seria 3731 poziț tip 3731-3 - samson group · presiunii de alimentare, aceasta trebuie s ă fie...
TRANSCRIPT
Seria 3731 Poziționer electropneumatic versiune Ex d Tip 3731-3 Cu comunicație HART®
Fig. 1 · Tip 3731-3
Instruc țiuni de Montare și Operare
EB 8387-3 RO
JIS Firmware version 1.53 Ediție Iulie 2008
Traducerea documentului original.
Există o versiune nouă
a documentul original.
Definirea tipurilor de atenționări din aceste instrucțiun
PERICOL! Indică o situație periculoasă care, dacă nu este evitată, duce la răniri și pierderi de vieți omenești.
ATENȚIE! Indică o situație periculoasă care, dacă nu este evitată, poate duce la răniri și pierderi de vieți omenești. 2 EB 8387-3 RO
NOTĂ! Indică posibilitatea distrugerilor materiale.
Notă: Explicații suplimentare, informații și sfaturi.
Cuprins
Cuprins
1 Instrucțiuni importanțe pentru siguranță 6
2 Cod articol 7
3 Construcție și principiu de funcționare. 8 3.1 Tipul aplicației 9 3.2 Echipament suplimentar. 10 3.3 Comunicație . . . 11 3.3.1 Configurare folosind TROVIS-VIEW software 11 3.4 Date tehnice. 12
4 Conectarea la robinetul de reglare – Piese și accesorii de montare 15 4.1 Conectare directă 17 4.1.1 Servomotor tip 3277-5. . . 17 4.1.2 Servomotor tip 3277. . . 20 4.2 Conectarea în conformitate cu IEC 60534-6 (NAMUR) . 22 4.3 Conectarea la robinetul pentru micro-debite tip 3510. . . 24 4.4 Conectarea la servomotoare rotative . 26 4.5 Dispozitiv pneumatic de inversare pentru servomotoare cu dublă acțiune. 28 4.5.1 Dispozitiv de inversare (1079-1118 sau 1079-1119) 28 4.6 Părți de montare și accesorii. 30
5 Conexiuni. 32 5.1 Conexiuni pneumatice. 32 5.1.1 Manometre pentru presiunea de semnal 33 5.1.2 Presiunea de alimentare. 33 5.1.3 Presiunea de semnal (ieșire) 33 5.2 Conexiunile electrice 34 5.2.1 Stabilirea comunicației 38
6 Comenzile operatorului și afișare. . 40 6.1 Buton rotativ . 40 6.2 Interfața serială 40 6.3 Afișări pe ecran . 40 6.4 Comunicație HART® 42
7 Pornire și setări. 42 7.1 Adaptarea afișajului. 43 7.2 Limitarea presiunii de semnal. 43 7.3 Verificarea domeniului de operare al poziționerului. 44 7.4 Alocare poziție închis robinet 45 7.5 Inițializare. 45
EB 8387-3 RO 3
Cuprins
7.5.1 MAX - Inițializare bazată pe domeniul maxim (metoda simplă) 47 7.5.2 NOM - Inițializare bazată pe domeniul nominal (metoda precisă). . 48 7.5.3 MAN - Inițializare bazată pe selectare manuală a domeniului (manuală) 49 7.5.4 SUB substituire calibrare 51 7.6 Calibrare poziție de Zero. 54 7.7 Setarea poziționerului pentru robineți închis/deschis 55 7.8 Resetare la valorile de fabrică . 57
8 Operare. . 58 8.1 Activarea și selectarea parametrilor 58 8.2 Modurile de operare. . . 59 8.2.1 Modurile de operare automat (AUTO) și manual (MAN) . . . 59 8.2.2 Poziția de siguranță (SAFE) . 60 8.3 Alarmă defecțiune / alarmă întreținere. . . 60 8.3.1 Confirmarea mesajelor de eroare 61
9 Întreținere 62
10 Repararea dispozitivelor cu protecție la explozie. 62
11 Listă coduri 63
12 Setarea cu programul TROVIS-VIEW – lista parametrilor 88 12.1 Generalități. . . 88 12.1.1 Cerințe de sistem. 88 12.2 Instalarea programului TROVIS-VIEW. 89 12.3 Pornirea TROVIS-VIEW și efectuarea setărilor de bază. 90 12.4 Transmisii de date. 92 12.4.1 Operare Offline (transmisii de date indirecte). 93 12.4.2 Operare Online (transmisii de date indirecte). 93 12.5 Setarea parametrilor. 94 12.6 Inițializarea poziționerului 96 12.7 Clasificarea stărilor 98
13 Dimensiuni în mm. . . 100 13.1 Conectarea în conformitate cu VDI/VDE 3845 (Septembrie 2010) 102
14 Anexe . . . 104 14.1 Selectarea caracteristicilor robinetului 104
Certificate. 106 Index . 108
4 EB 8387-3 RO
Modificări firmware poziționer
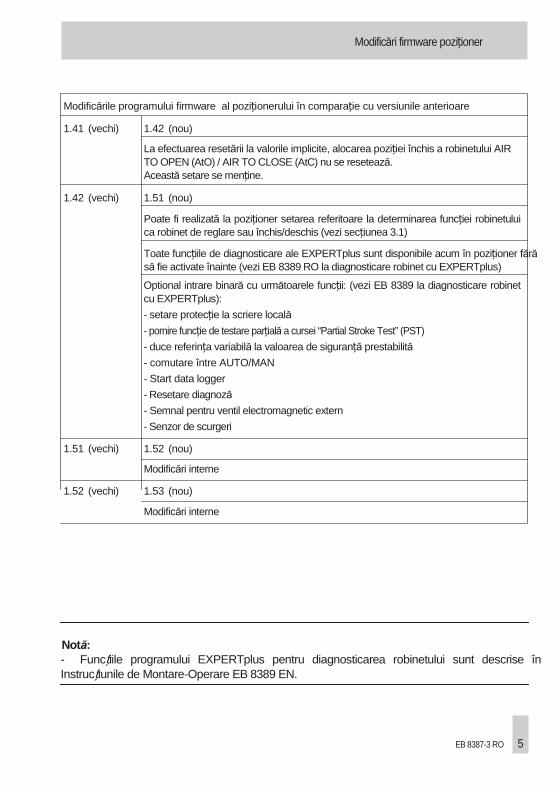
Modificările programului firmware al poziționerului în comparație cu versiunile anterioare
1.41 (vechi) 1.42 (nou)
La efectuarea resetării la valorile implicite, alocarea poziției închis a robinetului AIR TO OPEN (AtO) / AIR TO CLOSE (AtC) nu se resetează. Această setare se menține.
1.42 (vechi) 1.51 (nou)
Poate fi realizată la poziționer setarea referitoare la determinarea funcției robinetului ca robinet de reglare sau închis/deschis (vezi secțiunea 3.1)
Toate funcțiile de diagnosticare ale EXPERTplus sunt disponibile acum în poziționer fără să fie activate înainte (vezi EB 8389 RO la diagnosticare robinet cu EXPERTplus)
Optional intrare binară cu următoarele funcții: (vezi EB 8389 la diagnosticare robinet cu EXPERTplus):
- setare protecție la scriere locală
- pornire funcție de testare parțială a cursei “Partial Stroke Test” (PST)
- duce referința variabilă la valoarea de siguranță prestabilită
- comutare între AUTO/MAN
- Start data logger
- Resetare diagnoză
- Semnal pentru ventil electromagnetic extern
- Senzor de scurgeri
1.51 (vechi) 1.52 (nou)
Modificări interne
1.52 (vechi) 1.53 (nou)
Modificări interne
Notă: - Funcțiile programului EXPERTplus pentru diagnosticarea robinetului sunt descrise în Instrucțiunile de Montare-Operare EB 8389 EN.
EB 8387-3 RO 5
Instrucțiuni inportante de siguranță
1 Instruc țiuni importante de siguran ță
Pentru siguranța dvs., urmați cu strictețe aceste instrucțiuni cu privire la montarea, pornirea și operarea poziționerului:
Poziționerul poate fi asamblat, pornit sau operat doar de personalul experimentat familiarizat cu acest produs.
Conform acestor instrucțiuni de montare și operare, prin personal calificat se înțelege orice persoană capabilă să aprecieze sarcina care i-a fost atribuită și să recunoască posibilele pericole datorită pregătirii lor de specialitate, cunoștințelor și experienței lor precum și cunoștințelor privind standardele relevante.
Versiunile cu protecție la explozie ale acestui poziționer pot fi operate doar de personalul care a urmat o pregătire sau instruire specială sau care este autorizat să lucreze cu dispozitivele cu protecție la explozie în zonele cu risc. Consultați secțiunea 11 privind repararea versiunilor cu protecție la explozie. Orice pericol ce se poate produce din cauza agentului de proces, a presiunii de operare, presiunii de semnal sau de către piesele mobile ale robinetului de reglare trebuie să fie prevenit prin adoptarea măsurilor adecvate.
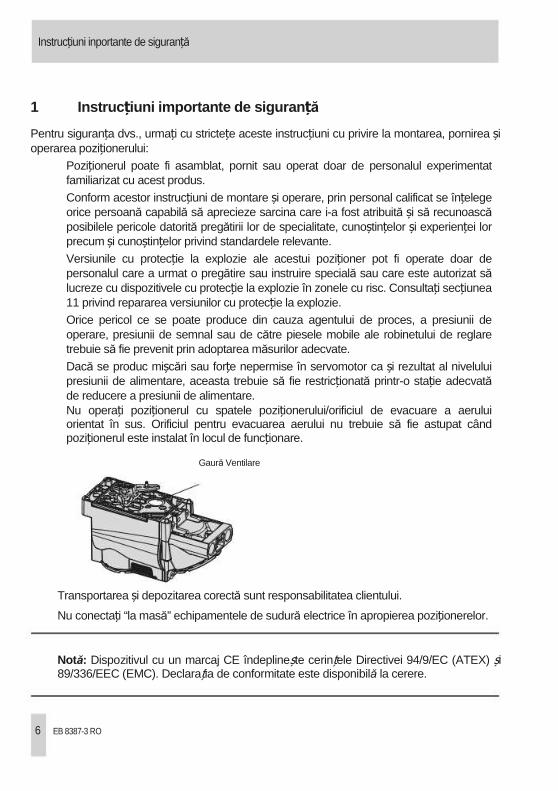
Dacă se produc mișcări sau forțe nepermise în servomotor ca și rezultat al nivelului presiunii de alimentare, aceasta trebuie să fie restricționată printr-o stație adecvată de reducere a presiunii de alimentare. Nu operați poziționerul cu spatele poziționerului/orificiul de evacuare a aerului orientat în sus. Orificiul pentru evacuarea aerului nu trebuie să fie astupat când poziționerul este instalat în locul de funcționare.
Gaură Ventilare
Transportarea și depozitarea corectă sunt responsabilitatea clientului.
Nu conectați “la masă” echipamentele de sudură electrice în apropierea poziționerelor.
Notă: Dispozitivul cu un marcaj CE îndeplinește cerințele Directivei 94/9/EC (ATEX) și 89/336/EEC (EMC). Declarația de conformitate este disponibilă la cerere.
6 EB 8387-3 RO
Cod articol
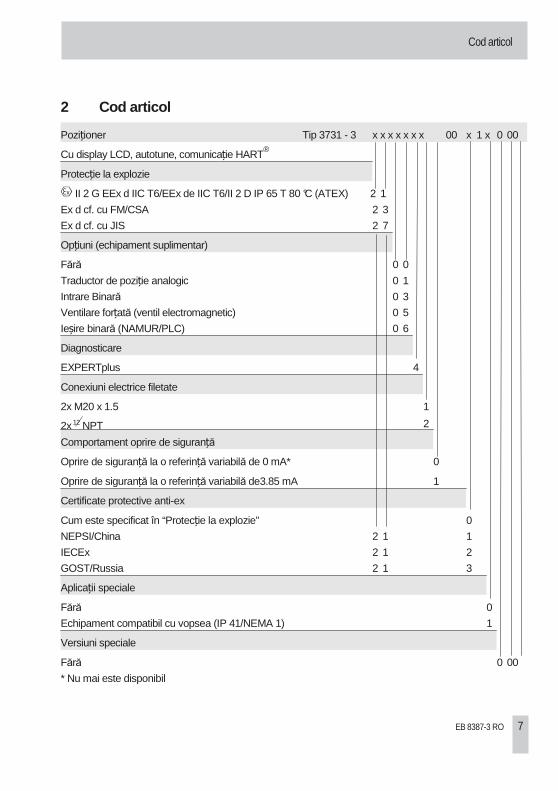
2 Cod articol Poziționer Tip 3731 - 3 x x x x x x x 00 x 1 x 0 00
Cu display LCD, autotune, comunicație HART®
Protecție la explozie
II 2 G EEx d IIC T6/EEx de IIC T6/II 2 D IP 65 T 80 °C (ATEX) 2 1
Ex d cf. cu FM/CSA 2 3
Ex d cf. cu JIS 2 7
Opțiuni (echipament suplimentar)
Fără 0 0
Traductor de poziție analogic 0 1
Intrare Binară 0 3
Ventilare forțată (ventil electromagnetic) 0 5
Ieșire binară (NAMUR/PLC) 0 6
Diagnosticare
EXPERTplus 4
Conexiuni electrice filetate
2x M20 x 1.5 1
2x 12 NPT 2
Comportament oprire de siguranță
Oprire de siguranță la o referință variabilă de 0 mA* 0
Oprire de siguranță la o referință variabilă de3.85 mA 1
Certificate protective anti-ex
Cum este specificat în “Protecție la explozie” 0
NEPSI/China 2 1 1
IECEx 2 1 2
GOST/Russia 2 1 3
Aplicații speciale
Fără 0
Echipament compatibil cu vopsea (IP 41/NEMA 1) 1
Versiuni speciale
Fără 0 00
* Nu mai este disponibil
EB 8387-3 RO 7
Construcție și principiu de funcționare
3 Construc ție și principiu de func ționare
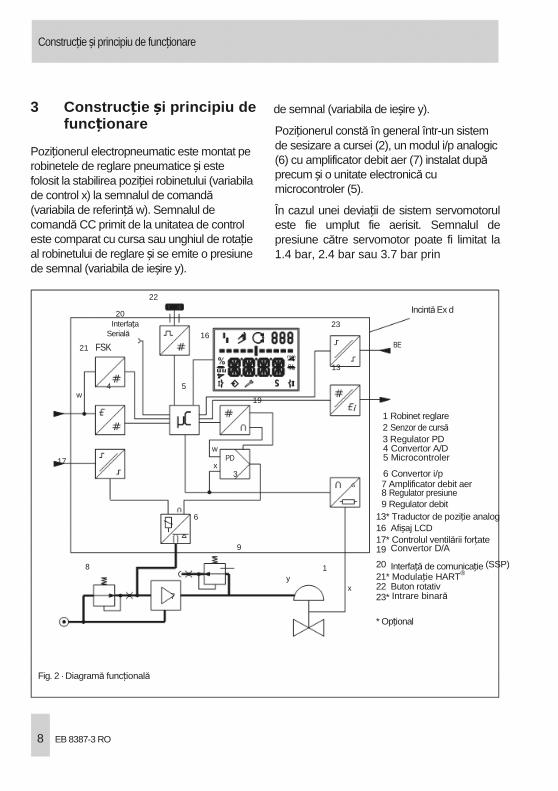
Poziționerul electropneumatic este montat pe robinetele de reglare pneumatice și este folosit la stabilirea poziției robinetului (variabila de control x) la semnalul de comandă (variabila de referință w). Semnalul de comandă CC primit de la unitatea de control este comparat cu cursa sau unghiul de rotație al robinetului de reglare și se emite o presiune de semnal (variabila de ieșire y).
de semnal (variabila de ieșire y).
Poziționerul constă în general într-un sistem de sesizare a cursei (2), un modul i/p analogic (6) cu amplificator debit aer (7) instalat după precum și o unitate electronică cu microcontroler (5).
În cazul unei deviații de sistem servomotorul este fie umplut fie aerisit. Semnalul de presiune către servomotor poate fi limitat la 1.4 bar, 2.4 bar sau 3.7 bar prin
22
20 Interfața
Serială
21 FSK
4 5 w
17
Incintă Ex d
23 16
BE mm
% 13
19
1 Robinet reglare 2 Senzor de cursă 3 Regulator PD
w 4 Convertor A/D PD 5 Microcontroler
x 3 6 Convertor i/p
G 7 Amplificator debit aer 8 Regulator presiune 9 Regulator debit
6 13* Traductor de poziție analog 16 Afișaj LCD 17* Controlul ventilării forțate
9 19 Convertor D/A 8 1 20 Interfață de comunicație (SSP)
y 21* Modulație HART® x 22 Buton rotativ
7 23* Intrare binară
* Opțional Fig. 2 · Diagramă funcțională
8 EB 8387-3 RO
Construcție și principiu de funcționare
software sau local de la poziționer. Un regulator de debit intermediar (9) cu setări fixe este utilizat pentru a purja poziționerul aerul în atmosferă. Debitul de aer este utilizat pentru purjarea interiorului incintei cât și pentru a optimiza capacitatea amplificatorului de aer (7). Convertorul i/p (6) este alimentat cu o presiune constantă de către regulatorul de presiune (8) fiind independent de presiunea de alimentare.
Toate părțile component sunt incluse în incinta Ex d. Cablurile electrice sunt conectate separate într-un compartiment terminal care este de asemenea proiectat cu protective Ex d.
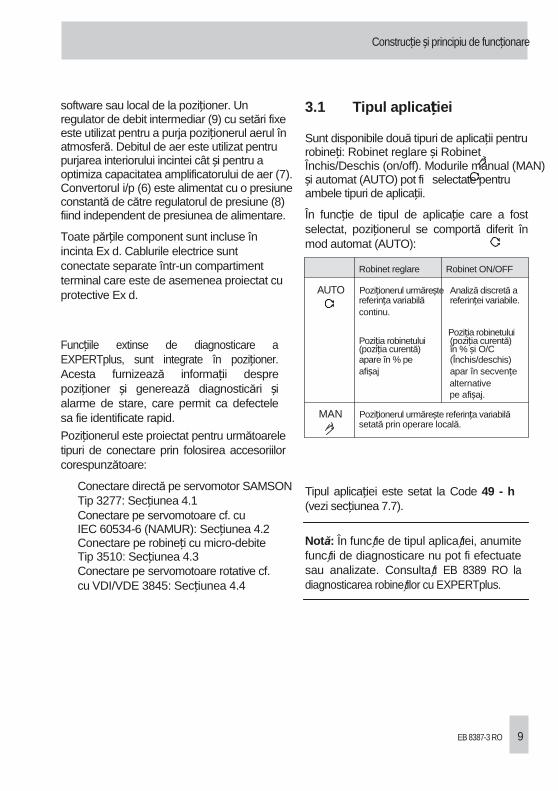
3.1 Tipul aplica ției
Sunt disponibile două tipuri de aplicații pentru robineți: Robinet reglare și Robinet Închis/Deschis (on/off). Modurile manual (MAN) și automat (AUTO) pot fi selectate pentru ambele tipuri de aplicații.
În funcție de tipul de aplicație care a fost selectat, poziționerul se comportă diferit în mod automat (AUTO):
Robinet reglare Robinet ON/OFF
AUTO Poziționerul urmărește Analiză discretă a referința variabilă referinței variabile. continu.
Poziția robinetului
Funcțiile extinse de diagnosticare a EXPERTplus, sunt integrate în poziționer. Acesta furnizează informații despre poziționer și generează diagnosticări și alarme de stare, care permit ca defectele sa fie identificate rapid.
Poziționerul este proiectat pentru următoarele tipuri de conectare prin folosirea accesoriilor corespunzătoare:
Conectare directă pe servomotor SAMSON Tip 3277: Secțiunea 4.1 Conectare pe servomotoare cf. cu IEC 60534-6 (NAMUR): Secțiunea 4.2 Conectare pe robineți cu micro-debite Tip 3510: Secțiunea 4.3 Conectare pe servomotoare rotative cf. cu VDI/VDE 3845: Secțiunea 4.4
Poziția robinetului (poziția curentă) (poziția curentă) în % și O/C apare în % pe (Închis/deschis) afișaj apar în secvențe
alternative pe afișaj.
MAN Poziționerul urmărește referința variabilă setată prin operare locală.
Tipul aplicației este setat la Code 49 - h (vezi secțiunea 7.7).
Notă: În funcție de tipul aplicației, anumite funcții de diagnosticare nu pot fi efectuate sau analizate. Consultați EB 8389 RO la diagnosticarea robineților cu EXPERTplus.
EB 8387-3 RO 9
Construcție și principiu de funcționare
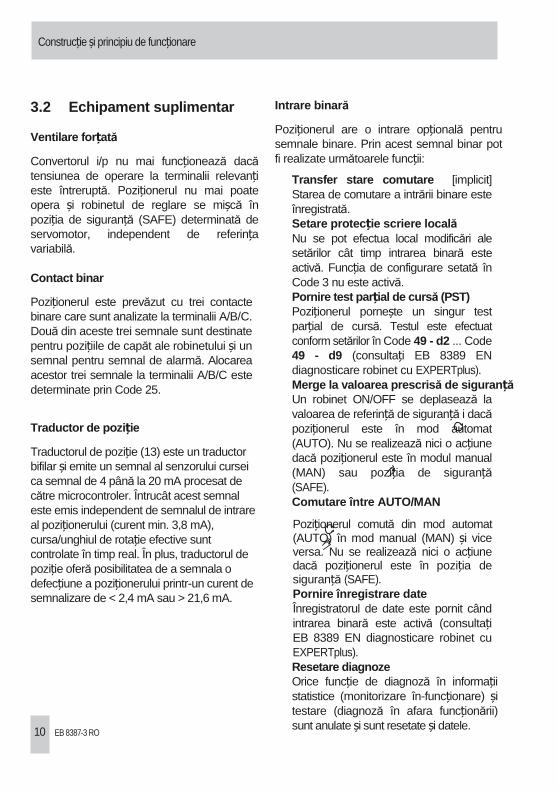
3.2 Echipament suplimentar Ventilare for țată
Convertorul i/p nu mai funcționează dacă tensiunea de operare la terminalii relevanți este întreruptă. Poziționerul nu mai poate opera și robinetul de reglare se mișcă în poziția de siguranță (SAFE) determinată de servomotor, independent de referința variabilă. Contact binar
Poziționerul este prevăzut cu trei contacte binare care sunt analizate la terminalii A/B/C. Două din aceste trei semnale sunt destinate pentru pozițiile de capăt ale robinetului și un semnal pentru semnal de alarmă. Alocarea acestor trei semnale la terminalii A/B/C este determinate prin Code 25.
Traductor de pozi ție
Traductorul de poziție (13) este un traductor bifilar și emite un semnal al senzorului cursei ca semnal de 4 până la 20 mA procesat de către microcontroler. Întrucât acest semnal este emis independent de semnalul de intrare al poziționerului (curent min. 3,8 mA), cursa/unghiul de rotație efective sunt controlate în timp real. În plus, traductorul de poziție oferă posibilitatea de a semnala o defecțiune a poziționerului printr-un curent de semnalizare de < 2,4 mA sau > 21,6 mA.
10 EB 8387-3 RO
Intrare binar ă
Poziționerul are o intrare opțională pentru semnale binare. Prin acest semnal binar pot fi realizate următoarele funcții:
Transfer stare comutare [implicit] Starea de comutare a intrării binare este înregistrată. Setare protec ție scriere local ă Nu se pot efectua local modificări ale setărilor cât timp intrarea binară este activă. Funcția de configurare setată în Code 3 nu este activă. Pornire test par țial de curs ă (PST) Poziționerul pornește un singur test parțial de cursă. Testul este efectuat conform setărilor în Code 49 - d2 ... Code 49 - d9 (consultați EB 8389 EN diagnosticare robinet cu EXPERTplus). Merge la valoarea prescris ă de siguran ță Un robinet ON/OFF se deplasează la valoarea de referință de siguranță i dacă poziționerul este în mod automat (AUTO). Nu se realizează nici o acțiune dacă poziționerul este în modul manual (MAN) sau poziția de siguranță (SAFE). Comutare între AUTO/MAN
Poziționerul comută din mod automat (AUTO) în mod manual (MAN) și vice versa. Nu se realizează nici o acțiune dacă poziționerul este în poziția de siguranță (SAFE). Pornire înregistrare date Înregistratorul de date este pornit când intrarea binară este activă (consultați EB 8389 EN diagnosticare robinet cu EXPERTplus). Resetare diagnoze Orice funcție de diagnoză în informații statistice (monitorizare în-funcționare) și testare (diagnoză în afara funcționării) sunt anulate și sunt resetate și datele.

Construcție și principiu de funcționare
Electroventil conectat Este recunoscută declanșarea unui electroventil. Senzor de scurgeri Eroarea “External leakage soon to be ex- pected” este setată. Eroarea este resetată când semnalul este setat la OFF. Alarma rămâne la înregistrări.
Notă: Opțiunile pentru intrarea binară pot fi configurate numai utilizând software TROVIS-VIEW prin intermediul parametrilor DD (consultați EB 8389 EN diagnosticare robinet cu EXPERTplus). Starea implicită este cu un contact deschis.
Conectare la terminalii A-B: Intrare binară pentru semnale de tensiune DC
Conectare la terminalii B-C: Intrare contact pentru un contact extern.
3.3 Comunica ție
Poziționerul este echipat cu un protocol al interfeței HART® (traductorul de la distanță accesibil prin magistrală) pt. comunicare. Datele sunt transmise printr-o frecvență supraimpusă cu modulație FSK (FSK = Frequency Shift Keying) la bucla de semnal existentă pentru variabila de referință de 4 până la 20 mA. Se poate utiliza fie un aparat de comunicație mobil compatibil HART sau un calculator cu modem FSK pentru a stabili comunicația și pentru operarea poziționerului
3.3.1 Configurare folosind software TROVIS-VIEW
Consultați Tabelul 5 la pagina 31 pentru codurile de comandă.
Poziționerul poate fi configurat utilizând software TROVIS-VIEW. Poziționerul este echipat în acest scop cu o INTERFAȚĂ SERIALĂ pentru a permite conectarea la un computer prin intermediul unui adaptor și cablu de la poziționer RS-232 la portul USB al unui computer. Software TROVIS-VIEW permite utilizatorului să seteze ușor parametrii în poziționer și să vizualizeze parametrii de proces online.
EB 8387-3 RO 11
Construcție și principiu de funcționare
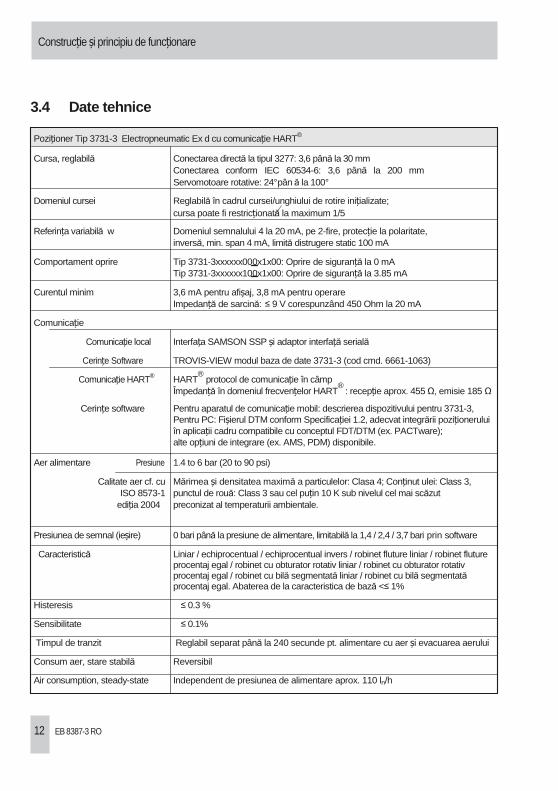
3.4 Date tehnice Poziționer Tip 3731-3 Electropneumatic Ex d cu comunicație HART®
Cursa, reglabilă Conectarea directă la tipul 3277: 3,6 până la 30 mm Conectarea conform IEC 60534-6: 3,6 până la 200 mm Servomotoare rotative: 24° pân ă la 100°
Domeniul cursei Reglabilă în cadrul cursei/unghiului de rotire inițializate; cursa poate fi restricționată la maximum 1/5
Referința variabilă w Domeniul semnalului 4 la 20 mA, pe 2-fire, protecție la polaritate, inversă, min. span 4 mA, limită distrugere static 100 mA
Comportament oprire Tip 3731-3xxxxxx000x1x00: Oprire de siguranță la 0 mA Tip 3731-3xxxxxx100x1x00: Oprire de siguranță la 3.85 mA
Curentul minim 3,6 mA pentru afișaj, 3,8 mA pentru operare Impedanță de sarcină: ≤ 9 V corespunzând 450 Ohm la 20 mA
Comunicație
Comunicație local Interfața SAMSON SSP și adaptor interfață serială
Cerințe Software TROVIS-VIEW modul baza de date 3731-3 (cod cmd. 6661-1063)
Comunicație HART® HART®
protocol de comunicație în câmp Împedanță în domeniul frecvențelor HART
® : recepție aprox. 455 Ω, emisie 185 Ω
Cerințe software Pentru aparatul de comunicație mobil: descrierea dispozitivului pentru 3731-3, Pentru PC: Fișierul DTM conform Specificației 1.2, adecvat integrării poziționerului în aplicații cadru compatibile cu conceptul FDT/DTM (ex. PACTware); alte opțiuni de integrare (ex. AMS, PDM) disponibile.
Aer alimentare Presiune 1.4 to 6 bar (20 to 90 psi)
Calitate aer cf. cu Mărimea și densitatea maximă a particulelor: Clasa 4; Conținut ulei: Class 3, ISO 8573-1 punctul de rouă: Class 3 sau cel puțin 10 K sub nivelul cel mai scăzut
ediția 2004 preconizat al temperaturii ambientale.
Presiunea de semnal (ieșire) 0 bari până la presiune de alimentare, limitabilă la 1,4 / 2,4 / 3,7 bari prin software
Caracteristică Liniar / echiprocentual / echiprocentual invers / robinet fluture liniar / robinet fluture procentaj egal / robinet cu obturator rotativ liniar / robinet cu obturator rotativ procentaj egal / robinet cu bilă segmentată liniar / robinet cu bilă segmentată procentaj egal. Abaterea de la caracteristica de bază <≤ 1%
Histeresis ≤ 0.3 %
Sensibilitate ≤ 0.1%
Timpul de tranzit Reglabil separat până la 240 secunde pt. alimentare cu aer și evacuarea aerului
Consum aer, stare stabilă Reversibil
Air consumption, steady-state Independent de presiunea de alimentare aprox. 110 ln/h
12 EB 8387-3 RO
Construcție și principiu de funcționare
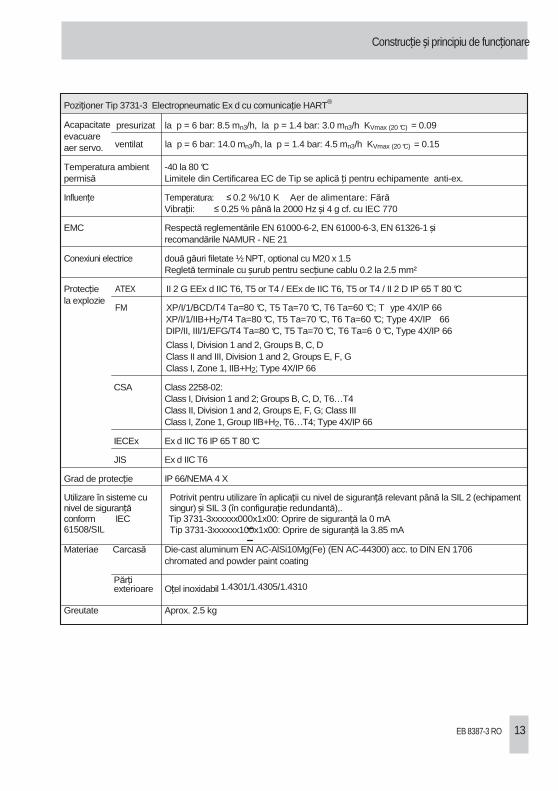
Poziționer Tip 3731-3 Electropneumatic Ex d cu comunicație HART®
Acapacitate evacuare aer servo.
presurizat la p = 6 bar: 8.5 mn3/h, la p = 1.4 bar: 3.0 mn3/h KVmax (20 °C) = 0.09
ventilat la p = 6 bar: 14.0 mn3/h, la p = 1.4 bar: 4.5 mn3/h KVmax (20 °C) = 0.15
Temperatura ambient -40 la 80 °C permisă Limitele din Certificarea EC de Tip se aplică ți pentru echipamente anti-ex.
Influențe Temperatura: ≤ 0.2 %/10 K Aer de alimentare: Fără Vibrații: ≤ 0.25 % până la 2000 Hz și 4 g cf. cu IEC 770
EMC Respectă reglementările EN 61000-6-2, EN 61000-6-3, EN 61326-1 și recomandările NAMUR - NE 21
Conexiuni electrice două găuri filetate ½ NPT, optional cu M20 x 1.5 Regletă terminale cu șurub pentru secțiune cablu 0.2 la 2.5 mm²
Protecție la explozie
ATEX II 2 G EEx d IIC T6, T5 or T4 / EEx de IIC T6, T5 or T4 / II 2 D IP 65 T 80 °C
FM XP/I/1/BCD/T4 Ta=80 °C, T5 Ta=70 °C, T6 Ta=60 °C; T ype 4X/IP 66 XP/I/1/IIB+H2/T4 Ta=80 °C, T5 Ta=70 °C, T6 Ta=60 °C; Type 4X/IP 66 DIP/II, III/1/EFG/T4 Ta=80 °C, T5 Ta=70 °C, T6 Ta=6 0 °C, Type 4X/IP 66
Class I, Division 1 and 2, Groups B, C, D Class II and III, Division 1 and 2, Groups E, F, G Class I, Zone 1, IIB+H2; Type 4X/IP 66
CSA Class 2258-02: Class I, Division 1 and 2; Groups B, C, D, T6…T4 Class II, Division 1 and 2, Groups E, F, G; Class III Class I, Zone 1, Group IIB+H2, T6…T4; Type 4X/IP 66
IECEx Ex d IIC T6 IP 65 T 80 °C
JIS Ex d IIC T6
Grad de protecție IP 66/NEMA 4 X
Utilizare în sisteme cu nivel de siguranță conform IEC 61508/SIL
Potrivit pentru utilizare în aplicații cu nivel de siguranță relevant până la SIL 2 (echipament singur) și SIL 3 (în configurație redundantă),. Tip 3731-3xxxxxx000x1x00: Oprire de siguranță la 0 mA Tip 3731-3xxxxxx100x1x00: Oprire de siguranță la 3.85 mA
Materiae Carcasă Die-cast aluminum EN AC-AlSi10Mg(Fe) (EN AC-44300) acc. to DIN EN 1706 chromated and powder paint coating
Părți exterioare Oțel inoxidabil 1.4301/1.4305/1.4310
Greutate Aprox. 2.5 kg
EB 8387-3 RO 13
Construcție și principiu de funcționare
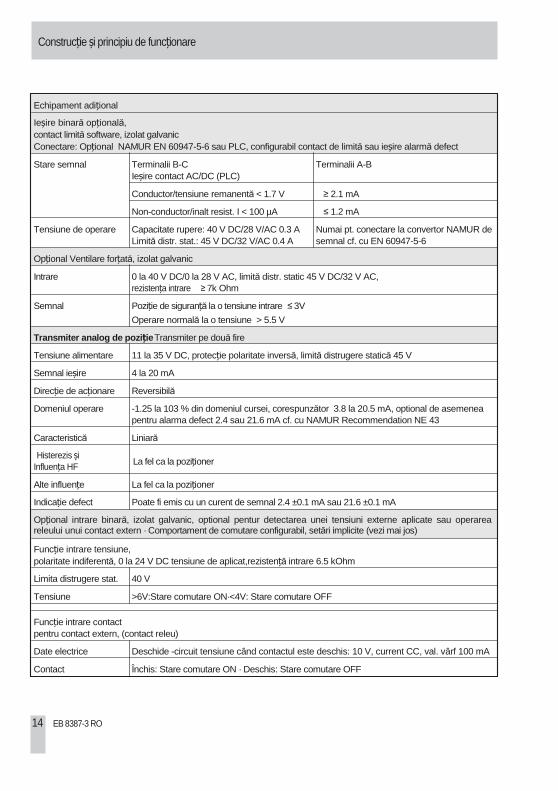
Echipament adițional
Ieșire binară opțională, contact limită software, izolat galvanic Conectare: Opțional NAMUR EN 60947-5-6 sau PLC, configurabil contact de limită sau ieșire alarmă defect
Stare semnal Terminalii B-C Terminalii A-B Ieșire contact AC/DC (PLC)
Conductor/tensiune remanentă < 1.7 V ≥ 2.1 mA
Non-conductor/inalt resist. I < 100 µA ≤ 1.2 mA
Tensiune de operare Capacitate rupere: 40 V DC/28 V/AC 0.3 A Numai pt. conectare la convertor NAMUR de Limită distr. stat.: 45 V DC/32 V/AC 0.4 A semnal cf. cu EN 60947-5-6
Opțional Ventilare forțată, izolat galvanic
Intrare 0 la 40 V DC/0 la 28 V AC, limită distr. static 45 V DC/32 V AC, rezistența intrare ≥ 7k Ohm
Semnal Poziție de siguranță la o tensiune intrare ≤ 3V
Operare normală la o tensiune > 5.5 V
Transmiter analog de pozi ție Transmiter pe două fire
Tensiune alimentare 11 la 35 V DC, protecție polaritate inversă, limită distrugere statică 45 V
Semnal ieșire 4 la 20 mA
Direcție de acționare Reversibilă
Domeniul operare -1.25 la 103 % din domeniul cursei, corespunzător 3.8 la 20.5 mA, optional de asemenea pentru alarma defect 2.4 sau 21.6 mA cf. cu NAMUR Recommendation NE 43
Caracteristică Liniară
Histerezis și Influența HF
La fel ca la poziționer
Alte influențe La fel ca la poziționer
Indicație defect Poate fi emis cu un curent de semnal 2.4 ±0.1 mA sau 21.6 ±0.1 mA
Opțional intrare binară, izolat galvanic, optional pentur detectarea unei tensiuni externe aplicate sau operarea releului unui contact extern · Comportament de comutare configurabil, setări implicite (vezi mai jos)
Funcție intrare tensiune, polaritate indiferentă, 0 la 24 V DC tensiune de aplicat,rezistență intrare 6.5 kOhm
Limita distrugere stat. 40 V
Tensiune >6V:Stare comutare ON·<4V: Stare comutare OFF
Funcție intrare contact pentru contact extern, (contact releu)
Date electrice Deschide -circuit tensiune când contactul este deschis: 10 V, current CC, val. vârf 100 mA
Contact Închis: Stare comutare ON · Deschis: Stare comutare OFF
14 EB 8387-3 RO
Conectarea la robinetul de reglare – Părți de montare și accesorii
4 Conectarea la robinetul de reglare – P ărți de montare și accesorii
ATENȚIE! Montați poziționerul realizând următoarea succesiune: 1. Monta ți pozi ționerul pe robinetul de reglare 2. Conectați alimentarea cu aer 3. Conectați alimentarea cu semnal electric 4. Efectuați setările pentru pornire
Poziționerul este proiectat pentru următoarele tipuri de conectare:
Conectare directă pe servomotor SAMSON Tip 3277 Conectare pe servomotoare cf. cu IEC
60534-6 (NAMUR) Conectare pe robineți cu micro-debite
Tip 3510 Conectare pe servomotoare rotative cf. cu
VDI/VDE 3845
NOTĂ! Montați poziționerul pe robinetul de reglare cu respectarea următoarelor instrucțiuni, pentru a evita distrugerea poziționerului: - Use only the mounting parts/accessories listed in the Tables 1 to 5 (pages 30 and 31) to mount the positioner. Observe the type of attachment! - Poziționerul este prevăzut cu conexiuni filetate ¼ NPT. Dacă sunt necesare conexiuni filetate G ¼ , montați placa de conectare (6) listată în accesorii.. - Consultați corelarea dintre levier și poziția de montare a pinului citire cursă pe levier (vezi tabele pagina 16)!
