teza 23-03-05 - ionica gheorghe
TRANSCRIPT

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 1/149
1
UNIVERSITATEA TEHNICĂ GHEORGHE ASACHI IASIFACULTATEA DE CONSTRUCII
CONTRIBUII PRIVIND ELABORAREA DE SISTEMEINTEGRATE DE PROGRAME PENTRU ANALIZĂ
STRUCTURALĂ
TEZĂ DE DOCTORAT
Autor:Ing. Gheorghe IONICĂ
Conducător ştiinific:Prof. Dr. Ing. Ioan CIONGRADI
2005

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 2/149
2
Soiei mele,
Irina

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 3/149
3
MULUMIRI
Această teză nu se putea realiza fără sprijinul unor persoane, faă de care in să îmiexprim recunoştina şi pe această cale.
În primul rând in să mulumesc domnului Prof. Dr. Ing. Ioan Ciongradi, pentru şansaoferită, de a continua doctoratul sub îndrumarea domniei sale, dintr-un moment încare ani de muncă ar fi putut să rămână nefructificai. Prin încrederea şi ajutorulacordate de dumnealui am putut realiza această cercetare, beneficiind de o îndrumarecompetentă, precum şi de libertatea de abordare a unui subiect multidisciplinar. Fărăsprijinul şi răbdarea dumnealui finalizarea acestei teze nu ar fi fost posibilă.
Doresc să mulumesc domnilor Prof. Dr. Ing. Mihai Budescu, Prof. Dr. Ing. VirgilBreabăn, Conf. Dr. Ing. Ferdinand Zsongor Gobesz pentru că au acceptat sarcina de afi refereni, precum şi domnului Prof. Dr. Ing. Nicolae ăranu, preşedintele comisiei.
În plus, doresc să mulumesc domnului Prof Dr. Ing. Mihai Budescu pentru sprijinulacordat de-a lungul anilor, precum şi pentru comentariile deosebit de utile referitoarela coninutul tezei, care se regăsesc reflectate în modul de abordare a subiectului.
Sunt muli cei de la care am primit sprijin în această perioadă de pregătire a tezei, darin în mod special să mulumesc companiei RoboBAT, care a dezvoltat programulRobot Millennium, una dintre uneltele principale pe care le-am folosit în cadrulprogramului inteligent integrat dezvoltat în cadrul tezei. De asemenea, prin instruirilede factură tehnică la care am participat în cadrul acestei companii orizonturile meleprofesionale s-au lărgit semnificativ, permiându-mi abordarea actuală a temei acesteiteze.
Mulumesc de asemenea pentru numeroasele comentarii şi sugestii primite de-a lungulultimilor ani, privind diferite aspecte ale tezei şi programului realizat în cadrul ei. Un rolaparte între cei care m-au influenat în abordarea domeniului ingineriei genetice şiinteligenei artificiale în general îl are domnul Prof. D. Dumitrescu, ale cărui cări şi
încurajări au fost extrem de importante pentru mine, în special în faza iniială a acesteiabordări, motiv pentru care in să îi mulumesc pe această cale.
Din variata documentaie pe care am folosit-o pe parcursul redactării tezei, in săsubliniez rolul deosebit pe care l-au jucat cările domnului Dr. Ing. Neculai Andrei dindomeniul programării matematice.
Aş dori de asemenea să îmi exprim mulumirea către Prof. Mircea Samfirescu, care a jucat un rol esenial în formarea mea ca om.
Doresc să mulumesc prietenilor, în general tuturor celor care m-au ajutat să finalizezaceastă teză, şi în special lui H.L. Cucu, ale cărui comentarii şi îndemnuri au constituitun real sprijin.
Mulumesc de asemenea soiei mele Irina, care m-a susinut şi încurajat pe totparcursul elaborării tezei, asigurându-mi sprijin complet şi necondiionat. Tot Irinei îidatorez şi susinerea în decizia de a începe acest doctorat.
Mulumirile mele sunt adresate şi băieilor mei Andrei şi Radu, din al căror preios timpal copilăriei am sacrificat o parte pentru elaborarea acestei teze; le mulumesc pentrurăbdarea şi înelegerea lor.
În final, mulumesc părinilor mei, pentru toate sacrificiile pe care le-au făcut de-alungul vieii lor pentru educaia şi devenirea mea.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 4/149
4
Motto:
„[...] în perspectiva infinitei apropieri de adevăr, algoritmii de optimizare rămânnecunoscui.”
Neculai Andrei,
“Teorie versus empirism în analiza algoritmilor de optimizare”,
Editura Tehnică, Bucureşti, 2004
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 5/149
5
CUPRINS
1. Introducere ............................................................................................. 10
1.1 Scopul tezei .............................................................................................. 10
1.2 Coninutul tezei ........................................................................................ 10
2. Metoda Elementului Finit aplicată în sistemele de calcul integrate ...... 13
2.1 Introducere .............................................................................................. 13
2.2 Modul în care se calculează structurile în regim integrat ......................... 14
2.3 Tipuri de calcul ce pot fi efectuate utilizând Metoda Elementului Finit .... 16
2.4 Concluzii ................................................................................................... 27
3. Inteligena Artificială ............................................................................. 30
3.1 Stadiul cunoaşterii .................................................................................... 30
3.2 Algoritmi genetici (AG) ............................................................................. 34
3.3 Concluzii ................................................................................................... 40 4. Sisteme integrate de programe de proiectare ....................................... 41
4.1 Generalităi ............................................................................................... 41
4.2 Exemple de sisteme integrate şi sisteme integrate inteligente ............... 46
4.3 Arhitectura Sistemelor Integrate Inteligente - Propunere ....................... 50
4.4 Concluzii ................................................................................................... 54
5. Optimizarea structurilor ......................................................................... 55
5.1 Introducere .............................................................................................. 55
5.2 Optimizarea – clasificare din prisma programării matematice. Stadiulcunoaşterii .......................................................................................................... 57
5.3 Probleme de optimizare structurală ......................................................... 71
5.4 Optimizarea structurilor – clasificare din prisma algoritmilor genetici.Paradigma simbolică ........................................................................................... 73
5.5 Concluzii ................................................................................................... 75
6. Algoritm hibrid de optimizare original şi program inteligent integrat .. 76
6.1 Introducere .............................................................................................. 76
6.2 Arhitectura algoritmului ........................................................................... 77
6.3 Descrierea modului de lucru al programului ............................................. 77 6.4 Studiul parametrilor de proces ................................................................. 79
6.5 Concluzii ................................................................................................... 86
7. Studii de caz ........................................................................................... 87
7.1 Optimizarea geometrică a structurilor plane din bare – aciuni statice .... 87
7.2 Optimizarea geometrică a structurilor spaiale din bare .......................... 92
7.3 Structură spaială din zăbrele – studiul parametrilor de proces ............. 104
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 6/149
6
7.4 Optimizarea unei structuri cu funcie exprimată explicit ....................... 108
8. CONCLUZII ........................................................................................... 113
8.1 Concluzii generale .................................................................................. 113
8.2 Elementele de noutate............................................................................ 118
8.3 Direcii viitoare de cercetare .................................................................. 119
BIBLIOGRAFIE ............................................................................................ 121
ANEXA 1. Aplicarea formulei Sherman-Morrison-Woodbury pentru calculul deplasărilor unei structuri .......................................................................... 132
ANEXA 2. Utilizarea programării genetice pentru regresia numerică ........ 141
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 7/149
7
Index figuriFIGURA 2—1 PROCESUL ANALIZEI CU ELEMENT FINIT ............ ............ .............. ............. .............. .......... 14 FIGURA 2—2 METODA INCREMENTALĂ ...................................................................................................... 19 FIGURA 2—3 SCHEMA METODEI ITERATIVE – RIGIDITATE CONSTANTĂ ........................................... 19 FIGURA 2—4 SCHEMA METODEI ITERATIVE – ACTUALIZARE DUPĂ FIECARE ITERAIE ............ ... 20 FIGURA 3—1 EVOLUIA UNUI STÂLP DE ÎNALTĂ TENSIUNE ................................................................. 31 FIGURA 3—2 DESCOMPUNEREA UNEI STRUCTURI ÎN ARBORE .......... .............. ............. .............. .......... 33
FIGURA 3—3 DESCOMPUNEREA UNEI STRUCTURI ÎN ARBORE .......... .............. ............. .............. .......... 34 FIGURA 3—4 ALGORITM GENETIC ÎN FORMA STANDARD .............. ............ ............. .............. ............. .... 34 FIGURA 3—5 DISCRETIZAREA SECIUNII TRANSVERSALE ÎN VEDEREA CODIFICĂRII ACESTEIA
........................................................................................................................................................................ 36 FIGURA 3—6 CODIFICARE BINARĂ A UNEI SECIUNI TRANSVERSALE .............................................. 37 FIGURA 3—7 CODIFICARE REALĂ (I) A UNEI SECIUNI TRANSVERSALE ........................................... 37 FIGURA 3—8 CODIFICARE REALĂ (II) A UNEI SECIUNI TRANSVERSALE .......................................... 38 FIGURA 4—1 REZULTATE ÎN FORMAT XML - SURSA DOCUMENTULUI (SURSA TABEL 4-1) ............ 44 FIGURA 4—2 SCHEMA LOGICĂ A SISTEMULUI HIBRID DE CONTROL .................................................. 47 FIGURA 4—3 SCHEMA OPENSTEP [ 198 ] ............ ............. ............ .............. ............. .............. ............ ............. 48 FIGURA 4—4 INTERFAA SOLVER AUTOMAT DE PROBLEME (APS) ..................................................... 49 FIGURA 4—5 SCHEMA BLOCURILOR SISTEMULUI GENESYS [ 230 ] ............. ............. ............ .............. .. 50 FIGURA 4—6 SCHEMA BLOCURILOR FUNCIONALE PENTRU UN PROGRAM INTEGRAT ............... 51 FIGURA 4—7 SCHEMA BLOCURILOR FUNCIONALE PENTRU UN SISTEM INTEGRAT INTELIGENT
........................................................................................................................................................................ 52 FIGURA 4—8 SCHEMA DE INTEGRARE A CELOR TREI PARADIGME ............ ............. ............ .............. .. 52 FIGURA 4—9 ARHITECTURA UNUI SISTEM INTELIGENT INTEGRAT ........................ ............ .............. .. 53 FIGURA 5—1 DIAGRAMA CICLU DE PROIECTARE ............. ............. .............. ............. ............ .............. ...... 55 FIGURA 5—2 PUNCTUL DE OPTIM SE AFLĂ ÎN INTERIORUL DOMENIULUI ADMISIBIL (RESTRICII
LINIARE) ....................................................................................................................................................... 59 FIGURA 5—3 PUNCTUL DE OPTIM SE AFLĂ PE FRONTIERA DOMENIULUI ADMISIBIL (RESTRICII
LINIARE) ....................................................................................................................................................... 59 FIGURA 5—4 PUNCTUL DE OPTIM SE AFLĂ PE FRONTIERA DOMENIULUI ADMISIBIL (RESTRICII
LINIARE ŞI NELINIARE) ............................................................................................................................ 60 FIGURA 5—5 FUNCIA OBIECTIV PREZINTĂ MAI MULTE PUNCTE DE OPTIM ................................... 60 FIGURA 5—6 SCHEMA LOGICĂ A ALGORITMULUI DE CĂUTARE PARALELĂ CU AXELE .............. .. 69 FIGURA 6—1 SCHEMA LOGICĂ ALGORITM HIBRID DE OPTIMIZARE ................................................... 78 FIGURA 6—2 VARIAIA OPTIMULUI ÎN FUNCIE DE PARAMETRUL PAS ............................................ 79 FIGURA 6—3 EVOLUIA NODURILOR ÎN SPAIUL DE CĂUTARE ........................................................... 80 FIGURA 6—4 VARIAIA OPTIMULUI ÎN FUNCIE DE DIMENSIUNEA POPULAIEI ............ .............. .. 81 FIGURA 6—5 VARIAIA OPTIMULUI ÎN FUNCIE DE NUMĂRUL DE GENERAII .............. ............. .... 81 FIGURA 6—6 DOMENIUL LOCAL DE CĂUTARE .......................................................................................... 83 FIGURA 6—7 CONFIGURAII OBINUTE PRIN CĂUTARE ALEATOARE ................................................ 84 FIGURA 6—8 CONFIGURAII OBINUTE PRIN CĂUTARE RESTRÂNSĂ................................................. 84 FIGURA 6—9 CONFIGURAIE OPTIMĂ (OPTIM LOCAL) ............................................................................ 85 FIGURA 6—10 INTERFAA PROGRAMULUI DE OPTIMIZARE ORIGINAL – IMPLEMENTARE ÎN
ROBOT MILLENNIUM ................................................................................................................................ 85 FIGURA 7—1 VARIAIA GREUTĂII ÎN FUNCIE DE NUMĂRUL DE GENERAII ............ .............. ...... 91 FIGURA 7—2 VEDERE GENERALĂ STRUCTURĂ ......................................................................................... 93 FIGURA 7—3 VEDERE GENERALĂ CU COTE ................................................................................................ 93 FIGURA 7—4 VEDERE LATERALĂ .................................................................................................................. 94 FIGURA 7—5 VARIAIA GREUTĂII ÎN FUNCIE DE NUMĂRUL DE GENERAII ............ .............. ...... 98 FIGURA 7—6 STRUCTURA OPTIMIZATĂ ..................................................................................................... 101 FIGURA 7—7 VARIAIA GREUTĂII ÎN FUNCIE DE NUMĂRUL DE GENERAII ............ .............. .... 103 FIGURA 7—8 EVOLUIA ALGORITMULUI ÎN FUNCIE DE PARAMETRII INIIALI ............ ............. .. 105 FIGURA 7—9 EVOLUIA FUNCIEI ÎN FUNCIE DE NUMĂRUL DE GENERAII; INCIDENA
OPERATORILOR ........................................................................................................................................ 109 FIGURA 7—10 INCIDENA OPERATORILOR GENETICI ............................................................................ 110 FIGURA 7—11 CONTRIBUIA OPERATORILOR LA EVOLUIA ALGORITMULUI ............ ............ ....... 111 FIGURA 7—12 SCHEMA LOGICĂ A ALGORITMULUI GENETIC FOLOSIT ÎN OPTIMIZAREA
FUNCIILOR .............................................................................................................................................. 112

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 8/149
8
Index figuri ANEXA 1 FIGURA A1 - 1 STRUCTURA INIIALĂ .......................................................................................................... 134 FIGURA A1 - 2 STRUCTURA MODIFICATĂ ................................................................................................... 134
Index figuri ANEXA 2 FIGURA A2 - 1 CAPTURĂ ECRAN CU REZULTATUL RULĂRII ................................................................. 145 FIGURA A2 - 2 SCHEMA LOGICĂ PROGRAM REGRESIE UTILIZÂND GP ............................................... 146
FIGURA A2 - 3 SCHEMA LOGICĂ A MODULULUI DE GENERARE A MEMBRILOR POPULAIEI ...... 147 FIGURA A2 - 4 SCHEMA BLOCURILOR DIN MODULUL DE GENERARE A MEMBRILOR MODIFICAIGENETIC ..................................................................................................................................................... 148
FIGURA A2 - 5 SCHEMA BLOCURILOR DIN MODULUL DE OPERARE GENETICĂ ASUPRAPOPULAIEI ............................................................................................................................................... 149

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 9/149
9
Index tabeleTABEL 2-1 RELAIA DINTRE DATE ŞI REZULTATE PENTRU CONSTITUIREA UNEI PROBLEME DE
OPTIMIZARE 28 TABEL 2-2 RELAIA DINTRE DATELE DE INTRARE ŞI REZULTATELE OBINUTE 29 TABEL 3-1 TABEL SECIUNI 38 TABEL 4-1 TABEL CU REZULTATE ÎN FORMAT TXT 44 TABEL 5-1 TABEL CENTRALIZATOR – FORMA VECTORILOR CU VARIABILELE PROBLEMEI 75
TABEL 7-1 LISTA PARAMETRILOR DE PROCES (PARAMETRI GLOBALI) 87 TABEL 7-2 LISTA PARAMETRILOR FIECĂREI ITERAII 88
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 10/149
10
1. INTRODUCERE
1.1 SCOPUL TEZEI
Contribuia la sistemele integrate de calcul structural constă în elaborarea unuialgoritm de optimizare structurală, precum şi în implementarea acestuia într-unprogram integrat de calcul structural.
În prezenta lucrare prezentăm un sistem original de optimizare a structuriloringinereşti. Originalitatea sistemului rezidă în următoarele caracteristici:
→ funcionează în regim integrat,
→ utilizează metoda elementului finit ca nucleu general de calcul al structurilor,→ utilizează metode computaionale inteligente pentru controlul procesului de
optimizare. Acestea integrează la rândul lor tehnici computaionale din domeniulprogramării matematice.
În esenă, sistemul propus prezintă două straturi de integrare: la nivel funcional suntintegrate modulele de calcul, la nivel conceptual sistemul integrează paradigmanumerică (dată de metodele matematice aplicate) cu cea simbolică (reprezentată dealgoritmul genetic).
1.2 CON INUTUL TEZEI
Domeniul optimizării a cunoscut o evoluie constantă indiferent de domeniul particularla care s-au făcut implementări. Tendina generală în acest domeniu este de a unifica,generaliza şi simplifica metodele şi tehnicile de optimizare. În prezent există foartemulte programe şi metode de optimizare elaborate.
Sistemul propus în prezenta lucrare este un sistem integrat original, care rezolvăprobleme specifice de optimizare structurală.
Teza conine şapte capitole, două anexe şi un capitol de concluzii. Fiecare capitol,exceptând capitolul de faă, debutează cu o prezentare generală a domeniului, coninedetalii despre subiectul abordat şi se încheie cu un subcapitol de concluzii.
Capitolul 2 prezintă caracteristicile sistemelor de calcul bazate pe metoda elementuluifinit, prezentându-se diverse tipuri de calcul. Accentul este pus pe formularea generalăa problemei, menionarea datelor de intrare şi a rezultatelor specifice fiecăreiprobleme. Pe baza acestor informaii, în capitolele următoare putem vedea cum se potlega modulele de calcul inteligent de modulele sau programele de calcul. În principiu,datele furnizate de programul de element finit formează baza pe care sunt dezvoltateapoi modulele de optimizare. Atât datele, cât şi rezultatele folosite şi furnizate deaceste programe sunt utilizate direct în calitate de restricii sau obiective aleprogramului de optimizare.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 11/149
11
Capitolul 3 este centrat pe metodele computaionale inteligente, în special peprezentarea algoritmului genetic. În acest capitol sunt descrise: structura standard aalgoritmului genetic, modulele sale funcionale. După cum se arată în acest capitol,metoda algoritmului genetic este una robustă, putând fi aplicată cu succes înrezolvarea problemelor de inginerie structurală. În acest sens sunt date câtevaexemple de codificare a problemelor specifice inginereşti, pentru a putea fi abordate
prin prisma acestor algoritmi. Acest capitol poate fi folosit ca un ghid de implementareşi modelare pentru probleme structurale cu algoritmi genetici.
În Capitolul 4 al tezei sunt prezentate pe scurt caracteristicile sistemelor integrate decalcul. Deşi programele de calcul integrate sunt larg răspândite, sunt publicate relativpuine articole sau cări în care acestea să fie descrise explicit. Acest fapt se datoreazăşi politicilor firmelor producătoare de a proteja tehnologiile şi metodele folosite înelaborarea acestora. În plus, abordarea programelor de calcul din acest unghi devedere mută centrul de greutate al problematicii în domeniul ştiinelor calculatoarelorşi al programării. Modelul matematic care stă la baza implementărilor trebuie săpermită elaborarea unor algoritmi care să poată rula fără intervenia utilizatorului saucu intervenii minime. În acest capitol accentul este pus pe prezentarea mecanismelor
intime de integrare a programelor. Totodată, este evideniată importana metodelorcomputaionale inteligente. În final, este prezentat un sistem original hibrid de calculintegrat.
Capitolul 5 prezintă metode clasice de optimizare din domeniul programăriimatematice. Necesitatea descrierii acestor metode a rezultat din faptul căprogramarea matematică este instrumentul de vârf din domeniul optimizării, cu careau fost obinute cele mai spectaculoase rezultate, cu aplicabilitate practică directă. Deasemenea, rezultatele obinute folosind aceste metode sunt reproduse cu metodaoriginală propusă în lucrarea de faă. După cum s-a constatat, rezultatele suntcomparabile din punct de vedere al preciziei, precum şi al numărului mic de iteraii.Din domeniul general al optimizării au fost particularizate procedee cu aplicabilitate
directă în optimizarea structurală. Alături de metodele de optimizare derivate dinprogramarea matematică sunt prezentate şi metode de optimizare bazate pe algoritmiigenetici.
În Capitolul 6 este prezentat algoritmul original de optimizare inteligentă integrată.Informaiile prezentate în capitolele precedente, referitoare la metoda elementelorfinite, algoritmi genetici, elemente de optimizare constituie fundamentul teoretic pebaza căruia a fost conceput algoritmul de optimizare, precum şi programul realizatpractic. Arhitectura algoritmului, descrierea modului de lucru al programului şi studiulcomportării acestuia prin prezentarea parametrilor de proces sunt prezentate pe larg.
Pentru a proba performanele programului original elaborat, în Capitolul 7 sunt
prezentate studii de caz pe care le considerăm concludente. Astfel, în 7.1 esteprezentată optimizarea unei structuri simple din bare supusă unor aciuni statice. Înacest capitol este pusă în evidenă abilitatea algoritmului de a identifica forma optimăa structurii într-un număr redus de iteraii. În 7.2 sunt optimizate structuri spaiale dinbare în două situaii. În primul caz, este optimizată o structură spaială din bare,modificarea structurii fiind efectuată prin modificarea tuturor nodurilor libere. În cazulal doilea este optimizată aceeaşi structură spaială, fiind modificate de această datătoate nodurile, mai puin cele cu reazeme. În 7.3 am efectuat un studiu detaliat alinfluenei şi importanei parametrilor de proces. Acest studiu este esenial pentru

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 12/149
12
înelegerea corectă a importanei alegerii parametrilor iniiali ai procesului deoptimizare.
Întrucât toate studiile de caz prezentate anterior sunt efectuate fără precizareaexplicită a funciei obiectiv, în 7.4 este prezentată optimizarea unei structuri utilizând ofuncie exprimată explicit. Prin comparaie cu rezultatele obinute de ali cercetătoriindicai în referine, metoda de optimizare inteligentă utilizată în acest capitol, indică o
bună compatibilitate cu rezultatele obinute prin metode clasice.Întrucât în calculul de optimizare, reducerea efortului de calcul este un deziderat, în Anexa 1 este prezentată o aplicaie originală a formulei Sherman-Morrison-Woodburypentru calculul deplasărilor unei structuri, utilizând rezultatele obinute anterior. Cuajutorul formulei prezentate este posibil ca, având o structură calculată, să putemevalua deplasările nodurilor pentru aceeaşi structură la care provocăm mici perturbaiiale geometriei, pe baza deplasărilor calculate anterior.
Pentru a evidenia şi alte aplicaii ale programelor inteligente, în Anexa 2 esteprezentat un program original şi algoritmul acestuia de regresie simbolică.
Capitolul final de concluzii prezintă sintetic contribuiile personale aduse prin prezenta
lucrare şi direciile viitoare de cercetare.În Bibliografie sunt indicate sursele de informare folosite.
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 13/149
13
2. METODA ELEMENTULUI FINITAPLICATĂ ÎN SISTEMELE DE CALCULINTEGRATE
2.1 INTRODUCERE
Metoda elementelor finite este folosită pentru rezolvarea problemelor fizice în calcululingineresc şi proiectare.
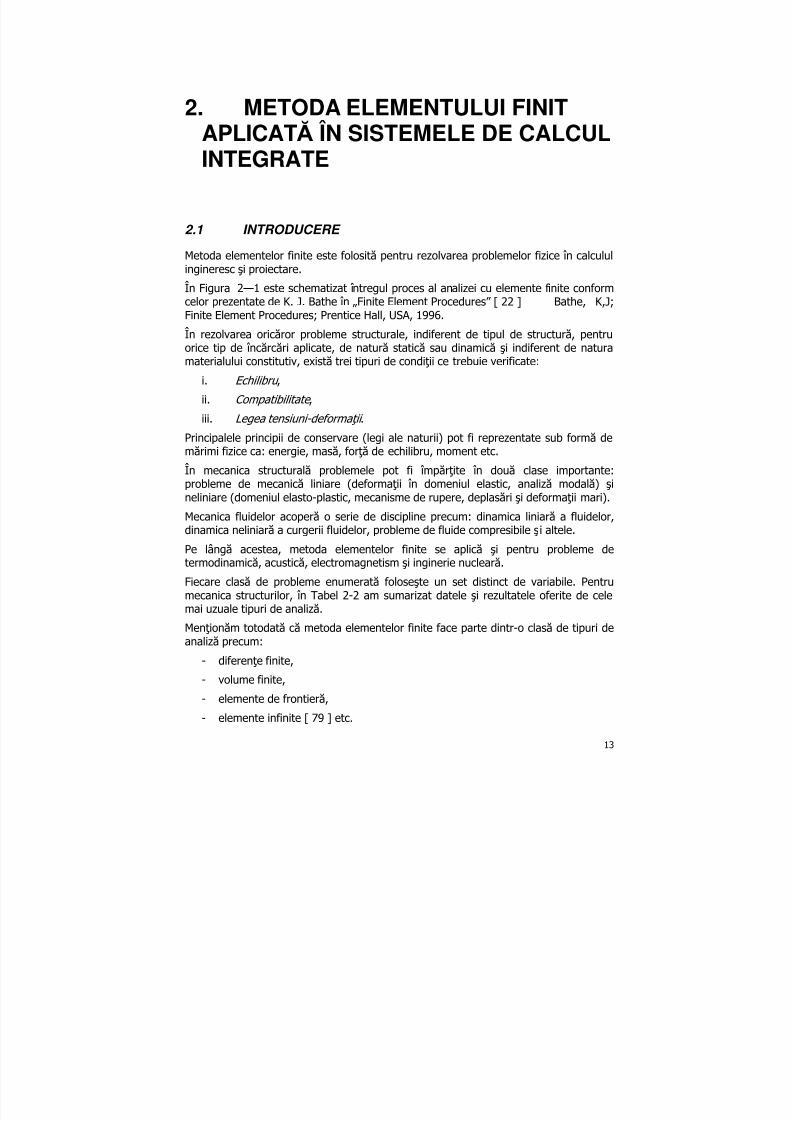
În Figura 2—1 este schematizat întregul proces al analizei cu elemente finite conform
celor prezentate de K. J. Bathe în „Finite Element Procedures” [ 22 ] Bathe, K,J;Finite Element Procedures; Prentice Hall, USA, 1996.
În rezolvarea oricăror probleme structurale, indiferent de tipul de structură, pentruorice tip de încărcări aplicate, de natură statică sau dinamică şi indiferent de naturamaterialului constitutiv, există trei tipuri de condiii ce trebuie verificate:
i. Echilibru ,
ii. Compatibilitate ,
iii. Legea tensiuni-deformaii .
Principalele principii de conservare (legi ale naturii) pot fi reprezentate sub formă de
mărimi fizice ca: energie, masă, foră de echilibru, moment etc.În mecanica structurală problemele pot fi împărite în două clase importante:probleme de mecanică liniare (deformaii în domeniul elastic, analiză modală) şineliniare (domeniul elasto-plastic, mecanisme de rupere, deplasări şi deformaii mari).
Mecanica fluidelor acoperă o serie de discipline precum: dinamica liniară a fluidelor,dinamica neliniară a curgerii fluidelor, probleme de fluide compresibile şi altele.
Pe lângă acestea, metoda elementelor finite se aplică şi pentru probleme determodinamică, acustică, electromagnetism şi inginerie nucleară.
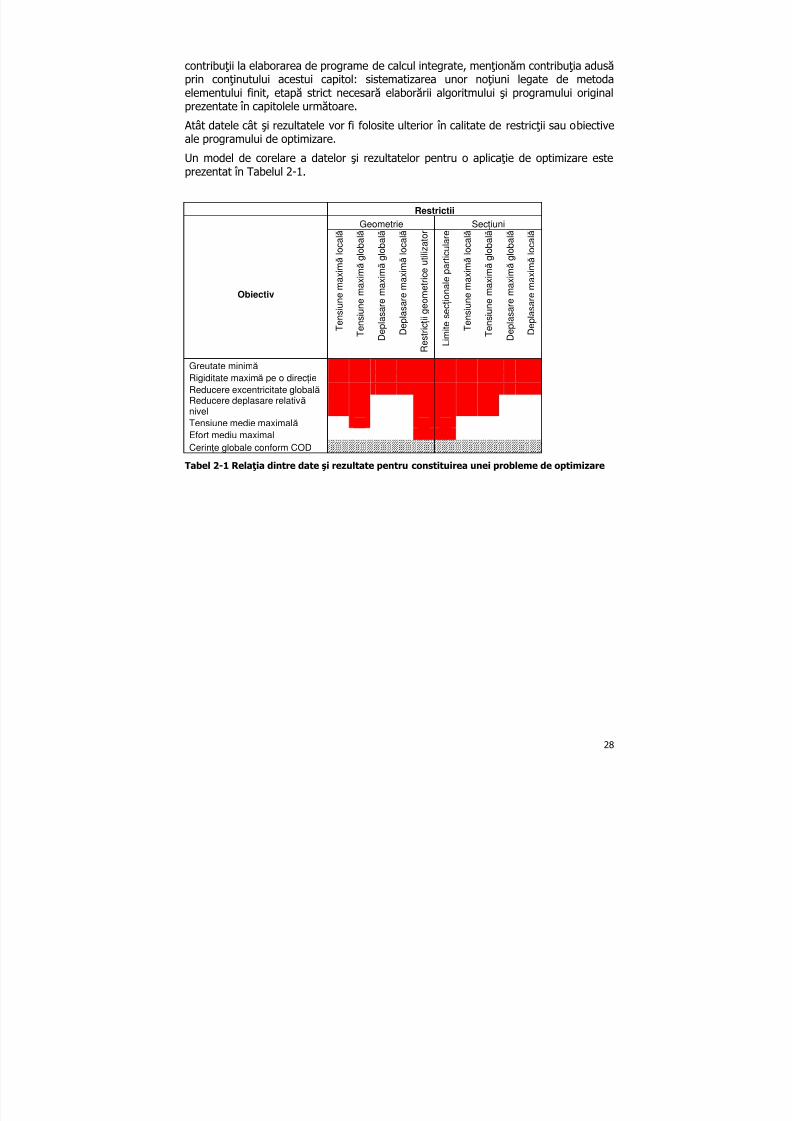
Fiecare clasă de probleme enumerată foloseşte un set distinct de variabile. Pentrumecanica structurilor, în Tabel 2-2 am sumarizat datele şi rezultatele oferite de celemai uzuale tipuri de analiză.Menionăm totodată că metoda elementelor finite face parte dintr-o clasă de tipuri deanaliză precum:
- diferene finite,
- volume finite,
- elemente de frontieră,
- elemente infinite [ 79 ] etc.
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 14/149
14
Figura 2—1 Procesul analizei cu element finit
2.2 MODUL ÎN CARE SE CALCULEAZ Ă STRUCTURILE ÎN REGIM INTEGRAT
Referindu-ne numai la segmentul de analiză structurală (programele integrate decalcul care utilizează metoda elementului finit), menionăm principalele operaii caresunt efectuate automat:
→ Discretizarea în elemente finite,
→ Pregătirea datelor,
→ Verificarea datelor,
→ Generarea matricei de rigiditate,
→ Asamblarea matricei k,
→ Transformarea în matrice bandă,
→ Condensarea matricei,
PROBLEMĂ FIZICĂ
MODEL MATEMATICGuvernat de ecuaii
matematice
Ipoteze asupra:- geometriei- cinematicii- legii materialului- încărcării- condiiilor de margine etc.
SCHIMBAREAPROBLEMEI
ÎMBUNĂTĂIREAMODELULUIMATEMATIC
Soluie element finit Alegerea:
- elementelor finite- densitate discretizare- parametri soluie
Reprezentare a:- încărcărilor- condiii frontieră
- etc. Rafinare discretizare,parametri soluie etc.
Aprecierea acurateei soluiei elementului finit amodelului matematic
Interpretare rezultate Rafinare analiză
Îmbunătăire proiectareOptimizare structurală
Soluieelement finita modelului
matematic

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 15/149
15
→ Rezolvarea sistemului de ecuaii,
→ Prezentarea rezultatelor.
Un software integrat de analiză structurală care permite calculul structurilor cu metodaelementului finit poate aborda următoarele tipuri de analiză structurală:
→ analiză statică liniară,→ analiză statică neliniară,
→ analiză la flambaj,
→ analiză modală (vibraiile proprii ale structurii, vectori şi valori proprii),
→ analiză armonică,
→ analiză seismică (are la bază un spectru conform unui normativ oarecare),
→ analiză spectrală (presupune specificarea unui spectru arbitrar de vibraii),
→ analiză biografică (de tip „Time-History),
→ analiză Pushover (incrementală),
→ analiza elasto-plastică a barelor,
→ analiză plastică (pentru elemente tip SHELL sau SOLID),
→ analiză termică,
→ analiza curgerii fluidelor,
→ acustică etc.
În metoda elementului finit se consideră că structura este formată din pări distincte(elemente finite). Acestea sunt interconectate prin intermediul nodurilor. Deformaiile
de pe domeniul elementelor finite sunt aproximate prin combinaii liniare aledeplasărilor nodale şi ale funciilor de interpolare, numite şi funcii de formă. Caurmare, energia potenială totală a sistemului depinde doar de parametrii nodali, caresunt independeni. Deplasările nodale colectate (asamblate) pentru întreaga structurăformează vectorul global al necunoscutelor Q. Pe baza unui principiu variaional (deexemplu, Principiul Lucrului Mecanic Virtual), se pot scrie condiii, ce conduc labinecunoscuta formă a sistemului de ecuaii de echilibru:
M Q'' + C Q' + K Q= F(t) - f(t,Q), ( 2-1 )
în care:
K - matricea de rigiditate tangentă, ca sumă a matricelor elementaleK = K 0 + K σ + K NL , ( 2-2 )
unde:
K 0 - matricea de rigiditate iniială (independentă de Q),
K σ - matricea tensiunilor (dependentă liniar de intensitatea compresiunii),
K NL - matricea celorlalte componente dependente de Q,
C - matricea de amortizare,

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 16/149
16
M - matricea maselor,
Q - deplasările (incremente sau deplasări totale),
Q' - viteze (derivatele de ordinul întâi ale vectorului Q în raport cu timpul),
Q'' - acceleraii (derivatele de ordinul al doilea ale vectorului Q),
F(t) - vectorul forelor exterioare,
f(t,Q) - vectorul forelor neechilibrate.
2.3 TIPURI DE CALCUL CE POT FI EFECTUATE UTILIZÂND METODA ELEMENTULUI FINIT
În prezentarea metodelor de calcul de mai jos am folosit următoarele sursebibliografice: [ 15 ], [ 22 ], [ 24 ], [ 31 ], [ 237 ], [ 236 ] şi altele. Pentru a nu îngreuna parcurgerea textului nu am folosit trimiteri explicite către aceste referine.
La detalierea metodelor de calcul şi a modelului matematic adoptat, ne-amconcentrate asupra posibilităilor de analiză existente în programul de element finitutilizat pentru implementarea modulelor de optimizare prezentate în capitoleleurmătoare (Robot Millennium).
Analiză statică
Sistemul general de ecuaii de echilibru poate fi simplificat atunci când se introduceipoteza suplimentară că încărcarea este cvasi-statică. Aceasta înseamnă că încărcărilesunt aplicate atât de lent, încât vitezele şi acceleraiile maselor sunt aproape nule şi,ca urmare, forele de inerie şi de amortizare, ca şi energia cinetică şi de amortizare,pot fi neglijate. Astfel, se obine un sistem redus de ecuaii ce descrie stareasistemului cu mai multe grade de libertate. În general, există două abordări aleproblemelor statice: cea liniară şi cea neliniară.
Analiza liniară
Analiza liniară reprezintă analiza structurală de bază. Ea porneşte de la ipoteza cădeplasările (săgei şi rotiri) sunt mici şi că materialul este perfect elastic. Acest lucruimplică liniaritatea dintre “cauză şi efect”, astfel că rezultatele obinute pentru o
încărcare afectată cu un factor α sunt aceleaşi cu cele obinute pentru încărcarea debază prin înmulirea ulterioară cu acel factor α. Matricea de rigiditate este atunciconstantă şi sistemul de ecuaii de echilibru ia forma:
K 0 Q = F, ( 2-3 )
care poate fi rezolvat prin metoda reducerii şi a substituiei inverse.
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 17/149
17
În cadrul analizei liniare deplasările sunt proporionale cu forele aplicate indiferent deamplitudinea acestora, deplasarea structurii fiind complet reversibilă.
Pentru efectuarea calculelor legate de analiza structurală pot fi definite următoareletipuri de încărcări:
→ toate tipurile de încărcări statice (fore concentrate – nodale, în noduri şi în oricepunct situat de-a lungul elementului, încărcări distribuite – constante şi variabilede-a lungul elementului),
→ deplasări impuse în reazeme şi scurtări / alungiri ale elementelor de tip bară,
→ încărcări din temperatură (câmp termic constant sau variabil pe înălimeaseciunii).
Pentru rezolvarea problemelor static liniare se utilizează metoda deplasărilor (arigidităilor).
Rezultatele ce se obin sunt:
→ deplasările nodale,→ eforturile şi tensiunile în elemente,
→ reaciunile ( forele din reazeme),
→ forele reziduale din noduri.
Analize neliniare
Comportare neliniară a structurii poate fi legată de un singur element al său(neliniaritate structurală sau de material) sau poate rezulta dintr-o relaie neliniarădintre fore şi deformata întregii structuri (neliniaritate geometrică).Pot exista mai multe surse de neliniaritate:
→ neliniaritate structurală,
→ neliniaritate geometrică,
→ neliniaritate de material.
Neliniaritatea structurală rezultă atât prin activarea / dezactivarea componentelorstructurale selectate (elemente, îmbinări, reazeme, sau grade de libertate) având o
astfel de lege de comportare privind forele sau deplasările, cât şi prin utilizarea deelemente neliniare, cum sunt cablurile. De aceea, sistemele neliniare prezintă anumiteparticularităi ale liniarităii dacă nu au în componenă cabluri. Multiplicarea cu unfactor a încărcării conduce la multiplicarea corespunzătoare a rezultatelor. Cu toateacestea, celelalte proprietăi nu corespund. Se presupune că sistemul de ecuaii iaforma următoare:
(K 0 + K σσσσ + K N) Q = F(t) - f(t,Q), ( 2-4 )
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 18/149
18
ca şi în cazul analizei statice, dar această presupunere a priori va trebui verificată a posteriori (după rezolvarea sistemului de ecuaii). Aceasta implică, în mod uzual, unproces iterativ.
Neliniaritatea geometrică este datorată luării în considerare a teoriei neliniare lacrearea sistemului de ecuaii de echilibru, chiar dacă este consecina modului desoluionare a problemei (luarea în considerare a efectelor de ordinul al doilea).Neliniarităile geometrice pot fi consecinele a două tipuri de efecte:
modificarea rigidităii elementului datorită modificării forelor interioare
efectul P-delta (influena deformaiei structurii aflate în echilibru).
Aceste două cauze pot fi considerate ca fiind independente din moment ce ele pot fiactivate prin opiuni separate. În plus, încărcările pot fi aplicate incremental pentrufiecare tip de analiză neliniară.
Neliniaritatea de material este legată de o relaie neliniară tensiuni-deformaii; se potlua în considerare materiale elasto-plastice, plastice şi alte materiale neliniare. Opseudo-neliniaritate de material poate fi obinută pentru elementele de tip cablu, careau relaii neliniare între tensiuni şi deformaii.
Toi algoritmii utilizai la rezolvarea problemelor neliniare se bazează pe ipoteza cărotirile sunt mici, astfel încât tangenta şi sinusul unghiului pot fi înlocuite cu mărimeasa.
Descrierea algoritmilor utilizai în analiza neliniară
Există mai multe metode de rezolvare a sistemului de ecuaii neliniare, dintre caresunt folosite uzual două: metoda integrării directe şi metoda incrementală.În metoda integrării directe, întregul vector din membrul drept al sistemului (vectorul încărcărilor) este aplicat o singură dată, deoarece se consideră că întreaga încărcareeste aplicată structurii într-un singur pas.
În metoda incrementală, membrul drept al sistemului (vectorul încărcărilor) este împărit în “n” pări egale, numite incremente. Un increment dat este aplicat structuriide îndată ce a fost obinut stadiul de echilibru pentru incrementul anterior. Valorileforelor neechilibrate sunt specificate pentru fiecare pas, ceea ce permitemonitorizarea relaiilor fore-deformaii corespunzătoare structurii.
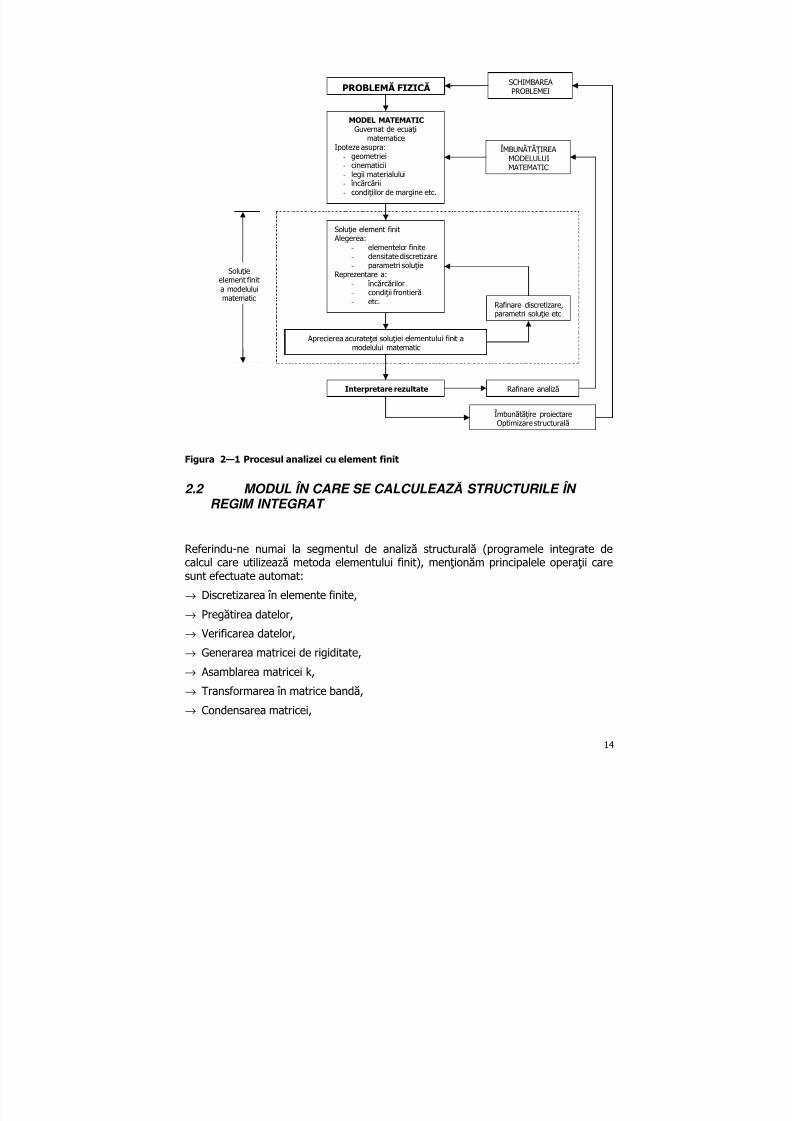
Un exemplu de proces neliniar abordat prin metoda incrementală este prezentat înFigura 2—2, în care sunt ilustrate variabilele utilizate în calculul neliniar.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 19/149
19
Figura 2—2 Metoda incrementală
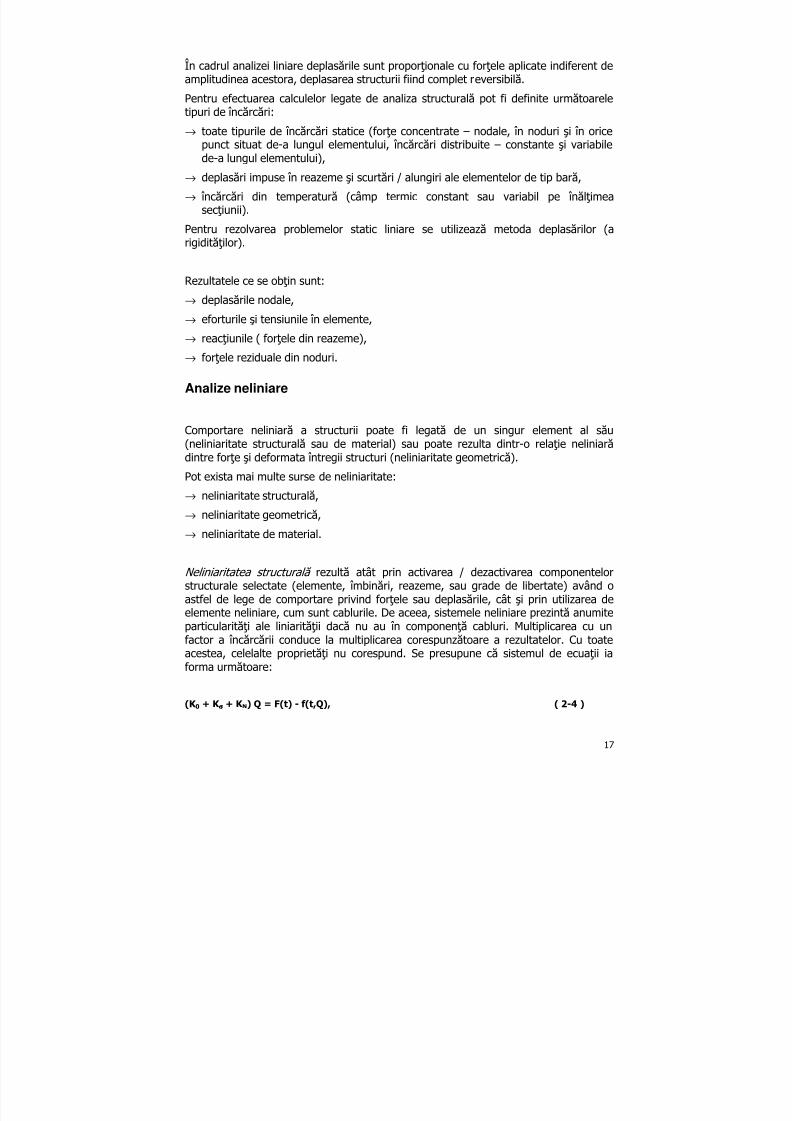
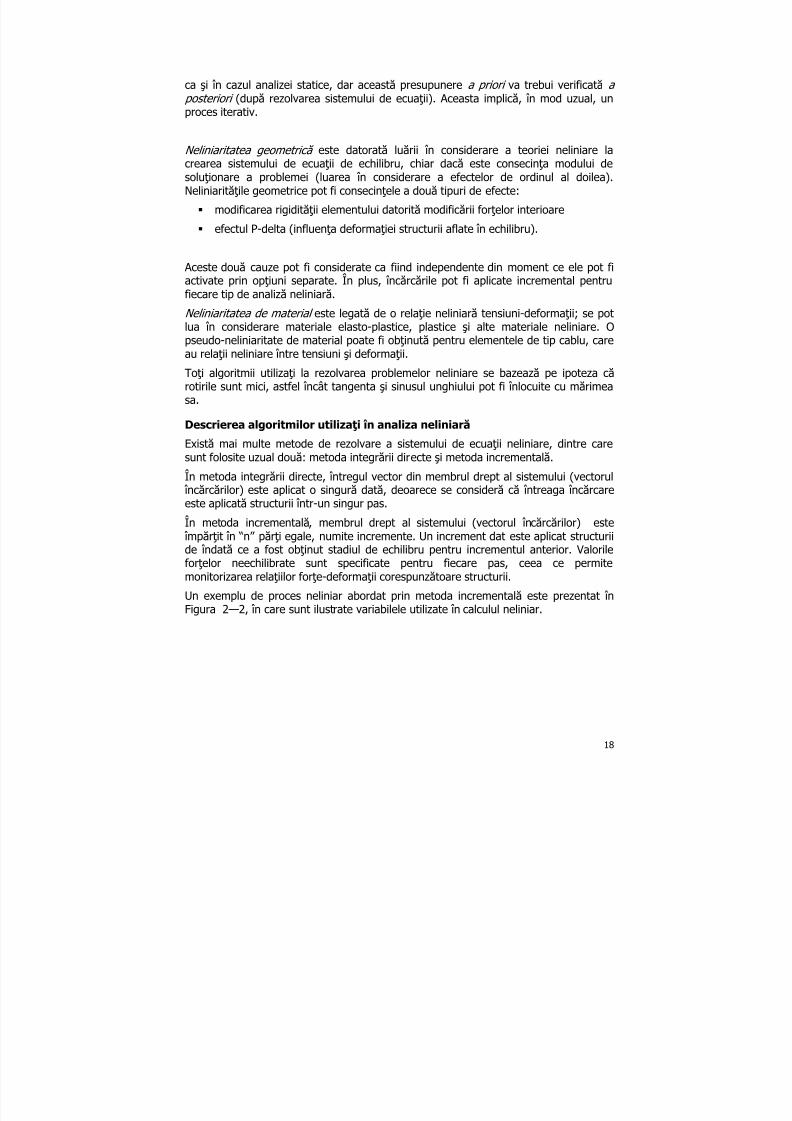
În Figura 2—3 şi Figura 2—4 sunt reprezentai algoritmii metodei iterative. În cadrulmetodei iterative procesul poate fi condus cu sau fără actualizarea matricei derigiditate după fiecare iteraie.
Figura 2—3 Schema metodei iterative – rigiditate constantă
Increment încărcaredF0
Deplasărisub-increment
dUn
Iteraii secundare(sub-incremente)
Prima deplasare dU0(sub-incremente)
IncrementÎncărcare1
IncrementÎncărcare2
Intensitate foră F
Deplasări U
ForeneechilibratedFn
dUi
dFi
Foră F
Deplasări U
Rigiditatea estemeninută
constantă peparcursul unui
increment de for ă

