universitatea politehnica bucurești -...
TRANSCRIPT

Universitatea Politehnica București
Facultatea de Automatică și Calculatoare
Departamentul de Automatică și Ingineria Sistemelor
LUCRARE DE LICENŢĂ
Modelarea și controlul panourilor fotovoltaice de mică putere
Absolvent
Crina-Loredana Torous
Coordonator
Prof.dr.ing. Dumitru Popescu
București, 2015
1
Cuprins:
1. Introducere 2
1.1. Structura lucrării 2
1.2. Importanţa şi actualitatea subiectului proiectului de diplomă 3
2. Configuraţia unei structuri cu surse de energie solară 6
2.1. Structura electronică a panoului fotovoltaic 9
2.1.1. Modelul simplificat cu o diodă 10
2.1.2. Modelul extins cu o diodă 11
2.1.3. Modelul extins cu două diode 12
2.2. Structura convertorului DC/DC 12
2.2.1. Configuraţia Boost 13
2.2.2. Configuraţia Buck 16
2.2.3. Configuraţia Buck-Boost 18
3. Deteminarea punctului de maximă putere pentru panoul fotovoltaic BGSP - P225 şi controlul
unghiului de rotaţie al panoului fotovoltaic 20
3.1. Radiaţia solară şi componentele acesteia 20
3.2. Elemente în orientarea panoului fotovoltaic după razele solare sau solar tracking 22
3.3. Modelarea motorului electric de curent continuu 22
3.4. Controlul unghiului de orientare al panoului fotovoltaic BGSP – P225 26
3.5. Algoritmi de căutare a punctului de putere maximă 29
3.5.1. Algoritmul Observă & Perturbă 30
3.5.2. Algoritmul conductanţă incrementală 31
3.5.3. Algoritmul Coggin’s 33
3.5.4. Algoritmul de gradient 34
3.6. Determinarea parametrilor panoului fotovoltaic BGSP - P225 35
3.7. Determinarea punctului de putere maximă în blocul de MPPT 38
4. Modelarea şi controlul convertorului DC/DC în configuraţie Buck 39
4.1. Modelarea convertorului DC/DC în configuraţie Buck 39
4.2. Controlul convertorului DC/DC prin comandă RST 43
4.2.1. Comanda RST prin metoda plasării polilor 43
4.2.2. Controlul convertorului DC/DC în configuraţie Buck 44
4.3. Analiză de robusteţe şi comandă robustă RST 47
5. Concluzii şi perspective 49
6. Bibliografie 51
2
1. Introducere
Sistemele generatoare de energie verde au captat atenţia comunităţii ştiinţifice nu doar din cauza
beneficiilor de mediu care le diferenţiază de metodele tradiţionale, poluante, epuizabile, ci şi
graţie complexităţii modelării şi controlului unui astfel de ansamblu. Sistemele fotovoltaice
alături de alte soluţii de energie regenerabilă, cum ar fii: turbinele eoliene, microhidrocentralele,
biomasa, energia geotermală, reprezintă soluţiile care adresează cererea, în creştere de energie
a unei populaţii în continuă dezvoltare.
Iniţial folosite pentru alimentarea sateliţilor în misiunile spaţiale, sistemele fotovoltaice au intrat
treptat în aplicaţii care contribuie la asigurarea necesarului de energie general. Totodată cu
evoluţia aplicaţiilor celulelor, se înregistrează şi o creştere a randamentului de conversie, care
ajunge la 25% în condiţii ideale, de laborator. Lucrarea va prezenta în continuare, optimizari în
algoritmi de căutare a punctului de extrem cât şi utilizarea unor metode performante de control.
1.1. Structura lucrării
Lucrarea prezintă metode performante de identificare a punctului de maximă putere al unui
panou fotovoltaic, controlul panoului prin propunerea unei soluţii de urmărire a deplasării
soarelui, în vederea obtinerii unui randament ridicat al ansamblului, cât şi controlul unui
convertor Buck, conectat la panoul fotovoltaic, în vederea obţinerii energiei la o valoare dorită,
pentru a putea fii furnizată consumatorilor, sau stocată. Importanţa pentru dezvoltarea
industriei energetice cât şi impactul asupra societăţii este subliniat, în linii mari, în primul
capitol.
Capitolul doi al lucrării trece în revistă configuraţiile în care sunt folosite instalaţiile
fotovoltaice şi face o prezentare a componentelor principale. În continuarea capitolului sunt
prezentate modele matematice folosite pentru celulele fotovoltaice cât şi configuraţiile cele mai
cunoscute pentru convertoarele de curent continuu-curent continuu.
Capitolul trei prezintă controlul panoului fotovoltaic BGSP - P225, cât şi a determinarea
punctului de maximă putere folosind algoritmii Coggin’s şi de gradient.
Capitolul patru este rezervat modelării convertorului DC/DC în configuraţie Buck controlul
puterii generate prin comandă polinomială RST.
Capitolul cinci face trecerea în revistă a concluziilor şi a perspectivelor de viitor ale unui astfel
de studiu în dezvoltarea şi cercetarea tehnologiilor verzi, nepoluante.

3
1.2. Importanţa şi actualitatea subiectului proiectului de diplomă
Energia solară a captat interesul omenirii încă din antichitate, fiind folosită de către greci pentru
aprinderea flacării olimpice sau pentru pornirea incendiilor. Prima celulă fotovoltaică este
confecţionată în 1893, ea suferind numeroase îmbunătăţiri de-alungul anilor. O contribuţie
importantă dezvoltării acestei tehnologii a fost adusă de către Albert Einstein în 1905, cand
acesta a explicat dualitatea luminii cu ajutorul teoriei cuantice. Aparitia jonctiunii p-n in 1949,
a împins şi mai departe progresul acestei tehnologii. Ulterior panourile solare au fost folosite
intensiv în asigurarea energiei pentru aparatele trimise în spaţiu (sateliţi). Panourile solare sunt
considerate soluţii viabile pentru alimentarea locuinţelor sau în contextul în care sunt grupate
corespunzător pentru alimentarea unor ansambluri mai mari de clădiri.
Efectul fotovoltaic este dat de apariţia unei tensiuni electromotoare în urma efectului energiei
solare asupra unui material solid. Fenomenul, descoperit accidental de către Edmund Becquerel,
este folosit ca principiu de bază de funcţionare pentru construirea celulei fotovoltaice. Iniţial
costurile erau mari iar randamentele scăzute pentru astfel de echipamente. În ziua de azi, situaţia
se schimbă treptat, prin diverse soluţii de optimizări, cum ar fii algoritmii de identificare a
punctului de maximă putere sau diverse progrese făcute în proiectarea convertoarelor sau a altor
echipamente care participă în colectarea, distribuţia şi stocarea energiei [6].
Dezvoltarea instalaţiilor care folosesc ca surse de energie, resurse regenerabile, a avut primul
salt dupa crizele petroliere din anii ’70. Din păcate însa, programe elaborate pentru dezolvatarea
acestui sector au aparut circa 15-20 de ani mai tarziu. Un alt factor care a dus la impunerea de
măsuri în domeniul surselor de energie au fost şi cei de mediu. În urma revoluţiei industriale şi
a globalizării apar diverse studii care scot în evidenţă efectele industriei asupra naturii. Primul
consiliu ONU convocat pentru aceasta problema a fost la Stockholm în anul 1972. În urma
conferinţei multe ţări au decis să introducă în agendele lor şi problemele de mediu, şi s-au
alcatuit documente cu planuri de acţiune pentru soluţionarea problemelor.
Posibilitatea implementării sistemelor fotovoltaice la nivelul locuinţelor duce la o independenţă
sporită a consumatorilor în raport cu furnizorii de energie electrică. La scara largă, un astfel de
sistem produce energia necesară fara a polua mediul, aspect care devine de o importanţă majoră
în contextul actual al influenţei amprentei industriei asupra mediului cât şi în situaţia în care
resursele folosite de către sistemele convenţionale sunt epuizabile sau rare în anumite arii
geografice [3]. Aspectul discontinuu al frecvenţei sursei de energie fotovoltaică, dat de
condiţiile atmosferice schimbătoare, este compensat prin stocarea energiei în instalaţii de
acumulare a energiei electrice sau termice sau prin producerea unor produşi intermediari, cum
ar fii hidrogenul obţinut prin electroliză. Un alt factor care conduce accelerat la dezvoltarea
4
instalaţiilor de energie regenerabilă este instabilitatea şi creşterea preţului hidrocarburilor,
precum şi faptul că puţine ţări beneficiază direct de aceste resurse, ceea ce duce la un monopol
asupra acestora. Acest aspect a condus la nivel european la impunerea unor măsuri pentru a
dezvolta sectorul energiei provenite din surse inepuizabile, cât şi pentru minimizarea impactului
asupra mediului, cum ar fii de exemplu, reducerea emisiilor de gaze cu efect de seră. Un alt
sector de luat în considerare este optimizarea proceselor, pentru obţinerea unei cantităţi de
energie maximă în condiţiile de lucru date.
În ceea ce priveşte ţările care au dezvoltat sectorul fotovoltaic în ultimii ani, se remarcă
Germania, în cadrul Uniunii Europene cu un total de 7411 MW instalaţi, America de Nord, iar
in zona Asiei se remarcă Japonia, urmată de China şi India. La nivelul anului 2008, ponderea
energiei generate din sisteme de energie verde nu a reuşit sa atingă 20%, însa politicile de
acordare de certificate verzi şi de finanţare a proiectelor aferente încurajează dezvoltarea
acestora. O dezvoltare rapidă a sistemelor de energie fotovoltaică s-a înregistrat în cadrul
Europei, unde se află mai mult de trei sferturi din totalul mondial. Dinamica dezvoltării energiei
regenerabile în intervalul 1998-2008, clasează pe primele locuri sectorul eolian, fotovoltaic şi
biomasa. Puterea fotovoltaică instalată în Uniunea Europeană a înregistrat o creştere continuă
în ultimii cinci ani.
La nivelul Europei, România se află pe locul 19 în clasamentul de energie fotovoltaică instalată,
cu 1.3 MW, în anul 2010. Potenţialul în România, pentru sectorul fotovoltaic este de 1,2 TWh,
iar cel pentru energie termică de 1,4*106 tep. Figura 1.2.1, prezintă radiaţia termică pe teritoriul
ţării şi energia care poate fi extrasă. Legea care susţine dezvoltarea sistemelor de energie
regenerabilă este legea 220/2008, care este aplicată în urma modificării aduse de legea
139/2010, care descrie modul de acordare al certificatelor verzi pentru energia livrata în reţeaua
electrică.[31]

5
Fig. 1.2.1 Potenţialul energetic fotovoltaic la nivelul României
În prezent, celulele fotovoltaice reprezintă o perspectivă promiţătoare în anumite contexte de zi
cu zi, cum ar fii: autostradă din celule fotovoltaice, concentratoare de lumină pentru celule
fotovoltaice sau celule fotovoltaice transparente pentru înlocuirea geamurilor Fig.1.2.2.
Figura 1.2.2. a.austostrada cu celule fotovoltaice, b.concentrator cu celule fotovoltaice
c.concentrator transparent celulă fotovoltaică

