modul 7 1
TRANSCRIPT
MODULUL 7. COORDONAREA CIRCULAŢIEI AUTOVEHICULELOR
MODULUL 7
COORDONAREA CIRCULAŢIEI AUTOVEHICULELOR
7. COORDONAREA CIRCULAŢIEI AUTOVEHICULELOR.............................................223 7.1. Introducere ............................................................................................................224 7.2. Coordonarea mişcării cu semnale prestabilite.......................................................224
7.2.1. Sistem simultan ..............................................................................................224 7.2.2. Sistem alternant..............................................................................................225 7.2.3. Sistemul progresiv ..........................................................................................225 7.2.4. Coordonarea unei reţele de străzi...................................................................229
7.3. APARATURA ŞI INSTALAŢIILE UTILIZATE LA COORDONAREA, DIRIJAREA ŞI CONTROLUL FLUXURILOR RUTIERE .............................. Error! Bookmark not defined.
7.3.1. Tipuri de automate de dirijare a circulaţiei.............. Error! Bookmark not defined. 7.3.1.1. Automate de dirijare a circulaţiei cu funcţionare prestabilită . Error! Bookmark not defined. 7.3.1.2. Automate de dirijare a circulaţiei acţionate de vehicule. .Error! Bookmark not defined. 7.3.1.3. Automate de dirijare a circulaţiei semiacţionate de vehicule. Error! Bookmark not defined. 7.3.1.4. Automate de dirijare acţionate de pietoni......... Error! Bookmark not defined. 7.3.2. Aparatură modernă de dirijare a traficului rutier.. Error! Bookmark not defined.
TEST 11.........................................................................................................................238
223
MODULUL 7. COORDONAREA CIRCULAŢIEI AUTOVEHICULELOR
7. COORDONAREA CIRCULAŢIEI AUTOVEHICULELOR
7.1. INTRODUCERE Semaforizarea unei intersecţii nu reprezintă decât un aspect izolat al problemei dirijării
automate a traficului urban. O dată cu dezvoltarea tehnologică pe planul informaticii creşte şi posibilitatea
controlului comportamentului în trafic. Informaţiile pot fi oferite participanţilor la trafic cu ajutorul mijloacelor de comunicaţie dezvoltate într-o formă optico-acustică inteligibilă. Astfel, va creşte cooperarea participanţilor la trafic în a se conforma ordinelor şi recomandările chiar şi atunci când nu constată avantaje personale imediate.
7.2. COORDONAREA MIŞCĂRII CU SEMNALE PRESTABILITE Semaforizarea unei intersecţii izolate nu reprezintă decât un aspect particular al
problemei dirijării automate a traficului rutier. Când două sau mai multe intersecţii se află de-a lungul arterei principale, este necesară o coordonare a funcţionării sistemului de dirijare a traficului din fiecare intersecţie pentru a fluidiza circulaţia de-a lungul traseului considerat.
Scopul sistemelor coordonate constă în asigurarea trecerii unui volum maxim de trafic, de-a lungul traseului, fără opriri forţate, fiind în acelaşi timp satisfăcute şi necesităţile traficului de traversare. Diferitele sisteme de coordonare liniară se consideră eficiente dacă minim 70% din numărul total al vehiculelor care se deplasează în plutoane, de-a lungul traseului considerat, prind “unda-verde”, respectiv trec prin diferitele intersecţii ale sistemului fără opriri.
În coordonarea instalaţiilor de semaforizare se utilizează mai multe sisteme de interconectare a intersecţiilor.
7.2.1. Sistem simultan Constă în faptul că de-a lungul traseului toate semafoarele dau concomitent indicaţii
identice pentru aceleaşi fluxuri de trafic. Rezultă deci, că tot traficul arterei este în mişcare pe un timp, fiind apoi oprit pentru o scurtă perioadă, la intersecţiile semaforizate, pentru a permite mişcarea traficului de traversare. Este unul dintre primele sisteme utilizate la coordonarea diferitelor instalaţii de semaforizare, având la ora actuală o aplicabilitate limitată. Se recomandă în cazul traseelor pentru care distanţele dintre intersecţii sunt destul de mari, viteza de deplasare, km/h a plutonului de vehicule calculându-se cu relaţia:
CDv
⋅=
278,0, (7.1)
unde, D – distanţa dintre intersecţii, m, iar C – durata ciclului, s. În cazul unor distanţe mici între intersecţiile traseului, mişcarea progresivă este mult
îngreunată prin viteza de deplasare relativ scăzută a vehiculelor, existând posibilitatea unor opriri frecvente. Din această cauză conducătorii sunt tentaţi la o viteză excesivă pentru a putea depăşi cât mai multe intersecţii pe durata aceluiaşi verde.
