controlul predictiv bazat pe modele int rare -stare -ie...
TRANSCRIPT
Modelare si control predictivModelare si control predictivModelare si control predictivModelare si control predictiv
- proiect -- proiect -- proiect -
Controlul predictiv bazat pe Controlul predictiv bazat pe Controlul predictiv bazat pe
modele intrare-stare-iesiremodele intrare-stare-iesiremodele intrare-stare-iesire
Asist. ing. Constantin Florin Caruntu Asist. ing. Constantin Florin Caruntu
Controlul predictiv bazat pe 10.01.2012 Controlul predictiv bazat pe
modele intare-stare-iesireCuprins
10.01.2012
23:03modele intare-stare-iesire
Cuprins23:03modele intare-stare-iesire
1. Introducere1. Introducere1. Introducere
2. Modele intrare-stare-iesire2. Modele intrare-stare-iesire2. Modele intrare-stare-iesire
3. Control predictiv fara restrictii3. Control predictiv fara restrictii
4. Control predictiv cu restrictii4. Control predictiv cu restrictii4. Control predictiv cu restrictii
5. Analiza stabilitatii5. Analiza stabilitatii5. Analiza stabilitatii
6. Analiza robustetii6. Analiza robustetii6. Analiza robustetii
Modelare si control predictivModelare si control predictivModelare si control predictivModelare si control predictiv
- proiect -- proiect -- proiect -
Controlul predictiv bazat pe Controlul predictiv bazat pe Controlul predictiv bazat pe
modele intrare-stare-iesiremodele intrare-stare-iesiremodele intrare-stare-iesire
Curs 6 – Urmarirea referintelor si Curs 6 – Urmarirea referintelor si Curs 6 – Urmarirea referintelor si
rejectia perturbatiilorrejectia perturbatiilorrejectia perturbatiilor
10.01.2012 10.01.2012
23:03 Analiza robustetii Urmarirea referintei23:03 Analiza robustetii Urmarirea referintei
� Pana acum a fost considerata doar problema de � Pana acum a fost considerata doar problema de � Pana acum a fost considerata doar problema de
controlare a starilor si intrarilor in jurul originii.controlare a starilor si intrarilor in jurul originii.controlare a starilor si intrarilor in jurul originii.
� In practica, se doreste urmarirea unei referinte diferite � In practica, se doreste urmarirea unei referinte diferite � In practica, se doreste urmarirea unei referinte diferite
de zero si varianta in timp.de zero si varianta in timp.de zero si varianta in timp.
• Aterizarea avioanelor pe pilot automat.• Aterizarea avioanelor pe pilot automat.• Aterizarea avioanelor pe pilot automat.
• Actionarea unui brat robotic pe o traiectorie predefinita.• Actionarea unui brat robotic pe o traiectorie predefinita.• Actionarea unui brat robotic pe o traiectorie predefinita.
• Probleme de urmarire prin radar.• Probleme de urmarire prin radar.• Probleme de urmarire prin radar.
�� In continuare, se va considera urmarirea unor semnale � In continuare, se va considera urmarirea unor semnale
de referinta constante pe portiuni.de referinta constante pe portiuni.
10.01.2012 10.01.2012
23:03 Analiza robustetii Sisteme liniare discrete23:03 Analiza robustetii Sisteme liniare discrete
� Model pe stare liniar in timp discret� Model pe stare liniar in timp discret� Model pe stare liniar in timp discret
( ) ( ) ( )x kT T Ax kT Bu kT+ = +( ) ( ) ( )x kT T Ax kT Bu kT+ = +( ) ( ) ( )( ) ( ) ( )x kT T Ax kT Bu kT+ = +
( ) ( ) ( )y kT Cx kT Du kT= +( ) ( ) ( )y kT Cx kT Du kT= +( ) ( ) ( )( ) ( )y kT Cx kT Du kT= +
( ) ( )z kT Hx kT=( ) ( )z kT Hx kT=
� → vectorul de stare
( ) ( )z kT Hx kT=nx∈ℝ� → vectorul de starenx∈ℝ� → vectorul de starex∈ℝ
� → vectorul intrarilor (comenzilor)mu∈ℝ� → vectorul intrarilor (comenzilor)mu∈ℝ� → vectorul intrarilor (comenzilor)u∈ℝ
� → vectorul iesilor (marimi masurabile)py∈ℝ� → vectorul iesilor (marimi masurabile)py∈ℝ� → vectorul iesilor (marimi masurabile)y∈ℝq∈ℝ� → vectorul marimilor controlabileqz∈ℝ� → vectorul marimilor controlabileqz∈ℝ
10.01.2012 10.01.2012
23:03 Analiza robustetii Urmarirea referintei – problema generala23:03 Analiza robustetii Urmarirea referintei – problema generala
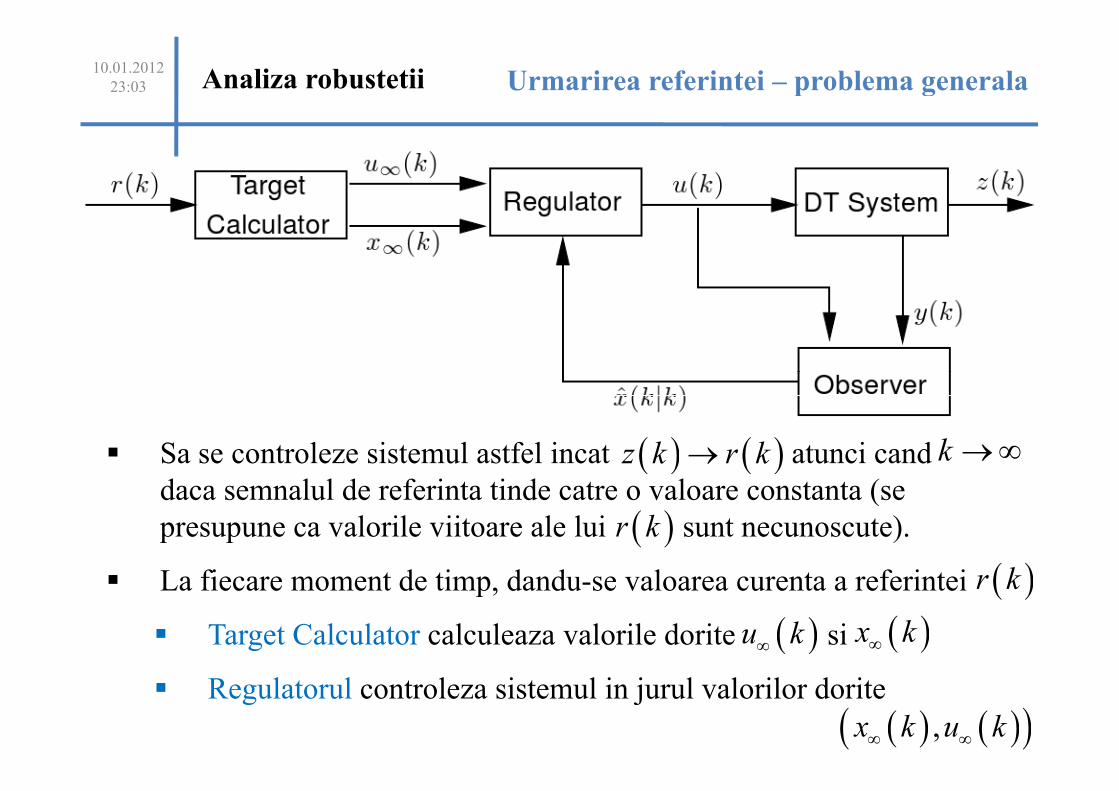
� Sa se controleze sistemul astfel incat atunci cand ( ) ( )z k r k→ k→∞� Sa se controleze sistemul astfel incat atunci cand ( ) ( )z k r k→ k→∞� Sa se controleze sistemul astfel incat atunci cand
daca semnalul de referinta tinde catre o valoare constanta (se ( ) ( )z k r k→
daca semnalul de referinta tinde catre o valoare constanta (se
presupune ca valorile viitoare ale lui sunt necunoscute).( )r kpresupune ca valorile viitoare ale lui sunt necunoscute).( )r kpresupune ca valorile viitoare ale lui sunt necunoscute).
