solicitarea structurii masinilor vibrante · tratarea dinamica a structurilor supuse la vibratii...
TRANSCRIPT

SOLICITAREA STRUCTURII JGHEABURILOR VIBRANTE SI BENELOR DE
TRANSPORT PENTRU AGREGATE MINERALE
Sârbu Lurenţiu, prof.univ.dr.ing.
Facultatea de Utilaj Tehnologic, Universitatea Tehnică de Construcţii Bucureşti
e-mail: [email protected]
Abstract
Tracked mobile crushing plants used for the processing of mineral aggregates containing food machinery, vibrating
structure type perforated sieve plate or bars, and continuous feed conveyor Vibrating jaw crusher. It was shaped metal
structure has a vibrant transport machinery used to power a high capacity crushing plant operated under a
postrezonanţă. We determined the structure of the machine application of transport crossing its vibrant resonance
vibrator shaft brake and spins were plotted graphs of corresponding metal structural elements that make up the transport
chute transersal subjected to oscillations in the planThe vibrating conveyors, vibrating screens or gratings paintings
vibrant, some component assemblies can have a working body in relative motion against the rigid, due to their own
elasticity can produce appreciable changes in the technological process.
Keywords: structura metalică bena, jgheab de transport vibrant, regim tranzitoriu masini vibrante, instalatii mobile de
concasat si sortat.
1. Modelul fizic al construcţiei
Se urmǎreşte stabilirea solicitǎrii structurii metalice a organului de lucru al unei maşini vibrante sub formǎ de
jgheab de alimentare.
Construcţia metalicǎ a organului de lucru al maşinii este alcǎtuitǎ dintr-o placǎ de bazǎ rezematǎ elastic la
care este ataşat generatorul de vibraţii. La placa de bazǎ sunt încastraţi pereţii laterali ai jgheabului de
transport.
Asupra plăcii orizontale şi pereţilor laterali în plan transversal acţioneazǎ forţele din legături, forţele de
inerţie şi momentele de inerţie în centrele lor de greutate sub acţiunea deformatiilor cauzate de sarciniile
transportate. La cele mentionate se adauga greutatea placilor si materialului, care s-au regasit in calculul
deformatiei placii Wmax (nu sunt figurate pe fig.1.1).
Legǎtura dintre placa orizontalǎ şi pereţi este asiguratǎ de eforturile orizontale X1 şi X2, eforturile verticale
Y1 şi Y2 şi momentele din incastrare M1 şi M2.
Aceastǎ schemǎ de calcul a solicitǎrii construcţiei supusǎ la vibraţii conţine şi eforturile T care acţioneazǎ
între plǎcile laterale verticale la partea lor superioarǎ (v. Fig.1.1).
Fig. 1.1
Admitem ca, schema generalǎ de calcul din figura 1.1, poate reprezenta: structura unui jgheab vibrant, sau
alimentator vibrant prevǎzut cu placa perforata, sau alimentator separator cu bare grizzly.

In acelaşi timp, modelul structurii meţionate poate reprezenta şi construcţia unei bene de transport in stare
deformata sub sarcina. Efortul din legǎtura T reprezintǎ aici legǎtura pereţilor verticali cu peretele din faţǎ al
benei tip cutie.
Construcţia acestui model in cazul benei a avut în vedere accidentele suferite asupra construcţiei, care s-au
soldat cu fisuri si rupturi în zona legǎturii dintre placa orizontalǎ cu pereţii verticali (în special în cazul
sarcinilor mari, în bucǎţi, plasate în benǎ) (fig.1.2).
Fig.1.2
Nota:
Schemǎ generalǎ de calcul propusa pentru structura metalica a jgheabului vibrant sau cutiei unui alimentator
vibrant, s-a considerat ca poate reprezenta din punct de vedere al dimensiunilor de gabarit si structura, si
construcţia unei bene de transport. Acest lucru s-a constatat din aprecierea caracteristicilor tehnice ale
benelor si ale transportorului vibrant folosit la instalatiile de concasat mobile pe senile de mare capacitate.
Tratarea dinamica a structurilor supuse la vibratii transversale, au avut in vedere solicitarile extreme care au
condus la fisurarea benelor, care pot fi considerate similare cu cele rezultate la franarea arborelui vibratorului
la trecerea prin zona de rezonanta. Din aceasta cauza structura metalica a multor masini vibrante (de ex.
ciururi cu gratar greu etc.), se executa asamblata prin suruburi, pentru a nu se produce fisurarea sudurilor in
timpul exploatarii.
In schema de calcul descrisǎ mai sus (fig.1.1) s-au fǎcut urmǎtoarele notaţii:
2,iy - acceleraţiile liniare şi unghiulare ale plăcilor, datorita deformatiei structurii (i=1,2,3);
- β – coeficientul de rigiditate liniară al jgheabului de transport sau al elasticităţii materialului plăcii
orizontale a benei;
- yi, i – deplasǎri, respectiv, rotiri mici ale plǎcilor generate de deformarea constructiei (i = 1,2,3)
Forţele şi momentele de inerţie care acţioneazǎ asupra elementelor construcţiei deformate în plan transveral
supuse la încovoiere sunt:
1 1 1;iF m y 2 2 2;iF m y 3 3 3;iF m y
1 1 1;iM J 2 2 2;iM J 3 3 3;iM J
unde: mi , Ji - mase şi momente de inertie ale plǎcilor jgheabului (i=1,2,3).
Se considerǎ fenomenul de rotire a plǎcii de bazǎ a jgheabului (sau al cutiei în plan transversal), produs în
jurul unei muchii a jgheabului, la încǎrcarea unor bucǎti mari de piatrǎ care trebuiesc transportate.
Diametrele bucatilor de material pot ajunge pânǎ la 1250 – 1600 mm, in cazul unor jgheaburi vibrante care
sunt montate pe instalatii mobile de concasat pe senile. Aceste materiale asigurǎ alimentarea concasoarelor
primare cu fǎlci, de tipul celor fabricate de firma Kleemann[7]. Astfel de sisteme de alimentare se folosesc la
instalatiile mobile de tipul concasor cu fǎlci pe şenile MOBICAT 100, 110, 120, 125, 140, 160 pentru
sortarea primarǎ a mineralelor sau a reziduurilor provenite din constructii înainte ca materialul sǎ fie introdus
în concasorul cu fǎlci.
