facultatea de inginerie electrica,energetica si ... 5.pdf · În matlab, trecerea din timp continuu...
TRANSCRIPT
05.03.2016
1
}1)}{({)}({)}({
)}({)}({)(
122
12
221
zthZthZzthZ
TthZthZzH ed
(2.119)
Ca să se obţină Z{h2(t)} mai întâi se discretizează h2(t)
trecâdu-se la h2(kTe).
Un alt procedeu constă în transformarea ecuaţiei diferenţiale
care descrie sistemul continuu în ecuaţii cu diferenţe
echivalente, cu precizarea legii de variaţie a semnalului de
intrare între momentele de eşantionare. Pentru un sistem a cărui funcţie de transfer H(s) admite numai
poli simpli nakpk ,1,
din suma componentelor yk(t) definite de relaţiile :
mărimea de ieşire din sistem y(t) rezultă
na
kk
k
kkk tyty
ps
sUcLsYLty
1
11 )()( };)(
{)}({)( (2.120)
Fiecare componentă yk(t) satisface următoarea ecuaţie
diferenţială )()()()()1( tuctytpty kkkk (2.121)
În condiţii iniţiale nule, soluţia acestei ecuaţii este
duectyt
tpkk
k )()(0
)(
(2.122)
Prin discretizarea timpului t = iTe rezultă
])()([
)()(
)1(
0 )1(
)1(
0
Tei iTe
Tei
ppTepTeipk
iTepiTep
kek
duedueeec
dueecTiy
kkkk
kk
(2.123)
iTe
Tei
piTepkek
Tepek dueecTiyeTiy kkk
)1(
)())1(()( deci (2.124)
În mod frecvent pentru u(t) sunt utilizate legi simple de variaţie
],)1[( pentru ))1(()( TiTiTiuu eee
],)1[( pentru )] ( ))1(([5.0)( TiTiTiuTiuu eeee
],)1[( pentru )()] ())1(()[()( TiTiTiuTiuTiuT
iu eeeee
e
1.
2.
3.
(2.125)
05.03.2016
2
care corespund extrapolatoarelor de diferite ordine. Dacă luăm
în consideraţie cazul 1 din (2.125) rezultă
iTeTei
pe
k
iTepk
ekTep
ekk
k
k eTiup
ecTiyeTiy )1())1(())1(()(
Folosind operatorul de întârziere z-1 se obţine
)1)(()()( 11 Tepe
k
kek
Tepek
kk eTiuzp
cTiyzeTiy
(2.126)
Funcţia de transfer discrete Hdk(z-1) asociată componentei
yk(iTe) şi Hd(z-1) asociată întregului sistem sunt date de relaţiile:
na
kTep
Tep
k
kd
Tep
Tep
k
kdk
ze
ze
p
czH
ze
ze
p
czH
k
k
k
k
11
11
1
11
1
)1()(
;1
)1()(
(2.127)
2.4.1.3. Schimbarea de reprezentare continuu-
discret în ecuaţii de stare
Pentru sistemul continuu caracterizat de ecuaţiile de stare
)()(
)()()(
tCxty
tButAxtx
(2.128)
matricea de transfer corespunzătoare este
BAsICsH 1)()(
Ecuaţiile de stare continue sunt transformate în ecuaţii de
stare discrete echivalente
)()(
)()()1(
kCxky
kuBkxAkx dd
(2.129)
(2.130) BAIeBdeBeA ATeTe
TeAd
ATed
1
0
)( )( ;
05.03.2016
3
Soluţia ecuaţiei diferenţiale de stare a sistemului continuu este
(2.131)
Introducând : t=(k+1)Te ; τ=kTe ; u(σ)= u(kTe), pentru ]T), (kT [kσ ee 1
se obţine din (2.131)
Te
eTeA
eATe
e
Tek
kTee
ATekAe
ATee
TkuBdeTkxeTkx
dTkBueeTkxeTkx
0
)(
)1()1(
)()())1((
)()())1((
(2.132)
Comparând (2.132) cu (2.129) rezultă matricile Ad , Bd:
Te
A(Te-σd
ATed BdσeBeA
0
) ; (2.133)
În MATLAB, trecerea din timp continuu în timp discret se
face cu funcţia c2d, care se apelează astfel
t
tAtA d)u(Bexetx
)()( )()(
),,(2],[ TBAdcBA dd (2.134)
Dacă sistemul continuu este cunoscut prin funcţia de transfer
H(s), se face mai întâi trecerea în planul stărilor cu
intrucţiunea tf2ss
),(2],,,[ dennumsstfDCBA
(2.135)
unde num şi den sunt numărătorul şi respectiv numitorul
funcţiei de transfer H(s). Cu matricile A, B din (2.135) şi
adoptând perioada de eşantionare Te , cu (2.134) se determină
matricile Ad, Bd ale sistemului discret.