�
( )r k
( )r k� La fiecare moment de timp, dandu-se valoarea curenta a referintei ( )r k� La fiecare moment de timp, dandu-se valoarea curenta a referintei ( )r k
( ) ( )� Target Calculator calculeaza valorile dorite si( )u k∞ ( )x k∞� Target Calculator calculeaza valorile dorite si( )u k∞ ( )x k∞
� Regulatorul controleza sistemul in jurul valorilor dorite � Regulatorul controleza sistemul in jurul valorilor dorite
( ) ( )( )( ) ( )( ),x k u k∞ ∞( ) ( )( ),x k u k∞ ∞
10.01.2012 10.01.2012
23:03 Analiza robustetii Urmarirea referintei – problema generala23:03 Analiza robustetii Urmarirea referintei – problema generala
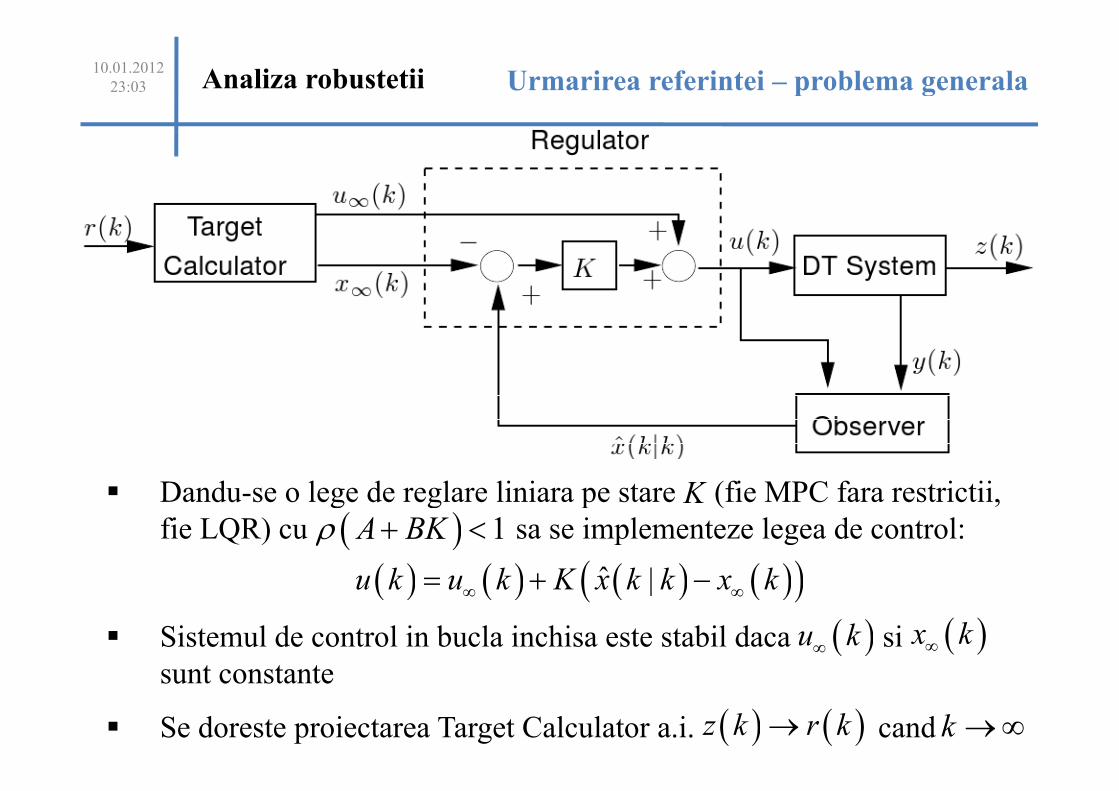
� Dandu-se o lege de reglare liniara pe stare (fie MPC fara restrictii, K� Dandu-se o lege de reglare liniara pe stare (fie MPC fara restrictii,
fie LQR) cu sa se implementeze legea de control:
K
( ) 1A BKρ + <fie LQR) cu sa se implementeze legea de control:( ) 1A BKρ + <fie LQR) cu sa se implementeze legea de control:( ) 1A BKρ + <
( ) ( ) ( ) ( )( )ˆ |u k u k K x k k x k= + −( ) ( ) ( ) ( )( )ˆ |u k u k K x k k x k∞ ∞= + −( ) ( ) ( ) ( )( )ˆ |u k u k K x k k x k∞ ∞= + −
( )� Sistemul de control in bucla inchisa este stabil daca si ( )u k∞ ( )x k∞� Sistemul de control in bucla inchisa este stabil daca si
sunt constante
( )u k∞ ( )x k∞
sunt constantesunt constante
( ) ( )z k r k→� Se doreste proiectarea Target Calculator a.i. cand( ) ( )z k r k→ k→∞� Se doreste proiectarea Target Calculator a.i. cand( ) ( )z k r k→ k→∞
10.01.2012 10.01.2012
23:03 Analiza robustetii Alegerea variabilelor controlate23:03 Analiza robustetii Alegerea variabilelor controlate
� Nu intotdeauna toate iesirile sunt marimi controlabile � Nu intotdeauna toate iesirile sunt marimi controlabile � Nu intotdeauna toate iesirile sunt marimi controlabile
(de ex, ).( ) ( ) a.i. H C z k y k≠ ≠(de ex, ).( ) ( ) a.i. H C z k y k≠ ≠(de ex, ).( ) ( ) a.i. H C z k y k≠ ≠
� In general, nu este posibil ca toate iesirile sau starile � In general, nu este posibil ca toate iesirile sau starile � In general, nu este posibil ca toate iesirile sau starile
sa fie controlate catre un punct de referinta arbitrarsa fie controlate catre un punct de referinta arbitrarsa fie controlate catre un punct de referinta arbitrar
� Exemplu: nu este posibil sa mentinem o masina � Exemplu: nu este posibil sa mentinem o masina � Exemplu: nu este posibil sa mentinem o masina
intr-o pozitie fixa in timp ce se mentine o viteza intr-o pozitie fixa in timp ce se mentine o viteza intr-o pozitie fixa in timp ce se mentine o viteza
diferita de zero.diferita de zero.diferita de zero.
� In general, variabilele controlate sunt o ( )z k� In general, variabilele controlate sunt o ( )z k� In general, variabilele controlate sunt o
combinatie liniara sau un subset al starilor sau
( )z k
( )x kcombinatie liniara sau un subset al starilor sau ( )x kcombinatie liniara sau un subset al starilor sau
iesirilor
( )x k
( )y kiesirilor ( )y kiesirilor ( )y k
� Problema: Ce valori ale lui H sunt permise ?� Problema: Ce valori ale lui H sunt permise ?� Problema: Ce valori ale lui H sunt permise ?