Sortarea se realizeazǎ aici fie cu ciur pentru aplicaţii grele cu douǎ etaje, cu oscilaţie independentǎ de
alimentator sau cu alimentator vibrant cu sistem de sortare primarǎ integrat.
In prima variantǎ etajul superior este, opţional cu bare sau cu placǎ perforatǎ, iar etajul inferior cu plasǎ din
sârmǎ de oţel sau placǎ oarbǎ din cauciuc. In a doua variantǎ nivelul superior este un grǎtar sau placǎ
perforatǎ. Acţionarea se face cu un vibrator actionat cu motor electric, cu frecvenţǎ reglabilǎ.
Forţele elastice F1 şi F2 sunt preluate de cadrul de rezemare:

F1 = S1 ; F2 = S2 (1.1)
unde: S1,S2 – deformaţiile elastice liniare ale plǎcii orizontale fata de cadrul de sprijin;
-rigiditatea reazemelor [N/m]
Momentele de legǎturǎ dintre plǎcile verticale ale jgheabului sau ale cutiei cu placa orizontalǎ sunt
condiţionate de rotirea staticǎ a plǎcii orizontale în raport cu o muchie a sa (v.fig.1.1). Deformatiile sunt date
de relatiile:
S1 = 1 ( a+t0) ; y1 = 1 (a/2 +t0) ;
S2 = 1 t0 ; 1y = (a/2 +t0); (1.2)
Sistemul de ecuaţii care exprimǎ oscilaţia construcţiei în plan transversal este de forma:
1 2 2 1 2 0 1 0 1 1 0 1 1
1 0 1 0
2
1 0 1 1 2 2 2
2
1 0 2 3 3 3 3
2 2 1
3 3 2
2 2
0
04
04
0
0
a as a x s s y a t y t m t J
k t k a t
hk a t x h m J
hk t x h m J
T m y x
T m y x
(1.3)
Placa orizontalǎ a maşinii este supusǎ rotirii în plan transversal cu unghiul 1 (fig.1.1) sub acţiunea
deformaţiilor liniare S1 şi S2. In funcţie de aceste deformaţii liniare, acceptate de strctura construcţiei, se pot
calcula momentele M1 şi M2.
Modelarea structurii (cutiei de alimentare-sortare, transport)
- volumul cutiei 16 – 20 m3 (pentru instalatii de concasat MC 140 Z şi MC 160Z);
- lungime A – 4798 mm;
- lǎţime B – 2500 mm ;
- înǎlţimea peretelui C – 1600 mm ;
- masa cutiei (organului de lucru al maşinii de transport) m = 5000 kg, repartizatǎ astfel:
- masǎ placǎ orizontalǎ;
- masǎ pereţi laterali;
- masǎ perete spate (faţǎ).
- masǎ totalǎ posibila a organului de lucru încǎrcat – 38000 kg;
Pentru calculul tensiunii maxime max si a deformaţiei Wmax , la plǎcile orizontale dreptunghiulare se
acceptǎ ipoteza elementarǎ cǎ placa elastica considerata are latura scurtǎ încastratǎ, iar celelalte trei laturi
sunt simplu rezumate. In aceastǎ ipotezǎ avem: 2
max 21
;p B
h
raportul B/A = <1
4
max 31
p BW
E h
unde: p – presiunea unitară;
h1 – grosimea plăcii de bază cu ramforsările sale;
B – lăţimea cutiei sau jgheabului;
a, t0 - distanţa dintre lonjeroanele cadrului de rezemare al jgheabului, respectiv consola de colţ a
jgheabului la lonjeron în plan transversal (fig.1.1)
2. Analiza regimurilor tranzitorii la maşinile vibrante.

Analiza regimurilor tranzitorii devine necesarǎ când regimul de funcţionare staţionar al maşinii vibrante se
aflǎ în domeniul postrezonant [1,2,3].
In aceastǎ situaţie viteza unghiularǎ de antrenare este variabilǎ şi parcurge un domeniu de frecvenţe ce
conţine şi domeniul de rezonaţǎ, astfel că, amplitudinea vibraţiei poate deveni atât de mare încât legǎturile
elastice ale maşinii pot fi distruse sau supuse unor solicitǎri foarte puternice ce conduc la apariţia unor fisuri.
Fig.2.1.
Se impune ca amplitudinea maximǎ la trecerea prin zona de rezonanţǎ sǎ nu depǎşeascǎ o limitǎ admisibilǎ
funcţie de deformaţia maximǎ admisibilǎ a elementelor elastice.
Se considerǎ cazul maşinilor vibratoare monomasice cu vibraţii dirijate ce reprezintǎ un sistem vibrator cu un
grad de libertate.
Regimul tranzitoriu de pornire pentru o maşinǎ antrenatǎ cu un motor electric este descrisǎ de ecuaţia
diferenţialǎ [1]:
( )cos( ( ) )xmx cx kx P t t B , (2.1.)
ce se deosebeşte de regimul staţionar, prin aceea cǎ, viteza unghiularǎ creşte de la zero la valoarea
staţionarǎ dupǎ o anumitǎ lege iar amplitudine a forţei pertubatoare, care este în general o funcţie de timp
(fig.2.1.)
