cursul 7 matematic a - anul iadrian.zalinescu/mat/slides 07.pdf · a. z alinescu (ia˘si) cursul 7...
TRANSCRIPT

Forme liniare, biliniare si patraticeCursul 7
Matematica - anul I
Facultatea de Informatica, UAIC
e-mail: [email protected]
web: https://profs.info.uaic.ro/~adrian.zalinescu
26 Noiembrie 2019
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Cuprins
1 Forme liniare
2 Forme biliniare
3 Forme patratice
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme liniare
Forme liniare
Definitie
Fie V un spatiu liniar.
• O aplicatie liniara f : V → � se numeste forma liniara sau functionala liniara.
• Spatiul liniar L(V ;�) al tuturor formelor liniare se numeste dualul lui V si senoteaza V ∗.
Propozitie
Fie V un spatiu liniar finit-dimensional. Atunci V ∗ este de asemeneafinit-dimensional si dimV ∗ = dimV .
Propozitie
Fie V un spatiu liniar finit-dimensional. Daca v ∈ V si v 6= 0, atunci existaf ∈ V ∗ astfel ıncat f (v) 6= 0.
Consecinta. Daca u, v ∈ V si u 6= v, atunci exista f ∈ V ∗ astfel ıncatf (u) 6= f (v).
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme liniare
Hiperplanuri vectoriale
Definitie
Fie (V ,+, ·) un spatiu liniar. Un subspatiu W ⊆ V se numeste un hiperplan(vectorial) daca exista f ∈ V ∗ r {0V ∗} astfel ıncat ker f = W .
Propozitie
Daca V este un spatiu finit-dimensional cu dimV = n ∈ �∗, atunci un subspatiuliniar W ⊆ V este un hiperplan daca si numai daca dimW = n− 1.
Demonstratie
“⇒” Daca W = ker f pentru o functionala liniara f ∈ V ∗ r {0V ∗}, atunci, dinteorema dimensiunii,
dimW = dim(ker f ) = dimV − dim(Im f ) = n− 1,
deoarece f 6= 0V ∗ si astfel Im f = �.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019

Forme liniare
Demonstratie
“⇐” Reciproc, daca dimW = n− 1, atunci exista o baza B = {b1, . . . , bn−1, bn}a lui V astfel ıncat Lin{b1, . . . , bn−1} = W . Luand f : V → � definita de
f (α1b1 + · · ·+ αnbn) := αn
pentru α1, . . . , αn ∈ �, avem f 6= 0V ∗ si
f (b1) = · · · = f (bn−1) = 0,
ceea ce implica W ⊆ ker f (adica f (v) = 0, ∀v ∈ W ). Pe de alta parte, dinimplicatia directa, dim(ker f ) = n− 1 si deci W = ker f . �
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019

Forme liniare
Fie (V ,+, ·) un spatiu liniar finit-dimensional si B = {b1, . . . , bn} o baza a lui V .
Daca W este un hiperplan cu W = ker f , unde f ∈ V ∗ r {0V ∗}, fieβ1 := f (b1), . . . , βn := f (bn). Atunci v ∈ ker f este caracterizata de ecuatia
(1) β1x1 + · · ·+ βnxn = 0,
unde x1, . . . , xn sunt coordonatele lui v ın baza B. Asadar
(2) W = {x1b1 + · · ·+ xnbn ∈ V | β1x1 + · · ·+ βnxn = 0} .
Reciproc, fiind dati β1, . . . , βn ∈ �, nu toti 0, submultimea lui V definita derelatia de mai sus este un hiperplan al lui V .
Se poate arata ca orice subspatiu liniar al lui V (nu numai hiperplanurile) potfi caracterizate de sisteme de ecuatii de forma (1).
Daca V = �n si B este o baza canonica, relatia (2) poate fi scrisa ca
W = {(x1, . . . , xn) ∈ �n | β1x1 + · · ·+ βnxn = 0} .