10.01.2012 10.01.2012
23:03 Analiza robustetii Perechi tinta de echilibru23:03 Analiza robustetii Perechi tinta de echilibru
Definitie (Pereche tinta de echilibru): Dandu-se o o Definitie (Pereche tinta de echilibru): Dandu-se o o Definitie (Pereche tinta de echilibru): Dandu-se o
referinta r pentru un sistem liniar discret, perechea referinta r pentru un sistem liniar discret, perechea referinta r pentru un sistem liniar discret, perechea
se numeste pereche tinta de echilibru (fara ( ) ( ),x k u k se numeste pereche tinta de echilibru (fara ( ) ( ),x k u k∞ ∞ se numeste pereche tinta de echilibru (fara
eroare de regim stationar) daca
( ) ( ),x k u k∞ ∞
eroare de regim stationar) dacaeroare de regim stationar) daca
x Ax Bu= +x Ax Bu∞ ∞ ∞= +x Ax Bu∞ ∞ ∞= +
=Hx r∞ =Hx r∞ =
� Rearanjand ecuatiile rezulta� Rearanjand ecuatiile rezulta� Rearanjand ecuatiile rezulta
( ) 0x − − ( ) 0xI A B ∞ − − =
( ) 0xI A B ∞ − − =
0 u rH ∞
= 0 u rH ∞
� In functie de alegerile lui H si r, perechea tinta de echilibru
∞ � In functie de alegerile lui H si r, perechea tinta de echilibru � In functie de alegerile lui H si r, perechea tinta de echilibru
poate sa existe sau nu.poate sa existe sau nu.poate sa existe sau nu.
10.01.2012 10.01.2012
23:03 Analiza robustetii Existenta perechilor tinta de echilibru23:03 Analiza robustetii Existenta perechilor tinta de echilibru
Propozitie: O conditie suficienta pentru garantarea o Propozitie: O conditie suficienta pentru garantarea o Propozitie: O conditie suficienta pentru garantarea
existentei unei perechi tinta de echilibru pentru orice existentei unei perechi tinta de echilibru pentru orice existentei unei perechi tinta de echilibru pentru orice
referinta r este ca matriceareferinta r este ca matriceareferinta r este ca matricea
( ) − − ( )I A B − − ( )I A B − −
0H 0H
sa aiba toate liniile linar independente.
sa aiba toate liniile linar independente.sa aiba toate liniile linar independente.
� Conditia de mai sus implica:� Conditia de mai sus implica:
• H trebuie sa aiba toate liniile liniar independente• H trebuie sa aiba toate liniile liniar independente• H trebuie sa aiba toate liniile liniar independente
• Numarul de intrari trebuie sa fie mai mare decat numarul • Numarul de intrari trebuie sa fie mai mare decat numarul
de variabile controlabile ( )m q≥de variabile controlabile ( )m q≥
10.01.2012 10.01.2012
23:03 Analiza robustetii Calcularea perechilor tinta – fara restrictii23:03 Analiza robustetii Calcularea perechilor tinta – fara restrictii
� La fiecare moment de timp, target calculator rezolva � La fiecare moment de timp, target calculator rezolva � La fiecare moment de timp, target calculator rezolva
