sisteme de actionare ii - mec.upt.romec.upt.ro/dolga/saii_3.pdf · prof. dr. ing. valer dolga 3...
TRANSCRIPT
SISTEME DE ACTIONARE II
Prof. dr. ing. Valer DOLGA,
Prof. dr. ing. Valer DOLGA 2
Cuprins_3
1. Caracteristici statice2. Stabilitatea functionarii sistemului3. Moment de inertie redus, masa redusa.4. Forta redusa si moment redus
Prof. dr. ing. Valer DOLGA 3
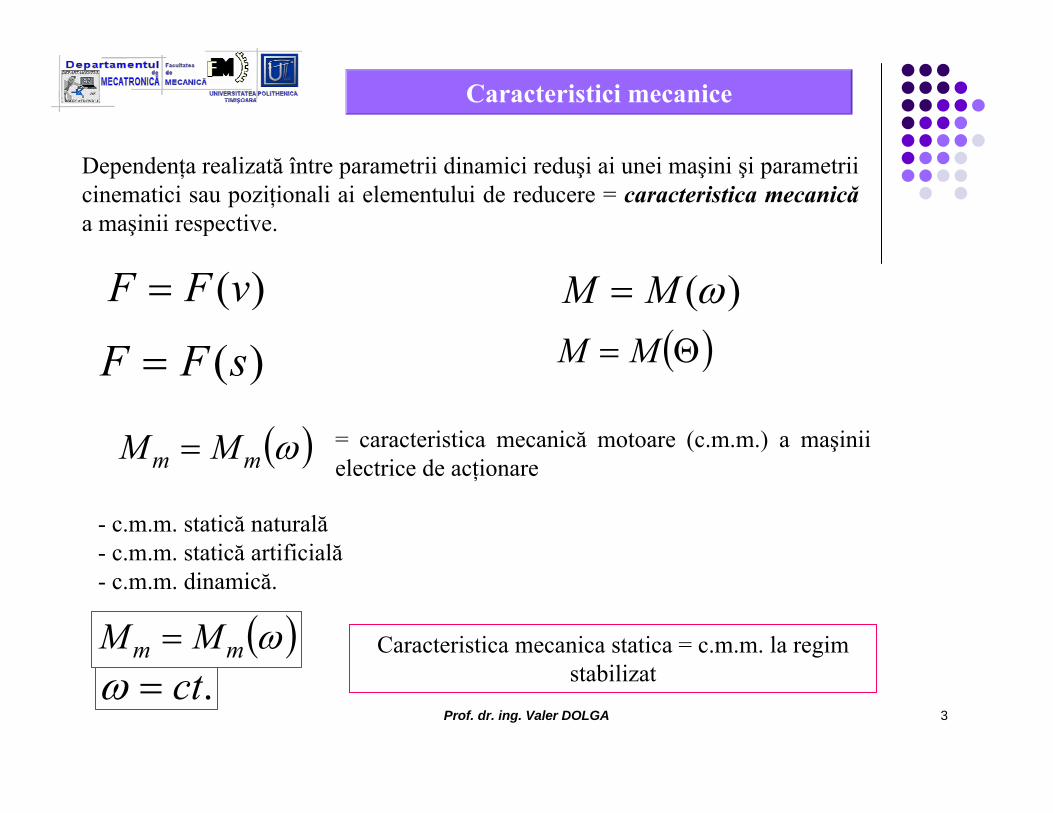
Caracteristici mecanice
Dependenţa realizată între parametrii dinamici reduşi ai unei maşini şi parametriicinematici sau poziţionali ai elementului de reducere = caracteristica mecanicăa maşinii respective.
)(vFF =
)(sFF =
)(ωMM =( )Θ= MM
( )ωmm MM = = caracteristica mecanică motoare (c.m.m.) a maşiniielectrice de acţionare
- c.m.m. statică naturală- c.m.m. statică artificială- c.m.m. dinamică.
( )ωmm MM =.ct=ω
Caracteristica mecanica statica = c.m.m. la regimstabilizat
Prof. dr. ing. Valer DOLGA 4
Caracteristica mecanică motoare statică naturală se obţine când la bornele de alimentare a maşinii electrice de acţionare se aplică tensiuneanominala (valoare, frecvenţă şi forma de variaţie în timp) iar în circuitulmaşinii nu se găsesc întercalate alte elemente de circuit (reostate, bobine, condensatoare).
Toate caracteristicile în regim stabilizat definite în alte condiţii decâtcele specificate anterior = caracteristici mecanice motoare artificiale.
Caracteristica mecanică dinamică a unei maşini de acţionare = totalitateapunctelor de funcţionare definite prin valorile momentane ale coordonatelor(M,ω) în timpul unui proces tranzitoriu.
Prof. dr. ing. Valer DOLGA 5
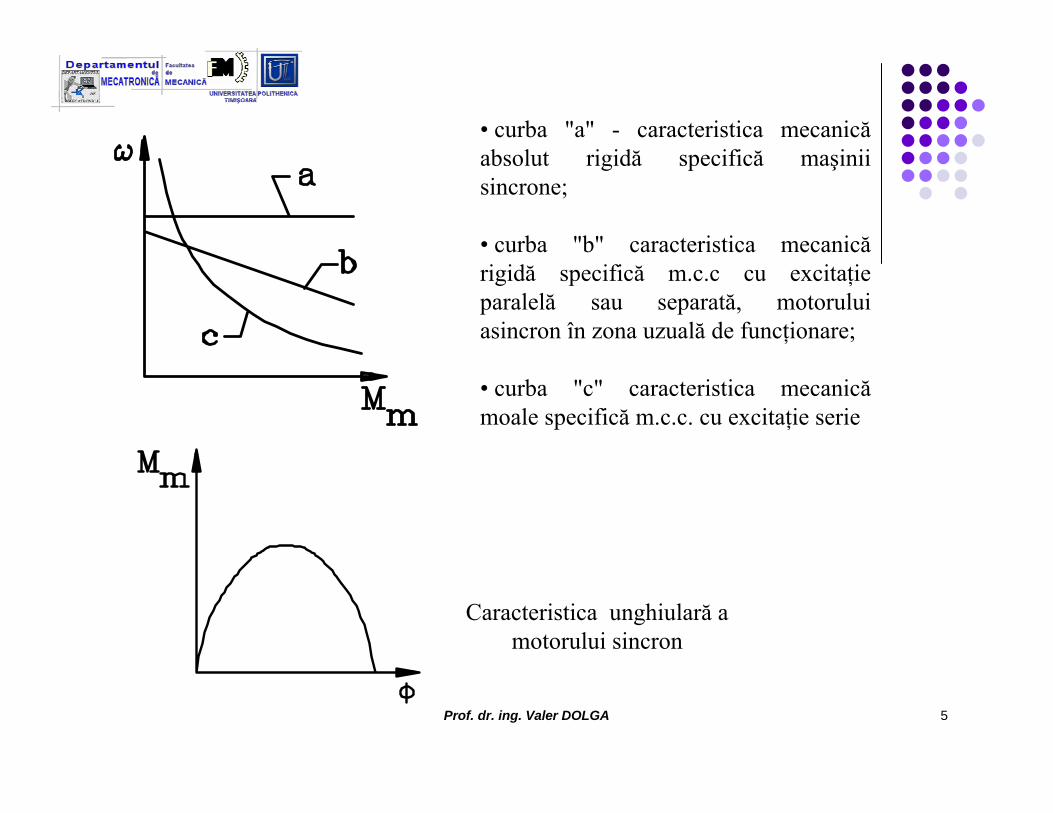
• curba "a" - caracteristica mecanicăabsolut rigidă specifică maşiniisincrone;
• curba "b" caracteristica mecanicărigidă specifică m.c.c cu excitaţieparalelă sau separată, motoruluiasincron în zona uzuală de funcţionare;
• curba "c" caracteristica mecanicămoale specifică m.c.c. cu excitaţie serie
Caracteristica unghiulară a motorului sincron
Prof. dr. ing. Valer DOLGA 6
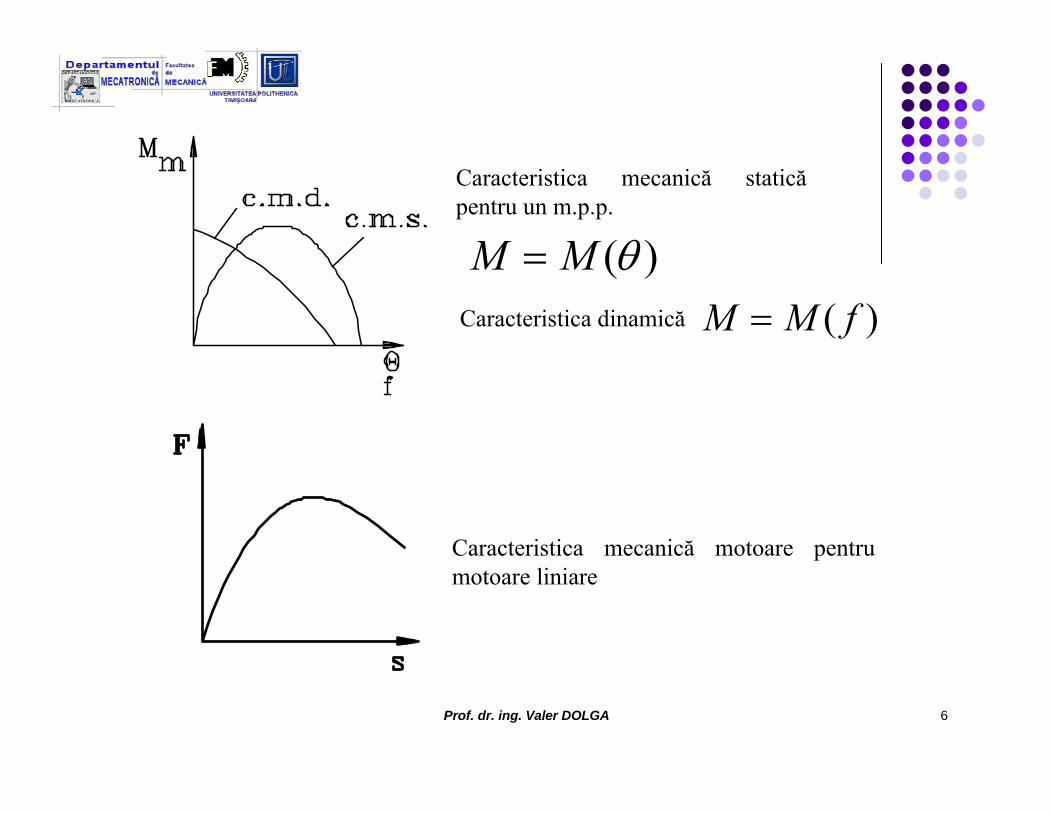
Caracteristica mecanică staticăpentru un m.p.p.
