3. 3.1. funcții primitive de modificare a intensității ... de... · funcții primitive de...
TRANSCRIPT
3. Tehnici de îmbunătățire a caracteristicilor spațiale ale imaginilor (image enhancement)
3.1. Funcții primitive de modificare a intensității luminoase a imaginilor
Modificarea intensității luminoase este una dintre cele mai simple tehnici de procesare a imaginilor. Fie f imagi-
nea de intrare. Imaginea rezultată în urma unei astfel de transformări, g, este calculată conform relației
( ) ( ( )) ( )
unde operatorul T modifică valoarea unui pixel r într-o valoare rezultat, s, deci poziția pixelului în imagine nu are nici o
semnificație. Cu alte cuvinte, fiecărui nivel de gri r din f îi corespunde unic nivelul de gri s din g, cu
( ) ( )
De exemplu, în cazul unei imagini cu 256 de niveluri de gri, T este un vector cu 256 de elemente.
În continuare este utilizată cu precădere relația (3.2) pentru definirea transformărilor asupra intensității luminoase
ale imaginilor.
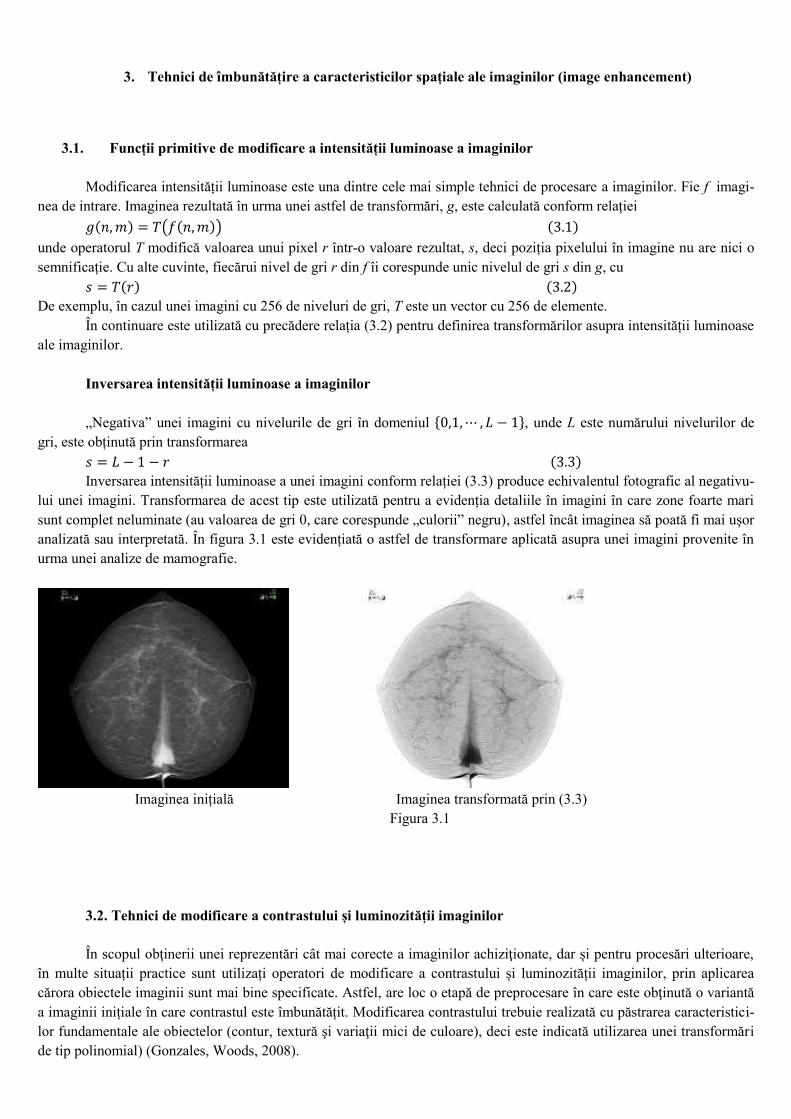
Inversarea intensității luminoase a imaginilor
„Negativa” unei imagini cu nivelurile de gri în domeniul { }, unde L este numărului nivelurilor de
gri, este obținută prin transformarea
( )
Inversarea intensității luminoase a unei imagini conform relației (3.3) produce echivalentul fotografic al negativu-
lui unei imagini. Transformarea de acest tip este utilizată pentru a evidenția detaliile în imagini în care zone foarte mari
sunt complet neluminate (au valoarea de gri 0, care corespunde „culorii” negru), astfel încât imaginea să poată fi mai ușor
analizată sau interpretată. În figura 3.1 este evidențiată o astfel de transformare aplicată asupra unei imagini provenite în
urma unei analize de mamografie.
Imaginea inițială
Imaginea transformată prin (3.3)
Figura 3.1
3.2. Tehnici de modificare a contrastului și luminozității imaginilor
În scopul obţinerii unei reprezentări cât mai corecte a imaginilor achiziţionate, dar și pentru procesări ulterioare,
în multe situații practice sunt utilizați operatori de modificare a contrastului și luminozității imaginilor, prin aplicarea
cărora obiectele imaginii sunt mai bine specificate. Astfel, are loc o etapă de preprocesare în care este obţinută o variantă
a imaginii inițiale în care contrastul este îmbunătățit. Modificarea contrastului trebuie realizată cu păstrarea caracteristici-
lor fundamentale ale obiectelor (contur, textură şi variaţii mici de culoare), deci este indicată utilizarea unei transformări
de tip polinomial) (Gonzales, Woods, 2008).
Transformarea Log
Forma generală a transformării Log este definită prin
( ) ( )
unde și c este constantă.
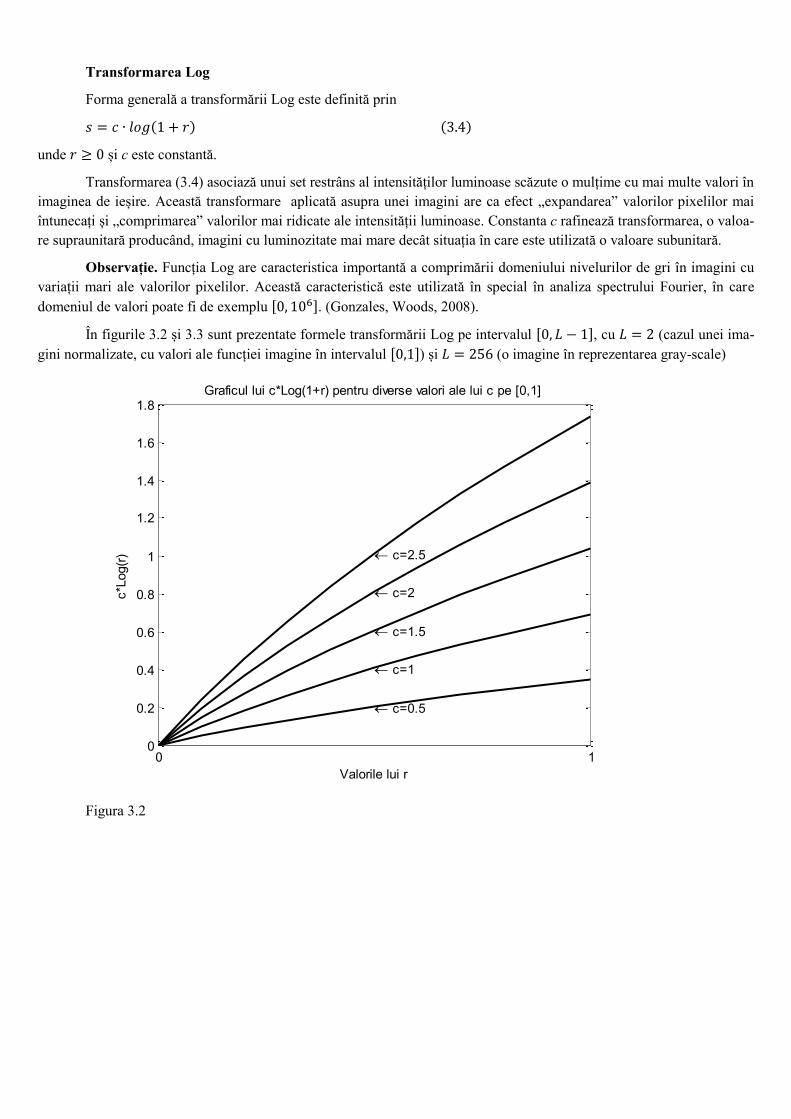
Transformarea (3.4) asociază unui set restrâns al intensităților luminoase scăzute o mulțime cu mai multe valori în
imaginea de ieșire. Această transformare aplicată asupra unei imagini are ca efect „expandarea” valorilor pixelilor mai
întunecați și „comprimarea” valorilor mai ridicate ale intensității luminoase. Constanta c rafinează transformarea, o valoa-
re supraunitară producând, imagini cu luminozitate mai mare decât situația în care este utilizată o valoare subunitară.
Observație. Funcția Log are caracteristica importantă a comprimării domeniului nivelurilor de gri în imagini cu
variații mari ale valorilor pixelilor. Această caracteristică este utilizată în special în analiza spectrului Fourier, în care
domeniul de valori poate fi de exemplu [ ]. (Gonzales, Woods, 2008).
În figurile 3.2 și 3.3 sunt prezentate formele transformării Log pe intervalul [ ], cu (cazul unei ima-
gini normalizate, cu valori ale funcției imagine în intervalul [ ]) și (o imagine în reprezentarea gray-scale)
Figura 3.2
0 10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Valorile lui r
c*L
og(r
)
Graficul lui c*Log(1+r) pentru diverse valori ale lui c pe [0,1]
c=0.5
c=1
c=1.5
c=2
c=2.5
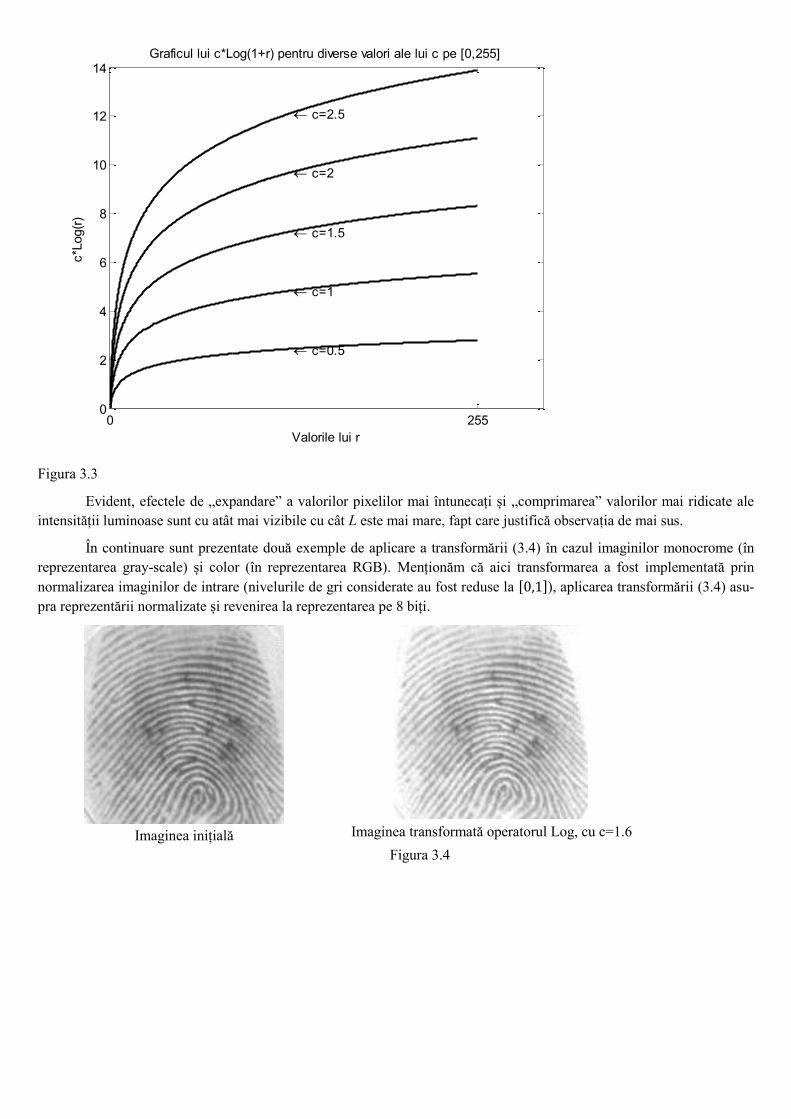
Figura 3.3
Evident, efectele de „expandare” a valorilor pixelilor mai întunecați și „comprimarea” valorilor mai ridicate ale
intensității luminoase sunt cu atât mai vizibile cu cât L este mai mare, fapt care justifică observația de mai sus.
