4. metode de restaurarea imaginilor - programare.ase.ro de restaurare - partea i.pdf · 6 figura...
TRANSCRIPT
1
4. Metode de restaurarea imaginilor
4.1. Generalități. Modele de degradare
Imaginile obţinute în urma unor operaţii de achiziţionare, transmisie de date, decompresie a unui fişier imagine
compresat în vederea unei transmisii mai rapide sunt afectate de diferite tipuri de degradări care influenţează
caracteristicile reprezentative ale imaginilor (cele mai importante fiind legate de poziția obiectelor în imagine, forma
obiectelor, posibilitatea distingerii obiectelor de fundal). Imaginile observate, rezultatul acestor perturbaţii, sunt greu de
analizat, în sensul în care posibile ale operații ulterioare (de exemplu segmentarea, identificarea/recunoașterea obiectelor
din imagine) conduc la rezultate eronate. Mecanismul de degradare este strâns legat de procesele fizice implicate în
perturbare: rezoluţia finită a senzorului matriceal (la momentul scanării), pocesul de refractare, focalizarea greşită, efecte
de estompare şi “mişcare” a imaginii la fotografiere, precum şi apariţia efectelor de tip zgomot (de obicei repartizat
normal sau uniform) în procesele de cuantificare şi transmitere de date.
Restaurarea imaginilor este procesul de reconstrucţie pe baza unor cunoştinţe a priori legate de modelul de
degradare. De accea tehnicile de restaurare sunt orientate în principiu către modelarea matematică a degradării, urmată de
aplicarea procesului invers în vederea obţinerii imaginii iniţiale. O abordare de acest gen implică de obicei formularea
unor criterii de tip performanţă care conduc la estimări optimale (din punct de vedere al criteriilor postulate) a rezultatului
dorit.
Ca o consecință directă, calitatea tehnicilor de restaurare depinde esenţial de acurateţea procesului de modelarea
degradării. Au fost dezvoltate o serie de modele matematice, pe baza diferitelor tipuri de cunoştinţe a priori considerate.
Unul dintre cele mai des utilizate modele de degradare este cel linear, în care se presupune că procesul de
deteriorare a imaginii este reprezentat printr-o superpoziţie a acesteia cu răspunsul unui impuls H, la care eventual este
adăugată o componentă zgomot aditiv.
În domeniul spațial, modelul de degradare este exprimat prin convoluția dintre operatorul h și imaginea originală
f, urmată de adăugarea componentei zgomot aditiv , cu rezultat imaginea observată g. Fie f funcție imagine de
dimensiune . Pentru , modelul de degradare este exprimat prin relația
( ) ( )( ) ( ) ( ) Informațiile legate de componenta zgomot sunt strict de natură statistică.
În domeniul frecvențelor, relația (4.1) este exprimată pe baza teoremei de convoluție (vezi §2.2) prin
( ) ( ) ( ) ( ) ( ) unde și , , și respetiv desemnează reprezentările Fourier ale funcțiilor g, h, f și .
În acest caz, restaurarea imaginii perturbate ( ) este procesul de obţinere a unei aproximaţii a originalului
( ), presupunând cunoscute informaţiile referitoare la procesul de degardare înglobate în forma operatorului .
Cercetările ultimilor ani au condus la metode diverse de restaurare, cum sunt:
filtrare inversă;
filtrare de tip Wiener;
filtrare de tip Kalman;
descompunerea în valori singulare (SVD);
procesare utilizând pseudoinvera.
Tehnicile menţionate mai sus sunt caracterizate de o complexitate ridicată a calculului implicat de modelele
matematice considerate. Pentru a elimina acest neajuns, care de obicei conduce la algoritmi care nu funcţionează în timp
real, s-au adus o serie de simplificări (în general de natură statistică) în ce priveşte modelul degradării. Astfel, metoda
filtrului invers este implementată doar în cazul în care se presupune absenţa oricărui zgomot din imaginea cunoscută
( ) (sau prezenţa lui într-o cantitate foarte mică). Filtrul Wiener este de obicei utilizat în condiţiile în care imaginile
sunt presupuse ca fiind procese stochastice staţionare în sens “tare”. Mai mult, implementarea unui filtru Wiener necesită
cunoştinţe a priori legate de puterea spectrală a matricei de autocorelaţie corespunzătoare imaginii originale. Abordările
date de filtrarea Kalman şi filtrarea pseudoinversă funcţionează eficient şi în cazul imaginilor nestaţionare, dar totuşi
necesită timp foarte mare de calcul. Modelele noncauzale (cum ar fi de exemplu modelele autoregresive) funcţionează, de
asemenea, în ipoteze de tip staţionaritate “tare” şi periodicitate a frontierelor.
Evaluarea calității unei proceduri de restaurare este realizată pe baza mai multor măsuri. Dacă f funcție imagine
de dimensiune , g este imaginea perturbată observată și este o aproximare a lui f obținută printr-o procedură de
restaurare, atunci calitatea restaurării este exprimată prin
2
raportul semnal-zgomot (Signal-to-Noise Ratio)
( ) [∑ ∑ ( ( ))
∑ ∑ ( ( ) ( ))
]
valoarea maximă a raportului semnal-zgomot (Peak Signal-to-Noise Ratio)
( ) [ ( ( ))
∑ ∑ ( ( ) ( ))
]
raportul semnal-zgomot - rădăcină mediei pătrată (Root Mean Squared Signal-to-Noise Ratio)
( ) √∑ ∑ ( ( ))
∑ ∑ ( ( ) ( ))
Evident, este o aproximare a lui f cu atât mai bună cu cât valorile SNR, PSNR și respectiv SNR_RMS sunt
mai mari.
