master optimizare prof dima
TRANSCRIPT
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 1/72
I. STUDIUL DISTRIBUŢIEI PONDERILOR ÎN BAZA GEODEZICĂ ŞITOPOGRFICĂ A UNEI CARIERE ÎN VEDEREA OPTIMIZĂRII
1.Scopul şi importanţa analizei distribuţiei ponderilor în baza geodezică şi topografică a unei cariere
Alegerea soluţiilor optime de proiectare şi exploatare a bazei geodezice şi topograficenecesare pentru lucrările curente dintr-o carieră (exploatare minieră la zi) presupune un studiudetaliat şi de mare complexitate care este necesar a se efectua atât în faza de constituire a bazeicât ţi în procesul de urmărire şi exploatare a acesteia de-a lungul timpului, pe durata defuncţionare a carierei.
In faza de desfăşurare a activităţilor de exploatare în carieră, principalele obiective suntacelea de a stabili evoluţia periodică (decadă, lună, trimestru, an) a fronturilor de lucru, trasareaaliniamentelor pentru circuitele de transport ale sterilului şi cărbunelui, urmărirea stabilităţiitaluzelor definitive ale carierei şi fronturilor de lucru, etc. fapt ce determină oportunităţi pentruidentificarea în orice punct sau zonă a exploatării, a tuturor sau principalelor valori care în mod
obişnuit se obţin prin calcul, ca de exemplu: tensiuni, deformaţii, deplasări statice sau dinamice,momente încovoietoare, forţe tăietoare, forţe axiale, etc.Dintre aceste mărimi, numai o parte pot rezulta în mod direct din indicaţiile şi
înregistrările furnizate de aparatura de măsurare, acestea constituind mărimile măsurabile.Celelalte mărimi (printre care şi volumele), urmează a fi deduse pe baza relaţiilor
matematice existente între diferite mărimi care caracterizează lucrările de geodezie şi topografiedintr-o exploatare la zi, precizia cu care se obtin marimile masurate direct determină şi precizia celorlaltemărimi. Acest fapt impune ca alegerea aparatelor şi metodelor de măsură să nu se facă la întâmplare, ci doar în contextulexistenţei unei corelaţii între sensibilitatea şi precizia lor, în aşa fel încât valoarea unei mărimi care nu poate fi obţinută direct săse obţină cu o precizie corespunzătoare indiferent de mărimea măsurabilă.
Se impune aşadar ca pornind de la scopul pentru care sunt efectuate măsurătorile să se stabilească valorilecorespunzătoare, ca mărime şi precizie, luând însă în considerare aspectul sconomic referitor la volumul observaţiilor necesar şisuficient care se impune.
Aşa după cum se ştie, o mărime măsurată de mai multe ori furnizează de fiecare dată oaltă valoare chiar dacă măsurătorile se desfăşoară în aceleaşi condiţii, de către acelaşioperator şi cu instrumente de mare precizie. Cauza acestor nepotriviri se datoreazăerorilor care afectează întotdeauna o măsurătoare, făcând ca valoarea adevărată a mărimiimăsurate să nu poată fi cunoscută niciodată.
Practic neputând fi determinată valoarea adevărată a mărimii măsurate seurmăreşte determinarea unei valori cât mai apropiată de cea adevărată într-un grad câtmai mare, în funcţie de scopul pentru care se execută măsurătorile.
Urmărirea evoluţiei fronturilor de lucru şi a stabilităţii taluzelor prin mijloacetopografice se constituie ca un exemplu de lucrări inginereşti care presupune efectuarea de
observaţii specifice asupra unor mărimi, în baza cărora să poată fi evaluate prin calcul altemărimi care pot caracteriza într-o măsură foarte dinamică o carieră într-un anumitinterval de timp.
Informaţiile care constituie baza concretă de date necesară rezolvării acestorprobleme provin din observaţiile de măsurare efectuate în principal asupra unghiurilor şidistanţelor. Calitatea informaţiilor obţinute din măsurători este funcţie directă de volumulobservaţiilor şi precizia aparatelor şi instrumentelor de măsurat.
Valorile în general mici şi foarte mici ale deformaţiilor taluzelor definitive şi alehaldelor de steril ajunse la cota finală, fac ca măsurătorile de urmărire a lor să constituie ooperaţie din cele mai dificile. In aceeaşi măsură, nivelul de veridicitate al rezultatelordepinde de calitatea observaţiilor şi de modul de abordare şi prelucrare a erorilor de
măsurare specifice, într-un cuvânt, de precizia de I lucru.
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 2/72
2.Clasificarea erorilor de măsurare specifice măsurătorilor geodezice şi topografice dintr-o exploatare minieră Ia zi
După cum s-a precizat, mărimea măsurată este afectată de erori inerente. Acţiunea acestor erorieste rezultatul unor cauze complexe, iar o analiză a acestora impune individualizarea, respectivclasificarea lor după mai multe criterii.
a) Erori după cauzele lor
In general, cauzele apariţiei erorilor de măsurare sunt multiple şi complexe. O posibilăgrupare a cauzelor poate duce la următoarea clasificare:1. erori instrumentale - datorate aparatelor şi instrumentelor de măsurat;2. erori personale - datorate operatorului care efectuează măsurătorile;3. erori de mediu - datorate influenţei mediului exterior.
b) Erori după valoarea de referinţă
Ţinând seama de modul general de definire a erorilor, ca diferenţe dintre observaţiile efectuate
asupra unor mărimi şi valoarea mărimii respective, pot fi precizate următoarele:Dacă se notează cu Mo valoarea mărimii respective, cu M; observaţiile şi cu ei erorile demăsurare, atunci:
Ei = Mi-M 0 , unde: i = l,2,...,n. (1.)
şi se disting:
• erori adevărate sau reale, de regulă notate cu e, erori care rezultă din diferenţeleobservaţiilor faţă de valoarea adevărată X.• erori aparente sau reziduale, de regulă notate cu v, erori care rezultă din diferenţele
observaţiilor faţă de valoarea determinată M (spre exemplu faţă de media observaţiilor). Seobservă deci, că erorile adevărate nu pot fi cunoscute, iar erorile aparente pot fi determinate deci,controlate şi cunoscute.
c) Erori după mărimea lor
Din punct de vedere al mărimii lor, erorile se grupează în:-erori mici sau tolerabile -cunoscute şi sub titulatura de erori admise;-erori netolerabile -neadmise sau greşeli.Este evident faptul că aceste erori pot fi surprinse dintr-o primă analiză a măsurătorilor.
Prelucrarea erorilor ce intervin în măsurătorile de urmărire a stabilităţii taluzelor şi a
operaţiilor topografice şi geodezice curente dintr-o carieră, implică obligativitatea eliniinăriiimediate a acelor observaţii afectate de erori netolerabile pentru evitarea compromiterii întreguluistudiu de prelucrare ulterioară a datelor.
d) Erori după modul lor de propagare
Din punct de vedere al modului de propagare (criteriu de clasificare care pune cel mai bine inevidenţă distribuţia ponderilor în lucrările geodezice şi topografice) se disting:1.erori sistematice - sunt acele erori provocate de cauze permanente şi au în fiecare caz o mărimeconstantă sau variabilă după o lege cunoscută;
Ele reprezintă erori controlabile ale aparatelor de măsură precum şi ale influenţelorcontrolabile ale mediului în care se execută măsurătorile.
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 3/72
Din punct de vedere algebric au acelaşi semn. Efectul erorii sistematice se anulează princalcul sau metoda de lucru respectiv, prin aplicarea corecţiei s asupra mărimii măsurate. Corecţiaiclicată mărimii măsurate este egală şi de semn contrar cu eroarea sistematică es;
2. erori accidentale - se mai numesc şi erori probabile sau întâmplătoare. Ele se datorează unor cauze aleatoare ce nu pot fi cunoscute şi deci înlăturate. Erorile accidentale sunt necontrolabile şiau următoarele caracteristici:- sunt mici;
- variază întâmplător în ambele sensuri (adică algebric pot fi când pozitive, când negative).După cele expuse se poate trage concluzia că la un număr mare de măsurători
(observaţii) poate fi redus efectul erorilor accidentale.Un exemplu de erori accidentale îl constituie cele care afectează observaţiile
efectuate asupra unei direcţii materializată cu un teodolit de precizie prin vizarea repetatăasupra unei mărci de observaţie amplasată pe aliniamentul de urmărire a stabilităţiitaluzelor sau într-un punct din operaţiile curente de triangulaţie, trilateraţie saupoligonometrie.
Dată fiind imposibilitatea punctării perfecte a reperului de observare (în stânga sau în dreapta acestuia), lecturile la cercul orizontal gradat al instrumentului vor fi influenţatede erori pozitive sau negative.
Neputând cunoaşte valoarea lecturii corespunzătoare unei punctări corecte, esteevident că nici diferenţele faţă de aceasta nu pot fi cunoscute chiar dacă ele practic există.
Din practica lucrărilor geodezice şi topografice ce se efectuează într-o exploatare lazi am constatat că erorile accidentale posedă următoarele caracteristici sau principii careghidează propagarea şi existenţa lor.
PRINCIPIUL CAUZALISTICErorile mici în valoare absolută, sunt mai frecvente decât cele mari.
PRINCIPIUL LIMITATIV
Toate erorile sunt mai mici decât o anumită limită.PRINCIPIUL DISTRIBUTIV
La un număr foarte mare de măsurători se obţin tot atâtea erori pozitive câte erori negative.
PRINCIPIUL PROBABILISTICProbabilitatea de a avea o anumită eroare este în funcţie de mărimea erorii.
In concluzie erorile accidentale nu pot fi anulate însă pot fi micşorate printr-o prelucrarecorespunzătoare a lor.
De asemenea este foarte important ca prelucrarea erorilor accidentale să se facă numai
după ce în prealabil au fost eliminate erorile sistematice.Metodele şi procedeele privind prelucrarea erorilor accidentale alcătuiesc în ansamblul lor TEORIA ERORILOR DE MĂSURARE.
3.Analiza propagării erorilor în reţelele geodezice şi topografice aferente exploatărilorminiere la zi realizate prin măsurători clasice
Lucrările geodezice şi topografice necesare activităţii din industria extractivă în particular şi a celorlalte activităţi economice, în general, au la bază măsurători în urma cărora se obţinvalori ale unghiurilor sau distanţelor.
In situaţia în care măsurătorile au fost realizate în aceleaşi condiţii şi de către
acelaşi operator, valoarea cea mai probabilă a mărimii măsurate se determină ca o mediearitmetică simplă, dată de relaţia:
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 4/72
( 2 . )
Faţă de valoarea cea mai probabilă a mărimii măsurate se pot determina valorile aparente afiecărei observaţii utilizând relaţiile:
v1 = M1 - Mv2 = M2 - M (3.)
....................vn = Mn - M
Dar, erorile aparente au două proprietăţi importante şi anume suma lor este totdeauna nulă aşacum r eiese din analiza relaţiilor (2.) şi (3.):
[ v ] = [ M ] - n M = 0 ( 4.)
şi suma pătratelor erorilor aparente este minimă:
(5.)
Din cele "n" observaţii realizate este importantă numai cea mai bună, dar trebuie stabilităşi eroarea ce o afectează, ce este dată de relaţia:
(6.)
De cele mai multe ori însă, operaţia de efectuare a măsurătorilor, se realizează în condiţiidiferite pentru aceeaşi mărime măsurată, acestea fiind de ponderi diferite, fapt ce implicăfolosirea, pentru determinarea valorii celei mai probabile ale mărimii măsurate, a relaţiei:
(7.)
in care:
(8.)
In acest caz condiţia de minim are forma:
[pvv ] = min (9.)
Rezultatele obţinute din măsurători de ponderi diferite sunt caracterizate de erori mediispecifice. Eroarea medie pătratică a unităţii de pondere, cu mare aplicabilitate în calculul
preciziilor de determinare se calculează cu una din relaţiile :
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 5/72
Respectiv
(10.)
3.1. Propagarea erorilor accidentale în măsurătorile indirecte
In general punctele reţelelor geodezice sau topografice sunt bine definite dacă se cunoaşte atât poziţia planimétrica cât şi cota acestora.Deci, o mărime măsurată prin măsurători indirecte este o funcţie de trei variabile de forma:
f = F(x,y,z) (11.)
în care, x, y şi z sunt afectate de erori, creşterile Δx, Δy, Δz conducând la o creştere finalăde forma Δf, adică:
f + Δf = F (x + Δx,y +Δy,z +Δz) (12.)Explicitând funcţia prin dezvoltarea lui Taylor vom avea:
(13.)unde:
(14.)Creşterile Δx, Δy, Δz, ca erori întâmplătoare, nefiind cunoscute ca mărime şi semn, se
înlocuiesc cu erori medii ± mx, ± my, ± mz, definite de instrumentele şi metodele de lucru.Prin ridicare la pătrat, în locul efectului real se va obţine, eroarea medie totală m t cecaracterizează rezultatul:
(15.)
cunoscută şi sub numele de legea propagării erorilor întâmplătoare în măsurătorileindirecte.
3.2. Propagarea erorilor accidentale în măsurătorile directe
In situaţia în care efectuarea măsurătorilor se realizează în aceleaşi condiţii (deinstrument, de mediu, etc.) diferenţialele din relaţia (15.) au valoarea matematică:
(16.)
ceea ce conduce la relaţia:

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 6/72
(17.)
Ca un caz particular, când erorile medii parţiale de măsurare sunt egale, având ca valoareeroarea medie unitară, rezultă legea propagării erorilor în măsurători directe de ponderi egale,dată de relaţia:
(18.)
Dar, în realitate pe lângă erorile accidentale, măsurătorile mai sunt afectate şi de erorilesistematice, caz în care eroarea totală este dată de rădăcina pătrată a sumei pătratelor erorilor sistematice şi erorilor accidentale.
(19.)
3.3. Propagarea erorilor în reţelele geodezice aferente exploatărilor miniere la zi
3.3.1. Propagarea erorilor în reţea geodezică sub forma unui lanţ de triunghiuri
In perimetrul exploatării miniere se află puncte ale triangulaţiei de stat, ce alcătuiesc oreţea de ordinul IV-V. Aceste puncte se utilizează pentru dezvoltarea reţelei geodezice sau baze
pentru constituirea triangulaţiilor topografice, a reţelelor de apropriere şi ulterior a reţelelor delucru.
La baza constituirii reţelelor de triangulaţie de ordin superior au fost utilizate preponderent lanţurile de trilateraţie, compuse în general din triunghiuri sau patrulatere.
In rezolvarea unui astfel de lanţ, baza de calcul o constituie măsurătorile efectuateasupraunei laturi bi eroarea "mb" (sau cu poziţie bine determinată dacă aparţine unei reţele deordin superior punctelor ce constituie lanţul, caz în care cunoaştem şi orientarea acesteia) şiunghiurile αi,βi,γi, afectate de eroarea de măsurare "m".
Fig. 5.1. Lanţ simplu
de triunghiuri
Metodologia de calcul are la bază, relaţiile:
(20 . )
n+1B
2
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 7/72
unde:
(21.)
Propagarea erorilor, în acest caz se realizează pentru laturile componente ale reţelei
folosind relaţia:
(22.)
pentru lungimea totală a lanţului pe baza relaţiei:
(23.)
şi pentru orientarea laturilor componente:
(24.)
Intr-un caz particular, când întreg lanţul trigonometric este constituit din triunghiuri echilaterale, se poate realiza şi unstudiu al propagării erorilor transversale, erori care pot fi calculate cu relaţia:
(25.)
3.3.2. Propagarea erorilor în reţele geodezice compacte
Reţelele geodezice compacte au o aplicabilitate mai răspândită decât lanţurile detriangulaţie şi la rândul lor pot fi formate din triunghiuri sau patrulatere de triangulaţie, acestea
din urmă, din punct de vedere al optimizării fiind mai puţin avantajoase deoarece conduc lalucrări de teren şi birou suplimentare şi implicit la costuri mai mari.Propagarea erorilor în acest caz se studiază din punct de vedere al erorilor medii ale
lungimii laturilor şi pe orientări.Relaţiile de calcul depind de forma triunghiurilor componente (echilaterale sau oarecare),
acestea fiind date de literatura de specialitate ca fiind :
a) pentru reţele for mate din triunghiuri echilaterale:
- deplasarea medie pătratică longitudinală nii a unuia din capetele unei diagonale oarecare, în raport cu celălalt capăt al său, esteegală cu deplasarea sa medie pătratică transversală mT :
(26.)
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 8/72
- eroarea medie pătratică pe orientări se poate determina în cazul reţelelor compensate numai pe bazaecuaţiilor de condiţii de figură, tur de orizont şi de pol cu relaţia:
(27.)
iar, în cazul în care se mai consideră în plus şi ecuaţiile de condiţie de constrângere pe orientareşi pe latură se obţine:
(28.)
unde:
n - numărul de triunghiuri existente între bază şi latura considerată; N - numărul total de triunghiuri existente între două baze.
a) pentru reţele de suprafaţă oarecare
Studiul propagării erorilor se realizează pentru:- reţele compensate numai pe baza ecuaţiilor de condiţii de figură, de tur de orizont şi depol cu relaţia:
(29.)
- reţele compensate pe baza ecuaţiilor de condiţii de figură, de tur de orizont, de pol, deconstrângere pe orientare şi pe latură cu relaţia:
(30.)
unde:
n - numărul de triunghiuri existente între bază şi latura considerată; N - numărul total de triunghiuri existente între două baze.
3.4. Propagarea erorilor în reţelele topografice aferente exploatărilor miniere la zi
3.4.1. Propagarea erorilor în traseul poligonal cu o orientare şi un punct fix
Acest tip de traseu se utilizează mai puţin în lucrările miniere de suprafaţă, în special laconstituirea reţelei de lucru pentru determinarea volumelor şi a unor aliniamente a traseelor
mijloacelor de transport, în faza de deschidere a carierelor, deoarece încă din faza de proiectare a