- Fixați o restrictive de presiune (Tabel 5 la pagina 31) pentru servomotoare cu arie membrane mai mica de 240 cm².
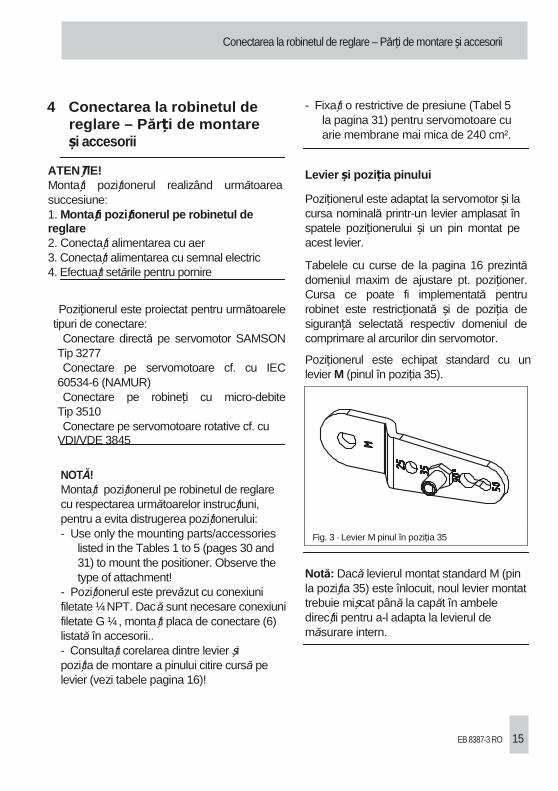
Levier și pozi ția pinului
Poziționerul este adaptat la servomotor și la cursa nominală printr-un levier amplasat în spatele poziționerului și un pin montat pe acest levier.
Tabelele cu curse de la pagina 16 prezintă domeniul maxim de ajustare pt. poziționer. Cursa ce poate fi implementată pentru robinet este restricționată și de poziția de siguranță selectată respectiv domeniul de comprimare al arcurilor din servomotor.
Poziționerul este echipat standard cu un levier M (pinul în poziția 35).
Fig. 3 · Levier M pinul în poziția 35
Notă: Dacă levierul montat standard M (pin la poziția 35) este înlocuit, noul levier montat trebuie mișcat până la capăt în ambele direcții pentru a-l adapta la levierul de măsurare intern.
EB 8387-3 RO 15
Conectarea la robinetul de reglare – Părți de montare și accesorii
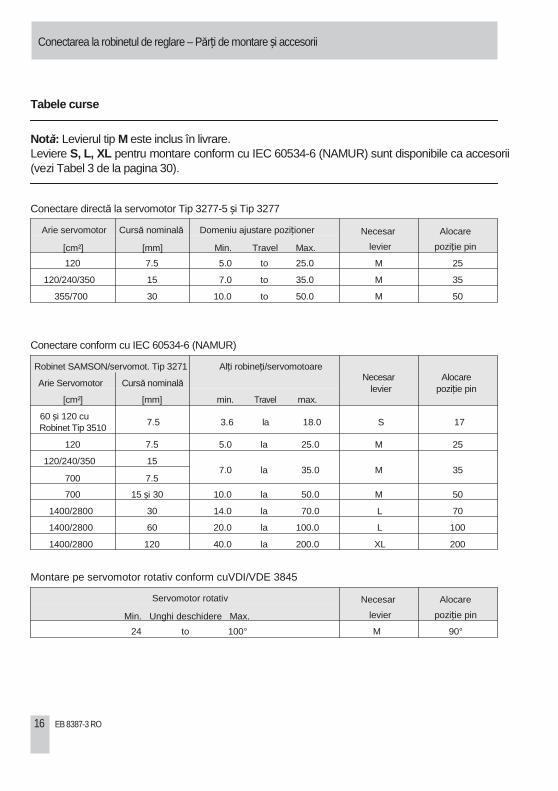
Tabele curse
Notă: Levierul tip M este inclus în livrare. Leviere S, L, XL pentru montare conform cu IEC 60534-6 (NAMUR) sunt disponibile ca accesorii (vezi Tabel 3 de la pagina 30). Conectare directă la servomotor Tip 3277-5 și Tip 3277
Arie servomotor Cursă nominală Domeniu ajustare poziționer Necesar Alocare
[cm²] [mm] Min. Travel Max. levier poziție pin
120 7.5 5.0 to 25.0 M 25
120/240/350 15 7.0 to 35.0 M 35
355/700 30 10.0 to 50.0 M 50 Conectare conform cu IEC 60534-6 (NAMUR)
Robinet SAMSON/servomot. Tip 3271
Arie Servomotor Cursă nominală
[cm²] [mm]
Alți robineți/servomotoare Necesar Alocare
levier poziție pin min. Travel max.
60 și 120 cu Robinet Tip 3510
7.5 3.6 la 18.0 S 17
120 7.5 5.0 la 25.0 M 25
120/240/350 15 7.0 la 35.0 M 35
700 7.5
700 15 și 30 10.0 la 50.0 M 50
1400/2800 30 14.0 la 70.0 L 70
1400/2800 60 20.0 la 100.0 L 100
1400/2800 120 40.0 la 200.0 XL 200
Montare pe servomotor rotativ conform cuVDI/VDE 3845
Servomotor rotativ Necesar Alocare
Min. Unghi deschidere Max. levier poziție pin
24 to 100° M 90°
16 EB 8387-3 RO
Conectarea la robinetul de reglare – Părți de montare și accesorii
4.1 Conectare direct ă
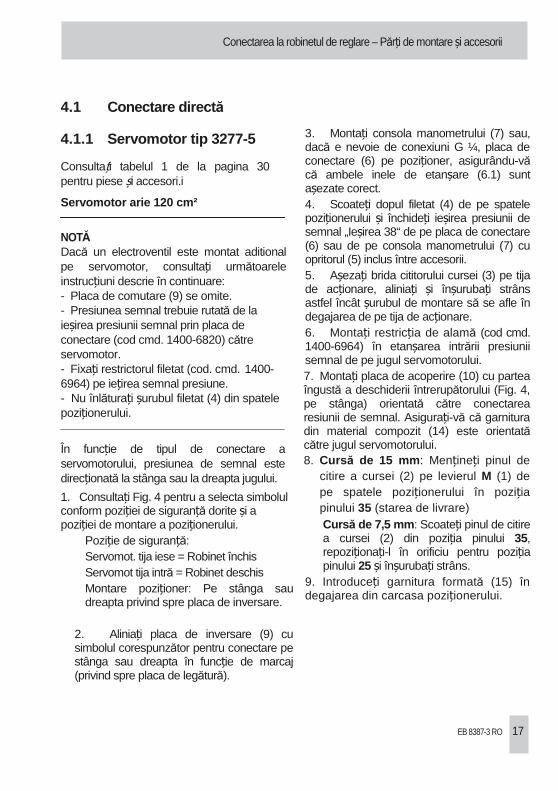
4.1.1 Servomotor tip 3277-5
Consultați tabelul 1 de la pagina 30 pentru piese și accesori.i
Servomotor arie 120 cm²
NOTĂ Dacă un electroventil este montat aditional pe servomotor, consultați următoarele instrucțiuni descrie în continuare: - Placa de comutare (9) se omite. - Presiunea semnal trebuie rutată de la ieșirea presiunii semnal prin placa de conectare (cod cmd. 1400-6820) către servomotor. - Fixați restrictorul filetat (cod. cmd. 1400-6964) pe iețirea semnal presiune. - Nu înlăturați șurubul filetat (4) din spatele poziționerului.
În funcție de tipul de conectare a servomotorului, presiunea de semnal este direcționată la stânga sau la dreapta jugului.
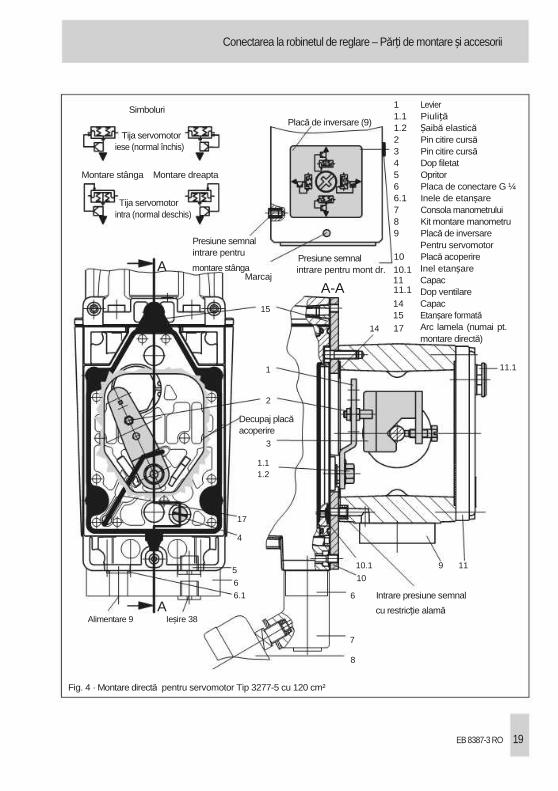
1. Consultați Fig. 4 pentru a selecta simbolul conform poziției de siguranță dorite și a poziției de montare a poziționerului.
Poziție de siguranță: Servomot. tija iese = Robinet închis Servomot tija intră = Robinet deschis Montare poziționer: Pe stânga sau dreapta privind spre placa de inversare.
2. Aliniați placa de inversare (9) cu simbolul corespunzător pentru conectare pe stânga sau dreapta în funcție de marcaj (privind spre placa de legătură).
3. Montați consola manometrului (7) sau, dacă e nevoie de conexiuni G ¼, placa de conectare (6) pe poziționer, asigurându-vă că ambele inele de etanșare (6.1) sunt așezate corect. 4. Scoateți dopul filetat (4) de pe spatele poziționerului și închideți ieșirea presiunii de semnal „Ieșirea 38“ de pe placa de conectare (6) sau de pe consola manometrului (7) cu opritorul (5) inclus între accesorii. 5. Așezați brida cititorului cursei (3) pe tija de acționare, aliniați și înșurubați strâns astfel încât șurubul de montare să se afle în degajarea de pe tija de acționare. 6. Montați restricția de alamă (cod cmd. 1400-6964) în etanșarea intrării presiunii semnal de pe jugul servomotorului. 7. Montați placa de acoperire (10) cu partea îngustă a deschiderii întrerupătorului (Fig. 4, pe stânga) orientată către conectarea resiunii de semnal. Asigurați-vă că garnitura din material compozit (14) este orientată către jugul servomotorului. 8. Curs ă de 15 mm : Mențineți pinul de
citire a cursei (2) pe levierul M (1) de pe spatele poziționerului în poziția pinului 35 (starea de livrare) Cursă de 7,5 mm : Scoateți pinul de citire a cursei (2) din poziția pinului 35, repoziționați-l în orificiu pentru poziția pinului 25 și înșurubați strâns.
9. Introduceți garnitura formată (15) în degajarea din carcasa poziționerului.
EB 8387-3 RO 17

Conectarea la robinetul de reglare – Părți de montare și accesorii
10. Înșurubați arcul lamelar (17) prin traversa de sub levier (1) ți presați în interiorul găurii din carcasă.Presați levierul (1) până se așează în locaș. Montați poziționerul pe placa de acoperire (10) folosind cele două șuruburi de fixare. Verificați și asigurați-vă că pinul citire cursă (2) stă așezat pe partea de sus a bridei (3) cititorului. Levierul (1) trebuie să stea rezemat pe brida cititorului preset de arc. asigurați-vă că inelul de etanșare (10.1) este introdus în orificiul plăcii intermediare. 11. Montați capacul (11) pe cealaltă parte. Asigurați-vă că dopul de aerisire este orientat în jos când robinetul de reglare este instalat pentru a permite scurgerea apei condensate care se adună.
18 EB 8387-3 RO
Conectarea la robinetul de reglare – Părți de montare și accesorii
Simboluri
Tija servomotor iese (normal închis)
Montare stânga Montare dreapta
Tija servomotor intra (normal deschis)
Presiune semnal intrare pentru
Placă de inversare (9)
Presiune semnal
1 Levier 1.1 Piuliță 1.2 Șaibă elastică 2 Pin citire cursă 3 Pin citire cursă 4 Dop filetat 5 Opritor 6 Placa de conectare G ¼ 6.1 Inele de etanșare 7 Consola manometrului 8 Kit montare manometru 9 Placă de inversare
Pentru servomotor 10 Placă acoperire
A montare stânga Marcaj
15
intrare pentru mont dr. 10.1 11
A-A 11.1
14 15
14 17
Inel etanșare Capac Dop ventilare Capac Etanșare formată Arc lamela (numai pt. montare directă)
1
2
Decupaj placă acoperire
3
1.1 1.2
17
4
5
6
6.1
A Alimentare 9 Ieșire 38
Fig. 4 · Montare directă pentru servomotor Tip 3277-5 cu 120 cm²
11.1
10.1 9 11
10
6 Intrare presiune semnal
cu restricție alamă
7
8
EB 8387-3 RO 19
Conectarea la robinetul de reglare – Părți de montare și accesorii
4.1.2 Servomotor Tip 3277
Consultați tabelul 2 de la pagina 30 pentru piesele de montare și accesorii.
Servomotoare cu arii 240 la 700 cm²
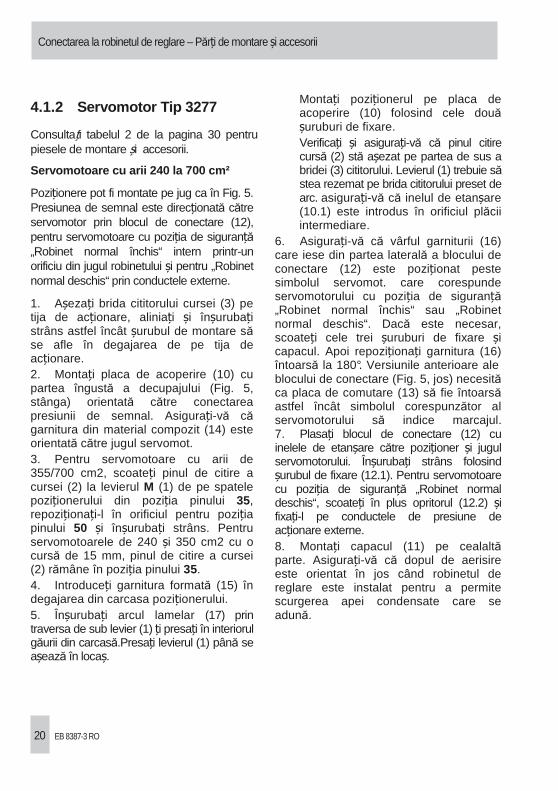
Poziționere pot fi montate pe jug ca în Fig. 5. Presiunea de semnal este direcționată către servomotor prin blocul de conectare (12), pentru servomotoare cu poziția de siguranță „Robinet normal închis“ intern printr-un orificiu din jugul robinetului și pentru „Robinet normal deschis“ prin conductele externe.
1. Așezați brida cititorului cursei (3) pe tija de acționare, aliniați și înșurubați strâns astfel încât șurubul de montare să se afle în degajarea de pe tija de acționare. 2. Montați placa de acoperire (10) cu partea îngustă a decupajului (Fig. 5, stânga) orientată către conectarea presiunii de semnal. Asigurați-vă că garnitura din material compozit (14) este orientată către jugul servomot. 3. Pentru servomotoare cu arii de 355/700 cm2, scoateți pinul de citire a cursei (2) la levierul M (1) de pe spatele poziționerului din poziția pinului 35, repoziționați-l în orificiul pentru poziția pinului 50 și înșurubați strâns. Pentru servomotoarele de 240 și 350 cm2 cu o cursă de 15 mm, pinul de citire a cursei (2) rămâne în poziția pinului 35. 4. Introduceți garnitura formată (15) în degajarea din carcasa poziționerului. 5. Înșurubați arcul lamelar (17) prin traversa de sub levier (1) ți presați în interiorul găurii din carcasă.Presați levierul (1) până se așează în locaș.
20 EB 8387-3 RO
Montați poziționerul pe placa de acoperire (10) folosind cele două șuruburi de fixare. Verificați și asigurați-vă că pinul citire cursă (2) stă așezat pe partea de sus a bridei (3) cititorului. Levierul (1) trebuie să stea rezemat pe brida cititorului preset de arc. asigurați-vă că inelul de etanșare (10.1) este introdus în orificiul plăcii intermediare.
6. Asigurați-vă că vârful garniturii (16) care iese din partea laterală a blocului de conectare (12) este poziționat peste simbolul servomot. care corespunde servomotorului cu poziția de siguranță „Robinet normal închis“ sau „Robinet normal deschis“. Dacă este necesar, scoateți cele trei șuruburi de fixare și capacul. Apoi repoziționați garnitura (16) întoarsă la 180°. Versiunile anterioare ale blocului de conectare (Fig. 5, jos) necesită ca placa de comutare (13) să fie întoarsă astfel încât simbolul corespunzător al servomotorului să indice marcajul. 7. Plasați blocul de conectare (12) cu inelele de etanșare către poziționer și jugul servomotorului. Înșurubați strâns folosind șurubul de fixare (12.1). Pentru servomotoare cu poziția de siguranță „Robinet normal deschis“, scoateți în plus opritorul (12.2) și fixați-l pe conductele de presiune de acționare externe. 8. Montați capacul (11) pe cealaltă parte. Asigurați-vă că dopul de aerisire este orientat în jos când robinetul de reglare este instalat pentru a permite scurgerea apei condensate care se adună.
Conectarea la robinetul de reglare – Părți de montare și accesorii
1 Levier 12 Bloc de conectare 1.1 Piuliță 12.1 Șurub 1.2 Șaibă elastică 12.2 Stopper or connection for 2 Pin citire cursă external piping 3 Follower clamp 13 Placă de inversare 10 Cover plate G ¼ 14 Garnitură 11 Cover 15 Garnitură formată 11.1 Vent plug 16 Garnitură
17 Arc lamela (numai pentru montare directă)
2
Decupaj placă acoperire (10) 17 Vedere C
15 10 14
1 2 3 11 11.1
1.1 1.2
16 Vedere A 16
C
SUPPLY Tija servomotor 16 12 12.1 12.2
intră iese A
Vedere B
SUPPLY
13 Bloc conectare (vechi) 12 cu placă inversare(13)
Tija intră
Tija iese
Marcaj
B
12
12.1 12.2
Fig. 5 · Conectare directă – Conexiunea presiunii semnal pentru servomotor Tip 3277 arii 240, 350, 355 și 700 cm²
EB 8387-3 RO 21
Conectarea la robinetul de reglare – Părți de montare și accesorii
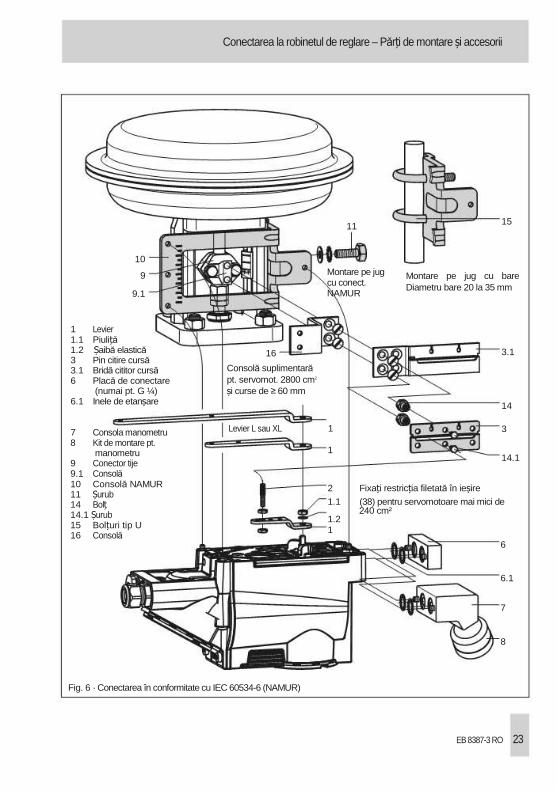
4.2 Conectare în conformitate cu IEC 60534-6 (NAMUR)
Consultați tabelul 3 de la pagina 30 pentru piesele de montare și accesorii.
Poziționerul este conectat la robinetul de reglare cu placă NAMUR (10).
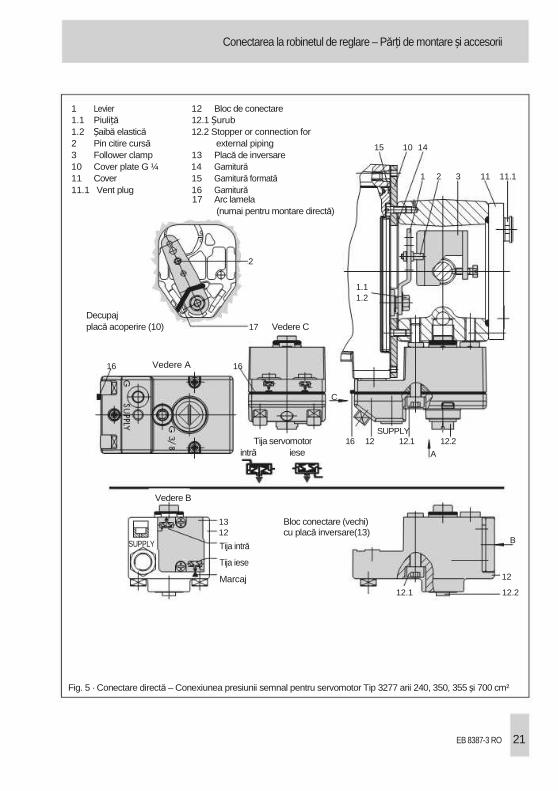
1. Servomotoare arii 120 la 700 cm²: Înșurubați cele două bolțuri (14) la placa de fixare (9.1) a conectorului tijei (9), amplasați placa cititorului cursei (3) deasupra și folosiți șuruburile (14.1) pentru a strânge. Servomotoare arii 2800 cm² și 1400 cm² (cursă 120 mm): - Pentru curse de 60 mm sau mai mici, înșurubați placa cititorului cursei mai lungă (3.1) direct la conectorul tijei (9). - Pentru curse mai mari de 60 mm, montați placa de fixare (16) mai întâi și apoi placa cititorului cursei (3) la placă împreună cu bolțurile (14) și șuruburile (14.1)
2. Montați placa NAMUR (10) la robinetul de reglare după cum urmează:
- Pentru conectare la flanșa NAMUR, folosiți șurubul M8 (11) și șaiba de siguranță dințată direct în orificiul jugului. - Pentru conectarea la robinetele cu jug tip tijă, folosiți șuruburile în U (15) în jurul jugului. Aliniați placa NAMUR (10) astfel încât fanta de pe placa cititorului cursei (3/3.1) să fie aliniată central cu placa NAMUR la mijlocul cursei robinetului.
3. Montați consola manometrului (7) sau, dacă e nevoie de conexiuni G ¼, placa de conectare (6) pe poziționer, asigurându-vă că ambele inele de etanșare (6.1) sunt așezate corect
22 EB 8387-3 RO
4. Presați restricția de alamă (cod cmd.
1400-6964) în etanșarea intrării presiunii semnal de pe jugul servomotorului la arii mai mici decât 240 cm².
5. Selectați mărimea levierului necesar (1) M, L sau XL și poziția pinului în funcție de mărimea servomotorului și de cursele robinetelor enumerate în tabelul de la pagina 16. Lever M cu poziție pin 25 sau 50: 5.1 Demontați pinul citire cursă (2) de la poziția pinului 35 ți înșurubați-l la poziția necesară. Levier L sau XL: 5.1 Deșurubați levierul standard M de pe axul poziționerului. 5.2 Înșurubați pinul citire cursă lung (2) inclus în kitul de montare în poziția necesară pe levierul (1) conform tabel. 5.3 Plasați levierul (1) pe axul poziționerului și înșurubați strâns folosing șaiba elastică (1.2) și piulița (1.1). 5.4 Mișcați levierul odată în ambele direcții până la capăt. 6. Așezați poziționerul pe placa NAMUR astfel încât pinul de citire a cursei (2) să se așeze în fanta de pe placa cititorului cursei (3, 3.1). Reglați corespunzător levierul (1). Înșurubați poziționerul pe placa NAMUR folosind ambele șuruburi de fixare..
Conectarea la robinetul de reglare – Părți de montare și accesorii
10
9
9.1
1 Levier 1.1 Piuliță 1.2 Șaibă elastică 3 Pin citire cursă 3.1 Bridă cititor cursă 6 Placă de conectare
(numai pt. G ¼) 6.1 Inele de etanșare
7 Consola manometru 8 Kit de montare pt.
manometru 9 Conector tije 9.1 Consolă
11
Montare pe jug cu conect. NAMUR
16
Consolă suplimentară pt. servomot. 2800 cm2 și curse de ≥ 60 mm
Levier L sau XL 1
1
15
Montare pe jug cu bare Diametru bare 20 la 35 mm
3.1
14
3
14.1
10 Consolă NAMUR 11 Șurub 14 Bolț 14.1 Șurub 15 Bolțuri tip U 16 Consolă Fig. 6 · Conectarea în conformitate cu IEC 60534-6 (NAMUR)
2 Fixați restricția filetată în ieșire
1.1 (38) pentru servomotoare mai mici de 240 cm²
1.2 1
6
6.1
7
8
EB 8387-3 RO 23
Conectarea la robinetul de reglare – Părți de montare și accesorii
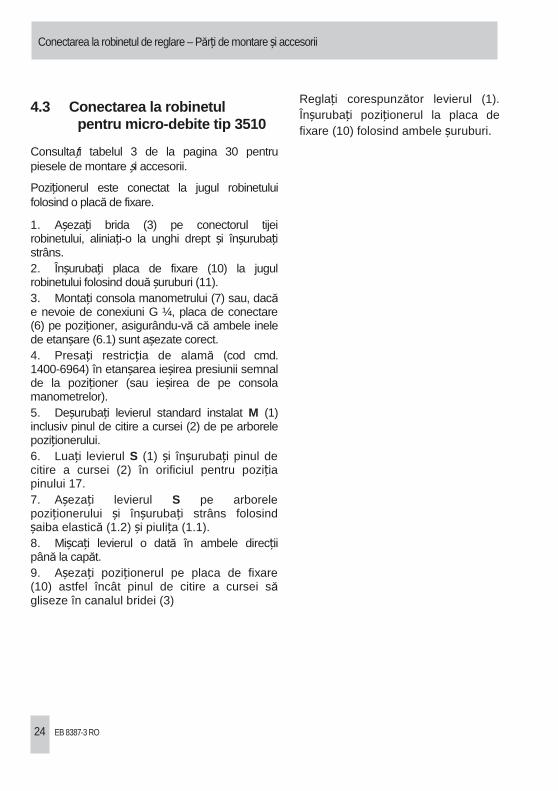
4.3 Conectarea la robinetul pentru micro-debite tip 3510
Consultați tabelul 3 de la pagina 30 pentru piesele de montare și accesorii.
Poziționerul este conectat la jugul robinetului folosind o placă de fixare.
1. Așezați brida (3) pe conectorul tijei robinetului, aliniați-o la unghi drept și înșurubați strâns. 2. Înșurubați placa de fixare (10) la jugul robinetului folosind două șuruburi (11). 3. Montați consola manometrului (7) sau, dacă e nevoie de conexiuni G ¼, placa de conectare (6) pe poziționer, asigurându-vă că ambele inele de etanșare (6.1) sunt așezate corect. 4. Presați restricția de alamă (cod cmd. 1400-6964) în etanșarea ieșirea presiunii semnal de la poziționer (sau ieșirea de pe consola manometrelor). 5. Deșurubați levierul standard instalat M (1) inclusiv pinul de citire a cursei (2) de pe arborele poziționerului. 6. Luați levierul S (1) și înșurubați pinul de citire a cursei (2) în orificiul pentru poziția pinului 17. 7. Așezați levierul S pe arborele poziționerului și înșurubați strâns folosind șaiba elastică (1.2) și piulița (1.1). 8. Mișcați levierul o dată în ambele direcții până la capăt. 9. Așezați poziționerul pe placa de fixare (10) astfel încât pinul de citire a cursei să gliseze în canalul bridei (3)
24 EB 8387-3 RO
Reglați corespunzător levierul (1). Înșurubați poziționerul la placa de fixare (10) folosind ambele șuruburi.
Conectarea la robinetul de reglare – Părți de montare și accesorii
1 Levier 1.1 Piuliță 1.2 Șaibă elastică 2 Pin citire cursă 3 Bridă 6 Placă de conectare
(numai pt. G ¼) 6.1 Inele de etanșare 7 Consola manometru 8 Kit de montare
manometru 10 Consolă 11 Șurub
11
3
11
10
Fixați restricția filetată în ieșire (38)
6 6.1
8 7
1.1 2
1.2 1
Levier S
Fig. 7 · Conectarea la robinetul pentru micro-debite Tip 3510
EB 8387-3 RO 25
Conectarea la robinetul de reglare – Părți de montare și accesorii
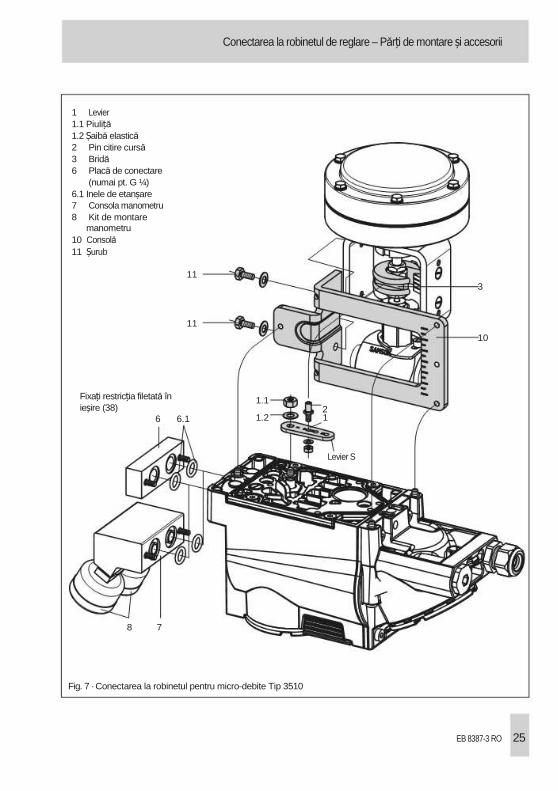
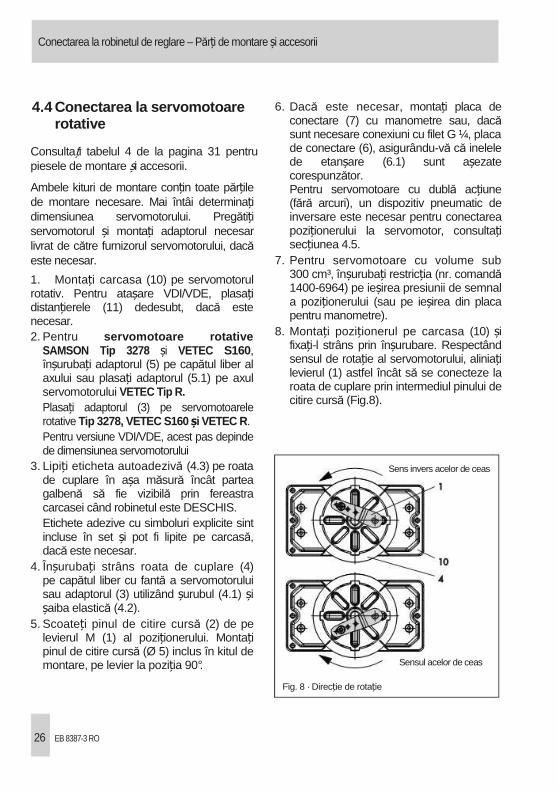
4.4 Conectarea la servomotoare rotative
Consultați tabelul 4 de la pagina 31 pentru piesele de montare și accesorii.
Ambele kituri de montare conțin toate părțile de montare necesare. Mai întâi determinați dimensiunea servomotorului. Pregătiți servomotorul și montați adaptorul necesar livrat de către furnizorul servomotorului, dacă este necesar.
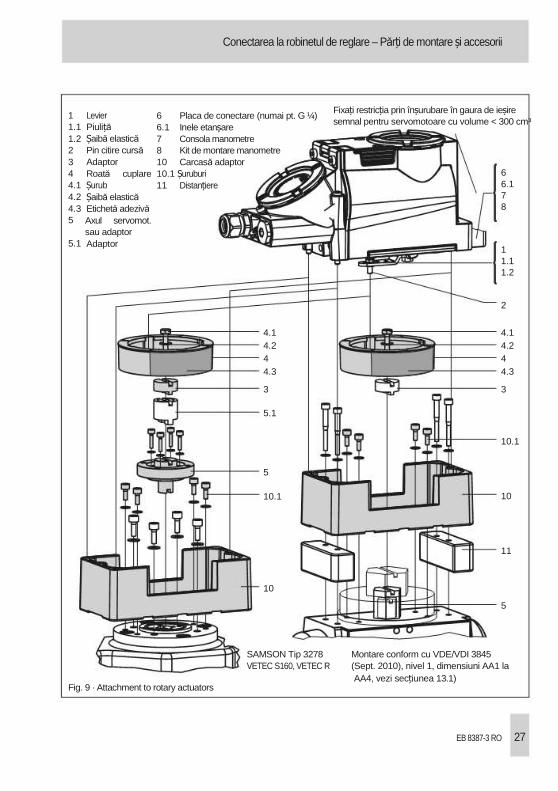
1. Montați carcasa (10) pe servomotorul rotativ. Pentru atașare VDI/VDE, plasați distanțierele (11) dedesubt, dacă este necesar. 2. Pentru servomotoare rotative
SAMSON Tip 3278 și VETEC S160, înșurubați adaptorul (5) pe capătul liber al axului sau plasați adaptorul (5.1) pe axul servomotorului VETEC Tip R.