In cazurile particulare n = 2 si n = 3, ecuatia (1) caracterizeaza o dreapta(1-dimensionala), respectiv un plan (2-dimensional) ce trece prin origine.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme liniare
Functionale afine
Urmatoarea notiunie permite caracterizarea tuturor dreptelor (daca n = 2) siplanurilor (cand n = 3), nu neaparat a celor ce trec prin origine.
Definitie
Fie V un spatiu liniar. O functie f : V → � se numeste functionala afina dacaexista o functionala liniara f0 ∈ V ∗ si o constanta c ∈ � astfel ıncatf (v) = f0(v) + c , ∀v ∈ V .
Pentru o functionala afina f : V → � se poate defini nucleul ei ın acelasi mod capentru functionalele liniare, adica ker f := {v ∈ V | f (v) = 0}.
Definitie
Fie V un spatiu liniar. O submultime U ⊆ V se numeste hiperplan afin dacaexista o functionala afina neconstanta f : V → � astfel ıncat ker f = U.
Cu alte cuvinte, U este un hiperplan afin daca exista un hiperplan vectorialW si un vector v0 ∈ V astfel ıncat
U = W + v0 := {v + v0 | v ∈ W }.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme liniare
Daca V este finit-dimensional cu o baza B = {b1, b2, . . . , bn}, atuncihiperplanurile afine sunt date de submultimi de forma
U = {x1b1 + · · ·+ xnbn ∈ V | β1x1 + · · ·+ βnxn + c = 0} ,
unde c , β1, . . . , βn ∈ �.
In cazurile n = 2 si n = 3, hiperplanurile afine sunt dreptele, respectivplanurile.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme biliniare
Forme biliniare
Definitie
Fie V si W spatii liniare. O functie g : V ×W → � se numeste forma (aplicatie)biliniara pe V ×W daca sunt satisfacute urmatoarele conditii:
1 g(αu + βv, w) = αg(u, w) + βg(v, w), ∀α, β ∈ �, ∀u, v ∈ V , ∀w ∈ W ;
2 g(v, λw + µz) = λg(v, w) + µg(v, z), ∀λ, µ ∈ �, ∀v ∈ V , ∀w, z ∈ W .
In cazul W = V , o forma biliniara pe V × V se mai numeste forma (aplicatie)biliniara pe V .
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme biliniare
1. Sa presupunem acum ca V si W sunt finit-dimensionale, cu bazeleB = {b1, . . . , bn} si B = {b1, . . . , bm} pe V , respectiv W .
Daca v ∈ V si w ∈ W au coordonatele ın bazele B, respectiv B, peα1, . . . , αn ∈ �, respectiv β1, . . . , βm ∈ �, atunci
g(v, w) = g
(n
∑i=1
αibi ,m
∑j=1
βj bj
)=
n
∑i=1
m
∑j=1
αi βjg(bi , bj ).
Scalarii aij := g(bi , bj ), 1 ≤ i ≤ n, 1 ≤ j ≤ m sunt numiti coeficientii formeibiliniare g ın raport cu bazele B si B;
matricea AgB,B
:= (aij ) 1≤i≤n1≤j≤m
ın Mnm se numeste matricea formei biliniare g
ın raport cu bazele B si B.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme biliniare
2. Daca B ′ = {b′1, . . . , b′n} este o alta baza a lui V si B ′ = {b′1, . . . , b′m} este oalta baza a lui W , sa notam S = (sij )1≤i ,j≤n ∈Mn matricea de trecere de la B laB ′ iar S = (sij )1≤i ,j≤m ∈Mm matricea de trecere de la B la B ′.
Atunci matricea lui g ın raport cu bazele B ′ si B ′ poate fi scrisa ca
AgB ′,B ′
= ST · AgB,B· S .
Se poate demonstra ca rangAgB ′,B ′
= rangAgB,B
, deci rangul matricei formei
biliniare g nu depinde de bazele considerate. Aceasta valoare comuna senumeste rangul lui g si este notata rang g .
