ivhmorator de fizicl, - cdn4.libris.ro de fizica. clasele 9... · societatea de stiinle fizice 9i...
TRANSCRIPT

Emilia Poll
IVhmorator de fizicl,- pentru clasele 9-I2 -
@ Booklet
deca da- 10 deci d- 101
hecto h- 102 centi 10,kilo k- 103 mili m 103
me0a M- 106 mrcro u- 10-6
otoa G- 10s nano n- 10etera T- 101' prco p- 10'12
peta P- 1 0r5 femto f- 10 15
exa E. 1018 ato a- 10 13
2.2. Punct material. Mobil ...................
6. Statica
7. Electrostatica.7.1. Sarcina elec{ric5....
1 . l. Antoniu - Termodinamicd. Transformdri potitrope gi liniare. Editura Teora, 1999_2. D. Niculescu - Complemente de fizic6. Edilura Eficient, Bucuregti, 1997.3- A. Osiac, Z. Petrescu, V. Rogu, S. Valceanu - Manual de fizicd, clasa a X_a.
Editura Corint, Bucuregti, 2000.4. V. Ovanes, C. Dobrescu, F. Stan - Manual de fizicd, clasa a X-a. Editura
Niculescu, Bucuregti, 2000.5. A. Popescu, L. DinicS, M. Fronescu, A. petrescu, N. Egeanu, A. Ghitd - probleme
de fizice pentru clasele lX-Xlt. Editura petrion. Bucurelti.6. M.M. Popovici - Fizicd - fenomene optice. Ediiuraleoia, Bucuregti, 1999.7. O. Rusu, R. Bobulescu, L. Dinicd - Manual de fizicd, clasa a X-a. Editura Teora,
Bucuregti, 2000.8. S. Talpalaru, D. Haralamb, C. Corega, G. Negrea, C. Rus - Manualde fizicd, clasa
a X-a gi clasa a Xl-a. Edilura polirom, lagi, ZOO0.9. Societatea de Stiinle Fizice 9i Chimice din Romania - probleme de fizicd
rezolvate. Editura Universul, Bucuresti, 1990.10. L Bunget si colectiv - Compediu de fizicd. Editura gtiinlificd si Enciclopedicd,
Bucuregti, 1 988.1 1. M. lvan, M. Logofdtu, B. Constantinescu - Manual de fizicd, ctasa a X_a. Editwa
Aramis, Bucuresti, 2000.12. R. lonescu-Andrei, C. Onea, l. Toma - Manual de fizicd, ctasa a !X-a. Edilura
Teora, Bucuresti, 1999.
5.10. Ciocniri ..............45
Bibliografie
1.2. Opbratii cu vectori ........................6noii..inifi6
"iii"-ni"iiiiii""Ji"r,i'ii;i;l;i....................................................t t
2.1. Miscare gi repaus. Sistem de referin{i ............................................11
8.6. Gruparea rezistoarelor .................70

10.5. Dilatarea0.6. Formula fundamentalS0.7. Ecuatia termice de stare0.8. Ener$ia internd a gazului0-9- Ecuatia caloricd de stare0. 1 0. Trarisformirile simPle0.11. Legea Dalton:.....................0.12. Coeficienti calorici. .........0.13. Primul principiu al termod0.14. Aplicalii ale primului princ0. 1 5. Transformarea adiabatice0.16. Transformdri politrope0.17. Al doilea principiu al t€
1 0.1 8. Randameintul motoarelor

Editura Bookletwww.booklet.ro
Penfu comenzi:
tel: 021 430.3095email: [email protected]: www.booklet.ro
Descrierea CIP a Bibliotecii Nationale a RomAnieiPOLL, EMILIA
Memorator de fizice: pontru clasele $12 / Emilia Poll Ed. rev.- Bucuregi : Booklet, 2018
Bibliogr.tsBN 978-606-590-644-0
53(075)
,,,,,1ilil1il1,,,,,
*9.B.Fdil
@Editura Booklet 2018Toate drepturile asupra lucrdrii aparlin editurii.
l. Vctori
Noliunea de vector, introdusd de SIMON STEVIN(1548-1620) provine din limba latind 9i inseamnd,,purtdtof'.