6
Lucrarea prezintă, ca soluţie pentru determinarea punctului de maximă putere algoritmi
numerici optimi cât şi performanţele lor în simulare. Algoritmii prezentaţi sunt algoritmul de
interpolare polinomială Coggin’s şi algoritmul de gradient Cauchy. În continuare, este prezentat
controlul unghiului de înclinaţie al panoului faţă de razele solare, utilizarea algoritmilor
numerici pentru determinarea punctului de putere maximă.După aceea este modelat convertorul
DC-DC în configuraţie Buck şi se prezintă controlul acestuia prin algoritmul numeric RST.
2. Configuraţia unei structuri cu surse de energie solară
Panourile fotovoltaice sunt folosite în 3 configuraţii: off-grid, conectate la reţea şi hibride. Cea
mai completă diagramă, şi bineînteles cea mai complexă este cea hibridă, prezentată în figura
2.1. prezentată mai jos.[27]
Panouri fotovoltaice
DC DC
Convertor cu funcţie MPPT
Panouri fotovoltaice
DC DC
Convertor cu funcţie MPPT
AC DC
Redresor cu funcţie MPPT
AC DC
Redresor cu funcţie MPPT
Turbină eoliană
DC AC
Invertor
DC AC
Invertor
Reţea electrică
Consumatori
Acumulator
Bloc gestiune acumulator
Sistem de supervizare Sistem de comunicaţie
Circuit intermediar de curent continuu
Fig.2.1. Configuraţia unui sistem hibrid
Vom începe prin a descrie componentele din această configuraţie, urmând ca ulterior să
evidenţiem diferenţele faţă de celelalte două. În schemă identificăm următoarele blocuri
funcţionale: generatorul fotovoltaic, generatorul eolian, sistemul de stocare a energiei electrice,
invertorul,convertorul, sistemul de comunicaţie şi sistemul de supervizare.
7
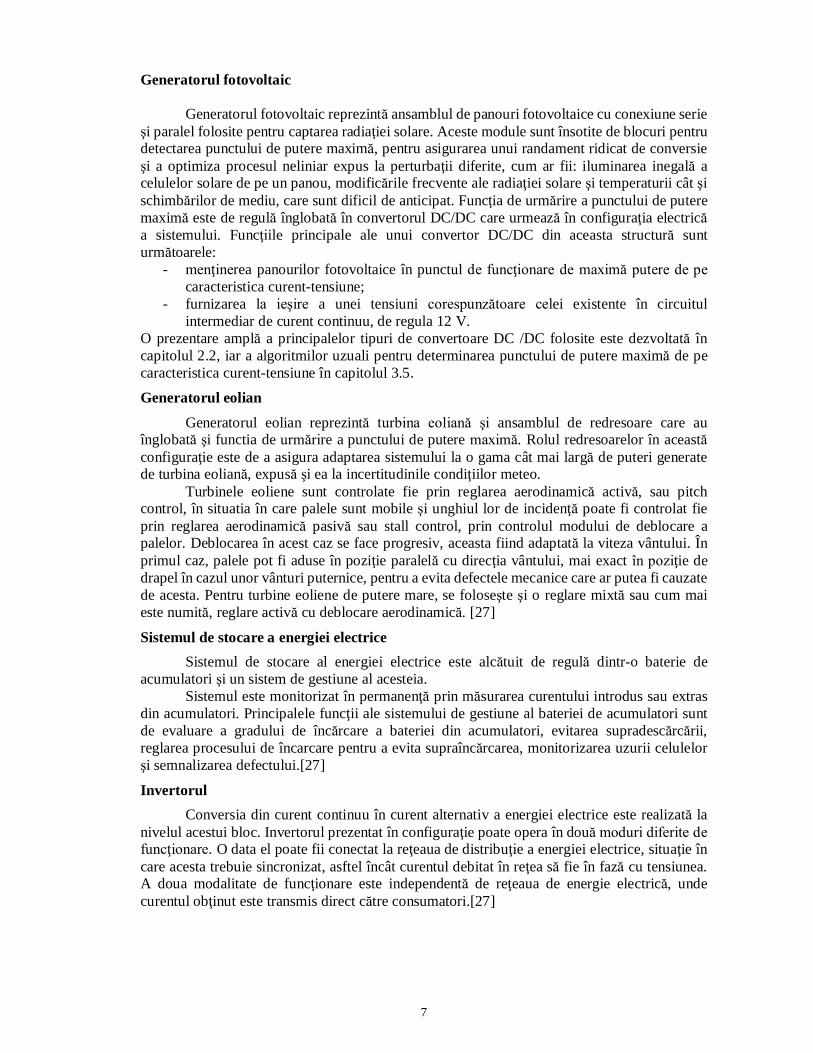
Generatorul fotovoltaic Generatorul fotovoltaic reprezintă ansamblul de panouri fotovoltaice cu conexiune serie şi paralel folosite pentru captarea radiaţiei solare. Aceste module sunt însotite de blocuri pentru detectarea punctului de putere maximă, pentru asigurarea unui randament ridicat de conversie şi a optimiza procesul neliniar expus la perturbaţii diferite, cum ar fii: iluminarea inegală a celulelor solare de pe un panou, modificările frecvente ale radiaţiei solare şi temperaturii cât şi schimbărilor de mediu, care sunt dificil de anticipat. Funcţia de urmărire a punctului de putere maximă este de regulă înglobată în convertorul DC/DC care urmează în configuraţia electrică a sistemului. Funcţiile principale ale unui convertor DC/DC din aceasta structură sunt următoarele:
- menţinerea panourilor fotovoltaice în punctul de funcţionare de maximă putere de pe caracteristica curent-tensiune;
- furnizarea la ieşire a unei tensiuni corespunzătoare celei existente în circuitul intermediar de curent continuu, de regula 12 V.
O prezentare amplă a principalelor tipuri de convertoare DC /DC folosite este dezvoltată în capitolul 2.2, iar a algoritmilor uzuali pentru determinarea punctului de putere maximă de pe caracteristica curent-tensiune în capitolul 3.5.
Generatorul eolian
Generatorul eolian reprezintă turbina eoliană şi ansamblul de redresoare care au înglobată şi functia de urmărire a punctului de putere maximă. Rolul redresoarelor în această configuraţie este de a asigura adaptarea sistemului la o gama cât mai largă de puteri generate de turbina eoliană, expusă şi ea la incertitudinile condiţiilor meteo. Turbinele eoliene sunt controlate fie prin reglarea aerodinamică activă, sau pitch control, în situatia în care palele sunt mobile şi unghiul lor de incidenţă poate fi controlat fie prin reglarea aerodinamică pasivă sau stall control, prin controlul modului de deblocare a palelor. Deblocarea în acest caz se face progresiv, aceasta fiind adaptată la viteza vântului. În primul caz, palele pot fi aduse în poziţie paralelă cu direcţia vântului, mai exact în poziţie de drapel în cazul unor vânturi puternice, pentru a evita defectele mecanice care ar putea fi cauzate de acesta. Pentru turbine eoliene de putere mare, se foloseşte şi o reglare mixtă sau cum mai este numită, reglare activă cu deblocare aerodinamică. [27]
Sistemul de stocare a energiei electrice Sistemul de stocare al energiei electrice este alcătuit de regulă dintr-o baterie de acumulatori şi un sistem de gestiune al acesteia. Sistemul este monitorizat în permanenţă prin măsurarea curentului introdus sau extras din acumulatori. Principalele funcţii ale sistemului de gestiune al bateriei de acumulatori sunt de evaluare a gradului de încărcare a bateriei din acumulatori, evitarea supradescărcării, reglarea procesului de încarcare pentru a evita supraîncărcarea, monitorizarea uzurii celulelor şi semnalizarea defectului.[27]
Invertorul Conversia din curent continuu în curent alternativ a energiei electrice este realizată la nivelul acestui bloc. Invertorul prezentat în configuraţie poate opera în două moduri diferite de funcţionare. O data el poate fii conectat la reţeaua de distribuţie a energiei electrice, situaţie în care acesta trebuie sincronizat, asftel încât curentul debitat în reţea să fie în fază cu tensiunea. A doua modalitate de funcţionare este independentă de reţeaua de energie electrică, unde curentul obţinut este transmis direct către consumatori.[27]
8
Sistemul de supervizare Sistemul de supervizare controlează acordarea parametrilor mecanici şi electrici ai structurii hibride pentru obţinerea unui randament ridicat în procesul de generare a energiei electrice. Sistemul poate funcţiona în două moduri. O funcţionare pasivă urmăreşte limitarea vitezei de variaţie a puterii introduse în reţea pentru a evita variaţiile mari asupra sistemului energetic. O funcţionare dispecerizată este al doilea mod de funcţionare şi presupune limitarea puterii generate de sistem, la nivel regional sau naţional pentru a stabiliza reţeaua electrică. În ambele cazuri, controlul puterii generate în reţea va fi realizat astfel încît să se asigure nivelul dorit de calitate a energiei cu o uzură minimă a sistemului de stocare. În cadrul unui sistem real, pot fi instalate o parte sau toate blocurile funcţionale. [27] Sistemele autonome de c.c. sunt cele mai simple configuraţii realizabile. Ele sunt destinate alimentării unor echipamente individuale alimentate în curent continuu (sisteme de semaforizare, lămpi pentru iluminat public, staţii meteorologice, etc.). Tensiunile oferite au valori standardizate (12V, 24V, 48V, 72V, etc.). Sistemele autonome de c.a. sînt utilizate pentru alimentarea unor locuinţe izolate sau a consumatorilor de curent alternativ. Puterile instalate sunt mai mari decât în cazul sistemelor de curent continuu iar tensiunea oferită este de 230V/50Hz (norma europeană).
Sistemele conectate la reţea sunt utilizate în cazul în care există acces la reţeaua de distribuţie a curentului electric. Energia generată de sursele regenerabile este introdusă direct în reţeaua electrică sub forma de curent alternativ. Există două configuraţii posibile de sisteme conectate la reţea:
sisteme cu compensarea consumului propriu – în acest caz, energia este introdusă în reţea după contorul de energie electrică şi se urmăreşte ca puterea introdusă să nu depăşească consumul propriu (să nu existe transfer în circuitul exterior). Sistemul va contribui la reducerea facturii de energie prin compensarea unei părti din consumul propriu;
sisteme cu dublă facturare – în acest caz, introducerea energiei în reţeaua electrică se face printr-un circuit independent prezăzut cu un contor de energie separat. Operatorul de distribuţie a energiei electrice va plăti contravaloarea energiei introduse în reţea pe baza informaţiei furnizate de contor.
Prima variantă de sistem conectat la reţea este avantajoasă în cazul în care consumul propriu este suficient de mare astfel încît sa nu fie necesară limitarea frecventă a puterii generate. Avantajul principal al acestei variante este acela ca evită procedurile şi costurile necesare instalării celui de-al doilea contor şi acceptării de către operatorul de distribuţie a calităţii de producător de energie.[27] Cea de a doua variantă oferă posibilitatea utilizării integrale a potenţialului surselor de energie regenerabilă dar necesită parcurgerea unor proceduri mai complicate şi costisitoare pentru integrarea sistemului în reţeaua electrică.[27]
9
2.1. Structura electronică a panoului fotovoltaic
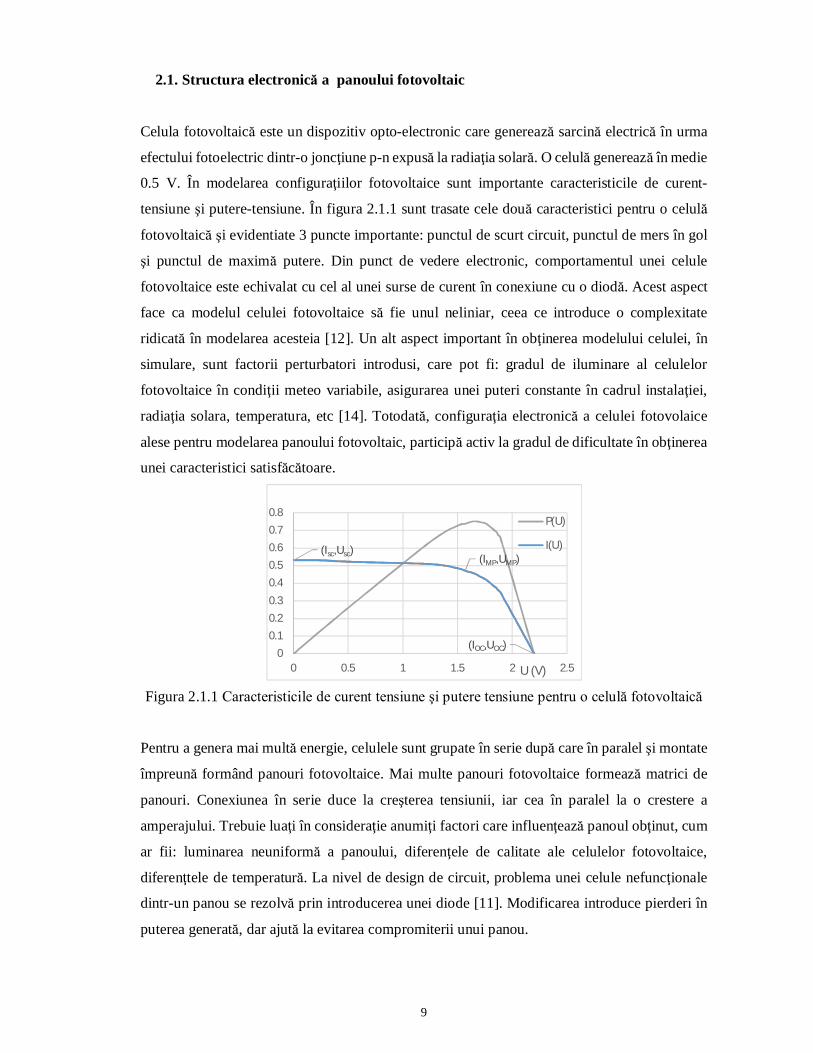
Celula fotovoltaică este un dispozitiv opto-electronic care generează sarcină electrică în urma
efectului fotoelectric dintr-o joncţiune p-n expusă la radiaţia solară. O celulă generează în medie
0.5 V. În modelarea configuraţiilor fotovoltaice sunt importante caracteristicile de curent-
tensiune şi putere-tensiune. În figura 2.1.1 sunt trasate cele două caracteristici pentru o celulă
fotovoltaică şi evidentiate 3 puncte importante: punctul de scurt circuit, punctul de mers în gol
şi punctul de maximă putere. Din punct de vedere electronic, comportamentul unei celule
fotovoltaice este echivalat cu cel al unei surse de curent în conexiune cu o diodă. Acest aspect
face ca modelul celulei fotovoltaice să fie unul neliniar, ceea ce introduce o complexitate
ridicată în modelarea acesteia [12]. Un alt aspect important în obţinerea modelului celulei, în
simulare, sunt factorii perturbatori introdusi, care pot fi: gradul de iluminare al celulelor
fotovoltaice în condiţii meteo variabile, asigurarea unei puteri constante în cadrul instalaţiei,
radiaţia solara, temperatura, etc [14]. Totodată, configuraţia electronică a celulei fotovolaice
alese pentru modelarea panoului fotovoltaic, participă activ la gradul de dificultate în obţinerea
unei caracteristici satisfăcătoare.
Figura 2.1.1 Caracteristicile de curent tensiune şi putere tensiune pentru o celulă fotovoltaică
Pentru a genera mai multă energie, celulele sunt grupate în serie după care în paralel şi montate
împreună formând panouri fotovoltaice. Mai multe panouri fotovoltaice formează matrici de
panouri. Conexiunea în serie duce la creşterea tensiunii, iar cea în paralel la o crestere a
amperajului. Trebuie luaţi în consideraţie anumiţi factori care influenţează panoul obţinut, cum
ar fii: luminarea neuniformă a panoului, diferenţele de calitate ale celulelor fotovoltaice,
diferenţtele de temperatură. La nivel de design de circuit, problema unei celule nefuncţionale
dintr-un panou se rezolvă prin introducerea unei diode [11]. Modificarea introduce pierderi în
puterea generată, dar ajută la evitarea compromiterii unui panou.
(IOC,UOC)
(IMP,UMP)(Isc,Usc)
00.10.20.30.40.50.60.70.8
0 0.5 1 1.5 2 2.5U (V)
P(U)
I(U)

10
Pentru a descrie comportarea unei celulte fotovoltaice se folosesc mai multe modele electronice,
printre acestea numărându-se: modelul simplificat, compus dintr-o diodă şi o sursa de curent,
modelul extins cu o diodă sau modelul celor 5 paramentrii, modelul extins cu două diode,
modelul Luft, modelul King, modelul A. Hadj Arab.
2.1.1. Modelul simplificat cu o diodă
Este modelul cel mai simplu folosit în modelarea comportamentului unui panou fotovoltaic.
Diagrama unei astfel de configuraţii electronice este prezentată în Figura 2.1.1.1.
Figura 2.1.1.1. Model simplificat celulă fotovoltaică
Ecuaţia curentului electric este :
퐼 = 퐼푝ℎ = −퐼 = 퐼푝ℎ − 퐼 ∗ 푒 ∗ ∗ − 1 (1)
Unde:
Iph – curent fotovoltaic ID – curent diodă I0 – curent de saturaţie al diodei UD – tensiune diodă m – parametru diodă (1-5) UT - tensiune termică celulă(27,7 mV) Modelul obţinut mai este cunoscut în literatura de specialitate ca LP3, ceea ce arată că
aproximarea facută este de tip lumped, iar modelul are 3 parametrii care trebuie identificaţi: Iph,
I0, n (n≠1) [6]. Curentul de saturaţie al diodei este calculat conform relaţiei următoare:
퐼 = 퐷 ∗ (푇 ) ∗ 푒∗
∗ ∗ (2)
Unde:
q – sarcina electrică, 1.602 x l0-19 C n – factor de formă ( 1 for ideal cell) K – constanta lui Boltzmann, 1.381 x l0-23 J/K TC – temperatura celulei (K) D – factorul de difuzie al diodei εG – energia de bandă a materialului (1.12 eV pentru Si, 1.35 eV pentru GaAs)
11
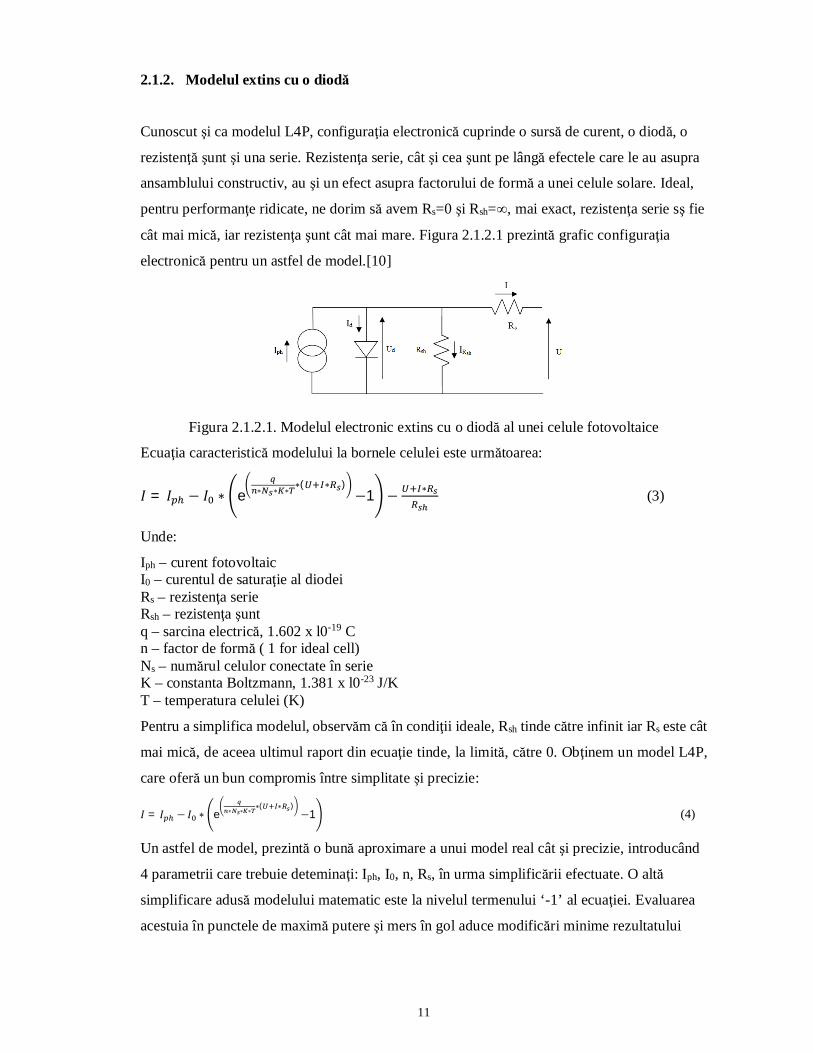
2.1.2. Modelul extins cu o diodă
Cunoscut şi ca modelul L4P, configuraţia electronică cuprinde o sursă de curent, o diodă, o
rezistenţă şunt şi una serie. Rezistenţa serie, cât şi cea şunt pe lângă efectele care le au asupra
ansamblului constructiv, au şi un efect asupra factorului de formă a unei celule solare. Ideal,
pentru performanţe ridicate, ne dorim să avem Rs=0 şi Rsh=∞, mai exact, rezistenţa serie sş fie
cât mai mică, iar rezistenţa şunt cât mai mare. Figura 2.1.2.1 prezintă grafic configuraţia
electronică pentru un astfel de model.[10]
Figura 2.1.2.1. Modelul electronic extins cu o diodă al unei celule fotovoltaice
Ecuaţia caracteristică modelului la bornele celulei este următoarea:
퐼 = 퐼 − 퐼 ∗ e ∗ ∗ ∗ ∗( ∗ )−1 − ∗
(3)
Unde:
Iph – curent fotovoltaic I0 – curentul de saturaţie al diodei Rs – rezistenţa serie Rsh – rezistenţa şunt q – sarcina electrică, 1.602 x l0-19 C n – factor de formă ( 1 for ideal cell) Ns – numărul celulor conectate în serie K – constanta Boltzmann, 1.381 x l0-23 J/K T – temperatura celulei (K)
Pentru a simplifica modelul, observăm că în condiţii ideale, Rsh tinde către infinit iar Rs este cât
mai mică, de aceea ultimul raport din ecuaţie tinde, la limită, către 0. Obţinem un model L4P,
care oferă un bun compromis între simplitate şi precizie:
퐼 = 퐼 − 퐼 ∗ e ∗ ∗ ∗ ∗( ∗ )−1 (4)
Un astfel de model, prezintă o bună aproximare a unui model real cât şi precizie, introducând
4 parametrii care trebuie deteminaţi: Iph, I0, n, Rs, în urma simplificării efectuate. O altă
simplificare adusă modelului matematic este la nivelul termenului ‘-1’ al ecuaţiei. Evaluarea
acestuia în punctele de maximă putere şi mers în gol aduce modificări minime rezultatului