Plasați adaptorul (3) pe servomotoarele rotative Tip 3278, VETEC S160 și VETEC R.
Pentru versiune VDI/VDE, acest pas depinde de dimensiunea servomotorului
3. Lipiți eticheta autoadezivă (4.3) pe roata de cuplare în așa măsură încât partea galbenă să fie vizibilă prin fereastra carcasei când robinetul este DESCHIS.
Etichete adezive cu simboluri explicite sint incluse în set și pot fi lipite pe carcasă, dacă este necesar.
4. Înșurubați strâns roata de cuplare (4) pe capătul liber cu fantă a servomotorului sau adaptorul (3) utilizând șurubul (4.1) și șaiba elastică (4.2).
5. Scoateți pinul de citire cursă (2) de pe levierul M (1) al poziționerului. Montați pinul de citire cursă (Ø 5) inclus în kitul de montare, pe levier la poziția 90°.
26 EB 8387-3 RO
6. Dacă este necesar, montați placa de conectare (7) cu manometre sau, dacă sunt necesare conexiuni cu filet G ¼, placa de conectare (6), asigurându-vă că inelele de etanșare (6.1) sunt așezate corespunzător.
Pentru servomotoare cu dublă acțiune (fără arcuri), un dispozitiv pneumatic de inversare este necesar pentru conectarea poziționerului la servomotor, consultați secțiunea 4.5.
7. Pentru servomotoare cu volume sub 300 cm³, înșurubați restricția (nr. comandă 1400-6964) pe ieșirea presiunii de semnal a poziționerului (sau pe ieșirea din placa pentru manometre).
8. Montați poziționerul pe carcasa (10) și fixați-l strâns prin înșurubare. Respectând sensul de rotație al servomotorului, aliniați levierul (1) astfel încât să se conecteze la roata de cuplare prin intermediul pinului de citire cursă (Fig.8).
Sens invers acelor de ceas
Sensul acelor de ceas
Fig. 8 · Direcție de rotație
Conectarea la robinetul de reglare – Părți de montare și accesorii
1 1.1 1.2 2 3 4 4.1 4.2 4.3 5 5.1
Levier Piuliță Șaibă elastică Pin citire cursă Adaptor Roată cuplare Șurub Șaibă elastică Etichetă adezivă Axul servomot. sau adaptor Adaptor
6 Placa de conectare (numai pt. G ¼) 6.1 Inele etanșare 7 Consola manometre 8 Kit de montare manometre 10 Carcasă adaptor 10.1 Șuruburi 11 Distanțiere
4.1 4.2 4 4.3
3
5.1
5
10.1
10
Fixați restricția prin înșurubare în gaura de ieșire semnal pentru servomotoare cu volume < 300 cm³
6 6.1 7 8
1 1.1 1.2
2
4.1 4.2 4 4.3
3
10.1
10
11
5
SAMSON Tip 3278 Montare conform cu VDE/VDI 3845 VETEC S160, VETEC R (Sept. 2010), nivel 1, dimensiuni AA1 la
AA4, vezi secțiunea 13.1) Fig. 9 · Attachment to rotary actuators
EB 8387-3 RO 27
Conectarea la robinetul de reglare – Părți de montare și accesorii
4.5 Dispozitiv pneumatic de inversare pt. servomotoare cu dubl ă acțiune
Pentru utilizarea cu servomotoare cu dublă acțiune, poziționerul trebuie să fie instalat cu un dispozitiv pneumatic de inversare cum ar fi SAMSON Tip 3710 (vezi Instrucțiuni de Montare și Operare EB 8392 EN).
Dacă se utilizează un dispozitiv de inversare (coduri 1079-1118 sau 1079-1119), se vor urma intstrucțiunile descrise în secțiunea 4.5.1.
4.5.1 Dispozitiv de inversare (1079-1118 sau 1079-1119)
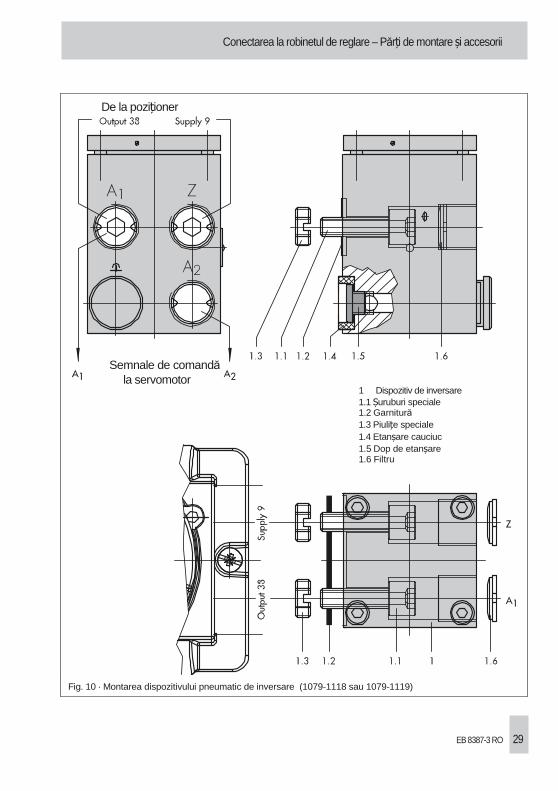
Presiunea de semnal de la ieșirea poziționerului este furnizată la ieșirea A1 a dispozitivului pneumatic de inversare. O presiune în sens opus, care este echivalentă cu presiunea de alimentare necesară când este adăugată la presiunea A1, este aplicată la ieșirea A2. Se aplică regula A1 + A2 = Z.
Montare
NOTĂ Dopul de etanșare (1.5) nu trebuie să fie deșurubat de la dispozitivul pneumatic de inversare. 1. Înșurubați piulițele speciale (1.3) de la
accesoriile dispozitivului pneumatic de inversare în orificiile poziționerului. Înlăturați etanșarea din cauciuc (1.4).
2. Introduceți garnitura (1.2) în degajarea dispozitivului pneumatic de inversare și împingeți ambele șuruburi tubulare speciale (1.1) în orificiile de conectare A1 și Z.
28 EB 8387-3 RO
3. Așezați dispozitivul pneumatic de inversare pe poziționer și înșurubați strâns folosind ambele șuruburi speciale (1.1) 4. Folosind o șurubelniță (lată de 8 mm) pentru a înșuruba filtrele închise (1.6) în orificiile de conectare A1 și Z.
Conexiunile presiunii de semnal
A1: Ieșirea A1 care conduce la conexiunea presiunii de semnal de la servomotorul care deschide robinetul când presiunea crește
A2: Ieșirea A2 care conduce la conexiunea presiunii de semnal de la servomotorul care închide robinetul când presiunea crește
NOTĂ La pornirea servomotoarelor dublă-acțiune, trebuie făcute următoarele setări după cum este descris în secțiunea7: - setați Cod 16 (limită presiune) pe No - Setați contactul culisant de pe poziționer la poziția AIR TO OPEN și Poziție de siguranță (Code 0) = AtO
Conectarea manometrelor
Secvența de montare descrisă în Fig. 10 rămâne neschimbată. Înșurubați o consolă a manometrului la conexiunile A1 și Z.
Consolă G¼ 1400-7106 manometru: ¼ NPT 1400-7107
Manometrele pentru alimentare su aer Z și ieșire A1 sunt listate în tabelele 1 la 4.
Conectarea la robinetul de reglare – Părți de montare și accesorii
De la poziționer
Semnale de comandă la servomotor
1 Dispozitiv de inversare 1.1 Șuruburi speciale 1.2 Garnitură 1.3 Piulițe speciale 1.4 Etanșare cauciuc 1.5 Dop de etanșare 1.6 Filtru
Fig. 10 · Montarea dispozitivului pneumatic de inversare (1079-1118 sau 1079-1119)
EB 8387-3 RO 29
Conectarea la robinetul de reglare – Părți de montare și accesorii
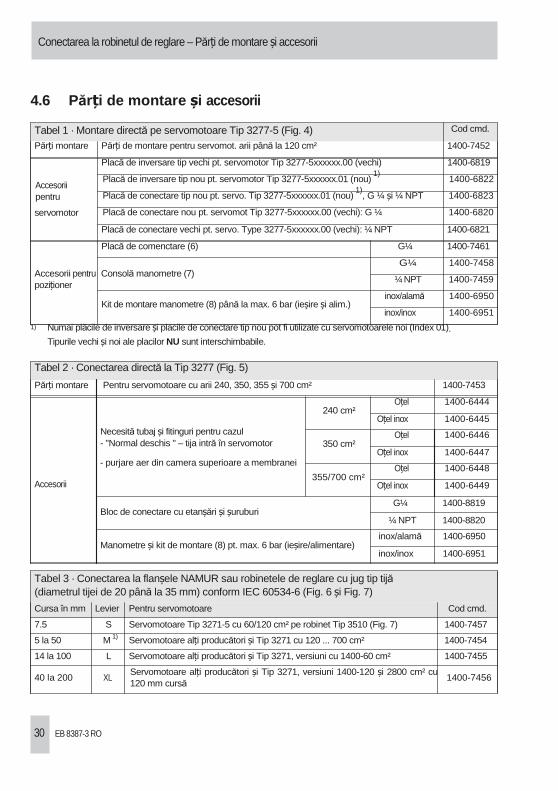
4.6 Părți de montare și accesorii Tabel 1 · Montare directă pe servomotoare Tip 3277-5 (Fig. 4) Cod cmd.
Părți montare Părți de montare pentru servomot. arii până la 120 cm² 1400-7452
Placă de inversare tip vechi pt. servomotor Tip 3277-5xxxxxx.00 (vechi) 1400-6819 Accesorii pentru
servomotor
Placă de inversare tip nou pt. servomotor Tip 3277-5xxxxxx.01 (nou) 1)
1400-6822
Placă de conectare tip nou pt. servo. Tip 3277-5xxxxxx.01 (nou) 1)
, G ¼ și ¼ NPT 1400-6823
Placă de conectare nou pt. servomot Tip 3277-5xxxxxx.00 (vechi): G ¼ 1400-6820
Placă de conectare vechi pt. servo. Type 3277-5xxxxxx.00 (vechi): ¼ NPT 1400-6821
Placă de comenctare (6) G¼ 1400-7461
Accesorii pentru Consolă manometre (7) poziționer
Kit de montare manometre (8) până la max. 6 bar (ieșire și alim.)
G¼ 1400-7458
¼ NPT 1400-7459
inox/alamă 1400-6950
inox/inox 1400-6951
1) Numai plăcile de inversare și placile de conectare tip nou pot fi utilizate cu servomotoarele noi (Index 01). Tipurile vechi și noi ale placilor NU sunt interschimbabile.
Tabel 2 · Conectarea directă la Tip 3277 (Fig. 5)
Părți montare Pentru servomotoare cu arii 240, 350, 355 și 700 cm² 1400-7453
Necesită tubaj și fitinguri pentru cazul - "Normal deschis " – tija intră în servomotor
- purjare aer din camera superioare a membranei
Accesorii
Oțel 1400-6444 240 cm²
Oțel inox 1400-6445
Oțel 1400-6446 350 cm²
Oțel inox 1400-6447
Oțel 1400-6448 355/700 cm²
Oțel inox 1400-6449
G¼ 1400-8819 Bloc de conectare cu etanșări și șuruburi
¼ NPT 1400-8820
inox/alamă 1400-6950 Manometre și kit de montare (8) pt. max. 6 bar (ieșire/alimentare)
inox/inox 1400-6951
Tabel 3 · Conectarea la flanșele NAMUR sau robinetele de reglare cu jug tip tijă (diametrul tijei de 20 până la 35 mm) conform IEC 60534-6 (Fig. 6 și Fig. 7)
Cursa în mm Levier Pentru servomotoare Cod cmd.
7.5 S Servomotoare Tip 3271-5 cu 60/120 cm² pe robinet Tip 3510 (Fig. 7) 1400-7457
5 la 50 M 1) Servomotoare alți producători și Tip 3271 cu 120 ... 700 cm² 1400-7454
14 la 100 L Servomotoare alți producători și Tip 3271, versiuni cu 1400-60 cm² 1400-7455 40 la 200 XL
Servomotoare alți producători și Tip 3271, versiuni 1400-120 și 2800 cm² cu 120 mm cursă
1400-7456
30 EB 8387-3 RO
Conectarea la robinetul de reglare – Părți de montare și accesorii
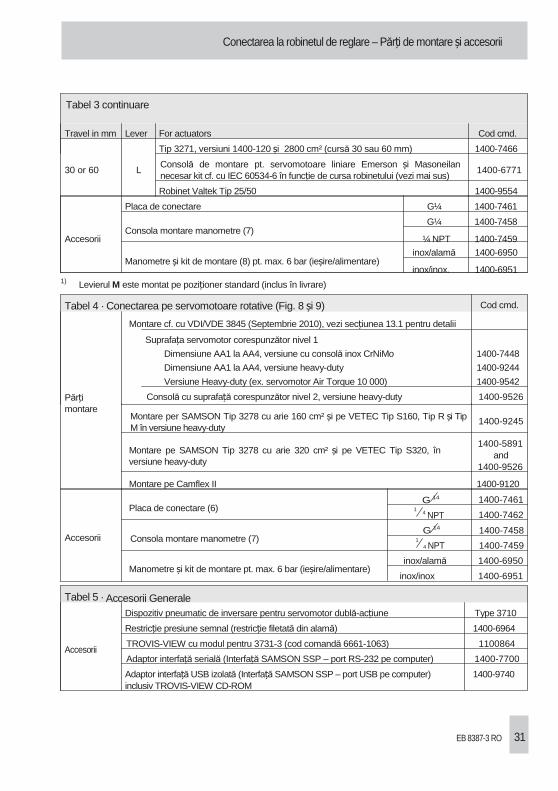
Tabel 3 continuare
Travel in mm Lever For actuators Cod cmd.
Tip 3271, versiuni 1400-120 și 2800 cm² (cursă 30 sau 60 mm) 1400-7466
30 or 60 L Consolă de montare pt. servomotoare liniare Emerson și Masoneilan necesar kit cf. cu IEC 60534-6 în funcție de cursa robinetului (vezi mai sus)
1400-6771
Robinet Valtek Tip 25/50 1400-9554
Placa de conectare G¼ 1400-7461
G¼ 1400-7458 Consola montare manometre (7)
Accesorii ¼ NPT 1400-7459
inox/alamă 1400-6950 Manometre și kit de montare (8) pt. max. 6 bar (ieșire/alimentare)
inox/inox. 1400-6951 1) Levierul M este montat pe poziționer standard (inclus în livrare)
Tabel 4 · Conectarea pe servomotoare rotative (Fig. 8 și 9) Cod cmd.
Montare cf. cu VDI/VDE 3845 (Septembrie 2010), vezi secțiunea 13.1 pentru detalii
Suprafața servomotor corespunzător nivel 1
Dimensiune AA1 la AA4, versiune cu consolă inox CrNiMo 1400-7448
Dimensiune AA1 la AA4, versiune heavy-duty 1400-9244
Versiune Heavy-duty (ex. servomotor Air Torque 10 000) 1400-9542
Părți montare
Consolă cu suprafață corespunzător nivel 2, versiune heavy-duty
Montare per SAMSON Tip 3278 cu arie 160 cm² și pe VETEC Tip S160, Tip R și Tip M în versiune heavy-duty
1400-9526
1400-9245
Montare pe SAMSON Tip 3278 cu arie 320 cm² și pe VETEC Tip S320, în versiune heavy-duty
1400-5891 and
1400-9526
Montare pe Camflex II 1400-9120
Placa de conectare (6) 1
G 14
4 NPT
1400-7461
1400-7462 Accesorii
Consola montare manometre (7) 1
G 14 1400-7458
4 NPT 1400-7459
Manometre și kit de montare pt. max. 6 bar (ieșire/alimentare) inox/alamă 1400-6950
inox/inox 1400-6951
Tabel 5 · Accesorii Generale
Dispozitiv pneumatic de inversare pentru servomotor dublă-acțiune Type 3710
Restricție presiune semnal (restricție filetată din alamă) 1400-6964
Accesorii TROVIS-VIEW cu modul pentru 3731-3 (cod comandă 6661-1063) 1100864
Adaptor interfață serială (Interfață SAMSON SSP – port RS-232 pe computer) 1400-7700
Adaptor interfață USB izolată (Interfață SAMSON SSP – port USB pe computer) 1400-9740 inclusiv TROVIS-VIEW CD-ROM
EB 8387-3 RO 31
Conexiuni
5 Conexiuni ATENȚIE! Montați poziționerul respectând următoarea secvență: 1. Montați pozitionerul pe robinetul de reglare 2. Conecta ți alimentarea cu aer 3. Conecta ți alimentarea electric ă 4. Efectuați setările de pornire Conectarea alimentării electrice poate determina o mișcare a tijei servomotorului, funcție de modul de operare. Nu atingeți sau blocați tija servomotorului pentru a evita rănirea mâinii sau degetelor.
5.1 Conexiuni pneumatice
PERICOL!
Pericol datorate formării unei atmosfere explozive! Operatorul aparatului trebuie sa se asigure că mediul de lucru nu poate forma o atmosferă explozivă, adică trebuie utilizate acele gaze care sunt fără conținut de substanțe a căror prezență în mediul de lucru formează atmosferă explozivă (ex. nu utilizați gaze inflamabile, oxigen sau gaze bogate în oxigen). 32 EB 8387-3 RO
NOTĂ Urmați instrucțiunile de mai jos pentru a evita deteriorarea poziționerului. - Presiunea de alimentare a poziționerului nu trebuie să depășească 6 bar.
- Fitingurile prevăzute cu filet ¼ NPT pot fi înfiletate direct în poziționer. Dacă se utilizează fitinguri cu filet G ¼, acestea vor fi înșurubate numai în placa de conectare (6) sau consola de conectare manometre disponibile ca accesorii.
Cele mai obişnuite fitinguri pentru ţevi de cupru sau de metal şi furtunuri din material plastic pot fi folosite.
- Alimentarea cu aer trebuie să fie uscată și fără urme de ulei sau praf. Instrucțiunile de întreținere pentru stațiile de reducerea presiunii din amonte trebuie să fie respectate.
Suflați tot tubajul de alimentare cu aer și fitinguri înainte de a le monta la poziționer.
Dacă poziționerul este atașat direct la servomotorul tip 3277, conexiunea presiunii la ieșire a poziționerului la servomotor este fixată. Pentru conectare conform IEC 60534-6 (NAMUR), presiunea de semnal poate fi direcționată spre camera inferioară sau superioară a membranei servomot., în funcție de acțiunea de siguranță a servomot. „Robinet normal închis“ sau „Robinet normal deschis“.
Pentru servomotoarele rotative, se aplică specificațiile fabricantului pentru conexiuni.
Conexiuni
5.1.1 Manometre pentru presiunea de semnal
Pentru a monitoriza alimentarea cu aer (alimentare) și presiunea de semnal (ieșire), vă recomandăm ca manometrele să fie conectate (vedeți accesorii tabele 1 la 5).
5.1.2 Presiunea de alimentare
Presiunea de alimentare necesară depinde de domeniul de reglare și de direcția de operare a servomotorului (poziția de siguranță). Domeniul de reglare este înregistrat pe plăcuța de identificare fie ca domeniu al arcului fie ca domeniu al presiunii de semnal, în funcție de servomotor. Funcția de siguranță este marcată FA sau FE, sau printr-un simbol. Servomotor tija iese FA (aerul deschide)
Poziție de siguranță "Robinet Închis" (pentru robient de trecere și robinet de colț):
Presiune necesară alimentare = max. domeniu arcuri + 0.2 bar, minim 1.4 bar. Servomotor tija intr ă FE (aerul închide)
Poziție de siguranță "Robinet Deschis" (pentru robient de trecere și robinet de colț):
Pentru robinetele cu închidere etanșă, presiunea de semnal maximă pstmax este estimată după cum urmează:
2 π ∆p
Dacă nu exist ă specifica ții, calcula ți dup ă cum urmeaz ă:
Presiune necesară alimentare = Val. superioară domeniu arcuri + 1 bar
5.1.3 Presiune de semnal (ie șire)
Presiunea de semnal de la ieșire (Output 38) a poziționerului poate fi limitată la 1.4, 2.4 sau 3.7 bar la Code 16.
Limitarea nu este activată în mod inplicit [No] .
pstmax = F + d [bar] 4 A
d = diametru scaun robinet [cm] ∆p = presiune diferențială pe robinet [bar]
A = arie servomotor [cm²] F = Domeniul superior de reglare al
servomotorului [bar] EB 8387-3 RO 33
Conexiuni
5.2 Conexiuni electrice PERICOL!
Risc de șocuri electrice și/sau formarea unei atmosfere explozive!
Petnru instalația electrică, trebuie să respectați reglementările electrotehnice relevante și reglementările privind prevenirea accidentelor care se aplică în țara utilizatorului Standardele următoare se aplică pentru montare în zone cu risc: EN 60079-14 : 2003 (VDE 0165 Part 1/1.98) "Aparate electrice pentru utilizare în prezența gazelor și atmosferelor explozive” și EN 50281-1-2: 1999 (VDE 0165 Part 2/11.99)"Aparate electrice pentru utilizare în prezența prafurilor combustibile” Instalați linia de conectare rigid ți asigurați-vă că este protejată adecvat împotriva deteriorărilor. Dacă temperatura ambientală depășește 70 °C la nivelul presetupelor cablurilor, utilizați conectori speciali rezistenți la temperatură. Integrați poziționerul intr-un sistem local de compensare de potențial (legare la masă/împământare).
Conexiunile trebuie s ă corespund ă tipului de protec ție EEx d
Poziționerul Tip 3731 trebuie prevăzut cu presetupe de cablu sau system tubaj electric care să respecte cerințele EN 60079-1: 2004 “ Aparate electrice pentru utilizare în prezența gazelor și atmosferelor explozive” - Part 1: Incinte Flameproof "d" Clauzele 13.1 și 13.2 – fiind necesară existența unui certificat de testare de tip. Nu utilizați presetupe de cablu simple sau dopuri simple. Etanșați orice deschidere care nu este utilizată după cum este specificat în Clauza 11.9 din EN 50018: 2004. Pentru instalare în tip de protecție Ex d, consultați de asemenea și Clauzele 9.4 și 10 din EN 60079-14: 2003.
Conectarea conform tipului de protec ție EEx e
Se aplică Clauza 11 din EN 60079-14: 2003. La conectarea cablurilor la aparate electrice cu tip de protecție “Siguranță crescută” conform cu EN 60079-7: 2004 “ Aparate electrice pentru utilizare în prezența gazelor și atmosferelor explozive” - Partea 7: Siguranță crescută “e”, trebuie utilizate presetupe de cablu conforme cu acest tip de protecție. Intrările de cablu și dopurile trebuie sa fie conform cu tipul de protecție “Ex e” și un certificat special de testare de tip trebuie să existe în acest sens.
34 EB 8387-3 RO
Conexiuni
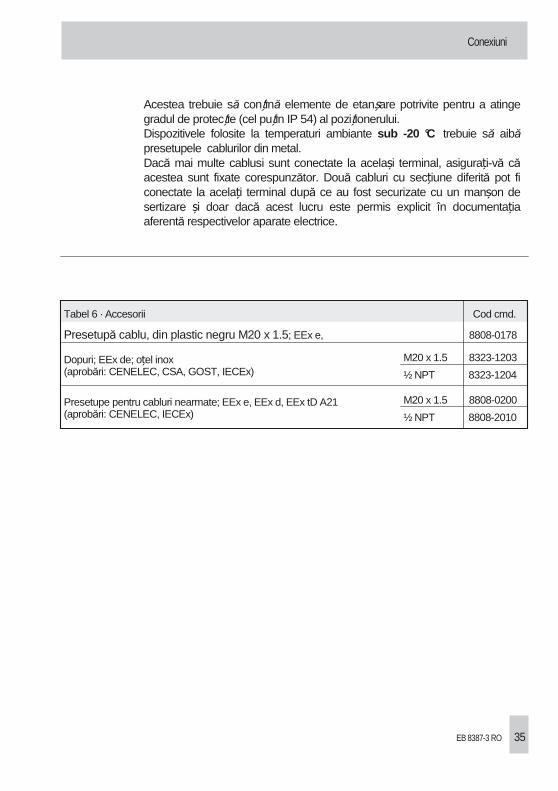
Acestea trebuie să conțină elemente de etanșare potrivite pentru a atinge gradul de protecție (cel puțin IP 54) al poziționerului. Dispozitivele folosite la temperaturi ambiante sub -20 °C trebuie să aibă presetupele cablurilor din metal. Dacă mai multe cablusi sunt conectate la același terminal, asigurați-vă că acestea sunt fixate corespunzător. Două cabluri cu secțiune diferită pot fi conectate la acelați terminal după ce au fost securizate cu un manșon de sertizare și doar dacă acest lucru este permis explicit în documentația aferentă respectivelor aparate electrice.
Tabel 6 · Accesorii Cod cmd.
Presetupă cablu, din plastic negru M20 x 1.5; EEx e, 8808-0178
Dopuri; EEx de; oțel inox M20 x 1.5 8323-1203 (aprobări: CENELEC, CSA, GOST, IECEx) ½ NPT 8323-1204 Presetupe pentru cabluri nearmate; EEx e, EEx d, EEx tD A21 M20 x 1.5 8808-0200 (aprobări: CENELEC, IECEx) ½ NPT 8808-2010
EB 8387-3 RO 35
Conexiuni
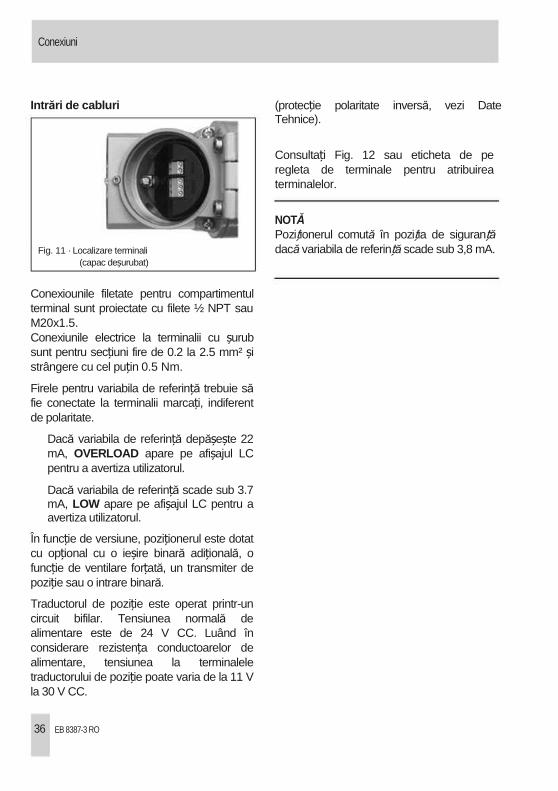
Intrări de cabluri Fig. 11 · Localizare terminali
(capac deșurubat)
Conexiounile filetate pentru compartimentul terminal sunt proiectate cu filete ½ NPT sau M20x1.5. Conexiunile electrice la terminalii cu șurub sunt pentru secțiuni fire de 0.2 la 2.5 mm² și strângere cu cel puțin 0.5 Nm.
Firele pentru variabila de referință trebuie să fie conectate la terminalii marcați, indiferent de polaritate.
Dacă variabila de referință depășește 22 mA, OVERLOAD apare pe afișajul LC pentru a avertiza utilizatorul.
Dacă variabila de referință scade sub 3.7 mA, LOW apare pe afișajul LC pentru a avertiza utilizatorul.
În funcție de versiune, poziționerul este dotat cu opțional cu o ieșire binară adițională, o funcție de ventilare forțată, un transmiter de poziție sau o intrare binară.
Traductorul de poziție este operat printr-un circuit bifilar. Tensiunea normală de alimentare este de 24 V CC. Luând în considerare rezistența conductoarelor de alimentare, tensiunea la terminalele traductorului de poziție poate varia de la 11 V la 30 V CC.
36 EB 8387-3 RO
(protecție polaritate inversă, vezi Date Tehnice).
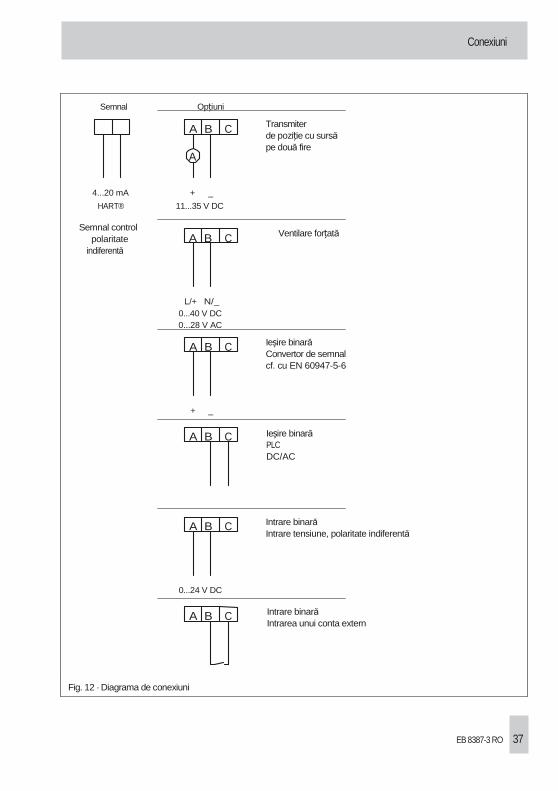
Consultați Fig. 12 sau eticheta de pe regleta de terminale pentru atribuirea terminalelor.
NOTĂ Poziționerul comută în poziția de siguranță dacă variabila de referință scade sub 3,8 mA.
Conexiuni
Semnal Opțiuni
A B C A
4...20 mA + _
HART® 11...35 V DC Semnal control
polaritate A B C indiferentă
L/+ N/_ 0...40 V DC 0...28 V AC
A B C
+ _
A B C
A B C
0...24 V DC
A B C Fig. 12 · Diagrama de conexiuni
Transmiter de poziție cu sursă pe două fire
Ventilare forțată
Ieșire binară Convertor de semnal cf. cu EN 60947-5-6
Ieșire binară PLC DC/AC
Intrare binară Intrare tensiune, polaritate indiferentă
Intrare binară Intrarea unui conta extern
EB 8387-3 RO 37
Conexiuni
5.2.1 Stabilirea comunica ției
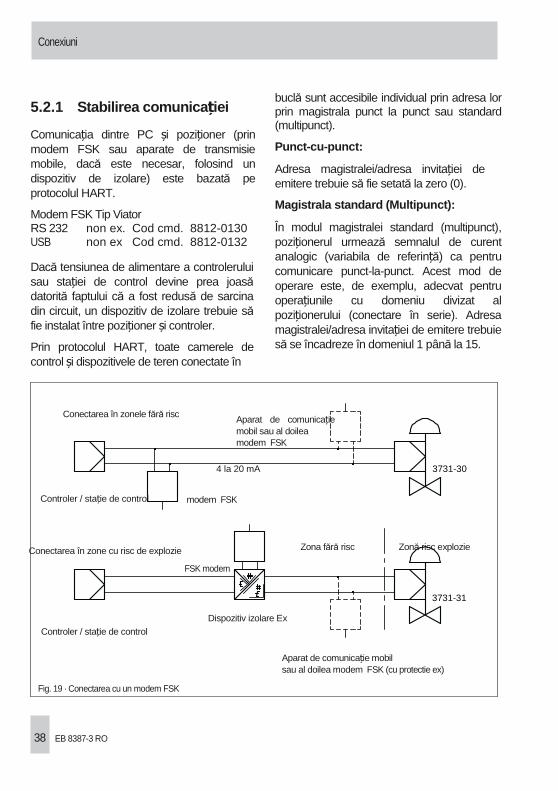
Comunicația dintre PC și poziționer (prin modem FSK sau aparate de transmisie mobile, dacă este necesar, folosind un dispozitiv de izolare) este bazată pe protocolul HART.
Modem FSK Tip Viator RS 232 non ex. Cod cmd. 8812-0130 USB non ex Cod cmd. 8812-0132
Dacă tensiunea de alimentare a controlerului sau stației de control devine prea joasă datorită faptului că a fost redusă de sarcina din circuit, un dispozitiv de izolare trebuie să fie instalat între poziționer și controler.
Prin protocolul HART, toate camerele de control și dispozitivele de teren conectate în
buclă sunt accesibile individual prin adresa lor prin magistrala punct la punct sau standard (multipunct).
Punct-cu-punct:
Adresa magistralei/adresa invitației de emitere trebuie să fie setată la zero (0).
Magistrala standard (Multipunct):
În modul magistralei standard (multipunct), poziționerul urmează semnalul de curent analogic (variabila de referință) ca pentru comunicare punct-la-punct. Acest mod de operare este, de exemplu, adecvat pentru operațiunile cu domeniu divizat al poziționerului (conectare în serie). Adresa magistralei/adresa invitației de emitere trebuie să se încadreze în domeniul 1 până la 15.
Conectarea în zonele fără risc
Aparat de comunicație mobil sau al doilea modem FSK
Controler / stație de control
Conectarea în zone cu risc de explozie
Controler / stație de control
4 la 20 mA 3731-30
modem FSK
Zona fără risc Zonă risc explozie
FSK modem
3731-31
Dispozitiv izolare Ex
Aparat de comunicație mobil sau al doilea modem FSK (cu protectie ex)
Fig. 19 · Conectarea cu un modem FSK
38 EB 8387-3 RO
Conexiuni
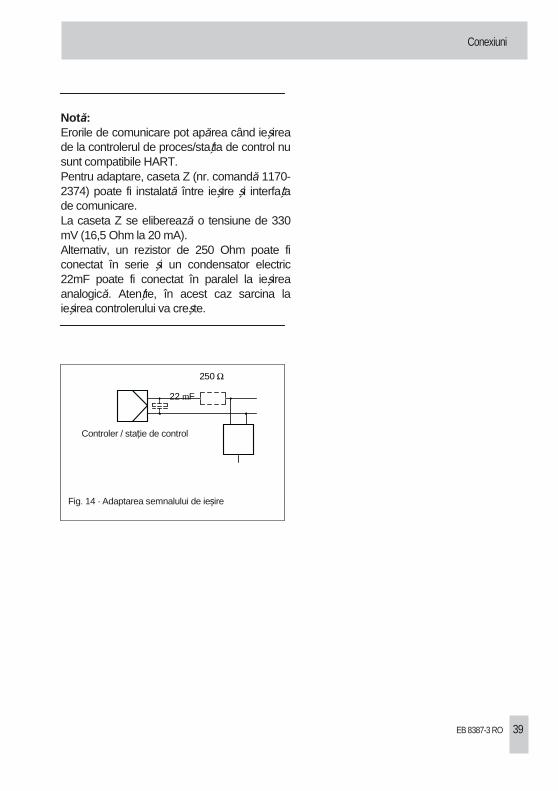
Notă: Erorile de comunicare pot apărea când ieșirea de la controlerul de proces/stația de control nu sunt compatibile HART. Pentru adaptare, caseta Z (nr. comandă 1170-2374) poate fi instalată între ieșire și interfața de comunicare. La caseta Z se eliberează o tensiune de 330 mV (16,5 Ohm la 20 mA). Alternativ, un rezistor de 250 Ohm poate fi conectat în serie și un condensator electric 22mF poate fi conectat în paralel la ieșirea analogică. Atenție, în acest caz sarcina la ieșirea controlerului va crește.
250 Ω
22 mF
Controler / stație de control
Fig. 14 · Adaptarea semnalului de ieșire
EB 8387-3 RO 39
Comenzile operatorului și afișări
6 Comenzile operatorului și afișări
6.1 Buton de comand ă rotativ
Butonul de comandă rotativ este localizat sub capacul din față. Poziționerul este operat la fața locului cu ajutorul butonului rotativ:
Rotiți pentru a selecta coduri și valori.