În continuare sunt prezentate două exemple de aplicare a transformării (3.4) în cazul imaginilor monocrome (în
reprezentarea gray-scale) și color (în reprezentarea RGB). Menționăm că aici transformarea a fost implementată prin
normalizarea imaginilor de intrare (nivelurile de gri considerate au fost reduse la [ ]), aplicarea transformării (3.4) asu-
pra reprezentării normalizate și revenirea la reprezentarea pe 8 biți.
Imaginea inițială
Imaginea transformată operatorul Log, cu c=1.6
Figura 3.4
0 2550
2
4
6
8
10
12
14
Valorile lui r
c*L
og(r
)
Graficul lui c*Log(1+r) pentru diverse valori ale lui c pe [0,255]
c=0.5
c=1
c=1.5
c=2
c=2.5
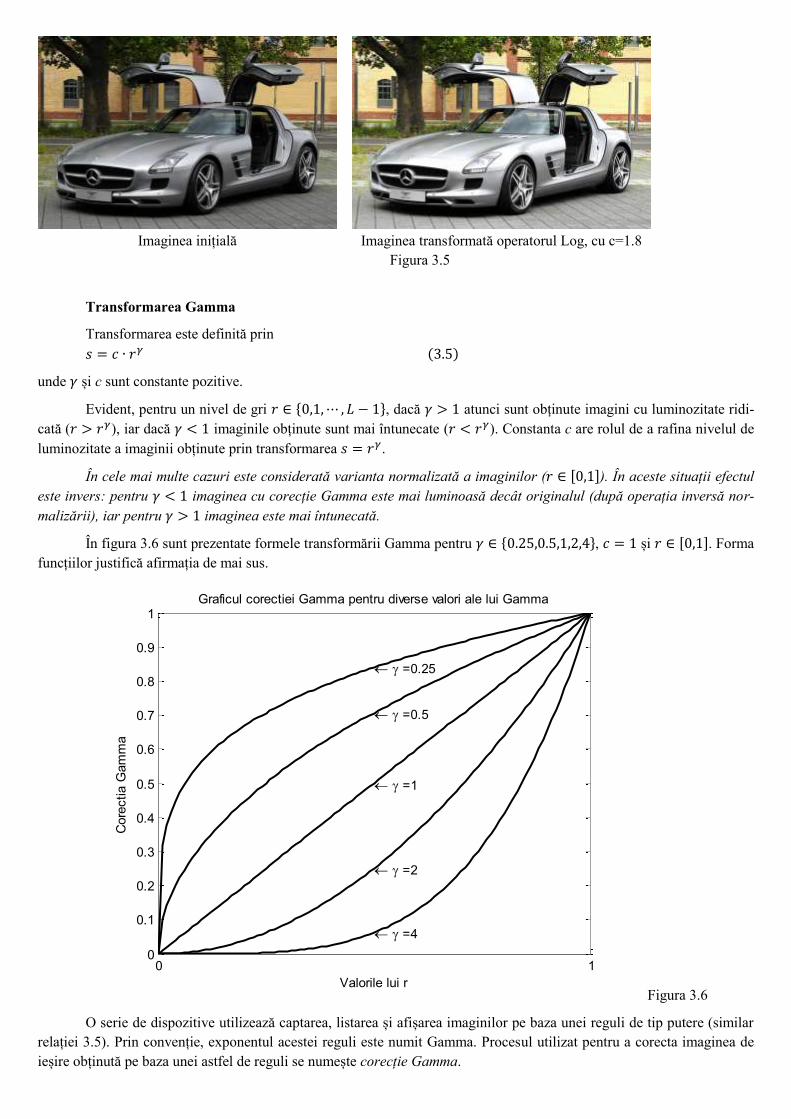
Imaginea inițială
Imaginea transformată operatorul Log, cu c=1.8
Figura 3.5
Transformarea Gamma
Transformarea este definită prin
( )
unde și c sunt constante pozitive.
Evident, pentru un nivel de gri { }, dacă atunci sunt obținute imagini cu luminozitate ridi-
cată ( ), iar dacă imaginile obținute sunt mai întunecate ( ). Constanta c are rolul de a rafina nivelul de
luminozitate a imaginii obținute prin transformarea .
În cele mai multe cazuri este considerată varianta normalizată a imaginilor ( [ ]). În aceste situații efectul
este invers: pentru imaginea cu corecție Gamma este mai luminoasă decât originalul (după operația inversă nor-
malizării), iar pentru imaginea este mai întunecată.
În figura 3.6 sunt prezentate formele transformării Gamma pentru { }, și [ ]. Forma
funcțiilor justifică afirmația de mai sus.
Figura 3.6
O serie de dispozitive utilizează captarea, listarea și afișarea imaginilor pe baza unei reguli de tip putere (similar
relației 3.5). Prin convenție, exponentul acestei reguli este numit Gamma. Procesul utilizat pentru a corecta imaginea de
ieșire obținută pe baza unei astfel de reguli se numește corecție Gamma.
0 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Valorile lui r
Core
ctia G
am
ma
Graficul corectiei Gamma pentru diverse valori ale lui Gamma
=0.25
=0.5
=1
=2
=4
Corecțiile Gamma sunt importante pentru afișarea corectă a imaginilor pe monitoare. Acele imagini care nu sunt
corect afișate sunt fie prea luminoase, fie, în cele mai multe cazuri, prea întunecoase. De asemenea, tentativa de a repro-
duce o culoare cât mai exact necesită utilizarea corecțiilor Gamma, deoarece modificarea valorilor parametrului modifi-
că nu doar intensitatea luminoasă, ci și raportul mutual între roșu, verde și albastru într-o imagine color reprezentată RGB.
Corecțiile Gamma sunt foarte importante pentru utilizarea imaginilor în scopuri comerciale (este deja o obișnuin-
ță ca imaginile create și afișate pe site-uri Web să fie des accesate de milioane de oameni, majoritatea acestora având mo-
nitoare cu proprietăți și setări diverse). Anumite sisteme au deja încorporat parțial corecția Gamma. De asemenea, stan-
dardele curente sub care sunt salvate imaginile nu conțin valoarea Gamma cu care a fost captată imaginea. Ținând cont de
aceste constrângeri, o abordare rezonabilă pentru stocarea imaginilor pe site-uri Web este aceea de a preprocesa imaginile
cu o valoare a parametrului care să reprezinte o medie a tipurilor de monitoare și calculatoare folosite la un momemnt
dat pe piață.
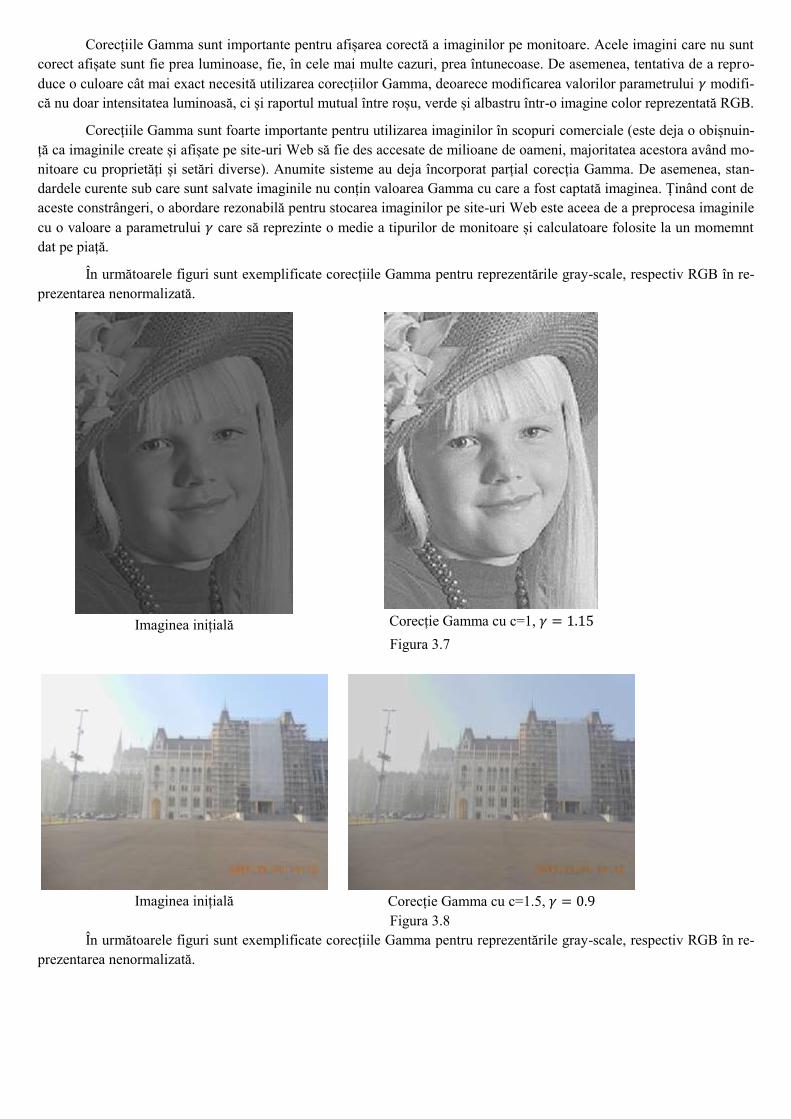
În următoarele figuri sunt exemplificate corecțiile Gamma pentru reprezentările gray-scale, respectiv RGB în re-
prezentarea nenormalizată.
Imaginea inițială
Corecție Gamma cu c=1,
Figura 3.7
Imaginea inițială
Corecție Gamma cu c=1.5,
Figura 3.8
În următoarele figuri sunt exemplificate corecțiile Gamma pentru reprezentările gray-scale, respectiv RGB în re-
prezentarea nenormalizată.
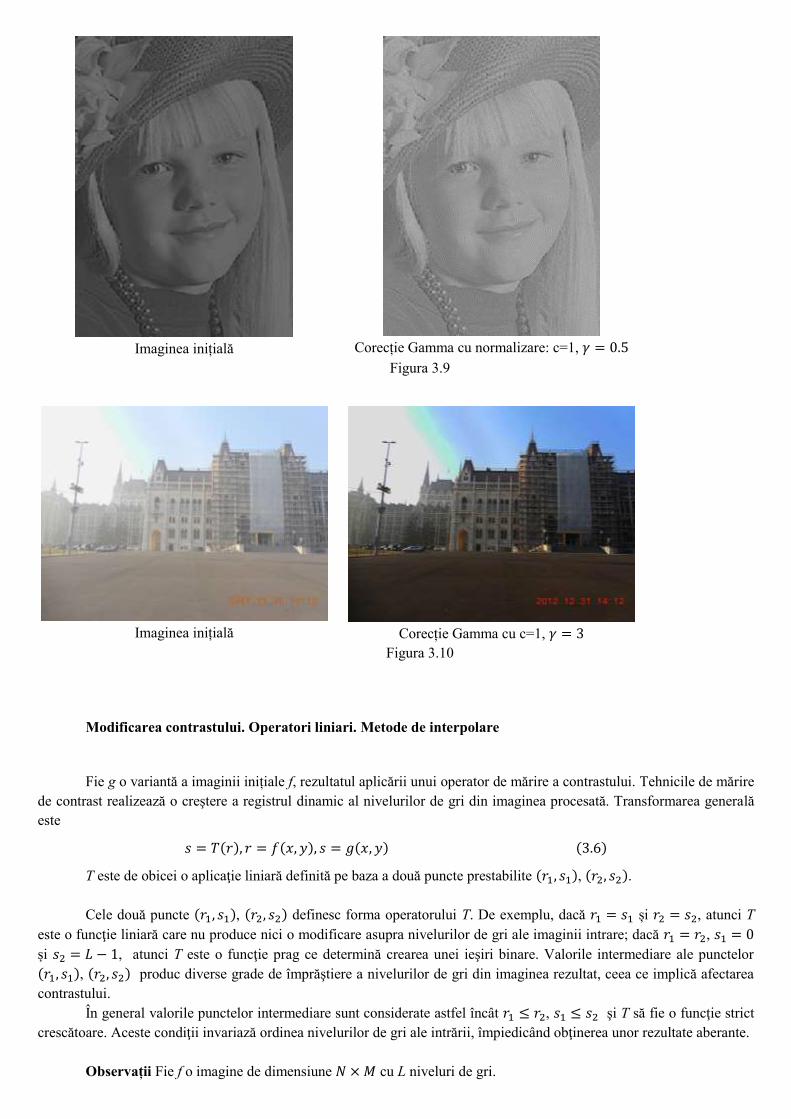
Imaginea inițială
Corecție Gamma cu normalizare: c=1,
Figura 3.9
Imaginea inițială
Corecție Gamma cu c=1,
Figura 3.10
Modificarea contrastului. Operatori liniari. Metode de interpolare
Fie g o variantă a imaginii inițiale f, rezultatul aplicării unui operator de mărire a contrastului. Tehnicile de mărire
de contrast realizează o creştere a registrul dinamic al nivelurilor de gri din imaginea procesată. Transformarea generală
este
( ) ( ) ( ) ( )
T este de obicei o aplicaţie liniară definită pe baza a două puncte prestabilite ( ), ( ).