urmatorul set de ecuatii liniareurmatorul set de ecuatii liniareurmatorul set de ecuatii liniare
( ) 0xI A B − − ( ) 0xI A B ∞ − − =
( )0 u rH
∞ = 0 u rH ∞
=
� Daca exista solutie, aceasta poate sa nu fie unica.
0 u rH ∞ � Daca exista solutie, aceasta poate sa nu fie unica.� Daca exista solutie, aceasta poate sa nu fie unica.
� Daca sunt calculate ca mai sus atunci se poate ( ) ( )( ),x k u k� Daca sunt calculate ca mai sus atunci se poate ( ) ( )( ),x k u k∞ ∞� Daca sunt calculate ca mai sus atunci se poate
arata ca atunci cand daca:
( ) ( )( )∞ ∞
( ) ( )z k r k→ k→∞arata ca atunci cand daca:( ) ( )z k r k→ k→∞
• Secventa converge catre o valoare constanta( )r ⋅• Secventa converge catre o valoare constanta( )r ⋅• Secventa converge catre o valoare constanta( )r ⋅
• Legea de control este ( ) ( ) ( ) ( )( )ˆ |u k u k K x k k x k= + −• Legea de control este ( ) ( ) ( ) ( )( )ˆ |u k u k K x k k x k∞ ∞= + −
• Matricea si estimatorul sunt stabile
( )∞ ∞
A BK+• Matricea si estimatorul sunt stabileA BK+• Matricea si estimatorul sunt stabileA BK+
10.01.2012 10.01.2012
23:03 Analiza robustetii Rejectia perturbatiilor – problema generala23:03 Analiza robustetii Rejectia perturbatiilor – problema generala
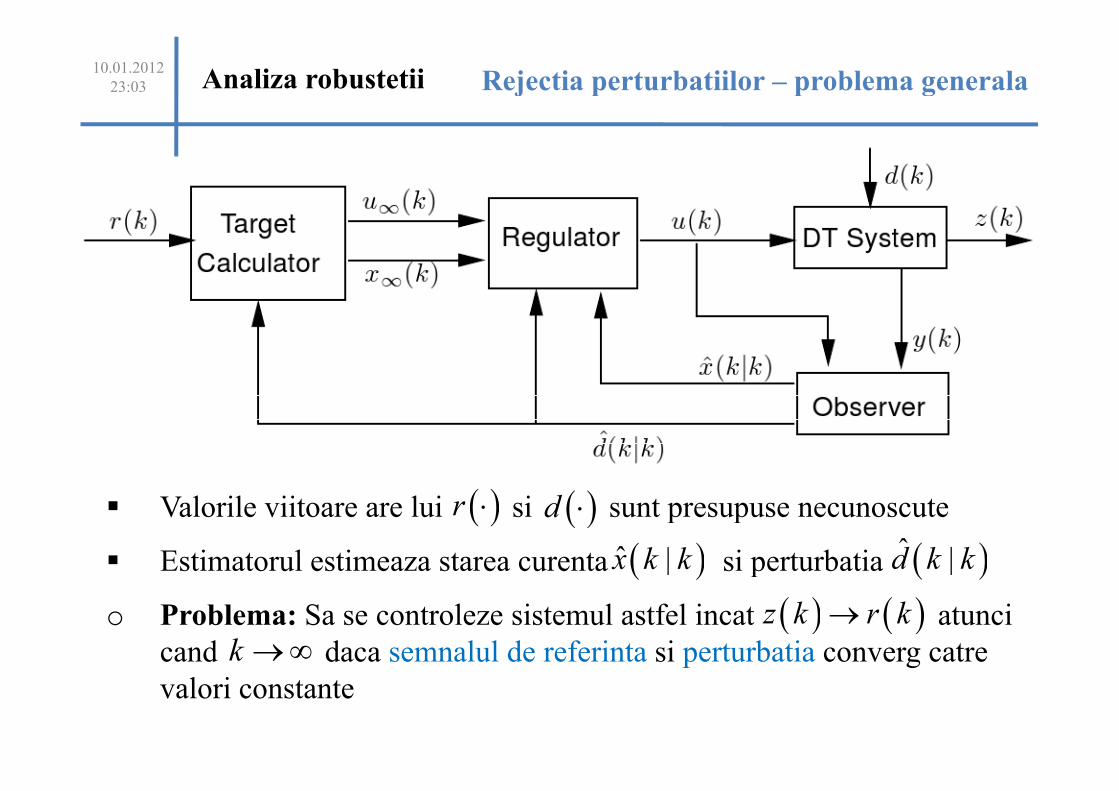
� Valorile viitoare are lui si sunt presupuse necunoscute( )r ⋅ ( )d ⋅� Valorile viitoare are lui si sunt presupuse necunoscute( )r ⋅ ( )d ⋅� Valorile viitoare are lui si sunt presupuse necunoscute( )r ⋅ ( )d ⋅
( ) ( )ˆ� Estimatorul estimeaza starea curenta si perturbatia( )ˆ |x k k ( )ˆ |d k k� Estimatorul estimeaza starea curenta si perturbatia( )ˆ |x k k ( )ˆ |d k k
o Problema: Sa se controleze sistemul astfel incat atunci ( ) ( )z k r k→o Problema: Sa se controleze sistemul astfel incat atunci
cand daca semnalul de referinta si perturbatia converg catre
( ) ( )z k r k→k→∞cand daca semnalul de referinta si perturbatia converg catre k→∞cand daca semnalul de referinta si perturbatia converg catre
valori constante
k→∞valori constante
10.01.2012 10.01.2012
23:03 Analiza robustetii Model constant al perturbatiilor23:03 Analiza robustetii Model constant al perturbatiilor
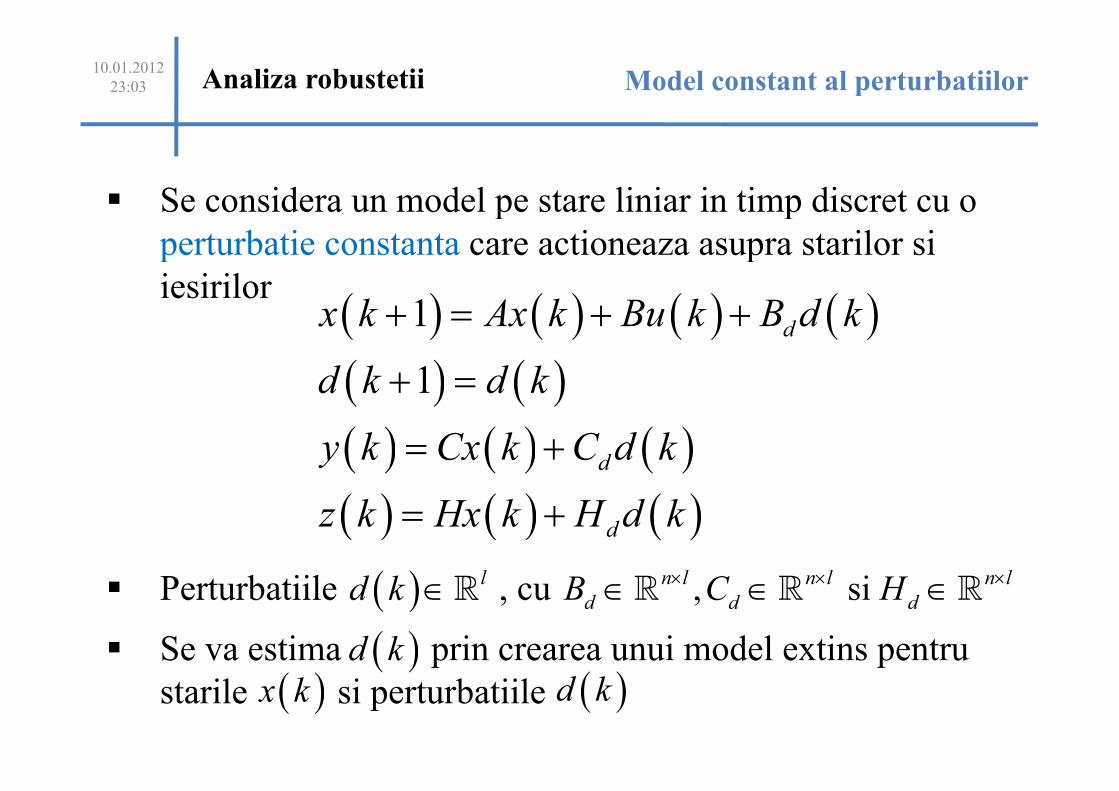
� Se considera un model pe stare liniar in timp discret cu o � Se considera un model pe stare liniar in timp discret cu o � Se considera un model pe stare liniar in timp discret cu o
perturbatie constanta care actioneaza asupra starilor si perturbatie constanta care actioneaza asupra starilor si perturbatie constanta care actioneaza asupra starilor si
iesiriloriesirilor( ) ( ) ( ) ( )1x k Ax k Bu k B d k+ = + +
iesirilor( ) ( ) ( ) ( )1 dx k Ax k Bu k B d k+ = + +( ) ( ) ( ) ( )( ) ( )
