35647220-curs-rm1
TRANSCRIPT
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 1/127
V. Daniel Olaru Alina Dimache Mircea Modiga
REZISTENŢA MATERIALELOR
- PARTEA I -
EDITURA FUNDAŢIEI UNIVERSITARE “DUNĂREA DE JOS”GALAŢI

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 2/127
CUPRINS1 INTRODUCERE
1.1 Obiectul şi problemele cursului de Rezistenţa materialelor.................... 5
1.2 Clasificarea corpurilor în Rezistenţa Materialelor.................................. 6
1.3 Forţe exterioare...........................................................................................71.3.1 Sarcini.................................................................................................... 7
1.3.2 Legături. For ţe de legătur ă..................................................................... 9
1.3.3. Aplicaţii …………………………………………………………….. 12
1.4 Forţe interioare (eforturi) ........................................................................ 13
1.5 Tensiuni ...................................................................................................... 151.6 Deplasări şi deformaţii ............................................................................. 15
1.7 Modelarea constitutivă a materialelor ....................................................17
1.8 Ipoteze fundamentale în Rezistenţa materialelor ..................................19
Teste ……………………………………………………………………. 20
2 GEOMETRIA SECŢIUNILOR TRANSVERSALE ALE BARELOR 2.1 Arii. Momente statice. Centre de greutate..............................................24
2.2 Momente de inerţie. Definiţii ...................................................................25
2.3 Variaţia momentelor de inerţie cu axe paralele......................................262.4 Caracteristicile geometrice ale unor secţiuni simple.............................. 27
2.5 Variaţia momentelor de inerţie la rotaţia axelor.................................... 31
2.6 Axe şi momente principale de inerţie ......................................................33
2.7 Momente de inerţie ale secţiunilor compuse........................................... 35
2.8 Aplicaţii ...................................................................................................... 35
Teste ……………………………………………………………………...37
3 EFORTURI ÎN BARE ŞI SISTEME DE BARE 3.1 Notaţii. Relaţii de echivalenţă între eforturi şi tensiuni ........................ 39
3.2 Eforturi în bare drepte încărcate în planul zx........................................ 403.2.1 Definiţii................................................................................................40
3.2.2 Relaţii diferenţiale şi relaţii de salt între eforturi şi încărcări .............. 42
3.2.3 Diagrame de eforturi............................................................................43
3.2.4 Folosirea simetriei şi antisimetriei for ţelor exterioare......................... 45
3.2.5 Aplicaţii ............................................................................................... 46
3.3 Eforturi în sisteme plane de bare. Aplicaţii ............................................53Teste .......................................................................................................... 55

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 3/127
Cuprins 3
4 ELEMENTE DE TEORIA ELASTICITĂŢII
4.1 Starea generală de tensiune...................................................................... 574.1.1 Starea de tensiune într-un punct. Componentele stării de tensiune ..... 57
4.1.2 Ecuaţiile de echilibru ale paralelipipedului elementar. Dualitatea
tensiunilor tangenţiale ......................................................................... 59
4.1.3 Ecuaţiile de echilibru ale tetraedrului elementar. Condiţii la limită în
tensiuni ................................................................................................ 61
4.1.4 Variaţia tensiunilor în jurul unui punct. Tensorul tensiunilor .............. 63
4.1.5 Tensiuni normale principale şi direcţii principale. Invarianţii stării de
tensiune ............................................................................................... 65
4.1.6 Exprimarea stării de tensiune prin tensiuni principale. Tensiuni
tangenţiale extreme. Tensiuni octaedrice ............................................68
4.1.7 Tensorul sferic şi tensorul deviator al tensiunilor ................................ 70
4.2 Starea generală de deformaţie .................................................................714.2.1 Relaţiile liniare între deformaţii specifice şi deplasări ........................ 71
4.2.2 Deformaţia liniar ă specifică pe o direcţie oarecare. Analogia dintre
starea de deformaţie şi starea de tensiune…………………………….73
4.2.3 Deformaţia volumică specifică ............................................................74
4.2.4 Tensorul deformaţiilor specifice. Tensorul sferic şi tensorul deviator
al deformaţiilor specifice .................................................................... 74
4.2.5 Ecuaţiile de compatibilitate a deformaţiilor specifice ......................... 75
4.3 Relaţii între tensiuni şi deformaţii specifice. Energia de deformaţie ... 77
4.3.1 Modelul corpului perfect elastic. Relaţiile lui Green........................... 774.3.2 Legea generalizată a lui Hooke............................................................79
4.3.3 Relaţia dintre constantele elastice ale unui material izotrop................ 81
4.3.4 Legea de variaţie a volumului..............................................................82
4.3.5 Legea de variaţie a formei ................................................................... 82
4.3.6 Relaţia dintre tensiunile tangenţiale octaedrice şi lunecările octaedrice.
Tensiuni şi deformaţii specifice generalizate şi relaţia dintre ele ........ 83
4.3.7 Energia de deformaţie pentru variaţia volumului şi a formei .............. 84
4.4 Scheme generale de rezolvare a problemelor de Teoria elasticităţii.....84
4.5 Probleme particulare ale teoriei elasticităţii........................................... 86
4.5.1 Problema plană în coordonate carteziene ............................................86
4.5.1.1 Starea plană de tensiune .........................................................86
4.5.1.2 Starea plană de deformaţie .................................................... 90
5 SOLICITAREA AXIALĂ
5.1 Eforturi axiale. Aplicaţii........................................................................... 91
5.2 Diagrama caracteristică a materialelor la întindere şi compresiune.Caracteristici şi proprietăţi mecanice ale materialelor.........................93
5.3 Tensiuni admisibile. Coeficienţi de siguranţă. Metode de calcul ........ 104
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 4/127
R EZISTENŢA MATERIALELOR 4
5.4 Relaţii de calcul pentru barele solicitate axial. Aplicaţii .....................105
5.5 Sisteme static nedeterminate solicitate la eforturi axiale. Exemple ... 110
5.6 Concentrări de tensiuni ......................................................................... 119
Teste......................................................................................................... 121
BIBLIOGRAFIE................................................................................................. 125

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 5/127
1. INTRODUCERE
1.1 OBIECTUL ŞI PROBLEMELE CURSULUI DE REZISTENŢA
MATERIALELOR
Rezistenţ a materialelor studiaz ă comportarea corpurile deformabile
supuse ac ţ iunilor exterioare mecanice sau/ şi termice. Corpuri deformabilesunt toate elementele ce intr ă în alcătuirea maşinilor, construcţiilor civile şiindustriale, mijloacelor de transport, instalaţiilor, utilajelor de tot felul etc.Noţiunea comportare introdusă în definiţie are un sens mai larg decât ceade rezistenţă conţinută în numele disciplinei – din care s-ar putea înţelegecă interesează numai studierea condiţiilor în care materialele rezistă, nucedează, nu se rup. A cunoaşte comportarea corpurilor reale înseamnă astăpâni calitativ şi cantitativ legile care guvernează întregul proces de de-formare a lor în funcţionare, incluzând stările limită la care acestea ar pu-tea ceda precum şi rezerva de siguranţă faţă de posibile stări de colaps.
Împreună cu alte cunoştinţe vizând aspecte funcţionale, tehnologice,
estetice şi economice, cunoştinţele de Rezistenţa materialelor contribuie lastabilirea soluţiilor optime pentru forma şi dimensiunile obiectelor tehnice,care să necesite un consum minim de materii prime, materiale, energie şimanoper ă şi să asigure un maxim de siguranţă şi fiabilitate.
În Rezistenţa materialelor se pun trei probleme principale, deopotrivă importante şi strâns legate între ele: problema for ţelor exterioare, proble-ma for ţelor interioare şi problema stărilor limită.
A) Problema for ţ elor exterioare constă în stabilirea schemelor de cal-cul cele mai apropiate de realitate pentru încărcările care solicită elemen-tele maşinilor şi construcţiilor. Ţinând seama de condiţiile de funcţionare
ale acestor elemente, for ţelor exterioare se obţin folosind cunoştinţe deMecanică şi de la alte discipline, rezultate ale măsur ărilor experimentaleprecum şi normative întocmite pe baza calculelor şi experienţei de exploa-tare. Nu sunt puţine situaţiile în care pentru stabilirea schemelor de calculale încărcărilor trebuie să se apeleze la date statistice şi metode probabi-listice, aceste scheme având un pronunţat caracter convenţional.
B) Problema for ţ elor interioare sau problema analizei constă în deter-minarea tensiunilor şi deformaţiile care apar în elementele maşinilor sauconstrucţiilor ca urmare a încărcărilor aplicate. Ele se determină utilizândcunoştinţe şi metode din Rezistenţa materialelor şi alte discipline înrudite(Teoria elasticităţii, Teoria plasticităţii ş.a.). Având în vedere marea varieta-

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 6/127
R EZISTENŢA MATERIALELOR _________________________
6
te a for ţelor ce pot solicita elementele maşinilor sau construcţiilor, acestemetode trebuie să ofere posibilitatea de analiză a structurilor încărcate cu
orice sisteme de for ţe posibile din punct de vedere fizic.C) Problema st ărilor limit ă constă în stabilirea tensiunilor şi deformaţii-
lor care pot fi acceptate în elementele maşinilor sau construcţiilor astfel în-cât acestea să-şi poată îndeplini în bune condiţii funcţiile pentru care aufost proiectate. Această problemă se mai numeşte a normării sau a tensi-unilor şi deformaţ iilor admisibile. Problema stărilor limită este deosebit decomplexă. Ea este strâns legată de problema for ţelor exterioare, necesi-tând şi o profundă cunoaştere a procedeelor de analiză.
În prezentul curs încărcările se consider ă cunoscute iar aspectele pri-vind normarea sunt prezentate sumar, ele fiind dezvoltate la disciplinele de
specialitate. Atenţia cea mai mare va fi acordată problemei for ţelor inter-ioare.
1.2 CLASIFICAREA CORPURILOR ÎN REZISTENŢA
MATERIALELOR
În formă schematizată pentru calcul, corpurile studiate în Rezistenţamaterialelor se pot împăr ţi în trei mari categorii: bare, plăci, masive.
Barele sunt corpuri cu o dimensiune predominantă faţă de celelaltedouă. Ele se obţin prin deplasarea de-a lungul unei curbe numită axa ba-
rei a unei figuri geometrice plane, numită sec ţ iune transversal ă, care r ă-mâne tot timpul normală la axă în centrul ei de greutate. După formaaxei, barele pot fi drepte sau curbe, acestea din urmă putând fi planesau spaţiale. Secţiunile transversale ale barelor pot fi masive sau alcătui-te din profile subţiri, deschise sau închise. Secţiunile transversale potavea forme, dimensiuni şi poziţii variabile de-a lungul axei; când suntconstante şi axa este dreaptă, bara se numeşte prismatic ă. După tipulfor ţelor care acţionează asupra lor, barele au diverse denumiri: grinzi,stâlpi, cabluri, arbori etc.
Pl ăcile sunt corpuri care au una din dimensiuni, numită grosime, multmai mic
ăîn compara
ţie cu celelalte dou
ă. Grosimea pl
ăcii este împ
ăr ţită
îndouă păr ţi egale de suprafaţ a mediană a plăcii. Plăcile pot fi clasificate du-pă forma suprafeţei mediane (plane sau curbe), a conturului acesteia(dreptunghiulare, circulare etc.), după variaţia şi mărimea grosimii, după modul de încărcare şi comportarea sub sarcini etc.
Masivele sunt corpurile la care cele trei dimensiuni sunt comparabile între. Ele sunt de o foarte mare diversitate.
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 7/127
Introducere 7
1.3 FORŢE EXTERIOARE
În principiu, orice corp poate fi studiat separat, cu condiţia să poată fideterminate toate interacţiunile acestuia cu exteriorul. Aceste interacţiunisunt fie cunoscute apriori, fie necunoscute, urmând a fi determinate încursul rezolvării. Interacţiunile cunoscute se numesc sarcini sau înc ărc ări .Ele pot fi nu numai mecanice ci şi termice. Interacţiunile necunoscute suntevidenţiate prin leg ături care modelează conexiunile corpului studiat cu ex-teriorul.
1.3.1 Sarcini
O primă clasificare împarte sarcinile în utile (greutatea manevrată deun pod rulant, presiunea din interiorul unui rezervor etc.) şi accesorii (for ţede iner ţie, de frecare sau care provin din acţiunea unor câmpuri, care nuau rol funcţional).
După poziţiile punctelor de aplicare, for ţele pot fi volumice şi superfici-ale (de suprafaţă).
For ţ ele volumice sunt for ţele de iner ţie şi cele care provin din acţiuneacâmpurilor exterioare (gravitaţional, magnetic etc.). Ele sunt caracterizatede intensitatea lor având ecuaţia dimensională [FL
–3] şi se măsoar ă în SI în N /m3 sau în alte unităţi obţinute prin folosirea multiplilor sau submultipli-lor pentru N şi m.
For ţ ele superficiale provin din contactul direct cu alte corpuri, solidesau fluide. Ele sunt caracterizate de intensitatea lor notată frecvent cu p,au ecuaţia dimensională [FL
–2] şi se măsoar ă în Pascali (Pa),
Pa = N /m2 , (1.1)
sau în alte unităţi obţinute prin folosirea multiplilor sau submultiplilor pen-tru N şi m. Mai des se întâlnesc
MPa = N /mm2 = 106 Pa , daN /cm2 = 10 – 1 MPa , GPa = 109 Pa . (1.2)
Frecvent se folosesc modele de sarcini concentrate şi sarcini distribui-
te liniar pe o linie curbă sau dreaptă, ultimele fiind notate în general cu q.Sarcinile distribuite liniar au ecuaţia dimensională [FL –1] şi se măsoar ă înN /m sau în alte unităţi obţinute prin folosirea multiplilor sau submultiplilor pentru N şi m. Frecvent se foloseşte
kN /m = 103 N /m . (1.3)
Atunci când este permis, încărcări complexe se înlocuiesc prin siste-me de for ţe mai simple, echivalente din punct de vedere static .
În figura 1.1, a este reprezentată înlocuirea unei sarcini p, uniform dis-tribuită pe o suprafaţă dreptunghiular ă, printr-o sarcină q distribuită liniar precum şi printr-o sarcină Q concentrată, în centrul for ţelor paralele q.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 8/127
R EZISTENŢA MATERIALELOR _________________________
8
Aceleaşi consideraţii sunt folosite în fig. 1.1, b pentru o sarcină liniar distribuită.
Un cuplu de două for ţe concentrate egale dar de semn contrar, acţio-nând pe suporturi paralele, se pot înlocui cu momentul cuplului, avândecuaţia dimensională [FL] şi unitatea de măsur ă Nm, kNm etc. Pot fi înlo-cuite şi cupluri de for ţe distribuite liniar cu momente distribuite liniar (v. fi-gura 7.2, b), având ecuaţia dimensională [FL –1L] şi unitatea de măsur ă Nm
–1m.
b
l/2 l/2
p
Q = ql
q=pb
2l/3 l/3
Q=ql/2
q = pb
l
b
b)a)
pl
Fig. 1.1
În calcule interesează şi clasificarea sarcinilor după modul de acţiune în timp. Se numesc statice, acele sarcini care se aplică lent şi progresiv,crescând de la zero la valoarea lor finală după care r ămân constante întimp (cazul I din figura 1.2). Sarcinile dinamice sunt acelea care se aplică prin şoc sau au variaţii în timp, aleatoare sau periodice. În figura 1.2 suntreprezentate două tipuri uzuale de sarcini periodice: simetrice (cazul II) şi pulsatorii (cazul III).
Cazul I
t t
Cazul III
t
F F F
Cazul II
Fig. 1.2
Încărcările mecanice aplicate corpurilor în Rezistenţa materialelor suntfor ţe modelate prin vectori legaţi, spre deosebire de cele folosite în Meca-nica teoretică unde for ţele erau modelate prin vectori alunecători iar mo-mentele prin vectori liberi.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 9/127
Introducere 9
Fig. 1.3
a)
Δl
l l l
F
F
H H B1 H
Δl
M /l
M
M l
l/2l
M /l M /l M /l M /l M /l
b) c)
d ) e) f )
M
B3
B1 B3
B2
F
B1 B1 B3
B2
B3 B1 B1 B3
l
B2
B3
B2
În figura 1.3 sunt prezentate două exemple. În primul exemplu, efectulfor ţei F asupra barei este diferit dacă punctul ei de aplicaţie este BB1, B2B sau BB3, deşi din punct de vedere al Mecanicii teoretice în toate cele treicazuri sistemele de for ţe (F , H ) sunt echivalente (H este reacţiunea din ar-ticulaţia B2B ). În cazul (a) zona BB1B2B se comprimă iar zona BB2B3B nu-şi modi-fică lungimea, în cazul (b) bara este nesolicitată iar în cazul (c ) zona BB1B2B nu-şi modifică lungimea iar zona BB2B3B este întinsă. În al doilea exemplu,efectul momentului M aplicat barei este diferit dacă punctul de aplicaţie alacestuia este BB1, B2B sau BB3, deşi în toate cele trei cazuri sistemele de for ţe
(M, M/l , – M/l ) sunt echivalente. În cazul (a) bara se deformează cu fibra întinsă sus, în cazul (b) forma deformată a barei prezintă un punct de in-flexiune în B2B iar în cazul (c ) bara se deformează cu fibra întinsă jos.
1.3.2 Legături. For ţe de legătur ă
Interacţiunile necunoscute sunt cele care apar la conexiunile corpuluistudiat cu cele învecinate, conexiuni numite leg ături . Acestea apar pe su-prafeţele exterioare ale corpului, deci interacţiunile care apar în legături aucaracter distribuit. Ele se evidenţiază prin înlăturarea legăturilor şi înlocui-rea acestora, conform axiomei legăturilor din Mecanică, cu for ţe de legătu-r ă distribuite. Uzual, for ţele de legătur ă distribuite sunt înlocuite cu torsorulacestora faţă de un punct convenabil ales. Elementele acestui torsor (for ţeşi momente) se numesc for ţ e de leg ătur ă sau reac ţ iuni .
Riguros vorbind, orice legătur ă este deformabilă. Există însă şi legăturipe direcţiile cărora deformaţiile sunt suficient de mici pentru a putea fi con-siderate rigide. În figura 1.4 sunt reprezentate convenţional legăturile rigi-de cunoscute din Mecanică şi anume reazemul simplu sau mobil (fig. 1.4,
a), articulaţ ia (în figura 1.4, b este reprezentată o articulaţie cilindrică) şiîncastrarea (în figura 1.4, c este reprezentată o încastrare plană fixă iar figurile 1.4, d şi 1.4, e reprezintă încastr ări plane deplasabile – pe orizonta-

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 10/127
R EZISTENŢA MATERIALELOR _________________________
10
lă respectiv pe verticală). Se observă că for ţele de legătur ă apar pe direcţi-ile deplasărilor blocate, marcate cu două liniuţe în figura 1.4.
Fig. 1.4
a)
b)
c)
e)
d )
c1)
Ansamblul format din sarcini şi reacţiuni reprezintă for ţ ele exterioare care acţionează asupra corpului.
Pentru un corp în echilibru (în repaos sau în mişcare uniformă), rezul-tanta şi momentul rezultant (faţă de orice punct) al for ţelor exterioare careacţionează asupra corpului sunt nule. Rezultă
, (1.4),= = ⇔M0 0 T = 0
=
=
unde cu T s-a notat torsorul format din rezultantă şi momentul rezultant.Proiectând pe trei axe relaţia (1.4) se obţin ecuaţ iile scalare de echilibru alfor ţelor exterioare, din care se determină reacţiunile,
;0 , 0 , 0ix iy izi i iF F F = =∑ ∑ ∑
. (1.5)0 , 0 , 0ix iy izi i i M M M = =∑ ∑ ∑
În scrierea ecuaţiilor de echilibru axele pot fi alese arbitrar.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 11/127
Introducere 11
Cazuri particulare
a) Dacă toate for ţele exterioare sunt conţinute într-un plan, de exem-
plu zx , pentru echilibru trebuie satisf ăcute ecuaţiile
. (1.6)0 , 0 , 0ix iz iyi i iF F M = =∑ ∑ ∑ =
=
Observaţ ii • Primele două ecuaţii din (1.6) se numesc simplu ecuaţ ii de proiec ţ ii .
Întrucât axele pot fi luate arbitrar, ultima ecuaţie din (1.6) poate fi scrisă înraport cu orice axă normală pe planul zx , trecând deci prin orice punct alacestui plan. De aceea acestei ecuaţii i se spune obişnuit ecuaţ ie de mo-mente faţă de un punct , deşi ea este o ecuaţie de momente faţă de o axă normală pe planul for ţelor.
• În unele cazuri se poate renunţa la o ecuaţie de proiecţii, scriind însă două ecuaţii de momente faţă de puncte convenabil alese. Sunt situaţii încare se poate renunţa la ambele ecuaţii de proiecţii, scriindu-se trei ecuaţiide momente faţă de trei puncte alese cu grijă (necolineare). În astfel decazuri, ecuaţiile de proiecţii la care se renunţă trebuie să fie identic satis-f ăcute; ele servesc la verificare.
b) Un sistem de for ţe exterioare paralele cu o axă, de exemplu cu z ,este în echilibru dacă
. (1.7)0 , 0 , 0iz ix iyi i iF M M = =∑ ∑ ∑
c ) Când for ţele paralele sunt cuprinse într-un plan, de exemplu zx ,ecuaţiile de echilibru devin
0 , 0iz iyi iF M = =∑ ∑ . (1.8)
Şi în acest caz se pot scrie două ecuaţii de momente faţă de două puncte convenabil alese, iar ecuaţia 0izi
F =∑ r ămâne pentru verificare.
d ) Dacă for ţele exterioare sunt concurente într-un punct, pentru echili-bru trebuie satisf ăcute ecuaţiile
, (1.9)0 , 0 , 0ix iy izi i iF F F = =∑ ∑ ∑ =iar dacă for ţele concurente sunt conţinute în planul xy , ecuaţiile de echili-bru devin
0 , 0ix iyi iF F = =∑ ∑ . (1.10)
Atunci când ecuaţiile de echilibru sunt suficiente pentru aflarea reacţi-unilor, se zice că problema este static determinat ă. În caz contrar, proble-ma este static nedeterminată.
Pentru a fi determinat ă din punct de vedere static , o bar ă acţionată desarcini conţinute într-un singur plan trebuie să aibă o încastrare plană (v.
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 12/127
R EZISTENŢA MATERIALELOR _________________________
12
figura 1.5, a) sau o articulaţ ie cilindric ă şi un reazem simplu a cărui direcţie
nu trece prin articulaţie (1.5, b). Bara din figura 1.5, c se zice că este sim-
plu rezemat ă la capete. Aceasta poate avea una sau două console la ca-pete (reprezentate cu linii întrerupte). Bara încastrată la un capăt şi liber ă la celălalt capăt se zice că este în consol ă.
b)a) c)
Fig. 1.5
Dacă în urma rezolvării sistemului de ecuaţii de echilibru reacţiunilerezultă negative, ele se vor reprezenta punctat, cu sens invers faţă de celales iniţial, iar pe desen se trece valoarea reacţiunii f ăr ă semnul minus.
Pentru rezolvarea problemelor static nedeterminate sunt necesareecuaţii suplimentare faţă de cele furnizate de Statică, ecuaţii care se obţindin considerente de deformare a corpului (v. p. 5.5 şi p. 6.5.3).
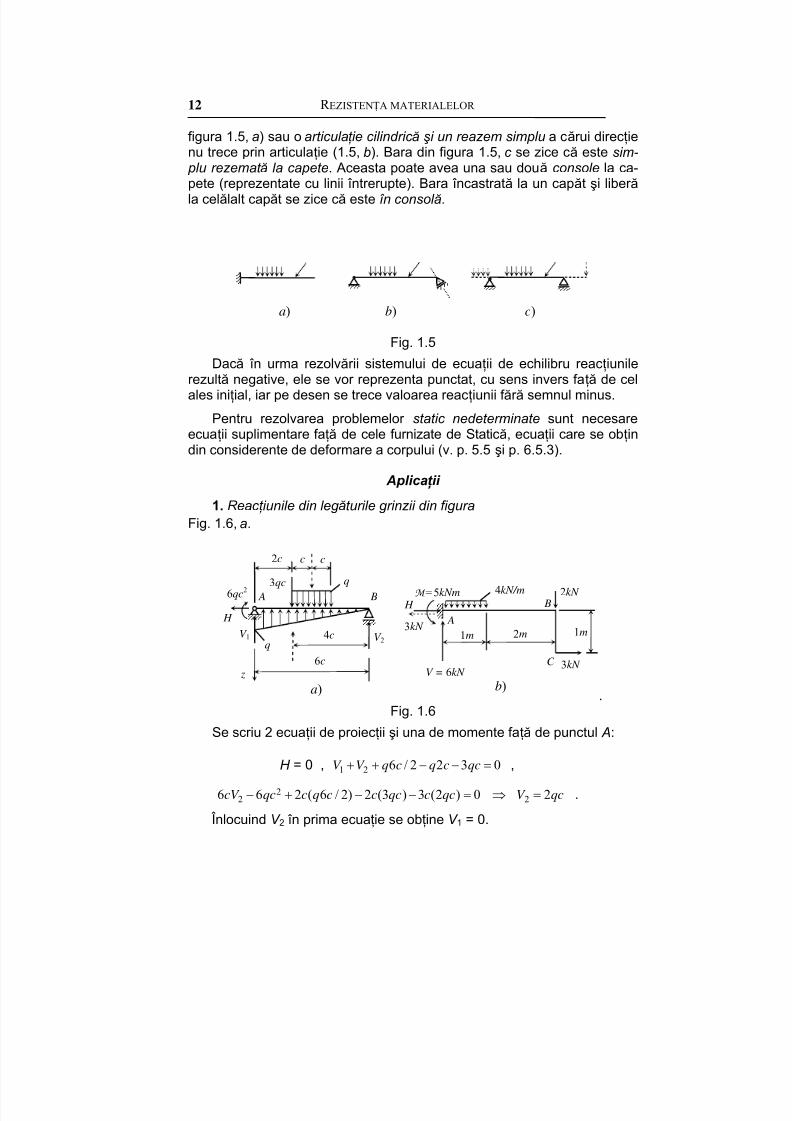
Aplicaţ ii
1. Reac ţ iunile din leg ăturile grinzii din figura Fig. 1.6, a.
.
q
6c
a)
q
c c 2c
4c 2m
3qc 6qc
2
V 1 V 2
b)
H
V = 6kN
M = 5kNm
z
4kN/m 2kN
3kN
1m
H
A B
A
B
C
3kN 1m
Fig. 1.6
Se scriu 2 ecuaţii de proiecţii şi una de momente faţă de punctul A:
H = 0 , 1 2 6 / 2 2 3 0V V q c q c qc+ + − − = ,
.22 26 6 2 ( 6 / 2) 2 (3 ) 3 (2 ) 0 2cV qc c q c c qc c qc V qc− + − − = ⇒ =
Înlocuind V 2 în prima ecuaţie se obţine V 1 = 0.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 13/127
Introducere 13
Este recomandabil ca reacţiunea V 1 să se obţină din ecuaţia demomente faţă de B,
,21 16 6 4 ( 6 / 2) 4 (3 ) 3 (2 ) 0 0qc cV c q c c qc c qc V + + − − = ⇒ =
ecuaţia de proiecţii pe z folosindu-se pentru verificare,
.2 6 / 2 3 2qc q c qc qc− − + + ≡ 0
2. Reac ţ iunile din încastrare pentru cadrul ABC din figura Fig. 1.6, b.
Scriind două ecuaţii de proiecţii şi una de momente faţă de A, se obţi-ne:
H + 3 = 0 ⇒ H = – 3 kN ;
V – 4⋅1 – 2 = 0 ⇒ V = 6 kN ;M – 4⋅1⋅0,5 – 2⋅3 + 3⋅1 = 0 ⇒ M = 5 kNm .
Altfel, folosind 3 ecuaţii de momente scrise faţă de punctele A, B, C ,rezultă acelaşi lucru:
M – 4⋅1⋅0,5 – 2⋅3 + 3⋅1 = 0 ⇒ M = 5 kNm ,
M – 3V + 4⋅1⋅2,5 + 3⋅1 = 0 ⇒ V = 6 kN ,M – 3V + 4⋅1⋅2,5 – H ⋅1 = 0 ⇒ H = – 3 kN .
1.4 FORŢE INTERIOARE (EFORTURI)
Între particulele care formează corpurile solide există for ţe de interac-ţiune, chiar şi în absenţa for ţelor exterioare. Sub acţiunea for ţelor exterioa-re corpurile se deformează, modificându-se şi aceste for ţe de interacţiune. În RM interesează tocmai aceste modificări ale for ţelor de interacţiune. Elese numesc for ţ e interioare, sunt dependente direct de for ţele exterioare şipot fi evidenţiate prin sec ţ ionări fictive ale corpului. Dac ă un corp este înechilibru, orice parte izolat ă din el prin sec ţ ionare va fi în echilibru.
Se consider ă un corp supus acţiunii sistemului de for ţe exterioare (F 1,F 2, ..., F k – 1, F k , ..., F n) care îi asigur ă echilibrul, adică torsorul T al acestor for ţe în raport cu orice punct este nul. Secţionând în mod fictiv corpul cuun plan Π (figura 1.7, a), rezultă două păr ţi separate de secţiunile S1, S2 (figura 1.7, b) Se notează cu (Q1) = (F 1, ..., F k – 1) şi cu (Q2) = (F k , ..., F n)sistemele de for ţe aplicate păr ţilor 1 respectiv 2 şi cu T1, T2, torsorii aces-tor sisteme faţă de un punct oarecare din planul secţiunii, de obicei centrulde greutate C al acesteia. Echilibrul corpului este asigurat dacă
T = T1 + T2 = 0 ⇔ T1 = – T2 . (1.11)
Echilibrul păr ţii 1 se realiza înainte de secţionare datorită for ţelor (Q1)care acţionau direct asupra acestei păr ţi dar şi a for ţelor (Q2) aplicate di-rect păr ţii 2. Acestea din urmă transmit din aproape în aproape, până în

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 14/127
R EZISTENŢA MATERIALELOR _________________________
14
planul secţiunii, acţiunea lor asupra păr ţii 1. Pentru menţinerea echilibruluipăr ţii 1, pe faţa S1 a secţiunii trebuie introdusă acţiunea păr ţii 2 asupra
păr ţii 1.
Fig. 1.7
Δ AΔ A
a) b)
Π F k – 1
F 2 F 1
F k
F n F 1F 2
F k – 1
F k
F n
1 2C C
S1 S2
(Δ P)2
(Δ P)1
C
F 1
F 2
F k – 1
F k
F n
1 2C
S1
S2
M t
M i
T
N
M
R
T – M
M t N
– R
M i
C
c)
Aceasta se manifestă prin for ţele (ΔP )1 distribuite continuu pe fiecareelement de arie (Δ A) şi având torsorul T 1 faţă de punctul C . Similar se de-fineşte torsorul T 2 al sistemului de for ţe (ΔP )2 care reprezintă acţiunea păr-ţii 1 asupra păr ţii 2. Întrucât (ΔP )2 = – (ΔP )1 conform principiului acţiunii şireacţiunii, rezultă T 2 = – T 1 . For ţele ΔP se numesc for ţ e interioare elemen-tare. Ele reprezintă efectul for ţelor exterioare asupra for ţelor de interacţiu-ne dintre particulele învecinate care au fost separate prin planul de sec ţio-nare.
Pentru a asigura echilibrul păr ţilor 1 şi 2 este deci necesar ca
T1 + T 1 = 0 , T2 + T 2 = 0 . (1.12)
Din relaţiile (1.11) şi (1.12), rezultă
T 1 = – T1 = T 2 , T 2 = – T2 = T 1 , (1.13)
adică torsorul de reducere în punctul C al for ţelor interioare care acţionea-ză pe o faţă a unei secţiuni într-un corp este egal cu torsorul de reducere în acelaşi punct C al for ţelor exterioare aplicate păr ţii de corp care a fost înlăturată sau este egal şi de semn contrar cu torsorul faţă de C al for ţelor exterioare aplicate păr ţii de corp căreia îi apar ţine secţiunea.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 15/127
Introducere 15
Elementele R şi M ale torsorului T 1 (sau T 2) se numesc for ţ e interioare.
1.5 TENSIUNI
For ţa elementar ă interioar ă ΔP care acţionează pe o arie elementar ă A
pe suprafaţa inter-
Tensiune total ă,
Ele se pot descompune în câte două componente, una (N respectiv M t )
normală la secţiune iar cealaltă (T respectiv M i ) situată în planul secţiunii –pe dreapta de intersecţie a secţiunii cu planul definit de normală şi R res-pectiv M (v. fig. 1.7, c ). Componentele N şi T se numesc for ţă axial ă res-pectiv for ţă t ăietoare iar M i şi M t se numesc moment încovoietor respectivmoment de torsiune. For ţele interioare N , T , M i , M t se mai numesc eforturi .
Δ din jurul unui punct B se poate descompune în două componente ele-
mentare şi anume: ΔN dispusă pe direcţia υ care este normală în B la sec-ţiune şi ΔT situată în planul secţiunii – pe dreapta de intersecţie a secţiuniicu planul definit de for ţa ΔP şi normală (figura 1.8, a).
Se numesc tensiuni sau eforturi unitare în punctul B
ioar ă de normală υ, intensităţile în B ale for ţelor interioare elementare careacţionează pe acea suprafaţă, adică valorile for ţelor ce ar acţiona pe o arieunitar ă în ipoteza distribuţiei uniforme a acestora pe aria respectivă. Eleau următoarele denumiri şi notaţii:
0lim A
P p
A
υΔ →
Δ=
Δ
; (1.14)
Tensiune normal ă,0
lim A
N
Aυ
Δ →
Δσ =
Δ; (1.15)
Tensiune tangenţ ial ă,0
lim A
T
Aυ
Δ →
Δτ =
Δ. (1.16)
Tensiunile au ecuaţia dimensională [FL –2] şi unitatea de măsur ă Pas-
calul . Împăr ţind la Δ A relaţia ΔP P2 = ΔN
2 + ΔT 2 şi trecând la limită, se obţine
2 2 2 pυ υ υ= σ + τ . (1.17)
1.6 DEPLASĂRI ŞI DEFORMAŢII
Sub acţiunea for ţelor exterioare un corp se deformează iar particulele
ent
acestuia se deplasează. Se numeşte deplasare a unei particule apar ţinândunui corp deformabil, vectorul având originea în punctul ocupat de particu-lă înainte de acţiunea for ţelor exterioare şi extremitatea în punctul ocupatde particulă după acţiunea for ţelor exterioare. Toate mărimile care se refe-r ă la starea deformată vor fi notate ca în figura 1.8, b, cu simbolul prim.
În cazul solidului considerat rigid, câmpul de deplasări era depend
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 16/127
R EZISTENŢA MATERIALELOR _________________________
16
doar de for ţele exterioare care determinau un anumit tip de mişcare(translaţie, rotaţie, plan-paralelă etc.).
Fig. 1.8
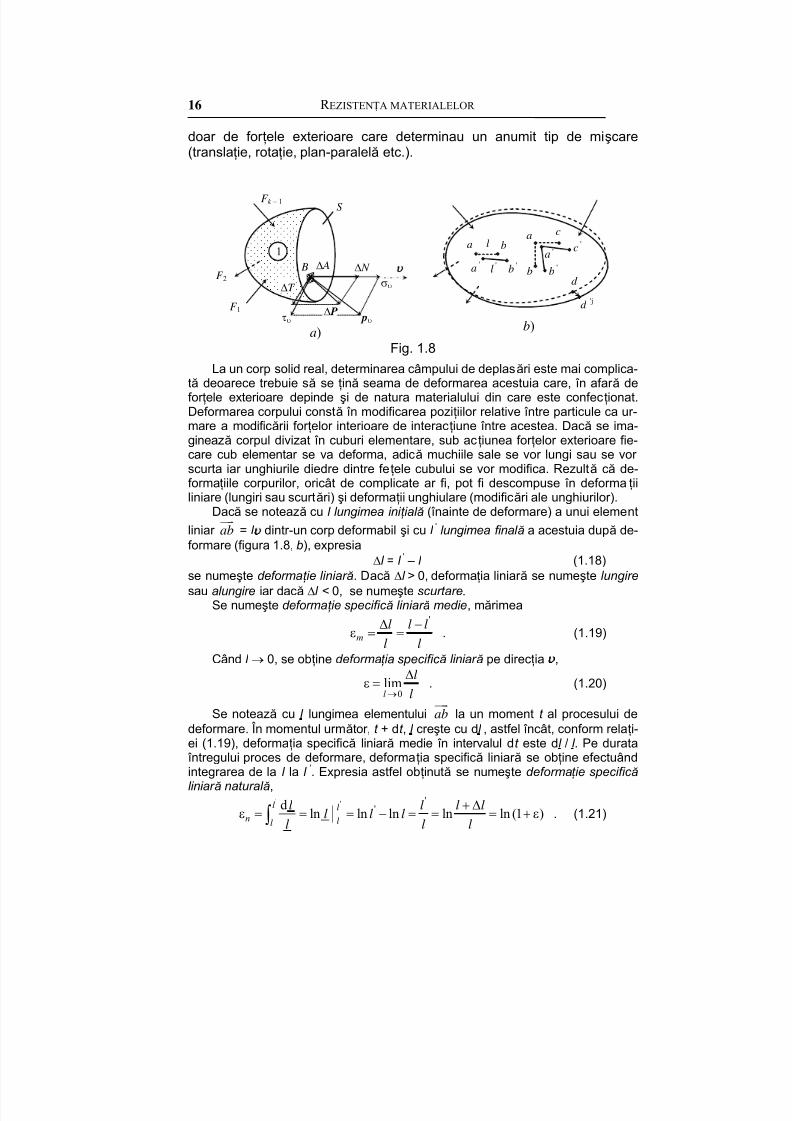
La un corp solid real, determinarea câmpului de deplasări este mai complica-d
nt
Δl = l – l (1.18)te deformaţ ie liniar ă. D
ărimea
tă eoarece trebuie să se ţină seama de deformarea acestuia care, în afar ă defor ţele exterioare depinde şi de natura materialului din care este confecţionat.Deformarea corpului constă în modificarea poziţiilor relative între particule ca ur-mare a modificării for ţelor interioare de interacţiune între acestea. Dacă se ima-ginează corpul divizat în cuburi elementare, sub acţiunea for ţelor exterioare fie-care cub elementar se va deforma, adică muchiile sale se vor lungi sau se vor scurta iar unghiurile diedre dintre feţele cubului se vor modifica. Rezultă că de-formaţiile corpurilor, oricât de complicate ar fi, pot fi descompuse în deforma ţii
liniare (lungiri sau scurtări) şi deformaţii unghiulare (modificări ale unghiurilor).Dacă se notează cu l lungimea ini ţ ial ă (înainte de deformare) a unui eleme
liniar ab = l υ dintr-un corp deformabil şi cu l ' lungimea final ă a acestuia după de-
formare (figura 1.8, b), expresia '
se numeş acă Δl > 0, deformaţia liniar ă se numeşte lungire sau alungire iar dacă Δl < 0, se numeşte scurtare.
Se numeşte deformaţ ie specific ă liniar ă medie, m
'
l l lm
l l
Δ −ε = = . (1.19)
l → 0, se obţine deformaţ ia specific ă pe direcţia υ,Când ă liniar
0
lim l
l l→Δε = . (1.20)
Se notează cu l lungimea elementului ab
la un moment t al procesului dedeformare. În momentul următor, t + dt , l cre cu dşte l , astfel încât, conform relaţi-ei (1.19), deformaţia specifică liniar ă medie în intervalul dt este dl /
l . Pe durata întregului proces de deformare, deformaţia specifică liniar ă se obţine efectuândintegrarea de la l la l
'. Expresia astfel obţinută se numeşte deformaţ ie specific ă liniar ă natural ă,
' 'l
ε ='
'dln ln ln ln ln (1 )
l
n ll
l l l ll l l
l l l
+ Δ= = − = = = + ε∫ . (1.21)
d ' j
Δ N Δ A
F k – 1S
F 1
F 2
1
τυ pυ
συ
Δ P
ΔT
la '
c aa b c '
bb'
l'
b 'a
' B υ
d
b)a)

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 17/127
Introducere 17
Se numeşte deformaţ ie unghiular ă sau lunecare, variaţia datorită deformării
unghiului format de două elemente liniare infinite a i ac ,
e
corpului a zim le, ab şbac
concurente, situate pe suprafaţa sau în interiorul corpului.Dacă unghiul ba ste de 90° (figura 1.8,c b), lunecarea se numeşte specific ă
o900, 0
bacba ca
=→ →
' ' 'lim ( )bac b a cγ = − . (1.22)
carea specifică se exprimă în radiani. Ea este pozitivă atunci cândşorează.
EA CONSTITUTIVĂ A MATERIALELOR
Compo nstitutive,care stabile nd seamaşi de temperatur ă.
atea materialelor reale.
şi Newton se utilizează în studiul fluidelor.*)
lelor.
În ţie seexprimă prin relaţia de propor ţion
Luneunghiul de 90° se mic
1.7 MODELAR
rtarea materialelor sub sarcini se modelează prin relaţ ii cosc legătura între tensiuni şi deformaţii specifice, uneori ţinâ
Relaţ iile constitutive în care intervin explicit şi variaţiile în raport cu timpul aletensiunilor şi deformaţiilor specifice se numesc reologice.
Ecuaţiile constitutive ale corpurile reale, tridimensionale, generalizează pecele obţinute pe modele constitutive monodimensionale. Există o multitudine deastfel de modele, explicabilă prin diversitatea şi complexitPe baza lor au fost dezvoltate diferite ştiinţe, unele regăsindu-se în cursul de Re-zistenţa materialelor, altele de sine stătătoare. Modelele constitutive cele maisimple şi frecvent folosite sunt modelele clasice ale lui Euclid, Pascal, Newton,
Hooke, Saint-Venant.Modelul Euclid , al corpului rigid, se utilizează în Mecanica teoretică. Indife-rent de mărimea for ţelor exterioare, deformaţiile corpurilor sunt nule.
Modelele Pascal
Modelul Hooke, pe baza căruia s-a dezvoltat disciplina numită Teoriaelasticităţii (clasică), are o largă utilizare şi în Rezistenţa ma riate
Fig. 1.9
această modelare, dependenţa dintre tensiune şi deforma
σ
alitate
*)Modelul Pascal se foloseşte în studiul echilibrului fluidelor şi mişcării fluidelor ideale. Con-
form acestui model, într-un punct al fluidului tensiunile normale sunt negative şi au aceeaşi valoa-
re pe orice element de suprafaţă, indiferent de orientarea acestuia. Modelul Newton se utilizează în
studiul fluidelor reale, când apar şi tensiunile tangenţiale.
σ
( E ) σ = E ε
ε E
1σ
ε b)a)

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 18/127
R EZISTENŢA MATERIALELOR _________________________
18
σ = E ε , (1.23)
numită legea lui Hooke ată în 1678 sub forma . Coe-ficientul E = (impropriu, enunţ ut tensio sic visconst. este numit ) modul de elasticitate (el defineş-
Teoria plasticit ăţ ii şi în Teoria vibraţ iilor sub
enantse obţine modelul Prandtl (figura recvent utilizat în Plasti itate. El
te de fapt rigiditatea modelului). Încercările de laborator au ar ătat că, înanumite limite, oţelurile se comportă după modelul Hooke. Grafic, modelulHooke se reprezintă printr-un resort (figura 1.9, a), iar relaţia (1.23) printr-odreaptă, ca în figura 1.9, b.
Modelul Saint-Venant este similar cu modelul Coulomb al frecării dealunecare. El se utilizează îndenumirea de model al corpului ideal-rigid – ideal-plastic. Ca şi modelulCoulomb, modelul Saint-Venant se reprezintă printr-un corp paralelipipedic
de masă m care se poate deplasa cu frecare pe un plan orizontal aspru,cu coeficientul de frecare μ ∼ σc / mg , unde mărimea pozitivă σc este o ca-racteristică a materialului (figura 1.10, a). Până la atingerea valorii σc ,
adică pentru |σ| < σc , deformaţia modelului este nulă. Pentru σ = ± (σc + 0)au loc deformaţii numite remanente sau plastice (ε p),
deoarece, dacă mo-delul se descarcă, el r ămâne cu deformaţia din momentul în care s-a f ăcutdescărcarea. Comportarea modelului este reprezentată grafic în figura1.10, b.
(σc)
σ < σ
Fig. 1.10
Fig. 1.11
Prin cuplarea în serie a unui model Hooke cu un model Saint-V1.11, a), f c
se mai numeşte model ideal-elastic – ideal-plastic, comportarea sa fiindreprezentată grafic în figura 1.11, b.
σ
ε
σc(σc)
σ
( E )
σc
a) b)
σ
c
σσ = σc + 0
ε ε p
σ = – ( σc + 0)
ε
σσ = σc
b) a)
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 19/127
Introducere 19
1.8 IPOTEZE FUNDAMENTALE ÎN REZISTENŢA MATERIALELOR
Î decalcul, în Rezistenţa materialelor se folosesc o serie de ipoteze fundamen-
le
În calculul de ordinul II ecua hilibru se scriu pe schema de-formată a barei. For ţele exterioare se deplasează odată cu punctele lor de
n stabilirea modelelor matematice pe baza cărora se obţin relaţiile
ta şi specifice. Ipotezele specifice se vor prezenta în cadrul diferitelor capitole. Ipotezele fundamentale, prezentate în continuare, se refer ă lastructura materialelor şi la comportarea lor sub sarcini.
• Materialele din care sunt confecţionate corpurile se consider ă conti-nue şi omogene. Un corp care ocupă un domeniu spaţial D este continuu,ac ' ⊂d ă în orice domeniu D D, oricât de mic, există materie. Pe baza aces-
tei ipoteze, tensiunile şi deformaţiile corpurilor se pot exprima prin funcţiicontinue.
• Corpul este omogen dacă are aceeaşi structur ă în toate punctele sa-le. Pentru unele materiale, cum sunt cele metalice, se admite ipoteza izo-tropiei , adică a invarianţei proprietăţilor fizico-mecanice cu direcţia. Există însă şi materiale anizotrope, cum sunt lemnele, compozitele etc.
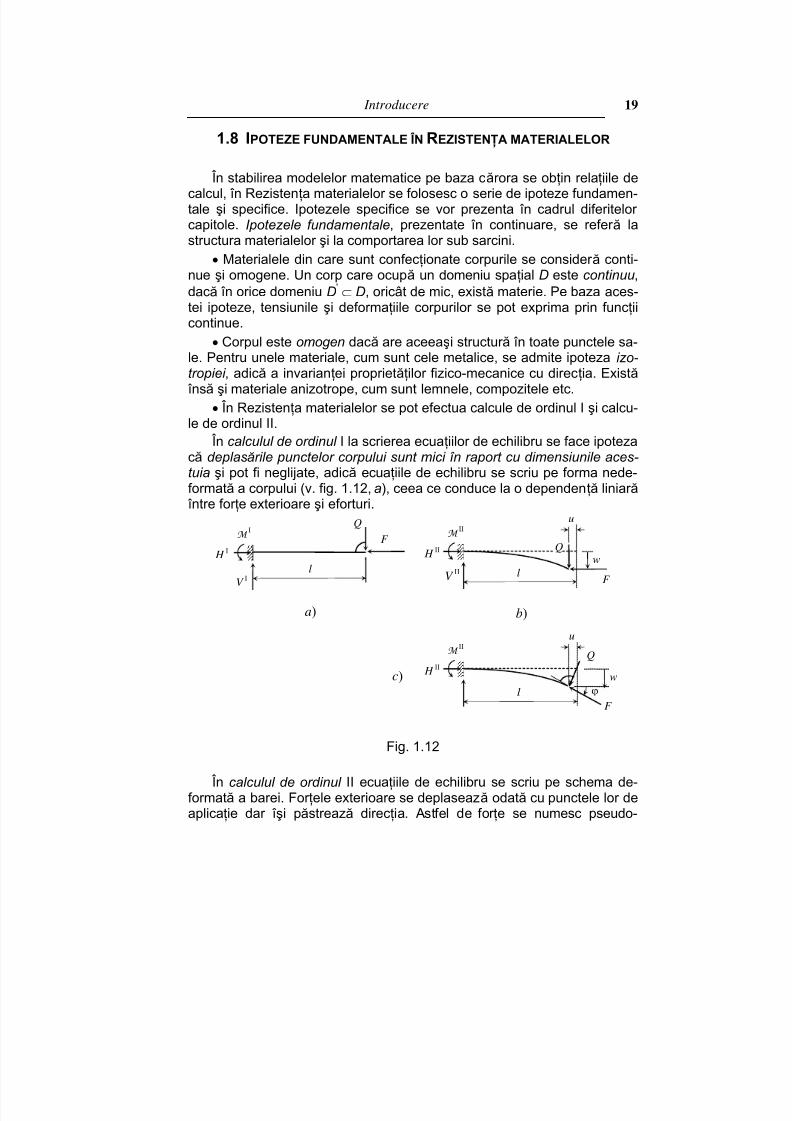
• În Rezistenţa materialelor se pot efectua calcule de ordinul I şi calcu-le de ordinul II.
În calculul de ordinul I la scrierea ecuaţiilor de echilibru se face ipotezacă deplasările punctelor corpului sunt mici în raport cu dimensiunile aces-tuia şi pot fi neglijate, adică ecuaţiile de echilibru se scriu pe forma nede-formată a corpului (v. fig. 1.12, a), ceea ce conduce la o dependenţă liniar ă
între for ţe exterioare şi eforturi.
Fig. 1.12
ţiile de ec
aplicaţie dar î şi păstrează direcţia. Astfel de for ţe se numesc pseudo-
l
Q M
I
a)
H I
F
u
M
b)
l
H II
V II
II
Q w
F
c)
V I
l
u
H II
M II
w
ϕ
Q
F

