proiect herlea 2011
TRANSCRIPT

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 1/54
UNIVERSITATEA "Lucian Blaga" SIBIU
Facultatea de Inginerie ’’Hermann Oberth ‘‘
Specializarea ELECTROMECANICĂ
STAND PENTRU STUDIUL PERFORMANŢELOR FUNCŢIONALE ALE MECANISMELOR DE DIRECŢIE
ACŢIONATE ELECTRIC
Coordonator: Absolvent:Prof. Dr. Ing. Barbu Ştefan Herlea Ilie-Gheorghe
2011
1
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 2/54
Subsemnatul , Herlea Gheorghe, declar pe proprie răspundere că lucrarea de faţă este rezultatul muncii mele,
pe baza cercetărilor mele şi pe baza informaţiilor obţinute din surse care au fost citate şi indicate, conform
normelor etice, în note şi în bibliografie. Declar că lucrarea nu a mai fost prezentată sub această formă la nici
o instituţie de învăţământ superior în vederea obţinerii unui grad sau titlu ştiinţific ori didactic.
Semnătura autorului,
2

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 3/54
CAPITOLUL I
INTRODUCERE
1.1 Obiectivul lucrării
Studiul asupra performanţelor funcţionale asupra mecanismelor de direcţie acţionate electric.
Standul este folosit pentru studiul cinematic al transmisiilor cu roţi dinţate. Am urmărit determinareaexperimentală a vitezei de deplasare între două puncte, precizia de deplasare şi poziţionarea. Prezenţa
senzorilor facilitează schimbarea vitezei de deplasare a curelei şi oprirea mesei deplasabile într-un anumit
punct. Rezultatele obţinute sunt comparate ulterior cu cele teoretice.
Automatizarea se referă la posibilitatea modificării vitezei curelei între anumite puncte şi prin acest sistem se
poate realiza o deplasare cu viteză variabilă. Comanda pentru modificarea turaţie sistemului de acţionare este
dată de un sistem de automatizare, care transmite motorului electric efectuarea unor mişcări de lucru necesare
sistemului de transmitere a mişcării de direcţie printr-o curea dinţată.
Am ales această temă pentru a arăta funcţionalitatea transmisiei printr-o curea dinţată comandată de o
instalaţie electrică de automatizare, mişcarea indicatorului fiind urmărită de trei senzori inductivi între
punctele A-B (apropiere rapidă), B-C (mişcare tehnologică) şi C-A (retragere rapidă).
Standul care simulează această mişcare este format din următoarele părţi:
- Actuatorul - format din motorul electric cu game de turaţii între 60 - 80 rot/min, puterea motorului
fiind de 0.2 kw- in curent continuu la a tensiune de alimentare de 12 V. Reductorul mecanic fiind
compus din melc, roata melcată, cuplajul electric si transmisia cu curea dinţată.
- Partea de comandă – formată din senzori inductivi, PLC, surse de alimentare pentru motor şi PLC,
punte redresoare, siguranţe automate, patru contactori, două butoane de start şi un buton de stop.
3

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 4/54
1.2 Transportoare cu curea dinţată
a Destinaţie:
Sunt destinate pentru transportul încărcăturilor în vrac şi bucată cu bucată în plan orizontal, în plan înclinat şiuneori chiar şi în plan vertical.
În funcţie de construcţia podinei se deosebesc:
- Transportoare cu plăci,
- Transportoare cu raclete,
- Transportoare cu balansiere,
- Transportoare cu poliţe,
- Transportoare suspendate (cu sau fără cărucioare).
b Avantajele transportoarelor cu curele dinţate sunt:
- Permite transportul pe distanţe mari,
- Mişcarea se transmite sincron,
- Vitezele unghiulare ale roţilor sunt constante şi ridicate,
- Randament mare al transmisiei,
- Pretensionare mică la montaj, deci o solicitare mică a arborilor şi reazemelor,- Permite transportul încărcăturilor fragile datorită faptului că amortizează şocurile şi vibraţiile,
- Funcţionează fără zgomot,
- Costurile de fabricaţie sunt reduse,
- Necesită precizie de execuţie şi montaj reduse, etc.
c Dezavantaje:
- Dimensiuni de gabarit mari,
- Tehnologie de execuţie ridicată,
- Necesitatea unor dispozitive de întindere ale curelei.
4

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 5/54
CAPITOLUL II
TRANSMISII PRIN CURELE
2.1Caracterizare. Domenii de folosire
Transmisiile prin curele sunt transmisii mecanice, care realizează transmiterea mişcării de rotaţie şi a sarcinii,
de la o roată motoare la una sau mai multe roţi conduse, prin intermediul unui element flexibil, fără sfârşit,
numit curea.
Transmiterea mişcării se poate realiza cu alunecare (la transmisiile prin curele late sau trapezoidale) sau fără
alunecare (la transmisiile prin curele dinţate).
Transmiterea sarcinii se realizează prin intermediul frecării care ia naştere între suprafeţele în contact ale
curelei şi roţilor de curea (în cazul transmisiilor cu alunecare) sau prin contactul direct dintre dinţii curelei şi
cei ai roţii (în cazul transmisiilor fără alunecare).
O transmisie prin curele se compune din roţile de curea – conducătoare 1 şi condusă 2 – elementul de legătură
(cureaua) 3 sistemul de întindere şi apărători de protecţie.
1
Forţa necesară de apăsare a curelei pe roţile de curea se realizează la montaj, prin întinderea (deformarea
elastică) curelei.
1 Radu Florea,Organe de masini, pag.402
5
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 6/54
1Comparativ cu celelalte transmisii mecanice, transmisiile prin curele cu alunecare prezintă o serie de
avantaje:
- se montează şi se întreţin uşor;
- funcţionează fără zgomot;
- amortizează şocurile şi vibraţiile;- necesită precizie de execuţie şi montaj relativ reduse;
- costurile de fabricaţie sunt reduse;
- transmit sarcina la distanţe relativ mari între arbori;
- permit antrenarea simultană a mai multor arbori;
- funcţionează la viteze mari;
- asigură protecţia împotriva suprasarcinilor.
Dintre dezavantajele acestor transmisii se pot menţiona:
- capacitate de încărcare limitată;
- dimensiuni de gabarit mari, comparativ cu transmisiile prin roţi dinţate;
- forţe de pretensionare mari, care solicită arborii şi reazemele;
- raport de transmitere variabil, ca urmare a alunecării curelei pe roţi;
- sensibilitate mărită la căldură şi umiditate;
- durabilitate limitată;
- necesitatea utilizării unor dispozitive de întindere a curelei.
Unele dintre dezavantajele transmisiilor cu alunecare sunt anulate de transmisiile prin curele dinţate.
Astfel:
- mişcarea se transmite sincron,
- vitezele unghiulare ale roţilor sunt constante şi ridicate;
- randamentul mecanic este mai ridicat;
- pretensionare mai mică la montaj, deci o solicitare redusă a arborilor şi lagărelor.
Principalele dezavantaje ale transmisiilor prin curele dinţate sunt:
- tehnologia de execuţie mai pretenţioasă, atât a roţilor de curea dinţate cât şi a curelelor,
- costurile montajului mai ridicate.
1 Gafitanu, M. s.a. Organe de masini, pag.381
6
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 7/54
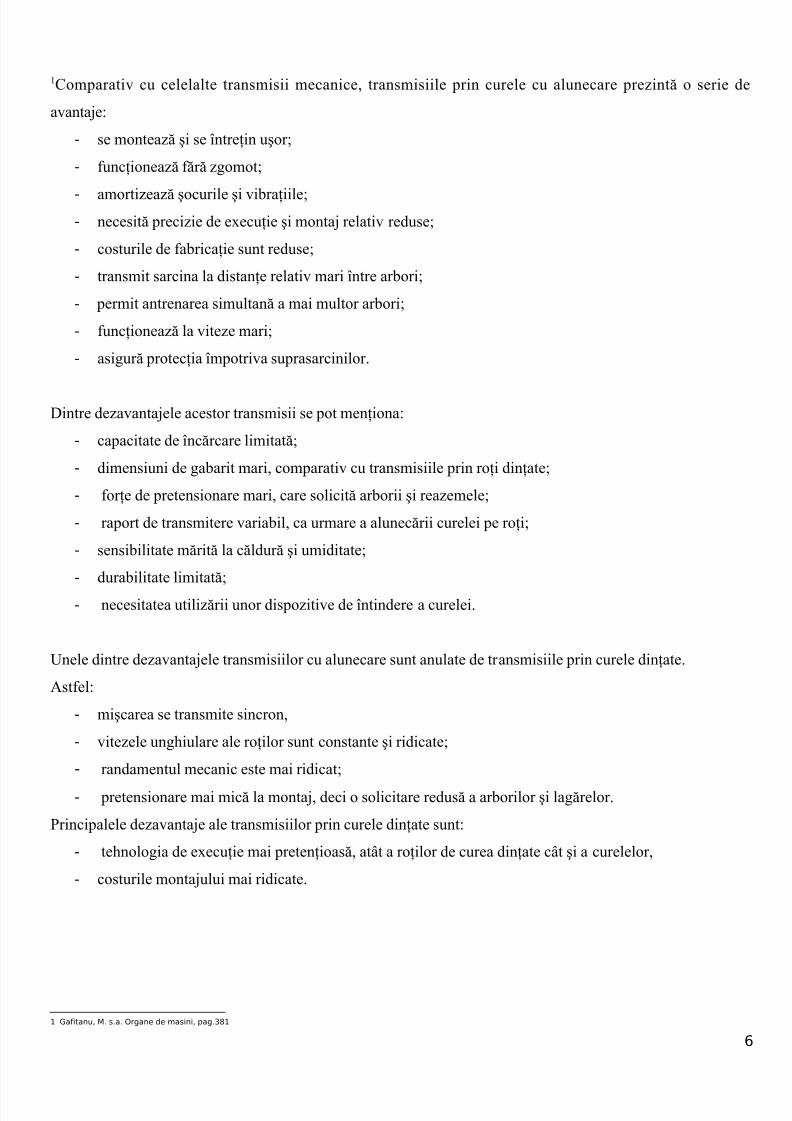
2.2 Clasificarea transmisiilor prin curele
2.2.1 După poziţia relativă a axei arborilor:
a. Cu axe paralele:1
Cu ramuri deschise
Cu ramuri încrucişate
b. Cu axe încrucişate:2
Fără role de ghidare
1 Viorica Constantin, Organe de masini și mecanisme, Vol. I, pag. 137
2 Mlădinescu, T. Organe de masini și mecanisme, pag 137
7

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 8/54
Cu role de ghidare1
2.2.2 După numărul arborilor conduşi:2
Cu un arbore condus Cu mai mulţi arbori antrenaţi (conduşi)
1 Gafitanu, M. s.a. Organe de masini, pag. 400
2 Mlădinescu, T. Organe de masini și mecanisme, pag 137
8

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 9/54
2.2.3 După tipul raportului de transmisie:1
• Cu raport de transmitere constant (vezi figurile de mai sus)
• Cu raport de transmitere variabil (vezi fig.1 şi 2)
În trepte (cutie de viteze) Continuu (variator )
Fig.1 Fig.2
1 Mlădinescu, T. Organe de masini și mecanisme, pag 137
9