2.4.2. Schimbarea de reprezentare neparametric –
parametric
Modelele parametrice pot fi estimate direct din datele de
intrare–ieşire sau utilizând o reprezentare neparametrică
intermediară. Utilizarea celei de-a doua variantă se justifică
prin:
05.03.2016
4
1. modelele neparametrice se obţin fără dificultate cu ajutorul
unor semnale de probă care se pot genera uşor ;
2. pentru că deducerea unui model neparametric nu necesită
precizarea structurii modelului se reduce considerabil timpul
necesar pentru validarea structurii;
3. modelele parametrice deduse indirect au uneori o precizie
comparabilă cu cea a modelelor parametrice deduse direct
din datele intrare–ieşire;
În domeniul timpului, modelul neparametric este dat prin
valorile ieşirii y(t) (sau y(kTe), k=0, 1, 2,… în cazul unui
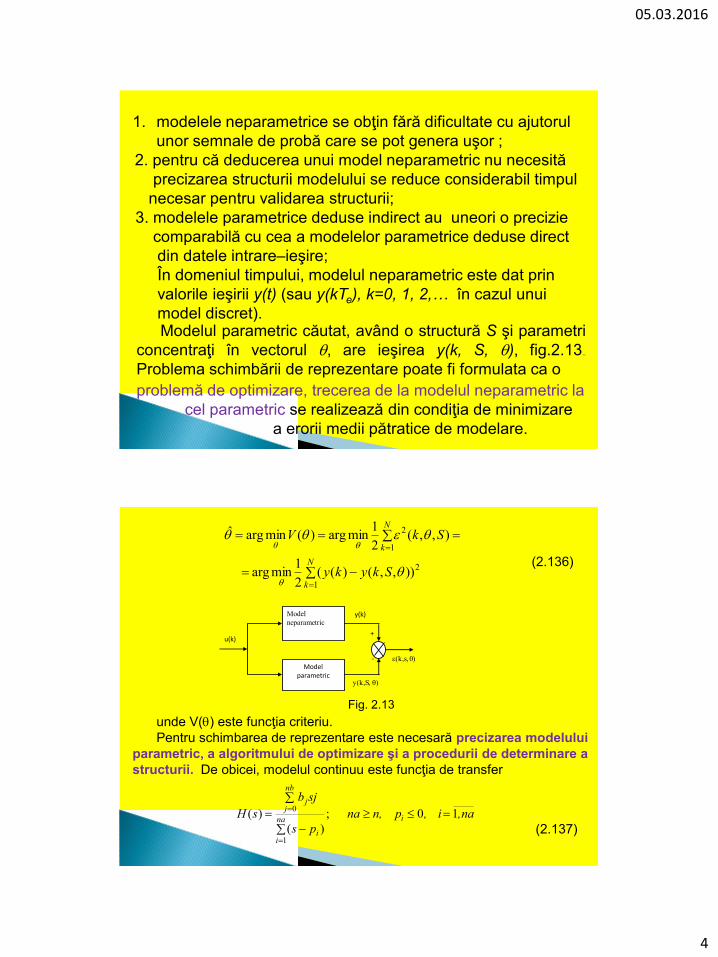
model discret). Modelul parametric căutat, având o structură S şi parametri
concentraţi în vectorul , are ieşirea y(k, S, ), fig.2.13..
Problema schimbării de reprezentare poate fi formulata ca o
problemă de optimizare, trecerea de la modelul neparametric la
cel parametric se realizează din condiţia de minimizare
a erorii medii pătratice de modelare.
N
k
N
kθ
Skyky
SkV
1
2
1
2
)),,()((2
1minarg
),,(2
1minarg)(minargˆ
(2.136)
Model
neparametric
Model parametric
u(k) +
-
y(k)
Fig. 2.13
)θS,y(k,
θ)s,ε(k,
unde V() este funcţia criteriu.