O altă măsură a calității procesului de restaurare este eroarea medie pătratică, definită prin relația,
( )
∑∑( ( ) ( ))
4.2. Modele de zgomot. Estimarea parametrilor componentei zgomot
Principalele surse de zgomot care perturbă imaginile digitale sunt legate de procesele de achiziție și/sau
transmitere. Performanțele senzorilor în achiziția imaginilor sunt afectate de diverși factori, în general dați de condițiile de
mediu, dar și de calitatea elementelor senzorilor. În procesul de transmitere, imaginile sunt peturbate în principal din
cauza interferențelor care pot apărea pe canalul de transfer pe parcursul efectuării acestuia.
Cele mai importante caracteristici ale componentei zgomot sunt caracteristicile spațiale ale lui și proprietatea
lui de a fi sau nu corelat cu imaginile pe care le perturbă. Cu excepția zgomotului periodic în domeniul spațial,
componenta zgomot este considerată independentă de coordonatele spațiale ale imaginii și necorelată cu valorile de gri
ale pixelilor imagine.
Cele mai des întâlnite funcții probabilitate de densitate care caracterizează componenta zgomot sunt, (Gonzales,
Woods, 2008)
zgomotul normal (gaussian), ( ),
( )
√ {
( )
}
Valoarea medie și varianța varabilei aleatoare sunt date prin
( ) ( ) (( ))
Zgomotul gaussian apare în general din cauza unor factori cum sunt zgomotul provocat de un circuit electronic
sau zgomot provocat de senzor (achiziția este efectuată într-un mediu cu grad scăzut de iluminare și/sau
temperaturi înalte).
zgomotul sare şi piper (sau zgomotul impuls),
( ) { { }
Dacă , atunci punctele cu intensitate luminoasă b vor fi transformate în puncte luminoase din imagine, în
timp ce pixelii cu nivel de gri a vor deveni puncte întunecate în imaginea rezultat. Dacă una din valorile A sau B
este 0, zgomotul este numit unipolar. Dacă nici una din probabilitățile A și B nu este nulă, zgomotul este numit
bipolar, valorile lui fiind asemănătoare granulelor de sare și piper. În cazul imaginilor monocrome, cea mai
întâlnită situație este . Zgomotul sare și piper apare în general în procesul de transformare a unei
imagini în reprezentarea digitală, de obiecei în etapa de scalare.
zgomotul exponenţial negativ,

3
( ) { { }
unde . Variabila aleatoare are media
și varianţa
. Zgomotul exponențial este regăsit în procesul de
achiziție în imagistica laser.
zgomotul Rayleigh,
( ) {
( ) {
( )
}
Media și varianța sunt
( ) √
( )
( )
Densitatea Rayleigh caracterizează zgomotul în tehnicile de producere a imaginilor care semnifică distanța
fiecărui pixel față de un punct specificat într-o arie dată (tehnici referite prin range imaging). Aceste metode sunt
asociate cu anumite dispozitive senzor. Dacă senzorul utilizat pentru obținerea unei astfel de imagini este calibrat
corect, valorile pixelilor imaginilor rezultat sunt date în unitatea de măsură a distanței (metrul).
zgomotul uniform, ( ),
( ) {
unde media lui este
şi varianţa este
( )
.
Deși este tipul de zgomot cel mai puțin întâlnit în situațiile practice, densitatea de probabilitate este foarte utilă
pentru generarea numerelor aleatoare utilizate în simulări.
Graficele funcțiilor de distribuție de probabilitate continue prezentate în paragraful precedent sunt incluse în
figura 4.1.
-10 -5 0 5 10 150
0.02
0.04
0.06
0.08
0.1
0.12
0.14
repartitia Gauss
=2 =3
0 1 2 3 4 5 60
0.5
1
1.5
2
2.5
3
repartitia exponentiala
a=3
4
Figura 4.1
Pentru identificarea tipului variabilei aleatoare zgomot şi parametrilor medie şi varianţă sunt utilizate o serie de
metode de natură statistică. Metoda optimă de evaluare a zgomotului presupune accesul la sistemul care a generat
zgomotul. În aceste condiţii, dacă procesul de generare a zgomotului este aplicat imaginilor având un singur nivel de gri
(imagini de tip “perete alb”), atunci este obţinută o selecţie pe baza căreia se poate analiza din punct de vedere statistic
tipul şi parametrii variabilei aleatoare zgomot.
În situația în care sunt disponibile doar imaginile corupte cu un anumit tip de zgomot, nu și senzorul care le-a
produs, parametrii funcției de densitate de probabilitate pot fi estimați pe baza unor subimagini S cu nivel de gri relativ
constant, reprezentând zone de fundal. Pentru aceste zone este calculată histograma subimaginii, ea fiind corespunzătoare
modelului de zgomot care a determinat perturbarea imaginilor observate (pe baza formei histogramei este determinat tipul
de zgomot indus de senzor). Fie L numărul nivelurilor de gri. Histograma suimaginii S este calculată pe baza normalizării
frecvențelor de apariție a nivelurilor de gri ale pixelilor din S,
( ) { } ( )
unde este numărul de apariții a lui ca valoare a pixelilor subimaginii și n este numărul total de pixeli din S.
Pe baza distribuției de probabilitate (4.3), parametrii medie și varinață corespunzători pixelilor din S sunt estimați
prin
∑ ( )
( )
∑( ) ( )
( )
Relațiile (4.4) și (4.5) caracterizează media și varianța în cazul repartiției gaussiene. Dacă densitatea de
probabilitate este identificată (pe baza formei histogramei) ca fiind Rayleigh, uniformă sau exponențială, atunci
parametrii distribuțiilor sunt calculați pornind de la (4.4) și (4.5) și ținând cont de legătura dintre aceștia și valorile medie
și varianță.
În cazul zgomotului sare și piper, estimarea parametrilor necesită calculul frecvențelor de apariție normalizate ale
nivelurilor de gri 0 și L-1. Obținerea acestor estimații necesită selectarea unei subimagini relativ constante cu nivele de
gri intermediare și în care să existe pixeli cu valorile de gri 0 și respectiv L-1să fie vizibili. Valorile histogramei pentru
nivelurile de gri 0 și L-1 vor sta la baza estimării parametrilor A și B din definiția distribuției de probabilitate a zgomotului
impuls.