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 10/54
2.3 TIPURI DE CURELE. MATERIALE. ELEMENTE CONSTRUCTIVE
2.3.1 Clasificarea curelelor1
După forma secţiunii, curelele pot fi:
- late (netede) – a,
- politriunghiulare – b,
- dinţate – c,
- trapezoidale - d,
- Rotunde - e.
Transmisiile prin curele late pot transmite puteri până la P = 2000 kW, la viteze periferice v ≤ 12 m/s şi
rapoarte de transmitere i ≤ 6 (maxim 10). Utilizarea curelelor moderne, de tip compound, a dus la ridicarea
performanţelor acestora, domeniul lor de utilizare fiind: P ≤ 5000 kW; v ≤ 100 m/s; i ≤ 10 (maxim 20).
Transmisiile prin curele late politriunghiulare (Poly-V) transmit puteri P ≤ 2500 kW, la viteze periferice v
≤ 50 m/s.
Transmisiile prin curele late dinţate pot transmite puteri până la P = 400 kW, la viteze periferice v ≤ 80 m/s
şi rapoarte de transmitere i ≤ 8 (maxim 10).
Transmisiile prin curele trapezoidale pot transmite puteri până la P = 1200 kW, la viteze periferice v
≤ 50m/s, atunci când distanţa dintre axe A < 3 m, iar raportul de transmitere maxim i ≤ 8 (maxim 10).
1 Mlădinescu, T. Organe de masini și mecanisme, pag 136
10
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 11/54
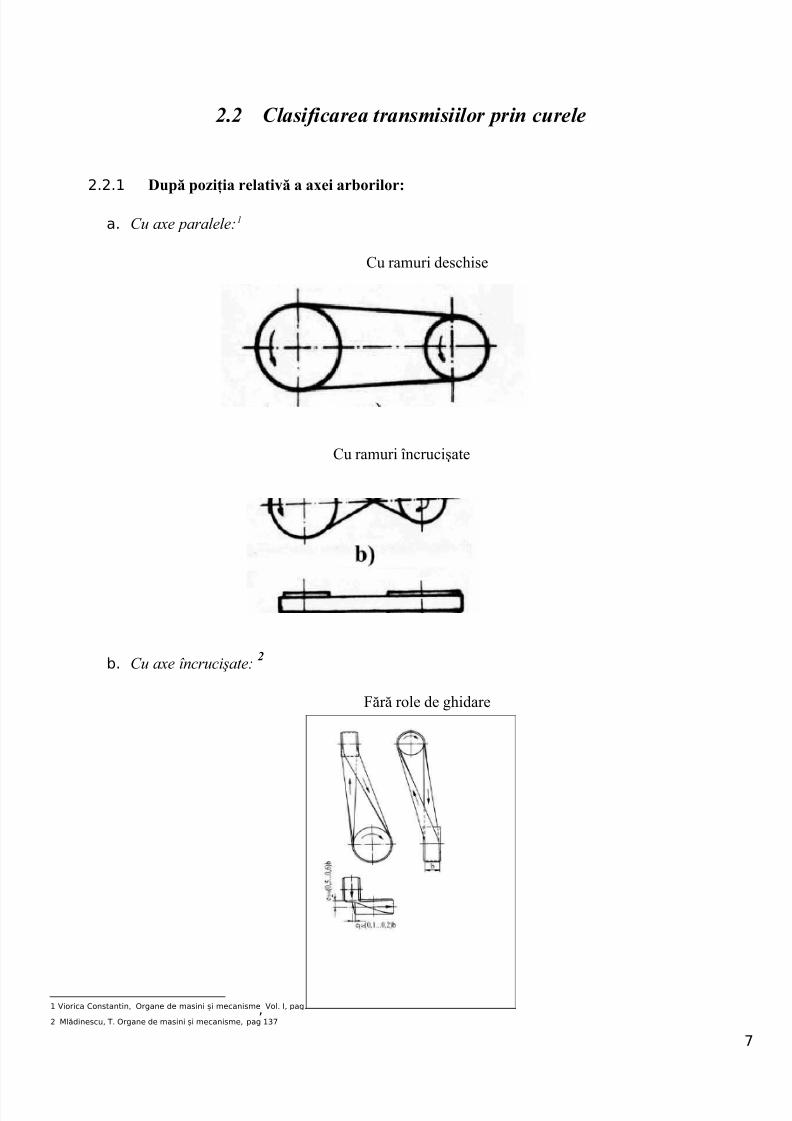
2.4 Performanţele transmisiilor prin curele
Pentru aceste curele, în tabelul de mai jos sunt prezentate câteva performanţe ale transmisiilor echipate cu
aceste curele, în funcţie de diverşi parametri (economici, funcţionali etc.).1
Parametrul Curelelate
Curelepolitriunghiulare
Cureledinţate
Curele trapezoidaleCurele
rotundeClasice Înguste
Indicele costuluiinstalării
1,1 1,2 1,4 1,4 1,0 ND*)
Întreţinere Da Da Nu Da Da Da
Raport putere/volum(kW/cm3)
0,8 1,7 1,9 0,7 1,8 ND*)
Frecvenţa maximă aîndoirilor
200 100 200 40 80 40
Încărcarea
arborilor *)(2…3) F u (2…2,5) F u F u (2…2,5) F u
(2…3) F u
Randament % 97…98 97 98 95 96 95
Raportul F u /F 0*) 0,3…0,4 0,4…0,5 1 0,5…0,6 0,4
*) ND – nu sunt date; F u – forţa utilă; F 0 – forţa de pretensionare.
1 Gafitanu, M. s.a. Organe de masini, pag. 401
11
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 12/54
Materiale pentru curele1
Materialele din care se confecţionează curelele trebuie să îndeplinească următoarele condiţii de bază: să fie
foarte elastice, pentru a se putea înfăşura pe roţi cu diametre mici, fără ca tensiunile de încovoiere, care iau
naştere, să aibă valori însemnate; coeficientul de frecare a elementului curelei în contact cu roata de curea săfie cât mai mare (pentru transmisiile prin curele cu alunecare); elementul curelei care preia sarcina principală
de întindere să aibă o rezistenţă ridicată; elementul curelei, în contact cu roata, să fie rezistent la uzură şi
oboseală şi să fie rezistent şi la acţiunea agenţilor externi; să fie ieftine.
Curele late netede (lise)
Materialele pentru aceste curele pot fi: pielea, ţesăturile textile, pânza cauciucată, materialele plastice, benzile
metalice.
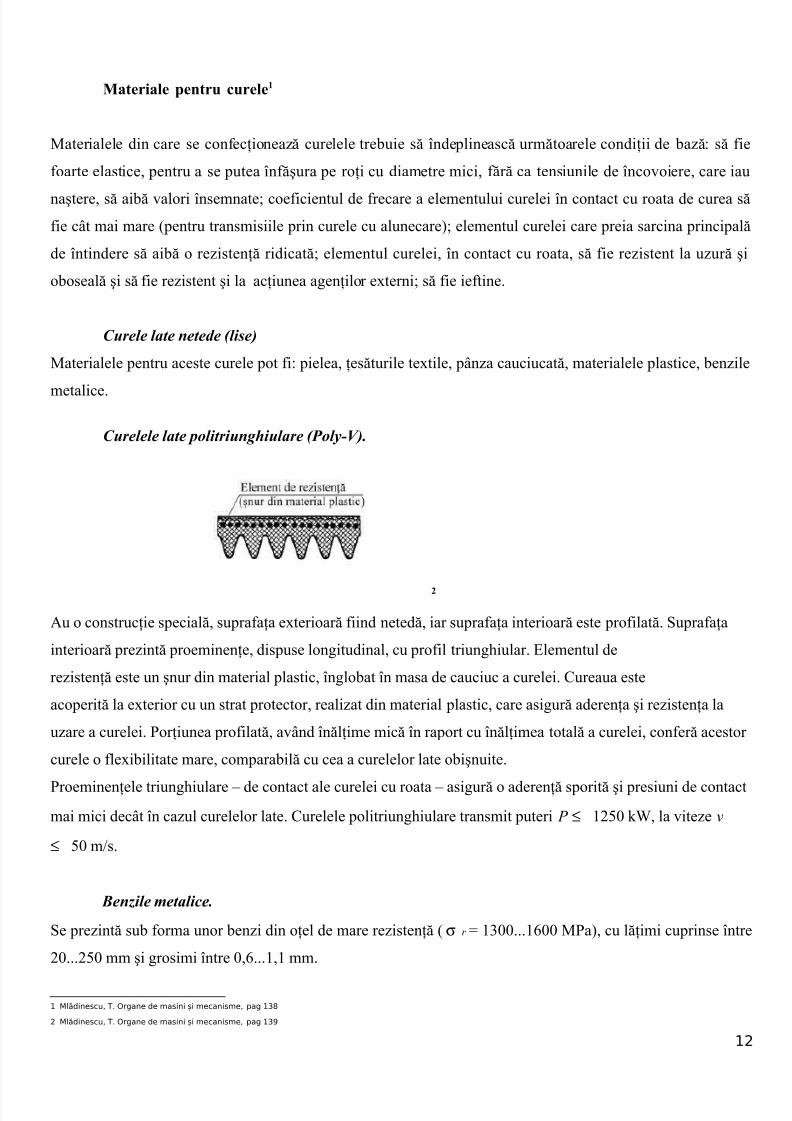
Curelele late politriunghiulare (Poly-V).
2
Au o construcţie specială, suprafaţa exterioară fiind netedă, iar suprafaţa interioară este profilată. Suprafaţa
interioară prezintă proeminenţe, dispuse longitudinal, cu profil triunghiular. Elementul de
rezistenţă este un şnur din material plastic, înglobat în masa de cauciuc a curelei. Cureaua este
acoperită la exterior cu un strat protector, realizat din material plastic, care asigură aderenţa şi rezistenţa la
uzare a curelei. Porţiunea profilată, având înălţime mică în raport cu înălţimea totală a curelei, conferă acestor
curele o flexibilitate mare, comparabilă cu cea a curelelor late obişnuite.
Proeminenţele triunghiulare – de contact ale curelei cu roata – asigură o aderenţă sporită şi presiuni de contact
mai mici decât în cazul curelelor late. Curelele politriunghiulare transmit puteri P ≤ 1250 kW, la viteze v
≤ 50 m/s.
Benzile metalice.
Se prezintă sub forma unor benzi din oţel de mare rezistenţă (σ r = 1300...1600 MPa), cu lăţimi cuprinse între
20...250 mm şi grosimi între 0,6...1,1 mm.
1 Mlădinescu, T. Organe de masini și mecanisme, pag 138
2 Mlădinescu, T. Organe de masini și mecanisme, pag 139
12

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 13/54
Transmisiile cu benzi metalice pot funcţiona la viteze foarte mari (apropiate de viteza sunetului), asigurând
transmiterea unor puteri mari. Necesită forţe de întindere, iniţiale, foarte mari, o foarte ridicată precizie de
execuţie şi montaj a roţilor şi o rigiditate mare a arborilor. Se pot utiliza în locul curelelor din piele sau textile
sau în locul angrenajelor, la locomotive, vapoare, termocentrale etc. În comparaţie cu angrenajele, transmisiile
cu bandă funcţionează cu zgomot mult mai redus. Pentru mărirea coeficientului de frecare dintre bandametalică şi roţile transmisiei, roţile de curea se pot căptuşi cu plută (µ = 0,35).
La transmisiile care funcţionează cu viteză foarte mare, pentru ca pierderile prin frecarea dintre elementele în
mişcare şi atmosferă să fie cât mai reduse, se recomandă introducerea acestora în carcase cu un anumit grad de
vid
Curele late dinţate (sincrone)
Cureaua dinţată se compune dintr-un element de înaltă rezistenţă, înglobat într-o masă compactă de cauciucsau material plastic . Suprafaţa exterioară şi zona danturată sunt protejate cu un strat din ţesături din fibre
sintetice rezistente la uzură şi la agenţi chimici şi termici. Elementul de rezistenţă poate fi realizat din cabluri
metalice, din fibre de poliester sau fibre de sticlă.
1
1 Mlădinescu, T. Organe de masini și mecanisme, pag 141
13

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 14/54
2.5. TRANSMISII PRIN CURELE DINŢATE
Transmisiile prin curele dinţate realizează transmiterea mişcării fără alunecare, dinţii curelei angrenând cu
dantura roţii de curea. Aceste transmisii cumulează avantajele transmisiilor prin curele late şi ale transmisiilor
prin lanţ.
Datorită avantajelor pe care le prezintă, aceste transmisii s-au impus, fiind utilizate în multe domenii, cum ar
fi: construcţia de autovehicule (la sistemul de distribuţie); construcţia maşinilor unelte, construcţia maşinilor
textile, birotică, computere, proiectoare, maşini de scris etcTransmisia cu curele dinţate fig. 3 se caracterizează printr-o mi care de angrenare între dantura interioara aș
curelelor si dantura rotii de curea.
1
Fig. 3
Fata de transmisiile cu curele late sau trapezoidale, transmisiile dinţate prezintă următoarele avantaje:
• funcţionare silentioasa
• raport de transmitere riguros constant-prin eliminarea alunecarilor între curea si roata
• forta de întindere initiala mica
• alungirea curelei în timpul functionarii neglijabila
• încarcari reduse pe arbori
• lipsa necesitatii reglarii periodice a transmisiei
• întretinere si montaj ieftin.
Transmisia prin cure-le dinţate poate transmite puteri de N<450 [kw], v<60 [m/s], raport de transmitere ,
randamente .
1 Gafitanu, M. s.a. Organe de masini, pag. 400
14