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 20/127
R EZISTENŢA MATERIALELOR _________________________
20
urmăritoare (v. fig. 1.12, b). Uneori for ţele exterioare nu numai că se de-plasează odată cu punctele lor de aplicaţie dar î şi păstrează şi poziţia rela-
tivă faţă de bar ă (for ţe urmăritoare, v. fig. 1.12, c ). În calculul de ordinul IIreacţiunile şi eforturile sunt funcţii neliniare de for ţele exterioare deoarecedepind de acestea şi prin intermediul deplasărilor. Se scriu expresiile pen-tru reacţiunile din încastrare pentru bara din figurile 1.12, a, b, c .a) Calculul de ordinul I, schema de calcul din figura 1.12, a,
I I I, , H F V Q Ql= = =M .b) Calculul de ordinul II, schema de calcul din figura 1.12, b,
F V Q= = , H II II, [ ]II ( , ) ( , )Q l u Q F F + w Q F = −M .
Q F F F ϕ + , , )V Q Q F F F
c ) Calculul de ordinul II, schema de calcul din figura 1.12, c ,II ( , ) H Q Q= ϕ (Qsin ( , ) cos II cos ( , ) sinϕ − ,= ϕ
[ ]II sin ( , ) cos ( , ) ( , )Q Q F F Q F w Q F = ϕ + ϕ +M
[ ][ ]cos ( , ) sin ( , ) ( , )Q Q F F Q F l u Q F + ϕ − ϕ − .
ţiunile din cazurile (b) şi (c ) devin egale cu cele din cazul (a), da-ierea ecuaţiilor de echilibru se ignor ă deformarea barei.
aterialelor
estrânsă a unui corp elastic se înlocuiesc printr-un alt sistem defor ţ e
lor diferite
T 1. Sarcini distribuite liniar se m ă în: 1. N/m2, 2. Nm, 3. N/m,4. N, 5.N/m3, şi în unităţile obţinute prin folosirea multiplilor şi submultipli-
entrate, 4. for ţe interioare, 5. încărcări.
Reaccă în scr • În funcţie de tipul problemei, se acceptă un model de comportareconstitutivă a materialului. Majoritatea problemelor Rezistenţei msunt rezolvate pe baza modelului Hooke, prin care se admite propor ţionali-tatea între tensiuni şi deformaţii specifice.
• În Rezistenţa materialelor se admite ipoteza cunoscută sub numelede
PRINCIPIUL LUI S AINT-VENANT: dac ă for ţ ele care ac ţ ioneaz ă pe o zo-nă r
aplicat în aceeaşi zonă şi echivalent cu primul din punct de vede-re static , noua distribuţ ie de for ţ e modific ă st ările de tensiune şi defor-maţ ie numai în zona de aplicare a for ţ elor şi în vecinătatea acesteia,dar nu modific ă aceste st ări la distanţ e mai mari faţă de acea zonă.
De exemplu, epruvetele folosite pentru determinarea caracteristicimecanice la tracţiune pot fi prinse în bacurile maşinii de încercat înmoduri, f ăr ă a fi afectată starea de tensiune în zona de măsur ă, suficientde depărtată faţă de zonele de prindere (figura 5.3, d ).
• Dacă nu se fac alte menţiuni, se face ipoteza că pentru un corp ne- încărcat starea de tensiuni şi deformaţ ii este nul ă.
Testeăsoar
lor.
T 2. Eforturile sunt: 1. for ţe exterioare, 2. sarcini distribuite, 3. for ţeconc
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 21/127
Introducere 21
T 3. Teoria elasticităţii s-a dezvoltat pe baza modelului :1.Euclid, 2. Pascal, 3. Newton, 4. Hooke, 5.Saint-Venant.
ile din legături au valorile:
Fig. 1.13
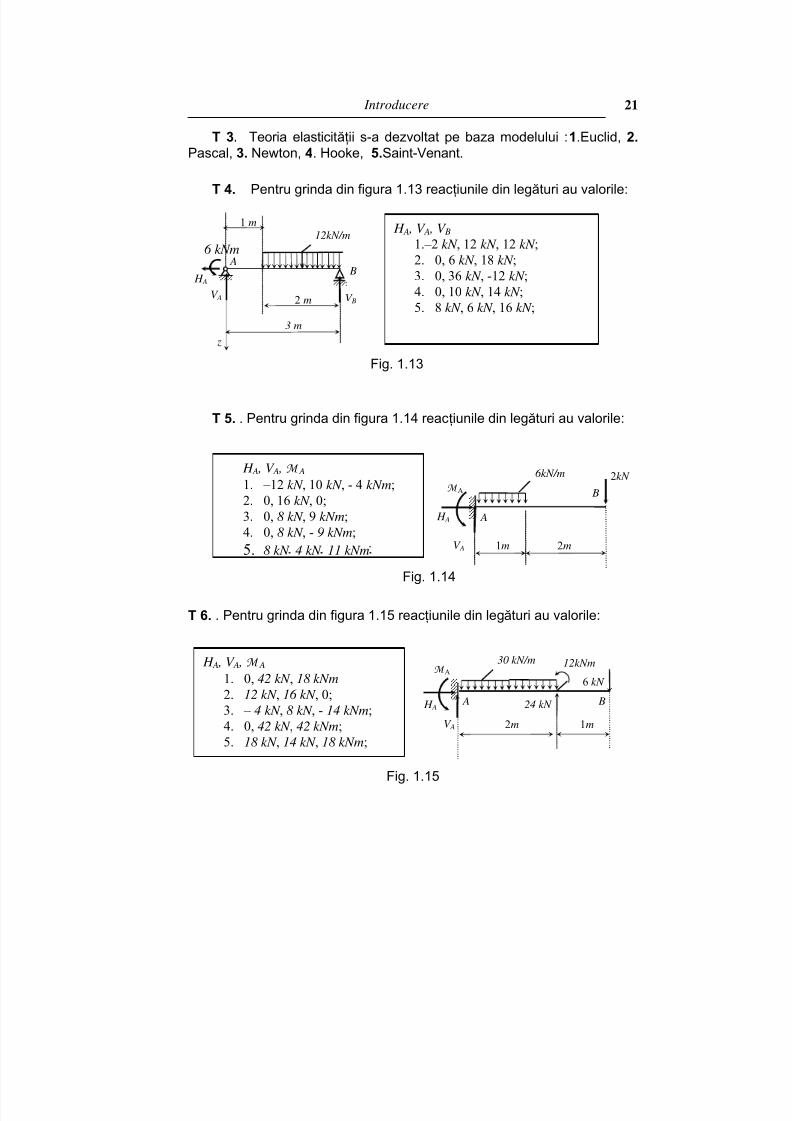
T 5. . Pentru grinda din figura 1.14 reacţiunile din legături au valorile:
Fig.
T 6. . Pentru grinda din figura gături au valorile:
Fig. 1.15
T 4. Pentru grinda din figura 1.13 reacţiun
1.14
1.15 reacţiunile din le
1 m H A , V A , V B12kN/m
1.–2 kN , 12 kN , 12 kN ;
kN , 18 kN ;2. 0, 6
3. 0, 36 kN , -12 kN ;
4. 0, 10 kN , 14 kN ;
5. 8 kN , 6 kN , 16 kN ;
H A , V M A
1. –12 kN , 10 kN , - 4 kNm;
, 0;
Nm;
A ,
2. 0, 16 kN 3. 0, 8 kN , 9 kNm;
4. 0, 8 kN , - 9 k
5. 8 kN 4 kN 11 kNm
H
A , V A , M A
1. 0, 42 kN , 18 kNm
, 16 kN , 0;
Nm;
;
2. 12 kN
3. – 4 kN , 8 kN , - 14 k
4. 0, 42 kN , 42 kNm
5. 18 kN , 14 kN , 18 kNm;
3 m
2 m
6 kNm A
V A V B
z
H A
B
6kN/m 2kN
H A
2m
M A
V A
1m
A
B
30 kN/m 12kNm
6 kN
B 24 kN
2m 1m
H A
M
A
A
V A
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 22/127
R EZISTENŢA MATERIALELOR _________________________
22
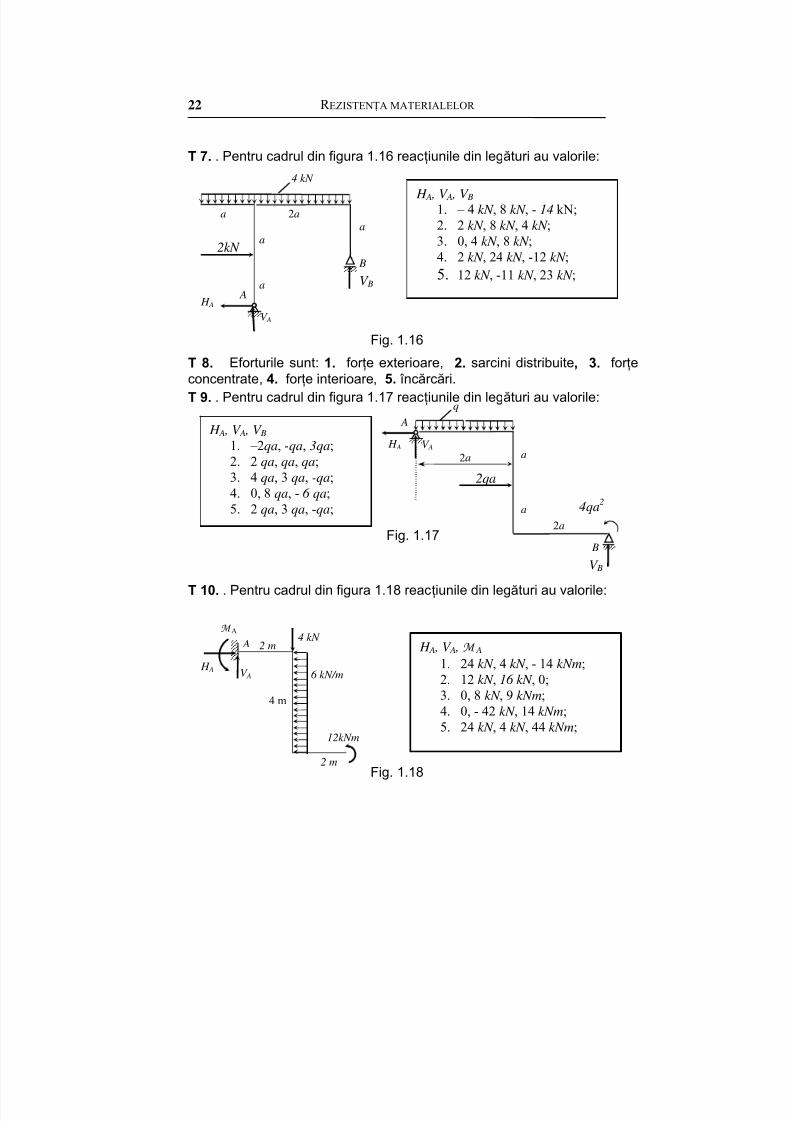
T 7. . Pentru cadrul din figura 1.16 reacţiunile din legături au valorile:
Fig. 1.16
8. Eforturile sunt: 1. for ţe exterioare, 2. sarcini distribuite, 3. for ţe, 4. for ţe interioare
T 10. . Pentru cadrul din figura 1.18 reac
Fig. 1.18
A
Tconcentrate , 5. încărcări.T 9. . Pentru cadrul din figura 1.17 reacţiunile din legături au valorile:
Fig. 1.17
ţiunile din legături au valorile:
V A
H A
2kN
2a
a
a
a
a
4 kN
B
V B
q
A
V A H A
B
4qa2
V B
2qa
2a
2a
a
a
H A , V A , V B1. – 4 kN , 8 kN , - 14 kN;
, 8 kN , 4 kN ;
kN ;
2. 2 kN
3. 0, 4 kN , 8 kN ;
N ;4. 2 kN , 24 kN , -12 k
235. 12 kN , -11 kN ,
H A , V A , V B1. –2qa, -qa, 3qa;
2. 2 qa, qa, qa;
3. 4 qa, 3 qa, -qa;
;4. 0, 8 qa, - 6 qa
5. 2 qa, 3 qa, -qa;
M A
H A , V A , M A
1. 24 kN , 4 kN , - 14 kNm;
kN , 16 kN , 0;
Nm;
2. 12
3. 0, 8 kN , 9 kNm;
4. 0, - 42 kNm;kN , 14
5. 24 k 4 k k N , N , 44
V A H A
A
12kNm
4 kN
4 m
2 m
2 m
6 kN/m
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 23/127
Introducere 23
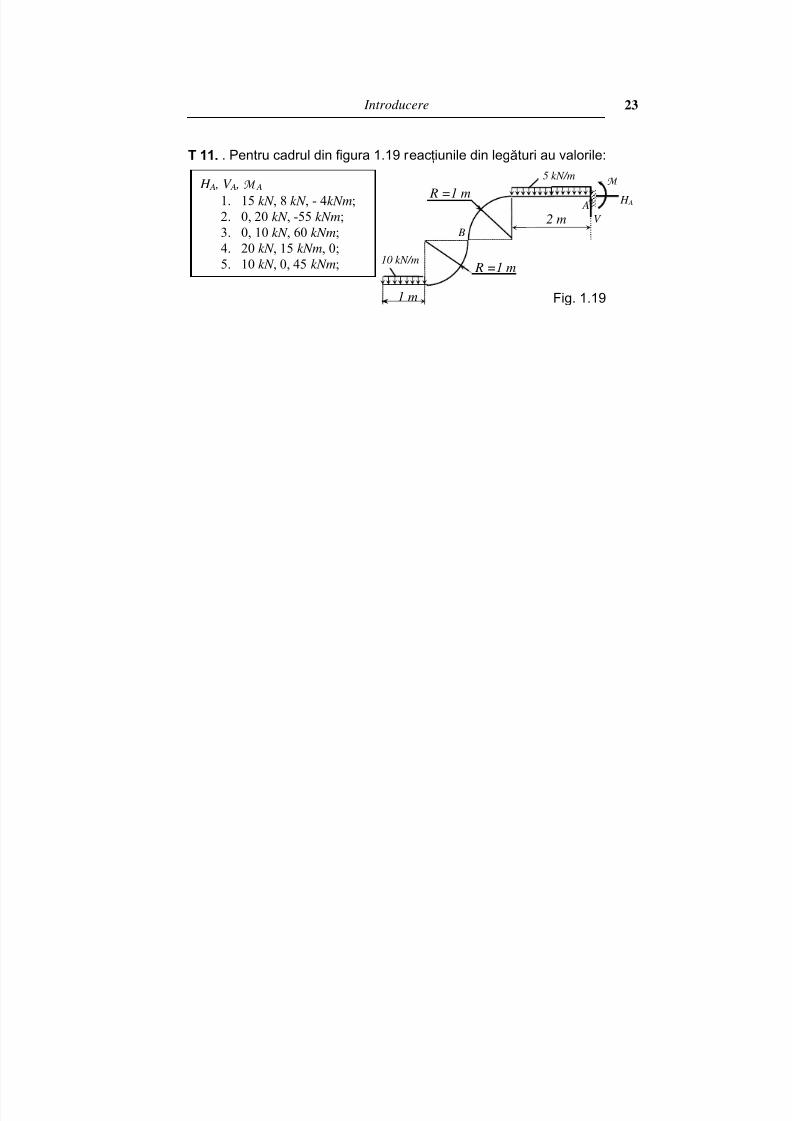
T 11. . Pentru cadrul din figura 1.19 reacţiunile din legături au valorile:
10 kN/m
Fig. 1.19
V
H A
M
A
1 m
B
R =1 m
R =1 m
2 m
5 kN/m H A , V A , M
A
0 kN , 60 kNm;
1. 15 kN , 8 kN , - 4kNm;
2. 0, 20 kN , -55 kNm;
3. 0, 1
4. 20 kN , 15 kNm, 0;
5. 10 kN , 0, 45 kNm;
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 24/127
2. GEOMETRIA SECŢIUNILOR
TRANSVERSALE ALE BARELOR
În calculele de rezistenţă ale barelor intervin diverse caracteristici ge-ometrice ale secţiunilor transversale. În acest capitol se prezintă unele dinaceste caracteristici geometrice, la care se face apel pe parcurs.
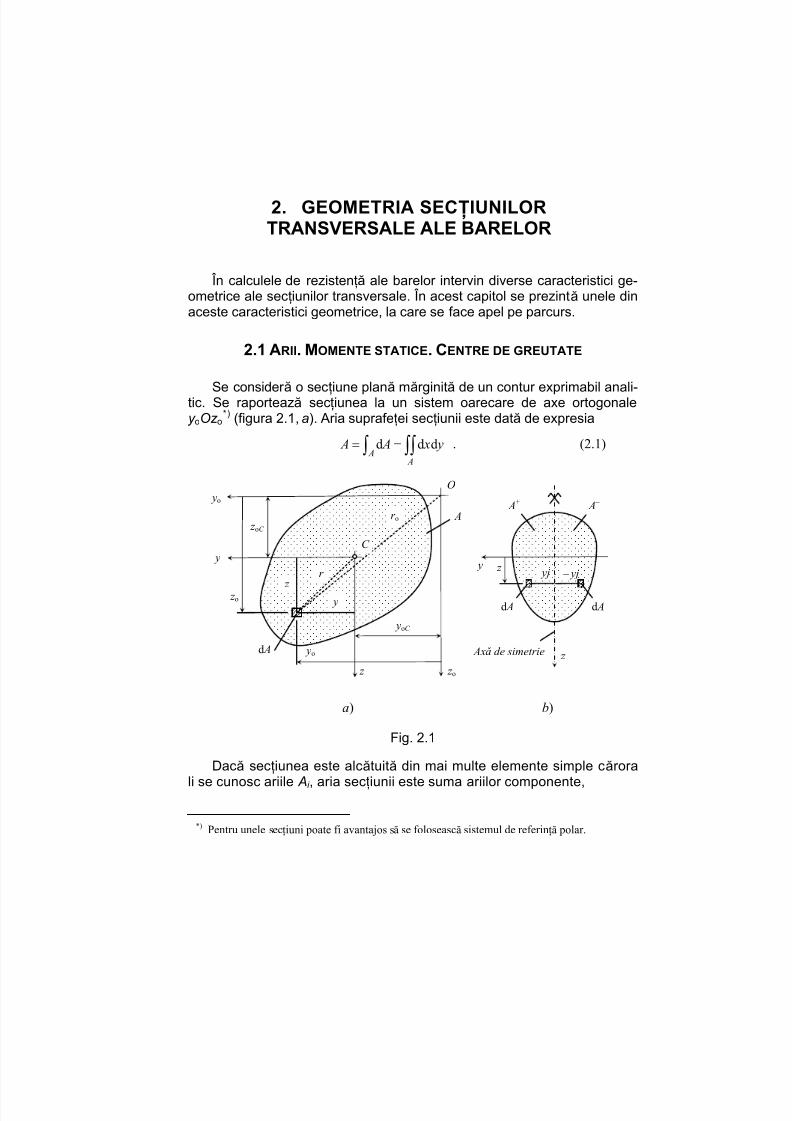
2.1 ARII. MOMENTE STATICE. CENTRE DE GREUTATE
Se consider ă o secţiune plană mărginită de un contur exprimabil anali-tic. Se raportează secţiunea la un sistem oarecare de axe ortogonaley oOz o
*) (figura ,2.1 a). Aria suprafeţei secţiunii este dată de expresia
d d A
A
d A A x= = y∫ ∫∫ . (2.1)
yoC
yo
zoC
y
yo
zo z
z
C
O
y
r o
r
d A
A
y j – y j
A –
d A
zo
z
y z
a) b)
A+
d A
Axă de simetrie
Fig. 2.1
Dacă secţiunea este alcătuită din mai multe elemente simple cărorali se cunosc ariile Ai , aria secţiunii este suma ariilor componente,
*) Pentru unele secţiuni poate fi avantajos să se folosească sistemul de referinţă polar.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 25/127
Caracteristici geometrice ale sec ţ iunilor barelor 25
ii A A= ∑ . (2.2)
Prin definiţie, momentele statice faţă de axele y o respectiv z o sunt:. (2.3)
o oo od , d y z A A
S z A S y= =∫ ∫ A
Din teorema momentelor statice (Varignon), se obţin relaţiile pentrucoordonatele centrului de greutate C al secţiunii în sistemul de axey oOz o,
o oo o
o o
d d,
z y A AC C
y A z AS S y z
A A A A= = = =
∫ ∫. (2.4)
Dacă secţiunea este alcătuită din mai multe elemente simple (v. Figura
2.1) cărora li se cunosc ariile Ai şi poziţiile centrelor de greutate prin coor-donatele , atunci relaţiileo o,
iC C y zi
(2.4) devin
o
o o
d d,iC i i
C C
y A z A y z
A A= =
∑ ∑ o iC
0=
. (2.5)
Orice axă care trece prin centrul de greutate al secţiunii se numeştecentral ă. În figura 2.1 sunt reprezentate axele centrale y şi z , duse paralelcu axele oarecare y o, z o ce pot avea orice origine.
Din (2.4) se observă imediat că faţă de axe centrale, momentele stati-ce sunt nule,
. (2.6)d 0 , d y z A A
S z A S y A= = =∫ ∫
2.2 MOMENTE DE INERŢIE. DEFINIŢII
În raport cu axele centrale y respectiv z se definesc următoarele mă-rimi geometrice ale secţiunii:
momente de iner ţ ie axiale,
2 2d , d y z A A
I z A I y A= =∫ ∫ ; (2.7)
moment de iner ţ ie centrifugal faţă de perechea de axe (y , z ),
d yz A
I yz A= ∫ ; (2.8)
moment de iner ţ ie polar faţă de polul C ,

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 26/127
R EZISTENŢA MATERIALELOR 26
2 2 2d ( + )d p y A A
z I r A y z A I I = = =∫ ∫ +
2
. (2.9)
Ecuaţia dimensională a momentelor de iner ţie este [L4], iar unitatea demăsur ă este m
4 (sau mm4, cm
4 etc.).Momentele de iner ţie axiale şi polare sunt mărimi strict pozitive. Mo-
mentele de iner ţie centrifugale pot avea orice semn sau pot fi nule.Se numesc raze de iner ţ ie faţă de axele y şi z , mărimile i y respectiv i z
din relaţiile 2 , y y z z I i A I i A= = . Rezultă
, y z
y z
I I i i
A A= = . (2.10)
Dac ă cel puţ in una din axele y sau z este de simetrie atunci momentul de iner ţ ie centrifugal este nul , deoarece, aşa cum se observă în figura 2.1, b, se poate scrie
. (2.11)d ( ) d yz A A
I yz A y z A+ −= + −∫ ∫ 0=
o o
2.3 VARIAŢIA MOMENTELOR DE INERŢIE CU AXE
PARALELE
Relaţii similare cu
(2.7),
(2.8),
(2.9) se pot scrie faţă de orice axe, deexemplu faţă de axele y o şi z o paralele cu axele centrale y respectiv z ,
o o o o
2 2o od , d , d y z y z
A A A I z A I y A I y z A= = =∫ ∫ ∫ . (2.12)
Înlocuind y o = y + y oC şi z o = z + z oC şi ţinând seama de (2.7), (2.8),(2.9) şi (2.6), relaţiile (2.12) devin
o
2 2o( ) d o y C y
AC I z z A I A z= + = +∫ , (2.13, a)
o
2 2o( ) d o z C z
A
C I y y A I A y= + = +
∫, (2.13, b)
o o
2o o o( )( ) d o y z C C yz
AC C I z z y y A I A y z= + + = +∫ . (2.13, c )
Relaţiile (2.13) au fost stabilite de Steiner (şi Huygens). Se observă că dintre toate momentele de iner ţie ce se pot calcula faţă de o serie de axeparalele între ele, cel calculat faţă de axa centrală este minim.
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 27/127
Caracteristici geometrice ale sec ţ iunilor barelor 27
2.4 CARACTERISTICILE GEOMETRICE ALE UNOR SECŢIUNI
SIMPLE
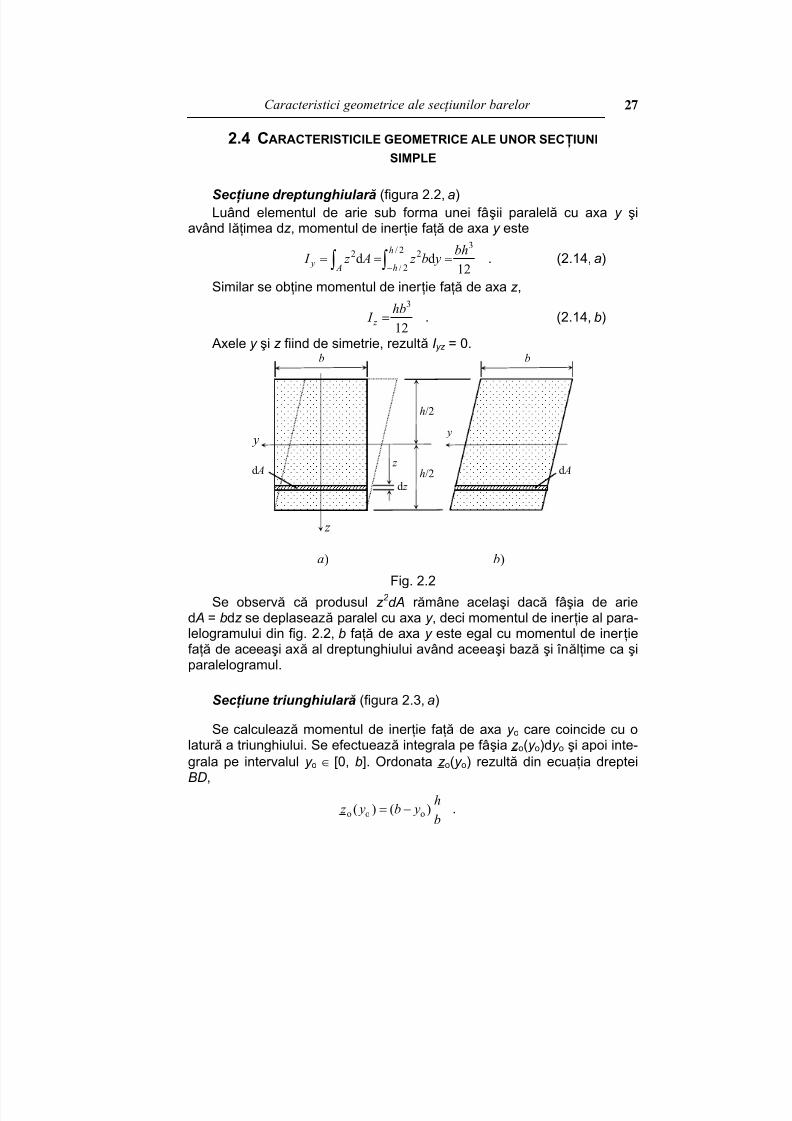
Sec ţ iune dreptunghiular ă (figura 2.2, a)Luând elementul de arie sub forma unei fâşii paralelă cu axa y şi
având lăţimea dz , momentul de iner ţie faţă de axa y este3
/ 22 2
/ 2d d
12
h
y A h
bh I z A z b y
−= = =∫ ∫ . (2.14, a)
Similar se obţine momentul de iner ţie faţă de axa z ,3
12 z
hb I = . (2.14, b)
Axele y şi z fiind de simetrie, rezultă I yz = 0.
z
y
a)
b
h/2
h/2d z
z
b
y
d A d A
b)
Fig. 2.2
Se observă că produsul z 2 dA r ămâne acelaşi dacă fâşia de arie
d A = bdz se deplasează paralel cu axa y , deci momentul de iner ţie al para-lelogramului din fig. 2.2, b faţă de axa y este egal cu momentul de iner ţiefaţă de aceeaşi axă al dreptunghiului având aceeaşi bază şi înălţime ca şi
paralelogramul.
Sec ţ iune triunghiular ă (figura 2.3, a)
Se calculează momentul de iner ţie faţă de axa y o care coincide cu olatur ă a triunghiului. Se efectuează integrala pe fâşia z o(y o)dy o şi apoi inte-grala pe intervalul y o ∈ [0, b]. Ordonata z o(y o) rezultă din ecuaţia drepteiBD,
o oo ( ) ( )h
z y b yb
= − .

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 28/127
R EZISTENŢA MATERIALELOR 28
Folosind relaţia (2.12)1 rezultă
oo
o
3 3( )2 2 3
o o o o o o 30 0 01d d d d ( )3 1
b z y b y
Ah bh I z A y z z y b yb
= = = − =∫ ∫ ∫ ∫ 2. (2.15)
Momentul de iner ţie I y se poate determina cu relaţia lui Steiner,
23 3
12 2 3 36 y
bh bh h bh I
⎛ ⎞= − =⎜ ⎟⎝ ⎠
. (2.16)
Observaţ ie. Se poate calculao y I şi altfel. Observând că
1 1
23( )1 1
2 2 12 2 2
OBGD y y
y
bh bh h h I I I
⎛ ⎞= = = + −⎜ ⎟⎝ ⎠3
,
se obţine pentru I y aceeaşi expresie ca mai sus, după care se calculează
o
23 3
36 2 3 12 y
bh bh h bh I
⎛ ⎞= + =⎜ ⎟⎝ ⎠
.
Fig. 2.3
yo
b
d yo
d zo
zo zo( yo)
zo
yo
h
y( z)
d z
z
a
b
y
z
B
D
C y
h/3
O
G
y1
h/2
a) b)
yd yC
Sec ţ iune eliptic ă (figura 2.3, b)
Aria
( ) 2 2
0 0 0d 4 d d 4 d
b y z b
A
a A A z y b z z
b= = = −∫ ∫ ∫ ∫ =
/ 22 2 2
0
4 sin ( cos )da
b b b abb
π
= − θ θ θ =∫ π . (2.17)

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 29/127
Caracteristici geometrice ale sec ţ iunilor barelor 29
Momentul de iner ţie faţă de axa z ,
3( )2 2 2 2
30 0 01d 4 d d 4 ( ) d3
b y z b z
Aa 3/ 2 I y A z y y b z zb
= = = −∫ ∫ ∫ ∫ =
3 2 42 2 3 2 2
3
0
4 1 4 3( ) arcsin
4 2 23
b
a b z b z z b z b z
bb
⎛ ⎞ π= − + − +⎜ ⎟⎜ ⎟
⎝ ⎠
3
4
a b= . (2.18)
Similar se obţine .3/ 4 y I ab= π
Momentul de iner ţie centrifugal faţă de axele y , z este nul iar momen-tul de iner ţie polar faţă de C este .3 3 2 2/ 4 / 4 ( ) / 4C I ab a b ab a b= π + π = π +
Pentru secţiunea circular ă, a = b = R = D/2,
4 4
4 64 y z
R D I I
π π= = = . (2.19, a)
Momentul de iner ţie centrifugal faţă de axele y , z este nul iar momen-tul de iner ţie polar faţă de C este
.42 /C p y I I I R= = = π 2 (2.19, b)
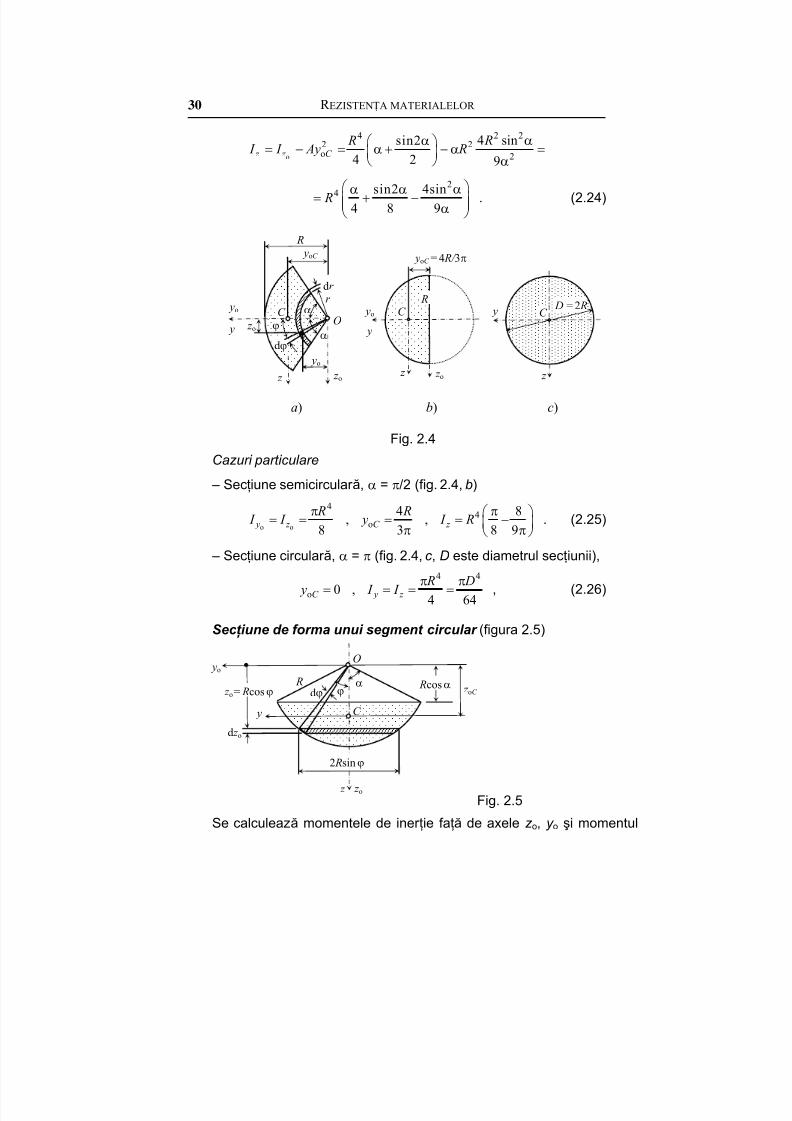
Sec ţ iune de forma unui sector circular (figura 2.4, a)Se calculează momentele de iner ţie faţă de axele y o, z o şi momentul
de iner ţie polar faţă de polul O,
o
42 2 2o
0
sin 2d sin d d
4 2
R
y y A
R I I z A r r r
+α
−α
α⎛ = = = ϕ ϕ = α −⎜⎝ ⎠∫ ∫ ∫
⎞⎟ , (2.20)
o
42 2 2o
0
sin 2d cos d d
4 2
R
z A
R I y A r r r
+α
−α
α⎛ = = ϕ ϕ = α +⎜⎝ ⎠∫ ∫ ∫
⎞⎟ , (2.21)
o o
4
2O y z
R I I I
α= + = . (2.22)
Se determină poziţia axei centrale z ,
3
o0
o 2
0
2sincos d dd 2 sin3
3d d
R
AC R
Rr r r y A R y
A Rr rA
α
−αα
−α
αϕ ϕ α= = = =
ααϕ
∫ ∫∫∫ ∫
. (2.23)
Se calculează momentul de iner ţie faţă de axa centrală z ,
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 30/127
R EZISTENŢA MATERIALELOR 30
o
2 242 2o 2
4 sinsin2
4 29
z z C
R R I I Ay R
αα⎛ ⎞= − = α + − α⎜ ⎟
α⎝ ⎠
=
24 4sinsin2
4 8 9 R
⎛ ⎞αα α= + −⎜⎜ α⎝ ⎠
⎟⎟ . (2.24)
zo
α
yoC
y
yo
zo z
r
dr
R
C ϕ
α
dϕ
O
yo
z zo
yo
y
C R
yoC = 4 R/ 3π
z
y C D = 2 R
a) b) c)
Fig. 2.4
Cazuri particulare
– Secţiune semicircular ă, α = π/2 (fig. 2.4, b)
o o
44
o
4 8, ,
8 3 8 y z C z
R R I I y I R
π π⎛ ⎞= = = = −⎜9
⎟π π⎝ ⎠. (2.25)
– Secţiune circular ă, α = π (fig. 2.4, c , D este diametrul secţiunii),4 4
o 0 ,4 64
C y z
R D y I I
π π= = = = , (2.26)
Sec ţ iune de forma unui segment circular (figura 2.5)
Fig. 2.5
yo
zo z
R ϕ
d zo
Rcos α zo= Rcos ϕ
2 Rsin ϕ
C
zoC α
O
y
dϕ
Se calculează momentele de iner ţie faţă de axele z o, y o şi momentul

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 31/127
Caracteristici geometrice ale sec ţ iunilor barelor 31
de iner ţie polar faţă de polul O,
o
4
02 2o sin4d ( cos ) 2 sin d( cos )
4 2 y
A R I z A R R R
α α⎛ ⎞= = ϕ ϕ ϕ = α −⎜ ⎟⎝ ⎠∫ ∫ . (2.27)
o
3 40 d( cos )(2 sin ) sin 2 sin 4
12 4 6 48 z z
R R R I I
α
ϕ ϕ α⎛ ⎞= = = α − +⎜ ⎟⎝ ⎠∫
α. (2.28)
Se determină poziţia axei centrale y .0 2
2
0
1 sin sin 2d 2 sin d( cos ) 2 d
2 2 A A A R R R R
α
α
− ϕ α⎛ ⎞= = ϕ ϕ = ϕ= α −⎜ ⎟⎝ ⎠∫ ∫ ∫ ,(2.29)
o
03 3
o
2d cos 2 sin d( cos ) sin
3 y A
S z A R R R R
α
= = ϕ ϕ ϕ =
∫ ∫α , (2.30)
o
3
o
4 sin
3 2 sin 2
y
C
S z R
A
α= =
α − α. (2.31)
Momentul de iner ţie faţă de axa y se obţine cu relaţia
o
2o y y C I I Az= − .
Pentru α = π/2 şi α = π, se obţin rezultatele din aplicaţia precedentă.
2.5 VARIAŢIA MOMENTELOR DE INERŢIE LA ROTAŢIAAXELOR
Se consider ă o secţiune raportată la sistemul de axe carteziene Oy ,Oz , în raport cu care momentele de iner ţie sunt date de relaţiile (2.7),(2.8). Rotind axele Oy , Oz cu acelaşi unghi α în jurul originii O se obţinesistemul de axe y
'Oz
' rotit faţă de primul (figura 2.6, a).
A
z
z
b)
y
z'
y
α
d A
d O
aib
c
e
z
y
α2
d Aα1
O
2
2 1
1
a)
α
y'
.
Fig. 2.6

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 32/127
R EZISTENŢA MATERIALELOR 32
Între coordonatele unui punct al secţiunii faţă de cele două sisteme dereferinţă există relaţiile
y ' = Ob = Oe + eb = Oe + dc = y cos α + z sin α , (2.32, a)
z ' = ab = ac – bc = ac – de = z cos α – y sin α . (2.32, b)
Momentele de iner ţie faţă de axele sistemului y 'Oz
' au expresiile
' ' ' '2 2' 'd , d , d y z y z A A
' ' A
I z A I y A I y z A= = =∫ ∫ ∫
Înlocuind (2.32) şi ţinând seama de (2.7), (2.8) se obţine
, (2.33,'2 2 2( cos sin ) d cos sin 2 sin cos y z yz y A
I z y A I I I = α − α = α + α − α∫ α
α
a)
,'2 2 2( cos sin ) d cos sin 2 sin cos z y yz z A
I y z A I I I = α + α = α + α + α∫ (2.33, b)
' ' ( cos sin ) ( cos sin ) d y z A
I y z z y= α + α α − α∫ A=
)
.2 2( )sin cos 2 (cos sin y z yz I I I = − α α + α − α (2.33, c )
Având în vedere identităţile trigonometrice
2 21 cos 2 1 cos 2
cos , sin2 2
+ α − αα = α = ,
2 2sin2
sin cos , cos sin cos 22
αα α = α− α = α , (2.34)
relaţiile (2.33) pot fi scrise şi în funcţie de unghiul dublu,
' cos 2 sin 22 2
y z y z yz y
I I I I I I
+ −= + α − α , (2.35, a)
' cos 2 sin 22 2
y z y z yz z
I I I I I
+ −= − α + I α , (2.35, b)
' ' sin 2 cos 22
y z yz y z
I I I I
−= α + α . (2.35, c )
Adunând relaţiile (2.35, b) şi (2.35, c ), se obţine
' ' const. y z O y z I I I I I + = + = = , (2.36)
adică, suma momentelor de iner ţ ie axiale în raport cu orice pereche deaxe ortogonale ce trec printr-un punct dat este un invariant la rotaţ ia axe-lor , fiind egală cu momentul de iner ţie polar faţă de acel punct.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 33/127
Caracteristici geometrice ale sec ţ iunilor barelor 33
2.6 AXE ŞI MOMENTE PRINCIPALE DE INERŢIE
Din (2.35) se vede că momentele de iner ţie ' ' ', , ' y z y z I I I sunt variabile perio-
dic cu unghiul α. Ţinând seama de (2.36), rezultă că există două axe reciproc or-togonale faţă de care momentele de iner ţie axiale au valori extreme, unul maximşi celălalt minim, suma lor fiind invariantul I O. Axele respective se numesc axe principale de iner ţ ie iar momentele faţă de aceste axe, momente principale deiner ţ ie. Ele se notează cu I 1 respectiv I 2. Direcţiile axelor principale de iner ţie sedetermină din relaţia
'
' '
d2 sin 2 cos 2 2
d 2
y y z yz y z
I I I I I
−⎛ ⎞= − α − α = − =⎜ ⎟
α ⎝ ⎠0 , (2.37)
din care rezultă 2
tan2 yz
y z
I
I I α = −
−. (2.38)
Din (2.37) se observă că momentele de iner ţ ie axiale au valori extreme faţă de axele în raport cu care momentul de iner ţ ie centrifugal este nul .
Ecuaţia (2.38) are în primul cerc două soluţii, 2α' şi 2α'' = 2α' + π, deci α'' =α' + π/2, ceea ce confirmă ortogonalitatea direcţiilor axelor principale.
Ţinând seama de identităţile
2 2
tan 2 1sin 2 , cos 2
1 tan 2 1 tan 2
αα = ± α = ±
+ α + α, (2.39)
momentele principale de iner ţie se obţin înlocuind (2.38) în (2.35, a),
1/ 22 2
2 2
2
1
2 2 4 41 1
( ) ( )
yz
y z y z y z yz
yz yz
y z y z
I
I I I I I I I I
I I
I I I I
−±
+ − −±= + −
+ +− −
.
Efectuând calculele, rezultă
2 21/ 2
1( ) 4
2 2
y z y z y
I I z I I I I
+= ± − + . (2.40)
Pentru a stabili corespondenţa dintre axele 1, 2 şi unghiurile α', α'', se face
derivata secundă a funcţiei ' ( ) y I α ,'
2
2 2
d 14 cos 2 sin 2 4 sin 2
d 2 tan 2
y y z yz yz
I I I I I
−⎛ ⎞ ⎛ ⎞= − α + α = α +⎜ ⎟ ⎜α α⎝ ⎠⎝ ⎠
1⎟ . (2.41)
Unghiul α' defineşte axa 1, adică α' = α1 , dacă 'sin2 yz I α < 0 . (2.42)
În caz contrar, unghiul α' defineşte axa 2, adică α' = α2 . La secţiuni alungite,cum este cea din figura 2.6, axa 1 este cea faţă de care materialul este mai de-părtat.
Axele principale care trec prin centrul de greutate al secţiunii se numesc

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 34/127
R EZISTENŢA MATERIALELOR 34
axe centrale principale de iner ţ ie iar momentele de iner ţie corespunzătoa-re acestor axe, momente de iner ţ ie centrale principale.
2.7 MOMENTE DE INERŢIE ALE SECŢIUNILOR COMPUSE
Din relaţiile de definiţie rezultă că momentele de iner ţ ie sunt mărimi aditive, adică pentru o suprafaţă compusă din mai multe arii, momentul deiner ţie faţă de o axă este suma momentelor de iner ţie faţă de acea axă aleariilor componente.
2.8 APLICAŢII
1. Sec ţ iune simetric ă faţă de o ax ă, format ă din inimă şi două platban-de neegale (figura 2.7, a).
h y
yo
B
b
z
d 1 A1
A2
Ai
t 2
t 1
a)
b
t
t i
t b
z
Ai
A p
A p
b
b
z
A p
A ph / 2
y
t i /2 t i /2
y
t
t
C C C
b) c)
zo
h / 2
t i d 2
Fig. 2.7
Cu notaţiile din figura 2.7, a, poziţia pe axa de simetrie a centrului degreutate al secţiunii se determină cu relaţia
12
o 1
1 2
2 2i
C
i
h t A h A
z d A A A
⎛ ⎞+ +⎜ ⎟⎝ ⎠= =
+ +. (2.43)
Momentul de iner ţie centrifugal I yz este nul. Momentele de iner ţie faţă de axele y şi z au expresiile
3
1 223 3
2 21 11 1 1 2 2
2
12 12 2 2 12
i
y i
t t t h
Bt h t bt 2 I A d A d A d
+⎛ ⎞−⎜ ⎟ ⎛ ⎞⎝ ⎠= + + + + − + +⎜ ⎟⎝ ⎠
=