Apasă pentru confirmarea setării.
6.2 Interfa ța serial ă
Conexiunea pentru interfața serială se află situată sub capacul de la afișare: Deșurubați și scoateți șurubul de fixare și apoi deșurubați capacul de la afișare.
NOTĂ Protecția la explozie devine ineficace odată cu deșurubarea capacului de la afișaj!
Poziționerul necesită o alimentare de cel puțin 4 mA.
Pentru a utiliza programul TROVIS-VIEW, conectați poziționerul la portul RS-232 sau USB al unui computer prin intermediul adaptorului (vezi accesorii în tabelul 5).
6.3 Afișări pe ecran
Simbolurile care apar pe afișajul LCD sunt atribuite parametrilor, codurilor și funcțiilor.
40 EB 8387-3 RO
Moduri de operare: Modul manual (MAN), secțiunea 8.2.1 Modul automat (AUTO), secțiunea 8.2.1
S Poziție de siguranță (SAFE), secțiune 8.2.2
Grafic bare: În modul manual și automat indică deviația sistemului care depinde de simbolul (+/-) și de valoare. Un element al graficului cu bare pe deviația de 1% a sistemului. Dacă dispozitivul nu a fost încă inițializat, icoana clipește pe ecran și poziția levierului în grade în relație cu axa longitudinală este indicată în locul deviației sistemului. Un element al graficului cu bare corespunde unei rotații de aproximativ 5°. Dacă al cincilea element se aprinde intermitent (afișat > 30°), unghiul de rota ție permis a fost depășit. Levierul și poziția pinului trebuie să fie verificate. Mesaje de stare
: Stare alarmă : Întrețunere necesară/Întreținere
cerută clipește: În afara specificației
Aceste icoane indică factul că are loc o eroare. O stare clasificată poate fi alocată fiecărei erori. Clasificările includ “Nici un mesaj”, “Întreținere așteptată”, “Întreținere cerută” și “Alarmă întreținere“ 8.3).
Configurare activat ă Indică faptul ca acele coduri marcate cu (*) în lista codurilor (secțiunea 11) sunt activate pentru configurare (vezi secțiunea).
Comenzile operatorului și afișări
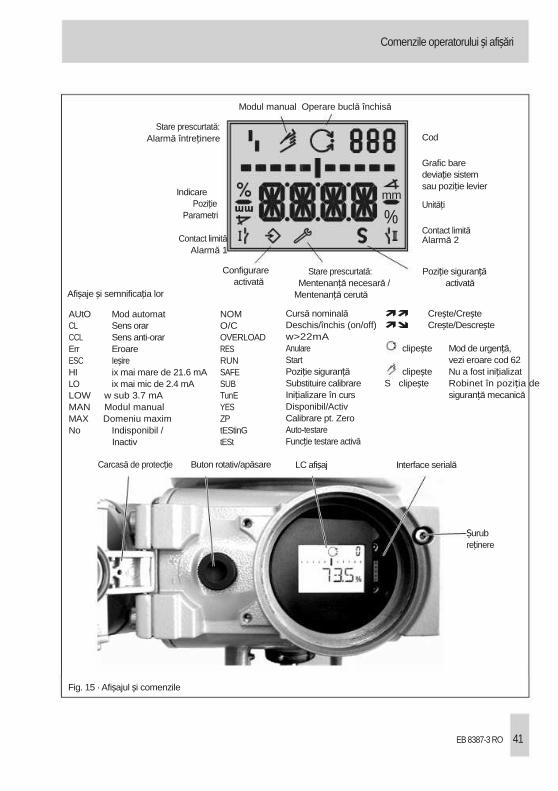
Modul manual Operare buclă închisă
Stare prescurtată: Alarmă întreținere
Indicare Poziție
Parametri
Contact limită Alarmă 1
Configurare activată
Afișaje și semnificația lor
AUtO Mod automat NOM CL Sens orar O/C CCL Sens anti-orar OVERLOAD Err Eroare RES ESC Ieșire RUN HI ix mai mare de 21.6 mA SAFE LO ix mai mic de 2.4 mA SUB LOW w sub 3.7 mA TunE MAN Modul manual YES MAX Domeniu maxim ZP No Indisponibil / tEStinG
Inactiv tESt Carcasă de protecție Buton rotativ/apăsare
Fig. 15 · Afișajul și comenzile
Cod
Grafic bare deviație sistem sau poziție levier
mm Unități
% Contact limită Alarmă 2
Stare prescurtată: Poziție siguranță Mentenanță necesară / activată
Mentenanță cerută
Cursă nominală Crește/Crește Deschis/închis (on/off) Crește/Descrește w>22mA Anulare clipește Mod de urgență, Start vezi eroare cod 62 Poziție siguranță clipește Nu a fost inițializat Substituire calibrare S clipește Robinet în poziția de Inițializare în curs siguranță mecanică Disponibil/Activ Calibrare pt. Zero Auto-testare Funcție testare activă
LC afișaj Interface serială
Șurub reținere
EB 8387-3 RO 41
Pornire - Setări
6.4 Comunica ția HART®
Poziționerul trebuie alimentat cu semnal cel puțin de 3.8 mA.
Un fișier DTM (Device Type Manager) în conformitate cu Specificația 1.2 este disponibil pentru comunicare. Acesta permite echipamentului, de exemplu, să fie rulat cu interfața de operare PACTware. Toți parametrii poziționerului sunt astfel accesibili prin acest DTM ți interfața de ooperare.
Notă: În cazul în care sunt activate funcții complexe în poziționer, care necesită timpi lungi de calcul sau cantități mari de date sunt stocate în memoria volatilă a poziționerului, alerta “busy” (ocupat) este creată de fișierul DTM.
Această alarmă nu este o alarmă de defect și poate fi doar simplu confirmată.
Protec ția la scriere Dreptul de scriere pentru comunicația HART® poate fi dezactivat prin Code 47. Puteți doar dezactiva sau activa această funcție local de la poziționer. Dreptul de scriere este activ în mod implicit. Operarea locală, inclusiv butonul de inițializare INIT pot fi blocate prin comunicație HART®. Cuvântul "HART" clipește pe ecran când Code 3 este selectat. Această funcție de blocare poate fi dezactivată numai prin comunicație HART®.
42 EB 8387-3 RO
7 Pornire - Set ări
ATENȚIE! Montați poziționerul cu respectarea următoarei secvențe: 1. Montați poziționerul pe robinet de reglare 2. Conectați alimentarea cu aer 3. Conectați alimentarea electrică 4. Efectua ți setările de pornire
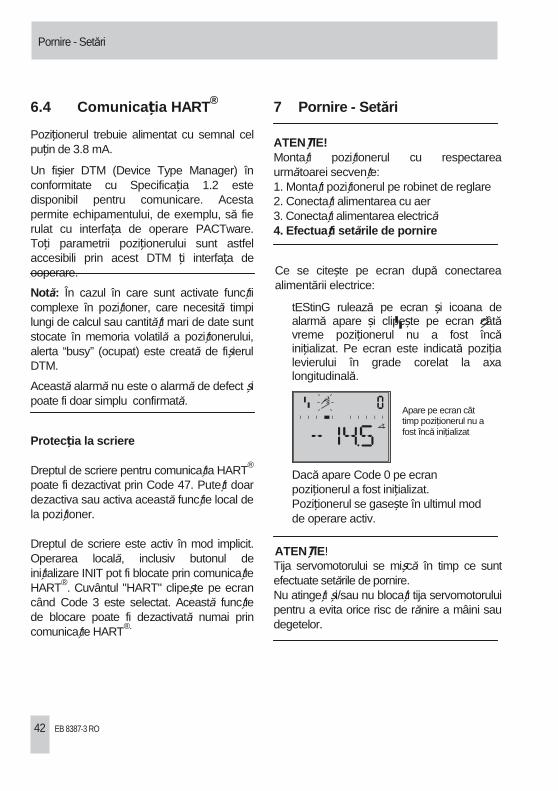
Ce se citește pe ecran după conectarea alimentării electrice:
tEStinG rulează pe ecran și icoana de alarmă apare și clipește pe ecran câtă vreme poziționerul nu a fost încă inițializat. Pe ecran este indicată poziția levierului în grade corelat la axa longitudinală.
Apare pe ecran cât timp poziționerul nu a fost încă inițializat
Dacă apare Code 0 pe ecran poziționerul a fost inițializat. Poziționerul se gasește în ultimul mod de operare activ.
ATENȚIE! Tija servomotorului se mișcă în timp ce sunt efectuate setările de pornire. Nu atingeți și/sau nu blocați tija servomotorului pentru a evita orice risc de rănire a mâini sau degetelor.
Pornire - Setări
NOTĂ Efectuați setările de pornire cu respectarea secvenței listate (secțiunile 7.1 până la 7.5).
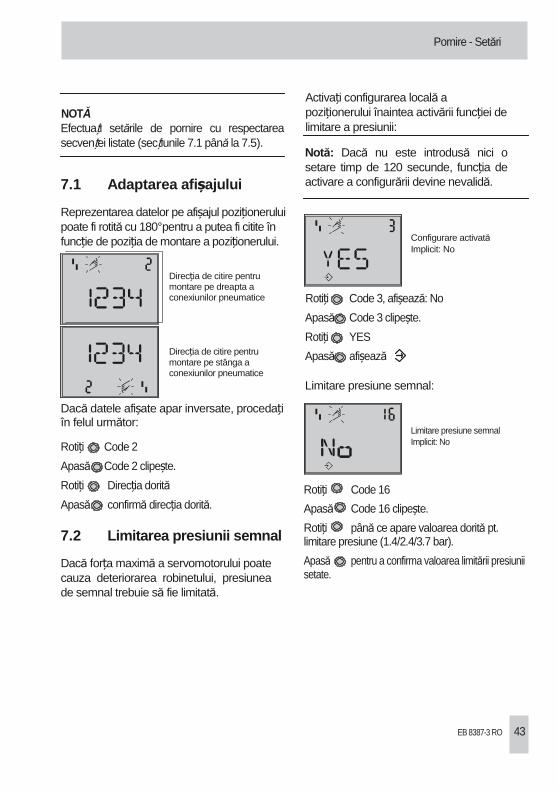
7.1 Adaptarea afi șajului
Reprezentarea datelor pe afișajul poziționerului poate fi rotită cu 180° pentru a putea fi citite în funcție de poziția de montare a poziționerului.
Direcția de citire pentru montare pe dreapta a conexiunilor pneumatice Direcția de citire pentru montare pe stânga a conexiunilor pneumatice
Dacă datele afișate apar inversate, procedați în felul următor:
Rotiți Code 2
Apasă Code 2 clipește.
Rotiți Direcția dorită
Apasă confirmă direcția dorită.
7.2 Limitarea presiunii semnal
Dacă forța maximă a servomotorului poate cauza deteriorarea robinetului, presiunea de semnal trebuie să fie limitată.
Activați configurarea locală a poziționerului înaintea activării funcției de limitare a presiunii:
Notă: Dacă nu este introdusă nici o setare timp de 120 secunde, funcția de activare a configurării devine nevalidă.
Configurare activată Implicit: No
Rotiți Code 3, afișează: No
Apasă Code 3 clipește.
Rotiți YES
Apasă afișează
Limitare presiune semnal:
Limitare presiune semnal Implicit: No
Rotiți Code 16
Apasă Code 16 clipește.
Rotiți până ce apare valoarea dorită pt. limitare presiune (1.4/2.4/3.7 bar).
Apasă pentru a confirma valoarea limitării presiunii setate.
EB 8387-3 RO 43

Pornire - Setări
7.3 Verificarea domeniului de operare al pozi ționerului
Pentru a verifica conectarea mecanică și funcționarea corectă, robinetul trebuie să fie acționat prin domeniul de operare al poziționerului din modul de operare manual cu variabila de referință manuală. Selectând modul de operare manual:
Mod de operare Implicit: MAN
Rotiți Code 0
Apasă Code 0 clipește.
Rotiți MAN
Apasă . Poziționerul schimbă modul de operare în manual. Verificareadomeniului de operare:
Referința variabilă manuală w (este indicat unghiul de rotație curent)
Rotiți Code 1
Apasă Code 1 și clipește.
Rotiți pâmă când presiunea din poziționer crește și robinetul de reglare se mișcă în poziția finală astfel încât să poată fi verificată cursa/unghiul de rotație. 44 EB 8387-3 RO
Unghiul de rotație în spatele poziționerului este indicat. Levierul în poziție orizontală (mijloc) este echivalent cu 0°. Pentru a fi siguri că poziționerul funcționează corect, graficul cu bare trebuie să nu clipească cât timp robbinetul se mișcă în domeniul său de operare. Ieșiti din Code 1 apăsând pe butonul rotativ. Domeniul de operare permis poate a fost depășit dacă unghiul afișat este moai mare de 30°, și graficul cu bare clipește. Poziționerul comută la poziția de siguranță (SAFE). După anularea poziției de siguranță (SAFE) (vezi secțiunea 8.2.2) este absolut necesar să fie verificate levierul și poziția pinului cititor de cursă cum este descris în secțiunea 4
ATENȚIE! Pentru a evita rănirea personalului sau deteriorări de echipamente cauzate de alimentarea cu aer sau alimentarea cu energie, deconectați aceste alimentări înainte de a înlocui levierul și/sau a schimba poziția pinului de citire a cursei.
Pornire - Setări
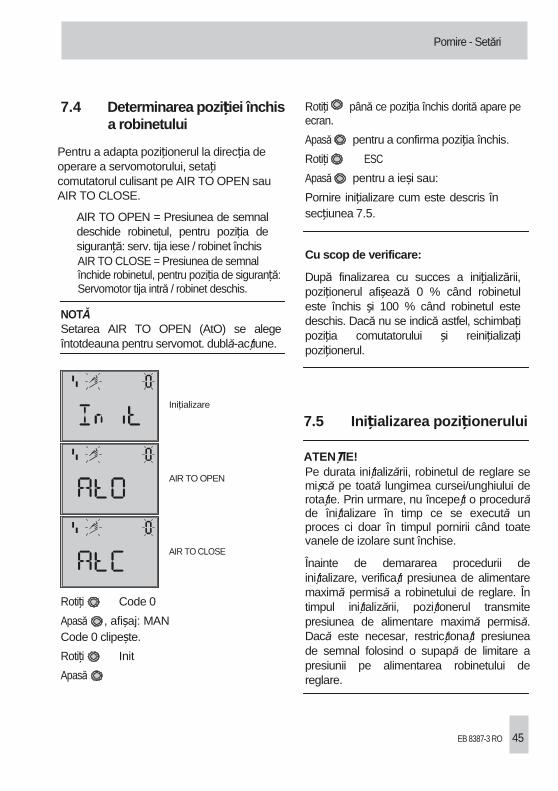
7.4 Determinarea pozi ției închis a robinetului
Pentru a adapta poziționerul la direcția de operare a servomotorului, setați comutatorul culisant pe AIR TO OPEN sau AIR TO CLOSE.
AIR TO OPEN = Presiunea de semnal deschide robinetul, pentru poziția de siguranță: serv. tija iese / robinet închis AIR TO CLOSE = Presiunea de semnal închide robinetul, pentru poziția de siguranță: Servomotor tija intră / robinet deschis.
NOTĂ Setarea AIR TO OPEN (AtO) se alege întotdeauna pentru servomot. dublă-acțiune.
Rotiți până ce poziția închis dorită apare pe ecran.
Apasă pentru a confirma poziția închis.
Rotiți ESC
Apasă pentru a ieși sau:
Pornire inițializare cum este descris în secțiunea 7.5.
Cu scop de verificare:
După finalizarea cu succes a inițializării, poziționerul afișează 0 % când robinetul este închis și 100 % când robinetul este deschis. Dacă nu se indică astfel, schimbați poziția comutatorului și reinițializați poziționerul.
Inițializare
7.5 Inițializarea pozi ționerului ATENȚIE!
AIR TO OPEN
AIR TO CLOSE
Rotiți Code 0
Apasă , afișaj: MAN Code 0 clipește.
Rotiți Init
Apasă
Pe durata inițializării, robinetul de reglare se mișcă pe toată lungimea cursei/unghiului de rotație. Prin urmare, nu începeți o procedură de înițializare în timp ce se execută un proces ci doar în timpul pornirii când toate vanele de izolare sunt închise.
Înainte de demararea procedurii de inițializare, verificați presiunea de alimentare maximă permisă a robinetului de reglare. În timpul inițializării, poziționerul transmite presiunea de alimentare maximă permisă. Dacă este necesar, restricționați presiunea de semnal folosind o supapă de limitare a presiunii pe alimentarea robinetului de reglare.
EB 8387-3 RO 45
Pornire - Setări
NOTĂ După ce poziționerul a fost montat pe un alt servomotor sau dacă locul de montare a fost schimbat și el înainte de re-inițializarea poziționerului, poziționerul trebuie să fie resetat la setarea de bază (val. implicite). Consultați secțiunea 7.8.
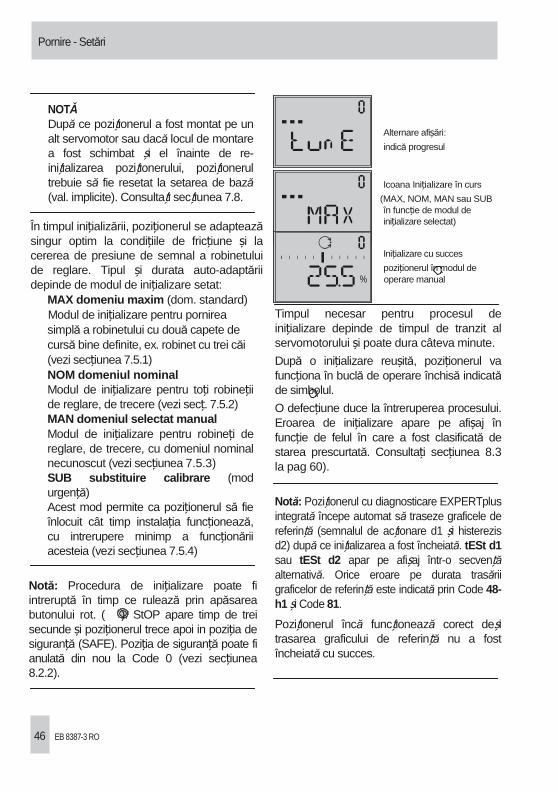
În timpul inițializării, poziționerul se adaptează singur optim la condițiile de fricțiune și la cererea de presiune de semnal a robinetului de reglare. Tipul și durata auto-adaptării depinde de modul de inițializare setat: MAX domeniu maxim (dom. standard)
Modul de inițializare pentru pornirea simplă a robinetului cu două capete de cursă bine definite, ex. robinet cu trei căi (vezi secțiunea 7.5.1) NOM domeniul nominal Modul de inițializare pentru toți robineții de reglare, de trecere (vezi secț. 7.5.2) MAN domeniul selectat manual Modul de inițializare pentru robineți de reglare, de trecere, cu domeniul nominal necunoscut (vezi secțiunea 7.5.3) SUB substituire calibrare (mod urgență) Acest mod permite ca poziționerul să fie înlocuit cât timp instalația funcționează, cu intrerupere minimp a funcționării acesteia (vezi secțiunea 7.5.4)
Notă: Procedura de inițializare poate fi intreruptă în timp ce rulează prin apăsarea butonului rot. ( ). StOP apare timp de trei secunde și poziționerul trece apoi in poziția de siguranță (SAFE). Poziția de siguranță poate fi anulată din nou la Code 0 (vezi secțiunea 8.2.2).
46 EB 8387-3 RO
Alternare afișări:
indică progresul
Icoana Inițializare în curs
(MAX, NOM, MAN sau SUB în funcție de modul de inițializare selectat)
Inițializare cu succes
poziționerul în modul de % operare manual
Timpul necesar pentru procesul de inițializare depinde de timpul de tranzit al servomotorului și poate dura câteva minute.
După o inițializare reușită, poziționerul va funcționa în buclă de operare închisă indicată de simbolul.
O defecțiune duce la întreruperea procesului. Eroarea de inițializare apare pe afișaj în funcție de felul în care a fost clasificată de starea prescurtată. Consultați secțiunea 8.3 la pag 60).
Notă: Poziționerul cu diagnosticare EXPERTplus integrată începe automat să traseze graficele de referință (semnalul de acționare d1 și histerezis d2) după ce inițializarea a fost încheiată. tESt d1 sau tESt d2 apar pe afișaj într-o secvență alternativă. Orice eroare pe durata trasării graficelor de referință este indicată prin Code 48-h1 și Code 81.
Poziționerul încă funcționează corect deși trasarea graficului de referință nu a fost încheiată cu succes.
Pornire - Setări
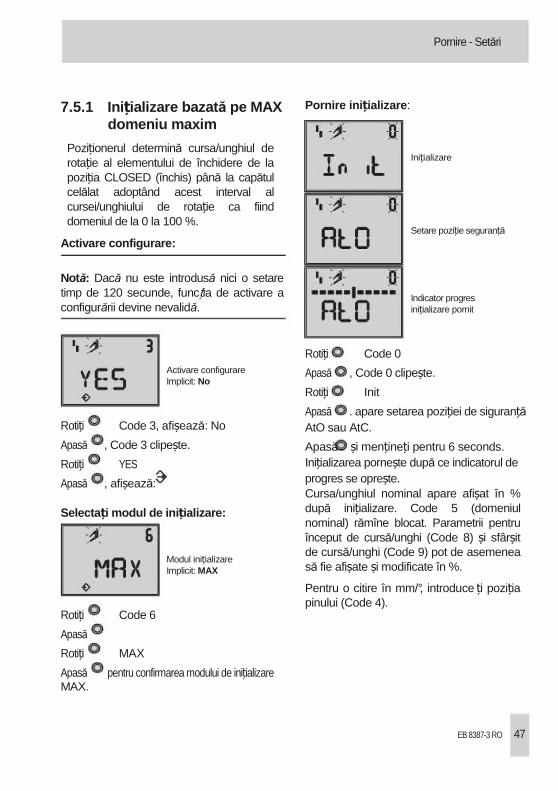
7.5.1 Inițializare bazat ă pe MAX domeniu maxim
Poziționerul determină cursa/unghiul de rotație al elementului de închidere de la poziția CLOSED (închis) până la capătul celălat adoptând acest interval al cursei/unghiului de rotație ca fiind domeniul de la 0 la 100 %.
Activare configurare:
Notă: Dacă nu este introdusă nici o setare timp de 120 secunde, funcția de activare a configurării devine nevalidă.
Activare configurare Implicit: No
Rotiți Code 3, afișează: No
Apasă , Code 3 clipește.
Rotiți YES
Apasă , afișează: Selecta ți modul de ini țializare:
Modul inițializare Implicit: MAX
Rotiți Code 6
Apasă
Rotiți MAX
Apasă pentru confirmarea modului de inițializare MAX.
Pornire ini țializare :
Inițializare
Setare poziție seguranță
Indicator progres inițializare pornit
Rotiți Code 0
Apasă , Code 0 clipește.
Rotiți Init
Apasă . apare setarea poziției de siguranță AtO sau AtC.
Apasă și mențineți pentru 6 seconds. Inițializarea pornește după ce indicatorul de progres se oprește. Cursa/unghiul nominal apare afișat în % după inițializare. Code 5 (domeniul nominal) rămîne blocat. Parametrii pentru început de cursă/unghi (Code 8) și sfârșit de cursă/unghi (Code 9) pot de asemenea să fie afișate și modificate în %.
Pentru o citire în mm/°, introduce ți poziția pinului (Code 4).
EB 8387-3 RO 47
Pornire - Setări
Introducere pozi ție pin : Activare configurare :
Notă: Dacă nu este introdusă nici o Poziție pin
mm Implicit: No
Rotiți Code 4
Press , Code 4 clipește.
Rotiți Poziție pin pe levier (vezi secțiunile relevante la tipuri de montări).
Press . Afișarea doemniului nominal apare în mm /°.
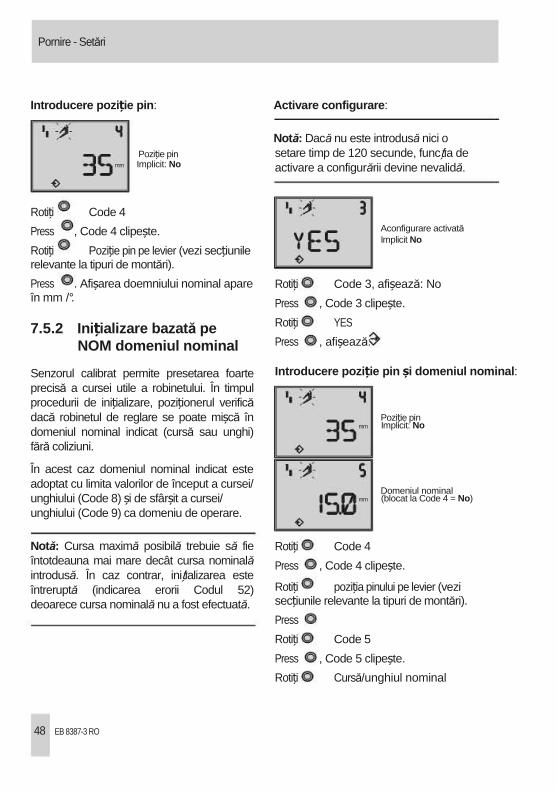
7.5.2 Inițializare bazat ă pe NOM domeniul nominal
Senzorul calibrat permite presetarea foarte precisă a cursei utile a robinetului. În timpul procedurii de inițializare, poziționerul verifică dacă robinetul de reglare se poate mișcă în domeniul nominal indicat (cursă sau unghi) fără coliziuni.
În acest caz domeniul nominal indicat este adoptat cu limita valorilor de început a cursei/ unghiului (Code 8) și de sfârșit a cursei/ unghiului (Code 9) ca domeniu de operare.
Notă: Cursa maximă posibilă trebuie să fie întotdeauna mai mare decât cursa nominală introdusă. În caz contrar, inițializarea este întreruptă (indicarea erorii Codul 52) deoarece cursa nominală nu a fost efectuată. 48 EB 8387-3 RO
setare timp de 120 secunde, funcția de activare a configurării devine nevalidă.
Aconfigurare activată Implicit No
Rotiți Code 3, afișează: No
Press , Code 3 clipește.
Rotiți YES
Press , afișează:
Introducere pozi ție pin și domeniul nominal :
Poziție pin mm Implicit: No
Domeniul nominal mm (blocat la Code 4 = No)
Rotiți Code 4
Press , Code 4 clipește.
Rotiți poziția pinului pe levier (vezi secțiunile relevante la tipuri de montări).
Press
Rotiți Code 5
Press , Code 5 clipește.
Rotiți Cursă/unghiul nominal
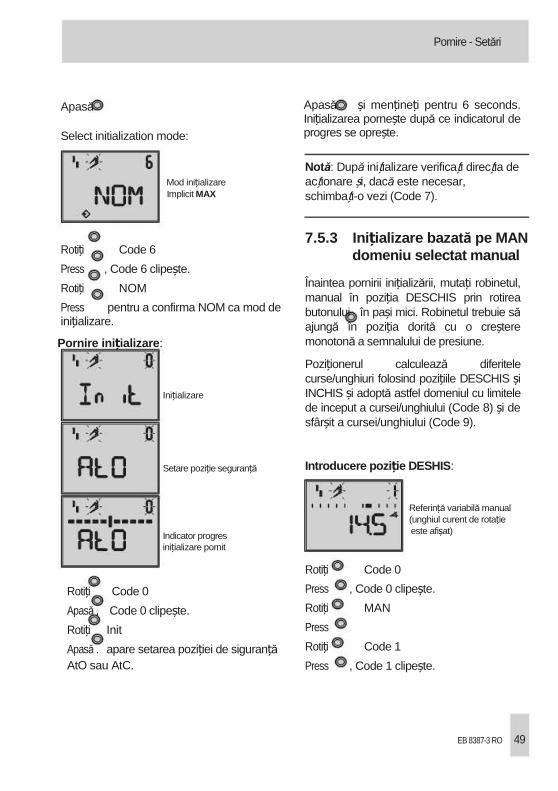
Pornire - Setări
Apasă Select initialization mode:
Mod inițializare
Implicit MAX
Rotiți Code 6
Press , Code 6 clipește.
Rotiți NOM
Press pentru a confirma NOM ca mod de inițializare.
Pornire ini țializare :
Inițializare
Setare poziție seguranță
Indicator progres inițializare pornit
Rotiți Code 0
Apasă , Code 0 clipește.
Rotiți Init
Apasă . apare setarea poziției de siguranță AtO sau AtC.
Apasă și mențineți pentru 6 seconds. Inițializarea pornește după ce indicatorul de progres se oprește.
Notă: După inițializare verificați direcția de acționare și, dacă este necesar, schimbați-o vezi (Code 7).
7.5.3 Inițializare bazat ă pe MAN domeniu selectat manual
Înaintea pornirii inițializării, mutați robinetul, manual în poziția DESCHIS prin rotirea butonului în pași mici. Robinetul trebuie să ajungă în poziția dorită cu o creștere monotonă a semnalului de presiune.
Poziționerul calculează diferitele curse/unghiuri folosind pozițiile DESCHIS și INCHIS și adoptă astfel domeniul cu limitele de inceput a cursei/unghiului (Code 8) și de sfârșit a cursei/unghiului (Code 9).
Introducere pozi ție DESHIS:
Referință variabilă manual (unghiul curent de rotație este afișat)
Rotiți Code 0
Press , Code 0 clipește.
Rotiți MAN
Press
Rotiți Code 1
Press , Code 1 clipește.
EB 8387-3 RO 49
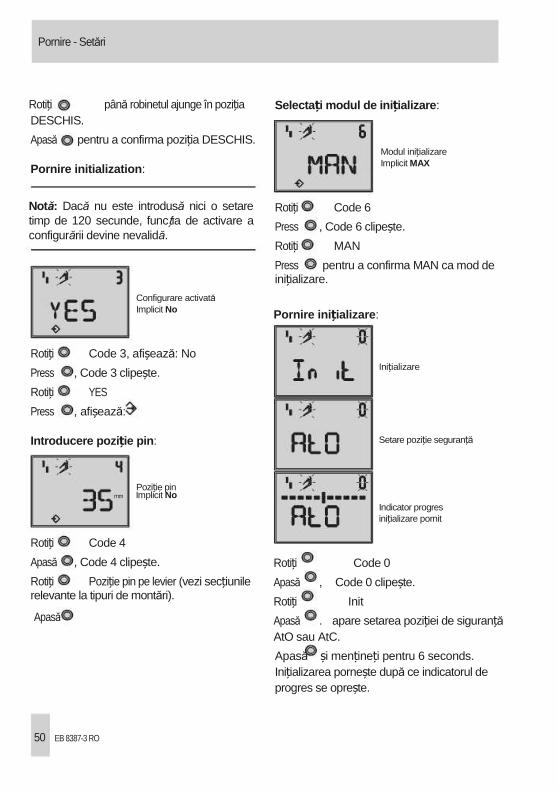
Pornire - Setări
Rotiți până robinetul ajunge în poziția DESCHIS.
Apasă pentru a confirma poziția DESCHIS. Pornire initialization :
Notă: Dacă nu este introdusă nici o setare timp de 120 secunde, funcția de activare a configurării devine nevalidă.
Configurare activată Implicit No
Rotiți Code 3, afișează: No
Press , Code 3 clipește.
Rotiți YES
Press , afișează: Introducere pozi ție pin :
Poziție pin mm Implicit No
Rotiți Code 4
Apasă , Code 4 clipește.
Rotiți Poziție pin pe levier (vezi secțiunile relevante la tipuri de montări).
Apasă
50 EB 8387-3 RO
Selecta ți modul de ini țializare :
Modul inițializare Implicit MAX
Rotiți Code 6
Press , Code 6 clipește.
Rotiți MAN
Press pentru a confirma MAN ca mod de inițializare.
Pornire ini țializare :
Inițializare
Setare poziție seguranță
Indicator progres inițializare pornit
Rotiți Code 0
Apasă , Code 0 clipește.
Rotiți Init
Apasă . apare setarea poziției de siguranță AtO sau AtC.
Apasă și mențineți pentru 6 seconds. Inițializarea pornește după ce indicatorul de progres se oprește.
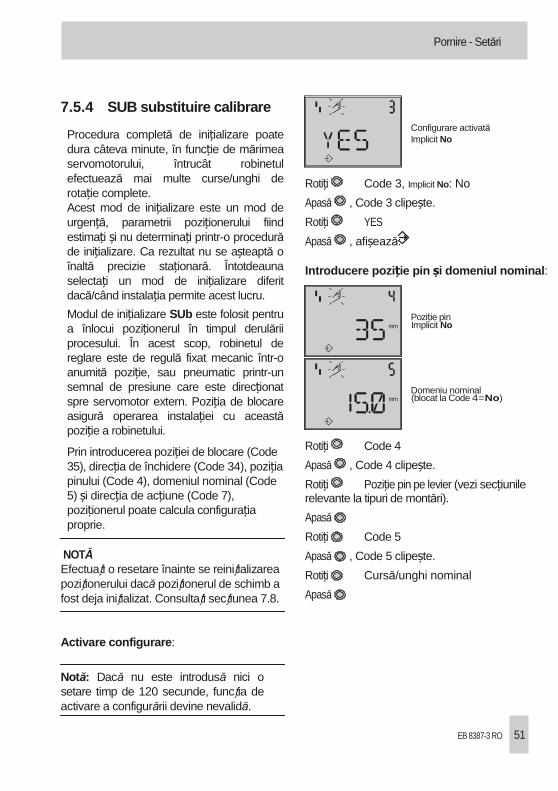
Pornire - Setări
7.5.4 SUB substituire calibrare
Procedura completă de inițializare poate dura câteva minute, în funcție de mărimea servomotorului, întrucât robinetul efectuează mai multe curse/unghi de rotație complete. Acest mod de inițializare este un mod de urgență, parametrii poziționerului fiind estimați și nu determinați printr-o procedură de inițializare. Ca rezultat nu se așteaptă o înaltă precizie staționară. Întotdeauna selectați un mod de inițializare diferit dacă/când instalația permite acest lucru.
Modul de inițializare SUb este folosit pentru a înlocui poziționerul în timpul derulării procesului. În acest scop, robinetul de reglare este de regulă fixat mecanic într-o anumită poziție, sau pneumatic printr-un semnal de presiune care este direcționat spre servomotor extern. Poziția de blocare asigură operarea instalației cu această poziție a robinetului.
Prin introducerea poziției de blocare (Code 35), direcția de închidere (Code 34), poziția pinului (Code 4), domeniul nominal (Code 5) și direcția de acțiune (Code 7), poziționerul poate calcula configurația proprie.
NOTĂ Efectuați o resetare înainte se reinițializarea poziționerului dacă poziționerul de schimb a fost deja inițializat. Consultați secțiunea 7.8.
Activare configurare :
Notă: Dacă nu este introdusă nici o setare timp de 120 secunde, funcția de activare a configurării devine nevalidă.
Configurare activată Implicit No
Rotiți Code 3, Implicit No: No
Apasă , Code 3 clipește.
Rotiți YES
Apasă , afișează:
Introducere pozi ție pin și domeniul nominal :
Poziție pin mm Implicit No
Domeniu nominal mm (blocat la Code 4=No)
Rotiți Code 4
Apasă , Code 4 clipește.
Rotiți Poziție pin pe levier (vezi secțiunile relevante la tipuri de montări).
Apasă
Rotiți Code 5
Apasă , Code 5 clipește.
Rotiți Cursă/unghi nominal
Apasă
EB 8387-3 RO 51
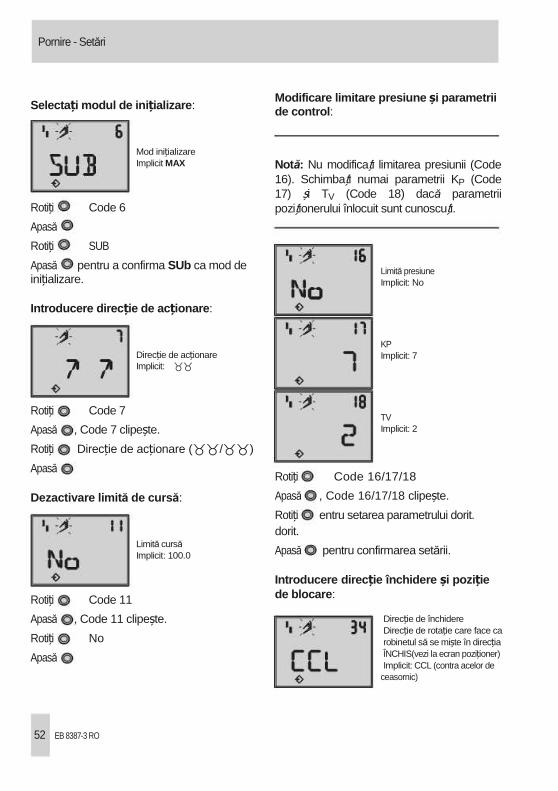
Pornire - Setări
Selecta ți modul de ini țializare : Mod inițializare Implicit MAX
Rotiți Code 6
Apasă
Rotiți SUB
Apasă pentru a confirma SUb ca mod de inițializare. Introducere direc ție de ac ționare :
Direcție de acționare Implicit:
Rotiți Code 7
Apasă , Code 7 clipește.
