c. g. haba - iota.ee.tuiasi.roiota.ee.tuiasi.ro/~cghaba/ap/labap/ap indrumar de laborator.pdf ·...
TRANSCRIPT
C. G. Haba
AUTOMATE PROGRAMABILE Îndrumar de laborator
Iași, 2012
Laborator 1. Instrucțțțțiuni de protecțțțția muncii pentru studențțțți
1) Generalitățțțți 1.1. Pentru evitarea accidentelor de natura electrica (electrocutare) mecanica sau
termica, studenții care efectuează lucrări practice în laboratoarele catedrei vor respecta întocmai instrucțiunile ce urmează:
1.2. In timpul lucrărilor de laborator studenții trebuie sa respecte în mod conștient o disciplina ferma, impusa de necesitatea de a preveni accidentele.
1.3. Studenții nu vor intra în laborator decât după intrarea conducătorului lucrărilor. 1.4. Odată intrat în laborator, studentul se va duce direct la locul unde va efectua
lucrarea si nu-l va părăsi decât daca acest lucru este impus de necesitatea efectuării lucrării.
Sunt interzise deplasările de la un loc la altul. 1.5. Este interzisa manipularea fără rost a butoanelor, comutatoarelor,
întrerupătoarelor etc. de la tablouri si de la alte instalațțțții din laborator. 2) Amenajarea locului de munca pentru lucrările din laborator 2.1. Fiecare lucrare de laborator va fi amenajata în spatiul ce îi este rezervat si va fi
alimentata cu energie electrica de la un tablou distributie prevăzut cu dispozitivele de protectie necesare.
2.2. Studentii trebuie sa verifice ca masinile electrice sunt fixate rigid pe platforme sau pe carcasele masinilor, pentru a se evita accidentele datorate punerii întâmplătoare sub tensiune a acestora.
2.3. Aparatele de măsura comanda si reglaj necesare lucrarii de laborator se vor aseza numai pe suprafetele orizontale. Nu se vor aseza aparate pe platforme sau pe carcasele masinilor, pentru a se evita accidentele datorate punerii întâmplatoare sub tensiune a acestora din urma.
2.4. Aranjarea aparatelor se va face pe un spatiu cât mai convenabil si în asa fel sa se poata manevra aparatele de comanda si de reglaj (întrerupatoare, reostate), sa se poata observa aparatele de masura de la locurile de comanda si de reglaj si sa se poata citi si nota indicatiile aparatelor de masura în timpul functionarii instalatiei.
Se recomanda ca mai întâi sa se aranjeze aparatele pe grupe în functie de circuitele pe care le deservesc si apoi sa efectueze legaturile între ele.
2.5. Spatiul din jurul masinilor si al meselor cu aparate si în special locurile de unde se manevreaza aparatele de comanda si de reglaj vor fi prevazute pe pardoseala cu covoare de cauciuc.
2.6. Spatiul din jurul masinilor si al meselor cu aparate nu trebuie sa fie ocupat cu diferite obiecte, scaune, masini, cabluri etc. pentru a se asigura o circulatie libera în jurul acestora si pentru a se putea interveni rapid în caz de avarii sau accidente.
3) Executarea lucrarilor practice în laborator 3.1. Înaintea începerii montajului precum si înaintea oricărei modificări a
acestuia se va verifica mai întâi ca întrerupatoarele care fac legatura cu reteaua sa fie deschise.
3.2. Montajul se va efectua numai cu conductoare bine izolate, iar bornele vor fi bine strânse pentru a nu se desface din cauza vibratiilor care apar în timpul functionarii masinii. Circuitele parcurse de curenti mari vor fi realizate cu conductoare de sectiune mare corespunzatoare, care sa nu se încalzeasca la curentul respectiv. Se va controla ca papucii cablurilor sa nu faca scurtcircuit între ei sau contact electric la masa metalica a masinilor si aparatelor.
Conductoarele de legatura vor fi astfel aranjate încât sa nu împiedice manevrarea aparatelor de comanda si de reglaj si citirea aparatelor de masura si sa nu atinga partile mobile ale masinilor. Dupa terminarea conexiunilor se vor îndeparta din montaj conductoarele cazute pe jos.
3.3. Pe circuitele principale se vor prevedea sigurante fuzibile sau dispozitive de protectie, care se vor alege în functie de circuitul care circula prin aceste circuite fara a le supradimensiona sau supratemporiza.
3.4. Pentru evitarea pericolului de electrocutare se interzice atingerea bornelor si a altor parti metalice din instalatie care se afla sub tensiune. De asemenea se interzice atingerea carcaselor metalice nelegate la pamânt ale masinilor si ale aparatelor electrice dupa ce acestea au fost cuplate la retea, deoarece carcasele metalice ar putea fi puse sub tensiune în urma defectarii izolatiei sau a unui contact la masa neobservat.
3.5. Tot pentru evitarea pericolului de electrocutare, studentii care au de manevrat întrerupatoare, reostate, tahometre etc., trebuie sa se asigure în prealabil ca stau pe covoare izolate si ca nu vor atinge cu cea de a doua mâna sau cu capul partile metalice aflate sau nu sub tensiune (ex.: borne, carcase metalice, tevi de apa si canalizare, caloriferul, centura de punere la pamânt etc.).
3.6. Nu se va modifica aranjarea aparatelor din instalatie cât timp aceasta se afla sub tensiune, pentru a se evita atingerea partilor metalice aflate sub tensiune sau desfacerea legaturilor.
3.7. Înainte de punerea instalatiei sub tensiune, toti studentii din grupa trebuie sa cunoasca bine montajul efectuat si modul de lucru.
3.8. Punerea sub tensiune a schemei de conexiuni executate sau a schemelor de conexiuni carora li s-au adus modificari se vor putea face numai dupa ce acestea au fost verificate si aprobate de catre conducatorul lucrarilor.
3.9. Studentul care urmeaza sa puna instalatia sub tensiune este obligat sa avertizeze despre acest lucru pe ceilalti colegi din grupa, pronuntând cu voce tare cuvintele “Atentie cuplez!” si nu va face cuplarea pâna nu s-a asigurat ca nimeni nu vine în contact cu partile instalatiei.
3.10. Nu se vor lasa masini sau instalatii în functionare nesupravegheate. 3.11. Întrucât arderea sigurantelor fuzibile este însotita uneori de arc electric
puternic si împroscarea cu picaturi de metal topit, este necesar sa nu se priveasca prea de aproape sigurantele fuzibile, mai ales în momentul cuplarii întrerupatoarelor de pe circuitele principale.
3.12. Pentru evitarea accidentelor de natura mecanica, se interzice atingerea partilor în miscare ale masinilor. Studentii vor purta îmbracaminte strânsa pe corp si parul scurt sau legat strâns pentru ca acestea sa nu fie prinse de partile în miscare ale masinilor, ceea ce ar putea duce la accidente.
3.13. La aparitia oricarui defect de natura electrica sau mecanica se vor scoate imediat instalatiile de sub tensiune si se va anunta imediat conducatorul lucrarilor.
3.14. Se interzice lucrul cu instalatii improvizate. 3.15. In timpul încercarilor experimentale, studentii nu vor supune instalatiile la
tensiuni, curenti sau viteze mai mari decât acelea pentru care acestea au fost construite,
pentru a nu le defecta si a provoca accidente. 3.16. La terminarea lucrarii, dupa scoaterea de sub tensiune se vor desface mai întâi
legaturile de la tabloul de distributie pentru a se evita o noua manevra de cuplare, care ar provoca accidente.
3.17. La desfacerea montajului se va avea în vedere ca unele borne care au fost parcurse de curent mare si nu au fost bine strânse ar putea sa fie fierbinti ceea ce ar putea produce arsuri.
Tot pentru evitarea arsurilor se vor manipula cu grija reostatele care au fost folosite în lucrare deoarece unele din ele s-ar putea sa fie încalzite puternic în timpul functionarii.
3.18. In afara instructiunilor generale de protectie a muncii studentii trebuie sa cunoasca temeinic atât partea teoretica a lucrarii, cât si modul de lucru indicate în referatul lucrarii, pentru a se evita montajele si manevrele gresite, ceea ce ar putea duce la defectarea masinilor si a aparatelor si ar putea provoca accidente. Nu vor fi admisi sa execute lucrari de laborator studentii care nu cunosc suficient partea teoretica si modul de lucru pentru lucrarea respectiva si nu aplica instructiunile de protectie a muncii.
4) Unele instructiuni generale cu privire la punere în functiune a
masinilor electrice 4.1. Pentru evitarea accidentelor, pe lânga instructiunile generale de protectie a
muncii aratate pâna aici, studentii trebuie sa respecte si modul de lucru indicat pentru fiecare lucrare. In cele ce urmeaza se atrage atentia asupra unora din cele mai importante reguli de lucru care trebuie respectate, (probleme de protectie a muncii care intervin) ca pornirea, încercarea si oprirea masinilor electrice.
4.2. Pornirea motorului asincron cu rotorul în scurtcircuit se face prin simpla cuplare a înfasurarii trifazate a statorului motorului la retea trifazata de tensiune corespunzatoare. Oprirea lui se face prin decuplarea de la retea.
4.3. Înainte de pornirea unui motor asincron cu inele (cu rotor bobinat) trebuie de verificat ca reostatul de pornire, care este legat de inele, sa fie pus pe pozitia rezistentei maxime. Pentru pornirea motorului, se cupleaza la retea înfasurarea trifazata a statorului si apoi se reduce treptat rezistenta reostatului de pornire, care este legat de inele, sa fie pus pe pozitia rezistentei maxime. Pentru pornirea motorului, se cupleaza la retea înfasurarea trifazata a statorului si apoi se reduce treptat rezistenta reostatului de pornire pâna la scurtcircuitarea ei. Se interzice punerea în sarcina a motorului înainte de scurtcircuitarea reostatului de pornire. Pentru oprirea motorului se decupleaza înfasurarea statorului de la retea si se aduce maneta reostatului de pornire în pozitia de pornire.
4.4. La pornirea unui motor de curent continuu cu excitatie derivatie sau cu excitatie mixta trebuie verificat ca reostatul de pornire sa se gaseasca în pozitia rezistentei zero (scurtcircuit). Dupa cuplarea motorului la retea, rezistenta reostatului de pornire se reduce treptat pâna la valoarea zero. La oprirea motorului reostatul de pornire trebuie
adus din nou în pozitia de pornire. La reglarea vitezei motorului cu excitatie derivatie si a celui cu excitatie mixta nu trebuie sa depaseasca 20% peste valoarea vitezei maxime.
5) Masuri de prim ajutor în caz de accidentare I) Primul ajutor în caz de electrocutare 1. Atingerea partilor conducatoare de curent ce se gasesc sub tensiune ne
provoaca în majoritatea cazurilor o contractare brusca si involuntara a muschilor. Din cauza aceasta, degetele, în cazul când victima tine conductorul în mâini se
strâng atât de tare, ca declansarea devine imposibila. Daca victima ramâne în atingere cu partile conducatoare de curent, atunci este necesar sa se stie si sa se tina minte ca, fara aplicarea masurilor cuvenite de securitate atingerea omului aflat sub tensiune este periculoasa pentru viata celui care intervine.
2. Prima actiune de întreprins este deconectarea partii din instalatie de care este prinsa victima.
Cu aceasta ocazie trebuie sa se tina seama: a) In cazul când victima se gaseste agatata la o înaltime oarecare deconectarea
instalatiei si eliberarea victimei de sub curent poate sa provoace caderea ei de la înaltime si în cazul acesta trebuie sa fie luate masuri ce garanteaza securitatea victimei în caz de cadere, altfel o deconectare nechibzuita poate sa cauzeze un rau mai mare decât cel provocat de curent electric;
b) In caz de deconectare pot fi stinse concomitent si luminile si atunci trebuie sa fie luate masuri pentru a avea alte surse de iluminat, (felinare, faclii, lumânari, un iluminat de rezerva, felinare cu acumulatoare etc.) fara sa se întârzie, din aceasta cauza, deconectarea si masurile de prim ajutor pentru victima.
3. In cazul când deconectarea instalatiei nu poate fi executata suficient de repede, atunci trebuie sa fie luate masurile de separare a victimei de partile conducatoare de curent de care este agatata si anume:
a) Pentru separarea victimei de partile conducatoare de curent sau a conducatorului electric de victima, trebuie sa se faca uz de: o haina uscata, o frânghie uscata, un bat, o scândura sau orice alt mijloc asemanator neconducator si uscat. Nu se pot întrebuinta în aceste cazuri obiecte metalice sau umede. Pentru ca victima sa fie separata repede de partile conducatoare de curent se poate trage de haina victimei, daca este uscata si departata de corp (de poalele hainei) evitând în acelasi timp atingerea de obiectele metalice, înconjuratoare si de partile corpului victimei, neacoperite cu haine;
b) De asemenea, nu se recomanda sa se traga victima de picioare fara o izolatie prealabila buna pentru mâini, deoarece încaltamintea poate fi umeda iar cuiele batute si ochiurile pentru sireturi sunt bune conducatoare de electricitate;
c) Când, în vederea salvarii, este nevoie sa se atinga victima, de partile corpului ce nu sunt acoperite cu haine, trebuie sa se puna manusi si galosi de cauciuc sau sa se înfasoare mâinile în fular uscat, o sapca de postav sau cu mâneca ori pulpana propriei haine uscate etc., sau acoperind victima cu o haina de cauciuc sau cauciucata sau cu o simpla stofa uscata. Se mai poate interveni strâns cu picioarele pe o scândura uscata sau orice alt asternut uscat neconducator de curent, pe o legatura sau pe un pachet de haine etc. Se mai recomanda sa se foloseasca daca se poate, numai o singura mâna.
4. La joasa tensiune, se poate într-un mod mai simplu sa se faca sa nu mai treaca curentul prin corpul victimei separând-o de pamânt, de exemplu, împingând sub victima o scândura uscata sau ridicând picioarele victimei de la pamânt cu ajutorul unei frânghii sau a unei haine uscate, decât sa se staruie sa se desprinda mâna ei, respectând totusi cu aceasta ocazie masurile de precautie atât fata de operator cât si fata de victima.
In caz de nevoie trebuie sa fie taiate conductoarele de joasa tensiune cu ajutorul unui topor cu coada de lemn uscat cu foarfeci izolante sau cu ajutorul unui alt aparat cu o izolatie corespunzatoare.
Operatia trebuie sa fie executata cu precautia cuvenita (nu se ating conductoarele, se taie fiecare conductor separat, cu manusile de cauciuc si cu galosii pusi).
5. Tragerea accidentatului de sub tensiune se poate executa numai la tensiune joasa (sub 500V), accidentatul nu va fi atins decât dupa ce curentul va fi întrerupt.
6. Modul de aplicare a masurilor de prim ajutor este în functie de starea în care se gaseste victima dupa scoaterea de sub curent.
a) In toate cazurile de electrocutare, chiar în cele în care victima nu poate sa aiba nimic, se va chema în mod obligatoriu imediat medicul;
b) Când victima si-a pierdut constiinta, va fi întinsa pe loc neted apoi i se va desface îmbracamintea la piept si la gât, se iau masuri pentru împrospatareaaerului, se evacueaza din încapere persoanele de prisos, apoi se da victimei sa miroase o solutie de amoniac, se stropeste cu apa (nu în gura), i se fac frictiuni pentru încalzirea corpului, medicul trebuie sa fie chemat urgent, în cazul când victima respira prost foarte rar si convulsiv, la fel ca un muribund, sa i se faca respiratia artificiala si un masaj în regiunea inimii;
c) In cazul când victima nu mai da semne de viata, bataile inimii, pulsul sunt absente, nu trebuie sa fie considerata pierduta, moartea poate fi adesea aparenta, iar victima va putea muri daca nu i se va da imediat primul ajutor, facându-i-se respiratia artificiala.
Respiratia artificiala trebuie sa fie facuta în mod continuu (conform cu instructiunile de la punctul b), pâna la sosirea medicului.
7. In operatia de aducere la viata a victimei care este aparenta este pretioasa fiecare secunda, de aceea primul ajutor trebuie dat imediat, daca este posibil chiar la fata locului. Se va transporta victima în alt loc numai în cazul când pericolul continua sa ameninte atât victima cât si pe salvatorul ei, sau în caz de imposibilitate sa i se acorde ajutorul pe loc.
8. Electrocutatul poate fi considerat mort numai în cazul unor grele leziuni corporale externe, de exemplu, fractura cutiei craniene în cadere sau carbonizarea întregului corp.
In celelalte cazuri, moartea poate fi constatata numai de catre medic. In nici un caz nu trebuie sa se aplice victimei, mijloace empirice sau babesti.
9. Respiratia artificiala va fi executata numai în cazurile în care victima nu respira de loc, sau daca respiratia se înrautateste. Executarea respiratiei artificiale trebuie sa fie începuta imediat ce victima a fost scoasa de sub curent si se continua fara întrerupere. Respiratia artificiala va fi continuata pâna la obtinerea rezultatului pozitiv (revenire la viata) sau pâna la aparitia semnelor neândoielnice ale mortii reale constatate de medic.
S-au observat cazuri când cei considerati morti, datorita leziunilor provocate de curentul electric au fost readusi la viata peste câteva ore, socotite dupa producerea accidentului.
10. Pe tot timpul executarii respiratiei artificiale, trebuie sa se observe atent fata accidentatului.
In cazul când se va observa o miscare a marului lui Adam, facând impresia ca înghite, atunci trebuie sa fie verificat daca nu cumva accidentatul va face o respiratie independenta. Continuarea executarii respiratiei artificiale, dupa constatarea ca cel mort a început sa respire independent si regulat, trebuie sa fie oprita, deoarece se poate pricinui vreo vatamare. Daca însa dupa câteva clipe de asteptare se va observa ca victima nu mai respira, sa se reia imediat respiratia artificiala.
11. Înainte de a se proceda la executarea respiratiei artificiale este necesar: a) Accidentatul sa fie culcat jos, dar nu direct pe pamânt, piatra sau ciment, ci pe
patura, haine, paie etc.; b) Sa se elibereze repede accidentatul, fara sa se piarda vreo secunda, de partile de
îmbracaminte care împiedica respiratia cum ar fi gulerul de la camasa, fularul sa se desfaca, cureaua de la pantaloni;
c) Tot asa de repede trebuie sa fie eliberata gura victimei de obiectele straine (sa se înlature protezele, daca are proteze dentare);
d) In cazul când gura accidentatului este înclestata, ea trebuie sa fie deschisa, în care scop maxilarul inferior este împins în afara. Pentru deschiderea gurii accidentatului, cel care da primul ajutor, aplica cele patru degete de la ambele mâini în spatele coltului maxilarului inferior, apoi prin apasarea degetelor mari asupra marginii maxilarului, se trage usor, astfel ca dintii maxilarului inferior sa fie adusi în fata dintilor maxilarului superior. In cazul când în modul aratat mai sus nu se reuseste sa se deschida gura, atunci se va recurge la ajutorul unei lame metalice sau unei linguri care se va introduce între masele la colturile gurii si nici de cum în fata, caci dintii se pot rupe si cu precautie se desclesteaza dintii.
II. Primul ajutor în caz de rânire 1. Fiecare rana poate fi usor infectata cu microbi ce se gasesc pe obiectul care a
produs ranirea, pe pielea ranita sau în praful înconjurator, în pamânt, pe mâinile intervenientului, pe pansamentul aplicat etc.
2. Trebuie data o deosebita atentie ranilor acoperite cu pamânt spre a se evita îmbolnavirea cu tetanos, boala grea, care da un procent mare de mortalitate.
Interventia imediata a medicului pentru facerea injectiei antitetanos previne aceasta îmbolnavire.
3. Pentru ca sa se previna formarea puroiului trebuie sa se tina seama în timpul pansamentului de unele reguli.
Intervenientul care da primul ajutor în caz de ranire, trebuie sa se spele bine pe mâini cu sapun, iar daca nu are aceasta posibilitate, atunci, trebuie sa-si unga mâinile cu tinctura de iod.
Totusi rana nu poate fi atinsa nici cu mâinile spalate. Cu aceasta ocazie, trebuie sa se stie si sa se tina minte ca:
a) Nu este îngaduita spalarea ranii cu apa sau cu orice alte medicamente, ori acoperirea ei cu prafuri sau cu unsori, toate cele enumerate mai sus împiedica vindecarea ranii, transporta murdaria de pe suprafata pielii pe rana însasi provocând prin aceasta formarea ulterioara de puroi;
b) De asemenea, nu este permisa curatirea ranii de nisip, de pamânt etc., prin aceasta nu se înlatura murdariile de pe rana, ci din contra, se poate infiltra murdaria mai adânc, infectându-se mult mai usor rana, curatirea ranii, asa cum trebuie, o poate face numai medicul.
c) Nu este permisa înlaturarea de pe rana a cheagurilor (se poate provoca o hemoragie puternica).
Laborator 2. Utilizarea programului Mitsubishi ALVLS
Introducere Programul Mitsubishi ALVLS este destinat scrierii programelor de aplicaŃii pentru
automatele Mitsubishi Alpha. Acest program utilizează limbajul orientat pe blocuri funcŃionale (FBD – functional block diagram). Acest limbaj face parte din categoria limbajelor grafice şi sunt normalizate prin standardul IEC 1131-3.
Aceste limbaje specifică în mod grafic comportamentul unui program prin intermediul unor funcŃii, acestea fiind reprezentate sub forma unor blocuri grafice (numite blocuri funcŃionale - BF) interconectate şi care comunică între ele prin intermediul unor semnale. În limbajele evaluate mai multe blocuri funcŃionale interconectate pot fi reprezentate printr-un alt bloc ceea ce permite o descriere ierarhizată pe mai multe niveluri.
Pentru a realiza comportamentul general, toate blocurile sunt conectate între ele. CirculaŃia semnalelor în cadrul unei scheme cu FB este unidirecŃională şi se face
conform următoarelor reguli: - semnalele circulă de la intrările schemei către intrările BF sau ieşirile schemei - semnalele circulă de la ieşirile BF către intrările celorlalte BF sau către ieşiri. Evaluarea unui program scris folosind FB se realizează conform următoarelor
reguli: - un element este executat o dată ce au fost calculate toate semnalele de intrare pentru acel element - un element este complet evaluat atunci când au fost calculate toate semnalele de ieşire ale acestuia - evaluarea unei scheme cu BF se încheie atunci când toate ieşirile schemei au fost calculate.
Programul Mitsubishi ALVLS În continuare se vor prezenta elementele interfeŃei programului Mitsubishi ALVLS
cu utilizatorul şi modul în care se poate utiliza aceasta pentru a scrie un program de aplicaŃie în limbaj orientat pe blocuri funcŃionale. Folosirea acestui program ne va permite studiul blocurilor principale utilizate în crearea unor scheme de comandă, modul în care acestea pot fi conectate pentru a crea scheme de comandă de la cele mai simple la cele de complexitate mai ridicată şi modul în care aceste scheme pot fi testate şi verificate.
Acest program Ńine seama şi de elementele specifice realizării programelor de aplicaŃie pentru automatele Alpha. Acestea vor fi de asemenea prezentate datorită faptului că vor fi utilizate în lucrările următoare.
Tipurile de blocuri Într-un program ce utilizează blocuri funcŃionale se pot utiliza 5 seturi de elemente: • intrări: în funcŃie de tipul AP, acesta poate avea 4, 6 sau 12 intrări. Acestea pot fi atât
intrări digitale cât şi analogice. Intrările sunt notate cu I01-I06.
• taste ale panoului frontal: acestea sunt notate cu K01-K08 şi permit introducerea datelor în zona de date a programului, deplasarea prin meniuri şi program, selectează opŃiunile de programare sau pot fi folosite ca intrări suplimentare în timpul funcŃionării AP.
• biŃii de memorie a sistemului: aceştia por furniza valori predefinite ale semnalelor şi informaŃii despre erorile din sistem. BiŃii de memorie sunt notaŃi cu M01-M05.
• ieşiri: acestea sunt digitale şi permit comanda elementelor de comutare de tip releu sau tranzitor ce pot fi introduse în schemele electrice de comandă. Acestea sunt notate cu O01-O04.
• blocurile funcŃionale: acestea sunt elementele de bază ale programului. Cu ajutorul lor informaŃiile primite de la intrări, taste ale panoului frontal şi biŃii de memorie sunt prelucrare fiind elaborate comenzile transmise la ieşirile AP.
Toate aceste elemente, alcătuind o diagramă bloc funcŃională, trebuie să fie dispuse pe o placă de bază având intrările în stânga şi ieşirile în dreapta. Acest cadru mai poartă numele de zonă de conexiuni.
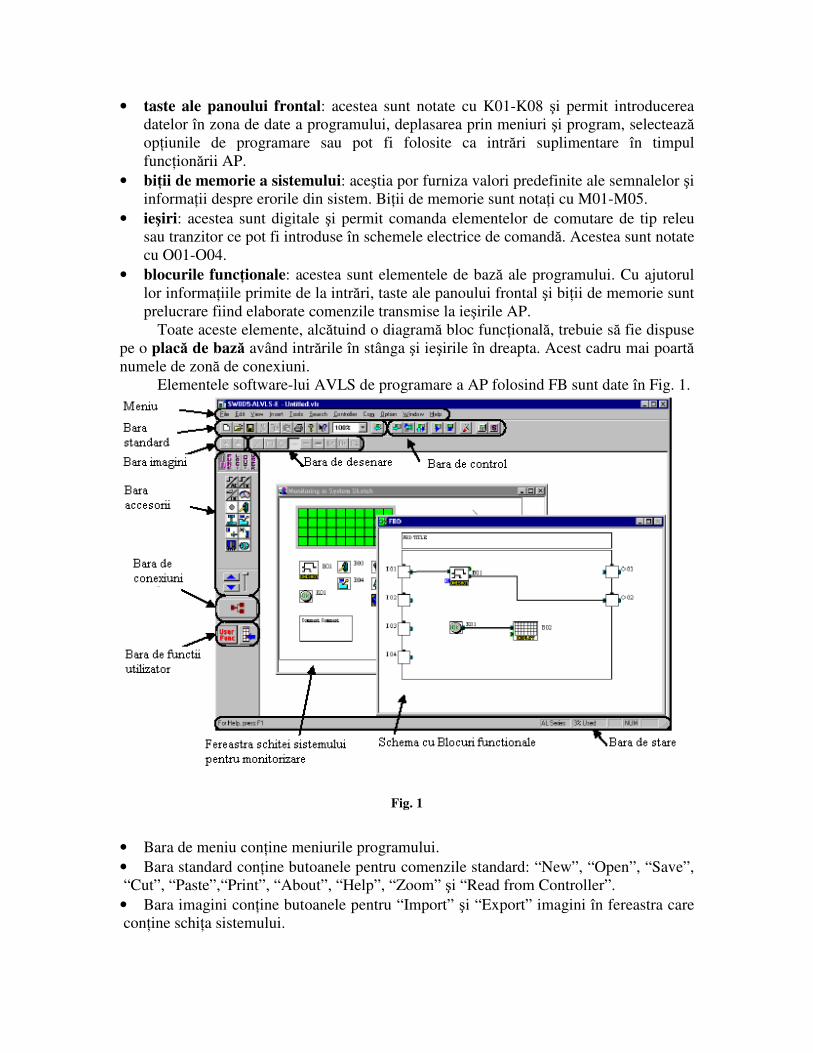
Elementele software-lui AVLS de programare a AP folosind FB sunt date în Fig. 1.
Fig. 1
• Bara de meniu conŃine meniurile programului. • Bara standard conŃine butoanele pentru comenzile standard: “New”, “Open”, “Save”, “Cut”, “Paste”,“Print”, “About”, “Help”, “Zoom” şi “Read from Controller”. • Bara imagini conŃine butoanele pentru “Import” şi “Export” imagini în fereastra care conŃine schiŃa sistemului.
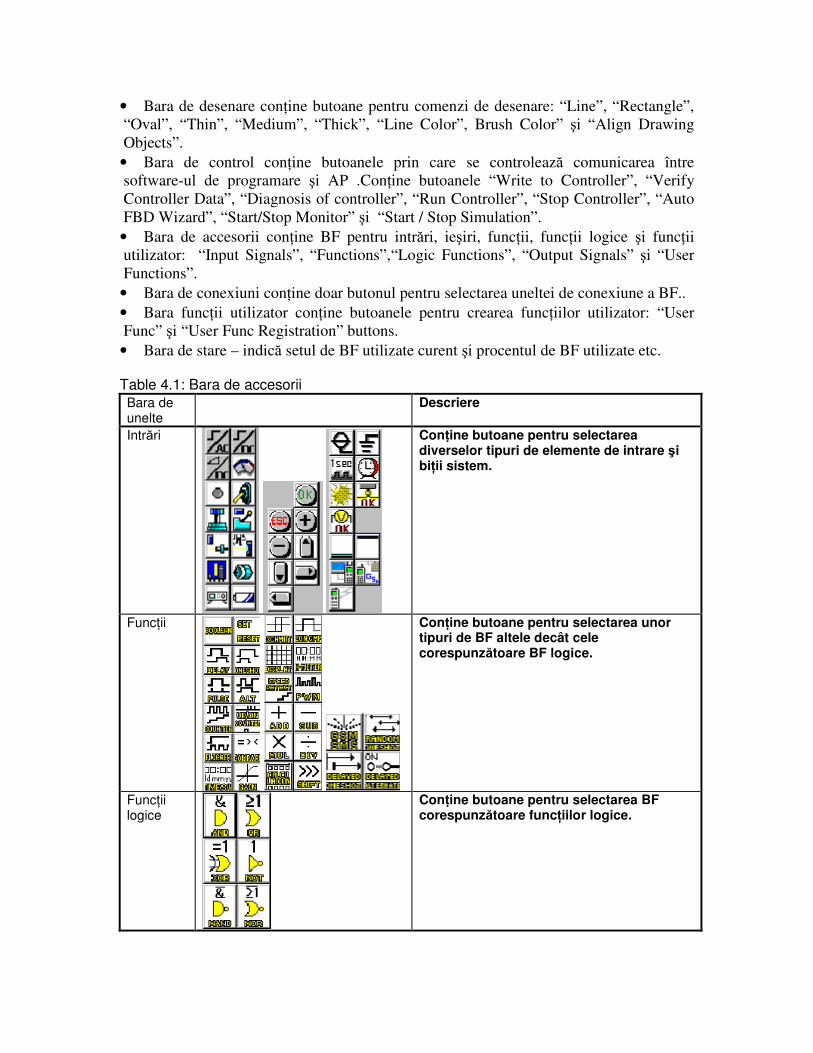
• Bara de desenare conŃine butoane pentru comenzi de desenare: “Line”, “Rectangle”, “Oval”, “Thin”, “Medium”, “Thick”, “Line Color”, Brush Color” şi “Align Drawing Objects”. • Bara de control conŃine butoanele prin care se controlează comunicarea între software-ul de programare şi AP .ConŃine butoanele “Write to Controller”, “Verify Controller Data”, “Diagnosis of controller”, “Run Controller”, “Stop Controller”, “Auto FBD Wizard”, “Start/Stop Monitor” şi “Start / Stop Simulation”. • Bara de accesorii conŃine BF pentru intrări, ieşiri, funcŃii, funcŃii logice şi funcŃii utilizator: “Input Signals”, “Functions”,“Logic Functions”, “Output Signals” şi “User Functions”. • Bara de conexiuni conŃine doar butonul pentru selectarea uneltei de conexiune a BF.. • Bara funcŃii utilizator conŃine butoanele pentru crearea funcŃiilor utilizator: “User Func” şi “User Func Registration” buttons. • Bara de stare – indică setul de BF utilizate curent şi procentul de BF utilizate etc. Table 4.1: Bara de accesorii Bara de unelte
Descriere
Intrări
ConŃine butoane pentru selectarea diverselor tipuri de elemente de intrare şi biŃii sistem.
FuncŃii
ConŃine butoane pentru selectarea unor tipuri de BF altele decât cele corespunzătoare BF logice.
FuncŃii logice
ConŃine butoane pentru selectarea BF corespunzătoare funcŃiilor logice.
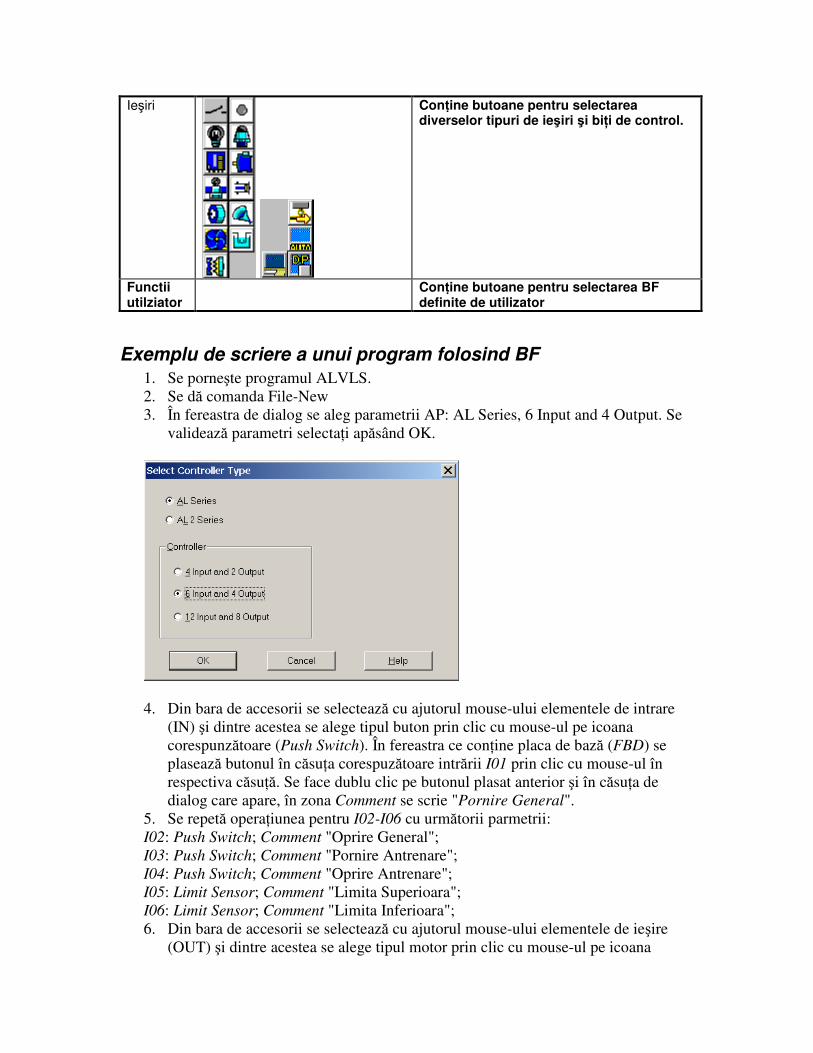
Ieşiri
ConŃine butoane pentru selectarea diverselor tipuri de ieşiri şi biŃi de control.
Functii utilziator
ConŃine butoane pentru selectarea BF definite de utilizator
Exemplu de scriere a unui program folosind BF 1. Se porneşte programul ALVLS. 2. Se dă comanda File-New 3. În fereastra de dialog se aleg parametrii AP: AL Series, 6 Input and 4 Output. Se
validează parametri selectaŃi apăsând OK.
4. Din bara de accesorii se selectează cu ajutorul mouse-ului elementele de intrare
(IN) şi dintre acestea se alege tipul buton prin clic cu mouse-ul pe icoana corespunzătoare (Push Switch). În fereastra ce conŃine placa de bază (FBD) se plasează butonul în căsuŃa corespuzătoare intrării I01 prin clic cu mouse-ul în respectiva căsuŃă. Se face dublu clic pe butonul plasat anterior şi în căsuŃa de dialog care apare, în zona Comment se scrie "Pornire General".
5. Se repetă operaŃiunea pentru I02-I06 cu următorii parmetrii: I02: Push Switch; Comment "Oprire General"; I03: Push Switch; Comment "Pornire Antrenare"; I04: Push Switch; Comment "Oprire Antrenare"; I05: Limit Sensor; Comment "Limita Superioara"; I06: Limit Sensor; Comment "Limita Inferioara"; 6. Din bara de accesorii se selectează cu ajutorul mouse-ului elementele de ieşire
(OUT) şi dintre acestea se alege tipul motor prin clic cu mouse-ul pe icoana
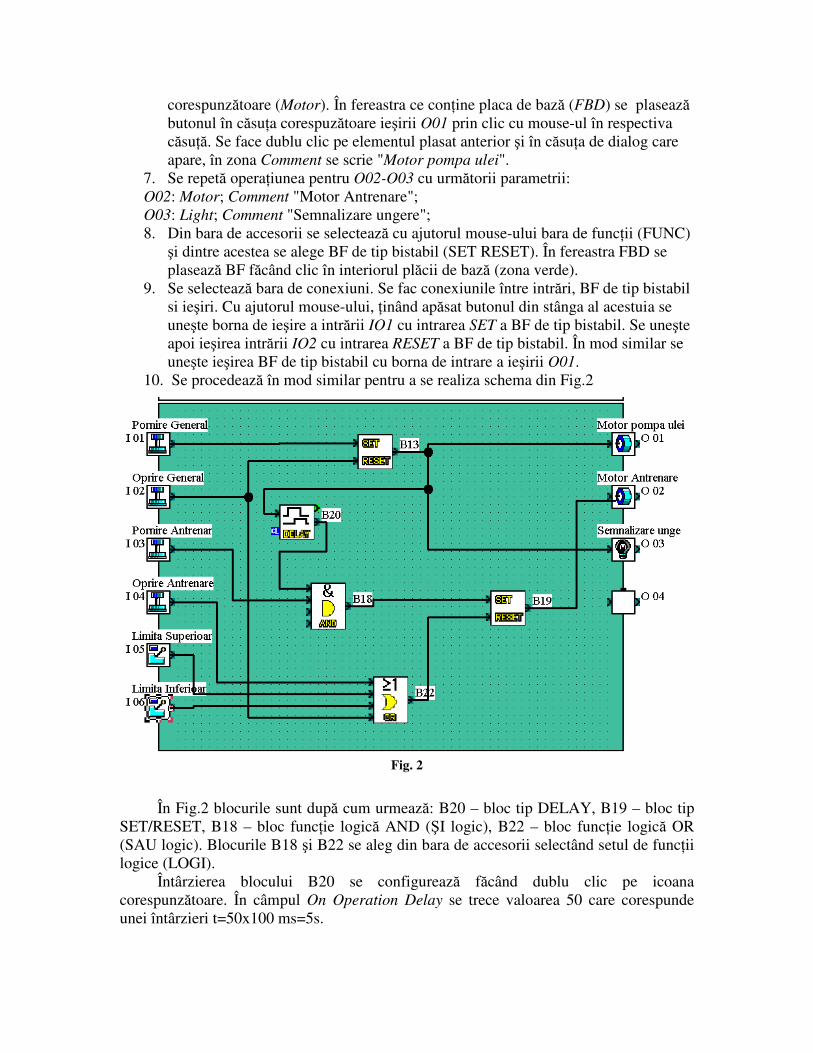
corespunzătoare (Motor). În fereastra ce conŃine placa de bază (FBD) se plasează butonul în căsuŃa corespuzătoare ieşirii O01 prin clic cu mouse-ul în respectiva căsuŃă. Se face dublu clic pe elementul plasat anterior şi în căsuŃa de dialog care apare, în zona Comment se scrie "Motor pompa ulei".
7. Se repetă operaŃiunea pentru O02-O03 cu următorii parametrii: O02: Motor; Comment "Motor Antrenare"; O03: Light; Comment "Semnalizare ungere"; 8. Din bara de accesorii se selectează cu ajutorul mouse-ului bara de funcŃii (FUNC) şi dintre acestea se alege BF de tip bistabil (SET RESET). În fereastra FBD se plasează BF făcând clic în interiorul plăcii de bază (zona verde).
9. Se selectează bara de conexiuni. Se fac conexiunile între intrări, BF de tip bistabil si ieşiri. Cu ajutorul mouse-ului, Ńinând apăsat butonul din stânga al acestuia se uneşte borna de ieşire a intrării IO1 cu intrarea SET a BF de tip bistabil. Se uneşte apoi ieşirea intrării IO2 cu intrarea RESET a BF de tip bistabil. În mod similar se uneşte ieşirea BF de tip bistabil cu borna de intrare a ieşirii O01.
10. Se procedează în mod similar pentru a se realiza schema din Fig.2
Fig. 2
În Fig.2 blocurile sunt după cum urmează: B20 – bloc tip DELAY, B19 – bloc tip
SET/RESET, B18 – bloc funcŃie logică AND (ŞI logic), B22 – bloc funcŃie logică OR (SAU logic). Blocurile B18 şi B22 se aleg din bara de accesorii selectând setul de funcŃii logice (LOGI).
Întârzierea blocului B20 se configurează făcând dublu clic pe icoana corespunzătoare. În câmpul On Operation Delay se trece valoarea 50 care corespunde unei întârzieri t=50x100 ms=5s.
Simularea funcŃionării programului Pentru simularea funcŃionării programului se apasă icoana Start/Stop Simulation din
bara de control sau se selectează din meniu comanda Controller-Simulation-Start. Activarea intrărilor se realizează făcând clic pe căsuŃele I01-I06 corespunzătoare. În modul simulare pentru toate ieşirile BF este precizată starea în care acestea se
află: activ=ON, inactiv=OFF. Căile active la un moment dat sunt precizate cu culoarea roşie iar cele inactive cu culoare albastră.
Procedeu experimental
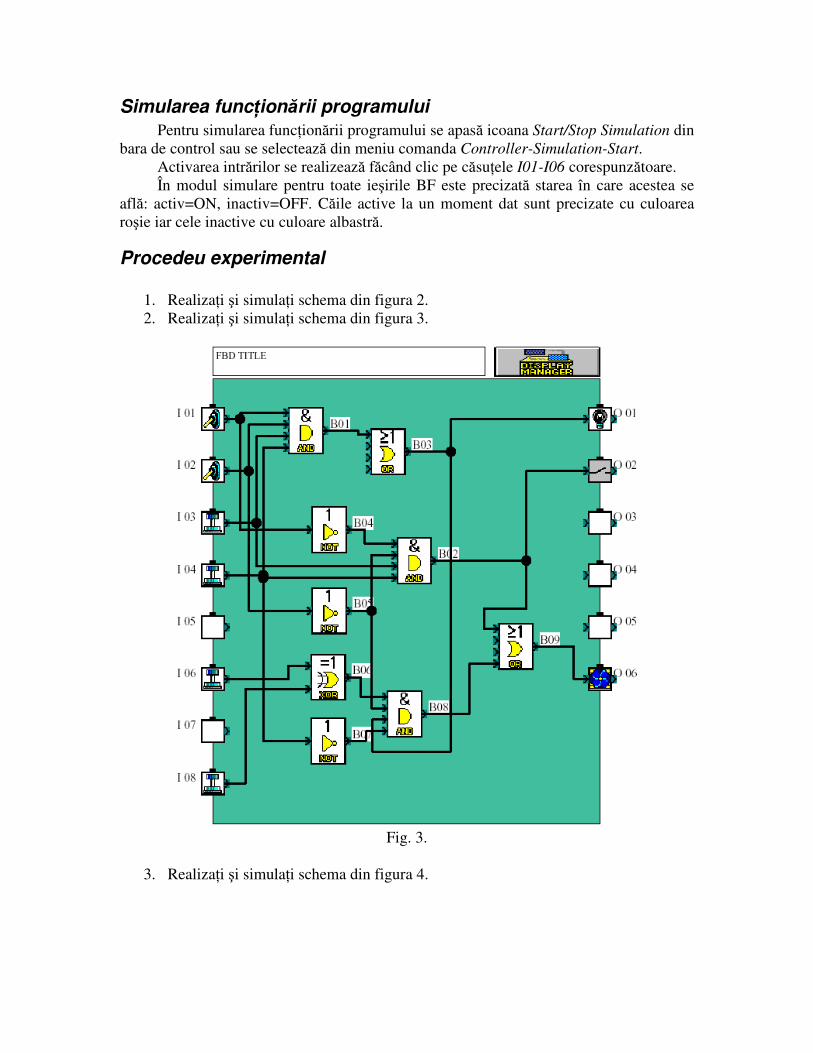
1. RealizaŃi şi simulaŃi schema din figura 2. 2. RealizaŃi şi simulaŃi schema din figura 3.
Fig. 3.
