mecanica corp deformabil -...
TRANSCRIPT

1
MECANICA CORP DEFORMABIL - NOŢIUNI GENERALE 1. Obiectul mecanicii corpului deformabil În mecanica generală corpul solid - este considerat rigid nedeformabil. Această ipoteză este adecvată şi suficientă pentru a evalua condiţiile de mişcare sau de repaus (de echilibru) ale diferitelor corpuri sub acţiunea diferitelor cauze externe. Pentru determinarea efectelor interioare date de sistemul de forţe exterioare considerat, ipoteza de corp rigid nu mai este satisfăcătoare. Explicate şi evaluate, fenomene reale ca deformarea, ruperea şi pierderea stabilităţii necesita introducerea unei noi diviziuni a mecanicii - mecanica corpului deformabil. Din cadrul vast al mecanicii corpului deformabil vor fi abordate în această lucrare disciplinele numite rezistenţa materialelor şi statica structurilor, discipline necesare evaluării comportamentului mecanic al corpurilor care alcătuiesc structurile de rezistenţă ale construcţiilor, în special structurile formate din bare (stâlpi, grinzi). In principiu, metodele staticii structurilor sunt destinate determinării secţiunilor cu efecte interioare maxime (tensiuni şi deformaţii) iar rezistenţa materialelor are ca scop asigurarea că aceste efecte nu depăşesc posibilităţile de rezistenţă ale materialului. 2. Ipoteze simplificatoare Fenomenul real al comportării structurilor sub sarcini este deosebit de complex. Pentru modelarea acestui fenomen într-o formă matematică simplă se utilizează o serie de ipoteze simplificatoare şi o schematizare a structurii reale. Principalele ipoteze simplificatoare admise atât în rezistenţa materialelor cât şi în statica structurilor sunt: - Materialul este continuu (în fiecare punct al spaţiului există un punct material); - Omogen - corpul are aceeaşi compoziţie în orice punct; - Izotrop - corpul are aceleaşi proprietăţi mecanice în orice direcţie; - Proprietăţile mecanice ale materialului nu sunt variabile în timp; - Materialul este elastic (deformaţiile sunt reversibile) şi liniar (adică respectă legea lui Hooke a proporţionalităţii liniare dintre tensiuni şi deformaţii); - Deformaţiile apărute sunt mici în raport cu dimensiunile corpului . Acceptând aceste ipoteze rezulta următoarele doua noi ipoteze. Sub acţiunea forţelor exterioare, structura de rezistenţă se deformează şi rămâne în echilibru în această poziţie. Ca urmare, ecuaţiile de echilibru static ar trebui exprimate în raport cu configuraţia deformată a structurii care nu este iniţial cunoscută. Insă, datorită faptului că deplasările structurii sunt mici în comparaţie cu dimensiunile sale, iar poziţia deformată este foarte apropiată de poziţia iniţială, această ipoteză a micilor deformaţii are drept consecinţă acceptarea următoarelor noi ipoteze: - Condiţiile de echilibru static se exprimă în raport cu poziţia nedeformată a structurii. Această