Cele două puncte ( ), ( ) definesc forma operatorului T. De exemplu, dacă și , atunci T
este o funcţie liniară care nu produce nici o modificare asupra nivelurilor de gri ale imaginii intrare; dacă ,
și , atunci T este o funcţie prag ce determină crearea unei ieşiri binare. Valorile intermediare ale punctelor
( ), ( ) produc diverse grade de împrăştiere a nivelurilor de gri din imaginea rezultat, ceea ce implică afectarea
contrastului.
În general valorile punctelor intermediare sunt considerate astfel încât , şi T să fie o funcţie strict
crescătoare. Aceste condiţii invariază ordinea nivelurilor de gri ale intrării, împiedicând obţinerea unor rezultate aberante.
Observații Fie f o imagine de dimensiune cu L niveluri de gri.
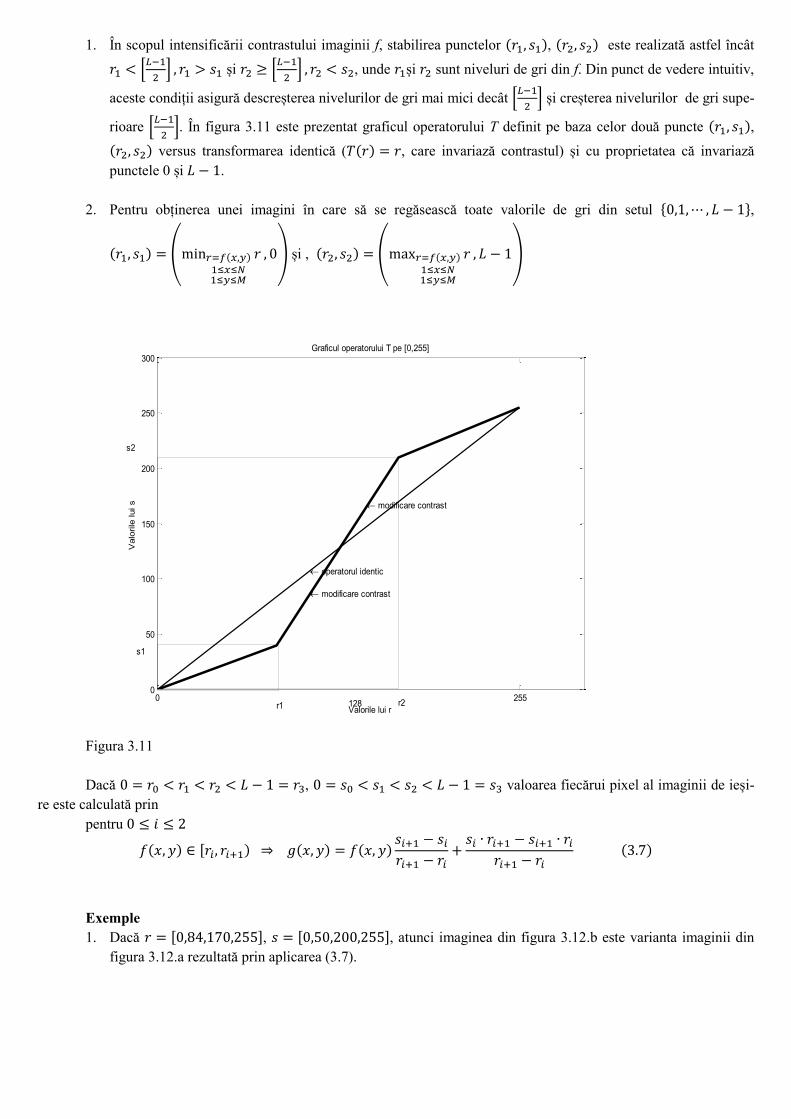
1. În scopul intensificării contrastului imaginii f, stabilirea punctelor ( ), ( ) este realizată astfel încât
[
] și [
] , unde și sunt niveluri de gri din f. Din punct de vedere intuitiv,
aceste condiții asigură descreșterea nivelurilor de gri mai mici decât [
] și creșterea nivelurilor de gri supe-
rioare [
]. În figura 3.11 este prezentat graficul operatorului T definit pe baza celor două puncte ( ),
( ) versus transformarea identică ( ( ) , care invariază contrastul) și cu proprietatea că invariază
punctele 0 și .
2. Pentru obținerea unei imagini în care să se regăsească toate valorile de gri din setul { },
( ) ( ( )
) și , ( ) ( ( )
)
Figura 3.11
Dacă , valoarea fiecărui pixel al imaginii de ieși-
re este calculată prin
pentru
( ) [ ) ( ) ( )
( )
Exemple
1. Dacă [ ], [ ], atunci imaginea din figura 3.12.b este varianta imaginii din
figura 3.12.a rezultată prin aplicarea (3.7).
0 2550
50
100
150
200
250
300
Valorile lui r
Valo
rile
lui s
Graficul operatorului T pe [0,255]
modificare contrast
modificare contrast
operatorul identic
128 r2r1
s1
s2
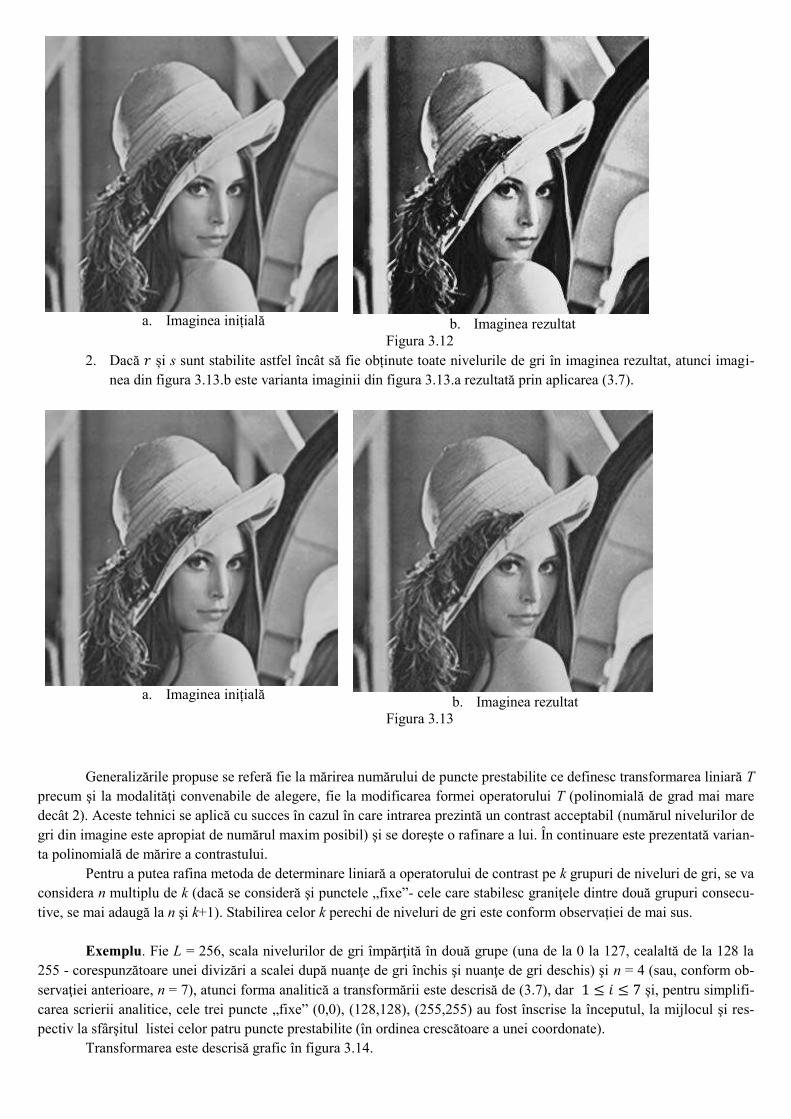
a. Imaginea inițială
b. Imaginea rezultat
Figura 3.12
2. Dacă și s sunt stabilite astfel încât să fie obținute toate nivelurile de gri în imaginea rezultat, atunci imagi-
nea din figura 3.13.b este varianta imaginii din figura 3.13.a rezultată prin aplicarea (3.7).
a. Imaginea inițială
b. Imaginea rezultat
Figura 3.13
Generalizările propuse se referă fie la mărirea numărului de puncte prestabilite ce definesc transformarea liniară T
precum şi la modalităţi convenabile de alegere, fie la modificarea formei operatorului T (polinomială de grad mai mare
decât 2). Aceste tehnici se aplică cu succes în cazul în care intrarea prezintă un contrast acceptabil (numărul nivelurilor de
gri din imagine este apropiat de numărul maxim posibil) şi se doreşte o rafinare a lui. În continuare este prezentată varian-
ta polinomială de mărire a contrastului.
Pentru a putea rafina metoda de determinare liniară a operatorului de contrast pe k grupuri de niveluri de gri, se va
considera n multiplu de k (dacă se consideră şi punctele „fixe”- cele care stabilesc graniţele dintre două grupuri consecu-
tive, se mai adaugă la n şi k+1). Stabilirea celor k perechi de niveluri de gri este conform observației de mai sus.
Exemplu. Fie L = 256, scala nivelurilor de gri împărţită în două grupe (una de la 0 la 127, cealaltă de la 128 la
255 - corespunzătoare unei divizări a scalei după nuanţe de gri închis şi nuanţe de gri deschis) şi n = 4 (sau, conform ob-
servaţiei anterioare, n = 7), atunci forma analitică a transformării este descrisă de (3.7), dar și, pentru simplifi-
carea scrierii analitice, cele trei puncte „fixe” (0,0), (128,128), (255,255) au fost înscrise la începutul, la mijlocul şi res-
pectiv la sfârşitul listei celor patru puncte prestabilite (în ordinea crescătoare a unei coordonate).
Transformarea este descrisă grafic în figura 3.14.
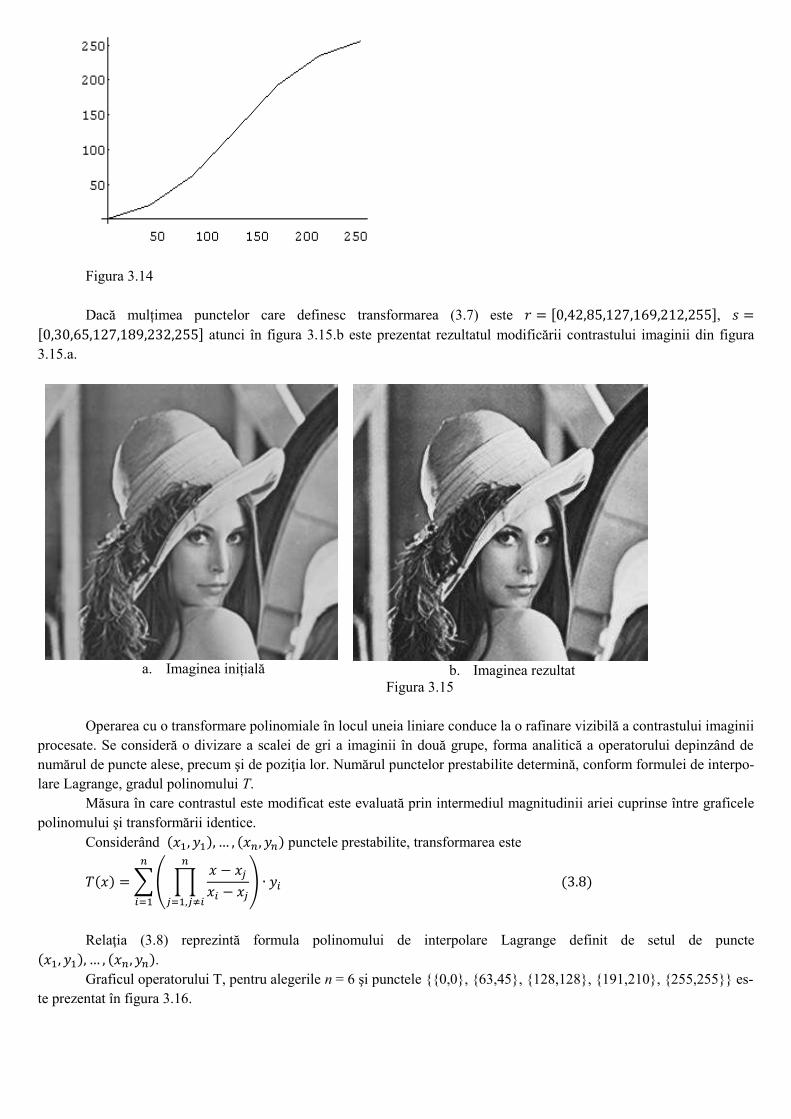
Figura 3.14
Dacă mulțimea punctelor care definesc transformarea (3.7) este [ ],
[ ] atunci în figura 3.15.b este prezentat rezultatul modificării contrastului imaginii din figura
3.15.a.
a. Imaginea inițială
b. Imaginea rezultat
Figura 3.15
Operarea cu o transformare polinomiale în locul uneia liniare conduce la o rafinare vizibilă a contrastului imaginii
procesate. Se consideră o divizare a scalei de gri a imaginii în două grupe, forma analitică a operatorului depinzând de
numărul de puncte alese, precum şi de poziţia lor. Numărul punctelor prestabilite determină, conform formulei de interpo-
lare Lagrange, gradul polinomului T.