Pentru schimbarea de reprezentare este necesară precizarea modelului
parametric, a algoritmului de optimizare şi a procedurii de determinare a
structurii. De obicei, modelul continuu este funcţia de transfer
,na, i pn, na
ps
sjb
sH ina
ii
nb
jj
10 ;
)(
)(
1
0
(2.137)
05.03.2016
5
căruia îi corespunde răspunsul indicial
..210 ;
)()(
)(1
,1
0
1
0 ,., , ke
pp
pb
p
bTkw
na
i
kTtp
ji
na
jij
nb
j
jij
na
ii
ei
(2.139)
Dacă se consideră modelul discret, funcţia de transfer poate fi de
forma
na
i
ii
nb
j
jj
d
za
zb
zH
1
01
1
)((2.140)
care are răspunsul indicial
(k,na)mnb kcu
ikwabkwbwwnb
i
m
idiiddd
min si
)()( )1( ;0)0(1 1
;1
(2.141)
Algoritmul de optimizare poate fi de tip gradient sau de tip cvasinewton.
Pentru determinarea structurii se determină vectorii parametrilor
pentru un şir.
de structuri din ce în ce mai complexe S1 S2……Sn
, incluse una în alta.
Odată cu complicarea structurii, minimul funcţiei criteriu scade, adică
)(ˆ( ...... )(ˆ()(ˆ( 21 nSVSVSV (2.142)
Va exista deci o structură Si pentru care nu se mai obţine o reducere
substanţială şi care se poate considera ca fiind cea reală.
2.5. Modelarea semnalelor de intrare
Metodele de identificare care folosesc semnale de probă sunt metode
active pentru că se intervine din exterior asupra procesului. Proiectarea şi analiza semnalelor de intrare s-au dezvoltat în paralel cu
studiul algoritmilor de identificare. Primele proceduri de identificare,
bazate pe o aparatură de calcul modestă, utilizau semnale de intrare
speciale (de probă) pentru obţinerea unor informaţii direct utilizabile
despre proces.
Metodele de identificare cu semnale de probă conduc exclusiv la modele
neparametrice (funcţie pondere, răspuns indicial, caracteristici de
frecvenţă),
05.03.2016
6
greu de utilizat în proiectarea sistemelor de reglare.
Dezvoltarea tehnicii de calcul a permis aplicarea unor metode
de identificare care nu sunt condiţionate de un tip special de
semnal de probă dar care implică algoritmi relativ complicaţi.
Semnalele de probă utilizate pentru identificări pot fi
deterministe sau aleatoare. Semnalele deterministe reprezintă
mărimi a căror evoluţie în timp este predictibilă, generarea lor
având la bază legi deterministe Precizia metodelor care folosesc semnale de probă
deterministe este influenţată în mare măsură de prezenţa
perturbaţiilor care se suprapun peste răspunsul la semnalul
de probă aplicat. Principial metodele de identificare cu semnale aleatoare se
bazează pe măsurarea funcţiilor de corelaţie sau a funcţiilor de
densitate spectrală, care permit deducerea unui model al
procesului.
Prin tehnicile de corelaţie se elimină efectele perturbaţiilor,
semnalele de probă nefiind corelate cu acestea. Semnalele
aleatoare pot fi uşor suprapuse peste mărimile curente din
funcţionarea normală a procesului, cu condiţia ca media lor să
fie nulă şi dispersia suficient de mică pentru a nu deranja
funcţionarea normală.
Pentru ca generarea semnalelor aleatoare de tipul
zgomotului alb este dificilă, se preferă semnale de tipul celor
pseudoaleatoare binare care permit utilizarea avantajoasă a
tehnicilor numerice.
2.5.1. Descrierea matematică a semnalelor deterministe
Semnalele continue de o formă oarecare pot fi descrise
matematic prin dezvoltare într-un set de funcţii ortogonale.
În acest mod, o funcţie arbitrară de timp poate fi descrisă
aproximativ printr-un număr finit de coeficienţi

05.03.2016
7
Definiţia 2.2 O funcţie reală f(t) : [a, b] este de pătrat integrabil
pe [a, b] dacă există integralele
b
a
dttf )( tdtfb
a
)(2şi (2.143)
Mulţimea funcţiilor de pătrat integrabil se notează cu L2. Norma unei
funcţii f(t) L2 pe intervalul [a, b] se defineşte prin
b
a
dttftf )()( 2 (2.144)
Definiţia 2.3. Dacă f(t) L2 atunci integrala L2 şi g(t)
b
a
dttgtfgf )()(,(2.145)
se numeşte produs scalar al funcţiilor f(t) şi g(t).