2
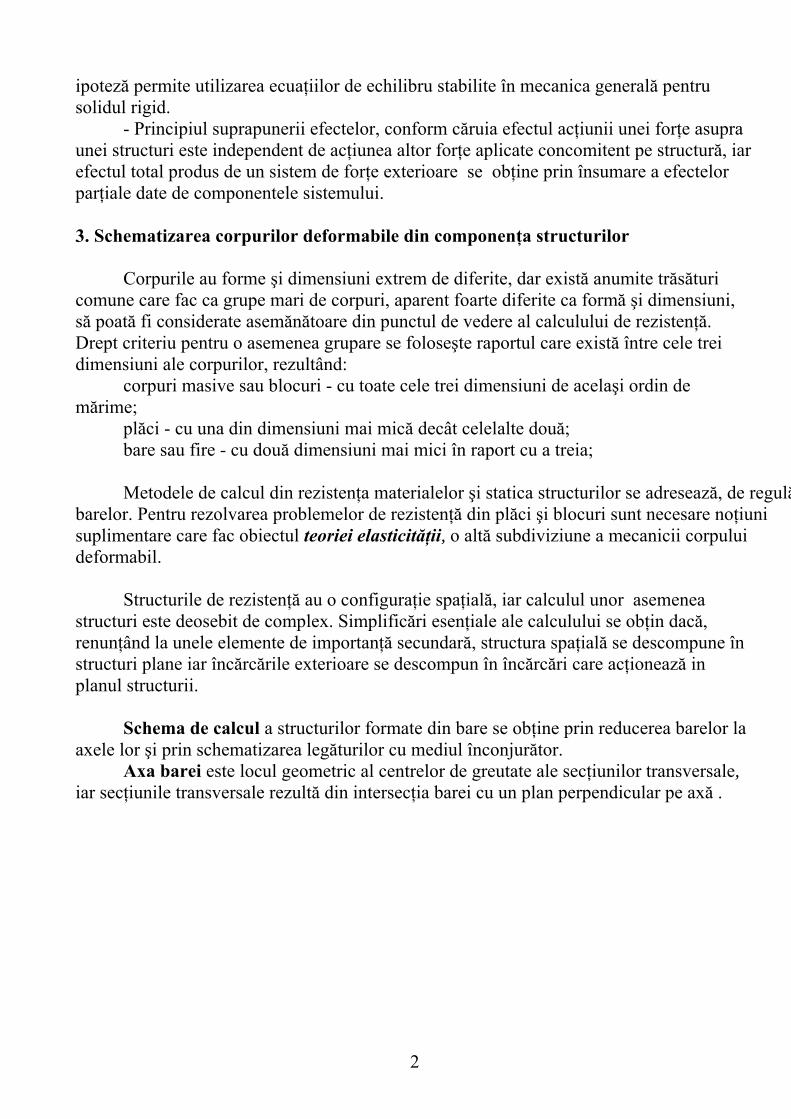
ipoteză permite utilizarea ecuaţiilor de echilibru stabilite în mecanica generală pentru solidul rigid. - Principiul suprapunerii efectelor, conform căruia efectul acţiunii unei forţe asupra unei structuri este independent de acţiunea altor forţe aplicate concomitent pe structură, iar efectul total produs de un sistem de forţe exterioare se obţine prin însumare a efectelor parţiale date de componentele sistemului. 3. Schematizarea corpurilor deformabile din componenţa structurilor Corpurile au forme şi dimensiuni extrem de diferite, dar există anumite trăsături comune care fac ca grupe mari de corpuri, aparent foarte diferite ca formă şi dimensiuni, să poată fi considerate asemănătoare din punctul de vedere al calculului de rezistenţă. Drept criteriu pentru o asemenea grupare se foloseşte raportul care există între cele trei dimensiuni ale corpurilor, rezultând: corpuri masive sau blocuri - cu toate cele trei dimensiuni de acelaşi ordin de mărime; plăci - cu una din dimensiuni mai mică decât celelalte două; bare sau fire - cu două dimensiuni mai mici în raport cu a treia; Metodele de calcul din rezistenţa materialelor şi statica structurilor se adresează, de regulăbarelor. Pentru rezolvarea problemelor de rezistenţă din plăci şi blocuri sunt necesare noţiuni suplimentare care fac obiectul teoriei elasticităţii, o altă subdiviziune a mecanicii corpului deformabil. Structurile de rezistenţă au o configuraţie spaţială, iar calculul unor asemenea structuri este deosebit de complex. Simplificări esenţiale ale calculului se obţin dacă, renunţând la unele elemente de importanţă secundară, structura spaţială se descompune în structuri plane iar încărcările exterioare se descompun în încărcări care acţionează in planul structurii. Schema de calcul a structurilor formate din bare se obţine prin reducerea barelor la axele lor şi prin schematizarea legăturilor cu mediul înconjurător. Axa barei este locul geometric al centrelor de greutate ale secţiunilor transversale, iar secţiunile transversale rezultă din intersecţia barei cu un plan perpendicular pe axă .