Glasificare:Vectorii pot fi: - legali (punct de aplicalie fix);- alunecitori (dreapta suport este fixatd, dar punctul de
aplicalie poate fi deplasat in lungul acestei drepte);- liberi (punctul lor de aplicalie poate fi deplasat oriunde in
spatiu, suportul lor rimdndnd paralel cu aceeagi dreaptd).
Vectorul este un segment de dreaptdorientat, caracterizat prin urmdtoareleelemente:- punct de aplica{ie (punctul A);- direclie (dreapta A);- sens (indicat de sdgeatd);- modul (lungimea segmentuluiAB).
Se noteazd cu EE ? Asau I (vezifig. 1)
Versorul (vectorul unitar) al unuivector ieste un vector avdnd direclia ':4
9i sensu/ vectorului A, iarmodulul egal cu unitatea:

Exemplu: f,_=---#--iPentru axele Ox, Oy 9i Oz vectorii corespunzdtori se
noteazd cu ;, j gi resPectiv R .
Expresia analiticd a unui vector:Orice vector situat pe axa Ox poate fi scris sub forma:
i = ax'iunde - a* este proieclia vectorului i pe axa Ox; aceastd
" proiecfie este pozitivd dacd vectorul are acelaqi
sens cu sensul pozitiv al axei 9i negativd insens contrar.
intr-un sistem ortogonal de axeOxyz, un vector i poate
fi scris astfel: a={+{+{i = a* 'T+ ay -j+ a, .R
cu a=,lal+aj**,unde:
lVersorul unei axe este un vector care are I
I modutut egal cu unitatea de lungime pe axd; I
lairecyia aceeagicu a axei; sensul acelaqicu I
lsensul pozitiv at axei; punctul de aplicalie in I
loriginea axei (O). I
+
h,.,"'si a] sunt componentels vsc*orului a pe eele 3 axe
Ja*a" Si a, reprezintd proiediile vectorului a pe cele 3 axe
I ox,oy ozI i R - sunt versorii axelor ox, Oy 9i oz
Proieclia unui vector i pe axa Ox de versor I, estenumdrul real a* definit de relalia:
a* * i'I* a'coscr'
unde a este unghiul format de vectorul i cu axa Ox.
Dacd -l<". fr Proiecfia este pozitivd, iar dacd
I .,r.8 proieclia este negativd.22
-f: :
O 4' a*>0 B' x O B' a,<0 A'x
Teoremi: Proieclia pe o axd Ox a sumei d a
vectorilor i,,,ir,...,7n este egalS cu sumaalgebricd a proiecliilor pe axa Ox alevectorilor i,, ir,...,(: S"+v1 **V2"r.'.iVnx
Descompunerea unui vector dupd doud direcliiconcurente
A descompune un vector * (D']
dupi doud direclii concurente(D1)9i(D2), de versori 4 Ei "r, 4/ . -;7inseamnd a afla doi vectori
^, - "/ -2t '9i {, orientalidupa di;;;iiil; o'rnk=*: IP')
si, respectiv Dr, astfelinc6t:
i=4*4=ar.{+a2.6.
'+,{ilffi.ffi,H#
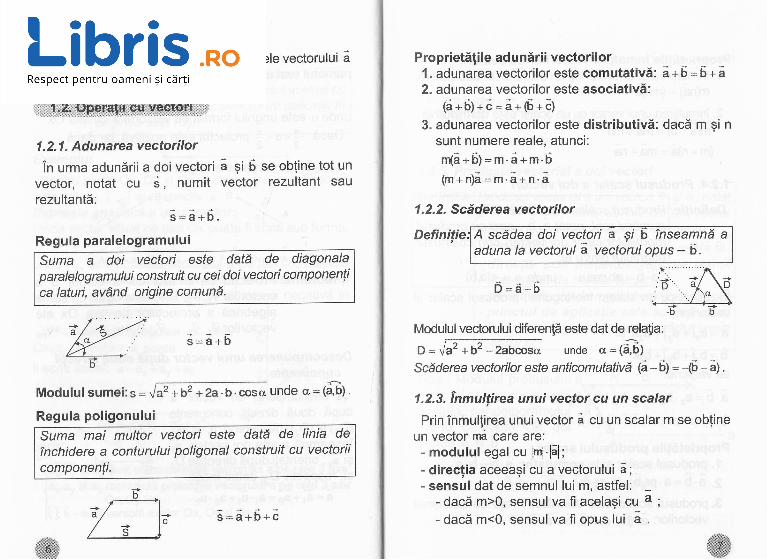
1.2.1. Adunarea vectorilor
Vectorii ".,
Ei *, se numesc componentele vectorului idupd direcliile Dr, respectiv, Dr.