Măsura în care contrastul este modificat este evaluată prin intermediul magnitudinii ariei cuprinse între graficele
polinomului şi transformării identice.
Considerând ( ) ( ) punctele prestabilite, transformarea este
( ) ∑( ∏
)
( )
Relaţia (3.8) reprezintă formula polinomului de interpolare Lagrange definit de setul de puncte
( ) ( ).
Graficul operatorului T, pentru alegerile n = 6 şi punctele {{0,0}, {63,45}, {128,128}, {191,210}, {255,255}} es-
te prezentat în figura 3.16.
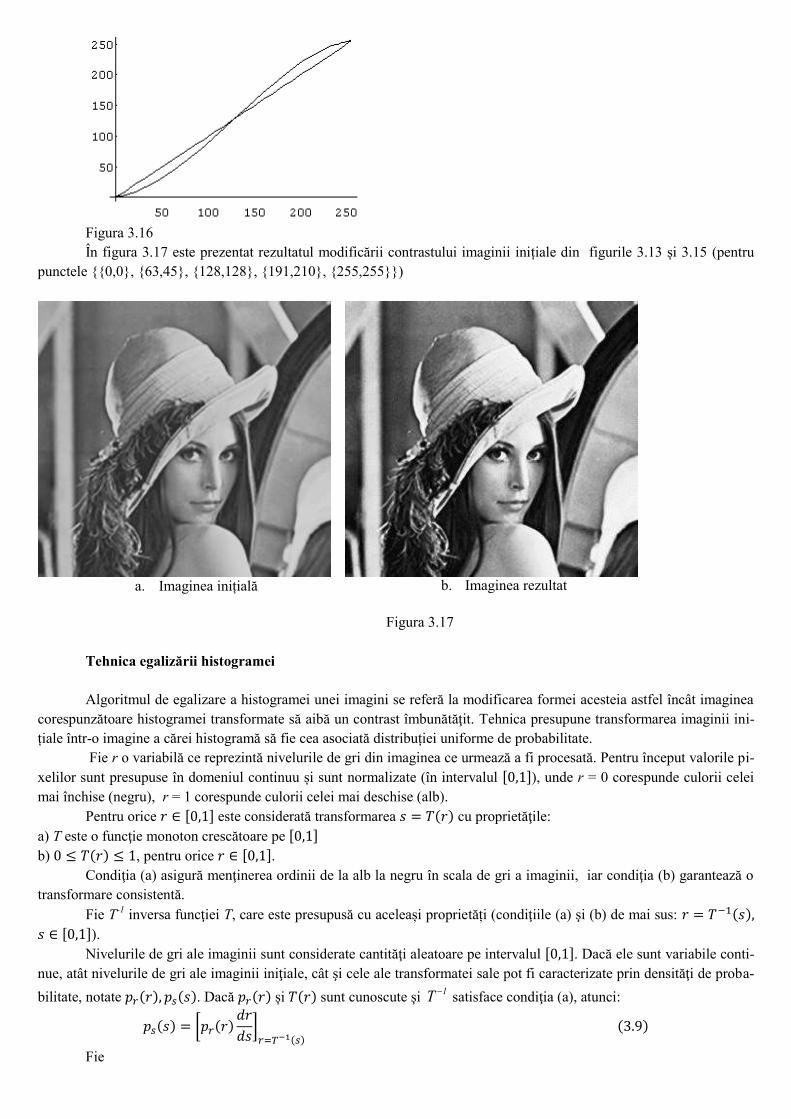
Figura 3.16
În figura 3.17 este prezentat rezultatul modificării contrastului imaginii inițiale din figurile 3.13 și 3.15 (pentru
punctele {{0,0}, {63,45}, {128,128}, {191,210}, {255,255}})
a. Imaginea inițială
b. Imaginea rezultat
Figura 3.17
Tehnica egalizării histogramei
Algoritmul de egalizare a histogramei unei imagini se referă la modificarea formei acesteia astfel încât imaginea
corespunzătoare histogramei transformate să aibă un contrast îmbunătăţit. Tehnica presupune transformarea imaginii ini-
țiale într-o imagine a cărei histogramă să fie cea asociată distribuției uniforme de probabilitate.
Fie r o variabilă ce reprezintă nivelurile de gri din imaginea ce urmează a fi procesată. Pentru început valorile pi-
xelilor sunt presupuse în domeniul continuu și sunt normalizate (în intervalul [ ]), unde r = 0 corespunde culorii celei
mai închise (negru), r = 1 corespunde culorii celei mai deschise (alb).
Pentru orice [ ] este considerată transformarea ( ) cu proprietăţile:
a) T este o funcţie monoton crescătoare pe [ ]
b) ( ) , pentru orice [ ].
Condiţia (a) asigură menţinerea ordinii de la alb la negru în scala de gri a imaginii, iar condiţia (b) garantează o
transformare consistentă.
Fie T-1
inversa funcţiei T, care este presupusă cu aceleași proprietăți (condiţiile (a) şi (b) de mai sus: ( )
[ ]).
Nivelurile de gri ale imaginii sunt considerate cantităţi aleatoare pe intervalul [ ]. Dacă ele sunt variabile conti-
nue, atât nivelurile de gri ale imaginii iniţiale, cât şi cele ale transformatei sale pot fi caracterizate prin densităţi de proba-
bilitate, notate ( ) ( ). Dacă ( ) și ( ) sunt cunoscute şi T 1 satisface condiţia (a), atunci:
( ) [ ( )
] ( )
( )
Fie

( ) ∫ ( )
( )
Membrul drept al relaţiei (3.10) este referit de obicei drept funcţie de distribuţie cumulativă CDF (Cumulative
Distribution Function) al lui r. Evident, operatorul definit în relația (3.10) satisface condiţiile (a) şi (b) menţionate mai
sus.
Din relaţia (3.10) obținem
( )
Înlocuind în (3.9) rezultă
( ) [ ( )
( )] ( )
[ ] ( )
ceea ce reprezintă densitatea de repartiţie uniformă pe intervalul de definiţie a variabilei transformate s.
Acest rezultat este independent de transformarea T (deci şi de inversa sa T-1
); această remarcă este extrem de im-
portantă, pentru că de obicei forma analitică a funcţiei T-1
este dificil de calculat.
În scopul aplicării acestei metode în procesarea unei imagini digitale, conceptele anterioare sunt reformulate în
formă discretă. În cazul în care scala de gri este mulţimea { }, densităţile de probabilitate sunt exprimate prin
( ) { }
unde este cel de-al k-lea nivel de gri din imagine, este numărul de apariții a lui ca valoare a pixelilor imaginii și
n este numărul total de pixeli din imagine. În caz discret, relaţia (3.10) devine
{ }
( ) ∑
∑ ( )
( )
unde
( )
iar T şi T-1
sunt astfel încât satisfac condiţiile (a) şi (b) mai sus menţionate. Pentru obținerea unei imagini cu valori de gri
în mulţimea { }, transformarea este
( ) ( ) ( ) ∑
Fie f imaginea de intrare și g imaginea calculată prin procedeul de egalizare a histogramei. Din punct de vedere al
implementării putem proceda astfel:
1. Pentru fiecare nivel de gri (intensitate luminoasa), { }, calculeaza densitatea de probabili-
tate a lui val, ( ).
2. Fiecare pixel din imaginea rezultat, ( ), este calculat prin
( ) ( ) ∑ ( )
( )
( )
În figura 3.18.b. este prezentat rezultatul modificării contrastului imaginii inițiale 3.18.a prin tehnica egalizării
histogramei. În figura 3.19 este prezentat un exemplu de transformare pentru imagini color în reprezentarea RGB.
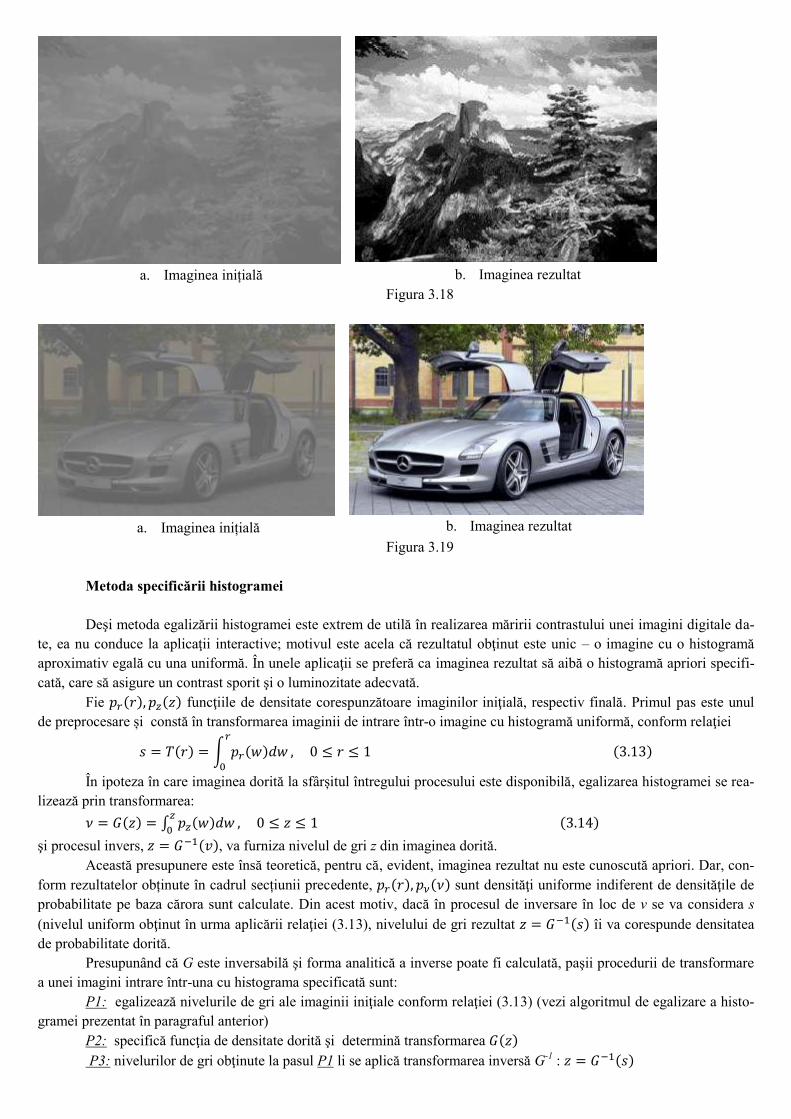
a. Imaginea inițială
b. Imaginea rezultat
Figura 3.18
a. Imaginea inițială
b. Imaginea rezultat
Figura 3.19
Metoda specificării histogramei
Deşi metoda egalizării histogramei este extrem de utilă în realizarea măririi contrastului unei imagini digitale da-
te, ea nu conduce la aplicaţii interactive; motivul este acela că rezultatul obţinut este unic – o imagine cu o histogramă
aproximativ egală cu una uniformă. În unele aplicaţii se preferă ca imaginea rezultat să aibă o histogramă apriori specifi-
cată, care să asigure un contrast sporit şi o luminozitate adecvată.
Fie ( ) ( ) funcţiile de densitate corespunzătoare imaginilor iniţială, respectiv finală. Primul pas este unul
de preprocesare și constă în transformarea imaginii de intrare într-o imagine cu histogramă uniformă, conform relaţiei
( ) ∫ ( )
( )
În ipoteza în care imaginea dorită la sfârșitul întregului procesului este disponibilă, egalizarea histogramei se rea-
lizează prin transformarea:
( ) ∫ ( )
( )
şi procesul invers, ( ), va furniza nivelul de gri z din imaginea dorită.
Această presupunere este însă teoretică, pentru că, evident, imaginea rezultat nu este cunoscută apriori. Dar, con-
form rezultatelor obținute în cadrul secțiunii precedente, ( ) ( ) sunt densităţi uniforme indiferent de densităţile de
probabilitate pe baza cărora sunt calculate. Din acest motiv, dacă în procesul de inversare în loc de v se va considera s
(nivelul uniform obţinut în urma aplicării relaţiei (3.13), nivelului de gri rezultat ( ) îi va corespunde densitatea
de probabilitate dorită.