1 dx k Ax k Bu k B d k+ = + +
( ) ( )1d k d k+ =( ) ( )1d k d k+ =( ) ( )( ) ( ) ( )
1d k d k+ =
( ) ( ) ( )y k Cx k C d k= +( ) ( ) ( )dy k Cx k C d k= +( ) ( ) ( )( ) ( ) ( )
dy k Cx k C d k
z k Hx k H d k
= +
= +( ) ( ) ( )z k Hx k H d k= +( ) ( ) ( )dz k Hx k H d k= +( ) ( ) ( )d
( )� Perturbatiile , cu ( ) ld k ∈ℝ , si n l n l n lB C H× × ×∈ ∈ ∈ℝ ℝ ℝ� Perturbatiile , cu ( ) ld k ∈ℝ , si n l n l n l
d d dB C H× × ×∈ ∈ ∈ℝ ℝ ℝ
� Se va estima prin crearea unui model extins pentru
( ) ℝ d d dℝ ℝ ℝ
( )d k� Se va estima prin crearea unui model extins pentru ( )d k� Se va estima prin crearea unui model extins pentru
starile si perturbatiile ( )d k
( )x k ( )d kstarile si perturbatiile ( )x k ( )d kstarile si perturbatiile ( )x k ( )d k
10.01.2012 10.01.2012
23:03 Analiza robustetii Model extins cu perturbatii23:03 Analiza robustetii Model extins cu perturbatii
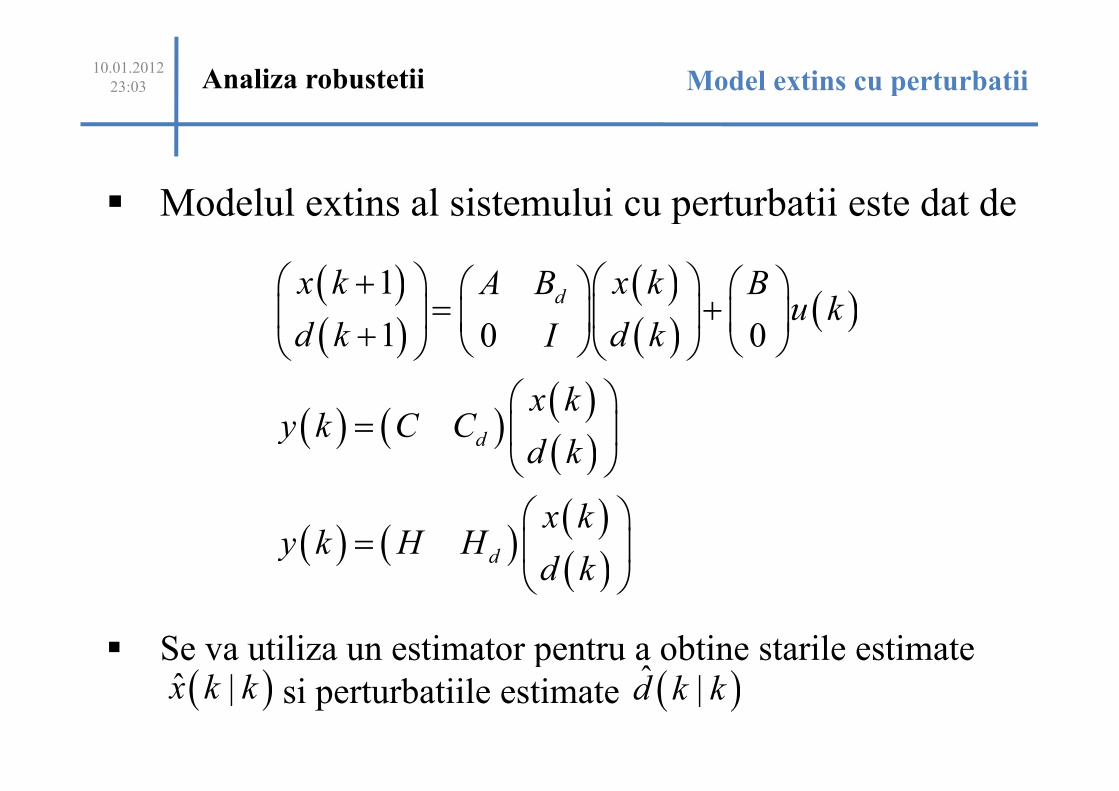
� Modelul extins al sistemului cu perturbatii este dat de� Modelul extins al sistemului cu perturbatii este dat de� Modelul extins al sistemului cu perturbatii este dat de
( ) ( )1x k x kA B B+ ( ) ( )( )
1d
x k x kA B Bu k
+ = +
( )( )
( )( )
( )1
1 0 0
dx k x kA B B
u kd k d kI
+ = + + ( ) ( )
( )1 0 0
u kd k d kI
= + + ( ) ( )( )
1 0 0d k d kI+
( ) ( )( )x k
( ) ( )( )( )x k
y k C C
= ( ) ( )( )( )dy k C Cd k
=
( ) ( )( )dy k C Cd k
= ( )
( )
d k
( ) ( )( )x k
( ) ( )( )( )x k
y k H H
= ( ) ( )( )( )dy k H Hd k
=
( ) ( )( )dd k ( )d k
� Se va utiliza un estimator pentru a obtine starile estimate � Se va utiliza un estimator pentru a obtine starile estimate
( )ˆ� Se va utiliza un estimator pentru a obtine starile estimate
si perturbatiile estimate ( )ˆ |x k k ( )ˆ |d k ksi perturbatiile estimate ( )ˆ |x k k ( )ˆ |d k ksi perturbatiile estimate ( ) ( )|d k k
10.01.2012 10.01.2012
23:03 Analiza robustetii Estimarea starilor si perturbatiilor23:03 Analiza robustetii Estimarea starilor si perturbatiilor
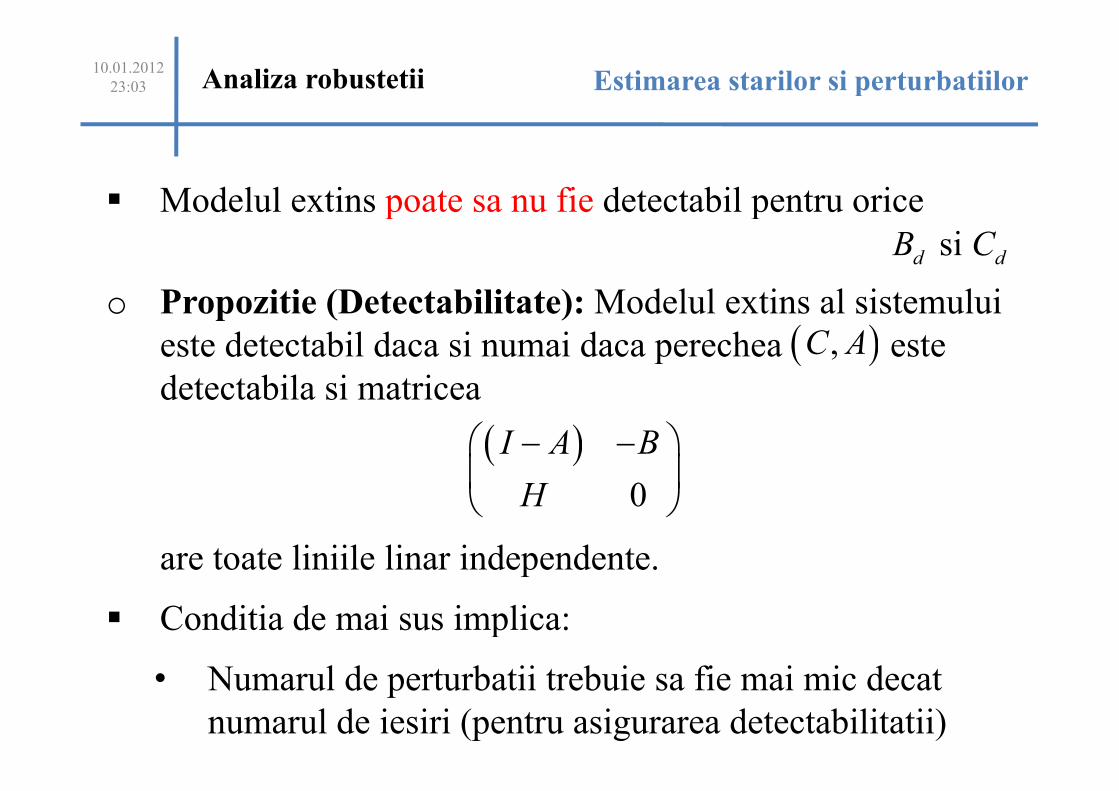
� Modelul extins poate sa nu fie detectabil pentru orice � Modelul extins poate sa nu fie detectabil pentru orice � Modelul extins poate sa nu fie detectabil pentru orice
si B C si d dB C si d dB C
o Propozitie (Detectabilitate): Modelul extins al sistemului o Propozitie (Detectabilitate): Modelul extins al sistemului
( ),C A
o
este detectabil daca si numai daca perechea este ( ),C Aeste detectabil daca si numai daca perechea este
detectabila si matricea
( ),C A
detectabila si matriceadetectabila si matricea
( ) − − ( )I A B − − ( )I A B − −
0H 0H
are toate liniile linar independente.
are toate liniile linar independente.are toate liniile linar independente.