Schema simplificata a unei bare
4. Schematizarea legaturilor corpurilor cu mediul înconjurător
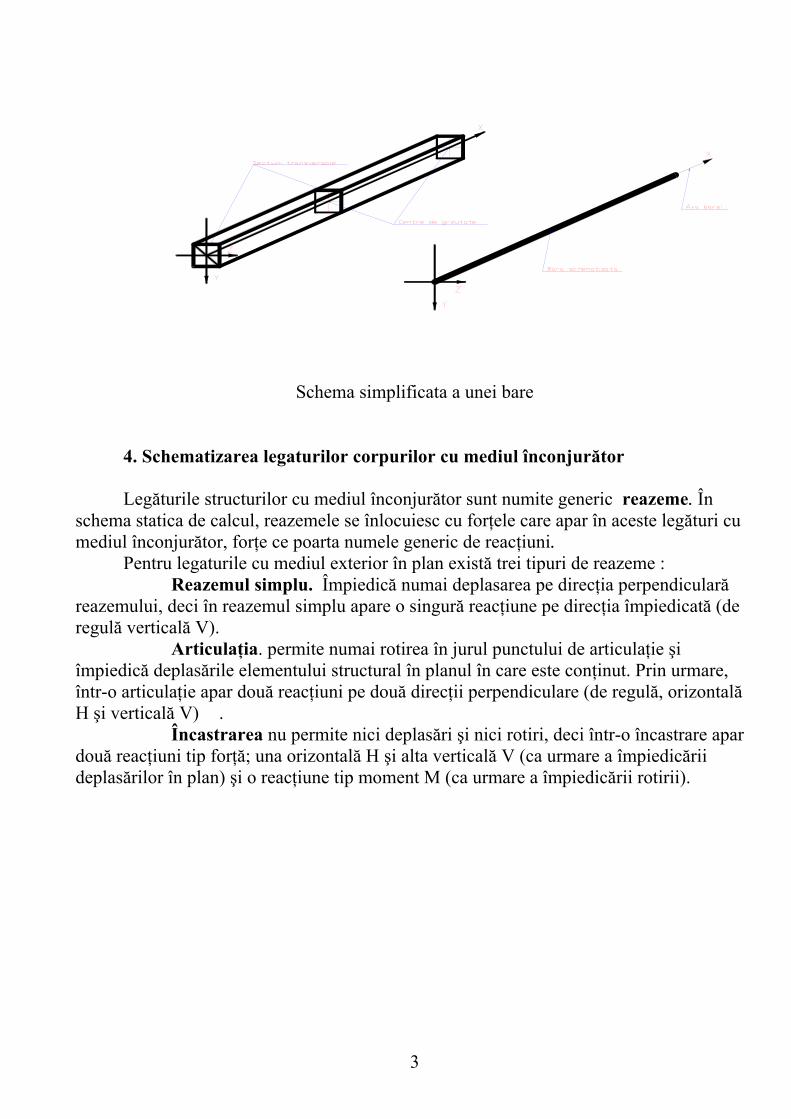
Legăturile structurilor cu mediul înconjurător sunt numite generic reazeme. În schema statica de calcul, reazemele se înlocuiesc cu forţele care apar în aceste legături cu mediul înconjurător, forţe ce poarta numele generic de reacţiuni. Pentru legaturile cu mediul exterior în plan există trei tipuri de reazeme : Reazemul simplu. Împiedică numai deplasarea pe direcţia perpendiculară reazemului, deci în reazemul simplu apare o singură reacţiune pe direcţia împiedicată (de regulă verticală V). Articulaţia. permite numai rotirea în jurul punctului de articulaţie şi împiedică deplasările elementului structural în planul în care este conţinut. Prin urmare, într-o articulaţie apar două reacţiuni pe două direcţii perpendiculare (de regulă, orizontală H şi verticală V) . Încastrarea nu permite nici deplasări şi nici rotiri, deci într-o încastrare apar două reacţiuni tip forţă; una orizontală H şi alta verticală V (ca urmare a împiedicării deplasărilor în plan) şi o reacţiune tip moment M (ca urmare a împiedicării rotirii).
3
reazem simplu articulaţie încastrare 5.STRUCTURI STATIC DETERMINATE. 5.1 Condiţia de determinare statica. O structură plană oarecare, alcătuită din mai multe corpuri rigide, poate fi caracterizată din două puncte de vedere: - Condiţia de invariabilitate geometrică şi fixare în plan, comparând numărul de corpuri cu numărul total de legaturi. l+r=3c unde: l - numărul de legături interioare r - numărul de legături exterioare c – numărul de corpuri. - Condiţia de determinare statica, comparând numărul de ecuaţii de echilibru static disponibile cu numărul de forţe de legătura din legaturi interioare şi din rezemări. Aceasta impune ca numărul de necunoscute să fie egal cu numărul de ecuaţii. Pentru fiecare corp se pot scrie 3 ecuaţii de echilibru. l+r=3c Rezultă că această relaţie reprezintă în acelaşi timp condiţia de invariabilitate geometrica şi fixarea în plan, cît şi condiţia de determinare statica .Astfel putem trage concluzia că structurile static determinate au numărul minim de legături, necesar pentru asigurarea invariabilităţii geometrice şi a fixării în plan. Dacă l+r < 3c înseamnă că numărul de legaturi nu asigură invariabilitatea geometrică a sistemului. Pentru fiecare legătură lipsă faţă de numărul minim necesar apare câte o posibilitate distinctă de deplasare. În acest caz sistemul este un mecanism.