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 20/149
20
Figura 2—4 Schema metodei iterative – actualizare după fiecare iteraie
În analiza neliniară standard, încărcarea este aplicată cu incrementul:dλ = 1.0 / X,
unde X – numărul de incremente ale încărcării; ca urmare, cel mai mare factor al încărcării (λ) ce poate fi atins pentru convergena rezultatelor, este
λmax =1.0.
Suplimentar, criteriile care conduc la oprirea analizei pot fi:
Cedarea (colapsul) structurii,
Atingerea factorului încărcării, Stare de plastifiere,
Atingerea gradului de plastifiere,
Depăşirea deplasării maximale a oricărui nod,
Depăşirea deplasării maximale a unui nod selectat.
Detaliind:
Cedarea structurii - calculul este oprit în momentul în care procesul iterativ estedivergent.
Atingerea factorului încărcării - calculul este efectuat până când valoarea λmax =λdef (unde λdef este factorul de încărcare definit de utilizator) sau când procesuliterativ devine convergent.
Starea de plastifiere - analiza este efectuată până când starea de plasticitateeste instaurată în orice punct al seciunii al cel puin unui element elasto-plastic, sau până când procesul iterativ este divergent.
dUi
dFi
Foră F
Deplasări U
Rigiditatea esteeste actualizată
după fiecareinteraie
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 21/149
21
Atingerea gradului de plastifiere - calculul este efectuat până când starea deplasticitate a oricărui element elasto-plastic atinge valoarea limită a stării deplasticitate (SLmax >0) determinată de către utilizator sau până când procesuliterativ este divergent.
Depăşirea deplasării maximale a oricărui nod - calculul este efectuat până cândvaloarea deplasării maxime în orice nod depăşeşte deplasarea admisibilă
definită de către utilizator sau până când procesul iterativ este divergent. Depăşirea deplasării maximale a unui nod selectat - calculul este efectuat până
când valoarea deplasării maxime în nodul specificat de utilizator depăşeştedeplasarea admisibilă definită de către utilizator sau până când procesul iterativeste divergent.
Există posibilitatea de a defini mai mult de un criteriu de oprire a analizei, cu condiiaca acestea să fie compatibile.
Analiză
de flambaj
În formularea sistemelor liniare poate fi luat în considerare efectul modificării rigidităiielementelor. Opiunea de calcul la flambaj investighează influena incrementului încărcării atunci când rigiditatea elementului scade. În timpul rezolvării problemeiliniare de valori proprii, se defineşte coeficientul încărcării critice, ce descrie nivelul de încărcare pentru care matricea de rigiditate devine particulară. Vectorul propriudefineşte forma de flambaj corespunzătoare încărcării critice aplicate (valoareproprie).
Soluionând problema de valori proprii pentru structura definită, rezultatele acesteianalize sunt următoarele:
→ numărul de moduri de flambaj;→ eforturi critice;
→ lungimi de flambaj;
→ valoarea globală a încărcării critice.
Analiză dinamică
Pot fi efectuate diverse tipuri de analize dinamice pentru fiecare dintre tipurile destructuri. Sunt utilizate ipotezele generale ale teoriei liniare, adică:
→ deformaiile sunt mici,
→ deplasările sunt mici,
→ materialele sunt liniar elastice.
Masele utilizate la analizele dinamice pot fi introduse utilizând una din metodeleurmătoare: greutatea proprie, greutatea proprie şi mase concentrate suplimentare,mase rezultate din fore, mase provenite din structuri tip off-shore.
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 22/149
22
Analiză modală
Analiza modală determină toi parametrii pentru modurile proprii de vibraie. Aceştiparametri includ:
→ valori proprii,
→ vectori proprii,
→ factori de participare,
→ mase.
Numărul de moduri de vibraie de calculat poate fi introdus direct sau prin definireaunui domeniu de valori pentru parametrii vibraiilor proprii. Valorile proprii şi modurilede vibraie sunt obinute din următoarea ecuaie:
( K - ωωωωi2 M ) Ui = 0. ( 2-5 )
Analiză armonică
Într-o analiză armonică, utilizatorul defineşte structura şi încărcările ca într-o analizăstatică liniară. Forele impuse sunt interpretate ca amplitudini ale forelor de excitaie.Frecvena lor, unghiul de fază şi perioada sunt definite de către utilizator. Ecuaiamişcării ce trebuie rezolvată în analiza armonică (presupunând că amortizareastructurii este neglijată) este:
( K - ωωωω2 M ) Q = F. ( 2-6 )
În urma analizei se obin:
→ valorile deplasărilor,
→ forele interioare,
→ reaciunile.
Analiză spectrală
În urma acestei analize se obin toate mărimile corespunzătoare analizei modale şi -deasemenea - pentru fiecare formă de vibraie, următoarele:
→ coeficienii de participare pentru analiza spectrală,
→ valoarea spectrului de excitaie a acceleraiei,
→ coeficienii modali,→ deplasări,
→ fore interioare,
→ reaciuni,
→ combinaii de vibraii.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 23/149
23
Ecuaia mişcării ce trebuie rezolvată în analiza spectrală este:
K Q + M Q'' = - M A. ( 2-7 )
Analiza seismică
În urma acestei analize se obin toate mărimile corespunzătoare analizei modale şi, de
asemenea, pentru fiecare formă de vibraie, următoarele:→ coeficienii de participare pentru analiza seismică,
→ valoarea spectrului excitaiei seismice,
→ coeficienii modali,
→ deplasările,
→ forele interioare,
→ reaciunile,
→ combinaii de vibraii.
Analiză biografică (“time-history”)
Analiza biografică (“time-history”) este o analiză ce permite obinerea răspunsuluistructurii la o excitaie impusă într-un interval de timp determinat (contrar celorlalteanalize care arată răspunsul structurii sub forma unor valori corespunzătoare unuisingur moment temporal, momentul zero).
Analiza biografică sau temporală (“time-history”) constă în găsirea soluiei pentruurmătoarea ecuaie în variabila “t”:
M * a(t) + C * v(t) + K * d(t) = F(t) ( 2-8 )
cu valorile iniiale cunoscute d(0)=d0 i v(0)=v0, unde:
M - matricea maselor,
K - matricea de rigiditate,
C = α * M + β * K - matricea de amortizare,
α, β - coeficieni,
d - vectorul deplasare,
v - vectorul viteză,
a - vectorul acceleraie,
F - vectorul încărcare.Toate expresiile ce conin parametrul (t) sunt dependente de timp.
Metoda descompunerii modale este o metodă mai simplă de obinere a soluiei, Ea sebazează pe reprezentarea mişcării structurii ca suprapunere a mişcărilor pentru formeindependente. De aceea, metoda impune cunoaşterea valorilor proprii, precum şi avectorilor proprii. În acest scop, se recomandă utilizarea metodei Lanczos, urmată apoide verificarea Sturm. Metoda descompunerii modale oferă avantaje în cazul ecuaiilorreduse necuplate.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 24/149
24
Ecuaia (fără amortizare) poate lua forma următoare:
( ) MX KX P t &&r r r
+ = ,
unde
( ) ( )r rP t P t k
k
Ng
k ==
∑1
ϕ ( 2-10 )
Ng – numărul de “grupuri de încărcări”,
( )ϕ k t - dependena de timp pentru al “k”-lea grup de încărcări.
( ) ( )r r
X t q t V i
i
m
i==
∑1 ( 2-11 )
Analiza neliniară biografică permite obinerea răspunsului structurii în cazul în care aufost definite orice tipuri de elemente neliniare. Analiza biografică constă în obinereasoluiei următoarei ecuaii în variabila “t”:
M * a(t) + C * v(t) + N (d(t)) = F(t) ( 2-12 )
cu valorile iniiale cunoscute d(0)=d0 şi v(0)=v0, unde:
M - matricea maselor,
K - matricea de rigiditate,
C = α * M + β * K - matricea de amortizare,N - vectorul forelor interioare (ce este într-o relaie neliniară cu vectoruldeplasărilor d)
α, β - coeficieni,
d - vectorul deplasare,
v - vectorul viteză,
a - vectorul acceleraie,
F - vectorul încărcare.
Un vector încărcare este presupus a fi de forma:
∑∑∑∑====
====n
i
ii
ext t t 1
)()( ϕ PF
, ( 2-13 )
unde:
“n” reprezintă numărul de componente,
Pi - a “i”-a componentă a forelor,
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 25/149
25
)(t iϕ - a “i”-a funcie dependentă de timp.
Analiză Pushover (Incrementală)
Analiza Pushover este o analiză structurală statică neliniară, care oferă posibilitateaprezentării – în manieră simplificată – a comportării structurii sub aciunea diferitelortipuri de încărcări produse de un seism. Încărcarea structurii se face incremental, înconcordană cu încărcarea adoptată. Creşterea valorii încărcării permite identificareaelementelor mai “slabe” ale structurii şi modurile de cedare ale acesteia. Acest tip deanaliză încearcă să estimeze rezistenele reale ale structurii. În timpul realizării acestuitip de analiză este necesar să se definească articulaii plastice.
Următoarele limitări pot interveni în funcie de implementarea algoritmului:
→ toate proprietăile neliniare care pot produce degradarea structurii sub aciunea
forelor produse de un seism sunt concentrate în articulaiile plastice;→ articulaiile plastice pot fi aplicate doar în elemente sub formă de bare;
→ articulaiile plastice sunt tratate ca fiind legături neliniare independente pe direciafiecărui grad de libertate a nodului selectat (se ignoră interaciunea dintre diferitelegrade de libertate).
Analiza “pushover” constă în parcurgerea celor câtorva paşi descrişi mai jos:
→ definirea articulaiilor plastice pe modelul de calcul al structurii;
→ stabilirea proprietăilor neliniare în aceste articulaii plastice (diagramele foră-deplasare şi moment-rotire);
→ efectuarea analizei modale pentru obinerea unui mod;→ definirea unui set de fore orizontale (acestea depinzând de tipul matricei maselor
utilizate în analiza modală);
→ definirea unui nod de control, a unei direcii şi a unei valori admisibile pentrudeplasare;
→ determinarea parametrilor analizei neliniare;
→ pornirea analizei statice neliniare; rezultatul acestei analize este curba V = V(D)corespunzătoare stării de echilibru, în care forele tăietoare sunt definite ca sumă areaciunilor produse pe o anumită direcie de setul de fore orizontalecorespunzător.
Determinarea curbei de rezistenă )( d
cap
a
cap
aSSS ==== , unde
cap
aS este acceleraia
spectrală, iar Sd este deplasarea spectrală şi conduce la:
→ netezirea curbei de rezistenă;
→ determinarea (printr-o analiză de tip „pas-cu-pas”) a punctului corespunzătoroptimului de exploatare.
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 26/149
26
Analiză elasto-plastică a barelor
Analiza elasto-plastică permite luarea în considerare a neliniarităii de material.Trebuie adăugat aici faptul că aceste neliniarităi de material pot ine cont demodificarea rigidităii materialului datorită factorilor externi, cum ar fi temperatura; deasemenea, pot fi luate în considerare aspectele reologice (modificarea proprietăilormaterialului în timp), în cazul cel mai general.
În cazul particular al analizei elasto-plastice pentru bare, la care nu sunt considerateefectele reologice sau influena temperaturii, pot fi adoptate următoarele metode deoperare:
→ analiza la nivel de element: adăugarea de grade de libertate globale
Barele sunt împărite în elemente de dimensiuni mai reduse şi pot exista diferitevalori ale parametrului de divizare. În fiecare element, tensiunile sunt calculate întrei puncte (se aplică o cuadratură Gauss de ordinul al treilea).
→ analiza la nivelul seciunii: ipoteza structurii stratificate.
O seciune este împărită într-un număr de straturi (fibre); într-o seciune încovoiată biaxial, vom vorbi despre zone. În fiecare dintre zone, tensiunile suntverificate în conformitate cu modelul ales. Eforturile sunt obinute prin integrareape întreaga seciune.
Pentru fiecare din zonele de pe seciune trebuie determinate: coordonatelecentrului de greutate în sistemul central al seciunii (y i, zi), aria zonei Ai, materialulatribuit zonei Mi, unde i reprezintă numărul zonei (i=1,…, N).
Analiza este efectuată într-o asemenea manieră încât, pentru fiecare increment al încărcării, se calculează incrementele deplasărilor în punctele de diviziuneconsiderate de-a lungul barei. După aceea, plecând de la aceste deplasări, suntcalculate deformaiile în punctele seciunii. Considerând funcii ce descriu
comportarea materialului modelat din zona dată, tensiunile sunt calculate în fiecarepunct pe baza deformaiilor. Pornind de la aceste tensiuni se obin apoi foreleinterioare de pe zonele respective. În fine, prin însumarea (integrarea) acestora, seobin eforturile de pe bară.
→ modelul de material: elastic-perfect plastic sau elasto-plastic cu consolidare, avândo comportare elastică şi liniară, iar în domeniul plastic – liniară cu consolidare;materialul este generat pe baza caracteristicilor sale: modulul lui Young (E) şi arezistenei de rupere (Re).
În analiza plastică trebuie modelată şi descărcarea materialului, ce defineştecomportarea materialului după depăşirea punctului de plastifiere în timpul
descărcării, atunci când deformaiile scad (gradientul deformaiilor este negativ).Pot fi utilizate următoarele tipuri de comportare a materialului: elastică, plastică, cudegradare şi mixtă.
Rezultatele obinute în urma analizei elasto-plastice a barelor sunt:
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 27/149
27
Deplasări
În timpul analizei elasto-plastice, se calculează direct deplasările pe bară. Suntimportante valorile săgeilor şi ale rotirilor din “nodurile” interioare ale barei. Pentru ase obine deplasările din orice punct al acesteia, se poate efectua interpolarea liniară între valorile din aceste “noduri”.
Fore interioareForele interioare din bară sunt calculate într-o manieră identică cu cea din analizaliniară. Utilizând eforturile din nodul iniial (de plecare) al barei şi încărcarea de-alungul acesteia, se determină eforturile din orice seciune transversală.
Algoritmul este diferit în cazul unei analize de tip P-delta, la care se ine cont deefectul excentricităilor cauzate de deplasările barei, obinute în punctele de divizareinterioară.
Tensiuni
În analiza elasto-plastică, tensiunile normale nu sunt distribuite liniar pe seciune, ci
sunt calculate în mod independent, pe fiecare dintre zone. Pe unele dintre acestea,tensiunile normale pot să ajungă în domeniul plastic, în timp ce în altele vor rămâne în domeniul elastic. De aceea, nu se pot determina cu exactitate tensiunile dintr-unpunct oarecare al barei.
2.4 Concluzii
În acest capitol a fost prezentată metoda elementului finit, ca instrument generalpentru rezolvarea problemelor de inginerie structurală. Formularea matematicămatriceală a metodei elementelor finite permite implementarea acesteia în programeintegrate de calcul pentru cele mai diverse tipuri de structuri inginereşti. În cadrul
acestui capitol au fost trecute în revistă cele mai uzuale tipuri de analiză pentrustructuri din domeniul ingineriei civile. În prezentarea acestora, accentul a fost pus peenumerarea datelor de intrare şi pe rezultatele obinute. Datele şi rezultatele obinutevor fi folosite ulterior, aşa cum vom prezenta în capitolele următoare, pentru a realizaprograme complexe de calcul şi optimizare, integrate, precum şi programe care coninmodule de calcul inteligente.
Pentru anumite tipuri de calcul (în special pentru cele neliniare şi dinamice), au fostdetaliate formulele matematice sau schema algoritmilor utilizai. O primă observaie pecare o putem face asupra metodei în ansamblu, dar în special asupra algoritmilorpentru analiza neliniară şi dinamică (liniară sau neliniară), unde calculul iterativ esteesenial, este aceea că ciclurile de calcul nu impun intervenia utilizatorului. Acest
aspect este foarte important: întrucât este permisă în acest fel crearea deautomatisme software în care aceste cicluri de calcul pot fi înglobate.
Datorită robusteii metodei elementului finit în rezolvarea problemelor de calculstructural, aceasta este foarte potrivită pentru a fi utilizată ca nucleu general de calculpentru programe integrate de optimizare. Totodată, pentru a implementa un sistemmai general de proiectare în inginerie, programele de calcul bazate pe metodaelementului finit pot fi adaptate pentru satisfacerea oricăror cerine de acest fel.Pentru a avea o imagine de ansamblu, în Tabel 2-2 au fost centralizate datele deintrare, rezultatele şi tipurile de analiză aferente. Întrucât scopul tezei este de a aduce
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 28/149
28
contribuii la elaborarea de programe de calcul integrate, menionăm contribuia adusăprin coninutului acestui capitol: sistematizarea unor noiuni legate de metodaelementului finit, etapă strict necesară elaborării algoritmului şi programului originalprezentate în capitolele următoare.
Atât datele cât şi rezultatele vor fi folosite ulterior în calitate de restricii sau obiectiveale programului de optimizare.
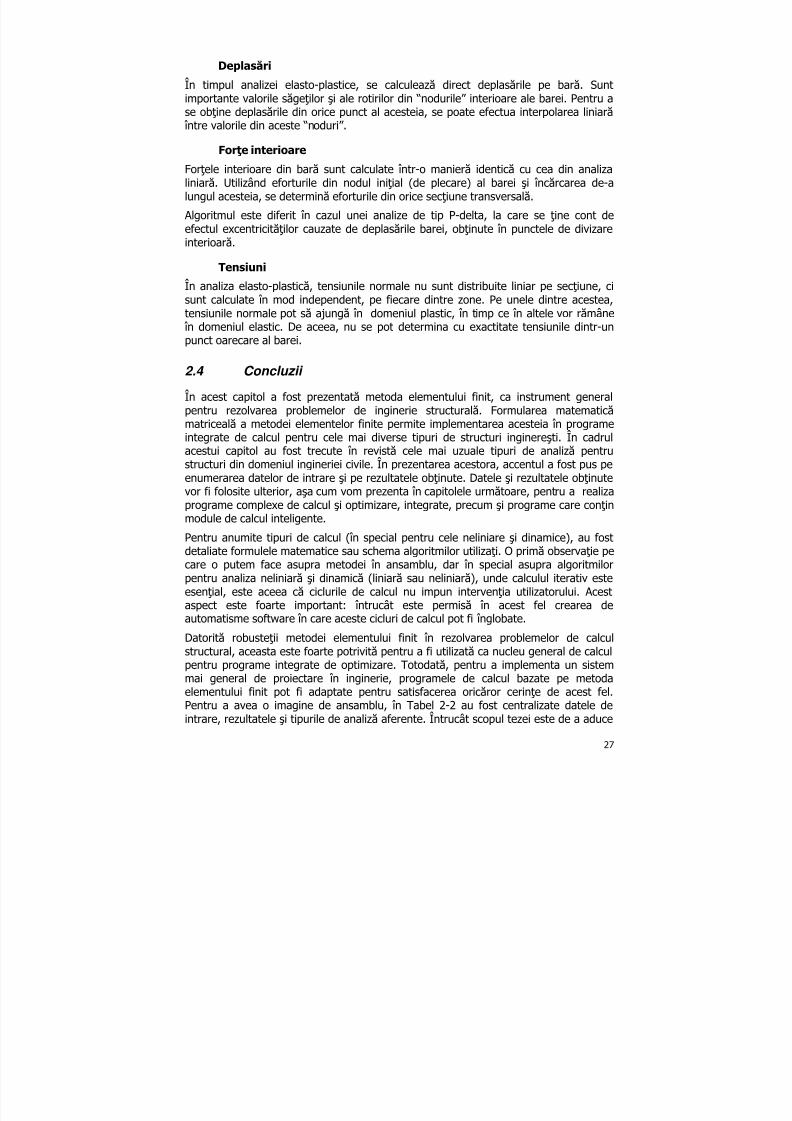
Un model de corelare a datelor şi rezultatelor pentru o aplicaie de optimizare esteprezentat în Tabelul 2-1.
Restrictii
Geometrie Seciuni
Obiectiv
T e n s i u n
e m a x i m ă l o
c a l ă
T e n s i u n e
m a x i m ă g
l o b a l ă
D e p l a s a r e
m a x i m ă g
l o b a l ă
D e p l a s a r e m a x i m ă l o
c a l ă
R e s t r i c i i g e o
m e t r i c e u t i l i z a t o r
L i m i t e s e c i o n a l e p a r t i c u l a r e
T e n s i u n
e m a x i m ă l o
c a l ă
T e n s i u n e
m a x i m ă g
l o b a l ă
D e p l a s a r e
m a x i m ă g
l o b a l ă
D e p l a s a r e m a x i m ă l o
c a l ă
Greutate minimă
Rigiditate maximă pe o direcie
Reducere excentricitate globală Reducere deplasare relativă nivel
Tensiune medie maximală
Efort mediu maximal
Cerine globale conform COD
Tabel 2-1 Relaia dintre date şi rezultate pentru constituirea unei probleme de optimizare
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 29/149
2 9
coordonate noduri
efecte de ordinul II
materiale liniare
materiale neliniare
fore nodale
fore distribuite
mase
reazeme liniare
reazeme neliniare
cabluri
factor încărcare
increment încărcare
număr moduri vibraie
număr moduri flambaj
spectrul de vibraie
articulaii plastice
seciuni bare, shell
deplasări nodale
eforturi
tensiuni pe bare
tensiuni pe seciune
reaciuni
factor încărcare
stare plastifiere
grad plastifiere
colaps structură
efort critic flambaj
valoare încărcare critică
valori proprii
vectori proprii
factori participare
mase globale
coeficienii de participare
valoarea spectrului de excitaie
coeficienii modali
rezultate la pas de timp
Fora tăietoare capabilă
deplasarea spectrală
acceleraia spectrală
s t r u c t ur
al ă
g e om e t
r i c ă
m a t er i a
l
f l am b a j
m o d al ă
ar m oni c ă
s ei s mi c ă
s p e c t r al ă
b i o gr af i c ă
i n c r em en t al ă
el a s t o- pl a s t i c ă
s t a t i c n el i ni a
r ă
s t a t i c l i ni ar ă
D A T E
R ez ul t a t e
A n al i z a
T a b el 2 -2
R el a i a d i
n t r e d a t el e d ei n t r ar e ş i r ez ul t a t el e o b i n u t e

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 30/149
30
3. INTELIGENA ARTIFICIALĂ
Inteligena artificială (IA) este o ramură a Informaticii care are ca obiectiv proiectareasau înzestrarea sistemelor cu proprietăi speciale pe care le putem asocia cu inteligenasau comportamentul inteligent uman.
Asupra IA s-a încercat formularea mai multor definiii care accentuează într-o măsurămai mare sau mai mică importana sau ponderea în manifestarea inteligenei aproceselor cognitive sau a comportamentului.
Inteligena artificială sau Inteligena sintetică, spre deosebire de metodele clasice deprogramare, în procesul de rezolvare al unei probleme, nu presupune cunoaştereametodei de rezolvare. IA presupune asumarea unui obiectiv şi trasarea în linii generalea comportamentului programului pentru rezolvarea problemei date.
Dintre tehnologiile IA putem enumera:
→ Reele neuronale,→ Algoritmi genetici,→ Programare genetică:→ Sisteme fuzzy,→ Sisteme expert,→ Ageni inteligeni.
3.1 STADIUL CUNOAŞ TERII
În cele ce urmează vom încerca să prezentăm câteva aplicaii ale inteligenei artificiale în inginerie.
Una din principalele probleme care intervin în constituirea modelului este chiarreprezentarea acestuia. Modalităile clasice de reprezentare permit abordarea explicită amodelului fizic sau geometric. Această modalitate este astăzi foarte intens dezvoltatăprin intermediul tehnologiei XML (eXtensible Markup Language).
După cum am menionat în capitolele precedente sunt dezvoltate specificaii XML pentru
reprezentarea cunoştinelor şi informaiilor din diverse domenii. Astfel, pentru inginerie civilă, Reinout van Rees [ 219 ] a propus ceXML. Acestespecificaii pot fi înelese şi ca subset al aecXML.
O altă formă de reprezentare a informaiilor şi a modelului structurii este reprezentareabazată pe gramatici [ 5 ]. Practic, reprezentarea bazată pe o gramatică constă în douăetape. În prima etapă entităilor din domeniul de proiectare le sunt ataşate un set desimboluri. Modelul real este astfel reprezentat de simbolurile alese, pe baza unor regulide combinare a acestora. În urma aplicării regulilor de combinare, entităile sunt

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 31/149
31
manipulate pe baza unei scheme de aplicare în etapa a doua. În acest fel, modelul estestocat prin setul „entităi – reguli”, ceea ce formează gramatica structurii sau amodelului.
Acest concept de modelare este denumit „modelare bazată pe reguli”. Structura esteelaborată sau dezvoltată printr-o metodă folosită şi în generarea fractalilor.
Un exemplu de aplicare este prezentat mai jos:Se alege entitatea de bază (denumită şi axiom): B, precum şi setul de reguli deevoluie:
Regula 1: B F[-B]+B ( 3-1 )
Regula 2: F FF ( 3-2 )
Aplicând recursiv regulile asupra axiomului este obinută o structură complexă dupănumai câteva iteraii:
Spre exemplu, în pasul 3 se obine: FFFF[-FF[-F[-B]+B]+F[-B]+B]+FF[F[B]+B]+F[-B]+B
Această tehnică s-a concretizat în conceptul SHAPE EVOLUTION (evoluia formei).Orestes Chouchoulas de la universitatea BATH [ 37 ] propune această metodă înelaborarea şi concepia structurilor din punct de vedere arhitectural. Atomii folosii îniniierea procesului de evoluie sunt constituii din atomi funcionali: încăperi, spaii detrecere.
Stephan Reudolph şi Rolf Alber [ 7 ] au propus şi abordarea inversă a problemei. Avândla dispoziie o structură existentă se pune problema de extragere a „gramaticii” care stăla baza modelului acesteia. Pentru extragerea acestor informaii sunt folosii algoritmigenetici. Regulile constau în acest caz în operaii geometrice (rotaii, scalări, translaii)asupra entităilor (bare, noduri).
Figura 3—1 Evoluia unui stâlp de înaltă tensiune

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 32/149
32
Tehnica elaborată de autorii menionai dezvoltă iterativ o structură până când aceastadevine conformă cu cea reală.
Tot autorii menionai mai sus folosesc tehnica directă pentru proiectarea automată şipentru sporire creativităii [ 5 ]. Ca atomi iniiatori ai procesului de proiectare folosescelemente de tip bară sau pânze, unite eventual în entităi funcionale.
Într-o altă lucrare, Stephan Rudolph şi Hansrudi Noser [ 185 ] folosesc pentruproiectarea şi elaborarea structurilor o altă abordare: din prisma gramaticilorstructurale, mulate pe o structură XML pentru reprezentarea cunoaşterii. Totodată, suntfolosite cunoştine de teoria grafurilor pentru structurarea şi parcurgerea informaiilor.
O altă problemă, legată de recunoaşterea structurilor, dar privită ca problemă generalăde recunoaşterea formelor (o aplicaie majoră a inteligenei artificiale), este rezolvatăde Jai McCormack [ 140 ] utilizând gramatica formei. În acest context, forma în sineeste descompusă în elemente ce definesc forma: linie sau muchie, sunt totodatăreinute şi elemente relaionale precum simetriile, dar şi relaiile dintre entităi: grupări,unghiuri etc.
Pentru a pune în evidenă diversitatea aplicaiilor posibile ale inteligeni artificialeamintim o altă aplicaie dezvoltată în contextul recunoaşterii formelor. Pentru a veni însprijinul inspectorilor tehnici sunt folosite aplicaii de recunoaştere a vocii [ 205 ]. Aceasta permite înregistrarea evenimentelor observate de inspectori pe teren în condiiidificile de accesibilitate.
În analiza fiabilităii structurilor calculate în domeniul elasto-plastic, ManolisPapadrakakis [ 158 ] utilizează reele neuronale artificiale şi simulare Monte Carlo.Cedarea structurii este evaluată de către o reea neuronală, prin instruirea acesteiautilizând diverse scenarii de cedare.
Reele neuronale artificiale sunt folosite pe scară largă pentru construirea modelelorempirice pornind de la date experimentale. Un exemplu de implementare a unui astfelse sistem este prezentat de Yoram Reich [ 181 ].
Pentru domeniul general de proiectare s-a încercat dezvoltarea unei unelte pentruelaborarea proiectelor încă din primele faze de proiectare. Un exemplu demn demenionat în acest sens este SDA (Conceptual Structural Design Aid) elaborat de Lightweight Structures Research Unit (LSRU) [ 197 ]. Sistemul constă într-o bază de dateinteractivă formată în 1995 şi dezvoltată cu susinerea Universităii New South Wales - Australia.
Acest concept este dezvoltat pe o platformă ce are ca nucleu o bază de date în caresunt stocate peste 400 de studii de caz complete şi peste 1000 studii ce caz pariale. Însistem sunt stocate informaii privind tipologiile structurale, modul cum acesteafuncionează, elementele componente prezentate în detaliu, constrângerile şi tipurile de încărcări. Sistemul poate fi interogat printr-o interfaă WEB. Acesta constă în trei mariseciuni:
- un ghid general de proiectare ce include prescripii derivate din analiza statisticăa categoriilor de: formă, utilizare (modul specific de utilizare) şi structură (datedespre teoria structurilor, modul în care acestea lucrează);

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 33/149
33
- bază de date coninând un set ilustrat de topologii constructive, forme şistructuri, toate formând un vocabular de proiectare;
- o seciune de referine; exemple de structuri din Australia şi din întreaga lume.
O altă tehnică folosită în elaborarea structurilor este oferită de Programarea Genetică. Aceasta a fost prezentată de Soh şi Yang [ 224 ] pentru structuri din bare. Astfel, ostructură ca cea din Figura 3—2 este descompusă într-un arbore care este apoi preluatde aparatul genetic al programului genetic.
Figura 3—2 Descompunerea unei structuri în arbore
Folosită în acest fel, programarea genetică deschide posibilitatea proiectării pe undomeniu deschis (open-domain design), în care proiectantul specifică într-o manierăaproximativă limitele şi posibilităile de dezvoltare a proiectului. Similar s-a dezvoltat şioptimizarea într-un domeniu deschis. Programul genetic dezvoltă autonom diverse
structuri în domeniul admisibil de proiectare ce sunt testate în cadrul rutinelor defitness.
În domeniul optimizării s-au creat o multitudine de tehnici de optimizare uni sau multi-criterială.
În acest domeniu, Coello Carlos [ 40 ] de la Tulane University, a aprofundat cercetările în sensul utilizării teoriei de optim Pareto (fundamentată de Vilfredo Pareto încă din1896). Spaiul soluiilor este explorat utilizând algoritmi genetici, în domeniulfrontierelor Pareto.
N1N2
N3 N4
j k m
n
i
l Ai
Aj Al
An Ak
N1 N4 N4 N2
Am
N2 N3
N4

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 34/149
34
3.2 ALGORITMI GENETICI (AG)
Clasele de tehnici de căutare din care derivă şi algoritmii genetici sunt prezentate înschema din Figura 3—3 [ 70 ]:
Figura 3—3 Descompunerea unei structuri în arbore
Algoritmii genetici pot fi folosii cu succes în probleme de optimizare structurală pentruinginerie civilă. În literatură există mai multe încercări reuşite de realizare a unorsisteme de programe ce utilizează AG pentru optimizare.
Algoritmii genetici sunt tehnici euristice de căutare în spaiul soluiilor, implementândparadigma darwinistă de evoluie.
Forma standard a unui algoritm genetic este următoarea [ 64 ], [ 65 ]:
Figura 3—4 Algoritm genetic în forma standard
În legătură cu algoritmul de mai sus, facem următoarele observaii:
Populaia P(t) este un vector alcătuit din variabilele de proiectare. Succesul algoritmului în soluionarea problemei este tributar şi modului în care este alcătuit vectorul iniial.
P1: Se pune t=0
P2: Se iniializează aleator populaia P(t)
P3: Se evaluează cromozomii populaiei P(t) în funcie de funcia de fittness (funcia de performană)
P4: Atâta timp cât criteriul de oprire nu este satisfăcut
P4.1 Se selectează cromozomii din P(t) asupra cărora se vor aplica operatorii genetici
P4.2 Se aplică operatorii genetici
P4.3 Se evaluaează populaia
END
Tehnici de căutare
Bazate pe calcul
DIRECT INDIRECT
Fibonacci Newton
Aleatoare - Dirijată
Recoaceresimulată
Algoritmievolutivi
Strategii evolutive Algoritmi genetici
Enumerative
Programaredinamică

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 35/149
35
Pentru alcătuirea vectorului cu variabilele de proiectare este necesară o codificare corespunzătoare a problemei.
Evaluarea populaiei este esenială în algoritmii genetici. Practic, pe baza informaiilorfurnizate de rutina de evaluare sunt luate deciziile de evoluie ulterioară a algoritmului.În contextul programelor de proiectare care utilizează algoritmi genetici, evaluarea
populaiei poate însemna apel la programul de calcul structural sau efectuarea decalcule intern. Este evident că în cazul în care se face apel în evaluare la un programextern, timpul de calcul global se măreşte considerabil. Este un fapt cunoscut că pentruprobleme complexe de calcul structural timpul de calcul poate deveni un criteriuimportant. În acest caz, este esenial ca algoritmul genetic să facă un număr deincursiuni externe cât mai mic.
Criteriul de oprire este ales uzual ca fiind numărul maxim de generaii (parametru impusde utilizator). În practică, din dorina de a obine rezultate de o precizie impusă, sepoate alege ca şi criteriu de oprire, precizia rezultatului obinut. În special în cazulprogramelor de optimizare, în care rezultatele nu sunt întotdeauna predictibile, se poatealege ca şi criteriu de oprire situaia procesului evolutiv: în lipsa obinerii unei
îmbunătăiri semnificative de la o generaie la alta, programul este oprit.Codificarea variabilelor de proiectare se poate face astfel: codificarea reală şi codificareabinară.
Întregul proces iterativ al algoritmului genetic este guvernat de o serie de parametri decare depinde evoluia programului în ansamblu. Astfel, parametri de proces pot fi:numărul de generaii, precizia funciei de performană (funcia de fitness), dimensiuneapopulaiilor, procentul în care se selectează membri populaiei pentru participarea laoperaii genetice, procentul de populaie care este selectat pentru supravieuire într-unnou ciclu de calcul etc.
Alegerea corectă1 a parametrilor de calcul influenează radical modul de lucru al
programului. Aceştia însă nu pot fi identici pentru orice tip de problemă. Programelecare folosesc algoritmi genetici de ultimă generaie încearcă stabilirea dinamică avalorilor parametrilor.
Faă de algoritmul de mai sus, în comunitatea ştiinifică de pe mapamond s-au testat şiimplementat o mare diversitate te tehnici prin care se încearcă mărirea vitezei deconvergenă a algoritmului2.
Implementarea originală propusă pentru sistemul prezentat în lucrarea de faă foloseşte AG în codificare reală. În plus, metoda propusă utilizează şi tehnici convenionalealgoritmice pentru sporirea eficienei algoritmului de căutare.
1 De cele mai multe ori, creatorul programului recomandă anumite domenii de valabilitate a parametrilor şi intervalul lor de variaie.În utilizarea unui program genetic se recomandă testarea algoritmului cu diverse seturi de parametri iniiali pentru a vedea dacăaceştia pot rezolva problema dată. 2 Există încercări de justificare matematică a eficienei algoritmilor genetici. În pofida simplităii lor, aceştia sunt capabili să rezolveprobleme foarte complexe. S-a cristalizat noiunea de schemă a cromozomilor care înseamnă o s imilaritate a cromozomilor (mulimide cromozomi cu poziii identice). Întrucât problematica algoritmilor genetci este amplu dezbătută în literatura de specialitate nuvom dezvolta aici teoria AG. Recomandăm consultarea [ 64 ] pentru lămuriri suplimentare.
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 36/149
36
Codificarea problemelor de inginerie structurală
Fără a avea pretenia epuizării tuturor tipurilor de probleme de optimizare ce pot fiabordate prin această metodă putem enumera câteva ce au fost testate şiimplementate cu succes:
→ optimizarea geometrică pentru structuri din bare,→ optimizarea geometrică pentru structuri din elemente tip SHELL,→ optimizarea topologică pentru structuri din bare,→ optimizarea geometrică a seciunilor elementelor din bare,→ optimizarea geometrică a seciunilor elementelor de tip placă sau shell,→ optimizarea topologică a seciunilor elementelor din bare.
În Capitolul 5 din lucrarea de faă sunt date câteva exemple de aplicare pentru o partedin problemele enumerate mai sus.
Deşi codificarea binară este mult mai simplu de implementat, fiind mult mai des utilizatădin acest motiv, am preferat implementarea în variantă reală a codificării.
Codificarea reală are mai multe avantaje:→ Nu mai este necesară prezena unor module de codificare/decodificare în vectori
binari, scurtându-se timpul de calcul;→ Entităile asupra cărora se operează sunt nişte „reali” şi deci o implementare în
variantă reală este mult mai apropiată de problema ce urmează a fi rezolvată.
În [ 99 ] am prezentat mai multe moduri de abordare a codificării problemelor deinginerie structurală.
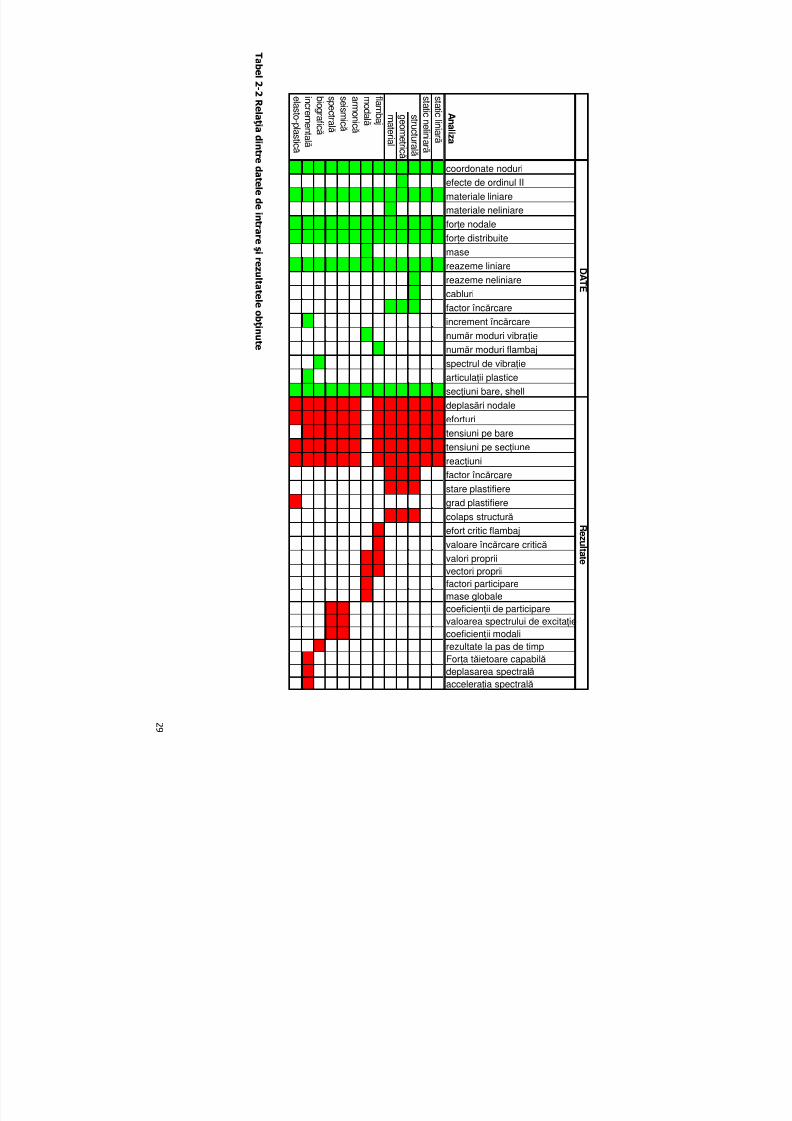
Pentru a pune în evidenă diferenele dintre modul de abordare a problemei, uzăm deurmătorul exemplu: se determină forma optimă a seciunii transversale pentru unelement structural supus la un set de încărcări date.
Sunt două aspecte fundamentale care sunt afectate de modul de codificare: spaiul decăutare şi forma soluiei.
Cele două imagini de mai jos (Figurile 3-5 şi 3-6) sunt concludente pentruexemplificarea problemei propuse:
Figura 3—5 Discretizarea seciunii transversale în vederea codificării acesteia
h
(h x v)
v