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 15/54
Fig. 41
Fig. 52
Dantura poate fi dispusă pe o parte a curelei (fig. 4) sau pe ambele părţi (fig. 5).
Curelele cu dantură pe o singură parte se folosesc la transmisiile cu axe paralele şi ramuri deschise, cu sau fără
rolă de întindere, iar curele cu dantură pe ambele părţi se folosesc la transmisiile cu mai mulţi arbori, dispuşi
de o parte şi de alta a curelei
Pentru o anumita tipodimensiune exista curele de lăţimi si lungimi diferite.
În secţiune dinţii au forma trapezoidala .
Dinţii curelelor pot fi trapezoidali, parabolici şi semicirculari. Profilul clasic al dintelui este cel trapezoidal, în
ultimul timp executându-se şi profile curbilinii, prin aceasta urmărindu-se reducerea zgomotului şi
îmbunătăţirea modului de intrare şi ieşire în şi din angrenare. Profilul cu formă parabolică permite utilizarea
dinţilor mai înalţi în raport cu profilul tradiţional. Această caracteristică, cumulată cu robusteţea dintelui,
permite o creştere a sarcinii transmise şi o reducere a interfeţei create în timpul angrenării dintre dintele
curelei şi cel al roţii. Forma parabolică determină următoarele avantaje: reducerea zgomotului în funcţionare;
sporirea puterii transmise; creşterea rezistenţei dintelui la oboseală.
Curelele sincrone cu dinţi trapezoidali, considerate standard, se utilizează în transmisii de până la 150 CP şi
16.000 rot/min. Dimensiunile standardizate sunt cele corespunzătoare pasului de (în ţoli): 0,080 (2/25); 0,125
(1/8); 0,200 (1/5); 0,375 (3/8); 0,500 (1/2); 0,875 (7/8) şi 1,25 (1 1/4), conform ISO 5294, 5295, 5296.
Curelele cu dinţi curbilinii, cu profil parabolic şi semicircular, pot prelua sarcini mai mari cu până la 200%
faţă de cele cu dinţi trapezoidali. Se regăsesc în gama de dimensiuni corespunzătoare paşilor de 3, 5, 8 şi 14
mm.
1 Mlădinescu, T. Organe de masini și mecanisme, pag 152
2 Mlădinescu, T. Organe de masini și mecanisme, pag 152
15

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 16/54
Parametrii curelelor dinţate
Parametrii curelelor dinţate sunt:1
• pasul p – distanţa dintre axele de simetrie ale doi dinţi consecutivi, măsurat pe porţiunea
rectilinie a curelei;
• lăţimea b - dimensiunea transversală a curelei;
• lungimea de divizare (primitivă) Lp – lungimea măsurată pe linia de divizare (linia pe
• care cureaua îşi păstrează lungimea constantă, chiar în situaţia înfăşurării pe roţi);
• numărul de dinţi :
• înălţimea totală hc.
Alte elemente geometrice ale curelei sunt:
· înălţimea dintelui h z – distanţa dintre linia de cap iș cea de picior a dintelui;
· lăţimea piciorului dintelui s z .
Roţile curelelor dinţate, asemănătoare roţilor dinţate, au principalele elemente geometrice:
2
· diametrul primitiv D p, definit prin relaţia D p1,2 = mz 1,2, în care m este modulul danturii;
· diametrul de cap d e, definit prin relaţia d e1,2 = m( z 1,2 – x1,2);
· raza de rotunjire a capului dintelui r 1 = k 1m;
· raza de rotunjire a piciorului dintelui r 2 = k 2m;
· înălţimea capului dintelui h = y1m.
1 Mlădinescu, T. Organe de masini și mecanisme, pag 152
2 Mlădinescu, T. Organe de masini și mecanisme, pag 153
16

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 17/54
2.6 .Dimensionarea transmisiei prin curea dinţată
Pentru dimensionarea unei transmisii prin curele dinţate sunt necesare următoarele date iniţiale :1
• puterea utila de transmis =0,2 [kw] [dată prin tema de proiect]
• tura ia de intrareț =60-80 [rot/min] [dată prin tema de proiect]
• raportul de transmitere i=1,5 [dată prin tema de proiect]
• distanta dintre axe a=500 [dată prin tema de proiect]
• tipul maşinii de antrenare si antrenata [motor electric]
• modul de întindere a curelei. [cu rolă de întindere]
Pornind de la aceste date, trebuie determinaţi si verificaţi următorii parametrii:
Puterea de calcul N c rezultata din modificarea puterii utile , inând cont de condi iile reale de funcţionareț ț 2
Nu = 0,2 [kw]
unde: C- coeficient total de corectie 3
- coeficient de siguran a care tine cont de tipul ma inilor de antrenare si antrenataț ș [Tab. 1]
c1= 1,3 [pentru motor de curent continuu, func ionare până la 8 ore/zi în regim de lucru alternativ]ț
1 M Gafitanu, Organe de masini , Vol 2, pag. 401
2 M Gafitanu, Organe de masini , Vol 2, pag. 403
3 M Gafitanu, Organe de masini , Vol 2, pag. 402
17

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 18/54
Tabelul 1. 1 Coeficientul de funcționare Cf
Tipul mașinii de acționare a transferului
1 M Gafitanu, Organe de masini , Vol 2, pag. 402
18

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 19/54
M o t o r d e c u r e n t a l t e r n a t i v m o n o f a z a t s a u t r i f a z a t
M o t o r
d e c u r e n t c o n t i n u u
M o t o r c u a r d e r e i n t e r n a
T u r b i n a c u n < 6 0 0 r o t / m i n
M o t o r d e c u r e
n t a l t e r n a t i v c u m o m e n t d e p o r n i r e r i d i c a t
M o t o r d e c . c .
c o m p o u n d
M a ș i n
i c u a b u r s a u m o t o r c u a r d
e r e i n t e r n a M
o t o r d e c . a . c u r
o t o r i n s c u r t - c i r c u i t c u p o r n
i r e d i r e c t a s a u c u d u b l a c o
l i v i e d e v e v e r i ă ț
M o t o r d e c . c . s e r i e
c u a r d e r e i n t e r n a c
u u n c i l i n d r u
19

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 20/54
Felul încărcării
Numărul de ore de lucru al transmisiei, din 24 de orepana la
88-16
peste16
pana la8
8-16peste
16pana la
88-16
peste16
Regim delucruaproape
constantMp ≤1,2Mtn
1,0 1,1 1,4 1,1 1,2 1,5 1,2 1,4 1,6
Variațiineînsemnate aleregimului delucruMp ≤1,5Mtn
1,1 1,2 1,5 1,2 1,4 1,6 1,3 1,5 1,7
Variațiineînsemnate
aleregimului delucru
M p ≤2,0Mtn
1,2 1,3 1,6 1,3 1,5 1,7 1,4 1,6 1,9
Regim delucrualternativ
M p ≤3,0Mtn
1,3 1,5 1,7 1,4 1,6 1,8 1,5 1,7 2,0
- coeficient ce depinde de tipul transmisiei multiplicatoare sau demultiplicatoare [Tab. 2]
c2=0,1 [pentru o transmisie demultiplicatoare, cu i=0,7]
Tabelul 21
Raportul c2
>1,00 01,00-0,81 0
0,80-0,58 0,100,57-0,41 0,200,40-0,29 0,300,28 si mai putin 0,40
- coeficient de exploatare [Tab. 3]
C3= 0 [pentru funcţionare 8-16 ore/zi]
Tabelul 32 Coeficient de exploatare
1 M Gafitanu, Organe de masini , Vol 2, pag. 403
2 M Gafitanu, Organe de masini , Vol 2, pag. 402
20

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 21/54
Timp defunctionare
24 ore /zi 8-16 ore/zi Functionareocazionala
0,2 0 -0,2
- coeficient care depinde de modul de întindere a curelei1
= 0.2 - întindere cu rola
= 0 - întinderea se face cu una din rotile transmisiei
Alegem = 0.2
Rezultă:
= 1,3 + 0,1 + 0 + 0,2 = 1,6
Nc = Nu · C = 1,6 · 0,2 = 0,32 [kw]
Tipul curelei se alege în functie de puterea de calcul si tura ia de intrare din figura 6.ț
Fig. 62
Vom alege o curea de tip XL pentru Nc=0,2 şi n=800 rot/min
Raportul de transmitere i. Se verifica daca este mai mic decât raportul de transmitere maxim impus detipul curelei tab. 4.
Tabelul 43
Tipul Pasul z1 minim D p1 minim Raportul de transmitere
1 M Gafitanu, Organe de masini , Vol 2, pag. 402
2 M Gafitanu, Organe de masini , Vol 2, pag. 404
3 M Gafitanu, Organe de masini , Vol 2, pag. 401
21
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 22/54
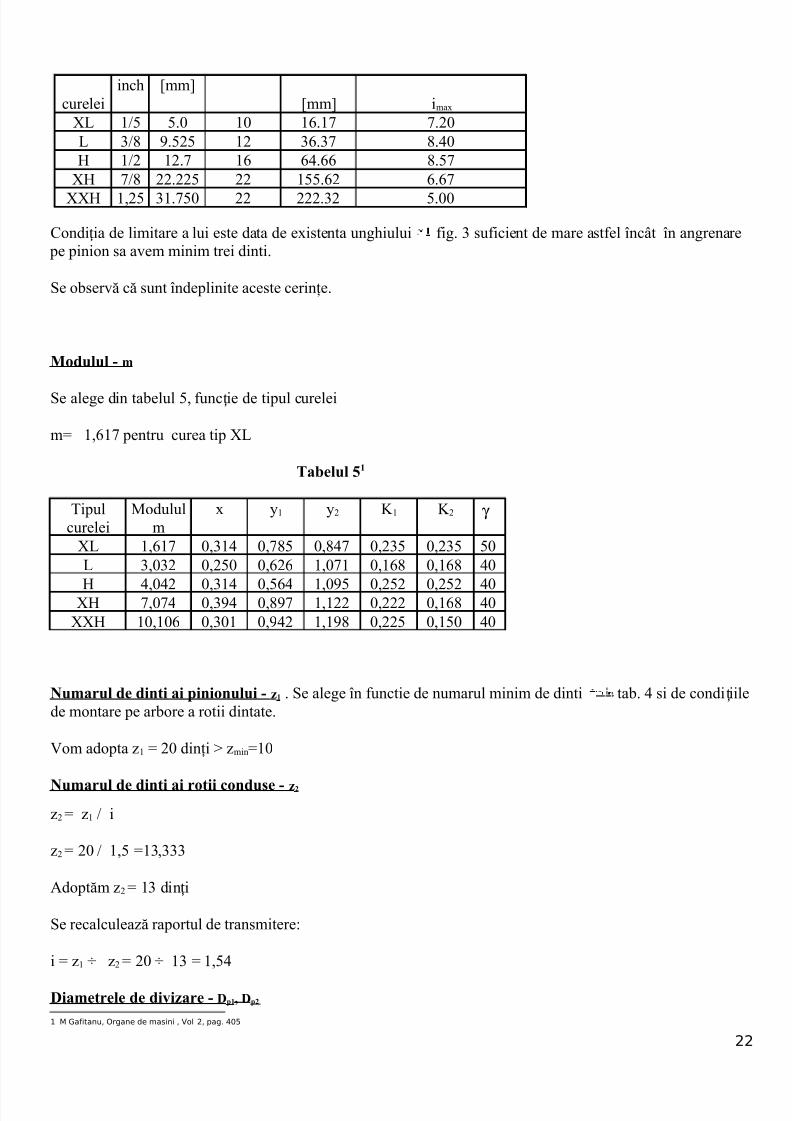
curelei [mm] imax
inch [mm]
XL 1/5 5.0 10 16.17 7.20L 3/8 9.525 12 36.37 8.40H 1/2 12.7 16 64.66 8.57
XH 7/8 22.225 22 155.62 6.67
XXH 1,25 31.750 22 222.32 5.00
Condi ia de limitare a lui este data de existenta unghiuluiț fig. 3 suficient de mare astfel încât în angrenare pe pinion sa avem minim trei dinti.
Se observă că sunt îndeplinite aceste cerinţe.
Modulul - m
Se alege din tabelul 5, func ie de tipul cureleiț
m= 1,617 pentru curea tip XL
Tabelul 51
Tipulcurelei
Modululm
x y1 y2 K 1 K 2 γ
XL 1,617 0,314 0,785 0,847 0,235 0,235 50L 3,032 0,250 0,626 1,071 0,168 0,168 40
H 4,042 0,314 0,564 1,095 0,252 0,252 40XH 7,074 0,394 0,897 1,122 0,222 0,168 40XXH 10,106 0,301 0,942 1,198 0,225 0,150 40
Numarul de dinti ai pinionului - z 1 . Se alege în functie de numarul minim de dinti tab. 4 si de condi iileț de montare pe arbore a rotii dintate.
Vom adopta z1 = 20 dinţi > zmin=10
Numarul de dinti ai rotii conduse - z 2
z2 = z1 / i
z2 = 20 / 1,5 =13,333
Adoptăm z2 = 13 din iț
Se recalculează raportul de transmitere:
i = z1 ÷ z2 = 20 ÷ 13 = 1,54
Diametrele de divizare - D
p1, D
p2
1 M Gafitanu, Organe de masini , Vol 2, pag. 405
22