� Conditia de mai sus implica:� Conditia de mai sus implica:� Conditia de mai sus implica:
• Numarul de perturbatii trebuie sa fie mai mic decat • Numarul de perturbatii trebuie sa fie mai mic decat • Numarul de perturbatii trebuie sa fie mai mic decat
numarul de iesiri (pentru asigurarea detectabilitatii)numarul de iesiri (pentru asigurarea detectabilitatii)numarul de iesiri (pentru asigurarea detectabilitatii)
10.01.2012 10.01.2012
23:03 Analiza robustetii Calcularea perechilor tinta cu perturbatii23:03 Analiza robustetii Calcularea perechilor tinta cu perturbatii
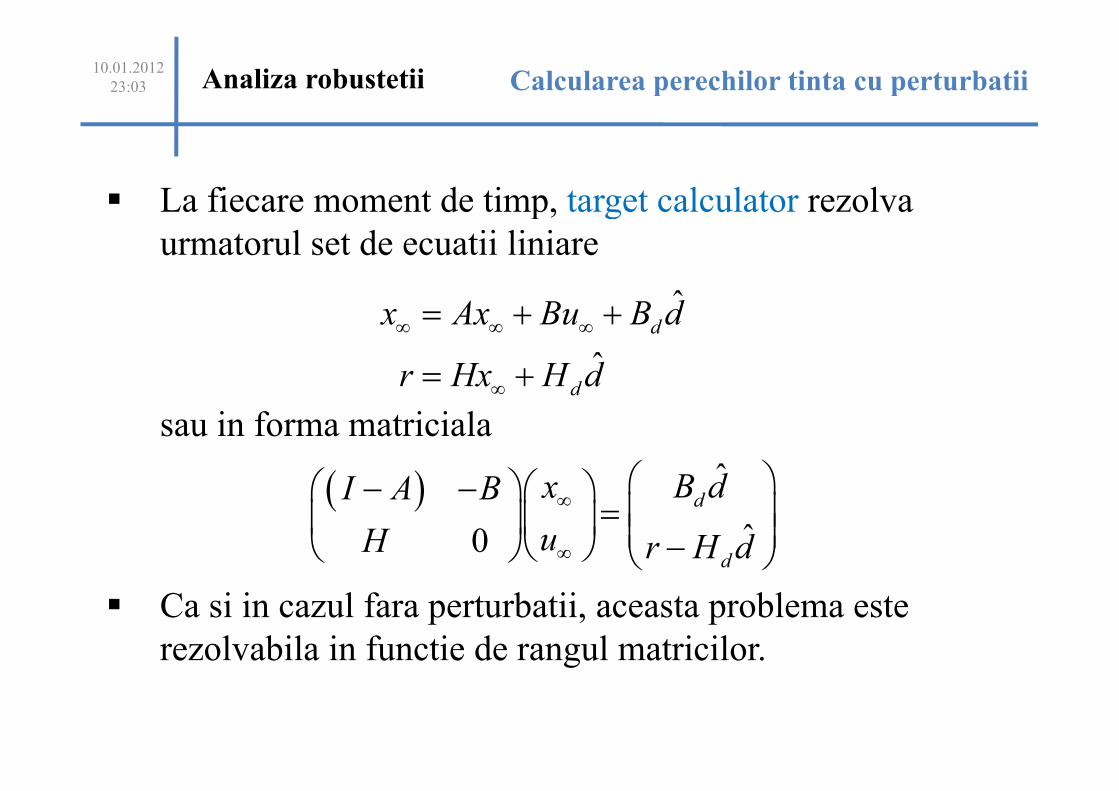
� La fiecare moment de timp, target calculator rezolva � La fiecare moment de timp, target calculator rezolva � La fiecare moment de timp, target calculator rezolva
urmatorul set de ecuatii liniareurmatorul set de ecuatii liniareurmatorul set de ecuatii liniare
ˆx Ax Bu B d= + + ˆdx Ax Bu B d∞ ∞ ∞= + +
ˆ
dx Ax Bu B d∞ ∞ ∞= + +
ˆr Hx H d= + ˆdr Hx H d∞= +
sau in forma matricialad∞
sau in forma matricialasau in forma matriciala
( ) ˆB dx − − ( ) ˆdB dxI A B ∞
− − =
( ) ˆdB dxI A B ∞
− − = ˆ0 uH r H d∞
= − ˆ0d
uH r H d∞ −
� Ca si in cazul fara perturbatii, aceasta problema este
dr H d∞ − � Ca si in cazul fara perturbatii, aceasta problema este � Ca si in cazul fara perturbatii, aceasta problema este
rezolvabila in functie de rangul matricilor.rezolvabila in functie de rangul matricilor.rezolvabila in functie de rangul matricilor.
10.01.2012 10.01.2012
23:03 Analiza robustetii Rejectia perturbatiilor - rezultate23:03 Analiza robustetii Rejectia perturbatiilor - rezultate
� Fie urmatoarele conditii indeplinite:� Fie urmatoarele conditii indeplinite:� Fie urmatoarele conditii indeplinite:
• Secventele si converg catre valori constante.( )r ⋅ ( )d ⋅• Secventele si converg catre valori constante.( )r ⋅ ( )d ⋅
• Conditiile de rang de pe slide-urile 10 si 15 sunt satisfacute.
( )• Conditiile de rang de pe slide-urile 10 si 15 sunt satisfacute.• Conditiile de rang de pe slide-urile 10 si 15 sunt satisfacute.
•• Estimatorul starilor/perturbatiilor este stabil.• Estimatorul starilor/perturbatiilor este stabil.
• Marimea de comanda este data de• Marimea de comanda este data de
( ) ( ) ( ) ( )( )ˆ |u k u k K x k k x k= + −( ) ( ) ( ) ( )( )ˆ |u k u k K x k k x k∞ ∞= + −
unde sunt alese ca in slide-ul anterior.
( ) ( ) ( ) ( )( )|u k u k K x k k x k∞ ∞= + −
( ) ( )( ),x k u kunde sunt alese ca in slide-ul anterior.( ) ( )( ),x k u k∞ ∞unde sunt alese ca in slide-ul anterior.( ) ( )( ),x k u k∞ ∞
• Matricea K este aleasa a.i. sa fie stabila.( )A BK+• Matricea K este aleasa a.i. sa fie stabila.( )A BK+
• Numarul de perturbatii = numarul de iesiri.• Numarul de perturbatii = numarul de iesiri.• Numarul de perturbatii = numarul de iesiri.
�� Daca toate conditiile de mai sus sunt satisfacute, atunci � Daca toate conditiile de mai sus sunt satisfacute, atunci
( ) ( )→ →∞( ) ( ) cand z k r k k→ →∞( ) ( ) cand z k r k k→ →∞
10.01.2012 10.01.2012
23:03 Analiza robustetii Calcularea perechilor tinta cu restrictii23:03 Analiza robustetii Calcularea perechilor tinta cu restrictii
� Se presupune ca exista restrictii asupra starilor si intrarilor� Se presupune ca exista restrictii asupra starilor si intrarilor� Se presupune ca exista restrictii asupra starilor si intrarilor
, 0,1,..., 1u u u i N≤ ≤ = −, 0,1,..., 1low i highu u u i N≤ ≤ = −
, 1,...,
low i high
y y y i N≤ ≤ =, 1,...,low i highy y y i N≤ ≤ =, 1,...,low i highy y y i N≤ ≤ =
� Se mai presupune ca:� Se mai presupune ca:� Se mai presupune ca:
• Conditiile de rang de pe slide-urile 10 si 15 sunt • Conditiile de rang de pe slide-urile 10 si 15 sunt
satisfacute.satisfacute.satisfacute.
• Estimatorul starilor/perturbatiilor este stabil.• Estimatorul starilor/perturbatiilor este stabil.• Estimatorul starilor/perturbatiilor este stabil.