3. RealizaŃi şi simulaŃi schema din figura 4.
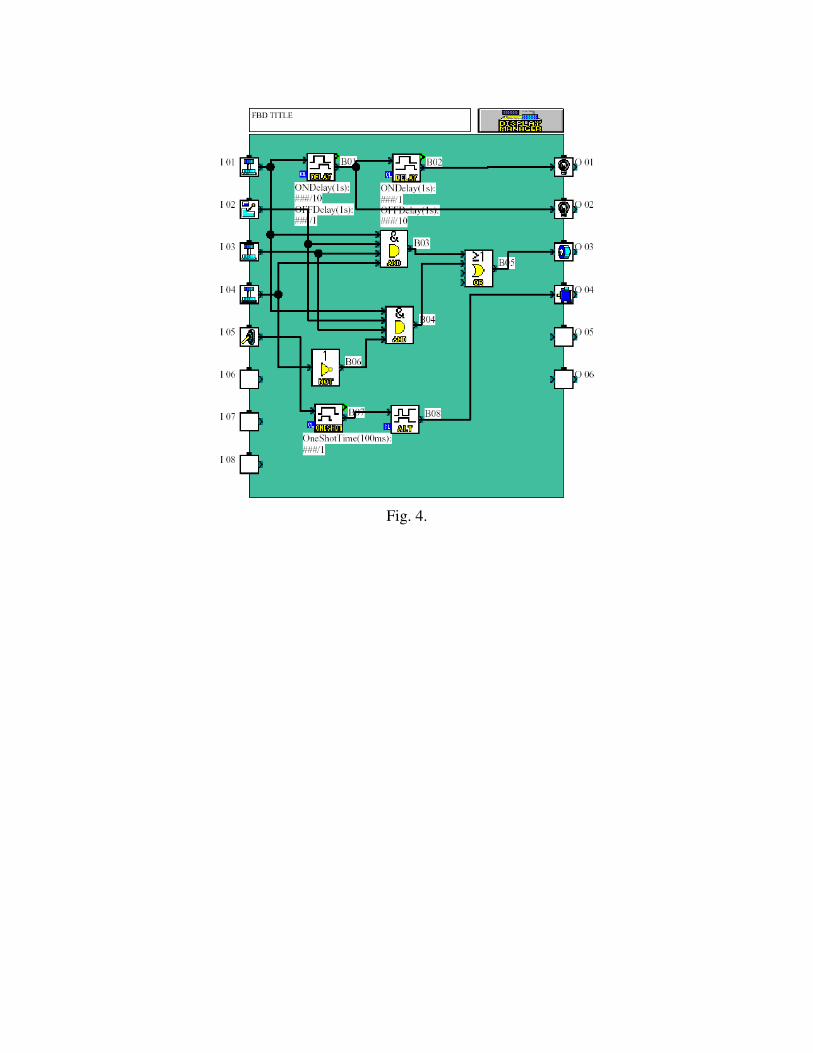
Fig. 4.

Laborator 3. Studiul porŃilor logice
Introducere
Circuitele de comandă pot fi realizate folosind porŃi logice. Acestea pot fi considerate ca materializând fie operatorii logici elementari fie funcŃiile logice elementare. PorŃile logice pot fi realizate folosind diverse tehnologii, cele mai utilizate la ora actuală fiind tehnologiile electronice bazate pe circuite integrate.
Există mai multe posibilităŃi de a verifica funcŃionarea corectă a unui circuit care realizează o funcŃie logică. Una dintre ele este simularea cu ajutorul unui program specializat care permite descrierea funcŃionalităŃii circuitului folosind porŃi logice şi care dispune de un simulator al funcŃionării acestora.
În acest scop, în cadrul laboratorului vom utiliza programul Mitsubishi ALVLS.
Tipuri de porŃi logice Principalele tipuri de porŃi logice sunt porŃile NU, ŞI, SAU, SAU-EXCLUSIV,
ŞI-NU, SAU-NU. Acestea materializează operatorii logici elementari definiŃi de tabelele următoare: NU
0 1 1 0
SAU 0 1 ŞI 0 1 SAU-EXCLUSIV 0 1
0 0 1 0 0 0 0 0 1 1 1 1 1 0 1 1 1 0
SAU- NU 0 1 ŞI-NU 0 1 ECHIVALENłA 0 1
0 1 0 0 1 1 0 1 0 1 0 0 1 1 0 1 0 1
Operatorii logici acŃionează asupra unor operanzi logici. Un operand logic poate
lua una din două valori. În logica clasică aceste valori pot fi valorile de ADEVĂRAT şi FALS. În cadrul porŃilor logice aceste valori se notează cu 0 şi 1 (0=FALS, 1=ADEVĂRAT).
În cadrul sistemelor de comandă cele două valori corespund fie unor valori ale mărimilor fizice de intrare şi de ieşire ale circuitelor care materializează operatorii logici elementari fie unor stări în care se poate găsi circuitul sau elementul respectiv.
De exemplu, în cadrul automatelor programabile, valoarea 0 la una dintre intrări corespunde aplicării unei tensiuni de 0V la acea intrare. Valoarea de 1 la una dintre intrări corespunde aplicării unei tensiuni de 24V. În cazul unei ieşiri a automatului, starea de 0
logic corespunde stării DESCHIS a contactelor releului de ieşire, în timp ce 1 logic corespunde stării ÎNCHIS a contactelor releului de ieşire.
În cazul porŃilor logice materializate cu circuite de tip TTL (Tranzistor-Tranzistor Logic), semnal logic 0, atât la intrare cât şi la ieşire corespunde unei tensiuni de 0V, iar semnal 1 logic corespunde unei tensiuni de 5V. Alte tehnologii pot utiliza alte valori ale tensiunilor sau alte mărimi fizice (curenŃi, presiuni, semnal luminos, stare de magnetizare etc).
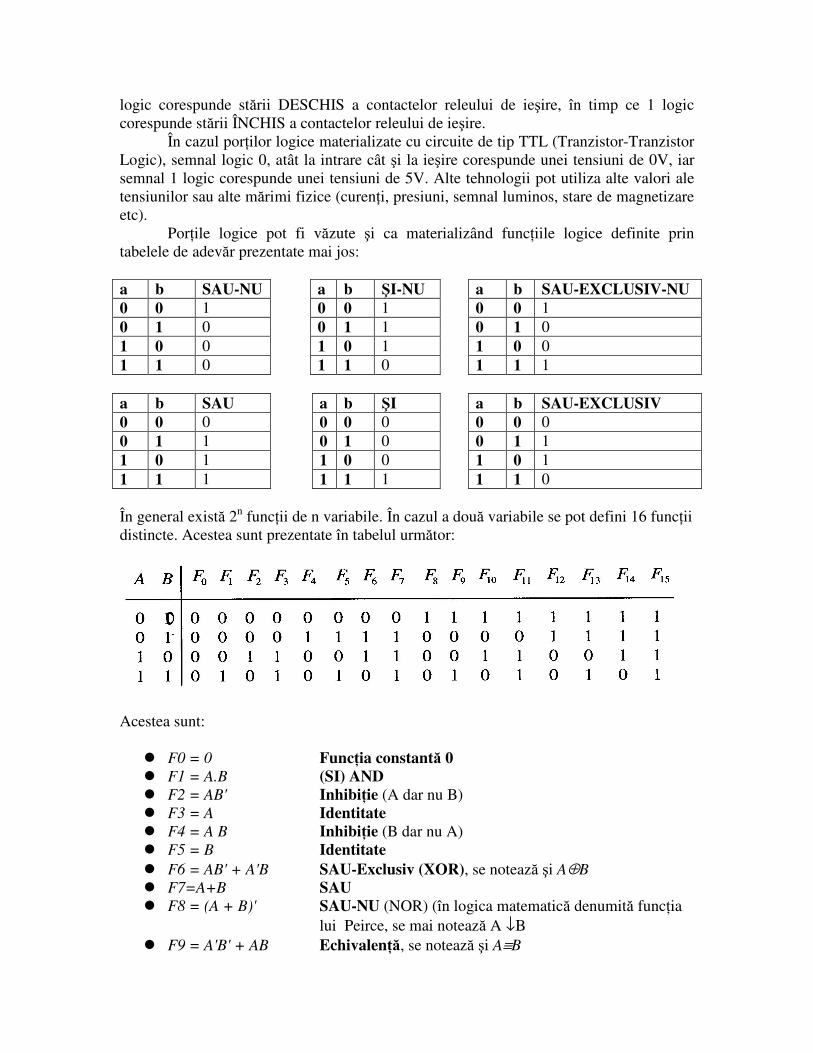
PorŃile logice pot fi văzute şi ca materializând funcŃiile logice definite prin tabelele de adevăr prezentate mai jos: a b SAU-NU a b ŞI-NU a b SAU-EXCLUSIV-NU 0 0 1 0 0 1 0 0 1 0 1 0 0 1 1 0 1 0 1 0 0 1 0 1 1 0 0 1 1 0 1 1 0 1 1 1 a b SAU a b ŞI a b SAU-EXCLUSIV 0 0 0 0 0 0 0 0 0 0 1 1 0 1 0 0 1 1 1 0 1 1 0 0 1 0 1 1 1 1 1 1 1 1 1 0 În general există 2n funcŃii de n variabile. În cazul a două variabile se pot defini 16 funcŃii distincte. Acestea sunt prezentate în tabelul următor:
Acestea sunt:
� F0 = 0 FuncŃia constantă 0 � F1 = A.B (SI) AND � F2 = AB' InhibiŃie (A dar nu B) � F3 = A Identitate � F4 = A B InhibiŃie (B dar nu A) � F5 = B Identitate � F6 = AB' + A'B SAU-Exclusiv (XOR), se notează şi A⊕B
� F7=A+B SAU � F8 = (A + B)' SAU-NU (NOR) (în logica matematică denumită funcŃia lui Peirce, se mai notează A ↓B � F9 = A'B' + AB EchivalenŃă, se notează şi A≡B
� F10=B' Complement, NU (NOT) � F11 = A + B' ImplicaŃie (B implică A), se notează şi B → A � F12 = A' Complement, NU (NOT) � F13= A' + B ImplicaŃie (A implică B), se notează şi A → B � F14 = (AB)' SI-NU (NAND) - în logica matematică denumită funcŃia Sheffer, se mai notează A ↑B � F15 = 1 FuncŃia constantă 1
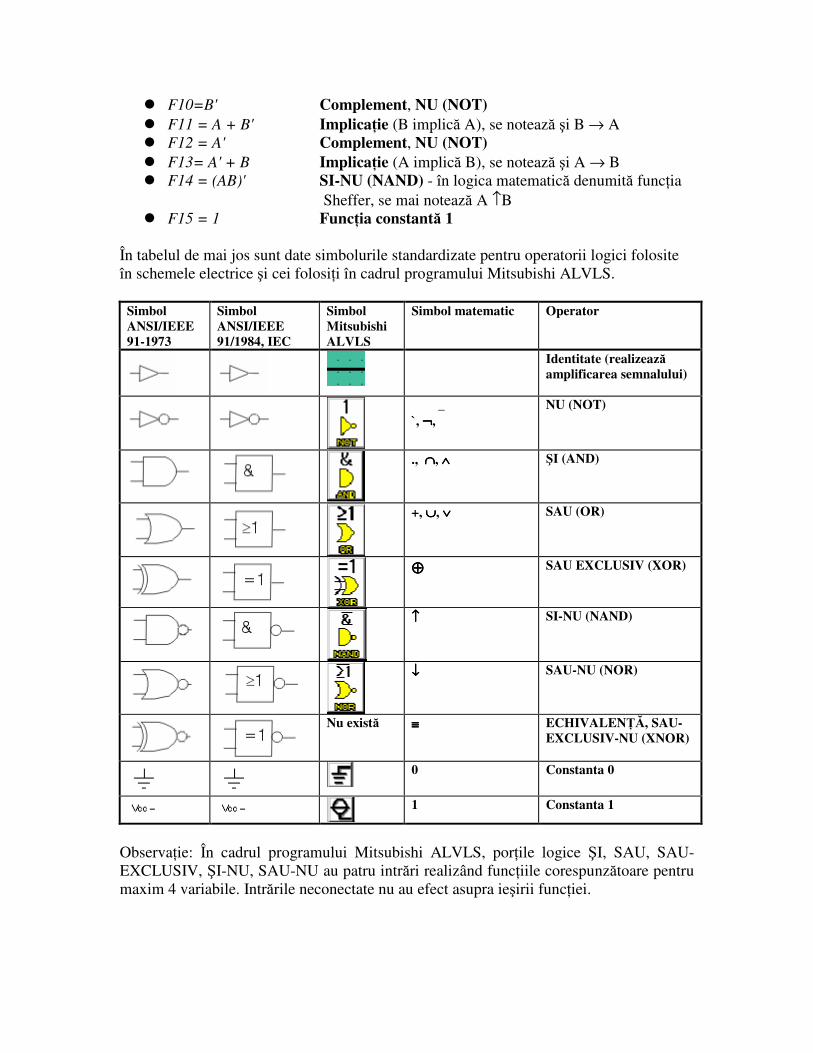
În tabelul de mai jos sunt date simbolurile standardizate pentru operatorii logici folosite în schemele electrice şi cei folosiŃi în cadrul programului Mitsubishi ALVLS.
Simbol ANSI/IEEE 91-1973
Simbol ANSI/IEEE 91/1984, IEC
Simbol Mitsubishi ALVLS
Simbol matematic Operator
Identitate (realizează amplificarea semnalului)
_ `, ¬¬¬¬,
NU (NOT)
., ∩∩∩∩, ∧∧∧∧ ŞI (AND)
+, ∪∪∪∪, ∨∨∨∨ SAU (OR)
⊕⊕⊕⊕ SAU EXCLUSIV (XOR)
↑↑↑↑ SI-NU (NAND)
↓↓↓↓ SAU-NU (NOR)
Nu există ≡≡≡≡ ECHIVALENłĂ, SAU-EXCLUSIV-NU (XNOR)
0 Constanta 0
1 Constanta 1
ObservaŃie: În cadrul programului Mitsubishi ALVLS, porŃile logice ŞI, SAU, SAU-EXCLUSIV, ŞI-NU, SAU-NU au patru intrări realizând funcŃiile corespunzătoare pentru maxim 4 variabile. Intrările neconectate nu au efect asupra ieşirii funcŃiei.

2. Procedeul experimental a) Stabilirea tabelului de adevăr pentru porŃile ŞI, ŞI-NU, SAU, SAU-NU, SAU-
EXCLUSIV, SAU-EXCLUSIV NEGAT. UrmaŃi indicaŃiile următoare: • se selectează, pe rând, porŃile amintite mai sus şi se poziŃionează în zona destinată circuitului; • pentru fiecare dintre ele se leagă la ambele intrări dispozitivele din categoria IN - intrări interactive; (nu uitaŃi să legaŃi efectiv aceste dispozitive, folosind unealta de conexiuni ); • la ieşirea fiecărei porŃi se leagă câte un element din categoria OUT (ieşiri) pentru a putea stabili starea sa logică; (nu uitaŃi să legaŃi efectiv aceste dispozitive, folosind unealta de conexiuni ); • se face clic pe butonul de simulare , pentru a pomi efectiv simularea. • se schimbă starea intrărilor dând clic pe acestea. Comandând intrările interactive, se stabilesc tabelele de adevăr pentru fiecare poartă în parte pentru cazul în care avem conectate 2, 3 şi 4 intrări.
b) Pornind de la variabilele binare A, B, C şi D, se realizează cu porŃi logice următoarele funcŃii:
f1=(A+(B.C)'+D)' f2=(A ⊕⊕⊕⊕B)'.D+C' f3=(A+B)'.(C+D)'
f4=A'.B+(A+B+C)' Pentru fiecare dintre funcŃiile de mai sus, se stabileşte tabelul de adevăr, folosind
intrări interactive şi elemente de ieşire. c) Studiul unui comparator digital.
Se realizează, cu ajutorul programului, următoarea schemă cu porŃi logice:
• se poziŃionează porŃile logice, led-urile şi intrările interactive; • se fac legăturile folosind unealta pentru legături, ; • se face clic pe butonul pentru a pomi simularea; • se modifică intrările stabilindu-se toate combinaŃiile posibile şi se notează de fiecare
dată starea celor trei ieşiri, notate 1, 2 şi 3; • se stabileşte care dintre ieşiri reprezintă A<B, A>B şi A=B.
d) Studiul unui semisumator. Se realizează schema cu porŃi logice prezentată alăturat.

• se poziŃionează porŃile logice, led-urile şi intrările interactive; • se fac legăturile folosind unealta pentru legături, ; • se face clic pe butonul pentru a porni simularea; • se modifică intrările prin obŃinându-se toate combinaŃiile posibile şi se notează de fiecare dată starea celor două ieşiri, S şi C; • se completează tabela de adevăr a circuitului. 3. ConŃinutul referatului • Simbolurile şi tabelele de adevăr pentru porŃile logice prezentate. • Schemele cu porŃi logice simulate cu ajutorul programului. • Tabelele de adevăr pentru funcŃiile logice studiate.
Laborator 4. Studiul decodificatoarelor şi multiplexoarelor
Decodificatoare Într-un sistem digital se folosesc diverse coduri, altele decât cel binar natural
pentru codarea informaŃiei. Folosirea decodificatoarelor este absolut necesară pentru a putea trece de la o reprezentare la alta. Ele sunt circuite combinaŃionale realizate cu porŃi logice.
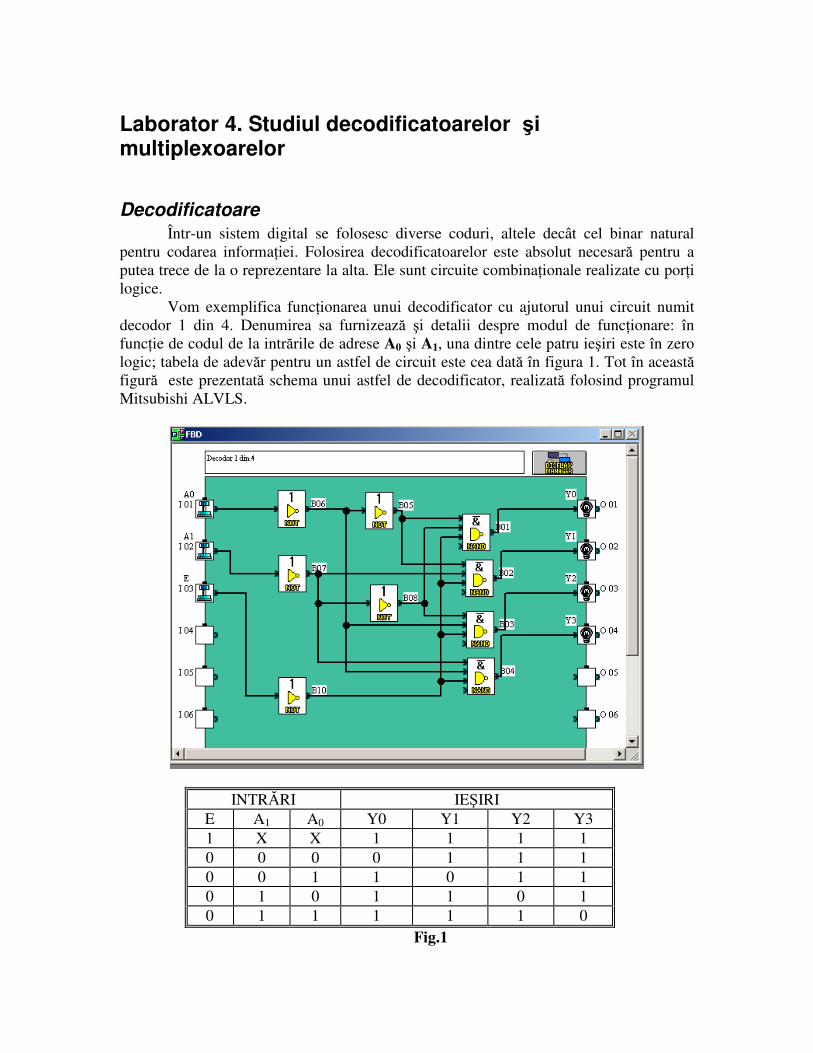
Vom exemplifica funcŃionarea unui decodificator cu ajutorul unui circuit numit decodor 1 din 4. Denumirea sa furnizează şi detalii despre modul de funcŃionare: în funcŃie de codul de la intrările de adrese A0 şi A1, una dintre cele patru ieşiri este în zero logic; tabela de adevăr pentru un astfel de circuit este cea dată în figura 1. Tot în această figură este prezentată schema unui astfel de decodificator, realizată folosind programul Mitsubishi ALVLS.
INTRĂRI IEŞIRI E A1 A0 Y0 Y1 Y2 Y3 1 X X 1 1 1 1 0 0 0 0 1 1 1 0 0 1 1 0 1 1 0 1 0 1 1 0 1 0 1 1 1 1 1 0
Fig.1

Din tabel se poate observa cu uşurinŃă că, funcŃie de biŃii de la intrările A0 şi A1,
una dintre ieşiri şi anume cea dată de numărul zecimal A1⋅21 + A0⋅2
0 va fi în 0 logic. În cazul circuitului simulat din figura 1, ieşirea notată 1 este în 0 logic. Borna E, numită bornă de validare (Enable - în limba engleză) inhibă ieşirile circuitului atunci când este în 1 logic; prima linie a tabelului din figura 1 pune în evidenŃă acest mod de funcŃionare: semnul X de la cele două intrări A arată că ele nu influenŃează în nici un fel funcŃionarea circuitului.
Există şi alte tipuri de decodificatoare: 1 din 8, BCD - zecimal (1 din 10), BCD - 7 segmente, ş.a. Unele dintre ele sunt realizate sub forma unor circuite integrate dedicate, altele se pot implementa utilizând porŃi logice şi/sau alte decodificatoare.
Vom exemplifica funcŃionarea unui alt decodificator, numit decodor BCD - 7 segmente, folosit pentru comanda dispozitivelor de afişare cu led-uri cu şapte segmente. Fiecărui segment i s-a atribuit o denumire, aşa cum se arată în figura 2.a.
(a)
0 0 0 0 0 abcdef 8 1 0 0 0 abcdefg 1 0 0 0 1 bc 9 1 0 0 1 abcdfg 2 0 0 1 0 abged 10 1 0 1 0 deg 3 0 0 1 1 abcdg 11 1 0 1 1 cdg 4 0 1 0 0 bcfg 12 1 1 0 0 bfg 5 0 1 0 1 acdfg 13 1 1 0 1 adfg 6 0 1 1 0 acdefg 14 1 1 1 0 cdfg 7 0 1 1 1 abc 15 1 1 1 1 -
(b) Fig.2
Evident, pentru a afişa o cifră, trebuie comandate doar anumite segmente: de
exemplu pentru cifra 6 trebuie să existe semnal de comandă pentru segmentele a, c, d, e, f, şi g. Totodată cifra zecimală şase este reprezentată în cod binar de numărul 0110; în consecinŃă, decodorul va activa ieşirile a, c, d, e, f, şi g atunci când cuvântul de la intrare este 0110. În tabelul din figura 2.b se dau codurile binare şi segmentele comandate pentru fiecare cuvânt de patru biŃi. Deoarece sunt patru biŃi, există 24 stări posibile şi din acest motiv în afara cifrelor propriu-zise apar şi alte combinaŃii ale segmentelor. Acestea sunt decodificate în funcŃie de aplicaŃia specifică a fiecărui decodor. În unele cazuri ele reprezintă cifrele următoare în sistemul de numeraŃie hexazecimal.
Multiplexoare Multiplexoarele sunt circuite logice care permit transferul informaŃiei la o ieşire
de la una din cele 2n intrări, funcŃie de selecŃia realizată cu n biŃi de adresă. Vom
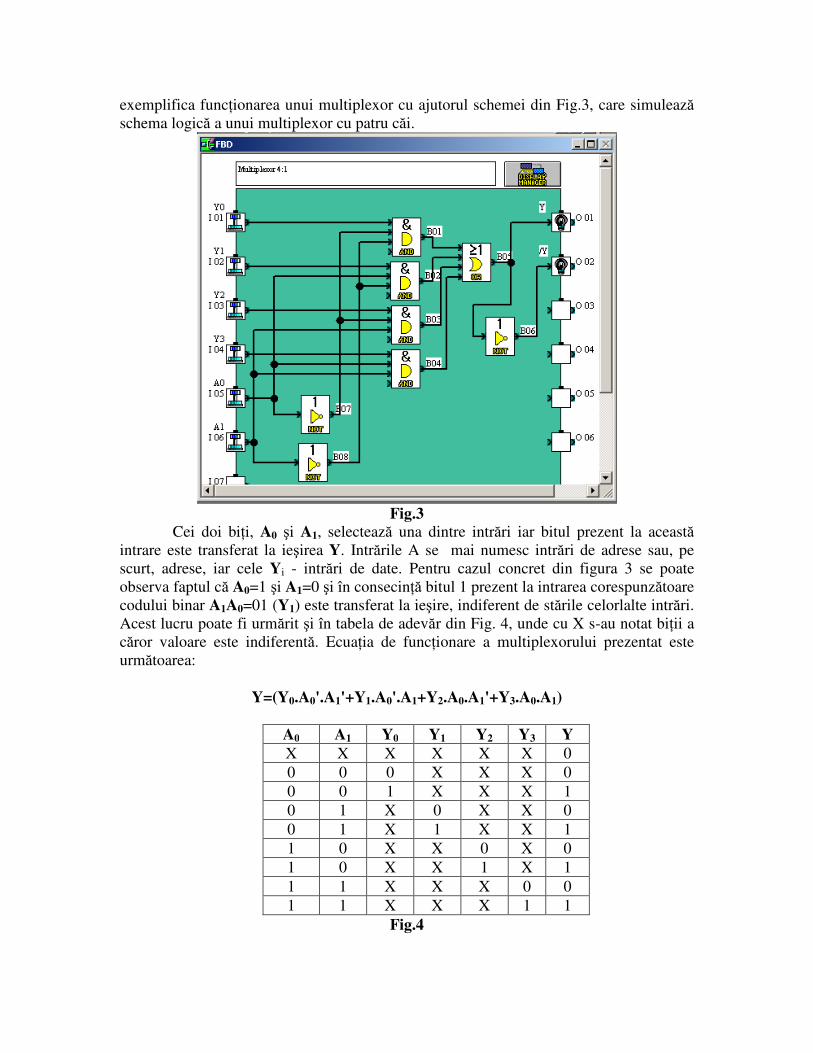
exemplifica funcŃionarea unui multiplexor cu ajutorul schemei din Fig.3, care simulează schema logică a unui multiplexor cu patru căi.
Fig.3
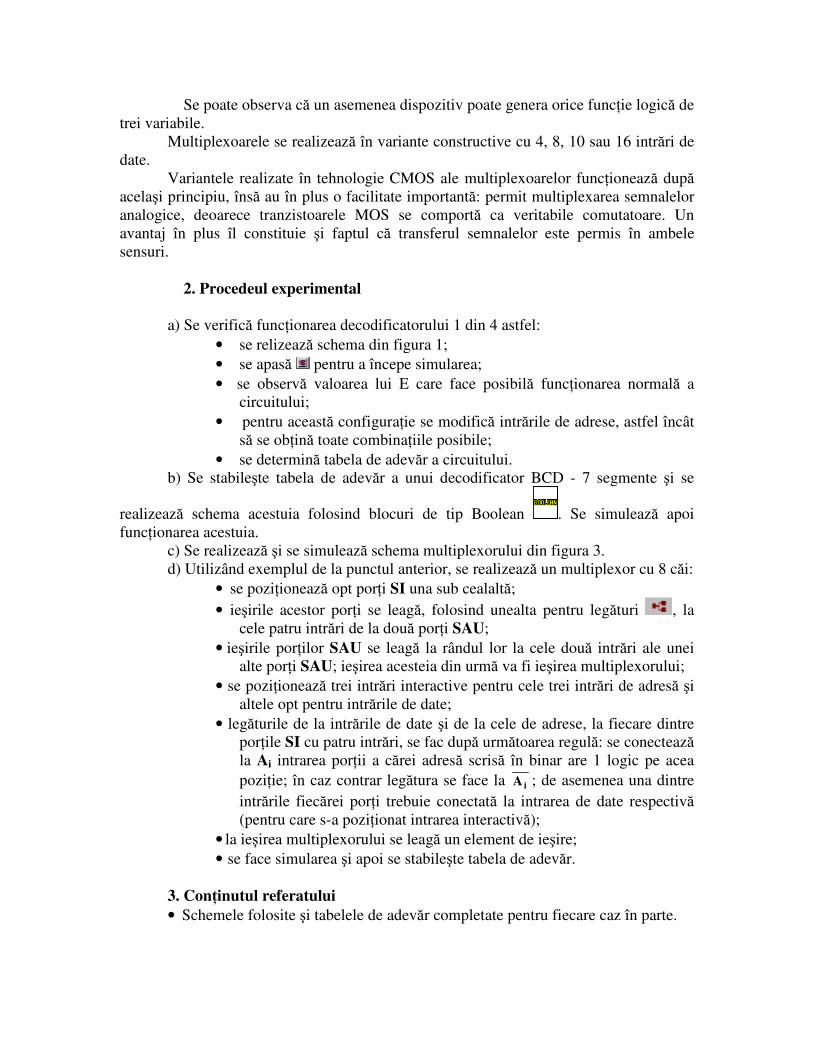
Cei doi biŃi, A0 şi A1, selectează una dintre intrări iar bitul prezent la această intrare este transferat la ieşirea Y. Intrările A se mai numesc intrări de adrese sau, pe scurt, adrese, iar cele Yi - intrări de date. Pentru cazul concret din figura 3 se poate observa faptul că A0=1 şi A1=0 şi în consecinŃă bitul 1 prezent la intrarea corespunzătoare codului binar A1A0=01 (Y1) este transferat la ieşire, indiferent de stările celorlalte intrări. Acest lucru poate fi urmărit şi în tabela de adevăr din Fig. 4, unde cu X s-au notat biŃii a căror valoare este indiferentă. EcuaŃia de funcŃionare a multiplexorului prezentat este următoarea:
Y=(Y0.A0'.A1'+Y1.A0'.A1+Y2.A0.A1'+Y3.A0.A1)
A0 A1 Y0 Y1 Y2 Y3 Y X X X X X X 0 0 0 0 X X X 0 0 0 1 X X X 1 0 1 X 0 X X 0 0 1 X 1 X X 1 1 0 X X 0 X 0 1 0 X X 1 X 1 1 1 X X X 0 0 1 1 X X X 1 1
Fig.4
Se poate observa că un asemenea dispozitiv poate genera orice funcŃie logică de trei variabile. Multiplexoarele se realizează în variante constructive cu 4, 8, 10 sau 16 intrări de date. Variantele realizate în tehnologie CMOS ale multiplexoarelor funcŃionează după acelaşi principiu, însă au în plus o facilitate importantă: permit multiplexarea semnalelor analogice, deoarece tranzistoarele MOS se comportă ca veritabile comutatoare. Un avantaj în plus îl constituie şi faptul că transferul semnalelor este permis în ambele sensuri. 2. Procedeul experimental a) Se verifică funcŃionarea decodificatorului 1 din 4 astfel:
• se relizează schema din figura 1; • se apasă pentru a începe simularea; • se observă valoarea lui E care face posibilă funcŃionarea normală a
circuitului; • pentru această configuraŃie se modifică intrările de adrese, astfel încât
să se obŃină toate combinaŃiile posibile; • se determină tabela de adevăr a circuitului.
b) Se stabileşte tabela de adevăr a unui decodificator BCD - 7 segmente şi se
realizează schema acestuia folosind blocuri de tip Boolean . Se simulează apoi funcŃionarea acestuia. c) Se realizează şi se simulează schema multiplexorului din figura 3.
d) Utilizând exemplul de la punctul anterior, se realizează un multiplexor cu 8 căi: • se poziŃionează opt porŃi SI una sub cealaltă; • ieşirile acestor porŃi se leagă, folosind unealta pentru legături , la
cele patru intrări de la două porŃi SAU; • ieşirile porŃilor SAU se leagă la rândul lor la cele două intrări ale unei
alte porŃi SAU; ieşirea acesteia din urmă va fi ieşirea multiplexorului; • se poziŃionează trei intrări interactive pentru cele trei intrări de adresă şi
altele opt pentru intrările de date; • legăturile de la intrările de date şi de la cele de adrese, la fiecare dintre
porŃile SI cu patru intrări, se fac după următoarea regulă: se conectează la Ai intrarea porŃii a cărei adresă scrisă în binar are 1 logic pe acea poziŃie; în caz contrar legătura se face la iA ; de asemenea una dintre intrările fiecărei porŃi trebuie conectată la intrarea de date respectivă (pentru care s-a poziŃionat intrarea interactivă);
• la ieşirea multiplexorului se leagă un element de ieşire; • se face simularea şi apoi se stabileşte tabela de adevăr.
3. ConŃinutul referatului
• Schemele folosite şi tabelele de adevăr completate pentru fiecare caz în parte.

• ExplicaŃi de ce se pot realiza orice funcŃii de trei variabile logice cu ajutorul unui multiplexor 1 din 8.

Laborator 5. Studiul circuitelor secvenŃiale
Circuite basculante bistabile Circuitul care are două stări stabile distincte, în care tranziŃiile de la o stare la alta
au loc rapid prin procese de basculare amorsate cu ajutorul unor semnale de comandă aplicate din exterior, se numeşte circuit basculant bistabil (CBB sau bistabil).
Într-un proces de basculare se produce o variaŃie rapidă a mărimilor electrice, datorită unei bucle active de reacŃie pozitivă. Procesul de basculare este un proces cumulativ care, odată amorsat, se dezvoltă în avalanşă.
Circuite basculante de tip RS
Un bistabil RS este prevăzut cu două intrări de comandă (de date) notate S (Set) şi R (Reset) şi două ieşiri Q şi Q’. NotaŃia folosită pentru ieşiri indică faptul că ieşirile circuitului sunt complementate. Intrarea S se va folosi pentru a înscrie informaŃia în circuit, pe când intrarea R pentru a şterge informaŃia din circuit.
In tabelul de adevăr ce sintetizează funcŃionarea CBB de tip RS (Tabelul 1) se notează prin Qn, starea ieşirii înainte de comandă iar prin Qn+1 starea ieşirii după comandă.
Circuitul va trebui să funcŃioneze astfel: • în lipsa unor comenzi pe intrări (Sn = Rn=0), starea
circuitului să nu se schimbe Qn+1= Qn ). Spunem că în acest caz circuitul memorează starea sa anterioară.
• există posibilitatea de a înscrie informaŃia în circuit. Comenzile aplicate vor fi Sn=1, Rn=0 iar la ieşire apare starea Qn+1 = 1.
• să se poată şterge informaŃia înmagazinată în circuit cu comenzile Sn = 0, Rn = 1. În acest caz ieşirea trece în starea Qn+1 = 0.
Din punct de vedere logic nu are sens să se facă simultan înscrierea şi ştergerea informaŃiei, motiv pentru care comanda Sn = 1, Rn = 1 va fi o comandă interzisă. Rezultă de aici condiŃia de bună funcŃionare a circuitului: Sn. Rn = 0.
Pentru a face sinteza circuitului se va considera drept semnal de ieşire Qn+1, adică starea circuitului la momentul tn+1. Din tabelul de adevăr se observă că acest semnal depinde atât de comenzile primite la momentul tn (Sn şi Rn) cât şi de starea anterioară a circuitului (Qn).
00 01 11 10 RnSn 00 01 11 10 RnSn 0 0 1 * 0 0 1 0 * 1 1 1 1 * 0 1 0 0 * 1 Qn Qn Qn+1 Qn+1’
Figura 2. Diagramele Karnaugh ale bistabilului de tip R-S.
TABELUL 1
tn tn+1
Rn Sn Qn Qn+1
0 0 0 0
0 0 1 1 Qn+1=Qn 0 1 0 1
0 1 1 1 Qn+1=l 1 0 0 0
1 0 1 0 Qn+1=0 1 1 0 ?
1 1 1 ?
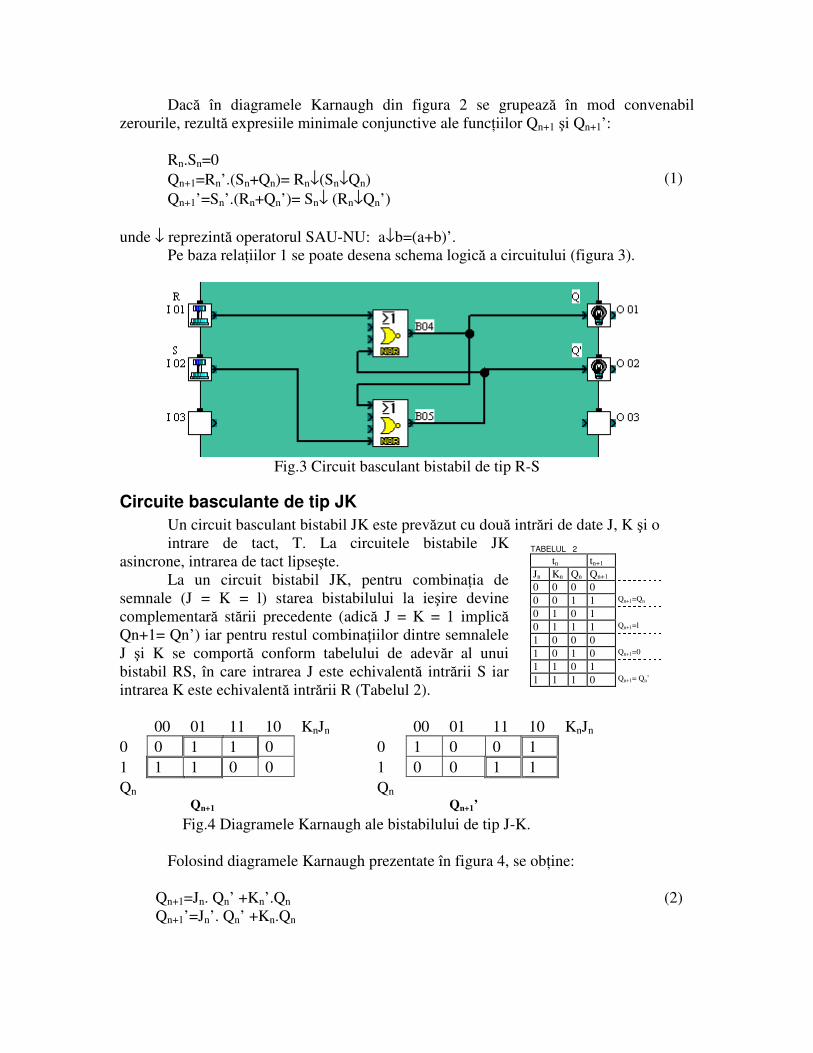
Dacă în diagramele Karnaugh din figura 2 se grupează în mod convenabil zerourile, rezultă expresiile minimale conjunctive ale funcŃiilor Qn+1 şi Qn+1’:
Rn.Sn=0 Qn+1=Rn’.(Sn+Qn)= Rn↓(Sn↓Qn) Qn+1’=Sn’.(Rn+Qn’)= Sn↓ (Rn↓Qn’)
(1)
unde ↓ reprezintă operatorul SAU-NU: a↓b=(a+b)’.
Pe baza relaŃiilor 1 se poate desena schema logică a circuitului (figura 3).
Fig.3 Circuit basculant bistabil de tip R-S
Circuite basculante de tip JK
Un circuit basculant bistabil JK este prevăzut cu două intrări de date J, K şi o intrare de tact, T. La circuitele bistabile JK
asincrone, intrarea de tact lipseşte. La un circuit bistabil JK, pentru combinaŃia de
semnale (J = K = l) starea bistabilului la ieşire devine complementară stării precedente (adică J = K = 1 implică Qn+1= Qn’) iar pentru restul combinaŃiilor dintre semnalele J şi K se comportă conform tabelului de adevăr al unui bistabil RS, în care intrarea J este echivalentă intrării S iar intrarea K este echivalentă intrării R (Tabelul 2).
00 01 11 10 KnJn 00 01 11 10 KnJn 0 0 1 1 0 0 1 0 0 1 1 1 1 0 0 1 0 0 1 1 Qn Qn Qn+1 Qn+1’
Fig.4 Diagramele Karnaugh ale bistabilului de tip J-K.
Folosind diagramele Karnaugh prezentate în figura 4, se obŃine:
Qn+1=Jn. Qn’ +Kn’.Qn
Qn+1’=Jn’. Qn’ +Kn.Qn (2)
TABELUL 2
tn tn+1
Jn Kn Qn Qn+1
0 0 0 0
0 0 1 1 Qn+1=Qn 0 1 0 1
0 1 1 1 Qn+1=l 1 0 0 0
1 0 1 0 Qn+1=0 1 1 0 1
1 1 1 0 Qn+1= Qn’
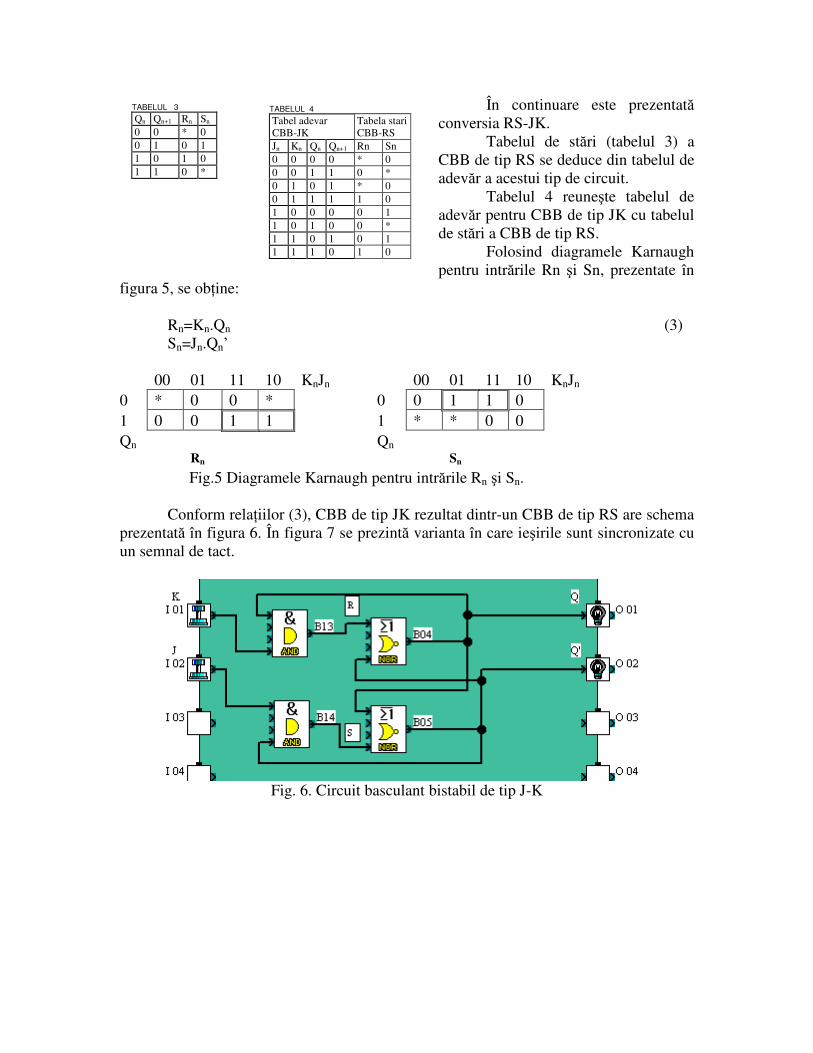
În continuare este prezentată conversia RS-JK.