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 23/54
1
D p1=1,617 · 20 = 32,34 mm
D p2=1,617 · 13 = 21,021 mm
Distanta axiala - a aleasa constructiv i este de 500mm i este limitata astfelș ș
0,5 · (32,34 + 21,021) + 2 · 1,617 = 29,9145≤500≤106,222
Condi ia este respectatăț
Lungimea curelei - L
2
L=2 · 500 + 1,57 · (32,34+21,021) + (32,34+21,021)2 / 4 · 500 = 1085,2 mm
Lungimea calculata se rotunjeste la un numar întreg de pasi dupa care se recalculeaza distanta axiala.
1085,2 / 1,617 = 671,12 pa iș
Adoptăm 670 pa iș
Rezultă Lc= 670 · 1,617 = 1083,39 mm
Distanţa dintre axe recalculată va fi a= 1083,39 · 500 / 1085,2 = 499,17 mm
Latimea curelei - b
3
unde: -puterea de calcul = 0,2 KW
-puterea transmisa de o curea lata , tip XL, de 25.4 mm [kw] - fig.7.
N0 = 0,8 KW
1 M Gafitanu, Organe de masini , Vol 2, pag. 405
2 M Gafitanu, Organe de masini , Vol 2, pag. 403
3 M Gafitanu, Organe de masini , Vol 2, pag. 403
23

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 24/54
1Fig. 7
z- numarul de dinti ai rotii conducatoare
-coeficient de latime pentru curele cu latime diferita de 1 inch (25,4 mm)
2
p se masoara în inch.
P= 1,617 / 25,4 = 0,064 inci
Rezultă k b = 0,878 · 0,0641,217 = 0,031
-coeficientul numarului de dinti în angrenare ai rotii mici de curea tabelul 6.
z0 3 4 5 >6k z 0.4 0.6 0.8 1
Tab. 6
3
4
1 Gafitanu, M. s.a. Organe de masini, pag. 4042 Gafitanu, M. s.a. Organe de masini, pag. 403
3 Gafitanu, M. s.a. Organe de masini, pag. 403
4 Gafitanu, M. s.a. Organe de masini, pag. 403
24

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 25/54
1
b = π · arcsin[1,617 · (20-13] / (2 · 499,17) = 1,83
z0 = 1,83 · 20 / (2 · π) = 5,82
Din tabelul 6 k z = 0,4
Rezultă b ≥ 0,2 / (0,8 · 0,031 · 0,6) = 13,4 mm
În figura 8 este prezentata geometria rotilor pentru curele dintate.
Fig. 8 2
3Relatiile de calcul pentru determinarea elementelor geometrice sunt:
Dp = m · z 4
D p1 = 1,617 · 20 = 32,34mm
D p2 = 1,617 · 13 = 21,021mm
Dc= m · (z – x) 5
x = 0,314 din Tab.7 pentru curea XL
Dc1= m · (z1 – x) = 1,617 · (20-0,314) = 31,83 mm
Dc2= m · (z1 – x) = 1,617 · (13-0,314) = 20,51 mm
h = y1 · m 6
1 Gafitanu, M. s.a. Organe de masini, pag. 403
2 Gafitanu, M. s.a. Organe de masini, pag. 405
3 Gafitanu, M. s.a. Organe de masini, pag. 4054 Gafitanu, M. s.a. Organe de masini, pag. 405
5 Gafitanu, M. s.a. Organe de masini, pag. 405
6 Gafitanu, M. s.a. Organe de masini, pag. 405
25

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 26/54
y1 = 0,785 din Tab.7 pentru curea XL
h = 0,785 · 1,617 = 1,27 mm
l0 = y2 · m 1
y2 = 0,847 din Tab.7 pentru curea XL
l0 = 0,847 · 1,617 = 1,37
r1 = k 1 · m 2
k 1 = 0,235 din Tab.7 pentru curea XL
k 1 = 0,235 · 1,617 = 0,38 mm
r2 = k 2 · m 3
k 1 = 0,235 din Tab.7 pentru curea XL
k 1 = 0,235 · 1,617 = 0,38 mm
Tabelul 7 4
Tpul
curelei
Modulul
m
x y1 y2 K 1 K 2 γ
XL 1,617 0,314 0,785 0,847 0,235 0,235 50L 3,032 0,250 0,626 1,071 0,168 0,168 40H 4,042 0,314 0,564 1,095 0,252 0,252 40
XH 7,074 0,394 0,897 1,122 0,222 0,168 40XXH 10,106 0,301 0,942 1,198 0,225 0,150 40
1 Gafitanu, M. s.a. Organe de masini, pag. 4052 Gafitanu, M. s.a. Organe de masini, pag. 405
3 Gafitanu, M. s.a. Organe de masini, pag. 405
4 Gafitanu, M. s.a. Organe de masini, pag. 405
26

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 27/54
27

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 28/54
CAPITOLUL III
PREZENTAREA PROIECTULUI 3.1. Prezentarea proiectului la nivel de schema bloc
28
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 29/54
Modul de functionare a schemei de automatizare
Functionarea schemei de automatizare se realizează prin acţionarea butonului de pornire Bp,prin care este
alimentată bobina releului intermediar Ri 1,ce memorează momentul de început al deplasării părţi metalice
lipite pe exteriorul curelei,care înlocuieşte masa de lucru de la o maşină-unealtă.
Senzorul SP 1 citeşte prezenţa lamelei metalice şi va închide contactul normal deschis,permiţând alimentarea
bobinei releului intermediar Ri2 şi a releului de timp MET 13 legat în paralel cu Ri2,ceea ce declanşează
mişcarea de avans rapid cu o turaţie mare.
La trecerea lamelei metalice prin apropierea senzorului Sp 2 se opreşte avansul rapid,începând deplasarea
tehnologică cu o turaţie mică realizată de releul intermediar Ri3 şi releul de timp Rti3’.
Când se termină avansul tehnologic,senzorul Sp 3 comandă mişcarea de retragere rapidă prin schimbareasensului de rotaţie cu o temporizare de 1s ,lucru necesar decuplării bobinei releului intermediar Ri4 ,până la
senzorul Sp1 va începe un nou ciclu sau poate fi oprit prin butonul de stop.
Am folosit trei relee de timp MET 13 cu temporizare de întârziere la acţionare,dar montate în paralel cu
releele intermediare ,deoarece RI-13 nu are suficiente contacte ND disponibile pentru a-mi putea realiza
funcţonarea schemei de automatizare.
În continuare,voi descrie echipamentele electrice prezente in schema electrică a proiectului de licenţă ,chiar de
generalităţi până la anumite calcule legate de parametri optimi de functionare a transformatorului.
29
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 30/54
3.2. Traductoare de pozitie si deplasare ( senzori inductuvi )1
Un senzor inductiv de proximitate are ca principiul de funcţionare compus dintr-un circuit oscilant LC,
un evaluator de semnal şi un amplificator de comutaţie. Bobina acestui circuit oscilant generează un câmp
electromagnetic alternativ de înaltă frecvenţă, care este emis la faţa senzorială a dispozitivului. La apariţia
unui obiect metalic (declanşator) în apropierea feţei sensibile, sunt generaţi curenţi turbionari. Pierderile
rezultate consumă energie din circuitul oscilant şi reduc oscilaţiile,iar circuitul evaluator de semnal
converteşte această informaţie în semnal bine definit.
Majoritatea senzorilor inductivi SICK sunt caracterizaţi de frecvenţe mari de comutaţie şi curenţi mari. Ei
sunt disponibili ca DC cu 3/4-fire, DC cu 2-fire, AC/DC cu 2-fire şi senzori NAMUR conform cu EN 50 227.
Sunt puse la dispoziţie mai multe variante de senzori de proximitate inductivi, şi anume: seria miniaturală,
seria standard, seria scurtă, seriile avansate, seriile Triplex, seriile INOX şi seriile pentru medii dure.Exemplu de senzor de proximitate
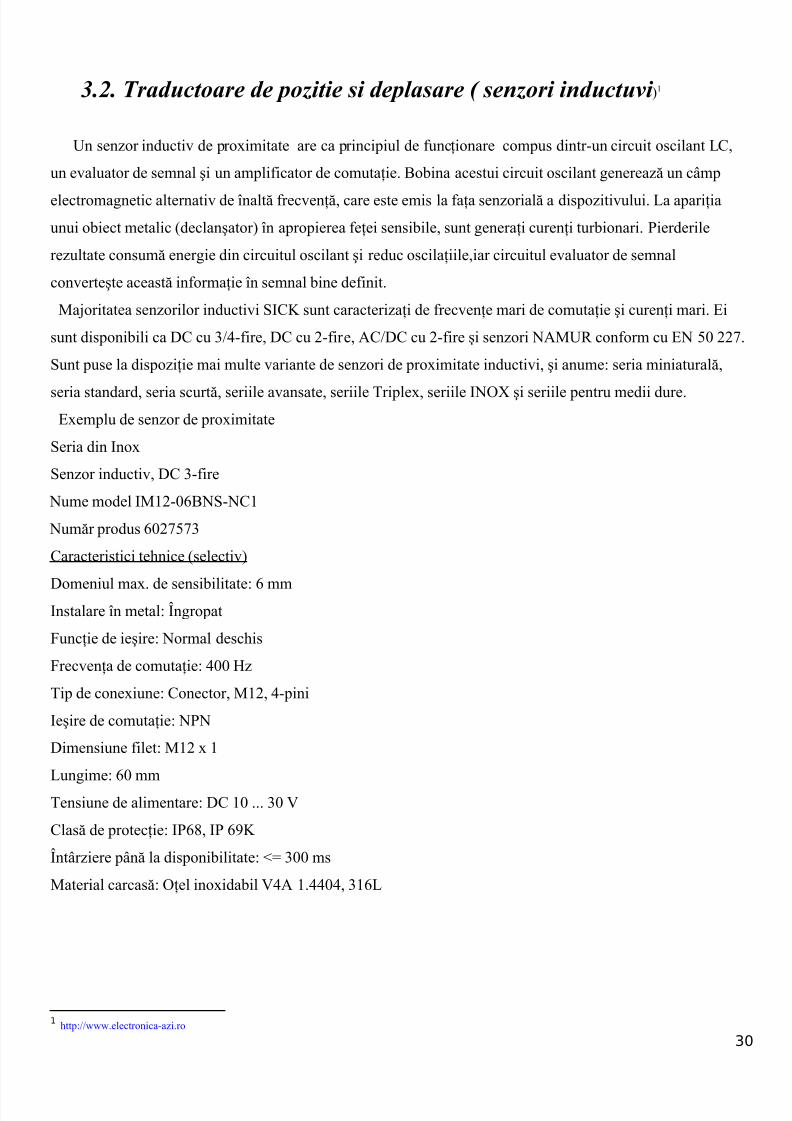
Seria din Inox
Senzor inductiv, DC 3-fire
Nume model IM12-06BNS-NC1
Număr produs 6027573
Caracteristici tehnice (selectiv)
Domeniul max. de sensibilitate: 6 mmInstalare în metal: Îngropat
Funcţie de ieşire: Normal deschis
Frecvenţa de comutaţie: 400 Hz
Tip de conexiune: Conector, M12, 4-pini
Ieşire de comutaţie: NPN
Dimensiune filet: M12 x 1
Lungime: 60 mmTensiune de alimentare: DC 10 ... 30 V
Clasă de protecţie: IP68, IP 69K
Întârziere până la disponibilitate: <= 300 ms
Material carcasă: Oţel inoxidabil V4A 1.4404, 316L
1 http://www.electronica-azi.ro
30
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 31/54
1
Fig 9. Senzori inductive( www.electronica-azi.ro)
Am ales senzori de proximitate pentru a pune în evidenţă marimea deplasarii organului mobil sau pozitia
acestuia în raport cu partea fixa a standului , de unde si denumirea de traductoare de deplasare sau traductoare
de pozitie.Definim in continuare notiunile de baza pe care le vom folosi:
I. Deplasarea – marimea care prezintă schimbarea pozitiei unui punct fata de un sistem de referinta.
II. Pozitia –din punctul de vedere al pozitiei mai definim proximitatea- desemneaza calitatea unui
corp de a se afla in imediata apropiere a unei pozitii date.
Masurarea preciziei dimensionale si de forma pieselor pote fi inclusa si ea in categoria masurarilor de
deplasare.
Clasificarea sistemelor de masurare a deplasarii 2
a. Dupa forma traiectoriei:
- liniare;
- rotative.
b. Dupa modalitatea de reprezentare efectiva a semnalului de iesire:
- anaogice;
1 http://www.electronica-azi.ro
2 AUTOMATIZARI PENTRU MASINI-UNELTE, UNIVERSITATEA „LUCIAN BLAGA” DIN SIBIU,2009, Prof. Univ. Dr. Ing. Laurean
BOGDAN
31