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 9/72
reţelei de sprijin se are în vedere, crearea unei densităţi suficient de bune care să asigure suport pentru constituirea reţelelor de lucru, a căror puncte să aibă o precizie ridicată.
Orientarea şi punctul fix aparţin de regulă reţelei de apropiere a carierei sau reţelei desprijin, dar în anumite faze de dezvoltare a lucrărilor miniere pot fi parte integrantă a unui alttraseu poligonal ce formează reţeaua de lucru.
în acest caz avem cunoscute : poziţia punctului A ( xa , ya), orientarea θ0 şi erorile lor; Elementele măsurate
sunt:- unghiurile α1, α2, ..., αn
-distanţele s1, s2, ..., sn
Principiul de calcul al orientărilor fiecărei laturi ale traseului poligonal este dat de
relaţia:
(31.)
iar al coordonatelor de relaţiile:
(32.)
Propagarea erorilor se face atât pe orientări cât şi pe coordonate, valoarea lor determinându-se prin relaţii de calcul specifice cum ar fi:- pentru orientări:
(33.)
Dacă (cazul specific măsurării unghiurilor în aceleaşi condiţii de precizie)rezultă că:
(34.)
- pentru coordonate:
(35.)
Eroarea m x a unui punct oarecare din traseul poligonal se determină astfel cu relaţiile:
Fig. 2. Traseu poligonal cu un punct fix şi oorientare fixă (flotant)

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 10/72
(36.)
unde:
■ pentru m xr :
(37.)
(38.)
(39.)
■ pentru m yr :
(40.)
(41.)
(42.)
3.4.2. Propagarea erorilor în traseul poligonal cu două orientări şi două puncte fixe
Această metodă se utilizează la realizarea reţelei de lucru pe treptele de exploatare,traseul poligonal sprijinindu-se pe două puncte ale poligonaţiei de contur ale carierei sau aletriangulaţiei topografice.
Ca date cunoscute în acest caz avem, coordonatele punctelor de capăt şi cele douăorientări ale acestora, ceea ce înseamnă elemente de constrângere suplimentare.
Fig. 3. Traseu poligonal sprijinit pe două puncte şi două orientări cunoscute
Relaţiile care guvernează această metodă sunt:
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 11/72
(43.)
Avându-se în vedere că avem cunoscute orientările în punctele de capăt, calculul acestora
se poate face pornind fie din punctul A, fie din punctul B.In situaţia în care orientarea de pornire este cea din punctul A, valoarea erorilor peorientări se determină cu relaţia:
(44.)
iar în cazul în care punctul de pornire este B avem relaţia:
(45.)
Determinarea expeditivă a valorii probabile a orientării va fi funcţie de ambele variante dedeterminare şi va fi dată de relaţia:
(46.)
unde:
(47.)
Eroarea medie pătratică a orientării se determină cu relaţia:
(48.)
Există şi situaţii particulare în care cele două orientări, iniţială şi finală sunt egale caz încare eroarea medie pătratică a unui unghi şi a orientării se determină cu relaţiile:
(49.)
Propagarea erorilor pe coordonate in varianta de rezolvare aproximativa se poatedetermina cu relatiile de mai jos, unde sunt luate in considerare doar erorile datorate masurarii
distantelor si erorilor coordonatelor de plecare (considerand metodologia de calcul initiala cu plecare din ambele puncte cu coordonate cunoscute).

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 12/72
(50.)
Plecand de la aceste premise eroarea probabila pe coordonate in punctul r este:
(51.)
unde:
; (52.)
; (53.)
In final, erorile probabile ale coordonatelor se vor obtine cu relatiile:
(54.)
unde:
(55.)
In situaţia în care se utilizează rezolvarea precisă prin metoda măsurătorilor condiţionate sistemul ecuaţiilor de erori seexprimă sub formă matriceală astfel:
(56.)

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 13/72
unde:
(57.)Dacă notăm ponderea unghiurilor cu pα (pα =1, dacă unghiurile se măsoară în aceleaşi
condiţii), iar ponderea de măsurarea a distanţelor cu ps = m2α / m2
s, matricea ponderilor are forma generalădată de relaţia:
(58.)
După rezolvarea sistemului de ecuaţii cu valorile probabile astfel obţinute se determinăorientările şi coordonatele punctelor folosind relaţiile:
(59.)
Calculul erorilor pe orientări şi coordonate se realizează utilizându-se metoda matriceală,având la bază exprimarea liniară a ecuaţiilor din relaţia de mai sus, pe baza căreia se determinăcomponente matricelor f, g şi h.
(60.)
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 14/72
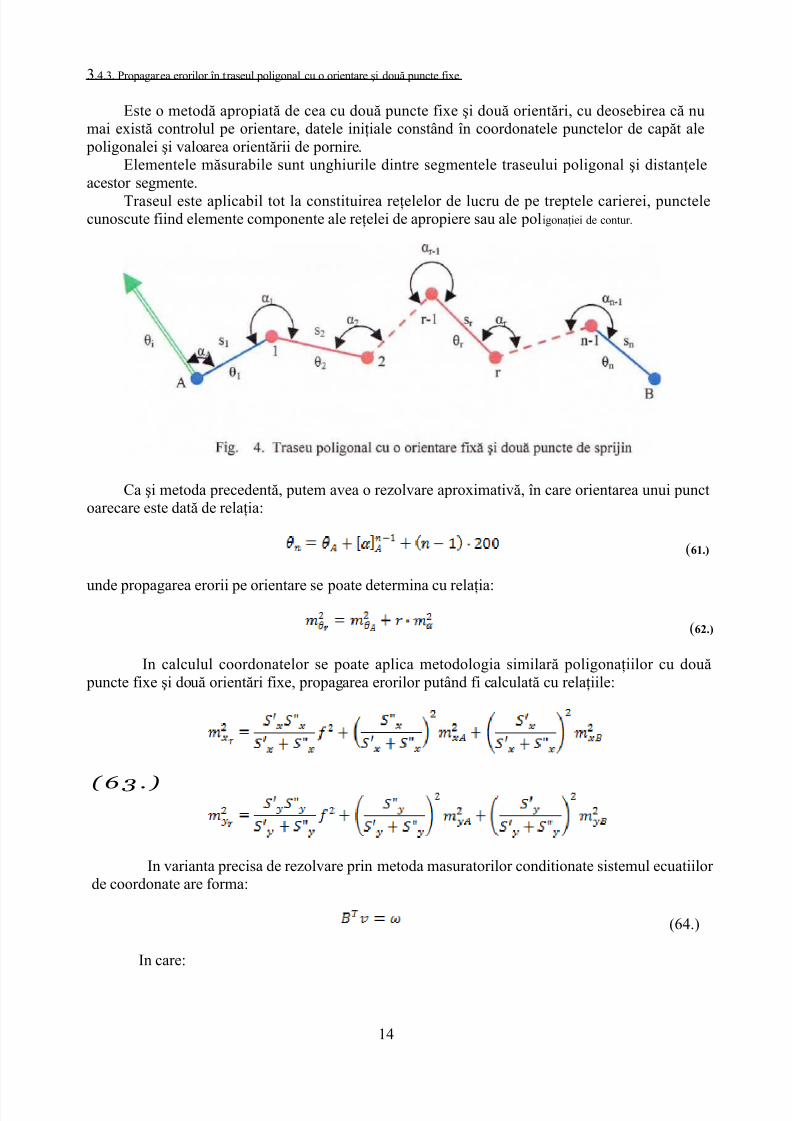
3.4 .3. Propagarea erorilor în traseul poligonal cu o orientare şi două puncte fixe
Este o metodă apropiată de cea cu două puncte fixe şi două orientări, cu deosebirea că numai există controlul pe orientare, datele iniţiale constând în coordonatele punctelor de capăt ale
poligonalei şi valoarea orientării de pornire.Elementele măsurabile sunt unghiurile dintre segmentele traseului poligonal şi distanţele
acestor segmente.Traseul este aplicabil tot la constituirea reţelelor de lucru de pe treptele carierei, punctele
cunoscute fiind elemente componente ale reţelei de apropiere sau ale poligonaţiei de contur.
Ca şi metoda precedentă, putem avea o rezolvare aproximativă, în care orientarea unui punctoarecare este dată de relaţia:
(61.)
unde propagarea erorii pe orientare se poate determina cu relaţia:
(62.)
In calculul coordonatelor se poate aplica metodologia similară poligonaţiilor cu două puncte fixe şi două orientări fixe, propagarea erorilor putând fi calculată cu relaţiile:
(63 . )
In varianta precisa de rezolvare prin metoda masuratorilor conditionate sistemul ecuatiilor de coordonate are forma:
(64.)
In care:
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 15/72
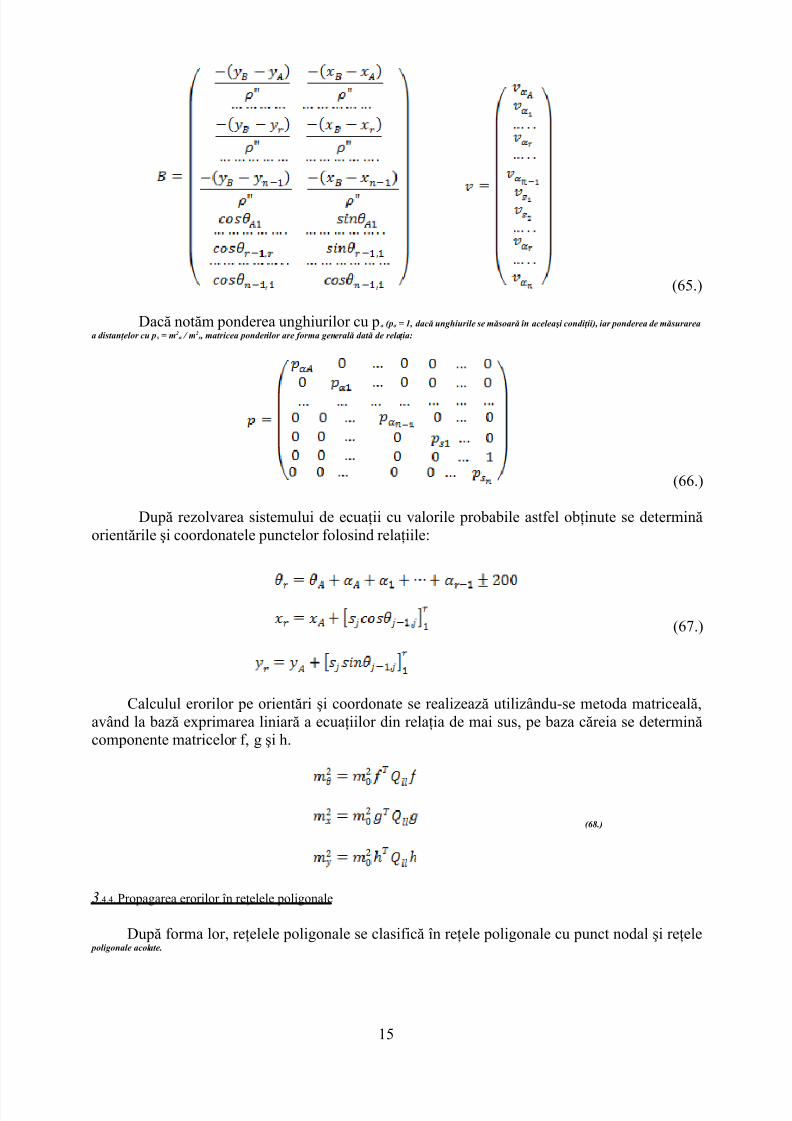
(65.)
Dacă notăm ponderea unghiurilor cu pα (pα = 1, dacă unghiurile se măsoară în aceleaşi condiţii), iar ponderea de măsurareaa distanţelor cu ps = m2
α / m2s , matricea ponderilor are forma generală dată de relaţia:
(66.)
După rezolvarea sistemului de ecuaţii cu valorile probabile astfel obţinute se determinăorientările şi coordonatele punctelor folosind relaţiile:
(67.)
Calculul erorilor pe orientări şi coordonate se realizează utilizându-se metoda matriceală,având la bază exprimarea liniară a ecuaţiilor din relaţia de mai sus, pe baza căreia se determinăcomponente matricelor f, g şi h.
(68.)
3 .4.4. Propagarea erorilor în reţelele poligonale
După forma lor, reţelele poligonale se clasifică în reţele poligonale cu punct nodal şi reţele poligonale acolate.