Tabelul de stări (tabelul 3) a CBB de tip RS se deduce din tabelul de adevăr a acestui tip de circuit.
Tabelul 4 reuneşte tabelul de adevăr pentru CBB de tip JK cu tabelul de stări a CBB de tip RS.
Folosind diagramele Karnaugh pentru intrările Rn şi Sn, prezentate în
figura 5, se obŃine: Rn=Kn.Qn
Sn=Jn.Qn’ (3)
00 01 11 10 KnJn 00 01 11 10 KnJn 0 * 0 0 * 0 0 1 1 0 1 0 0 1 1 1 * * 0 0 Qn Qn Rn Sn
Fig.5 Diagramele Karnaugh pentru intrările Rn şi Sn. Conform relaŃiilor (3), CBB de tip JK rezultat dintr-un CBB de tip RS are schema
prezentată în figura 6. În figura 7 se prezintă varianta în care ieşirile sunt sincronizate cu un semnal de tact.
Fig. 6. Circuit basculant bistabil de tip J-K
TABELUL 3
Qn Qn+1 Rn Sn 0 0 * 0 0 1 0 1 1 0 1 0 1 1 0 *
TABELUL 4
Tabel adevar CBB-JK
Tabela stari CBB-RS
Jn Kn Qn Qn+1 Rn Sn 0 0 0 0 * 0 0 0 1 1 0 * 0 1 0 1 * 0 0 1 1 1 1 0 1 0 0 0 0 1 1 0 1 0 0 * 1 1 0 1 0 1 1 1 1 0 1 0
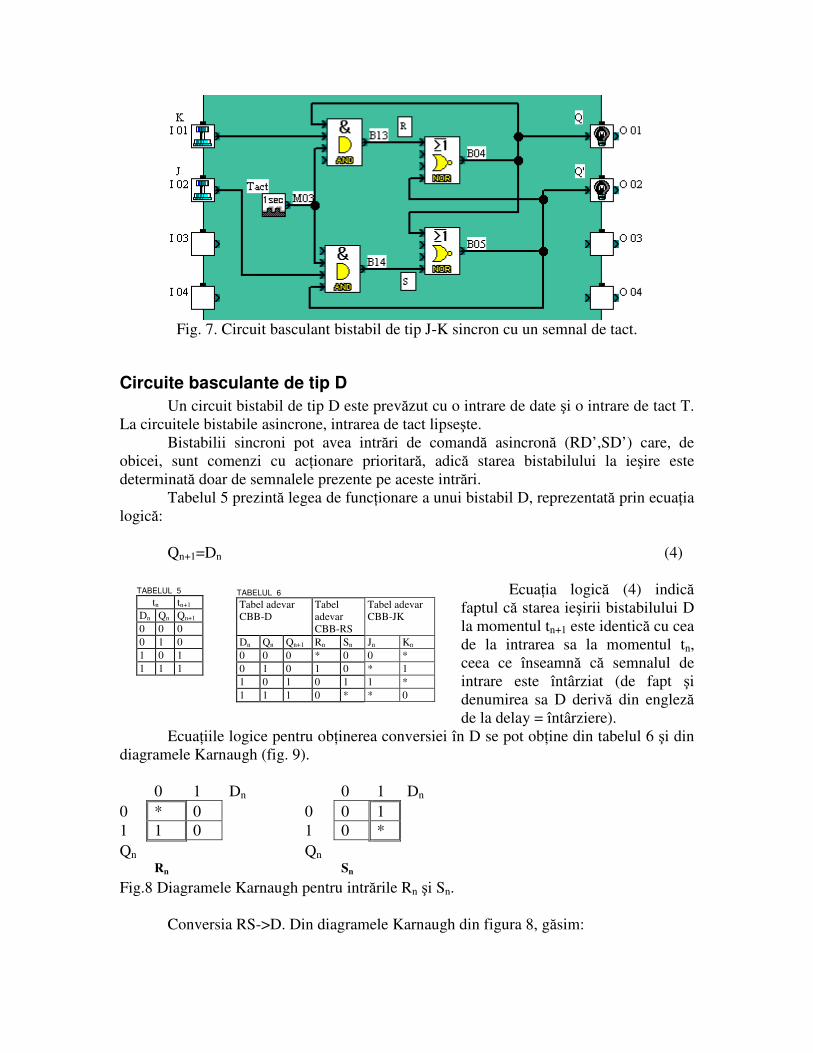
Fig. 7. Circuit basculant bistabil de tip J-K sincron cu un semnal de tact.
Circuite basculante de tip D
Un circuit bistabil de tip D este prevăzut cu o intrare de date şi o intrare de tact T. La circuitele bistabile asincrone, intrarea de tact lipseşte.
Bistabilii sincroni pot avea intrări de comandă asincronă (RD’,SD’) care, de obicei, sunt comenzi cu acŃionare prioritară, adică starea bistabilului la ieşire este determinată doar de semnalele prezente pe aceste intrări.
Tabelul 5 prezintă legea de funcŃionare a unui bistabil D, reprezentată prin ecuaŃia logică:
Qn+1=Dn (4)
EcuaŃia logică (4) indică faptul că starea ieşirii bistabilului D la momentul tn+1 este identică cu cea de la intrarea sa la momentul tn, ceea ce înseamnă că semnalul de intrare este întârziat (de fapt şi denumirea sa D derivă din engleză de la delay = întârziere).
EcuaŃiile logice pentru obŃinerea conversiei în D se pot obŃine din tabelul 6 şi din diagramele Karnaugh (fig. 9).
0 1 Dn 0 1 Dn 0 * 0 0 0 1 1 1 0 1 0 * Qn Qn Rn Sn Fig.8 Diagramele Karnaugh pentru intrările Rn şi Sn.
Conversia RS->D. Din diagramele Karnaugh din figura 8, găsim:
TABELUL 5
tn tn+1 Dn Qn Qn+1 0 0 0 0 1 0 1 0 1 1 1 1
TABELUL 6
Tabel adevar CBB-D
Tabel adevar CBB-RS
Tabel adevar CBB-JK
Dn Qn Qn+1 Rn Sn Jn Kn
0 0 0 * 0 0 * 0 1 0 1 0 * 1 1 0 1 0 1 1 * 1 1 1 0 * * 0
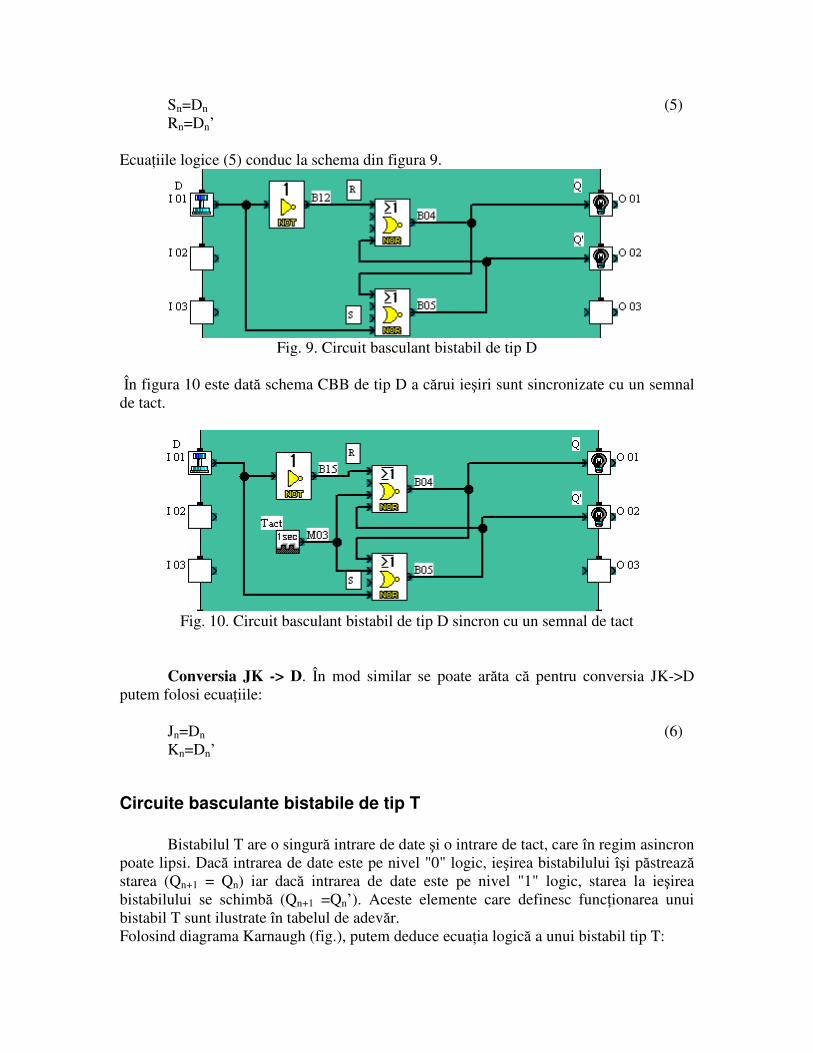
Sn=Dn
Rn=Dn’ (5)
EcuaŃiile logice (5) conduc la schema din figura 9.
Fig. 9. Circuit basculant bistabil de tip D
În figura 10 este dată schema CBB de tip D a cărui ieşiri sunt sincronizate cu un semnal de tact.
Fig. 10. Circuit basculant bistabil de tip D sincron cu un semnal de tact
Conversia JK -> D. În mod similar se poate arăta că pentru conversia JK->D putem folosi ecuaŃiile:
Jn=Dn
Kn=Dn’ (6)
Circuite basculante bistabile de tip T
Bistabilul T are o singură intrare de date şi o intrare de tact, care în regim asincron
poate lipsi. Dacă intrarea de date este pe nivel "0" logic, ieşirea bistabilului îşi păstrează starea (Qn+1 = Qn) iar dacă intrarea de date este pe nivel "1" logic, starea la ieşirea bistabilului se schimbă (Qn+1 =Qn’). Aceste elemente care definesc funcŃionarea unui bistabil T sunt ilustrate în tabelul de adevăr. Folosind diagrama Karnaugh (fig.), putem deduce ecuaŃia logică a unui bistabil tip T:
Qn+1=Tn’. Qn +Tn.Qn’=Tn⊕Qn
Qn+1’= Tn. Qn +Tn’.Qn’=(Tn⊕Qn)’ (6)
unde ⊕ reprezintă operatorul SAU-EXCLUSIV: a⊕b=a’.b+a.b’
Pentru a găsi ecuaŃiile logice care să permită conversia bistabililor RS, JK şi D în bistabil T, se va construi un tabel, în care în primele trei coloane (Tn, Qn, Qn+1) sunt trecute stările bistabilului convertit (în cazul de faŃă T) iar în celelalte tabelele de stări ale bistabililor de bază. Conversia RS->T. Se pot folosi ecuaŃiile (7) determinate într-un mod similar cazului bistabilului de tip D:
Sn=Tn. Qn’
Rn= Tn.Qn (7)
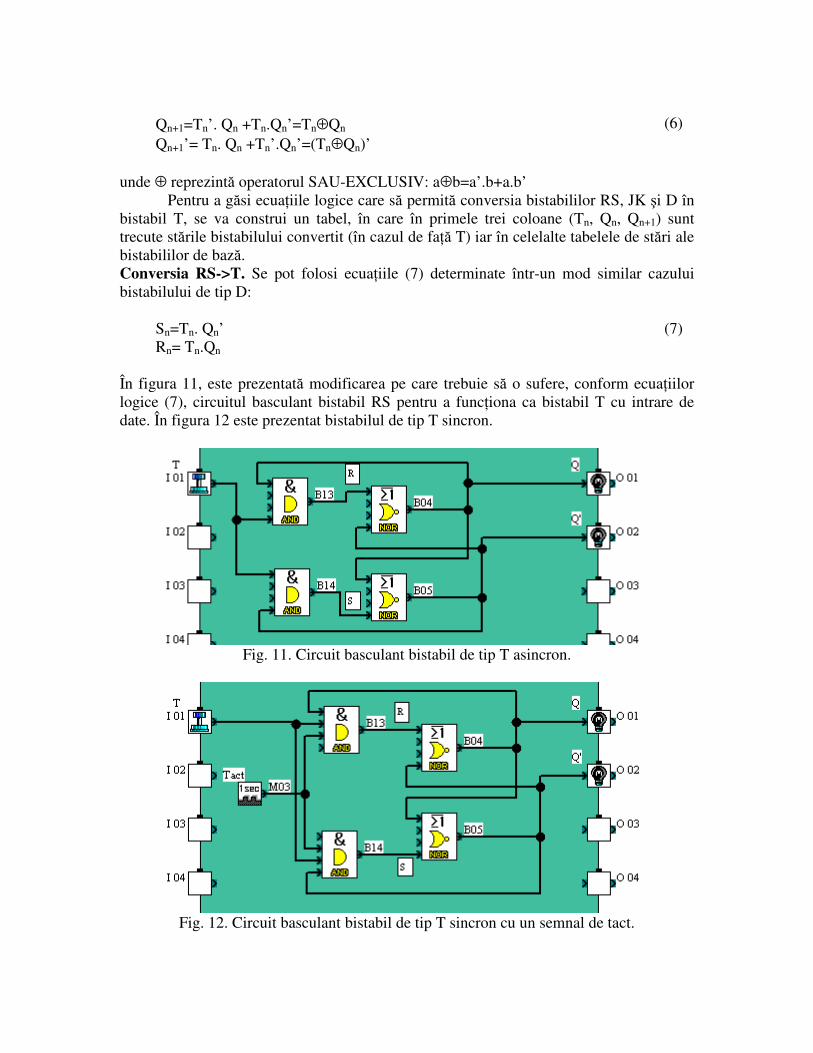
În figura 11, este prezentată modificarea pe care trebuie să o sufere, conform ecuaŃiilor logice (7), circuitul basculant bistabil RS pentru a funcŃiona ca bistabil T cu intrare de date. În figura 12 este prezentat bistabilul de tip T sincron.
Fig. 11. Circuit basculant bistabil de tip T asincron.
Fig. 12. Circuit basculant bistabil de tip T sincron cu un semnal de tact.
Conversia JK->T. Se determină ecuaŃia:
Jn=Kn=Tn (8) Conversia D->T. Din diagrama Karnaugh din figura 17g, găsim:
Dn=Tn.Qn’ +Tn’.Qn=Tn⊕Qn (9)
EcuaŃia logică (9) poate fi implementată, cel mai simplu, cu o poartă SAU-EXCLUSIV.
Din tabelul de adevăr şi din ecuaŃia logică a bistabilului de tip T rezultă că dacă T=l şi bistabilului i se aplică impulsuri de tact, atunci ieşirea lui îşi va modifica starea indiferent care stare a ieşirii a fost anterioară tactului (Qn+1 =Qn’). Această prioritate de numărare a bistabilului T îl face utilizabil în reŃelele de numărătoare: celulă de numărare, divizor cu 2.
Procedeul experimental a) Se verifică funcŃionarea circuitelor bistabile prezentate în referat :
• se realizează schemele din figurile 3, 6 7, 9, 10; • se apasă pentru a începe simularea; • pentru această configuraŃie se modifică intrările circuitului astfel încât
să se obŃină toate combinaŃiile posibile; • se determină tabela de adevăr pentru fiecare circuit în parte.
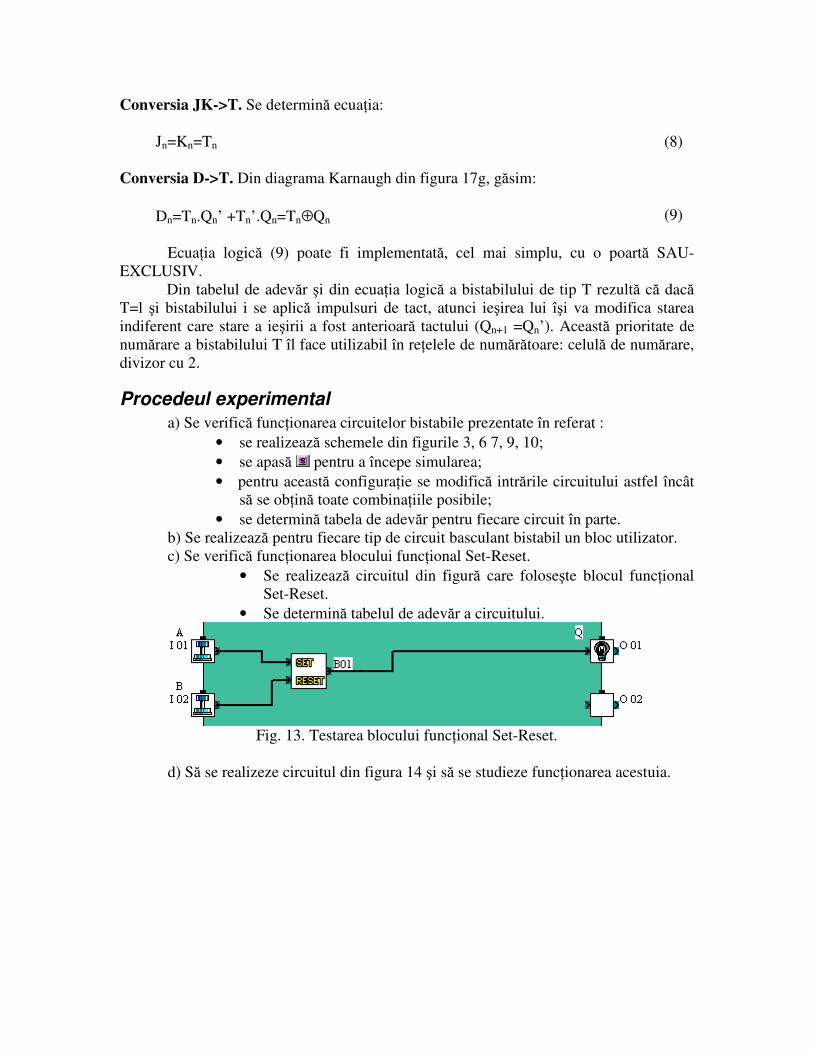
b) Se realizează pentru fiecare tip de circuit basculant bistabil un bloc utilizator. c) Se verifică funcŃionarea blocului funcŃional Set-Reset.
• Se realizează circuitul din figură care foloseşte blocul funcŃional Set-Reset.
• Se determină tabelul de adevăr a circuitului.
Fig. 13. Testarea blocului funcŃional Set-Reset.
d) Să se realizeze circuitul din figura 14 şi să se studieze funcŃionarea acestuia.
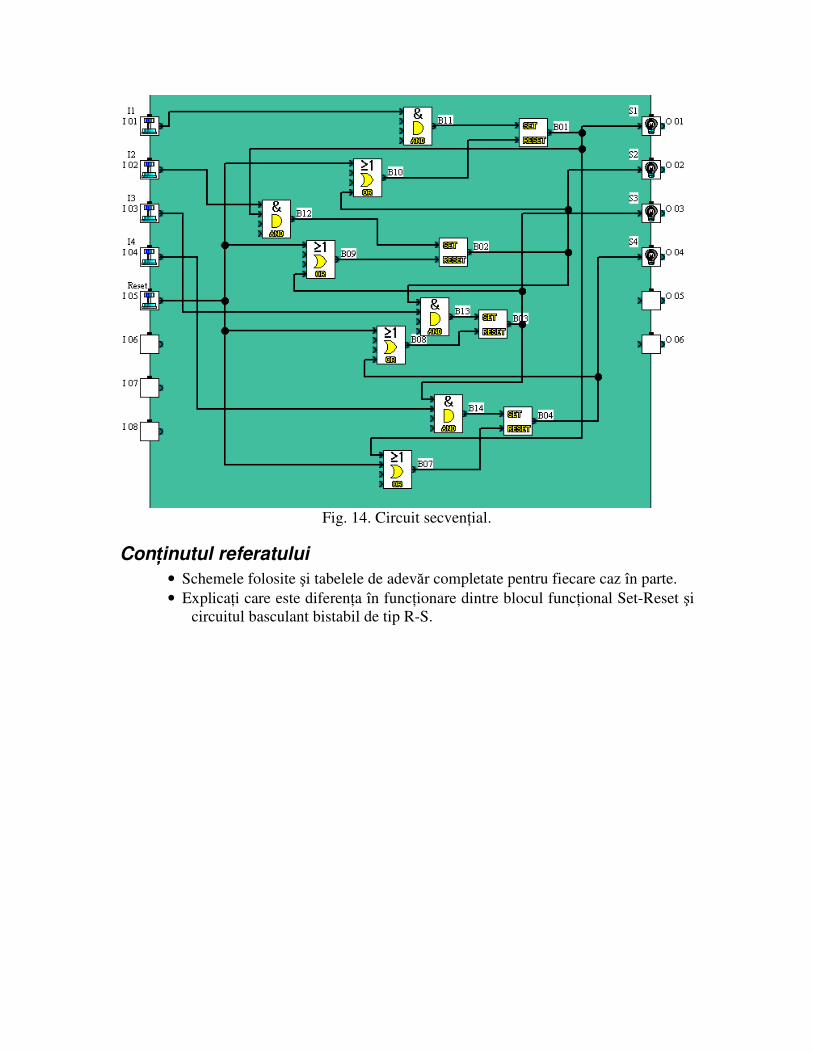
Fig. 14. Circuit secvenŃial.
ConŃinutul referatului
• Schemele folosite şi tabelele de adevăr completate pentru fiecare caz în parte. • ExplicaŃi care este diferenŃa în funcŃionare dintre blocul funcŃional Set-Reset şi
circuitul basculant bistabil de tip R-S.
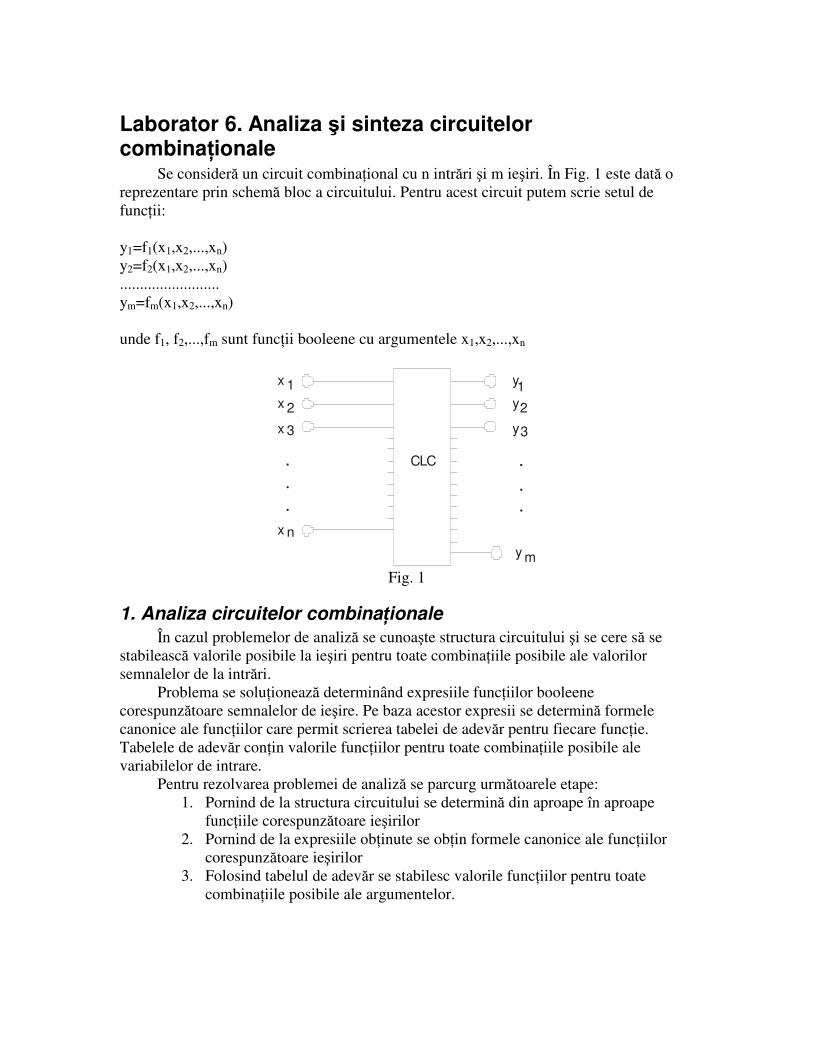
Laborator 6. Analiza şi sinteza circuitelor combinaŃionale
Se consideră un circuit combinaŃional cu n intrări şi m ieşiri. În Fig. 1 este dată o reprezentare prin schemă bloc a circuitului. Pentru acest circuit putem scrie setul de funcŃii: y1=f1(x1,x2,...,xn) y2=f2(x1,x2,...,xn) ......................... ym=fm(x1,x2,...,xn) unde f1, f2,...,fm sunt funcŃii booleene cu argumentele x1,x2,...,xn
CLC
x 1
x 2
x 3
x n
y1
y2
y3
y m
.
.
.
.
.
.
Fig. 1
1. Analiza circuitelor combinaŃionale În cazul problemelor de analiză se cunoaşte structura circuitului şi se cere să se
stabilească valorile posibile la ieşiri pentru toate combinaŃiile posibile ale valorilor semnalelor de la intrări.
Problema se soluŃionează determinând expresiile funcŃiilor booleene corespunzătoare semnalelor de ieşire. Pe baza acestor expresii se determină formele canonice ale funcŃiilor care permit scrierea tabelei de adevăr pentru fiecare funcŃie. Tabelele de adevăr conŃin valorile funcŃiilor pentru toate combinaŃiile posibile ale variabilelor de intrare.
Pentru rezolvarea problemei de analiză se parcurg următoarele etape: 1. Pornind de la structura circuitului se determină din aproape în aproape
funcŃiile corespunzătoare ieşirilor 2. Pornind de la expresiile obŃinute se obŃin formele canonice ale funcŃiilor
corespunzătoare ieşirilor 3. Folosind tabelul de adevăr se stabilesc valorile funcŃiilor pentru toate
combinaŃiile posibile ale argumentelor.
Etapa neobligatorie dar de multe ori utilă din punct de vedere practic presupune obŃinerea expresiilor minimale ale funcŃiilor. Materializarea expresiilor minimale are drept rezultat obŃinerea unui circuit echivalent cu primul dar mai economic decât primul.
Exemplul 1.
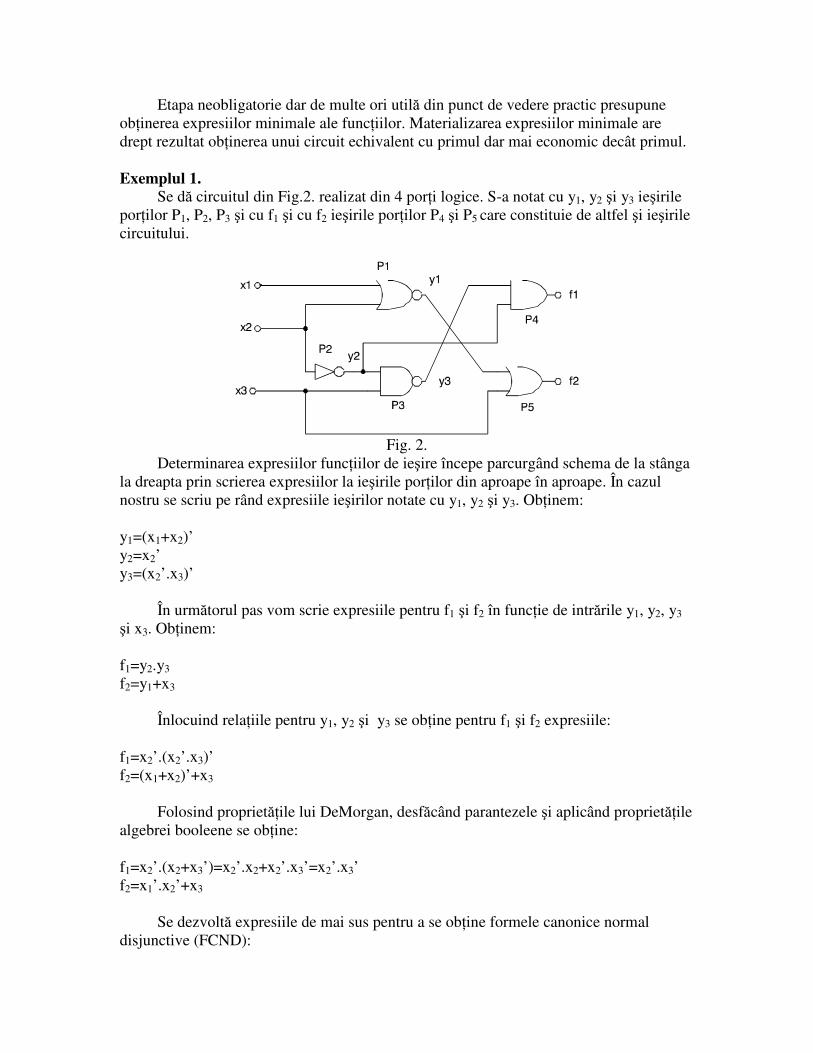
Se dă circuitul din Fig.2. realizat din 4 porŃi logice. S-a notat cu y1, y2 şi y3 ieşirile porŃilor P1, P2, P3 şi cu f1 şi cu f2 ieşirile porŃilor P4 şi P5 care constituie de altfel şi ieşirile circuitului.
Fig. 2.
Determinarea expresiilor funcŃiilor de ieşire începe parcurgând schema de la stânga la dreapta prin scrierea expresiilor la ieşirile porŃilor din aproape în aproape. În cazul nostru se scriu pe rând expresiile ieşirilor notate cu y1, y2 şi y3. ObŃinem:
y1=(x1+x2)’ y2=x2’ y3=(x2’.x3)’
În următorul pas vom scrie expresiile pentru f1 şi f2 în funcŃie de intrările y1, y2, y3 şi x3. ObŃinem:
f1=y2.y3 f2=y1+x3
Înlocuind relaŃiile pentru y1, y2 şi y3 se obŃine pentru f1 şi f2 expresiile:
f1=x2’.(x2’.x3)’ f2=(x1+x2)’+x3
Folosind proprietăŃile lui DeMorgan, desfăcând parantezele şi aplicând proprietăŃile algebrei booleene se obŃine:
f1=x2’.(x2+x3’)=x2’.x2+x2’.x3’=x2’.x3’ f2=x1’.x2’+x3
Se dezvoltă expresiile de mai sus pentru a se obŃine formele canonice normal disjunctive (FCND):

f1=(x1+x1’).x2’.x3’=x1.x2’.x3’+x1’.x2’.x3’=m0+m4 f2=x1’.x2’.(x3+x3’)+(x1+x1’).(x2+x2’).x3= =x1’.x2’.x3+x1’.x2’.x3’+x1.x2.x3+x1.x2’.x3+x1’.x2.x3+x1’.x2’.x3= =x1’.x2’.x3+x1’.x2’.x3’+x1.x2.x3+x1.x2’.x3+x1’.x2.x3=m0+m1+m3+m5+m7
Pe baza FNCD putem scrie tabelul de adevăr pentru cele două funcŃii: x1 x2 x3 f1 f2
0 0 0 1 1 0 0 1 0 1 0 1 0 0 0 0 1 1 0 1 1 0 0 1 0 1 0 1 0 1 1 1 0 0 0 1 1 1 0 1
2. Minimizarea funcŃiilor booleene În general, funcŃionarea unui circuit combinaŃional poate fi exprimată printr-un set
de funcŃii booleene care la rândul lor pot fi materializate prin intermediul unui circuit combinaŃional. Problema de minimizare a funcŃiilor booleene poate fi exprimată astfel: fiind dată o funcŃie booleană f (sau un set de funcŃii booleene f1, f2,...,fm) să se obŃină o formă a acesteia (acestora) care să satisfacă o anumită condiŃie de minimalitate. Dintre cele mai utilizate criterii de minimalitate amintim:
• număr minim de apariŃii a variabilelor • număr minim de apariŃii a variabilelor într-o formă normal disjunctivă a funcŃiei
(sumă de produse) • număr minim de termeni într-o formă normal disjunctivă a funcŃiei (sumă de
produse) având în vedere că nu există altă formă normal disjunctivă cu acelaşi număr de termeni, dar cu mai puŃine variabile.
2.1. Minimizarea FB folosind proprietăŃile algebrei booleene
łinând cont de cel de al treilea criteriu de minimalitate, se poate obŃine o sumă minimă folosind proprietăŃile algebrei booleene. În general, o sumă minimă se poate obŃine din forma canonică disjunctivă prin aplicarea teoremei de adiacenŃă logică exprimată prin expresia x.y+x.y’=x şi proprietatea de idempotenŃă exprimată prin expresia x+x=x. Teorema de adiacenŃă precum şi proprietatea de idempotenŃă pot fi aplicate în mod repetat până când se obŃine o expresie la care aceste proprietăŃi nu mai pot fi aplicate.
Exemplul 2. Se consideră FB f(x,y,z)=m0+m2+m3+m4+m5+m7=x’.y’.z’+ x’.y.z’+ x’.y.z+ x.y’.z’+ x.y’.z+ x.y.z.
Adăugăm încă un m0 şi un m7 şi apoi grupând m0 cu m2, m0 cu m4, m3 cu m7 şi m5 cu m7 se obŃine: f(x,y,z)=x’.z’(y+y’)+y’.z’.(x+x’) +y.z.(x’+x) +x.z.(y’+y)=x’.z’+y’.z’+y.z+x.z
Grupând m0 cu m2, m4 cu m5 şi m3 cu m7, aplicând teorema de adiacenŃă şi Ńinând cont de relaŃia x+x’=1, obŃinem: f(x,y,z)=x’.z’(y+y’)+x.y’.(z’+z)+y.z.(x’+x)= x’.z’+x.y’+y.z
Dacă în mod similar grupăm m2 cu m3, m4 cu m0 şi m5 cu m7, se obŃine pentru funcŃia f expresia: f(x,y,z)=x’.y+y’.z’+x.z
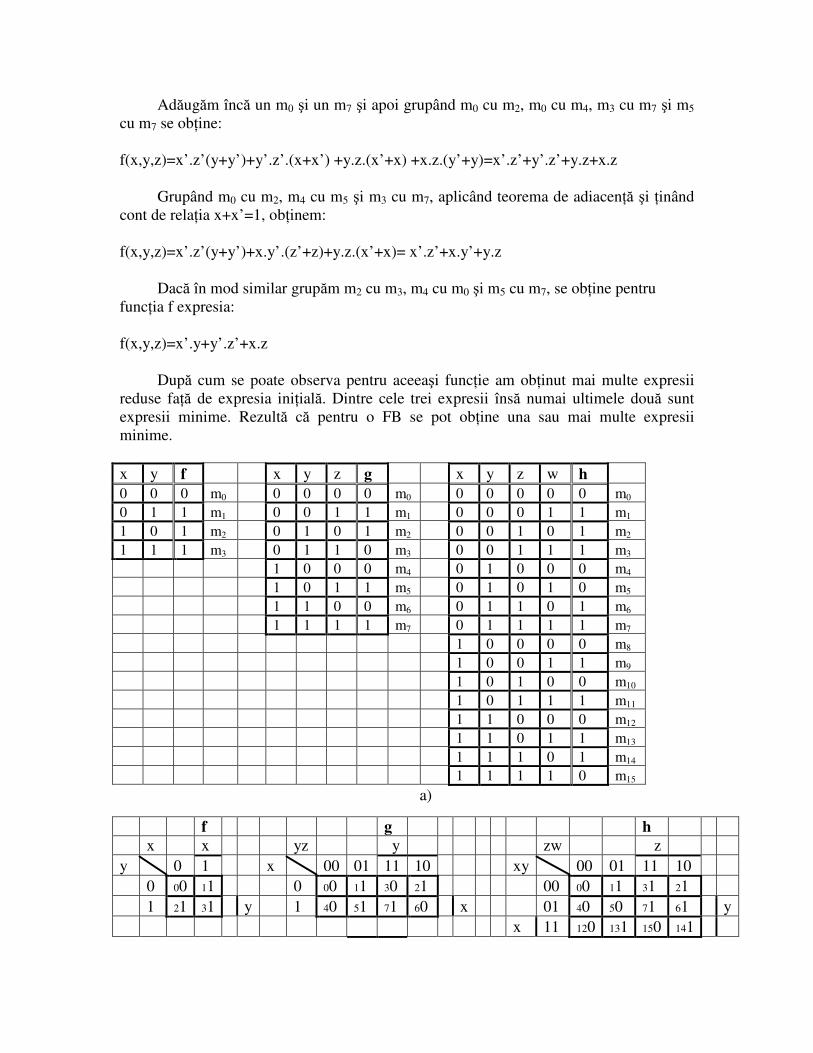
După cum se poate observa pentru aceeaşi funcŃie am obŃinut mai multe expresii reduse faŃă de expresia iniŃială. Dintre cele trei expresii însă numai ultimele două sunt expresii minime. Rezultă că pentru o FB se pot obŃine una sau mai multe expresii minime.
x y f x y z g x y z w h 0 0 0 m0 0 0 0 0 m0 0 0 0 0 0 m0 0 1 1 m1 0 0 1 1 m1 0 0 0 1 1 m1 1 0 1 m2 0 1 0 1 m2 0 0 1 0 1 m2 1 1 1 m3 0 1 1 0 m3 0 0 1 1 1 m3 1 0 0 0 m4 0 1 0 0 0 m4 1 0 1 1 m5 0 1 0 1 0 m5 1 1 0 0 m6 0 1 1 0 1 m6 1 1 1 1 m7 0 1 1 1 1 m7 1 0 0 0 0 m8 1 0 0 1 1 m9 1 0 1 0 0 m10 1 0 1 1 1 m11 1 1 0 0 0 m12 1 1 0 1 1 m13 1 1 1 0 1 m14 1 1 1 1 0 m15
a)
f g h x x yz y zw z y 0 1 x 00 01 11 10 xy 00 01 11 10 0 00 11 0 00 11 30 21 00 00 11 31 21 1 21 31 y 1 40 51 71 60 x 01 40 50 71 61 y x 11 120 131 150 141
z 10 80 91 111 100 w
b) Fig. 3.
2.2. Diagrama Veitch Karnaugh
Diagrama Veitch-Karnaugh (V-K) este o metodă grafică de a reprezenta într-o formă condensată tabelul de adevăr al unei FB. Poate fi folosită pentru reprezentarea FB cu un număr oricât de mare de variabile însă, în mod practic, se utilizează pentru reprezentarea FB cu până la 6 variabile.
Liniile şi coloanele diagramei V-K sunt etichetate astfel încât combinaŃia variabilelor de intrare pentru fiecare căsuŃă este determinată cu uşurinŃă din etichetele ataşate liniei şi coloanei corespunzătoare căsuŃei.
În Fig.3 b) sunt date diagramele V-K pentru funcŃii de f, g şi h având 2, 3 şi respectiv 4 variabile şi date prin tabelele de adevăr din Fig. 3 a). Numărul mic din fiecare căsuŃă indică mintermul corespunzător liniei din tabelul de adevăr.
Dacă n este numărul de variabile, diagrama V-K va avea 2n căsuŃe, una pentru fiecare din cei 2n mintermi (maxtermi) ai FB deci, câte una pentru fiecare linie a tabelului de adevăr al funcŃiei. Mai mult, aceste căsuŃe sunt aranjate în astfel încât mintermii (maxtermii) sunt reprezentaŃi într-o dispoziŃie geometrică care permite evidenŃierea mintermilor adiacenŃi. În acest fel, minimizarea poate fi realizată prin recunoaşterea unor configuraŃii în cadrul diagramei.
2.3. Minimizarea FB folosind diagramele Veitch-Karnaugh
În diagrama V-K fiecare căsuŃă care are un 1 corespunde unui minterm a formei
canonice normal disjunctive a funcŃiei. Deoarece două celule adiacente în diagramă corespund la doi mintermi care diferă între ei doar prin forma unei singure variabile, cei doi mintermi pot fi înlocuiŃi printr-un singur termen folosind proprietatea de adiacenŃă. În general se poate simplifica funcŃia logică reprezentată prin diagrama V-K prin combinarea căsuŃelor adiacente scriind termenul redus care rezultă folosind proprietatea de adiacenŃă. Perechea de valori de 1 se încercuieşte indicând astfel că mintermii corespunzători se combină rezultând un singur termen.
În cazul multor funcŃii booleene, procedeul de grupare a valorilor de 1 din diagrama V-K se poate extinde. În general se pot grupa 2i căsuŃe conŃinând valori de 1 rezultând un termen care conŃine n-i variabile, unde n este numărul de variabile ale funcŃiei.
Regula prin care se determină cum pot fi grupate căsuŃele conŃinând valori de 1 este următoarea:
- o mulŃime de 2i celule pot fi grupate dacă există i variabile ale funcŃiei booleene care iau toate cele 2i combinaŃii posibile în acea mulŃime de căsuŃe în timp ce celelalte n-i variabile au aceeaşi valoare pentru aceeaşi mulŃime de căsuŃe. Termenul corespunzător grupării va conŃine cele n-i variabile în care variabila este în formă normală dacă ea apare ca 1 pentru toate căsuŃele grupării şi în forma negată dacă ea apare ca 0 pentru toate căsuŃele grupării.
Din punct de vedere grafic, regula de mai sus ne spune că putem încercui mulŃimi dreptunghiulare având 2i valori de 1, prin aceasta înŃelegând şi mulŃimile dreptunghiulare obŃinute dacă muchiile opuse diagramei ar fi unite.
Se pot determina variabilele şi forma pe care acestea o au în termenul rezultant: • dacă o încercuire acoperă căsuŃe în care variabila este 0 atunci variabila
apare în termenul rezultant în forma negată • dacă o încercuire acoperă căsuŃe în care variabila este 1, atunci variabila
apare în termenul rezultant în forma normală. • dacă o încercuire acoperă atât căsuŃe în care variabila este 0 dar şi căsuŃe în
care variabila este 1, atunci acea variabilă nu mai apare în termenul rezultant.
