R2-^R cu proprietatea df = Xx dxx + X2 dx2, anume
i(x) = C*1 /(£2 + xl - a2) d* + (*' (02 + *2 + a2) dt = -^ +
A-i %o Ct %-\ , %o , (* A i
Soluţia generală este definită prin x\ + x\ + 2xfxf + 2a2(x2 — x?) = c.
2) Fie X1(x1, x2) = 2xxx2 + xfx2 H— - , X2(xx, xz) = x\ + xxx\ -\ 3
Deoarece
i_ {x) = i ^ («) = 2^ + «f + xi, cJx2 Sxj
319

rezultă
î(x) = (*' ( 2 ^ + i2*a + i§ j d* + (*' f *îo + %</ + — ) di =
3 3
Soluţia generală a ecuaţiei propuse este definită prin
ixxxz(x\ + x\ + 3%) = c.
3) f (*) = C*1 (e^ + 1) dt + (*' *M* ~ 1 e ^ di = c.
4) Din co = (1 + sin xx) dxx + (2 + sin x2) dx2 + ... +(n -\- sin #„) dx„ = — d(xx + 2^a -f ... + w ^ — cos xx — cos x% — ... — cos xn), rezultă soluţia generală,
xx + 2#a + ... -f nxn — cos xx — cos x2 — ... — cos xn = c.
5) Din co = xzxsxi(2x1 + x2 + x3 + «4) d% + x'1%2%4(^1 -f- 2#a + x3 -\-+ #4) d#2 + XiXzxi(x1 + ^ v + 2% + x^ dx3 + xxx2x3 • (xx + x2 + x3 + + 2xi) d#4 = ă(x1x2x3xi(xi + x2 -f- x3 + %))< rezultă soluţia generală definită prin «1^2^3*4(^1 + ^3 + «3 + «4) = c-
6) Mulţimea fl = { (%, x2, x3) eR3 | % > 1, #a > 1, x3 > 1} este deschisă, conexă şi simplu conexă.
Fie co l-forma diferenţială definită de expresia din partea stingă. Se constată că dw = (xx — 1) (x3 — x2) dx2 A d#3 + (x2 — 1) (% — xs) dxs A d% -4--f- (x3 — 1) (x2 — x) dxx A dx2 şi coAdco = 0. De aceea ecuaţia propusă este complet integrabilă.
Se observă că
1 co = f n ) d*i + f'H 1 d 3 + (#1 — 1)(%2 — l)(«s — 1) l *i — W \ xz — 1
+ [ 1 + ^ — ] d*3 = d[*! + x2 + *3 + In (*! - \){x2 - 1) («3 - 1)].
Soluţia generală este definită prin
Xi + «2 + %3 + In (#! — 1) (xz — 1) («3 — 1) = c, (xx , x2, x3) eD. 7) Notînd prin X = (Xx, X2, X3) cîmpul vectorial de coordonate Xx(x) ••
=2xz — 2>x3, X2(x) = x3 — 2xx, X3(x) = 3xx—x2 se verifică relaţia (X, rot X) = = 0, adică ecuaţia este complet integrabilă.
Determinăm integralele prime ale sistemului liniilor de vîrtej,
dxx dxz dx3
—2 —6 —4 Rezultă
<Pi(%» xz, x3) = 3 % — x2, <pa(%, %2, %) = 2% — *3. Scriem X = a grad cox + P grad cp2 Şi prin identificare obţinem
a(%, x2, x3) = 2% — x3, j3(%, .T2, #3) = %2 — 3Afx.
320

Ecuaţia Pfaff devine
(2%x — xs) d(3#x — xz) + (x2 — 3%) d(2#2 — x3) sau
d 3 % ~ *2 = 0.
Soluţia generală a ecuaţiei iniţiale este definită de
£%i — x$ = c.
adică este reprezentată de un fascicul de plane. 8} Ecuaţia dată este echivalentă cu sistemul
8x3 xs + a 8x3 x3 4- a _ A — - = • 3 ^ » = — — , ^ > 0, x2 > 0, x3 + a > 0. 3 % % 8x2 x2.
