lucrare de licenŢĂ - erasmus...
TRANSCRIPT
Universitatea Politehnica Bucureşti
Facultatea de Automatică şi Calculatoare
Departamentul de Automatică şi Ingineria Sistemelor
LUCRARE DE LICENŢĂ
Algoritmi pentru detectarea poziţiei
vorbitorului utilizând microfoane
multiple
Absolvent: Stancu Flavius-Valentin
Coordonator: Prof. Dr. Ing. Dumitrescu Bodgan
Bucureşti, 2013
2
Cuprins
Cuprins ..................................................................................................................................................... 2
1. Introducere .................................................................................................................................... 4
1.1 Scopul lucrarii ........................................................................................................... 4
1.2 Aplicatii....................................................................................................................... 4
1.3 Formularea problemei ............................................................................................. 5
2. Sistem de achizitie de date .................................................................................................. 6
2.1 Microfoane ................................................................................................................. 7
2.2 Sistem de microfoane .............................................................................................. 8
2.2.1 Uniform Linear Array – ULA ................................................................................ 9
2.2.2 Uniform Circular Array – UCA ............................................................................11
2.3 Etaj de prelucrare analogica ..................................................................................12
2.4 Placa de achizitie .....................................................................................................13
2.5 Etaj de prelucrare digitala .....................................................................................13
3. Metode de estimare DOA ..................................................................................................... 14
3.1 Notiuni introductive ................................................................................................14
3.2 Algoritmi neparametrici ..........................................................................................15
3.2.1 Algoritmul Beamforming .....................................................................................16
3.2.2 Algoritmul Capon .................................................................................................17
3.3 Algoritmi parametrici ..............................................................................................18
3.3.1 Metoda Celor Mai Mici Patrate Neliniara ..........................................................19
3.4 Algoritmi moderni ....................................................................................................19
3.4.1 Matrici rare ............................................................................................................20
3.4.2 Algoritmul JLZADOA ............................................................................................22
3.4.3 Algoritmul SOMP ..................................................................................................25
3.5 Cazul semnalelor multifrecventiale ......................................................................27
4. Analiza performantelor ......................................................................................................... 29
4.1 Contextul analizei ....................................................................................................29
4.2 Semnale monofrecventiale ....................................................................................30
4.2.1 Cazul Uniform Linear Array ................................................................................30
3
4.2.2 Cazul Uniform Circular Array .............................................................................36
4.3.3 Cazul estimarii eronate a frecventei semnalului ............................................39
4.3 Semnale multifrecventiale ideale .........................................................................41
4.3.1 Cazul Uniform Linear Array ................................................................................41
4.3.2 Cazul Uniform Circular Array .............................................................................46
4.4 Semnale multifrecventiale reale ...........................................................................48
5. Concluzii ........................................................................................................................................ 58
6. Bibliografie ................................................................................................................................... 59
4
1. INTRODUCERE
1.1 SCOPUL LUCRARII
Scopul lucrarii de fata este implementarea unor algoritmi de cautarea a surselor de sunet, plecand de la conceptul de matrice rara.
Desi domeniul a starnit interes inca din timpul primului razboi mondial si, in momentul de fata, exista o gama variata de algoritmi ce trateaza aceasta problema,
ideea de abordare a acestui subiect ca o recuperare de matrice rara a aparut la
sfarsitul secolului trecut.
1.2 APLICATII
Odata cu evolutia tehnologica, domeniul comunicatiilor a capatat mult mai
mult interes pe baza necesitatii de crestere a vitezei de transfer a informatiilor si a gamei de frecvente pentru canalele de comunicatie. Dar spectrul electromagnetic este o resursa limitata, asadar utilizarea eficienta a acestei resurse a devenit o
prioritate.Un pas in aceasta directie este utilizarea antenelor inteligente in dispozitivele actuale.
O antena inteligenta este constituita dintr-un numar de elemente de receptie aranjate conform unei geometrii ce confera acestei structuri proprietati noi, precum
cea de localizare a emitatorului.
Folosind o astfel de abordare, este posibila gestionarea eficienta a procesului
de transmitere a informatiei. Puterea semnalului se va concentra pe directia utilizatorului, iar utilizatorul va receptiona date doar de pe directia surselor,
zgomotele si interferentele fiind ignorate sau atenuate.
Aceasta tehnologie este folosita cu succes in domeniul militar pentru
radare/sonare, in domeniul comunicatiilor wireless, in seismologie, astrofizica, cercetare medicala etc.
5
1.3 FORMULAREA PROBLEMEI
Se considera problema localizarii a eminatori folosind un vector de
senzori. Cu alte cuvinte, se doreste o determinare a distributiei energiei in spatiu
unde pozitia unui emitator este reprezentata printr-un punct cu o concentratie mare de energie; problema este numita estimare spatiala.
Problema este asemanatoare cu cea a estimarii spectrale in timp, de aceea majoritatea metodelor temporale pot fi usor adaptate pentru a rezolva problema
spatiala.
In functie de distanta dintre surse si senzori, se pot distinge doua cazuri:
cazul near field: unda emisa de sursa este sferica; cazul far field: unda emisa de sursa este considerata unda planara
In cazul unei unde sferice, exista 3 parametrice pot fi estimati: distanta,
azimut si elevatie. In cazul undei planare prezinta interes un singur parametru, anume unghiul de incidenta al undei asupra structurii de senzori, numit DOA(Direction of Arrival).
In functie de pozitiile senzorilor in spatiu, se pot calcula intarzierile cu care o
unda planara este inregistrata de fiecare dintre acestia. Aceste intarzieri pot fi prelucrare de un algoritm pentru estimarea DOA.
In cadrul acestei lucrari se va trata cazul far field, ce implica estimarea parametrului DOA. Sursele de semnal vor fi semnale audio cu frecvente in spectrul vocal uman. Se vor utiliza microfoane aranjate in doua structuri geometrice diferite
pentru a prelua semnalul din mediu. Dupa prelucrarea acestuia, se vor aplica doi algoritmi ce au la baza conceptul de matrice rara.
6
2. SISTEM DE ACHIZITIE DE DATE
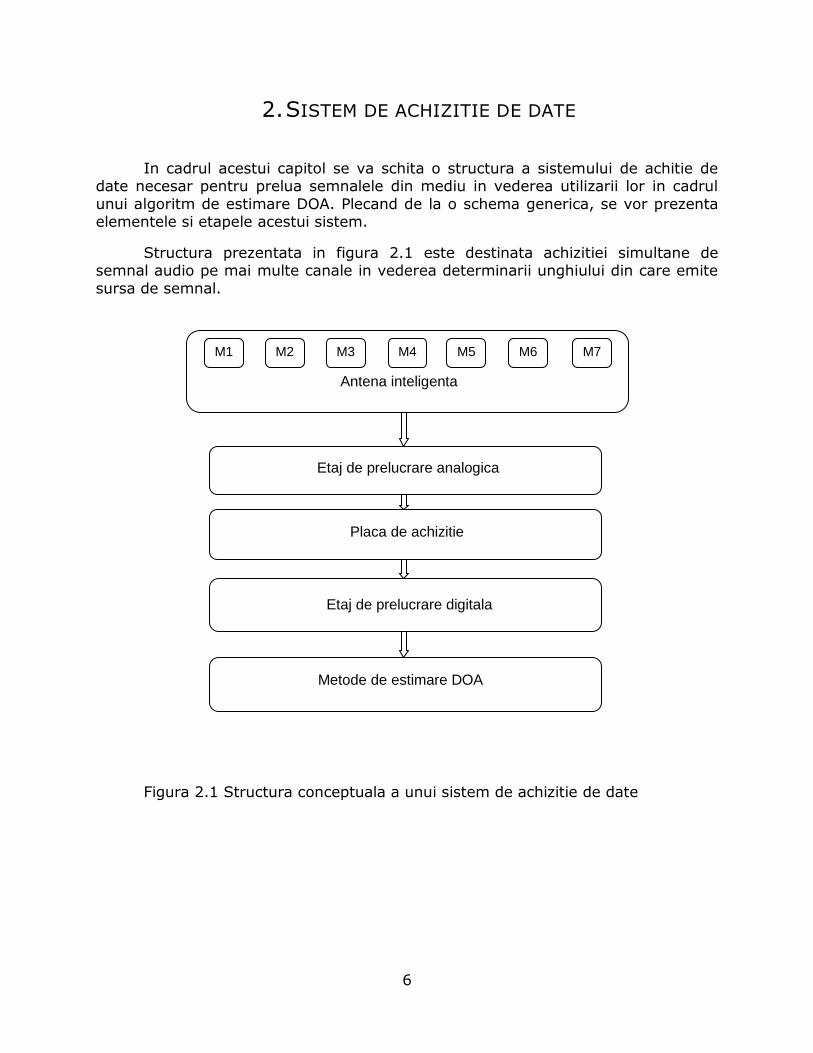
In cadrul acestui capitol se va schita o structura a sistemului de achitie de date necesar pentru prelua semnalele din mediu in vederea utilizarii lor in cadrul
unui algoritm de estimare DOA. Plecand de la o schema generica, se vor prezenta elementele si etapele acestui sistem.
Structura prezentata in figura 2.1 este destinata achizitiei simultane de semnal audio pe mai multe canale in vederea determinarii unghiului din care emite
sursa de semnal.
Figura 2.1 Structura conceptuala a unui sistem de achizitie de date
M1
1
M2
1
M3
1
M4
1
M5
1
M6
1
M7
1
Etaj de prelucrare analogica
Placa de achizitie
Antena inteligenta
Etaj de prelucrare digitala
Metode de estimare DOA
7
2.1 MICROFOANE
Un microfon reprezinta un senzors au un traductor ce converteste sunetul in semnal electric.
Din punct de vedere structural, un microfon se aseamana cu o ureche: o difragma este intinsa peste un tub, pentru a egaliza presiunea, apoi se masoara
deplasarea diafragmei datorata vibratiilor produse de sunet.
Diafragma este construita dintr-o foita metalica bine intinsa, fixată rigid pe
carcasa microfonului. Un astfel de sistem are o frecventa proprie de vibratii mecanice, care trebuie sa se gaseasca in afara benzii frecventelor transmise, pentru a nu se produce efecte de amplificare nedorite a frecventelor din apropierea
frecventei proprii. Aceasta conditie se realizeaza alegand convenabil grosimea diafragmei si tensiunea de intindere.
Microfoanele se pot clasifica dupa mai multe criterii:
din punct de vedere al principiului constructiv cu carbune
electrostatice dupa principiul de functionare
cu rezistenta variabila
electrodinamice electroacustice
piezoelectrice dupa tipul constructiv
cu bobina mobila
cu electret cu condensator
cu cristal dupa caracteristica de directivitate
omnidirectionale
unidirectionale/cardioide bidirectionale
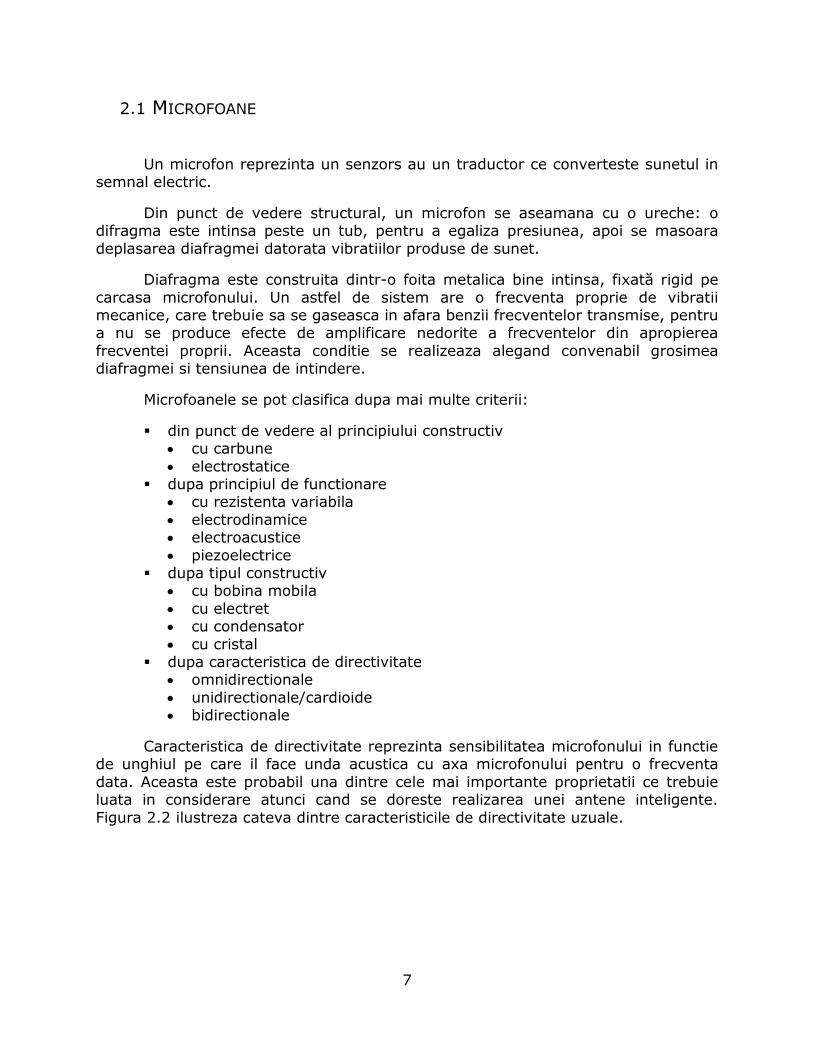
Caracteristica de directivitate reprezinta sensibilitatea microfonului in functie de unghiul pe care il face unda acustica cu axa microfonului pentru o frecventa
data. Aceasta este probabil una dintre cele mai importante proprietatii ce trebuie luata in considerare atunci cand se doreste realizarea unei antene inteligente.
Figura 2.2 ilustreza cateva dintre caracteristicile de directivitate uzuale.
8
Figura 2.2 Tipuri de caracteristici de directivitate ale microfoanelor
2.2 SISTEM DE MICROFOANE
Asa cum am prezentat in sectiunea anterioara, un microfon este capabil sa receptioneze un sunet. Folosind microfoane multiple, se va inregistra acelasi semnal
pe fiecare canal, dar va exista un defazaj produs de propagarea undei sonore in spatiu. Prin aranjarea senzorilor intr-o structura geometrica cunoscuta, se pot
utiliza defazajele pentru a estima directie din care provina unda sonora.
In prezent, exista multiple variante geometrice utilizare in acest domeniu:
Uniform Linear Array(ULA)
Uniform Circular Array (UCA)
Uniform Concentric Circular Array (UCCA)
Spherical Array
Uniform Square Array
Cross Array
Triangular Array
In continuare voi prezenta structurile ULA si UCA, intrucat acestea sunt
modelele ce vor fi implementate in cadrul algoritmilor
9
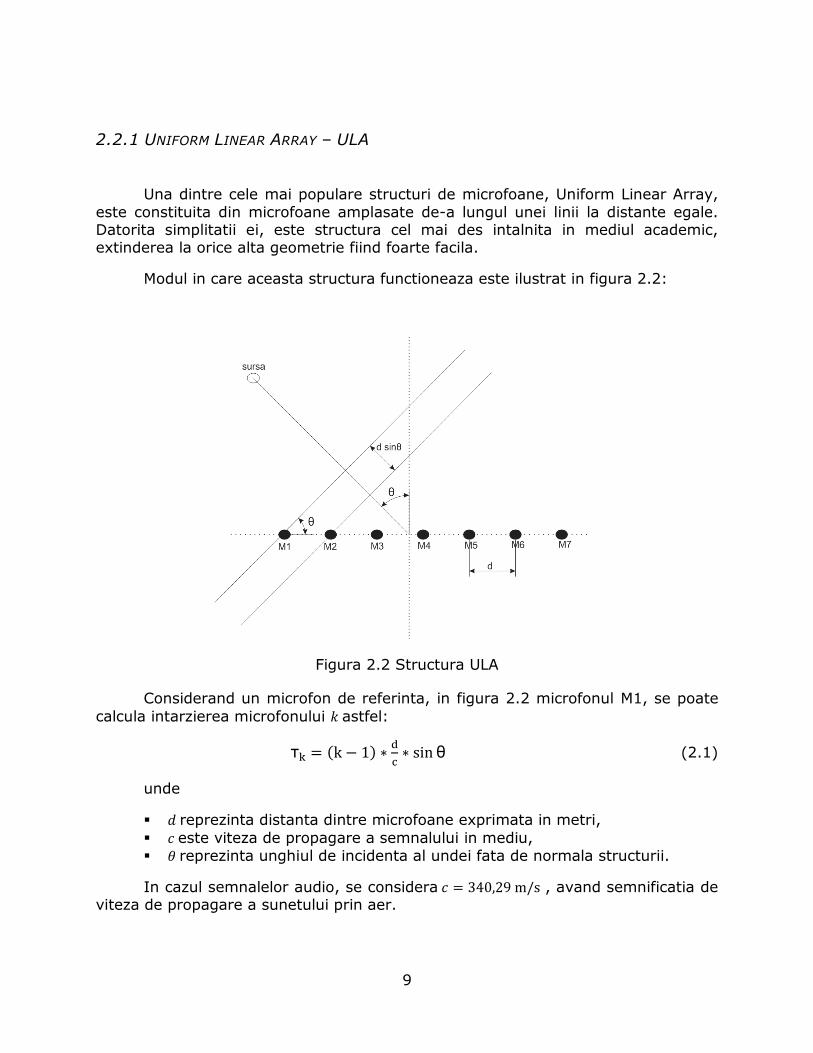
2.2.1 UNIFORM LINEAR ARRAY – ULA
Una dintre cele mai populare structuri de microfoane, Uniform Linear Array,
este constituita din microfoane amplasate de-a lungul unei linii la distante egale. Datorita simplitatii ei, este structura cel mai des intalnita in mediul academic, extinderea la orice alta geometrie fiind foarte facila.
Modul in care aceasta structura functioneaza este ilustrat in figura 2.2:
Figura 2.2 Structura ULA
Considerand un microfon de referinta, in figura 2.2 microfonul M1, se poate
calcula intarzierea microfonului astfel:
(2.1)
unde
reprezinta distanta dintre microfoane exprimata in metri,
este viteza de propagare a semnalului in mediu,
reprezinta unghiul de incidenta al undei fata de normala structurii.
In cazul semnalelor audio, se considera , avand semnificatia de viteza de propagare a sunetului prin aer.
10
Pentru a obtine un model matematic pentru ULA, se considera ca iesirea
acestuia este:
(2.2)
unde este semnalul incident asupra sistemului de microfoane, semnifica vectorul de directie si depinde de parametrul , iar reprezinta
zgomotul sistemului.
Daca se consideraca array-ul este compus din microfoane ,atunci forma
semnalelor de mai sus este urmatoarea:
(2.3)
(2.4)
(2.5)
Introducand relatia 2.1 in 2.5 obtinem:
(2.6)
Definind frecventa spatiala ca fiind egala cu frecventa semnalului inmultita cu
raportul dintre distanta intre doua unde si viteza de propagare a undei in mediu:
(2.7)
unde este frecventa purtatoarei, putem rescrie relatia 2.6:
(2.8)
astfel incat sa reprezinte pulsatia spatiala.
Pentru a determinarea valoarea distantei dintre microfoane ,vom apela la
teorema de esantionare Nyquist-Shannon, conform careia frecventa de
esantionare trebuie sa respecte urmatoarea relatie:
(2.9)
In acest caz, pentru ca vectorul sa fie unic definit, cu alte cuvinte sa nu
exista fenomenul de aliere in spatiu, este necesar ca pulsatia sa satisfaca
urmatoarea constrangere:
(2.10)
care este echivalenta cu
(2.11)
11
Considerand
lungimea de unda a semnalului, relatia 2.11 devine:
(2.12)
Se observa ca relatia 2.12 este dependenta de parametrul care se vrea a fi
estimat. Se doreste ca aceasta relatie sa fie valabila pentru orice valoare , asadar
se va considera urmatoarea constrangere :
(2.13)
Relatia 2.13 ne constrange ca distanta dintre senzori array-ului sa fie mai mica decat jumatate din lungimea de unda a semnalului si poate fi interpretata ca
teorema de esantionare spatiala Nyquist-Shannon.