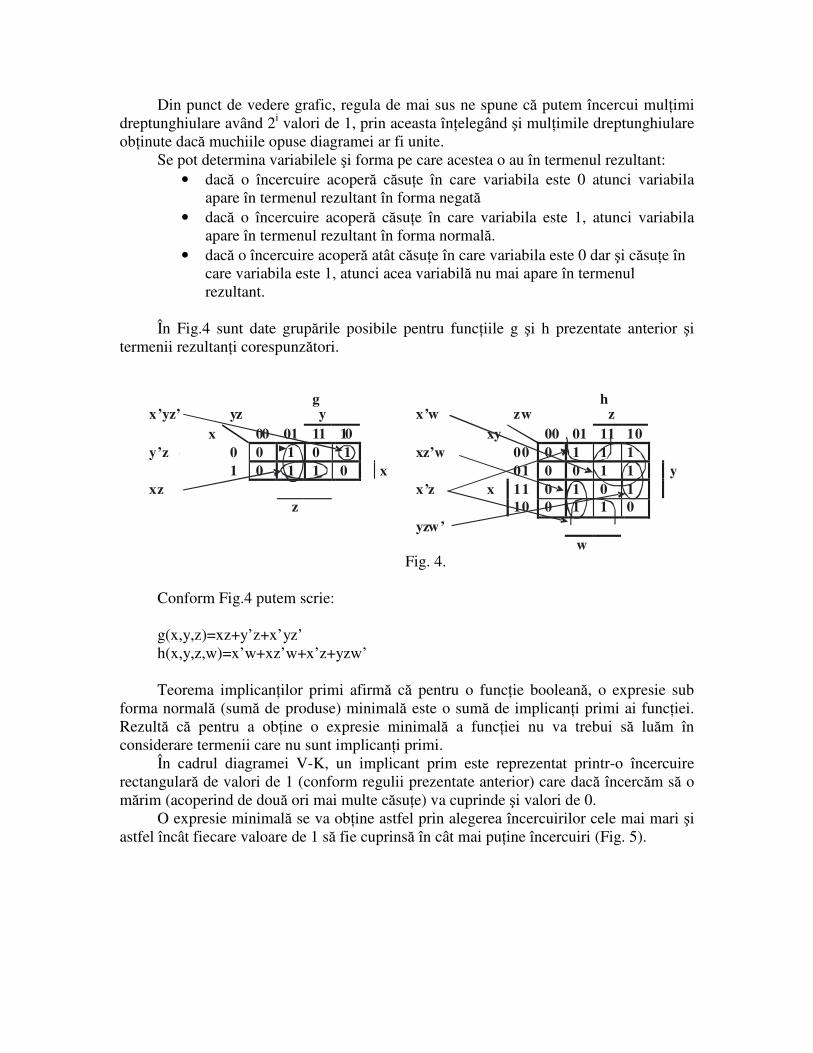
În Fig.4 sunt date grupările posibile pentru funcŃiile g şi h prezentate anterior şi
termenii rezultanŃi corespunzători.
g h x’yz’ yz y x’w zw z x 00 01 11 10 xy 00 01 11 10 y’z 0 0 1 0 1 xz’w 00 0 1 1 1 1 0 1 1 0 x 01 0 0 1 1 y xz x’z x 11 0 1 0 1 z 10 0 1 1 0 yzw’ w
Fig. 4.
Conform Fig.4 putem scrie: g(x,y,z)=xz+y’z+x’yz’ h(x,y,z,w)=x’w+xz’w+x’z+yzw’ Teorema implicanŃilor primi afirmă că pentru o funcŃie booleană, o expresie sub
forma normală (sumă de produse) minimală este o sumă de implicanŃi primi ai funcŃiei. Rezultă că pentru a obŃine o expresie minimală a funcŃiei nu va trebui să luăm în considerare termenii care nu sunt implicanŃi primi.
În cadrul diagramei V-K, un implicant prim este reprezentat printr-o încercuire rectangulară de valori de 1 (conform regulii prezentate anterior) care dacă încercăm să o mărim (acoperind de două ori mai multe căsuŃe) va cuprinde şi valori de 0.
O expresie minimală se va obŃine astfel prin alegerea încercuirilor cele mai mari şi astfel încât fiecare valoare de 1 să fie cuprinsă în cât mai puŃine încercuiri (Fig. 5).
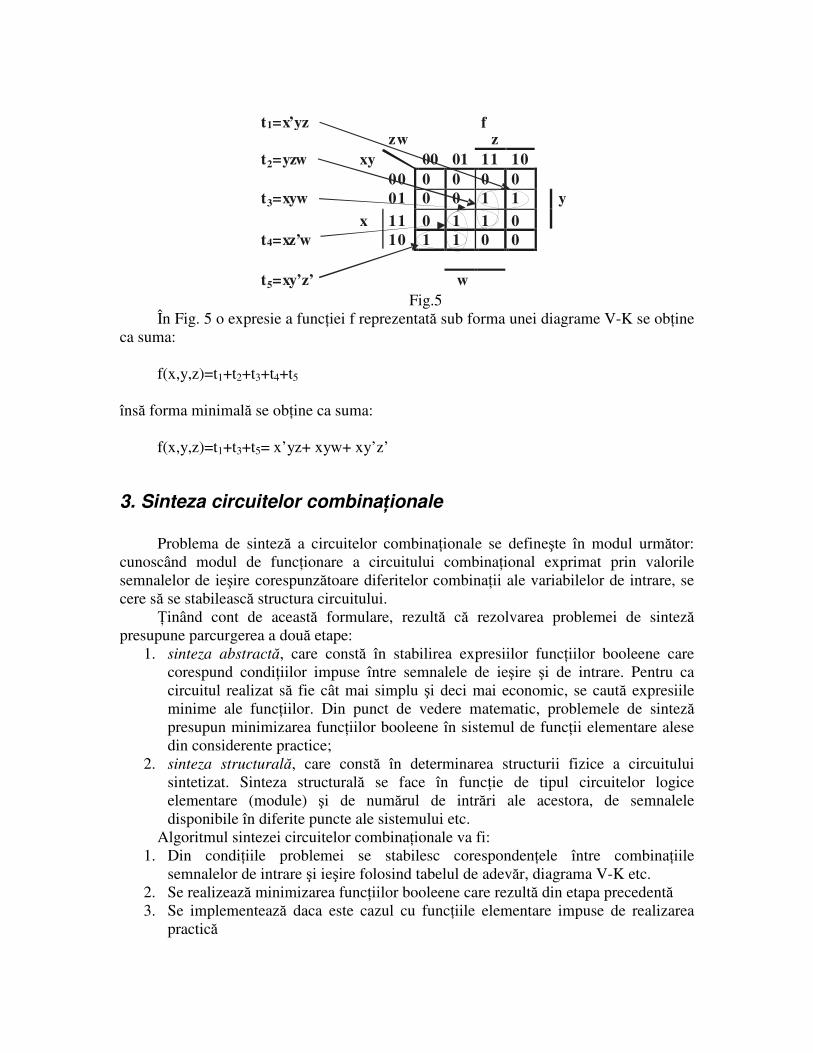
t1=x’yz f zw z t2=yzw xy 00 01 11 10 00 0 0 0 0 t3=xyw 01 0 0 1 1 y
x 11 0 1 1 0 t4=xz’w 10 1 1 0 0 t5=xy’z’ w
Fig.5 În Fig. 5 o expresie a funcŃiei f reprezentată sub forma unei diagrame V-K se obŃine
ca suma: f(x,y,z)=t1+t2+t3+t4+t5
însă forma minimală se obŃine ca suma:
f(x,y,z)=t1+t3+t5= x’yz+ xyw+ xy’z’
3. Sinteza circuitelor combinaŃionale
Problema de sinteză a circuitelor combinaŃionale se defineşte în modul următor: cunoscând modul de funcŃionare a circuitului combinaŃional exprimat prin valorile semnalelor de ieşire corespunzătoare diferitelor combinaŃii ale variabilelor de intrare, se cere să se stabilească structura circuitului.
łinând cont de această formulare, rezultă că rezolvarea problemei de sinteză presupune parcurgerea a două etape:
1. sinteza abstractă, care constă în stabilirea expresiilor funcŃiilor booleene care corespund condiŃiilor impuse între semnalele de ieşire şi de intrare. Pentru ca circuitul realizat să fie cât mai simplu şi deci mai economic, se caută expresiile minime ale funcŃiilor. Din punct de vedere matematic, problemele de sinteză presupun minimizarea funcŃiilor booleene în sistemul de funcŃii elementare alese din considerente practice;
2. sinteza structurală, care constă în determinarea structurii fizice a circuitului sintetizat. Sinteza structurală se face în funcŃie de tipul circuitelor logice elementare (module) şi de numărul de intrări ale acestora, de semnalele disponibile în diferite puncte ale sistemului etc.
Algoritmul sintezei circuitelor combinaŃionale va fi: 1. Din condiŃiile problemei se stabilesc corespondenŃele între combinaŃiile
semnalelor de intrare şi ieşire folosind tabelul de adevăr, diagrama V-K etc. 2. Se realizează minimizarea funcŃiilor booleene care rezultă din etapa precedentă 3. Se implementează daca este cazul cu funcŃiile elementare impuse de realizarea
practică

4. Se stabileşte logigrama plecând de la forma minimă obŃinută pentru funcŃiile de ieşire în pasul al treilea
5. Se analizează circuitul obŃinut pentru a vedea dacă corespunde condiŃiilor impuse iniŃial (etapă facultativă).
Exemplul 3.
Să se realizeze circuitul cu trei intrări şi cu o ieşire pentru care ieşirea este egală cu 1 dacă cel puŃin două intrări au valoarea 1.
Din descrierea problemei rezultă că funcŃionarea circuitului poate fi descrisă cu
ajutorul unei funcŃii booleene cu trei intrări. Să le numim pe acestea x, y şi z şi vom nota cu f ieşirea circuitului. Vom completa tabelul de adevăr al funcŃie pe baza datelor din problemă punând valoare 1 pentru liniile care au cel puŃin două valori de 1 şi 0 în rest:
x y z f
0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 1 1 0 0 0 1 0 1 1 1 1 0 1 1 1 1 1
În etapa următoare căutăm să simplificăm funcŃia f folosind diagrama V-K pe care
o completăm pe baza tabelului de adevăr şi realizăm grupările din figură:
f xy yz y x 00 01 11 10 yz 0 0 0 1 0 1 0 1 1 1 x xz z
Putem scrie astfel expresia simplificată a funcŃiei sub forma: f(x,y,z)=xy+xz+yz Folosind porŃi logice de tip SI şi SAU obŃinem schema logică următoare:
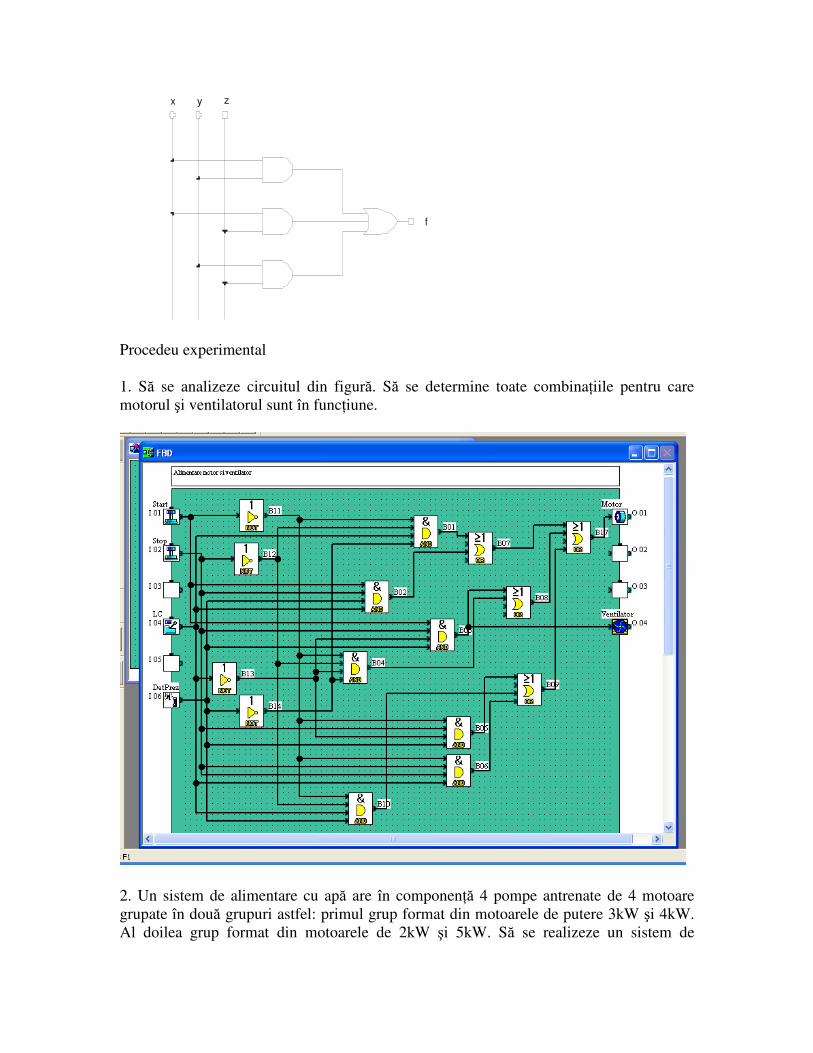
x y z
f
Procedeu experimental 1. Să se analizeze circuitul din figură. Să se determine toate combinaŃiile pentru care motorul şi ventilatorul sunt în funcŃiune.
2. Un sistem de alimentare cu apă are în componenŃă 4 pompe antrenate de 4 motoare grupate în două grupuri astfel: primul grup format din motoarele de putere 3kW şi 4kW. Al doilea grup format din motoarele de 2kW şi 5kW. Să se realizeze un sistem de

semnalizare şi avertizare care este format dintr-o lampă galbenă, una roşie şi o hupă care funcŃionează astfel:
a) lampa galbenă se aprinde dacă diferenŃa dintre puterile celor două grupuri de motoare este mai mare decât 3KW;
b) lampa roşie se aprinde dacă puterea motoarelor este mai mică sau egală cu 6 kW;
c) hupa va emite semnal sonor dacă funcŃionează doar un motor şi acesta are puterea mai mică decât 5 kW.
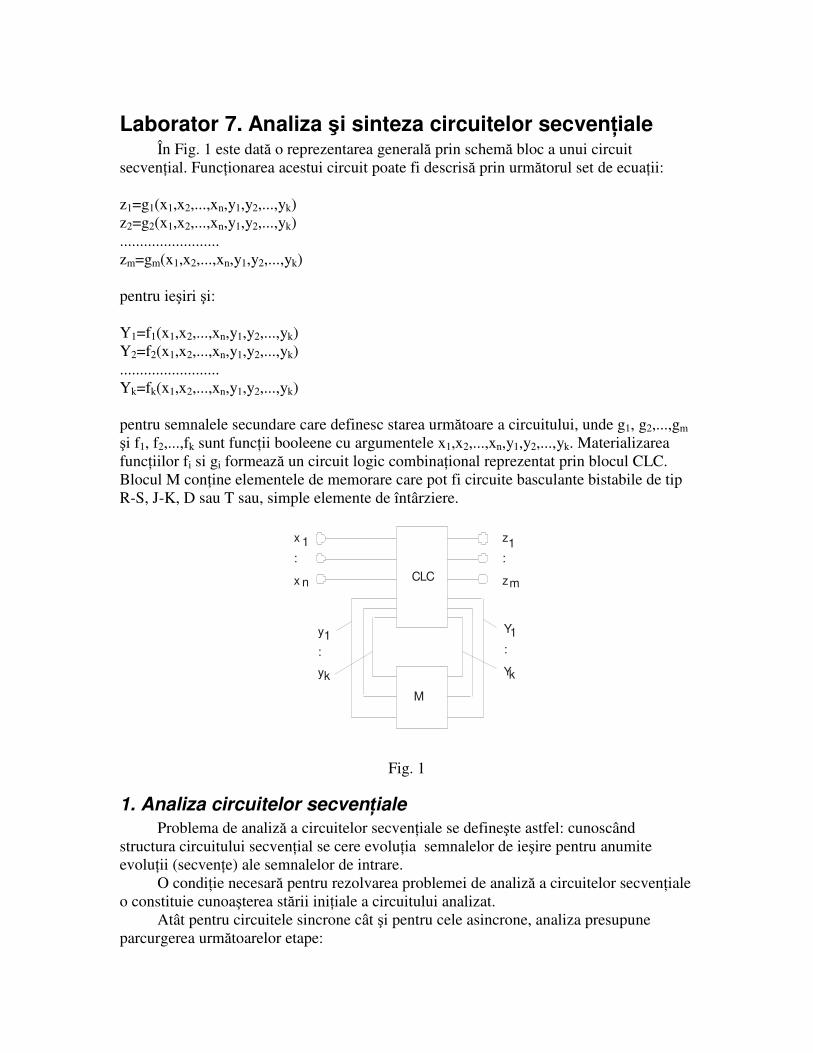
Laborator 7. Analiza şi sinteza circuitelor secvenŃiale În Fig. 1 este dată o reprezentarea generală prin schemă bloc a unui circuit
secvenŃial. FuncŃionarea acestui circuit poate fi descrisă prin următorul set de ecuaŃii: z1=g1(x1,x2,...,xn,y1,y2,...,yk) z2=g2(x1,x2,...,xn,y1,y2,...,yk) ......................... zm=gm(x1,x2,...,xn,y1,y2,...,yk) pentru ieşiri şi: Y1=f1(x1,x2,...,xn,y1,y2,...,yk) Y2=f2(x1,x2,...,xn,y1,y2,...,yk) ......................... Yk=fk(x1,x2,...,xn,y1,y2,...,yk) pentru semnalele secundare care definesc starea următoare a circuitului, unde g1, g2,...,gm şi f1, f2,...,fk sunt funcŃii booleene cu argumentele x1,x2,...,xn,y1,y2,...,yk. Materializarea funcŃiilor fi si gi formează un circuit logic combinaŃional reprezentat prin blocul CLC. Blocul M conŃine elementele de memorare care pot fi circuite basculante bistabile de tip R-S, J-K, D sau T sau, simple elemente de întârziere.
CLC
x 1
:
x n
z1
:
zm
M
y1
:
yk
Y1
:
Yk
Fig. 1
1. Analiza circuitelor secvenŃiale Problema de analiză a circuitelor secvenŃiale se defineşte astfel: cunoscând
structura circuitului secvenŃial se cere evoluŃia semnalelor de ieşire pentru anumite evoluŃii (secvenŃe) ale semnalelor de intrare.
O condiŃie necesară pentru rezolvarea problemei de analiză a circuitelor secvenŃiale o constituie cunoaşterea stării iniŃiale a circuitului analizat.
Atât pentru circuitele sincrone cât şi pentru cele asincrone, analiza presupune parcurgerea următoarelor etape:
4. Pornind de la structura circuitului se determină părŃile combinaŃionale şi cele de memorie şi se definesc semnalele de intrare, de ieşire şi semnalele secundare (de stare)
5. Se stabilesc expresiile funcŃiilor booleene ale ieşirilor din partea combinaŃională. FuncŃiile stabilite se pun în forma canonică
6. Corespunzător combinaŃiilor variabilelor de stare se realizează codificarea stărilor şi se definesc stările circuitului
7. Se construieşte tabelul stărilor şi/sau graful de tranziŃie a circuitului 8. Pentru evoluŃia semnalelor de intrare şi starea iniŃială impusă, folosindu-se
graful sau tabelul de tranziŃie, se stabileşte evoluŃia semnalelor la ieşire. Etapa neobligatorie dar de multe ori utilă din punct de vedere practic presupune
obŃinerea expresiilor minimale ale funcŃiilor de ieşire şi de tranziŃie. Materializarea expresiilor minimale are drept rezultat obŃinerea unui circuit echivalent cu primul dar mai economic decât primul.
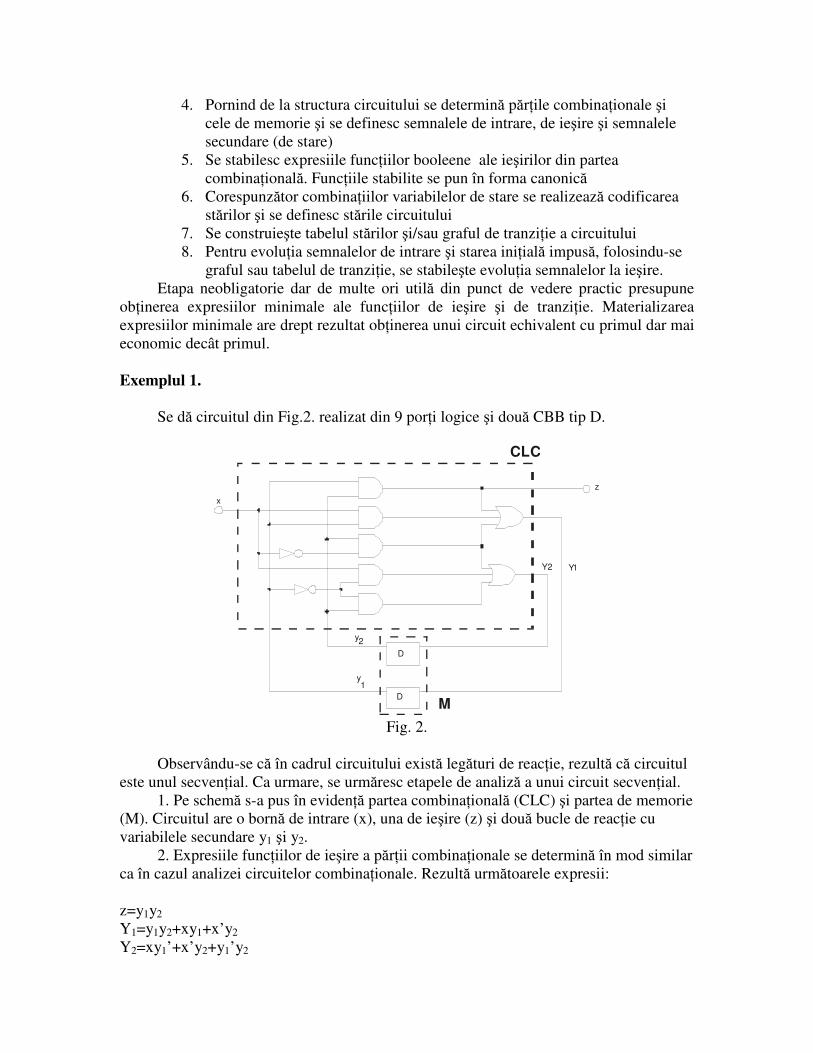
Exemplul 1.
Se dă circuitul din Fig.2. realizat din 9 porŃi logice şi două CBB tip D.
D
D
Y1Y2
y1
y2
x
z
CLC
M Fig. 2.
Observându-se că în cadrul circuitului există legături de reacŃie, rezultă că circuitul
este unul secvenŃial. Ca urmare, se urmăresc etapele de analiză a unui circuit secvenŃial. 1. Pe schemă s-a pus în evidenŃă partea combinaŃională (CLC) şi partea de memorie
(M). Circuitul are o bornă de intrare (x), una de ieşire (z) şi două bucle de reacŃie cu variabilele secundare y1 şi y2.
2. Expresiile funcŃiilor de ieşire a părŃii combinaŃionale se determină în mod similar ca în cazul analizei circuitelor combinaŃionale. Rezultă următoarele expresii:
z=y1y2 Y1=y1y2+xy1+x’y2 Y2=xy1’+x’y2+y1’y2

Prin dezvoltare se obŃin formele canonice ale funcŃiilor: z=xy1y2+x’y1y2 Y1=xy1y2+ x’y1y2+xy1y2’+x’y1’y2 Y2=xy1’y2+ xy1’y2’+x’y1y2+x’y1’y2 ObŃinerea formelor canonice poate fi realizată şi direct pe diagrama Veitch-
Karnaugh (V-K). În Fig. 3, funcŃiile y1 şi y2 sunt reprezentate pe aceeaşi diagramă şi separat este reprezentată funcŃia z.
Y1-Y2 z y1y2 y1 y1y2 y1 x 00 01 11 10 x 00 01 11 10 0 00 11 11 00 0 0 0 1 0 1 01 01 10 10 x 1 0 0 1 0 x y2 y2
Fig. 3 3. Circuitul studiat are două variabile de stare. Ca urmare, cele 4 combinaŃii
posibile ale valorilor acestora definesc stările circuitului. Putem scrie următoarea codificare:
y1 y2 sk
0 0 -> s0
0 1 -> s1
1 0 -> s2
1 1 -> s3
Conform acestei codificări şi a condiŃiilor problemei, starea iniŃială a circuitului
studiat este starea s0. 4. Având în vedere codificarea realizată şi diagrama din Fig. 3, se poate stabili
imediat tabelul stărilor. Tabelul corespunde unei reprezentări prin tabel a automatelor Moore.
În tabel s-au evidenŃiat stările stabile adică, stările pentru care stare prezentă şi starea următoare sunt identice.
x
sk
0 1 z
s0 s0 s1 0 s1 s3 s1 0 s2 s0 s2 0 s3 s3 s2 1
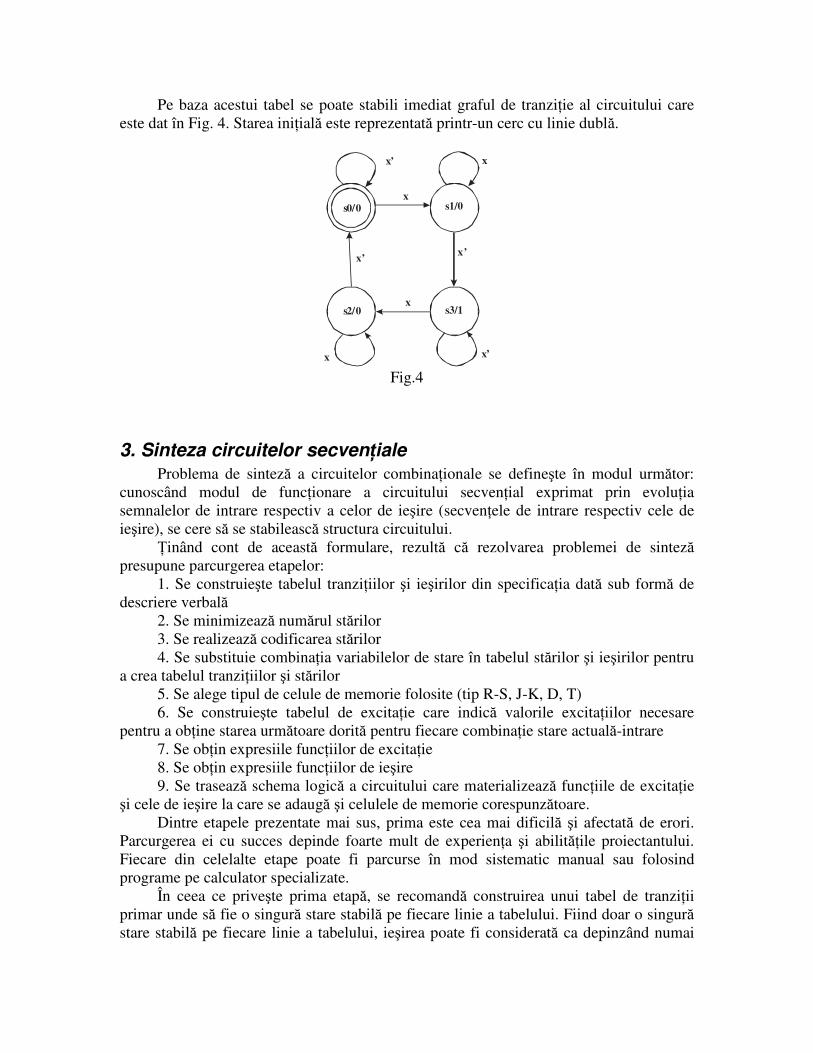
Pe baza acestui tabel se poate stabili imediat graful de tranziŃie al circuitului care este dat în Fig. 4. Starea iniŃială este reprezentată printr-un cerc cu linie dublă.
s0/0 s1/0
s3/1s2/0
x
x’
x
x’
x’ x
x x’
Fig.4
3. Sinteza circuitelor secvenŃiale Problema de sinteză a circuitelor combinaŃionale se defineşte în modul următor:
cunoscând modul de funcŃionare a circuitului secvenŃial exprimat prin evoluŃia semnalelor de intrare respectiv a celor de ieşire (secvenŃele de intrare respectiv cele de ieşire), se cere să se stabilească structura circuitului.
łinând cont de această formulare, rezultă că rezolvarea problemei de sinteză presupune parcurgerea etapelor:
1. Se construieşte tabelul tranziŃiilor şi ieşirilor din specificaŃia dată sub formă de descriere verbală
2. Se minimizează numărul stărilor 3. Se realizează codificarea stărilor 4. Se substituie combinaŃia variabilelor de stare în tabelul stărilor şi ieşirilor pentru
a crea tabelul tranziŃiilor şi stărilor 5. Se alege tipul de celule de memorie folosite (tip R-S, J-K, D, T) 6. Se construieşte tabelul de excitaŃie care indică valorile excitaŃiilor necesare
pentru a obŃine starea următoare dorită pentru fiecare combinaŃie stare actuală-intrare 7. Se obŃin expresiile funcŃiilor de excitaŃie 8. Se obŃin expresiile funcŃiilor de ieşire 9. Se trasează schema logică a circuitului care materializează funcŃiile de excitaŃie
şi cele de ieşire la care se adaugă şi celulele de memorie corespunzătoare. Dintre etapele prezentate mai sus, prima este cea mai dificilă şi afectată de erori.
Parcurgerea ei cu succes depinde foarte mult de experienŃa şi abilităŃile proiectantului. Fiecare din celelalte etape poate fi parcurse în mod sistematic manual sau folosind programe pe calculator specializate.
În ceea ce priveşte prima etapă, se recomandă construirea unui tabel de tranziŃii primar unde să fie o singură stare stabilă pe fiecare linie a tabelului. Fiind doar o singură stare stabilă pe fiecare linie a tabelului, ieşirea poate fi considerată ca depinzând numai
de starea curentă. În acest fel este posibil să se introducă stări suplimentare care însă pot fi eliminate mai târziu în etapa de minimizare a stărilor.
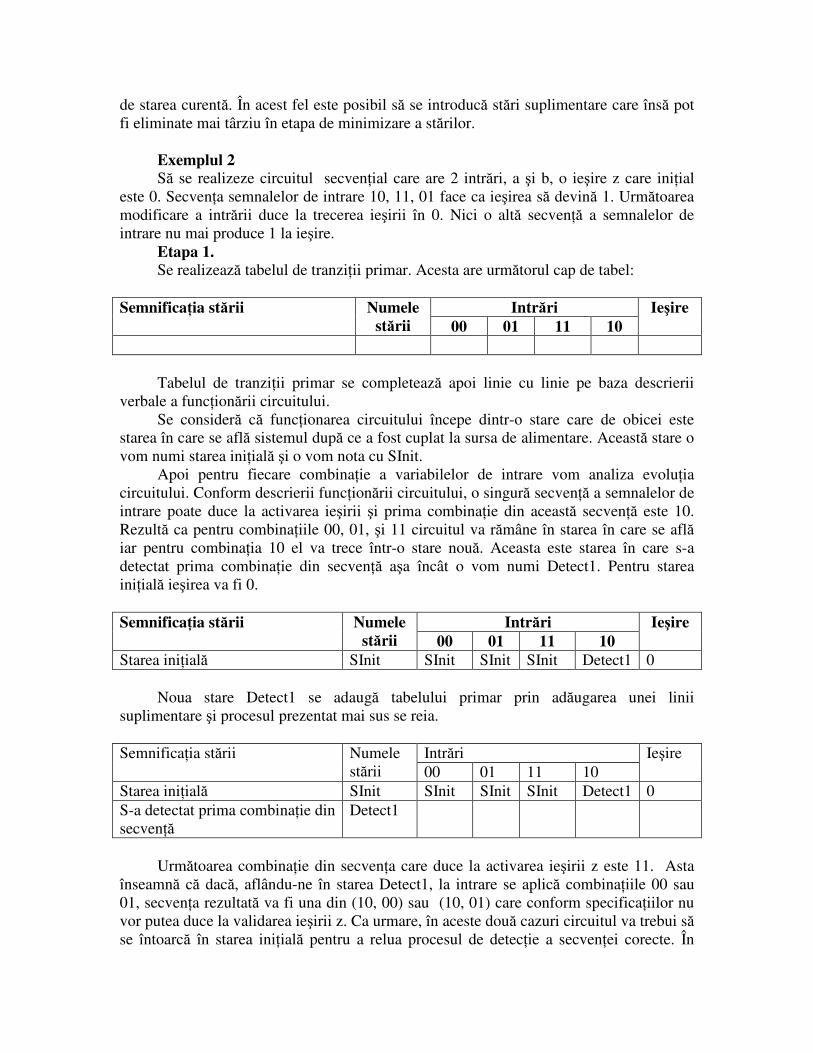
Exemplul 2 Să se realizeze circuitul secvenŃial care are 2 intrări, a şi b, o ieşire z care iniŃial
este 0. SecvenŃa semnalelor de intrare 10, 11, 01 face ca ieşirea să devină 1. Următoarea modificare a intrării duce la trecerea ieşirii în 0. Nici o altă secvenŃă a semnalelor de intrare nu mai produce 1 la ieşire.
Etapa 1. Se realizează tabelul de tranziŃii primar. Acesta are următorul cap de tabel:
SemnificaŃia stării Numele stării
Intrări Ieşire 00 01 11 10
Tabelul de tranziŃii primar se completează apoi linie cu linie pe baza descrierii
verbale a funcŃionării circuitului. Se consideră că funcŃionarea circuitului începe dintr-o stare care de obicei este
starea în care se află sistemul după ce a fost cuplat la sursa de alimentare. Această stare o vom numi starea iniŃială şi o vom nota cu SInit.
Apoi pentru fiecare combinaŃie a variabilelor de intrare vom analiza evoluŃia circuitului. Conform descrierii funcŃionării circuitului, o singură secvenŃă a semnalelor de intrare poate duce la activarea ieşirii şi prima combinaŃie din această secvenŃă este 10. Rezultă ca pentru combinaŃiile 00, 01, şi 11 circuitul va rămâne în starea în care se află iar pentru combinaŃia 10 el va trece într-o stare nouă. Aceasta este starea în care s-a detectat prima combinaŃie din secvenŃă aşa încât o vom numi Detect1. Pentru starea iniŃială ieşirea va fi 0.
SemnificaŃia stării Numele
stării Intrări Ieşire
00 01 11 10 Starea iniŃială SInit SInit SInit SInit Detect1 0
Noua stare Detect1 se adaugă tabelului primar prin adăugarea unei linii
suplimentare şi procesul prezentat mai sus se reia.
SemnificaŃia stării Numele stării
Intrări Ieşire 00 01 11 10
Starea iniŃială SInit SInit SInit SInit Detect1 0 S-a detectat prima combinaŃie din secvenŃă
Detect1
Următoarea combinaŃie din secvenŃa care duce la activarea ieşirii z este 11. Asta
înseamnă că dacă, aflându-ne în starea Detect1, la intrare se aplică combinaŃiile 00 sau 01, secvenŃa rezultată va fi una din (10, 00) sau (10, 01) care conform specificaŃiilor nu vor putea duce la validarea ieşirii z. Ca urmare, în aceste două cazuri circuitul va trebui să se întoarcă în starea iniŃială pentru a relua procesul de detecŃie a secvenŃei corecte. În
cazul în care combinaŃia la intrare este 10, rezultă că aceasta a rămas neschimbată aşa încât circuitul va rămâne în continuare în starea Detect1 aşteptând modificarea secvenŃei de intrare. Circuitul va trece într-o stare nouă doar dacă la intrare se aplică combinaŃia 11. Această nouă stare corespunde detecŃiei celei de a doua combinaŃie din secvenŃa care activează ieşirea z aşa încât o vom numi Detect2. Ieşirea circuitului rămâne în continuare 0. Tabelul primar va arăta astfel:
SemnificaŃia stării Numele
stării Intrări (ab) Ieşire
00 01 11 10 Starea iniŃială SInit SInit SInit SInit Detect1 0 S-a detectat prima combinaŃie din secvenŃă
Detect1 SInit SInit Detect2 Detect1 0
S-a detectat a doua combinaŃie din secvenŃă
Detect2
RaŃionând în mod similar rezultă că pentru combinaŃiile 00 şi 10 circuitul revine în
starea iniŃială, pentru combinaŃia 11 circuitul rămâne în starea Detect2 iar pentru combinaŃia 01 circuitul trece într-o stare nouă. Aceasta este starea în care a fost detectată şi cea de a treia combinaŃie din secvenŃă de activare a ieşirii z şi ca urmare aceasta va fi activată. Noua stare o vom numi Detect3. Din această stare circuitul revine în starea iniŃială la oricare din combinaŃiile diferite de ultima recepŃionată, adică 01.
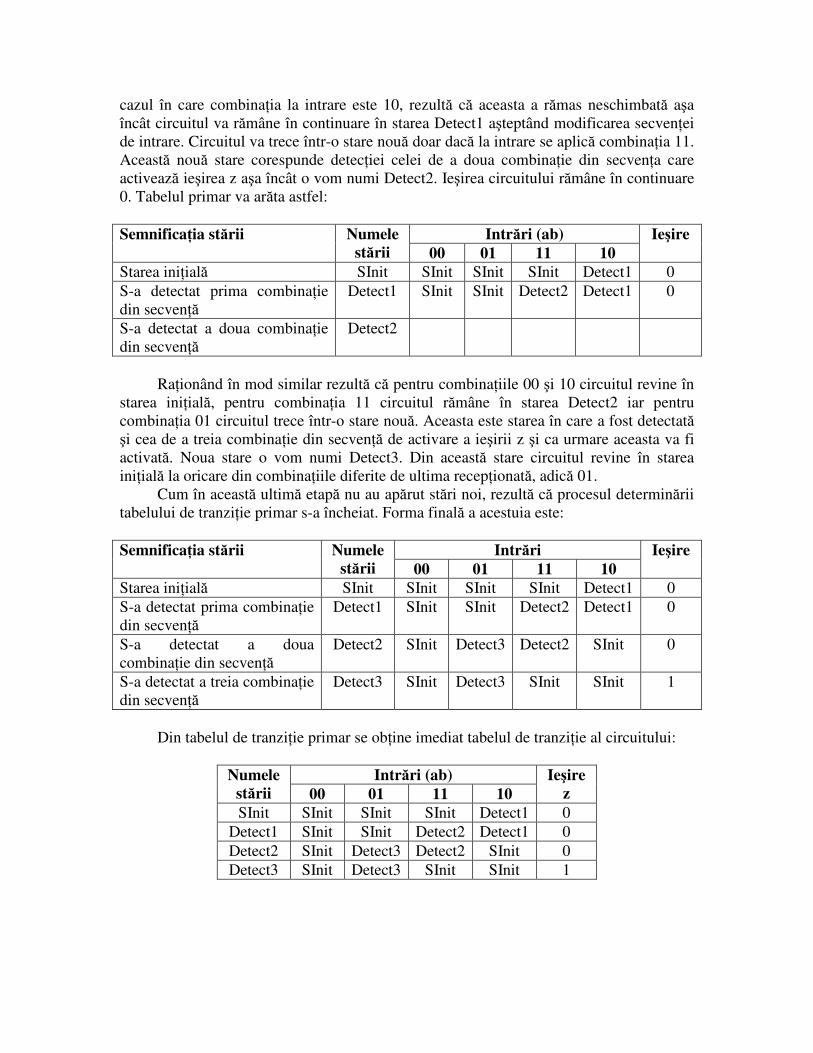
Cum în această ultimă etapă nu au apărut stări noi, rezultă că procesul determinării tabelului de tranziŃie primar s-a încheiat. Forma finală a acestuia este:
SemnificaŃia stării Numele
stării Intrări Ieşire
00 01 11 10 Starea iniŃială SInit SInit SInit SInit Detect1 0 S-a detectat prima combinaŃie din secvenŃă
Detect1 SInit SInit Detect2 Detect1 0
S-a detectat a doua combinaŃie din secvenŃă
Detect2 SInit Detect3 Detect2 SInit 0
S-a detectat a treia combinaŃie din secvenŃă
Detect3 SInit Detect3 SInit SInit 1
Din tabelul de tranziŃie primar se obŃine imediat tabelul de tranziŃie al circuitului:
Numele stării
Intrări (ab) Ieşire z 00 01 11 10
SInit SInit SInit SInit Detect1 0 Detect1 SInit SInit Detect2 Detect1 0 Detect2 SInit Detect3 Detect2 SInit 0 Detect3 SInit Detect3 SInit SInit 1

Etapa 2. În această etapă se urmăreşte eliminarea stărilor suplimentare introduse în procesul
de determinare a tabelului de tranziŃie a circuitului. Diverse metode de reducere a stărilor suplimentare pot fi găsite în manulalele de specialitate.
Etapa 3. Stările automatului sunt realizate prin itermediul variabilelor de stare. Cum aceste
variabile pot lua doar două valori rezultă că pentru n stări vom avea nevoie de cel puŃin m variabile binare, unde 2m≥n. În cazul nostru n=4 aşa încât vom utiliza 2 variabile de stare pe care le vom nota cu y1 şi y2. Vom alege următoarea codificare a stărilor:
SInit -> y1=0 y2=0 Detect1 -> y1=0 y2=1 Detect2 -> y1=1 y2=1 Detect3 -> y1=1 y2=0 În general există n! posibilităŃi de codificare a celor n stări. Etapa 4. Înlocuind codurile de mai sus în tabelul de tranziŃie obŃinem:
ab y1y2
00 01 11 10 z
00 00 00 00 01 0 01 00 00 11 01 0 11 00 10 11 00 0 10 00 10 00 00 1
Din acest tabel putem obŃine diagramele Veitch-Karnaugh (V-K) corespunzătoare funcŃiilor de stare Y1 şi Y2 corespunzătoare variabilelor de stare y1 şi y2 precum şi funcŃiei de ieşire z. Utilizând aceste diagrame putem minimiza aceste funcŃii.