Definiţia 2.4 Un şir finit de funcţii de pătrat integral pe [a, b],
niti ,1)},({ se numeşte ortogonal pe [a, b] dacă
ji ; 0
j i ; 0)()(
i
b
aji dttt
(2.146)
Dacă toţi i = 1, atunci sistemul niti ,1)},({ se numeşte sistem ortonormat.
niti ,1)},({
nitt ii ,1},)(/)({
)(ti
Orice sistem ortogonal poate fi normat. Astfel dacă
este ortogonal, atunci sistemul .
este ortonormat,
unde este norma funcţiei )(ti
niti ,1,)(
Definiţia 2.5 Dat fiind un sistem ortogonal de funcţii
:
şi o funcţie f(t) L2 pe [a, b], atunci numerele
b
ai
b
ai
i
ii
dtt
dtttf
t
tfc
)(
)()(
)(
))(,(
22
(2.147)
se numesc coeficienţii Fourier ai funcţiei f(t) în raport cu
sistemul niti ,1,)(
Dacă sistemul este ortonormat atunci coeficienţii Fourier sunt
(t)ici = (f(t), )
05.03.2016
8
b
aiii dtttfttfc )()())(),((
Un semnal oarecare u(t) poate fi aproximat printr-o combinaţie
liniară finită de funcţii ortogonale, în sensul minimizării erorii
medii pătratice
Fie un set de funcţii ortonormate niti ,1,)( aproximarea
m
iii tatu
1
)()(ˆ
şi eroarea medie pătratică de aproximare
b
a
m
iiim dttatuaaaV
1
221 ))()((),...,( (2.148)
Minimizând V(a) în raport cu ai rezultă din (2.148):
0)())()((2),...,(
1
1
b
a
m
ikii
k
m dtttatua
aaV
b
a
m
i
b
akiik dtttadtttu
1
)()()()( (2.149)
Ţinând seama de (2.146) şi (2.149), rezultă soluţia
b
akkk cdtttua )()(ˆ (2.150)
ka
ia
Deci, dacă coeficienţii sunt chiar coeficienţii Fourier ai
semnalului u(t) în raport cu sistemul ortogonal de funcţii, eroarea
pătratică medie de aproximare este minimă. De observat că valoarea lui nu depinde de m, deci de numărul funcţiilor
ortonormate utilizate. Minimul erorii medii pătratice este
b
a
m
iiii dttctucV
1
2 0))()(()(min
b
a
b
a
m
i
b
a
m
iiiii dttcdtttucdttu
1 1
22 0))(()()(2)(
b
a
m
i
b
a
b
a
m
i
m
jiji
b
ajijiiiii dtttccdttcdtttucdttu
1 1 ,1,
222 0)()(2)()()(2)( adică
05.03.2016
9
Ţinând seama de proprietăţile de ortonormalitate a
funcţiilor φi(t) şi de definiţia coeficienţilor ci , rezultă din (2.151),
inegalitatea lui Bessel
m
i
b
ai dttuc
1
22 )( (2.152)
Dacă aproximarea se face cu un şir infinit de funcţii ortonormate,
eroarea medie pătratică tinde la zero şi ca urmare (2.152) devine
egalitatea lui Parceval.
1
22 )(i
b
ai dttuc (2.153)
Noţiunile de ortogonalitate şi ortonormalitate pot fi extinse şi
prin introducerea unei funcţii de ponderare.
Definiţia 2.6 Un sistem de funcţii de pătrat integrabil ntii ,1)(
este ortogonal pe [a, b] cu ponderea p(t) dacă
b
a iji dttptt
ji 0
ji 0)()()(
(2.154)
În tabelul 2.1 sunt date seturi de funcţii ortogonale şi funcţiile de
ponderare corespunzătoare frecvent utilizate în aproximarea
semnalelor. Dintre acestea reprezentarea Fourier este cea mai
cunoscută. Alegerea acestui sistem de funcţii ortogonale, face
posibilă evidenţierea în mod practic a liniilor spectrale armonice.