La maşinile cu antrenare cinematicǎ, amplitudinea forţei perturbatoare este constantǎ, iar = t2/2
Ecuaţia (2.1) devine:
2
cos2
xtmx cx kx F
(2.2)
In lucrarea [1] se aratǎ ca, amplitudinea vibraţiei tranzitorii poate prezenta mai multe maxime descrescǎtoare
funcţie de pulsaţia de antrenare şi s-au stabilit relaţii de calcul aproximative. Astfel amplitudinea primului
maxim se poate calcula cu relaţia aproximativǎ:
0max2 2
;F f
xp m c
kp
m ;
2,5
2 21 0,465
cf c
m c
(2.3)
viteza unghiularǎ corespunzǎtoare primului maxim se calculeazǎ cu relaţia:
1 2
3
2
1 0,14
pc
m
(2.4)
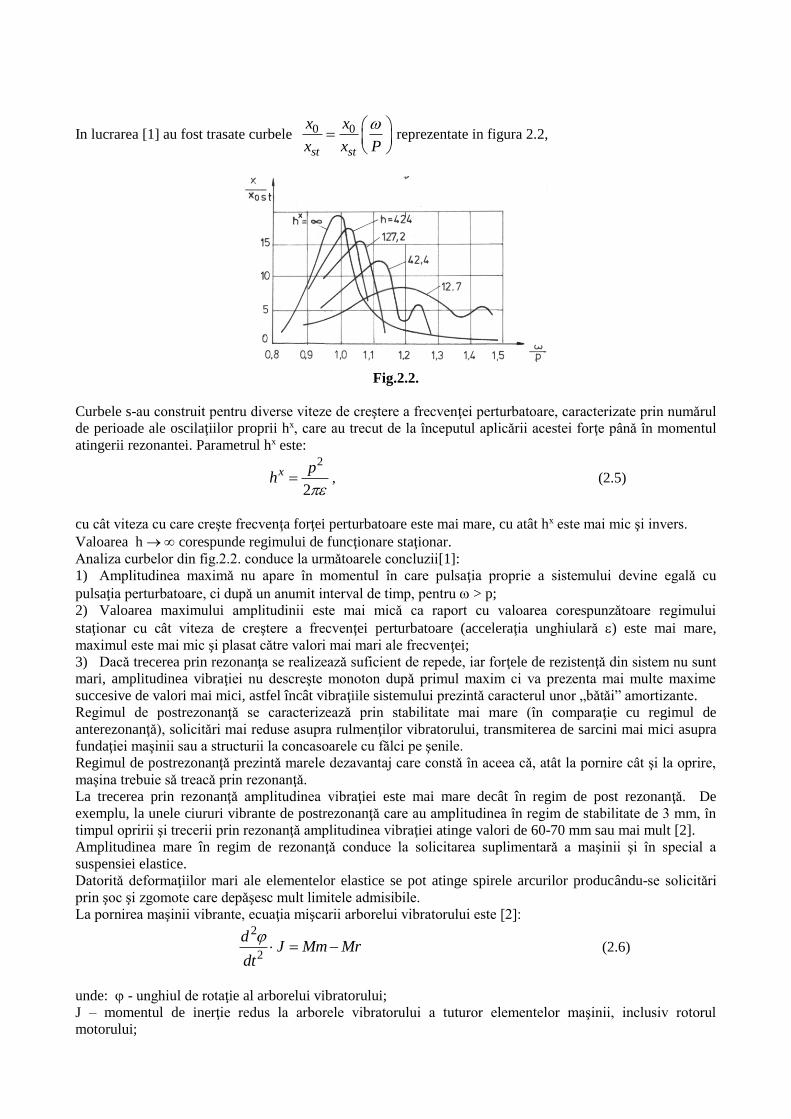
In lucrarea [1] au fost trasate curbele 0 0
st st
x x
x x P
reprezentate in figura 2.2,
Fig.2.2.
Curbele s-au construit pentru diverse viteze de creştere a frecvenţei perturbatoare, caracterizate prin numǎrul
de perioade ale oscilaţiilor proprii hx, care au trecut de la începutul aplicǎrii acestei forţe pânǎ în momentul
atingerii rezonantei. Parametrul hx este:
2
2
x ph
, (2.5)
cu cât viteza cu care creşte frecvenţa forţei perturbatoare este mai mare, cu atât hx este mai mic şi invers.
Valoarea h corespunde regimului de funcţionare staţionar.
Analiza curbelor din fig.2.2. conduce la urmǎtoarele concluzii[1]:
1) Amplitudinea maximǎ nu apare în momentul în care pulsaţia proprie a sistemului devine egalǎ cu
pulsaţia perturbatoare, ci dupǎ un anumit interval de timp, pentru > p;
2) Valoarea maximului amplitudinii este mai micǎ ca raport cu valoarea corespunzǎtoare regimului
staţionar cu cât viteza de creştere a frecvenţei perturbatoare (acceleraţia unghiularǎ ) este mai mare,
maximul este mai mic şi plasat cǎtre valori mai mari ale frecvenţei;
3) Dacǎ trecerea prin rezonanţa se realizeazǎ suficient de repede, iar forţele de rezistenţǎ din sistem nu sunt
mari, amplitudinea vibraţiei nu descreşte monoton dupǎ primul maxim ci va prezenta mai multe maxime
succesive de valori mai mici, astfel încât vibraţiile sistemului prezintǎ caracterul unor „bǎtǎi” amortizante.
Regimul de postrezonanţǎ se caracterizeazǎ prin stabilitate mai mare (în comparaţie cu regimul de
anterezonanţǎ), solicitǎri mai reduse asupra rulmenţilor vibratorului, transmiterea de sarcini mai mici asupra
fundaţiei maşinii sau a structurii la concasoarele cu fǎlci pe şenile.
Regimul de postrezonanţǎ prezintǎ marele dezavantaj care constǎ în aceea cǎ, atât la pornire cât şi la oprire,
maşina trebuie sǎ treacǎ prin rezonanţǎ.
La trecerea prin rezonanţǎ amplitudinea vibraţiei este mai mare decât în regim de post rezonanţǎ. De
exemplu, la unele ciururi vibrante de postrezonanţǎ care au amplitudinea în regim de stabilitate de 3 mm, în
timpul opririi şi trecerii prin rezonanţǎ amplitudinea vibraţiei atinge valori de 60-70 mm sau mai mult [2].
Amplitudinea mare în regim de rezonanţǎ conduce la solicitarea suplimentarǎ a maşinii şi în special a
suspensiei elastice.
Datoritǎ deformaţiilor mari ale elementelor elastice se pot atinge spirele arcurilor producându-se solicitǎri
prin şoc şi zgomote care depǎşesc mult limitele admisibile.
La pornirea maşinii vibrante, ecuaţia mişcarii arborelui vibratorului este [2]:
2
2
dJ Mm Mr
dt
(2.6)
unde: - unghiul de rotaţie al arborelui vibratorului;
J – momentul de inerţie redus la arborele vibratorului a tuturor elementelor maşinii, inclusiv rotorul
motorului;

Mm – momentul motorului, redus la arborele vibratorului;
Mr - momentul fortelor rezistente redus la arborele vibratorului.