Rotiți Direcție de acționare (/)
Apasă Dezactivare limit ă de curs ă:
Limită cursă Implicit: 100.0
Rotiți Code 11
Apasă , Code 11 clipește.
Rotiți No
Apasă
52 EB 8387-3 RO
Modificare limitare presiune și parametrii de control :
Notă: Nu modificați limitarea presiunii (Code 16). Schimbați numai parametrii KP (Code 17) și TV (Code 18) dacă parametrii poziționerului înlocuit sunt cunoscuți.
Limită presiune Implicit: No
KP Implicit: 7
TV Implicit: 2
Rotiți Code 16/17/18
Apasă , Code 16/17/18 clipește.
Rotiți entru setarea parametrului dorit. dorit.
Apasă pentru confirmarea setării.
Introducere direc ție închidere și pozi ție de blocare :
Direcție de închidere Direcție de rotație care face ca robinetul să se miște în direcția ÎNCHIS(vezi la ecran poziționer) Implicit: CCL (contra acelor de
ceasornic)
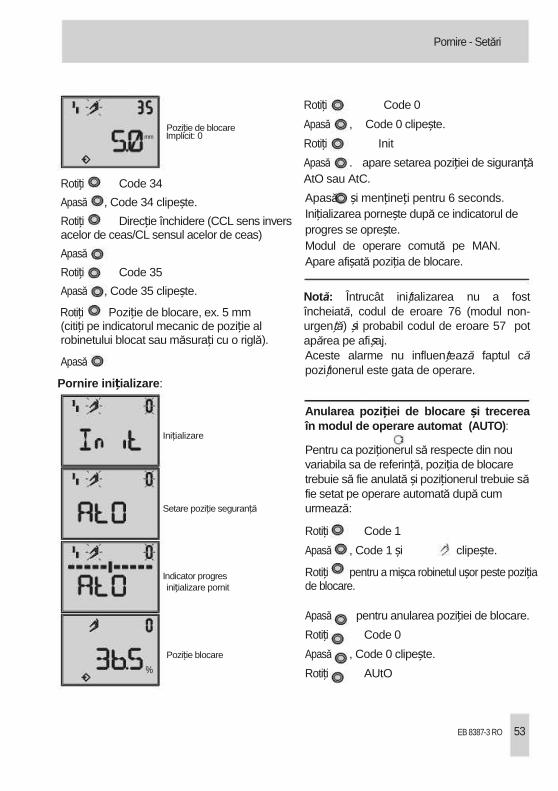
Pornire - Setări
Poziție de blocare mm Implicit: 0
Rotiți Code 34
Apasă , Code 34 clipește.
Rotiți Direcție închidere (CCL sens invers acelor de ceas/CL sensul acelor de ceas)
Apasă
Rotiți Code 35
Apasă , Code 35 clipește.
Rotiți Poziție de blocare, ex. 5 mm (citiți pe indicatorul mecanic de poziție al robinetului blocat sau măsurați cu o riglă).
Apasă
Pornire ini țializare :
Inițializare
Setare poziție seguranță
Indicator progres inițializare pornit
Poziție blocare
%
Rotiți Code 0
Apasă , Code 0 clipește.
Rotiți Init
Apasă . apare setarea poziției de siguranță AtO sau AtC.
Apasă și mențineți pentru 6 seconds. Inițializarea pornește după ce indicatorul de progres se oprește. Modul de operare comută pe MAN. Apare afișată poziția de blocare.
Notă: Întrucât inițializarea nu a fost încheiată, codul de eroare 76 (modul non-urgență) și probabil codul de eroare 57 pot apărea pe afișaj. Aceste alarme nu influențează faptul că poziționerul este gata de operare.
Anularea pozi ției de blocare și trecerea în modul de operare automat (AUTO):
Pentru ca poziționerul să respecte din nou variabila sa de referință, poziția de blocare trebuie să fie anulată și poziționerul trebuie să fie setat pe operare automată după cum urmează:
Rotiți Code 1
Apasă , Code 1 și clipește.
Rotiți pentru a mișca robinetul ușor peste poziția de blocare.
Apasă pentru anularea poziției de blocare.
Rotiți Code 0
Apasă , Code 0 clipește.
Rotiți AUtO
EB 8387-3 RO 53
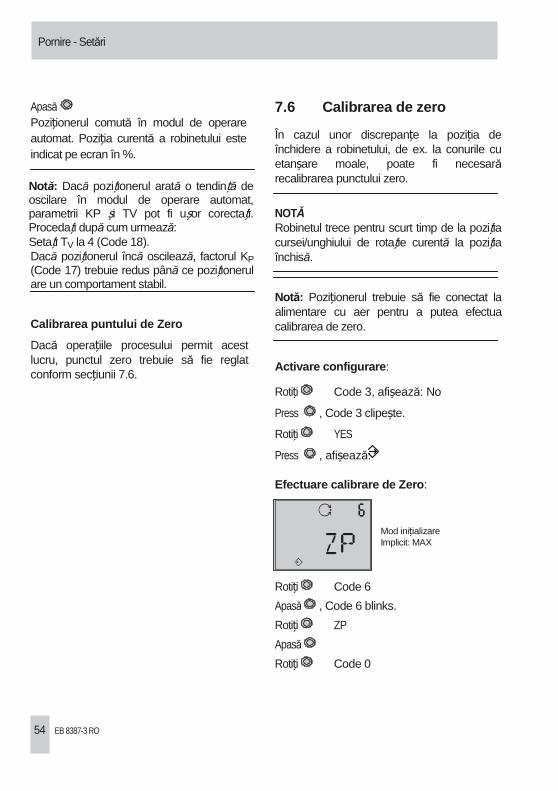
Pornire - Setări
Apasă Poziționerul comută în modul de operare automat. Poziția curentă a robinetului este indicat pe ecran în %. Notă: Dacă poziționerul arată o tendință de oscilare în modul de operare automat, parametrii KP și TV pot fi ușor corectați. Procedați după cum urmează: Setați TV la 4 (Code 18). Dacă poziționerul încă oscilează, factorul KP (Code 17) trebuie redus până ce poziționerul are un comportament stabil.
Calibrarea puntului de Zero
Dacă operațiile procesului permit acest lucru, punctul zero trebuie să fie reglat conform secțiunii 7.6.
54 EB 8387-3 RO
7.6 Calibrarea de zero
În cazul unor discrepanțe la poziția de închidere a robinetului, de ex. la conurile cu etanșare moale, poate fi necesară recalibrarea punctului zero.
NOTĂ Robinetul trece pentru scurt timp de la poziția cursei/unghiului de rotație curentă la poziția închisă.
Notă: Poziționerul trebuie să fie conectat la alimentare cu aer pentru a putea efectua calibrarea de zero.
Activare configurare :
Rotiți Code 3, afișează: No
Press , Code 3 clipește.
Rotiți YES
Press , afișează:
Efectuare calibrare de Zero :
Mod inițializare Implicit: MAX
Rotiți Code 6
Apasă , Code 6 blinks.
Rotiți ZP
Apasă
Rotiți Code 0
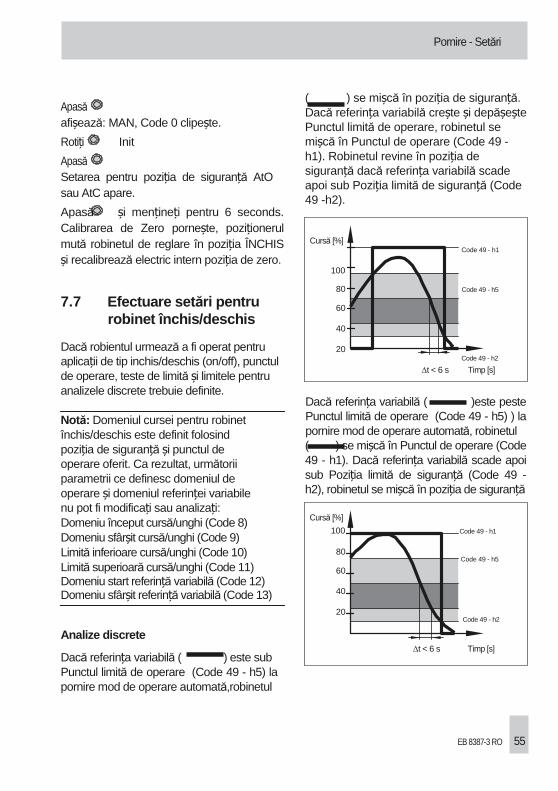
Pornire - Setări
Apasă afișează: MAN, Code 0 clipește.
Rotiți Init
Apasă Setarea pentru poziția de siguranță AtO sau AtC apare.
Apasă și mențineți pentru 6 seconds. Calibrarea de Zero pornește, poziționerul mută robinetul de reglare în poziția ÎNCHIS și recalibrează electric intern poziția de zero.
( ) se mișcă în poziția de siguranță. Dacă referința variabilă crește și depășește Punctul limită de operare, robinetul se mișcă în Punctul de operare (Code 49 - h1). Robinetul revine în poziția de siguranță dacă referința variabilă scade apoi sub Poziția limită de siguranță (Code 49 -h2).
Cursă [%] Code 49 - h1
7.7 Efectuare set ări pentru robinet închis/deschis
Dacă robientul urmează a fi operat pentru aplicații de tip inchis/deschis (on/off), punctul de operare, teste de limită și limitele pentru analizele discrete trebuie definite. Notă: Domeniul cursei pentru robinet închis/deschis este definit folosind poziția de siguranță și punctul de operare oferit. Ca rezultat, următorii parametrii ce definesc domeniul de operare și domeniul referinței variabile nu pot fi modificați sau analizați: Domeniu început cursă/unghi (Code 8) Domeniu sfârșit cursă/unghi (Code 9) Limită inferioare cursă/unghi (Code 10) Limită superioară cursă/unghi (Code 11) Domeniu start referință variabilă (Code 12) Domeniu sfârșit referință variabilă (Code 13)
Analize discrete
Dacă referința variabilă ( ) este sub Punctul limită de operare (Code 49 - h5) la pornire mod de operare automată,robinetul
100
80 Code 49 - h5
60
40
20 Code 49 - h2
∆t < 6 s Timp [s]
Dacă referința variabilă ( )este peste Punctul limită de operare (Code 49 - h5) ) la pornire mod de operare automată, robinetul ( ) se mișcă în Punctul de operare (Code 49 - h1). Dacă referința variabilă scade apoi sub Poziția limită de siguranță (Code 49 - h2), robinetul se mișcă în poziția de siguranță
Cursă [%]
100 Code 49 - h1
80 Code 49 - h5
60
40
20 Code 49 - h2
∆t < 6 s Timp [s]
EB 8387-3 RO 55
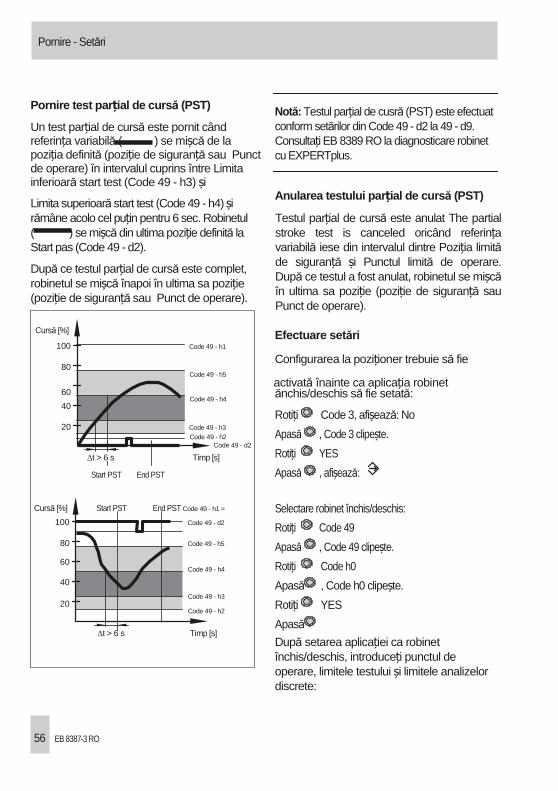
Pornire - Setări
Pornire test par țial de curs ă (PST)
Un test parțial de cursă este pornit când referința variabilă ( ) se mișcă de la poziția definită (poziție de siguranță sau Punct de operare) în intervalul cuprins între Limita inferioară start test (Code 49 - h3) și
Limita superioară start test (Code 49 - h4) și rămâne acolo cel puțin pentru 6 sec. Robinetul ( ) se mișcă din ultima poziție definită la Start pas (Code 49 - d2).
După ce testul parțial de cursă este complet, robinetul se mișcă înapoi în ultima sa poziție (poziție de siguranță sau Punct de operare). Cursă [%]
100 Code 49 - h1
80
Notă: Testul parțial de cusră (PST) este efectuat conform setărilor din Code 49 - d2 la 49 - d9. Consultați EB 8389 RO la diagnosticare robinet cu EXPERTplus.
Anularea testului par țial de curs ă (PST)
Testul parțial de cursă este anulat The partial stroke test is canceled oricând referința variabilă iese din intervalul dintre Poziția limită de siguranță și Punctul limită de operare. După ce testul a fost anulat, robinetul se mișcă în ultima sa poziție (poziție de siguranță sau Punct de operare).
Efectuare set ări
Configurarea la poziționer trebuie să fie Code 49 - h5
activată înainte ca aplicația robinet 60
Code 49 - h4 40
20 Code 49 - h3
Code 49 - h2 Code 49 - d2
∆t > 6 s Timp [s]
Start PST End PST
Cursă [%] Start PST End PST Code 49 - h1 =
100 Code 49 - d2
80 Code 49 - h5
60 Code 49 - h4
40
Code 49 - h3 20
Code 49 - h2
∆t > 6 s Timp [s]
56 EB 8387-3 RO
ănchis/deschis să fie setată:
Rotiți Code 3, afișează: No
Apasă , Code 3 clipește.
Rotiți YES
Apasă , afișează:
Selectare robinet închis/deschis:
Rotiți Code 49
Apasă , Code 49 clipește.
Rotiți Code h0
Apasă , Code h0 clipește.
Rotiți YES
Apasă
După setarea aplicației ca robinet închis/deschis, introduceți punctul de operare, limitele testului și limitele analizelor discrete:
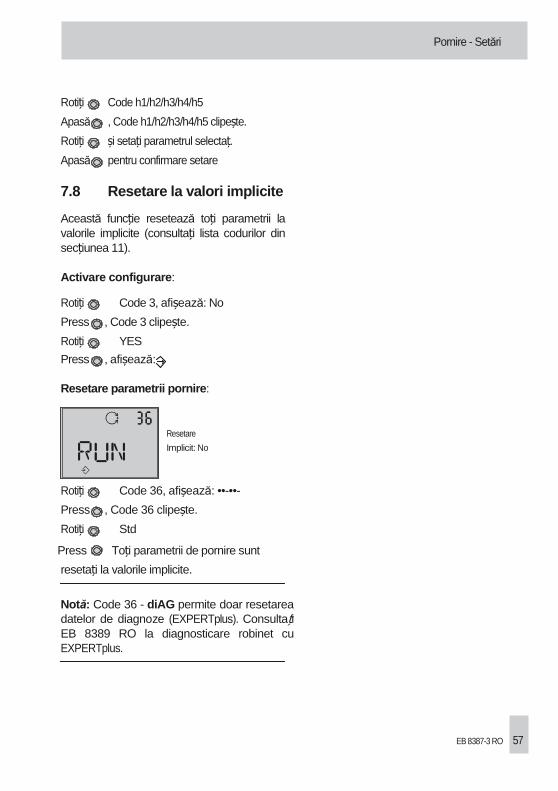
Pornire - Setări
Rotiți Code h1/h2/h3/h4/h5
Apasă , Code h1/h2/h3/h4/h5 clipește.
Rotiți și setați parametrul selectaț.
Apasă pentru confirmare setare
7.8 Resetare la valori implicite
Această funcție resetează toți parametrii la valorile implicite (consultați lista codurilor din secțiunea 11). Activare configurare :
Rotiți Code 3, afișează: No
Press , Code 3 clipește.
Rotiți YES
Press , afișează: Resetare parametrii pornire :
Resetare
Implicit: No
Rotiți Code 36, afișează: ••-••-
Press , Code 36 clipește.
Rotiți Std
Press . Toți parametrii de pornire sunt
resetați la valorile implicite.
Notă: Code 36 - diAG permite doar resetarea datelor de diagnoze (EXPERTplus). Consultați EB 8389 RO la diagnosticare robinet cu EXPERTplus.
EB 8387-3 RO 57
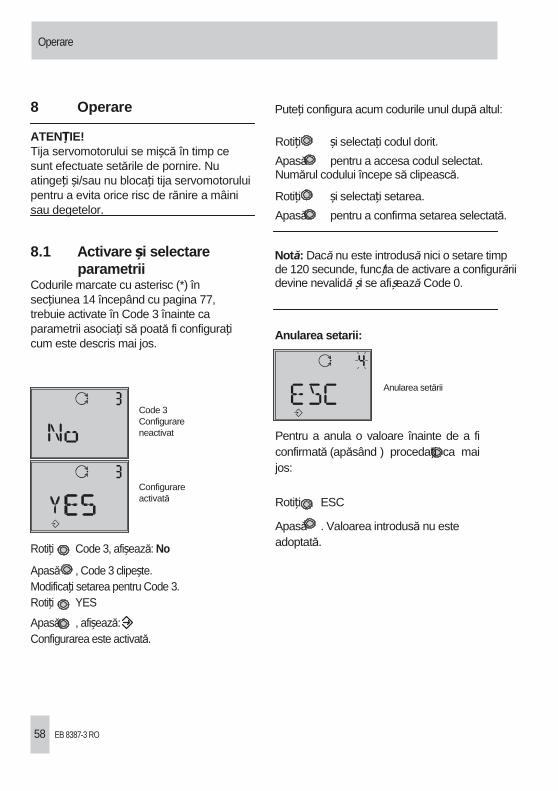
Operare
8 Operare ATENȚIE! Tija servomotorului se mișcă în timp ce sunt efectuate setările de pornire. Nu atingeți și/sau nu blocați tija servomotorului pentru a evita orice risc de rănire a mâini sau degetelor.
8.1 Activare și selectare parametrii
Codurile marcate cu asterisc (*) în secțiunea 14 începând cu pagina 77, trebuie activate în Code 3 înainte ca parametrii asociați să poată fi configurați cum este descris mai jos.
Code 3 Configurare neactivat Configurare activată
Rotiți Code 3, afișează: No
Apasă , Code 3 clipește. Modificați setarea pentru Code 3. Rotiți YES
Apasă , afișează: Configurarea este activată.
58 EB 8387-3 RO
Puteți configura acum codurile unul după altul:
Rotiți și selectați codul dorit.
Apasă pentru a accesa codul selectat. Numărul codului începe să clipească.
Rotiți și selectați setarea.
Apasă pentru a confirma setarea selectată.
Notă: Dacă nu este introdusă nici o setare timp de 120 secunde, funcția de activare a configurării devine nevalidă și se afișează Code 0.
Anularea setarii:
Anularea setării
Pentru a anula o valoare înainte de a fi confirmată (apăsând ) procedați ca mai jos:
Rotiți ESC
Apasă . Valoarea introdusă nu este adoptată.
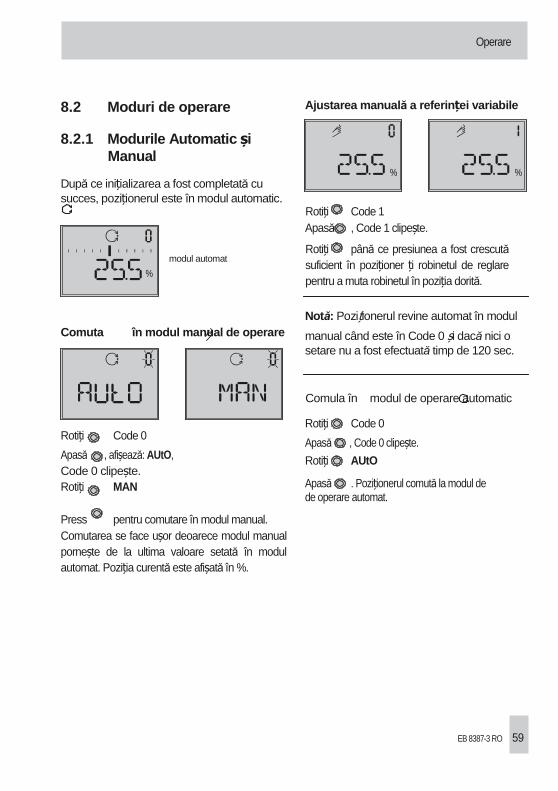
Operare
8.2 Moduri de operare
8.2.1 Modurile Automatic și Manual
După ce inițializarea a fost completată cu succes, poziționerul este în modul automatic.
modul automat
%
Comuta în modul manual de operare
Rotiți Code 0
Apasă , afișează: AUtO, Code 0 clipește. Rotiți MAN Press pentru comutare în modul manual. Comutarea se face ușor deoarece modul manual pornește de la ultima valoare setată în modul automat. Poziția curentă este afișată în %.
Ajustarea manual ă a referin ței variabile
% %
Rotiți Code 1 Apasă , Code 1 clipește.
Rotiți până ce presiunea a fost crescută suficient în poziționer ți robinetul de reglare pentru a muta robinetul în poziția dorită.
Notă: Poziționerul revine automat în modul
manual când este în Code 0 și dacă nici o setare nu a fost efectuată timp de 120 sec.
Comula în modul de operare automatic
Rotiți Code 0
Apasă , Code 0 clipește.
Rotiți AUtO
Apasă . Poziționerul comută la modul de de operare automat.
EB 8387-3 RO 59
Operare
8.2.2 Poziția de siguran ță (SAFE)
Dacă doriți mutarea robinetului în poziția de siguranță stabilită în timpul pornirii (vezi secțiunea 7.1), procedați după cum urmează:
Rotiți Code 0 Apasă , afișează: modul de operare curent (AUtO sau MAN), Code 0 clipește.
Rotiți SAFE Press , afișează: S. Robinetul se mută în poziția de siguranță. Odată ce poziționerul este inițializat, poziția curentă a sa este indicată pe ecran în %. Ieșirea din pozi șia de siguran ță
Rotiți Code 0 Apasă , Code 0 clipește.
Rotiți și selectați modul de operare dorit AUtO sau MAN. Apasă . Poziționerul comută la modul de operare selectat.
60 EB 8387-3 RO
8.3 Alarm ă Defecțiune / Alarm ă Între ținere
Toate alarmele de stare și defect sunt clasificate conform o stare a poziționerului. Setările implicite a clasifiării stărilor sunt listate în lista codurilor. Notă: Clasificarea stărilor poate fi modificată în TROVIS-VIEW și prin parametrii din fișierul DD. Consultați EB 8389 RO la diagnosticare robinet cu EXPERTplus. Pentru a avea o privire de ansamblu mai bună, alarmele clasificate sunt rezumate în stare prescurtată. Următoarele stări sunt disponibile:
Alarma de între ținere Poziționerul nu poate efectua sarcina de comandă datorită unei defecțiuni funcționale din dispozitiv sau la un periferic sau inițializarea nu a fost încă încheiată cu succes. Între ținere necesar ă Poziționerul efectuează încă sarcina de comandă (cu restricționări). S-a determinat o cerere de întreținere sau o uzură peste medie. Toleranța la uzură va dispărea în curând sau este redusă într-un ritm mai rapid decât cel preconizat. Întreținerea este necesară pe termen mediu. Între ținerea cerut ă Poziționerul efectuează încă sarcina de comandă (cu restricționări). S-a determinat o cerere de întreținere sau o uzură peste medie. Toleranța la uzură va dispărea în curând sau este redusă într-un ritm mai rapid decât cel preconizat. Întreținerea este necesară pe termen scurt.
Operare
În afara specifica ției Poziționerul este operat în afara condițiilor de operare specificate.
Notă: Dacă un eveniment este clasificat ca „Fără alarmă“, acest eveniment nu are niciun efect asupa stării prescurtate.
Starea prescurtată este afișată pe ecranul poziționerului cu următoarele icoane:
Positioner
Ieșire alarm ă defect
“Alarma de întreținere” ca stare prescurtată produce o comutare a ieșirii alarmei de defect.
Starea prescurtată “Verificare funcțională” poate de asemenea comuta contactul de alarmă defect la Code 32.
Starea prescurtată “Întreținere necesară/ cerută” poate de asemenea comuta contactul de alarmă defect la Code 33.
Stare prescurtată Alarmă întreținere
Verificare funcțională
Întreținere necesară/ Întreținere cerută
În afara specificației
display 8.3.1 Confirmare mesaje eroare
Activare configurare: Text, ex. tESting , Rotiți Code 3 TunE sau tESt Apasă , Code 3 clipește
Rotiți ON
Apasă , afișează: clipește
Confirmare mesaje eroare: If the positioner has not been initialized, the maintenance alarm icon ( ) appears on the display as the positioner cannot follow its reference variable.
If fault alarms exist, the possible source of error is displayed in Code 49 onwards. In this case, Err appears on the display.
Example Error caused by pin position
The cause and recommended action are listed in the code list (section 11).
Rotiți Codul de eroare dorit pentru confirmare. Apasă pentru confirmare mesaj eroare.
EB 8387-3 RO 61
Întreținere
9 Între ținere Poziționerul nu necesită întreținere. Există filtre cu o mărime a ochiului sitei de 100 micro în conexiunile pneumatice pentru alimentare și evacuare care pot fi demontate și curățate dacă este nevoie. Instrucțiunile de întreținere pentru orice stație de reducere a presiunii de alimentare din amonte trebuie să fie respectate. 62 EB 8387-3 RO
10 Repararea dispozitivelor cu protec ție la explozie
Dacă o piesă a poziționerului pe care se bazează protecția la explozie trebuie să fie servisată, poziționerul nu trebuie să fie pus din nou în funcțiune până când un expert nu a inspectat dispozitivul conform cerințelor protecției la explozie, până când acesta nu a emis un certificat care să afirme acest lucru sau până nu a oferit dispozitivului o marcă de conformitate. Inspectarea de către un expert nu este necesară dacă fabricantul efectuează o verificare de rutină a dispozitivului înainte de a-l repune în funcțiune. Trecerea testului de rutină trebuie să fie atestată prin atașarea unei mărci de conformitate la dispozitiv. Componentele cu protecție la explozie pot fi înlocuite numai cu piese originale și verificate de către fabricant. Dispozitivele care au fost deja utilizate în zone fără risc și care sunt destinate utilizării în zone cu risc în viitor, trebuie să îndeplinească cerințele de siguranță înscrise pe dispozitivele reparate. Înainte de funcționare, acestea trebuie să fie testate conform specificațiilor stipulate pentru „Repararea dispozitivelor cu protecție la explozie“. Citiți secțiunea 13 pentru operațiuni de întreținere, calibrare și ajustare în interiorul și în afara zonelor cu pericol de explozie.
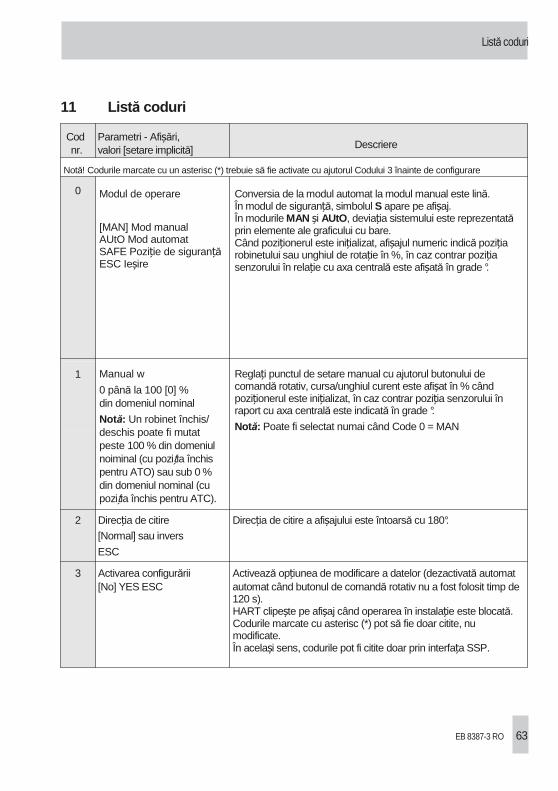
Listă coduri
11 List ă coduri Cod Parametri - Afișări, nr. valori [setare implicită]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
0 Modul de operare
[MAN] Mod manual AUtO Mod automat SAFE Poziție de siguranță ESC Ieșire
Conversia de la modul automat la modul manual este lină. În modul de siguranță, simbolul S apare pe afișaj. În modurile MAN și AUtO, deviația sistemului este reprezentată prin elemente ale graficului cu bare. Când poziționerul este inițializat, afișajul numeric indică poziția robinetului sau unghiul de rotație în %, în caz contrar poziția senzorului în relație cu axa centrală este afișată în grade °.
1 Manual w
0 până la 100 [0] % din domeniul nominal
Notă: Un robinet închis/ deschis poate fi mutat peste 100 % din domeniul noiminal (cu poziția închis pentru ATO) sau sub 0 % din domeniul nominal (cu poziția închis pentru ATC).
Reglați punctul de setare manual cu ajutorul butonului de comandă rotativ, cursa/unghiul curent este afișat în % când poziționerul este inițializat, în caz contrar poziția senzorului în raport cu axa centrală este indicată în grade °.
Notă: Poate fi selectat numai când Code 0 = MAN
2 Direcția de citire Direcția de citire a afișajului este întoarsă cu 180°.
[Normal] sau invers
ESC
3 Activarea configurării Activează opțiunea de modificare a datelor (dezactivată automat [No] YES ESC automat când butonul de comandă rotativ nu a fost folosit timp de 120 s).
HART clipește pe afișaj când operarea în instalație este blocată. Codurile marcate cu asterisc (*) pot să fie doar citite, nu modificate. În același sens, codurile pot fi citite doar prin interfața SSP.
EB 8387-3 RO 63
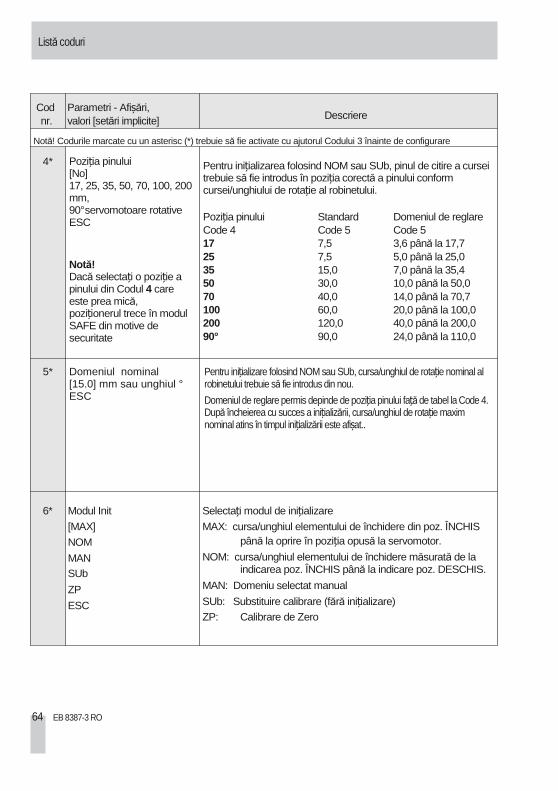
Listă coduri
Cod Parametri - Afișări, nr. valori [setări implicite]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
4* Poziția pinului [No] 17, 25, 35, 50, 70, 100, 200 mm, 90° servomotoare rotative ESC
Notă! Dacă selectați o poziție a pinului din Codul 4 care este prea mică, poziționerul trece în modul SAFE din motive de securitate
Pentru inițializarea folosind NOM sau SUb, pinul de citire a cursei trebuie să fie introdus în poziția corectă a pinului conform cursei/unghiului de rotație al robinetului. Poziția pinului Standard Domeniul de reglare Code 4 Code 5 Code 5 17 7,5 3,6 până la 17,7 25 7,5 5,0 până la 25,0 35 15,0 7,0 până la 35,4 50 30,0 10,0 până la 50,0 70 40,0 14,0 până la 70,7 100 60,0 20,0 până la 100,0 200 120,0 40,0 până la 200,0 90° 90,0 24,0 până la 110,0
5* Domeniul nominal [15.0] mm sau unghiul ° ESC
Pentru inițializare folosind NOM sau SUb, cursa/unghiul de rotație nominal al robinetului trebuie să fie introdus din nou.
Domeniul de reglare permis depinde de poziția pinului față de tabel la Code 4. După încheierea cu succes a inițializării, cursa/unghiul de rotație maxim nominal atins în timpul inițializării este afișat..
6* Modul Init Selectați modul de inițializare
[MAX] MAX: cursa/unghiul elementului de închidere din poz. ÎNCHIS
NOM până la oprire în poziția opusă la servomotor.
MAN NOM: cursa/unghiul elementului de închidere măsurată de la
SUb indicarea poz. ÎNCHIS până la indicare poz. DESCHIS.
ZP MAN: Domeniu selectat manual
ESC SUb: Substituire calibrare (fără inițializare)
ZP: Calibrare de Zero
64 EB 8387-3 RO
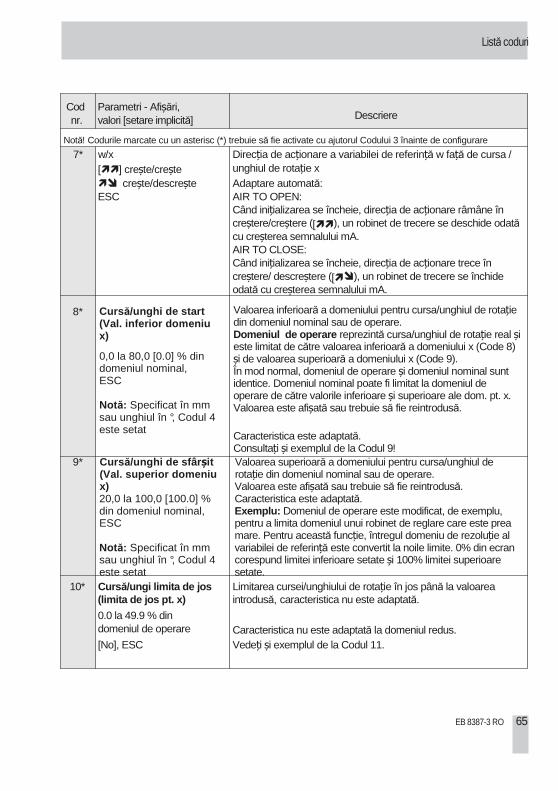
Listă coduri
Cod Parametri - Afișări, nr. valori [setare implicită]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
7* w/x Direcția de acționare a variabilei de referință w față de cursa / [] crește/crește unghiul de rotație x crește/descrește Adaptare automată: ESC AIR TO OPEN:
Când inițializarea se încheie, direcția de acționare râmâne în creștere/creștere ([), un robinet de trecere se deschide odată cu creșterea semnalului mA. AIR TO CLOSE: Când inițializarea se încheie, direcția de acționare trece în creștere/ descreștere ([), un robinet de trecere se închide odată cu creșterea semnalului mA.
8* Curs ă/unghi de start (Val. inferior domeniu x)
0,0 la 80,0 [0.0] % din domeniul nominal, ESC Notă: Specificat în mm sau unghiul în °, Codul 4 este setat
Valoarea inferioară a domeniului pentru cursa/unghiul de rotație din domeniul nominal sau de operare. Domeniul de operare reprezintă cursa/unghiul de rotație real și este limitat de către valoarea inferioară a domeniului x (Code 8) și de valoarea superioară a domeniului x (Code 9). În mod normal, domeniul de operare și domeniul nominal sunt identice. Domeniul nominal poate fi limitat la domeniul de operare de către valorile inferioare și superioare ale dom. pt. x. Valoarea este afișată sau trebuie să fie reintrodusă.
Caracteristica este adaptată. Consultați și exemplul de la Codul 9!