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 37/149
37
Înlocuind în matricea din Figura 3—5 zonele în care există material cu 1, iar pe celefără material cu 0 se obine o matrice în 1 şi 0. Prin parcurgerea acesteia într-o ordineprestabilită obinem forma vectorului binar.
Figura 3—6 Codificare binară a unei seciuni transversale
În Figura 3—6 spaiul de căutare a soluiei este de dimensiune (h x v), unde h şi v suntrezoluia sau pasul reelei pe cele două direcii. Forma vectorului (cromozomul)problemei este de forma:
{111…001…} şi are lungimea (h x v),
unde 1 corespunde unei celule în care există material atribuit, iar 0 semnifică absenamaterialului. Astfel, putem obine diverse configuraii ale seciunii operând numaiasupra vectorului în format de string binar.
În Figura 3—7, folosind codificarea reală, forma vectorului este:{B, H, Tf, Tw} şi are lungimea 4.
Figura 3—7 Codificare reală (I) a unei seciuni transversale
H
B
Tf
Tw
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 38/149
38
Spaiul de căutare poate fi discret sau continuu pentru fiecare din aceste variabile, cuvalori din R.
În varianta reală, deşi dimensiunea spaiului de căutare este evident mai mare, putemlesne adăuga restricii pentru fiecare variabilă din vector, limitând astfel domeniul de
căutare. Un alt avantaj obinut în urma folosirii implementării reale este coerenamodelului. Este mult mai uşor să verificăm corectitudinea unui cromozom (uncromozom este chiar o seciune transversală) din punct de vedere constitutiv.
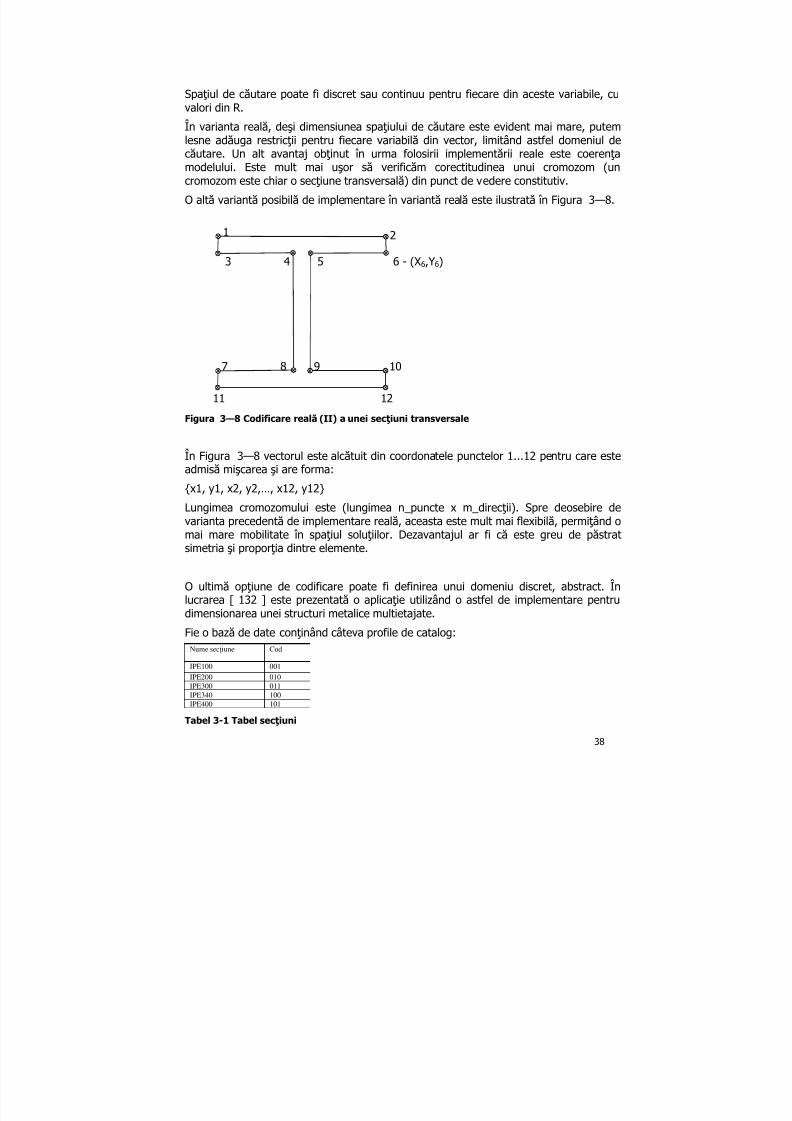
O altă variantă posibilă de implementare în variantă reală este ilustrată în Figura 3—8.
Figura 3—8 Codificare reală (II) a unei seciuni transversale
În Figura 3—8 vectorul este alcătuit din coordonatele punctelor 1...12 pentru care esteadmisă mişcarea şi are forma:
{x1, y1, x2, y2,…, x12, y12}
Lungimea cromozomului este (lungimea n_puncte x m_direcii). Spre deosebire devarianta precedentă de implementare reală, aceasta este mult mai flexibilă, permiând omai mare mobilitate în spaiul soluiilor. Dezavantajul ar fi că este greu de păstratsimetria şi proporia dintre elemente.
O ultimă opiune de codificare poate fi definirea unui domeniu discret, abstract. În
lucrarea [ 132 ] este prezentată o aplicaie utilizând o astfel de implementare pentrudimensionarea unei structuri metalice multietajate.
Fie o bază de date coninând câteva profile de catalog:Nume seciune Cod
IPE100 001
IPE200 010IPE300 011IPE340 100IPE400 101
Tabel 3-1 Tabel seciuni
11 12
987 10
543
21
6 - (X6,Y 6)

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 39/149
39
Fiecărui profil pe care dorim să-l utilizăm îi ataşăm o codificare binară reprezentândindexul în baza de date. Cromozomul va conine astfel referina în baza de date şi nuinformaii despre dimensiunile seciunii transversale.
Vectorul (cromozomul) problemei va fi un string cu dimensiunea de 3 bii:
{000}
În acest caz, este evidentă simplitatea implementării în variantă binară a algoritmului.
Modulele algoritmului genetic
Revenim asupra modulelor algoritmului genetic descris în seciunea 4.1 a acestuicapitol.
Modulul POPULAIE, conine o colecie de cromozomi (posibile soluii din spaiul decăutare) codificai binar sau real. Parametrii populaiei sunt: lungimea cromozomului,metoda de iniializare, metoda de selecie a cromozomilor care vor participa la o nouă
generaie, metoda de generare a noi cromozomi, metoda de evaluare, numărul demembri ai populaiei, numărul de generaii.
Modulul de EVALUARE face apel la o funcie cu care se poate evalua fiecare membru alpopulaiei. Termenul consacrat pentru funcia de evaluare este „funcia de fitness”, saufuncia de adecvare.
Pentru a putea evalua un membru al populaiei, acesta trebuie decodificat, mai alesdacă s-a lucrat în implementare binară, urmând ca rezultatul evaluării să fie folositpentru a decide dacă membrul respectiv va fi sau nu eliminat din populaie.
Modulul de MODIFICARE a populaiei poate implementa unul sau mai muli operatorigenetici cu care se vor modifica membrii selectai ai populaiei. Operatorii geneticifolosii uzual sunt: mutaie, încrucişare şi inversiune. În principiu, rolul acestor operatorieste de a perturba membrul asupra căruia se operează, pentru a produce o nouăvaloare.
Este demn de subliniat că o metodă similară metodei algoritmilor genetici estemenionată în [ 203 ], folosindu-se denumirea de modelare procedurală. Aceastafoloseşte o metodă similară prin care se perturbă valoarea variabilele, urmărind iterativmodul de variaie a funciei din care derivă variabilele respective.
Parametri algoritmului genetic sunt: procentele în care populaia este eşantionată, astfel încât fiecare eşantion să sufere câte o modificare.
Cele mai performante implementări ale algoritmilor genetici stabilesc dinamic valorileacestor parametri. Sunt stabilite anumite reguli după care algoritmul este capabil săsesizeze rata de succes a procedeului pe parcursul mai multor generaii, luând singurdecizii de modificare a parametrilor de proces.
Un astfel de procedeu s-a folosit şi în cazul programului genetic utilizat pentruoptimizarea unor funcii (vezi Capitolul 7.4).

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 40/149
40
3.3 Concluzii
Inteligena artificială este un domeniu vast de cunoaştere ce evoluează rapid, atât prinfundamentele teoretice, cât şi prin aplicaiile acesteia. În capitolul de faă am trecut înrevistă cele mai uzuale tehnici din domeniul inteligenei artificiale, focalizându-ne în celedin urmă asupra algoritmilor genetici. În prezentarea acestora, am dovedit că pot fiutilizai în probleme de inginerie structurală, dacă se foloseşte o codificare adecvată aproblemei în cauză. Din prezentarea mai multor metode de codificare a problemelorstructurale, am putut observa că o codificare reală poate fi mai avantajoasă faă decodificarea binară. Din acest motiv, în algoritmul prezentat în capitolele următoare amfolosit codificarea reală.
Din analiza exemplelor de aplicaii care utilizează diverse tehnici de inteligenă artificialăpe care le-am prezentat, concluzionăm că metodele de reprezentare a structuriloringinereşti prin intermediul unor structuri matematice sau simbolice manipulate desisteme inteligente sunt generatoare de noi paradigme de proiectare. Pentru acestmotiv, cercetările viitoare pe care le vom întreprinde vor fi îndreptate şi în această
direcie. După cum am observat, algoritmii genetici sunt o metodă extrem de simplu deimplementat. Pentru a fi însă utilizată în proiectarea structurilor, trebuie să se bazeze pemetodele de codificare a problemelor corespunzătoare. Seciunea din acest capitoldedicată metodelor de codificare va trebui extinsă în cercetările ulterioare şi pentru altetipuri de structuri: SHELL, SOLIDE, cabluri, structuri mixte etc.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 41/149
41
4. SISTEME INTEGRATE DE
PROGRAME DE PROIECTARE
4.1 GENERALIT Ă I
Domeniul sistemelor integrate este unul vast, acoperind multe ramuri ale ştiinei, cuaplicaii în diverse industrii.
Pentru a ne focaliza pe domeniul de interes al tezei de faă vom încerca să facem oscurtă introducere în terminologia utilizată în acest domeniu.
Conform DEX ediia 1996, un SISTEM „este un ansamblu de elemente dependente întreele şi formând un întreg organizat, care pune ordine într-un domeniu de gândireteoretică, reglementează clasificarea materialului într-un domeniu de ştiine ale naturiisau face ca o activitate practică să funcioneze potrivit scopului urmărit”.
Termenul INTEGRAT, folosit ca adjectiv, este definit ca „inclus, înglobat într-un tot”.Dacă ne referim la verbul A INTEGRA, definiia acestuia este: „a include, a îngloba, a(se) încorpora, a (se) armoniza într-un tot”.
Putem astfel să definim expresia SISTEM INTEGRAT, referindu-ne implicit la software,prin: „ansamblu sau program, care încorporează mai multe programe dependente întreele şi care funcionează ca un tot unitar”.
Pentru a particulariza sistemele integrate de programe pentru domeniul proiectării înconstrucii este necesară detalierea activităii de proiectare la care facem referină.Proiectarea de rezistenă presupune parcurgerea următoarelor etape: modelarea,calculul şi analiza rezultatelor.
Cele trei etape menionate mai sus sunt de obicei reluate iterativ.
Modelarea structurii urmăreşte găsirea unei reprezentări adecvate pentru: formă,geometrie, încărcări, materiale componente. Totodată, este stabilit şi modelulmatematic prin care pot fi calculate entităile incluse în modelul general al structurii.
Calculul structurii este efectuat pe baza modelului matematic ales, utilizând diversemetode de calcul, în funcie de tipul de structură, de solicitare etc. În funcie de tipul de
calcul solicitat de utilizator, poate fi reluat procesul de modelare. Analiza rezultatelor este etapa esenială prin care putem valida cele două etapeanterioare şi putem formula eventuale concluzii asupra întregului proces parcurs. Înacest stadiu, utilizatorul trebuie să dispună un mecanism accesibil de interogare şireprezentare a rezultatelor.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 42/149
42
Putem asocia cele trei etape menionate mai sus cu pre-procesarea3, procesarea şipost-procesarea, binecunoscutele etape de lucru în proiectarea asistată de calculator.
În definiia de mai sus am încercat să punem accentul pe caracterul de specializare aprogramelor componente, ceea ce înseamnă o abilitate ridicată a acestora de rezolvaproblemele încredinate, precum şi pe necesitatea de a trata proiectul în ansamblu, cape un tot unitar.
Prin integrarea mai multor programe se urmăreşte în principal:
mărirea performanelor acestora,
obinerea de simplitate în utilizare,
folosirea de structuri de date de intrare şi ieşire uniforme,
operarea într-o interfaă unitară, viteză globală de operare mărită,
scalabilitate ridicată. Scalabilitatea este importantă pentru îmbunătăireperformanelor programului în ansamblu: îmbunătăire modelului matematic(introducerea de noi solvere), îmbunătăire modelului geometric etc.
Putem vorbi de integrare şi la nivel de modul. Astfel, în cadrul aplicării unui solver spreexemplu, alcătuirea matricei de rigiditate, renumerotare, asamblarea şi toate celelalteoperaii pot fi privite ca fiind integrate. Întrucât programele de calcul sunt răspândite pescară largă, vom încerca să surprindem aspecte cât mai avansate şi generale aleintegrării, la nivelul întregii aplicaii, considerând că modulele componente funcionează
unitar.Caracteristicile care trebuie integrate şi care determină gradul de integrare sunt:
→ datele,
→ aplicaiile (modulele componente),
→ modul de prezentare (interfaa),
→ mecanismele operaionale (tehnologiile prin care comunică toate componentelesistemului).
Datele folosite în aplicaiile de proiectare sunt: geometria structurii, materialele
utilizate, legile constitutive exprimate numeric, condiiile de rezemare, încărcările – cualte cuvinte toate datele de intrare , dar şi rezultatele obinute în urma calculului:
3 Întrucât discuia de faă este centrată pe programe integrate de calcul, asociind modelarea cu pre-procesarea, am indus implicit o serie de simplificări: modelul matematic, cel geometric şi toate celelaltese presupun alese sau impuse. Spre exemplu, modelând o structură reală, utilizatorul va putea alege întreun model din elemente tip bară dreaptă, SHELL sau SOLID, constituite din elemente finite din cadrulteoriei generale a elementelor finite. În consecină, şi modelul matematic va fi cel al elementului finit.Deci, vom discuta de modelare într-un cadru relativ restrâns.
În consecină, putem defini un SISTEM INTEGRAT DE PROGRAME DE PROIECTAREca fiind „un ansamblu de programe specializate de proiectare interdependente,conceput pentru a permite elaborarea unui proiect în ansamblul său”.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 43/149
43
tensiuni, săgei, reaciuni etc. Uneori, rezultatele obinute într-o fază de calcul vor fifolosite ca date de intrare pentru pasul următor de calcul. Pe lângă acestea, în funciede complexitatea programului, sunt manipulate şi informaii legate de aspectul interfeei(poziia ferestrelor, forma tabelelor, notele de calcul etc.), stadiul proiectului, informaiigenerale ale proiectului care vor fi folosite ulterior şi de alte programe. Spre exemplu,dimensionând o îmbinare într-un program de calcul, rezultatele obinute pot fi folositepentru obinerea planurilor de detaliu ale structurii într-un program de detaliere. Aplicaiile sau modulele componente procesează datele de intrare pe baza unuialgoritm impus. A integra mai multe aplicaii înseamnă a asigura în primul rândcomunicarea dintre module. Un modul conceput pentru lucrul integrat are abilitatea dea prelua, procesa şi transmite mai departe datele de intrare. Un modul poate fi integrat într-o aplicaie chiar dacă integratorul nu are acces la codul sursă. În general, aplicaiileprevăzute a lucra într-un sistem integrat dispun de anumite pori sau interfee pe careprogramele le pot accesa în mod independent.
Interfaa pe care modulele sau aplicaiile o oferă are două niveluri: nivelul utilizator(este interfaa vizibilă pentru utilizatorul obişnuit, numită uzual şi interfaă grafică) şi
nivelul operaional (practic, aşa cum utilizatorul acionează la nivel fizic asupra interfeeigrafice, modulele transmit comenzi sau date prin intermediul interfeelor operaionale,cele menionate la paragraful precedent).
Mecanismele operaionale sau tehnologiile prin care se asigură comunicarea întretoate componentele sistemului integrat trebuie să poată prelua cele mai diverseinformaii. Inexistena unui mecanism global de interaciune într-un sistem de programeface ca sistemul să îşi piardă atributul de sistem integrat. Spre exemplificare, în sistemulpropus în prezenta lucrare este folosită tehnologia COM (tehnologie proprietarăMicrosoft ®) pentru preluarea şi transmiterea de date între aplicaii. În lipsa uneitehnologii similare de comunicare între module, schimbul de date s-ar pute face prinintermediul unor fişiere temporare stocate pe disc. Pe lângă pierderile majore de timp
cauzate de acest mecanism, datorită utilizării de resurse hardware, în cele mai frecventecazuri, este necesară şi intervenia utilizatorului pentru pregătirea sau validarea datelorstocate în fişiere. Acest lucru scade în mod evident gradul de integrare al aplicaiilor.
În arhitectura programelor integrate, o importană din ce în ce mai mare a început săcapete tehnologia XML. XML (Extended Markup Language) pare a fi viitorul înmanipularea datelor în tehnologia informaiei. Pe scurt, XML este un sistem de marcarea documentelor astfel încât acestea să poată fi procesate automat de către oriceprogram. Spre exemplu, dacă un proiectant transmite un raport de calcul prin emailunui alt proiectant, pe baza informaiilor coninute în mesaj, proiectantul, în calitate deoperator uman, poate procesa datele. Un program însă nu poate decela automat natura datelor. Mai concret, să presupunem că inginerul de structuri transmite prin email untabel cu reaciunile unei structuri inginerului proiectant de fundaii. Acesta din urmă,studiind datele primite constată că acestea sunt structurate pe CAZURI de încărcare,respectiv pe cazuri SIMPLE şi COMBINAII, fiind totodată exprimate în anumite unităide măsură. Pentru a face calculele fundaiilor, datele primite trebuie introdusecorespunzător în programul de dimensionare pentru fundaii.
Furnizând datele în format XML, este posibil ca acestea să fie procesate automat decătre programul de calcul. Acesta din urmă poate face singur distincia dintre un tabelcare ar conine reaciuni şi un tabel ce ar conine coordonate, spre exemplu.
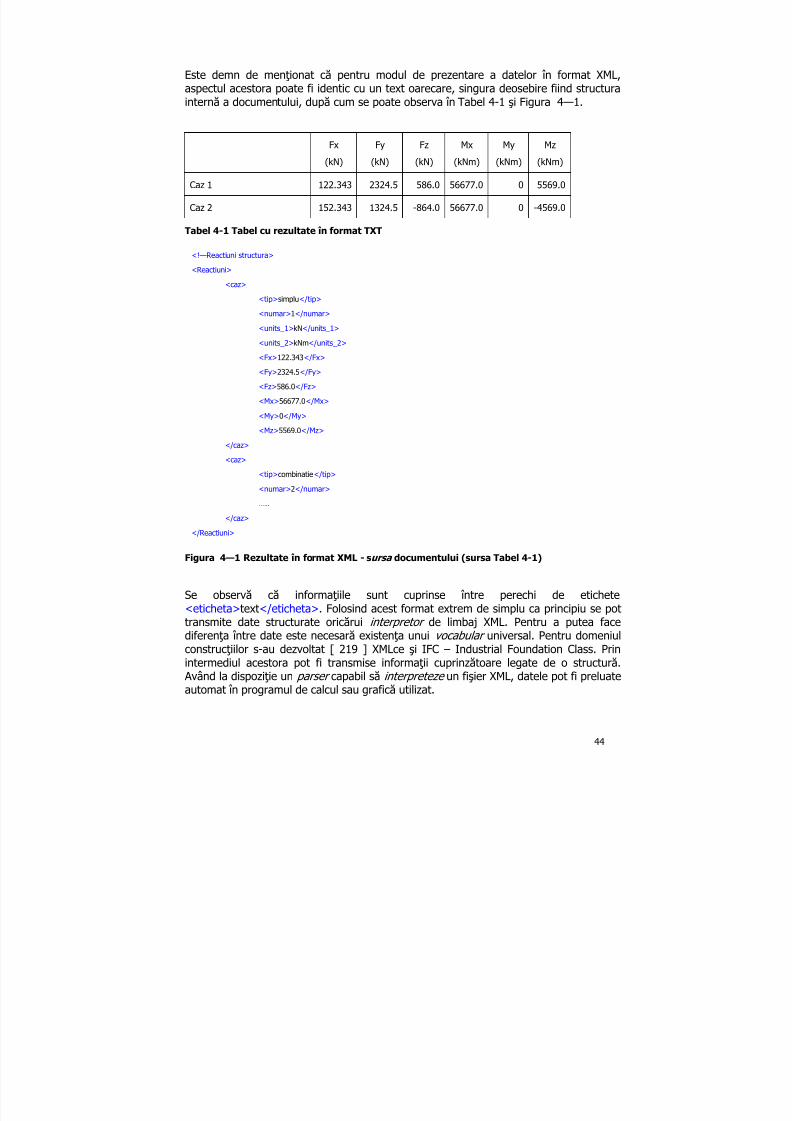
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 44/149
44
Este demn de menionat că pentru modul de prezentare a datelor în format XML,aspectul acestora poate fi identic cu un text oarecare, singura deosebire fiind structurainternă a documentului, după cum se poate observa în Tabel 4-1 şi Figura 4—1.
Fx
(kN)
Fy
(kN)
Fz
(kN)
Mx
(kNm)
My
(kNm)
Mz
(kNm)
Caz 1 122.343 2324.5 586.0 56677.0 0 5569.0
Caz 2 152.343 1324.5 -864.0 56677.0 0 -4569.0
Tabel 4-1 Tabel cu rezultate în format TXT
Figura 4—1 Rezultate în format XML - sursa documentului (sursa Tabel 4-1)
Se observă că informaiile sunt cuprinse între perechi de etichete<eticheta>text</eticheta>. Folosind acest format extrem de simplu ca principiu se pottransmite date structurate oricărui interpretor de limbaj XML. Pentru a putea facediferena între date este necesară existena unui vocabular universal. Pentru domeniulconstruciilor s-au dezvoltat [ 219 ] XMLce şi IFC – Industrial Foundation Class. Prinintermediul acestora pot fi transmise informaii cuprinzătoare legate de o structură. Având la dispoziie un parser capabil să interpreteze un fişier XML, datele pot fi preluateautomat în programul de calcul sau grafică utilizat.
<!—Reactiuni structura>
<Reactiuni>
<caz>
<tip>simplu</tip> <numar>1</numar>
<units_1>kN</units_1>
<units_2>kNm</units_2>
<Fx>122.343</Fx>
<Fy>2324.5</Fy>
<Fz>586.0</Fz>
<Mx>56677.0</Mx>
<My>0</My>
<Mz>5569.0</Mz>
</caz>
<caz>
<tip>combinatie</tip>
<numar>2</numar>
…..
</caz>
</Reactiuni>
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 45/149
45
Încheiem aici scurta introducere în XML, menionând că XML poate fi utilizat şi ca sistemde structurare a datelor pentru comunicarea internă dintre modulele unui sistemintegrat.
Sistemele integrate de programe de proiectare presupun parcurgerea într-un singursens a modulelor de preprocesare, procesare şi post procesare. Parcurgerea acestora se
face fără ca utilizatorul să fie nevoit să asigure explicit comunicarea acestor module.Comunicarea automată dintre module este un atribut al acestei arhitecturi integrate.
Faă de programele de calcul clasice, programele integrate prezintă următoareleavantaje:
→ scalabilitate ridicată: datorită tehnologiilor de comunicare prevăzute a priori înanatomia modulelor, acestea pot fi extinse sau se pot adăuga cu uşurină noimodule fără a fi nevoie de revizuirea întregii aplicaii;
→ uşurină în utilizare: interfaa comună sub care activează toate componentelesistemului generează crearea de automatisme la nivelul utilizatorului, care duc
implicit la sporirea vitezei de lucru; de asemenea, o interfaă unitară permite învăarea cu uşurină a comenzilor programelor; → reusabilitate: punerea în comun a datelor între modulele componente duce atât la
eficienă şi viteză în procesarea lor cât şi la standardizarea modului de interogare, cuefecte benefice asupra procesului de dezvoltare ulterioară a modulelor pe o bazăcomună.
Integrarea programelor de calcul în construcii prezintă totodată o serie de avantajespecifice acestui domeniu:
→ datorită unor interfee unitare şi prietenoase tot mai muli utilizatori cu abilităiminime în utilizarea calculatorului pot aborda practic orice proiecte pentru a leelabora cu ajutorul calculatorului;
→ utilizatorul are libertatea de a explora un domeniu mai larg de soluii datorităprocesului automatizat de calcul.
Cu toate avantajele care decurg din integrarea programelor de calcul integrate, acestearămân tributare funcionalităii şi posibilităilor de analiză care sunt implementate în fazade proiectare a programului. Se poate înlătura acest neajuns prin transformareaprogramelor integrate în programe inteligente integrate şi prin conceperea acestora cuo arhitectură deschisă, capabilă să permită integrarea de module adiionale.
Sistemele inteligente integrate reprezintă următorul stadiu de evoluie al sistemelor deprograme. Particularizând la domeniul ingineriei civile, sistemele inteligente integrate de
calcul sunt acele sisteme de calcul integrat care utilizează tehnici specifice inteligeneiartificiale pentru rezolvarea problemelor de calcul, dimensionare sau optimizare astructurilor, sau care permit abordarea unor clase de probleme care altfel nu pot firezolvate [ 9 ], [ 64 ].
Deşi abordarea unei problematici atât de complexe nu se poate face fără a ine cont decaracterul multidisciplinar al acestui demers, vom evidenia cu precădere acele aspecterelevante pentru domeniul construciilor.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 46/149
46
4.2 EXEMPLE DE SISTEME INTEGRATE Ş I SISTEME INTEGRATE INTELIGENTE
Inteligena artificială foloseşte metode precum:
→ Reele neuronale (ANN – Artficial Neural Networks),
→ Algoritmi genetici (GAs – Genetic Algorithms),→ Programare genetică (GP – Genetic Programming),→ GEP (Gene Expression Programming).
ANN, apărute în domeniul AI, au cunoscut o puternică dezvoltare cu aplicaii în special în recunoaşterea formelor, a sunetelor, culorilor etc. Alături de algoritmii genetici, ANNoferă baza învăării automate (machine learning) şi dezvoltării sistemelor adaptive. ANNconstă dintr-un număr finit de unităi de procesare similare numii neuroni artificiali.Neuronii artificiali sunt puternic interconectai prin intermediul unor legături de sarcinăcapabile să transmită semnale de la un neuron la altul prin întreaga reea. Un semnalsau mai multe semnale transmise într-un anume sens de la un neuron sau un set deneuroni este retransmis de neuronul destinaie pe baza unei funcii de activare specificătipului de implementare adoptat. Un neuron artificial poate avea una sau mai multeintrări, dar numai o singură ieşire.
AG (algoritmii genetici) manipulează cromozomi, adică posibile soluii ale problemei dinspaiul de căutare. Mulimea cromozomilor formează o populaie care este actualizată lafiecare generaie.
GP (programarea genetică) îşi propune să elaboreze automat programe care potsoluiona diverse clase de probleme. GP au la dispoziie un set de operatori şi operanzicu care este alcătuit automat un algoritm care verifică datele iniiale ale programului.Implementările clasice ale GP folosesc arbori pentru reprezentarea algoritmilor.
GEP este o variantă de implementare a GP care foloseşte o implementare originalăelaborată de către Cândida Ferreira [ 67 ], [ 68 ].
Un exemplu de vârf de integrare a programelor inteligente în sisteme clasice suntsistemele inteligente fuzzy de control optimal activ pentru protecia clădirilor (IFOAC –intelligent fuzzy optimal active control). Sistemele IFOAC imită inteligena umană înpredicia, adaptarea, luarea deciziilor pentru protecia clădirilor înalte la solicităriseismice. Astfel, Tani Akinori prezintă un sistem hibrid de control al sistemului deprotecie al clădirilor înalte cu baza izolată seismic, sistem ce controlează forele dinacuatori pentru a obine un răspuns al structurii predictibil [ 6 ].

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 47/149
47
Figura 4—2 Schema logică a sistemului Hibrid de Control
Sistemul hibrid propus combină IFOAC şi RFAC (sistem de control activ reflexiv fuzzy).
Caracteristicile sistemului IFOAC sunt:
→ sistem de predicie a input-urilor seismului;
→ sistem de predicia al răspunsului structural;
→ decizie fuzzy;
→ setarea funciilor membru prin studiu parametric (acest modul previne depăşireaforelor în acuatori).
Sistemul RFAC are următoarele module:
→ reguli de control fuzzy;
→ reglarea regulilor de control fuzzy prin algoritmi genetici (GAs);
→ genotip (G-Type);
→ funcia de evaluare.
Prin hibridizarea sistemului IFOAC şi RFAC s-au introdus module bazate pe algoritmigenetici pentru optimizarea modului de setare a regulilor fuzzy. Rezultatele prezentatede autorii menionai au fost încurajatoare, determinând dezvoltarea ulterioară asistemelor HC (sistemul de control hibrid menionat), RFAC şi IFOAC în sensuloptimizării complexe a acestora.
CARACTERISTICI ACUATOR
FUNCIE MEMBRU CARACTERISTICISTRUCTURĂ
PREDICIE INPUTSEISM
IDENTIFICARESTRUCTURALĂ
MAXIMIZARE DECIZIE
CONTROL FORĂ
SISTEMIFOAC
REGULICOMUTARE
PENTRUCONTROL
CONTROL FORĂ
FORĂ DE CONTROLDETERMINATĂ
ACUATOR
STRUCTURĂINPUT SEISM
FORĂ DE CONTROL DETERMINATĂ
REGULI CONTROL FUZZY
RĂSPUNS STRUCTURAL
Optimizat prinoperaii GA
Control activ reflectivFUZZY
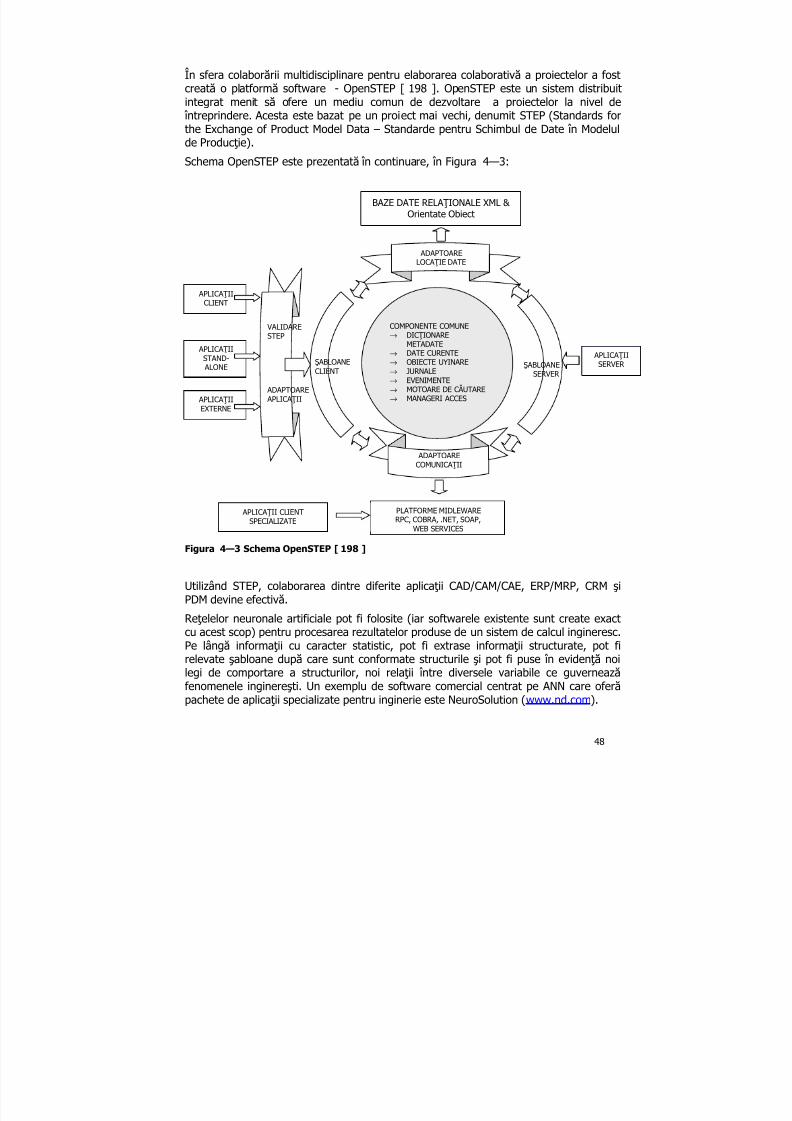
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 48/149
48
În sfera colaborării multidisciplinare pentru elaborarea colaborativă a proiectelor a fostcreată o platformă software - OpenSTEP [ 198 ]. OpenSTEP este un sistem distribuitintegrat menit să ofere un mediu comun de dezvoltare a proiectelor la nivel de întreprindere. Acesta este bazat pe un proiect mai vechi, denumit STEP (Standards forthe Exchange of Product Model Data – Standarde pentru Schimbul de Date în Modelulde Producie).
Schema OpenSTEP este prezentată în continuare, în Figura 4—3:
Figura 4—3 Schema OpenSTEP [ 198 ]
Utilizând STEP, colaborarea dintre diferite aplicaii CAD/CAM/CAE, ERP/MRP, CRM şi
PDM devine efectivă.Reelelor neuronale artificiale pot fi folosite (iar softwarele existente sunt create exactcu acest scop) pentru procesarea rezultatelor produse de un sistem de calcul ingineresc.Pe lângă informaii cu caracter statistic, pot fi extrase informaii structurate, pot firelevate şabloane după care sunt conformate structurile şi pot fi puse în evidenă noilegi de comportare a structurilor, noi relaii între diversele variabile ce guverneazăfenomenele inginereşti. Un exemplu de software comercial centrat pe ANN care oferăpachete de aplicaii specializate pentru inginerie este NeuroSolution (www.nd.com).
COMPONENTE COMUNE→ DICIONARE
METADATE→ DATE CURENTE→ OBIECTE UYINARE→ JURNALE→ EVENIMENTE→ MOTOARE DE CĂUTARE→ MANAGERI ACCES
ŞABLOANECLIENT
ADAPTOARELOCAIE DATE
ŞABLOANESERVER
APLICAIISERVER
ADAPTOARECOMUNICAII
PLATFORME MIDLEWARERPC, COBRA, .NET, SOAP,
WEB SERVICES
APLICAII CLIENTSPECIALIZATE
VALIDARESTEP
ADAPTOARE APLICAII
APLICAII
CLIENT
APLICAIISTAND- ALONE
APLICAIIEXTERNE
BAZE DATE RELAIONALE XML & Orientate Obiect
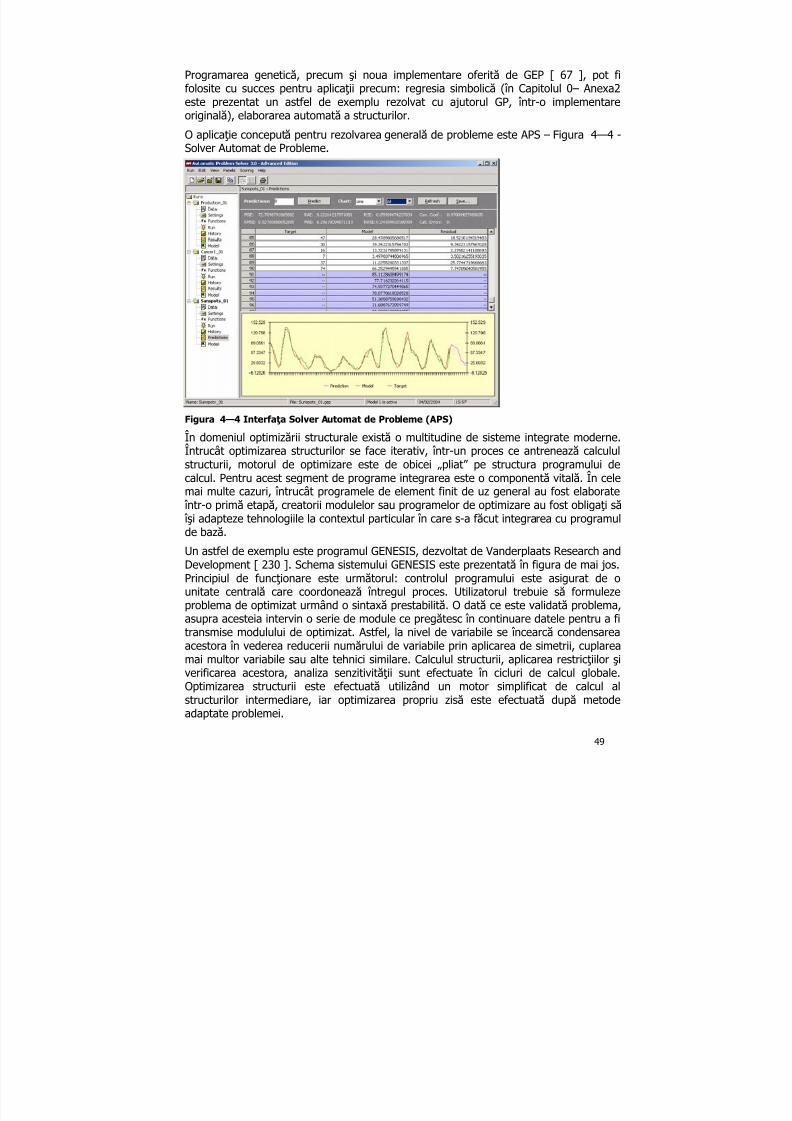
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 49/149
49
Programarea genetică, precum şi noua implementare oferită de GEP [ 67 ], pot fifolosite cu succes pentru aplicaii precum: regresia simbolică (în Capitolul 0– Anexa2este prezentat un astfel de exemplu rezolvat cu ajutorul GP, într-o implementareoriginală), elaborarea automată a structurilor.
O aplicaie concepută pentru rezolvarea generală de probleme este APS – Figura 4—4 -
Solver Automat de Probleme.
Figura 4—4 Interfaa Solver Automat de Probleme (APS)
În domeniul optimizării structurale există o multitudine de sisteme integrate moderne.
Întrucât optimizarea structurilor se face iterativ, într-un proces ce antrenează calcululstructurii, motorul de optimizare este de obicei „pliat” pe structura programului decalcul. Pentru acest segment de programe integrarea este o componentă vitală. În celemai multe cazuri, întrucât programele de element finit de uz general au fost elaborate într-o primă etapă, creatorii modulelor sau programelor de optimizare au fost obligai să îşi adapteze tehnologiile la contextul particular în care s-a făcut integrarea cu programulde bază.
Un astfel de exemplu este programul GENESIS, dezvoltat de Vanderplaats Research andDevelopment [ 230 ]. Schema sistemului GENESIS este prezentată în figura de mai jos.Principiul de funcionare este următorul: controlul programului este asigurat de ounitate centrală care coordonează întregul proces. Utilizatorul trebuie să formuleze
problema de optimizat urmând o sintaxă prestabilită. O dată ce este validată problema,asupra acesteia intervin o serie de module ce pregătesc în continuare datele pentru a fitransmise modulului de optimizat. Astfel, la nivel de variabile se încearcă condensareaacestora în vederea reducerii numărului de variabile prin aplicarea de simetrii, cuplareamai multor variabile sau alte tehnici similare. Calculul structurii, aplicarea restriciilor şiverificarea acestora, analiza senzitivităii sunt efectuate în cicluri de calcul globale.Optimizarea structurii este efectuată utilizând un motor simplificat de calcul alstructurilor intermediare, iar optimizarea propriu zisă este efectuată după metodeadaptate problemei.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 50/149
50
Figura 4—5 Schema blocurilor sistemului GENESYS [ 230 ]
4.3 Arhitectura Sistemelor Integrate Inteligente - Propunere
Prin utilizarea tehnicilor enumerate mai sus se pot rezolva probleme precum:
→ Acumularea de experienă de proiectare de către sisteme de programe integrate deproiectare (stocarea experienei umane într-o formă reutilizabilă de către programeautomate);
→ Elaborarea de metode pentru rezolvarea automată de probleme specifice deinginerie;
→ „Inventarea” automată de noi sisteme constructive care să corespundă unor cerinede performană impuse;
→ Optimizarea multicriterială a structurilor;→ Optimizare topologică urmată de optimizarea dimensională locală;→ Generarea automată de structuri care să corespundă limitelor impuse.
Una dintre cele mai grele probleme legate de implementarea într-un program cefoloseşte inteligena artificială a unei probleme concrete este gradul de pragmatizare aproblemei. De îndată de o problemă a fost corect definită şi abstractizată, flexibilitateametodelor AI permite o rezolvare extrem de simplă.
CONTROLPROGRAM
RESTRICII
GENERATOR APROXIMARE
PROBLEMĂ
ANALIZASENZITIVITĂII
ANALIZĂ MEF
ANALIZĂ
APROXIMATIVĂ
OPTIMIZATOR
CICLURI EXTERNE
CICLURI INTERNE

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 51/149
51
Pentru ca AI să funcioneze integrat cu SIP trebuie rezolvate următoarele probleme:
→ Integrarea datelor. Stabilirea unui mediu comun de date care să poată fi folosit detoate modulele componente (translatoare de date);
→ Integrarea rezultatelor. Rezultatele trebuie să poată fi accesate de modulele depostprocesare într-un mod unitar;
→ Integrarea procesării. La nivelul de procesare al fiecărei componente trebuieasigurată comunicarea şi colaborarea între module.
Intercalarea modulelor inteligente
Intercalarea AI se poate face astfel:
Intercalarea de AI între utilizator şi pre-procesor - la nivel de preprocesare→ colectarea inteligentă a datelor.
Intercalarea între preprocesare şi procesare→ sistemul trebuie să fie capabil să îşi aleagă singur modulele de procesare în funcie
de natura datelor de intrare;→ parcurgerea modulelor de procesare simultană: fiecare modul selectează automat
setul de date necesar pentru rezolvarea problemei;→ procesarea colaborativă.
Intercalarea numai la nivel de procesare
Procesarea distribuită şi colaborativă: modulele de procesare colaborează la realizareaunui task, existând timpi de aşteptare reciprocă între modulele colaborante.
Procesare de tip outsoucing: pentru rezolvarea unei probleme un modul de procesarepoate apela direct alt modul.
Intercalarea între procesare şi post-procesare
Intercalarea modulelor inteligente între modulele de procesare şi post-procesare poateavea următoarele roluri:
→ Filtrare - În acest caz AI are rolul de filtrare a rezultatelor;→ Conversie datelor provenite de la diverse module de procesare;→ Realocarea rezultatelor pentru modulul de DATE.
Ciclul de rezolvare a unei probleme cu ajutorul programelor integrate:
Figura 4—6 Schema blocurilor funcionale pentru un program integrat
Prin algoritmi înelegem toate metodele de analiză şi prelucrare disponibile (MEF, ANN,GAs, GP etc.).
DATE ALGORITMI REZULTATE

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 52/149
52
Ciclul de rezolvare a unei probleme cu ajutorul programelor integrate inteligentepresupune reversibilitatea dintre datele de intrare şi rezultate şi aciunea algoritmilor şiasupra datelor de intrare, şi asupra rezultatelor:
Figura 4—7 Schema blocurilor funcionale pentru un sistem integrat inteligent
În schema din Figura 4—9 este ilustrată o arhitectură completă a unui sistem de calculcare integrează module de calcul din domeniul inteligenei artificiale.
Sistemul integrat inteligent prezentat în Figura 4—9 permite mixarea tehnologiilor
clasice cu cele din domeniul „soft computing” pentru a produce un comportament global îmbunătăit. O gamă largă de aplicaii existente în prezent folosesc perechi de tehnologiimixte precum: MEF/ANN, GP/MEF, GA/MEF. Folosirea în comun a tuturor acestortehnologii înseamnă integrarea la nivel conceptual a paradigmei numerice reprezentatede MEF, cu paradigma simbolică reprezentată de GP/GA şi cea conexionistă,reprezentată de ANN.
Procesul de integrare devine ciclic: NUMERIC SYMBOLIC CONNEXIONIST NUMERIC.
Figura 4—8 Schema de integrare a celor trei paradigme
Acest sistem general este particularizat de sistemul prezentat în Figura 6-1.
CONEXIONIST
NUMERICSIMBOLIC
DATE
ALGORITMI
REZULTATE
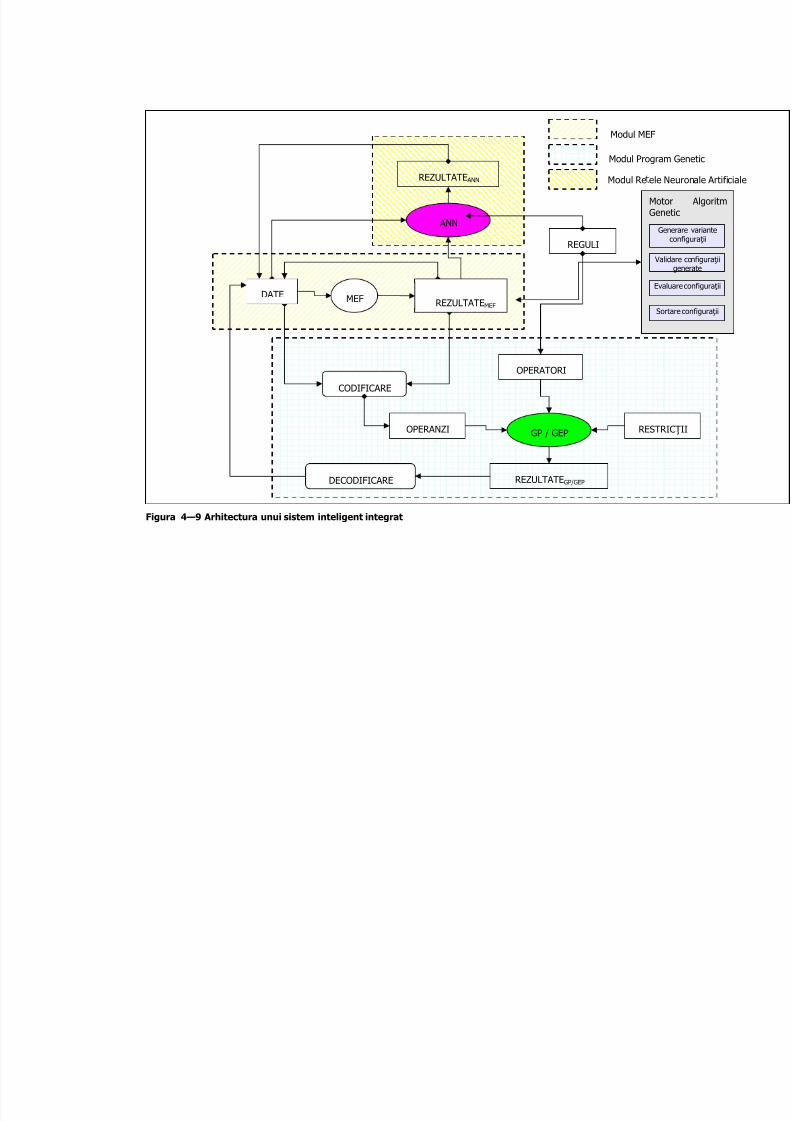
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 53/149
Figura 4—9 Arhitectura unui sistem inteligent integrat
REZULTATE ANN
RE
REZULTATEGP/GEP
GP / GEP
ANN
OPERATORI
OPERANZI
MEF
CODIFICARE
REGULI
DECODIFICARE
DATE REZULTATEMEF
Modul Pro
Modul Re
Modul ME