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 16/72
Fig. 5 Tipuri de retele poligonale
Ca date cunoscute în reţelele poligonale sunt coordonatele punctelor din extremităţilereţelelor şi orientările aferente acestora.
Metoda care permite o rezolvarea rapidă şi cu rezultate bune este aceea de a descompunereţelele în trasee poligonale simple de tipul celor prezentate anterior, în vederea determinăriicoordonatelor şi orientărilor provizorii în punctele nodale pentru care ulterior se vor scrie sisteme
de ecuaţii de erori cu forma matriceală prezentată în relaţia:
(69.)
In determinarea propagării ponderilor aferente reţelelor poligonale, avem relaţii specifice pentru ponderea pe orientări, dată de relaţia:
(70.)
nr - este numărul unghiurilor măsurate în traseul r, iar pentru ponderea pe coordonate:
(71.)
unde: sr - lungimea traseului "r".
Eroarea mărimilor determinate în cazul reţelelor poligonometrice are forma matriceală:
(72.)
unde:
(73.)
3.4.5. Propagarea erorilor în reţelele de îndesire prin intersecţie simplă înainte
Metoda de îndesire a reţelelor prin intersecţie înainte este mai puţin aplicabilă în cazulreţelelor geodezice dar, are o aplicabilitate mare în triangulaţiile locale aferente exploatărilor niiniere.
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 17/72
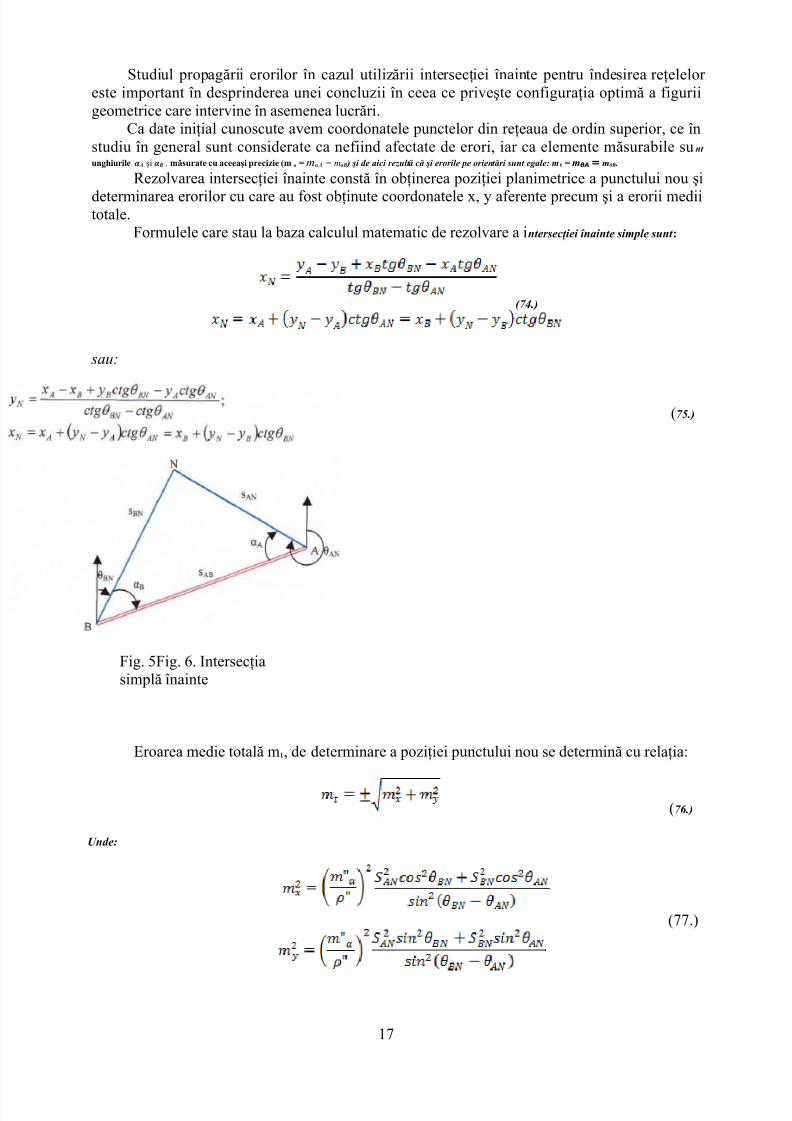
Studiul propagării erorilor în cazul utilizării intersecţiei înainte pentru îndesirea reţelelor este important în desprinderea unei concluzii în ceea ce priveşte configuraţia optimă a figuriigeometrice care intervine în asemenea lucrări.
Ca date iniţial cunoscute avem coordonatele punctelor din reţeaua de ordin superior, ce înstudiu în general sunt considerate ca nefiind afectate de erori, iar ca elemente măsurabile sunt
unghiurile α A şi α B , măsurate cu aceeaşi precizie (mα = mαA = mαB ) şi de aici rezultă că şi erorile pe orientări sunt egale: mθ = mθA = mθB .
Rezolvarea intersecţiei înainte constă în obţinerea poziţiei planimetrice a punctului nou şi
determinarea erorilor cu care au fost obţinute coordonatele x, y aferente precum şi a erorii mediitotale.
Formulele care stau la baza calculul matematic de rezolvare a intersecţiei înainte simple sunt :
(74.)
sau:
(75.)
Eroarea medie totală mt, de determinare a poziţiei punctului nou se determină cu relaţia:
(76.)
Unde:
(77.)
2
Fig. 5Fig. 6. Intersecţiasimplă înainte
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 18/72
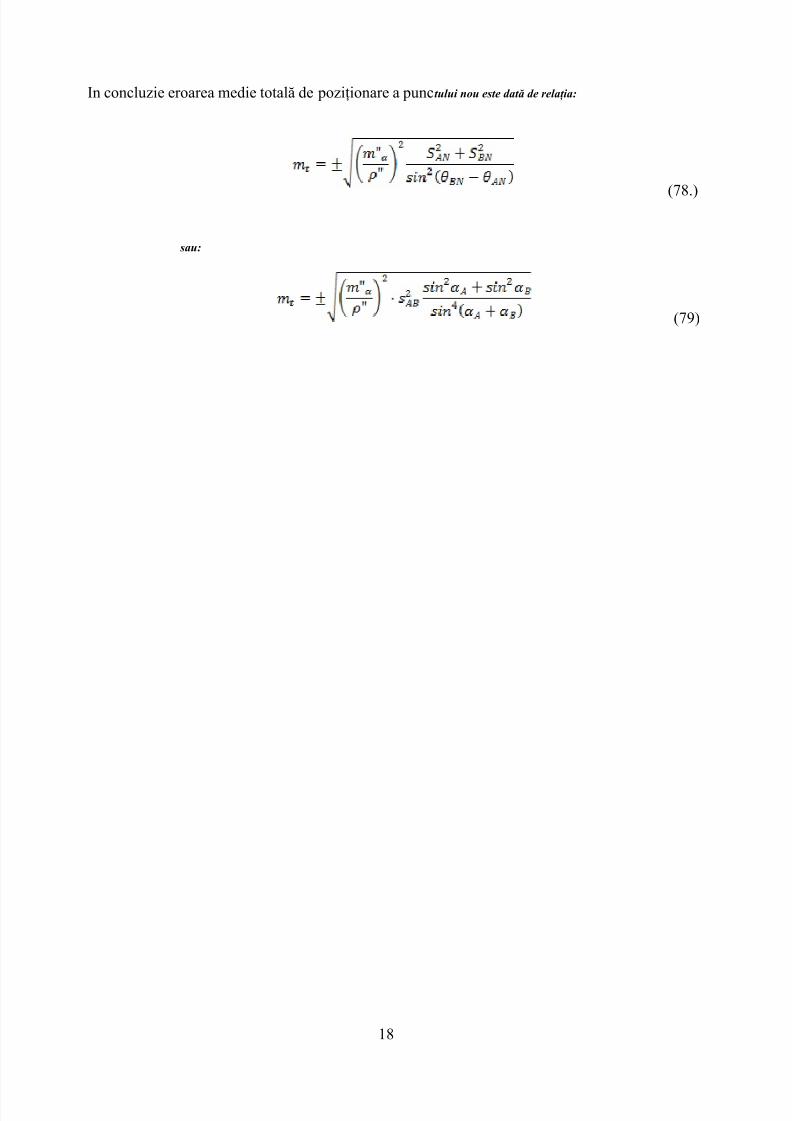
In concluzie eroarea medie totală de poziţionare a punctului nou este dată de relaţia:
(78.)
sau:
(79)
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 19/72
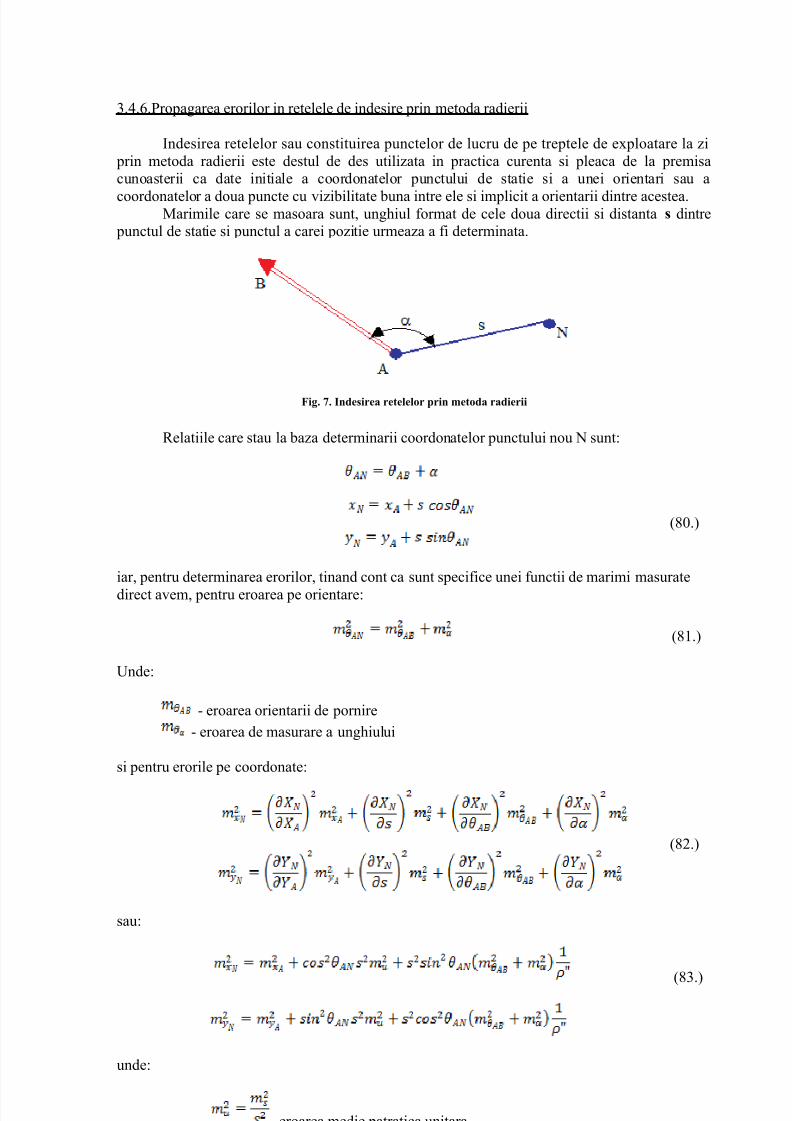
3.4.6.Propagarea erorilor in retelele de indesire prin metoda radierii
Indesirea retelelor sau constituirea punctelor de lucru de pe treptele de exploatare la zi prin metoda radierii este destul de des utilizata in practica curenta si pleaca de la premisacunoasterii ca date initiale a coordonatelor punctului de statie si a unei orientari sau a
coordonatelor a doua puncte cu vizibilitate buna intre ele si implicit a orientarii dintre acestea.Marimile care se masoara sunt, unghiul format de cele doua directii si distanta s dintre
punctul de statie si punctul a carei pozitie urmeaza a fi determinata.
Fig. 7. Indesirea retelelor prin metoda radierii
Relatiile care stau la baza determinarii coordonatelor punctului nou N sunt:
(80.)
iar, pentru determinarea erorilor, tinand cont ca sunt specifice unei functii de marimi masuratedirect avem, pentru eroarea pe orientare:
(81.)
Unde:
- eroarea orientarii de pornire
- eroarea de masurare a unghiului
si pentru erorile pe coordonate:
(82.)
sau:
(83.)
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 20/72
4. Analiza propagării erorilor în reţelele geodezice şi topografice aferente exploatărilor miniere la zi realizate prinmăsurători moderne (tehnologie GPS)
4.1.Precizia de estimare a poziţiei. Erorile ce influenţează măsurătorile GPS
Această poziţie este influenţată de o serie de erori care pot fi clasificate astfel:
1) erori sistematice (eliminate sau estimate în procesul de calcul):
-erori sistematice de reprezentare a orbitelor;-erori sistematice a modelului de funcţionare a ceasului;-coordonate (cunoscute) ale reţelei;-eroarea troposferica şi ionosferica;-ambiguitatea fazei purtătoarei.2) erori aleatoare:
-erori sistematice reziduale;-'cycle - slipsi' necorectaţi;-excentricitatea centrului de fază;
-eroarea datorată reflexiei semnalelor;-erori aleatoare de măsurare.
4.2.Indicatorii preciziei poziţiei
a) Abaterea standard a unităţii de pondere ( σ 0 );
(85.)
v - eroarea individualănu este eroarea de determinare a poziţiei cu un receptor GPS. Ea este numai o măsură a erorii
distanţei spre unul din sateliţi. b) DOP ( Dilution of Precisión — abaterea standard apriorică a poziţiei)
Contribuţia erorilor induse de geometria sateliţilor în calculul poziţiei este cunoscută subnumele de diluţia preciziei (DOP) şi are un efect multiplicativ asupra lui .
Geometria sateliţilor - reprezintă modul de dispunere spaţială a sateliţilor de la caresunt recepţionate semnalele GPS şi de aici, unghiurile între direcţiile de propagare asemnalelor.
In general, spaţiile mari dintre sateliţi şi receptor produc erori mai mici. Constelaţiacompletă de sateliţi GPS (disponibilă la sfârşitul anului 1992) a îmbunătăţit precizia determinăriipoziţiei.
Indicatorii DOP :
PDOP (Position DOP) - Abaterea standard apriorică a poziţieiPDOP = ([vv]x + [vv]y +[vv]z)1/2 (86.) PDOP este în acelaşi timp o funcţie matematică de coordonate relative ale receptorului şi
sateliţilor şi poate fi calculată uşor pentru o geometrie particulară a sateliţilor şi receptorului.HDOP ( Horizontal DOP) - Abaterea standard apriorică a poziţiei planimetrice
HDOP = ([vv]x + [vv]y)1/2 (87.)
VDOP (Vertical DOP) - Abaterea standard apriorică a coordonatei verticale;TDOP (Time DOP) - Abaterea standard apriorică a poziţiei datorată erorii ceasului
t l i

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 21/72
GDOP
Precizia poziţiei va fi dată de relaţiile:
(89.)
4 .3. Stadiul preciziei proiectate
Planul Federal de Radionavigaţie al S.U.A. (F.R.P. 1991) arată că după declararea operaţională a sistemului GPS, precizia de
determinare planimetrica (absolută) pentru utilizatorii SPS (Serviciul de Poziţionare Standard) este planificată a f i de 100 m cu probabilitatea
de 95%, iar pentru utilizatorii PPS (Serviciul de Poziţionare Precisă) de 17,8 m şi probabilitatea de 95%.
Precizia de determinare verticală (absolută) va fi de 156 m pentru utilizatorii SPS şi de27,7 m pentru utilizatorii PPS .
In ceea ce priveşte precizia de determinare a poziţiei relative, care interesează în special în reţelele topografice şi geodezice, aceasta poate fi comparatăcu măsurătorile efectuate cu firul de invar.
Preciza relativă se încadrează în valori de ordinul a câtorva ppm (părţi per milion) dindistanţa măsurată ( 1 - 3 x 1 0 - 6 x DKm) şi se menţine între aceste limite pentru distanţe de la câţiva kilometrii până la zeci şi sute de
kilometri, pretându-se la crearea unor reţele şi urmărire de precizie.Conform literaturii de specialitate se poate folosi următoarea formulă empirică pentru determinarea preciziei de aşteptat în măsurători statice GPS şi
prelucrare diferenţială:
(90.)
Pentru distanţe ceva mai mari precizia dată de relaţia de mai sus a putut fi atinsă.
Pentru utilizări locale poate fi prezentat tabelul următor, în care valorile pot fi acceptate cadomeniu de rezoluţie, dar nu au fost atinse în practica curentă:
Baza b (km) Eroarea relativa abazei db/b (ppm)
Eroarea absoluta abazei db (mm)
1 0,7 0,72 0,5 1,05 0,3 1,510 0,2 2,2 Precizia maxima de atins cu masuratorile diferentiale GPS
In lucrări mai noi din 1991, 1992 se vorbeşte de precizii maxime ce se obţin în reţele localeşi condiţii optime de cea. ±2 mm pe fiecare direcţie a axelor de coordonate. Cu aceasta nu a fostîncă atinsă precizia oferită de măsurătorile geodezice convenţionale, dar pentru multe aplicaţiiaceastă precizie poate fi considerată suficient de bună. Nu trebuie pierdute din vedere niciavantajele tehnologiei GPS faţă de metodele geodezice convenţionale: flexibilitatea şi eficienţa.
Factorul care limitează potenţialul de precizie a măsurătorilor GPS este desigur refracţia întroposfera, care nu poate fi obţinută din modele şi nici din măsurători de temperatură, presiune, umiditate la nivelul solului.
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 22/72
min)(1
→= ∑=
i
n
i
i xc x F (91.)
supusă la condiţiile:
;1
ji
ni
ji b xa =∑=
j= m,1 (92.)
;0≥i x i= n,1 (93.)
Aceasta este o problemă, de programare liniară cu restricţii de tip egalitate, cu varia bile dedecizie nenegative. În rezolvarea problemelor de optimizare a bazelor geodezice şi topografice acest caz este întâlnitmai puţin dar, în general toate problemele de optimizare pot fi aduse la această formă, înlăturând restricţia din relaţia
(6.3.) prin substituirea variabilei Xi cu două variabile pozitive a căror diferenţă este:
21 iii x x x −= (94.)
unde:
00 21 ≥≥ ii x x (95.)
Folosirea acestui procedeu de transformare conduce la rezolvarea problemelor deoptimizare însa are un neajuns, ce constă în dublarea numărului variabilelor problemei.
Acest neajuns poate fi înlăturat prin adunarea unei constante la fiecare variabilă de decizie, astfel:
iii k x x += 1 (96.)
unde ik are valoarea foarte mare.Şi această metodă, necesită însă, anumite precauţii în folosirea de valori foarte mari
pentru constanta k, deoarece ar conduce la nedeterminări de ordin numeric.Un alt aspect care este întâlnit în rezolvarea practică a problemelor de optimizare este
necesitatea de a se lua în considerare şi restricţiile de tip inegalitate şi transformarea acestora înrestricţii de tip egalitate, conform relaţiei (92.), care conduce la obţinerea unor rezultate utilizându-sevariabile de decizie adiţionale.
Astfel, pentru transformarea unei inegalităţi de tipul:
ji
n
i
ji b xa ≤∑=1
(97.)
într-o restricţie de tip egalitate, trebuie adăugată o variabilă de decizie 1+n x , astfel încât:
jni
n
i
ji b x xa =+ +=
∑ 1
1
(98.)
În acest proces, variabila de decizie 1+n x este denumită şi variabila pasivă şi pentru
rezolvarea de ansamblu a problemei de optimizare este necesară câte o astfel de variabilă pasivă pentru fiecare restricţie de tip inegalitate.
În situaţia în care semnul inegalităţii este ≥ atunci variabila pasivă se scade pentru a transforma
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 23/72
supusă la condiţia:
A∗ X = B (100.)
unde X nu are restricţii de semn.
În acest caz, programul de optimizare va conţine o subrutină ce va transforma problema deoptimizat, într-o problemă de programare liniară în forma standard, înainte de a se trece larezolvarea efectivă, a ei, cu tratare distinctă pentru sistemele liniare subdimensionate, respectiv pentru
sisteme liniare supradimensionate.
2.1.2. Problema sistemelor liniare subdimesionate
În situaţia în care numărul ecuaţiilor este mai mic decât numărul necunoscutelor, specific
cazurilor în care numărul măsurătorilor este insuficient, avem de a face cu sisteme liniare subdimensionate.Forma generală a unui sistem liniar subdimensionat este dată de relaţia:
A∗ X = B (101.)
unde:
=
=
=
mnmnmjmm
n j
n j
b
bb
B
x
x x
X
aaaa
aaaaaaaa
A ...;...;
......
..................
............
2
1
2
1
21
222221
111211
şi m< n (102.)