Notǎm = , se considerǎ Mm şi Mr cǎ nu depind de unghiul de rotaţie şi nici de timp. In acest caz:
0
1n
Mm MrMm Mr dt
J J
(2.7)
Unde:
n – viteza nominalǎ unghiularǎ a arborelui vibratorului;
τ - timpul de demaraj.
Din (2.7) rezultǎ:
n J
Mm Mr
(2.8)
Studiind mişcarea maşinii vibrante în regim de rezonanţǎ se constatǎ cǎ amplitudinea vibraţiei este funcţie de
timp.
Amplitudinea vibraţiei forţate în regim de rezonanţǎ depinde de timpul în care sistemul mecanic se aflǎ în
rezonanţǎ.
Amplitudinea vibraţiei forţate în regim de rezonanţǎ creşte puţin dacǎ sistemul mecanic este menţinut în
acest regim într-un interval scurt de timp.
Acest model de calcul al oscilaţiei sistemului (maşinii vibrante), care poate reprezenta un transportor de tip
jgheab, un alimentator, sau un ciur vibrant, va determina sistemul de oscilaţie al structurii mecanice a
construcţiei maşinii vibrante care poate fi supusǎ la acceleraţii de pânǎ la 6 G sau mai mult şi care pentru
integritatea sa se asambleazǎ prin îmbinǎri cu şuruburi deoarece sudurile fisureazǎ [5,6].
In consecinţǎ trecerea prin acest regim de rezonanţǎ, trebuie sǎ se facǎ cât mai repede. La pornirea maşinii se
reduce timpul τ de demaraj. Din relaţia (2.8) se observǎ cǎ τ scade dacǎ se micşoreazǎ momentul de inerţie
al arborelui vibratorului, folosind motoare electrice cu moment de pornire mare, tendinţǎ confirmatǎ în
construcţia maşinilor de acest tip [2.3].
Dificultǎţi deosebite la trecerea prin rezonanţǎ se obţin la oprirea maşinii. La decuplarea motorului electric
de la reţea, organele maşinii au o anumitǎ energie cineticǎ [2].
In regim de rezonanţǎ aceastǎ energie cineticǎ se transformǎ organului de lucru al maşinii gǎsit în mişcare
de translaţie şi ca rezultat creşte amplitudinea acestuia.
In scopul micşorǎrii energiei cinetice a organului de lucru al maşinii existǎ tendinţa de a folosi frâna care sǎ
opreascǎ arborele vibrator înainte de a se ajunge în zona de rezonanţǎ.
In lucrarea [2] se analizeazǎ cazul maşinii vibrante cu forţǎ perturbatoare unidirecţionalǎ pe verticalǎ, care
funcţioneazǎ în regim de postrezonanţǎ, adicǎ >> Py.
Ecuaţia diferenţialǎ a mişcǎrii maşinii are forma:
2 2 cosyy p y qr t . (2.9)
unde q-masa excentricului.
La > Py, pentru ecuaţia (2.9) se determinǎ soluţia particularǎ:
yf = Aycos(t + ) (2.10)
fy = - Aysin(t + ) = Aycos (t + 3/2) (2.11)
Relaţia (2.10) reprezintǎ vibraţia forţatǎ a maşinii iar relaţia (2.11) viteza vibraţiei forţate în regim stabilizat
de postrezonanţǎ. La t = 0, a fost decuplat motorul de la reţea şi cu ajutorul unei frâne a fost opritǎ rotirea
arborelui vibratorului.
Dacǎ se neglijeazǎ forţele de rezistenţǎ, ecuaţia frânǎrii maşinii dupǎ frǎnarea arborelui se scrie sub forma:
2 0yy p y (2.12)
cu soluţia generalǎ:
y = C1cos pyt +C2sinpyt (2.13)
Constantele C1, C2 se determinǎ cu ajutorul condiţiilor iniţiale.
La t = 0, y(0) = 0 şi y fmax = A’y (2.14)

Folosind condiţiile iniţiale, soluţia (2.14) ia forma:
y = A0sinpyt (2.15)
în care:
3
0 2 2yy y y
qrA A
p p p
(2.16)
Expresia (2.15) aratǎ legea mişcǎrii maşinii vibrante dupǎ frânarea arborelui motor, ceea ce aratǎ cǎ, maşina
efectueazǎ vibraţii libere cu pulsaţia py şi amplitudinea A0.
Din expresia (2.16) rezultǎ cǎ amplitudinea vibraţiei libere A0 este mai mare decât amplitudinea vibraţiei
forţate Ay de atâtea ori de câte ori pulsaţia forţei perturbatoare este mai mare decât pulsaţia vibraţiei libere.
Pentru cǎ A0 = A0(), rezultǎ cǎ nu este indiferent pentru ce valori ale vibraţiei forţate are loc frânarea
arborelui vibratorului.
2 2 23
22 2 2 2
3 yo
y y y y
qr pdA d qr
d d p p p p
(2.17)
se anuleazǎ pentru 3;0; 3y yp p
Dintre valorile care anuleazǎ derivata funcţiei A0() prezintǎ interes practic =0
Pentru =0 , funcţia A0(), are valoarea minimǎ dacǎ frânarea are loc în momentul în care viteza
unghiularǎ a arborelui vibratorului are valoarea 0.
Amplitudinea vibraţiei forţate pentru = Py 3 are valoarea:
22
2 2 2 2
3 3
23
yy
y y u
qr PqrA qr
p p p
, (2.18)
iar amplitudinea vibraţiei libere:
0
33 33
2 2
yy
y y
PA A qr qr
p p
(2.19)
Evident, cǎ pentru 0, amplitudinea vibraţiei libere este mai mare decât 1,5 3 qr.
Din punct de vedere fizic acest fenomen se explicǎ prin aceea cǎ în punctul = 0 energia cinetică a maselor
în mişcare de translaţie are valoarea minimǎ.
Punctul = 0 reprezintǎ un punct care indicǎ o schimbare calitativǎ în ceea ce priveşte transferul de energie
cineticǎ de la organul în mişcare de rotaţie la cele în mişcare de translaţie (organul de lucru al maşinii).
Dupǎ decuplarea motorului de la reţea, datoritǎ frecǎrilor din lagǎrele vibratorului şi motorului, turaţia
arborelui vibratorului scade.