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 35/127
Caracteristici geometrice ale sec ţ iunilor barelor 35
2
1 222 2
2 21 11 1 1 2 22 ,12 12 2 2 12
i
t t h
t h t A d A d A d
⎡ ⎤+⎛ ⎞−⎢ ⎥⎜ ⎟⎛ ⎞ ⎛ ⎞⎛ ⎞⎝ ⎠⎢ ⎥= + + + + − + +⎜ ⎟ ⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎝ ⎠ ⎝ ⎠
⎢ ⎥⎢ ⎥⎣ ⎦
2t
31 23 3
1 22
12 12 12
i
z
t t h t
t B t b I
+⎛ ⎞−⎜ ⎟⎝ ⎠= + + .
Dacă grosimile t 1 şi t 2 se pot neglija în raport cu h, B, b, d 1, d 2 şi se fac
înlocuirile 1 21 1 2 2, ,
2i
t t t B A t b A t h t h A
+⎛ ⎞= = − ≅ =⎜ ⎟⎝ ⎠
i i , rezultă
2 11 20,5 0,5,i A A Ad h d h
A A+ += = i A , (2.44)2 2
1 2 1 212 4 4
12
i i i y
h A A A A A A A I
A
+ + +≅ , 2 2
1 2
1( )
12 z I A B A b≅ + , (2.45)
unde A = A1 + A2+ Ai . (2.46)
Se pot calcula şi razele de iner ţie ale secţiunii,2
1 2 1 2
2
12 4 4
12
y i i y
I A A A A A A Ai h
A A
+ + += = i , (2.47)
2 2
1 2
12 z z
I A B A bi A A
+= = . (2.48)
2. Sec ţ iune simetric ă faţă de două axe, format ă din inimă şi două plat-bande identice, A1 = A2 = A p , t 1 = t 2 = t (figura 2.7, b).
Secţiunea având două axe de simetrie. Centrul de greutate se află laintersecţia lor iar I yz = 0. Momentele de iner ţie faţă de y şi z au expresiile
( )322
212 2 12
i y p p
t h t t h I A A
⎡ ⎤ −⎛ ⎞= + +⎢ ⎥⎜ ⎟⎝ ⎠⎢ ⎥⎣ ⎦
,3 3( )
212 12
i z
h t t tb I
−= + .
Neglijând grosimea t în raport cu h şi înlocuind ( )i it h t t h Ai− ≅ = , rezul-
tă
( )2
612
y i
h p I A A≅ + ,
2
6 z p
b I A≅ , (2.49)
relaţii care se pot obţine şi prin particularizare, direct din (2.45).Pentru secţiunea din figura 2.7, c momentul de iner ţie faţă de axa y es-
te acelaşi cu cel calculat pentru secţiunea din figura 2.7, b datorită dispu-nerii identice a ariilor faţă de această axă. Difer ă însă momentul de iner ţiefaţă de axa z , care se poate calcula în două moduri.
a) În primul mod, folosind formula lui Steiner, rezultă

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 36/127
R EZISTENŢA MATERIALELOR 36
3 2 3
2 ( )
12 2 2 4 2 12
i i i z
h t t b t t tb I h
⎡ ⎤− ⎛ ⎞ ⎛ ⎞= + − − +⎢ ⎥⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎢ ⎥⎣ ⎦
2t . (2.50)
Dacă se fac neglijările menţionate mai sus, se obţine22 2
31
4 6 6 2
p i z i p
p
A bb b A I A A
A
⎛ ⎞≅ + = +⎜ ⎟⎜ ⎟
⎝ ⎠, (2.51)
Se observă că, spre deosebire de secţiunea din figura 2.7, b, apare un ter-men în plus.
b) Mai convenabil este să se calculeze momentul I z prin scădere, observândcă atât dreptunghiul exterior cât şi cel interior (golul) sunt dispuse simetric faţă dez . În acest mod rezultă expresia
3 3( ) ( )( )
12 12
i
z
h t b h t b t
I
+ − −
= − , (2.52)care, după transformări, conduce la acelaşi rezultat cu (2.50). Dacă în această expresie se fac neglijările menţionate anterior, prin dezvoltare şi ignorarea terme-nilor infinitezimali de ordin superior se obţine (2.51).
3. Sec ţ iune f ăr ă axe de simetrie (figura 2.8).
α
'
α''1
zo
yo
y
z
z1
y2
y11
6t
2t
12t
4t
O1
z21
C 11
2t
2t 1
C 1
2
2
1
1
C 21
Fig. 2.8
Se determină coordonatele centrului de greutate al secţiunii,
o
12 2 42
12 2 6 4C
t t t y t
t t t t
⋅ ⋅= =⋅ + ⋅
, o
6 4 42
12 2 6 4C
t t t z t
t t t t
⋅ ⋅= =⋅ + ⋅
.
Se calculează momentele de iner ţie faţă de axele centrale y , z ,3 3
2 212 (2 ) 4 (6 )12 2 (2 ) 6 4 (2 ) 272
12 12 y
t t t t 4 I t t t t t t t = + ⋅ + + ⋅ = ,
3 32 22 (12 ) 6 (4 )
12 2 (2 ) 6 4 (2 ) 51212 12
z
t t t t 4 I t t t t t t t = + ⋅ + + ⋅ = ,

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 37/127
Caracteristici geometrice ale sec ţ iunilor barelor 37
40 12 2 2 ( 2 ) 0 6 4 ( 2 ) 2 192 yz I t t t t t t t t t = + ⋅ ⋅ − + + ⋅ − = − .
Se determină direcţiile axelor principale de iner ţie, conform (2.38),4
4 4
2 2( 192 )tan 2 1,6
272 512
yz
y z
I t
I I t t
−α = − = − = −
− −.
În primul cerc, ecuaţia trigonometrică obţinută are două soluţii,şi , adică '2 5α = − °8 ''2 58 180 122α = − ° + ° = ° ' 29α = − ° şi '' 61α = ° . Întrucât
, axa definită de unghiul α' 4sin 2 192 sin( 58 ) 0 yz I t α = − − ° > ' este direcţia
principală de iner ţie 2 (v. (2.41) şi figura 2.8).
Se determină momentele de iner ţie principale, conform (2.40),
4 4 4 4 2 41/ 2
272 512 1 (272 512 ) 4(192 )2 2
t t 2 I t t t += ± − + ,
41 618 I t = , 4
2 166 I t = .
Se observă că I 1 + I 2 = I y + I z .
Teste
Pentru secţiunea din figura 2.9, cunoscând B = 60 mm‚ h=120 mm,t 1=20 mm, t i =10 mm
T 12. poziţia pe axa de simetrie a centrului de greutate al secţiunii, d 1este: 1. 100 mm , 2. 72 mm , 3. 45 mm , 4. 20 mm , 5. 120 mm
T 13. momentul de iner ţie centrifugal I yz este : 1. 120 cm4, 2.
100x104 mm4, 3. 0 , 4. 88,4 x 10-8
m4, 5. 3580000 mm4
T 14. Momentul de iner ţie al secţiunii transversale faţă de axa centrală principală y este : 1. 442 cm4
, 2. 0 , 3. – 460 x 104 mm4, 4. 288,66
x10-8 m4, 5. 4860000 kNm
T 15. Câte şi care dintre r ăspunsurile de la T 9 nu pot fi adevărate ori-care ar fi secţiunea transversală analizată
Fig. 2.9
h y
B
z
yo
d 1 A1
Ai
t 1
C
zo
t i d 2
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 38/127
R EZISTENŢA MATERIALELOR 38
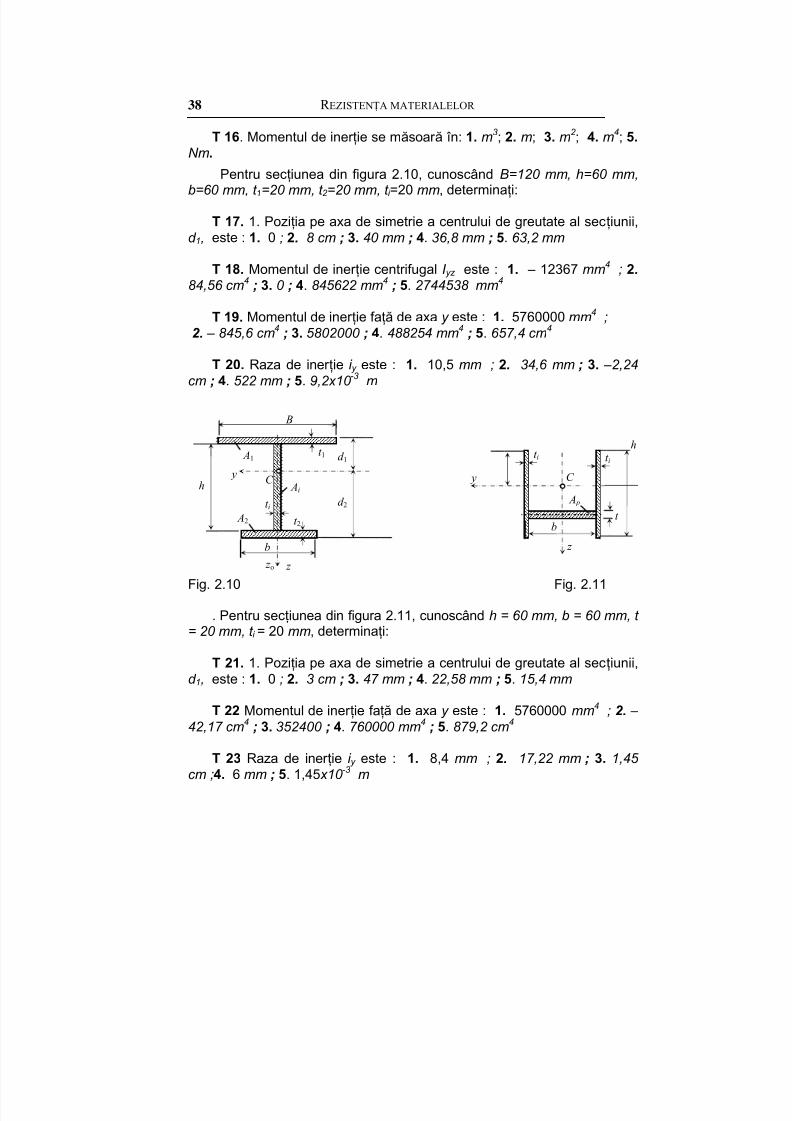
T 16. Momentul de iner ţie se măsoar ă în: 1. m3; 2. m; 3. m2 ; 4. m
4; 5.
Nm.
Pentru secţiunea din figura 2.10, cunoscând B=120 mm‚ h=60 mm,b=60 mm, t 1=20 mm, t 2 =20 mm, t i =20 mm, determinaţi:
T 17. 1. Poziţia pe axa de simetrie a centrului de greutate al secţiunii,d 1, este : 1. 0 ; 2. 8 cm ; 3. 40 mm ; 4. 36,8 mm ; 5. 63,2 mm
T 18. Momentul de iner ţie centrifugal I yz este : 1. – 12367 mm4
; 2. 84,56 cm4 ; 3. 0 ; 4. 845622 mm4 ; 5. 2744538 mm4
T 19. Momentul de iner ţie faţă de axa y este : 1. 5760000 mm4
;
2. – 845,6 cm4
; 3. 5802000 ; 4. 488254 mm4
; 5. 657,4 cm4
T 20. Raza de iner ţie i y este : 1. 10,5 mm ; 2. 34,6 mm ; 3. –2,24
cm ; 4. 522 mm ; 5. 9,2x10 -3
m
Fig. 2.10 Fig. 2.11
. Pentru secţiunea din figura 2.11, cunoscând h = 60 mm, b = 60 mm, t = 20 mm, t i = 20 mm, determinaţi:
T 21. 1. Poziţia pe axa de simetrie a centrului de greutate al secţiunii,d 1, este : 1. 0 ; 2. 3 cm ; 3. 47 mm ; 4. 22,58 mm ; 5. 15,4 mm
T 22 Momentul de iner ţie faţă de axa y este : 1. 5760000 mm4 ; 2. –
42,17 cm4 ; 3. 352400 ; 4. 760000 mm
4 ; 5. 879,2 cm
4
T 23 Raza de iner ţie i y este : 1. 8,4 mm ; 2. 17,22 mm ; 3. 1,45 cm ;4. 6 mm ; 5. 1,45 x10 -3 m
B
b
z
A p
y
t i t i
t
C
h
C h
y
d 1 A1
A2
Ai
t 2
b
z
t 1
zo
t i d 2

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 39/127
3. EFORTURI ÎN BARE ŞI SISTEME DEBARE
3.1 NOTAŢII. RELAŢII DE ECHIVALENŢĂ ÎNTRE EFORTURI ŞI
TENSIUNI
Bara dreaptă se raportează la un sistem drept de axe, Oxyz , cu axa x de-a lungul axei barei şi cu originea în punctul O care coincide cu centrulde greutate al feţei din stânga a barei *). Axele y şi z se aleg paralele cudirecţiile centrale principale de iner ţie ale secţiunilor transversale. Dacă seconsider ă axa Ox orizontală şi orientată de la stânga la dreapta, sunt posi-bile patru variante de reprezentare în plan a unui sistem drept, ar ătate înfig. 3.1, a, b, c , d . În prezentul curs se va adopta sistemul de reprezentaredin fig. 3.1, a.
Fig. 3.1
x
z( y)
a)
( y)
z
x
b) y
( z) x
d )
x
z y
( z)
y
x
c)
O secţiune transversală oarecare într-o bar ă are două feţe ataşate ce-lor două tronsoane obţinute prin secţionare. Normalele exterioare la celedouă feţe sunt dirijate după axa barei, dar au sensuri contrarii. Se numeşte pozitiv ă faţa pentru care normala exterioar ă coincide cu axa x şi negativ ă,faţa pentru care normala exterioar ă coincide cu axa – x .
În afara sistemului de referinţă Oxyz , se mai defineşte un sistem de
*) În Rezistenţa materialelor încă nu există un consens unanim privind utilizarea unui anume sis-tem de referinţă. Ca urmare, relaţii care descriu acelaşi fenomen fizic au semne sau chiar formediferite, în funcţie de sistemul de axe folosit. Aceste deosebiri sunt formale, rezultatele finale alecalculelor efectuate în diverse sisteme de axe fiind aceleaşi.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 40/127
R EZISTENŢA MATERIALELOR 40
axe pe faţa pozitivă. Pentru comoditatea scrierii, axele acestui sistem sevor nota tot cu x , y , z . La bare drepte, sistemul de axe din sec ţ iune, Cxyz ,
se obţine prin translaţia sistemului Oxyz în centrul de greutate C al feţeipozitive (figura 3.2). Descompunând şi componentele T , M din figura 1.7, i c pe axele Cy , Cz , se obţine reprezentarea din figura 3.2 a eforturilor într-obar ă, atât pe faţa pozitivă cât şi pe cea negativă. Ele au nume care sunt înconcordanţă cu solicit ărilor pe care ele le produc :
N – for ţă axial ă ;T , T y z – for ţ e t ăietoare sau de forfecare;
– moment de torsiune sau de r ăsucire;M t M , M y z – momente încovoietoare.
În fig. 3.2, a sunt reprezentate şi tensiunile care apar pe faţa pozitivă.Deoarece eforturile N , M , M y z , T , T y z , M t se obţin prin reducerea faţă de C
a tensiunilor ce acţionează pe suprafaţa A a secţiunii transversale, se potscrie următoarele relaţ ii de echivalenţă între tensiuni şi eforturi (sec ţ iona-le):
(3.1)d , d , d ,
d , d , ( )d
y z A A A
y yx z zx t zx yx A A A
N A M z A M y A
T A T A M y z
= σ = σ = − σ
= τ = τ = τ − τ
∫ ∫ ∫
∫ ∫ ∫ . A
z y
O
τ x
Fa ţ a negativă a sec ţ iunii Fa ţ a pozitivă a sec ţ iunii
T z
τ yx
B M
zτ zx
T y
M z
Axa bare
Fig. 3.2
3.2 EFORTURI ÎN BARE DREPTE ÎNCĂRCATE ÎN PLANUL zx 3.2.1 Definiţii
Dacă toate for ţele exterioare aplicate unei bare sunt conţinute în pla-nul zx , proiecţiile lor pe axa y şi momentele lor faţă de axele z şi x sunt nu-le. Rezultă că for ţele interioare vor avea numai componentele N , T z , M y ,aşa cum se vede în figura 3.3, a. Aceste eforturi se notează uneori N , T ,M .
Dacă se reprezintă momentul ca un arc orientat, se poate folosi sche-ma plană din figura 3.3, b, în care sunt reprezentate şi unele încărcări ex-terioare (for ţe concentrate după x şi z , for ţe distribuite şi momente concen-
i
Sec ţ iune transversal ă
N
M y
M z y
xT y
Axa barei
C
M t M t
σ
p
N T zC
A
x

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 41/127
Eforturi în bare şi sisteme de bare 41
trate) aplicate pe tronsoanele din stânga şi din dreapta secţiunii.Înc ărc ările exterioare sunt pozitive când sunt orientate în sensul axelor
de referinţă.
tronsonul din stânga ( stg )n tronsonul din dreapta (dr )n
a)
b)
M yT z
xC
N
fa ţ a negativă
a sec ţ iunii
z y
O
T z
M y y
x
x
C N
fa ţ a pozitivă
a sec ţ iunii
normala
exterioar ă
normala
exterioar ă
x N
T z
M y
( y)
O
z
C x
F ix
M y
q fa ţ a pozitivă
a sec ţ iunii
F iz
N
T z
M y
C
F z
F jx
M y
q
fa ţ a negativă
a sec ţ iunii
Fig. 3.3
N
T z M y
N
T z
M y
fa ţ a pozitivă a sec ţ iunii
fa ţ a negativă a sec ţ iunii
x – x
z
– z
(– y)
( y)
Fig. 3.4
Eforturile sunt pozitive când au orientarea axelor pozitive pe faţa pozi-tivă a secţiunii şi a axelor negative pe faţa negativă a secţiunii (v. figurile3.3, a şi b). O reprezentare compactă a eforturilor pe cele două feţe alesecţiunii este ar ătată în figura 3.4, c .
Se poate da şi o semnificaţie fizică sensurilor pozitive ale eforturilor.For ţa axială este pozitivă când produce întinderea barei, for ţa tăietoare es-te pozitivă când tinde să rotească în sens orar tronsonul de bar ă pe a că-

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 42/127
R EZISTENŢA MATERIALELOR 42
rui faţă acţionează iar momentul încovoietor este pozitiv când produce în-tindere în fibrele inferioare ale barei şi compresiune în cele superioare.
Ţinând seama de (1.14), pentru calculul eforturilor se pot folosi următoare-le relaţii algebrice, care exprimă de fapt echilibrul tronsonului din stângarespectiv din dreapta:
stg dr
ix jxi j
N F = − = F ∑ ∑ , (3.2, a)
stg dr
z iz jzi j
T F = − = F ∑ ∑ , (3.2, b)
stg dr C C
y iy jy
i j
M M M = − =∑ ∑ , (3.2, c )
Se face observaţia că în (3.2, c ) se introduc nu numai momentele date defor ţele F z dispuse pe tronsonul din stânga sau pe cel din dreapta secţiuniifaţă de centrul de greutate al acesteia ci şi momentele (concentrate sau/şidistribuite) din stânga sau din dreapta secţiunii, cum sunt momentele con-centrate notate M în figura 3.3, b.y
După cum este mai convenabil pentru calcul, în (3.2) se consider ă suma care se extinde asupra păr ţii din stânga sau cea care se extindeasupra păr ţii din dreapta secţiunii.
3.2.2 Relaţii diferenţiale şi relaţii de salt întreeforturi şi încărcări
Relaţiile (3.2) exprimă echilibrul unui tronson de bar ă. Echilibrul poatefi scris şi pentru un element infinitezimal de bar ă. Fie o grindă asupra căre-ia acţionează for ţe şi/sau momente concentrate şi/sau distribuite după ori-ce lege, ca în figura 3.5, a.
Se consider ă un element infinitezimal (figura 3.5, b) situat într-o zonă în care pe grindă sunt aplicate for ţele distribuite q( x ) şi q x ( x ) după z res-pectiv x şi momente distribuite my ( x ) (în particular, oricare din aceste sar-cini poate fi nulă). Din ecuaţiile de echilibru ale elementului,
d d 0 , d d
d d d d / 2 0
x z z z
y y y y
N N N q x T T T q x
M M M m x q x x
0 ,
,
+ − + = + − + =
+ − + − ⋅ =
rezultă următoarele relaţ ii diferenţ iale între eforturi şi sarcini distribuite,ddd
, ,d d d
y z x z y
M T N q q T
x x x= − = − = − m . (3.3)
Pentru bare pe care nu sunt aplicate for ţe situate pe axa x şi nici mo-mente distribuite, relaţiile (3.3) devin
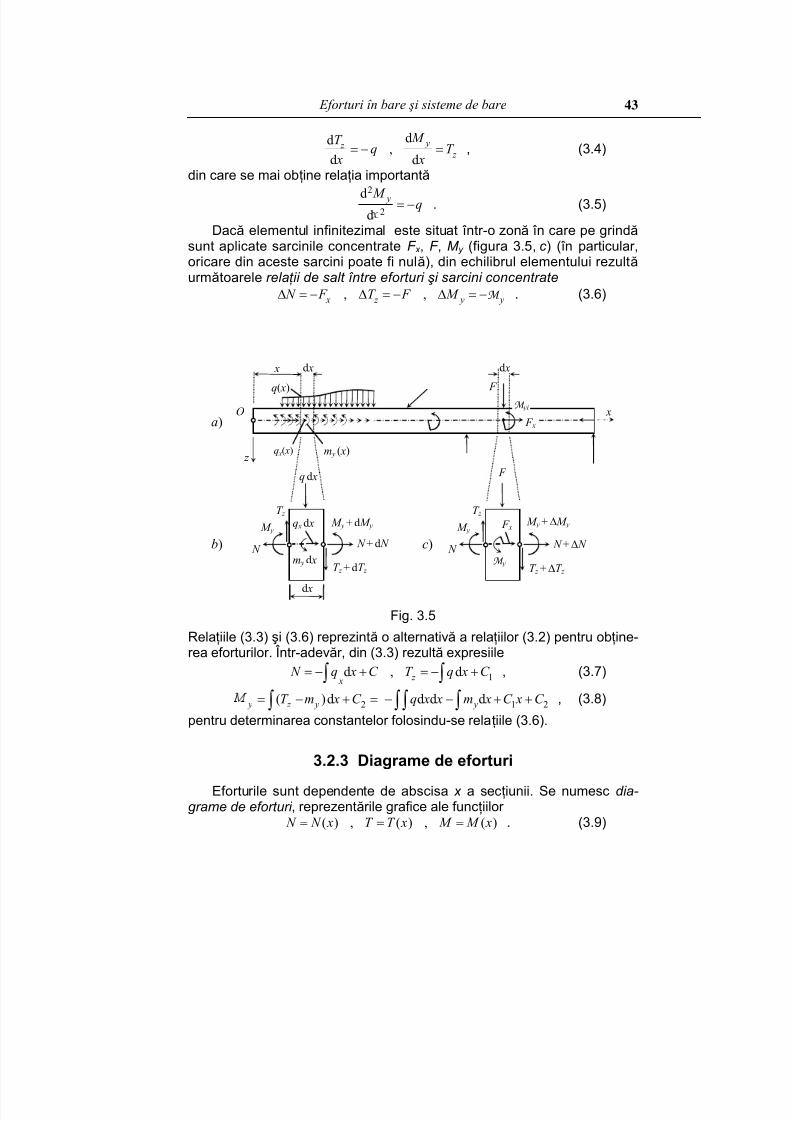
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 43/127
Eforturi în bare şi sisteme de bare 43
dd,
d d y z
z
M T q T
x x= − = , (3.4)
din care se mai obţine relaţia importantă 2
2
d
d y M
q= − . (3.5)
Dacă elementul infinitezimal este situat într-o zonă în care pe grindă sunt aplicate sarcinile concentrate F , F , M (figura 3.5, x y c ) (în particular,oricare din aceste sarcini poate fi nulă), din echilibrul elementului rezultă următoarele relaţ ii de salt între eforturi şi sarcini concentrate
, , x z y N F T F M Δ = − Δ = − Δ = −M y
C
2
. (3.6)
d x
N + d N
T z
N
M y
q( x)
x
z
O
b)
x F x
M yi
d x
q x( x) m y ( x)
m y d x
q x d x
q d x
T z + dT z
M y + d M y
N + Δ N
T z
N
M y
M y
F x
F
T z + ΔT z
M y + Δ M y
a)
c)
d x
F
Fig. 3.5
Relaţiile (3.3) şi (3.6) reprezintă o alternativă a relaţiilor (3.2) pentru obţine-rea eforturilor. Într-adevăr, din (3.3) rezultă expresiile
, (3.7)1d , d z x N q x C T q x= − + = − +∫ ∫ 2 1( )d d d d y z y y M T m x C q x x m x C x C = − + = − − + +∫ ∫ ∫ ∫ , (3.8)
(3.6).pentru determinarea constantelor folosindu-se relaţiile
3.2.3 Diagrame de eforturi
Eforturile sunt dependente de abscisa x a secţiunii. Se numesc dia-grame de eforturi , reprezentările grafice ale funcţiilor
. (3.9)( ) , ( ) , ( ) N N x T T x M M x= = =

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 44/127
R EZISTENŢA MATERIALELOR 44
Pentru trasarea diagramelor sunt utile următoarele propriet ăţ i care rezultă din relaţiile diferenţiale obţinute mai sus:
• panta diagramei funcţiei N este dată de funcţia q x luată cu semnschimbat; pe zona în care q = 0, N este constantă, conform (3.3) ;1 x • panta diagramei funcţiei T este dată de funcţia q luată cu semn
schimbat, conform (3.41); T este constantă pentru q = 0, este descrescă-toare când q > 0 şi crescătoare pentru q < 0;
• panta diagramei funcţiei M este dată de funcţia T , conform (3.42); M este funcţie crescătoare când T > 0 şi descrescătoare pentru T < 0; dacă T = 0, M este constant;
• dacă funcţia q este polinomială de grad n, T are gradul n + 1 iar M are gradul n + 2; în particular, când q = const. (n = 0), T are variaţie liniar ă iar M are variaţie parabolică de grad 2 cu concavitatea în sus atunci cândq > 0 şi cu concavitatea în jos pentru q < 0; în secţiunea în care T treceprin zero, M are un extrem (maxim pentru q > 0 şi minim pentru q < 0,conform (3.5));
• în dreptul unei for ţe concentrate coaxială cu bara, diagrama N înregistrea-ză o discontinuitate de valoare; în dreptul unei for ţe concentrate normală pe axabarei, diagrama T înregistrează o discontinuitate de valoare iar diagrama M odiscontinuitate de pantă; în dreptul unui moment concentrat, diagrama M înregis-trează o discontinuitate de valoare, conform (3.6)).
Sistemele de axe în care se trasează diagramele N , T , M sunt prezen-tate în figura 3.6, a. În mod uzual (figura 3.6, b) se renunţă la săgeţi înscriindu-se semnul pe diagramă. Alăturat se înscrie numele diagramei şi
unit ăţ ile de măsur ă (u.m.) folosite, dacă se lucrează numeric. Diagramelese coteaz ă folosind linii de indicaţie şi se haşureaz ă prin linii verticale caredefinesc la scara de reprezentare aleasă valorile eforturilor în diferite sec-ţiuni.
Frecvent, pe grinzi există mai multe zone de variaţie a eforturilor, defi-nite prin numere (se pot folosi şi litere) înscrise în dreptul sec ţ iunilor carac-teristice – secţiuni în care se aplică încărcări concentrate sau extremităţiale zonelor cu încărcări distribuite după o anumită lege. Corespunzător secţiunilor caracteristice se trasează linii de ordine extinse până la liniilede referinţă folosite la trasarea diagramelor (figura 3.6, b).
Apartenenţa la o zon
ăa unei sec
ţiuni se poate face indicând domeniul
de variaţie al abscisei x a acelei secţiuni sau, mai simplu, indicând nume-rele secţiunilor caracteristice care limitează zona respectivă. De exemplu, în scrierea expresiei pentru for ţa tăietoare pe zona 3-4 din figura 3.6, b seva scrie T < x ≤ x în loc de T ( x ), unde x 34 3 4. Se calculează valorile la ex-tremităţile intervalului, T 3 = T 34 ( x = x 3), T 4 = T 34 ( x = x 4) şi se construieştediagrama ţinând seama de aceste valori şi de proprietăţile prezentate maisus. Secţiunea situată imediat în dreapta unei for ţe sau unui moment con-centrat se va nota cu prim ( ' ), deoarece într-o astfel de secţiune apare unsalt în diagrama T respectiv M .
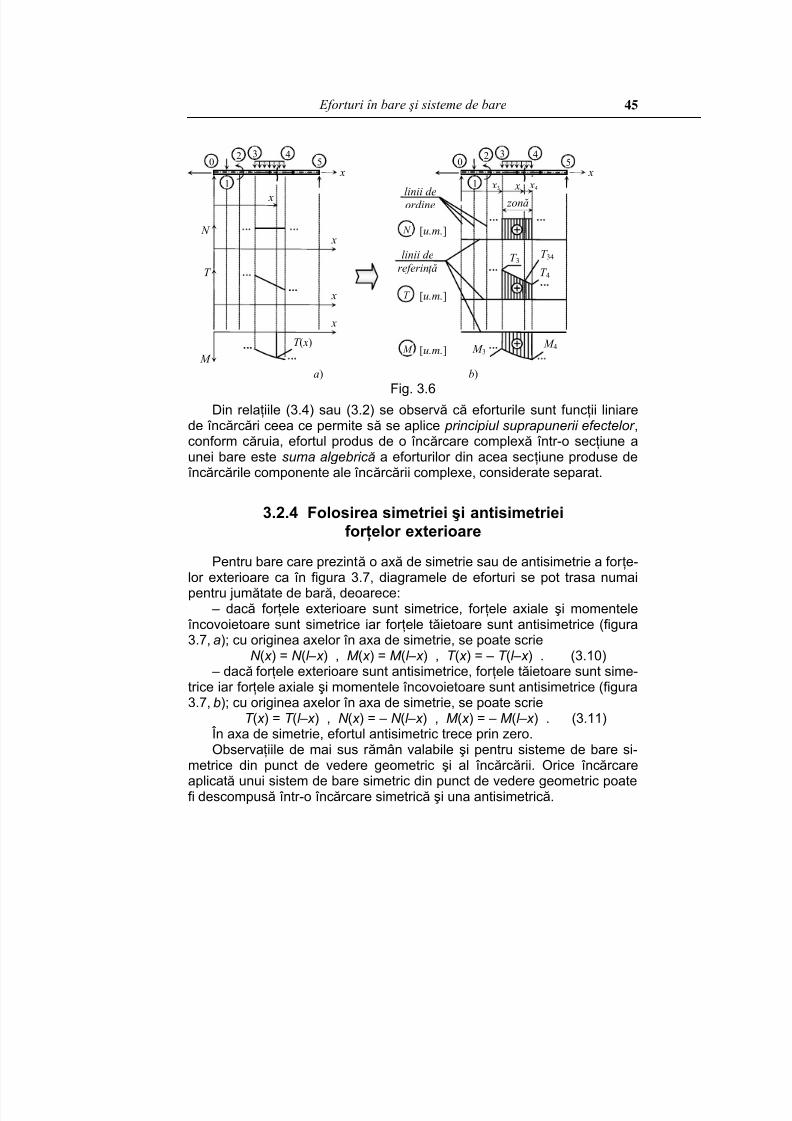
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 45/127
Eforturi în bare şi sisteme de bare 45
N x
a)
T
x
M
x
N
05
[u.m.]
x x
T [u.m.]
M [u.m.]
linii de
referin ţă
linii de
ordine
b)
0
1
2 3 45
x
2 3 4
zonă
x
M 4
T 3
1
T 34
T 4
x3 x4
T ( x) M 3
Fig. 3.6
Din relaţiile (3.4) sau (3.2) se observă că eforturile sunt funcţii liniarede încărcări ceea ce permite să se aplice principiul suprapunerii efectelor ,conform căruia, efortul produs de o încărcare complexă într-o secţiune aunei bare este suma algebric ă a eforturilor din acea secţiune produse de încărcările componente ale încărcării complexe, considerate separat.
3.2.4 Folosirea simetriei şi antisimetrieifor ţelor exterioare
Pentru bare care prezintă o axă de simetrie sau de antisimetrie a for ţe-lor exterioare ca în figura 3.7, diagramele de eforturi se pot trasa numaipentru jumătate de bar ă, deoarece:
– dacă for ţele exterioare sunt simetrice, for ţele axiale şi momentele încovoietoare sunt simetrice iar for ţele tăietoare sunt antisimetrice (figura3.7, a); cu originea axelor în axa de simetrie, se poate scrie
N ( x ) = N (l – x ) , M ( x ) = M (l – x ) , T ( x ) = – T (l – x ) . (3.10)
– dacă
for ţele exterioare sunt antisimetrice, for ţele tăietoare sunt sime-trice iar for ţele axiale şi momentele încovoietoare sunt antisimetrice (figura3.7, b); cu originea axelor în axa de simetrie, se poate scrie
T ( x ) = T (l – x ) , N ( x ) = – N (l – x ) , M ( x ) = – M (l – x ) . (3.11) În axa de simetrie, efortul antisimetric trece prin zero.Observaţiile de mai sus r ămân valabile şi pentru sisteme de bare si-
metrice din punct de vedere geometric şi al încărcării. Orice încărcareaplicată unui sistem de bare simetric din punct de vedere geometric poatefi descompusă într-o încărcare simetrică şi una antisimetrică.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 46/127
R EZISTENŢA MATERIALELOR 46
Fig. 3.7
q
M
a)
F 1q
N
M
T N
M
F 2 F 3 F 3 F 2
F 1M M
q
x
F 1
F 2 F 2
F 1qq
x
T
F 1q
N
M T – N
– M
F 2 F 3 F 3 F 2
F 1M
F 1
F 2 F 2
F 1q
b)
x
abcd d cba abcd d cba
A x ă d
e
s i m e t r i e
A x ă d
e
a n t i s i m e t r i e
l – x x l – x l
q
l
– T
3.2.5 Aplicaţii1. Grinda simplu rezemat ă la capete, înc ărcat ă cu o for ţă concentrat ă
normal ă pe ax ă (figura 3.8, a).Se determină reac ţ iunile din două ecuaţii de momente scrise faţă de
extremităţile grinzii, în care sunt aplicate reacţiunile,
2 1 10 , ( ) 0 ,l a b
M V l F l a V F F l l
−= − − = = =∑ , (3.12)
1 2 20 , 0 ,a
M V l Fa V F l
= − = =∑ . (3.13)
Reacţiunile sunt corect determinate dac
ătransform
ăîntr-o identitate
suma pe verticală (axa z ) a tuturor for ţelor, adică,
1 20 0 z
b a F V V F F F
l l ≡ ⇔ + − = + − ≡∑ F .
l V 1 = Fb/l
Fab/l
a)
F
a
M
Fa/l
Fb/l
T
l V 1
b)
F
a
M
T
Fa/l Fa
F
V 2 V 2
0 21 1 32
b
x x
Fa/l
Fig. 3.8
Se scriu expresiile for ţelor tăietoare şi momentelor încovoietoare folo-sind relaţiile (3.2), b şi c ,

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 47/127
Eforturi în bare şi sisteme de bare 47
'01 1 112,
b bT V F T V F F F F
l l = = = − = − = −
a
l .
0
01 11
0, 0 ;
, .
x M b
M V x F x Fabl x a M
l
= =⎧⎪
= = ⎨= =⎪⎩
112 1
2
, ;( )
, 0 .
Fab x a M
M V x F x a l
x l M
⎧= =⎪
= − − ⎨⎪ = =⎩
Se observă că for ţele tăietoare au valori constante pentru cele două zone, realizându-se salturi în dreptul for ţelor concentrate. Momentele în-covoietoare au variaţii liniare, fiind crescătoare pe prima zonă unde T > 0 şi
descrescătoare pe a doua zonă unde T < 0. Nefiind momente exterioareconcentrate, diagrama nu prezintă salturi. Momentul maxim se obţine însecţiunea în care este aplicată for ţa F şi are valoarea
max Fab
M l
= . (3.14)
Caz particular : a = b = l /2
1 2 max,2 4
F F V V M = = =
l . (3.15)
2. Grinda simplu rezemat ă cu o consol ă, înc ărcat ă cu o for ţă concen-trat ă aplicat ă la capătul consolei (figura 3.8, b).
Se determină reac ţ iunile din două ecuaţii de momente scrise faţă desecţiunile 1 şi 2,
2 1 10 , 0 ,a
M V l Fa V F l
= + = = −∑ ,
1 2 20 , ( ) 0 ,a l
M V l F a l V F l
+= − + = =∑ .
Se observă că au rezultat for ţe exterioare similare dar de semn contrar cu cele din figura 3.8, a. Făcând înlocuirile necesare, se obţin imediat dia-gramele de eforturi din cele obţinute anterior (figura 3.8, b).
3. Grinda simplu rezemat ă la capete, înc ărcat ă cu o sarcină Q = ql dis-
tribuit ă uniform pe deschiderea grinzii de lungime l (fig. 3.9, a).Din ecuaţiile de momente scrise faţă de extremităţile grinzii se deter-mină reacţiunile
1 2 2
ql V V = = . (3.16)
Se scrie expresia for ţelor tăietoare şi momentelor încovoietoare folo-sind relaţiile (3.2), b şi c ,

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 48/127
R EZISTENŢA MATERIALELOR 48
Fig. 3.9
M
q
T
1
V 1 V 2
2
x l /2 l
ql 2/8
ql /2
ql /2
M
T
1
V 1V 2
2
x l
2/ 9 3ql
ql /6
q
/ 3l
q( x)
ql /3
a) b)
qx/2 x/3Q
Ql /4 = ql 2/4
Q
bar ă simetrică,
încărcare simetrică j
Q = ql
1
12
2
02
2
2
ql x T
ql T qx
ql x l T
⎧= =⎪⎪
= − ⎨⎪ = = −⎪⎩
,
112
2
0, 0 ;
, 02 2
x M ql x M x qx
x l M
= =⎧= − ⎨
= =⎩
.
= l /2,For ţa tăietoare variază liniar, anulându-se pentru x o
o o02 2
ql l qx x− = → = ,
iar momentul încovoietor variază parabolic, având maximul la mijloculdeschiderii grinzii,
2 2( )max 12 o 2 2 2 2 8q l ql l l ql
M M x q⎛ ⎞ ⎛ ⎞
= = = − =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
. (3.17)
Observaţ ii • Se observă că, datorită simetriei încărcării, diagrama de for ţe tăie-
toare este antisimetrică iar cea de momente încovoietoare este simetrică.For ţa tăietoare trece prin zero la mijlocul barei.
• Dacă încărcarea Q nu ar fi fost distribuită, ci ar fi fost aplicată subformă concentrată, momentul maxim ar fi fost
2( ) ( )max max2
4 4Q qQl ql
M M . (3.18)= = =
4. Grinda simplu rezemat ă la capete, încărcată cu sarcina Q = ql /2 dis-

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 49/127
Eforturi în bare şi sisteme de bare 49
tribuită liniar pe deschiderea l (figura 3.9,b). Încărcarea totală a barei este Q = ql /2. Din ecuaţiile de momente scri-
se faţă de extremităţile grinzii se determină reacţiunile
2 1 10 , 0 ,2 3 6
l l ql M V l q V = − = =∑ ,
1 2 22
0 , 0 ,2 3 3
l l ql M V l q V = − = =∑ .
– Q = ql /6 + ql /3 – ql /2 ≡ 0.Verificare: V + V 1 2 Se scriu expresiile eforturilor folosind relaţiile (3.2), b şi c ,
2
12 1 2
1 1( ) 1 3
2 6 2 6
ql x ql xT V q x x q x
l l
⎛ ⎞= − = − = −⎜ ⎟
⎝ ⎠,
2 3
12 1 31 1( )2 3 6 2 3 6
ql x x ql x x M V x q x x q xl l
⎛ ⎞= − = − = −⎜ ⎟⎝ ⎠
l
.
Aceleaşi rezultate se obţin şi dacă se folosesc relaţiile (3.4), b, c .Observând că T (0) = T = ql /6 şi M (0) =M = 0, rezultă 12 1 12 1
2 2
12 1 1 1( )d d2 6 2
x x ql T q x x C q x C q C
l l = − + = − + = − + = −∫ ∫
qx
l ,
2 3 2
12 12 2 2 2 3d d
6 2 6 6 6
ql qx ql qx ql x x M T x C x C x C
l l l
⎛ ⎞ ⎛ = + = − + = − + = −⎜ ⎟ ⎜
⎝ ⎠ ⎝ ∫ ∫
3
l
⎞⎟
⎠.
Se observă că for ţa tăietoare variază după o parabolă de gradul al doi-
lea şi se anulează pentru o 3 / 3 x l = . Momentul încovoietor variază după o parabolă de gradul al treilea, are valori nule la extremităţi şi valoareamaximă la abscisa x (figura 3.9, b),o
2 2
max3 3 3
6 3 27 9 3
ql ql M
⎛ ⎞= − =⎜ ⎟⎜ ⎟
⎝ ⎠. (3.19)
5. Grinda simplu rezemat ă la capete, înc ărcat ă cu o sarcină distribuit ă antisimetric faţă de axa de simetrie a barei (figura 3.10, a).
Din ecuaţiile de echilibru a barei se determină reacţiunile,
1 21
2 2 4
ql l l V V q
l
= = = .
Se scriu expresiile for ţelor tăietoare şi momentelor încovoietoare,
1
12 o o
2
04 ; 0
4 4
2 4
ql x T
ql ql l T qx qx x
l ql x T
⎧= =⎪⎪
= − − = ⇒ =⎨⎪ = = −⎪⎩
4.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 50/127
R EZISTENŢA MATERIALELOR 50
2
23
3
2 4( )4
4
l q x T
ql
T q l x ql x l T
⎧= = −⎪⎪
= − − ⎨⎪ = =⎪⎩
l
.
1 2
12 12 o2
0 , 0; ( )
4 2 4 3, 02
x M ql x l ql
2qx M xl
x M
= =⎧⎪
= − = =⎨= =⎪⎩
M x .
123
2
, 0( ) 2
4 2 , 0
l x M ql l x
M x q l x
x l M
⎧= =− ⎪
= − + − ⎨⎪ = =⎩
.
Se observă că se confirmă observaţia generală conform căreia, dacă încărcările sunt antisimetrice, diagrama de for ţe tăietoare este simetrică iar cea de momente încovoietoare este antisimetrică. Momentul încovoie-tor trece prin zero la mijlocul barei.
Fig. 3.106. Grind ă cu deschiderea l , simplu rezemat ă la capete şi înc ărcat ă cuo sarcină Q distribuit ă uniform pe lungimea a (q = Q/a), ca în figura 3.10, b.
Din ecuaţiile de momente scrise faţă de extremităţile grinzii se deter-mină reacţiunile
2
2 1 10 , 0 ,2 2
a q M V l qa l V qa
l
⎛ ⎞= − − = = −⎜ ⎟
⎝ ⎠∑
a,
2
1 2 20 , 0 ,2 2
a q M V l qa V
l = − = =∑
a
Se scriu expresiile for ţ elor t ăietoare,
.
M
T
1
V 1
3
x l /2 l
ql 2/32
q V 2
ql /4
ql /2
ql /4 ql 2/32
2
q
x
bar ă simetrică,încărcare antisimetrică j
M
q
T
1
V 1 V 2
3
x a l
+
qa2/(2l )
Q=qa Q
2
x
xo
qa–qa2/(2l )
qa2/(2l – a)2/(4l )
ql /2
a) b)
ql /4

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 51/127
Eforturi în bare şi sisteme de bare 51
2
12 2
12 232
2
0 x T qa⎧
= = −
2
,2 2
2
qa
qa qal T qa qx T l l qa
x a T l
⎪⎪
= − − = −⎨⎪ = = −⎪⎩
.
For ţa tăietoare este constantă pe zona 2-3. Pe zona 1-2 are variaţieliniar ă, anulându-se la abscisa
o 12
a x = a
l
⎛ ⎞−⎜ ⎟
⎝ ⎠.
Se scriu expresiile momentelor încovoietoare,
12 20 0 x M
qa qx2
12
22 2 ( )2
M qa x qa
l a M l al
⎪= − − ⎨⎜ ⎟
= =⎧⎛ ⎞
= = −⎝ ⎠ ⎪⎩
,
22
223
3
( )( ) 2
20
qa x a M l aqa
M l x l l
x l M
⎧= = −⎪
= − ⎨⎪ = =⎩
.
Momentele încovoietoare au variaţie liniar ă pe zona 2-3. Pe zona 1-2variază parabolic, având un maxim pentru x = x ,o
22qa a⎛ ⎞max 12 o( ) 1
2 2 M M x x
l = = = −⎜ ⎟
⎝ ⎠.
7. Grinzi în consol ă. Pentru încărcarea cu o for ţă concentrată în capă-
8. Grinda simplu rezemat ă în u un moment concentrat (figura
ent aplicat la abscisa a faţă de extremitatea stângă (figura 3.12, a).
tul liber şi cu sarcini distribuite uniform şi liniar pe toată deschiderea, ex-presiile eforturilor şi diagramele sunt prezentate în figurile 3.11, a, b, c .
q F q
Fig. 3.11c ărcat ă c
3.12) A) MomReacţiunile sunt egale cu M / l şi orientate astfel încât cuplul acestora echi-librează momentul M. Ele dau o for ţă tăietoare constantă pozitivă. Momen-tele încovoietoare au expresiile
l
ql 2/2
ql
ql 2/6
x l x l x
Fl
T ( x) = – qx T ( x) = – qx2/2l ql /2 F
M ( x) = – qx2/2 M ( x) = – qx3/6l
T ( x) = – F
M ( x) = – Fx
a) b) c)