)(θMM =Caracteristica dinamică )( fMM =
Caracteristica mecanică motoare pentrumotoare liniare
Prof. dr. ing. Valer DOLGA 7
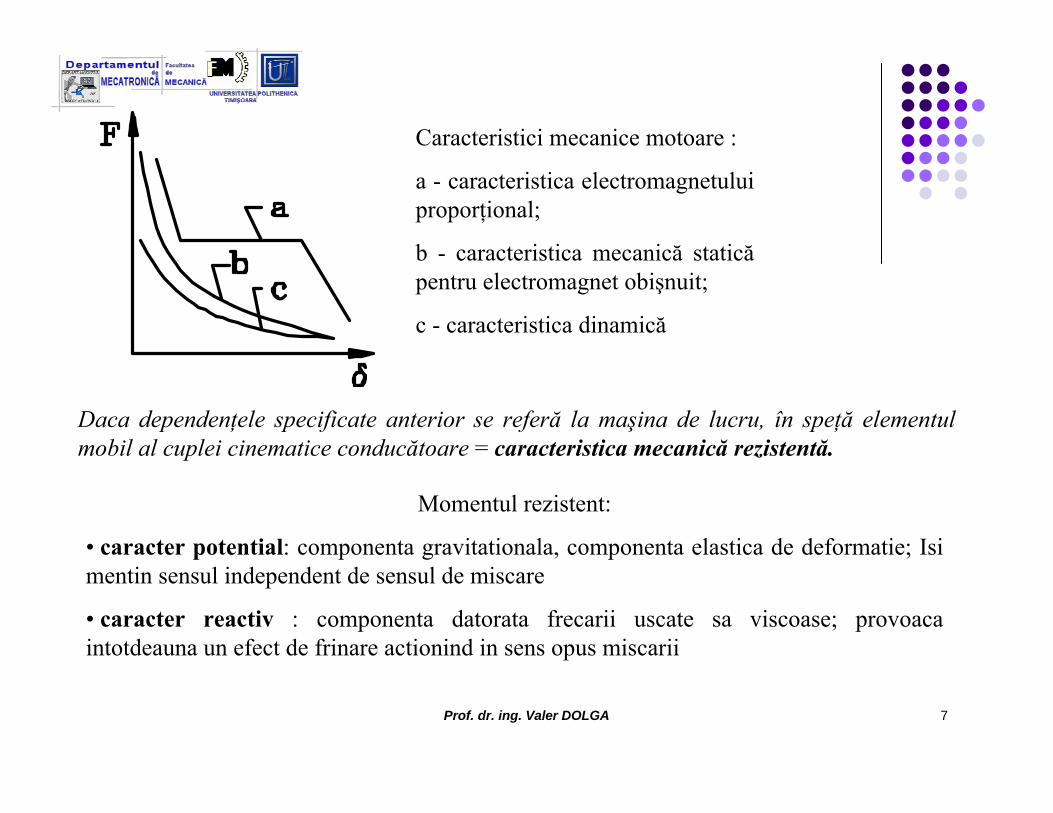
Caracteristici mecanice motoare :
a - caracteristica electromagnetuluiproporţional;
b - caracteristica mecanică staticăpentru electromagnet obişnuit;
c - caracteristica dinamică
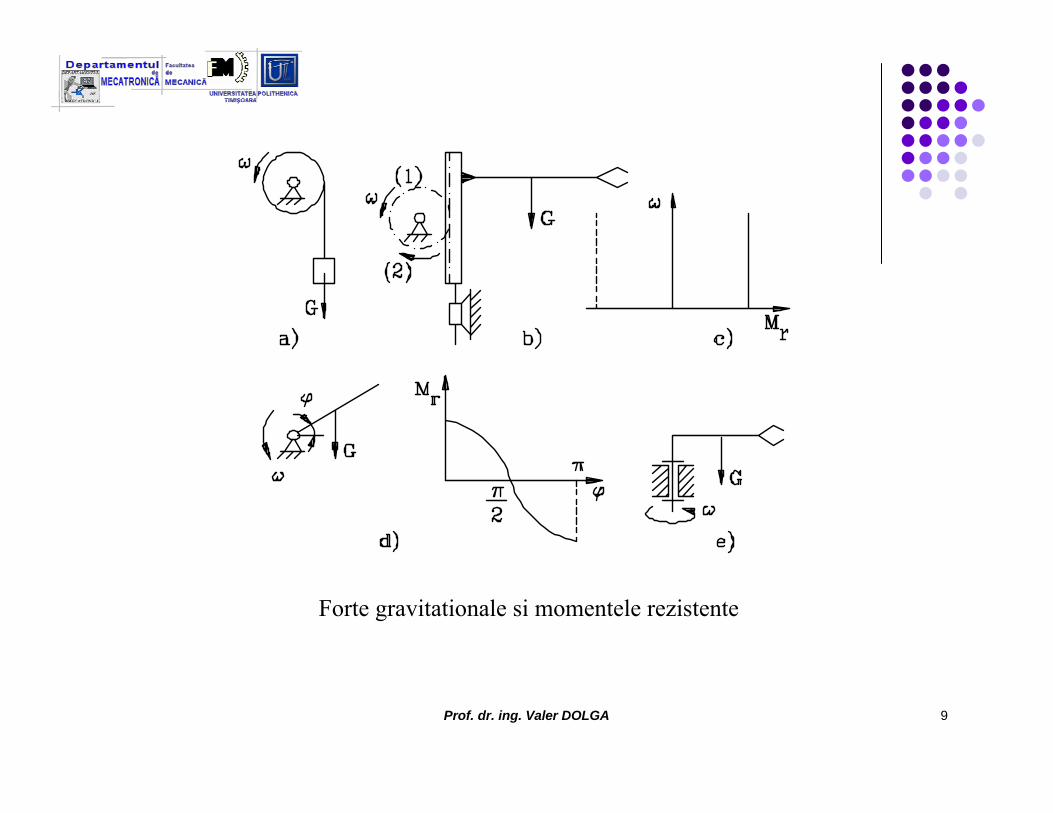
Daca dependenţele specificate anterior se referă la maşina de lucru, în speţă elementulmobil al cuplei cinematice conducătoare = caracteristica mecanică rezistentă.
Momentul rezistent:
• caracter potential: componenta gravitationala, componenta elastica de deformatie; Isimentin sensul independent de sensul de miscare
• caracter reactiv : componenta datorata frecarii uscate sa viscoase; provoacaintotdeauna un efect de frinare actionind in sens opus miscarii
Prof. dr. ing. Valer DOLGA 8
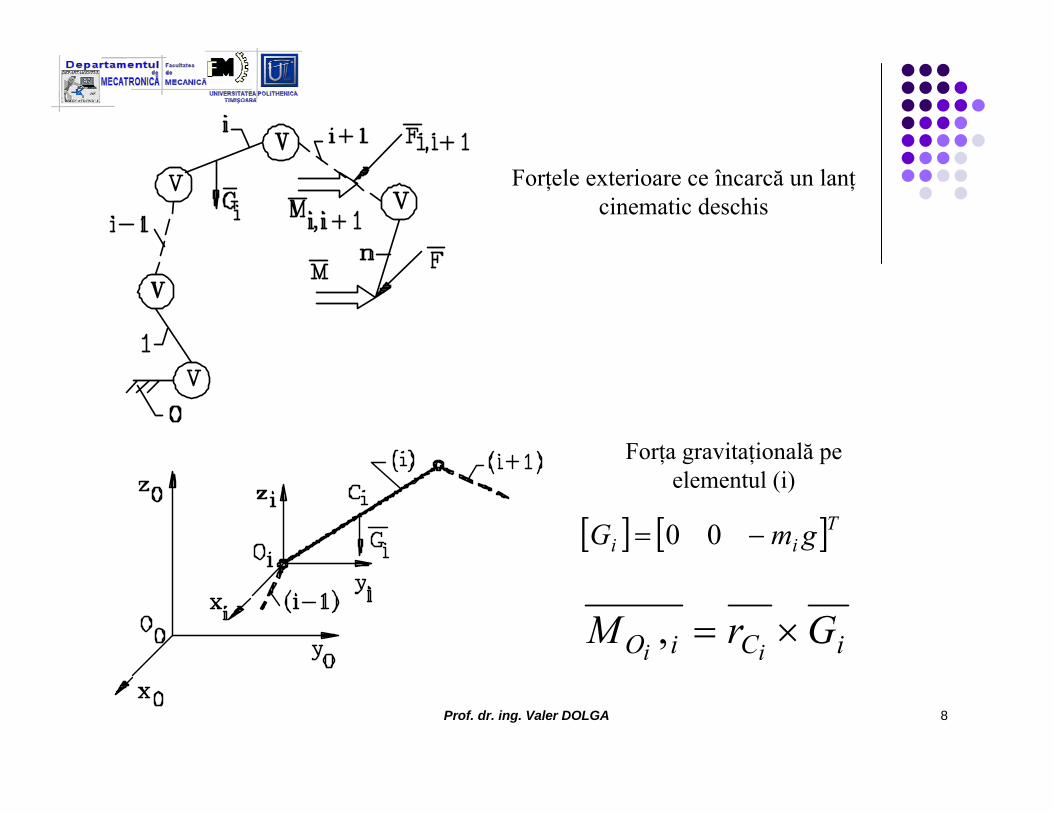
Forţele exterioare ce încarcă un lanţcinematic deschis
Forţa gravitaţională peelementul (i)
[ ] [ ]Tii gmG −= 00