9* Curs ă/unghi de sfâr șit (Val. superior domeniu x) 20,0 la 100,0 [100.0] % din domeniul nominal, ESC Notă: Specificat în mm sau unghiul în °, Codul 4 este setat
Valoarea superioară a domeniului pentru cursa/unghiul de rotație din domeniul nominal sau de operare. Valoarea este afișată sau trebuie să fie reintrodusă. Caracteristica este adaptată. Exemplu: Domeniul de operare este modificat, de exemplu, pentru a limita domeniul unui robinet de reglare care este prea mare. Pentru această funcție, întregul domeniu de rezoluție al variabilei de referință este convertit la noile limite. 0% din ecran corespund limitei inferioare setate și 100% limitei superioare setate.
10* Cursă/ungi limita de jos Limitarea cursei/unghiului de rotație în jos până la valoarea (limita de jos pt. x) introdusă, caracteristica nu este adaptată.
0.0 la 49.9 % din domeniul de operare Caracteristica nu este adaptată la domeniul redus. [No], ESC Vedeți și exemplul de la Codul 11.
EB 8387-3 RO 65
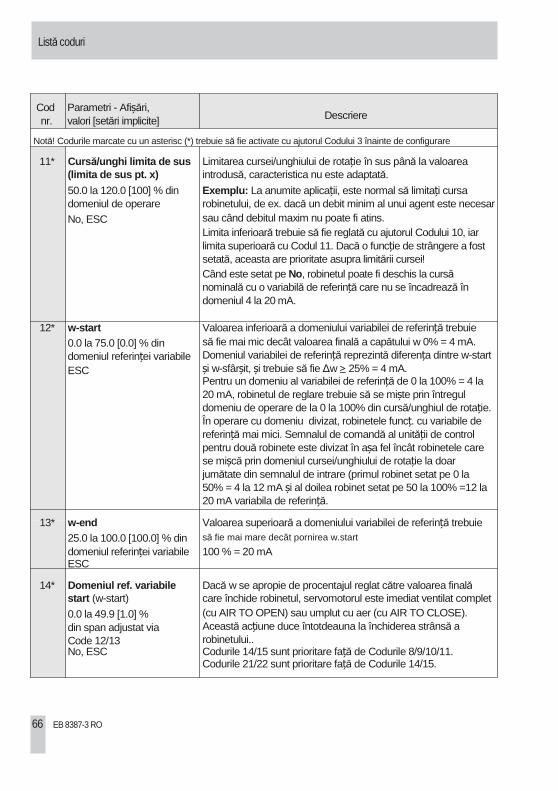
Listă coduri
Cod Parametri - Afișări, nr. valori [setări implicite]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
11* Cursă/unghi limita de sus Limitarea cursei/unghiului de rotație în sus până la valoarea (limita de sus pt. x) introdusă, caracteristica nu este adaptată.
50.0 la 120.0 [100] % din Exemplu: La anumite aplicații, este normal să limitați cursa domeniul de operare robinetului, de ex. dacă un debit minim al unui agent este necesar
No, ESC sau când debitul maxim nu poate fi atins. Limita inferioară trebuie să fie reglată cu ajutorul Codului 10, iar limita superioară cu Codul 11. Dacă o funcție de strângere a fost setată, aceasta are prioritate asupra limitării cursei! Când este setat pe No, robinetul poate fi deschis la cursă nominală cu o variabilă de referință care nu se încadrează în domeniul 4 la 20 mA.
12* w-start Valoarea inferioară a domeniului variabilei de referință trebuie 0.0 la 75.0 [0.0] % din să fie mai mic decât valoarea finală a capătului w 0% = 4 mA. domeniul referinței variabile Domeniul variabilei de referință reprezintă diferența dintre w-start
ESC și w-sfârșit, și trebuie să fie ∆w ≥ 25% = 4 mA. Pentru un domeniu al variabilei de referință de 0 la 100% = 4 la 20 mA, robinetul de reglare trebuie să se miște prin întregul domeniu de operare de la 0 la 100% din cursă/unghiul de rotație. În operare cu domeniu divizat, robinetele funcț. cu variabile de referință mai mici. Semnalul de comandă al unității de control pentru două robinete este divizat în așa fel încât robinetele care se mișcă prin domeniul cursei/unghiului de rotație la doar jumătate din semnalul de intrare (primul robinet setat pe 0 la 50% = 4 la 12 mA și al doilea robinet setat pe 50 la 100% =12 la 20 mA variabila de referință.
13* w-end Valoarea superioară a domeniului variabilei de referință trebuie
25.0 la 100.0 [100.0] % din să fie mai mare decât pornirea w.start domeniul referinței variabile 100 % = 20 mA ESC
14* Domeniul ref. variabile Dacă w se apropie de procentajul reglat către valoarea finală start (w-start) care închide robinetul, servomotorul este imediat ventilat complet
0.0 la 49.9 [1.0] % (cu AIR TO OPEN) sau umplut cu aer (cu AIR TO CLOSE). din span adjustat via Această acțiune duce întotdeauna la închiderea strânsă a Code 12/13 robinetului.. No, ESC Codurile 14/15 sunt prioritare față de Codurile 8/9/10/11.
Codurile 21/22 sunt prioritare față de Codurile 14/15.
66 EB 8387-3 RO
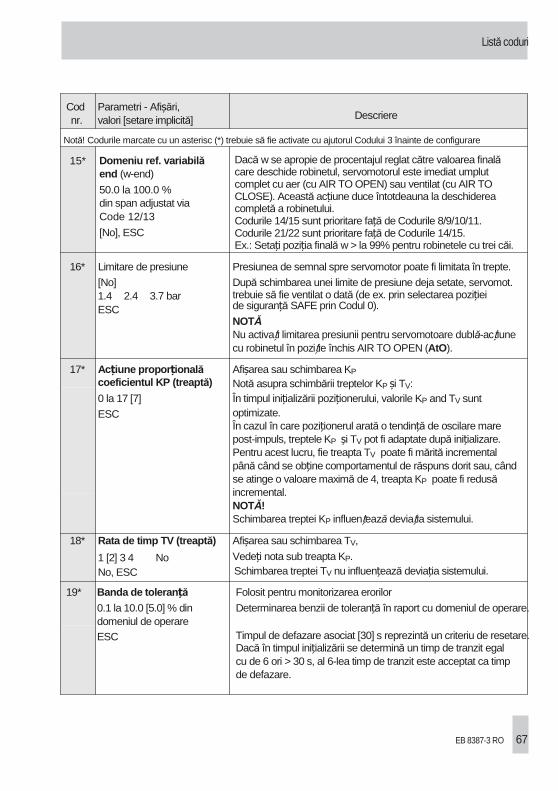
Listă coduri
Cod Parametri - Afișări, nr. valori [setare implicită]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
15* Domeniu ref. variabil ă end (w-end)
50.0 la 100.0 % din span adjustat via Code 12/13
[No], ESC
Dacă w se apropie de procentajul reglat către valoarea finală care deschide robinetul, servomotorul este imediat umplut complet cu aer (cu AIR TO OPEN) sau ventilat (cu AIR TO CLOSE). Această acțiune duce întotdeauna la deschiderea completă a robinetului. Codurile 14/15 sunt prioritare față de Codurile 8/9/10/11. Codurile 21/22 sunt prioritare față de Codurile 14/15. Ex.: Setați poziția finală w > la 99% pentru robinetele cu trei căi.
16* Limitare de presiune Presiunea de semnal spre servomotor poate fi limitata în trepte.
[No] După schimbarea unei limite de presiune deja setate, servomot. 1.4 2.4 3.7 bar trebuie să fie ventilat o dată (de ex. prin selectarea poziției ESC de siguranță SAFE prin Codul 0).
NOTĂ Nu activați limitarea presiunii pentru servomotoare dublă-acțiunecu robinetul în poziție închis AIR TO OPEN (AtO).
17* Acțiune propor țional ă Afișarea sau schimbarea KP
coeficientul KP (treapt ă) Notă asupra schimbării treptelor KP și TV: 0 la 17 [7] În timpul inițializării poziționerului, valorile KP and TV sunt
ESC optimizate. În cazul în care poziționerul arată o tendință de oscilare mare post-impuls, treptele KP și TV pot fi adaptate după inițializare. Pentru acest lucru, fie treapta TV poate fi mărită incremental până când se obține comportamentul de răspuns dorit sau, când se atinge o valoare maximă de 4, treapta KP poate fi redusă incremental. NOTĂ! Schimbarea treptei KP influențează deviația sistemului.
18* Rata de timp TV (treapt ă) Afișarea sau schimbarea TV,
1 [2] 3 4 No Vedeți nota sub treapta KP.
No, ESC Schimbarea treptei TV nu influențează deviația sistemului.
19* Banda de toleran ță Folosit pentru monitorizarea erorilor
0.1 la 10.0 [5.0] % din Determinarea benzii de toleranță în raport cu domeniul de operare. domeniul de operare ESC Timpul de defazare asociat [30] s reprezintă un criteriu de resetare. Dacă în timpul inițializării se determină un timp de tranzit egal cu de 6 ori > 30 s, al 6-lea timp de tranzit este acceptat ca timp de defazare.
EB 8387-3 RO 67
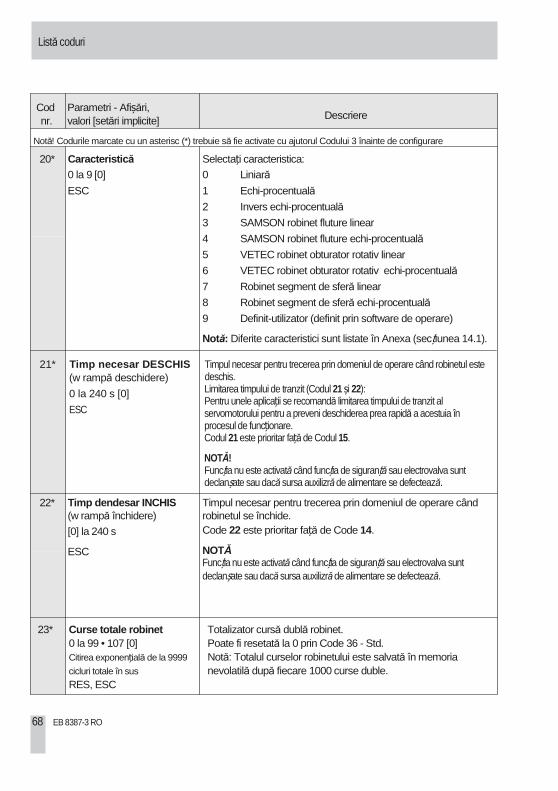
Listă coduri
Cod Parametri - Afișări, nr. valori [setări implicite]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
20* Caracteristic ă Selectați caracteristica:
0 la 9 [0] 0 Liniară
ESC 1 Echi-procentuală
2 Invers echi-procentuală
3 SAMSON robinet fluture linear
4 SAMSON robinet fluture echi-procentuală
5 VETEC robinet obturator rotativ linear
6 VETEC robinet obturator rotativ echi-procentuală
7 Robinet segment de sferă linear
8 Robinet segment de sferă echi-procentuală
9 Definit-utilizator (definit prin software de operare)
Notă: Diferite caracteristici sunt listate în Anexa (secțiunea 14.1).
21* Timp necesar DESCHIS (w rampă deschidere)
0 la 240 s [0]
ESC
Timpul necesar pentru trecerea prin domeniul de operare când robinetul este deschis. Limitarea timpului de tranzit (Codul 21 și 22): Pentru unele aplicații se recomandă limitarea timpului de tranzit al servomotorului pentru a preveni deschiderea prea rapidă a acestuia în procesul de funcționare. Codul 21 este prioritar față de Codul 15.
NOTĂ! Funcția nu este activată când funcția de siguranță sau electrovalva sunt declanșate sau dacă sursa auxilizră de alimentare se defectează.
22* Timp dendesar INCHIS Timpul necesar pentru trecerea prin domeniul de operare când (w rampă închidere) robinetul se închide.
[0] la 240 s Code 22 este prioritar față de Code 14.
ESC NOTĂ Funcția nu este activată când funcția de siguranță sau electrovalva sunt declanșate sau dacă sursa auxilizră de alimentare se defectează.
23* Curse totale robinet Totalizator cursă dublă robinet. 0 la 99 • 107 [0] Poate fi resetată la 0 prin Code 36 - Std. Citirea exponențială de la 9999 Notă: Totalul curselor robinetului este salvată în memoria cicluri totale în sus nevolatilă după fiecare 1000 curse duble. RES, ESC
68 EB 8387-3 RO
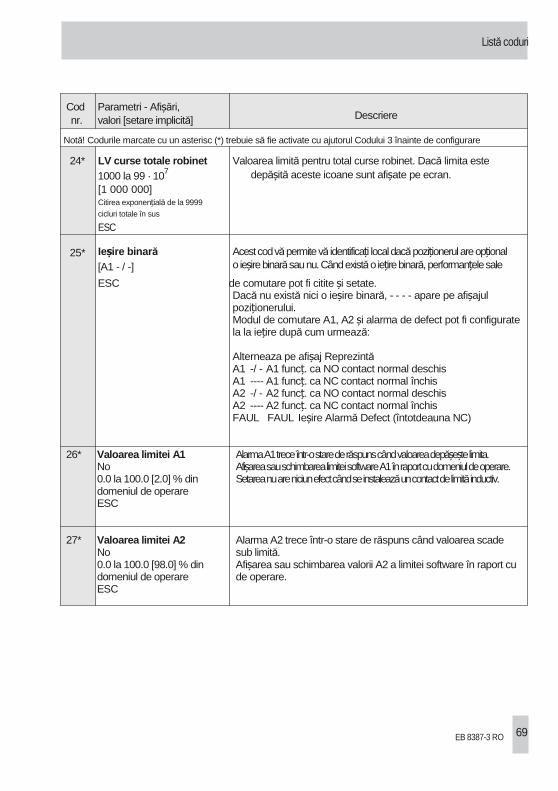
Listă coduri
Cod Parametri - Afișări, nr. valori [setare implicită]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
24* LV curse totale robinet Valoarea limită pentru total curse robinet. Dacă limita este 1000 la 99 · 107 depășită aceste icoane sunt afișate pe ecran. [1 000 000] Citirea exponențială de la 9999 cicluri totale în sus
ESC
25* Ieșire binar ă Acest cod vă permite vă identificați local dacă poziționerul are opțional [A1 - / -] o ieșire binară sau nu. Când există o iețire binară, performanțele sale
ESC de comutare pot fi citite și setate. Dacă nu există nici o ieșire binară, - - - - apare pe afișajul poziționerului. Modul de comutare A1, A2 și alarma de defect pot fi configurate la la iețire după cum urmează: Alterneaza pe afișaj Reprezintă A1 -/ - A1 funcț. ca NO contact normal deschis A1 ---- A1 funcț. ca NC contact normal închis A2 -/ - A2 funcț. ca NO contact normal deschis A2 ---- A2 funcț. ca NC contact normal închis FAUL FAUL Ieșire Alarmă Defect (întotdeauna NC)
26* Valoarea limitei A1 Alarma A1 trece într-o stare de răspuns când valoarea depășește limita. No Afișarea sau schimbarea limitei software A1 în raport cu domeniul de operare. 0.0 la 100.0 [2.0] % din Setarea nu are niciun efect când se instalează un contact de limită inductiv.
domeniul de operare ESC
27* Valoarea limitei A2 Alarma A2 trece într-o stare de răspuns când valoarea scade No sub limită. 0.0 la 100.0 [98.0] % din Afișarea sau schimbarea valorii A2 a limitei software în raport cu domeniul de operare de operare. ESC
EB 8387-3 RO
69
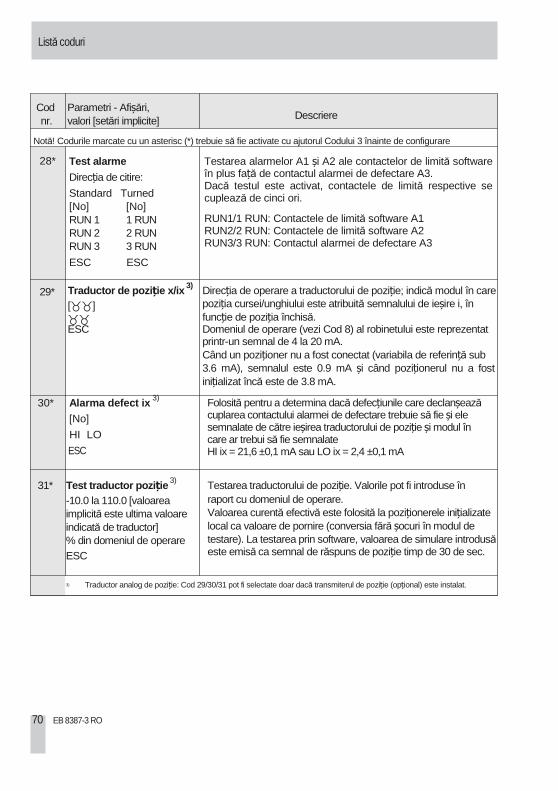
Listă coduri
Cod Parametri - Afișări, nr. valori [setări implicite]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
28* Test alarme
Direcția de citire:
Standard Turned [No] [No] RUN 1 1 RUN RUN 2 2 RUN RUN 3 3 RUN
ESC ESC
Testarea alarmelor A1 și A2 ale contactelor de limită software în plus față de contactul alarmei de defectare A3. Dacă testul este activat, contactele de limită respective se cuplează de cinci ori.
RUN1/1 RUN: Contactele de limită software A1 RUN2/2 RUN: Contactele de limită software A2 RUN3/3 RUN: Contactul alarmei de defectare A3
29* Traductor de pozi ție x/ix 3) Direcția de operare a traductorului de poziție; indică modul în care [] poziția cursei/unghiului este atribuită semnalului de ieșire i, în
funcție de poziția închisă. ESC Domeniul de operare (vezi Cod 8) al robinetului este reprezentat
printr-un semnal de 4 la 20 mA. Când un poziționer nu a fost conectat (variabila de referință sub 3.6 mA), semnalul este 0.9 mA și când poziționerul nu a fost inițializat încă este de 3.8 mA.
30* Alarma defect ix 3)
[No]
HI LO
ESC
Folosită pentru a determina dacă defecțiunile care declanșează cuplarea contactului alarmei de defectare trebuie să fie și ele semnalate de către ieșirea traductorului de poziție și modul în care ar trebui să fie semnalate HI ix = 21,6 ±0,1 mA sau LO ix = 2,4 ±0,1 mA
31* Test traductor pozi ție 3) Testarea traductorului de poziție. Valorile pot fi introduse în -10.0 la 110.0 [valoarea raport cu domeniul de operare. implicită este ultima valoare Valoarea curentă efectivă este folosită la poziționerele inițializate indicată de traductor] local ca valoare de pornire (conversia fără șocuri în modul de % din domeniul de operare testare). La testarea prin software, valoarea de simulare introdusă
ESC este emisă ca semnal de răspuns de poziție timp de 30 de sec.
3) Traductor analog de poziție: Cod 29/30/31 pot fi selectate doar dacă transmiterul de poziție (opțional) este instalat.
70 EB 8387-3 RO
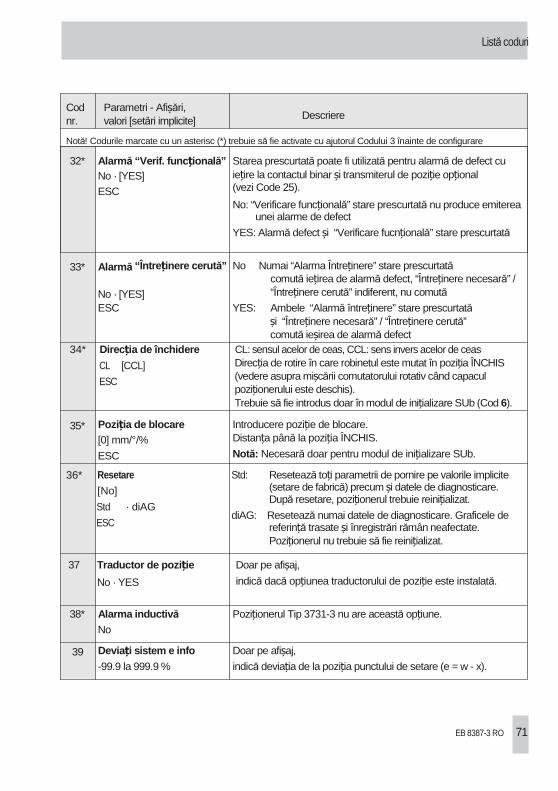
Listă coduri
Cod Parametri - Afișări, nr. valori [setări implicite]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
32* Alarm ă “Verif. func țional ă” Starea prescurtată poate fi utilizată pentru alarmă de defect cu No · [YES] iețire la contactul binar și transmiterul de poziție opțional
ESC (vezi Code 25).
No: “Verificare funcțională” stare prescurtată nu produce emiterea unei alarme de defect
YES: Alarmă defect și “Verificare fucnțională” stare prescurtată
33* Alarm ă “Între ținere cerut ă” No Numai “Alarma Întreținere” stare prescurtată comută iețirea de alarmă defect, “Întreținere necesară” /
No · [YES] “Întreținere cerută” indiferent, nu comută
ESC YES: Ambele “Alarmă întreținere” stare prescurtată și “Întreținere necesară” / “Întreținere cerută” comută ieșirea de alarmă defect
34* Direc ția de închidere
CL [CCL]
ESC
CL: sensul acelor de ceas, CCL: sens invers acelor de ceas Direcția de rotire în care robinetul este mutat în poziția ÎNCHIS (vedere asupra mișcării comutatorului rotativ când capacul poziționerului este deschis). Trebuie să fie introdus doar în modul de inițializare SUb (Cod 6).
35* Poziția de blocare Introducere poziție de blocare.
[0] mm/° /% Distanța până la poziția ÎNCHIS.
ESC Notă: Necesară doar pentru modul de inițializare SUb.
36* Resetare
[No]
Std · diAG
ESC
Std: Resetează toți parametrii de pornire pe valorile implicite (setare de fabrică) precum și datele de diagnosticare. După resetare, poziționerul trebuie reinițializat.
diAG: Resetează numai datele de diagnosticare. Graficele de referință trasate și înregistrări rămân neafectate.
Poziționerul nu trebuie să fie reinițializat.
37 Traductor de pozi ție Doar pe afișaj,
No · YES indică dacă opțiunea traductorului de poziție este instalată.
38* Alarma inductiv ă Poziționerul Tip 3731-3 nu are această opțiune.
No
39 Deviați sistem e info Doar pe afișaj,
-99.9 la 999.9 % indică deviația de la poziția punctului de setare (e = w - x). EB 8387-3 RO 71
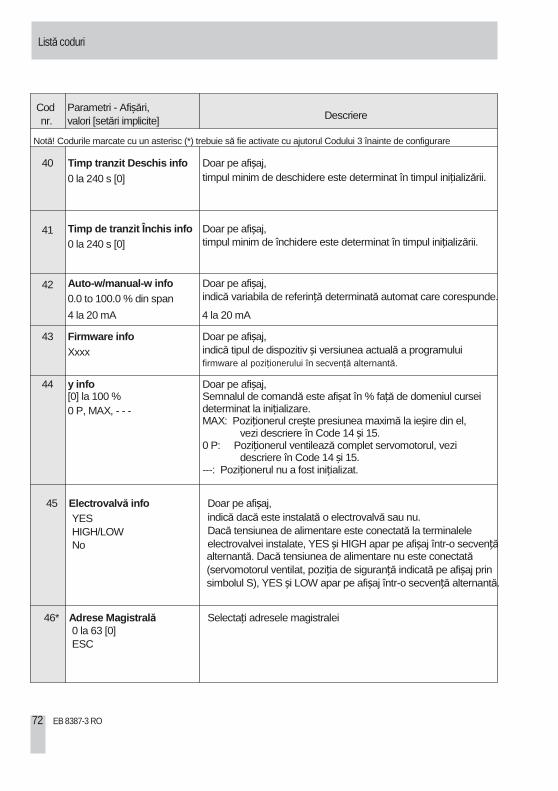
Listă coduri
Cod Parametri - Afișări, nr. valori [setări implicite]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
40 Timp tranzit Deschis info Doar pe afișaj,
0 la 240 s [0] timpul minim de deschidere este determinat în timpul inițializării.
41 Timp de tranzit Închis info Doar pe afișaj, 0 la 240 s [0] timpul minim de închidere este determinat în timpul inițializării.
42 Auto-w/manual-w info Doar pe afișaj, 0.0 to 100.0 % din span indică variabila de referință determinată automat care corespunde.
4 la 20 mA 4 la 20 mA
43 Firmware info Doar pe afișaj,
Xxxx indică tipul de dispozitiv și versiunea actuală a programului firmware al poziționerului în secvență alternantă.
44 y info Doar pe afișaj, [0] la 100 % Semnalul de comandă este afișat în % față de domeniul cursei 0 P, MAX, - - - determinat la inițializare.
MAX: Poziționerul crește presiunea maximă la ieșire din el, vezi descriere în Code 14 și 15.
0 P: Poziționerul ventilează complet servomotorul, vezi descriere în Code 14 și 15.
---: Poziționerul nu a fost inițializat.
45 Electrovalv ă info Doar pe afișaj, YES indică dacă este instalată o electrovalvă sau nu. HIGH/LOW Dacă tensiunea de alimentare este conectată la terminalele No electrovalvei instalate, YES și HIGH apar pe afișaj într-o secvență
alternantă. Dacă tensiunea de alimentare nu este conectată (servomotorul ventilat, poziția de siguranță indicată pe afișaj prin simbolul S), YES și LOW apar pe afișaj într-o secvență alternantă.
46* Adrese Magistral ă Selectați adresele magistralei 0 la 63 [0] ESC
72 EB 8387-3 RO
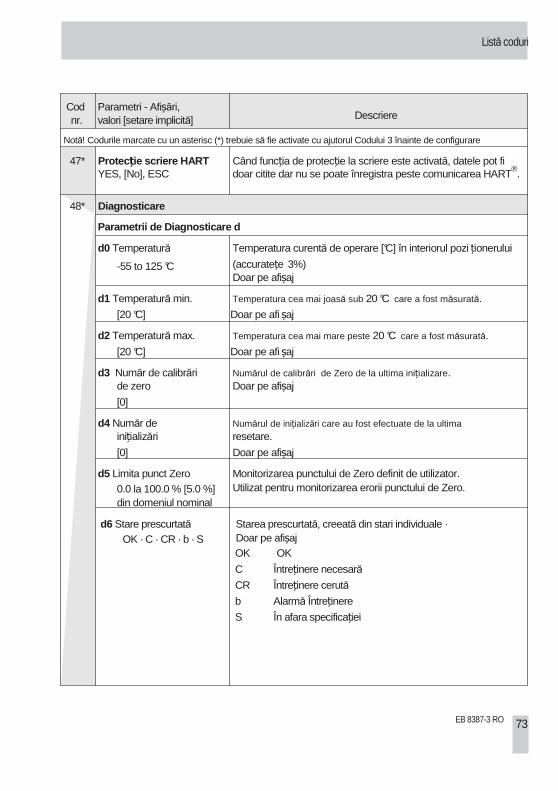
Listă coduri
Cod Parametri - Afișări, nr. valori [setare implicită]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
47* Protec ție scriere HART Când funcția de protecție la scriere este activată, datele pot fiYES, [No], ESC doar citite dar nu se poate înregistra peste comunicarea HART®.
48* Diagnosticare
Parametrii de Diagnosticare d
d0 Temperatură Temperatura curentă de operare [°C] în interiorul pozi ționerului
-55 to 125 °C (accuratețe 3%) Doar pe afișaj
d1 Temperatură min. Temperatura cea mai joasă sub 20 °C care a fost măsurată.
[20 °C] Doar pe afi șaj
d2 Temperatură max. Temperatura cea mai mare peste 20 °C care a fost măsurată.
[20 °C] Doar pe afi șaj
d3 Număr de calibrări Numărul de calibrări de Zero de la ultima inițializare. de zero Doar pe afișaj [0]
d4 Număr de Numărul de inițializări care au fost efectuate de la ultima inițializări resetare.
[0] Doar pe afișaj
d5 Limita punct Zero Monitorizarea punctului de Zero definit de utilizator. 0.0 la 100.0 % [5.0 %] Utilizat pentru monitorizarea erorii punctului de Zero. din domeniul nominal
d6 Stare prescurtată Starea prescurtată, creeată din stari individuale · OK · C · CR · b · S Doar pe afișaj
OK OK
C Întreținere necesară
CR Întreținere cerută
b Alarmă Întreținere
S În afara specificației
EB 8387-3 RO 73
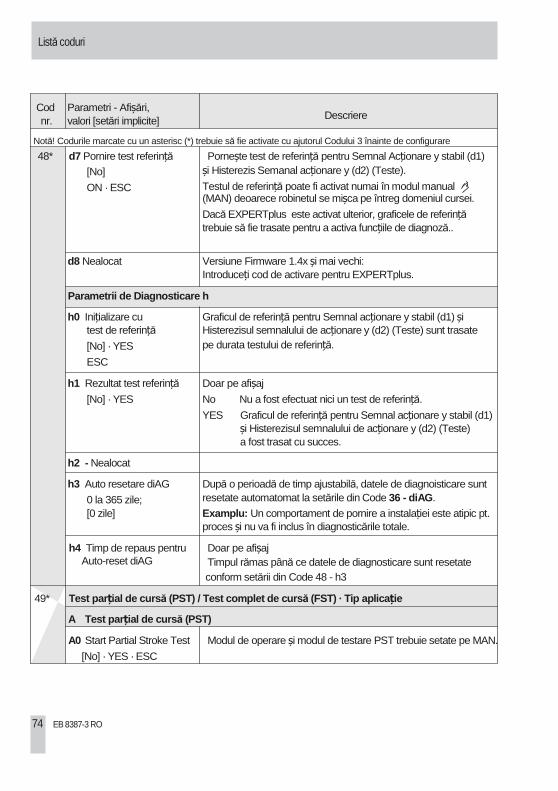
Listă coduri
Cod Parametri - Afișări, nr. valori [setări implicite]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
48* d7 Pornire test referință Pornește test de referință pentru Semnal Acționare y stabil (d1)
[No] și Histerezis Semanal acționare y (d2) (Teste).
ON · ESC Testul de referință poate fi activat numai în modul manual (MAN) deoarece robinetul se mișca pe întreg domeniul cursei.
Dacă EXPERTplus este activat ulterior, graficele de referință trebuie să fie trasate pentru a activa funcțiile de diagnoză..
d8 Nealocat Versiune Firmware 1.4x și mai vechi: Introduceți cod de activare pentru EXPERTplus.
Parametrii de Diagnosticare h
h0 Inițializare cu Graficul de referință pentru Semnal acționare y stabil (d1) și test de referință Histerezisul semnalului de acționare y (d2) (Teste) sunt trasate
[No] · YES pe durata testului de referință.
ESC
h1 Rezultat test referință Doar pe afișaj
[No] · YES No Nu a fost efectuat nici un test de referință.
YES Graficul de referință pentru Semnal acționare y stabil (d1) și Histerezisul semnalului de acționare y (d2) (Teste) a fost trasat cu succes.
h2 - Nealocat
h3 Auto resetare diAG După o perioadă de timp ajustabilă, datele de diagnoisticare sunt
0 la 365 zile; resetate automatomat la setările din Code 36 - diAG .
[0 zile] Examplu: Un comportament de pornire a instalației este atipic pt. proces și nu va fi inclus în diagnosticările totale.
h4 Timp de repaus pentru Doar pe afișaj Auto-reset diAG Timpul rămas până ce datele de diagnosticare sunt resetate
conform setării din Code 48 - h3
49* Test par țial de curs ă (PST) / Test complet de curs ă (FST) · Tip aplica ție
A Test par țial de curs ă (PST)
A0 Start Partial Stroke Test Modul de operare și modul de testare PST trebuie setate pe MAN.
[No] · YES · ESC
74 EB 8387-3 RO
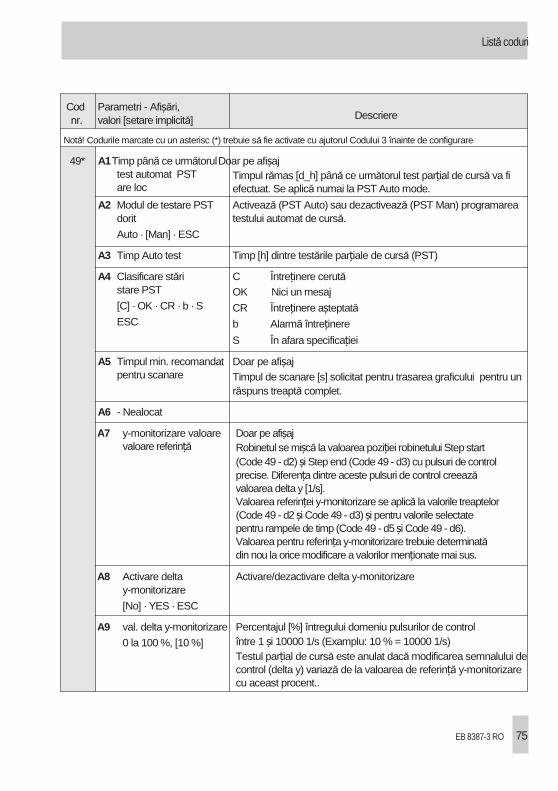
Listă coduri
Cod Parametri - Afișări, nr. valori [setare implicită]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
49* A1 Timp până ce următorul Doar pe afișaj test automat PST Timpul rămas [d_h] până ce următorul test parțial de cursă va fi are loc efectuat. Se aplică numai la PST Auto mode.
A2 Modul de testare PST Activează (PST Auto) sau dezactivează (PST Man) programarea dorit testului automat de cursă.
Auto · [Man] · ESC
A3 Timp Auto test Timp [h] dintre testările parțiale de cursă (PST)
A4 Clasificare stări C Întreținere cerută stare PST OK Nici un mesaj [C] · OK · CR · b · S CR Întreținere așteptată ESC b Alarmă întreținere
S În afara specificației
A5 Timpul min. recomandat Doar pe afișaj pentru scanare Timpul de scanare [s] solicitat pentru trasarea graficului pentru un
răspuns treaptă complet.
A6 - Nealocat
A7 y-monitorizare valoare Doar pe afișaj valoare referință Robinetul se mișcă la valoarea poziției robinetului Step start (Code 49 - d2) și Step end (Code 49 - d3) cu pulsuri de control
precise. Diferența dintre aceste pulsuri de control creează valoarea delta y [1/s].
Valoarea referinței y-monitorizare se aplică la valorile treaptelor (Code 49 - d2 și Code 49 - d3) și pentru valorile selectate pentru rampele de timp (Code 49 - d5 și Code 49 - d6). Valoarea pentru referința y-monitorizare trebuie determinată din nou la orice modificare a valorilor menționate mai sus.
A8 Activare delta Activare/dezactivare delta y-monitorizare y-monitorizare
[No] · YES · ESC
A9 val. delta y-monitorizare Percentajul [%] întregului domeniu pulsurilor de control
0 la 100 %, [10 %] între 1 și 10000 1/s (Examplu: 10 % = 10000 1/s) Testul parțial de cursă este anulat dacă modificarea semnalului de control (delta y) variază de la valoarea de referință y-monitorizare cu aceast procent..
EB 8387-3 RO 75
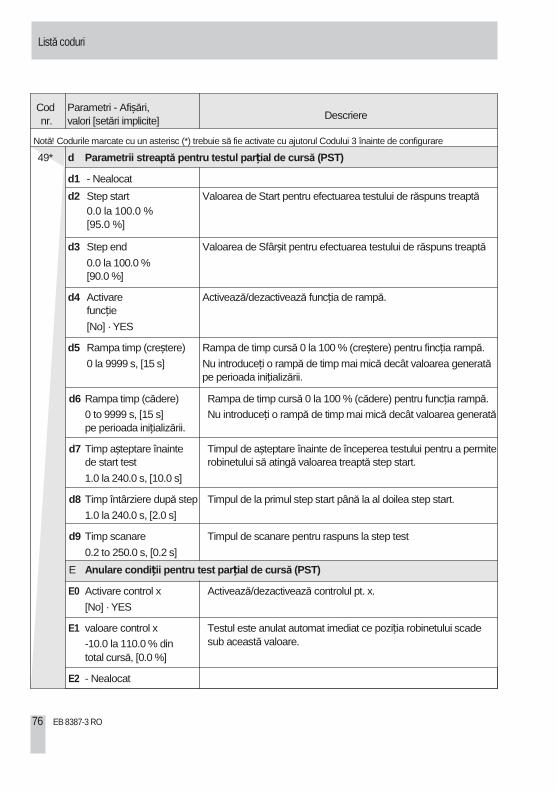
Listă coduri
Cod Parametri - Afișări, nr. valori [setări implicite]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
49* d Parametrii streapt ă pentru testul par țial de curs ă (PST)
d1 - Nealocat
d2 Step start Valoarea de Start pentru efectuarea testului de răspuns treaptă 0.0 la 100.0 % [95.0 %]
d3 Step end Valoarea de Sfârșit pentru efectuarea testului de răspuns treaptă
0.0 la 100.0 % [90.0 %]
d4 Activare Activează/dezactivează funcția de rampă. funcție
[No] · YES
d5 Rampa timp (creștere) Rampa de timp cursă 0 la 100 % (creștere) pentru fincția rampă.