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme biliniare
Nucleul unei forme biliniare
Fixand w ∈ W , forma biliniara g : V ×W → � defineste o functionalaliniara fw : V → � prin
fw(v) := g(v, w), v ∈ V .
Lasand w sa varieze, aplicatia w 7→ fw defineste un operator liniarg ′ : W → V ∗.Intr-o maniera similara se poate defini un operator liniar g ′′ : V → W ∗ pring ′′(v) := hv, unde functionala liniara hv ∈ W ∗ este introdusa de
hv(w) := g(v, w), w ∈ V .Definitie
Fie g : V ×W → � o forma biliniara si operatorii liniari asociati g ′ : W → V ∗ sig ′′ : V → W ∗ introdusi mai sus.
• Subspatiul liniar ker g ′ ⊆ W se numeste nucleul drept al lui g .
• Subspatiul liniar ker g ′′ ⊆ V se numeste nucleul stang al lui g .
• Daca Ker(g ′) = {0W } si Ker(g ′′) = {0V }, atunci forma biliniara g senumeste nedegenerata.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme biliniare
Forme biliniare simetrice
Definitie
O forma biliniara g : V × V → � se numeste simetrica daca
g(u, v) = g(v, u), ∀u, v ∈ V ,
respectiv antisimetrica daca
g(u, v) = −g(v, u), ∀u, v ∈ V .
Propozitie
Fie g : V ×V → � o forma biliniara simetrica sau antisimetrica. Atunci nucleul eidrept coincide cu nucleul ei stang.
Pentru o forma liniara ca mai sus, nucleul stang (ce coincide cu cel drept) senumeste nucleul lui g si se noteaza ker g .
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019

Forme biliniare
Teorema dimensiunii pentru forme biliniare
Propozitie
Fie V un spatiu liniar finit-dimensional si g : V × V → � o forma biliniarasimetrica. Atunci rang g + dim (ker g) = dimV .
Observatie. Datorita rezultatului de mai sus, o conditie necesara si suficienta cao forma biliniara simetrica sa fie nedegenerata este ca rang g = dimV .
Definitie
Fie g : V × V → � o forma biliniara simetrica.
• Doi vectori u, v ∈V se numesc ortogonali ın raport cu g daca g(u, v) = 0.
• Daca ∅ 6= U ⊆ V , spunem ca U este ortogonala ın raport cu g (saug -ortogonala) daca g(u, v) = 0 pentru orice vectori distincti u, v ∈ U.
• Daca ∅ 6= U ⊆ V , multimea U⊥g := {v ∈ V | g(u, v) = 0, ∀u ∈ U} e unsubspatiu liniar al lui V , numit suplimentul ortogonal al lui U ın raport cu g .
Observatie. Daca W este un subspatiu finit-dimensional al lui V cu {b1, . . . , bn}baza a lui W , atunci v ∈ W⊥g daca si numai daca g(bk , v) = 0, ∀k ∈ {1, . . . , n}.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme biliniare
Legea inertiei a lui Sylvester
Teorema
Fie (V ,+, ·) un spatiu liniar n-dimensional si g : V × V → � o forma biliniarasimetrica. Atunci exista p, q, r ∈ � astfel ıncat pentru orice baza g -ortogonala{b1, . . . , bn} a lui V , printre g(b1, b1), g(b2, b2), ..., g(bn, bn):
p reprezinta numarul de valori strict pozitive,
q reprezinta numarul de valori strict negative,
r reprezinta numarul de valori nule.
In plus,r = n− rang g .
Numerele p si q sunt numiti indicii de inertie pozitiva, respectiv negativa.
Tripletul (p, q, r) se numeste signatura lui g .
Evident, p + q + r = n (n = dimV ); mai mult, rang g = p + q = n− r .