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 54/149
54
4.4 Concluzii
Capitolul de faă a fost dedicat descrierii sistemelor integrate de programe: definirea lor,a modulelor componente, a modului de funcionare. O primă concluzie, foarteimportantă, ce se poate desprinde este aceea că un sistem poate fi considerat integrat
numai în cazul în care are cel puin trei caracteristici comune tuturor modulelorcomponente: date, interfee şi mecanisme. După cum s-a menionat, la nivel decomunicare între aplicaii, un rol tot mai important îl va juca în viitor tehnologia XML. Aceasta fiind o tehnologie de structurare a datelor, spre deosebire de tehnologia HTML,care este una de reprezentare a acestora, permite definirea (descrierea unui vocabularcomplet) unui domeniu complet de cunoaştere. Pentru domeniul de proiectare sunt dejaelaborate sau în curs de elaborare aecXML şi, mai particular, ceXML.
În domeniul sistemelor integrate sistemele inteligente, după cum au fost prezentate,prezintă avantaje majore faă de sistemele clasice integrate. Astfel, sistemele integrateinteligente permit abordarea unor domenii de cercetare sau de creaie care altfel nu potfi rezolvate. În cadrul acestor sisteme, prin prezentarea unor aplicaii existente s-a făcut
dovada că acestea pot fi folosite în cele mai diverse domenii: optimizare, proiectare,structurarea sau clasificarea cunoştinelor etc.
Schema originală propusă pentru un sistem integrat inteligent foloseşte metodaelementului finit ca nucleu general de calcul. Acest modul, este integrat în modulespecifice din domeniul inteligenei artificiale: reele neuronale, algoritmi genetici,programare genetică. În acest capitol accentul este pus pe modul în care se pot faceintegrarea şi armonizarea tuturor modulelor componente.
În contextul celor prezentate în acest capitol, sistemul integrat propus este unulgeneral. O particularizare a acestuia, un sistem de calcul cu element finit şi optimizareutilizând algoritmi genetici, este prezentat în capitolele următoare împreună cu aplicaii
concrete ale acestuia.
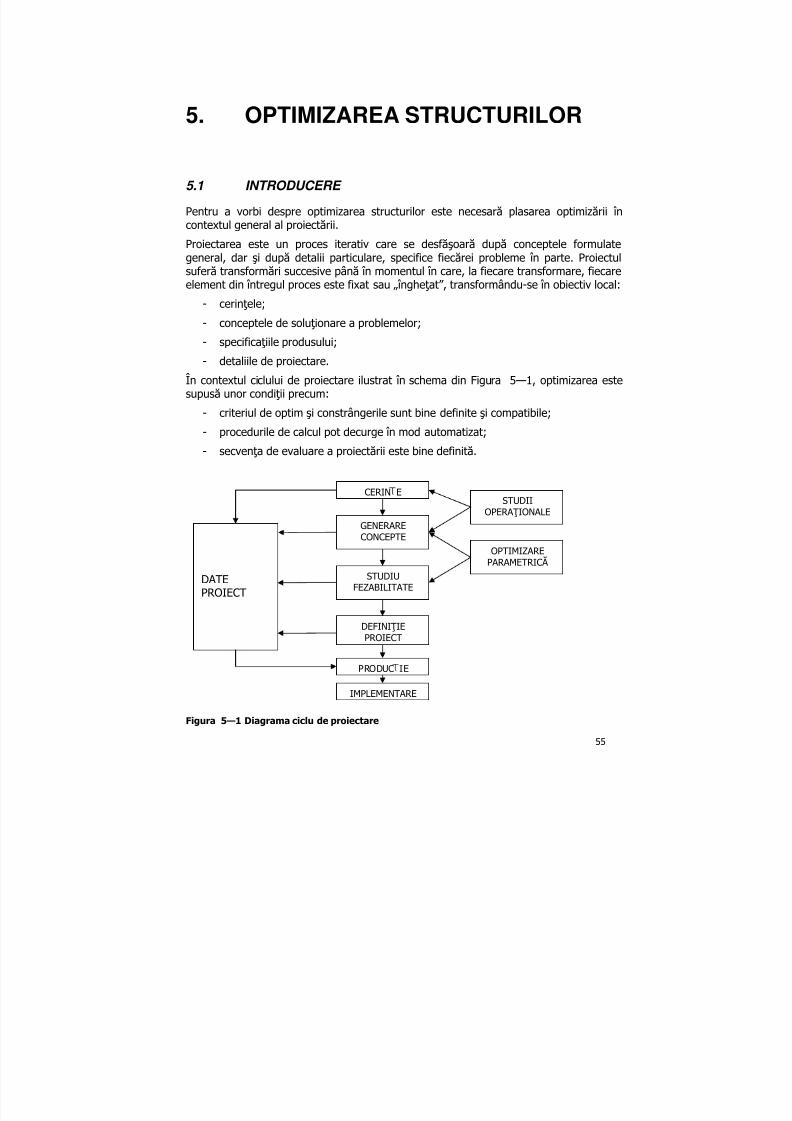
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 55/149
55
5. OPTIMIZAREA STRUCTURILOR
5.1 INTRODUCERE
Pentru a vorbi despre optimizarea structurilor este necesară plasarea optimizării încontextul general al proiectării.
Proiectarea este un proces iterativ care se desfăşoară după conceptele formulategeneral, dar şi după detalii particulare, specifice fiecărei probleme în parte. Proiectulsuferă transformări succesive până în momentul în care, la fiecare transformare, fiecareelement din întregul proces este fixat sau „îngheat”, transformându-se în obiectiv local:
- cerinele;- conceptele de soluionare a problemelor;
- specificaiile produsului;
- detaliile de proiectare.
În contextul ciclului de proiectare ilustrat în schema din Figura 5—1, optimizarea estesupusă unor condiii precum:
- criteriul de optim şi constrângerile sunt bine definite şi compatibile;
- procedurile de calcul pot decurge în mod automatizat;
- secvena de evaluare a proiectării este bine definită.
Figura 5—1 Diagrama ciclu de proiectare
CERIN E
GENERARECONCEPTE
STUDIUFEZABILITATE
DEFINIIEPROIECT
PRODUC IE
IMPLEMENTARE
DATEPROIECT
STUDIIOPERAIONALE
OPTIMIZAREPARAMETRICĂ
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 56/149
56
Un alt aspect fundamental în procesul de optimizare este legat de criteriul de optim.Experiena inginerească, „metrica” după care îl evaluăm pe „cel mai bun”, adicăelemente de cele mai multe ori subiective, au un impact important în procesul deoptimizare.
Vom prezenta în cele ce urmează două moduri de abordare a optimizării structurilor:
→ Optimizare din prisma programării matematice,→ Optimizare utilizând algoritmi genetici.
Algoritmul mixt propus în capitolul următor reprezintă o sinteză a celor două metodemenionate mai sus.
Privită ca problemă de căutare în spaiul soluiilor, faă de tehnicile convenionale,optimizarea utilizând GA oferă următoarele avantaje:
→ permite abordarea problemelor la care funcia de minimizat sau maximizat nu esteformulată explicit;
→ este o metodă extrem de flexibilă în abordarea problemelor cu funcii multi-obiectiv,chiar dacă funciile obiectiv nu sunt de aceeaşi natură;
→ implementarea restriciilor nu necesită un plus de efort computaional;→ implementarea unui algoritm general de optimizare poate rezolva probleme extrem
de diverse.
Paradigma numerică vs paradigma simbolică
Abordarea din prisma numerică a tehnologiilor „inteligente” prezintă un inconvenientmajor: nu este garantată găsirea unei soluii; dacă aceasta este găsită, pentru atingerea
unei precizii „suficiente” sunt necesare resurse de timp sau de calcul importante.Cu toate acestea, tehnologiile inteligente pot completa anumite zone computaionaleunde soluiile analitice sau numerice eşuează.
Inserarea unui algoritm genetic în ciclul de rezolvare a unei probleme specifice deconstrucii se poate face în diverse stadii de calcul sau poate substitui anumitecomponente ale algoritmului numeric.
Spre exemplificare, ne referim la formularea clasică a elementului finit:
KQ=F ( 5-1 )
Unde: K – este matricea de rigiditate,Q – este matricea deplasărilor,
F – este matricea forelor aplicate.
Q = K -1F ( 5-2 )

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 57/149
57
Dacă este vorba de o problemă de optimizare, se minimizează spre exemplu funcia:
Sum(Li xAi), ( 5-3 )
cu restriciile:
→ noduri compatibile,→ reazeme compatibile,→ tensiuni sau deplasări limitate la o anumită valoare.
Optimizarea va fi efectuată prin modificarea coordonatelor nodurilor structurii.
Întrucât în expresia (5-3) intervin coordonatele nodurilor, modificându-le, trebuie făcutapel la funcia (5-1) care este în măsură să arate noua stare de echilibru din structură(valorile deplasărilor nodurilor şi a eforturilor din bare). Este evident că orice apel alfuncie (5-1) implică un efort computaional cel puin egal cu cel iniial.
Per total, la n apeluri ale algoritmului la funcia (5-1), trebuie să se adauge şi efortul de
calcul depus pentru procesul de optimizare intrinsec.Metodele clasice de optimizare încearcă să minimizeze numărul de apeluri la funcia debază, cu toate acestea natura procesului de optimizare implică: derivări, inversări dematrice, ceea ce necesită un efort de calcul important.
5.2 OPTIMIZAREA – CLASIFICARE DIN PRISMA PROGRAM ĂRII MATEMATICE. STADIUL CUNOAŞ TERII
Programarea matematică, activitate dedicată prin excelenă rezolvării problemelor deoptimizare, nu se referă la dezvoltarea de programe informatice. Deşi uzual prinprogramare se numeşte procesul de scriere a programelor de calculator, programareamatematică înseamnă întregul proces de optimizare şi modelare a problemelor.
Programarea matematică vizează două activităi majore:
→ modelarea fenomenului,→ rezolvarea sau optimizarea.
Modelarea
Primul pas pe care trebuie să îl facem pentru a optimiza o problemă sau un fenomeneste de a formaliza problema, de a o formula din punct de vedere matematic.Modelarea implică: identificarea variabilelor asupra cărora se va interveni, aparametrilor întregului sistem, a relaiilor şi interdependenelor dintre variabile, precumşi a restriciilor care mărginesc sau condiionează problema.
Desigur, în procesul de formalizare din punct de vedere matematic al problemei suntnecesare utilizarea unor abilităi sau cunoştine matematice de nivel foarte înalt. Suntaplicate cunoştine de calcul algebric, diferenial, topologie, geometrie diferenială,

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 58/149
58
analiză funcională etc. La acestea adăugăm şi necesităile matematice specificedomeniului de inginerie structurală: metoda elementului finit, metode numerice aplicate,modelarea geometrică, statică etc.
Optimizarea din prisma programării matematice
Optimizarea propriu-zisă este activitatea de minimizare sau maximizare a modeluluiformulat matematic. În această etapă este necesară de cele mai multe ori cunoaştereafunciei obiectiv, a restriciilor, formulate într-o manieră clară, astfel încât să fie posibilsă aplicăm metodele specifice de rezolvare.
Metodele de optimizare clasice nu pot rezolva o problemă de optimizare la care funcianu este exprimată explicit. Întrucât în practică pot apare situaii în care este aproapeimposibil de formalizat o problemă s-au dezvoltat tehnici de optimizare care nu cerformularea explicită a funciei obiectiv sau a restriciilor.
Prezena restriciilor duce la creşterea gradului de dificultate al problemei de optimizare.
În funcie de tipul problemei de optimizat şi de tipul restriciilor pot exista mai multesituaii, evideniate în figurile 5-2 – 5-5:
Punctul de optim se află în interiorul domeniului admisibil (restricii liniare);
Punctul de optim se află pe frontiera domeniului admisibil (restricii liniare);
Punctul de optim se află pe frontiera domeniului admisibil (restricii liniare şineliniare);
Punctul de optim se află pe frontiera domeniului admisibil (restricii liniare şineliniare);
Funcia obiectiv prezintă mai multe puncte de optim. Punctul de optim A* se află în interiorul domeniului admisibil (restricii liniare), iar punctul B* se află în afara
domeniului admisibil.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 59/149
59
Figura 5—2 Punctul de optim se află în interiorul domeniului admisibil (restricii liniare)
Figura 5—3 Punctul de optim se află pe frontiera domeniului admisibil (restricii liniare)
x* g1(x)
g2(x)
f(x)
Restriciiliniare
Funciaobiectiv
Valoareao timă
Domeniul deadmisibilitate
x*
g1(x)
g2(x)
f(x)
Restricii
Funciaobiectiv
Valoarea
o timă
Domeniul deadmisibilitate

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 60/149
60
Figura 5—4 Punctul de optim se află pe frontiera domeniului admisibil (restricii liniare şineliniare)
Există situaii când funcia prezintă mai multe puncte de optim. În figura de mai jospunctul de optim A* se află în interiorul domeniului admisibil (restricii liniare), iarpunctul B* se află în afara domeniului admisibil.
Figura 5—5 Funcia obiectiv prezintă mai multe puncte de optim
A*g1(x)
g2(x)
∇f(x*)
∇g j(x*)
g3(x)
B*
x*
g1(x)
g2(x)
∇f(x*)
∇g j(x*)
g3(x)
Restriciiliniare
Restriciineliniare
Funcia
obiectiv
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 61/149
61
Procedura generală de modelare şi rezolvare a problemelor de optimizare
→ Definirea problemei de optimizat;→ Analiza şi identificarea variabilelor;→ Determinarea funciei obiectiv;→ Elaborarea funciilor restriciilor (egalităi sau inegalităi liniare sau neliniare);→ Aplicarea de modele aproximative în vederea simplificării sau condensării modelului;→ Rezolvarea problemei de optimizat;→ Analiza soluiei obinute, validarea rezultatelor.
Clase de metode de optimizare
→ Metode directe;→ Metode bazate pe optimalitatea Kuhn-Tucker;→ Metode de penalizare;→ Metode de punct interior de urmărire a traiectoriei centrale.
Metodele directe pot fi:
→ Metode de liniarizare;→ Metode de aproximare pătratică;→ Metoda simplex convexă;→ Metode de direcii admisibile;→ Metode de gradient;→ Metoda MINOS;→ Metoda elipsoidului.
Cele mai diverse tipuri de probleme de optimizare au fost prezentate pe larg înmonografia [ 12 ], din care redăm mai jos o sinteză a lor:
Optimizare fără restricii
Min { }n R x x f ∈:)( unde R R x f n →:)( . ( 5-4 )
Optimizare cu restricii
{ }u xl x f ≤≤:)( , ( 5-5 ) unde: variabila n
R x ∈ şi marginile n Rul ∈, .
Programare liniară
Min { } Biu xl I iu xal xciiii
T
ii
T ∈≤≤∈≤≤ ,,,: , ( 5-6 )

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 62/149
62
unde: n Rc ∈ sunt coeficienii funciei obiectiv, n
Rb ∈ reprezintă termenul liber, iarmxn Ra ∈ este matricea problemei;
n Rul ∈, au semnificaia menionată anterior.
Programare pătratică
Min
∈=∈≤+ Bib xa I ib xaQx x xcT
i
T T T ,,,:2
1, ( 5-7 )
unde: nxnn RQ R x ∈∈ , este o matrice simetrică.
Dacă Q este pozitiv semidefinită problema este convexă, altfel fiind neconvexă.
Problema celor mai mici pătrate fără restricii
Min
∑=
m
i i
x f 1
2)(2
1, ( 5-8 )
unde f i(x):R nR sunt denumite şi reziduuri.
Problema celor mai mici pătrate cu restricii
∈=∈≤− E ib xa I ib xad Cx i
T
ii
T
i ,,,:2
1min
2
2, ( 5-9 )
unde: ,n R x ∈ iar matricea C nu este în mod necesar pătratică.
Programarea semidefinită
( ){ }0:min ≥ xF xcT , ( 5-10 )
unde: ( ) ∑=
+=n
i
ii F xF xF 1
0 . ( 5-11 )
n Rc ∈ şi mm
nRF F F ×∈,...,, 10 sunt matrice simetrice cu elemente numere reale.
Inegalitatea ( ) 0≥ xF se numeşte inegalitate matriceală liniară .
Programarea conică de ordinul doi{ } N id xcb x A x f
i
T
iii
T ,...,1,min =+≤+ , ( 5-12 )
unde: Rd Rc Rb R A R f R x i
n
i
m
i
nm
i
nn ii ∈∈∈∈∈∈ × ,,,,, , iar norma care apare în problemăeste cea standard Euclidiană.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 63/149
63
Programarea mixtă semidefinită-pătratică-liniară
{ } xbT min , ( 5-13 )
referitor la: ∑=
=≥+n
i
k
ii
k Lk F xF
10 ,,...,1,0
,,...,1, N id xcb x A iT iii =+≤+
,0,00 ≥= xc x A
unde: n R x ∈ , iar matricele k
iF sunt simetrice cu elemente numere reale.
Programarea geometrică fără restricii
( ) mi x R x xgi
m ,...,1,0,:min =>∈ ( 5-14 )
unde funcia ( ) R R xg m →: este o funcie posinominală de forma:
( ) ( )ijm
j
j
n
i
ixc xg
α
∏∑==
=11
, ( 5-15 )
pentru care toi coeficieniiic sunt constante pozitive, iar
ijα sunt numere reale
arbitrare.
Programarea geometrică cu restricii
( ){ } xgmin ( 5-16 )
referitor la: ( ) ,,...,1,1 k i xgi
=≤
,0> x
unde funciile ( ) k i xgi ,...,1,0, = sunt funcii posinominale în variabila pozitivă .n
R x ∈
Programarea fracionară
( )( )
( )
=≤+
+mi xh
b xg
a x f i ,...,1,0:min ( 5-17 )
unde funciile g f , şi ih sunt definite pe n R cu valori reale, iar a şi b sunt constante
reale.
Optimizarea neliniară generală
( ) x f min ( 5-18 )
referitor la: ( ) ,0≥ xg
( ) ,0= xh
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 64/149
64
,u xl ≤≤
unde: n R x ∈ , iar funciile g f , şi h sunt definite pe n R cu valori reale.
Este posibilă o exprimare mai generală în care restriciile problemei se clasifică în liniareşi/sau neliniare şi inegalităi şi/sau egalităi, aceasta fiind forma cea mai generală aoptimizării neliniare. Printre tehnicile de soluionare a unei probleme de programareneliniară este şi aceea de simplificare sau reducere a problemei la una (sau mai multeprobleme) liniară.
Optimizarea în reele
Optimizarea în reele face apel la teoria grafurilor.
Fie un graf ( ) A N , unde N reprezintă mulimea nodurilor grafului numerotate cuni ,...,2,1= şi A este mulimea arcelor, adică a perechilor ordonate ( ) ji, , unde i este
nodul de plecare, iar j este nodul de sosire al arcului ( ) ji, . Atunci problema curgerii de
cost minim în reele este:
( )∑
∈ A ji
ijij xc,
min ( 5-19 )
referitor la:( ) ( )
,1,,,
nis x x i
Ai j
ji
A ji
ij≤≤=− ∑∑
∈∈
( 5-20 )
( ) ,,, A jiu xlijijij
∈≤≤
undei
s este ieşirea, sau fluxul total din nodul i . Analog se poate defini problemafluxului maxim în reele ca aceea de determinare a curgerii maxime de la un nod destart (nod sursă) la un nod terminal (nodul terminal nu este în mod necesar terminal alreelei ci poate fi orice nod deversor), care satisface ecuaiile de bilan etc.
Programarea liniară în numere întregi
{ }nT Z x xb Ax xc ∈≥= ,0,:min ( 5-21 )
unde n Z este mulimea vectorilor −n dimensionali cu componente numere întregi.
Programarea generală în numere întregi
( )t f min ( 5-22 )
referitor la: ( ) ,0≥ xg ( ) ,0= xh
,u xl ≤≤
unde .n Z x ∈

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 65/149
65
Programarea neliniară mixtă
( ) y x f ,min ( 5-23 )
referitor la: ( ) ,0, ≥ y xg
( ) ,0, = y xh , x x
u xl ≤≤
, y y
u yl ≤≤
unde n R x ∈ sunt variabilele continue, iar m Z y ∈ sunt variabile întregi. Limitele simple
yl şi yu sunt vectori cu componente numere întregi.
Programarea booleană (în zero-unu)
( ) x f min ( 5-24 )
referitor la: ( ) ,0≥ xg
( ) ,0= xh
{ }1,0∈ x ,
adică variabilele problemei ,,...,1, ni xi
= pot lua numai valorile zero sau unu.
Programarea cu mai multe funcii obiectiv
( ) ( ){ } x f x f m
,...,min 1 ( 5-25 )
referitor la: ( ) ,0≥ xg
( ) ,0= xh
,u xl ≤≤
unde: n R x ∈ , iar funciile g f i , şi h sunt definite pe n R cu valori reale.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 66/149
66
Principalele mărimi ce trebuie evaluate în cadrul metodelor de programare matematicăce folosesc tehnici derivative sunt Gradientul şi Hessianul funciei obiectiv, coeficieniiLagrange, Jacobianul restriciilor. Toate aceste mărimi joacă un rol determinant îndeterminarea admisibilităii soluiilor şi a existenei acesteia.
a) Gradientul funciei obiectiv reprezintă derivatele pariale de ordinul I a acesteia şi
are următoarea formă (vector coloană):
∂
∂
∂
∂∂
∂
=∇=
xn
x f
x
x f x
x f
x f c
*)(...
2
*)(1
*)(
*)( , ( 5-26 )
unde x1...xn sunt variabilele funciei, iar x* este soluia (optimul)
semnificaia gradientului: reprezintă normala la tangenta funciei în punctul x*.
b) Hessianul se obine derivând încă o dată gradientul. Se obine o matrice întotdeauna simetrică cu următoarea formă:
n jni x x
f H
i j
...1,...1;2
==
∂∂
∂= ( 5-27 )
c) Coeficienii Lagrange se obin dezvoltând derivatele pariale ale funciei obiectivşi ale restriciilor. Scriind relaia de legătură dintre gradientul funciei obiectiv şiJacobianul restriciilor obinem:
0*)(*)( =∇+∇ xh x f ν ; ( 5-28 )
unde ν este multiplicatorul Lagrange.Conform expresiei (5-28), optimul se găseşte în zona de admisibilitate, care se poateidentifica în situaia în care unghiul format de vectorul ∇f şi ∇h este ascuit.Multiplicatorul ν este un scalar al combinaiei liniare dintre gradientul funciei obiectiv şial restriciilor.
În cazul în care aceşti vectori sunt coliniari, punctul în care acest lucru se petrece, estechiar punctul de optim.
În principiu, condiia (5-28) este condiia necesară de optim pentru cazul restriciiloregalităi.
Similar, în cazul restriciilor inegalităi putem scrie o condiie necesară de optim. Aceastaeste cunoscută sub numele de condiia Karush-Kuhn-Tucker (KKT), şi are forma:
n j x
gu
x
h
x
f m
i i
ii
p
i i
ii
j
..1;1
*
1
* =∂
∂+
∂
∂=
∂
∂− ∑∑
==
ν ( 5-29 )
unde: x* este un punct de optim al funciei f(x)
cu restriciile hi(x) = 0, i=1..p; g j(x) ≤ 0, j=1..m

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 67/149
67
v* şi u* sunt multiplicatorii Lagrange.
Semnificaia ecuaie (5-29) este aceea că punctul candidat la optim trebuie să se afle îndomeniul fezabil (gradientul restriciilor trebuie să fie liniar independente).
Din studiul ecuaiilor de mai sus putem observa că optimul poate fi găsit prin rezolvareaunor ecuaii difereniale cu o formă clar precizată. Această observaie ne poate conduce
la concluzia parial adevărată că optimul ar putea fi găsit întotdeauna cu ajutorul unuialgoritm clar formulat.
Totuşi, trebuie să precizăm că ecuaiile ce definesc condiiile de optimalitate suntsupuse unor condiii extrem de restrictive [12], [13], [14].
Din acest motiv, o alternativă la aceste metode sunt cele de căutare directă. Spredeosebire de metodele derivative ce presupun calculul unor mărimi complexe, metodelede căutare directe folosesc cicluri ieftine de calcul.
Metode de căutare
Metodele directe de căutare permit optimizarea funciilor pentru care nu putem aplicametodele derivative de optimizare.
Metodele de căutare evaluează funcia f în k puncte {x k } urmărind evoluia funciei înscopul găsirii punctului de optim x*.
Situaiile în care se recomandă folosirea uneia dintre metodele directe de căutare sunturmătoarele:
→ funcia f nu este derivabilă,
→ derivatele sunt foarte greu de evaluat sau sunt discontinue,→ nu este necesară o soluie foarte precisă a problemei.
În literatură sunt implementate mai multe metode de căutare directă, datorită simplităiiacestora. În continuare vom prezenta schemele de aplicare pentru câteva metode decăutare.
Forma generală a algoritmului de căutare este (5-30).
Fie punctele:
x1, x2, ..., xk şi valorile funciei în acestea: f(x1), f(x2), ..., f(xk ).
Se cere determinarea unui punct x k+1 pentru care
f(x k+1 )<f(x i ) , ( 5-30 )
pentru orice i=1..k

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 68/149
68
Metoda de căutare paralelă cu axele
Această metodă este foarte simplă şi poate fi implementată uşor. Este aplicabilă înspecial pentru funcii netede. În această metodă direciile de căutare sunt fixate, ceeace conduce la un proces lent de căutare.
Oricare ar fi metoda de obinere a punctelor xk în care testăm existena optimului,acestea trebuie să satisfacă următoarea condiie:
|xm - xn| 0, pentru oricare şir de puncte { xn }, n ∈ N
Şirul care satisface această condiie se numeşte şir CAUCHY. Acesta este fundamental ,fiind convergent, cu o anumită viteză de convergenă.
Metodele de căutare directă sunt în general specializate în alcătuirea unui şirfundamental cu o rată de convergenă cât mai mare. În această situaie, număruliteraiilor pe care algoritmul le efectuează poate fi estimat apriori.
În generarea unui şir Cauchy, un alt criteriu important este condiia de oprire a
iteraiilor. Pentru oprirea iteraiilor, utilizatorul trebuie să precizeze eroarea ε faă decare se face raportarea. Pentru fiecare două valori consecutive ale punctului x se facetestarea expresiei:
||xk - xk-1|| < ε
Alegerea lui ε trebuie să se facă astfel încât xk să rezulte cât mai aproape de x*.
Condiia de oprire a iteraiilor poate avea diverse forme, cea de mai sus fiind cea maisimplă.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 69/149
69
Figura 5—6 Schema logică a algoritmului de căutare paralelă cu axele
i = 1, x0
START
di = {[0 … 1 … 0]T, pentru i= j,2j, 3j, …}, valoarea 1 din matriceainiială este pe poziia j
f + = f(xi + µdi)f – = f(xi - µdi)
f + < f(xi)
f - < f(xi)
di = - di
di
Se alege λi* astfel încât:
f(xi + λi* di) = min f(xi + λidi), λi
d
n
d
xi+1 = xi + λi* di
ε ≤−+ ii x x 1
ε ≤−+ )()( 1 ii x f x f
STOP
d
i = i + 1
f + > f(xi)f - > f(xi)
xi
ddi

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 70/149
70
Metoda HOOKE-JEEVES, de căutare a formei
Această metodă selectează direciile de căutare potrivit formei funciei de minimizat.Sunt efectuate două tipuri de mişcări: prima, este o căutare paralelă cu axele, iar apoise urmăreşte direcia si = xi – xi-n. Punctul xi este obinut în urma celor n căutăriparalele cu axele, iar punctul xi-n este punctul obinut înaintea acestora. Mişcare de
căutare paralelă cu axele, identifică comportarea locală a funciei. Aceasta este omişcare de explorare locală. Prin mişcare de căutare a formei este explorată formafunciei şi este accelerată convergena globală a algoritmului.
Algoritmul HOOKE-JEEVES este prezentat sub formă de pseudocod după cum urmează:
1. k = 1; se aleg x 1 şi paşii ∆x i , pentru i = 1..n, unde n sunt cele n axe de coordonate. x 1 este numit punct de bază;
2. se calculează f k = f(x k );
3. y k 0 = x k ;
4. pentru i = 1..n, se perturbă variabila x i în jurul bazei temporare y k i-1 pentru a
obine un nou punct temporar; 5. se testează punctul găsit;
6. dacă y k n = x k atunci, pentru max{ ∆x i }< ε , STOP; dacă max{ ∆x i }≥ ε , se micşorează
pasul ∆x i ;
7. dacă y k n ≠ x k se obine un nou punct bază y k
n = x k+1 şi se execută pasul următor;
8. se calculează direcia s = x k+1 – x k pentru care se determină y k+1 0 = x k+1 + λ ∗ s,
unde λ ∗ este soluia problemei pentru direcia s;
9. k = k+1;
10. f k = f(y k 0 ); Se execută o nouă explorare în jurul punctului y k
0 pentru a obine y k n ;
11. Dacă f(y k n ) < f(x k ) atunci se obine x k+1 = y k n şi se reia pasul 6. Dacă f(y k n ) ≥ f(x k ), atunci, dacă max{ ∆x i }≤ ε , STOP; dacă max{ ∆x i }> ε , se micşorează pasul ∆x i ;
12. k = k+1, x k+1 = x k , salt la 2.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 71/149
71
5.3 PROBLEME DE OPTIMIZARE STRUCTURAL Ă
Optimizarea geometrică
Structuri din bare
Procesul de optimizare este iniiat pornind de la o structură bine conformată din punctde vedere structural, gata calculată.
Coordonatele nodurilor asupra cărora se doreşte intervenia formează un vector:
{x1, y1, x2, y2,…, xn,yn,…}
Acest vector este preluat de motorul genetic şi este alterat de către operatorii geneticidisponibili.
Structuri din elemente tip SHELL
Ca şi la elementele din bare, trebuie selectate nodurile elementelor finite care vor fimodificate. Întrucât numărul elementelor vectorului format poate fi foarte mare, fapt cear putea conduce la un timp de calcul foarte lung, se pot alege numai unele noduri, iarcele similare pot „clona” modul de mişcare.
Optimizarea topologică
Structuri din bare
Spre deosebire de optimizare geometrică unde topologia structurii rămânenemodificată, modificându-se doar poziiile unor elemente în spaiu, optimizareatopologică vizează inserarea sau eliminarea unor elemente, modificând completgeometria iniială. Astfel, procesul de optimizare topologică este preponderent creator.Un aspect extrem de dificil pentru optimizare topologică utilizând AG este codificareastructurii. Întrucât AG utilizează un set de date abstracte, se pune problema găsirii unuilimbaj de descriere a structurii astfel încât structurile nou create să fie valide din punctde vedere structural ingineresc.
De codificarea structurii depinde şi „expresivitatea” AG în propunerea de noi structuri.
Propunem pentru codificarea structurii folosirea teoriei grafurilor. Astfel, nodurile saubarele structurii vor deveni elementele grafului.
Ca specializare distinctă în teoria grafurilor sunt grafurile triangulate. Acestea pot fifolosite cu uşurină în generarea de structuri de tip ferme cu zăbrele. Prin identificarea „ciclurilor” unui graf şi inserarea în acestea de noi sub-grafuri triangulate se pot obinenoi structuri perfect conformate din punct de vedere ingineresc.
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 72/149
72
Optimizarea geometrică a seciunilor transversale
Pentru a optimiza geometria seciunilor transversale pentru bare este necesar cavectorul ce va fi introdus în AG să conină toi parametrii seciunii de optimizat.
Restriciile impuse pot viza: respectarea unor proporii pentru seciunea transversală,respectarea unor limite minime sau maxime pentru dimensiunile seciunii transversale,respectarea unor limite constructive pentru dimensiunile alese.
Greutate minimă - Structuri din bare
min1
→∑=
ii
n
i
i A L ρ ( 5-31 )
unde:
n – numărul total de bare,
i – bara curentă,Li – lungimea unei bare,
Ai – aria seciunii transversale,
ρi – densitatea materialului barei curente,
221
221
221 )()()( iiiiiii z z y y x x L −+−+−= . ( 5-32 )
Aşadar, într-o structură spaială formată din bare, numărul variabilelor problemei deoptimizare este 6 x m, dacă sunt modificate coordonatele a „m” noduri
Vectorul variabilelor problemei de optimizare este:
{x11, x12, y11, y12, z11, z12, …, xi1, xi2, yi1, yi2, zi1, zi2, …, xn1, xn2, yn1, yn2, zn1, zn2}
Greutate minimă - Structuri tip shell
min1
→∑=
ii
n
i
i t S ρ ( 5-33 )
unde:
n – numărul total de plăci
i – placa iSi – suprafaa unui element de placă
ti – grosimea seciunii plăcii “i”
ρi – densitatea materialului plăcii “i”
Si poate fi exprimat fie în funcie de coordonatele punctelor caracteristice ale conturului,fie în funcie de suprafaa elementelor finite în care acesta este discretizat.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 73/149
73
∑−
=++ −=
1
011 )(
2
1 m
j
j j j jiY X Y X S
( 5-34 )
Vectorul variabilelor problemei de optimizare este:
{ …, X j, Y j, … } j = 1...m
Greutate minimă - Structuri tip structuri mixte (n bare, m plăci)
min11
→+∑∑==
j j
m
j
jii
n
i
i t S A L ρ ρ ( 5-35 )
Vectorul variabilelor problemei de optimizare este:
{ …, X j, Y j, … } j = 1...m
5.4 OPTIMIZAREA STRUCTURILOR – CLASIFICARE DIN PRISMA ALGORITMILOR GENETICI. PARADIGMA SIMBOLIC Ă
Un criteriu important al implementării algoritmilor genetici este modul de codificare alproblemei. Există două metode în prezent:
→ codificarea reală,→ codificarea binară.
Fiecare dintre aceste metode prezintă avantaje şi dezavantaje în funcie de categoria deprobleme ce urmează a fi rezolvate.
Referindu-ne exclusiv la probleme din domeniul ingineriei civile, din prisma funcieiobiectiv, putem clasifica algoritmii genetici astfel:
→ cu funcie obiectiv exprimată explicit,→ cu funcie obiectiv implicită.
Pentru a evita formularea uneori foarte laborioasă a funcie obiectiv, putem apela la unrezolvitor extern (program cu element finit) cu care să evaluăm structura.
Din punct de vedere al restriciilor aplicate asupra sistemului ce urmează a fi optimizatputem avea:
→ optimizare cu restricii,→ optimizare fără restricii.
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 74/149
74
În general, restriciile sunt exprimate sub forma unor inegalităi sau egalităi carecodifică:
→ tensiuni maxime,→ deformaii maxime,→ deplasări maxime,
→ greutate sau volum minime,→ moment de inerie maximetc.
Dirijarea procesului de căutare
În esenă, AG este o metodă de optimizare prin care găsirea optimului se face printr-ocăutare pseudo-aleatoare, utilizând paradigma evoluionistă darwinistă.
Metoda propusă în prezenta lucrare dirijează procesul de căutare, propunând „piste” de înaintare în spaiul soluiilor. Alegerea pistelor de căutare se face de către utilizator, pebaza experienei de proiectare acumulate. Astfel, în program, sunt implementate o seriede opiuni care „aşează” vectorul de căutare într-o zonă în care se aşteaptă de la bun început să fie găsită soluia.
Vectorul de evoluie este dirijat sau restricionat de:
curbe (arce de cerc, parabole, curbe de ordin superior),
linii sau direcii predefinite,
direcii simetrice (se utilizează simetria acolo unde este evidentă),
„clonarea” comportării (elemente similare au manifestări similare),
introducerea de restricii pentru avansarea pe anumite direcii.
Definirea funciei de fitness
Funcia de fitness este cea mai importantă componentă a AG. Aceasta decide dacăsoluia curentă este sau nu conformă cu specificaiile cerute de utilizator.
Fitnesul unei populaii poate fi evaluat astfel:
direct, componenta MEF returnează o valoare pentru o entitate anume;
utilizatorul formulează o funcie de minim/maxim, funcie care se referă tot la
aceleaşi valori; utilizatorul specifică o formulă de calcul pentru structura ce se optimizează;
se apelează la un întreg set de specificaii, de obicei cele ale unui cod dedimensionare.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 75/149
75
Problemă Elemente codificate Vector
Geometrie bare Coordonate noduri {...xi, yi, zi...}, i=1..n, n-nr de noduri seciune
Geometrie shell Coordonate noduri elementefinite
{...xi, yi, zi...} j, i=1..n, n-nr de noduri perelement finit, j=1..m, m- nr. elemente finite
Topologie TRUSS „noduri” graf {...xi, yi, zi...}, i=1..n, n-nr de noduri structură
Tabel 5-1 Tabel centralizator – forma vectorilor cu variabilele problemei
5.5 Concluzii
Programarea matematică reprezintă în acest moment cel mai puternic aparat matematicfolosit în optimizarea structurilor. Prezentarea acestei metode în linii generale, precum şiinventarierea şi prezentarea sintetică a mai multor variante de programare matematicăpune în evidenă şi dificultăile ce pot interveni în alegerea celei mai potrivite metode.
Totodată, programarea matematică ridică uneori probleme deosebite de implementare.În cazul metodelor derivative, când se încearcă integrarea unui program de optimizarepe structura unui program de element finit, principala problemă ce intervine esteexistena sau inexistena unei compatibilităi între acestea. Aici ne referim în special laimplementarea efectivă, la nivel matriceal şi la tipurile de operaii disponibile în sistemulcu element finit (calculul Jacobianului, al Hesianului etc.). Acesta este un motiv suficientpentru a ne determina să apelăm eventual la una din metodele nederivative deoptimizare. Dintre acestea, câteva metode au fost prezentate în capitolul de faă.
Concluzia generală pe care o putem formula prin compararea acestor metode este cănici una dintre ele nu garantează găsirea unui optim în condiii de generalitate extremă.În plus, resursele implicate în procesul de optimizare sunt întotdeauna mari: fie că sunt
necesare resurse computaionale hardware importante, fie că sunt implicate resursemari în elaborarea unui program complex de optimizare cu un aparat solid din punct devedere matematic.
Din cercetările efectuate am concluzionat că metoda algoritmilor genetici poate fi oalternativă demnă de luat în seamă pentru a fi implementată într-un program deoptimizare. În subcapitolele anterioare am încercat fundamentarea matematică pentru oserie de probleme de inginerie structurală. Implementarea efectivă ulterioară ne încurajează să continuăm cercetările şi pentru alte tipuri de structuri decât cele arătatecu titlul de studii de caz în prezenta teză.
Algoritmii genetici sunt totuşi imprevizibili ca rezultate. Un studiu al parametrilor deproces folosii în cadrul algoritmilor genetici este esenial pentru a defini domeniul deutilizare şi valabilitatea acestei metode. Acest aspect este prezentat pe larg în capitolulurmător.
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 76/149
76
6. ALGORITM HIBRID DE
OPTIMIZARE ORIGINAL ŞI PROGRAMINTELIGENT INTEGRAT
6.1 INTRODUCERE
Din expunerea făcută în capitolele anterioare putem trage următoarele concluzii, pebaza cărora vom putea motiva arhitectura algoritmului propus:
→ Metoda elementului finit poate fi folosită ca nucleu numeric pentru rezolvareagenerală a problemelor de calcul pentru cele mai diverse tipuri de structuri şisolicitări.
→ Există o multitudine de programe de calcul care folosesc MEF, acestea furnizândtoate datele necesare pentru a fi procesate în algoritmul de optimizare.
→ Pentru a lucra în regim integrat este necesară folosirea unor automatisme softwarepentru definirea problemei şi rezolvarea ei automată folosind MEF; De asemenea,este necesar ca programul să poată prelua automat datele din programul deelement finit şi să le folosească mai departe.
→ Formularea problemei de optimizare ar trebui făcută automat.
→ Întrucât rezolvarea problemelor folosind MEF este un proces costisitor din punct devedere al calculului, este necesar să se minimizeze numărul de rulări ale modeluluifolosind MEF.
→ Pentru a evita deteriorarea modelului structural modelat în urma ajustării geometrieisau topologiei în procesul de optimizare, este necesară definirea unui set de restriciisuplimentare faă de restriciile ce in de configuraia structurii (tensiuni, eforturi,deplasări).
→ Folosirea unui procedeu inteligent de optimizare este de preferat datorită simplităiimodului de implementare.
→ Ciclurile interne într-un algoritm genetic sunt relativ ieftine faă de ciclurile de calcul
din MEF, deci calculul trebuie centrat pe algoritmul genetic.→ Pentru o bună poziionare a procesului de căutare în spaiul soluiilor este foarte
utilă analiza senzitivităii.
→ Folosind analiza senzitivităii, spaiul de căutare este redus la şablonul sugerat decoeficienii de senzitivitate.
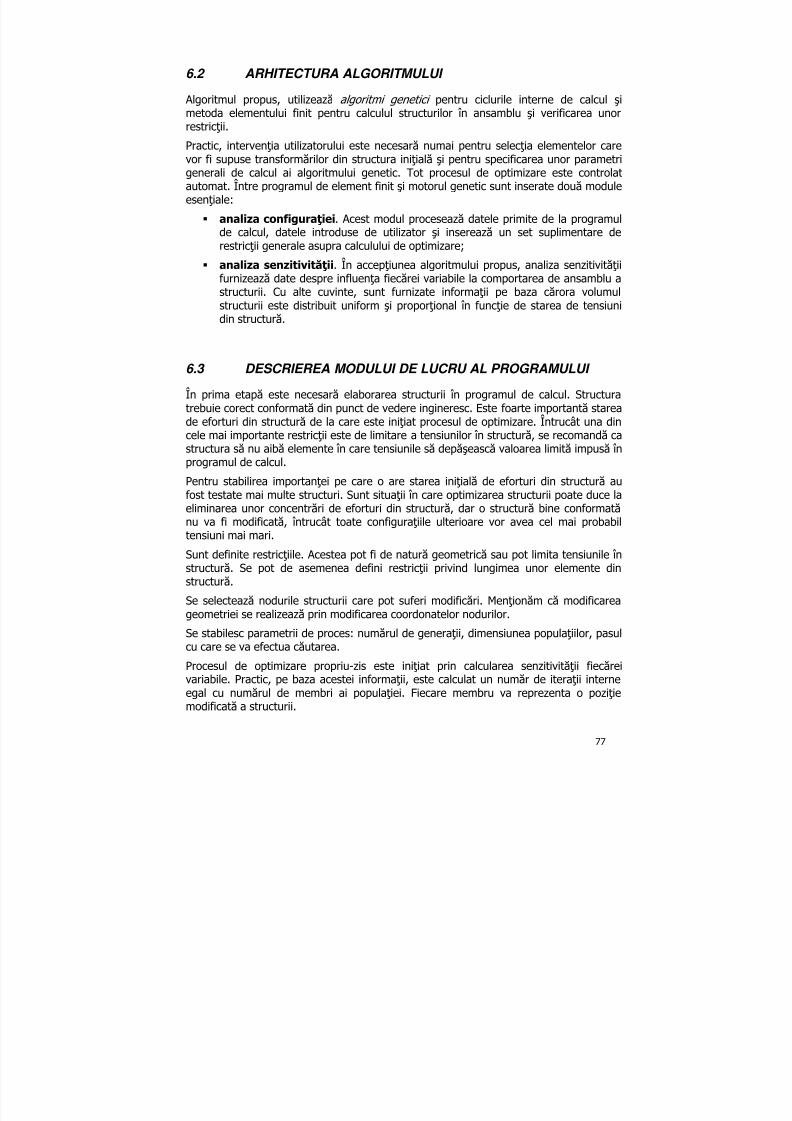
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 77/149
77
6.2 ARHITECTURA ALGORITMULUI
Algoritmul propus, utilizează algoritmi genetici pentru ciclurile interne de calcul şimetoda elementului finit pentru calculul structurilor în ansamblu şi verificarea unorrestricii.
Practic, intervenia utilizatorului este necesară numai pentru selecia elementelor carevor fi supuse transformărilor din structura iniială şi pentru specificarea unor parametrigenerali de calcul ai algoritmului genetic. Tot procesul de optimizare este controlatautomat. Între programul de element finit şi motorul genetic sunt inserate două moduleeseniale:
analiza configuraiei. Acest modul procesează datele primite de la programulde calcul, datele introduse de utilizator şi inserează un set suplimentare derestricii generale asupra calculului de optimizare;
analiza senzitivităii. În accepiunea algoritmului propus, analiza senzitivităiifurnizează date despre influena fiecărei variabile la comportarea de ansamblu astructurii. Cu alte cuvinte, sunt furnizate informaii pe baza cărora volumul
structurii este distribuit uniform şi proporional în funcie de starea de tensiunidin structură.
6.3 DESCRIEREA MODULUI DE LUCRU AL PROGRAMULUI
În prima etapă este necesară elaborarea structurii în programul de calcul. Structuratrebuie corect conformată din punct de vedere ingineresc. Este foarte importantă stareade eforturi din structură de la care este iniiat procesul de optimizare. Întrucât una dincele mai importante restricii este de limitare a tensiunilor în structură, se recomandă ca
structura să nu aibă elemente în care tensiunile să depăşească valoarea limită impusă înprogramul de calcul.
Pentru stabilirea importanei pe care o are starea iniială de eforturi din structură aufost testate mai multe structuri. Sunt situaii în care optimizarea structurii poate duce laeliminarea unor concentrări de eforturi din structură, dar o structură bine conformatănu va fi modificată, întrucât toate configuraiile ulterioare vor avea cel mai probabiltensiuni mai mari.
Sunt definite restriciile. Acestea pot fi de natură geometrică sau pot limita tensiunile înstructură. Se pot de asemenea defini restricii privind lungimea unor elemente dinstructură.
Se selectează nodurile structurii care pot suferi modificări. Menionăm că modificareageometriei se realizează prin modificarea coordonatelor nodurilor.
Se stabilesc parametrii de proces: numărul de generaii, dimensiunea populaiilor, pasulcu care se va efectua căutarea.
Procesul de optimizare propriu-zis este iniiat prin calcularea senzitivităii fiecăreivariabile. Practic, pe baza acestei informaii, este calculat un număr de iteraii interneegal cu numărul de membri ai populaiei. Fiecare membru va reprezenta o poziiemodificată a structurii.
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 78/149
78
Figura 6—1 Schema logică algoritm hibrid de optimizare
Este important ca pasul cu care este permisă generarea de noi membri să fie suficientde mic, astfel încât starea de eforturi din structură să nu fie modificată esenial.
Astfel, pentru n iteraii interne se poate aproxima că raportul dintre eforturile dinstructură este proporional cu structura iniială, luându-se ca şi criteriu decisiv numaigreutatea structurii.
Este sortată populaia generată, punându-se pe primul loc structura cea mai uşoară din
punct de vedere al greutăii. Această configuraie este încărcată în modulul de elementfinit şi este verificată. Situaia ideală este aceea pentru care sunt verificate restriciilelegate de tensiuni sau eforturi.
Dacă structura este verificată se poate trece la o nouă generaie, actualizând coeficieniide sensibilitate.
Dacă structura nu este verificată din punct de vedere al restriciilor impuse, se trece laverificarea în ordine descrescătoare a structurilor (configuraiilor) din populaie.
NUCLEU OPTIMIZARE(cicluri de calcul intern)
Motor Genetic
Analizaconfiguraiei
Analizasenzitivităii
Generare varianteconfiguratii
Validare configuraiigenerate
Evaluare configuraii
Sortare configuraii
MEF

