carto 34567
TRANSCRIPT
7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 1/16
Metode de masuare GPS

7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 2/16
Masuratori cinematice si statice
Masuratorile statice-Receptorul GPS este fix pe perioada slucru si realizeazămai multe epoci de măsurare.
Măsurători cinematice-O parte din receptoare sunt în mișcarSpredeosebire de metoda statică este necesarămenținerea le
cel puțin patru sateliți din constelația inițială.
7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 3/16
Măsurarea poziției unui singur punct
•
Se realizează folosind un singur GPS, iar precizia de determiredusă
• Sunt măsurate doar pseudodistanțele cu ajutorul codurilor. poate fi imbunatatita prin timpi de stationare indelungati.
• Stabilirea pozitiei unui punct se poate face folosind GPS-ul f
mobil

7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 4/16
Masuratori diferentiale
•
Folosesc două receptoare, unul care este tinut fix intr-oreferinta cu coordonate cunoscute si al doilea mobil, efecconcomitent masuratori de distante spre minimum 4 satelit
• Statia de referinta calculeaza coordonatele din datele satecompara cu cele cunoscute. Corectiile deduse sunt transmreal spre receptorul mobil, unde sunt actualizate coremăsurătorile de distanțe.
7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 5/16
Determinarea relativă a poziției punctel
•
Folosește două stații GPS care masoara simultan in locații difolosind semnalul de la aceiasi sateliti. Prina ceasta se stabildistantele ΔX, ΔY, ΔZ in sistemul WGS-84.
• Precizia este mult mai redidicata decat in cazul pozitionarii upunct.
•
Masuratorile sunt realizate in scobul obtinerii de retele GPS,precizia este foarte ridicată.
• Stabilirea pozitiei relative se face static sau dinamic

7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 6/16
Metoda statitica de masurare
• Pentru stabilirea coordonatelor cu precizie, datele dintr-un punct nou sunt rapo
existente sau efectuate simultan.• Durate sesiunii depinde de lungimea bazei de măsurare, de numărul sateliților
geometria constelației. Timpul estimat variază de la 30 minute la 2 ore pentru o bazăeste de cca 3 mm din llungimea bazei.
• Este principala metodă pentru îndesirea rețelelor geodezice

7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 7/16

7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 8/16
• În general în poziționarea relativă de precizie (centimetrică), sutilizează observații de fază, iar cele mai utilizate tehnici de prsunt cele în care se generează ecuații de diferențe simple, dubtriple între ecuațiile de observație inițiale
• Daca X j (t), Y j (t), Z j (t), sunt coordonatele cunoscute ale satelimomentul t iar XB, YB,ZBsunt coordonatele necunoscute (independente de timp)unui, receptor B stationar, ecuatia de pozitionare va fi:
(t)- distanta geometrica de la satelitul j la receptorul B la momentul
• In ecuatia de mai sus exista trei necunoscute (XB, YB, ZB)independente de momentul observatiei (t).

7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 9/16
In ecuatia de mai sus exista trei necunoscute pentru fiecare moment de observa(XB, YB, ZB) sunt functie de timp. Pentru nt epoci, numarul de cunoscute va fi 3nt
tehnicile de prelucrare diferentiala ca in figura 3 de mai sus in cazul pozitionariicinematice relative , daca sunt considerate observatiile de faza pe frecventele Ldoi sateliti (j si k) si 2 receptoare (A-static si B-mobil), ecuatiile de observatie voforma:
7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 10/16
• Din inecuatiile de mai sus se observa ca o solutie de pozitionare nu se poate obtine
masuratoare (nt=1), caz specific observatiilor cinematice.
• Din acest motiv, ecuatiile de simple,duble si triple diferente sunt modificate prin rez
necunoscutelor de ambiguitate.
• Ambiguitatile sunt calculate printr-un algoritm specific pe baza unui process de initianecunoscutelor de ambiguitate.
• Cu aceasta conditie suplimentara (ambiguitatile rezolvate) si nt=1 din inecuatiile de
conditia de baza a pozitionarii cinematice:nj>4
• adica numarul de sateliti observati necesar pozitionarii pe baza unei singure masuratori sa f
• Procesul de initializare a ambiguitatilor este efectuat in general la inceputul observatiilor ci
posibil a se efectua si intr-o alta etapa a determinarilor.
• Ambiguitatea initiala' poate fi utilizata in ecuatiile de dubla si tripla diferenta, atata timp ca
('cycle-slips') ale receptiei semnalelor satelitare.