Presupunând că G este inversabilă şi forma analitică a inverse poate fi calculată, paşii procedurii de transformare
a unei imagini intrare într-una cu histograma specificată sunt:
P1: egalizează nivelurile de gri ale imaginii iniţiale conform relaţiei (3.13) (vezi algoritmul de egalizare a histo-
gramei prezentat în paragraful anterior)
P2: specifică funcţia de densitate dorită şi determină transformarea ( )
P3: nivelurilor de gri obţinute la pasul P1 li se aplică transformarea inversă G-1
: ( )
În practică este posibil ca aplicaţia G să nu fie inversabilă; în această situaţie, pentru s nivel de gri şi
{ | ( ) }, este ales din M acel punct z care prezintă cea mai mică abatere faţă de o valoarea teoretică. Principalele
dificultăţi în aplicarea acestei metode apar în momentul alegerii unei histograme corespunzătoare modificării de contrast
dorită. În general sunt două modalităţi de specificare: alegerea unei forme analitice particulare (cum ar fi densitatea de
repartiţie Gauss) şi apoi digitizarea acesteia, respectiv selectarea unei curbe adecvate (în sensul contrastului) şi construirea
unei imagini cu histograma apropiată ca formă de acea curbă.
Pornind de la aceste concepte generale, una din variante este transformare dată de densitatea de repartiţie arcsin,
din două motive: pe de o parte, o histogramă apropiată ca formă de aceasta corespunde unei imagini cu contrast ridicat,
iar pe de altă parte, formele analitice ale CDF şi transformatei inverse pot fi ușor calculate, extensia de la intervalul de
definiţie [ ] către [ ] fiind imediată. Transformare G pe [ ] este deci:
( ) {
[ ( )
] [ ]
( )
Pentru aplicarea efectivă a unei astfel de transformări este realizată translatarea către intervalul dat de limitele va-
lorilor nivelurilor de gri ale imaginii, presupus a fi [ ], după cum urmează:
( )
[ ( ( ))
] [ ] ( ) [ ]
( )
( ) ( ) ( )
Obținem
( )
[ (
)
] [ ] ( )
Funcția G calculate pe baza relației (3.16) este inversabilă, inversa sa fiind dată de relaţia
( )
( ( (
))) [ ] [ ] ( )
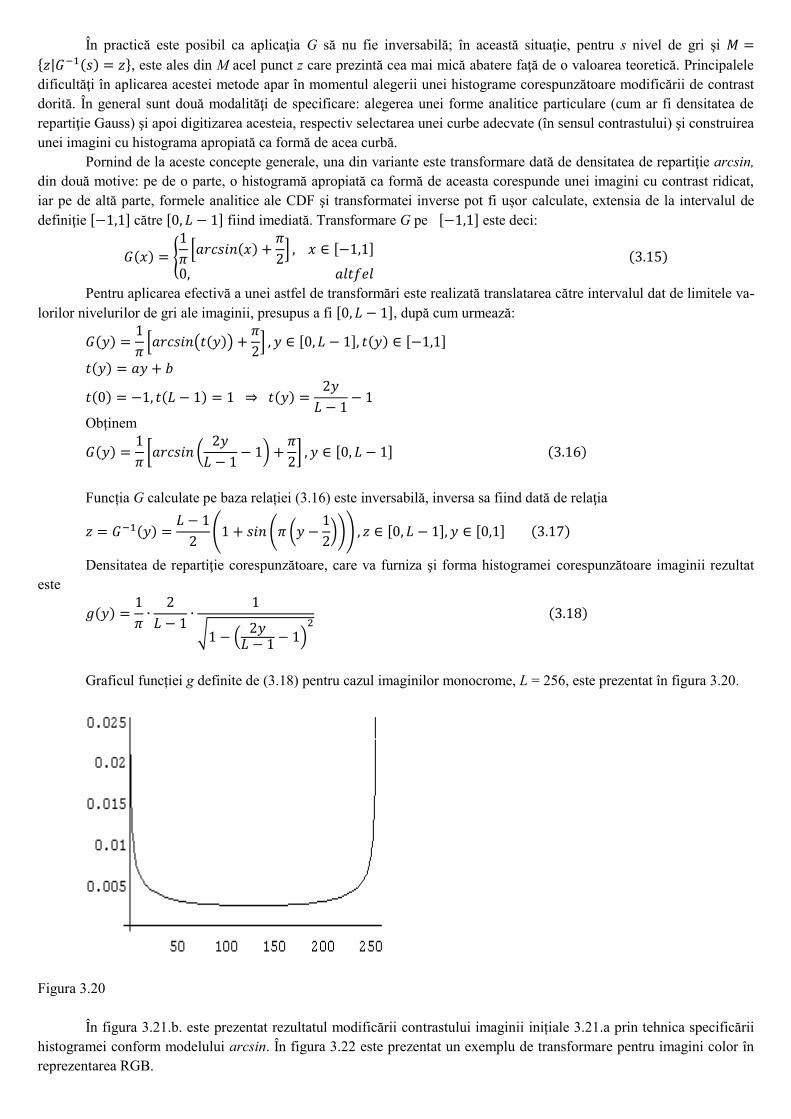
Densitatea de repartiţie corespunzătoare, care va furniza şi forma histogramei corespunzătoare imaginii rezultat
este
( )
√ ( )
( )
Graficul funcției g definite de (3.18) pentru cazul imaginilor monocrome, L = 256, este prezentat în figura 3.20.
Figura 3.20
În figura 3.21.b. este prezentat rezultatul modificării contrastului imaginii inițiale 3.21.a prin tehnica specificării
histogramei conform modelului arcsin. În figura 3.22 este prezentat un exemplu de transformare pentru imagini color în
reprezentarea RGB.
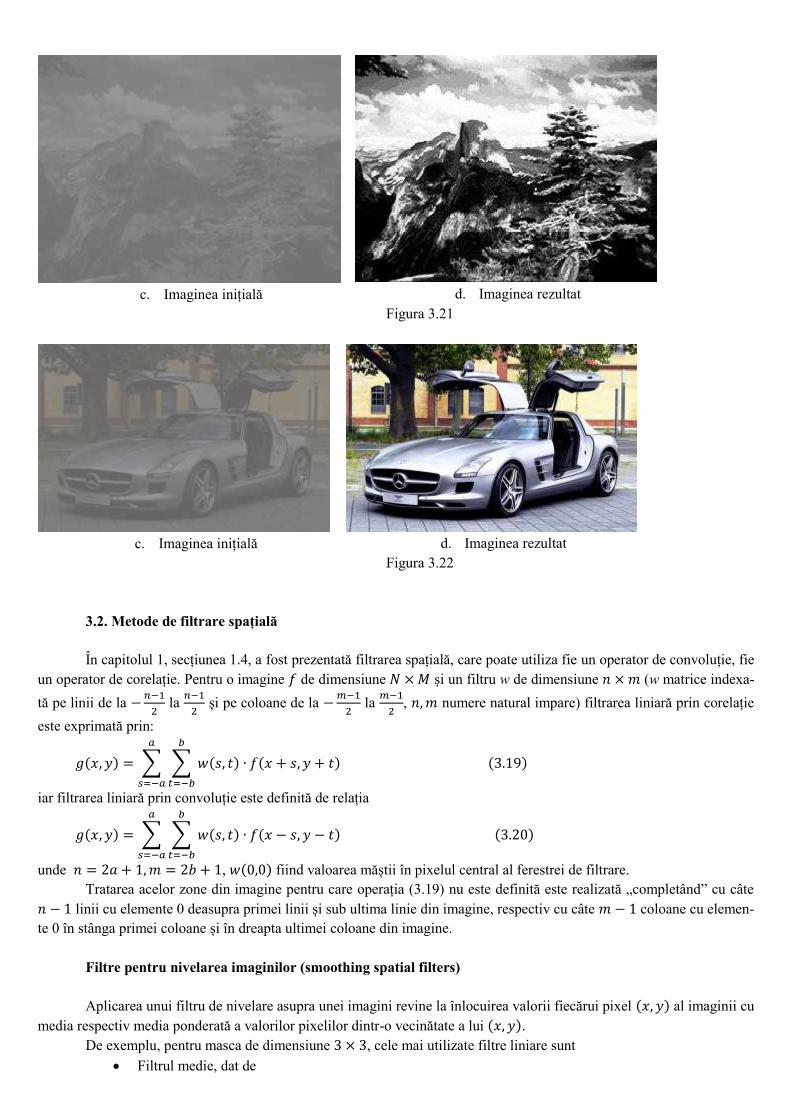
c. Imaginea inițială
d. Imaginea rezultat
Figura 3.21
c. Imaginea inițială
d. Imaginea rezultat
Figura 3.22
3.2. Metode de filtrare spațială
În capitolul 1, secțiunea 1.4, a fost prezentată filtrarea spațială, care poate utiliza fie un operator de convoluție, fie
un operator de corelație. Pentru o imagine de dimensiune și un filtru w de dimensiune (w matrice indexa-
tă pe linii de la
la
și pe coloane de la
la
, numere natural impare) filtrarea liniară prin corelație
este exprimată prin:
( ) ∑ ∑ ( ) ( )
( )
iar filtrarea liniară prin convoluție este definită de relația
( ) ∑ ∑ ( ) ( )
( )
unde , ( ) fiind valoarea măștii în pixelul central al ferestrei de filtrare.
Tratarea acelor zone din imagine pentru care operația (3.19) nu este definită este realizată „completând” cu câte
linii cu elemente 0 deasupra primei linii și sub ultima linie din imagine, respectiv cu câte coloane cu elemen-
te 0 în stânga primei coloane și în dreapta ultimei coloane din imagine.
Filtre pentru nivelarea imaginilor (smoothing spatial filters)
Aplicarea unui filtru de nivelare asupra unei imagini revine la înlocuirea valorii fiecărui pixel ( ) al imaginii cu
media respectiv media ponderată a valorilor pixelilor dintr-o vecinătate a lui ( ).
De exemplu, pentru masca de dimensiune , cele mai utilizate filtre liniare sunt
Filtrul medie, dat de

[
] [
]
În acest caz valoarea rezultată în urma filtrării este media pixelilor situați în vecinătatea a pixelului
central
Filtrul medie ponderată
[
] [
]
În acest caz valoarea rezultată în urma filtrării este media ponderată (în funcție de distanță) a pixelilor si-
tuați în vecinătatea a pixelului central.
Aplicarea filtrelor medie revine la aplicarea relației
( ) ∑ ∑ ( ) ( )
∑ ∑ ( )
( )
Principala utilitate a filtrelor de tip medie este de a reduce detaliile „irelevante” din imagini, unde prin zone irele-
vante înțelegem regiuni de pixeli de dimensiuni mici în raport cu dimensiunile măștii de filtrare.
Filtrele medie induc efectul de tip blur. Filtrele medie ponderată reduc acest efect. Efectele sunt vizibile și în ca-
zul exemplelor prezentate mai jos. (Gonzales, Woods, 2008)
Exemplu În figurile 3.23.b și 3.23.c sunt prezentate rezultatele aplicării filtrului medie de dimensiuni , res-
pectiv imaginii din figura 3.23.a, iar în figurile 3.23.d și 3.23.e sunt prezentate imaginile obținute prin aplicarea
filtrului medie ponderată de dimensiuni , respectiv . Măștile de filtrare utilizate în cazul mediei ponderate sunt
[ ]
[
]
Evident, pot fi folosite diverse ponderi ale pixelilor, ideea fiind aceea că pixelii mai apropiați de pixelul central în
vecinătatea considerată au o contribuție mai mare la determinarea valorii finale comparativ cu pixelii situați mai departe
de pixelul central. În acest exemplu, pentru dimensiunea 5, pixelul central are ponderea
, gradul de importantă a veci-
nilor scăzând apoi la valorile
(unde suma elementelor măștii de filtrare este 100).
În toate imaginile prelucrate, zonele de dimensiuni mici (în raport cu dimensiunile măștii de filtrare) care au „in-
formație” (obiecte din imagine) sunt estompate, celelalte având indus efectul blur (într-o mai mică măsură în cazul filtră-
rii medie ponderată). De asemenea, liniile și coloanele din marginile imaginilor filtrare au rezultat în urma completării cu
linii și coloane cu elemente nule (corespunzătoare culorii negru) în imaginea inițială.