Acesta este complet integrabil deoarece
xs + a \ x3 + a 8 ( x3 + a
8x2 \ xx ) x% 8x3 \ x1
8 xs + a x3 + a 8 ( x3
( ^ ) -8x± x2 Xi 8x3
Pentru prima ecuaţie a sistemului cu derivate parţiale asociem ecuaţia
dx3 _ d ^ x3 -\- a Xi
cu soluţia x3 -f- a = Xx(o(x2). înlocuind în a doua ecuaţie a sistemului găsim
d9 _ dx2
cp xz
adică cp(#) = cxs. Rezultă că soluţia generală a ecuaţiei iniţiale este definită prin
xs + a = cx1x2, Xi, x2, xs + a > 0.
9) Ecuaţia complet integrabilă cu soluţia generală definită prin
x\ + x\ + x\ = cx3, x3 > 0.
10) Soluţia generală, x3 + sin %\ + sin x2 = cx3 sin x± sin x%, xx, xze (0,7t) x3 > 0.
2. Să se determine factorul integrant necesar pentru ca ecuaţiile Pfaff de mai jos să devină ecuaţii diferenţiale exacte şi să se determine soluţiile generale ale acestor ecuaţii.
1) 2 In (x^Xg) 1 dx-L = 0, Xi, x2, x3 > 0
% + x2 + % #i_
2) 2#1(*i -f z§) d% - lx\xzdxz — 2^x 3 dx 3 = 0, (%, #2, *s) G R3 - {(0,0,0)}.
321

[2xx + xzx3xA{x\ + xfj] dxx + [2xz + x1x3xi(xl + xfj] dx2 +
+ xxxzXi(x\ + xl) ăx3 -f xxx2x3(xf + xfj dx'4 = O, xeH*.
Soluţie. 1) Notînd
deducem % T" X2 ~T ^3 A'(
8X( , . 2X. . . . . 3#, d#4
Să găsim o funcţie a:"(0, co)3 —> .R de clasă C1 astfel încît
Acest sistem admite soluţia particulară u(#) = % -f- #2 + x3. De aceea ecuaţia
( * i + xz+ # 3 )2 In (%^2^3) , 1 r — •
Xl + XZ + X3 Xx
ăxx = 0
este exactă. Se găseşte soluţia generală, (xx + xz + x3) In {xxxzx3) = c. 2) Pentru determinarea lui a se obţine sistemul
<3a 2a , P . », 2|i , 2a xa — - = x3—-i (# | + #|) h #1*2 = — 4%2a, 3% 3^2 ^^a 3%
(»i -f- 4 )—— + xxx3—^- = — 4*3a, 3x3 2%
care conduce la ecuaţia
3% ^2 d%2
cu soluţia particulară a(%) 1 (^1 + #2 "T %)
Amplificînd prin a se găseşte o ecuaţie diferenţială exactă cu soluţia generală definită prin x\ = c(x\ + x\ + xf).
3) [*(#) = rtW', (*f + xl) ew*** = c. 3. Fie cîmpul vectorial I = [ ( « X J ) X ^ X / , unde a, 6 sînt cîmpuri pa
ralele, ~ţ = xl + y] + zk, (a, r) > 0, (b, r) > 0, ( a x b, r) > 0. 1) Să se determine liniile de cîmp ale lui X şi suprafaţa de cîmp care se
sprijină pe curba (a, r ) = 1, (b, r) f2 = 1, unde r2 = %2 + j>2 + z2. 2) Să se determine suprafeţele de vîrtej ale lui X şi să se arate că sînt
ortogonale pe suprafeţele de cîmp ale lui X. 3) Să se arate că X şi rot X sînt cîmpuri biscalare.
322

Soluţie. 1) Liniile de cîmp sînt date de ecuaţia vectorială
{{(a Xb)Xr]Xr}xdr = r{{a X b) Xr, ăr) — (r, dr) {(aX~b)XÎ] = 0?