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 79/149
79
În cazul în care nici o structură din populaie nu este verificată, este păstrată structurainiială, nemodificată.
Ciclurile de calcul sunt terminate după atingerea criteriului global de oprire.
Pentru a evita situaia în care nu este validat primul membru al populaiei, şi deci suntnecesare apeluri suplimentare la MEF, este necesară alegerea judicioasă a unor
parametri de proces.
Parametrii de proces sunt:
PAS – pasul de incrementare a căutării în domeniul PASmax şi PASmin,
PASmax – pasul maxim (se aplică pe fiecare direcie de căutare),
PASmin – pasul minim (se aplică pe fiecare direcie de căutare),
NP – numărul de membri ai populaiei (dimensiunea populaiei),
NG – numărul de generaii.
6.4 STUDIUL PARAMETRILOR DE PROCES
Pentru a exemplifica importana alegerii corespunzătoare a parametrilor de proces amalcătuit graficele ce urmează.
Variaia optimului în funcie de parametrul PAS
0%
2%
4%
6%
8%
10%
12%
14%
10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
Variaia PAS [%] din pasul maxim impus
P r o c e n t m i n i m i z a r e g r e u t a t e [ % ]
[%g]
Tendina de
variaie
Figura 6—2 Variaia optimului în funcie de parametrul PAS
În Figura 6—2 se poate observa dependena aproape liniară între valoarea PAS şieficiena de minimizare a algoritmului. Revenim cu precizarea că PAS reprezintă

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 80/149
80
valoarea cu care programul va defini intervalul de căutare, aşa cum este exemplificat înFigura 6—3. La fiecare generaie, vor fi generate NP variante în domeniul PASmax şiPASminim. Dacă PAS este egal cu PASmax, atunci, căutarea se va efectua pe întregdomeniul. Se recomandă alegerea PAS= PASmax, dacă există certitudinea că cel puin ovariantă rezultată va fi validă. Este de preferat alegerea unui PAS egal cu o fraciune dinPASmax, dacă se doreşte o căutare fină, fără riscul de a eşua din domeniul admisibil.
Figura 6—3 Evoluia nodurilor în spaiul de căutare
Dimensiunea populaiei NP este un alt parametru foarte important.
În Figura 6—3 este ilustrată evoluia algoritmului în funcie de dimensiunea populaiei.Se poate observa că, deşi NP poate fi ales foarte mare, nu se mai poate obine oevoluie semnificativă a algoritmului. Pentru exemplul ilustrat mai jos, s-a obinut oscădere a greutăii structurii cu 7.5% utilizând mai puin de 10 membri, iar o creşterecu 0.2% a fost posibilă pentru un număr suplimentar de mai mult de 100 membri.Întrucât evaluarea fiecărui membru al populaiei se face în ciclurile interne de calcul alealgoritmului genetic, fără a se face apel la programul de element finit, calculul esterelativ rapid. În aceste cicluri de calcul sunt calculate numai greutăile fiecăreiconfiguraii (sau ali parametri ce in de funcia obiectiv).
K 0
K 1
K i
K NP
PASmax
PAS
Noduri structură

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 81/149
81
Variaia optimului în funcie de dimensiunea populaiei
6.00%
6.20%
6.40%
6.60%
6.80%
7.00%
7.20%
7.40%
7.60%
7.80%
8.00%
5 10 15 20 30 40 50 70 100 200
Dimensiune populaie NP
P r o c e n t m i n i m i z a r e g r e u t a t e
[ % ]
Variaia optimului în
funcie de NP
Tentina de variaie
(Log.)
Figura 6—4 Variaia optimului în funcie de dimensiunea populaiei
Un exemplu bine conformat va găsi o greutate minimă în aproximativ 3 generaii pentru10 membri NP.
Numărul de generaii influenează liniar crescător evoluia algoritmului pentru un numărfinit de generaii, urmând apoi o variaie constantă, fără a se putea produce o îmbunătăire a optimului.
Variaia optimului în funcie de numărul de generaii
0%
2%
4%
6%
8%
10%
12%
14%
16%
18%
1 2 3 4 5 6 7 8 9 10 11 12 13 14 14 16 15 16 17 20
Numărul de generaii NG
P
r o c e n t m i n i m i z a r e g r e u t a t e [ % ]
Figura 6—5 Variaia optimului în funcie de numărul de generaii
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 82/149
82
La fiecare generaie, membrul populaiei care a fost nominalizat ca fiind cel mai bun lageneraia precedentă va fi calculat în MEF.
După cum am prezentat în capitolele anterioare, în implementarea unei metode deoptimizare, eventual specializate pentru optimizare structurilor inginereşti intervinurmătoarele dificultăi:
1. calculul este efectuat iterativ. Sunt testate mai multe valori ce intervin în funcii în vederea găsirii valorii optime. Referindu-ne la optimizarea structurilor,recalculare funciei obiectiv presupune de fapt calculul întregii structuri. Acestlucru înseamnă că operaia de optimizare este costisitoare;
2. întrucât sunt disponibile foarte multe programe valoroase de calcul al structurilor,ideală ar fi situaia în care ar fi posibilă integrarea în acestea a unor module deoptimizare. Deoarece metodele de optimizare puternice folosesc tehnici dederivare, este foarte dificilă modificarea programelor existente pentru calcululhesianului sau a gradientului;
3. găsirea unui model matematic adecvat problemei de optimizat este dificilă;4. experiena de proiectare nu poate fi folosită întotdeauna în problemele de
optimizare;5. în cazul folosirii unor metode nederivative, timpul de calcul este destul de lung, în pofida faptului că iteraiile nu sunt întotdeauna costisitoare. În plus, erorile potfi mari, iar găsirea unei soluii nu este întotdeauna garantată.
Descrierea algoritmului
Domeniul de valabilitate: structuri din bare, fore axiale, preponderent de întindere saucompresiune.
Asimilăm variabilele de proiectare xi
cu coordonatele nodurilor structurii pe careurmează să o optimizăm. În această accepiune, x i poate conine oricare direcie înspaiu pe oricare axă X, Y sau Z.
Ecuaia generală a metodei este:
Min f(X). ( 6-1 )
Referitor la:
KQ=F. ( 6-2 )
Soluia problemei de optimizare, adică configuraia optimă a structurii, este formatădintr-o colecie de variabile x:
X* = {xi, xXR, i=1..n}, ( 6-3 )
unde x se obine pentru fiecare pas de analiză:
,xi = xi-1 + ∆iλi

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 83/149
83
unde: xi este valoarea variabilei în pasul i, pasul curent;
xi-1 este valoarea variabilei în pasul anterior (sau valoarea iniială);
∆i este pasul cu care va fi modificată variabila xi-1, permite explorarea globală înspaiul de căutare; este o valoare întotdeauna pozitivă;
λi
este un parametru prin intermediul căruia este explorat local spaiul decăutare; poate lua valori , în intervalul [-1…1].
Observaii privind calculul şi alegerea parametrilor ∆∆∆∆i şi λλλλi
∆i este în general impus de utilizator. Alegerea unei valori se face având în vederedimensiunile reale ale structurii şi limitele de mişcare ale nodurilor acesteia.
Spre exemplu, în figura de mai jos, se poate alege:
∆i = a, întrucât spaiul de mişcare al nodului i trebuie limitat pentru a nu se suprapunepeste nodurile vecine.
Figura 6—6 Domeniul local de căutare
Evident, fiecărui nod îi putem atribui valori distincte pentru ∆i.
λi are rolul de a căuta în domeniul ∆i şi poate lua valori între -1 şi 1. Rolul acestuiparametru este de a scala pasul ∆i pe fiecare direcie şi de a impune sensul de mişcare.
Căutare aleatoare
În cazul în care se optează pentru o căutare aleatoare, λi va lua valori aleatoare,uniform distribuite, în intervalul [-1..1]. O posibilă configuraie a structurii de mai suspoate fi următoarea:
a
a
Li
D ≤ 2a

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 84/149
84
Figura 6—7 Configuraii obinute prin căutare aleatoare
În exemplul de mai sus au fost permise mişcările nodurilor inferioare (exceptându-le pecele cu reazeme), simultan pe axele X şi Y.
Căutare aleatore restrânsă
Un prim aspect ce poate ajuta pentru a reduce spaiul de căutare este impunerea unordirecii limitate de căutare, în conformitate cu experiena de proiectare a utilizatorului.
Astfel, inhibând căutarea după X putem obine configuraii ale structurii cu o greutatemai mică decât cea iniială: optime locale.
Figura 6—8 Configuraii obinute prin căutare restrânsă
În acest caz, numărul de iteraii pentru găsirea unei configuraii acceptabile poate fi cumult redus faă de o căutare aleatoare pe toate axele.
P
a
X
Y
P
a
X Y
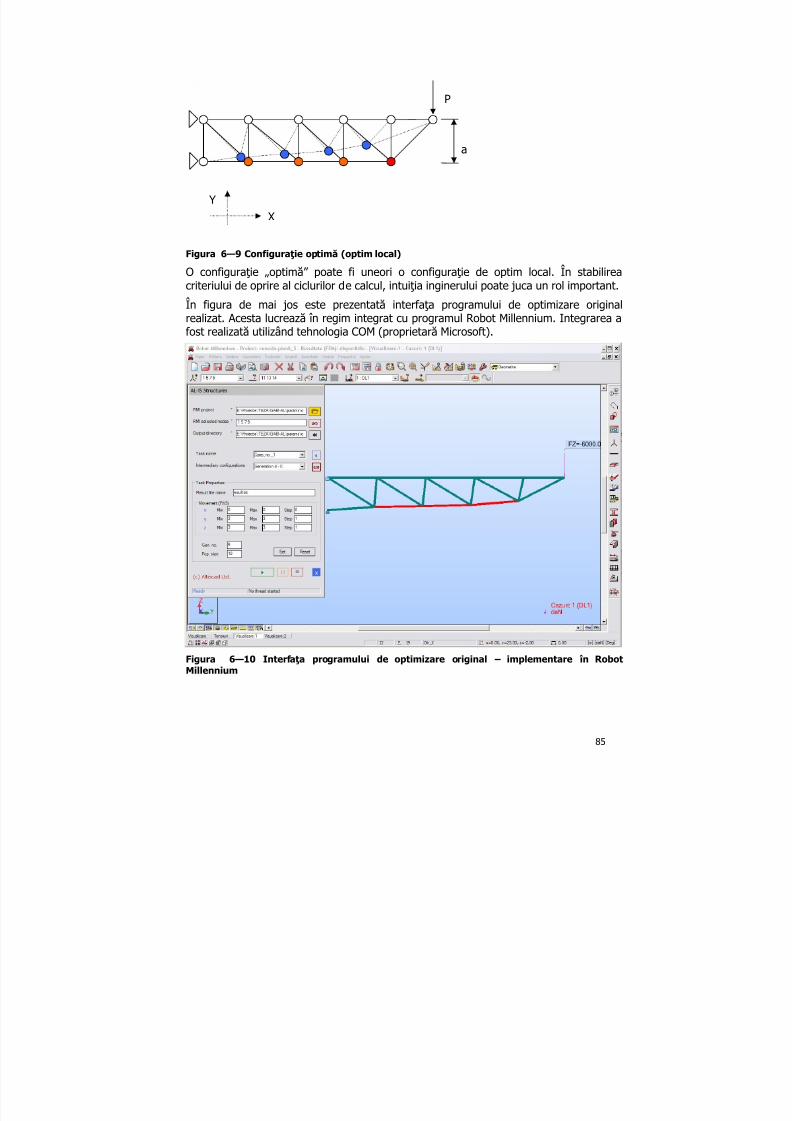
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 85/149
85
Figura 6—9 Configuraie optimă (optim local)
O configuraie „optimă” poate fi uneori o configuraie de optim local. În stabilireacriteriului de oprire al ciclurilor de calcul, intuiia inginerului poate juca un rol important.
În figura de mai jos este prezentată interfaa programului de optimizare originalrealizat. Acesta lucrează în regim integrat cu programul Robot Millennium. Integrarea afost realizată utilizând tehnologia COM (proprietară Microsoft).
Figura 6—10 Interfaa programului de optimizare original – implementare în RobotMillennium
P
a
X Y

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 86/149
86
6.5 Concluzii
Pentru crearea sistemului prezentat în acest capitol am folosit toate informaiileprezentate ulterior, şi anume: metoda elementelor finite, tehnici de optimizare dinprogramarea matematică şi algoritmi genetici – exponentul inteligenei artificiale.Calibrarea sistemului pentru diverse tipuri de probleme se face prin alegerea unor
parametri de proces potrivii, a căror importană este pusă în evidenă de problemeleexpuse ulterior. Studiul graficelor de influenă a valorilor parametrilor de proces asupraoptimului a fost efectuat prin rularea unui număr mare de exemple.
Putem concluziona că optimizarea se efectuează într-un număr relativ mic de cicluri decalcul. Acest aspect este aparent în contradicie cu caracterul aleator al procesului indusde algoritmul genetic. Datorită acestuia, în sisteme uzuale numărul de cicluri de calculeste mare. Însă folosirea originală a algoritmului genetic pentru explorarea spaiului decăutare prin cicluri „ieftine” de calcul duce la reducerea semnificativă a timpului de lucrual întregului ciclul de optimizare.
Pentru verificarea algoritmului propus au fost folosite programele existente de
optimizare şi exemple de structuri optimizate cu acestea. Rezultatele obinute suntspectaculoase.
Direciile viitoare de cercetare vor fi îndreptate în special în mărirea robusteiiprogramului. Întrucât scopul tezei a fost de a dezvolta sistemele integrate în general,scop pe care îl considerăm atins, din acest punct este necesară depunerea unui efort decercetare pe orizontală.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 87/149
87
7. Studii de caz
7.1 OPTIMIZAREA GEOMETRIC Ă A STRUCTURILOR PLANE DIN BARE – AC IUNI STATICE
Pentru a pune în evidenă eficiena algoritmului şi programului în optimizareastructurilor am definit problema: „Optimizare a unei console plane compusă din zăbrele”.
Problema este definită printr-un set de variabile colectate prin intermediul interfeeigrafice a programului. Acestea sunt centralizate în tabelul de mai jos.
Problemă: Greutate_minimăGeneraii (NG): 10Swap size(dimensiune populaie): 100Metoda% Search: 100% Step: 0% Mutants: 0
Număr variabile: 8 Vector iniial: { X1 ... X8 }
Tabel 7-1 Lista parametrilor de proces (parametri globali)
Semnificaia termenilor folosii în tabel este:
- NG – numărul de generaii . Acesta este egal cu numărul de iteraii externe aleprogramului. Structura va fi calculată de programul cu element finit de „NG” ori.
- Swap size – dimensiunea populaiei. Acest parametru defineşte numărul deiteraii interne. Algoritmul genetic va căuta soluia optimă într-un spaiu cu „swap-size” elemente.
- Metoda. În implementarea curentă s-a folosit un singur operator genetic decăutare. Procentul de 100% semnifică ponderea „swap-size” pe care aceastămetodă o foloseşte. Mai precis, fiecare metodă va lucra cu un procent din
dimensiunea populaiei egal cu cel specificat în interfaă. În implementărileviitoare vom defini şi alte metode de căutare (noi operatori genetici), motivpentru care acestea au fost menionate în tabel, deşi nu sunt încă disponibile.
- Număr variabile – este egal cu produsul dintre numărul de noduri şi numărul dedirecii de căutare disponibile. În cazul de faă, căutarea se face pentru 4 noduri,pe axele orizontală şi verticală.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 88/149
88
Mişcare: Free 3DDelta Y minus: 3Delta Y plus: 3Initial Y point: 3Delta Z minus: 3Delta Z plus: 3Initial Z point: 3Listă noduri: 3 7 9 11
Seciune: TRON 219x4.5Material: OL37
Tabel 7-2 Lista parametrilor fiecărei iteraii
Proprietăi seciune:
HY=21.9, HZ=21.9 [cm]
AX=30.338 [cm2]
IX=3494.480, IY=1747.240, IZ=1747.240 [cm4]
Proprietăi material:
E=2100000.00 (daN/cm2)
NI=0.30
G=808000.00 (daN/cm2)
Densitate =7701.00 (daN/m3)
Re=2000.00 (daN/cm2)
LX=0.00 (1/°C)
Coordonatele nodurilor în structura iniială [m]
NOD X Y Z3 0.0 19 -67 0.0 13 -6
9 0.0 25 -611 0.0 31 -6
Fora aplicată: 6500daN.
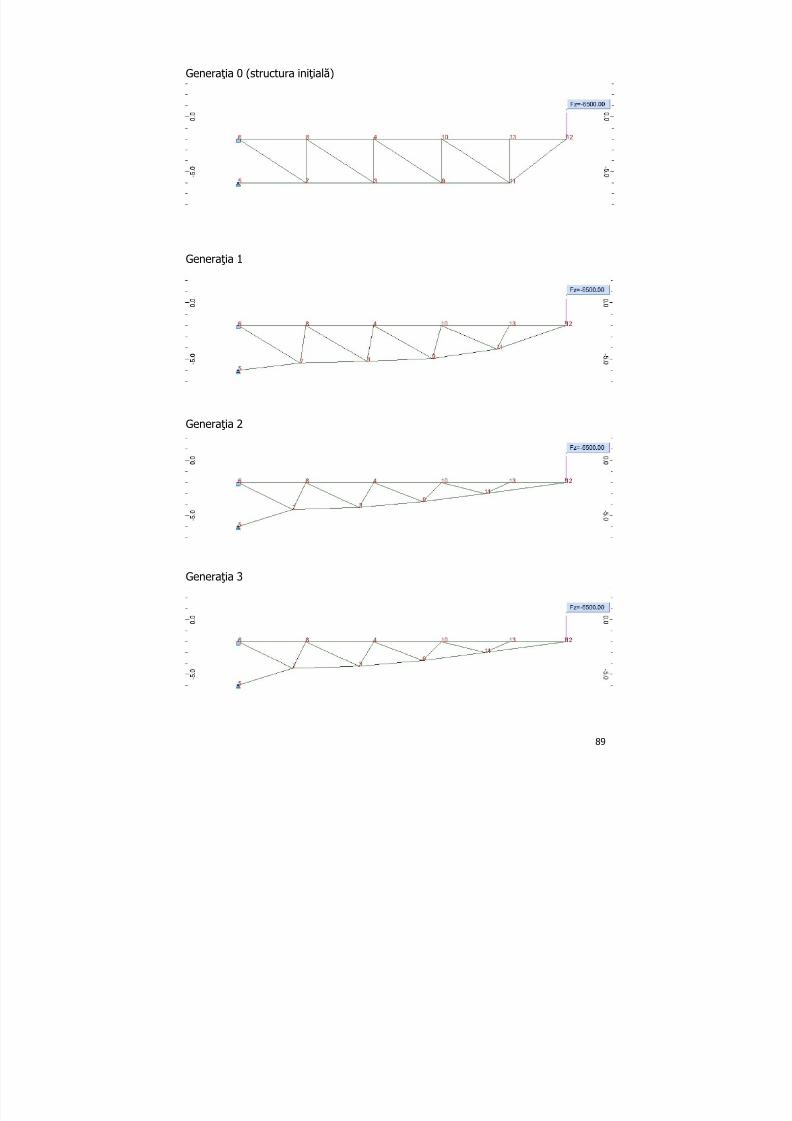
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 89/149
89
Generaia 0 (structura iniială)
Generaia 1
Generaia 2
Generaia 3
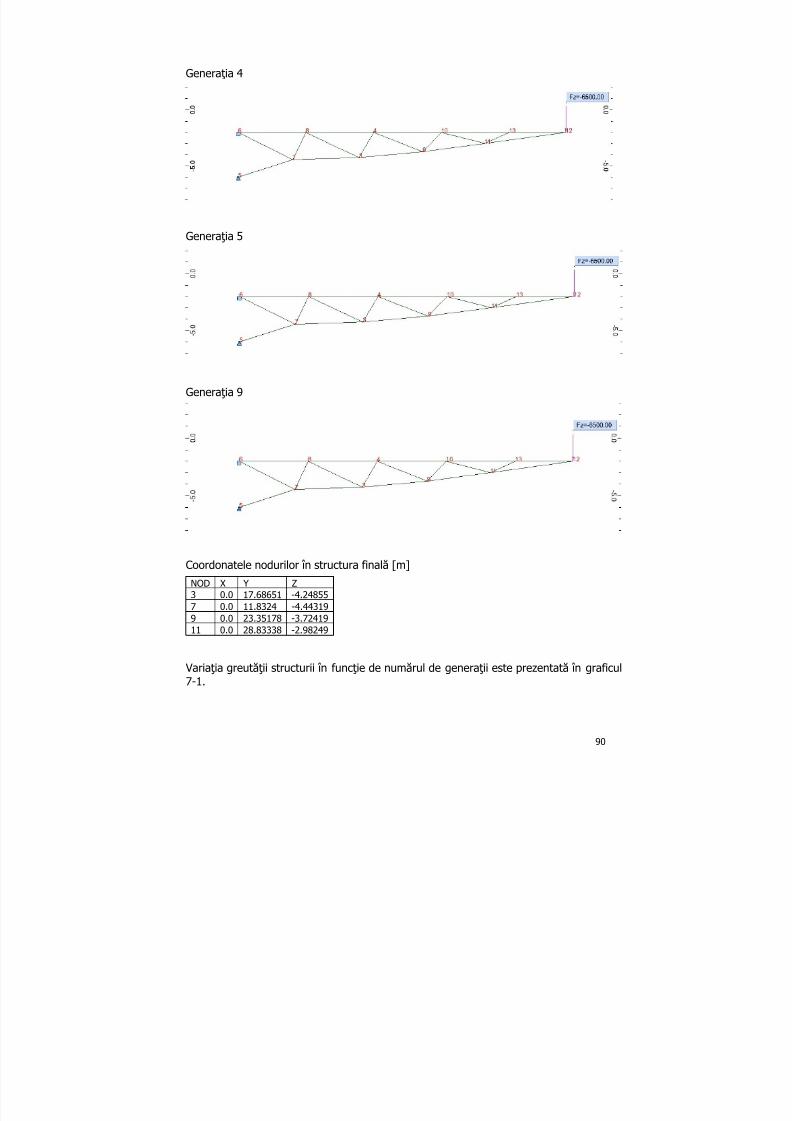
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 90/149
90
Generaia 4
Generaia 5
Generaia 9
Coordonatele nodurilor în structura finală [m]
NOD X Y Z3 0.0 17.68651 -4.24855
7 0.0 11.8324 -4.443199 0.0 23.35178 -3.7241911 0.0 28.83338 -2.98249
Variaia greutăii structurii în funcie de numărul de generaii este prezentată în graficul7-1.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 91/149
91
Variaia greutăii structurii
2000
2100
2200
2300
2400
2500
2600
Generaia
G r e u t a t e a [ k g ]
Greutatea
Greutatea 2483.2 2313.9 2153 2089.7 2089.5 2089.5 2089.5 2089.5 2089.4
1 2 3 4 5 6 7 8 9
Figura 7—1 Variaia greutăii în funcie de numărul de generaii
Se remarcă găsirea structurii optime după numai patru generaii. În generaiile 4-9, nua mai fost posibilă îmbunătăirea structurii.
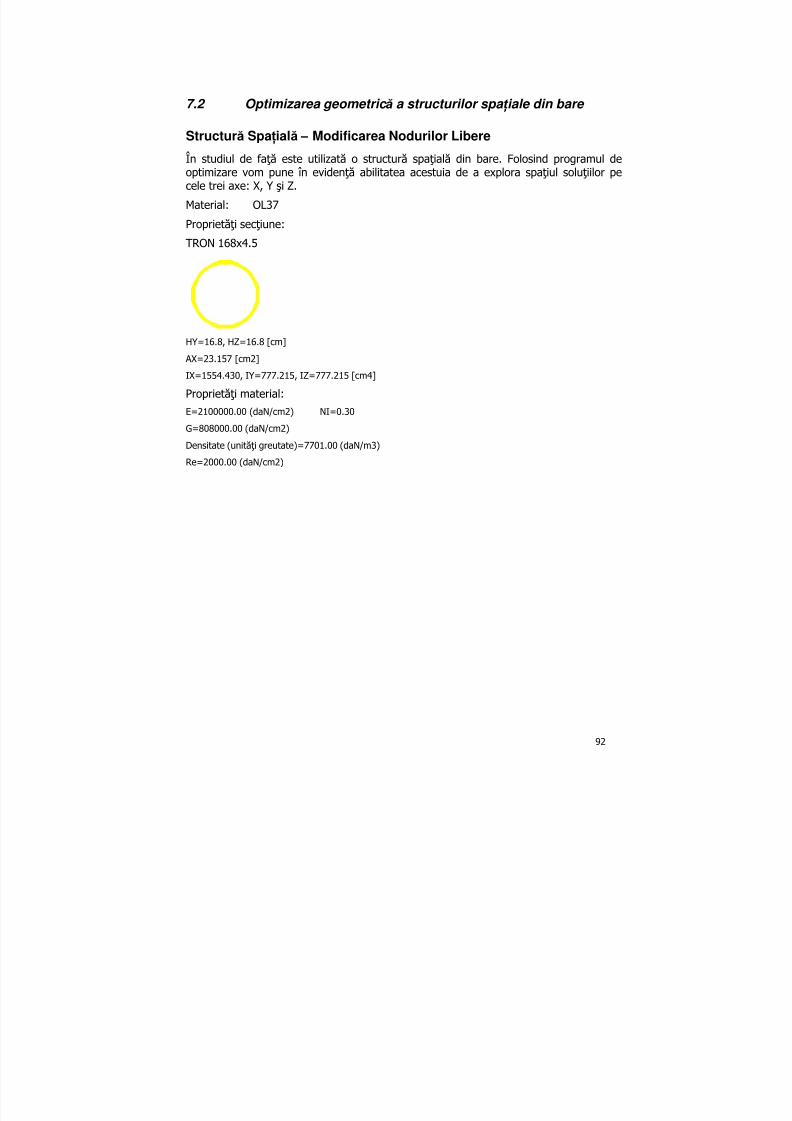
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 92/149
92
7.2 Optimizarea geometric ă a structurilor spa iale din bare
Structură Spaială – Modificarea Nodurilor Libere
În studiul de faă este utilizată o structură spaială din bare. Folosind programul deoptimizare vom pune în evidenă abilitatea acestuia de a explora spaiul soluiilor pecele trei axe: X, Y şi Z.
Material: OL37
Proprietăi seciune:
TRON 168x4.5
HY=16.8, HZ=16.8 [cm]
AX=23.157 [cm2]
IX=1554.430, IY=777.215, IZ=777.215 [cm4]
Proprietăi material:
E=2100000.00 (daN/cm2) NI=0.30
G=808000.00 (daN/cm2)
Densitate (unităi greutate)=7701.00 (daN/m3)
Re=2000.00 (daN/cm2)

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 93/149
93
Figura 7—2 Vedere generală structură
Figura 7—3 Vedere generală cu cote
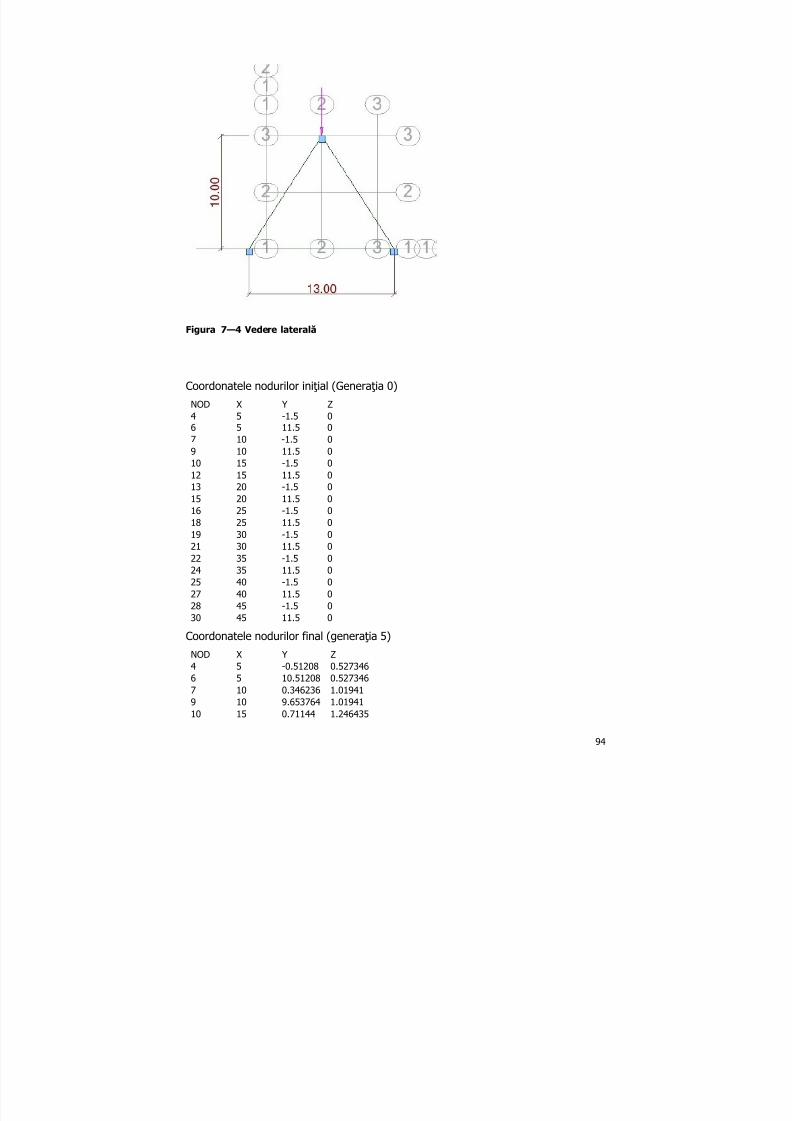
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 94/149
94
Figura 7—4 Vedere laterală
Coordonatele nodurilor iniial (Generaia 0)
NOD X Y Z4 5 -1.5 06 5 11.5 07 10 -1.5 0
9 10 11.5 010 15 -1.5 012 15 11.5 013 20 -1.5 015 20 11.5 016 25 -1.5 018 25 11.5 019 30 -1.5 021 30 11.5 022 35 -1.5 024 35 11.5 025 40 -1.5 027 40 11.5 0
28 45 -1.5 030 45 11.5 0
Coordonatele nodurilor final (generaia 5)
NOD X Y Z4 5 -0.51208 0.5273466 5 10.51208 0.5273467 10 0.346236 1.019419 10 9.653764 1.0194110 15 0.71144 1.246435
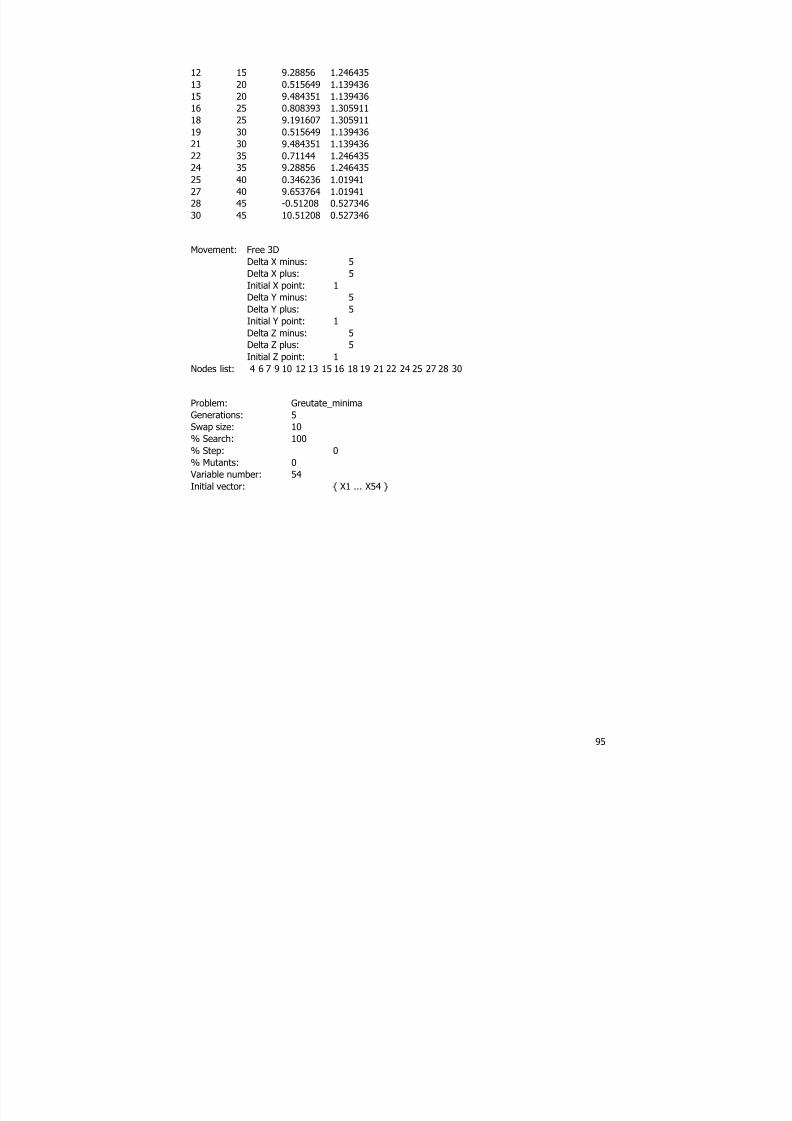
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 95/149
95
12 15 9.28856 1.24643513 20 0.515649 1.13943615 20 9.484351 1.13943616 25 0.808393 1.30591118 25 9.191607 1.30591119 30 0.515649 1.13943621 30 9.484351 1.13943622 35 0.71144 1.24643524 35 9.28856 1.24643525 40 0.346236 1.0194127 40 9.653764 1.0194128 45 -0.51208 0.52734630 45 10.51208 0.527346
Movement: Free 3DDelta X minus: 5Delta X plus: 5Initial X point: 1
Delta Y minus: 5Delta Y plus: 5Initial Y point: 1Delta Z minus: 5Delta Z plus: 5Initial Z point: 1
Nodes list: 4 6 7 9 10 12 13 15 16 18 19 21 22 24 25 27 28 30
Problem: Greutate_minimaGenerations: 5Swap size: 10% Search: 100
% Step: 0% Mutants: 0 Variable number: 54Initial vector: { X1 ... X54 }
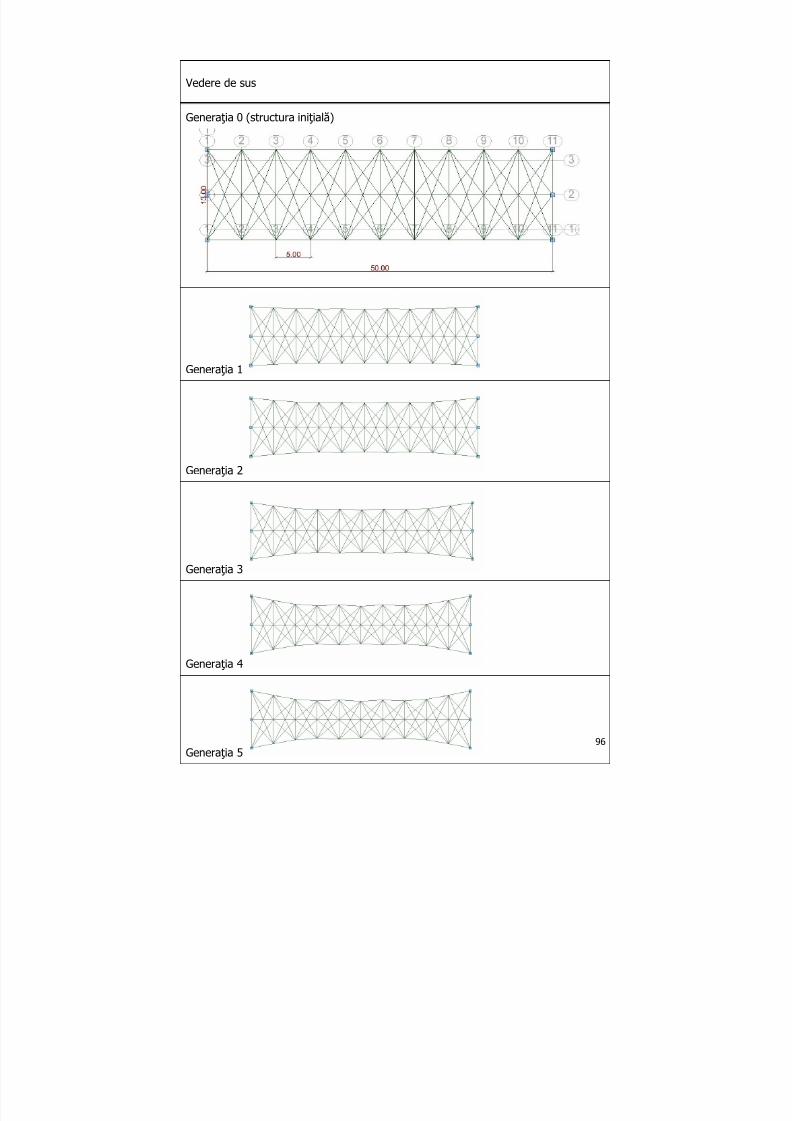
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 96/149
96
Vedere de sus
Generaia 0 (structura iniială)
Generaia 1
Generaia 2
Generaia 3
Generaia 4
Generaia 5
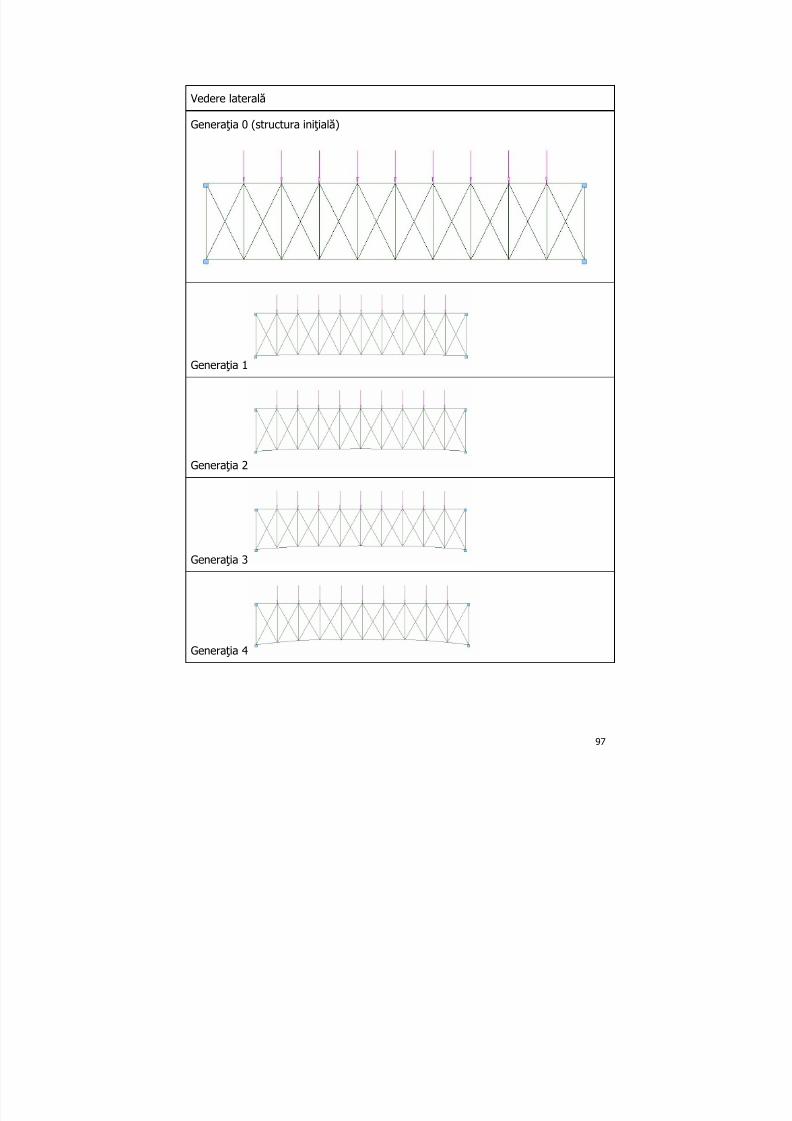
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 97/149
97
Vedere laterală
Generaia 0 (structura iniială)
Generaia 1
Generaia 2
Generaia 3
Generaia 4
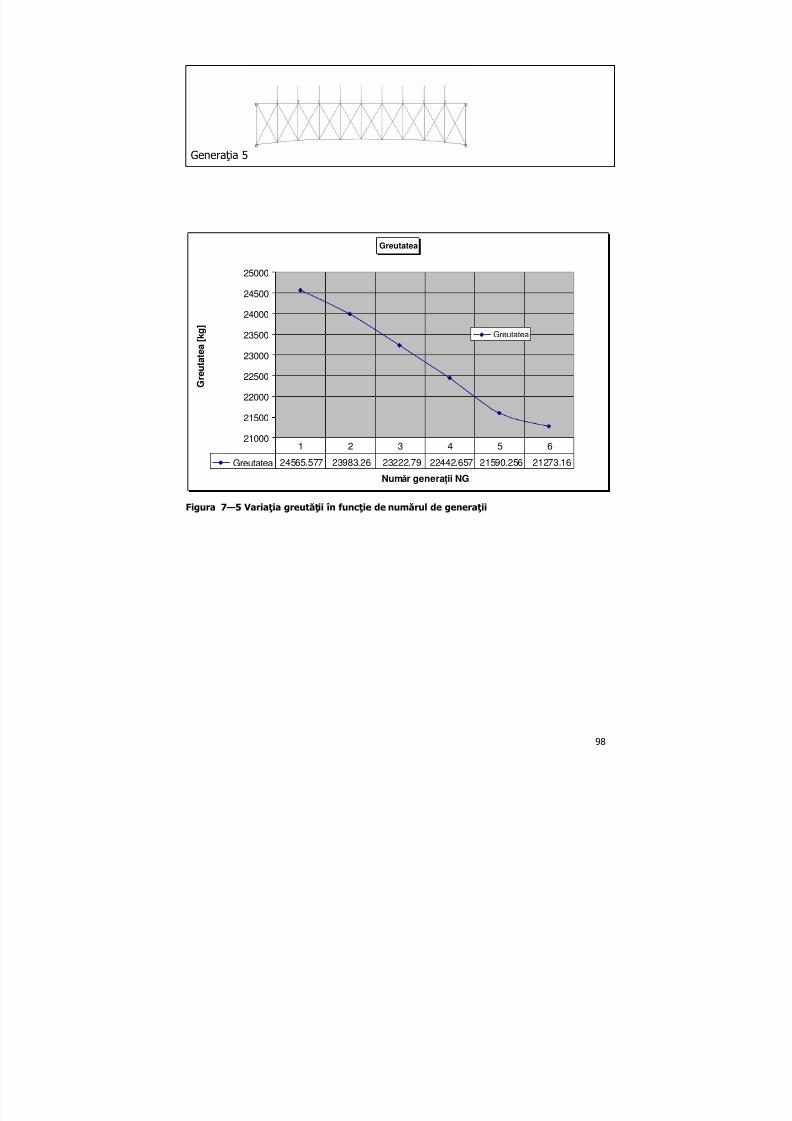
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 98/149
98
Generaia 5
Greutatea
21000
21500
22000
22500
23000
23500
24000
24500
25000
Număr generaii NG
G r e u t a t e a [ k g ]
Greutatea
Greutatea 24565.577 23983.26 23222.79 22442.657 21590.256 21273.16
1 2 3 4 5 6
Figura 7—5 Variaia greutăii în funcie de numărul de generaii