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 52/127
R EZISTENŢA MATERIALELOR 52
1
122
0 , 0 ,
, ;
x M ⎧ M x a
l x a M l
= =⎪
= ⎨= =⎪⎩
M
M
M
223
3
, ,( )
, 0 .
l a x a M
M l x l l
x l M
−⎧= = −⎪
= − − ⎨⎪ = =⎩
M M
Fig. 3.12
Se observă că dreptele care reprezintă diagramele de momente pe
3.13).
zonele 1-2, 2-3 sunt paralele. Diagrama de momente prezintă un salt ne-gativ în secţiunea în care este aplicat momentul concentrat pozitiv M.
B) Moment aplicat la extremitatea din stânga sau la cea din dreapta. Înambele cazuri se obţin aceleaşi reacţiuni şi aceleaşi for ţe tăietoare ca încazul precedent. Momentele încovoietoare rezultă imediat din cele obţinu-
te anterior, luând a = 0 respectiv a = l . Se obţin astfel diagramele repre-zentate în figurile 3.12, b, c ). Dacă momentele M au sensuri inverse, seschimbă semnele în aceste diagrame. Se observă că digrama dată de unmoment concentrat aplicat la o extremitate se obţine imediat unind printr-odreaptă ordonata care reprezintă acel moment (ţinând seama de semn) cuordonata nulă din celălalt reazem. În figura 3.12, d este prezentat cazul încare sunt aplicate momente la ambele extremităţi.
9. Grind ă înc ărcat ă numai cu for ţ e concentrate (figuraFolosind rezultatele din aplicaţia 1., reacţiunile se determină prin su-
prapunerea efectelor,
1
M / l
2
l
M
M / l
M
1 2
l
M 1
b)
M 2
1 2 M
M / l
3
a l M / l
M a / l
M (l – a) / l
1
M / l
2
l
M
M / l
M
a)
c) d )
M 1
M 2
M
M
M
M
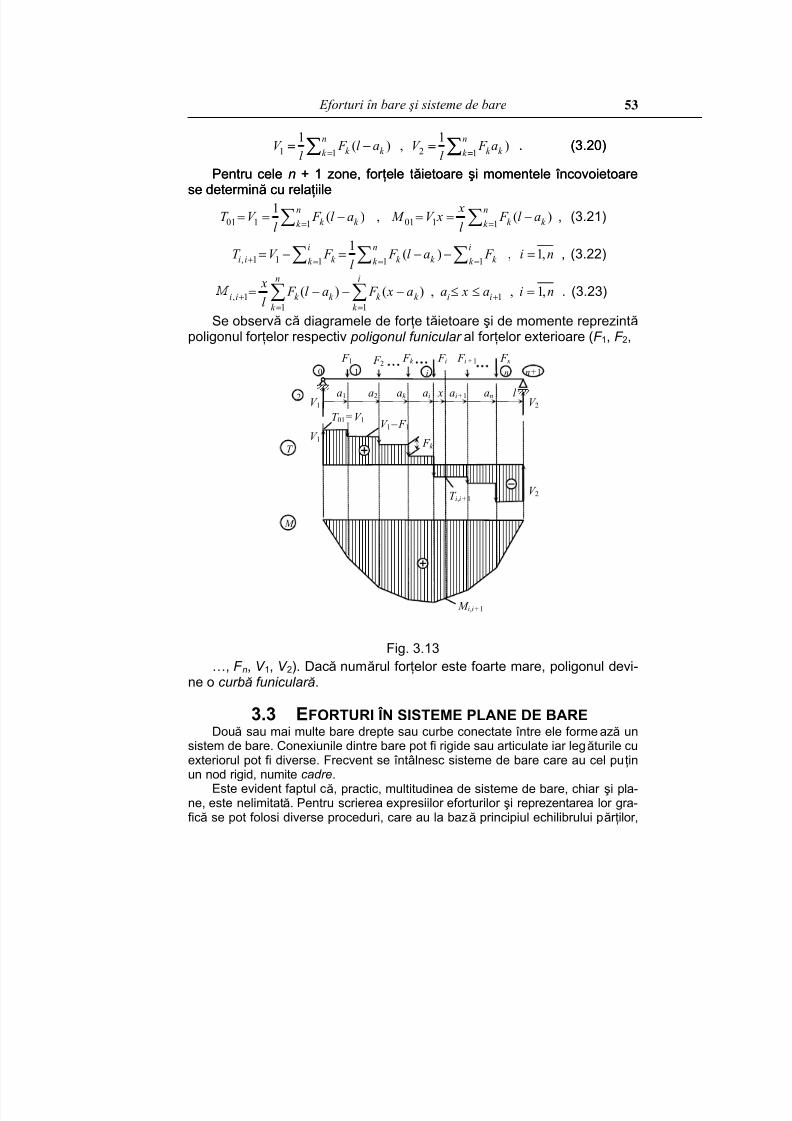
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 53/127
Eforturi în bare şi sisteme de bare 53
1 21 1
1( ) , )k k k k k k
F l a V F al l = =
− =∑ ∑ . (3.20)
Pentru cele n + 1 zone, for ţele tăietoare şi momentele încovoietoare
=− =∑ ∑ . (3.20)
Pentru cele n + 1 zone, for ţele tăietoare şi momentele încovoietoare
1 n nV ==
se determină cu relaţiilese determină cu relaţiile
01 1 01 11 1
1( )
nT V F l = = −∑ ∑, ( )
n
k k k k k k
xa M V x F l a
l l = == = − , (3.21)
, 1 1 1 1 1
1( ) , 1,
i n i
i i k k k k k k k T V F F l a F i
l + = = =
= − = − − =∑ ∑ ∑ n , (3.22)
, 1 11 1
( ) ( ) , , 1n i
i i k k k k i ik k
x, M F l a F x a a x a i n
l + +
= =
= − − − ≤ ≤∑ ∑ = . (3.23)
Se observă că diagramele de for ţe tăietoare şi de momente reprezintă
Fig. 3.13
…, F n, V 1, V 2). Dacă număru ste foarte mare, poligonul devi-
3.3 EFORTURI ÎN SISTEME PLANE DE BARE Două s ază un
practic, multitudinea de sisteme de bare, chiar şi pla-
poligonul for ţelor respectiv poligonul funicular al for ţelor exterioare (F , F ,1 2
l for ţelor ene o curbă funicular ă.
au mai multe bare drepte sau curbe conectate între ele formesistem de bare. Conexiunile dintre bare pot fi rigide sau articulate iar legăturile cuexteriorul pot fi diverse. Frecvent se întâlnesc sisteme de bare care au cel puţinun nod rigid, numite cadre.
Este evident faptul că,ne, este nelimitată. Pentru scrierea expresiilor eforturilor şi reprezentarea lor gra-fică se pot folosi diverse proceduri, care au la bază principiul echilibrului păr ţilor,
a1
F F F F F F k i i + 1 n1 2
a2 ak ai ai + 1 an l V 1 V 2
V 1
V 1 – F 1
V 2
F k
x
T i,i + 1
M i,i + 1
M
T
n + 1 0 1 ni
2
T 01 = V 1
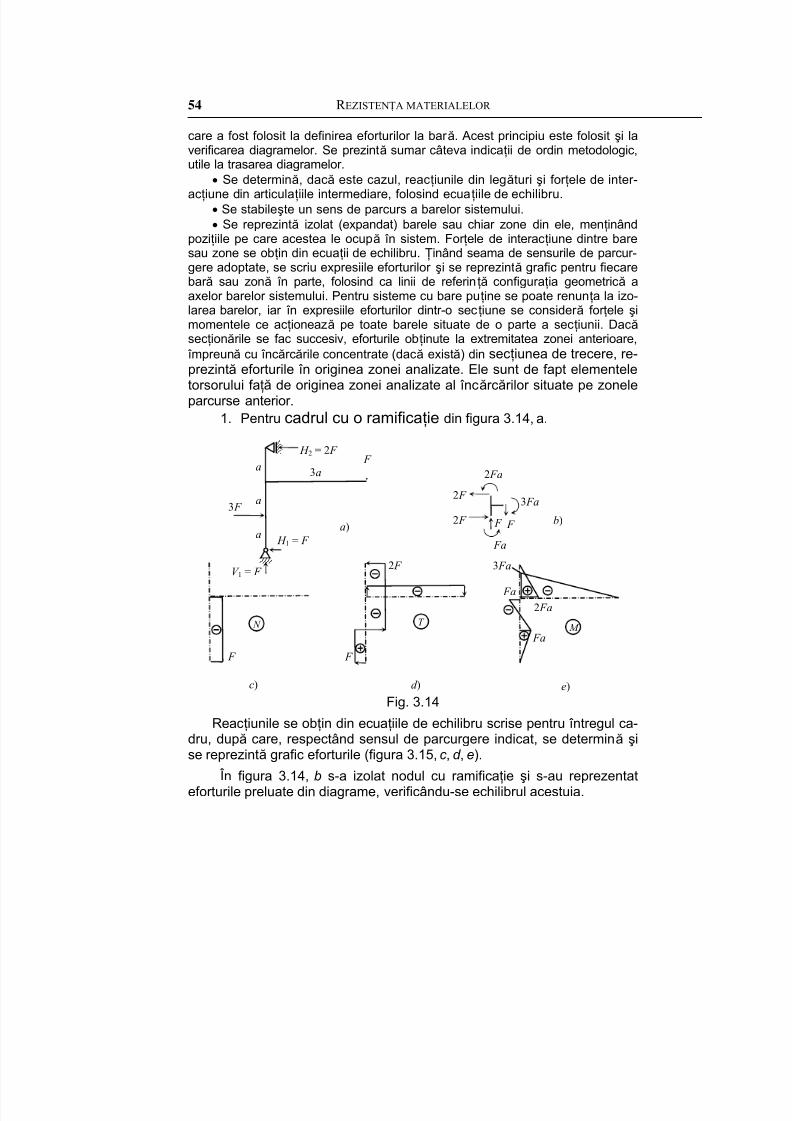
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 54/127
R EZISTENŢA MATERIALELOR 54
care a fost folosit la definirea eforturilor la bar ă. Acest principiu este folosit şi laverificarea diagramelor. Se prezintă sumar câteva indicaţii de ordin metodologic,
utile la trasarea diagramelor.• Se determină, dacă este cazul, reacţiunile din legături şi for ţele de inter-cţi
din ele, menţinândoz
rul cu o ramificaţie din figura 3.14, a.
Reacţiunile se obţin din ecua hilibru scrise pentru întregul ca-
aţie şi s-au reprezentatefor
a une din articulaţiile intermediare, folosind ecuaţiile de echilibru.• Se stabileşte un sens de parcurs a barelor sistemului.• Se reprezintă izolat (expandat) barele sau chiar zone
p iţiile pe care acestea le ocupă în sistem. For ţele de interacţiune dintre baresau zone se obţin din ecuaţii de echilibru. Ţinând seama de sensurile de parcur-gere adoptate, se scriu expresiile eforturilor şi se reprezintă grafic pentru fiecarebar ă sau zonă în parte, folosind ca linii de referinţă configuraţia geometrică aaxelor barelor sistemului. Pentru sisteme cu bare puţine se poate renunţa la izo-larea barelor, iar în expresiile eforturilor dintr-o secţiune se consider ă for ţele şimomentele ce acţionează pe toate barele situate de o parte a sec ţiunii. Dacă
secţionările se fac succesiv, eforturile obţinute la extremitatea zonei anterioare, împreună cu încărcările concentrate (dacă există) din secţiunea de trecere, re-prezintă eforturile în originea zonei analizate. Ele sunt de fapt elementeletorsorului faţă de originea zonei analizate al încărcărilor situate pe zoneleparcurse anterior.
1. Pentru cad
Fig. 3.14
ţiile de ecdru, după care, respectând sensul de parcurgere indicat, se determină şise reprezintă grafic eforturile (figura 3.15, c , d , e).
În figura 3.14, b s-a izolat nodul cu ramificturile preluate din diagrame, verificându-se echilibrul acestuia.
a
H 2 = 2 F F
a 3a Fa2
F 2 Fa3 F 3
N M T
c)
a H 1 = F
V 1 = F
F 2 b) F F a)
Fa
Fa
3 Fa F 2
Fa2
Fa
e)d )
F F
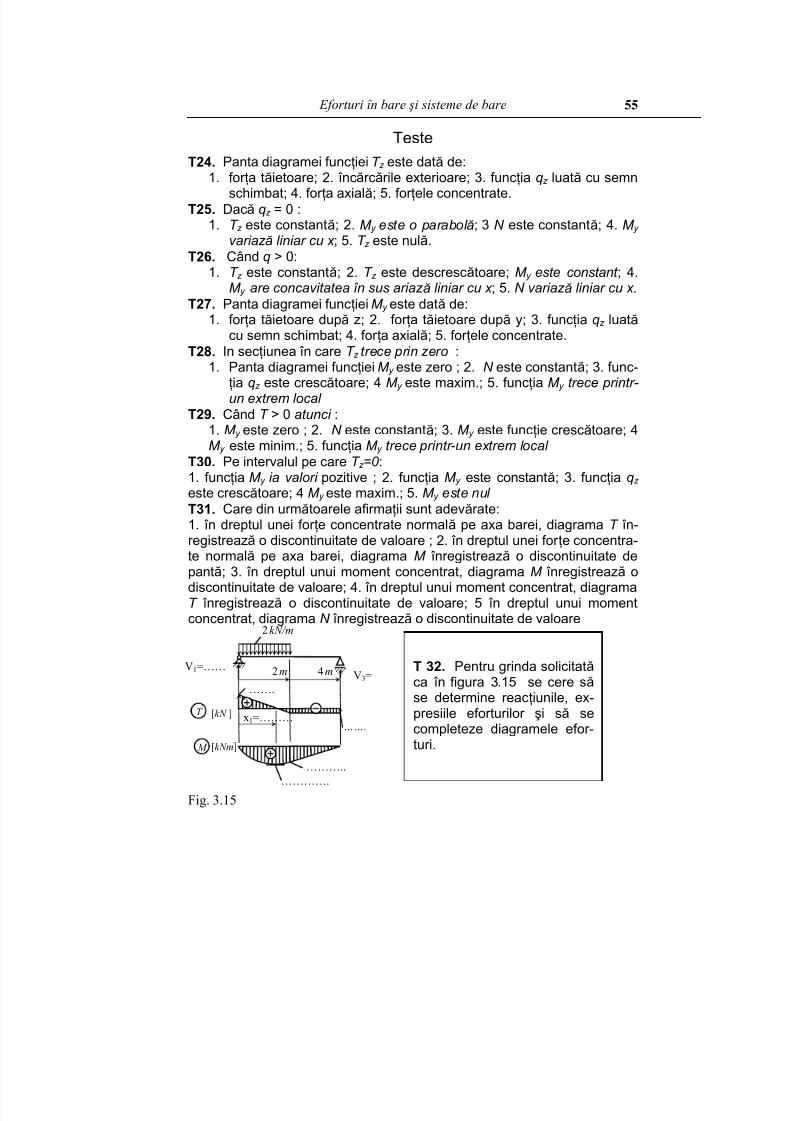
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 55/127
Eforturi în bare şi sisteme de bare 55
Teste
T24. Panta diagramei funcţiei T z este dată de:1. for ţa tăietoare; 2. încărcările exterioare; 3. funcţia qz luată cu semnschimbat; 4. for ţa axială; 5. for ţele concentrate.
T25. Dacă qz = 0 :1. T z este constantă; 2. M este o parabol ă; 3 N este constantă; 4. M y y
variaz ă liniar cu x ; 5. T z este nulă.T26. Când q > 0:
1. T z este constantă; 2. T z este descrescătoare; M y este constant ; 4.M y are concavitatea în sus ariaz ă liniar cu x ; 5. N variaz ă liniar cu x .
T27. Panta diagramei funcţiei M y este dată de:1. for ţa tăietoare după z; 2. for ţa tăietoare după y; 3. funcţia qz luată
cu semn schimbat; 4. for ţa axială; 5. for ţele concentrate.T28. In secţiunea în care T trece prin zero :z
1. Panta diagramei funcţiei M y este zero ; 2. N este constantă; 3. func-ţia qz este crescătoare; 4 M este maxim.; 5. funcţia M y y trece printr-un extrem local
T29. Când T > 0 atunci :1. M este zero ; 2. N este constantă; 3. M y y este funcţie crescătoare; 4M y este minim.; 5. funcţia M trece printr-un extrem local y
T30. Pe intervalul pe care T z =0 :1. funcţia pozitive ; 2. funcţia M este constantă; 3. funcţia qM ia valori y y z este crescătoare; 4 M y este maxim.; 5. M este nul y
T31. Care din următoarele afirmaţii sunt adevărate:1. în dreptul unei for ţe concentrate normală pe axa barei, diagrama T în-registrează o discontinuitate de valoare ; 2. în dreptul unei for ţe concentra-te normală pe axa barei, diagrama M înregistrează o discontinuitate depantă; 3. în dreptul unui moment concentrat, diagrama M înregistrează odiscontinuitate de valoare; 4. în dreptul unui moment concentrat, diagramaT înregistrează o discontinuitate de valoare; 5 în dreptul unui momentconcentrat, diagrama N înregistrează o discontinuitate de valoare
Fig. 3.15
V1=…… V3=2 m 4 m
x1=……… …….
…….
………..………….
[kN ]
[kNm] M
T
2 kN/m
T 32. Pentru grinda solicitată ca în figura 3.15 se cere să se determine reacţiunile, ex-presiile eforturilor şi să secompleteze diagramele efor-turi.
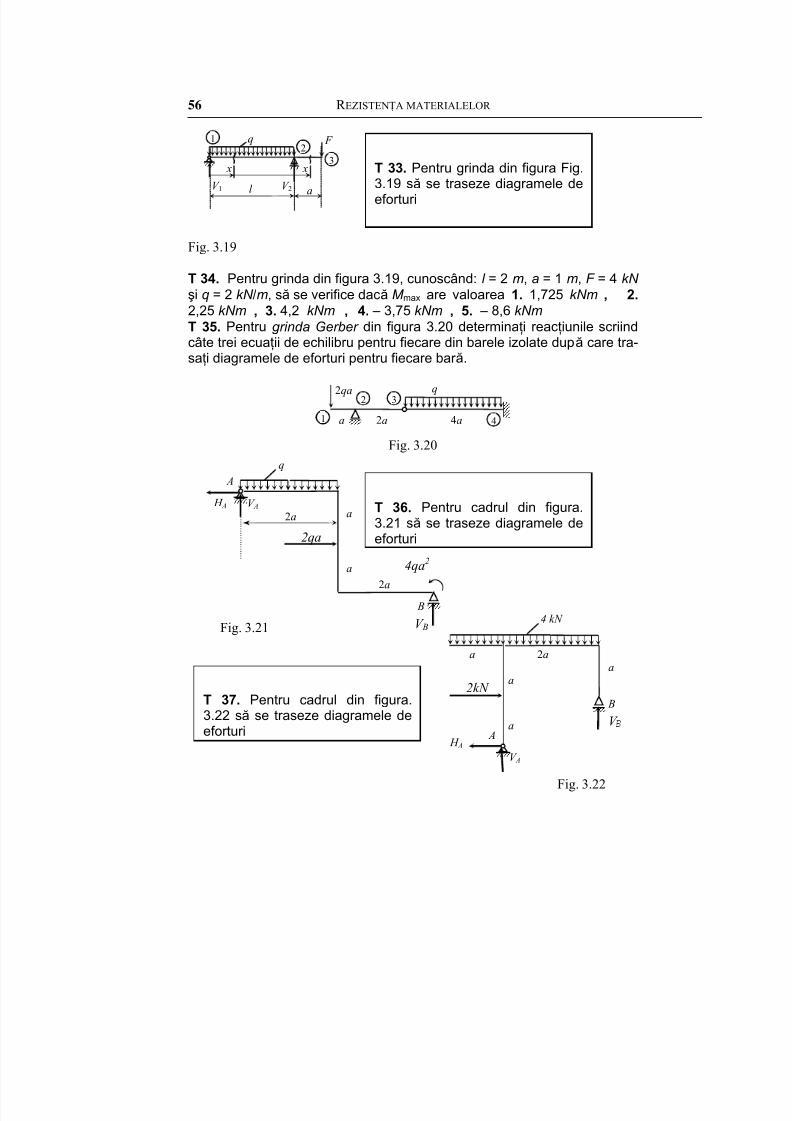
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 56/127
R EZISTENŢA MATERIALELOR 56
12
V 1
x x
V 2 l a
q F
3
T 33. Pentru grinda din figura Fig.3.19 să se traseze diagramele deeforturi
Fig. 3.19
T 34. Pentru grinda din figura 3.19, cunoscând: l = 2 m, a = 1 m, F = 4 kN şi q = 2 kN /m, să se verifice dacă M max are valoarea 1. 1,725 kNm , 2.2,25 kNm , 3. 4,2 kNm , 4. – 3,75 kNm , 5. – 8,6 kNm T 35. Pentru grinda Gerber din figura 3.20 determinaţi reacţiunile scriindcâte trei ecuaţii de echilibru pentru fiecare din barele izolate după care tra-saţi diagramele de eforturi pentru fiecare bar ă.
1
2
a 2a 4a
3
4
q 2qa
Fig. 3.20
q
Fig. 3.21
A
V A H A
Fig. 3.22
B
4qa2
V B
2qa
2a
2a
a
a
T 36. Pentru cadrul din figura.3.21 să se traseze diagramele deeforturi
4 kN
A
V A
H A
2kN
2a
a
a
B
V B
a
a
T 37. Pentru cadrul din figura.3.22 să se traseze diagramele deeforturi

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 57/127
4. ELEMENTE DE TEORIA ELASTICITĂŢII
Cea mai mare parte a materialelor din care sunt confecţionate elemen-tele maşinilor şi construcţiilor posedă proprietatea de elasticitate, adică revin la forma şi dimensiunile iniţiale după îndepărtarea for ţelor exterioarecare le deformează. Relaţiile Teoriei elasticităţii folosesc la rezolvarea mul-tor probleme ale Rezistenţei materialelor. Unele probleme nici nu pot fi re-
zolvate altfel. În prezentul capitol se prezintă relaţiile de bază ale Teorieielasticităţii, care vor fi folosite în prima parte şi mai ales în partea a doua acursului de Rezistenţa materialelor.
Ipotezele de bază ale Teoriei elasticităţii sunt cele prezentate la p. 1.8,cu observaţia că în Teoria elasticităţii se foloseşte strict modelul constitutival lui Hooke.
4.1 STAREA GENERALĂ DE TENSIUNE
4.1.1 Starea de tensiune într-un punct. Componentelestării de tensiune.
Se consider ă un corp continuu supus acţiunii unui sistem oarecare defor ţ e exterioare aplicate în puncte situate pe suprafaţ a corpului sau/şi îninteriorul lui. Aceste for ţe se numesc de suprafaţă, notate cu po, respectivvolumice, notate cu F v (v. p. 1.3.1).
Se raportează corpul la un sistem cartezian de axe x , y , z şi se consi-der ă în interiorul corpului un punct oarecare M o, având vectorul de poziţier = x i + y j + z k , unde i , j , k sunt versorii axelor. La p. 1.5 s-a ar ătat că dacă se consider ă în punctul M o
o secţiune efectuată printr-un plan de
normală
υ = l i +m j +nk , unde l ,
m,
n sunt cosinusurile directoare alenormalei (cosinusurile unghiurilor dintre normala υ şi axele x , y , z ), la apli-carea for ţelor exterioare, pe elementele de suprafaţă ale secţiunii apar tensiunile συ, τυ, pυ, numite tensiuni normale, tangenţiale respectiv totale(figura 4.1, a).
Ansamblul tensiunilor care acţionează pe toate suprafeţele ce pot fiduse în punctul M o defineşte starea de tensiune în acel punct iar totalitateastărilor de tensiune ale tuturor punctelor unui corp defineşte starea de ten-siune a acelui corp.
Se consider ă în punctul M o trei secţiuni paralele cu planele de coordo-nate. Ca şi la bare, există două feţe în orice secţiune. Feţele pe care nor-

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 58/127
R EZISTENŢA MATERIALELOR 58
mala exterioar ă are sensul unuia din versorii i , j , k se numesc feţe pozitive iar cele la care sensul este invers se numesc feţe negative. În figura 4.1, b
sunt reprezentate tensiunile totale p x , py , pz care acţionează pe feţele pozi-tive ale secţiunilor normale pe axele x , y , z .
τ zy
a)
σ x
i τ yx
τ zx
στ xy
τ xz τ yz
iσ zk
p z
p x τ zy
j
p z
p y
M o
τ yz τ xz
σ z
τ xy
σ y
p x
σ x
τ zx
τ yx
k
p y
p x
p z
p y
i
j
k
y z
x
k
i j
M o
Tensiuni totale pe fe ţ ele
j pozitive ale sec ţ iunilor în j
corp, normale pe axe
υ
pυ
συ
jComponentele st ării de tensiune j
pe fe ţ ele pozitive şi negative
ale elementului paralelipipedic
M o
τυ
b) c)
jSistemul de axe j
de referin ţă
Fig. 4.1
Ca şi la bare, este comod ca reprezentarea tensiunilor să se facă peun element paralelipipedic, ce conţine atât feţele pozitive cât şi pe celenegative. Pe elementul paralelipipedic din figura 4.1, c sunt reprezentatetensiunile totale şi componentele pe axe ale acestora, pe feţele pozitive şipe cele negative. Pe feţele pozitive componentele tensiunilor au sensurileaxelor iar pe cele negative au sensuri inverse axelor. Pe fiecare faţă plană a elementului paralelipipedic acţionează trei componente ale tensiunilor totale, una normală pe plan iar celelalte două conţinute în planul secţiunii.Componentele normale pe planul de secţionare se numesc tensiuni nor-
male şi se notează cu σi , i fiind indicele axei cu care sunt paralele. Com-ponentele situate în planul secţiunii se numesc tensiuni tangenţiale şi senotează cu τij . Primul indice este al axei cu care tensiunea tangenţială esteparalelă iar al doilea este al normalei la planul în care aceasta acţionează. În total, pe feţele paralelipipedului elementar acţionează nouă componenteale tensiunilor totale,
σ x , σy , σz , τ xy , τyx , τyz , τzy , τzx , τ xz , (4.1)numite componentele st ării de tensiune în punctul considerat.
Tensiunile totale sunt legate de componentele lor prin relaţiile evidente
x x yx zx= σ + τ + τ p i j k ,

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 59/127
Elemente de Teoria elasticit ăţ ii 59
y xy y zy= τ + σ + τ p i j k , (4.2)
z xz yz z
= τ + τ + σ p i j k
4.1.2 Ecuaţiile de echilibru ale paralelipipedului
Spre eforma-
.
elementar. Dualitatea tensiunilor tangenţiale
deosebire de solidele rigide, pentru echilibrul corpurilor dbile este necesar să fie în echilibru orice element infinitezimal izolat dincorp. Împăr ţirea corpului de dimensiuni finite în elemente infinitezimale seface astfel încât să rezulte cât mai puţine forme distincte ale elementelor.Corpurile raportate la sisteme de referinţă carteziene se divizează prin
plane paralele cu planele de coordonate în elemente infinitezimale de do-uă tipuri. Elementele situate în vecinătatea conturului au în general formă tetraedrică iar cele din interiorul corpului au formă paralelipipedică (figura4.2, a).
Fig. 4.2
Pentru obţinerea ecuaţiilor de echilibru ale unui paralelipiped elemen-tar izolat din interiorul unui corp se reprezintă for ţele care acţionează asu-pra acestui element şi anume for ţele volumice F v şi cele provenind dinacţiunea restului corpului asupra elementului considerat, adică for ţele datede tensiunile care acţionează pe feţele elementului. For ţele F v sunt date pe
d zy
zy y y
∂ττ +
∂
d xz xz z
z
∂ττ +
∂
d xy
xy y y
∂ττ +
∂
d y
d x
d x x x
x
∂σσ +
∂
d y
y y y
∂σσ +
∂
b)
a)
σ z
M o
y
x
τ yz
τ xz
τ zx
σ x
σ y
τ zy
τ yxτ xy
X
Y
Z
M
d z
d zx zx x
x
∂ττ +
∂
d yx
yx x x
∂ττ + ∂
d z z z
z
∂σσ +
∂d
yz
yz z z
∂ττ +
∂
po
υo
z

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 60/127
R EZISTENŢA MATERIALELOR 60
unitatea de volum, deci trebuie înmulţite cu volumul elementului. For ţeledate de tensiuni trebuie înmulţite cu ariile pe care tensiunile acţionează.
Dacă pe feţele care trec prin punctul M o( x , y , z ) al elementului paralelipi-pedic acţionează componentele (4.1), pe feţele ce trec prin punctulM ( x + d x , y + dy , z + dz ) componentele stării de tensiune vor avea creşterileevidenţiate în fig. 4.2, b.
Se egalează cu zero suma proiecţiilor for ţelor pe axele x, y , z , rezultă astfel următorul sistem de ecuaţ ii diferenţ iale de echilibru al paralelipipedu-lui elementar ,
0 xy x xz X
x y z
∂τ∂σ ∂τ+ + + =
∂ ∂ ∂,
0 yx y yz
Y x y z
∂τ ∂σ ∂τ+ + + =
∂ ∂ ∂, (4.3, a)
0 zy zx z Z
x y z
∂τ∂τ ∂σ+ + + =
∂ ∂ ∂.
În absenţa for ţelor volumice,
0 xy x xz
x y z
∂τ∂σ ∂τ+ + =
∂ ∂ ∂,
0 yx y yz
x y z
∂τ ∂σ ∂τ+ + =
∂ ∂ ∂, (4.3, b)
0 zy zx z
x y z
∂τ∂τ ∂σ+ + =∂ ∂ ∂
.
Ţinând seama de (4.2), ecuaţiile (4.3, a) pot fi scrise şi vectorial
y x zv
x y z
∂∂ ∂+ + +
p p p=
∂ ∂ ∂F 0 . (4.4)
Dacă elementul considerat este în mişcare neuniformă, notând cu Δ
deplasarea centrului de masă al acestuia şi cu ρ densitatea materialulufolosind legea a doua a lui Newton se obţine ecuaţ ia de mi şcare a parale-lipipedului elementar sub formă vectorială
i,
y x zv
x y z
∂∂ ∂+ + + − ρ
p p p=
∂ ∂ ∂F 0 , (4.5)
unde este vectorul acceleraţie; prin două puncte s-a indicat dubla deri-
vare în raport cu timpul. Sub formă scalar ă, ecuaţiile de mişcare se obţindin (4.3), adăugând în membrul stâng termenii , ,u v w−ρ −ρ −ρ , unde u, v
şi w sunt proiecţiile pe axe ale deplasării Δ.• Se egalează cu zero suma momentelor faţă de axa x a tuturor for ţe-
lor care acţionează asupra elementului paralelipipedic,
d dd d d d d d
yx x y yd d d
2 2 x x yx x y z y z x
∂τ⎛ ⎞∂σ⎛ ⎞ y z x
x x− σ +⎜ ⎟⎜ ⎟∂ ∂⎝ ⎠ ⎝ ⎠
+ + σ + τ +

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 61/127
Elemente de Teoria elasticit ăţ ii 61
d dd d d d d d d d d
2 2
y x
y y xy
x x y
y x z x z y x z y y y
∂σ ∂τ⎛ ⎞ ⎛ ⎞+ σ + − σ − τ + +⎜ ⎟ ⎜ ⎟
∂ ∂⎝ ⎠ ⎝ ⎠
d dd d d d d d d d
2 2
yz xz
yz yz xz
d
2
x x y z x y x y z x y
z z
∂τ⎛ ⎞ ∂τ⎛ ⎞+ τ + − τ − τ + +⎜ ⎟ ⎜ ⎟∂ ∂⎝ ⎠⎝ ⎠
d d dd d d d d d d d 0
2 2 xz
y y x y X x y z Y x y z+ τ − + =
2
x.
Efectuând reducerile şi simplificările şi neglijând infiniţii mici de ordinrezultă τyx = τ xy . Alte două relaţii se obţin în mod similar egalând
ţii) TENSIUNILORntre ele tensiunile
perpendiculare pe muchia de intersec ţ ie a celor dou
o-
ebir deat din
Condiţii la limită în tensiuni
reiplane paralele cu p , M o CA) şi un plan
superior,cu zero suma momentelor faţă de axele y , z . Relaţiile
τ xy = τyx , τyz = τzy , τzx = τ xz , (4.6)exprimă matematic
PRINCIPIUL DUALIT ĂŢII (reciprocităţii sau parităTANGENŢ ricare două plane perpendiculare î IALE: pe otangenţ iale care sunt
ă plane sunt egale între ele şi au acelaşi sens de orientare faţă deaceast ă muchie (fie diverg ambele, fie converg ambele faţă de muchiade intersec ţ ie a celor două plane).
Ţinând seama de dualitatea tensiunilor tangenţiale, numărul compnentelor stării de tensiune se reduce de la nouă la şase,
σ , σ , σ , τ = τ x y z xy yx , τyz = τzy , τ xz = τzx . (4.7)Ecuaţiile (4.3) conţin deci şase necunoscute. Ele sunt similare ecuaţii-
lor diferenţiale de echilibru (3.3), ob
ţinute la bare. Spre deos e îns
ăbare, problema generală a elasticităţii este static nedetermin ă încăfaza de scriere a ecuaţiilor diferenţiale de echilibru. Se remarcă faptul că şi în acest caz mai general, ca şi la bare, s-a considerat valabilă ipoteza cal-culului de ordinul I prezentată la (p.1.8), adică ecuaţiile de echilibru aleelementului paralelipipedic s-au scris pe forma nedeformată a acestuia.
4.1.3 Ecuaţiile de echilibru ale tetraedrului elementar.
Într-un punct M o din interiorul unui corp (v. fig. 4.3, b) se consider ă tlanele de coordonate (M o AB, M o BC
ABC , înclinat faţă de axe, de normală υ şi infinit apropiat faţă de punctulM o. Se formează astfel tetraedrul elementar M o ABC , asupra căruia acţio-nează rezultantele for ţei volumice F v şi a tensiunilor totale pυ , p x , py , pz ,reprezentate în figura 4.3, a. În figura 4.3, c sunt reprezentate componente-le pe axe ale for ţei volumice şi tensiunilor totale. Ele sunt aplicate în cen-trele de greutate corespunzătoare. Centrele de greutate ale feţelor tetrae-drului sunt situate în vârfurile A, B, C , M ale paralelipipedului cu muchiile
d x /3, dy /3, dz /3, iar centrul de greutate al volumului tetraedrului se află pediagonale M o N a acestui paralelipiped, la distanţa faţă de M egală cu ¾ M o
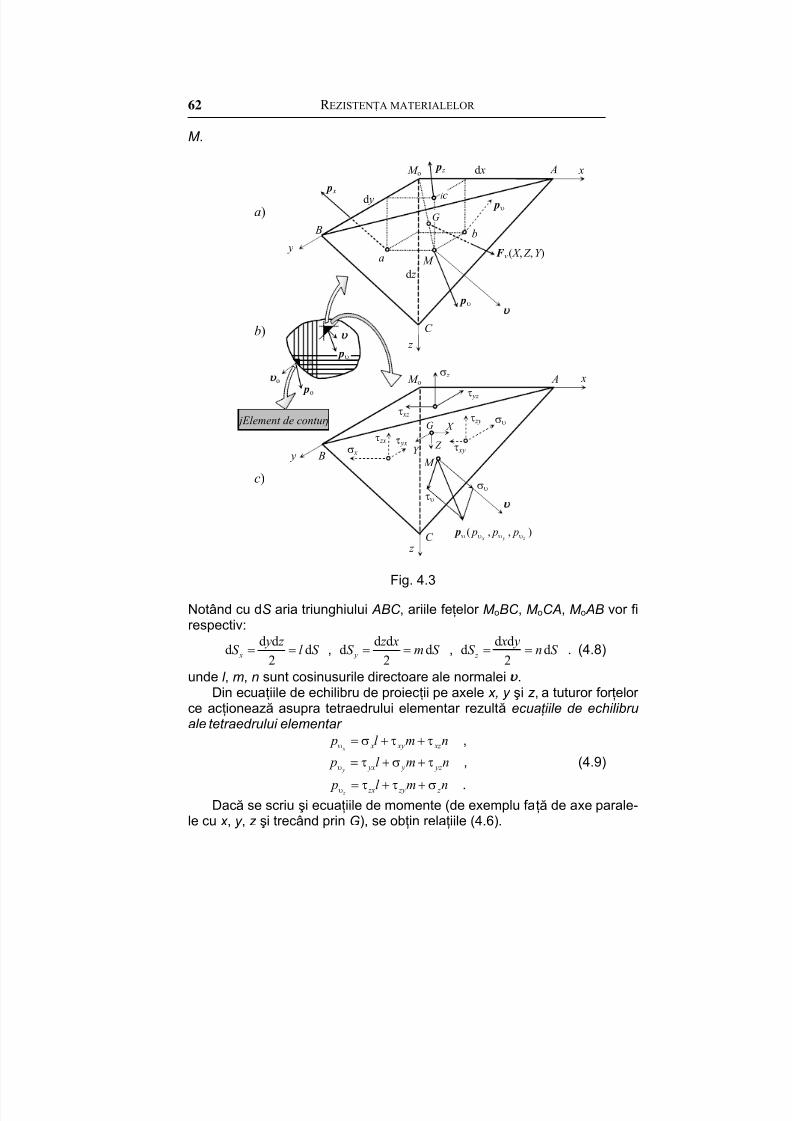
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 62/127
R EZISTENŢA MATERIALELOR 62
M .
Fig. 4.3
Notând cu dS aria triunghiului ABC , ariile feţelor M oBC , M oCA, M o B vor firespectiv:
A
d d
d d2
xS l S = = , y z d d
d d2
yS m S = = , z x d d
d d2
zS n S = = . (4.8)
unde l , m, n
x y
sunt cosinusurile directoare ale normalei υ.ecuaţiile de echilibru de proiecţii pe axele x, y şi z , a tu elor
ionează asupra tetraedrului element ă ecuaţ iile de echilibru Din turor for ţ
ce acţ ar rezultale tetraedrului elementar
x x xy xz p l m nυ = σ + τ + τ ,
y yx y yz p l m nυ = τ + σ + τ , (4.9)
z zx zy z p l mυ n= τ + τ + σ .
Dacă xe parale-le cu x , y iile (4.6)
se scriu şi ecuaţiile de momente (de exemplu faţă de a, z şi trecând prin G), se obţin relaţ .
G
c)
M o
y
z
x d x A
B
C
d y
d z
M
p z
p x
pυ
pυ
Fv ( X , Z , Y )
G
σ z M o
y
z
x A
B
C
τ yz
τ xz
ic
a)
b
a
τ zx
σ x
συτ zy
τ yx τ xy
X
Y Z
συτυ
( , , ) x y z
p p pυ υ υ υ p
M
υ
υ
po
υo
υ
pυ
b)
j Element de contur j

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 63/127
Elemente de Teoria elasticit ăţ ii 63
Folosind relaţiile (4.2), ecuaţiile (4.9) pot fi scrise şi sub forma
x y z x y z p p p l m nυ υ υ υ= + + = + + p i j k p p p . (4.10)
Pentru elementele tetraedrice care au o faţă pe conturul corpului de nor-tensiu-
interiorul corpului şi sarcinile de suprafaţă po x , p demală υo (v. fig. 4.3, b), ecuaţiile de echilibru stabilesc legătura întrenile din po ( oy , poz ,);aceea ecuaţiile se numesc condi ţ ii de contur în tensiuni . Aceste condiţiisunt date de relaţiile (4.9) în care pυ se înlocuieşte cu po iar υ cu υo ,
o o o o x xy xz xl m n pσ + τ + τ = ,
o o o o yx y yz yl m n pτ + σ + τ = , (4.11)
τ + τ + σ = .o o o zx zy z zl m n po
4.1.4 Variaţia tensiunilor în jurul unui punct.Tensorul tensiunilor
Din r ează peorice suprafa în acelpunct, se poate determin ile totale p x , py , pz , sau
elaţia (4.10), (4.9) se vede că tensiunea totală care acţionţă ce trece printr-un punct, deci starea de tensiune
a dacă se cunosc tensiuncomponentele acestora (σ x , σy , σz , τ xy = τyx , τyz = τzy , τ xz = τzx ), care acţi-onează în plane având ca normale axele de coordonate.
Se consider ă un nou sistem triortogonal de axe x ', y ', z ' ale căror cosi-nusuri directoare faţă de vechile axe sunt date prin matricea
' ' ' x y z
1 2 3
1 2 3
1 2 3
l l l
m m m
n n n
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
λ, (4.12)
adică '
1 1 1l m n= + +i i j k ,'
2 2 2l m n= + + j i j k , (4.13)
k ,
=i
'
3 3 3l m n= + + k i j
sau}' ' '{ } { j k i j k λ . (4.14)
Conf taleorm relaţiei (4.10), tensiunile to care acţionează pe feţeled drept normale axele x
', y ', z
' sunt date de relaţiile1
avân
' 1 1 x x y zl m n= + + p p p p ,
' 2 2 2 y x y zl m n= + + p p p p , (4.15)
n' 3 3 z x y zl m 3= + + p p p p .
Starea de tensiune într-un punc ate obiectivnumai d
t fiind o realit ă, dependentă e for ţele ce acţionează asupra corpului, nicidecum de alegerea

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 64/127
R EZISTENŢA MATERIALELOR 64
sistemului de axe, vectorii '' ', ,
x y z p p p vor reprezenta în punctul considerat
aceeaşi stare de tensiune ca şi vectorii , , x y z
p p p .
Ansamblul format de trei vectori, care se transformă conform relaţiilor (4.15) la rotirea sistemului de axe este un tensor de ordinul al doilea (ordi-nul unui tensor este dat de numărul ind ceicilor ne sari pentru identificareaozp iţiei elementelor sale în matricea asociată). Tensorii sunt mărimi mai
complexe decât vectorii. După cum un vector x y za a a= + + a i j k este de-
terminat de trei mărimi scalare şi r ămâne acelaşi la schimbarea sistemuluide axe, ' ' '
' x y za a a= + + a i j k modificându-i-se doar componentele pe noile
axe, tot aşa un tensor de ordinul al doilea, în partic nsiunilor,este o mărime obiectivă determinată de trei vectori, ( , ,
ular tensorul te
x y z p p p ), fiecare
dintre ac icându-se la schimbarea sistemului de axe,( ' ' ', ,
eşti vectori modif x y z p p p ), dar în ansamblu, caracterizând starea de tensiune într-un
punct, r ămâne un invariant faţă de schimbarea sistemului de axe. Vectoruleste un tensor de ordinul întâi iar scalarul este un tensor de ordinul zero.
iile simple efectuate asupra tensorilor coincid cu cele care serefer ă la matrice (tensorii de ordinul al doilea şi matricele pătrate asociatelor sunt izomorfe). Folosind scrierea matriceală, relaţiile
Operaţ
(4.2) se pot punesub forma
{ } { } x y z σ= T p p p i j k , (4.16)
unde σT este matricea asociată tensorului tensiunilor σT ,
⎡ ⎤σ x xy xzτ τ⎢
yx y yzσ
zx zy z
⎥= τ σ τ⎢ ⎥⎢ ⎥τ τ σ⎣ ⎦
xyz ) starea de tensiune într-un punct poate fii prin vectorul algebric (matricea coloană) cu şase elem
, (4.18)
T . (4.17)
Într-un sistem de axe (definită ş ente
{ }T
x y z xy yz zx= σ σ σ τ τ τ
unde simbolul T indică operaţia de transpunere matriceală. În virtutea relaţiilor (4.6) tensorul σT este simetric.
Ţinând seama de (4.2) şi (4.14) relaţiile (4.15) pot fi scrise sub forma{ }' ' ' ' '
' ' '{ } { } x y z σ σ= =T T p p p i j k i j k λ . (4.19)
6)Pe de altă parte, din (4.15) şi (4.1 rezultă
' ' '{ } { } { } x y z x y z σ= = T p p p p p p i j k λ . (4.20)
Din ultimele două relaţii se obţine σT T' 1
σ = λ λ . y , z
ă λ –1 T . deare a componentelor stării de tensiune la ro ax pot
sată,
Întrucât axele x ,
sunt ortogonale, matricea λ este ortogonală, adic = λ Relaţiiletransform taţia elor sescrie deci sub următoarea formă conden ' T
σ σT Tλ λ . (4.21)

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 65/127
Elemente de Teoria elasticit ăţ ii 65
Mărimea tensiunii totale care acţionează pe faţa ABC a tetraedruluiM o ABC rezultă din relaţia
x
2 2 2 2 x x
p p p pυ υ υ= + + ,
faţa ABC se ob peυ ,
υ υ+ . (4.23)
nl = σ + σ + σ + τ + τ + τ . (4.24)
mea tensiunii tangenţ iale pe faţa ABC s ţine din rela2
υ (4.22)unde , ,
x y z p p pυ υ υ sunt date de (4.9).
Tensiunea normal ă pe ţine proiectând vectorul pυ
direcţialp mpυ υ υσ = ⋅ = + p
x x x
Înlocuind (4.9), rezultă σ
np
2 2 2 2 2 2 x y z xy yz zxl m n lm mnυ
Mări e ob ţia2 2 pυ υ υ
τ = − σ . (4.25)
le.Invarianţii stării de tensiune
enormal
l , m, n, între care ex
m, n ale funcţiei lui Lagrange,
4.1.5 Tensiuni normale principale şi direcţii principa
Din relaţia (4.24) rezultă că tensiunea συ care apare pe un plan dăυ depinde de orientarea normalei, adică de cosinusurile directoare
istă relaţial 2 + m
2 + n2 – 1 = 0 . (4.26)
În cele ce urmează se vor determina planele în care tensiunile συ au
valori extreme. Conform metodei multiplicatorilor lui Lagrange, se formea- ză func ţ ia lui Lagrange
σ 2 2 2 2 2 22 2 2 ( 1) x y z xy yz zxl m n lm mn nl l m nυ = σ + σ + σ + τ + τ + τ − σ + + − ,
unde multiplicatorii σ au dimensiunea unei tensiuni. Se anulează derivate-le par ţiale în raport cu l ,
1( ) 0l m nυ∂σ
= σ − σ + τ + τ = ,2
x xy xzl ∂
1
( ) 0l m nυ∂σ= τ + σ − σ + τ = ,
2yx y yz
m∂(4.27)
1
( )2 zx zy zl m nn
υ∂σ
= τ + τ + σ − σ =∂ 0 .cât l , m, n nu pot fi simultan nuli, sistemul de ecua e şi
omogene (4.27) va avea soluţii nenule numai dacă determinantul principalului este egal cu zero, adică
Întru ţii liniar
al sistem
x xy xz
yx y yz
zx zy
σ − σ τ τ
τ σ − σ τ
τ τ σ
= 0 . (4.28)
z − σ
Dezvoltând determinantul (4.28), se obţine următoarea ecuaţie degradul al treilea în raport cu σ, numită ecuaţ ia caracteristic ă a st ării de ten-