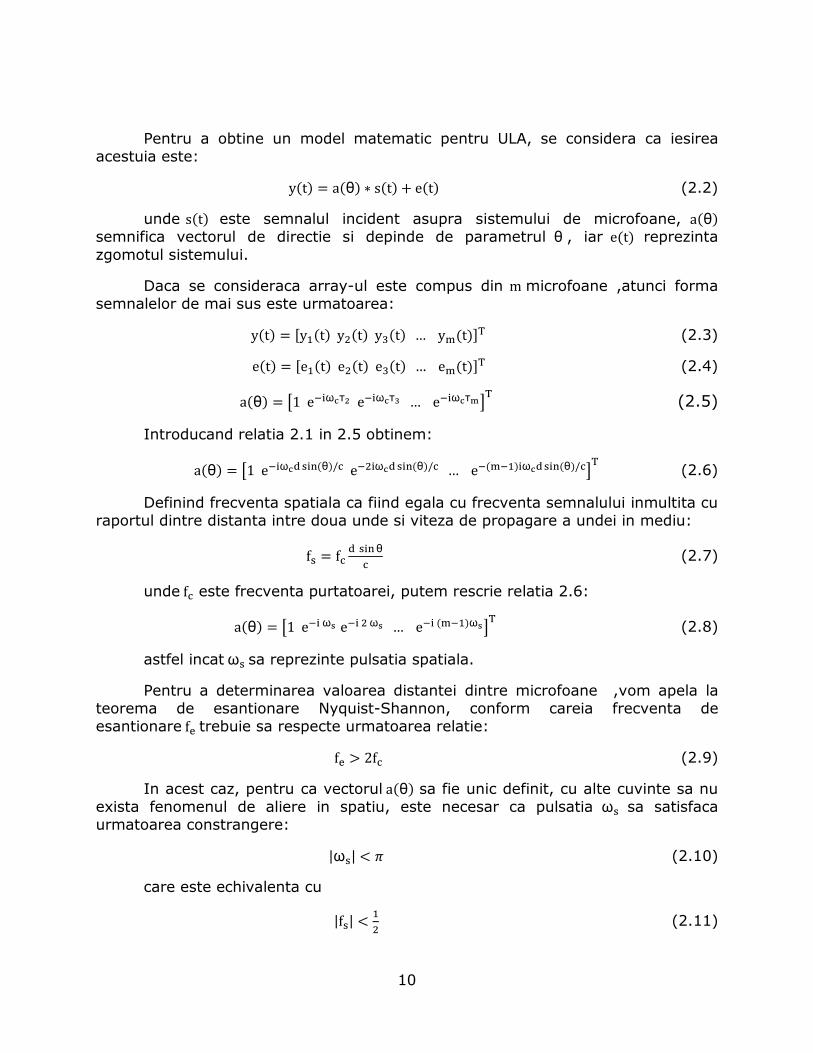
2.2.2 UNIFORM CIRCULAR ARRAY – UCA
O alta structura des intalnita in cazul antenelor inteligente este Uniform
Circular Array, ce consta in aranjarea senzorilor pe conturul unui cerc de raza , la
distante egale unul de altul.
Asemanator cazului ULA, figura 2.3 descrie modul de functionare.
Figura 2.3 Structura UCA

12
Considerand ca element de referinta centrul cercului si senzori, pozitia
unghiulara a microfonului este:
(2.14)
Daca o unda incidenta pe array trece prin centrul acestuia la momentul , intarzierea microfonului este data de formula :
(2.15)
Facand analogie cu cazul anterior, expresia vectorului de directie va fi:
(2.16)
Distanta dintre elementele array-ului este:
(2.17)
Constrangerea 2.13 se aplica si in acest caz. O forma alternativa a acestei constrangerii este :
(2.18)
2.3 ETAJ DE PRELUCRARE ANALOGICA
In majoritatea sistemelor, semnalul considerat necesita o etapa de prelucrare
inainte de a fi esantionat. In cazul de fata, se va considera necesara o etapa de filtrare si o etapa de amplificare datorita caracteristicilor microfoanelor.
Filtrarea analogica este un prim pas in prelucrarea semnalului, orice rafinare a spectrului semnalului va putea fi realiza ulterior digital. Este foarte important insa
ca orice prelucraresa nu altereze informatia. Desi este de dorit un filtru de ordin superior, este aproape imposibila realizarea mai multor filtre cu caracteristici identice din cauza preciziei de realizare a componentelor electrice.
Amplificarea semnalului este deseori intalnita pentru a exploata la maximum
domeniul de intrare al convertorului analog-numeric(CAN).
O alta prelucrare analogica utila poate fi considerata alterarea componentei
continue.
Scopul acestei prelucrari este acelasi ca si in cazul amplificarii. Daca domeniul CAN-
ului este simetric, de exemplu , se poate inlatura componenta continua pentru a centra semnalul pe axa timpului. Daca domeniul nu este simetric, de
exemplu , se va modifica componenta continua astfel incat semnalul sa fie
centrat pe mijlocul domeniului.
13
2.4 PLACA DE ACHIZITIE
Achizitia datelor in cazul estimarii DOA necesita ca esantionarea sa fie efectuata simultan pe toate canalele pentru a inregistra defazajele intre microfoane. Acest lucru este posibil in cazul in care fiecare canal este dotat cu cate un
convertor analog-numeric monocanal sau in cazul in care exista un singur convertor multicanal suficient de rapid pentru a converti datele provenite de pe
toate canalele, ce sunt stocate initial intr-un buffer analogic. Realizarea unei astfel de placi, in ambele cazuri, necesita foarte multa munca de proiectare, iar costurile componentelor sunt foarte mari.
Deoarece se considera ca frecventa maxima a semnalului vocal este de , frecventa minima necesare pentru o esantionare corecta este de . Placa de achizitie trebuie sa poata asigura o frecventa de esantionare mai mare sau cel putin
egala cu aceasta frecventa. Daca este posibil, se va alege o frecventa mai mare, multiplu intreg al frecventei minime de esantionare sau al unei frecventei din
vecinatatea acesteia, strict mai mare decat . Aceasta procedura poarta numele
de supraesantionare si prezinta avantajele reducerii zgomotului, cresterii rezolutiei si eliminarii fenomenului de aliere.
2.5 ETAJ DE PRELUCRARE DIGITALA
Ultima etapa de prelucrare a semnalului are loc in cadrul etajului digital. Aici
pot fi efectuate ultimele modificarii asupra semnalului inainte ca acesta sa fie utilizat pentru estimarea DOA.
Filtrarea digitala reprezinta una dintre operatiile cele mai intalnite in cadrul acestei etape. Daca timpul de achizitie si prelucrare al datelor nu este un factor
important in cadrul aplicatiei, semnalele pot fi filtrate cu filtre de ordin superior, pentru a corecta orice imperfectiune a filtrului analogic.
In cazul in care semnalele au fost supraesantionate, este necesara operatia de decimare, ce reduce frecventa de esantionare pana la valoarea dorita. Factorul
de decimare este egal cu raportul dintre frecventa de esantionare utilizata si cea de
,rotunjit corespunzator catre un numar intreg.
Aranjarea datelor intr-un format convenabil este realizata tot in acest etaj. Pentru algoritmii de estimare DOA, este necesar ca semnalele inregistrate pe
fiecare canal sa fie concatenate pe coloane, astfel incat sa se formeze o matrice cu un numar de coloane egal cu numarul de microfoane.
14
3. METODE DE ESTIMARE DOA
Acest capitol este dedicat prezentarii unor algoritmi de estimare a directiei de sosire. Se va pune accept pe contextul considerat pentru estimarea DOA si pe
algoritmii Simultaneous Orthogonal Matching Pursuit(SOMP) si Joint
Approximation for Direction of Arrival(JLZADOA), insa se vor prezenta sumar si alte
tipuri de algoritmi
O clasificare se poate face in functie de informatiile utilizate in estimarea parametrului DOA. Astfel putem imparti algoritmii in metode neparametrice, ce se bazeaza in general pe proiectarea unui filtru si nu tine cont de structura matricii de
covarianta a semnalului, si metode parametrice, ce utilizeaza structura matricii de covarianta pentru a realiza o separare a subspatiilor semnalelor. Recent s-a publicat
o noua abordare asupra acestei probleme ce presupune exploatarea conceptului de matrice rara.
Inainte de a trece la prezentarea algoritmilor, este necesara o scurta sectiune introductiva ce va clarifica premizele acestei lucrari.
3.1 NOTIUNI INTRODUCTIVE
Pentru a putea intelege mai bine problema estimarii DOA, este necesara modelarea matematica a vectorului de senzori, microfoane in cazul de fata. Odata
formulat, problema devine una de estimare parametrica asemanatoare celei de estimare frecventiala, deci o mare parte a algoritmilor utilizati in timp pot fi usor
adaptati sa satisfaca cerintele estimarii DOA.
Modelul urmator este dezvoltat pe baza unor presupuneri ce simplifica
operatia de modelare:
sursele sunt situate in planul indepartat ( far field scenario) fata de
microfoane; sursele si microfoanele sunt situate in acelasi plan;
sursele sunt considerate punctiforme; mediul de propagare este omogen astfel incat unda incidenta pe array
este considerata planara;
senzorii (microfoanele) pot fi modelati ca sisteme liniare invariante in timp;
functia de transfer a senzorilor si pozitia acestora este cunoscuta.
Daca ultimele doua presupuneri sunt indeplinite, se poate spune despre
antena ca este calibrata.
Pentru inceput se va considera cazul unei singure surse. Cazul mai multor surse se va obtine cu usurinta prin aplicarea principiului superpozitiei.
15
Se considera o singura unda incidenta si se noteaza cu valoarea semnalului
masurata in raport cu un punct de referinta la momentul . Punctul de referinta
poate fi considerat a fi unul dintre microfoane sau un punct din apropierea array-
ului. Cunoscand valorile intarzierilor ale microfoanelor in functie de geometria
structurii de senzori, iesirea microfonului este:
(3.1)
unde este raspunsul la impuls al microfonului , “ este operatorul de
convolutie si este zgomotul aditiv.
Transformata Fourier asociata semnalului este:
(3.2)
Daca se considera un semnal monofrecvential, vectorul functiilor de transfer
sau vectorul de directie , in forma completa, este exprimat astfel:
(3.3)
In general, functia de transfer a unui microfon este dependenta de unghiul
de incidenta al semnalului . Astfel, parametrul ce se doreste estimat intervine in
relatie nu doar prin intermediul intarzierii , dar si prin intermediul caracteristicii de
transfer . Daca se considera ca senzorii sunt omnidirectionali, atunci devine independenta de , si in plus, daca toti senzorii sunt identici, relatia 3.3
capata forma relatiei 2.8 in cazul ULA, respectiv relatia 2.16 in cazul UCA.
Deoarece senzorii au fost considerati elemente liniare, se poate aplica
principiul superpozitiei pentru a deduce forma modelului antenei inteligente in cazul surselor multiple.
(3.4)
3.2 ALGORITMI NEPARAMETRICI
Aceste metode nu fac nici o presupunere asupra matricii de covarianta a datelor, dar presupune cunoscuta forma functionala a vectorului de directie si numarul de surse . Esantionarea spatiala produsa de array este similara unei esantionari in timp cu un filtru de tip FIR. Principiul algoritmilor neparametrici
consta in proiectarea unui filtru ce indeplineste simultan urmatoarele conditii:
nu distorsioneaza semnalele provenit din directia atenueaza semnalele ce provin din orice alta directie decat
16
Semnalul astfel filtrat poate fi exprimat prin relatia 3.5.
(3.5)
iar energia acestuia este :
(3.6)
unde este matricea de covarianta.
Insa aceasta matrice teoretica nu poate fi determinata dintr-un numar finit
de esantioane, asadar se va apela la o estimare a acesteia, notata .
(3.7)
Beamforming si Capon sunt doi dintre algoritmii parametrici ce vor fi succint prezentati in continuare.
3.2.1 ALGORITMUL BEAMFORMING
Modalitatea in care acest algoritm proiecteaza filtrul poate fi reprezentata
prin urmatoarea problema de minimizare:
(3.8)
Deoarece se considera ca vectorul este normalizat si respecta relatia 3.9
(3.9)
solutia oferita de algoritmul Beamforming este:
(3.10)
Introducand expresia filtrului obtinut in relatia 3.6 obtinem:
(3.11)
17
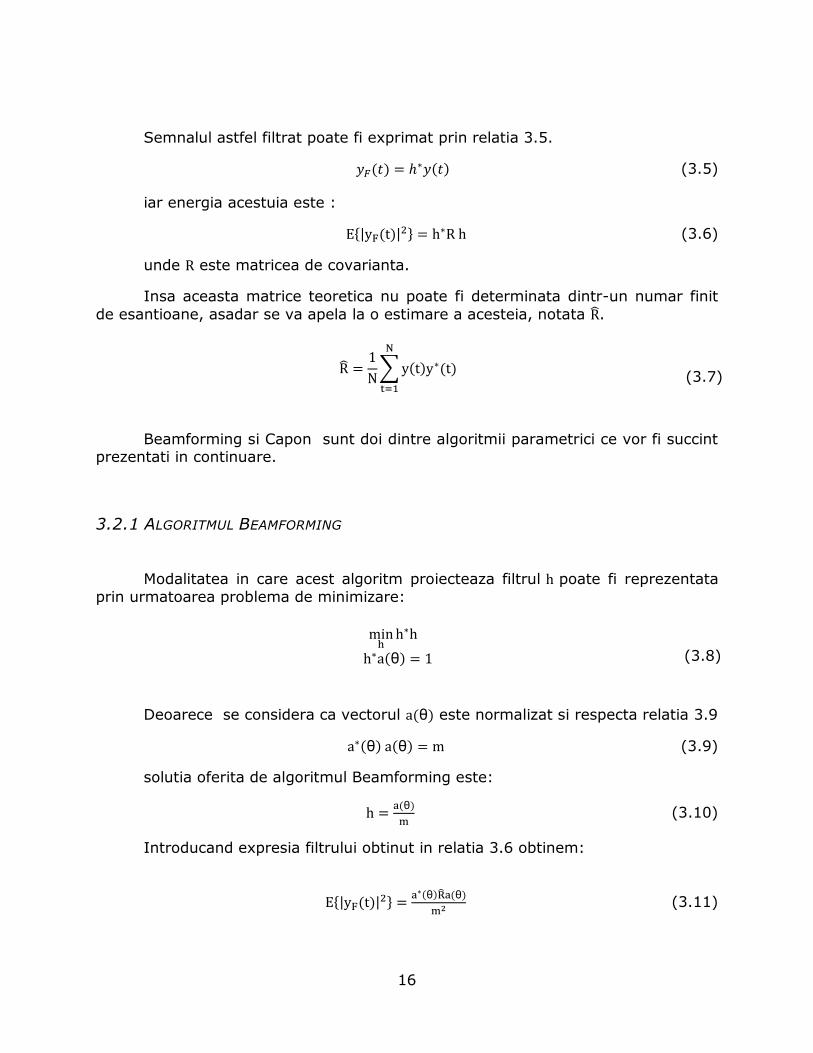
Directiile de incidenta estimate de algoritmul Beamforming sunt date de locatiile celor mai mari varfuri ale expresiei . Cu alte cuvinte, se
efectueaza o scanare a orizontului dupa toate directiile posibile si se memoreaza
valoarile unghiurilor pentru care puterea spectrala are cele mai mari valori.
O variante de implementare a acestui algoritm este:
Intrari:
Iesiri:
1.
2.
3. for in
4.
5. end
3.2.2 ALGORITMUL CAPON
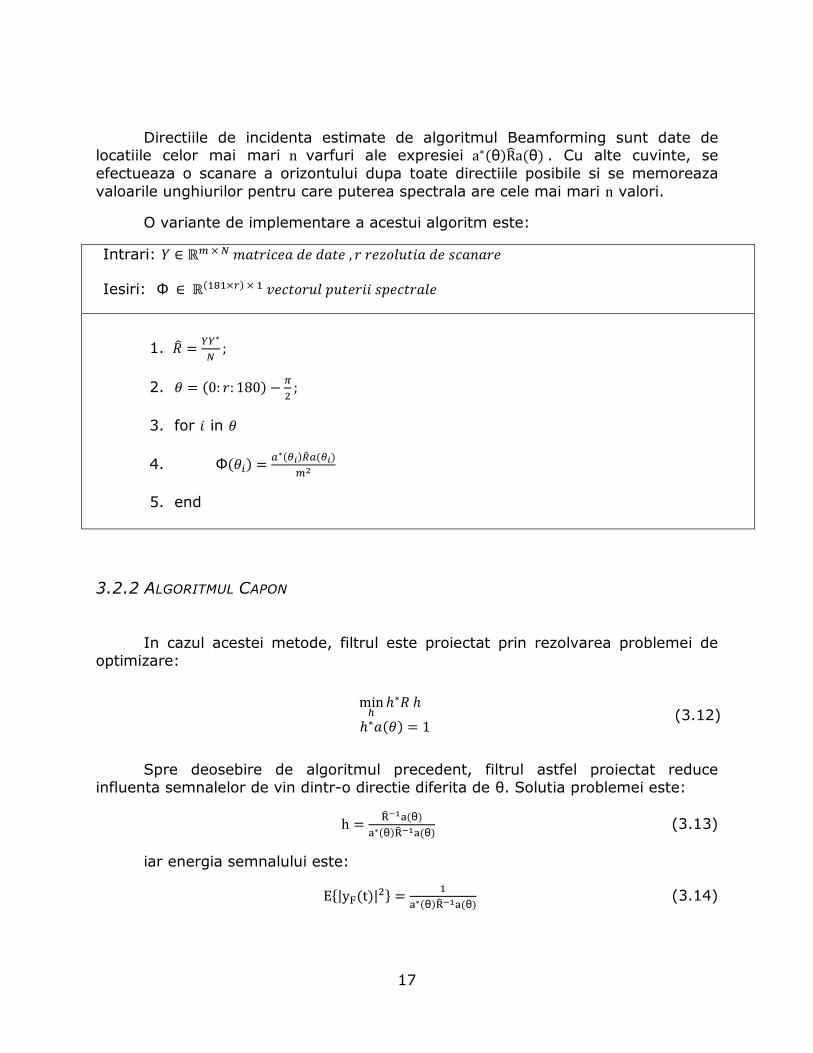
In cazul acestei metode, filtrul este proiectat prin rezolvarea problemei de
optimizare:
(3.12)
Spre deosebire de algoritmul precedent, filtrul astfel proiectat reduce
influenta semnalelor de vin dintr-o directie diferita de . Solutia problemei este:
(3.13)
iar energia semnalului este:
(3.14)
18
In mod asemanator, directiile estimare de algoritmul Capon sunt date de cele
mai inalte varfuri ale expresiei
.
O forma de implementare a metodei Capon este:
Intrari:
Iesiri:
1.
2.
3. for in
4.
5. end
Performantele acestei metode sunt superioare algoritmului Beamforming
datorita modalitatii de proiectare a filtrului.
Ambele metode de estimare DOA prezinta avantajul unei implementari usoare si ofera rezultate in conditiile in care nu se cunosc proprietati statistice despre date.
3.3 ALGORITMI PARAMETRICI
Acesta categorie de algoritmi se foloseste de structura matricii de covarianta a datelor pentru a estima mai precis parametrul de interes, DOA.
Se considera ca zgomotul este de tip zgomot alb si
(3.15)
Notand matricea de covarianta a semnalului de intrare cu
(3.16)
putem rescrie formula matricei de covarianta a semnalului de iesire in
conditiile in care matricea este nesingulara iar semnalul de intrare si zgomorul nu este corelat:
(3.17)
19
In aceasta categorie de algoritmi se inscriu urmatorii algoritmi:
Metoda Celor Mai Mici Patrate Neliniara (MCCMP-NL)
Metoda Yule-Walker
Pisarenko
Spectral/Root MUSIC( MUltiple SIgnal Classification)
ESPRIT(Estimation of Signal Parameters by Rotational Invariance
Techniques)
3.3.1 METODA CELOR MAI MICI PATRATE NELINIARA
MCCMP-NL identifica parametrul DOA prin minimizarea functiei
(3.17)
in raport cu semnalul . Acest lucru determina urmatoarea solutie:
(3.18)
Introducand relatia 3.18 inapoi in relatia 3.17 se obtine :
(3.19)
Astfel, rezultatele acestei metode sunt date de :
(3.20)
3.4 ALGORITMI MODERNI
Odata cu evolutia telecomunicatiilor, tot mai mult interes a fost acordat antenelor inteligente, in special asupra algoritmilor de estimare DOA. Prin
impunerea caracterului de matrice rara, se poate recupera matricea a semnalului emis. De mentionat faptul ca nu este necesara cunoasterea numarului de surse
apriori.
Inainte ce a detalia doua metode moderne de estimare spatiala, este absolut necesara mentionare si clarificarea conceptului de matrice rara.