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 24/72
Pentru rezolvarea acestui sistem de ecuaţii nedeterminant se ataşează o condiţie suplimentară datăde relaţia:
( ) min...22
2
2
1 =+++= ni x x x x F (103.)
Dacă, în rezolvare se introduce şi vectorul rezidual R care satisface condiţia:
R=A∗ X-B(104.)unde:
[ ] n jmib xa R i jiji ,1;,1, ==∀−= (105.)
şi ţinând cont că de faptul că trebuiesc înde plinite simultan condiţiile din relaţiile (101.) şi (103.)atunci avem:
( ) min2...1
22
2
2
1 =−+++= ∑=
i
m
i
ini r k x x x x F
(106.)
Pentru determinarea minimului acestei funcţii se pune condiţia ca:
( )
ni x
x F
i
i ,1,0 ==∂
∂(107.)
sistem a cărui desfăşurare este:
=−
=−
=−
022
............................
022
022
22
11
inin
ii
ii
ak x
ak x
ak x
;,1 mi = (108.)
şi care are soluţia de forma:
nick x ii ,1,, == (109.)
unde k este un vector cu m componente, cunoscut din literatura de specialitate şi subdenumirea de vectorul corelatelor, iar c un vector format din elementele situate încoloana i a matricei A cu forma matriceală generală dată de:
Pag. 24

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 25/72
ni
a
a
a
c
k
k
k
k
mi
i
i
m
,1;...
;...
2
1
2
1
=
=
= (110.)
Înlocuind în sistemul dat de relaţia (110.), valorile necunoscutelor date de relaţia (109.), se obţinesistemul:
=+++
=+++
=+++
mnmnmm
nn
nn
bck ack ack a
bck ack ack a
bck ack ack a
,...,,...................................................................
,...,,
,...,,
2211
22222121
11212111
(111.)
unde, pentru ecuaţia i , explicitarea are forma:
( )( )
( )ml ml l il il
mmii
mmii
ak ak ak ack a
ak ak ak ack a
ak ak ak ack a
+++=
+++=
+++=
...,
.................................................................
...,
...,
22111
2222121212
1212111111
(112.)
de unde se poate deduce că:
mibk l l k l l k l l immiii ,1,,...,,2211
==+++ (113.)
Pag. 25
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 26/72
ce reprezintă un sistem de m ecuaţii cu m necunoscute, în care il are forma:
( )iniii aaal ,...,, 21= (114.)
După rezolvarea acestui sistem se revine în relaţia (109.) şi se determină soluţiilesistemului iniţial.
2.1.3.Problema sistemelor supradimensionate
Spre deosebire de sistemele supradimensionate în care numărul ecuaţilor era maimic decât numărul necunoscutelor, aşa cum reiese şi din denumirea lor, sistemele
supradimensionate au în componenţa lor ecuaţii liniare în care numărul lor este mai maredecât numărul necunoscutelor.
Forma matriceală generală a unui astfel de sistem este dată de:
B X A =∗ (115.)
unde:
;
...
............
...
...
,2,1,
22221
11211
=
+++ n pn pn pn
n
n
aaa
aaa
aaa
A ;...
2
1
=
n x
x
x
X
=
+ pnb
b
b
B...
2
1
(116.)
Este cunoscut faptul că în sistemele de ecuaţii supradimensionate, numărul marede ecuaţii faţă de numărul necunoscutelor conduc la soluţii care nu satisfac toate acesteecuaţii fapt ce necesită transformarea acestuia într-un sistem normal în care numărulecuaţilor coincide cu cel al necunoscutelor.
Pentru rezolvarea unui astfel de sistem în geodezie şi topografice, în general, sefoloseşte metoda celor mai mici pătrate.Dacă notăm cu R vectorul rezidual care este dat de:
B X A R −∗= (117.)
sau:
Pag. 26

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 27/72
−+++=
−+++=
−+++=
+++++ pnnn pn pn pn pn
nn
nn
b xa xa xar
b xa xa xar
b xa xa xar
,22,11,
222221212
112121111
...
.....................................................
...
...
(118.)elementele acestuia trebuie să satisfacă condiţia:
min... 22
2
2
1 =+++ + pnr r r (119.)
Avându-se în vedere că fiecare componentă a sistemului (118.) este funcţie devariabilele i x , ni ,1= , atunci relaţia (119.) mai poate fi scrisa şi sub forma:
( ) min,...,,
2
1 1 1
2
21 =
−== ∑ ∑ ∑
+
=
+
= =
pn
i
pn
i
n
j
i jijinb xar x x x F
(120.)
Pentru obţinerea sistemului normal de ecuaţii liniare, se pune condiţia caderivatele parţiale ale funcţiei cu forma generală prezentată în relaţia (120.) să fie nule,
adică:
( )
ni x
x x x F
i
n ,1,0,...,, 21 ==
∂∂
(121.)
În acest caz sistemul normal de ecuaţii va avea forma:
=+++
=+++
=+++
nnnnnn
nn
nn
cb xcc xcc xcc
cb xcc xcc xcc
cb xcc xcc xcc
,,...,,
....................................................................,,..,,
,,...,,
2211
22222121
11212111
(122.)
Pag. 27
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 28/72
unde s-a notat cu ic , ni ,1= vectorul de dimensiune n+p format din elementele dincoloana i a matricei A. Prin rezolvarea acestuia se vor obţine în final soluţiile sistemului caresatisfac ecuaţiile sistemului iniţial, supradimensionat .
2.2. Categorii si criterii de optimizare
Pentru proiectarea unei reţele geodezice sau topografice, în general, care sădeservească activitatea de măsurători într-o exploatare minieră la zi, în particular, în principiu există mai multe variante dintre care doar una singură, necesită un număr minimde măsurători, cu costuri minime şi precizie ridicată de determinare a mărimilor şi timpscurt de materializare a acesteia în practică.
În geodezie şi topografie au existat şi există preocupări în ceea ce privesteoptimizarea bazelor geodezice şi topografice Mittermayer (1972) şi Wolf (1972).
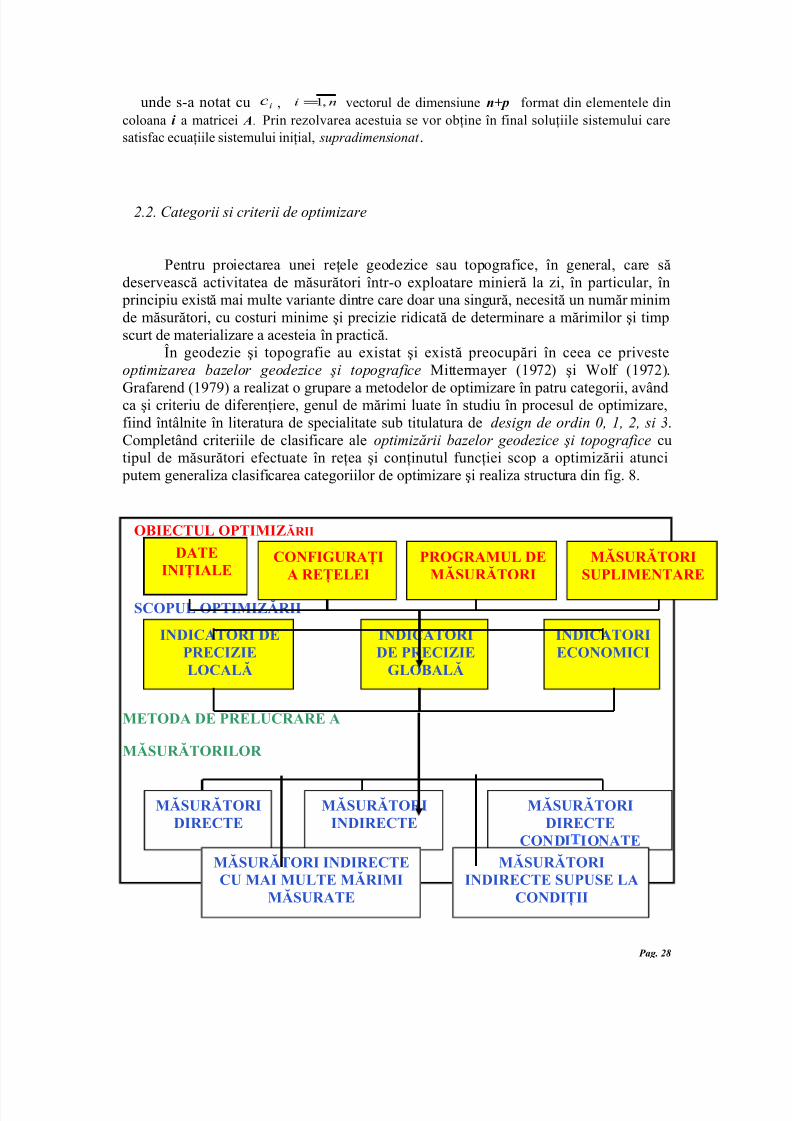
Grafarend (1979) a realizat o grupare a metodelor de optimizare în patru categorii, avândca şi criteriu de diferenţiere, genul de mărimi luate în studiu în procesul de optimizare,fiind întâlnite în literatura de specialitate sub titulatura de design de ordin 0, 1, 2, si 3.Completând criteriile de clasificare ale optimizării bazelor geodezice şi topografice cutipul de măsurători efectuate în reţea şi conţinutul funcţiei scop a optimizării atunci putem generaliza clasificarea categoriilor de optimizare şi realiza structura din fig. 8.
OBIECTUL OPTIMIZĂRII
SCOPUL OPTIMIZĂRII
METODA DE PRELUCRARE A
MĂSURĂTORILOR
Pag. 28
DATEINIŢIALE
CONFIGURAŢI
A REŢELEI
PROGRAMUL DE
MĂSURĂTORI
MĂSURĂTORI
SUPLIMENTARE
INDICATORI DEPRECIZIELOCALĂ
INDICATORIDE PRECIZIE
GLOBALĂ
INDICATORIECONOMICI
MĂSURĂTORIDIRECTE
MĂSURĂTORIINDIRECTE
MĂSURĂTORIDIRECTE
CONDI IONATE
MĂSURĂTORI INDIRECTECU MAI MULTE MĂRIMI
MĂSURATE
MĂSURĂTORIINDIRECTE SUPUSE LA
CONDIŢII
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 29/72
Fig. 8. Clasificarea categoriilor de optimizare
Aşa cum precizam mai sus, luând în considerare ca şi criteriu de diferenţiere în procesul deoptimizarea genul de mărimi luate în studiu, se disting patru categorii şi anume:
• optimizarea datelor iniţiale (design de ordinul 0), când se iau în studiu variante decalcul a reţelelor pornind de la cunoasterea iniţială a:
măsurătorilor unghiulare;
a orientării unei alturi;
a orientării unei laturi şi a mărimii unei laturi;
a orientării unei laturi, a mărimii unei laturi şi a coordonatelor unui
punct.• optimizarea configuraţiei reţel ei geodezice/topogrqfice (design de ordinul 1), este
pasul al doilea în realizarea optimului general, la acest nivel datele iniţiale considerându-seoptime. Pentru realizarea optimului în ceea ce priveşte configuraţia reţelei se iau în studiuvariante geometrice diferite, deci se acţionează asupra mărimii unghiurilor şi distanţelor,introducându-se, cu rol foarte important în determinarea optimului, restricţii generate defactori naturali, care complică foarte mult alegerea variantei optime;
• optimizarea programului de măsurători (design de ordinul 2), când seconsideră determinat optimul pentru datele iniţiale şi configuraţia reţelei luându-se în studiunumărul de repetări sau asupra metodei de măsurare a unghiurilor, distanţelor, etc., precumşi restricţiile impuse de precizia ce trebuie obţinuta. Această categorie este una dintre celemai studiate de-a lungul timpului în ceea ce priveşte determinarea optimului, anul 1979,constituind "vârful" abordării problemei prin lucrările lui Grafarend, Fotescu, Pelzer;
• optimizarea observaţiilor suplimentare (design de ordinul 3) care se aseamănăcu categoria anterioară cu deosebirea că se iau în considerare observaţii suplimentare înscopul creşterii preciziei de determinare a reţelei. Introducerea de măsurători suplimentare,conduce la condiţii suplimentare în prelucrarea datelor, având ca rezultat creşterea preciziei.Abordarea acestei categorii de optimizare vizează în special aspecte economice care conducla un volum minim de cheltuieli.
Optimizarea se poate realiza pentru fiecare categorie în parte sau luând în analizăsimultan două, trei sau chiar toate patru categoriile enumerate, fapt definit de literatura despecializate ca optimizare complexă sau design hibrid .
Procesul de optimizare are drept scop satisfacerea simultană a unui număr cât maimare de funcţii scop deci, implicit, a indicatorilor de precizie, respectiv a indicatorilor
economici, indiferent de metoda de prelucrare a măsurătorilor analizată, clasificareaacestuia pe baza conţinutului funcţiei scop fiind reprezentată de: optimizare în care funcţia scop conţine un indicator de precizie locală; optimizare în care funcţia scop conţine un indicator de precizie globală;
optimizare în care funcţia scop conţine un indicator economic.
O clasificare a procesului de optimizarea după metodele de prelucrare a măsurătorilor se prezintăsub forma:
Pag. 29
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 30/72
optimizarea reţelelor geodezice sau topografice, în care datele se prelucrează prinmetoda măsurătorilor directe;
optimizarea reţelelor geodezice sau topografice, în care datele se prelucrează prinmetoda măsurătorilor indirecte;
optimizarea reţelelor geodezice sau topografice, în care datele se prelucrează prinmetoda măsurătorilor directe condiţionate;
optimizarea reţelelor geodezice sau topografice, în care datele se prelucrează prinmetoda măsurătorilor indirecte cu mai multe mărimi măsurate;
optimizarea reţelelor geodezice sau topografice, în care datele se prelucrează prinmăsurători indirecte supuse la condiţii.
Dintre indicatorii de precizie enumeraţi şi posibil de luat în studiu, cu o aplicabilitate mai largă şicu o eficienţă ridicată, sunt indicatorii de precizie locală, care conduc la o cunoaştere a preciziei dedeterminare pentru fiecare punct în parte, permiţând luarea de măsuri corespunzătoare pentru evitareacazurilor de puncte insuficient de precis determinate.
Pentru atingerea acestui obiectiv ar putea fi utilizaţi acei indicatori de precizie cares-au dovedit a fi cu o influenţă şi importanţă mai mare precum:
erorile medii pătratice ale coordonatelor unui punct;
eroarea unei funcţii de coordonate; eroarea medie pătratică totală; mărimea semiaxei mari a elipselor erorilor; eroarea medie pătratică a unei orientări; eroarea unei diferenţe de coordonate; eroarea unei lungimi.
În cazul în care sunt ulitizaţi indicatorii de precizie aferenţi diferenţelor decoordonate respectiv lungimii unui segment, există posibilitatea introducerii unei funcţii
scop de forma:
min→ FF Q (123.)
sau:
FF Q FF F T Qmm ≤= 0 (124.)
unde:
FF QT - toleranţa admisă.
Spre deosebire de indicatorii de precizie locală, indicatorii de precizie globalăoferă posibilitatea caracterizării în ansamblu a unei reţele geodezice sau topografice sau în comparaţie cualte reţele similare.
Într-o clasificare a indicatorilor de precizie globală distingem:
eroarea medie pătratică a unităţii de pondere:
Pag. 30