Dezvoltarea în serie Fourier a semnalului x(t) periodic de perioadă
T, , este cunoscută sub forma )22
(T
tT
k
tjkk
k
tjk ecekStx )()(
2
2
)(1
)()(
T
Tk
tjk cdtetxT
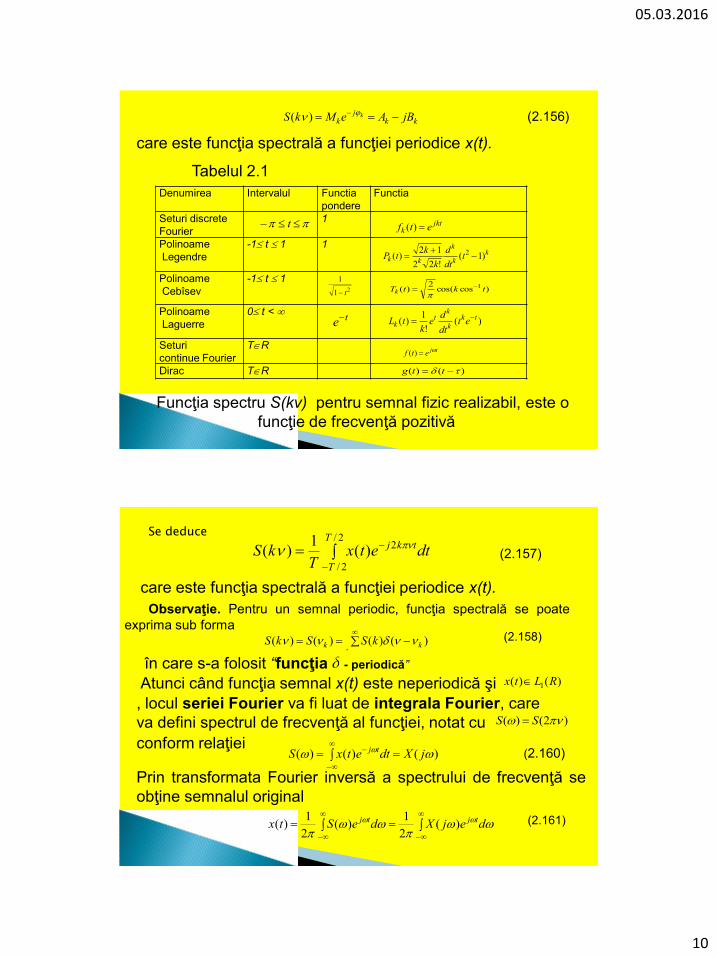
kSkS (2.155)
sunt coeficienţii Fourier complecşi (linii de spectru
Se poate exprima S(kν) sub forma
05.03.2016
10
kkj
k jBAeMkS k )( (2.156)
care este funcţia spectrală a funcţiei periodice x(t).
Denumirea Intervalul Functia
pondere
Functia
Seturi discrete
Fourier
1
Polinoame
Legendre
-1 t 1 1
Polinoame
Cebîsev
-1 t 1
Polinoame
Laguerre
0 t <
Seturi
continue Fourier
TR
Dirac TR
t jktk etf )(
k
k
k
kk tdt
d
k
ktP )1(
!22
12)( 2
)coscos(2
)( 1 tktTk
te )(!
1)( tk
k
kt
k etdt
de
ktL
tjetf )(
)()( ttg
Tabelul 2.1
21
1
t
Funcţia spectru S(kν) pentru semnal fizic realizabil, este o
funcţie de frecvenţă pozitivă
Se deduce
2/
2/
2)(1
)(T
T
tkj dtetxT
kS (2.157)
care este funcţia spectrală a funcţiei periodice x(t).
Observaţie. Pentru un semnal periodic, funcţia spectrală se poate
exprima sub forma
kkk kSSkS )()()()( (2.158)
în care s-a folosit “funcţia
- periodică”
)2()( SS
Atunci când funcţia semnal x(t) este neperiodică şi
conform relaţiei
)()( 1 RLtx
, locul seriei Fourier va fi luat de integrala Fourier, care
va defini spectrul de frecvenţă al funcţiei, notat cu
)()()( jXdtetxS tj
(2.160)
Prin transformata Fourier inversă a spectrului de frecvenţă se
obţine semnalul original
dejXdeStx tjtj )(2
1)(
2
1)( (2.161)
05.03.2016
11
Spectrul S(ω) este în general o funcţie complexă
)()()()()( jeMjBAS
unde
sinus)ata (transform sin)()(
cosinus)ata (transform cos)()(
tdttxB
tdttxA
(2.162)
(2.163)
În analiza spectrală se utilizează frecvent funcţia densitatea
spectrală de putere
)()()()(2
SSSSxx (2.164)
unde )()()( jBAS este spectrul conjugat..