20
3.4.1 MATRICI RARE
Despre o matrice se poate spune ca este rara daca majoritatea elementelor sale sunt nule, respectiv densa daca majoritatea elementelor sunt nenule.
Matricile rare reprezinta un domeniu de interes in mediul stiintific din punct de vedere al stocarii acestora, dar si pentru posibilitatea de optimizare a
algoritmilor existenti.
Pentru eficientizarea spatiului de stocare, in cazul matricilor rare, se poate
apela la una dintre urmatoarele metode:
memorare sub forma de triplet (valoare, linie, coloana) a elementelor
nenule comprimare pe linii
comprimare pe coloane comprimare pe blocuri aducerea matricii la o forma diagonala prin permutarea ”reverse Cuthill-
McKee”, etc.
Din punct de vedere al calcului numeric , prezinta un interes deosebit gasirea
unei solutii rare pentru sistemul:
(3.21)
unde si deoarece acesta este un sistem subdeterminat ce are
o infinitate de solutii. O astfel de solutie ar putea fi folosita in compresii, eliminarea zgomotelor etc datorita structurii sale si a continutului de informatii in forma
condensata despre vectorul .
Matricea este denumita dictionar si constituie o baza supradefinita pentru
vectorul . Coloanele matricii reprezinta termeni ai dictionarului, asadar o solutie
rara reprezinta exprimarea vectorului folosind un numar minim de termeni. Se
va considera notatia pentru termeni, reprezentand un index apartinand setului
. Acest set generic este folosit pentru a identifica coloanele matricii deoarece
este posibil ca acestea sa nu fie ordonate.
Produsul de tip Hermitian a doua matrici este definit ca urma produsului celor doua matrici:
(3.23)
unde reprezinta urma unei matrici si este egala cu suma elementelor situate pe diagonala principala.
In cazul acestei lucrari, dictionarul este format din vectorii de directie ,corespunzatori ULA sau UCA, ce scaneaza un semiplan in cazul ULA sau intregul
plan in cazul UCA conform unei rezolutii fixate.
21
De asemenea, este necesara definirea sau reamintirea unor norme asociate vectorilor si matricilor ce vor fi utilizate in algoritmii urmatori.
Norma a unui vector este definita astfel:
(3.24)
unde poate lua valori in intervalul .
Norma a unui vector este definita ca valoarea maxima a
elementelor vectorului luate in modul:
(3.25)
“Norma” a unui vector este definita ca fiind numarul de elemente nenule din vector.
(3.26)
unde reprezinta cardinalul unei multimi. Aceasta nu este considerata o
norma deoarece este o functie discontinua si nu satisface inegalitatea:
(3.27)
Norma Frobenius a unei matrici este definita ca:
(3.28)
Este posibila definirea unei norme hibride a unei matrici plecand
de la relatia 3.24:
(3.29)
22
3.4.2 ALGORITMUL JLZADOA
Joint approximation DOA este un algoritm publicat de Mashud Hyder si
Kaushik Mahata in anul 2010, ce ofera posibilitatea recuperarii matricii rare X din relatia
(3.30)
unde reprezinta o baza supracompleta ce contine vectorii de directie alesi conform numarului de elemente ale dictionarului , este
matricea ce contine cele esantioane de date inregistrate de cele microfoane si
este zgomotul aditiv, prin impunerea unei structuri rare a solutiei cu
ajutorul unei norme hibride.
(3.31)
(3.32)
(3.33)
(3.34)
Formularea sub forma de problema de optimizare a acestui caz este :
(3.35)
daca .
Exista multiple abordari ale acestei problemei, pentru diverse combinatii .
Algoritmul prezentat in aceasta lucrare trateaza cazul unei aproximari a
normei ce porneste de la relatia:
(3.36)
Norma se poate exprima ca:
(3.37)
unde reprezinta coloana a matricii iar functia este definita ca :
23
(3.38)
Astfel exprimata, norma nu este o functie neteda, deci se va apela la
aproximarea acesteia prin urmatoare functie de tip Gaussian:
(3.39)
Pentru matricea , definitia acestei functii este:
(3.40)
Deoarece limita functiei atunci cand tinde catre aproximeaza functia
(3.41)
rezulta ca norma poate fi obtinuta din atunci cand tinde catre .
(3.42)
Aceasta limita conduce la urmatoarea metoda de gasire a solutie :
(3.43)
unde este definita astfel:
(3.44)
Parametrul este folosit in aceasta relatie pentru a mentine balanda intre energia reziduala si raritatea semnalului, valoarea acestuia fiind determinata
experimental.
Daca tinde catre , va lua valoarea 0 si astfel va tinde catre 1
(3.45)
Introducand relatia 3.45 in relatia 3.43 obtinem, ceea ce reprezinta solutia in
sens CMMP a sistemului.
(3.46)
Acest rezultat sugereaza urmatoarea abordare iterativa:
se va considera o valoare initiala mare pentru ,
se va rezolva sistemul dat de relatia 3.43,
se reduce parametru si se reia pasul anterior pana la indeplinirea unui
criteriu de convergenta ales convenabil.
24
Deoarece matricea Hessiana a functiei nu este intotdeauna pozitiv definita,
sistemul descris de relatia 3.43 nu poate fi rezolvat printr-un algoritm de tip Gauss-Newton.
Se introduce functia :
(3.47)
unde este matricea diagonala definita astfel:
(3.48)
pentru care este valabila urmatoarea inegalitate:
(3.49)
Astfel, directia de descrestere este similara cu cea de tip Newton.
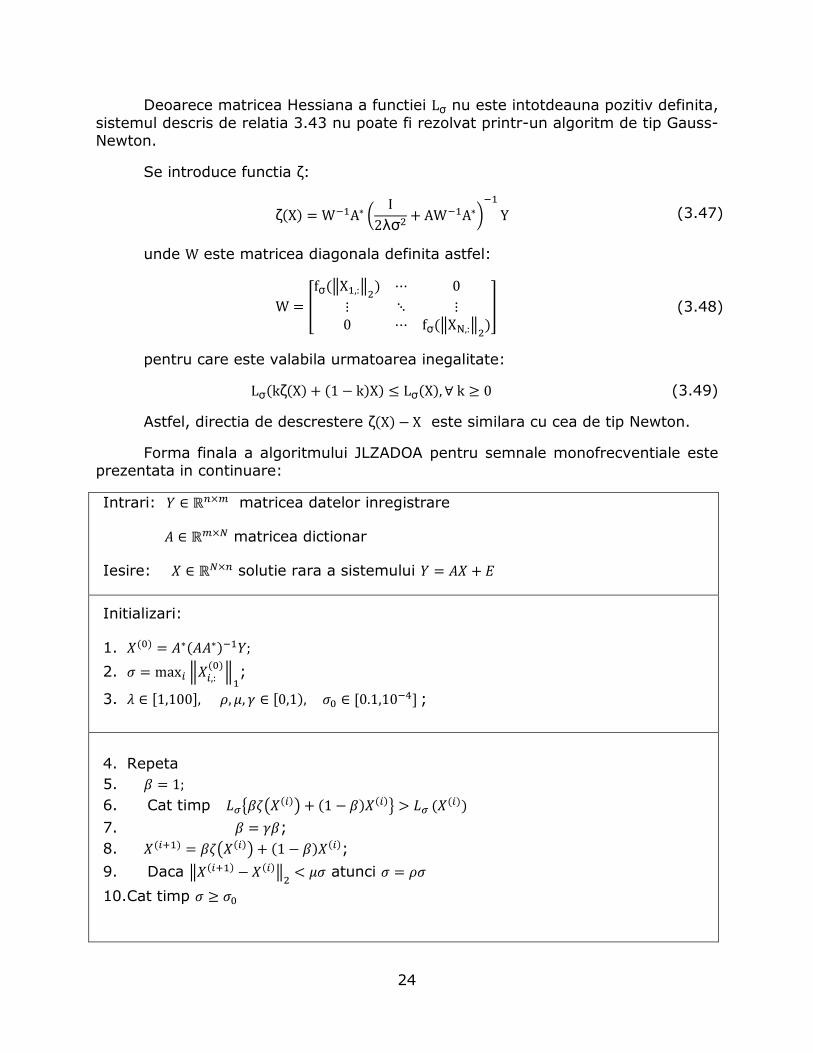
Forma finala a algoritmului JLZADOA pentru semnale monofrecventiale este prezentata in continuare:
Intrari: matricea datelor inregistrare
matricea dictionar
Iesire: solutie rara a sistemului
Initializari:
1.
2. ;
3. ;
4. Repeta
5.
6. Cat timp
7. ;
8. ;
9. Daca atunci
10.Cat timp
25
Se observa in cadrul algoritmului necesitatea initializarii unor parametrii. Desi
este specificata plaja acestora, valorile optime sunt determinate empiric si sunt puternic influentate de raportul semnal-zgomot(SNR).
3.4.3 ALGORITMUL SOMP
Simultaneous Orthogonal Matching Pursuit este al doilea algoritm prezentat
in cadrul acestei lucrari ce exploateaza proprietatea de matrice rara a sistemului descris de relatia...
Acesta este un algoritm lacom(greedy) ce are ca principiu de functionare cautarea elementelor din dictionar ce aproximeaza cel mai bine un semnal.
Presupunand ca exista multiple observatii asupra unui semnal, se doreste utilizarea acestora pentru a realiza o estimare simultana de precizie superioara.
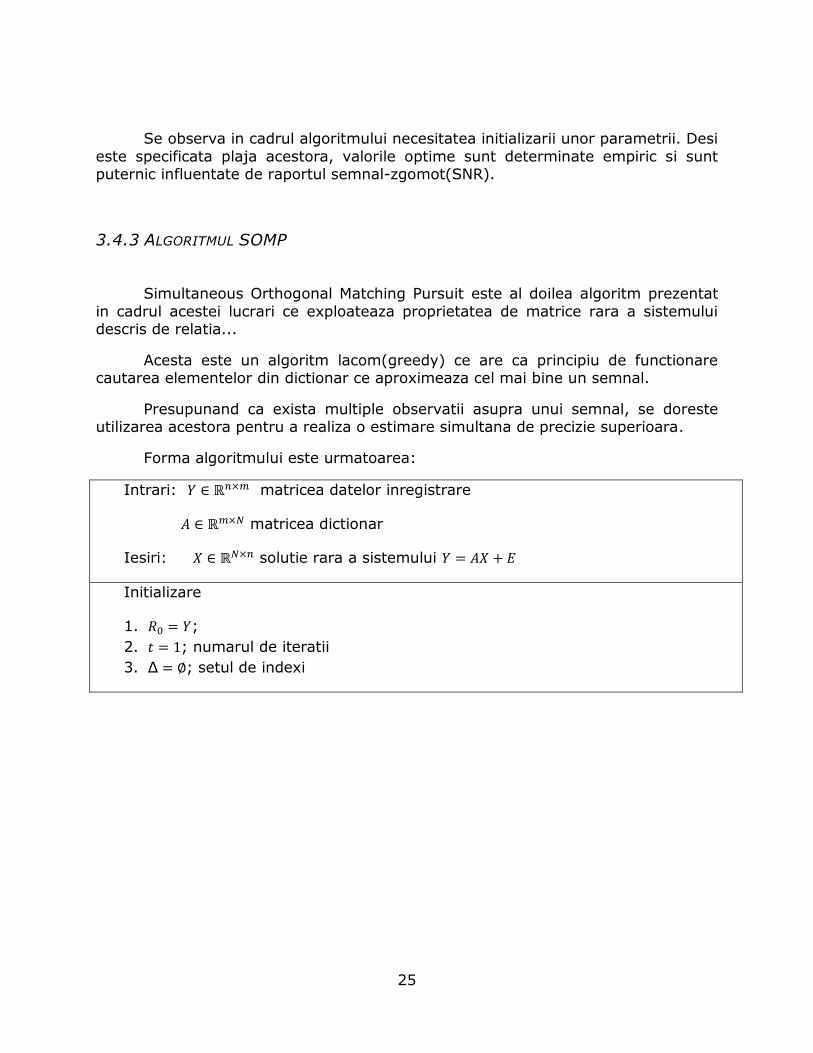
Forma algoritmului este urmatoarea:
Intrari: matricea datelor inregistrare
matricea dictionar
Iesiri: solutie rara a sistemului
Initializare
1. ;
2. ; numarul de iteratii
3. ; setul de indexi

26
4. Repeta
5. Cauta indexul ce satisface relatia
6. Memoreaza indexul gasit
7. Calculeaza proiectia ortogonala a reziduului pe subspatiul definit de setul
de indexi
8. Actualizeaza reziduul
9. pana cand este indeplinit un criteriu de convergenta ales convenabil.
unde prin se intelege selectia de coloane din matricea conform setului de indexi si reprezinta vector din baza canonica in .
Pasul 5 este denumit “selectie lacoma” deoarece se cauta termenul a carui contributie de energie este maxima pentru fiecare coloana a matricii de semnal.
Pasul 7 este necesar pentru a ne asigura ca un termen este selectat o singura data.
Criteriu de convergenta este ales in functie de aplicatie, cateva astfel de exemple fiind:
norma Frobenius a reziduulului devine mai mica decat un prag de precizie:
numarul de iteratii ale algoritmului este limitat la o valoare T (max N): t=T corelatia totala maxima dintre reziduu si un atom scade sub un prag:
27
Este important de mentionat ca se poate recurge la o conditie mai slaba de selectie a atomilor, de genul:
(3.50)
Valori mai mici ale parametrului vor selecta atomii cu o contributie mai mica la mai multe semnale, in timp ce valori mai mari selecteaza atomii ce
contribuie cu o cantitate mai mare de energie la un singur semnal.
3.5 CAZUL SEMNALELOR MULTIFRECVENTIALE
Pana acum am discutat despre cazul semnalelor monofrecventiale sau de banda ingusta, dar scopul acestei lucrari este acela de a identifica pozitia unui surse
de semnal multifrecvential cu spectrul in gama . Asadar este necesara
extinderea algoritmilor prezentati pentru a trata astfel de semnale.
O varianta pentru a utiliza algoritmii monofrecventiali in acest caz este
impartirea semnalului in functie de frecvente. Se va apela la Short Time Fourier Transform(STFT) pentru acest lucru intrucat proprietatile acestei transformarii pot fi aplicate in cazul estimarii DOA.
STFT, in cazul continuu, reprezinta aplicarea transformatei Fourier pe un
semnal multiplicat cu o fereastra nenula pentru o perioada scurta de timp
pentru a surprinde momentele in care au loc schimbarile de frecventa din semnal.
(3.51)
In cazul discret, datele pot fi grupate in blocuri , ce se pot suprapune, asupra carora este aplicata transformarea.
(3.52)
Pentru a obtine o matrice de semnale asupra careia se poate aplica un algoritm de estimare DOA pornind de la un semnal multifrecvential, este necesara o
prelucrare a acestora. Pentru exemplificare, se vor utiliza datele inregistrate de un singur microfon, urmand ca matricea sa fie obtinuta prin concatenarea pe coloane a vectorilor obtinuti.
se vor grupa datele in blocuri de dimensiune , unde este
putere a lui 2; pentru fiecare bloc de date se va aplica Fast Fourier Transform de ordinul
;
28
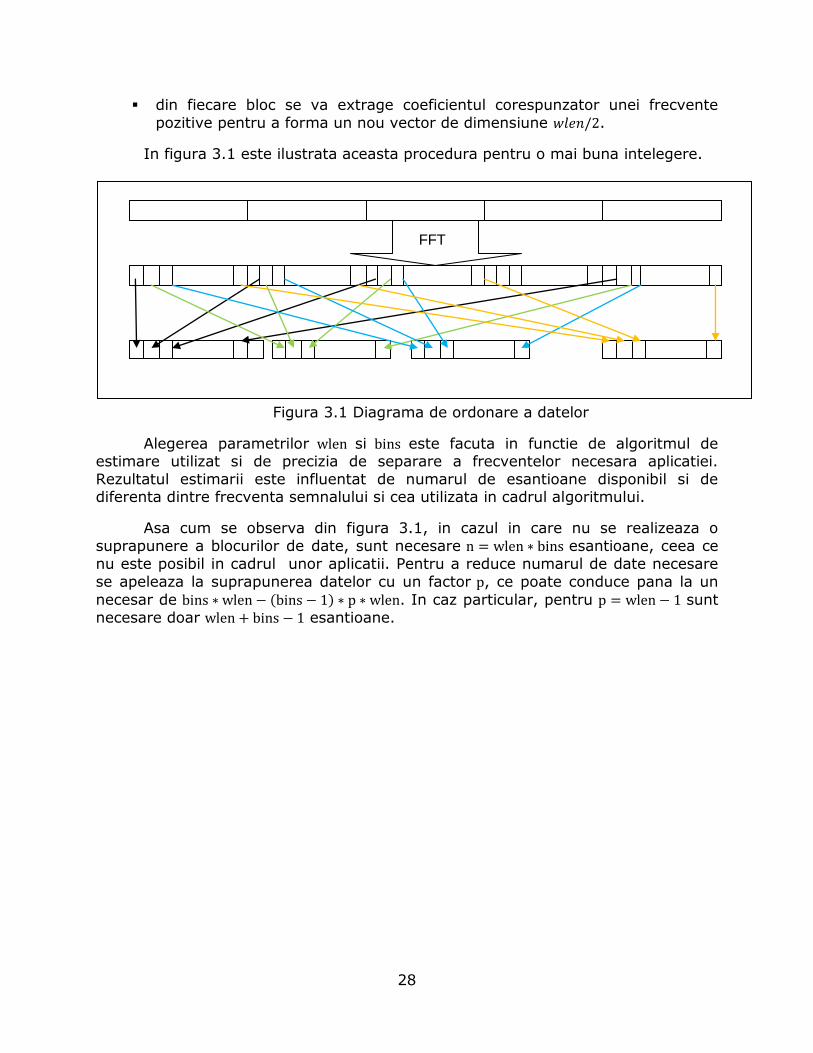
din fiecare bloc se va extrage coeficientul corespunzator unei frecvente
pozitive pentru a forma un nou vector de dimensiune .
In figura 3.1 este ilustrata aceasta procedura pentru o mai buna intelegere.
Figura 3.1 Diagrama de ordonare a datelor
Alegerea parametrilor si este facuta in functie de algoritmul de estimare utilizat si de precizia de separare a frecventelor necesara aplicatiei.
Rezultatul estimarii este influentat de numarul de esantioane disponibil si de diferenta dintre frecventa semnalului si cea utilizata in cadrul algoritmului.
Asa cum se observa din figura 3.1, in cazul in care nu se realizeaza o
suprapunere a blocurilor de date, sunt necesare esantioane, ceea ce
nu este posibil in cadrul unor aplicatii. Pentru a reduce numarul de date necesare
se apeleaza la suprapunerea datelor cu un factor , ce poate conduce pana la un
necesar de . In caz particular, pentru sunt
necesare doar esantioane.
FFT
29
4. ANALIZA PERFORMANTELOR
4.1 CONTEXTUL ANALIZEI
In acest capitol vor fi evaluate performantele algoritmilor SOMP si JLZADOA prin analiza rezultatelor obtinute in urma testarii in diverse conditii.
Cele doua metode au fost implementate in mediu Matlab si s-au desfasurat
multiple experimente pentru a surprinde performantele algoritmilor.
Se vor folosi urmatoarele tipuri de semnale cu spectrul in gama [0-4kHz]:
semnale monofrecventiale ideale, generate in Matlab; semnale multifrecventiale ideale, generate in Matlab;
semnale multifrecventiale reale, inregistrate cu ajutor sistemului de achizitie.
Structurile utilizate atat in cazul semnalelor generate cat si in cazul semnalelor reale sunt identice pentru a putea ilustra performantele algoritmilor si
anume:
Uniform Linear Array realizat cu ajutor a microfoane plasate la o
distanta intre doi senzori consecutivi; este considerat ca punct
de referinta pozitia primului microfon conform figurii 2.2;
Uniform Circular Array realizat cu ajutor a microfoane , cu raza
; este considerat ca punct de referinta centrul cercului pe care sunt dispuse microfoanele.
Rezultatele vor fi prezentate sub forma de grafice sau sub forma de tabele, acolo unde este cazul, si apoi interpretate.
De asemenea trebuie mentionat faptul ca pentru stabilitatea numerica a acestor algoritmi au fost introduse corectii minore acolo unde este cazul. Aceste
corectii au fost realizate astfel incat impactul lor asupra rezultatelor sa fie minim.