În exploatare, la realizarea unui sistem simultan se pot utiliza atât automatele de dirijare a circulaţiei cu programe fixe, cât şi cele acţionate de vehicule, asociate cu un tip de aparatură de genul programator sau centrală zonală şi programatoare, care coordonează funcţionarea automatelor de dirijare a circulaţiei în intersecţii.
224
MODULUL 7. COORDONAREA CIRCULAŢIEI AUTOVEHICULELOR 7.2.2. Sistem alternant
Semafoarele sau grupurile de semafoare adiacente, consecutive de-a lungul unui traseu dat, prezintă concomitent indicaţii contrare. Condiţia care se impune este ca vehiculele să parcurgă distanţa dintre două intersecţii într-o perioadă de timp egală cu jumătate din durata ciclului. Dacă nu se respectă viteza afişată, conducătorii vor constata că vor trebui să oprească la fiecare intersecţie.
Dacă fiecare semafor, pe o arteră de circulaţie, alternează ca funcţionare cu cel imediat adiacent, sistemul este numit simplu alternant.
Dacă, perechi de semafoare alternează ca funcţionare cu perechi adiacente, sistemul se numeşte dublu alternant.
Depinzând de distanţele dintre intersecţii, sistemul alternant nu se recomandă în cazul în care distanţele între intersecţii variază apreciabil. Atunci când distanţele prezintă o relativă constanţă, în lungul traseului considerat, acest sistem duce la rezultate bune. Viteza de deplasare a plutonului în mişcare progresivă, exprimată în km/h, pentru un sistem simplu alternant se calculează cu relaţia:
CDv
⋅=
139,0, (7.2)
unde: D – distanţa dintre intersecţii, m: C – durata ciclului, s. În cazul sistemului dublu alternant, se poate folosi
aceeaşi formulă, în care D reprezintă distanţa dintre mijloacele tronsoanelor aferente perechilor de semafoare adiacente care afişează aceeaşi fază. Lăţimea benzii de timp , care asigură o mişcare continuă vehiculelor, în sistemul dublu alternant este de obicei foarte îngustă.
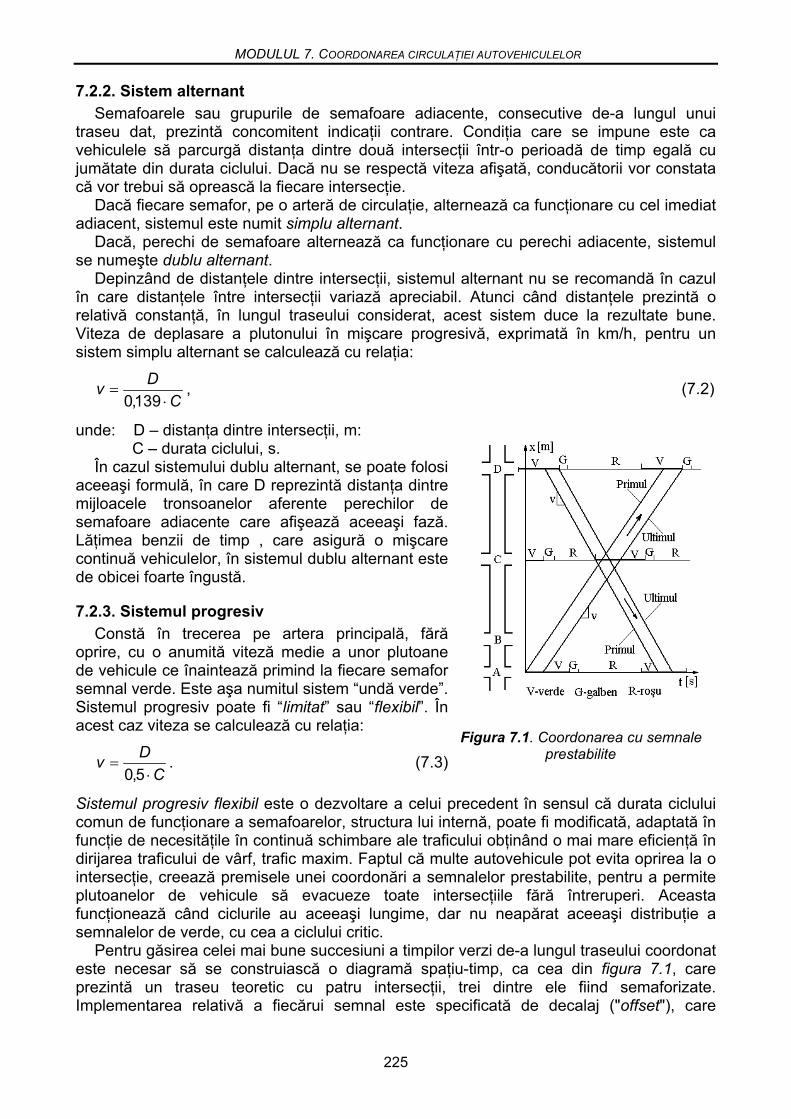
7.2.3. Sistemul progresiv Constă în trecerea pe artera principală, fără
oprire, cu o anumită viteză medie a unor plutoane de vehicule ce înaintează primind la fiecare semafor semnal verde. Este aşa numitul sistem “undă verde”. Sistemul progresiv poate fi “limitat” sau “flexibil”. În acest caz viteza se calculează cu relaţia:
CDv
⋅=
5,0. (7.3)
Figura 7.1. Coordonarea cu semnale prestabilite