Deoarece ~r şi (a X b) X ~r sînt presupuse cîmpuri independente, rezultă (r, d ? ) = = 0, ({axb)Xr, ăr) = 0 sau (2, r) (b, ăr) — (b,r) (a, ăr) = 0. Prin integrare obţinem ecuaţiile liniilor de cîmp, r2 = clt (a, r) = ca(6, y).
Condiţia de compatibilitate a sistemului r2 = cu (2, 7) = c%(b, 7), (2, 7) = — 1, (b, 7) r2 1 este cx = ca. Rezultă suprafaţa de cîmp r2(b, 7) = (2, 7).
— > — •
2) Suprafeţele de vîrtej ale lui X sînt suprafeţele de cîmp ale lui rot X. Acestea sînt generate de liniile de cîmp ale lui rot X.
Găsim rot X = 3(2 Xb)x7. Ecuaţia vectorială [(2 X b) X 7] X ăr = 0, împreună cu ipoteza că 7 şi axb nu sînt coliniare, implică ( ( 2 x 6 ) , ăr) = 0, (7, dr) ~ 0, adică (axb,7) = clt r2 = c2. Suprafeţele de vîrtej sînt definite prin 0 ( ( 2 x f , r ) , f 2) = 0.
Deoarece (X, rot X) = 0, suprafeţele de cîmp ale lui X sînt ortogonale pe suprafeţele de vîrtej ale lui X.
3) Relaţia (X, rot X) — 0 arată că X este biscalar. Ecuaţia Pfaff (X, dr) = r = 0 are soluţia = c. Rezultă
(axb.r)
AA = r{axb,7)2 grad ( 1 x 6 , F)
Se constată că (rot A, rot rot X) = — 9 ( 2 x 6 , (axb)x7) = 0. Deci -» -» (? ?)
rot A este biscalar. Ecuaţia Pfaff (rot X, ăr)= 0 are soluţia ;_>' —- = c. Găsim v ' (a, r)
rot X = 3(2, r) grad ( & ' ^ • (2, 7)
4. Se dau cîmpurile vectoriale
1) X(x, y, z) = 2(1 — e*') f + xz& J + x(l — ey) %, z > 0
2) A(x, v, z) = x2yzi + *y2^' + xyz%> x, y, z > 0
3) Z ( r ) = 2(2, 7) a + 2(6x7) &*- i g , y J j l i ^ J Z ( ^ | ) , $, bx7)>0. {a, bXr)
Să se arate că X este un cîmp biscalar şi să se determine funcţiile X şi f —>
astfel încît X = X grad f.
1 — ev
R. 1) X(x, y,z) = - xh2 grad # 2
2) X{x, y, z) = f - ^ - • grad (x2 + y2 + z2).
323

3) XCr) = (axb, 7) grad H i l t ^ h l î . (a X b, r
-> 5. Să se determine liniile de cîmp pentru X = yi -f zj + *Ă, (#, y, z )# 5 (O, O, 0), şi să se pună în evidenţă două suprafeţe neolonome care determină. aceste curbe.
Soluţie. Sistemul cu coeficienţi constanţi
!dx __ _ dy _ dz _ dt ~ y' dt ~~ ' dt~
are soiuţia -generală — [ V 3 V"3
x = c e* + e 2 I c% cos - y t + c3 sin —
- - f V3 YV3 "\ V3 ' 2 = d e ' -f- e 2 — l /2c 2 cos— 2 + l-^-^2 — c3 | s i n ^ r ^
Forma simetrică dx _ dy _ dz
implică z^# — vd_y = 0, xdy — zdz = 0. Aceste două ecuaţii Pfaff reprezintă respectiv suprafeţe neolonome întrucît nu sînt complet integrabile.
Evident, prin liniile de cîmp trec şi varietăţi olonome; xz—yx y*~2x z2—xy
dx __ dy _ dz _ (x2 — yz) dx + (v2 — zx) dy + (z2 — xy) dz y z x 0
implică d(x3 + y3 -\- z3 — xyz) — 0 şi deci xz + y3 + z3 — xyz = cx.