12
obţinut, de aceea poate fi eliminat din modelul celului fotovoltaice. Ecuaţia obţinută este
prezentată în ().
퐼 = 퐼 − 퐼 ∗ e ∗ ∗ ∗ ∗( ∗ ) (5)
2.1.3. Modelul extins cu două diode
Acest model, cunoscut şi ca 2M7P, cu 7 parametrii de determinat: Iph, I01, I02, n1, n2, Rs, Rsh, prezintă o complexitate mai avansată prin curenţii de saturaţie ai celor două diode. Bilanţul curenţilor la bornele externe este prezentat în (6).[9]
퐼 = 퐼 − 퐼 ∗ 푒 ∗ ∗ ∗ ∗( ∗ )− 1 − 퐼 ∗ 푒 ∗ ∗ ∗ ∗( ∗ )
− 1 − ∗ (6)
Modelul electronic pentru configuraţia menţionată este prezentat în Figura 2.1.3.1.
Figura. 2.1.3.1. Modelul extins cu două diode
Diodele sunt alese, în general, una ideală cu m1=1 şi a doua diodă cu m2=2.
2.2.Structura convertorului DC/DC
Convertoarele DC/DC sunt blocuri electronice funcţionale care transformă energia electrică
preluată de la o sursă de curent continuu cu tensiune constantă în energie de curent continuu la
o tensiune de altă valoare. Elementele constructive care intră în configuraţia unui convertor
DC/DC sunt semiconductoare cu conducţie unilaterală, pentru asigurarea unui randament
ridicat de conversie. [24]
Convertoarele DC/DC pot fii împărţite în două categorii:
- variatoare de tensiune continua (sau choppere)
- convertoare de curent continuu cu element disipativ comandat, conectat între sursă şi sarcină
Categoria a doua de convertoare este utilizată în aplicaţii în care sunt utilizate puteri mici, din
motive de randament sau constructive. Lucrarea prezintă convertoare din prima categorie, şi
foloseşte pentru control configuraţia unui convertor DC/DC Buck. În stabilirea tipului de

13
convertor poate fi definit un raport de transformare al convertorului, N. Considerând U1
tensiunea de intrare şi U2 tensiunea de ieşire, formula este:
푁 = (7)
Acest raport, împarte convertoarele DC/DC îin trei grupe:
- coborâtoare de tensiune (N<1)
- ridicătoare de tensiune (N>1)
- cu raport de transformare oarecare
Componentele principale ale convertoarelor DC/DC sunt blocul de filtrare (bobină,
condensator, etc) şi blocul de comutaţie (tranzistoare în tehnologie MOS sau IGBT, triace, etc).
Etajul de filtrare are rolul de a limita riplul transmis către sarcină, iar blocul de comutaţie asigură
forma PWM a semnalului. Valoarea tensiunii de riplu poate fi controlată şi din dimensionarea
componentelor electronice din circuit, deoarece ea creste o dată cu puterea consumată la ieşirea
redresorului şi scade o dată cu capacitatea condensatorului. Important pentru modelarea convertoarelor DC/DC sunt relaţiile lui Kirchoff pe ochiurile din
schemă pentru starile de ON şi OFF ale comutatorului. În continuare, lucrarea prezintă trei
configuraţii des întâlnite pentru convertoarele DC/DC: Boost, Buck şi Buck-Boost.
2.2.1. Configuraţia Boost
Convertorul DC/DC în configuraţie Boost are funcţia de a primi o tensiune în curent continuu
la intrare şi a furniza o tensiune de curent continuu la ieşire mai mare decât cea de intrare.
Raportul de transformare, N, este mai mare decat unu. Figura 2.2.1.1. prezintă schema
electronică de principiu a unui astfel de convertor.
Figura 2.2.1.1.Convertor Boost
Comportamentul convertorului este descris de cele două stări ale tranzistorului MOS Q1, care
comută între stările ON şi OFF. Totodată, se fac anumite presupuneri asupra componentelor
circuitului pentru a simplifica înţelegerea funcţionării, cum ar fii: dioda este ideală, capacitatea
C folosită este foarte mare pentru a nu avea mari diferenţe a tensiunii VC care cade pe
14
condensator. Astfel, în cazul în care comutatorul se află în starea OFF (deschis), dioda D1 va
fi blocată iar prin condensatorul C1 şi sarcina R nu va trece curent. În starea ON (închis) a
comutatorului Q1, dioda D1 conduce sarcină, iar după ce condesatorul C1 este încărcat,
tensiunea va ajunge la sarcină. [32]
Relaţiile Kirchoff care se obţin sunt după cum urmează:
- comutatorul Q1=OFF, dioda D1=blocată: = (8)
- comutatorul Q1=ON, dioda D1=conduce: = (9)
Unde
D – factor de umplere
IL – curent pe bobina
L – inductanţa bobinei
UIN – tensiunea de intrare
UOUT – tensiunea de ieşire
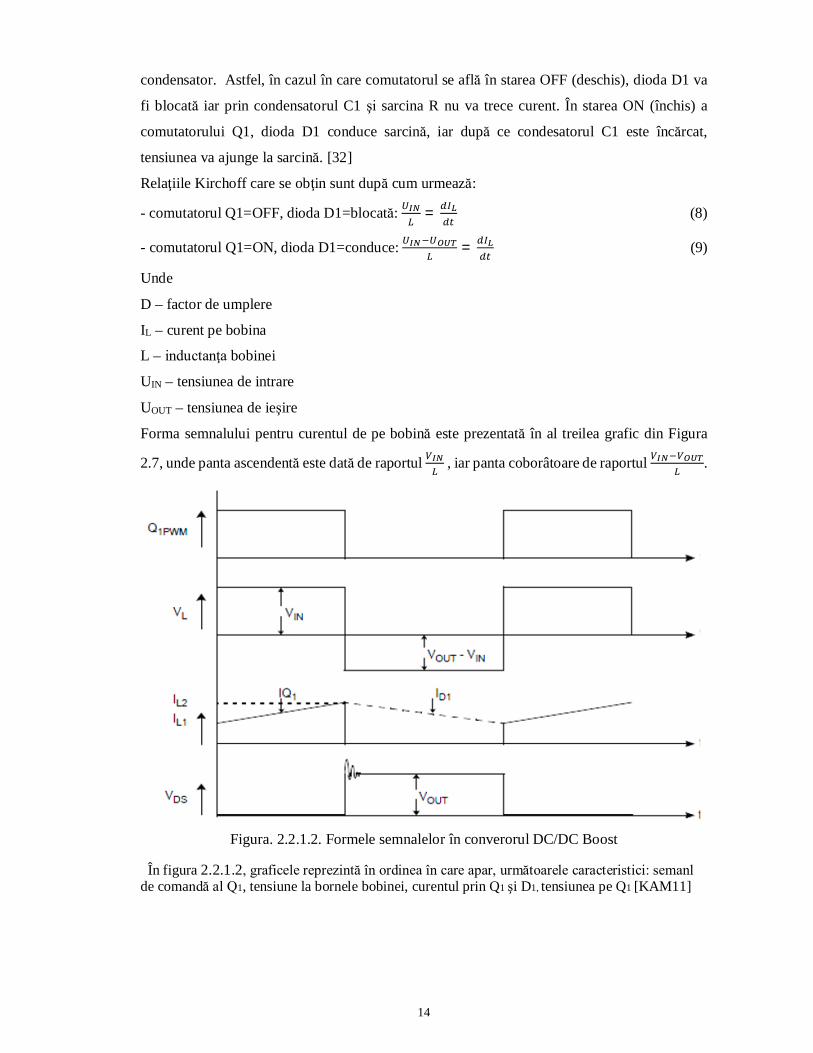
Forma semnalului pentru curentul de pe bobină este prezentată în al treilea grafic din Figura
2.7, unde panta ascendentă este dată de raportul , iar panta coborâtoare de raportul .
Figura. 2.2.1.2. Formele semnalelor în converorul DC/DC Boost
În figura 2.2.1.2, graficele reprezintă în ordinea în care apar, următoarele caracteristici: semanl de comandă al Q1, tensiune la bornele bobinei, curentul prin Q1 şi D1, tensiunea pe Q1 [KAM11]
15
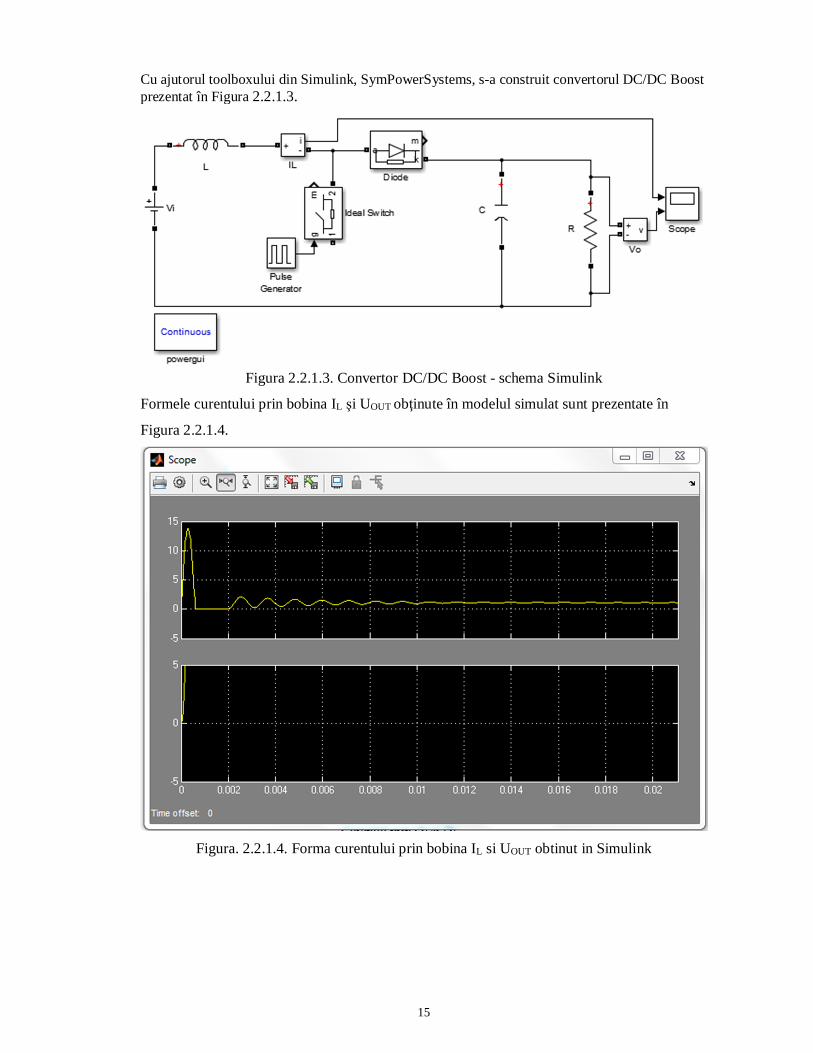
Cu ajutorul toolboxului din Simulink, SymPowerSystems, s-a construit convertorul DC/DC Boost prezentat în Figura 2.2.1.3.
Figura 2.2.1.3. Convertor DC/DC Boost - schema Simulink
Formele curentului prin bobina IL şi UOUT obţinute în modelul simulat sunt prezentate în
Figura 2.2.1.4.
Figura. 2.2.1.4. Forma curentului prin bobina IL si UOUT obtinut in Simulink
16
2.2.2. Configuraţia Buck
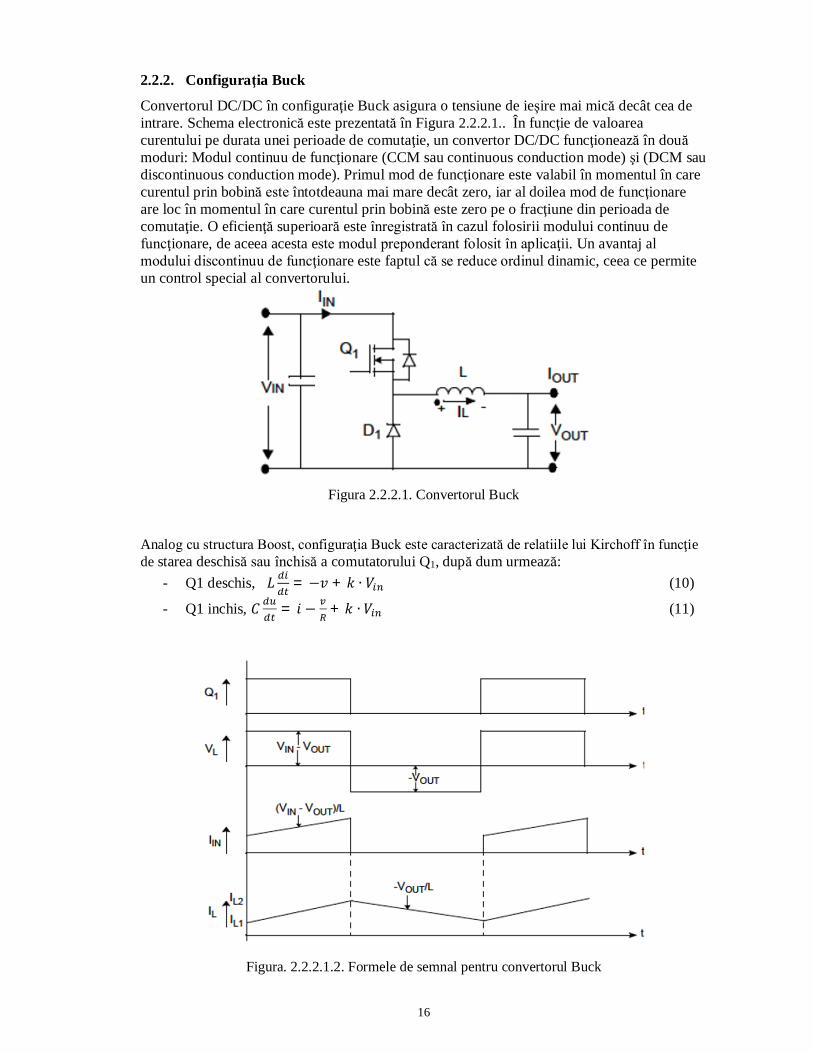
Convertorul DC/DC în configuraţie Buck asigura o tensiune de ieşire mai mică decât cea de intrare. Schema electronică este prezentată în Figura 2.2.2.1.. În funcţie de valoarea curentului pe durata unei perioade de comutaţie, un convertor DC/DC funcţionează în două moduri: Modul continuu de funcţionare (CCM sau continuous conduction mode) şi (DCM sau discontinuous conduction mode). Primul mod de funcţionare este valabil în momentul în care curentul prin bobină este întotdeauna mai mare decât zero, iar al doilea mod de funcţionare are loc în momentul în care curentul prin bobină este zero pe o fracţiune din perioada de comutaţie. O eficienţă superioară este înregistrată în cazul folosirii modului continuu de funcţionare, de aceea acesta este modul preponderant folosit în aplicaţii. Un avantaj al modului discontinuu de funcţionare este faptul că se reduce ordinul dinamic, ceea ce permite un control special al convertorului.
Figura 2.2.2.1. Convertorul Buck
Analog cu structura Boost, configuraţia Buck este caracterizată de relatiile lui Kirchoff în funcţie de starea deschisă sau închisă a comutatorului Q1, după dum urmează:
- Q1 deschis, 퐿 = −푣 + 푘 ∙ 푉 (10)
- Q1 inchis, 퐶 = 푖 − + 푘 ∙ 푉 (11)
Figura. 2.2.2.1.2. Formele de semnal pentru convertorul Buck

17
În figura . 2.2.2.1.2., graficele reprezintă în ordinea în care apar, următoarele caracteristici: semnalul de comandă al Q1, tensiunea la bornele inductorului, curentul de intrare, curentul prin inductor [32].Schema Simulink a acestui model este prezentată în figura 2.2.2.1.3, iar formele de semnal simulate pe bobină şi ieşire în figura 2.2.2.1.4.
Figura 2.2.2.1.3. Schema Simulink a convertorului Boost
Figura 2.2.2.1.4. Forma curentului prin bobina IL şi UOUT obţinut în Simulink