7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 11/16
Metode de prelucrare a observatiilor cinematice
• Cele mai cunoscute metode practice de a efectua prelucrarea observatiilor GPS cinematice, functie de difere
momentul efectuarii observatiilor si momentul deteminarii pozitiilor, sunt: metodele de tip PP - post-procesa
diferential RTK (Real Time Kinematic) - cinematic in timp real si variante de tip DGPS - GPS diferential.
Prelucrarea observatiilor GPS cinematice in mod PP (post-procesare)
• In acest caz prelucrarea datelor se realizeaza la un anumit timp dupa efectuarea observatiilor. Metoda este m
prelucrarea de tip RTK, dar eventuale neajunsuri in timpul efectuarii observatiilor (initializare gresita, intreru
semnalului, s.a.) pot duce la cresterea cheltuielilor. Ea se preteaza a fi utilizata in masuratori de cadastru sau
aerotriangulatie si nu numai.
• Determinarea ambiguitatilor se realizeaza in acest caz dupa efectuarea observatiilor, in etapa de calcul prin d
fi: metoda standard, m.c.m.m.p., metoda FARA (Fast Ambiguity Resolution Approach), metoda filtrului de ca
• La rezolvarea ambiguitatilor se au in vedere urmatorii factori principali: influenta ionosferei (>15-20km); ut
ale fazei pentru a 'discerne' parametrii corectiilor de ceas ai receptorului de ambiguitati; geometria satelitilo
of Precision); durata de observatii disponibile; existenta efectelor 'multipath'; numarul de frecvente si codur
L1+L2, cod PL1 sau/si PL2).

7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 12/16
• Majoritatea algoritmilor de 'fixare' a ambiguitatilor urmeaza o schema de forma cel
• Mai intai, ambiguitatile sunt determinate ca numere reale si apoi intr-un anumit sp
(cubic, paralelipipedic, s.a.) este determinata valoarea intreaga cea mai probabila.

7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 13/16
Prelucrarea observatiilor GPS cinematice in mod RTK (cinematic in timp
• In acest caz prelucrarea datelor se efectueaza odata cu efectuarea observatiilor satelita
este de o productivitate foarte ridicata, insa necesita un echipament mai scump, precude prelucrare implementate in general pe sistemele de masurare (receptoare, carnete
teren s.a.). Pretul unor astfel de sisteme de pozitionare este in scadere si va deveni cur
si pentru lucrari curente din domeniul cadastrului, GIS-ului si nu numai.
• In acest caz este necesara determinarea ambiguitatilor in timp real, fapt care implica u
de emisie-receptie si un algoritm de prelucrare adecvat. Determinarea ambiguitatilor i
(OTF-On The Fly) necesita pentru receptoare cu o singura frecventa (L1) un corelator de
ingusta pentru a reduce "zgomotul" si efectele "multipath" (receptia semnalelor reflecapropiate antenei de receptie), preferabil dispunerea si de un cod de tip PL1 . Pentru re
doua frecvente se pot rezolva ambiguitatile cu precizie centimetrica pentru distante de
observatii corelate sub un minut.

7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 14/16
Prelucrarea observatiilor GPS in mod DGPS(GPS-Diferential)
• Metoda de prelucrare de tip DGPS este o varianta a pozitionarii cinematice utilizate
aplicatii cu o precizie mai scazuta (dm, m) dar cu posibilitatea de ajunge si la precizi
(cm). Ea se poate aplica atat in timp real cat si post-procesare.
• De regula, pozitionarea relativa DGPS se realizeaza cu ajutorul pseudodistantelor de
baza observatiilor fazei undei purtatoare.
• O varianta moderna a aplicatiilor de tip DGPS este cea a utilizarii statiilor DGPS de r
virtuale. In principiu, metoda consta in determinarea corectiilor diferentiale intr-o r
de referinta si apoi 'interpolarea' acestor valori si pentru nodurile unui grid (retea u
puncte virtuale. Valorile astfel determinate sunt aplicate masuratorilor efectuate demobile situate la distanta minima de aceste puncte virtuale.
7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 15/16
Probleme specifice pozitionarii GPS cinematice
• In cazul pozitionarii relative GPS cinematice apar o serie de influente datorate unor surse d
care cele mai importante precum si marimea influientei lor sunt prezentate in tabelul de m
• Pe langa influientele prezentate mai sus, in pozitionarea relativa cinematica este necesara rproblemelor teoretice si practice legate de:
• Detectarea si rezolvarea "cyles-slips", initializarea observatiilor, rezolvarea ambiguitatilor
• Calitatea transmisie datelor, viteza de transmisie, intarzieri la transmisie
• Integritatea serviciului (asigurarea disponibilitatii serviciului)
• Redundanta vectori observati
• Costuri
Sursa de eroareAbsolut
GPS
Relativ
DGPS
Eroare orbite sateliti 550m 02ppm
Eroare ceas sateliti 5100m 01ppm
Ionosfera 0.5100m 150ppm
Troposfera 0.010.5 <3ppm
Multipath-cod m m
Multipath-faza mmcm mmcm
Antena de receptie mmcm mmcm