30
4.2 SEMNALE MONOFRECVENTIALE
4.2.1 CAZUL UNIFORM LINEAR ARRAY
Se vor considera urmatoarele experimente pentru arhitectura ULA:
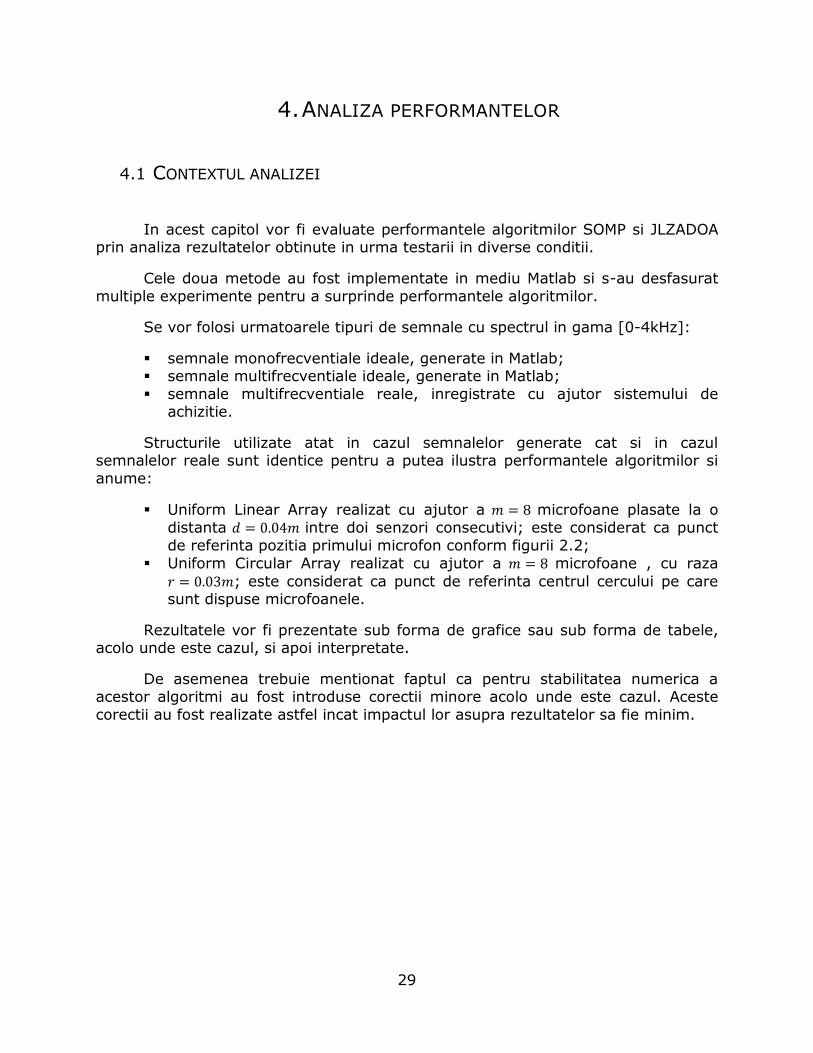
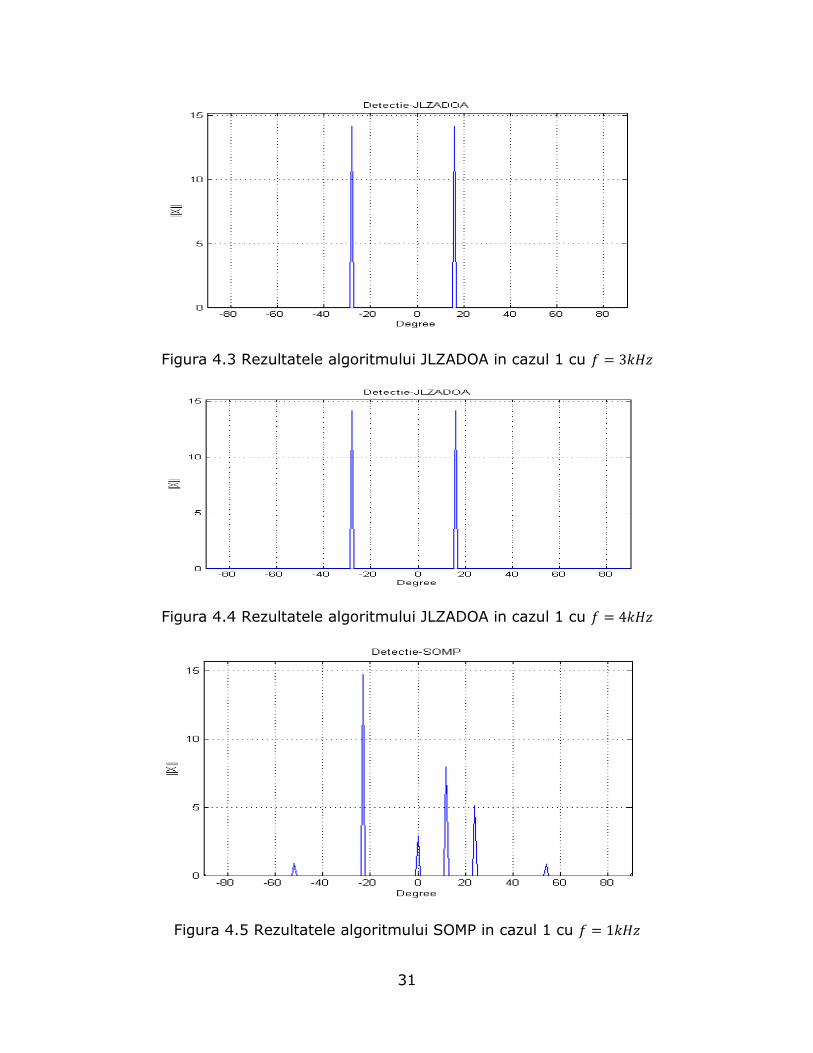
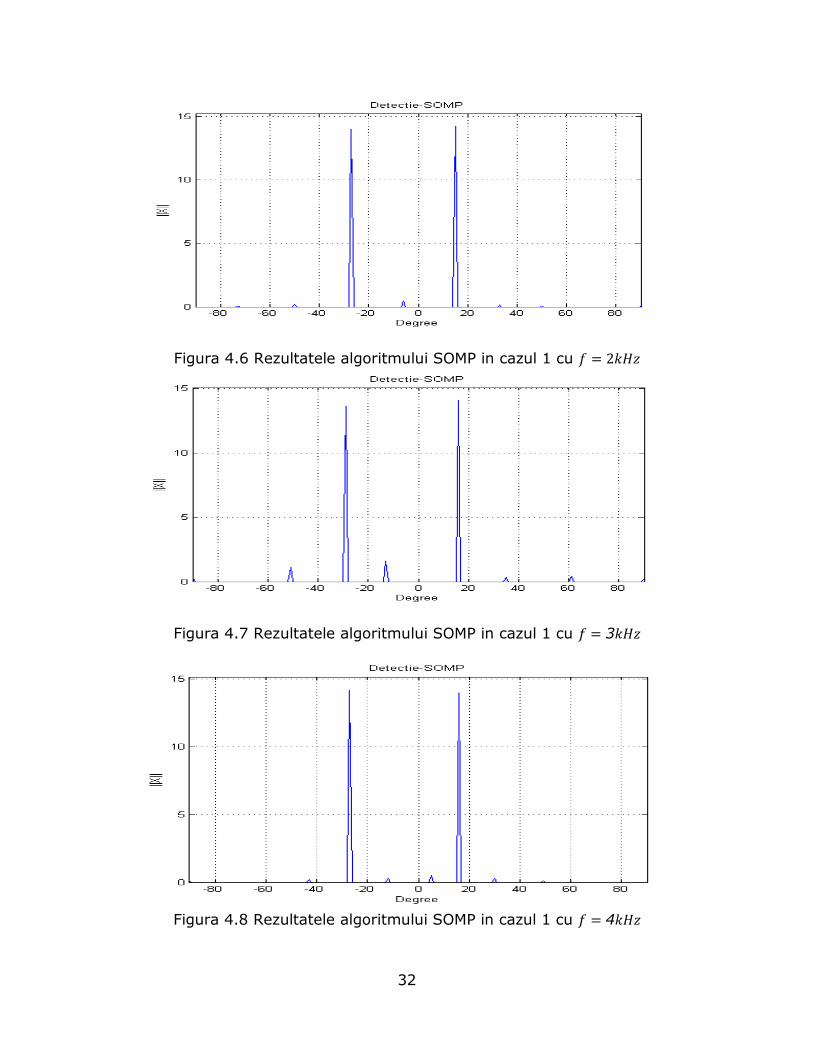
Cazul 1: determinarea pozitiei a doua surse identice departate, cu unghiurile si , ce emit semnale cu frecventa ,
considerand un numar de esantioane si o rezolutie de scanare ;
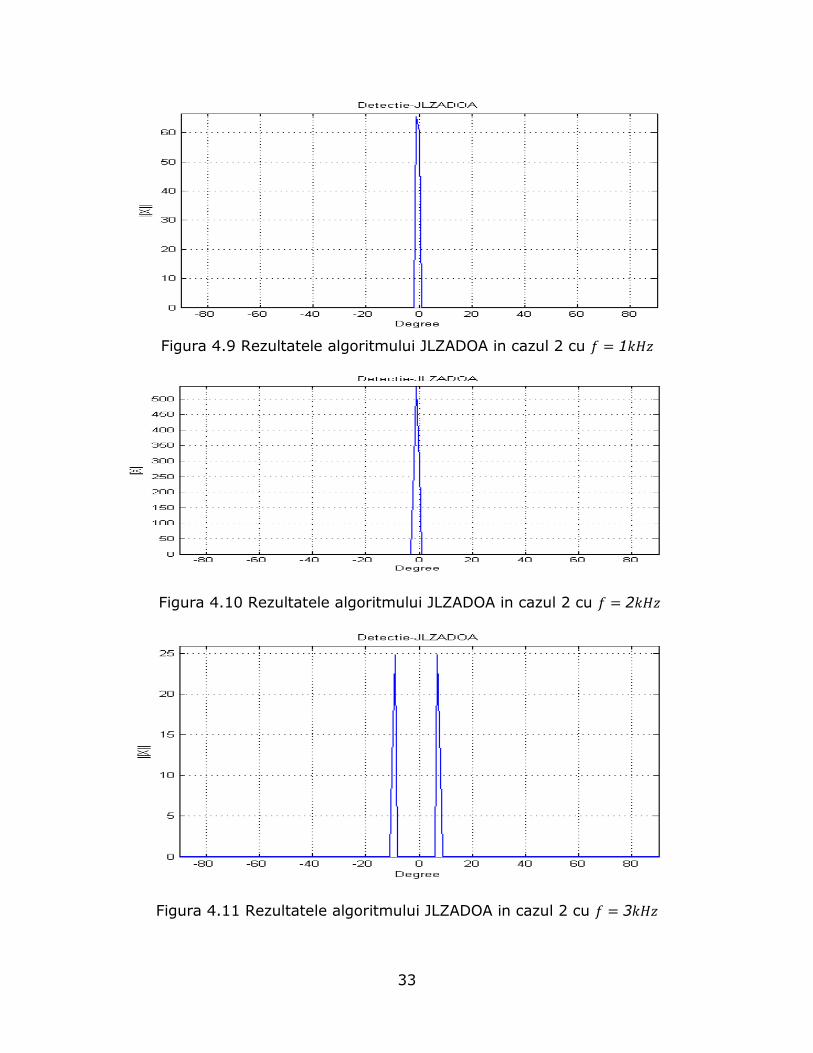
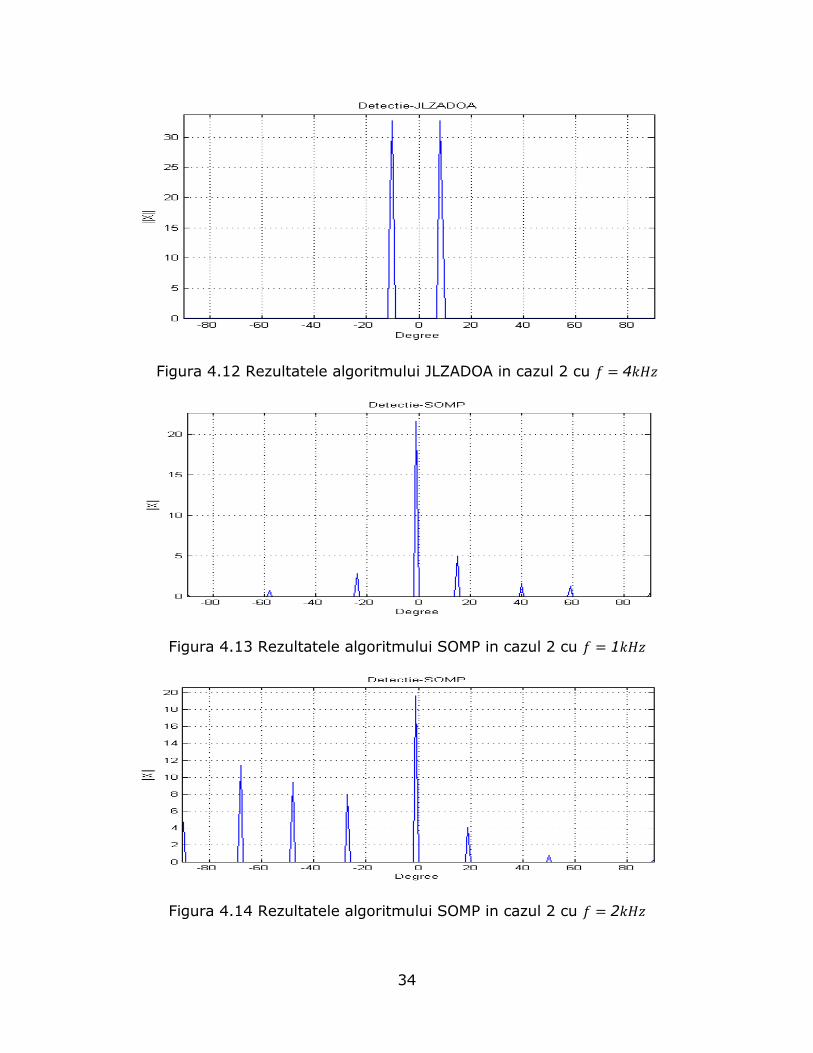
Cazul 2: determinarea pozitiei a doua surse identice departate, cu unghiurile si , ce emit semnale cu frecventa ,
considerand un numar de esantioane si o rezolutie de scanare .
Figura 4.1 Rezultatele algoritmului JLZADOA in cazul 1 cu
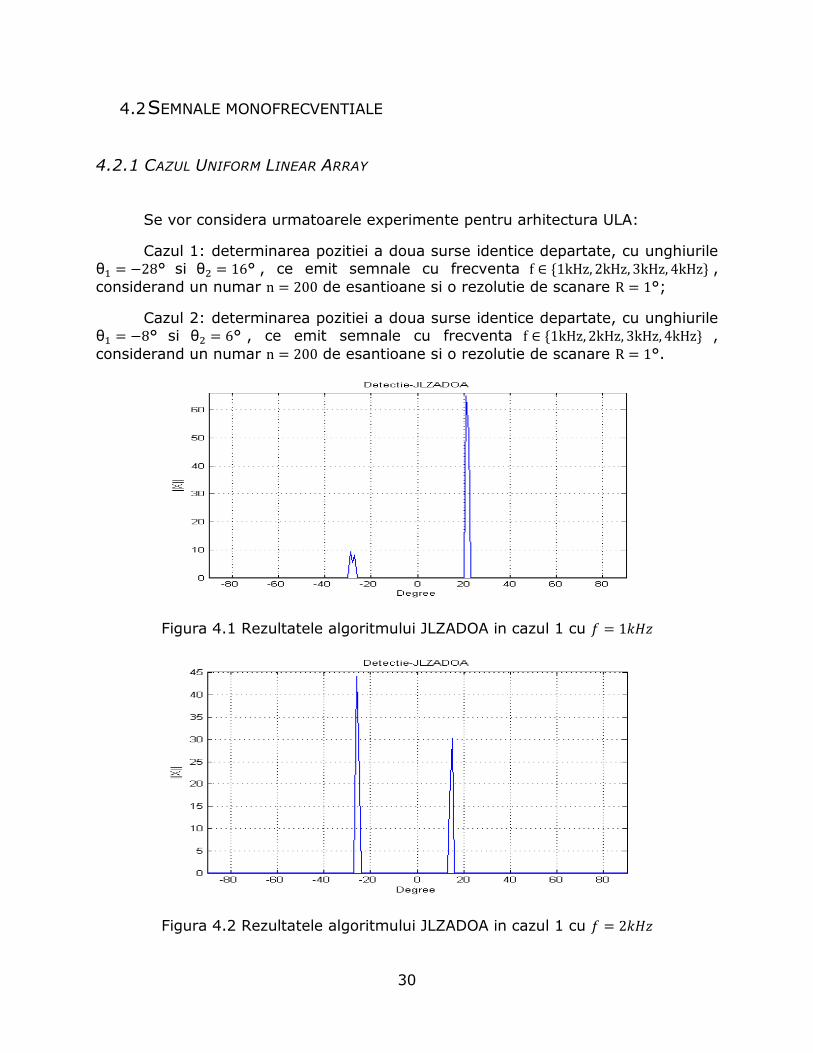
Figura 4.2 Rezultatele algoritmului JLZADOA in cazul 1 cu
31
Figura 4.3 Rezultatele algoritmului JLZADOA in cazul 1 cu
Figura 4.4 Rezultatele algoritmului JLZADOA in cazul 1 cu
Figura 4.5 Rezultatele algoritmului SOMP in cazul 1 cu
32
Figura 4.6 Rezultatele algoritmului SOMP in cazul 1 cu
Figura 4.7 Rezultatele algoritmului SOMP in cazul 1 cu
Figura 4.8 Rezultatele algoritmului SOMP in cazul 1 cu
33
Figura 4.9 Rezultatele algoritmului JLZADOA in cazul 2 cu
Figura 4.10 Rezultatele algoritmului JLZADOA in cazul 2 cu
Figura 4.11 Rezultatele algoritmului JLZADOA in cazul 2 cu
34
Figura 4.12 Rezultatele algoritmului JLZADOA in cazul 2 cu
Figura 4.13 Rezultatele algoritmului SOMP in cazul 2 cu
Figura 4.14 Rezultatele algoritmului SOMP in cazul 2 cu
35
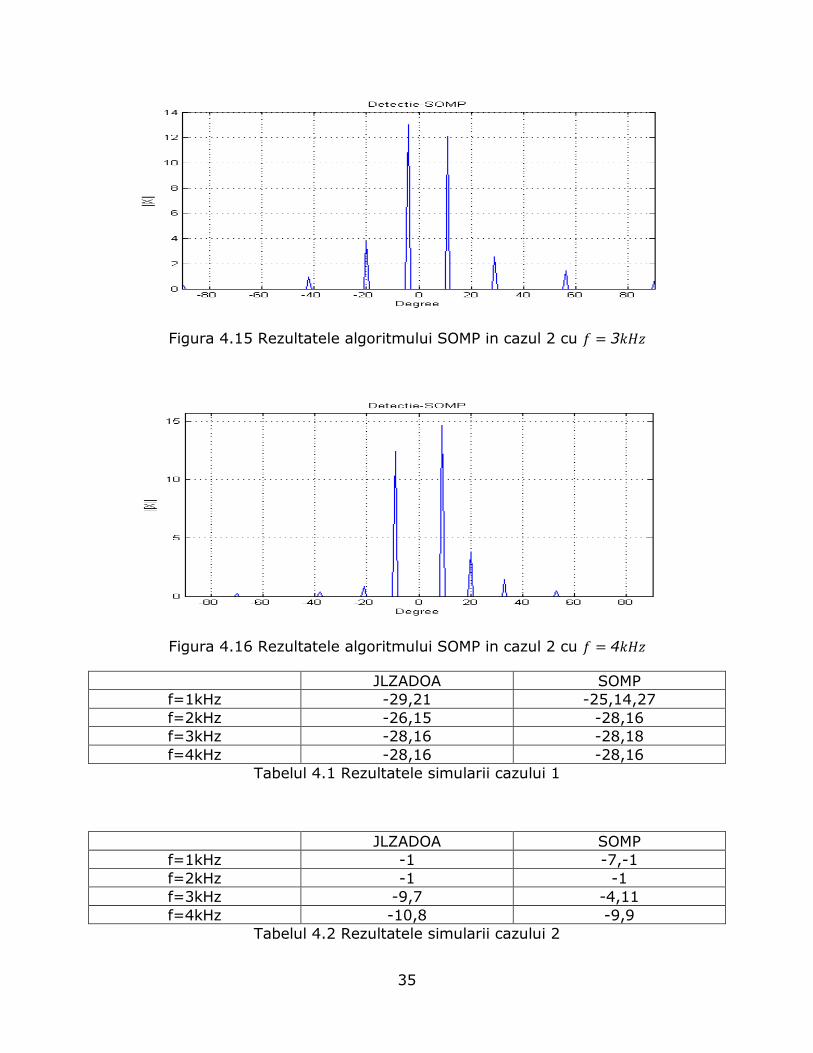
Figura 4.15 Rezultatele algoritmului SOMP in cazul 2 cu
Figura 4.16 Rezultatele algoritmului SOMP in cazul 2 cu
JLZADOA SOMP
f=1kHz -29,21 -25,14,27
f=2kHz -26,15 -28,16
f=3kHz -28,16 -28,18
f=4kHz -28,16 -28,16
Tabelul 4.1 Rezultatele simularii cazului 1
JLZADOA SOMP
f=1kHz -1 -7,-1
f=2kHz -1 -1
f=3kHz -9,7 -4,11
f=4kHz -10,8 -9,9
Tabelul 4.2 Rezultatele simularii cazului 2
36
Din rezultatele celor 2 experimente ca problema estimarii unui semnal cu frecvente in spectrul vocal este una dificila, convergenta algoritmilor fiind puternic
influentata de frecventa semnalului. Majoritatea algoritmilor de estimare DOA sunt utilizati in domenii ce implica semnale de frecvente mari, ce ar elimina acest
neajuns.