Grupând valorile de 1 se obŃin următoarele expresii: Y1=a’by1+aby2 Y2=ab’y1’+aby2 z=y1y2’
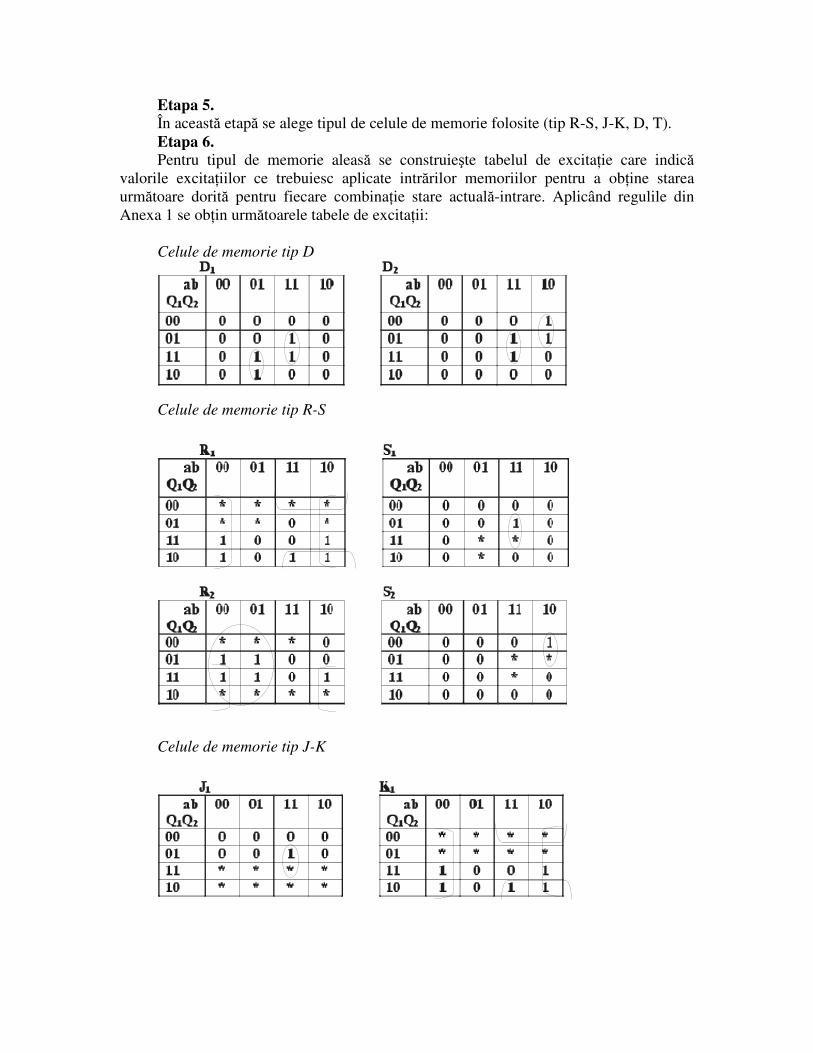
Etapa 5. În această etapă se alege tipul de celule de memorie folosite (tip R-S, J-K, D, T). Etapa 6. Pentru tipul de memorie aleasă se construieşte tabelul de excitaŃie care indică
valorile excitaŃiilor ce trebuiesc aplicate intrărilor memoriilor pentru a obŃine starea următoare dorită pentru fiecare combinaŃie stare actuală-intrare. Aplicând regulile din Anexa 1 se obŃin următoarele tabele de excitaŃii:
Celule de memorie tip D
Celule de memorie tip R-S
Celule de memorie tip J-K
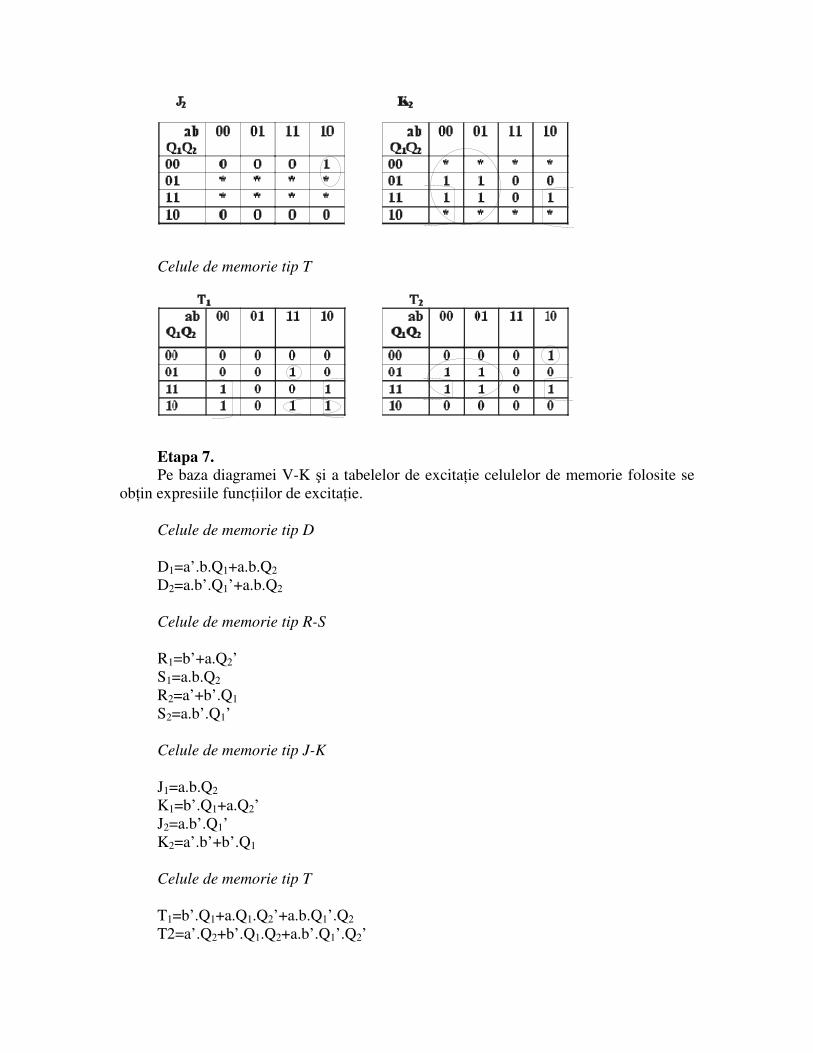
Celule de memorie tip T
Etapa 7. Pe baza diagramei V-K şi a tabelelor de excitaŃie celulelor de memorie folosite se
obŃin expresiile funcŃiilor de excitaŃie. Celule de memorie tip D
D1=a’.b.Q1+a.b.Q2 D2=a.b’.Q1’+a.b.Q2 Celule de memorie tip R-S
R1=b’+a.Q2’ S1=a.b.Q2 R2=a’+b’.Q1 S2=a.b’.Q1’ Celule de memorie tip J-K J1=a.b.Q2 K1=b’.Q1+a.Q2’ J2=a.b’.Q1’ K2=a’.b’+b’.Q1 Celule de memorie tip T T1=b’.Q1+a.Q1.Q2’+a.b.Q1’.Q2 T2=a’.Q2+b’.Q1.Q2+a.b’.Q1’.Q2’
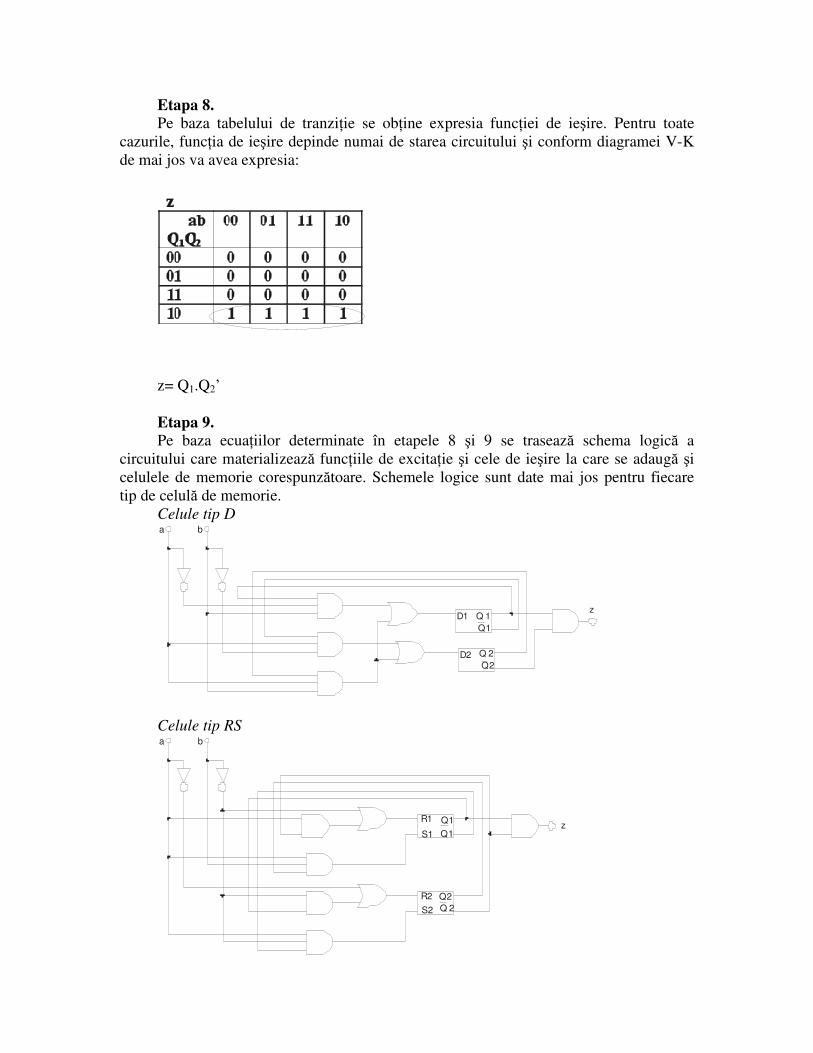
Etapa 8. Pe baza tabelului de tranziŃie se obŃine expresia funcŃiei de ieşire. Pentru toate
cazurile, funcŃia de ieşire depinde numai de starea circuitului şi conform diagramei V-K de mai jos va avea expresia:
z= Q1.Q2’ Etapa 9. Pe baza ecuaŃiilor determinate în etapele 8 şi 9 se trasează schema logică a
circuitului care materializează funcŃiile de excitaŃie şi cele de ieşire la care se adaugă şi celulele de memorie corespunzătoare. Schemele logice sunt date mai jos pentru fiecare tip de celulă de memorie.
Celule tip D
Q 1
Q1
D1
Q 2
Q2D2
a b
z
Celule tip RS
Q1
Q1
R1
S1
Q2
Q 2
R2
S2
a b
z
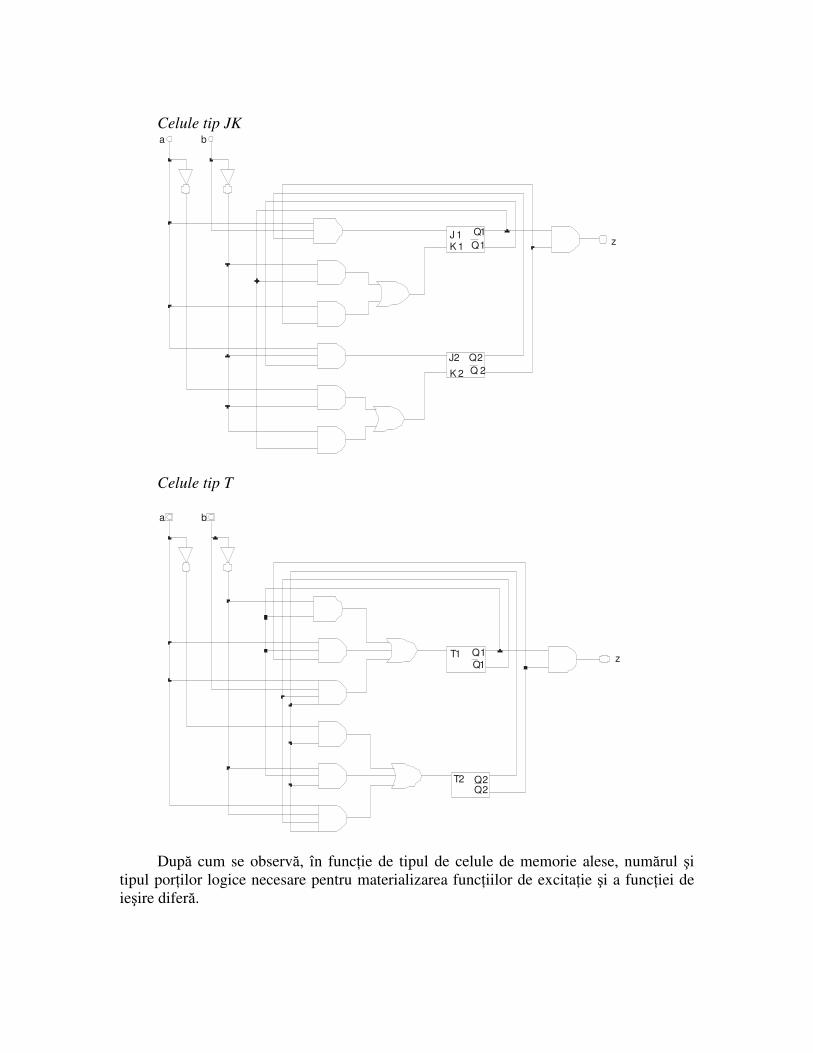
Celule tip JK
Q1
Q1J 1K 1
Q2
Q 2
J2
K 2
a b
z
Celule tip T
Q1
Q1T1
Q2Q2
T2
a b
z
După cum se observă, în funcŃie de tipul de celule de memorie alese, numărul şi
tipul porŃilor logice necesare pentru materializarea funcŃiilor de excitaŃie şi a funcŃiei de ieşire diferă.
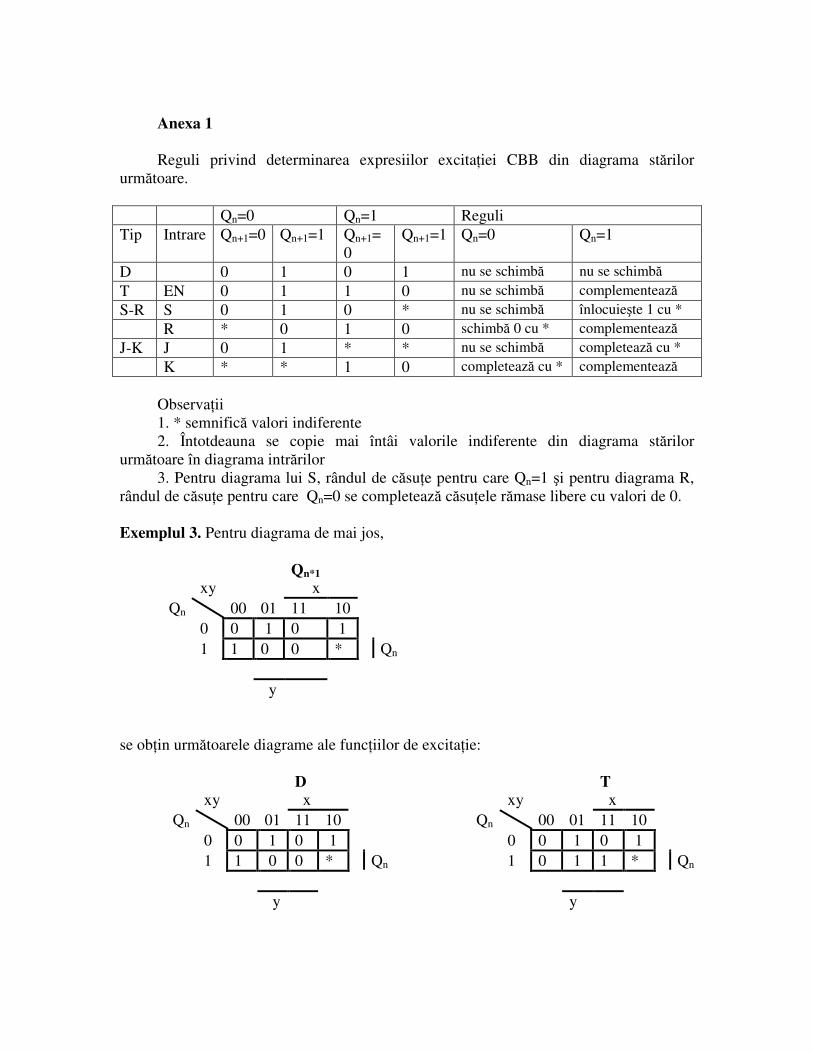
Anexa 1 Reguli privind determinarea expresiilor excitaŃiei CBB din diagrama stărilor
următoare.
Qn=0 Qn=1 Reguli Tip Intrare Qn+1=0 Qn+1=1 Qn+1=
0 Qn+1=1 Qn=0 Qn=1
D 0 1 0 1 nu se schimbă nu se schimbă
T EN 0 1 1 0 nu se schimbă complementează S-R S 0 1 0 * nu se schimbă înlocuieşte 1 cu * R * 0 1 0 schimbă 0 cu * complementează J-K J 0 1 * * nu se schimbă completează cu * K * * 1 0 completează cu * complementează
ObservaŃii 1. * semnifică valori indiferente 2. Întotdeauna se copie mai întâi valorile indiferente din diagrama stărilor
următoare în diagrama intrărilor 3. Pentru diagrama lui S, rândul de căsuŃe pentru care Qn=1 şi pentru diagrama R,
rândul de căsuŃe pentru care Qn=0 se completează căsuŃele rămase libere cu valori de 0. Exemplul 3. Pentru diagrama de mai jos, Qn*1 xy x Qn 00 01 11 10 0 0 1 0 1 1 1 0 0 * Qn y se obŃin următoarele diagrame ale funcŃiilor de excitaŃie: D T xy x xy x Qn 00 01 11 10 Qn 00 01 11 10 0 0 1 0 1 0 0 1 0 1 1 1 0 0 * Qn 1 0 1 1 * Qn y y
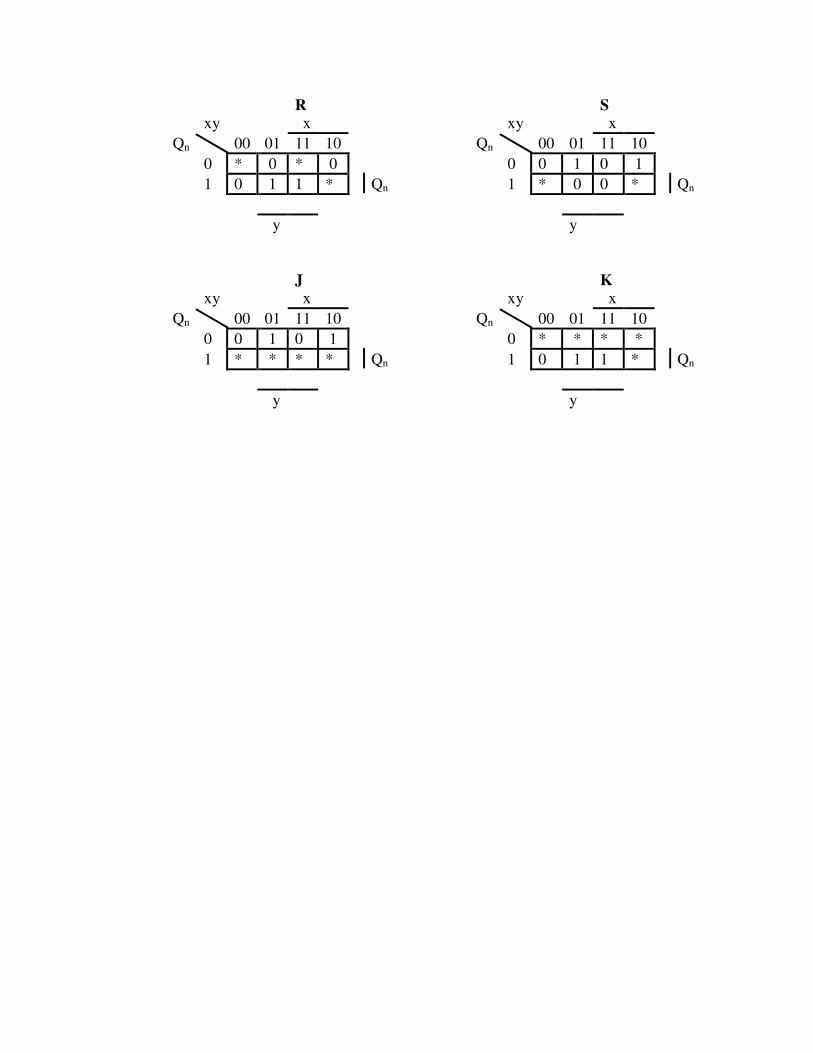
R S xy x xy x Qn 00 01 11 10 Qn 00 01 11 10 0 * 0 * 0 0 0 1 0 1 1 0 1 1 * Qn 1 * 0 0 * Qn y y J K xy x xy x Qn 00 01 11 10 Qn 00 01 11 10 0 0 1 0 1 0 * * * * 1 * * * * Qn 1 0 1 1 * Qn y y
Laborator 8. Programarea automatelor programabile în limbajul orientat pe scheme de contacte
Elementele de programare ale limbajului orientat pe scheme cu contacte
Scrierea unui program în limbajul orientat pe scheme de contacte (Ladder Diagram – LD) presupune desenarea unei diagrame (diagramă LD) similare unei scheme electrice cu contacte. Elementele componente ale diagramei LD modelează funcŃionarea elementelor unei scheme cu contacte. De aceea interpretarea funcŃionării diagramei LD este similară interpretării schemelor electrice cu contacte.
Elementele de bază utilizate pentru scrierea unui program în limbaj LD sunt contactele, bobinele, temporizatoarele, numărătoarele şi blocurile funcŃionale (funcŃiile).
Contactele
Contactele sunt elemente de programare care modelează contactele aparatelor electrice de comutaŃie. Ca şi în cazul acestora din urmă, contactele pot fi de tip n.d. şi n.î. (Fig.1).
În cadrul unui program LD, contactele pot fi asociate intrărilor AP, ieşirilor AP sau unor variabile interne. La intrări pot fi conectate dispozitive care au două stări de funcŃionare cum ar fi contactele auxiliare ale contactoarelor şi releelor, contactele n.î. sau n.d. ale butoanelor de comandă, limitatoarelor de cursă, detectoarelor de mărimi fizice, elementelor de protecŃie, ieşirile digitale ale unor aparate de măsură, protecŃie sau comandă, ieşirile digitale ale altor AP sau sisteme de comandă etc.
Pe lângă contactele obişnuite, unii producători pun la dispoziŃia programatorilor şi alte elemente de programare corespunzătoare intrărilor AP, întâlnite, îndeosebi, în cazul circuitele numerice, cum ar fi intrări cu memorie (latch), intrări active pe frontul crescător sau active pe frontul descrescător.
Bobinele
Bobinele sunt elemente de programare care modelează funcŃionarea bobinele contactoarelor şi releelor electromagnetice. Ca şi în cazul bobinelor din schemele electrice, bobinele din programele LD pot avea două stări: alimentate sau nealimentate. Ele pot fi asociate ieşirilor automatului dar şi unor variabile interne modelând astfel releele auxiliare din cadrul schemelor electrice cu contacte.
Fiecare ieşire este de asemenea identificată în mod unic, modul de identificare diferind de la un producător la altul. Fiecărei ieşiri i se asociază o singură bobină şi unul sau mai multe contacte ce pot fi utilizate în schemă în mod asemănător contactelor auxiliare ale contactoarelor şi releelor.
La aceste ieşiri pot fi conectate dispozitive care au două stări de funcŃionare cum ar fi bobinele contactoarelor sau releelor, elemente de semnalizare acustică sau luminoasă,
a) b)
IN001 IN002 IN003
Fig.1 Contacte: a) n.d., b) n.î. (două variante).
a) b)
OUT 001 OUT 002 OUT 003
Fig.2 Bobine: a) normală (două
variante), b) negată.
sarcini de putere mică, intrările digitale ale unor aparate de măsură, protecŃie sau comandă, intrările digitale ale altor AP sau sisteme de comandă etc.
În Fig.2 sunt date simbolurile folosite pentru reprezentarea bobinelor. Având în vedere că bobinele sunt asociate ieşirilor şi că acestea pot fi negate, putem întâlni ca element de programare în limbajul LD, bobina negată (Fig.2b). Într-un automat, fiecare ieşire este identificată în mod unic, identificarea fiind diferită de la producător la producător. Fiecărei ieşiri i se asociază unul sau mai multe contacte având acelaşi identificator şi care pot fi folosite în diagrama LD.
Temporizatoarele
Temporizatoarele sunt elemente de programare care modelează funcŃionarea releelor de timp şi a contactelor temporizate. Ele sunt utilizate pentru a realiza acŃiuni întârziate sau ce durează un anumit interval de timp. Producătorii de AP furnizează atât funcŃii elementare de temporizare cât şi funcŃii mai complexe. În acest fel, temporizatoarele utilizate în programele LD au o flexibilitate şi o funcŃionalitate mult mai mare decât temporizatoarele utilizate în schemele electrice.
Temporizatoarele simple permit realizarea unei acŃiuni întârziate cu un anumit interval de timp ce poate fi programat. FuncŃiile de temporizare mai complexe au în vedere obŃinerea unor temporizări variabile, funcŃie de anumite condiŃii care apar la un moment dat.
În cadrul programelor LD, un temporizator are o structură de tipul celei din Fig.3. Fiecare temporizator din schemă este identificat în mod unic, modul de identificare fiind diferit de la un producător la altul.
Materializarea temporizatoarelor în AP se realizează utilizând circuite numărătoare. Ca urmare, indicarea temporizării se va face precizând numărul de incremente de timp pe care temporizato rul îl va număra (valoarea prestabilită) şi durata unui increment (baza de timp). În cazul în care implementarea limbajului permite utilizarea unor baze de timp diferite pentru temporizatoare diferite, trebuie precizat pentru fiecare temporizator această bază de timp. Valorile uzuale pe care le poate avea baza de timp sunt 0,01s; 0,1s sau 1s.
În cazul în care baza de timp este aceeaşi pentru toate temporizatoarele, precizată în manualul de programare a AP, aceasta este omisă. Ca urmare, valoarea prestabilită poate fi exprimată în unităŃi de timp (s).
Temporizatoarele au cel puŃin o intrare de iniŃializare, la activarea căreia începe temporizarea şi o ieşire. În unele variante, acestea sunt prevăzute şi cu o intrare de validare şi încă o ieşire care reprezintă negata primei ieşiri.
Validare
IniŃializare
IeşireNr. temporizator
Baza de timp
Valoareaprestabilită
Fig.3 Structura unui temporizator.
Numărare Ieşire
Ieşire negată
Nr. numărător
Valoareprestabilită
IniŃializare
Fig.4. Structura unui numărător.
Numărătoarele
Numărătoarele sunt elemente de programare care poate primi o serie de impulsuri care sunt analizate în cadrul programului LD pentru a detecta numărul de apariŃii ale unor evenimente cum ar fi: numărul de paşi efectuaŃi de un motor pas cu pas, numărul de conectări-deconectări ale unui aparat. Numărul acestor evenimente poate fi comparat cu anumite valori prestabilite şi în funcŃie de rezultatul acestor comparaŃii pot fi luate anumite decizii şi date comenzile corespunzătoare.
Există mai multe tipuri de numărătoare, printre cele mai uzuale fiind: numărătoarele unidirecŃionale, crescătoare sau descrescătoare şi numărătoarele bidirecŃionale care pot număra atât descrescător cât şi crescător.
În cadrul programelor LD, un numărător are o structură de tipul celei din Fig.4. Fiecare numărător din schemă este identificat în mod unic, modul de identificare fiind diferit de la un producător la altul. Pentru fiecare numărător se precizează valoarea prestabilită, aceasta reprezentând valoarea maximă pe care o va număra numărătorul după care va activa ieşirea.
Numărătorul are cel puŃin două intrări, una de numărare şi una de iniŃializare (la activarea acesteia numărătorul începe să numere impulsurile sosite la intrarea de numărare) şi o ieşire. Alte variante de numărătoare sunt prevăzute şi cu o intrare de validare şi o ieşire care reprezintă negata primei ieşiri.
Blocurile funcŃionale
Pentru materializarea unor funcŃii mai complexe menite să uşureze scrierea programelor în limbaj LD sunt utilizate blocuri funcŃionale. Aceste blocuri modelează diverse categorii de funcŃii dintre care cele mai utilizate sunt următoarele: funcŃii de încărcare a unor constante numerice, funcŃii aritmetice, funcŃii logice pe 8 sau 16 biŃi, funcŃii de conversie a informaŃiei din diferite formate (binar, BCD, Gray etc), funcŃii de tratare a întreruperilor, funcŃii pentru detectarea fronturilor crescătoare sau descrescătoare a semnalelor, funcŃii pentru realizarea controlerelor şi secvenŃiatoarelor, funcŃii pentru actualizarea rapidă a intrărilor şi ieşirilor, funcŃii pentru comanda numărătoarelor de mare viteză.
De obicei, formatul şi modul de funcŃionare a blocurilor funcŃionale diferă de la un automat la altul, fiind specific fiecărui producător în parte. Prin intermediul standardului IEC 61131-3 şi a altor iniŃiative recente se caută standardizarea unor astfel de blocuri astfel încât ele să aibă nu numai aceeaşi interfaŃă dar şi acelaşi comportament, diferenŃa fiind dată numai de modul în care acestea sunt materializate pentru fiecare automat în parte. Standardul are drept scop şi asigurarea că aceste blocuri funcŃionale pot fi utilizate, folosind aceeaşi interfaŃă în oricare alt limbaj din cele 4 adoptate.
RestricŃii în scrierea programelor orientate pe scheme de contacte
Atunci când se realizează scrierea unui program LD pentru un automat programabil concret, trebuie să se Ńină seama de limitările pe care pachetul de programe le poate avea.
Limitări importante pe care le pot avea pachetele de programe ce utilizează limbajul LD sunt cele legate de formatul diagramei care materializează schema cu contacte. O parte din aceste limitări Ńin de proprietăŃile intrinseci ale limbajului; altele sunt specifice diferitelor programe comerciale şi sunt datorate soluŃiilor tehnice adoptate de firmele producătoare
pentru implementarea diverselor elemente ale limbajului. O parte a acestor limitări sunt prezentate în continuare:
a) o bobină trebuie să fie alimentată întotdeauna prin intermediul unui contact; b) bobina trebuie să fie introdusă întotdeauna la capătul din dreapta al liniei; c) toate contactele trebuie să fie pe direcŃie orizontală; d) numărul contactelor pe o linie de alimentare a unei bobine este limitat prin program; e) un grup de contacte poate alimenta o singură bobină; f) realizarea buclelor poate fi realizată într-un singur mod sau poate să nu fie permisă; g) sensul curentului prin circuit este de la stânga la dreapta diagramei. De obicei manualele de utilizare ale programelor conŃin toate informaŃiile necesare
pentru ca utilizatorul să poată scrie programul în formatul acceptat de AP.
Transcrierea schemelor electrice cu contacte
Scrierea unui program în limbajul LD poate fi realizată într-un mod simplu pornind de la schema electrică cu contacte al unui circuit care ar îndeplini aceeaşi funcŃie. Ceea ce trebuie să facă programatorul este să transpună schema respectivă folosind elementele de programare ale limbajului. Pentru acest lucru el va trebui să parcurgă următoarele etape: • definirea listei dispozitivelor conectate la intrările şi ieşirile AP, • atribuirea unor identificatori de intrare şi de ieşire acestor dispozitive, • trasarea diagramei LD, • indicarea conexiunilor la AP a elementelor de comandă.
Exemplul 1.
În Fig.5a se dă schema de comandă pentru pornirea unui motor din două puncte diferite şi oprirea dintr-un singur punct. Schema conŃine contactul n.î. F4 al unui releu termic utilizat pentru protecŃia la suprasarcină, butonul de oprire S1, butoanele de pornire S2 şi S3, contactoarele K1 şi K2 reprezentate prin bobinele contactoarelor şi contactele auxiliare K1 şi K2.
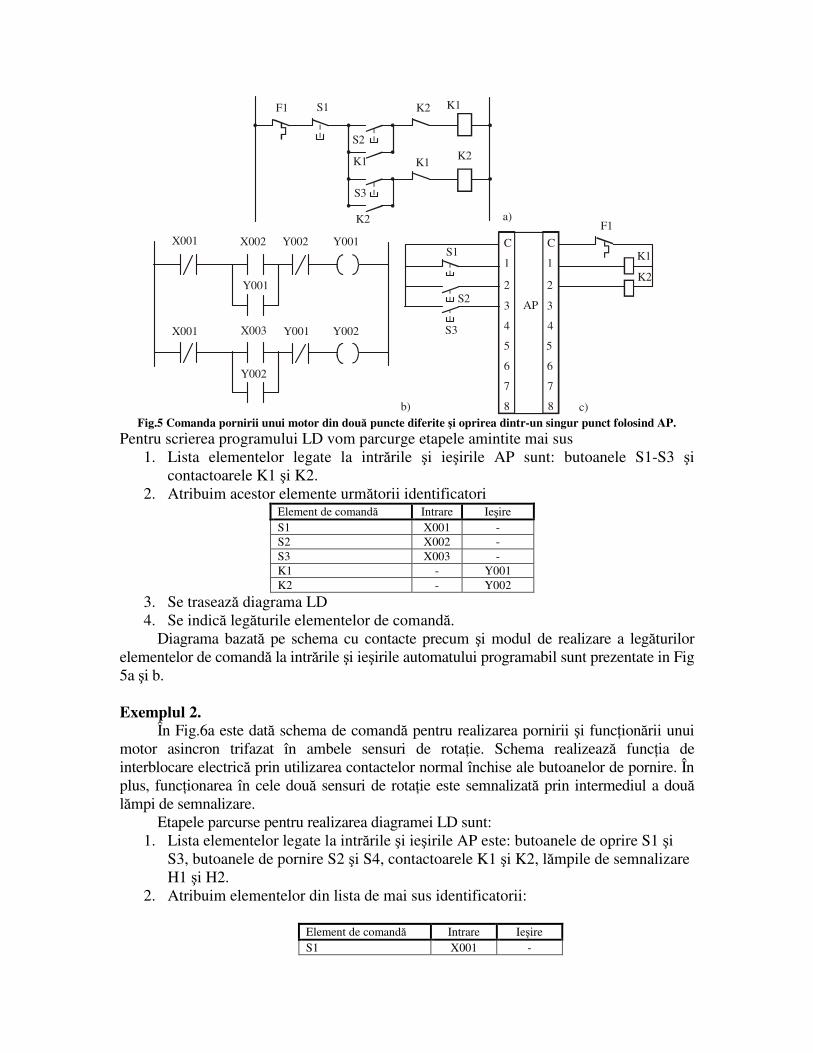
K2 a)
b) c)
X001
X001
X002
X003
Y002
Y001
Y001
C C
1 1
2 2
3 3
4 4
5 5
6 6
7 7
8 8
Y001
Y002
K2
K1
S1
S1 K1
K2
F1
APS2
S3
F1
S2
S3
Y002
K1
K2K1
Fig.5 Comanda pornirii unui motor din două puncte diferite şi oprirea dintr-un singur punct folosind AP.
Pentru scrierea programului LD vom parcurge etapele amintite mai sus 1. Lista elementelor legate la intrările şi ieşirile AP sunt: butoanele S1-S3 şi
contactoarele K1 şi K2. 2. Atribuim acestor elemente următorii identificatori
Element de comandă Intrare Ieşire S1 X001 - S2 X002 - S3 X003 - K1 - Y001 K2 - Y002
3. Se trasează diagrama LD 4. Se indică legăturile elementelor de comandă.
Diagrama bazată pe schema cu contacte precum şi modul de realizare a legăturilor elementelor de comandă la intrările şi ieşirile automatului programabil sunt prezentate in Fig 5a şi b. Exemplul 2.
În Fig.6a este dată schema de comandă pentru realizarea pornirii şi funcŃionării unui motor asincron trifazat în ambele sensuri de rotaŃie. Schema realizează funcŃia de interblocare electrică prin utilizarea contactelor normal închise ale butoanelor de pornire. În plus, funcŃionarea în cele două sensuri de rotaŃie este semnalizată prin intermediul a două lămpi de semnalizare.
Etapele parcurse pentru realizarea diagramei LD sunt: 1. Lista elementelor legate la intrările şi ieşirile AP este: butoanele de oprire S1 şi
S3, butoanele de pornire S2 şi S4, contactoarele K1 şi K2, lămpile de semnalizare H1 şi H2.
2. Atribuim elementelor din lista de mai sus identificatorii:
Element de comandă Intrare Ieşire S1 X001 -
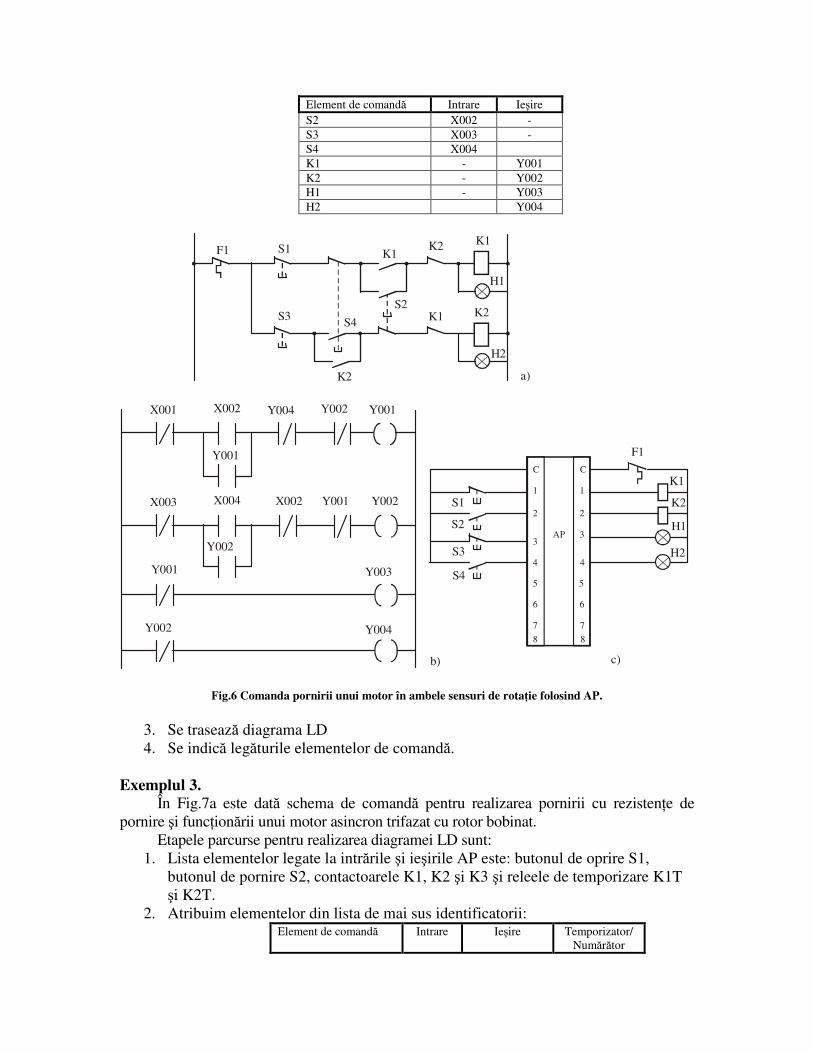
Element de comandă Intrare Ieşire S2 X002 - S3 X003 - S4 X004 K1 - Y001 K2 - Y002 H1 - Y003 H2 Y004
a)
b) c)
X001
X003
Y001
Y002
X002
X004
Y004 Y002
Y001X002
Y001
Y002
C C
1 1
2 2
33
4 4
5 5
6 6
7 7
8 8
Y001
Y002
Y003
Y004
K2K1
K1
K2
S1
S3
S1
K1
K2
F1
APS2
S3
S4
F1
S2
S4
K1
H1
H2
H1
H2
K2
Fig.6 Comanda pornirii unui motor în ambele sensuri de rotaŃie folosind AP.
3. Se trasează diagrama LD 4. Se indică legăturile elementelor de comandă.
Exemplul 3.
În Fig.7a este dată schema de comandă pentru realizarea pornirii cu rezistenŃe de pornire şi funcŃionării unui motor asincron trifazat cu rotor bobinat.
Etapele parcurse pentru realizarea diagramei LD sunt: 1. Lista elementelor legate la intrările şi ieşirile AP este: butonul de oprire S1,
butonul de pornire S2, contactoarele K1, K2 şi K3 şi releele de temporizare K1T şi K2T.
2. Atribuim elementelor din lista de mai sus identificatorii: Element de comandă Intrare Ieşire Temporizator/
Numărător
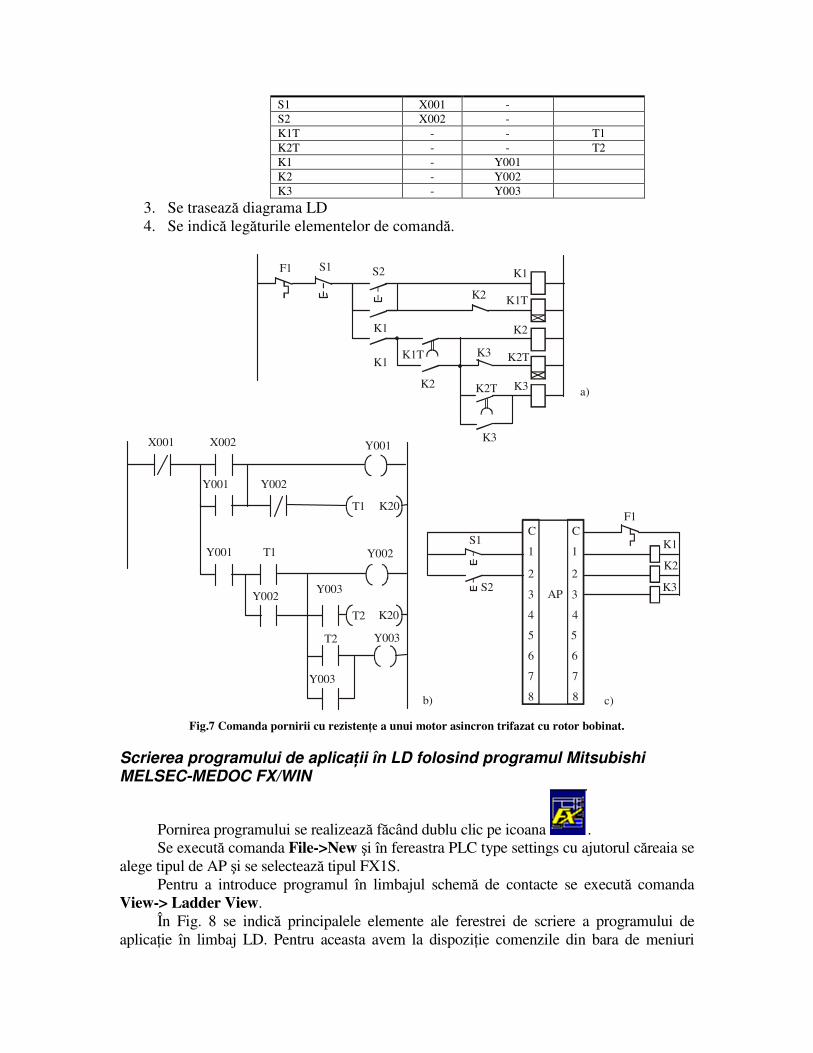
S1 X001 - S2 X002 - K1T - - T1 K2T - - T2 K1 - Y001 K2 - Y002 K3 - Y003
3. Se trasează diagrama LD 4. Se indică legăturile elementelor de comandă.
K2
K1
a)
b)
X001 X002
Y002
Y001
Y001
Y001
Y002
Y003
Y003
Y002
K2
K2
K3
K2T
K1T
S1F1 S2 K1
K1T
K2T
K3
K3
K
T2
T1
T2
K20
c)
C C
1 1
2 2
3 3
4 4
5 5
6 6
7 7
8 8
S1 K1
K2
F1
APS2
T1 K20
K3Y003
K1
Fig.7 Comanda pornirii cu rezistenŃe a unui motor asincron trifazat cu rotor bobinat.