Observaţii. Avem z'—xy x*—yz y%—xx
dx _ ăy __ dz _ (z2 — xy) dx + (x2 —- yz) dy + (v2 — z#) dz y z x 0
Cu toate acestea expresia (z2 — xy) dx + (x2 — yz) dy + (y2 — zx) dz nu este o combinaţie integrabilă deoarece rot [(z2 — xy) i + (x2 — yz) j + + (j>2 — zx) k] = 2>X^0. Există însă un factor integrant pentru ecuaţia (z2 — xy) dx + (x2 — yz) dy + (y2 — zx) dz = 0, dar dificultatea determinării efective a acestuia este echivalentă cu dificultatea de a găsi combinaţii integrabile pentru sistemul simetric.
6. Pe o subvarietate tridimensională se consideră l-formele diferenţia.'e-
1) « = (2xi + xzx3) dxx + (2xz + xtx3) dxz + (2x3 -f- xxxz — 1) dx3, 2xx + xsxs > 0.
2) to = x3(xz + x3) dx1 — xxx3 dxz + xxxz dx3.
S24

3) co = 2(x2 + x3) dxx -\- (xx -f- 2>xz + 3%3) dxz + (% — xz) dx3,
4x2 + 5x3 < 0.
Să se reducă la forma canonică. Soluţie. 1) Deoarece dco = 0 şi domeniul este simplu conex, există o func
ţie diferenţiabilă f cu proprietatea df = co şi anume
f (%, xz, x3) = \ (2% + x%x3) dxx + \ (2xz + x10xs) dx% + : V (2% + x%x3) dxx + \ Jx10 Jx2l
+ \ (2*3 + X10X20 — 1) d% = X\ + X% + X% + %Xa%3 + C. J*so
Considerăm transformarea
x\ = x\ + x\ + x\ + xxxzx3
, _ D(%x, *2, *3) A-g — X3
Ţinînd seama de relaţiile (notaţii adecvate!)
D (x\, x\, x\) — 2xx + x2x3 > 0.
3
£ co i Ţ=\ OX
rezultă cor = 1, co2- = 0, co3/ = 0.
2) Deoarece o)A<iu = 0, ecuaţia co = 0 este complet integrabilă. În acest caz există o transformare de coordonate astfel încît
fel «Sx3 fe^ d#3
unde (Mtl sînt funcţiile coordonate ale lui dco. 3) Se constată că coAdco = (—4x2— 5#3) d#1Ad#aAd.#s Şi deci ecua
ţia co = 0 nu este complet integrabilă. în acest caz există o transformare de coordonate astfel încît
3 flxi 3 fiyA
T)a* 7 7 = const' Z> w«' TT = °-
325
Bibliografie
1. J. Acher, J. Gardelle, Algebre lineaire et programmation lineaire, Dunod, Paris, 1970. 2. T. M. Apostol, Calculus, voi. I I , Blaisdell Publishing Company, 1969. 3. V. I. Arnold, Ecuaţii diferenţiale ordinare, Editura ştiinţifică şi enciclopedică, Bucureşti,
1978. 4. N. Barhvalov, Methodes numeriques, Editions Mir, Moscou, 1976. 5. C. Bănică, O. Stănăşilă, Metode algebrice în teoria globală a spaţiilor complexe, Editura
Academiei R.S.R., Bucureşti, 1974. 6. M. Bercovici, S. Rimer, A. Triandaf, Culegere de probleme de geometrie analitică şi diferen
ţială, E.D.P., Bucureşti, 1973. 7. M. Berger, B. Gostiaux, Geometrie differentielle, Armând Colin, Paris, 1972. 8. V. Boju, M. Popescu, Probleme de geometria varietăţilor diferenţiabile, Editura tehnică
Bucureşti, 1978. 9. Gh. Buzdugan, A. Beleş, C. Mitescu, R. Voinea, A. Petre, M. Blumemfeld, I. Constantinescu
Culegere de probleme de rezistenţa materialelor, E.D.P., Bucureşti, 1975. 10. R. M. Bowen, C. C. Wang, Introduction to vectors and tensors, voi. 1, 2, Plenum Press, New
York, London, 1976. 11. M. Craioveanu, I. D. Albu, Introducere algebrică în geometrie, sub forma unor exerciţii, Lito