iCiO GrMii×=,
Prof. dr. ing. Valer DOLGA 9
Forte gravitationale si momentele rezistente
Prof. dr. ing. Valer DOLGA 10
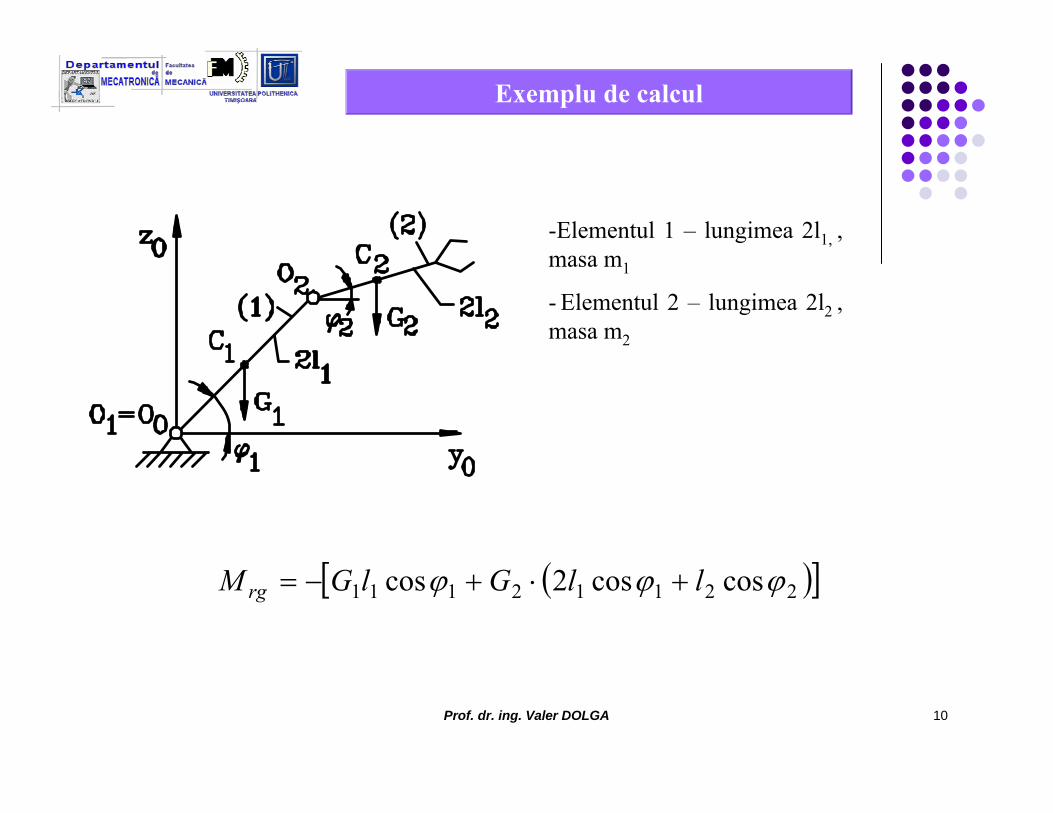
Exemplu de calcul
( )[ ]22112111 coscos2cos ϕϕϕ llGlGM rg +⋅+−=
-Elementul 1 – lungimea 2l1, , masa m1
- Elementul 2 – lungimea 2l2 , masa m2
Prof. dr. ing. Valer DOLGA 11
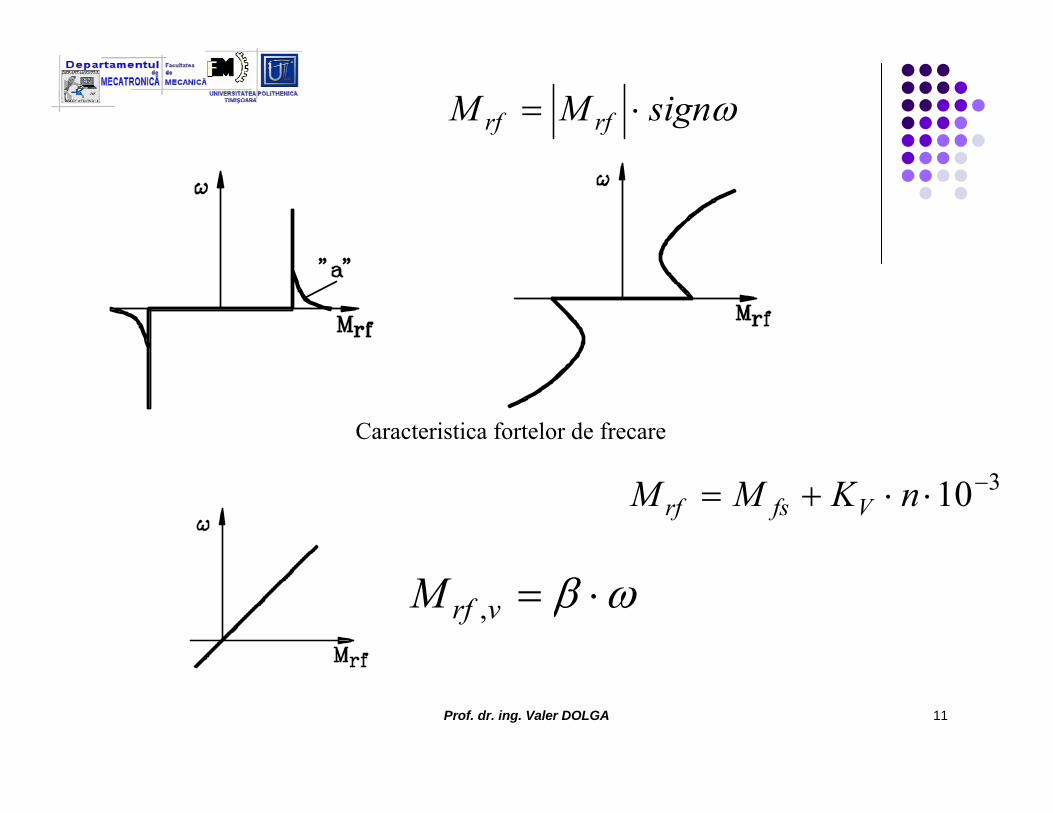
ωsignMM rfrf ⋅=
ωβ ⋅=vrfM ,
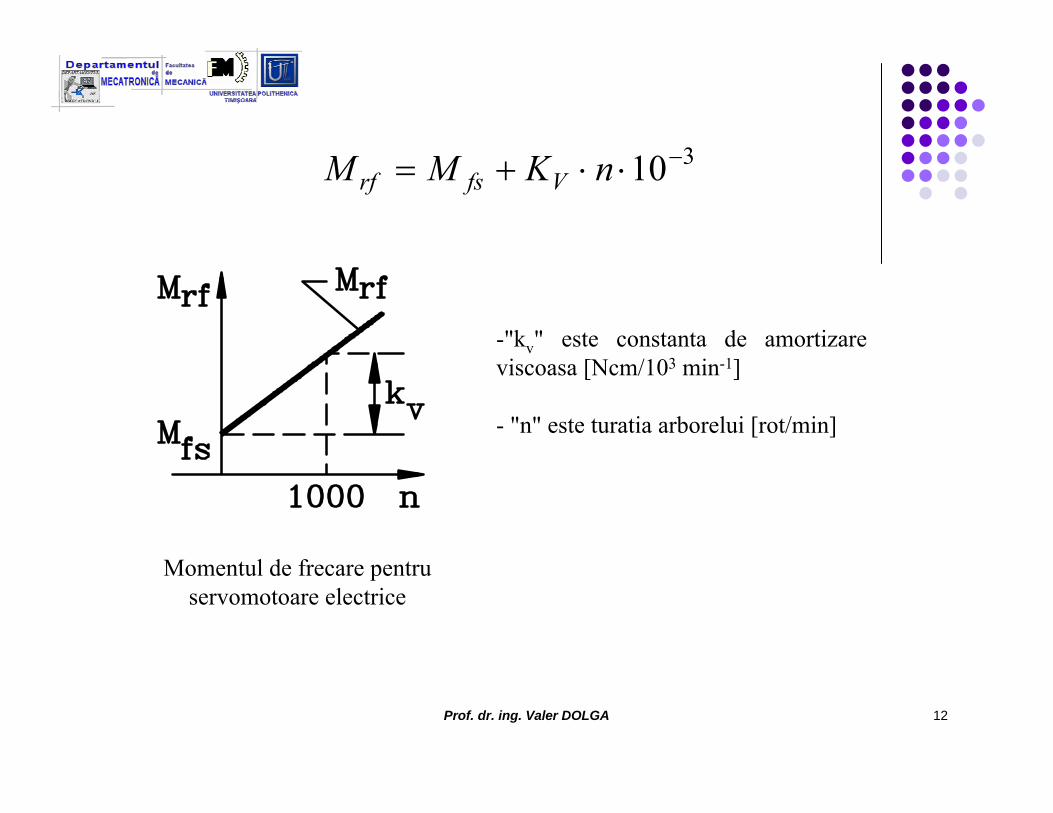
310−⋅⋅+= nKMM Vfsrf
Caracteristica fortelor de frecare
Prof. dr. ing. Valer DOLGA 12
310−⋅⋅+= nKMM Vfsrf
Momentul de frecare pentruservomotoare electrice
-"kv" este constanta de amortizareviscoasa [Ncm/103 min-1]
- "n" este turatia arborelui [rot/min]
Prof. dr. ing. Valer DOLGA 13
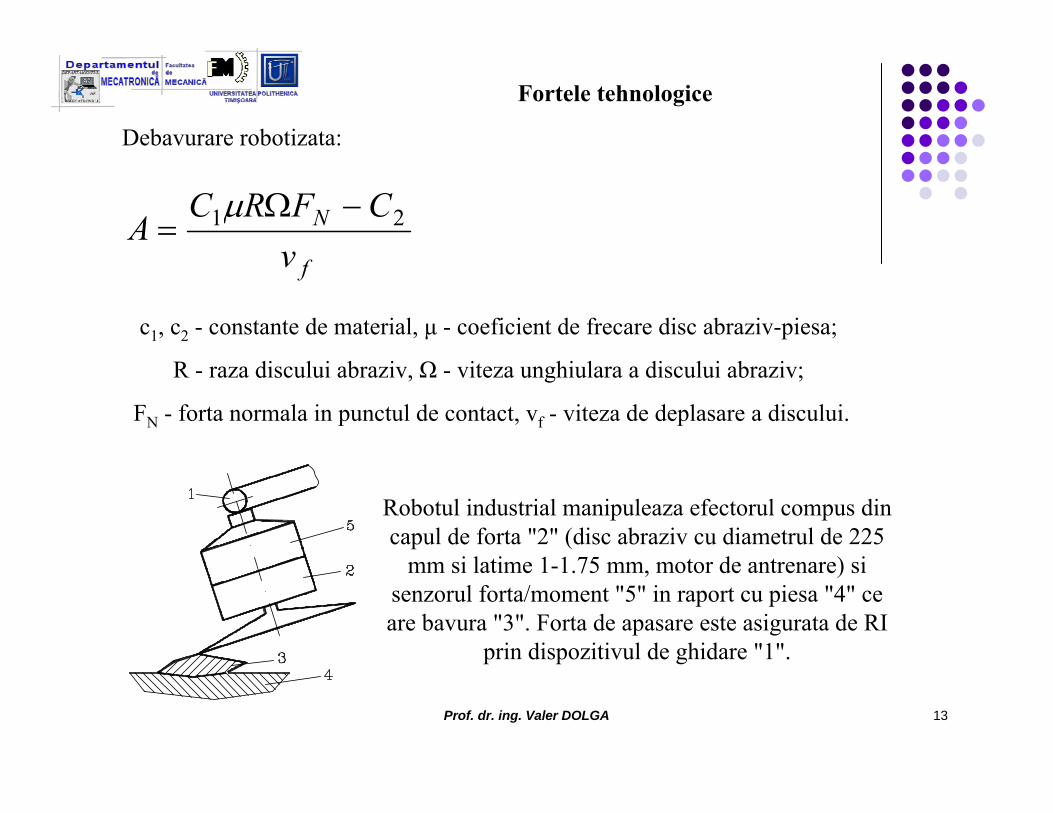
f
N
vCFRC
A 21 −Ω=
μ
Debavurare robotizata:
c1, c2 - constante de material, μ - coeficient de frecare disc abraziv-piesa;
R - raza discului abraziv, Ω - viteza unghiulara a discului abraziv;
FN - forta normala in punctul de contact, vf - viteza de deplasare a discului.