4

Dacă l+r > 3c înseamnă că numărul de legaturi este mai mare decât numărul minim de legături care asigură invariabilitatea geometrică a sistemului. Pentru fiecare legătură în plus faţă de numărul minim, apare câte o nedeterminare statică, adică exista câte o forţă de legătură ce nu poate fi determinată cu ajutorul relaţiilor de echilibru. În acest caz sistemul este un sistem static nedeterminat. 5.2 Calculul reacţiunilor. Calculul reacţiunilor din legăturile exterioare ale unei structuri, compuse, se poate face prin două metode principale: METODA SOLIDIFICĂRII – Această metodă constă în considerarea corpului solid rigid, iar reacţiunile sunt considerate forţe exterioare care echilibrează încărcările. METODA SEPARĂRII PĂRŢILOR – Această metodă constă în separarea corpului în părţi componente considerate corpului solid rigid, iar reacţiunile şi forţele de legătură devin forţe exterioare. Pentru ambele metode, dispunem de câte trei ecuaţii de echilibru static pentru fiecare corp solid rigid. Aceste trei ecuaţii pot fi: - două ecuaţii de proiecţii de forţe şi o ecuaţie de moment; Fx = 0 Fy = 0 MA = 0 -o ecuaţie de proiecţie de forţe şi două ecuaţii de moment (ecuaţia de proiecţie nu trebuie să se facă pe o axa normală la dreapta ce uneşte punctele în raport cu care se scriu ecuaţiile de moment; Fx = 0 MA = 0 MB = 0 axa OX nu este perpendiculara pe dreapta AB -trei ecuaţii de moment (în raport cu trei puncte necoliniare). MA = 0 MB = 0 MC = 0 punctele A,B şi C nu sunt coliniare 5.3 Diafragma de eforturi. După aflarea reacţiunilor se pot determina eforturile produse de încărcările exterioare in fiecare secţiune a structurii. Variaţia eforturilor va
5
fi prezentată sub forma unor diagrame de eforturi. Se vor realiza trei diagrame de eforturi secţionale, diagrama de forţă axială, diagrama de forţă tăietoare şi diagrama de moment. Pentru realizarea acestor diagrame, axa barei se va considera axa de referinţă iar efortul secţional se măsoară pe ordonată. Înaintea de începerea trasării diagramelor de moment se vor face anumite convenţii, necesare, acestea rămân neschimbate pe parcursul rezolvării problemei. a) Se stabileşte sensul de parcurgere a structurii, de obicei de la stânga la dreapta. b) Convenţia de semn forţă axială este pozitivă dacă întinde bara forţă tăietoare este pozitivă roteşte bara în sens orar momentul încovoietor este pozitiv dacă întinde fibra interioara a barei. c)Trasarea diagramei Diagrama de forţă axială întindere +.Se desenează deasupra axei de referinţă (axa barei) compresiune –.Se desenează sub axa de referinţă (axa barei) Diagrama de forţă axială Tăietoare +.Se desenează deasupra axei de referinţă (axa barei) Tăietoare –.Se desenează sub axa de referinţă (axa barei) Diagrama de momentul încovoietor se desenează pe partea fibrei întinse momentul încovoietor +.Se poziţionează sub axa de referinţă (axa barei) momentul încovoietor –.Se poziţionează deasupra axei de referinţă (axa barei)
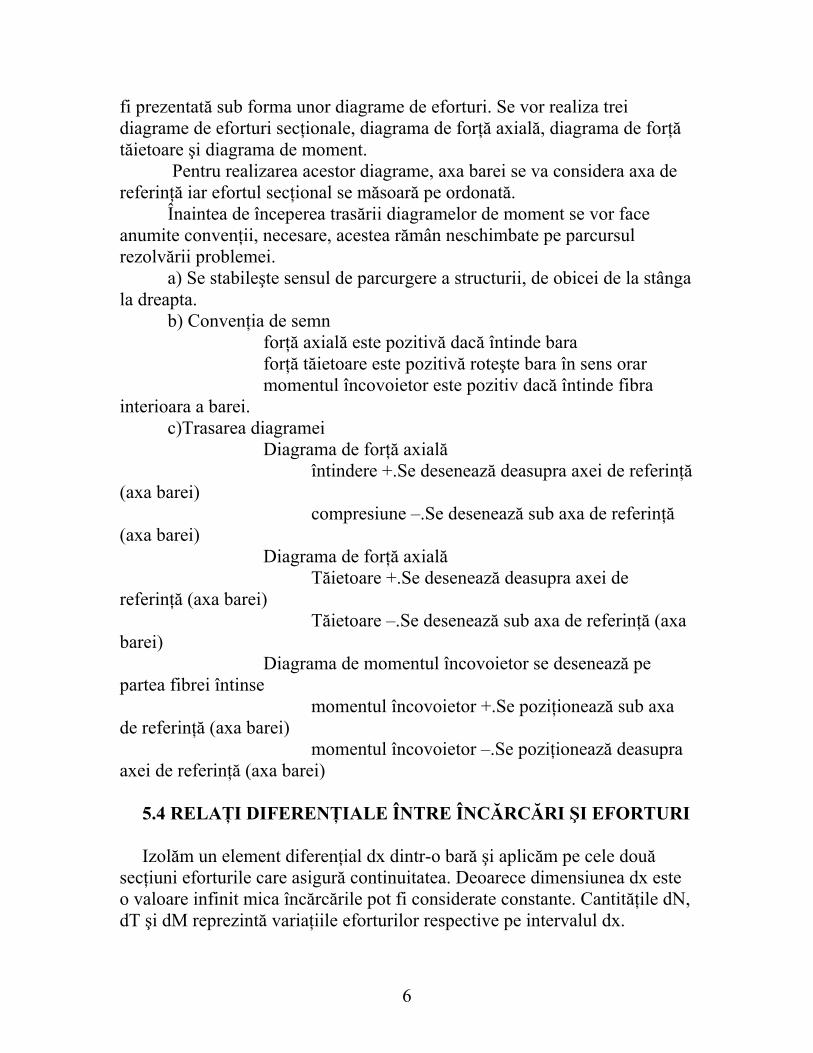
5.4 RELAŢI DIFERENŢIALE ÎNTRE ÎNCĂRCĂRI ŞI EFORTURI Izolăm un element diferenţial dx dintr-o bară şi aplicăm pe cele două
secţiuni eforturile care asigură continuitatea. Deoarece dimensiunea dx este o valoare infinit mica încărcările pot fi considerate constante. Cantităţile dN, dT şi dM reprezintă variaţiile eforturilor respective pe intervalul dx.