grafia Universităţii Timişoara, 1976. 12. M. Craiu, M. Roşculeţ, Ecuaţii diferenţiale aplicative, E.D.P. Bucureşti, 1971; Culegere
de probleme de analiză matematică, E.D.P. Bucureşti, 1976. 13. I. Creangă, C. Reischer, Algebră liniară, E.D.P., 1970. 14. V. Cruceanu, Elemente de algebră liniarăţi geometrie, E.D.P., 1973. 15. Şt. Dincă, R. Urseanu, Probleme rezolvate de matematici speciale, Litografie I .P. B. 1977. 16. Gh. Dodescu, M. Toma, Metode de calcul numeric, E.D.P. Bucureşti, 1976. 17. P. Dragomir, A. Dragomir, Structuri algebrice, Editura Facla, 1975. 18. N. Efimov, Formes quadratiques et matrices, Editions Mir, Moscou, 1976. 19. D. Fadeev et I. Sominski, Recueil d'exercices d'alg&bre superieure, Editions Mir, Moscou,
1970. 20. A. Philippov, Recueil de problemes d'equations differentielles, Editions Mir Moscou, 1976. 21 . D. Flondor, N. Donciu, Algebră şi analiză matematică, E.D.P., voi. I şi I I , 1979. 22. Gh. Galbură, F. Rado, Geometrie, E.D.P., 1979. 23. Negi Gastinel, Linear numerical analysis, Academic Press, 1970. 24. Gh. Gheorghiev, V. Oproiu, Varietăţi diferenţiabile finit şi infinit dimensionale, Editura
Academiei R.S.R., 1976. 25. Gh. Th. Gheorghiu, Algebră liniară, geometrie analitică şi diferenţială şi programare, E.D.P.,
1977. 26. E. Grecu, Culegere de probleme de algebră liniară, geometrie şi programare liniară, Litogiafia
I .P.B., 1979. 27. A. Halanay, Ecuaţii diferenţiale, E.D.P., 1972. 28. A. S. Houschalder, Theory of matrices in numerical analyses, New York, Blaisdel, 196-1. 29. S. Ianuş, Capitole speciale de teoria relativităţii generale, Litografia Univ. Bucureşti, 1975. 30. M. Ikramov, Recueil de problemes d'algebre lineaire, Editions Mir, Moscou, 1977.
826
31. N. Jacobson, Lectures in abstract algebra, I I . Linear algebra, Springer-Verlag, 1975. 32. M. Jurchescu, Introducere în analiza pe varietăţi, Litografia Univ. Bucureşti, 1980. 33. D. Kletenik, ProbUmes de geometrie analitique, Editions Mir, Moscou, 1969. 34. N. V. Kopchenova, I . Maron, Computaţional mathematics, Editions Mir, Moscou, 1975. 35. R. S. Ledley, Programarea şi utilizarea calculatoarelor numerice, Ed. tehnică, Buc. , 1968. 36. J . E. Lelong, J. M. Arnaudies, Equations diffe'rentielles inte'grales multiples. Fonctions holo-
morpkes, Dunod, Paris, 1974. 37. O. Mălăncioiu, Integrale multiple. Culegere de probleme. Litografia I .P. B. 1975. 38. N. Mihăileaau, Geometrie analitică, proiectivă şi diferenţială, E.D.P., 1972. 39. C. Mihu, Metode numerice în algebra liniară, Editura tehnică, Bucureşti, 197?. 40. R. Miron, Geometria analitică, E.D.P., 1976; Introducere în geometria diferenţială, Litografia
Universităţii Iaşi, 1971. 41. I. Morris, W. Hirsch, S. Smale, Diferenţial equations, dynamical sistems and linear algebra,
Academic Press, 1974. 42. E. Murgulescu, N. Donciu, Culegere de probleme de geometrie analitică şi diferenţială, E.D.P.,
1971. 43. E. Murgulescu, N. Donciu, V. Popescu, Geometrie analitică în spaţiu şi geometrie diferenţială.