Pentru implementarea filtrării este utilizată relația
( ) ∑ ∑ ( ) ( )
echivalenta relației (3.19), unde
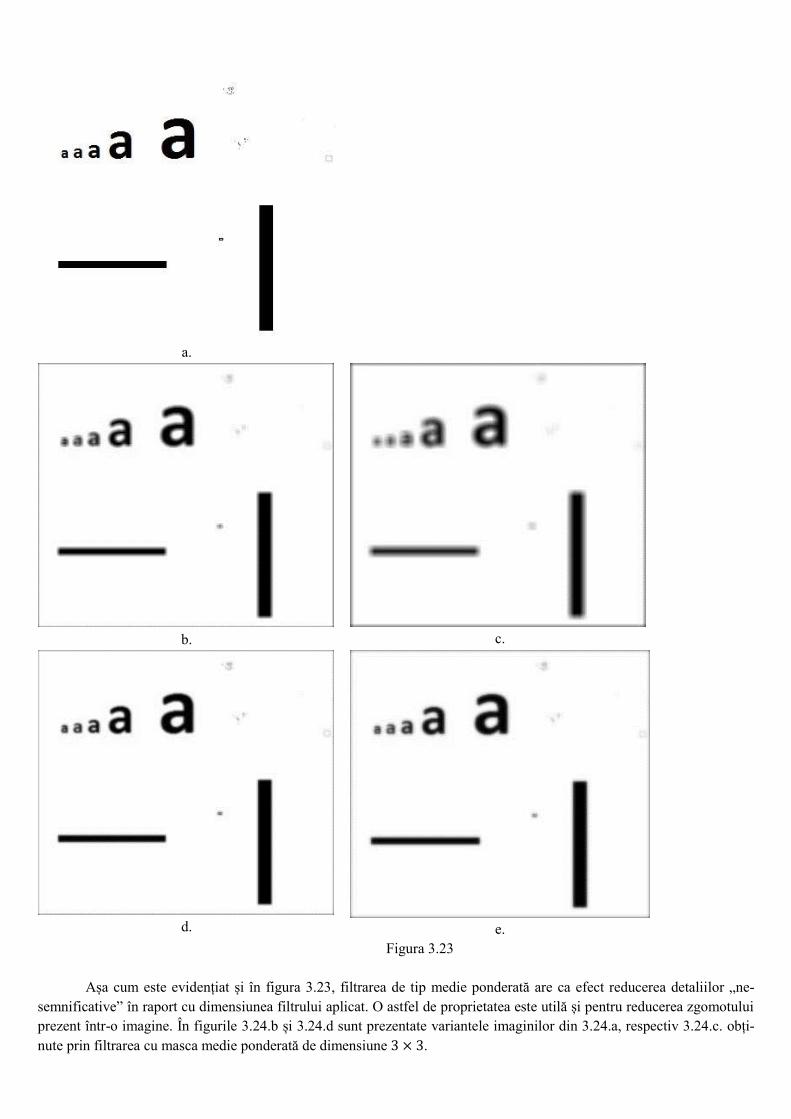
a.
b.
c.
d.
e.
Figura 3.23
Așa cum este evidențiat și în figura 3.23, filtrarea de tip medie ponderată are ca efect reducerea detaliilor „ne-
semnificative” în raport cu dimensiunea filtrului aplicat. O astfel de proprietatea este utilă și pentru reducerea zgomotului
prezent într-o imagine. În figurile 3.24.b și 3.24.d sunt prezentate variantele imaginilor din 3.24.a, respectiv 3.24.c. obți-
nute prin filtrarea cu masca medie ponderată de dimensiune .
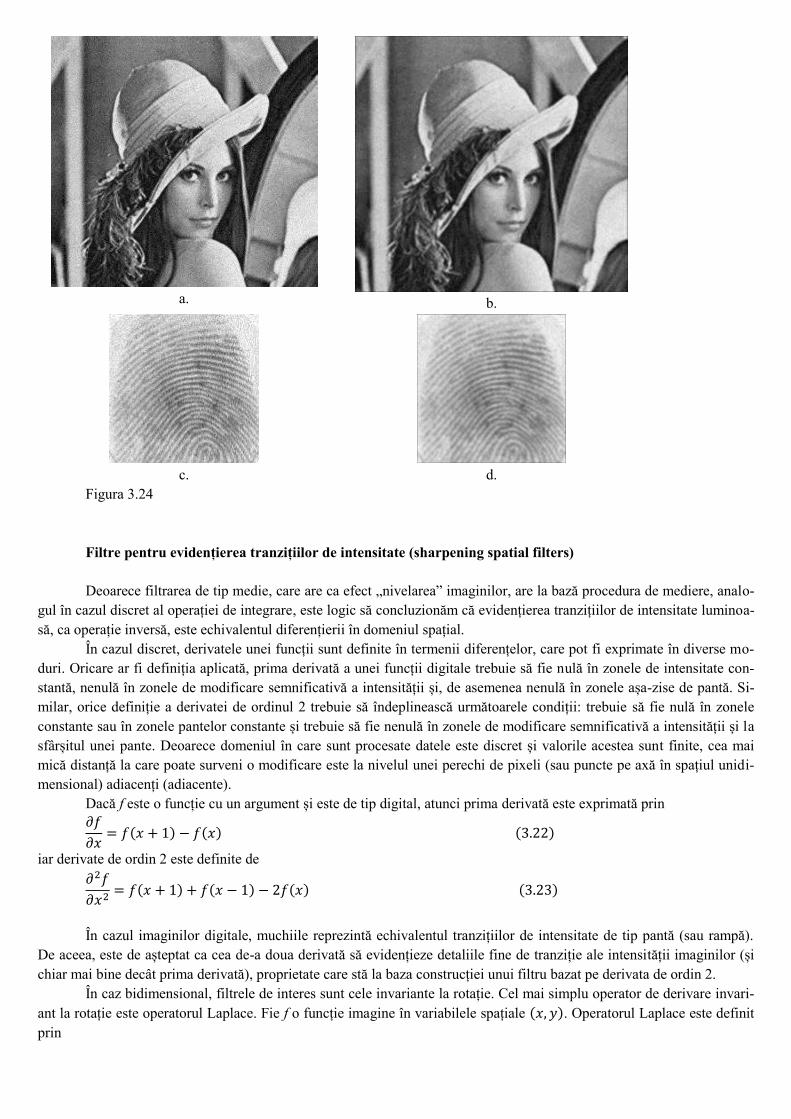
a.
b.
c.
d.
Figura 3.24
Filtre pentru evidențierea tranzițiilor de intensitate (sharpening spatial filters)
Deoarece filtrarea de tip medie, care are ca efect „nivelarea” imaginilor, are la bază procedura de mediere, analo-
gul în cazul discret al operației de integrare, este logic să concluzionăm că evidențierea tranzițiilor de intensitate luminoa-
să, ca operație inversă, este echivalentul diferențierii în domeniul spațial.
În cazul discret, derivatele unei funcții sunt definite în termenii diferențelor, care pot fi exprimate în diverse mo-
duri. Oricare ar fi definiția aplicată, prima derivată a unei funcții digitale trebuie să fie nulă în zonele de intensitate con-
stantă, nenulă în zonele de modificare semnificativă a intensității și, de asemenea nenulă în zonele așa-zise de pantă. Si-
milar, orice definiție a derivatei de ordinul 2 trebuie să îndeplinească următoarele condiții: trebuie să fie nulă în zonele
constante sau în zonele pantelor constante și trebuie să fie nenulă în zonele de modificare semnificativă a intensității și la
sfârșitul unei pante. Deoarece domeniul în care sunt procesate datele este discret și valorile acestea sunt finite, cea mai
mică distanță la care poate surveni o modificare este la nivelul unei perechi de pixeli (sau puncte pe axă în spațiul unidi-
mensional) adiacenți (adiacente).
Dacă f este o funcție cu un argument și este de tip digital, atunci prima derivată este exprimată prin
( ) ( ) ( )
iar derivate de ordin 2 este definite de
( ) ( ) ( ) ( )
În cazul imaginilor digitale, muchiile reprezintă echivalentul tranzițiilor de intensitate de tip pantă (sau rampă).
De aceea, este de așteptat ca cea de-a doua derivată să evidențieze detaliile fine de tranziție ale intensității imaginilor (și
chiar mai bine decât prima derivată), proprietate care stă la baza construcției unui filtru bazat pe derivata de ordin 2.
În caz bidimensional, filtrele de interes sunt cele invariante la rotație. Cel mai simplu operator de derivare invari-
ant la rotație este operatorul Laplace. Fie f o funcție imagine în variabilele spațiale ( ). Operatorul Laplace este definit
prin

( )
Similar relației (3.23), a doua derivată calculată pe direcțiile x, respectiv y, este definită de perechea de relații
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
În consecință,
( ) ( ) ( ) ( ) ( ) ( ) ( )
Relația (3.27) stă la baza definirii măștii de filtrare invariantă la rotații cu pasul de
[
] ( )
În definiția operatorului Laplace în caz discret pot fi incorporate și direcțiile diagonale, fiind obținut un filtru in-
variant la rotații de , cu masca
[
] ( )
Observație. O altă variantă de filtrul de tip Laplace este,
[
]
unde [ ] Aplicarea unui astfel de filtru are ca rezultat nivelarea imaginii.
Deoarece operatorul Laplace este de derivare, discontinuitățile din imagine sunt scoase în evidență, în timp ce re-
giunile cu un grad mic de variație a intensității luminoase sunt estompate. Efectul aplicării acestui operator, în variantele
(3.28) și (3.29) sunt prezentate în figurile 3.25.b și 3.25.c, pentru imaginea de intrare din figura 3.25.a.
a.
b
c.
Figura 3.25
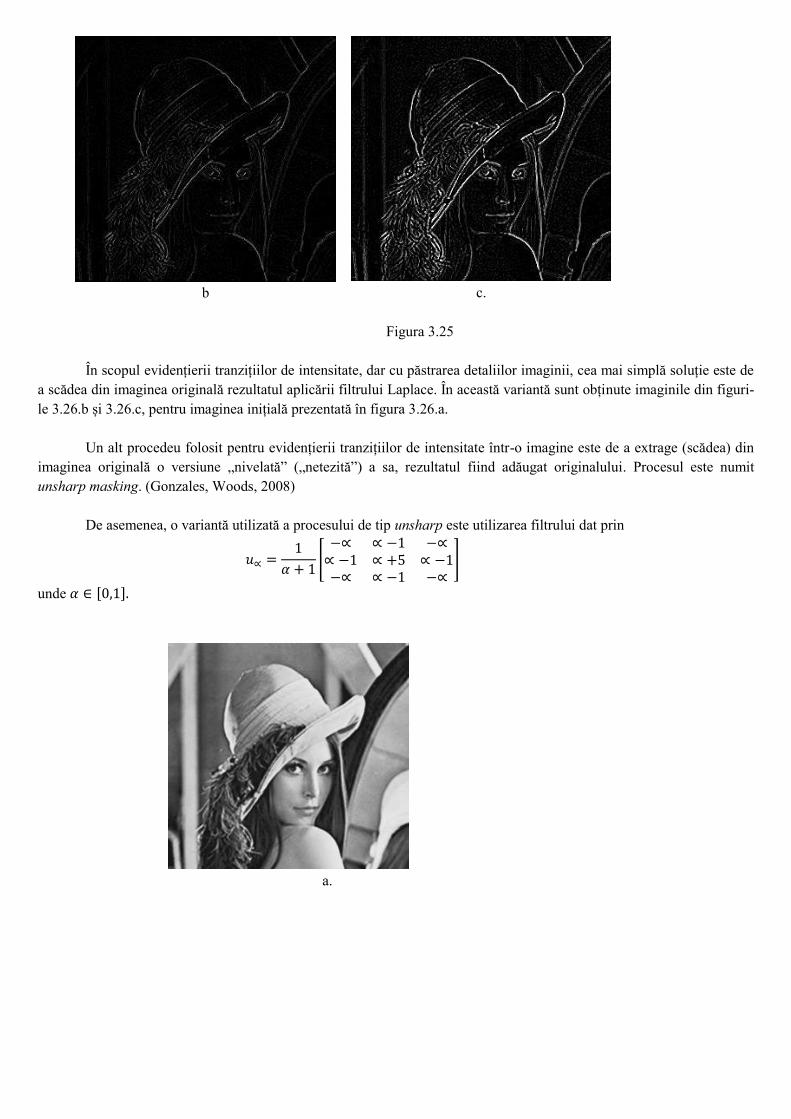
În scopul evidențierii tranzițiilor de intensitate, dar cu păstrarea detaliilor imaginii, cea mai simplă soluție este de
a scădea din imaginea originală rezultatul aplicării filtrului Laplace. În această variantă sunt obținute imaginile din figuri-
le 3.26.b și 3.26.c, pentru imaginea inițială prezentată în figura 3.26.a.
Un alt procedeu folosit pentru evidențierii tranzițiilor de intensitate într-o imagine este de a extrage (scădea) din
imaginea originală o versiune „nivelată” („netezită”) a sa, rezultatul fiind adăugat originalului. Procesul este numit
unsharp masking. (Gonzales, Woods, 2008)
De asemenea, o variantă utilizată a procesului de tip unsharp este utilizarea filtrului dat prin
[
]
unde [ ]
a.

b.
c.