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 32/54
- numerice (digitale).
In cazul sistemelor analogice marimea deplasarii, intre un interval dat este reprezentata in mod
proportional prin amplitudinea sau durata unui semnal electric (current, tensiune), forma avantajoasa pentru o
prelucare ulterioara. In acest caz se realizeaza o corespondenta biunivoca intre domeniul de masurare si
valorile dintre intervalul semnalului de iesire.
Sistemele numerice (digitale) utilizeaza in funcţionare impulsurile de tensiune definite ca treceri
successive de la nivelul logic 0 la nivelul logic 1 sau invers. Nivelele 1 si 0 logic sunt date de un anumit nivel
al tensiunii electrice propriu fiecarui fabricat. De obicei pentru nivelul 1 logic se utilizeaza valoarea d 5 V (in
tehnologie TTL) sau 15 V (in tehnologie CMOS). Informatia furnizata de traductoarele numerice poate fi
continuta in numarul de impulsuti, durata si frecventa acestora, sau poate fi codificata intr-un anumit mod de
succesiune a impulsurilor (codificarea poate presupune de asemenea ,modificarea duratei si/sau frecventei
acestora). Sistemele numerice de masyrare a deplasarii reprezintă următoarele avantaje:
- valoarea deplasarii poate fi dirijata direct spre echipamentul de prelucrare numerica a datelor;
- semnalul de masura este imun la perturbatii de amplitudine rezonabila, sistemul castigand in acuratele
si putandu-se astfel elimina blocurile de filtrare;
- sunt eliminate blocurile de conversie analog/digitala (A/D), semnamul provenit de la aceste sisteme de
masurare putand fi prelucrat direct in echipamentul de comanda numerica.
c. Dupa modalitatea de definire a pozitiei fata de sietemul de referinta considerat fix (pozitia 0):
• Sisteme analogice:
- absolute
- ciclic absolute
• Sisteme digitale:
- absolute
- inclementare
- ciclic absolute
d. Dupa fenomemul care sta la baza conversiei traductoarelor de pozitie si deplasare pot fi:
32
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 33/54
- resistive;
- inductive;
- capacitive;
- optice;
- ultrasonic;
- laser.
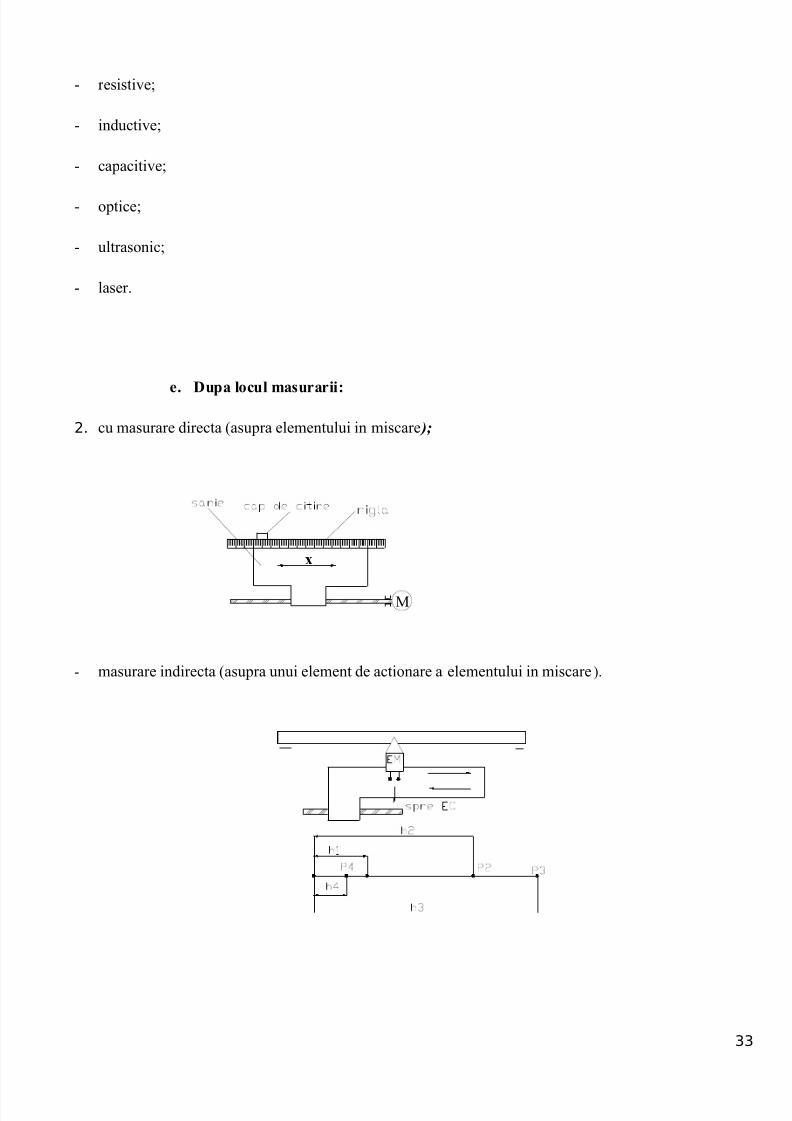
e. Dupa locul masurarii:
2. cu masurare directa (asupra elementului in miscare );
- masurare indirecta (asupra unui element de actionare a elementului in miscare).
33
x
M

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 34/54
3.3 Releele termice 1
Releul TSA 10AS este destinat protecţiei impotriva suprasarcinilor de durata ,iar principiul lor de
funcţionare se bazează pe proprietatea bimetalelor de a se deforma atunci cand temperatura acestora se
modifica.
Dacă curentul spre consumator va creste în caz de avarie ,lamela bimetalică va actiona mecanismul de
deconectare si va întrerupe alimentarea de la reţea ,care garantează o funcţionare stabilă şi prelungeşte
termenul de exploatare.
Bimetalul este o banda realizata din doua placi metalice imbinate prin sudare, lipire sau nituire,cu
coeficienţi de dilatare termica diferiţi. Prin încalzire bimetalul se curbează si intrerupe circuitul de alimentare
a instalaţiei protejate, întreruperea se realizează prin cuplarea releului termic cu un echipament de intrerupere
(contactor), releul termic întrerupe circuitul bobinei contactorului (sau al altui echipament de întrerupere) care
va intrerupe circuitul de alimentare a receptorului pe care il protejează.
Releul termic ales pentru protecţia termică a motorului este prevăzut cu rearmare, adică prevăzute sau
lipsite de dispozitivul de blocare a reanclasarii.
Dacă lipseşte dispozitivului de blocare, instalaţia protejata funcţionează instabil, fiind succesiv
conectata si deconectată ,iar reanclasarea se realizează manual sau automat.Releele termice pot fi prevăzute cu o banda metalica de compensare termica ce permite declanşarea la
valoarea impusa a intensităţii din circuit, independent de temperatura ambianta. ( -20 si + 50 °C).
Instalaţiile trifazate sunt protejate prin intermediul unui bloc de relee termice, adică al unui dispozitiv
compus din 3 bimetale montate fiecare pe câte una dintre faze care, prin intermediul unei tije comune, care va
acţiona un sistem de contacte unic.
. Dispozitivul consta in aceea ca, la lipsa deformării bimetalului dupa una din faze, săgeata rezultata
din deformarea celorlalte doua bimetale este mult amplificata, astfel incit circuitul de comanda sa fie acţionatintr-un timp mult mai scurt. Releele termice cu sau fara dispozitiv de acţionare la mersul in doua faze , sunt
folosite la protecţia la suprasarcina a motoarelor trifazate asincrone, pentru a se evita funcţionarea in doua faze
a acestora.
1 http://www.elewatt.ro
34

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 35/54
Fig. 10. Releu TSA 10A
Încălzirea lamelor bimetale unui releu termic se realizează prin:
• direct , atunci când se foloseste un şunt sau sunt parcurse de întreg curentul sau de o parte din acesta;
• indirect, dacă benzile bimetalice sunt încălzite prin conductorul de curentul supravegheat;
• mixt, bimetalele se află în serie sau în paralel cu o rezistenţă de încălzire;
• cu redactor de curent, atunci când curentul primit de aparatul supravegheat are valori mari
35

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 36/54
3.4. Motorul de curent continuu cu excitatie în serie 1
Am folosit un motor de curent continuu cu excitatie în serie datorită gamei de turatii disponibile, însă un
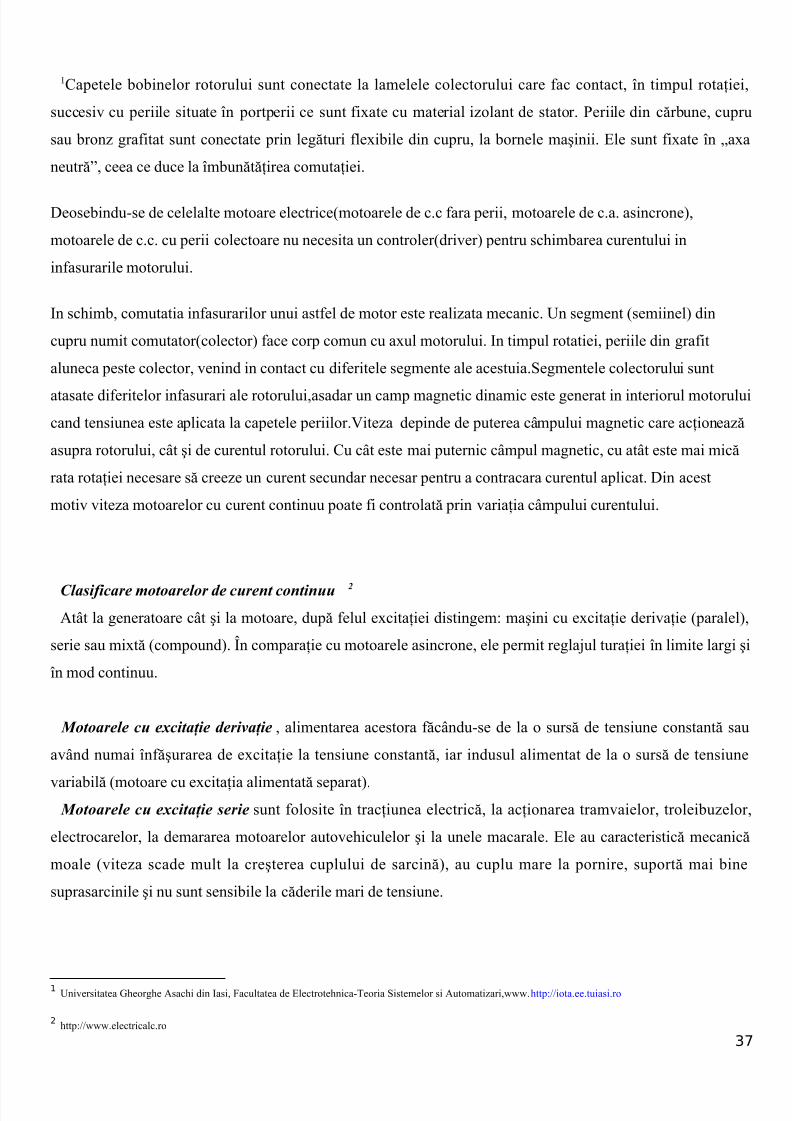
lucru necesar pentru respectarea unui ciclu normal de lucru pentru actuatorul cu curea dintată. Maşina decurent continuu este alcatuit dintr-un stator (inductor) , un rotor (indus),perii si un collector(comutator).
Fig 11. Schema de principiu a motorului de cc
Statorul este format dintr-o carcasă de fontă sau de oţel în miezul în miezul căreia sunt fixaţi polii
(principali şi auxiliari) cu bobinajele respective (inductoare) sau fără bobinaje în cazul magneţilor permanenţi
şi genereaza campul magnetic care inconjoara rotorul.
Acest camp magnetic poate fi generat in doua feluri: cu ajutorul unor magneti permanenti sau cu ajutorul
spirelor unor electromagneti.
Rotorul,denumit si armatura este realizat din una sau mai multe infasurari,iar curentul produce un câmp
magnetic care genereaza o forta electromagnetica, si ca rezultat rotorul se roteste ,iar rotatia rotorului induce o
tensiune în bobinajul rotorului. Acesta tensiune indusa are sens opus tensiunii aplicate rotorului. În timp ce
motorul se roteste mai rapid, tensiunea rezultata este aproape egala cu cea indusa. Viteza motorului va ramâneconstanta atât timp cât asupra motorului nu actioneaza nici o sarcina, Când asupra rotorului se aplica o
sarcina, tensiunea va fi redusa, dar motorul va absorbii un curent mai mare pentru a efectua lucru mecanic.
Cat timp motorul se roteste, infasurarile sunt alimentate în mod continuu cu secvente diferite, însă polii
magnetici generaţi de către rotor nu vor depasi polii generati in stator,fenomen numit comutatie.
1 http://www.electricalc.ro
36
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 37/54
1Capetele bobinelor rotorului sunt conectate la lamelele colectorului care fac contact, în timpul rotaţiei,
succesiv cu periile situate în portperii ce sunt fixate cu material izolant de stator. Periile din cărbune, cupru
sau bronz grafitat sunt conectate prin legături flexibile din cupru, la bornele maşinii. Ele sunt fixate în „axa
neutră”, ceea ce duce la îmbunătăţirea comutaţiei.
Deosebindu-se de celelalte motoare electrice(motoarele de c.c fara perii, motoarele de c.a. asincrone),
motoarele de c.c. cu perii colectoare nu necesita un controler(driver) pentru schimbarea curentului in
infasurarile motorului.
In schimb, comutatia infasurarilor unui astfel de motor este realizata mecanic. Un segment (semiinel) din
cupru numit comutator(colector) face corp comun cu axul motorului. In timpul rotatiei, periile din grafit
aluneca peste colector, venind in contact cu diferitele segmente ale acestuia.Segmentele colectorului sunt
atasate diferitelor infasurari ale rotorului,asadar un camp magnetic dinamic este generat in interiorul motoruluicand tensiunea este aplicata la capetele periilor.Viteza depinde de puterea câmpului magnetic care acţionează
asupra rotorului, cât şi de curentul rotorului. Cu cât este mai puternic câmpul magnetic, cu atât este mai mică
rata rotaţiei necesare să creeze un curent secundar necesar pentru a contracara curentul aplicat. Din acest
motiv viteza motoarelor cu curent continuu poate fi controlată prin variaţia câmpului curentului.
Clasificare motoarelor de curent continuu 2
Atât la generatoare cât şi la motoare, după felul excitaţiei distingem: maşini cu excitaţie derivaţie (paralel),
serie sau mixtă (compound). În comparaţie cu motoarele asincrone, ele permit reglajul turaţiei în limite largi şi
în mod continuu.
Motoarele cu excitaţie derivaţie , alimentarea acestora făcându-se de la o sursă de tensiune constantă sau
având numai înfăşurarea de excitaţie la tensiune constantă, iar indusul alimentat de la o sursă de tensiune
variabilă (motoare cu excitaţia alimentată separat). Motoarele cu excitaţie serie sunt folosite în tracţiunea electrică, la acţionarea tramvaielor, troleibuzelor,
electrocarelor, la demararea motoarelor autovehiculelor şi la unele macarale. Ele au caracteristică mecanică
moale (viteza scade mult la creşterea cuplului de sarcină), au cuplu mare la pornire, suportă mai bine
suprasarcinile şi nu sunt sensibile la căderile mari de tensiune.
1 Universitatea Gheorghe Asachi din Iasi, Facultatea de Electrotehnica-Teoria Sistemelor si Automatizari,www. http://iota.ee.tuiasi.ro
2 http://www.electricalc.ro
37