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 99/149
99
Structură Spaială – Modificare Globală
În exemplul de mai jos, structura este optimizată modificând nodurile libere, dar şinodurile cu fore aplicate. Întrucât sunt afectate şi nodurile asupra cărora sunt aplicateforele, starea de eforturi din structură variază mai rapid la fiecare generaie, faă de
situaia anterioară în care erau modificate numai nodurile libere.
Movement: Free 3DDelta X minus: 5Delta X plus: 5Initial X point: 1Delta Y minus: 5Delta Y plus: 5Initial Y point: 1Delta Z minus: 5Delta Z plus: 5Initial Z point: 1
Problem: Greutate_minimaGenerations: 5Swap size: 10% Search: 100% Step: 0% Mutants: 0
Variable number: 81Initial vector: { X1 ... X81 }
Vedere laterală
Generaia 0 (structura iniială)
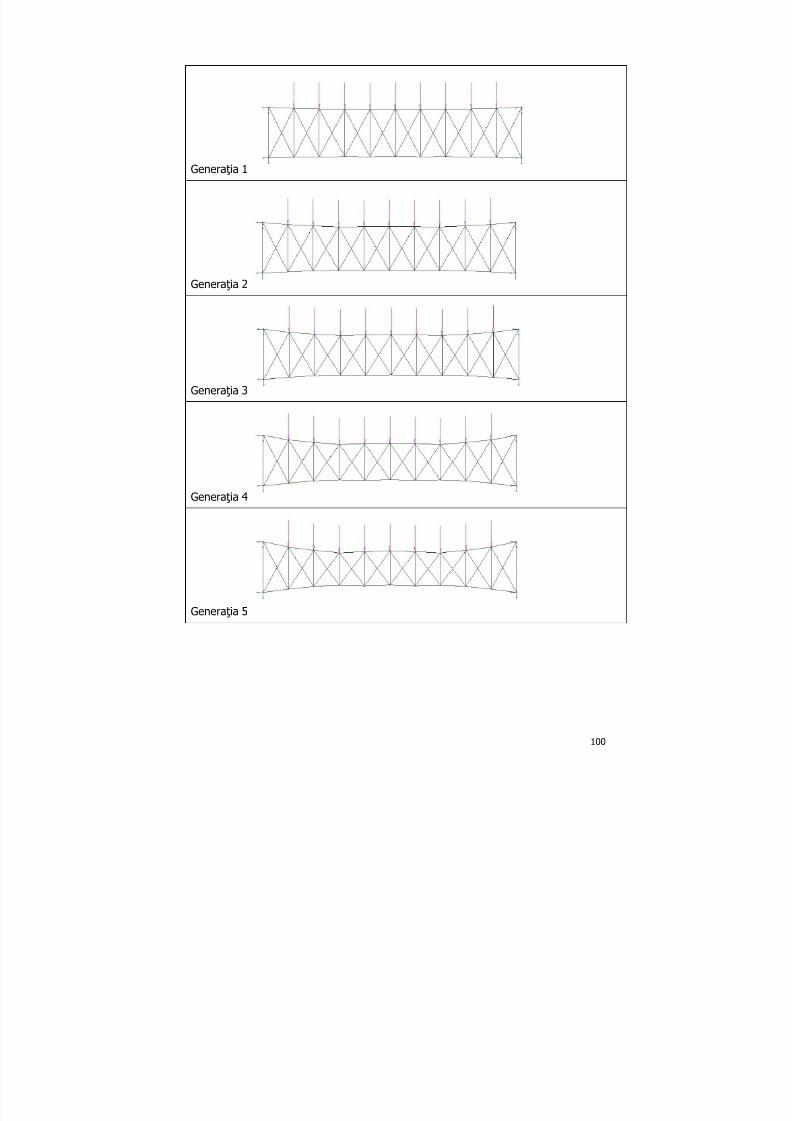
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 100/149
100
Generaia 1
Generaia 2
Generaia 3
Generaia 4
Generaia 5
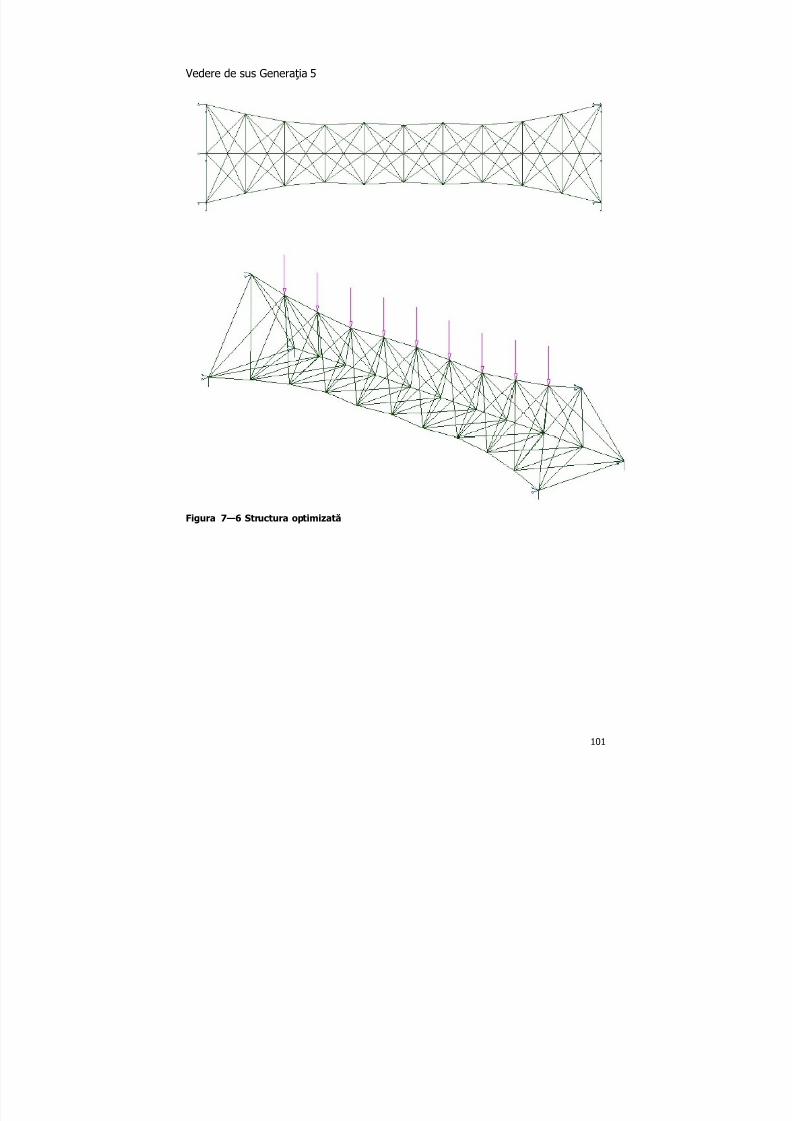
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 101/149
101
Vedere de sus Generaia 5
Figura 7—6 Structura optimizată
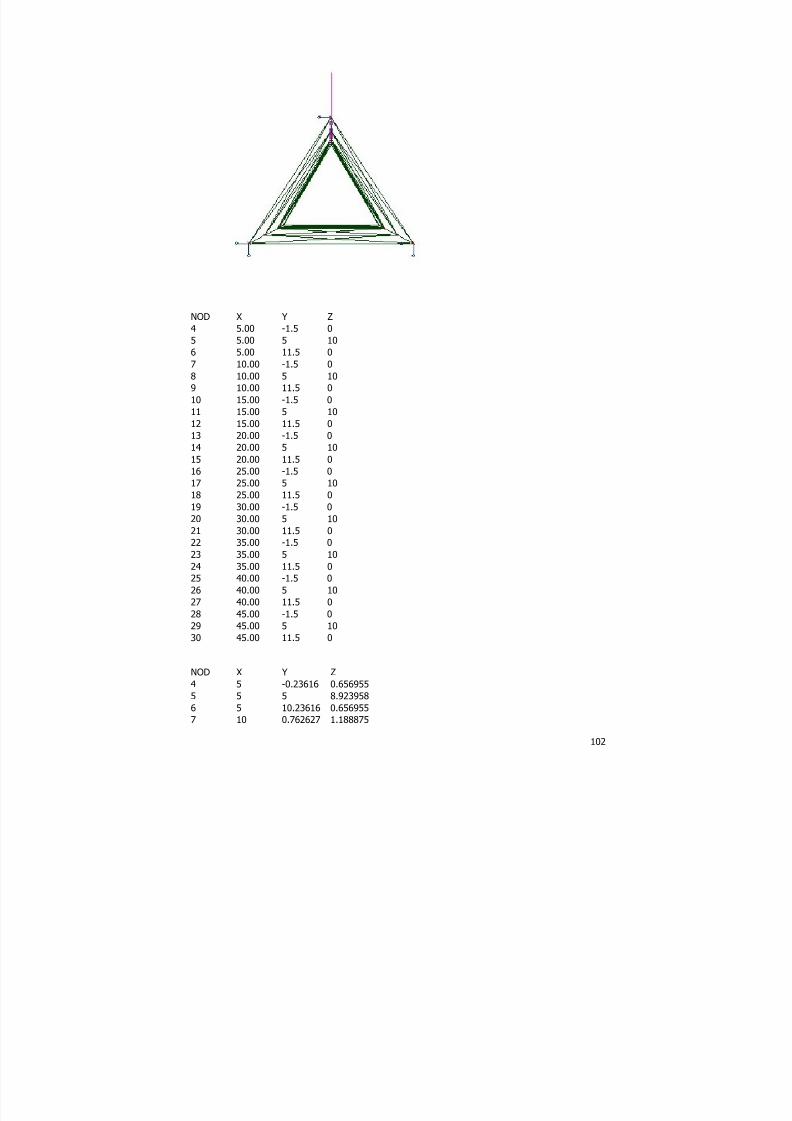
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 102/149
102
NOD X Y Z4 5.00 -1.5 05 5.00 5 106 5.00 11.5 07 10.00 -1.5 08 10.00 5 109 10.00 11.5 010 15.00 -1.5 011 15.00 5 1012 15.00 11.5 013 20.00 -1.5 014 20.00 5 1015 20.00 11.5 016 25.00 -1.5 017 25.00 5 1018 25.00 11.5 019 30.00 -1.5 020 30.00 5 1021 30.00 11.5 022 35.00 -1.5 023 35.00 5 1024 35.00 11.5 025 40.00 -1.5 026 40.00 5 10
27 40.00 11.5 028 45.00 -1.5 029 45.00 5 1030 45.00 11.5 0
NOD X Y Z4 5 -0.23616 0.6569555 5 5 8.9239586 5 10.23616 0.6569557 10 0.762627 1.188875
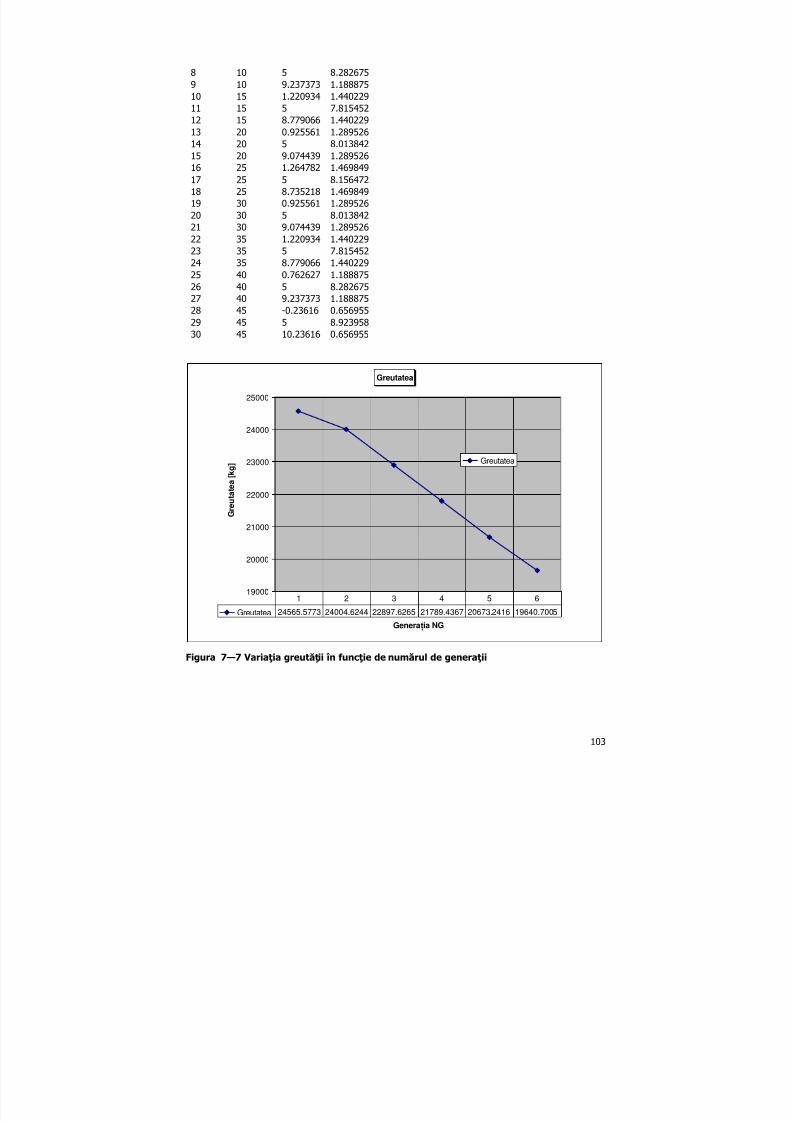
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 103/149
103
8 10 5 8.2826759 10 9.237373 1.18887510 15 1.220934 1.44022911 15 5 7.81545212 15 8.779066 1.44022913 20 0.925561 1.28952614 20 5 8.01384215 20 9.074439 1.28952616 25 1.264782 1.46984917 25 5 8.15647218 25 8.735218 1.46984919 30 0.925561 1.28952620 30 5 8.01384221 30 9.074439 1.28952622 35 1.220934 1.44022923 35 5 7.81545224 35 8.779066 1.44022925 40 0.762627 1.18887526 40 5 8.282675
27 40 9.237373 1.18887528 45 -0.23616 0.65695529 45 5 8.92395830 45 10.23616 0.656955
Greutatea
19000
20000
21000
22000
23000
24000
25000
Generaia NG
G r e u t a t e a [ k g ] Greutatea
Greutatea 24565.5773 24004.6244 22897.6265 21789.4367 20673.2416 19640.7005
1 2 3 4 5 6
Figura 7—7 Variaia greutăii în funcie de numărul de generaii

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 104/149
104
7.3 Structur ă spa ial ă din z ăbrele – studiul parametrilor de proces
În exemplul de mai jos am folosit pentru optimizarea unei structuri spaiale două seturide parametri iniiali.
În primul set am folosit un număr de generaii redus (10), dar un PAS mare. În setul 2am folosit un număr mare de generaii (100) şi PAS mic.
Se poate observa că rezultatele obinute în ambele cazuri sunt compatibile.
Setul 1:
Problem: Greutate_minimaGenerations: 10Swap size: 10% Search: 100% Step: 0% Mutants: 0
Variablenumber: 108Initial vector: { X1 ... X108 }
Setul 2:
Problem: Greutate_minimaGenerations: 100Swap size: 10% Search: 100
% Step: 0% Mutants: 0
Variablenumber: 108Initial vector: { X1 ... X108 }
Întrucât în cazul setului 2 după 50 de generaii nu au intervenit îmbunătăiri majore, îngraficul de mai jos am reprezentat pentru setul 2 numai primele 50 de generaii.
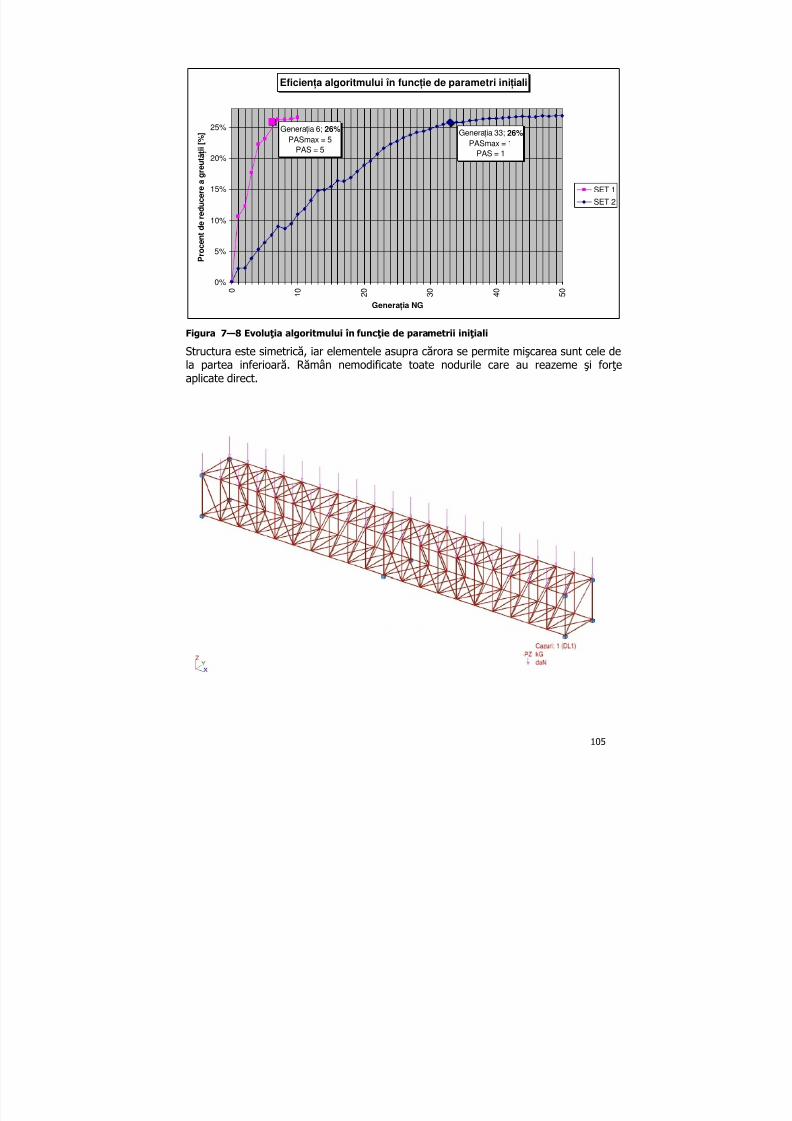
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 105/149
105
Eficiena algoritmului în funcie de parametri iniiali
Generaia 6; 26%
PASmax = 5
PAS = 5
Generaia 33; 26%
PASmax = 1
PAS = 1
0%
5%
10%
15%
20%
25%
0 1 0
2 0
3 0
4 0
5 0
Generaia NG
P r o c e n t d e r e d u c e r e a g r e u t ă i
i [ % ]
SET 1
SET 2
Figura 7—8 Evoluia algoritmului în funcie de parametrii iniiali
Structura este simetrică, iar elementele asupra cărora se permite mişcarea sunt cele dela partea inferioară. Rămân nemodificate toate nodurile care au reazeme şi foreaplicate direct.
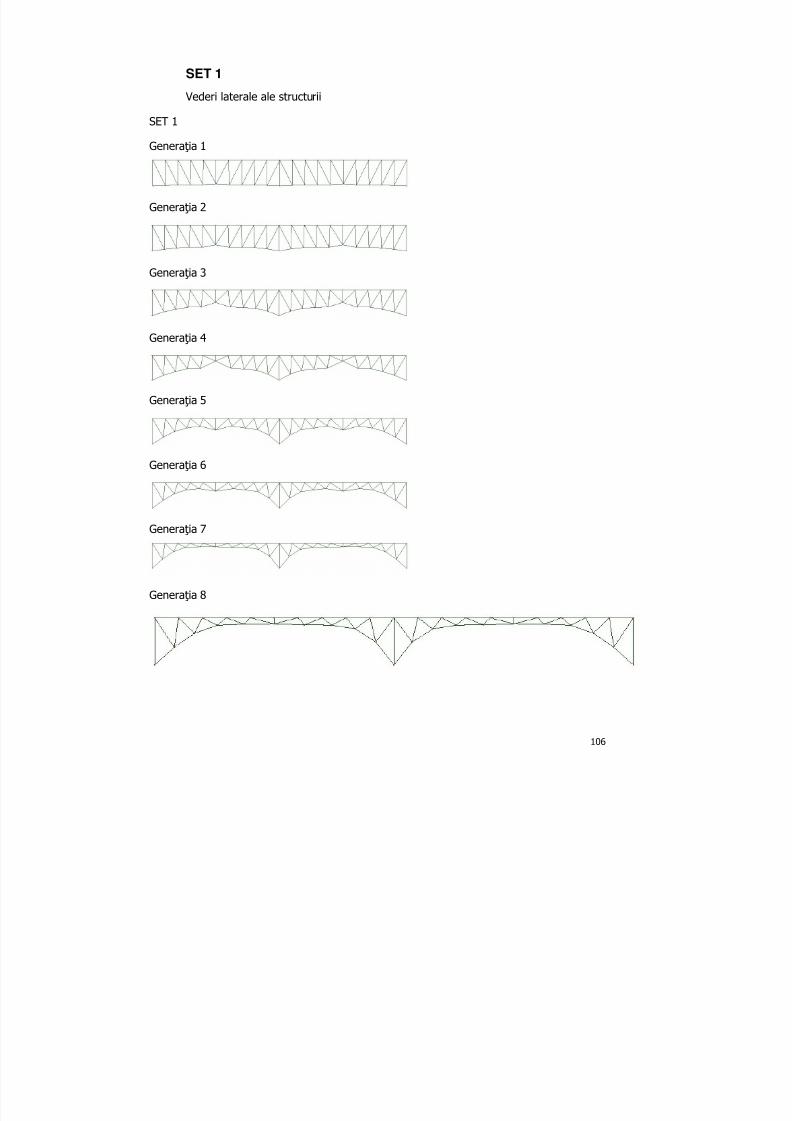
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 106/149
106
SET 1
Vederi laterale ale structurii
SET 1
Generaia 1
Generaia 2
Generaia 3
Generaia 4
Generaia 5
Generaia 6
Generaia 7
Generaia 8
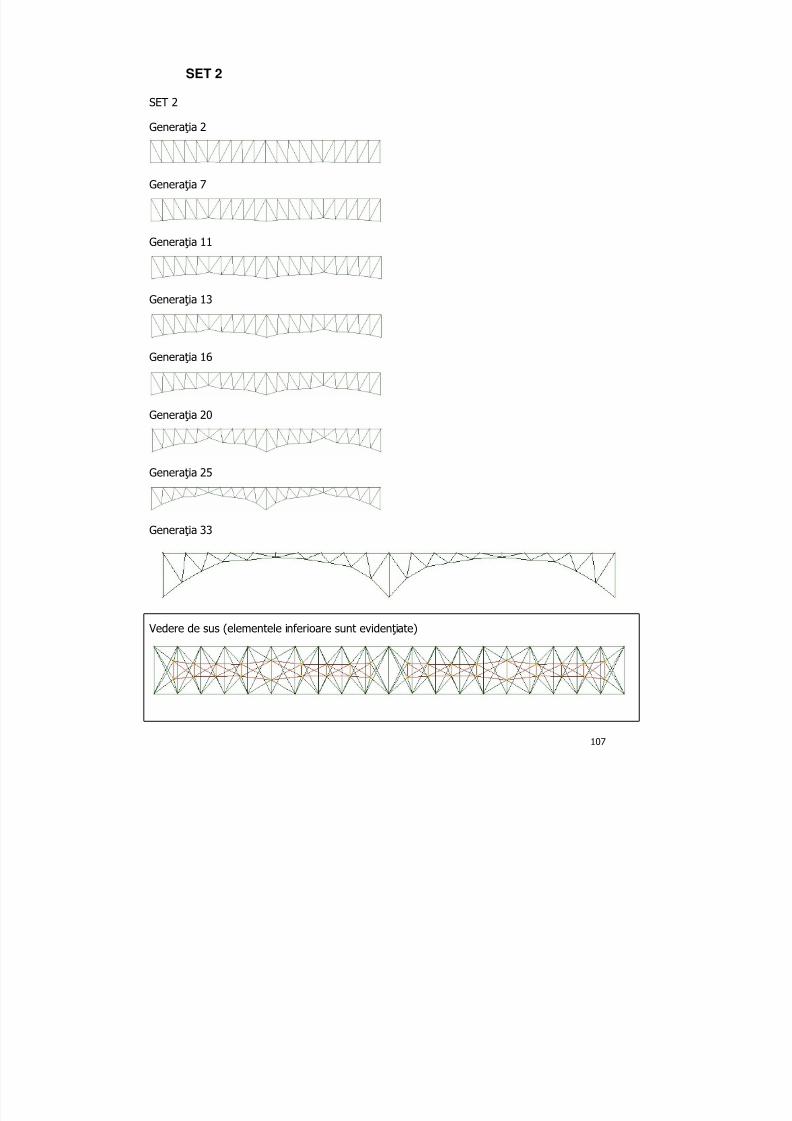
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 107/149
107
SET 2
SET 2
Generaia 2
Generaia 7
Generaia 11
Generaia 13
Generaia 16
Generaia 20
Generaia 25
Generaia 33
Vedere de sus (elementele inferioare sunt evideniate)

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 108/149
108
7.4 OPTIMIZAREA UNEI STRUCTURI CU FUNC IE EXPRIMAT Ă EXPLICIT
Pentru a arăta funcionalitatea algoritmului genetic în probleme de optimizare afunciilor cu restricii inegalităi am folosit următoarea funcie din [ 11 - Pag. 807],reprezentând calculul optim al unei grinzi cu zăbrele formată din trei bare:
Min 321 22 X X X ⋅++⋅ , referitor la:
0319.125.1
932.131
313221
32 ≥++
+−
X X X X X X
X X
0319.125.1
828.2634.01313221
31 ≥++
+− X X X X X X
X X
0319.125.1
25.01
313221
21 ≥++
−−
X X X X X X
X X
0319.125.1
25.01
313221
21 ≥++
−+
X X X X X X
X X
Rezultatele indicate în sursa citată sunt:F(x*)=2.732068
Cu:
x*X1 = 1.154701X2 = 0.422666X3 = 0.0
Stabilind ca obiectiv atingerea minimului funciei la valoarea 2.732068, am trasatgraficul de evoluie în Figura 7—9, unde 100% pe abscisă semnifică precizia maximăfaă de valoarea martor.
Valoarea funciei în punctul de optim găsită folosind algoritmul genetic este:
F(x*)=2.73383
x*X1 = 1.1555817X2 = 0.422666672X3 = 9.95093E-17

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 109/149
109
adică cu o eroare de 99.936% faă de valoarea martor.
În algoritmul genetic am folosit trei metode de alcătuire a populaiei: generarealeatoare de membri (RND), mutani (MUT) obinui prin transformarea membrilorselectai prin mutaii genetice şi membri obinui din părini care au suferit transformăriprin adăugarea unui gradient egal cu evoluia lor de la o generaie la alta (PAS).
Variaia optimizării funciei
0.000%
10.000%
20.000%
30.000%
40.000%
50.000%
60.000%
70.000%
80.000%
90.000%
100.000%
1 11 21 31 41 51 61 71 81 91 101 111 121 131 141 151 161 171 181 191 201
Număr generaii
P r e c i z i e s
o l u i e g ă s i t ă [ %
]
0.00%
5.00%
10.00%
15.00%
20.00%
25.00%
30.00%
RND
PAS
MUT
Figura 7—9 Evoluia funciei în funcie de numărul de generaii; incidena operatorilor
Din analiza graficului de mai jos putem face următoarele observaii:
Un rol important în atingerea obiectivului îl are iniializarea populaiei iniiale. În cazulde faă, iniializarea s-a făcut prin generare aleatoare de membri. Observăm că îngeneraia 1 s-a atins deja o precizie de aproximativ 15%, urmând ca în următoarelegeneraii consecutive să fie folosit tot acest operator pentru aproximativ 8 generaii.
Menionăm că algoritmul folosit are abilitatea de a selecta automat operatorul desucces.
În momentul în care RND nu mai poate aduce îmbunătăiri notabile asupra obiectivului,
programul trece automat la folosirea celorlali operatori.În primul rând, este folosit operatorul PAS care are rolul de a rafina căutarea în jurulsoluiei curente. În momentul în care se atinge precizia impusă, se renună la acestoperator în favoarea operatorului MUT.
Operatorul MUT are abilitatea de a căuta în profunzime în spaiul soluiilor. Se observăsalturile majore ale graficului în momentul folosirii acestui operator.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 110/149
110
Per global, distribuia numărului de apeluri la operatori arată că operatorul PAS a fostcel mai folosit, urmat fiind de MUT (vezi graficul din Figura 7—10).
Incidena operatorilor genetici în evoluia algoritmului
[%]
PAS 77%
MUT 21%
RND 2%RND
PAS
MUT
Figura 7—10 Incidena operatorilor genetici
Numărul relativ important de apeluri la operatorul PAS se justifică prin precizia foartemare impusă algoritmului (err<10-9).
În Figura 7—11 este ilustrată eficiena operatorilor în atingerea preciziei globaleimpuse. Procentul aferent operatorului RND (62.39%) include şi contribuia acestuia dinetapa de iniializare de aproximativ 30% precum şi poziionarea ulterioară pe direcia decăutare în generaiile imediat următoare (aprox. 15%).
Dacă ar fi să facem abstracie de operatorul RND (acesta este eficient numai în primaetapă, pe măsură ce se doreşte mărirea preciziei rezultatului final, acest operator numai este eficient), se observă că operatorul de mutaie este esenial în găsirea soluiei
finale.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 111/149
111
Contribuia operatorilor la evoluia algoritmului
[%]
62.39%
7.68%
29.85%
RND
PAS
MUT
Figura 7—11 Contribuia operatorilor la evoluia algoritmului
Descrierea algoritmului folosit
Primul bloc funcional este cel al iniializării populaiei. Acesta este parcurs o singurădată. Numărul de cicluri efectuate în interiorul acestui modul depinde de calitateamembrilor găsii. Se insistă până sunt validai toi membrii populaiei.
În modulul de evaluare a funciei este calculat fitness-ul fiecărui membru şi estememorat în structura acestuia. Din întreaga populaie este apoi selectat un numărvariabil de membri, după un criteriu elitist. Adică toi membri sunt sortai în funcie defitness şi sunt selectai numai cei mai buni.
Condiia de oprire poate conine fie o condiie asupra numărului de generaii cerut fieun criteriu de precizie a soluiei.
Blocul în care se aplică operatorii genetici este parcurs secvenial: fiecare operator esteaplicat în ordine, asupra câte unui eşantion al populaiei.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 112/149
112
noyes
Generare aleatoarea vectorului de test
Verificarea restriciilor
Evaluare funcie
Memorarea celui mai bun vector anterior
best_old_vector = best_vector
Selecia celui mai bun
vector de test gasit
best_vector = test_vector
Gen < genMax STOP
Verificarea restriciilor Verificarea restriciilor
Generare STEPa vectorului de test
Generare MUTANIai vectorului de test
Verificarea restriciilor
Evaluare funcie
Selecia celui mai bunvector de test gasit
best_vector = test_vector
Memorarea celui mai bun vectoranterior
best_old_vector = best_vector
Generare aleatoarea vectorului de test
Evaluare funcie
Selecia celui mai bunvector de test gasit
best_vector = test_vector
Memorarea celui mai bun vectoranterior
best_old_vector = best_vector
Evaluare funcie
Selecia celui mai bunvector de test gasit
best_vector = test_vector
Memorarea celui mai bun vectoranterior
best_old_vector = best_vector
ALGORITM DE
MINIMIZARE
/MAXIMIZARE A
UNEI FUNC II
CU SAU F Ă R Ă RESTRIC II
Figura 7—12 Schema logică a algoritmului genetic folosit în optimizarea funciilor
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 113/149
113
8. CONCLUZII
8.1 CONCLUZII GENERALE
Sistemele integrate de calcul reprezintă ultima generaie de programe de calcul. Apariiaşi dezvoltarea conceptului de program integrat a adus beneficii importante în toatedomeniile unde acesta a fost implementat. În particular, pentru domeniul inginerieistructurale, concepia programelor de calcul integrate înseamnă abordareamultidisciplinară a programării şi proiectării structurale.
Deşi programele de calcul integrate sunt relativ nou apărute şi nu au fost încă explorate
toate posibilităile lor, este deja elaborată o nouă generaie de programe: programeleinteligente integrate. Din această perspectivă, teza de faă este de mare actualitate. Îndezvoltarea şi implementarea unor sisteme integrate inteligente pentru ingineriastructurală, pe lângă problemele deosebite legate de tehnologia informaiei, deinteligenă artificială şi nu numai, au trebuit depăşite şi dificultăile legate de modelareaproblemelor specifice de rezistenă.
Teza elaborată contribuie la dezvoltarea sistemelor integrate de calcul prindezvoltarea unui nou sistem de proiectare integrat, inteligent, aplicat pentrudomeniul optimizării structurale, în special a optimizării geometrice astructurilor.
Arhitectura sistemului original realizat este concepută având la bază un modul(program) de calcul structural bazat pe metoda elementului finit. Un alt modul deprocesare folosit este un motor genetic inteligent (bazat pe algoritmi genetici). Pentru aasigura conlucrarea celor două module, care în varianta cea mai generală nu sunt doarmodule, ci sunt chiar sisteme complexe de programe, am sistematizat o serie de noiunispecifice de integrare a programelor. Arhitectura creată se bazează pe caracteristicileintrinseci ale fiecărei componente în parte, integrate pentru a funciona ca un tot unitar.
Metoda elementului finit permite calculul oricăror tipuri de structuri, supuse la cele maidiverse solicitări. Din formularea matematică a tipurilor de calcul ce pot fi efectuate seobservă că atât datele necesare efectuării calculului, cât şi rezultatele obinute pot fiapoi refolosite în cadrul modulelor de procesare inteligente. Modulele de procesare ce
utilizează metoda elementului finit pot fi folosite ca module generale de calcul pentrucele mai diverse aplicaii: optimizare, structurarea cunoştinelor etc. Prezentând sinteticdatele de intrare şi datele de ieşire (rezultatele), am pus în evidenă posibilitatea folosiriiulterioare a acestora în aplicaiile inteligente.
Metodele computaionale inteligente pot fi folosite alături de metodele clasice de calculşi analiză în inginerie. Tehnicile computaionale inteligente folosite în ingineriastructurală sunt din cele mai diverse: reele neuronale artificiale (Artificial NeuralNetworks - ANN). Programarea genetică (Genetic Programming - GP), Algoritmiigenetici (Genetic Algorithms - GAs), sisteme expert şi altele. În prezentarea stadiului

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 114/149
114
cunoaşterii am prezentat o gamă diversă de aplicaii ale acestora în inginerie. Asupranecesităii folosirii sistemelor expert am prezentat în [ 53 ] detalii privind sistemeleexpert pentru proiectarea plăcilor plane şi curbe din beton armat, subiecte care nu aumai fost tratate în această teză.
Dintre tehnicile computaionale inteligente, în teza de faă am folosit cu precădere
programarea genetică (GP) şi Algoritmii genetici (GAs). (Întrucât teza de faă seadresează domeniului ingineriei structurale şi nu tehnologiei informatice, facemurmătoarele precizări: Programarea genetică nu trebuie confundată cu activitatea deprogramare - activitate de redactare a programelor de calculator. Programarea geneticăeste o tehnică computaională inteligentă distinctă. Similar, algoritmii genetici fac partedintr-o altă categorie de tehnici computaionale inteligente şi nu se referă la algoritmi,ca proceduri de calcul).
Astfel, o primă aplicaie realizată folosind metodelor inteligente este regresia simbolicăutilizând GP. Implementarea unui program de regresie pentru prelucrarea datelorexperimentale cu ajutorul programării genetice a făcut şi obiectul studiului nostru şi amdovedit flexibilitatea şi simplitatea acestei metode. Programarea genetică permite
găsirea automată a unei metode sau conceperea automată a unui program, capabile sărezolve clase de probleme precizate a priori. Din analiza parametrilor de proces s-adesprins eficiena metodei pentru găsirea automată a unei formule capabile săreproducă un set de date experimentale. Datele iniiale au fost indicate de cătreutilizator; formula de calcul găsită foloseşte setul de operatori de calcul selectai iniialde utilizator.
Programul original elaborat şi prezentat are abilitatea de a alege automat parametriioptimi de proces, în vederea accelerării găsirii soluiei problemei. Formula finală decalcul găsită este implementată automat de către programul genetic într-un programautonom. Sursa acestui program poate fi compilată direct. Rulând executabilul rezultat,obinem rezolvarea problemei iniiale. În cazul de faă, programul original implementat
generează sursele de programe în limbajul C++. În aceeaşi măsură, pot fi realizateimplementări care să furnizeze programe în alte limbaje, după dorina utilizatorului.
Spre deosebire de programele genetice , care au abilitatea de a produce ele înseleprograme noi de calcul pentru clase de probleme generice, algoritmii genetici permitgăsirea unor soluii particulare pentru probleme formulate iniial. Ambele metode,algoritmii şi programele genetice, sunt foarte performante, întrucât permit abordareaunor probleme din cele mai diverse folosind o structură foarte simplă de calcul. Înstructura acestora nu este necesară formularea precisă a problemei de rezolvat, acesteaavând abilitatea de a găsi singure forma de rezolvare a problemei. Pentru a putea folosialgoritmii genetici în practică, am publicat în [ 99 ] diverse metode de codificare aproblemelor de inginerie structurală.
În teza de faă studiul metodelor de codificare a fost extins, prezentându-se într-omanieră intuitivă mai multe tehnici. Alegerea unei metode de codificare în detrimentulalteia se reflectă în definirea spaiului de căutare a soluiilor şi în modul în care acestava fi explorat. Trebuie subliniat că algoritmii genetici sunt, în esenă, metode de căutarealeatoare dirijată.
Există desigur mai multe forme de implementare a programelor genetice . În acest sens,programul genetic implementat este o variantă originală, nestandard: programul areabilitatea de a alege automat, în timp real, parametrii de proces optimi pentru

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 115/149
115
convergena rapidă a programului. Această variantă de implementare a fost elaboratădupă numeroase studii comparative de arhitecturi pentru găsirea celei mai rapidemetode. Studiile la care facem referire nu sunt incluse în prezenta teză. Structuraprogramului implementat tinde spre cea a unui program evolutiv . Operatorii geneticifolosii sunt de generare aleatoare, mutaie şi încrucişare.
Algoritmul genetic folosit a fost implementat în forma standard. Întrucât căutarea esteputernic influenată prin parametrii generali de proces, în varianta implementată nu amdezvoltat alte tehnici suplimentare de îmbunătăire a comportării algoritmului. Acestlucru este inclus însă în direciile viitoare de cercetare.
Punând în balană cele două clase de metode, metoda elementului finit şi algoritmiigenetici (deşi aici putem să ne referim în aceeaşi măsură şi asupra programelorgenetice), am relevat esena acestora, ca exponente ale paradigmei numerice, respectivparadigmei simbolice. Algoritmul original propus integrează din acest punct de vederecele două paradigme menionate: numerică şi simbolică. În rezolvarea unei probleme,orice contribuie cu o pondere mai însemnată a uneia dintre metode se face prindiminuarea cu aceeaşi măsură a ponderii celeilalte metode.
Analiza din punct de vedere teoretic a sistemelor integrate relevă aspectele eseniale alesistemelor ce au atributul de sisteme integrate: date comune, module componente,interfee de acces între modulele componente şi mecanisme operaionale. Totodată, dindefiniia formulată, rezultă necesitatea conlucrării în armonie a tuturor modulelor, învederea rezolvării unei probleme comune, complexe. În stadiul de reprezentare adatelor, tehnologia XML reprezintă o tehnologie de viitor, pe care majoritateaintegratorilor de sisteme vor fi nevoii să o folosească, pentru a asigura comunicareadintre module cu funciuni diverse. Spre deosebire de formatul HTML, cu a căruistructură seamănă, şi care permite numai reprezentarea datelor într-un format anume,tehnologia XML permite structurarea datelor, indiferent de formatul lor.
Un alt element important adus de sistemele integrate este reversibilitatea datelor deintrare cu rezultatele . Pe lângă necesitatea asigurării schimbului fluent de date întremodulele componente (ceea ce implică pregătire datelor), o altă componentă esenialăa sistemelor integrate sunt tehnologiile aferente schimbului de date între aplicaiilecomponente sau între interfeele acestora. De cele mai multe ori acestea sunt tributaremediului de lucru, aspecte care in însă de domeniul tehnologiei informaiei. Pentruinginerul de inginerie civilă, asimilarea acestor tehnologii este absolut necesară pentruimplementarea unui sistem integrat. Prezentarea sistematică a sistemelor integrate seconstituie într-un ghid de implementare pentru sisteme din domeniul inginerieistructurale.
Următorul stadiu de evoluie al sistemelor integrate este reprezentat de sistemele
integrate inteligente. În arhitectura sistemului integrat inteligent original propus suntintegrate modulele unui program de element finit şi module inteligente : reeleneuronale artificiale, programe genetice şi algoritmi genetici. Tehnologiile prezentateschematic în arhitectura sistemului integrat inteligent amintit mai sus suntparticularizate în realizarea unui program de optimizare original utilizând algoritmigenetici şi metoda elementului finit.
O aplicaie de mare interes în inginerie în general, şi în proiectarea structurilor înspecial, este optimizarea structurilor. Atât în ară, cât şi în străinătate, cercetările dindomeniul optimizării progresează rapid. Una dintre cele mai moderne tehnici de

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 116/149
116
optimizare este aceea bazată pe algoritmi genetici. În acest context, o primă aplicaiede mare actualitate realizată cu sistemul integrat original propus, este optimizareageometrică a structurilor. Pentru fundamentarea algoritmului sistemului integratinteligent şi pentru validarea programului original realizat pe baza acestui algoritm ne-am folosit de informaiile legate de programarea matematică şi de optimizare îngeneral.
Programarea matematică oferă un aparat matematic robust pentru cele mai diverseprobleme de optimizare. Metodele programării matematice pot fi împărite în două marigrupe: metode derivative şi metode nederivative. Metodele derivative presupun calcululunor mărimi (Jacobianul, Hessianul etc.) ce ajută la studiul existenei minimului saumaximului, precum şi la studiul avansat al formei şi comportării funciei. Metodelenederivative sunt în general metode de căutare a extremului urmărind forma funciei.
O altă abordare de difereniere a metodelor de optimizare este din prisma formeifunciei obiectiv. Acestea pot fi cu funcie obiectiv exprimată implicit sau explicit. Înstudiile de caz prezentate am abordat atât probleme cu funcie formulată implicit, cât şiprobleme cu funcie formulată explicit, folosind întotdeauna o metodă de optimizare
nederivativă.Întrucât în prezenta lucrare ne-am propus să implementăm un sistem de calcul şioptimizare, am optat pentru o metodă de optimizare nederivativă. Acest lucru a fostdeterminat de faptul că în arhitectura sistemului integrat propus am prevăzut programulde element finit ca un nucleu de sine stătător. A calcula mărimile cerute de metodelederivative ar însemna să consumăm cicluri de calcul costisitoare la fiecare ciclu deiterare şi, în plus, ar trebui să intervenim în structura programului de element finit.
Revenind asupra metodei elementelor finite, precizăm că mărimile de calcul (datele, darşi rezultatele) vor fi folosite de modulul de optimizare în calitate de restricii sau valoriale funcie obiectiv.
Particularizând problemele de optimizare pentru optimizarea structurilor, am prezentatformularea matematică a problemelor de optim pentru structuri din bare şi din SHELL, în cazul în care obiectivul este minimizarea greutăii. În cadrul acestor metode am pus în evidenă modul în care este alcătuit vectorul cu variabilele de proiectare. Acestapoate conine date şi rezultate provenite din programul de element finit, datesuplimentare oferite de utilizator şi date calculate local. Un aspect important rezolvat cuajutorul sistemului propus este formularea automată a funciei obiectiv.
După cum am precizat anterior, există două situaii: funcii explicite şi implicite. În cazul în care funcia obiectiv nu este exprimată explicit, sistemul are abilitatea de a prelua,transforma şi transmite toate datele într-o manieră coerentă, accesibilă tuturormodulelor componente. Practic, întreg managementul proceselor este asigurat de
controlul general al programului. Utilizatorul nu trebuie să definească forma matematicăa funciei obiectiv, ci numai tipul de problemă. Spre exemplu, un tip de problemăimplementat este „Greutate minimă”. Pentru acest tip de problemă, programulconstituie automat vectorul variabilelor şi forma matematică a restriciilor, funciaobiectiv fiind reconstituită prin interogarea programului de element finit şi a moduleloralgoritmului genetic.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 117/149
117
În cazul unor probleme cu funcie exprimată explicit, întrucât nu a trebuit să facem apella programul de element finit, formularea matematică a problemei fiind completă, amalocat modulului inteligent o pondere mai însemnată în rezolvarea problemei.
Sistemul integrat original de optimizare propus are următoarele caracteristici generale:lucrează integrat, foloseşte metoda elementului pentru calculul structurilor şi algoritmi
genetici pentru găsirea optimului. Raportându-ne la ciclurile de calcul menionate maisus, precizăm că sistemul rulează două cicluri de calcul: un ciclu de calcul extern, ceface apel la programul de element finit, şi un ciclu de calcul intern, ce este folosit dealgoritmul genetic. În special pentru structuri cu dimensiuni mari, pentru care numărulde variabile de proiectare este foarte mare, ciclurile externe de calcul sunt extrem decostisitoare din punct de vedere al timpului de calcul şi al resurselor hardwaremobilizate. Din acest motiv, reducerea numărului acestor cicluri este o cerină esenialăce trebuie respectată. Pe de altă parte, utilizarea metodei algoritmilor genetici (metodădedicată pentru probleme generale de căutare) pentru găsirea optimului implicăfolosirea unui număr mare de iteraii. Iteraiile interne, bazate pe algoritmi genetici,trebuie să fie cât mai „ieftine”, adică: resursele necesare să fie minime şi timpii deiterare scuri. Aceste cerine, sunt respectate întru-totul de algoritmul original pe bazacăruia s-a implementat programul. Considerăm că ponderea numeric vs. simbolic amodulelor, adică element finit vs. algoritm genetic, în rezolvarea problemei este „egală” sau, mai precis, optimă .
Ciclurile principale, cele bazate pe programul de element finit, efectuează calculul întregii structuri, oferind apoi rezultatele ciclurilor secundare.
Ciclurile secundare, cele guvernate de algoritmul genetic, generează la fiecare iteraie,câte un set de structuri (NP structuri). Acestea, nu se recalculează la fiecare iteraie. Aici am emis ipoteza că între două cicluri externe de calcul căutarea unui optim se facefără a altera fundamental structura. Deci, structurile intermediare vor fi similare structurii iniiale, iar algoritmul genetic va putea alege, cu o eroare predictibilă,
structura optimă, din punct de vedere al criteriului de optim ales. O dată aleasă ostructură candidată la optim, acesta este transmisă programului de element finit şi, înipoteza optimistă în care acesta nu violează restriciile şi obiectivul, va intra într-un nouciclu de calcul. Desigur, în varianta pesimistă, în care cel puin una din condiii esteviolată, o altă structură va fi verificată şi va deveni candidat la optim.
Întreg procesul de optimizare este guvernat de o serie de parametri pe care utilizatorul îi specifică iniial. Parametrii iniiali sunt: obiectivul, restriciile şi parametrii specificimodului algoritmului genetic. Din studiul parametrilor iniiali am putut observa căalgoritmul are abilitatea de a găsi un optim, dacă structura este corect conformată dinpunct de vedere structural. Totodată, restriciile impuse trebuie să permită existenaunui spaiu de căutare adecvat, în care este probabilă existena cel puin a unui extrem.
Pentru a fundamenta modul de alegere a parametrilor de proces, a fost efectuat unstudiu din care se desprinde ideea că alegerea adecvată a acestora poate reduceconsiderabil timpul de calcul. Totodată, în toate cazurile studiate, după un număr limitatde cicluri de calcul se remarcă apariia unui palier constant de evoluie a optimului. Acesta semnifică robusteea şi fiabilitatea algoritmului pentru situaii diverse de lucru.
Datorită tehnologiei integrate folosite, modul de lucru al programului este simplu:pornind de la o structură calculată, utilizatorul precizează obiectivul sau tipul deproblemă, restriciile şi parametrii de proces. O dată pornit sistemul de optimizare,