Figura 3.26
Alte tipuri de filtre utilizate pentru evidențierea tranzițiilor de intensitate în imagini sunt:
filtrele de tip gradient, bazate pe prima derivată a unei funcții imagine; acestea au măștile [
], res-
pectiv [
] (operatori Roberts - problema de implementare rezidă în faptul că măștile nu au dimen-
siuni impare) sau, în cazul filtrului Prewitt, [
];
operatori Sobel, dezvoltați tot pe baza operatorului gradient, cu măștile [
], respectiv
[
]
3.3. Metode de filtrare în domeniul frecvențelor
Filtrarea în domeniul de frecvențe presupune modificarea transformatei Fourier a unei imagini și calculul trans-
formatei inverse pentru a obține o imagine rezultat. Fie o imagine de dimensiune . Relația care definește procesul
de filtrare în domeniul frecvențelor este,
( ) [ ( ) ( )] ( )
unde ( ) desemnează transformata Fourier inversă în caz discret aplicată funcției Fct, adică ( ( ))
, ( ), H este funcția filtru și g este imaginea rezultat al filtrării. Funcțiile , H și g sunt matrice cu dimensiu-
nea . Produsul este calculat element cu element (nu este produs de matrice), adică pentru și
, ( )( ) ( ) ( ). Specificarea filtrului H este considerabil simplificată prin utilizarea
de funcții simetrice în raport cu centrul de simetrie (
), ceea ce implică ca să fie centrată. Pe baza proprietăților
prezentate în §2.2 (mai exact cele legate translație), rezultă că imaginea de intrare f este transformată prin
pentru și
( ) ( ) ( ) ( )
Observație. Implementările FFT pentru calculul TFD bidimensionale în MATLAB nu realizează pasul de centra-
re, deci funcțiile filtru trebuie definite astfel încât să corespundă datelor inițiale, necentrate. În continuare filtrele prezenta-
te vor fi aplicate după ce, în prealabil, a fost realizată etapa de centrare.
Pe baza celor prezentate, algoritmul generic de filtrare în domeniul de frecvențe utilizând un filtru dat de o funcție
simetrică este descris astfel. Fie o imagine de dimensiune , data de intrare.
Pas 1. Calculează funcția , de dimensiune prin adăugarea de linii și coloane nule, similar filtrării în do-
meniul spațial, unde, în general, .
Pas 2. Centrează pe baza relației (3.40) și obține .
Pas 3. Calculează (
).
Pas 4. Generează H o funcție filtru simetrică, cu centrul de simetrie (
) și elemente numere reale, matrice cu
dimensiunea . Calculează matricea G,
și , ( ) ( ) ( ).
Pas 5. Calculează , o variantă extinsă a imaginii procesate
Pentru
( ) ( [ ( )]) ( )
Pas 6. Calculează imaginea rezultat g de dimensiune prin eliminarea liniilor și coloanelor suplimentare din
, similar filtrării spațiale.
Observație. În cazul funcțiilor imagine, f este funcție cu numere reale și H este funcție simetrică în raport cu cen-
trul de simetrie (
), atunci g, funcția calculată prin relația (3.39) este, în teorie, cu numere reale. În practică, g poate să
rezulte cu valori numere complexe din cauza erorilor de rotunjire și a altor erori de calcul (dacă o componentă a lui g este
număr complex, acesta are în general partea imaginară foarte mică în modul – de tip parazit, dar nenulă). De aceea este
nevoie ca, la pasul 5, după calculul tranformatei Fourier inverse, să fie considerată numai partea reală a funcției rezultat.
Algoritmul este aplicat pentru toate funcțiile filtru prezentate în continuare.
Observație. Legătura dintre filtrarea în domeniul de frecvențe și filtrarea spațială cu mască de dimensiunea ima-
ginii filtrate este dată, în mod evident, de teorema de convoluție (vezi §2.2). Filtrarea în domeniul frecvențelor cu filtrul H
este echivalentă cu filtrarea în domeniul spațial cu filtrul unde ( ). Filtrul h este referit drept răspunsul la
impuls (impulse response) corespunzător lui H și, deoarece ambele filtre sunt finite (matrice), sunt numite filtre FIR (Fini-
te Impulse Response) (Gonzales, Woods, 2008). În capitolul 4 este prezentat un algoritm prin intermediul căruia să fie
realizată filtrarea în domeniul frecvențelor pe baza unui filtru dat printr-o mască în domeniul spațial.
Filtre de nivelare definite în domeniul de frecvențe. Filtre trece-jos (lowpass filters)
Contururile obiectelor (în special muchiile), dar și alte tipuri de modificări bruște ale nivelului intensității lumi-
noase (de exemplu zgomotul) ale imaginilor au corespondent frecvențe înalte în reprezentarea Fourier corespunzătoare. În
domeniul frecvențelor, nivelarea este realizată prin atenuarea nivelului frecvențelor înalte, adică prin procedeul de filtrare
trece-jos. Cele mai utilizate tipuri de filtre trece-jos sunt filtrul trece-jos ideal (ILPF – ideal lowpass filter), filtrul trece-jos
Butterworth (BLPF – Butterworth lowpass filter) și filtrul trece-jos gaussian (GLPF – Gaussian lowpass filter), acestea
acoperind toate posibilitățile de filtrare de acest tip, de la cea mai „brută” la cea mai „fină” (în sensul gradului de atenuare
a frecvențelor înalte).
Filtre ILP
Fie o valoare pozitivă dată, numită rază. Filtrul trece-jos care propagă (permite trecerea), fără a le atenua, toate
frecvențele din interiorul cercului cu rază și elimină (oprește trecerea) toate frecvențele cu valori în afara acestuia este
numit filtru ideal. Funcția de filtrare corespunzătoare este definită prin
( ) { ( ) ( )
( )
unde ( ) este distanța de la punctul ( ) la centrul de simetrie (
)
( ) √[(
)
(
)
] ( )

Punctul de tranziție a lui H de la 1 la 0 este numit frecvența de oprire (eliminare). Filtrul definit conform relației
(2.41) are frecvența de oprire .
Una dintre metodele standard de a determina puncte de oprire este calculul razelor cercurilor care includ o canti-
tate specificată, , din puterea spectrală totală a imaginii prelucrate, . Valoarea este calculată prin
[∑∑ ( )
⁄ ] ( )
unde pentru
( ) ( ( )) ( ( ))
( ) ( ) ( )
∑ ∑ ( )
și punctele ( ) din sumele care definesc relația ( )sunt în interiorul sau pe cercul cu raza .
Exemplu În figurile 3.27.b, 3.27.c și 3.27.d sunt prezentate rezultatele aplicării filtrului ILP pentru
{ } (procentul puterii spectrale păstrate fiind 92.2085, 98.4515, respectiv 99.8513) imaginii din figura 3.27.a.
a.
b.
c.
d.
Figura 3.27
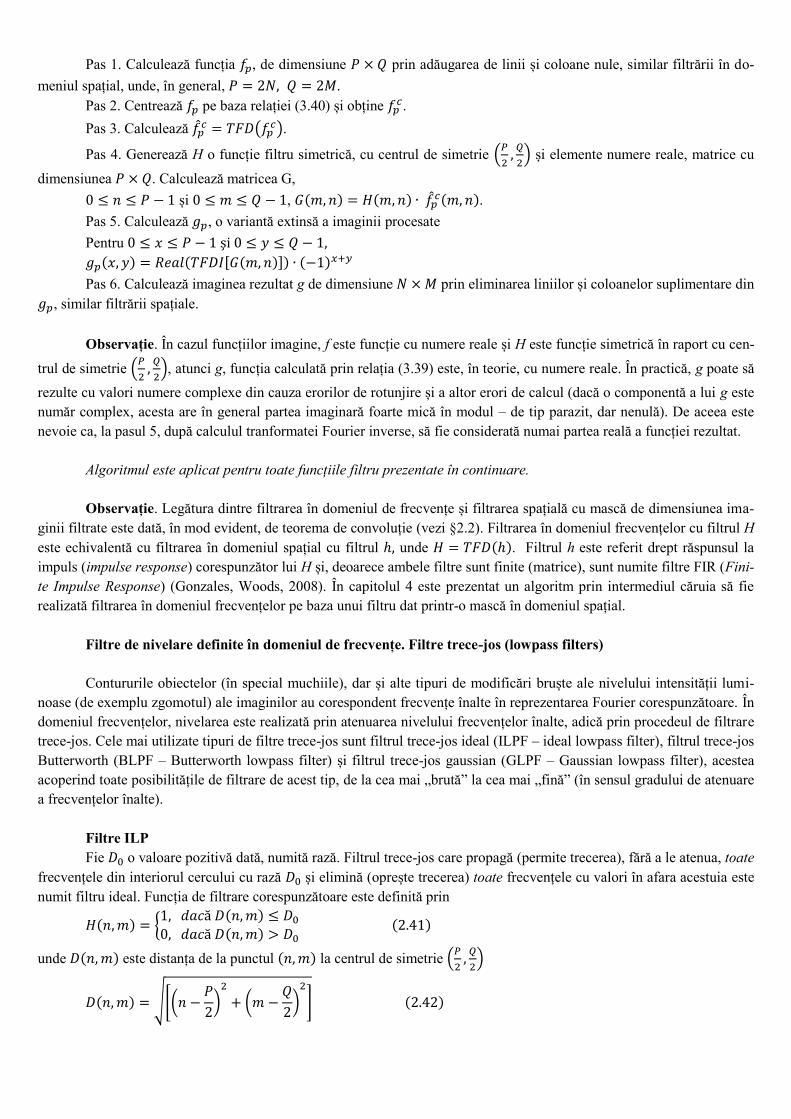
Exemplu În figurile 3.28.b, 3.28.c și 3.28.d sunt prezentate rezultatele aplicării filtrului ILP pentru
{ } (procentul puterii spectrale păstrate fiind 97.9098, 99.3807, respectiv 99.9298) imaginii perturbate din figu-
ra 3.28.a.
a.
b.
c.
d.
Figura 3.28
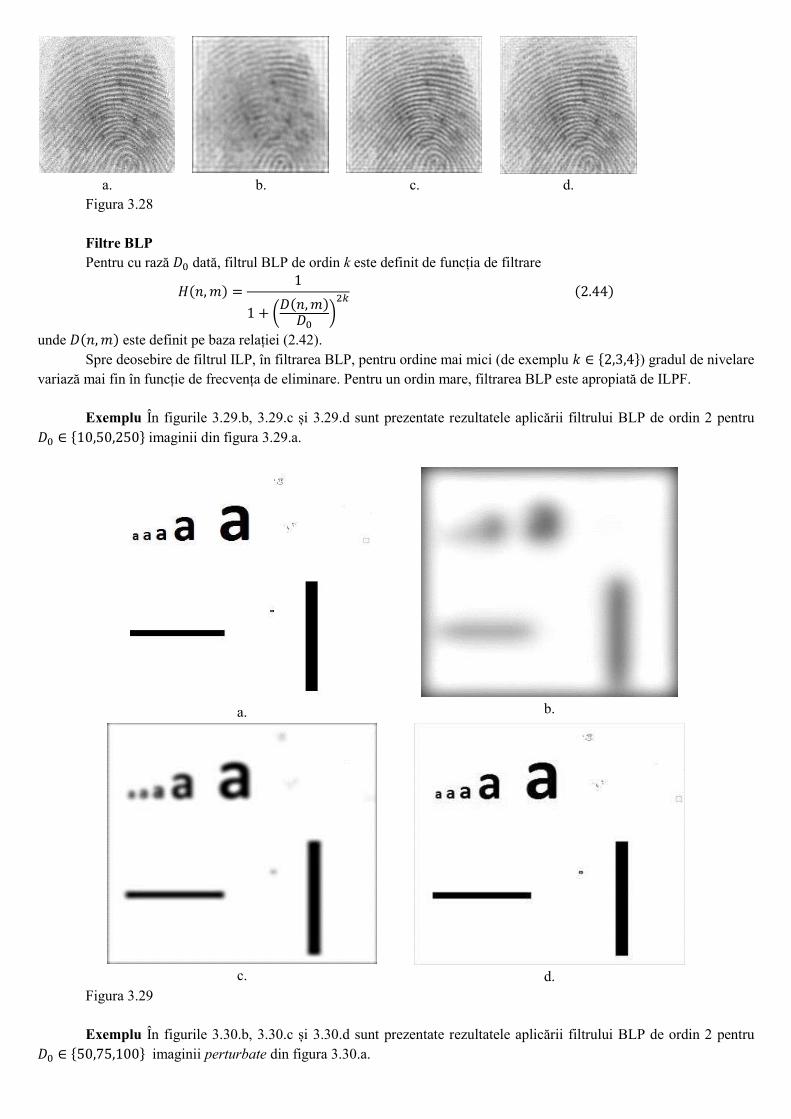
Filtre BLP
Pentru cu rază dată, filtrul BLP de ordin k este definit de funcția de filtrare
( )
( ( )
) ( )
unde ( ) este definit pe baza relației (2.42).