6

Încărcarea pdx se descompune pe direcţiile normală şi longitudinală ale elementului dx: pndx şi pldx.
Fx = 0 → -N + pldx – (N + dN) = 0 → lpdx
dN
Fy = 0 → T + pndx – (T + dT) = 0 → npdx
dT
Mo = 0 → M + Tdx + pldx e + pndx 2
dxe – (M + dM) = 0 →
Tdx
dM
Observaţii:
Pentru cazul când sarcinile sunt normale pe axul barei (pl=0) forţa axiala în lungul barei este constantă.
7

Anularea primei derivate reprezintă un punct extrem (maxim sau minim), deci în punctul în care T=0 momentul este maxim.
În punctul de aplicaţie al unei forţe concentrate cu direcţie comună cu axa barei în diagrama de forţă axială prezintă un salt în sensul şi cu mărimea forţei concentrate.
În punctul de aplicaţie al unei forţe concentrate cu normale pe axa barei în diagrama de forţă tăietoare prezintă un salt în sensul şi cu mărimea forţei concentrate iar în diagrama de moment un vârf.
În punctul de aplicaţie al unui moment concentrate diagrama de moment prezintă un salt în sensul şi cu mărimea momentului concentrate.
5.5 Exemple. 5.5.1. Grindă simplu rezemată cu sarcină concentrată la centru.