Robotul industrial manipuleaza efectorul compus din capul de forta "2" (disc abraziv cu diametrul de 225
mm si latime 1-1.75 mm, motor de antrenare) sisenzorul forta/moment "5" in raport cu piesa "4" ceare bavura "3". Forta de apasare este asigurata de RI
prin dispozitivul de ghidare "1".
Fortele tehnologice
Prof. dr. ing. Valer DOLGA 14
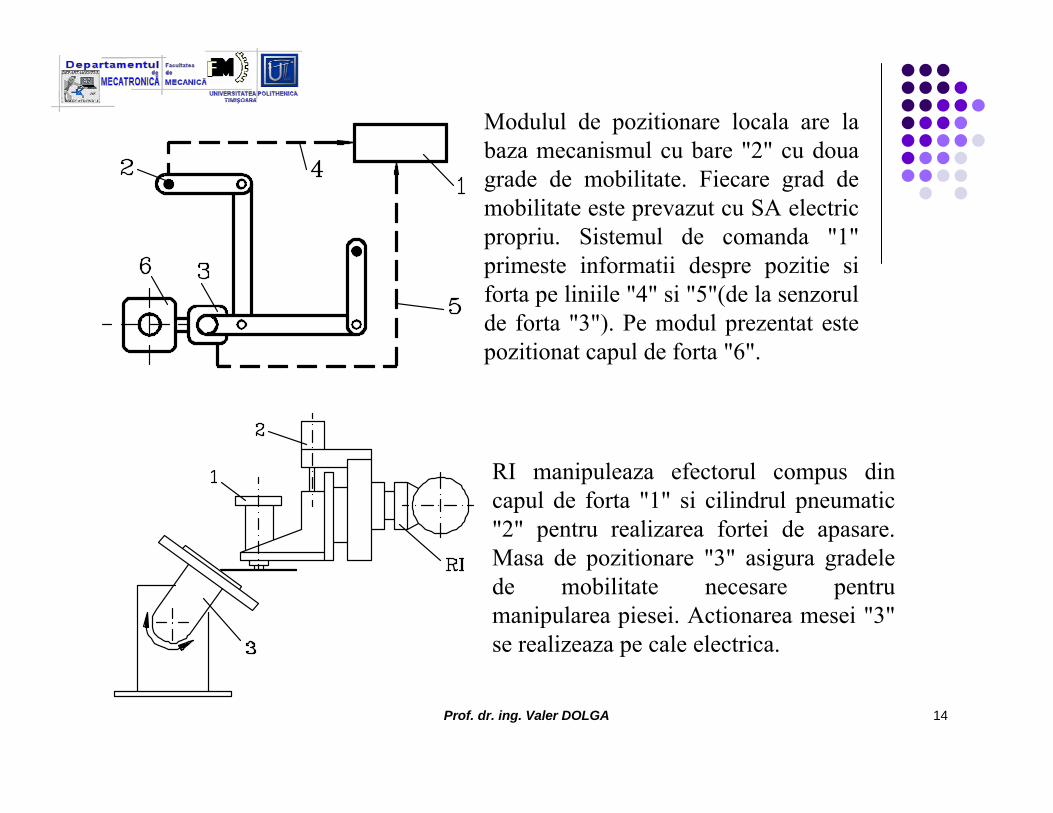
Modulul de pozitionare locala are la baza mecanismul cu bare "2" cu douagrade de mobilitate. Fiecare grad de mobilitate este prevazut cu SA electric propriu. Sistemul de comanda "1" primeste informatii despre pozitie siforta pe liniile "4" si "5"(de la senzorulde forta "3"). Pe modul prezentat estepozitionat capul de forta "6".
RI manipuleaza efectorul compus din capul de forta "1" si cilindrul pneumatic "2" pentru realizarea fortei de apasare. Masa de pozitionare "3" asigura gradelede mobilitate necesare pentrumanipularea piesei. Actionarea mesei "3" se realizeaza pe cale electrica.
Prof. dr. ing. Valer DOLGA 15
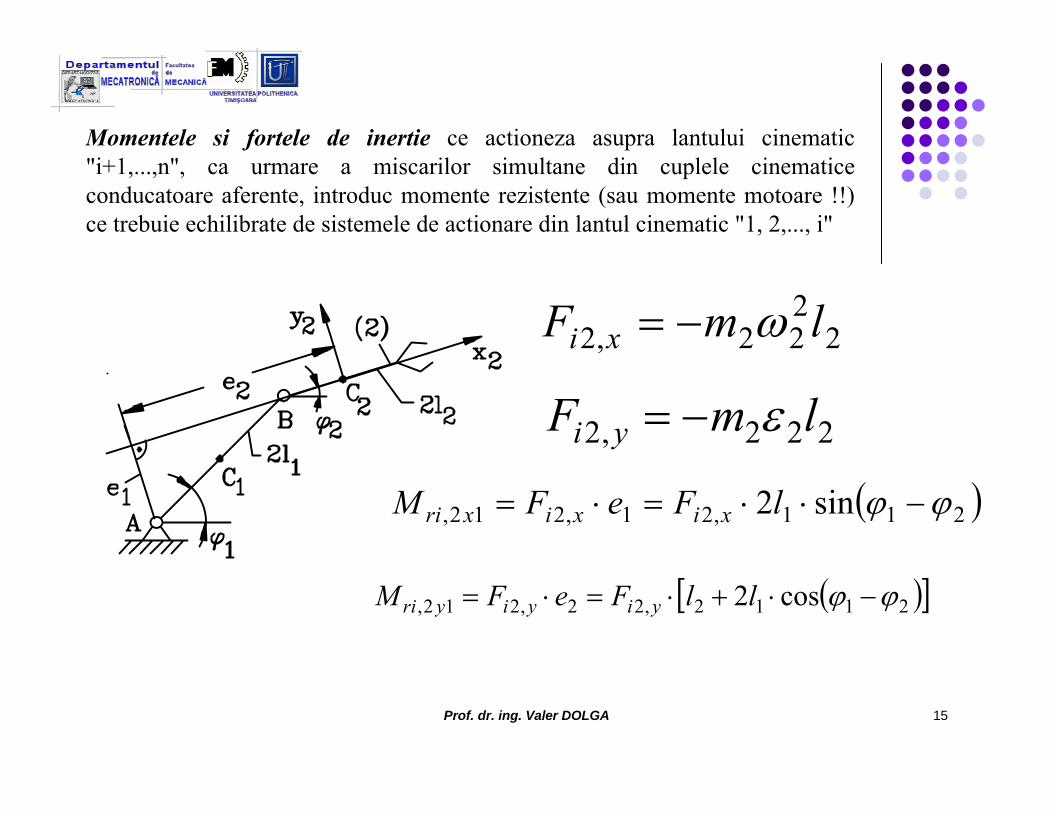
Momentele si fortele de inertie ce actioneza asupra lantului cinematic "i+1,...,n", ca urmare a miscarilor simultane din cuplele cinematiceconducatoare aferente, introduc momente rezistente (sau momente motoare !!) ce trebuie echilibrate de sistemele de actionare din lantul cinematic "1, 2,..., i"
2222,2 lmF xi ω−=
222,2 lmF yi ε−=
( )211,21,212, sin2 ϕϕ −⋅⋅=⋅= lFeFM xixixri
( )[ ]2112,22,212, cos2 ϕϕ −⋅+⋅=⋅= llFeFM yiyiyri
Prof. dr. ing. Valer DOLGA 16
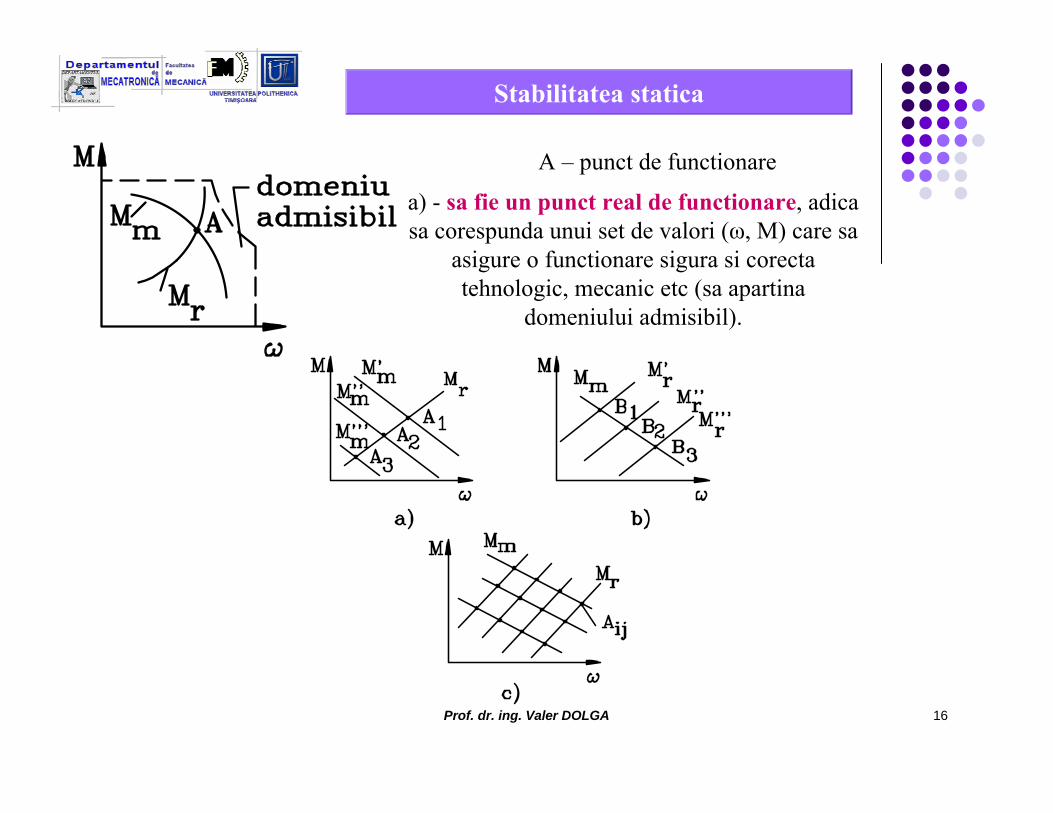
Stabilitatea statica
a) - sa fie un punct real de functionare, adicasa corespunda unui set de valori (ω, M) care sa
asigure o functionare sigura si corectatehnologic, mecanic etc (sa apartina
domeniului admisibil).