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
Forme patratice
Definitie
Fie V un spatiu liniar si g : V × V → � o forma biliniara simetrica. Functiah : V → �, definita de
h(v) := g(v, v), v ∈ V
se numeste forma (functionala) patratica asociata lui g .
Observatie. Deoareceh(u + v) = g(u + v, u + v) = g(u, u) + g(u, v) + g(v, u) + g(v, v) sig(u, v) = g(v, u), avem
h(u + v) = h(u) + 2g(u, v) + h(v), ∀u, v ∈ V .
Din aceasta formula putem deduce pe g daca-l cunoastem pe h:
g(u, v) =1
2[h(u + v)− h(u)− h(v)] , ∀u, v ∈ V
sau
g(u, v) =1
4[h(u + v)− h(u− v)] , ∀u, v ∈ V .
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
Sa presupunem acum ca V este un spatiu liniar finit-dimensional siB = {b1, . . . , bn} o baza a lui V .
Fie AgB,B = (aij )1≤i ,j≤n matricea lui g ın raport cu B. Daca x1, . . . , xn ∈ �
sunt coeficientii unui vector v ∈ V ın raport cu B, atunci
h(v) = h(x1b1 + · · ·+ xnbn) =n
∑i=1
n
∑j=1
aijxixj .
Partea dreapta a acestei egalitati este un polinom omogen de gradul 2, numitpolinomul patratic asociat cu forma patratica h si bazei B.
Determinantul matricei simetrice AgB,B se numeste discriminantul lui h ın
raport cu B, iar semnul acestuia este invariant ın raport cu B.
Spunem ca h este o forma patratica nedegenerata daca g este o formabiliniara nedegenerata, adica discriminantul lui h este diferit de zero(rangAg
B,B = rang g = n). Altfel, spunem ca h este o forma patraticadegenerata.
Daca (p, q, r) este signatura lui g , o vom numi de asemenea signatura lui h.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
Forma redusa a unei forme biliniare
Definitie
Fie V un spatiu liniar finit-dimensional si h : V → V o forma patratica asociataunei forme biliniare g : V × V → �.
• Daca B este o baza a lui V astfel ıncat matricea lui g este diagonala, numimforma canonica (redusa) a lui h polinomul patratic asociat lui h si B.
• Forma canonica a lui h se numeste normala daca matricea diagonala a lui gare pe diagonala numai elementele 1, −1 si 0.
Daca B = {b1, . . . , bn} este o baza a lui V care da forma canonica
ω1x21 + ω2x
22 + · · ·+ ωnx
2n
lui h, atunci B ′ = {c1b1, . . . , cnbn} da o forma normala lui h, unde ci = 1 dacaωi = 0, ın timp ce ci =
1√|ωi |
daca ωi 6= 0, pentru 1 ≤ i ≤ n.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
Metoda lui Gauss
Teorema
Fie V un spatiu liniar n-dimensional si h : V → � o forma patratica. Atunciexista o baza {b1, . . . , bn} a lui V si ω1, . . . , ωn ∈ � astfel ıncat pentru oricex1, . . . , xn ∈ � sa avem
h(x1b1 + · · ·+ xnbn) = ω1x21 + ω2x
22 + · · ·+ ωnx
2n .
Observatii.
Polinomul patratic ω1x21 + ω2x
22 + · · ·+ ωnx
2n este forma redusa a lui h
(matricea lui g ın raport cu {b1, . . . , bn} este o matrice diagonala cu intrarileω1, . . . , ωn).
Daca signatura lui h este (p, q, r), atunci printre coeficientii ω1, . . . , ωn, psunt strict pozitivi, q sunt strict negativi, iar r sunt egali cu 0.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019

Forme patratice
Metoda lui Jacobi
Teorema
Fie V un spatiu liniar n-dimensional si h : V → � o forma patratica. Fie ∆i ,1 ≤ i ≤ n minorii principali ai matricei (aij )1≤i ,j≤n asociate lui h ın raport cu obaza a lui V , adica
∆i =
∣∣∣∣∣∣∣∣∣a11 . . . a1i
a21 . . . a2i...