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 31/72
[ ]
min0 →−
±=k n
pvvm (125.)
În proiectarea unei reţele geodezice sau topografice, pentru determinarea variantei
optime se poate acţiona asupra mărimilor n , respectiv k prin introducerea unor noimăsurători sau a unor parametrii suplimentari. Trebuie remarcat însă, că odata cuintroducerea unor noi măsurători (se măreşte n ) sau a unor parametrii suplimentari (semăreşte k ) se va modifica şi [pvv]. Totuşi mărirea numărului de măsurători trebuie să se realizeze
ponderat şi în strânsă corelare cu numărul de parametrii suplimentari, deoarece creşterea excesivă aacestora poate conduce la rezultate eronate sau denaturarea prelucrării.
eroarea pătratelor erorilor medii este un indicator de precizie globală utilizat în reţelegeodezice sau topografice de dimensiuni nu prea mari:
( ) min2
0
2 →+= ∑∑ yy xxt QQmm (126.)
care trebuie să satisfacă şi restricţii de includere a erorilor mt într-o anumită toleranţă T impusă, a cărei valoare, în general diferă de la un ordin la altul al reţelei geodezice, matematic acest lucrufiind reprezentat de inegalitatea:
T mit
≤ (127.)
Pe langă indicatorii tehnici de precizie locală şi globală, în condiţiile impunerii unei eficienţeeconomice a complexului de operaţii, aferente proiectării şi materializării unei reţele geodezice şitopografice, optimizarea trebuie să ia în calcul şi indicatori economici dintre care un rol important îl arecostul operaţiilor de măsurare CM dat de relaţia:
min→= ∑ ii M ncC (128.)
unde:
−ic costul specific pentru o singură observaţie de tipul i;
−in numărul de repetări al unei observaţii de tipul i.
la care se ataşează şi restrictii prin care se asigură o precizie minimă pentru anumitemărimi sau soluţii pozitive de forma:
;ii T m ≤ (129.)
;0>in (130.)
2.3. Analiza categoriilor de optimizare ale reţelelor geodezice şi topografice
2.3.1 .Optimizarea datelor iniţiale
Pag. 31
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 32/72
Volumul datelor iniţale într-o reţea geodezică sau topografică este compus în general din valorile provizorii ale necunoscutelor, date cu privire la măsurători şi matricea de covarianţă aferentă, respectiv
informaţii cu privire la elementele de structură ale acesteia.
Elementele de structură ale reţelei, din punct de vedere al optimizării oferăinformaţii despre dimensiunea optimă a reţelei din punct de vedere al dezvoltării acesteia,mărimea optimă a unui unghi sau a unei laturi în reţea, care să satisfacă condiţii de precizie de ansamblu anteimpuse şi forme geometrice optime ce intră în componenţareţelei de ansamblu.
Studiul elementelor de structură se poate realiza pe fiecare tip de figură geometricăce intră în componenţa reţelei sau pe fiecare tip de reţea în parte.
2.3.1.1. Criterii de evoluţie ale reţelei planimetrice din punct de vedere al optimizării
Aşa cum precizam în subcapitolul anterior, pe lângă optimizarea elementelor geometrice ale reţelelor geodezice sau topografice, în cadrul datelor iniţiale se înscriu camărimi măsurate, valorile provizorii ale necunoscutelor, etc. care contribuie la conturarea următoarelor aspecte:
măsurătorile unghiulare contribuie la crearea geometriei intrinseci a reţelei geodezicefără a oferii indicii asupra amplasării sale în sistemul de referinţă folosit şi nici cu privire la
orientările sau mărimile laturilor;
orientarea unei laturi (a cărei poziţie este bine cunoscută în cazul în care ea aparţineunei reţele geodezice de ordin superior celei studiate, dacă ţinem cont de caracteristica dedezvoltarea a reţelelor de la superior la inferior) ce conferă întregii reţele geodezice oanumită orientare;
cunoaşterea unei anumite laturi din reţea (cunoscută de asemenea din reţelelegeodezice mai vechi) ce conferă întregii reţele o anumită scară;
în situaţia în care la restricţiile de mai sus, în plus, se mai cunosc şicoordonatele unui punct din reţea, atunci se poate face amplasamentul propriu-zis al reţelei în sistemul de coordonate considerat.
Astfel prin introducerea pe rând sau în combinaţii ale restricţiilor enumerate mai sus, înfuncţie de tipul reţelei geodezice sau topografice se poate realiza o clasificare a acestora pe bazagradelor de libertate pe care le au faţă de sistemul de coordonate luat ăn considerare, care se prezintă ca în fig. 9.
2.3.1.2. Analiza optimizării datelor iniţiale în reţelele prelucrate prin metoda măsurătorilor directe
Reţelele prelucrate prin metoda măsurătorilor directe se caracterizează prin aceeacă mărimile ce urmeaza a fi determinate au ca bază de calcul, funcţii de mărimi măsuratedirect, ce nu necesită completări prealabile.
Din această categorie fac parte reţelele de poligonaţii folosite pentru constituireatriangulaţiilor topograflce, respectiv a reţelelor de apropiere şi de lucru din exploatările
miniere la zi.
Pag. 32
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 33/72
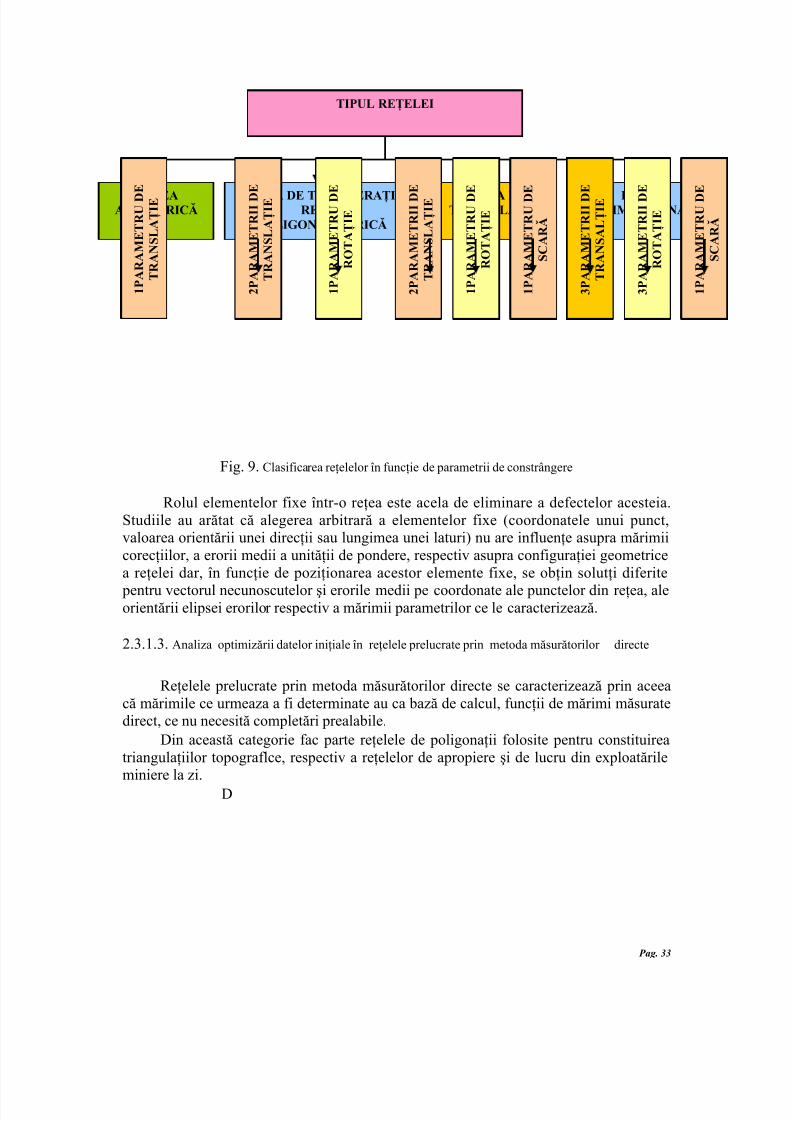
Fig. 9. Clasificarea reţelelor în funcţie de parametrii de constrângere
Rolul elementelor fixe într-o reţea este acela de eliminare a defectelor acesteia.Studiile au arătat că alegerea arbitrară a elementelor fixe (coordonatele unui punct,valoarea orientării unei direcţii sau lungimea unei laturi) nu are influenţe asupra mărimiicorecţiilor, a erorii medii a unităţii de pondere, respectiv asupra configuraţiei geometricea reţelei dar, în funcţie de poziţionarea acestor elemente fixe, se obţin solutţi diferite pentru vectorul necunoscutelor şi erorile medii pe coordonate ale punctelor din reţea, aleorientării elipsei erorilor respectiv a mărimii parametrilor ce le caracterizează.
2.3.1.3. Analiza optimizării datelor iniţiale în reţelele prelucrate prin metoda măsurătorilor directe
Reţelele prelucrate prin metoda măsurătorilor directe se caracterizează prin aceeacă mărimile ce urmeaza a fi determinate au ca bază de calcul, funcţii de mărimi măsuratedirect, ce nu necesită completări prealabile.
Din această categorie fac parte reţelele de poligonaţii folosite pentru constituireatriangulaţiilor topograflce, respectiv a reţelelor de apropiere şi de lucru din exploatările
miniere la zi.D
Pag. 33
TIPUL REŢELEI
REŢEAALIMETRICĂ
REŢEA DE TRILATERAŢIEREŢEA
POLIGONOMETRICĂ
REŢEA DETRIAGULAŢIE
REŢEATRIDIMENSIONALĂ
1 P A R A M E T R U D E
T R A N S L A Ţ I E
2 P A R A M E T R I I D E
T R A N S L A Ţ I E
1 P A R A M E T R U D E
R O T A Ţ I E
2 P A R A M E T R I I D E
T R A N S L A Ţ I E
1 P A R A M E T R U D E
R O T A Ţ I E
1 P A R A M E T R U D E
S C A R Ă
3 P A R A M E T R I I D E
T R A N S A L Ţ I E
3 P A R A M E T R I I D E
R O T A Ţ I E
1 P A R A M E T R U D E
S C A R Ă
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 34/72
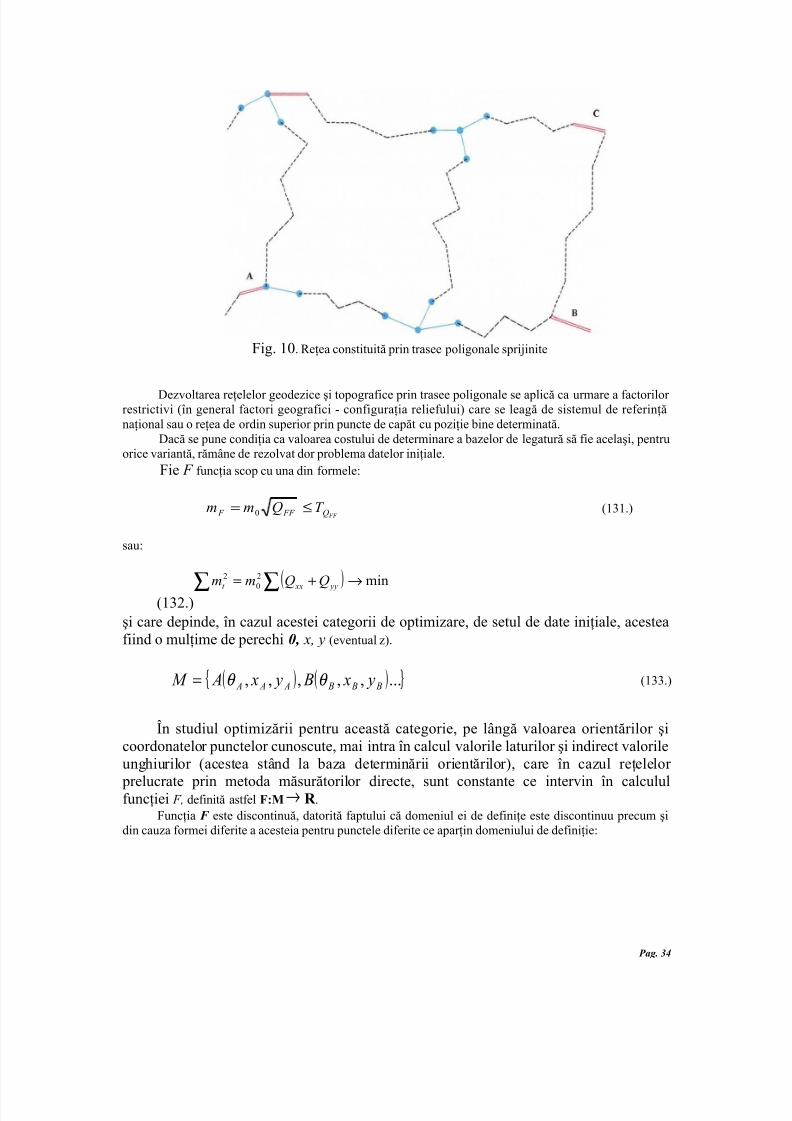
Fig. 10. Reţea constituită prin trasee poligonale sprijinite
Dezvoltarea reţelelor geodezice şi topografice prin trasee poligonale se aplică ca urmare a factorilor restrictivi (în general factori geografici - configuraţia reliefului) care se leagă de sistemul de referinţănaţional sau o reţea de ordin superior prin puncte de capăt cu poziţie bine determinată.
Dacă se pune condiţia ca valoarea costului de determinare a bazelor de legatură să fie acelaşi, pentruorice variantă, rămâne de rezolvat dor problema datelor iniţiale.
Fie F funcţia scop cu una din formele:
FF Q FF F T Qmm ≤= 0 (131.)
sau:
( ) min2
0
2
→+= ∑∑yy xxt QQmm
(132.)şi care depinde, în cazul acestei categorii de optimizare, de setul de date iniţiale, acesteafiind o mulţime de perechi 0, x, y (eventual z).
( ) ( ){ }...,,,,, B B B A A A y x B y x A M θ θ = (133.)
În studiul optimizării pentru această categorie, pe lângă valoarea orientărilor şicoordonatelor punctelor cunoscute, mai intra în calcul valorile laturilor şi indirect valorileunghiurilor (acestea stând la baza determinării orientărilor), care în cazul reţelelor
prelucrate prin metoda măsurătorilor directe, sunt constante ce intervin în calcululfuncţiei F, definită astfel F:M → R .
Funcţia F este discontinuă, datorită faptului că domeniul ei de definiţe este discontinuu precum şidin cauza formei diferite a acesteia pentru punctele diferite ce aparţin domeniului de definiţie:
Pag. 34

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 35/72
( )
( )
( )
===
===
===
;;;,,
...................................................................
;;;,,
;;;,,
N N N N
B B B B
A A A A
y y x x pentru y x F
y y x x pentru y x F
y y x x pentru y x F
θ θ θ
θ θ θ
θ θ θ
(134.)
Pentru detenninarea optimului în acest caz, datorită cauzelor prezentate mai sus, în determinareaextremului este imperios necesar să fie calculate efectiv toate variantele F A , F B , ... , F N , şi să se aleagăaceea care corespunde cel mai bine optimului general.
{ } { } N B A F F F F ,...,,
min
max
min
max =
(135.)
2.3.1.4. Analiza optimizării datelor iniţiale în reţelele prelucrate prin metoda măsurătorilor indirecte.
Abordarea rezolvării acestui gen de probleme de optimizarea se face pe formamatriceală care permite utilizarea tehnicii de calcul în condiţii optime din punct de vedereal utilizării resurselor acesteia şi a timpului de lucru.
Măsurătorile indirecte sunt caracterizate de un sistem normal de ecuaţii de eroricu forma generală:
nnk nnn
k
k
vl xk xb xa
vl xk xb xavl xk xb xa
=++++
=++++
=++++
...
.................................................
......
21
2222212
1112111
(136.)
sau scris în forma matriceală conform relaţiei:
Ax -1= v (137.)Rezolvarea unui astfel de sistem şi implicit a problemei de optimizare impune
adăugarea la sistem a condiţiei:
[ ] min=vv (138.)
Pentru determinarea coeficientului de pondere al unei funcţii considerăm că aceastaare forma:
Pag. 35

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 36/72
k k x f x f x f f F ++++= ...22110 (139.)
a cărei eroarea medie pătratică este:
f Q f mm XX T
F 2
0
2 = (140.)
sau:
( ) f pA A f mmT T
F
12
0
2 −= (141.)
unde matricea ( ) 1−
pA AT este pătratică şi conţine pe diagonala principală coeficienţii de pondere ai
mărimilor determinate direct.
( )
=−
nn
T
Q
Q
Q
pA A
.........
............
.........
.........
22
11
1
(142.)
În cele mai multe cazuri mărimile determinate indirect sunt coordonatele punctelor astfel că poate fi o corespondenţă între:
nn j Q y
Q y
Q x
→
→
→
...............
221
111
(143.)
j = numărul de perechi de coordonate şi n dată de relaţia:
n = 2j (144.)
În rezolvarea problemei de optimizare, eroarea medie pătratică a funcţiei F joacărolul indicatorului de precizie (locală sau globală). De exemplu, dacă indicatorul de precizie locală folositeste eroarea medie pătratică de determinare a punctului j ,
Pag. 36