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 66/127
R EZISTENŢA MATERIALELOR 66
siune,
3
3 2
1 2 I I σ − σ + σ − I =
unde
0 , (4.29)
1 x y z I = σ + σ + σ , (4.30, a)
2
x yx y zy z xz I
σ τ σ τ
xy y yz z zx x
σ τ= + +
σ, (4.30, b)
τ σ τ σ τ
3
x xy xz
yx y yz
zx zy z
I
σ τ τ
= τ σ τ
τ τ σ
. (4.30,
punct de vedere matematic, ecuaţia (4.2 au (4.2 intă
ecuaţia caracteristică a tensorului
c )
Din 8) s 9) reprez
σT sau a matricei σT
sunt, prin urmare valo-
rile obţinute pentru σ din rezolvarea ecuaţiei (4.29) valori proprii alei σT tensorulu sau matricei asociate aces Matricea rea si-
metrică, ecuaţia caracteristică a acesteia are întotdeauna r ădăcini reale,
le acestuia. Seă apoi două cosinusuri directoare în funcţie de cel de al treilea, de
tuia. lă σT fiind
care se notează cu σ1 , σ2 , σ3 şi se ordonează astfel încâtσ1 > σ2 > σ3 . (4.31)
Direcţiile obţinute prin introducerea succesivă a valorilor σ1 , σ2 , σ3 însistemul de ecuaţii se numesc direc ţ ii principale ale tensiunilor , iar planele perpendiculare pe direcţiile principale se numesc plane principale.Pentru determinarea direcţiei principale i (i = 1, 2, 3) se introduce valoarea
σ
(4.27)
i în sistemul şi se consider ă oricare două ecuaţii a(4.27)determinexemplu l i = ai ni şi mi = bi ni . Introducând aceste valori în (4.26) se obţine ni şi apoi l i şi mi ,
2 2 2 2 2 2
1, ,
1 1 1
i i
i i i
i i i i i i
a bn l m
a b a b a b= ± = ± = ±
+ + + + + +
. (4.32)
Multiplicatorii σi (i = 1, 2, 3) nu sunt altceva decât tensiunile normalecare acţionează în planele având normalele υ i (l i , mi , ni ). Într-adevăr, dacă se înlocuiesc în sistemul (4.27) σ şi cosinusurile directoare l , m, n cu σi
l i , mi , ni , se înmulţesc cele trei ecuaţii cu l i , mi , n şi apoi sedună ecuaţiile astfel transformate, ţinând seama de (4.26) s 2,3 .respectiv i a e obţine
2 2 2 2 2 2 , 1,i x i y i z i xy i i yz i i zx i i
l m n l m m n n l iσ = σ + σ + σ + τ + τ + τ =
Mărimile σ1 , σ2 , σ3 se numesc tensiuni principale. În planele principale tensiunile tangenţiale sunt nule. Într-adevăr, dacă
se consider ă un astfel de plan, de exemplu planul determinat de normalaυ i (l i , mi , ni ), luând
iυτ = 0 rezultă i i
pυ υ= σ , prin urmare
ix i ii i p p l l υ υ υ= = σ ,iy i i
p mυ υ= σ ,iz i i p nυ υ= σ . (4.33)
ţiile (4.27), care au Înlocuind aceste valori în (4.9) se obţin tocmai ecuaservit la determinarea tensiunilor şi direcţiilor principale.
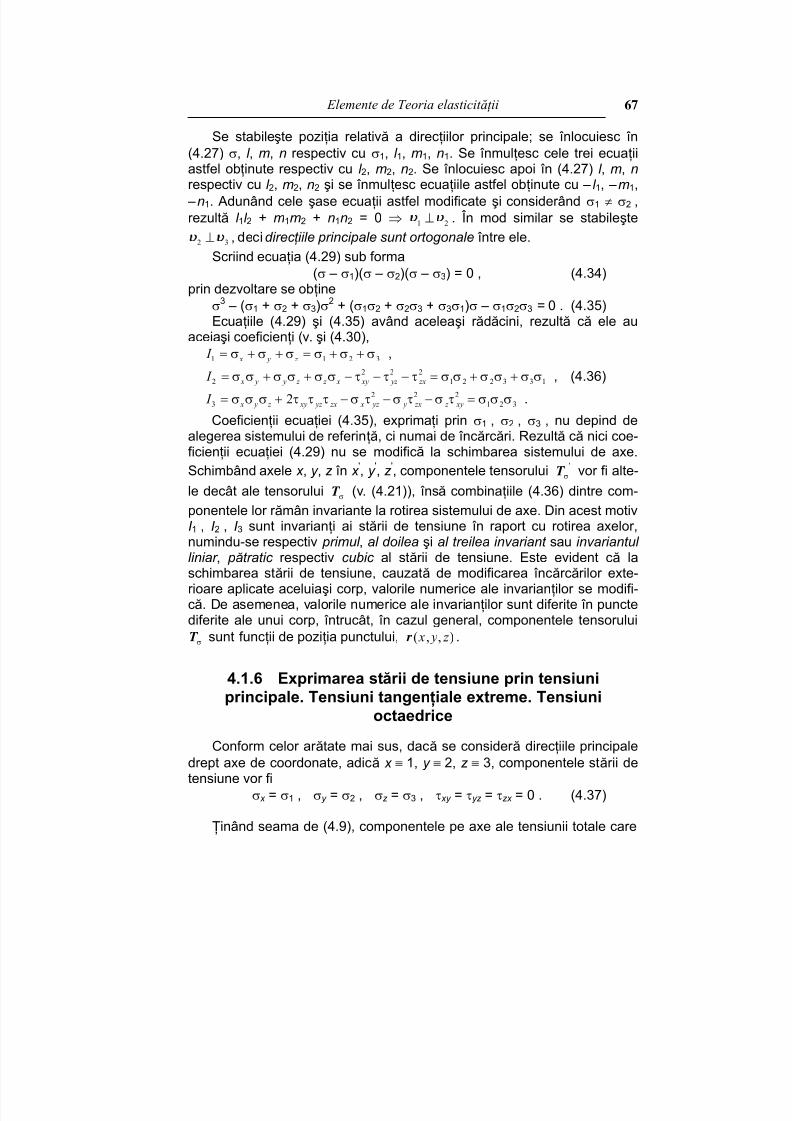
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 67/127
Elemente de Teoria elasticit ăţ ii 67
Se stabileşte poziţia relativă a direcţiilor principale; se înlocuiesc în(4.27) σ, l , m, n respectiv cu σ1, l 1, m1, n1. Se înmulţesc cele trei ecuaţii
stfel obţinute respectiv cu l a , n2. Se înlocuiesc apoi în (4.27) l , m, n cu l 2, m2, n2 şi se înmulţesc ecu astfel ob m1,
1 σ
2, m2
respectiv aţiile ţinute cu – l 1, –n . Adunând cele σ ≠ – şase ecuaţii astfel modificate şi considerând 1 2 ,
rezultă l 1l 2 + m1m2 + n1n2 = 0 ⇒ 1 2⊥υ . În mod similar se stabileşte
2 3⊥υ , decidirec ţ iile principale sunt ortogonale între ele.
Scriind ecuaţia sub forma(σ – σ
(4.29)1)(σ – σ2)(σ – σ3) = 0 , (4.34)
prin dezvoltare se obţineσ – (σ3
1 + σ2 + σ3)σ + (σ21σ2 + σ2σ3 + σ3σ1)σ – σ1σ2σ3 = 0 . (4.35)
Ecuaţiile şi având aceleaşi r ădăcini, rezultă că ele au
i coeficienţi (v. şi ),σ + σ + σ = σ + σ + σ ,
(4.29) (4.35)
(4.30aceiaş
3 3 1σ + σ σ + σ + σ σ ,
τ − σ τ − σ τ = σ σ σ .
m ifică la schimbarea sistemului de axe. x , y , z în x
', y ', vor fi alte-
decât ale tensorului
1 1 2 3 x y z I =
2 2 2
2 1 2 2 z x xy yz zx I = σ σ σ − τ − τ − τ = σ σ + σ (4.36) x y y z
2 2 2 2 I = σ σ σ + τ τ τ − σ3 1 2 3 x y z xy yz zx x yz y zx z xy
Coeficienţii ecuaţiei (4.35), exprimaţi prin σ1 , σ2 , σ3 , nu depind dealegerea sistemului de referinţă, ci numai de încărcări. Rezultă că nici coe-icienţii ecuaţiei (4.29) nu sef odSchimbând axele z
', componentele tensorului '
σT
σT le (v. (4.21)), însă combinaţiile (4.
onentele lor r ămân invariante la rotirea sistemului de axe. Din acest motiv
rc
ile
36) dintre com-
pI 1 , I 2 , I 3 sunt invarianţi ai stării de tensiune în raport cu rotirea axelor,numindu-se respectiv primul , al doilea şi al treilea invariant sau invariantul liniar , pătratic respectiv cubic al stării de tensiune. Este evident că laschimbarea stării de tensiune, cauzată de modificarea încă ărilor exte-rioare aplicate aceluiaşi corp, valorile numerice ale invarianţilor se modifi-că. De asemenea, valor numerice ale invarianţilor sunt diferite în punctediferite ale unui corp, întrucât, în cazul general, componentele tensorului
σT sunt funcţii de poziţia punctului, ( , , ) x y z r .
4.1.6 Exprimarea stării de tensiune prin tensiuniprincipale. Tensiuni tangenţiale extreme. Tensiuni
octaedrice
Conform celor ar ătate mai sus, dacă se consider ă direcţiile principaledrept axe de coordonate, adică x ≡ 1, y ≡ 2, z ≡ 3, componentele stării detensiune vor fi
σ x = σ1 , σy = σ2 , σz = σ3 , τ xy = τyz = τzx = 0 . (4.37)
Ţinând seama de (4.9), componentele pe axe ale tensiunii totale care

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 68/127
R EZISTENŢA MATERIALELOR 68
acţion rinci-pale s
ează pe o suprafaţă având normala υ(l , m, n) faţă de planele pe exprimă în funcţie de tensiunile principale prin relaţiile
1 x p l υ = σ , 2 y p mυ = σ , 3 z p nυ = σ . (4.38)
Rezultă
( ) ( ) ( )2 2 22
1 2 3 p l m nυ = σ + σ + σ . (4.39)
Tensiunea normal ă se calculează cu relaţia2 2
1 2 3l m nυσ = σ + σ + σ , (4.40)2
care se obţine din (4.24), iar tensiunea tangenţ ial ă, conform (4.25), este
limină n din (4.4 2 = 1 – l 2 2) şi apo derivea siaport cu l şi m. Se obţin două ecuaţii din care se obţin cosinu-
ectoare ale normalelor la planele în care tensiunile tan autreme,
)] 0m = ,
l = m = 0, deci n =tă soluţie se obţine considerând = 0, pentru a satisface prima
2 2 2 2 2 2 2 2 2 2 2
1 2 3 1 2 3( )l m n l m nυτ = σ + σ + σ − σ + σ + σ . (4.41)
Se determină tensiunile tangenţiale extreme şi planele pe care aces-tea acţionează.
Se e 1) (n – m i se ză expreobţinută în rasurile dir genţialevalori ex 2 2 2[ 2(l l m l σ + σ − σ + σ + σ − σ − σ 2
1 3 1 2 3 3 3
− σ2 2 2 2
2 3 1 2 3 3 3[ 2( )] 0m l m l mσ + σ − σ + σ + σ − σ = .
luţie a acestui sistem este ± O so 1.O al l
ecuaţie, iar din a doua rezultă m = ± 1/ 2 şi apoi n = ± (1 – 1 / 2)1 / 2. Consi-
derând m = 0, se obţine l = n = ± 1/ 2 . Soluţii l şi m simultan nenule nuexistă.Repetând procedura prin eliminarea lui m din (4.41) şi apoi a lui l , se
obţin şi celelalte grupuri de soluţii. Recapitulând, se observă că există treie soluţii,
;l m n= = = ±
cipa
grupuri d
;l m n= = ± = (4.42)
0 , 0 , 1
0 , 1 , 0
1 , 0 , 0 ,l m n= ± = =care de fapt corespund direcţiilor prin le adică planelor în care tensiuni-le tangenţiale sunt nule (expresia (4.41) este un minim) şi mai există încă
trei grupuri de soluţii1 12 2
1 1
0 , , ;
, 0 , ;
l m n
l m n
= = ± = ±
= ± = = ± (4.43)2 2
1 12 2
, , 0l m n= ± = ± =
care reprezintă fiecare câte un plan definit de câte o direcţie principală şi
,
bisectoarea unghiului dintre celelalte două direcţii principale.
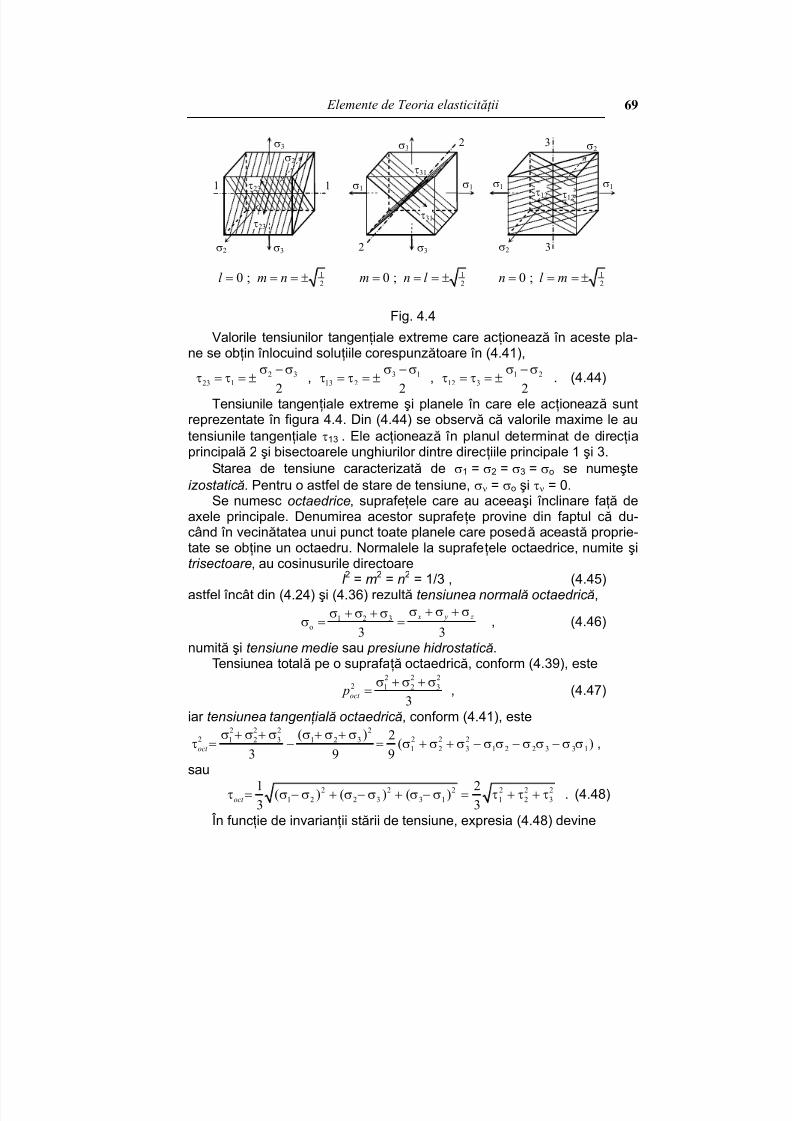
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 69/127
Elemente de Teoria elasticit ăţ ii 69
Fig. 4.4
Valorile tensiunilor tangenţiale extreme care acţionează în aceste pla-ne se obţin înlocuind soluţiile corespunzătoare în (4.41),
2 323 1
2
σ − στ = τ = ± , 3 1
13 22
σ − στ = τ = ± , 1 2
12 32
σ − στ = τ = ± . (4.44)
Tensiunile tangenţiale extreme şi planele în care ele acţionează suntreprezentate în figura 4.4. Din (4.44) se observă că valorile maxime le autensiunile tangenţiale τ13 . Ele acţionează în planul determinat de dire iaprincipală 2 şi bisectoarele unghiurilor dintre direcţiile principale 1 şi 3.
Starea de tensiune caracte σ1 = σ2 = σ3 = σo se numeşte
ţă dexele principale. Denumirea acestor suprafeţe provine diând în vecinătatea unui punct toate planele care posedă a rie-
cţ
rizată deizostatic ă. Pentru o astfel de stare de tensiune, σν = σo şi τν = 0.
Se numesc octaedrice, suprafeţele care au aceeaşi înclinare faa n faptul că du-c ceastă proptate se obţine un octaedru. Normalele la suprafeţele octaedrice, numite şitrisectoare, au cosinusurile directoare
l 2 = m2 = n2 = 1/3 , (4.45)astfel încât din (4.24) şi (4.36) rezultă tensiunea normal ă octaedric ă,
1 2 3o
3 3
x y zσ + σ + σσ + σ + σσ = = , (4.46)
numită şi tensiune medie sau presiune hidrostatic ă.Tensiunea totală pe o suprafaţă octaedrică, conform (4.39), este
2 2 22 1 2 3
3oct p
σ + σ + σ= , (4.47)
iar tensiunea tangenţ ial ă octaedric ă, conform (4.41), este2 2σ + + σ2 2
2 2 2 21 2 3 1 2 31 2 3 1 2 2 3 3 1
( ) 2( )
3 9 9oct
σ + σ σ + στ = − = σ + σ + σ − σ σ − σ σ − σ σ ,
sau2 2 2 2
1 2 2 3 3 1 1
1 2( ) ( ) ( )
oct τ = σ − σ + σ − σ + σ − σ = τ 2 2
2 3+ τ + τ . (4.48)3 3
În funcţie de invarianţii stării de tensiune, expresia (4.48) devine
12
0 ;l m n= = = ±
σ3
1 1
τ23
σ3σ2
σ2
σ3
2
2
σ3
3
3 σ2
σ2
σ1σ1σ1σ1
12
0 ;m n l = = = ± 12
0 ;n l m= = = ±
τ31
τ31
τ23 τ12 τ12

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 70/127
R EZISTENŢA MATERIALELOR 70
2
1
23
3oct 2 I I τ = − , (4.49)
iar în funcţie de componentele tensorului σT rezultă
2 2 2 2 21( ) ( ) ( ) 6(
3oct x y y z z x xy yz zxτ = σ − σ + σ − σ + σ − σ + τ + τ + τ2 ) . (4.50)
.7 Tensorul sferic şi tensorul deviator al tensiunilor
ă, de-tensorul sferic a cărui matrice aso este
0 0
σ
4.1
Dacă din starea generală de tensiune se separ ă starea izostaticfinită de ciată
o
o0 0σ
o
0 0⎡ ⎤
⎢ ⎥= σ⎢ ⎥⎢ ⎥σ⎣ ⎦
(4.51)
unde σo este dat de relaţia (4.46), atunci se poate scrie
S ,
σ σ σ= +T S D . (4.52)
Tensorul σ D se numeşte deviatorul tensiunilor , iar matricea asociată
zx zy z
σ
⎡ ⎤σ − σ τ τ⎢ ⎥= τ σ − σ τ⎢ ⎥⎢ ⎥τ τ σ − σ⎣ ⎦
D ,
0 0σ − σ⎡ ⎤
acestuia se poate exprima în funcţie de componentele stării de tensiune într-un reper oarecare,
yz (4.53)o
o
o
x xy xz
yx y
sau în funcţie de tensiunile principale,
2 o
3 o
0 0
0 0
σ⎢ ⎥
1 o
= σ − σ⎢ ⎥⎢ ⎥σ − σ⎣ ⎦
D . (4.54)
Deoarece oricare trei direcţii ortogonale ale tensorului sferic sunt prin-cipale, rezultă că direc ţ iile principale ale deviatorului coincid cu direc ţ iile
.ţi ai deviatorului, calculaţi cu expresiile (4.30
principale ale tensorului tensiunilor Primii doi invarian ), sunt
1 o
2 2 2 2 2
2
3 0
2( ) ( ) ( ) 6( ) .
6 D x y y z z x xy yz zx
I
I
= σ + σ + σ − σ =
⎡ ⎤= − σ − σ + σ − σ + σ − σ + τ + τ + τ⎣ ⎦(4.55)
parând (4.55) cu (4.50) rezultă:
1
D x y z
Com2
23
oct D
2 I τ = − . (4.56)

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 71/127
Elemente de Teoria elasticit ăţ ii 71
4.2 STAREA GENERALĂ DE DEFORMAŢIE
4.2.1 Relaţiile liniare între deformaţii specifice şi deplasări
ele care acţionează asupra corpurilor produc modificări ale dimen-i formei acestora, adică modifi ale distanţelor şi po ela-
tive dintre particulele corpului. A cunoaşte aţ ie într-un punct înseamn a putea de-
termina deform nghiulare înorice plan din microvolumul din jurul acelui punct.
d
deformarepunctul
Admi a seg-mentului
For ţsiunilor ş cări ziţiilor r
starea de deform ăaţiile liniare pe orice direcţie şi deformaţiile u
Fie un punct A (figura 4.5, a) având coordonatele ( x , y , z ) înainte deeformare. După deformare, punctul A ajunge în A'( x +u, y +v , z +w ), unde
u = u( x , y , z ) , v = v ( x , y , z ) , w = w ( x , y , z ) (4.57)reprezintă proiecţiile pe axele de coordonate ale vectorului deplasare Δ.
Fig. 4.5
Fie un alt punct B la o distanţă infinitezimală de A. DupăB ajunge în B
', astfel încât BB' = Δ + dΔ. Dacă AB = dr , atunci
A'B' = dr ' = – Δ + dr + (Δ + dΔ) = dr + dΔ .ţând valabilă ipoteza micilor deplasări, lungimea A
'B
' = ds'
AB după deformare se poate scrie sub forma2 2
'2 ' 2
d d d d d d d d d d
u u u v v v
s x x y z y x y z x y z ⎜⎝ x y z
⎛ ⎞ ⎛ ⎞∂ ∂ ∂ ∂ ∂ ∂
= = + + + + + + + +⎜ ⎟ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠ ⎠ r 2
d d d dw w w
z x y z x y z
⎛ ⎞∂ ∂ ∂+ + + +⎜ ⎟∂ ∂ ∂
,⎝ ⎠
sau, neglijând termenii infinitezimali de ordin superior,
2' 2 2 2d d 1 2 d 1 2 d 1 2u v w
s x y z⎛ ⎞∂ ∂ ∂⎛ ⎞ ⎛ = + + + + +⎜ ⎟
x y z
⎞ +⎜ ⎟ ⎟∂ ∂ ∂⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎜
2d d 2d d 2d du v v w w u
x y y z z x y x z y x
⎛ ⎞ ⎛ ⎞∂ ∂ ∂ ∂ ∂ ∂⎛ ⎞+ + + + + +⎜ ⎟ ⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠⎝ ⎠ ⎝ ⎠ z. (4.58)
a)
A'
A x
B
Δ
d r r A
B'
yd x B
d y90°
z
B 'C
C '
b)
ϕ xy
α d r '
Δ + dΔ β
A'

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 72/127
R EZISTENŢA MATERIALELOR 72
Dacă segmentul AB este paralel cu axa x atunci dy = dz = 0, iar din.58) rezultă relaţia (4
2' 2d d 1 2
u s x
∂⎛ ⎞= +⎜ ⎟∂⎝ ⎠(4.59)
ă parte, din definiţia deformaţiei specifice liniare a segmentu-lui AB = d x (v. (1.20)) se poate scrie
.
Pe de alt
'd d
d
x
s x
x
−ε = sau )'d d (1 x s x= + ε . (4.60)
Ridicând la pătrat expresia (4.60) şi neglijând 2
xε faţă de ceilalţi doi
termeni din paranteză, se obţine
) 2' 2
d d (1 2 x s x= + ε . (4.61)Comparând (4.59) cu (4.61) rezultă
x
u∂ε =
∂. (4.62)
În fig , b AB aralelepectiv cu x ş y C , deform
ura 4.5 s-au considerat două elemente şi AC p res-axele i . Lungimile elementelor AB, A CB după are
vor fi, conform relaţiei (4.58),' ' 2 2( ) d A B (1 2 ) x x= + ε , (4.63)
C y ) y A' ' 2 2( ) d (1 2+ ε , (4.64)=
' ' 2 2 2( ) d (1 2 ) d (1 2 )C B x y 2d ( d ) x y u v x y y x⎛ ⎞∂ ∂− +⎜ ⎟= + ε + + ε + ∂ ∂⎝ ⎠
. (4.65)
Folosind primele două relaţii din (4.63) şi teorema generalizată a luiPitagora, se poate scrie
' ' 2 2 2( ) d (1 2 ) d (1 2 ) 2d d 1 2 1 2 cos x y x y xyC B x y x y= + ε + + ε − + ε + ε ϕ . (4.66)
2 xε şi 2 yε Din (4.65) n i peşi (4.66), eglijând sub radical în raport cu uni-
ăcând înlocuirea sintatea şi f )cos sin(90ϕ xy xy xy xy= ° − ϕ γ ≈ γ , se o= bţine
xy
u v
y x
∂ ∂γ = +
∂ ∂.
tre deformaţ ii specifice şi deplasări :
Prin permutarea indicilor se mai pot scrie două relaţii similare cu (4.62) şi două relaţii similare cu ultima. Rezultă următoarele şase relaţ ii liniare care stabilesc legătura în

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 73/127
Elemente de Teoria elasticit ăţ ii 73
, ; x xy
u u v
x y x
⎫∂ ∂ ∂ε = γ = +
, ;
, .
y yz
z zx
v v w
y z y
w w u
z x z
⎪∂ ∂ ∂⎪⎪∂ ∂ ∂ ⎪ε = γ = + ⎬
∂ ∂ ∂
⎪⎪
∂ ∂ ∂ ⎪ε = γ = +⎪∂ ∂ ∂ ⎭
(4.67)
Ecuaţiile (4.67) au fost obţinute de Cauchy în anul 1823.
cţie
oarecare. Analogia dintre starea de deforma i
Se va calcula deform direcţia AB, având cosi-nusurile directoare
4.2.2 Deformaţia liniar ă specifică pe o dire
ţie şstarea de tensiune
aţia specifică liniar ă pe
d
d
xl = ,
s
d ym = ,
d zn = . (4.68)
d s d s
nd cu ευ deformaţ ecifică r ă a elementului AB,Notâ ia sp linia'd d s s
d s
υ
−ε = , (4.69)
are la pătrat şi neglijarea termenului infinitezimal de ordinul doi,prin ridicrezultă
2' 2d d (1 2 ) s s υ= + ε . (4.70)
Înlocuind (4.67), (4.68) şi (4.70) în (4.58) ă rezult 2 2 2
x y z xy yzυ zxl m n lm m nl nε = ε + + ε + γ + γ + γ .
ec seb a nei relaţii analogă cu (4.24), dacă se cunosc deformaţiile
te ar ăta c
ă, dac
ăsunt cunoscute deforma
ţiile specifice (4.72),
obţine tr-un pla are,dic
ε (4.71)
Se observă că deformaţia specifică liniar ă pe dir ţia oarecare ABobţine pe az uspecifice
ε x , εy , εz , γ xy , γyz , γzx . (4.72)Se poa
se poate şi deformaţia specifică unghiular ă în n oareca ă variaţia unghiului dintre două direcţii oarecare, dar perpendiculare între ele, care trec printr-un punct A. Rezultă că, la fel ca la starea de ten-siune, cele şase deformaţii specifice ε x , εy , εz , γ xy , γyz , γzx sunt componente-le stării de deformaţie în punctul considerat. Se observă de asemeneaanalogia formală perfectă între relaţiile (4.71) şi (4.24), deci toate rezulta-tele obţinute la starea de tensiune se pot folosi şi la starea de deformaţie,f ăcând înlocuirile
i iσ → ε (i = x , y , z ) ,1
2ij ijτ → γ , (i , j = x , y , z ; i ≠ j ) . (4.73)
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 74/127
R EZISTENŢA MATERIALELOR 74
4.2.3 Deformaţia vol
Se calculează variaţia volumului unui element paralelipipedic infinite-zimal datorită element. Mu-chiile elementu le cu direcţiile
umică specifică
deformării corpului din care este izolat acestlui, de lungimi d x , dy , dz se consider ă parale
deformaţiilor principale. Volumul dV = d x dy dz al elementului devine după deformare dV
' = d x ' dy
' dz ', sau, ţinând seama de (4.60)2,
'
1 2 3d d (1 )d (1 )d (1 )V x y z= + ε + ε + ε .
Deformaţ ia specific ă volumic ă (variaţia unităţii de volum) este dată derelaţia
'
1 2 3 1d
v x y zV
unde s-
d d=
V V J
−ε ≈ ε + ε + ε = ε + ε + ε , (4.74)
au neglijat infiniţii mici de ordin superior.
4 Tensorul deformaţiilor specifice. Tensorul sfericiilor specifice
ţieform .(4.17))
=
4.2.şi tensorul deviator al deformaţ
Prin analogie cu starea de tensiune, componentele stării de deformaează tensorul deformaţ iilor specifice, T ε, având matricea asociată (v
1 1
2 2
1 1
2 2
1 1
2 2
x xy xz
yx y yzε
zx zy z
⎡ ⎤ε γ γ⎢ ⎥
⎢ ⎥= γ ε γ ⎢ ⎥⎢ ⎥γ γ ε⎣ ⎦
orul T σ admite trei valori proprii, care sunt deformaţ iile specifice
ale, ε1 > ε > ε , adică soluţiile ecuaţiei (v. (4.29))
3 J = 0 , (4.76)
T . (4.75)
Tensliniare princip 2 3
3 2
1 2 J J ε − ε + ε −
unde (v. (4.30)
1 1 2 3 ., x y z J const = ε + ε + ε = ε + ε + ε =
2 2 2
1 2 2 3 3 1
3 1 2 3
1( ) .,
4
det .,
z z x xy yz zx const
J T const ε
+ ε ε − γ + γ + γ = ε ε + ε ε + ε ε =
= = ε ε ε =
(4.77)
t invarianţ ii tensorului deformaţ iilor specifice.La fel ca tensorul tensiunilor şi tensorul deformaţiilor specifice se poa-
te descompune într-un tensor sferic şi un tensor deviator al deformaţ iilor
2 x y y J = ε ε + ε ε
sun
specifice,
ε ε ε= +T S D , (4.78)
având matricele asociate

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 75/127
Elemente de Teoria elasticit ăţ ii 75
o0 0ε
⎢ ⎥
= ε⎢ ⎥S
o
o
0 0
0 0
ε⎡ ⎤
⎢ ⎥ε⎣ ⎦
,
1 1o 2 2
1 1
o2 21 1
o2 2
x xy xz
yx y yz
zx zy z
ε
⎡ ⎤ε − γ γε⎢ ⎥
= γ ε − ε γ⎢ ⎥⎢ ⎥γ γ ε − ε⎣ ⎦
D , (4.79)
unde
o
1( )
3x y zε = ε + ε + ε (4.80)
aţ ia specific ă liniar ă medie.ponentele tensorului sferic produc
formaţiile specifice unghiulare sunt
este deformCom numai modificarea volumului
unui element izolat din corp, întrucât denule iar cele liniare sunt identice pe toate direcţiile.
Componentele tensorului deviator produc numai modificarea formei
elementului. Într-adevăr, conform (4.74) şi (4.79) se obţine( ) ( )1 0 D D
J ε ε
νε = = . (4.81)
Pe baza analogiei cu (4.50) (v. şi(4.56)), lunecarea specific ă octaedri-area specifică într-un plan octaedric) poate fi scrisă su toa-c ă (lunec b urmă
rele forme
2 2 2 2 2 22 3( ) ( ) ( ) ( )
3oct x y y z z x xy yz zxγ = ε − ε + ε − ε + ε − ε + γ + γ + γ =
2
2 2
1 2 2 3 3 1
2( ) ( ) ( )
3= ε − ε + ε − ε + ε − ε = 2
2 2 2 21 2 3 1 2 22 2 2 83 ( )
3 3 3D J J J = γ + γ + γ = − = , (4.82)
)D este al doilea invariant al tensorului deviator al deformaţiilor .
T σ
deformaţie poate fi definită şi prin vectorul
cuaţiile de compatibilitate a deformaţiilor specifice
s
unde (J 2specifice Direc ţ iile deformaţ iilor principale ale tensorului T ε se determină în ace-laşi mod în care s-au obţinut direcţiile principale ale tensorului , f ăcândevident substituţiile (4.73).
Lunec ările specifice extreme apar în planele bisectoare ale unghiurilor diedre formate de planele determinate de direcţiile principale ale deforma-iilor ţ şi sunt date de expresiile
23 1 2 3γ = γ = ε − ε , 31 2 1 3γ = γ = ε − ε , 21 3 1 2γ = γ = ε − ε . (4.83)
Similar cu (4.18), starea dealgebric
{ }T
x y z xy yz zx= ε ε ε γ γ γ . (4.84)
4.2.5 E
Din ecuaţiile (4.67) se pot determina deformaţiile specifice atunci cânde cunosc deplasările şi invers, dacă sunt cunoscute deformaţiile, prin in-
tegrare se pot determina deplasările. Întrucât mărimile care intervin în sis-

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 76/127
R EZISTENŢA MATERIALELOR 76
temul de ecuaţii diferenţiale (4.67) sunt funcţii de trei variabile (coordona-tele x , y , z ), pentru a fi posibilă integrarea, deformaţiile specifice nu pot fi
funcţii arbitrare de x , y , z ci trebuie să satisfacă anumite condiţii de inte-grabilitate, care, în mod formal, se pot obţine după cum urmează. Primarelaţie din (4.67) se derivează de două ori în raport cu y , a doua sederivează de două ori în raport cu x , a patra se derivează de două ori, odată în raport cu x şi o dată în raport y , se adună apoi relaţiile astfel trans-formate. Rezultă prima relaţie din (4.85) şi similar celelalte două,
2 22
2 2
y xy x
y x x y
∂ ε ∂ γ∂ ε+ =
∂ ∂ ∂ ∂,
2 22
2 2
y y z
z y y
z
z
∂ ε ∂∂ ε+ =
γ
∂ ∂ ∂ ∂, (4.85)
2 2 2
2 2
z x zx
x z y z
∂ ε ∂ ε ∂ γ+ =
∂ ∂ ∂ ∂.
Alt grup de trei relaţii se obţine procedând astfel: a patra relaţie din(4.67) se derivează în raport cu z , a cincea în raport cu (– x ) şi a şasea înraport cu y , se adună relaţiile astfel transformate iar rezultatul se derivează în raport cu x obţinându-se astfel prima ecuaţie din (4.86), celelalte două relaţii obţinându-se similar modului în care s-a dedus prima,
2
2 xy yz zx x
z x y y z
⎛ ⎞∂γ ∂γ∂ ∂γ ∂ ε− + =⎜ ⎟⎜ ⎟∂ ∂⎝ ⎠
∂ ∂ ∂ ∂,
2
2 yz xy y zx
y x y z z
⎛ ⎞∂γ ∂γ ∂ ε∂ ∂γ− + =⎜ ⎟⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠ x
, (4.86)
2
2 xy yz zx z
z y z x x y
⎛ ⎞∂γ ∂γ∂ ∂γ ∂ ε− + =⎜ ⎟⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠
.
Ecuaţiile (4.85) şi (4.86) se numesc ecuaţ iile lui Saint-Venant (1864).in punct de vedere matematic ele sunt condi ţ ii necesare şi suficiente deD
integrabilitate a ecuaţ iilor lui Cauchy , iar din punct de vedere fizic suntcondi ţ ii de compatibilitate sau de continuitate a deformaţ iilor (elementele încare poate fi divizat un corp (v. fig. 4.2, a) trebuie să se deformeze astfel încât să nu apar ă goluri sau interferenţe între ele). Pentru domenii simpluconexe, îndeplinirea condiţiilor de continuitate asigur ă şi unicitatea soluţii-lor (unicitatea funcţiilor u, v şi w care se obţin prin integrare din (4.67)).

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 77/127
Elemente de Teoria elasticit ăţ ii 77
4.3 RELAŢII ÎNTRE TENSIUNI ŞI DEFORMAŢII SPECIFICE. ENERGIA DE DEFORMAŢIE
4.3.1 Modelul corpului perfect elastic. Relaţiile luiGreen
Se consider ă un corp perfect elastic, în echilibru, având stările iniţialede tensiune şi deformaţie nule. Sub acţiunea unui sistem de for ţe exterioa-re având torsorul nul în fiecare microvolum al corpului apare o stare detensiune caracterizată de tensorul T σ (sau de vectorul σ) şi o stare de de-formaţie caracterizată de tensorul T ε (sau de vectorul ε). Corpul fiind elas-tic, dacă se îndepărtează sistemul de for ţe, dispare şi deformaţia acestuia,adică lucrul mecanic consumat de for ţele sistemului de for ţe exterioarepentru deformarea corpului se înmagazinează integral în acesta sub formă de energie potenţială de deformaţie.
F
(1)
Δ
Δo
(2)
(3)
(1)
F oΔ
Δ
Δo
F
F o
F
δΔ (1)(1)
(2)
(3)
F = 0Δ = 0
F = 0Δ = 0
Fig. 4.6
Un model simplu de corp perfect elastic este un resort ca în fig. 4.6.Relaţia dintre for ţa F aplicată resortului şi alungirea sa Δ, la încărcarea şila descărcarea acestuia, este reprezentată în fig. 4.6. Prin deformarearesortului, for ţa F efectuează un lucru mecanic, iar dacă resortul este
perfect elastic, lucrul mecanic efectuat într-un ciclu complet încărcare-descărcare este nul,
,o o
1 2 30 0
L LΔ=Δ Δ
− − Δ== δ = δ∫ ∫ F Δ
1 2 3 1 0 L − − − = . (4.87)
Se consider ă dintr-un corp perfect elastic un element infinitezimal devolum dV = d x .dy .dz , pentru care înainte de încărcare, σ = 0 şi ε = 0. Într-unmoment oarecare din timpul procesului de încărcare, stării de tensiune σ îicorespunde starea de deformaţie ε. Dacă încărcările dispar, componentelevectorului σ şi concomitent componentele vectorului ε devin nule. Aceasta înseamnă că lucrul mecanic efectuat de for ţele care acţionează asupraelementului de volum nu depinde de modul în care cresc deformaţiile ci
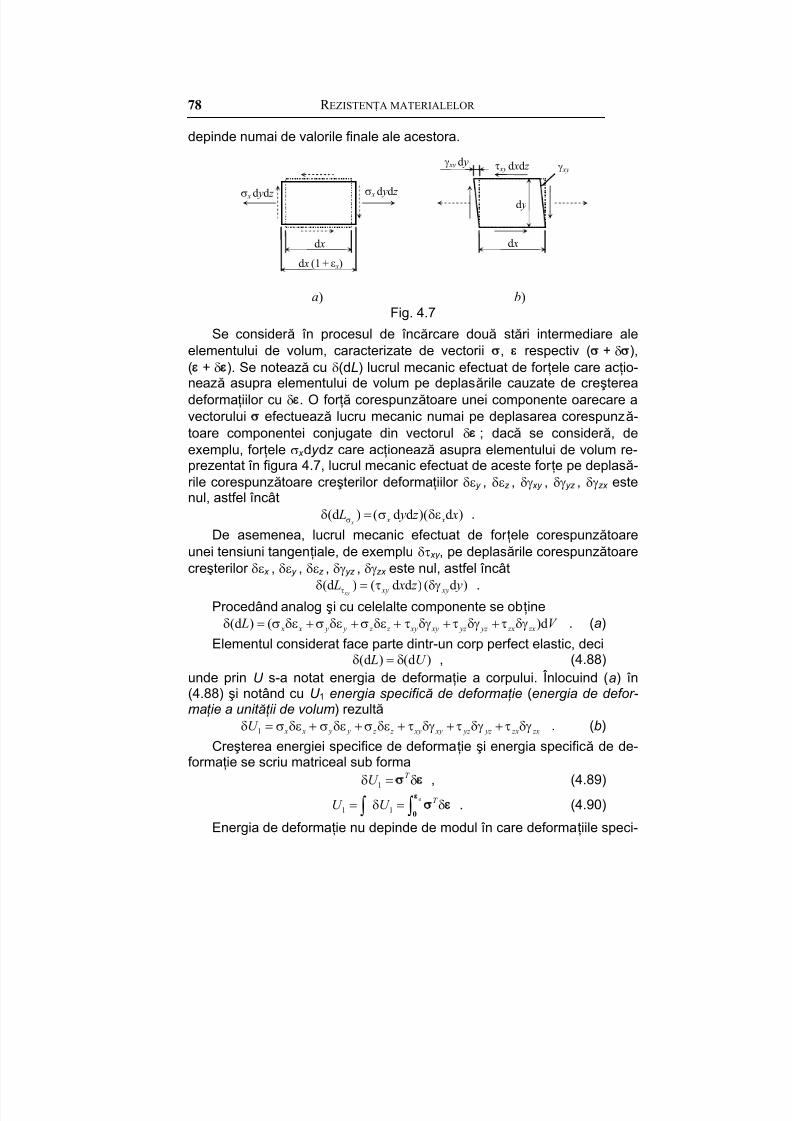
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 78/127
R EZISTENŢA MATERIALELOR 78
depinde numai de valorile finale ale acestora.
d x
d x (1 + ε x)
σ x d yd zσ x d yd z
d x
d y
τ xy d xd z γ xy d y γ xy
a) b) Fig. 4.7
Se consider ă în procesul de încărcare două stări intermediare aleelementului de volum, caracterizate de vectorii σ, ε respectiv (σ + δσ),(ε + δε). Se notează cu δ(dL) lucrul mecanic efectuat de for ţele care acţio-nează asupra elementului de volum pe deplasările cauzate de creştereadeformaţiilor cu δε. O for ţă corespunzătoare unei componente oarecare avectorului σ efectuează lucru mecanic numai pe deplasarea corespunză-toare componentei conjugate din vectorul δε ; dacă se consider ă, deexemplu, for ţele σ x .dy .dz care acţionează asupra elementului de volum re-prezentat în figura 4.7, lucrul mecanic efectuat de aceste for ţe pe deplasă-rile corespunzătoare creşterilor deformaţiilor δεy , δεz , δγ xy , δγyz , δγzx este
nul, astfel încât .(d ) ( d d )( d ) x x x L y zσδ = σ δε x
De asemenea, lucrul mecanic efectuat de for ţele corespunzătoareunei tensiuni tangenţiale, de exemplu δτ xy , pe deplasările corespunzătoarecreşterilor δε x , δεy , δεz , δγyz , δγzx este nul, astfel încât
(d ) ( d d ) ( d ) xy xy xy L x z yτδ = τ δγ .
Procedând analog şi cu celelalte componente se obţineδ . (a)(d ) ( )d x x y y z z xy xy yz yz zx zx L V = σ δε + σ δε + σ δε + τ δγ + τ δγ + τ δγ
Elementul considerat face parte dintr-un corp perfect elastic, deci(d ) (d ) L U δ = δ , (4.88)
unde prin U s-a notat energia de deformaţie a corpului. Înlocuind (a) în(4.88) şi notând cu U 1 energia specific ă de deformaţ ie (energia de defor-maţ ie a unit ăţ ii de volum) rezultă
1 x x y y z z xy xy yz yz zx zxU δ = σ δε + σ δε + σ δε + τ δγ + τ δγ + τ δγ . (b)
Creşterea energiei specifice de deformaţie şi energia specifică de de-formaţie se scriu matriceal sub forma
1
T U δ = δε , (4.89)
o
1 1
T U U = δ = δ∫ ∫0ε
σ ε . (4.90)
Energia de deformaţie nu depinde de modul în care deformaţiile speci-

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 79/127
Elemente de Teoria elasticit ăţ ii 79
fice cresc ci numai de valorile finale ale acestora, deci expresia de subintegrala (4.90) trebuie să fie o diferenţială totală exactă, adică
1 1 1 1 1 11 x y z xy yz zx
x y z xy yz zx
U U U U U U U ∂ ∂ ∂ ∂ ∂ ∂δ = δε + δε + δε + δγ + δγ + δγ∂ε ∂ε ∂ε ∂γ ∂γ ∂γ
. (c )
Comparând (b) cu (c ) rezultă relaţ iile lui Green,1 1 1 1 1, , , , , 1
x y z xy yz zx
x y z xy yz zx
U ∂τ =
∂ε ∂ε ∂ε ∂γ ∂γ ∂γ . (4.91)
valabile pentru orice mediu continuu perfect elastic, nu neapărat liniar.
4.3.2 Legea generalizată a lui Hooke
Relaţiile calitative şi cantitative între componentele vectorilor σ
şiε
ca-
F = k Δ , (4.92)
U U U U U ∂ ∂ ∂ ∂ ∂σ = σ = σ = τ = τ =
re reprezintă legea constitutiv ă a materialului se pot stabili numai experi-mental , în laboratoare. Pentru o serie de materiale, aceste relaţii sunt linia-re, dacă deformaţiile nu depăşesc anumite limite. Pentru modelul materia-lului liniar-elastic (propus de Hooke), raportul F / Δ are valoare constantă.Diagrama caracteristic ă F – Δ pentru acest model este deci o dreaptă (ca în figura 1.9) având ecuaţia
unde
o
1o
const.
F F
k F Δ == = = =Δ Δ (4.93)
se numeşte constant ă de rigiditate, fiind numeric egală cu for ţa care pro-duce o deplasare unitar ă capătului resortului. Mărimea
0
1 f
F k == = Δ (4.94)
şte coeficient de flexibilitate şi reprezint
ţia (4.87), rezul
se nume ă deplasarea produsă de ofor ţă unitar ă. Folosind mărimea f , relaţia liniar ă (4.92) se scrie sub forma
Δ = f F = k – 1 F . (4.95)
Din rela tă o
L k Δ
= Δ
2 2
o o o o1 2 30 2 2 2
k F F
k − −
Δ ΔδΔ = = =∫ . (d )
relaţiile (4.92), (4.95), între vectorii tensiunilor ş
σ (4.96)mentele mat teia) sunt co ca-
ifică de de-
Generalizând i defor-maţiilor specifice (σ şi ε, v.
(4.18), (4.84)) care apar într-un punct al unuicorp liniar-elastic se pot scrie relaţ iile liniare
σ = D ε sau ε = D – 1
unde ele ricelor D, D – 1 (inverse una al nstantere urmează a se stabili pentru fiecare material în parte. Relaţiile (4.96) re-prezintă exprimarea matriceală a
legii generalizate a lui Hooke.Prin analogie cu (d ) şi utilizând relaţia (4.96), energia spec
formaţie pentru materiale a căror comportare respectă modelul Hooke se