Scrierea programului de aplicaŃii în LD folosind programul Mitsubishi MELSEC-MEDOC FX/WIN
Pornirea programului se realizează făcând dublu clic pe icoana . Se execută comanda File->New şi în fereastra PLC type settings cu ajutorul căreaia se
alege tipul de AP şi se selectează tipul FX1S. Pentru a introduce programul în limbajul schemă de contacte se execută comanda
View-> Ladder View. În Fig. 8 se indică principalele elemente ale ferestrei de scriere a programului de
aplicaŃie în limbaj LD. Pentru aceasta avem la dispoziŃie comenzile din bara de meniuri
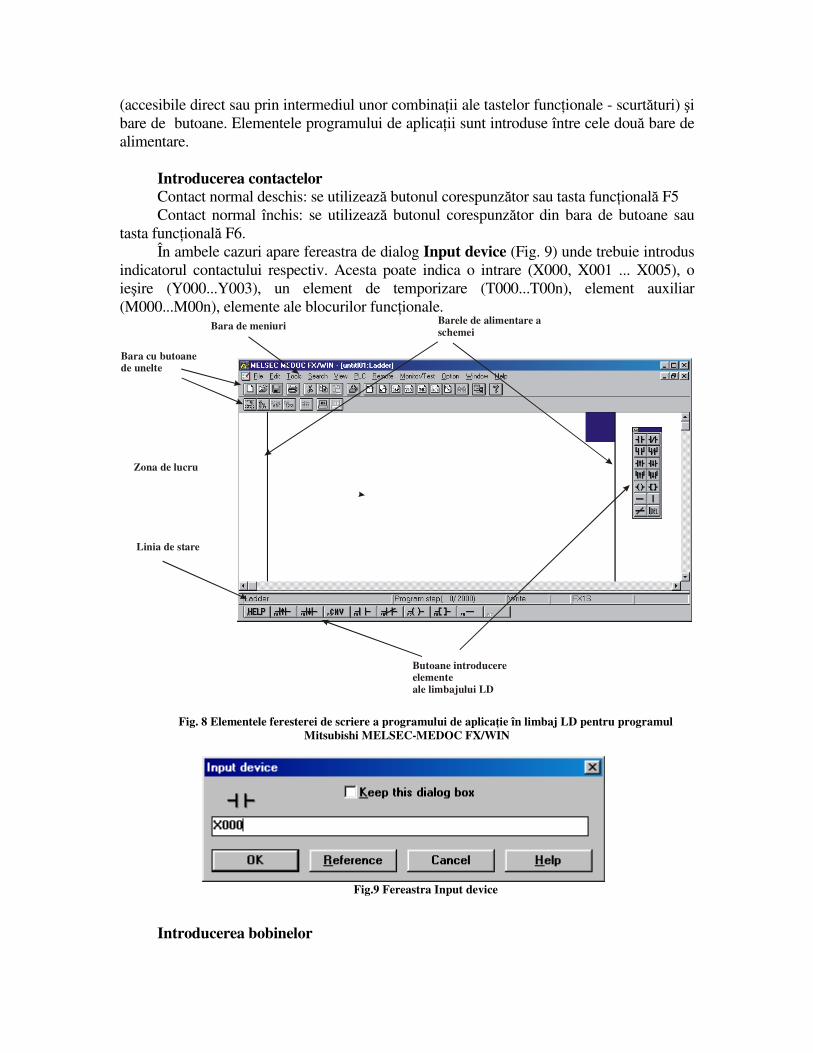
(accesibile direct sau prin intermediul unor combinaŃii ale tastelor funcŃionale - scurtături) şi bare de butoane. Elementele programului de aplicaŃii sunt introduse între cele două bare de alimentare.
Introducerea contactelor Contact normal deschis: se utilizează butonul corespunzător sau tasta funcŃională F5 Contact normal închis: se utilizează butonul corespunzător din bara de butoane sau
tasta funcŃională F6. În ambele cazuri apare fereastra de dialog Input device (Fig. 9) unde trebuie introdus
indicatorul contactului respectiv. Acesta poate indica o intrare (X000, X001 ... X005), o ieşire (Y000...Y003), un element de temporizare (T000...T00n), element auxiliar (M000...M00n), elemente ale blocurilor funcŃionale.
Zona de lucru
Bara cu butoane de unelte
Bara de meniuri
Linia de stare
Butoane introducere elementeale limbajului LD
Barele de alimentare aschemei
Fig. 8 Elementele feresterei de scriere a programului de aplicaŃie în limbaj LD pentru programul
Mitsubishi MELSEC-MEDOC FX/WIN
Fig.9 Fereastra Input device
Introducerea bobinelor
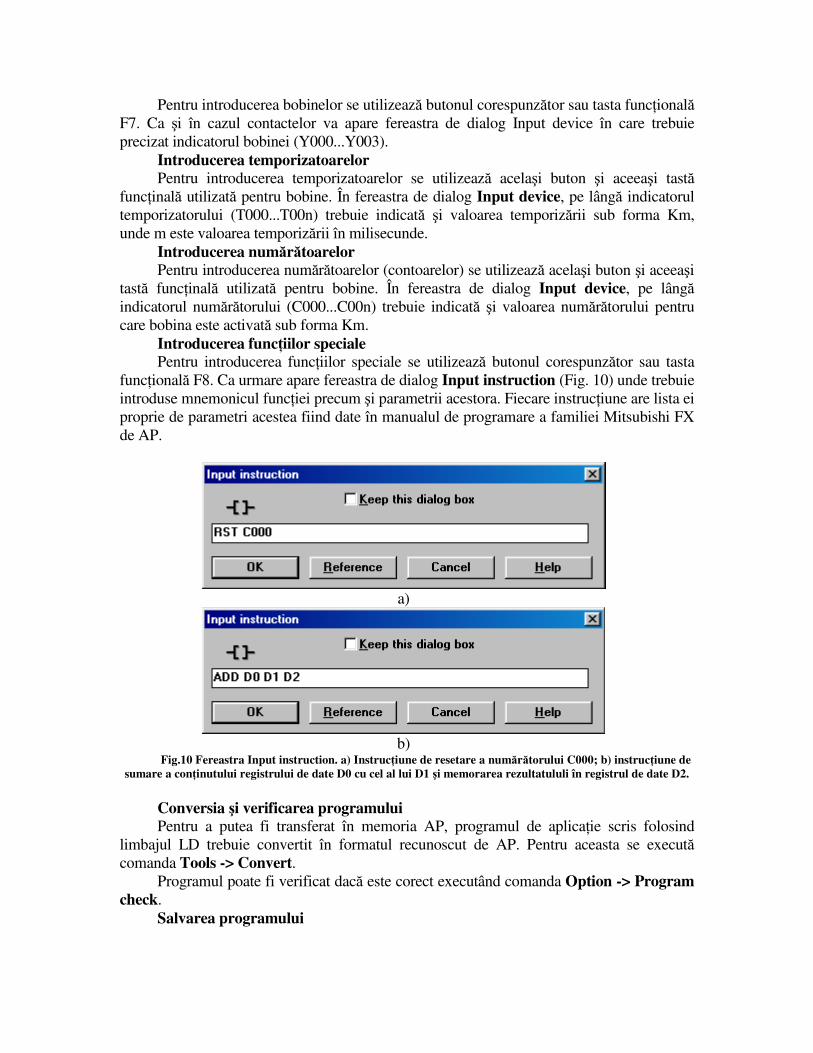
Pentru introducerea bobinelor se utilizează butonul corespunzător sau tasta funcŃională F7. Ca şi în cazul contactelor va apare fereastra de dialog Input device în care trebuie precizat indicatorul bobinei (Y000...Y003).
Introducerea temporizatoarelor Pentru introducerea temporizatoarelor se utilizează acelaşi buton şi aceeaşi tastă
funcŃinală utilizată pentru bobine. În fereastra de dialog Input device, pe lângă indicatorul temporizatorului (T000...T00n) trebuie indicată şi valoarea temporizării sub forma Km, unde m este valoarea temporizării în milisecunde.
Introducerea numărătoarelor Pentru introducerea numărătoarelor (contoarelor) se utilizează acelaşi buton şi aceeaşi
tastă funcŃinală utilizată pentru bobine. În fereastra de dialog Input device, pe lângă indicatorul numărătorului (C000...C00n) trebuie indicată şi valoarea numărătorului pentru care bobina este activată sub forma Km.
Introducerea funcŃiilor speciale Pentru introducerea funcŃiilor speciale se utilizează butonul corespunzător sau tasta
funcŃională F8. Ca urmare apare fereastra de dialog Input instruction (Fig. 10) unde trebuie introduse mnemonicul funcŃiei precum şi parametrii acestora. Fiecare instrucŃiune are lista ei proprie de parametri acestea fiind date în manualul de programare a familiei Mitsubishi FX de AP.
a)
b)
Fig.10 Fereastra Input instruction. a) InstrucŃiune de resetare a numărătorului C000; b) instrucŃiune de sumare a conŃinutului registrului de date D0 cu cel al lui D1 şi memorarea rezultatululi în registrul de date D2.
Conversia şi verificarea programului Pentru a putea fi transferat în memoria AP, programul de aplicaŃie scris folosind
limbajul LD trebuie convertit în formatul recunoscut de AP. Pentru aceasta se execută comanda Tools -> Convert.
Programul poate fi verificat dacă este corect executând comanda Option -> Program check.
Salvarea programului

Programul de aplicaŃie poate fi salvat folosind comanda File -> Save as. Numele fişierului trebuie sa respecte convenŃia de nume pentru fişierele sistemului de operare MS-DOS.
Procedeu experimental
1. Se vor scrie programele de aplicaŃii scrise în LD pentru AP din exemplele 1-3. 2. Se va scrie programul de aplicaŃie scris în LD pentru un AP pentru comanda a
trei motoare conform următoarelor condiŃii: • motorul al doilea porneşte după 5 secunde după pornirea primului motor; • motorul al treilea porneşte după 10 secunde după pornirea celui de al doilea motor • lampa de semnalizare avertizează situaŃia în care doar unul din cele trei motoare sunt în stare de funcŃionare
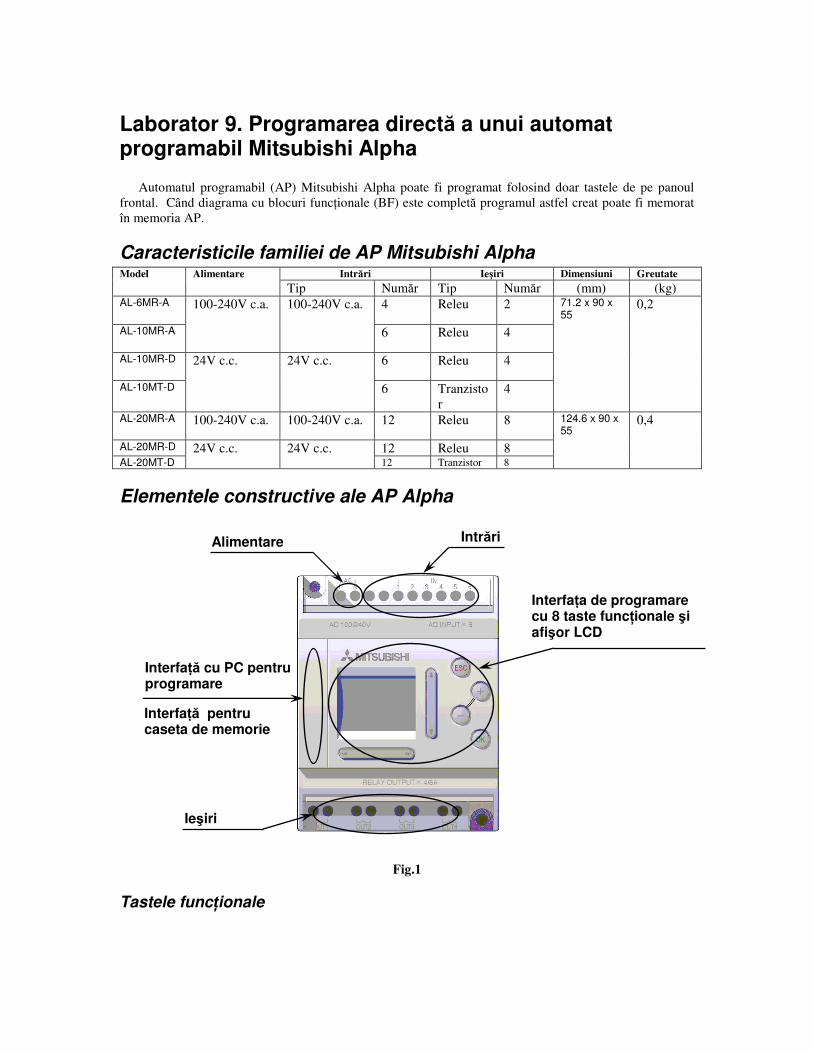
Laborator 9. Programarea directă a unui automat programabil Mitsubishi Alpha
Automatul programabil (AP) Mitsubishi Alpha poate fi programat folosind doar tastele de pe panoul frontal. Când diagrama cu blocuri funcŃionale (BF) este completă programul astfel creat poate fi memorat în memoria AP.
Caracteristicile familiei de AP Mitsubishi Alpha Model Alimentare Intrări Ieşiri Dimensiuni Greutate
Tip Număr Tip Număr (mm) (kg) AL-6MR-A
100-240V c.a. 100-240V c.a. 4 Releu 2 71.2 x 90 x
55
0,2
AL-10MR-A
6 Releu 4
AL-10MR-D
24V c.c. 24V c.c. 6 Releu 4
AL-10MT-D
6 Tranzisto
r 4
AL-20MR-A
100-240V c.a. 100-240V c.a. 12 Releu 8 124.6 x 90 x
55
0,4
AL-20MR-D 24V c.c. 24V c.c. 12 Releu 8 AL-20MT-D 12 Tranzistor 8
Elementele constructive ale AP Alpha
Fig.1
Tastele funcŃionale
Intrări
Ieşiri
InterfaŃa de programare cu 8 taste funcŃionale şi afişor LCD
Alimentare
InterfaŃă cu PC pentru programare
InterfaŃă pentru caseta de memorie
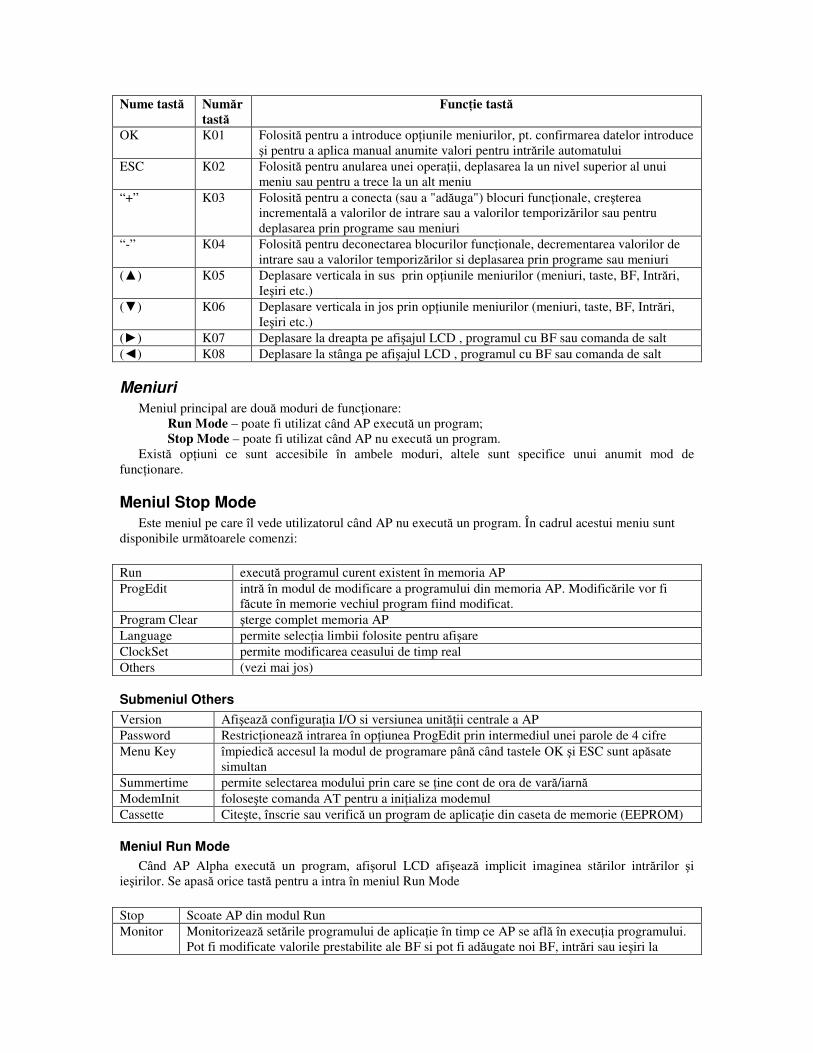
Nume tastă Număr tastă
FuncŃie tastă
OK K01 Folosită pentru a introduce opŃiunile meniurilor, pt. confirmarea datelor introduce şi pentru a aplica manual anumite valori pentru intrările automatului
ESC K02 Folosită pentru anularea unei operaŃii, deplasarea la un nivel superior al unui meniu sau pentru a trece la un alt meniu
“+” K03 Folosită pentru a conecta (sau a "adăuga") blocuri funcŃionale, creşterea incrementală a valorilor de intrare sau a valorilor temporizărilor sau pentru deplasarea prin programe sau meniuri
“-” K04 Folosită pentru deconectarea blocurilor funcŃionale, decrementarea valorilor de intrare sau a valorilor temporizărilor si deplasarea prin programe sau meniuri
(▲) K05 Deplasare verticala in sus prin opŃiunile meniurilor (meniuri, taste, BF, Intrări, Ieşiri etc.)
(▼) K06 Deplasare verticala in jos prin opŃiunile meniurilor (meniuri, taste, BF, Intrări, Ieşiri etc.)
(►) K07 Deplasare la dreapta pe afişajul LCD , programul cu BF sau comanda de salt (◄) K08 Deplasare la stânga pe afişajul LCD , programul cu BF sau comanda de salt
Meniuri
Meniul principal are două moduri de funcŃionare: Run Mode – poate fi utilizat când AP execută un program; Stop Mode – poate fi utilizat când AP nu execută un program.
Există opŃiuni ce sunt accesibile în ambele moduri, altele sunt specifice unui anumit mod de funcŃionare.
Meniul Stop Mode
Este meniul pe care îl vede utilizatorul când AP nu execută un program. În cadrul acestui meniu sunt disponibile următoarele comenzi: Run execută programul curent existent în memoria AP ProgEdit intră în modul de modificare a programului din memoria AP. Modificările vor fi
făcute în memorie vechiul program fiind modificat. Program Clear şterge complet memoria AP Language permite selecŃia limbii folosite pentru afişare ClockSet permite modificarea ceasului de timp real Others (vezi mai jos)
Submeniul Others
Version Afişează configuraŃia I/O si versiunea unităŃii centrale a AP Password RestricŃionează intrarea în opŃiunea ProgEdit prin intermediul unei parole de 4 cifre Menu Key împiedică accesul la modul de programare până când tastele OK şi ESC sunt apăsate
simultan Summertime permite selectarea modului prin care se Ńine cont de ora de vară/iarnă ModemInit foloseşte comanda AT pentru a iniŃializa modemul Cassette Citeşte, înscrie sau verifică un program de aplicaŃie din caseta de memorie (EEPROM)
Meniul Run Mode
Când AP Alpha execută un program, afişorul LCD afişează implicit imaginea stărilor intrărilor şi ieşirilor. Se apasă orice tastă pentru a intra în meniul Run Mode Stop Scoate AP din modul Run Monitor Monitorizează setările programului de aplicaŃie în timp ce AP se află în execuŃia programului.
Pot fi modificate valorile prestabilite ale BF si pot fi adăugate noi BF, intrări sau ieşiri la
program. Programul din memoria AP nu va fi modificat. ClockSet Vezi Stop Mode Language Vezi Stop Mode Others Vezi Stop Mode
Meniul Edit
Poate fi selectat când AP este in opŃiunea ProgEdit sau Monitor. ProgSize Afişează numărul de BF utilizate şi procentul din memorie care este folosită. Jump Realizează trecerea la un meniu care indică locurile în care putem merge într-un program: M
– biŃii sistem (1-5), I - intrările AP (4,6 sau 12), O – ieşirile AP (2,4 sau 8), K – taste (1-8), B – blocuri funcŃionale create de utilizator
New FB Creează un nou BF din cele 22 predefinite de producător Exit revine la meniul principal Mnemonic atribuie o mnemonică liniei de program curente.
Meniul de editare a BF
Meniul de editare a BF poate fi accesat din modul ProgEdit sau Monitor. Setup FB Se precizează valorile optime pentru BF astfel încât să îşi îndeplinească funcŃiile în cadrul
programului de aplicaŃie Change No Modifica numărul BF Delete FB Şterge BF selectat
Afişorul LCD
Prin intermediul afişorului LCD pot fi afişate şi alte informaŃii în afara meniurilor AP.
Imaginea I/O
Primul lucru care este afişat de afişorul LCD este imaginea I/O (intrări/ieşiri) şi ceasul de timp real care indică ora curentă.
Fiecărei intrări şi ieşiri îi corespunde un cerc. Dacă acesta este gol înseamnă că intrarea/ieşirea respectivă este inactivă. Dacă cercul este plin, înseamnă că intrarea/ieşirea este activă.
Pentru ceasul de timp real, modul corespunzător orarului de vară este indicat prin afişarea literei s în faŃa orei afişate.
FuncŃia LCD
Prin această funcŃie pot fi afişate informaŃii pe 4 linii, fiecare linie conŃinând maxim 10 caractere.
Elementele programului de aplicaŃii
Elementele programului de aplicaŃii sunt sub forma unor blocuri. Fiecare bloc are o anumită formă şi se
indică numărul blocului, numărul de intrări disponibile, ieşirile disponibile şi mnemonicul blocului (indică funcŃia blocului).
Blocuri de intrare
Corespund intrărilor AP (I01-I12), intrărilor de la tastatură (K01-K08) şi biŃilor sistem (M01-M05). Numărul intrării este in colŃul dreapta sus, tipul de intrare în dreapta jos iar ieşirea în partea dreaptă.
Blocuri funcŃionale
BF pot avea până la 4 intrări reprezentate în partea stângă a blocului iar ieşirile sunt reprezentate în partea dreaptă. Unele BF pot conŃine date pentru a fi folosite în comparaŃii sau sunt folosite pentru a afişa
diverse mesaje. Aceste BF nu au ieşiri. Numărul şi mnemonicul BF sunt reprezentate în colŃul dreapta sus respectiv dreapta jos al simbolului.
Blocuri de ieşire
Blocurile de ieşire au o singură intrare şi o singură ieşire. Numărul şi mnemonicul BF sunt reprezentate în colŃul dreapta sus respectiv dreapta jos al simbolului.
Blocuri conectate
Blocurile care sunt conectate pot fi reprezentate simultan pe afişajul LCD. Blocul care furnizează semnalul de ieşire este reprezentat în partea stângă a afişorului. Borna de intrare care primeşte semnalul va fi afişat intermitent. O bornă de intrare care este deja conectată va fi afişată printr-un triunghi plin.
Conectarea blocurilor
Conectarea blocului sursa cu blocul receptor al semnalului
Se execută paşii: 1) se selectează blocul sursă, se face deplasare spre dreapta până ieşirea blocului este afişată
intermitent. În cazul în care se doreşte adăugarea unui bloc nou se apasă tasta "+". 2) în dreapta blocului sursă apar o serie de opŃiuni ce includ ieşiri ale AP disponibile, BF care au
borne de intrare libere, adăugarea unui nou BF. Se face selecŃia cu tasta "OK" 3) blocul receptor va afişa cât mai multe dintre bornele de intrare (uneori nu toate acestea vor
încăpea pe afişaj). Bornele libere sunt reprezentate cu ">" iar cele conectate deja cu un triunghi plin. Un cursor "Connect" va fi afişat deasupra sau dedesubtul blocului din stânga. OpŃiunea curentă va fi afişată intermitent. Se parcurg opŃiunile folosind tastele de deplasare şi se acceptă opŃiunea dorită apăsând tasta "OK".
Conectarea blocului receptor al semnalului cu blocul sursa
Se execută paşii: 1) se selectează blocul care va recepŃiona semnalul 2) deoarece bornele de ieşire pot avea mai multe conexiuni, vor fi afişate toate opŃiunile posibile
(taste, BF, intrări şi ieşiri ale AP) incluzând şi cea de adăugare a unui BF nou. Se parcurg opŃiunile posibile până la cea dorită care este selectată prin apăsarea tastei "OK"
3) conexiunea selectată va fi afişată intermitent pe ecran împreună cu "Connect". Pentru acceptarea conexiunii se apasă tasta "OK".
Deconectarea a două blocuri Se face deplasarea până la conexiunea care trebuie eliminată. Se apasă tasta "-" pentru a comanda deconectarea. Va apare cuvântul "Disconnect". Se apasă "OK" pentru validarea comenzii.
Deplasarea printre blocurile programului de aplicaŃie
Deplasarea între BF se poate realiza cu tastele de deplasare. Aceasta se realizează de-a lungul legăturilor care există între blocuri.
Se poate sări de la un bloc la altul folosind comanda "Jump".
BiŃii sistem
BiŃii sistem au fost creaŃi pentru a furniza semnale corespunzătoare valorilor logice constante şi pentru a oferi informaŃii despre funcŃionarea ceasului de timp real. Tastă Descriere M01 Întotdeauna active - "ON" - (echivalent lul "1" logic) M02 Întotdeauna inactiv - “OFF” - (echivalent lui "0" logic) M03 0.5 secunde active ("ON"), 0.5 secunde inactiv ("OFF") M04 Activ (“ON”) când apare o eroarea a ceasului de timp real

Tastă Descriere M05 Activ (“ON”) când este activată orarul de vară
Blocurile funcŃionale
În tabelul de mai jos este descrisă pe scurt funcŃionalitatea BF şi memoria pe care o consumă. Bloc funcŃional OcteŃi Descriere AND 19 FuncŃia SI. Intrările nefolosite sunt considerate active OR 19 FuncŃia SAU. Intrările nefolosite sunt considerate inactive XOR 13 FuncŃia SAU EXCLUSIV NAND 19 FuncŃia SI-NU. Intrările nefolosite sunt considerate inactive NOR 19 FuncŃia SAU-NU. Intrările nefolosite sunt considerate active NOT 10 FuncŃia NU BOOLEAN 1(1) EcuaŃie logică folosind operaŃiile SI, SAU, XOR, NU, paranteze şi
intrările selectate ca variabile. SET/RESET 14 Bistabil DELAY 19 Element de întârziere pe frontul crescător, descrescător sau ambele ale
semnalului de intrare. ONE SHOT 17 Trimite un singur puls. Bazat pe semnal de intrare sau pe timp.
Disponibilă o bornă de resetare. PULSE 10 Trimite un puls pe frontul crescător, descrescător sau ambele ale
semnalului de intrare. FLICKER 19 Trimite un tren de impulsuri. Se pot preciza timpii pentru stările
activ/inactiv, repetiŃia, durata sau funcŃionare continuă ALT 13 Ieşirea basculează în starea opusă cu fiecare impuls aplicat la intrare COUNTER 16 Numărător. Poate fi resetat U/D COUNTER Numărător bidirecŃional. Poate fi precizată o valoare prestabilită pentru
care ieşire devine activă ("ON") COMPARE 17 Compară două valori folosind una din relaŃiile: <,>,=,<=,>=,<> TIME SWITCH 2(2) Foloseşte ceasul de timp real pentru a activa/inactiva ieşirea. Poate fi
programat săptămânal sau calendaristic. OFFSET GAIN 22 Manipulează valorile analogice : y = A/B*x + C; Fixează limitele
inferioară şi superioară DISPLAY 3(3) Afişează mesaje sau date pe afişorul LCD ZONE COMPARE 20 Compară o valoare cu un domeniu de valori (analogice sau valori ale BF) SHMITT TRIGGER 19 Activează intrarea pentru o valoare limită superioară şi o dezactivează
pentru o valoare limită inferioară (sau invers) Hour Meter 19 Înregistrează timpul ce a trecut de la activarea unui semnal System Outputs 10 Comandă dispozitive externe AP prin intermediul releelor sau
tranzistoarelor. 1) nr.de octeŃi folosiŃi=19+1x(nr. caractere din ecuaŃie) 2) nr.de octeŃi folosiŃi=8+4x(nr. de comutări) 3) nr.de octeŃi folosiŃi=13+1x(nr. de caractere afişate)
Procedeu experimental 1. Folosind tastele funcŃionale, introduceŃi în memoria AP Alpha schema din Fig.2. 2. RealizaŃi o schemă de comandă care să poată fi implementată folosind un AP Alpha cu 6 intrări şi 4 ieşiri şi care să realizeze comanda a trei motoare conform următoarelor condiŃii: - motorul al doilea porneşte după 5 secunde după pornirea primului motor; - motorul al treilea porneşte după 10 secunde după pornirea celui de al doilea motor
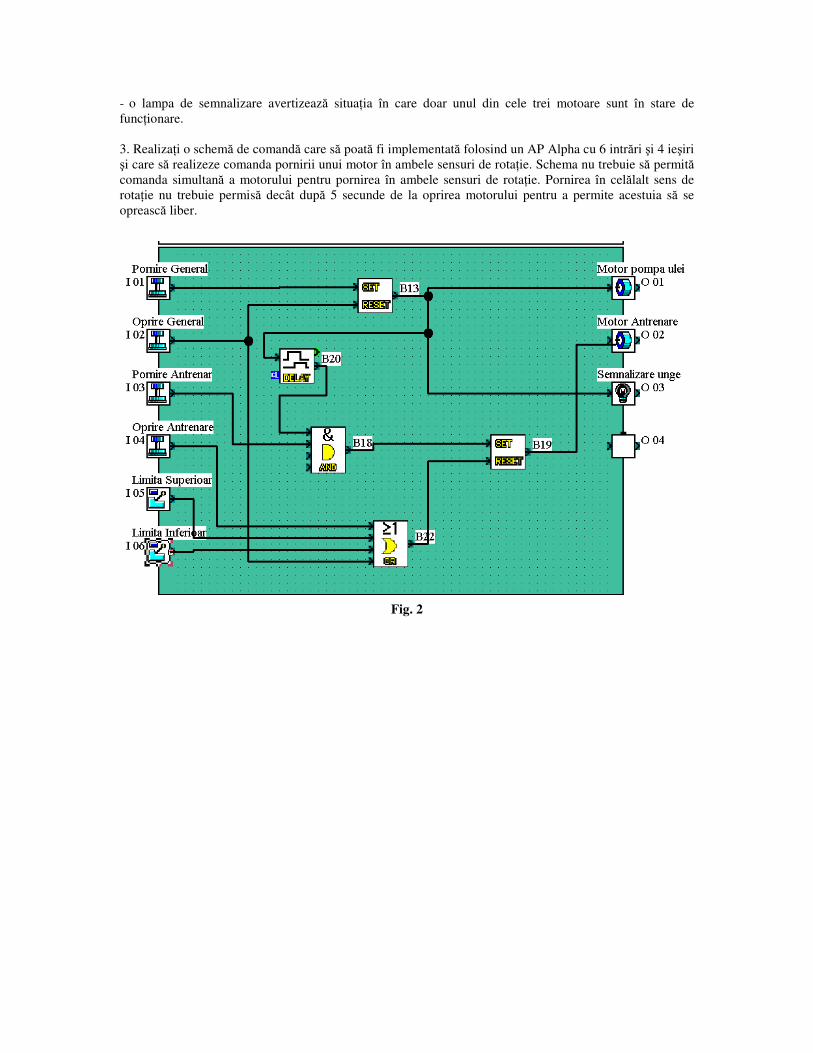
- o lampa de semnalizare avertizează situaŃia în care doar unul din cele trei motoare sunt în stare de funcŃionare. 3. RealizaŃi o schemă de comandă care să poată fi implementată folosind un AP Alpha cu 6 intrări şi 4 ieşiri şi care să realizeze comanda pornirii unui motor în ambele sensuri de rotaŃie. Schema nu trebuie să permită comanda simultană a motorului pentru pornirea în ambele sensuri de rotaŃie. Pornirea în celălalt sens de rotaŃie nu trebuie permisă decât după 5 secunde de la oprirea motorului pentru a permite acestuia să se oprească liber.
Fig. 2
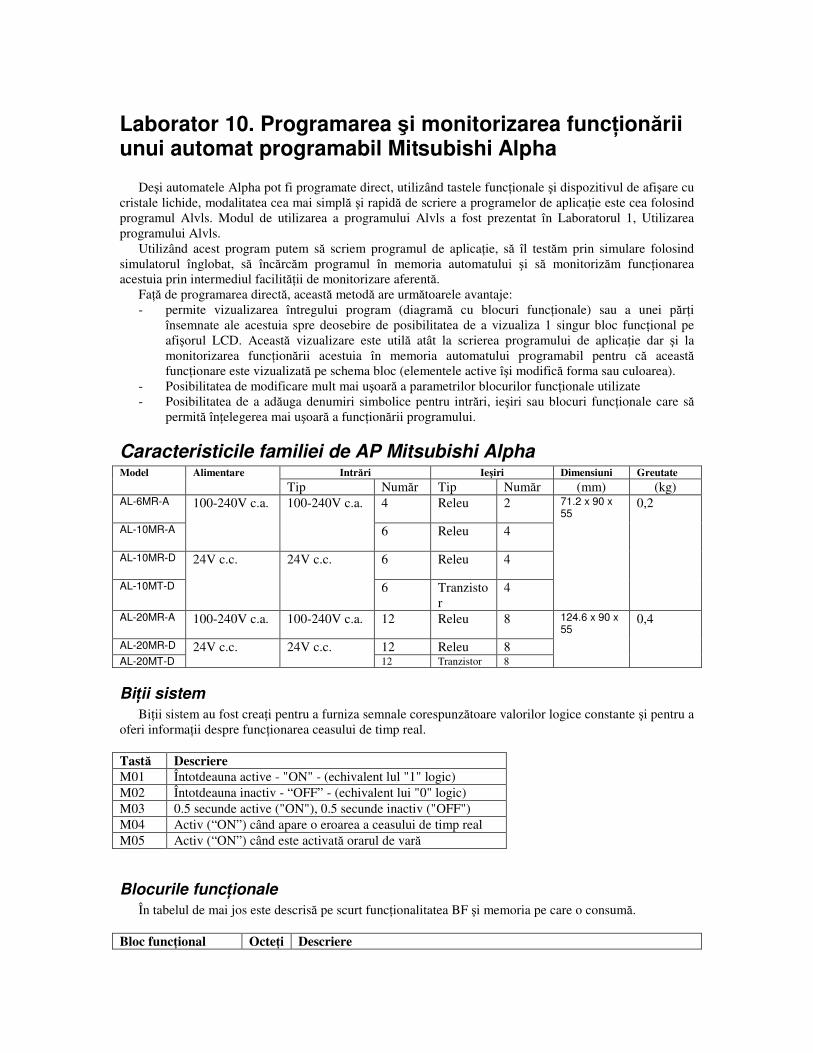
Laborator 10. Programarea şi monitorizarea funcŃionării unui automat programabil Mitsubishi Alpha
Deşi automatele Alpha pot fi programate direct, utilizând tastele funcŃionale şi dispozitivul de afişare cu cristale lichide, modalitatea cea mai simplă şi rapidă de scriere a programelor de aplicaŃie este cea folosind programul Alvls. Modul de utilizarea a programului Alvls a fost prezentat în Laboratorul 1, Utilizarea programului Alvls.
Utilizând acest program putem să scriem programul de aplicaŃie, să îl testăm prin simulare folosind simulatorul înglobat, să încărcăm programul în memoria automatului şi să monitorizăm funcŃionarea acestuia prin intermediul facilităŃii de monitorizare aferentă.
FaŃă de programarea directă, această metodă are următoarele avantaje: - permite vizualizarea întregului program (diagramă cu blocuri funcŃionale) sau a unei părŃi
însemnate ale acestuia spre deosebire de posibilitatea de a vizualiza 1 singur bloc funcŃional pe afişorul LCD. Această vizualizare este utilă atât la scrierea programului de aplicaŃie dar şi la monitorizarea funcŃionării acestuia în memoria automatului programabil pentru că această funcŃionare este vizualizată pe schema bloc (elementele active îşi modifică forma sau culoarea).
- Posibilitatea de modificare mult mai uşoară a parametrilor blocurilor funcŃionale utilizate - Posibilitatea de a adăuga denumiri simbolice pentru intrări, ieşiri sau blocuri funcŃionale care să
permită înŃelegerea mai uşoară a funcŃionării programului.
Caracteristicile familiei de AP Mitsubishi Alpha Model Alimentare Intrări Ieşiri Dimensiuni Greutate
Tip Număr Tip Număr (mm) (kg) AL-6MR-A
100-240V c.a. 100-240V c.a. 4 Releu 2 71.2 x 90 x
55
0,2
AL-10MR-A
6 Releu 4
AL-10MR-D
24V c.c. 24V c.c. 6 Releu 4
AL-10MT-D
6 Tranzisto
r 4
AL-20MR-A
100-240V c.a. 100-240V c.a. 12 Releu 8 124.6 x 90 x
55
0,4
AL-20MR-D 24V c.c. 24V c.c. 12 Releu 8 AL-20MT-D 12 Tranzistor 8
BiŃii sistem
BiŃii sistem au fost creaŃi pentru a furniza semnale corespunzătoare valorilor logice constante şi pentru a oferi informaŃii despre funcŃionarea ceasului de timp real. Tastă Descriere M01 Întotdeauna active - "ON" - (echivalent lul "1" logic) M02 Întotdeauna inactiv - “OFF” - (echivalent lui "0" logic) M03 0.5 secunde active ("ON"), 0.5 secunde inactiv ("OFF") M04 Activ (“ON”) când apare o eroarea a ceasului de timp real M05 Activ (“ON”) când este activată orarul de vară
Blocurile funcŃionale
În tabelul de mai jos este descrisă pe scurt funcŃionalitatea BF şi memoria pe care o consumă. Bloc funcŃional OcteŃi Descriere
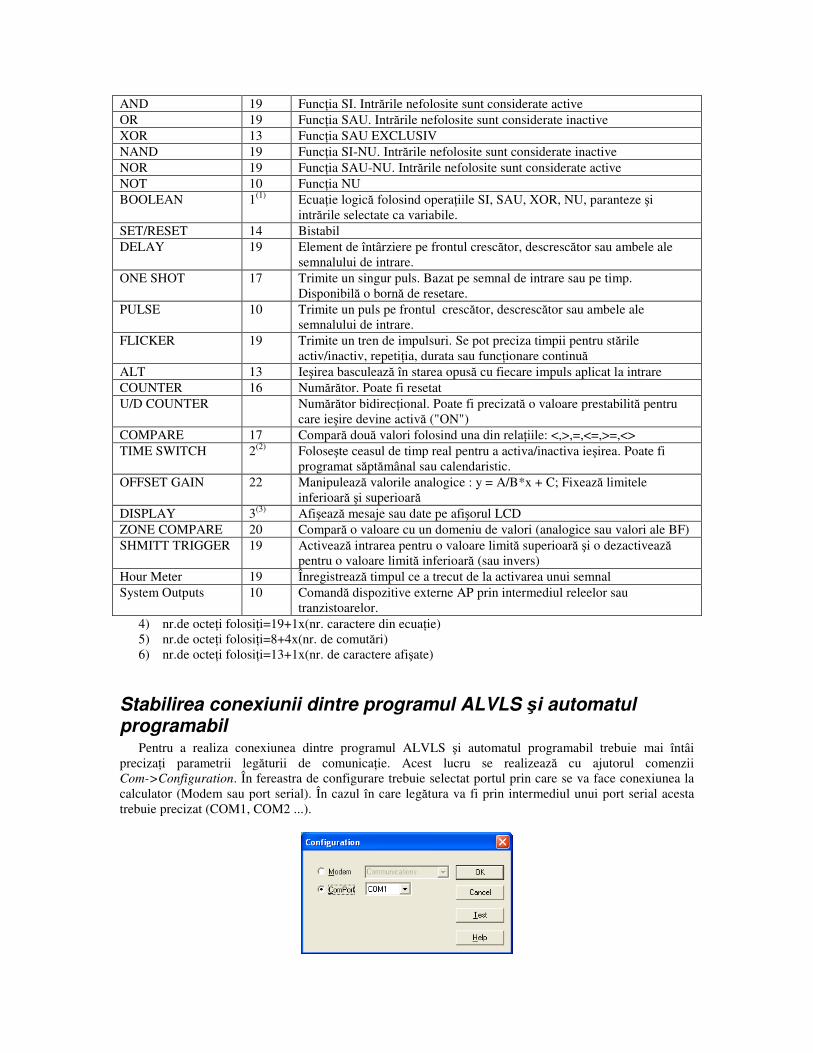
AND 19 FuncŃia SI. Intrările nefolosite sunt considerate active OR 19 FuncŃia SAU. Intrările nefolosite sunt considerate inactive XOR 13 FuncŃia SAU EXCLUSIV NAND 19 FuncŃia SI-NU. Intrările nefolosite sunt considerate inactive NOR 19 FuncŃia SAU-NU. Intrările nefolosite sunt considerate active NOT 10 FuncŃia NU BOOLEAN 1(1) EcuaŃie logică folosind operaŃiile SI, SAU, XOR, NU, paranteze şi
intrările selectate ca variabile. SET/RESET 14 Bistabil DELAY 19 Element de întârziere pe frontul crescător, descrescător sau ambele ale
semnalului de intrare. ONE SHOT 17 Trimite un singur puls. Bazat pe semnal de intrare sau pe timp.
Disponibilă o bornă de resetare. PULSE 10 Trimite un puls pe frontul crescător, descrescător sau ambele ale
semnalului de intrare. FLICKER 19 Trimite un tren de impulsuri. Se pot preciza timpii pentru stările
activ/inactiv, repetiŃia, durata sau funcŃionare continuă ALT 13 Ieşirea basculează în starea opusă cu fiecare impuls aplicat la intrare COUNTER 16 Numărător. Poate fi resetat U/D COUNTER Numărător bidirecŃional. Poate fi precizată o valoare prestabilită pentru
care ieşire devine activă ("ON") COMPARE 17 Compară două valori folosind una din relaŃiile: <,>,=,<=,>=,<> TIME SWITCH 2(2) Foloseşte ceasul de timp real pentru a activa/inactiva ieşirea. Poate fi
programat săptămânal sau calendaristic. OFFSET GAIN 22 Manipulează valorile analogice : y = A/B*x + C; Fixează limitele
inferioară şi superioară DISPLAY 3(3) Afişează mesaje sau date pe afişorul LCD ZONE COMPARE 20 Compară o valoare cu un domeniu de valori (analogice sau valori ale BF) SHMITT TRIGGER 19 Activează intrarea pentru o valoare limită superioară şi o dezactivează
pentru o valoare limită inferioară (sau invers) Hour Meter 19 Înregistrează timpul ce a trecut de la activarea unui semnal System Outputs 10 Comandă dispozitive externe AP prin intermediul releelor sau
tranzistoarelor. 4) nr.de octeŃi folosiŃi=19+1x(nr. caractere din ecuaŃie) 5) nr.de octeŃi folosiŃi=8+4x(nr. de comutări) 6) nr.de octeŃi folosiŃi=13+1x(nr. de caractere afişate)
Stabilirea conexiunii dintre programul ALVLS şi automatul programabil
Pentru a realiza conexiunea dintre programul ALVLS şi automatul programabil trebuie mai întâi precizaŃi parametrii legăturii de comunicaŃie. Acest lucru se realizează cu ajutorul comenzii Com->Configuration. În fereastra de configurare trebuie selectat portul prin care se va face conexiunea la calculator (Modem sau port serial). În cazul în care legătura va fi prin intermediul unui port serial acesta trebuie precizat (COM1, COM2 ...).