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 118/149
118
acesta va găsi un extrem, în funcie de parametrii precizai, rezultatele fiind prezentate într-o interfaă grafică.
Studiile de caz efectuate au fost validate prin raportare la date martor prezentate înliteratura străină şi naională de specialitate.
Astfel, pentru studiul optimului unei structuri plane din bare solicitată la aciuni statice,
s-a utilizat un exemplu optimizat cu sistemul GENESIS, prezentat în [ 230 ]. Comparândrezultatele obinute, s-a constatat compatibilitatea lor. Facem meniunea că GENESISeste un sistem de ultimă generaie ce foloseşte programarea matematică derivativă.
Pentru structuri spaiale din bare am dovedit că sistemul propus poate găsi un optim într-un număr redus de iteraii. În optimizarea structurilor spaiale am efectuat şi unstudiu comparativ al optimului pentru parametri de lucru iniiali diferii. Deşi numărul decicluri de calcul diferă pentru fiecare set de parametri, rezultatul final este acelaşi.Precizăm că aceste studii au fost efectuate pentru situaia în care au fost modificatenumai nodurile libere ale structurii.
O altă aplicaie prezentată este optimizarea unei structuri spaiale în cazul modificării şi
a nodurilor în care sunt aplicate forele. Acest studiu de caz a fost efectuat pentru astudia optimul în cazul în care condiiile iniiale variază puternic de la un ciclul de calculextern la altul, caz în care ipoteza iniială asumată ar putea fi violată. Acest lucru se întâmplă în cazul în care însuşi punctul de aplicare al forelor este schimbat la fiecareiteraie externă. Şi în acest caz optimul a fost găsit fără dificultate.
Dacă studiile de caz menionate mai sus s-au referit la optimizarea unor structuri cufuncie obiectiv exprimată implicit, într-un alt studiu de caz, am optimizat o structură dinbare cu funcie exprimată implicit. Aceasta a fost selecionată din [ 11 ] şi rezultateleobinute au arătat eficiena algoritmului genetic şi pentru astfel de situaii.
În arhitectura sistemului original propus am evitat recalcularea structurii în ciclurileinterne de calcul. Într-o primă fază a studiului nostru, am încercat găsirea unei metodesimplificate de calcul, pentru a o putea folosi în cadrul ciclurilor interne. Aplicareaformulei Sherman-Morrison-Woodbury pentru calculul deplasărilor unei structuri,folosind rezultatele obinute dintr-un calcul anterior atunci când dorim recalculareastructurii s-a dovedit a fi o bună posibilitate. Formula găsită permite preluarearezultatelor (deplasări) unei structuri iniiale căreia i se aplică o perturbare geometrică.Deplasările noii structuri sunt calculate folosind deplasările structurii iniiale. Totuşi, însistemul implementat, nu am folosit această formulă. Am evitat calculul redundant alstructurii prin arhitectura ingenioasă a sistemului, aşa cum a fost ea prezentată.Formula găsită considerăm că are valoare teoretică, motiv pentru care am prezentat-o în lucrarea de faă.
8.2 Elementele de noutate
Elementele de noutate rezultate din cercetările efectuate sunt rezumate mai jos:
- sinteza noiunilor legate de metoda elementului finit şi sistematizareacorespunzătoare a acestora pentru a putea fi integrate într-un sistem mai larg;
- precizarea rolului pe care îl are inteligena artificială în dezvoltarea sistemelorintegrate;

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 119/149
119
- fundamentarea conceptelor legate de sistemele integrate, arhitectura lor,posibilităi de implementare, tehnologii conexe;
- formularea unei definiii a sistemelor integrate de proiectare structurală;
- prezentarea conceptuală a integrării paradigmei numerice şi paradigmeisimbolice în probleme de optimizare;
- prezentarea explicită a posibilităilor de codificare a problemelor de ingineriestructurală pentru rezolvarea acestora cu algoritmi genetici;
- detalierea modului de lucru al algoritmilor genetici în programe de optimizarestructurală (formulare, module componente);
- dezvoltarea unei arhitecturi pentru un sistem complet integrat (cu module deelement finit, reele neuronale artificiale, programare genetică şi algoritmigenetici);
- prezentarea sintetică a metodelor de optimizare matematică şi modul lor deaplicare în optimizarea structurală;
- concepia unui algoritm de optimizare cu element finit şi algoritmi genetici şiimplementarea acestuia într-un sistem integrat funcional;
- validarea programului elaborat prin prezentarea unor studii de caz concludente;
- fundamentarea mărimilor şi parametrilor folosii în procesul de optimizare(evaluarea incidenei şi contribuiei parametrilor şi operatorilor folosii);
- elaborarea unui algoritm pentru rezolvarea problemelor de optimizare cu funciiexprimate explicit, cu restricii inegalităi sau fără restricii şi implementareaacestuia într-un program funcional;
- elaborarea unui program de regresie numerică utilizând programarea geneticăpentru prelucrarea datelor experimentale. S-a efectuat şi rafinarea acestuia,oferindu-i atributul de program evolutiv;
- aplicarea formulei Sherman-Morrison-Woodbury pentru a deduce o formulă derecalculare a deplasărilor unei structuri.
8.3 Direc ii viitoare de cercetare
Eforturile viitoare de cercetare vor fi îndreptate în primul rând spre dezvoltareaprogramului de optimizare, pentru a putea fi aplicat şi pentru alte tipuri de structuri: cuelemente de tip SHELL şi SOLID.
Rafinarea procesului de căutare, pentru reducerea timpului de operare al programuluicu algoritm genetic, şi implicit pentru reducerea timpului de lucru pentru întregprogramul de optimizare, este o altă direcie de cercetare.
Studiul programului de optimizare trebuie extins asupra unui număr cât mai divers detipuri de probleme. Prezena în sistem a algoritmului genetic induce un caracterimprevizibil, în anumite limite, a comportării acestuia. Din acest motiv, este esenialăvalidarea lui pentru cele mai diverse situaii concrete de proiectare.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 120/149
120
Dezvoltarea sistemului de calcul integrat în ideea integrării şi a modulelor reelelorneuronale, a programului genetic, a tehnicilor FUZZY, alături de algoritmul geneticintegrat deja este un obiectiv de perspectivă pe care l-am asumat, sistemul integratinteligent actual fiind, din acest punct de vedere, numai o componentă.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 121/149
121
BIBLIOGRAFIE
[ 1 ] Abraham; Ajith; Intelligent Systems: Architectures and Perspectives; Facultyof Information Technology; Monash University; Australia.;
[ 2 ] Agati, Pierre; Lerouge, Frederic; Rossetto, Marc; Resistance des materiaux –Cours et exercices corriges; Dunod; Paris;1999;
[ 3 ] Agent, Radu; Postelnicu, Tudor; Calculul structurilor cu diafragme din betonarmat – II; Editura Tehnică; Bucureşti;1983;
[ 4 ] Aizenberg, Ia. M.; Construcii cu structura autoadaptabilă la solicităriseismice; Editura Tehnică; Bucureşti;1982;
[ 5 ] Alber, Rolf; Rudolph, Stephan; On a grammar – based design language thatsupports automated design generation and creativity; University of Stuttgart;Germany. (articol);
[ 6 ] Akinori, Tani; Research of Intelligent Fuzzy Optimal Active and Hybrid ControlSystems of Building Structures – Verification of Optimization Method onSwitching Rules of Control Forces; Kobe University Japan;
[ 7 ] Alber, Rolf; Rudolph, Stephan; An Evolutionary Approach to the InverseProblem in Rule-Based Design Representations; University of Stuttgart;Germany. (articol);
[ 8 ] Alexandru, Adriana; Sisteme expert – Concepte şi aplicaii; Editura MatrixRom; Bucureşti;2002;
[ 9 ] Alvarez, L. F.; Design Optimization Based on Genetic Programming; University
of Bradford; UK;2000;[ 10 ] Andone, Ioan; Sisteme inteligente hibride – Teorie. Studii de caz pentru
aplicaii economice. Ghidul dezvoltatorului; Editura Economică;Bucureşti;2002;
[ 11 ] Andrei, Neculai; Programarea matematică avansată – Teorie. Metodecomputaionale. Aplicaii; Editura Tehnică; Bucureşti;1999;
[ 12 ] Andrei, Neculai; Modele, probleme de test şi aplicaii de programarematematică; Editura Tehnică; Bucureşti;2003;
[ 13 ] Andrei, Neculai; Sisteme şi pachete de programe pentru programareamatematică; Editura Tehnică; Bucureşti;2002;
[ 14 ] Andrei, Neculai; Optimizare fără restricii. Metode de direcii conjugate;
Editura Matrix Rom; Bucureşti;2000;[ 15 ] Anton, I.; Resiga, R.; Sofonea, V.; Bernard, S.; Muntean, S.; Proceedings of the
workshop on Numerical Methods in Fluid Mechanics and Fluent Applications;Editura Orizonturi Universitare; Timişoara;2003
[ 16 ] Armaş, Ioan; Calitatea şi fiabilitatea sistemalor mecatronice. Metode deanaliză şi sinteză; Editura Victor; Bucureşti;2004;
[ 17 ] Asayama, Shuichi; Mae, Toshifumi; Fractal Truss Structure and AutomaticForm Generation Using Iterated Function System; Tokio Denki University,Japan;

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 122/149
122
[ 18 ] Axinte, Elena; Bazele proiectării elementelor şi structurilor din oel dupăEurocod; Editura Societăii Academice „Matei-Teiu Botez”; Iaşi;2003;
[ 19 ] Baitsch, Matthias; Object Oriented Finite Element Analysis for StructuralOptimization using p-Elements; University of Bochum;
[ 20 ] Balcu, Mircea; Probleme actuale în mecanica solidului deformabil cu aplicaii în construcii; Editura Matrix Rom; Bucureşti;2003;
[ 21 ] Barr, Avron; Feigenbaum, Edward; The Handbook of Artificial Intelligence –volume 1-2; USA;1981;
[ 22 ] Bathe, K,J; Finite Element Procedures; Prentice Hall, USA, 1996
[ 23 ] Băjenescu, Titu; Performanele inteligenei artificiale – de la teorie la aplicaii;Editura Albastră; Cluj-Napoca;2002;
[ 24 ] Becker, A.A.; Introduction to Non-Linear Finite Element Analysis; NottinghamUniversity;
[ 25 ] Berbente, Corneliu; Mitran, Sorin; Zancu, Silviu; Metode numerice; EdituraTehnică; Bucureşti;1998;
[ 26 ] Bernstein, S.; Richter, M.; The Use of Genetic Algorithms in Finite Element
Model Identification; Bachaus-Universitat Weimar; Germany;[ 27 ] Beu, Titus Adrian; Calcul numeric în C; Editura Albastră; Cluj-Napoca;1999;
[ 28 ] Binda, L.; Anzani, A.; Structural Behaviour and Durability of Stone Masonry;Politecnico di Milano; Italy. (articol);
[ 29 ] Binder, Thomas Hougardy, Peter; Optimization of Castings and Forgings at AUDI AG;
[ 30 ] Bistriceanu, Eleodor; Stănşilă, Octavian; Matematică şi realitate; EdituraMatrix Rom; Bucureşti;1996;
[ 31 ] Boldureanu, Ioan Petru; Basic Elements of Soil Mechanics; Editura OrizonturiUniversitare; Timişoara;1999;
[ 32 ] Brâncovean, Lucian; Reele neuronale cu propagarea înapoi a erorii. (articol);
[ 33 ] Cadar, Ioan; Clipii, Tudor; Tudor, Agneta; Beton armat; Editura OrizonturiUniversitare; Timişoara;1999;
[ 34 ] Caluianu, Sorin; Inteligenă artificială în instalaii – Logica fuzzy şi teoriaposibilităilor; Editura Matrix Rom; Bucureşti;2000;
[ 35 ] Căpăână, Dan; Calculatorul în ajutorul proiectării construciilor; EdituraTehnică; Bucureşti.;
[ 36 ] Chiorescu, Gheorghe; Introducere matematică în optimizare şi control; EdituraMatrix Rom; Bucureşti;2001;
[ 37 ] Chouchoulas, Orestes; Shape Evolution; University of Bath; UK. (articol);
[ 38 ] Christiansson, Per; Using Knowledge Nodes for Knowledge Discovery and Data
Mining; Aalborg University; Aalborg. (articol);[ 39 ] Clough, Ray; Penzien,Joseph; Dynamics of structures; USA;1975;
[ 40 ] Coello, Carlos; Christiansen, Alan; Two New GA – based Methods forMultiobjective Optimization; Tulane University; USA. (articol);
[ 41 ] Cohen, Paul; Feigenbaum, Edward; The Handbook of Artificial Intelligence –volume 3; USA;1982;
[ 42 ] Col, D.; Furini, F.; Static – Vibrational Design of a Bonnet with FrameTopological Optimization; Torino; Italy;
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 123/149
123
[ 43 ] Constantinescu, Ioan; Dăne, Georgeta; Metode noi pentru calcule derezistenă; Editura Tehnică; Bucureşti;1989;
[ 44 ] Cormen, Thomas; Leiserson, Charles; Rivest, Ronald; Introducere în algoritmi;Editura Computer Libris Agora; Massachusetts;1990;
[ 45 ] Cornu, Alexandru; Schulz, Tiberiu; Culegere de probleme de rezistenamaterialelor, rezolvate cu ajutorul calculatorului; Institutul Politehnic „Traian
Vuia”; Timişoara;1986;[ 46 ] Cosmulescu, Paul; Structuri metalice spaiale; Editura Junimea; Iaşi;1991;
[ 47 ] Crainic, Liviu; Stănciulescu, Ilinca; Calcul post – elastique des structures;Editura Matrix Rom; Bucureşti;2000;
[ 48 ] Crăciun, Dan; Logică şi teoria argumentării; Editura Tehnică; Bucureşti;2000;
[ 49 ] Creu, Vladimir-Ioan; Structuri de date şi algoritmi – Vol.1 – Structuri de datefundamentale; Editura Orizonturi Universitare; Timişoara;2000;
[ 50 ] Cristea, Dan; Programarea bazată pe reguli; Editura Academiei Române;Bucureşti;2002;
[ 51 ] Cristescu, Sorin – Alexandru; Algoritmi genetici. (articol);
[ 52 ] Cucu, H.L.; Popa, A.G.; Ionică, Gh.; Aspects Regarding the Analysis of FlatSlabs with Hybrid-Strain Finite Elements; Acta Technica Napocensis; 46/2003;pag. 177-186;
[ 53 ] Cucu, H.L.; Popa, A.G.; Ionică, Gh.; Asupra implementării unui sistem expertpentru proiectarea plăcilor plane şi curbe de beton armat»; SesiuneaŞtiinifică Construcii-Instalaii CIB 2004, Braşov, 18-19 noiembrie 2004 ;ISBN 973-635-410-5, pag. 125-132;
[ 54 ] Dalban, C.; Chesaru, E.; Dima, Ş.; Şerbescu, C.; Consrucii cu structurămetalică; Editura Didactică şi Pedagogică; Bucureşti;1997;
[ 55 ] Dantzig, George; Dempster, M.A.H.; Kallio, Markku; Programarea liniară asistemelor mari – vol.I – Concepte, metode, experienă de calcul; EdituraTehnică; Bucureşti;1990;
[ 56 ] Dantzig, George; Dempster, M.A.H.; Kallio, Markku; Programarea liniară asistemelor mari – vol.I – Implementări, experimente, aplicaii; EdituraTehnică; Bucureşti;1990;
[ 57 ] Despinescu, Octavian; Dezvoltarea aplicaiilor în Visual Basic.NET; EdituraPolirom; Iaşi;2004;
[ 58 ] Dogaru, Dorian; Elemente de grafică 3D; Editura Ştiinifică şi Enciclopedică;Bucureşti;1988;
[ 59 ] Dragotă, Iulian; Petrehuş, Viorel; Metode numerice pentru ecuaii difereniale;Editura Orizonturi Universitare; Timişoara;2002;
[ 60 ] Dransfield, Peter; Haber, Donald; Instruire programată în metoda loculuirădăcinilor; Editura Tehnică; Bucureşti.;
[ 61 ] Dubină, D.; Georgescu, M.; Zaharia, R.; Grecea, D.; Ionică, Gh.; Dinu, F.;Ungureanu, V.; Goina, D.; Probleme particulare legate de utilizareaconstruciilor uşoare parter în România;
[ 62 ] Dubină, D.; Pintea, D.; Ionică, Gh.; Dumitrescu, D.; Reguli româneşti pentruproiectarea antifoc a elementelor metalice;
[ 63 ] Dumitrescu, D.; Principiile matematice ale teoriei clasificării; Editura Academiei Române; Bucureşti;1999;

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 124/149
124
[ 64 ] Dumitrescu, D.; Algoritmi genetici şi strategii evolutive – aplicaii înInteligena Artificială şi în domenii conexe; Editura Albastră; Cluj-Napoca;2000;
[ 65 ] Dumitrescu, D.; Principiile Inteligenei Artificiale; Editura Albastră; Cluj-Napoca;1999;
[ 66 ] Fahrig, T.; Nachtwey, B.; A Product Model based Approach to Interactive CAE
Design Optimization; Technische Universitat Braunschweig, Germany;[ 67 ] Ferreira, Cândida; Gene Expression Programming – Mathematical Modeling by
an Artificial Intelligence; Editura Angra do Heroismo; Portugal;2002;
[ 68 ] Ferreira, Cândida; Gene Expression Programming: a New Adaptive Algorithmfor Solving Problems; Universidade dos Acores; Portugal. (articol);
[ 69 ] Ferry Borges, J.; Castanheta, M.; Sigurana structurilor; Editura Tehnică;Bucureşti.;
[ 70 ] Filho, Jose Ribeiro; Alippi, Cesare; Treleaven, Philip; Genetic AlgorithmProgramming Environments; University College London. (articol);
[ 71 ] Filimon, Ioan; Soare, Mircea; Ecuaii difereniale cu aplicaii în mecanicaconstruciilor; Editura Tehnică; Bucureşti.;
[ 72 ] Filip, Florin Gheorghe; Bărbat, Boldur; Informatica industrială – Noi paradigmeşi aplicaii; Editura Tehnică; Bucureşti;1999;
[ 73 ] Filip, Florin Gheorghe; Decizie asistată de calculator – Decizii, decideni,metode şi instrumente de bază; Editura Tehnică; Bucureşti;2002;
[ 74 ] Flondor, Paul; Ionescu, Cezar; Introducere în algoritmi genetici; Editura All;Bucureşti;1999;
[ 75 ] Florea, Adrian; Vinan, Lucian; Simularea şi optimizarea arhitecturilor de calcul în aplicaii practice; Editura Matrix Rom; Bucureşti;2003;
[ 76 ] Fraser, Adam; Genetic Programming in C++; University of Salford. (articol);
[ 77 ] Freischlad, M.; Acquisition of Conceptual Design Knowledge in Structural
Engineering; University Duisburg Essen; Germany;[ 78 ] Gârbea, Dan; Analiză cu elemente finite; Editura Tehnică; Bucureşti;1990;
[ 79 ] Gerdes, Klaus; A Review of Infinite Element Method; Journal of Computational Acoustics;(articol);
[ 80 ] Gheorghiu, Adrian; Proporii şi trasee geometrice în arhitectură; EdituraTehnică; Bucureşti;1991;
[ 81 ] Gheorghiu, Alexandru; Statica, stabilitatea şi dinamica construciilor; EdituraDidactică şi Pedagogică; Bucureşti.;
[ 82 ] Gheorghiu, Alexandru; Statica construciilor – III; Editura Tehnică;Bucureşti.;
[ 83 ] Gioncu, Victor; Ivan, Marin; Bazele calculului structurilor la stabilitate; Editura
Facla; Timişoara;1983;[ 84 ] Giumale, Cristian; Introducere în analiza algoritmilor – Teorie şi aplicaie;
Editura Polirom; Iaşi;2004;
[ 85 ] Gobesz, Zsongor; Contribuii la dezvolarea sistemelor expert în domeniulconstruciilor; Universitatea Tehnică Cluj – Napoca; 1999. (teză de doctorat);
[ 86 ] Gorunescu, Florin; Prodan, Augustin; Modelare stochastică şi simulare; Editura Albastră; Cluj-Napoca;2001;

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 125/149
125
[ 87 ] Grecea, Daniel Mihai; Calculul static şi dinamic al structurilor în cadremultietajate necontravântuite; Editura Orizonturi Universitare;Timişoara;2001;
[ 88 ] Gruen, Florian; Eichlseder, Wilfried; Puchner, Klaus; Shape and TopologyOptimization Regarding Fatigue Analysis; University of Leoben; Austria;
[ 89 ] Haase, Gundolf; Optimal Sizing and Shape Optimization in Structural
Mechanics; Johannes Kepler University of Liny; Austria;[ 90 ] Haba, Cristian-Goyoz; Huanu, Corneliu; Sinteza asistată a structurilor
numerice complexe folosind diagrame de decizie binară; Editura Tehnică –Info; Chişinău;2002;
[ 91 ] Hazard, Claude; Lelong, Fredy; Quinzain, Bruno; Memotech – StructuresMetalliques; Editura Casteilla; Paris;2000;
[ 92 ] Hitchings, D.; A Finite Element Dynamics Primer; NAFEMS;
[ 93 ] Hwang, H. Y.; Choi, K. K.; Chang, K. H.; Second – Order Shape DesignSensitivity Using P-Version Finite Element Analysis; The University of Iowa;Iowa City;1996;
[ 94 ] Hwang, H. Y.; Choi, K. K.; Chang, K. H.; Shape Design Sensitivity Analysis and
Optimization of Elastic Solids Using P-Version Finite Element Method; TheUniversity of Iowa; Iowa City;1995;
[ 95 ] Ieremia, Mircea; Elasticitate, Plasticitate, Neliniaritate; Editura Printech;Bucureşti;1998;
[ 96 ] Ifrim, Mihail; Dinamica structurilor şi ingineria seismică; Editura Didactică şiPedagogică; Bucureşti.;
[ 97 ] Ioan, Paul; Betea, Ştefan; Structuri metalice multietajate amplasate în zoneseismice. Partea I – Principii şi metode de calcul; Editura Matrix Rom;Bucureşti;2001;
[ 98 ] Ionescu, Felicia; Grafica în relitatea virtuală; Editura Tehnică; Bucureşti;2000;
[ 99 ] Ionică, Gh.; Cucu, H.L.; Popa, Anca-Gabriela; Integrated Inteligent Programs
System for Civil Engineering Design; Technical University of Cluj-Napoca;[ 100 ] Ionică, Gh.; Pachet de programe pentru proiectarea la aciunea focului a
construciilor metalice; Buletinul Ştiinific al Universităii PolitehnicaTimişoara; tomul 41 (55); fascicula 2; 1996;
[ 101 ] Ionică, Gh.; PC Tools for Implementing EUROCODE Fire Design Rules; SecondWorld Conference on Steel in Construction; Donostia San Sebastian; mai 1998;
[ 102 ] Ionică, Gh.; Utilizarea programului Robot Millennium în proiectareastructurilor metalice complexe; The 9th International Conference on MetalStructures; Timişoara; octombrie 2000;
[ 103 ] Ioniă Cârstoiu, Dorin; Sisteme expert; Editura All; Bucureşti;1994;
[ 104 ] Ioniă, Silviu; Elemente de ingineria cunoştinelor cu aplicaii în sistemele
expert; Editura Matrix Rom; Bucureşti;2004;[ 105 ] Ivan, Adrian; Numerical methods; Editura Orizonturi Universitare;
Timişoara;2003;
[ 106 ] Ivan, Marin; Bazele calculului liniar al structurilor; Editura Facla;Timişoara;1985;
[ 107 ] Ivan, Marin; Proceedings of the 9th International Conference on MetalStructures; Editura Orizonturi Universitare; Timişoara;2000;
[ 108 ] Ivan, Marin; Proceedings of the Eighth International Conference on SteelStructures – vol.I; Editura Mirton; Timişoara;1997;

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 126/149
126
[ 109 ] Ivan, Marin; Proceedings of the Eighth International Conference on SteelStructures – vol.II; Editura Mirton; Timişoara;1997;
[ 110 ] Ivaşc, Corneliu; Contribuii privind optimizarea calculului structurilor derezistenă pentru construcii considerând caracterul lor spaial; UniversitateaTehnică „Gh. Asachi” Iaşi; 2000. (teză de doctorat);
[ 111 ] Jamsa, Kris; Visual Basic.NET – Sfaturi şi tehnici; Editura B.I.C. All;
Bucureşti;2003;[ 112 ] Jamsa, Kris; Klander, Lars; Totul despre C şi C++. Manualul fundamental de
programare în C şi C++; Editura Teora; Bucureşti.;
[ 113 ] Jamsa, Kris; Succes cu C++; Editura All; Bucureşti.;
[ 114 ] Jamsa, Kris; Schmauder, Phil; Yee, Nelson; Biblioteca programatorului – VRML; Editura All; Bucureşti;1998;
[ 115 ] Jelic Wellmann, Andres; Distributed Computing of Failure Probabilities forStructures in Civil Engineering; University of Bochum;
[ 116 ] Kabath, Meik; Building Design towards 5-dimensions; Germany;
[ 117 ] Kaklauskas, G.; Deflection Calculation of RC Beams: Finite Element Software
Versus Design Code Methods; Vilnius Gediminas Technical University;Lithuania;
[ 118 ] Kalev, Danny; Tobler, Michael; Walter, Jan; C++; Bucureşti.;
[ 119 ] Kandil, Amr; Distributed Computing for the Optimization of Large–ScaleConstruction Projects; University of Illinois at Urbana – Champaign;
[ 120 ] Khajehpour, Siavash; Optimal Conceptual Design of High – Rise OfficeBuildings; University of Waterloo; Canada;2001;
[ 121 ] Kicinger, Rafal; Distributed Evolutionary Design: Island-Model BasedOptimization of Steel Skeleton Structures in Tall Buildings; George MasonUniversity, USA;
[ 122 ] Knuth, Donald; Arta programării calculatoarelor – volumul 1 – Algoritmi
fundamentali; Editura Teora; Bucureşti.;[ 123 ] Knuth, Donald; Arta programării calculatoarelor – volumul 2 – Algoritmi
seminumerici; Editura Teora; Bucureşti.;
[ 124 ] Knuth, Donald; Arta programării calculatoarelor – volumul 3 – Sortare şicăutare; Editura Teora; Bucureşti.;
[ 125 ] Kobayashi, Hisashi; Modeling and Analysis – An Introduction to SystemPerformance Evaluation Methodology; USA;1978;
[ 126 ] Kwak, Hyo-Gyoung; Kim, Jin-Kook; Efficient Shoring System in RC FrameStructures; Korea Advanced Institute of Science and Technology;
[ 127 ] Langdon, W. B.; Quick Intro to simple gp; University College of London; 1994.(articol);
[ 128 ] Larionescu, Dan; Calcul numeric pentru ingineri; Editura Agir; Bucureşti;2002;[ 129 ] Levy, Matthys; Salvadori, Mario; De ce cad construciile; Editura Tehnică;
Bucureşti;1998;
[ 130 ] Lorenz, Hempel; Optimization of Street Lane Usage; Bauhaus University;Germany;
[ 131 ] Lungu, Dan; Ghiocel, Dan; Metode probabilistice în calculul construciilor;Editura Tehnică; Bucureşti.;
[ 132 ] Mahfouz, S. Y.; Design Optimization of Steelwork; University of Bradford;UK;1999;

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 127/149
127
[ 133 ] Maisonneuve, Herve; Redactarea ştiinifică; Editura DAN.;
[ 134 ] Mangeron, Dumitru; Poteraşu, Victor Florin; Vulpe, Adrian; Teoria Optimizăriistructurilor cu aplicaii; Editura Junumea; Iaşi;1980;
[ 135 ] Marin, Cornel; Popa, Ion Florin; Hadăr, Anton; Albu, Laureniu; Modelarea cuelemente finite a structurilor mecanice; Editura Academiei Române; Editura Agir; Bucureşti;2002
[ 136 ] Marian, Ironim; Cucu, Hortensiu-Liviu; Probleme de sinteză din rezistenamaterialelor; Editura U.T. PRES; Cluj-Napoca;2004;
[ 137 ] Marusciac, Dumitru; Dumitraş, Macedon; Andreica, Horia; Bogdanovits, Petru;Munteanu, Constantin; Proiectarea structurilor etajate pentru construciicivile; Editura Tehnică; Bucureşti;2000
[ 138 ] Massonnet, Ch.; Deprez, G.; Maquoi, R.; Muller, R.; Fonder, G.; Calcululstructurilor la calculatoare electronice; Editura Tehnică; Bucureşti.;
[ 139 ] Mateescu, Dan; Clădiri înalte cu schelet din oel; Editura Academiei Române;Bucureşti;1997;
[ 140 ] McCormack, Jay; Cagan, Jonathan; Enabling the use of shape grammars:shape grammar interpretation through general shape recognition; Carnegie
Mellon University; Pittsburgh. (articol);[ 141 ] Meske, R.; Friedrich, M.; Optimization of Simple Linear and Advanced Non-
linear problems using TOSCA and ABAQUS; Germany;
[ 142 ] Metea, Luminia; Chirilă, Sanda; Dezvoltarea aplicaiilor Windows; EdituraHelicon; Timişoara;1993;
[ 143 ] Michalewicz, Zbigniew; Xiao, Jing; Trojanowski, Krzysztof; EvolutionaryComputation: One Project, Many Directions; University of North Carolina(USA); Polish Academy of Sciences (Poland). (articol);
[ 144 ] Moisa, Trandafir; Itoafă, Alexandru; Algoritmii genetici. (articol);
[ 145 ] Mora, Rodrigo; A Framework for Computer – Aided Conceptual Design of Building Structures; Concordia University; Montreal; Canada;
[ 146 ] Mosqueda, Gilberto; Sanchez, Abel; Current Computational Methods inStructural Dinamics;1997;
[ 147 ] Muller, O.; Topology Optimization of Large Real World Structures;
[ 148 ] Munteanu, Ioan; Structuri pentru construcii – Teorie şi calcul – vol.II; Editura Academiei Republicii Socialiste România; Bucureşti;1984;
[ 149 ] Munteanu, Ligia; Donescu, Ştefania; Introducere în teoria solitonilor – Aplicaii în mecanică; Editura Academiei Române; Bucureşti;2002;
[ 150 ] Neagu, Ciprian-Daniel; Bumbaru, Severin; Sisteme multimedia. Grafică pecalculator; Editura Matrix Rom; Bucureşti;2001;
[ 151 ] Niculiu, Tudor; Simularea ierarhică inteligentă; Editura Matrix Rom;
Bucureşti;2002;[ 152 ] Niznik, Andre; Piechnik, Stefan; Matrice de rigidite de la poutre non
prismatique. (articol);
[ 153 ] Oprea, Gheorghe; Stabilitatea şi calculul de ordinul II al structurilor din bare;Editura Naional.;
[ 154 ] Oprea, Mihaela; Sisteme bazate pe cunoştine – Ghid teoretic şi practic;Editura Matrix Rom; Bucureşti;2002;
[ 155 ] Oproiu, Vasile; Geometria computaională a curbelor şi suprafeelor; EdituraUniversităii “Alexandru Ioan Cuza”; Iaşi;2003;
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 128/149
128
[ 156 ] Pacoste, Costin; Stoian, Valeriu; Dubină, Dan; Metode moderne în mecanicastructurilor; Editura Ştiinifică şi Enciclopedică; Bucureşti;1988;
[ 157 ] Papadrakakis, Manolis; Lagaros, Nicos; Plevris, Vagelis; Optimum Design of 3DStructures under Static and Dynamic Loading; National Technical University Athens; Greece; (articol);
[ 158 ] Papadrakakis, Manolis; Papadopoulos, Vissarion; Lagaros, Nikos; Structural
reliability analysis of elastic-plastic structures using neural networks andMonte Carlo simulation; National Technical University Athens; Greece;(articol);
[ 159 ] Papadrakakis, Manolis; Lagaros, Nikos; Tsompanakis, Yiannis; Structuraloptimization using evolution strategies and neural networks; NationalTechnical University Athens; Greece; (articol);
[ 160 ] Papadrakakis, Manolis; Lagaros, Nikos; Plevris, Vagelis; Optimum Design of 3DStructures Under Static and Dynamic Loading; National Technical University Athens; Greece; (articol);
[ 161 ] Pascariu, Ioan; Elemente finite. Concepte – aplicaii; Editura Militară;Bucureşti;1985;
[ 162 ] Paulay, Thomas; Bachmann, Hugo; Moser, Konrad; Proiectarea structurilor debeton armat la aciuni seismice; Editura Tehnică; Bucureşti;1997;
[ 163 ] Paulay, Tom; Understanding Torsional Phenomena in Ductile Systems;University of Canterbury. (articol);
[ 164 ] Pătrăşcioiu, Cristian; Metode numerice aplicate în ingineria chimică – AplicaiiPascal; Editura Matrix Rom; Bucureşti;2004;
[ 165 ] Petcu, Valeriu; Calculul structurilor de beton armat în domeniul plastic;Editura Tehnică; Bucureşti.;
[ 166 ] Petcu, Valeriu; Calculul structurilor de beton armat în domeniul plastic;Editura Tehnică; Bucureşti.;
[ 167 ] Petcu, Valeriu; Svasta, Carmen; Calculul automat al elementelor din beton
armat. Programe Basic; Editura Tehnică; Bucureşti;1986;[ 168 ] Petcu, Valeriu; Soare, Mircea; Svasta, Carmen; Automatizarea calculului de
rezistenă în construcii. Programe Basic; Editura Tehnică; Bucureşti;1989;
[ 169 ] Pick, T.; Development and Analysis of Sparse Matrix Concepts for FiniteElement Approximation on General Cells; Universitat Hannover; Germany;
[ 170 ] Pintea, D.; Ionică, Gh.; Dubină, D.; Verificarea rezistenei la foc a structurilormetalice;
[ 171 ] Popa, A.G.; Cucu, H.L.; Ionică, Gh.; Analysis of the Progressive StiffnessDegradation of R.C. Shear Walls; Acta Technica Napocensis; 46/2003; pag.167-176;
[ 172 ] Popa, Marin; Popa, Mariana; Grafuri şi reele – vol.I; Editura Fundaiei
România de Mâine; Bucureşti;2003;[ 173 ] Popescu, Paul; Structuri din beton armat şi zidărie. Elemente structurale din
beton armat; Editura Fundaiei România de Mâine; Bucureşti;2003;
[ 174 ] Popovici, Dorin Mircea; Popovici, Ioan Mircea; Rican, Jean Gabriel; Proiectareşi implementare software; Editura Teora; Bucureşti;1998;
[ 175 ] Postelnicu, Tudor; Nistorescu, Daniel; Îndrumător de proiectare – Structurădin beton armat cu 2 niveluri (P+1E); Editura Matrix Rom; Bucureşti;2001;
[ 176 ] Rafiroiu, Mihai; Modele de simulare în construcii; Editura Facla;Timişoara;1982;

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 129/149
129
[ 177 ] Raicu, Lucian; Grafic şi vizual între clasic şi modern; Editura Paideia;Bucureşti;2002;
[ 178 ] Rank, Ernst; Analysis of Building Structure and Topology Based on GraphTheory; Technische Universitat Munchen;
[ 179 ] Raue, Erich; Analysis and Design of Hybrid Structures Using OptimizationStrategies; Bauhaus-University Weimar; Institute of Structural Engineering;
[ 180 ] Răutu, Sandu; Bănu, Valeriu; Statica construciilor; Editura Didactică şiPedagogică; Bucureşti.;
[ 181 ] Reich, Yoram; A metodology for building neural networks models fromempirical engineering data; Tel Aviv University; Israel. (articol);
[ 182 ] Reitman, M. I.; Şapiro G. S.; Metode de proiectare optimă a corpurilordeformabile; Editura Tehnică; Bucureşti.;
[ 183 ] Rendi, Dorina – Marieta; Metode ale cercetării operaionale. Progamareliniară. Teoria jocurilor. Teoria grafurilor; Editura Orizonturi Universitare;Timişoara;2002;
[ 184 ] Rich, Elaine; Artificial Intelligence; USA;1983;
[ 185 ] Rudolph, Stephan; Noser, Hansrudi; On Engineering Design Generation with XML-based Knowledge – Enhanced Grammars; University of Stuttgart(Germany); University of Zurich (Switzerland). (articol);
[ 186 ] Rusu, Gheorghe; Elemente de teoria probabilităilor şi statistică matematică;Editura Sedcom Libris; Iaşi;2002;
[ 187 ] Salvadori, Mario; Construcii – Lupta împotriva gravitaiei; Editura Albatros;Bucureşti;1983;
[ 188 ] Salvadori, Mario; Mesajul structurilor; Editura Tehnică; Bucureşti;1991;
[ 189 ] Salvadori, Mario; Baron, Melvin; Metode numerice în tehnică; Editura Tehnică;Bucureşti;1972;
[ 190 ] Sauter, Jurgen; Lauber, Boris; Structural Optimization – Integration and Gaps
in Workflows of Numerical Simulation Processes; Germany;[ 191 ] Savii, George; Luchin, Milenco; Modelare şi simulare; Editura Eurostampa;
Timişoara;2000;
[ 192 ] Scarlat, Adrian; Stabilitatea şi calculul de ordinul II al structurilor; EdituraTehnică; Bucureşti;1969;
[ 193 ] Scheer, S.; da Gama, C. L. G.; Learning Objects for a Teaching and LearningNetwork in Structural Engineering; Universidade Federal do Parana; Brazil.(articol);
[ 194 ] Scheiber, Ernest; Lupu, Mircea; Rezolvarea asistată de calculator aproblemelor de matematică; Editura Matrix Rom; Bucureşti;2003;
[ 195 ] Schildt, Herbert; C#; Editura Teora; Bucureşti.;
[ 196 ] Schuring, Dieterich; Scale Models in Engineering – Fundamentals and Applications; Pergamon Press.;
[ 197 ] Sedlak, Vinzenz; SDA – The Conceptual Design For Structures In Architecture;(articol);
[ 198 ] Semenov, V.; Bazhan, A.; Morozov, S.; Distributed STEP-Compilant Platformfor Multimodal Collaboration in Architecture, Engineering and Construction;Institute for System Programming of the Russian Academy of Sciences;Russia;

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 130/149
130
[ 199 ] Sofron, Emil; Bizon, Nicu; Ioniă, Silviu; Răducu, Radian; Sisteme de controlFUZZY – Modelare şi proiectare asistate de calculator; Editura All; C;
[ 200 ] Staicu, Ştefan; Aplicaii ale calculului matriceal în mecanica solidelor; Academiei Republicii Socialiste România; Bucureşti;1986;
[ 201 ] Stănăşilă, Tatiana; Metode statistice pentru ingineri; Editura Matrix Rom;Bucureşti;1998;
[ 202 ] Stănciulescu, Florin; Modelarea sistemelor de mare complexitate; EdituraTehnică; Bucureşti;2003;
[ 203 ] Stoica, Marcel; Andreica, Marin; Săndulescu, Iosif; Introducere în modelareaproceduală; Editura Scrisul Românesc; Craiova;1989;
[ 204 ] Stroustrup, Bjarne; Creatorul limbajului C++; Editura Teora; Bucureşti;2003;
[ 205 ] Sunkpho, Jirapon; Garett, James; Smailagic, Asim; Opportunities to UseSpeech Recognition for Bridge Inspection; Carnegie Mellon University;Pittsburgh. (articol);
[ 206 ] Şulea, Dorel; Inventica aplicată – Incursiuni creative în domeniul măsurărilorelectrice; Editura Performantica; Iaşi;2002;
[ 207 ] Tănăsescu, Aurelian; Constantinescu, Radu; Marinescu, Ioan; Busuioc, Liliana;Grafică asistată. Programme Fortran pentru reprezentări geometrice – vol.I;Editura Tehnică; Bucureşti;1989;
[ 208 ] Tănăsescu, Aurelian; Constantinescu, Radu; Marinescu, Ioan; Busuioc, Liliana;Grafică asistată. Programme Fortran pentru reprezentări geometrice – vol.II;Editura Tehnică; Bucureşti;1989;
[ 209 ] Tărăuşan-Matu, Ştefan; Interfaarea evoluată om – calculator; Editura MatrixRom; Bucureşti;2000;
[ 210 ] Tătar, Doina; Inteligenă Artificială – Demonstrarea automată a teoremelor.Prelucrarea limbajului natural; Editura Albastră; Cluj-Napoca;1999;
[ 211 ] Toadere, Teodor; Grafe – Teorie, algoritmi şi aplicaii; Editura Albastră; Cluj-Napoca;2002;
[ 212 ] Tonn, Christian; Plausibility in Architectural Design – DOMEdesign – SoftwareSupport for the formal shaping and architect- oriented design of shellstructures;
[ 213 ] Tuma, Jan; Handbook of Structural and Mechanical Matrices; USA;1988;
[ 214 ] Turda, Dan – Vasile; Aspecte privind optimizarea structurilor reticulate;Universitatea Tehnică Cluj – Napoca; 2003. (teză de doctorat);
[ 215 ] urcanu, Costin Radu; Soluii originale în construcii – Concepie, protejare,valorificare; Editura Matrix Rom; Bucureşti;2003;
[ 216 ] Udrişte, Constantin; Iftode, Vasile; Postolache, Mihai; Metode numerice decalcul – Algoritmi şi programe Turbo Pascal; Editura Tehnică; Bucureşti;1996;
[ 217 ] Umberto, Eco; Cum se face o teză de licenă; Editura Pontica;2000;[ 218 ] Vaarmann, Otu; On the Solution of Nonlinear Optimization Problems of High
Dimension; Tallinn Technical University;
[ 219 ] Van Rees, Reinout; CeXML – An XML Vocabulary for Building and CivilEngineering; Delft University of Technology;2000;
[ 220 ] Vanderplaats, Garret; Numerical Optimization Techniques for EngineeringDesign; Editura Vanderplaats Research & Development, Inc.; ColoradoSprings;2001;
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 131/149
131
[ 221 ] Vaughan, Chris; Product Data Management and The Engineering AnalysisEnvironment; NAFEMS;
[ 222 ] Vişinoiu, Niculae; Statistica Matriceală; Editura All; Bucureşti;1996;
[ 223 ] Vuc, Liviu; Milici, Constantin; Dimoiu, Iuliu; Rachin, Nicolae; Modelematematice în proiectarea construciilor; Editura Facla; Timişoara;1981;
[ 224 ] Yang, Y. W.; Soh, C. K.; Open – Domain Structural Optimal Design usingGenetic Programming. (articol);
[ 225 ] Zaharie, D.; Introducere în Inteligena Computaională. (articol);
[ 226 ] Zaharie, D.; Reele feedforward cu un singur nivel. (articol);
[ 227 ] Zaharie, Dorin; Albescu, Felicia; Mihai, Florin; Năstase, Pavel; Bojan, Irina; Anica-Popa, Liana; Sisteme expert – Teorie şi aplicaii; Editura Dual Tech;1999
[ 228 ] Zeevaert, Leonardo; Soil – Structure Interaction of a Rigid Foundation Subjectto a Dynamic Overturning Moment; Facultad de Ingineria; Unam; Mexico.;
[ 229 ] ***; Proceedings of the 10th International Conference on Metal Structures;Editura Orizonturi Universitare; Timişoara;2003;
[ 230 ] ***; GENESIS – Design Manual; Editura Vanderplaats Research &
Development, Inc.; Colorado Springs;2004;[ 231 ] ***; Reele neuronale; Editura Microinformatica; Cluj-Napoca;1994;
[ 232 ] ***; Manualul inginerului – Fundamente; Editura Tehnică; Bucureşti;1995;
[ 233 ] ***; Resistance au feu des structures; L’Universite de Liege;1983;
[ 234 ] ***; A New Approach for Sizing, Shape and Topology Optimization; 1996 SAEInternational Congress and Exposition; Detroit; Michigan USA;
[ 235 ] ***; Topology Optimization with Casting and Machining Restrictions by theExample of Brake Parts; CAD-FEM Users’ Meeting 2003;
[ 236 ] ***; NAFEMS A Finite Element Primer ; NAFEMS
[ 237 ] ***; Robot Millennium ; Users & Theory Manual, RoboBAT, 2004