i) Verificăm dacă sistemul este static determinat.
8

3c-l-r=0 3·1-0-3=0 ii) Stabilim sensul de parcurgere a sistemului şi convenţia de semn pentru diagramele de eforturi secţionale. iii) Scriem ecuaţiile de echilibru static (câte 3 pentru fiecare corp) 1) ΣM1 = 0 → P·l/2 - V3=0 → V3 = P/2 2) ΣM3 = 0 → -P·l/2+V1=0 → V1 = P/2 3) ΣFX = 0 → H1 = 0
5.5.2. Grindă simplu rezemată cu sarcină uniform distribuită.
9

1) ΣM1 = 0 → P·l·l/2 -V3=0 → V3 = P·l/2 2) ΣM3 = 0 → -P·l/2 + V1=0 → V1 = P·l/2 3) ΣFX = 0 → H1 = 0
5.5.3. Grindă simplu rezemată cu sarcină concentrată excentric.
10
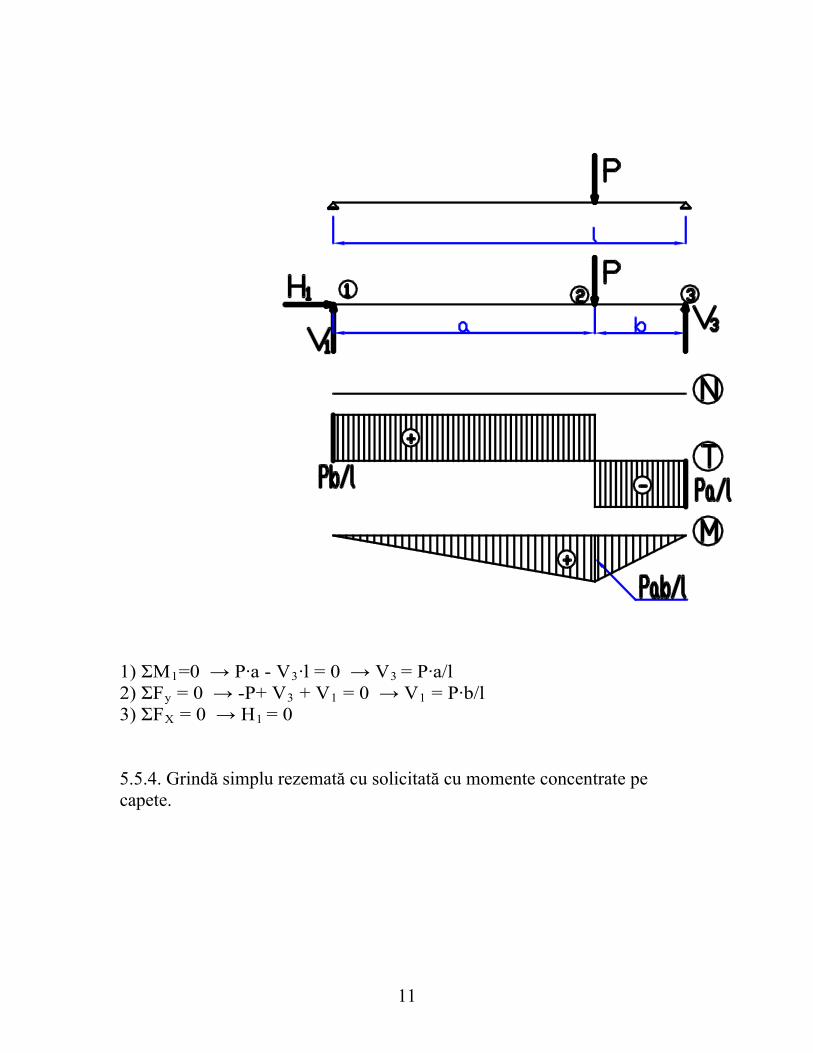
1) ΣM1=0 → P·a - V3·l = 0 → V3 = P·a/l 2) ΣFy = 0 → -P+ V3 + V1 = 0 → V1 = P·b/l 3) ΣFX = 0 → H1 = 0 5.5.4. Grindă simplu rezemată cu solicitată cu momente concentrate pe capete.
11
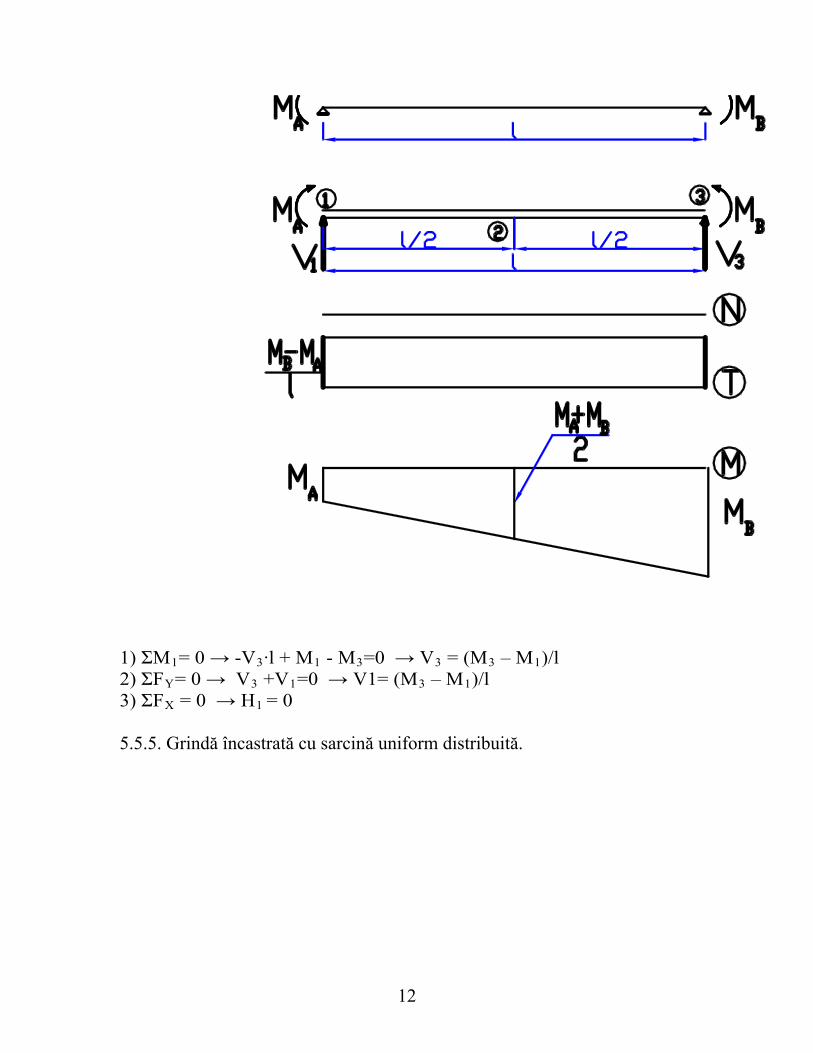
1) ΣM1= 0 → -V3·l + M1 - M3=0 → V3 = (M3 – M1)/l
2) ΣFY= 0 → V3 +V1=0 → V1= (M3 – M1)/l3) ΣFX = 0 → H1 = 0 5.5.5. Grindă încastrată cu sarcină uniform distribuită.