18
2.2.3. Configuraţia Buck-Boost
Convertorul în configuraţie Buck-Boost primeşte la intrare o tensiune de o anumită valoare şi
returnează o tensiune fie de o valoare mai mare fie mai mică faţă de tensiunea de la intrare.
Figura 2.2.3.1 arată formele de semnal din cadrul acestei configuraţii de convertor şi schema
electronică de principiu.[32]
Figura. 2.2.3.1 Convertorul Buck-Boost şi formele de semnal
În figura prezentată, graficele reprezintă în ordinea în care apar, următoarele caracteristici: tensiune pe bobină , curent prin bobină, curent prin Q1, curent de condensator Relaţiile Kirchoff pentru starea deschisă a comutatorului Q1 sunt:
= ∗ 푉 (12)
= ∗ −푖 − (13) Pentru starea închisă a circuitului acestea devin:
= ∗ 푉 (14)
= ∗ − (15)

19
Figurile 2.2.3.1.2. şi 2.2.3.1.3. prezintă schema în Simulink a convertorului şi curentul de pe
bobină şi tensiunea de ieşire a acestuia.
Figura 2.2.3.1.2. Schema Simulink a convertorului Buck-Boost
Figura 2.2.3.1.3. Forma curentului prin bobina IL şi UOUT obţinut în Simulink

20
3. Deteminarea punctului de maximă putere pentru panoul fotovoltaic BGSP - P225 şi
controlul unghiului de rotaţie al panoului fotovoltaic
3.1. Radiaţia solară şi componentele acesteia
Pentru a înţelege procesul de controlat, este necesară studierea elementelor de radiaţie solară
care influenţează randamentul sistemului. Radiaţia solară care ajunge la suprafaţa Pământului
este redusă cu 25%-30% din cauza dispersării şi absorbţiei acesteia în atmosferă. Din acest
procent, radiaţia solară globală se împarte în trei componente: radiaţia difuză şi radiaţia directă,
la care se adaugă şi radiaţia reflectată [23].
Radiaţia directă reprezintă componenta care se întâlneşte în condiţiile unui cer senin. Pentru o
suprafaţă înclinată, relaţia dată de această componentă este prezentată în ().
퐸 = 퐸 ∗ 푐표푠휃 (16)
Unde:
퐸 – radiaţia directă
퐸 – radiaţia directă care cade pe suprafaţa oblică
Θ – unghiul de incidenţă
Radiaţia solară difuză este componenta absorbită de norii din atmosferă. Formula de calcul a
acesteia,퐸 , este dată în ().
퐸 = 퐸 ∗ ( ) (17)
O altă componentă a radiaţiei solare este cea reflectată de obiectele din mediu. Aceasta depinde
de caracteristica reflectantă a obiectelor. Formula acesteia de calcul este prezentată mai jos.
퐸 = 퐸 + 퐸 ∗ 휑 ∗ ( ) (18)
O relaţie a radiaţiei globale este prezentată în ().
퐸 = 퐸 + 퐸 + 퐸 = 퐸 ∗ 푐표푠휃 + 퐸 ∗ ( ) + 퐸 + 퐸 ∗ 휑 ∗ ( ) (19)
Unde 휑 reprezintă coeficientul de reflecţie al suprafeţei. Valoarea acestuia variază de la 0
pentru o suprafaţă care nu reflectă până la 0.7 pentru o suprafaţă puternic reflectantă, cum ar fii
zăpada.
O altă componentă importantă în modelarea ulterioară a procesului reprezintă coordonatele care
determină poziţia soarelui pe cer cât şi unghiurile care se formează între razele solare şi
instalaţia fotovoltaică. Coordonatele importante sunt date de unghiul de zenit, unghiul de azimut
si unghiul altitudinal. Figura 3.1.1 prezintă grafic aceste componente. Unghiul de zenit
reprezintă unghiul din planul vertical dintre orizontală şi soare. Unghiul de azimut este unghiul
dintre proiecţia pe plan orizontal a poziţiei soarelui şi normala la plan. Unghiul altitudinal este
21
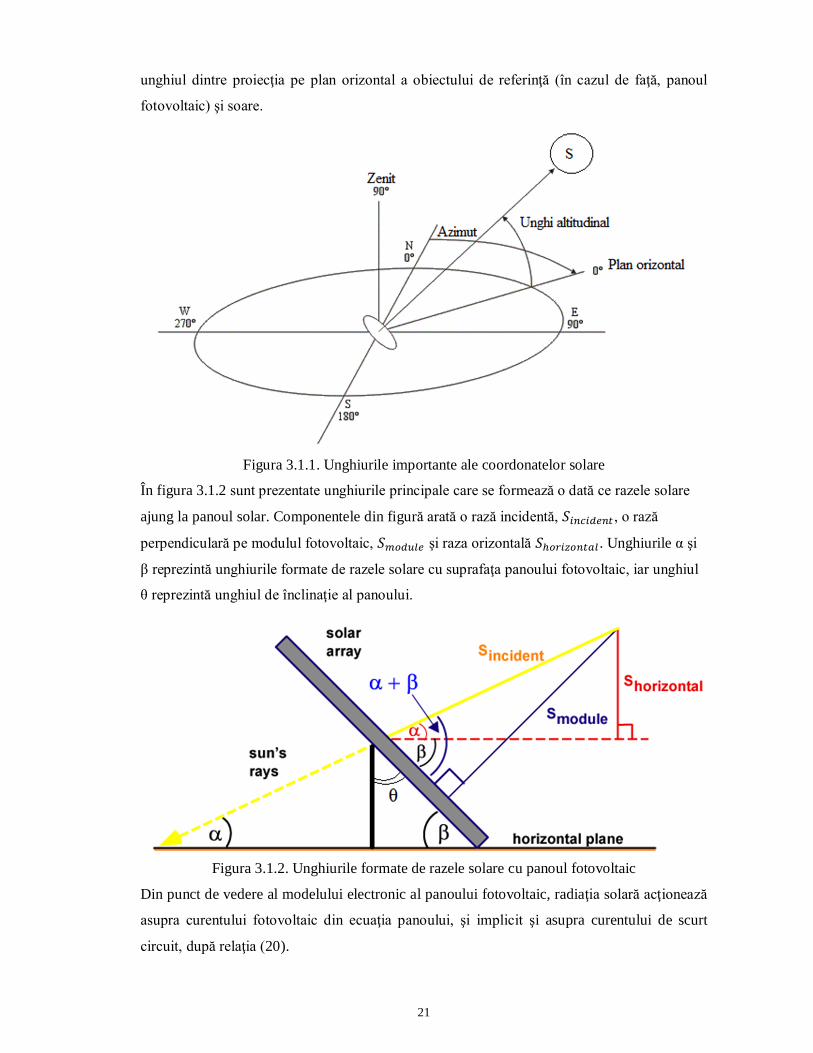
unghiul dintre proiecţia pe plan orizontal a obiectului de referinţă (în cazul de faţă, panoul
fotovoltaic) şi soare.
Figura 3.1.1. Unghiurile importante ale coordonatelor solare
În figura 3.1.2 sunt prezentate unghiurile principale care se formează o dată ce razele solare
ajung la panoul solar. Componentele din figură arată o rază incidentă, 푆 , o rază
perpendiculară pe modulul fotovoltaic, 푆 şi raza orizontală 푆 . Unghiurile α şi
β reprezintă unghiurile formate de razele solare cu suprafaţa panoului fotovoltaic, iar unghiul
θ reprezintă unghiul de înclinaţie al panoului.
Figura 3.1.2. Unghiurile formate de razele solare cu panoul fotovoltaic
Din punct de vedere al modelului electronic al panoului fotovoltaic, radiaţia solară acţionează
asupra curentului fotovoltaic din ecuaţia panoului, şi implicit şi asupra curentului de scurt
circuit, după relaţia (20).

22
퐼 = ∗ (20)
În practică, radiaţia solară folosită pentru modelarea acesteia în panoul fotovoltaic va lua în
consideraţie doar componenta directă şi de difuzie. Înlocuind cu relaţia radiaţiei solare globale
se obţine relaţia:
퐼 =∗( ∗ ∗
( )
(21)
Temperatura are şi ea o influenţă în cadrul rezultatului obţinut din modelul matematic al celulei
fotovoltaice, ea acţionând asupra curentului fotovoltaic, prin mutarea caracteristicii de curent
tensiune la dreapta sau la stânga funcţie de creşterea sau descreşterea acesteia. Elementele
prezentate sunt luate în considerare, în continuare, în cadrul modelării panoului fotovoltaic şi a
strategiei de control propuse pentru deplasarea panoului fotovoltaic după mişcarea soarelui în
decursul unei zile.[29]
3.2. Modelarea motorului electric de curent continuu
În lucrare este folosit un motor electric de curent continuu pentru modificarea unghiului de
orientare al panoului solar, asftel încât acesta să urmărească traiectoria soarelui pe cer pe
parcursul unei zile. Începem modelarea motorului electric de curent continuu prin scrierea
relațiilor elementelor mecanice şi electromagnetice în regim tranzitoriu ale acestuia [32] :
푢 = 푅 ∗ 푖 + ( ) + 푒 (22)
푒 = 퐾 ∗ 훷 ∗ 훺 (23)
푚 = 퐾 ∗ 훷 ∗ 푖 (24)
푚 −푚 = 퐽 ∗ (25)
푢 = 푅 ∗ 푖 + 퐿 ∗ (26)
훷 = 푓(푖 ) (27)
푚 = 푓(훺) (28)
Unde:
퐿 = inductivitatea circuitului rotoric
퐿 = inductivitatea circuitului de excitaţie
퐽 = momentul de inerţie mecanic
푢 = tensiunea rotorică
푢 = tensiunea de excitaţie
푒 = tensiunea electromotoare indusă
푚 = cuplul rezultant de sarcină

23
m = cuplul electromagnetic
푖 = curentul de excitaţie
Φ = flux de excitaţie
훺 = viteza de rotaţie
Modelul dinamic astfel obţinut este neliniar, din cauza componentelor 훷 ∗ 훺 şi 훷 ∗ 푖 .
În continuare, se aplică transformata Laplace ecuaţiilor liniare în condiţii iniţiale nule, şi
obţinem următoarele relaţii:
푢 (푠) − 푒 (푠) = (푅 + 푠퐿 ) ∗ 푖 (푠) (29)
푚(푠) −푚 (푠) = 퐽 ∗ 푠 ∗ 훺(푠) (30)
푢 (푠) = (푅 + 푠퐿 ) ∗ 푖 (푠) (31)
Introducem în ecuaţii constanta de timp a circuitului rotoric TA, constanta de timp a circuitului
de excitaţie şi constanta de timp electromecanică; acestea au următoarele formule:
푇 = (32)
푇 = (33)
푇 = ∗ (34)
Modelul se liniarizează prin variaţii în jurul punctului static de funcţionare (푢 = 푢 + 훥푢 ).
Funcţia de transfer în situaţia în care intrarea în sistem este tensiunea rotorică, iar ieşirea
sistemului este viteza de rotaţie este prezentată în (35).
퐻 (푠) = ( )( )
=∗ ∗ ∗ ∗
∗ ∗ ∗ ∗ ∗ ∗
(35)
Se grupează şi se rearanjează termenii corespunzător, şi se obţine:
퐻 (푠) =∗ ∗ ∗
=( ∗ )( ∗ )
≃ (36)
Modelul obţinut poate fii redus la un sistem de ordinul I, în situaţia în care 푇 ≫ 푇 .
Datele caracteristice motorului ales sunt următoarele:
- puterea nominală Pn = 8.3 KW - tensiunea nominală Un = 220V - turaţia nominală nn=1500 [rot/min] - randamentul η = 85% - rezistenţa rotorică Ra = 1.45 Ω - inductivitate rotorică La = 15.5 mH - moment de inerţie J m = 0,48 Kg*m2
- moment de inerţie utilaj acţionat (sarcina) Js=6.5 Kg*m2 prin reductor cu i=1:10 În continuare, se prezintă calculul parametrilor din funcţia de transfer:
퐾 = = 0.99 (37)
24
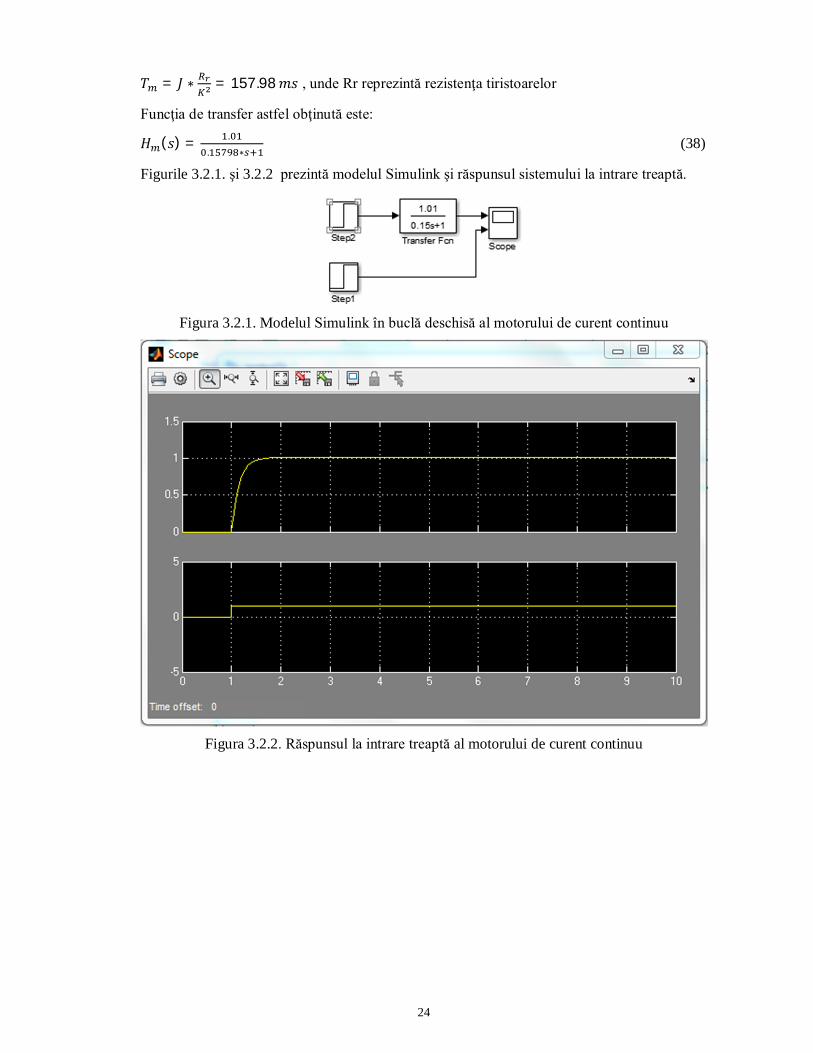
푇 = 퐽 ∗ = 157.98푚푠 , unde Rr reprezintă rezistenţa tiristoarelor
Funcţia de transfer astfel obţinută este:
퐻 (푠) = .. ∗
(38)
Figurile 3.2.1. şi 3.2.2 prezintă modelul Simulink şi răspunsul sistemului la intrare treaptă.
Figura 3.2.1. Modelul Simulink în buclă deschisă al motorului de curent continuu
Figura 3.2.2. Răspunsul la intrare treaptă al motorului de curent continuu

25
3.3. Elemente în orientarea panoului fotovoltaic după razele solare sau solar tracking
Unghiul de înclinare al unui panou fotovoltaic are un rol important în maximizarea puterii solare
captate de instalaţie, din cauza menţinerii panoului într-o poziţie care îl expune razelor
perpendiculare, iar unghiul de orientare ajută la poziţionarea panoului după mişcarea soarelui
de-alungul cerului în decursul unei zile. O reprezentare grafică a acestor unghiuri pe un panou
fotovoltaic este prezentat în Figura 3.3.1. În funcţie de zona geografică în care se montează
panourile, se poate determina unghiul de înclinare optim, acesta depinzând de latitudine.[21]
Controlul unghiurilor unui panou se face cu ajutorul motoarelor electrice pe două axe. Unghiul
de înclinare θ, poate fi ajustat sezonier, deoarece o dată instalat, panoul fotovoltaic va fi expus
unor anumite componente ale radiatiei solare, aflate sub unghiurile determinate de poziţia
panoului.
Figura 3.3.1. Unghiurile de înclinare şi orientare ale unui panou fotovoltaic
Putem concluziona că unghiul de înclinare este ajutstat o dată prin poziţionarea eficientă a
panourilor solare, în momentul în care sunt instalate într-o anumită zonă geografică, urmând ca
ulterior să fie ajustat în raport cu anotimpurile şi implicit variaţia unghiului de incidenţă al
razelor solare [22]. Lucrarea prezintă controlul unghiului de orientare a unui panou fotovoltaic,
deci de-alungul unei axe de deplasare.