Sistemul progresiv flexibil este o dezvoltare a celui precedent în sensul că durata ciclului comun de funcţionare a semafoarelor, structura lui internă, poate fi modificată, adaptată în funcţie de necesităţile în continuă schimbare ale traficului obţinând o mai mare eficienţă în dirijarea traficului de vârf, trafic maxim. Faptul că multe autovehicule pot evita oprirea la o intersecţie, creează premisele unei coordonări a semnalelor prestabilite, pentru a permite plutoanelor de vehicule să evacueze toate intersecţiile fără întreruperi. Aceasta funcţionează când ciclurile au aceeaşi lungime, dar nu neapărat aceeaşi distribuţie a semnalelor de verde, cu cea a ciclului critic.
Pentru găsirea celei mai bune succesiuni a timpilor verzi de-a lungul traseului coordonat este necesar să se construiască o diagramă spaţiu-timp, ca cea din figura 7.1, care prezintă un traseu teoretic cu patru intersecţii, trei dintre ele fiind semaforizate. Implementarea relativă a fiecărui semnal este specificată de decalaj ("offset"), care
225
MODULUL 7. COORDONAREA CIRCULAŢIEI AUTOVEHICULELOR reprezintă diferenţa dintre un timp de referinţă considerat originea diagramei spaţiu - timp şi începutul primului verde complet.
Cele două perechi de linii paralele desenate reprezintă viteza constantă sau traiectoriile primului şi ultimului vehicul din pluton, pe direcţia pe care se eliberează intersecţia, fără oprire. Diferenţa de timp dintre traiectoriile paralele în fiecare direcţie a mişcării este cunoscută sub denumirea de "bandă completă" pe direcţie.
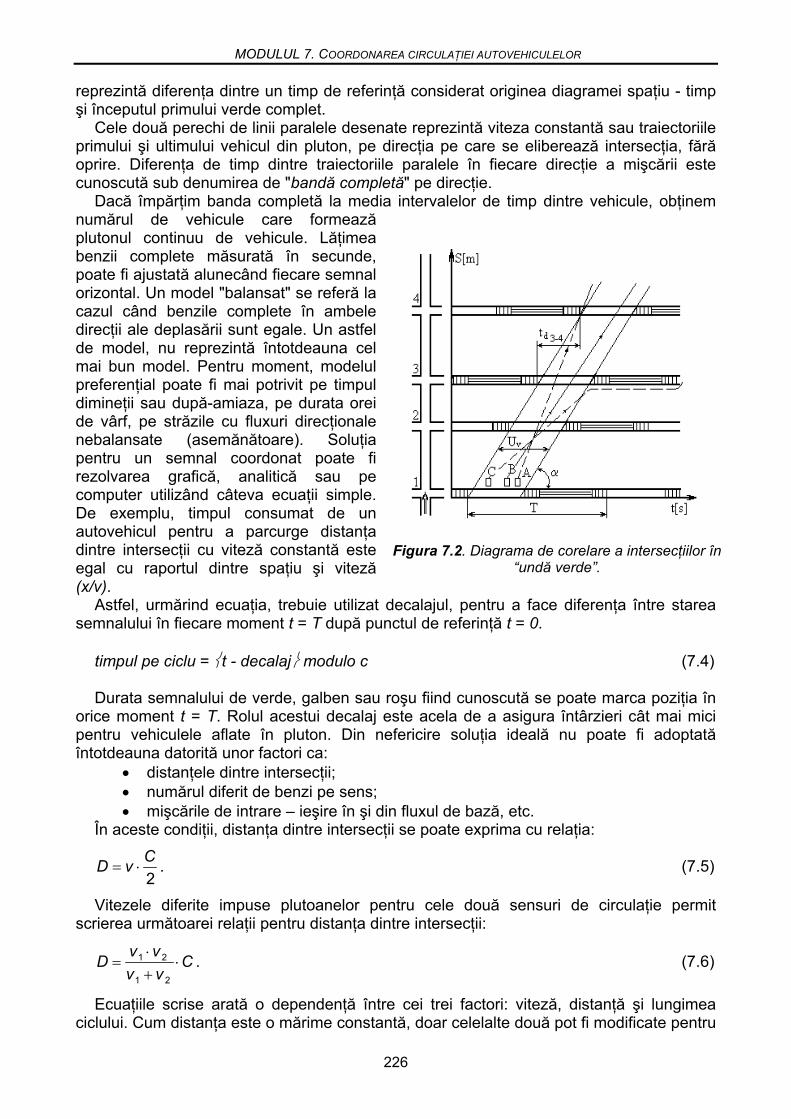
Dacă împărţim banda completă la media intervalelor de timp dintre vehicule, obţinem numărul de vehicule care formează plutonul continuu de vehicule. Lăţimea benzii complete măsurată în secunde, poate fi ajustată alunecând fiecare semnal orizontal. Un model "balansat" se referă la cazul când benzile complete în ambele direcţii ale deplasării sunt egale. Un astfel de model, nu reprezintă întotdeauna cel mai bun model. Pentru moment, modelul preferenţial poate fi mai potrivit pe timpul dimineţii sau după-amiaza, pe durata orei de vârf, pe străzile cu fluxuri direcţionale nebalansate (asemănătoare). Soluţia pentru un semnal coordonat poate fi rezolvarea grafică, analitică sau pe computer utilizând câteva ecuaţii simple. De exemplu, timpul consumat de un autovehicul pentru a parcurge distanţa dintre intersecţii cu viteză constantă este egal cu raportul dintre spaţiu şi viteză (x/v).
Figura 7.2. Diagrama de corelare a intersecţiilor în “undă verde”.