• Numarul de perturbatii = numarul de iesiri.• Numarul de perturbatii = numarul de iesiri.• Numarul de perturbatii = numarul de iesiri.
( ) ( )ˆ� Conditie in plus: sunt de asa natura incat ( ) ( )ˆ si |r k d k k� Conditie in plus: sunt de asa natura incat ( ) ( )ˆ si |r k d k k� Conditie in plus: sunt de asa natura incat
exista perechi tinta de echilibru care sa satisfaca conditiile.
( ) ( )exista perechi tinta de echilibru care sa satisfaca conditiile.
10.01.2012 10.01.2012
23:03 Analiza robustetii Calcularea perechilor tinta cu restrictii23:03 Analiza robustetii Calcularea perechilor tinta cu restrictii
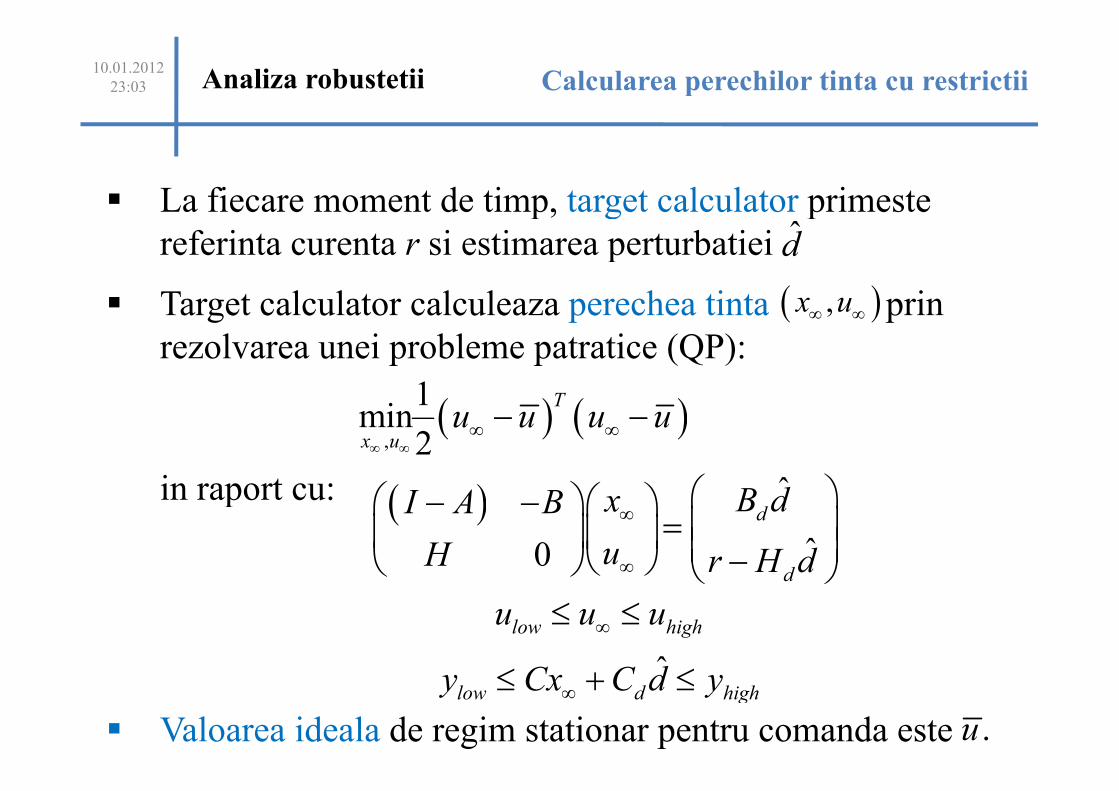
� La fiecare moment de timp, target calculator primeste � La fiecare moment de timp, target calculator primeste � La fiecare moment de timp, target calculator primeste
referinta curenta r si estimarea perturbatiei d̂referinta curenta r si estimarea perturbatiei d̂referinta curenta r si estimarea perturbatiei d̂
� Target calculator calculeaza perechea tinta prin ( ),x u� Target calculator calculeaza perechea tinta prin ( ),x u∞ ∞
rezolvarea unei probleme patratice (QP):rezolvarea unei probleme patratice (QP):
( ) ( )1 T− −( ) ( )1
minT
u u u u∞ ∞− −( ) ( ),
min2x uu u u u
∞ ∞∞ ∞− −
, 2x u∞ ∞
in raport cu: ( ) ˆB dxI A B − − in raport cu: ( ) ˆdB dxI A B ∞
− − =
( )ˆ0
dB dxI A B
uH
∞ − − = − ˆ0
duH r H d∞
= − ˆ0d
uH r H d∞ −
u u u≤ ≤low highu u u∞≤ ≤
ˆ
low high∞
≤ + ≤ˆlow d highy Cx C d y∞≤ + ≤ˆlow d highy Cx C d y∞≤ + ≤
� Valoarea ideala de regim stationar pentru comanda este .u� Valoarea ideala de regim stationar pentru comanda este .u
10.01.2012 10.01.2012
23:03 Analiza robustetii Control predictiv cu rejectia perturbatiilor23:03 Analiza robustetii Control predictiv cu rejectia perturbatiilor
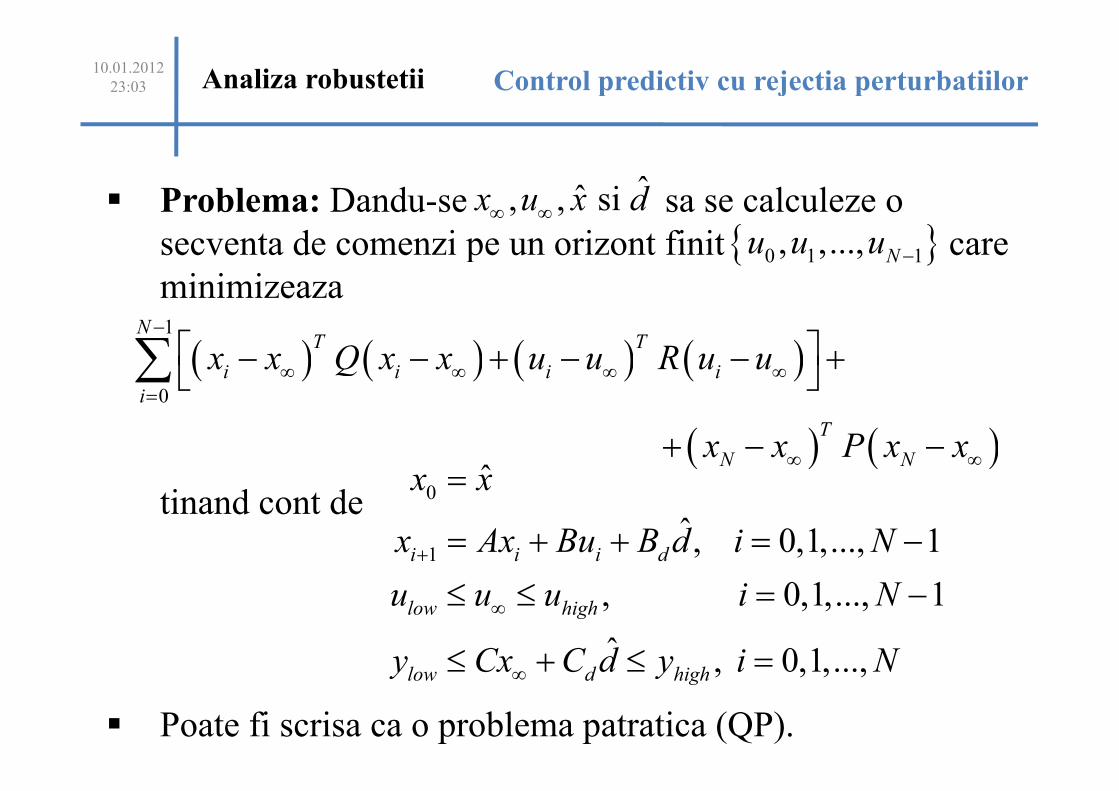
� Problema: Dandu-se sa se calculeze o ˆˆ, , si x u x d� Problema: Dandu-se sa se calculeze o ˆˆ, , si x u x d∞ ∞� Problema: Dandu-se sa se calculeze o
secventa de comenzi pe un orizont finit care { }, ,...,u u u
ˆˆ, , si x u x d∞ ∞
secventa de comenzi pe un orizont finit care { }0 1 1, ,..., Nu u u −secventa de comenzi pe un orizont finit care
minimizeaza
{ }0 1 1, ,..., Nu u u −
minimizeaza minimizeaza 1N−
( ) ( ) ( ) ( )1N