26
3.4. Controlul unghiului de orientare al panoului fotovoltaic BGSP – P225
Sistemul obţinut pentru controlul platformei sistemului fotovoltaic este format din: motorul
electric de curent continuu, care controlează rotirea panoului după direcţia soarelui pe cer,
modelul panoului fotovoltaic şi un traductor de poziţie. În cadrul acestui sistem, traductorul este
modelat cu ajutorul unei amplificări, prezentate în formula (39).[30]
퐻 (푠) = (39)
Unde, 푃 ∈ (0, 200), iar U ∈ (0 , 10).
Funcţia de transfer care rezultă pentru traductor pentru valorile alese 푃 = 180푊şi 푈 =
9.2V este:
퐻 (푠) =.
= 1.023 (40)
Panoul fotovoltaic este modelat asemănător cu cel al traductorului de turaţie, printr-o
amplificare. Formula folosită pentru determinarea amplificării este:
퐾 = (41)
Înlocuind numeric se obţine:
퐾 = = 0.84 (42)
Funcţia de transfer globală a procesului obţinut este de forma:
퐻 (푠) = 퐻 (푠) ∗ 퐻 (푠) ∗ 퐻 (푠) = .. ∗
∗ 0.84 ∗ 1.023 (43)
Obţinem că funcţia de transfer globală a sistemului:
퐻 (푠) = .. ∗
(44)
Diagrama în Simulink a răspunsului sistemului obţinut este prezentată în Figura 3.4.1, iar
răspunsul sistemului la intrare treaptă în Figura 3.4.2.
Figura 3.4.1. Diagrama în Simulink a sistemului panoului fotovoltaic în buclă deschisă
27
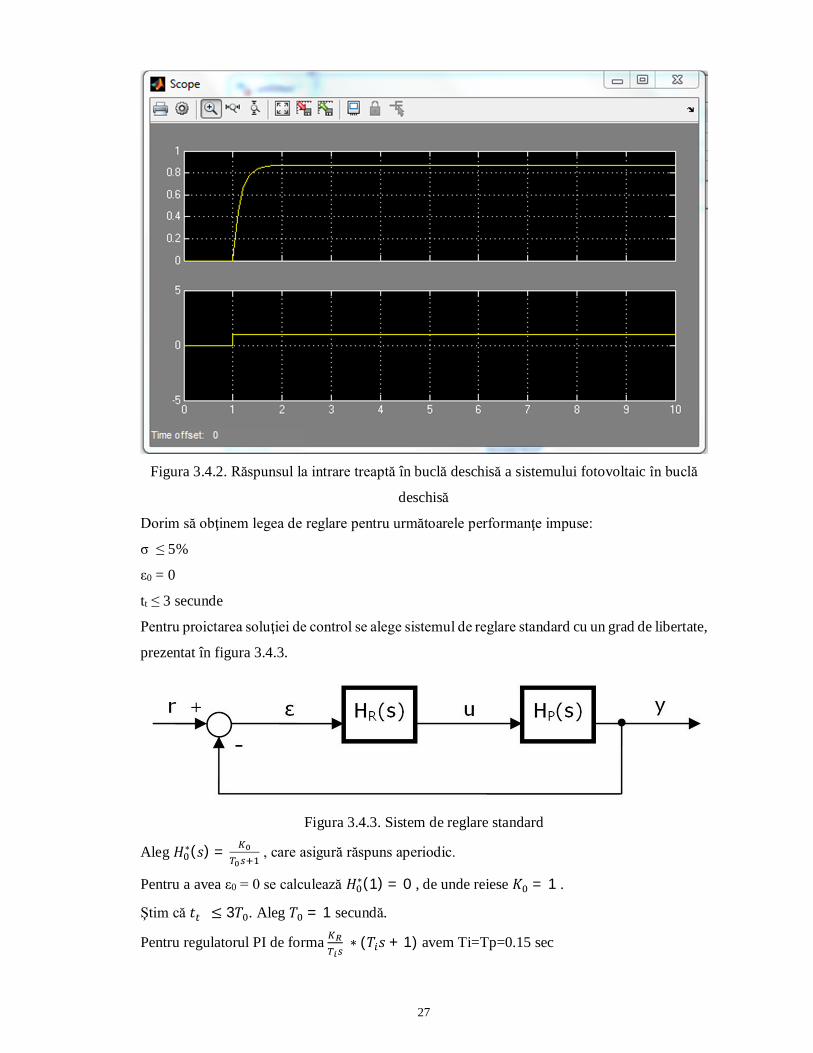
Figura 3.4.2. Răspunsul la intrare treaptă în buclă deschisă a sistemului fotovoltaic în buclă
deschisă
Dorim să obţinem legea de reglare pentru următoarele performanţe impuse:
σ ≤ 5%
ε0 = 0
tt ≤ 3 secunde
Pentru proictarea soluţiei de control se alege sistemul de reglare standard cu un grad de libertate,
prezentat în figura 3.4.3.
Figura 3.4.3. Sistem de reglare standard
Aleg 퐻∗(푠) = , care asigură răspuns aperiodic.
Pentru a avea ε0 = 0 se calculează 퐻∗(1) = 0 , de unde reiese 퐾 = 1 .
Ştim că 푡 ≤ 3푇 . Aleg 푇 = 1 secundă.
Pentru regulatorul PI de forma ∗ (푇 푠 + 1) avem Ti=Tp=0.15 sec
28
퐻∗(푠) = (45)
Se calculează de unde rezultă că 퐾 = .∗
= 0.177 (46)
Obţinem că Ti=Tp şi Kr=0.177 (47)
Algoritmul de reglare PI obţinut este:
퐻 (푠) = ..
(48)
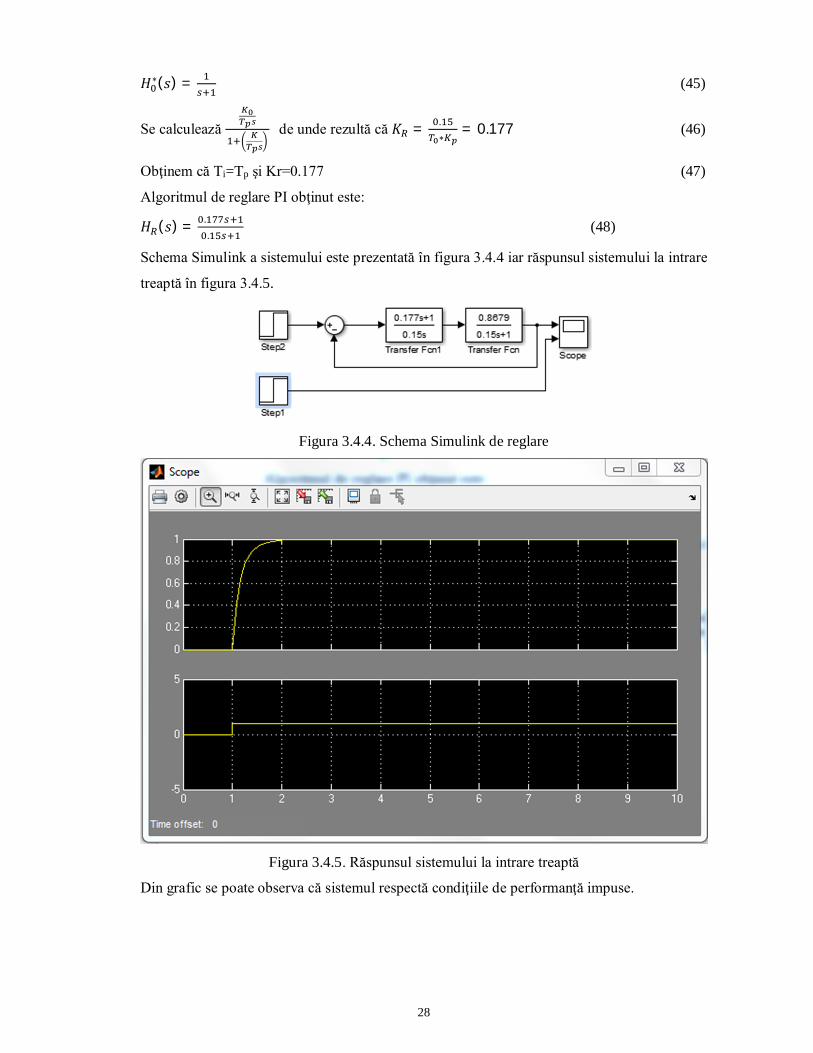
Schema Simulink a sistemului este prezentată în figura 3.4.4 iar răspunsul sistemului la intrare
treaptă în figura 3.4.5.
Figura 3.4.4. Schema Simulink de reglare
Figura 3.4.5. Răspunsul sistemului la intrare treaptă
Din grafic se poate observa că sistemul respectă condiţiile de performanţă impuse.
29
3.5. Algoritmi de căutare a punctului de putere maximă MPPT
În cadrul sistemelor fotovoltaice sunt prezente numeroase perturbaţii precum, temperatura,
radiaţia solară, mişcarea frontului de nori, etc care influenţează randamentul de conversie a
luminii solare în energie electrică. Acest aspect introduce diverse pierderi în cantitatea de
energie convertită şi introdusă în sistem. Pentru a menţine sistemul de conversie a energiei la
un randament eficient sunt folosiţi algoritmi de căutare a punctului de putere maximă. Dintre
aceştia amintim, algoritmii direcţi: perturbă & observă, conductanţă incrementală şi algoritmii
indirecţi: control fracţionar al tensiunii, control fracţionar al curentului. Aceste metode sunt
grupate în literatura de specialitate sub titlul de Maximum Power Point Tracking (MPPT).
Există cel puţin 15 de metode folosite cu acest scop. Cele mai utilizate metode sunt prezentate
în tabelul 3.5.1, cu avantajele şi dezavantajele corespunzătoare fiecărei metode [13] [1].
Aspectele importante pentru aceşti algoritmi sunt viteza de convergenţă şi capacitatea
algoritmilor de a identifica punctul de maxim sub diferite condiţii de mediu, sau mai bine zis
perturbaţii, cât şi în situaţia în care am avea de furnizat aceleaşi rezultate în condiţii care
evoluează rapid, cum ar fii schimbări climatice bruşte. În majoritatea cazurilor algoritmul optim
este ales după mai multe criterii, cum ar fii:
- Complexitatea implementarii (sisteme autonome, conectate la retea, spaţiale)
- Tipul şi numărul senzorilor de care este nevoie
- Capacitatea algoritmului de a detecta puncte de maxim local
- Cost
- Timp de răspuns
- Tipul de implementare (analogică, numerică, mixtă)
Metodele MPPT se împart în metode directe şi indirecte [19], [5]. Caracteristicile specifice
metodelor directe sunt următoarele:
- Folosesc tensiunea şi/sau curentul măsurat
- Independente de temperatură şi nivelele de degradare
- Necesită putere de calcul mare
În comparaţie, metodele indirecte sau de pseudo căutare, determină punctul de maxim în funcţie
de curent, tensiune, radiaţie, expresiile matematice folosite. O consecinţă a implementării unui
algoritm MPPT în cadrul sistemului de panouri fotovoltaice este faptul că randamentul acestuia
este maximizat fără a mai fi influenţat semnificativ de factorii perturbatori.

30
Avantaje Dezavantaje
Control fracţionar al tensiunii simplă de implementat -necesitatea măsurării
periodice a tensiunii în circuit
deschis (care variază în
funcţie de condiţiile de
mediu)
Control fracţionar al
curentului
simplă de implementat -necesitatea măsurării
periodice a curentului în
circuit deschis (care variază
în funcţie de condiţiile de
mediu)
Perturbă & observă logică simplă de comandă -performanţa algoritmului
depinde de frecvenţa de
operare
-nu atinge un punct stabil de
funcţionare -> chiar în
condiţii de mediu invariante
va oscila în jurul punctului de
maxim
Conductanţă incrementală absenta oscilatiilor din jurul
punctului de putere maxima
-implementare complexă
Tabel 3.5.1. Avantaje şi dezavantaje ale metodelor uzuale folosite in MPPT
3.5.1. Algoritmul Observă & Perturbă
Algoritmul este folosit în mod special pentru simplitatea implementării şi a rezultatelor
satisfăcătoare obţinute. Metoda constă în modificarea periodică a tensiunii panoului şi
măsurarea totodată a puterii obţinute. În momentul în care puterea obţinută creşte o dată cu
modificarea tensiunii într-o anumită direcţie, direcţia aceasta este menţinută şi la următoarea
iteraţie. În cazul în care puterea obţinută este mai mică faţă de valoarea precedentă, direcţia de
căutare este schimbată. Din cauza diferenţelor mici ale puterii obţinute, o dată cu atingerea
punctului de putere maximă, rezultă mai multe puncte în jurul punctului de putere maximă.
Oscilaţiile produse pot fi înlăturate prin introducerea unui pas variabil de înaintare []. O altă
eroare apare în condiţiile în care apar schimbări rapide de vreme, care fac ca sistemul să devieze
de la punctul de maxim. Acest inconvenient este şi el combătut prin introducerea unor puncte
auxiliare în jurul punctului de maxim care ajută la stabilizare [18]. Paşii expliciţi ai algoritmului

31
sunt prezentaţi în Figura 3.5.1.1. În comparaţie cu algoritmul de conductanţă incrementală, care
este introdus pentru a rezolva câteva din lipsurile metodei prezentate, algoritmul Perturbă &
Observă are o convergenţă mai rapida, pentru condiţtii diferite de vreme. [16],[17], [20].
Figura 3.5.1.1. Schema algoritmului Perturbă & Observă
3.5.2. Algoritmul conductanţă incrementala
Metoda de conductanţă incrementala este bazată pe faptul ca panta puterii în punctul de maxim
este egala cu 0, şî mai mică sau mai mare în stanga şi în dreapta. Spre deosebire de metoda
prezentată anterior, aceasta oferă rezultate mai bune, în sensul ca nu oscileaza în jurul punctului
de maxim, ci oferă un rezultat exact, cu diferenţa că viteza de convergenţa este mai redusă
pentru condiţii atmosferice variabile în comparaţie cu metoda Perturbă & Observă. Formulele
care dau logica de parcurgere a pantei sunt prezentate în (49)- (51).[15]
= 0 , condiţie pentru punctul de maxim (49)
> 0 , condiţie pentru punctele din stânga punctului de maxim (50)
< 0 , condiţie pentru punctele din dreapta punctului de maxim (51)
Deoarece relaţia puterii depinde de curent şi tensiune, formulele de mai sus devin:
= − , condiţie pentru punctul de maxim (52)
> − , condiţie pentru punctele din stânga punctului de maxim (53)
< − , condiţie pentru punctele din dreapta punctului de maxim (54)

32
Algoritmul începe prin măsurarea tensiunii şi curentului panoului, pentru a calcula diferenţele
incrementale de la următorul pas. Valorile măsurate sunt scăzute din cele precedente. În paralel,
este calculată şi suma incrementală şi suma instantanee . Semnul acestei sume este
verificat pentru a stabili modificarea tensiunii panoului. Acesti paşi se fac ţinând cont de faptul
că suma incrementală este zero în punctul de maxim. O dată ce este atins punctul de maxim,
algoritmul verifică diferenţa de curent din panou. În condiţiile în care sunt observate modificări,
atunci algoritmul va stabili un nou punct de start. Algoritmul şi pasii expliciţi sunt prezentaţi în
Figura 3.5.2.1..
Figura 3.5.2.1. Algoritmul de conductanţă incrementală
Algoritmul de conductanţă incrementală prezintă o stabilitate ridicată spre deosebire de
algoritmul Perturbă & Observă, având un comportament ce asigură o funcţionare satisfăcătoare
în condiţiile în care punctul de maxim este atins. Un dezavantaj al acestui algoritm, este că în
practică, din cauza erorilor de măsurare şi a aproximarilor dX≈ΔX, unde X reprezintă marimile
măsurate I şi U. Soluţii pentru acest aspect sunt propuse în [18] unde sunt introduse marginile
de eroare εu, εi, εinc, ale căror valori sunt acordate în simulare.