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 132/149
132
ANEXA 1. APLICAREA FORMULEI
SHERMAN-MORRISON-WOODBURYPENTRU CALCULUL DEPLASĂRILORUNEI STRUCTURI
În cazul programelor de optimizare este necesară recalcularea structurilor la fiecare pasal algoritmului de optimizare. Recalcularea structurii necesită un efort computaionalimportant. De aici s-a născut necesitatea găsirii unei metode de calcul simplificate a
structurilor refolosind datele obinute deja pentru structura iniială.Fie o structură a cărei ecuaie conform MEF este următoarea:
KQ=P A1 1
Unde: K este matricea de rigiditate
Q – matricea necunoscutelor deplasări
P – matricea termenilor liberi
Unde conform regulii lui Cramer obinem deplasarea nodului “i”:
K
K q
i
i =
A1 2
La structura de mai sus intervine o perturbare în unul din nodurile structurii. Pentru aevita recalcularea întregii structuri, putem deduce deplasările noii structuri dindeplasările cunoscute deja.
Ecuaia structurii modificate este:
K 1Q1 = P A1 3
Conform formulei Sherman-Morrison (Woodbury):
uvk k +=1 ,
adică, putem exprima un vector sau o matrice folosind matricea anterioară plus unprodus de doi vectori u şi v.
Dacă u este matricea unitate, iar k este matricea de rigiditate iniială, k1 este matriceade rigiditate modificată, putem deduce:
K 1 = K + U × V A1 5
Revenim la ecuaia elementului finit pentru structura modificată şi aplicăm formula luiCramer, obinând pentru fiecare i necunoscută:

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 133/149
133
1
11
K
K q
i
i = ,
unde K 1i este matricea obinută prin înlocuirea coloanei “i” cu coloana termenilor liberi.
Ceea ce dorim este să evităm recalcularea matricei K 1, de aceea vom exprima K 1 prin
matricea K.
Înlocuim în formula (A1-5) matricea K 1i , respectiv K 1 cu expresia (A1-5):
11
11
V U K
V U K q
ii
i⊗+
⊗+=
,
adică:
11
11
1 −
−
⊗+
⊗+
=K V I K
K V I K
qiii
i
A1 8
înlocuim în (A1-8) termenul corespunzător din (A1-6) şi obinem:
11
11
1 −
−
⊗+
⊗+=
K V I
K V I qq
ii
ii
,
unde:
q1i - deplasarea din structura modificată,
qi - deplasarea din structura iniială, U poate fi matricea unitate,
V1 se poate obine prin diferena matricelor K1 şi K, iar matricea Vi1 prin înlocuirea în V1 a coloanei “i” cu coloana termenilor liberi.
Deşi în formula (A1-9) intervin calculul determinanilor, ceea ce presupune un efortcomputaional deosebit în cazul sistemelor de ecuaii de mari dimensiuni, considerăm că
formula (A1-9) are valoare cel puin teoretică, întrucât demonstrează posibilitateafolosirii datelor obinute într-un ciclu de calcul în paşii următori de calcul.
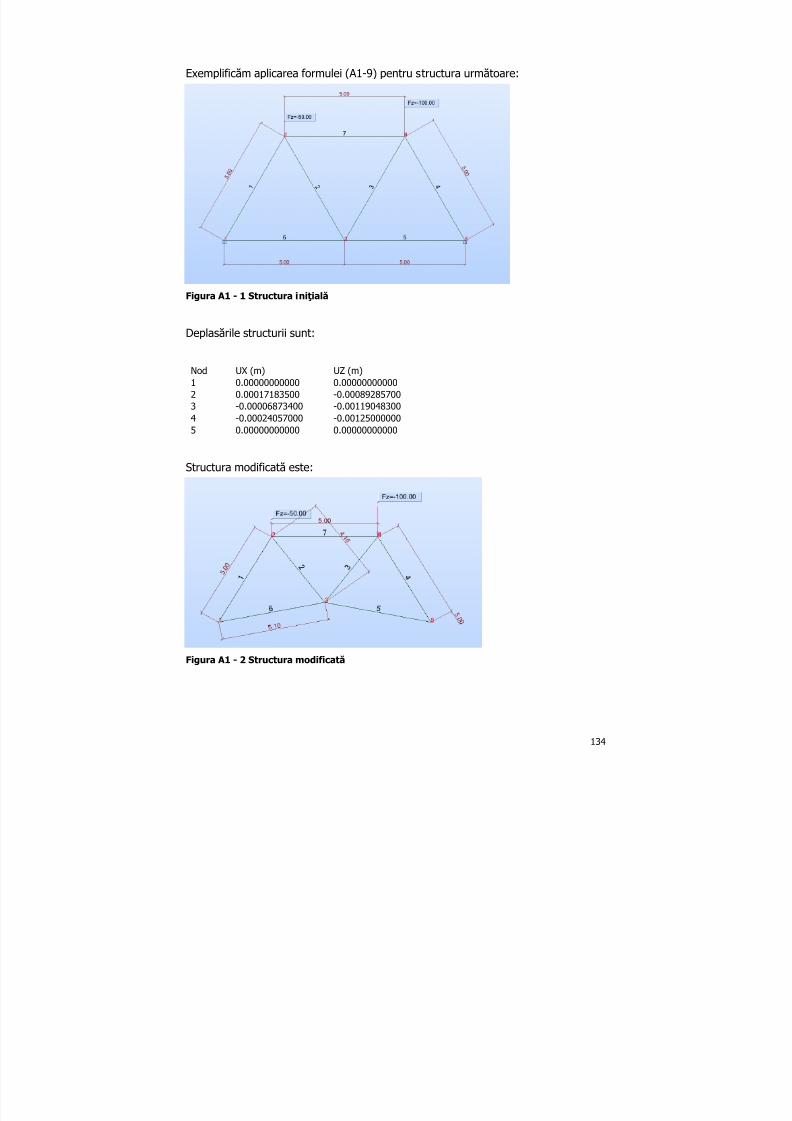
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 134/149
134
Exemplificăm aplicarea formulei (A1-9) pentru structura următoare:
Figura A1 - 1 Structura iniială
Deplasările structurii sunt:
Nod UX (m) UZ (m)1 0.00000000000 0.000000000002 0.00017183500 -0.000892857003 -0.00006873400 -0.001190483004 -0.00024057000 -0.001250000005 0.00000000000 0.00000000000
Structura modificată este:
Figura A1 - 2 Structura modificată
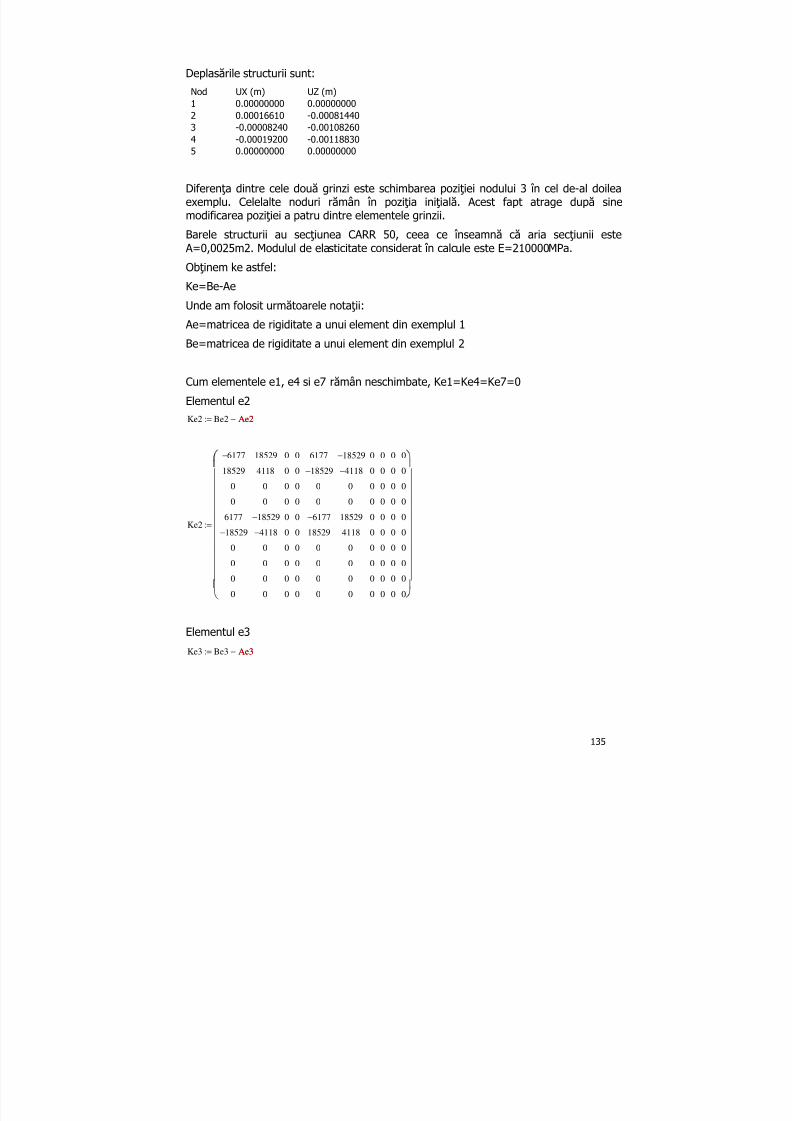
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 135/149
135
Deplasările structurii sunt:
Nod UX (m) UZ (m)1 0.00000000 0.000000002 0.00016610 -0.000814403 -0.00008240 -0.001082604 -0.00019200 -0.00118830
5 0.00000000 0.00000000
Diferena dintre cele două grinzi este schimbarea poziiei nodului 3 în cel de-al doileaexemplu. Celelalte noduri rămân în poziia iniială. Acest fapt atrage după sinemodificarea poziiei a patru dintre elementele grinzii.
Barele structurii au seciunea CARR 50, ceea ce înseamnă că aria seciunii este A=0,0025m2. Modulul de elasticitate considerat în calcule este E=210000MPa.
Obinem ke astfel:
Ke=Be-Ae
Unde am folosit următoarele notaii: Ae=matricea de rigiditate a unui element din exemplul 1
Be=matricea de rigiditate a unui element din exemplul 2
Cum elementele e1, e4 si e7 rămân neschimbate, Ke1=Ke4=Ke7=0
Elementul e2Ke2 Be2 Ae2−:= Ae2
Ke2
6177−
18529
0
0
6177
18529−
0
0
0
0
185294118
0
0
18529−
4118−
0
0
0
0
00
0
0
0
0
0
0
0
0
00
0
0
0
0
0
0
0
0
617718529−
0
0
6177−
18529
0
0
0
0
18529−
4118−
0
0
18529
4118
0
0
0
0
00
0
0
0
0
0
0
0
0
00
0
0
0
0
0
0
0
0
00
0
0
0
0
0
0
0
0
00
0
0
0
0
0
0
0
0
:=
Elementul e3
Ke3 Be3 Ae3−:= Ae3
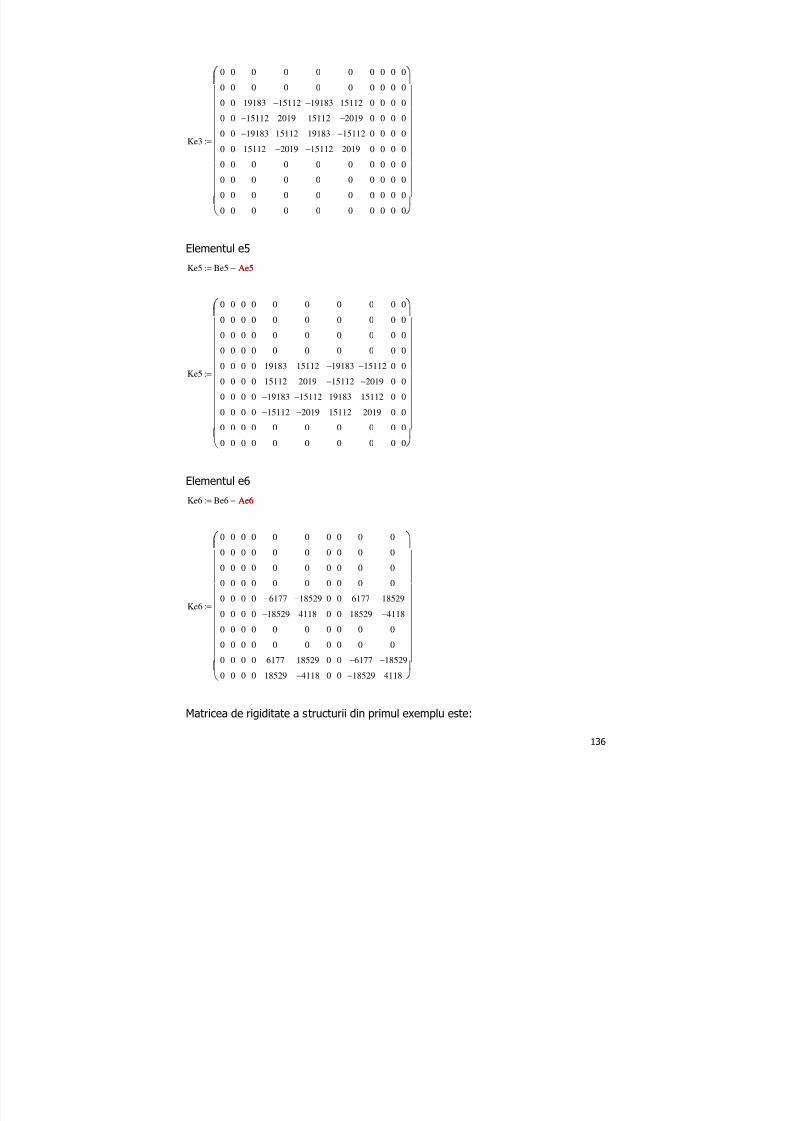
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 136/149
136
Ke3
0
0
0
0
0
00
0
0
0
0
0
0
0
0
00
0
0
0
0
0
19183
15112−
19183−
151120
0
0
0
0
0
15112−
2019
15112
2019−0
0
0
0
0
0
19183−
15112
19183
15112−0
0
0
0
0
0
15112
2019−
15112−
20190
0
0
0
0
0
0
0
0
00
0
0
0
0
0
0
0
0
00
0
0
0
0
0
0
0
0
00
0
0
0
0
0
0
0
0
00
0
0
0
:=
Elementul e5
Ke5 Be5 Ae5−:= Ae5
Ke5
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
19183
15112
19183−
15112−
0
0
0
0
0
0
15112
2019
15112−
2019−
0
0
0
0
0
0
19183−
15112−
19183
15112
0
0
0
0
0
0
15112−
2019−
15112
2019
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
:=
Elementul e6
Ke6 Be6 Ae6−:= Ae6
Ke6
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
6177−
18529−
0
0
6177
18529
0
0
0
0
18529−
4118
0
0
18529
4118−
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
6177
18529
0
0
6177−
18529−
0
0
0
0
18529
4118−
0
0
18529−
4118
:=
Matricea de rigiditate a structurii din primul exemplu este:

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 137/149
137
A
131250
45465
26250−
45465−
105000−
00
0
0
0
45465
78750
45465−
78750−
0
00
0
0
0
26250−
45465−
157500
0
26250−
45465105000−
0
0
0
45465−
78750−
0
157500
45465
78750−0
0
0
0
105000−
0
26250−
45465
262500
026250−
45465−
105000−
0
0
0
45465
78750− 0×
0
15750045465−
78750−
0
0
0
0
105000−
0
26250−
45465−157500
0
26250−
45465
0
0
0
0
45465−
78750−0
157500
45465
78750−
0
0
0
0
105000−
026250−
45465
131250
45465−
0
0
0
0
0
045465
78750−
45465−
78750
:=
Matricea de rigiditate redusă a structurii din primul exemplu se obine prin anularea apatru linii si a patru coloane corespunzătoare blocajelor pe direciile respective:
Ar 4.523 1030
×=
Inversa matricei Ar este:
Ar1−
1.31 105−
×
2.062− 106−
×
2.381 106−
×
2.749− 106−
×
8.333 10
6−
×
6.873− 107−
×
2.062− 106−
×
1.071 105−
×
1.375− 106−
×
7.936 106−
×
6.873 10
7−
×
3.571 106−
×
2.381 106−
×
1.375− 106−
×
4.762 106−
×
0
2.381 10
6−
×
1.375 106−
×
2.749− 106−
×
7.936 106−
×
0
1.587 105−
×
2.749 10
6−
×
7.936 106−
×
8.333 106−
×
6.873 107−
×
2.381 106−
×
2.749 106−
×
1.31 10
5−
×
2.062 106−
×
6.873− 107−
×
3.571 106−
×
1.375 106−
×
7.936 106−
×
2.062 10
6−
×
1.071 105−
×
=
Conform regulii lui Cramer, se obine Ar1, unde prima coloană este înlocuită cu vectorulforelor
Ar1
0
50−
0
00
100−
0
157500
45465
78750−
0
0
26250−
45465
262500
026250−
45465−
45465
78750−
0
15750045465−
78750−
105000−
0
26250−
45465−
157500
0
0
0
45465−
78750−
0
157500
:=
Ar1 7.771 1026
×= - determinantul matricei Ar1
iar inversa matricei Ar1 este:
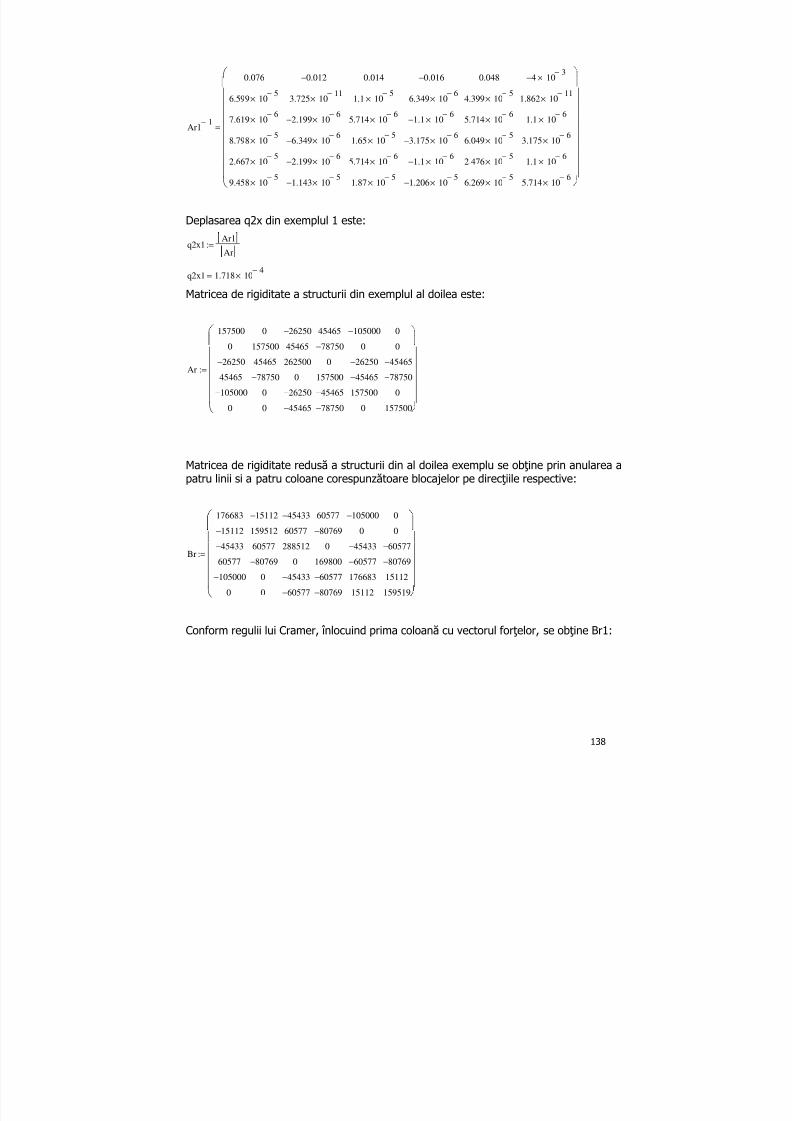
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 138/149
138
Ar11−
0.076
6.599 105−
×
7.619 106−
×
8.798 105−
×
2.667 105−
×
9.458 105−
×
0.012−
3.725− 1011−
×
2.199− 106−
×
6.349− 106−
×
2.199− 106−
×
1.143− 105−
×
0.014
1.1 105−
×
5.714 106−
×
1.65 105−
×
5.714 106−
×
1.87 105−
×
0.016−
6.349− 106−
×
1.1− 106−
×
3.175− 106−
×
1.1− 106−
×
1.206− 105−
×
0.048
4.399 105−
×
5.714 106−
×
6.049 105−
×
2.476 105−
×
6.269 105−
×
4− 103−
×
1.862 1011−
×
1.1 106−
×
3.175 106−
×
1.1 106−
×
5.714 106−
×
=
Deplasarea q2x din exemplul 1 este:
q2x1Ar1
Ar:=
q2x1 1.718 104−
×= Matricea de rigiditate a structurii din exemplul al doilea este:
Ar
157500
0
26250−
45465
105000−
0
0
157500
45465
78750−
0
0
26250−
45465
262500
0
26250−
45465−
45465
78750−
0
157500
45465−
78750−
105000−
0
26250−
45465−
157500
0
0
0
45465−
78750−
0
157500
:=
Matricea de rigiditate redusă a structurii din al doilea exemplu se obine prin anularea apatru linii si a patru coloane corespunzătoare blocajelor pe direciile respective:
Br
176683
15112−
45433−
60577
105000−
0
15112−
159512
60577
80769−
0
0
45433−
60577
288512
0
45433−
60577−
60577
80769−
0
169800
60577−
80769−
105000−
0
45433−
60577−
176683
15112
0
0
60577−
80769−
15112
159519
:=
Conform regulii lui Cramer, înlocuind prima coloană cu vectorul forelor, se obine Br1:

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 139/149
139
Br1
0
50−
0
0
0
100−
15112−
159512
60577
80769−
0
0
45433−
60577
288512
0
45433−
60577−
60577
80769−
0
169800
60577−
80769−
105000−
0
45433−
60577−
176683
15112
0
0
60577−
80769−
15112
159519
:=
Br11−
0.067
5.283 105−
×
8.375 106−
×
6.924 105−
×
1.919 105−
×
7.833 105−
×
8.753− 103−
×
3.289 106−
×
2.373− 106−
×
2.247− 106−
×
7.428− 107−
×
7.455− 106−
×
0.017
1.24 105−
×
6.488 106−
×
1.865 105−
×
6.165 106−
×
2.217 105−
×
0.017−
6.468− 106−
×
1.387− 106−
×
3.407− 106−
×
4.343− 107−
×
1.275− 105−
×
0.039
3.251 105−
×
6.068 106−
×
4.468 105−
×
1.847 105−
×
4.756 105−
×
5.624− 103−
×
1.645− 106−
×
1.186 106−
×
1.123 106−
×
3.714 107−
×
3.728 106−
×
=
Fie vr Br Ar−:= Matricea unitate este:
B
125073
63994
26250−
45465−
98823−18529−
0
0
0
0
63994
82827
45465−
78750−
18529−4118−
0
0
0
0
26250−
45465−
176683
15112−
45433−60577
105000−
0
0
0
45465−
78750−
15112−
159512
6057780769−
0
0
0
0
98823−
18529−
45433−
60577
2885120
45433−
60577−
98823−
18529
18529−
4118−
60577
80769−
0169800
60577−
80769−
18529
4118−
0
0
105000−
0
45433−60577−
176683
15112
26250−
45465
0
0
0
0
60577−80769−
15112
159519
45465
78750−
0
0
0
0
98823−18529
26250−
45465
125073
63994−
0
0
0
0
185294118−
45465
78750−
63994−
82868
:=
vr
1.918 104
×
1.511− 104
×
1.918− 104×
1.511 104
×
0
0
1.511− 104
×
2.012 103
×
1.511 104×
2.019− 103
×
0
0
1.918− 104
×
1.511 104
×
2.601 104×
0
1.918− 104
×
1.511− 104
×
1.511 104
×
2.019− 103
×
0
1.23 104
×
1.511− 104
×
2.019− 103
×
0
0
1.918− 104×
1.511− 104
×
1.918 104
×
1.511 104
×
0
0
1.511− 104×
2.019− 103
×
1.511 104
×
2.019 103
×
=
Fie vr1 Br1 Ar1−:=

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 140/149
140
vr1
0
0
0
0
0
0
1.511− 104
×
2.012 103
×
1.511 104
×
2.019− 103
×
0
0
1.918− 104
×
1.511 104
×
2.601 104
×
0
1.918− 104
×
1.511− 104
×
1.511 104
×
2.019− 103
×
0
1.23 104
×
1.511− 104
×
2.019− 103
×
0
0
1.918− 104
×
1.511− 104
×
1.918 104
×
1.511 104
×
0
0
1.511− 104
×
2.019− 103
×
1.511 104
×
2.019 103
×
=
Matricea unitate este :
I
1
0
0
0
00
0
1
0
0
00
0
0
1
0
00
0
0
0
1
00
0
0
0
0
10
0
0
0
0
01
:=
I vr1 Ar11−
⋅+ 1.431=
I vr Ar1−
⋅+ 1.489= Se determină deplasarea q2x din exemplul 2:
q2x2 q2x1I vr1 Ar1
1−⋅+
I vr Ar1−
⋅+
⋅:=
obinem valoarea deplasării pe x a nodului 2:
q2x2 1.652 104−
×= , valoare comparabilă cu cea rezultată din calculul cu element finit(1.661 x10-4).

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 141/149
141
ANEXA 2. UTILIZAREA PROGRAMĂRIIGENETICE PENTRU REGRESIA
NUMERICĂ
Utilizarea datelor obinute experimental pentru deducerea legilor de comportare afenomenului modelat se poate face utilizând programarea genetică.
Spre deosebire de algoritmii genetici, care generează soluii la probleme formulateconcret, programele genetice generează automat programe, care ele însele rezolvăproblemele supuse spre rezolvare.
Programul genetic ilustrat mai jos foloseşte următoarele pachete de date:- operatorii . Aceştia sunt o colecie de date din care PG îşi va alege singuropreatorii pe care îi va folosi în generarea unei expresii matematice. În listaoperatorilor pot figuta operatoriu matematici simplu operand (ridicare la pătrat,exponenialul) dar şi operaii dublu (+, -, /, *) sau multiplu operand (IF, funciicomplexe);
- operanzii : sunt datele experimentale furnizate de utilizator (de obicei acesteasunt furnizate tabelar);
- funcia de performană sau funcia de fitness : este criteriul după care o expresieconstruită din operatori şi operanzi va fi cotată. În funcie de criteriul de
performană, funcia curentă va fi sau nu reinută ca fiind o soluie validă sau nu.
Luăm în considerare următoarele date obinute experimental:
a b c y16.00 30.00 16000.00 6.8016.00 25.00 14000.00 5.7016.00 20.00 12000.00 4.6016.00 15.00 10000.00 3.4018.00 30.00 16000.00 8.0018.00 25.00 14000.00 6.60
18.00 20.00 12000.00 5.3018.00 15.00 10000.00 4.0020.00 30.00 16000.00 8.0020.00 25.00 14000.00 7.8020.00 20.00 12000.00 6.3020.00 15.00 10000.00 4.7022.00 30.00 16000.00 8.0022.00 25.00 14000.00 8.0022.00 20.00 12000.00 7.4022.00 15.00 10000.00 5.60
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 142/149
142
Unde a, b, c sunt variabilele, iar y este valoarea funciei pe care dorim să o obinem.
Rulând programul genetic, obinem un program capabil să reproducă dateleexperimentale date iniial, având la bază formula găsită anterior.
Operanzii folosii sunt: LOGS (Logaritm în baza 10), ASIN (Arcsinus), EXPS(exponeniala), SIN (sinus), ^ (rdicare la putere de forma a^b, unde b este puterea),COS, TAN, +, -, *, /.
Operatorii sunt toate variabilele: a, b, c.
Funcia de fitness face apel la fiecare ciclu de calcul la funcia returnată de program. Înmomentul în care această funcie returnează pentru toate datele de intrare o valoare cuo eroare compatibilă cu cea solicitată de utilizator, funcia găsită este automat integrată într-un program a cărui sursă este salvată pe disc.
Formula găsită are următoarea formă:
((((LOGS((ASIN(TAN(COS(TAN(TAN(ASIN(((a)^(b))+(c))))))))/(EXPS(SIN(LOGS(SIN((a)^(P))))))))+(LOGS(LOGS((((EXPS(P))*(TAN((b)-(TAN(EXPS(c))))))*((SIN(ASIN(P)))^(P)))+((((((a)+(LOGS((EXPS(P))*(G))))+(c))+(SIN(EXPS(COS((b)^(ASIN(P)))))))-(SIN(COS((LOGS((EXPS(P))+(EXPS(P))))*(SIN(COS(b)))))))-((COS(SIN(((TAN(COS(COS(c))))-(SIN(COS((P)*(b)))))/(EXPS(TAN(ASIN(SIN(TAN((c)*(TAN(G)))))))))))-(((TAN(G))^(P))+((COS((G)/(P)))/(TAN(LOGS(c)))))))))))/((TAN((ASIN(SIN(P)))*(((((b)*(b))+(c))-(EXPS((EXPS(P))-((b)-(P)))))-(EXPS((SIN(EXPS(LOGS(P))))+(c))))))+((G)-(TAN(TAN((TAN(TAN(TAN(TAN(P)))))*(((b)+(c))-((LOGS(SIN(LOGS((G)-(G)))))+(SIN(SIN((c)-(G))))))))))))*((b)-(TAN((ASIN(TAN(EXPS(LOGS((b)-(a))))))*(EXPS((G)-(LOGS((P)+(SIN((P)-(c)))))))))))
După efectuarea unor grupări de termeni şi eliminări ale unor temeni redundani,rezultă următoarea funcie:
(((LOGS(LOGS((((EXPS(P))*(TAN(b)))*((SIN(ASIN(P)))^(P)))+((((((a)+(LOGS((EXPS(P))*(G))))+(c))+(SIN(EXPS(COS((b)^(0))))))-(SIN(COS((LOGS((EXPS(P))+(EXPS(P))))*(SIN(COS(b)))))))-((COS(SIN(((TAN(COS(COS(c))))-(SIN(COS((P)*(b)))))/(EXPS(TAN(ASIN(SIN(TAN(0)))))))))-(((TAN(G))^(P))+(1)))))))/(G))*(b))
Sursa programului care foloseşte funcia de mai sus este:
#include <stdlib.h>#include <stdio.h>#include <math.h>#include <time.h>#include <float.h>#include <assert.h>#include <conio.h>
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 143/149
143
#define G 9.816262
#define P 3.141592
float DIVS ( float top, float bot ){if (bot == 0.0)
return (1.0);elsereturn ( top/bot );
}
float SIN ( float x ){if ((x>pow(2,63)) || (x<(-pow(2,63))))
return (0.0);elsereturn ( sin(x) );
}
float COS ( float x ){if ((x>pow(2,63)) || (x<(-pow(2,63))))
return (0.0);elsereturn ( cos(x) );
}
float ASIN ( float x ){if( (x >= -1.0) && (x <= 1.0) )
return asin(x);elsereturn ( 0.0 );
}
float TAN ( float x ){if ( cos(x) < 0.000000001)
return ( 0.0 );elsereturn tan(x);
}
float POWS ( float x, float y ){if ((x==0.) || (y<0.))
return (0.0);elsereturn ( pow( x, y ) );
}
float LOGS ( float x ){if (x < 0.000000001)
return (0.0);elsereturn ( log( x ) );

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 144/149
144
}
float EXPS ( float x ){if (x > pow(2,63) )
return (0.0);else
return ( exp( x ) );}
float gp( float a, float b, float c ){
return ( ((DIVS(((LOGS(DIVS((ASIN(TAN(COS(TAN(TAN(ASIN((POWS((a),(b)))+(c)))))))),(EXPS(SIN(LOGS(SIN(POWS((a),(P)) )))))) ))+(LOGS(LOGS((((EXPS(P))*(TAN((b)-(TAN(EXPS(c))))))*(POWS((SIN(ASIN(P))),(P))))+((((((a)+(LOGS((EXPS(P))*(G))))+(c))+(SIN(EXPS(COS(POWS((b),(ASIN(P))) )))))-(SIN(COS((LOGS((EXPS(P))+(EXPS(P))))*(SIN(COS(b)))))))-((COS(SIN(DIVS(((TAN(COS(COS(c))))-(SIN(COS((P)*(b))))),(EXPS(TAN(ASIN(SIN(TAN((c)*(TAN(G))))))))) )))-((POWS((TAN(G)),(P)))+(DIVS((COS(DIVS((G),(P)) )),(TAN(LOGS(c)))) )))))))),((TAN((ASIN(SIN(P)))*(((((b)*(b))+(c))-
(EXPS((EXPS(P))-((b)-(P)))))-(EXPS((SIN(EXPS(LOGS(P))))+(c))))))+((G)-(TAN(TAN((TAN(TAN(TAN(TAN(P)))))*(((b)+(c))-((LOGS(SIN(LOGS((G)-(G)))))+(SIN(SIN((c)-(G)))))))))))) )*((b)-(TAN((ASIN(TAN(EXPS(LOGS((b)-(a))))))*(EXPS((G)-(LOGS((P)+(SIN((P)-(c))))))))))) );}
void main(void){
float temp;char proc='%';printf (" \t Result \t\t Input \t\t\t Deviation\n ");printf ("\t-------------------------------------------------------------\n "); temp = gp( 16.000000,
30.000000, 16000.000000 );printf ("\t %f ", temp);
printf ("\t\t 6.800000 ");printf ("\t\t %f %c\n",fabs(fabs(temp-(6.800000))/(6.800000))*100,proc);temp = gp( 16.000000, 25.000000, 14000.000000 );printf ("\t %f ", temp);printf ("\t\t 5.700000 ");printf ("\t\t %f %c\n",fabs(fabs(temp-(5.700000))/(5.700000))*100,proc);temp = gp( 16.000000, 20.000000, 12000.000000 );printf ("\t %f ", temp);printf ("\t\t 4.600000 ");printf ("\t\t %f %c\n",fabs(fabs(temp-(4.600000))/(4.600000))*100,proc);temp = gp( 16.000000, 15.000000, 10000.000000 );printf ("\t %f ", temp);printf ("\t\t 3.400000 ");
printf ("\t\t %f %c\n",fabs(fabs(temp-(3.400000))/(3.400000))*100,proc);printf ("\n\n\t Press any key...\n");getch();
}
Observăm că apelul funciei gp se face la un set de funcii care sunt incluse în funciainiială. Utilizăm totodată şi un set de două constante.

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 145/149
145
După compilarea şi rularea acestui program obinem rezultatele conform capturii deecran de mai jos:
Figura A2 - 1 Captură ecran cu rezultatul rulării
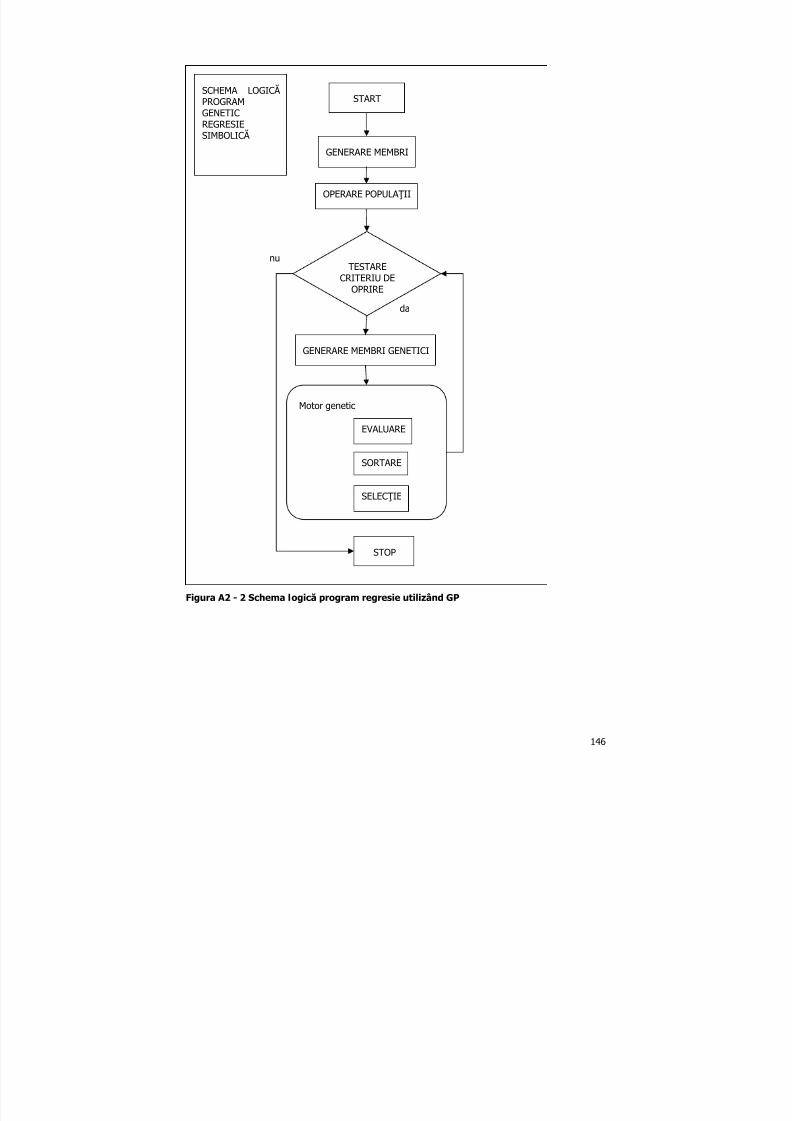
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 146/149
146
Figura A2 - 2 Schema logică program regresie utilizând GP
da
Motor genetic
START
GENERARE MEMBRI
OPERARE POPULAII
TESTARECRITERIU DE
OPRIRE
GENERARE MEMBRI GENETICI
EVALUARE
SORTARE
SELECIE
STOP
nu
SCHEMA LOGICĂPROGRAMGENETICREGRESIESIMBOLICĂ

5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 147/149
147
Modulul de generare a membrilor populaiei
Figura A2 - 3 Schema logică a modulului de generare a membrilor populaiei
Validare
Generare variabile aleatoare
Testarecorectitudine
Depăşire adâncimemaximă admisă
arbore?
incorect
da
corect
nu
MODULGENERARE
MEMBRI
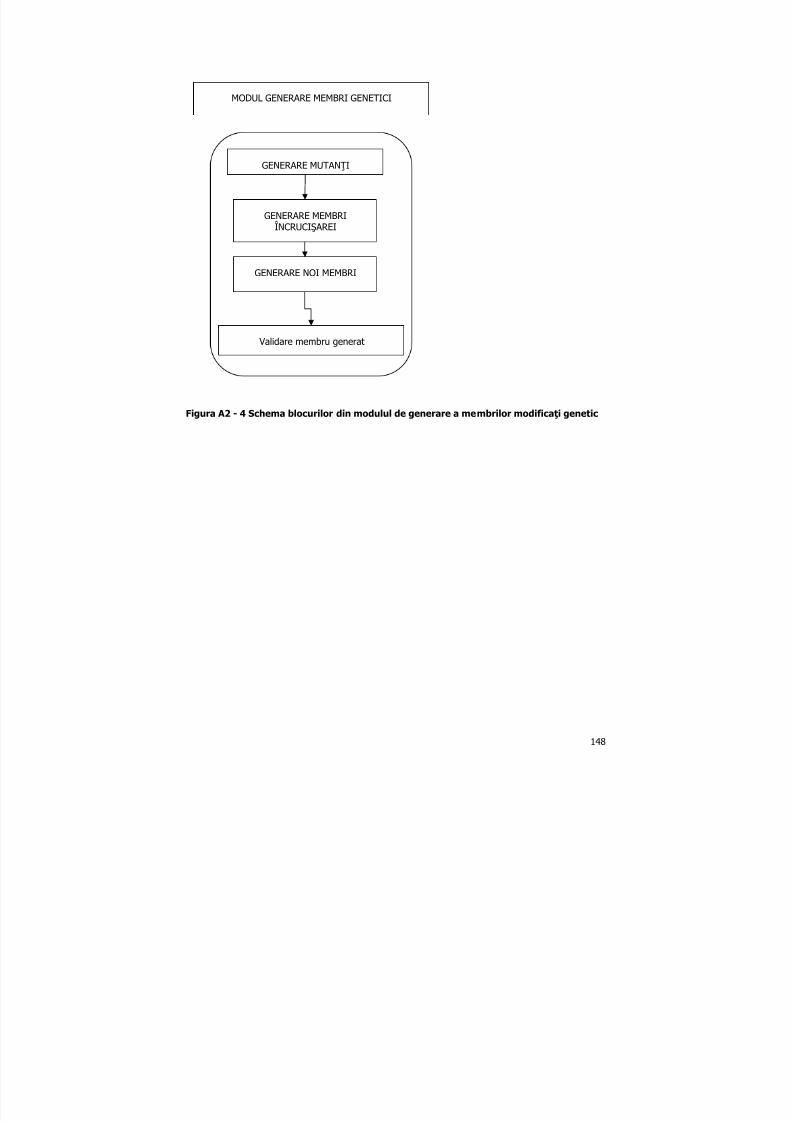
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 148/149
148
Figura A2 - 4 Schema blocurilor din modulul de generare a membrilor modificai genetic
GENERARE MUTANI
GENERARE MEMBRIÎNCRUCIŞAREI
MODUL GENERARE MEMBRI GENETICI
GENERARE NOI MEMBRI
Validare membru generat
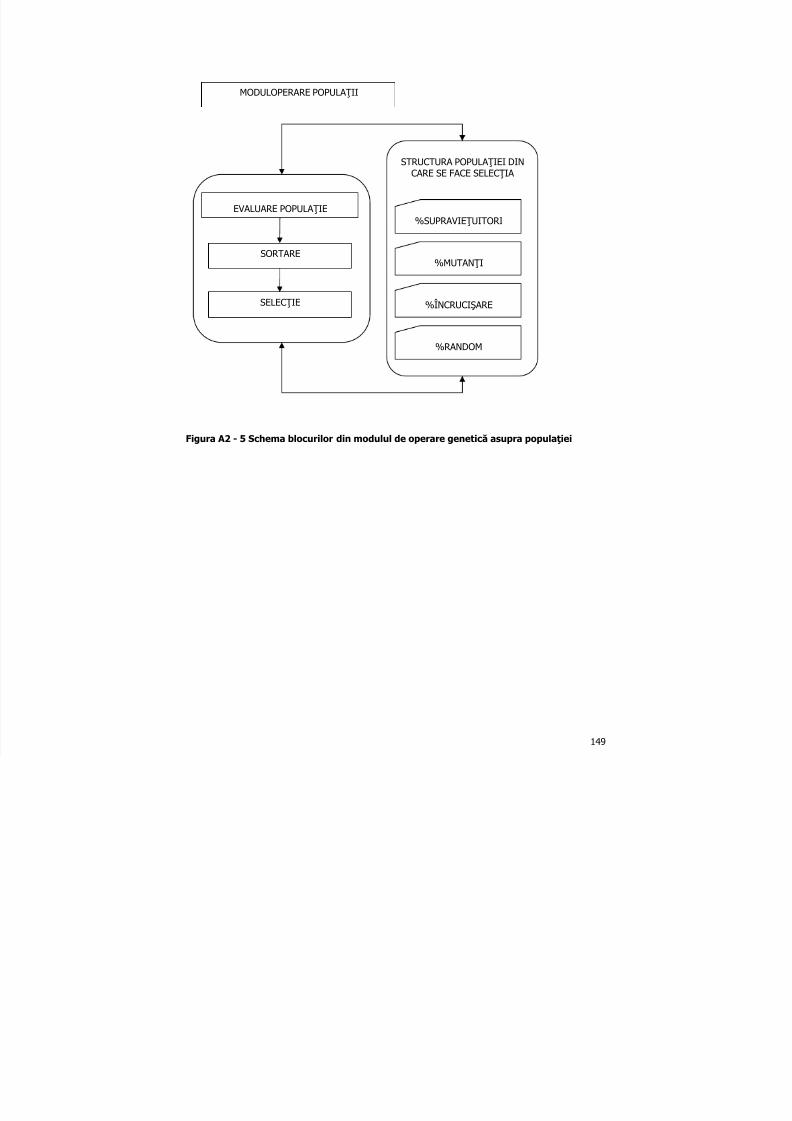
5/6/2018 TEZA 23-03-05 - IONICA Gheorghe - slidepdf.com
http://slidepdf.com/reader/full/teza-23-03-05-ionica-gheorghe 149/149
Figura A2 - 5 Schema blocurilor din modulul de operare genetică asupra populaiei
STRUCTURA POPULAIEI DINCARE SE FACE SELECIA
EVALUARE POPULAIE
SORTARE
MODULOPERARE POPULAII
SELECIE
%SUPRAVIEUITORI
%MUTANI
%ÎNCRUCIŞARE
%RANDOM