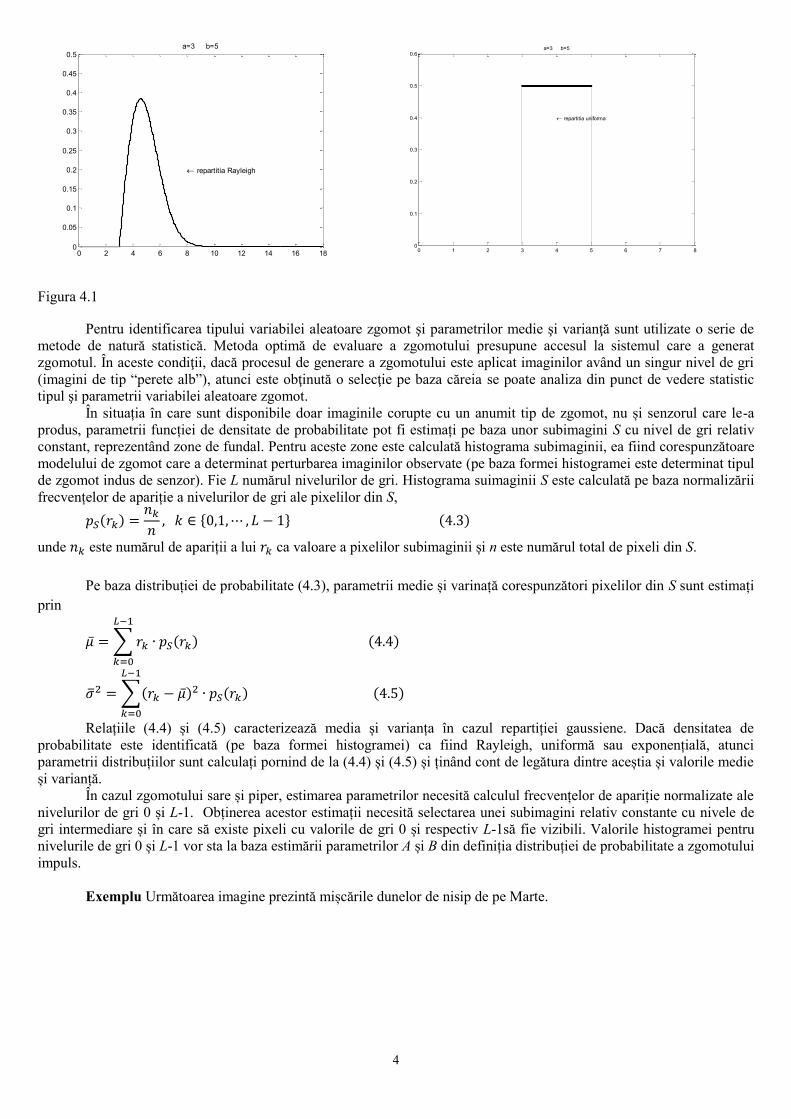
Exemplu Următoarea imagine prezintă mișcările dunelor de nisip de pe Marte.
0 2 4 6 8 10 12 14 16 180
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
repartitia Rayleigh
a=3 b=5
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
repartitia uniforma
a=3 b=5

5
Figura 4.2.
(http://storage0.dms.mpinteractiv.ro/media/1/186/15786/7955795/2/60472047.jpg)
Subimaginile alese pentru analiză sunt zone din imagine reprezentând fundal, pe care se distinge zgomot (Figura
4.3 a și b):
- prima subimagine este cuprinsă în interiorul celei de-a doua imagini (în zona mai întunecată din centru) din
4.2.
- a doua subimagine este cuprinsă în interiorul celei de-a doua imagini, spre centrul acesteia
a
b
Figura 4.3
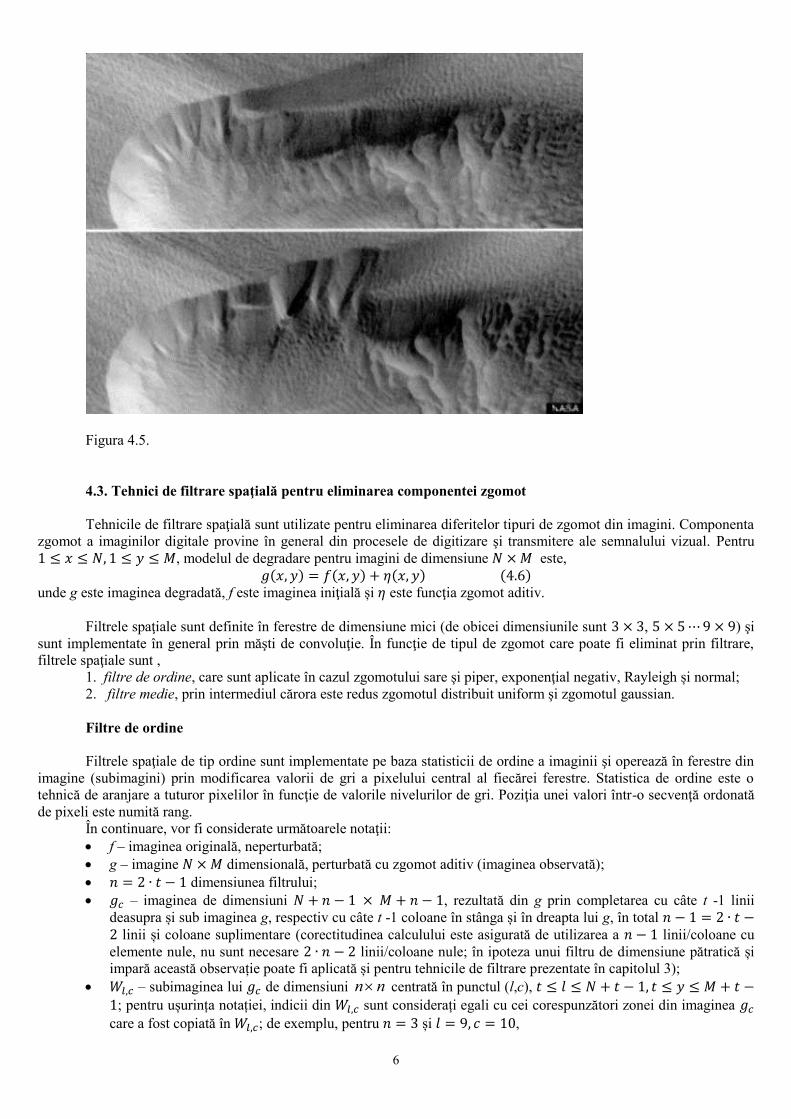
Histogramele subimaginilor din figurile 4.3.a și 4.3.b. sunt prezentate în figurile 4.4.a și 4.4.b și 4.5. Evident, ca
formă, acestea corespund câte unei distribuții normale. Pentru eliminarea acestui tip de zgomot poate fi folosit un filtru de
ordine (vezi § 4.3). Rezultatul filtrării cu filtrul alfa-trimmed cu masca de dimensiune 3 și este prezentat în figura
4.5.