33
3.5.3. Algoritmul Coggin’s
Algoritmul de interpolare polinomială Coggin’s calculează maximul funcţiei criteriu, care în cazul lucrării de faţă este funcţia P(U), pentru a determina tensiunea pentru puterea generată este maximă. Metoda primeşte ca parametrii de iniţializare un punct de start pentru algoritm, U0, eroarea algoritmului ε şi mărimea pasului de înaintare, ΔU0. Pornind din punctul iniţial U0, algoritmul caută spre vecinatatea punctului U*, folosind un pas de înaintare variabial, care se dublează în situaţia în care direcţia este menţinută sau se înjumătăţeşte în cazul în care direcţia trebuie schimbată. În vecinătatea punctului U*, funcţia criteriu P(U) este aproximată de polinomul de gradul doi în cele trei puncte obţinute în jurul acestei vecinatăţi (Uk-1, Uk, Uk+1). Următorul pas urmat de algoritm este evaluarea punctului de maxim al interpolarii polinomiale, care aproximează U* al funcţiei criteriu P(U). după ecuaţia prezentată în (55).[8], [4] 푈∗ = ∗ 〖( 〗 ∗ ( ) ∗ ( ) 〖( 〗 ∗ ( )
( )∗ ( ) ( )∗ ( ) ( )∗ ( ) (55)
Paşii expliciţi ai metodei sunt prezentaţi în figura 3.5.3.1.
Figura 3.5.3.1. Paşii algoritmului Coggin’s

34
3.5.4. Algoritmul de gradient
Algoritmul de gradient este o metodă robustă cu o convergenţă rapidă cunoscută pentru
performanţele ridicate care le prezintă. În cazul particular al panoului fotovoltaic, metoda este
aplicată pe caracteristica puterii funcţie de tensiune şi curent, P(I,U). Un desen al acestei
caracteristici a fost obţinut în Matlab şi este prezentat în Figura 3.5.4.1. Asemeni algoritmului
Coggin’s, parametrii primiţi la iniţializare sunt: un punct de start dat de perechea (I0,U0), pasul
de înaintare λ, şi eroarea ε. Următorul pas este evaluarea gradientului funcţiei puterii. Relaţia
de recurentă folosită în algoritm este relaţia Cauchy şi este prezentată în (56).[29]
(Ik+1, Uk+1) = (Ik, Uk) + α * GP(Ik, Uk) (56) Atâta timp cât condiţia ||GP(Ik+1, Uk+1)||< ε este îndeplinită, algoritmul va continua să caute o soluţie.
Figura 3.5.4.1. Caracteristica P(I,U) a panoului fotovoltaic.
O prezentare schematică a paşilor algoritmului este prezentată mai jos, în Figura 3.5.4.2..

35
Figura 3.5.4.2. Paşii algoritmului de gradient
3.6. Determinarea parametrilor panoului fotovoltaic BGSP - P225
Configuraţia electronică folosită, în continuare, în această lucrare este L4P. Pentru determinarea
caracteristicilor curent-tensiune, putere-tensiune ale panoului fotovoltaic în simulare este
necesară explicitarea relaţiilor de curent şi putere corespunzătoare modelului ales. Reluăm
ecuaţia pentru curent, cu simplificările aferente pentru rezistenţa sunt şi serie:
퐼 = 퐼 − 퐼 ∗ e ∗ ∗ ∗ ∗( ∗ )−1 (57)
O altă simplificare adusă modelului este la nivelul termenului „-1” al ecuaţiei de curent. Acesta,
evaluat în punctele de putere maximă şi de mers în gol, are o influenţă minoră asupra
rezultatului obţinut şi poate fi eliminat. Ecuaţia care rezultă este prezentată în (58)[2].
퐼 = 퐼 − 퐼 ∗ e ∗ ∗ ∗ ∗( ∗ ) (58)
Relaţia pentru puterea generată de panoul fotovoltaic este:
푃 = 푈 ∗ 퐼 = 푈 ∗ 퐼 − 푈 ∗ 퐼 ∗ 푒 ∗ ∗ ∗ ∗( ∗ ) (59)
Caracteristicile curent-tensiune, putere-tensiune ale unui panou fotovoltaic prezintă 3 puncte
importante, după cum urmează:
- Punctul de scurt circuit, unde I = ISC, U = 0 - Punctul de mers în gol, unde I = 0, U = UOC - Punctul de maximă putere, unde I = IMP, U = UMP

36
Pentru determinarea celor 4 parametrii ai modelului, Iph, I0, n, Rs, , relaţia curentului este scrisă
în aceste trei puncte, obţinându-se un sistem de 3 ecuaţii [7]. Deasemenea, este introdusă o a
patra ecuaţie a punctului de maximă putere pe caracteristica analitică putere-tensiune = 0.
Sistemul rezultat, prezintă patru ecuaţii cu patru necunoscute :
퐼 − 퐼 = 0 (60)
−퐼 ∗ 푒 ∗ ∗ ∗ ∗( )− 퐼 = 0 (61)
퐼 − 퐼 ∗ 푒 ∗ ∗ ∗ ∗( ∗ )− 퐼 = 0 (62)
1 − 푒 ∗ ∗ ∗ ∗( ∗ )∗ 1 + ∗ ∗ ∗ ∗
∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗= 0 (63)
Sistemul este rezolvat prin metode analitice. Urmând substituţii succesive, rezultatele obţinute
sunt prezentate în ().
푛 =∗ ∗
∗ ( ∗ )
(64)
푅 =∗ ∗ ∗
∗ (65)
퐼 = 퐼 ∗ 푒 ∗ ∗ ∗ (66) 퐼 = 퐼 (67)
Datele folosite pentru calculul parametrilor sunt extrase din catalogul panoului solar BGSP -
P225, prezentate în tabelul 3.6.1, pentru E=800 W/m2 şi T=250C.
Parametru Valoare Unitate E 800 W/m2 T 25 0C
ISC 8.25 A VOC 37.5 V IMP 7.7 A VMP 29.4 V
Tabel 3.6.1. Parametrii de catalog ai panoului solar
Dupa o substituţie numerică, rezultatele sunt prezentate în Tabelul 3.6.2..
Parametru Valoare Unitate 푛 1.6 - 푅 0.032 Ω 퐼 0.036889 A 퐼 8.25 A
Tabel 3.6.2.Parametrii calculaţi ai panoului fotovoltaic
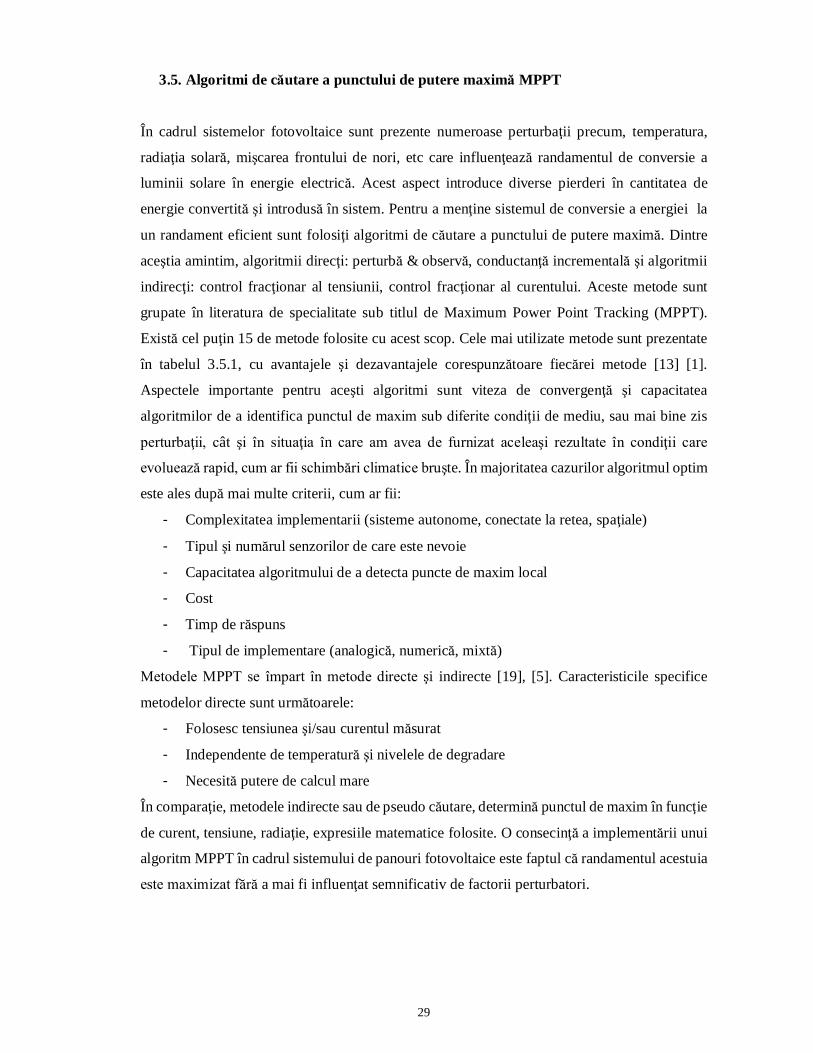
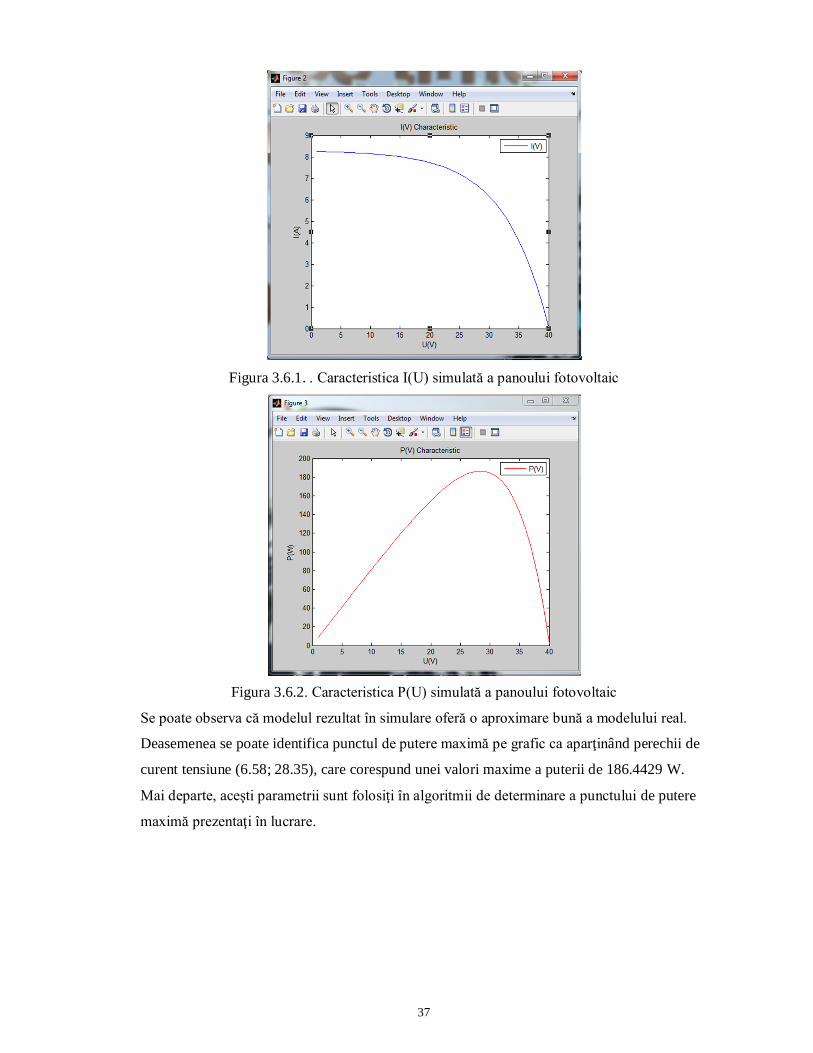
În figurile 3.6.1 şi 3.6.2. sunt prezentate rezultatele în simulare, obţinute cu ajutorul
parametrilor determinaţi ai modelului panoului fotovoltaic.
37
Figura 3.6.1. . Caracteristica I(U) simulată a panoului fotovoltaic
Figura 3.6.2. Caracteristica P(U) simulată a panoului fotovoltaic
Se poate observa că modelul rezultat în simulare oferă o aproximare bună a modelului real.
Deasemenea se poate identifica punctul de putere maximă pe grafic ca aparţinând perechii de
curent tensiune (6.58; 28.35), care corespund unei valori maxime a puterii de 186.4429 W.
Mai departe, aceşti parametrii sunt folosiţi în algoritmii de determinare a punctului de putere
maximă prezentaţi în lucrare.

38
3.7. Determinarea punctului de putere maximă în blocul de MPPT
Lucrarea propune algoritmul Coggin’s aplicat pe caractertistica putere-tensiune,P(U) pentru
controlul puterii fotovoltaice generate. Pentru o analiză comparativă a eficienţei algoritmului,
este prezentat şi algoritmul de gradient aplicat pe caracteristica tridimensională, putere-curent-
tensiune, P(I,U). Tabelele 3.7.1 şi 3.7.2 prezintă seturile de date de intrare pentru cei doi
algoritmi, iar tabelele 3.7.3. şi 3.7.4. prezintă rezultatele obţinure în simularea celor doi
algoritmi.
Set de date U0( V) ε Δ U0 1 1 0.0001 0.4 2 40 0.0001 0.4 3 33 0.0001 0.4
Tabel 3.7.1. Date de intrare algoritm Coggin’s
Set de date U0( V) I0 ( A) α ε 1 6 10 0.5 0.0001 2 30 9 0.5 0.0001 3 40 8 0.5 0.0001
Tabel 3.7.2. Date de intrare algoritm de gradient
Set de date Imp (A) Ump (V) Pmax(W) Iteratii 1 6.57 28.3747 186.4217 68 2 6.57 28.3747 186.4217 12 3 6.57 28.3747 186.4217 29
Tabel 3.7.3. Date de iesire algoritm Coggin’s Set de date Imp (A) Ump( V) Pmax(W) Iteratii 1 6.4882 28.7360 186.4449 8 2 6.4522 28.9227 186.6150 10 3 6.4568 28.8494 186.2748 8
Tabel 3.7.4. Date de ieşire algoritm de gradient
S-au ales mai multe seturi de date pentru a face iniţializarea algoritmilor din diferite puncte
pentru a testa dacă rezultatele obţinute vor fii similare şi pentru a valida performanţele acestora
în procesul de urcare şi coborâre pe panta de putere pentru determinarea valorii maxime. Figura
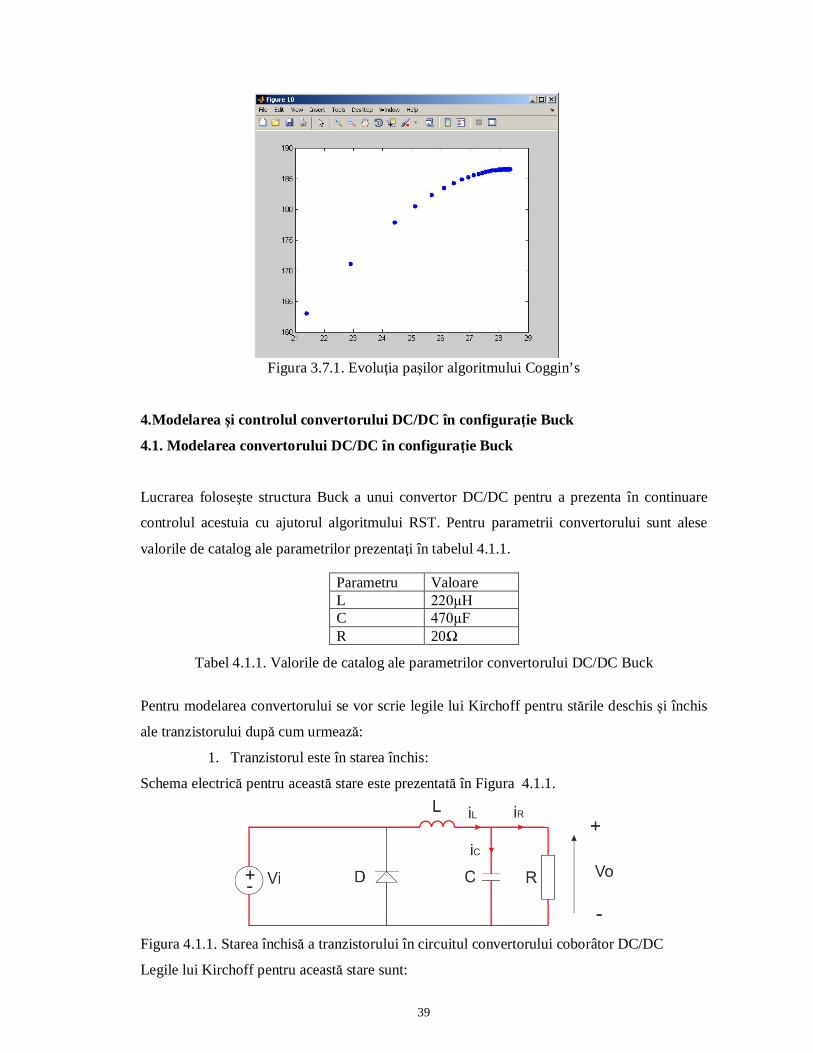
3.7.1 arată punctele obţinute în timpul rulării metodei Coggin’s.
39
Figura 3.7.1. Evoluţia paşilor algoritmului Coggin’s
4.Modelarea şi controlul convertorului DC/DC în configuraţie Buck
4.1. Modelarea convertorului DC/DC în configuraţie Buck
Lucrarea foloseşte structura Buck a unui convertor DC/DC pentru a prezenta în continuare
controlul acestuia cu ajutorul algoritmului RST. Pentru parametrii convertorului sunt alese
valorile de catalog ale parametrilor prezentaţi în tabelul 4.1.1.
Parametru Valoare L 220μH C 470μF R 20Ω
Tabel 4.1.1. Valorile de catalog ale parametrilor convertorului DC/DC Buck
Pentru modelarea convertorului se vor scrie legile lui Kirchoff pentru stările deschis şi închis
ale tranzistorului după cum urmează:
1. Tranzistorul este în starea închis:
Schema electrică pentru această stare este prezentată în Figura 4.1.1.
Figura 4.1.1. Starea închisă a tranzistorului în circuitul convertorului coborâtor DC/DC
Legile lui Kirchoff pentru această stare sunt:

40
푈 = 푈 + 푈 (68)
푈 = 푈 = 푈 (69)
퐼 = 퐼 + 퐼 (70)
Relaţiile care rezultă sunt:
푈 − 퐿 ∗ − 푈 = 0 (71)
푖 = + 퐶 ∗ (72)
2. Tranzistorul este în starea deschis:
Schema electrică pentru această stare este prezentă în Figura 4.1.2.
Figura 4.1.2. Starea deschisă a tranzistorului în circuitul convertorului coborâtor DC/DC
Relaţiile obţinute sunt:
푈 + 푈 = 0 (73)
푈 = 푈 = 푈 (74)
푖 = 푖 + 푖 (75)
Asa cum este arătat şi în [25],[24], pentru controlul unui convertor Buck, pot fi alese două
modele intrare-ieşire, unul care modelează influenţa tensiunii de intrare 푉 , asupra sistemului
şi prezentat în Figura 4.1.2. ca 퐺 (푠), şi cel în care se foloseşte un modul PWM care
controlează convertorul. Pentru a obţine modelul matematic al convertorului DC/DC Buck se
stabilesc iniţial intrările şi ieşirile sistemului astfel:considerăm intrarea,u a sistemului factorul
de umplere D, iar ieşirea y a sistemului tensiunea de ieşire 푈 . Figura 4.1.3. prezintă ambele
modele în structura de reglare.
41
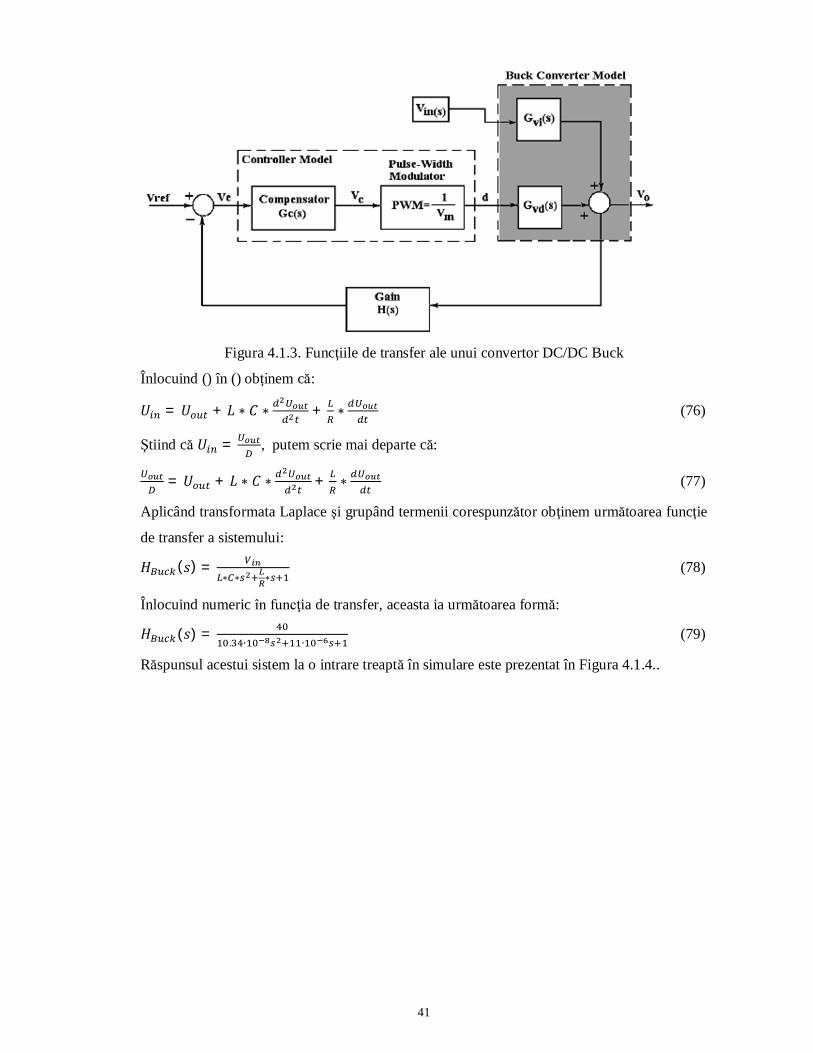
Figura 4.1.3. Funcţiile de transfer ale unui convertor DC/DC Buck
Înlocuind () în () obţinem că:
푈 = 푈 + 퐿 ∗ 퐶 ∗ + ∗ (76)
Ştiind că 푈 = , putem scrie mai departe că:
= 푈 + 퐿 ∗ 퐶 ∗ + ∗ (77)
Aplicând transformata Laplace şi grupând termenii corespunzător obţinem următoarea funcţie
de transfer a sistemului:
퐻 (푠) =∗ ∗ ∗
(78)
Înlocuind numeric în funcţia de transfer, aceasta ia următoarea formă:
퐻 (푠) =. ∙ ∙
(79)
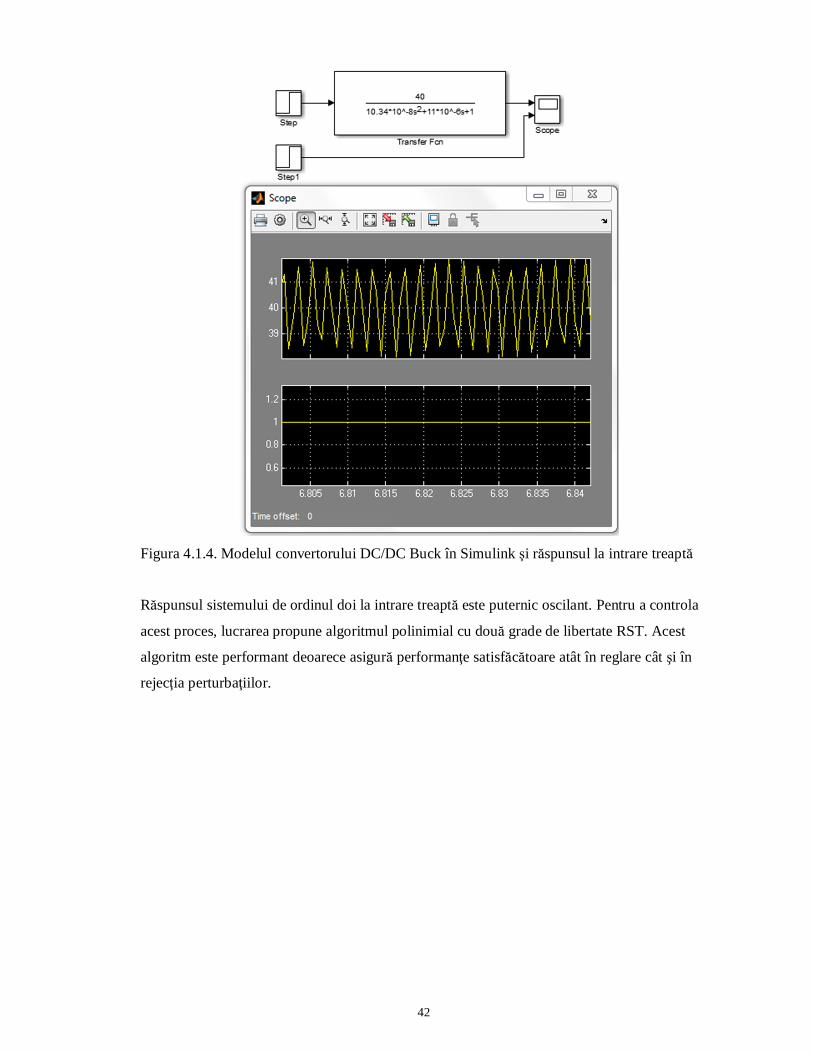
Răspunsul acestui sistem la o intrare treaptă în simulare este prezentat în Figura 4.1.4..
42
Figura 4.1.4. Modelul convertorului DC/DC Buck în Simulink şi răspunsul la intrare treaptă
Răspunsul sistemului de ordinul doi la intrare treaptă este puternic oscilant. Pentru a controla
acest proces, lucrarea propune algoritmul polinimial cu două grade de libertate RST. Acest
algoritm este performant deoarece asigură performanţe satisfăcătoare atât în reglare cât şi în
rejecţia perturbaţiilor.

43
4.2. Controlul convertorului DC/DC Buck prin comanda RST
4.2.1. Comanda RST prin metoda plasării polilor
Metoda plasării polilor ajută la proiectarea regulatoarelor RST robuste, în timp discret. Această
metoda nu impune restricţii asupra gradelor polinoamelor procesului discretizat,
퐴(푞 ),퐵(푞 ). Zerourile procesului nu sunt simplificaţi, de aceea metoda este bună şi pentru
procese cu zerouri instabile [28]. Metoda polinomială RST are două grade de libertate şi asigură
atât rejecţia perturbaţiilor prin filtrele digitale R şi S cât şi urmărirea referinţei prin intermediul
filtrului digital T. Structura canonică a regulatorului digital RST este prezentată în Figura
4.2.1.1.
Figura 4.2.1.1. Structura de reglare RST
Funcţia de transfer a procesului este de forma:
퐻 (푞 ) = 푞( )
(80)
unde polinoamele au următoarele forme:
퐴(푞 ) = 1 + 푎 ∗ 푞 + ⋯+ 푎 ∗ 푞 (81)
퐵(푞 ) = 푏 ∗ 푞 + ⋯+ 푏 ∗ 푞 (82)
Iar d este numărul întreg de perioade de eşantionare.
Funcţia de transfer în buclă închisă are următoarea formă:
퐻 = 푞 ∗( )∗ ( ) ( )∗ ( )
= ∗ ( )
, unde
P(q ) = 퐴(푞 ) ∗ 푆(푞 ) + 퐵(푞 ) ∗ 푅(푞 ) = 1 + 푝 ∗ 푞 + ⋯+ 푝 ∗ 푞 (83)
Funcţia de sensibilitate a ieşirii în raport cu perturbaţia are forma:
퐻 (푞 ) = ∗( )
(84)
Polinoamele obţinute, R, S şi T au forma prezentata în (85)-(87).
푅(푧 ) = 푟 + 푟 ∙ 푧 + ⋯+ 푟 ∙ 푧 (85) 푆(푧 ) = 푠 + 푠 ∙ 푧 + ⋯+ 푠 ∙ 푧 (86) 푇(푧 ) = 푡 + 푡 ∙ 푧 + ⋯+ 푡 ∙ 푧 (87) Metoda plasării polilor constă în specificarea polinomului 푃(푞 ) şi determinarea polinoamelor 푅(푞 ) şi 푆(푞 ). Polinomul 푇(푞 ) este calculat similar cu polinomul 푃(푞 ), prin alegerea

44
unui sistem de ordinul doi şi perechea (ζ,ω) care satisface cerinţele de reglare impuse sistemului. 4.2.2. Controlul convertorului DC/DC în configuraţie Buck
Lucrarea propune controlul convertorului DC/DC în configuraţie Buck prin algoritmul
polinomial RST prin metoda plasării polilor. Algoritmul are două grade de libertate şi asigură
atât urmărirea referinţei cât şi rejecţia perturbaţiilor. Primul pas este discretizarea funcţiei de
transfer a convertorului alegând perioada de discretizare 푇 = 10 sec. Aceasta este prezentată
în ().
퐻 (푧 ) = . ∙ . ∙. ∙ . ∙
(88)
Polinoamele A(z-1) si B(z-1) obţtinute sunt prezentate în () şi ().
퐴(푧 ) = 1 + 1.895 ∗ 푧 + 0.849 ∗ 푧 , unde gradul polinomului na=2 (89)
퐵(푧 ) = 77.89 ∗ 푧 + 73.89 ∗ 푧 , unde gradul polinomului nb=2 (90)
Următorul pas este impunerea polinomului P(z-1). Ştim că 푃(푧 ) = 푃 (푧 ) ∗ 푃 (푧 ), unde
PD(z-1) este componenta dominantă iar PF(z-1) este componenta auxiliară.
Alegem perechea (ζ,ω) care să satisfacă relaţiile (), pentru obţinerea performanţelor dorite si
pentru impunerea polinomului caracteristic care alocă polii:
푃(푠) = (푠 + 2 ∗ 휁 ∗ 휔 ∗ 푠 + 휔 ) (91)
2 ∗∗
≤ 휔 ≤∗
(92)
휎 = 푒 (93)
푡 ≃∗
(94)
Impun valorile pentru suprareglaj şi timpul de răspuns al sistemului în bulă închisă.
Folosim relaţiile de proiectare (92)-(94)
σ ≤ 5%
tr ≤ 5 ms
εst = 0
Şi rezultă perechea (ξ, ω)=(0.9,1500).
În simulare performanţele impuse au fost validate.
Polinomul caracteristic obţinut este:
푃(푧 ) = 1 − 1.929 ∙ 푧 + 0.931 ∙ 푧 (95)
De asemenea, pentru calculul polinomului T, care asigură performanţe în urmărire se impune perechea (휔 = 39.5 rad/s , ζ = 0.9). In simulare performanţele în urmărire au fost validate.
45
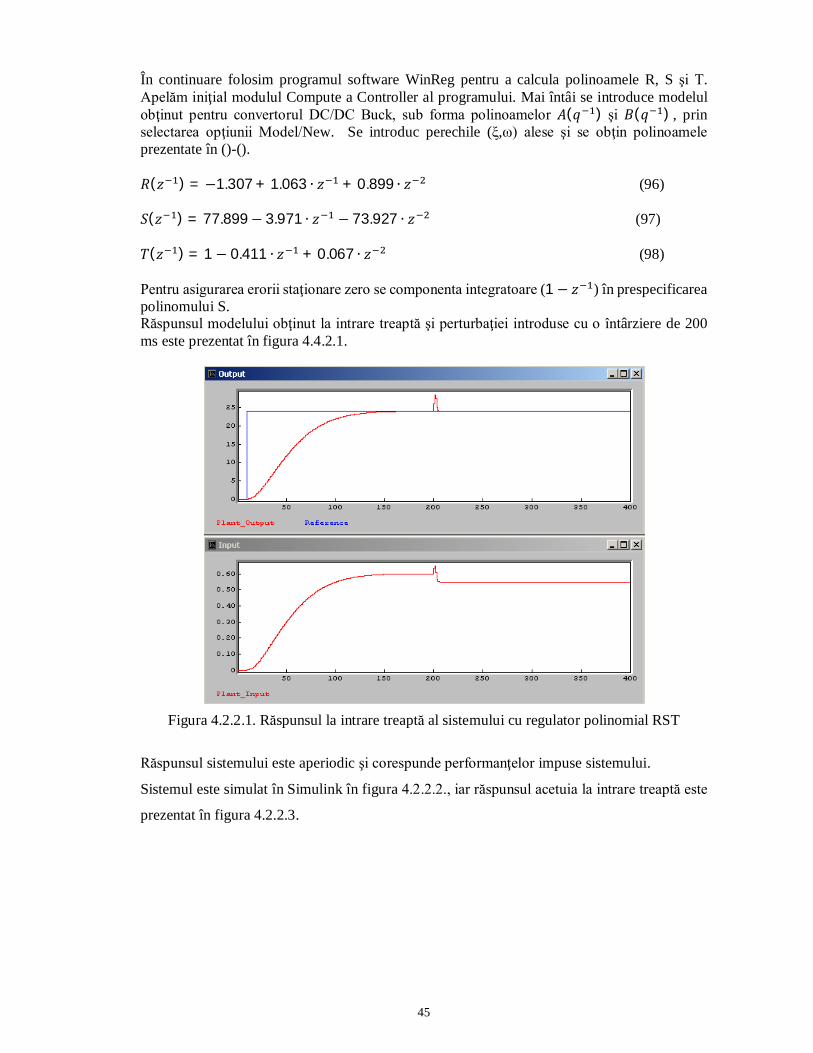
În continuare folosim programul software WinReg pentru a calcula polinoamele R, S şi T. Apelăm iniţial modulul Compute a Controller al programului. Mai întâi se introduce modelul obţinut pentru convertorul DC/DC Buck, sub forma polinoamelor 퐴(푞 ) şi 퐵(푞 ), prin selectarea opţiunii Model/New. Se introduc perechile (ξ,ω) alese şi se obţin polinoamele prezentate în ()-(). 푅(푧 ) = −1.307 + 1.063 ∙ 푧 + 0.899 ∙ 푧 (96) 푆(푧 ) = 77.899 − 3.971 ∙ 푧 − 73.927 ∙ 푧 (97) 푇(푧 ) = 1 − 0.411 ∙ 푧 + 0.067 ∙ 푧 (98) Pentru asigurarea erorii staţionare zero se componenta integratoare (1 − 푧 ) în prespecificarea polinomului S. Răspunsul modelului obţinut la intrare treaptă şi perturbaţiei introduse cu o întârziere de 200 ms este prezentat în figura 4.4.2.1.
Figura 4.2.2.1. Răspunsul la intrare treaptă al sistemului cu regulator polinomial RST
Răspunsul sistemului este aperiodic şi corespunde performanţelor impuse sistemului.
Sistemul este simulat în Simulink în figura 4.2.2.2., iar răspunsul acetuia la intrare treaptă este
prezentat în figura 4.2.2.3.