Când > 0 , energia cineticǎ a maselor în mişcare de rotaţie se micşoreazǎ datoritǎ frecǎrilor, dar nu se
transmite maselor în mişcare de translaţie.
Când < 0, energia cineticǎ a maselor în mişcare de rotaţie se micşoreazǎ în continuare atât frecǎrile din
lagǎre cât şi a transmiterii de energie cineticǎ maselor în mişcare de translatie.
Aceasta din urmǎ reprezintǎ cauza creşterii amplitudinii vibraţiei în regim de rezonanţǎ.
Dacǎ se neglijeazǎ frecǎrile în regim de rezonanţǎ, sistemul mecanic pǎstreazǎ numai energia cineticǎ pe care
o avea în momentul când = 0, adicǎ se poate determina amplitudinea vibraţiei în regim de rezonanţǎ la
oprirea liberǎ a maşinii vibrante.
Dacǎ se considerǎ (2.11) scrisǎ sub forma [2]:
fy = Ay sint (2.20)
şi se ia = , = t se determinǎ energia cineticǎ a sistemului dupǎ [2], de forma:
2 2 2 2 21 1 cos 2 12
2 2 2c y y
tE M m A mr A mr J
(2.21)

Tinând seama cǎ cos2t 1 se determinǎ valoarea maximǎ a energiei cinetice:
2 2 2 2 2max
1 12
2 2c y yE M m A mr A mr J
(2.22)
In vecinǎtatea regimului de rezonanţǎ, considerând mişcarea oscilatorie armonicǎ cu pulsaţia =Py şi
aplitudinea Ar =Ay, energia cineticǎ are expresia [2]:
2 2 2 2,max
1 12
2 2r r r y yE M m A mrA p mr J p
(2.23)
Egalând (2.22) cu (2.23) rezultă expresia amplitudinii vibraţiei în regim de rezonanţă la oprirea liberă[2].
2
2 22 5
4r r
mr JA q q r
M m
(2.24)
Prin faptul cǎ s-a neglijat energia cineticǎ care se consumǎ pentru învingerea forţelor de rezistenţǎ când
pulsaţia scade de la valoarea 3 Py la Py , formula (2.24) conduce la valori pentru Ar mai mari decât cele
reale. Acest fapt nu conduce la impiedicarea folosirii practice a formulei, deoarece valori mai mari pentru
Ar influenţeazǎ pozitiv asupra siguranţei în exploatare şi a rezistenţei construcţiei maşinii[2].
3. Regimul de solicitare maximǎ a structurii organului de lucru a maşinii
vibrante de alimentare-transport.
In aceastǎ aplicaţie se considerǎ masa vibrantǎ supusǎ la vibraţii verticale.
In prima etapǎ se cere sǎ se determine amplitudinea vibraţiei maşinii la trecerea prin rezonanţǎ în timpul
opririi libere cât şi la oprirea prin frânarea arborelui vibratorului.
Se determinǎ apoi deformaţia maximǎ a suspensiei elastice. Cu aceste date calculate se verificǎ rezistenţa
alimentatorului.
Dacă considerăm influenţa modelului general al maşinii vibrante aflate în regim tranzitoriu, asupra
modelului elastic deformat al construcţiei alimentatorului, rezultă că cel din urmă primeşte un impuls prin
forţa elastică F2 de forma:
2 2 0 1F S t adică 2y S (3.1)
Avem
2
2 0 2 2sin siny y
y y
qrF y A p t p t
p p
(3.2)
1x = S2 / t0 = A0 sin py t / t0 (3.3)
Avem o soluţie particulară a rotirii forţate 1x generată de vibraţia transversală a structurii maşinii vibrante
dată de relaţia (3.3).
Rezolvând împreună sistemul de ecuaţii diferenţiale (1.3) în 1 şi ţinând seama de faptul că:
2
1 2 0 1 1 0 1 2 2sin 0
2y
y y
a qry y a t m t p t
p p
, (3.4)
se obţine ecuaţia diferenţială a rotirii în 1 de forma:
2220 1 2
1 0 1 0 0 1
20
0 1 2 20
1013 7
12 3 3 6
2 sin y
y y
a t x xat m a t a t
a t qra t y p t
t p p
(3.5)

Pentru care se acceptă o soluţie generală 1k te , adică:
2
22 20 1 20 1 0 0
1013 70
12 3 3 6
kt ktat x xak e t m e a t a t
(3.6)
La t =0, rezultă:
21 2
0 0
1,22 2
1 0 0
( )6
13 10 7
12 3 3
x xa t a t
k
m a at t
(3.7)
pentru ecuaţia rotirii plăcii de bază a construcţiei φ1 dată de (3.6) se alege o soluţie de forma:
1 1 11 1 11 10cos sin xA k t k t C (3.8)
unde soluţia particulară C reprezintă rotirea statică data de relaţia:
1 0
21 20 0
2
6
y a tC
x xa t a t
(3.9)
iar 10x este rotirea forţată dată de osciaţia maşinii vibrante asupra construcţiei alimentatorului.
Pentru X1 = -X2 avem:
220
10 02 20
sin :xy
y y
a t qrp t a t
t p p
(3.10)
Se acceptă condiţia iniţială de forma:
22
11 22 2
0 0
7
120
h mx h
a t a t
(3.11)
Conform construcţiei modelului elasto-plastic al secţiunii transversale a structurii transportorului rezemat
elastic, alcătuit din trei plăci legate între ele, din rezolvarea sistemului (1.3), rezultă condiţia:
20
1 2 2 3 3 1
3
2 2
thX m h m
h
(3.12)
care asigură legătura dintre rotirea φ1, a plăcii orizontale a transportorului (sau benei) şi acceleraţiile rotirilor
celor doi pereţi laterali 2 şi 3 .
Pentru ecuaţia (3.12) se aleg soluţii generale de forma:
1 2 331 2, ,
k tk t k te e e (3.13)
care se introduc in (3.12) impreună cu derivatele lor, se obtine o relaţie de forma:
22 2 0
1 2 2 3 3
3
2 2
th hX m k m k
h
(3.14)
La t=0, rezultă 2 2
1 2 2 3 3
3
2 2
h hX m k m k (3.15)
Aplicând în (3.11) soluţiile generale de forma (3.13) avem la t=0:
20 1 12
22 27
12
a t x hk
h m
(3.16)
Introducând (3.16) în (3.15) rezultă:
2
2 01 0
23
3
25 18
7 7
2
tx a t
h hkh
m
(3.17)
Cu valorile coeficienţilor (3.16) şi (3.17), la t=0, se poate determina valoarea efortului X1. Apoi, valoarea
efortului X1 se introduce în legea de rotire a plăcii de bază φ1.