a.
b.
Figura 4.4
0 50 100 150 200 250 3000
0.005
0.01
0.015
0.02
0.025
0.03
0 50 100 150 200 250 3000
0.01
0.02
0.03
0.04
0.05
0.06
6
Figura 4.5.
4.3. Tehnici de filtrare spaţială pentru eliminarea componentei zgomot
Tehnicile de filtrare spaţială sunt utilizate pentru eliminarea diferitelor tipuri de zgomot din imagini. Componenta
zgomot a imaginilor digitale provine în general din procesele de digitizare şi transmitere ale semnalului vizual. Pentru
, modelul de degradare pentru imagini de dimensiune este,
( ) ( ) ( ) ( ) unde g este imaginea degradată, f este imaginea iniţială și este funcţia zgomot aditiv.
Filtrele spaţiale sunt definite în ferestre de dimensiune mici (de obicei dimensiunile sunt , ) şi
sunt implementate în general prin măşti de convoluţie. În funcţie de tipul de zgomot care poate fi eliminat prin filtrare,
filtrele spaţiale sunt ,
1. filtre de ordine, care sunt aplicate în cazul zgomotului sare şi piper, exponenţial negativ, Rayleigh și normal;
2. filtre medie, prin intermediul cărora este redus zgomotul distribuit uniform şi zgomotul gaussian.
Filtre de ordine
Filtrele spaţiale de tip ordine sunt implementate pe baza statisticii de ordine a imaginii şi operează în ferestre din
imagine (subimagini) prin modificarea valorii de gri a pixelului central al fiecărei ferestre. Statistica de ordine este o
tehnică de aranjare a tuturor pixelilor în funcţie de valorile nivelurilor de gri. Poziţia unei valori într-o secvenţă ordonată
de pixeli este numită rang.
În continuare, vor fi considerate următoarele notaţii:
f – imaginea originală, neperturbată;
g – imagine dimensională, perturbată cu zgomot aditiv (imaginea observată);
dimensiunea filtrului;
– imaginea de dimensiuni , rezultată din g prin completarea cu câte t -1 linii
deasupra și sub imaginea g, respectiv cu câte t -1 coloane în stânga și în dreapta lui g, în total linii și coloane suplimentare (corectitudinea calculului este asigurată de utilizarea a linii/coloane cu
elemente nule, nu sunt necesare linii/coloane nule; în ipoteza unui filtru de dimensiune pătratică și
impară această observație poate fi aplicată și pentru tehnicile de filtrare prezentate în capitolul 3);
– subimaginea lui de dimensiuni nn centrată în punctul (l,c), ; pentru ușurința notației, indicii din sunt considerați egali cu cei corespunzători zonei din imaginea care a fost copiată în ; de exemplu, pentru și ,

7
[ ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )] [
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )]
{
} - secvenţa crescătoare a valorilor de gri corespunzătoare pixelilor din Wl,c;
- aproximarea imaginii f calculată prin aplicarea unui filtru de ordine (este calculată imaginea prin
aplicarea unui filtru de ordine asupra lui și, similar oricărei proceduri de filtrare spațială, cele t linii și
coloane extreme din sunt eliminate: ( ) )
Nivelul de gri al fiecărui pixel (l,c) din este calculat prin aplicarea filtrului de ordine considerat în fereastra Wl,c.
Alegerile cel mai des utilizate pentru t sunt sau . În continuare sunt prezentate principalele filtre de ordine
aplicate în procesul de restaurare.
Filtrul median este cel mai utilizat filtru de ordine. Tipurile de zgomot care poate fi eliminat sunt impulsul
unipolar și bipolar, Rayleigh, gaussian şi exponenţial negativ (rezultatele aplicării acestui filtru sunt foarte bune în
particular pentru imagini corupte cu zgomot de tip impuls). Prin aplicarea filtrului median rezultă imaginea ,
( ) unde, pentru
( ) [
]
și ( ) în rest.
Efectul aplicării acestui filtru este, pe lângă cel de eliminare a zgomotului, și de nivelare a imaginii. Gradul de
nivelare este cu atât mai mare cu cât dimensiunea filtrului este mai mare, deci este recomandat utilizarea măștilor de
dimensiune mică ( ). De exemplu, în cazul zgomotului de tip impuls este recomandată folosirea repetată a
filtrului median de dimensiune . Este de remarcat că, și în această situație, numărul de aplicări repetate trebuie să fie
mic, altfel fectul de nivelare este foarte puternic.
În figura 4.6.a este prezentată o imagine cu zgomot impuls foarte mare (cu probabilitate 0.2). În figurile 4.6.b,
respectiv 4.6.c este inclus rezultatul filtrării imaginii 4.6.a, respectiv 4.6.b. cu filtru median de dimensiune . De
asemenea, gradul de restaurare este măsurat prin aplicarea SNR pentru fiecare dintre imagini relativ la imaginea originală,
neperturbată. Imaginea originală poate fi accesată pe https://biostatmatt.com/archives/727.
a.