46
Figura 4.2.2.2. Schema Simulink pentru algoritmul RST pentru controlul convertorului
DC/DC
Figura 4.2.2.3. Răspunsul sistemului la intrare treaptă

47
4.3. Analiză de robusteţe şi comandă robustă RST
Indicatorii care ajută în analiza robusteţii unui sistem sunt: marginea de fază (Δφ), marginea de
modul (ΔM), marginea de întarziere (Δτ) şi marginea de amplitudine (ΔG). Aceştia exprimă
distanţa minimă faţă de punctul critic [-1,j0] de pe diagrama Nyquist [28].
Figura 4.3.1. Marginile de modul, fază şi amplitudine
Folosind programul WinReg pentru analiza de robustet a comenzii nominale calculată anterior
(doar polinoamele R şi S), a rezultat o margine de robusteţe ΔM=0.286 nesatisfăcătoare. Prin
introducerea de poli auxiliari în polinomul caracteristic ales iniţial, s-a obţinut o îmbunătăţire
corespunzătoare marginii de robusteţe ΔM=0.49 după cum este prezentat în Figura 4.3.2 şi în
tabelul Tabel 4.3.1.

48
Figura 4.3.2. Polii introduşi în programul WinReg pentru îmbunătăţirea comenzii
Parametru Valoare Înainte de îmbunătăţirea comenzii Marginea de modul 0.286 Max|Syp| 10.868 dB Marginea de amplitudine 1.41 Marginea de întârziere 47.6 deg Marginea de fază 0.00340 sec După îmbunătăţirea comenzii Marginea de modul 0.490 Max|Syp| 5.23 dB Marginea de amplitudine 2.460 Marginea de întârziere 59.1 deg Marginea de fază 0.00237 sec
Tabel 4.3.1. Valorile obţinute pentru parametrii de robusteţe
49
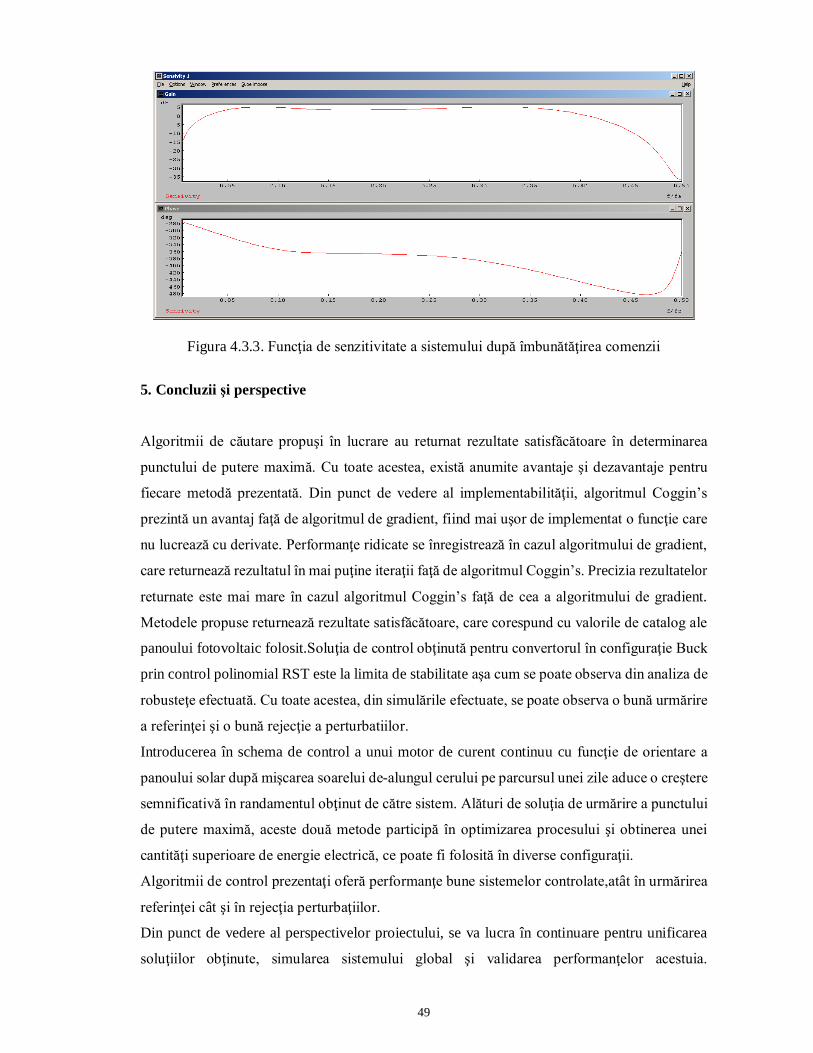
Figura 4.3.3. Funcţia de senzitivitate a sistemului după îmbunătăţirea comenzii
5. Concluzii şi perspective
Algoritmii de căutare propuşi în lucrare au returnat rezultate satisfăcătoare în determinarea
punctului de putere maximă. Cu toate acestea, există anumite avantaje şi dezavantaje pentru
fiecare metodă prezentată. Din punct de vedere al implementabilităţii, algoritmul Coggin’s
prezintă un avantaj faţă de algoritmul de gradient, fiind mai uşor de implementat o funcţie care
nu lucrează cu derivate. Performanţe ridicate se înregistrează în cazul algoritmului de gradient,
care returnează rezultatul în mai puţine iteraţii faţă de algoritmul Coggin’s. Precizia rezultatelor
returnate este mai mare în cazul algoritmul Coggin’s faţă de cea a algoritmului de gradient.
Metodele propuse returnează rezultate satisfăcătoare, care corespund cu valorile de catalog ale
panoului fotovoltaic folosit.Soluţia de control obţinută pentru convertorul în configuraţie Buck
prin control polinomial RST este la limita de stabilitate aşa cum se poate observa din analiza de
robusteţe efectuată. Cu toate acestea, din simulările efectuate, se poate observa o bună urmărire
a referinţei şi o bună rejecţie a perturbatiilor.
Introducerea în schema de control a unui motor de curent continuu cu funcţie de orientare a
panoului solar după mişcarea soarelui de-alungul cerului pe parcursul unei zile aduce o creştere
semnificativă în randamentul obţinut de către sistem. Alături de soluţia de urmărire a punctului
de putere maximă, aceste două metode participă în optimizarea procesului şi obtinerea unei
cantităţi superioare de energie electrică, ce poate fi folosită în diverse configuraţii.
Algoritmii de control prezentaţi oferă performanţe bune sistemelor controlate,atât în urmărirea
referinţei cât şi în rejecţia perturbaţiilor.
Din punct de vedere al perspectivelor proiectului, se va lucra în continuare pentru unificarea
soluţiilor obţinute, simularea sistemului global şi validarea performanţelor acestuia.

50
Deasemenea se va lucra la introducerea în schema de control a unui invertor, pentru modelarea
şi simularea comportamentului sistemului pentru situaţia în care energia electrică va fii
furnizată în reţea. O altă perspectivă este implementarea fizică a sistemului astfel obţinut în
vederea asigurării necesarului de energie electrică într-o casă inteligentă. Acest aspect, ajută la
dezvoltarea soluţiilor pentru casele autonome din punct de vedere energetic. O altă perspectivă
este dezvoltarea software a unui program care interfaţează controlul acestor componente, din
punct de vedere al monitorizării acestora, validării, sau a acordării soluţiei de control.
O altă dezvoltare a proiectului, pe viitor, poate fi obţinută printr-un studiu de caz cu privire la
fezabilitatea structurilor de panouri fotovoltaice într-o anumită zonă geografică a ţării sau
adaptarea acestor structuri la condiţiile urbane. Datele obţinute sunt utile pentru poziţionarea
eficientă a panourilor fotovoltaice, astfel ajutând la obţinerea unui randament sporit cât şi a unei
soluţii de control optime.
51
6. Bibliografie:
[1] Roberto Faranda, Sonia Leva, A comparative study of MPPT techniques for PV Systems,
Energy Department, Politecnico di Milano, 7th WSEAS International Conference on Application of Electrical Engineering (AEE’08), Trondheim, Norway, July 2-4, 2008
[2] Ramos Hernanz, JA.1, Campayo Martín, J.J.1 Zamora Belver, I.1, Larrañaga Lesaka, J.2, Zulueta Guerrero, Modelling of Photovoltaic Module, International Conference on Renewable Energies and Power Quality,(ICREPQ’10),Granada (Spain), 23th to 25th March, 2010
[3] Savita Nema, R.K.Nema, Gayatri Agnihotri, Matlab / simulink based study of photovoltaic cells / modules / array and their experimental verification, INTERNATIONAL JOURNAL OF ENERGY AND ENVIRONMENT, Volume 1, Issue 3, 2010 pp.487-500
[4] Pierre Borne, Dumitru Popescu, Florin Gh, Filip, Dan Ştefănoiu, Optimization in Enginerring Sciences Exact Methods, Wiley, 2013
[5] C. Liu, Wu and R. Cheng, Advanced algorithm for mppt control of photovoltaic systems, Department of Electrical & Computer Engineering, Ryerson University, Toronto, Ontario, Canadian Solar Buildings Conference, Montreal, August 20-24, 2004
[6] Laurentiu Fara, Mihai Razvan, Mitroi Corneliu, Cincu Vladimir, Iancu Catalin Zaharia, Silvian Fara, Dumitru Finta, Dragos Comaneci, Mihai Iancu, Fizica si tehnologia celulelor si sistemelor fotovoltaice, Editura Academiei Oamenilor de Ştiinţă din România, 2009, pp 261-274
[7] J. Surya Kumari and Ch. Sai Baby, Mathematical Modeling and Simulation of Photovoltaic Cell using Matlab-Simulink Environment, International Journal of Electrical and Computer Engineering (IJECE), Vol 2, No. 1, February 2012, pp 26-34
[8] M. R. Odekunle, T. A. Badru, Optimization by coggins-fibonacci method, Department of Mathematics and Computer Science, Federal University of Technology,
[9] M. Azzouzi, Member, IAENG, L. Mazzouz and D. Popescu Matlab-Simulink of Photovoltaic System Based on a Two-Diode Model, Proceedings of the World Congress on Engineering 2014 Vol I, WCE 2014, July 2 - 4, 2014, London, U.K.
[10] Dominique Bonkoungou, Zacharie Koalag, Donatien Njomo, Modelling and Simulation of photovoltaic module considering single-diode equivalent circuit model in MATLAB, International Journal of Emerging Technology and Advanced Engineering Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 3, March 2013)
[11] Huan-Liang Tsai, Ci-Siang Tu, and Yi-Jie Su, Member, IAENG, Development of Generalized Photovoltaic Model Using MATLAB/SIMULINK, Proceedings of the World Congress on Engineering and Computer Science 2008 WCECS 2008, October 22 - 24, 2008, San Francisco, USA
[12] J. Salazar, F. Tadeo, C. Prada, L. Palacin, Simulation and Control of a PV System connected to a Low Voltage Network, XXXI JORNADAS DE AUTOMÁTICA, SEPTEMBER 08-10, 2010, JAÉN, SPAIN
[13] Dr. Abu Tariq, Mohammed Asim and Mohd.Tariq, Simulink based modeling, simulation and Performance Evaluation of an MPPT for maximum power generation on resistive load, 2011 2nd International Conference on Environmental Science and Technology IPCBEE vol.6 (2011) © (2011) IACSIT Press, Singapore
[14] Tarak Salmi, Mounir Bouzguenda, Adel Gastli, Ahmed Masmoudi, MATLAB/Simulink Based Modelling of Solar Photovoltaic Cell, INTERNATIONAL JOURNAL of RENEWABLE ENERGY RESEARCH Tarak Salmi et al., Vol.2, No.2, 2012
[15] Srdjan Srdic, Zoran Radakovic, Vladimir Vojinovic, Implementation of the Incremental Conductance MPPT Algorithm for Photovoltaic Systems, IX Symposium Industrial Electronics INDEL 2012, Banja Luka, November 01-03, 2012
[16] Manish Srivastava, Sunil Agarwal, Ekta Sharma, Design and Simulation of Perturb and Observe MPPT Algorithm for 72 Cell Solar PV System, International Journal of Soft Computing and Engineering (IJSCE) ISSN: 2231-2307, Volume-4 Issue-6, January 2015
[17] H. Mohssine, M. Kourchi, H. Bouhouch F. Debbagh, Perturb and Observe (P&O) and Incremental Conductance (INC) MPPT Algorithms for PV Panels, International Journal of Soft Computing and Engineering (IJSCE) ISSN: 2231-2307, Volume-5 Issue-2, May 2015
[18] Hanen Abbes, Hafedh Abid, Kais Loukil, An Improved MPPT Incremental Conductance Algorithm Using T-S Fuzzy System for Photovoltaic Panel, INTERNATIONAL JOURNAL of RENEWABLE ENERGY RESEARCH Hanen Abbes et al., Vol.5, No.1, 2015
[19] Williams K. Francis , Prof. Shanifa Beevi S , Prof. Johnson Mathew, MATLAB/Simulink PV Module Modelof P&O And DC Link CDC MPPT Algorithms with Labview Real Time Monitoring And Control Over P&O Technique, International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering (An ISO 3297: 2007 Certified Organization) Vol. 3, Special Issue 5, December 2014
[20] Tekeshwar Prasad Sahu , T.V. Dixit and Ramesh Kumar, Simulation and Analysis of Perturb and Observe MPPT Algorithm for PV Array Using ĊUK Converter, Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 4, Number 2 (2014), pp. 213-224 © Research India Publications http://www.ripublication.com/aeee.htm
[21] Osamede Asowata* , James Swart, Christo Pienaar , Optimum Tilt Angles for Photovoltaic Panels during Winter Months in the Vaal Triangle, South Africa, Smart Grid and Renewable Energy, 2012, 3, 119-125

52
[22] Tiberiu Tudorache1 ,Liviu Kreindler1, Design of a Solar Tracker System for PV Power Plants, Acta Polytechnica Hungarica Vol. 7, No. 1, 2010
[23] L.T. Wong, W.K. Chow,Solar radiation model, Applied Energy 69 (2001) 191–224 [24] Dariusz Czarkowski, DC-DC Converters, in Muhammad H. Rashid, ed., Power Electronic
Handbook, Academic Press, 2nd Edition, 2006 [25] SujataVerma, S.K Singh and A.G. Rao, Overview of Control Techniques for DC-DC
converters, Research Journal of Engineering Sciences, Vol 2, August 2013, Pg No 18-21. [26] Florin Dragan & Daniel Curiac, Daniel Iercan and Ioan Filip, Sliding Mode Control for a
Buck Converter, Proceedings of the 9th WSEAS International Conference on Automatic Control, Modeling & Simulation, 2007, 162-165
[27] Control Engineering & Energy S.R.L., Energylife – Manual de prezentare, 2014 [28] I.D. Landau, G. Zito, Digital Control Systems, Springer, 2006 [29] D. Popescu, D. Stefanoiu, C. Lupu, C. Petrescu, B. Ciubotaru, C. Dimon, Automatica
Industriala, AGIR, 2006 [30] I. Dumitrache, Ingineria Reglarii, Politehnica Press, 2005 [31] Adrian Badea, Horia Necula, Surse Regenerabile de energie, Editura Agir,2013 [32] R. W. Erickson, D. Maksimovic, Fundamentals of Power Electronics, Kluwer Academic
Publishers, 2nd Edition, 2004.