?n urma adundriivector, notat curezultantd:
6=i+6.Regula paralelogramulu i
Suma a doi vectori esfe datd de diagonalaparalelogramului construit cu cei doivectoi componen,ti
ca laturi, avhnd origine comund.
6=i+6
Modulul sumei: s = G2 + b2 + 2a;- coso unde a = (iE) .
Regula poligonuluiSuma mai muttor vectori este datd de linia deinchidere a conturului poligonal construit cu vectoriicomponenli.
a doi vectori i 9i 6 se obfine tot un
s, numit vector rezultant sau
i = i+6+d
Proprietilile adunirii vectorilor{. adunarea vectorilor este comutativi: d+6 =6*d2. adunarea vectorilor este asociativd:
(i+6)+6 = i+ (6 +i)3. adunarea vectorilor este distributivi: dacd m si n
sunt numere reale, atunci:
n{i+6} =m.i+m.5{m*n)i= m.i+n'i
1.2.2. Scdderea vectorilor
D=a-6
Modulul vectorului diferenti este dat de relatia:
D=G,*b,-2abcos" unde *={fr}Scdderea vectoilor este anticomutativd (; - 6) = -i6 -;t1.2.3. inmutlirea unui vector cu un scalar
Prin inmullirea unuivector i cu un scalar m se obtineun vector nd care are:- modulul egal cu lml'lil;- direclia aceeagi cu a vectorului d;- sensul dat de semnul lui m, astfel:
- dacd m>0, sensul va fi acelagi cu a ;
- daci m<0, sensulva fi opus lui a .

Proprietifile inmullirii vectorilor cu scalari:f . inmullirea unui vector cu un scalar este asociativi:
r(na) = {mn)a
2. inmullirea unui vector cu un scalar este distributivi:n{i+6) =nfr+n${m*nF= nfr+ni
1.2.4. Produsul scalar a doi vectori
in raport cu un sistem triortogonal, produsul scalar al
vectorilor:
a - ari+ arJ+ ar* 9i
6 = b*i+ bvj+ b.R
se va scrie:
i'fr = ax .b* +a, "b, + ar'br.
9alinutmntca: T.i=j.i= R'ii= 1 9i i'i=l'fr * ['i= 6'
Proprietilile produsului scalar1. produsul scalar este comutativ: a'b = b"a '
2. a.b=a-Fkb=b'Fhascalar este distributiv fald de adunarea
i.t6+d) = i.6+i-6.3. produsul
vectorilor:
ffi
Produsul scalar a doi uectoria si b esfe
numdrul real, notat d'6 , egal cu produsulmodulelor cetor doi vectori prin cosinusulunghiuluidintre ei:
i.6=abcoscl unde a=q{e6}
4. produsul scalar al unui vector pdn el insugi este dat
de relafia: 6-i=d2 =a2.5. {rnil'(rS}=m.ni-6.6. A.A=0 dacd 6=0sau6=0,saudacd i este
perpendicular pe b.
1.2.5. Produsul vectorial a doi vectori
Definilie. Produsulvectorial a doivectori a si b, notatprin 6 = i x 6, esfe definit ca un vectorcaracterizat prin urmdtoarele elemente :
- modulul l6i = ": pl 16l sin*, unde
".:<(d, 5);
- direclia este perpendiculard pe planuldeterminat de cei doi vectori;
- sensul esfe dat de regula burghiului (drept);- punctul de aplica{ie este acelagi cu al
vectorilor componenli sau in vdrful unuia
Obs.; Modulul produsuluivectorial este numeric egalcu aria paralelogramuluiavdnd ca laturi cei doivectori e 9i 6.