Fig.1 Fereastra de configurare a conexiunii de comunicaŃie dintre programul ALVLS şi automatul programabil.
Odată stabiliŃi parametrii conexiunii programul poate interacŃiona cu automatul prin intermediul comenzilor din meniul Controller. În tabelul de mai jos sunt prezentate comenzile disponibile în meniul Controller şi efectul lor.
Write to controller Se transferă programul din memoria calculatorului în memoria
automatului programabil Read from Controller Se citeşte programul existent în memoria automatului programabil
şi se stochează în memoria calculatorului Verify Controller data with Program Se compară programul din memoria calculatorului cu cel din
memoria automatului programabil Clear Controller Contents Se şterge memoria automatului programabil Diagnosis of Controller Se diagnostichează funcŃionarea automatului programabil Drive Controller Se trece automatul programabil din starea de execuŃie a
programului de aplicaŃie (Run) în starea în care poate fi transferat programul în memoria sa (Stop). Transferul programului în memoria automatului se poate face doar dacă acesta nu este în modul de execuŃie a programului de aplicaŃie (Run).
Monitor/Test Se trece programul ALVLS în modul de monitorizare a automatului programabil (Start) sau se revine în starea iniŃială (Stop).
Procedeu experimental 1. Folosind programul ALVLS, introduceŃi în memoria AP Alpha schema din Fig.2 şi monitorizaŃi funcŃionarea acestuia. 2. RealizaŃi o schemă de comandă care să poată fi implementată folosind un AP Alpha cu 6 intrări şi 4 ieşiri şi care să realizeze comanda a trei motoare conform următoarelor condiŃii: - motorul al doilea porneşte după 5 secunde după pornirea primului motor dacă limitatorul de cursă LC1 este activat; - motorul al treilea porneşte după 10 secunde după pornirea celui de al doilea motor - o lampa de semnalizare avertizează situaŃia în care doar unul din cele trei motoare sunt în stare de funcŃionare. 3. RealizaŃi o schemă de comandă care să poată fi implementată folosind un AP Alpha cu 6 intrări şi 4 ieşiri şi care să realizeze comanda pornirii unui motor în ambele sensuri de rotaŃie. Schema nu trebuie să permită comanda simultană a motorului pentru pornirea în ambele sensuri de rotaŃie. Pornirea în sensul de rotaŃie spre stânga nu trebuie permisă decât după 5 secunde de la oprirea motorului pentru a permite acestuia să se oprească liber. În celălalt sens de rotaŃie nu există această restricŃie.
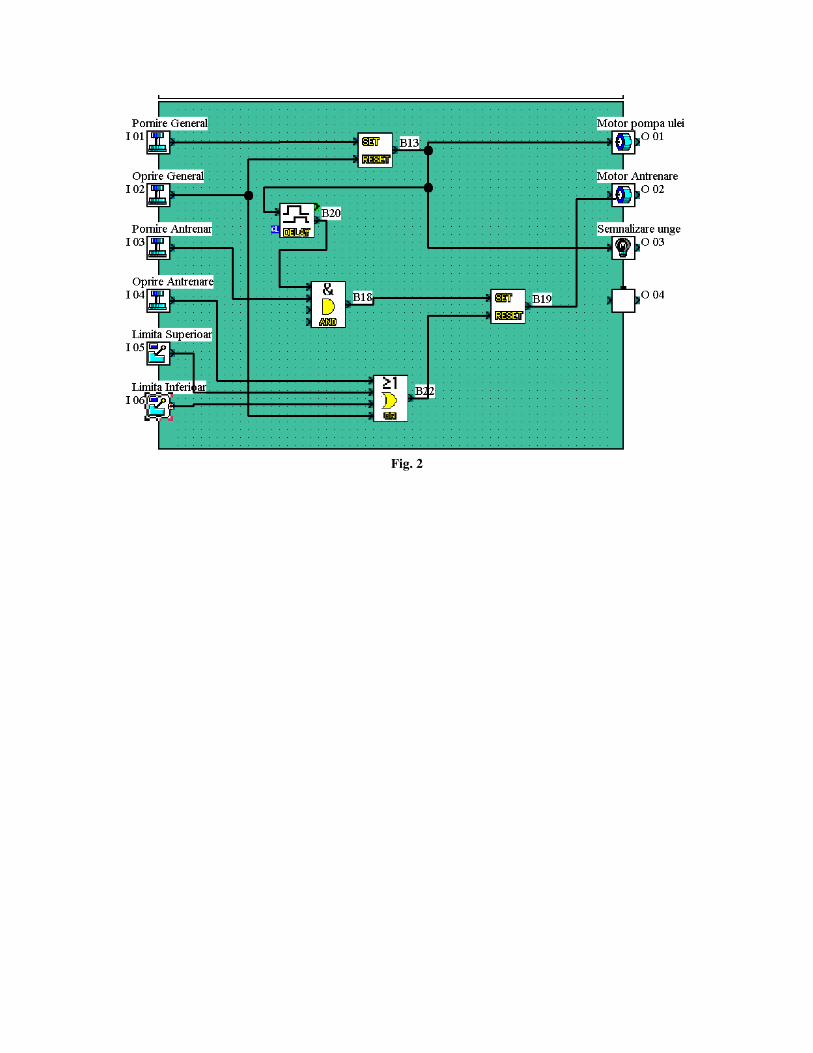
Fig. 2
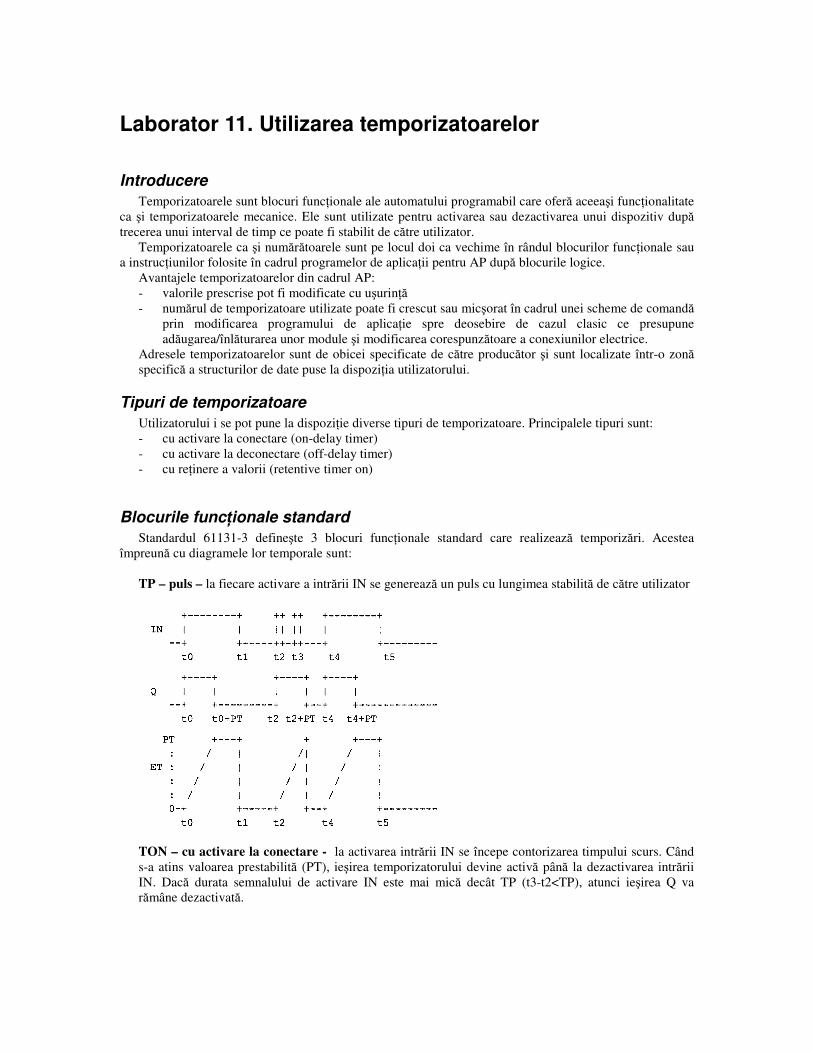
Laborator 11. Utilizarea temporizatoarelor
Introducere
Temporizatoarele sunt blocuri funcŃionale ale automatului programabil care oferă aceeaşi funcŃionalitate ca şi temporizatoarele mecanice. Ele sunt utilizate pentru activarea sau dezactivarea unui dispozitiv după trecerea unui interval de timp ce poate fi stabilit de către utilizator.
Temporizatoarele ca şi numărătoarele sunt pe locul doi ca vechime în rândul blocurilor funcŃionale sau a instrucŃiunilor folosite în cadrul programelor de aplicaŃii pentru AP după blocurile logice.
Avantajele temporizatoarelor din cadrul AP: - valorile prescrise pot fi modificate cu uşurinŃă - numărul de temporizatoare utilizate poate fi crescut sau micşorat în cadrul unei scheme de comandă
prin modificarea programului de aplicaŃie spre deosebire de cazul clasic ce presupune adăugarea/înlăturarea unor module şi modificarea corespunzătoare a conexiunilor electrice.
Adresele temporizatoarelor sunt de obicei specificate de către producător şi sunt localizate într-o zonă specifică a structurilor de date puse la dispoziŃia utilizatorului.
Tipuri de temporizatoare
Utilizatorului i se pot pune la dispoziŃie diverse tipuri de temporizatoare. Principalele tipuri sunt: - cu activare la conectare (on-delay timer) - cu activare la deconectare (off-delay timer) - cu reŃinere a valorii (retentive timer on)
Blocurile funcŃionale standard
Standardul 61131-3 defineşte 3 blocuri funcŃionale standard care realizează temporizări. Acestea împreună cu diagramele lor temporale sunt:
TP – puls – la fiecare activare a intrării IN se generează un puls cu lungimea stabilită de către utilizator
TON – cu activare la conectare - la activarea intrării IN se începe contorizarea timpului scurs. Când s-a atins valoarea prestabilită (PT), ieşirea temporizatorului devine activă până la dezactivarea intrării IN. Dacă durata semnalului de activare IN este mai mică decât TP (t3-t2<TP), atunci ieşirea Q va rămâne dezactivată.
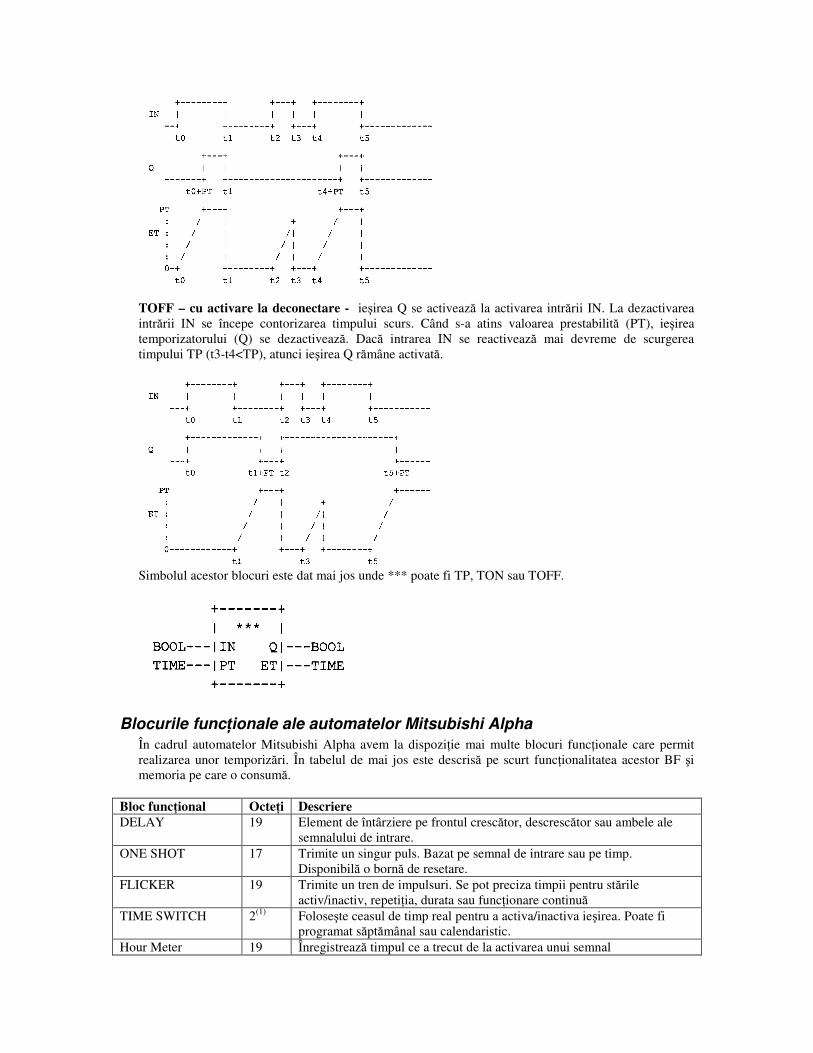
TOFF – cu activare la deconectare - ieşirea Q se activează la activarea intrării IN. La dezactivarea intrării IN se începe contorizarea timpului scurs. Când s-a atins valoarea prestabilită (PT), ieşirea temporizatorului (Q) se dezactivează. Dacă intrarea IN se reactivează mai devreme de scurgerea timpului TP (t3-t4<TP), atunci ieşirea Q rămâne activată.
Simbolul acestor blocuri este dat mai jos unde *** poate fi TP, TON sau TOFF.
Blocurile funcŃionale ale automatelor Mitsubishi Alpha
În cadrul automatelor Mitsubishi Alpha avem la dispoziŃie mai multe blocuri funcŃionale care permit realizarea unor temporizări. În tabelul de mai jos este descrisă pe scurt funcŃionalitatea acestor BF şi memoria pe care o consumă.
Bloc funcŃional OcteŃi Descriere DELAY 19 Element de întârziere pe frontul crescător, descrescător sau ambele ale
semnalului de intrare. ONE SHOT 17 Trimite un singur puls. Bazat pe semnal de intrare sau pe timp.
Disponibilă o bornă de resetare. FLICKER 19 Trimite un tren de impulsuri. Se pot preciza timpii pentru stările
activ/inactiv, repetiŃia, durata sau funcŃionare continuă TIME SWITCH 2(1) Foloseşte ceasul de timp real pentru a activa/inactiva ieşirea. Poate fi
programat săptămânal sau calendaristic. Hour Meter 19 Înregistrează timpul ce a trecut de la activarea unui semnal
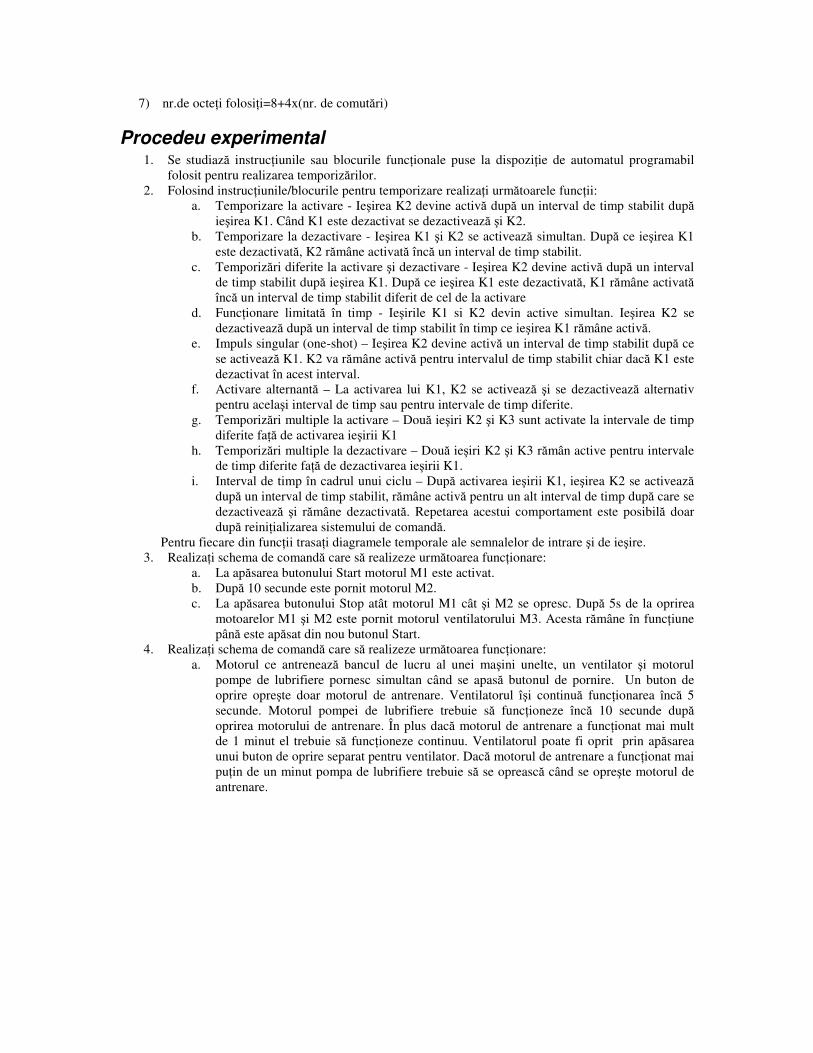
7) nr.de octeŃi folosiŃi=8+4x(nr. de comutări)
Procedeu experimental 1. Se studiază instrucŃiunile sau blocurile funcŃionale puse la dispoziŃie de automatul programabil
folosit pentru realizarea temporizărilor. 2. Folosind instrucŃiunile/blocurile pentru temporizare realizaŃi următoarele funcŃii:
a. Temporizare la activare - Ieşirea K2 devine activă după un interval de timp stabilit după ieşirea K1. Când K1 este dezactivat se dezactivează şi K2.
b. Temporizare la dezactivare - Ieşirea K1 şi K2 se activează simultan. După ce ieşirea K1 este dezactivată, K2 rămâne activată încă un interval de timp stabilit.
c. Temporizări diferite la activare şi dezactivare - Ieşirea K2 devine activă după un interval de timp stabilit după ieşirea K1. După ce ieşirea K1 este dezactivată, K1 rămâne activată încă un interval de timp stabilit diferit de cel de la activare
d. FuncŃionare limitată în timp - Ieşirile K1 si K2 devin active simultan. Ieşirea K2 se dezactivează după un interval de timp stabilit în timp ce ieşirea K1 rămâne activă.
e. Impuls singular (one-shot) – Ieşirea K2 devine activă un interval de timp stabilit după ce se activează K1. K2 va rămâne activă pentru intervalul de timp stabilit chiar dacă K1 este dezactivat în acest interval.
f. Activare alternantă – La activarea lui K1, K2 se activează şi se dezactivează alternativ pentru acelaşi interval de timp sau pentru intervale de timp diferite.
g. Temporizări multiple la activare – Două ieşiri K2 şi K3 sunt activate la intervale de timp diferite faŃă de activarea ieşirii K1
h. Temporizări multiple la dezactivare – Două ieşiri K2 şi K3 rămân active pentru intervale de timp diferite faŃă de dezactivarea ieşirii K1.
i. Interval de timp în cadrul unui ciclu – După activarea ieşirii K1, ieşirea K2 se activează după un interval de timp stabilit, rămâne activă pentru un alt interval de timp după care se dezactivează şi rămâne dezactivată. Repetarea acestui comportament este posibilă doar după reiniŃializarea sistemului de comandă.
Pentru fiecare din funcŃii trasaŃi diagramele temporale ale semnalelor de intrare şi de ieşire. 3. RealizaŃi schema de comandă care să realizeze următoarea funcŃionare:
a. La apăsarea butonului Start motorul M1 este activat. b. După 10 secunde este pornit motorul M2. c. La apăsarea butonului Stop atât motorul M1 cât şi M2 se opresc. După 5s de la oprirea
motoarelor M1 şi M2 este pornit motorul ventilatorului M3. Acesta rămâne în funcŃiune până este apăsat din nou butonul Start.
4. RealizaŃi schema de comandă care să realizeze următoarea funcŃionare: a. Motorul ce antrenează bancul de lucru al unei maşini unelte, un ventilator şi motorul
pompe de lubrifiere pornesc simultan când se apasă butonul de pornire. Un buton de oprire opreşte doar motorul de antrenare. Ventilatorul îşi continuă funcŃionarea încă 5 secunde. Motorul pompei de lubrifiere trebuie să funcŃioneze încă 10 secunde după oprirea motorului de antrenare. În plus dacă motorul de antrenare a funcŃionat mai mult de 1 minut el trebuie să funcŃioneze continuu. Ventilatorul poate fi oprit prin apăsarea unui buton de oprire separat pentru ventilator. Dacă motorul de antrenare a funcŃionat mai puŃin de un minut pompa de lubrifiere trebuie să se oprească când se opreşte motorul de antrenare.
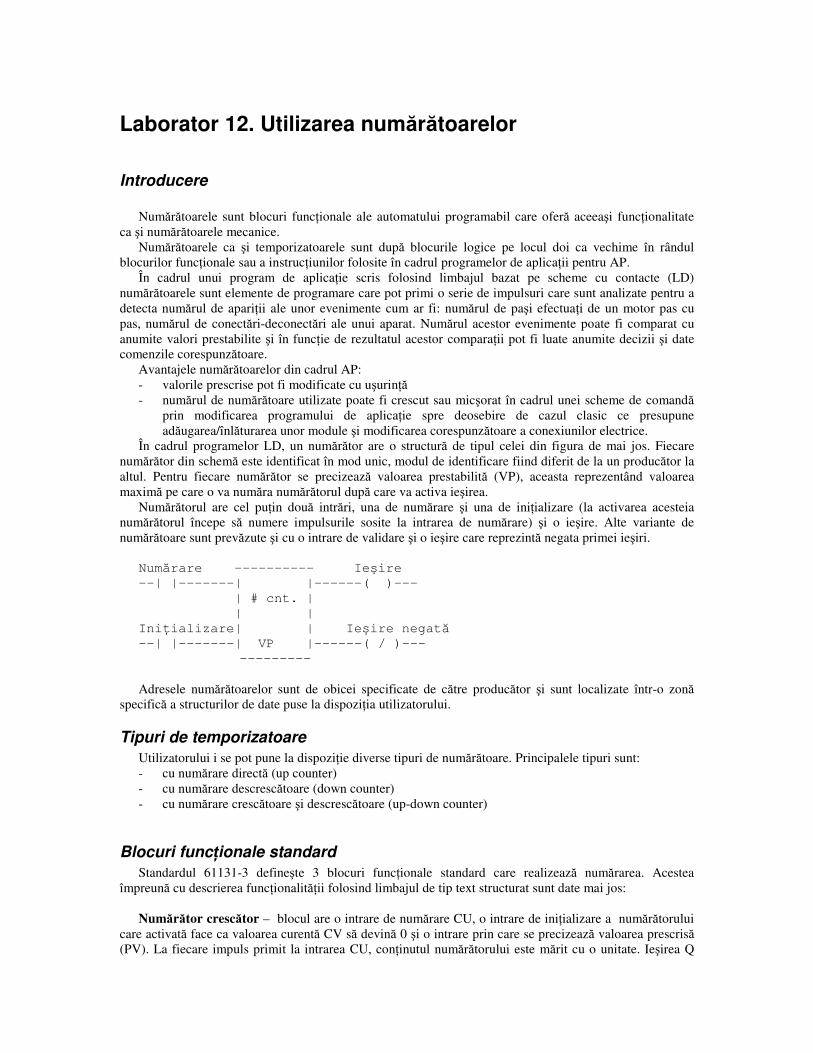
Laborator 12. Utilizarea numărătoarelor
Introducere
Numărătoarele sunt blocuri funcŃionale ale automatului programabil care oferă aceeaşi funcŃionalitate
ca şi numărătoarele mecanice. Numărătoarele ca şi temporizatoarele sunt după blocurile logice pe locul doi ca vechime în rândul
blocurilor funcŃionale sau a instrucŃiunilor folosite în cadrul programelor de aplicaŃii pentru AP. În cadrul unui program de aplicaŃie scris folosind limbajul bazat pe scheme cu contacte (LD)
numărătoarele sunt elemente de programare care pot primi o serie de impulsuri care sunt analizate pentru a detecta numărul de apariŃii ale unor evenimente cum ar fi: numărul de paşi efectuaŃi de un motor pas cu pas, numărul de conectări-deconectări ale unui aparat. Numărul acestor evenimente poate fi comparat cu anumite valori prestabilite şi în funcŃie de rezultatul acestor comparaŃii pot fi luate anumite decizii şi date comenzile corespunzătoare.
Avantajele numărătoarelor din cadrul AP: - valorile prescrise pot fi modificate cu uşurinŃă - numărul de numărătoare utilizate poate fi crescut sau micşorat în cadrul unei scheme de comandă
prin modificarea programului de aplicaŃie spre deosebire de cazul clasic ce presupune adăugarea/înlăturarea unor module şi modificarea corespunzătoare a conexiunilor electrice.
În cadrul programelor LD, un numărător are o structură de tipul celei din figura de mai jos. Fiecare numărător din schemă este identificat în mod unic, modul de identificare fiind diferit de la un producător la altul. Pentru fiecare numărător se precizează valoarea prestabilită (VP), aceasta reprezentând valoarea maximă pe care o va număra numărătorul după care va activa ieşirea.
Numărătorul are cel puŃin două intrări, una de numărare şi una de iniŃializare (la activarea acesteia numărătorul începe să numere impulsurile sosite la intrarea de numărare) şi o ieşire. Alte variante de numărătoare sunt prevăzute şi cu o intrare de validare şi o ieşire care reprezintă negata primei ieşiri.
Numărare ---------- Ieşire
--| |-------| |------( )---
| # cnt. |
| |
IniŃializare| | Ieşire negată
--| |-------| VP |------( / )---
---------
Adresele numărătoarelor sunt de obicei specificate de către producător şi sunt localizate într-o zonă
specifică a structurilor de date puse la dispoziŃia utilizatorului.
Tipuri de temporizatoare
Utilizatorului i se pot pune la dispoziŃie diverse tipuri de numărătoare. Principalele tipuri sunt: - cu numărare directă (up counter) - cu numărare descrescătoare (down counter) - cu numărare crescătoare şi descrescătoare (up-down counter)
Blocuri funcŃionale standard
Standardul 61131-3 defineşte 3 blocuri funcŃionale standard care realizează numărarea. Acestea împreună cu descrierea funcŃionalităŃii folosind limbajul de tip text structurat sunt date mai jos:
Numărător crescător – blocul are o intrare de numărare CU, o intrare de iniŃializare a numărătorului
care activată face ca valoarea curentă CV să devină 0 şi o intrare prin care se precizează valoarea prescrisă (PV). La fiecare impuls primit la intrarea CU, conŃinutul numărătorului este mărit cu o unitate. Ieşirea Q
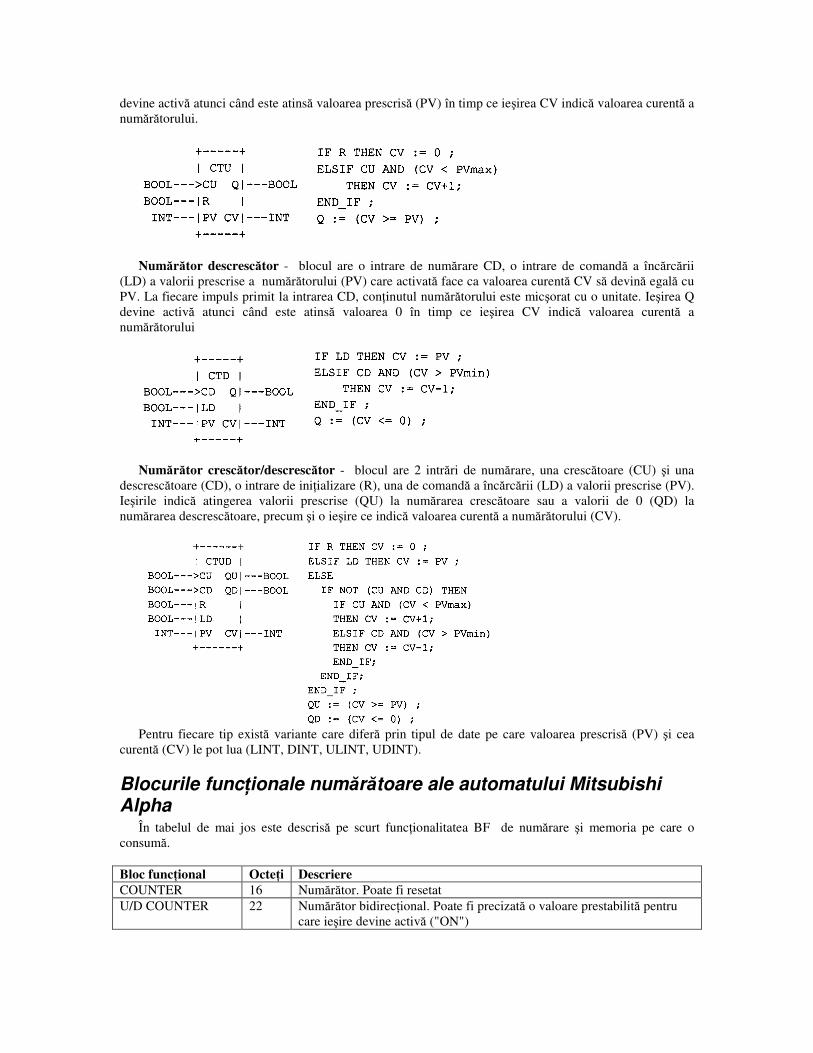
devine activă atunci când este atinsă valoarea prescrisă (PV) în timp ce ieşirea CV indică valoarea curentă a numărătorului.
Numărător descrescător - blocul are o intrare de numărare CD, o intrare de comandă a încărcării
(LD) a valorii prescrise a numărătorului (PV) care activată face ca valoarea curentă CV să devină egală cu PV. La fiecare impuls primit la intrarea CD, conŃinutul numărătorului este micşorat cu o unitate. Ieşirea Q devine activă atunci când este atinsă valoarea 0 în timp ce ieşirea CV indică valoarea curentă a numărătorului
Numărător crescător/descrescător - blocul are 2 intrări de numărare, una crescătoare (CU) şi una
descrescătoare (CD), o intrare de iniŃializare (R), una de comandă a încărcării (LD) a valorii prescrise (PV). Ieşirile indică atingerea valorii prescrise (QU) la numărarea crescătoare sau a valorii de 0 (QD) la numărarea descrescătoare, precum şi o ieşire ce indică valoarea curentă a numărătorului (CV).
Pentru fiecare tip există variante care diferă prin tipul de date pe care valoarea prescrisă (PV) şi cea
curentă (CV) le pot lua (LINT, DINT, ULINT, UDINT).
Blocurile funcŃionale numărătoare ale automatului Mitsubishi Alpha
În tabelul de mai jos este descrisă pe scurt funcŃionalitatea BF de numărare şi memoria pe care o consumă. Bloc funcŃional OcteŃi Descriere COUNTER 16 Numărător. Poate fi resetat U/D COUNTER 22 Numărător bidirecŃional. Poate fi precizată o valoare prestabilită pentru
care ieşire devine activă ("ON")
Procedeu experimental 5. Se studiază instrucŃiunile sau blocurile funcŃionale pentru numărare puse la dispoziŃie de
automatul programabil folosit. 6. Folosind instrucŃiunile/blocurile pentru numărare realizaŃi următoarele funcŃii:
a. Numărare directă – Ieşirea numărătorului devine activă când numărul de impulsuri la intrarea de numărare atinge valoarea prestabilită.
b. Sumarea valorii a două numărătoare c. ObŃinerea diferenŃei a două numărătoare d. ObŃinerea frecvenŃei unui eveniment periodic prin raportul dintre numărul de evenimente
într-un interval de timp
7. RealizaŃi schema de comandă care să realizeze următoarea funcŃionare: a. La ieşirea unui sistem de îmbuteliere a sticlelor acestea sunt puse în cutii cu capacitatea
de 6 sticle iar cutiile sunt ambalate în lăzi cu capacitatea de 10 cutii. b. Sticlele vin pe o bandă rulantă în şir câte una şi prin ghidaje mecanice sunt aranjate în
lăcaşul de ambalare cu 6 poziŃii. Când au fost pregătite 6 sticle banda rulantă trebuie oprită. Un manipulator preia sticlele şi le introduce în cutie făcând astfel loc următoarelor 6 sticle. Banda rulantă a sticlelor nu îşi reia funcŃionarea decât după ce este sesizat printr-un senzor de proximitate faptul că cutia a fost preluată de banda rulantă a cutiilor.
c. O altă bandă rulantă transportă cutiile la locul de ambalare în lăzi unde are loc o operaŃiune similară celei de mai sus. Banda rulantă a cutiilor nu îşi reia funcŃionarea decât după ce este sesizat printr-un senzor de proximitate faptul că lada plină a fost evacuată.
8. RealizaŃi schema de comandă care să realizeze următoarea funcŃionare: a. O parcare are o barieră de intrare şi una de ieşire fiecare dotate cu un senzor de prezentă
autovehicul. La bariera de intrare există un buton eliberare tichet iar la cea de ieşire un buton de validare tichet.
b. Pentru a introduce în parcare un autovehicul acesta trebuie să fie în dreptul senzorului de prezenŃă la intrare şi să fie apăsat butonul de eliberare tichet parcare. De la momentul apăsării acestui buton până la ridicarea barierei se scurg 5 secunde. Bariera rămâne deschisă 15 s după care se coboară automat.
c. Pentru a scoate din parcare un autovehicul acesta trebuie să fie în dreptul senzorului de prezenŃă la ieşire şi să fie apăsat butonul de validare tichet parcare. De la momentul apăsării acestui buton până la ridicarea barierei se scurg 5 secunde. Bariera rămâne deschisă 15 s după care se coboară automat.
d. Bariera de intrare nu se deschide decât dacă există locuri libere în parcare. Acest lucru este semnalizat printr-o lampă de culoare verde. Când nu mai sunt locuri libere în parcare se aprinde o lampă de culoare roşie.
e. Dacă automatul programabil oferă posibilitatea, se afişează numărul de locuri libere existente în parcare.
f. Pentru contorizarea numărului de locuri libere din parcare se va utiliza un numărător bidirecŃional care trebuie iniŃializat cu un număr egal cu numărul de locuri existente în parcare.
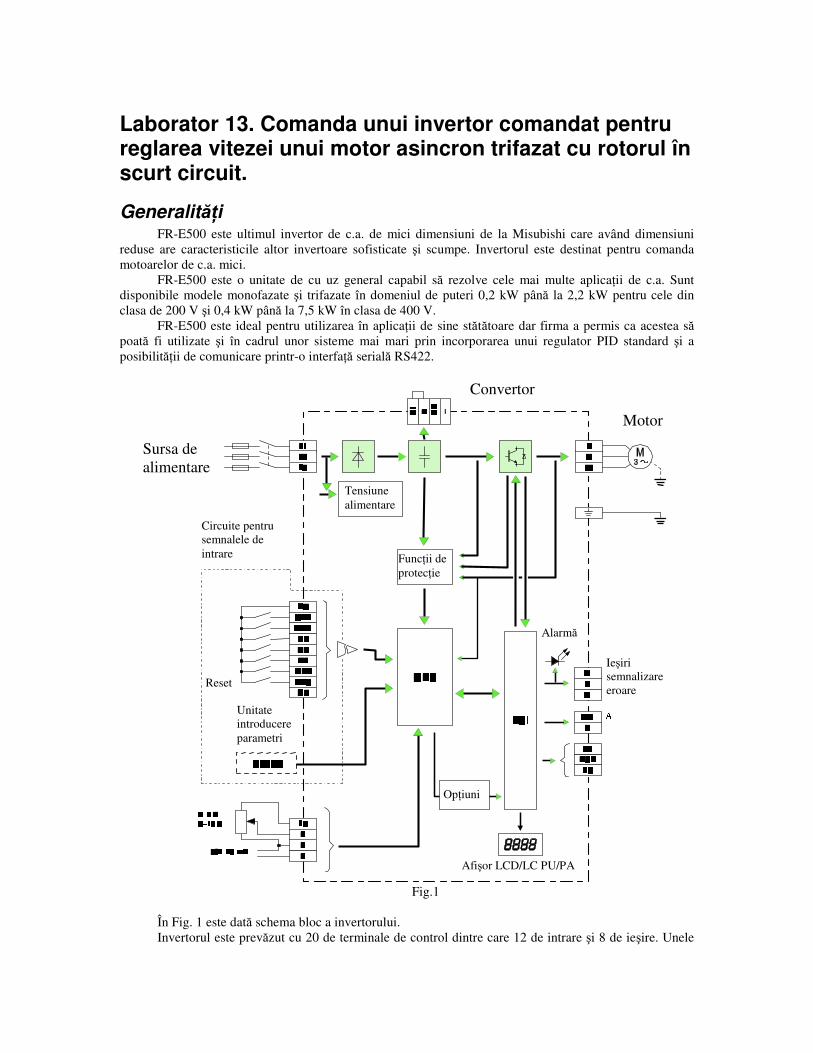
Laborator 13. Comanda unui invertor comandat pentru reglarea vitezei unui motor asincron trifazat cu rotorul în scurt circuit.
GeneralităŃi FR-E500 este ultimul invertor de c.a. de mici dimensiuni de la Misubishi care având dimensiuni
reduse are caracteristicile altor invertoare sofisticate şi scumpe. Invertorul este destinat pentru comanda motoarelor de c.a. mici.
FR-E500 este o unitate de cu uz general capabil să rezolve cele mai multe aplicaŃii de c.a. Sunt disponibile modele monofazate şi trifazate în domeniul de puteri 0,2 kW până la 2,2 kW pentru cele din clasa de 200 V şi 0,4 kW până la 7,5 kW în clasa de 400 V.
FR-E500 este ideal pentru utilizarea în aplicaŃii de sine stătătoare dar firma a permis ca acestea să poată fi utilizate şi în cadrul unor sisteme mai mari prin incorporarea unui regulator PID standard şi a posibilităŃii de comunicare printr-o interfaŃă serială RS422.
Fig.1 În Fig. 1 este dată schema bloc a invertorului. Invertorul este prevăzut cu 20 de terminale de control dintre care 12 de intrare şi 8 de ieşire. Unele
Convertor
Motor
Sursa de alimentare
Tensiune alimentare
Ieşiri semnalizare eroare
FuncŃii de protecŃie
Alarmă
Circuite pentru semnalele de intrare
Afişor LCD/LC PU/PA
OpŃiuni
Unitate introducere parametri
Reset
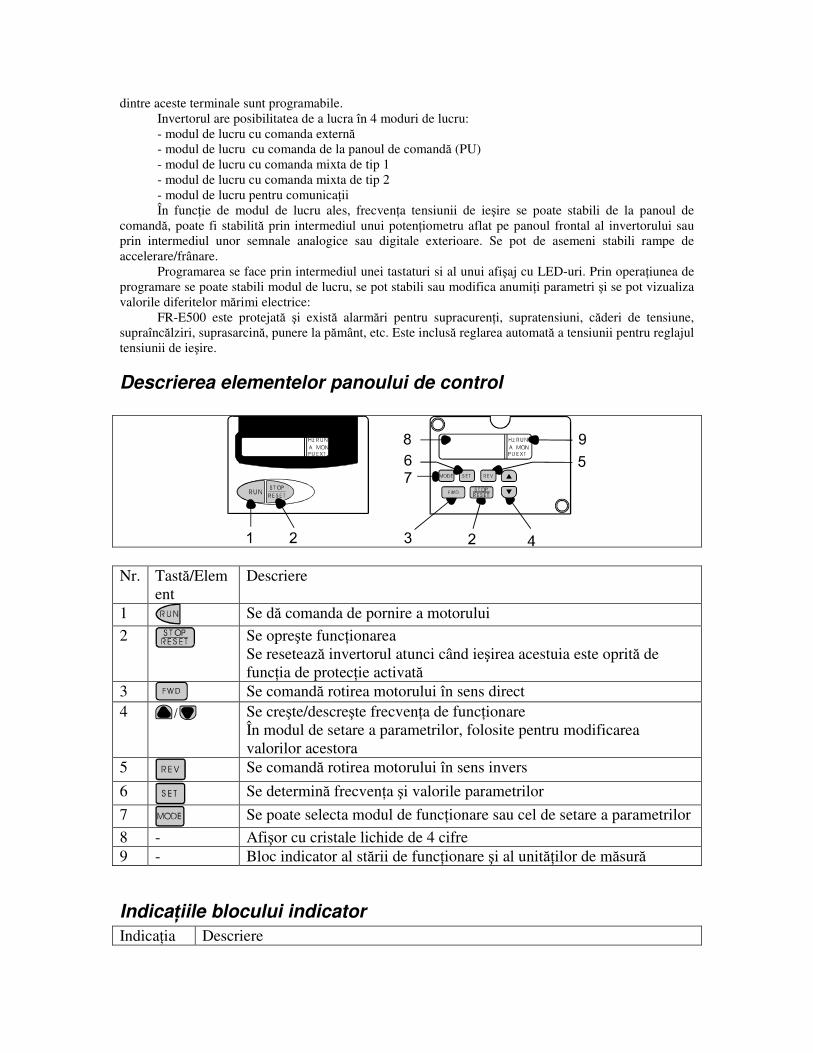
dintre aceste terminale sunt programabile. Invertorul are posibilitatea de a lucra în 4 moduri de lucru: - modul de lucru cu comanda externă - modul de lucru cu comanda de la panoul de comandă (PU) - modul de lucru cu comanda mixta de tip 1 - modul de lucru cu comanda mixta de tip 2 - modul de lucru pentru comunicaŃii În funcŃie de modul de lucru ales, frecvenŃa tensiunii de ieşire se poate stabili de la panoul de
comandă, poate fi stabilită prin intermediul unui potenŃiometru aflat pe panoul frontal al invertorului sau prin intermediul unor semnale analogice sau digitale exterioare. Se pot de asemeni stabili rampe de accelerare/frânare.
Programarea se face prin intermediul unei tastaturi si al unui afişaj cu LED-uri. Prin operaŃiunea de programare se poate stabili modul de lucru, se pot stabili sau modifica anumiŃi parametri şi se pot vizualiza valorile diferitelor mărimi electrice:
FR-E500 este protejată şi există alarmări pentru supracurenŃi, supratensiuni, căderi de tensiune, supraîncălziri, suprasarcină, punere la pământ, etc. Este inclusă reglarea automată a tensiunii pentru reglajul tensiunii de ieşire.