Spre deosebire de filtrul ILP, în filtrarea BLP, pentru ordine mai mici (de exemplu { }) gradul de nivelare
variază mai fin în funcție de frecvența de eliminare. Pentru un ordin mare, filtrarea BLP este apropiată de ILPF.
Exemplu În figurile 3.29.b, 3.29.c și 3.29.d sunt prezentate rezultatele aplicării filtrului BLP de ordin 2 pentru
{ } imaginii din figura 3.29.a.
a.
b.
c.
d.
Figura 3.29
Exemplu În figurile 3.30.b, 3.30.c și 3.30.d sunt prezentate rezultatele aplicării filtrului BLP de ordin 2 pentru
{ } imaginii perturbate din figura 3.30.a.
a.
b.
c.
d.
Figura 3.30
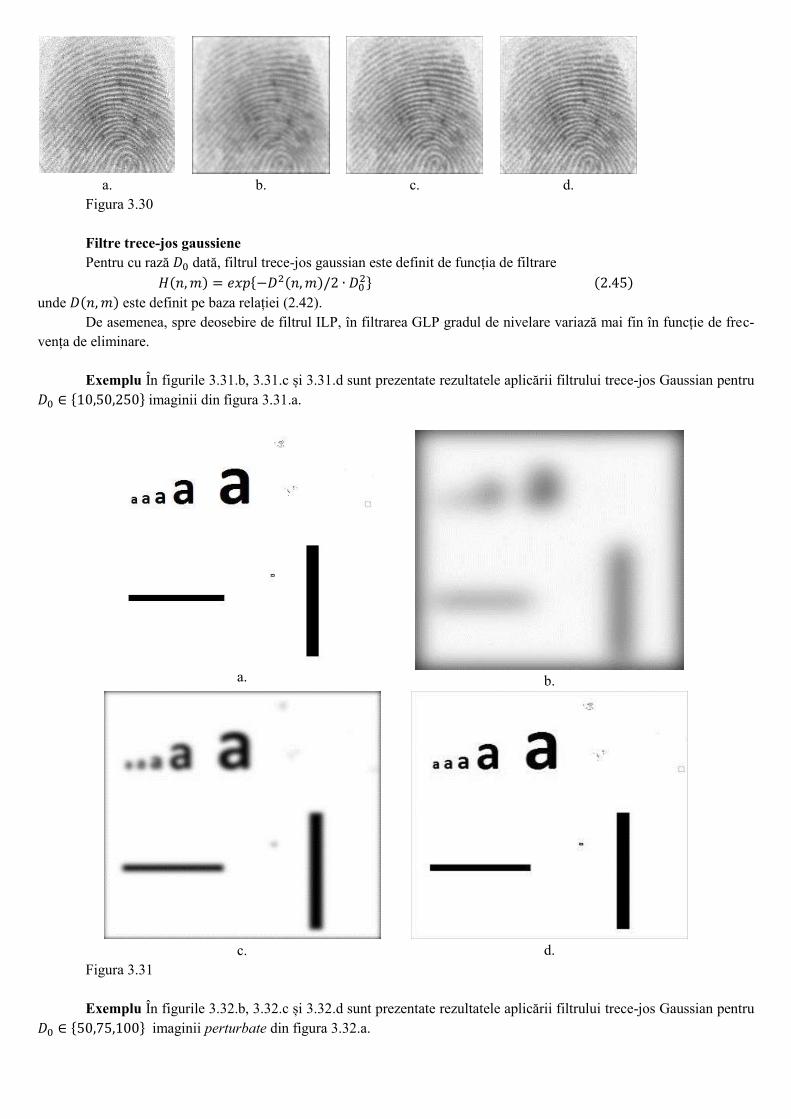
Filtre trece-jos gaussiene
Pentru cu rază dată, filtrul trece-jos gaussian este definit de funcția de filtrare
( ) { ( ) } ( )
unde ( ) este definit pe baza relației (2.42).
De asemenea, spre deosebire de filtrul ILP, în filtrarea GLP gradul de nivelare variază mai fin în funcție de frec-
vența de eliminare.
Exemplu În figurile 3.31.b, 3.31.c și 3.31.d sunt prezentate rezultatele aplicării filtrului trece-jos Gaussian pentru
{ } imaginii din figura 3.31.a.
a.
b.
c.
d.
Figura 3.31
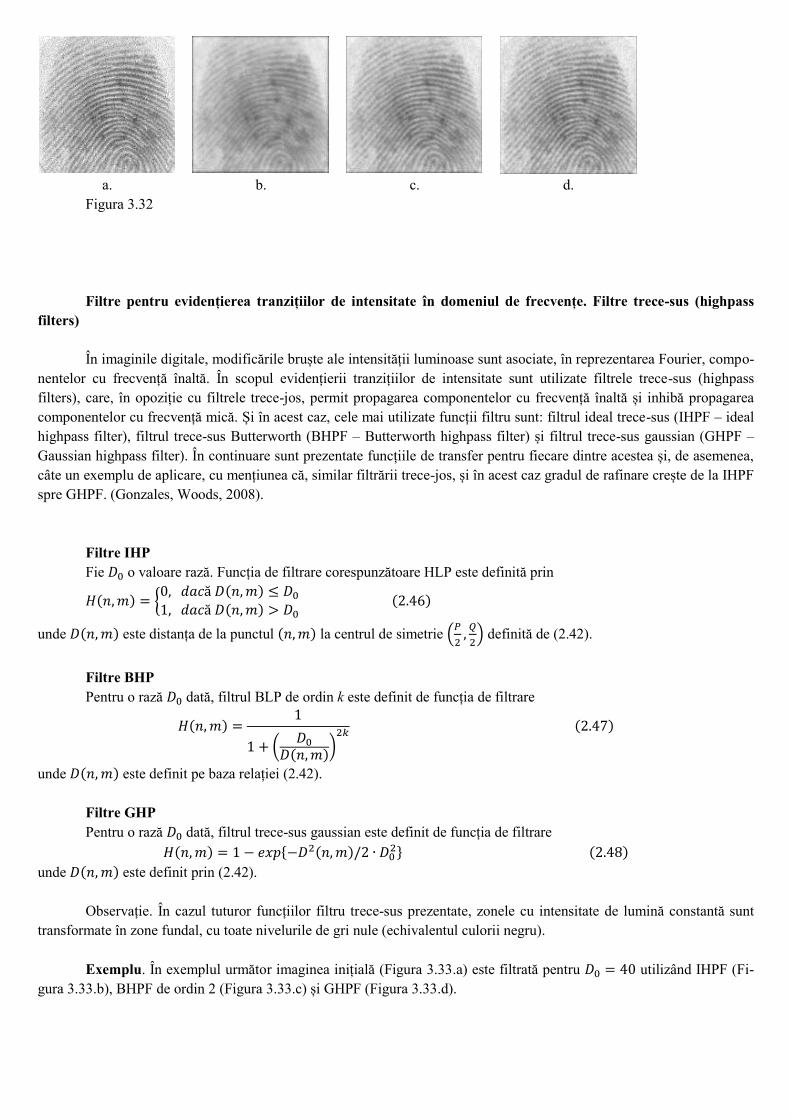
Exemplu În figurile 3.32.b, 3.32.c și 3.32.d sunt prezentate rezultatele aplicării filtrului trece-jos Gaussian pentru
{ } imaginii perturbate din figura 3.32.a.
a.
b.
c.
d.
Figura 3.32
Filtre pentru evidențierea tranzițiilor de intensitate în domeniul de frecvențe. Filtre trece-sus (highpass
filters)
În imaginile digitale, modificările bruște ale intensității luminoase sunt asociate, în reprezentarea Fourier, compo-
nentelor cu frecvență înaltă. În scopul evidențierii tranzițiilor de intensitate sunt utilizate filtrele trece-sus (highpass
filters), care, în opoziție cu filtrele trece-jos, permit propagarea componentelor cu frecvență înaltă și inhibă propagarea
componentelor cu frecvență mică. Și în acest caz, cele mai utilizate funcții filtru sunt: filtrul ideal trece-sus (IHPF – ideal
highpass filter), filtrul trece-sus Butterworth (BHPF – Butterworth highpass filter) și filtrul trece-sus gaussian (GHPF –
Gaussian highpass filter). În continuare sunt prezentate funcțiile de transfer pentru fiecare dintre acestea și, de asemenea,
câte un exemplu de aplicare, cu mențiunea că, similar filtrării trece-jos, și în acest caz gradul de rafinare crește de la IHPF
spre GHPF. (Gonzales, Woods, 2008).
Filtre IHP
Fie o valoare rază. Funcția de filtrare corespunzătoare HLP este definită prin
( ) { ( ) ( )
( )
unde ( ) este distanța de la punctul ( ) la centrul de simetrie (
) definită de (2.42).
Filtre BHP
Pentru o rază dată, filtrul BLP de ordin k este definit de funcția de filtrare
( )
(
( )) ( )
unde ( ) este definit pe baza relației (2.42).
Filtre GHP
Pentru o rază dată, filtrul trece-sus gaussian este definit de funcția de filtrare
( ) { ( ) } ( )
unde ( ) este definit prin (2.42).
Observație. În cazul tuturor funcțiilor filtru trece-sus prezentate, zonele cu intensitate de lumină constantă sunt
transformate în zone fundal, cu toate nivelurile de gri nule (echivalentul culorii negru).
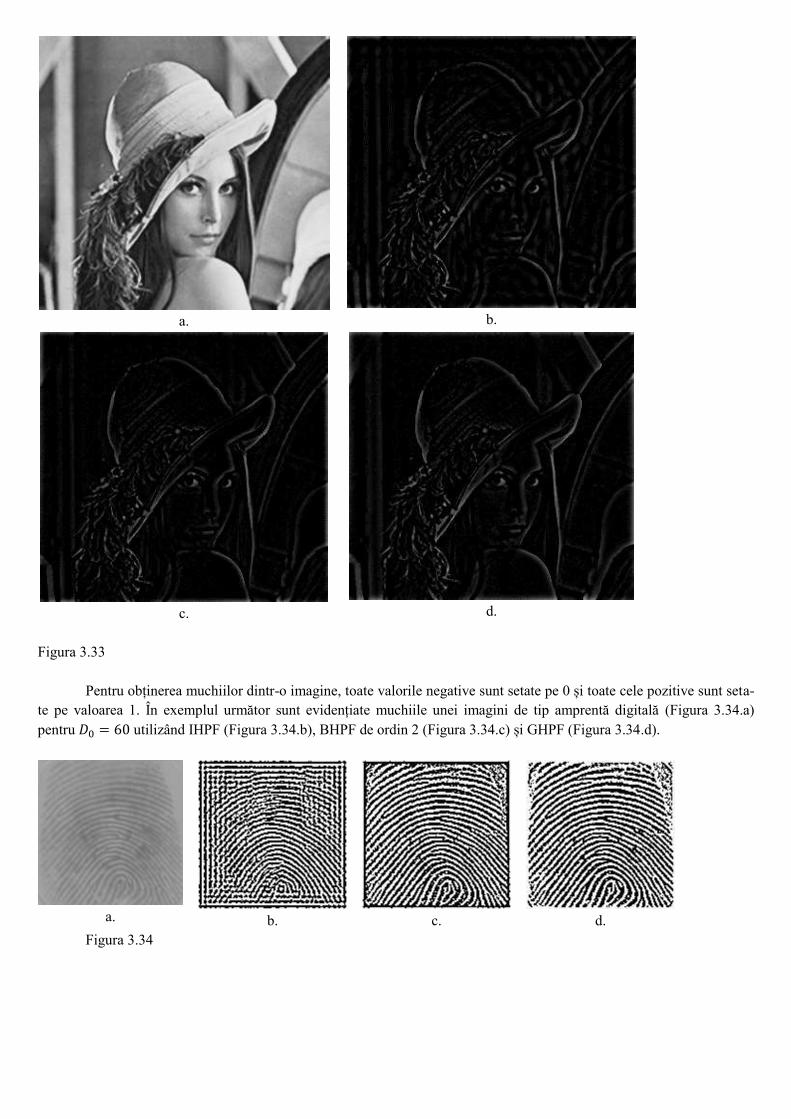
Exemplu. În exemplul următor imaginea inițială (Figura 3.33.a) este filtrată pentru utilizând IHPF (Fi-
gura 3.33.b), BHPF de ordin 2 (Figura 3.33.c) și GHPF (Figura 3.33.d).
a.
b.
c.
d.
Figura 3.33
Pentru obținerea muchiilor dintr-o imagine, toate valorile negative sunt setate pe 0 și toate cele pozitive sunt seta-
te pe valoarea 1. În exemplul următor sunt evidențiate muchiile unei imagini de tip amprentă digitală (Figura 3.34.a)
pentru utilizând IHPF (Figura 3.34.b), BHPF de ordin 2 (Figura 3.34.c) și GHPF (Figura 3.34.d).
a.
b.
c.
d.
Figura 3.34