Astfel, urmărind ecuaţia, trebuie utilizat decalajul, pentru a face diferenţa între starea semnalului în fiecare moment t = T după punctul de referinţă t = 0.
timpul pe ciclu = ⎨t - decalaj⎬ modulo c (7.4) Durata semnalului de verde, galben sau roşu fiind cunoscută se poate marca poziţia în
orice moment t = T. Rolul acestui decalaj este acela de a asigura întârzieri cât mai mici pentru vehiculele aflate în pluton. Din nefericire soluţia ideală nu poate fi adoptată întotdeauna datorită unor factori ca:
• distanţele dintre intersecţii; • numărul diferit de benzi pe sens; • mişcările de intrare – ieşire în şi din fluxul de bază, etc.
În aceste condiţii, distanţa dintre intersecţii se poate exprima cu relaţia:
2CvD ⋅= . (7.5)
Vitezele diferite impuse plutoanelor pentru cele două sensuri de circulaţie permit scrierea următoarei relaţii pentru distanţa dintre intersecţii:
CvvvvD ⋅
+⋅
=21
21 . (7.6)
Ecuaţiile scrise arată o dependenţă între cei trei factori: viteză, distanţă şi lungimea ciclului. Cum distanţa este o mărime constantă, doar celelalte două pot fi modificate pentru
226
MODULUL 7. COORDONAREA CIRCULAŢIEI AUTOVEHICULELOR obţinerea unei soluţii optime, ceea ce înseamnă o viteză între anumite limite şi o lungime a ciclului care să corespundă cererii de trafic cu întârzieri minime pentru toţi participanţii.
În situaţia prezentată în figura 7.2, se poate constata că, dacă un vehicul (B) din pluton se înscrie în mişcare cu o viteză constantă egală cu viteza recomandată, el va traversa toate intersecţiile. Dacă un autovehicul (A) porneşte cu o viteză sensibil mai mare decât viteza constantă indicată, el va traversa în timp mai favorabil intersecţiile (2) şi (3) în care sunt semnale de verde, în schimb în intersecţia 4 va “prinde” semnalul de galben sau chiar roşu.
Pentru vehiculul (C) care va circula cu o viteză inferioară celei recomandate se constată că va trece continuu doar prin primele două intersecţii ajungând în intersecţia (3) la apariţia semnalului de galben şi va trebui să aştepte până la apariţia următorului semnal de verde.
În cazul ideal se va obţine o “undă verde” caracterizată de banda continuă de lăţime Uv. Practic, posibilitatea menţinerii constante a lăţimii benzii este condiţionată, în primul rând de variaţia fluxului de circulaţie care se deplasează pe direcţia undei precum şi de fluxurile opuse din fiecare intersecţie.