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 38/54
Motoarele cu excitaţie mixtă se utilizează la acţionările mecanismelor cu regim variabil, cu număr mare de
conectări şi frânare dinamică la oprire. Caracteristicile lor sunt intermediare în raport cu cele ale motoarelor
derivaţie şi serie.
Caracteristicile motoarelor de curent continuu 1
Schema electrică echivalentă a unui motor de curent continuu este ca aceea prezentată în figura de mai
jos.
În această schemă R a reprezintă rezistenţa înfăşurării rotorice ( a indusului ) a motorului de curent continuu, U
este tensiunea de alimentare a motorului iar Ia’ este curentul absorbit de motor (curentul principal din indusul
motorului ). E reprezintă tensiunea electromotoare indusă în înfăşurarea rotorică, aceasta are sens opus
curentului rotoric.
Ex este înfăşurarea de excitaţie a motorului alimentată cu tensiunea Ue iar Ie este curentul absorbit de
înfăşurarea de excitaţie.
Scriind teorema a II-a a lui Kirchhoff pentru circuitul indusului avem:
-E = R a Ia’ – U
de unde: Ia’ =a R
E U −
1 www.regie.live
38
U
Ue
Ia
’
Ie
Ra
E
Ex
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 39/54
La pornire, când turaţia motorului este nulă, tensiunea electromotoare E indusă în înfăşurarea rotorică
este nulă şi, ca urmare, curentul absorbit de motor este foarte mare, el poate fi de 6...20 de ori mai mare decât
curentul nominal. Prin urmare este necesară reducerea acestuia cu ajutorul unui reostat de pornire înseriat cu
circuitul rotoric. Curentul de pornire al motorului va fi:
pa
p R R
U I +
=
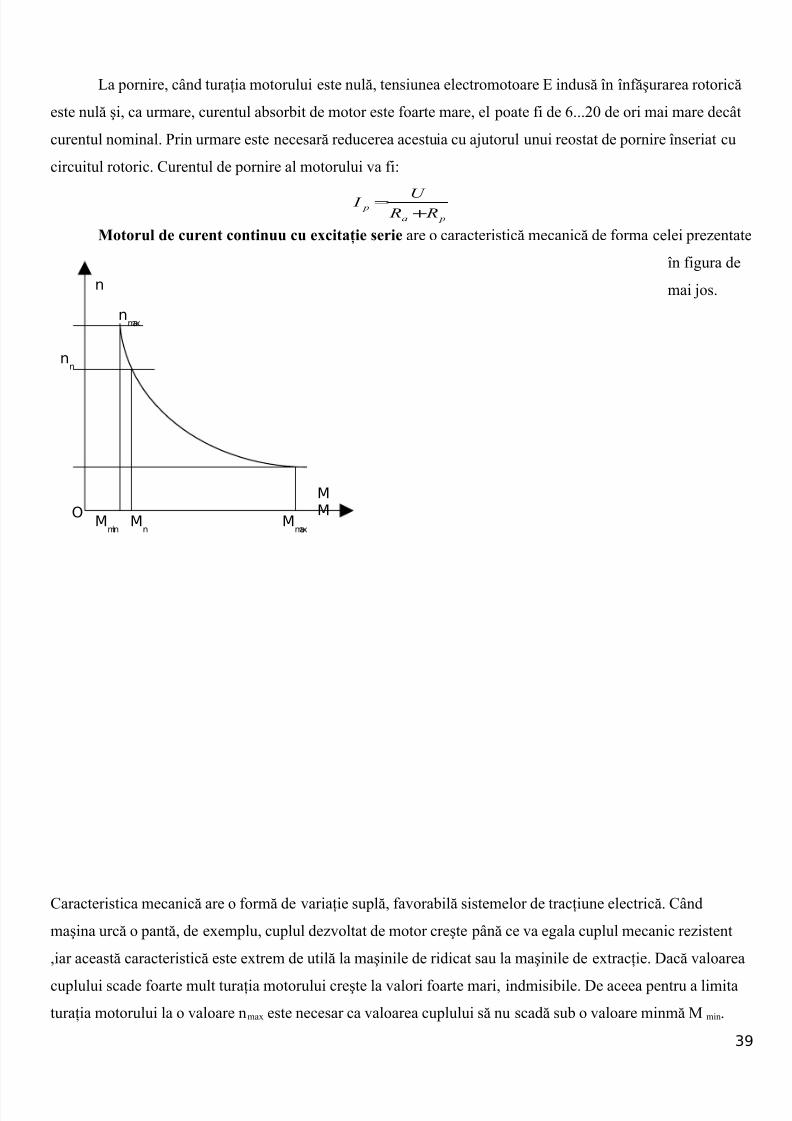
Motorul de curent continuu cu excitaţie serie are o caracteristică mecanică de forma celei prezentate
în figura de
mai jos.
Caracteristica mecanică are o formă de variaţie suplă, favorabilă sistemelor de tracţiune electrică. Când
maşina urcă o pantă, de exemplu, cuplul dezvoltat de motor creşte până ce va egala cuplul mecanic rezistent
,iar această caracteristică este extrem de utilă la maşinile de ridicat sau la maşinile de extracţie. Dacă valoarea
cuplului scade foarte mult turaţia motorului creşte la valori foarte mari, indmisibile. De aceea pentru a limita
turaţia motorului la o valoare nmax este necesar ca valoarea cuplului să nu scadă sub o valoare minmă Mmin.
39
nn
MM
n
Mmax
Mmin
Mn
nmax
O

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 40/54
Turaţia motorului cu excitaţie serie se poate regla prin modificarea tensiunii de alimentare sau prin
modificarea curentului de excitaţie.
3.5.Butoanele de comanda
Butoanele de comanda sunt aparate neautomate cu o singura pozitie de repaus, care se utilizeaza din
circuitele de comanda ale actionarilor electrice, prevazute cu unul sau mai multe grupuri de contacte normal
inchise (de oprire) si normal deschise (de pornire).
Butoanele de comanda se folosesc in instalatiile de comanda si automatizare fiind destinate comenzii
de la distanta in special a contactoarelor si releelor intermediare. Ele pot avea doua butoane care inchid sau
deschid contactele normal deschise ND, respectiv normal inchise NI sau un singur buton. Butoanele care aucontacte NI cat si ND, pot fi astfel folosite ca butoane de pornire sau/si ca butoane de pornire.
Butoanele de comanda pot fi cu revenire sau cu retinere,totuşi, cu retinere rămân în pozitia de retinere
în pozitia de comanda si dupa incetarea comenzii.
Dintre acestea cele mai utilizate sunt:
- buton de comanda cu retinere
- buton cu pipa
- buton ciuperca
- buton ciuperca cu retinere
- buton cu lampa etc
Butoanele pot avea una din următoarele culori: rosu, galben, verde, negru si alb (sau albastru deschis).
Acelasi standard prevede si functiile corespunzatoare fiecarei culori (de ex: rosu – oprire sau oprire rapida,
verde – pornire etc.).
40
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 41/54
Figura 12. Butoane de comandă
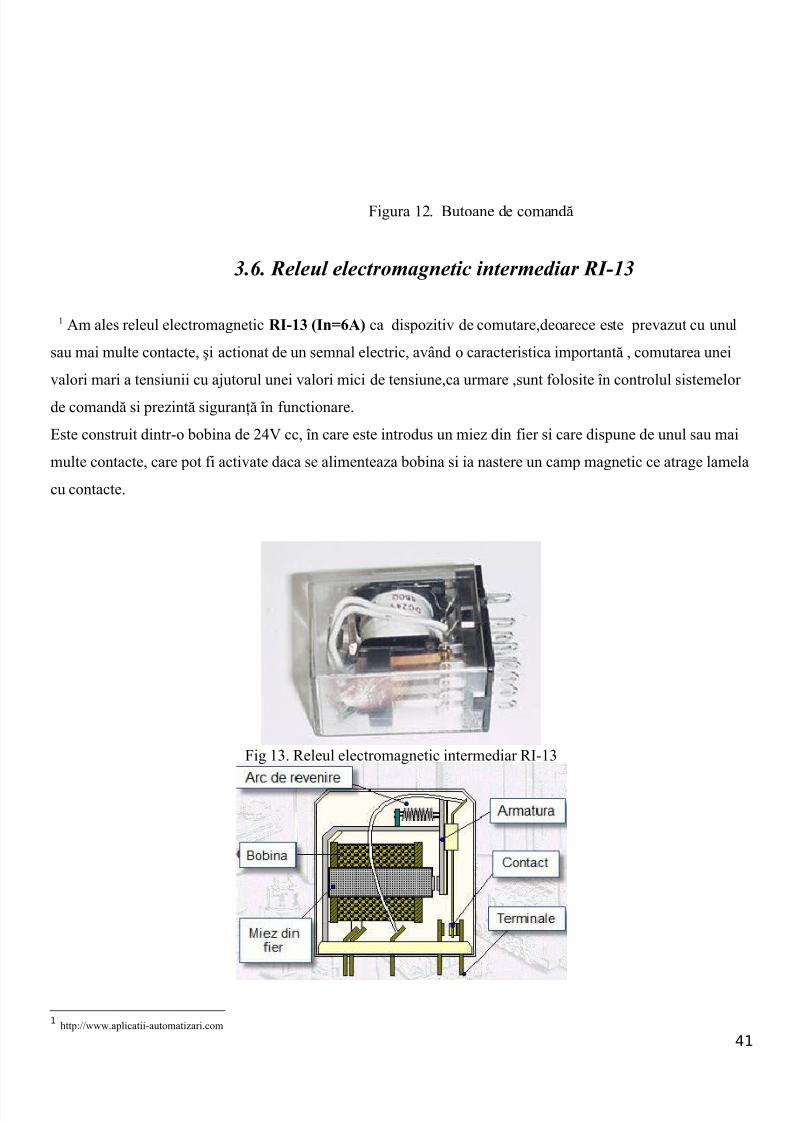
3.6. Releul electromagnetic intermediar RI-13
1 Am ales releul electromagnetic RI-13 (In=6A) ca dispozitiv de comutare,deoarece este prevazut cu unul
sau mai multe contacte, şi actionat de un semnal electric, având o caracteristica importantă , comutarea unei
valori mari a tensiunii cu ajutorul unei valori mici de tensiune,ca urmare ,sunt folosite în controlul sistemelor
de comandă si prezintă siguranţă în functionare.
Este construit dintr-o bobina de 24V cc, în care este introdus un miez din fier si care dispune de unul sau mai
multe contacte, care pot fi activate daca se alimenteaza bobina si ia nastere un camp magnetic ce atrage lamela
cu contacte.
Fig 13. Releul electromagnetic intermediar RI-13
1 http://www.aplicatii-automatizari.com
41