De asemenea, se poate observa algoritmii pot identifica cu usurinta surse
departate, insa au probleme in cazul in care unghiul dintre surse este mic. Acest fapt ar putea fi cu usurinta combatut de cresterea secventei semnalului, dar in
cadrul vocii umane nu este posibil asa ceva.
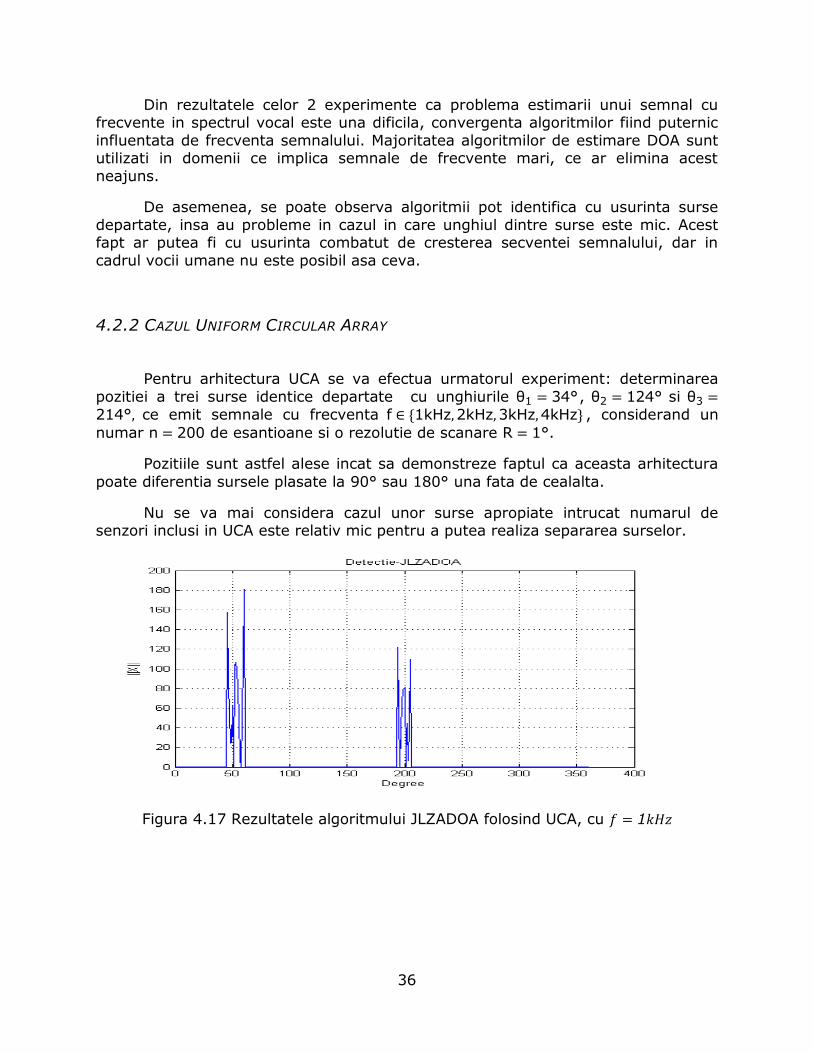
4.2.2 CAZUL UNIFORM CIRCULAR ARRAY
Pentru arhitectura UCA se va efectua urmatorul experiment: determinarea
pozitiei a trei surse identice departate cu unghiurile 1 3 , 2 12 si 3 21 ce emit semnale cu frecventa f 1 2 3 , considerand un
numar n 200 de esantioane si o rezolutie de scanare 1 .
Pozitiile sunt astfel alese incat sa demonstreze faptul ca aceasta arhitectura
poate diferentia sursele plasate la 0 sau 1 0 una fata de cealalta.
Nu se va mai considera cazul unor surse apropiate intrucat numarul de senzori inclusi in UCA este relativ mic pentru a putea realiza separarea surselor.
Figura 4.17 Rezultatele algoritmului JLZADOA folosind UCA, cu
37
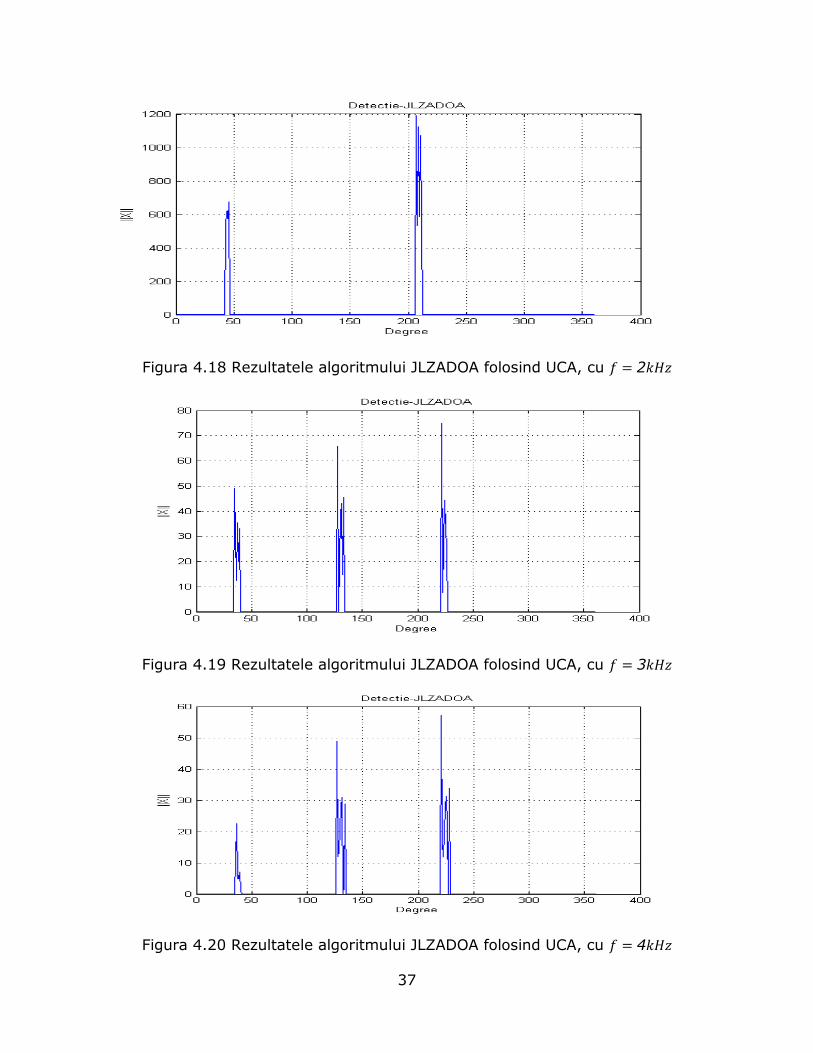
Figura 4.18 Rezultatele algoritmului JLZADOA folosind UCA, cu
Figura 4.19 Rezultatele algoritmului JLZADOA folosind UCA, cu
Figura 4.20 Rezultatele algoritmului JLZADOA folosind UCA, cu
38
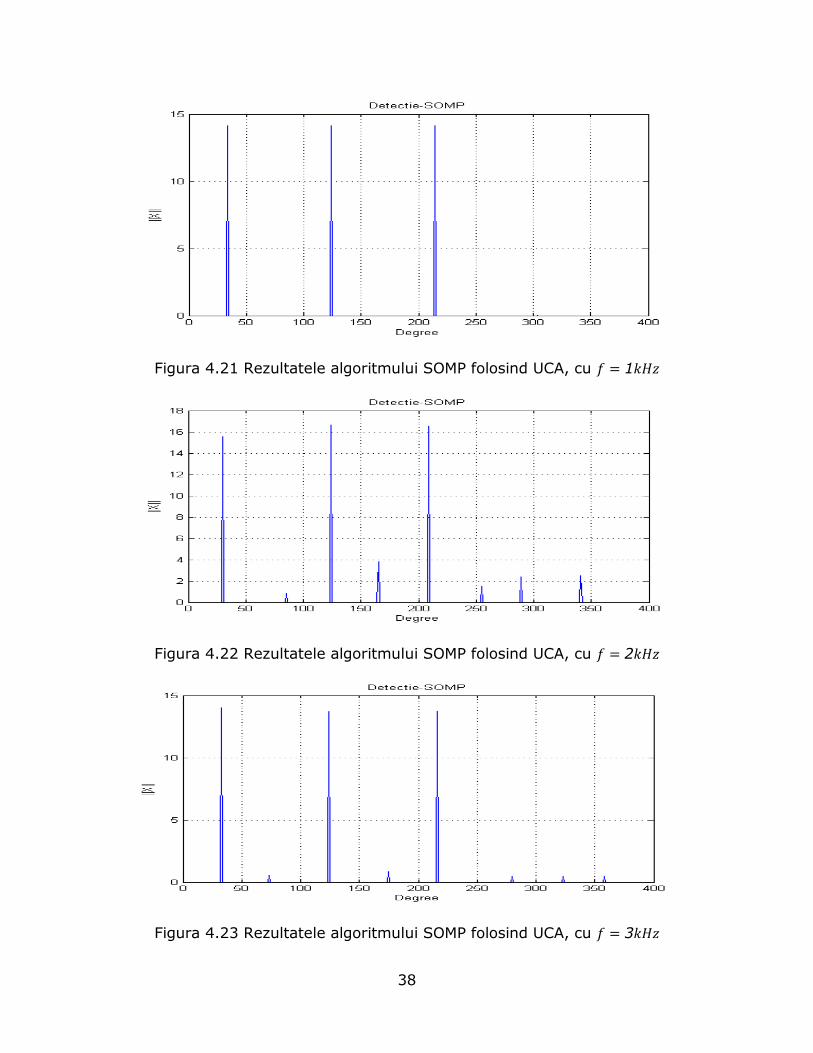
Figura 4.21 Rezultatele algoritmului SOMP folosind UCA, cu
Figura 4.22 Rezultatele algoritmului SOMP folosind UCA, cu
Figura 4.23 Rezultatele algoritmului SOMP folosind UCA, cu
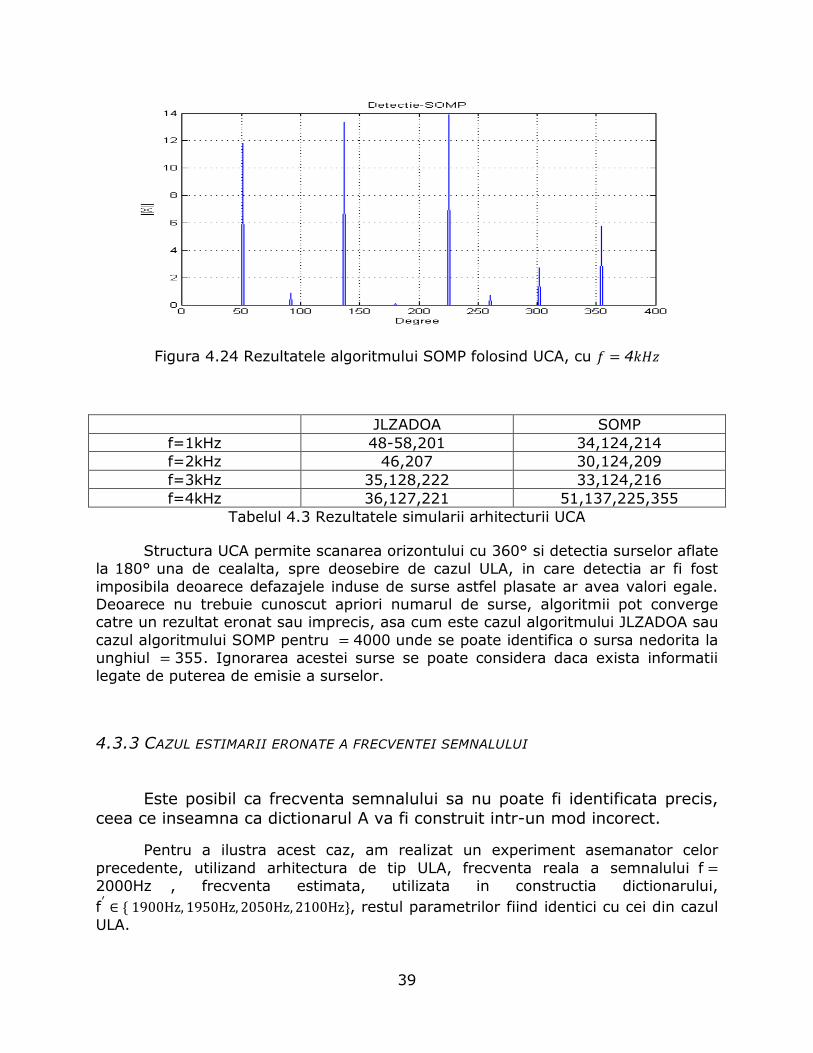
39
Figura 4.24 Rezultatele algoritmului SOMP folosind UCA, cu
JLZADOA SOMP
f=1kHz 48-58,201 34,124,214
f=2kHz 46,207 30,124,209
f=3kHz 35,128,222 33,124,216
f=4kHz 36,127,221 51,137,225,355
Tabelul 4.3 Rezultatele simularii arhitecturii UCA
Structura UCA permite scanarea orizontului cu 3 0 si detectia surselor aflate
la 1 0 una de cealalta, spre deosebire de cazul ULA, in care detectia ar fi fost
imposibila deoarece defazajele induse de surse astfel plasate ar avea valori egale. Deoarece nu trebuie cunoscut apriori numarul de surse, algoritmii pot converge catre un rezultat eronat sau imprecis, asa cum este cazul algoritmului JLZADOA sau
cazul algoritmului SOMP pentru 000 unde se poate identifica o sursa nedorita la
unghiul 3 . Ignorarea acestei surse se poate considera daca exista informatii
legate de puterea de emisie a surselor.
4.3.3 CAZUL ESTIMARII ERONATE A FRECVENTEI SEMNALULUI
Este posibil ca frecventa semnalului sa nu poate fi identificata precis,
ceea ce inseamna ca dictionarul A va fi construit intr-un mod incorect.
Pentru a ilustra acest caz, am realizat un experiment asemanator celor
precedente, utilizand arhitectura de tip ULA, frecventa reala a semnalului f 2000 , frecventa estimata, utilizata in constructia dictionarului,
f , restul parametrilor fiind identici cu cei din cazul
ULA.
40
Rezultatele sunt prezentate in tabelul 4.4.
JLZADOA SOMP
f’=1 00 -28,16 -30,17
f’=1 0 -27,16 -29,17
f’=20 0 -26,16 -27,16
f’=2100 -25,15 -27,15
Tabelul 4.4 Rezultatele simularii algoritmilor in cazul estimarii eronate a frecventei
semnalului
Rezultatele obtinute in urma acestor simulari dovedesc faptul ca algoritmii utilizati in acest caz pot converge catre solutia corecta chiar daca exista incertitudini
in privinta frecventei semnalului. Acest rezultat poate fi utilizat in cazul semnalelor multifrecventiale deoarece nu va fi necesara separarea precisa a frecventelor pentru ca algoritmii JLZADOA si SOMP sa obtina rezultatele dorite. Acest lucru se traduce
in reducerea ordinului FFT, egal totodata cu dimensiunea ferestrei, ceea ce determina un numar mai mic de esantioane necesar.
In cadrul acestor experimente, au fost folosite semnale monofrecventiale in conditii de simulare ideale. Cu toate acestea, se dovedeste ca problema localizarii
vorbitorului este una dificila din cauza frecventelor joase ce intra in componenta semnalului vocal. Ambele structuri utilizate prezinta avantajul simplitatii geometriei
si a calculelor aferente acestora, permitand localizarea surselor intr-un semiplan, in cazul ULA, sau intr-un plan, in cazul UCA.
41
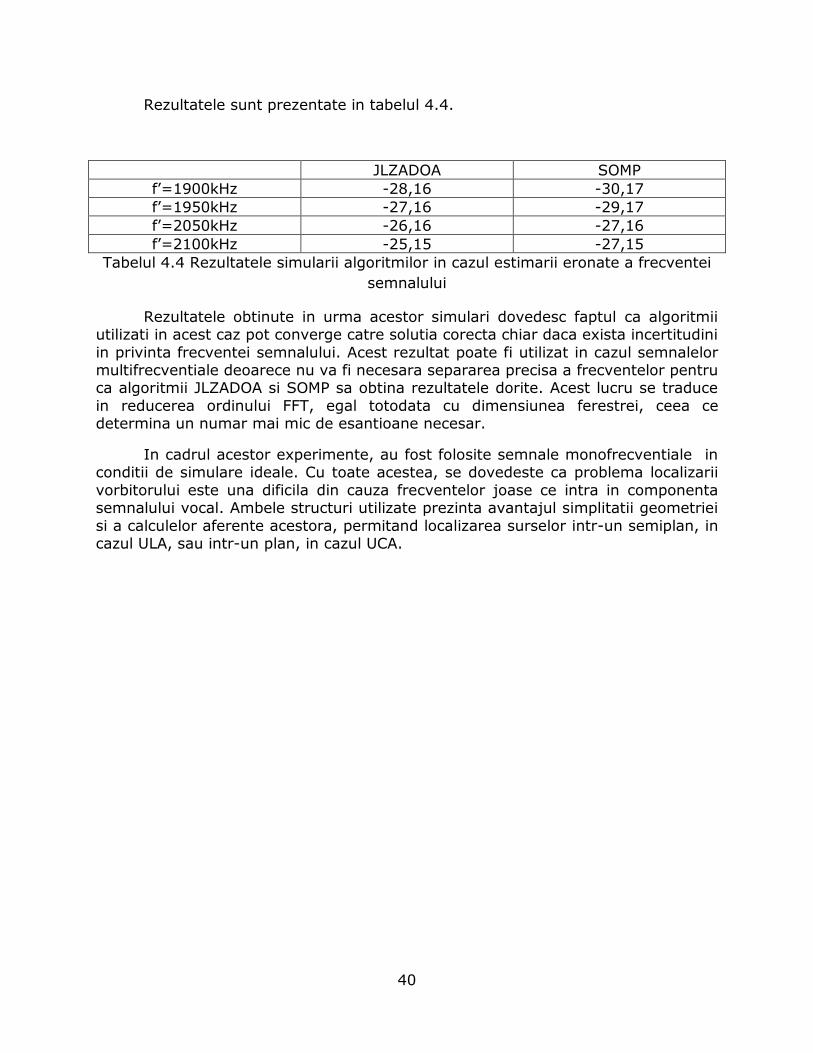
4.3 SEMNALE MULTIFRECVENTIALE IDEALE
4.3.1 CAZUL UNIFORM LINEAR ARRAY
In cadrul acestei experiment , se doreste identificarea pozitiei a doua surse
identice departate, ale caror semnal este format din sinusoide de frecvente . Unghiurile surselor sunt si . Se
va considera o rezolutie , frecventa de esantionare , ordinul
FFT/dimensiunea ferestrei , numarul de ferestre si un factor de
suprapunere .