12
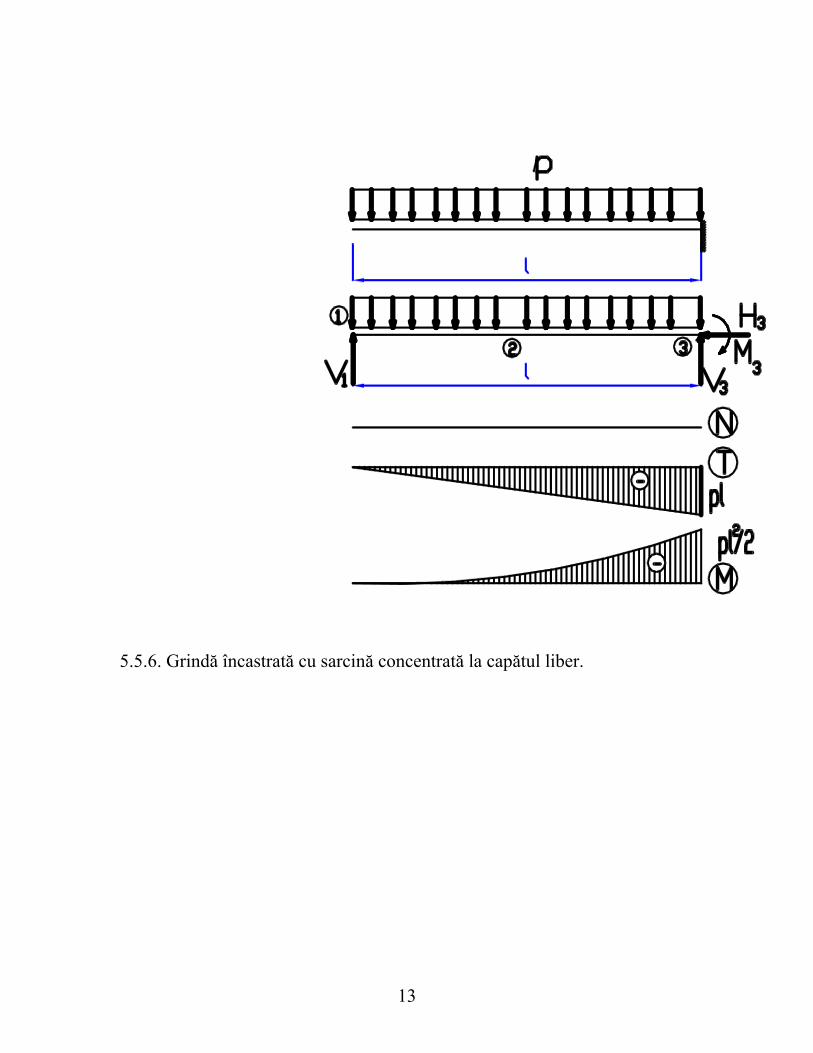
5.5.6. Grindă încastrată cu sarcină concentrată la capătul liber.
13
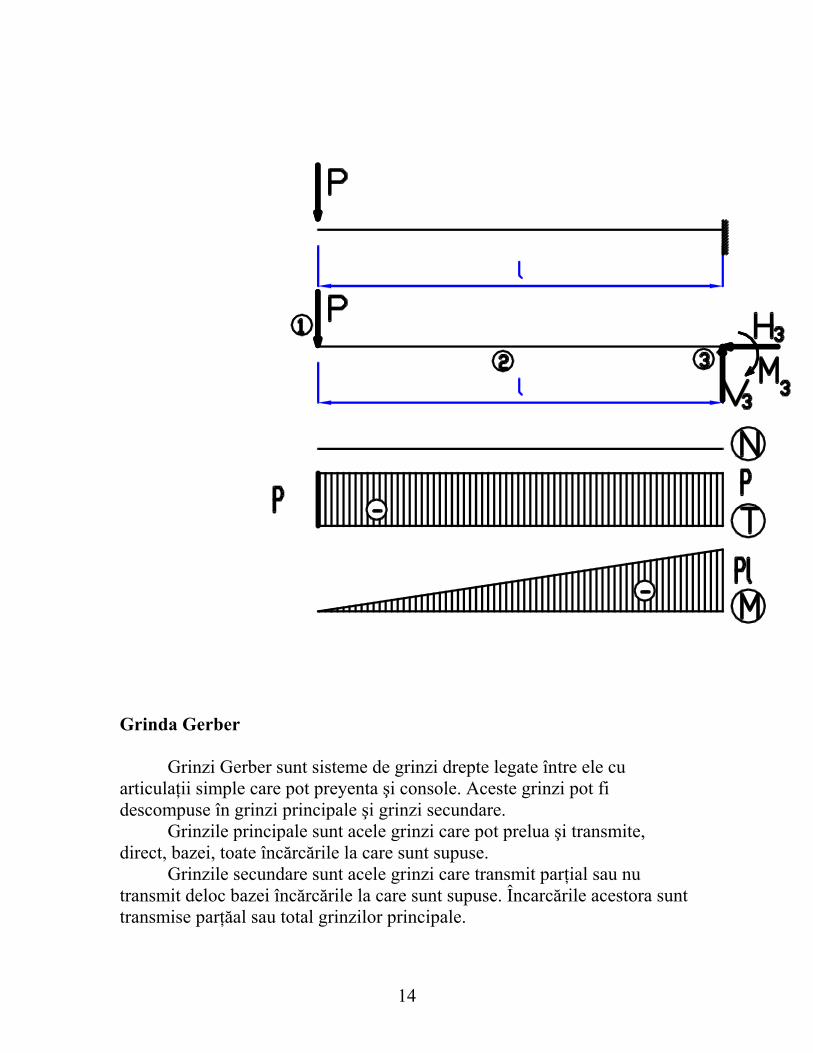
Grinda Gerber
Grinzi Gerber sunt sisteme de grinzi drepte legate între ele cu articulaţii simple care pot preyenta şi console. Aceste grinzi pot fi descompuse în grinzi principale şi grinzi secundare.