A – punct de functionare
Prof. dr. ing. Valer DOLGA 17
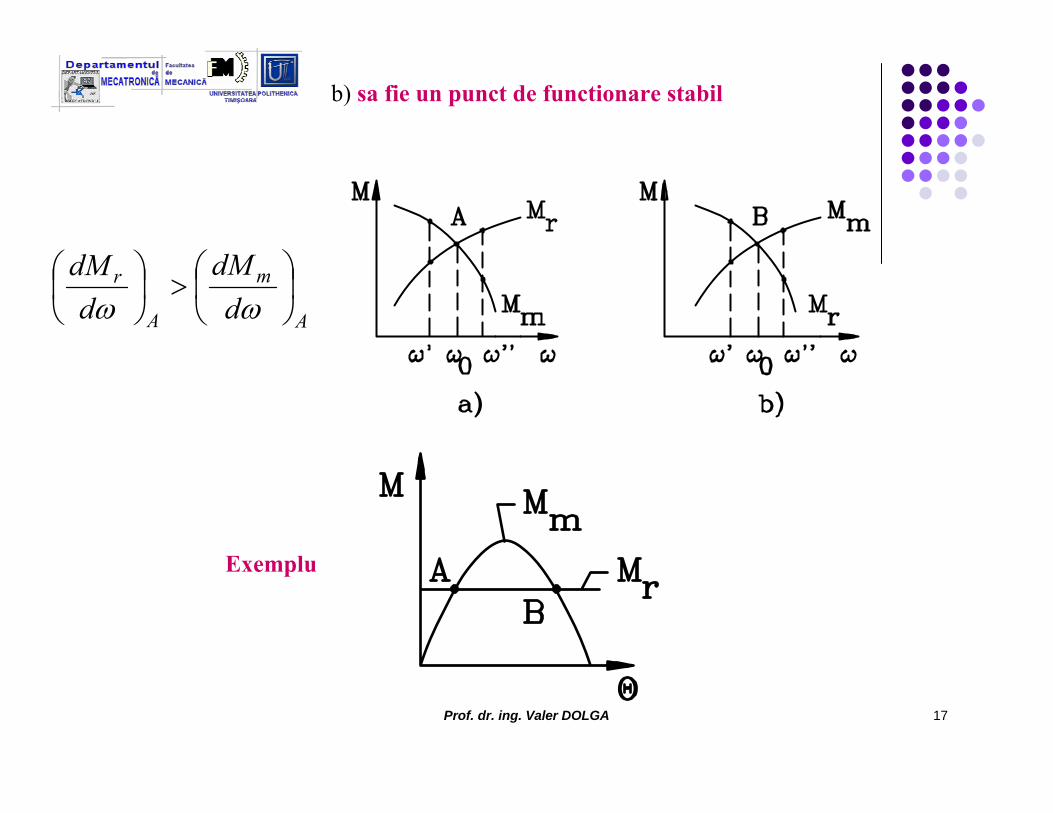
b) sa fie un punct de functionare stabil
Exemplu
A
m
A
r
ddM
ddM
⎟⎠⎞
⎜⎝⎛>⎟
⎠⎞
⎜⎝⎛
ωω
Prof. dr. ing. Valer DOLGA 18
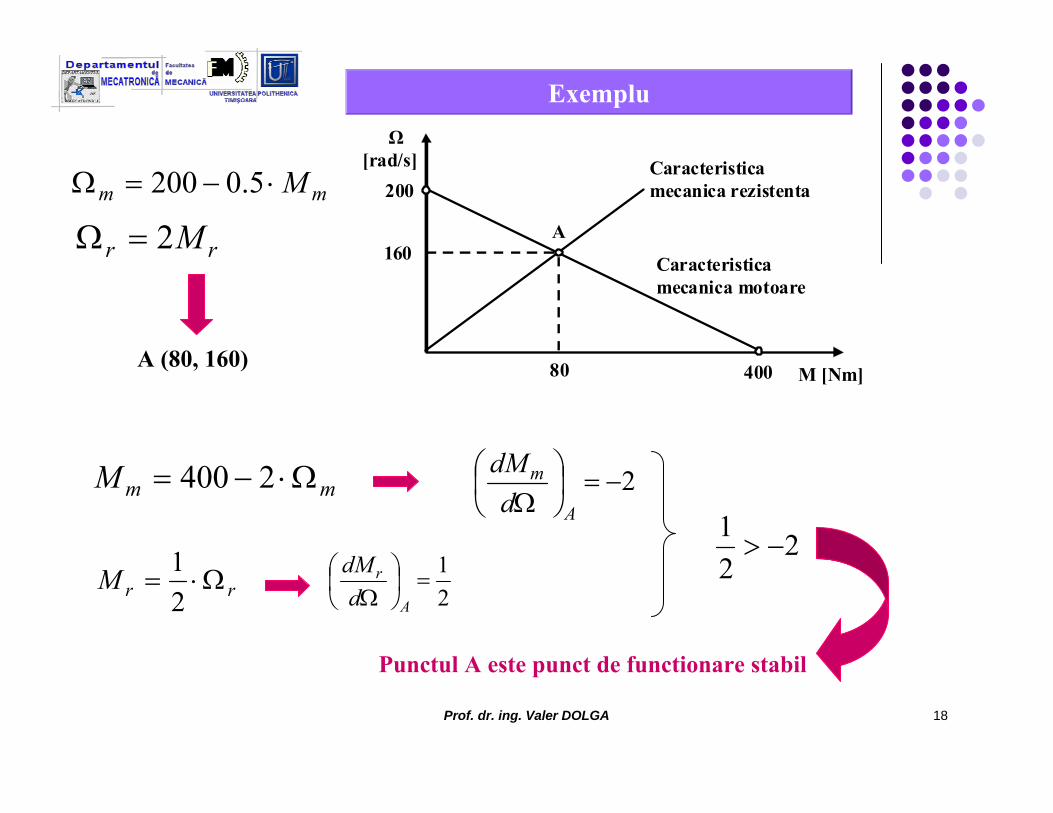
Exemplu
M [Nm]
Ω [rad/s]
200
400
A
Caracteristica mecanica rezistenta
Caracteristica mecanica motoare
80
160
mm M⋅−=Ω 5.0200
rr M2=Ω
A (80, 160)
mmM Ω⋅−= 2400 2−=⎟⎠⎞
⎜⎝⎛
Ω A
m
ddM
rrM Ω⋅=21
21
=⎟⎠⎞
⎜⎝⎛
Ω A
r
ddM
221
−>
Punctul A este punct de functionare stabil
Prof. dr. ing. Valer DOLGA 19
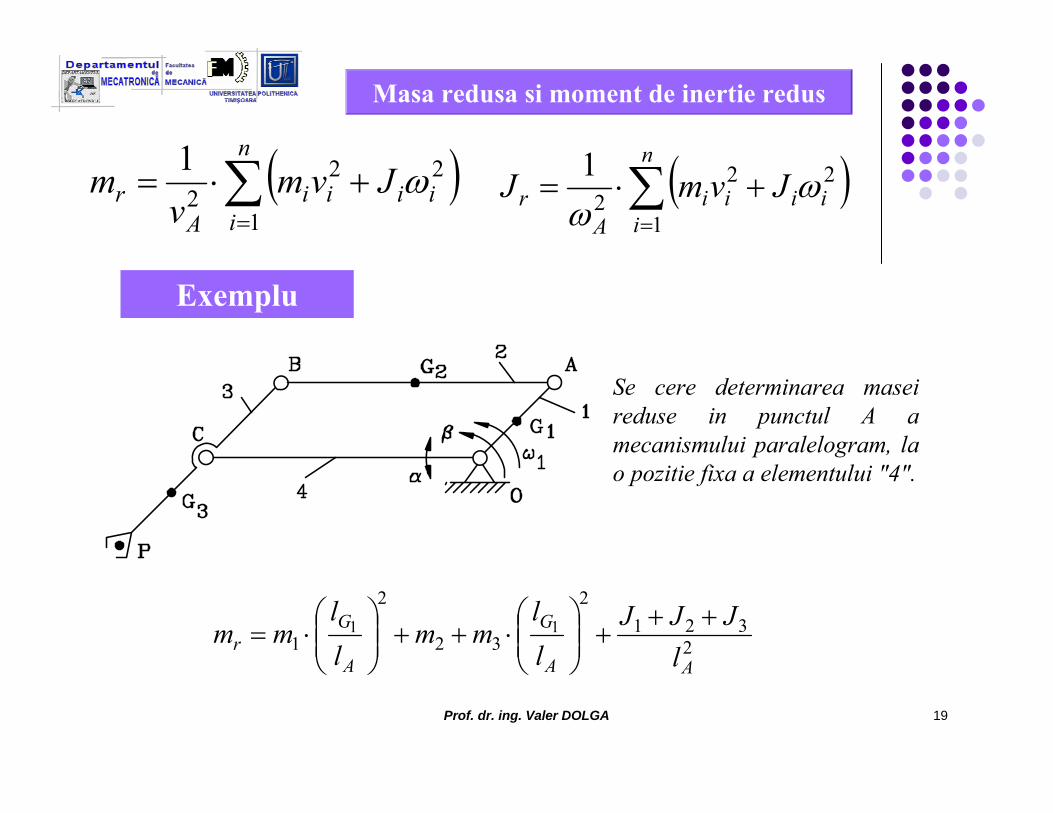
Masa redusa si moment de inertie redus
( )∑=
+⋅=n
iiiii
Ar Jvm
vm
1
222
1 ω ( )∑=
+⋅=n
iiiii
Ar JvmJ
1
222
1 ωω
Exemplu
2321
2
32
2
111
AA
G
A
Gr l
JJJll
mmll
mm +++⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅++⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅=
Se cere determinarea maseireduse in punctul A a mecanismului paralelogram, la o pozitie fixa a elementului "4".