Semnalul x(t) şi spectrul său S(ω) exprimă acelaşi fenomen fizic
în două forme diferite, în domeniul amplitudine – timp
(reprezentare temporală) şi în domeniul amplitudine – frecvenţă
(reprezentare frecvenţială).
Pentru unui semnal fizic dat x(t) se poate asocia spectrul
Fourier S(ω) determinat analitic sau experimental.
În cazul semnalelor eşantionate reprezentarea în timp este
ieiTtiTxtx )()()(*
(2.165)
unde Te este perioada de eşantionare, iar reprezentarea în
domeniul frecvenţelor este
iT
i e
ijXiT
jXjX )]([2
)(*
(2.166)
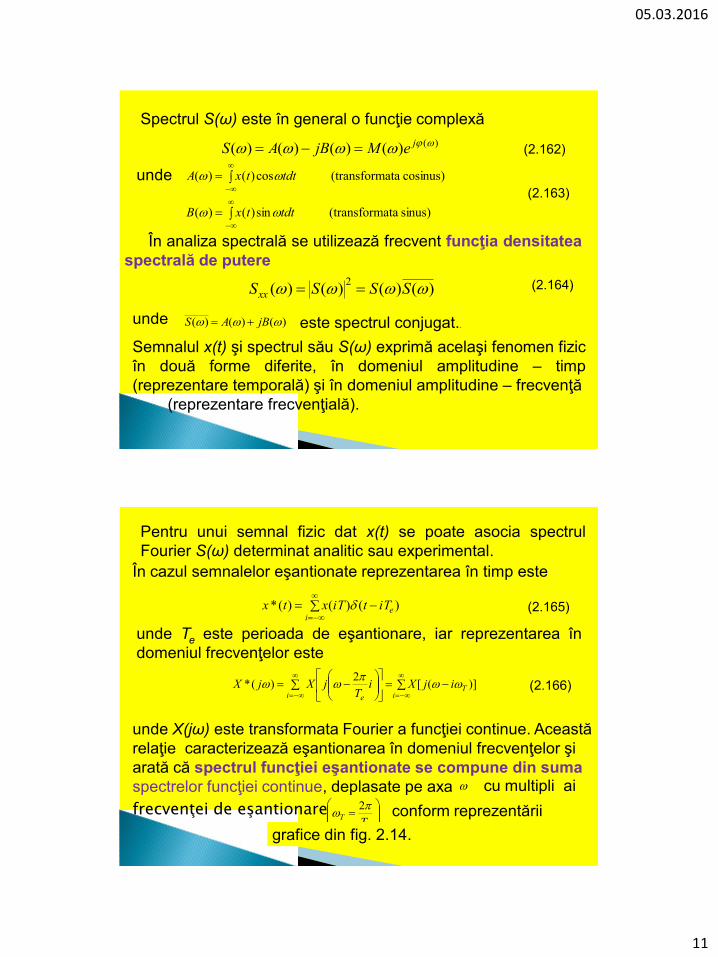
unde X(jω) este transformata Fourier a funcţiei continue. Această
relaţie caracterizează eşantionarea în domeniul frecvenţelor şi
arată că spectrul funcţiei eşantionate se compune din suma
spectrelor funcţiei continue, deplasate pe axa cu multipli ai
frecvenţei de eşantionare
e
TT
2 conform reprezentării
grafice din fig. 2.14.