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 42/54
Fig 14. Parti componente RI-13
Aceste aparate asigură o anumită desfăşurare a proceselor cum ar fi: pornirea, oprirea, protecţia împotriva
regimurilor de funcţionare anormale, avariile, controlul şi reglarea proceselor de producţie sau a deplasării
organelor de maşini unelte.Aparatele se pot clasifica după funcţia pe care o au de îndeplinit, în:
- aparate de conectare care servesc la deschiderea, închiderea şi comutarea circuitelor electrice.1Ele se pot clasifica după felul acţionării (manuale şi automate), după mijlocul de stingere a arcului electric(în
ulei, în aer), sau după funcţiile îndeplinite (întrerupătoare, comutatoare, contactoare, ruptoare, etc.).
- aparate de protecţie (de obicei contra supracurenţilor): siguranţe fuzibile, relee bimetalice, relee
electromagnetice, etc.
Cel mai des întâlnit dintre releele intermediare este releul intermediar RI – 13 şi este produs în toate variantele posibile de alimentare, iar în cadrul aceluiaşi gabarit există diferite
variante constructive : rezistente la vibraţii, cu consum redus, tropicalizate, etc.
Caracteristici tehnice ale releului intermediar RI 13 :
• Tensiuni de alimentare nominale : - 6, 12, 15, 18, 24, 48, 110, 120 VCC ,
- 24, 48, 110, 220 Vca .
• Putere consumată : - max 3 W pentru c.c.,
- max 3,4 VA pentru c.a.,
- max 0,4 W pentru variante cu sensibilitate sporită.
• Variante constructive : - cu 2 sau 3 contacte,
• Curentul nominal de durată la contact : 3 - 10 A.
• Tensiunea nominală la contact : 220 V, curent alternativ sau continuu.
Viteza de comutare este de asemenea net inferioară cele mai multe aparate de comutaţie ajungând abia la
întârzieri de zecimi de secundă
Dar avantajul tehnologiei electromecanice faţă de cea electronică este dată de calitatea contactelor realizate,care datorită folosirii unor materiale de înaltă conductivitate cum ar fi argintul, ajung la rezistenţe foarte mici,
de ordinul sutimilor de Ohm.
.
1 Universitatea Gheorghe Asachi din Iasi, Facultatea de Electrotehnica-Teoria Sistemelor si Automatizari,www. http://iota.ee.tuiasi.ro
42

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 43/54
Fig 15. Reprezentarea contactelor unui releu RI - 13.
Această schema prezintă numerele alocate contactelor, iar acestea reprezinta numerele contactelor de
conectare ale releului; cifrele de la 1,2 si 3 etc. sunt numerotate pe releu de la stanga la dreapta ,dar indică
dacă este vorba de un contact normal inchis sau un contact normal deschis.
Toate contactele a caror ultima cifra este 1 sau 2 indica contacte normal inchise ,însă cifrele a caror ultima
valoare este 3 sau 4 indica contacte normal deschise.
Fig 16. Reprezentarea contactelor pe schema de montaj
3.7.Sigurante automate monopolare
Un întrerupător automat este un comutator electric automat destinat să protejeze circuitele electrice
43

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 44/54
împotriva scurtcircuitelor , astfel încât circuitul protejat să nu sufere stricăciuni din cauza efectelor termice
provocate de un curent mai mare decât cel nominal, întrerupătoarele automate trebuie reanclanşate (manual
sau automat), după înlăturarea defectului. Întrerupătoarele automate există într-o largă diversitate de mărimi,
de la întrerupătoare miniatură până la întrerupătoare de foarte mari dimensiuni, folosite la tensiuni foarte
înalte (e.g. 400kV). Numărul de poli poate fi 1, 1+N, 2, 2+N, 3, 3+N.Dupa cuvantul "mono" ne putem da seama ca aceste sigurante asigura protectia unui circuit
intrerupand un singur conductor din circuitul respectiv ,iar în instalatiile electrice acestea se ataseaza atat pe
conductorul de faza cat si pe cel de nul (cate o siguranţa pentru fiecare) sau doar pe conductorul de faza .
Figura 17. Siguranţă automată Moeller
44
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 45/54
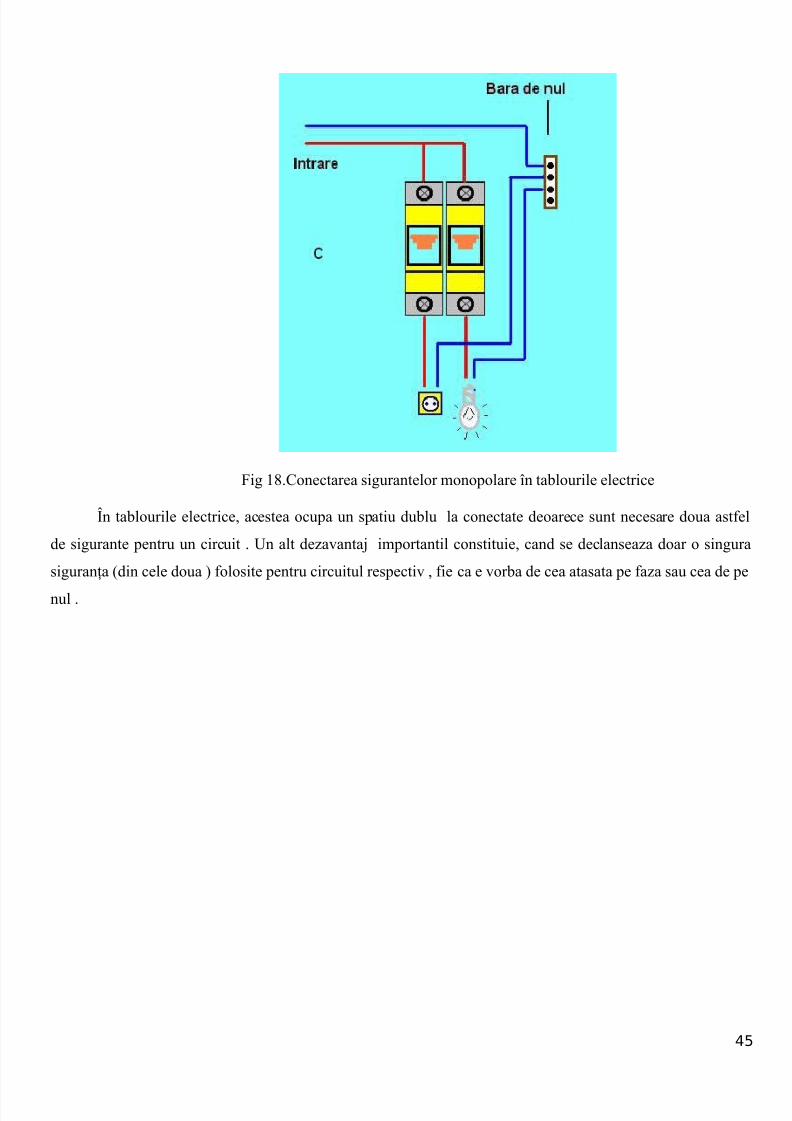
Fig 18.Conectarea sigurantelor monopolare în tablourile electrice
În tablourile electrice, acestea ocupa un spatiu dublu la conectate deoarece sunt necesare doua astfel
de sigurante pentru un circuit . Un alt dezavantaj importantil constituie, cand se declanseaza doar o singura
siguranţa (din cele doua ) folosite pentru circuitul respectiv , fie ca e vorba de cea atasata pe faza sau cea de pe
nul .
45
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 46/54
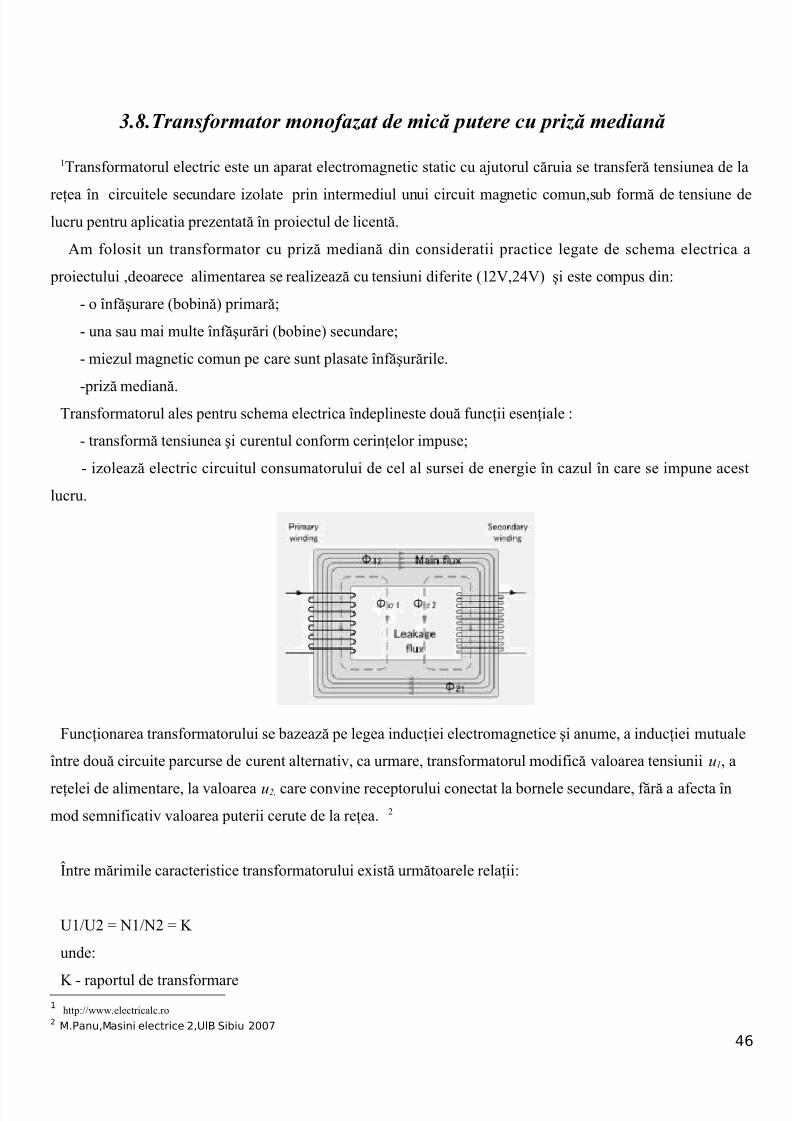
3.8.Transformator monofazat de mică putere cu priză mediană
1Transformatorul electric este un aparat electromagnetic static cu ajutorul căruia se transferă tensiunea de la
reţea în circuitele secundare izolate prin intermediul unui circuit magnetic comun,sub formă de tensiune delucru pentru aplicatia prezentată în proiectul de licentă.
Am folosit un transformator cu priză mediană din consideratii practice legate de schema electrica a
proiectului ,deoarece alimentarea se realizează cu tensiuni diferite (12V,24V) şi este compus din:
- o înfăşurare (bobină) primară;
- una sau mai multe înfăşurări (bobine) secundare;
- miezul magnetic comun pe care sunt plasate înfăşurările.
-priză mediană.Transformatorul ales pentru schema electrica îndeplineste două funcţii esenţiale :
- transformă tensiunea şi curentul conform cerinţelor impuse;
- izolează electric circuitul consumatorului de cel al sursei de energie în cazul în care se impune acest
lucru.
Funcţionarea transformatorului se bazează pe legea inducţiei electromagnetice şi anume, a inducţiei mutuale
între două circuite parcurse de curent alternativ, ca urmare, transformatorul modifică valoarea tensiunii u1, a
reţelei de alimentare, la valoarea u2, care convine receptorului conectat la bornele secundare, fără a afecta în
mod semnificativ valoarea puterii cerute de la reţea. 2
Între mărimile caracteristice transformatorului există următoarele relaţii:
U1/U2 = N1/N2 = K
unde:
K - raportul de transformare1 http://www.electricalc.ro2 M.Panu,Masini electrice 2,UlB Sibiu 2007
46