0 la 9999 s, [15 s] Nu introduceți o rampă de timp mai mică decât valoarea generată pe perioada inițializării.
d6 Rampa timp (cădere) Rampa de timp cursă 0 la 100 % (cădere) pentru funcția rampă.
0 to 9999 s, [15 s] Nu introduceți o rampă de timp mai mică decât valoarea generată pe perioada inițializării.
d7 Timp așteptare înainte Timpul de așteptare înainte de începerea testului pentru a permite de start test robinetului să atingă valoarea treaptă step start.
1.0 la 240.0 s, [10.0 s]
d8 Timp întârziere după step Timpul de la primul step start până la al doilea step start.
1.0 la 240.0 s, [2.0 s]
d9 Timp scanare Timpul de scanare pentru raspuns la step test
0.2 to 250.0 s, [0.2 s]
E Anulare condi ții pentru test par țial de curs ă (PST)
E0 Activare control x Activează/dezactivează controlul pt. x.
[No] · YES
E1 valoare control x Testul este anulat automat imediat ce poziția robinetului scade
-10.0 la 110.0 % din sub această valoare.
total cursă, [0.0 %]
E2 - Nealocat
76 EB 8387-3 RO
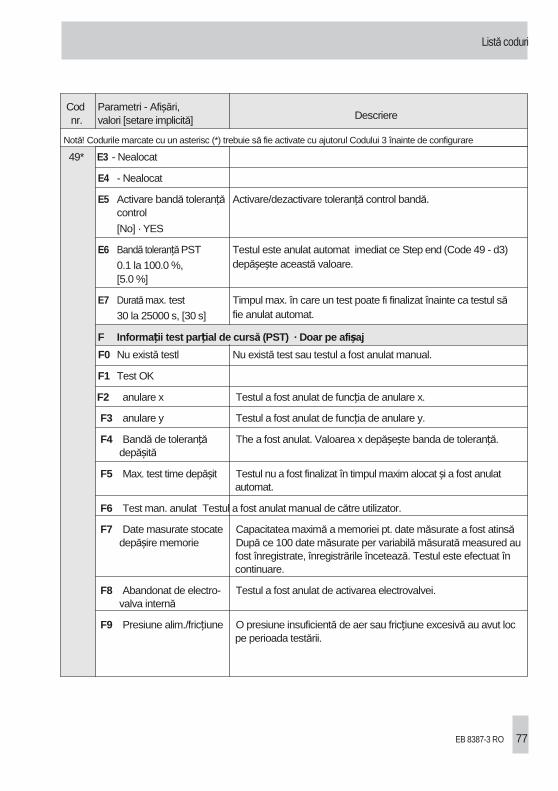
Listă coduri
Cod Parametri - Afișări, nr. valori [setare implicită]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
49* E3 - Nealocat
E4 - Nealocat
E5 Activare bandă toleranță Activare/dezactivare toleranță control bandă. control
[No] · YES
E6 Bandă toleranță PST Testul este anulat automat imediat ce Step end (Code 49 - d3)
0.1 la 100.0 %, depășește această valoare. [5.0 %]
E7 Durată max. test Timpul max. în care un test poate fi finalizat înainte ca testul să
30 la 25000 s, [30 s] fie anulat automat.
F Informa ții test par țial de curs ă (PST) · Doar pe afi șaj
F0 Nu există testl Nu există test sau testul a fost anulat manual.
F1 Test OK
F2 anulare x Testul a fost anulat de funcția de anulare x.
F3 anulare y Testul a fost anulat de funcția de anulare y.
F4 Bandă de toleranță The a fost anulat. Valoarea x depășește banda de toleranță. depășită
F5 Max. test time depășit Testul nu a fost finalizat în timpul maxim alocat și a fost anulat automat.
F6 Test man. anulat Testul a fost anulat manual de către utilizator.
F7 Date masurate stocate Capacitatea maximă a memoriei pt. date măsurate a fost atinsădepășire memorie După ce 100 date măsurate per variabilă măsurată measured au
fost înregistrate, înregistrările încetează. Testul este efectuat în continuare.
F8 Abandonat de electro- Testul a fost anulat de activarea electrovalvei. valva internă
F9 Presiune alim./fricțiune O presiune insuficientă de aer sau fricțiune excesivă au avut loc pe perioada testării.
EB 8387-3 RO 77
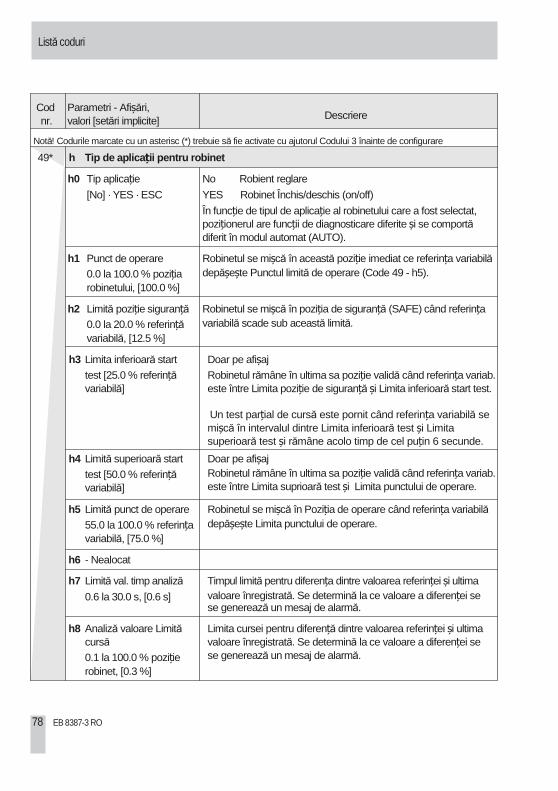
Listă coduri
Cod Parametri - Afișări, nr. valori [setări implicite]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
49* h Tip de aplica ții pentru robinet
h0 Tip aplicație No Robient reglare
[No] · YES · ESC YES Robinet Închis/deschis (on/off)
În funcție de tipul de aplicație al robinetului care a fost selectat, poziționerul are funcții de diagnosticare diferite și se comportă diferit în modul automat (AUTO).
h1 Punct de operare Robinetul se mișcă în această poziție imediat ce referința variabilă
0.0 la 100.0 % poziția depășește Punctul limită de operare (Code 49 - h5). robinetului, [100.0 %]
h2 Limită poziție siguranță Robinetul se mișcă în poziția de siguranță (SAFE) când referința
0.0 la 20.0 % referință variabilă scade sub această limită. variabilă, [12.5 %]
h3 Limita inferioară start Doar pe afișaj
test [25.0 % referință Robinetul rămâne în ultima sa poziție validă când referința variab. variabilă] este între Limita poziție de siguranță și Limita inferioară start test.
Un test parțial de cursă este pornit când referința variabilă se mișcă în intervalul dintre Limita inferioară test și Limita superioară test și rămâne acolo timp de cel puțin 6 secunde.
h4 Limită superioară start Doar pe afișaj
test [50.0 % referință Robinetul rămâne în ultima sa poziție validă când referința variab. variabilă] este între Limita suprioară test și Limita punctului de operare.
h5 Limită punct de operare Robinetul se mișcă în Poziția de operare când referința variabilă
55.0 la 100.0 % referința depășește Limita punctului de operare. variabilă, [75.0 %]
h6 - Nealocat
h7 Limită val. timp analiză Timpul limită pentru diferența dintre valoarea referinței și ultima
0.6 la 30.0 s, [0.6 s] valoare înregistrată. Se determină la ce valoare a diferenței se se generează un mesaj de alarmă.
h8 Analiză valoare Limită Limita cursei pentru diferență dintre valoarea referinței și ultima cursă valoare înregistrată. Se determină la ce valoare a diferenței se
0.1 la 100.0 % poziție se generează un mesaj de alarmă.
robinet, [0.3 %]
78 EB 8387-3 RO
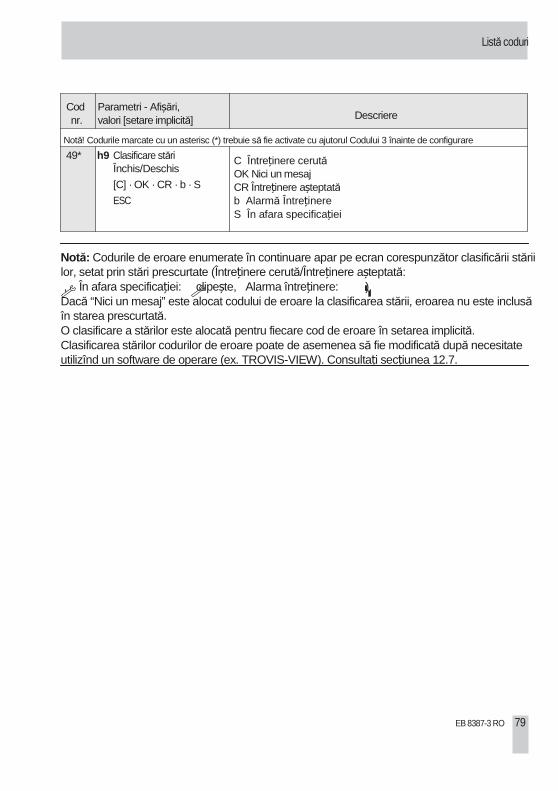
Listă coduri
Cod Parametri - Afișări, nr. valori [setare implicită]
Descriere
Notă! Codurile marcate cu un asterisc (*) trebuie să fie activate cu ajutorul Codului 3 înainte de configurare
49* h9 Clasificare stări Închis/Deschis
[C] · OK · CR · b · S
ESC
C Întreținere cerută OK Nici un mesaj CR Întreținere așteptată b Alarmă Întreținere S În afara specificației
Notă: Codurile de eroare enumerate în continuare apar pe ecran corespunzător clasificării stării lor, setat prin stări prescurtate (Întreținere cerută/Întreținere așteptată: , În afara specificației: clipește, Alarma întreținere: ). Dacă “Nici un mesaj” este alocat codului de eroare la clasificarea stării, eroarea nu este inclusă în starea prescurtată. O clasificare a stărilor este alocată pentru fiecare cod de eroare în setarea implicită. Clasificarea stărilor codurilor de eroare poate de asemenea să fie modificată după necesitate utilizînd un software de operare (ex. TROVIS-VIEW). Consultați secțiunea 12.7.
EB 8387-3 RO 79
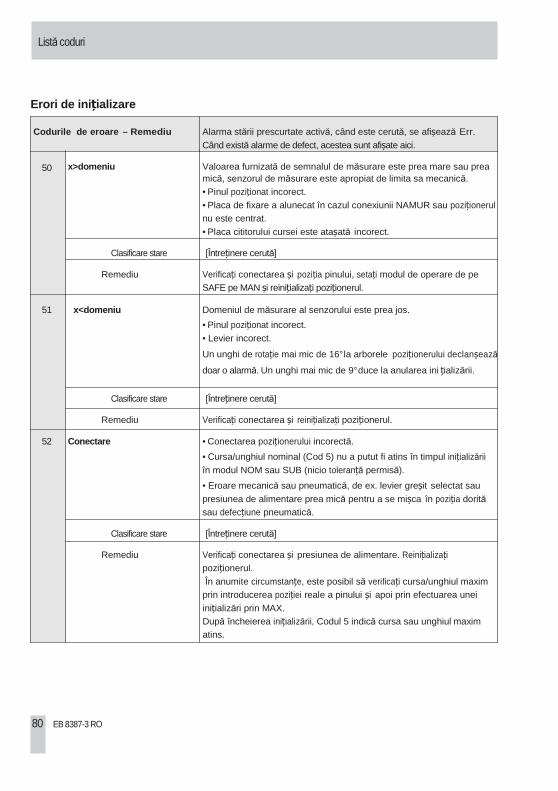
Listă coduri
Erori de ini țializare
Codurile de eroare – Remediu Alarma stării prescurtate activă, când este cerută, se afișează Err.
Când există alarme de defect, acestea sunt afișate aici.
50 x>domeniu Valoarea furnizată de semnalul de măsurare este prea mare sau prea mică, senzorul de măsurare este apropiat de limita sa mecanică. • Pinul poziționat incorect.
• Placa de fixare a alunecat în cazul conexiunii NAMUR sau poziționerul nu este centrat.
• Placa cititorului cursei este atașată incorect.
Clasificare stare [Întreținere cerută]
Remediu Verificați conectarea și poziția pinului, setați modul de operare de pe SAFE pe MAN și reinițializați poziționerul.
51 x<domeniu Domeniul de măsurare al senzorului este prea jos.
• Pinul poziționat incorect.
• Levier incorect.
Un unghi de rotație mai mic de 16° la arborele poziționerului declanșează
doar o alarmă. Un unghi mai mic de 9° duce la anularea ini țializării.
Clasificare stare [Întreținere cerută]
Remediu Verificați conectarea și reinițializați poziționerul.
52 Conectare • Conectarea poziționerului incorectă.
• Cursa/unghiul nominal (Cod 5) nu a putut fi atins în timpul inițializării
în modul NOM sau SUB (nicio toleranță permisă).
• Eroare mecanică sau pneumatică, de ex. levier greșit selectat sau
presiunea de alimentare prea mică pentru a se mișca în poziția dorită sau defecțiune pneumatică.
Clasificare stare [Întreținere cerută]
Remediu Verificați conectarea și presiunea de alimentare. Reinițializați poziționerul.
În anumite circumstanțe, este posibil să verificați cursa/unghiul maxim prin introducerea poziției reale a pinului și apoi prin efectuarea unei
inițializări prin MAX. După încheierea inițializării, Codul 5 indică cursa sau unghiul maxim atins.
80 EB 8387-3 RO
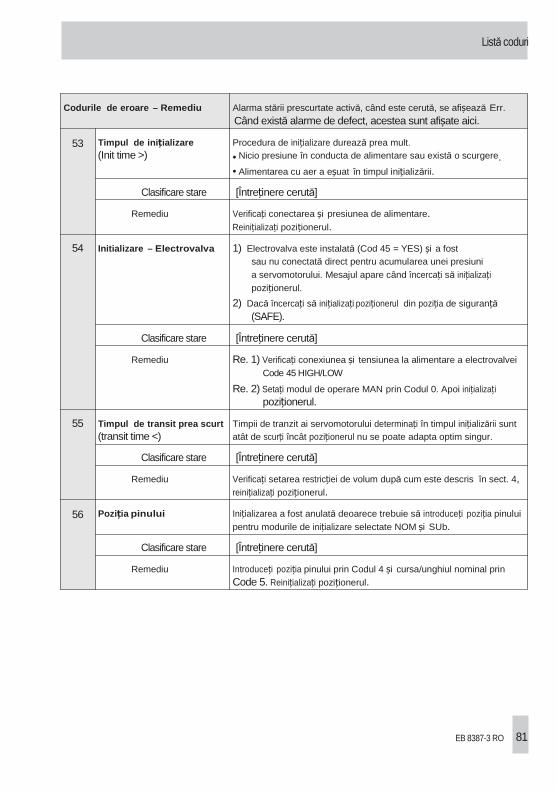
Listă coduri
Codurile de eroare – Remediu Alarma stării prescurtate activă, când este cerută, se afișează Err.
Când există alarme de defect, acestea sunt afișate aici.
53 Timpul de ini țializare Procedura de inițializare durează prea mult. (Init time >) • Nicio presiune în conducta de alimentare sau există o scurgere.
• Alimentarea cu aer a eșuat în timpul inițializării.
Clasificare stare [Întreținere cerută]
Remediu Verificați conectarea și presiunea de alimentare. Reinițializați poziționerul.
54 Initializare – Electrovalva 1) Electrovalva este instalată (Cod 45 = YES) și a fost sau nu conectată direct pentru acumularea unei presiuni
a servomotorului. Mesajul apare când încercați să inițializați poziționerul.
2) Dacă încercați să inițializați poziționerul din poziția de siguranță (SAFE).
Clasificare stare [Întreținere cerută]
Remediu Re. 1) Verificați conexiunea și tensiunea la alimentare a electrovalvei Code 45 HIGH/LOW
Re. 2) Setați modul de operare MAN prin Codul 0. Apoi inițializați poziționerul.
55 Timpul de transit prea scurt Timpii de tranzit ai servomotorului determinați în timpul inițializării sunt (transit time <) atât de scurți încât poziționerul nu se poate adapta optim singur.
Clasificare stare [Întreținere cerută]
Remediu Verificați setarea restricției de volum după cum este descris în sect. 4, reinițializați poziționerul.
56 Poziția pinului Inițializarea a fost anulată deoarece trebuie să introduceți poziția pinului pentru modurile de inițializare selectate NOM și SUb.
Clasificare stare [Întreținere cerută]
Remediu Introduceți poziția pinului prin Codul 4 și cursa/unghiul nominal prin Code 5. Reinițializați poziționerul.
EB 8387-3 RO 81
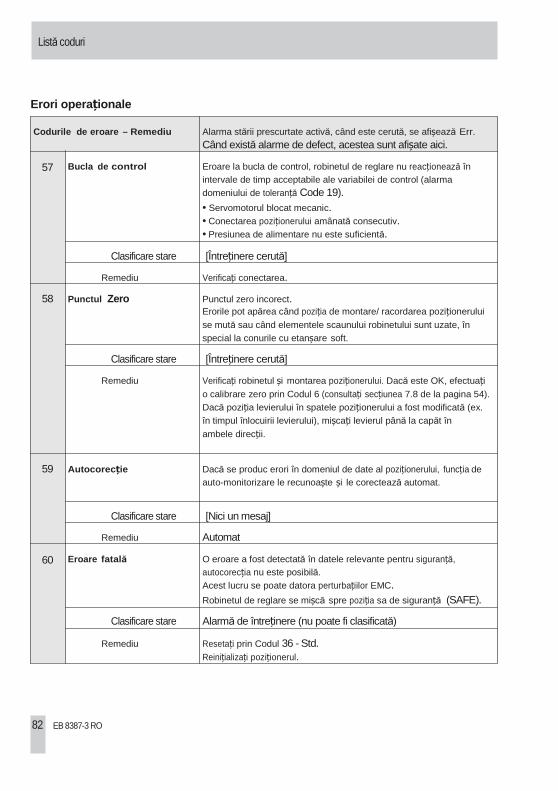
Listă coduri
Erori opera ționale Codurile de eroare – Remediu Alarma stării prescurtate activă, când este cerută, se afișează Err.
Când există alarme de defect, acestea sunt afișate aici.
57 Bucla de control Eroare la bucla de control, robinetul de reglare nu reacționează în intervale de timp acceptabile ale variabilei de control (alarma domeniului de toleranță Code 19). • Servomotorul blocat mecanic. • Conectarea poziționerului amânată consecutiv. • Presiunea de alimentare nu este suficientă.
Clasificare stare [Întreținere cerută]
Remediu Verificați conectarea.
58 Punctul Zero Punctul zero incorect. Erorile pot apărea când poziția de montare/ racordarea poziționerului se mută sau când elementele scaunului robinetului sunt uzate, în special la conurile cu etanșare soft.
Clasificare stare [Întreținere cerută]
Remediu Verificați robinetul și montarea poziționerului. Dacă este OK, efectuați o calibrare zero prin Codul 6 (consultați secțiunea 7.8 de la pagina 54). Dacă poziția levierului în spatele poziționerului a fost modificată (ex. în timpul înlocuirii levierului), mișcați levierul până la capăt în ambele direcții.
59 Autocorec ție Dacă se produc erori în domeniul de date al poziționerului, funcția de auto-monitorizare le recunoaște și le corectează automat.
Clasificare stare [Nici un mesaj]
Remediu Automat
60 Eroare fatal ă O eroare a fost detectată în datele relevante pentru siguranță, autocorecția nu este posibilă. Acest lucru se poate datora perturbațiilor EMC. Robinetul de reglare se mișcă spre poziția sa de siguranță (SAFE).
Clasificare stare Alarmă de întreținere (nu poate fi clasificată)
Remediu Resetați prin Codul 36 - Std. Reinițializați poziționerul.
82 EB 8387-3 RO
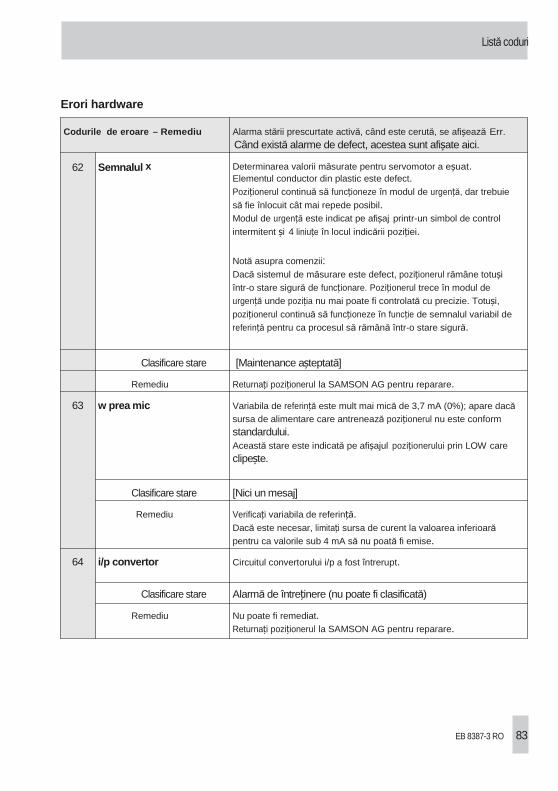
Listă coduri
Erori hardware Codurile de eroare – Remediu Alarma stării prescurtate activă, când este cerută, se afișează Err.
Când există alarme de defect, acestea sunt afișate aici.
62 Semnalul x Determinarea valorii măsurate pentru servomotor a eșuat. Elementul conductor din plastic este defect. Poziționerul continuă să funcționeze în modul de urgență, dar trebuie să fie înlocuit cât mai repede posibil. Modul de urgență este indicat pe afișaj printr-un simbol de control
intermitent și 4 liniuțe în locul indicării poziției.
Notă asupra comenzii: Dacă sistemul de măsurare este defect, poziționerul rămâne totuși într-o stare sigură de funcționare. Poziționerul trece în modul de urgență unde poziția nu mai poate fi controlată cu precizie. Totuși,
poziționerul continuă să funcționeze în funcție de semnalul variabil de referință pentru ca procesul să rămână într-o stare sigură.
Clasificare stare [Maintenance așteptată]
Remediu Returnați poziționerul la SAMSON AG pentru reparare.
63 w prea mic Variabila de referință este mult mai mică de 3,7 mA (0%); apare dacă sursa de alimentare care antrenează poziționerul nu este conform standardului. Această stare este indicată pe afișajul poziționerului prin LOW care clipește.
Clasificare stare [Nici un mesaj]
Remediu Verificați variabila de referință. Dacă este necesar, limitați sursa de curent la valoarea inferioară pentru ca valorile sub 4 mA să nu poată fi emise.
64 i/p convertor Circuitul convertorului i/p a fost întrerupt.
Clasificare stare Alarmă de întreținere (nu poate fi clasificată)
Remediu Nu poate fi remediat. Returnați poziționerul la SAMSON AG pentru reparare.
EB 8387-3 RO 83
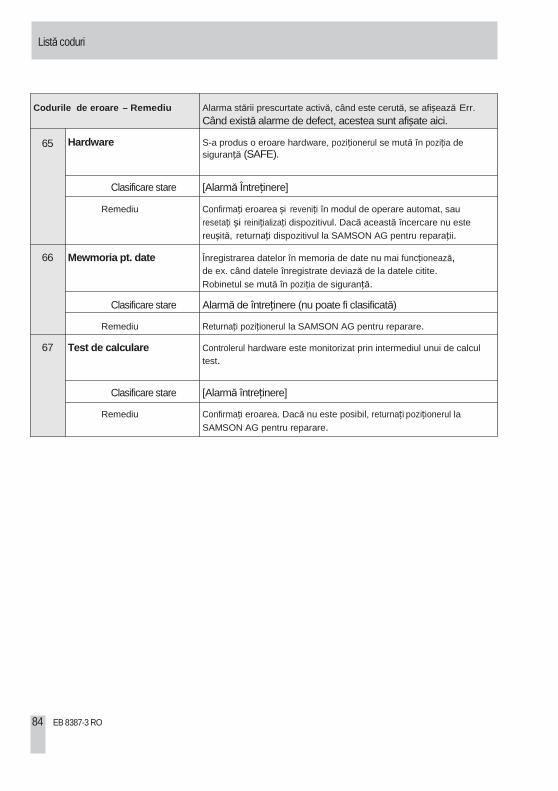
Listă coduri
Codurile de eroare – Remediu Alarma stării prescurtate activă, când este cerută, se afișează Err.
Când există alarme de defect, acestea sunt afișate aici.
65 Hardware S-a produs o eroare hardware, poziționerul se mută în poziția de siguranță (SAFE).
Clasificare stare [Alarmă Întreținere]
Remediu Confirmați eroarea și reveniți în modul de operare automat, sau resetați și reinițializați dispozitivul. Dacă această încercare nu este reușită, returnați dispozitivul la SAMSON AG pentru reparații.
66 Mewmoria pt. date Înregistrarea datelor în memoria de date nu mai funcționează, de ex. când datele înregistrate deviază de la datele citite. Robinetul se mută în poziția de siguranță.
Clasificare stare Alarmă de întreținere (nu poate fi clasificată)
Remediu Returnați poziționerul la SAMSON AG pentru reparare.
67 Test de calculare Controlerul hardware este monitorizat prin intermediul unui de calcul test.
Clasificare stare [Alarmă întreținere]
Remediu Confirmați eroarea. Dacă nu este posibil, returnați poziționerul la SAMSON AG pentru reparare.
84 EB 8387-3 RO
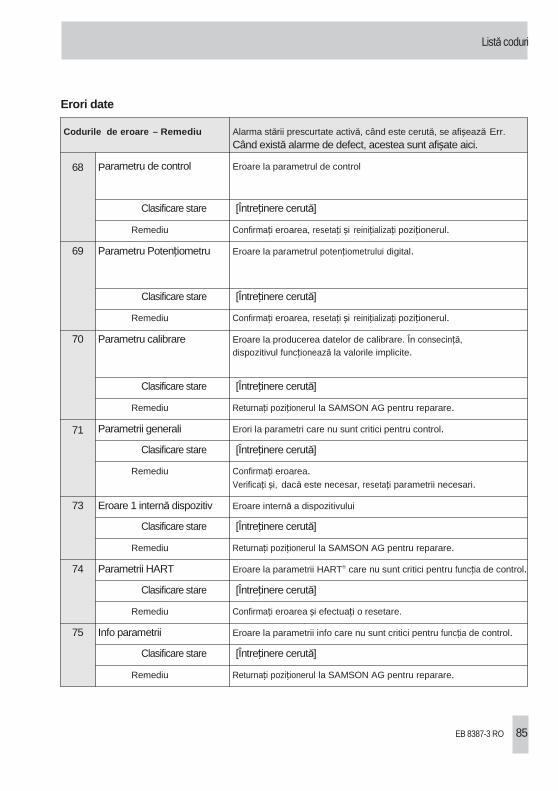
Listă coduri
Erori date Codurile de eroare – Remediu Alarma stării prescurtate activă, când este cerută, se afișează Err.
Când există alarme de defect, acestea sunt afișate aici.
68 Parametru de control Eroare la parametrul de control
Clasificare stare [Întreținere cerută]
Remediu Confirmați eroarea, resetați și reinițializați poziționerul.
69 Parametru Potențiometru Eroare la parametrul potențiometrului digital.
Clasificare stare [Întreținere cerută]
Remediu Confirmați eroarea, resetați și reinițializați poziționerul.
70 Parametru calibrare Eroare la producerea datelor de calibrare. În consecință, dispozitivul funcționează la valorile implicite.
Clasificare stare [Întreținere cerută]
Remediu Returnați poziționerul la SAMSON AG pentru reparare.
71 Parametrii generali Erori la parametri care nu sunt critici pentru control.
Clasificare stare [Întreținere cerută]
Remediu Confirmați eroarea. Verificați și, dacă este necesar, resetați parametrii necesari.
73 Eroare 1 internă dispozitiv Eroare internă a dispozitivului
Clasificare stare [Întreținere cerută]
Remediu Returnați poziționerul la SAMSON AG pentru reparare.
74 Parametrii HART Eroare la parametrii HART® care nu sunt critici pentru funcția de control.
Clasificare stare [Întreținere cerută]
Remediu Confirmați eroarea și efectuați o resetare.
75 Info parametrii Eroare la parametrii info care nu sunt critici pentru funcția de control.
Clasificare stare [Întreținere cerută]
Remediu Returnați poziționerul la SAMSON AG pentru reparare.
EB 8387-3 RO 85
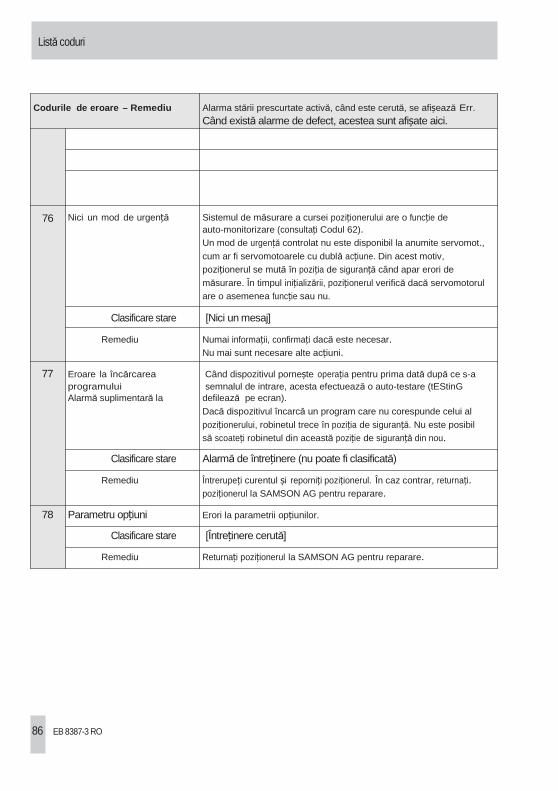
Listă coduri
Codurile de eroare – Remediu Alarma stării prescurtate activă, când este cerută, se afișează Err.
Când există alarme de defect, acestea sunt afișate aici.
76 Nici un mod de urgență Sistemul de măsurare a cursei poziționerului are o funcție de auto-monitorizare (consultați Codul 62). Un mod de urgență controlat nu este disponibil la anumite servomot., cum ar fi servomotoarele cu dublă acțiune. Din acest motiv, poziționerul se mută în poziția de siguranță când apar erori de măsurare. În timpul inițializării, poziționerul verifică dacă servomotorul are o asemenea funcție sau nu.
Clasificare stare [Nici un mesaj]
Remediu Numai informații, confirmați dacă este necesar. Nu mai sunt necesare alte acțiuni.
77 Eroare la încărcarea Când dispozitivul pornește operația pentru prima dată după ce s-a programului semnalul de intrare, acesta efectuează o auto-testare (tEStinG
Alarmă suplimentară la defilează pe ecran). Dacă dispozitivul încarcă un program care nu corespunde celui al poziționerului, robinetul trece în poziția de siguranță. Nu este posibil să scoateți robinetul din această poziție de siguranță din nou.
Clasificare stare Alarmă de întreținere (nu poate fi clasificată)
Remediu Întrerupeți curentul și reporniți poziționerul. În caz contrar, returnați. poziționerul la SAMSON AG pentru reparare.
78 Parametru opțiuni Erori la parametrii opțiunilor.
Clasificare stare [Întreținere cerută]
Remediu Returnați poziționerul la SAMSON AG pentru reparare.
86 EB 8387-3 RO
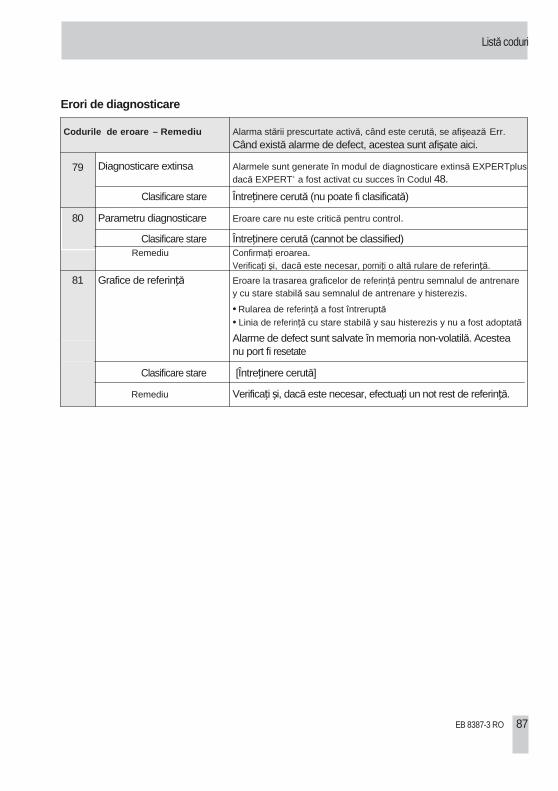
Listă coduri
Erori de diagnosticare Codurile de eroare – Remediu Alarma stării prescurtate activă, când este cerută, se afișează Err.
Când există alarme de defect, acestea sunt afișate aici.
79 Diagnosticare extinsa Alarmele sunt generate în modul de diagnosticare extinsă EXPERTplus dacă EXPERT+ a fost activat cu succes în Codul 48.
Clasificare stare Întreținere cerută (nu poate fi clasificată)
80 Parametru diagnosticare Eroare care nu este critică pentru control.
Clasificare stare Întreținere cerută (cannot be classified) Remediu Confirmați eroarea.
Verificați și, dacă este necesar, porniți o altă rulare de referință. 81 Grafice de referință Eroare la trasarea graficelor de referință pentru semnalul de antrenare
y cu stare stabilă sau semnalul de antrenare y histerezis.
• Rularea de referință a fost întreruptă • Linia de referință cu stare stabilă y sau histerezis y nu a fost adoptată
Alarme de defect sunt salvate în memoria non-volatilă. Acestea nu port fi resetate
Clasificare stare [Întreținere cerută]
Remediu Verificați și, dacă este necesar, efectuați un not rest de referință.
EB 8387-3 RO
87
Setări în TROVIS-VIEW software
12 Setari în TROVIS-VIEW software
12.1 Generalil ăți
Programul TROVIS-VIEW permite ca diverite echipamente smart SAMSON să fie configurate cu ajutorul unei interfețe de comunicare comune. Acesta conține interfața de operare, serverul de comunicație și modile specifice pentru dispozitive. Programul are o prezentare de tip Windows Explorer®. Întreaga configurare apoziționerului poate fi efectuată prin intermediul Interfețelor de Configurării și Operare din TROVIS-VIEW. Programul TROVIS-VIEW este disponibil pe Internet (http://www.samson.de) în Services > Support & Downloads. Programul poate de asemenea să fie oferit pe suport CD-ROM la cerere. Notă: Următoarele instrucțiuni includ o descriere a funcțiilor cheie a programului TROVIS-VIEW în conjuncție cu Poziționerul Tip 3731-3. Consultați și ajutorul on-line în meniul ? pentru descieri mai detaliate. 12.1.1 Cerin țe sistem
Cerințe Hardware
PC cu procesor Pentium II sau echivalent (300 MHz sau superior), 500 MHz recomandat Interfața serială și adaptor USB/RS-232 Min. 96 MB RAM, 192 MB RAM recomandat Min. 150 MB liber pe hard-disk plus aprox. 15 ... 20 MB spațiu adițional pe hard disk pentru fiecare modul SAMSON SVGA placă video (min. 800 x 600) CD-ROM drive
Cerințe Software
Sistem de operare: Windows® 2000 (min. SP2), Windows® XP, Windows® Vista, Windows® 7 Microsoft®.NET Framework Version 2.0 sau superior (inclus pe CD-ROM instalare) Internet browser: Microsoft® Internet Explorer Adobe® Reader®
Accesorii
Adaptor Interfață Serială, cod comandă 1400-7700 (Interfață SAMSON SSP/port RS-232 pe PC) Adaptor Interfață USB izolat, cod comandă 1400-9740 (Interfață SAMSON SSP/port USB pe computer)
88 EB 8387-3 RO

Setări în TROVIS-VIEW software
12.2 Installing TROVIS-VIEW software
1. Rulați setup.exe pentru a instala programul.
Instalarea programului din fișierul ZIP file download: Download și dezarhivare fișier ZIP în sistemul dvs. înainte de a incepe instalarea. Instalarea programului de pe CD-ROM: Odată introdus, CD-ROM-ul pornește instalarea programului automat, în funcție de configurarea sistemului de operare. Nu este necesar să rulați setup.exe. 2. Urmați mesajele de pe ecran și instrucțiunile programului de instalare.