0
a
.fl"*"*04'm=a'b'sinu
Regula burghiului:
sensul produsului vectorial'
Se agazd burghiul perpendicular pe planulformat de
cei doi vectoria sl fr 9l se rofegfe astfel ca vectorul,
i sii se suprapund peste vectorul6 pe drumul cel
mai scut7. Sensu/ de inaintare al burghiului va fi 9i
d
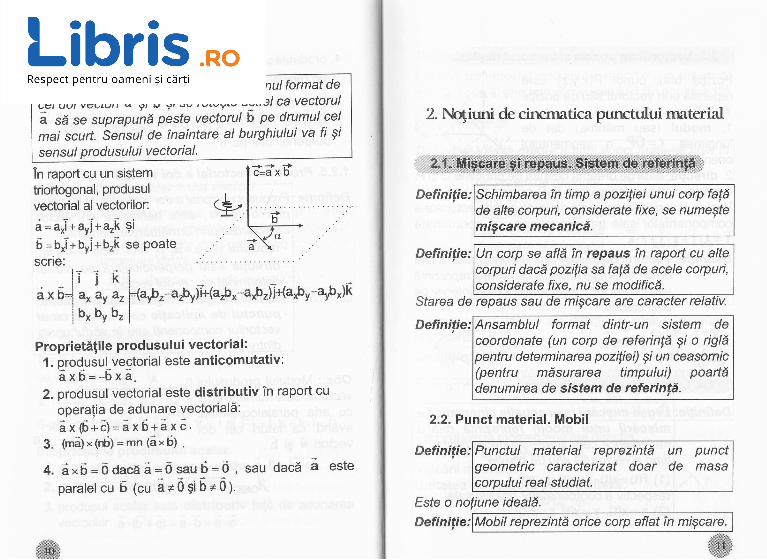
in raport cu un sistemtriortogonal, produsul
vectorial al vectorilor:
i=aj+aj+arft gi
6 =t*i+bri+brR se poate
scrie:r+ * -- Ili j k
I
a x ul ax'ay azl={arur*arbrii+(a$**aFrii+(a*br-a,,bx}k
lu*ornrl
Proprietilile produsului vectorial :
1. p-rodusul vegtorial este anticomutativ:axb:..bxa.
2. produsul vectorial este distributiv in raport cu
operalia de adunare vectoriald:
ix{6+6}=6x6+ix6.3. (mi)"(nE):mn(i"6).
4. A*6=ddacai=6sau6:0, sau dacd i este
paralel cu 6 1cu i*6 gi 6*01
2. I\btftfff de cinematica puncttrlui material
Definitie: Schimbarea in timp a poziliei unui corp fa,td
alte corpuri, considerate fixe, se numegtemecantca.
Definilie:
Starea de repaus sau de migcare are caracter relativ.
Definilie: Ansamblul format dintr-un sisfem decoordonate (un corp de referinld gi o rigld
determinarea poziliei) gi un ceasornic(pentru mdsurarea timpului) poaftddenumirea de sistem de referintd.
2.2. P unct material. Mobil
Esfe o noliune ideald.

Pozitia unui punct P(x,y,z) estereperatd prin vectorulsdu de pozitief : OP , caracterizat prin:1. modul (sau mirime) dat delungimea .t = OP a segmentuluiorientat OP.2. directie, datd de dreapta definitd de punctele O gi P.
3. sens, dat de succesiunea O-P, origine-mobil.Vectorulde pozitie se poate scrie ca suma vectoriald acomognentgrlor s;ale pe cele trei axe de coordonatef =x.i+y' j+z.kDefinilie: Vectorul deplasare al unui punct materialfald
de un sistem de referinld considerat reprezintdvaialia vectorului de pozi{e intr-un interual detimp stabilit.
t=r,-i *{ff=};:};[e]*,=m
v
,YIavl.yz
Legea migcdrii (sau ecualia cinematicd amigcdrii unui mobil) reprezintd relaliamatematicd care stabile$te dependen{a detimp a vectorului sdu de pozi[ie:
(1 ) r(t) = x(t).i + y(t)' j +z{t}.irespectiv a coordonatelor poziliei sale:(2\ x=x(t), y=y{t) z=z(t).
Definilie
Ecuatia traiectoriei mobiluluiin raport cu un sistem deaxe Oxyz se obtine prin eliminarea lui f din ecuatiile (2).
Definilie Wteza medie a unui punct material aflat inmiqcare in rapoft cuun sistem de referinld,este mdrimea fizicdvectoriald definitd cara portu I d i ntre vectoru Ideplasare giinterualulde timp considerat.
q-tiVectorul vitezd medie are directia si sensul vectoruluideplasare.
Vectorul vitezd momentand are direcliatangentei la traiectorie 9i sensulmigcdrii mobilului.Unitatea de mdsuri pentru vitezi:
t,,l = lAr]sr- mr.rsr [at]r,_ s