Rezultă două condiţii iniţiale posibile la sistemul material considerat:
2
1 2 2 22 20 0
(0)h h
x m ht t
(3.18)
22
1 1 22 20 0
7
12(0)
h mh
xa t a t
(3.19)
Adunând (3.18) cu (3.19) rezultă:
21 22 22 2 2 2
0 00 0
71 120
x h x hm h
t ta t a t
(3.20)
adică:
1 22 2
002
22 2 2
0 0
(0)7
1 12
x h x h
ta t
m ht a t
(3.21)
Dacă X1= - X2 si 2(0) 0 din relaţia (3.21) rezultă:
22 2
0
2
22 2 2
0 0
1 1
(0)7
1 12
x h
ta b
m ht a t
(3.22)
Cunoscând valorile acceleraţiei rotirii peretelui 2 0 va rezulta valoarea rotirii 1(0) .
4. Exemplu de calcul
Datele iniţiale folosite în exemplul de calcul, de mai jos, sunt orientative.
- masa organului de lucru (transportorului vibrant) M= 5000 kg;
- masa elementelor în mişcare de rotaţie m = 1500 kg;
- momentul de inerţie maselor în mişcare de rotaţie redus la arborele vibromotorului J=74 kgm2;

- coeficientul de rigiditate al suspensiei elastice Ky = 6 x 105 N/m;
- amplitudinea vibraţiei în regim stabilizat Ay = 2,0 mm;
- turaţia arborelui vibratorului n = 1200 rot/min.
Pulsaţia proprie 19,6y
Kyp s
M m
Raportul maselor: 0,23m
qM m
Pulsaţia forţei perturbatoare 1125,6
30s
; ω > Py masina vibrantă funcţionează în regim
stabilizat de postrezonanţă;
Excentricitatea maselor vibratoare este r =4,322 mm.
Amplitudinea vibraţiei libere la oprire, dacă arborele vibrant este frânat când are viteza unghiulară ω0:
1
0 3 16,608yp s ,
este: A0 =2,583 mm
Amplitudinea de rezonanţă la oprirea liberă a maşinii vibrante
Ar = 151,91mm
Deformaţia statică a sistemului elastic de rezemare al maşinii la trecerea prin rezonanţă în timpul opririi
libere:
max r sf A f ,
unde
106,275sy
M m gf mm
K
,
rezultă f max =151,91 + 106,275=258,18 mm
Expresia rotirii forţate a jgheabului pentruX1 = X2 , tinand seana de:
2 22 3 2 3
5 20
(0) 0,309 / ; (0) 0,309 / ; 930 ;
1500 ; 725 ; 1,576 10 /
rad s rad s m m kg
h mm t mm x N mm
este: 1x = - 0,0078 rad.
Soluţia generală a rotirii φ1, este de forma:
1 1 11 1 12 13cos sin sinA k t B k t C D k t
Cu condiţiile iniţiale
la 1 1 1 1,20, (0) 0,0078; (0) 0; (0) 0; 6,5596,t k i
Se calculeaza valorile constantelor de integrare A1, B1 D şi
Graficul legii de rotire a plăcii de bază în plan transversal φ1 in cazul vibratiilor în regim de postrezonanţă
ale maşinii vibrante de transport este indicat in fig.4.1, curba 1.
Viteza de rotire 1 a placii de baza a transportorului supusa la oscilatii în plan transversal este indicat in
figura 4.1, curba 2.
Legea de rotire φ1(t) şi viteza de rotire 1( )t în plan transversal a plăcii de bază a transportorului vibrant, la
funcţionare în regim de frânare a arborelui vibratorului la trecerea prin rezonanţă sunt indicate în figura 4.1,
curbele 3 şi 4.
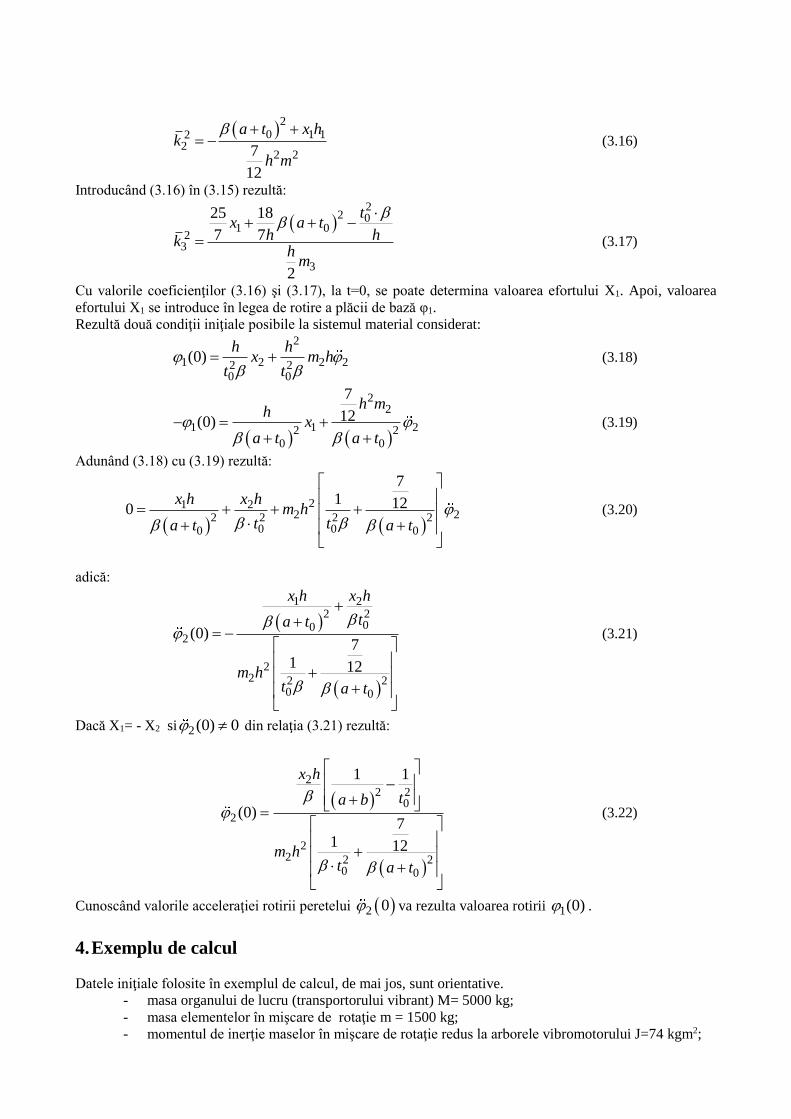
Legea de rotire 2 a peretelui lateral al jgheabului maşinii vibrante de transport, supus la oscilaţii
transversale este dată de ecuaţia:
2 2 2( ) cos 1t A k t
unde: 2 2 2 2
10,0055; 7,6223, 0,319A k
s
adică: 2( ) 0,0055 cos7,622 1t t
Fig.4.1
Notatii (fig.4.1):
1- oscilatiile libere la franare;
2- viteza oscilatiilor libere;
3- oscilatiile fortate la rezonanta;
4- viteza oscilatiilor fortate.