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 37/72
222
j j y x f mmm +=
(145.)
atunci matriceaT f va avea forma:
( )11...00=T
f (146.)
Dacă se foloseşte suma tuturor erorilor de determinare a punctelor ca indicator de
precizie globală:
2222
...1 j j y x y f mmmm +++= (147.)
atunci:
( )11...11=T
f
(148.)
Matricele f şi p nu depind de poziţia elementelor de sprijin din reţea însă, pentru poziţii diferite ale elementelor de sprijin se obţin componente diferite ale matricei A .
2.3.1.5. Analiza optimizării datelor iniţiale în reţelele prelucrate prin metodamăsurătorilor condiţionate.
În practica prelucrării observaţiilor geodezice sau topografice, întâlnim cazuri cândcondiţiile geometrice pot fi liniare şi neliniare, fapt ce presupune, că în general condiţiilegeometrice pot fi scrise matematic prin funcţii neliniare.
Pentru rezolvarea acestui gen de măsurători se porneşte de la sistemul ecuaţiilor deerori aferent sau sistemul de ecuaţii ale corecţiilor, ce sunt liniare şi care au formagenerală:
=++++
=++++=++++
0...
.................................................
0...
0...
2211
22211
12211
r nn
nn
nn
vr vr vr
vbvbvb
vavava
ω
ω
ω
(149.)unde n > r .
Scris sub formă matriceală acest tip de măsurători este caracterizat de un sistem deecuaţii de forma:
ω =v BT (150.)
Pag. 37

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 38/72
unde:
=
=
=
nrnnn v
v
v
v
rba
rba
rba
B...
;...
;
...
............
...
...
2
1
2
1
222
111
ω
ω
ω
ω(151.)
Pentru rezolvarea sistemului de ecuaţii de erori şi studierea problemelor de optimizarea se ataşeazala sistemul ecuaţiilor de erori o funcţie cu expresia matriceală de forma:
( )[ ] ( ) min21
=−−=−
ω ω v B B Bvv F T T
T T (152.)
a cărei eroare medie pătratică este dată de relaţia:
( ) f B B B B E f mmT T T
F
12
0
2 −−=
(153.)
unde E este matricea unitate şi inversa acesteia nu depinde de poziţia datelor iniţiale.
Pag. 38

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 39/72
Deoarece în reţea nu există decât o singură bază de sprijin (se cunosc doar mărimile necesare şi suficiente determinării reţelei) atunci, în afara condiţiilor geometrice, nu mai există alte condiţii suplimentare (de orientări, de coordonate, de unghifix, etc.).
În acest caz matricea B este formată doar din coeficienţii condiţiilor de figură ce nu depinde
de poziţia datelor iniţiale.Matricea F depinde de poziţia datelor iniţiale şi notăm cu A f , B f , C f , … matricelecorespunzatoare variantelor luate în analizav A,B,C... ce satisfac condiţiile.
=
...................................................
var
var
var
2
0
2
0
2
0
2
ciabila pentru f Q f m
biabila pentru f Q f m
aiabila pentru f Q f m
m
C ll
T
A
Bll
T
A
All
T
A
F
(154.)unde:
( ) T T
ll B B B B E Q1−
−=
(155.)
2.3.2. Optimizarea configuraţiei reţelelor geodezice şi topografice
2.3.2.1. Analiza optimizării configuraţiei reţelelor prelucrate prin măsurători directe
Studiul optimizării reţelelor prelucrate prin măsurători directe se efectuează într-oreţea în care există doar numărul necesar şi suficient de elemente de sprijin şi pentru carenu există constrângeri, unde se consideră mărimile măsurate nl l l ,...,,
21 ce sunt unghiuri şidistanţe.
Dacă notăm cu F funcţia scop care depinde atât de mărimile măsurate nl l l ,...,,21 , cât şi de
erorile de măsurare ln21 ,...,, mmm l l , aceasta are forma generală dată de relaţia (156.):
( )ln2121
,...,,,,...,, mmml l l F F l l n= (156.)
La baza studiului de optimizare stă determinarea minimului funcţiei F , indiferent detipul indicatorului de precizie folosit, exprimat de relaţia:
min2 →= m F
(157.)În situaţia în care reţeaua luată în studiu are o formă geometrică variabilă, se vor obţine derivate
parţiale diferite şi chiar erori de măsurare diferite:
Pag. 39

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 40/72
2
2
2
2
2
2
2
1
...21 nl
n
l l ml
f m
l
f m
l
f F
∂∂++
∂∂+
∂∂=
(158.)
a cărei formă liniară, în procesul de optimizare ar trebui să aibă forma dată de relaţia:
nnl al al aa F ++++= ...22110 < T(159.)
Deoarece această exprimare în cele mai multe cazuri nu este posibilă, se poate recurge la liniarizareafuncţiei F pe porţiuni.
nndl adl adl aa F ++++= ...22110 (160.)
în care:
)
∂
∂+
∂
∂
∂
∂++
∂∂
∂
∂
∂+
∂∂
∂
∂
∂=
∂∂
+
∂∂∂
∂∂
++
∂∂
∂∂
+
∂∂∂
∂∂
=
∂∂
+
∂∂∂
∂∂
++
∂∂∂
∂∂
+
∂∂
∂∂
=
=
n
l
nn
l
n
l
nn
l
nn
l l
l
nn
l l
n
l
f m
l
f
l
f m
l l
f
l
f m
l l
f
l
f a
l
f m
l l
f
l
f m
l
f
l
f m
l l
f
l
f a
l
f m
l l
f
l
f m
l l
f
l
f m
l
f
l
f a
l l l l F a
n
n
n
2
2
22
2
2
2
22
1
2
2
2
2
22
2
2
2
2
2
11
2
1
2
1
2
1
22
12
2
2
2
2
1
2
1
1
00
3
0
2
0
10
22...22
.............................................................................................................................
22...22
22...22
,...,,,
21
21
21
(161.)
sunt calculele pentru valorile 00
2
0
1 ,...,, nl l l aferente proiectului provizoriu al reţelei ce urmeaza a fi
optimizată.În urma optimizării funcţiei (160.), la care se vor ataşa condiţiile şi restricţiile corespunzatoare, se
va obţine sistemul următor:
nnn dl l l
dl l l
dl l l
+=
+=
+=
00
2
0
2
0
2
1
0
1
0
1
...................
(162.)
adică un nou punct în jural căruia se va face dezvoltarea următoare.Calculele se repetă până la încadrarea functiei F în toleranţa admisă sau până la stabilizarea
valorilor 00
2
0
1 ,...,, nl l l , ceea ce echivalează cu obţinerea formei finale a reţelei.
Este de remarcat că:
Pag. 40
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 41/72
r unghiurilocazul inl
m
i
l i 0=∂
∂
(163.)
( )telor discazul inml
l m
l
m
si
i s
i
l i
tan=∂∂
=∂
∂
(164.)
unde:
= sm eroarea relativă de măsurarea a distanţelor
În situaţia în care efectuăm calculele apelând la forma matriceală, mai accesibilă programatorilor pentru rezolvarea pr oblemelor complexe, relaţia (159.) are forma:
T AQ A F LL
T <= (165.)
unde:
=
∂∂
∂∂∂
∂
=
2
2
2
2
1
...00
............
0...0
0...0
;
...
2
1
nl
l
l
LL
n
m
m
m
Q
l
f
l
f l
f
A (166.)
Pag. 41

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 42/72
Diferenţiind funcţia dată de relaţia (165.) obţinem:
n
n
dl l
F dl
l
F dl
l
F dF
∂∂++
∂∂+
∂∂= ...2
2
1
1
(167.)
în care:
∂∂
+∂∂
+∂∂
∂
∂
+∂
∂
+∂
∂
∂∂
+∂∂
+∂
∂
=
∂∂∂∂∂∂
Al
Q A
l
AQ A AQ
l
A
Al
Q
Al
A
Q A AQl
A
Al
Q A
l
AQ A AQ
l
A
l F
l F
l F
n
LLT
n
LL
T
LL
n
T
LLT
LL
T
LL
T
LLT
LL
T
LL
T
n..........................................................
...222
111
21
(168.)
Pag. 42
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 43/72
∂
∂=
∂∂
∂∂∂
∂∂
∂∂
∂
=∂∂
0...0...0
...............
0...2...0
...............0...0...0
,
........
........
1
2
2
2
1
2
i
l
l LL
in
i
i
i
l
mm
l
Q
ll
f
l
f
ll
f
l
Ai
i
(169.)
Dacă se face notaţia:
∂∂
∂∂
∂∂
=nl
A
l
A
l
A B ,...,,
21
(170.)
atunci matricea B este pătratică şi simetrică faţă de diagonala principală şi are forma generală dată derelaţia:
Pag. 43

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 44/72
∂∂
∂∂∂
∂∂∂
∂∂∂∂∂∂∂∂
∂∂∂
∂∂∂
∂∂
=
2
2
2
2
1
2
2
2
2
2
2
12
2
1
2
21
2
2
1
2
......
.............................
....
....
nnn
n
n
l
f
l l
f
l l
f
l l f
l f
l l f
l l
f
l l
f
l
f
B (171.)
După determinarea matricei B coloanele acesteia se vor înlocui în relaţia (168.) cuajutorul căreia vom determina coeficienţii dezvoltării liniare (167.)
Deoarece calculul derivatelor parţiale pe cale analitică este greoi, chiar şi în cazul folosirii tehniciimoderne, este mai indicat din punct de vedere al optimizării timpului să se recurgă la metoda numerică dederivare descrisă de relaţia:
( ) ( )
0
00
2
0
1
00
2
0
1 ,...,,...,,,...,,...,,lim
k k
nk nk
xak xa
xk x x f xa x x f
x
f
k k −−
=∂∂
→
(172.)
Avându-se în vedere că ăn relaţiile de calcul apar şi derivatele de ordinul 2 acestease calculează, prin însumare membru cu membru şi neglijând termenii de ordin superior ai dezvoltării:
( ) ( )
( ) ( )
( ) ( ) ( ) ...2
...2
1
...2
1
2
2
2
2
2
2
2
2
2
dx x
f x f dx x f dx x f
dx x
f dx
x
f x f dx x f
dx x
f dx
x
f x f dx x f
∂∂+=−++
−∂∂
+∂∂
+=−
+∂∂
+∂∂
+=+
(173.)
deci:
( ) ( ) ( )
22
2 2
dx
x f dx x f dx x f
x
f −−++=
∂∂
(174.)
Pag. 44

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 45/72
de asemenea:
( ) ( ) ...2
1
2
1
,,
2
2
2
2
2
2
2
+∂∂∂
+∂∂
+∂∂
+∂∂
+=++ dxdy y x
f
dy y
f
dx x
f
dy y
f
y x f dy ydx x f (175.)
de unde rezultă că:
( )
...2
1
2
111,2
2
2
2
2
22
+∂∂
∂+∂∂−
∂∂−
∂∂−
∂∂=++=
∂∂∂
dxdy y x
f dy
y
f
dy
dx
x
f
dx y
f
dy y
f
dxdy
dy ydx x f dxdy
y x
f
(176.)
Dacă dx = dy = , unde 00 ≠→ ξ ξ dar , atunci:
( ) ( ) ( )
( ) ( ).
2
11,,
.2
2
2
2
2
2
2
22
2
∂∂
+∂∂
−
∂∂
+∂∂
−−++
=∂∂
∂
−−++=
∂∂
y
f
x
f
y
f
x
f y x f y x f
y x
f
x f x f x f
x
f
ξ ξ
ξ ξ
ξ
ξ ξ
(177.)
În concluzie, coeficienţii naaa ,..,2,1 se pot determina prin metoda numerică, minimizareafuncţiei F realizându-se prin programare liniară. Este important de reţinut ca şi restricţiile sau condiţiile,daca există, trebuie să fie liniarizate şi exprimate în funcţie de creşterile ndl dl dl ,...,, 21 .
2.3.2.2. Analiza optimizării configuraţiei reţelelor prelucrate prin metodamăsurătorilor indirecte
În cazul reţelelor prelucrate prin metoda măsurătorilor indirecte eroarea medie pătratică de determinare a unei mărimi are forma:
( ) f pA A f mQmmT T
ff
12
0
2
0
2 −== (178.)
în care matricea f conţine informaţii legate de configuraţia reţelei, iar matricea p conţine informaţii cu privire la precizia de măsurare a unghiurilor sau distanţelor. Deoarece precizia de măsurare a distanţelor depinde şi de lungimea acestora, rezultă că şi matricea p depinde de configuraţia reţelei.
În procesul de optimizare funcţia care stă la baza studiului este dată de relaţia:
Pag. 45

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 46/72
( )n ff l l l F Q F ,...,,
21== (179.)
al cărei minim trebuie determinat şi pentru care se va face liniarizarea ei în felul următor:
......2
2
1
1
0 +∂∂++
∂∂+
∂∂+=+ n
n
dl l
f dl
l
f dl
l
f adf F (180.)
unde:
00
2
0
10 ,...,. nl l l F a =
( ) ( ) ( )
( ) ( )
( ) ( ) ( )i
T T T
i
T T T
T
i
T T T
T
i
T T T T
i
T
i
l
f pA A f f pA A
l
A p A pA A f
f pA A A
l
p A pA A f
f pA A pAl
A pA A f f pA A
l
f
l
F
∂∂
+
∂∂
−
−
∂
∂−
−
∂∂
−∂∂
=∂∂
−−−
−−
−−−
111
11
111
(181.)
unde:
∂∂
∂∂
∂∂
=∂∂
i
r
iii
T
l
f
l
f
l
f
l
f ...21
(182.)
unde:r - numărul mărimilor determinate direct.
Pag. 46

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 47/72
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=∂∂
i
k
i
k
i
k
iii
iii
i
l
h
l
b
l
a
l h
l b
l a
l
h
l
b
l
a
l
A
............
222
111
(183.)
iar, k - numărul de ecuaţii din sistemul caracteristic măsurătorilor indirecte:
∂∂
∂
∂∂∂
=∂
∂
i
k
i
i
i
l
p
l
p
l
p
l
p
....00
................
0....0
0....0
2
1
(184.)
În cazul în care indicatorul de precizie urmărit este eroarea coordonatelor unui punct (un indicator de precizie locală) sau suma erorilor coordonatelor punctelor (un indicator de
precizie globală ), componentele matricei f sunt elemente nule urmând ca la ecuaţia (180.) să se adauge şirestricţiile corespunzătoare exprimate prin creşterile ndl dl dl ,...,, 21 .
Calculele aferente procesului liniarizare - optimizare descrise mai sus se repetă până când F < T unde T - toleranţa admisă, sau:
ξ <≈≈≈ ndl dl dl ...21 (185.)
Pag. 47

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 48/72
Configuraţia optimă a reţelei va fi caracterizată de mărimile obţinute ca rezultat.,...,, 21 nl l l Pentru calculul derivatelor parţiale se poate folosi şi metoda numerică:
( ) ( )
ξ
ξ nini
i
l l l l F l l l l F
l
F ,...,,...,,,...,,...,, 2121 −+=
∂∂
(186.)
unde:
.0,0 ≠→ ξ ξ
Această metodă se pretează programării deoarece aceeaşi procedură de calcul afuncţiei într-un punct este folosită şi la calculul valorilor funcţiei în vecinătatea punctuluiceea ce conduce la rezolvarea rapidă a problemei cu un efort foarte mic.
2.3.2.3. Analiza optimizării configuraţiei reţelelor prelucrate prin metoda măsurătorilor condiţionate
Aşa cum precizăm la descrierea acestui tip de măsurători, mărimile măsurate înreţele sunt unghiuri sau distanţe care sunt supuse la condiţii.
În procesul de optimizare, în vederea determinării optimului configuraţieireţelelor prelucrate prin metoda măsurătorilor condiţionate, eroarea medie pătratică dedeterminare a unei funcţii de mărimi obţinute prin acest gen de măsurători se determinăcu relaţia:
( ) Qf BQB BQB f Qf f mQmm T T T T
FF
12
0
2
0
2 −−==
(187.)
unde, informaţiile cu privire la configuraţia reţelei sunt conţinute în matricea Q FF al căruiminim trebuie să-1 determiăm pornind de la forma generală a funcţiei dată de relaţia:
( ) min,...,, 21 →== n FF l l l F Q F (188.)
Faptul că se are în vedere un indicator de precizie locală sau globală ce este descris cuajutorul matricei f , avem informaţii cu privire la configuraţia reţelei cuprinse în toate matricele: Q,B, f .
Minimul funcţiei se obţine după modelul descris, prin liniarizare - optimizare pe porţiuni.
......2
21
0 +∂∂
++∂∂
+∂∂
+=+ n
n
dl l
F dl
l
F
l
F adF F
(189.)
unde:
Pag. 48
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 49/72
00
2
0
10 ,....,, nl l l F a =
( )( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( )i
T T T
i
T T t
i
T T T T T
i
T T T
T T
i
T T T T T
i
T T T
T T
i
T T T
i
T
T T
i
T
i
T
i
T
i
T
i
l
f Q BQB BQB f f
l
Q BQB BQB f
Qf l
BQB BQB f Qf BQB B
l
BQ BQB BQB f
Qf BQB B Bl
Q BQB BQB f Qf BQB BQB
l
BQB BQB f
Qf BQB Bl
BQ f Qf BQB B B
l
Q f
Qf BQB BQBl
f
l
f
Q f f l
Q
f Qf l
f
l
F
∂∂
−∂∂
−
−∂∂
−∂∂
+
+∂∂
+∂∂
+
+∂∂
−∂∂
−
−∂
∂
−∂
∂
+∂
∂
+∂
∂
=∂
∂
−−
−−−
−−−−
−−
−
11
111
1111
11
1
(190.)
Deoarece matricea il F ∂∂ / este pătratică, termenii au formă de scriere simetrică şi sunt egali.Astfel se poate scrie şi forma restrânsă a relaţiei (187.) care este dată de relaţia:
( )
( ) ( )
( ) ( )( ) ( ) Qf BQB B B
l
Q BQB BQB f
Qf BQB BQBl
B
QB BQB f
Qf BQB Bl
BQ f Qf BQB B B
l
Q f
Qf BQB BQBl
f f
l
Q f f
l
f
l
F
T T
i
T T T
T T
I
T T T
T T
i
T T T
I
T
T T
i
T
i
T
i
T
i
11
11
11
1
2
22
22
−−
−−
−−
−
∂∂
+
+∂
∂
+
+∂∂
−∂∂
−
−∂∂
−∂∂
+∂∂∂
=∂∂
(191.)
în care:
∂∂
∂∂
∂∂
=∂∂
i
h
iii
T
l
f
l
f
l
f
l
f ...21
(192.)
Pag. 49