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 80/127
R EZISTENŢA MATERIALELOR 80
poate exprima sub următoarele forme:
1
1
( )2 x x y y z z xy xy yz yz zx zx+ γ τ + γ τ , (4.97)U = ε σ + ε σ + ε σ + γ τ
1 1
1 1 1 1
2 2 2 2
T T T T U U = = ⇔ = =D Dσ ε ε σ ε ε εT . (4.98)
observă că matricea D este simetrică deoarece este egal cu
telor elastice independente
Se ătranspusa sa, prin urmare, în cazul general (al materialelor anizotrope), eaconţine 21 de constante elastice de material.
Pentru materiale izotrope numărul constancare fac legătura între σ şi ε se reduce la două. Experimental se constată că pentru un element dintr-un material liniar-elastic şi izotrop solicitatmonoaxial, de exemplu prin tensiuni σ x (ca în figura 4.7, a), concomitent cu
deformaţia ce apare pe direcţia x , x
x E
σε = , (4.99)
ţii şi pe direcţii transversale faţă de direcţia x , propor şiapar deforma ţionalede semn contrar cu ε x ,
x y z x
E
σε = ε = −υε = −υ . (4.100)
ţia (4.100) intervin două constante elastice. E se nume odul În rela şte m
de elasticitate longitudinal (sau modulul lui Young ) iar υ se numeşte coefi-cient de contrac ţ ie transversal ă (sau coeficientul lui Poisson). Relaţii simi-
lare cu (4.99), (4.100) se pot scrie dacă elementul este solicitat monoaxialprin tensiuni σy sau σz . Dacă elementul este solicitat concomitent prin ten-siunile σ x , σy , σz , dată fiind liniaritatea relaţiilor (4.99) şi (4.100), se poateaplica principiului suprapunerii efectelor. Astfel, de exemplu, pe direcţia x ,deformaţia specifică va fi suma deformaţiilor specifice obţinute la acţiuneaseparată a celor trei tensiuni, adică
y x z x
E E E
σσ σε = − υ − υ . (4.101)
al se constată că între tensiuni tangenţiale ărileTot experiment şi lunecspecifice corespunzătoare există de asemenea o relaţie de propor ţionalita-
te. De exemplu între τ xy şi γ xy există relaţia de propor ţionalitate xy
xyG
τγ = , (4.102)
unde G modulul lui se numeşte modul de elasticitate transversal (sauKirchhoff ). Scriind toate relaţiile de tip (4.101), (4.102), se obţine
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 81/127
Elemente de Teoria elasticit ăţ ii 81
1 2(1( ) ;
1 2(1( ) ;
1 2(1( ) ;
)
)
)
xy
x x y z xy xy
yz
y y z x yz yz
zx z z x y zx zx
E E
E E
E E
G
G
G
τ+ υ⎡ ⎤ε = σ − υ σ + σ γ = τ =⎣ ⎦
τ+ υ⎡ ⎤ε = σ − υ σ + σ γ = τ =⎣ ⎦
+ υ τ⎡ ⎤ε = σ − υ σ + σ γ = τ =⎣ ⎦
. (4.103)
4.3.3 Relaţia dintre constantele elastice ale unuimaterial izotrop
Pentru materiale liniar-elastice izotrope, constantele elastice E , υ şi G nu sunt independente. Pentru a obţine această dependenţă, se remarcă mai întâi faptul că, pentru astfel de materiale, axele principale ale stării de
tensiune coincid cu axele principale ale stării de deformaţie. În conformita-te cu relaţiile (4.83) şi (4.101), se poate scrie:
( )1 2 3 2 3 112 1 2 1 2
1
E E E E
σ σ + σ σ σ + σ + υ⎛ ⎞ ⎛ ⎞γ = ε − ε = − υ − − υ = σ − σ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ E
.
Pe de altă parte, conform relaţiei (4.102) şi (4.44) se poate scrie
12 1 212
2G G
τ σ − σγ = = ,
iar din comparaţia ultimelor două expresii, rezultă
2(1 )
E G =
+ υ. (4.104)
Pe baza relaţiilor (4.101), (4.102) şi (4.104), folosind şi relaţiile similareobţinute prin analogie, se obţine forma explicită a legii lui Hooke generali-zat ă, scrisă matriceal sub forma (4.96):
1 0 0 0
1 0 0 0
1 0 0 0
1 20 0 0 0 0
2(1 )(1 2 )1 2
0 0 0 0 02
1 20 0 0 0 02
x x
y y
z z
xy xy
yz yz
zx zx
E
− υ υ υ⎡ ⎤⎢ ⎥υ − υ υσ ε⎧ ⎫ ⎧⎢ ⎥
⎪ ⎪ ⎪υ υ − υ⎢ ⎥σ ε⎪ ⎪ ⎪⎢ ⎥− υσ ε⎪ ⎪ ⎪⎪ ⎪ ⎪⎢ ⎥=⎨ ⎬ ⎨⎢ ⎥+ υ − υτ γ⎪ ⎪ ⎪⎢ ⎥− υ⎪ ⎪ ⎪τ γ⎢ ⎥⎪ ⎪ ⎪⎢ ⎥
τ γ⎪ ⎪ ⎪⎩ ⎭ ⎩− υ⎢ ⎥⎢ ⎥⎣ ⎦
⎫⎪⎪⎪⎪⎬⎪⎪⎪
⎪⎭
; (4.105)
1 0 0 0
1 0 0 0
1 0 0 01
0 0 0 2(1 ) 0 0
0 0 0 0 2(1 ) 0
0 0 0 0 0 2(1 )
x x
y y
z z
xy xy
yz yz
zx zx
E
ε −υ −υ⎧ ⎫ ⎡ ⎤ ⎧⎪ ⎪ ⎢ ⎥ ⎪ε −υ −υ⎪ ⎪ ⎢ ⎥ ⎪
ε −υ −υ⎪ ⎪ ⎢ ⎥ ⎪=⎨ ⎬ ⎨⎢ ⎥γ + υ⎪ ⎪ ⎪⎢ ⎥
⎪ ⎪ ⎪⎢ ⎥γ + υ⎪ ⎪ ⎪⎢ ⎥
⎢ ⎥γ +⎩ ⎭ ⎣ ⎦ ⎩
σ ⎫⎪σ ⎪
σ ⎪⎬
τ ⎪⎪τ⎪
υ τ ⎭
. (4.106)
În raport cu axele principale, legea lui Hooke generalizată devine:
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 82/127
R EZISTENŢA MATERIALELOR 82
[ ]
[ ]
[ ]
1 1 2
2 2 3
3 3 1
1( )
1( )
1( )
E
E
E
ε = σ − υ σ + σ
ε = σ − υ σ + σ
ε = σ − υ σ + σ
3
2
2
. (4.107)
4.3.4 Legea de variaţie a volumului
Adunând membru cu membru relaţiile (4.107) şi ţinând seama de(4.46) rezultă
1 2 3 1 2 31 2 1 2( ) 3v E E
o− υε = ε + ε + ε = σ + σ + σ = σ− υ , (4.108)
adică deformaţia specifică volumică este propor ţională cu tensiunea me-die.
La o solicitare izostatică, dacă σo > 0 atunci εv trebuie să rezulte deasemenea pozitiv şi viceversa. Acest lucru este posibil numai dacă υ < 0,5;pentru oţeluri obişnuite, E OL = 2,1⋅1011
Pa, υOL = 0,3. Înlocuind aceste va-lori în (4.104) rezultă GOL = 0,807⋅1011
Pa.Dacă se face notaţia
1 2 3o
3 3
x y z v
3
ε + ε + εε + ε + ε εε = = = , (4.109)
relaţia (4.108) devine
o o1 2
E σ = ε
− υsau 1 1
1 2
E I J =
− υ. (4.110)
Experimentele arată că relaţia (4.108) este valabilă chiar şi pentru va-lori foarte mari ale tensiunii medii (1500 MPa), deci practic variaţ ia volumu-lui are loc întotdeauna elastic .
4.3.5 Legea de variaţie a formei
Dacă se rezolvă sistemul (4.103) în raport cu σ x , σy , σy şi se foloseştenotaţia (4.109), se obţine
o
o
o
3
1 1 2
3
1 1 2
3
1 1 2
x x
y y
z z
E
E
E
υ⎡ ⎤σ = ε + ε⎢ ⎥+ υ − υ⎣ ⎦υ⎡ ⎤σ = ε + ε⎢ ⎥+ υ − υ⎣ ⎦υ⎡ ⎤σ = ε + ε⎢ ⎥+ υ − υ⎣ ⎦
. (4.111)
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 83/127
Elemente de Teoria elasticit ăţ ii 83
Din relaţiile (4.111) rezultă
2 const.1
x y y z z x
x y y z z x
E
G
σ − σ σ − σ σ − σ
= = = = =ε − ε ε − ε ε − ε + υ , (4.112)iar în raport cu axele principale aceste relaţii devin:
2 3 3 1 23 311 2 12
1 2 2 3 3 1 12 23 31
2 222 const.G
σ − σ σ − σ τ τσ − σ τ= = = = = = =
ε − ε ε − ε ε − ε γ γ γ(4.113)
De asemenea din (4.111) ţinând seama de (4.108) se obţine
. (4.114)o o
o o
o o
2 ( )
2 ( )
2 ( )
x x
y y
z z
G
G
G
σ − σ = ε − ε
σ − σ = ε − ε
σ − σ = ε − εScriind ultimele trei relaţii din (4.103) sub forma
12
2 xy xyG
⎛ ⎞τ = γ⎜ ⎟⎝ ⎠
,1
22
yz yzG⎛ ⎞τ = γ⎜ ⎟⎝ ⎠
,1
22
zx zxG⎛ ⎞τ = γ⎜⎝ ⎠
⎟ (4.115)
şi având în vedere (4.53) şi (4.79), rezultă 2Gσ ε= D D , (4.116)
adică deviatorul tensiunilor este propor ţional cu deviatorul deformaţiilor.Formulele (4.115) sau (4.116) reprezintă legea de variaţ ie a formei la de-formarea corpului .
4.3.6 Relaţia dintre tensiunile tangenţiale octaedrice şi
lunecările octaedrice. Tensiuni şi deformaţii specificegeneralizate şi relaţia dintre ele
Folosind relaţiile (4.113) se poate stabili o legătur ă între τoct şi γoct ; în-locuind relaţiile (4.113) în (4.48) şi ţinând seama de (4.82) rezultă
2 2 2
1 2 2 3 3 1
12 ( ) ( ) ( )
3oct oct G Gτ = ε − ε + ε − ε + ε − ε = γ . (4.117)
În Teoria plasticităţii, în locul tensiunii şi lunecării specifice octaedricese folosesc alte două mărimi, care difer ă de τoct şi γoct numai printr-un coe-ficient numeric şi anume: – tensiuni generalizate sau intensitatea tensiunilor :
2 2
1 2 2 3 3 1
3 1( ) ( ) (
2 2i oct σ = τ = σ − σ + σ − σ + σ − σ 2
) ; (4.118)
– deformaţ ii specifice generalizate sau intensitatea deformaţ iilor specifi-ce:
2 2
1 2 2 3 3 1
3 2 2( ) ( ) (
4(1 ) 2(1 )i oct ε = γ = ε − ε + ε − ε + ε − ε
+ υ + υ2) . (4.119)
Înlocuind τoct şi γoct obţinute din aceste ultime relaţii în (4.117) rezultă
i i E σ = ε . (4.120)
În cazul solicitării monoaxiale,

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 84/127
R EZISTENŢA MATERIALELOR 84
şi1 2 30, 0σ ≠ σ = σ = 2 3 1ε = ε = −υε .
Înlocuind în (4.118) şi (4.119) rezultă σi = σ1 , εi = ε1 , adică relaţia(4.120) se transformă în legea lui Hooke pentru solicitarea monoaxială.
4.3.7 Energia de deformaţie pentru variaţia volumului şia formei
Partea din energia potenţială specifică de deformaţie acumulată de unelement unitar de volum prin modificarea numai a formei sale se numeşteenergie potenţ ial ă specific ă de variaţ ie a formei ,
1 1 1 f vU U U = − . (4.121)
unde U 1v reprezintă energia potenţ ial ă specific ă de variaţ ie a volumului .Energia potenţială specifică de deformaţie U 1 se poate exprima exclu-
siv în funcţie de tensiuni folosind legea lui Hooke generalizată. În acestscop se înlocuieşte (4.103) în (4.97) obţinându-se
2 2 2
1
12 ( )
2x y z x y y z z xU
E ⎡ ⎤= σ + σ + σ − υ σ σ + σ σ + σ σ +⎣ ⎦ . (4.122)
2 2 21( )
2xy yz zx
G+ τ + τ + τ . (4.123)
Dacă axele x , y , z coincid cu direcţiile principale, relaţia (4.122) devine2 2 2
1 1 2 3 1 2 2 3 3
12 ( )
2U
E ⎡ ⎤= σ +σ + σ − υ σ σ + σ σ + σ σ⎣ ⎦1 . (4.124)
Întrucât pentru tensorul deviator al stării de deformaţie (Dε) s-a obţinutεv = 0, rezultă că variaţ ia formei corpului este produsă numai decomponentele deviatorului tensiunilor, în timp ce componentele tensoruluisferic produc variaţia volumului.
Introducând în (4.122) componentele tensorului S σ în locul componen-telor tensorului T σ se obţine
2 2 2
1 o o o 1 2
1 1 2 1 23 2 3 3 (
2 2 6vU
E E E
2
3)− υ − υ
⎡ ⎤= σ − υ σ = σ = σ + σ + σ⎣ ⎦ . (4.125)
Înlocuind în (4.121) valorile date de (4.124) şi (4.125) rezultă 2 2
1 1 2 2 3 3
1
( ) ( ) ( )6 f U E
+ υ
⎡ ⎤= σ − σ + σ − σ + σ − σ⎣ ⎦2
1 . (4.126)
4.4 SCHEME GENERALE DE REZOLVARE A PROBLEMELOR
DE TEORIA ELASTICITĂŢII
Mai sus au fost obţinute toate relaţiile necesare pentru rezolvarea pro-blemelor de elasticitate. Conexiunile dintre aceste relaţii sunt prezentateschematic în figura 4.8.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 85/127
Elemente de Teoria elasticit ăţ ii 85
Fig. 4.8
3 ecuaţii
X , Y , Z
p xo,
p yo,
p zo
, , , , , x y z xy yz zxσ σ σ τ τ τ , , , , , x y z xy yz zxε ε ε γ γ γ 6 ecuaţii
6 ecuaţii
u, v, w
6 ecuaţii3 ecuaţii
(4.9)
(4.3
(4.103)
(4.67)
(4.85)
Rezolvarea problemelor Teoriei elasticităţii constă în integrarea ecua-ţiilor diferenţiale de echilibru şi a condiţiilor de continuitate (compatibilitate)
a deformaţiilor specifice, cu respectarea condiţiilor la limită. Problemelepot apare sub două aspecte distincte.1. Determinarea deplasărilor şi tensiunilor care apar într-un corp dato-
rită acţiunii unui sistem de sarcini – problema direct ă.2. Determinarea încărcărilor şi a celorlalte necunoscute atunci când
sunt date deplasările, tensiunile sau deformaţiile specifice – problemainversă.
Dacă deformaţiile specifice satisfac condiţiile de compatibilitate, rezol-varea problemei inverse este elementar ă.
Pentru rezolvarea problemei directe, până în prezent nu a fost găsită ometodă generală. Rezolvarea problemei directe în diverse cazuri particula-
re se poate face după două scheme de bază.a) Considerând drept necunoscute tensiunile, înlocuind legea lui
Hooke (4.103) în ecuaţiile de continuitate (4.85) se obţin ecuaţ iile lui Beltrami-Michell (1892; 1899). Tensiunile determinate cu ajutorul acestor ecuaţii trebuie să satisfacă în plus ecuaţiile de echilibru (4.3) precum şicondiţiile la limită.
b) Considerând drept necunoscute deplasările u, v , w , se obţin relaţiile între tensiuni şi deplasări eliminând din (4.67) deformaţiile specifice cu aju-torul legii lui Hooke, după care se înlocuiesc tensiunile în ecuaţiile de echi-libru (4.3 obţinând un sistem de trei ecuaţii diferenţiale liniare în deplasări-le u, v , w , numite ecuaţ iile lui Lammé (1883). Deplasările determinate dinaceste ecuaţii trebuie să satisfacă în plus şi condiţiile la limită.
Pentru rezolvarea unor probleme particulare de elasticitate, în literatu-r ă au fost elaborate o serie întreagă de metode analitice şi numerice. Unadintre metode, datorată lui Saint-Venant (1855), se numeşte metodasemi-inversă. Conform acestei metode, o parte din soluţie se alege pe ba-za unor analize calitative, a unor rezolvări aproximative sau experimental,restul soluţiei determinându-se din sistemul de ecuaţii mai simple care aur ămas.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 86/127
R EZISTENŢA MATERIALELOR 86
4.5 PROBLEME PARTICULARE ALE TEORIEI ELASTICITĂŢII
4.5.1 Problema plană în coordonate carteziene
Problema plană include două cazuri analoge din punct de vedere ma-tematic şi anume starea plană de tensiune şi starea plană de deformaţie.
4.5.1.1 Starea plană de tensiune Starea plană de tensiune este aceea în care tensiunile paralele cu una
dintre axele de coordonate sunt nule iar celelalte tensiuni nu depind deaceastă coordonată. Astfel, considerând
0 z yz zxσ = τ = τ = , (4.127)
matricea asociată tensorului tensiunilor devine0
0
0 0 0
x xy
yx yσ
⎡ ⎤σ τ⎢ ⎥= τ σ⎢ ⎥⎢ ⎥⎣ ⎦
T . (4.128)
Astfel de stări de tensiune apar în plăcile subţiri încărcate prin for ţeparalele cu feţele şi distribuite uniform pe grosime (figura 4.9, a).
x
a) b)
y
α
y
z x
y
α
τ xy
τ yx
σ y
σ x
σν
τν
υ
υ
pυ pυ y
pυ x
Fig. 4.9
În cazul stării plane de tensiune, ecuaţiile (4.9) devin
x
y
x xy
yx y
p l m
p l m
υ
υ
= σ + τ ⎫⎪⎬
= τ + σ ⎪⎭, (4.129)
undel = cos α , m = cos (90° – α) = sin α . (4.130)
Ecuaţiile de echilibru (4.3, luând X = Y = 0 , capătă forma
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 87/127
Elemente de Teoria elasticit ăţ ii 87
0
0
xy x
yx y
x y
x y
∂τ ⎫∂σ+ = ⎪∂ ∂
⎪⎬∂τ ∂σ ⎪+ = ⎪∂ ∂ ⎭
. (4.131)
Tensiunile principale se determină din ecuaţia (4.29), în care
1 x y I = σ +σ , 2
2 x y x I
y= σ σ −τ , 3 0 I = . (4.132)
Înlocuind (4.132) în (4.29), rezultă ecuaţia2
1 2( ) I I 0σ σ − σ + = ,având soluţiile
2
, 2
2 2
x y x y I II
x y xy
σ + σ σ + σ⎛ ⎞
σ = ± − σ σ + τ⎜ ⎟⎝ ⎠ , 0 III
σ = ,
care se ordonează astfel încât σ1 > σ2 > σ3 , adică
1max ( , , ) I II III σ = σ σ σ , 3 min ( , , ) I II III σ = σ σ σ . (4.133)
Dacă σI > 0 şi σII < 0, tensiunile principale sunt σ2 = 0 şi
2 2
1,3
1( ) 4
2 2
x y
x y x
σ + σσ = ± σ − σ + τ y
0
. (4.134)
Direc ţ iile principale se determină din sistemul (4.27). După înlocuirile(4.127) şi (4.130), acest sistem devine
( ) ,cos sin x xyσ − σ α + τ α = cos ( )sin 0
xy yτ α + σ − σ α = ,
iar prin eliminarea lui σ se obţine2 2cos sin
sin cos
x y
xy
σ − σα − α=
α α τ.
Introducând unghiul dublu, rezultă 2
tan2xy
x y
τα =
σ − σ. (4.135)
Ecuaţia (4.135) are în primul cerc două soluţii, 2α1 şi 2α2 = 2α1 + π, deunde rezultă că direc ţ iile principale, normale pe planele în care τ = 0, sunt ortogonale între ele.
Tensiunea normal ă pe un plan de normală υ (l , m) se calculează curelaţia (4.24), care devine
, (4.136)2 2 2 x y xyl m l υ ασ = σ = σ + σ + τ m
sau introducând unghiul dublu,
cos 2 sin 22 2
x y x y
xyα
σ + σ σ − σσ = + α + τ α . (4.137)
Tensiunea tangenţ ial ă pe un plan de normală υ (l , m) se calculează curelaţia (4.25), în care se fac înlocuirile (4.129) şi (4.136), obţinându-se
.2 2 2 2 2( ) ( ) ( 2 x xy xy y x y xyl m l m l m lmατ = σ + τ + τ + σ − σ + σ + τ 2)
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 88/127
R EZISTENŢA MATERIALELOR 88
Efectuând calculele rezultă
sin 2 cos 22
x y
xyα
σ − σ
±τ = α − τ α . (4.138)Tensiunile tangenţ iale extreme
1 212
2
σ − στ = ± , 2 3
232
σ − στ = ± , 1
312
3σ − στ = ± , (4.139)
Dacă σ1 > 0 , σ2 = 0 , σ3 < 0 ,2 2
13 max
1( ) 4
2x y xτ = τ = σ − σ + τ y
, 112
2
στ = , 3
232
στ = . (4.140)
Legea lui Hooke pentru starea plană de tensiune capătă forma
;
; 0
; 0
x y x
x x
y x
y y
x y
z z
E G
E
E
y
y
z
x
σ − υσ τ ⎫ε = γ = ⎪
⎪σ − υσ ⎪ε = γ = ⎬
⎪σ + σ ⎪
ε = −υ γ = ⎪⎭
, (4.141)
unde, conform relaţiilor (4.67)
x
u∂ε =
∂, y
v
y
∂ε =
∂, xy
u v
y x
∂ ∂γ = +
∂ ∂. (4.142)
Rezolvând sistemul (4.141) în raport cu tensiunile se obţine
2 ( )1 x x y
E
σ = ε + υε− υ , 2 ( )1 y y x
E
σ = ε + υε− υ , xy xyGτ = γ . (4.143)Din (4.141) se observă că o stare plană de tensiune nu este şi stare
plană de deformaţie, deoarece εz ≠ 0. În reperul principal, primele două relaţii din (4.141) şi (4.143) se scriu
sub forma
1 2 21 2,
E E E E
σ σ σ σε = − υ ε = − υ 1 ; (4.144, a)
1 12( )
1
E 2σ = ε + υ
− υε , 2 22
(1
E 1)σ = ε + υ
− υε . (4.144, b)
Deformaţia specific
ăliniar
ăpe o direc
ţie oarecare definit
ăde un unghi
α se determină în funcţie de ε x , εy şi γ xy din (4.71), în care se fac înlocuirile(4.130),
cos 2 sin 22 2 2
x y x y xy
α
ε + ε ε − ε γε = − α + α . (4.145)
În analiza experimentală a tensiunilor (prin tensometrie electrică rezis-tivă) este util a exprima lunecarea specifică γ xy în funcţie de deformaţiilespecifice liniare ε x , εy şi εα, unde α = 45° sau 120°. Luând α = 45°, se ob-ţine

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 89/127
Elemente de Teoria elasticit ăţ ii 89
4522
x y
xy °
ε + ε⎛ ⎞γ = ε −⎜ ⎟
⎝ ⎠
. (4.146)
Folosind relaţiile (4.134), (4.135) şi substituţiile (4.73), se pot determi-na deformaţiile specifice principale şi direcţiile acestora,
2 2o 901,2 o 45 45 90
45 o 90
o 90
2( ) (
2 2
2tan2
°° °
° °
°
ε + εε = ± ε − ε + ε − ε
ε − ε − εα =
ε − ε
)°
(4.147)
şi apoi tensiunile principale σ1 , σ2 , folosind legea lui Hooke (4.144).Cazuri particulare ale st ării plane de tensiune• Starea de forfecare pur ă este un caz particular al stării plane de ten-
siune, în care σ x = σy = 0. În acest caz, invarianţii stării de tensiune au ex-presiile , ,1 0 I = 2 0 I = 2
3 xy I = −τ iar tensiunile principale se obţin în funcţie
de τ xy din ecuaţia (4.29) 3
2 0 I σ − σ = , din care rezultă
1 xyσ = τ , 2 0σ = , 3 xyσ = −τ . (4.148)
τ xy
σ1
τ xy
τ yx τ yx
σ2
σ1 = |τ xy | σ2 = |τ xy |
Fig. 4.10
Direcţiile principale se determină din (4.135),
,tan2α = ∞ 2 2
πα = , 1
4
πα = , 2
3
4
πα = . (4.149)
Starea de forfecare pur ă este deci acea stare plană în care tensiunile norma-le principale sunt egale între ele şi de semne contrare, având aceeaşi mărime pecare o au tensiunile tangenţiale extreme care acţionează în plane f ăcând unghiuride 45° cu planele principale (figura 4.10)
• Starea liniar ă (monoaxial ă) de tensiune este un alt caz particular al stăriiplane, în care σy = τ xy =0. Invarianţii stării de tensiune sunt 1 x I = σ , ,
. Dacă σ2
0 I =
3 0 I = x > 0, rezultă
σ1 = σ x şi σ2 = σ3 = 0 . (4.150)

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 90/127
R EZISTENŢA MATERIALELOR 90
ασ x
σα
τα
pα
Fig. 4.11
Pe o suprafaţă înclinată cu unghiul α (v. fig. 4.11) faţă de secţiunea normală,din relaţiile (4.137), (4.138) rezultă:
– tensiunile normale1 cos 2
2 xα
+ ασ = σ ; max 0 xα=σ = σ = σ ; (4.151)
– tensiunile tangenţialesin 2
2
xα
στ = α ; max
42
xπ
α=
στ = τ = ; (4.152)
– tensiunile totale2 2 cos x pα α α= σ + τ = σ α . (4.153)
4.5.1.2 Starea plană de deformaţ ieStarea plană de deformaţ ie apare în zona centrală a corpurilor prismatice de
lungime mare încărcate prin for ţe perpendiculare pe axă şi distribuite uniform pelungimea acestora. Luând axa z în lungul corpului, rezultă w = 0 , u = u( x ) ,
v = v ( x ). Pe baza relaţiilor (4.67) şi (4.85), rezultă ,0 z yz zxε = γ = γ = 0 zx yzτ = τ = . (4.154)
Celelalte componente ale stării de deformaţie şi de tensiune sunt funcţii de coor-donatele x şi y .
Legea lui Hooke pentru starea plană de deformaţie capătă forma
( ) ; (
( ) ;
x ) x y z z x y
y x
y z x xy
E E
E E G
σ υε = − σ + σ σ = υ σ + σ
σ υε = − σ + σ γ = yτ
(4.155)
Se observă că o stare plană de deformaţie nu este şi stare plană de tensiu-
ne, deoarece σz ≠ 0. Dacă se elimină σz , se obţine2
2
1,
1
1, .
1
x x y
xy
y y x xy
E
E G
− υ υ⎛ ⎞ε = σ − σ⎜ ⎟− υ⎝ ⎠
τ− υ υ⎛ ⎞ε = σ − σ γ =⎜ ⎟− υ⎝ ⎠
(4.156)
Relaţiile (4.156) sunt similare cu (4.141) în care se fac înlocuirile
1 21
E E E → =
− υ, 1
1
υυ →
υ, 1
1
12(1 )
E G G= =
+ υ. (4.157)υ =
−
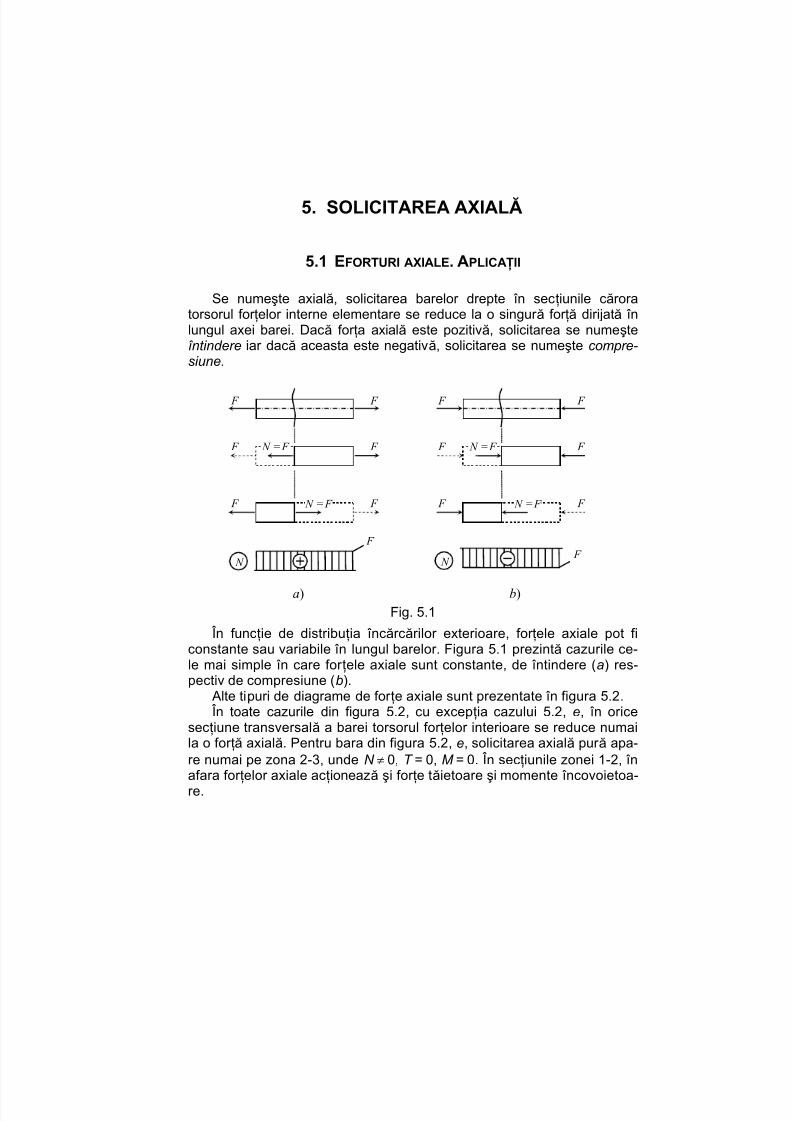
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 91/127
5. SOLICITAREA AXIALĂ
5.1 EFORTURI AXIALE. APLICAŢII
Se numeşte axială, solicitarea barelor drepte în secţiunile căroratorsorul for ţelor interne elementare se reduce la o singur ă for ţă dirijată în
lungul axei barei. Dacă for ţa axială este pozitivă, solicitarea se numeşteîntindere iar dacă aceasta este negativă, solicitarea se numeşte compre-siune.
a)
F
F
F
F F N = F
F F
b)
F
N F
F
F F
F F
N
N = F
N = F N = F
Fig. 5.1
În funcţie de distribuţia încărcărilor exterioare, for ţele axiale pot ficonstante sau variabile în lungul barelor. Figura 5.1 prezintă cazurile ce-
le mai simple în care for ţele axiale sunt constante, de întindere (a) res-pectiv de compresiune (b). Alte tipuri de diagrame de for ţe axiale sunt prezentate în figura 5.2. În toate cazurile din figura 5.2, cu excepţia cazului 5.2, e, în orice
secţiune transversală a barei torsorul for ţelor interioare se reduce numaila o for ţă axială. Pentru bara din figura 5.2, e, solicitarea axială pur ă apa-re numai pe zona 2-3, unde N 0, T = 0, M =≠ 0. În secţiunile zonei 1-2, înafara for ţelor axiale acţionează şi for ţe tăietoare şi momente încovoietoa-re.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 92/127
R EZISTENŢA MATERIALELOR 92
a) Bara solicitat ă de for ţ e exterioare
dirijate după axa barei
F
F 1 = F
N
F 2 = F F 3 = 3,5 F
1
2 F
1,5 F N 2
N 1 F /sin α
F / tan α
α
c) Bara prismatică în mi şcare
de rota ţ ie uniformă în jurul unei
axe care trece prin extremitatea sa
x
F F
F + g ρ Al
A, l , ρ
F 1 F 2a
T
M
F 2
aF 2
F 1
e)
2 3 41
2
N
N
1 2 3
b) Sistem de bare articulate la capete,
solicitate prin for ţ e nodale ( grind ă cu zăbrele)
d ) Bara prismatică vertical ă solicitat ă
de o for ţă F şi de greutatea proprie
N
x
ξ d ξ
dm = ρ Adξ
x = l ω = const.
N ( x) = 2l
x Ad ρ ξ ξω∫ =
2 22
2
l x A
−ρ ω
Fig. 5.2
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 93/127
Solicitarea axial ă 93
5.2 DIAGRAMA CARACTERISTICĂ A MATERIALELOR LA
ÎNTINDERE ŞI COMPRESIUNE. CARACTERISTICIŞI PROPRIETĂŢI
MECANICE ALE MATERIALELOR
Materialele obţinute prin procedee industriale prezintă întotdeaunanumeroase şi variate modificări structurale, neomogenităţi şi chiar mi-cro-fisuri, arbitrar distribuite în masa lor, ceea ce face ca proprietăţileacestora să poată fi apreciate numai statistic. Pentru scopuri practice,proprietăţile materialelor reale se determină experimental , de obicei peloturi de profile, table etc. Determinarea în laborator a proprietăţilor me-canice ale materialelor se face prin mai multe încerc ări mecanice. Celemai uzuale dintre acestea sunt încercările la tracţiune şi la compresiune,
care permit determinarea caracteristicilor mecanice de bază, întâlnite întoate calculele de rezistenţă.
Încerc ările la trac ţ iune se execută la maşini speciale de încercat,utilizând epruvete de formă standardizată. Pentru materiale metalice, încercarea la tracţiune la temperatura ambiantă este reglementată înprezent prin standardul românesc SR EN 10002-1, emis de IRS în 1994,identic cu Standardul European EN 10002-1:1990 [36]. Epruvetele celemai frecvent utilizate sunt cele de secţiune circular ă. Ele conţin o por ţiu-ne cilindrică de lucru, calibrată, de diametru d şi lungime Lo c şi capetelede prindere în bacurile maşinii de încercat, care se îmbină cu zona cali-brată prin două zone racordate ca în figura 5.3, a. Încărcarea epruveteise realizează prin intermediul for ţelor distribuite pe suprafaţa inelar ă dediametre
D, . În figurile 5.3d o , b şi c se mai prezintă două modalităţi de încărcare a epruvetei: prin intermediul unor îmbinări filetate prevăzute laextremităţile epruvetei, respectiv prin for ţe aplicate în lungul a două ge-neratoare, în cazurile în care capetele de prindere nu sunt prelucrate (înacest caz bacurile de prindere au suprafeţele de prindere striate); acestultim mod de prindere se foloseşte mai ales la epruvete plate, avândsecţiune dreptunghiular ă.
În zonele din apropierea capetelor de prindere, distribuţia tensiunilor într-o secţiune transversală este neomogenă şi neuniformă, aşa cum se
vede în figura 5.3, d , astfel încât( , , )
A y z dAσ∫ N = F = , (5.1)
unde A este aria secţiunii transversale a epruvetei. Punctele unei astfel desecţiuni au deplasări axiale diferite. Pe baza principiului lui Saint-Venant,pe măsura îndepărtării de zonele de prindere, punctele secţiunilor trans-versale au aceleaşi deplasări axiale, astfel încât se consider ă valabilă aşa-numita ipotez ă a sec ţ iunilor plane sau
IPOTEZA LUI BERNOULLI: o sec ţ iune plană şi normal ă pe axa barei înainte de deformare r ămâne plană şi normal ă pe axa barei deforma-te.
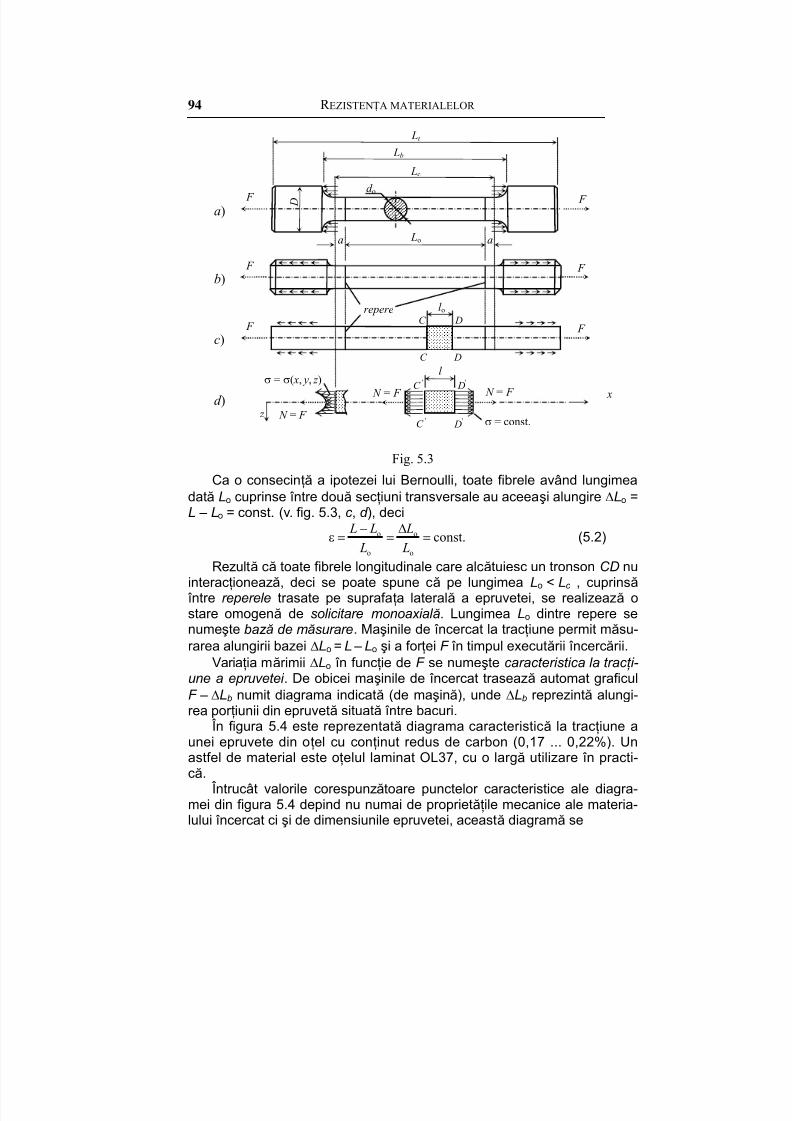
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 94/127
R EZISTENŢA MATERIALELOR 94
a)
b)
d )
F
F
c) F
F
F
F
Lo a
Lc
d o
l oC D
C D
l
C ' D'
C ' D' σ = const. N = F
σ = σ( x, y, z)
N = F
D
repere
Lb
Lt
a
x N = F
z
Fig. 5.3
Ca o consecinţă a ipotezei lui Bernoulli, toate fibrele având lungimea
dată L cuprinse între două secţiuni transversale au aceeaşi alungire ΔLo o =L – L = const. (v. fig. 5.3, c , d ), decio
o o
o o
const. L L L
L L
− Δε = = = (5.2)
Rezultă că toate fibrele longitudinale care alcătuiesc un tronson CD nuinteracţionează, deci se poate spune că pe lungimea L < Lo c , cuprinsă între reperele trasate pe suprafaţa laterală a epruvetei, se realizează ostare omogenă de solicitare monoaxial ă. Lungimea Lo dintre repere senumeşte baz ă de măsurare. Maşinile de încercat la tracţiune permit măsu-rarea alungirii bazei ΔL
o = L
–
şi a for ţei F în timpul executării încercării.Lo
Variaţia mărimii ΔLo în funcţie de F se numeşte caracteristica la trac ţ i-une a epruvetei . De obicei maşinile de încercat trasează automat graficulF – ΔL numit diagrama indicată (de maşină), unde ΔLb b reprezintă alungi-rea por ţiunii din epruvetă situată între bacuri.
În figura 5.4 este reprezentată diagrama caracteristică la tracţiune aunei epruvete din oţel cu conţinut redus de carbon (0,17 ... 0,22%). Unastfel de material este oţelul laminat OL37, cu o largă utilizare în practi-că.
Întrucât valorile corespunzătoare punctelor caracteristice ale diagra-mei din figura 5.4 depind nu numai de proprietăţile mecanice ale materia-lului încercat ci şi de dimensiunile epruvetei, această diagramă se