T Tx x Q x x u u R u u
− − − + − − +∑ ( ) ( ) ( ) ( )T T
i i i ix x Q x x u u R u u∞ ∞ ∞ ∞ − − + − − + ∑ ( ) ( ) ( ) ( )
0
i i i i
i
x x Q x x u u R u u∞ ∞ ∞ ∞=
− − + − − + ∑
( ) ( )0i
T
=
( ) ( )Tx x P x x+ − −( ) ( )N Nx x P x x∞ ∞+ − −
ˆx x=tinand cont de
( ) ( )N N∞ ∞
0ˆx x=
tinand cont de 0ˆ
ˆ
x x=tinand cont de
ˆ, 0,1,..., 1x Ax Bu B d i N= + + = −1ˆ, 0,1,..., 1i i i dx Ax Bu B d i N+ = + + = −1
, 0,1,..., 1
i i i d
u u u i N
+
≤ ≤ = −, 0,1,..., 1low highu u u i N∞≤ ≤ = −, 0,1,..., 1
ˆ
low highu u u i N∞≤ ≤ = −
ˆ , 0,1,...,y Cx C d y i N≤ + ≤ =ˆ , 0,1,...,low d highy Cx C d y i N∞≤ + ≤ =
� Poate fi scrisa ca o problema patratica (QP).
low d high∞
� Poate fi scrisa ca o problema patratica (QP).� Poate fi scrisa ca o problema patratica (QP).
10.01.2012 10.01.2012
23:03 Analiza robustetii Control predictiv cu rejectia perturbatiilor23:03 Analiza robustetii Control predictiv cu rejectia perturbatiilor
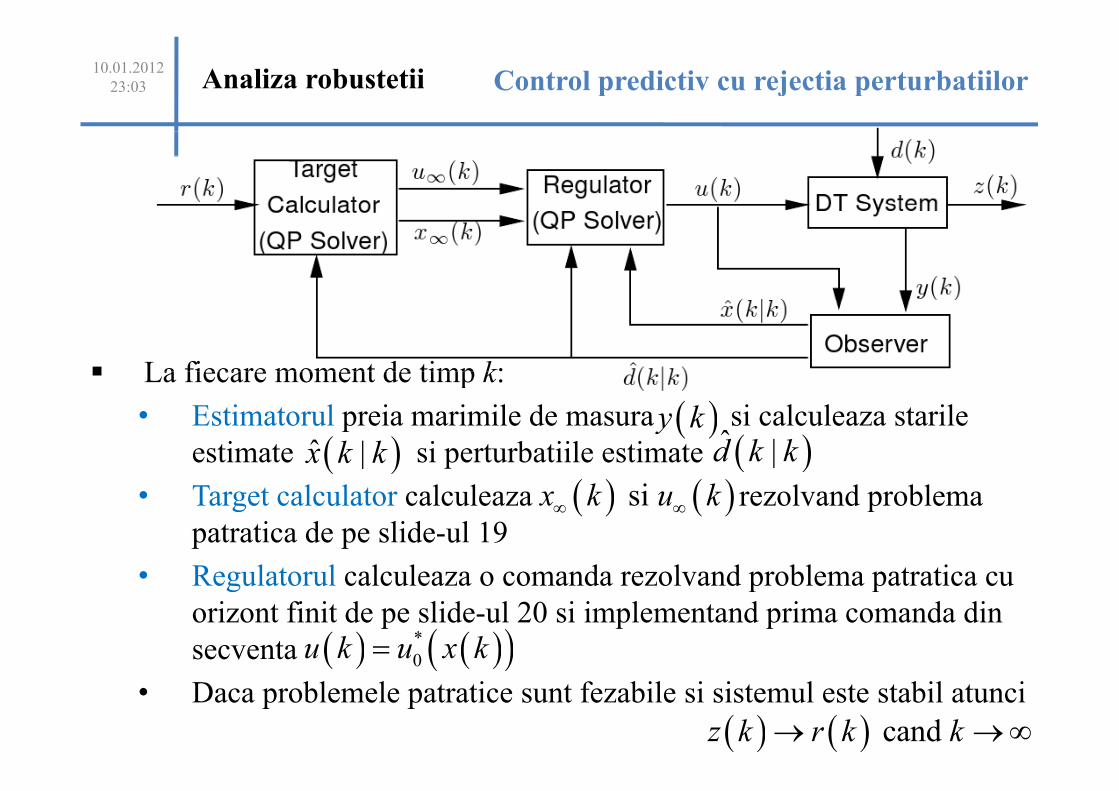
� La fiecare moment de timp k:� La fiecare moment de timp k:
( )• Estimatorul preia marimile de masura si calculeaza starile ( )y k• Estimatorul preia marimile de masura si calculeaza starile
estimate si perturbatiile estimate ( )y k
( )ˆ |x k k ( )ˆ |d k kestimate si perturbatiile estimate ( )ˆ |x k k ( )ˆ |d k kestimate si perturbatiile estimate
• Target calculator calculeaza rezolvand problema
( )ˆ |x k k ( )|d k k
( ) ( ) si x k u k• Target calculator calculeaza rezolvand problema
patratica de pe slide-ul 19( ) ( ) si x k u k∞ ∞
patratica de pe slide-ul 19( ) ( )∞ ∞
patratica de pe slide-ul 19
• Regulatorul calculeaza o comanda rezolvand problema patratica cu • Regulatorul calculeaza o comanda rezolvand problema patratica cu • Regulatorul calculeaza o comanda rezolvand problema patratica cu
orizont finit de pe slide-ul 20 si implementand prima comanda din orizont finit de pe slide-ul 20 si implementand prima comanda din
secventa ( ) ( )( )*u k u x k=secventa ( ) ( )( )*
0u k u x k=secventa
• Daca problemele patratice sunt fezabile si sistemul este stabil atunci
( ) ( )( )0u k u x k=• Daca problemele patratice sunt fezabile si sistemul este stabil atunci• Daca problemele patratice sunt fezabile si sistemul este stabil atunci
( ) ( ) cand z k r k k→ →∞( ) ( ) cand z k r k k→ →∞