Grinzile principale sunt acele grinzi care pot prelua şi transmite, direct, bazei, toate încărcările la care sunt supuse.
Grinzile secundare sunt acele grinzi care transmit parţial sau nu transmit deloc bazei încărcările la care sunt supuse. Încarcările acestora sunt transmise parţăal sau total grinzilor principale.
14

Rezolvarea acestor grinzi se poate face unitar, pe tot ansamblul, sau prin descompunerea grinzii în grinzi principale şi grinzi secundare. A doua metodă fiind mai uşoară.
Rezolvarea grinzii secundare ΣM5 = 0 = 4xV3 + 2x100 – 2x200 V3 = 50kN ΣFY = 0 = -V3 + V5 + 100 + 200 =0 VA = 350kN
15
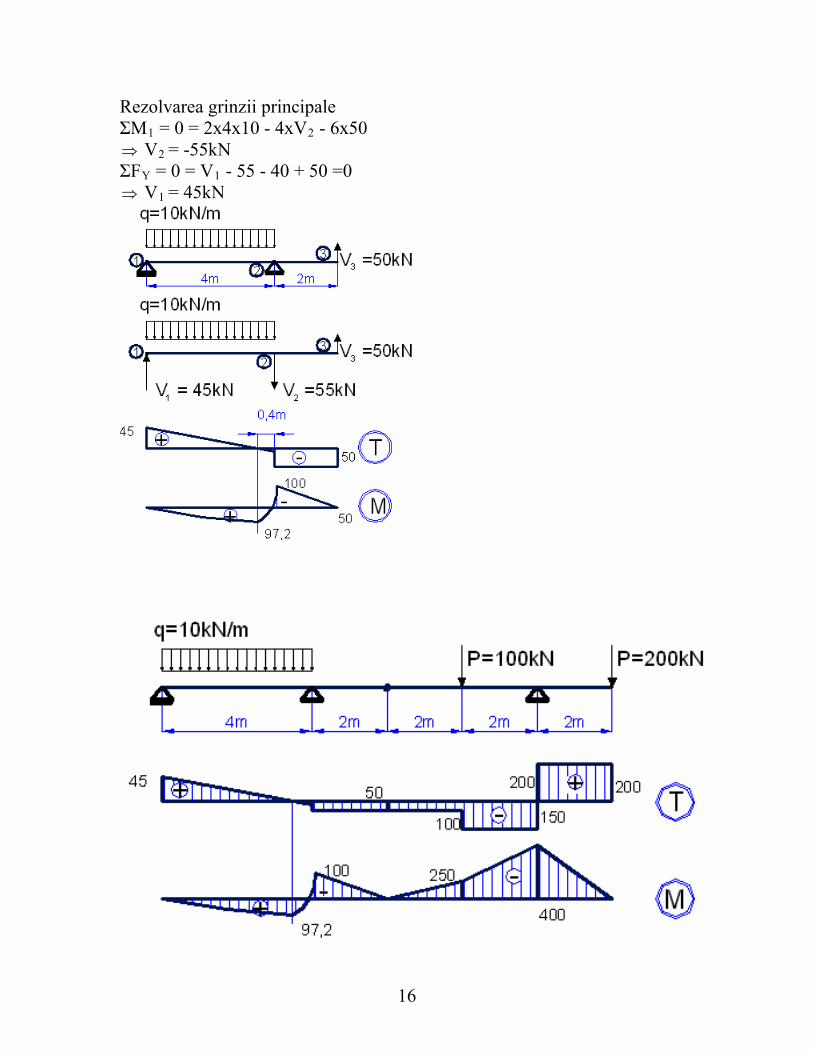
Rezolvarea grinzii principale ΣM1 = 0 = 2x4x10 - 4xV2 - 6x50 V2 = -55kN ΣFY = 0 = V1 - 55 - 40 + 50 =0 V1 = 45kN
16