SNR= 6.2762
b.
SNR= 18.8301
c.
SNR=19.5634
Figura 4.6
Filtrele de ordine maxim şi minim transformă imaginea g conform relaţiilor,
a) filtrul maxim,
( ) unde, pentru
( )
și ( ) în rest.
b) filtrul minim,
( ) unde, pentru
( )
și ( ) în rest.
8
Filtrul minim este utilizat în scopul eliminării zgomotului de tip sare ( ( ) ). Prin aplicarea filtrului maxim
rezultă o imagine din care a fost îndepărtată componenta zgomot de tip piper ( ( ) ).
Filtrul punct mediu calculează astfel,
( ) unde, pentru
( )
și ( ) în rest.
Filtrul de ordine punct mediu este util pentru eliminarea zgomotului distribuit uniform şi a zgomotului gaussian.
Filtrul medie alfa-trimmed calculează media aritmetică a valorilor de gri ale pixelilor din fereastră, cu excepţia
rangurilor extreme. Dacă T este numărul de valori excluse, 1nT0 2 , atunci
( ) unde, pentru
( )
∑
și ( ) în rest.
Pentru T=0 este obţinut filtrul medie. Dacă T=
, atunci este obținut filtrul median. Filtrul medie alfa-trimmed
este aplicat în cazul imaginilor în care zgomotul înglobează o mixtură de componente zgomot (de exemplu zgomot sare şi
zgomot Gaussian sau zgomot sare și piper și zgomot uniform).
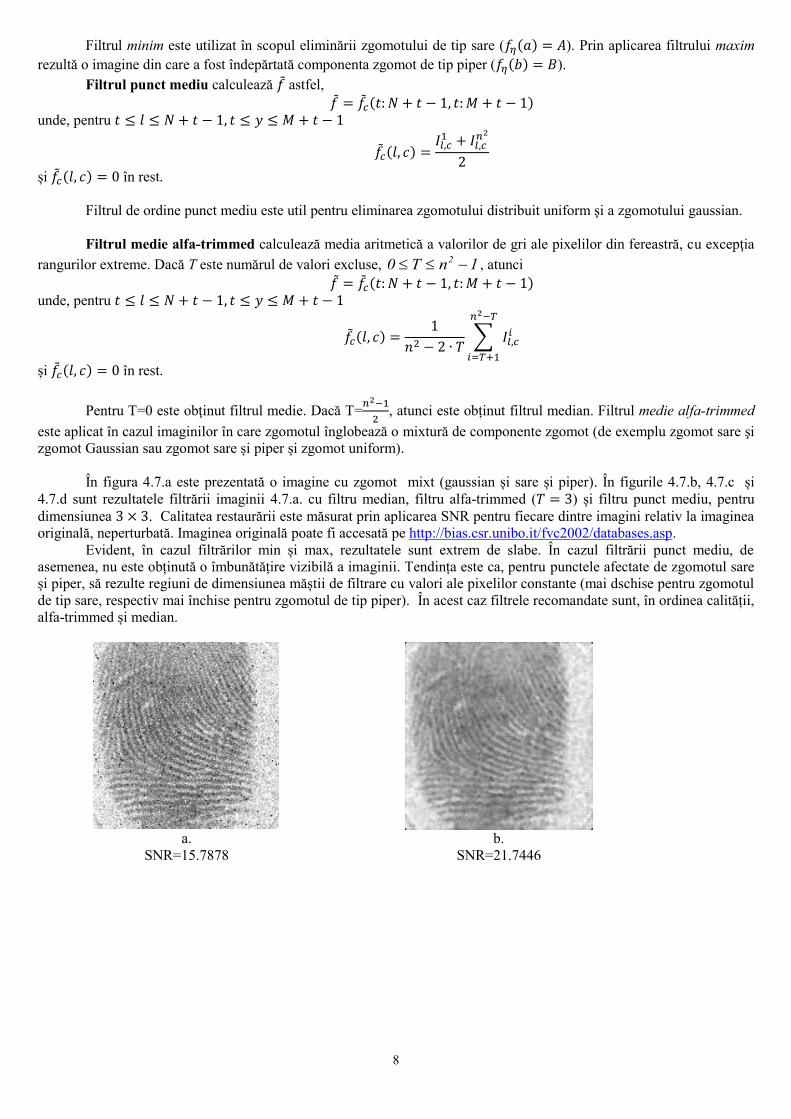
În figura 4.7.a este prezentată o imagine cu zgomot mixt (gaussian și sare și piper). În figurile 4.7.b, 4.7.c și
4.7.d sunt rezultatele filtrării imaginii 4.7.a. cu filtru median, filtru alfa-trimmed ( ) și filtru punct mediu, pentru
dimensiunea . Calitatea restaurării este măsurat prin aplicarea SNR pentru fiecare dintre imagini relativ la imaginea
originală, neperturbată. Imaginea originală poate fi accesată pe http://bias.csr.unibo.it/fvc2002/databases.asp.
Evident, în cazul filtrărilor min și max, rezultatele sunt extrem de slabe. În cazul filtrării punct mediu, de
asemenea, nu este obținută o îmbunătățire vizibilă a imaginii. Tendința este ca, pentru punctele afectate de zgomotul sare
și piper, să rezulte regiuni de dimensiunea măștii de filtrare cu valori ale pixelilor constante (mai dschise pentru zgomotul
de tip sare, respectiv mai închise pentru zgomotul de tip piper). În acest caz filtrele recomandate sunt, în ordinea calității,
alfa-trimmed și median.
a.
SNR=15.7878
b.
SNR=21.7446

9
c.
SNR=22.1882
d.
SNR=16.6483
Figura 4.7
Filtre de tip medie
Principiul de aplicare al filtrelor de tip medie este similar filtrelor de ordine.
Utilizând notaţiile din paragraful dedicat filtrelor de ordine, sunt prezentate în continuare principalele filtre medie.