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 95/127
Solicitarea axial ă 95
F [daN ]
F p
F e
F c
F c′
H o'
Δ L
C
M
R
H
Δ Lo [mm]O
P
E
F max
H '
Fig. 5.4
σ
P
C
M
σ p
σe
σc
σr
σc'
O
R*
ε
σr *
Diagrama real ă
Diagrama
conven ţ ional ă
α
ε p εe
εr
H
H o'
H ' R
E
Fig. 5.5
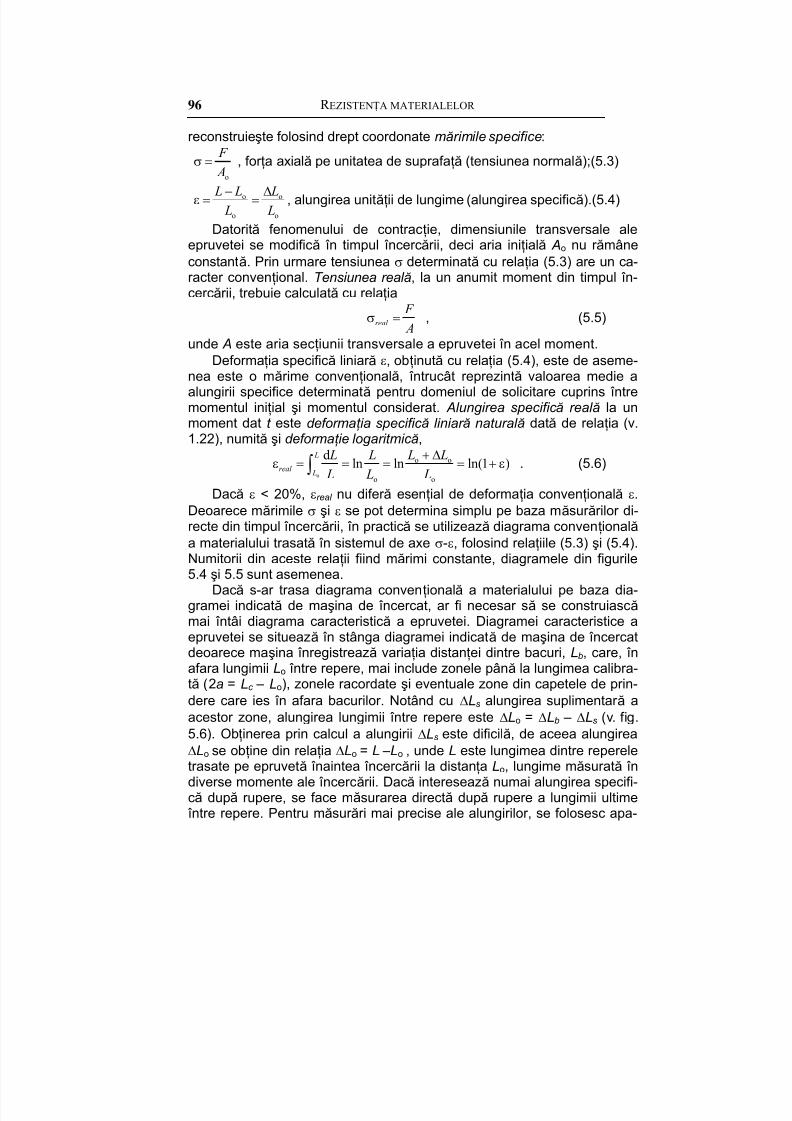
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 96/127
R EZISTENŢA MATERIALELOR 96
reconstruieşte folosind drept coordonate mărimile specifice:
o
F
Aσ = , for ţa axială pe unitatea de suprafaţă (tensiunea normală);(5.3)
o
o o
L L L
L L
− Δε = = o , alungirea unităţii de lungime (alungirea specifică).(5.4)
Datorită fenomenului de contracţie, dimensiunile transversale aleepruvetei se modifică în timpul încercării, deci aria iniţială Ao nu r ămâneconstantă. Prin urmare tensiunea σ determinată cu relaţia (5.3) are un ca-racter convenţional. Tensiunea real ă, la un anumit moment din timpul în-cercării, trebuie calculată cu relaţia
real
F
Aσ = , (5.5)
unde A este aria secţiunii transversale a epruvetei în acel moment.Deformaţia specifică liniar ă ε, obţinută cu relaţia (5.4), este de aseme-
nea este o mărime convenţională, întrucât reprezintă valoarea medie aalungirii specifice determinată pentru domeniul de solicitare cuprins întremomentul iniţial şi momentul considerat. Alungirea specific ă real ă la unmoment dat t este deformaţ ia specific ă liniar ă natural ă dată de relaţia (v.1.22), numită şi deformaţ ie logaritmic ă,
o
o o
o o
dln ln ln(1 )
L
real L
L L L L
L L L
+ Δε = = = = + ε∫ . (5.6)
Dacă ε < 20%, εreal nu difer ă esenţial de deformaţia convenţională ε.Deoarece mărimile σ şi ε se pot determina simplu pe baza măsur ărilor di-recte din timpul încercării, în practică se utilizează diagrama convenţională a materialului trasată în sistemul de axe σ-ε, folosind relaţiile (5.3) şi (5.4).Numitorii din aceste relaţii fiind mărimi constante, diagramele din figurile5.4 şi 5.5 sunt asemenea.
Dacă s-ar trasa diagrama convenţională a materialului pe baza dia-gramei indicată de maşina de încercat, ar fi necesar să se construiască mai întâi diagrama caracteristică a epruvetei. Diagramei caracteristice aepruvetei se situează în stânga diagramei indicată de maşina de încercatdeoarece maşina înregistrează variaţia distanţei dintre bacuri, Lb, care, în
afara lungimii Lo între repere, mai include zonele până la lungimea calibra-tă (2a = L – Loc ), zonele racordate şi eventuale zone din capetele de prin-dere care ies în afara bacurilor. Notând cu ΔLs alungirea suplimentar ă aacestor zone, alungirea lungimii între repere este ΔL = ΔL – ΔL (v. fig.o b s
5.6). Obţinerea prin calcul a alungirii ΔLs este dificilă, de aceea alungireaΔL
o se obţine din relaţia ΔLo = L
–Lo , unde L este lungimea dintre repereletrasate pe epruvetă înaintea încercării la distanţa Lo, lungime măsurată îndiverse momente ale încercării. Dacă interesează numai alungirea specifi-că după rupere, se face măsurarea directă după rupere a lungimii ultime între repere. Pentru măsur ări mai precise ale alungirilor, se folosesc apa-
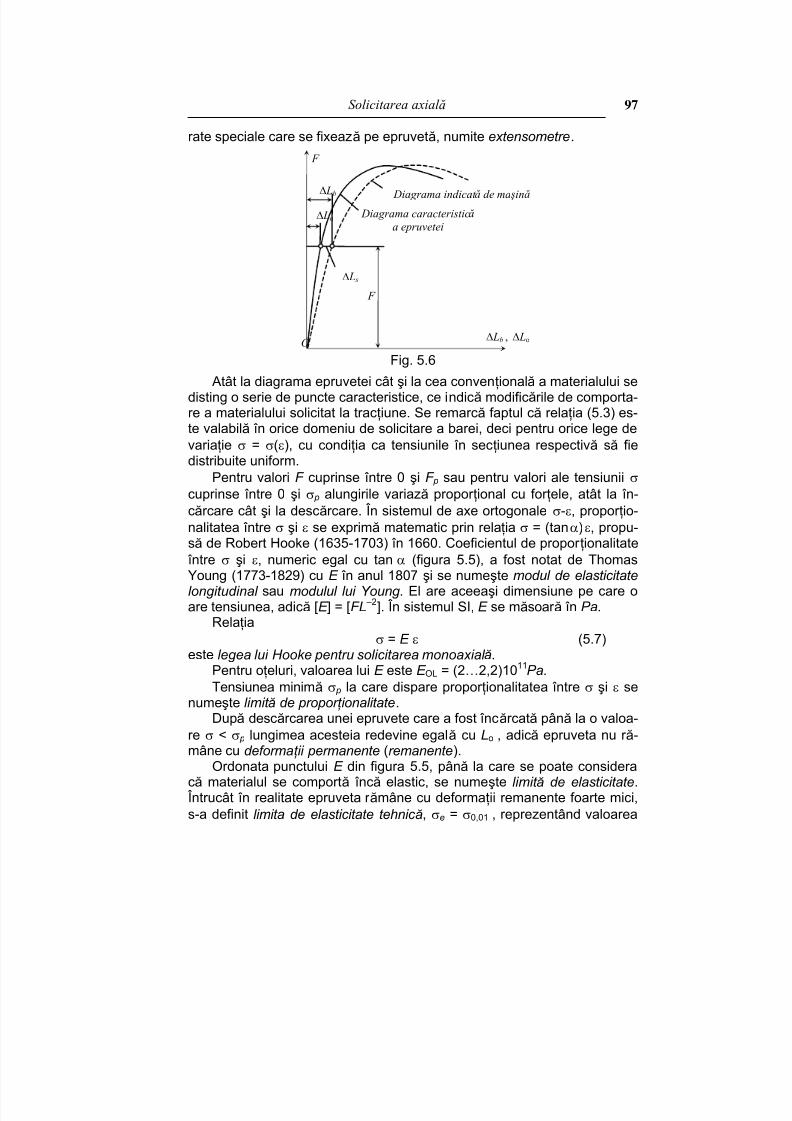
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 97/127
Solicitarea axial ă 97
rate speciale care se fixează pe epruvetă, numite extensometre.
O
Diagrama indicat ă de ma şină
Diagrama caracteristică
a epruvetei
F
F
Δ L
o
Δ Lb
Δ L s
Δ Lb , Δ Lo
Fig. 5.6
Atât la diagrama epruvetei cât şi la cea convenţională a materialului sedisting o serie de puncte caracteristice, ce indică modificările de comporta-re a materialului solicitat la tracţiune. Se remarcă faptul că relaţia (5.3) es-te valabilă în orice domeniu de solicitare a barei, deci pentru orice lege devariaţie σ = σ(ε), cu condiţia ca tensiunile în secţiunea respectivă să fiedistribuite uniform.
Pentru valori F cuprinse între 0 şi F p sau pentru valori ale tensiunii σ cuprinse între 0 şi σ p alungirile variază propor ţional cu for ţele, atât la în-cărcare cât şi la descărcare. În sistemul de axe ortogonale σ-ε, propor ţio-nalitatea între σ şi ε se exprimă matematic prin relaţia σ = (tanα) ε, propu-să de Robert Hooke (1635-1703) în 1660. Coeficientul de propor ţionalitate între σ şi ε, numeric egal cu tan α (figura 5.5), a fost notat de ThomasYoung (1773-1829) cu E în anul 1807 şi se numeşte modul de elasticitatelongitudinal sau modulul lui Young . El are aceeaşi dimensiune pe care oare tensiunea, adică [E ] = [FL
–2]. În sistemul SI, E se măsoar ă în Pa.Relaţia
σ = E ε (5.7)este legea lui Hooke pentru solicitarea monoaxial ă.
Pentru oţeluri, valoarea lui E este E = (2…2,2)1011
Pa. OL Tensiunea minimă σ p la care dispare propor ţionalitatea între σ şi ε senumeşte limit ă de propor ţ ionalitate.
După descărcarea unei epruvete care a fost încărcată până la o valoa-re σ < σ lungimea acesteia redevine egală cu Lo p , adică epruveta nu r ă-mâne cu deformaţ ii permanente (remanente).
Ordonata punctului E din figura 5.5, până la care se poate consideracă materialul se comportă încă elastic, se numeşte limit ă de elasticitate. Întrucât în realitate epruveta r ămâne cu deformaţii remanente foarte mici,s-a definit limita de elasticitate tehnic ă, σ = σ , reprezentând valoarea0,01e
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 98/127
R EZISTENŢA MATERIALELOR 98
tensiunii căreia îi corespunde deformaţia specifică remanentă de 0,01%.Se numeşte elasticitate proprietatea materialelor de a se deforma sub
sarcini şi a reveni la dimensiunile iniţiale când sarcinile dispar .Pentru F > F e , panta diagramei caracteristice începe să scadă foarte
mult, iar pentru F = F (v. fig. 5.4c ) diagrama caracteristică devine practicorizontală. Aceasta înseamnă că ΔL creşte în timp ce F r ămâne constantă. În această zonă se zice că materialul curge (prin asemănare cu fluidele),zona C -H numindu-se palier de curgere. Tensiunea convenţională
o
cc
F
Aσ = . (5.8)
se numeşte limit ă de curgere aparent ă. Ea are mare importanţă practică.Pentru materiale obişnuite, utilizate în construcţii de maşini, civile şi indus-
triale, σ şi σ difer ă puţin între ele şi chiar faţă de σ p e c . De aceea, se poateadmite σ , iar în unele calcule (dacă nu există date pentru σ şi σ≈ σ p e p e) sepoate lua chiar σ ≈ σ ≈ σ , având în vedere că σ şi σ p e c p e se obţin mai dificildecât σ . Pentru oţelul OL37, de exemplu, σ ≈ σ ≈ 200 MPa iar σc c p e =200...230 MPa.
În zona H -M care urmează după palierul de curgere, creşterea alungi-rii epruvetei are loc numai dacă for ţa F creşte, de aceea această zonă senumeşte zonă de înt ărire. Pentru a scoate în evidenţă punctele caracteris-tice ale diagramei, în figurile 5.4 şi 5.5 nu au fost respectate propor ţiile. Înrealitate, în zona de întărire, panta diagramei este de zeci sau chiar sutede ori mai mică decât în zona iniţială
OP ,zonă care, dacă ar fi reprezenta-tă la scar ă, ar coincide practic cu axa verticală.
Deformaţia epruvetei solicitată până în zona de întărire este formată dintr-o componentă elastică şi una plastică. Pentru a pune în evidenţă de-formaţia elastică se descarcă epruveta, complet. Experimental se constată că relaţia dintre tensiuni şi deformaţii, la descărcare, este dată tot de rela-ţia (5.7), adică diagrama caracteristică la descărcare este dreapta H
' 'H o şi
nu curba H 'HCEPO înregistrată la încărcare. Acest fenomen a fost obser-
vat pentru prima dată în 1831 de František Gerstner (1756-1832). Din mo-tivele ar ătate mai sus, ε nu este comparabil ca mărime cu εe p – aşa cumaparent rezultă din figura 5.5; în realitate ε << ε .e p
'
Reîncărcând o epruvetă ce a fost descărcată până în H o , relaţia σ-ε sereprezintă grafic prin dreapta H '
o H ' ' ', dacă σ ≤ σ . Pentru σ > σc c diagrama
urmează traseul H 'IJ , pe care l-ar fi parcurs epruveta dacă nu ar fi fost
descărcată. Pentru epruveta descărcată în punctul H ' (situat în zona de întărire) şi apoi reîncărcată, ordonata σ '
c reprezintă noua limită de propor-ţionalitate, de elasticitate şi de curgere.
Procedeul tehnic prin care se obţine creşterea limitei de curgere a unuimaterial prin deformări plastice la rece se numeşte ecruisaj . Ecruisajul es-te un fenomen complex care se poate explica prin deformarea gr ăunţilor cristalini în direcţia solicitării; în cristale apar tensiuni interne iar materialuldevine fragil, aspect deseori nedorit, care poate fi ameliorat printr-un tra-
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 99/127
Solicitarea axial ă 99
tament termic adecvat, de recoacere.Dacă se încearcă la compresiune un material ecruisat la tracţiune, se
constată că limita de curgere are valori mai mici decât cea a materialuluineecruisat. Fenomenul este cunoscut sub numele de efect Bauschinger . Având în vedere acest efect, fenomenul de ecruisaj devine util în proiecta-rea organelor de maşini şi elementelor de construcţii la care în timpul func-ţionării tensiunile în anumite zone nu-şi schimbă semnul.
Prin ecruisare se poate realiza şi o mărire a rezistenţei la tracţiune. Astfel, când gradul de reducere a secţiunii este de 85…90% se poate ob-ţine o dublare a rezistenţei la tracţiune. Se impune însă ca reducerea desecţiune să fie uniformă şi nu locală ca în zona gâtuirii. Acest procedeueste folosit în industrie la laminarea tablelor la rece şi la trefilarea sârme-lor.
Prin măsur ări deosebit de precise s-a constatat că linia H ' 'H o se abatede rectiliniaritate, spre dreapta la descărcare şi spre stânga la încărcare,formând o bucl ă de histerezis (figura 5.5), ce joacă un rol important în ca-zul solicitărilor variabile (repetate de un număr mare de ori).
În punctul M al diagramei din figura 5.5 se constată că într-o anumită zonă de pe lungimea epruvetei deformaţiile plastice cresc mult mai repedeşi sunt mult mai pronunţate în comparaţie cu cele care apar în restul epru-vetei. În această zonă se produce o îngustare locală a epruvetei, numită gâtuitur ă. Zona în care apare gâtuitura depinde de particularităţile indivi-duale ale epruvetei (distribuţia defectelor interioare şi superficiale). Înce-
pând cu punctul M , for ţa F se micşorează iar îngustarea epruvetei în zonagâtuită progresează. Starea de tensiune în zona gâtuită nu mai este niciuniformă nici omogenă. Între punctele M şi R creşterea deformaţiilor plas-tice ale epruvetei se produce numai în zona gâtuită care se mai numeştedin acest motiv zona de curgere local ă. În acest interval al încercării, ten-siunea convenţională, definită de relaţia (5.3) scade, însă tensiunea reală medie în gâtuitur ă creşte până la ruperea epruvetei (care se produce înpunctul R
* ) iar diferenţa dintre diagrama convenţională şi diagrama reală este sensibilă, atât din cauza diferenţelor apreciabile între ariile A şi Ao câtşi datorită caracterului spaţial al stării de tensiune din zona gâtuită.
Mărimea convenţională obţinută cu relaţiamax
o
r F A
σ = (5.9)
se numeşte rezistenţ a la trac ţ iune (notată R m în standardul SR EN 10002-1). Ea reprezintă ordonata punctului M din diagrama convenţională.
Alungirea specific ă după rupere se calculează folosind relaţiao
o
ur
L L
L
−ε = , (5.10)
unde Lu este lungimea ultimă, obţinută prin măsurarea lungimii între repe-re, aşezând cap la cap bucăţile obţinute după ruperea epruvetei.
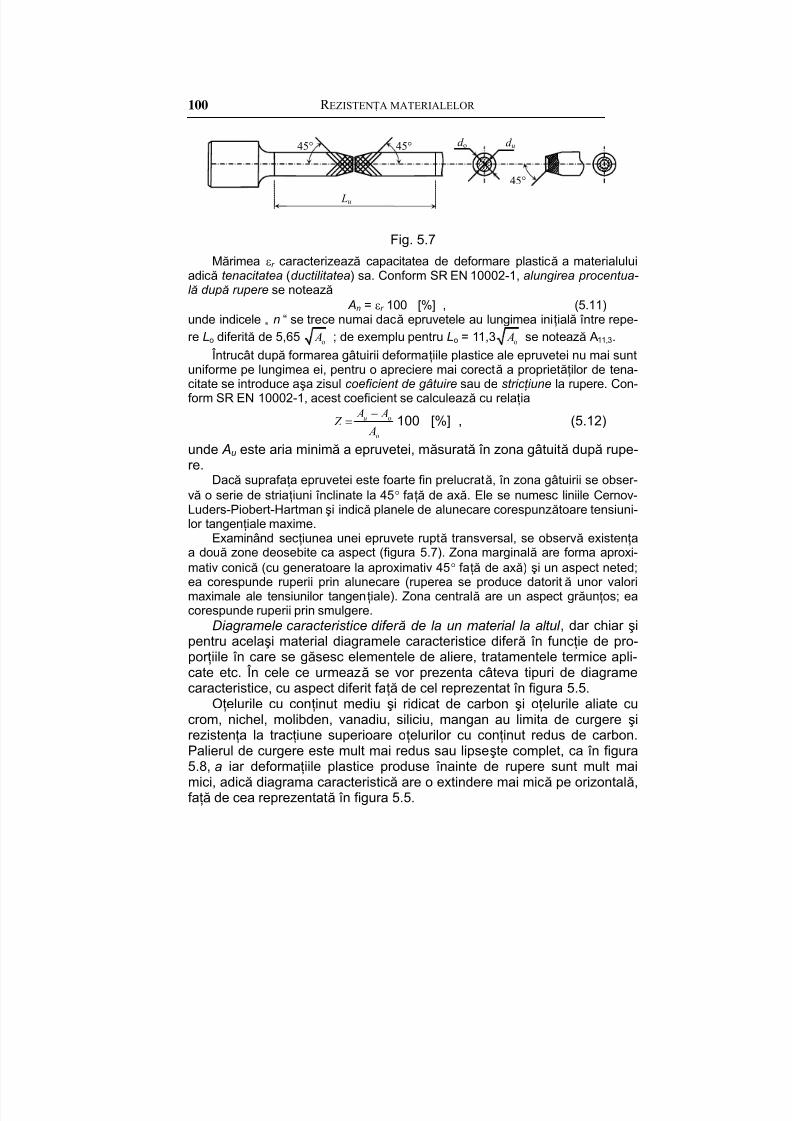
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 100/127
R EZISTENŢA MATERIALELOR 100
Lu
d o45° d u45°
45°
Fig. 5.7
Mărimea ε caracterizează capacitatea de deformare plasticăr a materialuluiadică tenacitatea (ductilitatea) sa. Conform SR EN 10002-1, alungirea procentua-l ă după rupere se notează
An = ε 100 [%] , (5.11)r
unde indicele „ n “ se trece numai dacă epruvetele au lungimea iniţială între repe-
re L o A o Ao diferită de 5,65 ; de exemplu pentru Lo = 11,3 se notează A .11,3
Întrucât după formarea gâtuirii deformaţiile plastice ale epruvetei nu mai suntuniforme pe lungimea ei, pentru o apreciere mai corectă a proprietăţilor de tena-citate se introduce aşa zisul coeficient de gâtuire sau de stric ţ iune la rupere. Con-form SR EN 10002-1, acest coeficient se calculează cu relaţia
o
o
u A A Z
A
−= 100 [%] , (5.12)
unde Au este aria minimă a epruvetei, măsurată în zona gâtuită după rupe-re.
Dacă suprafaţa epruvetei este foarte fin prelucrată, în zona gâtuirii se obser-vă o serie de striaţiuni înclinate la 45° faţă de axă. Ele se numesc liniile Cernov-Luders-Piobert-Hartman şi indică planele de alunecare corespunzătoare tensiuni-lor tangenţiale maxime.
Examinând secţiunea unei epruvete ruptă transversal, se observă existenţaa două zone deosebite ca aspect (figura 5.7). Zona marginală are forma aproxi-mativ conică (cu generatoare la aproximativ 45° faţă de axă) şi un aspect neted;ea corespunde ruperii prin alunecare (ruperea se produce datorită unor valorimaximale ale tensiunilor tangenţiale). Zona centrală are un aspect gr ăunţos; eacorespunde ruperii prin smulgere.
Diagramele caracteristice difer ă de la un material la altul , dar chiar şipentru acelaşi material diagramele caracteristice difer ă în funcţie de pro-por ţiile în care se găsesc elementele de aliere, tratamentele termice apli-
cate etc. În cele ce urmează se vor prezenta câteva tipuri de diagramecaracteristice, cu aspect diferit faţă de cel reprezentat în figura 5.5.
Oţelurile cu conţinut mediu şi ridicat de carbon şi oţelurile aliate cucrom, nichel, molibden, vanadiu, siliciu, mangan au limita de curgere şirezistenţa la tracţiune superioare oţelurilor cu conţinut redus de carbon.Palierul de curgere este mult mai redus sau lipseşte complet, ca în figura5.8, a iar deformaţiile plastice produse înainte de rupere sunt mult maimici, adică diagrama caracteristică are o extindere mai mică pe orizontală,faţă de cea reprezentată în figura 5.5.
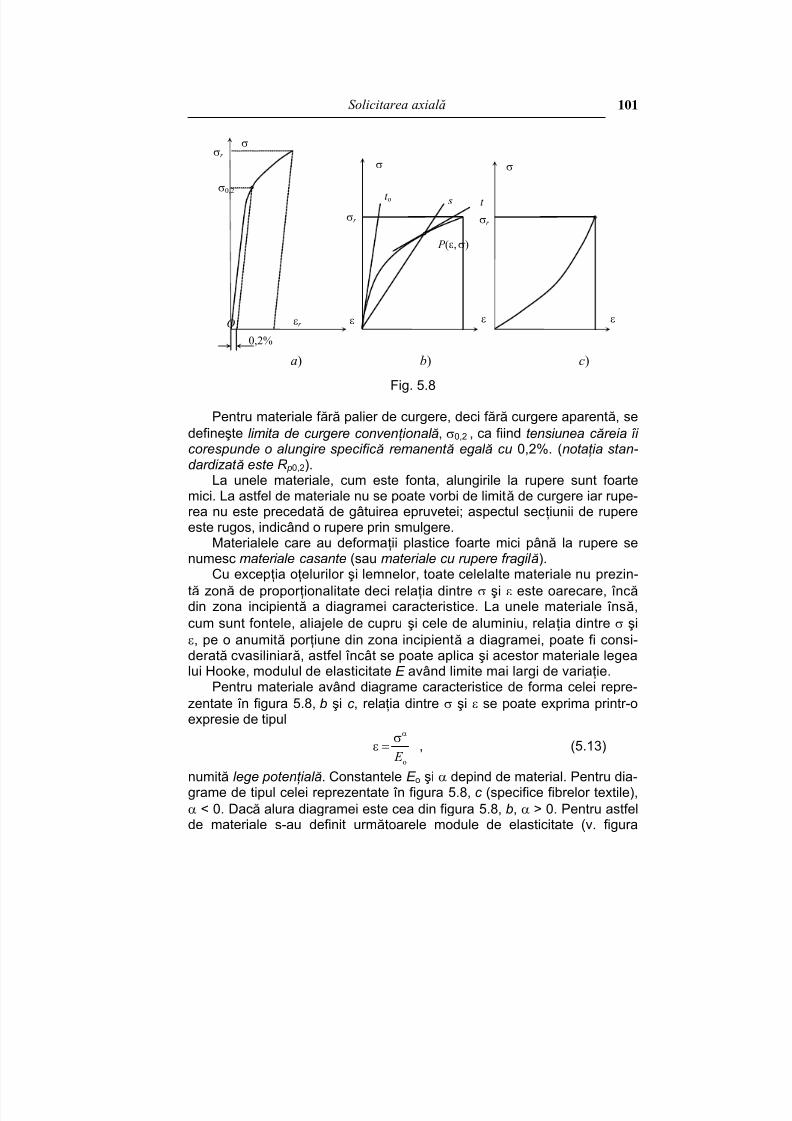
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 101/127
Solicitarea axial ă 101
0,2%
O εεr
σ
σ0,
2
ε
σ
σr
P (ε, σ)
t
ε
σ
a) b) c)
st o
σr
σr
Fig. 5.8
Pentru materiale f ăr ă palier de curgere, deci f ăr ă curgere aparentă, sedefineşte limita de curgere convenţ ional ă, σ0,2 , ca fiind tensiunea c ăreia îi corespunde o alungire specific ă remanent ă egal ă cu 0,2%. (notaţ ia stan-dardizat ă este R ). p0,2
La unele materiale, cum este fonta, alungirile la rupere sunt foartemici. La astfel de materiale nu se poate vorbi de limit
ăde curgere iar rupe-
rea nu este precedată de gâtuirea epruvetei; aspectul secţiunii de rupereeste rugos, indicând o rupere prin smulgere.
Materialele care au deformaţii plastice foarte mici până la rupere senumesc materiale casante (sau materiale cu rupere fragil ă).
Cu excepţia oţelurilor şi lemnelor, toate celelalte materiale nu prezin-tă zonă de propor ţionalitate deci relaţia dintre σ şi ε este oarecare, încă din zona incipientă a diagramei caracteristice. La unele materiale însă,cum sunt fontele, aliajele de cupru şi cele de aluminiu, relaţia dintre σ şiε, pe o anumită por ţiune din zona incipientă a diagramei, poate fi consi-derată cvasiliniar ă, astfel încât se poate aplica şi acestor materiale legea
lui Hooke, modulul de elasticitate E având limite mai largi de variaţie.Pentru materiale având diagrame caracteristice de forma celei repre-zentate în figura 5.8, b şi c , relaţia dintre σ şi ε se poate exprima printr-oexpresie de tipul
o E
ασε = , (5.13)
numită lege potenţ ial ă. Constantele E o şi α depind de material. Pentru dia-grame de tipul celei reprezentate în figura 5.8, c (specifice fibrelor textile),α < 0. Dacă alura diagramei este cea din figura 5.8, b, α > 0. Pentru astfelde materiale s-au definit următoarele module de elasticitate (v. figura
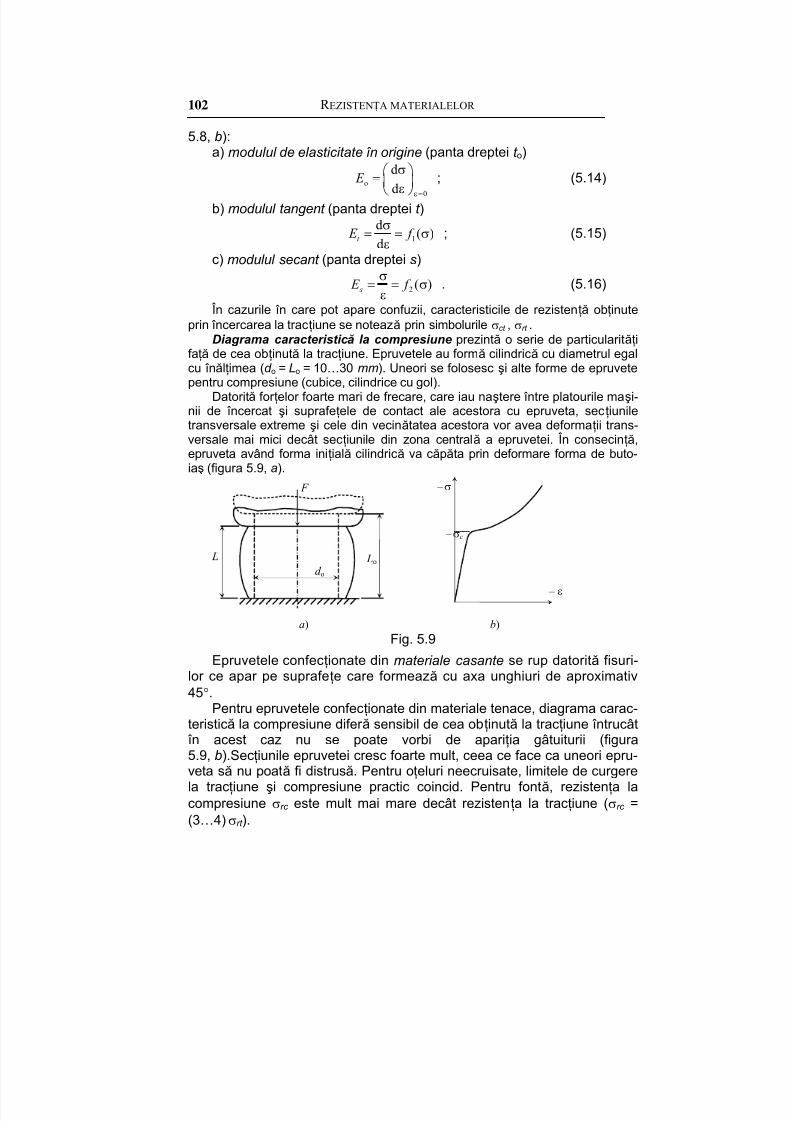
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 102/127
R EZISTENŢA MATERIALELOR 102
5.8, b):a) modulul de elasticitate în origine (panta dreptei t )o
o
0
d
d E
ε=
σ⎛ ⎞= ⎜ ⎟ε⎝ ⎠; (5.14)
b) modulul tangent (panta dreptei t )
1
d( )
dt E f
σ= = σ
ε; (5.15)
c) modulul secant (panta dreptei s)
2 ( ) s E f σ
= = σε
. (5.16)
În cazurile în care pot apare confuzii, caracteristicile de rezistenţă obţinuteprin încercarea la tracţiune se notează prin simbolurile σct , σ .rt
Diagrama caracteristic ă la compresiune prezintă o serie de particularităţifaţă de cea obţinută la tracţiune. Epruvetele au formă cilindrică cu diametrul egalcu înălţimea (d = =Lo o 10…30 mm). Uneori se folosesc şi alte forme de epruvetepentru compresiune (cubice, cilindrice cu gol).
Datorită for ţelor foarte mari de frecare, care iau naştere între platourile maşi-nii de încercat şi suprafeţele de contact ale acestora cu epruveta, secţiuniletransversale extreme şi cele din vecinătatea acestora vor avea deformaţii trans-versale mai mici decât secţiunile din zona centrală a epruvetei. În consecinţă,epruveta având forma iniţială cilindrică va căpăta prin deformare forma de buto-iaş (figura 5.9, a).
– ε
d o
F
a)
Lo L
b)
– σc
– σ
Fig. 5.9
Epruvetele confecţionate din materiale casante se rup datorită fisuri-
lor ce apar pe suprafeţe care formează cu axa unghiuri de aproximativ45°.
Pentru epruvetele confecţionate din materiale tenace, diagrama carac-teristică la compresiune difer ă sensibil de cea obţinută la tracţiune întrucât în acest caz nu se poate vorbi de apariţia gâtuiturii (figura5.9, b).Secţiunile epruvetei cresc foarte mult, ceea ce face ca uneori epru-veta să nu poată fi distrusă. Pentru oţeluri neecruisate, limitele de curgerela tracţiune şi compresiune practic coincid. Pentru fontă, rezistenţa lacompresiune σ este mult mai mare decât rezistenţa la tracţiune (σrc rc =(3…4) σ ).rt
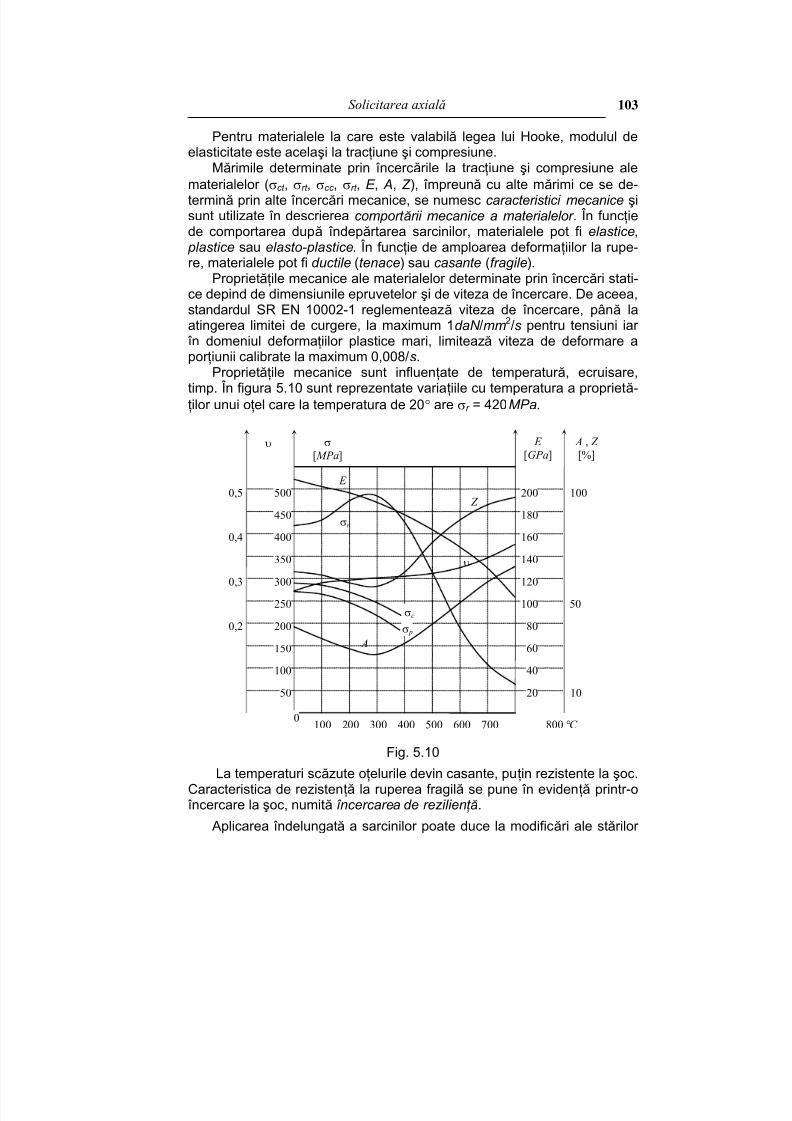
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 103/127
Solicitarea axial ă 103
Pentru materialele la care este valabilă legea lui Hooke, modulul deelasticitate este acelaşi la tracţiune şi compresiune.
Mărimile determinate prin încercările la tracţiune şi compresiune alematerialelor (σct , σ , σrt cc , σrt , E , A, Z ), împreună cu alte mărimi ce se de-termină prin alte încercări mecanice, se numesc caracteristici mecanice şisunt utilizate în descrierea comport ării mecanice a materialelor . În funcţiede comportarea după îndepărtarea sarcinilor, materialele pot fi elastice,
plastice sau elasto-plastice. În funcţie de amploarea deformaţiilor la rupe-re, materialele pot fi ductile (tenace) sau casante (fragile).
Proprietăţile mecanice ale materialelor determinate prin încercări stati-ce depind de dimensiunile epruvetelor şi de viteza de încercare. De aceea,standardul SR EN 10002-1 reglementează viteza de încercare, până laatingerea limitei de curgere, la maximum 1daN /mm
2/s pentru tensiuni iar în domeniul deformaţiilor plastice mari, limitează viteza de deformare apor ţiunii calibrate la maximum 0,008/s.
Proprietăţile mecanice sunt influenţate de temperatur ă, ecruisare,timp. În figura 5.10 sunt reprezentate variaţiile cu temperatura a proprietă-ţilor unui oţel care la temperatura de 20° are σr = 420 MPa.
σ
[ MPa]
100 200 300 400 500 600 700 800 °C
σ p
Z
σc
A , Z
[%]
20
60
100
140
180
40
80
120
160
200 100
50
10
0,5
0,4
0,2
0,3
50
150
250
350
450
100
200
300
400
500
υ
0
E
[GPa]
σr
υ
E
A
Fig. 5.10
La temperaturi scăzute oţelurile devin casante, puţin rezistente la şoc.Caracteristica de rezistenţă la ruperea fragilă se pune în evidenţă printr-o încercare la şoc, numită încercarea de rezilienţă.
Aplicarea îndelungată a sarcinilor poate duce la modificări ale stărilor
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 104/127
R EZISTENŢA MATERIALELOR 104
de tensiune şi deformaţie ale pieselor, mai ales în condiţii de temperaturimai mari decât cele normale. Fenomenele în care în relaţia dintre σ şi ε
intervine ca variabilă timpul şi eventual temperatura, adică σ = σ(ε, t , T )sau ε = ε (σ, t , T ), se numesc reologice. Se constată că dacă σ = const.,deformaţiile specifice la o temperatur ă dată cresc în timp; fenomenul senumeşte fluaj şi este descris de relaţii de forma ε ε= (t ) T , σ = const. Dacă ε =const., tensiunile la o temperatur ă dată descresc în timp; fenomenul senumeşte relaxare şi este descris de relaţii având forma ε = ε (t ) T , σ = const.
5.3 TENSIUNI ADMISIBILE. COEFICIENŢI DE SIGURANŢĂ. METODE DE
CALCUL Oricărui organ de maşină sau element de construcţie trebuie să îi fie
asigurată rezistenţa (tensiunile să nu depăşească anumite valori) şi rigidi-tatea (deformaţiile să nu depăşească anumite valori iar forma să fie stabi-lă). În general este deci nevoie să se stabilească criterii de rezistenţă şicriterii de rigiditate.
Pentru un corp solicitat monoaxial, notând cu σmax tensiunea maximă care apare în acel corp, condiţia de rezistenţă se scrie sub forma
σmax < σlim , (5.17)unde σlim poate fi, după caz, limita de curgere convenţională σ0,2 sau limitade curgere aparentă (pentru materiale ductile), rezistenţa la tracţiune σr (pentru materiale casante), limita de elasticitate (în cazurile în care defor-maţiile corpului trebuie să fie foarte mici şi să aibă caracter elastic), rezis-
tenţa la oboseală (în cazul în care solicitările sunt variabile în timp). Secţi-unea în care tensiunea σ are cea mai mare valoare se numeşte sec ţ iune
periculoasă. În stabilirea mărimilor care intervin în relaţia (5.17) există incertitudini
în evaluarea sarcinilor, în stabilirea relaţiilor de calcul (obţinute de regulă prin acceptarea unor ipoteze simplificatoare), în stabilirea proprietăţilor mecanice ale materialelor (datorită neomogenităţilor, imperfecţiunilor teh-nicilor de măsurare, fenomenelor de uzur ă, coroziune etc.). Din acestemotive, relaţia max lim / cσ ≤ σ(5.17) se va scrie sub forma , unde c se nu-
meşte coeficient de siguranţă. El este întotdeauna supraunitar, c > 1.
Raportullim
ac
σσ = (5.18)
se numeşte tensiune (sau rezistenţă) admisibil ă. Pentru materiale ductilesolicitate static, tensiunea admisibil ă are expresia
ca
c
σσ = , (5.19)
iar pentru materiale casante,
r a
c
σσ = . (5.20)
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 105/127
Solicitarea axial ă 105
• Metoda de calcul bazată pe condiţiamax aσ ≤ σ (5.21)
se numeşte metoda rezistenţ elor admisibile. Dezavantajul acestei metodeconstă în aceea că admite drept stare limită de rezistenţă atingerea valoriiadmisibile într-un singur punct sau într-o zonă redusă a piesei.
• O altă metodă utilizată în Rezistenţa Materialelor este metoda capa-cit ăţ ii portante sau metoda st ării limit ă (limit design). Principial, în această metodă se determină încărcarea limită care produce distrugerea construc-ţiei prin ruperea unora dintre elementele sale sau prin producerea de de-formaţii inadmisibile. Aplicând încărcării limită un coeficient de siguranţă,se află sarcina capabilă a construcţiei, adică
limmax
F F
c
≤ . (5.22)
≥ În construcţii de maşini, metoda constă în verificarea inegalităţii c ef
, unde c c a ef este coeficientului efectiv de siguranţă al piesei proiectate iar c este valoarea impusă acestuia.a
În alegerea coeficienţilor de siguranţă şi a tensiunilor admisibile tre-buie să se ţină seama de o serie de factori: natura materialului, trata-mente termice aplicate, durata de folosire a piesei, modul de evaluare asarcinilor, modul de realizare a ipotezelor de calcul, temperatur ă, regimulde funcţionare, importanţa piesei, costul ei, etc. De asemenea, o atenţiedeosebită trebuie acordată modului de acţiune al sarcinilor în timp.
În toate calculele de rezistenţă ale unei piese sau element de con-
strucţie intervin trei grupe principale de mărimi: sarcini , propriet ăţ i mecani-ce ale materialului şi dimensiuni .
Operaţia de determinare a dimensiunilor unei piese (de obicei dimen-siuni ale secţiunilor transversale) atunci când se cunosc sarcinile, materia-lul şi celelalte condiţii de lucru se numeşte DIMENSIONARE.
Dacă sunt cunoscute dimensiunile, calitatea materialului şi celelaltecondiţii de lucru (exprimate prin tensiunea admisibilă), satisfacerea relaţiei(5.21) se numeşte VERIFICARE.
Există situaţii în care se cunosc dimensiunile, calitatea materialului dincare este confecţionată piesa şi condiţii de lucru şi se cere să se determi-
ne încărcările maxime care-i pot fi aplicate. O astfel de problemă se nu-meşte DETERMINAREA ÎNC ĂRC ĂRILOR CAPABILE (eforturilor capabile) ce pot fipreluate de piesă.
5.4 RELAŢII DE CALCUL PENTRU BARELE SOLICITATE AXIAL. APLICAŢII
Întocmai ca la epruveta la tracţiune, dacă se exceptează zonele în ca-re se aplică încărcările exterioare, barele solicitate axial respectă ipotezalui Bernoulli, deci tensiunile normale σ sunt uniform distribuite pe o secţiu-

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 106/127
R EZISTENŢA MATERIALELOR 106
ne oarecare de arie A( x ) şi se calculează cu relaţia( )
( ) ( )
N x
x A xσ = , (5.23)unde N ( x ) este for ţa axială din secţiunea respectivă.
Relaţia (5.23) este valabilă pentru orice lege de material σ-ε. Dacă tensiunile nu depăşesc valoarea σ p, relaţia σ-ε este dată de legea luiHooke pentru solicitarea monoaxială, (5.7).
Se numeşte prismatic ă bara având aceeaşi formă şi aceleaşi dimensi-uni în toate secţiunile transversale, A( x ) = A = const. Pentru bara prismati-că la care for ţa axială N r ămâne constantă pe toată lungimea L, starea dedeformaţii este omogenă, tensiunile şi deformaţiile specifice se calculează cu relaţiile (5.3) respectiv (5.4).
Pentru alungirea barei se obţine relaţia NL L L L
E EA
σΔ = ε = = . (5.24)
Dacă bara nu este prismatică şi/sau for ţa axială variază în lungul ba-rei, atunci relaţia (5.24) este valabilă numai pe o lungime infinit mică a ei,deci
0
( )
( )
L N x dx
L EA x
Δ = ∫ . (5.25)
Mărimea
, ;
EA N daN
k L m cm
⎡ ⎤
= ⎢ ⎥⎣ ⎦ (5.26)se numeşte rigiditate la for ţ a axial ă şi este numeric egală cu for ţa axială care produce o alungire unitar ă,
1 Lk N
Δ == . (5.27)
Pentru bara de secţiune variabilă,
0
1
( )
Lk
dx
A x E
=
∫. (5.28)
Alungirea produsă de o for ţă axială egală cu unitatea se numeşte fle-
xibilitatea barei la for ţ e axiale. Flexibilitatea este inversa rigidităţii,
1
1( ) , ;
N
L m f L
k AE N daN =
cm⎡ ⎤= = = Δ ⎢ ⎥⎣ ⎦. (5.29)
În funcţie de natura problemelor ce trebuie rezolvate, formulele (5.23) şi (5.24) pot lua diverse forme, aşa cum rezultă din tabelul 5.3.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 107/127
Solicitarea axial ă 107
Tabel 5.3
Criteriul de
rezistenţă Criteriul de rigiditate
Criteriul
Tipul problemei Se dă Δ LSe dă εσa a a
maxnec
a
N A ≥
σ a) Dimensionare
maxnec
a
N A
E ≥
ε max
nec
a
N L A
E L≥
Δ
maxef a
ef
N
Aσ = ≤ σ b) Verificare
maxef a
ef
N
EAε = ≤ ε max
ef a
ef
N L L L
EAΔ = ≤ Δ
acap ef
L N EA
L
Δ= c) Efort capabil cap a ef N A= σ cap ef a N EA= ε
Aplicaţ ii
1. Bara verticală de secţiune constantă, fixată la capătul superior şisupusă acţiunii greutăţii proprii şi unei for ţe aplicată în capătul liber.
x
F
σ σ( x) A l
E , ρσmax
u
Δl
u( x)
F / A
Fig. 5.11
Diagrama de for ţe axiale este redată în figura 5.2, f . Tensiunile se potcalcula cu (5.23) în care N ( x ) = + g ρ A(l x ) sau din prima relaţie (4.3,F – a),care, pentru o stare liniar ă de tensiune devine (la bare solicitate axial, sta-rea liniar ă de tensiune este consecinţa ipotezei lui Bernoulli)
d ( )
0d
x
X x
σ
+ = , (5.30)unde for ţa volumică X este greutatea specifică a materialului, g ρ [N /m3].
Integrând relaţia (5.30) se obţineσ( x ) = – g ρ x + C .
( ) F
l A
σ = F
C g A
l = + ρDin condiţia rezultă , prin urmare
max( )
F g l x
Aσ = + ρ − . (5.31)
În figura 5.11 este reprezentată diagrama de variaţie a tensiunilor pelungimea barei. Tensiunea maximă apare în secţiunea x = 0 şi are valoa-

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 108/127
R EZISTENŢA MATERIALELOR 108
rea
( )
F
gl Aσ = + ρ . (5.32)condiţia (5.21) rezultă Din
nec
a
F A
gl ≥
σ − ρ. (5.33)
Alungirea barei se poate calcula din relaţia (5.25) sau integrând ecua-a dţi iferenţială (4.62),
( ) xu x dx C = ε +∫ ,
nform legii lui Hooke,unde, co
( )
( ) x
( ) F g
x l x
E EA E
σ ρ= + − .
ă
ε =
Rezult2
1( )2
Fx g xu x l x C
EA E
⎛ ⎞ρ= + − +⎜ ⎟
⎝ ⎠.
Din condiţia u(0) = 0 rezultă C = 0 , adică 1
2
( ) Fx Gl x x
u x⎛ ⎞
= +2
22 EA EA l l
−⎜ ⎟⎝ ⎠
, (5.34)
unde cu G s-a notat greutatea barei, G = g ρ Al .u( x ). Pentru x
= l , rezultă În figura 5.11 este reprezentată grafic funcţia
max2( )G F +
u u l l l EA
= = Δ = . (5.35)
l – x ) are alungireaTronsonul de lungime (2
( ) F l x G l −( ) ( ) ( ) 1
2
xl x u l u x
EA EA l
⎛ ⎞Δ − = − = + −⎜ ⎟⎝ ⎠
. (5.36)
2. Bara de egală rezistenţă solicitată axial.elaţia (5.33), care exprimă
re în toatec
d, rezultă
Bara din figura 5.11 se dimensionează cu r condiţia ca în secţiunea periculoasă să se atingă rezistenţa admisibilă.Restul materialului va fi utilizat neeconomic, deoarece σ < σa .
Se numesc de egal ă rezistenţă, barele neprismatice la ca se ţiunile tensiunile sunt egale cu rezistenţa admisibilă, σ( x ) = const. = σa.Legea de variaţie a ariei A( x ) se obţine din ecuaţia diferenţială de echilibrua elementului de lungime d x din figura 5.12, a,
d ( ) ( )d 0a A x gA x xσ + ρ = .
Integrân
ln ( )a
g A x x C
ρ= − +
σ.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 109/127
Solicitarea axial ă 109
d x
σ( x + d x) = σa
ρ gA( x)dx
A( x) + d A( x)
A( x)σ( x) = σa
F
x
l
F
n
i
2
1
σa
a) b) c) d )
Fig. 5.12
Din condiţia la limită A(l ) = F / σ rezultă a
lna a
gl F C
ρ= +
σ σ.
Înlocuind, se obţine funcţia A( x ) (pe baza căreia s-a trasat conturulbarei din figura 5.12, b),
( )
( ) a
g l x
a
F A x e
ρ −σ=
σ . (5.37)
3. Bara cu secţiune variabilă în trepte. Deoarece realizarea barelor cu secţiune variabilă după legea (5.37)
este neeconomică, barele foarte lungi, cum sunt pr ă jinile de foraj, se con-fecţionează din mai multe tronsoane prismatice ca în figura 5.12, b. Untronson i are aria secţiunii transversale A şi lungimea l . Conform (5.33)i i ,pentru calculul ariilor necesare ale secţiunilor transversale ale celor n tron-soane se obţin succesiv relaţiile:
1
1
nec
a
F A
gl =
σ − ρ,
1
2
1
2 1( )(
nec anec
a a a
F gA l F A
gl gl gl 2 )+ ρ σ= =
σ − ρ σ − ρ σ − ρ,
……………………………………….1
1
( )i
i
anec i
a j
j
F A
gl
−
=
σ=
σ − ρ∏. (5.38)
……………………………………….
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 110/127
R EZISTENŢA MATERIALELOR 110
1
1( )
n
n
anec n
a i
i
F A
gl
−
=
σ=
σ − ρ∏
.
Alungirea totală a barei din figura 5.12, c se obţine prin însumareaalungirilor celor n tronsoane, calculate cu formula (5.35),
1
1 1
1
1
21
22
ii i
j jn j
i
i i
Al A l F gA l g F g l l
EA EA
−
=
=
+ ρ + ρ+ ρΔ = +
∑∑ l . (5.39)
5.5 SISTEME STATIC NEDETERMINATE SOLICITATE LA EFORTURI
AXIALE. EXEMPLE
Se numesc static nedeterminate acele sisteme pentru care eforturilenu pot fi determinate numai din ecuaţiile de echilibru. Gradul de nedeter-minare statică a unui sistem este egal cu numărul de necunoscute supra-numerare faţă de ecuaţiile de echilibru. Pentru rezolvarea sistemelor staticnedeterminate trebuie obţinute tot atâtea ecuaţii suplimentare cât estegradul de nedeterminare. Aceste ecuaţii suplimentare sunt în concordanţă cu modul în care se deformează sistemul. Ele se numesc condi ţ ii de de-formaţ ie sau ecuaţ ii de compatibilitate a deplasărilor .
Metoda de calcul a sistemelor static nedeterminate în care necunoscu-
tele sunt eforturi sau reacţiuni, care se determină din condiţii de compatibi-litate a deplasărilor, se numeşte metoda eforturilor . Există o metodologiegenerală pentru calculul sistemelor static nedeterminate prin metodaeforturilor, care se va prezenta într-un capitol separat, în volumul următor.
O altă metodă de calcul a sistemelor static nedeterminate este metodadeplasărilor . În această metodă drept necunoscute se consider ă deplasări-le, care se determină din condi ţ ii de echilibru. Şi pentru această metodă există o metodologie generală de calcul.
Rezolvarea problemelor static nedeterminate este posibilă numai dacă sunt cunoscute rigidităţile tuturor barelor sau rapoartele dintre ele, respec-tiv coeficienţii α = αdin relaţiile k , unde k k o oi i i este o mărime oarecareavând dimensiunea unei rigidităţi la for ţa axială; de obicei k o este rigidita-tea uneia dintre barele sistemului. În general, tensiunile efective care seobţin în diverse bare ale sistemului static nedeterminat nu satisfac condiţiade a fi foarte apropiate de αa . Din acest motiv se modifică rigidităţile bare-lor componente ale sistemului static nedeterminat şi se reface calculul,deci problemele de dimensionare optimă se rezolvă prin metoda aproxi-maţ iilor succesive.
În cele ce urmează se vor rezolva prin cele două metode câteva sis-teme tipice static nedeterminate, relativ simple, alcătuite din bare solicitatenumai de eforturi axiale.
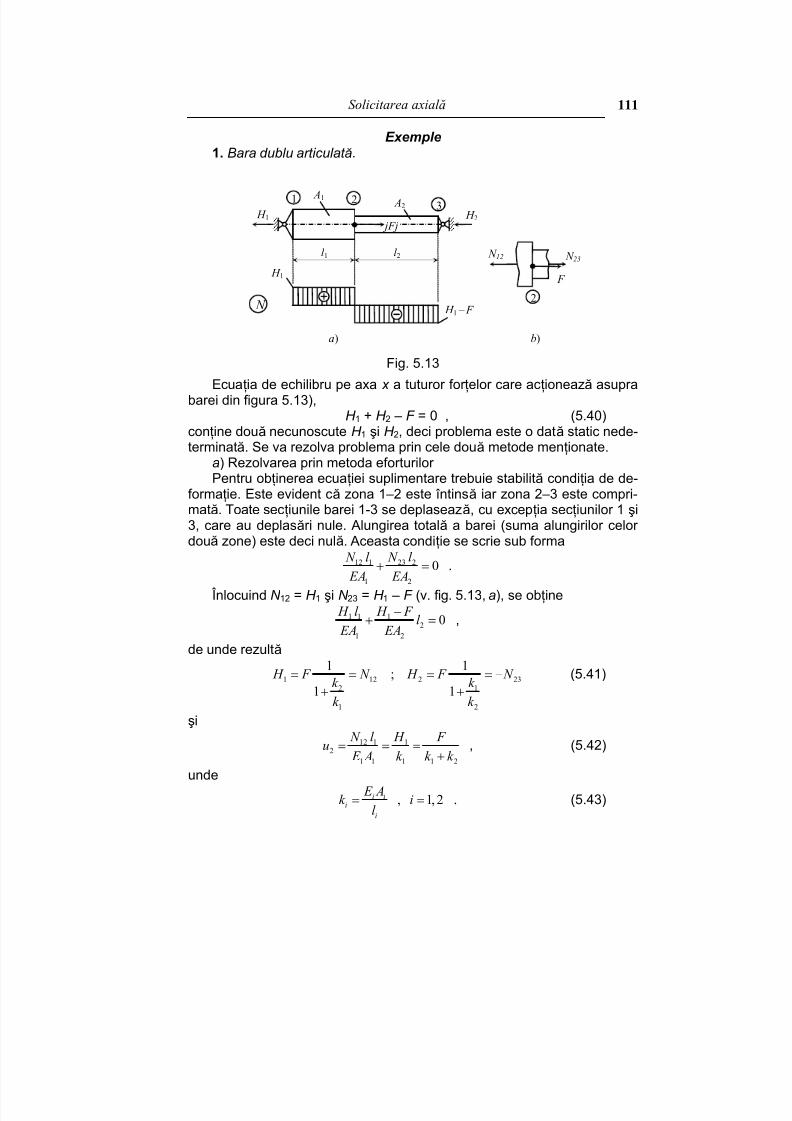
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 111/127
Solicitarea axial ă 111
Exemple 1. Bara dublu articulat ă.
l 1 l 2
H 2 H 1
A1 A2
N
F
N 23 N 12
1 23
2
H 1
j F j
H 1 – F
a) b)
Fig. 5.13
Ecuaţia de echilibru pe axa x a tuturor for ţelor care acţionează asuprabarei din figura 5.13),
H + H – F = 0 , (5.40)1 2
conţine două necunoscute H şi H 1 2, deci problema este o dată static nede-terminată. Se va rezolva problema prin cele două metode menţionate.
a) Rezolvarea prin metoda eforturilor Pentru obţinerea ecuaţiei suplimentare trebuie stabilită condiţia de de-
formaţie. Este evident că zona 1–2 este întinsă iar zona 2–3 este compri-mată. Toate secţiunile barei 1-3 se deplasează, cu excepţia secţiunilor 1 şi3, care au deplasări nule. Alungirea totală a barei (suma alungirilor celor două zone) este deci nulă. Aceasta condiţie se scrie sub forma
23 212 1
1 2
0 N l N l
EA EA+ = .
Înlocuind N = H şi N = H – F (v. fig. 5.13, a), se obţine12 1 23 1
1 1 12
1 2
0 H l H F
l EA EA
−+ = ,
de unde rezultă
1 12 22 1
1 2
1 1;1 1
H F N H F N k
k k
= = = = −+ +
23k (5.41)
şi
12 1 12
1 1 1 1 2
N l H F u
E A k k k = = =
+, (5.42)
unde
, 1,i ii
i
E Ak i
l = = 2 . (5.43)