Descrierea elementelor panoului de control
Nr. Tastă/Elem
ent Descriere
1 Se dă comanda de pornire a motorului
2 Se opreşte funcŃionarea Se resetează invertorul atunci când ieşirea acestuia este oprită de funcŃia de protecŃie activată
3 Se comandă rotirea motorului în sens direct 4 Se creşte/descreşte frecvenŃa de funcŃionare
În modul de setare a parametrilor, folosite pentru modificarea valorilor acestora
5 Se comandă rotirea motorului în sens invers
6 Se determină frecvenŃa şi valorile parametrilor
7 Se poate selecta modul de funcŃionare sau cel de setare a parametrilor
8 - Afişor cu cristale lichide de 4 cifre 9 - Bloc indicator al stării de funcŃionare şi al unităŃilor de măsură
IndicaŃiile blocului indicator
IndicaŃia Descriere
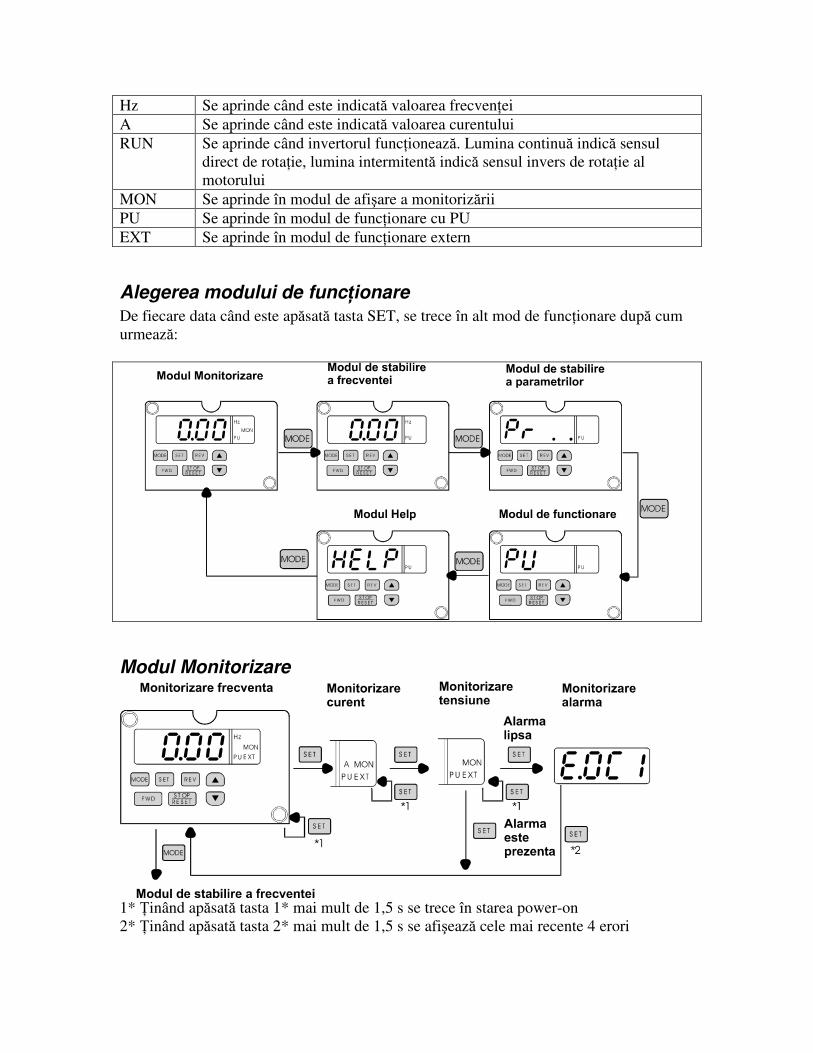
Hz Se aprinde când este indicată valoarea frecvenŃei A Se aprinde când este indicată valoarea curentului RUN Se aprinde când invertorul funcŃionează. Lumina continuă indică sensul
direct de rotaŃie, lumina intermitentă indică sensul invers de rotaŃie al motorului
MON Se aprinde în modul de afişare a monitorizării PU Se aprinde în modul de funcŃionare cu PU EXT Se aprinde în modul de funcŃionare extern
Alegerea modului de funcŃionare De fiecare data când este apăsată tasta SET, se trece în alt mod de funcŃionare după cum urmează:
Modul Monitorizare
1* łinând apăsată tasta 1* mai mult de 1,5 s se trece în starea power-on 2* łinând apăsată tasta 2* mai mult de 1,5 s se afişează cele mai recente 4 erori
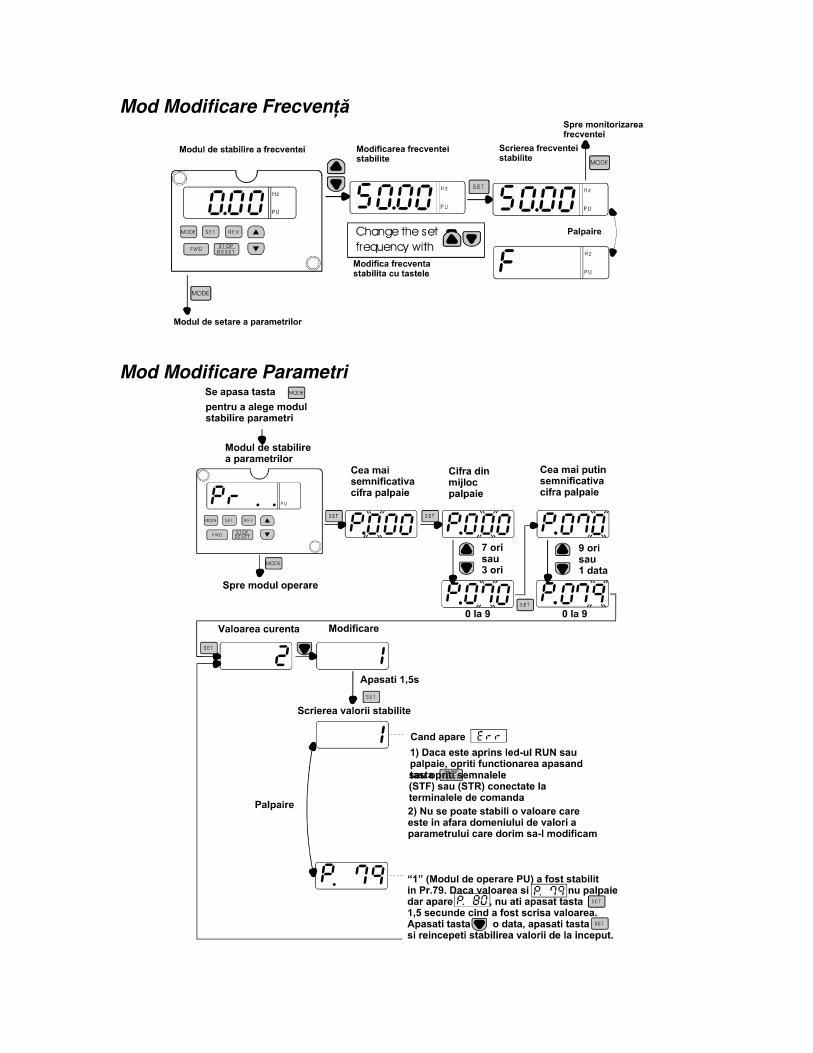
Mod Modificare FrecvenŃă
Mod Modificare Parametri
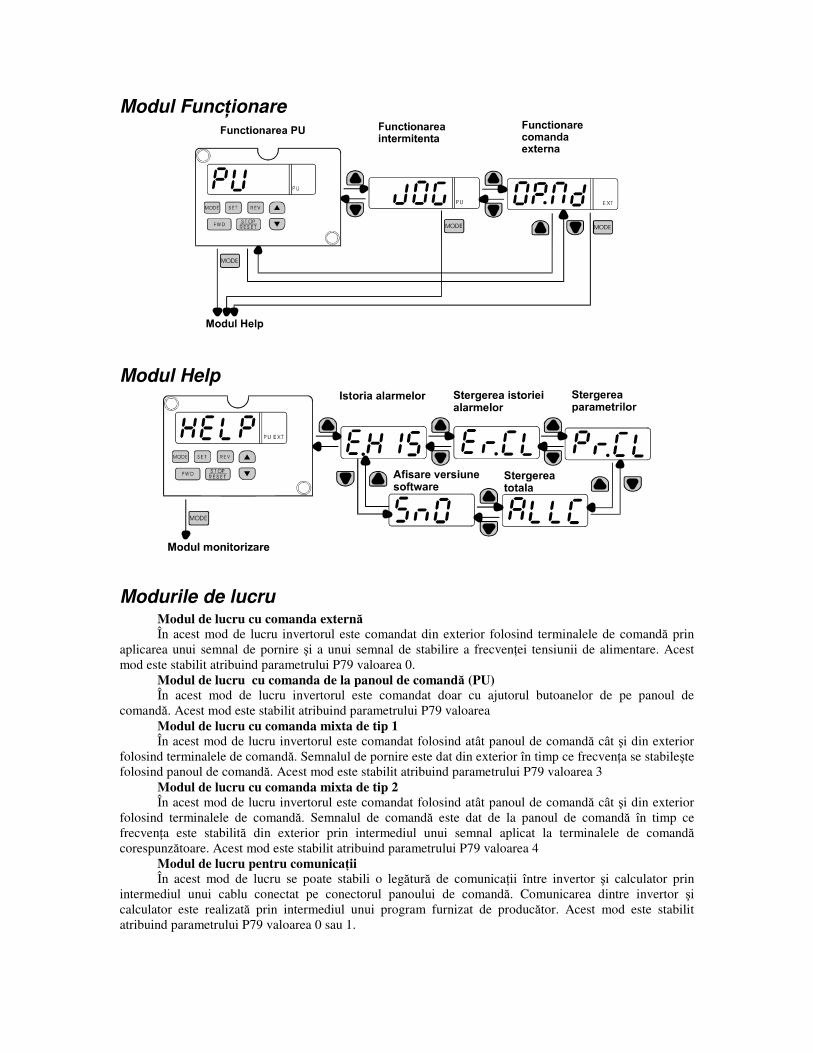
Modul FuncŃionare
Modul Help
Modurile de lucru Modul de lucru cu comanda externă În acest mod de lucru invertorul este comandat din exterior folosind terminalele de comandă prin
aplicarea unui semnal de pornire şi a unui semnal de stabilire a frecvenŃei tensiunii de alimentare. Acest mod este stabilit atribuind parametrului P79 valoarea 0.
Modul de lucru cu comanda de la panoul de comandă (PU) În acest mod de lucru invertorul este comandat doar cu ajutorul butoanelor de pe panoul de
comandă. Acest mod este stabilit atribuind parametrului P79 valoarea Modul de lucru cu comanda mixta de tip 1 În acest mod de lucru invertorul este comandat folosind atât panoul de comandă cât şi din exterior
folosind terminalele de comandă. Semnalul de pornire este dat din exterior în timp ce frecvenŃa se stabileşte folosind panoul de comandă. Acest mod este stabilit atribuind parametrului P79 valoarea 3
Modul de lucru cu comanda mixta de tip 2 În acest mod de lucru invertorul este comandat folosind atât panoul de comandă cât şi din exterior
folosind terminalele de comandă. Semnalul de comandă este dat de la panoul de comandă în timp ce frecvenŃa este stabilită din exterior prin intermediul unui semnal aplicat la terminalele de comandă corespunzătoare. Acest mod este stabilit atribuind parametrului P79 valoarea 4
Modul de lucru pentru comunicaŃii În acest mod de lucru se poate stabili o legătură de comunicaŃii între invertor şi calculator prin
intermediul unui cablu conectat pe conectorul panoului de comandă. Comunicarea dintre invertor şi calculator este realizată prin intermediul unui program furnizat de producător. Acest mod este stabilit atribuind parametrului P79 valoarea 0 sau 1.
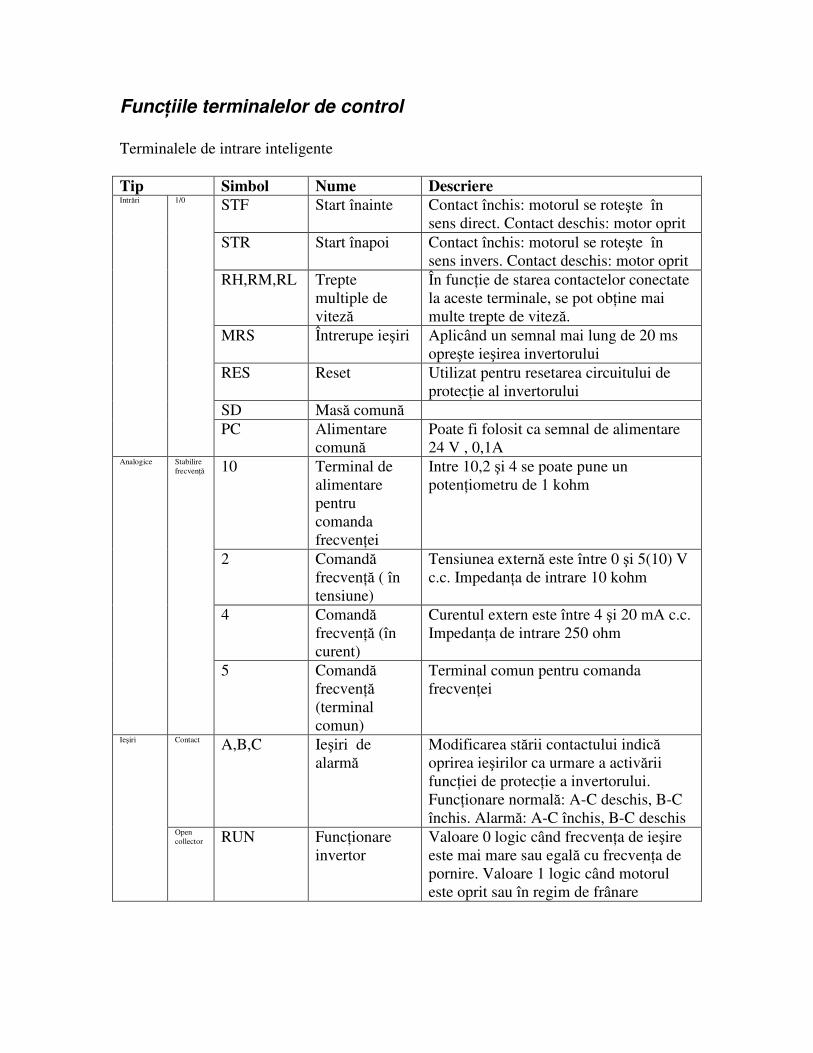
FuncŃiile terminalelor de control Terminalele de intrare inteligente Tip Simbol Nume Descriere Intrări 1/0 STF Start înainte Contact închis: motorul se roteşte în
sens direct. Contact deschis: motor oprit STR Start înapoi Contact închis: motorul se roteşte în
sens invers. Contact deschis: motor oprit RH,RM,RL Trepte
multiple de viteză
În funcŃie de starea contactelor conectate la aceste terminale, se pot obŃine mai multe trepte de viteză.
MRS Întrerupe ieşiri Aplicând un semnal mai lung de 20 ms opreşte ieşirea invertorului
RES Reset Utilizat pentru resetarea circuitului de protecŃie al invertorului
SD Masă comună PC Alimentare
comună Poate fi folosit ca semnal de alimentare 24 V , 0,1A
Analogice Stabilire frecvenŃă 10 Terminal de
alimentare pentru comanda frecvenŃei
Intre 10,2 şi 4 se poate pune un potenŃiometru de 1 kohm
2 Comandă frecvenŃă ( în tensiune)
Tensiunea externă este între 0 şi 5(10) V c.c. ImpedanŃa de intrare 10 kohm
4 Comandă frecvenŃă (în curent)
Curentul extern este între 4 şi 20 mA c.c. ImpedanŃa de intrare 250 ohm
5 Comandă frecvenŃă (terminal comun)
Terminal comun pentru comanda frecvenŃei
Ieşiri Contact A,B,C Ieşiri de alarmă
Modificarea stării contactului indică oprirea ieşirilor ca urmare a activării funcŃiei de protecŃie a invertorului. FuncŃionare normală: A-C deschis, B-C închis. Alarmă: A-C închis, B-C deschis
Open collector RUN FuncŃionare
invertor Valoare 0 logic când frecvenŃa de ieşire este mai mare sau egală cu frecvenŃa de pornire. Valoare 1 logic când motorul este oprit sau în regim de frânare
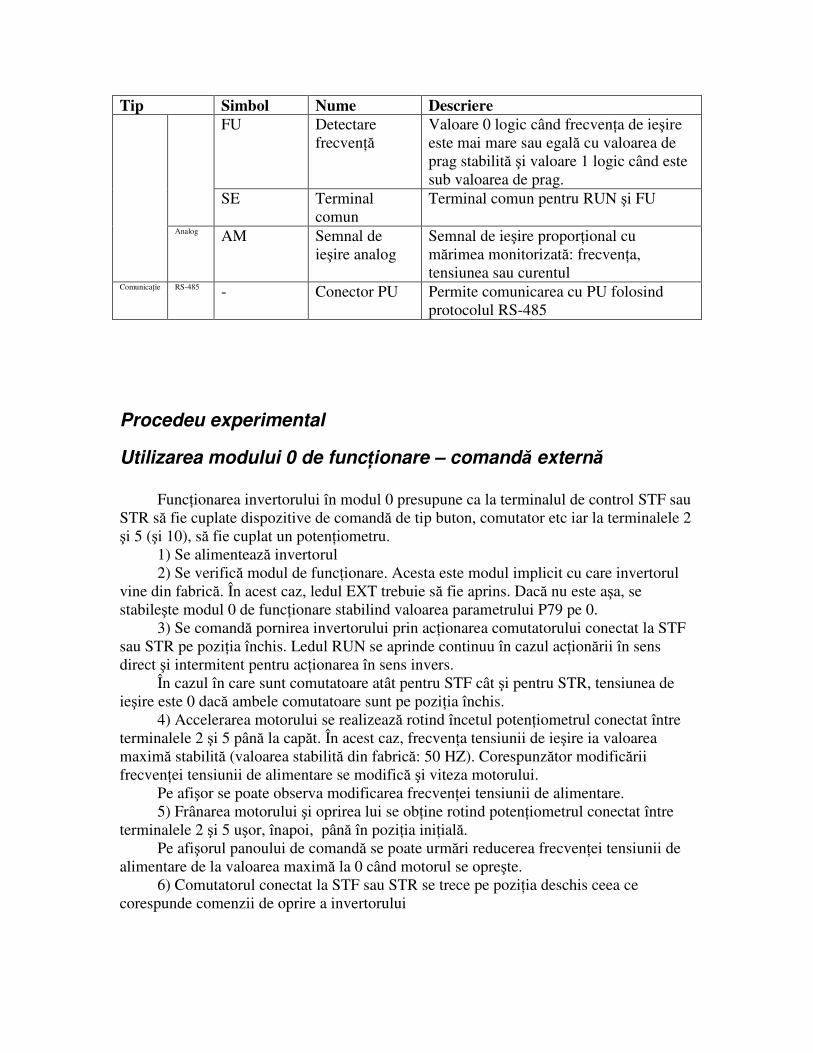
Tip Simbol Nume Descriere FU Detectare
frecvenŃă Valoare 0 logic când frecvenŃa de ieşire este mai mare sau egală cu valoarea de prag stabilită şi valoare 1 logic când este sub valoarea de prag.
SE Terminal comun
Terminal comun pentru RUN şi FU
Analog AM Semnal de ieşire analog
Semnal de ieşire proporŃional cu mărimea monitorizată: frecvenŃa, tensiunea sau curentul
ComunicaŃie RS-485 - Conector PU Permite comunicarea cu PU folosind protocolul RS-485
Procedeu experimental
Utilizarea modului 0 de funcŃionare – comandă externă
FuncŃionarea invertorului în modul 0 presupune ca la terminalul de control STF sau STR să fie cuplate dispozitive de comandă de tip buton, comutator etc iar la terminalele 2 şi 5 (şi 10), să fie cuplat un potenŃiometru.
1) Se alimentează invertorul 2) Se verifică modul de funcŃionare. Acesta este modul implicit cu care invertorul
vine din fabrică. În acest caz, ledul EXT trebuie să fie aprins. Dacă nu este aşa, se stabileşte modul 0 de funcŃionare stabilind valoarea parametrului P79 pe 0.
3) Se comandă pornirea invertorului prin acŃionarea comutatorului conectat la STF sau STR pe poziŃia închis. Ledul RUN se aprinde continuu în cazul acŃionării în sens direct şi intermitent pentru acŃionarea în sens invers.
În cazul în care sunt comutatoare atât pentru STF cât şi pentru STR, tensiunea de ieşire este 0 dacă ambele comutatoare sunt pe poziŃia închis.
4) Accelerarea motorului se realizează rotind încetul potenŃiometrul conectat între terminalele 2 şi 5 până la capăt. În acest caz, frecvenŃa tensiunii de ieşire ia valoarea maximă stabilită (valoarea stabilită din fabrică: 50 HZ). Corespunzător modificării frecvenŃei tensiunii de alimentare se modifică şi viteza motorului.
Pe afişor se poate observa modificarea frecvenŃei tensiunii de alimentare. 5) Frânarea motorului şi oprirea lui se obŃine rotind potenŃiometrul conectat între
terminalele 2 şi 5 uşor, înapoi, până în poziŃia iniŃială. Pe afişorul panoului de comandă se poate urmări reducerea frecvenŃei tensiunii de
alimentare de la valoarea maximă la 0 când motorul se opreşte. 6) Comutatorul conectat la STF sau STR se trece pe poziŃia deschis ceea ce
corespunde comenzii de oprire a invertorului
Utilizarea modului 1 de funcŃionare – comandă de la panoul de comandă
1) Se alimentează invertorul 2) Se verifică modul de funcŃionare şi dacă nu este cel corect se stabileşte modul 1
de funcŃionare stabilind valoarea parametrului P79 pe 1. FuncŃionarea în acest mod este semnalată de aprinderea ledului PU.
3) Se stabileşte frecvenŃa de lucru aşa cum este descris în capitolul Mod Modificare FrecvenŃă la valoarea de 45 Hz.
3) Se comandă pornirea invertorului prin apăsarea butonului RUN (sau a butoanelor FWD sau REV). Ledul RUN se aprinde continuu în cazul acŃionării în sens direct şi intermitent pentru acŃionarea în sens invers. Motorul accelerează până ce frecvenŃa atinge valoarea stabilită. Pe afişor se poate observa modificarea frecvenŃei tensiunii de alimentare.
5) Oprirea motorului se obŃine apăsând butonul STOP/RESET. Pe afişorul panoului de comandă se poate urmări reducerea frecvenŃei tensiunii de alimentare de la valoarea maximă la 0 când motorul se opreşte. Indicatorul RUN se stinge.
Utilizarea modului 2 de funcŃionare – comandă mixtă tip 1 din exterior şi de la panoul de comandă
1) Se alimentează invertorul 2) Se verifică modul de funcŃionare şi dacă nu este cel corect se stabileşte modul 1
de funcŃionare stabilind valoarea parametrului P79 pe 3. FuncŃionarea în acest mod este semnalată de aprinderea ambelor leduri PU şi EXT.
3) Se dă comanda de pornire din exterior prin intermediul unui comutator cuplat pe terminalul de control STF sau STR.
4) Se stabileşte frecvenŃa de lucru folosind tastele la valoarea 60 Hz. 5) Se opreşte motorul trecând comutatorul comenzii de pornire pe poziŃia deschis.
Utilizarea modului 3 de funcŃionare – comandă mixtă tip 2 din exterior şi de la panoul de comandă
1) Se alimentează invertorul 2) Se verifică modul de funcŃionare şi dacă nu este cel corect se stabileşte modul 1
de funcŃionare stabilind valoarea parametrului P79 pe 4. FuncŃionarea în acest mod este semnalată de aprinderea ambelor leturi PU şi EXT.
3) Se dă comanda de pornire folosind butoanele RUN sau FWD/REV de pe panoul de comandă. Ledul RUN se aprinde.
4) Accelerarea motorului se realizează rotind încetul potenŃiometrul conectat între terminalele 2 şi 5 până la capăt. În acest caz, frecvenŃa tensiunii de ieşire ia valoarea maximă stabilită (valoarea stabilită din fabrică: 50 HZ). Corespunzător modificării frecvenŃei tensiunii de alimentare se modifică şi viteza motorului.
Pe afişor se poate observa modificarea frecvenŃei tensiunii de alimentare. 5) Frânarea motorului şi oprirea lui se obŃine rotind potenŃiometrul conectat între
terminalele 2 şi 5 uşor, înapoi, până în poziŃia iniŃială.
Pe afişorul panoului de comandă se poate urmări reducerea frecvenŃei tensiunii de alimentare de la valoarea maximă la 0 când motorul se opreşte.
5) Oprirea invertorului se obŃine apăsând butonul STOP/RESET. Indicatorul RUN se stinge.
Procedeu experimental
1. StabiliŃi următoarele trepte de viteză folosind panoul digital: 15 Hz, 25 Hz, 45 Hz. Se alimentează invertorul. Treptele de viteză se stabilesc cu ajutorul parametrilor P4, P5 şi P6. Valorile din
fabrică sunt: P4 50Hz P5 30Hz P6 10 Hz
2. RealizaŃi comanda manuală pentru realizarea unui ciclu de lucru cu mai multe trepte de viteză. ScrieŃi un program de aplicaŃie pentru automatul Mitsubishi Alpha care să permită comanda manuală a invertorului după cum urmează:
1) Se alimentează invertorul. 2) Se trece comutatorul de pornire 1 sau 2 (acŃionare în sens direct sau în sens
indirect) apoi se stabileşte frecvenŃa de ieşire cu ajutorul întrerupătoarelor 3 şi 4. 3) RealizaŃi următoare ciclogramă a frecvenŃei de ieşire: 0-15-25-0-25-15-25-0. 4)TreceŃi comutatorul de pornire 1 sau 2 înapoi în poziŃia deschis.
3. RealizaŃi comanda automată a unui ciclu de lucru cu mai multe trepte. ScrieŃi programul de aplicaŃie pentru automatul Mitsubishi Alpha care să realizeze următorul ciclu cu mai multe trepte în următoarele moduri ce pot fi selectate de la panoul de comandă al automatului prin intermediul unui meniu: Modul 1 ciclu: La apăsarea butonului Start se va executa un ciclu. Dispozitivul de afişare va afişa modul de lucru în care se află sistemul. Modul n cicluri: Folosind butoanele de pe panoul frontal şi dispozitivul de afişare LCD se selectează un număr n de cicluri precizat. La apăsarea butonului Start se vor executa ciclul de lucru de n ori. Pe dispozitivul de afişare cu LCD va fi afişat modul de lucru şi numărul ciclului executat. Modul Continuu: La apăsarea butonului Start ciclul de lucru va fi executat fără întrerupere. Oprirea execuŃiei se va putea comanda cu ajutorul unui buton Stop. Dispozitivul de afişare va trebui să afişeze modul de lucru în care se află şi numărul de cicluri efectuate până la momentul curent.
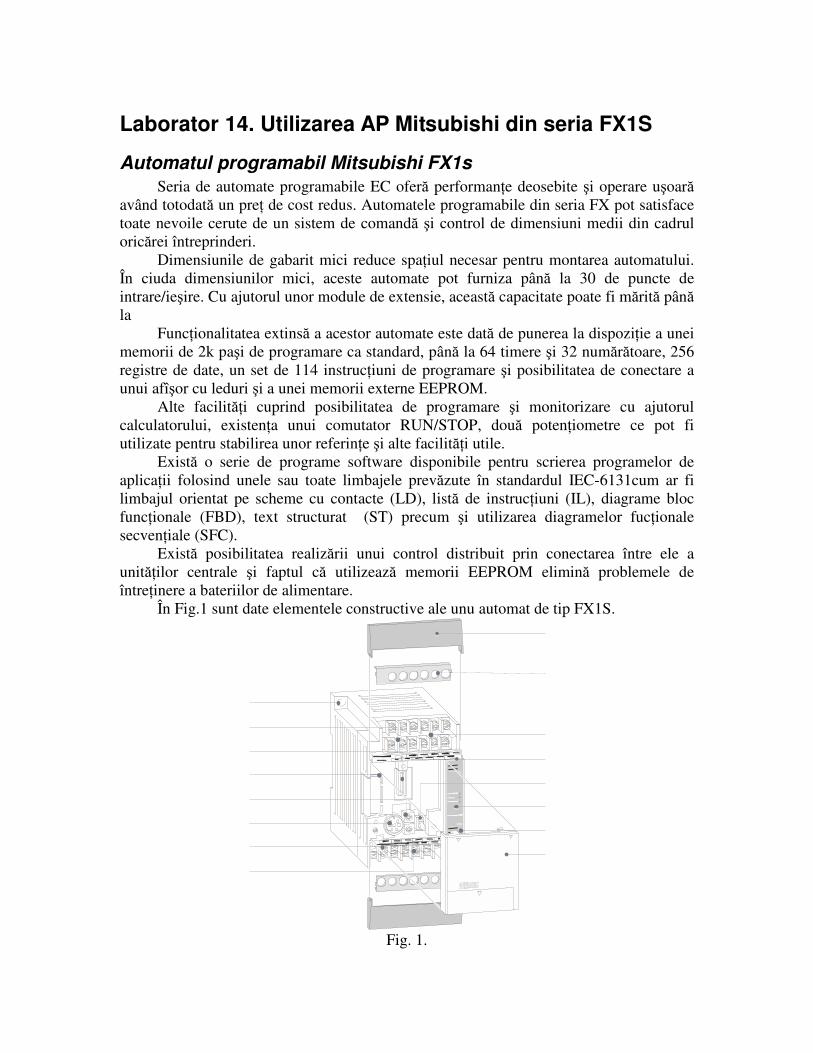
Laborator 14. Utilizarea AP Mitsubishi din seria FX1S
Automatul programabil Mitsubishi FX1s Seria de automate programabile EC oferă performanŃe deosebite şi operare uşoară
având totodată un preŃ de cost redus. Automatele programabile din seria FX pot satisface toate nevoile cerute de un sistem de comandă şi control de dimensiuni medii din cadrul oricărei întreprinderi.
Dimensiunile de gabarit mici reduce spaŃiul necesar pentru montarea automatului. În ciuda dimensiunilor mici, aceste automate pot furniza până la 30 de puncte de intrare/ieşire. Cu ajutorul unor module de extensie, această capacitate poate fi mărită până la
FuncŃionalitatea extinsă a acestor automate este dată de punerea la dispoziŃie a unei memorii de 2k paşi de programare ca standard, până la 64 timere şi 32 numărătoare, 256 registre de date, un set de 114 instrucŃiuni de programare şi posibilitatea de conectare a unui afîşor cu leduri şi a unei memorii externe EEPROM.
Alte facilităŃi cuprind posibilitatea de programare şi monitorizare cu ajutorul calculatorului, existenŃa unui comutator RUN/STOP, două potenŃiometre ce pot fi utilizate pentru stabilirea unor referinŃe şi alte facilităŃi utile.
Există o serie de programe software disponibile pentru scrierea programelor de aplicaŃii folosind unele sau toate limbajele prevăzute în standardul IEC-6131cum ar fi limbajul orientat pe scheme cu contacte (LD), listă de instrucŃiuni (IL), diagrame bloc funcŃionale (FBD), text structurat (ST) precum şi utilizarea diagramelor fucŃionale secvenŃiale (SFC).
Există posibilitatea realizării unui control distribuit prin conectarea între ele a unităŃilor centrale şi faptul că utilizează memorii EEPROM elimină problemele de întreŃinere a bateriilor de alimentare.
În Fig.1 sunt date elementele constructive ale unu automat de tip FX1S.
Fig. 1.
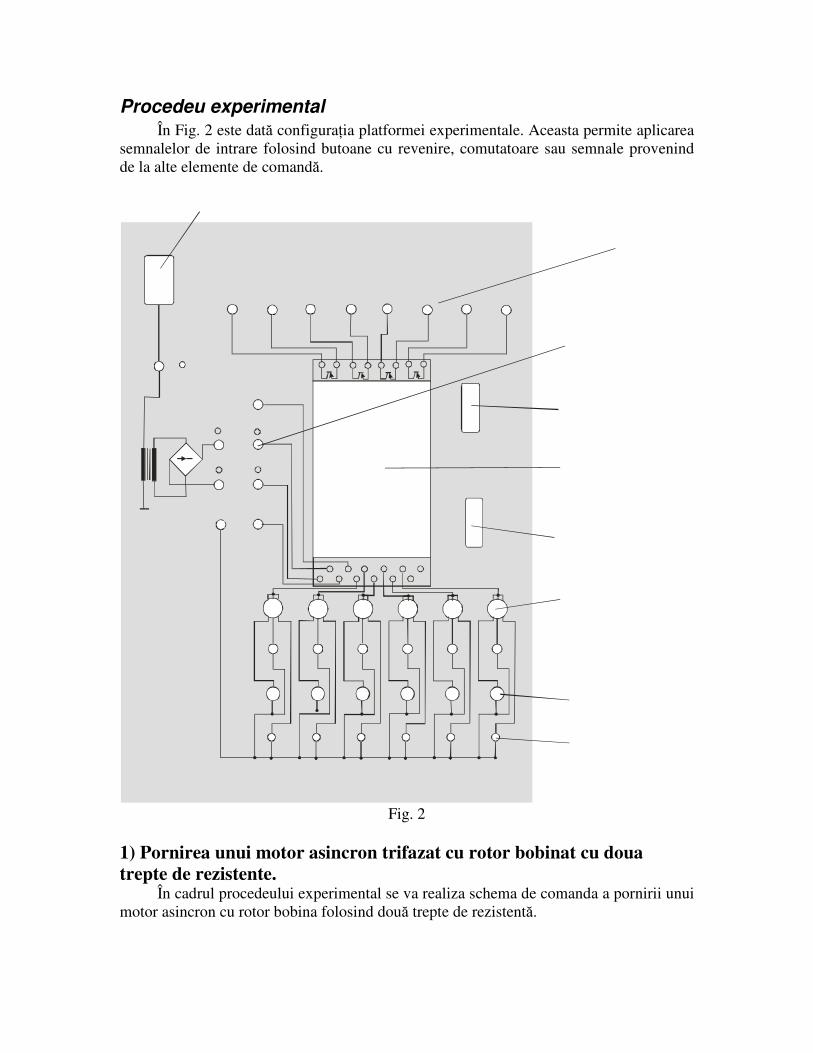
Procedeu experimental În Fig. 2 este dată configuraŃia platformei experimentale. Aceasta permite aplicarea
semnalelor de intrare folosind butoane cu revenire, comutatoare sau semnale provenind de la alte elemente de comandă.
Fig. 2
1) Pornirea unui motor asincron trifazat cu rotor bobinat cu doua trepte de rezistente.
În cadrul procedeului experimental se va realiza schema de comanda a pornirii unui motor asincron cu rotor bobina folosind două trepte de rezistentă.
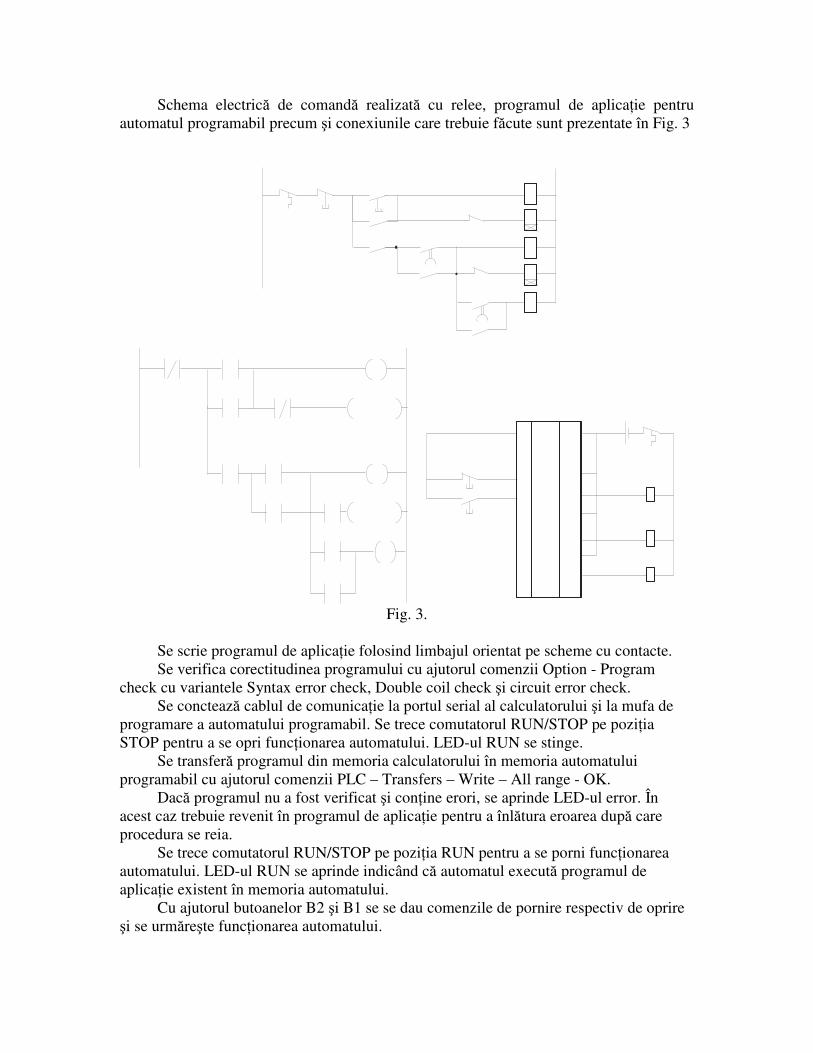
Schema electrică de comandă realizată cu relee, programul de aplicaŃie pentru automatul programabil precum şi conexiunile care trebuie făcute sunt prezentate în Fig. 3
Fig. 3.
Se scrie programul de aplicaŃie folosind limbajul orientat pe scheme cu contacte. Se verifica corectitudinea programului cu ajutorul comenzii Option - Program
check cu variantele Syntax error check, Double coil check şi circuit error check. Se conctează cablul de comunicaŃie la portul serial al calculatorului şi la mufa de
programare a automatului programabil. Se trece comutatorul RUN/STOP pe poziŃia STOP pentru a se opri funcŃionarea automatului. LED-ul RUN se stinge.
Se transferă programul din memoria calculatorului în memoria automatului programabil cu ajutorul comenzii PLC – Transfers – Write – All range - OK.
Dacă programul nu a fost verificat şi conŃine erori, se aprinde LED-ul error. În acest caz trebuie revenit în programul de aplicaŃie pentru a înlătura eroarea după care procedura se reia.
Se trece comutatorul RUN/STOP pe poziŃia RUN pentru a se porni funcŃionarea automatului. LED-ul RUN se aprinde indicând că automatul execută programul de aplicaŃie existent în memoria automatului.
Cu ajutorul butoanelor B2 şi B1 se se dau comenzile de pornire respectiv de oprire şi se urmăreşte funcŃionarea automatului.
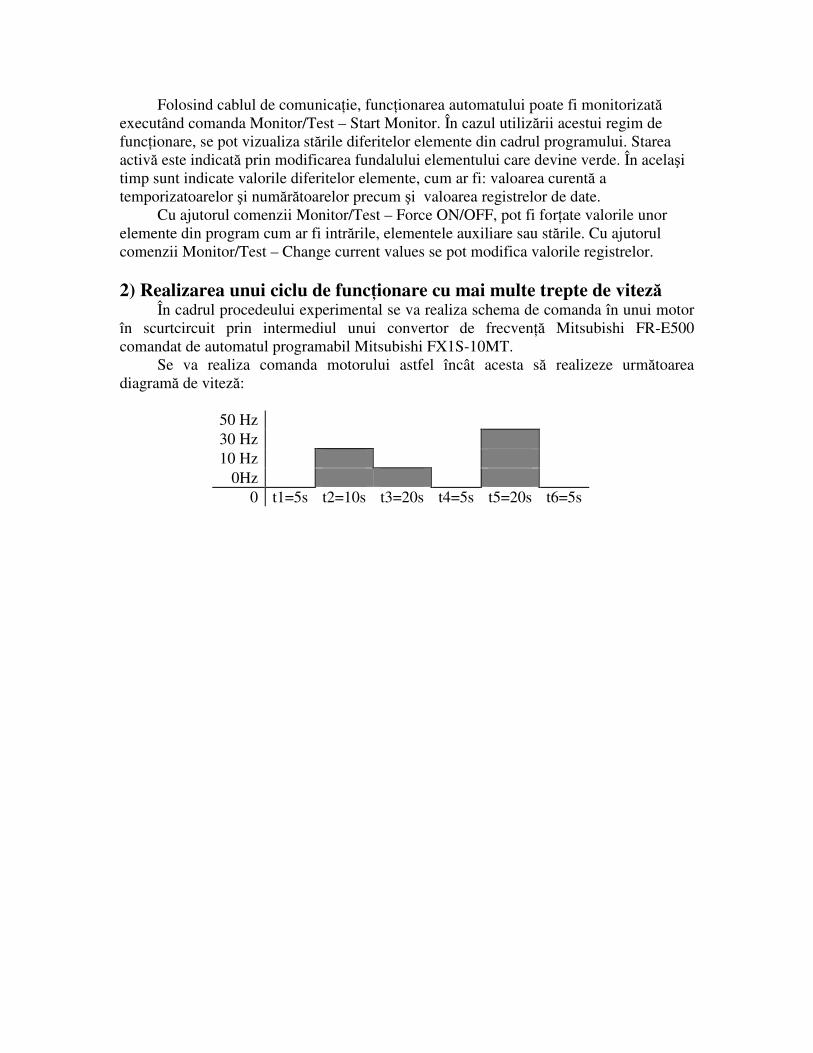
Folosind cablul de comunicaŃie, funcŃionarea automatului poate fi monitorizată executând comanda Monitor/Test – Start Monitor. În cazul utilizării acestui regim de funcŃionare, se pot vizualiza stările diferitelor elemente din cadrul programului. Starea activă este indicată prin modificarea fundalului elementului care devine verde. În acelaşi timp sunt indicate valorile diferitelor elemente, cum ar fi: valoarea curentă a temporizatoarelor şi numărătoarelor precum şi valoarea registrelor de date.
Cu ajutorul comenzii Monitor/Test – Force ON/OFF, pot fi forŃate valorile unor elemente din program cum ar fi intrările, elementele auxiliare sau stările. Cu ajutorul comenzii Monitor/Test – Change current values se pot modifica valorile registrelor.
2) Realizarea unui ciclu de funcŃionare cu mai multe trepte de viteză
În cadrul procedeului experimental se va realiza schema de comanda în unui motor în scurtcircuit prin intermediul unui convertor de frecvenŃă Mitsubishi FR-E500 comandat de automatul programabil Mitsubishi FX1S-10MT.
Se va realiza comanda motorului astfel încât acesta să realizeze următoarea diagramă de viteză:
50 Hz 30 Hz 10 Hz
0Hz 0 t1=5s t2=10s t3=20s t4=5s t5=20s t6=5s

Cuprins Laborator 1. Instrucțiuni de protecția muncii pentru studenți ............................................ 2 Laborator 2. Utilizarea programului Mitsubishi ALVLS ................................................... 9 Laborator 3. Studiul porŃilor logice .................................................................................. 16 Laborator 4. Studiul decodificatoarelor şi multiplexoarelor ........................................... 21 Laborator 5. Studiul circuitelor secvenŃiale ...................................................................... 26 Laborator 6. Analiza şi sinteza circuitelor combinaŃionale .............................................. 34 Laborator 7. Analiza şi sinteza circuitelor secvenŃiale ..................................................... 44 Laborator 8. Programarea automatelor programabile în limbajul orientat pe scheme de contacte ............................................................................................................................. 57 Laborator 9. Programarea directă a unui automat programabil Mitsubishi Alpha ........... 67 Laborator 10. Programarea şi monitorizarea funcŃionării unui automat programabil Mitsubishi Alpha ............................................................................................................... 73 Laborator 11. Utilizarea temporizatoarelor ....................................................................... 77 Laborator 12. Utilizarea numărătoarelor........................................................................... 80 Laborator 13. Comanda unui invertor comandat pentru reglarea vitezei unui motor asincron trifazat cu rotorul în scurt circuit. ....................................................................... 83 Laborator 14. Utilizarea AP Mitsubishi din seria FX1S ................................................... 92 Cuprins .............................................................................................................................. 96