Culepere de probleme, E.D.P., 1973. 44. P. S. Modenov, A. S. Parhomenko, Sbornik zadaci po analiticeshoi gheometrii, Moskva, 1976. 45. V. Olariu, Analiză matematică şi matematici speciale, Litografia I .P.B., 1979. 46. B. O'Neill, Elementary differential geometry, Academic Press, 1970. 47. D. I. Papuc, A. C. Albu, Elemente de geometrie diferenţială globală, E.D.P., 1973. 48. D. Pedoe, A geometric introduction to linear algebra, New York Wiley, 1963. 49. I . Pop, Varietăţi diferenţiabile. Culegere de probleme, Litografia Univ. Iaşi, 1975. 50. L. S. Pontriaghin, Obîkovenie diferentialnîe urovnenie, Nauka, 1974. 51. I. P. Popescu, Lecţii de geometrie diferenţială, Litografia Univ. Timişoara, 1973. 52. I. P. Popescu, Elemente de geometrie analitică, Litografia Univ. Timişoara, I, 1978; I I , 1979. 53. C. Radu, Algebră şi geometrie, Litografia I.P.B., 1976. 54. C. Radu, E. Cioară, Programarea în F0RTRAN, metode numerice de calcul, Litografia I.P.B.
1979. 55. M. Sarian, E. Caragheorghe, D. D. Boiangiu, D. Voiculescu, L. GhermăneScu-Ionescu,
N. Enescu, St. Staicu, E. Haşeganu-Zamfirescu, D. Rugescu, D. Coman, Probleme de mecanică pentru ingineri şi subingineri, E.D.P., Bucureşti, 1975.
56. L. Smith, Linear algebra, Springer-Verlag, 1978. 57. C. Teleman, Geometria diferenţială locală şi globală, Editura tehnică, 1974. 58. I; D. Teodorescu, St. D. Teodorescu, Culegere de probleme de geometrie superioară, E .D.P .
1975. 59. J. A. Thorpe, Elementary Topics in differential geometry, Springer-Verlag, 1979. 60. C. Udrişte, Probleme de algebră liniară, geometrie analitică şi diferenţială, E.D.P., 1976. 61. C. Udrişte, Curbe şi suprafeţe, Litografia I .P.B., 1975. 62. C. Udrişte, Analiză matematică, Litografia I.P.B., 1975. 63. C. Udrişte, C. Bucur, Probleme de matematici şi observaţii metodologice, Editura Facla,
Timişoara, 1980. 64. C. Udrişte, E. Tănăsescu, Minime şi maxime ale funcţiilor'reale de variabile reale, Editura
tehnică, Bucureşti, 1980. 65. C. Udrişte, C. Radu, C. Dicu, O. Mălăncioiu, Algebră, geometrie şi ecuaţii diferenţiale, E.D.P. 66. V. Vladimirov et Coli. Recueil de problemes d'equations de physique mathematique, Editions
Mir, Moscou, 1976. 67. V. Voievodine, Algebre lineaire, Editions Mir, Moscou, 1976. 68. Gh. Gh. Vrânceanu, G. Mărgulescu, Geometrie analitică, E.D.P., 1973. 69. T6hoku Math. J, Kodai Math. Sem. Rep., J. Math. Soc. Japon, Tensor, The Amer. Math.
Monthly, colecţiile 1970-1980.
327
Plan editură Nr. 9059. Coli de iipar: 20,50. Bun de tipar; noiembrie 1981.
Tiparul executat sub comanda nr. 264 la
întreprinderea poligrafică „13 Decembrie 1918",
str. Grlgore Alexandrescu nr.89—97 Bucureşti
Republica Socialistă România