Prof. dr. ing. Valer DOLGA 20
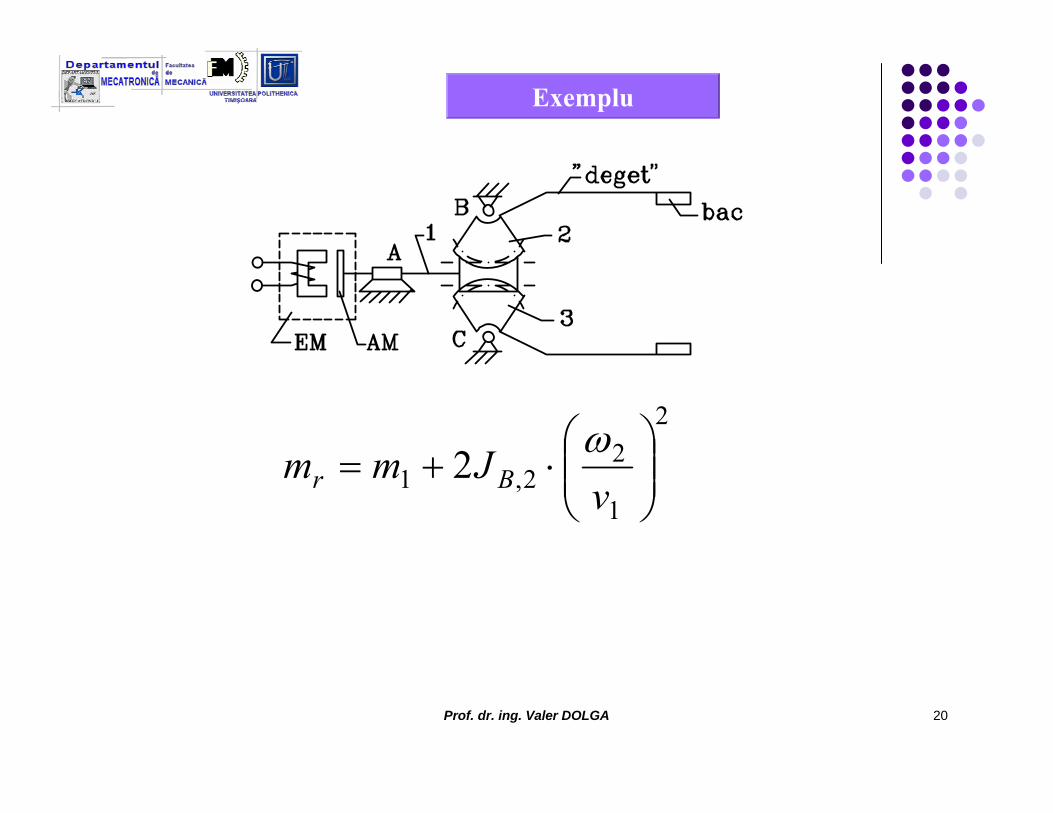
Exemplu
2
1
22,1 2 ⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅+=
vJmm Br
ω
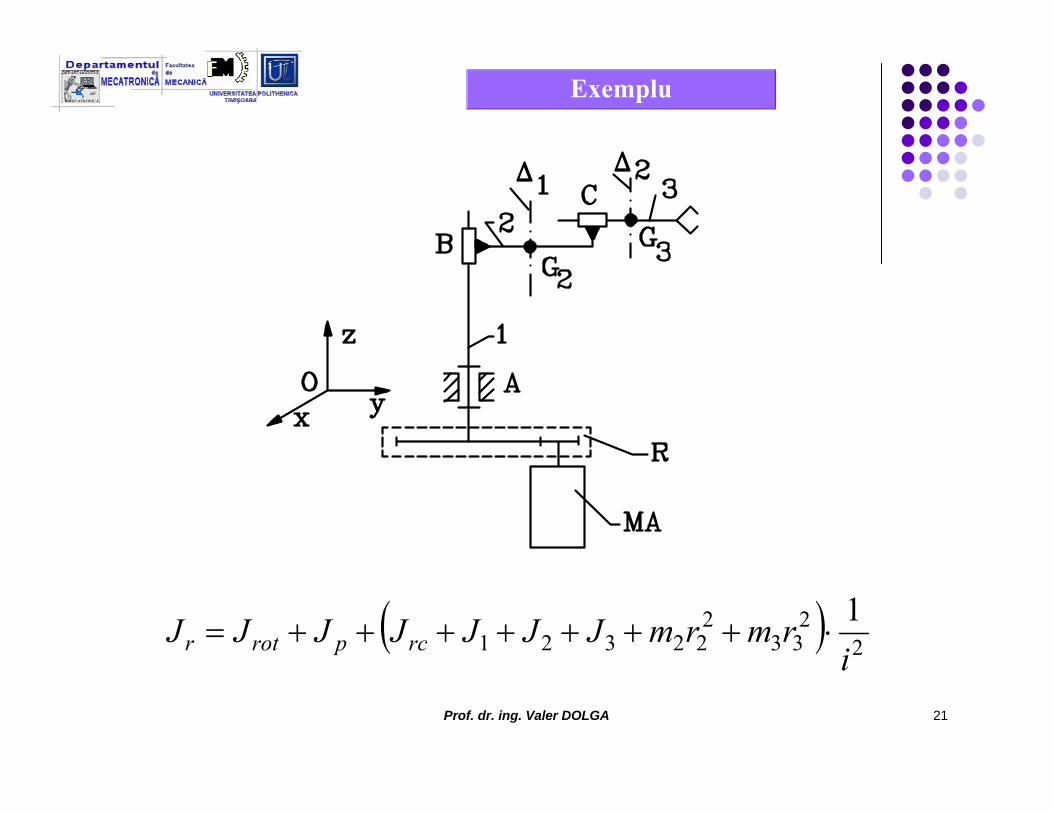
Prof. dr. ing. Valer DOLGA 21
Exemplu
( ) 22
332
223211i
rmrmJJJJJJJ rcprotr ⋅+++++++=
Prof. dr. ing. Valer DOLGA 22
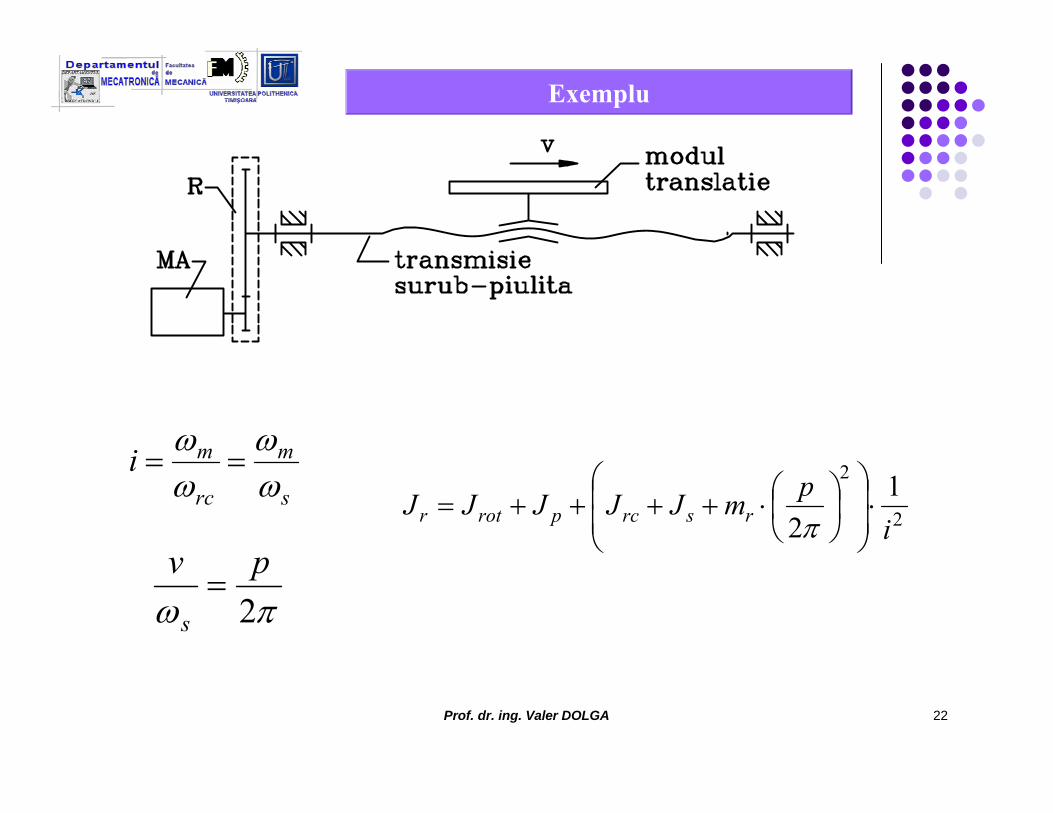
Exemplu
s
m
rc
miωω
ωω
==
πω 2pv
s=
2
2 12 ipmJJJJJ rsrcprotr ⋅⎟
⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛⋅++++=π
Prof. dr. ing. Valer DOLGA 23
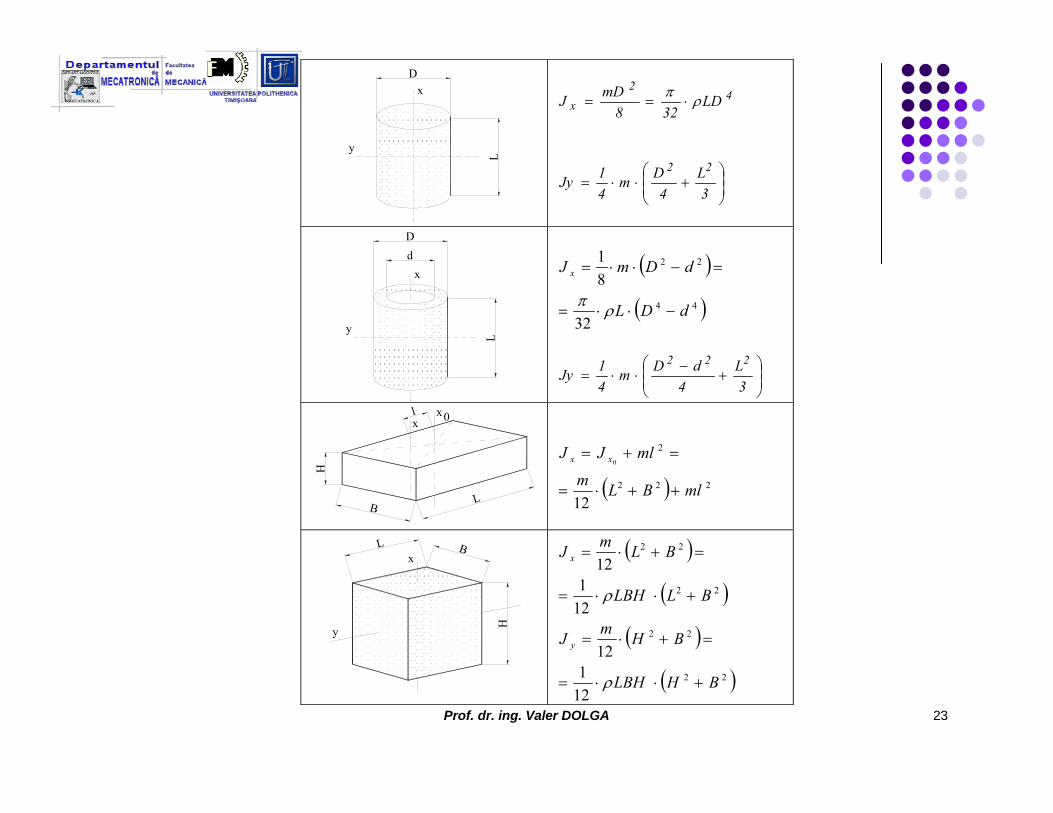
D
L
y
x
4
2x LD
328mDJ ρπ
⋅==
⎟⎟⎠
⎞⎜⎜⎝
⎛+⋅⋅=
3L
4Dm
41Jy
22
L
D
y
xd
( )
( )44
22
32
81
dDL
dDmJ x
−⋅⋅=
=−⋅⋅=
ρπ
⎟⎟⎠
⎞⎜⎜⎝
⎛+
−⋅⋅=
3L
4dDm
41Jy
222
L
l
B
H
x0x
( ) 222
2
12
0
mlBLm
mlJJ xx
++⋅=
=+=
L
H
Bx
y
( )
( )22