Filtrul medie aritmetică este un filtru trece-jos şi aplicarea lui are efect de nivelare a imaginii perturbate (vezi
§3.2). Calculul imaginii este descris prin,
( ) unde, pentru
( )
∑ ( )
( ) { } { }
și ( ) în rest.
Aplicarea filtrului medie aritmetică are inconvenientul că determină voalarea imaginii. Tehnicile de filtrare
dezvoltate în continuare au fost studiate în scopul minimizării efectului de voalare.
Filtrul medie geometrică este aplicat conform relaţiei,
( ) unde, pentru
( ) ( ∏ ( ( ))( ) { } { }
)
și ( ) în rest.
Filtrul medie armonică,
( ) unde, pentru
( )
∑
( )( ) { } { }
și ( ) în rest.
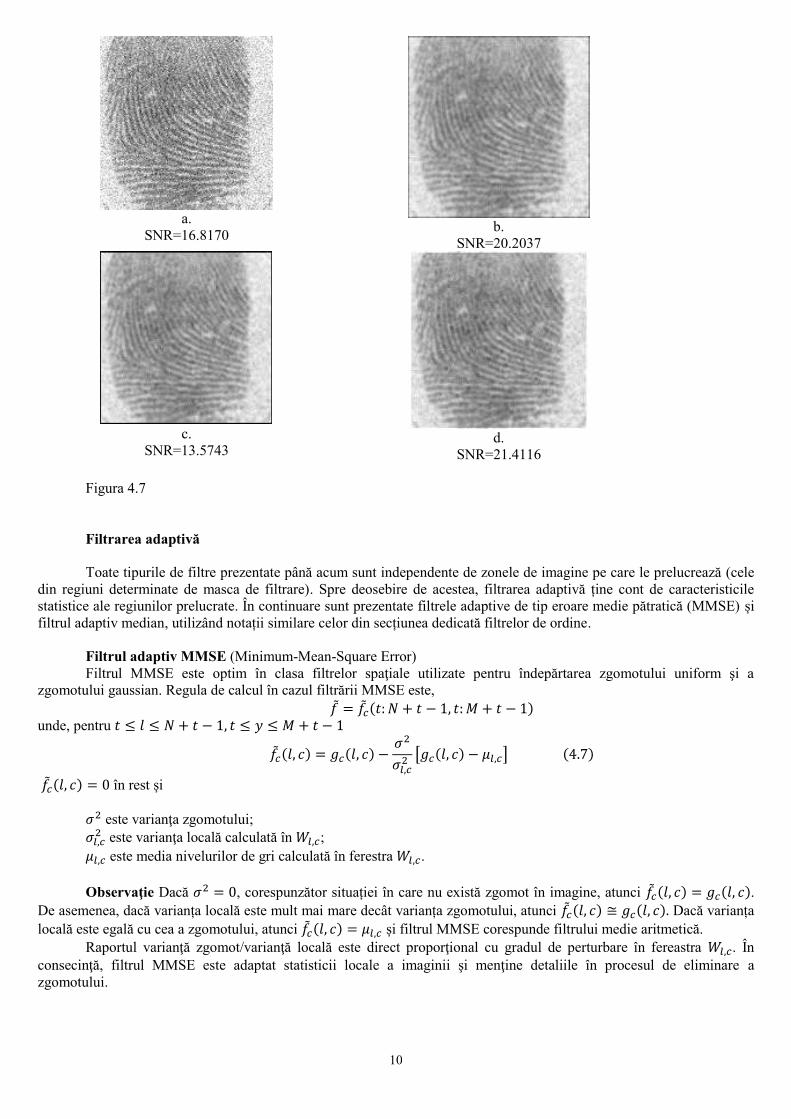
În figura 4.8.a este prezentată o imagine cu zgomot mixt (gaussian și uniform). În figurile 4.8.b, 4.8.c și 4.8.d
sunt rezultatele filtrării imaginii 4.8.a. cu filtru medie aritmetică, filtru medie geometrică și filtru medie armonică, pentru
dimensiunea . Calitatea restaurării este măsurat prin aplicarea SNR pentru fiecare dintre imagini relativ la imaginea
originală, neperturbată. Imaginea originală poate fi accesată pe http://bias.csr.unibo.it/fvc2002/databases.asp.
10
a.
SNR=16.8170
b.
SNR=20.2037
c.
SNR=13.5743
d.
SNR=21.4116
Figura 4.7
Filtrarea adaptivă
Toate tipurile de filtre prezentate până acum sunt independente de zonele de imagine pe care le prelucrează (cele
din regiuni determinate de masca de filtrare). Spre deosebire de acestea, filtrarea adaptivă ține cont de caracteristicile
statistice ale regiunilor prelucrate. În continuare sunt prezentate filtrele adaptive de tip eroare medie pătratică (MMSE) și
filtrul adaptiv median, utilizând notații similare celor din secțiunea dedicată filtrelor de ordine.
Filtrul adaptiv MMSE (Minimum-Mean-Square Error)
Filtrul MMSE este optim în clasa filtrelor spaţiale utilizate pentru îndepărtarea zgomotului uniform şi a
zgomotului gaussian. Regula de calcul în cazul filtrării MMSE este,
( ) unde, pentru
( ) ( )
[ ( ) ] ( )
( ) în rest și
este varianţa zgomotului;
este varianţa locală calculată în ;
este media nivelurilor de gri calculată în ferestra .
Observaţie Dacă , corespunzător situației în care nu există zgomot în imagine, atunci ( ) ( ).
De asemenea, dacă varianța locală este mult mai mare decât varianța zgomotului, atunci ( ) ( ) Dacă varianța
locală este egală cu cea a zgomotului, atunci ( ) și filtrul MMSE corespunde filtrului medie aritmetică.
Raportul varianţă zgomot/varianţă locală este direct proporţional cu gradul de perturbare în fereastra . În
consecinţă, filtrul MMSE este adaptat statisticii locale a imaginii şi menţine detaliile în procesul de eliminare a
zgomotului.