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 47/54
U1 şi U2 - tensiunea din primar, respectiv secundar
N1 şi N2 - numărul de spire din primar, respectiv secundar.
Factorul de putere
Dacă se neglijează pierderile de putere în transformator se poate spune că:P2 ≈ P1, adică U2I2cosφ2 = U1I1cosφ1 → cosφ2 ≈ cosφ1
Această relaţie arată că factorul de putere al unui transformator este determinat de sarcina conectată la
ieşirea sa şi prin urmare este improprie indicarea puterii active a unui transformator: P=UIcosφ, putând lua
valori în intervalul 0 ÷ UI
Din acest motiv în cazul transformatoarelor se indică puterea aparentă, adică: S = UI [ VA ]
Miezul feromagnetic se confecţionează din tole de tablă silicioasă puternic aliată, laminată la cald sautexturată; tolele se izolează între ele cu lac sau oxizi ceramici. Miezul feromagnetic este format din coloane şi
juguri, pe coloane fiind aşezate înfăşurările (figura 3.1).
Fig 19. Transformator monofazat.
Îmbinarea jugului cu coloanele se poate efectua prin suprapunerea sau prin întreţeserea tolelor ca în figura de jos.
Fig 20 . Îmbinarea miezurilor.
47

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 48/54
La transformatoarele mici (până la 1 kVA),miezul va avea o sectiune de formă pătrată sau
dreptunghiulară iar la transformatoarele de puteri mai mari ,miezul are secţiunea realizată cu două sau mai
multe trepte (figura ).
Fig 21. Forme ale secţiunii miezului.
Miezul feromagnetic se poate construi “cu coloane” sau “în manta” (figura ),iar înfăşurările
transformatoarelor se realizează din conductor de cupru sau de aluminiu, ele fiind izolate cu bumbac, email
sau hârtie.
În continuare se vor nota cu indice “1” toate mărimile caracteristice înfăşurării primare şi cu indice
“2” toate mărimile caracteristice înfăşurării secundare.
Fig 22.Tipuri constructive de miez.
1 În schema de funcţionare există un număr bine stabilit de echipamente electrice si anume:
• cinci relee intermediare cu o putere ,P =3*5=15W;
1 M.Panu,Masini electrice 2,UlB Sibiu 2007
48

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 49/54
• două relee de timp cu o putere de Pt=6W;
• un motor de cc ,Pm=12*3=36W
Puterea de încărcare a transformatorului este situată în jurul procentului de 80%,iar valoarea calculată sub
forma:36+6+15=67 W
67*1,2=80,4W
În concluzie, transformatorul ales va avea puterea de 100 wati,aşadar,se poate afirma că functionează în
parametri normali.
Fig 23. Transformator monofazat de mica putere 1
1 www.bizoo.ro
49
5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 50/54
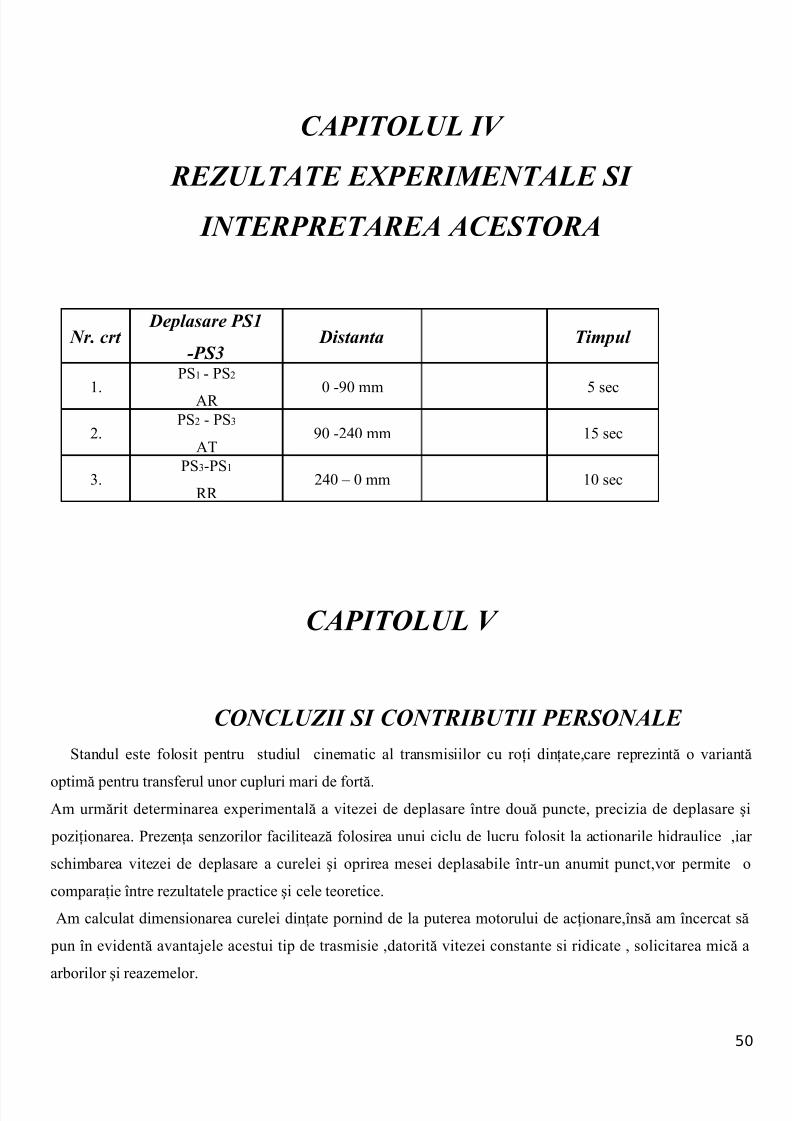
CAPITOLUL IV
REZULTATE EXPERIMENTALE SI
INTERPRETAREA ACESTORA
Nr. crt Deplasare PS1
-PS3 Distanta Timpul
1.
PS1 - PS2
AR 0 -90 mm 5 sec
2.PS2 - PS3
AT90 -240 mm 15 sec
3.PS3-PS1
RR 240 – 0 mm 10 sec
CAPITOLUL V
CONCLUZII SI CONTRIBUTII PERSONALE
Standul este folosit pentru studiul cinematic al transmisiilor cu roţi dinţate,care reprezintă o variantă
optimă pentru transferul unor cupluri mari de fortă.Am urmărit determinarea experimentală a vitezei de deplasare între două puncte, precizia de deplasare şi
poziţionarea. Prezenţa senzorilor facilitează folosirea unui ciclu de lucru folosit la actionarile hidraulice ,iar
schimbarea vitezei de deplasare a curelei şi oprirea mesei deplasabile într-un anumit punct,vor permite o
comparaţie între rezultatele practice şi cele teoretice.
Am calculat dimensionarea curelei dinţate pornind de la puterea motorului de acţionare,însă am încercat să
pun în evidentă avantajele acestui tip de trasmisie ,datorită vitezei constante si ridicate , solicitarea mică a
arborilor şi reazemelor.
50

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 51/54
Automatizarea se referă la posibilitatea modificării vitezei curelei între anumite puncte şi prin acest sistem se
poate realiza o deplasare cu viteză variabilă. Comanda pentru modificarea turaţie sistemului de acţionare este
dată de un sistem de automatizare, care transmite motorului electric efectuarea unor mişcări de lucru necesare
sistemului de transmitere a mişcării de direcţie printr-o curea dinţată.
Avantajele utilizarii acestor transmisii sunt: posibilitatea transmiterii miscarii de rotatie si a puterii la distantemari, functionare silentioasa, amortizarea socurilor, protectie la suprasarcini, posibilitatea functionarii la
turatii mari.
Am utilizat această temă pentru a arăta funcţionalitatea transmisiei printr-o curea dinţată comandată de o
instalaţie electrică de automatizare, mişcarea indicatorului fiind urmărită de trei senzori inductivi între
punctele A-B (apropiere rapidă), B-C (mişcare tehnologică) şi C-A (retragere rapidă).
51

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 52/54
CAPITOLUL VI
BIBLIOGRAFIE
1. Gafitanu, M. s.a. Organe de masini, vol. II. Bucuresti, Editura tehnica, 1983
2. Paizi, Gh. s.a. Organe de Masini si mecanisme. Bucuresti, Ed. Didactica si pedagogica, 1977
3. Mlădinescu, T. Organe de masini si mecanisme, Bucuresti, Ed. Didactica si pedagogica, 1972
4. I. Cioc, N. Catrina, N.Cristea. tehnologia fabricarii, intretinerii si repararii masinimor si aparatelor
electrice, Ed. Didactica si Pedagogica, Bucuresti 1977
5. Horovitz, B. Reductoare si variatoare de turatie, Bucuresti, Ed. tehnica, 1963
6. Horovitz, B. s.a. Transmisii si variatoare prin curele si lanturi, Bucuresti, Editura tehnica, 1971
7. Manea, Gh. s.a. organe de masini vol II, Bucuresti, Editura tehnica, 1958
8. Miloiu, Gh. s.a. transmisii mecanice moderne, Editia a II- a, Bucuresti, Editura tehnica, 1980.
9. Bodgan Laurean, Automatizari pentru masini-unelte, Universitatea „Lucian Blaga” Sibiu, 2009
10.Prof.dr.ing. Emil Simion, prof.dr.ing. Basarab Guzun, prof.dr.ing. Roman Morar, Acta Universitatis
Cibiniensis. Vol. XLI : Seria Tehnica : H. Inginerie electrica si electronica, Sibiu, Editura Universitatii
'Lucian Blaga, 1999
11.Bogdan Mihai, Notiuni generale de inginerie electrica si electronica, Sibiu, Editura Universitatii
"Lucian Blaga", 2000
12.M.Panu,Masini electrice 2,UlB Sibiu 2007
52

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 53/54
CUPRINS
Rezumat lucrare (romana & engleza)........................................................................................................................3
Cap. 1 INTRODUCERE……………………………………………………...………………………………….4
1.1 Obiectivul lucrării................................................................................................................................Error:
Reference source not found
1.2. Transportoarele cu curea dinţată .......................................................................................................4
a. Destina ie........................................................................................5ț
b. Avantaje............................................................................................7
c. Dezavantaje..........................................7
Cap. 2 TRANSMISII PRIN CURELE..............................................................................12
2.1. Caracterizare. Domenii de folosire....................................................................................12
2.2. Clasificarea transmisiilor prin curele……………….......................................................13
2.3. Tipuri de curele. Materiale. Elemente constructive.....................................................................................18
2.3.1. Clasificarea curelelor................................................................................................26
2.3.2. Performanţele transmisiilor prin curele.....................................................................27
2.3.3. Materiale pentru curele.....................................................................27
Cap. III TRANSMISII PRIN CURELE DIN ATEȚ .......................................................................12
3.1. Caracterizare. Domenii de folosire.......................................................................123.2. Parametrii curelelor din ate.......................................................................12ț
3.3. Dimensionarea transmisiei prin curea dinţată.......................................................................12
Cap. IV PREZENTAREA PROIECTULUI ........................................................................................38
4.1. Prezentarea proiectului la nivel de schema bloc................................................................38
4.2. Traductoare de pozitie si deplasare ( senzori inductuvi)…….……………………….....…….43
4.3. Clasificarea sistemelor de măsurare a deplasării…………………………………….…..……….47
4.4. Relee termice…………………………………….…..……….474.5.Motorul de curent continuu cu excita ie în serie...................................................................ț 54
4.6. Butoanele de comanda........................................................................................................65
4.7. Relee intermediare electromagnetice..............................................66
4.8. Sigurante automate monopolare........................................................................................67
4.9 Transformator monofazat de mică putere cu priză mediană............................................................67
Cap. V REZULTATE EXPERIMENTALE SI INTERPRETAREA ACESTORA.......................70
Cap. VI CONCLUZII SI CONTRIBU II PERSONALEȚ ..................................................................73
53

5/6/2018 Proiect Herlea 2011 - slidepdf.com
http://slidepdf.com/reader/full/proiect-herlea-2011 54/54
BIBLIOGRAFIE .................................................................................................................................74
54