7/24/2019 carto 34567
http://slidepdf.com/reader/full/carto-34567 16/16
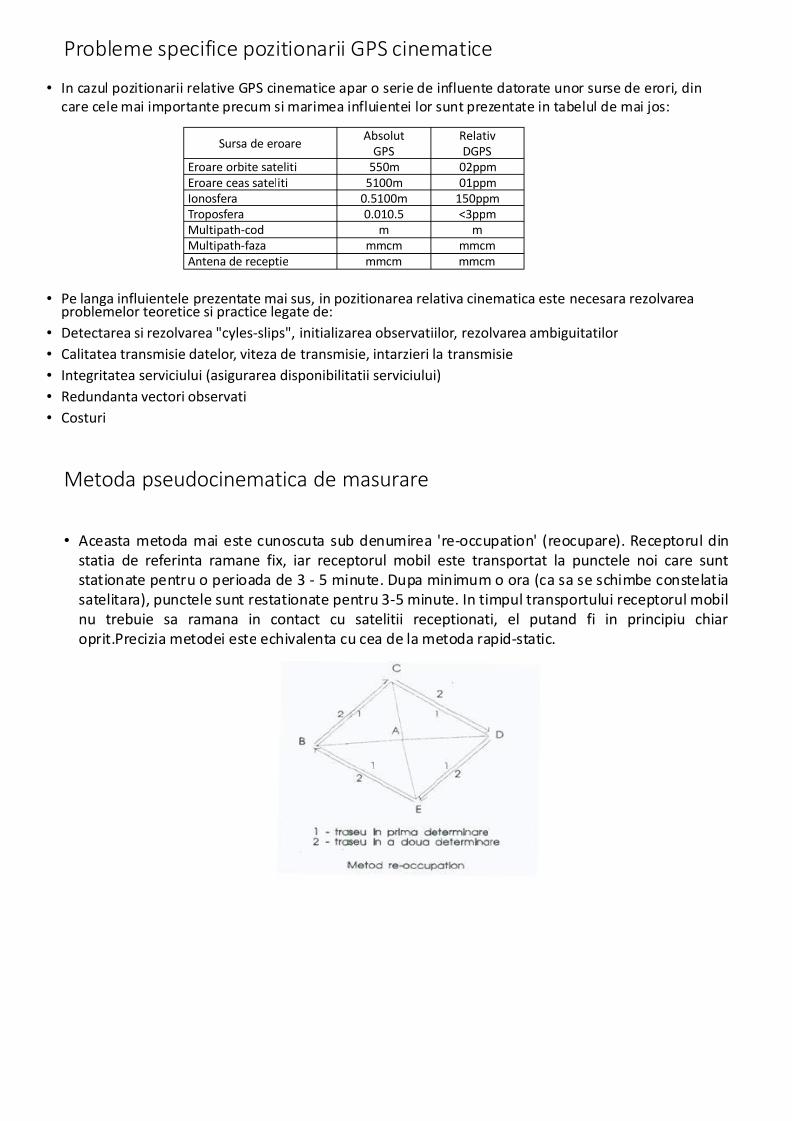
Metoda pseudocinematica de masurare
• Aceasta metoda mai este cunoscuta sub denumirea 're-occupation' (reocupare).
statia de referinta ramane fix, iar receptorul mobil este transportat la punctele
stationate pentru o perioada de 3 - 5 minute. Dupa minimum o ora (ca sa se schimsatelitara), punctele sunt restationate pentru 3-5 minute. In timpul transportului re
nu trebuie sa ramana in contact cu satelitii receptionati, el putand fi in p
oprit.Precizia metodei este echivalenta cu cea de la metoda rapid-static.