...ai1 . . . aii
∣∣∣∣∣∣∣∣∣ , 1 ≤ i ≤ n.
Daca ∆i 6= 0, ∀i ∈ {1, . . . , n}, atunci h poate fi redusa la forma canonica
µ1x21 + µ2x
22 + · · ·+ µnx
2n ,
unde µi =∆i−1
∆i, ∀i = {1, . . . , n}, cu ∆0 = 1.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
Definitie
Fie V un spatiu liniar n-dimensional si h : V → � o forma patratica cu signatura(p, q, r).
• Daca p = n, h se numeste forma patratica pozitiv-definita.
• Daca q = 0, forma patratica h se numeste pozitiv-semidefinita.
• Daca q = n, h se numeste forma patratica negativ-definita.
• Daca p = 0, forma patratica h se numeste negativ-semidefinita.
• Forma patratica h se numeste nedefinita daca p > 0 si q > 0.
Fie ∆i , 1 ≤ i ≤ n minorii principali ai matricei asociate lui h ın raport cu o baza alui V . Atunci h este pozitiv-definita daca si numai daca
∆i > 0, ∀i ∈ {1, . . . , n},
iar h este negativ-definita daca si numai daca
(−1)i∆i > 0, ∀i ∈ {1, . . . , n}.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019

Forme patratice
Metoda valorilor proprii
Teorema
Fie (V , 〈·, ·〉) un spatiu prehilbertian cu dimV = n si h : V → � o formapatratica. Atunci exista o baza ortonormala ın raport cu care h are forma canonica
λ1x21 + λ2x
22 + · · ·+ λnx
2n , x1, x2, . . . , xn ∈ �,
unde λ1, λ2, . . . , λn ∈ � sunt valorile proprii ale matricei asociate lui h ın raportcu orice baza a lui V .
Metoda demonstratiei este similara cu algoritmul de diagonalizare pentruoperatori liniari.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
Functionale patratice neomogene
Definitie
Fie V un spatiu liniar, h : V → � o forma patratica si f : V → � o functionalaafina. Suma h+ f se numeste functionala (forma) patratica neomogena pe V .
Daca V este finit-dimensional si B = {b1, . . . , bn} este o baza a lui V ,atunci pentru orice x1, . . . , xn ∈ �,
(3) (h+ f )(x1b1 + · · ·+ xnbn) =n
∑i=1
n
∑j=1
aijxixj +n
∑i=1
bixi + c ,
unde A = (aij )1≤i ,j≤n este matricea asociata lui h, b1, . . . , bn ∈ � si c ∈ �.
Termenul din dreapta acestei egalitati se numeste polinomul patratic asociatlui h+ f (acesta este un polinom de grad 2, nu necesar omogen).
Daca V = �n si B este baza sa canonica, atunci (3) poate fi privit ca
(h+ f )(x) = ρ(x) := 〈Ax, x〉+ 〈b, x〉+ c , ∀x ∈ �n
(unde vectorul x ∈ �n este interpretat ca matrice coloana pentru ınmultireacu A).
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019

Forme patratice
Reciproc, pentru o matrice simetrica A ∈Mn, b ∈ �n si c ∈ �, functiaρ : V → � data de
ρ(x) := 〈Ax, x〉+ 〈b, x〉+ c , ∀x ∈ �n
defineste o functionala patratica neomogena pe V .
Mai mult, A poate fi nesimetrica, deoarece
〈Ax, x〉 =1
2〈Ax, x〉+ 1
2〈x,Ax〉
=1
2〈Ax, x〉+ 1
2〈ATx, x〉 =
⟨1
2
(A+ AT
)x, x
⟩,
asadar matricea A poate fi ınlocuita de matricea simetrica 12 (A+ AT).