22
121
12
BLLBH
BLmJ x
+⋅⋅=
=+⋅=
ρ
( )
( )22
22
121
12
BHLBH
BHmJ y
+⋅⋅=
=+⋅=
ρ
Prof. dr. ing. Valer DOLGA 24
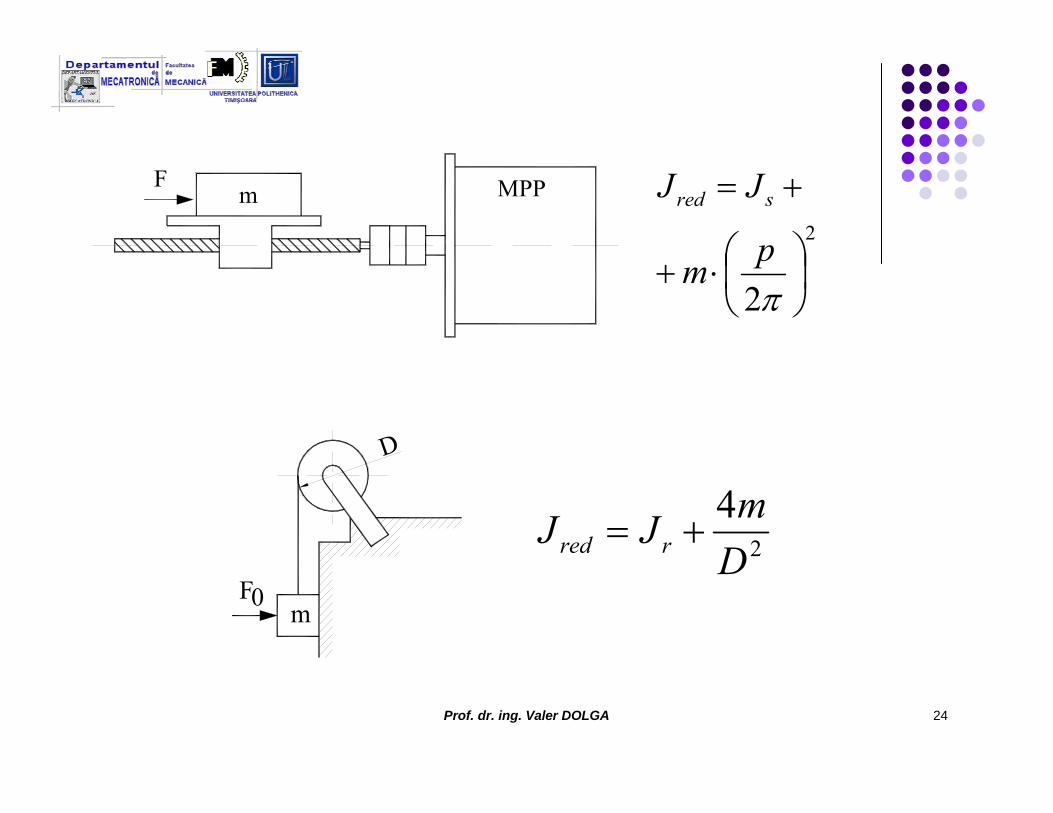
m MPPF
2
2⎟⎠⎞
⎜⎝⎛⋅+
+=
πpm
JJ sred
D
mF0
2
4DmJJ rred +=
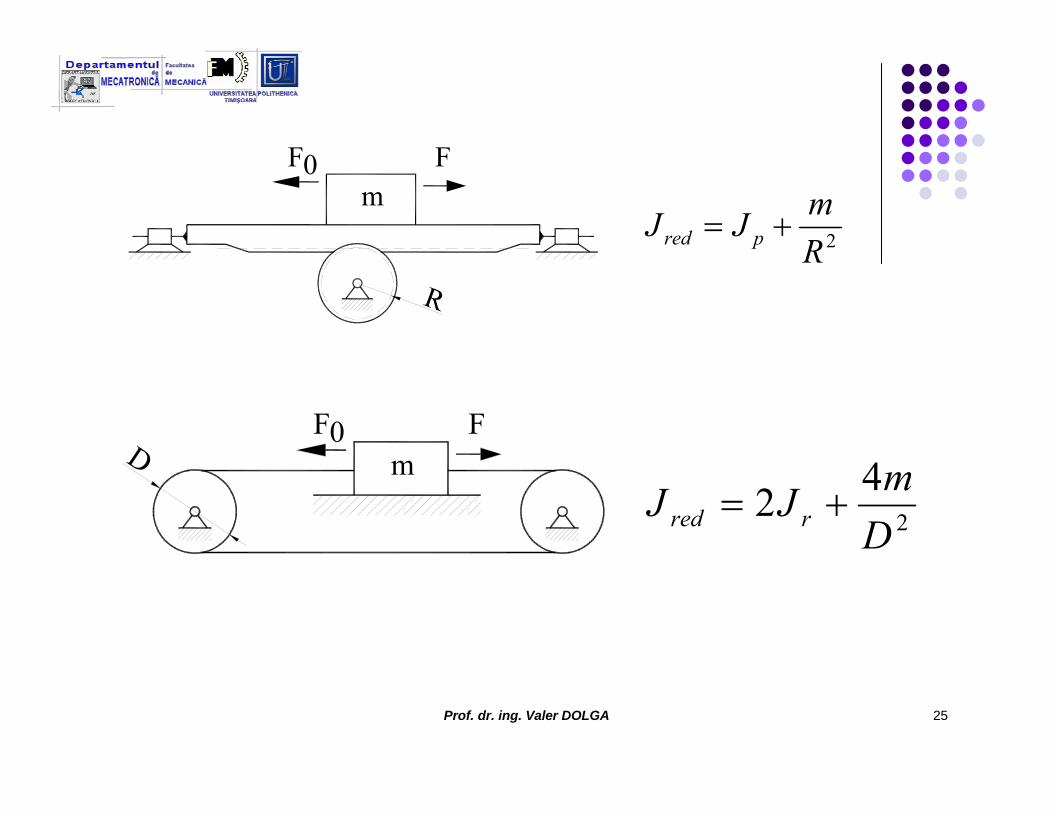
Prof. dr. ing. Valer DOLGA 25
FF0m
R
2RmJJ pred +=
mFF0
D
2
42D
mJJ rred +=
Prof. dr. ing. Valer DOLGA 26
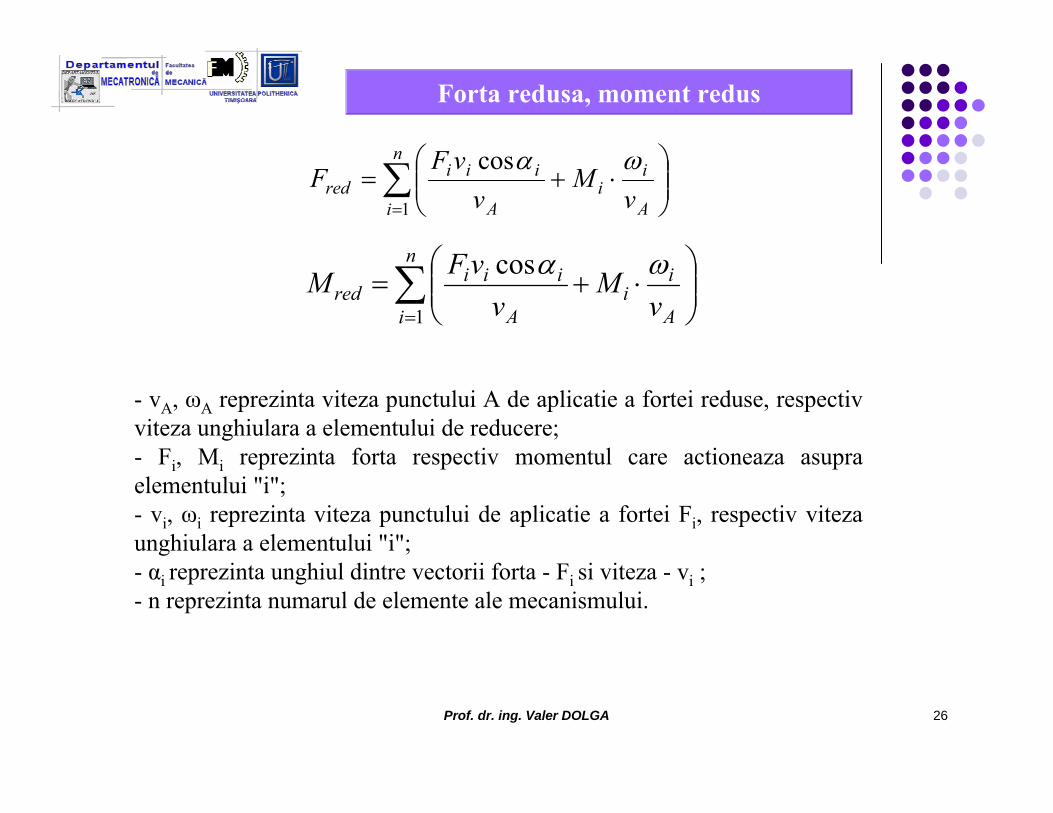
Forta redusa, moment redus
∑=
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅+=
n
i A
ii
A
iiired v
Mv
vFF
1
cos ωα
∑=
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅+=
n
i A
ii
A
iiired v
Mv
vFM1
cos ωα
- vA, ωA reprezinta viteza punctului A de aplicatie a fortei reduse, respectivviteza unghiulara a elementului de reducere;- Fi, Mi reprezinta forta respectiv