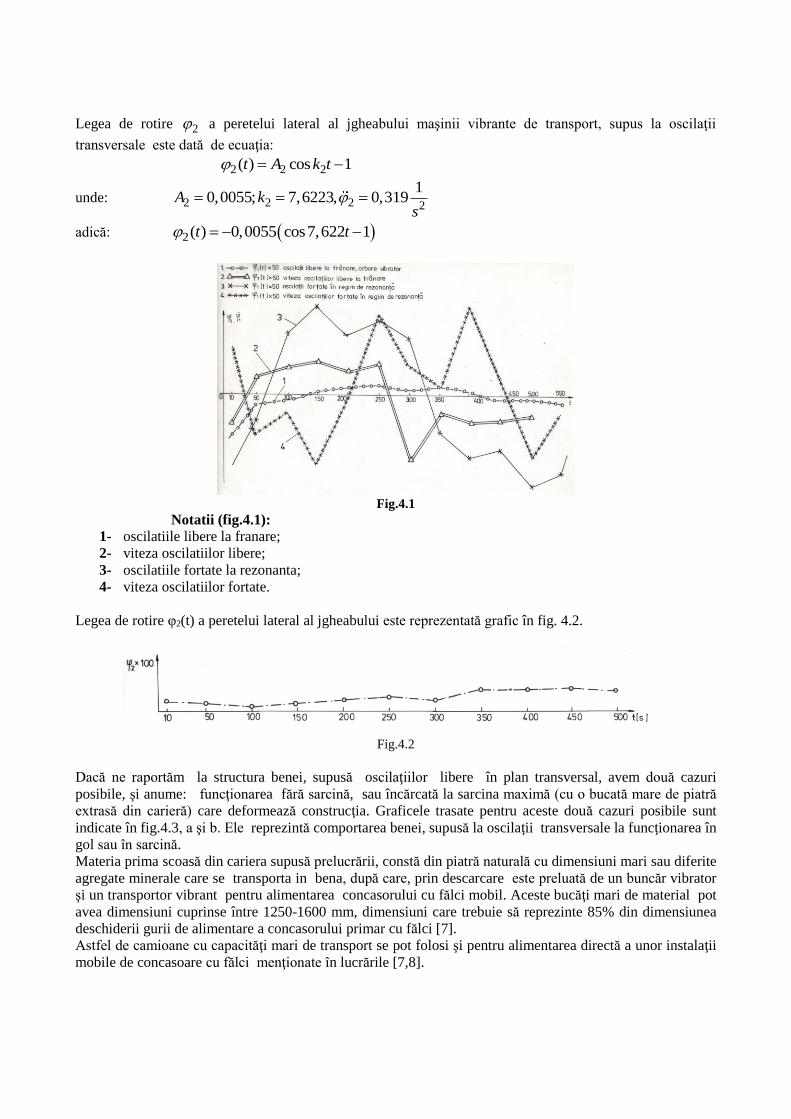
Legea de rotire φ2(t) a peretelui lateral al jgheabului este reprezentată grafic în fig. 4.2.
Fig.4.2
Dacă ne raportăm la structura benei, supusă oscilaţiilor libere în plan transversal, avem două cazuri
posibile, şi anume: funcţionarea fără sarcină, sau încărcată la sarcina maximă (cu o bucată mare de piatră
extrasă din carieră) care deformează construcţia. Graficele trasate pentru aceste două cazuri posibile sunt
indicate în fig.4.3, a şi b. Ele reprezintă comportarea benei, supusă la oscilaţii transversale la funcţionarea în
gol sau în sarcină.
Materia prima scoasă din cariera supusă prelucrării, constă din piatră naturală cu dimensiuni mari sau diferite
agregate minerale care se transporta in bena, după care, prin descarcare este preluată de un buncăr vibrator
şi un transportor vibrant pentru alimentarea concasorului cu fălci mobil. Aceste bucăţi mari de material pot
avea dimensiuni cuprinse între 1250-1600 mm, dimensiuni care trebuie să reprezinte 85% din dimensiunea
deschiderii gurii de alimentare a concasorului primar cu fălci [7].
Astfel de camioane cu capacităţi mari de transport se pot folosi şi pentru alimentarea directă a unor instalaţii
mobile de concasoare cu fălci menţionate în lucrările [7,8].