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
Forma normala a unei functionale patratice neomogene
Sa consideram acum o schimbare afina de coordonate, adica o transformare deforma
x′ = Sx + x0,
unde S ∈Mn este o matrice nesingulara si x0 ∈ �n.Se poate arata ca exista o astfel de schimbare, cu S matrice ortonormala(S−1 = ST) astfel ıncat ρ are forma:
ρ(x) =n
∑i=1
λi (x′i )
2 + c0, ∀x ∈ �n,
daca detA 6= 0.
ρ(x) =n−r∑i=1
λi (x′i )
2 + γx ′n−r+1, ∀x ∈ �n,
daca detA = 0 si (p, q, r) este signatura lui h (deci r > 0, iar n− r esterangul lui A).
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
Clasificare geometrica
Dintr-un punct de vedere geometric,
ker ρ := {x ∈ �n | ρ(x) = 0}
reprezinta o conica ın cazul n = 2, o cuadrica ın cazul n = 3, respectiv ohipercuadrica daca n ≥ 4.
1. Cazul n = 1: formele normale ale ρ sunt:
x2 + 1 (ker ρ = ∅: doua puncte “imaginare”);
x2 − 1 (ker ρ = {−1, 1}: doua puncte distincte);
x2 (ker ρ = {0}: doua puncte identice).
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
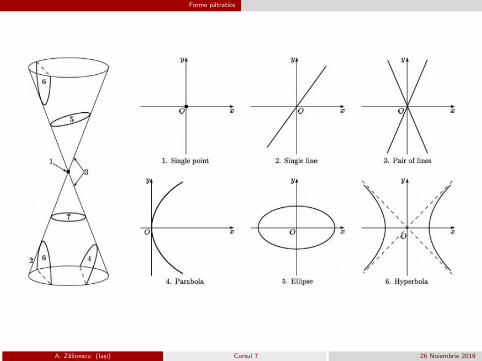
2. Cazul n = 2: noua tipuri de conice, dupa forma normala a lui ρ:
x21 + x2
2 + 1 = 0 (∅: elipsa “imaginara”);
x21 − x2
2 + 1 = 0 (hiperbola);
x21 + x2
2 − 1 = 0 (elipsa);
x21 − x2 = 0 (parabola);
x21 + x2
2 = 0 (un punct: doua drepte “imaginare”, conjugate);
x21 − x2
2 = 0 (doua drepte ce se intersecteaza);
x21 + 1 = 0 (∅: doua drepte “imaginare”);
x21 − 1 = 0 (doua drepte paralele);
x21 = 0 (doua drepte identice).
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
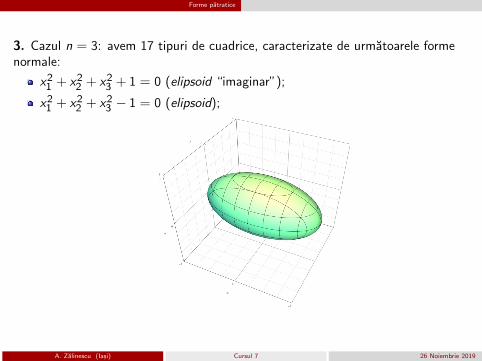
3. Cazul n = 3: avem 17 tipuri de cuadrice, caracterizate de urmatoarele formenormale:
x21 + x2
2 + x23 + 1 = 0 (elipsoid “imaginar”);
x21 + x2
2 + x23 − 1 = 0 (elipsoid);
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