Într-adevăr, fluxului de circulaţie luat în studiu pe o anumită direcţie i se pot adăuga (respectiv scădea) fracţiuni de fluxuri de la un tronson de arteră la altul, ceea ce face ca fluxul de bază să se modifice continuu ca mărime şi compoziţie. Teoretic ar fi posibil ca modificările în valoarea fluxului să se compenseze pe fiecare tronson în parte şi ca atare, să apară în toate intersecţiile care se succed aceeaşi mărime a fluxului. Această situaţie nu poate fi decât o întâmplare. De-a lungul unui traseu apar fluctuaţiile de mărime şi de compoziţie, iar în intersecţie pot exista modificări şi în raportul dintre fracţiunile de fluxuri (stânga, înainte şi dreapta).
Pe de altă parte, mărimea fluxurilor opuse poate influenţa (potrivit raportului faţă de fluxul principal) lungimea ciclului şi durata semnalului de verde din fiecare intersecţie.
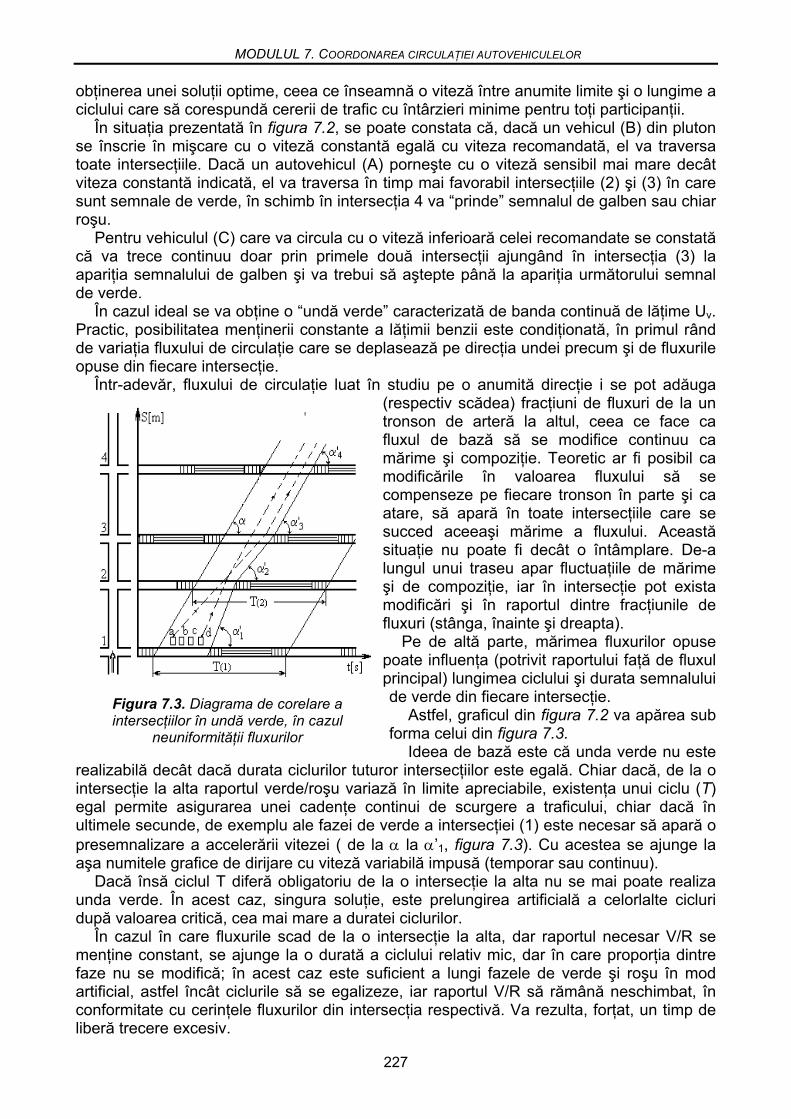
Astfel, graficul din figura 7.2 va apărea sub forma celui din figura 7.3.
Ideea de bază este că unda verde nu este realizabilă decât dacă durata ciclurilor tuturor intersecţiilor este egală. Chiar dacă, de la o intersecţie la alta raportul verde/roşu variază în limite apreciabile, existenţa unui ciclu (T) egal permite asigurarea unei cadenţe continui de scurgere a traficului, chiar dacă în ultimele secunde, de exemplu ale fazei de verde a intersecţiei (1) este necesar să apară o presemnalizare a accelerării vitezei ( de la α la α’1, figura 7.3). Cu acestea se ajunge la aşa numitele grafice de dirijare cu viteză variabilă impusă (temporar sau continuu).
Figura 7.3. Diagrama de corelare a intersecţiilor în undă verde, în cazul
neuniformităţii fluxurilor
Dacă însă ciclul T diferă obligatoriu de la o intersecţie la alta nu se mai poate realiza unda verde. În acest caz, singura soluţie, este prelungirea artificială a celorlalte cicluri după valoarea critică, cea mai mare a duratei ciclurilor.