05.03.2016
12
- 0
)( jX
)X(j
Tω2
T2
TTω ω
Fig. 2.14
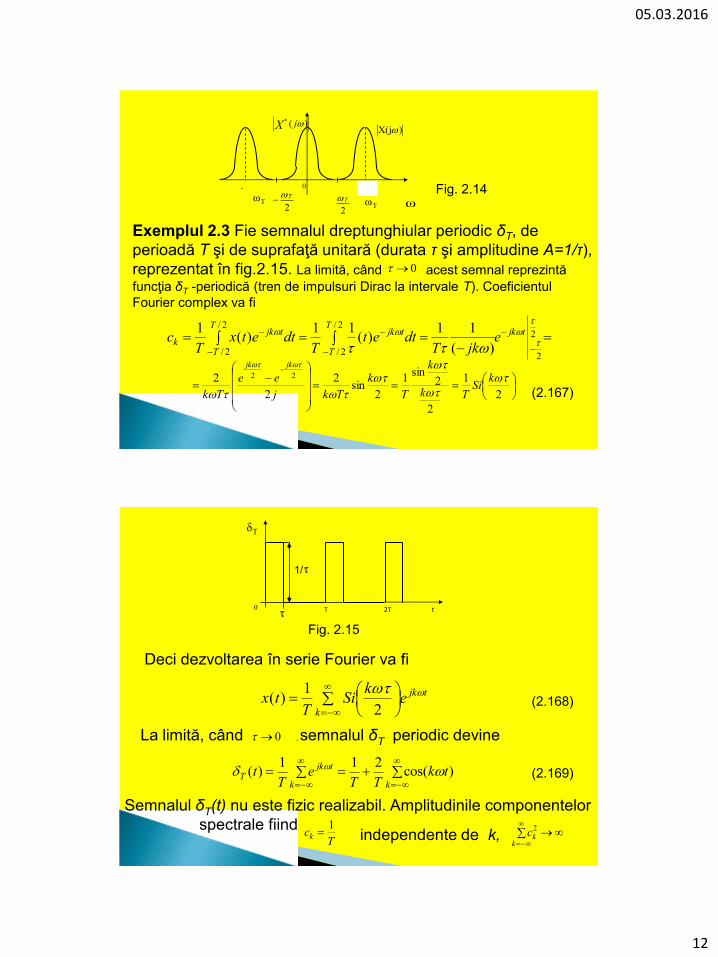
Exemplul 2.3 Fie semnalul dreptunghiular periodic δT, de
perioadă T şi de suprafaţă unitară (durata τ şi amplitudine A=1/τ),
reprezentat în fig.2.15. La limită, când acest semnal reprezintă
funcţia δT -periodică (tren de impulsuri Dirac la intervale T). Coeficientul
Fourier complex va fi
0
2
2
2/
2/
2/
2/ )(
11)(
11)(
1
tjkT
T
tjkT
T
tjkk e
jkTdtet
Tdtetx
Tc
2
1
2
2sin
1
2sin
2
2
2 22
kSi
Tk
k
T
k
Tkj
ee
Tk
jkjk
(2.167)
1/
2T T t 0
Tδ
Fig. 2.15
τ
τ
Deci dezvoltarea în serie Fourier va fi
k
tjkek
SiT
tx
2
1)( (2.168)
La limită, când 0 , semnalul δT periodic devine
kk
tjkT tk
TTe
Tt )cos(
211)(
(2.169)
Semnalul δT(t) nu este fizic realizabil. Amplitudinile componentelor
spectrale fiind T
ck
1 independente de k,
kkc2
05.03.2016
13
puterea semnalului este infinită. Funcţia Si(α) este dată de
obicei sub formă tabelată sau grafic.
Exemplul 2.4 Se consideră impulsul Dirac )(t neperiodic, definit prin
1)(lim)(
0dttdtt (2.170)
Transformata Fourier a acestei funcţii este F{δ(t)}=1, deci