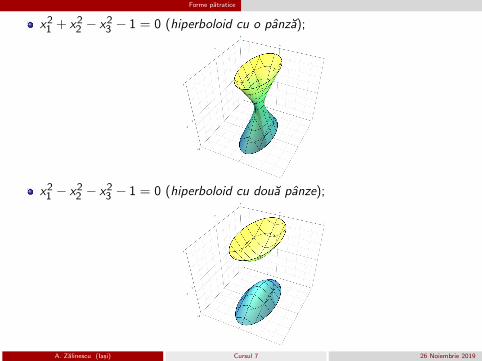
x21 + x2
2 − x23 − 1 = 0 (hiperboloid cu o panza);
x21 − x2
2 − x23 − 1 = 0 (hiperboloid cu doua panze);
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
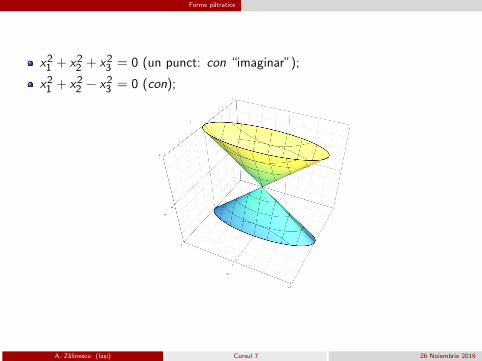
x21 + x2
2 + x23 = 0 (un punct: con “imaginar”);
x21 + x2
2 − x23 = 0 (con);
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
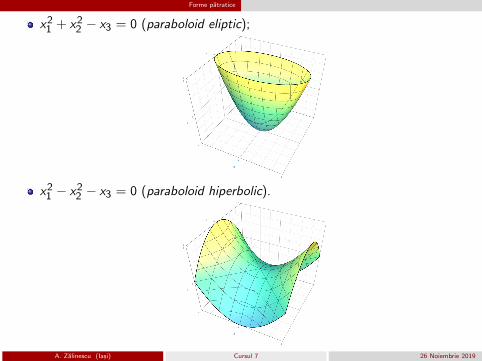
x21 + x2
2 − x3 = 0 (paraboloid eliptic);
x21 − x2
2 − x3 = 0 (paraboloid hiperbolic).
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
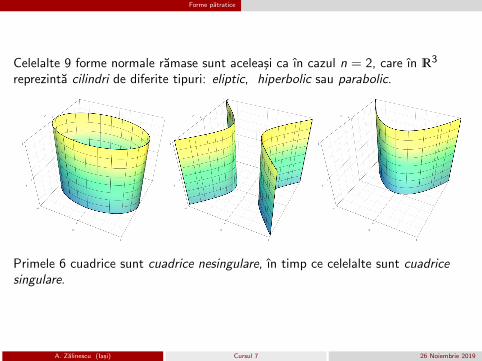
Celelalte 9 forme normale ramase sunt aceleasi ca ın cazul n = 2, care ın �3
reprezinta cilindri de diferite tipuri: eliptic, hiperbolic sau parabolic.
Primele 6 cuadrice sunt cuadrice nesingulare, ın timp ce celelalte sunt cuadricesingulare.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019
Forme patratice
M. Ariciuc, S. Roatesi, Lectii de algebra liniara si geometrie analitica, EdituraMatrix Rom, Bucuresti, 2008.
K. C. Border, More than you wanted to know about quadratic forms, Caltech,2016.
K. Conrad, Bilinear Forms, Notes on Advanced Linear Algebra, 2015.
C. Costinescu, Algebra liniara si aplicatii ın geometrie, Editura Matrix Rom,Bucuresti, 2005.
D. Draghici, Algebra, Editura Didactica si Pedagogica, Bucuresti, 1972.
G. Galbura, F. Rado, Geometrie, Ed. Didactica si Pedag., Bucuresti, 1979.
M. Neagu, Geometria curbelor si suprafetelor. Teorie si aplicatii, EdituraMatrix Rom, Bucuresti, 2013.
P. Ott, Bilinear and Quadratic Forms, Prof. Robert Beezer’s Notes onAdvanced Linear Algebra, 2014.
I. Radomir, Elemente de algebra vectoriala, geometrie si calcul diferential,Editura Albastra, Cluj-Napoca, 2000.
A. Zalinescu (Iasi) Cursul 7 26 Noiembrie 2019