Rezultatele sunt prezentate in continuate:
Figura 4.25 Rezultatele algoritmului JLZADOA in cazul semnalelor multifrecventiale
ideale (reprezentare 3d)
42
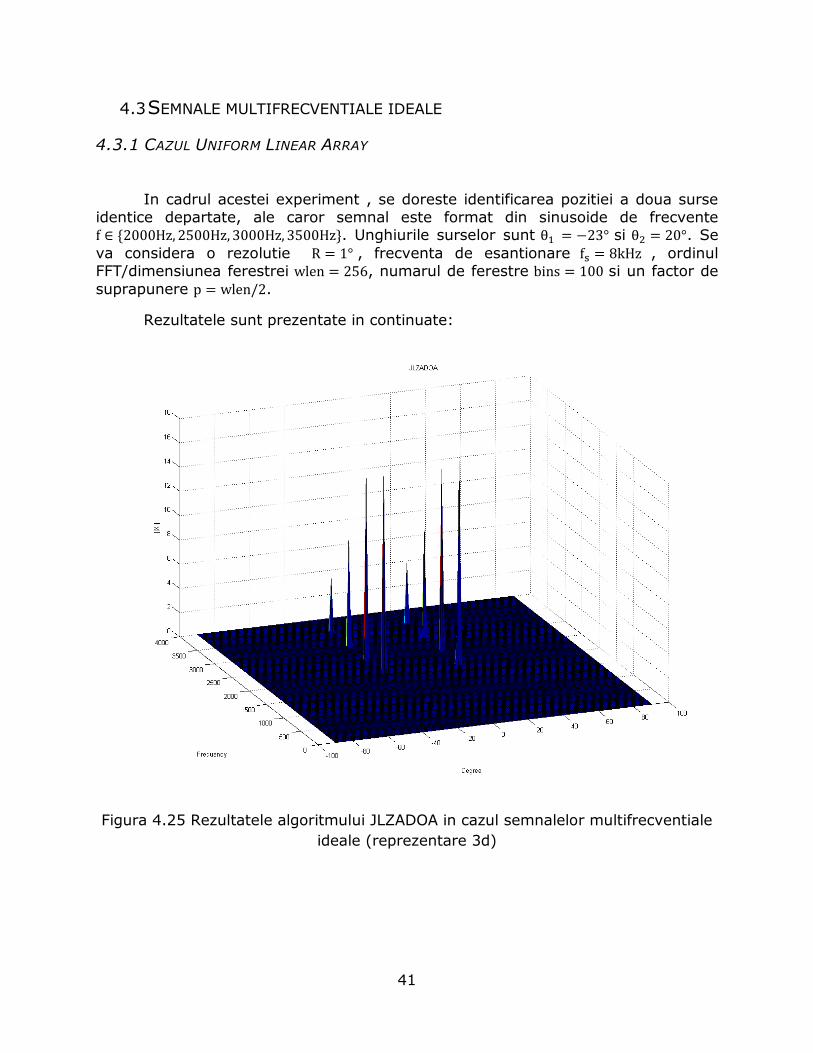
Figura 4.26 Rezultatele algoritmului JLZADOA in cazul semnalelor multifrecventiale
ideale (reprezentare 2d)
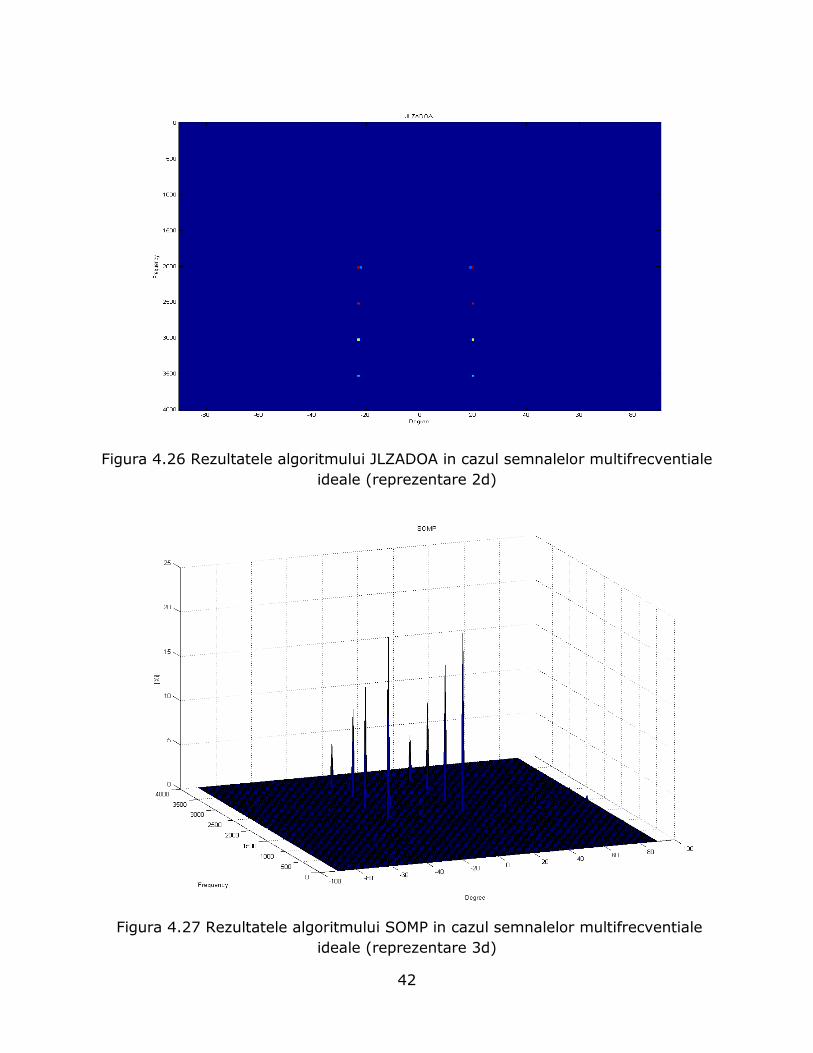
Figura 4.27 Rezultatele algoritmului SOMP in cazul semnalelor multifrecventiale
ideale (reprezentare 3d)
43
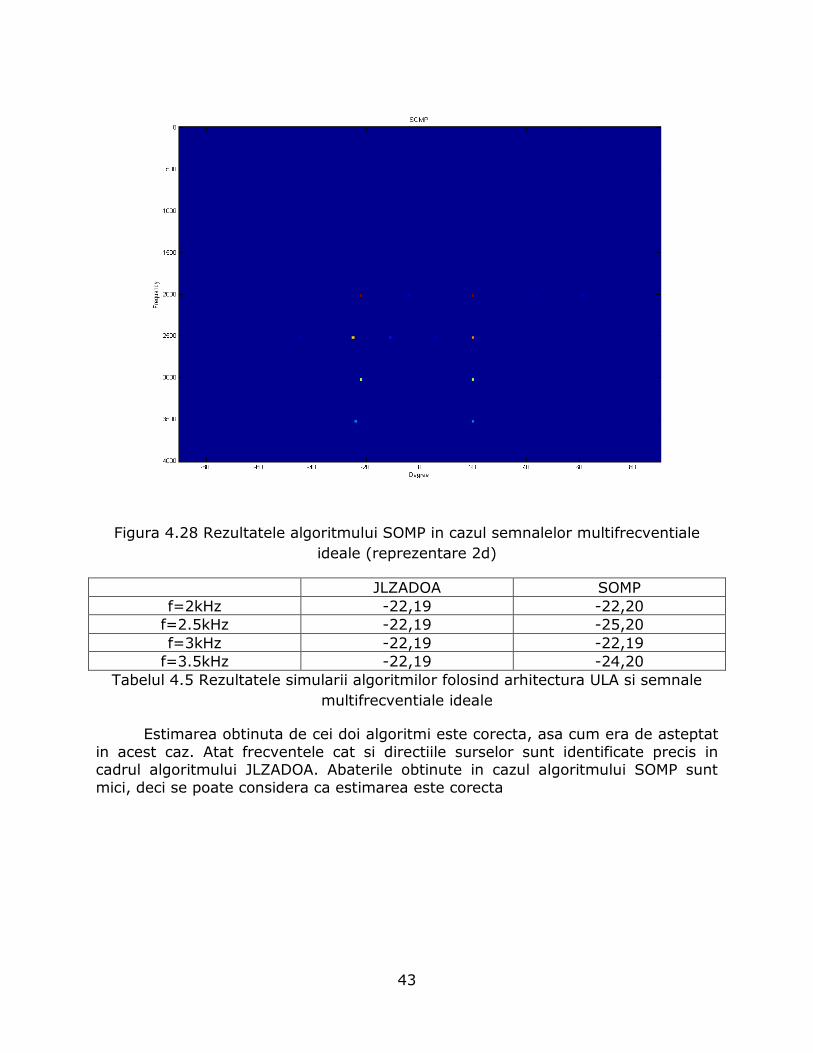
Figura 4.28 Rezultatele algoritmului SOMP in cazul semnalelor multifrecventiale
ideale (reprezentare 2d)
JLZADOA SOMP
f=2kHz -22,19 -22,20
f=2.5kHz -22,19 -25,20
f=3kHz -22,19 -22,19
f=3.5kHz -22,19 -24,20
Tabelul 4.5 Rezultatele simularii algoritmilor folosind arhitectura ULA si semnale
multifrecventiale ideale
Estimarea obtinuta de cei doi algoritmi este corecta, asa cum era de asteptat
in acest caz. Atat frecventele cat si directiile surselor sunt identificate precis in cadrul algoritmului JLZADOA. Abaterile obtinute in cazul algoritmului SOMP sunt
mici, deci se poate considera ca estimarea este corecta
44
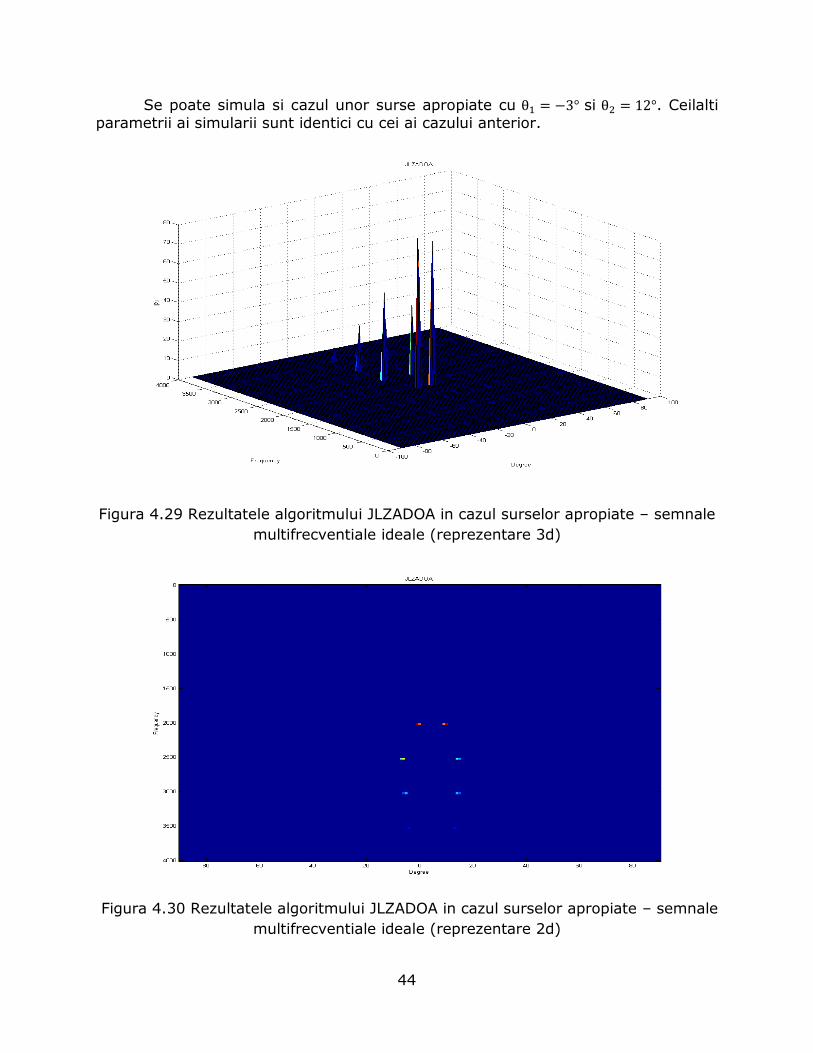
Se poate simula si cazul unor surse apropiate cu si . Ceilalti
parametrii ai simularii sunt identici cu cei ai cazului anterior.
Figura 4.29 Rezultatele algoritmului JLZADOA in cazul surselor apropiate – semnale
multifrecventiale ideale (reprezentare 3d)
Figura 4.30 Rezultatele algoritmului JLZADOA in cazul surselor apropiate – semnale
multifrecventiale ideale (reprezentare 2d)
45
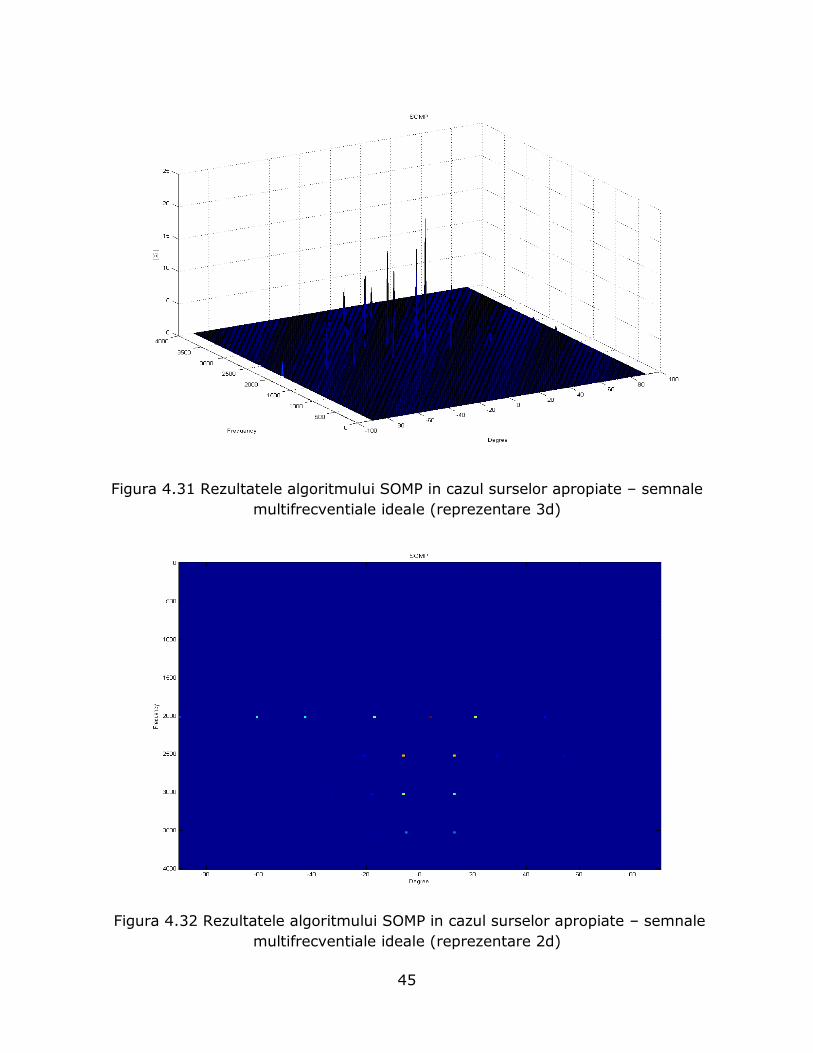
Figura 4.31 Rezultatele algoritmului SOMP in cazul surselor apropiate – semnale
multifrecventiale ideale (reprezentare 3d)
Figura 4.32 Rezultatele algoritmului SOMP in cazul surselor apropiate – semnale
multifrecventiale ideale (reprezentare 2d)
46
JLZADOA SOMP
f=2kHz -1,8 -62,-43,-17,4,21
f=2.5kHz -5,13 -7.13
f=3kHz -5.13 -6,13
f=3.5kHz -4,13 -5,13
Tabelul 4.6 Rezultatele simularii algoritmilor in cazul surselor apropiate folosind
arhitectura ULA si semnale multifrecventiale ideale
In cazul unor surse apropiate, estimarile pentru frecventele mari sunt corecte. Odata cu scaderea frecventei, rezultatele devin imprecise, asa cum era de asteptat. Nici unul dintre algoritmi nu este capabil sa localizeze pozitia surselor la
frecventa de 2kHz, rezultatul pentru JLZADOA fiind deviat iar estimarea obtinuta de SOMP fiind complet eronata.
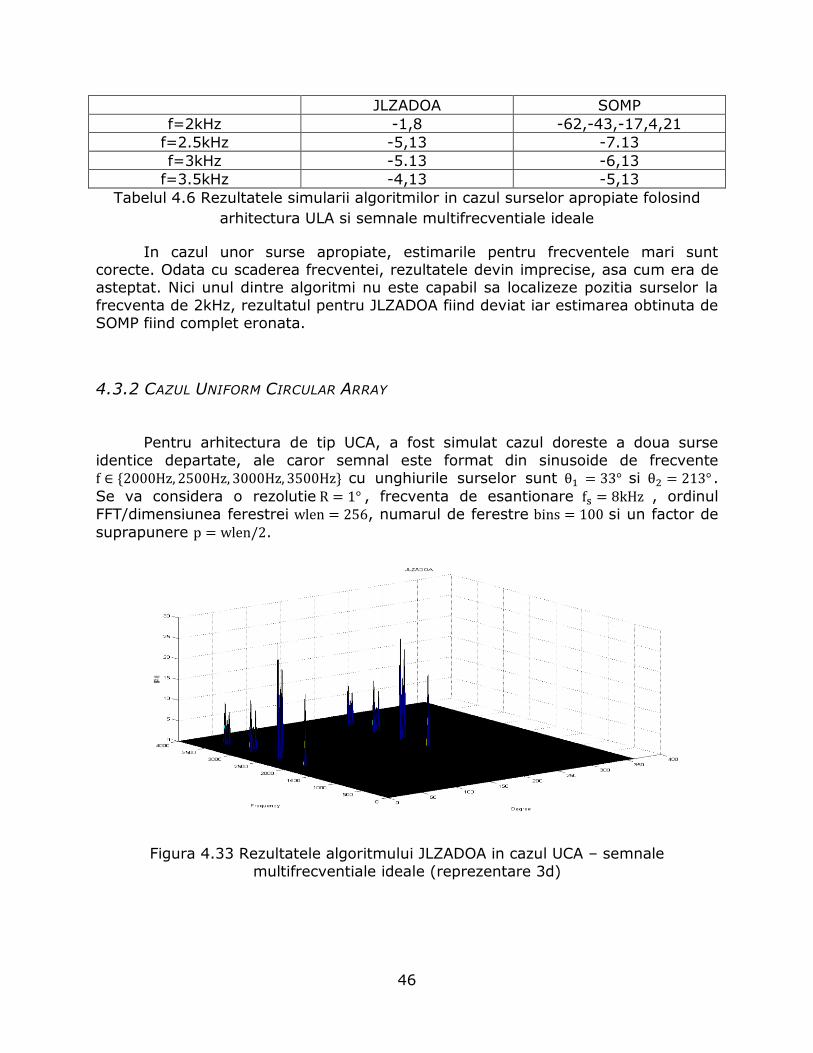
4.3.2 CAZUL UNIFORM CIRCULAR ARRAY
Pentru arhitectura de tip UCA, a fost simulat cazul doreste a doua surse
identice departate, ale caror semnal este format din sinusoide de frecvente cu unghiurile surselor sunt si . Se va considera o rezolutie , frecventa de esantionare , ordinul
FFT/dimensiunea ferestrei , numarul de ferestre si un factor de
suprapunere .