În cazul în care fluxurile scad de la o intersecţie la alta, dar raportul necesar V/R se menţine constant, se ajunge la o durată a ciclului relativ mic, dar în care proporţia dintre faze nu se modifică; în acest caz este suficient a lungi fazele de verde şi roşu în mod artificial, astfel încât ciclurile să se egalizeze, iar raportul V/R să rămână neschimbat, în conformitate cu cerinţele fluxurilor din intersecţia respectivă. Va rezulta, forţat, un timp de liberă trecere excesiv.
227
MODULUL 7. COORDONAREA CIRCULAŢIEI AUTOVEHICULELOR
Desigur că o “undă verde” nu este şi nu poate fi valabilă numai pentru unul din sensurile de circulaţie şi pentru celălalt nu. Se pot crea uneori “unde verzi” unidirecţionale cu efect pozitiv, dar numai la orele de vârf ale fluxurilor pendulare. În plus vitezele de parcurgere trebuie să fie asemănătoare.
Dificultatea principală constă în faptul că distanţa între intersecţii variază permanent şi în limite foarte largi, ceea ce împiedică, în general, construirea unei funcţionări simetrice pe sistem de reţea, în care “undele verzi” ale celor două sensuri contrare se împletesc, viteza de regim fiind aceeaşi. După cum se vede în figură, ar putea fi integrate în sistemul undei, intersecţiile situate cel mult în poziţii de tipul (A) sau (B) adică relativ apropiate de intersecţiile principale, în cazul în care fluxurile de traversare ar fi suficient de slabe pentru a suporta o fază de liberă trecere foarte scurtă (echivalentă intervalului de galben – roşu/galben).
Modalităţile de realizare a coordonării liniare de tip “undă verde” prezentate se referă la număr redus de intersecţii, pe distanţe relativ mici, fără necesitatea modificării pe parcurs a regimului de viteze.
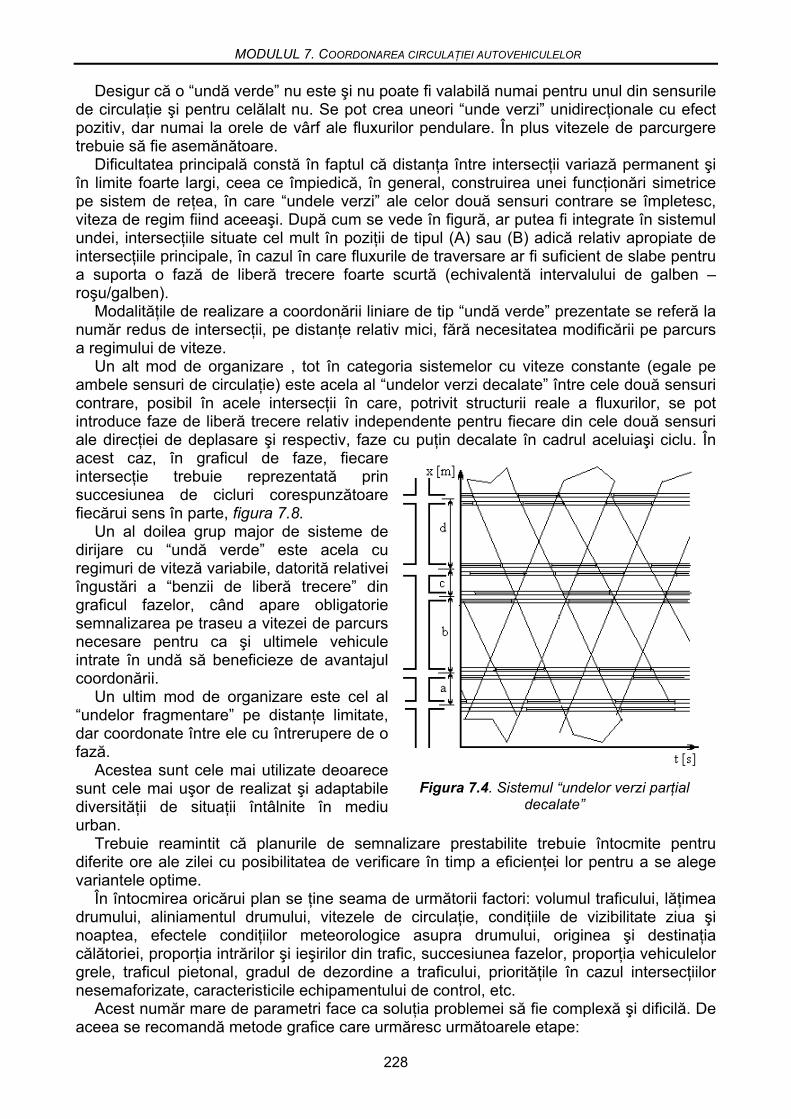
Un alt mod de organizare , tot în categoria sistemelor cu viteze constante (egale pe ambele sensuri de circulaţie) este acela al “undelor verzi decalate” între cele două sensuri contrare, posibil în acele intersecţii în care, potrivit structurii reale a fluxurilor, se pot introduce faze de liberă trecere relativ independente pentru fiecare din cele două sensuri ale direcţiei de deplasare şi respectiv, faze cu puţin decalate în cadrul aceluiaşi ciclu. În acest caz, în graficul de faze, fiecare intersecţie trebuie reprezentată prin succesiunea de cicluri corespunzătoare fiecărui sens în parte, figura 7.8.