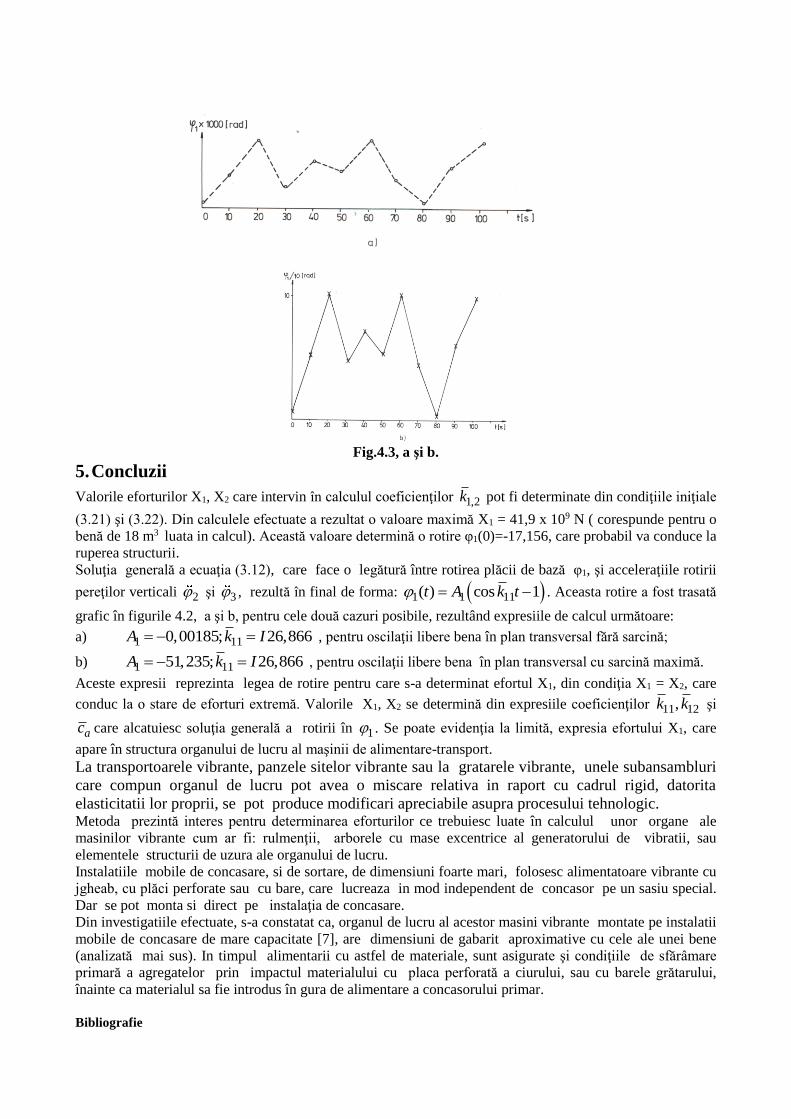
Fig.4.3, a şi b.
5. Concluzii
Valorile eforturilor X1, X2 care intervin în calculul coeficienţilor 1,2k pot fi determinate din condiţiile iniţiale
(3.21) şi (3.22). Din calculele efectuate a rezultat o valoare maximă X1 = 41,9 x 109 N ( corespunde pentru o
benă de 18 m3 luata in calcul). Această valoare determină o rotire φ1(0)=-17,156, care probabil va conduce la
ruperea structurii.
Soluţia generală a ecuaţia (3.12), care face o legătură între rotirea plăcii de bază φ1, şi acceleraţiile rotirii
pereţilor verticali 2 şi 3 , rezultă în final de forma: 1 1 11( ) cos 1t A k t . Aceasta rotire a fost trasată
grafic în figurile 4.2, a şi b, pentru cele două cazuri posibile, rezultând expresiile de calcul următoare:
a) 1 110,00185; 26,866A k I , pentru oscilaţii libere bena în plan transversal fără sarcină;
b) 1 1151,235; 26,866A k I , pentru oscilaţii libere bena în plan transversal cu sarcină maximă.
Aceste expresii reprezinta legea de rotire pentru care s-a determinat efortul X1, din condiţia X1 = X2, care
conduc la o stare de eforturi extremă. Valorile X1, X2 se determină din expresiile coeficienţilor 11 12,k k şi
ac care alcatuiesc soluţia generală a rotirii în 1 . Se poate evidenţia la limită, expresia efortului X1, care
apare în structura organului de lucru al maşinii de alimentare-transport.
La transportoarele vibrante, panzele sitelor vibrante sau la gratarele vibrante, unele subansambluri
care compun organul de lucru pot avea o miscare relativa in raport cu cadrul rigid, datorita
elasticitatii lor proprii, se pot produce modificari apreciabile asupra procesului tehnologic. Metoda prezintă interes pentru determinarea eforturilor ce trebuiesc luate în calculul unor organe ale
masinilor vibrante cum ar fi: rulmenţii, arborele cu mase excentrice al generatorului de vibratii, sau
elementele structurii de uzura ale organului de lucru.
Instalatiile mobile de concasare, si de sortare, de dimensiuni foarte mari, folosesc alimentatoare vibrante cu
jgheab, cu plăci perforate sau cu bare, care lucreaza in mod independent de concasor pe un sasiu special.
Dar se pot monta si direct pe instalaţia de concasare.
Din investigatiile efectuate, s-a constatat ca, organul de lucru al acestor masini vibrante montate pe instalatii
mobile de concasare de mare capacitate [7], are dimensiuni de gabarit aproximative cu cele ale unei bene
(analizată mai sus). In timpul alimentarii cu astfel de materiale, sunt asigurate şi condiţiile de sfărâmare
primară a agregatelor prin impactul materialului cu placa perforată a ciurului, sau cu barele grătarului,
înainte ca materialul sa fie introdus în gura de alimentare a concasorului primar.
Bibliografie
[1] Marius Munteanu, Introducerea în dinamica maşinilor vibrante, Editura Academiei RSR, Bucureşti, 1986;
[2] Corneliu Stanciu, Dinamica maşinilor, probleme speciale, Institutul de Construcţii Bucureşti, 1974;
[3] Gh.Iordache, Gh.Ene, M. Rasidescu, Utilaje pentru industria materialelor de construcţii, Editura tehnică,
Bucureşti, 1987
[4] * * * - Catalog maşini de concasat şi sortat firma MEM, Italy, 2010
[5] * * * - Tehnical Innovation and Experience, Poema, Crushing Plant CRIFI, Hunedoara România, 2010
[6] * * * - Terex Minerals Procesing Systems Comprehensive Crushing and Screening, capabilities, Terex, 2010
[7] x x x – Wirtgen Group, Kleemann, Despre noi, Concasoare, sortare si reciclare, Concasoare cu falci mobile pe
senile si Concasoare cu impact mobile pe senile, Kleemann GmbH, 2009;
[8] x x x - Wirtgen Group, Kleemann, Mobiscreen MS 19 D si Ms 20D, Mobile screening plants, Kleemann GmbH,
2009.