11
Observație În cele mai multe situații, pentru toți pixelii din imagine, . În cazurile în care această
inegalitate nu este respectată, pentru a nu obține valori negative pentru nivelurile de gri ale imaginii rezultat,
este
înlocuită cu 1 în relația (4.7).
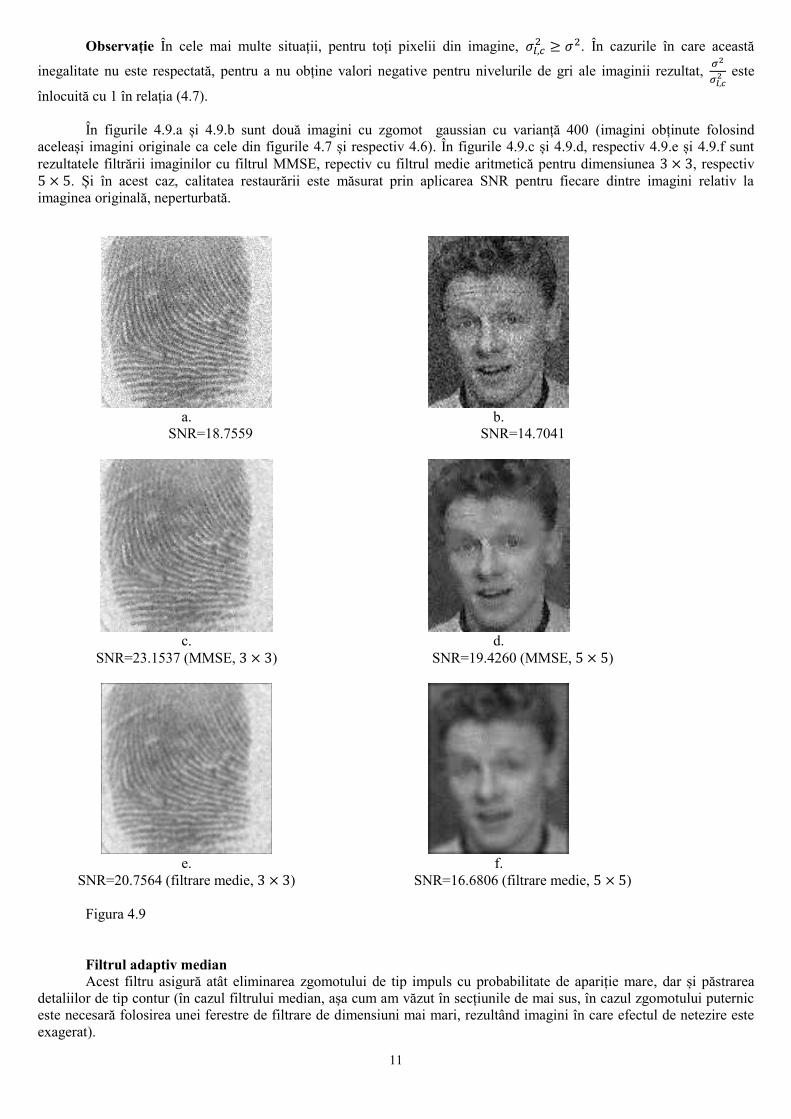
În figurile 4.9.a și 4.9.b sunt două imagini cu zgomot gaussian cu varianță 400 (imagini obținute folosind
aceleași imagini originale ca cele din figurile 4.7 și respectiv 4.6). În figurile 4.9.c și 4.9.d, respectiv 4.9.e și 4.9.f sunt
rezultatele filtrării imaginilor cu filtrul MMSE, repectiv cu filtrul medie aritmetică pentru dimensiunea , respectiv
. Și în acest caz, calitatea restaurării este măsurat prin aplicarea SNR pentru fiecare dintre imagini relativ la
imaginea originală, neperturbată.
a.
SNR=18.7559
b.
SNR=14.7041
c.
SNR=23.1537 (MMSE, )
d.
SNR=19.4260 (MMSE, )
e.
SNR=20.7564 (filtrare medie, )
f.
SNR=16.6806 (filtrare medie, )
Figura 4.9
Filtrul adaptiv median
Acest filtru asigură atât eliminarea zgomotului de tip impuls cu probabilitate de apariție mare, dar și păstrarea
detaliilor de tip contur (în cazul filtrului median, așa cum am văzut în secțiunile de mai sus, în cazul zgomotului puternic
este necesară folosirea unei ferestre de filtrare de dimensiuni mai mari, rezultând imagini în care efectul de netezire este
exagerat).

12
Pentru o dimensiune dată și fie subimaginea de dimensiune
centrată în pixelul ( ), {
} secvenţa crescătoare a valorilor de gri corespunzătoare pixelilor din ,
[
] valoarea mediană a nivelurilor de gri din
și dimensiunea maximă acceptată pentru . Pentru fiecare
pixel ( ) din subimaginea , intensitatea sa luminoasă este ( ).
Filtrarea adaptivă de tip median calculează, pentru fiecare pixel ( ) (centrul subimaginii ) valoarea nouă
( ) prin parcurgerea următoarelor etape (Gonzales, Woods, 2008):
I. [
]
[
]
Dacă și , treci la etapa II
Altfel (dimensiunea crește astfel încât masca de filtrare să rămână o fereastră pătrată cu
dimensiune impară)
Dacă repetă etapa I
Altfel ( ) [
]
II. ( )
( )
Dacă și ( ) ( )
Altfel ( ) [
]
În algoritmul prezentat mai sus, pentru fiecare dimensiune , valorile și
sunt considerate din
punct de vedere statistic componente ale zgomotului de tip impuls. Scopul primei etape a algoritmului este acela de a
determina dacă rezultatul filtrării mediane, [
], este o componentă impuls (nivel de gri alb sau negru) sau nu. În caz
afirmativ ( [
]
sau [
]
), dimensiunea subimaginii este mărită și este testat dacă noua valoare mediană
este sau nu zgomot impuls. În cazul în care este identificată tentativa de depășire a dimensiunii maxime, , algoritmul
returnează valoarea curentă calculată de filtrul median. Cu cât probabilitatea de apariție a zgomotului impuls sare și/sau
piper este mai mică sau cu cât dimensiunea maximă acceptată este mai mare, cu atât situația depășirii lui (și,
implicit, părăsirea algoritmului încă de la prima etapă) este mai puțin probabilă. Evident, cu cât probabilitățile asociate
impulsurilor cresc, cu atât dimensiunea ferestrei în care este realizată eliminarea acestui tip de zgomot trebuie să fie mai
mare.