momentul care actioneaza asupraelementului "i";- vi, ωi reprezinta viteza punctului de aplicatie a fortei Fi, respectiv vitezaunghiulara a elementului "i";- αi reprezinta unghiul dintre vectorii forta - Fi si viteza - vi ;- n reprezinta numarul de elemente ale mecanismului.
Prof. dr. ing. Valer DOLGA 27
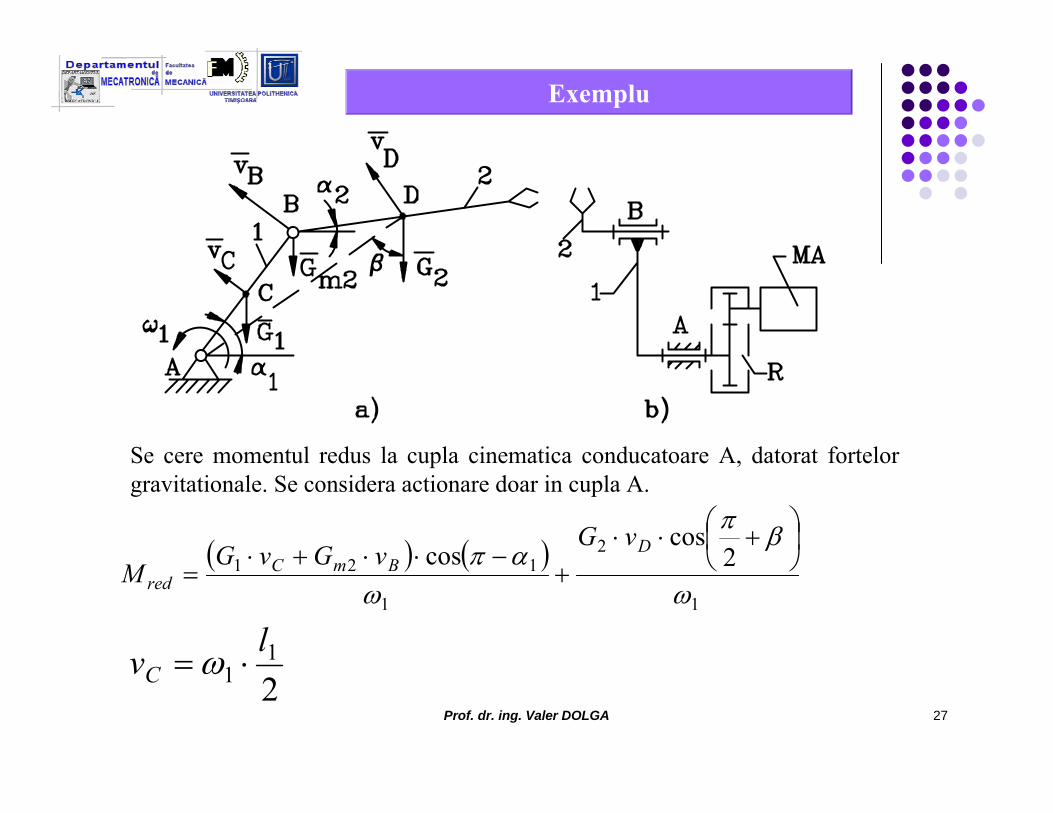
Exemplu
Se cere momentul redus la cupla cinematica conducatoare A, datorat fortelorgravitationale. Se considera actionare doar in cupla A.
( ) ( )1
2
1
121 2cos
cosω
βπ
ωαπ ⎟
⎠⎞
⎜⎝⎛ +⋅⋅
+−⋅⋅+⋅
=D
BmCred
vGvGvG
M
21
1l
vC ⋅= ω
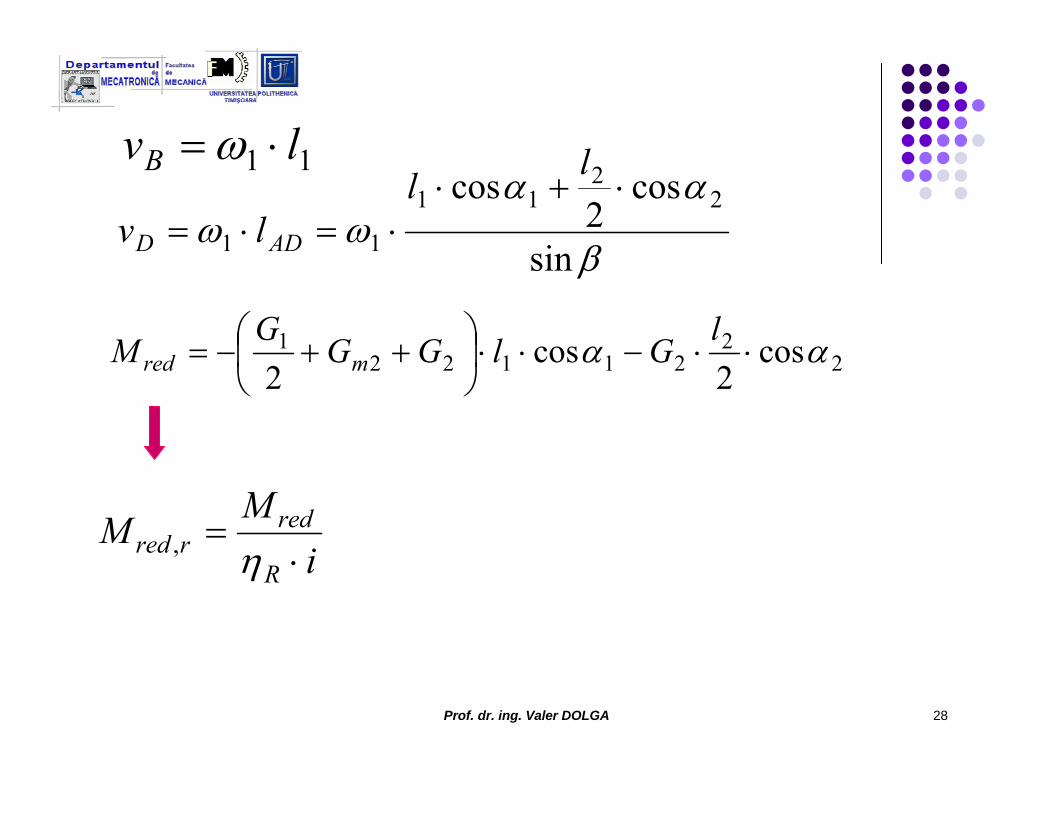
Prof. dr. ing. Valer DOLGA 28
11 lvB ⋅= ω
β
ααωω
sin
cos2
cos 22
11
11
⋅+⋅⋅=⋅=
ll
lv ADD
22
211221 cos
2cos
2αα ⋅⋅−⋅⋅⎟
⎠⎞
⎜⎝⎛ ++−=
lGlGGGM mred
iM
MR
redrred ⋅=η,