Figura 4.33 Rezultatele algoritmului JLZADOA in cazul UCA – semnale
multifrecventiale ideale (reprezentare 3d)
47
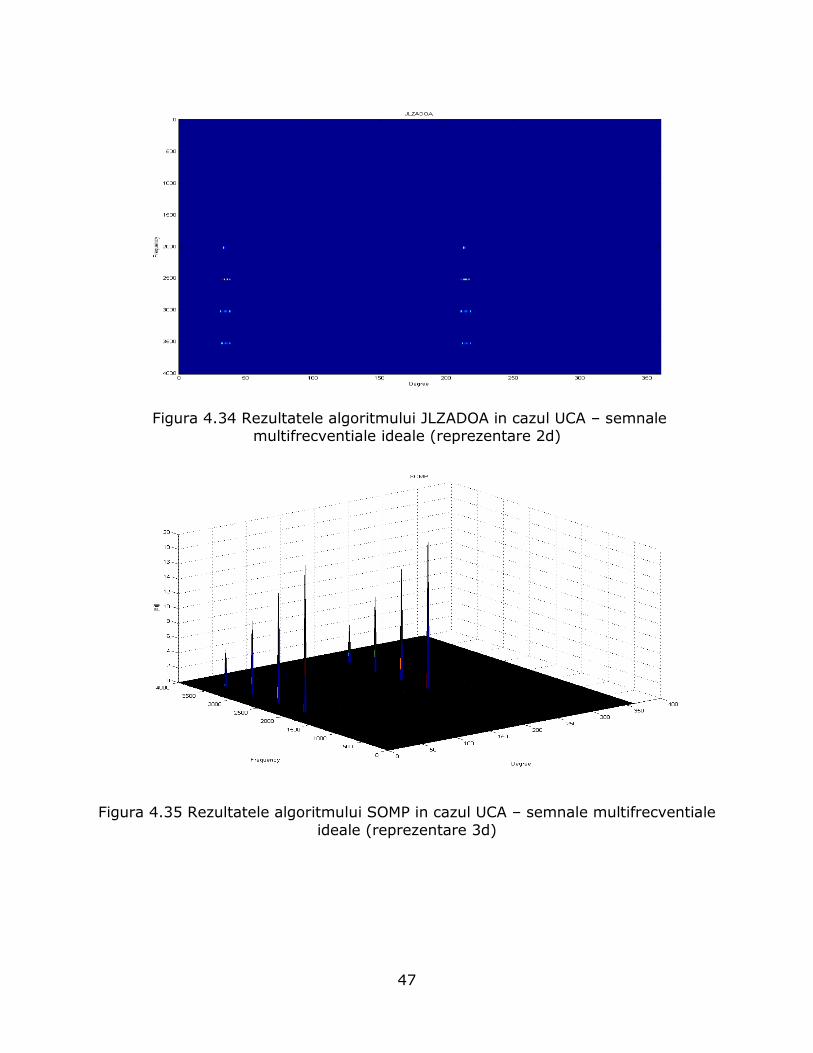
Figura 4.34 Rezultatele algoritmului JLZADOA in cazul UCA – semnale multifrecventiale ideale (reprezentare 2d)
Figura 4.35 Rezultatele algoritmului SOMP in cazul UCA – semnale multifrecventiale
ideale (reprezentare 3d)
48
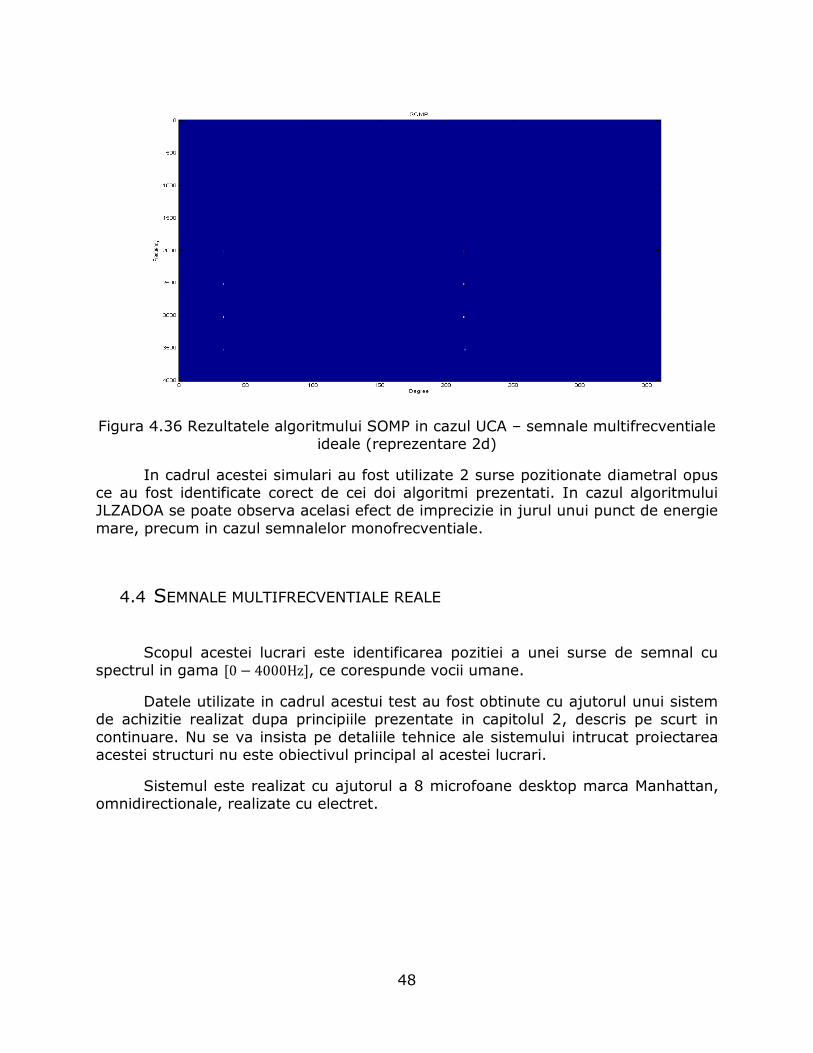
Figura 4.36 Rezultatele algoritmului SOMP in cazul UCA – semnale multifrecventiale ideale (reprezentare 2d)
In cadrul acestei simulari au fost utilizate 2 surse pozitionate diametral opus ce au fost identificate corect de cei doi algoritmi prezentati. In cazul algoritmului JLZADOA se poate observa acelasi efect de imprecizie in jurul unui punct de energie
mare, precum in cazul semnalelor monofrecventiale.
4.4 SEMNALE MULTIFRECVENTIALE REALE
Scopul acestei lucrari este identificarea pozitiei a unei surse de semnal cu spectrul in gama , ce corespunde vocii umane.
Datele utilizate in cadrul acestui test au fost obtinute cu ajutorul unui sistem de achizitie realizat dupa principiile prezentate in capitolul 2, descris pe scurt in
continuare. Nu se va insista pe detaliile tehnice ale sistemului intrucat proiectarea acestei structuri nu este obiectivul principal al acestei lucrari.
Sistemul este realizat cu ajutorul a 8 microfoane desktop marca Manhattan, omnidirectionale, realizate cu electret.
49
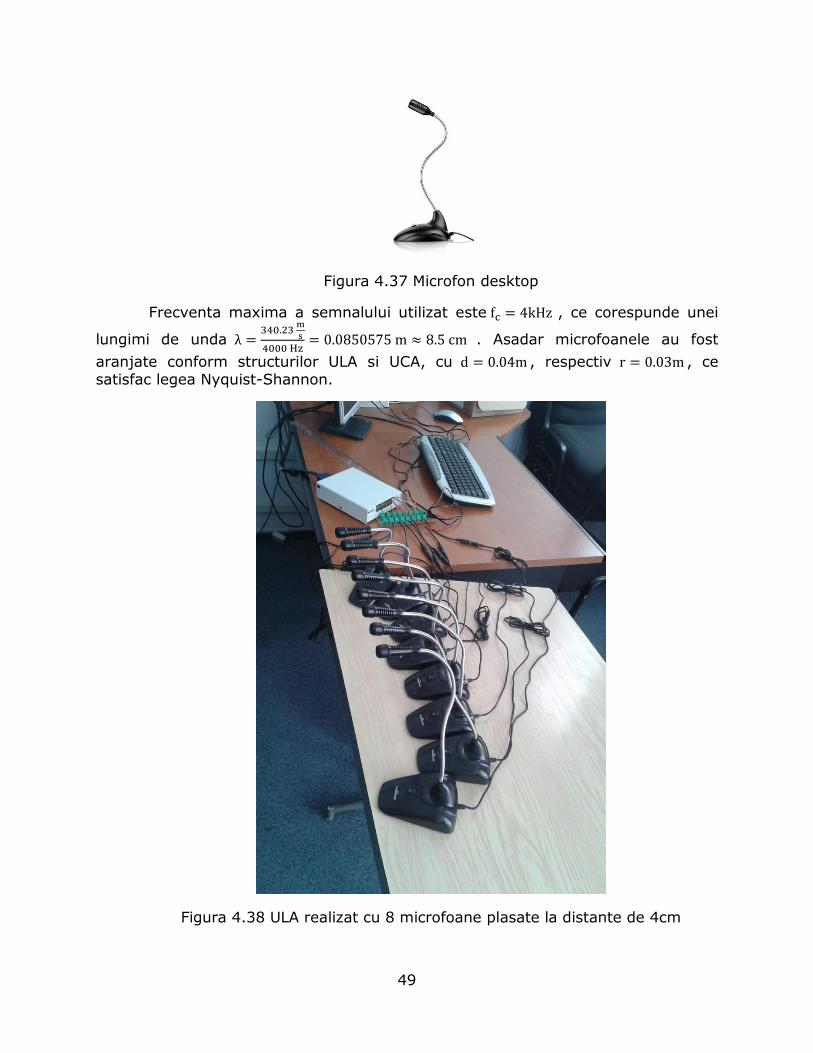
Figura 4.37 Microfon desktop
Frecventa maxima a semnalului utilizat este , ce corespunde unei
lungimi de unda
. Asadar microfoanele au fost
aranjate conform structurilor ULA si UCA, cu , respectiv , ce satisfac legea Nyquist-Shannon.
Figura 4.38 ULA realizat cu 8 microfoane plasate la distante de 4cm
50
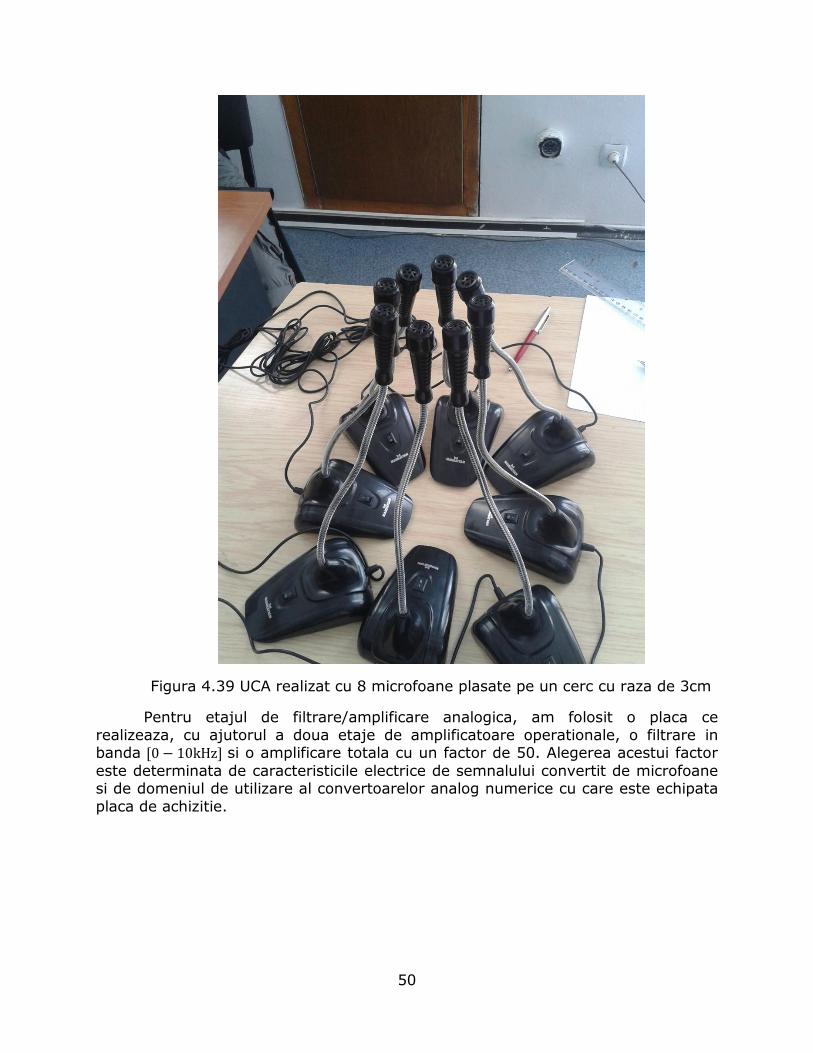
Figura 4.39 UCA realizat cu 8 microfoane plasate pe un cerc cu raza de 3cm
Pentru etajul de filtrare/amplificare analogica, am folosit o placa ce
realizeaza, cu ajutorul a doua etaje de amplificatoare operationale, o filtrare in banda si o amplificare totala cu un factor de 50. Alegerea acestui factor
este determinata de caracteristicile electrice de semnalului convertit de microfoane si de domeniul de utilizare al convertoarelor analog numerice cu care este echipata
placa de achizitie.
51
Figura 4.40 Etaj de prelucrare analogica
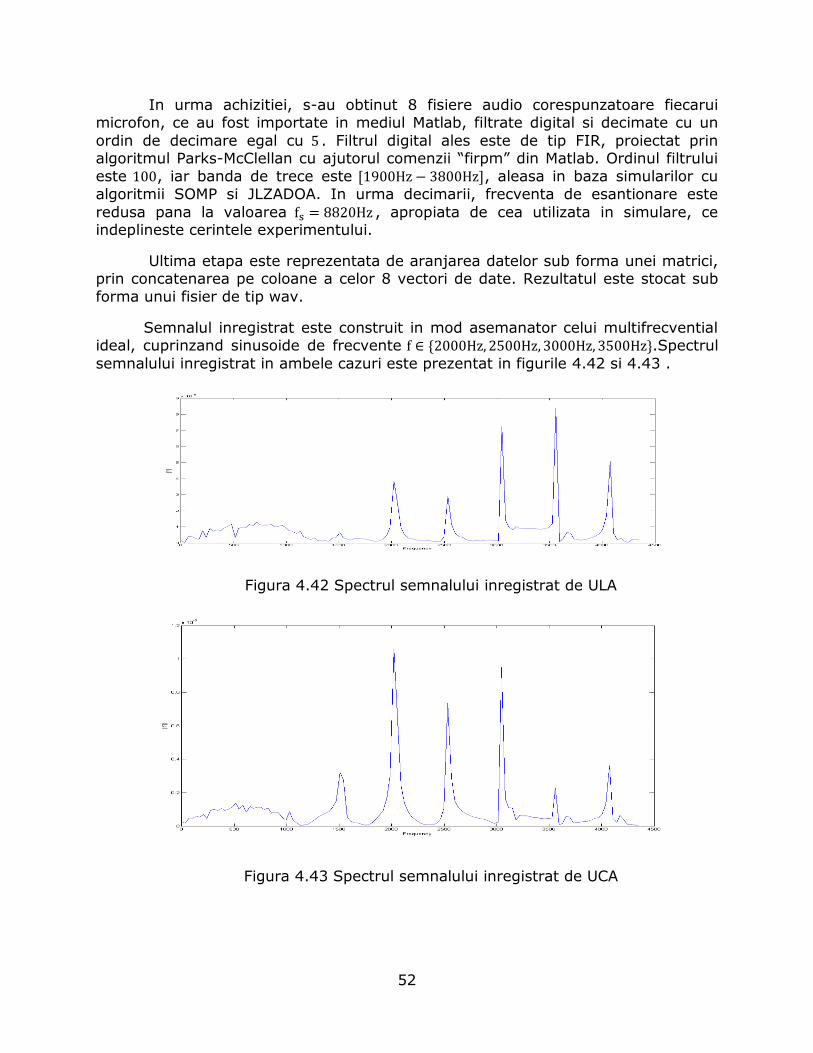
Figura 4.41 Schema logica corespunzatoare unui canal
Aceasta din urma este o placa National Instruments model PXI-7833R , ce dispune de 8 canale analogice de intrare dotate fiecare cu cate un convertor analog
numeric cu o rezolutie de 16 biti,capabil sa esantioneze cu o frecventa maxima
un semnal in gama .
Pentru a utiliza eficient aceasta placa, este nevoie ca iesirea unui microfon ce
se regaseste in jurul valorii de cu oscilatii de pana la sa fie amplificata de
aproximativ 50 ori. Achizitia s-a realizat la frecventa , o frecventa
standard in domeniul audio. Desi o valoare de este suficienta pentru
esantiona corect semnalul vocal, s-a apelat la supraesantionarea datelor in scopul unor prelucrari ulterioare de semnal.
52
In urma achizitiei, s-au obtinut 8 fisiere audio corespunzatoare fiecarui microfon, ce au fost importate in mediul Matlab, filtrate digital si decimate cu un
ordin de decimare egal cu . Filtrul digital ales este de tip FIR, proiectat prin algoritmul Parks-McClellan cu ajutorul comen ii “firpm” din Matlab. Ordinul filtrului
este , iar banda de trece este , aleasa in baza simularilor cu
algoritmii SOMP si JLZADOA. In urma decimarii, frecventa de esantionare este
redusa pana la valoarea , apropiata de cea utilizata in simulare, ce indeplineste cerintele experimentului.
Ultima etapa este reprezentata de aranjarea datelor sub forma unei matrici, prin concatenarea pe coloane a celor 8 vectori de date. Rezultatul este stocat sub
forma unui fisier de tip wav.
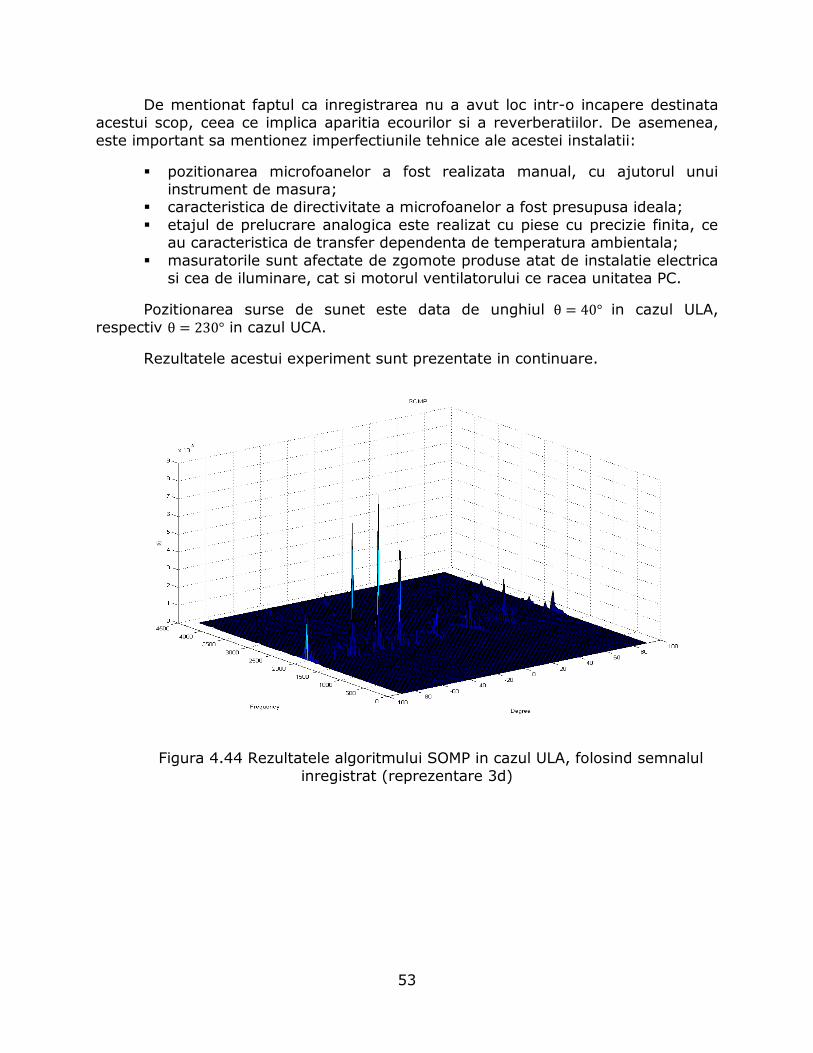
Semnalul inregistrat este construit in mod asemanator celui multifrecvential ideal, cuprinzand sinusoide de frecvente .Spectrul
semnalului inregistrat in ambele cazuri este prezentat in figurile 4.42 si 4.43 .