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 50/72
∂∂
∂∂
∂∂
=∂∂
i
n
i
i
i
l
Q
l Q
l
Q
l
Q
...00
............
0...0
0....0
2
1
(193.)
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=∂∂
i
n
i
n
i
n
iii
iii
i
l
r
l
b
l
a
l
r
l
b
l
a
l
r
l
b
l
a
l
B
...
............
...
...
222
111
(194.)
pentru unghiuri:
jil
Q
i
j,,0 ∀=
∂∂
(195.)
pentru distanţe:
Pag. 50
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 51/72
,0≠∂
∂
i
j
l
Qnumai dacă i=j
(196.)
În această situaţie:
(
ir
i
ir
i
jl m
l
l m
l
Q2
22
2=∂
∂=
∂
∂
(197.)
În varianta numerică derivatele parţiale ale funcţiei F se determină cu ajutorul relaţiei:
( ) ( )
ξ
ξ nini
i
l l l l F l l l l F
l
F ,...,,...,,,...,,...,, 2121 −+=
∂∂
(198.)
unde:
.0,0 ≠→ ξ ξ
2.3.2.4. Analiza optimizării configuraţiei reţelelor prelucrate prin metodamăsurătorilor indirecte cu mai multe mărimi măsurate
În cazul măsurătorilor indirecte cu mai multe mărimi măsurate, forma generală a sistemuluiecuaţiilor de erori se prezintă astfel:
0......
.........................................................................................
0......
0......
212211
222122211
121112211
=++++++++
=++++++++
=++++++++
r hr r r nn
bhnn
ahnn
x H x B x Avr vr vr
x H x B x Avbvbvb
x H x B x Avavava
ω
ω
ω
(199.)
unde mărimile i x care se obţin indirect este mai mic decât numărul ecuaţiilor, iar corecţiile mărimilor măsurate sunt în număr mai mare decât numărul ecuaţiilor.
Astfel pentru reţelele prelucrate prin metoda măsurătorilor indirecte cu mai multe mărimimăsurate, eroarea medie pătratică de determinare a unei funcţii pătratice corespunzătoare este:
FF Qmm 2
0= (200.)
Pag. 51

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 52/72
unde:
g Q g aQf Q AQ g f Q f Q xxT T T
LLT
FF +−= 0
02
(201.)
în care matricele componente sunt date de:
( ) ( ) ( )
( )[ ]( )
( ) 1
0
10
11
111
−
−
−−
−−−
=
=
=
+−=
T
T
T T
XX
T T
xx
T T T T
LL
aQaQ
QA AQ
AaQa AQ
aQaQa A AaQaQaaQaQaQaQQ
(202.)
Informaţii cu privire la configuraţia reţelei sunt conţinute în matricele A, a, Q şi înfuncţie de indicatorul de precizie urmărit pot fi găsite informaţii şi în matricele f şi g.
Funcţia se liniarizează în jurul valorilor provizorii proiectate 00
2
0
1,...,, nl l l conform
relaţiei:
......2
2
1
1
0 +∂∂
++∂∂
+∂∂
+=+ n
n
dl l
F dl
l
F dl
l
F adF F
(203.)
unde valorile derivatelor parţiale se pot determina analitic astfel:
i
T T
i
T T
i
T T
i
T T
i
T T T
i
T T
i
T
i
xxT xx
i
T
i
LLT LL
i
T
i
FF
l
f aQQ AQ g
f l
QaQ AQ g Qf
l
aQ AQ g aQf
l
Q AQ g
aQf Ql
AQ g aQf Q A
l
Q g aQf Q AQ
l
g
g l
Q g g Q
l
g f
l
Q f f Q
l
f
l
Q
∂∂−
−∂∂−
∂∂−
∂∂
−
−∂
∂−∂
∂−∂
∂−
−∂
∂+
∂∂+
∂∂
+∂
∂=∂
∂
00
00
0000
00
0
0
00
2
222
222
22
(204)
Pag. 52

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 53/72
( ) ( )
( ) ( )
( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( ) aQaQa A
l
Q AaQaQaaQaQa AQ
l
aaQaQa
aQaQa A AQaQaal
QaaQaQa
aQaQa A AQaQaQal
aaQaQa
aQaQa A AQaQal
aQ
aQaQa A AQaQaal
QaQaQaa
l
QaaQaQa
aQaQaQal
aaQaQa
aQaQal
aQaQaQaa
l
Q
l
Q
l
Q
T T
i
xxT T T T
xx
i
T T
T T
xx
T T
i
T T
T T
xx
T T
i
T T
T T
xx
T
i
T
T T
xx
T T
i
T T
i
T T
T T
i
T T
T
i
T T T
iii
LL
1111
111
111
11
1111
11
11
2
2
2
2
2
2
22
−−−−
−−−
−−−
−−
−−−−
−−
−−
∂
∂+
∂
∂+
+∂∂−
−∂∂−
−∂
∂+
+∂∂+
∂∂+
+∂∂+
+∂
∂−∂∂−
∂∂=
∂∂
(205.)
( )[ ] ( ) ( )[ ]( )[ ] ( ) ( ) ( )[ ]( )[ ] ( ) ( ) ( )[ ] 111111
111111
11111
2
2
2
−−−−−−
−−−−−−
−−−−−
∂∂
+
+∂∂
+
+∂∂
−=∂∂
AaQa A AaQaal
QaaQa A AaQa A
AaQa A AaQaQal
aaQa A AaQa A
AaQa A AaQal
A AaQa A
l
Q
T T T T
i
T T T T
T T T T
i
T T T T
T T
i
T T T
i
xx
(206.)
( ) ( ) ( ) ( ) 11110
2−−−−
∂∂
−∂∂
=∂∂
QA A Al
A AQA AQA AQA
l
AQA A
l
Q T
i
T T T
i
T T
i
(207.)
( ) ( ) ( ) ( ) 11110 2−−−−
∂∂
−∂∂
−=∂
∂ T T
i
T T T
i
T
i
aQaal
QaaQaaQaQa
l
aaQa
l
Q
(208.)
cu semnificaţiile următoare:
Pag. 53
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 54/72
(209.)
În varianta numerică, derivatele parţiale ale funcţiei FF
Q se determinăcu ajutorul relaţiei:
Pag. 54
∂∂
∂∂
∂∂
=∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂
∂
∂
∂
∂
∂
=∂∂
∂∂
∂∂
∂∂
∂
∂
∂
∂
∂
∂∂∂
∂∂
∂∂
=∂∂
∂∂
∂∂
∂∂=
∂∂
∂∂
∂∂
∂∂
=∂∂
i
n
i
i
i
i
n
ii
i
i
n
ii
i
n
ii
i
i
r
i
r
i
r
iii
iii
i
i
n
iii
T
i
n
iii
T
l
Q
l
Q
l
Q
l
Q
l
h
l
h
l
h
l
b
l
b
l
bl
a
l
a
l
a
l
a
l
H
l
B
l
A
l
H
l
B
l
A
l
H
l
B
l
A
l
A
l
g
l
g
l
g
l
g
l
f
l
f
l
f
l
f
...00
............
0...0
0...0
...
.............
...
...
...
............
...
...
...
...
2
1
2
21
21
222
111
21
21
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 55/72
( ) ( )
ξ
ξ nini
i
l l l l F l l l l F
l
F ,...,,...,,,...,,...,, 2121 −+=
∂∂
(210.)
unde:.0,0 ≠→ ξ ξ
2.3.2.5. Analiza optimizării configuraţiei reţelelor prelucrate prin metodamăsurătorilor indirecte supuse la relaţii de condiţie
În practica geodezică se întâlnesc situaţii când anumite mărimi i x sunt legate deobservaţii printr-un sistem de forma:
nnhnnn
h
h
vl xh xb xa
vl xh xb xa
vl xh xb xa
=++++
=++++
=++++
...
................................................
...
...
21
2222212
1112111
(211.)
şi în acelaşi timp trebuie să îndeplinească în mod strict r condiţii date de sistemul:
0...
..................................................
0...0...
2211
22211
12211
=++++
=++++
=++++
r hh
hh
hh
x R x R x R
x B x B x B x A x A x A
ω
ω
ω
(212.)
Rezolvarea directă a acestei probleme constă în exprimarea primelor necunoscuter din sistemul (212.), în funcţie de celelalte h-r necunoscute şi substituirea lor în (211.).
În acest caz, eroarea medie pătratică de determinare a unei funcţii de mărimi obţinute prinmăsuratori indirecte supuse la relaţii de condiţie este:
FF Qmm 2
0
2 = (213.)
unde:
( ) ( ) ( )[ ] ( ) f pA A B B pA A B B pA A f f pA A f Q T T T T T T T T
FF
11111 −−−−−−=
(214.)
Pag. 55
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 56/72
În ceea ce priveste obiectul studiului de optimizare, informaţii din acest punct devedere sunt conţinute în matricele A, B, Q şi eventual în f . Funcţia se liniarizează în jurul valorilor
provizorii proiectate 00
2
0
1 ,...,, nl l l conform relaţiei:
......2
2
1
1
0+
∂∂
++∂∂
+∂∂
+=+ n
n
dl l
f dl
l
f dl
l
f adf F (215.)
pentru care valorile derivatelor parţiale se pot determina analitic astfel:
( ) ( ) ( )
( ) ( ) ( ) ( )[ ] ( )
( ) ( ) ( )[ ] ( )
( ) ( ) ( )[ ] ( )
( ) ( ) ( )[ ] ( )
( ) ( )[ ] ( )
( ) ( )[ ] ( ) ( )[ ] ( )( ) ( )[ ] ( ) ( ) ( )[ ]
( ) ( ) ( )[ ] ( ) ( )
( )[ ] ( ) f pA A B B pA A B
B pA A Al
p A pA A B B pA A B B pA A f f pA A B
B pA A B B pA A pAl
A pA A B B pA A B B pA A f
f pA A B B pA A B B pA Al
B
B pA A B B pA A f
f pA A B B pA A Bl
B pA A f
f pA A B B pA A B B pA Al
A A pA A f
f pA A B B pA A B B pA A Al
p A pA A f
f pA A B B pA A B B pA A pl
A pA A f
f pA A B B pA A B B pA A
l
f f pA A
l
p A pA A f
f pA A pAl
A pA A f f pA A
l
f
l
Q
T T T
T T
i
T T T T T T T T
T T T T
i
T T T T T T T
T T T T T
i
T T T T T
T T T
i
T T T
T T T T T
i
T T T
T T T T T
i
T T T
T T T T T A
i
T T T
T T T T T
i
T T
i
T T T
T
i
T T T T
i
T
i
FF
111
111111
111111
1111111
1111
11111
11111
11111
111111
111
.
..
.2
2
2
2
2
2
2
2
−−−
−−−−−−
−−−−−−
−−−−−−−
−−−−
−−−−−
−−−−−
−−−−−
−−−−−−
−−−
∂∂
−
∂∂
−
−∂∂
+
+∂∂−
−∂∂+
+∂∂
+
+∂∂
+
+
∂
∂−
∂
∂−
−∂∂
−∂∂
=∂∂
(216.)
unde:
Pag. 56

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 57/72
(217.)
În varianta numerică derivatele parţiale
ale funcţiei FF Q se obţin cu:
Pag. 57
∂∂
∂∂
∂∂
=∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=∂∂
∂∂
∂∂
∂∂
=∂∂
i
n
i
i
i
i
h
ii
i
h
ii
i
h
ii
i
i
n
i
n
i
n
iii
iii
i
i
n
iii
T
l
p
l p
l
p
l
p
l
R
l
R
l
R
l
B
l
B
l
B
l
A
l
A
l
A
l
B
l h
l b
l a
l
h
l
b
l
a
l
h
l
b
l
a
l
A
l
f
l
f
l
f
l
f
...00
............
0...0
0...0
...
............
...
...
...
............
...
...
...
2
1
21
21
21
222
111
21
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 58/72
( ) ( )
ξ
ξ nini
i
l l l l F l l l l F
l
F ,...,,...,,,...,,...,, 2121 −+=
∂∂
(218.)
unde:
.0,0 ≠→ ξ ξ
2.3.3. Optimizarea programului de măsurători aferent reţelelor geodezice şi topografice
În cadrul acestei categorii de optimizare se presupune cunoscută configuraţiareţelei geodezice sau topografice, problema optimului referindu-se, în special, lastabilirea numărului de observaţii pentru fiecare măsurătoare în parte, cu condiţiasatisfacerii unei anumite funcţii scop şi restricţii impuse de programul de optimizare.
Rezultatul procesului de optimizare a măsurătorilor constă în perfecţionareasuccesivă a matricei ponderilor.
Pe ansamblu, se disting două grupe de optimizare a programului de măsurători:
a) Optimizarea vizează aspecte economice cum ar fi costul operaţiilor topografice:
( ) min,...,, 21 → N OOOc (219.)
unde:
=ic costul unei observaţii asupra mărimii “i”;
la care, se ataşează funcţia de forma:
1;2
0 ≥≤= I FF OT Qm F (220.)
car e urmăreşte, perfecţionarea continuă a matricei ponderilor şi înscrierea în toleranţele admise pentrudiferite elemente ale reţelei.
b) Optimizarea vi zează indicatori de precizie:
min2
0 →= FF Qm F (221.)
la care se ataşează ca restricţie, condiţia de înscriere într-un cost total T C , al întregii sesiuni
de măsurători, dat de relaţia:
Pag. 58

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 59/72
( ) 1,,...,, 21 ≥≤ I T N OC OOOC (222.)
Deoarece şi în cazul acestei categorii de optimizare, în majoritatea cazurilor
funcţia F nu are o forma liniară, se recurge la liniarizarea în jurul setului de valori provizorii00
2
0
1 ,...,, N OOO atât a funcţiei F cât şi a funcţiei C (indiferent care este optimizată).
Astfel, pentru cazul când procesul de optimizare vizează procese economice, funcţia scop are forma:
( ) min,...,,... 002
012
2
1
1
→+∂∂++
∂∂+
∂∂
N N
N
OOOC dOO
C dO
O
C dO
O
C
(223.)
cu restricţiile:
( ) N idOO
T OOO F dOO
F
dOO
F
dOO
F
ii
N N N
,1,1
,...,,...
00
2
0
122
11
=≥+≤+∂
∂
++∂
∂
+∂
∂
(224.)
În cazul în care procesul de optimizare urmăreste indicatorii de precizie, funcţia scop areforma:
( ) min,...,,...00
2
0
12
2
1
1
=+∂∂++
∂∂+
∂∂
N N
N
OOO F dOO
F dO
O
F dO
O
F
(225.)
cu restricţiile caracterizate de relaţiile:
( )
N idOO
C OOOC dOO
C dO
O
C dO
O
C
ii
T N N
N
,1,1
,...,,...00
2
0
12
2
1
1
=≥+
≤+∂∂
++∂∂
+∂∂
(226.)
Ca rezultate ale procesului de optimizare avem ROi ∈ . Cum în practică sunt acceptate
doar valori naturale, N Oi ∈ , se va calcula:
[ ] 1+= ii OO (227.)
Pag. 59