spectrul de amplitudine al impulsului este constant pe
întreaga axă a frecvenţei.
Exemplul 2.5. Se consideră funcţia treaptă unitară (Heaviside)
definită prin
0 t 1
0t 0)(t (2.171)
j
tF1
)( excluzând o vecinătate a originii deoarece )(t
nu este absolut integrabilă. Pentru a determina spectrul în întreg
domeniul frecvenţelor se poate aproxima semnalul treaptă,
conform relaţiei
; )(
)(X ;
2
2sin
2( lar triunghiuImpulsul 2/
2
A
jXje
AjX j
0 ; j
1
0 );(
][lim)]([0
teFtF (2.172)
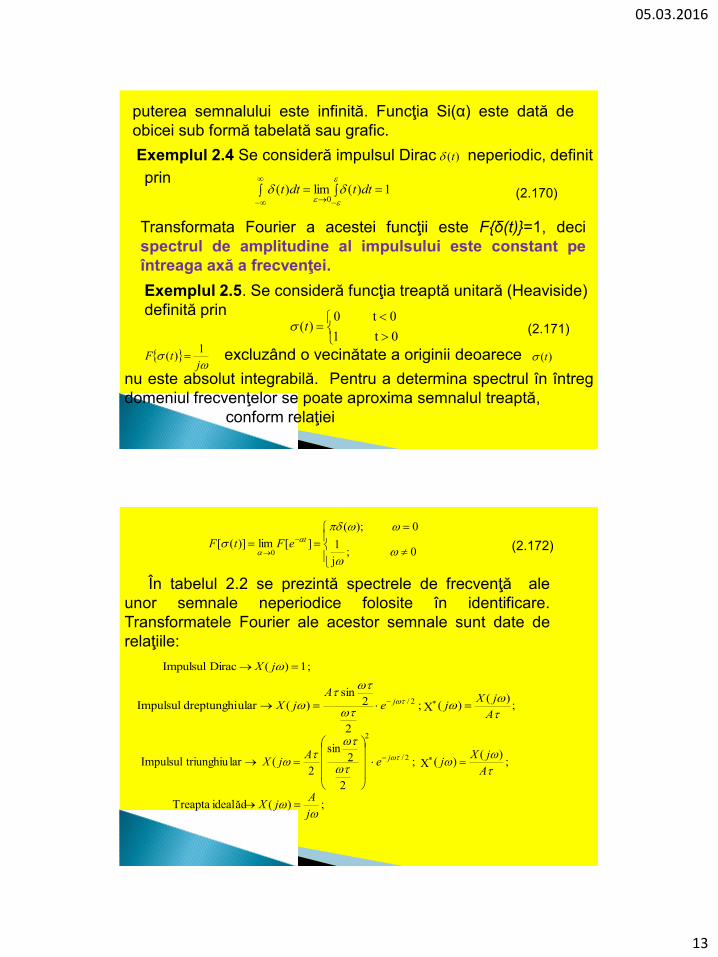
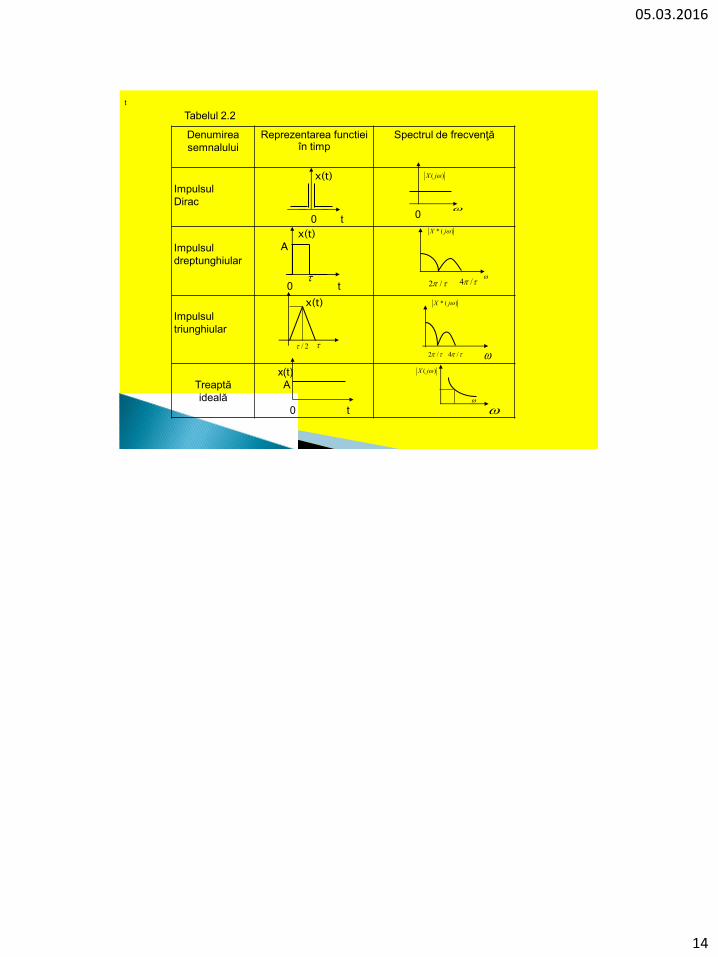
În tabelul 2.2 se prezintă spectrele de frecvenţă ale
unor semnale neperiodice folosite în identificare.
Transformatele Fourier ale acestor semnale sunt date de
relaţiile:
; 1)( DiracImpulsul jX
;)(
)(X ;
2
2sin
)(ular dreptunghi Impulsul 2/
A
jXje
AjX j
; )(idealădTreapta
j
AjX
05.03.2016
14
Denumirea
semnalului
Reprezentarea functiei în timp
Spectrul de frecvenţă
Impulsul
Dirac
x(t) 0 t
0
Impulsul
dreptunghiular
x(t) A
0 t
Impulsul
triunghiular
x(t)
Treaptă
ideală
x(t)
A
0 t
)( jX
)(* jX
/2 /4
2/
)(* jX
/2 /4
)( jX
t
Tabelul 2.2