Dacă
[
]
(corespuzător situației și ), atunci [
] nu este zgomot impuls și este
parcursă etapa a doua a algoritmului. Dacă valoarea de gri a pixelului central al ferestrei curente, ( ), este zgomot
impuls ( sau ), atunci ( ) primește valoarea [
] (care nu este zgomot impuls). În caz contrar,
valoarea de gri a pixelului central este păstrată nemodificată. Acest pas asigură eliminarea distorsiunilor induse de filtrul
median.
Observație. Din punct de vedere al implementării, stabilirea valorii parametrului este realizată prin
aplicarea filtrului median cu ferestre de dimensiuni din ce în ce mai mari, până la eliminarea completă a zgomotului
impuls. Evident, aceste etape nu au rolul de a determina obținerea unor imagini restaurate cu care să fie continuată
procesarea (de exemplu detectarea muchiilor, identificarea obiectelor din imagine ș.a.m.d), ci numai de a determina cea
mai mică dimensiune a filtrului median care asigură eliminarea zgomotului sare și piper fără a deteriora semnificativ
imaginea prin netezire. Acea dimensiune (sau o valoare apropiată) dau valoarea parametrului .
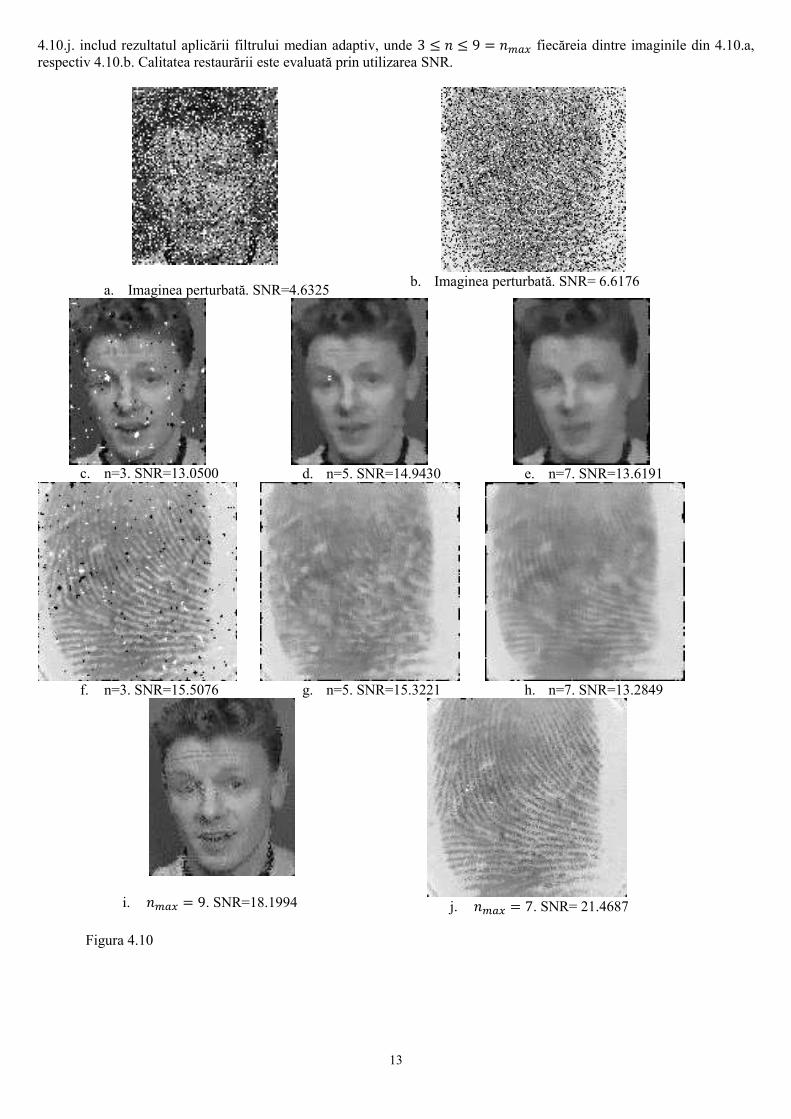
În figurile 4.10.a, respectiv 4.10.b sunt prezentate imagini perturbată puternic (probabiltăți de 0.35) cu zgomot
sare și piper (imaginile originale utilizate și în exemplul din figura 4.9). În figurile 4.10.c, 4.10.d, 4.10.e și respectiv
4.10.f, 4.10.g, 4.10.h sunt prezentate rezultatele aplicării filtrului median cu dimensiuni 3, 5 și 7 pe ficare dintre imaginile
din 4.10.a, respectiv 4.10.b. (dimensiunea este mărită pâna la dispariția efectului zgomotului, dar, evident, imaginile sunt
din ce în ce mai netezite, o serie de datalii de tip contur fiind pierdute prin filtrarea standard mediană). Figurile 4.10.i și
13
4.10.j. includ rezultatul aplicării filtrului median adaptiv, unde fiecăreia dintre imaginile din 4.10.a,
respectiv 4.10.b. Calitatea restaurării este evaluată prin utilizarea SNR.
a. Imaginea perturbată. SNR=4.6325
b. Imaginea perturbată. SNR= 6.6176
c. n=3. SNR=13.0500
d. n=5. SNR=14.9430
e. n=7. SNR=13.6191
f. n=3. SNR=15.5076
g. n=5. SNR=15.3221
h. n=7. SNR=13.2849
i. . SNR=18.1994
j. . SNR= 21.4687
Figura 4.10