Figura 4.42 Spectrul semnalului inregistrat de ULA
Figura 4.43 Spectrul semnalului inregistrat de UCA
53
De mentionat faptul ca inregistrarea nu a avut loc intr-o incapere destinata acestui scop, ceea ce implica aparitia ecourilor si a reverberatiilor. De asemenea,
este important sa mentionez imperfectiunile tehnice ale acestei instalatii:
pozitionarea microfoanelor a fost realizata manual, cu ajutorul unui instrument de masura;
caracteristica de directivitate a microfoanelor a fost presupusa ideala;
etajul de prelucrare analogica este realizat cu piese cu precizie finita, ce au caracteristica de transfer dependenta de temperatura ambientala;
masuratorile sunt afectate de zgomote produse atat de instalatie electrica si cea de iluminare, cat si motorul ventilatorului ce racea unitatea PC.
Pozitionarea surse de sunet este data de unghiul in cazul ULA,
respectiv in cazul UCA.
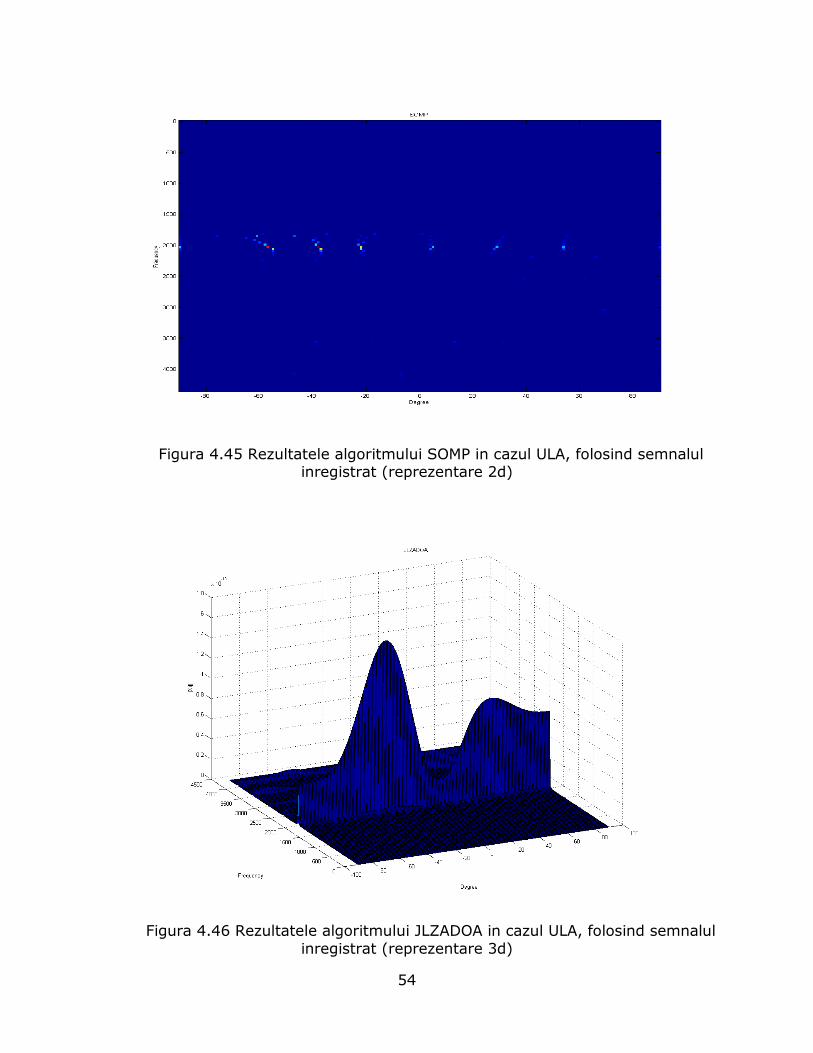
Rezultatele acestui experiment sunt prezentate in continuare.
Figura 4.44 Rezultatele algoritmului SOMP in cazul ULA, folosind semnalul
inregistrat (reprezentare 3d)
54
Figura 4.45 Rezultatele algoritmului SOMP in cazul ULA, folosind semnalul inregistrat (reprezentare 2d)
Figura 4.46 Rezultatele algoritmului JLZADOA in cazul ULA, folosind semnalul
inregistrat (reprezentare 3d)
55
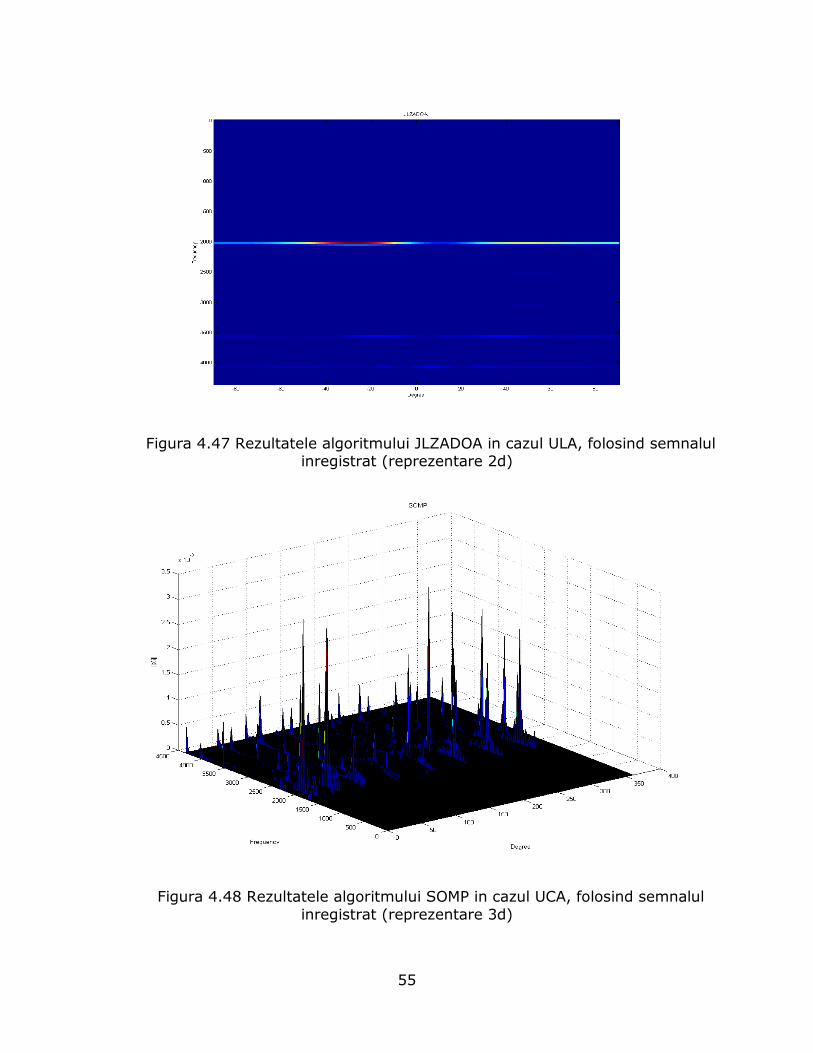
Figura 4.47 Rezultatele algoritmului JLZADOA in cazul ULA, folosind semnalul inregistrat (reprezentare 2d)
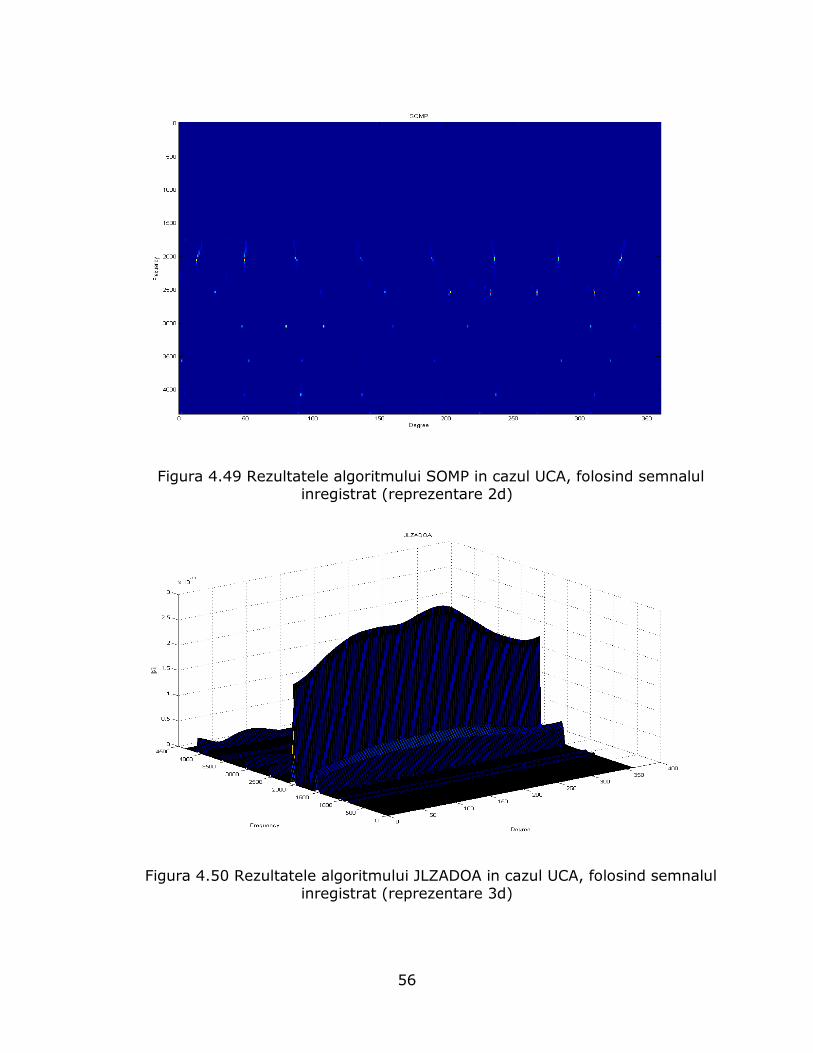
Figura 4.48 Rezultatele algoritmului SOMP in cazul UCA, folosind semnalul
inregistrat (reprezentare 3d)
56
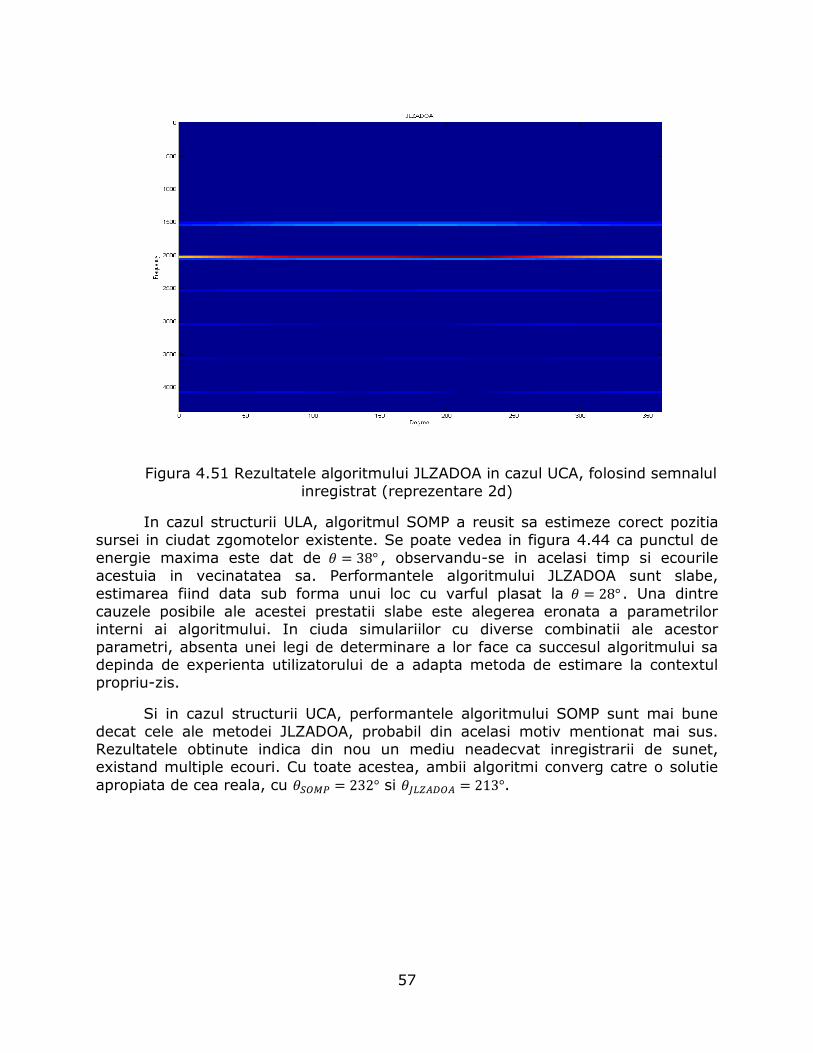
Figura 4.49 Rezultatele algoritmului SOMP in cazul UCA, folosind semnalul inregistrat (reprezentare 2d)
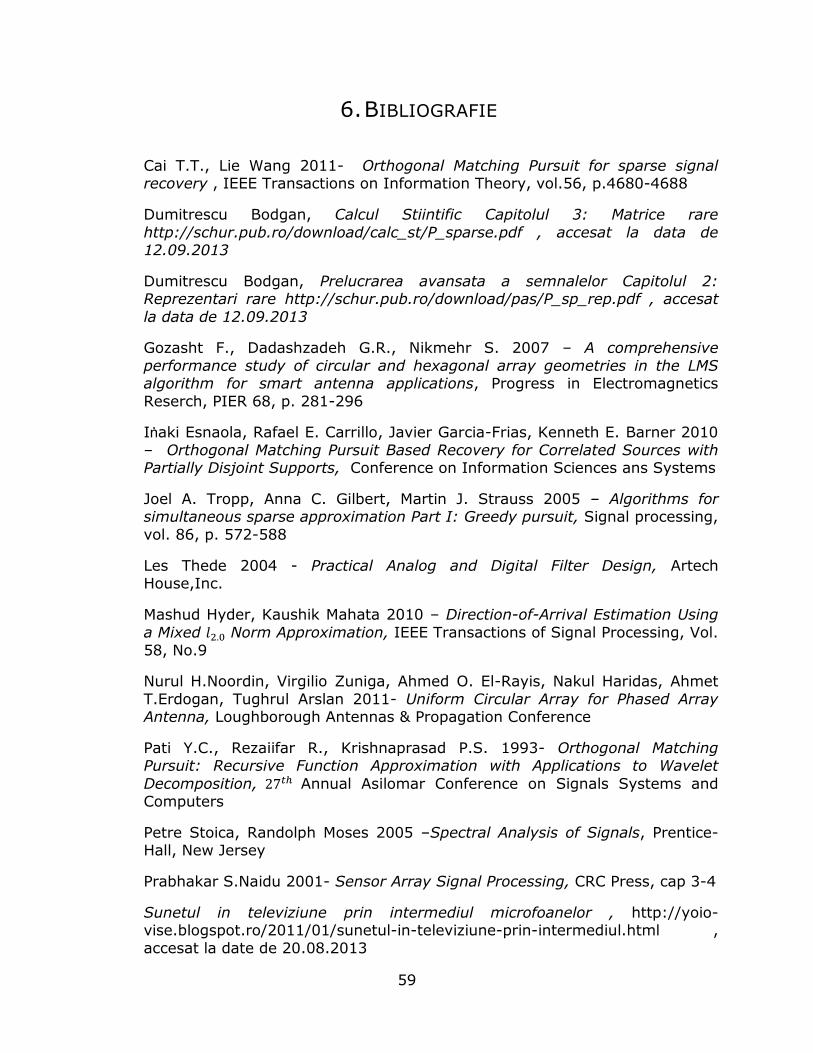
Figura 4.50 Rezultatele algoritmului JLZADOA in cazul UCA, folosind semnalul inregistrat (reprezentare 3d)
57
Figura 4.51 Rezultatele algoritmului JLZADOA in cazul UCA, folosind semnalul
inregistrat (reprezentare 2d)
In cazul structurii ULA, algoritmul SOMP a reusit sa estimeze corect pozitia
sursei in ciudat zgomotelor existente. Se poate vedea in figura 4.44 ca punctul de
energie maxima este dat de , observandu-se in acelasi timp si ecourile
acestuia in vecinatatea sa. Performantele algoritmului JLZADOA sunt slabe,
estimarea fiind data sub forma unui loc cu varful plasat la . Una dintre
cauzele posibile ale acestei prestatii slabe este alegerea eronata a parametrilor interni ai algoritmului. In ciuda simulariilor cu diverse combinatii ale acestor
parametri, absenta unei legi de determinare a lor face ca succesul algoritmului sa depinda de experienta utilizatorului de a adapta metoda de estimare la contextul propriu-zis.
Si in cazul structurii UCA, performantele algoritmului SOMP sunt mai bune
decat cele ale metodei JLZADOA, probabil din acelasi motiv mentionat mai sus. Rezultatele obtinute indica din nou un mediu neadecvat inregistrarii de sunet, existand multiple ecouri. Cu toate acestea, ambii algoritmi converg catre o solutie
apropiata de cea reala, cu si .

58
5. CONCLUZII
In cadrul acestui lucrari am prezentat doi algoritmi ce se bazeaza pe conceptul de matrice rara pentru a rezolva problema estimarii pozitiei unei surse de
semnal din spectrul vocal uman. Cei doi algoritmi iterativi, Joint Approximation
for Direction of Arrival si Simultaneous Orthogonal Matching Pursuit, au fost testati
in diverse instante pentru a prezenta performantele lor, culminand cu un test pe un set de date reale, inregistrat cu ajutorul unui sistem de achizitie .
Comparand puterea de calcul necesara pentru rularea acestor algoritmi cu cea necesara unui algoritm clasic de tip parametric sau neparametric, putem spune
ca acesti algoritmi sunt mai dificil de implementat. Cu toate acestea, numarul de iteratii necesar algoritmului JLZADOA pentru a converge catre o solutie este foarte
mic, avand valori intre 6 si 14. In cazul algoritmului SOMP timpul de convergenta este foarte mic datorita simplitatii sale. Mai mult, acest algoritm poate fi utilizat intr-un algoritm in doua etape pentru a efectua o estimare rapida cu o rezolutie
scazuta, urmand ca apoi sa fie aplicat un alt algoritm in jurul directiilor estimare de SOMP, ce poate identifica locatia surselor cu o precizie ridicata.
59
6. BIBLIOGRAFIE
Cai T.T., Lie Wang 2011- Orthogonal Matching Pursuit for sparse signal recovery , IEEE Transactions on Information Theory, vol.56, p.4680-4688
Dumitrescu Bodgan, Calcul Stiintific Capitolul 3: Matrice rare
http://schur.pub.ro/download/calc_st/P_sparse.pdf , accesat la data de 12.09.2013
Dumitrescu Bodgan, Prelucrarea avansata a semnalelor Capitolul 2: Reprezentari rare http://schur.pub.ro/download/pas/P_sp_rep.pdf , accesat
la data de 12.09.2013
Gozasht F., Dadashzadeh G.R., Nikmehr S. 2007 – A comprehensive
performance study of circular and hexagonal array geometries in the LMS algorithm for smart antenna applications, Progress in Electromagnetics
Reserch, PIER 68, p. 281-296
Iṅaki Esnaola, Rafael E. Carrillo, Javier Garcia-Frias, Kenneth E. Barner 2010
– Orthogonal Matching Pursuit Based Recovery for Correlated Sources with Partially Disjoint Supports, Conference on Information Sciences ans Systems
Joel A. Tropp, Anna C. Gilbert, Martin J. Strauss 2005 – Algorithms for simultaneous sparse approximation Part I: Greedy pursuit, Signal processing,
vol. 86, p. 572-588
Les Thede 2004 - Practical Analog and Digital Filter Design, Artech House,Inc.
Mashud Hyder, Kaushik Mahata 2010 – Direction-of-Arrival Estimation Using
a Mixed Norm Approximation, IEEE Transactions of Signal Processing, Vol.
58, No.9
Nurul H.Noordin, Virgilio Zuniga, Ahmed O. El-Rayis, Nakul Haridas, Ahmet
T.Erdogan, Tughrul Arslan 2011- Uniform Circular Array for Phased Array Antenna, Loughborough Antennas & Propagation Conference
Pati Y.C., Rezaiifar R., Krishnaprasad P.S. 1993- Orthogonal Matching Pursuit: Recursive Function Approximation with Applications to Wavelet
Decomposition, Annual Asilomar Conference on Signals Systems and Computers
Petre Stoica, Randolph Moses 2005 –Spectral Analysis of Signals, Prentice-Hall, New Jersey
Prabhakar S.Naidu 2001- Sensor Array Signal Processing, CRC Press, cap 3-4
Sunetul in televiziune prin intermediul microfoanelor , http://yoio-vise.blogspot.ro/2011/01/sunetul-in-televiziune-prin-intermediul.html ,
accesat la date de 20.08.2013

60