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 112/127
R EZISTENŢA MATERIALELOR 112
b) Rezolvarea prin metoda deplasărilor Se notează deplasările celor trei secţiuni cu u , u şi u1 2 3 = 0, considera-
te pozitive spre dreapta. Ecuaţia de echilibru a nodului 2 (v. fig. 5.13, b)conduce la ecuaţia
– N + N + F = 0 ,12 23
undeN = k (u – u ) = k , N = k (u – u ) = – k .u u12 1 2 3 1 2 23 2 3 2 2 2
Înlocuind N şi N în ecuaţia de echilibru şi rezolvând-o se obţine12 23
2
1 2
F u
k k =
+ 122
1
1
1
N F k
k
=+
231
2
1
1
N F k
k
= −+
; ; . (5.44)
2. Eforturi produse de variaţ ii de temperatur ă.
Dilatările datorate variaţiilor de temperatur ă se determină cu relaţiaT l l T Δ = α Δ , (5.45)
unde α este coeficientul de dilatare termică liniar ă, L este lungimea bareişi ΔT este variaţia de temperatur ă, aceeaşi pe toată lungimea barei. Aces-te dilatări se produc nestingherit în bare sau sisteme de bare static deter-minate, dar sunt par ţial sau total împiedicate în sisteme static nedetermi-nate, ducând la apariţia unor eforturi în barele sistemului respectiv.
Se consider ă cel mai simplu exemplu şi anume bara prismatică situată între două reazeme rigide (figura 5.14). Reacţiunea H care apare la creş-terea temperaturii cu ΔT duce la apariţia for ţei axiale N = H . Condiţia ca
alungirea totală a barei (Δl = Δl
T N
+ Δl ) să fie nulă, conduce la relaţia0
H l l l T
EAΔ = α Δ + = , (5.46)
din care rezultă N
E T A
σ = = − αΔ, H N EA T = = − αΔ . (5.47)
Pentru ΔT > 0 bara este comprimată şi invers, pentru ΔT < 0 bara este întinsă (cu condiţia ca fixările extreme să fie bilaterale).
l Δl
E , A, α, ΔT
H H
l , E , A, α, ΔT
Fig. 5.14
Dacă la una dintre extremităţile barei există un spaţiu cunoscut δ (rost de dilataţ ie), condiţia de deformaţie se scrie sub forma
H l l l T
EAΔ = α Δ + = δ , (5.48)
de unde rezultă

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 113/127
Solicitarea axial ă 113
EA H EA
l T
δ= − αΔ . (5.49)
Evident, ultima relaţie are sens numai dacă α l ΔT > δ.3. Bara alc ătuit ă din mai multe tronsoane.
Fig. 5.15
F m F j F 1
1
δ
i –1 i i+1n
Pentru un tronson i (i = 1,2,…n) se notează cu l , A , E , α şi ΔT i i i i i res-
pectiv lungimea, aria secţiunii transversale, modulul de elasticitate longitu-dinal, coeficientul de dilatare termică liniar ă şi diferenţa de temperatur ă.Se consider ă că asupra barei acţionează m for ţe F j ( j = 1,…m) consideratepozitive ca în figura 5.15. Algoritmul de rezolvare a problemei prin metodaeforturilor este următorul:
a) se calculează reacţiunea din stânga, în ipoteza că bara este liber ă în capătul din dreapta
(o )
1
m
j
j
H F =
= ∑ ; (5.50)
b) se calculează for ţele axiale pe fiecare tronson în ipoteza că bara
este liber ă în capătul din dreapta(o ) (o )
( )
i j
j i
N H F = − ∑ ; (5.51)
c) se calculează (o )
(o )
1 1
n ni i
i i i
i i i i
N l l l T
E A= =
Δ = α Δ +∑ ∑ ; (5.52)
d) dacă Δl (o) ≤ δ , tensiunile în fiecare tronson au valorile
(0 )
ii
i
N
Aσ = ; (5.53)
e) dacă Δl (o) ≥ δ, se recalculează reacţiunea H din extremitatea stângă a barei, utilizând condiţia de deformaţie
1 1 ( )
( )n n
ii i i j
i i j ii i
l l T H F
E A= =
α Δ + − = δ∑ ∑ ∑ ; (5.54)
f) se determină tensiunile
( )
j
j iii
i i
H F N
A A
−
σ = =∑
. (5.55)
4. Sisteme alc ătuite din bare paralele, care susţ in o bar ă rigid ă articu-lat ă la un capăt (figura 5.16).
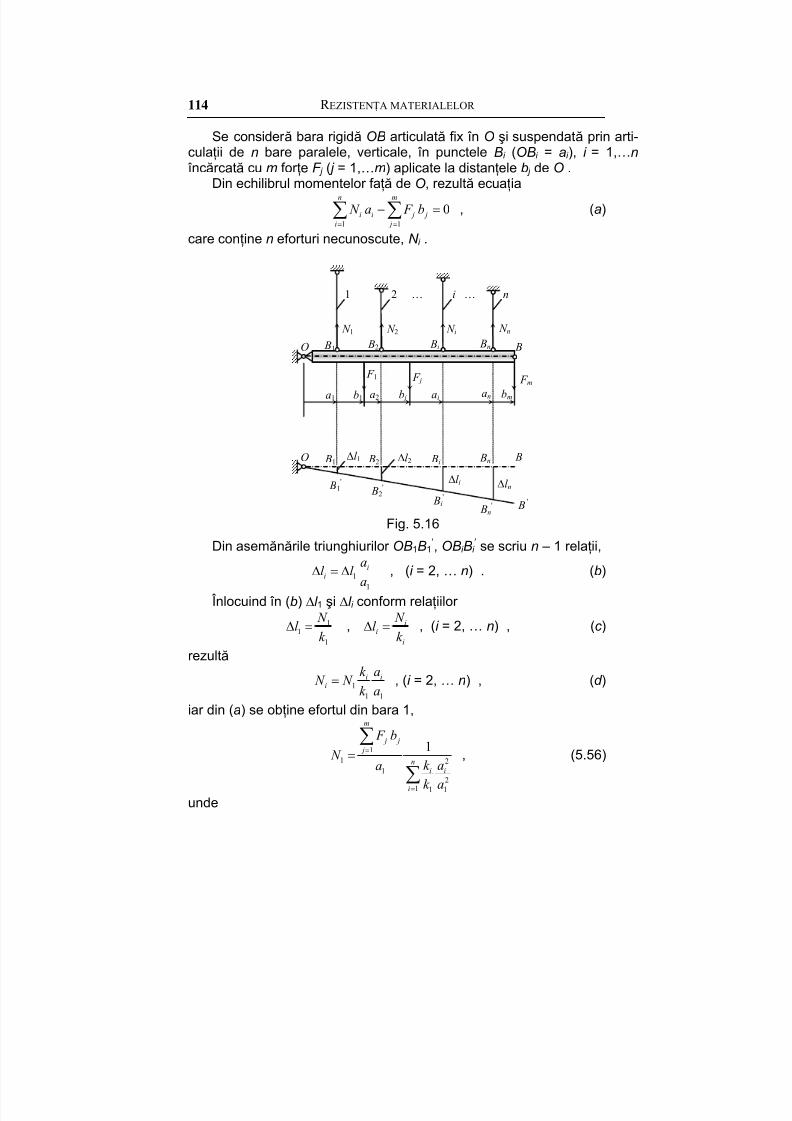
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 114/127
R EZISTENŢA MATERIALELOR 114
Se consider ă bara rigidă OB articulată fix în O şi suspendată prin arti-culaţii de n bare paralele, verticale, în punctele B (OB = a ), i B
i i j j
i j= =
i i i = 1,…n
încărcată cu m for ţe F ( j = 1,…m) aplicate la distanţele b j j de O .Din echilibrul momentelor faţă de O, rezultă ecuaţia
n m
N a F b1 1
0− =∑ ∑ , (a)
care conţine n eforturi necunoscute, N i .
Din asemănările triunghiurilo
Fig. 5.16
r OB1BB Bi Bi ′ se scriu n – 1 relaţii,1
′, O
1
1
ial l Δ = Δ , (i = 2, … n) . (b)i
a
Înlocuind în (b) Δl şi Δl i conform relaţiilor 1
1 N l Δ = ,1
1k
i N l Δ = , (i = 2,i
ik … n) , (c )
rezultă
1
1 1
i ii
k a N N k a
= , (i = 2, … n) , (d )
a) se obţine efortul din bara 1,iar din (
1
1 2
1
21 1 1
1
m
F b∑ j j
j
ni i
i
N k aa
k a
=
=
=
∑, (5.56)
unde
B1'
1
O
F 1
B1
F j F m
2 … i … n
B2 Bi Bn
N 1 N 2 N i N n
a1 a2 ai anb1 b j bm
B
O B1 B2 Bi BnΔl 1 Δl 2
Δl i Δl n
B
B2'
Bi
'
Bn' B '
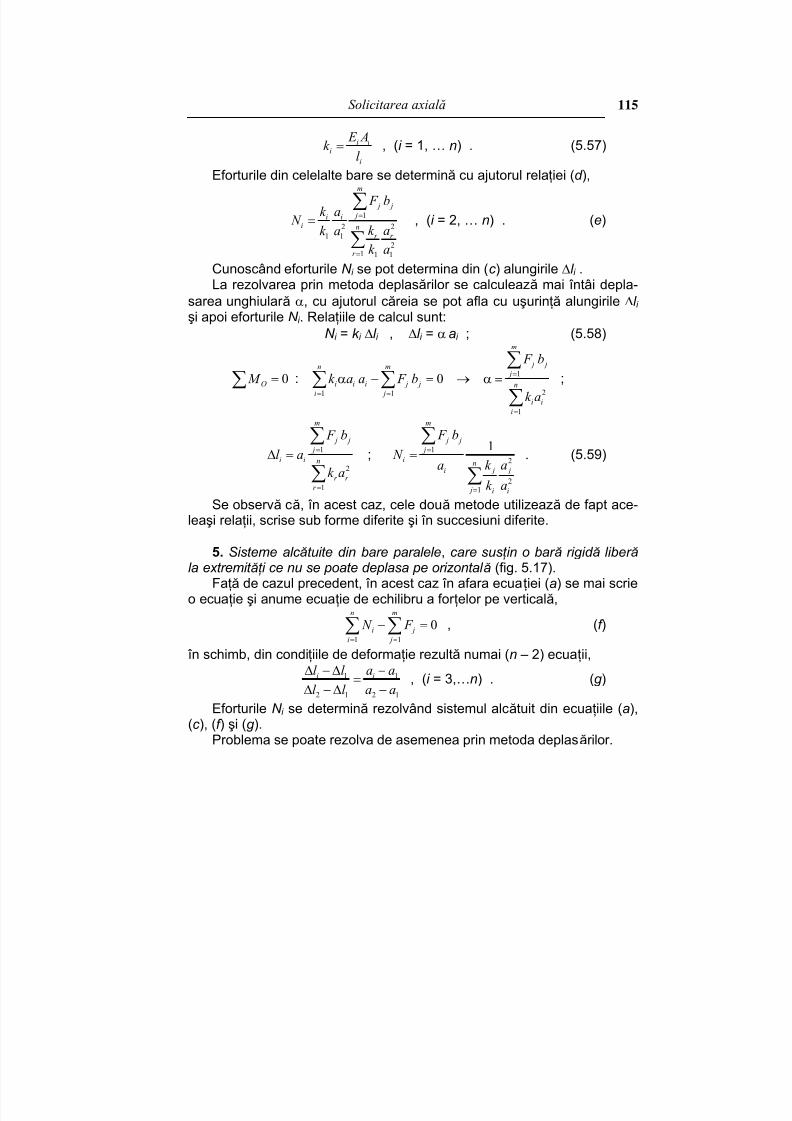
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 115/127
Solicitarea axial ă 115
i ii
i
E Ak
l = , (i = 1, … n) . (5.57)
Eforturile din celelalte bare se determină cu ajutorul relaţiei (d ),
1
22
1 1
21 1 1
m
j j
ji ii n
r r
r
F bk a
N k ak a
k a
=
=
=∑
∑, (i = 2, … n) . (e)
Cunoscând eforturile N se pot determina din (c ) alungirile Δl .i i
La rezolvarea prin metoda deplasărilor se calculează mai întâi depla-sarea unghiular ă α, cu ajutorul căreia se pot afla cu uşurinţă alungirile Δl i şi apoi eforturile N . Relaţiile de calcul sunt:i
N i = k i Δl i , Δl = α
; (5.58)ai i
1
2
1
m
j j
j
n
i i
i
F b
k a
=
=
α =∑
∑ : →
1 1
0n m
i i i j j
i j
k a a F b= =
α − =∑ ∑0O M =∑ ;
1
2
1
m
j j
j
i i n
r r
r
F b
l a
k a
=
=
Δ =∑
∑1
2
21
1
m
j j
j
i n j ji
j i i
F b
N k aa
k a
=
=
=∑
∑; . (5.59)
Se observă că, în acest caz, cele două metode utilizează de fapt ace-leaşi relaţii, scrise sub forme diferite şi în succesiuni diferite.
5. Sisteme alc ătuite din bare paralele, care susţ in o bar ă rigid ă liber ă la extremit ăţ i ce nu se poate deplasa pe orizontal ă (fig. 5.17).
Faţă de cazul precedent, în acest caz în afara ecuaţiei (a) se mai scrieo ecuaţie şi anume ecuaţie de echilibru a for ţelor pe verticală,
1 1
0n m
i j
i j
N F = =
− =∑ ∑ , (f )
în schimb, din condiţiile de deformaţie rezultă numai (n – 2) ecuaţii,1
2 1 2
i il l a al l a a
Δ − Δ −=Δ − Δ −
1
1
, (i = 3,…n) . (g )
Eforturile N i se determină rezolvând sistemul alcătuit din ecuaţiile (a),(c ), (f ) şi (g ).
Problema se poate rezolva de asemenea prin metoda deplasărilor.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 116/127
R EZISTENŢA MATERIALELOR 116
Fig. 5.17
O B1 B2 Bi Bn B
B '
B1'
B2'
Bi'
Bn'
O'
Δl 1 Δl 2 Δl i Δl n
. . . . . .
a1 a2 aib j
F j
6. Bare cu sec ţ iune neomogenă (figura 3.18).
F F
1 2
n
Fig. 3.18
Dacă elementele componente ale barelor cu secţiune neomogenă sunt dispuse simetric în raport cu centrul de greutate al secţiunii transver-sale, atunci ecuaţiile (a) şi (f ) din problemele precedente se reduc la una
singur ă,
1
n
i
i
N F =
=∑ . (h)
Admiţând că elementele componente ale barei sunt solidarizate întreele, adică Δl = const. şi ţinând cont de (h) rezultă i
1 2
1 2
1
... ...i n
n
i n j
j
N N N N F
k k k k k
=
= = = = = =
∑, (5.60)
de unde se obţin eforturile axiale din fiecare bar ă,
1
ii n
j
j
k N F
k =
=∑
, (i = 1,2,…n) . (5.61)
7. Sistem de bare cu tensiuni ini ţ iale de montaj . Este evident că laproblema precedentă soluţia economică ar corespunde cazului în care întoate elementele componente tensiunile ating simultan valoarea admisibi-lă, lucru care de obicei nu se întâmplă. Din acest motiv, la barele cu secţi-uni neomogene, tensiunea admisibilă se realizează de obicei numai într-unul din elemente, celelalte fiind solicitate la tensiuni mai mici decât celeadmisibile.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 117/127
Solicitarea axial ă 117
În scopul folosirii complete a capacităţii de rezistenţă a tuturor elemen-telor componente se introduc prin montaj tensiuni iniţiale, care măresc
sarcina capabilă a barei. De exemplu, se consider ă o bar ă alcătuită dindouă piese fixate solidar la capete, acţionată de for ţele F
(fig. 5.19, a).
F F 1 2
l 1 δ
a) b)
2
Fig. 5.19
Din relaţiile obţinute mai sus rezultă 1
1 1
1 1 2 2
a
E F
E A E Aσ = ≤ σ
+2
2 2
1 1 2 2
a
E F
E A E Aσ = ≤
+σ, . (5.62)
Sarcina capabilă a sistemului este
2 21 1 1
1 1
1a
E A F A
E A
⎛ ⎞= σ +⎜ ⎟
⎝ ⎠1 1
2 2 2
2 2
1a
E A F A
E A
⎛ ⎞= σ +⎜
⎝ ⎠F max = min(F , F ), , ⎟ . (5.63)1 2
1
1 2
a a
E E
σ σ=Dacă 2 atunci F = F = F 1 2 max . (5.64)
Se presupune F < F 1 2. În acest caz piesa 1 se confecţionează mai
lungă cu δ decât piesa 2, deci la montaj piesa 1 este comprimată cu for ţade montaj X iar piesa 2 este întinsă cu aceeaşi for ţă. Din condiţia
1 1 2 2
X l X l
E A E A+ = δ , (i )
se obţine for ţa de montaj
1 1 2 21 1 2 2
2 2 1 1
1 1
1 1
X E A E A E A E Al l
E A E A
δ δ= =
+ +. ( j )
Suprapunând tensiunile date de for ţa F peste cele de montaj, rezultă
1
1 1
1 1 2 2 1
a
E X
F E A E A Aσ = − ≤ σ+2
2 2
1 1 2 2 2
a
E X
F E A E A Aσ = ++ ≤ σ, . (k )Relaţiile (k ) pot fi îndeplinite simultan pentru
2 1 2 11 1 2 2
1 1 2 22 1 2 1
2 2 1 1
1 1
1 1
a a a a X E A E A E A E A E E E E
E A E A
⎛ ⎞ ⎛ ⎞σ σ σ σ= − =⎜ ⎟ ⎜
⎝ ⎠ ⎝ ⎠+ +− ⎟ . (5.65)
În acest caz, rezultă
2 1
2 1
a al E E
⎛ ⎞σ σδ = −⎜ ⎟
⎝ ⎠max 1 1 2 2a a F A A= σ + σ; . (5.66)
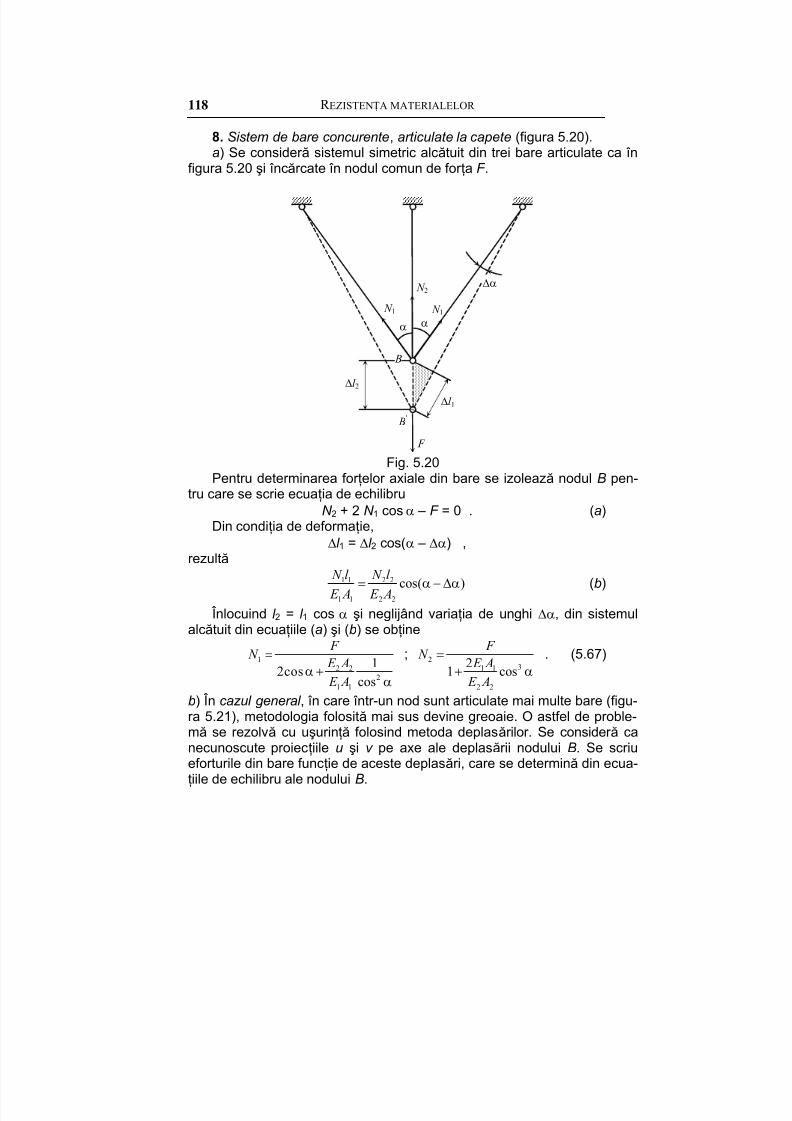
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 118/127
R EZISTENŢA MATERIALELOR 118
8. Sistem de bare concurente, articulate la capete (figura 5.20).a) Se consider ă sistemul simetric alcătuit din trei bare articulate ca în
figura 5.20 şi încărcate în nodul comun de for ţa F .
α
F
N 2
Δl 1
Δl 2
B
N 1 N 1
α
Δα
B'
Fig. 5.20Pentru determinarea for ţelor axiale din bare se izolează nodul B pen-
tru care se scrie ecuaţia de echilibruα – F = 0 . (a)N + 2 N cos2 1
Din condiţia de deformaţie,Δl = Δl cos(α – Δα) ,1 2
rezultă
1 1 2 2
1 1 2 2
cos( ) N l N l
E A E A= α − Δα (b)
Înlocuind l = l cos2 1 α şi neglijând variaţia de unghi Δα, din sistemulalcătuit din ecuaţiile (a) şi (b) se obţine
1
2 2 2
1 1
12cos cos
F N
E A
E A
=
α + α
23
1 1
2 2
21 cos
F N
E A
E A
=
+ α
; . (5.67)
b) În cazul general , în care într-un nod sunt articulate mai multe bare (figu-ra 5.21), metodologia folosită mai sus devine greoaie. O astfel de proble-mă se rezolvă cu uşurinţă folosind metoda deplasărilor. Se consider ă canecunoscute proiecţiile u şi v pe axe ale deplasării nodului B. Se scriueforturile din bare funcţie de aceste deplasări, care se determină din ecua-ţiile de echilibru ale nodului B.

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 119/127
Solicitarea axial ă 119
Δl i
v
F
N i
B1
α1
F x
F y
B' B
N n
αi
αn
u
B'
B
u
v B2
B3
i
αi
N 1
a) b)
Fig. 5.21 În conformitate cu figura 5.21, b , din relaţia
1 2 3cos sin i i i
i i i
i i i
N l N l B B B B u v
E A k ′Δ = + = α + α = = , (5.68)
rezultă cosα sinα N = k i i (u + v ) . (5.69)i i
Din echilibrul nodului B,
1
cos 0n
i i x
i
N F =
− α + =∑1
sin 0n
i i y
i
N F =
− α + =∑, , (5.70)
rezultă sistemul de ecuaţii2
1 1
cos cos sinn n
i i i i i
i i
u k v k F = =
xα + α α∑ ∑ = ,
2
1 1
sin cos sinn n
i i i i i
i i
u k v k F = =
α α + α =∑ ∑ .
Rezolvând acest sistem se obţin deplasările u şi v ale nodului B şi apoieforturile din toate barele.
5.6 CONCENTRĂRI DE TENSIUNI
Tensiunile care apar în zonele de schimbare a formei şi dimensiunilor secţiunilor, în jurul găurilor, precum şi în zonele de contact dintre corpurisunt mai mari decât cele calculate cu formulele din Rezistenţa materiale-lor. Fenomenul se numeşte concentrarea tensiunilor , iar variaţia de secţiu-ne sau cauza care îl produce se numeşte concentrator .
Notând cu σn tensiunea nominală, determinată cu formulele Rezis-tenţei materialelor şi cu σmax tensiunea maximă din zona concentratoru-
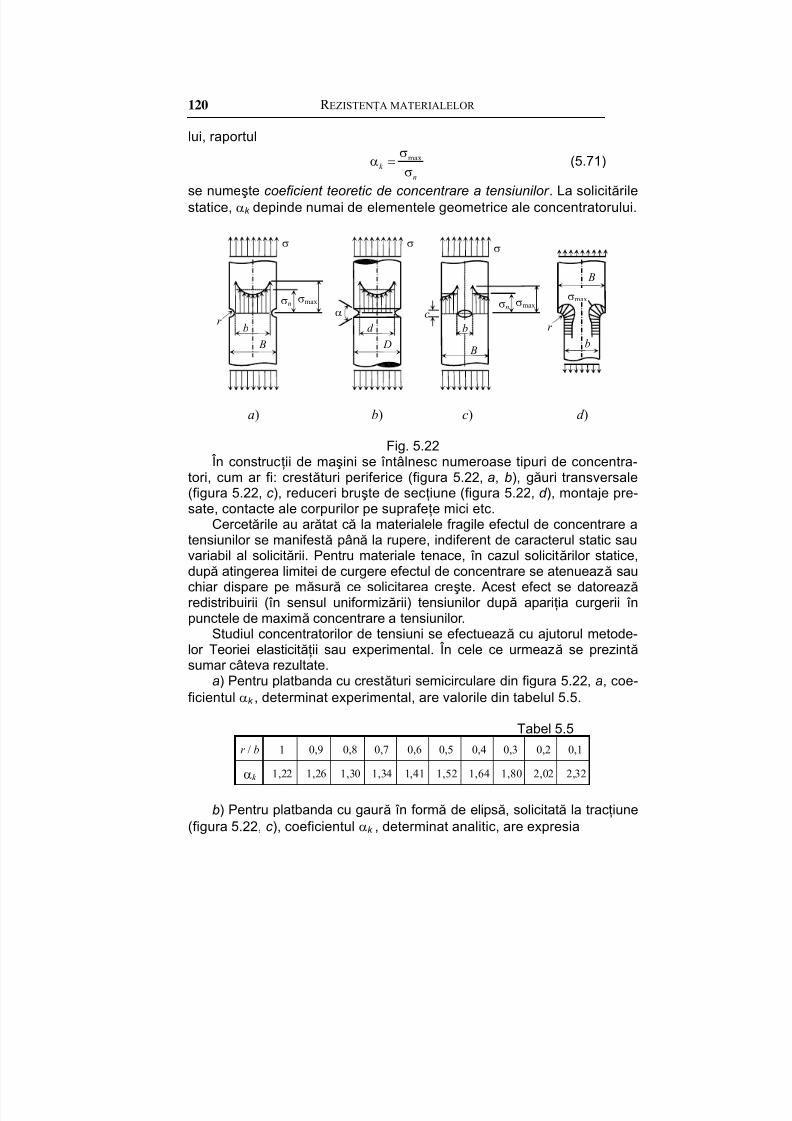
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 120/127
R EZISTENŢA MATERIALELOR 120
lui, raportul
max
k n
σ
α = σ (5.71)se numeşte coeficient teoretic de concentrare a tensiunilor . La solicitărilestatice, α depinde numai de elementele geometrice ale concentratorului.k
a) b)
d
D
αb
r
σ
B
σnσmax
c)
σ
B
c
b
d )
B
b
r
σmaxσn σmax
σ
Fig. 5.22
În construcţii de maşini se întâlnesc numeroase tipuri de concentra-tori, cum ar fi: crestături periferice (figura 5.22, a, b), găuri transversale(figura 5.22, c ), reduceri bruşte de secţiune (figura 5.22, d ), montaje pre-sate, contacte ale corpurilor pe suprafeţe mici etc.
Cercetările au ar ătat că la materialele fragile efectul de concentrare atensiunilor se manifestă până la rupere, indiferent de caracterul static sauvariabil al solicitării. Pentru materiale tenace, în cazul solicitărilor statice,după atingerea limitei de curgere efectul de concentrare se atenuează sauchiar dispare pe măsur ă ce solicitarea creşte. Acest efect se datorează redistribuirii (în sensul uniformizării) tensiunilor după apariţia curgerii înpunctele de maximă concentrare a tensiunilor.
Studiul concentratorilor de tensiuni se efectuează cu ajutorul metode-lor Teoriei elasticităţii sau experimental. În cele ce urmează se prezintă
sumar câteva rezultate.a) Pentru platbanda cu crestături semicirculare din figura 5.22, a, coe-ficientul α , determinat experimental, are valorile din tabelul 5.5.k
Tabel 5.5
r / b 1 0,9 0,8 0,7 0,6 0,5 0,4 0,3 0,2 0,1
α 1,22 1,26 1,30 1,34 1,41 1,52 1,64 1,80 2,02 2,32k
b) Pentru platbanda cu gaur ă în formă de elipsă, solicitată la tracţiune(figura , c ), coeficientul α5.22 , determinat analitic, are expresiak
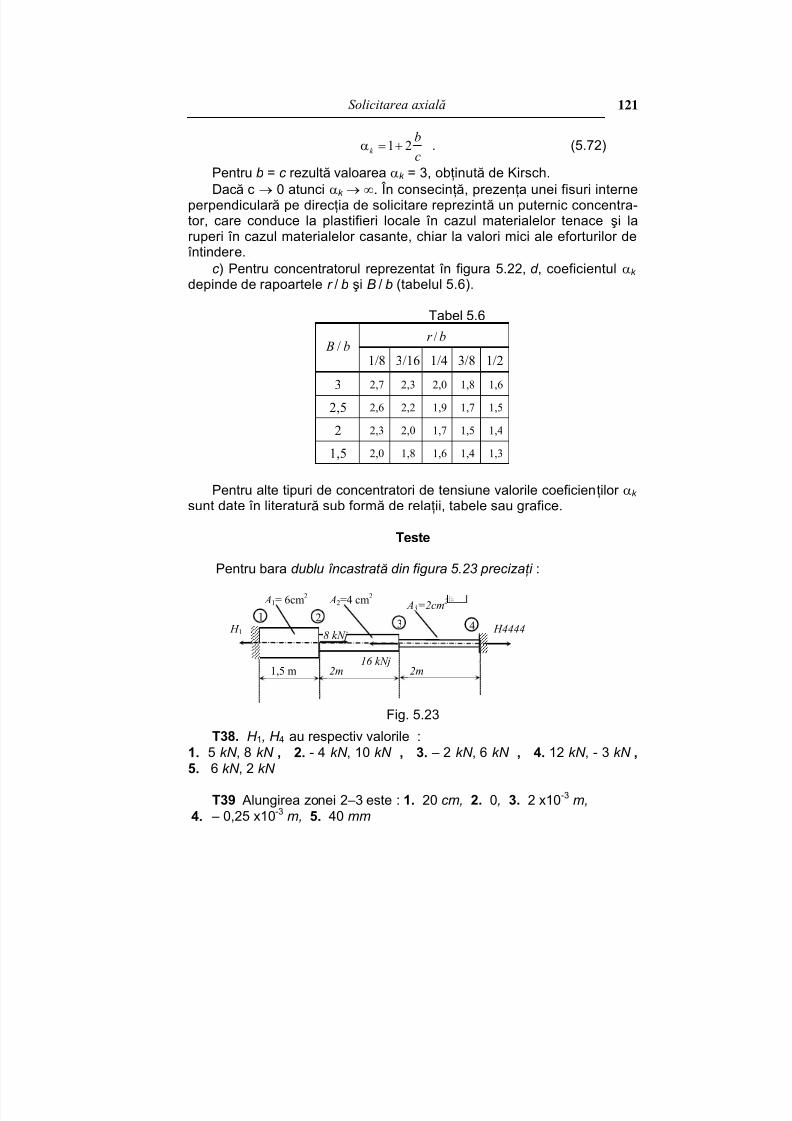
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 121/127
Solicitarea axial ă 121
1 2k
b
cα = + . (5.72)
Pentru b = c rezultă valoarea α = 3, obţinută de Kirsch.k
Dacă c → 0 atunci αk → ∞. În consecinţă, prezenţa unei fisuri interneperpendicular ă pe direcţia de solicitare reprezintă un puternic concentra-tor, care conduce la plastifieri locale în cazul materialelor tenace şi laruperi în cazul materialelor casante, chiar la valori mici ale eforturilor de întindere.
, d , coeficientul αc ) Pentru concentratorul reprezentat în figura 5.22 k
depinde de rapoartele r / b şi B / b (tabelul 5.6).
Tabel 5.6
r b /
b B /
1/8 3/16 1/4 3/8 1/2
3 2,7 2,3 2,0 1,8 1,6
2,5 2,6 2,2 1,9 1,7 1,5
2 2,3 2,0 1,7 1,5 1,4
1,5 2,0 1,8 1,6 1,4 1,3
Pentru alte tipuri de concentratori de tensiune valorile coeficienţilor αk
sunt date în literatur ă sub formă de relaţii, tabele sau grafice.
Teste
Pentru bara dublu încastrat ă din figura 5.23 precizaţ i :
1,5 m 2m
H 1
2m
H4444
A1= 6cm2
A2=4 cm2
1 23
8 kN j
A3=2cm2
2. 13. 0,5 4. 0,755. 3
4
16 kN j
Fig. 5.23
T38. H 1, H 4 au respectiv valorile :1. 5 kN , 8 kN , 2. - 4 kN , 10 kN , 3. – 2 kN , 6 kN , 4. 12 kN , - 3 kN ,5. 6 kN , 2 kN
-3 T39 Alungirea zonei 2–3 este : 1. 20 cm, 2. 0, 3. 2 x10 m,
-34. – 0,25 x10 m, 5. 40 mm

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 122/127
R EZISTENŢA MATERIALELOR 122
Pentru sistemul de două bare paralele, care susţ in bara rigid ă OB2 ,
articulat ă în O (figura 5.24) precizaţi :
T40 Raportul dintre Δl / Δl 2 1
O
12 kN
1
B1 B2
2
B1'
O B1 B2
Δl 2Δl 1
B2'
2,5 m2 m 3 m
are valoarea :1. 3/2 2. 1 3. 2 4. 3/4 5. 3
T41 Valoarea for ţei axialedin bara 2 este :
1. 11,25 kN 2. 8,75 kN 3. 6,923 kN 4. 9 kN 5. 37 kN
Fig. 5.24
T 42 Ecuaţia de momente faţă de articulaţia din punctul O este :
1. 2N = 0+ 24 – 3N 21
2. N = 0- 24 + 3N 21
3. 2N = 0- 30 + 3N 21
4. - 2N = 0+ 24 + 3N 21
5. 2N = 0+ 30 + 3N 21
T43 In secţiunea transversală a unei bare solicitate axial, exceptând
zonele în care se aplică încărcările exterioare, tensiunile normale, σ 1. variază direct propor ţional cu lungimea barei2. sunt uniform distribuite pe secţiune3. variază invers propor ţional cu aria secţiunii transversale4. este funcţie de for ţa axială din secţiunea analizată 5. variază invers propor ţional cu modulul de elasticitate longitudinal
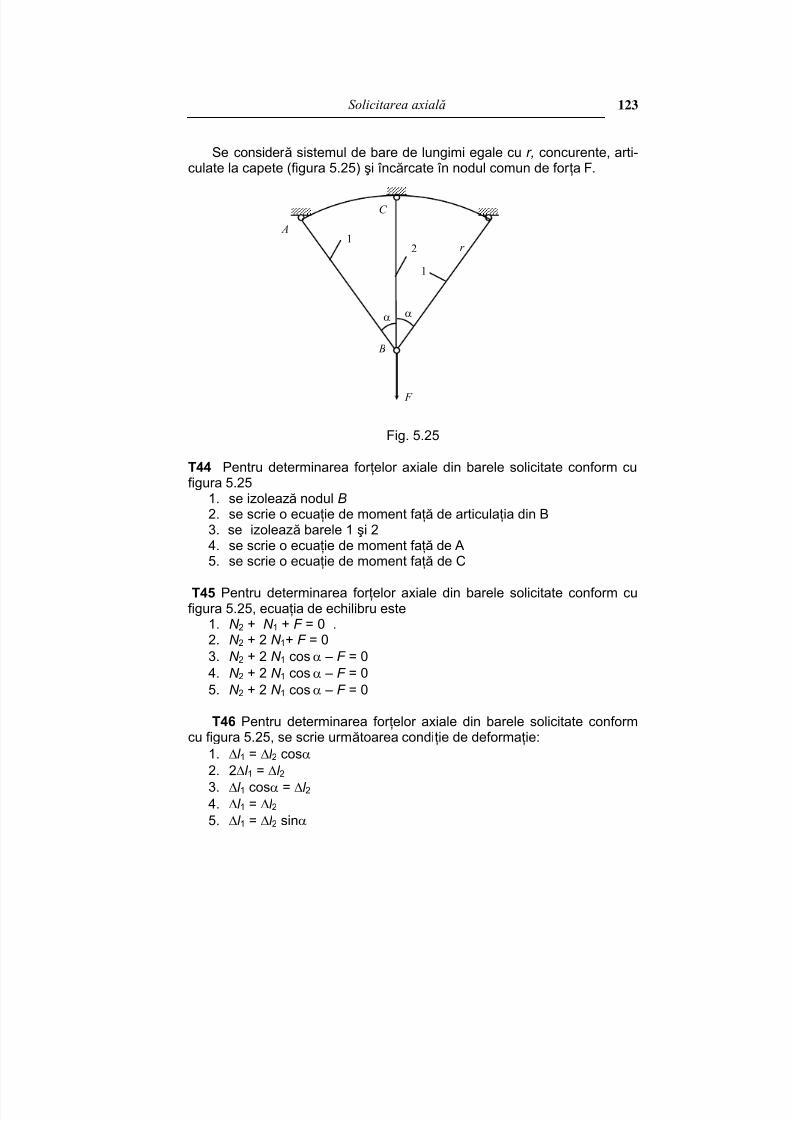
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 123/127
Solicitarea axial ă 123
Se consider ă sistemul de bare de lungimi egale cu r, concurente, arti-
culate la capete (figura 5.25) şi încărcate în nodul comun de for ţa F.
α
F
2
α
A
C
1
1r
B
Fig. 5.25
T44 Pentru determinarea for ţelor axiale din barele solicitate conform cufigura 5.25
1. se izolează nodul B 2. se scrie o ecuaţie de moment faţă de articulaţia din B3. se izolează barele 1 şi 24. se scrie o ecuaţie de moment faţă de A5. se scrie o ecuaţie de moment faţă de C
T45 Pentru determinarea for ţelor axiale din barele solicitate conform cufigura 5.25, ecuaţia de echilibru este
1. N + N + F = 0 .2 1
+ 2 N + F = 02. N 2 1
α – F = 03. N + 2 N cos2 1
α – F = 04. N + 2 N cos2 1
α – F = 0+ 2 N cos5. N 2 1
T46 Pentru determinarea for ţelor axiale din barele solicitate conformcu figura 5.25, se scrie următoarea condiţie de deformaţie:
1. Δl = Δl cosα 1 2
2. 2Δl = Δl 1 2
3. Δl cosα = Δl 1 2
4. Δl = Δl 1 2
5. Δl = Δl sinα 1 2

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 124/127
R EZISTENŢA MATERIALELOR 124
T47 In cazul sistemului de bare din figura 5.25 cunoscând F = 90 kN,
r = 1 m, α =30 o 11, E= 2x10 21 24 , 3 A cm A cm= = 2 , Pa, v aloarea raportului
N /N este:2 1
2,
3
3,
21. 2; 2. 2 3 , 3 4. 5. cos ,α
T48 In cazul sistemului de bare din figura 5.25 cunoscând F = 90 kN,
r = 1 m, α =30 o 11, E= 2x10 2
1 24 , 3 A cm A cm= = 2 , Pa, d eplasarea pe verti-cală a punctului B este:
-31. 0,5 mm, 2. 5x10 m, 3. 0,2 m, 4. 5 x cm, 5. 0.2 mm,

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 125/127
BIBLIOGRAFIE
[1] Alămoreanu E., Buzdugan Gh., Iliescu N., Mincă I. Sandu M., În-drumar de calcul în Ingineria mecanic ă, Editura Tehnică, Bucu-reşti, 1996.
[2] Anghel A., Rezistenţ a materialelor – partea I, Editura Tehnică,Bucureşti, 2001.
[3] Beleş A., Voinea R, Rezistenţ a materialelor , vol. II Editura Teh-nică Bucureşti, 1958.
[4] Bia C., Ille V., Soare M.V., Rezistenţ a materialelor şi TeoriaElasticit ăţ ii , Editura Did. şi Pedagogică Bucureşti, 1983.
[5] Boleanţu L., Dobre I., Aplicaţ ii ale Mecanicii solidului deformabil în construc ţ ia de maşini , Editura Facla, Timişoara 1978.
[6] Buga M., Iliescu N., Atanasiu C., Tudose I., Radu Gh., Problemealese de Rezistenţ a materialelor , Editura Univ. Politehnica, Bu-cureşti, 1995.
[7] Buzdugan Gh., Rezistenţ a materialelor , Editura Academiei,Bucureşti, 1986.
[8] Buzdugan Gh. ş.a., Culegere de probleme din Rezistenţ a ma-terialelor , Editura Did. şi Pedagogică, Bucureşti, 1979.
[9] Buzdugan Gh., Blumenfeld M., Calculul de rezistenţă al piese-lor de maşini , Editura Tehnică, Bucureşti, 1979.
[10] Chirică I., Elasticitate, Fundamente, Exemple, Aplicaţ ii , EdituraTehnică,
Bucureşti,
1997.
[11] Ciofoaia V., Talpoşi A., Biţ C., Teoria elasticit ăţ ii şi plasticit ăţ ii ,Editura Bravox,
Braşov,
1995.
[12] Curtu I., Crişan R., Rezistenţ a materialelor şi Teoria Elasticit ă-
ţ ii , Univ. „Transilvania“ din Braşov,
1997.[13] Deutsch I., Rezistenţ a materialelor , E.D.P., Bucureşti, 1976.
[14] Deutsch I., Goia I., Curtu I., Neamţu T. Sperchez F., Problemede Rezistenţ a materialelor , E.D.P., Bucureşti, 1979.
[15] Dobre I. ş.a., Culegere de probleme de Rezistenţ a materialelor ,Univ. Politehnica „Traian Vuia“, Timişoara, 1988.
[16] Feodosiev V.I., Resistance des materiaux , Ed. de la Paix,Moscou, 1977.
[17] Gere J.M., Timoshenko S.P., Mechanics of Materials – 4th
Edi-

5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 126/127
BIBLIOGRAFIE 126
tion, PWS Publishing Company, Boston, 1997.
[18] Goia I., Rezistenţ a materialelor , vol. I, Editura Transilvania,Braşov, 2000.
[19] Horbaniuc D., Leon D., Bârsănescu P., Rezistenţ a materialelor.Elasticitate – probleme, Editura Gh. Asachi, Iaşi, 1993.
[20] Mincă I., Atanasiu C., Sandu A., Sandu C., Rezistenţ a materia-lelor şi elemente de teoria elasticit ăţ ii. Solicit ări simple, EdituraTehnică, Bucureşti, 1998.
[21] Mocanu C.I., Gavrilescu I., Rezistenţ a materialelor , EdituraFundaţiei Universitare „Dunărea de Jos“, Galaţi, 1999.
[22] Mocanu D.R., Rezistenţ a materialelor , Editura Tehnică, Bucu-reşti, 1980.
[23] Modiga M., Olaru V.D., Dimache A., Introducere în Mecanicamediilor continue şi în Mecanica microstructural ă, Editura Teh-nică, Bucureşti, 2001.
[24] Modiga M., Rezistenţ a materialelor – Îndrumar de lucr ări de la-borator , Institutul Politehnic Galaţi, 1972.
[25] Modiga M., Rezistenţ a materialelor , partea I, Editura Univ. dinGalaţi, 1983.
[26] Munteanu M., Radu Gh.N., Popa A., Rezistenţ a materialelor ,Univ. „Transilvania“ din Braşov, vol. I, II, 1988, 1990.
[27] Nash W.A., Schaum's Outline of Theory and Problems of Strength of Materials – 4
thEdition, McGraw-Hill Book Com-
pany, New York, 1998.
[28] Ponomariov S.D. ş.a., Calculul de rezistenţă în construc ţ ia demaşini – vol. I, II, III (trad. din limba rusă), Editura Tehnică Bucu-reşti, 1960, 1963, 1964.
[29] Posea N., Rezistenţ a materialelor , Editura Did. şi Pedagogică,Bucureşti, 1979.
[30] Stoicescu L., Rezistenţ a materialelor , vol. I, II, Editura Evrika,Br ăila, 2004.
[31] Teodorescu P.P., Ille V., Teoria elasticit ăţ ii şi introducere în Me-canica solidelor deformabile, vol. I, Editura Dacia, Cluj-Napoca, 1976.
[32] Timoshenko S.P., Goodier J.N., Theory of Elasticity , McGraw-Hill International Editions, Engineering Mechanics Series, NewYork, 1970.
[33] Timoshenko S.P., History of Strength of Materials, McGraw-Hill
5/16/2018 35647220-Curs-RM1 - slidepdf.com
http://slidepdf.com/reader/full/35647220-curs-rm1 127/127
Solicitarea axial ă a barelor 127
Book Company, New York – Dover Edition, 1983.
[34] Tudose I., Atanasiu C., Iliescu N.V., Rezistenţ a materialelor ,Editura Did. şi Pedagogică Bucureşti, 1981.
[35] Voinea R., Voiculescu D., Simion F.P., Introducere în Mecanicasolidului cu aplicaţ ii în inginerie, Editura Academiei Române,Bucureşti, 1989.
[36] *** Institutul Român de Standardizare (IRS), Materiale metalice – ÎNCERCAREA LA TRAC Ţ IUNE – Partea 1: Metod ă deîncercare la temperatura ambiant ă , SR EN 10002-1, 1994,identic cu Standardul European EN 10002-1:1990.
[37] *** Manual pentru calculul construc ţ iilor , vol. 1, Editura Tehni-
că, Bucureşti, 1977.
[38] *** Manualul inginerului mecanic 1 , Editura Tehnică, Bucureşti,1959.