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 60/72
2.3.3.1. Analiza optimizării programului de măsurători în reţele geodezice şitopografice prelucrate prin metoda măsurătorilor directe
Informaţii cu privire la configuraţia reţelei geodezice şi topografice, care se prelucrează prin metoda măsurătorilor directe sunt cuprinse în funcţia de forma:
222
2
2
2
2
1
2
1
2 ... N N mamamam F +++== (228.)
Avându-se în vedere că asupra unei mărimi măsurate se efectuează mai multeobservaţii, eroarea de măsurare im depinde de numărul de observaţii şi este dată de relaţia:
i
oii
n
mm
2
2 = (229.)
unde:
−2
oim eroarea medie pătratică pentru o singură observaţie de tipul “i”;
−in numărul de observaţii asupra mărimii “i”.
Înlocuind relaţia (229.) în (228.) avem:
N
N N
n
ma
n
ma
n
ma F 0
2
2
2
02
2
2
1
2
01
2
1 ...+++= (230.)
pentru care derivatele parţiale vor fi:
2
2
0
2
i
ii
i n
ma
n
F =
∂∂
(231.)
Observafie: Valorile ia sunt derivatele parţiale ale funcţiei (orientare, coordonată, etc.) a
cărei eroare medie pătratică este luată în studiu în vederea optimizării.
Pentru determinarea derivatelor parţiale în raport cu numărul de observaţii se poatefolosi şi metoda numerică conform relaţiei:
( ) ( )
ξ
ξ 000
2
0
1
000
2
0
1 ,...,,...,,,...,,...,, nini
i
mmmm F mmmm F
n
F −+=
∂∂
(232.)unde:
Pag. 60
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 61/72
.0,0 ≠→ ξ ξ
2.3.3.2. Analiza optimizării programului de măsurători în reţelele geodezice şitopografice prelucrate prin metoda măsurătorilor indirecte
Informaţii cu privire la configuraţia reţelei şi baza de pornire în studiul optimizăriireţelelor geodezice şi topografice în care măsurătorile se prelucrează prin metodamăsurătorilor indirecte sunt redate de funcţia F care are forma din relaţia următoare:
min→= FF Q F (233.)
în care matricea FF Q este dată de:
( ) f pA A f Q T T
FF
1−= (234.)
Avându-se în vedere că rezultatul optimizării programului de măsurători, constăîn perfecţionări succesive ale matricei ponderilor iar, în ecuaţia de mai sus singuramatrice care depinde de numărul de repetări este chiar matricea p care are forma:
=
2
2
2
2
1
1...00
............
0...1
0
0....01
N m
m
m
p (235.)
unde:
−2
im eroarea medie pătratică a mărimii “i”;
şi ştiind că:
Pag. 61

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 62/72
i
ii
n
mm
2
02 = (236.)
în care:
20im - eroarea medie pătratică aferentă unei singure observaţii de tipul "i";
in - numărul de observaţii efectuate asupra numărului"i".
atunci, matricea ponderilor poate fi scrisă într-o altă formă:
=
2
0
2
02
2
2
01
1
...00
............
0...0
0....0
N m
n
m
n
m
n
p (237.)
matrice, care va fi supusă procesului de perfecţionare succesivă în vederea determinării optimului în ceeace priveşte programul de măsurători.
Pentru aceasta, va trebui sa efectuăm liniarizarea funcţiei F, formă în care derivatele parţiale seobţin cu relaţia:
( ) ( ) f pA A An
p A pA A f
n
F T
i
T T T
i
11 −−
∂∂
=∂∂
(238.)
unde:
Pag. 62
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 63/72
∂∂
∂∂
∂∂
∂∂
=∂∂
i
N
i
k
i
i
i
n p
n
p
n
p
n
p
n
p
...0...00
...................
0.......00
....................
0...0...0
0...0...0
2
1
(239.)
Din matricele ponderilor prezentate în relaţiile de mai sus se observă că:
=
≠
=
∂
∂
ik pentrum
ik pentru
n
p
i
i
k
2
0
1
0
(240.)
Metodologia de lucru în procesul de optimizare este aceeaşi ca în cazulmăsurătorilor directe cu deosebirea că valorile coeficienţilor din dezvoltarea liniară se vor calcula cu relaţia:
( ) ( ) f pA A An
p A pA A f
n
F T
i
T T T
i
11 −−
∂∂
=∂∂
(241.)
Pentru determinarea derivatelor parţiale în raport cu numărul de observaţii se poate folosi şimetoda numerică când se utilizează relaţia:
ξ
ξ 000
2
0
1
000
2
0
1 ,...,,...,,,...,,...,, nini
i
mmmm F mmmm F
n
F −+=
∂∂
(242.)
Pag. 63
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 64/72
unde:
.0,0 ≠→ ξ ξ
2.3.3.3. Analiza optimizării programului de măsurători în reţelele geodezice şitopografice prelucrate prin metoda măsurătorilor condiţionate
În cazul reţelelor geodezice şi topografice, prelucrate prin metoda măsurătorilor condiţionate, forma funcţiei F care ne oferă informaţii cu privire la configuraţia acestora este dată derelaţia:
min→= FF Q F (243.)
unde:
( ) Qf BQB BQB f Qf f Q T T T T FF
1−−=
(244.)
În această ecuaţia mărimea care conţine informaţii privitoare la numărul derepetări este matricea Q ce are forma:
== −
N
N
nm
n
m
nm
pQ
2
0
2
2
02
1
2
01
1
...00
............
0...0
0....0
(245.)
Unde:
2
im = eroarea medie pătratică a mărimii “i”dată de relaţia:
Pag. 64

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 65/72
i
ii
n
mm
2
02 = (246.)
în care:
2
0im = eroarea medie pătratică aferentă unei singure observaţii de tipul "i ";
in = numărul de observaţii efectuate asupra numărului "i".
Pentru a determina optimul în ceea ce priveşte programul de măsurători în cazul reţelelor prelucrate prin metoda măsurătorilor condiţionate, trebuie liniarizată funcţia F , unde intervin derivatele parţiale ce se prezintă sub forma:
( )
( ) ( ) Qf BQB B B
n
Q BQB BQB f
Qf BQB B Bn
Q f f
n
Q f
n
F
T T
i
T T T
T T
i
T
i
T
I
11
1
2
−−
−
∂
∂+
+∂∂
−∂∂
=∂∂
(247.)
unde derivatee parţiale ale matricei Q vor fi:
∂∂
∂∂
∂∂
∂∂
=∂∂
i
N
i
k
i
i
i
nQ
n
Q
n
Q
n
Q
n
Q
...0...00
...................
0.......00
....................
0...0...0
0...0...0
2
1
(248.)
Din matricele ponderilor prezentate în relaţiile, de mai sus se observă că:
Pag. 65

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 66/72
=
−
≠
=
∂
∂
ik pentrun
m
ik pentru
n
Q
i
i
i
k
20
0
(249.)
Determinarea optimului în ceea ce priveşte programul de măsurători în acest caz se face analogmăsurătorilor directe necondiţionate sau indirecte, cu deosebirea că valorile coeficienţilor din dezvoltarealiniară se vor calcula cu relaţia:
( )
( ) ( ) Qf BQB B BnQ BQB BQB f
Qf BQB B Bn
Q f f
n
Q f
n
F
T T
i
T T T
T T
i
T
i
T
I
11
1
2
−−
−
∂∂+
+∂∂
−∂∂
=∂∂
(250.)
sau cu relaţia:
ξ
ξ 000
2
0
1
000
2
0
1 ,...,,...,,,...,,...,, nini
i
mmmm F mmmm F
n
F −+=
∂∂
(251.)
unde:
0,0 ≠→ ξ ξ , când se foloseşte metoda numerică.
2.3.3.4 .Analiza optimizării programului de măsurători în reţelele geodezice şi topografice prelucrate prinmetoda măsurătorilor indirecte cu mai multe mărimi măsurate
Aşa cum precizam la categoria de optimizare anterioară, acest tip de reţele suntcaracterizate prin faptul că, în sistemul de ecaţii aferente, numărul mărimilor măsurateeste mai mic ca numărul ecuaţiilor acestuia, prin procesul de optimizare a programului de
măsurători urmărindu-se determinarea numărului optim de observaţii pe care va trebui să lerealizeze un geodez sau un topograf asupra unei mărimi măsurate.
Forma funcţiei F , furnizoare de informaţii cu privire la configuraţia reţelei, în acest caz este datăde relaţia:
min→= FF Q F (252.)
unde:
Pag. 66

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 67/72
g Q g Qf Q AQ g f Q f Q xx
T T T
LL
T
FF +−= 0
02 (253.)
Datele referitoare la numărul de repetări pentru fiecare observaţie sunt cuprinse în
mod direct în matricea Q ce, la randul ei, afecteaza şi matricele 00 ,, QQQ LL .
Pentru a transforma funcţia F sub formă liniară, se calculează derivatele parţiale cu relaţiile:
g
n
Q g f
n
Qa AQ g
aQf n
Q AQ g aQf Q A
n
Q g f
n
Q f
n
F
i
xxT
i
T T
i
T T T
i
T
I
LLT
I
∂∂
+∂∂
−
−∂∂
−∂∂
−∂
∂=
∂∂
0
00
0
0
2
22
(254.)
respectiv a derivatelor parţiale ale matricelor, cu relaţiile:
( ) ( )
( ) ( )
( )[ ] ( ) ( ) ( )[ ]( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) aQaQaan
QaaQa A AQaQaQa
aQaQa A AQaQaan
QaaQaQa
aQaQa AnQ AaQaQaaQaQa A AQaQaa
nQ
aQaQaan
QaaQaQaaQaQaa
n
Q
n
Q
n
Q
AaQa A AaQaan
QaaQa A AaQa A
n
Q
aQaan
QaaQa
n
Q
QA A An
Q AQA A
n
Q
T T
i
T T
xx
T T
T T
xx
T T
i
T T
T T
i
xxT T T T xx
T T
i
T T
i
T T T T
iii
LL
T T T T
i
T T T
i
XX
T T
i
T
i
T
i
T T
i
111
111
1111
1111
111111
110
110
2
2
−−−
−−−
−−−−
−−−−
−−−−−−
−−
−−
∂∂−
−∂∂−
−∂∂+∂∂+
+∂∂+
∂∂−
∂∂=
∂∂
∂∂=
∂∂
∂∂−=
∂∂
∂∂−=
∂∂
(255.)
Studiul optimizării programului de măsurători se realizează ca în cazul celorlaltetipuri de măsurători, cu deosebirea că valorile coeficienţilor din dezvoltarea liniară se vor calcula cu relaţiile (6.164.) şi (6.165.), dezvoltate anterior, respectiv cu relaţia:
( ) ( )
ξ
ξ 000
2
0
1
000
2
0
1 ,...,,...,,,...,,...,, nini
i
mmmm F mmmm F
n
F −+=
∂∂
(256.)
unde:
Pag. 67

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 68/72
0,0 ≠→ ξ ξ , când se foloseşte metoda numerică.
2.3.3.5. Analiza optimizării programului de măsurători în reţele geodezice şi topografice prelucrate prin metoda măsurătorilor indirecte supuse la relaţii de condiţie
Forma funcţiei F care oferă informaţii cu privire la configuraţia reţelei este de tipul:
min→= FF Q F
(257.)Unde:
FF Q este dată de relaţia:
( ) ( ) ( )[ ] ( ) f pA A B B pA A B B pA A f f pA A f Q T T T T T T T T
FF
11111 −−−−−−=
(258.)
Informaţii referitoare la numărul de repetări ale fiecărei observaţii sunt cuprinse înmatricea ponderilor, aceasta fiind obiectul studiului de optimizare cu privire la programulde măsurători.
Pentru realizarea formei liniare a funcţiei F, ce uşurează calculele aferente optimizăriitrebuiesc determinate derivatele parţiale ale funcţiei F, lucru realizabil, utilizându-se relaţia:
( ) ( )
( ) ( ) ( )[ ] ( )
( ) ( )[ ] ( ) ( ) ( )[ ] ( pA A B B pA A B B pA A An
p A pA A B B pA A B B pA A f
f pA A B B pA A B B pA A An
p A pA A f
f pA A An
p A pA A f
n
Q
T T T T T
i
T T T T T T T
T T T T T
i
T T T
T
i
T T T
i
FF
1111111
11111
11
2
−−−−−−−
−−−−
−−
∂∂
−
−∂∂+
+∂∂
−=∂∂
(259.)
unde derivatele parţiale in
p
∂
∂
se calculează cu relaţia:
Pag. 68
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 69/72
∂∂
∂∂
∂∂
∂∂
=∂∂
i
N
i
k
i
i
i
n p
n
p
n
p
n
p
n
p
...0...00
...................
0.......00
....................
0...0...0
0...0...0
2
1
(260.)
Din matricele ponderilor prezentate în relaţiile de mai sus se observă că:
=
≠
=
∂
∂
ik pentrum
ik pentru
n
p
ii
k
2
0
1
0
(261.)
Etapele de optimizare se realizează ca în cazul măsurătorilor directe cu deosebireacă valorile coeficienţilor din dezvoltarea liniară se vor calcula cu relaţia de mai sus(6.169), iar în varianta numerică se va folosi relaţia:
ξ
ξ 000
2
0
1
000
2
0
1 ,...,,...,,,...,,...,, nini
i
mmmm F mmmm F
n
F −+=
∂∂
(262.)
unde:
0,0 ≠→ ξ ξ .
2.3.4. Optimizarea măsurătorilor suplimentare aferente reţelelor geodezice şi topografice
Pag. 69
7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 70/72
În acest caz, ca şi în cazul categoriei de optimizare a programului de măsurători secunoaşte configuraţia reţelei data de funcţia F aferentă, urmărindu-se determinarea optimului înceea ce priveşte reţelele geodezice şi topografice prin studii asupra unor observaţii suplimentare ce seintroduc cu scopul creşterii preciziei de determinare a reţelei, însa cu menţinerea unui volum minim decheltuieli.
Dacă în reţeaua geodezică sau topografică există m variante de introducere a unor condiţiisuplimentare, atunci există posibilitatea de a face n combinaţii între variantele studiate, ce satisfac relaţia:
m
m
m
mmm C C C C n ++++= −121 ... (263.)
sau:
12 −= mn (264.)
Notând cu mccc ,...,, 21 costurile variantelor, atunci se poate calcula costul fiecărei combinaţii
cu relaţia:
c AC v ∗= (265.)
unde:
=
n
v
e
e
e
C ...
2
1
= matricea costurilor pe combinaţie (266.)
Pag. 70

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 71/72
=
111...1
...............
101...0
001...0
110...0
010...0
100...0
A = matricea variantelor pe combinaţie; (267.)
=
mc
c
c
c...
2
1
= matricea costurilor pe varianta; (268.)
Matricea A este de forma n x m, unde o linie corespunde unei combinaţii iar, o coloanăcorespunde unei variante, acestea furnizând informaţii cu privire la prezenţa sau absenţa unei variante din
combinaţie.Ordinea de studiu a combinaţiilor se va alege în stransă legatură cu ordinea crescătoare aelementelor matricei C V pornind de la cea mai ieftină combinaţie spre cea mai scumpă, în fiecarecalculându-se, indicatorul de precizie m cu obligativitatea verificării înscrierii în toleranţa admisă.
FF Qmm0
±= (269.)
numai dacă:
T m ≤ (270.)
În acest caz ciclul operaţiilor se opreşte şi ca rezultat al optimizării se reţinecombinaţia pentru care s-a calculat ultimul indicator de precizie.Valoarea indicatorului de precizie se calculează conform metodei de prelucrare
alese, folosind una din relaţiile:
• pentru cazul prelucrării reţelelor prin metoda măsurătorilor indirecte:
( ) f pA A f mQmmT T
ff
12
0
2
0
2 −==
(271.)
Pag. 71

7/28/2019 Master Optimizare Prof Dima
http://slidepdf.com/reader/full/master-optimizare-prof-dima 72/72
• pentru cazul prelucrării reţelelor prin metoda măsurătorilor condiţionate:
( ) Qf BQB BQB f Qf f mQmm T T T T
FF
12
0
2
0
2 −−==
(272.)
• pentru cazul prelucrării reţelelor prin metoda măsurătorilor indirecte cu maimulte mărimi măsurate:
FF Qmm 20= (273.)
unde:
g Q g aQf Q AQ g f Q f Q xxT T T
LLT
FF +−= 0
02
• pentru cazul prelucrării reţelelor prin metoda măsurătorilor indirecte supusela condiţii:
FF Qmm 2
0
2 = (274.)
unde:
( ) ( ) ( )
[ ]( ) f pA A B B pA A B B pA A f f pA A f Q T T T T T T T T
FF
11111 −−−−−−=