Un al doilea grup major de sisteme de dirijare cu “undă verde” este acela cu regimuri de viteză variabile, datorită relativei îngustări a “benzii de liberă trecere” din graficul fazelor, când apare obligatorie semnalizarea pe traseu a vitezei de parcurs necesare pentru ca şi ultimele vehicule intrate în undă să beneficieze de avantajul coordonării.
Un ultim mod de organizare este cel al “undelor fragmentare” pe distanţe limitate, dar coordonate între ele cu întrerupere de o fază.
Acestea sunt cele mai utilizate deoarece sunt cele mai uşor de realizat şi adaptabile diversităţii de situaţii întâlnite în mediu urban.
Figura 7.4. Sistemul “undelor verzi parţial decalate”
Trebuie reamintit că planurile de semnalizare prestabilite trebuie întocmite pentru diferite ore ale zilei cu posibilitatea de verificare în timp a eficienţei lor pentru a se alege variantele optime.
În întocmirea oricărui plan se ţine seama de următorii factori: volumul traficului, lăţimea drumului, aliniamentul drumului, vitezele de circulaţie, condiţiile de vizibilitate ziua şi noaptea, efectele condiţiilor meteorologice asupra drumului, originea şi destinaţia călătoriei, proporţia intrărilor şi ieşirilor din trafic, succesiunea fazelor, proporţia vehiculelor grele, traficul pietonal, gradul de dezordine a traficului, priorităţile în cazul intersecţiilor nesemaforizate, caracteristicile echipamentului de control, etc.
Acest număr mare de parametri face ca soluţia problemei să fie complexă şi dificilă. De aceea se recomandă metode grafice care urmăresc următoarele etape:
228
MODULUL 7. COORDONAREA CIRCULAŢIEI AUTOVEHICULELOR • determinarea direcţiei cu volumul cel mai mare de trafic sau a traficului preferenţial; • proiectarea mişcării progresive cu ajutorul timpilor de verde calculaţi, cu viteze impuse
sau calculate fără a acorda atenţie traficului din sens opus. Ca o regulă, perioadele de sfârşit de verde sunt folosite pentru trecerea tuturor autovehiculelor din pluton. Se obţine astfel, automat o perioadă pentru intrările în trafic. O excepţie la această regulă apare atunci când plutonul trebuie să se adapteze unui număr mai mic de benzi decât cel avut în intersecţia precedentă. Desenarea benzii de trafic drept pentru sensul opus în concordanţă cu condiţiile specifice din planul de semnalizare determinat anterior. Factorii ce trebuie luaţi în considerare sunt vitezele calculate pentru această direcţie şi posibilităţile de schimbare a intervalelor de verde sau de interschimbare a fazelor. Dacă banda nu poate fi prevăzută fără “shift-uri” (puncte în care autovehiculele sunt obligate să încetinească sau să oprească uşor) trebuie examinat locul unde va fi plasat un astfel de punct. Schimbările în coordonarea direcţiei preferenţiale trebuie făcute dacă rezultă întârzieri mici pentru traficul ambelor sensuri;
• examinarea condiţiilor de părăsire a fluxului principal, căutându-se zonele cel mai bine plasate şi având cele mai bune condiţii;
• introducerea în trafic a perioadelor de verde aferente traficului pietonal; • dacă este posibil, să se adopte lăţimi diferite ale acceselor şi evacuărilor astfel încât să
nu se îngreuneze circulaţia din sens opus; • alegerea unui echipament de control al traficului cât mai adecvat situaţiei reale.
7.2.4. Coordonarea unei reţele de străzi Toate metodele de coordonare liniară prezentate pot fi aplicate, cu diferite performanţe
şi în cazul reţelelor de străzi. Un prim caz, în acest domeniu, îl
constituie categoria reţelelor compuse în întregime din străzi cu circulaţia canalizată în sens unic.