EB 8387-3 RO 89
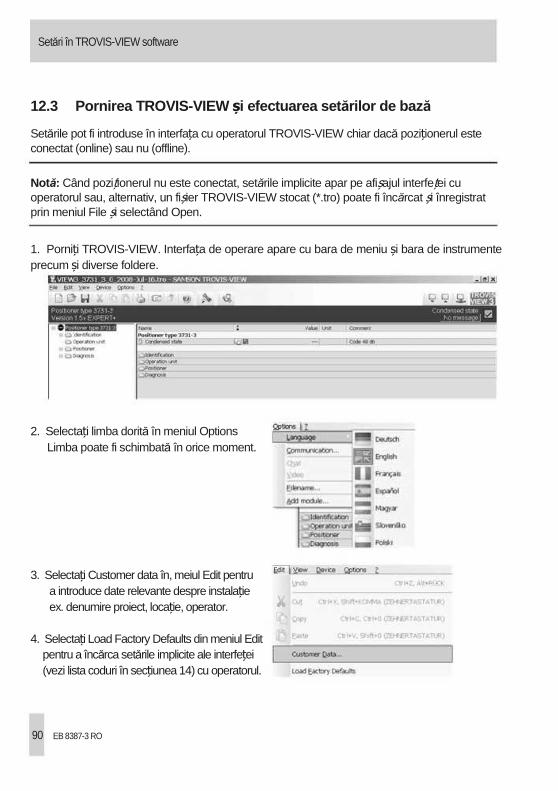
Setări în TROVIS-VIEW software
12.3 Pornirea TROVIS-VIEW și efectuarea set ărilor de baz ă
Setările pot fi introduse în interfața cu operatorul TROVIS-VIEW chiar dacă poziționerul este conectat (online) sau nu (offline).
Notă: Când poziționerul nu este conectat, setările implicite apar pe afișajul interfeței cu operatorul sau, alternativ, un fișier TROVIS-VIEW stocat (*.tro) poate fi încărcat și înregistrat prin meniul File și selectând Open.
1. Porniți TROVIS-VIEW. Interfața de operare apare cu bara de meniu și bara de instrumente precum și diverse foldere.
2. Selectați limba dorită în meniul Options Limba poate fi schimbată în orice moment.
3. Selectați Customer data în, meiul Edit pentru a introduce date relevante despre instalație ex. denumire proiect, locație, operator.
4. Selectați Load Factory Defaults din meniul Edit pentru a încărca setările implicite ale interfeței (vezi lista coduri în secțiunea 14) cu operatorul.
90 EB 8387-3 RO
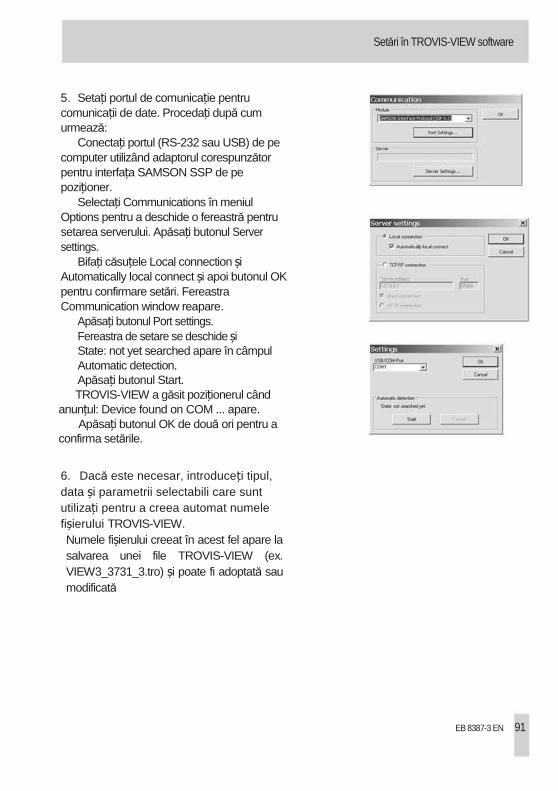
Setări în TROVIS-VIEW software
5. Setați portul de comunicație pentru comunicații de date. Procedați după cum urmează: Conectați portul (RS-232 sau USB) de pe computer utilizând adaptorul corespunzător pentru interfața SAMSON SSP de pe poziționer. Selectați Communications în meniul Options pentru a deschide o fereastră pentru setarea serverului. Apăsați butonul Server settings. Bifați căsuțele Local connection și Automatically local connect și apoi butonul OK pentru confirmare setări. Fereastra Communication window reapare. Apăsați butonul Port settings. Fereastra de setare se deschide și
State: not yet searched apare în câmpul Automatic detection. Apăsați butonul Start.
TROVIS-VIEW a găsit poziționerul când anunțul: Device found on COM ... apare. Apăsați butonul OK de două ori pentru a
confirma setările.
6. Dacă este necesar, introduceți tipul, data și parametrii selectabili care sunt utilizați pentru a creea automat numele fișierului TROVIS-VIEW. Numele fișierului creeat în acest fel apare la salvarea unei file TROVIS-VIEW (ex. VIEW3_3731_3.tro) și poate fi adoptată sau modificată
EB 8387-3 EN 91
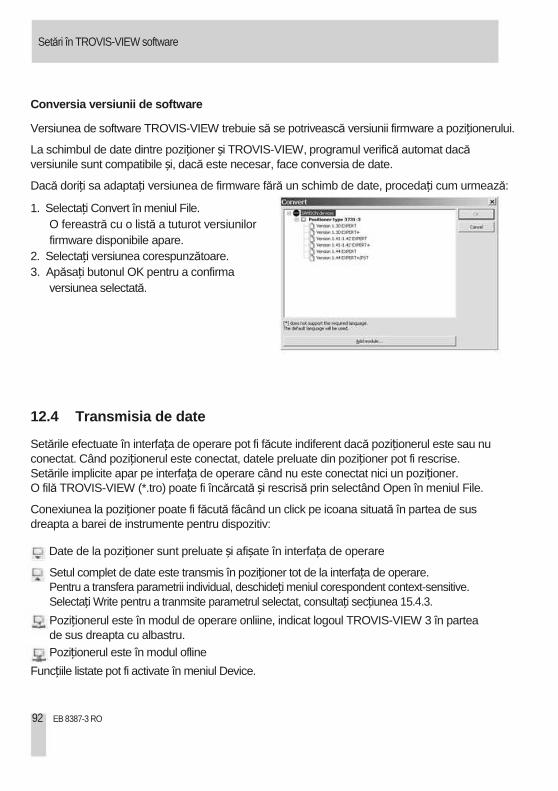
Setări în TROVIS-VIEW software
Conversia versiunii de software
Versiunea de software TROVIS-VIEW trebuie să se potrivească versiunii firmware a poziționerului.
La schimbul de date dintre poziționer și TROVIS-VIEW, programul verifică automat dacă versiunile sunt compatibile și, dacă este necesar, face conversia de date.
Dacă doriți sa adaptați versiunea de firmware fără un schimb de date, procedați cum urmează:
1. Selectați Convert în meniul File. O fereastră cu o listă a tuturot versiunilor firmware disponibile apare.
2. Selectați versiunea corespunzătoare. 3. Apăsați butonul OK pentru a confirma versiunea selectată.
12.4 Transmisia de date
Setările efectuate în interfața de operare pot fi făcute indiferent dacă poziționerul este sau nu conectat. Când poziționerul este conectat, datele preluate din poziționer pot fi rescrise. Setările implicite apar pe interfața de operare când nu este conectat nici un poziționer. O filă TROVIS-VIEW (*.tro) poate fi încărcată și rescrisă prin selectând Open în meniul File.
Conexiunea la poziționer poate fi făcută făcând un click pe icoana situată în partea de sus dreapta a barei de instrumente pentru dispozitiv:
Date de la poziționer sunt preluate și afișate în interfața de operare
Setul complet de date este transmis în poziționer tot de la interfața de operare. Pentru a transfera parametrii individual, deschideți meniul corespondent context-sensitive. Selectați Write pentru a tranmsite parametrul selectat, consultați secțiunea 15.4.3.
Poziționerul este în modul de operare onliine, indicat logoul TROVIS-VIEW 3 în partea de sus dreapta cu albastru. Poziționerul este în modul ofline
Funcțiile listate pot fi activate în meniul Device.
92 EB 8387-3 RO
Setări în TROVIS-VIEW software
Notă: Efectuați conexiunile electrice cum este descris în secțiunea 5.2 inainte de a începe transmiterea oricăror date către poziționer.
12.4.1 Operare Offline (transmisie indirect ă de date)
În modul offline, nu există co comunicație de date constantă între computer și poziționer. Trebuie mai întâi stabilită comunicația pentru a putea prelua date de la poziționer și a transmite informații către acesta.
Transmitere date către poziționer: Selectați Download to device în meniul Device pentru a transfera date către poziționer. Sarcina de control este implementată după ce datele sunt transmise de către TROVIS-VIEW. Preluarea de date din poziționer: Selectați Upload from device în meniul Device pentru a transfera date din poziționer. Preluarea de date este indicată în TROVIS-VIEW prin icoana.
Notă: Transmisia de date poate fi efectuată de asemenea prin click pe icoana din bara de utilitare a dispozitivului: click pentru transmisie date din TROVIS-VIEW către poziționer și, click pentru pentru preluare date și afișarea lor înTROVIS-VIEW.
12.4.2 Operare Online (transmisie direct ă de date)
Poziționerul și TROVIS-VIEW sunt conectate continuu în operare on-line. Configurarea curentă și datele de operare sunt preluate ciclic din poziționer și afișate în TROVIS-VIEW. De asemenea, orice setare efectuată îm TROVIS-VIEW este direct transferată către poziționer.
Activare operare online : Selectați Online în meniul Device pentru a activa modul online. În modul online, este prezentă pe bara de utilitare a dispozitivului. Dezactivare operare online: Selectați Online în meniul Device în cimp ce modul online este activat. Modul online este astfel anulat.
Notă: Alternativ, click pe bara de utilitare a dispozitivului pentru a activat dezactiva modul de operare online.
EB 8387-3 RO 93
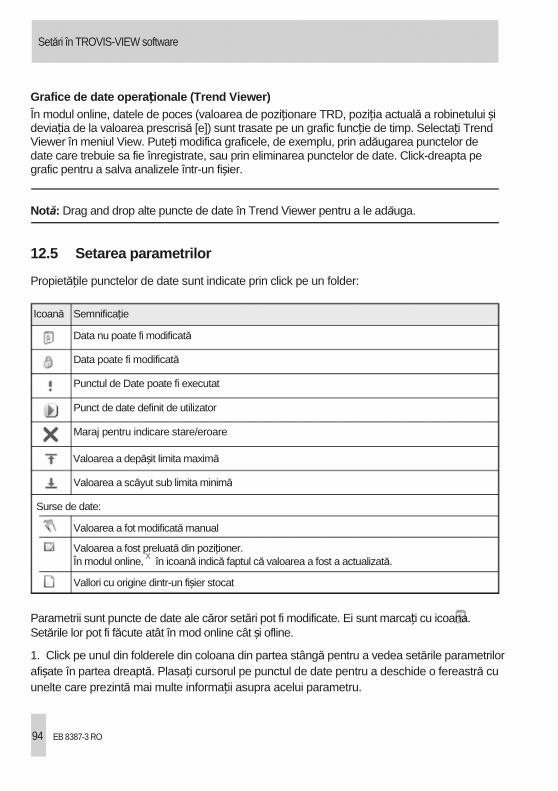
Setări în TROVIS-VIEW software
Grafice de date opera ționale ( Trend Viewer ) În modul online, datele de poces (valoarea de poziționare TRD, poziția actuală a robinetului și deviația de la valoarea prescrisă [e]) sunt trasate pe un grafic funcție de timp. Selectați Trend Viewer în meniul View. Puteți modifica graficele, de exemplu, prin adăugarea punctelor de date care trebuie sa fie înregistrate, sau prin eliminarea punctelor de date. Click-dreapta pe grafic pentru a salva analizele într-un fișier. Notă: Drag and drop alte puncte de date în Trend Viewer pentru a le adăuga.
12.5 Setarea parametrilor
Propietățile punctelor de date sunt indicate prin click pe un folder:
Icoană Semnificație
Data nu poate fi modificată
Data poate fi modificată
Punctul de Date poate fi executat
Punct de date definit de utilizator
Maraj pentru indicare stare/eroare
Valoarea a depășit limita maximă
Valoarea a scăyut sub limita minimă
Surse de date:
Valoarea a fot modificată manual
Valoarea a fost preluată din poziționer. În modul online, X în icoană indică faptul că valoarea a fost a actualizată.
Vallori cu origine dintr-un fișier stocat
Parametrii sunt puncte de date ale căror setări pot fi modificate. Ei sunt marcați cu icoana. Setările lor pot fi făcute atât în mod online cât și ofline.
1. Click pe unul din folderele din coloana din partea stângă pentru a vedea setările parametrilor afișate în partea dreaptă. Plasați cursorul pe punctul de date pentru a deschide o fereastră cu unelte care prezintă mai multe informații asupra acelui parametru.
94 EB 8387-3 RO
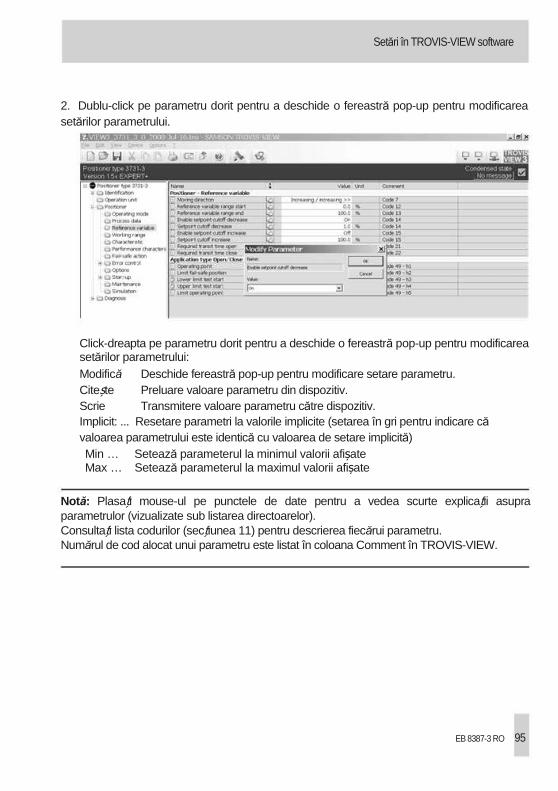
Setări în TROVIS-VIEW software
2. Dublu-click pe parametru dorit pentru a deschide o fereastră pop-up pentru modificarea setărilor parametrului.
Click-dreapta pe parametru dorit pentru a deschide o fereastră pop-up pentru modificarea setărilor parametrului: Modifică Deschide fereastră pop-up pentru modificare setare parametru. Citește Preluare valoare parametru din dispozitiv. Scrie Transmitere valoare parametru către dispozitiv. Implicit: ... Resetare parametri la valorile implicite (setarea în gri pentru indicare că valoarea parametrului este identică cu valoarea de setare implicită) Min … Setează parameterul la minimul valorii afișate Max … Setează parameterul la maximul valorii afișate
Notă: Plasați mouse-ul pe punctele de date pentru a vedea scurte explicații asupra parametrulor (vizualizate sub listarea directoarelor). Consultați lista codurilor (secțiunea 11) pentru descrierea fiecărui parametru. Numărul de cod alocat unui parametru este listat în coloana Comment în TROVIS-VIEW.
EB 8387-3 RO 95
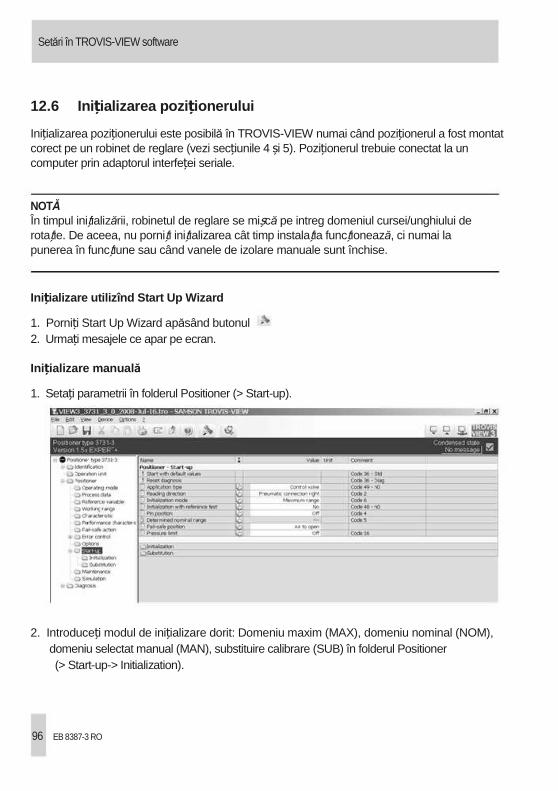
Setări în TROVIS-VIEW software
12.6 Inițializarea pozi ționerului
Inițializarea poziționerului este posibilă în TROVIS-VIEW numai când poziționerul a fost montat corect pe un robinet de reglare (vezi secțiunile 4 și 5). Poziționerul trebuie conectat la un computer prin adaptorul interfeței seriale. NOTĂ În timpul inițializării, robinetul de reglare se mișcă pe intreg domeniul cursei/unghiului de rotație. De aceea, nu porniți inițializarea cât timp instalația funcționează, ci numai la punerea în funcțiune sau când vanele de izolare manuale sunt închise.
Inițializare utilizînd Start Up Wizard
1. Porniți Start Up Wizard apăsând butonul 2. Urmați mesajele ce apar pe ecran. Inițializare manual ă
1. Setați parametrii în folderul Positioner (> Start-up). 2. Introduceți modul de inițializare dorit: Domeniu maxim (MAX), domeniu nominal (NOM), domeniu selectat manual (MAN), substituire calibrare (SUB) în folderul Positioner (> Start-up-> Initialization). 96 EB 8387-3 RO
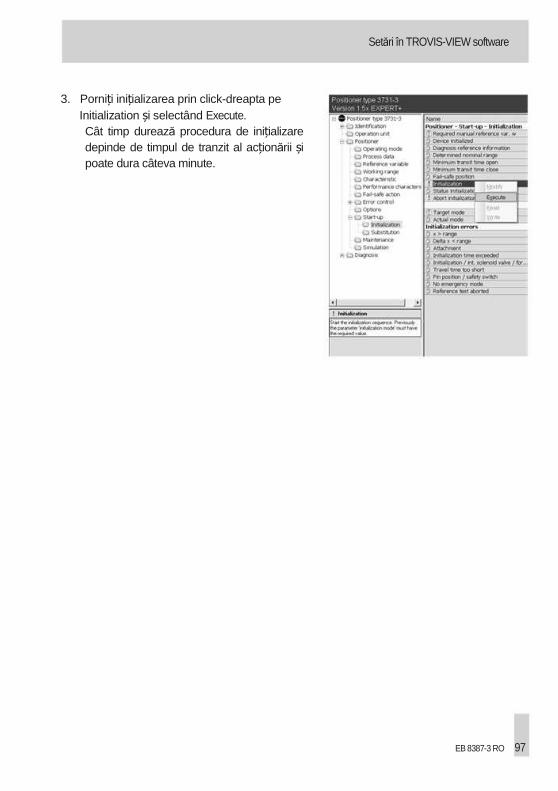
Setări în TROVIS-VIEW software
3. Porniți inițializarea prin click-dreapta pe Initialization și selectând Execute.
Cât timp durează procedura de inițializare depinde de timpul de tranzit al acționării și poate dura câteva minute.
EB 8387-3 RO 97
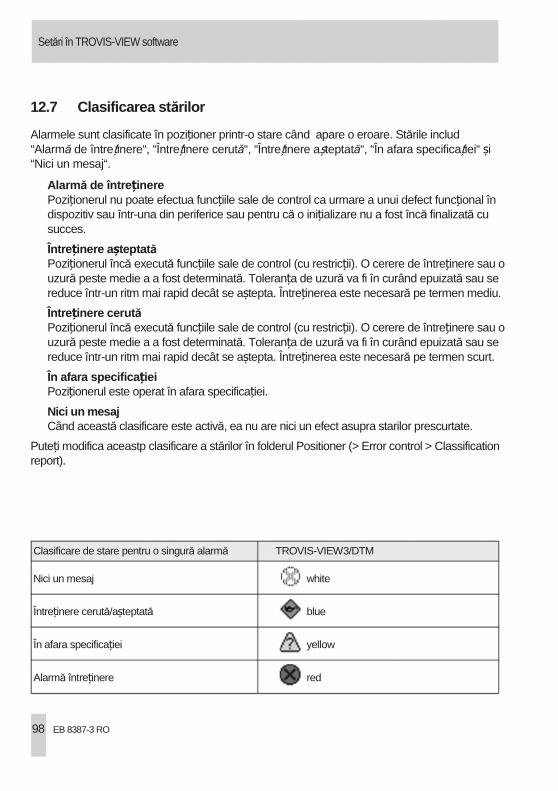
Setări în TROVIS-VIEW software
12.7 Clasificarea st ărilor
Alarmele sunt clasificate în poziționer printr-o stare când apare o eroare. Stările includ “Alarmă de întreținere“, “Întreținere cerută“, “Întreținere așteptată“, “În afara specificației“ și “Nici un mesaj“.
Alarm ă de între ținere Poziționerul nu poate efectua funcțiile sale de control ca urmare a unui defect funcțional în dispozitiv sau într-una din periferice sau pentru că o inițializare nu a fost încă finalizată cu succes.
Între ținere așteptat ă Poziționerul încă execută funcțiile sale de control (cu restricții). O cerere de întreținere sau o uzură peste medie a a fost determinată. Toleranța de uzură va fi în curând epuizată sau se reduce într-un ritm mai rapid decât se aștepta. Întreținerea este necesară pe termen mediu.
Între ținere cerut ă Poziționerul încă execută funcțiile sale de control (cu restricții). O cerere de întreținere sau o uzură peste medie a a fost determinată. Toleranța de uzură va fi în curând epuizată sau se reduce într-un ritm mai rapid decât se aștepta. Întreținerea este necesară pe termen scurt.
În afara specifica ției Poziționerul este operat în afara specificației.
Nici un mesaj Când această clasificare este activă, ea nu are nici un efect asupra starilor prescurtate.
Puteți modifica aceastp clasificare a stărilor în folderul Positioner (> Error control > Classification report).
Clasificare de stare pentru o singură alarmă TROVIS-VIEW3/DTM
Nici un mesaj white
Întreținere cerută/așteptată blue
În afara specificației yellow
Alarmă întreținere red
98 EB 8387-3 RO
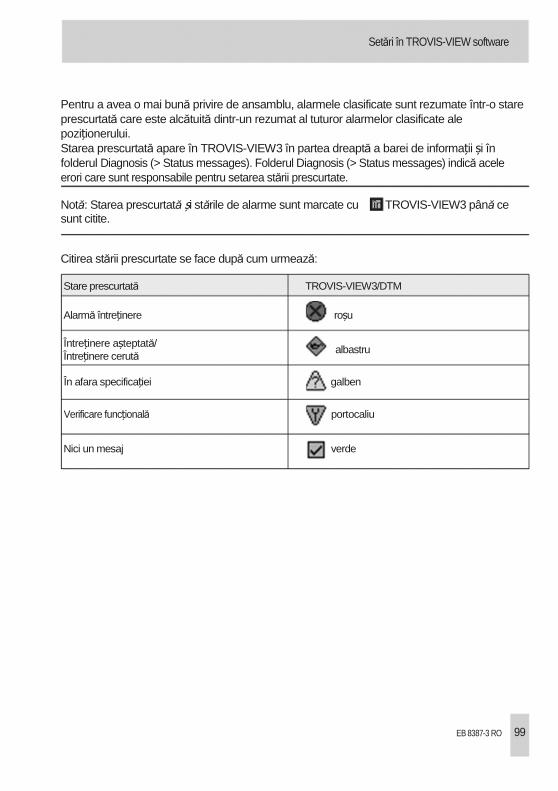
Setări în TROVIS-VIEW software
Pentru a avea o mai bună privire de ansamblu, alarmele clasificate sunt rezumate într-o stare prescurtată care este alcătuită dintr-un rezumat al tuturor alarmelor clasificate ale poziționerului. Starea prescurtată apare în TROVIS-VIEW3 în partea dreaptă a barei de informații și în folderul Diagnosis (> Status messages). Folderul Diagnosis (> Status messages) indică acele erori care sunt responsabile pentru setarea stării prescurtate.
Notă: Starea prescurtată și stările de alarme sunt marcate cu în TROVIS-VIEW3 până ce sunt citite.
Citirea stării prescurtate se face după cum urmează: Stare prescurtată TROVIS-VIEW3/DTM
Alarmă întreținere roșu
Întreținere așteptată/ Întreținere cerută
albastru
În afara specificației galben
Verificare funcțională portocaliu
Nici un mesaj verde
EB 8387-3 RO 99
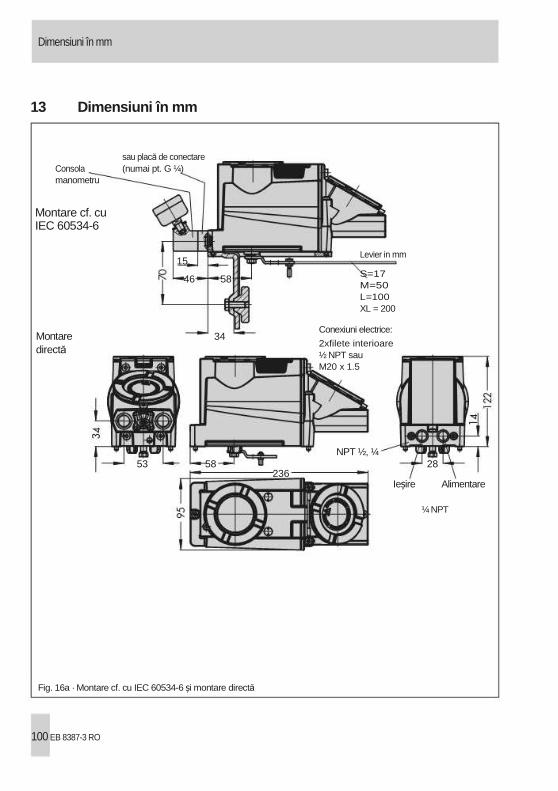
Dimensiuni în mm
13 Dimensiuni în mm sau placă de conectare Consola (numai pt. G ¼) manometru
Montare cf. cu IEC 60534-6
15
46 58
Montare 34 directă
53 58 236
Fig. 16a · Montare cf. cu IEC 60534-6 și montare directă
Levier in mm
S=17 M=50 L=100 XL = 200
Conexiuni electrice:
2xfilete interioare ½ NPT sau M20 x 1.5
NPT ½, ¼ 28
Ieșire Alimentare
¼ NPT
100 EB 8387-3 RO
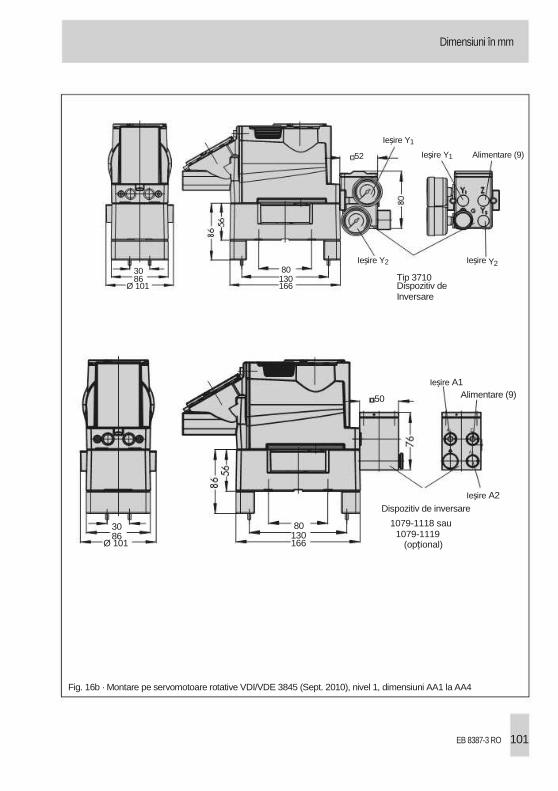
Dimensiuni în mm
Ieșire Y1
52 Ieșire Y1 Alimentare (9)
Ieșire Y2 Ieșire Y2 30 80 86 130 Tip 3710
Ø 101 166 Dispozitiv de Inversare
Ieșire A1
50 Alimentare (9)
A1 Z
A2
Ieșire A2 Dispozitiv de inversare
30 80 1079-1118 sau 86 130 1079-1119
Ø 101 166 (opțional)
Fig. 16b · Montare pe servomotoare rotative VDI/VDE 3845 (Sept. 2010), nivel 1, dimensiuni AA1 la AA4
EB 8387-3 RO 101
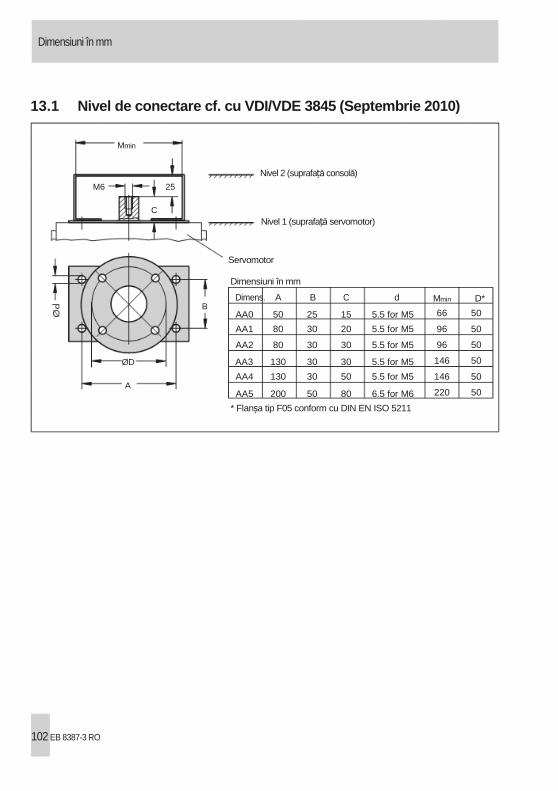
Dimensiuni în mm
13.1 Nivel de conectare cf. cu VDI/VDE 3845 (Septembrie 2010) Mmin
Nivel 2 (suprafață consolă)
M6 25 C
Nivel 1 (suprafață servomotor)
Servomotor Dimensiuni în mm
Dimens. A B C d B
AA0 50 25 15 5.5 for M5
AA1 80 30 20 5.5 for M5
AA2 80 30 30 5.5 for M5
ØD AA3 130 30 30 5.5 for M5
AA4 130 30 50 5.5 for M5 A
AA5 200 50 80 6.5 for M6
* Flanșa tip F05 conform cu DIN EN ISO 5211
Mmin D*
66 50
96 50
96 50
146 50
146 50
220 50
102 EB 8387-3 RO
EB 8387-3 RO 103
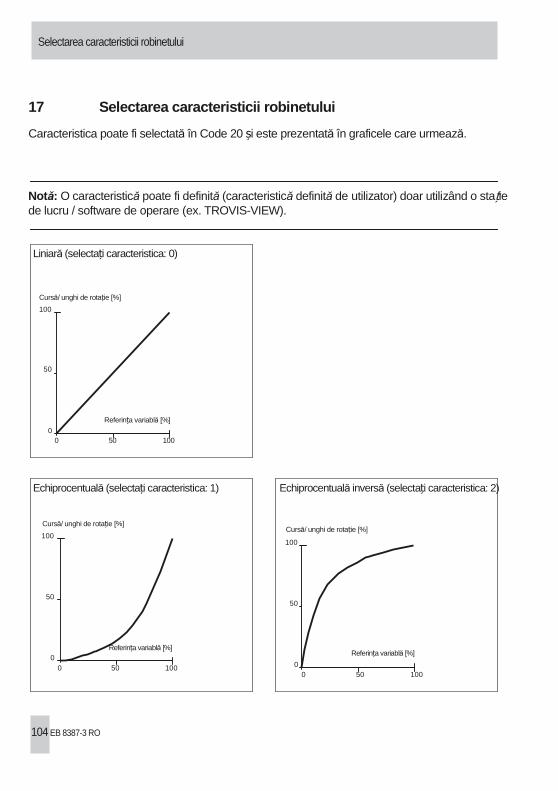
Selectarea caracteristicii robinetului
17 Selectarea caracteristicii robinetului
Caracteristica poate fi selectată în Code 20 și este prezentată în graficele care urmează.
Notă: O caracteristică poate fi definită (caracteristică definită de utilizator) doar utilizând o stație de lucru / software de operare (ex. TROVIS-VIEW).
Liniară (selectați caracteristica: 0) Cursă/ unghi de rotație [%]
100
50
Referința variablă [%]
0 0 50 100
Echiprocentuală (selectați caracteristica: 1)
Cursă/ unghi de rotație [%]
100
50
Referința variablă [%] 0
0 50 100
Echiprocentuală inversă (selectați caracteristica: 2)
Cursă/ unghi de rotație [%]
100
50
Referința variablă [%]
0 0 50 100
104 EB 8387-3 RO
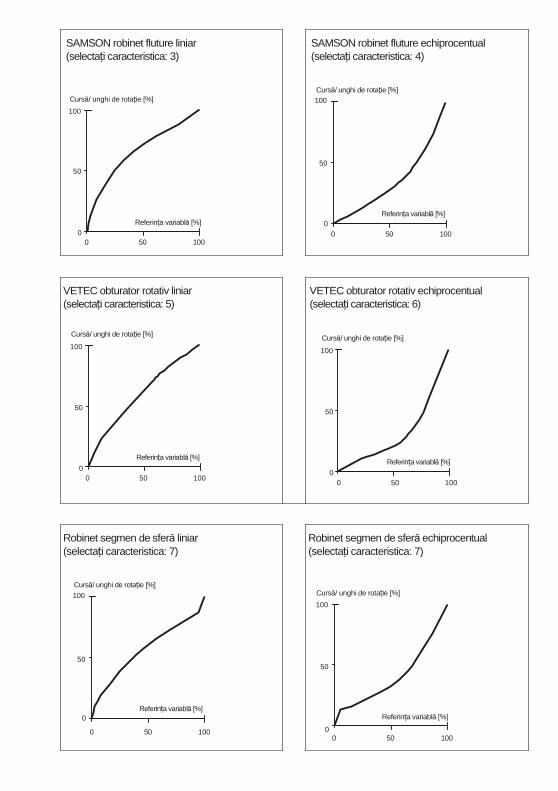
SAMSON robinet fluture liniar SAMSON robinet fluture echiprocentual (selectați caracteristica: 3) (selectați caracteristica: 4)
Cursă/ unghi de rotație [%]
Cursă/ unghi de rotație [%] 100
100
50 50
Referința variablă [%] Referința variablă [%] 0
0 0 50 100 0 50 100
VETEC obturator rotativ liniar (selectați caracteristica: 5)
Cursă/ unghi de rotație [%]
100
50
Referința variablă [%]
0 0 50 100
VETEC obturator rotativ echiprocentual (selectați caracteristica: 6)
Cursă/ unghi de rotație [%]
100
50
Referința variablă [%]
0 0 50 100
Robinet segmen de sferă liniar Robinet segmen de sferă echiprocentual (selectați caracteristica: 7) (selectați caracteristica: 7)
Cursă/ unghi de rotație [%]
100 Cursă/ unghi de rotație [%]
100
50 50
Referința variablă [%] 0 Referința variablă [%]
0 50 100 0 0 50 100
106 EB 8387-3 RO
EB 8387-3 RO 107

SAMSON AG · MESS- UND REGELTECHNIK Weismüllerstraße 3 · 60314 Frankfurt am Main · Germany
Phone: +49 69 4009-0 · Fax: +49 69 4009-1507
Internet: http://www.samson.de EB 8387-3 RO