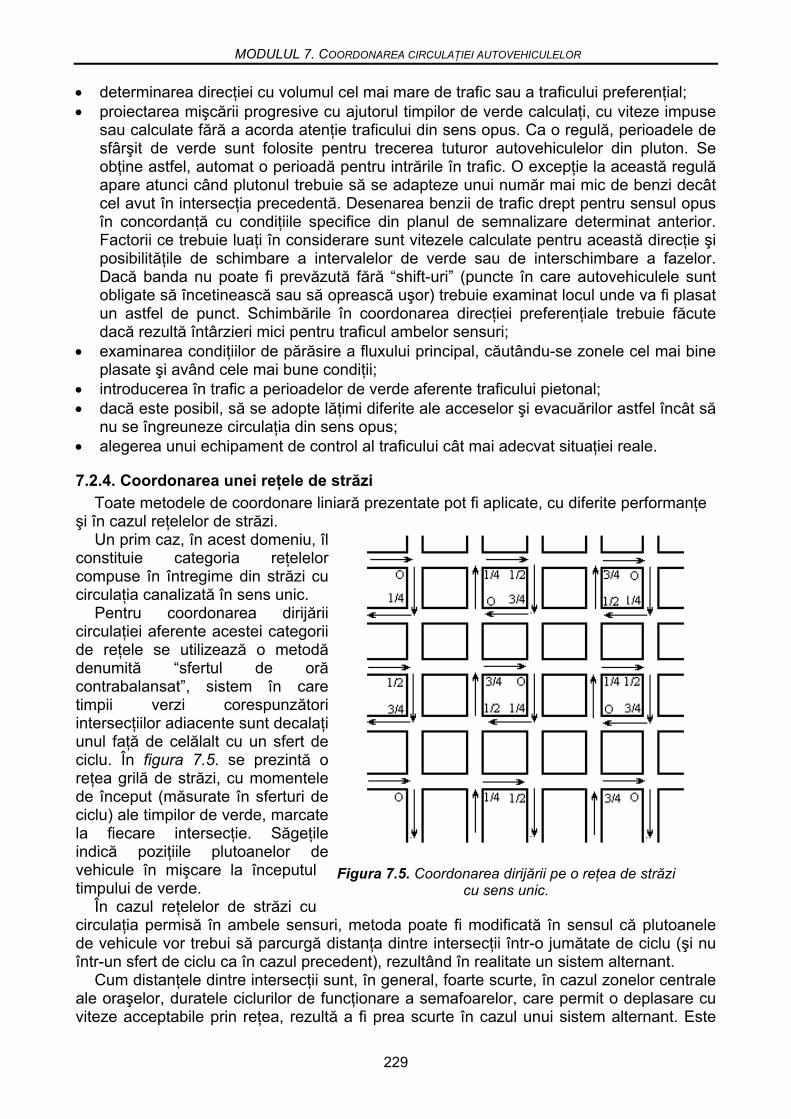
Pentru coordonarea dirijării circulaţiei aferente acestei categorii de reţele se utilizează o metodă denumită “sfertul de oră contrabalansat”, sistem în care timpii verzi corespunzători intersecţiilor adiacente sunt decalaţi unul faţă de celălalt cu un sfert de ciclu. În figura 7.5. se prezintă o reţea grilă de străzi, cu momentele de început (măsurate în sferturi de ciclu) ale timpilor de verde, marcate la fiecare intersecţie. Săgeţile indică poziţiile plutoanelor de vehicule în mişcare la începutul timpului de verde.
În cazul reţelelor de străzi cu circulaţia permisă în ambele sensuri, metoda poate fi modificată în sensul că plutoanele de vehicule vor trebui să parcurgă distanţa dintre intersecţii într-o jumătate de ciclu (şi nu într-un sfert de ciclu ca în cazul precedent), rezultând în realitate un sistem alternant.
Figura 7.5. Coordonarea dirijării pe o reţea de străzi cu sens unic.
Cum distanţele dintre intersecţii sunt, în general, foarte scurte, în cazul zonelor centrale ale oraşelor, duratele ciclurilor de funcţionare a semafoarelor, care permit o deplasare cu viteze acceptabile prin reţea, rezultă a fi prea scurte în cazul unui sistem alternant. Este
229

MODULUL 7. COORDONAREA CIRCULAŢIEI AUTOVEHICULELOR preferabil deci, ca în aceste situaţii să fie folosită metoda sfertului de ciclu contrabalansat (cu o reţea de străzi în sens unic), care are avantajul de a permite folosirea unor cicluri de funcţionare a semafoarelor mai mari (ce conduce la creşterea generală a capacităţii de circulaţie a intersecţiilor), asociate unor viteze de deplasare acceptabile.
230